/









































































































































































Text
КАК Э. СМИРНОВ
СКОНСТРУИРОВАТЬ
И ПОСТРОИТЬ
летлющую модель
Э. СМИРНОВ,
мастер спорта
КАК
СКОНСТРУИРОВАТЬ
И ПОСТРОИТЬ
ЛЕТАЮЩУЮ МОДЕЛЬ
ИЗДАТЕЛЬСТВО ДОСААФ
МОСКВА—1973
Scan AAW
СОДЕРЖАНИЕ
Стр.
Введение ...... я . * * . * 3
ПРОЕКТИРОВАНИЕ СВОБОДНОЛЕТАЮЩИХ МОДЕЛЕЙ
Аэродинамические силы................................. 8
Полет свободнолетающих моделей .... 14
Проектирование ..................................... 32
ОСНОВЫ КОНСТРУИРОВАНИЯ ЛЕТАЮЩИХ МОДЕЛЕЙ
Крыло . 132
Стабилизатор ..................................... 162
Фюзеляж............................................163
Рабочие чертежи....................................176
Смирнов Энгельс Павлович
КАК СКОНСТРУИРОВАТЬ
И ПОСТРОИТЬ ЛЕТАЮЩУЮ
МОДЕЛЬ
Редактор Е. В. Ефремова
Художественный редактор Т. А. Хитрова
Технический редактор 3. И. Сарвина
Корректор М. П. Горбунова
Г-11116 Сдано в набор 24/VIII-72 г. Подписано к печати 28/XI-72 п
Изд. № 2/5348 Формат 84ХЮ8!/з2. 6-9-2
Бумага типографская № 3 Тираж 90 000 экз. 91-72
Объем физ. п. л. 5,5 = 9,24 усл. п. л. Уч.-изд. л. 9,12 Цена 34 коп.
Изд-во ДОСААФ, 107066, Москва Б-6&
Новорязанская ул., д. 26
Типография Изд-ва ДОСААФ
Зак. 247
Отпечатано с готового набора в типографии «Красная звезда».
Хорошевское шоссе, 38. Зак. 1756.
ВВЕДЕНИЕ
Модели, которые с момента запуска летают самостоятельно,
без вмешательства спортсмена, называются свободнолетающими.
Наиболее распространены в настоящее время среди них модели
планеров, резиномоторные и с поршневыми двигателями (таймер-
ные).
Начиная с 1952 года к свободнолетающим моделям предъяв-
ляются определенные требования (нормы), ограничивающие габа-
риты и вес, способы запуска и параметры их двигателей. Эти тре-
бования по мере совершенствования моделей изменялись. Только
с моделями, удовлетворяющими современным требованиям, спорт-
смены допускаются к соревнованиям.
Модель планера — ее обычно называют моделью планера
класса А-2 (рис. 1) — должна иметь вес не менее 410 2 и не-
сущую площадь, в которую входит площадь крыла и стабилиза-
тора, не более 34 дм2. Запускают модель планера с помощью лее-
ра, длина которого не более 50 м1.
Резиномоторные модели в качестве двигателя должны иметь
резиновый. жгут — резиномотор, вес которого не должен превы-
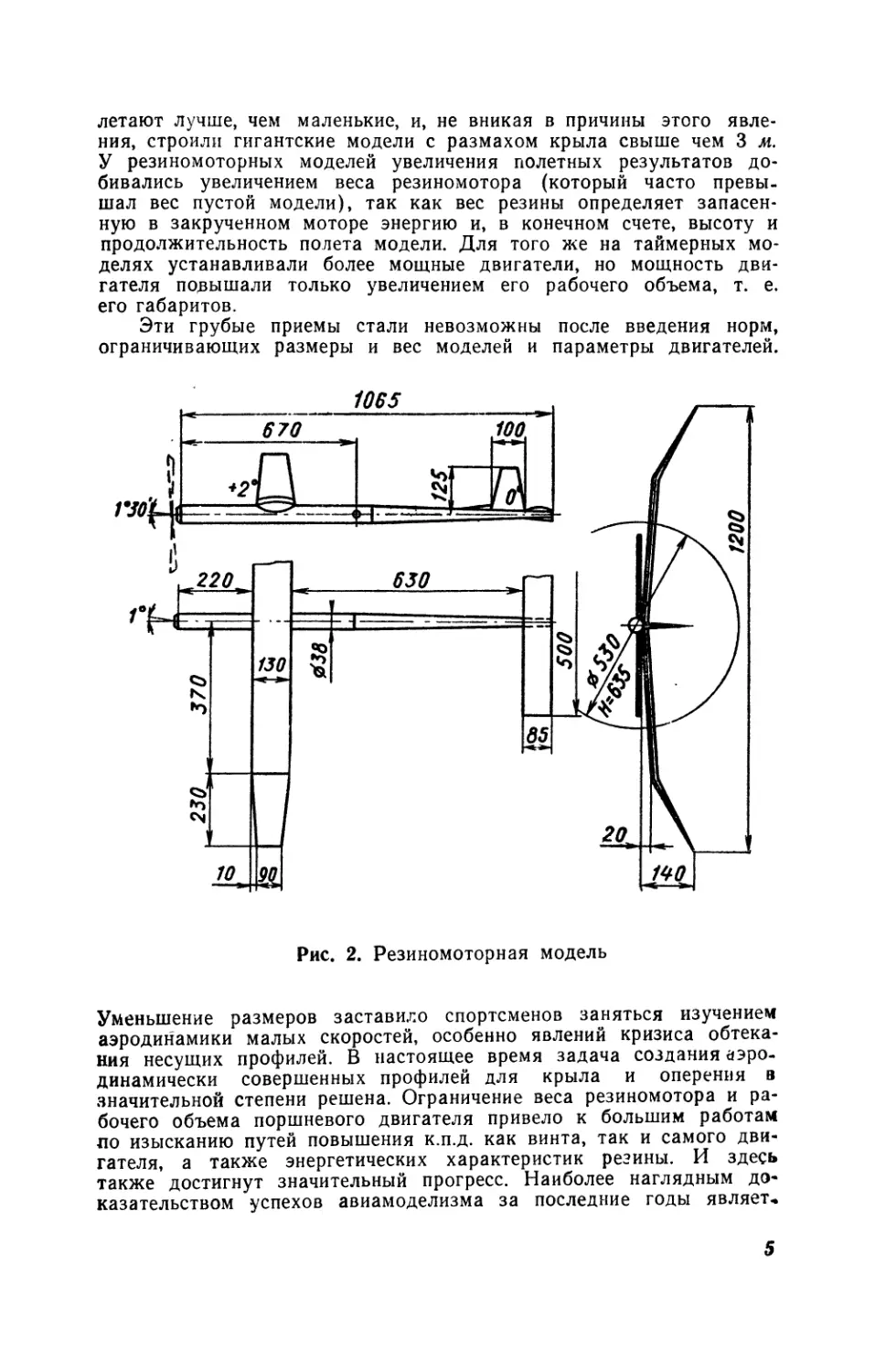
шать 40 г. Вес всей модели — не менее 230 г, несущая поверх-
ность — не более 19 дм2 (рис. 2).
На таймерных моделях (рис. 3) устанавливают двигатели с
рабочим объемом, не превышающим 2,5 см3, при этом вес модели
в г не должен быть менее трехсоткратного рабочего объема дви-
гателя, выраженного в см3. Например, если на модели установлен
двигатель МК-12В, рабочий объем которого равен 2,5 см3, то
уменьшать ее вес ниже 750 г нельзя. Кроме того, нагрузка на
каждый дм2 несущей площади не должна 'быть менее 20 г, по-
этому несущую площадь модели при весе 750 г выполняют не бо-
лее 37,5 дм2.
Модели планеров, резиномоторные и таймерные запускают с
рук. На время работы двигателя таймерной модели в полете от-
ведено 10 сек., время раскручивания резиномотора может быть
любым.
Свободноле тающие модели на соревнованиях испытывают
только на продолжительность полета. Каждую секунду полета
оценивают в 1 очко, но максимальная оценка одного полета при-
1 При замере длины леер предварительно растягивают с уси^
лием 2 кг, определяемым с помощью динамометра.
3
нята равной 180 сек. Таким образом, модель должна летать не
менее чем 3 мин.
На состязаниях спортсмен запускает свою модель семь раз,
не обязательно одну и ту же. По правилам соревнований он мо-
жет иметь две модели одного и того же типа и запускать их по
своему выбору. Занятое авиамоделистом место определяется сум-
мой очков за эти семь полетов. Если несколько спортсменов по-
кажут одинаковый результат, то назначаются дополнительные —
восьмой, девятый и т. д. — запуски, которые и выявляют победи-
теля. Зачетное время восьмого полета при этом увеличивается до
240 сек., девятого до 300 сек. и т. д., на 60 сек. в каждый после-
дующий полет.
Время полета модели планера считается с момента отцепле-
ния ее от леера, время полета резиномоторной и таймерной моде-
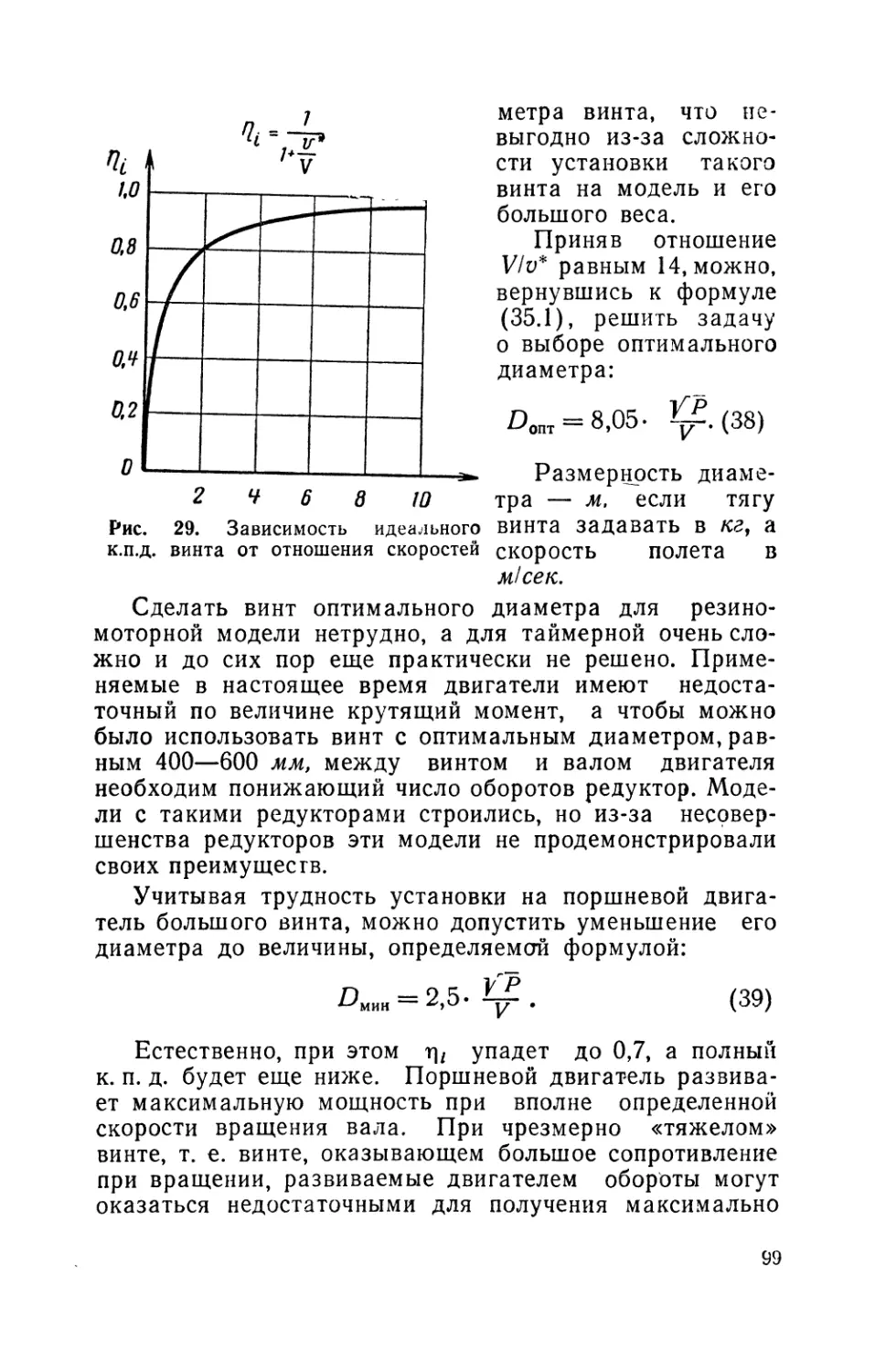
лей — с момента выпуска их из рук.
До введения указанных выше требований, чтобы повысить
продолжительность 'полета моделей, авиамоделисты шли наиболее
простыми путями. Например, было замечено, что большие модели
4
летают лучше, чем маленькие, и, не вникая в причины этого явле-
ния, строили гигантские модели с размахом крыла свыше чем 3 м.
У резиномоторных моделей увеличения полетных результатов до-
бивались увеличением веса резиномотора (который часто превы-
шал вес пустой модели), так как вес резины определяет запасен-
ную в закрученном моторе энергию и, в конечном счете, высоту и
продолжительность полета модели. Для того же на таймерных мо-
делях устанавливали более мощные двигатели, но мощность дви-
гателя подышали только увеличением его рабочего объема, т. е.
его габаритов.
Эти грубые приемы стали невозможны после введения норм,
ограничивающих размеры и вес моделей и параметры двигателей.
10 у |Pg
140
Рис. 2. Резиномоторная модель
Уменьшение размеров заставило спортсменов заняться изучением
аэродинамики малых скоростей, особенно явлений кризиса обтека-
ния несущих профилей. В настоящее время задача создания аэро-
динамически совершенных профилей для крыла и оперения в
значительной степени решена. Ограничение веса резиномотора и ра-
бочего объема поршневого двигателя привело к большим работам
по изысканию путей повышения к.п.д. как винта, так и самого дви-
гателя, а также энергетических характеристик резины. И здесь
также достигнут значительный прогресс. Наиболее наглядным до-
казательством успехов авиамоделизма за последние годы являет-
5
Рис. 3. Таймерная модель
ся то, что современные модели, «втиснутые» в жесткие рамки
норм, летают значительно лучше, чем модели, строившиеся ранее
без всяких ограничений.
ПРОЕКТИРОВАНИЕ
СВОБОДНОЛЕТАЮЩИХ МОДЕЛЕЙ
Любую летающую модель разрабатывают в два
этапа.
Первый этап — проектирование, когда опре-
деляют схему модели, ее основные размеры, профили
крыла и оперения, подбирают винтомоторную группу,
а также рассчитывают действующие в полете на модель
нагрузки. Естественно, стараются создать схему такой
модели, которая обладала бы наилучшими летными ка-
чествами: аэродинамическим совершенством, устойчи-
востью, наибольшей высотой полета и т. д.
Второй этап — конструирование, когда раз-
рабатывают конструкции частей, узлов и модели в це-
лом, изготавливают рабочие чертежи. Конструкция мо-
дели должна обеспечивать ее прочность и жесткость
при заданном весе, так как получить стабильные и вы-
сокие полетные результаты возможно только, если мо-
дель не деформируется и не разрушается в полете и
при посадке от действующих на нее нагрузок.
Накоплен большой опыт в создании свободнолетаю-
щих моделей, на практике выработаны многие рекомен-
дации и отмечены интересные закономерности, позво-
ляющие наиболее успешно и просто решать задачи
проектирования. Воспользуемся этими рекомендациями
и закономерностями и мы. Но прежде чем перейти не-
посредственно к проектированию, познакомимся с не-
обходимыми для этого основными понятиями аэроди-
намики и теории полрта летающих моделей.
7
АЭРОДИНАМИЧЕСКИЕ СИЛЫ
Прежде всего нужно условиться, что полет модели—
это движение ее относительно воздуха, а не относитель-
но земли.
При полете модели воздух оказывает на нее опре-
деленное действие: с одной стороны, мешает ее движе-
нию, с другой — поддерживает ее. Это действие возду-
духа на летящую модель принято представлять в виде
аэродинамической силы /?м (рис. 4,а). Сила 7?м явля-
ется результирующей сил, действующих на отдельные
части модели, — на крыло, оперение, фюзеляж и т. д.
Направление этой силы зависит от того, как происходит
полет модели: при вертикальном взлете и пикирова-
нии — направлена точно по направлению движения мо-
дели, во всех других случаях — под углом к направле-
нию движения.
В аэродинамике принято-действие одной аэродинами-
ческой силы заменять действием двух ее составляю-
щих — силы сопротивления X и подъемной силы Y.
£ила сопротивления всегда направлена против направ-
ления движения, подъемная сила — перпендикулярно
ему. Как и сила 7?м, сила сопротивления и подъемная
сила модели складываются из сил, действующих на от-
дельные части модели.
Как показывают расчеты и опыты, подъемная сила
модели Ум в основном складывается из подъемной си-
лы крыла и стабилизатора. При обычных фор-
мах фюзеляжей их подъемная сила пренебрежимо
мала. Поэтому, говоря о несущей площади, под-
разумевают только суммарную площадь крыла и
стабилизатора.
Сила сопротивления Хм модели, наоборот, склады-
вается из сил сопротивления всех без исключения час-
тей модели — крыла, оперения, фюзеляжа, пилона и
дополнительных узлов и деталей. Правда, у правильно
спроектированной, аэродинамически совершенной моде-
ли большую часть сопротивления составляет все же со-
противление крыла.
Величина силы сопротивления модели в целом или
отдельной ее части зависит от геометрических размеров,
скорости полета, плотности воздуха и аэродинамическо-
го совершенства. Эту зависимость принято записывать
8
Рис. 4. Модель в полете:1
а —« аэродинамические силы, действующие на модель в полете;
& —> схема планирующего полета модели; схема действующих сил
при взлете модели планера на леере в и моторной г
в виде формулы:
X = cx.S-p.^, (1)
где сх — безразмерный коэффициент, который опреде-
ляет аэродинамическое совершенство модели
9
или ее части и называется коэффициентом ло-
бового сопротивления;
V — скорость полета модели;
р — массовая плотность воздуха;
S — характеристичный размер модели или ее части.
Значения коэффициента сх для различных частей мо-
дели приведены в табл. 1. Естественно, может возник-
нуть вопрос, почему коэффициент cv для крыла или
оперения значительно — в десятки раз — меньше, чем,
например, для фюзеляжа. Здесь все дело в том, что
принято считать за характеристичный размер S. Для
фюзеляжа S — это площадь наибольшего поперечного
сечения фюзеляжа — ёго называют миделем фюзе-
ляжа, для крыла и оперения S — это их площадь. В
табл. 1 площади, к которым относится коэффициент с х
заштрихованы.
Таблица 1
Элемент
модели
Элемент
модели
1 — фюзеляж прямоугольного сечения; 2 — круглая стойка; 3 —
пилон; 4 — стабилизатор, 5 — фюзеляж круглого сечения; 6 —
обтекаемая стойка; 7 — киль; 8 — крыло
Массовая плотность воздуха р — это масса едини-
цы объема воздуха; зная весовую плотность воздуха
7» р можно определить, разделив 7 на ускорение зем-
ного притяжения gy равное 9,81 м/сек2.
Р =:g = ОТ кг'сек21м*‘ (2)
Чтобы получить указанную в формуле (2) размер-
ность для р, 7 нужно взять в кг/м*. Массовая плотность
10
зависит от физического состояния воздуха — его тем-
пературы, давления, влажности; для нормальных усло-
вий р можно считать равной 0,125 кг • сек2/м4.
. Приведенные в табл. 1 значения коэффициентов сх
предполагают, что входящие в формулу (1) величины
имеют следующие размерности: S — л2, V — м/сек,
р — кг • сек2/м\ сила X, определенная по формуле
(1), — кг.
В качестве характеристичного размера для всей мо-
дели принимают площадь крыла; поэтому коэффициент
сопротивления всей модели находят через коэффициенты
сопротивления отдельных ее частей так, как показано
в формуле (3):
= Сх + с жст • “у + ехк • у + ехф • у + Схп' у Н-> (^)
где схм— коэффициент сопротивления всей модели;
сх — коэффициент сопротивления крыла;
Gct — коэффициент сопротивления стабилизатора;
5СТ — площадь стабилизатора;
S — площадь крыла;
схк — коэффициент сопротивления киля;
SK — площадь киля;
схф — коэффициент сопротивления фюзеляжа;
5Ф — мидель фюзеляжа;
схп — коэффициент сопротивления пилона;
Sn — поперечное сечение пилона.
Аналогично в формулу можно включить и осталь-
ные детали модели: стойки, подкосы, винт и т. д.
С учетом формулы (3) величину сопротивления всей
модели можно было бы определить по формуле (1),
переписав ее в виде:
XM = cxu-S-P-^. (1.1)
Однако точно рассчитать сопротивление модели нам
не удастся, так как еще нет достаточно достоверных
значений коэффициентов для различных частей модели,
полученных в тех же условиях, в которых летает мо-
дель. Тем не менее некоторые выводы из рассмотрения
формул (1) и (3) можно сделать.
Во-первых, следует уменьшать мидель фюзеляжа
до величины, необходимой для размещения двигателя,
11
механизмов и обеспечивающей нужную жесткость и
прочность фюзеляжа. Во-вторых, фюзеляжи надо делать
наиболее обтекаемой формы. Аэродинамически выгод-
ная форма — каплеобразная. В-третьих, необходимо
уменьшать количество вспомогательных элементов —
стоек, подкосов и т. д., находящихся в потоке воздуха.
Нельзя считать, что наиболее выгодны крылья с
наименьшим сопротивлением, так как такие крылья, как
правило, имеют и меньшую подъемную силу.
Подъемная сила крыла зависит от его геометриче-
ских размеров, скорости полета модели, плотности воз-
духа и несущей способности профиля крыла. Эту зави-
симость принято записывать в виде формулы, подобной
формуле для тобового сопротивления:
Y = Cy.S.P42, (4)
где cv — коэффициент подъемной силы крыла, учитыва-
ющий несущую способность профиля.
Подробно о коэффициенте су рассказывается в раз-
деле «Проектирование», а сейчас важно только знать,
что этот коэффициент зависит от формы профиля и
угла атаки — угла между скоростью набегающего
воздушного потока и хордой профиля. Хорда про-
филя — это условная прямая линия, применяемая для
построения профиля, проходящая, как правило, через
носик и хвостик профиля.
Размерность величин, входящих в формулу (4), та-
кая же, как и в формуле (1). Подъемная сила стабили-
затора, а также боковая сила, действующая на верти-
кальное оперение, определяются по формулам, анало-
гичным формуле (4):
„ IZ2
Кст = ГуСТ ‘ *^ст‘ Р ’ *2" > (5)
. ZK = ^-SK-p-y, (6)
где суст и cz — коэффициенты подъемной силы стаби-
лизатора и боковой силы вертикального оперения1.
Как мы уже знаем, подъемная сила модели обра-
зуется ее несущей площадью и складывается из подъ-
1 По величине значение cz соответствует значению cv ПР°'
филей.
12
емной силы крыла и подъемной силы стабилизатора:
ГМ=Г+ГСТ. (7)
Обычно подъемная сила крыла составляет 90—95%
подъемной силы свободнолетающей модели, подъемная
сила стабилизатора — не более 10% подъемной силы
модели. Чтобы найти подъемную силу всей модели,
воспользуемся общей формулой
^Sm-S-p-y - (7-Н
где сум — коэффициент подъемной силы модели, опре-
деляемый с достаточной степенью точности по формуле
+ (7-2)1
Подъемная сила модели и ее лобовое сопротивление
меняются в зависимости от режима полета модели. Так,
в планирующем полете подъемная сила примерно р5в-
на весу модели, а ее лобовое сопротивление в 8—15 раз
меньше подъемной силы; при крутом взлете, наоборот,
лобовое сопротивление становится значительно больше
подъемной силы. Естественно, ни подъемная сила, ни
лобовое сопротивление в отдельности ничего не говорят
об аэродинамическом совершенстве модели. Однако
этого нельзя сказать об отношении этих сил. Отноше-
ние подъемной силы к лобовому сопротивлению, назы-
ваемое аэродинамическим качеством, пол-
ностью определяет аэродинамическое совершенство мо-
дели. Аэродинамическое качество обычно обозначается
буквой К
к = УЫ!ХЫ = с^/с^. (8)
Чем больше аэродинамическое качество, тем выше аэ-
родинамическое совершенство модели.
Аэродинамическое качество модели меняется в поле-
те: в планирующем полете оно выше, чем при крутом
взлете. Поэтому принято выделять максимальное аэро-
динамическое качество, которое и определяет ее аэро-
1 Равенство указано не точным, а приближенным вследствие
того, что скорость воздушного потока около стабилизатора при-
мерно на 1—2% ниже, чем около крыла.
13
динамическое совершенство. И хотя модель на режиме
максимального аэродинамического качества, как пра-
вило, не летает, продолжительность и высота полета
будут выше при прочих равных условиях у тех моделей,
которые имеют большее значение максимального аэро-
динамического качества.
ПОЛЕТ СВОБОДНОЛЕТАЮЩИХ МОДЕЛЕЙ
Продолжительность полета модели планера — это
время планирующего полета с момента отцепления ее
от леера до приземления. Продолжительность полета
резиномоторной и таймерной моделей складывается из
времени их полета с работающим двигателем (резино-
мотором или поршневым) и времени последующего пла-
нирования. Тем не менее и для этих моделей планиру-
ющий полет имеет решающее значение, так как время
его составляет большую часть продолжительности всего
полета. Действительно, продолжительность моторного
полета модели с поршневым двигателем не превышает
10 сек.; у резиномоторной модели время раскручивания
резиномотора, как правило, менее 45 сек.
ПЛАНИРУЮЩИЙ ПОЛЕТ
Силы, действующие на модель в планирующем по-
лете. Как мы уже знаем, в полете на модель действует
сила лобового сопротивления. И чтобы полет был воз-
можен, нужна движущая сила, которая преодолевала
бы силу лобового сопротивления. Движущей силой
в планирующем полете является вес модели. Нормаль-
ный планирующий полет — установившийся, в котором
все силы, действующие на модель, взаимно уравнове-
шены, вследствие чего скорость полета и угол планиро-
вания постоянны.
Какие же силы действуют в установившемся плани-
рующем полете? Их всего три — подъемная сила, сила
сопротивления и вес модели.
На рис. 4,6 показана планирующая модель и все
действующие на нее силы; в установившемся полете
они приложены в центре тяжести модели. GM — вес
14
модели, 0 — угол планирования, который измеряется
между горизонтом и направлением полета модели, сов-
падающим с направлением скорости полета. Как вид-
но из рисунка, сопротивление модели уравновешивае!-
ся только частью веса модели, равной GM - sin©; боль-
шая часть веса модели, равная GM -cos0, уравновеши-
вается подъемной силой.
^M = GM-sin0, (9)
rM = GM-cos0. (10)
Y
Разделив уравнение (10) на (9), получим ctg0=yi ;
но Ум/Хм есть аэродинамическое качество модели, сле-
довательно, K=ctg0. С другой стороны, аэродинамиче-
ское качество равно отношению расстояния Ln.n, про-
ходимого моделью в планирующем полете, к высоте Н,
с которой она была запущена, т. е. Л^Лп-п/^-
Для большинства свободнолетающих моделей К
равно 8—15, что соответствует углу планирования 4—5°.
Косинус углов 4—5° равен соответственно 0,998—0,996,
т. е. практически близок к 1, поэтому можно сказать,
что подъемная сила при планировании равна весу мо-
дели:
Гм-Ом. (10.1)
Скорость снижения. Планируя, модель снижается.
Чем медленнее она снижается, тем длительнее плани-
рует. Скорость снижения определяется скоростью пла-
нирования и углом планирования:
I/-sin0. (11)
С учетом формулы (9) можно записать:
Vc=V-XufGu^V-Xu/YM (11.1)
Vc^V-cxuleVM- VIX. (11.2)
Итак, скорость снижения тем меньше, чем меньше
скорость полета и выше аэродинамическое качество
модели. Однако уменьшить скорость полета моделей
сколько-нибудь значительнее не удается. Чтобы убе-
15
диться в этом, воспользуемся формулой (7.1) и опреде-
лим из нее скорость планирования:
V = 1/ —,с учетом формулы (10.1)
’ Су • О • р
Величина р называется нагрузкой на площадь кры-
ла. Так как у свободнолетающих моделей вес и несущая
площадь ограничены, а стабилизатор нельзя сделать
сколько угодно малым (SCT для моделей планеров —1
не менее 0,13S, для моторных моделей — не менее 0,2S),
нагрузка — вполне определенная величина, не ниже:
0 41
для моделей планеров р= 0’30 м2 = 1,36 кг/м2,
о 0,23 * л л /9
для резиномоторных моделей р = -тг-т~—j-= 1,44 кг[мг9
V j 1 V Jvt>
0 75
для таймерных моделей р = — 2,42 кг!м\
и, о 1
Величина сум для модели в целом редко превышает
1,2; у таймерных моделей сум , как правило, меньше, чем
у моделей планеров и резиномоторных, но может дости-
гать 1.
Подставив значения р и сум в формулу (12), получим,
что при нормальных атмосферных условиях, когда
р—0,125 кг • сек2!м\ возможная скорость моделей пла-
неров и резиномоторных будет составлять соответствен-
но 4,2 и 4,4 м!сек, таймерных — 6,2 м!сек. Поэтому
практически остается только один путь для уменьшения
скорости снижения — это улучшение аэродинамическо-
го совершенства моделей, в конечном счете—уменьше-
ние ее сопротивления.
При полете с максимальным качеством модель будет
снижаться со скоростью большей, чем минимально воз-
можная. Чтобы убедиться в этом, объединим формулы
(11.2) и (12):
16
Таким образом, наименьшую скорость снижения мо-
дель будет иметь при максимальном отношении £|/2/£2хм,
а не при максимальном качестве су1А1схм.
Как правило, наименьшую скорость снижения имеет
модель при больших углах атаки (при больших Сум),
чем угол атаки, обеспечивающий максимальное аэро-
динамическое качество. Значения , которые были
использованы выше для определения скорости планиро-
вания, соответствуют наименьшей скорости снижения.
Как показывают расчеты, скорость модели при пла-
нировании с максимальным качеством примерно на 10%
выше скорости модели при планировании с минималь-
ной скоростью снижения. При планировании с наимень-
шей скоростью снижения (оптимальном планировании)
угол планирования будет больше, чем при планирова-
нии с максимальным качеством, а дальность планиро-
вания, наоборот, меньше.
Начинающие авиамоделисты допускают ошибку,
когда прекращают регулировку моделей, добившись на-
ибольшей дальности планирования; регулировку нужно
продолжать, увеличивая после этого угол атаки моде-
ли (например, путем уменьшения угла установки стаби-
лизатора или увеличения угла установки крыла) до по-
лучения наибольшей продолжительности полета.
Перегрузки в планирующем полете. При планиро-
вании возможны случаи, когда силы, действующие на
модель, не уравновешиваются. Так, например, резкий
порыв ветра изменяет подъемную силу и она становит-
ся значительно больше или меньше веса модели. Наи-
более опасны встречные порывы ветра, увеличивающие
подъемную силу. В момент появления порыва ветра
модель вследствие своей инерционности сохраняет ус-
тановившуюся скорость и угол атаки неизменными.
Скорость крыла относительно потока при этом стано-
вится равной сумме скорости ветра в порыве и устано-
вившейся скорости летящей модели. Вследствие этого
подъемная сила при постоянном угле атаки, пропорци-
ональная только относительной скорости, увеличивается.
Отношение величины действующей подъемной силы
к величине подъемной силы в установившемся планиро-
вании называется перегрузкой. Знать перегрузку
необходимо для правильного конструирования модели.
17
в первую очередь ее крыла. Перегрузку, действующую
на крыло, определяют по формуле:
п=Гд/Г. (13)
Как мы уже знаем, подъемная сила крыла составля-
ет большую часть (не менее 90%) подъемной силы всей
модели. Поэтому в некоторых случаях, когда выделить
долю крыла из подъемной силы всей модели трудно,
перегрузку с достаточной для практического использо-
вания степенью точности можно определить через об-
щую подъемную силу
п-Гмд/Гм-Гмд/См. (13.1)
Легко показать, что при воздействии встречного по-
рыва перегрузка определяется только соотношением
скоростей модели и ветра:
СумР• S*2
(V+lFn)2 ( Гпу
1/2 — I/ + V) 1
(13.2)
где Wn — скорость порыва ветра.
Как правило, авиамоделисты стараются не запус-
кать модели в сильный, порывистый ветер. Но такие за-
пуски бывают необходимы на соревнованиях.
Скорость ветра в порыве может достигать в усло-
виях соревнований 3 м/сек. Перегрузка, обусловленная
этим порывом, будет равна для моделей: планера —
2,95, резиномоторной — 2,85 и таймерной — 2,2. При
определении этих перегрузок были приняты скорости
полета, указанные на стр. 16.
Приведенные значения перегрузок — умеренные, на
взлете возможны более значительные.
ВЗЛЕТ МОДЕЛИ ПЛАНЕРА
Модель планера запускают с помощью леера. Дви-
жущей силой, преодолевающей сопротивление модели
при взлете, является натяжение леера. Как показывает
опыт, при запуске модели в спокойную погоду, когда
скорость ветра не превышает 4 м/сек, натяжение леера
относительно невелико г— не превышает 1 кг, но при
сильном порывистом ветре величина натяжения увели-
18
чивается до 3 кг, а иногда и более. Примерно такое же
натяжение леера бывает и при так называемом «дина-
мическом старте». Цель «динамического старта» — за-
ставить модель после отцепления от леера набрать еще
дополнительно 3—4 м высоты. Для этого модель к мо-
менту отцепления от леера «разгоняют», заставляя ее
лететь со скоростью, большей скорости планирования.
После отцепления от леера модель уменьшает свою ско-
рость, вследствие чего приобретенная при разгоне ки-
нетическая энергия переходит в потенциальную энер-
гию высоты. Ускорить полет модели можно только уве-
личением натяжения леера. Но это увеличение имеет
свой предел, определяемый прочностью крыла. Как бу-
дет показано ниже, правильно сконструированное кры-
ло может при небольшом весе выдержать действие
подъемной силы, превышающей подъемную силу в го-
ризонтальном или планирующем полете в несколько
раз.
На рис. 4,в показана взлетающая на леере модель
планера. На нее действуют вес GM , натяжение леера N
и результирующая аэродинамическая сила /?мд, кото-
рую, как обычно, представим в виде подъемной силы
Гмд и силы сопротивления Хмд . С достаточным осно-
ванием можно считать, что все действующие на модель
силы и в'этом случае уравновешиваются. Зная вес мо-
дели и натяжение леера, можно определить силу /?мд,
воспользовавшись известной из школьного курса триго-
нометрии формулой для стороны треугольника, лежа-
щей против тупого угла («теоремой косинусов»):
G^ + №-2GM^.cos?= Пд + ^д. (14)
Разделив правую и левую части формулы (14) на
GJ, ^юлучим:
Приняв во внимание, что
через угол стояния модели ср
угол р можно выразить
(угол между горизонтом и
19
прямой, соединяющей модель и запускающего), а вели-
чиной 1//С2 пренебречь, так как она примерно в 100 раз
меньше 1, окончательно запишем формулу перегрузки:
п,
(15)
Итак, перегрузка при взлете на леере зависит от его
натяжения и положения модели. При прочих равных ус-
ловиях перегрузка наибольшая при углах стояния мо-
дели, близких к 90°, т. е. при нахождении модели над
головой запускающего,' как, например, при динамичес-
ком старте. В этом случае
N
п
(15.1)
Как мы уже говорили, натяжение леера достигает
3 кг; при весе модели в 0,41 кг перегрузка будет иметь
значительную величину — 8,3!
