


Author: Данхэм Д.У. Назиров Р.Р. Фаркуар Р.У. Чумаченко Е.Н. Эйсмонт Н.А.
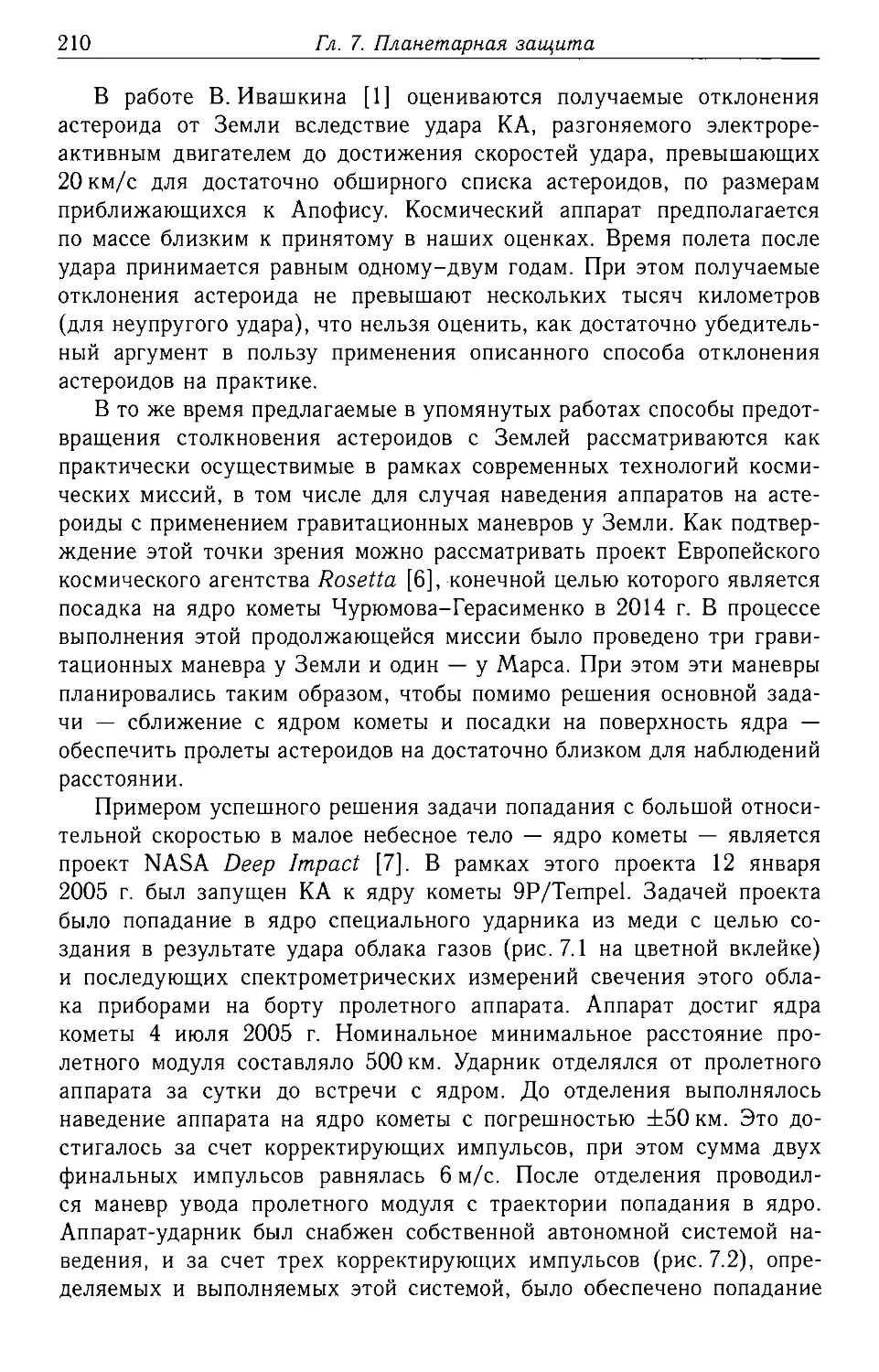
Tags: теоретическая астрономия небесная механика солнечная система астрономия космонавтика космические полеты
ISBN: 978-5-9221-1495-0
Year: 2013




КОСМИЧЕСКИЕ
МИССИИ
Ии
ISEE-3 Vf^Ktory
Rv Jim to FiMd
Son-Cart* Lin»
ПЛАНЕТАРНАЯ
ЗАЩИТА V
Д. У. Данхэм
P. P. Назиров
P. У. Фаркуар
E. H. Чумаченко
Н. А. Эйсмонт
А. В. Симонов
Д. У. Данхэм
Р. Р. Назиров
Р. У. Фаркуар
Е. Н. Чумаченко
Н. А. Эйсмонт
А. В. Симонов
КОСМИЧЕСКИЕ
МИССИИ
И
ПЛАНЕТАРНАЯ
ЗАЩИТА
МОСКВА
ФИ ЗМ АТЛИТ®
2013
УДК 521
ББК 22.655
К71
Работа выполнена при поддержке гранта Пра-
вительства РФ для государственной поддержки
научных исследований, проводимых под руковод-
ством ведущих ученых в российских образова-
тельных учреждениях высшего профессиональ-
ного образования по направлению «Космические
исследования и технологии» 2011-2013 гг.
Авторский коллектив:
Данхэм Д.У., Назиров Р.Р., Фаркуар Р.У., Чумаченко Е.Н.,
Эйсмонт Н.А., Симонов А. В.
Космические миссии и планетарная защита. — М.: ФИЗМАТЛИТ,
2013. - 276 с. - ISBN 978-5-9221-1495-0.
В книге рассматриваются вопросы динамики и управления движением
космических аппаратов. При этом значительное внимание уделяется описанию
пионерских миссий, послуживших прототипами для последующих космических
проектов. Один из характерных примеров такой миссии — проект полета
в окрестность солнечно-земной коллинеарной точки либрации с последующими
гравитационными маневрами, которые позволили обеспечить облет кометы
Джакобини-Циннера. Основной задачей других представленных в книге про-
ектов является решение проблемы астероидной опасности, реальность которой
была подтверждена недавним падением астероида в районе Челябинска. В кни-
ге излагаются впервые предложенные методы предотвращения столкновения
опасных небесных тел с Землей путем направления на них малых астерои-
дов с помощью гравитационных маневров у Земли. В числе проектов, полу-
чивших в последнее время поддержку, анализируются пилотируемые полеты
к астероидам.
Книга представляет интерес для студентов и специалистов в области
динамики космического полета и исследований Солнечной системы.
Рецензенты:
д.т.н., профессор, вед. науч. сотр. НИЦ РКО ЦНИИ-4 МО С. С. Вениаминов;
д.т.н., профессор, лауреат Государственной премии, действ, член Российской
академии космонавтики им. К. Э. Циолковского, гл. науч. сотр.
НТЦ «Космонит» (РОСКОСМОС) А. И. Назаренко
ISBN 978-5-9221-1495-0
© ФИЗМАТЛИТ, 2013
© Коллектив авторов, 2013
ОГЛАВЛЕНИЕ
Предисловие...................................................... 5
Перечень сокращений............................................. 10
Глава 1. Обзор методов траекторных измерений космического ба-
зирования для орбит в окрестности коллинеарных точек либ-
рации ..................................................... 12
1.1. 0 применении космических оптических средств для обнаруже-
ния и каталогизации опасных астероидов...................... 12
1.2. Размещение в окрестности Венеры космических обсерваторий
с целью обнаружения потенциально опасных астероидов........ 19
1.3. Миссии к точкам либрации, 1978-2002 гг................. 28
1.4. Методы проектирования орбит в окрестности точек либрации
для европейских проектов.................................... 55
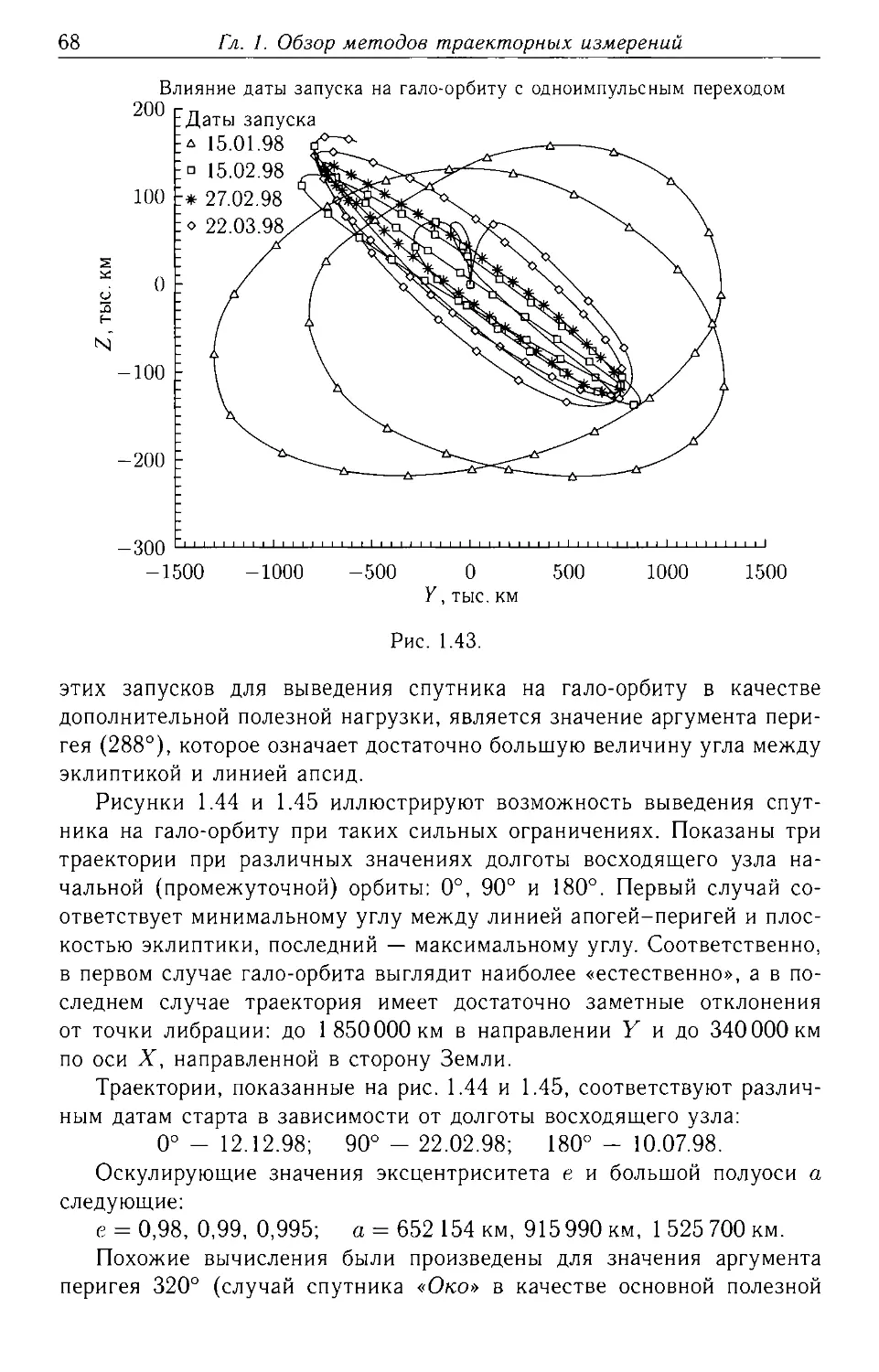
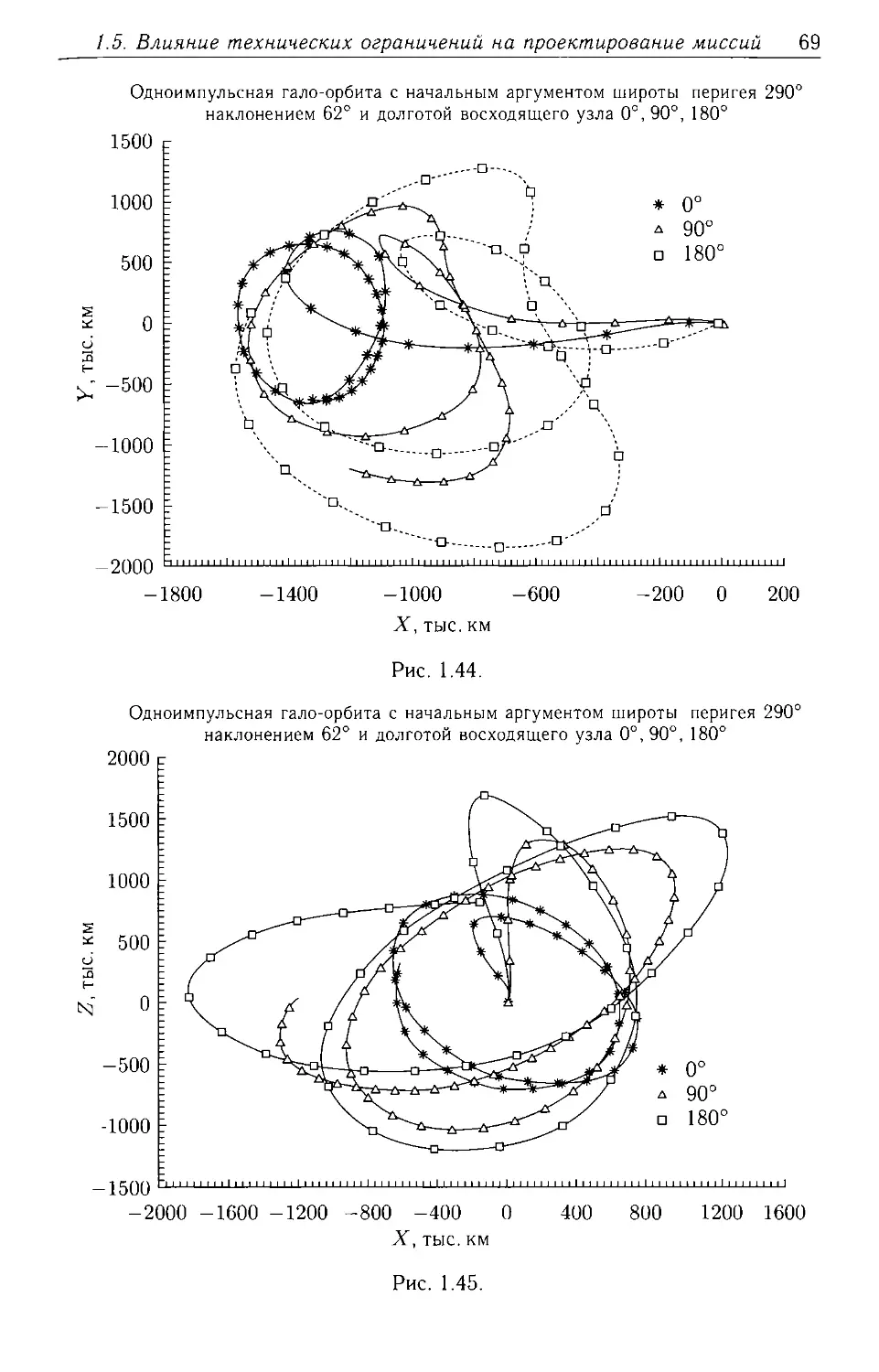
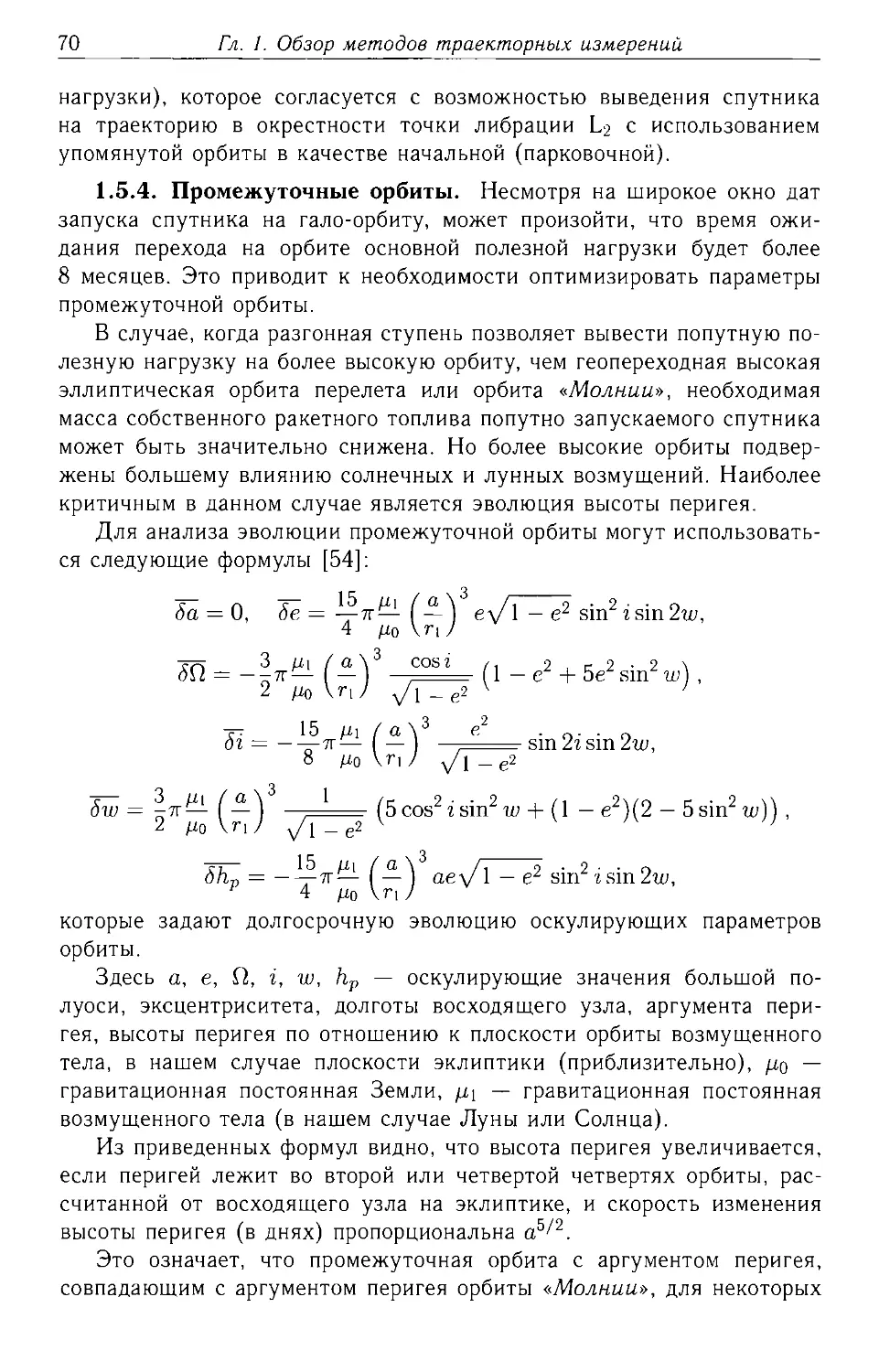
1.5. Влияние технических ограничений на проектирование миссий
к коллинеарным точкам либрации системы Солнце-Земля .... 64
1.6. 06 использовании солнечного паруса в миссиях в окрестности
точек либрации.............................................. 72
Список литературы к главе 1............................. 73
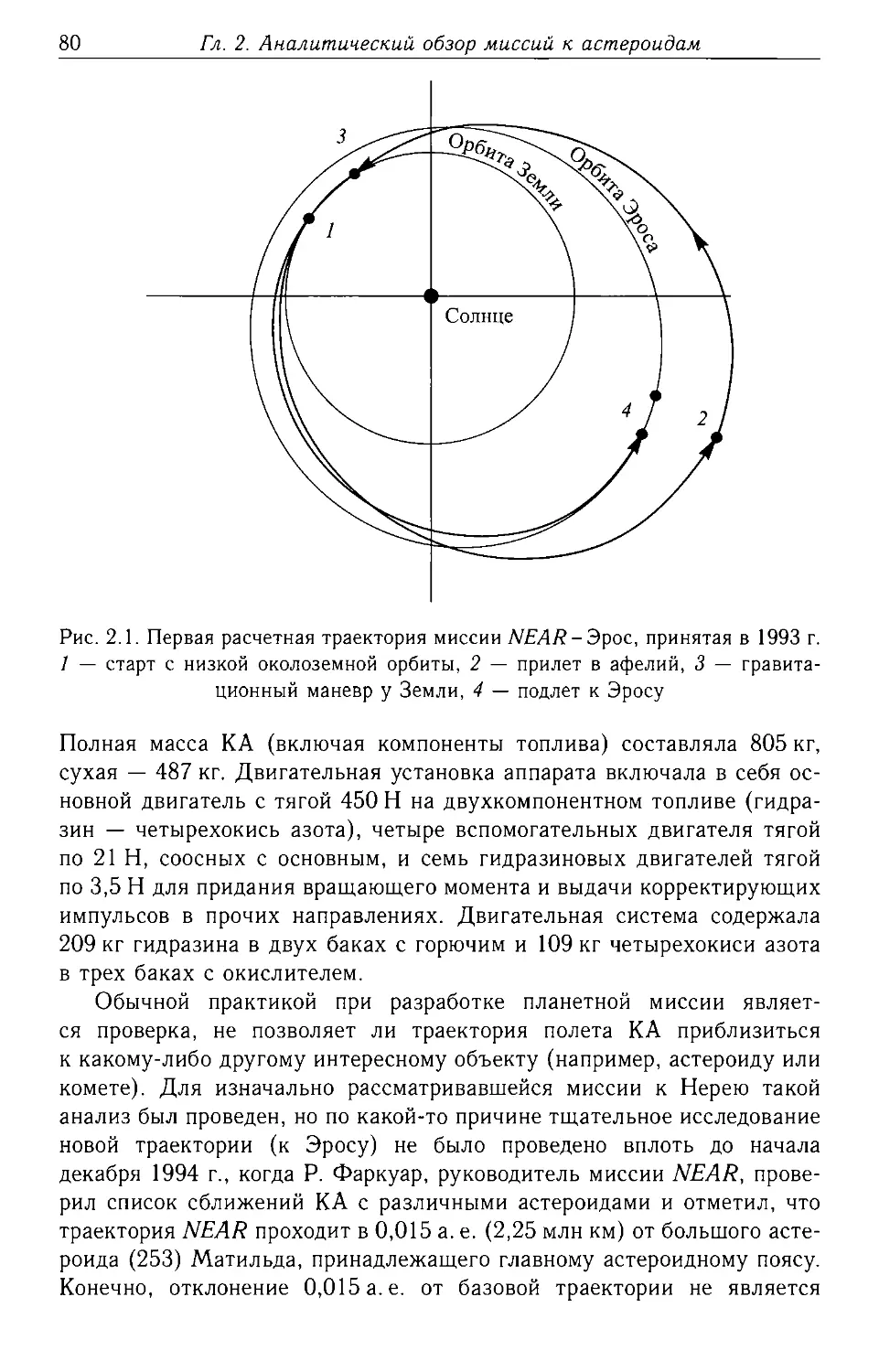
Глава 2. Аналитический обзор миссий к астероидам................ 78
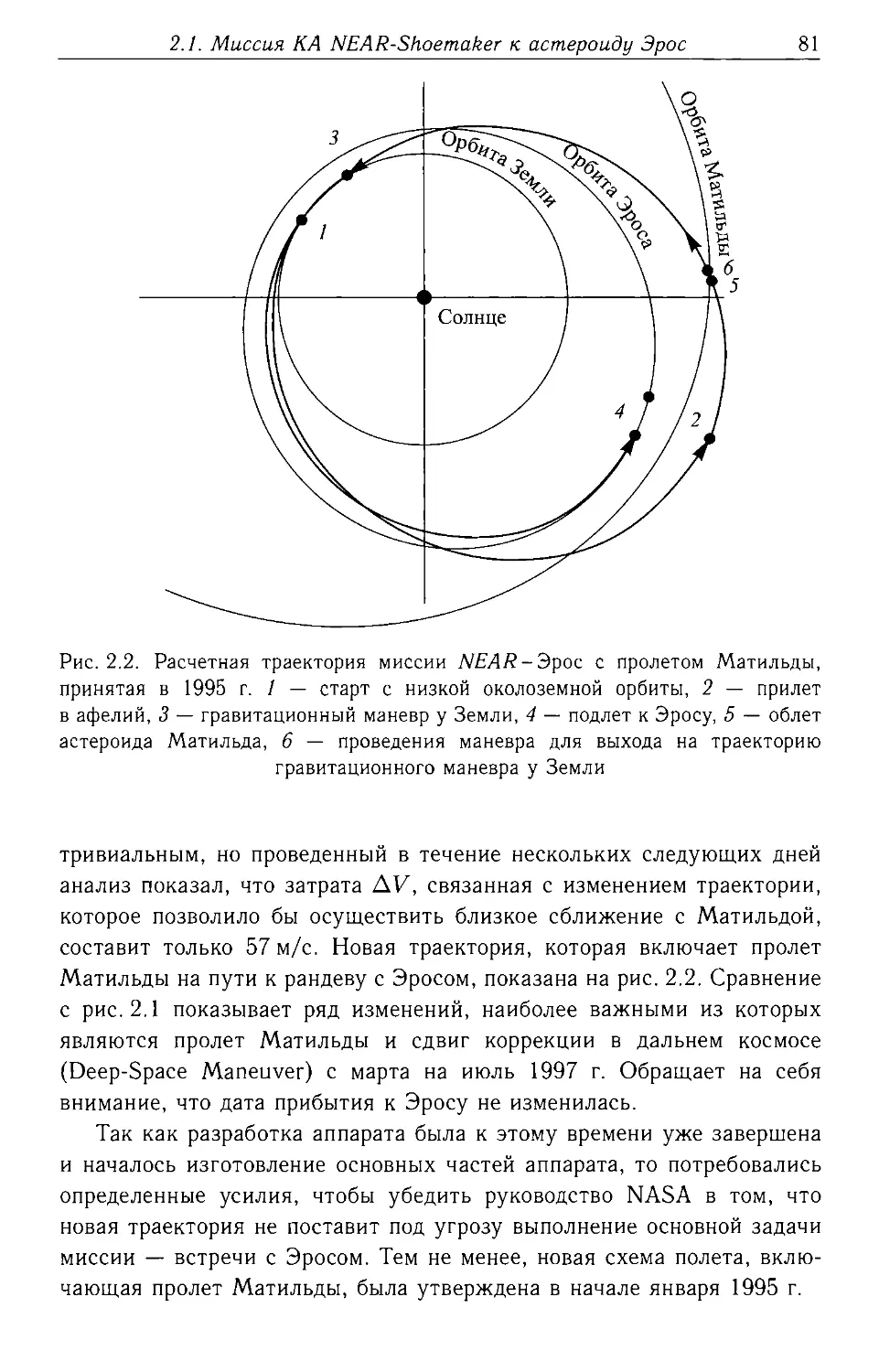
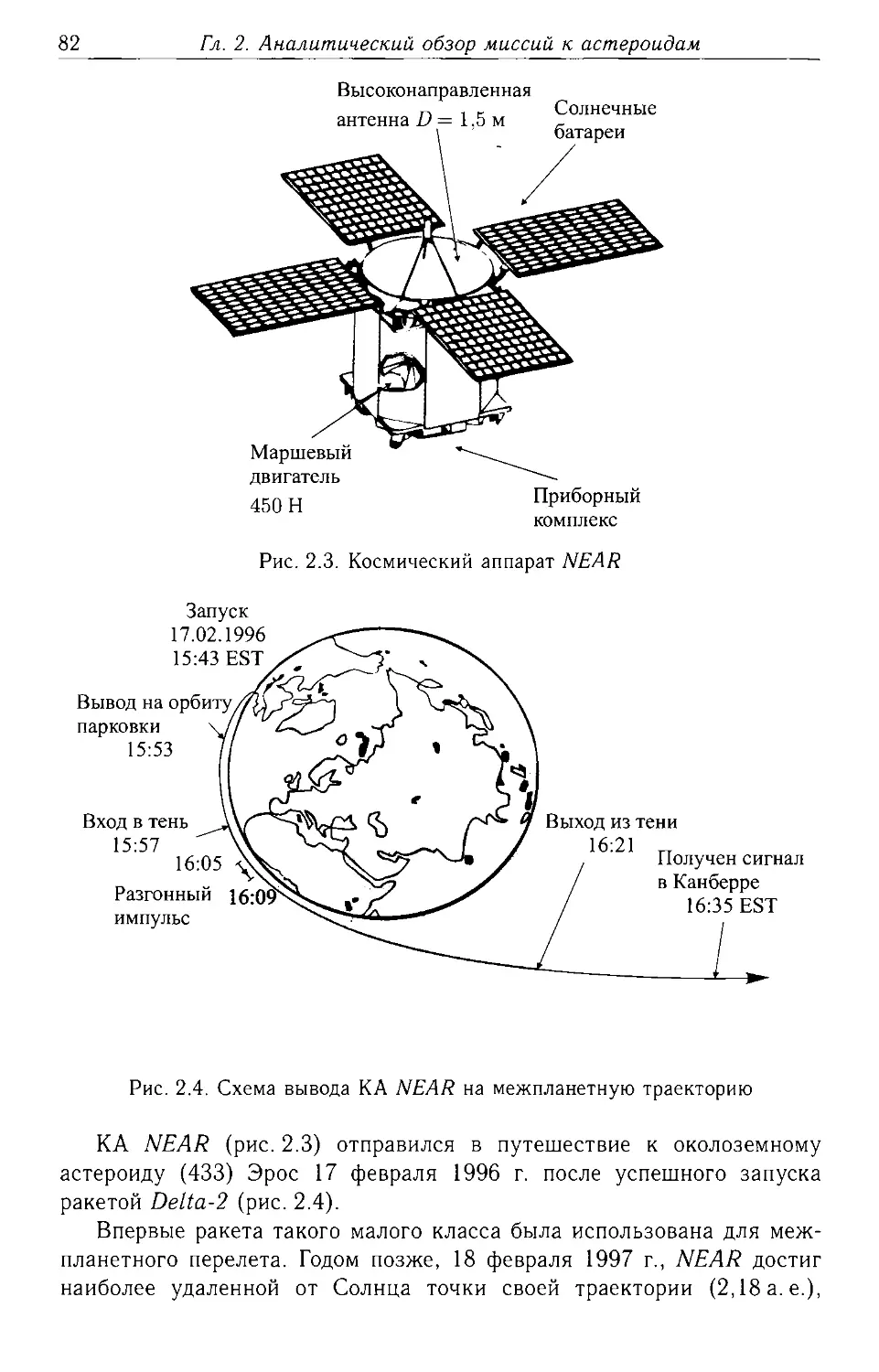
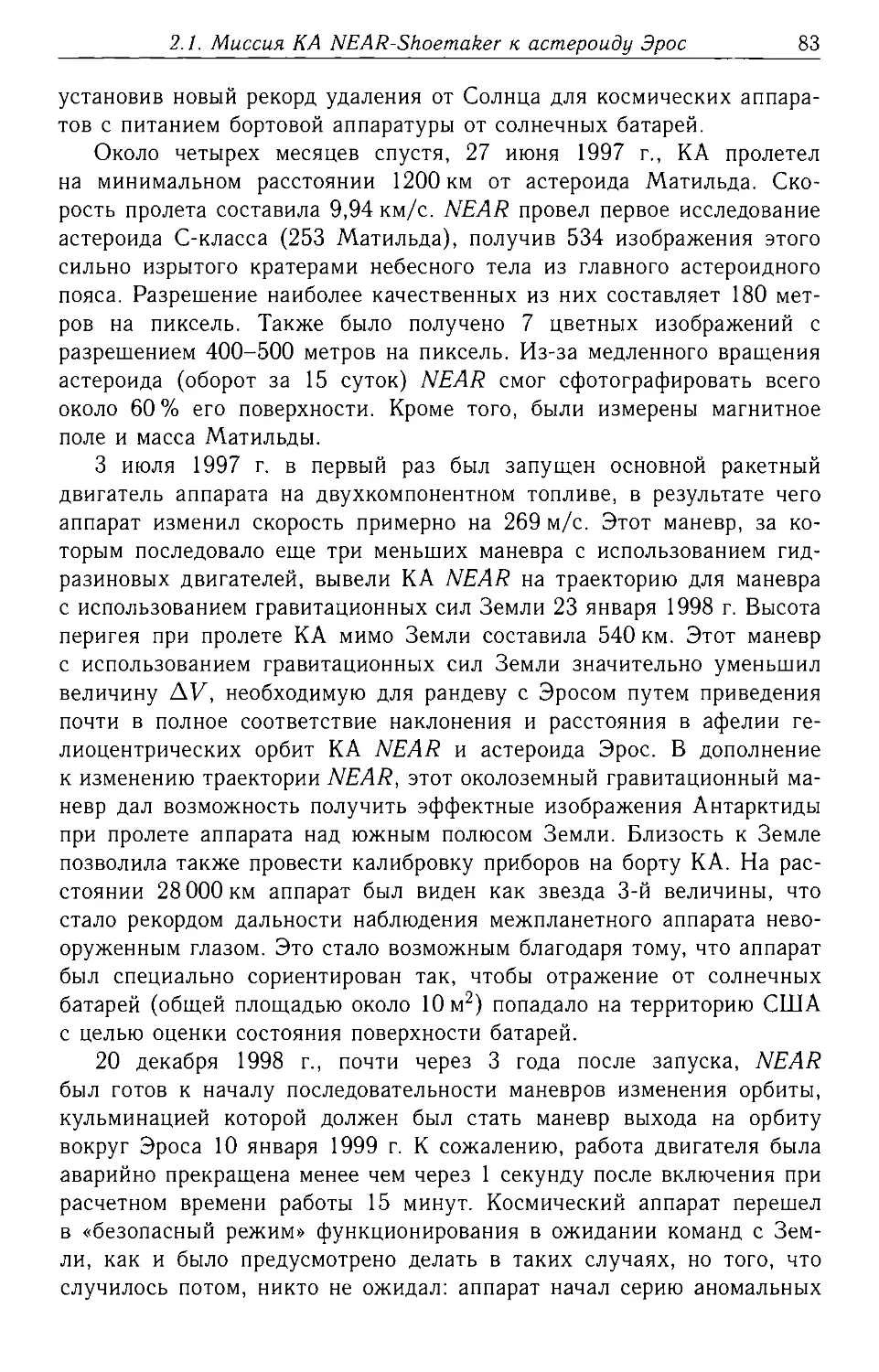
2.1. Миссия КА NEAR-Shoemaker к астероиду Эрос.............. 78
2.2. Миссия Hayabusa........................................ 89
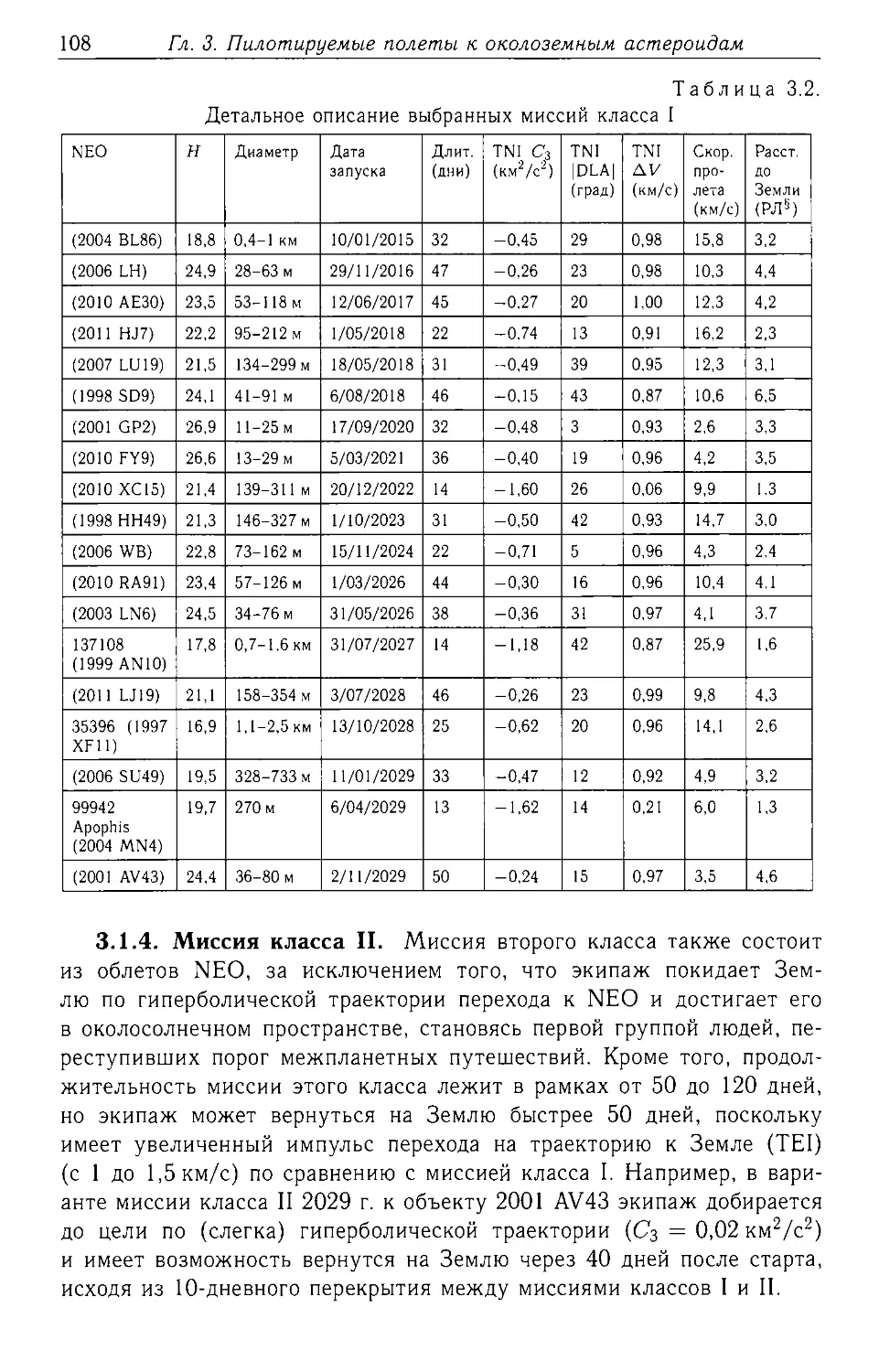
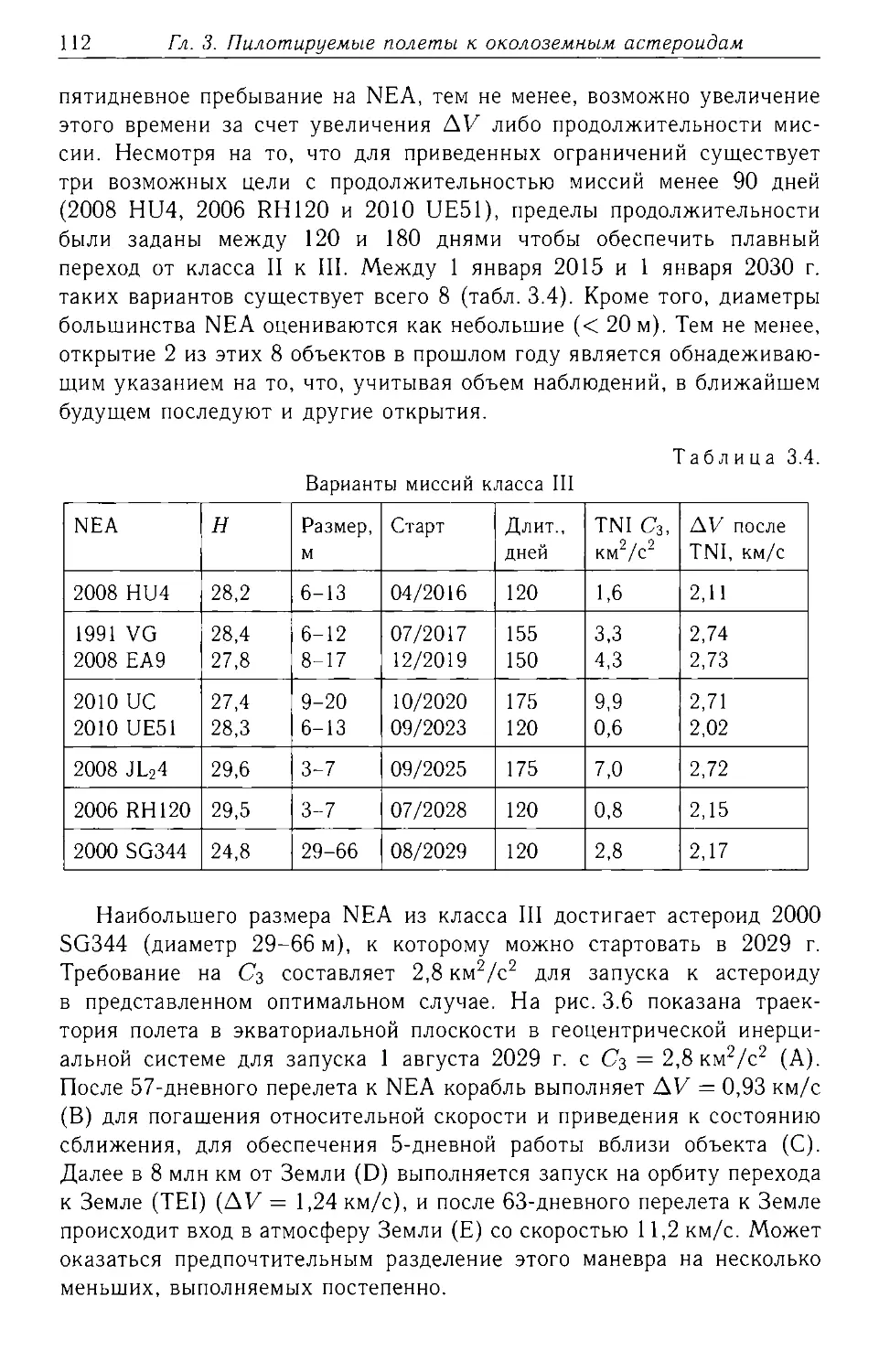
Глава 3. Пилотируемые полеты к околоземным астероидам........... 99
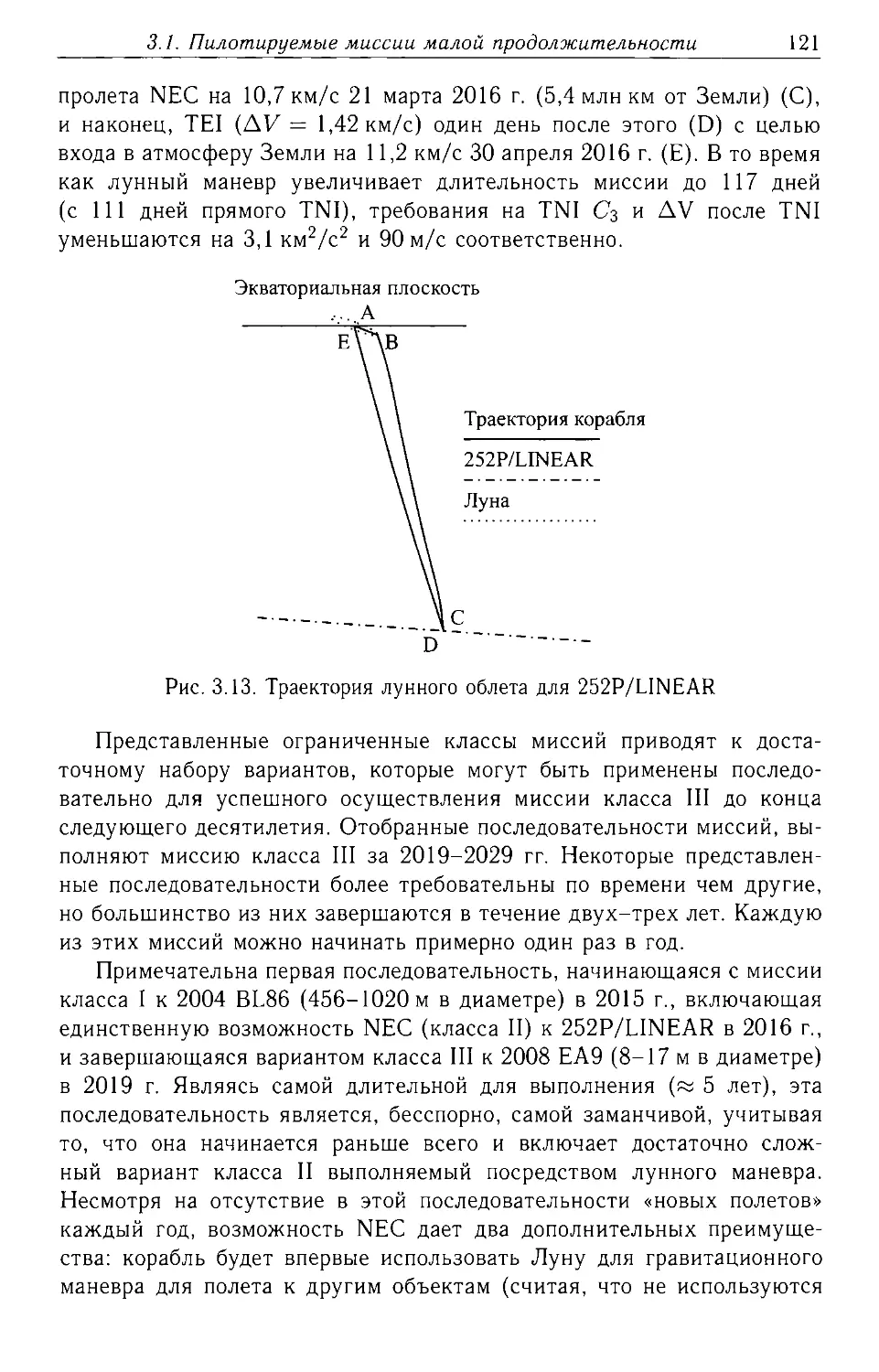
3.1. Переступая порог в межпланетное пространство: пилотируемые
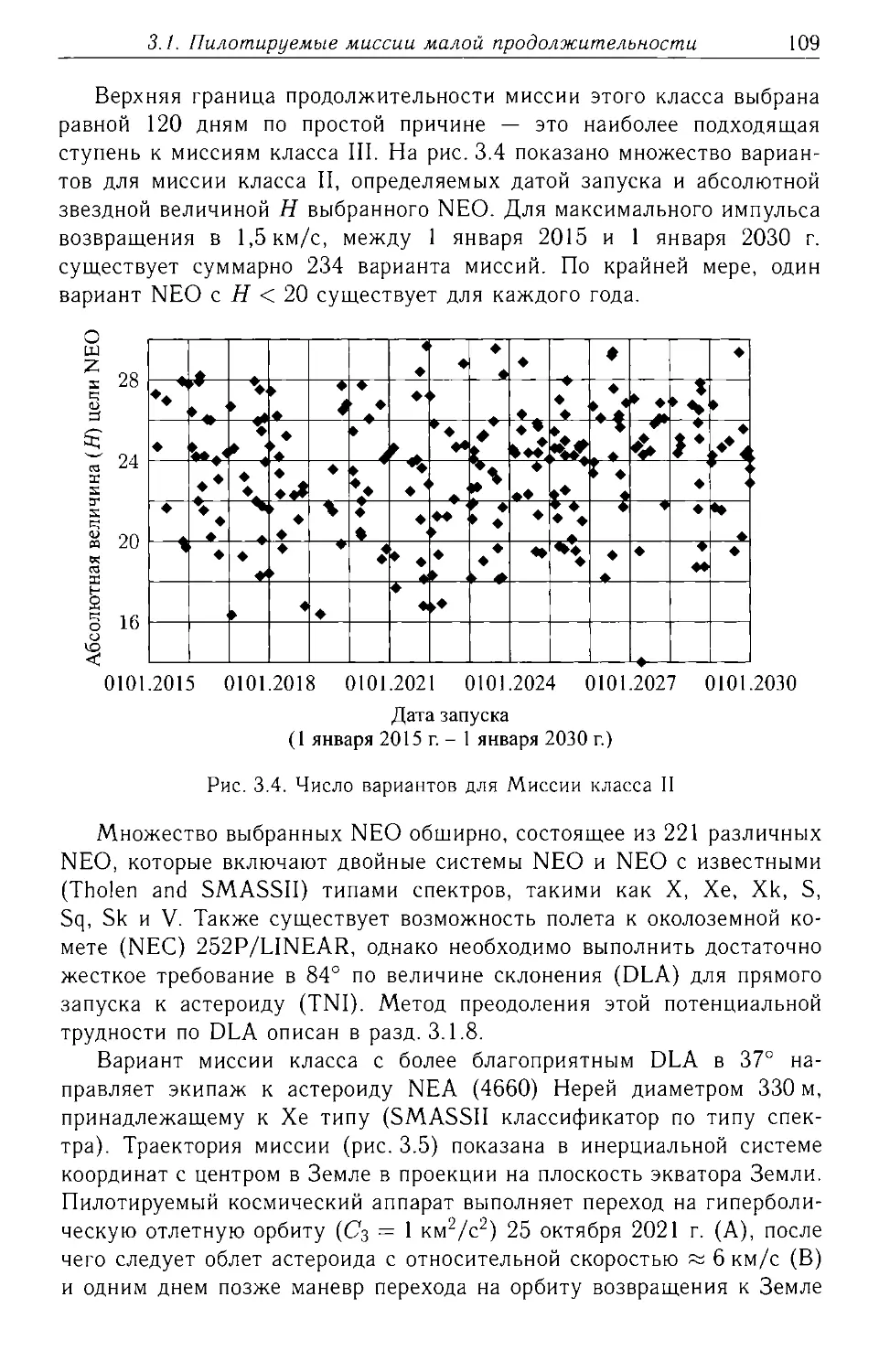
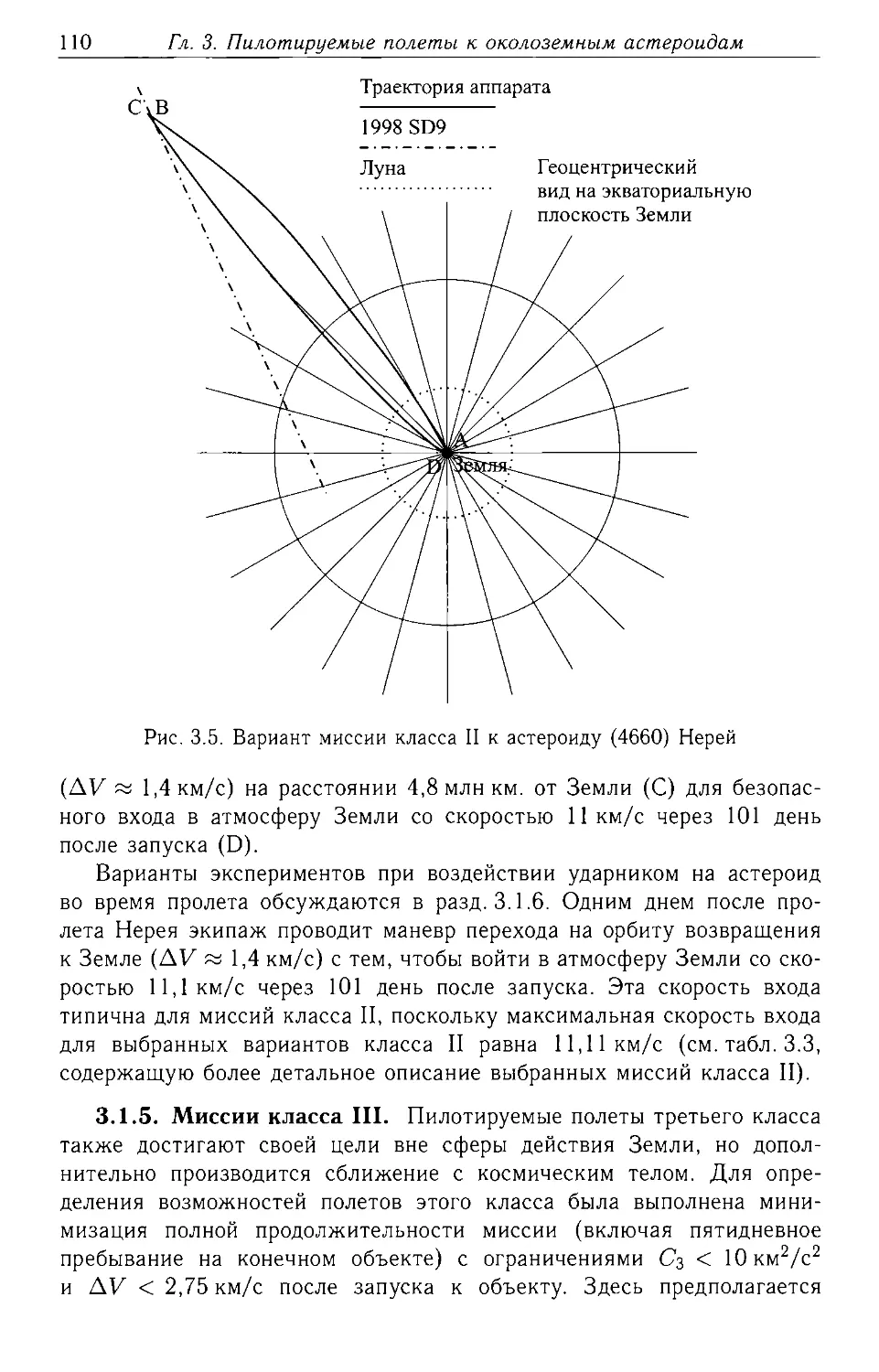
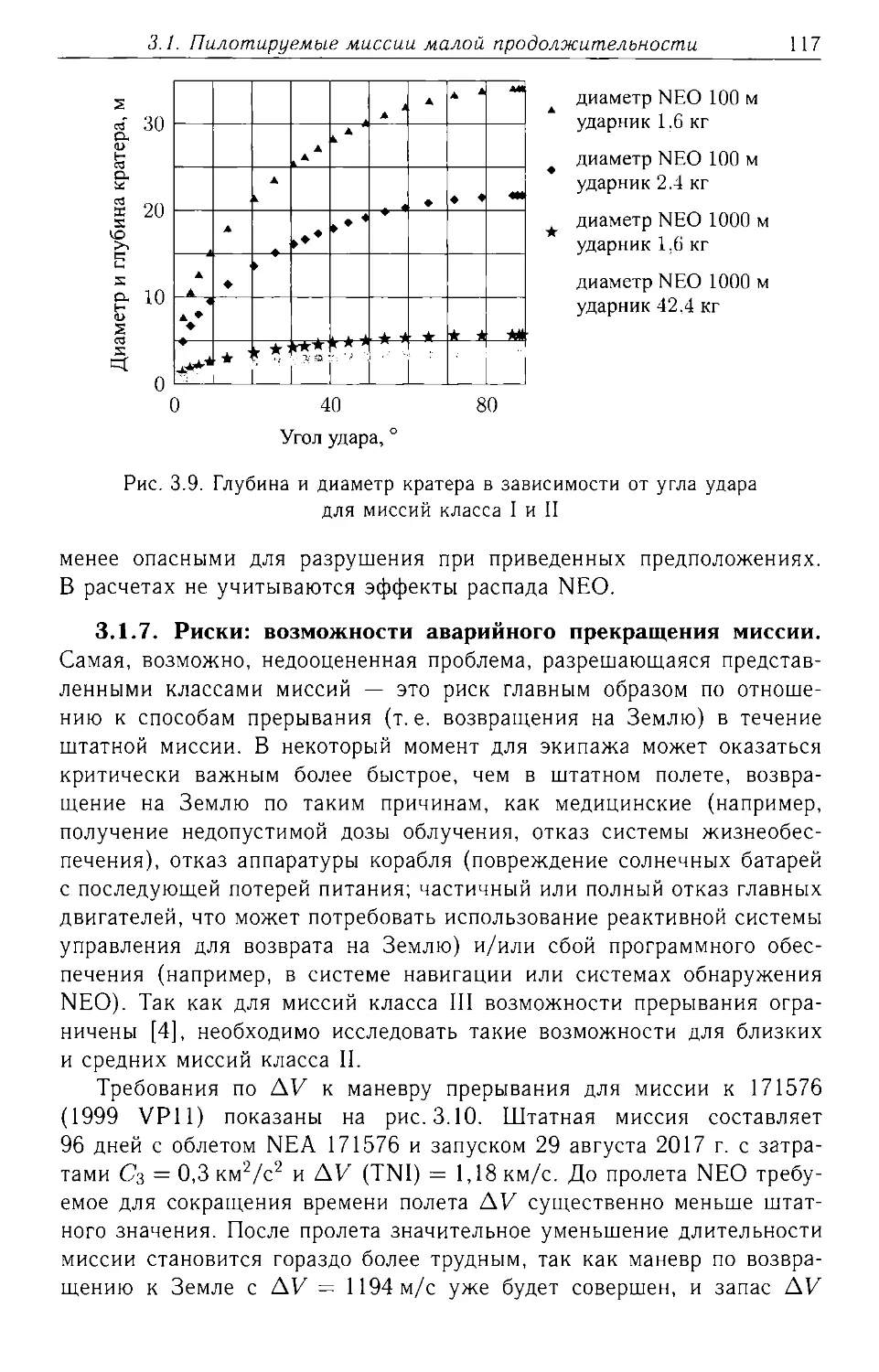
миссии малой продолжительности к околоземным объектам ... 99
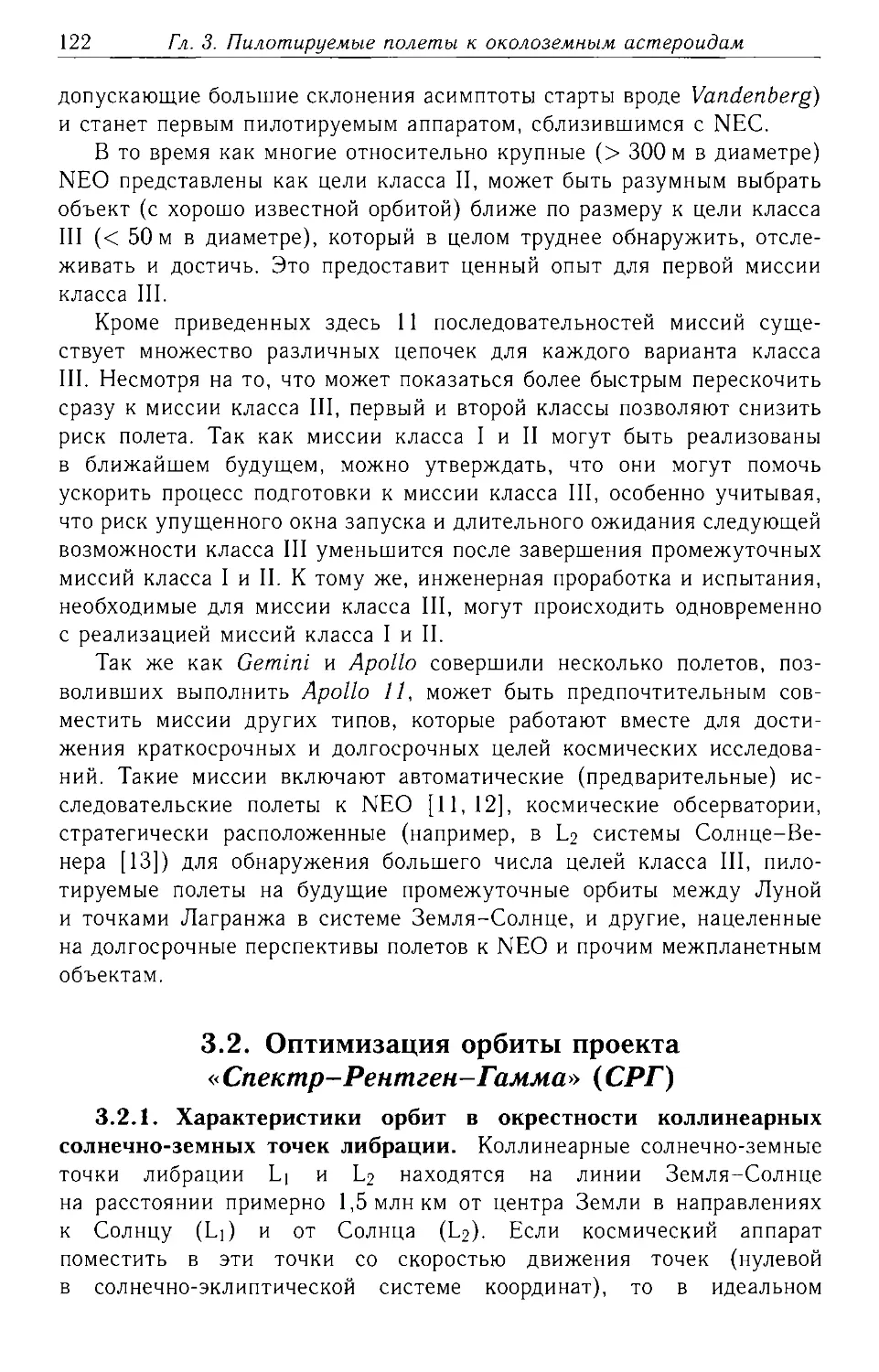
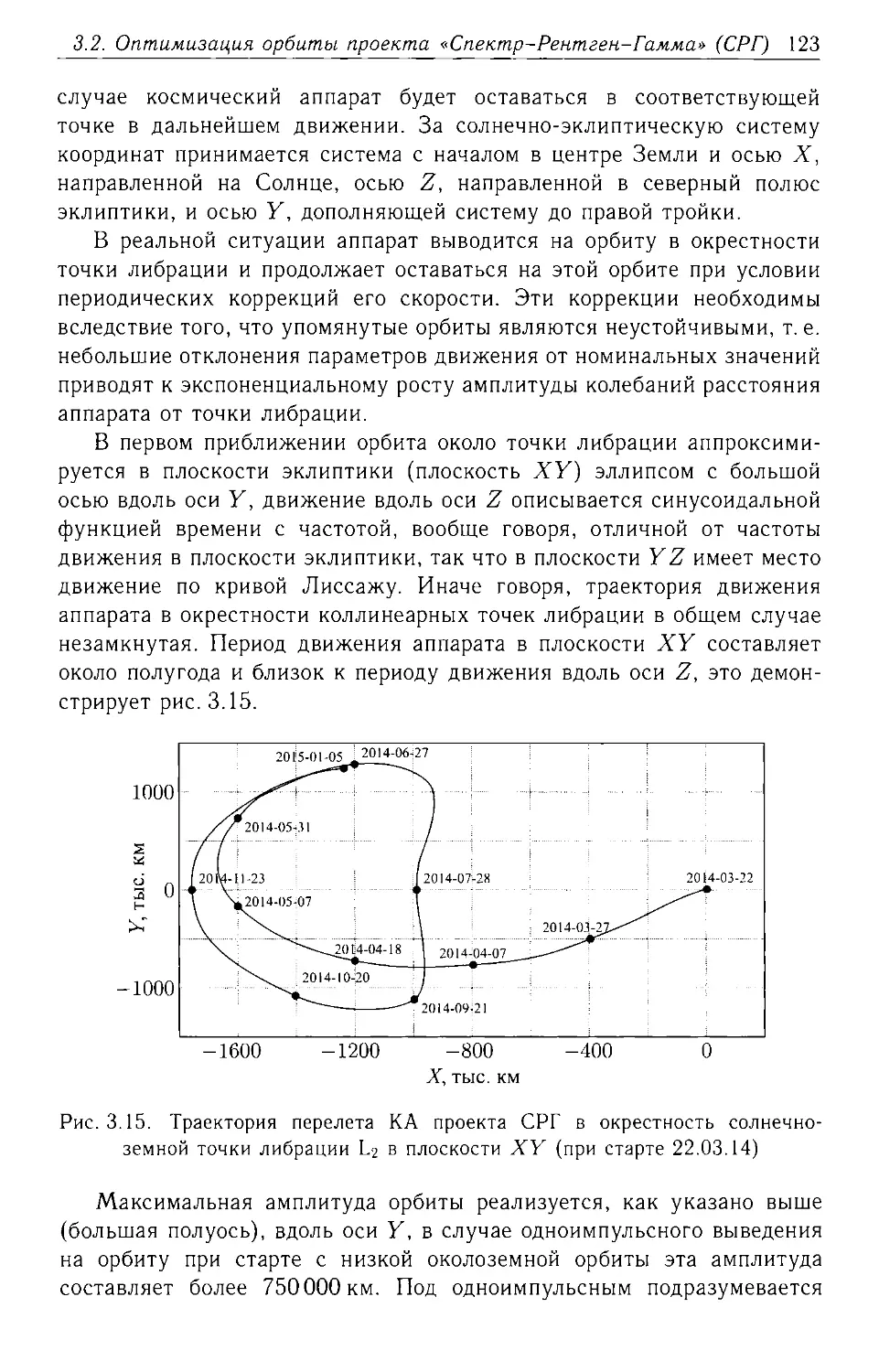
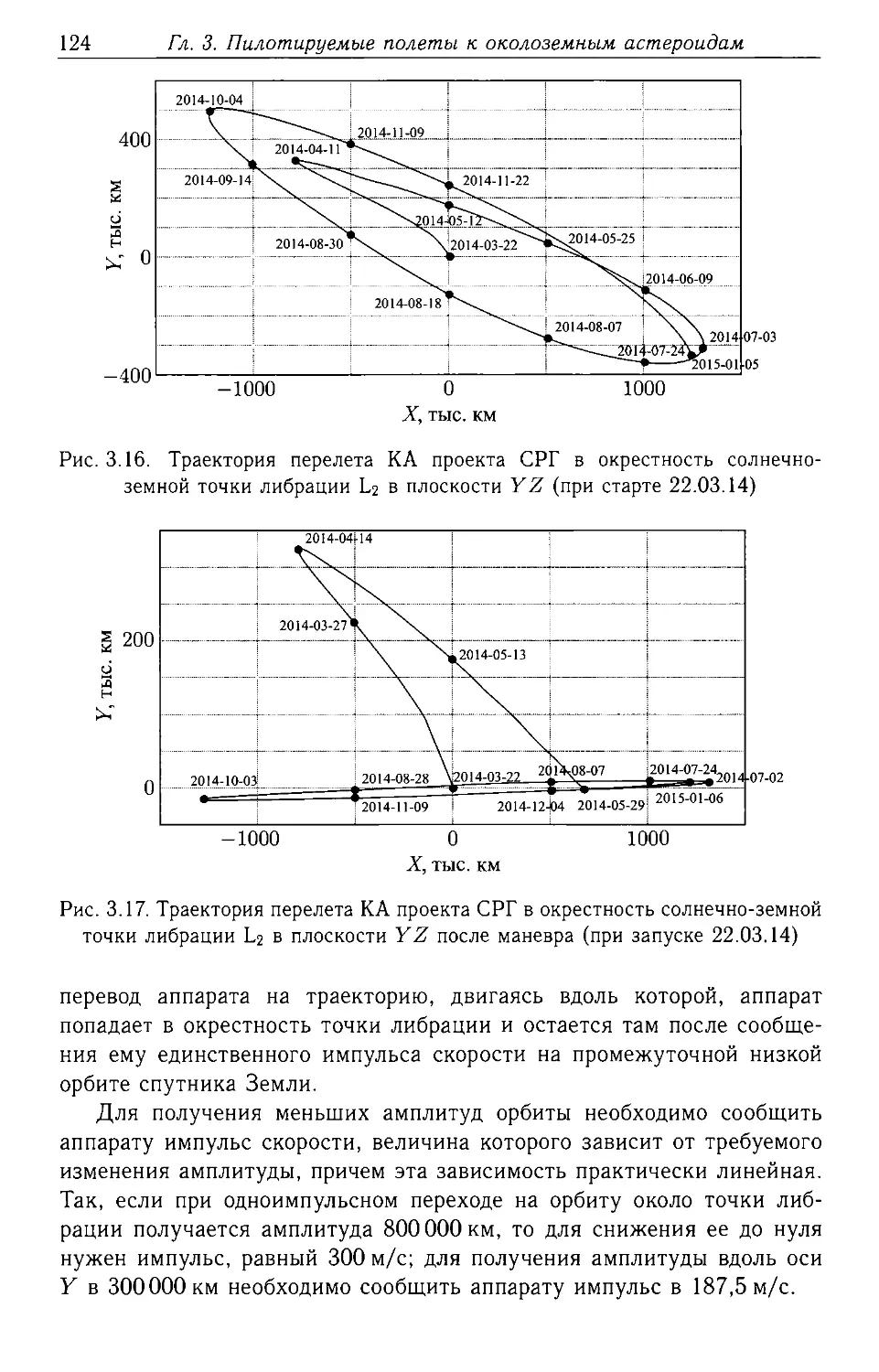
3.2. Оптимизация орбиты проекта «Спектр-Рентген-Гамма» (СРГ) 122
Список литературы к главе 3............................ 131
Глава 4. Разработка методов управления орбитальным движени-
ем для траекторий в окрестности точек либрации............ 134
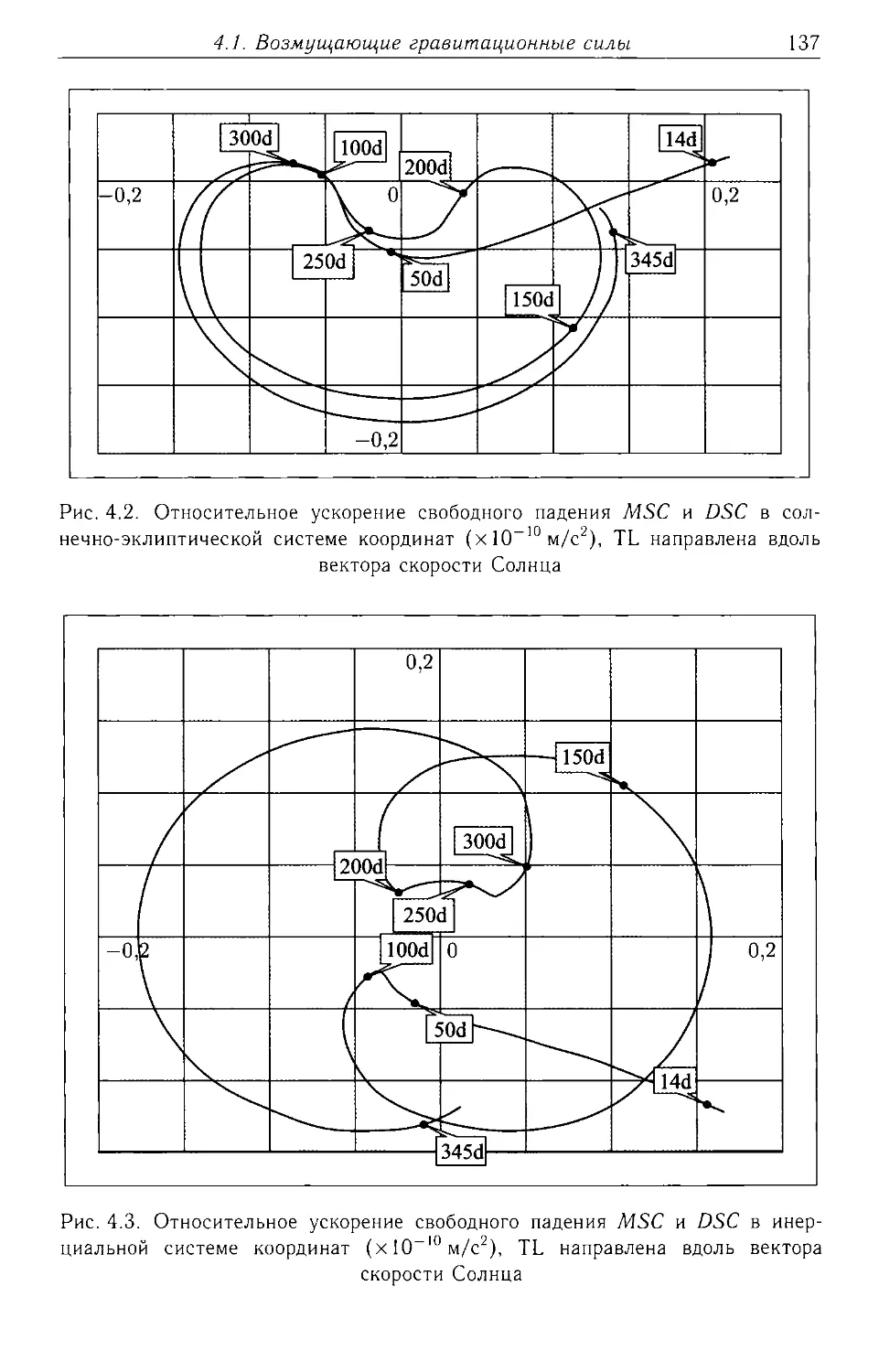
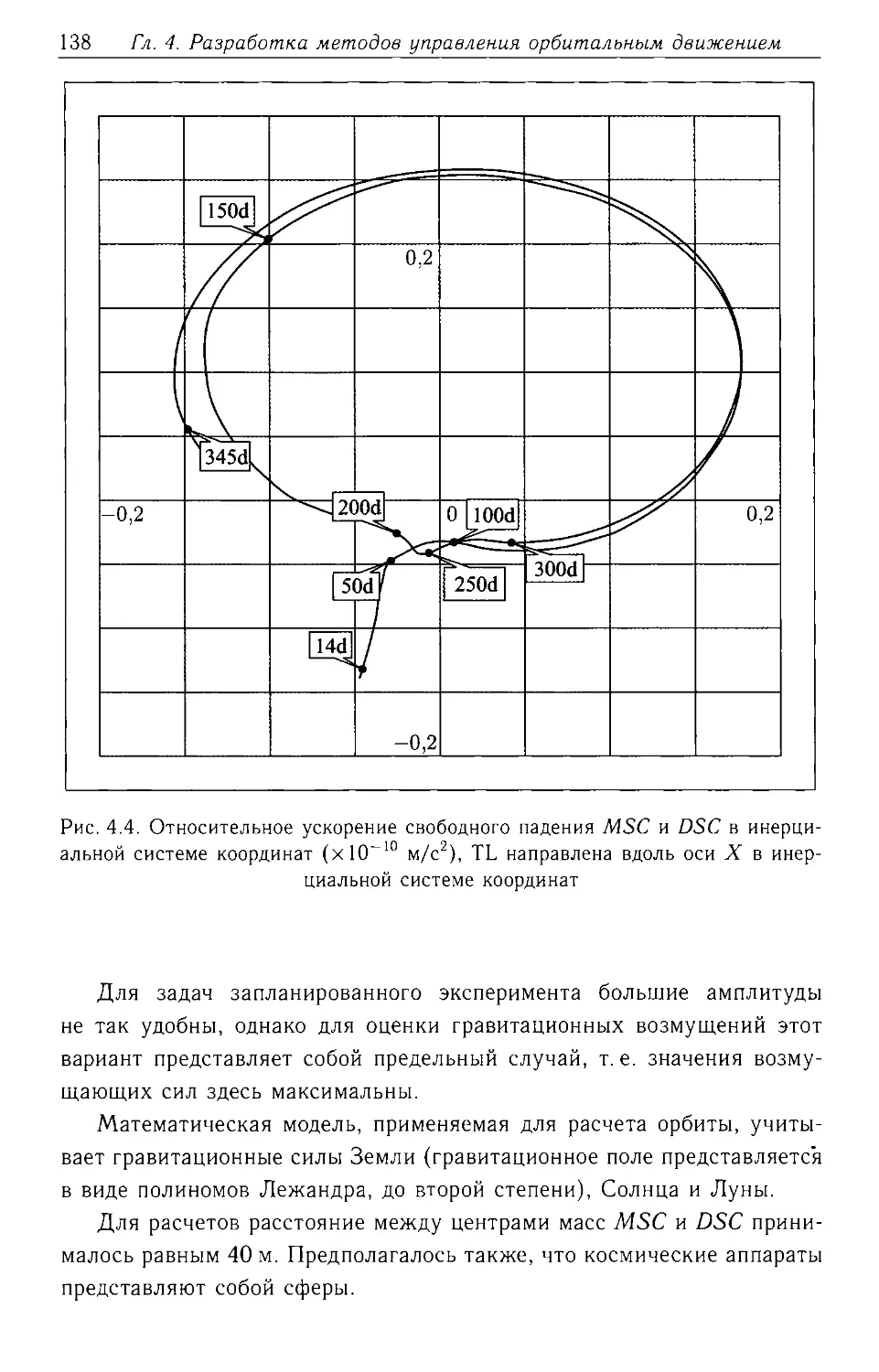
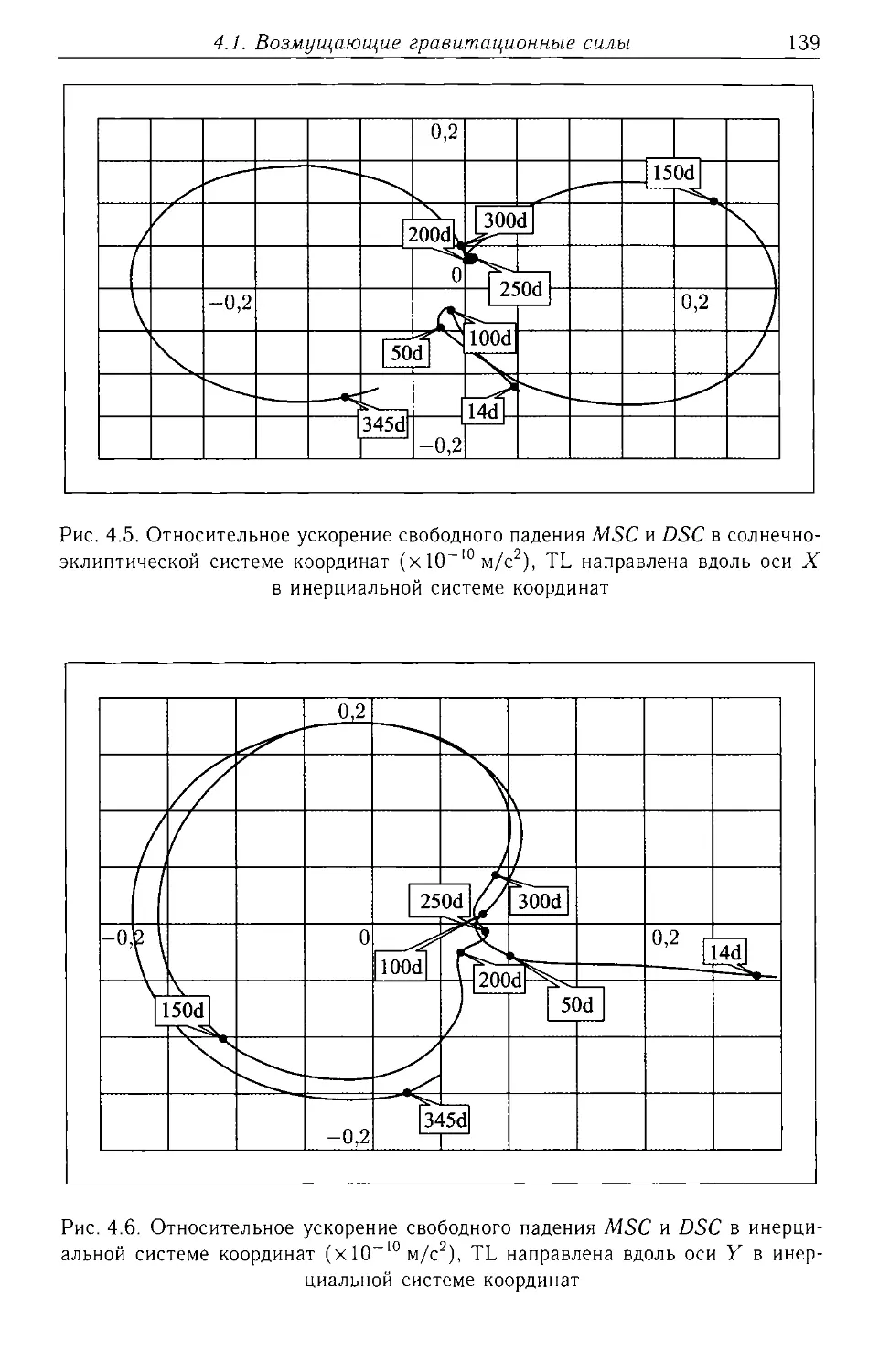
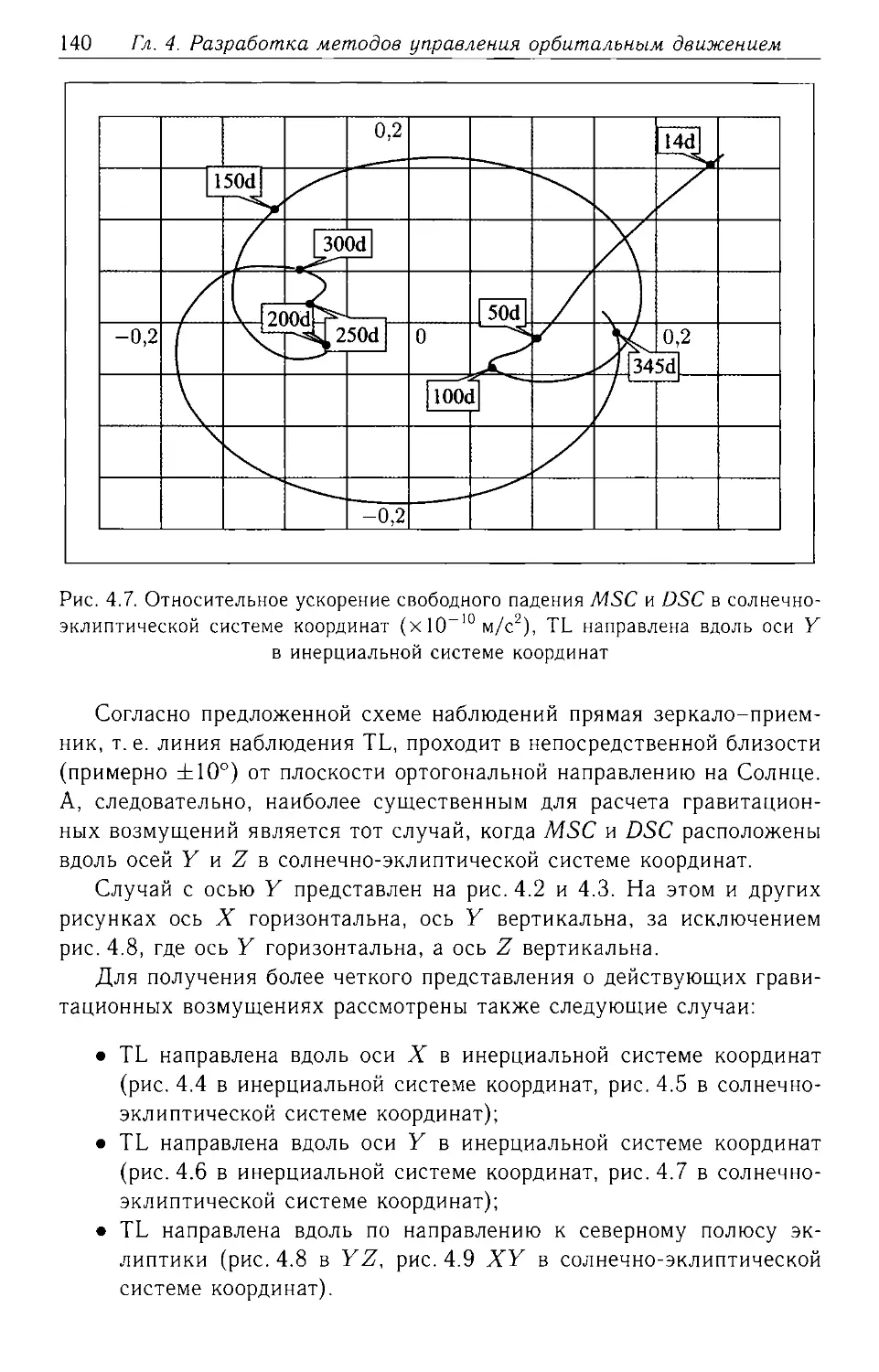
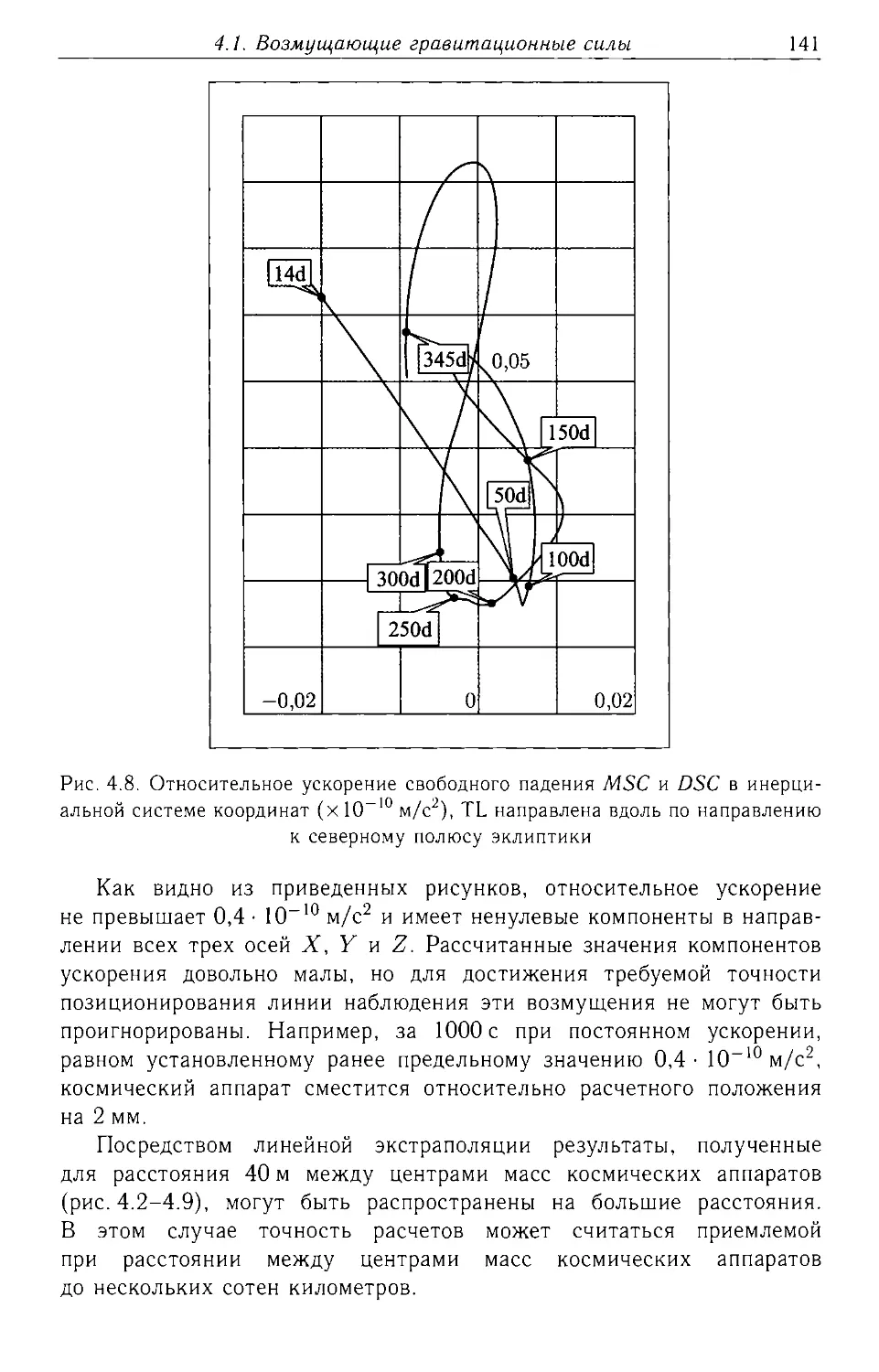
4.1. Возмущающие гравитационные силы....................... 135
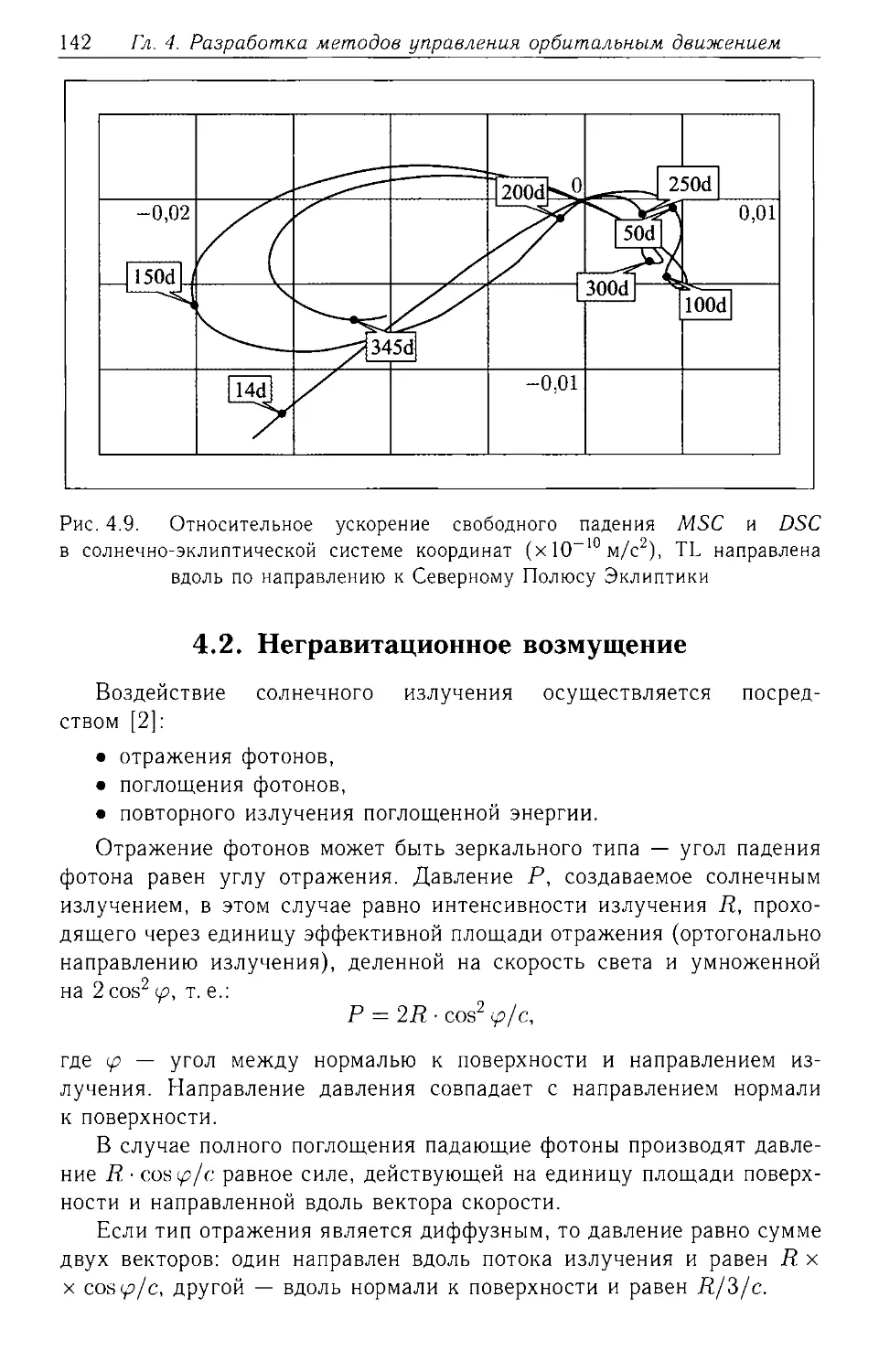
4.2. Негравитационное возмущение........................... 142
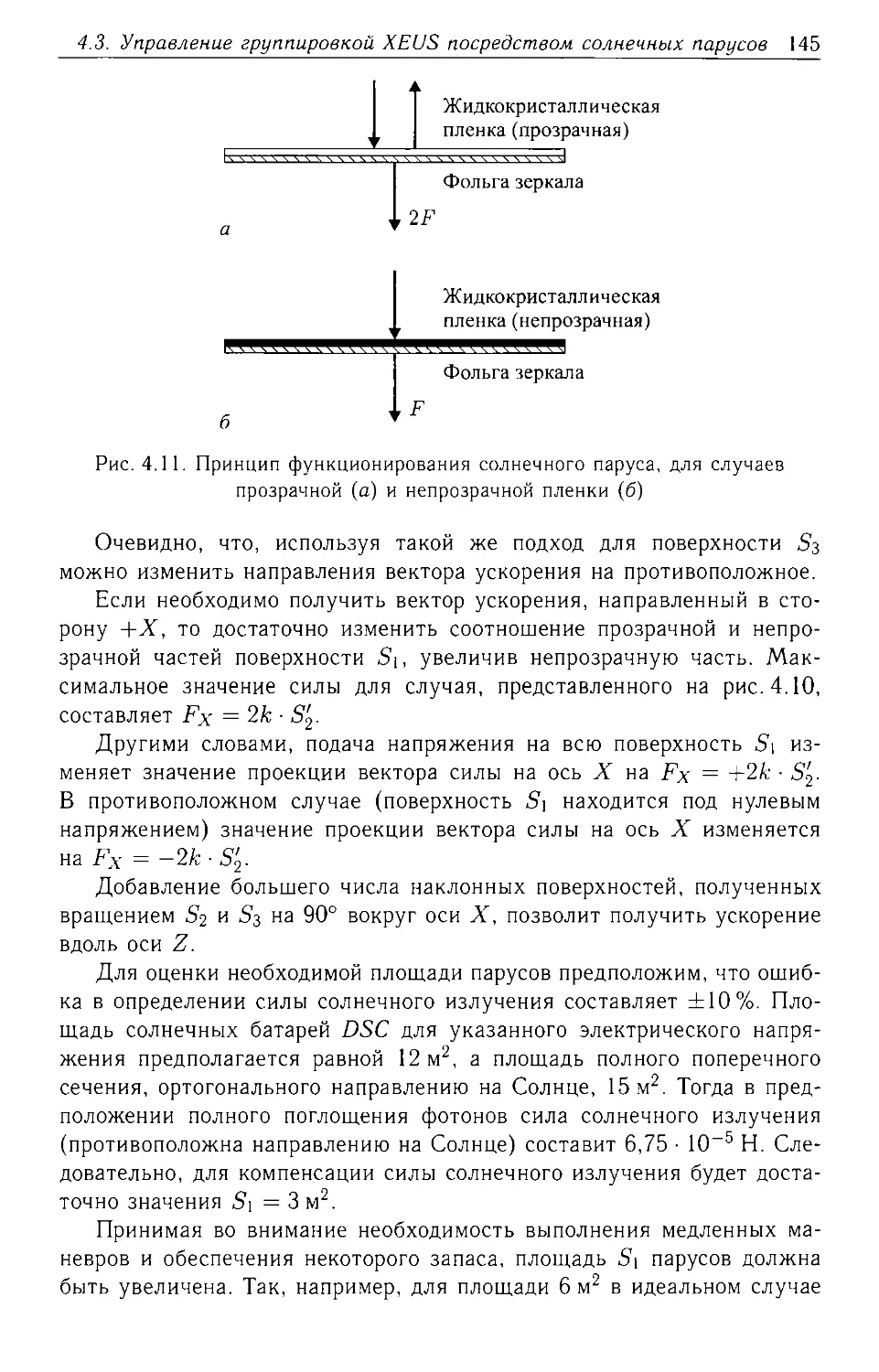
4.3. Управление группировкой XEUS посредством солнечных парусов 144
4.4. Построение траектории движения космического аппарата
в окрестности точки либрации L,............................ 146
4.5. Построение гало-орбиты в окрестности точки либрации L2 . . . . 150
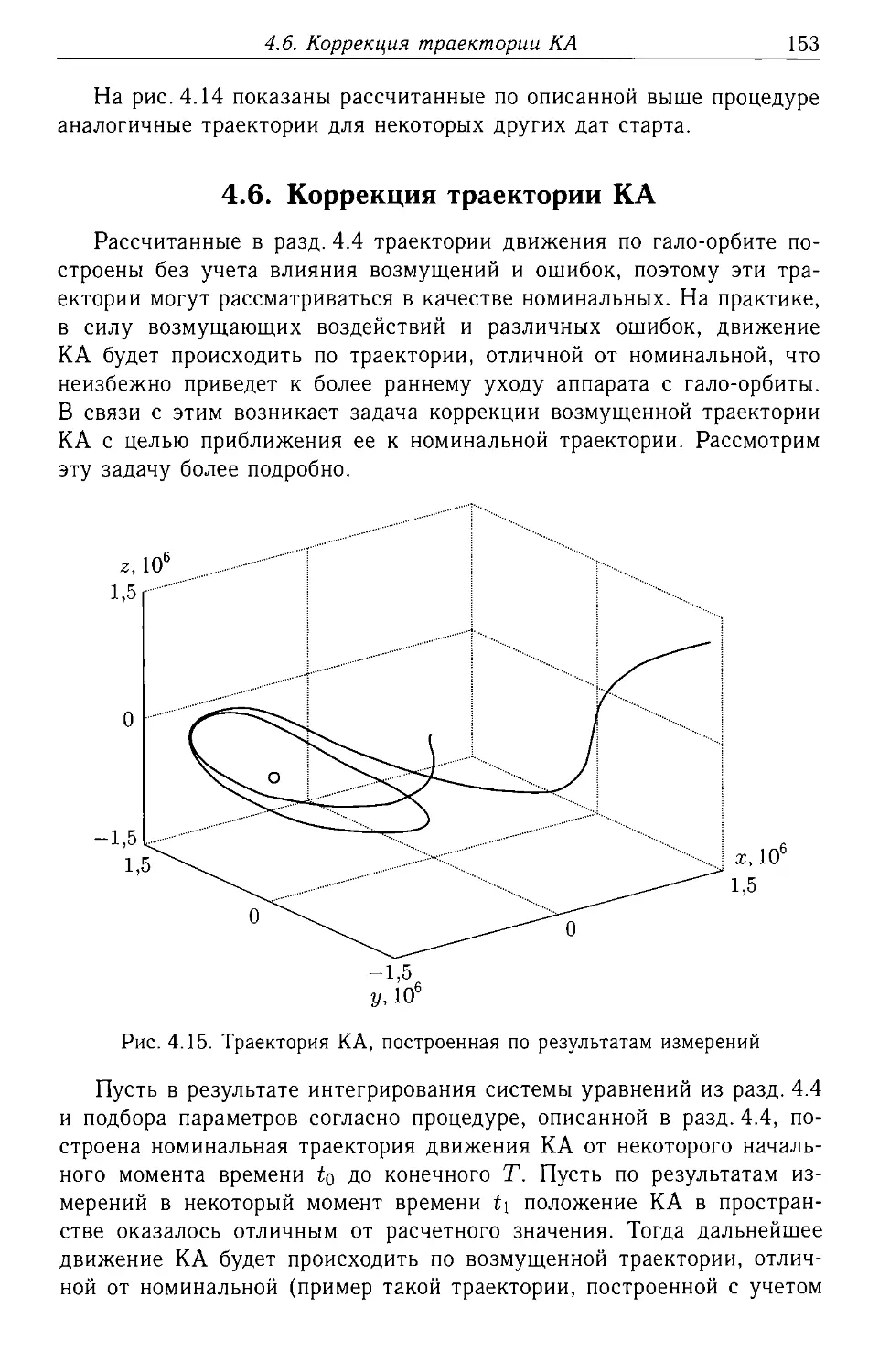
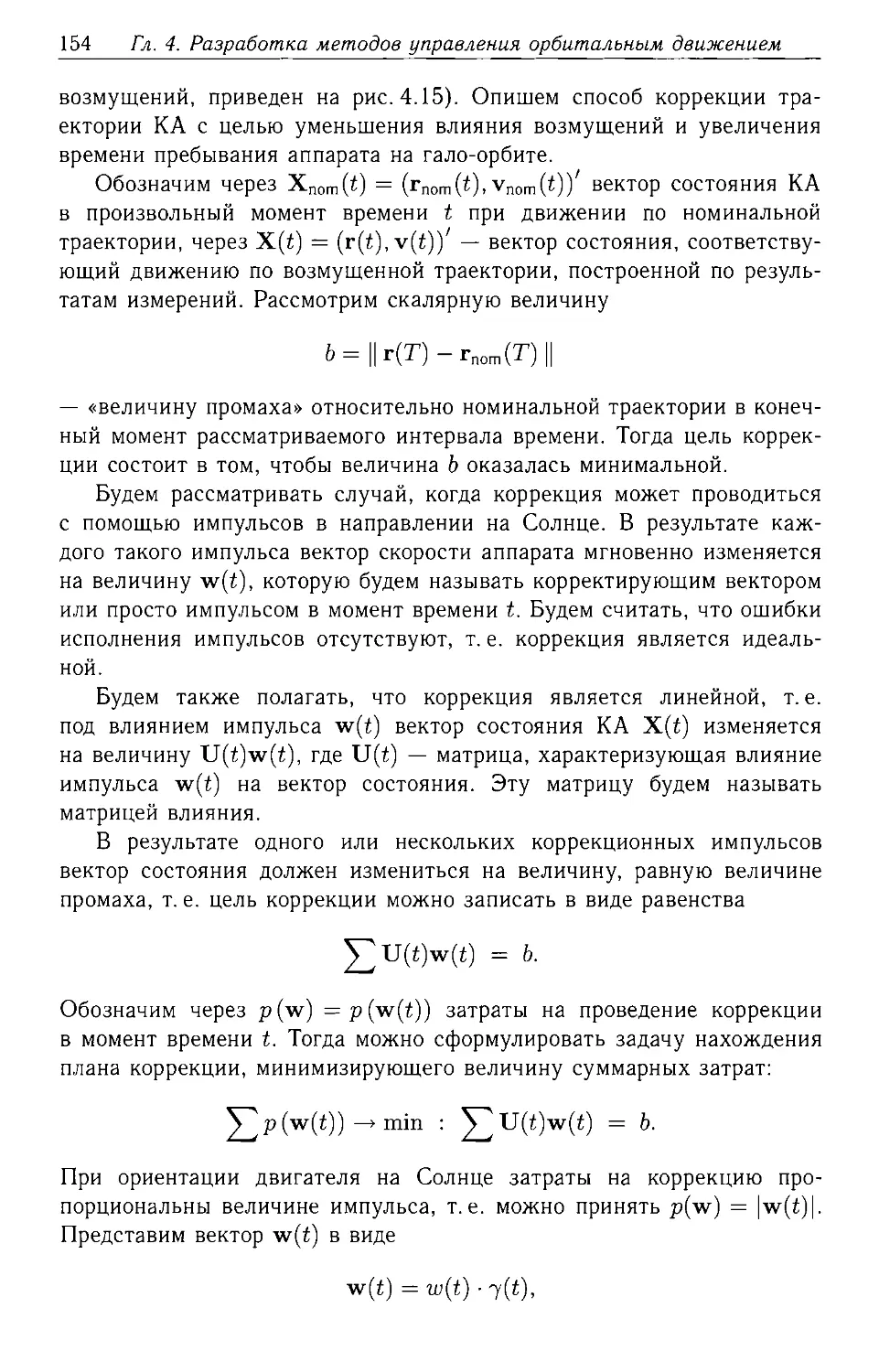
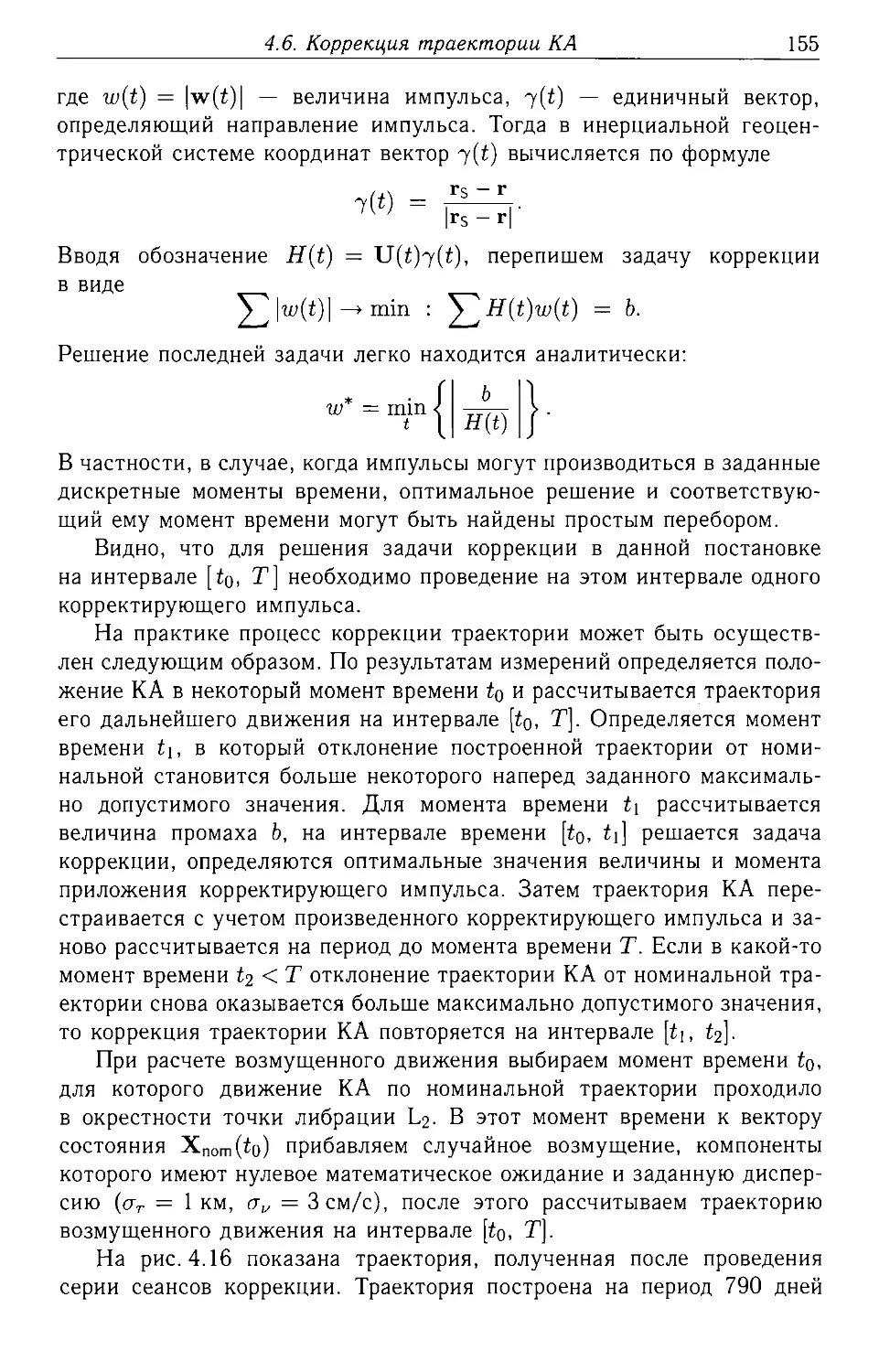
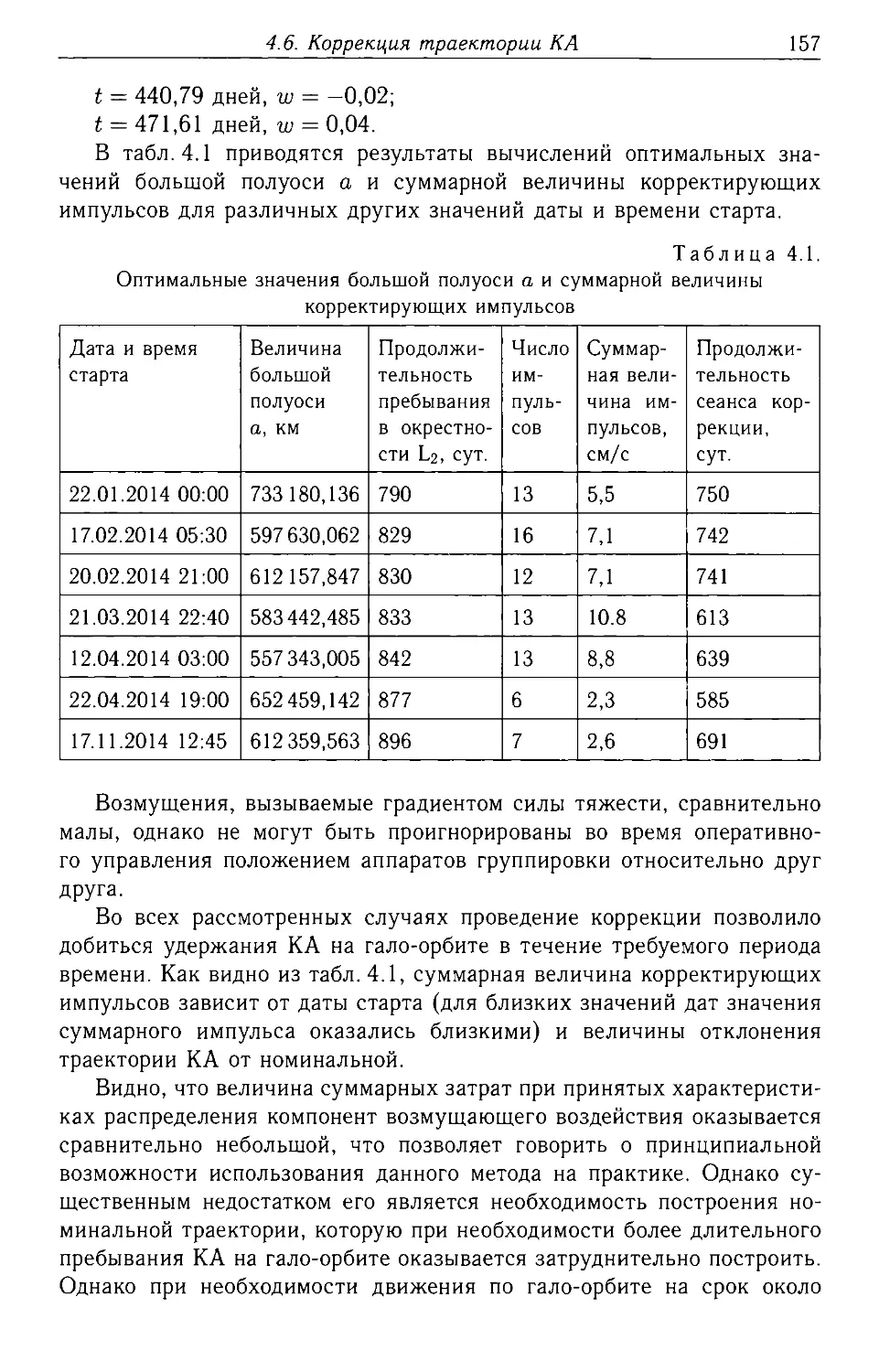
4.6. Коррекция траектории КА............................... 153
Список литературы к главе 4............................ 158
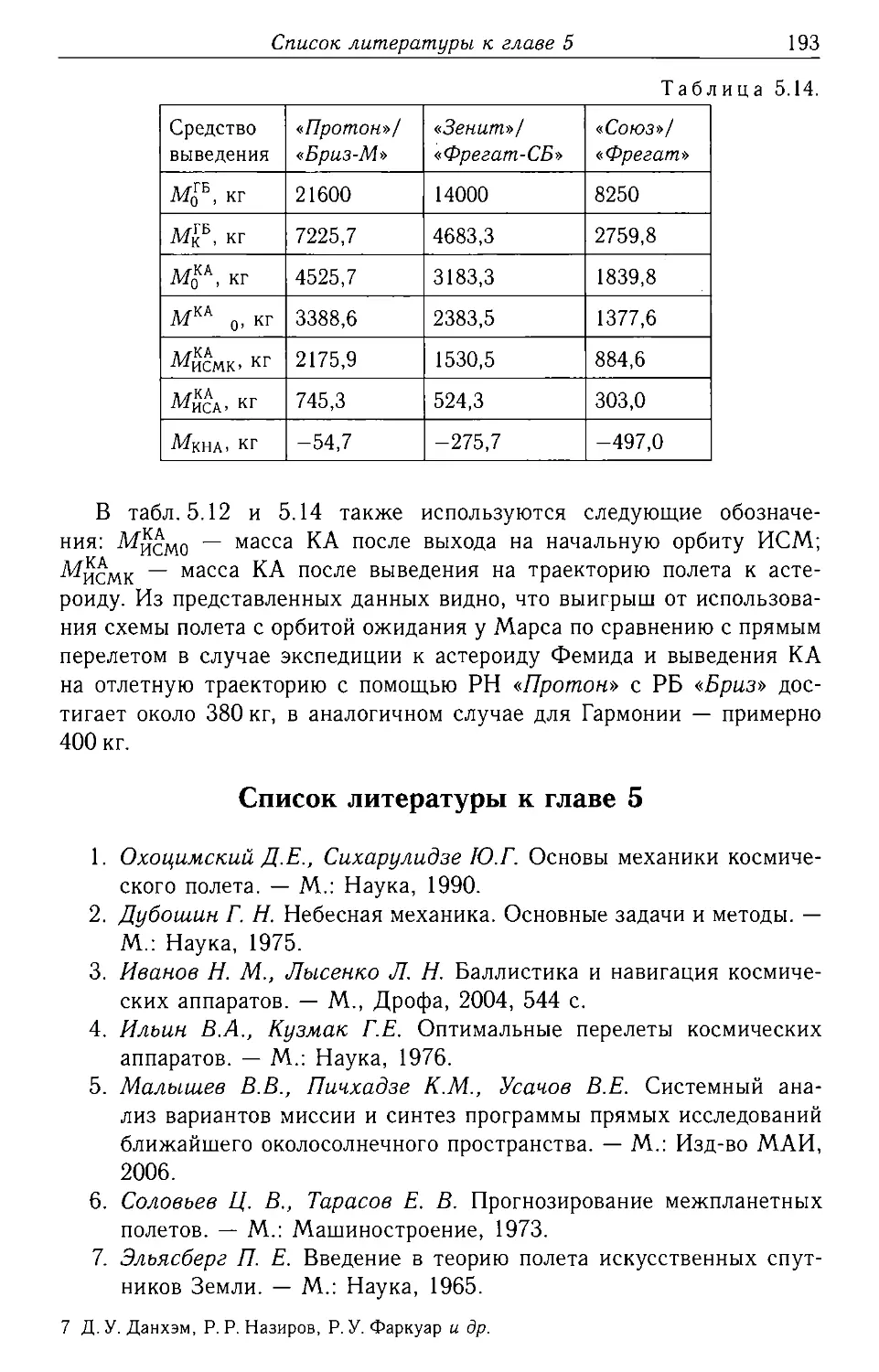
Глава 5. Схема полета к астероидам Главного пояса с использова-
нием орбит искусственного спутника Марса.................. 159
5.1. Постановка задачи..................................... 161
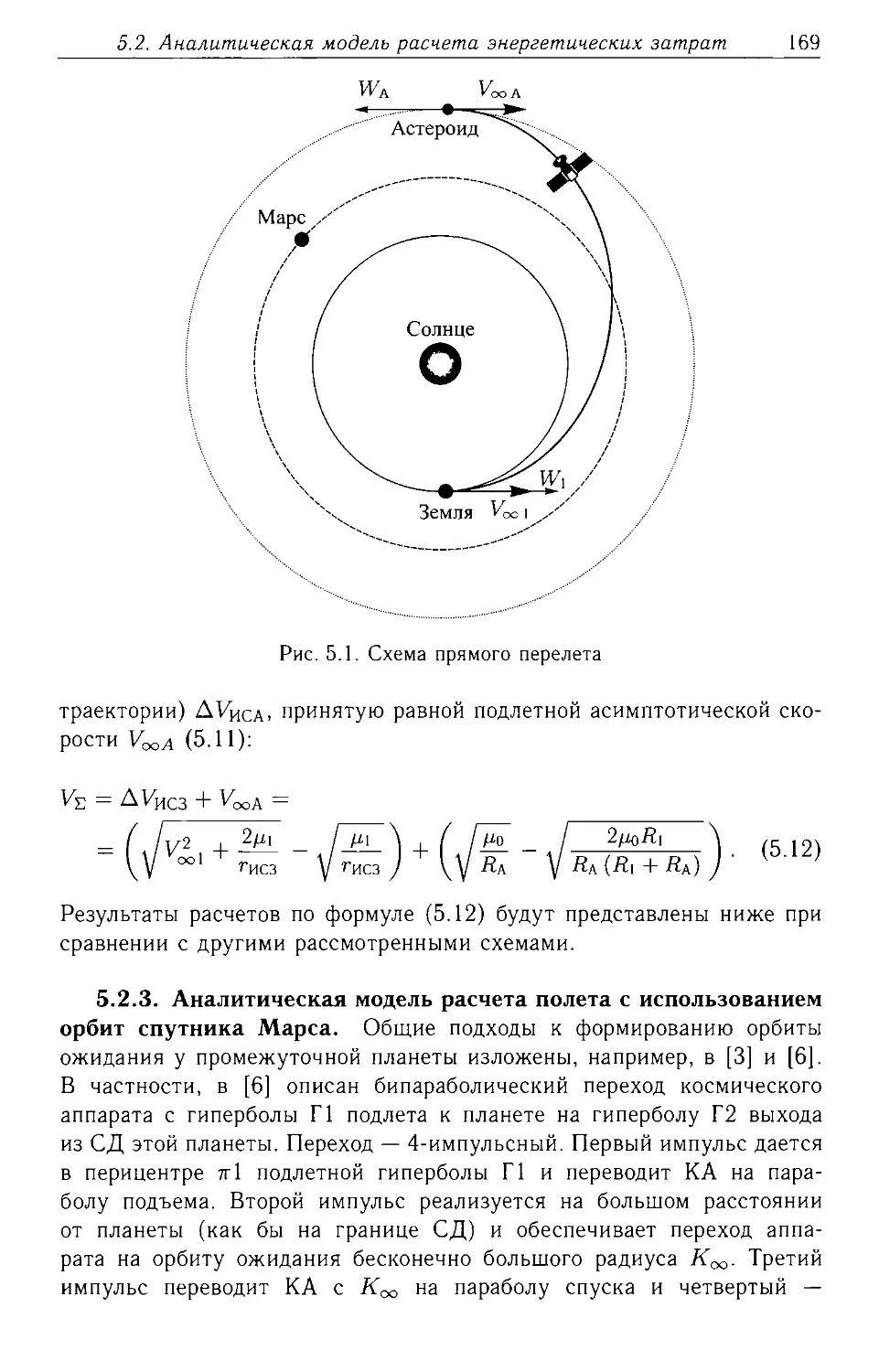
5.2. Аналитическая модель расчета энергетических затрат.... 166
4
Оглавление
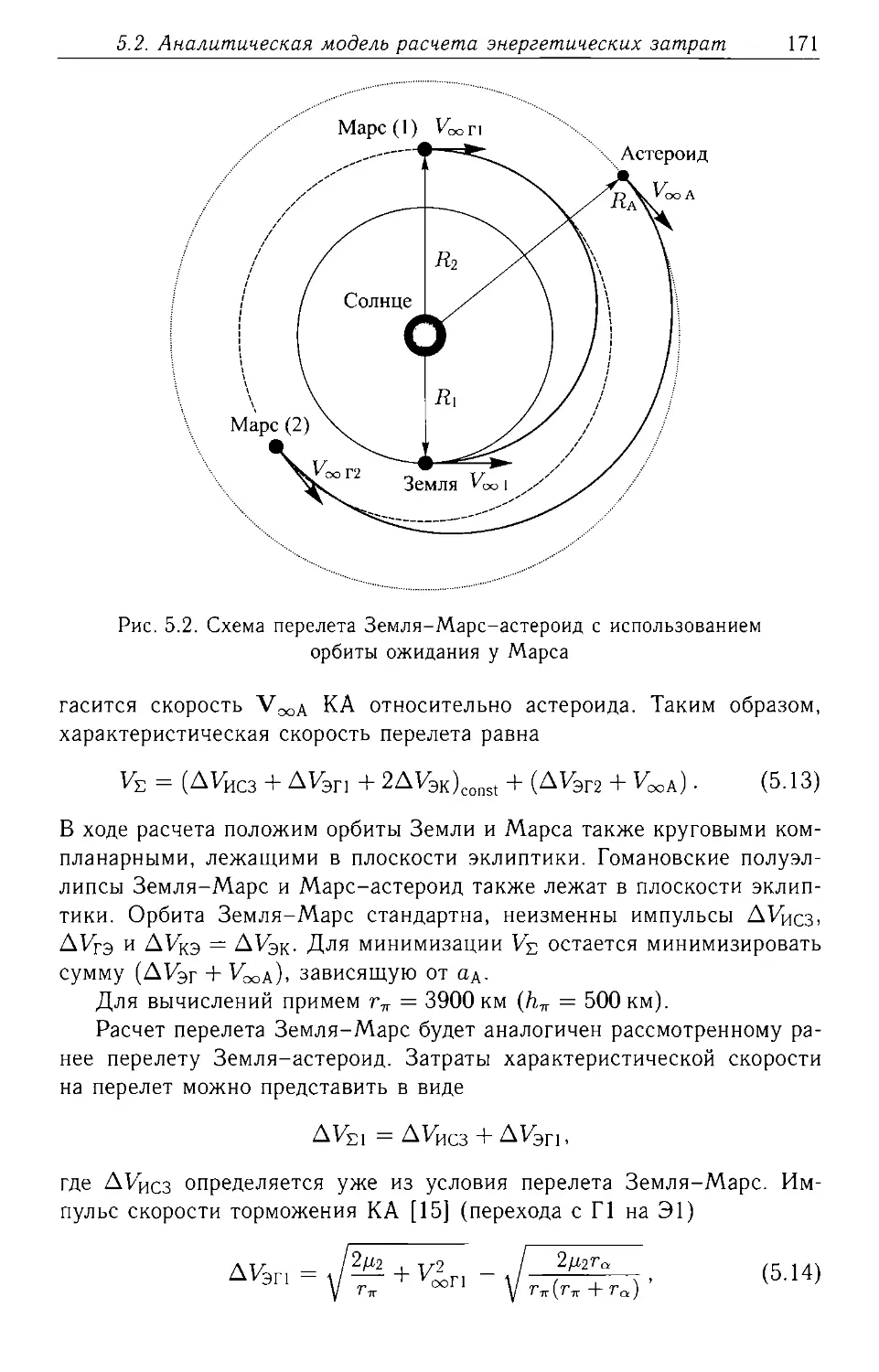
5.3. Численная модель расчета энергетических затрат схем полетов 174
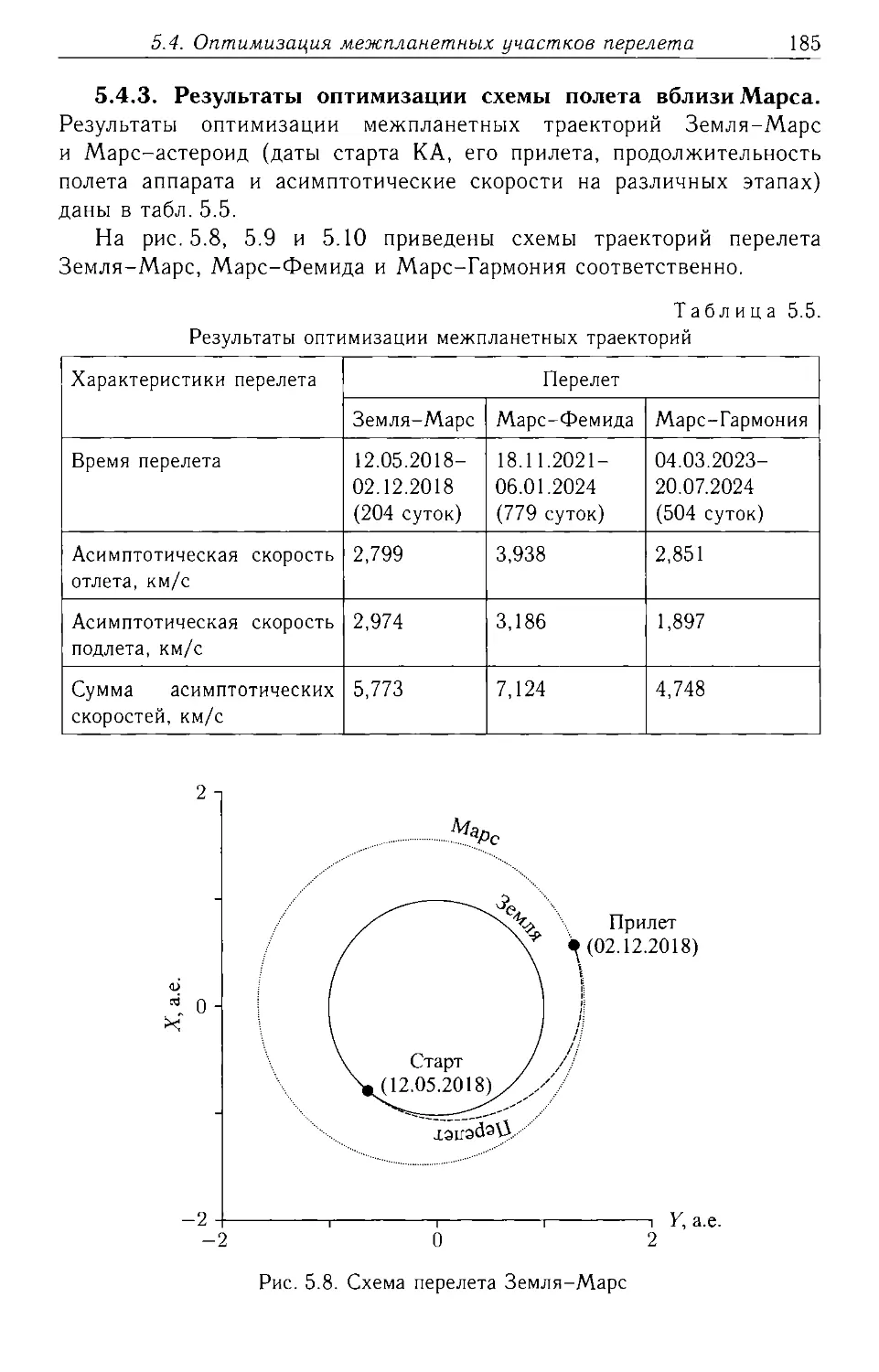
5.4. Оптимизация межпланетных участков перелета................. 180
Список литературы к главе 5................................. 193
Глава 6. Выбор траекторий межпланетных пилотируемых иссле-
довательских миссий....................................... 195
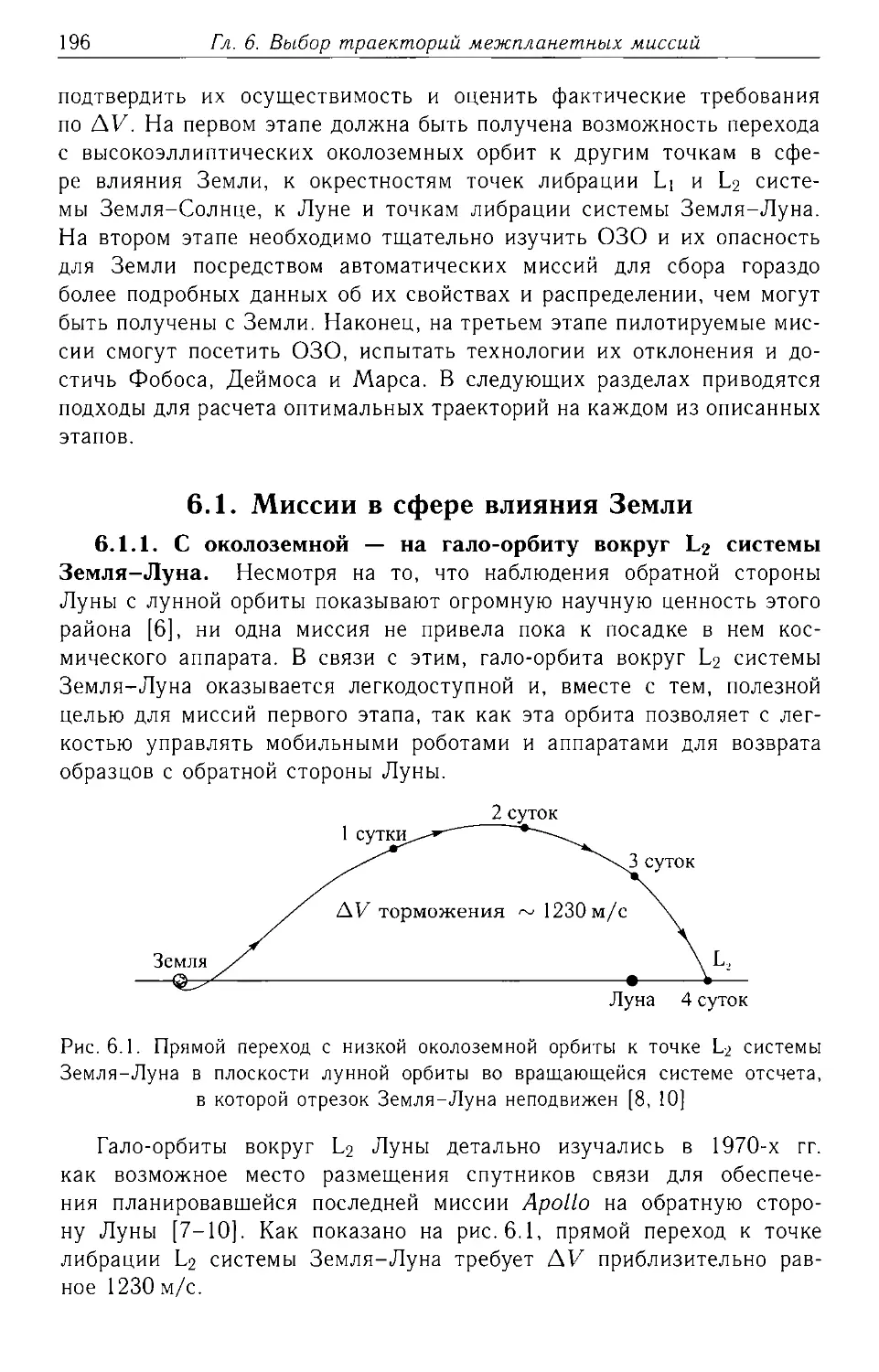
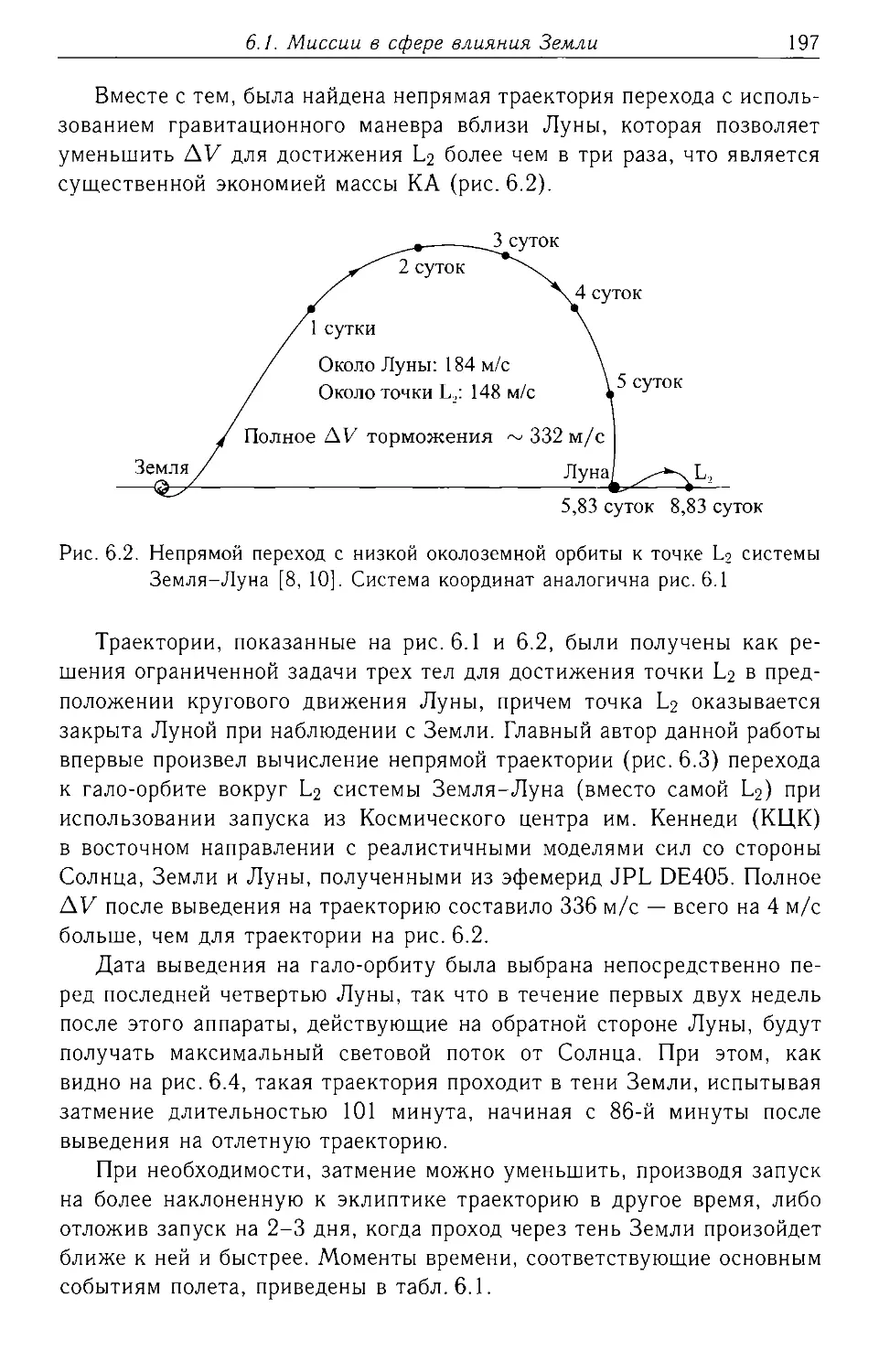
6.1. Миссии в сфере влияния Земли............................... 196
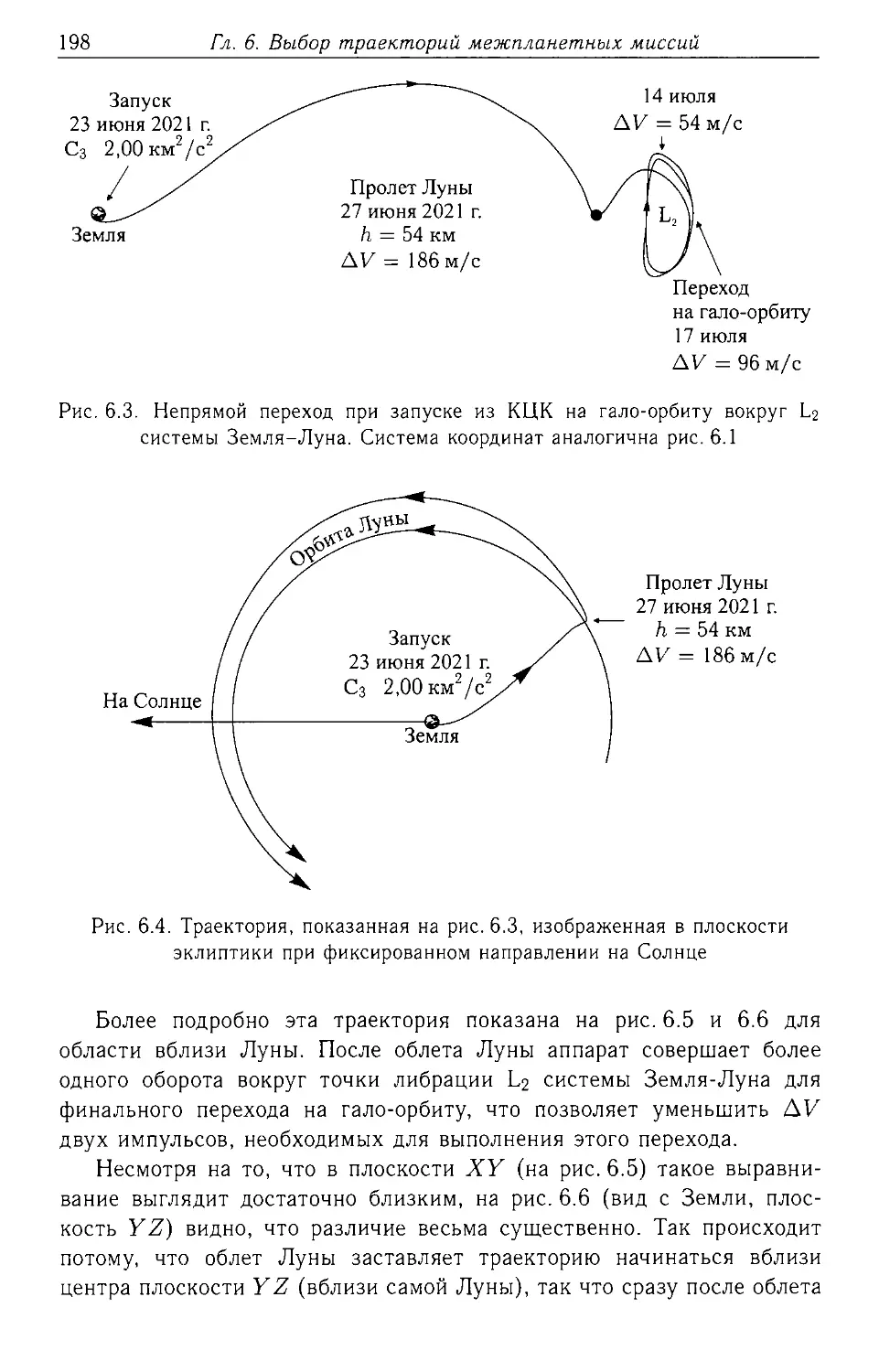
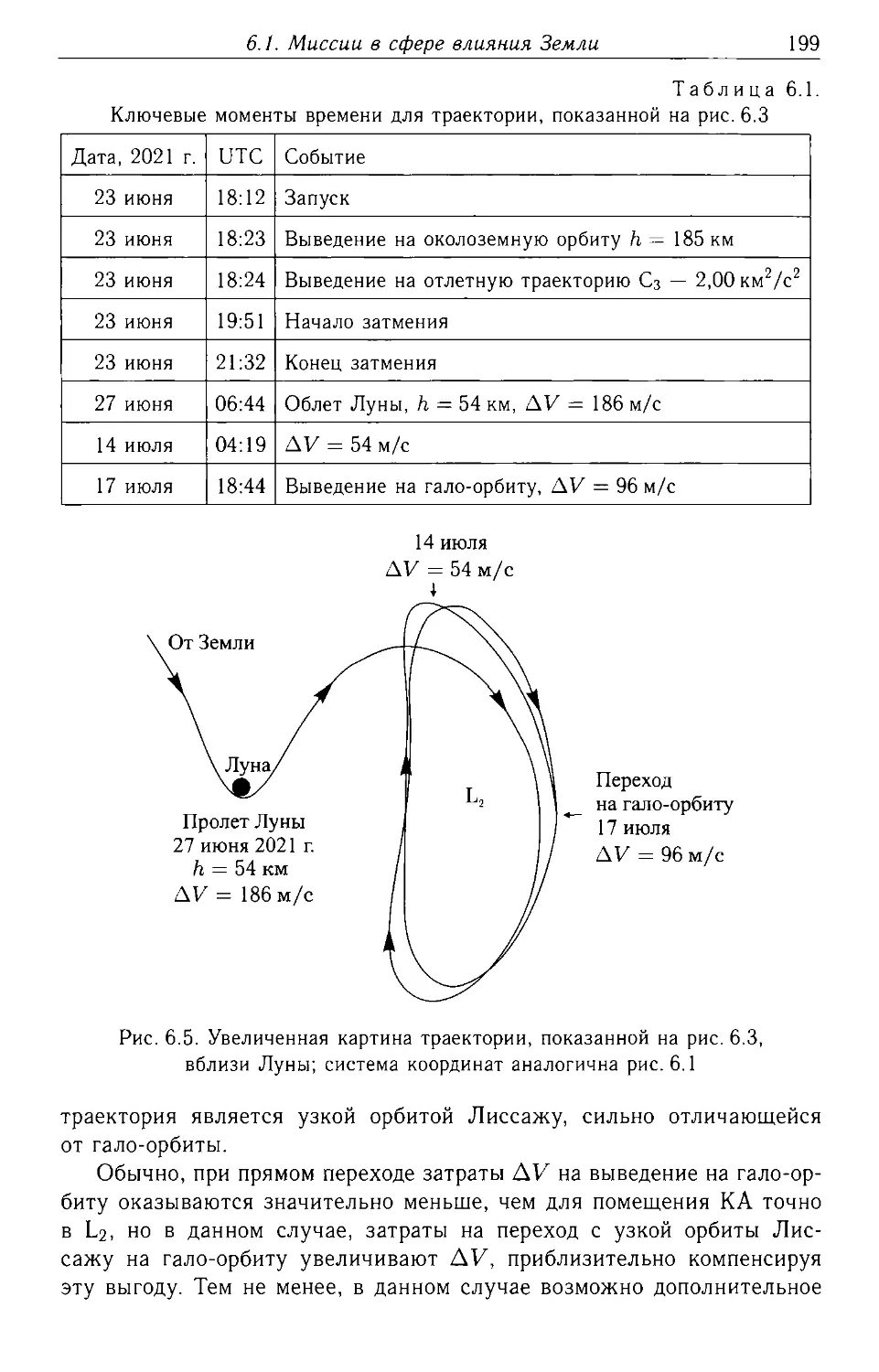
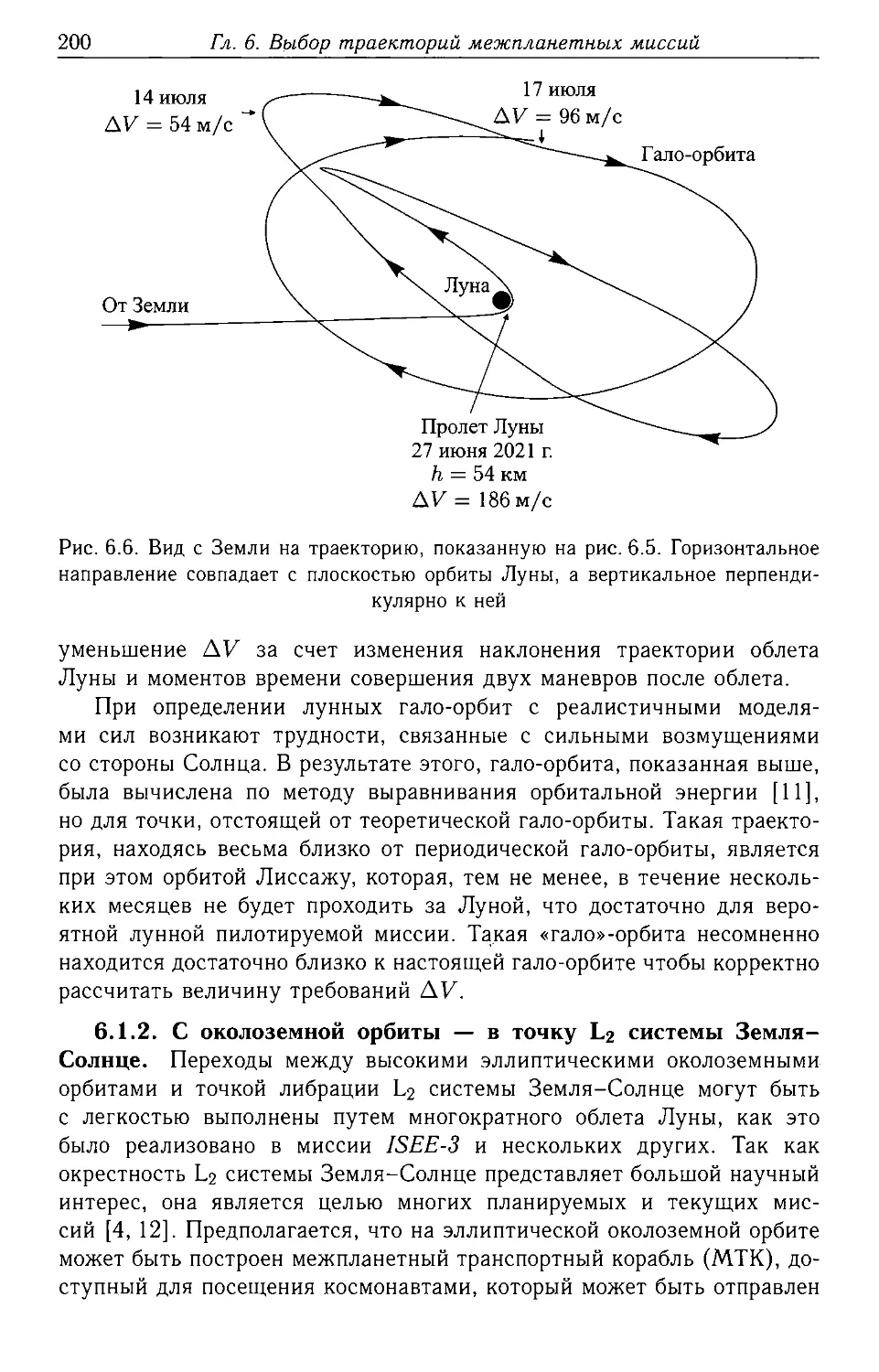
6.2. Миссии за сферой влияния Земли. Межпланетный транспорт-
ный корабль (МТК).......................................... 202
6.3. Миссии к околоземным астероидам............................ 203
Список литературы к главе 6................................. 205
Глава 7. Планетарная защита......................................... 207
7.1. Наведение малых астероидов на опасные околоземные объекты 208
7.2. Выбор астероида в качестве управляемого снаряда............ 228
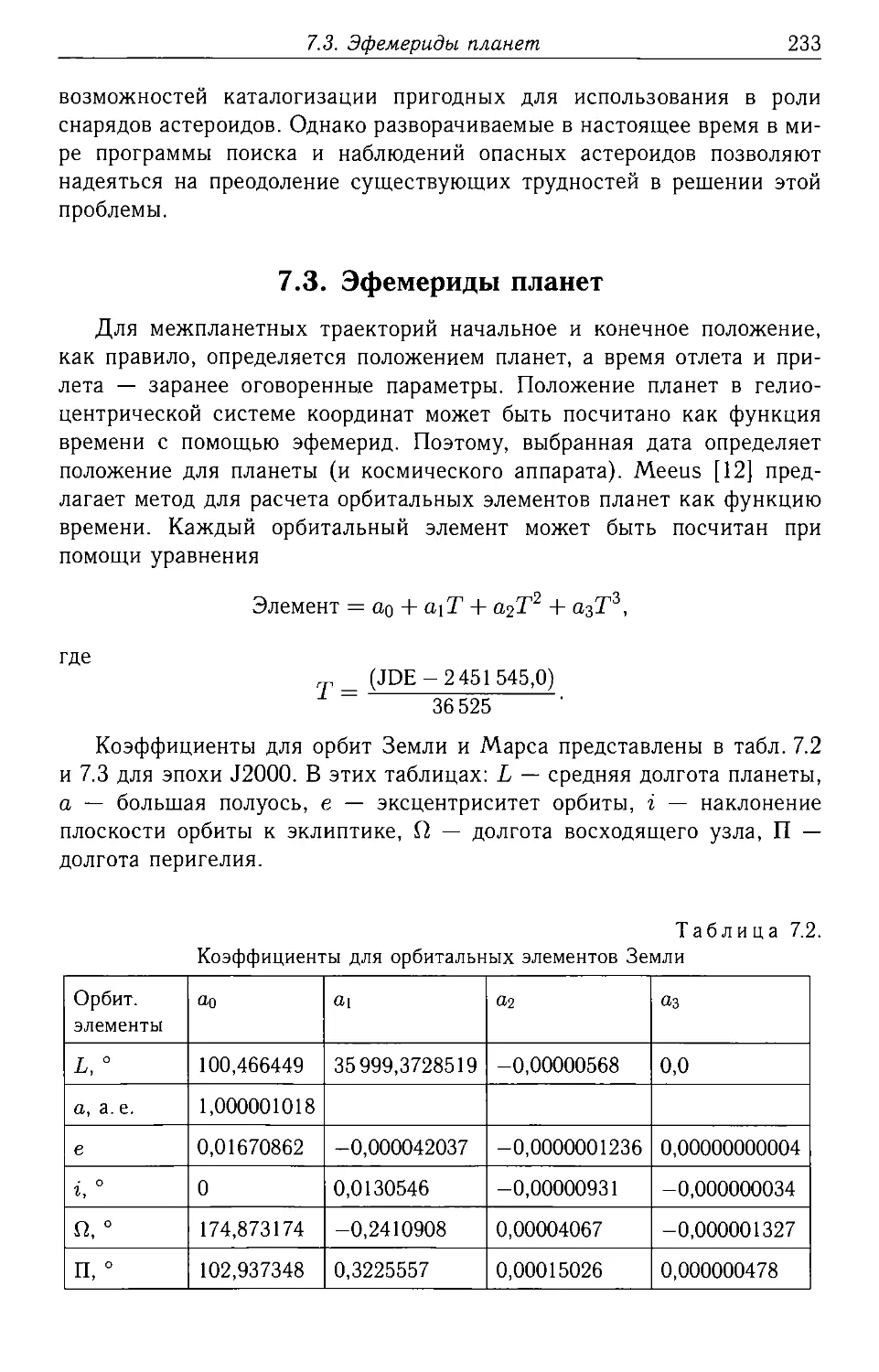
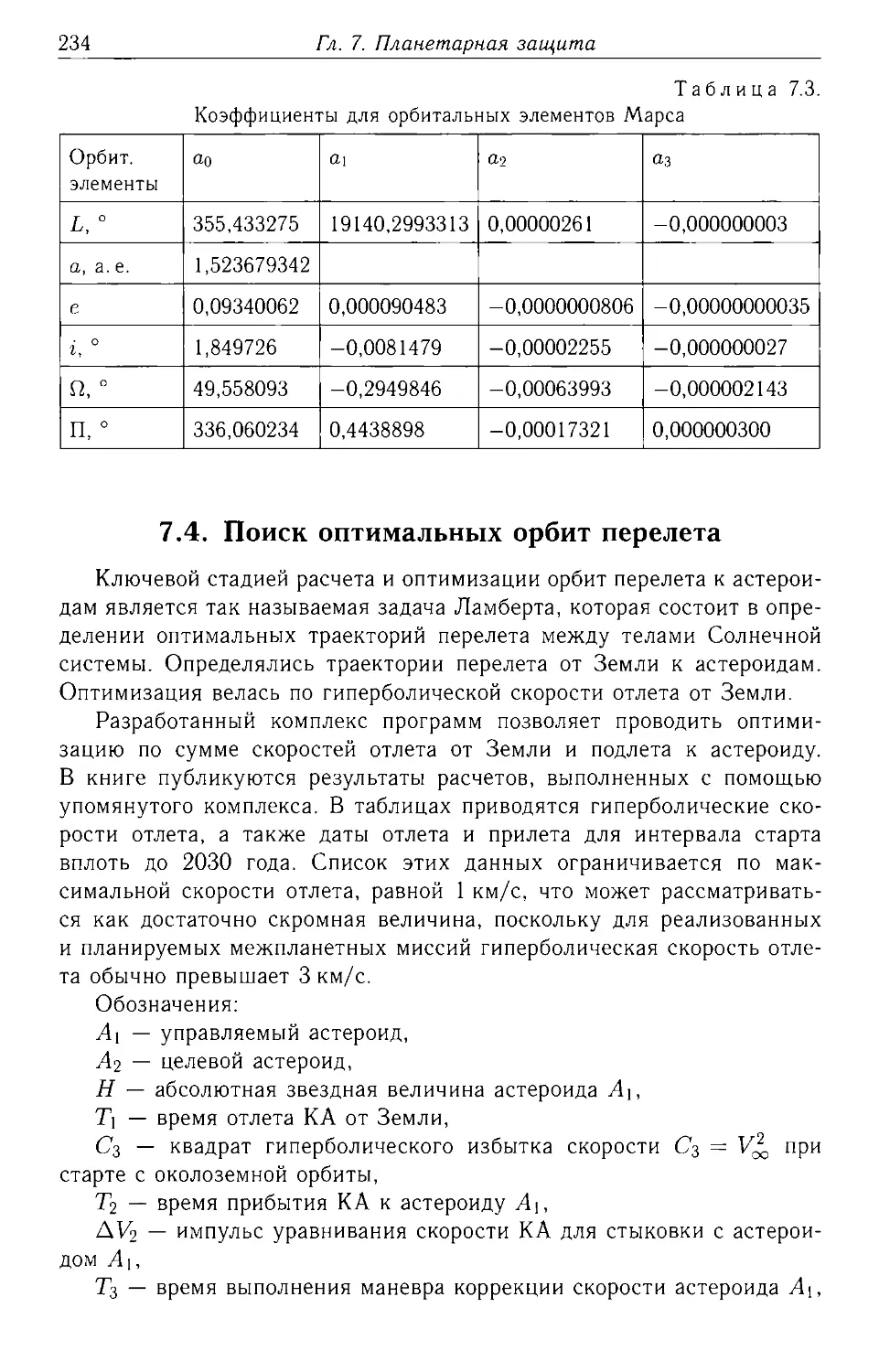
7.3. Эфемериды планет........................................... 233
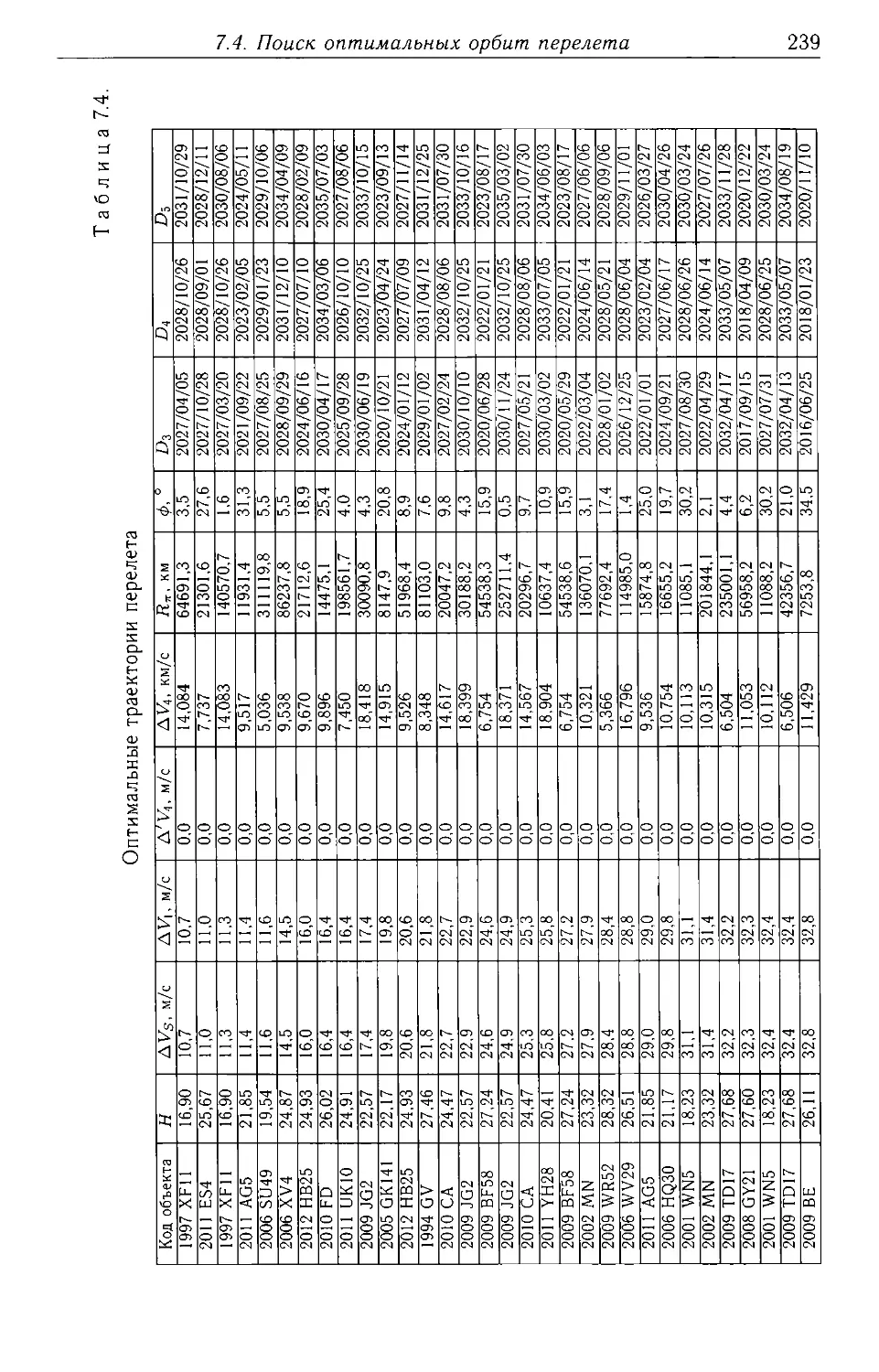
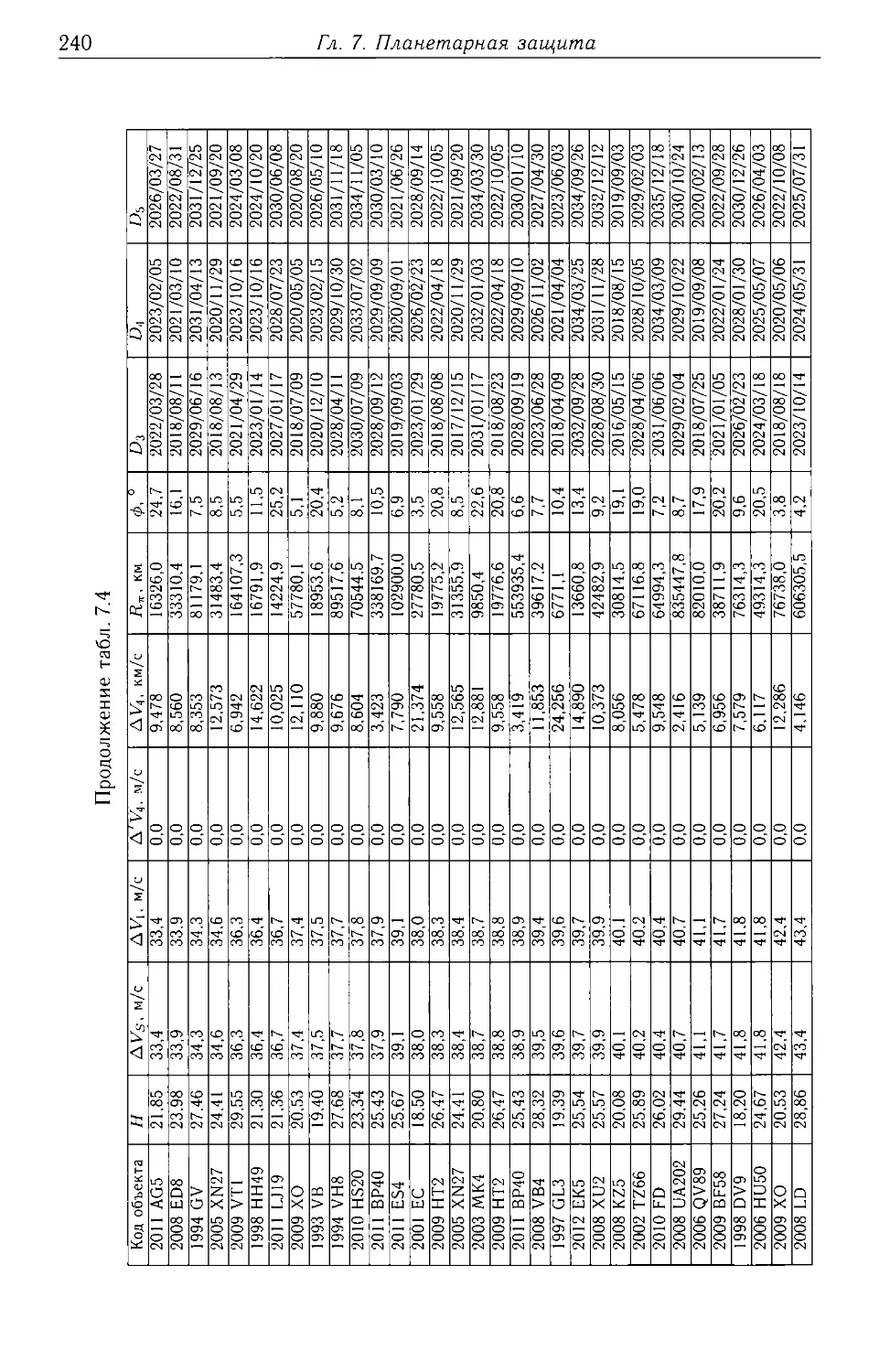
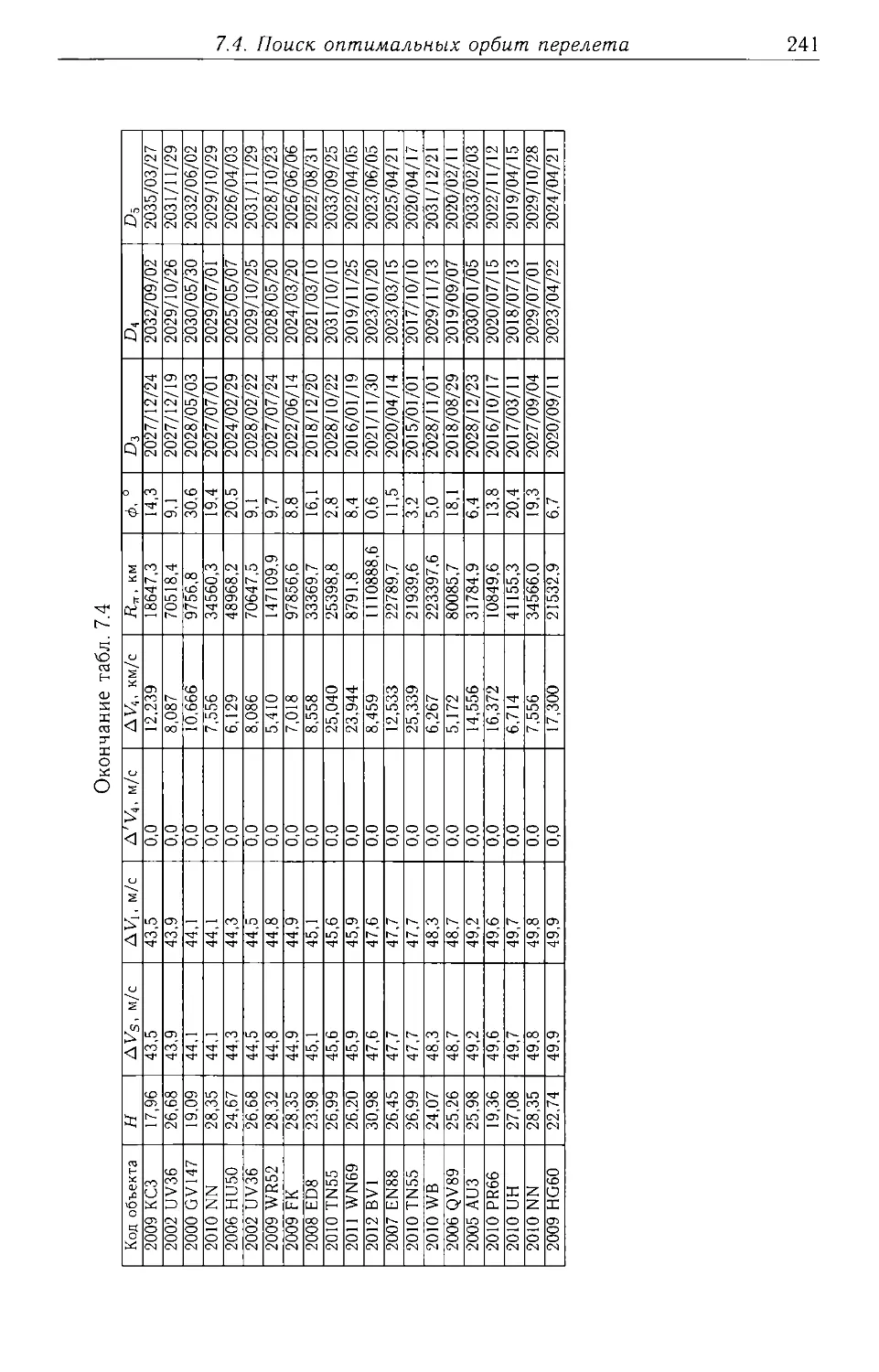
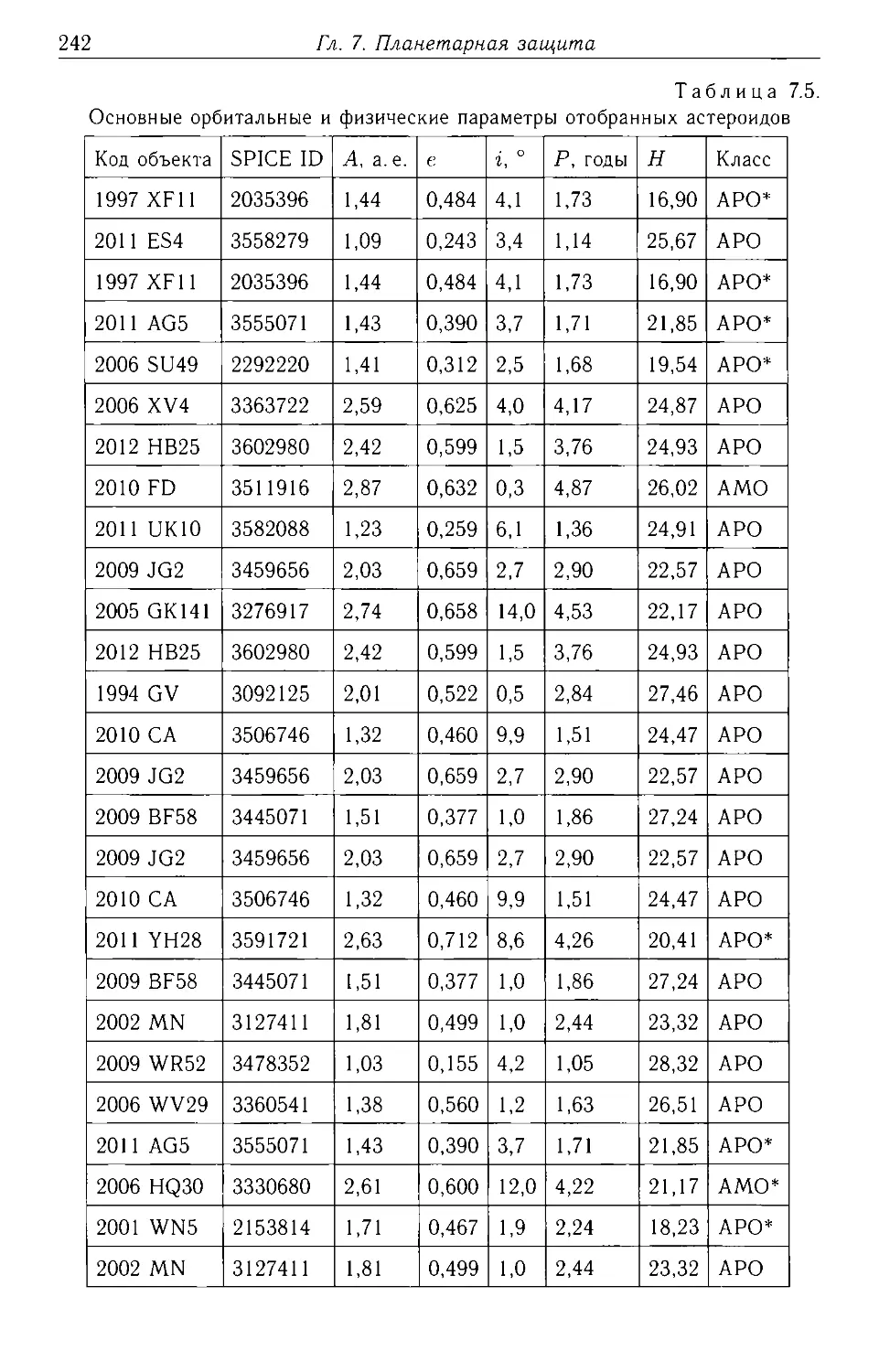
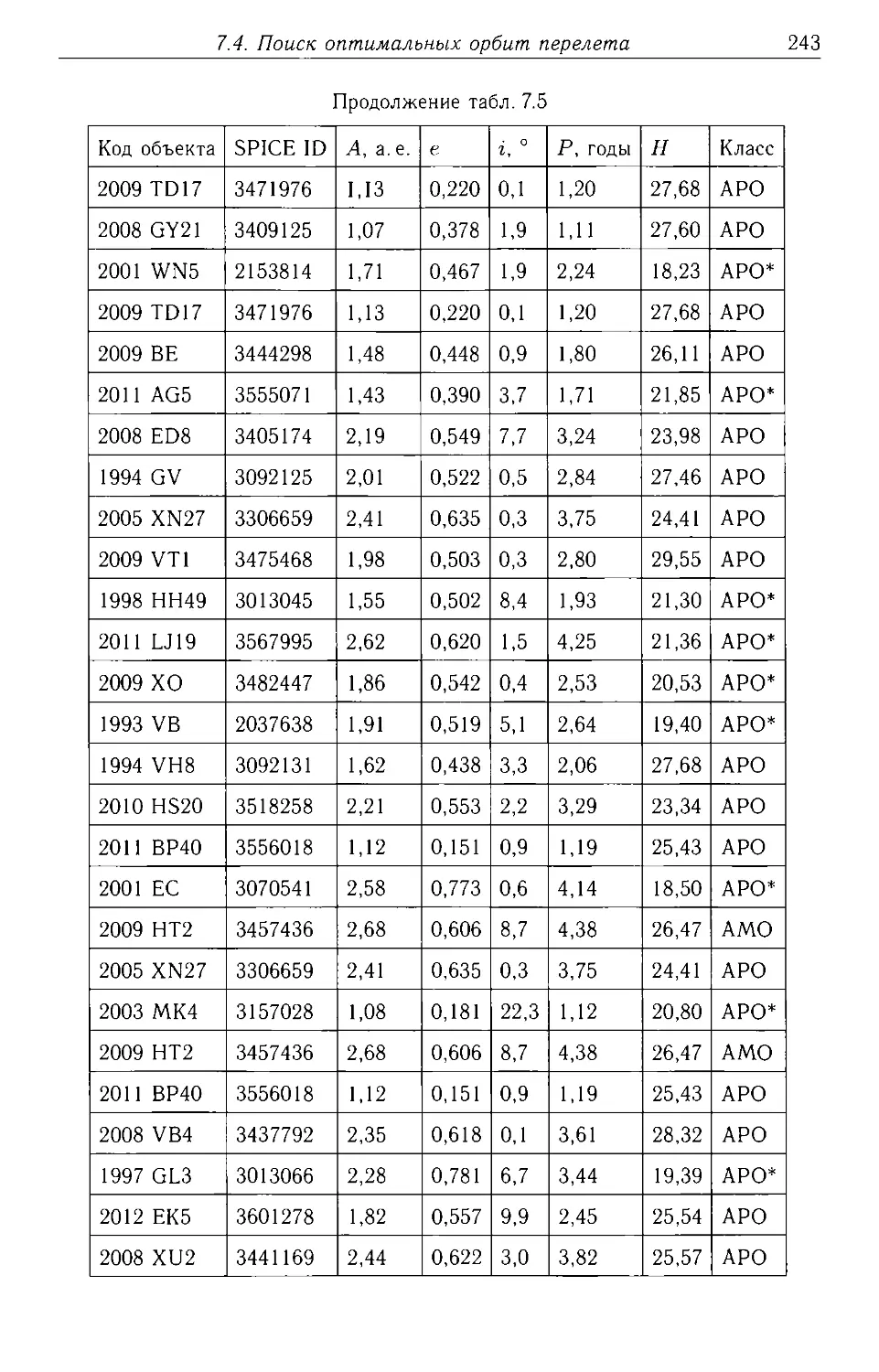
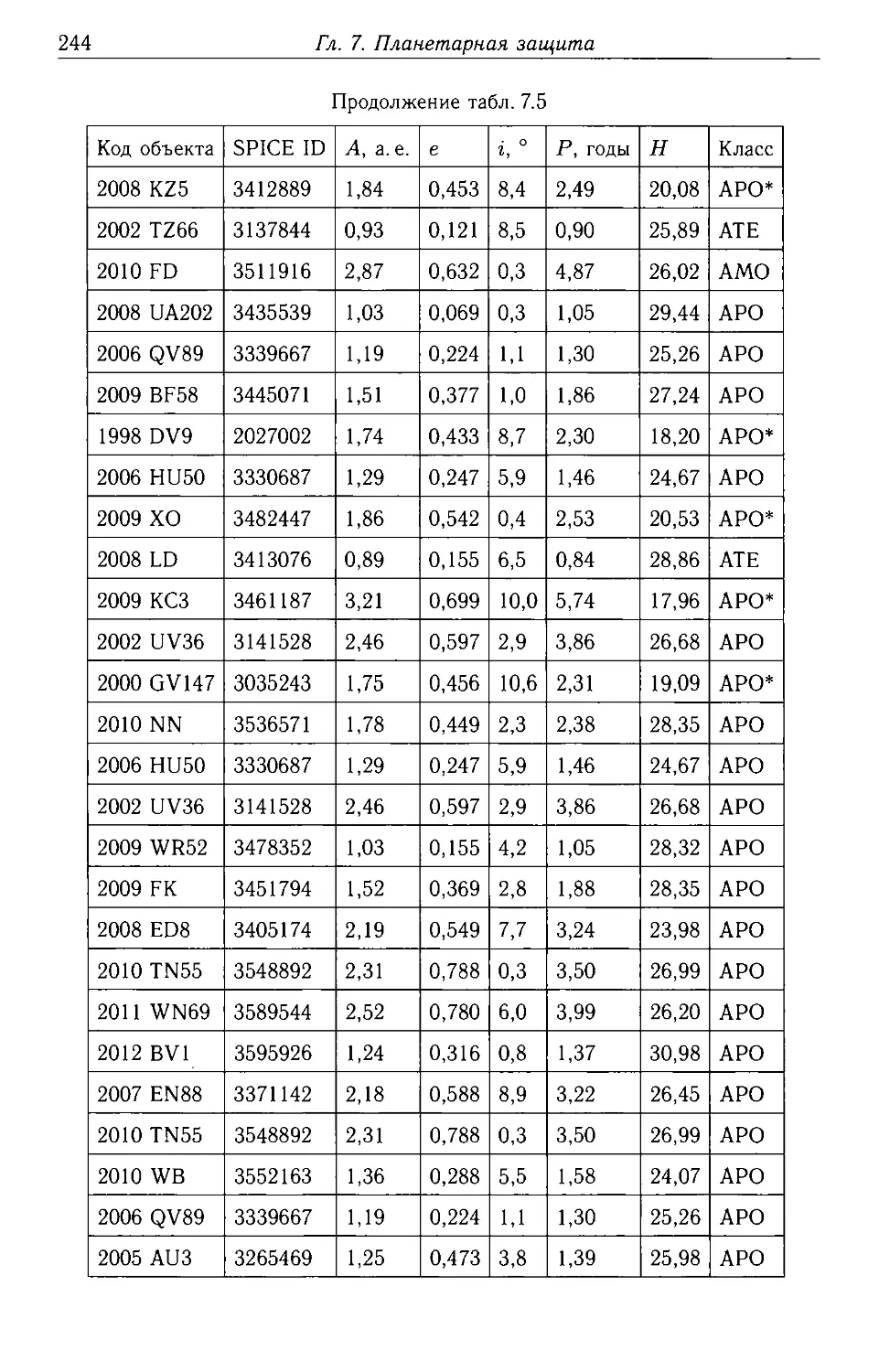
7.4. Поиск оптимальных орбит перелета........................... 234
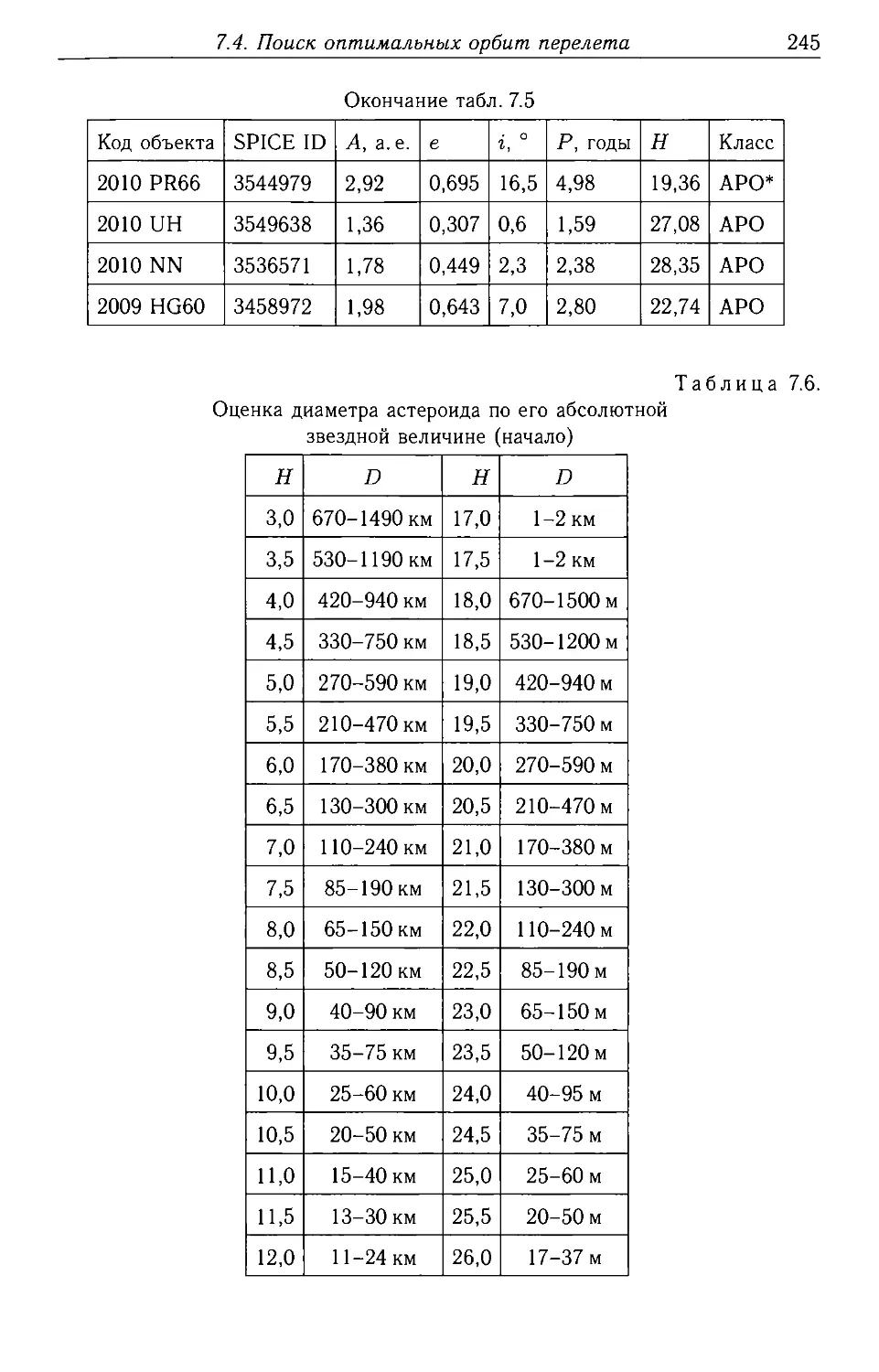
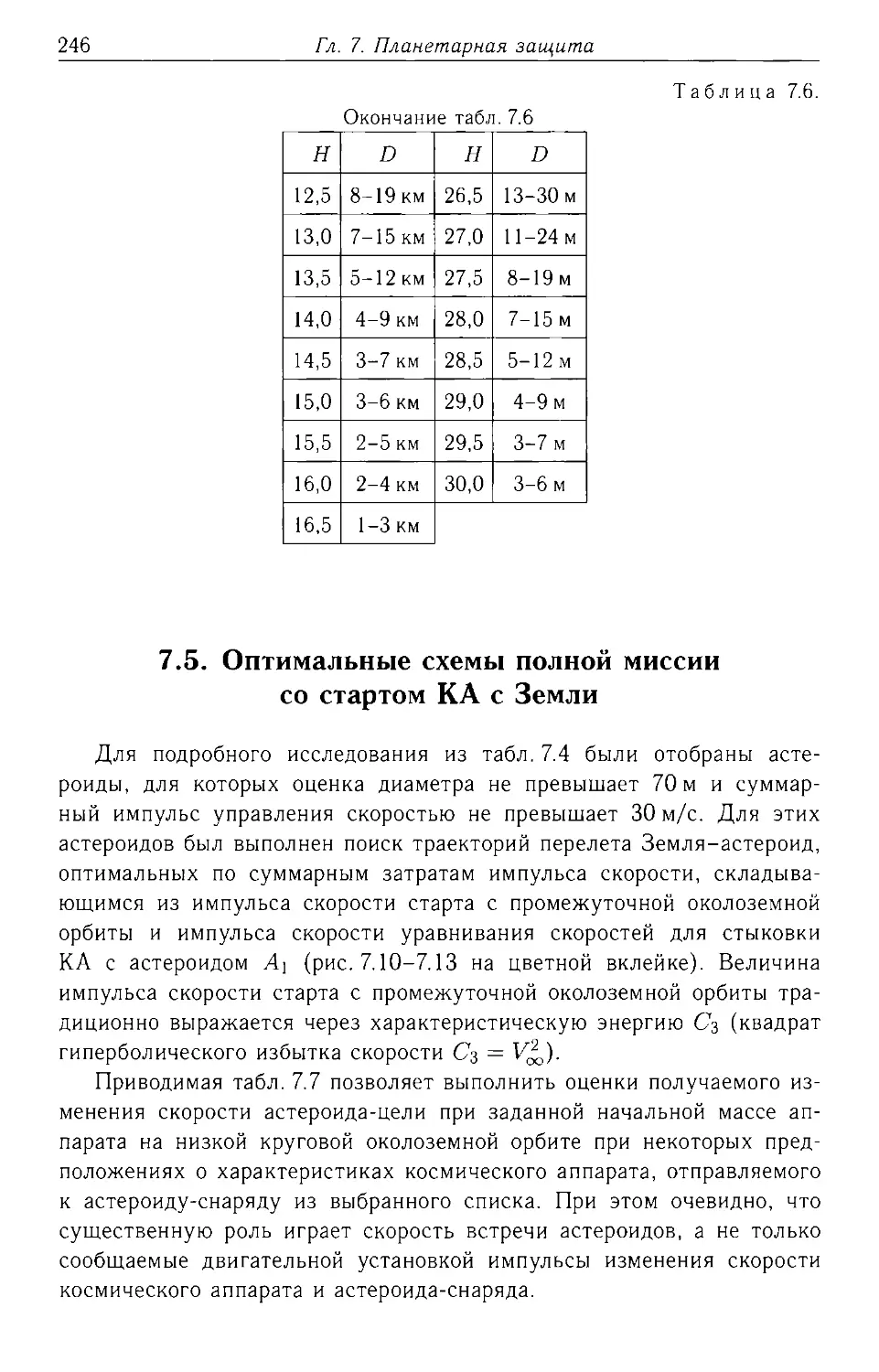
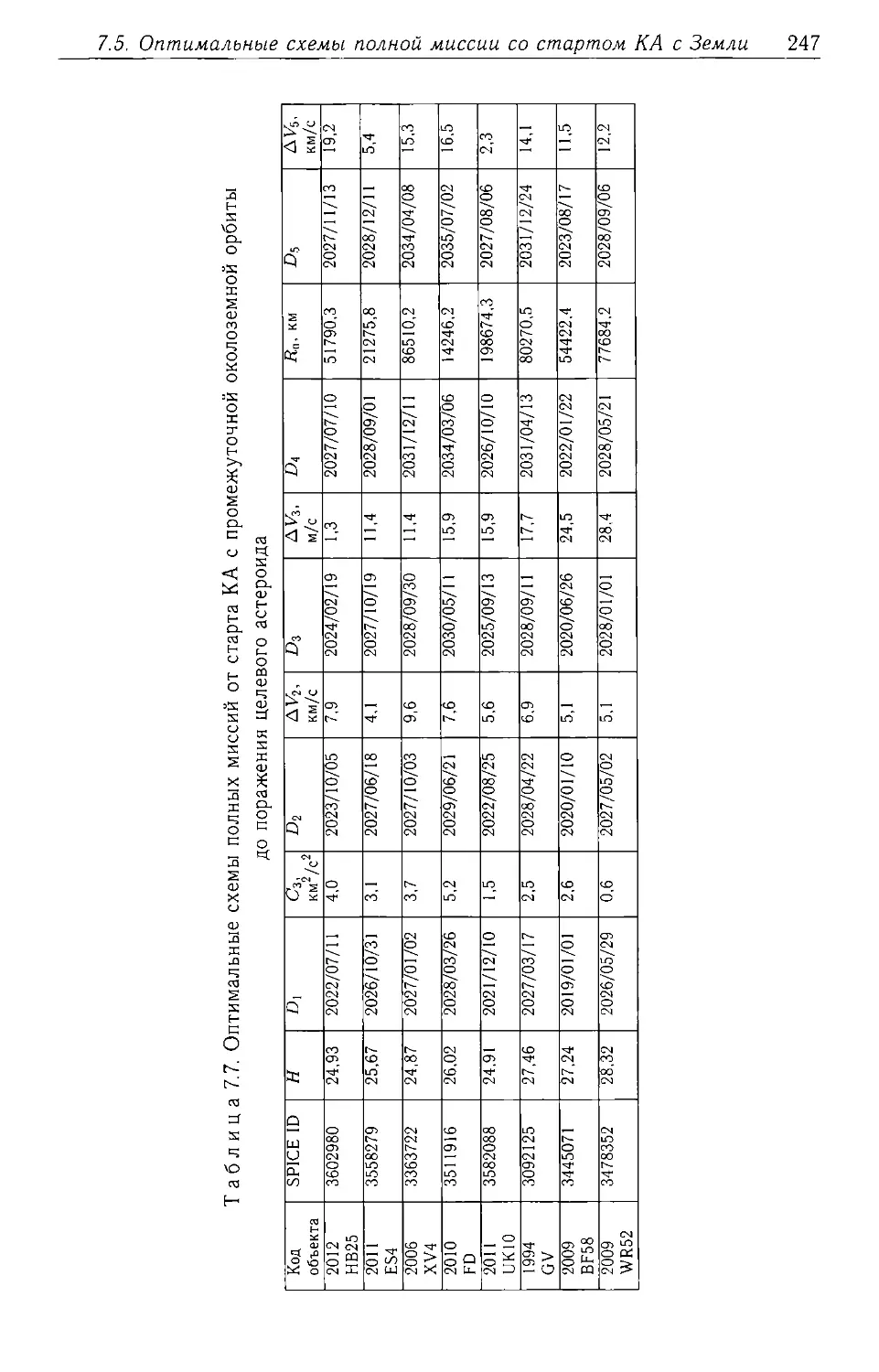
7.5. Оптимальные схемы полной миссии со стартом КА с Земли . . . 246
Список литературы к главе 7................................. 248
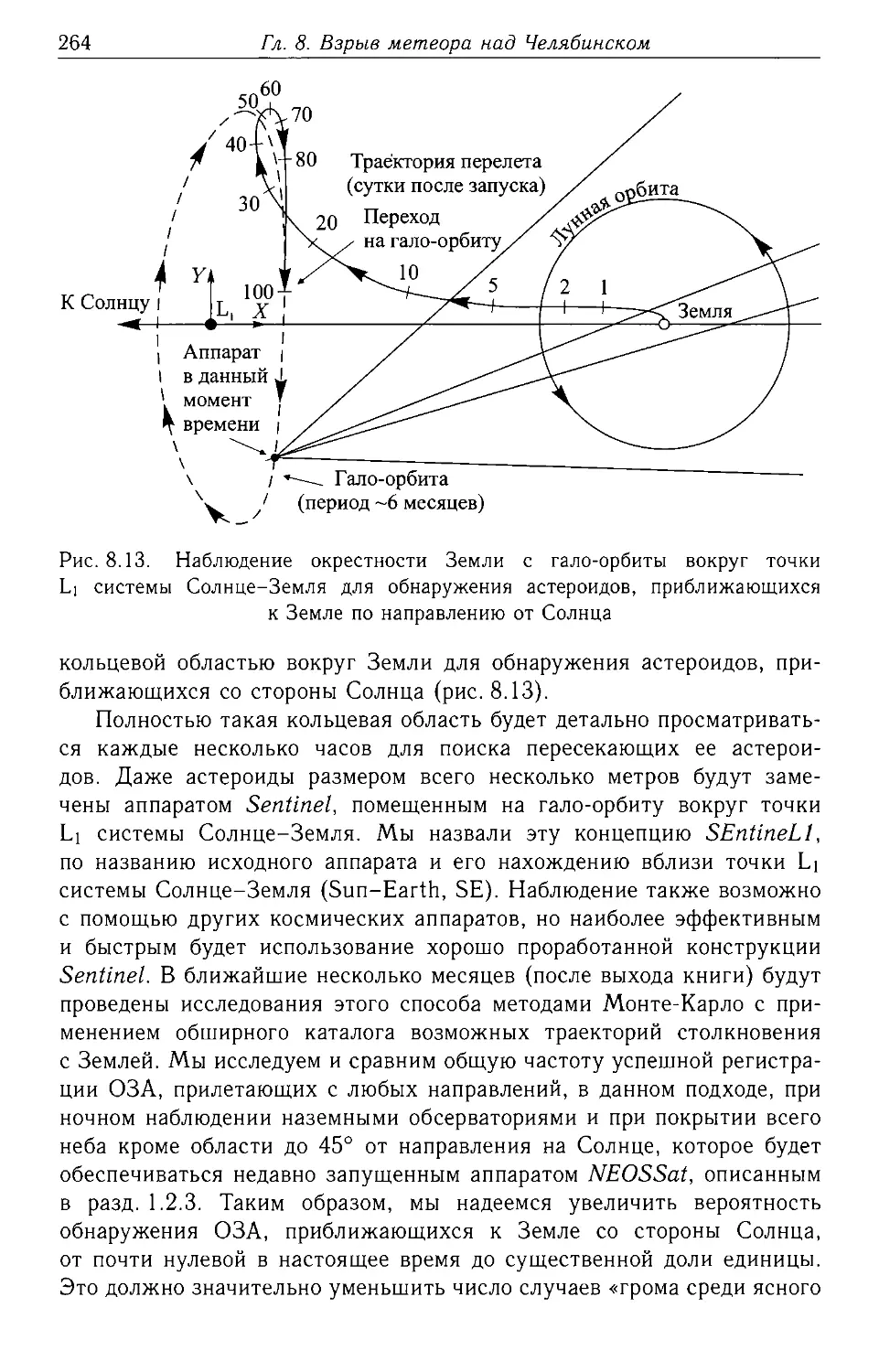
Глава 8. Взрыв метеора над Челябинском: новое подтверждение
необходимости планетарной защиты.......................... 250
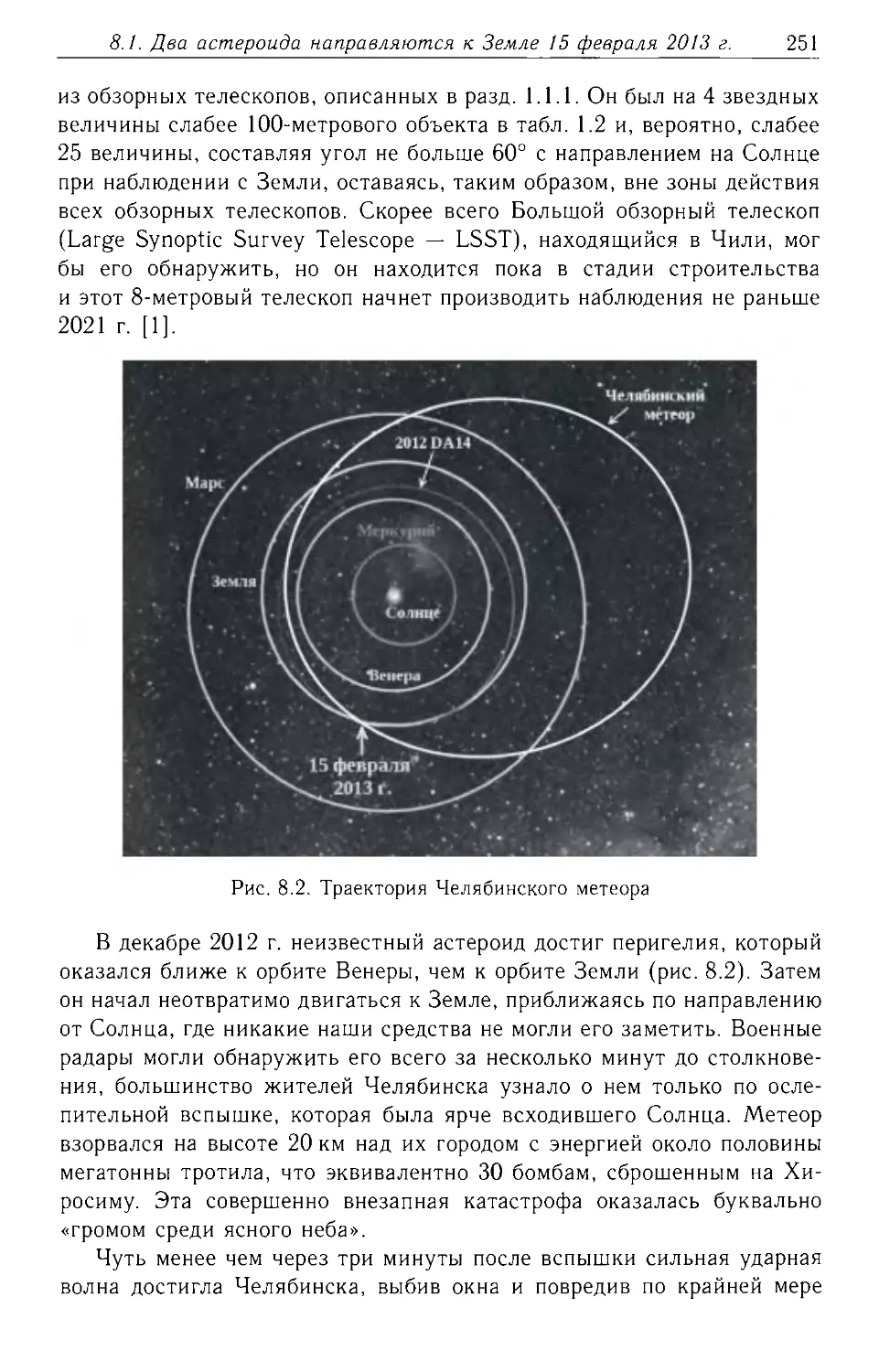
8.1. Два астероида направляются к Земле 15 февраля 2013 г.. 250
8.2. Хронология других случаев падения астероидов............... 253
8.3. Ранения и жертвы при падениях метеоритов................... 256
8.4. Гибель динозавров.......................................... 257
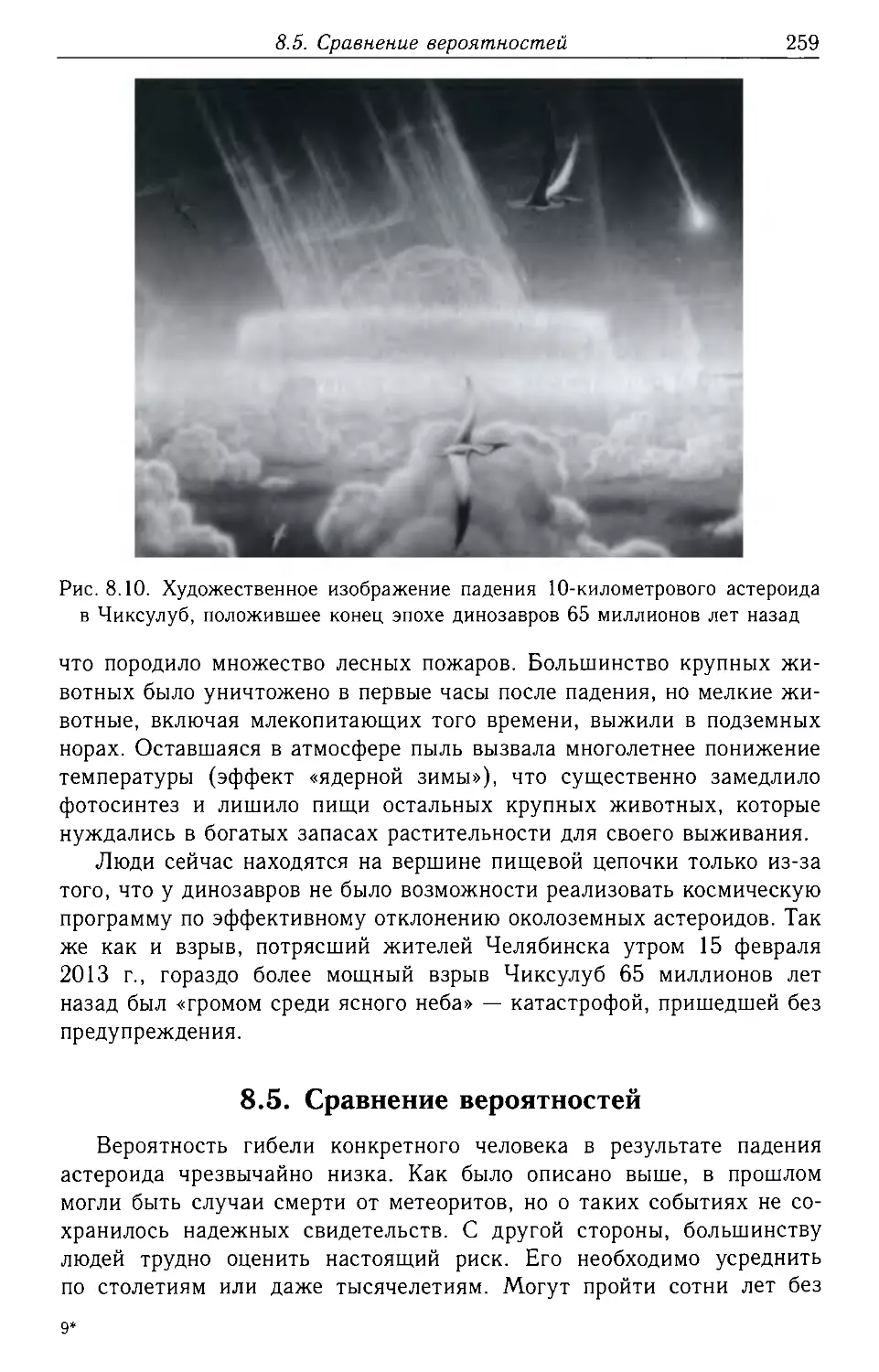
8.5. Сравнение вероятностей..................................... 259
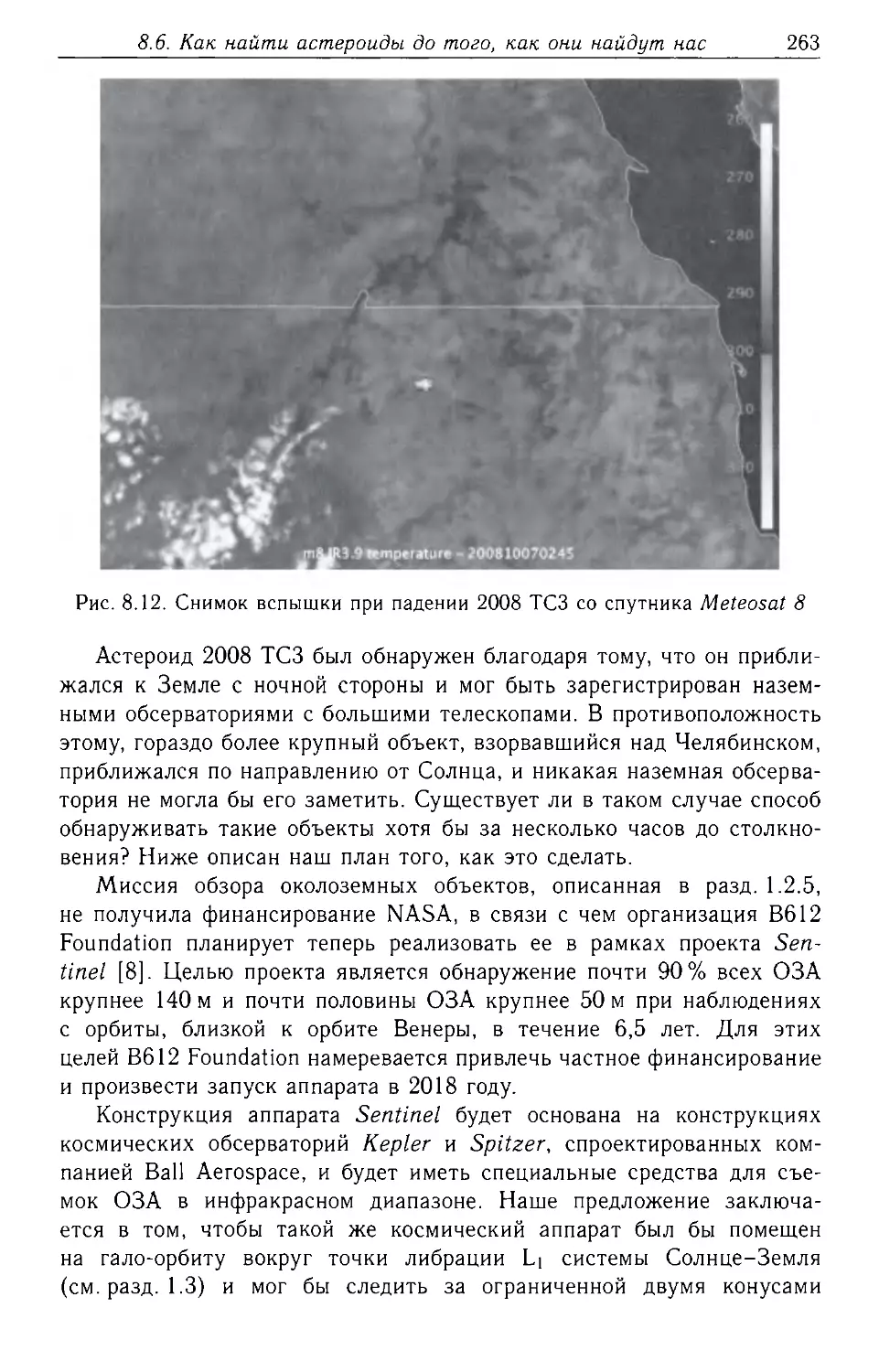
8.6. Как найти астероиды до того, как они найдут нас. Первый
случай: 2008 ТСЗ........................................... 261
8.7. Заключение: нам нужна надежная планетарная защита..... 265
Список литературы к главе 8................................. 266
Об авторах.......................................................... 267
ПРЕДИСЛОВИЕ
Три основные причины побудили нас написать эту книгу:
• озабоченность ограниченностью притока молодых специалистов
в НИИ и КБ, занимающихся научными исследованиями в об-
ласти математического моделирования физико-механических сис-
тем и процессов, динамики полета, разработки космических мис-
сий и астронавигации;
• выполнение комплекса научных исследований в лаборатории
«Космические исследования, технологии, системы и процессы»
МИЭМ НИУ ВШЭ и подготовка, в связи с этим, обширно-
го материала, соответствующего современному положению дел
в авиакосмической отрасли;
• многочисленные дискуссии с коллегами-математиками, механи-
ками, физиками и астронавигаторами по проблемам астероидной
опасности. Причем, в конце каждой научной дискуссии, прак-
тически всегда, обсуждался вопрос о том, что необходимо ве-
сти кропотливую подготовку молодых исследователей, способных
на основе накопленных знаний, предложить самые, на первый
взгляд, невероятные и неожиданные, но теоретически обоснован-
ные и подкрепленные накопленными практическими результата-
ми решения.
По этим же причинам книга адресована весьма широкому кругу
читателей в чисто публицистическом, познавательном отношении.
С этой целью, включенные в книгу материалы излагаются с доста-
точным уровнем подробности, позволяющим воспринимать их утвер-
ждения, не обращаясь к первоисточнику. В то же время при отбо-
ре материалов не ставилась задача охвата максимального количества
работ. Обсуждаются в первую очередь публикации, описывающие ре-
ально выполненные проекты с применением практически проверенных
методик. При этом изложение моделей дается в объеме и виде, которые
в большинстве случаев позволяют воспроизвести их в других исследо-
ваниях или применить в учебном процессе.
В первой главе книги дается обоснование использования космиче-
ских средств для обнаружения опасных околоземных объектов и опре-
деления их эфемерид. При этом указывается, что достаточно удобными
6
Предисловие
для этих целей являются окрестности солнечно-земных точек либра-
ции и, по-видимому, наиболее соответствующими стоящим задачам —
коллинеарные точки либрации.
В первой главе книги подробно описывается пионерская миссия,
разработанная Р. Фаркуаром и Д. Данхэмом, в рамках которой аппарат
был направлен в солнечно-земную точку либрации Ц, а затем, за счет
многократных гравитационных маневров у Луны, направлен к комете
Джакобини-Циннера.
Приводится описание успешно реализуемых в настоящее время
европейских проектов Planck и Hershel с использованием гало-орбит
в окрестности точки либрации !<. Дана методика выбора параметров
для проектирования соответствующих орбит и управления движением
аппарата на гало-орбите.
Рассмотрены вопросы управления орбитальным движением аппа-
ратов в окрестности солнечно-земных коллинеарных точек либрации.
В качестве одного из таких способов рассмотрено управление группи-
ровкой аппаратов с помощью солнечного паруса с изменяемыми отра-
жательными характеристиками. Как пример приводится миссия XEUS,
для которой требовалось удерживать прямую линию, соединяющую
два аппарата в заданном направлении, при этом расстояние между
аппаратами должно было сохраняться неизменным. Построена картина
управляющих сил, которые можно получить при достаточно малых
размерах паруса, сопоставимых с площадью солнечных батарей, если
поддерживаемое расстояние между аппаратами находится в пределах
сотни метров.
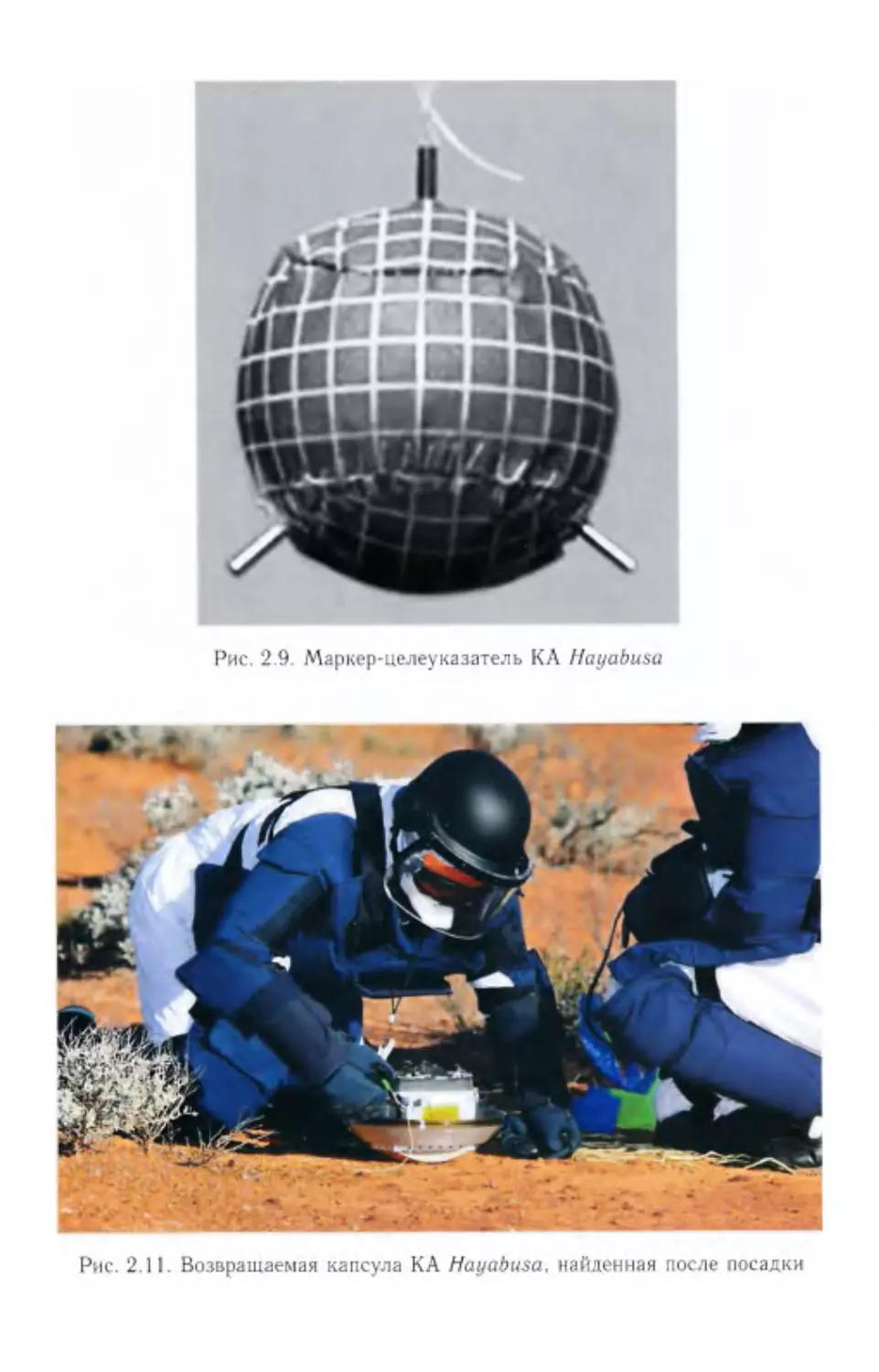
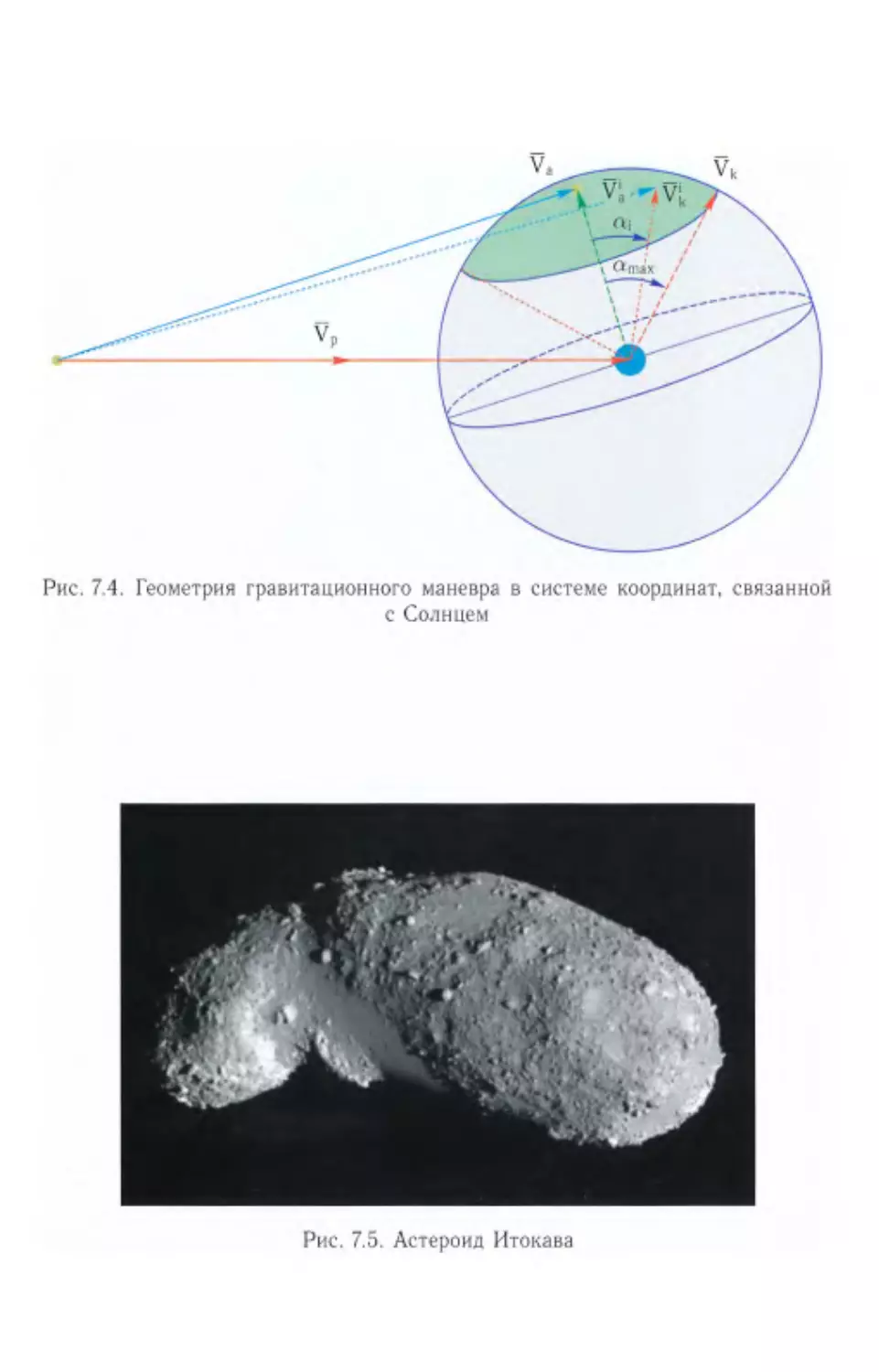
Во второй главе представлен обзор миссий к астероидам. Предпо-
чтение отдается описаниям уже реализованных миссий к астероиду
Эрос (миссия NEAR, США) и к астероиду Итокава (миссия Hayabusa,
Япония). Миссия NEAR была первой в мире, в которой была выполнена
посадка на астероид; в ходе японской миссии Hayabusa впервые в мире
была осуществлена доставка образцов грунта с поверхности астероида.
Еще одним достижением этой миссии было использование ионного
двигателя для выполнения маневров в космосе.
Эти миссии представляют очень большой интерес с точки зре-
ния применения в ходе их реализации весьма изощренных способов
управления движением, включая гравитационные маневры и гибкое
планирование операций по изменению траекторий.
В третьей главе рассматриваются задачи пилотируемых полетов
к околоземным астероидам ограниченной длительности полета в пре-
делах возможностей ракетно-космической техники сегодняшнего дня.
Для изучения возможных траекторий полетов, позволяющих распро-
странить пилотируемые исследования за орбиту Луны, по нашему
мнению, потребуются международное сотрудничество (подобное тому,
Предисловие
7
что наблюдается в случае МКС) и многоразовые космические ап-
параты. Многоразовые КА будут использовать околоземные орбиты
с высокой энергией, значительное изменение которых может быть до-
стигнуто с помощью лунных гравитационных маневров и небольших
импульсов тяги в областях слабой устойчивости, в особенности, около
коллинеарных точек либрации системы Земля-Солнце.
В книге классифицируются миссии в зависимости от длительности
полета и решаемых миссией задач: облет астероида и посадка, либо
выход в его близкую окрестность. Из множества известных астероидов
выбираются классы достижимых, исходя из принятых ограничений для
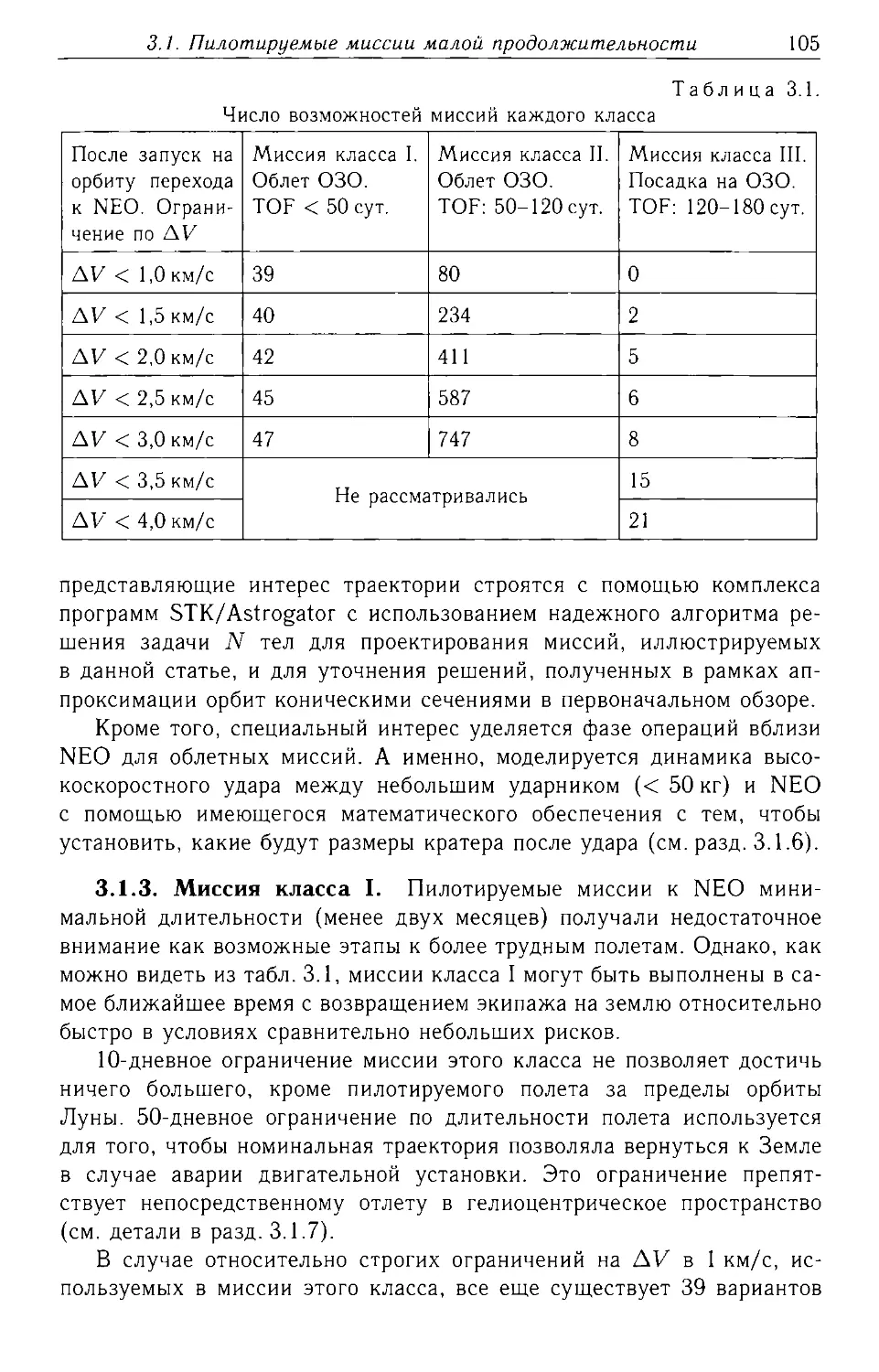
интервала запусков с 2015 по 2030 г. Обосновывается возможность
практически ежегодного запуска к астероидам, подпадающим под пред-
ложенную классификацию, что дает возможность строить программу
поэтапного разворачивания комплексной задачи пилотируемых полетов
к астероидам с нарастанием уровня сложности решаемых задач.
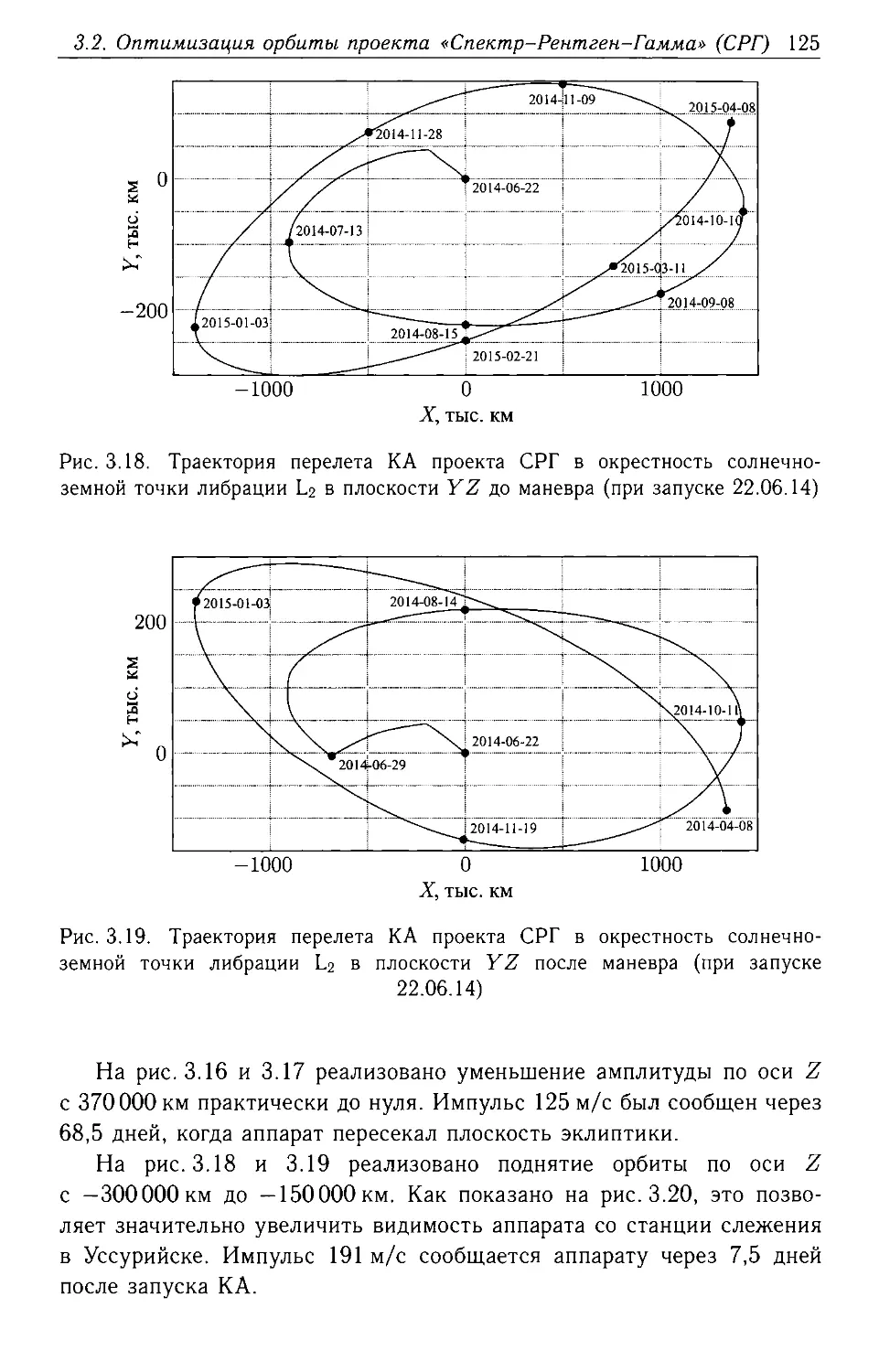
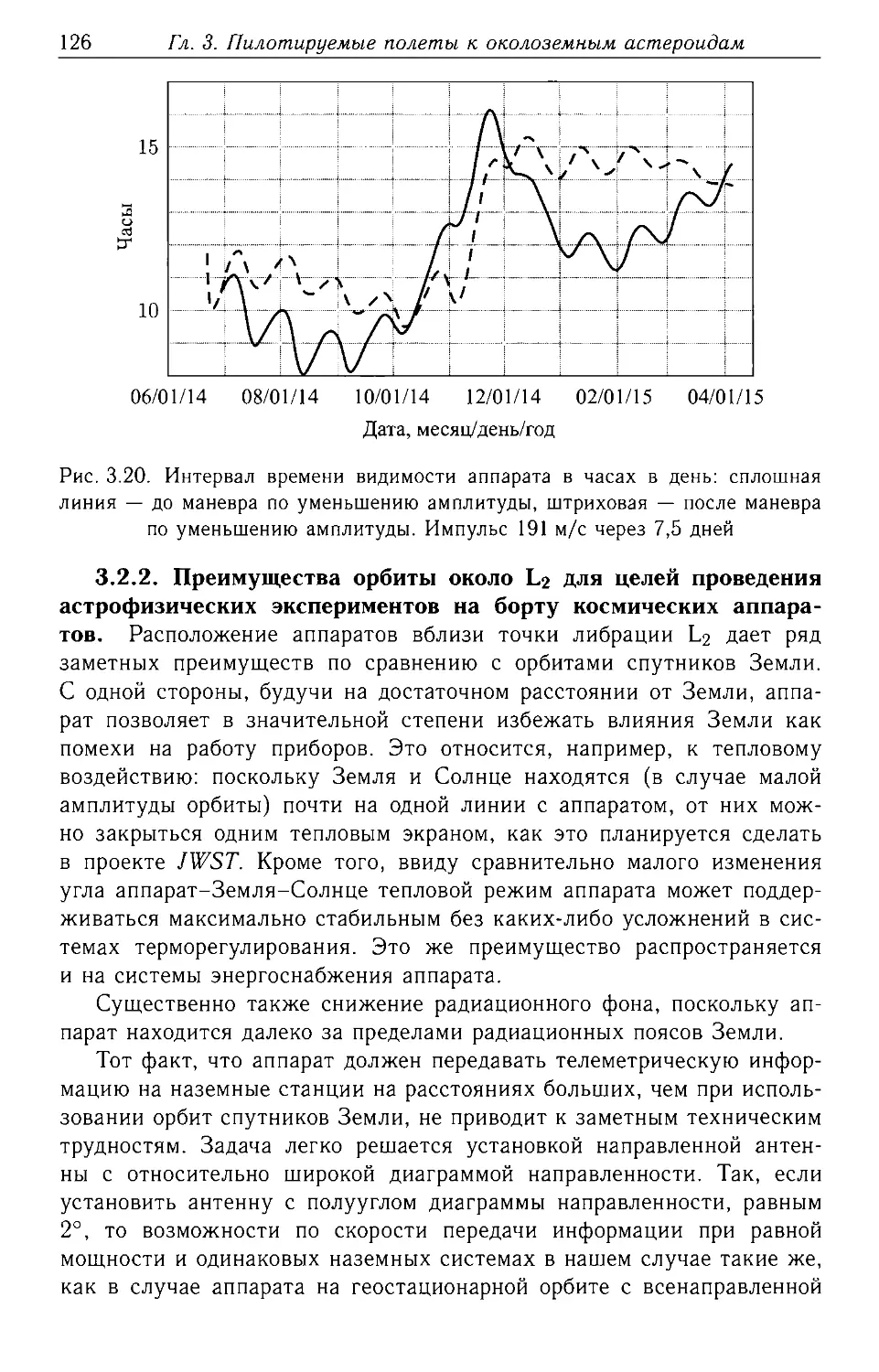
В этой главе обсуждаются методы выведения в окрестность точ-
ки либрации Lq аппарата «Спектр-Рентген-Гамма» при выполнении
требований достижения максимальных периодов видимости с россий-
ских наземных станций ценой минимального расхода рабочего тела
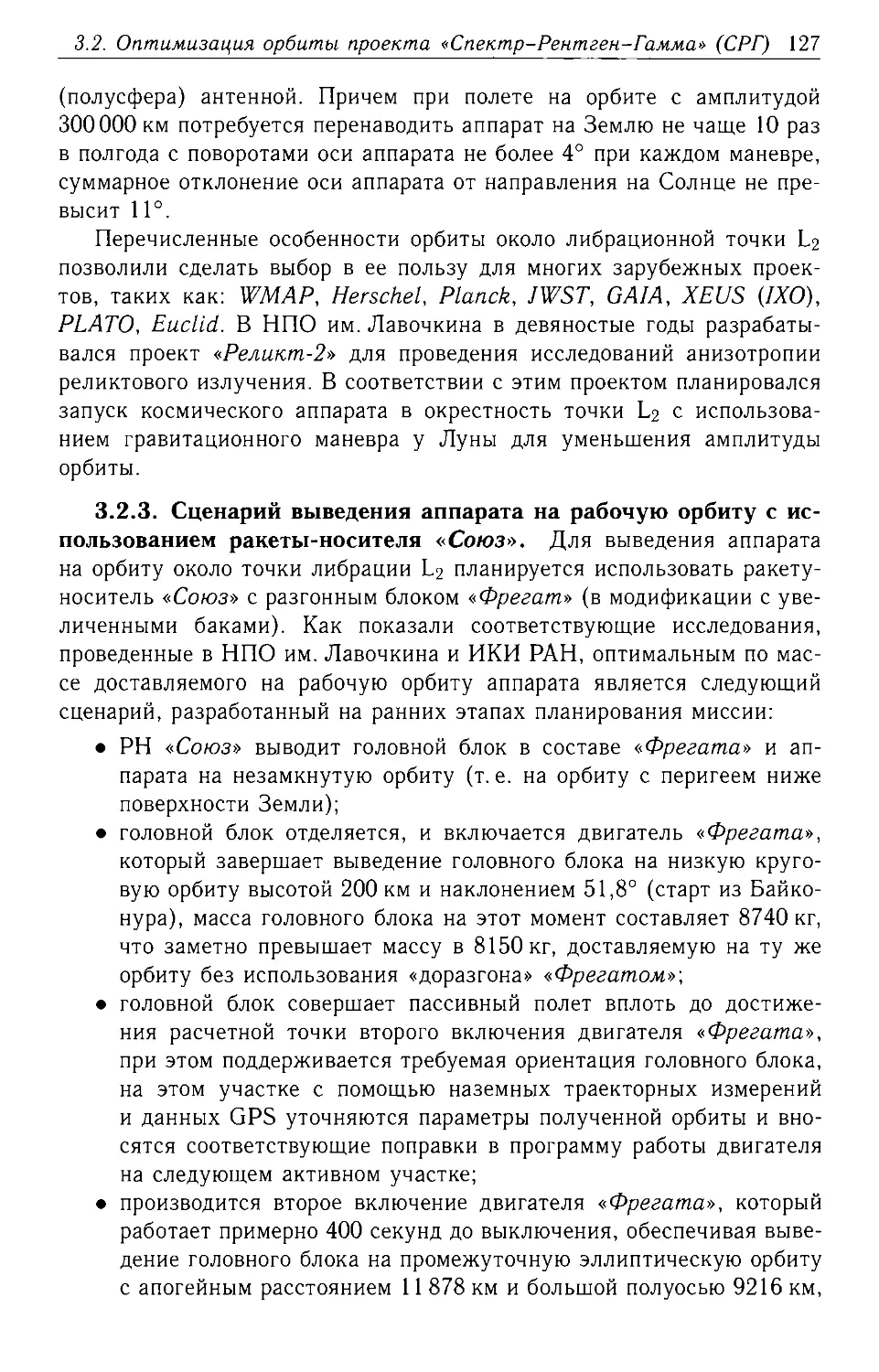
разгонной ступени или аппарата. Показано, что существует стратегия
выведения, включающая маневры на орбите перехода к точке либра-
ции, при которой амплитуда движения аппарата вдоль нормали к плос-
кости эклиптики сводится к минимуму, что обеспечивает требуемые
длительности видимости с наземных станций даже в наименее благо-
приятный сезон полета (лето). Рассмотрены возможности проведения
гравитационных маневров у Луны для решения этой задачи и показано,
что такая технология также применима, но приводит к ограничениям
в части реализации проекта по датам старта.
В четвертой главе рассмотрены вопросы управления орбитальным
движением аппаратов в окрестности солнечно-земных коллинеарных
точек либрации. В качестве одного из таких способов рассмотрено
управление группировкой аппаратов с помощью солнечного паруса
с изменяемыми отражательными характеристиками.
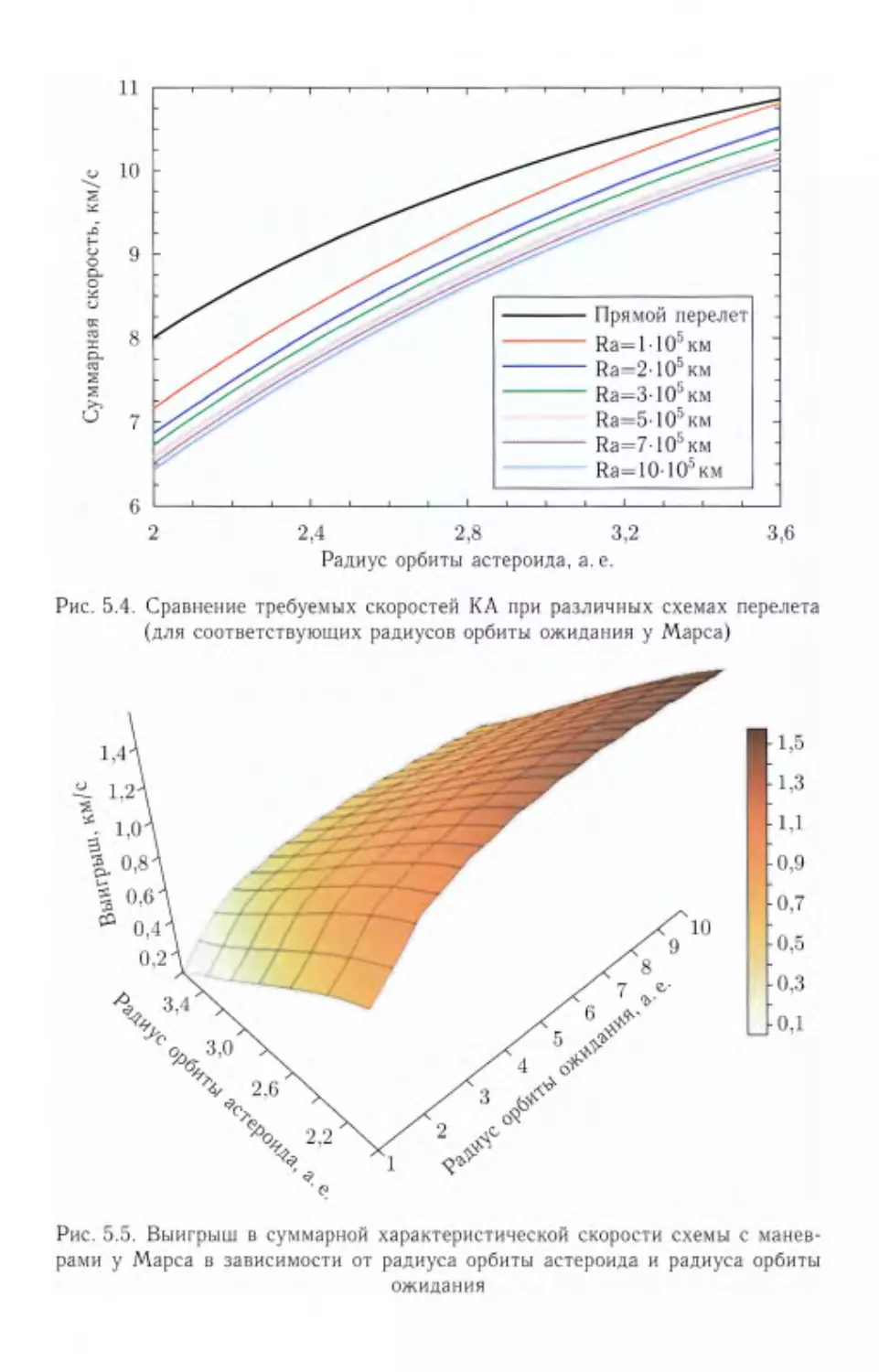
В пятой главе приводятся результаты традиционного способа кор-
рекции орбиты аппарата, функционирующего в окрестности точки либ-
рации, т. е. способ с использованием ракетного двигателя. Задача реша-