На соревнованиях часто приходится наблюдать по-
ломку крыльев моделей планеров при любых углах сто-
яния. Наряду с ошибками запускающих причина этих
поломок — резкие порывы ветра. В начале действия по^
рыва ветра модель благодаря своей инерционности сох-
раняет положение в пространстве и скорость неизмен-
ными, вследствие чего углы атаки крыла и стабилиза-
тора резко возрастают.
Чтобы убедиться в этом, обратимся к рис. 4,в, на
котором скорость порыва ветра обозначена W7/*, а ско-
рость модели до воздействия этого порыва — VB. Сло-
жить по правилу сложения скоростей Wn * и VBнельзя,
так как эти скорости относятся к разным объектам —
модели и воздуху. Поэтому воспользуемся тем, что по-
лет модели можно рассматривать как движение ее от-
носительно воздуха и как движение воздуха относи-
тельно модели (в тОхМ и другом случае физическая кар-
тина
друг
току
Так,
полета будет одной и той же). Чтобы отличить
от друга скорости, относящиеся к воздушному по-
и модели, условимся первые отмечать звездочкой,
если скорость модели относительно воздуха обо-
20
значили VB, то скорость потока воздуха относительно
Этой модели — VB. Так как указанные на рис. 4,в ско-
рости VB и 1Гп относятся к одной и той же воздушной
среде, можем сложить их и получим новую скорость Vn,
с которой поток во время действия порыва набегает на
модель.
Как видно из рисунка, угол атаки ап — угол между
хордой и скоростью Vn — увеличился по сравнению с
первоначальным углом атаки а, следовательно, увели-
чился и коэффициент подъемной силы сум. Если же
учесть, что и скорость Vn больше первоначальной
скорости VB , то нужно ожидать значительного увели-
чения подъемной силы, т. е. увеличения перегрузки. При
сильных порывах перегрузка может даже превзойти по-
лученное нами выше значение. Однако едва ли стоит
рассчитывать прочность крыла исходя из значений пе-
регрузки, больших 8,5, так как крылья с таким запасом
прочности будут чрезмерно тяжелы. Опасных же зна-
чений перегрузок можно избежать, если при запуске
моделей внимательно следить за состоянием окружаю-
щего воздуха и при порывах ветра своевременно умень-
шать натяжение леера.
Стойкость крыла к кратковременным перегрузкам
повышают, применив упругое его крепление. Тадое
крепление имеют крылья большинства современных мо-
делей планеров.
ВЗЛЕТ МОТОРНЫХ МОДЕЛЕЙ
Силы, действующие на взлете. Движущая сила при
взлете моторных моделей — тяга винта, которая преодо-
левает не только сопротивление модели, но частично и
ее вес. Чтобы убедиться в этом, посмотрим на рис. 4,г, на
котором показана взлетающая модель. При взлете на
модель действуют вес модели GM, тяга винта Р и аэро-
динамическая сила /?мв , которую, как обычно, пред-
ставим в виде двух ее составляющих—подъемной си-
лы Умв и силы сопротивления Хмв. Так как полет моде-
ли, правильно отрегулированной, установившийся (за
исключением только начального участка взлета — уча-
21
стка разгона), все эти силы уравновешены, вследствие
чего можно записать:
ГМв = GM • COS0, (16)
P = ^MB + GH.sin0, (17)
где 0 — угол взлета.
Как следует из формулы (16), подъемная сила
крыла уменьшается с увеличением угла взлета; при
вертикальном взлете она отсутствует. Уменьшить подъ-
емную силу на взлете практически можно, только умень-
шив скорость взлета или коэффициент суМ, в конечном
счете — су крыла. Коэффициент подъемной силы взле-
тающей модели сумв можно определить по формуле (16):
у — п . __с .9.0* ^8 т р с — 2-^M-cos0
'МВ - COSO ---- £умв Р £умв с •
' £ р • о • V в
Но вес модели и подъемная сила при
примерно равны: GM — Км и
планировании
-у, поэтому
окончательно
/У V
^\мв “ ^ум ’ * COS0
(18)
и (для крыла)
> V \2
— -cos©.
(18.1)
Снижать скорость модели не всегда целесообразно,
так как при этом уменьшится набранная ею высота. Для
каждой модели существует оптимальная скорость, с
которой модель должна набирать высоту; эта скорость
определяется аэродинамическим совершенством модели,
углом взлета и мощностью двигателя — поршневого
или резинового.
Формула (17), дающая величину потребной для поле-
та тяги, показывает, что на малых углах подъема тяга в
большей степени зависит от сопротивления модели, при
больших углах подъема — от веса модели. Ка^ прави-
ло, сопротивление модели в моторном полете больше,
чем при планировании. С увеличением угла подъема
потребная для взлета т?яга растет. В качестве примера
на рис. 5,а показан график зависимости тяги, высоты
22
полета, времени от угла и скорости подъема для рези-
номоторной модели; на рис. 5,6 — подобный же график
зависимости для таймерной модели. Эти графики поз-
воляют примерно оценить величину тяги, потребную
для взлета модели, и, естественно, только в том случае,
если выбраны углы подъема и скорость модели при
взлете. А это можно сделать, ясно представляя себе
зависимость продолжительности и высоты полета от
этих параметров.
Продолжительность и высота полета. Время полета
моторной модели складывается из времени моторного
полета и времени планирования.
Время работы поршневого двигателя в полете зада-
но — оно не должно превышать 10 сек., поэтому един-
ственная задача при моторном полете таймерной моде-
ли — достижение наибольшей высоты. Для резиномо-
торной модели существенно и время моторного полета,
так как оно часто составляет значительную часть об-
щего времени полета. Известны модели, которые боль-
шую часть всего полета — около двух минут — совер-
шали с работающим резиномоторюм. Продолжитель-
ность полета резиномоторной модели зависит от многих
параметров: удельной, энергии резины, аэродинамичес-
кого совершенства модели, скорости планирования, ко-
эффициента полезного действия винта и, наконец, ско-
рости взлета Ув и угла взлета 0. Вследствие неравно-
мерной раскрутки резиномотора (см. рис. 27) скорость
взлета и угол взлета непостоянны — в начале взлета
они больше, чем в его конце. Поэтому, говоря о скоро-
сти и угле взлета резиномоторной модели, имеют в
виду их средние значения.
На графике (см. рис. 5,а) показана зависимость об-
щего времени полета, а также времени моторного поле-
та от средних угла взлета и скорости взлета аэродина-
мически совершенной (К=Ю) модели, имеющей рези-
номотор весом 40 г из высококачественной резины и хо-
рошо подобранный винт. Как видно из графика, наи-
большая продолжительность полета получается при
оптимальной скорости взлета, которая при углах взлета
до 40° незначительно отличается от скорости, соответст-
вующей максимальному аэродинамическому качеству.
Если же модель взлетает с большей скоростью, то дос-
тигнутая ею высота уменьшится. Это объясняется тем,
23
что при увеличении скорости возрастает сопротивление
модели и значительная часть энергии резиномотора рас-
ходуется на преодоление этого возросшего сопротивле-
ния. Уменьшение скорости полета по сравнению с опти-
мальной также приведет к увеличению сопротивления,
но уже за счет повышения коэффициента сопротивления:
чтобы удержаться на траектории набора высоты, модель
должна перейти на большие углы атаки, на которых ко-
эффициент сопротивления крыла резко возрастает. Ес-
тественно, и в этом случае уменьшится время полета.
Что касается влияния угла взлета на продолжительность
полета, то при оптимальной скорости взлета оно незна-
чительно.
На графике показано, что добиться необходимого
трехминутного полета резиномоторной модели, вероят-
но, возможно, но только в идеальных атмосферных ус-
ловиях. При полете в возмущенной атмосфере, обычной
для дневного времени летом, режим полета модели не-
однократно нарушается, что приводит к уменьшению
продолжительности полета. В этих случаях оказывает-
ся необходимо, чтобы модель смогла набрать доста-
точную высоту. «Запас» высоты позволит модели с
большей вероятностью использовать дл$ь увеличения
времени полета восходящие потоки. Как правило, мо-
дель «чувствует» эти потоки на высоте не менее 50 м.
Как зависит высота полета резиномоторной модели от
средних значений скорости взлета и угла взлета, пока-
зано на том же графике (см. рис. 5,а). Из этого графи-
Рис. 5. Полетные характеристики моделей:
а — график зависимости тяги Р, высоты полета Нв,
времени моторного полета /м.п и общего времени
полета t от скорости взлета VB и угла взлета 0
для резиномоторной модели (пример: м/сек,
6 = 10е, Р = 0,075 кг, /м.п= 44 сек., /=138 сек.,
#в='42 jh); б — график зависимости тяги Р, высоты
полета Нв от скорости взлета VB , угла взлета 0 и
мощности двигателя N для таймерной модели (при-
мер: У = 0,3 л. с., Р = 1,08 кг, V в = 13,2 м/сек,
0=70°, Нв = 120 At); в — график зависимости от
угла взлета 0, высоты полета И в и времени полета t
при взлете с оптимальной скоростью резиномоторной
модели
25
ка следует, что наибольшей высоты можно достигнуть
при оптимальной скорости полета — так же, как и про-
должительности полета; при этом большим углам взле-
та соответствует и большая высота.
Часто наблюдаемые на соревнованиях внешне эф-
фектные взлеты «свечкой» — с большой скоростью
под большими углами — дают меньшую высоту, чем
спокойный взлет с относительно небольшими скоростью
и углом 0 (сравните, например, высоту при скорости
10 м/сек и угле 0=40° и высоту при скорости 5 м/сек
и угле 0=20°).
Итак, оптимальным средним значением скорости
взлета резиномоторной модели можно считать скорость,
соответствующую максимальному аэродинамическому
качеству, т. е. примерно 4,5 м/сек (см. стр. 16).
Для решения вопроса об оптимальном угле взлета
на рис. 5,в приведен график зависимости времени по-
лета и высоты полета от угла взлета при условии взлета
с оптимальной скоростью. Из этого графика видно, что
оптимальными средними углами взлета нужно считать
10—20°; при меньших углах взлета высота будет не-
достаточной для успешного использования восходящих
потоков; при больших углах прирост высоты незначи-
телен. Повышенная мощность резиномотора в начале
его раскручивания обеспечивает взлет с начальными уг-
лами порядка 45°, хотя средний за моторный полет угол
взлета и не будет превышать 20°.
Иные выводы можно сделать, рассмотрев взлет тай-
мерной модели. В отличие от резиномоторной, эта мо-
дель должна в течение отведенных ей 10 сек. взлететь
на наибольшую высоту. Естественно, сделать это на ре-
жиме максимального аэродинамического качества, т. е.
при скорости около 6 м/сек, не удается. Поэтому необ-
ходимо, чтобы таймерные модели взлетали с большими
скоростями, хотя при этом значительная часть мощно-
сти их двигателя и будет теряться на преодоление ло-
бового сопротивления.
Высота, на которую взлетает таймерная модель, за-
висит от мощности двигателя N, коэффициента полез-
ного действия т], аэродинамического совершенства мо-
дели на взлете и, наконец, скорости VB и угла взлета 0.
Эта зависимость для аэродинамически совершенной мо-
26
дели с правильно подобранным винтом (т]=0,6) приве-
дена на рис. 5,6. Этот график показывает, что малые
углы взлета для таймерных моделей невыгодны, так
как при этом достигнутая моделью высота явно ма-
ла. Повышение мощности двигателя при малых углах
взлета практически бесполезно, потому что ведет к
крайне малому приросту высоты. Гораздо лучше ис-
пользуется повышенная мощность при больших углах
взлета.
Тем не менее стремиться к углам взлета более 70°
едва ли следует, так как увеличение высоты при этом
незначительное—не более 3%, а стабильность взлета по-
нижается: появляется возможность «сваливания модели
на спину». Поэтому оптимальными углами взлета © сле-
дует считать 50—70°. Даже при умеренной мощности
двигателя, равной 0,3 л. с., можно достичь высоты 120 м,
чему соответствует общая продолжительность полета
около 3 мин.
Чтобы модель могла взлететь с большими углами 0,
как мы уже знаем, необходимо уменьшить угол атаки
крыла. Практически этого добиваются несколькими спо-
собами.
Первый способ, наиболее распространенный, — нак-
лон вала винта вниз, чтобы направление тяги винга
проходило выше центра тяжести модели (ц.т.). В по-
лете под действием тяги модель уменьшает свой угол
атаки до тех пор, пока возникший на стабилизаторе до-
полнительный аэродинамический момент уравновесит
момент тяги. Наклон вала винта подбирается при регу-
лировке модели.
Второй способ — уменьшение на 2—5° угла установ-
ки крыла при работающем двигателе; одновременно с
выключением двигателя или несколько позднее крыло
автоматически устанавливается на угол, необходимый
для планирующего полета. Этот способ обеспечивает
наименьшее сопротивление модели на взлете, но прак-
тически трудно осуществим из-за сложности поворота
всего крыла. Этот способ успешно использовали на
практике.
Третий способ — применение на крыле закрылка, от-
клоняемого на 5—10° вниз в планирующем полете.
Этот способ проще второго и дает неплохие результаты.
Возможности его можно расширить, применив щелевой
27
закрылок, повышающий коэффициент су крыла. Этот
способ используется редко.
Четвертый способ — увеличение на 1—3° угла уста-
новки стабилизатора при работающем двигателе; при
остановке двигателя или несколько позднее стабилиза-
тор автоматически занимает положение, соответствую-
щее нормальному планирующему полету. Этот способ
осуществить легче, чем предыдущие; недостаток его,
как и первого, — несколько большее сопротивление на
взлете, так как продольная ось модели составляет угол
с направлением полета. Этот способ применяется часто.
Пятый способ — отклонение вниз на больший угол
(до 10°) не всего стабилизатора, а только установлен-
ного на нем руля высоты; при остановке двигателя руль
занимает положение, обеспечивающее нормальное пла-
нирование. Этот легко осуществимый способ имеет пре-
имущество: руль эффективен только в струе от винта;
при отсутствии обдува эффективность руля резко па-
дает, поэтому аварии с моделью не произойдет даже в
случае заклинивания руля в отклоненном вниз положе-
нии после остановки двигателя. Но и этот способ име-
ет недостаток, присущий предыдущему.
Ввиду того, что теоретически точно рассчитать уг-
лы поворота крыла и стабилизатора или углы откло-
нения руля и закрылков трудно, их нужно подбирать
при регулировке моделей.
При больших углах взлета сделать плавным переход
к планированию сложно. После выключения двигателя
модель некоторое время еще продолжает двигаться по
инерции вверх, теряя свою скорость, после чего свалива-
ется в пикирование; при пикировании модель теряет
большую часть набранной высоты. Улучшить переход на
планирование можно, если заставить модель после оста-
новки двигателя сделать вираж.
Некоторые спортсмены на своих моделях отклоняют
руль направления вправо и после регулировки плани-
рующего полета жестко крепят его в этом положении.
При регулировке моторного полета они склоняют вал
винта влево, добиваясь взлета с небольшим , разворо-
том вправо. Модели с такой регулировкой, как правило,
плавно переходят на планирование. С той же целью
часто применяют управляемый руль поворота. В мотор-
ном полете этот руль устанавливается в нейтральное
28
положение; в момент выключения двигателя или нес-
колько позднее (на 1—2 сек.) руль отклоняется впра-
во, заставляя модель сделать вираж в ту же сторону.
Управление крылом, стабилизатором, закрылками и
рулями осуществляется теми же механизмами, которые
выключают двигатель.
Моторные модели запускают с рук. Чтобы модель не
теряла время на разгон, ее нужно выпускать с толч-
ком. Силу толчка и угол запуска определяют в процессе
регулировки модели. Опытному спортсмену удается за-
пустить модель так, что она сразу же начинает полет с
нужной скоростью и углом взлета. При неправильном
запуске модель перейдет к установившемуся полету
только через некоторое время, когда она, в силу при-
сущей ей устойчивости, исправит ошибку запускающе-
го. Модель, запущенная со слишком большим углом к
горизонту или со слабым толчком, сразу же начинает
уменьшать свой угол взлета; при этом скорость ее уве-
личивается. Только набрав определенную скорость, мо-
дель переходит в установившийся полет. При слишком
малом угле запуска избыток мощности идет .на разгон
модели; с ростом скорости увеличивается подъемная си-
ла крыла, а следовательно, и угол взлета. При дости-
жении определенного угла взлета модель переходит в
установившийся полет.
Естественно, ошибки, допускаемые при запуске,
уменьшают потенциально возможные высоту и продол-
жительность полета модели.
Перегрузки на взлете. При нормальном взлете подъ-
емная сила модели меньше ее веса, т. е. перегрузка
меньше 1. Таким образом, нормальный установивший-
ся взлет не определяет прочность крыла. Однако при
взлете в порывистый ветер, даже не очень сильный, пе-
регрузки могут достичь значительной величины. Осо-
бенно велика опасность возникновения больших пере-
грузок при крутом взлете моделей с большей, чем при
планировании, скоростью.
Чтобы понять причину возникновения перегрузки,
посмотрим рис. 6, на котором показана взлетающая мо-
дель. Если на эту модель подействует порыв ветра со
скоростью W*, то в первый момент, вследствие инерци-
онности самой модели, скорость воздушного потока от-
носительно нее Уп и угол атаки несущих поверхностей,
29
Рис. 6. Действие порыва
ветра на взлетающую
модель
в первую очередь крыла, увеличатся. Для определения
скорости Уп и приращения угла атаки Ла воспользуем-
ся вновь теоремой косинусов, а также теоремой сину-
сов:
v„=/VI + lVn5 + 2VB-lVn.cose, (19)
W
= arcsin -пт5 • sin0.
•/п
(20)
Увеличение угла атаки на величину Да приведет к
повышению коэффициента су, что совместно с возраста-
нием скорости (от VB до Уп) вызовет значительное уве-
личение подъемной силы, а следовательно, и перегруз-
ки. Эту перегрузку определим отношением подъемной
силы крыла при действии порыва ветра, обозначив
ее Увд, к подъемной силе крыла при планировании:
п=Гвд/Г. (21)
Коэффициент подъемной силы, соответствующий Увд
обозначим с>вд и окончательно запишем:
' сувд ( Уп\2
71 —'-- • I «л I
Су X У J •
(21.1)
30
В качестве примера, поясняющего все сказанное вы-
ше, определим перегрузку для таймерной модели, взле-
тающей под углом 0=60° со скоростью 12,5 м/сек, при-
мерно вдвое превышающей скорость планирования; ко-
эффициент су при планировании примем равным 1. При
этих условиях коэффициент суз, определенный по фор-
муле (18.1), будет равен:
/6,2V
‘°’5 ==0’1225’
Предположим, что на модели установлен профиль
NACA-6412 (см. стр. 59), для которого значение коэф-
фициента^, равное 0,1225, будет при угле атаки—3°; для
других профилей, естественно, угол атаки может быть
иным. Если на эту модель подействует резкий порыв
ветра со скоростью 3 м/сек, то мгновенные значения Vn
и Да будут соответственно равны:
Vn = /156 4- 9 + 2-12,5-3-0,5 = 14,25 м/сек,
Да = arcsin yt^-0,866 = arcsin 0,182 = 10°30'.
Таким образом, новый мгновенный угол атаки будет
7°30'; ему соответствует сувд =1,15.
Перегрузку определим по формуле (21.1), так как
все входящие в нее величины нам уже известны:
1,15/14,25X2
П~ 1,0 к 6,2 / = 6,1‘
Такое значение перегрузки можно считать характер-
ным для таймерных моделей.
У резиномоторных моделей в отношении перегрузки
наиболее опасен начальный участок,взлета, когда из-за
повышенной мощности резиномотора в начале его рас-
кручивания скорость взлета увеличивается. При усло-
вии правильной регулировки модели можно для расчета
принять следующие значения угла и скорости взлета:
0 = 45°, VB = 1,25 - V = 5,5 м/сек.
Сделав расчет, аналогичный приведенному выше,
получим перегрузку, равную 4. *
Причина возникновения перегрузки — не только по-
рывы ветра. Перегрузки возникают и в неустановившем-
ся полете, например, при крутом вираже, или в юм
31
случае, если модель вследствие неправильной баланси-
ровки сделает петлю; наиболее опасен выход из петли,
так как в этот момент модель имеет наибольшую ско-
рость, а центробежная сила и вес модели направлены
в одну сторону. Как показывают расчеты, перегрузка
при этом может достигать 6. Это значение перегрузки
и следует принять для резиномоторной модели. Мень-
шие перегрузки имеют место при неправильных запус-
ках модели, например, при слишком малых углах к го-
ризонту.
ПРОЕКТИРОВАНИЕ
На рис. 7 и 8 показаны модели планера и резиномо-
торная, а также обозначены те их характерные разме-
ры, которые определяются в процессе проектирования.
Эти размеры следующие: I — размах крыла; /ц —
длина центральной части крыла; в\ — наибольшая хор-
да крыла; в2 — наименьшая хорда крыла; ф!—угол по-
Рис. 7. Схема модели планера (с указанием основных размеров)
32
Рис. 8. Схема резиномоторной модели (с указанием основных
размеров)
перечного V центральной части крыла; фв —угол попе-
речного V концевых частей крыла; /ст — размах стаби-
лизатора; в1ст — наибольшая хорда стабилизатора;
в2ст — наименьшая хорда стабилизатора; фст — угол
поперечного V стабилизатора; /к— высота киля; в1к —
наибольшая хорда киля; в2к — наименьшая хорда ки-
ля; Лф — длина фюзеляжа; L — плечо стабилизатора;
LK — плечо киля; LH — длина носовой части фюзеля-
жа; р — угол установки крыла; рст — угол установки
стабилизатора; САХ — средняя аэродинамическая хор-
да крыла; Хц/Т — расстояние от носика -САХ до центра
тяжести модели; г/ц7т — расстояние от САХ до центра
тяжести модели; САХст — средняя аэродинамическая
хорда стабилизатора; хст — расстояние от носика
33
САХст до центра давления стабилизатора; САХК —
средняя аэродинамическая хорда киля; хк —
расстояние от носика САХК до центра давления киля;
D — диаметр винта.
Кроме того, обозначим: площадь крыла — S, пло-
щадь стабилизатора — SCT, площадь киля — SK.
Многие из указанных обозначений понятны из ри-
сунков, но такие, как L, £к, Хц.т, г/ц.т , САХ и т. д., ве-
роятно, ясны не всем, и поэтому подробно рассмотрим
их в последующих разделах. Таймерная модель здесь
не приведена, но и для нее характерны те же размеры.
КРЫЛО
Причины появления аэродинамических сил: подъем-
ной и лобового сопротивления. Правильно спроектиро-
вать крыло можно только при отчетливом представле-
нии всех физических явленйй, происходящих при дви-
жении крыла в воздухе, прежде всего причин возник-
новения сил — подъемной и лобового сопротивления.
Теория и практика показывают, что при скоростях,
на которых летают модели, аэродинамически наиболее
выгодны крылья, имеющие выпуклую верхнюю поверх-
ность и вогнутую нижнюю, как говорят, крылья, имею-
щие выпукло-вогнутый профиль.
Крыло с таким профилем показано на рис. 9,Л. На
его примере рассмотрим возникновение сил подъемной
и лобового сопротивления. Будем иметь в виду, что
для возникновения этих аэродинамических сил безраз-
лично, движется ли крыло относительно неподвижного
воздуха, или воздух движется относительно непод-
вижного крыла, важно, чтобы было относительное дви-
жение. В аэродинамике обычно принято при определе-
нии аэродинамических сил считать неподвижным кры-
ло, а движущимся — «набегающим» — воздух. Не бу-
дем нарушать традицию и мы.
На крыло, показанное на рис. 9,Л, набегает поток
воздуха. У носика крыла поток раздваивается: одна
часть его обтекает верхнюю поверхность крыла, дру-
гая — нижнюю. Вблизи верхней поверхности, благода-
ря ее выпуклости, поток воздуха, начиная от носика
крыла, сужается и увеличивает свою скорость. Подниж-
34
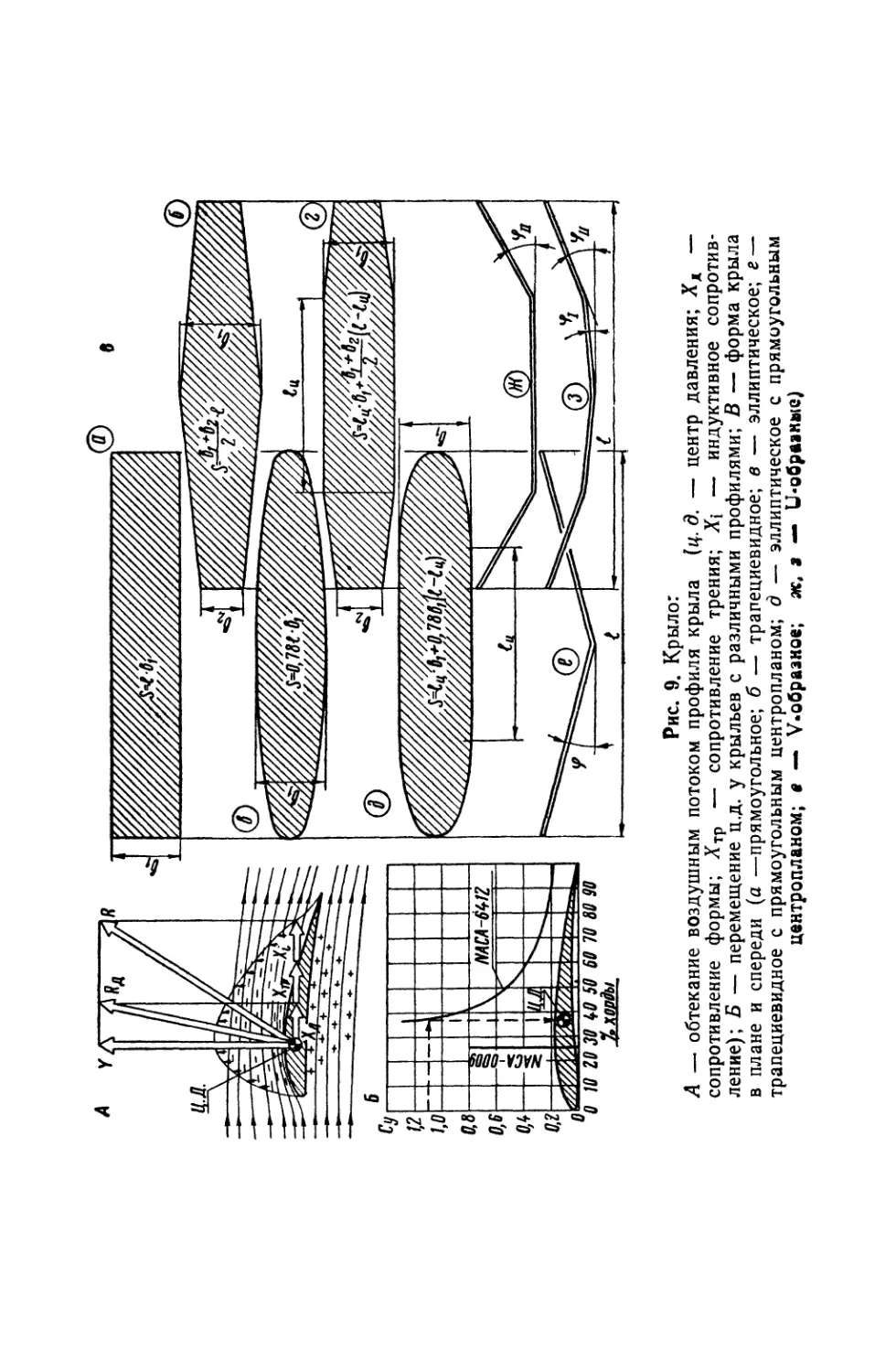
Рис. 9. Крыло:
А — обтекание воздушным потоком профиля крыла (ц. д. — центр давления; Хл —
сопротивление формы; Хтр — сопротивление трения; — индуктивное сопротив-
ление); Б — перемещение ц.д. у крыльев с различными профилями; В — форма крыла
в плане и спереди (а —прямоугольное; б — трапециевидное; в — эллиптическое; г —
трапециевидное с прямоугольным центропланом; д — эллиптическое с прямоугольным
центропланом; а — У*образное; ж» a — U-образные)
ней поверхностью крыла, наоборот, поток расширяет-
ся, вследствие чего скорость его несколько умень-
шается.
Это изменение скоростей над крылом и под кры-
лом является одной из причин возникновения подъем-
ной силы. Существует определенная связь между ско-
ростью воздушного потока и давлением воздуха в нем.
Эта связь была впервые обнаружена и исследована
итальянским ученым Бернулли и нашла свое выра-
жение в физическом законе, называемом теоремой Бер-
нулли.
Физический смысл теоремы Бернулли при примене-
нии ее к воздушному потоку заключается в том, что
если благодаря сужению потока скорость его увеличи-
вается, давление в нем падает, а при расширении по-
тока и уменьшении его скорости — растет.
Если применить положения теоремы Бернулли к по-
казанному на рис. 9,Л крылу, то становится ясно, что
давление под крылом будет больше, чем над крылом.
Разность этих давлений, воздействующих на пло-
щадь крыла, создает аэродинамическую силу /?д, на-
правленную на указанном рисунке вверх и несколько
назад. Составляющая этой силы, перпендикулярная
направлению движения воздушного потока перед кры-
лом, и есть п о д ъе м н а я сила крыла. Вторая со-
ставляющая, которая имеет направление, совпадающее
со скоростью набегающего потока, тормозит его и яв-
ляется частью лобового сопротивления крыла; ее назы-
вают сопротивлением давления или соп-
ротивлением формы. Полное сопротивление кры-
ла складывается, помимо сопротивления давления, из
сопротивления трения и индуктивного
сопротивления. Как ясно из самого названия,со-
противление трения — это сила трения воздуха о по-
верхность крыла, которая зависит от состояния поверх-
ности: чем поверхность ровней и глаже, тем меньше со-
противление трения. Индуктивное сопротивление связа-
но с геометрической формой крыла, и о нем будет ска-
зано ниже.
На практике определить раздельно сопротивление
давления и сопротивление трения не удается, поэтому
определяют только их сумму, которую называют про-
фильным сопротивлением крыла.
36
Не только крыло с выпукло-вогнутым профилем име-
ет подъемную силу. Ее создают двояковыпуклые про-
фили (см. рис. 16,ч), плоско-выпуклые (см. рис. 16,ил)
и S-образные (см. рис. 12,Д). Но плоско-выпуклые и
двояковыпуклые профили имеют хорошие характеристи-
ки при больших скоростях полета или при больших хор-
дах крыла; при малых скоростях полета, свойственных
свободнолетающим моделям, они неэффективны и ис-
пользуются только для хвостового оперения. 5-образ-
ные профили применяются для моделей типа «летаю-
щее крыло»; несущая способность этих профилей ниже,
чем выпукло-вогнутых.
Характерным для крыльев с любыми профилями яв-
ляется то, что разность давлений над крылом и под ним
непостоянна вдоль профиля: как правило, начиная от
носика профиля она растет, а к хвостику профиля
вновь падает до 0, при этом характер распределения
разности давлений вдоль профиля зависит от его фор-
мы и угла атаки. Типичное распределение разности
давлений показано на рйс. 9,Л.
Характер распределения разности давлений определя-
ет точку приложения аэродинамической силы /?д . Так
как сила /?д есть равнодействующая сил давления над
крылом и под ним, она должна быть приложена в точ-
ке, относительно которой моменты указанных сил дав-
ления равны 0. Эту точку, располагаемую на хорде, на-
зывают центром давления (ц. д.). Естествен-
но, и подъемную силу У, и силу сопротивления X так-
же считают приложенными в ц.д. Положение ц.д. на
хорде меняется от угла атаки в соответствии с измене-
нием распределения разности давлений. Для обычных
несимметричных профилей с увеличением угла атаки,
т. е. с увеличением су , ц.д. перемещается вперед. Чем
меньше вогнутость профиля, тем меньше перемещение
ц.д.; у симметричных профилей в диапазоне летных уг-
лов атаки ц.д. не изменяется — он находится на 25%
хорды от носика профиля. Характер зависимости поло-
жения ц.д. от величины су для двух различных профи-
лей показан на рис. 9,5.
Площадь крыла. Проектирование крыла начнем с
определения его площади. Как мы уже знаем, несущая
площадь модели, равная сумме площадей крыла и го-
ризонтального оперения (стабилизатора), ограничена по
37
величине. Наибольшая величина несущей площади для
моделей равна: планера А-1 — 34 дм2, резиномотор-
ной — 19 дм2, таймерной весом 750 г — 37,5 дм2.
При определении площади крыла необходимо уяс-
нить, что относительная несущая способность стабили-
затора, представляющая собой подъемную силу, кото-
рую имеет 1 дм2 его площади, значительно меньше, чем
относительная несущая способность крыла. Это объ-
ясняется тем, что для необходимой балансировки мо-
дели углы атаки стабилизатора, а следовательно, и его
коэффициент су ст берут меньше, чем углы атаки и со-
ответственно коэффициент Су крыла. Поэтому, естест-
венно, чем большую часть несущей площади составляет
площадь крыла, тем меньше скорость снижения моде-
ли. Однако, как узнаем ниже, беспредельно увеличи-
вать площадь крыла за счет площади оперения при
обычных схемах моделей и аэродинамически наиболее
совершенных профилях нельзя. Расчеты и практика по-
казывают, что наиболее целесообразно принять следу-
ющие значения распределения несущей площади между
крылом и оперением: для модели планера SCT /S «
0,13—0,22; для резиномоторной и таймерной моделей
SCT /S = 0,2—0,35. Ниже выясним: модели с меньши-
ми значениями SCT /S должны иметь большую длину
фюзеляжа, чем модели с большими значениями SCT /S;
но устойчивый полет можно обеспечить при всех ука-
занных значениях 5СТ /5.
Под несущей площадью крыла и оперения подразу-
меваются площади проекций крыла и оперения на го-
ризонтальную плоскость, т. е. их «тень». Так как кры-
ло, а иногда и оперение имеют поднятые вверх кон-
цы, их фактическая площадь больше, чем несущая.
Из-за увеличения несущей площади модели планера или
резиномоторной по сравнению с допустимой по нормам
их могут снять с соревнований. Чтобы этого не слу-
чилось, несущую площадь моделей нужно делать не-
сколько меньше допустимой — примерно на 0,1—0,2 дм2.
Для таймерных моделей, у которых ограничена наг-
рузка на несущую площадь, а не сама несущая пло-
щадь, увеличение ее не имеет таких катастрофических
последствий, так как всегда можно повысить вес мо-
дели, установив дополнительные грузы.
Форма крыла. В плане форма крыла определяется
38
его контуром и соотношением размаха и ширины. У
свободнолетающих моделей наиболее часто контур кры-
ла выполняют прямоугольным, трапециевидным, эллип-
тическим, трапециевидным с прямоугольным центропла-
ном, эллиптическим с прямоугольным центропланом,
прямоугольным с закругленными краями (рис. 9,Б).
От формы крыла в плане зависит его сопротивление
и прочность. О влиянии формы крыла на его прочность
рассказывается на стр. 147, здесь же рассмотрим за-
висимость сопротивления крыла от его формы.
Мы уже знаем, что воздушный поток, действуя на
крыло, вызывает появление на нем аэродинамической
силы. Естественно, в соответствии с известным физиче-
ским законом, и крыло, действуя на поток, отклоняет
его от первоначального положения. Это отклонение- по-
тока вызывает появление индуктивного сопротивления,
существующего независимо от профильного сопротив-
ления.
Обратимся к рис. 10,Л, на котором показано кры-
ло, обтекаемое потоком воздуха. Если перед крылом
скорость воздушного потока относительно крыла была
V*, то за крылом она отклонится на некоторый угол
Да; абсолютную величину скорости отклонившегося по-
тока будем считать неизменной. Скорость, с которой
крыло отклонило поток, легко определить, если пост-
роить треугольник скоростей по двум известным ско-
ростям и углу между ними. Эта так называемая и н-
дуктивная скорость обозначается VL . Из рас-
смотрения треугольника скоростей можно заключить,
что скорость потока за крылом в направлении его дви-
жения уменьшилась на величину ДУ*. Увлекая за
собой поток со скоростью ДУ*, крыло испытывает со-
противление своему движению; это ^сопротивление, свя-
занное с появлением индуктивной скорости, также на-
зывается индуктивным.
X _ у .fa ~ ~ Y— ~ ~ Сур-И2 . 2? /99)
Y 2 “ Г 2 ~ рл/а. У* “2л; /з ’
Да
1 Так как Да обычно менее 10°, то tg «j- можно считать
Да
равным самому углу , измеренному в радианах.
39
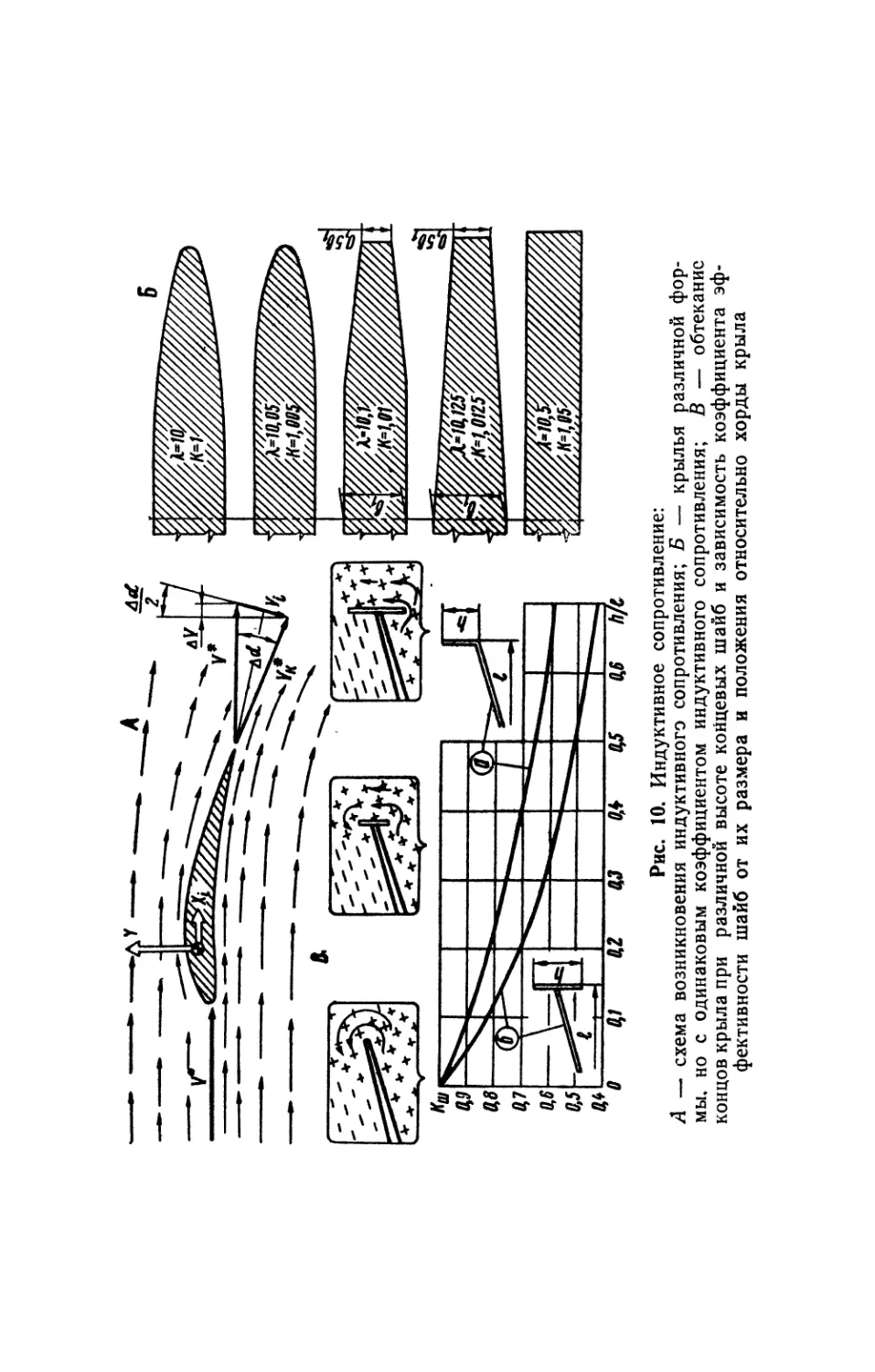
Рис. 10. Индуктивное сопротивление:
Д — схема возникновения индуктивного сопротивления; Б — крылья различной фор-
мы. но с одинаковым коэффициентом индуктивного сопротивления; В — обтекание
концов крыла при различной высоте концевых шайб и зависимость коэффициента эф-
фективности шайб от их размера и положения относительно хорды крыла
Как и все аэродинамические силы, индуктивное сопро-
тивление принято выражать через его коэффициент:
Xt = , т- е- предполагается, что
с /93)
Сх1 12
Итак, индуктивное сопротивление возникает одно-
временно с появлением подъемной силы. При одной и
той же площади крыла и одинаковых условиях полета
меньшим индуктивным сопротивлением будет обладать
крыло, у которого больше отношение /2/5; это отно-
шение называется удлинением крыла X. Но индуктив-
ное сопротивление зависит не только от удлинения, но
и от контура крыла. Так, формула (23) для коэффици-
ента индуктивного сопротивления действительна только
для эллиптического крыла; для крыльев других форм
обычно вводится поправочный коэффициент к и для
них:
= (23-1)
Величину коэффициента к для различных форм крыла
находят в пределах 1—1,05: к e 1 — для эллиптиче-
ского крыла и к = 1,05 — для прямоугольного крьь
ла, обладающего наибольшим коэффициентом индук-
тивного сопротивления.
На рис. 10,5 показаны крылья различных форм, но
с одинаковым коэффициентом индуктивного сопротив-
ления. Исходным для сравнения принято эллиптическое
крыло с удлинением 10. Крыло с прямоугольным цен-
тропланом и эллиптическими законцовками имеет точно
такое же индуктивное сопротивление, как и эллиптиче-
ское, если его удлинение равно 10,05, т. е. больше на
0,5%. Крыло с прямоугольным центропланом и трапе-
циевидными законцовками имеет такое же индуктивное
сопротивление при удлинении 10,1. Естественно, изго-
товить такие крылья значительно проще, чем эллипти-
ческие.
Эффект, аналогичный увеличению удлинения, дает
установка на концах крыла небольших плоскостей —
шайб, препятствующих перетеканию воздуха с нижней,
поверхности крыла на верхнюю (рис. 10,В). Причина
41
этого перетекания — повышенное давление воздуха под
крылом и пониженное над крылом. Естественно, чем
больше высота шайбы, тем меньше перетекание возду-
ха. В аэродинамике существует несколько установлен-
ных на опыте зависимостей эффективности ‘ крыла от
высоты шайб; чаще всего используются следующие за-
висимости:
I _____2_
эф “ КШ
(24)
и соответственно
5
Су Су
xl ш к «Л
(23.2)
где — коэффициент эффективности шайб, зави-
сящий от высоты шайб и расположения их по размаху
крыла и относительно хорды. Значения коэффициента
кш приведены на рис. 10,В. • Как видно из графика, на-
ибольшую эффективность имеют шайбы, расположенные
на концах крыла симметрично относительно концевой
хорды.
При планировании с наименьшей скоростью сниже-
ния наиболее действенный путь уменьшения индуктив-
ного сопротивления — увеличение удлинения крыла.
Этим путем идут строители планеров, применяя крылья
с удлинением до 25. Но чрезмерное увеличение удли-
нения для летающих моделей, имеющих относительно
небольшие размеры, невыгодно. Как будет показано в
следующем разделе, величину удлинения крыла ограни-
чивает минимально допустимая ширина крыла. При
чрезмерном уменьшении ширины крыла растет его про-
фильное сопротивление, причем более значительно, чем
уменьшается индуктивное сопротивление. Поэто-
му, учитывая вполне определенные площади
крыльев, можно рекомендовать следующие макси-
мально допустимые значения удлинения у мо-
делей: планеров — 16; резиномоторных — 10; тай-
мерных — 10. Проектировать крылья с большими
удлинениями не следует; уменьшить удлинение, для по-
вышения прочности и жесткости крыла возможно у мо-
делей: планеров — до 12, резиномоторных — до 8, тай-
мерных — до 7. Уменьшение удлинения благоприятно
сказывается и на высоте, на которую взлетает таймер-
42
ная модель. Взлет ее происходит под очень большими
углами 0; при этом коэффициент подъемной силы с?
близок к 0, вследствие чего индуктивное сопротивление
чрезвычайно мало по сравнению с профильным, про-
фильное же сопротивление, как правило, падает с уве-
личением ширины крыла.
Выбрав площадь крыла S, его удлинение Л и фор-
му, можно определить его основные размеры: размах /,
хорду в|, длину центральной части /ц и т. д. Все не-
обходимые для этого формулы показаны на рис. 9,Б.
Формы крыла при виде спереди не столь разнообраз-
ны, как формы крыла в плане. На всех свободнолета-
ющих моделях крылья имеют приподнятые вверх кон-
цы. Иногда вверх отклонена вся половина (консоль)
крыла (см. рис. 9,В, е) и такое крыло называется V-об-
разным. Чаще всего встречаются U-образные крылья, у
которых вверх сильно отклонены только концевые ча-
сти крыла; центральная часть или плоская (см. рис.
9,В,ж), или имеет очень небольшой угол поперечного
V (см. рис. 9,В,з).
Величину угла поперечного V V-образного крыла,
обозначаемую ф, следует брать равной для моделей:
планеров ф = 10—12°; резиномоторных и таймерных
Ф = 12—14°. В настоящее время V-образные крылья
применяют редко. Подавляющее большинство свобод-
нолетающих моделей имеют U-образные крылья.
Для U-образного крыла, имеющего переменный угол
Ф по размаху, определяют средний или эффективный
угол поперечного V, обозначаемый фср . Этот угол
находится способом, указанным на стр. 69. Величина
эффективного угла поперечного V должна быть несколь-
ко больше, чем указанная выще величина угла попе-
речного V V-образного крыла для моделей: планера—
<рср = 10—14°; резиномоторной — фср = 14—19°; тай-
мерной — фгр = 12—16°. Угол поперечного V в цент-
ральной части U-образного крыла обычно принимают
не более 5°.
Профиль крыла. Профили крыльев очень разнообраз-
ны: выпукло-вогнутые, плоско-выпуклые, двояковыпук-
лые, S-образные. Но для всех этих профилей сущест-
вуют общие геометрические параметры: толщина с, вог-
нутость f, координаты (место расположения от носи-
ка) наибольшей толщины хс и наибольшей вогнутости
43
Xf, радиус носика г. Обычно все эти параметры пред-
ставляют в виде долей хорды в профиля, т. е. в виде
относительных величин: относительной^голщины профи-
ля с = с/в; относительной вогнутости f == f/e; относи-
тельной координаты наибольшей толщины хс = хс1в. и
наибольшей вогнутости xf =х^в профиля, относитель-
ного радиуса носика г — г/в.
Хорда профиля — это условная линия, необ-
ходимая для построения контура профиля. Как прави-
ло, конструкторы профилей располагают хорду следу-
ющим образом:
— для выпукло-вогнутых профилей как касатель-
ную к нижнему контуру профиля (В-6358) или как
прямую, соединяющую наиболее удаленные точки кон-
тура профиля (NACA-6412);
— для плоско-выпуклых профилей как прямую, сов-
мещенную с нижним контуром профиля (Clark-Y);
— для двояковыпуклых профилей как прямую, сое-
диняющую наиболее удаленные точки контура профиля
(NACA-0009).
Вогнутость профиля измеряют между сред-
ней линией профиля и его хордой. Средней линией
профиля называется геометрическое место точек;
расположенных посередине ординат, перпендикуляр-
ных хорде и ограниченных верхним и нижним конту-
рами (рис. 11). _
По толщине профили делятся на гонкие (£_меныпе
0,08), средние (с равна 0,08—0,12) и толстые (с больше
0,12). В зависимости от вогнутости средней линии раз-
личают профили: с малой вогнутостью (f меньше 0,015),
Рис. 11. Способ построения профиля по исходной таблице
(см. стр. 45)
44
Исходная таблица
х.% 0 2,5 5 10 20 30 40 50 60 70 80 90 100
Ув.% 0 2,61 3,74 5,37 7,33 8,25 8,35 7,87 7,00 5,76 4,21 2,33 0,09
Vh.% 0 — 1,37 — 1,65 — 1,73 —1,3 —0,78 —0,35 —0,07 0.14 0,26 0,26 0,14 0,09
Рассчитанная таблица
в = 175 мм 1% в = 1,75 мм
X. мм 0 4,37 8,75 17,5 35 52,5 70 87,5 105 122,5 140 157,5 175
уъ, мм 0 4,6 6,6 9,4 12,9 14,5 14,7 13,8 12,3 10,1 7,4 4,1 0,16
ун, мм 0 —2,4 —2,9 —3,0 —2,3 — 1,4 —0,6 0,1 0,25 0,45 0,45 0,25 0,16
со средней вогнутостью (f=0,015—0,04) и большой вогну-
тостью (f больше 0,04).
К настоящему времени разработано и испытано ог-
ромное количество различных профилей. Геометричес-
кая форма этих профилей представлена таблицами, в
которых даны координаты верхнего ув и нижнего уа
контуров профиля в процентах от хорды в в зависимо-
сти от расстояния х от носика профиля, которое также
задается в процентах от хорды в. Если значения ув и
уп положительные, то контур профиля весь лежит
вверх от хорды (В-6358), если значения ув положи-
тельные, а Ун — отрицательные, верхний и нижний кон-
туры находятся в разных сторонах от хорды (NACA-
0009). В таблицах некоторых профилей часть ординат
у н отрицательная, часть — положительная; поэтому
нижний контур такого профиля расположен по обе сто-
роны от хорды (NACA-6412)). Пользуясь такими таб-
лицами, легко рассчитать и построить профиль с любой
хордой. На рис. 11 в качестве примера показано пост-
роение профиля с хордой 175 мм; так как 1% хорды
профиля равен 1,75 мм, все значения рассчитанной
таблицы получены умножением координат, приведен-
ных в исходной таблице, на 1,75 мм. При построении
контура профиля все значения х отложены вправо по
хорде, а соответствующие значения ув и ун — вверх и
вниз от хорды.
Каждый профиль имеет собственное, присвоенное
только ему название, которое в первую очередь указы-
вает конструктора профиля. Так, профили разработаны:
ЦАГИ — в Центральном аэрогидродинамическом ин-
ституте СССР, NACA — в американском институте
NACA, G (Gottingen) — в немецком аэродинамическом
институте, расположенном в Гёттингене, В — венгер-
ским ученым Г. Бенедеком специально для летающих
моделей и т. д. В названии профиля часто указаны и
его основные геометрические параметры. Так, входя-
щие в название профилей NACA и В цифры обознача-
ют следующие параметры: первые одна или две циф-
ры — максимальную вогнутость в % хорды профиля
NACA или максимальную толщину в % хорды профи-
ля В; вторые одна или две цифры — координату в
% хорды (или в % хорды, умноженных на 10) макси-
мальной вогнутости профиля (от его носика); послед-
46
ние одна или две цифры — максимальную толщину
в % хорды профиля NACA или максимальную вогнутость в
% хорды профиля В. Например, профиль NACA-6412
имеет максимальную вогнутость 6%, расположенную на
40% хорды от носика профиля, и толщину, равную
12% хорды; профиль NACA-6409 отличается от про-
филя NACA-6412 только своей толщиной, равной 9%
хорды. Часто применяемый авиамоделистами профиль
В-6356 имеет вогнутость и толщину, равные 6% хорды,
причем максимальная вогнутость расположена на рас-
стоянии 35% хорды от носика профиля.
Для того, чтобы из большого числа существующих
профилей выбрать наиболее подходящий для проекти-
руемой модели, нужно знать их аэродинамические ха-
рактеристики, в первую очередь коэффициенты подъем-
ной силы су и сопротивления сх. Так как эти коэф-
фициенты зависят от угла атаки а, их обычно пред-
ставляют в виде графиков, подобных показанным на
рис. 15. Значения коэффициентов су и сх при различ-
ных углах атаки замеряют при испытаниях модели
крыла в аэродинамической трубе; принято эту модель
крыла делать прямоугольной формы в плане с удлине-
нием 5 или 6. Поэтому, если на графиках указываются
фактически замеренные при испытаниях зависимости су
и сх от а, то одновременно указывается, какое удлине-
ние имела модель крыла. Это важно потому, что заме-
ренный в эксперименте коэффициент сх является коэф-
фициентом полного сопротивления крыла, равным сум-
ме коэффициентов профильного и индуктивного сопро-
тивлений, т. е. сх = схп + cxi.
На рис. 12,А показаны аэродинамические коэффици-
енты профиля RAF-15, полученные при испытании мо-
дели крыла с удлинением 6. Приведенный на графике
коэффициент сх включает в себя коэффициент сх1, со-
ответствующий X = 6.
Результаты испытаний моделей крыльев обычно об-
рабатывают для того, чтобы исключить из замеренного
сопротивления индуктивное сопротивление. Сделать это
нетрудно, так как 1 модели крыла известно, а су оп-
ределяется испытаниями. Полученная в результате об-
работки зависимость схп = сх — сх1 от су полностью
соответствует зависимости сх при бесконечно большом
удлинении. Поэтому часто на этих графиках дается ука-
47
л ж Аэродинамические характеристики профилей крыла:
Л — профиль RAF-15 и его характеристики; 1 — зависимость су от а; 2 — зависи-
мость Су от сх (поляра); Б — поляры профиля № 60: 1 — соответствует Re=21000;
~ поляры профиля G-417b, снятые в турбулентном
потоке при Re=42000 (поляра /) и при Re= 189000( поляра 2); Г - поляры профиля
G-417B, снятые в ламинарном потоке при Re=42000 (поляра /) и при Re-189000
(поляра 2)
зание, что X = сю (См. рис. 15,а); иногда на графиках
нет никаких ссылок на величину X, в этом случае на
них также указывается схп. Вместо графиков зависи-
мости су или сх от а обычно строят поляры профилей,
представляющие собой зависимости су от сх или с хп.
Если на поляре нанесены точки и указаны углы атаки,
на которых получены значения су и сх в этих точках,
то такая поляра полностью характеризует аэродинами-
ческое качество профиля (рис. 12,5). Иногда на поляре
не указывают углы атаки, но дополнительно приводят
зависимость су от а (см. рис. 12,Л). В этом случае по
углу а определяют су, а по значению су на поляре на-
ходят сх (или схп).' Если из начала координат про-
вести касательную к поляре, то точка касания опреде-
лит угол, на котором профиль имеет максимальное аэ-
родинамическое качество.
Аэродинамические характеристики профилей, в том
числе и их поляры, зависят от условий, в которых они
определялись. Так, на рис. 12,Б показаны две поляры,
очень сильно отличающиеся друг от друга, хотя и от-
носятся к одному и тому же профилю № 60. Судя по
поляре 2, профиль № 60 очень хороший, так как его
максимальное аэродинамическое качество около 50. Ес-
ли же принять во внимание поляру /, то этот профиль
никуда не годится — его максимальное аэродинамичес-
кое качество более чем в 10 раз меньше—всего 4,4. По-
этому определить хороший или плохой профиль можно
только в зависимости от условий его применения. Если
использовать профиль в условиях, в которых снималась
поляра 2, он покажет хорошие аэродинамические харак-
теристики; в условиях, соответствующих поляре /, он бу-
дет не эффективен.
Для летающих моделей (а также для планеров и до-
звуковых самолетов) характеристикой условий испыта-
ния и применения профилей является критерий Рейноль-
дса или число Рейнольдса Re. На рис. 12,5 пока-
зано, что поляра 2 снималась при Re, равном 168000; по-
ляра же 1 определялась при Re, меньшем в во-
семь раз, т. е. при Re=21000. Для тел, движущихся от-
носительно воздуха, критерий Рейнольдса записывается
в следующем виде:
Re = , (25)
49
где V — скорость движения тела относительно воздуха,
для модели — скорость ее полета, м/сек;
в — линейный размер в направлении движения:
хорда крыла, длина фюзеляжа, м;
v — коэффициент кинематической вязкости возду-
ха, зависящий от его температуры, влажности,
атмосферного давления.
При нормальных атмосферных условиях v = 14,57*
• 10~6 м2/сек и
Re 69000 V-e. (25.1)
Повышение аэродинамического качества при увели-
чении Re не является особенностью только профиля
N60, это явление — общее для всех профилей крыльев,
хотя и существуют такие, у которых изменение аэроди-
намических характеристик, вызванное изменением Re, не-
велико, значительно меньшее, чем у профиля № 60. Что-
бы понять причину непостоянства аэродинамических ха-
рактеристик, рассмотрим, как происходит обтекание воз-
душным потоком модели крыла с толстым профилем, на-
пример, N60, при различных значениях числа Рейнольдса.
При Re, не превышающем нескольких сотен тысяч,
удобно наблюдать обтекание при помощи дымовой аэро-
динамической трубы, так как окрашенные струйки воз-
духа хорошо заметны. Такая картина обтекания модели
крыла потоком воздуха со скоростью, соответствующей
Re = 21000, показана на рис. 12,5,1. Набегающий воздух
у носика крыла разделяется на два потока, один из ко-
торых обтекает нижнюю поверхность крыла, второй —
верхнюю. У поверхности крыла поток воздуха вслед-
ствие его вязкости затормаживается; по мере удаления
от поверхности крыла скорость воздушного потока рас-
тет и на некотором расстоянии 6 становится далее не-
изменяемой. Этот прилегающий к поверхности крыла
слой толщиной б, в котором происходит изменение ско-
рости, называется пограничным слоем. В рассмат-
риваемом случае при Re = 21000 изменение скорости в
пограничном слое плавное, движение струй потока па-
раллельное, перемещение их в направлении поверхности
крыла отсутствует. Такой пограничный слой называется
ламинарным. Ламинарный пограничный слой сохра-
няется в нашем случае только в передней части крыла,
до наиболее высокой Точки профиля. За этой точкой на-
50
чинается расширение воздушного потока, уменьшение
его скорости и повышение статического давления. Лами-
нарный пограничный слой вследствие малой его толщи-
ны и плавного изменения скорости в нем отрывается от
крыла и размывается. Между оторвавшимся погранич-
ным слоем и поверхностью крыла образуется зона, в ко-
торой воздух имеет беспорядочное вихревое движение.
Чем больше эта вихревая зона, тем меньше подъемная
сила крыла и больше его профильное сопротивление.
При изменении скорости воздушного потока характер
обтекания этой же модели крыла изменяется. Так, при
увеличении скорости до величины, соответствующей Re=
168000, вихревая зона значительно уменьшается и обте-
кание профиля приближается к идеальному. Это проис-
ходит потому, что пограничный слой качественно изме-
няется и становится турбулентным. Струи в нем пе-
рестают двигаться параллельно и равномерно — они
начинают интенсивно перемешиваться. Вследствие этого
перемешивания скорость в пограничном слое нарастает
очень резко; сам же пограничный слой становится тол-
ще. Более мощный (по сравнению с ламинарным) тур-
булентный пограничный слой преодолевает увеличиваю-
щееся в задней части профиля давление. Поэтому отрыв
турбулентного слоя и образование вихревой зоны проис-
ходит значительно ближе к хвостику профиля или не
происходит вообще (см. рис. 12,5,2)*
Профильное сопротивление крыла складывается из
сопротивления давления и сопротивления трения. Сопро-
тивление трения при ламинарном пограничном слое
меньше, чем при турбулентном. Но при ламинарном по-
граничном слое при малых значениях Re имеет место
широкая вихревая зона за крылом, приводящая к чрез-
вычайно большому увеличению сопротивления давления.
При турбулентном пограничном слое сопротивление тре-
ния значительно повышается, но слабо выраженная вих-
ревая зона означает низкое сопротивление давления.
Большинство исследователей пришло к выводу, что
при малых Re предпочтительнее обтекание профилей с
турбулентным пограничным слоем. В этом случае можно
получить коэффициент су до 1,4 и максимальное аэроди-
намическое качество до 50.
Турбулентный пограничный слой возникает при боль-
ших Re. Но каким же образом получить его при малых Re?
5J
Если набегающий на крыло воздушный поток турбу-
лизирован, его скорость и плотность в различных точках
непостоянны, то и пограничный слой будет турбулент-
ным. Но сколько-нибудь определенных данных о степени
турбулентности атмосферного воздуха, в котором летает
модель, нет. Можно предполагать, что в тихую, безвет-
ренную погоду турбулентность воздуха отсутствует; при
ветре турбулентность воздуха может быть значитель-
ной. Это предположение подтверждалось на практике,
когда модель при полетах в ветер показывала лучшие
результаты, чем при тихой и жаркой погоде.
На рис. 12.В. показаны полученные немецким ученым
Шмитцем поляры профиля G-417b, снятые при раз-
личных Re в турбулентном потоке. Поляры, несмотря на
большую разницу в величине Re, отличаются незначи-
тельно. Поляры того же профиля, снятые при разных
значениях Re, но в ламинарном потоке, сильно отлича-
ются друг от друга (рис. 12,Г).
Если при больших Re характеристики профилей пра-
ктически не зависят от-того, ламинарный или турбулент-
ный поток их обтекает, то при малых Re разница харак-
теристик существенна: сравните поляры 1 на рис. 12,В и Г.
Аэродинамические характеристики профилей при малых
Re в турбулентном потоке выше, чем в ламинарном.
Так как рассчитывать на полет модели в турбулизи-
рованном воздухе нет оснований, попытались турбулизи-
ровать пограничный слой непосредственно перед крылом
при помощи специальных турбулизаторов. Еще в 1942
году Шмитц, испытывая в ламинарной аэродинамичес-
кой трубе профиль W60, имеющий при малых Re очень
плохие аэродинамические характеристики, установил пе-
ред ним на специальных кронштейнах проволочный тур-
булизатор диаметром около 1 мм. В результате таких
испытаний аэродинамические характеристики значитель-
но улучшились: максимальное количество увеличилось
вдвое, а максимальное значение cN — в полтора раза.
Полученные поляры, снятые при Re=42000 (рис. 13,А),
показывают, что турбулизатор эффективен только до оп-
ределенных углов атаки. На слишком больших углах
атаки (>10°) турбулентный след от турбулизатора не по-
падает на верхнюю поверхность крыла, а проходит вы-
ше ее, не оказывая практически никакого влияния на
обтекание крыла. Прй уменьшении углов атаки турбу-
52
Рис. 13. Повышение аэродинамических характеристик профилей:
А — поляры профиля № 60, снятые в ламинарном потоке при Re=42000; 1 — без
турбулизатора; 2 — с турбулизатором перед крылом; Б — применяемые турбулиза-
торы и их рекомендуемое расположение; а — перед крылом, б — на верхней поверх-
ности крыла, (стабилизатора); в — дырчатый; / — хорда; 2 — турбулизатор; В —по-
ляры профиля G-417a, снятые в ламинарном потоке,/—поляра при Re=42000; 2—поля-
ра при Re~ 168000; Г — график зависимости наивыгоднейших геометрических пара-
метров профилей от Re
лентный след попадает на нижнюю поверхность крыла
и тем самым повышает сопротивление трения.
Таким образом, хотя этот способ турбулизации и
дает значительный эффект в условиях лабораторного
эксперимента, в реальных условиях полета модели, осо-
бенно при порывистом ветре, он не является идеальным.
Избежать этих недостатков можно, если установить
турбулизатор непосредственно на верхней поверхности
крыла (рис. 13,25,6). Такой турбулизатор применяют час-
то. Он представляет собой нить 0,3—0,7 мм, приклеен-
ную к верхней поверхности крыла вблизи его носика (на
расстоянии 5—10% хорды), и действует в большом ди-
апазоне углов атаки. Некоторые авиамоделисты, стре-
мясь уменьшить сопротивления трения путем сохране-
ния ламинарного участка на передней части крыла, на-
клеивают турбулизатор непосредственно перед точкой
отрыва пограничного слоя, т. е. перед наиболее высокой
точкой профиля на летном угле атаки. Такой турбулиза-
тор эффективен только при полетах модели в тихую по-
году; при неустойчивой, ветреной погоде, когда угол ата-
ки модели может меняться в широких пределах, эффек-
тивность его падает.’
Стремясь повысить надежность турбулизации по-
граничного слоя при различных углах атаки, некото-
рые авиамоделисты наклеивают не одну турбулизиру-
ющую нить, а несколько. Точно такой же эффект дает
оклейка передней части крыла сверху гофрированной
бумагой, с глубиной гофра 0,2—0,5 мм. Применив та-
кую обшивку на одной из моделей планеров, автор этой
книги получил хорошие результаты.
Спортсмены применяют, хотя и более редко, еще
один вид турбулизатора — дырчатый (см. рис. 13,Ь\в).
Он представляет собой ряд отверстий, расположенных
вдоль размаха крыла, на расстоянии от носика крыла
10—30% хорды. Воздух, протекающий через эти от-
верстия с нижней поверхности крыла на верхнюю под
действием разности давлений под крылом и над кры-
лом, турбулизирует пограничный слой на верхней по-
верхности крыла. Результаты испытаний модели кры-
ла с профилем NACA-6409, проведенных английски-
ми авиамоделистами в аэродинамической трубе, пока-
зывают, что дырчатый турбулизатор позволяет сохра-
нить высокие аэродинамические характеристики при
54
уменьшении Re до 40 000, в то время как без такого
турбулизатора получить такие же характеристики мож-
но только при Re больше 65000. В указанном экспери-
менте отверстия 0 0,7 мм были расположены на рас-
стоянии 15% от носика профиля, через 25 мм по разма-
ху крыла.
Все эти способы принудительной турбулизации по-
граничного слоя необходимы для профилей, характери-
стики которых при малых Re невысоки, а именно для
профилей средней и большой толщины и с большим ра-
диусом закругления носика, а также для тонких про-
филей с большой вогнутостью.
Профили с острым носиком, точнее, с малым радиу-
сом закругления носика, как правило, не нуждаются в
турбулизаторах. Точка разделения воздуха на два пото-
ка, один из которых обтекает нижнюю сторону крыла,
а второй — верхнюю, на летных углах атаки не лежит
в самой передней точке профиля — она находится вбли-
зи носика на нижней поверхности крыла. Обтекая «ост-
рую» переднюю кромку, поток, идущий на верхнюю по-
верхность крыла, турбулизируется. При обтекании тол-
стой передней кромки подобной турбулизации не проис-
ходит.
Так, характеристики испытанного Шмитцем профи-
ля в виде изогнутой пластинки оказались практически
независимыми от Re вследствие «самотурбулизирую-
щих» свойств этого профиля. Поляры изогнутой плас-
тинки — профили G-417a, снятые в ламинарном пото-
ке, показаны на рис. 13,В.
Однако делать чрезмерно острую переднюю кромку
не следует, она может явиться причиной срыва потока
со всей поверхности крыла.
Экспериментально _у далось установить основные па-
раметры профиля — с, f и г, которые обеспечивают без-
отрывное обтекание профилей при различных Re
(рис. 13,Г).
Профили, параметры которых не выходят за преде-
лы, указанные на графике рис. 13, Г, не нуждаются в
применении какого-либо типа турбулизаторов. Но если
радиус носика, вогнутость или толщина профиля пре-
восходят допустимое значение этих величин для данно-
го Re, необходимо прибегнуть к помощи турбулизато-
ра.
55
Рис. 14. Поляры профиля G-417b, сня-
тые в ламинарном потоке при Re=42000:
7 — поляра без применения турбули-
затора, 2 — поляра с применейием тур-
булизатора, расположенного перед
крылом
Так, уже упоми-
навшийся профиль
G-417b, имеющий
вогнутость 8,7%, при
Re, меньших 100 000,
оказался значитель-
но хуже профиля
G-417a, вогнутость
которого всего 5,8%.
Но характеристики
профиля G-417b
значительно улуч-
шились при приме-
нении турбулизато-
ра (рис. 14).
При сравнивании
обтекания двух про-
филей с различной
кривизной верхнего
контура, например,
G-417a и G-417B,
можно сделать сле-
дующий вывод: при большей кривизне расшире-
ние потока в задней части профиля больше, сле-
довательно, больше и статическое давление. Сте-
пень турбулентности пограничного слоя, вызван-
ной острым носиком, оказывается недостаточной,
чтобы пограничный слой удержался у поверхности
крыла — он все же отрывается. При увеличении же
степени турбулентности путем установки дополнитель-
ного турбулизатора точка отрыва смещается назад,
вследствие чего аэродинамические характеристики про-
филя улучшаются. Однако полностью устранить отрыв
пограничного слоя при малых Re практически никогда
не удается. При наличии же вихревого следа за кры-
лом увеличить подъемную силу можно, отогнув вниз
заднюю кромку; интенсивность отбрасывания вниз воз-
душного потока при этом увеличивается.
Удачный профиль с отогнутой вниз задней кромкой
был создан датским авиамоделистом X. Хансеном. Этот
профиль (см. рис. 16,0) часто использовали на моде-
лях планеров, которое показывали отличные летные
качества. На резиномоторных моделях применяли моди-
56
фицированные (с уменьшенной до 6% толщиной и до
6% вогнутостью) профили этого типа.
Над уменьшением вихревого следа за профилем с
отогнутой вниз задней кромкой работал советский спорт-
смен В. Матвеев. Он создал профиль, у которого вогну-
тость нижнего контура в области задней кромки боль-
ше, чем кривизна верхнего контура; естественно, зад-
няя кромка при этом получалась тупой. У такого про-
филя можно'ожидать более позднего отрыва погранич-
ного слоя из-за малой крутизны верхнего контура; ту-
пая же задняя кромка «тонет» в вихревом следе и не
ухудшает поэтому практически аэродинамических ха-
рактеристик профиля. Такие профили В. Матвеев ус-
пешно применял на резиномоторных моделях.
Аэродинамические характеристики профилей ухуд-
шаются с уменьшением Re. При некотором значении
Re наступает так называемый кризис обтекания, обус-
ловленный отрывом пограничного слоя и, вследствие
этого, резким падением аэродинамических характерис-
тик. Число Рейнольдса, соответствующее кризису обте-
кания, называется критическим числом Rebp.
Для различных профилей ReKP неодинаково; кроме то-
го, ReKp для одного и того же профиля зависит от сте-
пени турбулентности потока, в котором находится про-
филь. Так, для профилей N60 и G-417b в ламинарном
потоке ReKp примерно равно 65 000; в турбулентном по-
токе для профиля G-417b ReKP менее 14 000, так как
кризиса обтекания при испытаниях этого профиля от
значений Re=189 000 до 14 000 не было обнаружено.
Для профиля G-417a даже в ламинарном потоке ReKp
менее 21 000.
Для летающей модели необходимо выбирать-только
такой профиль, у которого ReKP меньше, чем значение
Re, которое имеет место при полете" модели, в первую
очередь при планировании.
Как было показано на стр. 16, скорость планиро-
вания резиномоторных моделей и моделей планеров
примерно равна 4,2—4,4 м!сек, таймерных — 6,2
м!сек. При обычных для этих моделей удлинениях кры-
ла (см. стр. 42) величина Re для крыла составляет у
моделей: резиномоторных — 40000; планеров —
45000; таймерных — 80000.
Ясно, что профили типа N60 с ReKp = 65000 не
57
пригодны для моделей ни планеров, ни резиномотор-
ных. Но если бы мы попытались все же использо-
вать для них профиль типа N60, то хорду крыла
необходимо было бы принять не менее 295 мм; индук-
тивное сопротивление крыльев с такой хордой было бы
чрезмерно большим, так как удлинение соответственно
составляло бы 5 и 3.
Для таймерных моделей профили типа N60 под-
ходят. Профиль G-417a по своим аэродинамиче-
ским характеристикам подошел бы для всех типов мо-
делей, если бы у моторных моделей не было участка
взлета.
Так, таймерные модели взлетают с большими угла-
ми к горизонту и их крыло имеет очень малую подъ-
емную силу; коэффициент су крыла при этом близок
к 0. Но все сильно вогнутые профили при малых зна-
чениях су имеют большое профильное сопротивление;
так, если у профиля N60 при су = 0 коэффициент
схп = 0,025, то у профиля G-417a— 0,045, а у про-
филя G-417b — даже 0,075.
Причиной такого повышения профильного сопротив-
ления у сильно вогнутых профилей при малых су , т. е.