лась в постановке, когда аппарат требуется удерживать вблизи номи-
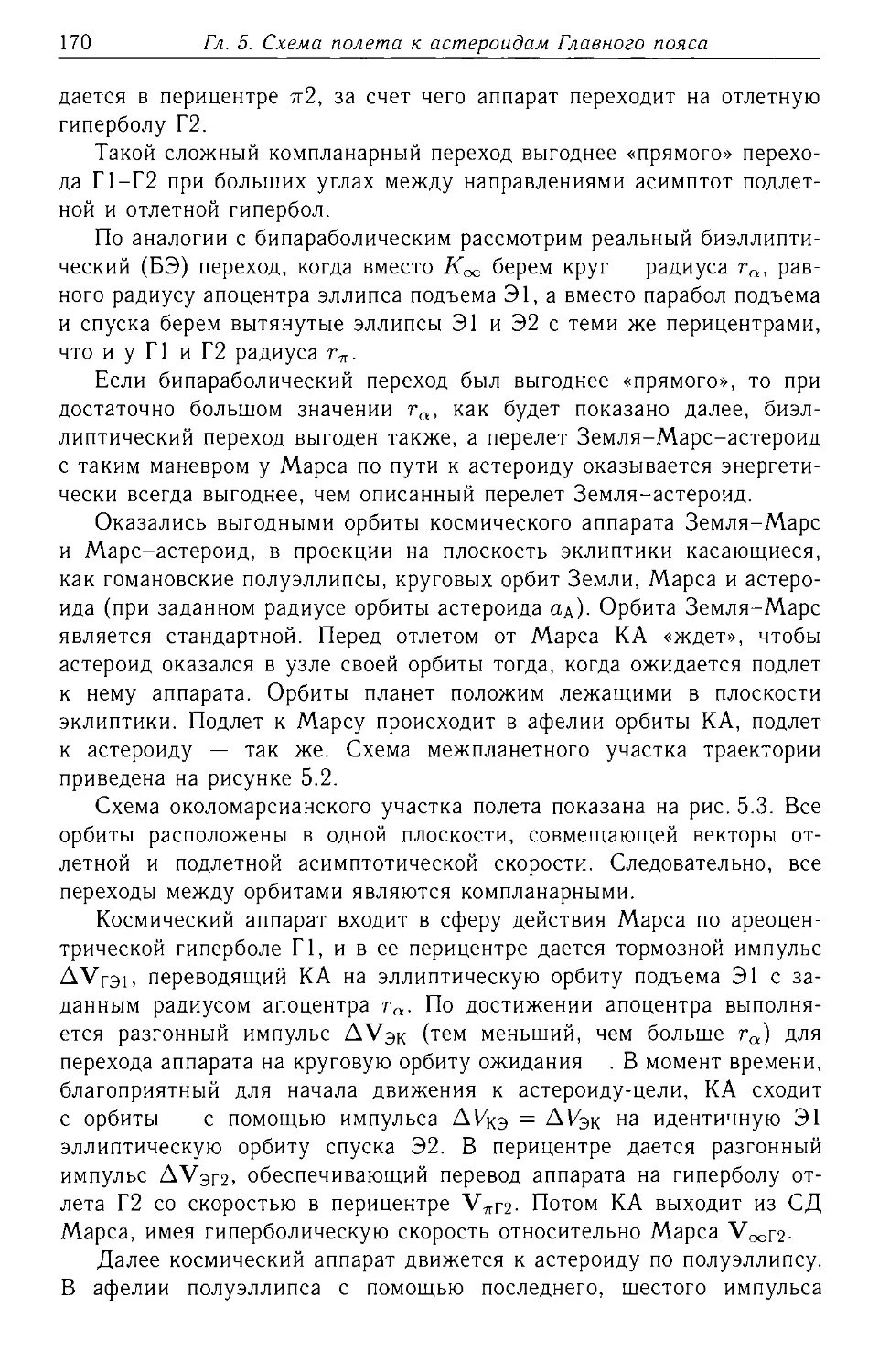
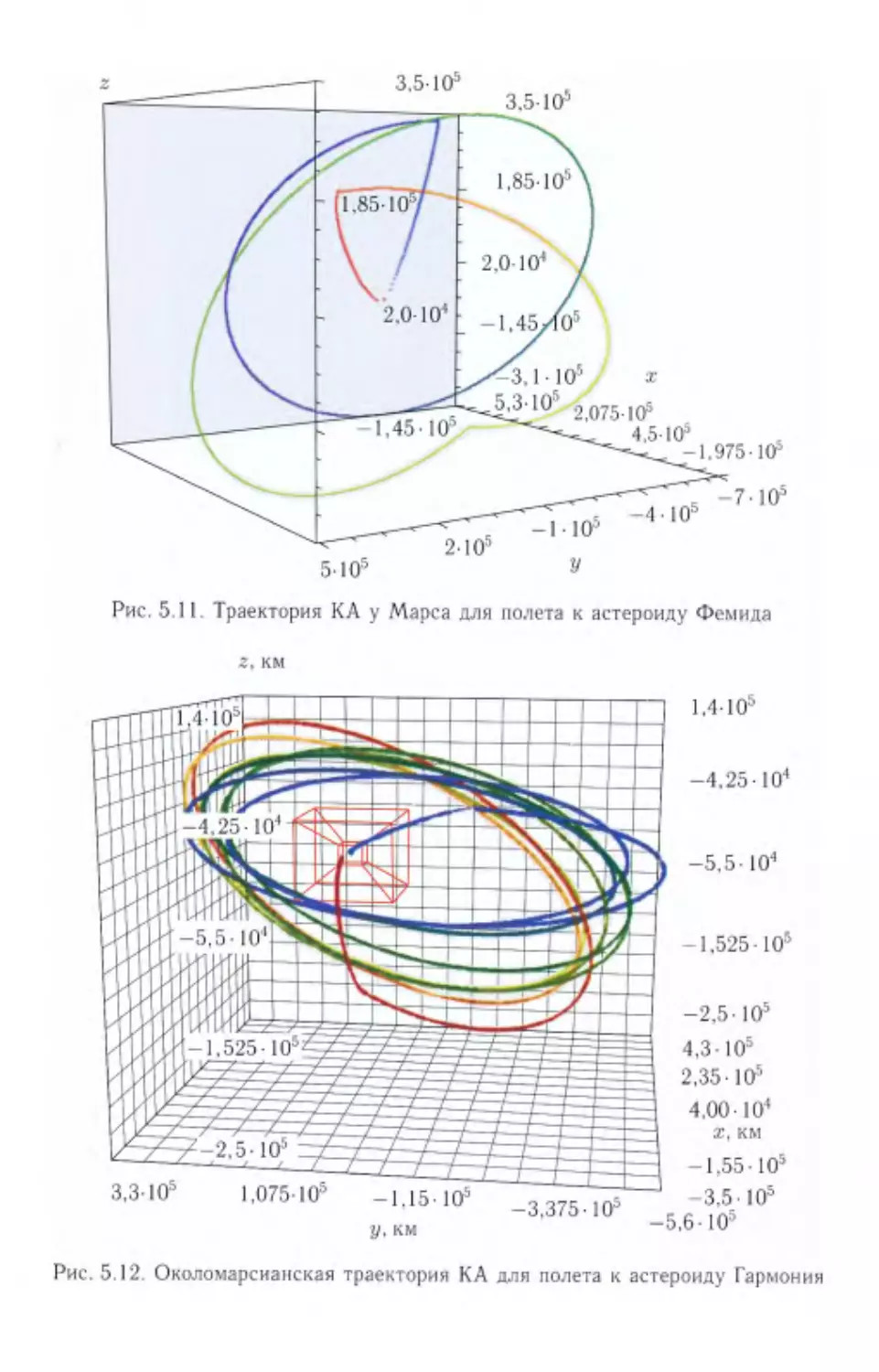
нальной орбиты. Дано описание схемы полета в Главный пояс астеро-
идов с использованием орбиты ожидания у промежуточной планеты —
Марса. Методика формирования траекторий для такой схемы рассмот-
рена сначала в упрощенной постановке. С помощью аналитических
выражений показано, что рассматриваемая схема по энергетическим
затратам выгоднее прямого перелета к астероиду. Далее эта гипотеза
8
Предисловие
подтверждена уже на точных моделях движения планет, астероидов
и космического аппарата.
В шестой главе развиваются идеи, предложенные исследователь-
ской группой Международной академии астронавтики и представлен-
ные в 2008 г. на Международном конгрессе по астронавтике в Глазго.
В качестве первых миссий предлагается обслуживание крупных кос-
мических телескопов на орбитах вокруг точек либрации Земля-Солнце
либо поддержка исследований обратной стороны Луны с гало-орбиты
вокруг L2 системы Земля-Луна.
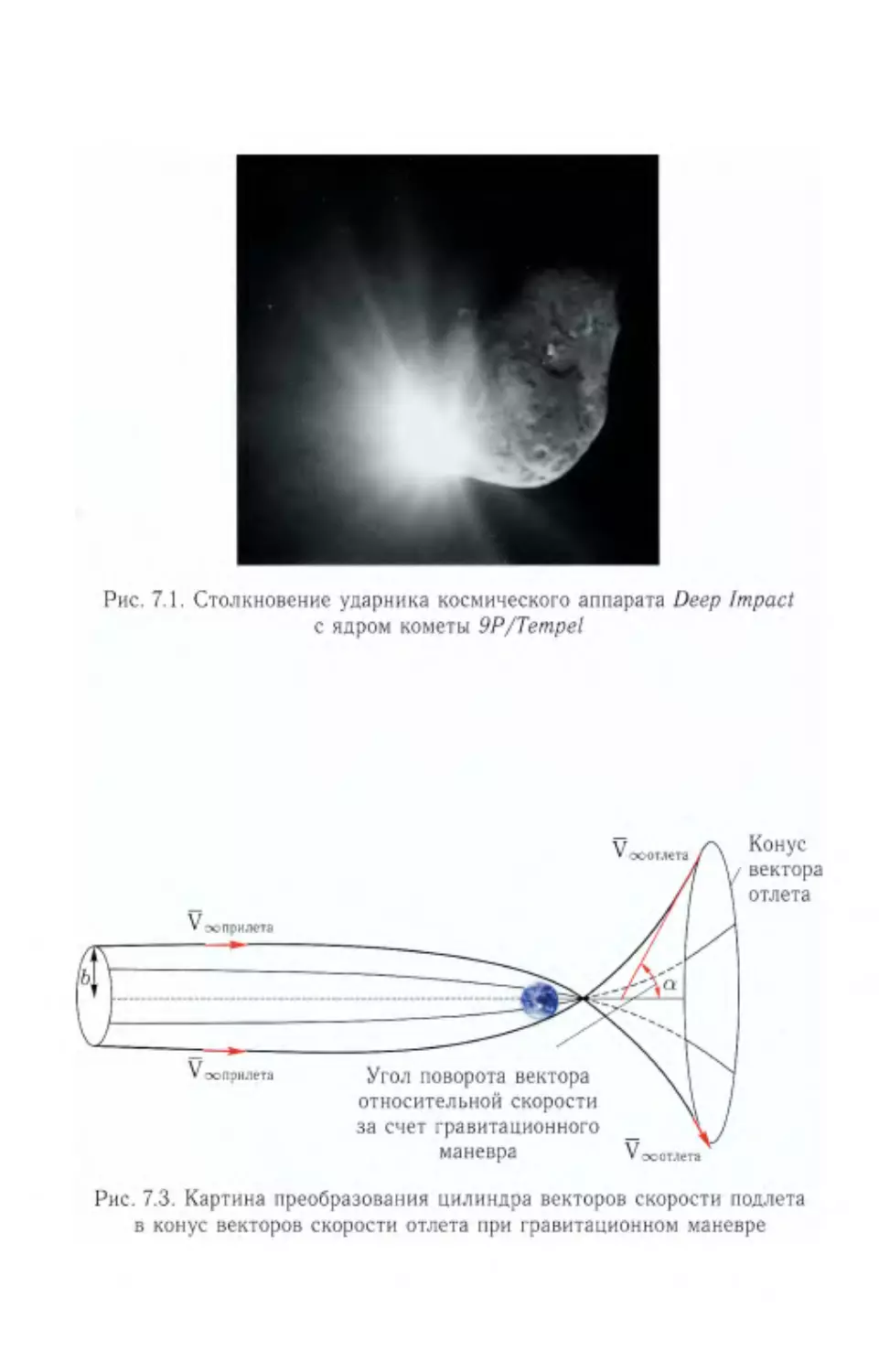
В седьмой главе рассмотрена новая идея в области планетарной
защиты от опасных околоземных объектов. Подробно описывается
предложение использовать астероиды сравнительно малого размера для
отклонения от столкновения с Землей опасных астероидов. Существо
концепции заключается в сообщении малому астероиду сравнительно
небольшого импульса скорости с тем, чтобы перевести его на траекто-
рию к Земле, где за счет гравитационного маневра при пролете Земли
этот астероид будет направлен на траекторию столкновения с опасным
околоземным объектом.
В книге дается ответ на вопрос, существуют ли астероиды в имею-
щемся в настоящее время каталоге, которые можно перевести на тра-
екторию столкновения с астероидом Апофис до ожидаемой его встречи
с Землей. Приводятся результаты первого этапа отбора астероидов.
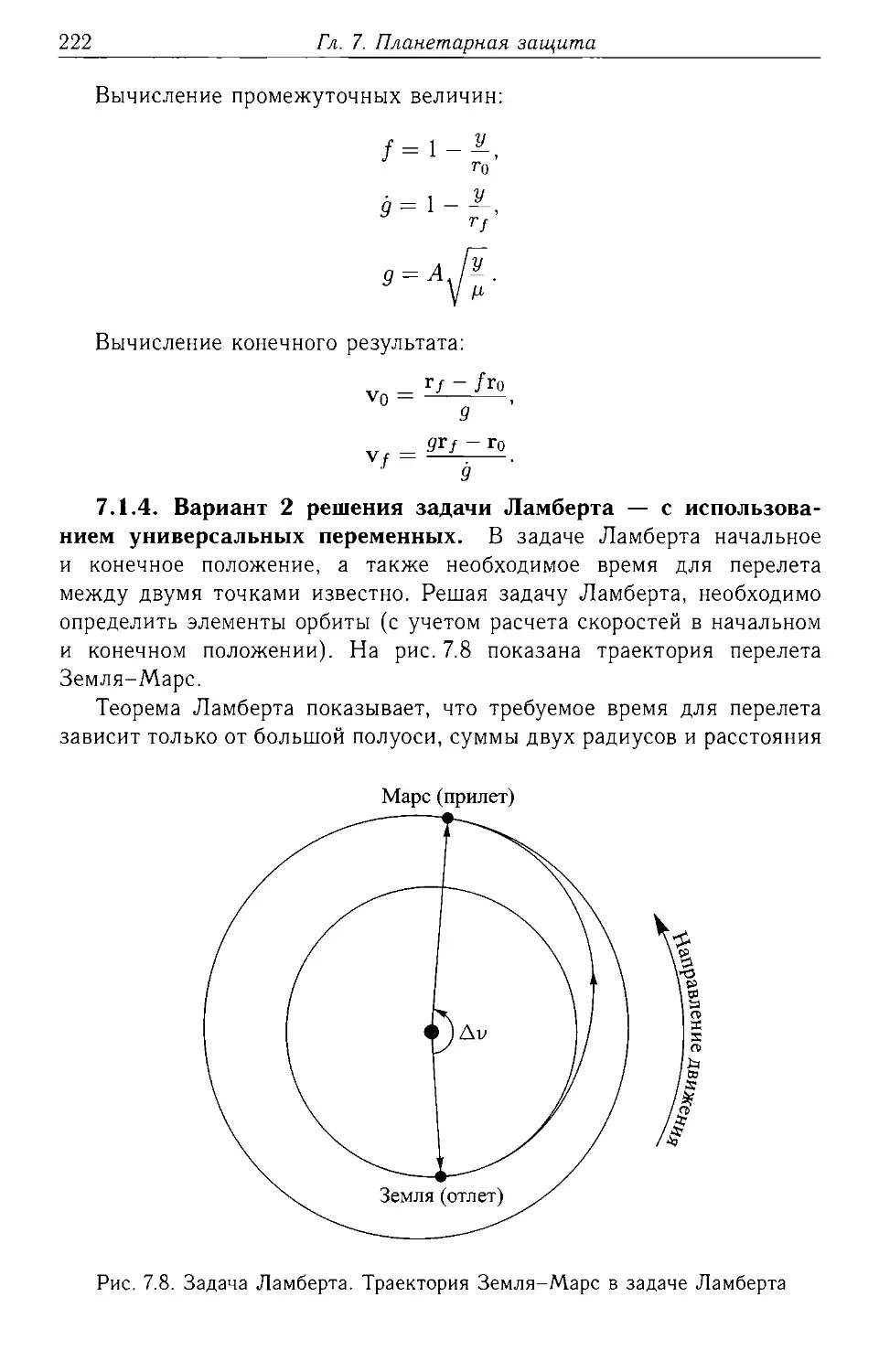
Рассмотрена задача Ламберта как основная составляющая проектиро-
вания траекторий с использованием гравитационных маневров.
В этой главе дается краткое описание математического аппарата,
разработанного для расчетов и оптимизации орбит перелета к асте-
роидам, представляющим практически полный список околоземных
астероидов. При этом значительное внимание уделяется решению про-
блемы обширности этого списка. Разработанный комплекс программ
позволяет проводить оптимизацию по сумме скоростей отлета от Земли
и подлета к астероиду. Приводятся результаты расчетов, выполненных
с помощью упомянутого комплекса, показаны гиперболические скоро-
сти отлета, а также даны даты отлета и прилета для интервала старта
вплоть до 2030 г.
Исследуются траектории перелетов к планетам и астероидам с ис-
пользованием гравитационных маневров.
Построение и содержательная часть книги рассчитана на возмож-
ность последующего применения ее материалов в образовательном
процессе при подготовке специалистов в области механики и астронав-
тики. Изложенные в книге результаты исследований в значительной
мере рассматриваются как исходная база для последующих разработок
в области задач планетарной защиты, пока еще ожидающих своих
решений.
Предисловие
9
В заключении считаем необходимым выразить признательность
за помощь в подготовке материалов к печати ведущему научному
сотруднику лаборатории «Космические исследования, технологии, си-
стемы и процессы» МИЭМ НИУ ВШЭ Логашиной И.В., старшим
научным сотрудникам Аксенову С.А. и Малашкину А.В., научным
сотрудникам Федяеву К.С. и Боярскому М.Н., младшим научным
сотрудникам Боберу С.А., Ерохиной О.С. и Корзо В.Н., инженерам
исследователям Ледкову А.А., Краснопольскому П.К., Федоренко А.Н.,
Шумилину А.В., Шумилину Н.В., а так же студентам кафедры ме-
ханики и математического моделирования МИЭМ НИУ ВШЭ Ивано-
ву А.М., Борхсениусу С.А. и Пузино Ю.А.
Предоставленные сотрудниками лаборатории, полученные совмест-
но с авторами книги и автономно научные результаты и обзорные
материалы помогли сделать изложение более рельефным и интересным.
Авторы
Перечень сокращений
а.е. — 1 астрономическая единица = 149 598000 километров
АСЗ — астероид, сближающийся с Землей
ГБ — головной блок (связка РБ и КА)
ДУ — двигательная установка
ДУ КА — двигательная установка космического аппарата
ДУ РБ — двигательная установка разгонного блока
ИС — искусственный спутник
ИСА — искусственный спутник астероида
ИСВ — искусственный спутник Венеры
ИСЗ — искусственный спутник Земли
ИСЛ — искусственный спутник Луны
ИСМ — искусственный спутник Марса
ИСП — искусственный спутник планеты
КА — космический аппарат
КНА — комплекс научной аппаратуры
МТК — межпланетный транспортный корабль
ОИС — орбита искусственного спутника
ОИСА — орбита искусственного спутника астероида
ОИСВ — орбита искусственного спутника Венеры
ОИСЗ — орбита искусственного спутника Земли
ОИСЛ — орбита искусственного спутника Луны
ОИСМ — орбита искусственного спутника Марса
ОИСЮ — орбита искусственного спутника Юпитера
ПО — программное обеспечение
ПК — программный комплекс
ПОО — потенциально опасный объект
ПЗС — прибор с зарядовой связью. Общее обозначение класса полу-
проводниковых приборов, в которых применяется технология управля-
емого переноса заряда в объеме полупроводника
РБ — разгонный блок
PH — ракета-носитель
СД — сфера действия
СК — система координат
Li, Бг — точки либрации
AV — корректирующий ипмульс на единицу массы, км/с
Сз — энергия запуска на единицу массы, км2/с2
DLA — склонение асимптоты запуска
Перечень сокращений
11
ESA — (European Space Agency) Европейское космическое агент-
ство
Н — абсолютная звездная величина
IEO — объект, орбита которого полностью расположена внутри
орбиты Земли
KSC — Космический центр имени Кеннеди
LEO — низкая околоземная орбита
NASA — (National Aeronautics and Space Administration) Нацио-
нальное управление по воздухоплаванию и исследованию космического
пространства США
NEA — околоземный астероид
NEO — околоземный объект
NEC — околоземная комета
РНА — потенциально опасный астероид
SOI — сфера влияния
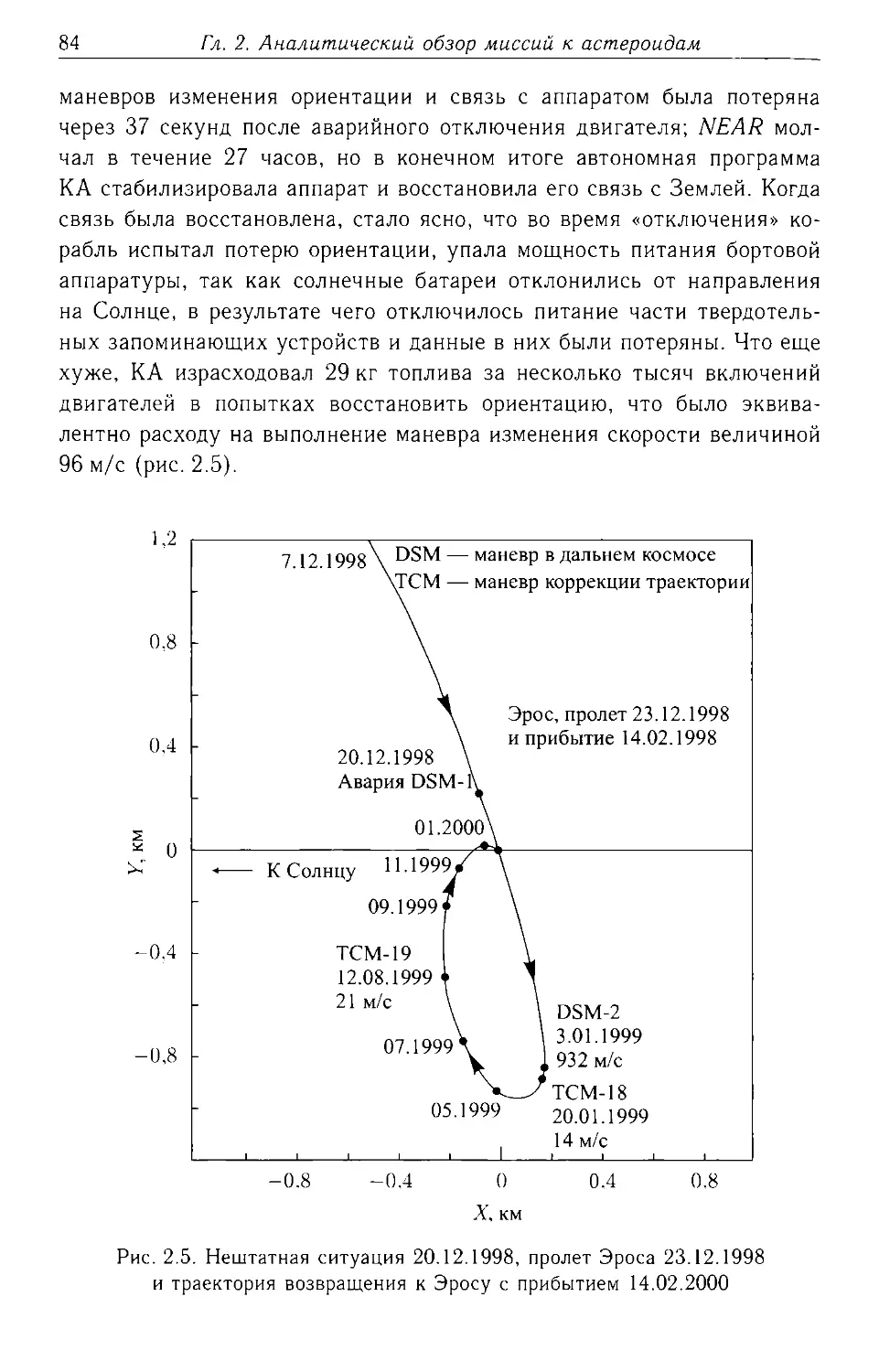
ТСМ — маневр коррекции траектории
TEI — запуск на орбиту перехода к Земле
TL — линия наблюдений
TLI — запуск на орбиту перехода к Луне
TNI — запуск на орбиту перехода к NEO
TOF — время полета (длительность миссии)
VAFB — военно-воздушная база Ванденберг
WSB — граница слабой стабильности
Глава 1
ОБЗОР МЕТОДОВ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ
КОСМИЧЕСКОГО БАЗИРОВАНИЯ ДЛЯ ОРБИТ
В ОКРЕСТНОСТИ КОЛЛИНЕАРНЫХ
ТОЧЕК ЛИБРАЦИИ
1.1. О применении космических оптических средств
для обнаружения и каталогизации
опасных астероидов *)
Проблема астероидной опасности относится к современному вари-
анту гипотезы гибели человечества. На каждом этапе развития науки
ученые предлагали в соответствии со своим уровнем знаний соот-
ветствующий аспект этой проблемы. В XVIII веке это были кометы,
отравлявшие земную атмосферу ядовитыми газами. В XX веке —
космические гамма-всплески в нашей Галактике, губящие все жи-
вое (хотя и на одном полушарии) своим мощным ультрафиолетом
и гамма-излучением, близкие сверхновые со своим губительным по-
током релятивистских и нерелятивистских протонов, которые могли
привести к быстрому вымиранию 2/3 всех видов живых существ
440 миллионов лет тому назад. В наши дни, благодаря современным оп-
тическим методам регистрации оптических транзиентов, растет число
обнаруженных астероидов и квазипланет за орбитой Плутона. Опасны-
ми являются астероиды с размерами от сотен метров и до нескольких
километров, сталкивающиеся с Землей. Особенно опасными кажутся
астероиды из пояса Койпера с большими наклонениями. Можно заме-
тить, что особенную опасность представляют астероиды с обратным
вращением, относительная скорость которых составляет 50-70 км/с,
а кинетическая энергия которых может достигать уровня, измеряемого
энергией взрыва от 50 до 500 тысяч 100-мегатонных термоядерных
') По материалам публикации: Курт В.Г. Приборы и методы обнаружения
опасных астероидов наземными и космическими оптическими средствами //
Косм, исслед. Т. 48, № 5. 2010. С. 465-470.
1.1. О применении космических оптических средств 13
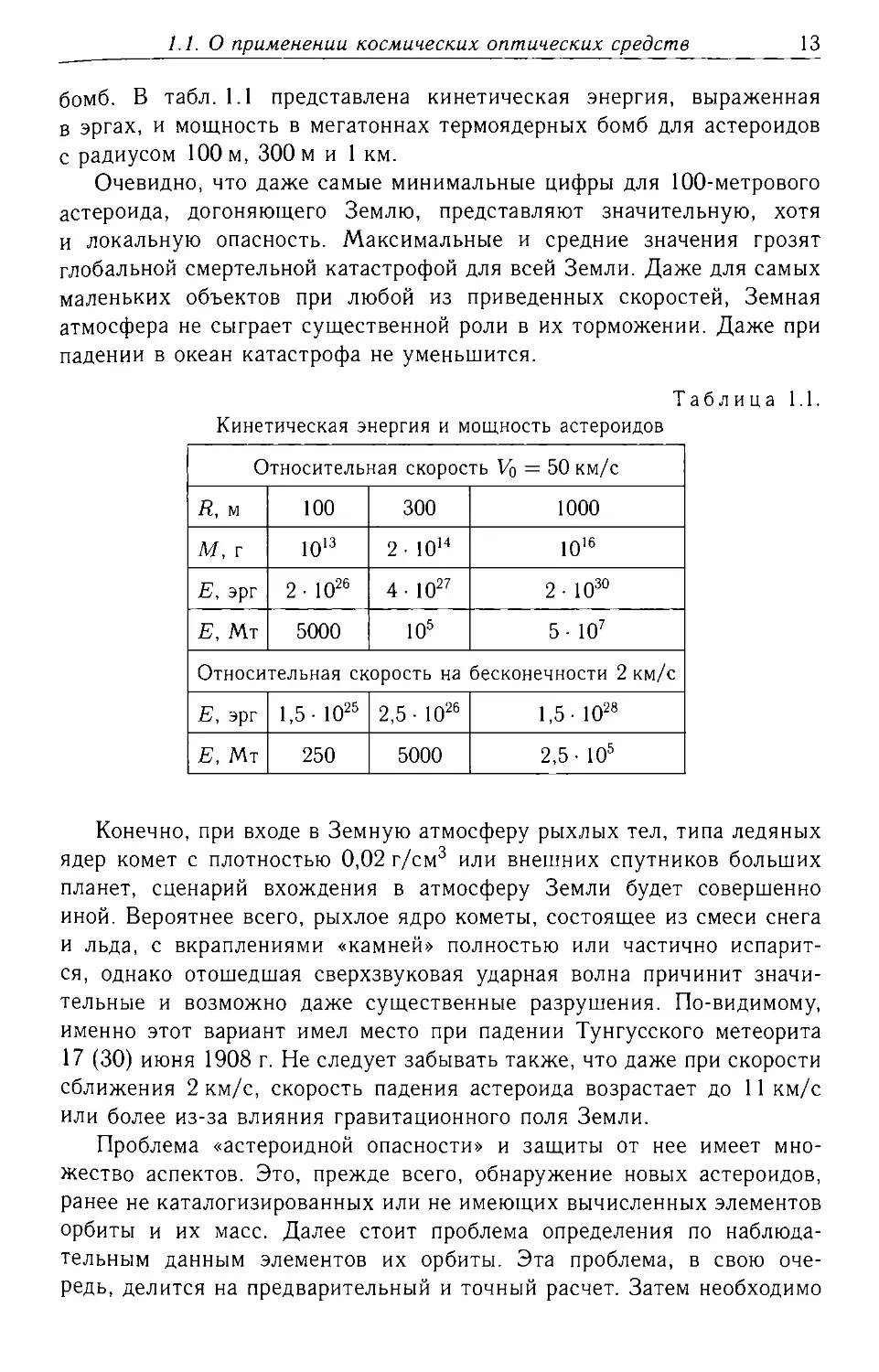
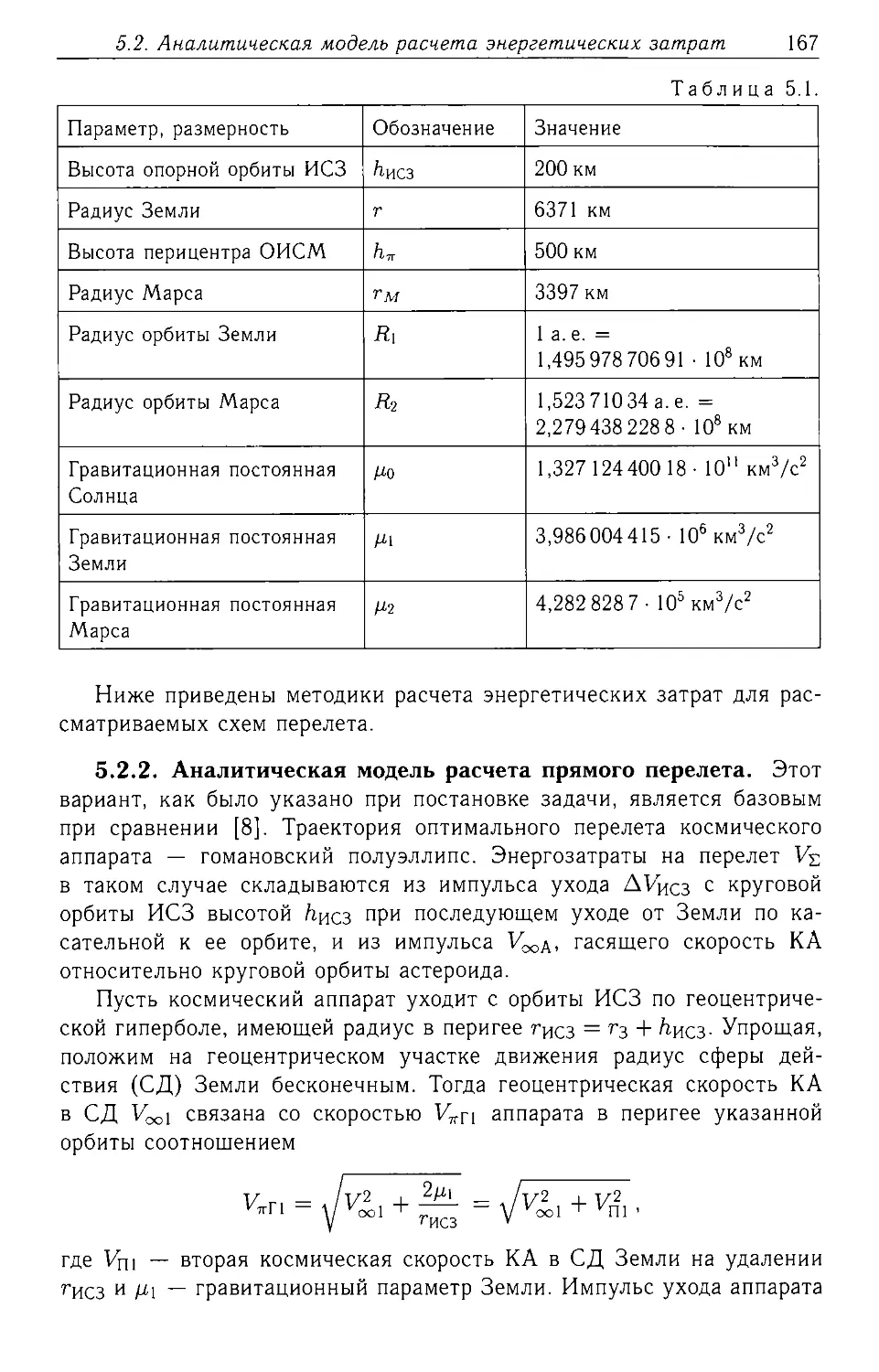
бомб. В табл. 1.1 представлена кинетическая энергия, выраженная
в эргах, и мощность в мегатоннах термоядерных бомб для астероидов
с радиусом 100м, 300 м и 1 км.
Очевидно, что даже самые минимальные цифры для 100-метрового
астероида, догоняющего Землю, представляют значительную, хотя
и локальную опасность. Максимальные и средние значения грозят
глобальной смертельной катастрофой для всей Земли. Даже для самых
маленьких объектов при любой из приведенных скоростей, Земная
атмосфера не сыграет существенной роли в их торможении. Даже при
падении в океан катастрофа не уменьшится.
Таблица 1.1.
Кинетическая энергия и мощность астероидов
Относительная скорость Vo = 50 км/с
R, м 100 300 1000
М, г ю13 2- 1014 1016
Е, эрг 2 • 1026 4 • 1027 105 2 • Ю30
Е, Мт 5000 5- 107
Относительная скорость на бесконечности 2 км/с
Е, эрг 1,5- 1025 2,5 1026 1,5- 1028
Е, Мт 250 5000 2,5- 105
Конечно, при входе в Земную атмосферу рыхлых тел, типа ледяных
ядер комет с плотностью 0,02 г/см3 или внешних спутников больших
планет, сценарий вхождения в атмосферу Земли будет совершенно
иной. Вероятнее всего, рыхлое ядро кометы, состоящее из смеси снега
и льда, с вкраплениями «камней» полностью или частично испарит-
ся, однако отошедшая сверхзвуковая ударная волна причинит значи-
тельные и возможно даже существенные разрушения. По-видимому,
именно этот вариант имел место при падении Тунгусского метеорита
17 (30) июня 1908 г. Не следует забывать также, что даже при скорости
сближения 2 км/с, скорость падения астероида возрастает до 11 км/с
или более из-за влияния гравитационного поля Земли.
Проблема «астероидной опасности» и защиты от нее имеет мно-
жество аспектов. Это, прежде всего, обнаружение новых астероидов,
ранее не каталогизированных или не имеющих вычисленных элементов
орбиты и их масс. Далее стоит проблема определения по наблюда-
тельным данным элементов их орбиты. Эта проблема, в свою оче-
редь, делится на предварительный и точный расчет. Затем необходимо
14
Гл. 1. Обзор методов траекторных измерений
произвести вычисление прогноза их движения на большом удалении
от Земли (порядка 1 а. е.) и на ближнем участке порядка миллиона
или десяти миллионов километров с учетом влияния Земли, и Луны.
Для этого последнего участка орбиты опасного астероида следует учи-
тывать все известные гармоники в разложении гравитационного поля
Земли и Луны. Стоит или не стоит проводить такие вычисления, ко-
нечно, зависит от расстояния в перигелии орбиты (больше или меньше
радиуса Земли). И, наконец, если все-таки астероид относится к ка-
тегории «опасных», возникает задача принятия срочных мер по его
отклонению или разрушении тем или иным способом.
Остановимся на проблеме обнаружения новых астероидов с помо-
щью существующих оптических средств.
1.1.1. Возможности наземной аппаратуры. Проблема обнару-
жения астероидов с помощью наземной аппаратуры имеет большой
задел. Аналогичная аппаратура уже давно используется для реги-
страции оптических транзиентов, связанных с оптическим послесве-
чением космических гамма-всплесков. Такая аппаратура была создана
в США (ROTSE) и в России (МАСТЕР, ГАИШ МГУ). Есть, одна-
ко, и существенное различие для приборов, регистрирующих опти-
ку гамма-всплесков и новые, ранее неизвестные астероиды. Прибо-
ры типа ROTSE и МАСТЕР включаются по команде ALLERT, по-
лучаемой по Интернету от рентгеновских и гамма-спутников типа
SWIFT или INTEGRAL с задержкой от момента регистрации рентге-
на и гамма-излучения в несколько секунд или минут. Рентгеновские
детекторы этих или аналогичных спутников дают координаты с точно-
стью несколько угловых минут, после чего оптические телескопы авто-
матически наводятся на указанную область. Аппаратура для регистра-
ции астероидов должна планомерно сканировать всю доступную для
ночных условий небесную сферу с учетом засветки Луной и конечно
погодных условий. Очевидно, ее следует устанавливать в тех местах,
где процент ясных ночей велик. Такие места имеются в Чили, на Гавай-
ях, Узбекистане (гора Майданак) и Таджикистане (Санглок), где число
ясных ночей превышает 250-300 в год, а астроклиматические условия
не хуже, чем в Чили. Следует обратить внимание на Антарктику, где
также имеются аналогичные места, пригодные для установки полно-
стью автоматизированных телескопов, аналогичных упомянутым выше.
Конечно, стоимость этой аппаратуры будет существенно выше, и она
потребует телеметрического съема получаемой информации с помощью
спутниковой системы. Это также существенно увеличит ее стоимость.
Кроме того, полярный день сделает возможным наблюдения лишь пол-
года.
1.1. О применении космических оптических средств
15
По-видимому, эту задачу следует решать путем установки несколь-
ких десятков идентичных приборов во всех пригодных для наблюдений
местах как в северном, так и в южном полушариях.
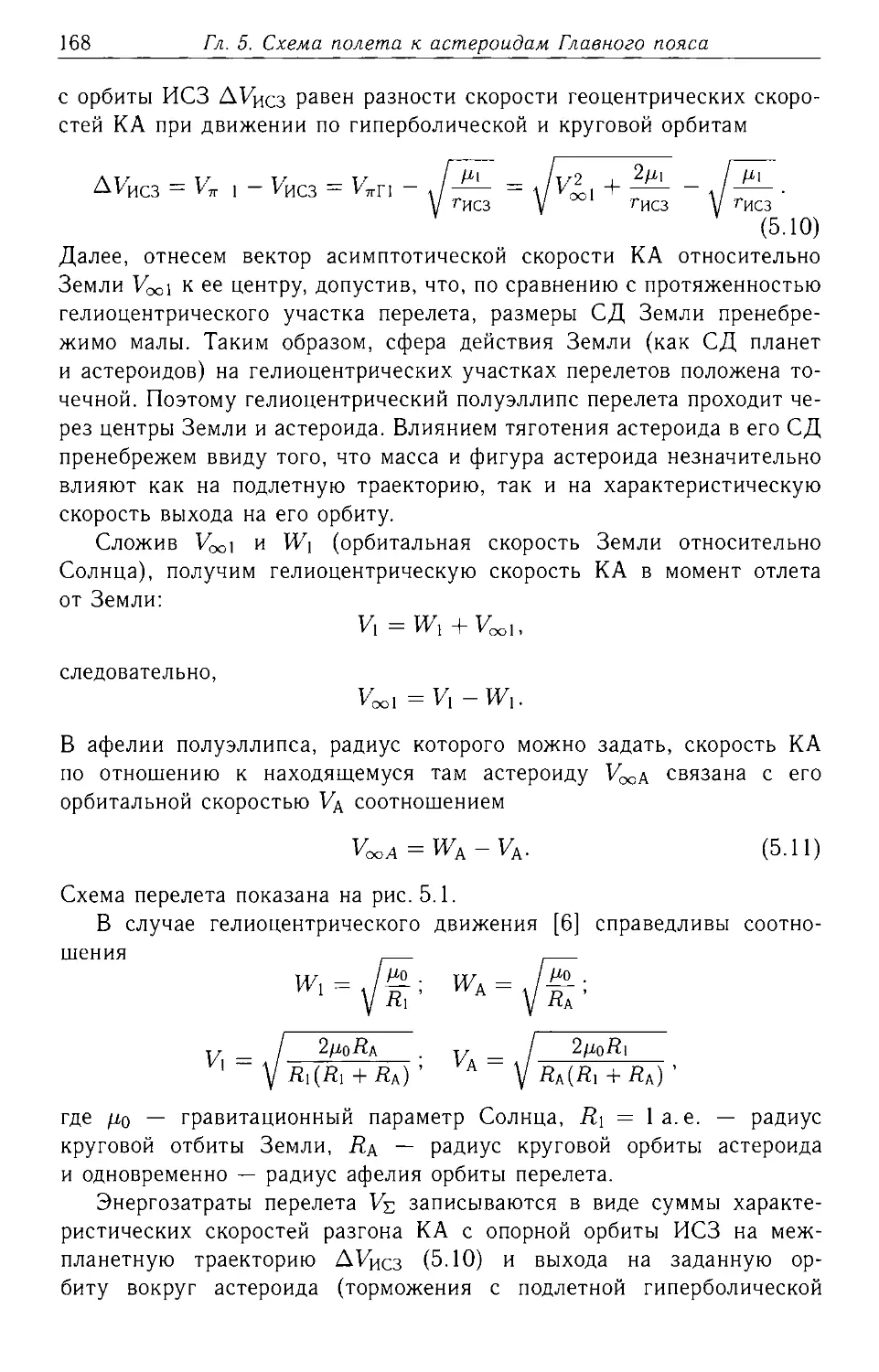
Оценим параметры такой аппаратуры. Здесь следует, в первую оче-
редь, выбрать оптимум между чувствительностью, полем зрения, точ-
ностью определения координат и временем обзора примерно половины
небесной сферы. Будем исходить из идентичности оптических парамет-
ров поверхности астероидов с лунной поверхностью, что, по-видимому,
недалеко от истины. Примем, что альбедо всех астероидов мало
и равно, как и у Луны, А — 0,12. Тогда их блеск будет равен
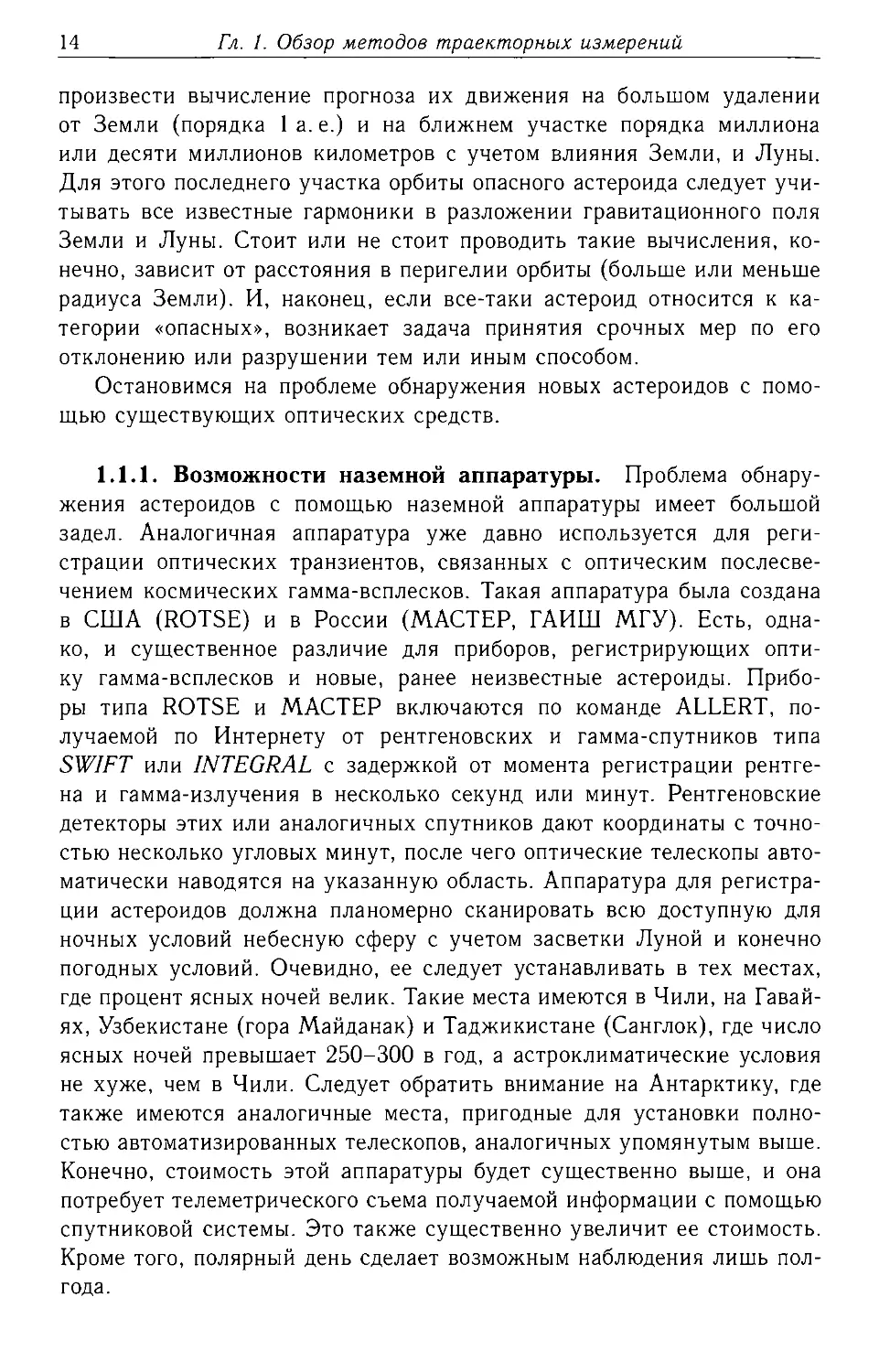
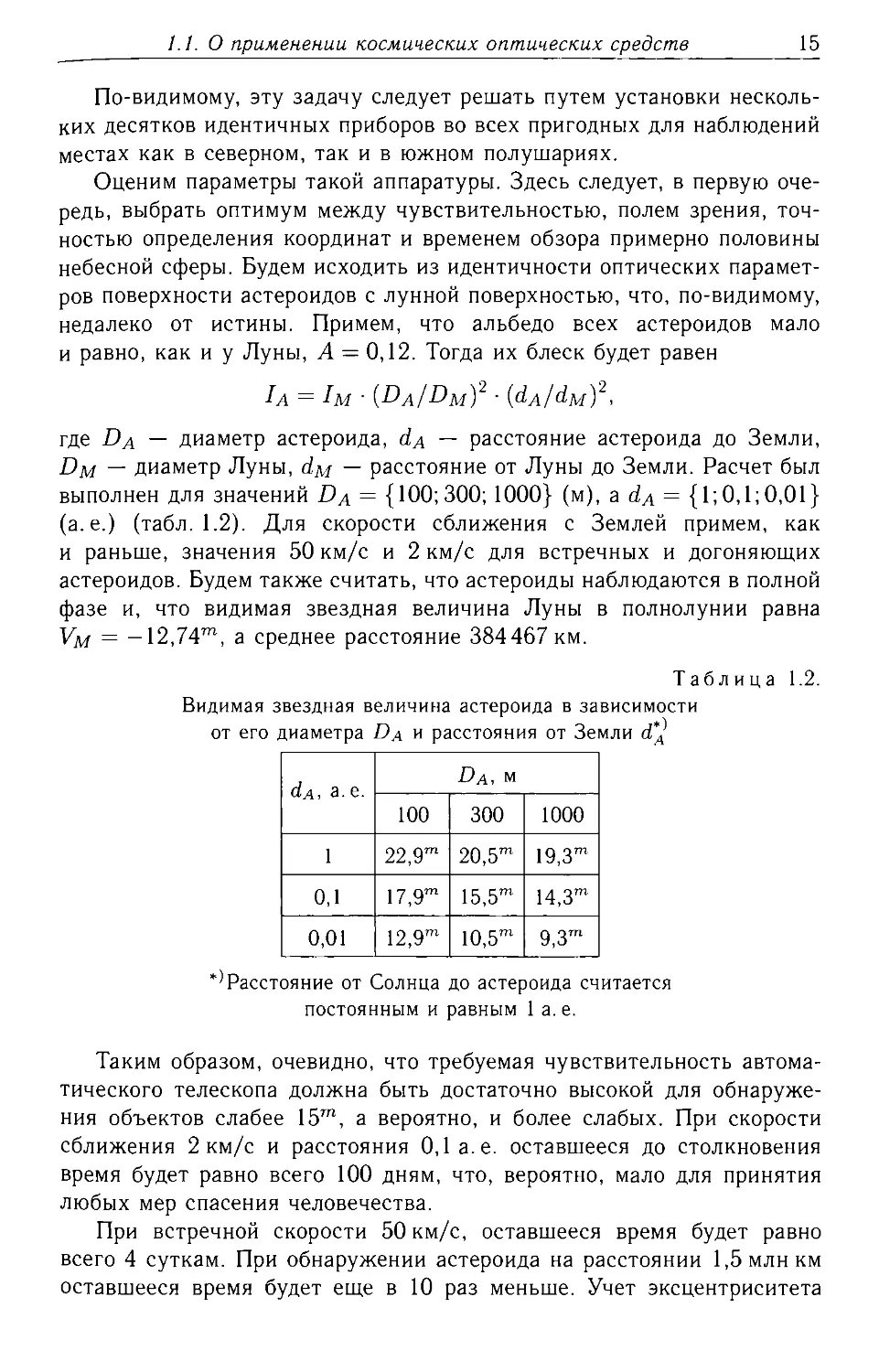
1д = 1м (Ра/Dm)2 (ср^м)2,
где Da — диаметр астероида, — расстояние астероида до Земли,
Dm — диаметр Луны, dM — расстояние от Луны до Земли. Расчет был
выполнен для значений Da = {100; 300; 1000} (м), а с!д = {1;0,1;0,01}
(а.е.) (табл. 1.2). Для скорости сближения с Землей примем, как
и раньше, значения 50 км/с и 2 км/с для встречных и догоняющих
астероидов. Будем также считать, что астероиды наблюдаются в полной
фазе и, что видимая звездная величина Луны в полнолунии равна
Vm = — 12,74™, а среднее расстояние 384 467 км.
Таблица 1.2.
Видимая звездная величина астероида в зависимости
от его диаметра Da и расстояния от Земли d*{
<7д, а. е. Da, м
100 300 1000
1 22,9™ 20,5™ 19,3™
0,1 17,9™ 15,5™ 14,3™
0,01 12,9™ 10,5™ 9,3™
"2 Расстояние от Солнца до астероида считается
постоянным и равным 1 а. е.
Таким образом, очевидно, что требуемая чувствительность автома-
тического телескопа должна быть достаточно высокой для обнаруже-
ния объектов слабее 15™, а вероятно, и более слабых. При скорости
сближения 2км/с и расстояния 0,1 а.е. оставшееся до столкновения
время будет равно всего 100 дням, что, вероятно, мало для принятия
любых мер спасения человечества.
При встречной скорости 50 км/с, оставшееся время будет равно
всего 4 суткам. При обнаружении астероида на расстоянии 1,5 млн км
оставшееся время будет еще в 10 раз меньше. Учет эксцентриситета
16
Гл. 1. Обзор методов траекторных измерений
орбиты обнаруженного астероида может несколько изменить приведен-
ные значения, но существенно на них не повлияет. Становится ясно,
что желательно наблюдать новые или перемещающиеся звездоподоб-
ные объекты вплоть до еще более слабых величин порядка 17m-20m,
что представляет уже существенно более сложную задачу.
При экспозиции порядка 100 с неподвижный объект 15т может
быть зарегистрирован с хорошим отношением «сигнал/шум» телеско-
пом с объективом диаметром порядка 5 см. Фокусное расстояние при
светосиле 1 : 2 будет равно 10 см и поле зрения для матрицы ПЗС
размером 5 х 5 см составит 25°. Для обзора 50% небесной сферы
понадобиться 30-40 экспозиций, что потребует не менее 1-2 часов
чисто наблюдательного времени. Существенный вопрос — обнаружение
и выделение такого объекта на фоне неподвижных звезд. Это мож-
но сделать либо по обнаружению его собственного движения, либо
по сравнению с имеющимися каталогами или картами всего неба, на-
пример, GSC (до 15т), либо по оцифрованному Паломарскому атласу.
При скорости сближения 50 км/с величина смещения за 100 с составит
вполне заметную величину около 1', а при скорости 2 км/с всего око-
ло 2", что уже трудно обнаружимо. Не менее сложная задача — поиск
отсутствующих объектов в выбранном каталоге. Величина смещения,
конечно, зависит еще и от угла между лучом зрения и вектором
скорости астероида.
При сближении астероида с Землей на расстояние менее 1 млн км
следует повторять такие вычисления с учетом гравитационного возму-
щения от Луны и с учетом высших гармоник разложения гравитацион-
ного потенциала Земли. Ясно, что при этом времени до столкновения
останется еще меньше.
Даже при таком оптимистическом варианте вряд ли можно будет
надеяться на 100% осмотр всей небесной сферы из-за запретной зоны
вблизи от Солнца, величина которой близка к 50%. Для полного
обзора необходим будет примерно целый год наблюдений, что может
свести «на нет» задачу обнаружения близких сближающихся с Землей
опасных объектов.
Задачу обнаружения опасных астероидов можно облегчить, наблю-
дая только область вблизи эклиптики и полагая, что астероиды имеют
небольшой разброс наклонений.
Наконец, можно существенно упростить задачу обнаружения сла-
бых астероидов, используя зеркально-линзовые телескопы с диаметром
зеркала 0,5-1 м, аналогичных камерам для наблюдений искусствен-
ных спутников Земли (типа Beker-Nunn-камеры в США) и камеры
ВАУ Института Астрономии РАН в Звенигороде. Эта камера имеет
диаметр входного отверстия 50 см и диаметр главного зеркала 107 см.
Фокусное расстояние камеры равно 70 м, что с матрицей ПЗС размером
1.1. О применении космических оптических средств
17
36 х 36 мм (3056 х 3056 пикселей) дает возможность перекрыть поле
зрения 100' х 100'.
Beker-Nunn-камера Смитсонианского института в США была спе-
циально спроектирована для наблюдений слабых (до 11т) ИСЗ еще
в конце 1950-х гг. Она является вариантом телескоп Шмидта с трех-
линзовым корректором с асферикой центральной линзы. Камера имеет
входную апертуру 508 мм и фокус 510 мм, т. е. весьма светосильная:
D : F = 1 : 1.
Для фотографирования ИСЗ ее поле зрения ориентируется вдоль трека
спутника и равняется 30° х 5°, т. е. 150 град2. Очевидно, что исполь-
зование матриц ПЗС в таком варианте невозможно из-за требуемого
размера матрицы или их решетки 30 х 5 см. При размере ПЗС де-
тектора 5 х 5 см поле зрения составит всего 25 град2. Вероятно, что
все-таки именно камеры типа ВАУ или Beker-Nunn являются самыми
подходящими средствами для поиска новых и опасных астероидов.
Использование больших по размерам фотоматериалов с их последую-
щим сканированием и автоматической обработкой полученных сканов
машинами типа PDS с современным софтом является оптимальным
на сегодняшний день. Заметим, однако, что для сканирования пластин-
ки размером 30 х 30 см, как это делалось при составлении каталога
для HST GSC, требовалось время порядка 12 часов непрерывной рабо-
ты. Для матрицы ПЗС размером 5 х 5 см потребуется время порядка
нескольких минут.
1.1.2. Возможности наблюдений из космоса. Рассмотрим те-
перь возможности, получаемые при установке телескопа на ИСЗ. Преж-
де всего, это дает практически 24-часовое наблюдательное время.
Значительно сокращается область недоступная для наблюдений из-за
Солнца. Уже при удалении от Солнца на 30° рассеянный свет при
оптимально сконструированной бленде может быть вполне приемлемым
для наблюдений не слишком слабых объектов (скажем, ярче 12т). Ска-
нирование может быть осуществлено путем медленного (ш < 0,1°/с)
вращения всего аппарата вокруг оси, ориентированной на Солнце, что
соответствует 1 часу. Сканирование по второй оси может быть осу-
ществлено путем поворотного зеркала, наклоняемого при каждом обо-
роте на угол порядка 5°. При столь медленном сканировании на осмотр
почти всей небесной сферы уйдет около суток. Конечно, низкие орбиты
имеют большой недостаток — почти половину небесной сферы закрыва-
ет Земля. Несомненно, для специализированного спутника, сконстру-
ированного для решения лишь задачи обнаружения новых (и ранее
известных уже) астероидов, предпочтительнее высокоапогейные орби-
ты типа орбит российских спутников «Астрон» (1983 г.) и «-Гранат-»
18
Гл. 1. Обзор методов траекторных, измерений
(1989 г.) с апогеем 300 тыс. км и перигеем порядка 10 тыс. км и пе-
риодом 4 суток. Более интересным кажется размещение спутника
во второй точке Лагранжа Lg на удалении от Земли 1,5 млн км. Этот
вариант потребует, конечно, установки на аппарате двигателя малой
тяги для коррекции орбиты. Для управления таким специализиро-
ванным аппаратом потребуется свой пункт управления, так как объ-
ем получаемой информации составит 1-2 Гбайт/сут или 15кбайт/с
при 24-часовой непрерывной работе. Кажется, сегодня это уже не пред-
ставляет непреодолимой трудности.
Следующий этап работы начинается после того, как опасный асте-
роид будет обнаружен и предварительный анализ его движения при
первом, втором или даже третьем пролете мимо Земли составит реаль-
ную угрозу. К сожалению, кратковременные оптические наблюдения
с точностями даже порядка 1" не могут обеспечить необходимой точ-
ности прогноза. Единственным надежным способом определения орби-
ты опасного объекта является запуск специального аппарата к нему,
посадка на его поверхность и длительные (порядка года) наблюдения
с максимально возможной точностью дальности и радиальной скорости
с помощью приема сигнала этого аппарата, т. е. так, как это делается
для межпланетных станций.
Один такой замечательный пример уже есть. 12 февраля 2001 г.
американский космический аппарат NEAR-Shoemaker совершил мяг-
кую посадку на поверхность астероида Эрос. Хотя 800-килограммовый
зонд не был оборудован посадочным устройством, тем не менее, ему
удалось сесть со скоростью всего 1,9 м/с. Аппарат после посадки
полностью сохранил работоспособность. Вся его аппаратура работа-
ла, включая солнечные батареи. К сожалению, фотографировать, на-
ходясь на поверхности, было невозможно (большая часть приборов
NEAR-Shoemaker была предназначена для дистанционных исследова-
ний), но те данные, что были накоплены зондом во время его сближе-
ния и посадки, были постепенно переданы на Землю для обработки.
С их помощью была получена детальная информация о поверхности
астероида и, в частности, о необычном процессе эрозии (считалось,
что на астероиде отсутствуют кратеры меньше нескольких метров
в диаметре, однако снимки с близкого расстояния показали, что они
все же есть, но засыпаны мелкой пылью, природа которой неясна). При
сближении космическими аппаратами были получены также фотогра-
фии астероидов Гаспра, Матильда и Ида со спутником Дактиль — пер-
вый пример астероида со спутником. Конечно, эти астероиды-гиганты
с размерами более 10 км со стабильными и слабо возмущаемыми
орбитами, но их изучение важно для определения их масс и других
физических параметров. Масса малых и потому опасных астероидов
может быть оценена лишь по их блеску в предположении (весьма
1.2. Размещение космических обсерваторий в окрестности Венеры 19
проблематичном) об их альбедо и форме, часто отличной от даже
квазисферической. Сегодня уже получены отличные снимки свыше
десяти крупных астероидов.
1.2. Размещение в окрестности Венеры космических
обсерваторий с целью обнаружения потенциально
опасных астероидов
До 1801 г. люди не были осведомлены об угрозе объектов NEA.
1 января 1801 г. Дж. Пьяцци в Палермской обсерватории на Сици-
лии обнаружил первый астероид (1) Церера. Вскоре были обнаружены
еще три астероида, но они также находились в «безопасных» около-
круговых орбитах между Марсом и Юпитером, заполняя пространство
«отсутствующей планеты» Боде и не представляя никакой угрозы для
любой из больших планет. Но стало понятно, что Солнечная система
содержит, вероятно, множество каменных тел, намного более крупных,
чем известные сегодня метеориты [1].
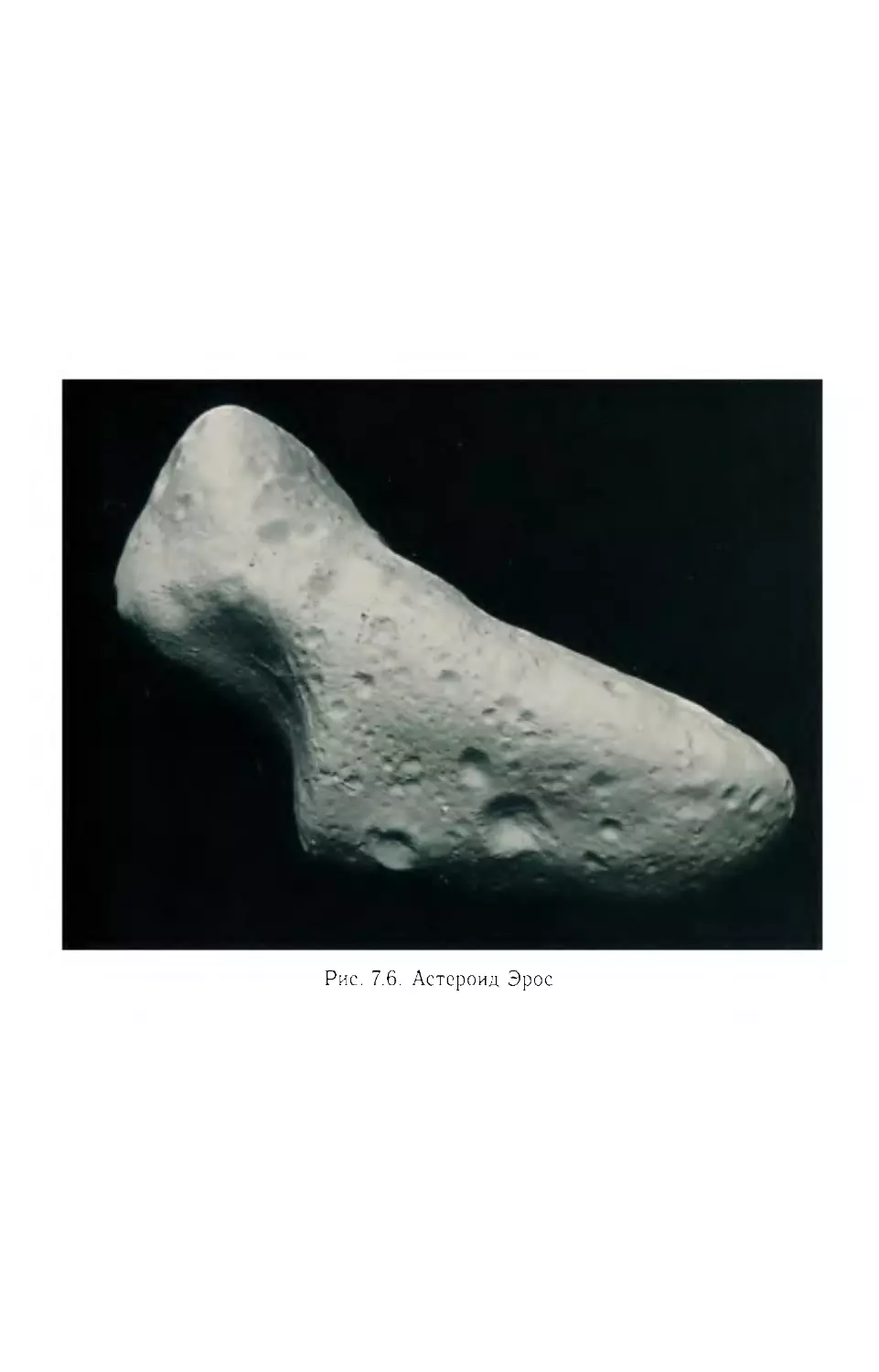
13 августа 1898 г. К. Витт в Германии обнаружил астероид (433)
Эрос, первый объект NEA. Астрономы тогда поняли, что астероиды
располагаются не только в пределах главного пояса между Марсом
и Юпитером, но могут, по крайней мере, пересекать орбиту Мар-
са и подходить довольно близко к Земле. Эрос представляет собой
астероид группы Амура с перигелием 1,13 а. е. и наклонением орбиты
к эклиптике, равным 11°. Эрос, по размерам превышающий астероид,
создавший кратер Чиксулуб, погубивший динозавров, не будет про-
ходить около Земли в ближайший миллион лет, но имеет 50%-ную
вероятность сделать это в следующие 5 миллиардов лет [2].
Эрос интенсивно исследовался в 2000 и 2001 гг. благодаря мис-
сии NEAR-Shoemaker. Космический аппарат совершил первую успеш-
ную посадку на астероид 12 февраля 2001 г. Двигатели NEAR-
Shoemaker были включены для создания тормозного импульса ДУ,
когда он столкнулся с поверхностью, его бортовая система наведения
и управления попыталась завершить работу двигателей. При этом
космический аппарат покрылся грязью в силу продолжающегося рас-
хода топлива. Это был непреднамеренный эксперимент по отклонению
астероида, не очень успешный, поскольку импульс ДУ, сообщенный
Эросу, был настолько малым, что пройдет 50 миллиардов лет, прежде
чем Эрос переместится в результате на один земной радиус [3].
1.2.1. Поиск объектов NEA. Важной исторической датой явля-
ется 24 апреля 1932 г., когда К. Рейнмут из Гейдельберга (Германия)
обнаружил первый астероид, пересекающий орбиту Земли — (1862)
Аполлон. Хотя его орбита была определена достаточно хорошо для
20
Гл. 1. Обзор методов траекторных измерений
того времени, Аполлон был потерян и не наблюдался до 1973 г., когда
вновь была хорошо определена его орбита [1]. В течение многих лет,
вплоть до 1951 г., астероид Аполлон, пересекающий орбиту Земли,
рассматривался как недоразумение.
При составлении первого Паломарского обзора неба был найден
астероид (1620) Географ, орбита которого также перескала орбиту
Земли. Постепенно было найдено большое количество астероидов се-
мейства Аполлона с большими полуосями орбит свыше 1,0, орбиты
которых пересекали Землю. В настоящее время Центр малых планет
(Minor Planet Center — МРС) внес в список 3139 астероидов семейства
Аполлона [4]. Другой вехой было открытие 7 января 1976 г. астро-
номом Паломарской обсерватории Е. Хелин астероида (2062) Атон [1].
Это был первый обнаруженный астероид с большой полуосью орбиты,
меньшей среднего радиуса орбиты Земли. Но даже эти объекты нахо-
дятся существенное время вне орбиты Земли вблизи афелия и могут
поэтому быть легко обнаружены наземными обсерваториями. В насто-
ящее время известны 514 астероидов семейства Атона [5].
С ростом числа обнаруженных в начале 1990-х гг. астероидов се-
мейств Аполлона и Атона, орбиты которых пересекают орбиту Змели,
астрономы стали лучше понимать перспективы и угрозы, представля-
емые этими объектами NEA, и интерес к ним резко возрос. Были на-
чаты продуктивные наблюдения на больших наземных обсерваториях,
приведшие к новым открытиям большого количества объектов NEA.
Но даже в 1994 г., когда в Аризоне была созвана первая большая
конференция по данной теме, не было серьезных намерений вынести
наблюдения в космос и попытаться найти объекты IEO (Interior Earth
Objects), ни один из которых не был обнаружен к тому времени [6].
1.2.2. Фаэтон — первый объект NEO, обнаруженный из кос-
моса. Спутник IRAS был запущен 25 января 1983 г. на солнечно-
синхронную околоземную орбиту и работал в течение десяти меся-
цев, пока не был израсходован жидкий гелий, использовавшийся для
охлаждения инфракрасного датчика. Этот спутник выполнил первый
всесторонний ИК-обзор неба. 11 октября 1983 г. С. Грин и Дж. Дэвис,
изучая данные спутника IRAS, обнаружили астероид группы Апполо-
на, названный (3200) Фаэтон. Это был первый астероид, обнаруженный
с космического аппарата. Возможно, Фаэтон представляет собой мерт-
вую комету, родительское тело наблюдаемого ежегодного метеорного
ливня Геминиды (Geminids). По данным IRAS были обнаружены два
других новых астероида. Данные спутника, в соединении с наземными
наблюдениями в оптическом диапазоне, использовались, чтобы оценить
диаметры около 2000 астероидов [7]. Но по современным стандар-
там датчики IRAS были не очень чувствительны, чтобы эффективно
1.2. Размещение космических обсерваторий в окрестности Венеры 21
обнаружить на небе малые объекты NEA. Поскольку наблюдения были
ограничены полосой приблизительно 90° от Солнца, спутник не мог
наблюдать объекты IEO. IRAS был предназначен не для обнаружения
астероидов, а для выполнения первой разведки неба за пределами
Солнечной системы в ИК-диапазоне и нахождения распределения пыли
в ее пределах, и он позволил сделать важное открытие — обнаружение
следов пыли, оставленных кометами.
1.2.3. Другие миссии на орбите Земли по обнаружению объ-
ектов NEA. 11 февраля 2003 г. наземный телескоп Массачусетско-
го технологического института (M.I.T.) LINEAR обнаружил (163693)
Атира — первый открытый астероид, орбита которого полностью рас-
положена в пределах орбиты Земли, т. е. первый объект IEO. Впервые
было получено убедительное доказательство существования класса
астероидов, которые было очень трудно наблюдать с Земли, так как
они всегда находились на относительно малых элонгациях от Солнца
для наблюдателей на Земле (очень густые сумерки или малая высота
над горизонтом затрудняет наблюдение этих объектов), в то же время,
находясь достаточно близко к Земле, чтобы представлять потенциаль-
ную угрозу. Астероиды, афелии орбит которых меньше, чем 1,0 а.е.,
могли быть объектами IEO — новым классом объектов NEA, кото-
рые должны были называться астероидами группы Атиры по имени
их первого открытого члена, аналогично другим классам объектов
NEA. Однако сейчас эти объекты чаще называют астероидами аро-
hele. Они не выделены в отдельную группу Центром малых планет,
но включены в его список астероидов группы Атона. На 31 января
2010 г. этот список включает 15 астероидов с афелиями меньшими,
чем 1,0, большая часть которых являются, вероятно, объектами IEO.
Поскольку 5 из них имеют афелии больше, чем 0,983, есть некоторый
шанс, что они пересекают эксцентричную орбиту Земли. Но и в этом
случае некоторые астероиды с большими афелиями — порядка 1,016
(имеются 22 астероида с афелиями между 1,000 и 1,016) — могут
быть объектами IEO, если их афелии почти такие же, как афелий
Земли. В любом случае теперь ясно, что существует популяция объ-
ектов IEO, которые могут наблюдаться более эффективно из космоса,
чем с поверхности Земли, из-за возмущающего влияния атмосферы.
Сейчас планируется ряд миссий с тем, чтобы попытаться обнаружить
объекты NEA из космоса. Это миссии на орбите Земли с телескопами,
которые позволяют им наблюдать объекты при солнечных элонгациях,
значительно меньших, чем в случае наблюдений с Земли. Эти приборы
выводятся на близкие к круговым солнечно-синхронные орбиты вблизи
земного терминатора на высоты от 500 до 700 км, что позволяет им по-
лучать солнечную энергию в течение большего времени.
22
Гл. 1. Обзор методов траекторных измерений
12 января 2010 г. КА WISE (Wide Field Infrared Survey Explorer),
запущенный 14 декабря 2009 г., обнаружил свой первый объект NEA
из космоса — 1-километровый объект, обозначенный сейчас как 2010
АВ78 [8]. КА WISE был предназначен для обзора неба с высокой
чувствительностью в ИК-диапазоне спектра с целью наблюдения звезд
и галактик. В этом отношении данный КА представляет собой совре-
менную, более мощную версию аппарата IRAS, но в качестве допол-
нительной задачи он имеет также целенаправленный специфический
поиск объектов NEA. КА WISE имеет 40-сантиметровый телескоп и на-
блюдает в дуге большого круга с 90°-й элонгацией от Солнца. Посколь-
ку наблюдательная программа WISE началась всего лишь несколькими
днями раньше первого успеха с наблюдением 2010 АВ78, этот КА,
вероятно, обнаружит намного больше объектов NEA в течение его за-
планированной однолетней миссии [9]. Ученые проекта WISE надеются
обнаружить в течение миссии примерно пятую часть объектов NEA
диаметром до 0,7 км, но из-за 90°-ного солнечного удаления некоторые
из них будут, вероятно, объектами IEO.
26 февраля 2013 г. канадское космическое агентство запустило свой
спутник NEOSSat (Near Earth Object Surveillance Satellite). Он плани-
рует наблюдать астероиды до 20т с солнечными элонгациями до 45°,
так что это, вероятно, первая миссия, предназначенная, в основном,
для поиска объектов NEA и, в частности, объектов IEO. NEOSSat
будет также наблюдать искусственные спутники на геосинхронной
и других высоких орбитах для NORAD.
В 2013 г. Немецкий центр воздушных и космических полетов
DLR (Deutsch Zentrum fiir Luft-und Raumfahrt) планировал запу-
стить на околоземную орбиту спутник AsteroidFinder. Он должен был
стать первой космической миссией, посвященной только обнаружению
объектов IEO, так как с помощью 25-см телескопа, установленного
на AsteroidFinder, планировалось проводить наблюдения на элонгациях
от Солнца от 30° до 60°. Этот космический аппарат не должен был
расходовать рабочее тело и охлаждающий компонент [10]. К сожале-
нию, работа над миссией была свернута в 2012 г., и правительство
Германии больше не планирует выделять на нее средства.
1.2.4. NEOShield — первая предложенная миссия поиска асте-
роидов за пределами орбиты Земли. Самым ранним серьезным
предложением по наблюдению потенциально опасных астероидов с ап-
паратов космического базирования является проект NEOShield, пред-
ложенный Лабораторией прикладной физики Университета Джона Хоп-
кинса Институту перспективных концепций NASA [11]. Этот проект
предусматривал запуск к Венере трех космических аппаратов типа
Sentry, которые затем должны были использовать пролет около Венеры
1.2. Размещение космических обсерваторий в окрестности Венеры 23
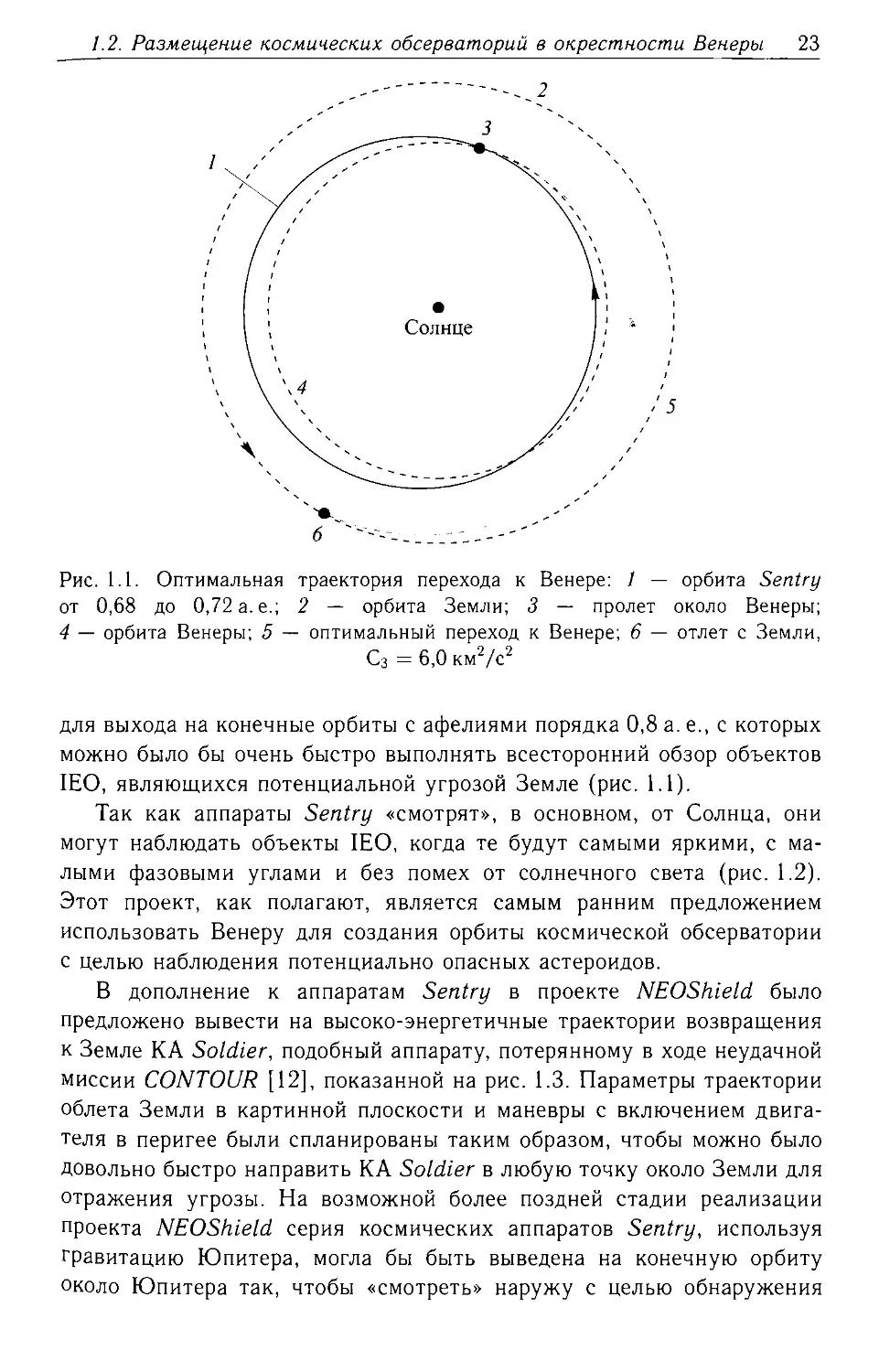
Рис. 1.1. Оптимальная траектория перехода к Венере: 1 — орбита Sentry
от 0,68 до 0,72 а. е.; 2 — орбита Земли; 3 — пролет около Венеры;
4 — орбита Венеры; 5 — оптимальный переход к Венере; 6 — отлет с Земли,
Сз = 6,0 км2/с2
для выхода на конечные орбиты с афелиями порядка 0,8 а. е., с которых
можно было бы очень быстро выполнять всесторонний обзор объектов
IEO, являющихся потенциальной угрозой Земле (рис. 1.1).
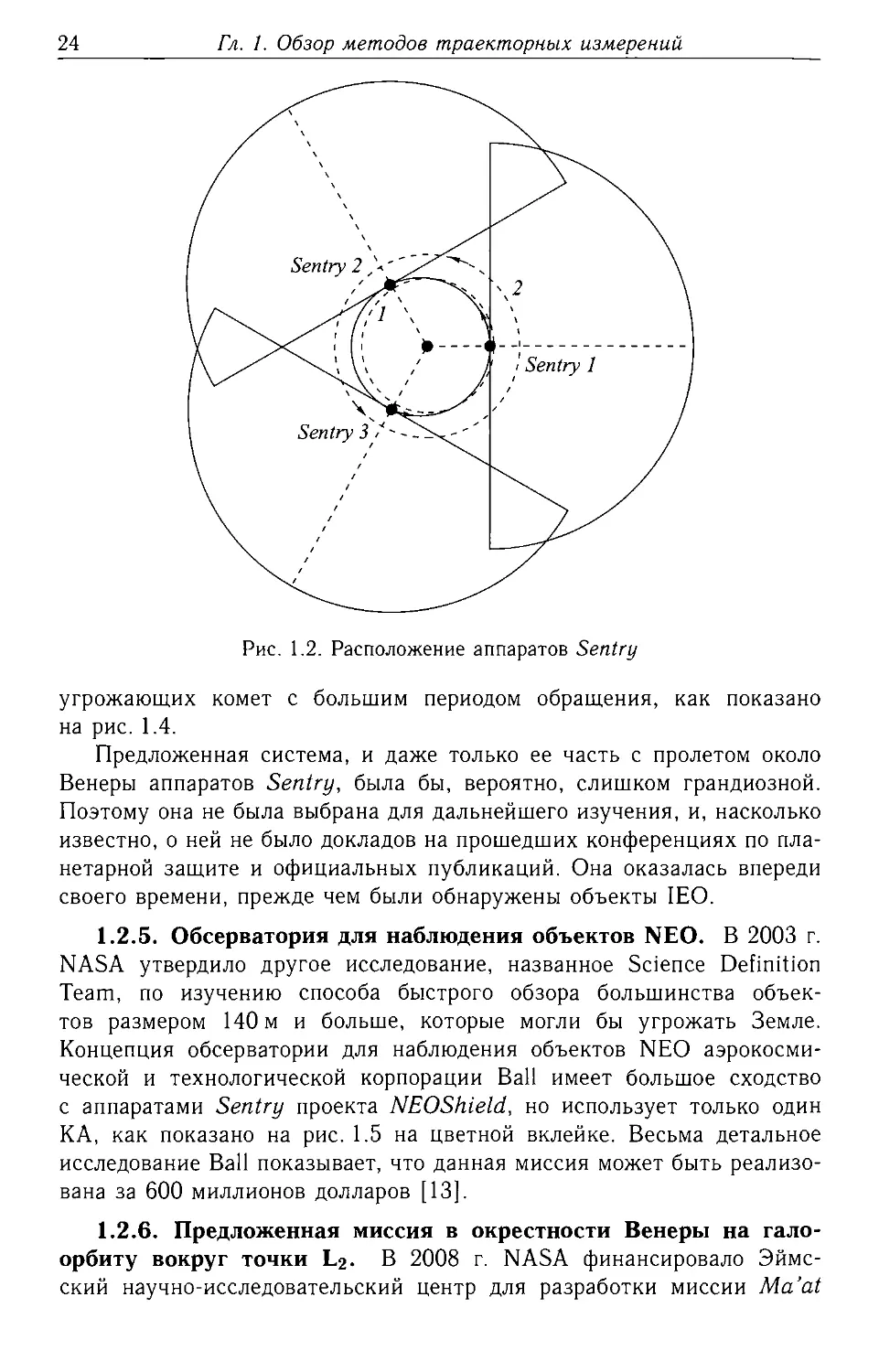
Так как аппараты Sentry «смотрят», в основном, от Солнца, они
могут наблюдать объекты IEO, когда те будут самыми яркими, с ма-
лыми фазовыми углами и без помех от солнечного света (рис. 1.2).
Этот проект, как полагают, является самым ранним предложением
использовать Венеру для создания орбиты космической обсерватории
с целью наблюдения потенциально опасных астероидов.
В дополнение к аппаратам Sentry в проекте NEOShield было
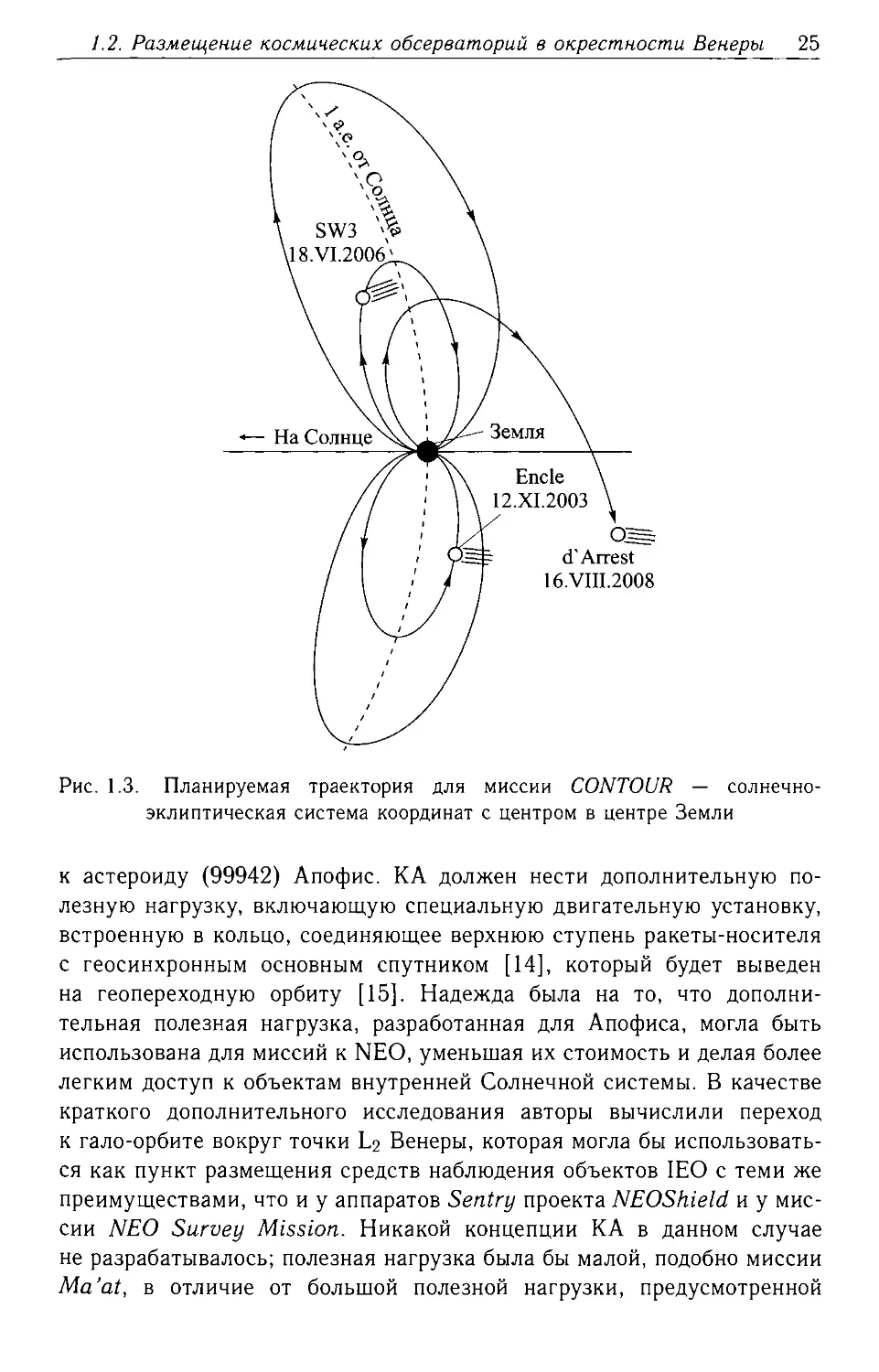
предложено вывести на высоко-энергетичные траектории возвращения
к Земле КА Soldier, подобный аппарату, потерянному в ходе неудачной
миссии CONTOUR [12], показанной на рис. 1.3. Параметры траектории
облета Земли в картинной плоскости и маневры с включением двига-
теля в перигее были спланированы таким образом, чтобы можно было
довольно быстро направить КА Soldier в любую точку около Земли для
отражения угрозы. На возможной более поздней стадии реализации
проекта NEOShield серия космических аппаратов Sentry, используя
гравитацию Юпитера, могла бы быть выведена на конечную орбиту
около Юпитера так, чтобы «смотреть» наружу с целью обнаружения
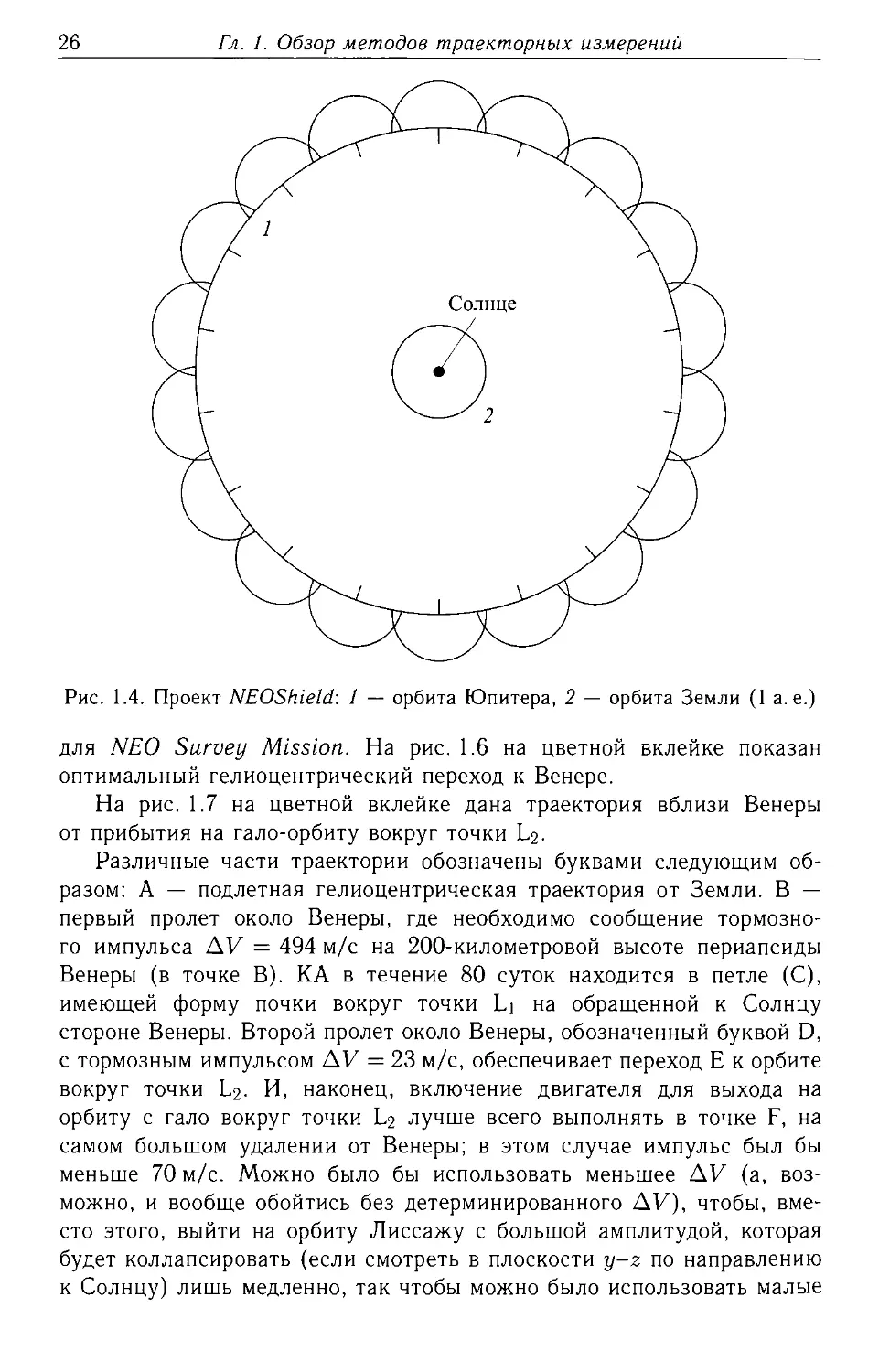
24
Гл. 1. Обзор методов траекторных измерений
угрожающих комет с большим периодом обращения, как показано
на рис. 1.4.
Предложенная система, и даже только ее часть с пролетом около
Венеры аппаратов Sentry, была бы, вероятно, слишком грандиозной.
Поэтому она не была выбрана для дальнейшего изучения, и, насколько
известно, о ней не было докладов на прошедших конференциях по пла-
нетарной защите и официальных публикаций. Она оказалась впереди
своего времени, прежде чем были обнаружены объекты IEO.
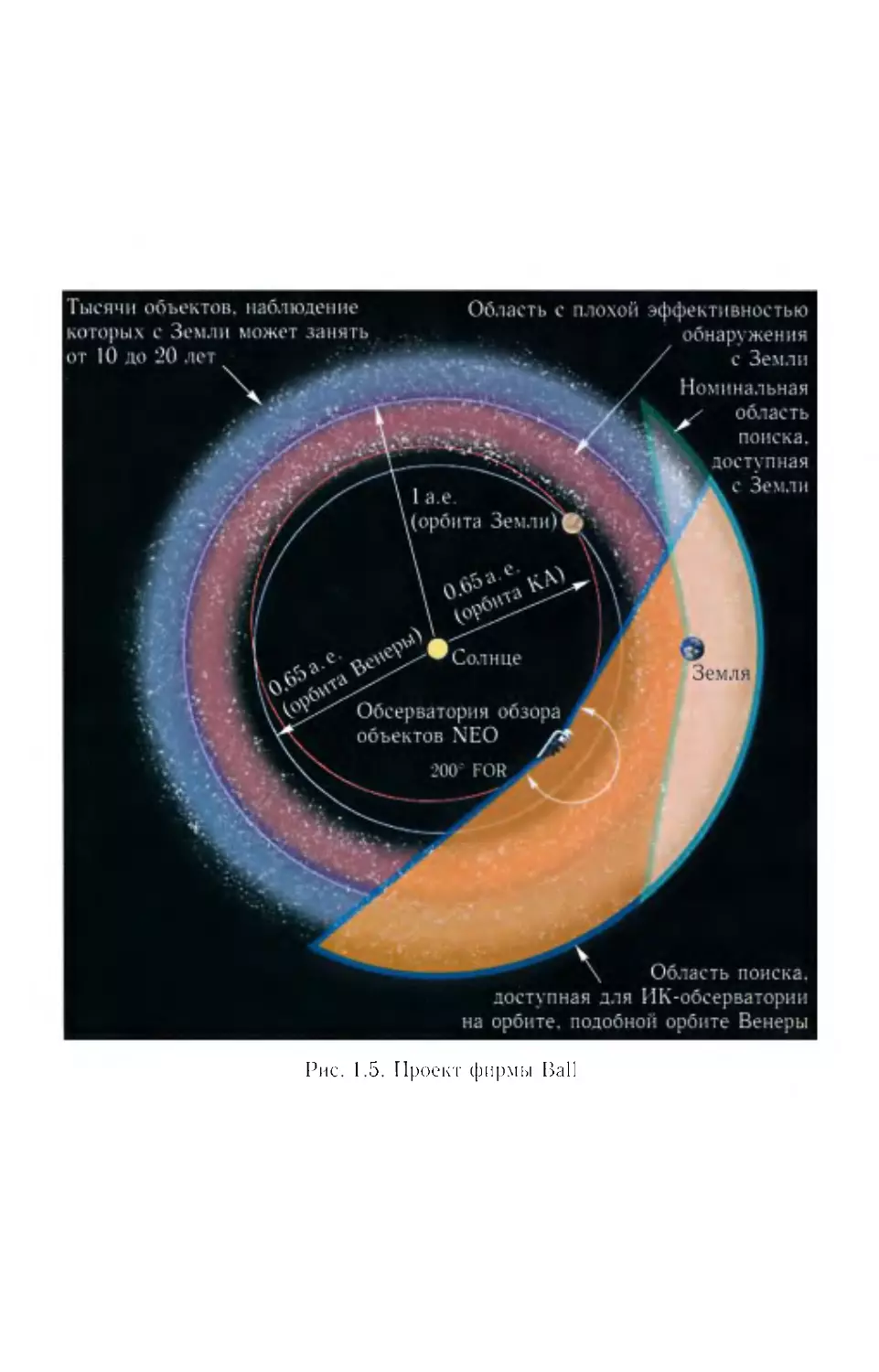
1.2.5. Обсерватория для наблюдения объектов NEO. В 2003 г.
NASA утвердило другое исследование, названное Science Definition
Team, по изучению способа быстрого обзора большинства объек-
тов размером 140 м и больше, которые могли бы угрожать Земле.
Концепция обсерватории для наблюдения объектов NEO аэрокосми-
ческой и технологической корпорации Ball имеет большое сходство
с аппаратами Sentry проекта NEOShield, но использует только один
КА, как показано на рис.1.5 на цветной вклейке. Весьма детальное
исследование Ball показывает, что данная миссия может быть реализо-
вана за 600 миллионов долларов [13].
1.2.6. Предложенная миссия в окрестности Венеры на гало-
орбиту вокруг точки Ьг. В 2008 г. NASA финансировало Эймс-
ский научно-исследовательский центр для разработки миссии Ma’at
1.2. Размещение космических обсерваторий в окрестности Венеры 25
Рис. 1.3. Планируемая траектория для миссии CONTOUR — солнечно-
эклиптическая система координат с центром в центре Земли
к астероиду (99942) Апофис. КА должен нести дополнительную по-
лезную нагрузку, включающую специальную двигательную установку,
встроенную в кольцо, соединяющее верхнюю ступень ракеты-носителя
с геосинхронным основным спутником [14], который будет выведен
на геопереходную орбиту [15]. Надежда была на то, что дополни-
тельная полезная нагрузка, разработанная для Апофиса, могла быть
использована для миссий к NEO, уменьшая их стоимость и делая более
легким доступ к объектам внутренней Солнечной системы. В качестве
краткого дополнительного исследования авторы вычислили переход
к гало-орбите вокруг точки L2 Венеры, которая могла бы использовать-
ся как пункт размещения средств наблюдения объектов 1ЕО с теми же
преимуществами, что и у аппаратов Sentry проекта NEOShield и у мис-
сии NEO Survey Mission. Никакой концепции КА в данном случае
не разрабатывалось; полезная нагрузка была бы малой, подобно миссии
Ma’at, в отличие от большой полезной нагрузки, предусмотренной
26
Гл. 1. Обзор методов траекторных измерений
Рис. 1.4. Проект NEOShield: 1 — орбита Юпитера, 2 — орбита Земли (1 а.е.)
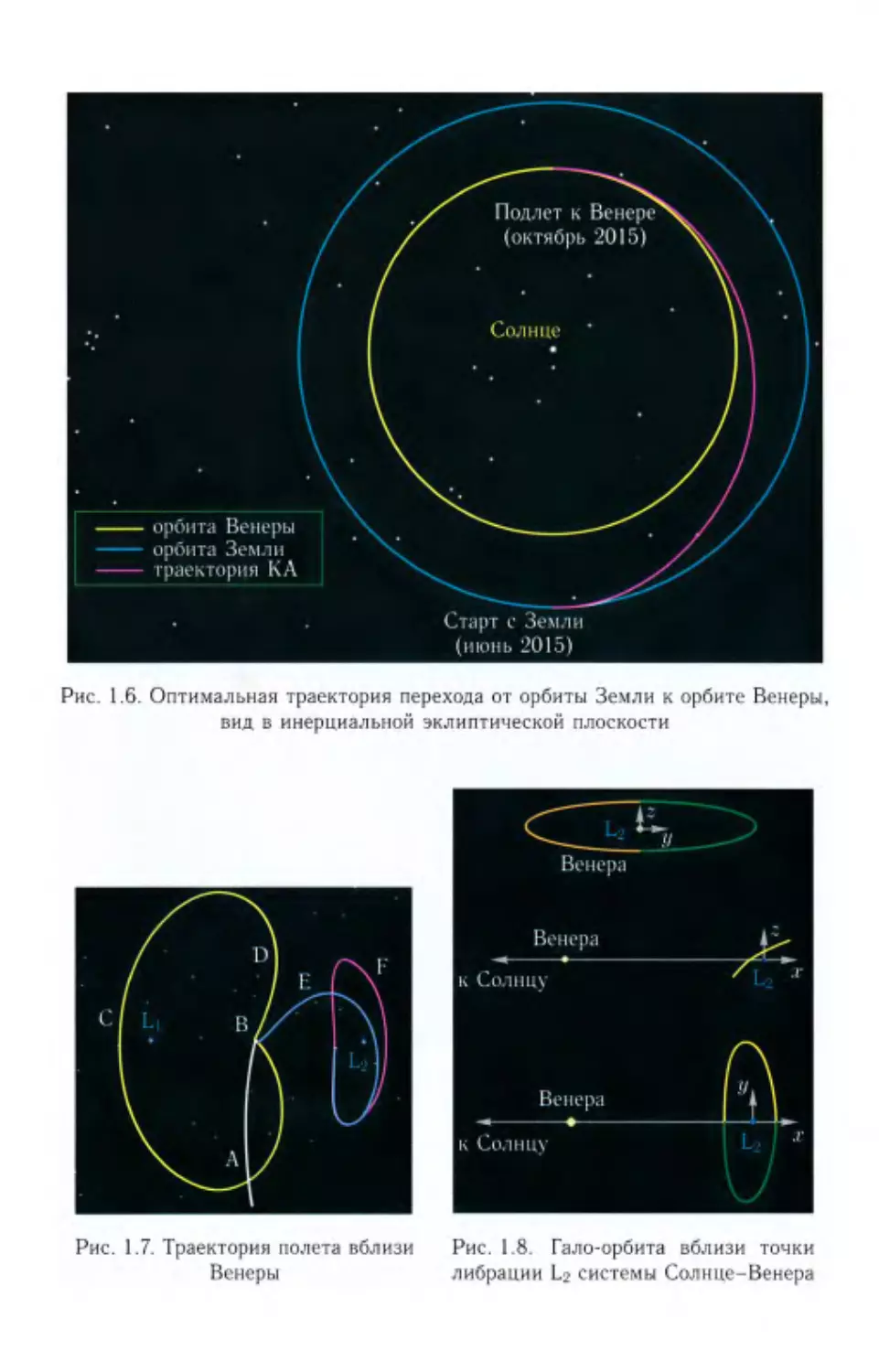
для NEO Survey Mission. На рис. 1.6 на цветной вклейке показан
оптимальный гелиоцентрический переход к Венере.
На рис.1.7 на цветной вклейке дана траектория вблизи Венеры
от прибытия на гало-орбиту вокруг точки Ьг.
Различные части траектории обозначены буквами следующим об-
разом: А — подлетная гелиоцентрическая траектория от Земли. В —
первый пролет около Венеры, где необходимо сообщение тормозно-
го импульса ДУ = 494 м/с на 200-километровой высоте периапсиды
Венеры (в точке В). КА в течение 80 суток находится в петле (С),
имеющей форму почки вокруг точки L] на обращенной к Солнцу
стороне Венеры. Второй пролет около Венеры, обозначенный буквой D,
с тормозным импульсом ДУ = 23 м/с, обеспечивает переход Е к орбите
вокруг точки Ьг. И, наконец, включение двигателя для выхода на
орбиту с гало вокруг точки Ьг лучше всего выполнять в точке F, на
самом большом удалении от Венеры; в этом случае импульс был бы
меньше 70 м/с. Можно было бы использовать меньшее ДУ (а, воз-
можно, и вообще обойтись без детерминированного ДУ), чтобы, вме-
сто этого, выйти на орбиту Лиссажу с большой амплитудой, которая
будет коллапсировать (если смотреть в плоскости y-z по направлению
к Солнцу) лишь медленно, так чтобы можно было использовать малые
1.2. Размещение космических обсерваторий в окрестности Венеры 27
маневры для предотвращения любых возможных длительных затмений
Венерой.
Три изображения периодической гало-орбиты вокруг точки Ьг, кото-
рая могла бы использоваться в этом случае, показаны во вращающейся
системе координат на рис. 1.8 на цветной вклейке. Опыт работы с КА,
функционирующим на гало-орбите вокруг солнечно-земной точки Li,
показывает, что для поддержания КА около неустойчивой гало-орбиты
требуется ДУ, равное от 2 до 4 м/с в год [16]. Близкая величина ДУ
потребовалась бы каждый венерианский год (или от 3 до 6 м/с каждый
земной год) с маневром, необходимым приблизительно каждые два
месяца (т. е. дважды на каждом витке около L,).
Космический аппарат IRAS, а теперь и WISE, доказали, что объек-
ты NEA могут быть обнаружены с помощью космических миссий. Ожи-
дается, что космические аппараты NEOSSat и AsteroidFinder могут
ускорить открытие объектов NEA, и, особенно, потенциально опасных
объектов IEO, с солнечно-синхронной низкой околоземной орбиты. Но,
будучи расположенными близко к Земле, эти аппараты никогда не смо-
гут проводить полные обзоры; останутся объекты либо еще слишком
близкие к Солнцу, либо продолжающие находиться слишком далеко
от Земли в течение ограниченной длительности миссии, чтобы их мож-
но было наблюдать. И можно лишь надеяться, что только миссии
с выходом на гелиоцентрические орбиты, полностью расположенные
в пределах орбиты Земли и «смотрящие» на Землю, будут способ-
ны обеспечивать всесторонний поиск потенциально опасных объектов
NEA в течение относительно малого числа лет работы.
Может показаться, что было бы лучше избежать сложных манев-
ров для достижения гало-орбиты, чтобы как раз использовать пролет
на большом расстоянии от Венеры для выхода на гелиоцентрическую
орбиту, подобную орбите Венеры, аналогично случаю с аппаратами
Sentry проекта NEOShield или миссии NEO Survey. Разумеется, для
этих миссий потребовалось бы меньшее количество рабочего тела —
только то, которое достаточно для коррекции ошибок выведения при
запуске и для направления аппарата к целевой В-плоскости Венеры,
чтобы достичь желаемой орбиты. Но для длительных научных наблю-
дений вблизи Венеры, а также для обзора объектов NEA можно было
бы использовать гало-орбиту Венеры, поскольку, в отличие от других
орбит, такая орбита обеспечивала бы почти постоянное расстояние
от КА до орбиты Земли, что упростило бы стратегию охвата наблю-
дениями и, возможно, тепловое регулирование на более постоянном
расстоянии от Солнца благодаря близкой к круговой орбите Венеры.
Эти операции не должны быть слишком интенсивными, поскольку
малые маневры, необходимые для поддержания гало-орбиты, будут
необходимы примерно только каждые два месяца, что обеспечит малую
28
Гл. 1. Обзор методов траекторных измерений
стоимость по сравнению с операциями, которые были бы необходимы
для получения и анализа большого объема изображений при поиске
объектов NEA.