на малых углах атаки, является интенсивный срыв по-
тока ца нижней поверхности крыла. Высокое профильное
сопротивление неблагоприятно сказывается на высоте,
которую модель набирает в моторном полете, так как
значительная часть мощности двигателя расходуется на
преодоление силы сопротивления.
Лучшие результаты дает применение на моделях
этого типа профилей со средней вогнутостью и средней
толщиной, например, NACA-6409, NACA-4409. Хотя
модель с таким профилем и не будет иметь минималь-
но возможной скорости снижения, большая достигну-
тая высота позволит ей держаться в воздухе продол-
жительное время.
Разобравшись в особенностях авиамодельной аэ-
родинамики, вы сможете вполне квалифицированно вы-
брать профиль крыла для проектируемой модели из
приведенных на рис. 15 и 16 профилей и их характе-
ристик. Многие профили, приведенные на риС. 16, не
были испытаны в аэродинамических трубах при малых
Re, поэтому их характеристики отсутствуют; тем не
менее эти профили были проверены на летающих мо-
58
0 0J1 0,02 0,03 0,04 0,05 606 CM
О ' o'oi 0,02 OflJ 0,04 0,05 0,06 C™
Рис. 15. Поляры профилей:
— В-6308; б — NACA-6412; в — NACA-4409; г — К-2; д —
В-8306; е — NACA-0009
59
Профиль x% 0 2,5 5 10 20
NACA-4406 ^B94 0,0 1,88 2,79 4,15 5,90
Ун94 0,0 —0,79 —0,82 —0,69 0,12
NACA-6409 Ув94 0,0 2,96 4,3 6,31 8,88
Ун94 0,0 —1,11 —1,18 —0,88 +0.1?
NACA-4409 У в94 0 , 2,61 3,74 5,37 7,33
Ун94 0 —1,37 —1,65 —1,73 —1,3
NACA-6412 У в94 0 3,8 5,36 7,58 10,34
Ун94 0 —1;64 — 1,99 —1,99 —1.25
B-8358 У в 94 1.0 4,3 6,22 8,87 11,5
Ун94 1,0 0,0 0,23 1,15 з,зз
B-8356 Vb°/o 1,1 4,15 5,83 8,0 9,97
Ун94 1,1 0,03 0,05 0,5 1,87
В-6308 J's94 0,7 3,4 5,2 7,6 10,2
Ун94 0,7 0,2 0,8 2,1 4,1
B-8306 У в 94 1,2 4,1 5,8 8,2 10,2
Ун% 1,2 0 0,1 0,6 2,1
G-499 Ув94 1,25 3,15 4,3 5,9 8,1
Ун94 1,25 0,05 0,0 0,25 1,35
G-342 Ув94 0,8 3,7 4,9 6,5 8,5
Ун94 0,8 0,2 0,8 1,7 3,1
Таблица 2
30 40 50 60 70 80 90 100
6,76 6,90 6,55 5,85 4,85 3,56 1,96 0,0
0,74 1,10 1,24 1,27 1,16 0,91 0,49 0,0
10,13 10,35 9,81 8 78 7,28 5,34 2,95 0,0
1,12 1,65 1,86 1,92 1,76 1,36 0,74 0,0
8,25 8.35 7,87 7,0 5,76 4,21 2,33 0,09
—0,76 —0,35 —0,07 0,14 0,26 0,26 0,14 0,09
11,65 11,8 11,16 9.95 8,26 6,63 3,33 0,12
—0,38 0,2 0,65 0,78 0,85 0,73 0,39 0,12
12.18 11,78 10,68 9,08 7,14 4,98 2,72 0,3
4,58 4,9 4,76 4,26 3,47 2,41 1,25 0,0
10,37 9,91 8,88 7,5 5,9 4,2 2,32 0,3
2,70 3,05 2,98 2,67 2,22 1,62 0,89 0,0
11,0 10,8 9,9 8,4 6,7 4,6 2,5 0,2
5,2 5,5 5,3 4,7 3,8 2,7 1,4 0,0
10,5 9,9 8,8 7,5 5,8 4,1 2,3 0,3
2,8 3,0 2,9 2,6 2,2 1,5 0,8 0,0
9,25 9,45 9,15 8,45 7,15 5,2 2,8 0,0
2,45 3,2 3,8 4,05 3,8 3,0 1,7 0,0
9,1 9,2 8,9 8,1 _6,6_ 4,8 2,7 0,3
3,9 4,2 4,0 3,7 3,3 2,4 1,3 0,0
Профиль x% 0 2,5 5 10 20
G-361 УвК 0,8 3,4 4,9 6,9 8,9
Ун% 0,8 0,1 0,4 1,1 2,1
G-484 J-в”/» 1,25 3,55 4,4 5,8 7,5
Ун* 1,25 0 0 0,45 1,6
G-417a Ув* 1,45 3,65 4,7 6,3 7,75
Ун* 1,45 0,45 1,55 3,3 4,85
G-417b У в* 1,5 4,55 5,59 7,94 10,06
Ун* 1,5 0,47 2,09 4,44 6,56
MVA-123 У в* 4,5 7,1 8,4 10,1 11,9
Ун* 4,5 3,7 4,1 5,1 6,3
MVA-301 У в* 4,3 8,3 9,9 12,0 14,2
_Ун0/» 4,3 3,1 3,3 3,7 4,6
MVA-344 Ув°/° 5,1 8,0 9,0 10,0 11,1
Ун* 5,1 3,9 3,6 3,5 4,0
K-2 Ув0/» 0,4 3,0 4,4 6,1 8,0
JH°/Zo 0,4 0,3 0,7 1,5 2,9
Gail Ув°/° 1,0 4,65 6,35 8,85 11,7
Cheesman Ун* 1,0 — 1,10 —1,25 —0,95 0,05
BPH-8510 У в* 0,8 4,5 6,4 8,9 | 11,5
Ун* 0,8 0,0 0,0 0,4 | 1
№ 60 У в* 3,4 6,76 8,24 10,14 11,98
_ун% 3,4 1,46 0,96 0,4 0,04
NACA-0009 У в* 0 1,96 2,67 3,51 4,3
Ун* 0 1,96 —2.67 —3,51 —4,3
Glark-Y Ув* 1,75 3,25 3,95 4,8 5,7
Ун* 1,75, 0,74 0.47 0,21 0,02
П родолжение
30 40 50 60 70 80 90 100
9,3 9,0 8,2 7,0 5,6 4,0 2,1 0,1
2,8 3,1 3,2 3,0 2,6 2,0 1,0 0,1
8,4 8,7 8,3 7,5 6,3 4,7 2,65 0,05
2,15 3,5 3,9 3,9 3,6 2,9 1,65 0,05
8,6 8,8 8,45 7,85 6,9 5,7 4,25 1,45
5,7 5,9 5,55 4,95 4,00 2,8 1,3 1,45
11,27 11,55 10,91 10,2 8,86 7,17 5,05 1,5
7,77 8,05 7,41 6,7 5,36 3,67 1,55 1,5
12,5 12,5 12,0 11,1 — 7,9 —. 3,7
7,1 7.1 6,7 6,1 —• 4,8 —• 3,5
14,9 14,7 13.9 12,5 10,8 8,6 6,2 3,5
5,2 5,4 5,3 5,2 4,9 4,3 3,8 3,2
11,3 11,0 10,5 9,8 9,0 8,0 6,7 4,7
4,4 4,5 4,4 4,1 3.9 3,6 3,8 4,3
8,5 8,6 8,3 7,7 6.6 4.9 2,9 0,2
3,4 3,7 3,8 3,5 3,1 2,2 1,1 ’ 0,0
13,25 13,80 13,60 12?75 11.05 8,45 4,55 0,0
1,10 2,15 3,00 3,55 3,70 3,15 1,70 0,0
12,3 12.5 12,0 11,0 9,5 7,0 4,0 0,5
2,7 3,6 4,0 4,2 3.9 з,сг 1,7 0,0
12,41 12,03 11,06 9,55 7,66 5,5 3,04 0,4
0,04 0,22 0,48 0,71 0,78 0,64 0,37 0,0
4,5 4,25 3,97 3,42 2,75 1,97 1,09 0,09
—4,5 -4,25 —3,97 —3,42 —2,75 — 1,97 -1,09 -0,09
5,85 5,5 5,25 4,58 3,68 2,61 1,4 0,06
0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0
Рис. 16. Профили крыла (координаты профилей указаны в табл. 2)
делях, что дает основание рекомендовать их. Данные
для построения этих профилей приведены в табл. 2.
Для крыльев моделей планеров и резиномоторных
следует использовать профили, показанные на рис. 16,
б, г, д, е, ж, з, и, к, л, м, н, о, п, р, т, у, ф, а для
таймерных — на рис. 16, а, в, с, х.
Начинающие авиамоделисты должны применять уже
испытанные ранее профили, самостоятельно проекти-
ровать их можно, только имея значительный опыт в
постройке летающих моделей.
64
Таблица координат профиля RAF-15 (см. рис. 12)
X, % Уз, % Ун, %
0 1,5 1,5
2.5 3,94 0,5
5,0 5,00 0,13
10 6,09 0,02
20 6,96 0,53
30 6,94 1,02
40 6,63 1,02
50 6,13 0,71
60 5,52 0,33
70 4,79 0,06
80 3,91 0,04
90 2,81 0,21
100 0,94 0,94
ЦЕНТРОВКА МОДЕЛИ И ПЛЕЧО СТАБИЛИЗАТОРА
Крыло дает около 95% подъемной силы всей мо-
дели. Вследствие этого может появиться ложное мне-
ние, что стабилизатор для модели вреден, так как при-
бавляет еще добавочное сопротивление. На самом деле
это не так. А бесхвостой схемы аэродинамические харак-
теристики моделей хуже, чем с хвостовым оперением.
Любая летающая модель испытывает в полете раз-
личного рода возмущения. Причина некоторых из этих
возмущений заложена в самих моделях: у планера —
отцепка от леера, у резиномоторной и таймерной —
прекращение работы двигателя и связанное с ним пре-
кращение обдува стабилизатора струей от винта, из-
менение положения рулей или стабилизатора и т. п.
Такого рода возмущения модель получает в каждом
полете, и характер их, как правило, постоянен.
Причина другой части возмущений зависит от окру-
жающей модель атмосферы; эти возмущения случай-
ные, изменяющиеся от полета к полету, — порывы вет-
ра, термические и динамические потоки. Причиной воз-
65
Рис. 17. Схема возникновения демпфирующих моментов:
а — при возмущающем моменте, вызывающем кабрирование;
б — при возмущающем моменте, вызывающем пикирование
мущений могут быть и ошибки при запуске моделей.
Любое возмущение нарушает нормальный режим по-
лета модели: так, например, встречный порыв ветра
изменяет скорость модели, увеличивается ее угол атаки,
вследствие чего модель кабрируег и может даже пе-
ревернуться «на спину». При одной и той же величи-
не возмущения степень нарушения режима полета за-
висит от степени устойчивости модели и от ее,демпфи-
рующих свойств: при достаточной степени устойчиво-
сти и хороших демпфирующих свойствах нарушение
режима полета небольшое. Демпфирующие свойства
модели проявляются в виде дополнительных аэродина-
66
мических сил и моментов, возникающих при измене-
нии положения модели в воздухе под действием возму-
щений и препятствующих этому изменению. Особенно
большое значение имеют демпфирующие мо-
менты, действующие в плоскости симметрии модели,
которые называют продольными демпфирую-
щими моментами. Так как в полете модель пово-
рачивается относительно своего центра тяжести (ц. т.),
среди всех продольных демпфирующих моментов наи-
большую величину имеет демпфирующий момент ста-
билизатора. Демпфирующие моменты крыла и фюзеля-
жа составляют, как правило, не более 10% от сум-
марного продольного демпфирующего момента модели.
Возникновение продольных демпфирующих моментов
крыла и стабилизатора пояснено на рис. 17.
Под действием возмущающего момента Л1ВОЗМ на
крыле и стабилизаторе приведенной на рис. 17 модели
появляются переносные скорости V ш и VwCT, величи-
на которых пропорциональна угловой скорости воз-
мущенного движения со и расстоянию от ц.т. модели. Эти
переносные скорости вызывают изменение углов атаки
крыла и стабилизатора; уменьшение их на крыле и
увеличение на стабилизаторе, причем ввиду большего
расстояния стабилизатора от ц. т. угол атаки на нем
увеличивается значительно сильнее, чем уменьшается
на крыле. Это изменение углов атаки приводит к
уменьшению подъемной силы крыла и более значи-
тельному увеличению подъемной силы стабилизатора,
т, е. к появлению момента Л4деМп , препятствующе-
го Л4ВОЗМ . Чем больше плечо стабилизатора, тем
больше его демпфирующий ’ момент и зависимость эта
не прямая, а квадратичная. Поэтому у моделей бесхво-
стой схемы демпфирующие свойстца значительно хуже,
чем у моделей со стабилизатором, и бесхвостки более
чувствительны к возмущениям.
Характерное свойство демпфирующих моментов —
они возникают только при вращении модели относи-
тельно ее ц. т. и пропадают, как только это враще-
ние прекратится, независимо от положения, в котором
оказалась модель. Но чтобы модель могла нормально
продолжить свой полет, ее необходимо вернуть к то-
му исходному режиму полета, на котором она летала
до начала действия возмущения. Так как демпфиру-
ет
ющие моменты не могут этого сделать, нужно,
чтобы при отклонении модели от исходного . ре-
жима появились какие-то другие, восстанавлива-
ющие аэродинамические моменты, действующие до
тех пор, пока модель не вернется к исходному ре-
жиму. Способность модели возвращаться к исходному
режиму полета после прекращения действия возмуще-
ния называется устойчивостью.
При проектировании модели особое внимание сле-
дует уделять продольной устойчивости,
т. е. способности модели восстанавливать свое исход-
ное положение после действия возмущений в продоль-
ной плоскости (плоскости симметрии модели). Про-
дольную устойчивость еще называют устойчивостью по
углу атаки, так как продольно устойчивая модель при
любом изменении угла атаки возвращается к углу
атаки, соответствующему исходному режиму полета мо-
дели.
Продольно неустойчивая модель не восстанавлива-
ет нарушенный возмущением полет и поэтому нормаль-
но летать не может.
У моделей появление продольных восста-
навливающих моментов, необходимых для
создания продольной устойчивости, возможно только
при условии соответствующего выбора места располо-
жения ц. т. относительно крыла, т. е. центровки
м одели.
Прежде чем рассматривать влияние центровки на
продольную устойчивость модели, необходимо усло-
виться, относительно какого параметра крыла нужно
определять положение ц. т. Чтобы все рекомендации
по выбору положения ц. т. были действительны для
любых крыльев, этот параметр не должен зависеть от
формы крыла в плане и его поперечного V. Таким па-
раметром является средняя аэродинамиче-
ская хорда крыла (САХ). Это условная ли-
ния, величина которой и место расположения зависят
от формы крыла в плане и спереди. САХ у V-образ-
ного крыла лежит на линии хорд, у U-образного —
может находиться и вне крыла.
Графические способы определения САХ крыльев
разных геометрических форм показаны на рис. 18.
Сложнее найти положение САХ при виде спереди и
68
сбоку U-образного крыла. В этом случае сначала
нужно определить САХ для центральной части (I)
крыла — САХ I, затем для концевой части (II) —•
САХ II и только после этого — САХ всего крыла.
Положение САХ от середины крыла определяется по
формуле:
где /сах /2 — расстояние САХ от середины крыла;
~(4ахц —4axi ) — расстояние между САХ I и САХ
2 \ ' II вдоль размаха;
Sn — площадь концевой части крыла.
Перенеся САХ I и САХ II на линию хорд при виде
крыла спереди, нужно соединить их прямой и уже на
эту прямую спроектировать САХ всего крыла. Осо-
бенность U-образного крыла — расположение САХ вне
крыла. Определив положение САХ при виде крыла в
плане и спереди, нетрудно получить САХ и при виде
крыла сбоку.
Воспользовавшись найденными средними аэродина-
мическими хордами всего крыла и отдельных его ча-
стей, можно определить углы поперечного V вдоль
размаха. Эффективный (средний) угол поперечного V
для U-образного крыла связан с углами поперечного V
отдельных частей крыла следующим соотношением:
ФсрЛах* 2 = *4ах| ’?i 4~ *^н *4ахц * Фц4” * * * * > (27)
где , Sn и т. д. — площади участков крыла, име-
ющих углы поперечного V, со-
ответственно- равные <р1т (p(j
и т. д.;
4axi Лахц ИТ-Д-— расстояния между средними
аэродинамическими хордами,
симметрично расположенными
относительно центра крыла уча-
стков крыла, имеющих соответ-
ственно площади f 5П и т. д.
Зная форму крыла в плане и выбрав значение фср
(см. стр. 43), можно определить углы qjj , фп и т. д.;
69
Рис. 18. Определение средней аэродинамической хорды
у крыльев:
а — V-образного; б — U-образного; 1 — прямоуголь-
ного; 2 — трапециевидного; 3 — эллиптического; 4 —»
трапециевидного с прямоугольным центропланом; 5 —
эллиптического с прямоугольным центропланом; 6 —
стреловидного
при этом нужно помнить, что угол поперечного V цен-
тральной части крыла не превышает обычно 5°.
Положение ц, т. относительно САХ определяется
двумя координатами — хц.т и //ц.т ; хц.т — это изме-
ряемое вдоль САХ расстояние от начала САХ до ц. т.;
Уи-т — расстояние от ц. т. до САХ, измеряемое в на-
правлении, перпендикулярном САХ. Координаты хц.т
и выраженные в долях САХ называются со-
ответственно центровкой по длине САХ и
центровкой по высоте.
хц.т = ^т, (28)
ах
= (29)
°сах
Если хц.т менее 0,25, то говорят, что модель имеет
переднюю центровку; при хц.т более 0,30 — центров-
ка задняя. Величине хц.т , равной 0,25 — 0,3, соот-
ветствует средняя центровка.
Решающее значение для продольной устойчивости
имеет центровка^ по длине САХ; центровка по высоте
влияет на продольную устойчивость не столь значи-
тельно.
Влияние центровки по длине САХ на устойчивость
модели рассмотрим с помощью рисунков, объясняющих
возникновение восстанавливающих моментов при пе-
редней и задней центровках.
При передней центровке в установившемся полете
подъемная сила крыла стремится повернуть модель
носом вниз, уменьшая угол атаки. Если бы не было
других аэродинамических сил, модель вместе с крылом
повернулась бы по потоку так, что подъемная сила
крыла стала бы равной 0 (или близкой к 0 при высоко-
расположенном крыле), и вместо установившегося по-
лета модель отвесно бы падала.
Но на модели имеется стабилизатор, который при
определенном отрицательном угле атаки
дает аэродинамическую силу, направленную вниз. Мо-
мент этой силы стремится повернуть модель на боль-
ший угол атаки, уравновешивая тем самым момент
крыла и балансируя модель на необходимом угле
атаки.
72
Все моменты, стремящиеся уменьшить угол
атаки, называются пикирующими, а моменты,
стремящиеся, наоборот, увеличить угол атаки — к а б-
рирующими. Условимся считать пикирующие мо-
менты положительными, а кабрирующие — отрица-
тельными.
В установившемся полете моменты всех аэродина-
мических сил относительно ц. т. модели уравновешива-
ются и модель оказывается сбалансированной на нуж-
ном угле атаки, т. е. при передней центровке: М —
Л4СТ = 0, но так как Л4 = У • (хц. д — хцт) и Мст =
Кст • L (моментами силы сопротивления стабилиза-
тора и крыла ввиду их малости пренебрежем), то
—*ц.т) “ ~ 0 (рис. 19,а).
Далее предположим, что действием возмущения, на-
пример, порыва ветра, модель окажется запрокинутой
на большой угол атаки (рис. 19,6). При этом подъ-
емная сила крыла возрастет, а отрицательная подъ-
емная сила стабилизатора уменьшится; возможно, она
станет равной 0 или даже положительной. Таким обра-
зом, равновесие моментов, а следовательно, и баланси-
ровка модели нарушатся, разность М — Мст уже не бу-
дет равной 0, она станет положительной величиной,
т. е. пикирующим моментом. Этот пикирующий мо-
мент и является восстанавливающим моментом, так как
он стремится вернуть модель к первоначальному по-
ложению.
Аналогичное явление имеет место и при вынуж-
денном отклонении модели на меньшие углы атаки
(рис. 19,в). В этом случае пикирующий момент крыла
уменьшится, кабрирующий момент стабилизатора уве-
личится, следовательно, появится восстанавливающий
момент, возвращающий модель^ к исходному поло-
жению.
При перемещении ц. т. назад восстанавливающие
моменты уменьшаются, а при слишком задних центров-
ках не появляются вообще. На рис. 20 показана мо-
дель, имеющая заднюю центровку. Момент крыла этой
модели — кабрирующий; следовательно, для обеспече-
ния балансировки стабилизатор должен иметь подъем-
ную силу, т. е. быть, как говорят, несущим. Несущий
стабилизатор дает пикирующий момент, уравновешива-
ющий момент крыла.
73
Рис. 19. Схема возникновения продольных восстанавливающих
моментов при передней центровке:
а равновесие сил в установившемся полете; б — вырав-
нивание кабрирования; в — выравнивание пикирования
При отклонении модели под действием какого-либо
возмущения на больший угол атаки подъемные силы
крыла и стабилизатора возрастают и восстанавлива-
ющий момент будет иметь место только в том случае,
если пикирующий момент стабилизатора превысит каб-
рирующий момент крыла. При уменьшении угла ата-
ки крыло и стабилизатор уменьшают подъемную силу
и восстанавливающий момент возможен только при ус-
ловии более значительного снижения момента стабили-
затора по сравнению с моментом крыла.
При заданных значениях площади стабилизатора
и его плеча существует такое предельно заднее поло-
жение ц. т., при котором восстанавливающие моменты
пропадают, становятся равными нулю. Такая центровка
называется критической. Если же ц. т. сместится
за предельно заднее положение (такая центровка назы-
74
V
Рис. 20. Схема появления продольных восстанавливающих
моментов при задней центровке:
а —• равновесие сил в установившемся полете; б — момен-
ты, возникающие при кабрировании; в — моменты, возни-
кающие при пикировании
вается з а к р и т и ч е с кой), то при отклонении модели
от положения равновесия появляются аэродинамические
моменты, стремящиеся еще более увеличить это отклоне-
ние. Таким образом, модели, имеющие критическую
центровку, — нейтральны, а при закритической
центровке — неустойчивы.
Модель с критической и закритической центровка-
ми летит только до первого возмущения, которое вы-
водит ее из режима установившегося полета, и вер-
нуться к этому режиму она уже не может. На рис. 21,а
показано действие на такую модель встречного по-
рыва ветра: модель запрокидывается на большие уг-
75
Рис. 21. Действие возмущения на модель:
а — с закритической центровкой; б — с излишне передней цент-
ровкой; в — с нормальной центровкой
лы атаки, теряет скорость и падает; попутный порыв
ветра сразу же «сбрасывает» ее в пикирование.
Неустойчивость, свойственная моделям с закритиче-
ской центровкой, называется апериодической
неустойчивостью.
Чтобы не допустить на модели критическую и закри-
тическую центровки, необходимо знать предельно
заднее положение ц. т. Рассчитать его трудно, поэтому
лучше воспользоваться графиком рис. 22. В правой ча-
Рис. 22. График для определения допустимой центровки модели
76
сти показана зависимость предельно заднего положе-
ния ц.т. от коэффициента продольной ус-
тойчивости Лст (его еще называют коэффициен-
том эффективности стабилизатора) и центровки по
высоте.
Коэффициент Лст рассчитывают по формуле:
л ____^ст * L
71 СТ о.я
° °сах
(30)
Для моделей планеров его можно принять равным
0,75—1,2, для резиномоторных и таймерных — 1,1—1,7.
Из графика видно, что у моделей, имеющих большие
значения ЛС7 , допустимы более задние центровки.
Подобный же эффект дает и увеличение центровки
по высоте: на моделях высокопланов центровки могут
быть более задними, чем на низкопланах.
Может сложиться мнение, что для обеспечения про-
дольной устойчивости модели предпочтительнее не зад-
ние, а передние центровки, гарантирующие появление
восстанавливающих моментов. Но это неверно. При пе-
редних центровках восстанавливающие моменты чрезмер-
но велики. Модель под действием чрезмерно большого
восстанавливающего момента не возвращается к свое-
му исходному положению, а проскакивает через него.
В новом отклоненном положении на модель действует
восстанавливающий момент противоположного направ-
ления. Но и он имеет величину большую, чем необхо-
димо для возвращения модели в исходное положение,—
и модель вновь проскакивает через него. Таким обра-
зом, модель, имеющая переднюю центровку, прежде
чем вернуться к своему исходному положению, со-
вершает длительные колебания вокруг своего ц. т. Эти
колебания приводят к волнообразному полету, в ко-
тором модель, конечно, не покажет хороших результа-
тов (см. рис. 21,6).
Величина (амплитуда) и продолжительность про-
дольного колебательного движения, помимо центровки,
зависят от демпфирующей способности модели и ее про-
дольного момента инерции. Чем меньше момент инер-
ции, тем быстрее модель успокаивается и прекраща-
ет колебания. Уменьшить продольный момент инерции
можно, облегчая детали конструкции, расположенные
на большом расстоянии от ц. т., — хвостовое оперение,
77
хвостовую и носовую часть фюзеляжа. Груз, нужный
для приведения веса такой облегченной модели к вели-
чине, необходимой по нормам, следует размещать в
ц. т. модели — в этом случае он практически не уве-
личит ее момент инерции. Это особенно широко ис-
пользуется на моделях планеров: на некоторых, пост-
роенных в последнее время, после балансировки вес
был около 300—350 г. Чтобы сделать вес равным
410 г, в фюзеляже около ц. т. заделывают свинцовый
груз нужного веса. Такие модели планеров показыва-
ли неплохие результаты при полетах в возмущенном
воздухе.
Но только уменьшения момента инерции недоста-
точно для быстрого затухания колебаний: необходимо
еще, чтобы демпфирующая способность модели была
высокой. Основную долю демпфирования дает стаби-
лизатор, крыло же вследствие близкого расстояния от
ц. т., а фюзеляж из-за малого значения су слабо вли-
яют на демпфирование.
Демпфирующий момент стабилизатора определяет-
ся величиной коэффициента продольного демпфирую-
щего момента, зависящего от произведения Лст— •
*сах
Чем больше это произведение, тем выше значение
продольного демпфирующего момента. Поэтому для
продольной устойчивости модели имеет большое значе-
ние не только величина Лст , но и соотношение пло-
щади стабилизатора и его плеча. Модель с большим
плечом и маленьким стабилизатором обладает лучшим
демпфированием, чем модель с меньшим плечом, хотя
коэффициент А ст у них одинаковый. Чрезмерно уве-
личивать плечо стабилизатора нельзя, так как это ве-
дет к повышению момента инерции модели и значи-
тельному уменьшению стабилизатора, а следовательно,
его хорды (см. стр. 80). Как показывает практика,
оптимальными значениями для Лст-------следует счи-
®сах
тать 4—7.
В левой части графика рис. 22 показана зависи-
мость предельно переднего положения ц. т., обеспечи-
вающего достаточно, быстрое затухание продольных ко-
лебаний модели, от величины Дет’— и Лст. ПоЭТО-
^сах
78
му графику можно с достаточной точностью определить
те границы, за которые не должен выходить ц. т. При
некоторых параметрах модели, особенно при больших
значениях Аст и АСт • ;— , границы допустимых цен-
бсах
тровок широки; у моделей с небольшим плечом опере-
ния и малым Аст , наоборот, центровка должна быть
очень строгой, и ошибки в ее определении недопу-
стимы.
Для получения дополнительной подъемной силы у
стабилизатора нужно выбирать центровку на 0,1—
0,3 всах более переднюю, чем предельно задняя, но
обязательно проверять, не переходит ли она за грани-
цу предельно передней центровки.
В качестве примера на рис. 22 показано определе-
ние границ центровки для модели, имеющей следую-
щие геометрические параметры: Лст = 1,1; Аст. ~ =
= 5,8; £/ц.т= 0,5. Как видно из графика, ц. т. этой мо-
дели должен быть в пределах 0,50—0,77 всах; целесооб-
разнее всего расположить ц. т. на расстоянии 0,65 ог
носика САХ.
Центровка по высоте z/u.T для большинства свобод-
нолетающих моделей находится в пределах 0,4—0,6.
Добиться полного совпадения принятой при проектиро-
вании центровки по высоте с практически полученной
на модели удается редко. Но это и не столь сущест-
венно, так как ошибка даже в 0,2 всах (что составля-
ет 25—50 мм) на продольную устойчивость модели
практически не скажется. В крайнем же случае все
ошибки в центровке по высоте легко компенсировать
незначительным изменением центровки по длине САХ.
СТАБИЛИЗАТОР
Как определить площадь стабилизатора, рассказано
на стр. 38. Нужно иметь также в виду, что поц пло-
щадью стабилизатора понимают площадь его проек-
ции на горизонтальную плоскость. При отсутствии по-
перечного V фактическая площадь стабилизатора и
площадь его проекции равны.
Форма стабилизатора в плане, как правило, ана-
79
логична форме крыла; часто стабилизатор делаки
прямоугольным. Характерным для стабилизатора яв-
ляется меньшее, чем у крыла, удлинение; обычно оно
находится в пределах 5—7,5. Большое удлинение кры-
ла (см. раздел «Крыло») вызывается необходимостью
снизить индуктивное сопротивление при больших зна-
чениях коэффициента су , присущих крылу. Коэффици-
ент су стабилизатора при нормальном установившем-
ся полете модели не превышает 0,3. При таком зна-
чении су влияние удлинения стабилизатора на общее
сопротивление модели невелико. Так, если при удли-
нении 5 сопротивление стабилизатора составляет 10%
общего сопротивления модели, то даже при увеличе-
нии удлинения до 10 сопротивление стабилизатора сни-
зится только до 9,4%, т. е. на 0,6% общего сопро-
тивления модели, что практического значения не
имеет.
В то же время уменьшение хорды стабилизатора
при больших X ведет к понижению Re; что может •
явиться причиной докритического обтекания; при этом
сопротивление стабилизатора не только не уменьшит-
ся, но даже увеличится (за счет увеличения слп ), а
эффективность стабилизатора упадет.
Как. показывает опыт, едва ли целесообразно на
свободнолетающих моделях делать ширину стабилиза-
тора менее 75 мм. Поэтому при малых площадях ста- .
билизаторов, свойственных моделям резиномоторным
и планеров, предпочтительнее прямоугольная форма, а .
не эллиптическая или трапециевидная, особенно с боль-
шим сужением.
Для увеличения эффективности стабилизатора на
больших углах атаки, которые могут иметь место в
неустановившемся полете, например, в порывистый ве-
тер, на концах стабилизатора иногда устанавливают
шайбы (см. стр. 88). При наличии центрального киля
эти шайбы небольшого размера — их высота состав-
ляет 15—30 мм. При двухкилевом оперении площадь
каждой шайбы — киля иногда достигает 20% площа-
ди стабилизатора.
Все современные свободнолетающие модели имеют
несущие стабилизаторы, создающие в установившемся
полете подъемную силу. Правда, величина этой подъ-
емной силы невелика: ограничена, как было рассказано
80
в предыдущем разделе, требованиями устойчивости. Ко-
эффициент су стабилизатора не превышает 0,3 (в
установившемся полете), поэтому не следует применять
для стабилизатора столь же сильно несущие профили,
как для крыла. Во многих случаях — а на таймерных
моделях практически всегда — на стабилизаторах при-
меняют плоско-выпуклые профили толщиной 6—10%,
например, типа Clark-Y.
Желательно, чтобы положительные углы атаки, на
которых происходит срыв на верхней поверхности ста-
билизатора, и отрицательные углы атаки, на которых
происходит срыв потока на нижней поверхности, бы-
ли бы большими, чем соответствующие углы на кры-
ле. Добиться этого можно применением на стабили-
заторе несколько больших по толщине профилей, чем
на крыле, со средней или малой вогнутостью. Напри-
мер, неплохой эффект давало использование на крыле
профиля MVA-123, а на стабилизаторе — MVA-301
с наклеенным турбулизатором. Модель с такими про-
филями устойчиво летала в сильный порывистый ве-
тер, даже имея несколько более заднюю, чем обычно,
центровку (ее ц. т. располагался примерно на 65%
хорды крыла*).
Тонкие профили с большой вогнутостью и профили
с острой передней кромкой применять на стабилизато-
рах не следует. Для улучшения устойчивости всех
свободнолетающих моделей, за исключением только
моделей таймерных, целесообразно на стабилизаторах
использовать турбулизаторы, лучше всего в виде на-,
клеенной на стабилизатор сверху нити. Турбулизаторы,
расположенные перед стабилизатором (см. рис. 13,Б,а),
применять не следует, так как при нормальном полете
модели, при малых значениях су - стабилизатора, кро-
ме дополнительного сопротивления, они ничего не
дают.
киль
Для нормального полета модели недостаточно
только одной продольной устойчивости. Модель должна
еще иметь путевую и поперечную устойчивость.
Путевая устойчивость — термин условный,
81
так как под ним понимают не способность модели вы-
держивать заданное направление полета, а способ-
ность удерживать свою продольную ось вдоль направ-
ления воздушного потока подобно флюгеру. Попе-
речная устойчивость характеризует способ-
ность модели устранять возникший в результате воз-
мущения крен.
Путевую и поперечную устойчивость отделять друг
от друга и рассматривать изолированно нельзя, так
как они определяются взаимосвязанными параметра-
ми: поперечным V крыла, площадью киля, а также раз-
мерами фюзеляжа — плечом киля, боковой поверхно-
стью фюзеляжа. Часто поэтому путевую и поперечную
устойчивости объединяют одним >понятием — боко-
вая устойчивость. '
Роль киля, как средства обеспечения путевой ус-
тойчивости, объяснять не надо; модель, снабженная
достаточно эффективным килем, ведет себя подобно
флюгеру, устанавливаясь вдоль воздушного потока.
При любом отклонении продольной оси модели от на-
правления полета на киле возникает боковая сила
ZK, заставляющая модель повернуть свою продольную
ось в сторону направления полета.
Сложнее явление выравнивания крена. Чтобы по-
нять его, обратимся к рис. 23, на котором показана
накренившаяся в результате возмущения модель. Так
как подъемная сила Ум при отсутствии скольжения
всегда находится в плоскости, перпендикулярной кры-
лу, то между нею и силой веса модели GM появляется
угол, вызывающий дополнительную боковую силу Z.
Под действием этой силы модель начинает двигаться
вбок, скользить со скоростью Vz . Модель, имевшая
поступательную скорость V, при появлении крена на-
чинает двигаться со скоростью VCK , составляющей угол
Рск с продольной осью модели. Угол (3Ск называет-
ся углом скольжения. При полете со сколь-
жением, благодаря наличию поперечного V, угол ата-
ки на той половине крыла, в сторону которой происхо-
дит скольжение, больше, чем на противоположной по-
ловине (см. рис. 23,г). Половина крыла с большим
углом атаки имеет и большую подъемную силу; раз-
ница в величине подъёмных сил обеих половин крыла
и вызывает момент выравнивания крена. Крыло, не
82
Рис. 23. Выравнивание крена у поперечно-устойчивой модели:
а — исходное положение модели; б — под действием возму-
щения у модели появился крен; в — боковая сила заставляет
модель «скользить» в сторону крена; как только скольжение
началось, модель несколько поварачивается носом в сторону
крена; г — угол атаки на крыле, в сторону которого проис-
ходит скольжение, увеличивается, на противоположном —
уменьшается. Чтобы убедиться в этом, нужно посмотреть на
модель по направлению ее скорости полета, т. е. по VCk- Из-
менение углов атаки приводит к появлению восстанавливаю-
щего момента Мв‘, д — под действием восстанавливающего
момента модель вернулась к исходному положению
имеющее поперечного V, не обладает способностью
создавать восстанавливающий момент.
Итак, крен при V- или U-образном крыльях вырав-
нивается только в том случае, если имеет место сколь-
жение. Но это возможно лишь при вполне опреде-
ленных соотношениях между величиной поперечного V
крыла и эффективностью киля.