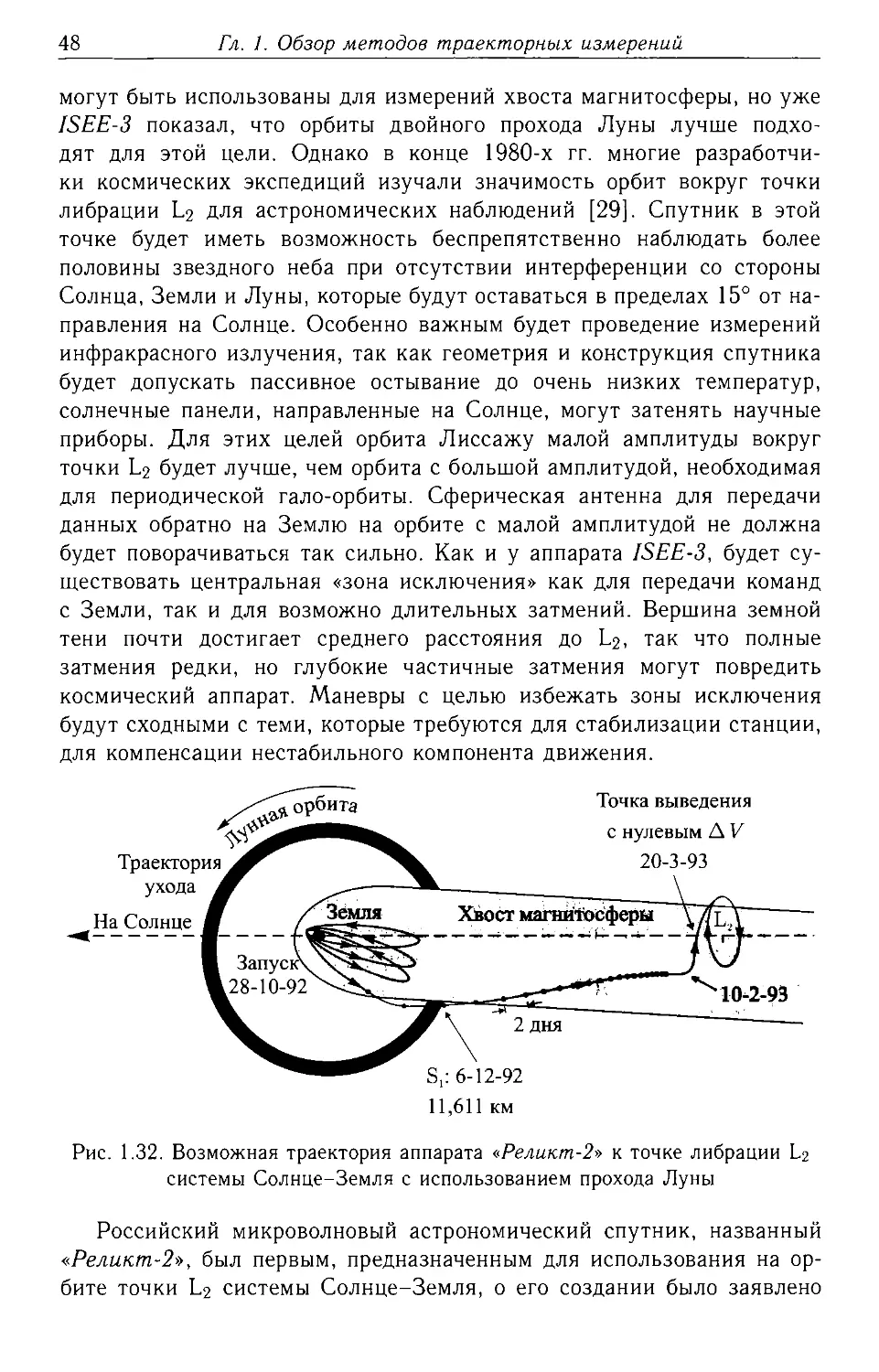
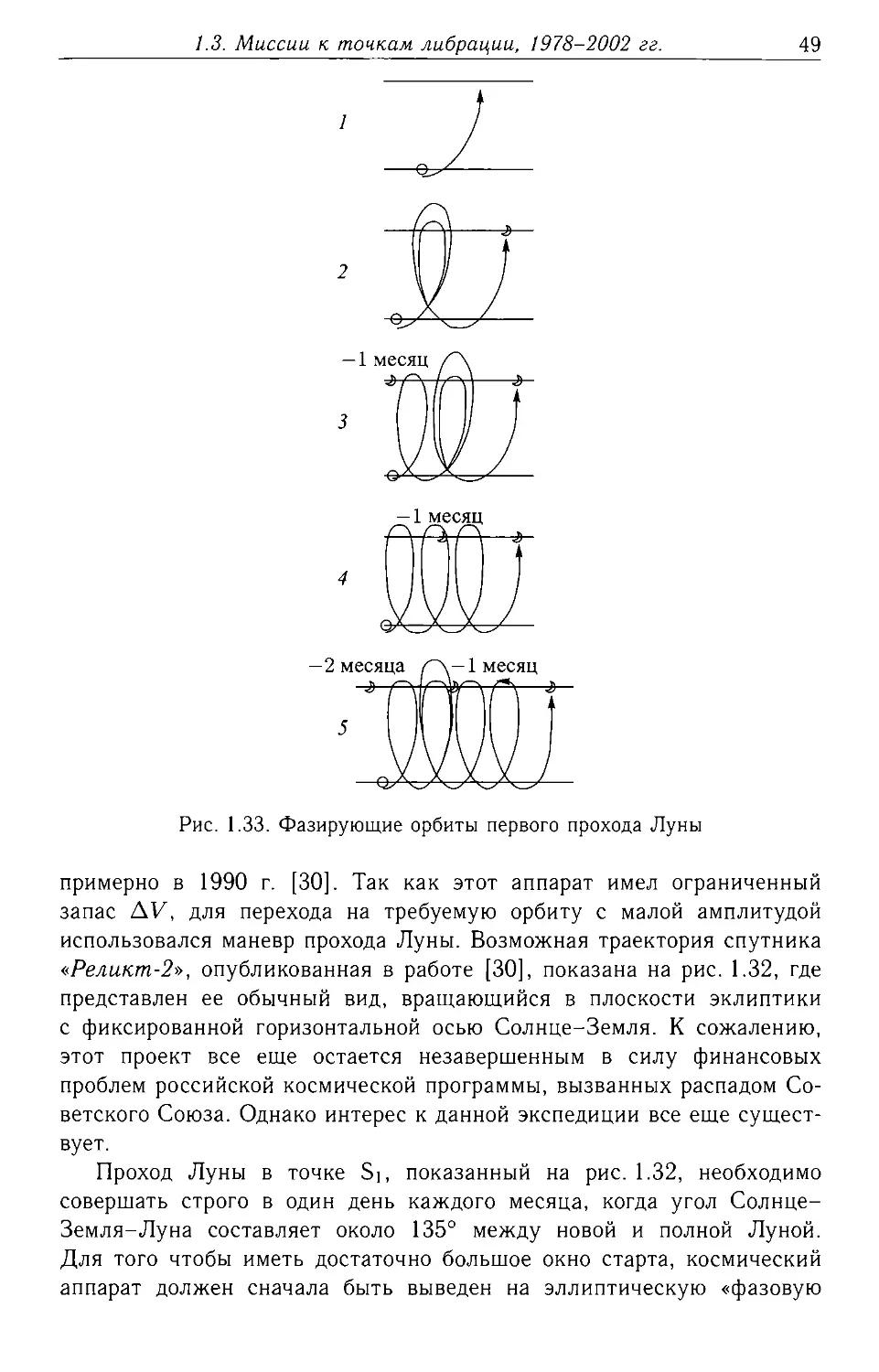
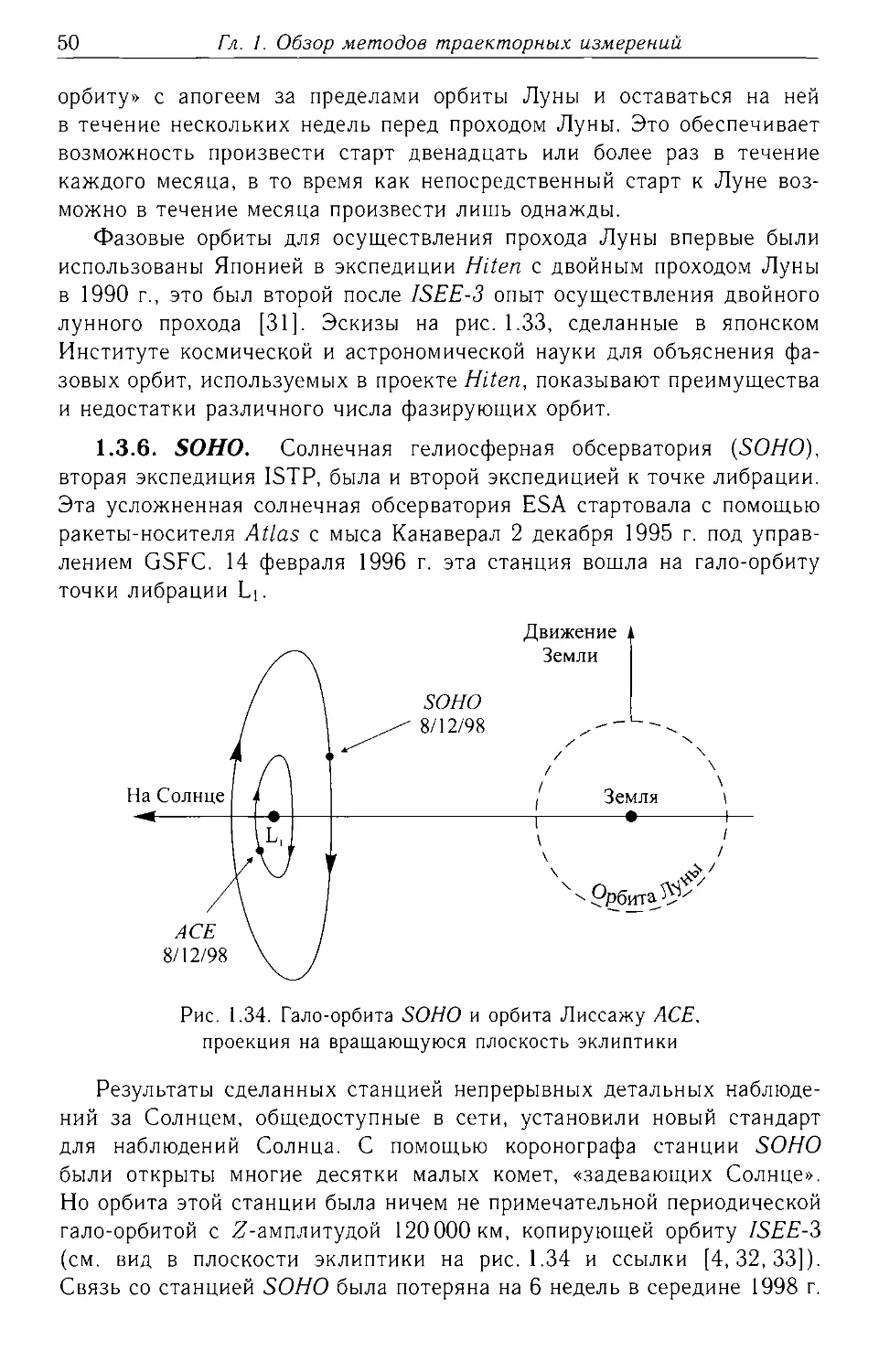
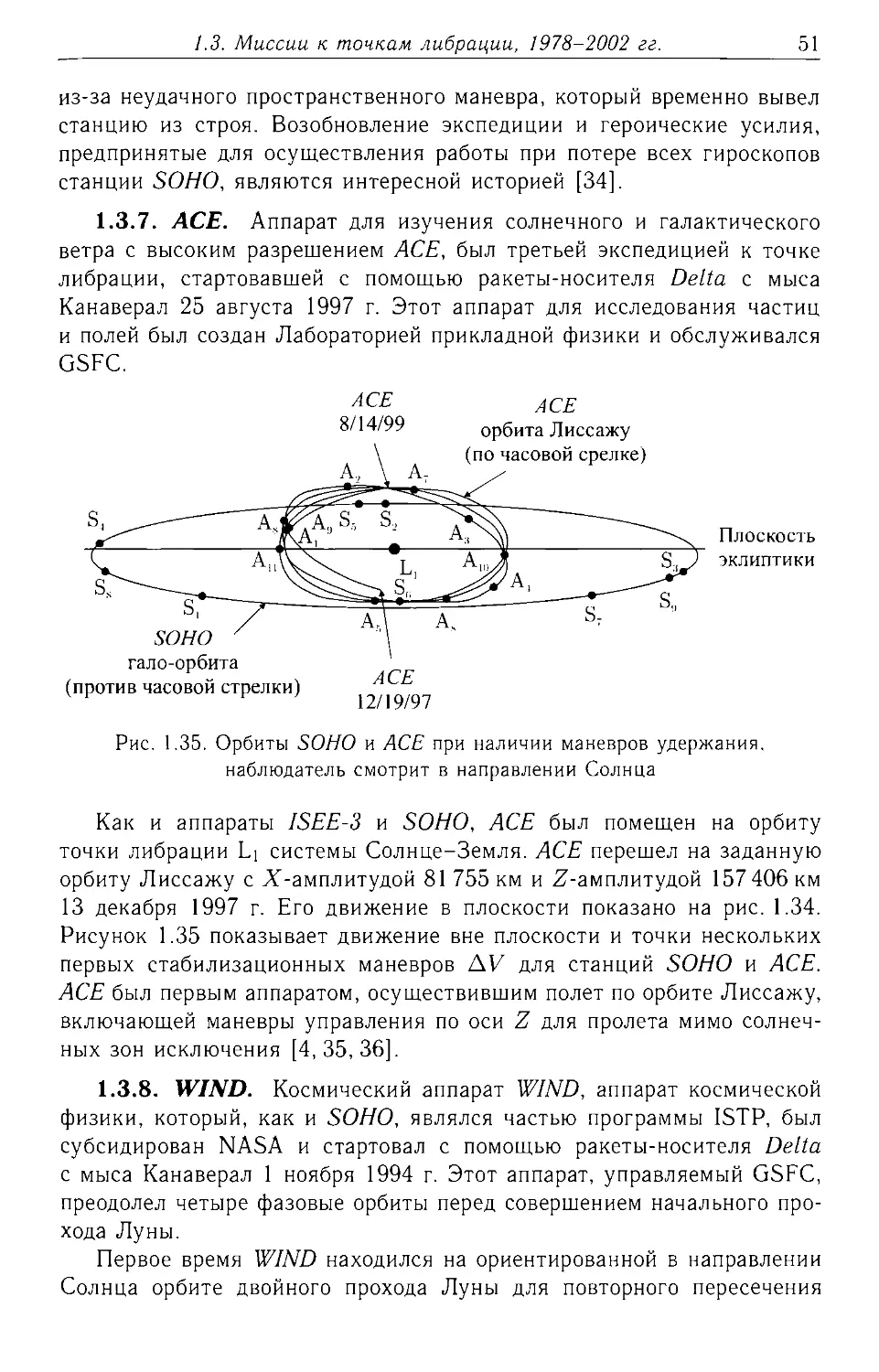
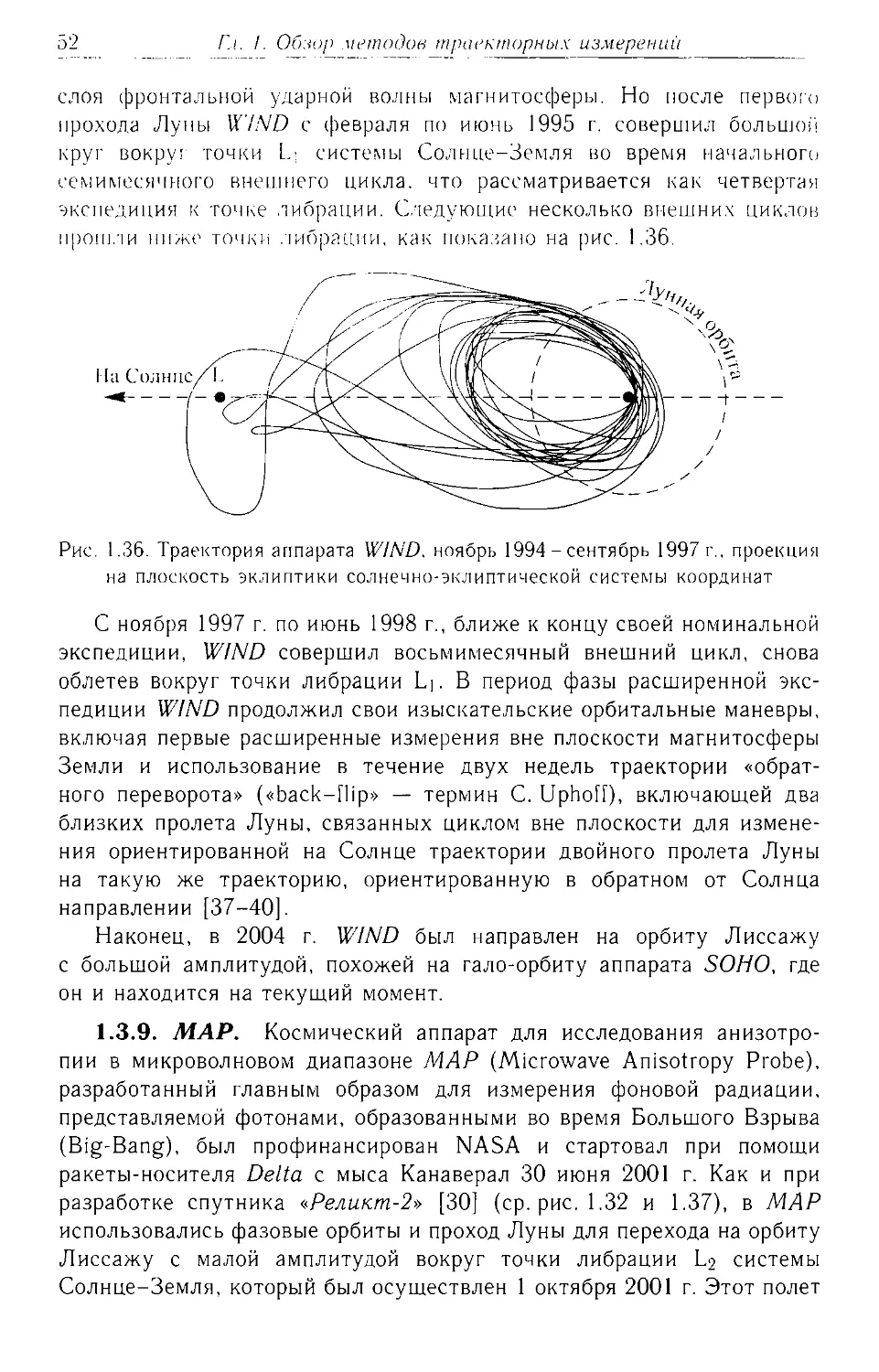
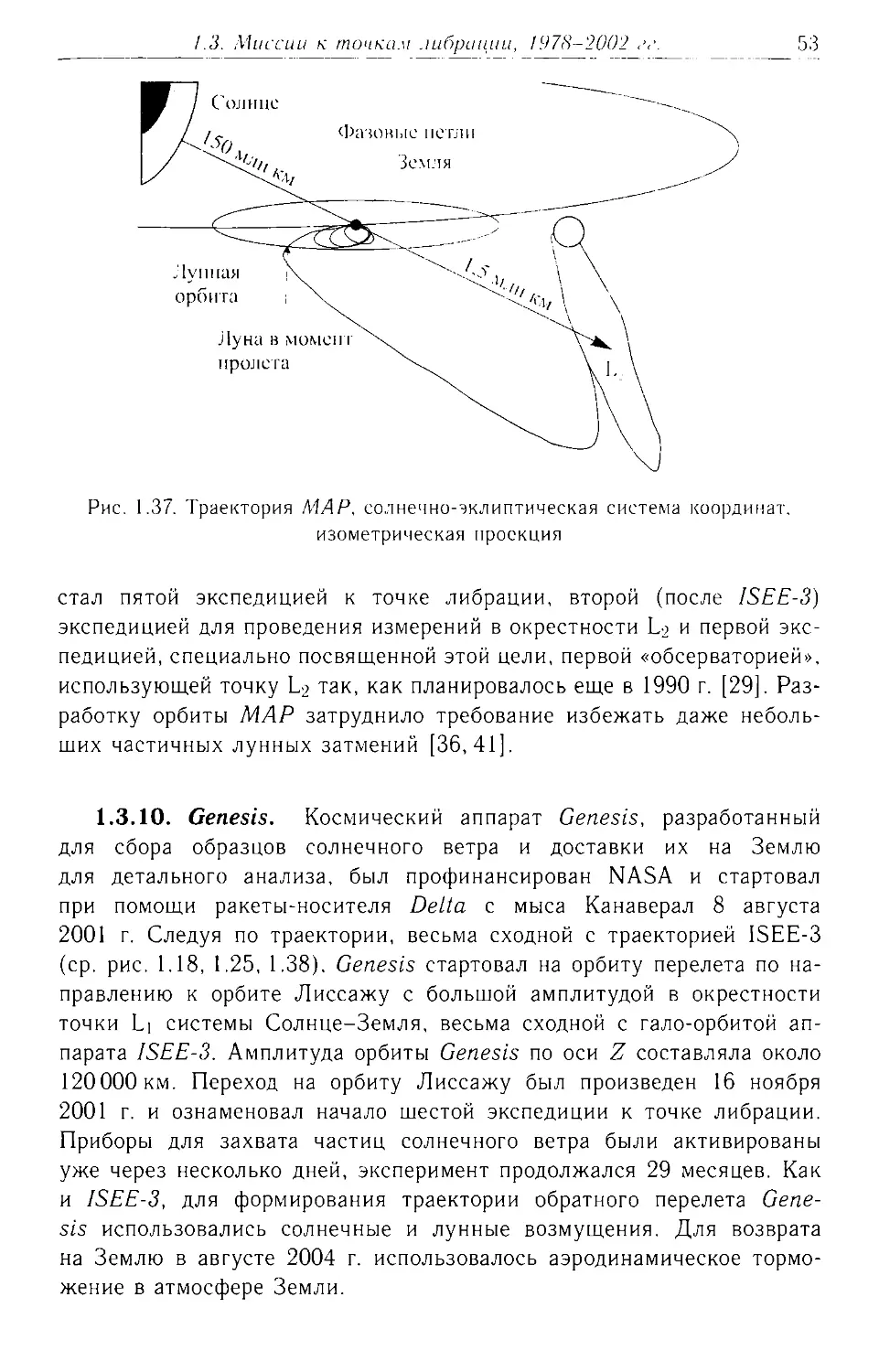
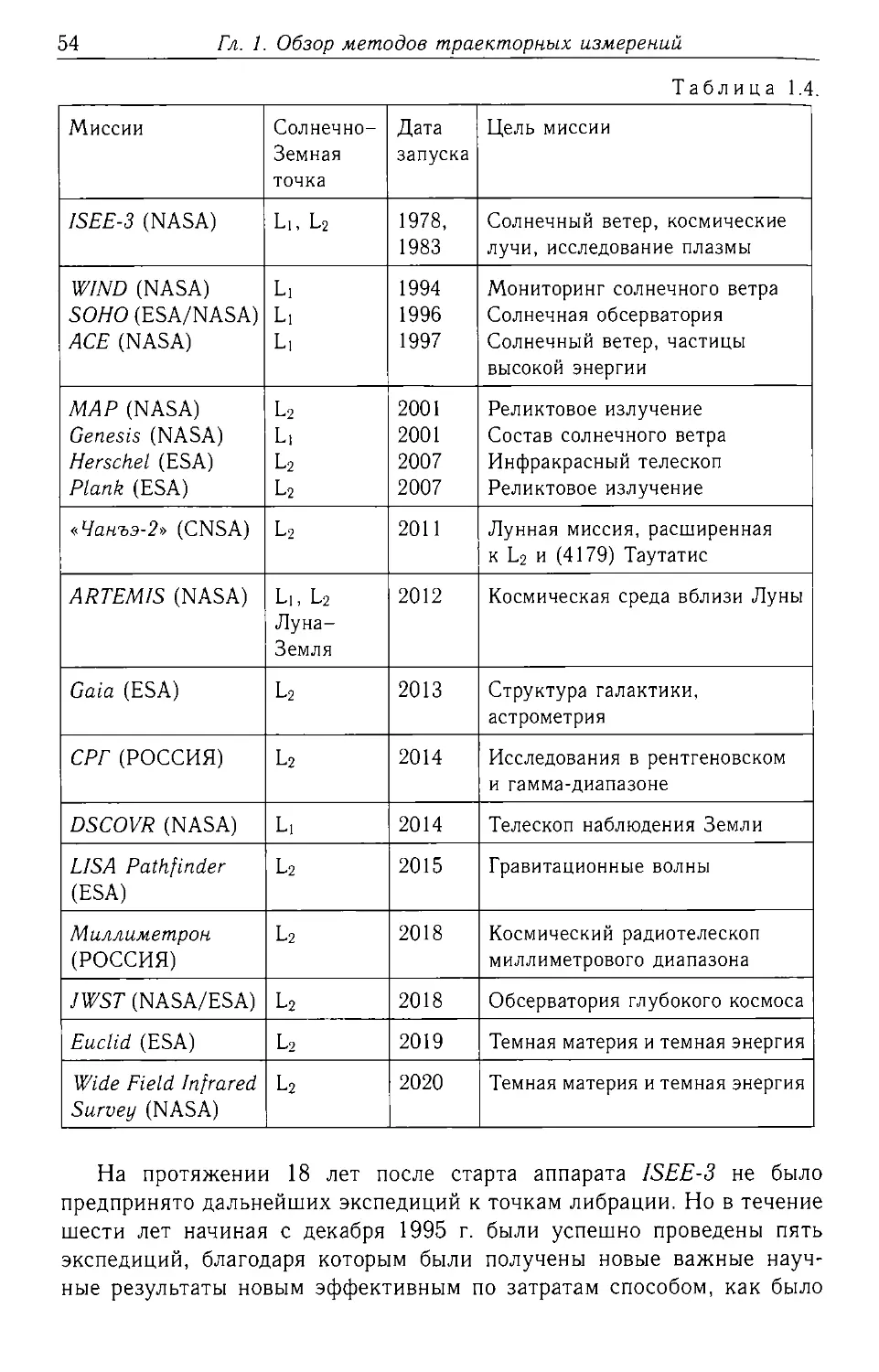
1.3. Миссии к точкам либрации, 1978-2002 гг.
(По материалам: Libration Point Orbits and Applications /
Gomez G., Lo M.W. and Masdemont J.J., Eds. —
Singapore: World Scientific Publishing, 2003)
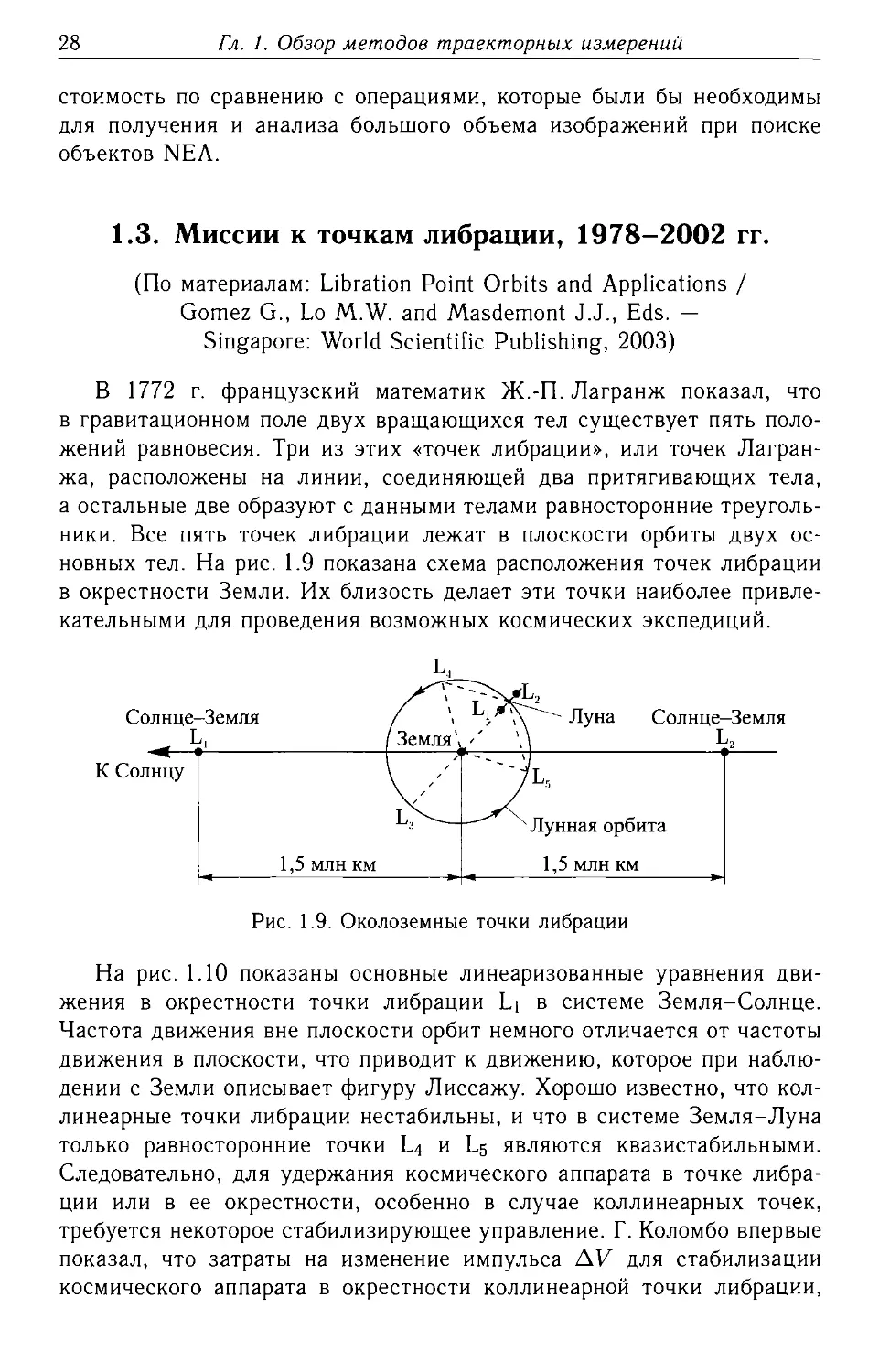
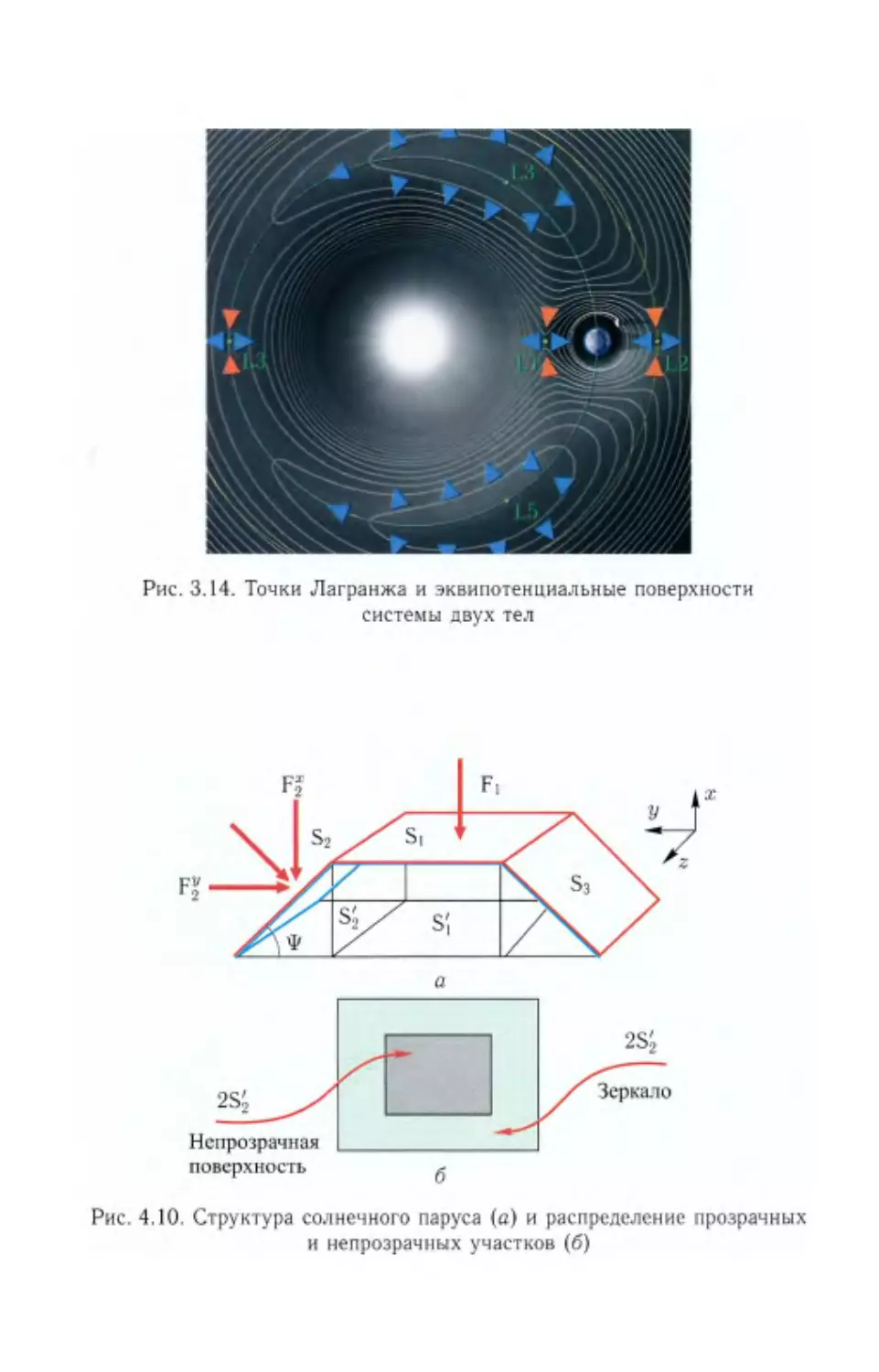
В 1772 г. французский математик Ж.-П. Лагранж показал, что
в гравитационном поле двух вращающихся тел существует пять поло-
жений равновесия. Три из этих «точек либрации», или точек Лагран-
жа, расположены на линии, соединяющей два притягивающих тела,
а остальные две образуют с данными телами равносторонние треуголь-
ники. Все пять точек либрации лежат в плоскости орбиты двух ос-
новных тел. На рис. 1.9 показана схема расположения точек либрации
в окрестности Земли. Их близость делает эти точки наиболее привле-
кательными для проведения возможных космических экспедиций.
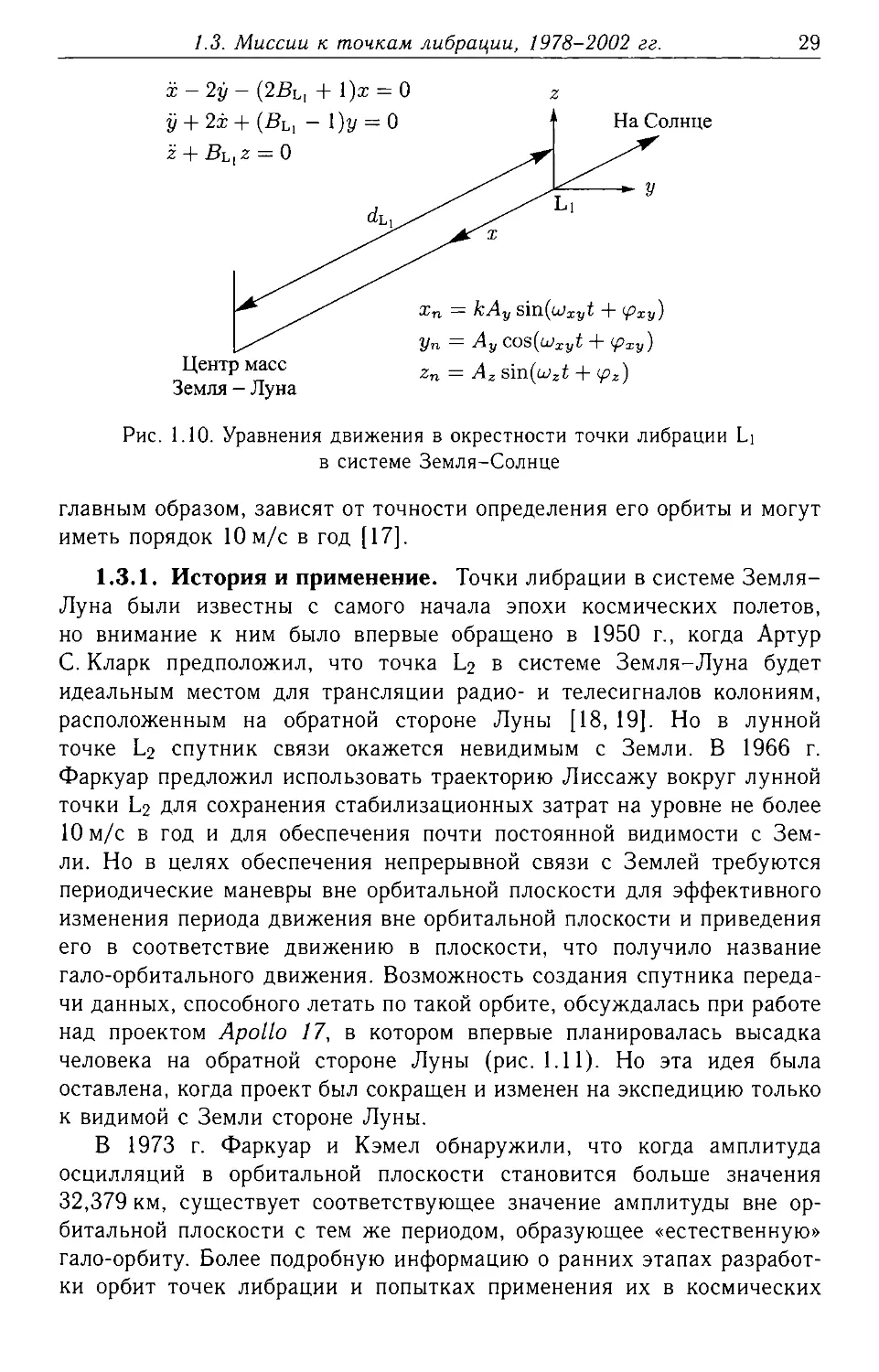
На рис. 1.10 показаны основные линеаризованные уравнения дви-
жения в окрестности точки либрации Li в системе Земля-Солнце.
Частота движения вне плоскости орбит немного отличается от частоты
движения в плоскости, что приводит к движению, которое при наблю-
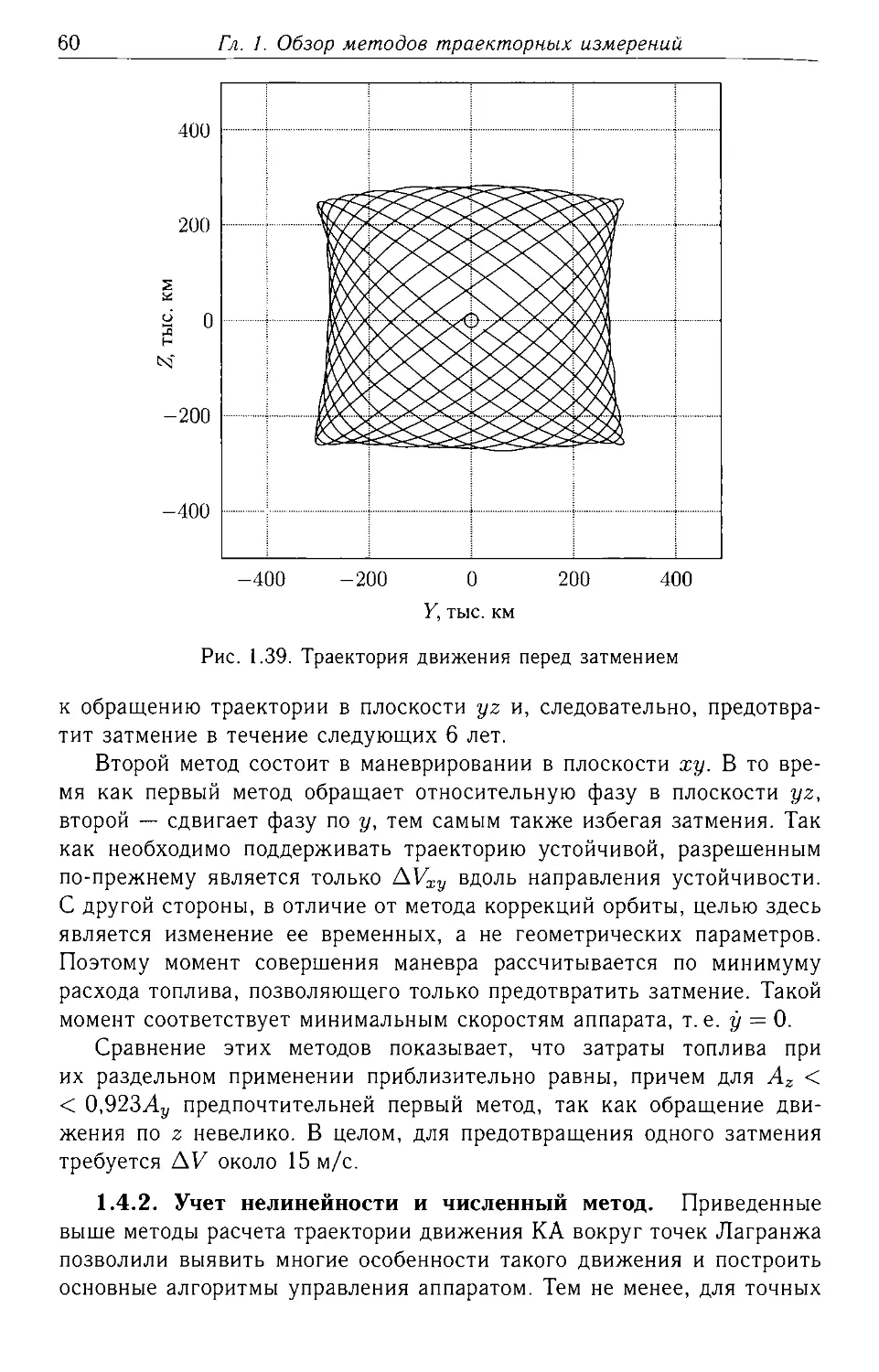
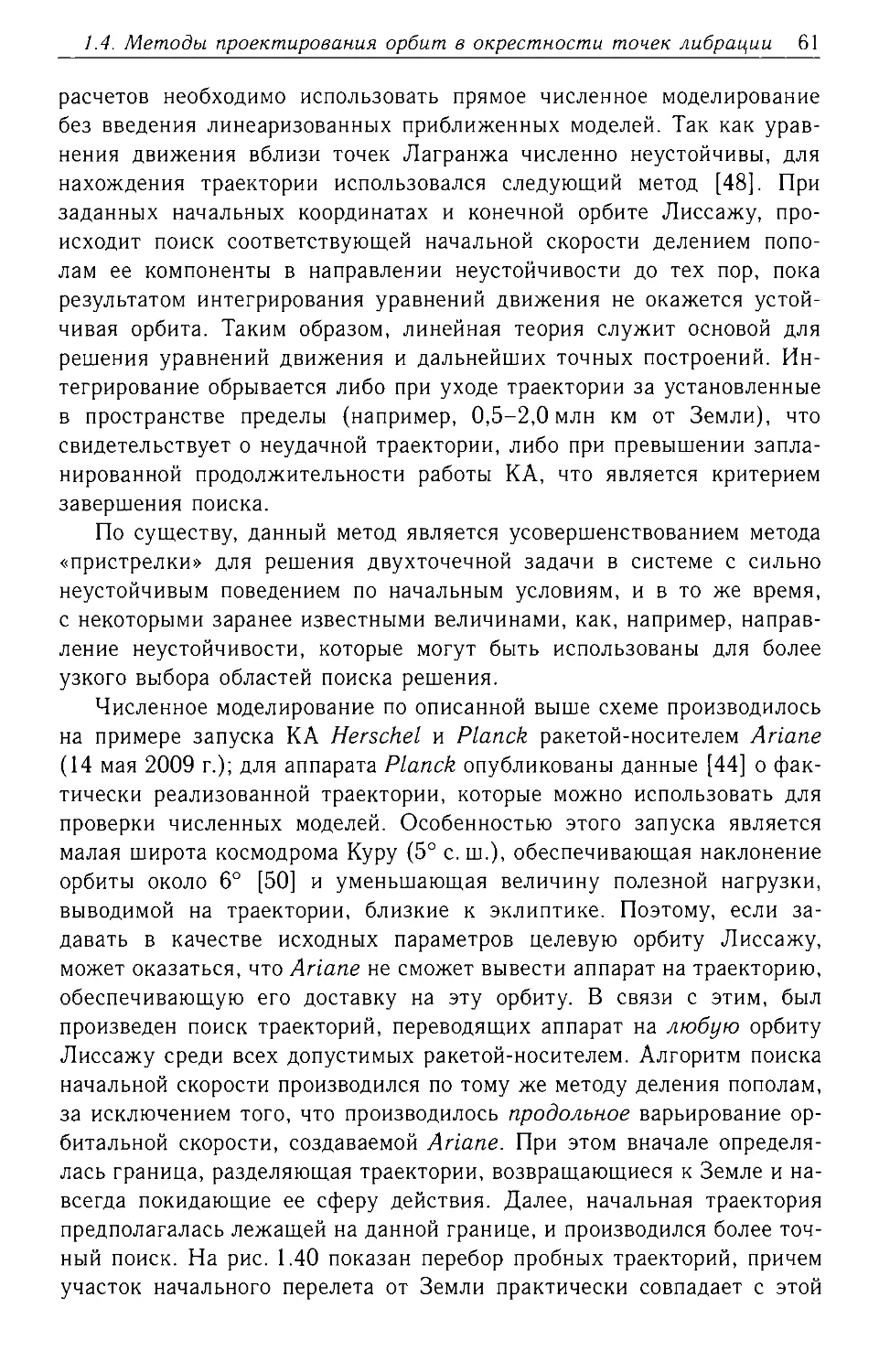
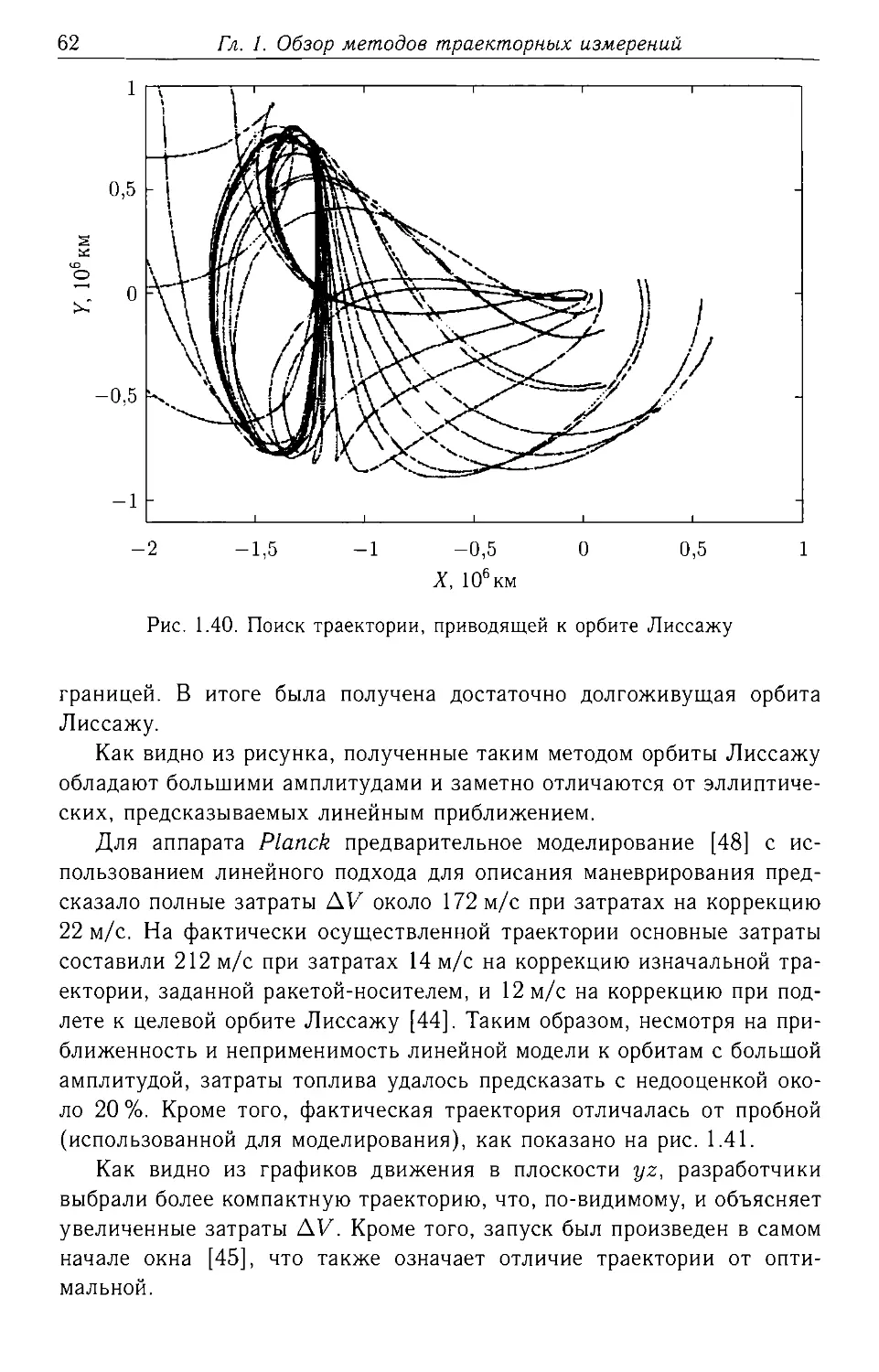
дении с Земли описывает фигуру Лиссажу. Хорошо известно, что кол-
линеарные точки либрации нестабильны, и что в системе Земля-Луна
только равносторонние точки L4 и L5 являются квазистабильными.
Следовательно, для удержания космического аппарата в точке либра-
ции или в ее окрестности, особенно в случае коллинеарных точек,
требуется некоторое стабилизирующее управление. Г. Коломбо впервые
показал, что затраты на изменение импульса AV для стабилизации
космического аппарата в окрестности коллинеарной точки либрации,
1.3. Миссии к точкам либрации, 1978-2002 гг.
29
На Солнце
х — 2у — (2Вь, + 1)ж = О
У + 2х + (BL, - 1)у = О
Центр масс
Земля - Луна
zn = Az sm(u}zt + <pz)
Рис. 1.10. Уравнения движения в окрестности точки либрации Li
в системе Земля-Солнце
главным образом, зависят от точности определения его орбиты и могут
иметь порядок 10 м/с в год [17].
1.3.1. История и применение. Точки либрации в системе Земля-
Луна были известны с самого начала эпохи космических полетов,
но внимание к ним было впервые обращено в 1950 г., когда Артур
С. Кларк предположил, что точка L2 в системе Земля-Луна будет
идеальным местом для трансляции радио- и телесигналов колониям,
расположенным на обратной стороне Луны [18, 19]. Но в лунной
точке L2 спутник связи окажется невидимым с Земли. В 1966 г.
Фаркуар предложил использовать траекторию Лиссажу вокруг лунной
точки L2 для сохранения стабилизационных затрат на уровне не более
10 м/с в год и для обеспечения почти постоянной видимости с Зем-
ли. Но в целях обеспечения непрерывной связи с Землей требуются
периодические маневры вне орбитальной плоскости для эффективного
изменения периода движения вне орбитальной плоскости и приведения
его в соответствие движению в плоскости, что получило название
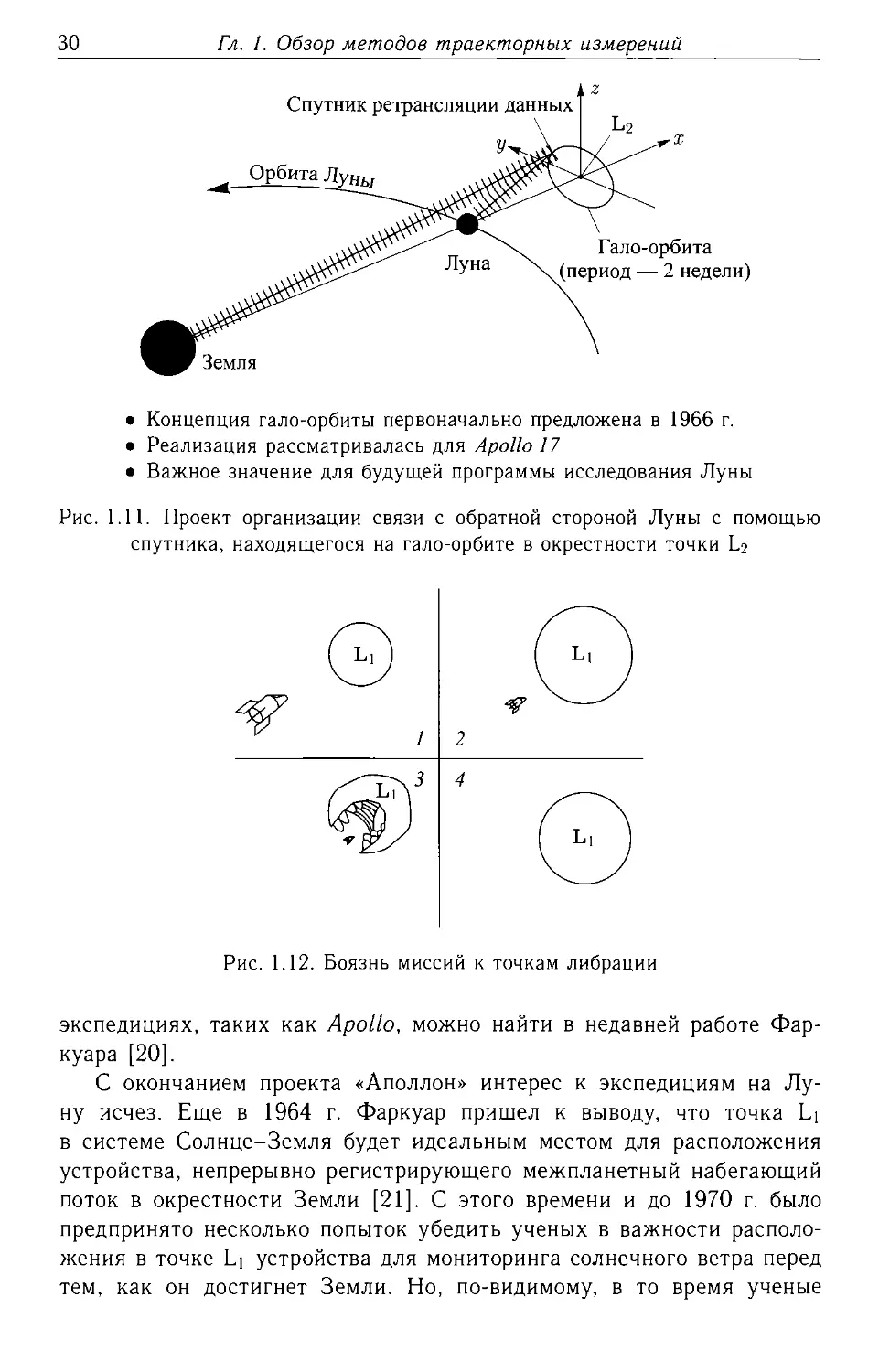
гало-орбитального движения. Возможность создания спутника переда-
чи данных, способного летать по такой орбите, обсуждалась при работе
над проектом Apollo 17, в котором впервые планировалась высадка
человека на обратной стороне Луны (рис. 1.11). Но эта идея была
оставлена, когда проект был сокращен и изменен на экспедицию только
к видимой с Земли стороне Луны.
В 1973 г. Фаркуар и Кэмел обнаружили, что когда амплитуда
осцилляций в орбитальной плоскости становится больше значения
32,379 км, существует соответствующее значение амплитуды вне ор-
битальной плоскости с тем же периодом, образующее «естественную»
гало-орбиту. Более подробную информацию о ранних этапах разработ-
ки орбит точек либрации и попытках применения их в космических
30
Гл. 1. Обзор методов траекторных измерений
• Концепция гало-орбиты первоначально предложена в 1966 г.
• Реализация рассматривалась для Apollo 17
• Важное значение для будущей программы исследования Луны
Рис. 1.11. Проект организации связи с обратной стороной Луны с помощью
спутника, находящегося на гало-орбите в окрестности точки Бг
Рис. 1.12. Боязнь миссий к точкам либрации
экспедициях, таких как Apollo, можно найти в недавней работе Фар-
куара [20].
С окончанием проекта «Аполлон» интерес к экспедициям на Лу-
ну исчез. Еще в 1964 г. Фаркуар пришел к выводу, что точка Li
в системе Солнце-Земля будет идеальным местом для расположения
устройства, непрерывно регистрирующего межпланетный набегающий
поток в окрестности Земли [21]. С этого времени и до 1970 г. было
предпринято несколько попыток убедить ученых в важности располо-
жения в точке Li устройства для мониторинга солнечного ветра перед
тем, как он достигнет Земли. Но, по-видимому, в то время ученые
1.3. Миссии к точкам либрации, 1978-2002 гг.
31
боялись сделать что-то новое в этой области, так что предложение
Фаркуара не вызвало большого интереса (рис. 1.12).
1.3.2. ISEE-3. В 1971 г. опасения утихли, когда Н. Ф. Несс,
знаменитый исследователь космоса из Годдарского Центра космиче-
ских полетов (GSFC) NASA, убедился в целесообразности располо-
жения в точке L[ системы Солнце-Земля космического аппарата для
проведения мониторинга солнечного ветра. В 1972 г. было решено
включить такой аппарат в разрабатываемую программу запуска трех
спутников, которая стала известной как Международная программа по
исследованию Солнца-Земли (ISEE) [22]. Программы ISEE-1 и ISEE-2
проводились на высокой эллиптической орбите Земли с расстоянием
в апогее около 24 радиусов Земли. Эти два спутника предназнача-
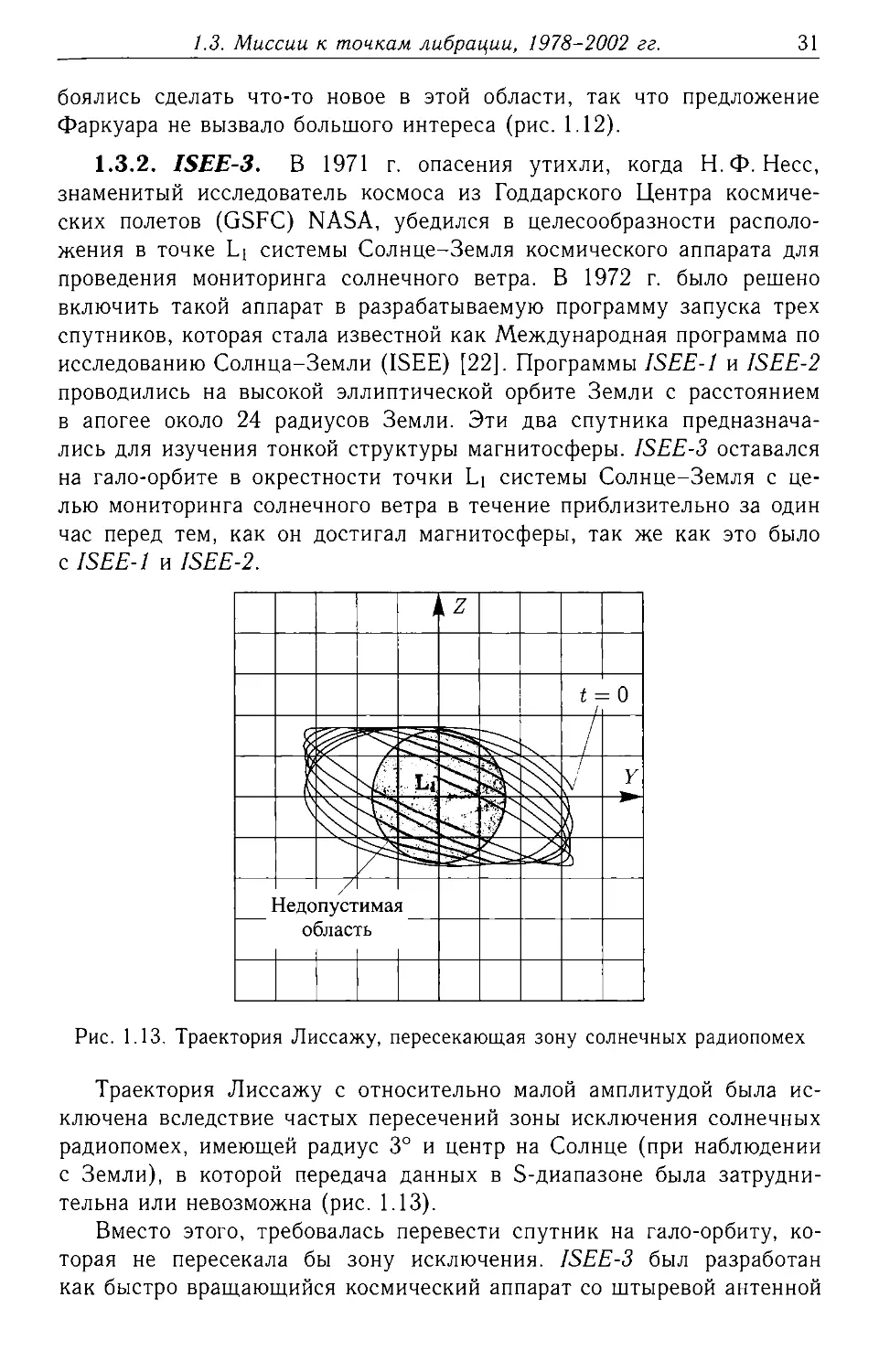
лись для изучения тонкой структуры магнитосферы. ISEE-3 оставался
на гало-орбите в окрестности точки Ц системы Солнце-Земля с це-
лью мониторинга солнечного ветра в течение приблизительно за один
час перед тем, как он достигал магнитосферы, так же как это было
с ISEE-1 и ISEE-2.
Рис. 1.13. Траектория Лиссажу, пересекающая зону солнечных радиопомех
Траектория Лиссажу с относительно малой амплитудой была ис-
ключена вследствие частых пересечений зоны исключения солнечных
радиопомех, имеющей радиус 3° и центр на Солнце (при наблюдении
с Земли), в которой передача данных в S-диапазоне была затрудни-
тельна или невозможна (рис. 1.13).
Вместо этого, требовалась перевести спутник на гало-орбиту, ко-
торая не пересекала бы зону исключения. ISEE-3 был разработан
как быстро вращающийся космический аппарат со штыревой антенной
32
Гл. 1. Обзор методов траекторных измерений
Верхняя граница диаграммы направленности антенны
12
Нижняя граница диаграммы направленности антенны
| Зона помех от Солнца
[диаметр 6°]
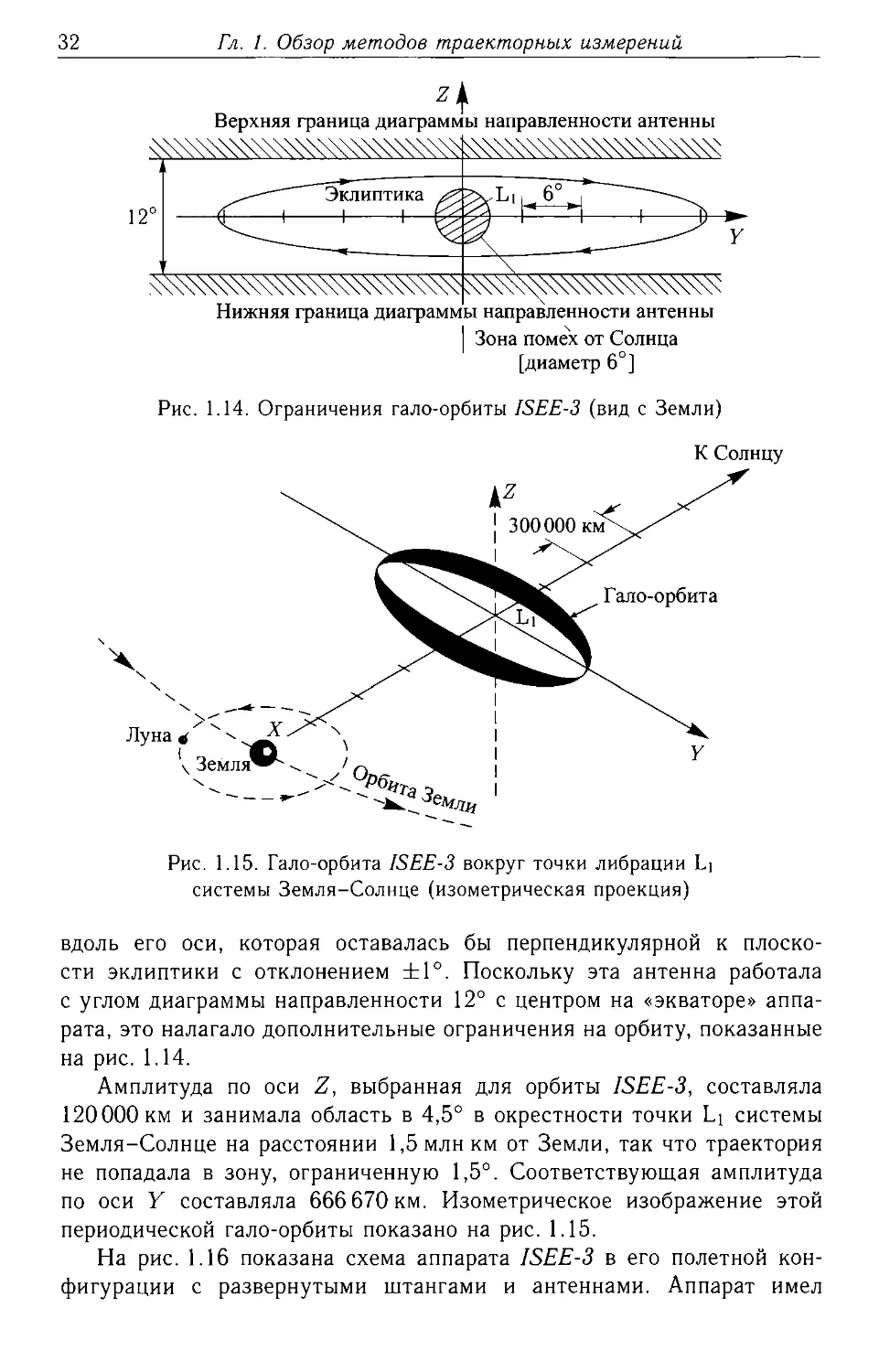
Рис. 1.15. Гало-орбита ISEE-3 вокруг точки либрации Li
системы Земля-Солнце (изометрическая проекция)
вдоль его оси, которая оставалась бы перпендикулярной к плоско-
сти эклиптики с отклонением ±1°. Поскольку эта антенна работала
с углом диаграммы направленности 12° с центром на «экваторе» аппа-
рата, это налагало дополнительные ограничения на орбиту, показанные
на рис. 1.14.
Амплитуда по оси Z, выбранная для орбиты ISEE-3, составляла
120000 км и занимала область в 4,5° в окрестности точки Ц системы
Земля-Солнце на расстоянии 1,5 млн км от Земли, так что траектория
не попадала в зону, ограниченную 1,5°. Соответствующая амплитуда
по оси Y составляла 666 670 км. Изометрическое изображение этой
периодической гало-орбиты показано на рис. 1.15.
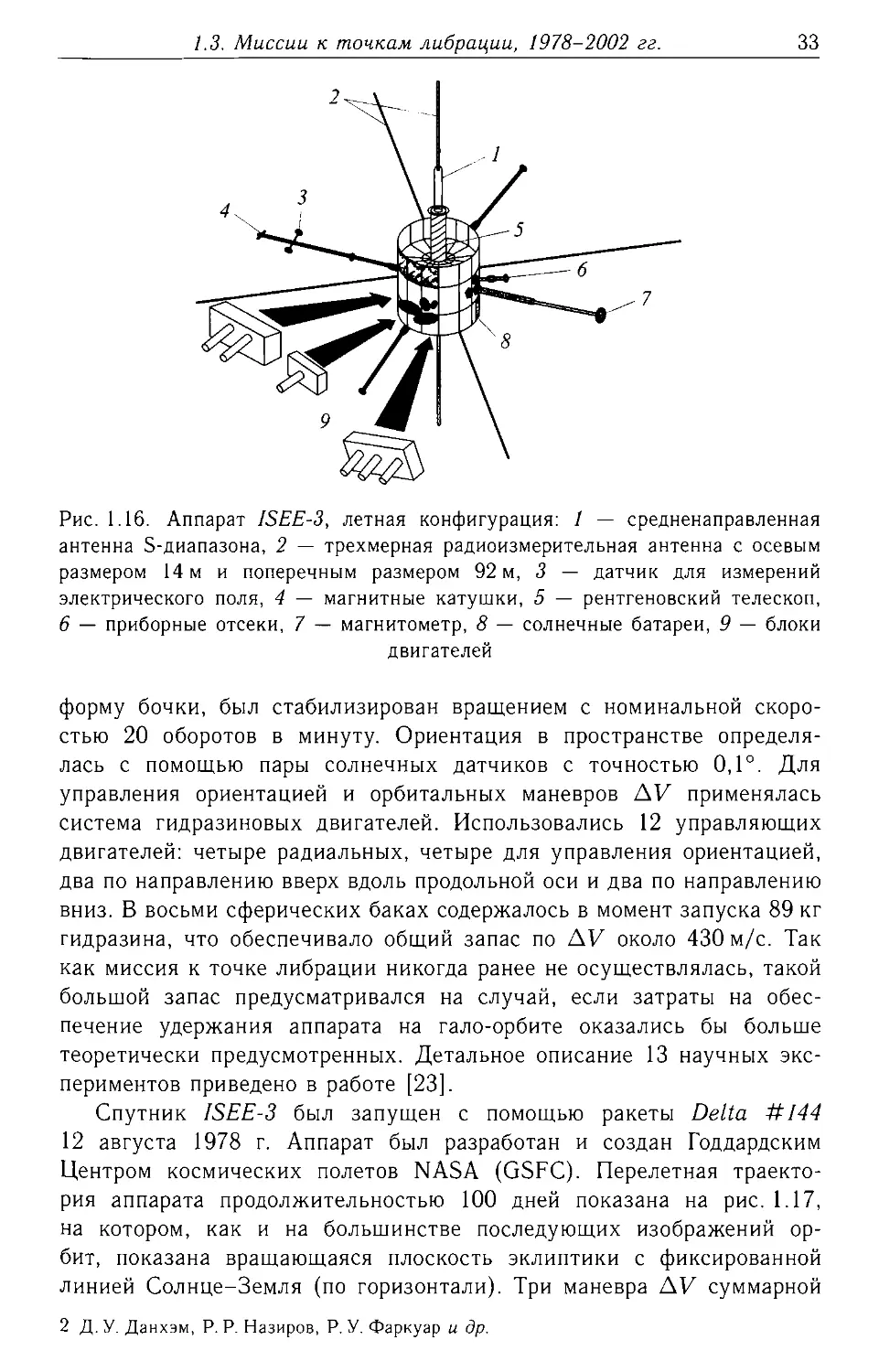
На рис. 1.16 показана схема аппарата ISEE-3 в его полетной кон-
фигурации с развернутыми штангами и антеннами. Аппарат имел
1.3. Миссии к точкам либрации, 1978-2002 гг.
33
Рис. 1.16. Аппарат ISEE-3, летная конфигурация: 1 — средненаправленная
антенна S-диапазона, 2 — трехмерная радиоизмерительная антенна с осевым
размером 14 м и поперечным размером 92 м, 3 — датчик для измерений
электрического поля, 4 — магнитные катушки, 5 — рентгеновский телескоп,
6 — приборные отсеки, 7 — магнитометр, 8 — солнечные батареи, 9 — блоки
двигателей
форму бочки, был стабилизирован вращением с номинальной скоро-
стью 20 оборотов в минуту. Ориентация в пространстве определя-
лась с помощью пары солнечных датчиков с точностью 0,1°. Для
управления ориентацией и орбитальных маневров ДУ применялась
система гидразиновых двигателей. Использовались 12 управляющих
двигателей: четыре радиальных, четыре для управления ориентацией,
два по направлению вверх вдоль продольной оси и два по направлению
вниз. В восьми сферических баках содержалось в момент запуска 89 кг
гидразина, что обеспечивало общий запас по ДУ около 430 м/с. Так
как миссия к точке либрации никогда ранее не осуществлялась, такой
большой запас предусматривался на случай, если затраты на обес-
печение удержания аппарата на гало-орбите оказались бы больше
теоретически предусмотренных. Детальное описание 13 научных экс-
периментов приведено в работе [23].
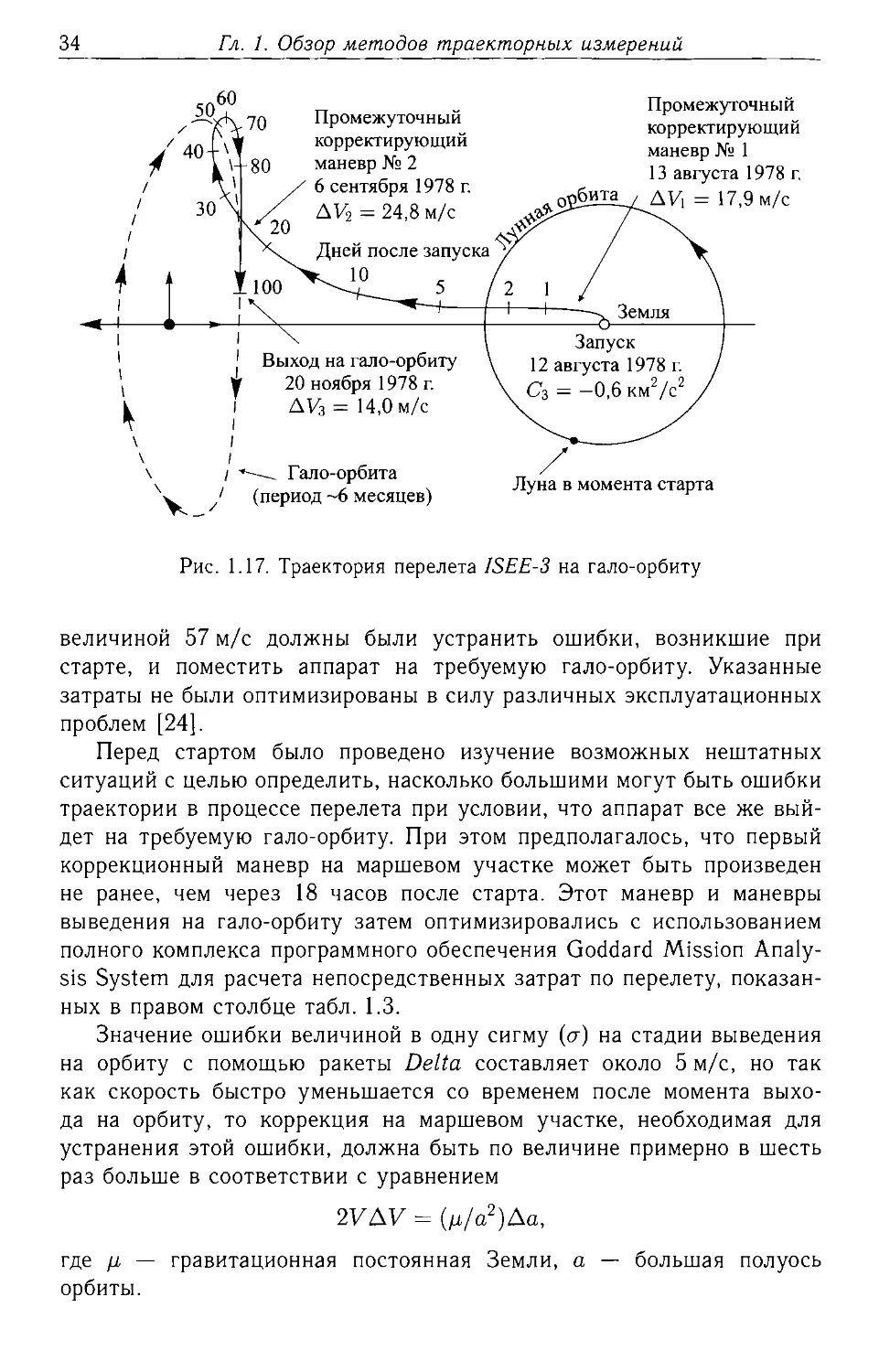
Спутник ISEE-3 был запущен с помощью ракеты Delta #144
12 августа 1978 г. Аппарат был разработан и создан Годдардским
Центром космических полетов NASA (GSFC). Перелетная траекто-
рия аппарата продолжительностью 100 дней показана на рис. 1.17,
на котором, как и на большинстве последующих изображений ор-
бит, показана вращающаяся плоскость эклиптики с фиксированной
линией Солнце-Земля (по горизонтали). Три маневра ДУ суммарной
2 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
34
Гл. 1. Обзор методов траекторных измерений
4'4 so
30 \
Промежуточный
корректирующий
маневр № 2
6 сентября 1978 г.
ДУ2 = 24,8 м/с
1100
5
Дней после запуска
Выход на гало-орбиту
20 ноября 1978 г.
ДГз = 14,0 м/с
Промежуточный
корректирующий
маневр № 1
13 августа 1978 г,
бита ДП = 17,9 м/с
Луна в момента старта
Запуск
Рис. 1.17. Траектория перелета ISEE-3 на гало-орбиту
12 августа 1978 г.
Сз = —0,6 км2/с
-—_ Гало-орбита
(период ~6 месяцев)
величиной 57 м/с должны были устранить ошибки, возникшие при
старте, и поместить аппарат на требуемую гало-орбиту. Указанные
затраты не были оптимизированы в силу различных эксплуатационных
проблем [24].
Перед стартом было проведено изучение возможных нештатных
ситуаций с целью определить, насколько большими могут быть ошибки
траектории в процессе перелета при условии, что аппарат все же вый-
дет на требуемую гало-орбиту. При этом предполагалось, что первый
коррекционный маневр на маршевом участке может быть произведен
не ранее, чем через 18 часов после старта. Этот маневр и маневры
выведения на гало-орбиту затем оптимизировались с использованием
полного комплекса программного обеспечения Goddard Mission Analy-
sis System для расчета непосредственных затрат по перелету, показан-
ных в правом столбце табл. 1.3.
Значение ошибки величиной в одну сигму (<т) на стадии выведения
на орбиту с помощью ракеты Delta составляет около 5 м/с, но так
как скорость быстро уменьшается со временем после момента выхо-
да на орбиту, то коррекция на маршевом участке, необходимая для
устранения этой ошибки, должна быть по величине примерно в шесть
раз больше в соответствии с уравнением
2VAV = (д/а2)Да,
где ц — гравитационная постоянная Земли, а — большая полуось
орбиты.
1.3. Миссии к точкам либрации, 1978-2002 гг.
35
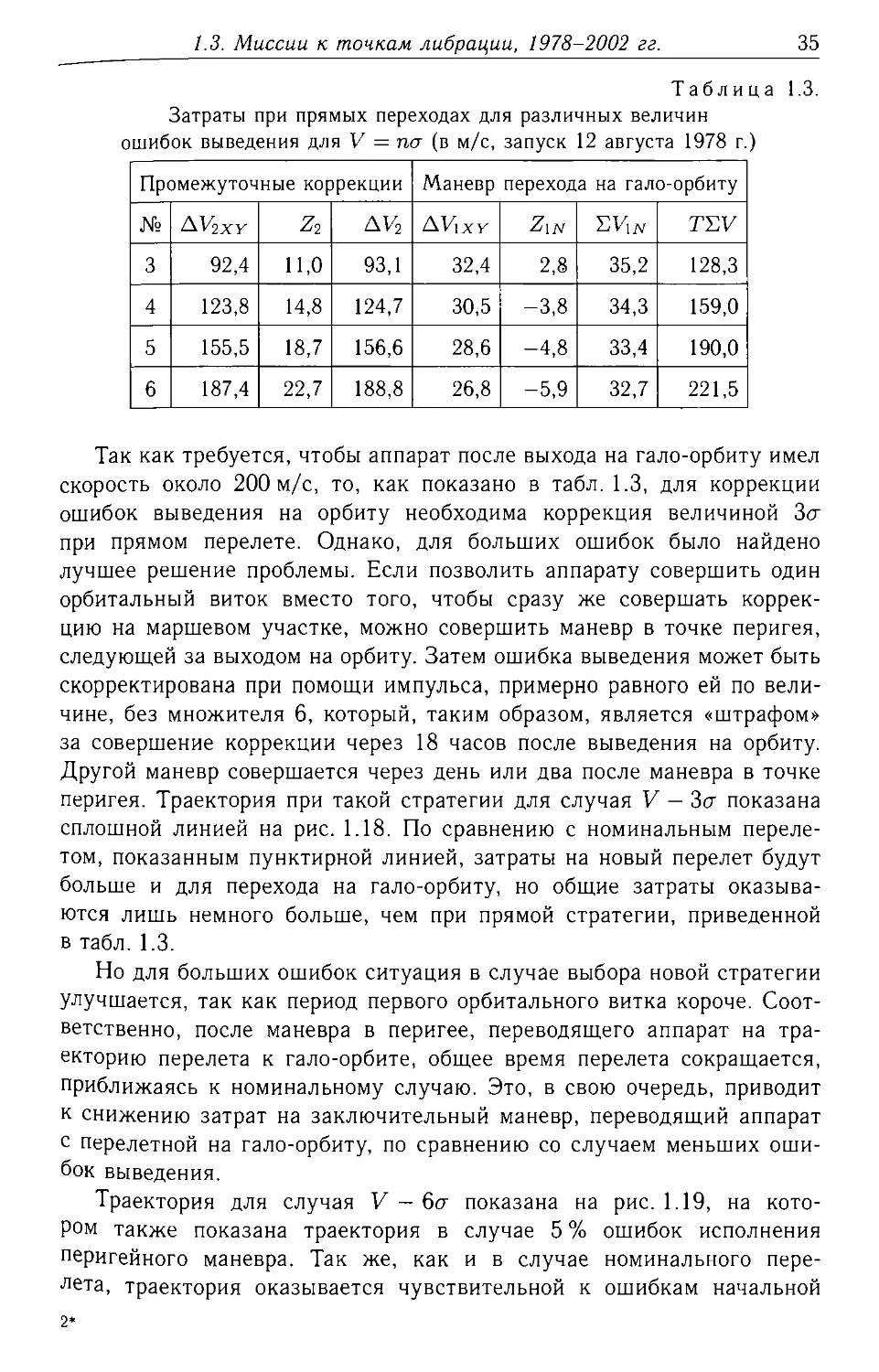
Таблица 1.3.
Затраты при прямых переходах для различных величин
ошибок выведения для V = па (в м/с, запуск 12 августа 1978 г.)
Промежуточные коррекции Маневр перехода на гало-орбиту
№ ДЕгху z2 ДП2 AVixr ZlN SV1N TSV
3 92,4 11,0 93,1 32,4 2,8 35,2 128,3
4 123,8 14,8 124,7 30,5 -3,8 34,3 159,0
5 155,5 18,7 156,6 28,6 -4,8 33,4 190,0
6 187,4 22,7 188,8 26,8 -5,9 32,7 221,5
Так как требуется, чтобы аппарат после выхода на гало-орбиту имел
скорость около 200 м/с, то, как показано в табл. 1.3, для коррекции
ошибок выведения на орбиту необходима коррекция величиной За
при прямом перелете. Однако, для больших ошибок было найдено
лучшее решение проблемы. Если позволить аппарату совершить один
орбитальный виток вместо того, чтобы сразу же совершать коррек-
цию на маршевом участке, можно совершить маневр в точке перигея,
следующей за выходом на орбиту. Затем ошибка выведения может быть
скорректирована при помощи импульса, примерно равного ей по вели-
чине, без множителя 6, который, таким образом, является «штрафом»
за совершение коррекции через 18 часов после выведения на орбиту.
Другой маневр совершается через день или два после маневра в точке
перигея. Траектория при такой стратегии для случая V — За показана
сплошной линией на рис. 1.18. По сравнению с номинальным переле-
том, показанным пунктирной линией, затраты на новый перелет будут
больше и для перехода на гало-орбиту, но общие затраты оказыва-
ются лишь немного больше, чем при прямой стратегии, приведенной
в табл. 1.3.
Но для больших ошибок ситуация в случае выбора новой стратегии
улучшается, так как период первого орбитального витка короче. Соот-
ветственно, после маневра в перигее, переводящего аппарат на тра-
екторию перелета к гало-орбите, общее время перелета сокращается,
приближаясь к номинальному случаю. Это, в свою очередь, приводит
к снижению затрат на заключительный маневр, переводящий аппарат
с перелетной на гало-орбиту, по сравнению со случаем меньших оши-
бок выведения.
Траектория для случая V — 6а показана на рис. 1.19, на кото-
ром также показана траектория в случае 5 % ошибок исполнения
перигейного маневра. Так же, как и в случае номинального пере-
лета, траектория оказывается чувствительной к ошибкам начальной
2*
36
Гл. 1. Обзор методов траекторных измерений
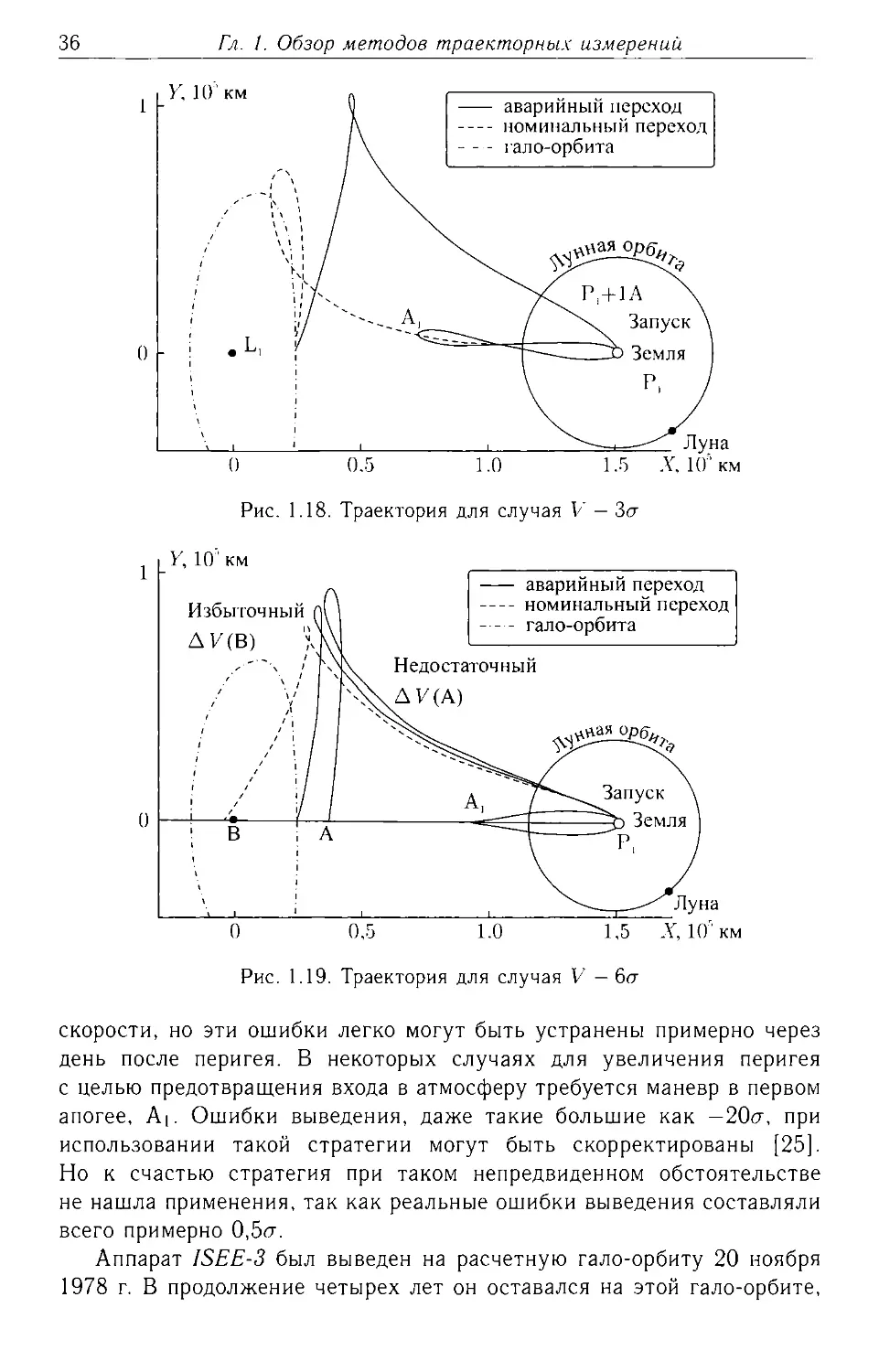
Рис. 1.18. Траектория для случая V — 3<г
Рис. 1.19. Траектория для случая V — 6<т
скорости, но эти ошибки легко могут быть устранены примерно через
день после перигея. В некоторых случаях для увеличения перигея
с целью предотвращения входа в атмосферу требуется маневр в первом
апогее, А|. Ошибки выведения, даже такие большие как —20<т, при
использовании такой стратегии могут быть скорректированы [25].
Но к счастью стратегия при таком непредвиденном обстоятельстве
не нашла применения, так как реальные ошибки выведения составляли
всего примерно 0,5<т.
Аппарат ISEE-3 был выведен на расчетную гало-орбиту 20 ноября
1978 г. В продолжение четырех лет он оставался на этой гало-орбите,
1.3. Миссии к точкам либрации. 1978-2002 гг.
37
при этом для поддержания орбиты каждый год требовался коррек-
тирующий импульс величиной менее 10 м/с. Для сохранения квази-
периодической, «сбалансированной» орбиты требовался импульс, уда-
ляющий только нестабильную составляющую движения, возникаю-
щую вследствие ошибок определения орбиты. Для аппарата JSEE-3
использовалась стратегия, которую можно называть почти неэффек-
тивной стратегией точного управления, она всегда направлена на мини-
мизацию невязок от номинальной траектории, в отличие от свободной
стратегии, такой как маневры «балансировки энергии», использовав-
шиеся в некоторых более поздних экспедициях [4]. При большом
запасе топлива не было принципиально важно сохранить гало-орбиту
самым оптимальным способом. Даже при использовании стратегии
точного управления ISEE-3 мог оставаться на гало-орбите около 30 лет.
Но у Фаркуара и некоторых ученых были другие планы относительно
будущего этого аппарата.
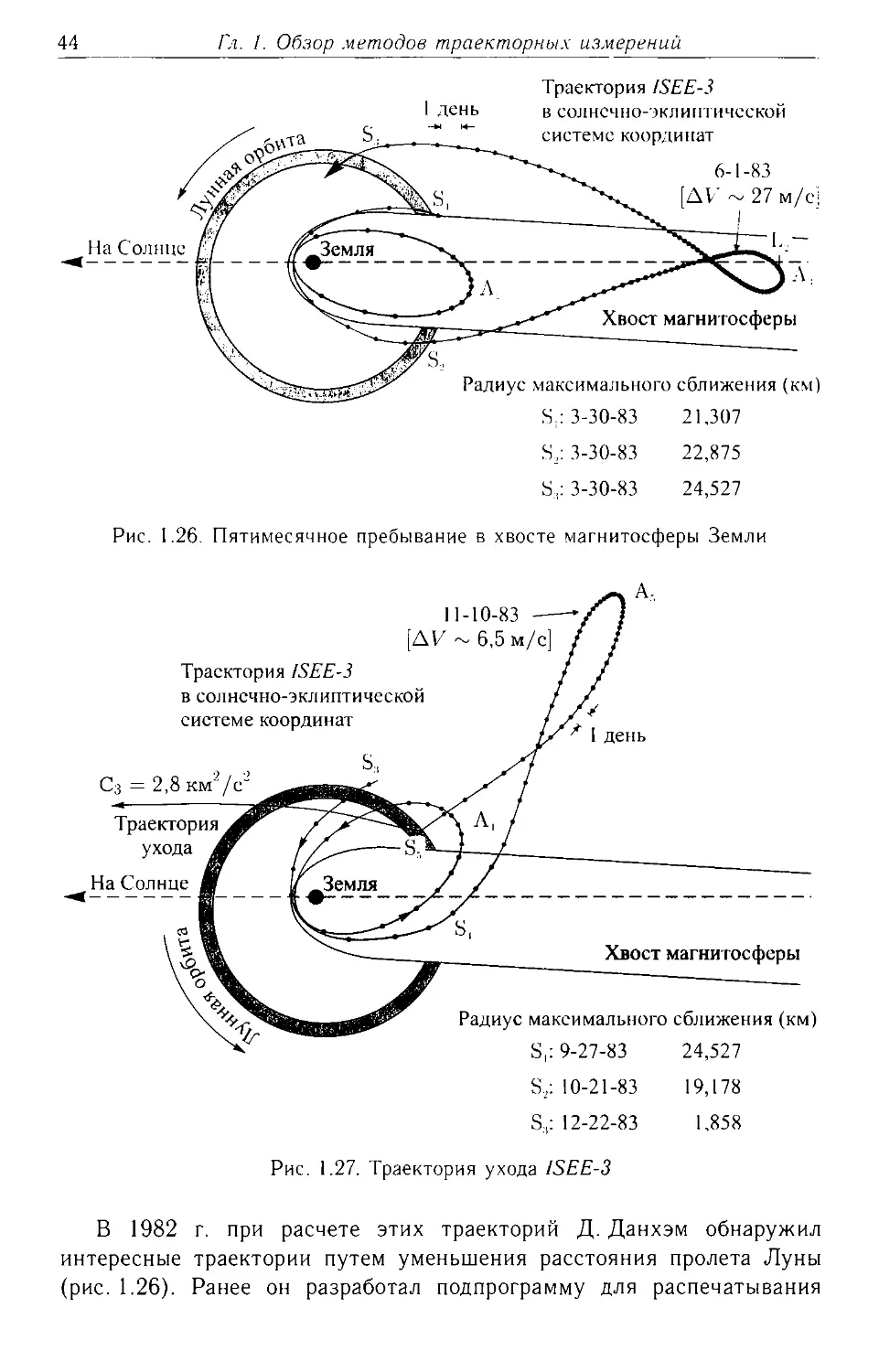
1.3.3. Орбиты двойного облета Луны. Некоторые ученые вы-
двигали требование о том, чтобы измерения ISEE-3 производились
с относительно фиксированного расстояния от Земли. Это было
необходимо для исследования хвостовой части магнитосферы Земли,
заметаемой солнечным ветром, и сбора его образцов на различном
расстоянии от Земли повсюду от орбиты Луны до ближайшей точки L»,
находящейся от Земли на расстоянии 1,5 млн км, примерно в четыре
раза большем, чем расстояние до Луны. Они хотели вывести аппарат
JSEE-3 с гало-орбиты для проведения этих новых измерений в проти-
воположном направлении. В 1981 и 1982 гг. расходы на космическую
науку были ограничены, что привело к прекращению разработки рабо-
чего космического аппарата, который мог бы выполнить эти измерения.
Это было веским аргументом для того, чтобы сделать что-то новое
с JSEE-3 в конце его четырехлетней миссии.
В это же время ученые обсуждали продолжение экспедиции JSEE-3,
названное ONEP (Origins of Near Earth Plasma), которое впоследствии
выделилось в программу ISTP (International Solar-Terrestrial Physics
Program). Исследование хвоста магнитосферы Земли имело высокий
приоритет для ONEP. Для изучения хвоста магнитосферы на желаемых
различных расстояниях, меньших, чем расстояние до Луны, требова-
лось перейти на некоторую высокоэллиптическую орбиту, но как это
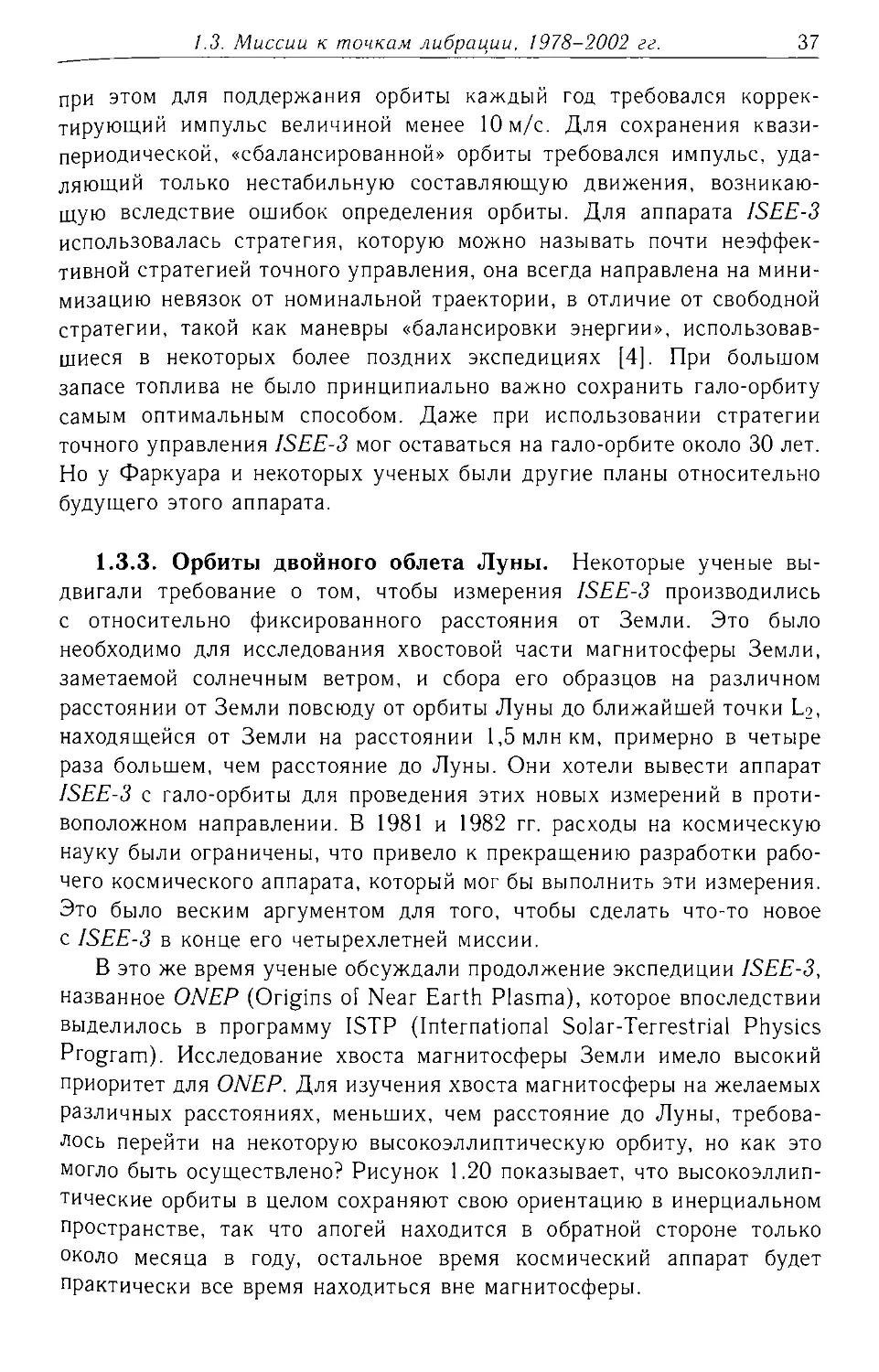
могло быть осуществлено? Рисунок 1.20 показывает, что высокоэллип-
тические орбиты в целом сохраняют свою ориентацию в инерциальном
пространстве, так что апогей находится в обратной стороне только
около месяца в году, остальное время космический аппарат будет
практически все время находиться вне магнитосферы.
38
Гл. 1. Обзор методов траекторных измерений
Магнитосфера
Земли
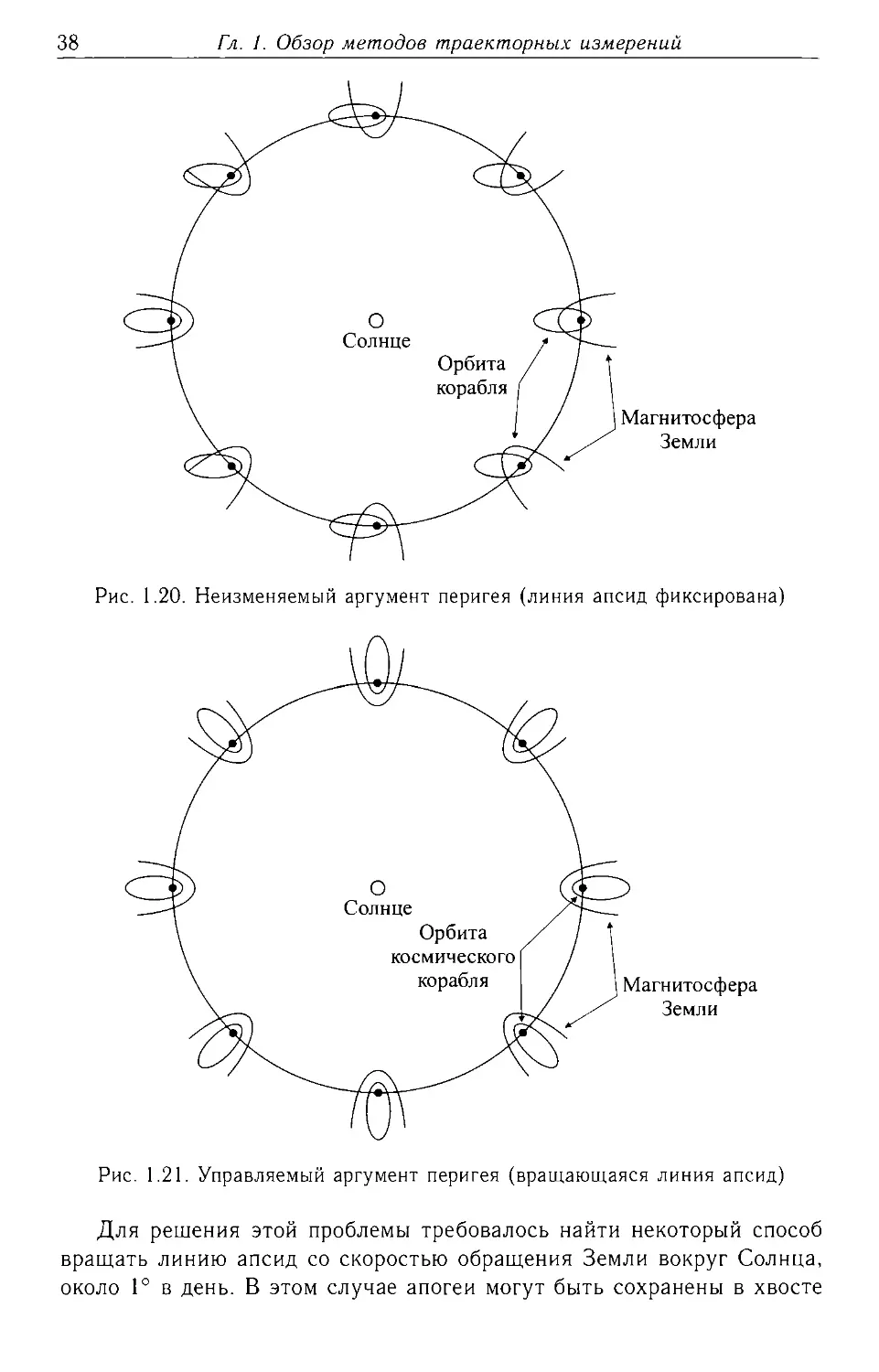
Для решения этой проблемы требовалось найти некоторый способ
вращать линию апсид со скоростью обращения Земли вокруг Солнца,
около 1° в день. В этом случае апогеи могут быть сохранены в хвосте
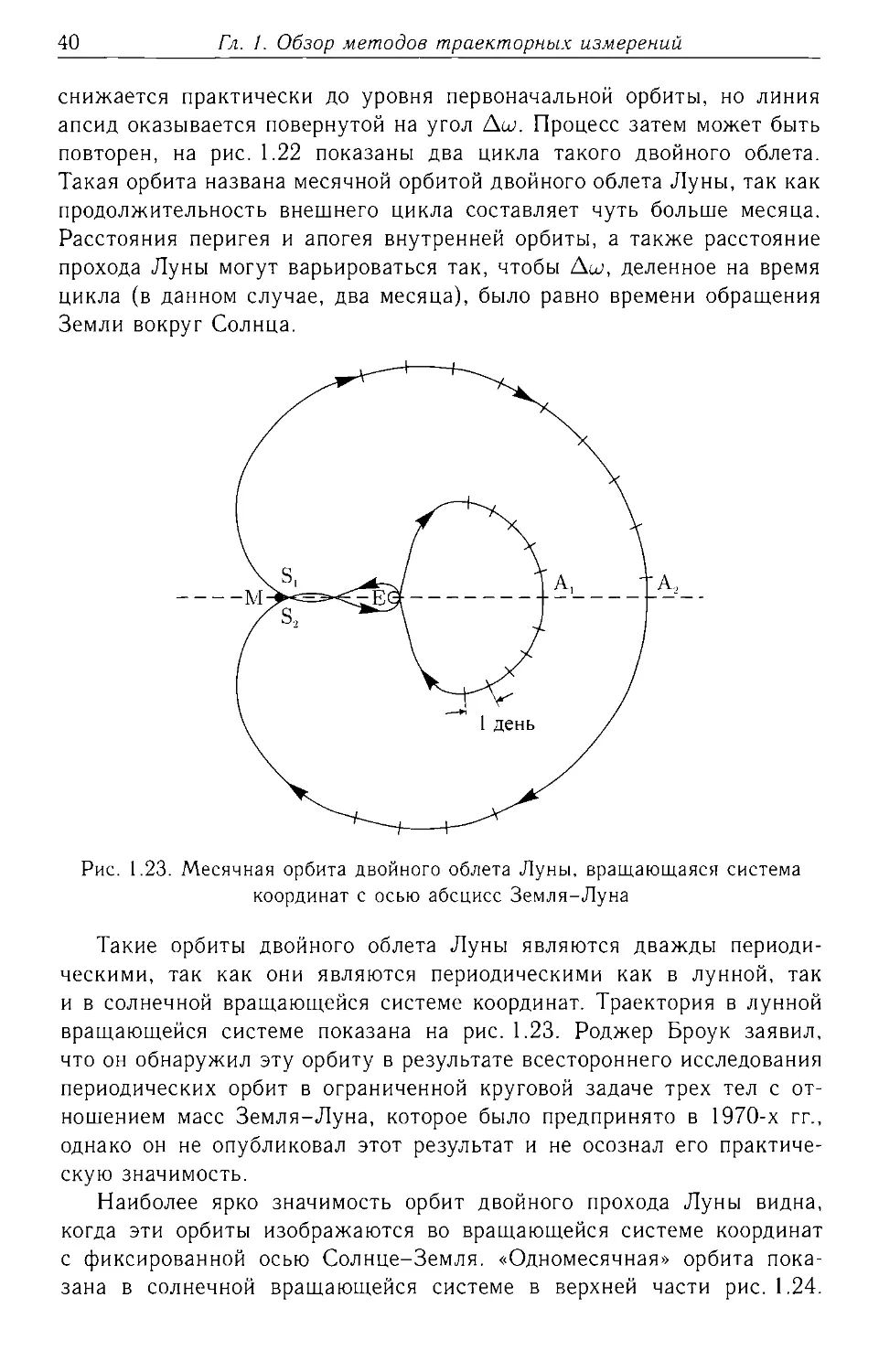
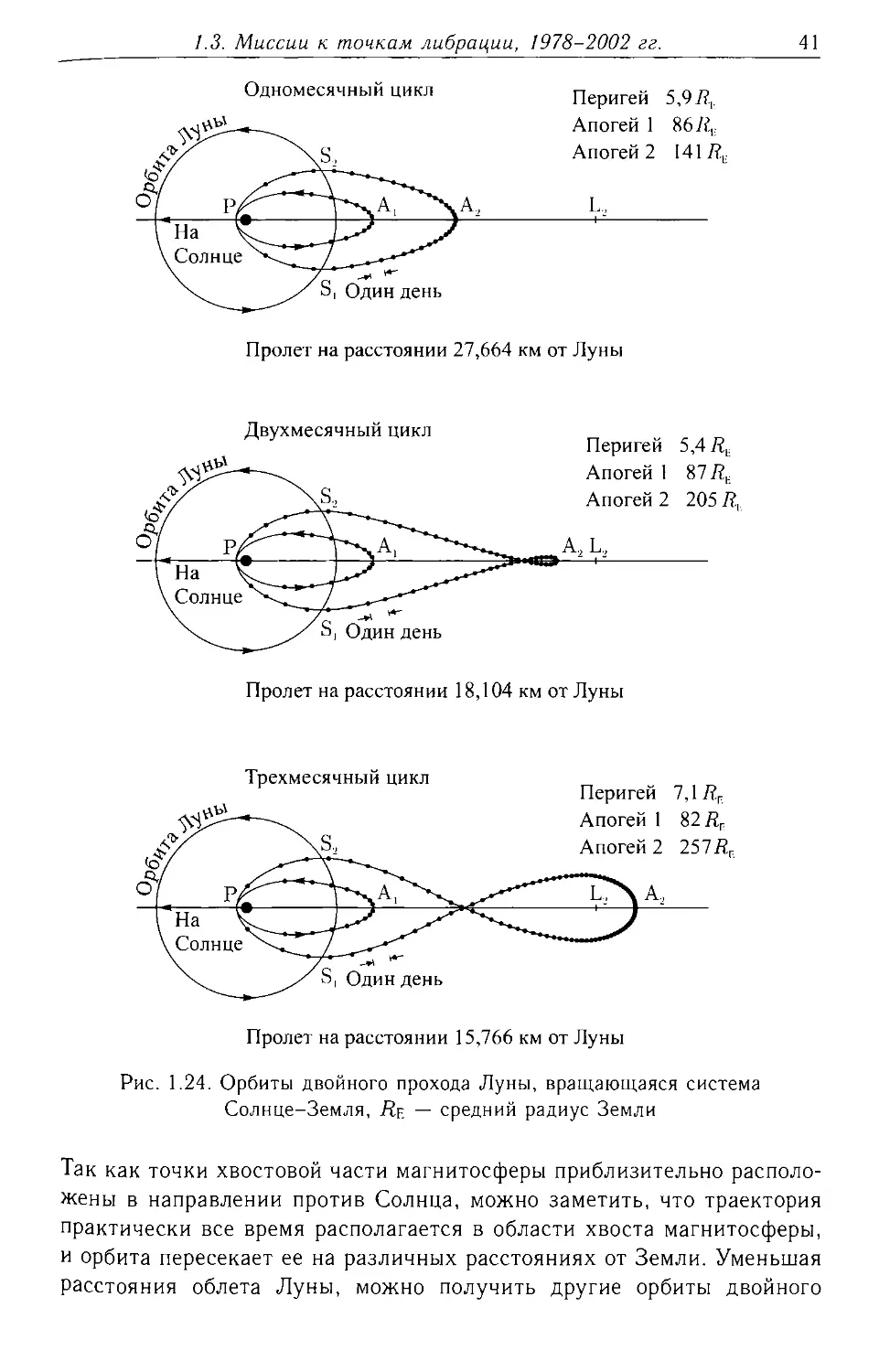
1.3. Миссии к точкам либрации, 1978-2002 гг. 39
магнитосферы, как показано на рис. 1.21. При этом параметры маг-
нитосферы могут быть измерены на различных расстояниях от Зем-
ли. Но как можно осуществить вращение линии апсид с требуемой
скоростью? Для того, чтобы сделать это с помощью маневров ДУ,
потребуются затраты порядка 400 м/с в месяц, которые, очевидно,
являются непомерно высокими. Представляется, что данная проблема
должна быть решена с помощью маневров прохода Луны, но как
это осуществить практически? Над решением работали специалисты
по астродинамике со всего мира, но первые предложения приводили
к орбитам, проходящим слишком близко от поверхности Луны, а с уче-
том солнечных возмущений и эксцентриситета величиной примерно
0,05 орбита оказывалась проходящей буквально вплотную к поверхно-
сти Луны.
Рис. 1.22. Месячная орбита двойного облета Луны, инерциальная система
В 1979 г. хорошее решение проблемы было предложено Фаркуа-
ром [26]. Траектория в инерциальной системе показана на рис.1.22.
Стартуя в точке апогея Ai, космический аппарат совершает около
3/4 витка орбиты, встречаясь с Луной в точке Sj. Этот касатель-
ный облет переводит аппарат на более высокую орбиту, проходящую
через точку Аг, по которой аппарат движется 33 дня, после чего
снова достигает орбиты Луны (точки на рис. 1.22 соответствуют ин-
тервалу в 1 день). После вторичного прохода Луны орбита аппарата
40 Гл. 1. Обзор методов траекторных измерений
снижается практически до уровня первоначальной орбиты, но линия
апсид оказывается повернутой на угол Дш. Процесс затем может быть
повторен, на рис. 1.22 показаны два цикла такого двойного облета.
Такая орбита названа месячной орбитой двойного облета Луны, так как
продолжительность внешнего цикла составляет чуть больше месяца.
Расстояния перигея и апогея внутренней орбиты, а также расстояние
прохода Луны могут варьироваться так, чтобы Дщ, деленное на время
цикла (в данном случае, два месяца), было равно времени обращения
Земли вокруг Солнца.
Рис. 1.23. Месячная орбита двойного облета Луны, вращающаяся система
координат с осью абсцисс Земля-Луна
Такие орбиты двойного облета Луны являются дважды периоди-
ческими, так как они являются периодическими как в лунной, так
и в солнечной вращающейся системе координат. Траектория в лунной
вращающейся системе показана на рис. 1.23. Роджер Броук заявил,
что он обнаружил эту орбиту в результате всестороннего исследования
периодических орбит в ограниченной круговой задаче трех тел с от-
ношением масс Земля-Луна, которое было предпринято в 1970-х гг.,
однако он не опубликовал этот результат и не осознал его практиче-
скую значимость.
Наиболее ярко значимость орбит двойного прохода Луны видна,
когда эти орбиты изображаются во вращающейся системе координат
с фиксированной осью Солнце-Земля. «Одномесячная» орбита пока-
зана в солнечной вращающейся системе в верхней части рис. 1.24.
1.3. Миссии к точкам либрации, 1978-2002 гг.
41
Одномесячный цикл
Пролет на расстоянии 27,664 км от Луны
Перигей 5,97?,.
Апогей 1 8677,,
Апогей 2 141 7?t
L,
5,4 Rt
877?t
205 R,
Пролет на расстоянии 18,104 км от Луны
Трехмесячный цикл
Перигей
Апогей 1
Апогей 2
7,17?г
82 /7Г
257 Rv.
Пролет на расстоянии 15,766 км от Луны
Рис. 1.24. Орбиты двойного прохода Луны, вращающаяся система
Солнце-Земля, /У — средний радиус Земли
Так как точки хвостовой части магнитосферы приблизительно располо-
жены в направлении против Солнца, можно заметить, что траектория
практически все время располагается в области хвоста магнитосферы,
и орбита пересекает ее на различных расстояниях от Земли. Уменьшая
расстояния облета Луны, можно получить другие орбиты двойного
42
Гл. 1. Обзор методов траекторных измерений
облета Луны с более высокими апогеями внешнего цикла и, таким
образом, как можно дольше оставаться в хвосте магнитосферы и из-
мерять его на больших расстояниях. Орбиты с внешним циклом в два
месяца и три месяца показаны соответственно на средней и нижней
частях рис. 1.24. Также возможно произвести множественные измене-
ния во внутренней орбите, увеличивая время между проходами Si и S-2
до двух месяцев или даже до трех или более месяцев, в этих случаях
расстояние между Si и S2 увеличивается.
Как относятся орбиты двойного облета Луны к орбитам точек
либрации? Обе орбиты являются орбитами с высоким апогеем, кото-
рые сохраняют фиксированную ориентацию во вращающейся системе
Солнце-Земля, так что обе они представляют интерес для экспери-
ментов в области космической физики. Орбиты точек либрации явля-
ются более высокими; на самом деле, в реальной солнечной системе
с учетом всевозможных возмущений орбиты двойного облета Луны
с внешними циклами в пять и более месяцев проходят около или даже
вокруг точек либрации L) и L2. При точном расчете движения Луны
достаточно просто спроектировать траекторию перелета с одного типа
орбит на другой.
1.3.4. Расширенная экспедиция ISEE-3/ICE. В марте 1981 г.
Фред Скарф, ведущий исследователь плазменных волн в эксперименте
ISEE, выразил желание использовать космический аппарат для ис-
следования отдаленного хвоста магнитосферы или, возможно, даже
для полета через хвост кометы. Он стал обсуждать с Фаркуаром воз-
можность такого применения аппарата. Фаркуар понимал, что ISEE-3,
находящийся на орбите точки либрации Ц, может легко покинуть
эту гало-орбиту (на нестабильном многообразии, используя современ-
ную терминологию) для перелета к большому количеству других мест
расположения, возможно, с использованием облетов Луны. В первое
время низкая скорость телеметрии антенны ISEE-3 заранее исключала
вариант кометы. Но в июле 1981 г. Джоэл Смит и Уоррен Мартин
из компании JPL объявили, что с использованием нового оборудо-
вания, которое было установлено на антеннах Deep Space Network,
стало возможным обеспечить передачу данных с ISEE-3 со скоро-
стью 1000бит/с на расстоянии 0,5 а. е. Был дан толчок к разработ-
ке расширенной экспедиции к комете, которая, желательно, включа-
ла бы и исследование хвоста магнитосферы Земли. Важность такой
экспедиции особенно возросла после закрытия в 1981 г. специально
разрабатывавшейся в США отдельной экспедиции к комете Галлея.
По различным причинам, главным образом из-за более короткого рас-
стояния для передачи данных, в качестве цели новой экспедиции была
выбрана комета Джакобини-Циннера (ДжЦ) [20].
Рис. 1.25. Перелет ISEE-3 с гало-орбиты в хвост магнитосферы
Усилия были верными, но в первое время не было понятно, как
достичь ДжЦ. Возникла сложная двухточечная задача с ограничения-
ми, с аппаратом ISEE-3, находящимся на фиксированной гало-орбите,
и встречей с ДжЦ, которая в сентябре 1985 г. должна была пере-
сечь плоскость эклиптики. Как показано в работе [20], решение было
найдено с помощью орбит двойного пролета Луны.
Найденный наилучший способ организации серии пролетов Луны
показан на рис. 1.25.
Тормозной импульс ДУ величиной 4 м/с приводил к медленному
уходу ISEE-3 с гало-орбиты и последующему движению по направле-
нию к Земле и лунной орбите. Солнечные возмущения привели к эво-
люции орбиты, которая позволила к концу 1982 г. получить хорошую
возможность для перелета через хвост магнитосферы Земли в течение
«трехмесячного» цикла в начале 1983 г. Так как траектория ISEE-3
не лежала в плоскости орбиты Луны, то для достижения цели первого
лунного облета Si 30 марта 1982 г. потребовался маневр вне плоскости
движения в районе точки апогея 8 февраля.
Расчеты движения ДжЦ показали, каким должен быть завершаю-
щий участок траектории перелета от кометы до точки S4 (рис. 1.25).
Эти расчеты позволяют даже приблизительно определить положение
точки S3. Но как точка S, на рис. 1.25 может быть сопоставлена
с точкой S3 на рис. 1.27? Для поиска решения были испробованы
многие варианты пролетов через Луну [27]. Наилучшее решение было
найдено при использовании одного из самых простейших внешних цик-
лов продолжительностью пять месяцев, при котором аппарат несколько
месяцев проводит в окрестности точки либрации L2. Это решение
показано на рис. 1.26.
44
Гл. 1. Обзор методов траекторных измерений
Траектория /SEE-3
I день в солнечно-эклиптической
St 3-30-83 21,307
S2: 3-30-83 22,875
S,: 3-30-83 24,527
Рис. 1.26. Пятимесячное пребывание в хвосте магнитосферы Земли
А.
Сз = 2,8 km?/cj
Земля
Хвост магнитосферы
S,
9-27-83
10-21-83
Радиус максимального сближения (км)
24,527
19,178
11-10-83 —
[ДУ ~ 6,5 м/с]
Траектория ISEE-3
в солнечно-эклиптической
системе координат
х 1 день
Траектория
ухода
На Солнце
S;i: 12-22-83 1,858
Рис. 1.27. Траектория ухода ISEE-3
В 1982 г. при расчете этих траекторий Д. Данхэм обнаружил
интересные траектории путем уменьшения расстояния пролета Луны
(рис. 1.26). Ранее он разработал подпрограмму для распечатывания
1.3. Миссии к точкам либрации, 1978-2002 гг.
45
Солнечно-эклиптическая сие гема координат
Рис. 1.28. Орбита пятимесячного пребывания ISEE-3 в хвосте магнитосферы
Показана траектория для 420 дней после облета Луны
Рис. 1.29. Возможная траектория ISEE-3 к орбите Лиссажу точки L_>
конечной траектории, рассчитанной во время работы программы, но,
к сожалению, созданная им распечатка была утрачена. В силу того, что
эта новая траектория могла представлять интерес, он заново ее сгене-
рировал. Сначала он взял известный вектор состояния аппарата ISEE-3
сразу после точки Si, который был рассчитан Крэгом Робертсом,
и использовал программу пролета для более близкого расстояния, чем
это показано на рис. 1.27. Результат показан на рис. 1.28.
При сообщении аппарату малого тормозного импульса AV в точке
перигея Р2 (2 апреля 1983 г.), расстояние пролета Луны уменьшается,
тем самым достигаются более продолжительные внешние циклы, по-
добные тем, что выполнялись в 1982 г. При уменьшении скорости толь-
ко на 4 мм/с расстояние пролета Луны уменьшалось на 49 км, приводя
к орбите Лиссажу с малой амплитудой, которая показана на рис. 1.29.
46
Гл. 1. Обзор методов траекторных измерений
Эта траектория не удовлетворяла цели исследования кометы с помощью
аппарата ISEE-3 в данное время, поэтому данный результат не был
опубликован. Но он подтвердил верность концепции использования
лунных облетов для перехода на орбиту Лиссажу точки L2 с малой
амплитудой для очень малых (только статистически) значений ДУ.
Позже такие траектории планировалось использовать для экспедиций
«Релик.т-2» и МАР.
Аппарат ISEE-3 упустил свой шанс стать первым спутником в точ-
ке L2 системы Солнце-Земля, таким спутником стал аппарат МАР
(Microwave Astronomy Probe), запущенный в 2001 г. Но зато ISEE-3
стал первым аппаратом, который провел непосредственные измерения
кометы, что явилось его более значимой отличительной особенностью.
Траекторию ухода ISEE-3 иллюстрирует рис. 1.26. Более подробное
рассмотрение пролета Луны S5, который делает траекторию аппарата
гиперболической относительно Земли, показано на рис. 1.30.
Рис. 1.30. Пятый облет Луны аппаратом ISEE-3 22 декабря 1983 года
Непосредственно после этого пролета NASA переименовало аппа-
рат, он получил название ICE (International Cometary Explorer). Первые
3,4 года гелиоцентрической орбиты ICE показаны на рис. 1.31 в более
крупном масштабе в плоскости эклиптики во вращающейся системе
с фиксированной осью Солнце-Земля. С целью обеспечить пролет ICE
через хвост кометы ДжЦ на расстоянии около 8000 км от ее ядра
в 1985 г. были произведены три маневра ДУ суммарной величиной
42 м/с. Более детальная информация об этой весьма успешной экспе-
диции приводится в [20].
В 2014 г. аппарат ICE пройдет около Земли, и для обеспечения
пролета Луны 10 августа 2014 г. были осуществлены маневр ДУ
1.3. Миссии к тоннам либрации, 1978-2002 гг.
47
8 мая 1987 г.
На Солнце
Земля
Перигелий 0,93 а.е.
Афелий 1,03 а.е.
Наклонение 0,1°
Скорость пролета
над кометой
Джакобини- Циннера
21 км/с
0,21 а.е. до кометы Галлея
8° — угол комета-Солнцс-КА
29 марта 1986 г.
87.' Комета Джакобини-Циннера
in n oz Ч сентября 1985 г.
12-9-86
0,93 а.е. до кометы Галлея
1 ° — угол комета-Солнце-КА
31 октября 1985 г.
1-13-86
Траектория ISEE-3
относительно фиксированной
линии Солнце - Земля
1-18-86
12-19-84
0,1 а.е.
1-24-84
Старт 22 декабря 1983 г.
Рис. 1.31. Начальная гелиоцентрическая орбита ICE при пролете кометы ДжЦ
в 1985 г.
в плоскости величиной 1,5 м/с и маневр AV вне плоскости величиной
39 м/с соответственно 27 февраля и 7 апреля 1986 г. Этот пролет
Луны и несколько малых маневров могут снова перевести ICE на око-
лоземную орбиту, возможно, даже с возвращением его на орбиту точки
либрации [28]. Но другой сценарий развития событий был предложен
в 1998 г. С помощью маневра AV величиной 25 м/с, произведенного
10 января 2010 г. ICE может пролететь мимо Земли на расстоянии
около 36 радиусов Земли и во второй раз встретиться с ДжЦ 19 сен-
тября 2018 г. [20]. Аппарат ISEE/ICE может быть известен как первый
аппарат, исследовавший комету, но в космонавтике он наиболее зна-
менит как первый аппарат, побывавший на орбитах точек либрации
и осуществивший двойной пролет Луны.
1.3.5. «Реликт-2», первые планы астрономического спутни-
ка в точке 1-2. ISEE-3 доказал практическую значимость орбиты
в окрестности точки Ц системы Солнце-Земля для проведения измере-
ний в интересах космической физики (в особенности при изучении сол-
нечного ветра). Орбиты в окрестности точки L2 системы Солнце-Земля
48
Гл. 1. Обзор методов траекторных измерений
могут быть использованы для измерений хвоста магнитосферы, но уже
ISEE-3 показал, что орбиты двойного прохода Луны лучше подхо-
дят для этой цели. Однако в конце 1980-х гг. многие разработчи-
ки космических экспедиций изучали значимость орбит вокруг точки
либрации Lg для астрономических наблюдений [29]. Спутник в этой
точке будет иметь возможность беспрепятственно наблюдать более
половины звездного неба при отсутствии интерференции со стороны
Солнца, Земли и Луны, которые будут оставаться в пределах 15° от на-
правления на Солнце. Особенно важным будет проведение измерений
инфракрасного излучения, так как геометрия и конструкция спутника
будет допускать пассивное остывание до очень низких температур,
солнечные панели, направленные на Солнце, могут затенять научные
приборы. Для этих целей орбита Лиссажу малой амплитуды вокруг
точки L2 будет лучше, чем орбита с большой амплитудой, необходимая
для периодической гало-орбиты. Сферическая антенна для передачи
данных обратно на Землю на орбите с малой амплитудой не должна
будет поворачиваться так сильно. Как и у аппарата ISEE-3, будет су-
ществовать центральная «зона исключения» как для передачи команд
с Земли, так и для возможно длительных затмений. Вершина земной
тени почти достигает среднего расстояния до L2, так что полные
затмения редки, но глубокие частичные затмения могут повредить
космический аппарат. Маневры с целью избежать зоны исключения
будут сходными с теми, которые требуются для стабилизации станции,
для компенсации нестабильного компонента движения.
11,611 км
Рис. 1.32. Возможная траектория аппарата «Реликт-2» к точке либрации L2
системы Солнце-Земля с использованием прохода Луны
Российский микроволновый астрономический спутник, названный
«Реликт-2», был первым, предназначенным для использования на ор-
бите точки L2 системы Солнце-Земля, о его создании было заявлено
1.3. Миссии к точкам либрации, 1978-2002 гг.
49
Рис. 1.33. Фазирующие орбиты первого прохода Луны
примерно в 1990 г. [30]. Так как этот аппарат имел ограниченный
запас ДУ, для перехода на требуемую орбиту с малой амплитудой
использовался маневр прохода Луны. Возможная траектория спутника
«Релик.т-2», опубликованная в работе [30], показана на рис. 1.32, где
представлен ее обычный вид, вращающийся в плоскости эклиптики
с фиксированной горизонтальной осью Солнце-Земля. К сожалению,
этот проект все еще остается незавершенным в силу финансовых
проблем российской космической программы, вызванных распадом Со-
ветского Союза. Однако интерес к данной экспедиции все еще сущест-
вует.
Проход Луны в точке Si, показанный на рис. 1.32, необходимо
совершать строго в один день каждого месяца, когда угол Солнце-
Земля-Луна составляет около 135° между новой и полной Луной.
Для того чтобы иметь достаточно большое окно старта, космический
аппарат должен сначала быть выведен на эллиптическую «фазовую
50
Гл. I. Обзор методов траекторных измерений
орбиту» с апогеем за пределами орбиты Луны и оставаться на ней
в течение нескольких недель перед проходом Луны. Это обеспечивает
возможность произвести старт двенадцать или более раз в течение
каждого месяца, в то время как непосредственный старт к Луне воз-
можно в течение месяца произвести лишь однажды.
Фазовые орбиты для осуществления прохода Луны впервые были
использованы Японией в экспедиции Hiten с двойным проходом Луны
в 1990 г., это был второй после ISEE-3 опыт осуществления двойного
лунного прохода [31]. Эскизы на рис. 1.33, сделанные в японском
Институте космической и астрономической науки для объяснения фа-
зовых орбит, используемых в проекте Hiten, показывают преимущества
и недостатки различного числа фазирующих орбит.
1.3.6. SOHO. Солнечная гелиосферная обсерватория (SOHO),
вторая экспедиция ISTP, была и второй экспедицией к точке либрации.
Эта усложненная солнечная обсерватория ESA стартовала с помощью
ракеты-носителя Atlas с мыса Канаверал 2 декабря 1995 г. под управ-
лением GSFC. 14 февраля 1996 г. эта станция вошла на гало-орбиту
точки либрации L|.
Рис. 1.34. Гало-орбита SOHO и орбита Лиссажу АСЕ,
проекция на вращающуюся плоскость эклиптики
Результаты сделанных станцией непрерывных детальных наблюде-
ний за Солнцем, общедоступные в сети, установили новый стандарт
для наблюдений Солнца. С помощью коронографа станции SOHO
были открыты многие десятки малых комет, «задевающих Солнце».
Но орбита этой станции была ничем не примечательной периодической
гало-орбитой с Z-амплитудой 120000км, копирующей орбиту ISEE-3
(см. вид в плоскости эклиптики на рис. 1.34 и ссылки [4,32,33]).
Связь со станцией SOHO была потеряна на 6 недель в середине 1998 г.
1.3. Миссии к точкам либрации, 1978-2002 гг.
51
из-за неудачного пространственного маневра, который временно вывел
станцию из строя. Возобновление экспедиции и героические усилия,
предпринятые для осуществления работы при потере всех гироскопов
станции SOHO, являются интересной историей [34].
1.3.7. АСЕ. Аппарат для изучения солнечного и галактического
ветра с высоким разрешением АСЕ, был третьей экспедицией к точке
либрации, стартовавшей с помощью ракеты-носителя Delta с мыса
Канаверал 25 августа 1997 г. Этот аппарат для исследования частиц
и полей был создан Лабораторией прикладной физики и обслуживался
GSFC.
АСЕ АСЕ
Плоскость
эклиптики
Рис. 1.35. Орбиты SOHO и АСЕ при наличии маневров удержания,
наблюдатель смотрит в направлении Солнца
Как и аппараты ISEE-3 и SOHO, АСЕ был помещен на орбиту
точки либрации L] системы Солнце-Земля. АСЕ перешел на заданную
орбиту Лиссажу с А'-амплитудой 81 755 км и Z-амплитудой 157 406 км
13 декабря 1997 г. Его движение в плоскости показано на рис. 1.34.
Рисунок 1.35 показывает движение вне плоскости и точки нескольких
первых стабилизационных маневров AV для станций SOHO и АСЕ.
АСЕ был первым аппаратом, осуществившим полет по орбите Лиссажу,
включающей маневры управления по оси Z для пролета мимо солнеч-
ных зон исключения [4, 35, 36].
1.3.8. WIND. Космический аппарат WIND, аппарат космической
физики, который, как и SOHO, являлся частью программы ISTP, был
субсидирован NASA и стартовал с помощью ракеты-носителя Delta
с мыса Канаверал 1 ноября 1994 г. Этот аппарат, управляемый GSFC,
преодолел четыре фазовые орбиты перед совершением начального про-
хода Луны.
Первое время WIND находился на ориентированной в направлении
Солнца орбите двойного прохода Луны для повторного пересечения
Гл. Г Обзор методов траекторных измерении
слоя фронтальной ударной волны магнитосферы. Но после первого
прохода Луны W”/;VD с февраля по июнь 1995 г. совершил большой
круг вокруг точки L; системы Солнце-Земля во время начального
семимесячного внешнего цикла, что рассматривается как четвертая
экспедиция к точке либрации. Следующие несколько внешних циклов
прошли ни/ке точки либрации, как показано на рис. 1.36.
Рис. 1.36. Траектория аппарата WIND, ноябрь 1994 - сентябрь 1997 г., проекция
на плоскость эклиптики солнечно-эклиптической системы координат
С ноября 1997 г. по июнь 1998 г., ближе к концу своей номинальной
экспедиции, WIND совершил восьмимесячный внешний цикл, снова
облетев вокруг точки либрации L|. В период фазы расширенной экс-
педиции WIND продолжил свои изыскательские орбитальные маневры,
включая первые расширенные измерения вне плоскости магнитосферы
Земли и использование в течение двух недель траектории «обрат-
ного переворота» («back—flip» — термин С. Uphofl), включающей два
близких пролета Луны, связанных циклом вне плоскости для измене-
ния ориентированной на Солнце траектории двойного пролета Луны
на такую же траекторию, ориентированную в обратном от Солнца
направлении [37-40].
Наконец, в 2004 г. WIND был направлен на орбиту Лиссажу
с большой амплитудой, похожей на гало-орбиту аппарата SOHO, где
он и находится на текущий момент.
1.3.9. МАР. Космический аппарат для исследования анизотро-
пии в микроволновом диапазоне MAP (Microwave Anisotropy Probe),
разработанный главным образом для измерения фоновой радиации,
представляемой фотонами, образованными во время Большого Взрыва
(Big-Bang), был профинансирован NASA и стартовал при помощи
ракеты-носителя Delta с мыса Канаверал 30 июня 2001 г. Как и при
разработке спутника «Реликт-2» [30] (ср. рис. 1.32 и 1.37), в МАР
использовались фазовые орбиты и проход Луны для перехода на орбиту
Лиссажу с малой амплитудой вокруг точки либрации L2 системы
Солнце-Земля, который был осуществлен 1 октября 2001 г. Этот полет
Рис. 1.37. Траектория МАР, солнечно-эклиптическая система координат,
изометрическая проекция
стал пятой экспедицией к точке либрации, второй (после ISEE-3)
экспедицией для проведения измерений в окрестности L» и первой экс-
педицией, специально посвященной этой цели, первой «обсерваторией»,
использующей точку L2 так, как планировалось еще в 1990 г. [29]. Раз-
работку орбиты МАР затруднило требование избежать даже неболь-
ших частичных лунных затмений [36,41].
1.3.10. Genesis. Космический аппарат Genesis, разработанный
для сбора образцов солнечного ветра и доставки их на Землю
для детального анализа, был профинансирован NASA и стартовал
при помощи ракеты-носителя Delta с мыса Канаверал 8 августа
2001 г. Следуя по траектории, весьма сходной с траекторией ISEE-3
(ср. рис. 1.18, 1.25, 1.38), Genesis стартовал на орбиту перелета по на-
правлению к орбите Лиссажу с большой амплитудой в окрестности
точки Li системы Солнце-Земля, весьма сходной с гало-орбитой ап-
парата ISEE-3. Амплитуда орбиты Genesis по оси Z составляла около
120000км. Переход на орбиту Лиссажу был произведен 16 ноября
2001 г. и ознаменовал начало шестой экспедиции к точке либрации.
Приборы для захвата частиц солнечного ветра были активированы
уже через несколько дней, эксперимент продолжался 29 месяцев. Как
и ISEE-3, для формирования траектории обратного перелета Gene-
sis использовались солнечные и лунные возмущения. Для возврата
на Землю в августе 2004 г. использовалось аэродинамическое тормо-
жение в атмосфере Земли.
54
Гл. 1. Обзор методов траекторных измерений
Таблица 1.4.
Миссии Солнечно- Земная точка Дата запуска Цель миссии
ISEE-3 (NASA) Li, L2 1978, 1983 Солнечный ветер, космические лучи, исследование плазмы
WIND (NASA) Li 1994 Мониторинг солнечного ветра
SOHO (ESA/NASA) Li 1996 Солнечная обсерватория
ACE (NASA) Li 1997 Солнечный ветер, частицы высокой энергии
MAP (NASA) l2 2001 Реликтовое излучение
Genesis (NASA) Li 2001 Состав солнечного ветра
Herschel (ESA) l2 2007 Инфракрасный телескоп
Plank (ESA) l2 2007 Реликтовое излучение
«Чанъэ-2» (CNSA) l2 2011 Лунная миссия, расширенная к L2 и (4179) Таутатис
ARTEMIS (NASA) Li, L2 Луна- Земля 2012 Космическая среда вблизи Луны
Gaia (ESA) l2 2013 Структура галактики, астрометрия
СРГ (РОССИЯ) l2 2014 Исследования в рентгеновском и гамма-диапазоне
DSCOVR (NASA) L, 2014 Телескоп наблюдения Земли
LISA Pathfinder (ESA) l2 2015 Гравитационные волны
Миллиметрон (РОССИЯ) l2 2018 Космический радиотелескоп миллиметрового диапазона
JWST (NASA/ESA) l2 2018 Обсерватория глубокого космоса
Euclid (ESA) l2 2019 Темная материя и темная энергия
Wide Field Infrared Survey (NASA) l2 2020 Темная материя и темная энергия
На протяжении 18 лет после старта аппарата ISEE-3 не было
предпринято дальнейших экспедиций к точкам либрации. Но в течение
шести лет начиная с декабря 1995 г. были успешно проведены пять
экспедиций, благодаря которым были получены новые важные науч-
ные результаты новым эффективным по затратам способом, как было
1.4. Методы проектирования орбит в окрестности точек либрации 55
Рис. 1.38. Траектория аппарата Genesis, вид в солнечно-эклиптической
системе координат
описано выше. Но эти экспедиции лишь слегка затронули область тех
возможностей, которые могут предоставить орбиты вокруг точек либра-
ции. В табл. 1.4 перечислены шесть экспедиций, благодаря которым пе-
релет к точкам либрации стал вполне привычной процедурой, и также
перечислены восемь планируемых на протяжении ближайших лет экс-
педиций для наблюдений в точке либрации L2 системы Солнце-Земля.
Кроме этих экспедиций создан аппарат DSCOVR (Triana) для непре-
рывного наблюдения Земли с орбиты точки либрации Li системы
Солнце-Земля, но пока не ясно, когда этот аппарат будет запущен [42].
Тем не менее, результаты проведенных шести экспедиций позволяют
говорить о том, что у экспедиций к точкам либрации, несомненно,
имеется большое будущее.
1.4. Методы проектирования орбит в окрестности
точек либрации для европейских проектов
(По материалам статьи Hechler М., Cobos J.
Herschel, Planck and Gaia Orbit Design //
Libration Point Orbits and Applications /
Gomez G., Lo M.W. and Masdemont J.J., Eds. —
Singapore: World Scientific Publishing, 2003)
Использование космических аппаратов для астрономических и аст-
рофизических наблюдений накладывает ограничения на траекторию
их движения, связанные с необходимостью обеспечения устойчивого
режима работы точных инструментов, а также уменьшения участка
неба, недоступного для наблюдения из-за влияния Солнца и ближай-
ших планет. Одной из таких траекторий является орбита Лиссажу
вокруг точки Лагранжа L2 в системе Земля-Солнце [43]. В настоящее
время планируется и успешно осуществляется несколько проектов,
56
Гл. 1. Обзор методов траекторных измерении
использующих орбиты Лиссажу, например WMAP (NASA, запущен
в 2001 г.) [43], Planck [44] и Herschel [45] (ESA, запущены в 2009 г.),
Gaia (ESA, запуск планируется в 2013 г.) [46], причем новые научные
данные, полученные WMAP, Planck и Herschel, подтверждают пер-
спективность такого подхода.
Для разработки подобных проектов необходим метод расчета требу-
емых траекторий космического аппарата во время перелета к точке L2,
перехода на орбиту Лиссажу заданного размера и удержания на этой
орбите. Кроме того, при необходимости непрерывного освещения сол-
нечных батарей аппарата нужно периодически вносить строго кон-
тролируемые изменения в параметры орбиты, чтобы избежать затме-
ния аппарата Землей. Управление движением вблизи L? осложняется
неустойчивостью орбиты Лиссажу, а траектория перелета ограничена
возможностями ракеты-носителя. Ниже рассматривается подход к опи-
санию этой неустойчивости, позволяющий производить расчет целевых
траекторий и соответствующего режима управления, а также оценку
влияния выбора ракеты-носителя на режим перелета и достижимые
параметры орбиты.
1.4.1. Линейная теория. Орбита Лиссажу. Для описания дви-
жения КА введем систему координат с осью х вдоль направления
от Солнца к барицентру системы Земля-Луна, осью z, направленной
из плоскости эклиптики, и осью у, дополняющей систему до декарто-
вой. Ограниченная задача трех тел для КА в системе Земля-Солнце
представляется дифференциальными уравнениями, нелинейными как
по координатам, так и по скоростям [47]. Точки Лагранжа определя-
ются в такой системе из условия VI/ = 0, где потенциал U учитывает
действие как гравитационных, так и фиктивных сил — центробежной
и кориолисовой. Для упрощения рассмотрения уравнения движения
можно линеаризовать вокруг точек Лагранжа и записать в безраз-
мерном виде, где в качестве единиц расстояния и времени выбраны
астрономическая единица и сидерический год, деленный на 2тг [48].
Для точки L2 такие уравнения имеют вид:
f х — 2у — (1 + 2А) х = 0
у + 2х-(1 - К)у = 0 , Д- 3,940522. (1.1)
[ z + Kz = 0
Эти уравнения допускают решение:
1
С1
еА' + А2
= А,
У
COS (шгД + p.ry)
('2 sin (ojTyt T p.ry)
Z = Az cos (щД + ^z),
(1.2)
1.4. Методы проектирования орбит в окрестности точек либрации 57
где С] « -0,545 26, с2 « 3,187 23, шгу » 2,057 01, ccz « 1,985 07, Л «
« 2,484 322, а коэффициенты А определяются начальными условия-
ми, причем движение по z развязано с движением в плоскости ху.
Приведенное выше решение состоит из трех основных компонент: экс-
поненциально нарастающее (неустойчивое) решение с амплитудой А1,
затухающее решение с амплитудой А2 и гармоническое решение с ам-
плитудами Ах, Ау = с-2А.т и А?- Таким образом, траектория будет
устойчивой при А[ = 0, а при дополнительном условии А2 = 0 она
является орбитой Лиссажу (в плоскости ху описывается эллипс, а двух
других плоскостях — фигуры Лиссажу). Дифференцируя по времени
и исключая А2 и А.г из (1.2), можно получить, что начальные условия
для устойчивого случая удовлетворяют уравнению:
/ С2--Г у \ С>Х у
\2d, 2d-,J 2d-i 2dt
(1.3)
где d\ = + c2ix.,:y « 5,201 57, d2 = ciw.ry — c2X « —9,039 70. Это
выражение, вообще говоря, справедливо для любого момента времени,
если А| = 0. Отсюда следует, что если управление аппаратом вызывает
изменения скорости, происходящие почти мгновенно по сравнению
с периодом орбиты (т. е. (х,у) мало меняется), то условие сохранения
устойчивости определяется параллельностью вектора изменения скоро-
сти направлению устойчивости'.
= (1-4)
Lrt| а-2 J
Соответственно, изменение скорости, ортогональное к .s, приводит
к наибольшему по модулю А\ и названо направлением неустойчивости.
Направление .ч отклонено от оси х приблизительно на —61,4°.
Этот результат важен по нескольким причинам. Во-первых, если
требуется изменить параметры орбиты, не нарушая ее устойчивость,
импульс двигательной установки должен быть направлен как можно
точнее вдоль ±.ч; одновременно, это определяет минимально возможное
ДП такого маневра. Во-вторых, для восстановления потерянного рав-
новесия при сохранении параметров орбиты (либо намеренного увода
аппарата с орбиты) вектор импульса должен быть ориентирован вдоль
направления неустойчивости, что также дает минимальное ДП для
этого случая. Наконец, направление устойчивости не зависит от поло-
жения в пространстве, что позволяет упростить алгоритм поддержания
орбиты.
Изменение орбиты. При запуске КА ракета-носитель, вообще го-
воря, выводит его на траекторию, которая не обязательно оканчивается
на желаемой орбите Лиссажу. Поэтому аппарат должен иметь воз-
можность изменять параметры своей орбиты. В случае, если требуется
перевести КА с устойчивой орбиты Лиссажу с амплитудами А.,. и А-
58
Гл. 1. Обзор методов траекторных измерений
(А) = Ач = 0) на устойчивую орбиту с амплитудами А'х и A'z = Az
(А( = 0), оказывается возможным однократное применение импульса
вдоль направления устойчивости. Это, вообще говоря, приводит к то-
му, что А'2 0, но соответствующая компонента движения быстро
затухает. При этом в течение всего маневра координаты КА практи-
чески не изменяются. Как было указано выше, это дает возможность
минимизировать необходимое AI4,, за счет сохранения устойчивости
траектории.
Дифференцируя (1.2), исключая А^ и считая, что АУ^Цз, можно
найти положение КА на орбите, применение импульса в котором изме-
няет Ах на заданную величину при минимальном &Уху'.
При этом
х
У/С2
. У
arctg- = —q.
(1-5)
AV’x,, = ± (А' — АД
х- у \ X х /
С?2
dic2
(1.6)
Таким образом, существует две симметрично расположенных точки
на изначальной орбите, позволяющих выполнять оптимальные пере-
ходы между орбитами Лиссажу, направление на которые из центра
орбиты составляет +28,6° от оси х, т. е. строго вдоль направления
неустойчивости.
Полученный результат позволяет определить два взаимно ортого-
нальных направления: при сообщении импульса вдоль одного направ-
ления компенсируется составляющая, приводящая к уходу аппарата
из окрестности точки либрации, импульс вдоль второго направления
позволяет менять амплитуду Ах, Ау.
С другой стороны, для маневра, изменяющего только Az, из (1.2)
следует, что импульс должен быть приложен в момент времени с наи-
большим z, то есть z=0. Вводя амплитуду орбиты по у как Ау = czAx,
получаем выражения для AV (в единицах СИ):
А = ААу • 3,647 94 10-7 с-1,
(17)
ДИ2 = ААг • 3,952 26 • 10~7 с"1. '
Оптимальный способ комбинирования AAy и AAZ зависит от целей,
поставленных перед КА. Далее приводится алгоритм, полученный для
случая, когда для Ау и А2 заданы целевые значения ау и az, что спра-
ведливо, если для аппарата нужно задать фиксированный угол между
направлениями на Солнце и на Землю. Такие условия работы КА
определяются с одной стороны преимуществами непрерывного освеще-
ния солнечных батарей без попадания в тень Земли, а с другой —
1.4. Методы проектирования орбит в окрестности точек либрации 59
минимизацией участка неба, недоступного для наблюдения из-за близ-
кого направления на Солнце или Землю.
В нормальном состоянии: Ау ау и Az az, и коррекции не тре-
буется; при превышении хотя бы одного ограничения производится
коррекция орбиты путем сообщения аппарату AV только вдоль оси
нарушенного ограничения. Такая коррекция включает в себя последо-
вательное применение AVxy и AVZ, так как условия оптимальности
момента включения двигателей в плоскости ху и по оси z, вообще
говоря, не совпадают. Величина AV при этом выбирается такой, чтобы
после комбинированного маневра А2 + = а2 + а|. Например, при
превышении только Ау > ау аппарату нужно сообщить
ЛТД, = -3,647 94 10~7с-1 • х/а2+а2-А2,
\1 у с Z.
где отрицательный знак соответствует уменьшению Ау, а при превы-
шении обоих ограничений —
AVxy = 3,647 94 • 10-7с“1 • (ау - Ау)
У ’ \ у У /
И
А К = 3,952 26 10“7c~‘ (az - Az)
(оба значения отрицательны).
Данный метод пригоден как для коррекции орбиты для предотвра-
щения влияния небольших возмущений на уже установленную орбиту,
так и для разовых переходов между сильно отличающимися траекто-
риями, в том числе и при первоначальном выведении аппарата.
Устранение затмений. Орбитам Лиссажу свойственно различие
периодов колебаний по осям у и z. В связи с этим появляется возмож-
ность попадания КА в тень Земли, что показано на рис. 1.39.
Так как затмения будут происходить приблизительно раз в 6 лет
[49], а длительность использования КА может превышать это время,
необходимо выработать способ избежания затмений путем измене-
ния параметров орбиты. При этом желательно истратить как можно
меньшее количество топлива и, одновременно, устранить возможность
более скорого повторного затмения на новой траектории. Далее пред-
лагаются два метода, основанные на раздельном изменении параметров
в плоскости ху и по оси z.
Первый метод включает в себя маневрирование исключительно
по оси z. Из уравнений (1.2) следует, что при обращении фазы коле-
баний по z относительно фазы по у равносильно обращению времени
в плоскости yz. Таким образом, если расчет показывает, что текущая
траектория пройдет в ближайшее время через тень Земли, применение
AI4, меняющего скорость по z на обратную в момент у = 0, приведет
60
Гл. 1. Обзор методов траекторных измерений
Рис. 1.39. Траектория движения перед затмением
к обращению траектории в плоскости yz и, следовательно, предотвра-
тит затмение в течение следующих 6 лет.
Второй метод состоит в маневрировании в плоскости ху. В то вре-
мя как первый метод обращает относительную фазу в плоскости yz,
второй — сдвигает фазу по у, тем самым также избегая затмения. Так
как необходимо поддерживать траекторию устойчивой, разрешенным
по-прежнему является только ДУ^ вдоль направления устойчивости.
С другой стороны, в отличие от метода коррекций орбиты, целью здесь
является изменение ее временных, а не геометрических параметров.
Поэтому момент совершения маневра рассчитывается по минимуму
расхода топлива, позволяющего только предотвратить затмение. Такой
момент соответствует минимальным скоростям аппарата, т. е. у — 0.
Сравнение этих методов показывает, что затраты топлива при
их раздельном применении приблизительно равны, причем для Az <
< 0,9234,, предпочтительней первый метод, так как обращение дви-
жения по z невелико. В целом, для предотвращения одного затмения
требуется ДУ’ около 15 м/с.
1.4.2. Учет нелинейности и численный метод. Приведенные
выше методы расчета траектории движения КА вокруг точек Лагранжа
позволили выявить многие особенности такого движения и построить
основные алгоритмы управления аппаратом. Тем не менее, для точных
1.4. Методы проектирования орбит в окрестности точек либрации 61
расчетов необходимо использовать прямое численное моделирование
без введения линеаризованных приближенных моделей. Так как урав-
нения движения вблизи точек Лагранжа численно неустойчивы, для
нахождения траектории использовался следующий метод [48]. При
заданных начальных координатах и конечной орбите Лиссажу, про-
исходит поиск соответствующей начальной скорости делением попо-
лам ее компоненты в направлении неустойчивости до тех пор, пока
результатом интегрирования уравнений движения не окажется устой-
чивая орбита. Таким образом, линейная теория служит основой для
решения уравнений движения и дальнейших точных построений. Ин-
тегрирование обрывается либо при уходе траектории за установленные
в пространстве пределы (например, 0,5-2,0 млн км от Земли), что
свидетельствует о неудачной траектории, либо при превышении запла-
нированной продолжительности работы КА, что является критерием
завершения поиска.
По существу, данный метод является усовершенствованием метода
«пристрелки» для решения двухточечной задачи в системе с сильно
неустойчивым поведением по начальным условиям, и в то же время,
с некоторыми заранее известными величинами, как, например, направ-
ление неустойчивости, которые могут быть использованы для более
узкого выбора областей поиска решения.
Численное моделирование по описанной выше схеме производилось
на примере запуска КА Herschel и Planck ракетой-носителем Ariane
(14 мая 2009 г.); для аппарата Planck опубликованы данные [44] о фак-
тически реализованной траектории, которые можно использовать для
проверки численных моделей. Особенностью этого запуска является
малая широта космодрома Куру (5° с. ш.), обеспечивающая наклонение
орбиты около 6° [50] и уменьшающая величину полезной нагрузки,
выводимой на траектории, близкие к эклиптике. Поэтому, если за-
давать в качестве исходных параметров целевую орбиту Лиссажу,
может оказаться, что Ariane не сможет вывести аппарат на траекторию,
обеспечивающую его доставку на эту орбиту. В связи с этим, был
произведен поиск траекторий, переводящих аппарат на любую орбиту
Лиссажу среди всех допустимых ракетой-носителем. Алгоритм поиска
начальной скорости производился по тому же методу деления пополам,
за исключением того, что производилось продольное варьирование ор-
битальной скорости, создаваемой Ariane. При этом вначале определя-
лась граница, разделяющая траектории, возвращающиеся к Земле и на-
всегда покидающие ее сферу действия. Далее, начальная траектория
предполагалась лежащей на данной границе, и производился более точ-
ный поиск. На рис. 1.40 показан перебор пробных траекторий, причем
участок начального перелета от Земли практически совпадает с этой
62
Гл. 1. Обзор методов траекторных измерений
Рис. 1.40. Поиск траектории, приводящей к орбите Лиссажу
границей. В итоге была получена достаточно долгоживущая орбита
Лиссажу.
Как видно из рисунка, полученные таким методом орбиты Лиссажу
обладают большими амплитудами и заметно отличаются от эллиптиче-
ских, предсказываемых линейным приближением.
Для аппарата Planck предварительное моделирование [48] с ис-
пользованием линейного подхода для описания маневрирования пред-
сказало полные затраты ДУ около 172 м/с при затратах на коррекцию
22 м/с. На фактически осуществленной траектории основные затраты
составили 212 м/с при затратах 14 м/с на коррекцию изначальной тра-
ектории, заданной ракетой-носителем, и 12 м/с на коррекцию при под-
лете к целевой орбите Лиссажу [44]. Таким образом, несмотря на при-
ближенность и неприменимость линейной модели к орбитам с большой
амплитудой, затраты топлива удалось предсказать с недооценкой око-
ло 20%. Кроме того, фактическая траектория отличалась от пробной
(использованной для моделирования), как показано на рис. 1.41.
Как видно из графиков движения в плоскости yz, разработчики
выбрали более компактную траекторию, что, по-видимому, и объясняет
увеличенные затраты ДУ. Кроме того, запуск был произведен в самом
начале окна [45], что также означает отличие траектории от опти-
мальной.
1.4. Методы проектирования орбит в окрестности точек либрации 63
X, 105 км
Рис. 1.41. Модельная (а) и фактическая (б) траектории Planck [44]
Полученная линеаризованная модель может быть использована для
предсказания динамики орбиты, а также для формирования эффек-
тивных алгоритмов изменения амплитуд движения и предотвращения
затмений. Кроме того, использование линейной теории для численного
моделирования сложных траекторий выведения аппаратов на орбиты
Лиссажу позволяет значительно упростить алгоритм поиска нужной
траектории. Результаты моделирования полностью подтверждают ос-
новные выводы теории, и их сравнение с практически реализуемы-
ми траекториями также показывает состоятельность предложенных
методов. Предложенные методы расчета могут найти широкое приме-
нение при проектировании космических аппаратов, в том числе, для
определения траекторий движения планируемых миссий, таких как
Gaia.
64
Гл. 1. Обзор методов траекторных измерений
1.5. Влияние технических ограничений
на проектирование миссий к коллинеарным точкам
либрации системы Солнце-Земля
(По материалам публикации Eismont N., Sukhanov А.,
Khrapchenkov V.. Technical Constraints Impact on Mission Design
to the Collinear Sun-Earth Libration Points //
Libration Point Orbit and Application)
Экспедиции к коллинеарным точкам либрации системы Солнце-
Земля, во время которых планируется проведение научных экспери-
ментов, обладают большими преимуществами в силу оптимальных
условий для проведения различных измерений, которыми обладает
данная область космического пространства. При проведении некоторых
экспериментов требуется сохранять относительно близкое положение
аппарата к точкам либрации. В частности, это необходимо при иссле-
довании фонового микроволнового излучения и инфракрасного излу-
чения. В то же время другие эксперименты, такие как исследование
солнечного ветра, допускают наличие большой амплитуды движения
спутника относительно точек либрации.
Поэтому представляет научный интерес исследование возможно-
сти выведения космического аппарата на орбиту вокруг коллинеарных
точек либрации при условии, что допустимы отклонения аппарата
от этих точек в пределах 1400 тысяч километров по трансверсали
в направлении линии Солнце-Земля. Такие требования обусловлены
рядом технических ограничений на возможность выведения спутника
на орбиту вокруг точек либрации. Эти ограничения возникают в силу
необходимости уменьшения затрат на запуск и проведение экспедиции
в целом.
1.5.1. Перечень и природа технических ограничений. В даль-
нейшем будем считать, что возможность осуществления экспеди-
ции к точкам либрации ограничивается характеристиками российских
средств выведения на орбиту полезной нагрузки, которые используются
для запуска спутников на высокие эллиптические орбиты. Сейчас для
этих целей используются следующие типы ракет-носителей:
• «Протон» с разгонным блоком «Бриз» в качестве верхней ступени;
• «Молния»;
• «Союз» с разгонным блоком «Фрегат» в качестве верхней сту-
пени.
«Протон» используется для выведения на геостационарную орби-
ту, «Молния» и «Союз» выводят спутники связи «Молния» и воен-
1.5. Влияние технических ограничений на проектирование миссий 65
ные спутники «Око» на высокие эллиптические орбиты с периодом
в 12 часов.
Во время запуска на геостационарную орбиту спутник выводится
на геопереходную высокую эллиптическую орбиту.
Важно подчеркнуть, что параметры орбиты для выводимой полез-
ной нагрузки полностью определяются требованиями этой полезной
нагрузки, включая дату и время старта. Начальные параметры орбиты
полезной нагрузки близки к следующим [51]:
• «Молния»:
период — 0,5 звездных дней;
высота перигея — примерно 640 км;
наклонение — примерно 63°;
аргумент перигея — 288°;
долгота восходящего узла определяется исходя из требова-
ний построения группировки спутников.
• «Око»: сходные параметры за исключением аргумента перигея,
который составляет около 320°.
• «Протон»: геопереходные орбиты являются достаточно типичны-
ми с наклонением около 47,5°, высотой перигея 200 км и высотой
апогея 35 920 км, аргумент перигея для этих орбит приблизитель-
но 0° [52].
Главным препятствием при использовании «Протона» для транс-
портировки полезной нагрузки является необходимость изменять верх-
нюю ступень с целью установки дополнительной нагрузки. Достаточно
очевидно, что эта полезная нагрузка должна быть установлена между
верхней ступенью и основным аппаратом, выводимым на орбиту, что
не так просто осуществить, принимая во внимание широкий спектр
возможных спутников, выводимых на орбиту с помощью «Протона».
В случае, когда верхняя ступень используется для маневра с це-
лью дальнейшего перелета на гало-орбиту, существенным техническим
ограничением является временная задержка, необходимая для запус-
ка дополнительного двигателя (в настоящее время верхний предел
этой временной задержки составляет несколько часов). Это означает,
что спутник, выводимый на гало-орбиту, должен быть оборудован
собственным двигателем, либо разгонный блок «Бриз» должен быть
подвергнут существенной модификации.
Использование носителя «Молния» полностью исключает дополни-
тельный запуск двигателя разгонной ступени, так как этот двигатель
может быть запущен только один раз.
Наиболее удобным вариантом является использование носителя
«Союз»-«Фрегат», так как разгонный блок «Фрегат» оборудован дви-
гателем многоразового запуска. Но даже в этом случае существуют
3 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
66
Гл. 1. Обзор методов траекторных измерений
ограничения на временной интервал между стартом ракеты-носителя
и последним запуском двигателя разгонной ступени.
Кроме того, во многих случаях номинальный перелет от начальной
высокой эллиптической орбиты к гало-орбите должен быть осуществ-
лен с помощью одноимпульсного маневра.
Для уменьшения затрат должен быть рассмотрен простейший спо-
соб управления спутником, такой как в случае стабилизации враще-
нием. Примером такой стабилизации может служить серия российских
спутников «Прогноз», у которых ось вращения периодически направ-
лялась на Солнце.
Один из спутников этой серии предполагалось использовать в про-
екте «Реликт-2», главной целью которого было изучение микро-
волнового фонового излучения. С целью обеспечения возможности
направить ось вращения спутника в направлении Солнца долж-
ны были применяться маневры коррекции в направлении Солнца
(или в направлении, противоположном Солнцу), что расширяет пере-
чень возможных технических ограничений.
Другой пример налагаемых ограничений относится к экспедиции
к точке либрации с использованием электрореактивных двигателей
малой тяги [53]. Очевидно, что применение этих двигателей требует
максимальной степени использования солнечной энергии. В оптималь-
ном случае солнечные панели должны всегда оставаться в положении,
ортогональном направлению на Солнце, и ось управляющего двигателя
должна быть направлена вдоль вектора скорости, что может достигать-
ся только с использованием вращающихся панелей или двигателей.
Во избежание этой трудности и для упрощения управления спутником
было предложено использовать стабилизацию вращением, при которой
ось вращения была ортогональна направлению на Солнце и лежала
в плоскости орбиты. Импульсы выдаются вдоль оси вращения. Сол-
нечные панели имеют форму цилиндрической поверхности с осью, на-
правленной вдоль оси вращения. Управляющие двигатели включаются,
когда угол между вектором скорости и осью вращения становится
меньше 60°.
В целом можно сказать, что перечисленные выше технические
ограничения выглядят достаточно сильными для того, чтобы отдельно
исследовать вопрос о принципиальной возможности экспедиции к кол-
линеарным точкам либрации при наличии таких ограничений.
1.5.2. Влияние даты старта на гало-орбиту при фиксирован-
ном значении восходящего узла. На рис. 1.42 и 1.43 представлены
траектории к окрестностям точки либрации L2 и вокруг нее в случае,
когда перелет осуществляется при помощи одного импульса с геоста-
ционарной высокой эллиптической орбиты, имеющей наклонение 62°,
1.5. Влияние технических ограничений на проектирование миссий 67
аргумент перигея по отношению к экватору 0° и долготу восходящего
узла 0°. Траектории показаны в солнечно-эклиптической системе ко-
ординат, интервал между соседними точками соответствует четырем
дням. Проверяются четыре даты старта: 15.01.98, 15.02.98, 27.02.98
и 22.03.98.
Рис. 1.42.
На данных рисунках можно заметить, что для дат с 15.02 до 22.03
результирующие гало-орбиты являются до некоторой степени сходны-
ми с амплитудой по оси Y в пределах 800000 км, изменением коор-
динаты X в пределах от 1 150000км до 1750000км и амплитудой
по оси Z 150000км. Для даты старта 15.01 амплитуда по оси Y
увеличивается до 1300000 км с аналогичным ростом при движении
амплитуд по другим осям.
Но в любом случае рис. 1.42 и 1.43 демонстрируют возможность
достаточно широкого окна дат старта для выведения спутника на гало-
орбиту (более двух месяцев), по крайней мере, для начальных орбит
с аргументом перигея близким к нулю.
1.5.3. Влияние долготы восходящего узла на характеристи-
ки гало-орбиты. Большинство регулярных запусков на высокую
эллиптическую орбиту планируется для выведения спутников свя-
зи «Молния». Основной проблемой, возникающей при использовании
3*
68
Гл. t. Обзор методов траекторных измерений
Влияние даты запуска на гало-орбиту с одноимпульсным переходом
этих запусков для выведения спутника на гало-орбиту в качестве
дополнительной полезной нагрузки, является значение аргумента пери-
гея (288°), которое означает достаточно большую величину угла между
эклиптикой и линией апсид.
Рисунки 1.44 и 1.45 иллюстрируют возможность выведения спут-
ника на гало-орбиту при таких сильных ограничениях. Показаны три
траектории при различных значениях долготы восходящего узла на-
чальной (промежуточной) орбиты: 0°, 90° и 180°. Первый случай со-
ответствует минимальному углу между линией апогей-перигей и плос-
костью эклиптики, последний — максимальному углу. Соответственно,
в первом случае гало-орбита выглядит наиболее «естественно», а в по-
следнем случае траектория имеет достаточно заметные отклонения
от точки либрации: до 1850000 км в направлении У и до 340000км
по оси X, направленной в сторону Земли.
Траектории, показанные на рис. 1.44 и 1.45, соответствуют различ-
ным датам старта в зависимости от долготы восходящего узла:
0° - 12.12.98; 90° - 22.02.98; 180° - 10.07.98.
Оскулирующие значения эксцентриситета е и большой полуоси а
следующие:
е = 0,98, 0,99, 0,995; а = 652 154 км, 915990 км, 1 525 700 км.
Похожие вычисления были произведены для значения аргумента
перигея 320° (случай спутника «Око» в качестве основной полезной
1.5. Влияние технических ограничений на проектирование миссий 69
Одноимпульсная гало-орбита с начальным аргументом широты перигея 290°
наклонением 62° и долготой восходящего узла 0°,90°, 180°
, тыс. км Y, тыс. км
X, тыс. км
Рис. 1.44.
Одноимпульсная гало-орбита с начальным аргументом широты перигея 290°
наклонением 62° и долготой восходящего узла 0°, 90°, 180°
Рис. 1.45.
70
Гл. 1. Обзор методов траекторных измерений
нагрузки), которое согласуется с возможностью выведения спутника
на траекторию в окрестности точки либрации L2 с использованием
упомянутой орбиты в качестве начальной (парковочной).
1.5.4. Промежуточные орбиты. Несмотря на широкое окно дат
запуска спутника на гало-орбиту, может произойти, что время ожи-
дания перехода на орбите основной полезной нагрузки будет более
8 месяцев. Это приводит к необходимости оптимизировать параметры
промежуточной орбиты.
В случае, когда разгонная ступень позволяет вывести попутную по-
лезную нагрузку на более высокую орбиту, чем геопереходная высокая
эллиптическая орбита перелета или орбита «Молнии», необходимая
масса собственного ракетного топлива попутно запускаемого спутника
может быть значительно снижена. Но более высокие орбиты подвер-
жены большему влиянию солнечных и лунных возмущений. Наиболее
критичным в данном случае является эволюция высоты перигея.
Для анализа эволюции промежуточной орбиты могут использовать-
ся следующие формулы [54]:
5а = 0, 5е — -—тт — (— е \/1 — е2 sin2 г sin 2w,
4 мо kn /
с.-. 3 pi / a \ cos 1 /. 2 > e 2 • 2 \
= —-7Г— — , 1 — e + 5e sin w ,
2 Mo kn / v71 -
Yr 15 mi (a)3 e2 • o- • о
oi = — —тг — — sinzisinzw,
8 Mo \r> ) У1 - e2
5w — ^тг — ГДЛ 1 (5 cos2 i sin2 w + (1 — e2)(2 — 5 sin2 w)) ,
2 mo \riJ y/i _ e2 v
5hr> = — (—ae\/l — e2 sin2 i sin 2w,
4 mo kn )
которые задают долгосрочную эволюцию оскулирующих параметров
орбиты.
Здесь а, е, Q, г, w, hp — оскулирующие значения большой по-
луоси, эксцентриситета, долготы восходящего узла, аргумента пери-
гея, высоты перигея по отношению к плоскости орбиты возмущенного
тела, в нашем случае плоскости эклиптики (приблизительно), мо —
гравитационная постоянная Земли, mi — гравитационная постоянная
возмущенного тела (в нашем случае Луны или Солнца).
Из приведенных формул видно, что высота перигея увеличивается,
если перигей лежит во второй или четвертой четвертях орбиты, рас-
считанной от восходящего узла на эклиптике, и скорость изменения
высоты перигея (в днях) пропорциональна а5/2.
Это означает, что промежуточная орбита с аргументом перигея,
совпадающим с аргументом перигея орбиты «Молнии», для некоторых
1.5. Влияние технических ограничений на проектирование миссий 71
положений восходящего узла (относительно экватора) не удовлетворя-
ет этому требованию, и высота перигея для таких значений долготы
восходящего узла будет уменьшаться.
Поэтому для того, чтобы исключить дополнительные ограничения
при задании начальных параметров орбиты, предлагается выбирать
промежуточную орбиту с теми же начальными значениями параметров,
что и у орбиты «Молнии».
В этом случае для перелета на орбиту около точки либрации необ-
ходим импульс AV величиной порядка 700 м/с. Принимая во внимание
возможные общие и корректирующие маневры, необходимо, кроме то-
го, иметь на борту выводимого спутника дополнительный запас рабо-
чего тела, достаточный для проведения маневра AV величиной около
400 м/с (из них около 300 м/с на случай, если амплитуда гало-орбиты
должна уменьшаться от максимального значения до нуля [30], и при-
мерно 100 м/с для маневров коррекции).
В случае, когда основной полезной нагрузкой является спутник
«Око» (аргумент перигея равен 320°), высота перигея растет при лю-
бом значении долготы восходящего узла, так что можно безопасно
осуществить перелет нашего спутника на орбиту с более высоким апо-
геем, используя двигатель верхней ступени. Например, для перелета
на орбиту с большой полуосью 100000км используется маневр AV
величиной примерно 540 м/с с соответствующим уменьшением массы
топлива на борту выводимого спутника.
1.5.5. Возможность маневров при ограничениях на направле-
ние импульса. Как уже упоминалось выше, ограничения на направ-
ление импульса двигателей могут налагаться в виде требования по ми-
нимизации затрат на управление ориентацией аппарата. В работе [55]
было показано, что для удержания спутника на гало-орбите с помощью
коррекционных маневров достаточно производить импульсные манев-
ры ДV в направлении Солнца. Дополнительный расход топлива в этом
случае не превосходит 13%. Это дает возможность использовать для
экспедиции на гало-орбиту стабилизированные по вращению спутники
с осью вращения, периодически направленной на Солнце.
Экспедиция к точке либрации с использованием электрореактивных
двигателей малой тяги и стабилизации спутника вращением исследо-
валась в работе [53]. Предполагалось, что импульс прилагается, когда
угол между векторами импульса и скорости находится в пределах 60°.
Результаты данной работы подтверждают реализуемость такого под-
хода. Расходы топлива в этом случае возрастают на 17%, и время
перелета будет длиннее в 1,7 раз по сравнению с тем случаем, когда
импульс направлен вдоль вектора скорости.
72
Гл. 1. Обзор методов траекторных измерений
В настоящей работе были изучены технические ограничения, нала-
гаемые на возможность проведения и основные характеристики миссий
на гало-орбиты. Главным источником этих ограничений являются тре-
бования уменьшения затрат на проведение миссии.
Было показано, что выполнение миссии к точкам либрации возмож-
но при наличии ограничений, налагаемых условиями запуска спутни-
ка в качестве попутной полезной нагрузки при проведении регуляр-
ных запусков (таких как выведение на орбиту аппаратов «Молния»
или «Око») и выведения спутника на геопереходную орбиту перелета.
В наихудшем случае космический аппарат должен быть оборудован
двигательной установкой с запасом топлива, достаточным для осу-
ществления маневра с характеристической скоростью ДУ до 1100 м/с.
Из анализа следует, что возможно использование спутников, ста-
билизированных вращением, с направлением импульса вдоль оси вра-
щения. Это справедливо для случая, когда ось вращения направлена
на Солнце, а также для движения при использовании солнечных бата-
рей, когда ось вращения ортогональна направлению на Солнце и лежит
в плоскости орбиты.
1.6. Об использовании солнечного паруса в миссиях
в окрестности точек либрации
В работах [56-58] рассматриваются вопросы, связанные с исполь-
зованием солнечного паруса для решения задач динамики полета
и управления космических аппаратов:
• возможности солнечного паруса при полетах в окрестности кол-
линеарных солнечно-земных точек либрации L) и Lg в части сме-
щения соответствующих траекторий относительно их положения
без использования солнечного паруса;
• возможности солнечного паруса при выполнении маневров
окрестности точки либрации для изменения амплитуды траекто-
рий, а также для избежания попадания космического аппарата
в область затенения Землей (полеты около Бг) или в область
радиопомех от Солнца (L,);
• возможности поддержания требуемой конфигурации группировок
при полетах в окрестности точек либрации.
Результаты перечисленных исследований приводят к заключению:
• для реалистических размеров паруса, соотносимых с массой ап-
парата (вплоть до 0,02 кг/м), отношения массы аппарата к пло-
щади паруса), и при условии применения паруса с изменяемой
отражательной способностью (за счет использования жидкокри-
сталлических пленок) существует возможность сдвига орбиты
Список литературы к главе 1
73
около Li в сторону Солнца от изначального положения с центром
на расстоянии 1,5 млн км до расстояний 2,5 млн км; для L2 орбита
может быть смещена в сторону Земли;
• при одноимпульсном выведении аппарата в окрестность точки
либрации Lj аппарат с парусом переходит на орбиту со значи-
тельно большей амплитудой (в 2-3 раза больше, в зависимости
от отношения площади паруса к массе аппарата), но при этом
есть возможность уменьшить эту амплитуду до требуемых ве-
личин 200-300 тыс. км за счет выполнения маневров перехода
с помощью паруса с управляемым соотношением отраженного
потока света к поглощенному;
• при изменении амплитуды можно изменять период движения
аппарата около точки либрации, что дает возможность управлять
фазой положения аппарата на орбите около точки либрации;
• для поддержания конфигурации группировки при относительно
небольших ее размерах возможно применение парусов сравни-
тельно небольшой площади, сопоставимой по размером с площа-
дью солнечных батарей; это дает возможность в рамках суще-
ствующих технологий обеспечивать с помощью солнечного пару-
са удержание заданного направления вектора зеркало-детектор
при слежении за небесным источником системой из двух аппара-
тов (зеркало-детектор), как это требовалось, например, в проекте
по исследованию рентгеновских источников XEUS; для случая
исследования астероидов та же методика применима для наблю-
дений затмения астероидами звезд. Был определен закон управ-
ления, который можно реализовать с помощью паруса с управля-
емым отражением.
Список литературы к главе 1
1. Gehrels Т. The Asteroids: History, Surveys, Techniques, and Future
Work. Asteroids. — Tucson: University of Arizona Press, 1979.
P. 3-24.
2. Mainzer A. et al. IR Detection and Characterization
of NEOs, at 1st IAA Planetary Defense Conference: Protecting
Earth from Asteroids. 2009. Conference CD available from
esa. conference, bureau@esa.int.
3. Dunham D.W., Farquhar R.W., McAdams J.V. et al. Implemen-
tation of the First Asteroid Landing // Icarus. 2002. V. 159.
P. 433-438.
4. Mottola S. et al. AsteroidFinder / SSB: A German Mission
for the Search for IEOs // 1st IAA Planetary Defense Conference:
74
Гл. 1. Обзор методов траекторных измерений
Protecting Earth from Asteroids. 2009. Conference CD available
from esa.conference.bureau@esa.int
5. MPC (2010a), http://www.cfa.harvard.edu/iau/lists/Apollos.html.
6. Gehrels T. Hazards due to Comets and Asteroids. — Tucson: Uni-
versity of Arizona Press, 1994.
7. Dermott S.F., Nicholson P.D., Kim Y. et al. The Impact
of IRAS on Asteroidal Science. Lecture Notes in Physics, 297. -
Berlin/Heidelberg: Springer, 1988.
8. MPC (2010b), http://www.cfa.harvard.edu/iau/lists/Atens.html.
9. Laurin D. et al. The Near Earth Object Surveillance Satellite
(NEOSSat) Searching for near Earth asteroids and comets with
a small telescope // 1st IAA Planetary Defense Conference: Pro-
tecting Earth from Asteroids 2009.Conference CD available from
esa. conference, bureau@esa.int.
10. Morrison D., Chartres J., Coloprete A. et al. Physical Characteriza-
tion of Sub-Km NEA’s: Low Cost Mission Approaches 11 1st IAA
Planetary Defense Conference: Protecting Earth from Asteroids.
2009. Conference CD available from esa.conference.bureau@esa.int.
11. Trajectory Design from Geosynchronous Transfer Orbit to Near-
Earth Asteroids // 1st IAA Planetary Defense Conference: Pro-
tecting Earth from Asteroids 2009. Conference CD available from
esa.conference.bureau@esa.int.
12. Farquhar R.W., Dunham D.W., Jen S.-C. Contour Mission
Overview and Trajectory Design // Advances in the Astronautical
Sciences. 1997. № 95. P. 921-934.
13. Arentz R. et al. NEO Survey: An Efficient Search for Near-Earth
Objects by in IR Observatory in a Venus Like Orbit // 1st IAA
Planetary Defense Conference: Protecting Earth from Asteroids.
2009. Conference CD available from esa.conference.bureau@esa.int.
14. Morbidelli A. (2002). Modern Integrations of Solar System Dynam-
ics // Annual Review of Earth and Planetary Sciences. 2002. V. 30.
P. 89-112.
15. Genova A.L., Dunham D.W., Williams B.G. Flexible Trajec-
tory Design from Geosynchronous Transfer Orbit to Near-Earth
Asteroids // 1st IAA Planetary Defense Conference: Protect-
ing Earth from Asteroids 2009. Conference CD available from
esa.conference.bureau@esa.int.
16. Dunham D.W., Roberts C.E. Stationkeeping Techniques for Librati-
on-Point Satellites, Journal of the Astronautical // Sciences. 2001.
V. 49. P. 127-144.
17. Columbo G. The Stabilization of an Artificial Satellite at the Inferior
Conjunction Point of the Earth-Moon System, Smithsonian Astro-
physical Observatory Special Report No. 80, November 1961.
Список литературы к главе 1
75
18. Clarke А. С. Interplanetary Flight. — London: Temple Press Books
Ltd., 1950. P. 111-112.