83
При чрезмерно большой эффективности киля угол
скольжения мал, а иногда скольжение вообще отсут-
ствует. В этом случае углы атаки на обеих полови-
нах крыла практически не будут отличаться, следова-
тельно, момент, выводящий модель из крена, отсутст-
вует. Более того, крен увеличивается, модель войдет
в крутую спираль, которая закончится поломкой мо-
дели. Такой полет — признак так называемой спи-
ральной неустойчивости модели (рис. 24,Л).
При малой эффективности киля, наоборот, модель
слишком вяло стремится повернуться по направлению
полета; углы скольжения при этом чрезмерно велики, а
следовательно, велик и восстанавливающий момент
крыла. Поэтому модель не вернется в исходное по-
ложение, а перейдет через него, получив крен в проти-
воположную сторону. И этот крен модель выровняет
чрезмерно энергично, опять пройдя исходное положе-
ние. Таким образом, модель будет лететь все вре-
мя меняя крен и направление полета. Такой полет,
напоминающий популярный у конькобежцев вид ката-
ния, называемый «голландский шаг», — признак бо-
ковой колебательной неустойчивости мо-
дели (рис. 24,Б). Избежать обоих видов боковой не-
Рис. 24. Боковая неустойчивость модели:
А — спиральная неустойчивость: а — при появлении крена возни-
кает боковая сила, заставляющая модель скользить в сторону кре-
на; б — чрезмерно эффективный киль интенсивно поворачивает мо-
дель носом в сторону крена, устанавливая продольную ось модели
вдоль скорости полета VCi6 в — скорость УСк совпадает с продоль-
ной осью модели и углы атаки на обоих крыльях одинаковы, и силы,
устраняющие крен, не появляются; Б — боковая колебательная не-
устойчивость: а — при появлении крена возникает боковая сила,
заставляющая модель скользить в сторону крена; б — недостаточ-
ная эффективность киля приводит к чрезмерно большим углам
скольжения; в — угол атаки на крыле, в сторону которого проис-
ходит скольжение, увеличивается, на противоположном — умень-
шается. Чтобы убедиться в этом, нужно посмотреть на модель по
направлению скорости ее полета, т. е. по УСк- Слишком большое
различие в углах атаки, соответствующее большим углам скольже-
ния, приводит к излишне интенсивному выравниванию; г — под
действием чрезмерно большого восстанавливающего момента модель
переходит через нейтральное положение и накреняется в противо-
положную сторону; В — траектории полета неустойчивой модели
после действия возмущения: 1 — при спиралькой неустойчивости;
2 — при колебательной неустойчивости
85
Рис. 25. Графики для определения коэффициента эффективности
киля модели:
а — планера; б — резиномоторной; в — таймерной
устойчивости можно, только соответствующим образом
согласовав поперечное V крыла и эффективность
киля.
Эффективность киля определяется его коэффи-
циентом эффективности, называемым также
коэффициентом путевой устойчивости и обозначаемым
Дк:
• (31)
На рис. 25 показаны графики зависимости величи-
ны Ак , обеспечивающей боковую устойчивость моде-
ли, от угла поперечного V крыла. По этим графи-
кам можно определить размеры киля. Выбрав в со-
ответствии с указаниями на стр. 43 величину угла
поперечного V V-образного крыла или среднего угла
поперечного V U-образного крыла, по графикам следует
найти величину Ак . Точки пересечения координат уг-
ла поперечного V и коэффициента эффективности киля
должны обязательно лежать в светлой зоне. Сочета-
ние угла поперечного V и коэффициента Лк вне свет-
лой зоны может привести к появлению на модели ли-
бо спиральной неустойчивости (зона Л), либо коле-
бательной неустойчивости (зона Б),
По выбранной величине Ак и известным величинам
S и I нужно найти произведение площади киля на его
86
плечо SK-LK. Плечо Zк следует принять из усло-
вий компоновки киля на модели, после чего легко оп-
ределить площадь киля.
В среднем для современных моделей характерен
киль площадью: резиномоторных — до 8% от площади
крыла, планера — не превышающий 4,5% площади
крыла, таймерной — 6% площади крыла.
Необходимость большого киля на резиномоторной
модели в основном вызвана наличием длинной перед-
ней части фюзеляжа и винтом, которые вызывают зна-
чительную путевую неустойчивость как в моторном
полете, так и при планировании.
У моделей планеров и таймерных передняя часть
фюзеляжа значительно короче, и для компенсации ее
дестабилизующего ... влияния требуется значительно
меньшая площадь киля. При чрезмерно короткой пе-
редней части фюзеляжа и малом киле демпфирова-
ние боковых колебаний модели очень слабое, и модель
после действия возмущения длительно «рыскает» и рас-
качивается. Чтобы улучшить демпфирующие свойст-
ва, у моделей планеров в передней части фюзеляжа
располагают гребень, на нем же крепят и крыло. Пи-
лон, на котором устанавливают крыло таймерных мо-
делей, также улучшает демпфирующие свойства.
График рис. 25,а построен с учетом площади фюзе-
ляжа с гребнем, располагаемых перед ц. т. модели.
Если на проектируемой модели эта площадь более
2 дм3, то для определения размеров киля следует при-
нять наибольшее значение коэффициента Ак , допу-
скаемое при выбранном угле поперечного V; при мень-
шей площади фюзеляжа с гребнем делайте киль с ми-
нимально допустимыми по приведенному графику раз-
мерами.
СХЕМЫ ХВОСТОВОГО ОПЕРЕНИЯ
У моделей нормальной схемы хвостовое оперение
состоит из стабилизатора и одного киля, реже — двух
(рис. 26). Киль в однокилевом оперении можно распо-
лагать сверху а, в, снизу г, а также по обе стороны
фюзеляжа б, д, е.
При верхнем расположении киля а его конструкция
87
Рис. 26. Схемы хвостового оперения:
а — однокилевое с верхним расположением киля; б — однокилевое
с верхнерасположенным и смещенным вперед килем; в — однокиле-
Еое с верхнерасположенным и смещенным назад килем; г — одно-
килевое с нижним расположением киля и V-образным стабилизато-
ром; д — однокилевое со стабилизатором, установленным на киле;
е — однокилевое, с расположенным по обе стороны от фюзеляжа
килем; ж — двухкилевое
может быть легкой, так как аэродинамические силы,
действующие на него, малы, а при посадке он защищен
фюзеляжем. Чтобы на больших углах атаки киль не
затенялся стабилизатором, их рекомендуется смещать
относительно друг друга. Целесообразнее всего киль
ставить перед стабилизатором б. Установка киля за
стабилизатором в едва ли целесообразна потому, что
в этом случае он затеняется, кроме того, чрезмерно
удлиненная хвостовая часть фюзеляжа усложняет ба-
лансировку модели. Верхнее расположение киля в ча-
ще всего встречается,' у таймерных моделей. У моделей
планеров киль часто устанавливают снизу фюзеляжа
88
г, что также устраняет затенение киля. Но конст-
рукция киля в этом случае должна быть прочной, так
как модель садится на него.
На некоторых моделях устанавливают стабилизатор
на верхнерасположенном киле д, затенения которого в
этом случае не происходит. Хотя такой киль и предо-
хранен при посадках фюзеляжем, он должен быть
прочным и жестким, чтобы деформации его и стабили-
затора под действием аэродинамических сил в полете
были малы.
Более целесообразна схема хвостового оперения с
килем, расположенным по обе стороны от фюзеляжа—
вверх и вниз е, так как в этом случае крепление ста-
билизатора может быть жестким ввиду малой высоты
верхней части киля; нижняя часть киля обеспечивает
хорошую путевую устойчивость на больших углах
атаки. Такая схема оперения неплохо зарекомендова-
ла себя на моделях резиномоторных и планеров.
Двухкилевое оперение ж применяют редко из-за
повышенного веса и трудности создания жесткой кон-
струкции, несмотря на некоторое увеличение эффектив-
ности стабилизатора.
ДВИГАТЕЛЬ
Двигателем резпномоторной модели служит жгут из
нескольких резиновых нитей или лент. Резиновый дви-
гатель имеет свойство, которое затрудняет использо-
вание всех его энергетических возможностей: развивае-
мый им крутящий момент изменяется во время рабо-
ты, причем это изменение носит сложный характер. Но
относительная дешевизна, простота, удобство в эксплу-
атации, надежность обеспечили резиновому двигателю
в настоящее время очень широкое распространение.
Для изготовления таких двигателей применяют спе-
циальную резину. О ее пригодности для использования
на модели судят по целому ряду свойств. Основная
характеристика резины — ее удельная энергия, изме-
ряемая работой, которую может совершить 1 кг ре-
зины. Удельная энергия резины 8 равна отношению
совершенной работы резины к ее весу: г == £/Gp. Раз-
мерность удельной энергии — метры, поэтому удель-
89
ную энергию резины можно представить как высоту, на
которую резина сможет поднять сама себя. Резина вы*
полняет работу, сокращаясь после растяжения либо
раскручиваясь после закручивания. Хотя сущность яв-
лений сокращения и раскручивания резины одна и та
же, удельные энергии их различные. Различие в ос-
новном определяется наличием сил трения в раскручи-
вающемся пучке резины и неравномерностью работы в
нем каждой нити. При закручивании пучка резины
все нити его растягиваются, однако нити, лежащие сна-
ружи, оказываются наиболее растянутыми, а внутри
пучка — наименее. Количество оборотов, на которые
можно закрутить жгут- резины (резиномотор), опреде-
ляется только вытяжкой наружных нитей; внутренние
нити, не растянутые полностью, уменьшают удельную
энергию всего жгута, по отношению к той удельной
энергии, которую можно бы было получить при полном
растяжений всех нитей жгута. Кроме того, сильно вытя-
нутые наружные' нити сдавливают, прижимают друг к
другу внутренние нити, вызывая появление значитель-
ных сил трения между ними. Эти силы трения также
уменьшают полезную работу резиномотора при раскру-
чивании по сравнению с его работой при сокращении.
Учитывая характер работы резинового жгута на мо-
дели, нас интересует только его удельная энергия рас-
кручивания. Резиномотор при своем раскручивании от-
дает запасенную при закручивании энергию неравно-
мерно. Поэтому вторая важная характеристика резины,
работающей в жгуте, — характер кривой раскручива-
ния, т. е. зависимость крутящего момента от времени
работы или от количества оборотов, на которое закру-
чен жгут,
На рис. 27,Л приведен график кривых раскручива-
ния резиномоторов из наиболее употребительных сор-
тов резины. Кривая раскручивания резиномотора из
отечественной резины сечением 1X4 а достаточно по-
лога, что говорит о пригодности данной резины для ра-
боты с винтом неизменяемого в полете шага. Круглая
венгерская резина б обладает очень крутой' характе-
ристикой раскручивания, поэтому ее можно успешно
применять только при условии изменения шага винта или
при автоматической перебалансировке модели в полете.
Итальянская резина «Пирелли» в обладает лучшей хара-
90
Рис. 27. Характеристики резиномоторов:
А — график кривых раскручивания резиномоторов весом 40 г из
различных сортов резины: а — отечественная сечением 1X4 мм
(24 нити); б — венгерская 0 1,3 мм (64 нити); в — «Пирелли»
сечением 1X5 мм (20 нитей); Б — максимальное число оборотов,
на которое можно закрутить резиномогор: 1 — отечественная и
венгерская резина; 2 — резина «Пирелли» и «Дэнлоп»
ктеристикой раскручивания, чем венгерская, но нес-
колько более крутой, чем отечественная резина.
Удельную энергию раскручивания резины, работаю-
щей в жгуте, можно определить из графика зависимо-
сти крутящего момента от числа оборотов, на которые
этот жгут закручен. Работа, которую совершил рези-
номотор при своем раскручивании, в определенном
масштабе равна площади, заключенной между осями
координат (Л1кр и п) и самой кривой раскручивания.
Эту площадь и масштаб определить нетрудно, если
учесть следующее соотношение:
Мкр-п-2тс — Еп,
91
где Еп — работа, которую совершает крутящий мо-
мент Л1кр на пути, равном п оборотов.
Для примера определим удельную энергию раскру-
чивания резины «Пирелли». При раскручивании первых
20 оборотов (п = 20) у резиномотора из резины «Пи-
релли» (рис. 27,Л) крутящий момент изменится с 4,5
кгсм до 2,7 кгсм. Средний за эти 20 оборотов крутя-
щий момент Л4кр1 будет равен 3,325 кгсм, и работа
резиномотора Е{ = 6,28 • 3,325 • 20 = 417,62 кгсм =
4,1762 кгм. Аналогично определим работу резинрмо-
тора и при дальнейшем его раскручивании. Полная ра-
бота, которую может совершить он при своем раскру-
чивании, равна сумме работ при раскручивании каждых
20 оборотов; в рассматриваемом случае Е = 25,2 кгм.
Удельная энергия раскручивания (напомним, что вес
Е 25 2
резиномотора — 40 г) будет: е = =
= 630~~. Это очень высокое значение удельной энер-
гии, даже если учесть, что данный резиномотор был за-
кручен на предельное число оборотов (после снятия
характеристики очень многие нити резиномотора были
надорваны).
При многократном применении резиномотора, а
следовательно, его недокручивании, нужно считать, что
удельная энергия резины «Пирелли» равна в среднем
600 — 550 кгм]кг. Резина других сортов при раскручи-
вании в пучке имеет соответственно следующие значе-
ния удельной энергии: отечественная сечением 1X4 мм
— 320—360 кгм/кг, венгерская круглая — 450 — 520
кгм]кг. Применяемая за рубежом английская резина
«Дэнлоп» имеет характеристики, аналогичные резине
«Пирелли», но более капризна в работе. Неплохая
кривая раскручивания и наибольшая среди других сор-
тов резины удельная энергия обеспечили резине «Пи-
релли» очень широкое распространение. На подавля-
ющем большинстве хорошо летающих спортивных мо-
делей двигатель сделан именно из этой резины.
Менее важные характеристики резины —удельный
вес и максимальное растяжение. Удельный вес отечест-
венной и венгерской резин около 0,9г/сл/3, «Пирелли» и
«Дэнлоп» — около 0,98 г/см*. Максимальное растя-
жение резины, показывающее, во сколько раз по срав-
92
нению с начальной длиной можно вытянуть резиновую
нить до обрыва, определяет число оборотов, на которое
можно завести двигатель. Так, отечественная резина
вытягивается в среднем в 6,5 раз, венгерская — в 5,5—
6,5, «Пирелли» и «Дэнлоп» в 7 раз.
Максимальное число оборотов, на которое можно
завести резиномотор, определяют по формуле:
» = (32)
где /р — длина резиномотора, см;
Зм— сечение резиномотора, см2;
к — коэффициент, зависящий от максимального
растяжения резины, т. е. от сорта резины.
Значения коэффициента к даны в табл. 3. Кроме
того, максимальное число оборотов, на которое мож-
но завести резиномотор весом 40 г, указано на гра-
фике рис. 27,5.
Для подбора винта понадобится значение крутяще-
го момента, развиваемого резиномотором определенно-
го сечения. Так как крутящий момент резиномотора
меняется очень сильно (в начале раскручивания он
в 3—4 раза больше, чем в середине), то необходимо
его осреднить. Можно предположить, что резиномотор
совершает свою работу Е = 8 • Gp равномерно, с
постоянным крутящим моментом, равным Л4ср . При
этом предположении имеем следующее равенство:
г • Gp «= 2т;Л1ср •/г. (33)
Формула (33) дает нам связь между средним кру-
тящим моментом резиномотора и его сечением
Действительно, произведение s • Gp — величина посто-
янная для данного резиномотора, а значение п можно
определить из формулы (32):
e-Gp —- 2тг-Л1ср-к-
откуда
Л4Ср
g- Gp»)/^ 5М
2тс/с-/р
Так как Gn = tp-/p-Sm, то окончательно имеем:
'ИЧ> = S = «1 (34)
93
Коэффициент Ki, характеризующий сорт резины, мож-
но взять из табл. 3. Чаще нам придется определять
сечение резиномотора по моменту, необходимому для
вращения винта. В этом случае:
SM=K2-VMb. (34.1)
Коэффициент к2 для каждого сорта резины также ука-
зан в табл. 3.
Таблица 3
Сорт резины к *1 к2
Отечественная сечением 1X4 мм Венгерская 01,3жл< «Пирелли» и «Дэнлоп» 5—5,5 5,5—6 6,5—7 0,8 0,97 1,2 1,2 1,00 0,9
Характеристики резиномоторов, приведенные на рис.
27 и табл. 3, соответствуют предварительной вытяжке
резиномоторов в 2,5 раза. При большей предваритель-
ной вытяжке резиномотор возможно закрутить на боль-
шее число оборотов, однако средний крутящий момент
его будет соответственно ниже; удельная энергия прак-
тически не изменится. Предварительная вытяжка вли-
яет на число оборотов, на которое можно завести ре-
зиномотор, и его средний крутящий момент, но не на
удельную энергию. Вероятно, на удельную энергию ре-
зиномотора из определенной резины влияет его сечение.
Чем толще резиномотор, тем больше потери энергии на
преодоление сил трения между отдельными нитями.
Уменьшить эти потери можно, хорошо смазав резиномо-
тор касторовым маслом. Резина обладает еще одним
свойством: «устает». Если резиномотор был полностью
закручен, то после этого он должен «отдохнуть», т. е.,
его нельзя использовать в течение определенного про-
межутка времени. «Неотдохнувший» резиномотор об-
ладает меньшей (иногда на 20 — 25%) удельной
энергией. Поэтому не рекомендуется использовать один
резиномотор на несколько последовательных зачетных
полетов. Резина венгерская «устает» мало и быстро вос-
станавливает первоначальные свойства, «Пирелли» по-
94
еле первой же полной закрутки теряет около 20 — 25%
удельной энергии (для восстановления необходимо око-
ло 18 суток). Только при правильной эксплуатации ре-
зиномотора возможны продолжительные и стабильные
полеты модели.
ВОЗДУШНЫЙ винт
Движущей силой при взлете резиномоторных и тай-
мерных моделей является тяга воздушного винта. Воз-
душный винт состоит из одной, двух или более лопа-
стей, соединенных друг с другом ступицей. Основная
часть винта — лопасти, так как только они и созда-
ют тягу. Винты бывают правого и левого вращения.
Винт правого вращения создает тягу при вращении‘по
часовой стрелке, если смотреть на него по направле-
нию полета модели; винт левого вращения создает тягу
при вращении против часовой стрелки, если смотреть
на него по тому же направлению. С точки зрения полу-
чения тяги винты правого и левого вращения равноцен-
ны, но на практике чаще применяют винты правого вра-
щения, более удобные в эксплуатации.
Установленный на модели винт при своем вращении
подсасывает находящийся перед ним воздух и, поджи-
мая и закручивая его, прогоняет через плоскость своего
вращения. Величина поджатия, т. е. разность стати-
ческих давлений за винтом и перед ним, у летающих
моделей невелика: не превышает 0,005 кг!см2, т. е.
составляет тысячные доли атмосферы. А это позволяет
считать проходящий через плоскость вращения винта
поток неизменяющим свой объем, несжимаемым.
Предположением о несжимаемости воспользуемся
для упрощения расчета винта: выведем формулу тяги
винта как силы реакции отброшенного винтом назад
воздушного потока. Эта формула интересна тем, что
показывает наиболее действенный способ повышения
эффективности винта.
Силу тяги, как и любую другую силу, можно опре-
делить, воспользовавшись известной формулой второ-
го закона механики:
Р = т.^- = £.ДУ*, (35)
95
Рис. 28. Схема воздушного по-
тока, создаваемого винтом
где AV* — изменение ско-
рости воздушно-
го потока за вре-
мя At:
т
— секундная масса
воздуха, про-
шедшего через
винт.
Чтобы конкретизирова гь
эту формулу применитель-
но к воздушному винту, вос-
пользуемся принятой в аэро-
динамике схемой (рис. 28).
Пусть винт диаметром D
установлен на модели, летя-
щей со скоростью VB . При
своем вращении он подса-
сывает воздух, находящий-
ся перед ним, и отбрасывает
его через плоскость своего
вращения назад со скоро-
стью v*. За винтом ско-
рость отброшенного воздуш-
ного потока еще возраста-
ет вдвое, до 2у*, за счет
дальнейшего его сужения.
Вернемся к формуле
(35). Прежде всего измене-
ние скорости ДУ* равно 2v\
так как скорость воздушного потока относительно моде-
ли перед винтом равна Ув*, за винтом Ув* + 2т>*.
Секундную же массу воздуха m/At можно опреде-
лить в любом сечении отброшенной винтом воздушной
струи, так как она неразрывна и практически несжи-
маема. Проще всего определить секундную массу воз-
духа в плоскости вращения винта: m/At ==pF(VB* + *>*)•
Здесь F — площадь, отметаемая винтом. После
всех подстановок получим для тяги винта следующую
формулу:
P = p-F-2-o*(-o*+ -D2-v*(v* + Ув*)~
sO,2D2--a*-(^*+К*)- (35.1У
96
Из формулы (35.1) следует, что тяга винта зависит
от- его диаметра, скорости отбрасывания воздушной
струи и скорости полета модели. Наиболее действен-
ный способ увеличения тяги — увеличение диаметра
винта, так как тяга пропорциональна диаметру винта
во второй степени.
Тягу можно повысить и если винт будет отбрасы-
вать воздух назад с большей скоростью у*. Но этот
способ увеличения тяги требует чрезмерно большой
мощности двигателя и поэтому энергетически невыго-
ден. Чтобы убедиться в этом, рассмотрим, на что рас-
ходуется подводимая к винту мощность.
Во-первых, большая часть мощности расходуется
на повышение давления в воздушном потоке за винтом,
хотя величина этого повышения относительно и неве-
лика. Эту часть, мощности обозначим /Уид и опреде-
лим по формуле:
(36)
где Q — объем воздуха, проходящий через площадь,
ометаемую винтом, в 1 секунду (так назы-
ваемый объемный расход воздуха);
Др — разность статических давлений за плоско-
стью вращения винта и перед ней.
Естественно, Q = у • ~ F • (^* + К*), откуда
= к*). (36.1)
Но произведение разности статических давлений на
площадь, ометаемую винтом, есть не что иное, как тя-
га винта, т. е.
= P-(v* + V*) = Pv* + Р- V*. (36.2)
Во-вторых, часть мощности расходуется на закручи-
вание отбрасываемого винтом воздушного потока, так
как в действительности струи воздушного потока за
винтом движутся не параллельно оси вращения винта,
а по винтовым линиям. Чем больше повышение дав-
ления за винтом, тем больше при прочих равных ус-
ловиях закрутка воздушного потока.
В-третьих, часть мощности расходуется на преодо-
ление сопротивления винта при его вращении. Причины
возникновения этого сопротивления — трение лопастей
97
о воздух (сопротивление трения) и вихревая зона за
лопастями (сопротивление давления), т. е. те же яв-
ления, которые имеют место при движении в воздухе
крыла.
Та часть мощности, которая обеспечивает полет мо-
дели с нужной тягой и скоростью, называется полез-
ной мощностью; она равна Р • V (или PV*). Все
остальное — бесполезные потери мощности. Даже в
идеальном случае, если предположить, что отсутствуют
потери на закрутку воздушного потока и сопротивле-
ние винта, и мощность, подводимая к винту, в точно-
сти равна 7УИД , будут иметь место потери, зависящие
от скорости отбрасывания воздушной струи, а именно
Р • v*. И эти потери тем больше, чем больше ско-
рость v*. Легко показать, что произведение
P-v* есть мощность отброшенного винтом воздушно-
го потока: Р = • ДУ* - 2 • — • и*, следовательно,
где т • (2и*)2 — кинетическая энергия отброшен-
ного винтом воздушного потока;
у (2^*)2 — мощность воздушного потока.
Идеальный к. п. д. и оптимальный диаметр винта.
Величину потерь на создание отбрасываемого винтом
воздушного потока принято оценивать идеальным ко-
эффициентом полезного действия (идеальным
к. п. д.) т),:
= _ Р У ~ У __ _±_ /37)
' ДГид “ P.R/4* — У 4- о* “ v^*
1 + V
На рис. 29 показана зависимость t)z от отношения
скоростей У/2у*. Как видно из графика, т], резко ра-
стет до значения V/v* = 8 и достигает при этом ве-
личины 0,9. Практически достаточную величину 0,95
имеет при V/v* = 14. Дальнейшее увеличение отно-
шения V/v* становится уже невыгодным, так как по-
вышение идеального ,к. п. д. винта при этом очень не-
значительно. Кроме того, чрезмерное уменьшение ско-
рости v* влечет за собой сильное увеличение диа-
98
к.п.д. винта от отношения скоростей
Сделать винт оптимального
метра винта, что не-
выгодно из-за сложно-
сти установки такого
винта на модель и его
большого веса.
Приняв отношение
Vlv* равным 14, можно,
вернувшись к формуле
(35.1), решить задачу
о выборе оптимального
диаметра:
Ц,пт = 8,05. ££.(38)
Размерность диаме-
тра — м, если тягу
винта задавать в кг, а
скорость полета в
м!сек.
диаметра для резино-
моторной модели нетрудно, а для таймерной очень сло-
жно и до сих пор еще практически не решено. Приме-
няемые в настоящее время двигатели имеют недоста-
точный по величине крутящий момент, а чтобы можно
было использовать винт с оптимальным диаметром, рав-
ным 400—600 мм, между винтом и валом двигателя
необходим понижающий число оборотов редуктор. Моде-
ли с такими редукторами строились, но из-за несовер-
шенства редукторов эти модели не продемонстрировали
своих преимуществ.
Учитывая трудность установки на поршневой двига-
тель большого винта, можно допустить уменьшение его
диаметра до величины, определяемой формулой:
£>мии = 2,5. (39)
Естественно, при этом упадет до 0,7, а полный
к. п. д. будет еще ниже. Поршневой двигатель развива-
ет максимальную мощность при вполне определенной
скорости вращения вала. При чрезмерно «тяжелом»
винте, т. е. винте, оказывающем большое сопротивление
при вращении, развиваемые двигателем обороты могут
оказаться недостаточными для получения максимально
99
возможной мощности. «Облегчить» винт можно или
уменьшением его диаметра, или уменьшением его ши-
рины. Но делать лопасть с шириной, меньшей 7% диа-
метра винта, нельзя, так как чрезмерно узкий и тонкий
виж может разрушиться под действием центробеж-
ных и аэродинамических сил. Поэтому часто еще боль-
ше уменьшают диаметр винта, хотя это и ведет к по-
нижению его к. п. д.
Найти численную величину диаметра винта по фор-
мулам (38) и (39) очень легко, если вспомнить раздел
«Взлет моторных моделей».
Коэффициент полезного действия винта. Идеальный
к. п. д. винта учитывает только одну часть потерь мощ- •
ности, подводимой к винту, — потери на отбрасывание
назад воздушного потока. Полностью учитывает потери
действительный к. п. д. винта т], который опре-
деляется отношением полезной мощности винта, т. е.
Р- V, к затраченной на вращение винта мощности. За-
траченную мощность можно рассчитать, зная скорость
вращения винта и потребный для его вращения крутя-
щий момент, а затем вычислить
Мюл Р-У
Л^затр Af-co M‘2nns ’
(40)
где со = 2^ns— угловая скорость винта, измеряемая в
радианах за секунду;
ns— скорость вращения винта в оборотах за
секунду.
К. п. д. винта — основная величина, характеризую-
щая правильность выбора винта. Чтобы модель могла
показать хорошие полетные результаты, ее винт должен
иметь возможно более высокий к. п. д.
Шаг винта. Рассмотрим движение винта в полете.
Работающий винт вращается вокруг своей оси и одно-
временно перемещается вдоль нее со скоростью, рав-
ной скорости полета модели. Путь, проходимый винтом
в направлении полета модели за один оборот, назы-
вается поступью винта Нл .
Яд=У/пт. (41)
Мысленно выделим на пути движения винта полый
воздушный цилиндр с радиусами внутренним /?2 и
внешним /?1 (рис. 30,а), причем ось этого цилиндра со-
100
t Рис. 30. Элементы работы воздушного винта:
о а — траектория движения сечений лопастей; б — развертка траекторий на плоскость; в — планы скоростей
на носике и хвостике профиля лопасти; г — аэродинамические силы, действующие на элемент лопасти;
д — шаг, поступь и скольжение элемента лопасти
впадает с осью вращения винта. Между внутренней и
внешней поверхностями воображаемого цилиндра ока-
жется часть лопасти (элемент ее), которая своими тор-
цевыми сечениями опишет винтовые линии. Что эти
линии винтовые, нетрудно убедиться, так как переме-
щение винта вдоль оси вращения прямо пропорцио-
нально углу его поворота. Развернем обе цилиндриче-
ские поверхности на плоскость (рис. 30,6). Прямые
1—Г и 2—2' представляют собой развернутый на пло-
скость путь, проходимый соответствующими сечениями
лопасти. Чем дальше от оси вращения находится сече-
ние лопасти, тем больший путь оно проходит, но дви-
жение происходит под меньшими углами к плоскости
вращения винта (у1<уг) •
Указанный, элемент лопасти можно рассматривать
как небольшое крыло, движущееся вокруг оси враще-
ния со скоростью 2nRns (/? — радиус среднего сече-
ния элемента лопасти).
Одновременно с вращением этот элемент переме-
щается в направлении, перпендикулярном плоскости
вращения винта, со скоростью V. Кроме того, как мы
уже знаем, винт подсасывает воздух, находящийся пе-
ред ним, со скоростью v*. Таким образом, элемент ло-
пасти совершает сложное движение, причем в движу-
щемся потоке. Для упрощения последующих рассуж-
дений предположим, что рассматриваемый элемент
лопасти неподвижен, а воздушный поток, в котором он
находится, вращается с той же скоростью (2n;/?ns )*и
одновременно движется в осевом направлении со ско-
ростью V* + v*. В предыдущих разделах мы уже ча-
сто пользовались подобными предположениями (см.
стр. 33). Сложив по правилу треугольника указанные
скорости, получим суммарную скорость WQ *, которую
имеет поток на носике профиля лопасти (рис. 30,в).
Но за винтом, как уже указывалось на стр. 97, воз-
душный поток оказывается закрученным в сторону вра-
щения винта. Величина этого закручивания, измеряе-
мая тангенциальной скоростью потока и*, изменяется
по длине лопасти, уменьшаясь к ее концу.
Таким образом, треугольник скоростей, а следова-
тельно, и суммарная скорость IFk на хвостике
профиля будут иными, чем на его носике. Поэтому в
102
аэродинамике принято выделять среднюю суммарную
скорость №ср (рис. 30,г), которая и является опре-
деляющей для всех расчетов. Тангенциальная ско-
рость и* в среднем сечении лопасти для моделей не
превышает: у резиномоторных 1,0 м/сек, у таймерных—
5 м/сек, что составляет только около 5% окружной
скорости 2nRns в этом же среднем сечении. Величина
скорости у*, как уже указывалось на стр. 98, 99, для
моделей составляет: резиномоторных около 7% скоро-
сти полета, у таймерных может достигать 35% ско-
рости полета.
При движении элемента лопасти под углом атаки
а к скорости ТГСр на нем возникает подъемная сила
ДУЛ и сила сопротивления ЛХЛ, Но нас будут ин-
тересовать силы не подъемная и не сопротивления,
так как их направления для каждого сечения лопасти
различны, а сила ДРЛ , направленная вдоль оси вра-
щения винта, и сила Дфл , лежащая в плоскости вра-
щения винта. ДРЛ — есть тяга элемента лопасти, а
ДФл — сила сопротивления вращению элемента лопа-
сти. Для указанного элемента лопасти можно запи-
сать:
ДРЛ = Д Кл • созф — ДХЛ • sintp» (42)
Д(?л = Д Гл• sin<p + ДА"Л • созф. (43)
Принимая во внимание, что сила Дфл приложена
на расстоянии R от оси вращения, момент сопротив-
ления вращению и мощность, нужную для вращения
элемента лопасти, определяют по формулам:
ДЛ4л = Д(Эл./г, (44)
Д?/л «8 ДЛ4Л • о) = Д<2Л • 2vRns. (45)
Рассматривая винтовую лопасть состоящей из несколь-
ких элементов и найдя для каждого элемента ве-
личину ДРЛ, Д7ИЛ и Д7УЛ , их суммированием рас-
считывают тягу винта и необходимые для его вращения
крутящий момент и мощность.
Если продлить хорду сечения лопасти (см. рис. 30,г)
до пересечения с направлением скорости полета в точ-
ке Д, то получим прямоугольный треугольник АВС.
Соединив точки В и D (отрезок CD равен скорости
V), найдем второй треугольник BCD. Разделив все сто-
103
роны этих треугольников на скорость вращения винта
, получим треугольники авс и ecd, соответственно
подобные треугольникам АВС и BCD (см. рис. 30,д).
В треугольниках авс и ecd общий катет вс равен пу-
ти, проходимому сечением лопасти за один оборот в
плоскости вращения. Катет cd, равный Vfns » есть
уже известная нам поступь винта.
Угол е, равныйф—у, называется углом сколь-
жения; соответствующий ему отрезок ad называется
скольжением S. Катет ас называется шагом
сечения лопасти Я; шаг сечения лопасти опре-
деляется как путь, проходимый сечением лопасти в на-
правлении оси вращения винта, если бы скольжение
отсутствовало:
H^H, + S= Vlns + S. (46)
Винт, у которого шаг всех сечений лопасти одина-
ков, называется винтом постоянного шага.
Углы атаки а сечений лопастей винта постоянного шага
различны и несколько уменьшаются к концу и комлю
лопасти. Существуют еще винты переменного
шага, у которых шаг сечений лопастей непостоянный.
Чаще всего у них шаг сечений лопасти уменьшается
к концу лопасти. Так как винты постоянного шага
имеют неплохие аэродинамические характеристики и
их легче рассчитать и изготовить, они широко приме-
няются на летающих моделях. У винта постоянного
шага можно говорить о шаге и скольжении всего вин-
та, а не о шаге и скольжении сечения лопасти.
При расчете удобнее пользоваться не абсолютными
значениями шага, поступи и скольжения, а их относи-
тельными величинами:
— относительным шагом винта
h = (47)
— относительной поступью винта
— относительным скольжением винта
<, = й = 1“Я!=1-л- («)
104
И для.винтов с переменным шагом также приме-
няется понятие шага винта; в этом случае под шагом
винта здесь понимается шаг сечения лопасти, располо-
женного на расстоянии 0,375 D от оси вращения.
Винт имеет высокий к. п. д.» как правило, только в
том случае, если разность h—X находится в пределах
0,1—0,25.
Форма лопасти характеризуется контуром и отно-
сительной шириной. Аэродинамически наиболее выгод-
ны лопасти, имеющие контур, близкий к эллипсу. Ло-
пасти такой формы наиболее часто применяются для
моделей и резиномоторных, и таймерных. Характери-
стики винта зависят в значительно меньшей степени от
контура лопасти, чем от относительной ее ширины. Под
относительной шириной лопасти понимают ее макси-
мальную ширину, выраженную в долях диаметра. Учи-
тывая выгодность установки на модель винтов боль-
шого диаметра, относительную ширину лопасти выби-
рают в пределах 0,08—0,10 Z). Большую относитель-
ную ширину берут только в том случае, если макси-
мальная ширина лопасти расположена от оси враще-
ния винта менее чем на 0,25 D.
В качестве примера на рис. 31,а, б показаны наи-
более часто используемые формы лопастей.
Профиль лопасти. Как правило, лопасти винтов ре-
зиномоторных моделей имеют выпукло-вогнутый про-
филь. Чаще всего применяются тонкие профили типа
G-4I7a, G-417b или профили серии В. Хорошие ре-
зультаты показали также винты с толстыми профиля-
ми типа MVA-301, NACA-6412. Лопасть с толстым
профилем лучше работает на большом диапазоне уг-
лов атаки при полете резиномоторной модели, чем ло-
пасть с тонким профилем. Лопасть имеет переменный
по своей длине профиль: чем ближе к ступице, тем он
более толстый; вогнутость его уменьшается к концу
лопасти. Лопасть должна быть легкой, прочной и же-
сткой: из липы большую ее часть делают толщиной
1 —1,5 мм, а из бальзы — 1,5—2,5 мм (рис. 31,6).
Для винтов таймерных моделей наиболее характер-
ны плоско-выпуклые профили типа Clark-Y с толщи-
ной до 15% у комля и 7 — 8% — на конце лопасти.