19. Clarke A. C. The Making of a Moon. — New York: Harper & Broth-
ers, 1957, P. 192-198.
20. Farquhar R. W. The Flight of ISEE-3/ICE: Origins, Mission His-
tory, and a Legacy, J. Astronautical Sciences, Vol. 49, No. 1,
January 2001, pp. 23-73 and presented at the AIAA/AAS Astrody-
namics Conference, Boston, Massachusetts, August 11, 1998.
21. Farquhar R. W. Linear Control System for a Satellite at the
Sun-Earth Collinear Libration Points, Lockheed Interdepartmental
Communication FM-52-20-274, March 9, 1964.
22. Ogilvie K. W. et al. International Sun-Earth Explorer: A Three-
Spacecraft Program // Science. 1977. V. 198, No. 4313, October 14.
P. 131-138.
23. Special Issue on Instrumentation for the International Sun-Earth
Explorer Spacecraft // IEEE Transactions on Geoscience Electron-
ics. 1978. V. GE-16.
24. Farquhar R. W. et al. Trajectories and Orbital Maneuvers for the
First Libration-Point Satellite // J. Guidance and Control. 1980.
V. 3, No. 6. P. 549-554.
25. Dunham D. Contingency Plans for the ISEE-3 Libration-Point Mis-
sion, AAS Paper 79-129 presented at the AAS/AIAA Astrodynamics
Specialist Conference, Provincetown, Massachusetts, June 25-27,
1979.
26. Farquhar R. W. and Dunham, D. W. A New Trajectory Concept for
Exploring the Earth’s Geomagnetic Tail // J. Guidance and Control.
1981. V. 4, No. 2. P. 192-196. Presented as AIAA Paper 80-0112
at the AIAA Aerospace Sciences Meeting, Pasadena, California,
January 14-16, 1980.
27. Muhonen D. P. et al. Alternative Gravity Assist Sequences for the
ISEE-3 Escape Trajectory 11 J. Astronautical Sciences. 1985. V. 33,
No. 3. P. 255-288.
28. Roberts С. E. et al. The International Cometary Explorer Comet
Encounter and Earth Return Trajectory // Advances in the Astro-
nautical Sciences. 1989. V. 69. P. 709-725.
29. Farquhar R. W. and Dunham, D. W. Use of Libration-Point Orbits
for Space Observatories // Observatories in Earth Orbit and Be-
yond. — Kluwer Academic Publishers, 1990. P. 391-395.
30. Eismont N., et al. Lunar Swingby as a Tool for Halo-Orbit
Optimization in Relict-2 Project. ESA SP-326, December 1991.
P. 435-439.
76
Гл. 1. Обзор методов траекторных измерений
31. Uesugi К. Space Odyssey of an Angel Summary of the Hiten’s
Three Year Mission // Advances in the Astronautical Sciences.
1993. V. 84. P. 607-621.
32. Dunham D. W. et al. Transfer Trajectory Design for the SOHO
Libration-Point Mission, IAF Paper 92-0066, September 1992.
33. Domingo V., et al. The SOHO Mission: An Overview // Solar
Physics. 1995. V. 162, No. 1-2. P. 1-37.
34. Roberts С. E. The SOHO Mission Halo Orbit Recovery from the
Attitude Control Anomalies of 1998, presented at the International
Conference on Libration Point Orbits and Applications, Aiguablava,
Spain, June 10, 2002.
35. Stone E. C. et al. The Advanced Composition Explorer // Space
Science Reviews, 1998.
36. Beckman M. Orbit Determination Issues for Libration Point Orbits,
presented at the International Conference on Libration Point Orbits
and Applications, Aiguablava, Spain, June 13, 2002.
37. Dunham D. IF. et al. Double Lunar-Swing by Trajectories for the
Spacecraft of the International Solar-Terrestrial Physics Program //
Advances in the Astronautical Sciences, 1989. V. 69. P. 285-301.
38. Acuna M. H. et al. The Global Geospace Science Program and Its
Investigations // Space Science Reviews. 1995. V. 71. P. 5-21.
39. Franz H. et al. WIND Nominal Mission Performance and Extended
Mission Design // J. Astronautical Sciences. 2001. V. 49. No. 1.
P. 145-167 and presented at the AIAA/AAS Astrodynamics Con-
ference, Boston, Massachusetts, August 11, 1998.
40. Uphoff C. IF. The Art and Science of Lunar Gravity Assist //
Advances in the Astronautical Sciences. 1989. V. 69. P. 333-346.
41. Cuevas O. et al. An Overview of Trajectory Design Operations for
the Microwave Anisotropy Probe Mission, AIAA Paper 2002-4425,
presented at the AIAA/AAS Astrodynamics Specialist Conference,
Monterey, California, August 5, 2002.
42. Houghton M. B. Getting to LI the Hard Way: TRIANA’s Launch
Options // International Conference on Libration Point Orbits
and Applications, Aiguablava, Spain, June 10, 2002.
43. Bennett C.L., et al. The Microwave Anisotropy Probe Mission //
Astrophysical Journal, 2003. V. 583. P. 1-29.
44. Planck Collaboration, Planck Early Results. I. The Planck Mis-
sion // Astronomy and Astrophysics, 2011. V. 536. AL
45. Pllbratt G.L. et al. Herschel Space Observatory // Astronomy and
Astrophysics, 2010. V. 518. LI.
46. ESA Science and Technology: Gaia. [Online]. Available: http://
sci.esa.int/gaia
Список литературы к главе 1
77
47. Иванов И.М., Лысенко Л.Н. Баллистика и навигация космиче-
ских аппаратов — М.: Дрофа, 2004.
48. Hechler М., Cobos J. Herschel, Planck and Gaia Orbit Design //
Libration Point Orbits and Applications I Gomez G, Lo M.W. and
Masdemont J.J., Eds. — Singapore: World Scientific Publishing,
2003. P. 115-135.
49. Cobos J., Masdemont J.J. Astrodynamical Applications of Invariant
Manifolds Associated with Collinear Lissajous Libration Orbits 11
Libration Point Orbits and Applications I Gomez G, Lo M.W.
and Masdemont J.J., Eds. — Singapore: World Scientific Publishing,
2003. P. 253-268.
50. Ariane 5 User’s Manual, Arianespace, 2011.
51. Лисов И. «Молния-3» занимает место в строю // Новости космо-
навтики. 2001, № 12. С. 47.
52. Лисов И. «Радуга-1». Пополнение в системе военной связи //
Новости космонавтики. 2001, № 12. С. 37-38.
53. Sukhanov A., Eismont N., Prudkoglyad A. Trajectory Design
for Experimental Mission to sun Earth L\ and L2 Points Using
SEP // Revista Brasileira de Ciencias. Special Issue. 1999. V. XXL
P. 313-321.
54. Элъясберг П.Е. Введение в теорию движения искусственных спут-
ников Земли. — М.: Наука, 1965. 491 с.
55. Eliasbeng Р., Timokhova Т. Orbital Correction of Spacecraft
in Vicinity of Collinear Center of Libration (in Russian). Space
Research Institute Preprint 1003, Moscow, 1985.
56. Eismont N., Nazirov P. Solar Sails as a Tool for Spacecraft Mo-
tion Control Near Solar-Terrestrial Libration Points. — Proceedings
of the 18th International Symposium on Space Flight Dynamics.
11-15 October 2004, Munich, Germany, ESA SP-548, pp. 123-127.
57. Novikov D., Nazirov R., Eismont N. Spacecraft Formation Con-
trol in Vicinity of Libration Points Using Solar Sails. Proceedings
of the 5th International Symposium of the Academy of Astronautics.
4-8 April 2005, Berlin, Germany, pp. 304-311, edited by Hans
Peter, Rainer Sandau, Arnoldo Valenzuela, De Grayter.
58. Nazirov R., Eismont N. Small Solar Sails with Variable Reflectiv-
ity. — Препринт ИКИ PAH Pr-2142, Москва 2008.
59. Roberts C.E. Long Term Missions at the Sun-Earth Libration Point
LI: ACE, SOHO, and WIND. Paper AAS 11-485 presented at the
Astrodynamics Specialist Conference, Girdwood, Alaska, August
2011.
Глава 2
АНАЛИТИЧЕСКИЙ ОБЗОР
МИССИЙ К АСТЕРОИДАМ
2.1. Миссия КА NEAR-Shoemaker к астероиду Эрос
(По материалам публикаций Dunham D. W., McAdams J. V.,
and Farquhar R. W. NEAR Mission Design;
Farquhar R. W. NEAR Shoemaker at Eros:
Mission Director’s Introduction //
J. Hopkins Apl. Tech. Digest. 2002. V. 23, No. 1)
В 1990 г. NASA представила новую программу экономичных пла-
нетарных миссий под названием Discovery. Миссии по этой программе
должны были иметь хорошо обозначенные научные цели, а также
накладывались строгие ограничения на расходы и время разработки.
Стоимость миссии, включая запуск и первые 30 дней полета, не должна
была превышать 150 млн долларов в ценах 1992 г., а разработка
не должна длиться более 35 месяцев. Кроме того, для запуска должны
использоваться ракеты-носители класса Delta или легче.
В октябре 1991 г. рабочая группа по научной программе Discovery
(Discovery Science Working Group — DSWG) приняла рекомендацию,
что первой миссией программы должно стать сближение с около-
земным астероидом (Near Earth Asteroid Rendezvous, сокращенно —
NEAR).
В том же 1991 г. конкурентные предложения по миссии NEAR
были подготовлены в APL (Applied Physics Laboratory университета
Джона Хопкинса) и в JPL (Jet Propulsion Laboratory — Лаборато-
рия реактивного движения NASA). После тщательного обзора двух
предложений специально отобранной группой опытных руководителей
проектов NASA возложило главную ответственность за управление
подготовкой миссии NEAR на команду APL. Вслед за этим решением,
APL выполнил исследования по определению основных концепций
и стратегических целей миссии.
Условие использования ракеты не тяжелее Delta резко ограни-
чило возможности для миссий сближения с околоземными астеро-
идами. В 1992 г. был проведен поиск целей для ДЕИА-миссий,
2.1. Миссия КА NEAR-Shoemaker к астероиду Эрос
79
соответствующих требованиям проекта Discovery. При этом учитыва-
лись следующие ограничения:
1. Запуск должен состояться в период с 1996 по 2000 г.
2. Орбита астероида-цели должна быть хорошо определена
(т. е. астероид должен иметь собственный номер).
3. Афелий орбиты астероида-цели должен быть менее 2,5 а.е.
4. Требования к суммарному маневру изменения скорости (ДУ)
после запуска не более 2 км/с.
5. Требуемое общее ДV должно быть менее 6 км/с (под общим Д V
подразумевается сумма ДУ, необходимого для запуска аппарата
с низкой круговой околоземной орбиты на гелиоцентрическую
траекторию, и ДУ после запуска, необходимое для сближения
с астероидом).
Третье и четвертое условия связаны со стоимостью и сложно-
стью КА (в особенности, по мощности электропитания, системам
термоконтроля и двигательным установкам), а выполнение пятого
условия позволяло обеспечить выполнение миссии с использованием
ракеты-носителя класса Delta. Несмотря на то, что эти условия су-
щественно ограничили круг возможных кандидатов, было найдено 4
приемлемых сценария полетов к трем астероидам, подходящие для
осуществления миссии в течение пятилетнего интервала. Основным
кандидатом рассматривался Нерей со стартом миссии в январе 1998
г., но при дальнейшем анализе возникло опасение, что малый размер
отобранных объектов может ограничить количество и разнообразие
полученной в ходе миссии научной информации.
Еще в ранних предложениях в качестве интересной цели полета
к близким астероидам нередко упоминался Эрос, который в пери-
гелии сближается с орбитой Земли и значительно крупнее (34,4 х
х 11,2 х 11,2 км) остальных предложенных целей. Однако для полета
к нему требовалось ДУ, превышающее 6 км/с, и большое наклонение
асимптоты траектории полета, что особенно критично при запуске
с космодрома на мысе Канаверал. В сентябре 1992 г. разработчика-
ми миссии было предложено использовать двухгодичную траекторию
с использованием метода AVEGA (ДУ and Earth Gravity Assist, т. e.
ДУ и вспомогательный маневр с использованием притяжения Земли)
для получения требуемого наклонения орбиты аппарата к плоскости
эклиптики Солнечной системы и уменьшения требуемой общей величи-
ны ДУ. Таким образом, в середине 1993 г. первой миссией NEAR был
определен ДУЕОА-полет к Эросу, а дата старта смещена на февраль
1996 г. (рис. 2.1).
Разработка NEAR началась в декабре 1993 г., и готовый КА был от-
правлен в Космический центр им. Кеннеди примерно 24 месяца спустя.
80
Гл. 2. Аналитический обзор миссий к астероидам
Рис. 2.1. Первая расчетная траектория миссии NEAR -Эрос, принятая в 1993 г.
1 — старт с низкой околоземной орбиты, 2 — прилет в афелий, 3 — гравита-
ционный маневр у Земли, 4 — подлет к Эросу
Полная масса КА (включая компоненты топлива) составляла 805 кг,
сухая — 487 кг. Двигательная установка аппарата включала в себя ос-
новной двигатель с тягой 450 Н на двухкомпонентном топливе (гидра-
зин — четырехокись азота), четыре вспомогательных двигателя тягой
по 21 Н, соосных с основным, и семь гидразиновых двигателей тягой
по 3,5 Н для придания вращающего момента и выдачи корректирующих
импульсов в прочих направлениях. Двигательная система содержала
209 кг гидразина в двух баках с горючим и 109 кг четырехокиси азота
в трех баках с окислителем.
Обычной практикой при разработке планетной миссии являет-
ся проверка, не позволяет ли траектория полета КА приблизиться
к какому-либо другому интересному объекту (например, астероиду или
комете). Для изначально рассматривавшейся миссии к Нерею такой
анализ был проведен, но по какой-то причине тщательное исследование
новой траектории (к Эросу) не было проведено вплоть до начала
декабря 1994 г., когда Р. Фаркуар, руководитель миссии NEAR, прове-
рил список сближений КА с различными астероидами и отметил, что
траектория NEAR проходит в 0,015 а. е. (2,25 млн км) от большого асте-
роида (253) Матильда, принадлежащего главному астероидному поясу.
Конечно, отклонение 0,015а.е. от базовой траектории не является
2.1. Миссия КА NEAR-Shoemaker к астероиду Эрос
81
Рис. 2.2. Расчетная траектория миссии NEAR-Зрел с пролетом Матильды,
принятая в 1995 г. 1 — старт с низкой околоземной орбиты, 2 — прилет
в афелий, 3 — гравитационный маневр у Земли, 4 — подлет к Эросу, 5 — облет
астероида Матильда, 6 — проведения маневра для выхода на траекторию
гравитационного маневра у Земли
тривиальным, но проведенный в течение нескольких следующих дней
анализ показал, что затрата ДУ, связанная с изменением траектории,
которое позволило бы осуществить близкое сближение с Матильдой,
составит только 57 м/с. Новая траектория, которая включает пролет
Матильды на пути к рандеву с Эросом, показана на рис. 2.2. Сравнение
с рис. 2.1 показывает ряд изменений, наиболее важными из которых
являются пролет Матильды и сдвиг коррекции в дальнем космосе
(Deep-Space Maneuver) с марта на июль 1997 г. Обращает на себя
внимание, что дата прибытия к Эросу не изменилась.
Так как разработка аппарата была к этому времени уже завершена
и началось изготовление основных частей аппарата, то потребовались
определенные усилия, чтобы убедить руководство NASA в том, что
новая траектория не поставит под угрозу выполнение основной задачи
миссии — встречи с Эросом. Тем не менее, новая схема полета, вклю-
чающая пролет Матильды, была утверждена в начале января 1995 г.
82
Гл. 2. Аналитический обзор миссий к астероидам
комплекс
Рис. 2.3. Космический аппарат NEAR
Запуск
Рис. 2.4. Схема вывода КА NEAR на межпланетную траекторию
КА NEAR (рис. 2.3) отправился в путешествие к околоземному
астероиду (433) Эрос 17 февраля 1996 г. после успешного запуска
ракетой Delta-2 (рис. 2.4).
Впервые ракета такого малого класса была использована для меж-
планетного перелета. Годом позже, 18 февраля 1997 г., NEAR достиг
наиболее удаленной от Солнца точки своей траектории (2,18 а.е.),
2.1. Миссия КА NEAR-Shoemaker к астероиду Эрос
83
установив новый рекорд удаления от Солнца для космических аппара-
тов с питанием бортовой аппаратуры от солнечных батарей.
Около четырех месяцев спустя, 27 июня 1997 г., КА пролетел
на минимальном расстоянии 1200 км от астероида Матильда. Ско-
рость пролета составила 9,94 км/с. NEAR провел первое исследование
астероида С-класса (253 Матильда), получив 534 изображения этого
сильно изрытого кратерами небесного тела из главного астероидного
пояса. Разрешение наиболее качественных из них составляет 180 мет-
ров на пиксель. Также было получено 7 цветных изображений с
разрешением 400-500 метров на пиксель. Из-за медленного вращения
астероида (оборот за 15 суток) NEAR смог сфотографировать всего
около 60 % его поверхности. Кроме того, были измерены магнитное
поле и масса Матильды.
3 июля 1997 г. в первый раз был запущен основной ракетный
двигатель аппарата на двухкомпонентном топливе, в результате чего
аппарат изменил скорость примерно на 269 м/с. Этот маневр, за ко-
торым последовало еще три меньших маневра с использованием гид-
разиновых двигателей, вывели КА NEAR на траекторию для маневра
с использованием гравитационных сил Земли 23 января 1998 г. Высота
перигея при пролете КА мимо Земли составила 540 км. Этот маневр
с использованием гравитационных сил Земли значительно уменьшил
величину АУ, необходимую для рандеву с Эросом путем приведения
почти в полное соответствие наклонения и расстояния в афелии ге-
лиоцентрических орбит КА NEAR и астероида Эрос. В дополнение
к изменению траектории NEAR, этот околоземный гравитационный ма-
невр дал возможность получить эффектные изображения Антарктиды
при пролете аппарата над южным полюсом Земли. Близость к Земле
позволила также провести калибровку приборов на борту КА. На рас-
стоянии 28000 км аппарат был виден как звезда 3-й величины, что
стало рекордом дальности наблюдения межпланетного аппарата нево-
оруженным глазом. Это стало возможным благодаря тому, что аппарат
был специально сориентирован так, чтобы отражение от солнечных
батарей (общей площадью около 10 м2) попадало на территорию США
с целью оценки состояния поверхности батарей.
20 декабря 1998 г., почти через 3 года после запуска, NEAR
был готов к началу последовательности маневров изменения орбиты,
кульминацией которой должен был стать маневр выхода на орбиту
вокруг Эроса 10 января 1999 г. К сожалению, работа двигателя была
аварийно прекращена менее чем через 1 секунду после включения при
расчетном времени работы 15 минут. Космический аппарат перешел
в «безопасный режим» функционирования в ожидании команд с Зем-
ли, как и было предусмотрено делать в таких случаях, но того, что
случилось потом, никто не ожидал: аппарат начал серию аномальных
84
Гл. 2. Аналитический обзор миссий к астероидам
маневров изменения ориентации и связь с аппаратом была потеряна
через 37 секунд после аварийного отключения двигателя; NEAR мол-
чал в течение 27 часов, но в конечном итоге автономная программа
КА стабилизировала аппарат и восстановила его связь с Землей. Когда
связь была восстановлена, стало ясно, что во время «отключения» ко-
рабль испытал потерю ориентации, упала мощность питания бортовой
аппаратуры, так как солнечные батареи отклонились от направления
на Солнце, в результате чего отключилось питание части твердотель-
ных запоминающих устройств и данные в них были потеряны. Что еще
хуже, КА израсходовал 29 кг топлива за несколько тысяч включений
двигателей в попытках восстановить ориентацию, что было эквива-
лентно расходу на выполнение маневра изменения скорости величиной
96 м/с (рис. 2.5).
Рис. 2.5. Нештатная ситуация 20.12.1998, пролет Эроса 23.12.1998
и траектория возвращения к Эросу с прибытием 14.02.2000
2.1. Миссия КА NEAR-Shoemaker к. астероиду Эрос
85
Результатом этой нештатной ситуации стал незапланированный
пролет мимо Эроса 23 декабря на расстоянии 3827 км от центра масс
Эроса с относительной скоростью 965 м/с. Тем не менее, благодаря
«прощающему» характеру траектории, при выборе которой принима-
лись во внимание возможные неполадки, 3 января 1999 г. КА NEAR
выполнил большой маневр по скорости (ДУ » 932 м/с), что позволило
перевести КА на траекторию возвращения к Эросу (рис. 2.5). За этим
решающим событием последовала уточняющая коррекция 20 января
и промежуточная коррекция 12 августа, которая перевела КА на тра-
екторию в окрестности Эроса. Новой датой встречи стало 14 февраля
2000 г. — день святого Валентина.
В 10:47 EST 14 февраля 2000 г. КА NEAR выполнил маневр выхода
на орбиту величиной 10м/с, который поместил аппарат на орбиту
321 х 366 км вокруг Эроса. Это стало первым случаем, когда кос-
мический аппарат вышел на орбиту вокруг малого тела Солнечной
системы (астероида или кометы). На этой орбите были сделаны первые
снимки астероида и получены данные о поверхности и геологии Эроса.
Орбита постепенно была понижена до 35 км круговой полярной орбиты
к 14 июля 2000 г. NEAR оставался на этой орбите в течение 10 дней,
а затем к 5 сентября 2000 г. орбита была поэтапно повышена до 100 км.
Маневры в середине октября 2000 г. привели к облету Эроса на высоте
5,3 км от поверхности в 3:00 EST 26 октября.
После этого NEAR был переведен на 200 км круговую орбиту и сме-
нил орбиту с полярной на экваториальную орбиту. К 13 декабря 2000 г.
орбита была вновь понижена до 35-километровой круговой. Начиная
с 24 января 2001 г. космический аппарат произвел серию низких
(5-6 км) пролетов над поверхностью, а 28 января пролетел в 2-3 км
от астероида.
14 марта 2000 г. аппарат, называвшийся при запуске просто NEAR,
получил название NEAR-Shoemaker в честь американского геоло-
га Юджина Шумейкера, погибшего в автокатастрофе в Австралии
в 1997 г. Многолетние исследования Шумейкера существенно повлия-
ли на понимание роли астероидов в формировании планет.
Годовое пребывание КА NEAR на орбите вокруг Эроса стало без-
условным успехом. Был проведен ряд чрезвычайно сложных орбиталь-
ных маневров. Научные результаты, полученные с орбиты Эроса, пре-
взошли все ожидания. Однако, по мере того, как NEAR подошел к кон-
цу основной фазы своей миссии, возникла некоторая неопределенность
в отношении окончательной судьбы космического аппарата. Должен ли
он быть просто оставлен на орбите вокруг Эроса? Или же возможно
выработать полезную научную программу для продленной миссии?
Одной из выдвинутых идей, стало смелое предложение, что КА должен
медленно опуститься на поверхность Эроса и попытаться совершить
86
Гл. 2. Аналитический обзор миссий к астероидам
посадку на его поверхности. Во время спуска, космический аппарат
должен был удержать свою остронаправленную антенну в направле-
нии на Землю для передачи изображений и других научных данные
с максимально возможной скоростью. Если бы все прошло по плану,
были бы получены изображения поверхности Эроса с разрешением
от 10 до 20 раз лучше, чем когда-либо ранее. Так как изображения
должны были передаваться во время спуска, успешность доставки этих
изображений не должна была зависеть от того, переживет ли аппарат
столкновение при посадке. Итак, основной задачей управляемого спус-
ка было получение изображений с наибольшим разрешением. Вторич-
ная цель заключалась в осуществлении мягкой посадки (т. е. скорости
столкновения КА с поверхностью менее 3 м/с).
КА NEAR начал спуск на поверхность Эроса в 10:30 утра EST
12 февраля 2001 г. Во время спуска NEAR передал 69 изображений
Эроса, последнее из которых с высоты всего 125м над поверхностью.
Примерно в 15:02 EST, NEAR произвел удивительно точную мягкую
посадку на поверхность Эроса. Скорость контакта оценивается в преде-
лах от 1,5 до 1,8 м/с и стала, на тот момент, самой низкой посадочной
скоростью, когда-либо достигнутой планетным посадочным модулем.
Посадка NEAR на Эрос была показана в прямом телевизионном
эфире. В дополнение к этому, несколько вебсайтов распространяли
последние изображения с NEAR для заинтересованной обществен-
ности. На вебсайте APL было зарегистрировано около 2 миллионов
посещений. Также это событие широко освещалось в печатных СМИ.
После приземления панели солнечных батарей оказались освещены
Солнцем, что обеспечило энергией гамма-рентгеновский спектрометр.
Работая на поверхности, этот прибор мог с высокой точностью опре-
делять состав грунта Эроса на глубине до 10 сантиметров. К сожале-
нию, камера аппарата оказалась обращенной к поверхности астероида
и получить с нее изображения после посадки не удалось. Находясь на
поверхности, аппарат передавал данные еще более двух недель. 28 фев-
раля 2001 г. миссия NEAR была завершена. В декабре 2002 г. была
предпринята последняя попытка связаться с аппаратом, оказавшаяся
неудачной.
Полет КА NEAR-Shoemaker стал первой миссией в программе эко-
номичных планетных миссий NASA Discovery, которая предусматрива-
ла трехлетний срок от начала разработки КА до его запуска и затраты
не более 150 млн долларов на миссию в ценах 1992 г. Окончатель-
ная общая стоимость миссии NEAR составила около 224 млн долл.,
и складывается из 124,9 млн долл, на разработку и изготовление КА,
44,6 млн долл, на запуск и сопровождение, и 54,6 млн долл, на управ-
ление полетом и анализ данных.
2.1. Миссия КА NEAR-Shoemaker к. астероиду Эрос
87
На протяжении своего 5-летнего полета NEAR Shoemaker стал
первым во внушительном списке достижений, в том числе, как:
• первый космический аппарат с питанием аппаратуры от солнеч-
ных батарей, работавший за пределами орбиты Марса (1997 г.);
• первая встреча с астероидом С-класса (27 июня 1997 г.);
• первая встреча с околоземным астероидом (23 декабря 1998 г.);
• первый космический аппарат на орбите вокруг малого небесного
тела (14 февраля 2000 г.);
• первый космический корабль, осуществивший мягкую посадку
на малое небесное тело (12 февраля 2001 г.).
Последнее достижение было особенно важно для NASA, поскольку
впервые космический аппарат США оказался первым, совершившим
мягкую посадку на поверхности какого-либо тела Солнечной системы
(см. табл. 2.1).
Таблица 2.1.
Первые мягкие посадки на тела Солнечной системы
Дата первой посадки Объект Аппарат Страна
3 февраля 1966 г. Луна «Луна-9» СССР
15 декабря 1970 г. Венера «Венера-7» СССР
2 декабря 1971 г. Марс «Марс-3» СССР
12 февраля 2001 г. Эрос NEAR США
Справка
Основные технические характеристики КА NEAR Shoemaker
• Полная масса: 805 кг.
• Сухая масса: 486 кг.
• Основные особенности конструкции:
— трехосная стабилизация,
— фиксированные солнечные батареи,
— фиксированные приборы.
• Электропитание: 4 солнечные GaAs-батареи размером 1,8 х 1,2 м,
суммарно 1800 Вт на 1а. е., 400 Вт на максимальном удалении,
аккумуляторная батарея NiCad 9 А ч.
• Телеметрия: Фиксированная остронаправленная антенна диамет-
ром 1,5 м, передача в рентгеновском диапазоне, используется
DSN NASA.
• Размер: 1,7 х 1,7 м в базе.
• Скорость канала передачи данных: переменная от 9б/с
до 26,8 б/с при использовании 70 м наземной антенны.
• Емкость бортовой памяти: 1,8 Гбит, твердотельная.
88
Гл. 2. Аналитический обзор миссий к астероидам
• Двигательная установка: маршевый двигатель тягой 450 Н, дви-
гатели малой тяги 4 х 21 Н и 7 х 3,5 Н; общий запас ДУ
1450 м/с.
Основные технические характеристики ракеты-носителя Delta-2
• Высота: 39 м.
• Диаметр: 2,44 м.
• Стартовая масса: до 231 870 кг.
• Ступени: 2 или 3
— Первая ступень — ЖРД кислород/керосин, тяга 1054,2 кН.
— Вторая ступень — ЖРД НДМГ+гидразин/тетраоксид ди-
азота, тяга 43,6 кН.
— Третья ступень — твердотопливный разгонный блок PAM-D,
тяга 66,0 кН.
• Твердотопливные ускорители: 3,4 или 9 тягой 492,9 кН.
• Выводимая нагрузка:
— на низкую околоземную орбиту: 2700-6100 кг,
— на гелиоцентрическую орбиту: 1000 кг.
Для запуска КА NEAR Shoemaker использовался вариант с 9
твердотопливными ускорителями и 3-й ступенью/разгонным блоком
PAM-D (вариант компоновки Delta 7925).
Астероид (433) Эрос
• Дата обнаружения: 13 августа 1898 г.
• Категория: Околоземные астероиды (Амуры).
• Орбитальные характеристики:
— Эксцентриситет: 0,223.
— Большая полуось: 218,1 млн км (1,458 а.е.).
— Перигелий: 169,5 млн км (1,133 а.е.).
— Афелий: 266,8 млн км (1,783 а.е.).
— Период обращения: 643,0 сут. (1,761 г).
— Средняя орбитальная скорость: 24,36 км/с.
— Наклонение: 10,83°.
• Физические характеристики:
— Размеры: 34,4 х 11,2 х 11,2 км.
— Масса: 6,69 х 1015 кг.
— Средняя плотность: 2,67 г/см3.
— Ускорение свободного падения на поверхности: 5,9 мм/с2.
— Скорость убегания: 10,3 м/с.
— Период вращения: 5,270 ч.
— Альбедо: 0,25.
2.2. Миссия Hayabusa
89
2.2. Миссия Hayabusa
Миссия Hayabusa стала первым проектом, целью которого была
доставка образца вещества астероида на Землю.
Кроме того, Hayabusa был первым космическим аппаратом, предна-
значенным для мягкой посадки на астероид и дальнейшего взлета с его
поверхности (КА NEAR Shoemaker осуществил управляемый спуск
на поверхность астероида (433) Эрос в 2000 г., но он не был рассчитан
на работу в качестве посадочного аппарата и остался на астероиде
до завершения работы с ним). Строго говоря, Hayabusa не был предна-
значен для посадки, а просто должен был коснуться астероида устрой-
ством захвата образцов с его поверхности, а затем удалиться от него.
Тем не менее, это был первый космический аппарат, с самого начала
разработанный именно с целью произвести контакт с поверхностью
астероида. Несмотря на изначальный расчет лишь на кратковремен-
ный контакт с астероидом, фактически Hayabusa осуществил посадку
на поверхность астероида и находился на ней в течение более 30 минут.
Космический аппарат Hayabusa (рис.2.7 на цветной вклейке)
являлся платформой для тестирования новых космических техно-
логий и основной задачей проекта Hayabusa была первая в ми-
ре практическая реализация космического полета с использованием
ионно-плазменных двигателей со сверхвысокочастотной ионизацией ра-
бочего тела. Японское космическое агентство JAXA определило сле-
дующие критерии успеха и соответствующие показатели для основных
этапов в миссии космического аппарата Hayabusa (табл. 2.2).
Основные этапы миссии
До запуска
История японской миссия к астероиду берет свое начало в 1986—
1987 гг., когда ученые ISAS (Institute of Space and Astronautical
Science, Научно-исследовательский институт космонавтики и астро-
навтики) изучали осуществимость миссии с целью возврата образца
вещества с астероида Антарес и пришли к выводу, что тогда еще
не было технологических возможностей для успеха такого рода миссии.
В период с 1987 по 1994 г., совместная группа ISAS/NASA также
изучила несколько возможных миссий: миссия сближения с астероидом
позже воплотилась в миссию NEAR, а возвращение образца вещества
кометы позже реализовалось в миссии Stardust.
В 1995 г. ISAS выбрал взятие пробы вещества астероида (как
миссию для демонстрации технологических возможностей) и асте-
роид Нерей (как первый кандидат для цели полета) и астероид
1989 ML в качестве запасного кандидата. Осуществление проекта
MUSES-C (Mu Space Engineering Spacecraft С — космический корабль
90
Гл. 2. Аналитический обзор миссий к астероидам
Таблица 2.2.
Критерии успеха миссии Hayabusa
Критерий Баллы Результат
Работа ионных двигателей 50 Успех
Работа ионных двигателей в течение более 1000 часов 100 Успех
Гравитационный маневр у Земли с помощью ионных двигателей 150 Успех
Сближение с астероидом Итокава с использованием автономной навигации 200 Успех
Научные наблюдения астероида Итокава 250 Успех
Прикосновение к поверхности и сбор проб 275 Успех
Возвращение посадочной капсулы на Землю 400 Успех
Пробы получены для лабораторного анализа 500 Успех
для демонстрации космических технологий) началось в 1996 финан-
совом году. Авария при запуске ракеты M-V в июле 2000 г. привела
к задержке запуска миссии с июля 2002 до конца года — вне пределов
окон запуска, как к Нерею, так и к 1989 ML. В результате, целе-
вым астероидом был назначен 1998 SF36. Далее запуск был отложен
с декабря 2002 на май 2003 г. для перепроверки уплотнительных
колец из гироскопов системы управления, поскольку выяснилось, что
один из них был изготовлен с использованием материалов, отличных от
указанных в спецификации. В конце концов, 9 мая 2003 в 4:29:25 UTC
MUSES-C был запущен ракетой-носителем типа М-V. После запуска
название аппарата было изменено на Hayabusa, что по-японски озна-
чает «сокол-сапсан».
Маршевый участок траектории показан на рис. 2.8 на цветной
вклейке.
Проверка ионных двигателей началась 27 мая 2003 г. На полную
мощность в рабочем режиме двигательная установка была выведена
25 июня.
ISAS обратился к первооткрывателям астероида 1998 SF36 с прось-
бой дать ему имя Хидео Итокавы, пионера японского ракетостроения
и космонавтики, и 6 августа 2003 г. Циркуляр Малых Планет сообщил,
что ранее безымянный астероид 1998 SF36 был назван Итокава.
31 марта 2004 г., работа ионных двигателей была остановлена для
подготовки к гравитационному маневру при пролете Земли. Последняя
коррекция перед пролетом была проведена 12 мая.
2.2. Миссия Hayabusa
91
19 мая Hayabusa успешно совершил гравитационный маневр при
пролете Земли на минимальном расстоянии 3700 км. Пролет Земли
был использован для проверки и калибровки камер и инфракрасного
спектрометра на борту аппарата, для чего производилась съемка Земли
и Луны.
27 мая работа ионных двигателей была возобновлена.
18 февраля 2005 г. Hayabusa прошел афелий на расстоянии 1,7а.е.
31 июля отказал гироскоп управления ориентацией вокруг оси.
14 августа с борта аппарата было получено первое изображение
цели полета — астероида Итокава. Снимок был сделан звездным датчи-
ком в виде светящейся точки — изображения астероида, движущегося
на фоне звезд.
28 августа ионные двигатели Hayabusa были выключены для про-
изводства орбитального маневрирования с использованием рулевых
двигателей на двухкомпонентном топливе.
Начиная с 4 сентября камерами Hayabusa смогли подтвердить вы-
тянутую форму астероида Итокава, а с 11 сентября стали различимы
отдельные возвышенности на астероиде.
12 сентября Hayabusa подошел на расстояние 20 км к астероиду
и было официально объявлено, что Hayabusa «прибыл к цели».
Работа в окрестностях астероида Итокава
15 сентября 2005 г. было опубликовано «цветное» фото астероида
(которое, фактически, было в оттенках серого).
4 октября JAXA (Японское агентство аэрокосмических исследова-
ний, в которое влился ISAS после реорганизации отрасли) объявило,
что космический аппарат был успешно переведен в его «исходное поло-
жение» в 7 км от поверхности астероида Итокава. Были опубликованы
изображения астероида крупным планом. Было также объявлено, что
второй гироскоп, управляющий ориентацией по оси У, также вышел
из строя, и что отныне управление ориентацией осуществляется одним
гироскопом (по оси Z) и двумя двигателями малой тяги на химическом
топливе.
3 ноября Hayabusa занял позицию на высоте 3,0 км. Затем он начал
свой первый «тренировочный» спуск вначале до высоты 30 метров
над поверхностью, где должно было быть произведено тестирование
приборов, и затем до 15 метров, где был запланирован сброс на по-
верхность астероида маркера-целеуказателя и посадочного минимодуля
MINERVA. На начальном этапе спуск проходил успешно, были по-
лучены навигационные изображения с широкоугольной камеры. Так
как сигналам с Hayabusa требовалось около 17 минут, чтобы дойти
от Земли, и столько же обратно, то Hayabusa был оснащен автономной
системой навигации и управление спуском производилось бортовым
92
Гл. 2. Аналитический обзор миссий к астероидам
компьютером в автономном режиме. Космический аппарат спускался
медленно и плавно в течение нескольких часов. Потом, когда он ока-
зался на высоте 700 метров, была выдана команда на прекращение
спуска. Но Hayabusa опустился еще на несколько сотен метров, преж-
де чем дальнейший спуск прекратился. Сбой был объяснен тем, что
оптическая система автономной навигации не смогла с достаточной
точностью отслеживать положение аппарата относительно поверхности
астероида, что, вероятно, было вызвано сложной формой Итокавы.
7 ноября Hayabusa был в 7,5 км от Итокава.
9 ноября Hayabusa произвел спуск до 70 м для проверки системы
навигации при посадке, включая работу лазерного альтиметра. После
этого Hayabusa вновь поднялся, а затем снова спустился до 500 м
и выпустил один из маркеров-целеуказателей в космос, чтобы прове-
рить способность аппарата отслеживать его, что и было подтверждено
(рис. 2.9 на цветной вклейке).
Маркеры-целеуказатели представляли собой шары диаметром око-
ло 10 см и весом около 200 граммом. Шары были покрыты мягким
материалом с высоким коэффициентом отражения и были наполне-
ны шариками из специального материала, которые поглощали энер-
гию столкновения и предотвращали отскок маркера от поверхности.
Маркеры должны были служить искусственными ориентирами на по-
верхности астероида, так как на ровной, подходящей для посадки
местности могло не оказаться естественных визуальных ориентиров,
необходимых для функционирования автономной системы навигации
при посадке, конкретно выработки команд для гашения горизонтальной
скорости аппарата относительно поверхности. Маркер подсвечивался
лампой-вспышкой каждые 2 секунды. В бортовую систему обработки
изображений поступала пара снимков - со вспышкой и без нее. Про-
цессор изображений вычитал второе изображение из первого с целью
идентификации маркера и определения направления на него.
Изначально планировалось осуществить две посадки в двух местах
на поверхности астероида. После анализа изображений крупного плана
местность в районе пустыни Вумера (точка посадки В) оказалась
слишком скалистой, чтобы быть годной для посадки. После этого море
Муз (точка посадки А) было выбрано в качестве места как для первой,
так и, при возможности, второй посадки.
12 ноября Hayabusa приблизился на 55м к поверхности астеро-
ида. По команде из наземного центра управления было произведено
отделение посадочного минимодуля MINERVA. Но за время распро-
странения сигнала автономная система навигации аппарата приняла
решение перейти в режим набора высоты, так как оценила скорость
снижения как слишком большую для текущей высоты, в результате
чего модуль MINERVA отделился от КА на стадии отдаления Hayabusa
2.2. Миссия Hayabusa
93
от астероида и, соответственно, вместо посадки на поверхность улетел
в открытый космос, что было зафиксировано с борта аппарата.
19 ноября Hayabusa совершил первую посадку на астероид. Нет
никакой ясности относительно того, что происходило с аппаратом
во время и после маневра, потому что остронаправленные антенны
КА не могли быть использованы во время заключительной фазы
приземления, а также перерыва в связи во время передачи роли назем-
ной станции слежения от американской системы Deep Space Network
к японской станции Усуга. Изначально сообщалось, что Hayabusa
остановился примерно в 10 метрах над поверхностью, и парил на этой
высоте в течение 30 минут по неизвестным причинам. С Земли была
подана команда на прекращение спуска и подъем, и к тому времени
как связь была восстановлена, зонд оказался в 100км от астероида.
При этом КА перешел в «безопасный режим», медленно вращаясь
в попытке стабилизировать ориентацию. Однако когда после полно-
го восстановления управления и связи с аппаратом были переданы
и проанализированы данные, записанные во время попытки посадки,
JAXA объявило 23 ноября, что зонд на самом деле осуществил контакт
с поверхностью астероида. К сожалению, последовательность процесса
забора проб с помощью «обстрела» поверхности не была запущена, так
как датчики обнаружили препятствие во время спуска и зонд пытался
прервать посадку, но поскольку его ориентация была не подходящей
для подъема, КА предпочел продолжить спуск в безопасном режиме,
в котором не подразумевается взятие образцов.
В 21:10 UTC аппарат соприкоснулся заборным ковшом с поверх-
ностью астероида и отскочил от нее неподалеку от места посадки
посадочного маркера с координатами 6° южной широты и 39° восточ-
ной долготы в море Муз (рис. 2.10). Второе соприкосновение и отскок
произошли в 21:30 UTC. Между 21:41 UTC и 22:15UTC, Hayabusa
находился на поверхности астероида в юго-западной части района моря
Муз до тех пор, пока с Земли на борт не поступила команда включения
двигателей в режим подъема. Так как оставалась высокая вероятность
того, что частицы реголита, поднятые с поверхности заборным ковшом
и обладавшие скоростью ниже скорости отрыва (менее ~ 20 см/с),
могли попасть в емкость для образцов, соединенную с ковшом во вре-
мя непредусмотренного пребывания КА на поверхности, то эта ем-
кость была закрыта с целью сохранения этих образцов и возвращения
их на Землю.
25 ноября была предпринята вторая попытка посадки на астероид.
Первоначально все шло по плану и контакт с поверхностью был зафик-
сирован по деформации складного заборного ковша в 22:07 UTC. Счи-
талось, что на этот раз система забора образцов была активирована,
однако при дальнейшем анализе выяснилось, что, вероятно, произошел
94
Гл. 2. Аналитический обзор миссий к астероидам
очередной сбой и «пульки», которые должны были выбить частицы
грунта, не были отстрелены. Тем не менее, вторая емкость для об-
разцов также была загерметизирована для дальнейшего перемещения
в возвращаемую капсулу. Из-за обнаружившейся утечки в системе од-
ного из двигателей аппарат перешел в «безопасный режим удержания».
Рис. 2.10. Изображение, снятое бортовой камерой в процессе посадки
(видны — тень аппарата и посадочный маркер)
30 ноября JAXA объявило, что управление и связь с Hayabusa
были восстановлены, но осталась проблема с реактивной системой
управления, вероятно, связанная с промерзанием части системы.
6 декабря Hayabusa был в 550 км от Итокава. 27 ноября аппарат
испытал отключения электроэнергии при попытке коррекции ориента-
ции, вероятно из-за утечки топлива.
2 декабря при очередной попытке коррекции ориентации рулевой
двигатель не развил достаточной тяги.
3 декабря обнаружилась, что ось Z аппарата отклонилась на вели-
чину от 20 до 30° от направления на Солнце и это отклонение росло.
4 декабря в качестве чрезвычайной меры был произведен выпуск
ксенона из ионных двигателей в попытке скорректировать вращение.
Результат этого действия был признан успешным. Далее управление
ориентацией производилось с использованием ксенона.
5 декабря ориентация была восстановлена в достаточной степени
для того, чтобы восстановить связь через средненаправленную антенну.
2.2. Миссия Hayabusa
95
Была получена и проанализирована телеметрия, но часть записанных
телеметрических данных оказалось сбойной из-за предыдущих отклю-
чений электропитания.
8 декабря было отмечено внезапное изменение ориентации, и связь
с Hayabusa была потеряна. Считается, что наиболее вероятной при-
чиной потери ориентации явилось утечка и испарение от 8 до 10 ку-
бических сантиметров топлива. В течение двух месяцев пришлось
ожидать стабилизации вращения Hayabusa через преобразование пре-
цессии в чистое вращение, после чего ось вращения должна была быть
направлена к Солнцу и Земле в пределах заданного сектора.
Восстановление управления и возвращение на Землю
Восстановление контакта с Hayabusa включало в себя следующие
этапы:
23 января был обнаружен сигнал радиомаяка КА.
26 января аппарат ответил на команды с Земли, изменив сигнал
радиомаяка.
6 февраля была подана команда на выпуск ксенона для изменения
ориентации с целью улучшения связи. Скорость изменения направле-
ния оси вращения составила около двух градусов в день.
25 февраля были получены телеметрические данные с использова-
нием малонаправленной антенны.
4 марта телеметрические данные были получены от средненаправ-
ленной антенны.
К 6 марта было установлено, что Hayabusa находится в 13000 км
впереди Итокава по направлению его орбиты и КА отдаляется от асте-
роида со скоростью 3 м/с.
1 июня руководством миссии было сообщено, что подтверждается
нормальное функционирование двух из четырех ионных двигателей
и что этого достаточно для обратного пути.
30 января 2007 г. JAXA сообщило, что 7 из 11 солнечных батарей
работают и возвращаемая капсула загерметизирована.
25 апреля JAXA сообщило, что Hayabusa отправился в обратный
путь к Земле.
29 октября JAXA сообщило об успешном завершении первого этапа
маневра изменения траектории. Космический аппарат переведен в ре-
жим стабилизации вращением.
4 февраля 2009 г. JAXA сообщило об успешном повторном запуске
ионных двигателей и начале второго этапа маневра коррекции траек-
тории.
4 ноября 2009 г. ионный двигатель D автоматически прекратил
работу в результате обнаружения аномально высокого напряжения
нейтрализатора, вызванного деградацией оборудования. Двигатель А
96
Гл. 2. Аналитический обзор миссий к астероидам
был остановлен вскоре после запуска, работа двигателя В прекращена
в апреле 2007 также в результате повышения напряжения нейтрализа-
тора, вызванного деградацией.
19 ноября 2009 г. JAXA объявило, что им удалось объединить
ионный генератор двигателя В и нейтрализатор ионного двигателя А.
Будучи неоптимальной, это конфигурация, тем не менее, должна была
обеспечить необходимую величину AV, так как осталось добавить
около 200 м/с в дополнение к уже набранным 200 м/с из 2200 м/с,
необходимых для возвращения к Земле.
5 марта 2010 г. Hayabusa был на траектории, которая проходила
в пределах орбиты Луны и работа ионных двигателей была приостанов-
лена для проведения точных траекторных измерения при подготовке
для выполнения первого маневра коррекции траектории для приведе-
ния траектории в диск Земли.
27 марта в 06:17 UTC Hayabusa был на траектории, проходящей
в 20000 км от центра Земли, завершив операцию перехода с орбиты
Итокава к Земле.
6 апреля завершился предварительный этап первого маневра кор-
рекции траектории (ТСМ-0), выведший траекторию приблизительно
в диск Земли.
Полностью первый этап коррекции траектории был завершен
к 4 мая и траектория была точно направлена внутрь диска Земли:
до Земли осталось 17 млн км.
22 мая был начат второй корректирующий маневр, который продол-
жался около 92 часов и закончился 26 мая (ТСМ-2, осталось 9 млн км
до Земли).
С 3 по 5 июня третий маневр (ТСМ-3, осталось 4 млн км до Земли)
сместил траекторию от края Земли в район Бумеры в Южной Австра-
лии, и, наконец, четвертый маневр (ТСМ-4, 2 млн км до Земли) был
произведен 9 июня в течение 2,5 часов для того, чтобы точно направить
спускаемую капсулу на испытательный полигон Бумера.
Спускаемая капсула была отделена от основного аппарата
в 10:51 UTC 13 июня 2010 г. на расстоянии 40000км до Земли
и через три часа вошла в атмосферу Земли. Оснащенная теплозащитой
капсула совершила парашютный спуск в Южной Австралии, в то время
как основной космический аппарат распался и сгорел в атмосфере.
Считается, что капсула испытала пик перегрузки торможения
величиной около 25(/ и удельный тепловой поток примерно в 30 раз
больше того, с которым столкнулся спускаемый аппарат лунной
миссии Apollo.
Приземление капсулы ожидалось внутри площадки размером 20 км
на 200 км на территории испытательного полигона Бумера. Четыре
наземных команды расположились вокруг этой области и обнаружили
2.2. Миссия Hayabusa
97
возвращение капсулы по оптическим наблюдениям и радиомаяку. За-
тем в район приземления капсулы была направлена команда на вер-
толете, которая зафиксировала координаты капсулы с помощью GPS.
Капсула была подобрана в 7:08 UTC 14 июня и отправлена для изу-
чения в Японию, куда и была доставлена 18 июня 2010 г. (рис. 2.11
на цветной вклейке).
Анализ с помощью сканирующего электронного микроскопа выявил
в одной из двух емкостей для образцов внутри возвращаемой капсулы
Hayabusa около 1500 скалистых частиц. Их размер в основном менее
10 микрометров. После дальнейшего изучения результатов анализа
и сравнения составов минералов, в частности, концентрации оливина
и пироксена, для большинства из этих частиц было признано их вне-
земное происхождение. Безусловно, они были собраны с поверхности
астероида Итокава.
Основные технические характеристики КА Hayabusa
• Масса: полная: 510 кг, сухая: 380 кг.
• Размеры КА: 1,0 х 1,1 х 1,6 м, размах солнечных батарей 5,98 м.
• Источники питания: 2 GaAs солнечные батареи (площадь
12 м2) + аккумуляторы (15А-ч).
• Мощность солнечных батарей: 2,6 кВт (в 1 а. е. от Солнца).
• Ориентация: трехосная.
• Двигательная установка маршевая (4 безэлектродных ионных
двигателя с высокочастотной ионизацией типа /ИО):
— максимальная тяга: 8,1 мН,
— потребляемая мощность: 340 Вт,
— ионный пучок: 1500 В, 0,136 А,
— удельный импульс: 3090 с,
— рабочее тело: ксенон (65 кг),
— двигатели малой тяги: 12 ЖРД,
— тяга: 22 Н,
— топливо: АТ+НДМГ (50 кг).
• Остронаправленная антенна: диаметр 1,5 метра, на двухосном
шарнире.
• Возвращаемая капсула: диаметр 40 см, высота 25 см, масса около
20 кг.
Основные технические характеристики ракеты-носителя M-V (М-5)
• Тип: твердотопливная,
• Стартовая масса: 137 500-139000 кг,
• Число ступеней: 3 или 4,
• Высота: 30,8 м,
4 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
98
Гл. 2. Аналитический обзор миссий к астероидам
• Диаметр: 2,5 м,
• Полезная нагрузка: 1800 кг на низкую околоземную орбиту.
Основные характеристики астероида (25143) Итокава
• Категория: околоземные астероиды.
• Открыт: в 1998 г.
• Орбитальные характеристики:
— Эксцентриситет: 0,280 30,
— Большая полуось: 198,074 млн км (1,32404 а. е.),
— Перигелий: 142,554 млн км (0,952 911 6 а. е.),
— Афелий: 253,594 млн км (1,695 1684 а. е.),
— Период обращения 556,481 земных суток (1,524 года),
— Средняя орбитальная скорость 25,368 км/с,
— Наклонение: 1,622°.
• Основные физические характеристики:
— Размеры: 535 х 294 х 209 м,
— Масса: (3,5 ±0,1) х 1О10 кг,
— Средняя плотность: 19 ± 0,13 г/см3,
— Ускорение свободного падения на поверхности: ~ 0,1 мм/с2,
— Скорость убегания: ~ 0,2 м/с,
— Период вращения: 12,132 ч,
— Альбедо: 0,53.
Глава 3
ПИЛОТИРУЕМЫЕ ПОЛЕТЫ
К ОКОЛОЗЕМНЫМ АСТЕРОИДАМ
В силу того, что астероиды представляют интерес не только как
планетарная угроза, но и как объекты с наиболее древней в солнеч-
ной системе структурой (более 4,5 миллиардов лет), то экспедиции
к ним оправданы и с точки зрения сугубо научного интереса. Это
распространяется и на пилотируемые экспедиции к астероидам. Сле-
дует отметить, что околоземные астероиды наиболее легко достижимы
современными средствами ракетно-космической техники, и поэтому
могут рассматриваться как первоочередные объекты для пилотируемых
полетов за пределы системы Земля-Луна.
В книге рассматривается эта задача, в том числе приводятся резуль-
таты отбора наиболее подходящих астероидов с точки зрения их дос-
тижимости на различных этапах программы расширения присутствия
человека в околосолнечном пространстве.
3.1. Переступая порог в межпланетное пространство:
пилотируемые миссии малой продолжительности
к околоземным объектам
Исследования с участием человека околоземных объектов (030)
представляют весьма важные и вдохновляющие возможности как сту-
пени к последующему изучению Марса и его колонизации. Пошаговый
подход (аналогичный тому, который был использован в программе
Apollo во время лунной гонки) не только снижает риск космических
миссий вообще и сложность исследований космоса с участием челове-
ка, но также снижает время ожидания, необходимое для подготовки
«новой миссии», позволяя обществу оказывать свою решающую под-
держку программе намного раньше, чем это возможно без промежуточ-
ных результатов. К счастью, в настоящее время астероиды стали рас-
сматриваться всерьез как предмет и цель в космических исследованиях
с участием человека, в особенности со стороны NASA, как следует
из итогов анализа Белым Домом предложений NASA по бюджету
4*
100
Гл. 3. Пилотируемые полеты к околоземным астероидам
на 2012 бюджетный год, которые выдвигают на передний план «миссии
к астероидам в следующей декаде». Наиболее доступными для пило-
тируемых миссий являются околоземные объекты, которые пролетают
сравнительно близко от Земли. Наиболее предпочтительные в плане
энергетических затрат миссии с посадкой на ОЗО, как правило, тре-
буют для своей реализации длительность полета от 180 до 365 дней,
если использовать двигательные установки, работающие на химиче-
ском рабочем теле в рамках ограничений сегодняшних технологий. Тем
не менее, существует значительный разрыв между миссиями к ОЗО
и лунными миссиями, особенно, что касается их длительности, требо-
ваний по энергетике и возможности аварийного прекращения миссии.
При постепенном преодолении этих ограничений люди могут получить
бесценный опыт, дающий уверенность в успехе, путем планирования
менее продолжительных (< 180 дней) и менее сложных миссий с об-
летом ОЗО и посадкой на них. Такие миссии делятся на три класса,
позволяющие добиваться поэтапного движения человечества в целом
на его пути в решении задач межпланетных полетов к астероидам,
Марсу и Луне.
3.1.1. Введение и предыстория. В середине космической гонки
между США и СССР футуролог Дэндридж Кол и писатель в области
наук о космосе Дональд Кокс выделили пять выдающихся этапов,
представляющих ключевые вехи в космической гонке:
1. Первый искусственный спутник Земли.
2. Первый человек на околоземной орбите.
3. Первый человек на окололунной орбите.
4. Первая посадка человека на Луну.
5. Первая пилотируемая межпланетная миссия [1].
К 1961 г. США уже проиграли первые два этапа {«Спутник»
и «Восток») и оказались под угрозой проиграть третий и четвертый
этапы. Если бы СССР продолжил свои победы и выиграл лунную
гонку, то, как полагали Кол и Кокс, США могли бы вернуть себе
престиж, только выиграв важный пятый этап, который мог быть вы-
полнен за счет использования технологии Apollo/Saturn и выдвинул
бы США далеко вперед в гонке к планетам. Однако возможные планы
выполнить пятый этап Соединенными Штатами Америки после победы
в третьем и четвертом этапах {Apollo 8 и Apollo 11), т. е. в лунной
гонке, были отложены на неопределенный срок.
По прошествии почти 40 лет после последней пилотируемой миссии
на Луну {Apollo 17) выполнить пятый этап не пыталась ни одна
страна мира. Несмотря на отсутствие состояния космической гонки
в наши дни, по-прежнему чрезвычайно важное значение сохраняет
выполнение пятого этапа, поскольку это будет сигналом человечеству
3.1. Пилотируемые миссии малой продолжительности
101
о преодолении порога в межпланетное пространство, в конечном итоге
ведущего к использованию и колонизации Солнечной системы и про-
странства за ее пределами.
Известно, что исполнительная власть в США в настоящее время
рассматривает пилотируемые миссии к околоземным объектам. Наибо-
лее предпочтительная рассматриваемая миссия — это краткосрочный
полет (примерно 180 дней) с посадкой на ОЗО, который описан как
цель, достижимая с использованием «гибкого пути», в «Обзоре планов
Комитета пилотируемых космических полетов» [2] (и проанализиро-
ванных Лэндисом и др. [3], а также Хопкинсом и Дисселем [4],
среди остальных). Однако существуют существенные разрывы (т. е.,
требования по характеристической скорости и длительности полета)
между этой миссией и ранее выполненными пилотируемыми мисси-
ями на Луну. Таким образом, главная цель — это идентификация
и классификация типов миссий, которые перебрасывают мост через
эти критические для миссий разрывы, подобно тому, как Gemini по-
мог реализовать Apollo, который, в свою очередь, осуществил миссии
в рамках генеральной репетиции (т. е., Apollo 8, который впервые
отправил человека за пределы низкой околоземной орбиты и к Луне,
и Apollo 10, который испытал лунный модуль на низкой окололунной
орбите), с тем чтобы помочь достичь результатов Apollo 11, миссии,
доставившей первого человека на поверхность Луны.
На рис. 3.1 представлены три класса пилотируемых миссий к NEO
с облетом и рандеву. Даны длительность миссии и требуемое ДУ.
Каждая непрерывная кривая представляет ДУ в зависимости от дли-
тельности миссии для отдельного случая облета или рандеву с NEO
в интервале дат запуска между 2015 и 2030 гг. Миссии класса I и II
являются этапами для пилотируемых полетов на пути от миссий к Луне
и миссий III класса.
Как можно видеть, облеты человеком ОЗО служат краеугольным
камнем в миссии с посадкой на ОЗО, если проводить сравнение
со временем и опытом, приобретенным после достижения орбиты Луны
в межпланетном пространстве (который практически отсутствует). Об-
летные миссии ОЗО могут заполнить разрывы в опыте маневров после
выведения, в выборе скорости входа в атмосферу и возможных аварий-
ных вариантах прерывания миссии (эти миссии становятся менее пред-
почтительными при увеличении расстояния до Земли). Полезно также
накопить опыт в получении телеметрических данных с аппаратов,
направляемых к ОЗО, траекторных измерениях и операциях по сбли-
жению с ОЗО во время миссий их облета, поскольку это поможет
подготовить миссии с посадкой на ОЗО. Несмотря на важность этого
поэтапного подхода, миссии с облетом ОЗО получили недостаточно
серьезного внимания как пилотируемые исследовательские миссии,
Облет ОЗО
Сближение с 030
Класс I
в сфере Земли
облет 030
Класс II
вне сферы Земли
облет 030
Класс 111
вне сферы Земли
сближение с ОЗО
О 20 40 60 80 100 120 140 160 180
Полная продолжительность, сут
Существует больше
миссий с меньшим ДУ
но с большей
длительностью
2008 HU4
(Запуск в 2016 г )
2010 UES1
(Запуск в 2028 г.)
2006 RH120
(Запуск в 2028 г.)
2000 SG344
(Запуск в 2028 г.)
Рис. 3.1. Длительность миссии и требуемое ДУ для пилотируемых миссий к NEO с облетом и рандеву
Гл. 3. Пилотируемые полеты к околоземным астероидам
3.1. Пилотируемые миссии малой продолжительности
103
главным образом, в силу ограниченности научной отдачи от таких
полетов. Однако такие полеты не должны быть мотивированы научной
отдачей в плане фундаментальных наук, но, скорее, исследовательской
отдачей, с тем, чтобы повысить шансы на успех в миссии посадки
на ОЗО.
После анализа оптимальных траекторий для всех известных ОЗО,
результатом которого было группирование пролетных непродолжитель-
ных миссий к ОЗО в классы I и И, в то время как класс III был
обозначен как первые пилотируемые миссии с посадкой (рис. 3.1).
Интервал длительности для класса I был выбран в пределах от 10
до 50 дней. Эти миссии «внутри сферы влияния» (ВСВ) предполага-
ют отправлять экипаж на субпараболические переходные траектории
(С < 0км2/с2) для встречи с ОЗО-целью (естественное тело, не явля-
ющееся Землей или Луной для первого раза) и находящиеся на рассто-
яниях менее 2,5 млн км от Земли, и все же дальше, чем Луна. Класс
II включает миссии за пределами сферы влияния, которые предпо-
лагают отправить экипаж на гиперболические переходные траектории
с длительностью миссии в пределах от 50 до 120 дней. Эти миссии
позволяют экипажу быть первым, кто достигнет ОЗО за пределами
сферы влияния Земли, проникая в межпланетное пространство.
И, наконец, класс III предлагает шанс на первую посадку человека
на межпланетное тело.
Работа начинается с детализации инструментов и методов для вы-
явления возможностей в пределах всех трех классов миссий. Далее
раскрываются характеристики, примеры и приложения этих классов,
затем следуют заключительные соображения по цене и значимости
выполнения этих миссий с применением поэтапного подхода.
3.1.2. Предположения, ограничения и используемые инстру-
менты программного обеспечения. Предполагается следующий про-
филь пролетных миссий: разгонная ступень носителя выполняет запуск
на переходную к ОЗО траекторию (ПОТ), необходимую для облета
ОЗО. Запуск на переходную к Земле траекторию (ПЗТ) выполняется
через день после облета (с целью уменьшения рисков) для того, чтобы
направить аппарат на орбиту безопасного входа в атмосферу Земли.
Миссии с посадкой (рандеву) отличаются тем, что после запуска
на траекторию перелета к ОЗО требуется дополнительный импульс для
гашения относительной скорости при подлете к ОЗО.
Первый обширный обзор ОЗО, подходящих для пилотируемых
миссий, выполнен для периода с первого января 2015 г. по 1 ян-
варя 2030 г. в варианте с использованием методов аппроксимации
траекторий коническими сечениями, изложенными в виде програм-
мы на MATLAB [5], которая использует эфемериды 8271 известных
104
Гл. 3. Пилотируемые полеты к околоземным астероидам
астероидов, предоставляемые системой JPL HORIZONS [6]. Обзор
сделан, исходя из ограничений по значению отлетной энергии (Transfer
to Near Earth Object TNI) C3 < 5 км2/с2 (для облетов) и C3 < 10 км2/с2
(для рандеву) и ограничений по последующему ограничению характе-
ристической скорости ДУ предельными значениями 3 км/с и 4 км/с
соответственно и, наконец, по предельной скорости входа в атмосферу
< 12 км/с. Никаких ограничений на склонение гиперболической асимп-
тоты при запуске (DLA) не накладывалось (см. разд. 3.1.8).
Поскольку главное внимание уделяется непродолжительным пило-
тируемым полетам к NEO, то возможности их выполнения оценивались
по результатам минимизации длительности миссий с ограничениями
по Д V, необходимым после выведения аппарата, но на практике миссия
может быть оптимизирована по тем параметрам, которые являются
проблемными. Поскольку никакого конкретного космического аппарата
не предполагалось в данном исследовании, решение по ограничени-
ям характеристической скорости ДУ принималось, главным образом,
на базе имеющихся возможностей, определяемым конкретными значе-
ниями достижимого ДУ с некоторым смещением в сторону меньших
требований по энергии, реальных в рамках существующих технологий.
При этом предполагалось, что возможно применение всего одной сту-
пени для межпланетного аппарата. Следует отметить, что существует
много вариантов миссий облета, которые требуют Д V не более 100 м/с
после выведения аппарата на траекторию к NEO.
Для класса I требования по ДV могут удерживаться на сравнитель-
но низком уровне (< 1 км/с) без заметной утраты набора возможностей
(табл. 3.1), поэтому это ограничение и используется для этого класса.
Для класса II разумное увеличение требуемого ДУ (50%) все еще
предоставляет много возможных вариантов (234) для широкого раз-
нообразия достижимых NEO и, таким образом, ограничение 1,5 км/с
для импульса после выведения выбирается как ограничение для этого
класса. Наконец, имеется много возможных вариантов для класса
III, но в попытках по удержанию требований по ДУ в оправданной
близости таковым для класса II (т. е. 100% увеличение) было принято
ограничение в 2,75 км/с, что привело к результату в 8 возможных
вариантов миссий.
Результаты получены для различных уровней ограничений с целью
продемонстрировать соотношение между располагаемым ДУ аппара-
та и получаемым набором возможных вариантов. Энергия Сз после
запуска ограничена значением 5км2/с2 для облетов и 10км2/с2 —
для миссий с рандеву (последние включают пятидневное пребывание
у NEO).
Эти ограничения по ДУ приводят к необходимости выполнения
этапа исследований миссий всех трех классов, в рамках которого
3.1. Пилотируемые миссии малой продолжительности
105
Таблица 3.1.
Число возможностей миссий каждого класса
После запуск на орбиту перехода к NEO. Ограни- чение по ДУ Миссия класса I. Облет ОЗО. TOF < 50 сут. Миссия класса II. Облет ОЗО. TOF: 50-120 сут. Миссия класса III. Посадка на ОЗО. TOF: 120-180 сут.
ДУ < 1,0 км/с 39 80 0
ДУ < 1,5 км/с 40 234 2
ДУ < 2,0 км/с 42 411 5
ДУ < 2,5 км/с 45 587 6
ДУ < 3,0 км/с 47 747 8
ДУ < 3,5 км/с Не рассматривались 15
ДУ < 4,0 км/с 21
представляющие интерес траектории строятся с помощью комплекса
программ STK/Astrogator с использованием надежного алгоритма ре-
шения задачи N тел для проектирования миссий, иллюстрируемых
в данной статье, и для уточнения решений, полученных в рамках ап-
проксимации орбит коническими сечениями в первоначальном обзоре.
Кроме того, специальный интерес уделяется фазе операций вблизи
NEO для облетных миссий. А именно, моделируется динамика высо-
коскоростного удара между небольшим ударником (< 50 кг) и NEO
с помощью имеющегося математического обеспечения с тем, чтобы
установить, какие будут размеры кратера после удара (см. разд. 3.1.6).
3.1.3. Миссия класса I. Пилотируемые миссии к NEO мини-
мальной длительности (менее двух месяцев) получали недостаточное
внимание как возможные этапы к более трудным полетам. Однако, как
можно видеть из табл. 3.1, миссии класса I могут быть выполнены в са-
мое ближайшее время с возвращением экипажа на землю относительно
быстро в условиях сравнительно небольших рисков.
10-дневное ограничение миссии этого класса не позволяет достичь
ничего большего, кроме пилотируемого полета за пределы орбиты
Луны. 50-дневное ограничение по длительности полета используется
для того, чтобы номинальная траектория позволяла вернуться к Земле
в случае аварии двигательной установки. Это ограничение препят-
ствует непосредственному отлету в гелиоцентрическое пространство
(см. детали в разд. 3.1.7).
В случае относительно строгих ограничений на ДУ в 1 км/с, ис-
пользуемых в миссии этого класса, все еще существует 39 вариантов
106 Гл. 3. Пилотируемые полеты к околоземным астероидам
для запуска в течение 13 из 15 проанализированных лет между 2015
и 2030 гг., как видно на рис. 3.2. Несмотря на два непродолжительных
разрыва в годах запуска (нет возможности запуска в 2012 и 2025 г.),
вероятно, что только одна миссия в пределах этого класса в действи-
тельности будет реализована как этап для миссии следующего класса.
С этой точки зрения, имеющихся 39 вариантов миссии (к 39 различным
NEO) более чем достаточно для планирования реализуемой миссии.
Дата запуска
(1 января 2015 г. - 1 января 2030 г.)
Рис. 3.2. Число вариантов для миссии класса I, определяемых датой запуска
и абсолютной звездной величиной Н выбранного NEO
Интересно рассмотреть в деталях номинальную миссию почти
максимальной длительности (46 дней), входящую в этот класс мис-
сий, анализируя полет к околоземному астероиду (NEA) 1998 SD9
(рис. 3.3). Траектория миссии показана в инерциальной системе коор-
динат с центром в Земле в проекции на экваториальную плоскость
Земли. Пилотируемый космический аппарат выполняет переход на суб-
параболическую орбиту к астероиду 6 августа 2018 г. (А), за которым
следует 20-дневный полет к астероиду и его облет (скорость облета
10,6 км/с) в 2,5 млн км от Земли (В), далее маневр возвращения к Зем-
ле (AV ~ 0,9 км/с) одним днем позже (С) для достижения безопасного
входа в атмосферу при 11 км/с (D).
Запуск аппарата в рамках этой миссии предполагается выполнить
с космического центра имени Кеннеди (KSC) 6 августа 2018 г., откуда
экипаж будет отправлен к границе солнечно-земной области слабой
устойчивости примерно в 2,5 млн км от Земли, которая делает профиль
траектории для таких миссии аналогичным профилю миссии в район
солнечно-земных точек Лагранжа (Lj и L2), которые могут быть местом
3.1. Пилотируемые миссии малой продолжительности
107
для межпланетных пересадочных узлов или космических обсерваторий
(например, обсерватория Planck). Требуемое для запуска склонение
в 43° (DLA) больше, чем желаемое для предполагаемого космодрома
KSC (максимальное склонение DLA для KSC до того, как возникают
потери по полезной нагрузке — 28,5°), но приемлемое. Днем позже наи-
более тесного сближения с NEO при относительно скорости пролета
10,6 км/с экипаж выполнит маневр возвращения к Земле, что требует
868 м/с ДУ для того, чтобы перейти на траекторию безопасного входа
в атмосферу Земли (TEI) (т. е. угол входа к —8°) с относительной
скоростью 11км/с (см. таблицу 3.2, содержащую более детальное
описание выбранных миссий класса I).
Некоторая скрытая выгода миссий почти максимальной длитель-
ности этого класса относится к исследованию Марса с участием
человека, поскольку от экипажа может быть понадобится использо-
вать в аварийном случае траекторию перелета к Марсу (или одному
из его спутников) с применением технологии движения через солнечно-
марсианскую зону малой стабильности. Таким образом, опыт полетов
в районе солнечно-земной области малой стабильности поможет при-
готовиться к будущим аварийным ситуациям в солнечно-марсианских
зонах слабой стабильности.
108
Гл. 3. Пилотируемые полеты к околоземным астероидам
Таблица 3.2.
Детальное описание выбранных миссий класса I
NEO Н Диаметр Дата запуска Длит, (дни) TNI С3 (км2/с2) TNI DLA| (град) TNI ДУ (км/с) Скор, про- лета (км/с) Расст. до Земли (РЛ5)
(2004 BL86) 18,8 0,4-1 км 10/01/2015 32 -0,45 29 0,98 15,8 3,2
(2006 1_Н) 24,9 28-63 м 29/11/2016 47 -0,26 23 0,98 10,3 4,4
(2010 АЕЗО) 23,5 53-118 м 12/06/2017 45 -0,27 20 1,00 12,3 4,2
(2011 HJ7) 22,2 95-212 м 1/05/2018 22 -0,74 13 0,91 16,2 2,3
(2007 LU19) 21,5 134-299м 18/05/2018 31 -0,49 39 0,95 12,3 3,1
(1998 SD9) 24,1 41-91м 6/08/2018 46 -0,15 43 0,87 10,6 6,5
(2001 GP2) 26,9 11-25 м 17/09/2020 32 -0,48 3 0,93 2.6 3,3
(2010 FY9) 26,6 13-29м 5/03/2021 36 -0,40 19 0,96 4,2 3,5
(2010 ХС15) 21,4 139-311 м 20/12/2022 14 -1,60 26 0,06 9,9 1.3
(1998 НН49) 21,3 146-327м 1/10/2023 31 -0,50 42 0,93 14,7 3,0
(2006 WB) 22.8 73-162 м 15/11/2024 22 -0,71 5 0,96 4,3 2,4
(2010 RA91) 23,4 57-126 м 1/03/2026 44 -0,30 16 0,96 10,4 4.1
(2003 LN6) 24,5 34-76 м 31/05/2026 38 -0,36 31 0,97 4,1 3.7
137108 (1999 AN10) 17,8 0,7-1,6 км 31/07/2027 14 -1,18 42 0,87 25,9 1.6
(2011 LJ19) 21,1 158-354 м 3/07/2028 46 -0,26 23 0,99 9,8 4,3
35396 (1997 XF11) 16,9 1,1-2,5 км 13/10/2028 25 -0,62 20 0,96 14.1 2,6
(2006 SU49) 19,5 328-733м 11/01/2029 33 -0,47 12 0,92 4,9 3,2
99942 Apophis (2004 MN4) 19,7 270 м 6/04/2029 13 -1,62 14 0,21 6,0 1,3
(2001 AV43) 24,4 36-80 м 2/11/2029 50 -0,24 15 0.97 3,5 4,6
3.1.4. Миссия класса II. Миссия второго класса также состоит
из облетов NEO, за исключением того, что экипаж покидает Зем-
лю по гиперболической траектории перехода к NEO и достигает его
в околосолнечном пространстве, становясь первой группой людей, пе-
реступивших порог межпланетных путешествий. Кроме того, продол-
жительность миссии этого класса лежит в рамках от 50 до 120 дней,
но экипаж может вернуться на Землю быстрее 50 дней, поскольку
имеет увеличенный импульс перехода на траекторию к Земле (TEI)
(с 1 до 1,5 км/с) по сравнению с миссией класса I. Например, в вари-
анте миссии класса II 2029 г. к объекту 2001 AV43 экипаж добирается
до цели по (слегка) гиперболической траектории (Сз = 0,02 км2/с2)
и имеет возможность вернутся на Землю через 40 дней после старта,
исходя из 10-дневного перекрытия между миссиями классов I и II.
3.1. Пилотируемые миссии малой продолжительности
109
Верхняя граница продолжительности миссии этого класса выбрана
равной 120 дням по простой причине — это наиболее подходящая
ступень к миссиям класса III. На рис. 3.4 показано множество вариан-
тов для миссии класса II, определяемых датой запуска и абсолютной
звездной величиной Н выбранного NEO. Для максимального импульса
возвращения в 1,5 км/с, между 1 января 2015 и 1 января 2030 г.
существует суммарно 234 варианта миссий. По крайней мере, один
Дата запуска
(1 января 2015 г. - 1 января 2030 г.)
Рис. 3.4. Число вариантов для Миссии класса II
Множество выбранных NEO обширно, состоящее из 221 различных
NEO, которые включают двойные системы NEO и NEO с известными
(Tholen and SMASSII) типами спектров, такими как X, Хе, Xk, S,
Sq, Sk и V. Также существует возможность полета к околоземной ко-
мете (NEC) 252P/LINEAR, однако необходимо выполнить достаточно
жесткое требование в 84° по величине склонения (DLA) для прямого
запуска к астероиду (TNI). Метод преодоления этой потенциальной
трудности по DLA описан в разд. 3.1.8.
Вариант миссии класса с более благоприятным DLA в 37° на-
правляет экипаж к астероиду NEA (4660) Нерей диаметром 330 м,
принадлежащему к Хе типу (SMASSII классификатор по типу спек-
тра). Траектория миссии (рис. 3.5) показана в инерциальной системе
координат с центром в Земле в проекции на плоскость экватора Земли.
Пилотируемый космический аппарат выполняет переход на гиперболи-
ческую отлетную орбиту (С*з — 1 км2/с2) 25 октября 2021 г. (А), после
чего следует облет астероида с относительной скоростью ~ 6 км/с (В)
и одним днем позже маневр перехода на орбиту возвращения к Земле
110
Гл. 3. Пилотируемые полеты к околоземным астероидам
(ДУ ~ 1,4 км/с) на расстоянии 4,8 млн км. от Земли (С) для безопас-
ного входа в атмосферу Земли со скоростью 11км/с через 101 день
после запуска (D).
Варианты экспериментов при воздействии ударником на астероид
во время пролета обсуждаются в разд. 3.1.6. Одним днем после про-
лета Нерея экипаж проводит маневр перехода на орбиту возвращения
к Земле (ДУ « 1,4 км/с) с тем, чтобы войти в атмосферу Земли со ско-
ростью 11,1км/с через 101 день после запуска. Эта скорость входа
типична для миссий класса II, поскольку максимальная скорость входа
для выбранных вариантов класса II равна 11,11км/с (см. табл. 3.3,
содержащую более детальное описание выбранных миссий класса II).
3.1.5. Миссии класса III. Пилотируемые полеты третьего класса
также достигают своей цели вне сферы действия Земли, но допол-
нительно производится сближение с космическим телом. Для опре-
деления возможностей полетов этого класса была выполнена мини-
мизация полной продолжительности миссии (включая пятидневное
пребывание на конечном объекте) с ограничениями Сз < 10км2/с2
и ДУ < 2,75 км/с после запуска к объекту. Здесь предполагается
3.1. Пилотируемые миссии малой продолжительности
111
Таблица 3.3.
Детальное описание выбранных миссий класса II
NEO Н Диаметр Дата запуска Длит, дни TNI С3. км2/с2 TNI |DLA| град TNI Д1/, км/с Скор, про- лета, км/с Расст. до Земли, РЛ5
85990 (1999 JV6) 19,8 293-656 м 11/11/2015 108 1,55 64 1,47 9,9 13,0
Комета 252P/LINEAR 18,6* 25/01/2016 111 1,51 84 1,46 10,8 14,0
(2009 DL46) 21,6 126-282м 27/04/2016 54 0,14 20 1,47 6,5 6,0
171576 (1999 VP11) 18,3 0,6-1,3 км 29/08/2017 96 0,30 9 1.18 21,1 5,8
(2008 TZ3) 20,3 227-508 м 30/03/2018 81 0,58 79 1,43 9,0 6,6
68347 (2001 КВ67) 19,7 304-679 м 11/04/2018 96 0,92 31 1,42 13,4 9,6
163899 (2003 SD220) 16,9 1,1-2,5 км 1/11/2018 96 0,60 37 1,47 6,4 8,2
66391 (1999 KW4) 16,5 1,3 км 28/03/2019 117 1,43 33 1,45 21,5 13,5
(2006 SF6) 19,9 279-624 м 30/09/2019 108 1,22 52 1,45 7,8 12,1
(2008 TZ3) 20,3 227-508 м 31/03/2020 81 0,71 54 1,45 8,8 7,3
3361 Орфей (1982 HR) 19,0 300 м 22/09/2021 120 1,71 70 1,40 8,3 15,0
4660 Нерей (1982 DB) 18,2 330 м 25/10/2021 101 1,03 37 1,39 6,3 12,5
7335(1989JA) 17,0 1,8 км 5/04/2022 108 1,25 53 1.41 12,9 11.9
(1994 XD) 19,1 400-895 м 27/04/2023 90 0,88 51 1,42 21,7 8,6
(2003 UC20) 18,1 0,6-1,4 км 9/09/2023 114 1,78 74 1,49 7,6 14,6
139622 (2001 QQ142) 18,3 0,6-1,3 км 6/10/2023 120 1.53 31 1,43 6,8 14,5
(2002 NV16) 21,4 141-316 м 3/09/2024 105 1,34 82 1,48 4,9 11,9
(2007 SQ6) 21,9 111-248м 12/02/2025 108 1,08 52 1,43 6,4 11,3
(2011 DU) 21,2 152-340м 2/03/2025 111 1,53 82 1,49 9,3 13,2
(2002 JX8) 19,8 290-648 м 17/03/2025 102 1,23 77 1,47 5,3 11,2
(2008 DG5) 19,7 308-689 м 22/04/2025 90 0,93 54 1,49 6,3 9,1
(1997 QK1) 20,1 251-562 м 9/07/2025 87 0,88 84 1,48 9,6 8,6
152637 (1997 NC1) 18.2 0,6-1,3 км 5/05/2026 102 0,49 32 1,46 9,1 7.7
4953 (1990 MU) 14,1 4-8 км 9/04/2027 117 0.96 49 1,48 23,5 12,0
(2004 ОВ) 18.8 0,5-1,0 км 4/09/2028 53 0,15 5 1,49 7,3 5,9
(1998 ХХ2) 19,8 289-647 м 18/10/2028 81 0,89 69 1,44 7,8 7.9
(2009 BL71) 21,8 118-264м 15/02/2029 87 0,82 7 1,42 9.3 8,4
(2000 SL|0) 21,6 126-281 м 7/04/2029 78 0,69 58 1,36 8,0 6,8
* Полная звездная величина кометы;
РЛ§ — расстояние до Луны « 384 400 км
112 Гл. 3. Пилотируемые полеты к околоземным астероидам
пятидневное пребывание на NEA, тем не менее, возможно увеличение
этого времени за счет увеличения ДУ либо продолжительности мис-
сии. Несмотря на то, что для приведенных ограничений существует
три возможных цели с продолжительностью миссий менее 90 дней
(2008 HU4, 2006 RH120 и 2010 UE51), пределы продолжительности
были заданы между 120 и 180 днями чтобы обеспечить плавный
переход от класса II к III. Между 1 января 2015 и 1 января 2030 г.
таких вариантов существует всего 8 (табл. 3.4). Кроме того, диаметры
большинства NEA оцениваются как небольшие (< 20 м). Тем не менее,
открытие 2 из этих 8 объектов в прошлом году является обнадеживаю-
щим указанием на то, что, учитывая объем наблюдений, в ближайшем
будущем последуют и другие открытия.
Таблица 3.4.
Варианты миссий класса III
NEA Н Размер, м Старт Длит., дней TNI Сз, КМ /С“ ДУ после TNI, км/с
2008 HU4 28,2 6-13 04/2016 120 1,6 2,11
1991 VG 28,4 6-12 07/2017 155 3,3 2,74
2008 ЕА9 27,8 8-17 12/2019 150 4,3 2,73
2010 UC 27,4 9-20 10/2020 175 9,9 2,71
2010 UE51 28,3 6-13 09/2023 120 0,6 2,02
2008 JL24 29,6 3-7 09/2025 175 7,0 2,72
2006 RH120 29,5 3-7 07/2028 120 0,8 2,15
2000 SG344 24,8 29-66 08/2029 120 2,8 2,17
Наибольшего размера NEA из класса III достигает астероид 2000
SG344 (диаметр 29- 66 м), к которому можно стартовать в 2029 г.
Требование на Сз составляет 2,8 км2/с2 для запуска к астероиду
в представленном оптимальном случае. На рис. 3.6 показана траек-
тория полета в экваториальной плоскости в геоцентрической инерци-
альной системе для запуска 1 августа 2029 г. с Сз = 2,8км2/с2 (А).
После 57-дневного перелета к NEA корабль выполняет ДУ = 0,93 км/с
(В) для погашения относительной скорости и приведения к состоянию
сближения, для обеспечения 5-дневной работы вблизи объекта (С).
Далее в 8 млн км от Земли (D) выполняется запуск на орбиту перехода
к Земле (TEI) (ДУ = 1,24 км/с), и после 63-дневного перелета к Земле
происходит вход в атмосферу Земли (Е) со скоростью 11,2 км/с. Может
оказаться предпочтительным разделение этого маневра на несколько
меньших, выполняемых постепенно.
3.1. Пилотируемые миссии малой продолжительности
113
С в
Траектория аппарата
2000 SG344
Луна
Вид на экваториальную
плоскость Земли
в геоцентрический системе
Рис. 3.6. Вариант класса III для 2000 SG344
Скорости входа в атмосферу в этом классе полетов составляют
от 11,03 до 11,4 км/с, причем для варианта 1991 VG с оптималь-
ным запуском 25 июля 2017 г. максимальный |DLA| составляет 47°.
Единственным другим вариантом, требующим |DLA| > 25°, является
2006 RH120, оптимально запускаемый 17 июля 2028 г., с |DLA| = 44°.
Следует отметить, что продолжительность миссии в этом варианте
может быть уменьшена до 90 дней увеличением ДV до ~ 3,4 км/с
после запуска к астероиду. Кроме того, несмотря на ограниченное
количество вариантов класса III, завершение миссий предыдущих клас-
сов значительно увеличит вероятность успешного выполнения миссии
класса III в первую же попытку. Аналогичное рассуждение применимо
в отношении пользы миссий класса III для более сложных миссий
к NEO и Марсу.
3.1.6. Операции в окрестности NEO. Несмотря на то, что при-
веденные классы миссий нацелены на изучение возможностей поле-
тов, а не на научные исследования, необходимо все же рассмотреть
и их научное значение. Третий класс миссий — пилотируемые полеты
к NEO со сближением вне сферы действия Земли — представляет
возможности получения богатых научных данных [3] (включая возврат
114 Гл. 3. Пилотируемые полеты к околоземным астероидам
образцов), так как экипаж сможет выполнять действия вне корабля
на NEO в течение 5 дней. С другой стороны, это не применимо для
миссий классов I и II, в которых корабль минует целевой объект
с относительной скоростью 30 км/с и выше.
Небольшой маневр коррекции траектории, выполняемый перед
сближением, определяет расстояние подлета к цели, и следовательно,
оказывает сильное влияние на возможности наблюдений доступных
экипажу и научным инструментам, установленным на корабле (таким
как датчик изображений, спектрометр, радар, пылеуловитель и анали-
затор, и др.). В табл. 3.5 показаны возможности наблюдений с корабля,
запущенного для облета астероида 163899 (2003 SD220) в ноябре
2018 г. с относительной скоростью 6,4 км/с. NEO имеет величину 16,9
и предполагаемый диаметр 1500 м. Для сравнения Луна имеет угловой
размер ~ 0,5° с Земли. Если корабль сближается с NEA до 160 км,
объект будет иметь угловые размеры Луны при наблюдении с Земли
и будет оставаться в поле зрения 90° в течение 50 секунд. Пред-
полагая использование 0,5-метрового телескопа (сходного с HiRISE
на Mars Reconnaissance Orbiter), может оказаться предпочтительным
более близкий подлет к NEA (» 40 км), обеспечивающий разрешение
3,6 см на пиксель, т. е. лучшее качество наблюдений (например, размер,
форма, частичная топография, альбедо объекта, и др.), хотя и при
меньшем времени наблюдений (» 12 секунд).
Таблица 3.5.
Влияние минимального расстояния сближения на наблюдение объекта
Расстояние сближения, км Макси- мальный угловой размер, 0 Угловая скорость, °/с Время в поле зрения 90°, с Разрешение 0,5 м телескопа, см/пикс
10 8,58 36,6 3,1 1,8
40 2,15 9,17 12 7,2
160 0,54 2,29 50 29
640 0,13 0,57 200 115
2560 0,03 0,14 800 462
При облете гораздо меньшего объекта (например, диаметром 65 м)
с большей скоростью (10,6 км/с) он будет иметь гораздо меньший
угловой размер (« 0,1°) и будет находиться в поле зрения 90° в тече-
ние меньшего времени (7,5 секунд из-за увеличения угловой скорости
до 15° в секунду).
3.1. Пилотируемые миссии малой продолжительности
115
Следует отметить, что, скорее всего, будет желательным обзор NEO
с освещенной Солнцем стороны для улучшения условий наблюдений.
Кроме того, высокая скорость разворота в точке наибольшего сближе-
ния будет вызывать затруднения [7], требующие особенных характери-
стик приборов и особой проработки процесса пролета.