Иногда применяют профили, имеющие небольшую —
— до 2% — вогнутость нижнего контура.
105
Рис. 31. Лопасти воздушных винтов:
а —« форма лопасти йодели: 1 — резиномоторной; 2
таймерной; б — профилировка лопасги модели: 1 —
таймерной; <2 — резиномоторной
Подбор винтомоторной группы резиномоторной мо-
дели. Полет модели успешен только в том случае,
если он происходит с оптимальными скоростью и углом
взлета. Для этого установленный на модель винт дол-
жен развивать необходимую тягу и работать на режи-
ме высокого к.п.д., т. е. для его вращения нужен ми-
нимальный крутящий момент, определяющий сечение
резиномотора. Чтобы обеспечить выполнение этих ус-
ловий, и подбирают винтомоторную группу. Расчет-
ные методы подбора ее трудоемки и не оправдывают
затраченного времени, так как дают конечный ре-
зультат приближенно из-за малой достоверности ис-
ходных данных для расчета — аэродинамических ха-
рактеристик и режимов полета. Поэтому приводим
графический способ подбора винтомоторной группы,
который более прост, удобен и дает приемлемые для
практического использования результаты.
На рис. 32 показана номограмма, связывающая
между собой диаметр винта D, относительный шаг h,
сечение резиномотора SM, средний угол взлета 0 и,
наконец, средний к. п. д. винта г). Номограмма рассчи-
тана автором этой книги для аэродинамически совер-
шенной резиномоторной модели весом 230 г, взлетаю-
щей с оптимальной средней скоростью (см. стр. 16).
Пользоваться номограммой очень просто. Вначале
выбираем исходные данные: D и 0. Сделать это нетруд-
но, если учесть все сказанное на стр. 26 и 99.
Из точки Л соответствующей выбранному D, опуска-
ем перпендикуляр к оси D вниз до пересечения с кри-
вой, соответствующей взятому 0 в точке 2. На оси ц
находим значение к.п.д. винта (точка 3), которое в дан-
ном случае равно 0,67. Это достаточно высокое среднее
за весь моторный полет значение -к.п.д., поэтому счита-
ем исходные величины D и 0 соответствующими друг
ДРУГУ-
Далее восстанавливаем перпендикуляр из точки 1
до пересечения с линией взятого 0 в точке 4. Из точки 4
проводим перпендикуляр к оси h и продолжим его в ле-
вую часть номограммы до пересечения в точке 6 с ли-
нией выбранного 0. Точка пересечения проведенного
перпендикуляра с осью h (точка 5) дает значение отно-
сительного шага винта (в нашем примере он равен 1,37).
Затем из точки 6 опускаем перпендикуляр на ось SM ,
107
Рис. 32. Номограмма для подбора винтомоторной группы резино-
моторной модели:
А —. шкала, показывающая сечение резиномотора из отечественной
резины; Б — шкала для резины «Пирелли»; В — шкала для вен-
герской круглой резины. (Пример: £> = 0,56 м\ 0=15°; й=1,37;
SM = 1,03 см2 по шкале А; т] = 0,67)
точка 7 определит необходимое сечение резиномотора.
В приведенном примере резиномотор должен иметь
сечение: из отечественной резины 1,03 сл/2, т. е. состоять
из 26 нитей (1 Х'4 ла/); из резины «Пирелли» — только
0,79 сл/2, что соответствует 16 нитям (1Х‘5 мм) или
20 нитям (1 Х'4 мм)\ из венгерской резины — из 68 ни-
тей 0 1,3 мм.
Полученные по номограмме сечения резиномоторов
соответствуют ширине лопастей, равной 8,5%D. Если ло-
пасти более узкие или широкие, то сечение резиномото-
ра следует пропорционально уменьшить или увеличить.
Так, при ширине лотгасти 10%D сечение резиномотора,
полученное по номограмме, нужно умножить на ^=1,18.
108
Для приведенного примера увеличенные сечения резино-
моторов из разного сорта резины соответственно равны
1,22 см2, 0,93 см2, 1,06 см2.
Особенности работы винта резиномоторной модели
и пути увеличения его к._п. д. Так как резиномотор
развивает в процессе раскручивания переменный кру-
тящий момент, то эта его особенность причиняет мно-
го неприятностей авиамоделистам.
Изменение крутящего момента резиномотора, как
правило, вызывает изменение скорости вращения вин-
та. Чем больше крутящий момент, тем с большей ско-
ростью вращается винт.
Всякое изменение скорости вращения винта по сра-
внению с расчетной при полете модели с постоянной
скоростью влечет за собой изменение режима рабо-
ты винта, в частности, изменение углов атаки лопа-
стей, а следовательно, уменьшение его к. п. д. Это
уменьшение к. п. д. винта в основном определяется уве-
личением той части потерь мощности резиномотора, ко-
торая зависит от сопротивления вращению самого
винта.
В этом нетрудно убедиться, если рассмотреть тре-
угольник скоростей какого-либо сечения лопасти. На
рис. 33 дан треугольник скоростей для расчетного
случая, когда крутящий момент резиномотора равен
его среднему значению (а). Если модель сбалансиро-
вана на полет со скоростью V, то в начале раскручи-
вания резиномотора, когда скорость вращения винта
наибольшая, угол скольжения сечения лопасти ei бу-
дет больше, чем наивыгоднейший угол скольжения е.
К. п. д. винта при этом, разумеется, уменьшится. Если
угол атаки, соответствующий будет больше, чем
критический для данного профиля„ лопасти, сопротив-
ление винта вращению возрастет настолько сильно, а
тяга может уменьшиться до такой величины, что к. п. д.
винта практически упадет ниже 0,5 (1,6).
При уменьшении крутящего момента в конце рас-
кручивания резиномотора по сравнению с расчетным
наблюдается обратная картина (1,в): углы скольжения
лопастей становятся отрицательными и винт почти не
дает тяги. При столь большом диапазоне углов
скольжения лопастей в полете сопротивление и тяга
их, а следовательно, и к. п. д. меняются очень сильно.
109
Рис. 33. Изменение режимов работы:
1 —• винта неизменяемого шага в полете с оптимальной скорогтью;
П — винта неизменяемого шага в полете с переменной скоростью
при постоянном значении X; III —• винта изменяемого в полете ша-
га; а —• начало; б — середина; в — конец раскручивания резино-
мотора
На рис. 34,а, б показано изменение к. п. д. (т]) по мере
раскручивания резиномотора с обычным винтом, рас-
считанным на определенную скорость вращения. При
этом расчетном режиме ц достигает 0,8 примерно в
середине раскручивания резиномотора. Кривая б пока-
зывает изменение т] с достаточно толстым ( ~ 5%) про-
филем лопастей. Кривая а построена для винта с тон-
ким ( ~2%) остроносым профилем лопастей.
Как видно из графика, в начале и конце раскручива-
ния резиномотора т] падает до 0,5—0,6 и в среднем за
весь полет равен 0,68—0,7. Характерно, что у лопастей
с более толстыми профилями т] меняется в полете ме-
нее резко, чем у лопастей с тонкими остроносыми про-
ПО
Филями. Это объясняется
тем, что качество более
толстых профилей сохра-
няется высоким на боль-
шем диапазоне углов ата-
ки.
Существуют два спосо-
ба повышения т), средне-
го за весь полет.
Первый способ — сде-
лать балансировку моде-
ли, а следовательно, и ее
скорость во время полета
изменяющейся так, чтобы
поступь винта Нл =
V!ns (см. рис. 33,//) ос-
при раскручивании резиномотора:
а — винт с тонким профилем ло-
пастей; б —• винт с толстым про-
филем лопастей; в — поступь
винта в полете постоянна; г —
неправильно подобранный винт;
д — винт с изменяемым в полете
шагом
тавалась в течение всего
полета постоянной. При
сохранении определенной
поступи углы атаки и
скольжения лопастей в
течение полета будут на-
ивыгоднейшими, и т] ста-
нет постоянным (см. рис. 34,в).
Для автоматической перебалансировки модели в по-
лете с целью получения примерно постоянного значения
поступи //д московские спортсмены мастера спорта
В. Куманин и В. Колпаков сконструировали и успешно
применили на своих моделях специальный механизм.
Этот механизм (рис. 35,6) изменяет установочный угол
стабилизатора, а следовательно, угол атаки крыла и ско-
рость полета модели. Так, при увеличении угла атаки
стабилизатора скорость модели возрастает, при умень-
шении — падает. Механизм устанавливают в хвостовой
части фюзеляжа. Он состоит из исполнительного уст-
ройства, задающего изменение установочного угла ста-
билизатора, и датчика крутящего момента резиномото-
ра, преобразующего крутящий момент в поступатель-
ное движение ползунка.
Конструкция механизма очень проста. Основанием
датчика крутящего момента служит дюралюминиевая
трубка с подшипником. В подшипнике вращается вал,
один конец которого служит для крепления резиномо-
111
тора, а другой, согнутый по дуге и снабженный пру-
жиной, проходит свободно через ту же трубку. К это-
му концу вала подсоединена тяга, изготовленная из
стальной проволоки сечением 0,2—0,25 мм, которая идет
к ползунку. Ползунок перемещается относительно ку-
лачка, установленного на стабилизаторе, в одну сторо-
ну — пружиной, в другую — тягой от датчика крутяще-
го момента.
При полностью закрученном резиномоторе пружина
датчика крутящего момента сжимается, освобождая
тягу, вследствие чего ползунок перемещается в крайнее
заднее положение А; по мере раскручивания резиномо-
тора ползунок двигается тягой от датчика вперед. В
момент остановки винта и перехода на планирование он
занимает положение Б. При передвижении из точки А
в точку Б ползунок своим роликом действует на при-
кленный к стабилизатору .кулачок, изменяя угол уста-
новки стабилизатора в соответствии с профилем ку-
лачка. Профиль кулачка подбирается в процессе регу-
лировки модели и в общем случае имеет вид, показан-
ный на рис. 35,6. Изменение угла установки стабили-
затора в полете составляет, как правило, 1,5—2°. Ход
ползунка и, следовательно* длину кулачка нужно делать
возможно большими, так как точность регулировки при
этом повысится. Положение ролика ползунка относитель-
но кулачка определяется не скоростью вращения винта,
а крутящим моментом резиномотора. Однако соответ-
ствующей профилировкой кулачка можно добиться поч-
ти полного постоянства На во время полета.
Основной недостаток этого способа — увеличение
скорости в начале взлета модели, вследствие чего часть
энергии резиномотора тратится на преодоление повы-
шенного сопротивления; доля энергии резиномотора, рас-
ходуемая на подъем модели вверх, при этом, естествен-
но, уменьшается (см. стр. 23). Кроме того, при умень-
шении скорости в конце полета модель переходит на из-
лишне большие углы атаки, сопротивление ее при этом
также повышается.
Второй способ — применение винтов изменяемого в
полете шага. При сохранении оптимальной скорости
взлета в начале раскручивания резиномотора необходи-
мо уменьшить шаг винта для сохранения наивыгодней-
шего угла скольжения лопасти е (см. рис. 33,///).
112
Рис. 35. Механизмы для повышения к. п. д. винта
резиномоторной модели:
а — механизм изменения шага винта: 1 — лопасть
(показана условно); 2 — ось лопасти; 3 — втулка
(паять к оси лопасти); 4 — ступица; 5 — кулиса;
6 — вал винта; 7—пружина механизма; 8—упор; 9 —
гайка и шайба крепления оси лопасти; 10 — стапель
для установки лопастей; 11 — динамометр;
б — механизм перебалансировки модели в полете:
1 — датчик момента; 2 — пружина; 3 — дюралюми-
ниевая трубка Q10X8 мм; 4 — вал (проволока ОВС
0 2,2 мм); 5—ушко или ролик; 6 — исполнительный
механизм; 7 — пружина или резина; 8 — ползунок с
роликом; 9 — направляющая рейка; 10 кулачок
(копир); 11 — тяга; 12 — резиномотор
113
По мере раскручивания резиномотора шаг винта не-
обходимо увеличивать. В этом случае ц в полете ме-
няется так, как показано на рис. 34,5. Средний же за
весь полет к. п. д. будет равен 0,8.. Одна из конструкций
винтов изменяемого в полете шага показана на рис.
35,а.
Ступица винта, выточенная из дюралюминия, сво-
бодно вращается на валу. В ступицу ввернут упор,
имеющий отверстие для отогнутого конца вала винта.
Лопасти подвешены на двух Г-образных осях, вращаю-
щихся в ступице свободно, без люфтов. Оси закреплены
в ступице: с одной стороны — припаянной шайбой, с
другой стороны — гайкой. Это крепление дает возмож-
ность легко снимать лопасти вместе с их осями. К оси
лопасти припаян палец, который ее и поворачивает. Вал
винта имеет ушко для заводки резиномотора и отогну-
тый по дуге окружности (с центром на оси вращения)
конец. Этот конец'вала должен свободно перемещаться
в отверстии упора. К валу винта припаяна кулиса,
имеющая удлиненные отверстия для пальцев на оси ло-
пасти. Перед пайкой кулисы следует уточнить взаимное
положение кулисы и отогнутого конца вала. Пружина,
поставленная на отогнутом конце вала, подбирается
опытным путем.
Механизм работает следующим образом: крутящий
момент резиномотора, приложенный к валу винта, сжи-
мает пружину механизма: чем больше крутящий мо-
мент резиномотора, тем сильнее сжимается пружина.
Таким образом, резиномотор врац|ает винт, предвари-
тельно сжав пружину. Так как кулиса припаяна к валу,
то всякое изменение положения вала относительно сту-
пицы вызовет поворот лопастей. В начале раскручива-
ния резиномотора, когда крутящий момент большой,
пружина сильно сжимается и лопасти поворачиваются
на меньший шаг. По мере раскручивания резиномото-
ра шаг винта будет увеличиваться.
Лопасти на выбранный шаг следует устанавливать
на стапеле, показанном на рис. 35,а, приложив к валу
винта момент, равный Мср . Этот момент легко опре-
делить по формуле (34) или взять с графика раскручи-
вания резиномотора^ Жесткость пружины легче всего по-
добрать при регулировочных запусках модели. Если в
начале полета модели винт раскручивается с очень
114
большой скоростью, причем угол подъема модели неве-
лик, заменяют пружину на более жесткую. Если же в
начале полета модели винт раскручивается сравнитель-
но медленно, а угол подъема модели останется малым,
то ставят более мягкую пружину.
Пружину следует заменять, только проверив шаг
винта по Л1ср . При правильно выбранной пружине вы-
сота полета модели будет наибольшей.
Для нормальной работы подобного механизма жела-
тельно, чтобы ось поворота лопасти проходила через
осевую линию лопасти.
Подбор винта для таймерной модели. Особенность
этих моделей состоит в том, что их поршневые двига-
тели развивают максимальную мощность при вполне
определенной, номинальной скорости вращения вала.
Если скорость вращения вала больше или меньше но-
минальной, мощность на валу двигателя уменьшится.
Скорость вращения вала двигателя зависит от винта мо-
дели.
Для вращения каждого винта необходима опреде-
ленная мощность, которая определяется диаметром вин-
та, его шагом, шириной лопастей и их профилем, а так-
же скоростью полета модели. Если при заданной ско-
рости полета и номинальной скорости вращения винта
мощность, потребная для вращения винта, окажется
большей, чем мощность двигателя, то такой винт назы-
вается «тяжелым». Если же нужная для вращения вин-
та мощность при тех же условиях окажется меньше мощ-
ности двигателя, tq этот винт, наоборот, называется
.«легким». Таким образом, понятия «легкий» или «тя-
желый» винт связаны с его геометрическими параметра-
ми и режимом работы, а не с его весом.
Чтобы полностью использовать, возможность двига-
теля, необходим винт, который при номинальном числе
оборотов двигателя на заданной скорости модели пол-
ностью использовал бы развиваемую двигателем мощ-
ность.
На рис. 36 показаны внешние характеристики (за-
висимости мощности от числа оборотов вала) двух
поршневых двигателей — компрессионного МК-12В и
двигателя с калильным зажиганием МД-2,5, а также
потребные мощности в зависимости от числа оборотов
для трех различных винтов.
115
Рис. 36. Внешние характе-
ристики поршневых двига-
телей:
с калильным зажиганием
МД-2,5 и компрессионного
MK-J2B и потребные
мощности трех винтов — I,
II и III
Винт 1 — «тяжелый» для
обоих двигателей, винт II —
оптимален для двигателя МД-
2,5, но несколько «тяжел» для
другого двигателя, винт III,
наоборот, оптимален для дви-
гателя МК-12В, но слишком
«легок» для двигателя МД-2,5.
Следовательно, для двигателей,
имеющих различные внешние
характеристики, требуются
различные по своим геометри-
ческим параметрам винты. Но
этого еще мало. Потребная
для вращения винта мощность
зависит от режима полета, в
первую очередь от его скоро-
сти. Поэтому винт, оптималь-
ный для данного двигателя и скорости полета, при
уменьшении скорости становится «тяжелым» и, наобо-
рот, при разгоне модели «облегчается». Объяснить это
явление вы сможете сами, если вернетесь к рис. 30 и
формулам 42—45.
Говоря об оптимальном винте для двигателя, нельзя
забывать о том, что он должен быть оптимальным так-
же и для модели, обеспечивая ее взлет в наивыгодней-
шем режиме (0, V) с минимальными потерями (т])
для достижения максимальной высоты полета (Н3 ), о
чем было сказано в предыдущих разделах.
Расчетные способы определения параметров вин-
та по заданным параметрам двигателя и режиму поле-
та сложны и трудоемки, поэтому и здесь, как и в слу-
чае резиномоторных моделей, воспользуемся графи-
ческим способом.
На рис. 37 приведена рассчитанная автором этой кни-
ги номограмма, связывающая между собой геометриче-
ские параметры винта D и й, и его к.п.д. т), меха-
нические параметры двигателя N и м и полетные харак-
теристики модели Ув , 0, Нв, t и Р. По номограмме
модель имеет вес ,750 г и достаточно высокое аэроди-
намическое совершенство, ширина лопастей—0,08£>.
Размерность величин, указанных в номограмме, сле-
116
дующая: D и. Нв в м, N — д л. с.; п — в об/мин]
V — в, м/сек\ Р — в кг; t — в сек.
Например, на модели предполагается установить дви-
гатель, развивающий при скорости п = 15000 об/мин
мощность N — 0,3 л. с. Требуется определить диаметр
винта D и его шаг h, обеспечивающие наибольшую для
этого двигателя высоту полета, а также режим взлета
(VB, в).
Прежде всего на оси п найдем скорость вращения
вала двигателя, равную 15000 об/мин (точка Д). Из
этой точки восстановим перпендикуляр до пересечения
в точке Б с кривой соответствующей мощности (0,3 л. с.).
Через точку Б проведем прямую, параллельную оси
оборотов, влево, до пересечения с прямыми, соответ-
ствующими диаметрам винта; примем D — 0,2 м, это
точка В. Этот диаметр выбран не случайно: если про-
верите другие диаметры, то убедитесь, что они обеспе-
чат не лучший конечный результат — высоту и, следо-
вательно, продолжительность полета.
Из точки В опустим перпендикуляр вниз до пере-
сечения его в точке Г с характеристикой при h = 0,54.
Этой точке соответствует к. п. д., равный всего 0,54 (со-
впадение величины h и т] — случайное). И хотя воз-
можны режимы работы винта с большим к. п.д., на-
пример, при h = 0,62 (ему соответствует г] = 0,78),
они не улучшат высоту полета, так как полет будет
проходить с большой скоростью и вся мощность двига-
теля уйдет на разгон модели, а не на подъем' ее на
высоту. ‘
Далее из точки Г проведем прямую, перпендикуляр-
ную оси X, до пересечения в точке Е с перпендикуля-
ром, опущенным из точки А; при этом точка Д опреде-
лит относительную поступь винта X (0,26). Разность
h — X = 0,28 для относительного шага h = 0,54
чрезмерно велика, чем и объясняется малое значение
к. п. д. Из точки Е проведем линию вдоль нанесенных
на графике кривых до пересечения в точке Ж с- осью
II—//, после чего найдем точку Зв месте пересечения
линии, проходящей через точку Ж параллельно оси
1/в , и прямой, соответствующей выбранному диаметру
винта (0,2 м). Далее отметим на оси /—I буквой Л
место пересечения с кривой выбранной мощности и
найдем точку К пересечением двух прямых: одной, про-
117
Рис. 37. Номограмма для подбора винта таймерной модели
веденной через точку Л параллельно оси Ув>и другой,
проведенной из точки 3 перпендикулярно к первой; при
этом точка И определит значение скорости полета
(13 м!сек). Через точку К проведем прямую до пе-
ресечения ее в точке М с осью Р/х\, после чего опре-
делим точку Н как место пересечения восстановленно-
го из точки М перпендикуляра к оси Р/х\ с прямой
найденного ранее к. п. д.
Из точки Н опустим перпендикуляр к оси Р до пе-
ресечения в точке П с линией уже определенного, ранее
значения скорости полета; попутно в точке О получим
величину развиваемой винтом тяги (0,96 кг).
Теперь осталось определить только параметры по-
лета: 0, Нв и t. Значение угла взлета получим в
точке Р, проведя перпендикуляр к оси 0 из точки П.
Высота полета при этом будет равна 105 м, так как
точка П лежит не только на кривой скорости полета
14, но одновременно и’’на кривой (пунктирной), со-
ответствующей высоте 105 м. Полное время полета
модели, ориентировочно можно определить по оси /,
проведенной параллельно оси Нв, это время для рас-
сматриваемого случая составит ~ 175 сек, что близ-
ко к требуемому.
Естественно, что этих результатов можно достиг-
нуть только в том случае, если винт в полете работает
на расчетном режиме, т. е. при взлете модели со ско-
ростью 13 м/сек и углом 54,5°. Если же режим
взлета иной, то результаты полета понизятся. В этом
легко убедиться, если предположить, что модель взле-
тает со скоростью, большей или меньшей 13 м/сек, или
с углами, большими или меньшими 54,5°. Поэтому осо-
бое внимание нужно уделять регулировке моторного
полета, добиваясь взлета модели на расчетном режи-
ме. Этого следует добиваться способами, указанными
в разделе «Взлет моторных моделей».
Каким образом можно еще повысить летные резуль-
таты таймерных моделей?
Самый простой способ — увеличение мощности дви-
гателя. Воспользовавшись данной номограммой, легко
убедиться, что модель с двигателем мощностью 0,4 л. с.
с той же скоростью вращения вала (15000 об/мин)
достигает высоты 135 м и продолжительности до 200
сек. Почти такого же результата добиваются и при мощ-
120
ности двигателя 0,3
X с., но с редуктором,
понижающим число
оборотов на валу винта
до 2500 об!мин, диа-
метр винта в этом слу-
чае увеличивают до
0,4—0,45 м. Некоторого
улучшения высоты и
продолжительности, ве-
роятно, можно достичь,
применив однолопаст-
ной винт несколько
большего диаметра, с
той же шириной лопа-
сти, т. е. 8% D; однако
избежать биения тако-
го винта на всех режи-
мах полета чрезвычай-
но трудно.
Построение шабло-
нов лопастей. Для из-
готовления винтов из
брусков необходимо
иметь два шаблона:
для лопасти винга све-
рху и для лопасти вин-
та сбоку. Зная диаметр
винта D и его относи-
тельный шаг h, выб-
Рис. 38. Способ постро-
ения шаблонов лопастей
винтов:
А — общий вид лопасти;
Б — определение сечений
заготовки; В — построение
верхнего шаблона лопасти;
Г — построение бокового
шаблона; Д — пересчет бо-
кового шаблона; Е — пост-
роение шаблонов для изго-
товления лопасти из тонкою
бруска.
121
рав форму и профиль лопасти, делаем шаблоны в
общем случае по способу, указанному на рис. 38.
Проводим линию 0—0 и будем считать, что ось
вращения винта лежит на ней. Вычерчиваем общий
вид лопасти винта, но так, чтобы ось лопасти была
перпендикулярна линии 0—0. Делим лопасть по длине
несколькими сечениями. Количество сечений и их рас-
стояние от оси вращения выбирается произвольно, од-
нако для получения шаблонов достаточной точности
следует придерживаться указанной схемы (т. е. прово-
дить сечения на расстоянии 0,15 £>, 0,25 £>, 0,35 £>,
0,45 D и 0,5D от оси вращения). Чтобы определить
установочные углы сечений лопасти ф, а следователь-
но, чтобы получить сечения заготовки лопасти, постро-
им треугольник, подобный показанному на рис. 30,д,
но только со сторонами, меньшими в 2л раз (т. е.
меньшими в 6,28 раза). Таким образом, катеты пост-
. Н hD
роенных треугольников будут равны = §7 и
соответственно 0,15Z), 0,250, 0,350, 0,450 и 0,50.
Дальнейшее построение ясно из рис. 38, где указа-
ны условно только два сечения заготовки лопасти.
Вначале брусок обрабатывают, как правило, в соот-
ветствии с шаблоном винта сверху, поэтому приходит-
ся боковой шаблон пересчитывать с учетом этой об-
работки. Способ изготовления винта из одного бруска
при больших диаметрах очень трудоемок. Поэтому в
тех случаях, когда можно сделать лопасти отдельно от
ступицы, рекомендуется выполнять лопасти из тонкого
бруска, изготовив специальные шаблоны (рис. 38,£).
Углы фь ф2 и т. д. получены из построения Б. На-
иболее широкую сторону тонкого бруска (размер А2)
берут параллельной последнему сечению лопасти, уста-
новочный угол которого в данном случае ф5. Вычер-
ченные шаблоны наклеивают на тонкий картон или фа-
неру и очень аккуратно вырезают.
ПРИМЕРЫ ПРОЕКТИРОВАНИЯ СВОБОДНОЛЕТАЮЩИХ МОДЕЛЕЙ
В предыдущих разделах рассмотрены основные по-
ложения, которые необходимо знать при проектирова-
нии свободнолетающих моделей. Здесь же, на кои-
х?2
кретных примерах покажем, как применить эти поло-
жения для проектирования моделей планера и резино-
моторной.
Начнем с модели планера, так как она наименее
трудоемка в проектировании.
Модель планера
1. Определим несущую площадь. Учитывая воз-
можность ошибок при изготовлении модели и ее при-
еме на соревнованиях, несущую площадь выберем рав-
ной 33,8 дм2.
2. Несущую площадь распределим между крылом и
стабилизатором. На основании статистики отношение
примем равным 0,15, т. е. 5 + 0,155 =33,8 дм2.
откуда 5 = 29,45 дм2 и 5СТ = 4,35 дм2.
3. Определим размах крыла, приняв среднее для
моделей планеров удлинение 13:1 • 5 в
= V 13-29,45 = 19,6 дм = 1960 мм.
4. Форму крыла выберем трапециевидной с прямо-
угольной центральной частью, так как оно по величи-
не индуктивного сопротивления незначительно отли-
чается от эллиптического. Длину прямоугольной цен-
тральной части примем равной 2/з размаха крыла. Су-
жение трапециевидной концевой части, т. е. отношение
концевой хорды крыла к наибольшей хорде, возьмем
также равным 2/3.
5. Определим ширину крыла, воспользовавшись
формулой площади крыла трапециевидной формы с
прямоугольным центропланом:
s=/u.e1 + ^f/-zu'] = |-7/.eiI
• у = 1,59 дм = 159 мм.
Целесообразно величину в\ округлить до 160 мм,
уменьшив при этом соответственно размах крыла. Кон-
цевую хорду крыла округлим до 105 мм: в2=2/з ="
= 107 мм — 105 мм.
2
6. Уточним размах крыла: 5 = 29,45 дм2—-у1- 1,6-f-
123
л
650 325
Шст'ВОг
1'1950
51
CMl
H2£cm‘3Z5_ j
112 [£'465
1IZecun'B02
Рис. 39. Определение размеров крыла моделей:
А — планера; Б — резиномоторной; а — вид в плане; б —
* вид спереди
4- /=1,509/; /=£/1,509=19,52 дм = 1952мм.
Примем размах крыла равным 1950 мм; площадь его
будет 29,41 дм2, т. е. меньше предварительно выбранной
на 0,13%, что допустимо: /„ = 2/з I - 1300 мм.
7. Вычертим крыло в плане и определим величину
САХ и положение САХ на этом виде крыла (рис. 39,А,а):
Для центральной части половины крыла: S1=-£.
= 10,4<? м2, — 1п/2 = 650 мм, всаХ[ = в1 =160 мм.
Для концевой части половины крыла: SH =^ЦЬ^ •
- 1,325-3,25 = 4,305 дм2, ~/сах„ = 650 + 152 = 802 мм
(размер 152 найден построением), всах1| =^—7^ = 132,5лл.
Величина и положение САХ всего крыла: всах =
= - i>508 дм = 150,8 мм, - Л/Сах[ _|_
+ *2 (Агахц Azaxi ) * — 4,65 дм — 465 ММ.
8. Определим форму крыла спереди. Эффективный
угол поперечного V примем равным 11°, а угол по-
перечного V в центральной части — 3°. Угол попереч-
124
ного V концевой части крыла <р найдем из формулы:
срср =* , решая его относительно <р п,
(Oj 4- ои)«/сах
т. е.
?cp*(^I + ^U)’4ax—ф] •^i*4axi
фц =--------------------------------=
°л4сахп
11.14,705-2-4,65 —3-10Л-2-3,25 _ jgo
4,305-2-8,02
9. Вычертим вид крыла спереди и отметим на нем
положение САХ (рис. 39,А,б).
10. Выберем профиль крыла, учитывая значитель-
ные перегрузки на взлете, с толщиной 8%. Неплохо за-
рекомендовал себя на ряде моделей профиль В-8356,
поэтому его и применим на своей модели. Конечно, по
мере накопления опыта в запуске модели планера
можно будет в дальнейшем применить и более тонкий
профиль, с толщиной до 6%. Для улучшения аэродина-
мических характеристик профиля В-8356 в условиях
полёта нашей модели (Re 45000) на крыле исполь-
зуем турбулизатор в виде наклеенной на верхнюю по-
верхность нити.
11. Определим плечо стабилизатора, приняв коэф-
фициент эффективности стабилизатора ' равным 0,85;
как показывает статистика, такое значение является
«У • L
средним для современных моделей планеров: А ст= ,
* ®сах
, Лст-5-всах 0,85-29,41 -1,£08 о
откуда L = -^4—— = — --------л-дг—’---— 8,65 дм.
О ст 4
12. На основе статистических данных выберем цен-
тровку по высоте САХ, равной 0,5.
13. Определим центровку по длине САХ, пользуясь
графиком рис. 22. Предельно заднее положение ц. т.—
на 67% САХ, предельно переднее — на 43% САХ. Следу-
ет принять центровку на 7% вперед от предельно задне-
го положения, а именно на 60% САХ, чему соответству-
ет положение ц. т. на 80 мм от начала САХ.
14. Выберем форму стабилизатора в виде трапеции
с сужением 2/з; удлинение его примем равным 6,0.
15. Определим размеры стабилизатора — его раз-
мах и центральную и концевую хорды: /ст—]/k-SCT =
= j/6* 4,35 = 5,1 дм — 510 мм* так как SCT = e2£L±±si ’
125
./ст = -^-Якт^ст, ТО 51ст = ^’< р1 = Ь02 дм = 102 ММ-
Округлим наибольшую хорду до 100 мм; тогда кон-
цевая хорда будет равна: в2ст = 2 ’7“^—в1ст= —
— 1,0 — 0,7 дм = 70 мм.
16. Для стабилизатора выберем профиль Clark-Y с
относительной толщиной 11%, так как он обеспечивает
широкий диапазон рабочих углов атаки.
17. Выберем схему хвостового оперения с килем,
расположенным снизу фюзеляжа. Плечо киля примем
равным плечу стабилизатора, т. е. LK = L = 865 мм.
18. Определим по графику рис. 25 коэффициент эф-
фективности киля, при фСр = 11° равный в среднем
0,0112. Дк= S-^f- = 0,0112, откуда 5К = 0,0112 •
29,41-19,5 П7. . .
• ----------= 0J4 дм2.
Ъ, оэ
19. Примем длину носовой части фюзеляжа LH рав-
ной 260 мм, так как статистика ограничивает Лн пре-
делами 210—300 мм.
20. Определим величину хст — расстояние от но-
сика САХ до центра давления стабилизатора. Величи-
ну и место нахождения найти несложно, воспользо-
вавшись рис. 18. Ц. д. нужно считать приложенным на
расстоянии 0,25—0,3 всахст. При отсутствии стрело-
видности стабилизатора, как в нашем случае, можно
считать, что ц. д. находится на 0,25—0,3 ст-
21. Величину хк , ввиду сложности определения
САХ киля, будем считать равной 0,3 максимальной
хорды киля.
22. Определив все основные размеры, приступим к
вычерчиванию эскиза модели планера (в масштабе
1 : 10 или 1:5). Вычерчиваем все три вида модели
(см. рис. 40,а) — в плане, спереди и сбоку в следую-
щем порядке:
а) Вычертив крыло в плане, наносим САХ. На
продольной оси модели указываем ц. т. и отмечаем L.
Вычерчиваем стабилизатор; при этом центральная хор-
да стабилизатора на 0,3 своей длины должна перекры-
вать L. Откладываем длину носовой части фюзеляжа
и наносим его контур; максимальную толщину фюзеля-
жа следует брать не менее 20 мм.
126
Рис. 40. Эскизы моделей: а — планера; б — резиномоторной
б) На продольную ось фюзеляжа (вид сбоку) пере-
носим с вида сверху ц. т.» вычерчиваем относительно
его САХ под углом 3° к продольной оси фюзеляжа; по-
127
строим вид крыла сбоку. Вычерчиваем фюзеляж и
киль, стараясь придать им аэродинамически целесооб-
разную форму; наносим боковую проекцию стабилиза-
тора, приняв его установочный угол равным —2°, —3°.
Отмечаем на фюзеляже место крепления стартового
крючка.
в) Вычерчиваем вид модели спереди. Имея готовы-
ми уже две проекции, это нетрудно сделать.
Резиномоторная модель
1. Несущую площадь примем равной 18,9 дм2,
в том числе, 4 дм2 — площадь стабилизатора и 14,9
дм2 — площадь крыла (5СТ/ S = 0,27).
2. Определим размах крыла, приняв среднее для ре-
зиномоторных моделей удлинение 10: I = J/X-S =
= |/10-14,9 = 12,2 дм = 1220 мм.
3. 1^рыло сделаем с прямоугольным центропланом
и концевыми частями, с криволинейными передней и
задней кромками и наибольшим сужением площадь
прямоугольной части примем примерно равной в/5 пло-
щади крыла, т. е. 9 дм2, при этом площадь концевых
частей крыла будет 5,9 дм2.
Для упрощения задачи определения размеров кры-
ла концевую часть с криволинейными кромками заме-
ним при расчете на трапециевидную, уменьшив не-
сколько — до 5,7 дм2 — ее площадь.
При этом предложении: Su = 25j — = 9 дм2
2Sn = 1 (I -/„)•(*.+ e2) = тО-У-Gi + W =
= l(l,75Ze, - 15,75) = 5,7 дм2, откуда в1 = =
= 1,27 = 127 мм. ’
Округлим величину в[ до 125 мм и примем величи-
ну в2 = 3А равной 95 мм. Уточним размах крыла:
2-$ц =|(/ - /„)•(*, + *2) =(1 - + вг) =±(1-1,2)-
• 2,2= 1,1/-7,92 = 5,7 дм2, откуда / = Ц^-=12,4^=
= 1240 мм.
4. Вычертим крыло в плане и определим положение
САХ на виде крыла,сверху (рис. 39,Б,а).
Прежде всего нййдем САХ и их координаты уча-
стков I и II крыла: 2Si = 9 дм2, ecaX| = et = 125 мм\
128
/г^сах^ — 1/<^ц — 180 мм9 25ц — 5,7 дм\ #Сах — ~
5 7 ”ц
~5b= 1’096 дм^ 110 ММ> ^ахп = 72^+120 = 360 +
+ 120 = 480 мм (размер 120 найден построением),
а затем САХ всего крыла и координату /Сах:^сах= у -
14 ,9 1 i 1
12 ,4 1*2 120 ММ* "2*/сах — "~2 1“ “2*(4ахц 4axj ) *
• ^|15и = 180+116 = 296 мм.
5. Определим форму крыла спереди. Эффективный
угол поперечного V примем равным 16°, центральную
часть крыла сделаем плоской. При этом угол попереч-
ного V концевых частей крыла будет равен: <рп =
__ ?ср’С$1 ) +ах 16-14,7-5,92 _ 25 5О
£|| '^сахп 5,7-9,6 ’
6. Вычертим крыло спереди и отметим на нем по-
ложение САХ (рис. 39,5,6).
7. Выберем профиль крыла. Учитывая небольшие
средние углы взлета резиномоторных моделей, приме-
ним профиль с большой вогнутостью G-361, имею-
щий толщину 6,5%.
8. Определим плечо стабилизатора, приняв коэффи-
циент эффективности стабилизатора равным 1,40, что
является средним для резиномоторных моделей:
L = Яст-5-«сах = 1.4-14,9-1,2 = 6 25 дм _ б25 мм
Ост 4
9. Центровку по высоте примем равной 0,6, что со-
ответствует расположению ц. т. ниже САХ на 72 мм.
10. Определим центровку по длине САХ при помо-
щи графика рис. 22. Предельно заднее положение
ц. т. — 90% САХ, предельно переднее — 37% от на-
чала САХ. Таким образом для нашей модели
диапазон допустимых центровок очень широк. Учиты-
вая высокое значение коэффициента продольного демп-
фирования (произведение Аст-— = 7,3), примем
центровку на 25% вперед от предельно задней, т. е.
Хц.т = 0,65, чему соответствует положение ц. т. на
78 мм от начала САХ.
11. Выберем прямоугольную форму стабилизатора,
удлинение — 4,5; при этом хорда стабилизатора будет
129
94 мм, а размах 425 мм. Округлим хорду вст до
95 мм и уточним размах /Ст = 420 мм.
12. Для стабилизатора возьмем профиль MVA-301,
так как у него широкий диапазон углов безотрывного
обтекания.
13. Схему хвостового оперения выберем с килем,
расположенным по обе стороны от фюзеляжа. Стаби-
лизатор разместим на верхней половине киля, плечо
которого примем равным плечу стабилизатора, т. е.
ZK= L = 625 мм.
14. Определим по графику рис. 25 коэффициент эф-
фективности киля, при эффективном угле поперечного
V в 16°, равный в среднем 0,036, а затем и площадь ки-
ля: Ак = =0,036, откуда SK= 0,036- =
= 1,035 дм\
15. Величину хст будем считать равной 0,3 в ст,
величину хк — соответственно 0,3 максимальной хор-
ды киля.
16. Определим параметры винтомоторной группы,
воспользовавшись номограммой рис. 32. Принятый ва-
риант отмечен на номограмме пунктирной линией. Пара-
метры винта: диаметр—0,56 м> относительный шаг—1,37,
относительную ширину лопастей примем равной 8,5% D,
т. е. 48 мм. Потребное сечение резиномотора из резины
«Пирелли» будет равно 0,78 см2; для удобства изготов-
ления резиномотора примем его сечение 0,8 см2, что
соответствует 20 нитям резины 1 X 4 мм. Длину рези-
номотора ориентировочно определим по формуле:
= 0,8 0,98 = 51 см = 510 мм.
Этот резиномотор можно будет закрутить на 360—
400 оборотов. Модель с выбранной винтомоторной груп-
пой сможет набрать около 50 м высоты и продержать-
ся в воздухе около 160 сек. (см. рис. 5).
17. Определив все основные размеры модели, при-
ступим к вычерчиванию эскиза (см. рис. 40,6) в том
же порядке, который был указан выше для модели
планера. Помните, что длина носовой части фюзеляжа
должна быть достаточной, чтобы сложенные лопасти
винта не касались крыла; лопасти винта, сложившиеся
на крыло, вызывают срыв модели в штопор.
130
ОСНОВЫ КОНСТРУИРОВАНИЯ
ЛЕТАЮЩИХ МОДЕЛЕЙ
В полете на модель действуют различные силы: ве-
са, аэродинамические, тяги винта или натяжения лее-
ра; под действием этих сил отдельные части модели
изменяют свою форму, деформируются, а в некоторых
случаях ломаются.
Аэродинамические силы, действующие на крыло,
стремятся изогнуть и закрутить его. При изгибе уве-
личивается угол поперечного V крыла; при чрезмерном
увеличении угла поперечного V площади киля оказы-
вается недостаточно для создания боковой устойчивости
модели — модель становится колебательно неустойчи-
вой (см. стр. 85).
При скручивании изменяются углы атаки крыла,
что приводит к нарушению продольной и поперечной
балансировки модели; при уменьшении углов атаки
модель планирует более круто и может перейти в пи-
кирование, увеличение углов атаки приводит, наоборот,
к кабрированию; при неодинаковом закручивании лево-
го и правого крыльев модель виражит.
Аэродинамические силы, действующие на хвостовое
оперение, скручивают и изгибают фюзеляж, вследствие
чего положение хвостового оперения относительно кры-
ла изменяется, что при больших деформациях делает
невозможным нормальный полет модели. Резиномотор
сильно сжимает и скручивает фюзеляж, что также при-
водит к изменению взаимного положения крыла и опе-
рения.
Чтобы модель могла успешно летать, деформации
131
ее и ее частей в полете должны быть достаточно ма-
лыми, или, как принято говорить, модель в целом и
все ее части должны быть жесткими. Жесткость — это
способность конструкции как можно меньше изменять
свою геометрическую форму под действием нагрузок.
Конечно, абсолютно жестких конструкций нет — все
они под нагрузками меняют свою форму, но одни кон-
струкции меняют свою форму незначительно, другие,
под теми же нагрузками — очень сильно.
Поэтому прежде чем говорить о том, жесткая кон-
струкция или нет, определяют величину допустимой
для жесткой конструкции деформации. Так, жестким
нужно считать крыло, которое в нормальном плани-
рующем полете изменяет угол поперечного V на вели-
чину, не превышающую 2% размаха крыла; что ка-
сается жесткости крыла на кручение, то величина за-
кручивания в нормальном планирующем полете для
жесткого крыла не должна превышать долей гра-
дуса.
В полете возможны s значительные перегрузки: так,
например, подъемная сила крыла может по своей ве-
личине в несколько раз превысить подъемную силу в
планирующем полете. Естественно, деформации кон-
струкции при таких перегрузках будут большими, но,
если перегрузки носят кратковременный характер, по-
вышенные деформации можно допустить; важно только,
чтобы под действием перегрузок не произошло разру-
шение конструкции, т. е. конструкция была прочной.
Итак, модель, а следовательно, и все ее части, не-
обходимо делать прочными и жесткими, а вес их при
этом должен быть наименьшим, что возможно только
при правильном конструктивном их выполнении.
КРЫЛО
Крылья свободнолетающих моделей разнообразны
по конструкции. Они отличаются по типу обшивки. Ча-
ще всего применяются крылья с мягкой ' обшивкой и
крылья со смешанной: жесткой в передней части и мяг-
кой—на всей остальной; целиком с жесткой обшивкой—
значительно реже. В качестве мягкой обшивки исполь-
зуют бумагу (лучше всего — специальная длинново-
132
локнистая непроклеенная) и тонкую синтетическую
ткань. Жесткую обшивку изготовляют из бальзового
шпона толщиной от 0,5 до 1,5 мм.
Независимо от типа обшивки все крылья имеют
элементы: продольные — лонжероны, стрингеры, кром-
ки и поперечные — нервюры и законцовки.
Лонжероны и стрингеры воспринимают изгибающие
моменты от действующих на крыло аэродинамических
сил; нервюры придают крылу необходимый профиль, а
в отдельных случаях, кроме того, препятствуют скру-
чиванию крыла. Кромки и законцовки делают крыло
необходимой геометрической формы.
По числу продольных элементов крылья делятся на
однолонжеронные, двухлонжеронные и многолонже-
фонные, которые ошибочно называют стрингерными.
Однолонжеронные и двухлонжеронные крылья имеют,
помимо кромок, соответственно один или два лонжеро-
на. Часто встречаются крылья, в центральной части
которых находятся два лонжерона, а в концевой —
один. В отличие от лонжерона, являющегося мощной
продольной балкой, воспринимающей изгибающий мо-
мент, стрингер представляет собой тонкую продольную
рейку, которая сама по себе может воспринять только
часть продольной нагрузки крыла. Стрингерные крылья
применяются гораздо реже, чем одно- ,и двухлонжерон-
ные.
Расположение лонжеронов и стрингеров вдоль хор-
ды крыла должно быть определенным, так как от это-
го зависит величина скручивающих крыло моментов.
На рис. 41 показаны крылья трех моделей. Несмот-
ря на то, что эти крылья имеют одинаковую геометри-
ческую форму и подъемные силы, действующие на
них, равны, деформации, вызываемые, этими силами,
различны.
Крыло а только прогнулось на величину fK , а
крылья бив не только прогнулись, но и закрутились,
вследствие чего углы атаки на конце крыла б увели-
лись, на конце крыла в — уменьшились.
Для сохранения продольной балансировки предпо-
чтительнее чистый изгиб крыла, так как любое скру-
чивание нарушает продольную балансировку и его не
следует допускать.
Чем же вызывается скручивание крыла? Как мы
133
Рис. 41. Деформация крыла в полете:
а — чистый изгиб; бив — изгиб и скручивание; 1 — центр дав-
ления; 2 — центр жесткости; 3 — линия центров давления; 4 —
ось жесткости
уже знаем, аэродинамическая сила в каждом сечении
крыла приложена в его ц. д.; линия, на которой распо-
ложены центры давлений всех сечений крыла, назы-
вается линией центров давлений. Скручи-
вание же крыла может происходить только относитель-
но вполне определенной линии, называемой осью
жесткости. Ось жесткости — условная линия, оп-
ределить точное положение которой по длине хорды
крыла довольно сложно, но это практически и не тре-
буется. Можно считать, что у правильно сконструиро-
ванного однолонжеронного крыла ось жесткости прохо-
дит через лонжерон, а при чрезмерно мощной задней
кромке перемещается за лонжерон, ближе к задней
кромке.
У двухлонжеронного крыла ось жесткости находит-
ся между лонжеронами; как определить ее место рас-
положения по хорде, рассказано на стр. 140.
Ось жесткости крыла, как правило, находится вбли-
зи прямой, проходящей через центры тяжести сечений
крыла и называемой линией центров тяже-
сти.
Максимальной подъемной силе соответствует поло-
жение ц. д. на 25—30% хорды; при перемещении ц. д.
назад подъемная сила крыла уменьшается (см. рис.
9,5). Поэтому необходимо при проектировании крыла
стремиться, чтобы ось жесткости находилась на рас-
стоянии 25—30% Хорды. В этом случае большая подъ-
емная сила не вызовет скручивания крыла, так как соз-
134
даваемый ею скручивающий момент будет близким
к 0.
Полностью избавиться от скручивающих крыло
моментов невозможно, поэтому необходимо создавать
конструкции, которые под действием скручивающих мо-
ментов имели бы малые деформации. Полагаться, что
жесткость на кручение крылу придаст мягкая обшивка
(бумага, ткань) нельзя, так как такая обшивка в сы-
рую погоду (а на соревнованиях возможны полеты и
в дождь) теряет натяжение, обвисает и не может вос-
принять скручивающих моментов. Недостаточная жест-
кость крыла может явиться причиной флаттера —
йзгибных и крутильных колебаний крыла. Чаще всего
флаттер наблюдается у крыльев с провисшей, ненатя-
нутой обшивкой, но может быть и у крыльев с тонким
профилем и нормальной обшивкой, так как мягкая об-
шивка при тонком профиле крыла плохо сопротив-
ляется скручиванию крыла. Помимо состояния обшив-
ки, на флаттер большое влияние оказывает расположе-
ние линии центров тяжести по длине хорды крыла.
Наиболее склонны к флаттеру крылья с задним (бо-
лее 35%) расположением линии центров тяжести, т. е.
с тяжелой задней частью. Для исключения флаттера це-
лесообразно загрузить переднюю часть крыла, устано-
вив специальные балансиры — вынесенные перед кры-
лом грузы (рис. 42,г). Такие балансиры довольно часто
устанавливают на крылья резиномоторных моделей,
имеющих тонкие профили; балансиры следует распола-
гать на концевых частях V-образных крыльев и в месте
перегиба V-образных крыльев. Флаттер наблюдается при
повышенной скорости полета: на взлете моторных мо-
делей, при динамическом старте моделей планеров и
Является причиной большого числа аварий моделей.
КОНСТРУКЦИЯ КРЫЛЬЕВ
Однолонжеронное крыло. Продольные элементы у та-
кого крыла: передняя и задняя кромки и один лонже-
рон; поперечные элементы — прямые .или перекре-
щивающиеся нервюры и законцовки. Передняя кромка
может быть достаточно массивной, заднюю же кромку
135
Рис. 42. Одно лонжеронные крылья:
1 — передняя кромка; 2 — верхняя полка лонжерона; 3 — нижняя полка лонжерона;
4 — стенка лонжерона; 5 — задняя кромка; 6 — жесткая обшивка; 7 — противофлат-
терный балансир
делать чрезмерно тяжелой не следует из-за возможно-
сти возникновения флаттера. Мощный лонжерон, вос-
принимающий весь изгибающий момент аэродинамиче-
ских сил, действующих на крыло, располагают в месте
наибольшей толщины профиля, как правило, на рассто-
янии 0,3—0,35 хорды профиля от его носика, т. е. прак-
тически вблизи оси центров давления крыла.
Крыло с прямыми нервюрами и мягкой обшивкой по-
казано на рис. 42,г. Это наиболее простое в изготов-
лении крыло имеет существенные недостатки: во-первых,
обшивка между нервюрами провисает при натяжении,
вследствие чего профиль крыла искажается; во-вторых,
конструкция крыла не работает на кручение, поэтому
скручивающие моменты аэродинамических сил воспри-
нимаются только обшивкой. Искажение профиля крыла
можно уменьшить, поставив дополнительные носики
нервюр между нервюрами крыла. Еще меньше будет
Искажаться профиль крыла, если на передней части кры-
ла сверху применить жесткую обшивку, например, из
бальзового шпона толщиной 1 мм. Ввиду того, что
такая обшивка практически жесткости крыла Иа круче-
ние не повысит, целесообразно установить в передней
части крыла косые^носики нервюр (см. рис. 42,в). Рас-
положенные под жесткой обшивкой, они не исказят про-
филь крыла; в то же время они вместе с лонжероном и
передней кромкой создадут пространственную конструк-
цию, хорошо работающую на кручение.
Этот же принцип — создание кромками, лонжероном
и нервюрами пространственной конструкции — заложен
jb крыльях с перекрещивающимися нервюрами, показан-
ных на рис. 42,а,б. Крыло б имеет небольшой вес,
Йо. очень жестко на кручение и на изгиб. Недостаток
его — искажение профиля натянутой обшивкой, даже в
случае постановки дополнительных носиков нервюр.
Крыло а с жесткой обшивкой в передней части аэроди-
намически более выгодно, хотя и уступает крылу б по
весу.
Соединять перекрещивающиеся нервюры друг с дру-
гом можно двумя способами: прорезав пазы в одной
нервюре сверху, во второй — снизу, до середины высоты
нервюр; чаще одну из нервюр разрезают пополам и в
стык приклеивают к целой нервюре.
Иногда встречаются крылья, в которых каждая нер-
137
вюра перекрещивается не с одной, а с несколькими нер-
вюрами; это так называемая геодезическая конструкция,
Такие крылья сохраняют свою жесткость даже при из-
ломе одной или нескольких нервюр и лучше сохраняют
профиль в случае применения мягкой обшивки. Недо-
статок крыльев геодезической конструкции — их ис-
ключительная трудоемкость.
Расстояние между нервюрами, поставленными пря-
мо, следует делать равным 0,25—0,35 ширины крыла в
данном месте; в центре, на конце и в месте перегиба
крыла нервюры располагают чаще, на расстоянии 0,12—
0,18 ширины крыла. Примерно такие же расстояния
нужно делать между носиками и-хвостиками перекрещи-
вающихся нервюр.
Учитывая большую жесткость крыла с перекрещива-
ющимися нервюрами или с дополнительными косыми
носиками, его лонжерон можно отнести несколько
назад, но не далее чем 0,4 ширины крыла.
Очень часто у однолонжеронного крыла применяют
жесткую обшивку его передней части не только свер-
ху, но и снизу. В этом случае жесткая обшивка вме-
сте с лонжероном и передней кромкой образует коробку,
которая сама по себе обладает высокими прочностью и
жесткостью и является основным силовым элементом
крыла.
В качестве обшивки для таймерных моделей приме-
няют бальзу толщиной 1—1,5 мм, для моделей планеров
и резиномоторных — 0,7—1 мм; слои бальзы распола-
гаются вдоль размаха крыла. Лучшую прочность мож-
но получить, использовав жесткую обшивку из двух
слоев бальзового шпона толщиной 0,5 мм, склеенных
между собой так, что их слои составляют угол 45° с
лонжероном и в то же время перпендикулярны друг
Рис. 43. Конструкции крыльев:
а — двухлонжеронное с раскосами; б — двухлонжеронное с ко-
сыми полунервюрами; в — двухлонжеронное с перекрещивающи-
мися нервюрами; г — стрингерное; д — крыло-монокок; 1 — пе-
редняя кромка; 2 — задняя кромка; 3—4 — лонжероны; । 5 —
раскос; 6 — полунервюра; 7 — стрингер; 8 — бальзовая наклад-
ка; 9 — верхняя обшивка; 10 — нижняя обшивка
139
другу. Такая двухслойная обшивка, в отличие от одно-
слойной, меньше коробится при высыхании и не рас-
трескивается. Применять перекрещивающиеся нервюры
в крыле с жесткой обшивкой на всей его передней ча-
сти нецелесообразно.
Однолонжеронные крылья, как правило, относитель-
но более легкие, чем крылья других конструкций. Удель-
ный вес, т. е. вес 1 дм2 конструкции, составляет для
крыла с мягкой обшивкой — 3—4 г!дм2, для крыла с
частично жесткой обшивкой — 4—5,5 г!дм2.
Двухлонжеронное крыло. На крыльях с большой
хордой устанавливают два лонжерона. Нервюры в двух-
лонжеронных крыльях обычно ставят прямо (рис. 43,а).
Для увеличения жесткости крыла на кручение между
лонжеронами целесообразно располагать раскосы, об-
разующие вместе с полками лонжеронов пространствен-
ную форму. Раскосы следует делать из твердой бальзы,
липы или сосны, в зависимости от их длины сечением
от 1 х 1 до 2 х 2 мм. Очень часто вместо раскосов меж-
ду лонжеронами устанавливают косые б или пере-
крещивающиеся в дополнительные нервюры, обыч-
но изготавливаемые из бальзы толщиной 1—2 мм. По-
мимо придания высокой жесткости крылу, они еще и
поддерживают обшивку. По схеме а было изготовлено
для резиномоторной модели крыло с удлинением 15,5 и
площадью около 16 дм2\ при умеренном весе — около
70 г — крыло оказалось чрезвычайно жестким.
Целесообразно лонжероны устанавливать от носика
профиля: первый — на расстоянии 0,25 хорды, второй—
0,65 хорды. Чтобы центр жесткости двухлонжеронного
крыла не оказался слишком далеко от ц. д. при боль-
шой перегрузке, сечения лонжеронов должны быть впол-
не определенными.
Величина и геометрическая форма сечения лонже-
рона определяют его момент сопротивления — основ-
ной параметр, от которого зависит прочность лонжеро-
на. Момент сопротивления сечения лонжерона рассчи-
тывают относительно условной оси, проходящей через
ц. т. сечения лонжерона параллельно хорде крыла. Ве-
личину момента сопротивления сечения лонжерона мож-
но подсчитать, воспользовавшись формулами, указанны-
ми в табл. 4.
140
Таблица 4
Сечение
Момент сопротивления
Сечение
Момент сопротивления
^ = 6^[«э-(//-2Г)з]
ВТъ(\ЖН*-2,\ЬН>1ъ + 1,35Т|)
1,35 Н
Гн = 0,77в; Гв = 0,15 О.ЗЛ
Для двухлонжеронного крыла при выборе сечений
лонжеронов необходимо следить, чтобы отношение мо-
ментов сопротивления лонжеронов соответствовало бы
формуле (50), так как в противном случае центр жест-
кости уйдет слишком далеко от ц. д,:
в
^ = 0,8--^-, (50)
вл
где W7! — момент сопротивления сечения первого лон-
жерона;
W2 — момент сопротивления сечения второго лон-
жерона;
в — хорда крыла;
бл — расстояние между лонжеронами;
к — постоянный коэффициент, который можно
брать в пределах 0,05—0,1.
Если же мы примем расстояние между лонжеронами
равным 0,4в, т. е. первый лонжерон расположим на рас-
стоянии 0,25в, а задний — на 0,65в, то формула (50) уп-
ростится:
_ 2л:
1— 2,5л: ’
(50.1)
Таким образом, отношение моментов сопротивлений
№2/^1 расположенных так лонжеронов должно быть в
пределах 0,115—0,27, т. е. передний лонжерон имеет
момент сопротивления сечения больше, чем задний, в
3,7—8,7 раза. О подборе сечений лонжеронов рассказа-
но ниже.
Двухлонжеронные крылья также часто имеют сме-
шанную обшивку: заклеенную бальзовым шпоном верх-
нюю поверхность крыла от передней кромки до перед-
него лонжерона; иногда бальзовая обшивка не дохо-
дит до переднего лонжерона, а кончается на 10—20 мм
от передней кромки.
Удельный вес двухлонжеронных крыльев с мягкой
обшивкой, как правило, составляет 3,8—5 г1дм\ со сме-
шанной обшивкой — 4,8—5,5 г!дм?.
Стрингерное крыло. Иногда вместо одного или двух
массивных лонжеронов устанавливают вдоль крыла не-
сколько относительно тонких, которые моделисты на-
142
зывают стрингерами. Расположение стрингеров — при-
мерно равномерное по длине хорды, число стрингеров
сверху обычно больше, чем снизу профиля. Такие стрин-
герные крылья (рис. 43,г*) с мягкой обшивкой иногда
применяют на легких моделях, но широкого распростра-
нения они не получили из-за малой живучести: вслед-
ствие небольшого сечения возможен случайный излом
одного или нескольких стрингеров, что в свою очередь
может явиться причиной поломки всего крыла. Стрингер-
ные крылья редко делают разъемными, так как крепле-
ния половин крыла трудно связать со всеми стрингера-
ми. Если же все стрингеры в узлах крепления не свя-
заны друг с другом, то прочного соединения половин
крыла не получится.
Удельный вес стрингерных крыльев — 5—6 г!дм2.
Крыло моноблок. Стрингерное крыло в случае при-
менения жесткой обшивки оказывается выгодным, осо-
бенно для таймерных моделей. Число стрингеров и тол-
щина обшивки взаимозависимы: чем больше стринге-
ров, тем меньше может быть толщина обшивки. Одна-
ко по технологическим соображениям не следует де-
лать обшивку тоньше 0,7 мм, а стрингеры — меньше чем
2X2 мм. Бальзовую обшивку необходимо тщательно
приклеивать к нервюрам, стрингерам и кромкам, в про-
тивном случае прочность и жесткость крыла будет низ-
кой. Целесообразно толщину бальзовой обшивки на
верхней поверхности крыла делать примерно в 1,5 раза
больше, чем на нижней. При однослойной обшивке на-
правление ее волокон нужно располагать вдоль размаха
крыла; при более прочной двухслойной обшивке волок-
на каждого ее слоя должны быть перпендикулярны друг
другу и в то же время находиться под углом 45э к
кромкам и стрингерам. Стрингеры в этом крыле в ос-
новном служат для подкрепления бальзовой обшивки,
которая и воспринимает полностью изгибающий и скру-
чивающий моменты, действующие на крыло.
При достаточно мощной обшивке — толщиной 1,5 мм
и более — пропадает необходимость в стрингерах. Бес-
стрингерное крыло с жесткой обшивкой называется кры-
ло-монокок. На рис. 43,д показано крыло-монокок тай-
мерной модели победителя мирового чемпионата 1967 г.
Верхняя и нижняя обшивки изготовлены из бальзового
шпона толщиной 1,5 мм; волокна бальзы — вдоль раз-
143
маха. Крыло имеет переднюю кромку из бальзы сече-
нием 8X10 мм и небольшой, длиной 470 мм, лонжерон
из бальзы толщиной 5 мм. Задняя кромка образована
склеенными между собой верхней и нижней обшив-
ками.
Для предохранения бальзовой обшивки от растрес-
кивания вдоль волокон крыло обтянуто тонкой синтети-
ческой тканью (вес 1 ти2 этой ткани — 27 г) и покры-
то эпоксидным лаком.
Неплохие результаты дает оклейка бальзовой обшив-
ки длинноволокнистой бумагой на лаке AI-H (эмалите)
или на жидкоразведенном клее АК-20.
Перед оклейкой (безразлично, бумагой или тканью)
бальзовую обшивку нужно тщательно зачищать наждач-
ной бумагой и покрывать эмалитом или эпоксидным ла-
ком несколько раз (3—4) с зачисткой наждачной бума-
гой после каждого покрытия. Оклеивать предваритель-
но неподготовленную бальзовую поверхность нельзя, так
как волокна бальзы при пропитке лаком набухают,
вспучиваются и поверхность обшивки поэтому получает-
ся шероховатой.
Удельный вес крыльев-монокок и моноблок состав-
ляет 5,5—8 г!дм\
ИЗГИБ КРЫЛА
Образуемая крылом подъемная сила вызывает изгиб
его. Степень изгиба крыла зависит не столько от вели-
чины подъемной силы, сколько от величины момента
подъемной силы относительно места крепления крыла
к фюзеляжу.
Момент подъемной силы сложно определить потому,
что подъемная сила является нагрузкой, распределенной
по размаху крыла, причем характер ее распределения
зависит от формы крыла в плане. Характер распреде-
ления подъемной силы- незакрученного крыла, т. е. име-
ющего постоянный установочный угол по размаху, по-
вторяет форму крыла (табл. 5).
Естественно, отклонение от этого положения имеет
место только на конце крыла вследствие концевого эф-
фекта (см. стр. 41), но для упрощения расчетов кон-
144
Таблица 5
1 - Схема распределения подъемной силы Величина распре- деленной нагрузки Величина изгибающего момента
'/2 [ЩШШДШЕ У ч^Г • 1. В любой точке х\ М -Я— /Ид. - 2 . 2. В центре крыла: Мо = -у- .
см ** о ** II II «4 еч о 1. В любой точке х: Мх = qr^- + q,~q2-X3 х 42 2 6/ 2. В центре крыла: м _ + q4\
<z = 1,27r- 1. В любой точке х: М, - , {' 3_ (2/х — х2)2 _ 6/ 2 1 — X] •arc cos . 2. В центре крыла: М° - '3 •
145
Рис. 44. Изменение изгибающего мо-
мента по размаху крыльев различ-
ной геометрической формы
мента и характер его изменения
цевым эффектом и за-
круткой крыла обыч-
но пренебрегают.
Крылья всех без ис-
ключения летающих
моделей закреплены
на фюзеляже только в
своей середине; такие
крылья называются
свободнонесущи-
м и. У свободнонесу-
щих крыльев изгибаю-
щий момент изменяет-
ся по размаху: в месте
крапления крыла он
наибольший, к концу
крыла он падает. Вели-
чина изгибающего мо-
по размаху крыла за-
висят при прочих равных условиях от распределения
подъемной силы по размаху, т. е. от формы крыла в
плане.
На рис. 44 показано изменение изгибающего момента
от подъемной силы у незакрученных крыльев одной
площади, равного размаха и имеющих одинаковую
подъемную силу, но различную геометрическую форму:
прямоугольную, трапециевидную с сужением ei/e2 = 2,
эллиптическую, трапециевидную с прямоугольным цен-
тропланом и треугольную. По оси абсцисс отложен раз-
мах крыльев, по оси ординат — величина относительно-
го изгибающего момента. Здесь под величиной относи-
тельного изгибающего момента понимается отношение
действующего изгибающего момента в любом месте
крыла произвольной формы (прямоугольной, трапецие-
видной, эллиптической, треугольной) к максимальному
изгибающему моменту крыла прямоугольной формы.
Из этого графика видно, что при одних и тех же
величинах площади, размаха и подъемной силы изги-
бающий момент будет составлять в середине трапецие-
видного момента крыла только 87% изгибающего мо-
мента крыла прямоугольной формы; у эллиптического
крыла — 85%, а у треугольного — 77%. В середине
консоли крыла разница еще существенней, например, у
146
эллиптического крыла изгибающий момент будет только
76% от изгибающего момента прямоугольного крыла.
Что касается изгибающего момента, действующего
на трапециевидное крыло с прямоугольным центропла-
ном, то он по величине и характеру изменения вдоль
размаха незначительно отличается от изгибающего мо-
мента прямоугольного крыла. Как показывают расче-
ты, то же самое можно сказать и о прямоугольном
крыле с эллиптическими законцовками, и о трапецие-
видном с малым сужением (меньше 1,5). Поэтому для
определения изгибающего момента крыльев этих наибо-
лее распространенных в настоящее время форм с доста-
точной для практических целей точностью можно поль-
зоваться графиками/ приведенными на рис. 45, рассчи-
танными для прямоугольного крыла. Графики связыва-
ют между собой размах крыла I и изгибающий момент
в любом месте крыла Мизг для моделей различных ти-
пов. Величина изгибающего момента дана с учетом оп-
ределенной выше перегрузки для модели: планера —
8,5, резиномоторной и таймерной — 6.
При определении изгибающего момента собственным
весом крыла можно пренебречь вследствие малого мо-
мента веса крыла по сравнению с моментом от аэроди-
намических сил, тем более что максимальная перегрузка
имеет место, как правило, на взлете, когда подъемная
сила направлена под углом к силе веса.
Изгибающий момент, действующий на крыло, воспри-
нимается, в зависимости от конструкции крыла, лонже-
ронами, стрингерами, жесткой обшивкой и кромками.
Чтобы крыло не сломалось под действием изгибающе-
го момента, сечения продольных элементов крыла и
толщина жесткой обшивки должны быть определен-
ными.
ОПРЕДЕЛЕНИЕ СЕЧЕНИЙ ЛОНЖЕРОНОВ
При расчете на прочность лонжеронных крыльев счи-
тают, что весь изгибающий момент воспринимается
только лонжеронами; кромки и обшивка при определе-
нии необходимых сечений лонжеронов не учитываются
и, как принято говорить, идут в запас прочности крыла.
147
шеъ asz
Рис. 45. Изменение изгибающего момента по размаху прямо-
угольного крыла моделей планера, резиномоторной и таймерной
Величина изгибающего момента характеризует по-
перечное сечение лонжерона. При прочих равных усло-
виях большой изгибающий момент требует применения
более мощного, прочного и жесткого, а следовательно,
и более тяжелого лонжерона. Чтобы можно было сра-
внивать между собой лонжероны различных сечений,
принято находить их момент сопротивления W, так как
этот условный параметр наряду с материалом пол-
ностью характеризует прочность лонжеронов. Необхо-
димый по условиям прочности момент сопротивления се-
чения лонжерона рассчитывают по формуле:
1аизг]
(51)
где Мизг — значение изгибающего момента в данном
месте лонжерона;
аизг — допустимое напряжение изгиба для матери-
ала, из которого предполагается сделать
лонжерон;
W — момент сопротивления сечения лонжерона.
Если величину Мизг измерять в кгем, а [о изг ] — в
к,г!см\ то момент сопротивления получится в см3. Допу-
стимое напряжение изгиба — величина, характеризую-
щая прочность материала; если в конструкции, напри-
мер, в лонжероне, действующие напряжения будут боль-
ше, чем допустимые, то конструкция может разрушить-
ся. Поэтому нельзя допускать превышения действующих
напряжений над допустимыми. А если действующие на-
пряжения много меньше, чем допустимые, конструкция
будет чрезмерно перетяжелена, что также нежела-
тельно.
Допустимые напряжения для различных пород дре-
весины указаны в табл. 6.
Момент сопротивления сечения зависит от формы
сечения и его размеров: чем больше размеры сечения,
тем больше его момент сопротивления.
149
Таблица 6
Вид древесины Удельный вес, кг/дм3 [^изг], кг/см2 [Праст]*, кг/см2 [ОсжГ*. кг/см2
Сосна 0,52 650 830 350
Ель 0,47 600 750 320
Пихта 0,44 580 720 340
Липа 0,48 470 600 270
Бальза 0,18—0,27 110—180 115—240 94—220
Бук 0,65 730 930 390
Береза 0,79 850 1200 450
О
* [араст ] — допустимое напряжение растяжения.
** [0сж] — допустимое напряжение сжатия.
При рассмотрении формулы (51) можно подумать,
что для лонжеронов выгодно выбирать материал с на-
ибольшим значением [аизг], так как при этом лонже-
роны будут тоньше. Это мнение неверное. Материалы
с высоким значением (ст изг], как правило, тяжелые. По-
этому лонжероны, выполненные из таких материалов,
несмотря на меньшее сечение, обладают повышенным
весом. Наиболее выгодны для изготовления лонжеро-
нов материалы, у которых отношение [аизг] к их
удельному весу у имеет самое высокое значение (пих-
та, ель, сосна). Самая доступная древесина — сосна,
ее чаще всего используют для лонжеронов. Бальзу для
лонжеронов применять не следует, по сравнению с сос-
новыми той же прочности они будут тяжелее.
Решающее значение для прочности и жесткости име-
ет форма лонжерона. На рис. 46 приведены попереч-
ные сечения сосновых лонжеронов с одинаковой проч-
ностью (Л1ИЗГ = 1 кгм) и высотой. Самое большое по-
перечное сечение у сплошного прямоугольного лонже-
рона, а следовательно, он и самый тяжелый. Лонже-
роны, состоящие из двух полок, значительно легче.
Это объясняется тем, что изгибающий момент вос-
принимается в основном теми слоями древесины лон-
жерона, которые расположены ближе к верхнему и
нижнему обводам крь|ла. В сплошном лонжероне его
внутренняя часть, несмотря па свою массивность, прак-
150
Рис. 46.
ковую
Поперечные сечения лонжеронов, имеющих одина-
прочность на изгиб (MHsr =1 кгм, //=15 мм)
тически бесполезна при изгибе. Лишенные массивной
внутренней части двухполочные лонжероны, естествен-
но, легче. Двухполочные лонжероны с одинаковым се-
чением верхних и нижних полок очень часто применя-
ются на летающих моделях. Но целесообразнее пол-
ки делать не одинакового, а разного сечения: верхнюю
полку в 1,5—1,75 раза толще, чем нижнюю.
Верхняя и нижняя полки в лонжероне работают по
разному: верхняя сжимается и изгибается, нижняя —
растягивается (рис. 47). Любые древесные материалы
при растяжении выдерживают значительно большие на-
грузки, чем при изгибе и особенно при сжатии (см.
табл. 6). Так, чтобы разорвать сосновую рейку сече-
нием 1 см2, нужно приложить к ней силу 830 кг;
при сжатии эта же рейка ломается при усилии не более
350 кг. Если же при сжатии имеет место так называ-
емый продольный изгиб (см. рис. 47,а), то сжимаемая
рейка разрушится при усилии, значительно меньшем,
чем 350 кг. При продольном изгибе рейка теряет ус-
тойчивость, из прямолинейной становится изогнутой, с
увеличением изгибающего момента прогиб между нер-
вюрами fn увеличивается, и, наконец, при определенной
величине этого прогиба полка ломается. Чтобы избе-
жать продольного изгиба и потери устойчивости и за-
ставить верхнюю полку, как говорят, работать на чи-
стое сжатие, между полками лонжерона необходимо
вклеить легкую и тонкую (толщиной около 1 мм) баль-
зовую стенку (см. рис. 47,6). Стенка может быть не це-
лой вдоль размаха крыла; технологически проще уста-
навливать короткие вкладыши, длиной, равной рассто-
янию между нервюрами.
Для подбора сечений сосновых лонжеронов по из-
151
Рис. 47. Изгиб двухполочного лонжерона:
а — без вертикальной стенки; б — со стенкой; 1 —
верхняя полка; 2 — нижняя полка; 3 — стенка;
fn— прогиб полки; ГСж — усилие, сжимающее верх-
нюю полку; Fp — усилие, растягивающее нижнюю
полку
вестному изгибающему моменту можно воспользоваться
графиками рис. 48.
Высоту лонжерона Н следует брать макси-
мально возможной. При наличии мягкой обшивки
лонжерон или его верхняя полка должны быть не-
сколько ниже, чем верхний контур нервюры, иначе
провисшая при натяжении между нервюрами обшивка
ляжет на лонжерон и исказит профиль крыла. У
крыльев с частично жесткой обшивкой лонжерон или
его верхнюю полку располагают на уровне верхнего
контура профиля, так как провисания обшивки опа-
саться не нужно. Рекомендуемое положение лонжеро-
нов относительно контура профиля показано на
рис. 49.
При определении размеров лонжерона с различны-
ми сечениями полок цо графику рис. 48,в предпола-
гается, что обе полки имеют одинаковую ширину.
Иногда целесообразнее полки делать одинаковой тол-
152
Рис. 48. Определение сечений лонжеронов:
а — график для сплошного лонжерона из сосны; б — график для
двухполочного лонжерона из сосны (Я — высота лонжерона; В —
ширина лонжерона и высота его полки); в — график для двухпо-
лочного соснового лонжерона с различными полками: (Я — высота
лонжерона; Тв — высота верхней полки; Тн — высота нижней пол-
ки; В — ширина полки)
153
Рис. 49. Лонжероны переменного по длине сечения и их положение
относительно контура профиля:
а — сплошной лонжерон с постоянной высотой и переменной шири-
ной; б — сплошной лонжерон с постоянной шириной и переменной
высотой; в — сплошной лонжерон, склеенный по ширине; г —
сплошной лонжерон, склеенный по высоте; д — двухполочный лон-
жерон с переменной шириной и постоянной высотой полок; е —
двухполочный лонжерон с постоянной шириной и переменной вы-
сотой полок; ж — двухполочный лонжерон с полками, склеенны-
ми по ширине; з —двухполочный лонжерон с полками, склеенны-
ми по высоте
щины, но с различной шириной — верхнюю шире, чем
нижнюю. И в этом случае необходимо воспользовать-
ся графиком 48,в и определить с его помощью сече-
ния полок, а затем изменить форму сечения верхней
полки, сделав толщину равной толщине нижней пол-
ки, но сохранив неизменной площадь сечения. Новую
ширину верхней полки Вв.п, следовательно, нужно опре-
делить по формуле:
Вв.п = В-£, (52)
1 н
где В, 7\и Тн — величины, определенные по графи-
ку рис. 48,в.
154
При определении сечения лонжерона однолонже-
ронного крыла нужно считать, что на лонжерон дейст-
вует весь изгибающий момент от аэродинамических
сил. В двухлонжеронном крыле действующий изги-
бающий момент нужно распределить между передним
и задним лонжеронами.
Как мы уже знаем, отношение моментов сопротив-
лений лонжеронов крыла должно быть в пре-
делах 0,115—0,27. Если материал обоих лонжеронов
одинаков, то отношение воспринимаемых ими моментов
такое же, как и отношение моментов сопротивления,
т. е.
1^2 _ ^ИЭГ2 /ко\
- мизг1 •
Сумма действующих на лонжероны моментов рав-
на изгибающему моменту:
<зг = ЛГизг1 + Л4ИЗГ2 = М изг1 (1 + 1Г2/ Wx\ (54)
где Л4изг1 и Л4изг2 — соответственно изгибающие мо-
менты, действующие на первый и второй лонжероны.
Зная величину действующего на крыло изгибающе-
го момента, по формулам (53) и (54) легко определить
значения Л4ИЗГ1 и Л4изг2 , необходимые для расчета
лонжеронов.
Как мы уже знаем, изгибающий момент уменьшает-
ся от середины крыла к его концу. Поэтому для об-
легчения лонжерона целесообразно его делать с пере-
менным сечением по размаху: большим — в центре
крыла, меньшим — на конце. Сечение лонжерона или
его полки изменяется плавно, если они выструганы из
целой рейки, см. рис. 49,а, б, или ступенчато при склей-
ке из нескольких реек (см. рис. 49,в,г). Клееные лон-
жероны и полки более прочны и «меньше подвержены
короблению, чем изготовленные из целой рейки. Ча-
ще всего полки лонжерона склеивают по ширине, так
как это легко осуществить непосредственно при сбор-
ке крыла.
Чтобы правильно выбрать размеры лонжеро-
на, достаточно определить изгибающий момент и соот-
ветствующие ему сечения в трех местах: в центре кры-
ла, посредине центральной части и в конце централь-
ной части, т. е. в месте отгиба «ушей».
Например, подберем лонжероны для моделей пла-
155
нера и резиномоторной (см. рис. 40). Начнем с мо-
дели планера. Поперечные сечения лонжерона опреде-
лим в трех точках: в центре крыла (точка 0), на рас-
стоянии 325 мм (точка Д) и 650 мм (точка Б) от
центра крыла — в следующем порядке:
1. Найдем действующую в момент перегрузки подъ-
емную силу крыла: Уд = 0,95 • Ом • п = 0,95 • 0,41 • 8,5 =
= 3,31 кг. На одну половину (консоль) крыла прихо-
дится 0,5 Уд, т.е. 1,655 кг.
2. Найдем подъемную силу центральной прямо-
угольной части и трапециевидной концевой части кон-
соли крыла; так как крыло не имеет аэродинамической
закрутки, то УД| = 1,655 - у- = I >655 • —1,17 кг,
Г«г. = '655' - 1'655-"ff>5 = °'485 “
Из-за наличия поперечного V фактическая подъем-
ная сила, направленная всегда перпендикулярно ли-
нии хорд крыла, будет несколько больше, чем Уд (рис.
50). В центральной-части крыла угол поперечного V
невелик и поэтому его влиянием можно пренебречь,
но для концевой части, поднятой вверх под углом 19°,
нужно определить фактическую подъемную силу УфП :
Гф11 = Гд„ • —— =0,485. = 0,51 кг.
Д11 coscpu ’ 0,9455 ’
3. Распределим подъемную силу вдоль размаха
крыла и рассчитаем величину распределенной нагруз-
ки (подъемной силы):
Уд. М7_1Й .
— в центральной части qx = = о7б§~ Ьо кг/м,
— в концевой части _ п 1 _о 0,51
(см. табл. 5) 1 +в2/в1’" 2 *0,342’
• v 1 > = 1,8 кг!м.
1,65
Совпадение значений q\, подсчитанных для цен-
тральной и концевой частей, обязательно:
q2 = 2 • • -г^тт- = 0,655 q. = 1,18 кг/ж
4. Определим изгибающий момент в точке Б. Этот
момент создается только концевой трапециевидной
частью крыла и его можно определить по формуле,
156
325
Рис. 50. Схема расчета изгибающих моментов
приведенной в табл. 5: Мъ = 2ga^1
•0,117 = 0,0816 кгм = 8,16 кгсм.
Определяют изгибающий момент в точке Б и ина-
че. Знаем положение САХ II вдоль размаха крыла —
152 мм от точки Б, что соответствует 152/cos<pn =
160 мм от точки Б вдоль линии хорд концевой части
крыла.
Приложив Уфп на САХ II, легко определим изги-
бающий момент в точке Б: Мб = 0,51 -0,16 =0,0816 кгм^
=8,16 кгсм. Значения Мб, полученные двумя приведен-
ными способами, естественно, совпали.
5. Определим изгибающий момент в точке А. Этот
момент создается трапециевидной концевой частью и
157
/„у _ 1.8
2/ — 2
половиной прямоугольной части консоли крыла и равен
сумме моментов обоих указанных частей крыла относи-
тельно точки А.
ЯЛ « • ЛЛ (1п\2 1>8
Момент центральной части: zHai = yjy == -2~
.0,106 = 0,0955 кгм = 9,55 кгсм.
Момент концевой части: /Иди = Уфц(^ ‘ cos 4-
+ 0,16 ^ = 0,51-0,468 = 0,238 кгм = 23,8 кгсм.
Суммарный момент: 714 д = УИд| == 9,55+23,8 =
= 33,35 кгсм.
6. Определим изгибающий момент в точке 0. Этот
момент создается трапециевидной частью и всей пря-
моугольной частью консоли крыла и равен сумме мо-
ментов обоих указанных частей крыла относительно
точки 0.
Момент центральной части: Л40| = f*1 (
• 0,424=0,382 кгд/=38,2 кгсм.
Момент концевой части: Моц = Кфп • * cos 19° +
+ 0,16 ) = 0,51 -0,775^=0,395 кгм = 39,5 кгсм.
Суммарный момент: М0 = 714О| + 7140ц = 77,7 кгсм.
Сравним рассчитанные значения изгибающих мо-
ментов с полученными по графику рис. 45:
— по расчету: Мо — 77,7 кгсм, Л7д = 33,35 кгсм,
Мб = 8,16 кгсм;
— по графику: 2И0 = 80 кгсм, М\ = 36 кгсм, Мб =
= 10 кгсм.
Как видим, разница незначительная, и, следователь-
но, график дает вполне достаточные для практическо-
го использования результаты.
7. Крыло сделаем двухлонжеронным в центральной
части и однолонжеронным — в концевой. Отношение
моментов сопротивлений лонжеронов примем равным
0,25 и распределим изгибающий момент между первым
л < ^^изг ^^изг
и вторым лонжеронами: Л4ИЗГ1 = “ /1У7 = =
1 "Г W 2! Мк J 1
= 0,8 Мизг, Л1изг2 = 0,2 Л4ИЗГ.
• Первый лонжерон: A40i = 62 кгсм, TWai = 26,6 кгсм,
ЛГб1 =8,1 кгсм.
Второй лонжерон: Мо2 = 15,7 кгсм, Мь2 — 6,75 кгсм.
158
Эти значения изгибающего момента — эксплуата-
ционные, имеющие место в полете. Чтобы крыло мог-
ло многократно выдерживать эти моменты, необходи-
мо лонжероны рассчитывать на несколько большие
моменты. Величина, показывающая, во сколько раз рас-
четный изгибающий момент больше, чем эксплуатаци-
онный, называется коэффициентом запаса
прочности. Для лонжеронов этот коэффициент сле-
дует брать равным 1,2.
Поэтому для подбора лонжеронов примем следую-
щие значения изгибающих моментов: Л401р = 74,4 кгсм,
^А1Р = 32 кгсм, ТИБ1р = 9,8 кгсм, ТИ02р = 18,4 кгсм,
Л/А 2р = 8,1 кгсм.
8. Лонжероны установим' на расстоянии 0,25 и 0,65
хорды крыла от носика профиля. Высота профиля в
месте установки первого лонжерона — 13,0 мм, вто-
рого — 6,8 мм. Лонжероны сделаем двухполочными, с
различной толщиной сосновых полок. Предположив
применение жесткой обшивки в передней части крыла,
примем высоту первого лонжерона равной 13,0 мм, а
заднего — 5,8 мм. Высоту полок Тв й Тн сделаем по-
стоянной на центральной прямоугольной части крыла и
равной:
— для первого лонжерона Тв1 = 2 мм и ГН1 =
1,3 мм;
— для второго лонжерона Тв2 = 1,5 мм и THi =
1 мм.
Чтобы определить сечения полок, воспользуемся
графиком рис. 48. Прежде всего узнаем отношение
ГВ1 /Н для первого лонжерона; оно равно 0,156. От-
ложим это значение на оси Т31Н (точка /). Далее из
точки, соответствующей значению изгибающего момен-
та 74,4 кгсм (возьмем 75 кгсм, 'точка 2), проведем
перпендикуляр к оси AfH3r до пересечения с прямой,
соответствующей Н = 1,30 см, в точке 3. Затем из
точек 1 и 3 проведем две взаимно перпендикулярные
прямые до пересечения в точке 4. Эта точка соответ-
ствует ширине полки лонжерона, равной 9,3 мм. Ос-
тальные сечения полок лонжерона найдем аналогично
и получим следующие их величины: для первого лонже-
рона в точке А — 4X2 мм и соответственно 4X1,3 мм,
в точке Б — 1x2 мм и соответственно 1X1,3 мм; для
второго лонжерона в точке 0 — 8x1,5 мм и соответ-
159
Рис. 51. Лонжероны для моделей планера а и резиномоторной б
ственно 8X1 мм, в точке А — 4x1,5 мм и соответ-
ственно 4X1 мм. В точке Б сечение второго лонжерона
прочностью не ограничивается. У лонжерона концевой
части крыла целесообразно уменьшить высоту полок и
сделать ее равной для верхней — 1,5 мм и для ниж-
ней — 1 мм. Ширина полок при этом должна быть не
менее 1,6 мм (см. рис. 48).
Лонжерон с рассчитанными сечениями полок выдер-
живает аэродинамические нагрузки, но его можно по-
вредить при неосторожном обращении с моделью и
неудачных ее посадках,. Поэтому следует увеличить
ширину полок лонжеронов: в концевой части до 3 мм,
160
а в центральной части — до 4 мм. Окончательные
размеры лонжеронов показаны на рис. 51,а. Между
полками лонжеронов нужно обязательно устанавливать
стенки.
Для резиномоторной модели изгибающие моменты
определим с помощью графика рис. 45 тоже в трех
точках: в центре крыла, посередине центральной части
консоли, т. е. на расстоянии 180 мм от центра крыла,
и в месте перегиба, на расстоянии 360 мм от центра
крыла. Эти изгибающие моменты соответственно рав-
ны: 21 кгсм, 11,0 кгсм и 3,5 кгсм. Запас прочности,
как и раньше, примем равным 1,2; с учетом этого
запаса прочности расчетные моменты будут равны:
25,2 кгсм, 13,2 кгсм, 4,2 кгсм.
Крыло сделаем однолонжеронным, с полками разно-
го сечения. Толщину полок примем равными: верхней—
1,5 мм, нижней — 1 мм. Верхнюю часть крыла до
лонжерона заклеим бальзовым шпоном. Лонжерон
разместим на расстоянии 43 мм (35%в) от носика
профиля. Высота профиля в этом месте 8 мм, высоту
лонжерона Н сделаем точно такой же. С помощью
графика рис. 48,в определим сечения полок лонжеро-
нов в выбранных точках. Они будут ^соответственно
равны: верхняя полка—7X1,5 мм, 4x1,5jhjhh 1,5X1,5 мм;
нижняя полка — 7 X 1,0 мм, 4 х 1,0 мм и 1,5 X 1,0 мм.
Целесообразно ширину полок в месте перегиба увели-
чить и лонжерон сделать так, как показано на рис.
51,6.
ПОДБОР ЧИСЛА И СЕЧЕНИЙ СТРИНГЕРОВ ДЛЯ СТРИНГЕРНОГО
КРЫЛА
Расчет стрингерного крыла сложен. Поэтому мож-
но воспользоваться следующим приближенным спосо-
бом: условно заменив все стрингеры одним лонжеро-
ном с высотой, равной 0,6 толщины профиля, опреде-
лим для него по графику (см. рис. 48,в) необходимые
сечения полок. Затем эти сечения разделим на выб-
ранное число стрингеров так, чтобы стрингеры имели
обязательно квадратное сечение, но меньше, чем 2X2
мм, стрингеры делать не следует. Учитывая более тя-
желые условия работы верхних стрингеров по сравне-
161
нию с подкрепленными стенками верхними полками
лонжеронов, число верхних стрингеров следует увели-
чить на 1—2 по сравнению с расчетным.
ПОДБОР ТОЛЩИНЫ ОБШИВКИ КРЫЛА-МОНОКОК
Чтобы выбрать толщину бальзовой обшивки, сле-
дует воспользоваться Графиком рис. 52. На нем тол-
щина обшивки дана в зависимости от хорды крыла
и величины изгибающего момента. Эта толщина — ми-
кости. При малых изгибающих моментах крыло было бы
прочным и при тонкой обшивке. Но делать обшивку
тоньше 1 мм не следует, так как возможно ее короб-
ление. Кроме того, крыло с чрезмерно тонкой обшив-
кой может сломаться при грубых посадках модели.
СТАБИЛИЗАТОР
Как и крыло, стабилизатор может иметь мягкую,
смешанную и, крайне редко, жесткую обшивку. Для об-
легчения выдерживания заданной центровки модели и
улучшения ее продольной устойчивости желательно,
162
чтобы вес стабилизатора был минимальным. Чтобы
при малом весе конструкции стабилизатор был проч-
ным и жестким, наиболее целесообразно применить пе-
рекрещивающиеся нервюры. Часто используют ста-
билизаторы и с прямыми нервюрами, особенно с жест-
кой обшиввдй в его передней части. Наиболее распро-
странены однолонжеронные стабилизаторы, двухлонже-
ронные и стрингерные встречаются редко из-за боль-
шего, чем у однолонжеронных, веса. Относительный
вес однолонжеронных стабилизаторов для моделей
планеров и резиномоторных, как правило, не превы-
шает 2 г!дм\ у таймерных достигает 5 г!дм2. На
рис. 53 показаны наиболее типичные конструкции ста-
билизаторов.
ФЮЗЕЛЯЖ
В полете фюзеляж изгибается и скручивается аэро-
динамическими силами, действующими на хвостовое
оперение. При перегрузках эти силы достигают значи-
тельной величины и чтобы противостоять им, фюзеляж
необходимо выполнять достаточно прочным и жестким.
Так, например, бальзовый фюзеляж моделей планера у
задней кромки крыла должен иметь сечение диаметром
не менее 18 мм при толщине стенки 2 мм, у таймер-
ной — диаметром 40 мм.
Практически же сечений, рассчитанных на аэродина-
мические силы, оказывается недостаточно, чтобы фю-
зеляж не сломался при принудительных и аварийных
посадках модели. При таких посадках действующие на
фюзеляж перегрузки в 2—3 раза превышают действу-
ющие в полете. Таким образом, не полет, а посадка
определяет необходимую прочность”фюзеляжа.
Перегрузки при посадке зависят от многих причин,
в частности, от состояния грунта. Особенно большие
перегрузки возникают при посадке на твердый грунт:
асфальт, бетон. Как показали проведенные расчеты,
фюзеляжи свободнолетающих моделей, применяемых в
настоящее время схем, в месте крепления крыла долж-
ны выдерживать без поломок действующие в вертикаль-
ной плоскости изгибающие моменты с величиной не
менее для моделей: таймерной — 4 кем, планера — 1,5
163
Рис. 53. Конструкции стабилизаторов:
а — с перекрещивающимися нервюрами; б — с прямыми нер-
вюрами и дополнительными носиками; в — с прямыми нервюрами
и жесткой обшивкой передней части
кгм, резиномоторной — 1,0 кгм. В горизонтальной пло-
скости на фюзеляж могут действовать изгибающие мо-
менты, составляющие- 50—70% от указанных ве-
личин.
164
35
Рис. 54. Поперечные сечения различных фюзеляжей-монокок,
имеющих одинаковую прочность на изгиб й толщину обшивки 2 мм:
а — квадратное; б — круглое; в — ромбическое; г — треуголь-
ное; х—х плоскость изгиба
Большое значение для прочности и веса фюзеляжа
имеет форма его поперечного сечения. На рис. 54 по-
казаны сечения четырех бальзовых фюзеляжей с оди-
наковой прочностью на изгиб в вертикальной плоско-
сти. Наименьшее поперечное сечение, а следовательно,
и наименьший вес у квадратного фюзеляжа а\ немно-
гим отличается круглый б. Ромбический (квадратный,
поставленный на ребро) в и треугольный г — значи-
тельно тяжелее первых двух, вследствие чего применять
их не следует.
Прочность и вес фюзеляжа зависят и от вида об-
шивки. Все используемые в настоящее время фюзеляжи
по виду обшивки можно разделить на три группы: с
мягкой, с жесткой и со смешанной обшивками. Обшив-
ка определяет силовую схему фюзеляжа: если в фюзе-
ляже с жесткой обшивкой сама обшивка воспринимает
действующие на него силы, то в фюзеляже с мяг-
кой обшивкой эту задачу выполняет; каркас. Мягкая
обшивка только придает аэродинамическую форму фю-
зеляжу, но в восприятии действующих сил почти не
участвует.
В соответствии с классификацией по виду обшивки
рассмотрим несколько наиболее типичных и технически
обоснованных конструкций фюзеляжей.
Фюзеляж с мягкой обшивкой (бумажной, тканевой).
Такие фюзеляжи состоят из продольных элементов —
лонжеронов и поперечных — шпангоутов (рис. 55,а).
Лонжероны воспринимают действующие на фюзеляж
165
Рис. 55. Фюзеляжи с мягкой обшивкой:
а — шпангоутный; б — ферменный; 1 — лонжерон; 2 — шпан-
гоут; 3 — подмоторные балбчки; 4 — боковины; 5 — задняя
бобышка; 6 — раскос; 7 — косынка; 8 — передняя кромка ки-
ля; 9 — руль направления; 10 — задняя кромка киля
продольные силы, шпангоуты придают фюзеляжу опре-
деленную форму поперечного сечения и воспринимают
поперечные нагрузки.
Недостаток этих фюзеляжей — относительно малая
жесткость при относительно большом весе. Мягкая об-
шивка в фюзеляжах — работающая, она частично вос-
принимает крутящие и изгибающие моменты; естест-
венно, при повреждении обшивки — а это случается
при посадках часто — прочность и жесткость снижают-
ся. Перечисленные недостатки и явились причиной то-
го, что шпангоутные фюзеляжи в настоящее время в
чистом виде применяются только на простейших моде-
лях.
Значительно большей жесткостью обладают фермен-
ные фюзеляжи; кроме того, они имеют наименьший вес
среди всех типов современных фюзеляжей. Продоль-
ные элементы ферменного фюзеляжа — мощные лонже-
роны, число которых обычно равно 4 или 6; поперечные
элементы — раскосы. Для образования жесткой фермы
необходимо, чтобы в одной точке на лонжероне сходи-
лись четыре раскоса — по два на каждой грани фю-
зеляжа. Число раскосов можно увеличить, но дополни-
166
цельные раскосы же-'
^ткости фюзеляжа не
увеличат; правда,
’Иногда они подкре-
пят лонжероны от
прогиба под дейст-
вием натянувшейся
обш ивки. К л а сси ч^-
ский пример фермен-
ного фюзеляжа —
фюзеляж резиномо-
торной модели, по-
казанный на рис.
55,6. Он собран из
четырех ферменных
панелей, каждая из
Рис. 56. График для определения
сечения лонжеронов:
соснового — сплошные кривые, баль-
зового — пунктирные кривые. Штри-
ховкой ограничены рекомендуемые зо-
ны. (Пример: при расстоянии между
раскосами 50 мм сосновый лонжерон
3X3 мм выдержит усилие 20,5 кг, баль-
зовый 5x5 мм — 22,5 кг
НН)
которых состоит из
двух плоских сосно-
вых реек сечением
1,2x4 мм и бальзо-
вых раскосов сече-
нием 3x2 мм. Полу-
чившийся в резуль-
тате склеивания па-
нелей Г-образный лонжерон очень прочен. Носовая
часть фюзеляжа для обеспечения плавного перехода от
квадратного сечения к круглому обшита бальзовым шпо-
ном. На фюзеляже жестко установлен киль, собранный
из двух бальзовых кромок и бальзовых же раскосов.
После оклейки длинноволокнистой бумагой и четырех-
разового покрытия эмалитом вес фюзеляжа составляет
45 г.
Для выбора сечений лонжеронов следует воспользо-
ваться графиком рис. 56. Величины сечения лонжеро-
на на этом графике даны в зависимости от расстояния
между раскосами и действующего на него сжимающего
продольного усилия.
Как определить сжимающие усилия от действующе-
го на фюзеляж изгибающего момента, объяснено в <абл.
7. Там же даны и формулы для расчета. Усилия от верти-
кального и горизонтального изгибающих моментов нуж-
но рассчитать отдельно с учетом запаса прочности 1,2 и
для подбора лонжеронов принять большее из них. Оп-
167
рецеленные по графику рис. 56 сечения лонжеронов не-
обходимы от носа фюзеляжа до места наибольшего из-
гибающего момента, т. е. примерно до задней кромки
крыла; по мере приближения к концу фюзеляжа лонже-
рон можно делать тоньше, постепенно уменьшая его
сечение вдвое.
У резиномоторной модели лонжероны фюзеляжа
нужно проверить на прочность при закрученном ре-
зиномоторе.
Осевое усилие в кг, с которым полностью закручен-
Таблица 7
Схема фюзеляжа Сечение х—х Усилие в лонжероне
168
ный резиномотор сжимает фюзеляж, можно определить
по формуле:
FpM=10.SM. (55)
Если фюзеляж симметричен относительно резиномо-
тора и каждый лонжерон расположен на одинаковом
расстоянии от двигателя, то сжимающее усилие, прихо-
дящееся на один лонжерон, равно:
Fi = (56)
где п — число лонжеронов.
Учитывая длительное (по сравнению с аэродинами-
ческими и посадочными перегрузками) действие за-
крученного резиномотора на фюзеляж, коэффициент
запаса прочности в этом случае следует принять рав-
ным 2 и сечение лонжеронов рассчитывать на усилие,
равное 2 F\.
При смещении резиномотора относительно оси сим-
метрии фюзеляжа в лонжеронах возникнут различные
усилия: чем лонжерон ближе к резиномотору, тем боль-
ше в нем сжимающее усилие. Лонжероны от носа мо-
дели до заднего узла крепления резиномотора должны
'иметь постоянное сечение.
Расстояние между раскосами не следует делать боль-
ше расстояния между лонжеронами в месте установ-
ки раскосов. Необходимо стремиться к тому, чтобы
отношение расстояния между раскосами к ширине (или
толщине) лонжерона было бы не более 20, так как в
этом случае лонжероны работают на сжатие. При сли-
шком большом расстоянии между раскосами возможен
их продольный изгиб и разрушение при сравнительно
небольшом усилии.
В качестве примера определим сечение лонжерона для
резиномоторной модели, имеющей ферменный фюзеляж
квадратного сечения, со стороной квадрата //ф, равной
40 мм\ расстояние между раскосами т тоже 40 мм.
Прежде всего найдем усилие, действующее на каж-
дый лонжерон, условно считая, что Нф — а немногим
отличается от Н& (так как Нф много больше а):
/Ък~7Иизг/27Уф = 100/2-4 = 12,5 кг.
Сравним это значение Гсж с усилием приходя-
щимся на один лонжерон от закрученного резиномото-
169
7
Рис. 57. Фюзеляжи с жесткой обшивкой:
а—фюзеляж-моноблок таймерной модели; 6—фюзеляж-моноблок
модели планера; в — фюзеляж-монокок модели планера; г —
фюзеляж-монокок резиномоторной модели; д — разборный мо-
нокок резиномоторной модели; 1 — лонжерон; 2 — шпангоут;
3 — боковина; 4 — пилон; 5 — передняя кромка киля; 6 —
руль направления; 7 — киль; 8 — пластина крепления стаби-
лизатора, 9 — долбленый фюзеляж, 10 — моторная часть фю-
зеляжа; 11 — хвостовая часть; 12 — кольцо; 13 — заклепка;
14 — фанерное кольцо; 15 — пластина крепления крыла; 16 —
крючок; 17 — резиновое кольцо; 18 — штырь крепления рези-
номотора; 19 — целлулоидное кольцо. 20 — фанерное кольцо
ра. Так, если на модели установлен резиномотор се-
чением 0,8 см2, то развиваемое им сжимающее усилие
равно 8 кг. Этому усилию соответствует значение Fu
равное 2 кг. Даже с учетом запаса прочности 2 сжи-
мающее усилие резиномотора в нашем, примере не яв-
ляется определяющим для выбора сечения лонже-
ронов.
Приняв запас прочности, равный 1,2, получим для
лонжерона расчетное усилие, равное 15 кг. По графи-
ку рис. 56 определим сечение соснового лонжерона:
оно равно 2,5 X 2,5 мм.
Расчет по приведенной методике дает минимально
допустимое по требованию прочности сечение лонжеро-
нов. Делать их тоньше нельзя, увеличить же сечение в
171
некоторых случаях просто необходимо. Так, в данном
случае возможен прогиб лонжерона натянувшейся об-
шивкой, вследствие чего наступит чрезмерно раннее его
разрушение. Кроме того, выдержать точно сечение 2,5х
2,5 мм на всей его длине практически трудно. Поэтому
рекомендуем всегда увеличивать сечение лонжеронов
примерно на 0,5 мм на сторону; в нашем примере его
целесообразно сделать сечением 3X3 мм. В частности,
это увеличение толщины лонжерона компенсирует сде-
ланное нами в начале допущение (замену Нф— а на
#ф).
Фюзеляж-моноблок. Такие фюзеляжи представляют
собой коробку, образованную жесткой обшивкой,- под-
крепленной каркасом из стрингеров и шпангоутов. Из-
гибающие моменты в моноблочных фюзеляжах воспри-
нимаются обшивкой и стрингерами, которые имеют
меньшее сечение, чем, например, лонжероны фермен-
ных фюзеляжей. Шпангоуты устанавливаются редко,
на сравнительно большом расстоянии друг от друга. В
качестве обшивки таких фюзеляжей обычно применяют
бальзовый шпон толщиной 1—3 мм; слои бальзы рас-
полагают вдоль фюзеляжа. Для предохранения от рас-
трескивания бальзу необходимо оклеить длинноволокни-
стой бумагой или тонкой тканью. Наиболее целесообраз-
но делать обшивку из двух слоев бальзы. Первый слой
бальзового шпона (толщиной, равной половине толщи-
ны обшивки) приклеивают к каркасу под углом 45° к
продольной оси фюзеляжа, второй слой — перпендику-
лярно первому. Такая двухслойная обшивка более проч-
на и не подвергается короблению.
На рис. 57,а, б показаны моноблочные фюзеляжи мо-
делей таймерной и планера.
Стрингер в моноблочном фюзеляже выдерживает
большее усилие, чем точно такой же стрингер в фюзе-
ляже с мягкой обшивкой; жесткая обшивка подкреп-
ляет стрингеры и они, как говорят, работают на чи-
стое сжатие.
Фюзеляж-монокок. В фюзеляжах такого типа об-
шивка полностью воспринимает изгибающие и скручи-
вающие моменты. Для подкрепления ее иногда устанав-
ливают шпангоуты, преимущественно в местах крепле-
ния других узлов и деталей модели. Стрингеры отсут-
ствуют.
172
Конструктивное выполнение фюзеляжей-монокок са-
мое разнообразное.
Для моделей планеров фюзеляж часто вырезают из
липового или из бальзового бруска и внутри облегча-
ют (см. рис. 57,в). Снаружи такой фюзеляж оклеивают
длинноволокнистой бумагой или тонкой тканью, грунту-
ют и окрашивают нитроэмалями.
Чаще всего фюзеляж делают составным по длине.
На рис. 57,г показан фюзеляж резиномоторной модели.
Его передняя часть, в которой помещен резиномотор,
сделана из дюралюминиевой трубы диаметром 30 мм с
толщиной стенки 0,3 мм. Хвостовая часть — долбленая
из бальзы, толщина стенок переменная: от 1,5 мм впе-
реди до 1 мм у киля. Обе части фюзеляжа склеены че-
рез фанерное кольцо клеем БФ-2, можно ВК-9. На
хвостовой части фюзеляжа жестко установлен вырезан-
ный из бальзовой пластины киль.
Промышленность выпускает дюралюминиевые тру-
бы (материал — Д16Т) с толщиной стенки не менее
1 мм, поэтому приходится уменьшать толщину стенки
до 0,3 мм путем механической обточки или химическим
фрезерованием — травлением. В первом случае трубу
обрабатывают на токарном станке с помощью специ-
ального приспособления — люнета, поддерживающего
трубу около резца и передвигающегося вместе с резцом.
При химическом фрезеровании тзлщина стенки трубы
уменьшается вследствие растворения металла на по-
верхности. После химического фрезерования наружную
поверхность трубы зачищают и полируют. Независимо
от способа изготовления трубы ее рекомендуется ано-
дировать для предохранения от окисления.
Фюзеляж, показанный на рис. 57,5, разборный: пе-
редняя и задняя части его соединены друг с другом со-
единительной муфтой и резиновым кольцом. Иногда
применяют резьбовое соединение.. Передняя часть фюзе-
ляжа выклеена из трех слоев бальзового шпона на ци-
линдрической трубе — оправке. Первый слой толщи-
ной 0,5 мм навивают на трубу так, чтобы слои баль-
зы были под углом 45° к оси трубы, второй такой же
слой — перпендикулярно первому. Наружный слой —
толщиной 1 мм; его слои параллельны оси трубы. Слои
между собой нужно клеить казеиновым или столярным
173
Рис. 58. Фюзеляжи смешанной конструкции:
1 — лонжерон;* 2 — шпангоуТ; 3 — боковина; 4 — пилон; 5 —
раскос; 6 — передняя кромка киля; 7 — киль; 8 —> руль нап-
равления; 9 — ребро; 10 — пластина крепления стабилизато-
ра; 11 — долбленая носовая часть фюзеляжа; 12 — трубча-
тая носовая часть фюзеляжа; 13 — штырь крепления крыла;
14 — накладки-обтекатели
клеем тщательно. Полученную трубу после зачистки
следует оклеить длинноволокнистой бумагой.
Хвостовую балочку склеивают из шести бальзовых
пластин толщиной \лмм и также оклеивают длинново-
локнистой бумагой.
Фюзеляж смешанной конструкции. Такой фюзеляж
имеет мягкую обшивку в хвостовой части и жесткую—
в передней. Хвостовая часть получается легкой, вслед-
ствие чего улучшается устойчивость модели. Применение
жесткой обшивки в передней части фюзеляжа позволя-
ет создать прочные и жесткие узлы крепления крыла,
двигателя, стартового крючка и других деталей, рас-
положенных в передней части.
Эти фюзеляжи применяются в настоящее время ча-
сто на моделях всех типов. На рис. 58 показаны раз-
личные фюзеляжи: а — таймерной модели — передняя
часть его выполнена в виде моноблока, задняя — .фер-
менная, ромбического сечения; фюзеляж модели пла-
нера б с долбленой: (монокок) передней частью и фер-
менной хвостовой балочкой, собранной из двух шйро-
174
Рис. 59. Рабочие чертежи резиномоторной модели
ких мощных бальзовых лонжеронов и тонких бальзо-
вых раскосов; ферменную хвостовую часть имеет и фю-
зеляж резиномоторной модели в. Передняя часть фю
зеляжа выклеена на круглой оправке из двух слое
ватмана (внутри) и одного слоя 2 мм бальзового шпона
(снаружи). Для обеспечения плавного перехода от круг-
лого сечения к ромбическому на грани хвостовой ча-
сти наклеены бальзовые обтекатели.
В этом разделе мы не пытались описать все извест-
ные в настоящее время конструкции фюзеляжей — это
невозможно, но рис. 55, 57, 58 дают достаточно полное
представление об основных направлениях конструирова-
ния фюзеляжей.
РАБОЧИЕ ЧЕРТЕЖИ
К изготовлению модели можно приступать, только
имея уже детально разработанные рабочие чертежи.
Составление рабочих чертежей — завершающий этап
конструктивной разработки модели. Рабочие чертежи—
это чертежи частей модели в натуральную величину.
Они необходимы для изготовления отдельных деталей и
сборки частей модели. Обычно части модели — крыло,
фюзеляж, стабилизатор — вычерчивают отдельно с ука-
занием действительных размеров кромок, лонжеронов,
стрингеров, шпангоутов и т. д. Рабочие чертежи сле-
дует делать на плотной чертежной бумаге — ватмане—
остро отточенным карандашом с твердостью 2Т или
ЗТ, пользуясь чертежными инструментами — рейсши-
ной, угольниками, циркулем, транспортиром. Чертить,
как говорят, «на глазок» нельзя: дефекты чертежа не-
минуемо повторятся и даже умножатся на готовой мо-
дели. При вычерчивании рабочих чертежей необходимо
продумывать все, вплоть до мелочей: где установить
усиливающие раскосы, уголки, как связать лонжеро-
ны с законцовками и т. д., так как в противном слу-
чае неминуемы переделки на собранной модели, кото-
рые, естественно, снизят качество ее изготовления.
Для примера на рис. 59 показаны правильно
составленные рабочие чертежи спроектированной
(см. рис. 40) резиномоторной модели.
Цена 34 коп.