Для увеличения научной значимости миссии возможен выстрел
небольшим телом из космического корабля, что вызовет выброс ве-
щества объекта в результате удара. Дополнительные научные данные,
которые можно будет получить при ударе с NEO, включают прочность
и структуру поверхности, особенно если глубина кратера достигает
более 0,5 м.
Результаты гипотетических случаев соударения представлены
на рис. 3.7.
диаметр NEO 100 м
ударник 1,6 кг
диаметр NEO 100 м
ударник 42,4 кг
диаметр NEO 1000 м
ударник 1,6 кг
диаметр NEO 1000 м
ударник 42,4 кг
глубина NEO 1000 м
ударник 1,6 кг
глубина NEO 100 м
ударник 1,6 кг
глубина NEO 100 м
ударник 42,4 кг
глубина NEO 1000 м
ударник 42,4 кг
Рис. 3.7. Глубина и диаметр кратера в зависимости от скорости удара
для гипотетических 100- и 1000-метровых объектов
Миссия класса I к 1998 SD9 (диаметр 50 м и плотность 1200 кг/м3)
использует ударник массой 1 кг и плотностью 3000 кг/м3 на скорости
10,6 км/с, а миссия класса II к Нерею (330 м) — тот же ударник
на скорости 6,3 км/с. Во всех случаях предполагается угол удара 45°.
Не учитываются эффекты распада NEO. В предположении, что NEO
имеют плотность 1200 кг/м3 и диаметр 100 и 1000 м, показаны глубина
и диаметр кратера для широкого диапазона скорости ударника при
его плотности 3000 кг/м3. Для каждого объекта взяты два значения
116 Гл. 3. Пилотируемые полеты к околоземным астероидам
массы ударника: 1,6 и 42,4 кг. Из графиков видно, что для большинства
скоростей удара образующийся кратер имеет большие размеры относи-
тельно диаметра NEO. С другой стороны, при приближении глубины
и диаметра кратера к диаметру NEO увеличивается опасность разру-
шения объекта. Поэтому необходимо более детальное исследование для
диаметра и глубины кратера вблизи диаметра NEO для определения
условий разрушения и разлета.
2
m
диаметр NEO 100 м
ударник 42,4 кг
угол удара 45°
диаметр NEO 100 м
ударник 1,6 кг
угол удара 45°
диаметр NEO 1000 м
ударник 42,4 кг
угол удара 45°
диаметр NEO 1000 м
ударник 1,6 кг
угол удара 45°
Рис. 3.8. Полный выброс массы из NEO в зависимости от скорости удара
Масса выброшенного вещества 100-метрового объекта существенно
зависит от массы ударника (рис. 3.8): не более 10000 т для ударника
1,6 кг и не более 131000 т для ударника 42,2 кг, причем последнее
велико по сравнению с полной массой NEO 628000 т. Несмотря на то,
что масса ударника также влияет на выброшенную массу для NEO
диаметром 1000 м, с учетом его полной массы в 680 млн т, зависимости
менее выражены: диапазон выбрасываемой массы составляет от 458
до 6691 т при массе ударника от 1,6 до 42,4 кг.
Влияние угла удара на диаметр и глубину кратера для описанных
случаев миссий класса I и II представлено на рис. 3.9. Как можно
заметить, при стремлении угла удара к 90° диаметр и глубина кратера
достигают максимальных значений, что может вызвать затруднения
для случая 1998 SD9. Этот объект предположительно составляет 50 м
в диаметре, и назначение угла удара 30° (легче всего осуществить
угол 90°) может теоретически привести к кратеру диаметром ~ 25 м,
что создает опасность раскола и/или разрушения NEO. Поэтому пред-
ставляется разумным не осуществлять ударов с объектами малого
диаметра, если не обеспечены малые углы соударения (< 10°). NEO
большего диаметра, такие как Нерей (330 м), представляются гораздо
3.1. Пилотируемые миссии малой продолжительности
117
диаметр NEO 100 м
ударник 1.6 кг
диаметр NEO 100 м
ударник 2.4 кг
диаметр NEO 1000 м
ударник 1.6 кг
диаметр NEO 1000 м
ударник 42.4 кг
Угол удара,
Рис. 3.9. Глубина и диаметр кратера в зависимости от угла удара
для миссий класса I и II
менее опасными для разрушения при приведенных предположениях.
В расчетах не учитываются эффекты распада NEO.
3.1.7. Риски: возможности аварийного прекращения миссии.
Самая, возможно, недооцененная проблема, разрешающаяся представ-
ленными классами миссий — это риск главным образом по отноше-
нию к способам прерывания (т. е. возвращения на Землю) в течение
штатной миссии. В некоторый момент для экипажа может оказаться
критически важным более быстрое, чем в штатном полете, возвра-
щение на Землю по таким причинам, как медицинские (например,
получение недопустимой дозы облучения, отказ системы жизнеобес-
печения), отказ аппаратуры корабля (повреждение солнечных батарей
с последующей потерей питания; частичный или полный отказ главных
двигателей, что может потребовать использование реактивной системы
управления для возврата на Землю) и/или сбой программного обес-
печения (например, в системе навигации или системах обнаружения
NEO). Так как для миссий класса III возможности прерывания огра-
ничены [4], необходимо исследовать такие возможности для близких
и средних миссий класса II.
Требования по AV к маневру прерывания для миссии к 171576
(1999 VP11) показаны на рис. 3.10. Штатная миссия составляет
96 дней с облетом NEA 171576 и запуском 29 августа 2017 г. с затра-
тами Сз = 0,3 км2/с2 и AV (TNI) =1,18 км/с. До пролета NEO требу-
емое для сокращения времени полета AV существенно меньше штат-
ного значения. После пролета значительное уменьшение длительности
миссии становится гораздо более трудным, так как маневр по возвра-
щению к Земле с AV = 1194 м/с уже будет совершен, и запас AV
118
Гл. 3. Пилотируемые полеты к околоземным астероидам
и времени для изменения периода траектории возврата к Земле после
прохождения апогея будет невелик.
Кроме того, варианты безопасного возвращения к Земле определены
как ключевые факторы, задающие границу между первым и вторым
классами миссий. Миссии класса I будут, вообще говоря, иметь от-
рицательное требование к TNI Сз, и их траектории приведут назад
к Земле в случае отказа двигательной системы и невыполнения запуска
на орбиту перехода к Земле, тогда как миссия класса II перейдет на ги-
перболическую отлетную асимптоту с положительным Сз и, в конце
концов, покинет сферу действия Земли в случае такого отказа.
Пролет NEO
Рис. 3.10. Потребность ДУ для прерывания миссии в зависимости
от длительности миссии и момента прерывания
Любопытно, что это приводит к неточной границе между классами I
и II с длительностью миссии около 50 дней и TNI Сз около нуля. Это
становится ясным из того, что низкоэнергетическая миссия около этой
границы направит корабль около и/или через WSB-область в системе
Земля-Солнце, которая меняет возмущения, действующие на аппарат,
в зависимости от его положения относительно точек Ц и Lg [8]. Таким
образом, гиперболические TNI могут приводить к геоцентрическим
траекториям в течение месяцев после отказа двигательной системы,
в то время как под-параболические TNI потенциально переводят тра-
екторию в гиперболическую после эффектов WSB-области.
Миссия класса I к 1998 SD9 является одним из таких граничных
случаев. На рис. 3.11 представлена траектория миссии к 1998 SD9,
использующая TNI Сз = —0,15 км2/с2 (А) после отказа двигателей
3.1. Пилотируемые миссии малой продолжительности
119
Траектория корабля
Рис. 3.11. Естественное поведение траектории к 1998 SD9, использующей TN1
Сз = —0,15 км2/с2
Рис. 3.12. Естественное поведение траектории к 1998 SD9, использующей TN1
Сз = +0,25 км2/с2
и пропуска TEI (В). Этот вариант требует малого отрицательного Сз,
и после пропуска TEI корабль будет оставаться на геоцентрической
орбите приблизительно 300 дней прежде, чем уйти на гелиоцентри-
ческую (С). Траектория показана в геоцентрической инерциальной
системе перпендикулярно плоскости экватора. Максимальное расстоя-
ние до Земли в течение геоцентрической стадии — 2,1 млн км.
Для того же случая, изменение условий TNI с Сз — +0,25 км2/с2,
приводит к аналогичному поведению, так как возмущение с гипер-
болической на подпараболическую траекторию вносится другой об-
ластью около границы слабой стабильности (WSB) Земли-Солнца.
Изменяющееся влияние WSB, таким образом, приводит к необходи-
мости анализа траекторий после отказа двигателей в миссиях около
120
Гл. 3. Пилотируемые полеты к околоземным астероидам
вышеописанной границы длительности или Сз на случай непредвиден-
ной ситуации.
Естественное поведение траектории к 1998 SD9 с Сз = +0,25 км2/с2
представлено на рис. 3.12. Траектория показана в геоцентрической
инерциальной системе перпендикулярно плоскости экватора. Исходя-
щее прямое восхождение, требуемое для TNI, изменено с 253° (типич-
ный случай 1998 SD9) до 100°, чтобы показать различные эффекты
WSB-области Земли-Солнца, которая возмущает траекторию от ги-
перболической до под-параболической даже в течение 300-дневного
периода (С), несмотря на максимальное расстояние до Земли почти
в 5 млн км.
3.1.8. Достижение высокого склонения асимптоты. Так как
ни один из классов миссий не накладывает ограничений на возможный
требуемый угол DLA для прямого запуска к астероиду, для некоторых
стартовых площадок может оказаться невозможным выполнить требо-
вание большого склонения асимптоты для конкретной миссии к NEO.
Например, единственным случаем кометы в представленных классах
миссий является 252P/LINEAR от 25 января 2016 г., для которой
требуется |DLA| = 84°.
В то время как запуск с Vandenberg Air Force Base может удовле-
творить этим требованиям для прямого запуска к астероиду, запуск
с космодрома NASA KSC связан со значительными массовыми издерж-
ками, учитывая, что диапазон DLA без потерь составляет от —28,5°
до 28,5°. С другой стороны, корабль, запущенный из KSC, может
выполнить разновидность обратного лунного облета [9] и перейти
в требуемую плоскость для достижения цели, позволяя выполнить
любое требование на DLA. Такой маневр аналогичен выполненному
миссией LCROSS, в который намеренно изменялось наклонение орбиты
для столкновения с южным полюсом Луны на достаточно большой
скорости и небольшим углом падения после многочисленных обратных
облетных орбит [10].
Для достижения 252P/LINEAR запуск из KSC NASA выполняется
за 20 дней до требуемого оптимального по времени TNI для использо-
вания благоприятной геометрии, обеспечивающей лунный облет, тре-
бующий Сз = —1,6 км2/с2 для запуска на обриту для перехода к Луне
(TLI) вместо 1,5км2/с2 для прямого запуска к астероиду. Траектория
показана (рис.3.13) в геоцентрической инерциальной системе перпен-
дикулярно плоскости экватора. Этот 117-дневный вариант миссии клас-
са II требует для прямого TNI |DLA|=84°, что косвенно достигается
кораблем выполнением под-параболического TNI (Сз = —1,6 км2/с2)
5 января 2016 г. для перелета к Луне с |DLA| = 18° (А) с последующим
приполярным (87°) лунным облетом на высоте 1059 км (В) с целью
3.1. Пилотируемые миссии малой продолжительности
121
пролета NEC на 10,7 км/с 21 марта 2016 г. (5,4 млн км от Земли) (С),
и наконец, TEI (ДУ = 1,42 км/с) один день после этого (D) с целью
входа в атмосферу Земли на 11,2 км/с 30 апреля 2016 г. (Е). В то время
как лунный маневр увеличивает длительность миссии до 117 дней
(с 111 дней прямого TNI), требования на TNI Сз и ДУ после TNI
уменьшаются на 3,1 км2/с2 и 90 м/с соответственно.
Рис. 3.13. Траектория лунного облета для 252P/LINEAR
Представленные ограниченные классы миссий приводят к доста-
точному набору вариантов, которые могут быть применены последо-
вательно для успешного осуществления миссии класса III до конца
следующего десятилетия. Отобранные последовательности миссий, вы-
полняют миссию класса III за 2019-2029 гг. Некоторые представлен-
ные последовательности более требовательны по времени чем другие,
но большинство из них завершаются в течение двух-трех лет. Каждую
из этих миссий можно начинать примерно один раз в год.
Примечательна первая последовательность, начинающаяся с миссии
класса I к 2004 BL86 (456-1020 м в диаметре) в 2015 г., включающая
единственную возможность NEC (класса II) к 252P/LINEAR в 2016 г.,
и завершающаяся вариантом класса III к 2008 ЕА9 (8-17 м в диаметре)
в 2019 г. Являясь самой длительной для выполнения (~ 5 лет), эта
последовательность является, бесспорно, самой заманчивой, учитывая
то, что она начинается раньше всего и включает достаточно слож-
ный вариант класса II выполняемый посредством лунного маневра.
Несмотря на отсутствие в этой последовательности «новых полетов»
каждый год, возможность NEC дает два дополнительных преимуще-
ства: корабль будет впервые использовать Луну для гравитационного
маневра для полета к другим объектам (считая, что не используются
122
Гл. 3. Пилотируемые полеты к околоземным астероидам
допускающие большие склонения асимптоты старты вроде Vandenberg)
и станет первым пилотируемым аппаратом, сблизившимся с NEC.
В то время как многие относительно крупные (> 300 м в диаметре)
NEO представлены как цели класса II, может быть разумным выбрать
объект (с хорошо известной орбитой) ближе по размеру к цели класса
III (< 50 м в диаметре), который в целом труднее обнаружить, отсле-
живать и достичь. Это предоставит ценный опыт для первой миссии
класса III.
Кроме приведенных здесь 11 последовательностей миссий суще-
ствует множество различных цепочек для каждого варианта класса
III. Несмотря на то, что может показаться более быстрым перескочить
сразу к миссии класса III, первый и второй классы позволяют снизить
риск полета. Так как миссии класса I и II могут быть реализованы
в ближайшем будущем, можно утверждать, что они могут помочь
ускорить процесс подготовки к миссии класса III, особенно учитывая,
что риск упущенного окна запуска и длительного ожидания следующей
возможности класса III уменьшится после завершения промежуточных
миссий класса I и II. К тому же, инженерная проработка и испытания,
необходимые для миссии класса III, могут происходить одновременно
с реализацией миссий класса I и II.
Так же как Gemini и Apollo совершили несколько полетов, поз-
воливших выполнить Apollo 11, может быть предпочтительным сов-
местить миссии других типов, которые работают вместе для дости-
жения краткосрочных и долгосрочных целей космических исследова-
ний. Такие миссии включают автоматические (предварительные) ис-
следовательские полеты к NEO [11,12], космические обсерватории,
стратегически расположенные (например, в L2 системы Солнце-Ве-
нера [13]) для обнаружения большего числа целей класса III, пило-
тируемые полеты на будущие промежуточные орбиты между Луной
и точками Лагранжа в системе Земля-Солнце, и другие, нацеленные
на долгосрочные перспективы полетов к NEO и прочим межпланетным
объектам.
3.2. Оптимизация орбиты проекта
«Спектр-Рентген-Гамма» (СРГ)
3.2.1. Характеристики орбит в окрестности коллинеарных
солнечно-земных точек либрации. Коллинеарные солнечно-земные
точки либрации L, и L2 находятся на линии Земля-Солнце
на расстоянии примерно 1,5 млн км от центра Земли в направлениях
к Солнцу (Li) и от Солнца (L2). Если космический аппарат
поместить в эти точки со скоростью движения точек (нулевой
в солнечно-эклиптической системе координат), то в идеальном
3.2. Оптимизация орбиты проекта «Спектр-Рентген-Гамма» (СРГ) 123
случае космический аппарат будет оставаться в соответствующей
точке в дальнейшем движении. За солнечно-эклиптическую систему
координат принимается система с началом в центре Земли и осью X,
направленной на Солнце, осью Z, направленной в северный полюс
эклиптики, и осью Y, дополняющей систему до правой тройки.
В реальной ситуации аппарат выводится на орбиту в окрестности
точки либрации и продолжает оставаться на этой орбите при условии
периодических коррекций его скорости. Эти коррекции необходимы
вследствие того, что упомянутые орбиты являются неустойчивыми, т. е.
небольшие отклонения параметров движения от номинальных значений
приводят к экспоненциальному росту амплитуды колебаний расстояния
аппарата от точки либрации.
В первом приближении орбита около точки либрации аппроксими-
руется в плоскости эклиптики (плоскость XY) эллипсом с большой
осью вдоль оси Y, движение вдоль оси Z описывается синусоидальной
функцией времени с частотой, вообще говоря, отличной от частоты
движения в плоскости эклиптики, так что в плоскости YZ имеет место
движение по кривой Лиссажу. Иначе говоря, траектория движения
аппарата в окрестности коллинеарных точек либрации в общем случае
незамкнутая. Период движения аппарата в плоскости XY составляет
около полугода и близок к периоду движения вдоль оси Z, это демон-
стрирует рис. 3.15.
Рис. 3.15. Траектория перелета КА проекта СРГ в окрестность солнечно-
земной точки либрации 1.2 в плоскости XY (при старте 22.03.14)
Максимальная амплитуда орбиты реализуется, как указано выше
(большая полуось), вдоль оси Y, в случае одноимпульсного выведения
на орбиту при старте с низкой околоземной орбиты эта амплитуда
составляет более 750000км. Под одноимпульсным подразумевается
124
Гл, 3. Пилотируемые полеты к околоземным астероидам
Рис. 3.16. Траектория перелета КА проекта СРГ в окрестность солнечно-
земной точки либрации Ьг в плоскости YZ (при старте 22.03.14)
X, тыс. км
Рис. 3.17. Траектория перелета КА проекта СРГ в окрестность солнечно-земной
точки либрации Ьг в плоскости YZ после маневра (при запуске 22.03.14)
перевод аппарата на траекторию, двигаясь вдоль которой, аппарат
попадает в окрестность точки либрации и остается там после сообще-
ния ему единственного импульса скорости на промежуточной низкой
орбите спутника Земли.
Для получения меньших амплитуд орбиты необходимо сообщить
аппарату импульс скорости, величина которого зависит от требуемого
изменения амплитуды, причем эта зависимость практически линейная.
Так, если при одноимпульсном переходе на орбиту около точки либ-
рации получается амплитуда 800000 км, то для снижения ее до нуля
нужен импульс, равный 300 м/с; для получения амплитуды вдоль оси
Y в 300000 км необходимо сообщить аппарату импульс в 187,5 м/с.
3.2. Оптимизация орбиты проекта «Спектр-Рентген-Гамма» (СРГ) 125
Рис. 3.18. Траектория перелета КА проекта СРГ в окрестность солнечно-
земной точки либрации L2 в плоскости YZ до маневра (при запуске 22.06.14)
Рис. 3.19. Траектория перелета КА проекта СРГ в окрестность солнечно-
земной точки либрации L2 в плоскости YZ после маневра (при запуске
22.06.14)
На рис. 3.16 и 3.17 реализовано уменьшение амплитуды по оси Z
с 370000км практически до нуля. Импульс 125 м/с был сообщен через
68,5 дней, когда аппарат пересекал плоскость эклиптики.
На рис. 3.18 и 3.19 реализовано поднятие орбиты по оси Z
с —300000 км до —150000 км. Как показано на рис. 3.20, это позво-
ляет значительно увеличить видимость аппарата со станции слежения
в Уссурийске. Импульс 191 м/с сообщается аппарату через 7,5 дней
после запуска КА.
126
Гл. 3. Пилотируемые полеты к околоземным астероидам
Дата, месяц/день/год
Рис. 3.20. Интервал времени видимости аппарата в часах в день: сплошная
линия — до маневра по уменьшению амплитуды, штриховая — после маневра
по уменьшению амплитуды. Импульс 191 м/с через 7,5 дней
3.2.2. Преимущества орбиты около Ьг для целей проведения
астрофизических экспериментов на борту космических аппара-
тов. Расположение аппаратов вблизи точки либрации L2 дает ряд
заметных преимуществ по сравнению с орбитами спутников Земли.
С одной стороны, будучи на достаточном расстоянии от Земли, аппа-
рат позволяет в значительной степени избежать влияния Земли как
помехи на работу приборов. Это относится, например, к тепловому
воздействию: поскольку Земля и Солнце находятся (в случае малой
амплитуды орбиты) почти на одной линии с аппаратом, от них мож-
но закрыться одним тепловым экраном, как это планируется сделать
в проекте JWST. Кроме того, ввиду сравнительно малого изменения
угла аппарат-Земля-Солнце тепловой режим аппарата может поддер-
живаться максимально стабильным без каких-либо усложнений в сис-
темах терморегулирования. Это же преимущество распространяется
и на системы энергоснабжения аппарата.
Существенно также снижение радиационного фона, поскольку ап-
парат находится далеко за пределами радиационных поясов Земли.
Тот факт, что аппарат должен передавать телеметрическую инфор-
мацию на наземные станции на расстояниях больших, чем при исполь-
зовании орбит спутников Земли, не приводит к заметным техническим
трудностям. Задача легко решается установкой направленной антен-
ны с относительно широкой диаграммой направленности. Так, если
установить антенну с полууглом диаграммы направленности, равным
2°, то возможности по скорости передачи информации при равной
мощности и одинаковых наземных системах в нашем случае такие же,
как в случае аппарата на геостационарной орбите с всенаправленной
3.2. Оптимизация орбиты проекта «Спектр-Рентген-Гамма» (СРГ) 127
(полусфера) антенной. Причем при полете на орбите с амплитудой
300000 км потребуется перенаводить аппарат на Землю не чаще 10 раз
в полгода с поворотами оси аппарата не более 4° при каждом маневре,
суммарное отклонение оси аппарата от направления на Солнце не пре-
высит 11°.
Перечисленные особенности орбиты около либрационной точки L2
позволили сделать выбор в ее пользу для многих зарубежных проек-
тов, таких как: WMAP, Herschel, Planck, JWST, GAIA, XEUS (IXO),
PLATO, Euclid. В НПО им. Лавочкина в девяностые годы разрабаты-
вался проект «Реликт-2» для проведения исследований анизотропии
реликтового излучения. В соответствии с этим проектом планировался
запуск космического аппарата в окрестность точки L2 с использова-
нием гравитационного маневра у Луны для уменьшения амплитуды
орбиты.
3.2.3. Сценарий выведения аппарата на рабочую орбиту с ис-
пользованием ракеты-носителя «Союз». Для выведения аппарата
на орбиту около точки либрации L2 планируется использовать ракету-
носитель «Союз» с разгонным блоком «Фрегат» (в модификации с уве-
личенными баками). Как показали соответствующие исследования,
проведенные в НПО им. Лавочкина и ПКИ РАН, оптимальным по мас-
се доставляемого на рабочую орбиту аппарата является следующий
сценарий, разработанный на ранних этапах планирования миссии:
• PH «Союз» выводит головной блок в составе «Фрегата» и ап-
парата на незамкнутую орбиту (т. е. на орбиту с перигеем ниже
поверхности Земли);
• головной блок отделяется, и включается двигатель «Фрегата»,
который завершает выведение головного блока на низкую круго-
вую орбиту высотой 200 км и наклонением 51,8° (старт из Байко-
нура), масса головного блока на этот момент составляет 8740 кг,
что заметно превышает массу в 8150 кг, доставляемую на ту же
орбиту без использования «доразгона» «Фрегатом»;
• головной блок совершает пассивный полет вплоть до достиже-
ния расчетной точки второго включения двигателя «Фрегата»,
при этом поддерживается требуемая ориентация головного блока,
на этом участке с помощью наземных траекторных измерений
и данных GPS уточняются параметры полученной орбиты и вно-
сятся соответствующие поправки в программу работы двигателя
на следующем активном участке;
• производится второе включение двигателя «Фрегата», который
работает примерно 400 секунд до выключения, обеспечивая выве-
дение головного блока на промежуточную эллиптическую орбиту
с апогейным расстоянием 11 878 км и большой полуосью 9216 км,
128
Гл. 3. Пилотируемые полеты к околоземным астероидам
масса головного блока в момент выключения двигателя составля-
ет 6331 кг;
• головной блок движется в пассивном режиме с поддержанием
ориентации вплоть до достижения района перигея через при-
мерно 2,2 часа, когда производится третье включение двигателя
на примерно 501 секунду, которое выводит аппарат на траекторию
пролета в окрестности Луны с параметрами, обеспечивающими
попадание аппарата на рабочую орбиту в окрестности L2;
• аппарат отделяется от разгонной ступени «Фрегат», после чего
активируются все системы аппарата, начиная с раскрытия солнеч-
ных батарей, масса аппарата (без переходника между аппаратом
и «Фрегатом») составляет при этом 2218 кг;
• производятся траекторные измерения с помощью наземных стан-
ций и определяются параметры полученной орбиты,
• вычисляются параметры первого корректирующего импульса для
обеспечения необходимой орбиты пролета Луны и примерно через
сутки после старта выполняется коррекция с величиной импульса
не более 20 м/с, при этом расходуется около 20 кг гидразина;
• далее до пролета Луны производится еще 1-2 коррекции с сум-
марным расходом гидразина около 7 кг, перед каждой коррекцией
выполняются серии сеансов траекторных измерений;
• после пролета Луны вплоть до попадания на орбиту Лиссажу
около точки либрации производятся сеансы траекторных измере-
ний и коррекций параметров траектории с суммарным расходом
на этом участке полета около 10-13 кг гидразина, последняя
коррекция производится примерно за 3-4 дня до пересечения
аппаратом плоскости XZ.
Приведенные в сценарии выведения аппарата на рабочую орбиту
оценки массы головного блока и аппарата сделаны в предположении,
что двигатель «Фрегата» имеет тягу 2 тонны и удельный импульс,
равный 332 секундам, направление вектора тяги двигателя предпола-
гается совпадающим с вектором скорости головного блока. Двигатель
аппарата работает на гидразине и имеет удельный импульс 225 секунд.
Масса «Фрегата» в момент отделения аппарата полагалась равной
1070 кг (вариант с увеличенными баками).
В связи с планируемым гравитационным маневром у Луны появля-
ются ограничения на возможные даты старта, оценки показывают, что
окна старта составляют 2 суток в течение каждого месяца.
В случае отказа от гравитационного маневра у Луны и при сохра-
нении требования по величине амплитуды окололибрационной орбиты
(300000 км) масса полезной нагрузки должна быть уменьшена пример-
но на 190 кг.
3.2. Оптимизация орбиты проекта «Спектр-Рентген-Гамма» (СРГ) 129
Коллинеарные солнечно-земные точки либрации Ц и L2 находятся
на линии Земля-Солнце на расстоянии примерно 1,5 млн км от центра
Земли в направлениях к Солнцу (Ц) и от Солнца (L2).
Заметим, что в настоящее время прорабатывается вариант запуска
СРГ с помощью ракеты-носителя Зенит, что дает возможность суще-
ственно увеличить массу полезной нагрузки. В этой связи целесооб-
разно рассмотерть альтернативные облету Луны варианты построения
орбиты в окрестности солнечно-земной точки либрации L2.
3.2.4. Операции управления движением на орбите около точки
либрации L2. Движение в окрестности точки либрации L2 является
неустойчивым. Это означает, что без управляющих воздействий аппа-
рат неизбежно покинет окрестность точки. Поэтому для удержания
аппарата на орбите требуются периодические коррекции параметров
орбиты, а именно вектора скорости аппарата. Частота и величина
этих коррекций зависит от точности определения параметров орби-
ты и точности исполнения корректирующих импульсов. Результаты
проведенных исследований и имеющийся опыт реализации полетов
в окрестности солнечно-земных коллинеарных точек либрации пока-
зывает, что достаточно расходовать около 1,5м/с характеристической
скорости в год (суммарно) (что соответствует 1,5 кг гидразина) при
частоте импульсов один раз в месяц, чтобы обеспечить удержание
аппарата около точки либрации. Большим преимуществом этих ма-
невров является отсутствие необходимости специальных разворотов
аппарата для исполнения корректирующих маневров: достаточно на-
правлять вектор тяги вдоль вектора направления на Солнце. Таким
образом, если корректирующие двигатели установлены таким образом,
что их тяга направлена ортогонально поверхности солнечных батарей
к Солнцу и от Солнца, то этого достаточно для проведения корректи-
рующих маневров без дополнительных разворотов. Потери в характе-
ристической скорости при этом не превышают 15%.
Таким образом, для решения задачи удержания аппарата на за-
данной орбите в течение заданных 5 лет операций необходимо 7,5 кг
гидразина.
Однако помимо решения этой задачи необходимо обеспечить непо-
падание аппарата в тень Земли в течение всего периода его функ-
ционирования. Как показали исследования этой проблемы, имеется
возможность такого выбора начальной орбиты, при котором аппарат
не будет заходить в тень Земли в течение 6 лет. После этого требуется
выполнить маневр изменения орбитальных параметров, позволяющий
аппарату обходить тень в течение последующих 6 лет. Величина им-
пульса скорости для такого маневра составляет 16 м/с. При формиро-
вании начальной орбиты, не заходящей в тень в течение 6 лет, может
5 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
130
Гл. 3. Пилотируемые полеты к околоземным астероидам
потребоваться импульс, не превосходящий этой величины. Таким обра-
зом, следует предусмотреть запас гидразина, соответствующий приве-
денной величине характеристической скорости, позволяющей избежать
попадания аппарата в тень, равный 16 кг.
Суммарно мы получаем, масса гидразина на борту аппарата, необ-
ходимая для орбитальных маневров при реализации миссии, состав-
ляет 63,5 кг. Ее можно уменьшить на 16 кг, если будет подтверждена
возможность выведения аппарата на орбиту, не заходящую в тень без
дополнительных маневров в течение первых 6 лет полета.
Следует также учесть массу гидразина для проведения управления
ориентацией в процессе разгрузки маховиков. Однако следует отме-
тить, что есть возможность снизить эти затраты за счет оптимального
совмещения орбитальных маневров и разгрузки маховиков системы
ориентации. Кроме того, возможна значительная экономия гидразина
путем оптимальной компоновки аппарата, минимизирующей внешние
моменты, порождаемые силами солнечного давления.
3.2.5. Возможные длительности сеансов связи с аппаратом
с наземных станций управления и приема телеметрической ин-
формации. Предполагалось, что в ходе выполнения миссии будут
использоваться станции дальней связи «Медвежьи озера» (56° с, ш,,
38° в. д.) и в Уссурийске (43,8° с. ш., 132° в. д.).
Минимальный угол места, при котором возможна связь с аппара-
том, принимался равным 5°.
Для случая, когда аппарат находится в плоскости эклиптики, мак-
симальное время видимости из «Медвежьих озер» достигается в день
зимнего солнцестояния 22 декабря и составляет 15,78 часа. Если аппа-
рат в эту дату имеет склонение 4° относительно эклиптики, то интер-
вал видимости увеличивается до 16,88 часа, при —4° — уменьшается
до 14,81 часа. В день летнего солнцестояния интервал видимости
достигает минимальных величин: для аппарата в эклиптике 4,73 часа
и для случаев ±4° этот интервал 6,18 и 2,49 часа соответственно.
Для станции в Уссурийске эти же величины, приводимые в той же
последовательности, что и для «Медвежьих Озер», составляют 14,21,
14,83 и 13,62 часа для дня зимнего солнцестояния и 7,56, 8,28 и 6,74
часа для дня летнего солнцестояния.
В дни равноденствия интервалы видимости составляют для «Мед-
вежьих Озер» 10,80, 11,60 и 9,99 часа; для Уссурийска эти величины
равны 11,07, 11,59 и 10,55 часа.
Из приведенных цифр видно, что с учетом разности долготы стан-
ций в наименее благоприятный сезон вблизи летнего солнцестояния
эти станции обеспечивают непрерывную связь с аппаратом в течение
Список литературы к главе 3
131
более чем 12,75 часа, если аппарат находится в плоскости эклиптики
и выше.
В наиболее благоприятный сезон вблизи дня зимнего солнцестоя-
ния непрерывная связь с аппаратом может длиться более чем 21,5 часа.
Следует отметить, что имеется возможность оптимизировать орбиту
с целью получения максимального времени видимости в течение года
за счет выбора сезона запуска аппарата. При этом, как показывают
предварительные оценки, лучшими являются даты запуска, при ко-
торых аппарат, двигаясь по орбите Лиссажу, достигает минимальных
эклиптических склонений вблизи дней весеннего и осеннего равноден-
ствий. Однако такой подход приводит к сокращению допустимых окон
запуска аппарата по датам в течение года [14, 15].
Список литературы к главе 3
1. Cole DM. and Сох D.W. Islands in Space, The Challenge of the
Planetoids. Philadelphia, PA: Chilton Co., 1964.
2. Augustine N. et al. Report of U.S. Human Spaceflight Plans Com-
mittee, Augustine Commission Report, http://www.nasa.gov/pdf/
396093main_HSF_Cmte_FinalReport.pdf
3. Landis R.R. et al. A Piloted Orion Flight to a Near-Earth Object:
A Feasibility Study Ц AIAA Paper 2007-6168, AIAA SPACE 2007
Conference & Exposition, Long Beach, CA, Sep. 18-20, 2007.
4. Hopkins J.B. and Dissel A.F. Plymouth Rock: Early Human Mis-
sions to Near Earth Asteroids Using Orion Spacecraft // AIAA
Paper 2010-8608, AIAA SPACE 2010 Conference & Exposition,
Anaheim, CA, Aug. 30-Sep. 2, 2010.
5. Foster C. and Daniels M. Mission Opportunities for Human Ex-
ploration of Nearby Planetary Bodies // AIAA Paper 2010-8609,
AIAA SPACE 2010 Conference & Exposition, Anaheim, CA, Aug.
30-Sep. 2, 2010.
6. Giorgini J.D. Horizons On-Line Ephemeris System, 2009, http://
ssd.jpl.nasa.gov/?horizons [retrieved Sep. 1, 2011].
7. Smith E.A. A Manned Flyby Mission to Eros. Proceedings of the
Third Space Congress: The Challenge of Space, pp. 137-155; paper
presented at the Third Space Congress in Cocoa Beach, Florida,
Mar. 7-10, 1966.
8. Penzo P.A. et al. Multiple Lunar Swingbys for Small Body and
Planetary Missions // AAS Paper 95-147, A AS/ AIAA Space flight
Mechanics Meeting, Albuquerque, NM, Feb. 13-16, 1995.
9. Uphoff C. The Art and Science of Lunar Gravity Assist 11 Advances
in the Astronautical Sciences, 1989. V. 69. P. 333-346.
132
Гл. 3. Пилотируемые полеты к околоземным астероидам
10. Galal К. et al. Trajectory Design and Orbit Determination for the
Lunar CRater Observation and Sensing Satellite (LCROSS) // 20th
International Symposium on Space Flight Dynamics, Annapolis,
MD, Sep. 2007.
11. Genova A.L. et al. Low-Thrust Transfers from Sun-Synchronous
Orbits to Lagrange Points and Near-Earth Objects 11 New Trends in
Astrodynamics and Applications VI — An International Conference,
New York, NY, June 6-8, 2011.
12. Chartres J.T.A. et al. Innovative Mission Design to Characterize
99942 Apophis // 1st IAA Planetary Defense Conference: Protecting
Earth from Asteroids, Granada, Spain, Apr. 27-30, 2009.
13. Dunham D.W. and Genova, A.L. Interior Earth Object Detection
via a Halo-Orbiting Space Observatory in the Sun-Venus System //
1st IAA Planetary Defense Conference: Protecting Earth from As-
teroids, Granada, Spain, Apr. 27-30, 2009.
14. Proceedings of the Conference Libration Point Orbits and Applica-
tions. Edited by Gerard Gomez, Martin W. Lo, Josef J. Masdemont.
World Scientific Publishing Co. Pte. Ltd., 2003.
15. Eismont N., Dunham D., Jen Sh-C., Farquhar R. Lunar Swingby
as a Tool for Halo-Orbit Optimization in Relict-2 Project. Proceed-
ings of the ESA Symposium on Spacecraft Flight Dynamics, held
in Darmstadt, Germany, 30 September - 4 October 1991 (ESA
SP-326, December 1991).
16. Leonel Rios-Reyes Solar Sails: Modeling, Estimation, and Trajec-
tory Control. A Dissertation Submitted in Partial Fulllment of the
Requirements for the Degree of Doctor of Philosophy (Aerospace
Engineering) in The University of Michigan, 2006.
17. The Interstellar Probe (ISP): Pre-Perihelion Trajectories and Appli-
cation of Holography I G.L. Matloff [and others], — NASA, 2002.
18. Vulpetti G. Overview of Advanced Space Propulsion via So-
lar Photon Sailing [Electronic resource] I G. Vulpetti 11 Inter-
national Academy of Astronautics. 2005. Access mode: http://
nuke.giovannivulpetti.it/SolarSailing/tabid/56/Default.aspx. — Title
screen.
19. Мамонтов Д. На зеркальных парусах I Д. Мамонтов 11 Популяр,
механика. 2006. Февр. С. 27-32.
20. Презентация Small Solar Power Sail Demonstration [Электронный
ресурс] // Сайт аэрокосмического агентства Японии JAXA. —
2010. — Режим доступа: http://www.jaxa.jp/pr/brochure/pdf/04/
sat28.pdf. — Загл. с экрана.
Список литературы к главе 3
133
21. Osamu Mori, Yuichi Tsuda, Hirotaka Sawada, Ryu Funase,
Takayuki Yamamoto, Takanao Saiki, Katsuhide Yonekura, Hi-
rokazu Hoshino, Hiroyuki Minamino, Tatsuya Endo, Junichiro
Kawaguchi and IKAROS Demonstration Team JAXA Exploration
Center, Japan Aerospace Exploration Agency (Japan). Second In-
ternational Symposium on Solar Sailing, New York, 2010. Report
on Deployment Solar Power Sail Mission of IKAROS.
22. Сурдин В.Г. Эффект инженера Ярковского / В.Г. Сурдин // При-
рода. - 2004. № 11. С. 91-96.
Глава 4
РАЗРАБОТКА МЕТОДОВ УПРАВЛЕНИЯ
ОРБИТАЛЬНЫМ ДВИЖЕНИЕМ
ДЛЯ ТРАЕКТОРИЙ
В ОКРЕСТНОСТИ ТОЧЕК ЛИБРАЦИИ
В настоящее время все большее применение в космических иссле-
дованиях получают не единичные аппараты, а группировки, состоящие
из нескольких аппаратов. В плазменных исследованиях это позво-
ляет разрешать задачу пространственно-временной неопределенности
измеряемых параметров. В астрофизических исследованиях такой под-
ход позволяет строить телескопы с большим фокусным расстоянием,
вплоть до десятков метров. В качестве примера последнего можно
сослаться на проект XEUS (к настоящему времени отмененный в силу
проблем с финансированием). Далее проблема исследуется на примере
упомянутого проекта. Одной из ключевых проблем XEUS является
поддержание заданного относительного положения аппарата, несущего
зеркало телескопа и аппарата с приемником рентгеновского излучения.
Как альтернатива традиционным реактивным двигателям предлагаются
солнечные паруса с управляемыми отражательными характеристиками.
Ясно, что предлагаемая концепция построения сверхдлиннофокус-
ного телескопа в космосе легко распространяется на случай, когда
требуется применение аппаратов очень больших размеров.
Показано, что такие паруса площадью в несколько квадратных
метров, состоящие из двух слоев: жидкокристаллической пленки и зер-
кально отражающей фольги, могут быть использованы для управления
относительным положением аппаратов телескопа.
Для проведения исследований космические аппараты группировки
должны находиться в заданных положениях относительно друг друга.
Это означает, что линия наблюдений TL, направленная к выбранной
точке на небе, должна проходить через оптические центры аппарата
с приемником рентгеновского излучения Detector Spacecraft (DSC)
и аппарата, несущего зеркало телескопа, Mirror Spacecraft (X1SC).
4.1. Возмущающие гравитационные силы
135
Точность взаимного положения определяется сферой радиусом
1 мм. Вместо упомянутых оптических центров в нашем исследовании
предлагается рассматривать центры масс космических аппаратов.
В работе изучается возможность применимости ряда устройств для
поддержания требуемого относительного положения космических аппа-
ратов с учетом расчетных возмущающих сил. Одним из таких инстру-
ментов может стать солнечный парус с управляемыми отражательными
характеристиками.
4.1. Возмущающие гравитационные силы
Хорошо известен тот факт, что первоначально для проекта XEUS
была предложена сравнительно низкая круговая околоземная орбита.
Однако впоследствии была выбрана орбита в окрестности коллинеар-
ной точки либрации L2 системы Солнце-Земля.
Одной из основных причин для данного решения послужил слиш-
ком высокий уровень возмущающих гравитационных сил, действую-
щих на аппараты группировки XEUS на низкой круговой околоземной
орбите. Эти силы изменяются обратно пропорционально кубу рассто-
яния от центра Земли до космического аппарата и прямо пропорцио-
нально расстоянию между центрами масс.
Точка либрации L2 лежит на прямой Солнце-Земля, примерно
на расстоянии 1,5 млн км от Земли, располагаясь на противоположной
от Солнца стороне [1]. А это означает, что гравитационные возмуще-
ния, действующие на аппарат в данной точке, практически в 10 млн раз
меньше, чем на 600 км круговой орбите.
С целью получения более точной оценки был выполнен ряд вы-
числений для орбиты в окрестностях точки L2 с большой амплитудой
и следующими начальными оскулирующими параметрами:
Большая полуось 720 526,8 км
Эксцентриситет 0,99
Наклонение 65°
Долгота восходящего узла 0
Аргумент перигея 0
Аргумент широты 0
Дата начала отсчета 22.01.09
Время начала отсчета 00 UT
136 Гл. 4. Разработка методов управления орбитальным движением
Орбита около точки либрации, отвечающая заданным параметрам,
представлена на'рис. 4.1 в солнечно-эклиптической системе координат
с началом отсчета в центре Земли, осью X, направленной к Солнцу,
и Y, лежащей в плоскости эклиптики.
Рис. 4.1. Орбита космического аппарата в солнечно-эклиптической системе
координат после запуска с низкой околоземной орбиты, х 106 км (в прямоуголь-
никах указаны дни с момента старта с низкой околоземной круговой орбиты)
Это одноимпульсная орбита, т. е. для выведения космического ап-
парата с низкой околоземной орбиты на орбиту около точки либрации
необходим только один импульс скорости. В этом случае расход топ-
лива минимален, а амплитуды орбит около точек либрации вдоль осей
X и Y максимальны.
4.1. Возмущающие гравитационные силы
137
| 30 OdJ |100d| 200d| 114d|
-0,2 \ 0 0,2
250d ’’ 50d| 345d|~
150d
-0,2
Рис. 4.2. Относительное ускорение свободного падения MSC и DSC в сол-
нечно-эклиптической системе координат (х 1О-10 м/с2), TL направлена вдоль
вектора скорости Солнца
Рис. 4.3. Относительное ускорение свободного падения MSC и DSC в инер-
циальной системе координат (х 1О-10 м/с2), TL направлена вдоль вектора
скорости Солнца
138 Гл. 4. Разработка методов управления орбитальным движением
|150d|
0,2
Тз45Я
-0,2 Х^2( )0d| 0 1100d| 0,2
[5 jd? |~250d] 300d |
[i4d]
-0,2
Рис. 4.4. Относительное ускорение свободного падения MS С и DSC в инерци-
альной системе координат (х1(У 10 м/с2), TL направлена вдоль оси X в инер-
циальной системе координат
Для задач запланированного эксперимента большие амплитуды
не так удобны, однако для оценки гравитационных возмущений этот
вариант представляет собой предельный случай, т. е. значения возму-
щающих сил здесь максимальны.
Математическая модель, применяемая для расчета орбиты, учиты-
вает гравитационные силы Земли (гравитационное поле представляется
в виде полиномов Лежандра, до второй степени), Солнца и Луны.
Для расчетов расстояние между центрами масс MSC и DSC прини-
малось равным 40 м. Предполагалось также, что космические аппараты
представляют собой сферы.
4.1. Возмущающие гравитационные силы
139
Рис. 4.5. Относительное ускорение свободного падения MSC и DSC в солнечно-
эклиптической системе координат (х 1О~10 м/с2), TL направлена вдоль оси X
в инерциальной системе координат
Рис. 4.6. Относительное ускорение свободного падения MSC и DSC в инерци-
альной системе координат (х1О~10 м/с2), TL направлена вдоль оси Y в инер-
циальной системе координат
140 Гл. 4. Разработка методов управления орбитальным движением
Рис. 4.7. Относительное ускорение свободного падения MSC и DSC в солнечно-
эклиптической системе координат (х 1О-10 м/с2), TL направлена вдоль оси Y
в инерциальной системе координат
Согласно предложенной схеме наблюдений прямая зеркало-прием-
ник, т. е. линия наблюдения TL, проходит в непосредственной близости
(примерно ±10°) от плоскости ортогональной направлению на Солнце.
А, следовательно, наиболее существенным для расчета гравитацион-
ных возмущений является тот случай, когда MSC и DSC расположены
вдоль осей У и Z в солнечно-эклиптической системе координат.
Случай с осью У представлен на рис. 4.2 и 4.3. На этом и других
рисунках ось X горизонтальна, ось У вертикальна, за исключением
рис. 4.8, где ось У горизонтальна, а ось Z вертикальна.
Для получения более четкого представления о действующих грави-
тационных возмущениях рассмотрены также следующие случаи:
• TL направлена вдоль оси X в инерциальной системе координат
(рис. 4.4 в инерциальной системе координат, рис. 4.5 в солнечно-
эклиптической системе координат);
• TL направлена вдоль оси У в инерциальной системе координат
(рис. 4.6 в инерциальной системе координат, рис. 4.7 в солнечно-
эклиптической системе координат);
• TL направлена вдоль по направлению к северному полюсу эк-
липтики (рис. 4.8 в YZ, рис. 4.9 XY в солнечно-эклиптической
системе координат).
4.1. Возмущающие гравитационные силы
141
Рис. 4.8. Относительное ускорение свободного падения MSC и DSC в инерци-
альной системе координат (х 1О-10 м/с2), TL направлена вдоль по направлению
к северному полюсу эклиптики
Как видно из приведенных рисунков, относительное ускорение
не превышает 0,4- Ю-10м/с2 и имеет ненулевые компоненты в направ-
лении всех трех осей X, Y и Z. Рассчитанные значения компонентов
ускорения довольно малы, но для достижения требуемой точности
позиционирования линии наблюдения эти возмущения не могут быть
проигнорированы. Например, за 1000 с при постоянном ускорении,
равном установленному ранее предельному значению 0,4- Ю-10м/с2,
космический аппарат сместится относительно расчетного положения
на 2 мм.
Посредством линейной экстраполяции результаты, полученные
для расстояния 40 м между центрами масс космических аппаратов
(рис. 4.2-4.9), могут быть распространены на большие расстояния.
В этом случае точность расчетов может считаться приемлемой
при расстоянии между центрами масс космических аппаратов
до нескольких сотен километров.
142 Гл. 4. Разработка методов управления орбитальным движением
Рис. 4.9. Относительное ускорение свободного падения MSC и DSC
в солнечно-эклиптической системе координат (х 1О-10 м/с2), TL направлена
вдоль по направлению к Северному Полюсу Эклиптики
4.2. Негравитационное возмущение
Воздействие солнечного излучения осуществляется посред-
ством [2]:
• отражения фотонов,
• поглощения фотонов,
• повторного излучения поглощенной энергии.
Отражение фотонов может быть зеркального типа — угол падения
фотона равен углу отражения. Давление Р, создаваемое солнечным
излучением, в этом случае равно интенсивности излучения R, прохо-
дящего через единицу эффективной площади отражения (ортогонально
направлению излучения), деленной на скорость света и умноженной
на 2 cos2 р, т. е.:
Р = 2R- cos2 р/с,
где р — угол между нормалью к поверхности и направлением из-
лучения. Направление давления совпадает с направлением нормали
к поверхности.
В случае полного поглощения падающие фотоны производят давле-
ние R сояр/с равное силе, действующей на единицу площади поверх-
ности и направленной вдоль вектора скорости.
Если тип отражения является диффузным, то давление равно сумме
двух векторов: один направлен вдоль потока излучения и равен R. х
х сояр/с, другой — вдоль нормали к поверхности и равен R/3/с.
4.2. Негравитационное возмущение
143
Энергия, поглощаемая поверхностью, излучается обратно в про-
странство. Процесс повторного излучения порождает реактивные силы.
Если обозначить интенсивность излучения с единицы поверхности
через Rb, тогда реактивное давление, возникающее вследствие из-
лучения, составит Ль/З/с (пространственное распределение фотонов
предполагается таким же, как и в случае отражения диффузного типа).
Распределение Rb по поверхности пропорционально температуре
поверхности в четвертой степени, которая в свою очередь зависит
от многих факторов, таких как теплоизоляция, тип питания приборов
и т. д.
Электрическая мощность солнечных батарей DSC равна примерно
2,5 кВт, а значит, эта энергия будет излучаться как тепловая прибора-
ми космического аппарата. Предположим, что тепловая энергия излу-
чается только одной лицевой поверхностью (предельный случай), тогда
реактивная сила будет равна 2,78 • 10-6 Н, а ускорение возмущающей
силы для 2200 кг DSC составит 1,26- 10“9 /с2, т. е. в 31,5 раз больше,
чем значение возмущения от градиента гравитации.
Излучение в радиодиапазоне может также порождать реактивные
возмущающие силы (помимо рассмотренного повторного теплового из-
лучения). Для остронаправленных антенн реактивная сила может быть
приблизительно оценена по формуле Rr/c, где Rr — мощность излу-
чения. Например, если Rr = 40 Вт (наиболее правдоподобная оценка
для XEUS), то реактивная сила будет равна F = 0,129 10 ~6 Н. Тогда
ускорение 2200 кг DSC составит 0,584 • 10-1° м/с2, что в 1,5 раза боль-
ше, чем максимальное значение силы гравитационных возмущений.
Очевидно, что описанные возмущения увеличивают те, которые
возникают из-за разницы в ускорениях, обусловленной отношением
площади поперечного сечения к массе для DSC и MSC. Из этого
следует основное требование к конструкции космических аппаратов
группировки: добиться одинаковой степени облученности, порожда-
ющей ускорения, обоих космических аппаратов по крайне мере для
случая расчетного взаимоположения и угловой ориентации.
Системы космического аппарата, такие как системы ориентации
и управления двигательной установкой, так же как и охлаждающие
устройства, являются неизбежными источниками дополнительных воз-
мущений вследствие утечки газа. Для оценки данных ускорений необ-
ходимо провести анализ предыдущих миссий.
Условимся считать данные возмущения пренебрежительно малыми
по сравнению с возмущениями, возникающими по причине солнечного
излучения.
144 Гл. 4. Разработка методов управления орбитальным движением
4.3. Управление группировкой XEUS
посредством солнечных парусов
Пусть управление ориентацией космических аппаратов XEUS осу-
ществляется обычным образом, т. е. посредством гидразиновых ракет-
ных двигателей малой тяги и маховиков. Периодическое включение
реактивных двигателей (полный импульс за год для каждого из аппа-
ратов около 1 м/с, и корректирующие маневры 1-2 раза в месяц) обес-
печивает поддержание аппаратов на орбите около точки либрации [3].
Использование подобных средств возвращает аппараты в первоначаль-
но заданные положения с известной заранее точностью.
Для целей поддержания и постепенного изменения взаимопо-
ложения космических аппаратов предлагается использовать другой
инструмент [4]. Его предположительный внешний вид представлен
на рис. 4.10 на цветной вклейке, он представляет собой три плоские
поверхности, смонтированные под некоторым углом Ф друг другу. Эти
поверхности играют роль солнечных парусов, и каждый из них состоит
из двух слоев (см. рис. 4.11).
Первый слой представляет собой жидкокристаллическую пленку,
изменяющую свою прозрачность при подаче электрического напряже-
ния (при подаче напряжения она непрозрачна, в противном случае —
прозрачна).
Второй слой (находящийся под первым, вторым от Солнца) — это
зеркально отражающая фольга.
Таким образом, если подать напряжения на первый слой, он станет
непрозрачным и, в идеальном случае (парус поглощает солнечное из-
лучение), вектор результирующей силы будет направлен вдоль вектора
скорости падающих фотонов (Р — R - cos<p/c).
В отсутствие напряжения (пленка прозрачна) фольга выступит
в качестве отражающей поверхности и в идеальном случае вектор
результирующей силы будет ортогонален поверхности паруса (P-Rx
х cos2 99/с).
Для простоты будем считать, что Ф = 45°. За номинальный случай
(управляющие воздействия отсутствуют) примем ситуацию, когда по-
верхность S| полупрозрачна, поверхности 5г, S3 непрозрачны.
Снятие напряжения с поверхности S2 не повлечет за собой измене-
ние значения проекции F2x, однако проекция F>y, до этого равняю-
щаяся нулю, станет равной
F2Y = F2X = -к S'2,
что приведет к возникновению ускорения вдоль оси Y.
4.3. Управление группировкой XEUS посредством солнечных парусов 145
Жидкокристаллическая
пленка (прозрачная)
Фольга зеркала
Жидкокристаллическая
пленка (непрозрачная)
Фольга зеркала
Рис. 4.11. Принцип функционирования солнечного паруса, для случаев
прозрачной (а) и непрозрачной пленки (б)
Очевидно, что, используя такой же подход для поверхности S3
можно изменить направления вектора ускорения на противоположное.
Если необходимо получить вектор ускорения, направленный в сто-
рону +Х, то достаточно изменить соотношение прозрачной и непро-
зрачной частей поверхности Si, увеличив непрозрачную часть. Мак-
симальное значение силы для случая, представленного на рис. 4.10,
составляет Fx = 2k S'2.
Другими словами, подача напряжения на всю поверхность Si из-
меняет значение проекции вектора силы на ось X на Fx = +2k S2.
В противоположном случае (поверхность S, находится под нулевым
напряжением) значение проекции вектора силы на ось X изменяется
на Fx = —2k S2.
Добавление большего числа наклонных поверхностей, полученных
вращением S2 и S3 на 90° вокруг оси X, позволит получить ускорение
вдоль оси Z.
Для оценки необходимой площади парусов предположим, что ошиб-
ка в определении силы солнечного излучения составляет ±10%. Пло-
щадь солнечных батарей DSC для указанного электрического напря-
жения предполагается равной 12 м2, а площадь полного поперечного
сечения, ортогонального направлению на Солнце, 15 м2. Тогда в пред-
положении полного поглощения фотонов сила солнечного излучения
(противоположна направлению на Солнце) составит 6,75 • 10-5 Н. Сле-
довательно, для компенсации силы солнечного излучения будет доста-
точно значения Si = 3 м2.
Принимая во внимание необходимость выполнения медленных ма-
невров и обеспечения некоторого запаса, площадь Si парусов должна
быть увеличена. Так, например, для площади 6 м2 в идеальном случае
146 Гл. 4. Разработка методов управления орбитальным движением
появляется возможность вращения линии наблюдения в плоскости эк-
липтики на 0,25° в течение 3 часов с нулевой конечной скоростью.
Как было отмечено ранее, космические аппараты должны быть
приведены в соответствие друг с другом с целью получения в но-
минальном случае равных ускорений, образующихся по причине сол-
нечного излучения. Для этого площадь поперечного сечения MSC
должна быть увеличена, так как первоначально отношение площади
поперечного сечения к массе MSC в 2 раза меньше, чем для DSC
(принимая во внимание солнечные паруса DSC). Добиться этого можно
установкой солнечных парусов на MSC.
Если паруса изготовлены с использованием жидкокристаллической
пленки, так же как и для DSC, то тогда скорость маневра (изменение
направления линии наблюдения) группировки автоматически возраста-
ет. По примерным подсчетам площадь зеркальных отражающих пару-
сов для MSC должна составить порядка 10 м2. Используя эти паруса
для маневров, возможно, добиться увеличения скорости вращения ли-
нии наблюдения в два раза.
4.4. Построение траектории движения космического
аппарата в окрестности точки либрации L2
Настоящий параграф посвящен вопросам построения траектории
космического аппарата в окрестности точки либрации L2. Известно,
что в при определенных значениях параметров траектории движение
КА в окрестности точки либрации происходит по так называемой
гало-орбите, в результате чего аппарат может при отсутствии управ-
ления длительное время оставаться на достаточно малых расстояниях
от этой точки.
В данном параграфе описывается метод построения траектории
движения КА по гало-орбите для заданных значений даты и времени
старта при условии, что заданы пять из шести элементов орбиты. Зна-
чение шестого элемента выбирается из условия максимизации времени
пребывания КА в окрестности точки либрации. Далее рассматривает-
ся задача линейной импульсной коррекции траектории, при помощи
которой возмущенная траектория движения КА может быть прибли-
жена к номинальной. Коррекция траектории КА осуществляется путем
изменения компонент вектора скорости с помощью импульсов вдоль
заданного направления.
Приводятся основные теоретические сведения и результаты числен-
ных расчетов для модельных примеров.
4.4. Построение траектории движения вблизи точки либрации Б> 147
4.4.1. Описание математической модели движения КА. Мате-
матическая модель пространственного движения составляется с учетом
воздействия гравитационных полей Солнца, Земли и Луны.
Все рассматриваемые ниже векторы считаются столбцами и на-
браны полужирным шрифтом; длина вектора набирается той же бук-
вой, что и сам вектор, но обычным шрифтом, как и все скаляр-
ные величины; индекс «'» означает транспонирование. Например, г —
вектор-столбец, г' — вектор-строка, г = |г|.
Производная от скалярной величины по вектору считается
„ u дБ
вектором-строкой. Например, —------вектор-строка.
(УХо
Используемые постоянные величины:
у г — гравитационная постоянная Земли, уЕ — 398 600,435 608 км3/с2;
у$ — гравитационная постоянная Солнца, у$ = 132 712,44002 х
х 106 км3/с2;
Дм ~ гравитационная постоянная Луны, ум = 4902,8 км3/с2;
С/о — коэффициент полярного сжатия, С20 — 1/298,257;
^Eequat — ЭКВЭТОрИЭЛЬНЫЙ радиус ЗеМЛИ, T?Eequat — 6378,137 КМ;
Основные обозначения:
г = r(i) = {x,y,z} — вектор координат аппарата в экваториальной
геоцентрической равноденственной системе координат;
v = v(Z) — вектор координат аппарата в экваториальной геоцентри-
ческой равноденственной системе координат;
rs = ~ вектор координат Солнца в экваториальной гео-
центрической равноденственной системе координат;
гм = {.гм.ДМ’^м} — вектор координат Луны в экваториальной
геоцентрической равноденственной системе координат;
X(i) = — вектор-столбец координат и скоростей аппа-
рата (вектор состояния);
Ф = $(f,z0) — переходная, или фундаментальная, матрица раз-
мера 6x6;
4.4.2. Уравнения движения аппарата. Будем далее рассматри-
вать движение в инерциальной геоцентрической системе координат.
В этой системе движение КА в гравитационном поле Солнца, Земли
и Луны описывается уравнениями
Г г - rs г - ГМ Г5 ГМ г
v = -Де^> - Ms;----------Пз “ Мм;--------гз ~ Уз ~ Ум — + * ЕоЫ’
г' г- rs! |г - гмГ тк
148 - Гл. 4. Разработка методов управления орбитальным движением
где
FE0b! = • С20 • ^Eequat ' ( 5^ - 1 ) • Г - ^C20^Eequat '
Г \ г / г
’ 0 '
О
1
4.4.3. Уравнения движения Луны. Движение Луны
воздействия Земли и Солнца описывается уравнениями
с учетом
Гм = VM,
/ . хГМ Гм - rs
VM = -(РЕ + Мм) — - Ms:----
rM rM-rs
— + Fmow,
rs
где
„ 26,332 34305 Л’м
* МоЫ —---------5----- 0-2---1 • Гм -
\ Гм /
52,664 685 Izm
5
ГМ
5
ГМ
0 '
О
1
4.4.4. Уравнения движения Солнца . Движение Солнца относи-
тельно Земли описывается уравнениями
rs = vs,
• / . \ rs rs — гм ГМ
Vs = -(ME + Ms)~3 - Мм:--------------?з - Мм^--
rs |rs - гм| гм
4.4.5. Уравнения в вариациях для матрицы Ф. Переходная
матрица Ф выражает в линейном приближении зависимость вектора
состояния в момент времени t от вектора состояния в момент време-
ни to:
Матрица Ф является решением матричного уравнения
Ф =
Озхз 1з
Fr Озхз
Ф
при начальном условии
Ф(ДЛо) = 1б>
где
F _ dv
Fr~dr
Mm
|r - rM|3
Ms (т _ з
|r - rs|3 \ |r - rs|2
1 - I—^-7 • (r - rM
|r-rM|
- 1.5 • С2о ' ^Eequat
4.4. Построение траектории движения вблизи точки либрации L2 149
10z /п п х , 5
— • (О 0 г) + - •
Г г
- 3 • Сго • -Riequat ’
4.4.6. Построение траектории движения КА. Построение тра-
ектории движения КА проводилось путем численного интегрирования
следующей системы приведенных выше дифференциальных уравнений:
Г = V,
Г г - rs Г - rM rs Гм . V
v = ~ме ^7 - Ms:--гт - Мм:----гт - Ms -3 ~ Мм * е оы.
Г - rs г -Гм rs
Гм = VM,
/ , X Гм ГМ - rS rs , -г,
VM = -(.Me + MMj-3- - MS:-----------xj- - Ms-3 + -г МоЫ.
rM rM — rs ’ rs
rs = vs,
i . , Ц rs — Гм Гм
vs = -(Me + Ms)- 3 - Мм:------s - Мм —,
rs |rs-rM| rM
Ф =
ОзхЗ 1з
Fr Озхз
Ф
при начальных условиях, определяемых по начальным значениям эле-
ментов орбиты. Величины Геоы, Fmow, Fr, стоящие в правых частях,
вычислялись по формулам, приведенным выше.
Рассмотрим следующий состав элементов орбиты, полностью ее
определяющий:
а — величина большой полуоси,
е — эксцентриситет,
i — наклонение орбиты,
Я — долгота восходящего узла,
ш — аргумент перицентра,
и — аргумент широты.
Для такого набора элементов орбиты вычисление начального поло-
жения КА происходило по следующим формулам:
х = г (cos Я • cos и — sin Я sin и cos г),
у = r (sin Я • cos и + cos Я sin и cos i),
z = r sin u sin г,
vx — vr (cos Я • cos и — sin Я sin и cos i) — vu (cos Я sin и + sin Я cos и cos i),
vy = vr (s'n ' cos u + cos s’n u cos *) — vu (s'11 s^n u ~ cos cos u cos ) -
vz = vT sin и sin i + vu cos и sin i,
150 Гл. 4. Разработка методов управления орбитальным движением
где г = J + р— радиус-вектор КА в геоцентрической системе
Гй . а уДГр
координат, vr = - е sin v и vu = -- — проекции вектора скорости
соответственно на радиус-вектор и нормаль к нему, р = а(1 — е2) —
фокальный параметр, П = и — ш — истинная аномалия.
4.5. Построение гало-орбиты в окрестности точки
либрации L2
Построение гало-орбиты в окрестности точки либрации L2 для за-
данных даты и времени старта осуществляется по известным значени-
ям каких-либо пяти из шести элементов орбиты КА. Подбор значения
шестого элемента проводится из условия максимизации времени дви-
жения КА внутри сферы заданного радиуса с центром в точке L2. Этот
способ позволяет для выбранных даты и времени старта осуществить
построение траектории движения КА по гало-орбите в окрестности
точки L2 на достаточно большой срок (около двух лет).
Более подробно процедура построения движения по гало-орбите
описывается следующим образом:
1. Определяются дата и время старта. В качестве примера рас-
смотрим построение траектории для даты 22.01.2014 и времени старта
00 ч 00 мин 00 с. Пусть заданы следующие значения элементов орбиты:
е = 0,99, г = 51,50°, Q = 0°, ш = 10°, и = 10°.
Значение шестого элемента орбиты — величины большой полуоси а —
требуется подобрать так, чтобы КА максимальное время оставался
в окрестности точки либрации L2.
1. Задается некоторый интервал начальных значений величины
большой полуоси. Например, а\ — 500000км, а2 = 900000км.
2. Рассчитывается вектор состояния аппарата X(i) в инерциальной
геоцентрической системе координат на момент старта.
3. Рассчитывается траектория движения КА на некоторый заданный
период времени путем интегрирования системы дифференциальных
уравнений, приведенной в п. 4.4.
4. Для различных значений а в интервале от а] до а2 определя-
ется время пребывания аппарата в окрестности точки либрации L2
(в качестве такой окрестности, например, может быть выбрана сфера
радиуса 1,5 млн км) и анализируется зависимость времени первого
выхода траектории из этой окрестности от величины большой полуоси.
График такой зависимости для рассматриваемого примера приведен
на рис. 4.12.
4.5. Построение гало-орбиты в окрестности точки либрации L? 151
Рис. 4.12. Пример зависимости времени пребывания в окрестности
точки либрации от величины большой полуоси
Рис. 4.13. Номинальная траектория в солнечно-эклиптической
системе координат
152
Гл. 4. Разработка методов управления орбитальным движением
Рис. 4.14. Примеры номинальных траекторий КА для различных дат старта
Видно, что кривая на рис. 4.12 имеет резкий пик, соответствующий
максимальному времени пребывания аппарата на орбите в окрестности
точки либрации. Соответствующее экстремальное значение а может
быть найдено численной процедурой. В рассматриваемом примере зна-
чение большой полуоси, соответствующее максимуму времени, соста-
вило а = 733 180,135 728 км.
При таком значении шестого элемента орбиты траектория аппарата
в солнечно-эклиптической геоцентрической системе координат имеет
вид, показанный на рис. 4.13 (траектория была рассчитана на период
796 суток с момента старта).
4.6. Коррекция траектории КА
153
На рис. 4.14 показаны рассчитанные по описанной выше процедуре
аналогичные траектории для некоторых других дат старта.
4.6. Коррекция траектории КА
Рассчитанные в разд. 4.4 траектории движения по гало-орбите по-
строены без учета влияния возмущений и ошибок, поэтому эти тра-
ектории могут рассматриваться в качестве номинальных. На практике,
в силу возмущающих воздействий и различных ошибок, движение
КА будет происходить по траектории, отличной от номинальной, что
неизбежно приведет к более раннему уходу аппарата с гало-орбиты.
В связи с этим возникает задача коррекции возмущенной траектории
КА с целью приближения ее к номинальной траектории. Рассмотрим
эту задачу более подробно.
Рис. 4.15. Траектория КА, построенная по результатам измерений
Пусть в результате интегрирования системы уравнений из разд. 4.4
и подбора параметров согласно процедуре, описанной в разд. 4.4, по-
строена номинальная траектория движения КА от некоторого началь-
ного момента времени to Д° конечного Т. Пусть по результатам из-
мерений в некоторый момент времени tj положение КА в простран-
стве оказалось отличным от расчетного значения. Тогда дальнейшее
движение КА будет происходить по возмущенной траектории, отлич-
ной от номинальной (пример такой траектории, построенной с учетом
154 Гл. 4. Разработка методов управления орбитальным движением
возмущений, приведен на рис. 4.15). Опишем способ коррекции тра-
ектории КА с целью уменьшения влияния возмущений и увеличения
времени пребывания аппарата на гало-орбите.
Обозначим через Xnom(Z) = (rnom(i),Vnom^))' вектор состояния КА
в произвольный момент времени t при движении по номинальной
траектории, через X(t) = (r(Z),v(t))/ — вектор состояния, соответству-
ющий движению по возмущенной траектории, построенной по резуль-
татам измерений. Рассмотрим скалярную величину
6 = || r(T) — rnom(T) ||
— «величину промаха» относительно номинальной траектории в конеч-
ный момент рассматриваемого интервала времени. Тогда цель коррек-
ции состоит в том, чтобы величина Ь оказалась минимальной.
Будем рассматривать случай, когда коррекция может проводиться
с помощью импульсов в направлении на Солнце. В результате каж-
дого такого импульса вектор скорости аппарата мгновенно изменяется
на величину w(i), которую будем называть корректирующим вектором
или просто импульсом в момент времени t. Будем считать, что ошибки
исполнения импульсов отсутствуют, т. е. коррекция является идеаль-
ной.
Будем также полагать, что коррекция является линейной, т. е.
под влиянием импульса w(f) вектор состояния КА X(t) изменяется
на величину U(f)w(f), где U(f) — матрица, характеризующая влияние
импульса w(f) на вектор состояния. Эту матрицу будем называть
матрицей влияния.
В результате одного или нескольких коррекционных импульсов
вектор состояния должен измениться на величину, равную величине
промаха, т. е. цель коррекции можно записать в виде равенства
^U(t)w(t) = Ь.
Обозначим через p(w) = p(w(f)) затраты на проведение коррекции
в момент времени t. Тогда можно сформулировать задачу нахождения
плана коррекции, минимизирующего величину суммарных затрат:
^P(w(t)) min : ^U(i)w(t) = b.
При ориентации двигателя на Солнце затраты на коррекцию про-
порциональны величине импульса, т. е. можно принять p(w) = |w(t)|.
Представим вектор w(t) в виде
w(t) = w(i) -7(t),
4.6. Коррекция траектории КА
155
где w(t) = |w(t)| — величина импульса, 7(f) — единичный вектор,
определяющий направление импульса. Тогда в инерциальной геоцен-
трической системе координат вектор 7(f) вычисляется по формуле
rs - г
|rs — г| ’
Вводя обозначение H(t) — перепишем задачу коррекции
в виде
min: = ь-
Решение последней задачи легко находится аналитически:
* Г Ь 1
w = mm 4 .
t | Я(«) J
В частности, в случае, когда импульсы могут производиться в заданные
дискретные моменты времени, оптимальное решение и соответствую-
щий ему момент времени могут быть найдены простым перебором.
Видно, что для решения задачи коррекции в данной постановке
на интервале [to, Т] необходимо проведение на этом интервале одного
корректирующего импульса.
На практике процесс коррекции траектории может быть осуществ-
лен следующим образом. По результатам измерений определяется поло-
жение КА в некоторый момент времени t0 и рассчитывается траектория
его дальнейшего движения на интервале [to, Т]. Определяется момент
времени t\, в который отклонение построенной траектории от номи-
нальной становится больше некоторого наперед заданного максималь-
но допустимого значения. Для момента времени ti рассчитывается
величина промаха Ь, на интервале времени [to, ti] решается задача
коррекции, определяются оптимальные значения величины и момента
приложения корректирующего импульса. Затем траектория КА пере-
страивается с учетом произведенного корректирующего импульса и за-
ново рассчитывается на период до момента времени Т. Если в какой-то
момент времени t2 < Т отклонение траектории КА от номинальной тра-
ектории снова оказывается больше максимально допустимого значения,
то коррекция траектории КА повторяется на интервале [tj, t2].
При расчете возмущенного движения выбираем момент времени to,
для которого движение КА по номинальной траектории проходило
в окрестности точки либрации L2. В этот момент времени к вектору
состояния Хпот(/о) прибавляем случайное возмущение, компоненты
которого имеют нулевое математическое ожидание и заданную диспер-
сию (сгг = 1 км, = Зсм/с), после этого рассчитываем траекторию
возмущенного движения на интервале [to, Т].
На рис.4.16 показана траектория, полученная после проведения
серии сеансов коррекции. Траектория построена на период 790 дней
156 Гл. 4. Разработка методов управления орбитальным движением
Рис. 4.16. Траектория КА после проведения коррекции. Кружками отмечены
точки, в которых проводились корректирующие импульсы
с момента старта, коррекция проводилась в общей сложности в течение
750 дней. Для удержания КА на гало-орбите в течение этого перио-
да времени потребовалось проведение 13 корректирующих импульсов
суммарной величиной 5,5 см/с при условии, что минимальный интер-
вал между проведением двух соседних импульсов составлял не менее
30 дней. Моменты приложения импульсов отмечены на рис. кружками.
Распределение величин импульсов (в см/с) в течение периода кор-
рекции выглядит следующим образом (положительный знак соответ-
ствует случаю, когда импульс направлен в направлении Солнца, отри-
цательный — в противоположном направлении):
t = 40,65 дней, w — —0,34;
t = 72,07 дней, и = —0,07;
t = 163,04 дней, w = —0,65;
t — 194,25 дней, w = —0,41;
t = 224,96 дней, w = —0,16;
t = 255,74 дней, w = —0,17;
t = 286,42 дней, w = —0,23;
t = 317,27 дней, w = —0,29;
t = 348,24 дней, w = —0,80;
t — 379,34 дней, w — —2,00;
t = 409,94 дней, w = —0,31;
4.6. Коррекция траектории КА
157
t = 440,79 дней, w = —0,02;
t = 471,61 дней, w = 0,04.
В табл. 4.1 приводятся результаты вычислений оптимальных зна-
чений большой полуоси а и суммарной величины корректирующих
импульсов для различных других значений даты и времени старта.
Таблица 4.1.
Оптимальные значения большой полуоси а и суммарной величины
корректирующих импульсов
Дата и время старта Величина большой полуоси а, км Продолжи- тельность пребывания в окрестно- сти L2, сут. Число им- пуль- сов Суммар- ная вели- чина им- пульсов, см/с Продолжи- тельность сеанса кор- рекции, сут.
22.01.2014 00:00 733 180,136 790 13 5,5 750
17.02.2014 05:30 597 630,062 829 16 7,1 742
20.02.2014 21:00 612 157,847 830 12 7,1 741
21.03.2014 22:40 583442,485 833 13 10.8 613
12.04.2014 03:00 557 343,005 842 13 8,8 639
22.04.2014 19:00 652 459,142 877 6 2,3 585
17.11.2014 12:45 612 359,563 896 7 2,6 691
Возмущения, вызываемые градиентом силы тяжести, сравнительно
малы, однако не могут быть проигнорированы во время оперативно-
го управления положением аппаратов группировки относительно друг
друга.
Во всех рассмотренных случаях проведение коррекции позволило
добиться удержания КА на гало-орбите в течение требуемого периода
времени. Как видно из табл. 4.1, суммарная величина корректирующих
импульсов зависит от даты старта (для близких значений дат значения
суммарного импульса оказались близкими) и величины отклонения
траектории КА от номинальной.
Видно, что величина суммарных затрат при принятых характеристи-
ках распределения компонент возмущающего воздействия оказывается
сравнительно небольшой, что позволяет говорить о принципиальной
возможности использования данного метода на практике. Однако су-
щественным недостатком его является необходимость построения но-
минальной траектории, которую при необходимости более длительного
пребывания КА на гало-орбите оказывается затруднительно построить.
Однако при необходимости движения по гало-орбите на срок около
158 Гл. 4. Разработка методов управления орбитальным движением
двух лет (четыре витка) этот способ обеспечивает требуемое движение
при малых величинах коррекционных импульсов, что делает целе-
сообразным его использование в таких случаях. Разработка методов
построения траектории движения КА по гало-орбите на более длитель-
ные периоды времени планируется на следующих этапах работы.
Список литературы к главе 4
1. Dunham D.W. and Farquhar R.W. Libration Point Missions,
1978-2002 // Proceedings of the Conference Libration Point Or-
bits and Applications.World Scientific. Ed. G. Gomez, M.W. Lo,
J.J. Masdemont Aiguablava, Spain, 10-14 June 2002, pp. 45-73.
2. Spacecraft Attitude Determination and Control I Ed. by James
R. Wertz. D. — Reidel Publishing Company, 1978. P. 129-130,
570-573.
3. Hechler M., Cobos J. Herchel, Planck and Gaia Orbit Design //
Proceedings of the Conference Libration Point Orbits and Applica-
tions.World Scientific / Ed. G. Gomez, M.W. Lo, J.J. Masdemont
Aiguablava, Spain, 10-14 June 2002, pp. 115-135.
4. Eismont N., Nazirov R. Solar Sails as a Tool for Spacecraft Motion
Control Near Solar-Terrestrial Libration Points // Proceedings of the
18th International Symposium on Space Flight Dynamics. Munich,
Germany, ESA-SP 548, 2004, pp. 123-127.
Глава 5
СХЕМА ПОЛЕТА К АСТЕРОИДАМ ГЛАВНОГО
ПОЯСА С ИСПОЛЬЗОВАНИЕМ ОРБИТ
ИСКУССТВЕННОГО СПУТНИКА МАРСА
В настоящее время известны различные схемы полета для дости-
жения Главного пояса астероидов. К ним относятся прямой полет
от Земли к малому телу; использование гравитационных облетов пла-
нет, включая Землю; попутный облет астероида при полете к телам
Солнечной системы и другие. Полет в Главный пояс астероидов (ГПА)
при любой из перечисленных схем требует больших затрат энергии [1],
так как для доставки КА с научной аппаратурой приемлемой массы
используются средства выведения тяжелого класса. В связи с этим
незначительная экономия на массе рабочего тела (менее одного-двух
процентов от общей массы космического аппарата) позволяет суще-
ственно увеличить массу комплекса целевой аппаратуры. Подобная
экономия может быть получена в результате выбора приемлемой схемы
полета с последующей оптимизацией ее характеристик.
В случае, если при реализации схемы прямого перелета к заданно-
му небесному телу невозможно доставить необходимую массу научной
аппаратуры, обычно используют следующие способы, усложняющие
траекторию полета КА, но приводящие к уменьшению затрат топлива
на реализацию экспедиции [1-7]:
— использование гравитационных маневров;
— применение в качестве двигательной установки на КА электроре-
активных двигателей.
Первый способ позволяет уменьшить энергетические затраты, одна-
ко он имеет существенный недостаток. Необходимо определять опти-
мальную взаимную конфигурацию как минимум (в случае единствен-
ного пролета) трех планет — старта, прилета и промежуточной, около
которой и совершается гравитационный маневр. Подобное оптималь-
ное расположение планет длится весьма недолго, поэтому интервалы
времени для старта, проведения гравитационного маневра и прилета
сильно сжаты.
160
Гл. 5. Схема полета к астероидам Главного пояса
Второй способ также имеет недостатки. Действительно, предлага-
емые электрореактивные двигатели обладают высоким удельным им-
пульсом (примерно на порядок выше «химических»), но очень низкой
величиной тяги — единицы и десятки граммов против сотен килограмм
и тонн тяги у двигателей с химическим топливом. К тому же, для
обеспечения работы электрореактивных двигателей необходимо боль-
шое напряжение, что приводит к установке на КА солнечных батарей
значительной площади. В связи с этим полеты таких межпланетных ап-
паратов значительно усложняются на гелиоцентрических расстояниях,
превышающих орбиту Марса.
Наряду со схемами прямого полета к астероидам, возможно приме-
нение схемы с использованием орбиты ожидания у Марса. С первого
взгляда создается впечатление, что они не будут энергетически выгод-
нее прямого полета. Действительно, увеличивается количество актив-
ных маневров, схема полета не соответствует гомановской [7], которая
в данном случае как бы должна являться оптимальной по затратам
характеристической скорости.
Однако, при изучении схемы с использованием высококруговой
орбиты ожидания в работе Л. Б. Ливанова [8] в упрощенной постанов-
ке отмечена принципиальная возможность энергетического выигрыша
полетов к Главному поясу астероидов через орбиту искусственного
спутника Марса по сравнению с прямыми полетами Земля-астероид.
Также данная схема имеет существенные преимущества:
— возможность декомпозиции межпланетного участка полета на две
части: Земля-Марс и Марс-Главный пояс астероидов и после-
дующее раздельное решение оптимизационной задачи синтеза
схемы полета;
— возможность расчета гравитационного маневра у Марса как част-
ного случая использования орбиты ожидания нулевой длитель-
ности;
— выполнение исследований околомарсианского пространства и ха-
рактеристик астероида с помощью одного КА.
При классификации схем полета межпланетных КА траектории
с использованием орбиты ожидания у промежуточной планеты обычно
отсутствуют. Это является следствием того факта, что при полетах
на большие расстояния от Земли (дальше Венеры и Марса) сегодня
в основном используют гравитационные маневры. Такой прием доста-
точно эффективен с точки зрения изменения траектории дальнейшего
полета, однако обладает и существенным недостатком: даже для схемы
с одним гравитационным маневром нужна оптимальная конфигура-
ция сразу трех планет — старта, промежуточной и прилета. Полет
же к планетам юпитерианской группы, как и перелет в ближайшее
5.1. Постановка задачи
161
околосолнечное пространство, требует большего числа гравитационных
маневров. Поиск оптимального решения при этом сильно затруднен.
Но на это идут, так как в случае нахождения оптимального решения
перелет, за исключением операций по выведению КА на траекторию
отлета от Земли, является практически «бесплатным» с точки зрения
энергетических затрат.
На сегодняшний день пока нет примеров практического использо-
вания схемы перелета с орбитой ожидания у промежуточной планеты.
Это обусловлено, во-первых, тем, что такой вариант полета будет более
энергозатратным, чем прямой перелет к целевой планете. Во-вторых,
при полете к разным планетам ставятся разные научные задачи, а, сле-
довательно, состав комплекса научных приборов будет различаться.
Также введение дополнительных участков полета усложняет схему
экспедиции, снижая тем самым ее надежность.
По этим причинам схемы полета с орбитой ожидания практиче-
ски не упоминаются в литературе. Исключением, пожалуй, являются
только [3, 6].
5.1. Постановка задачи
5.1.1. Выбор оптимизируемого функционала. Современные
тенденции расширения и увеличения круга научных задач, ставящихся
перед космическими аппаратами, предназначенными для дистанцион-
ных и контактных исследований небесных тел Солнечной системы
в целом и астероидов Главного пояса в частности, приводят к требо-
ваниям по увеличению массы научной аппаратуры, устанавливаемой
на аппараты для таких экспедиций. Анализ же разработанных на
сегодня методик разработки «классических» схем полета к объектам
«дальнего» космоса показал, что возможно расширение существующе-
го спектра построения траекторий полета за счет применения орбиты
ожидания у удобно расположенной «по пути» промежуточной планеты.
Для перелета в Главный пояс астероидов такой планетой является
Марс.
Однако в настоящее время отсутствуют научно обоснованные ме-
тодики определения параметров подобных траекторий. В соответствии
с этим возникает актуальная научная задача: разработать методику
синтеза и оптимизации траекторий полета к Главному поясу астероидов
с использованием орбит искусственного спутника Марса, обеспечиваю-
щих энергетический выигрыш по сравнению со схемой прямого полета.
Для оценки эффективности экспедиций межпланетных КА в лите-
ратуре предлагаются различные виды критериев [5,9-12]:
— стоимость экспедиции,
— надежность выполнения экспедиции,
6 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
162
Гл. 5. Схема полета к. астероидам Главного пояса
— научная эффективность экспедиции,
— продолжительность экспедиции.
На разных этапах исследований изучаемого небесного тела —
цели экспедиции (предварительный, основной и специальный этапы)
приоритет между критериями будет разным. Поэтому в функционал,
оптимизируемый при разработке экспедиции, в зависимости от этапа
исследований они будут входить с разными весовыми коэффициентами.
Однако при разработке баллистической схемы экспедиции эти кри-
терии обычно редуцируются до двух, зачастую противоположных —
массы КА на завершающей фазе полета (как правило, на конечной
орбите или после посадки на небесное тело — цель экспедиции)
и длительности полета, от старта с Земли и до окончания полета.
Научная эффективность и надежность экспедиции, как правило, на-
прямую зависят от массы КА — как через массу научной аппаратуры,
так и возможность резервирования служебных систем и их эффектив-
ность. Длительность полета бывает зачастую менее принципиальной,
однако также влияет на надежность, но с противоположным эффектом.
Нередко длительность экспедиции из оптимизируемого функционала
выносят и рассматривают в качестве ограничения.
Классическим же вариантом является использование функционала
в виде суммарной характеристической скорости экспедиции AVs [6].
Из формулы Циолковского [7] видно, что при применении реактивных
двигателей расход рабочего тела (топлива) будет тем больше, чем
больше требуемое приращение скорости КА — характеристической ско-
рости маневров. Это обстоятельство позволяет рассматривать в каче-
стве оптимизируемого функционала не конечную массу КА (или массу
комплекса научной аппаратуры, доставляемой на необходимую орбиту
вблизи небесного тела — цели экспедиции), а суммарную характери-
стическую скорость миссии, уменьшение которой позволяет уменьшить
требуемые затраты топлива, а значит — увеличить массу научной
аппаратуры. Ведь приращения скорости КА реализуются с помощью
его двигательной установки (ДУ). При этом затрачивается определен-
ное количество рабочего тела, а вследствие этого уменьшается масса,
отводимая на комплекс научной аппаратуры (КНА).
Также неоспоримой выгодой такого рассмотрения является воз-
можность абстрагирования как от конкретных параметров самого
КА, его массовых характеристик и схемы деления, так и массово-
энергетических характеристик средств выведения, осуществляющих
доставку выводимого КА на опорную или отлетную орбиту.
5.1.2. Формализация задачи. Общая математическая модель
движения КА на гелиоцентрических и планетоцентрических участках
5.1. Постановка задачи
163
активного и пассивного полета может быть представлена [9] как дина-
мическая система вида
= фг (хг,иг,рг,д, 1г), (5.1)
Ct-Li
Где хг(фф) — вектор состояния КА на г-м участке полета; <pi —
функция правых частей дифференциальных уравнений; щ — функция
управления; pi — варьируемые параметры, являющиеся внутренними
факторами влияния на г-м участке полета, q — внешние факторы
влияния, определяющие схему полета КА и влияющие на все участки
траектории; ф — время, независимая переменная.
Моменты времени окончания полета КА на г-м участке траекто-
рии t* определяются из условия
q,ti] — 0, (5.2)
Условие (5.2) для случая окончания межпланетного перелета, т. е.
попадания КА в «точечную» сферу действия планеты, определяется как
равенство координат КА г и планеты прилета R в момент tk:
r(tk) - R(tk) = 0. (5.3)
В моменты времени i-: происходит преобразование вектора состояния
от одной системы, описывающей движение на г-м участке полета,
к другой, моделирующей движение КА на следующем, г + 1-м, участке:
£г+1(Сн) = 1= 1,...,М- 1. (5.4)
В настоящей работе моменты времени характеризуются, как пра-
вило, изменением скорости КА вследствие работы его ДУ на величи-
ну AVj. Условие (5.4) для такого изменения скорости при применении
метода импульсной аппроксимации может быть записано как
V^(t°+1) = V^) + AV^). (5.5)
КА в начальный момент времени ii находится на опорной круговой
орбите Земли высотой /гисз> отсчитанной от среднего радиуса Земли гз
и имеет соответствующую скоростью Гисз:
r(ij) — /гИСз + Аз-
V(ti) — Гисз-
(5.6)
Условие прилета КА к астероиду как выравнивание их гелиоцентриче-
ских координат и скоростей:
= (Ы- (5.7)
5.1.3. Постановка задачи оптимизации. С использованием сде-
ланных выше обозначений определим показатель энергетических за-
6*
164
Гл. 5. Схема полета к астероидам Главного пояса
трат, представляющий собой суммарную характеристическую скорость
экспедиции, в виде следующего соотношения:
лу
Fj = = fj , j=l,2,...,n; (5.8)
i=i
где fj — алгоритм расчета значения энергетических затрат Fj для j-й
схемы полета; Nj — число участков j-й схемы полета; п — число
анализируемых схем полета. При этом для всех анализируемых схем
полета начальные условия движения КА, записанные в виде систе-
мы (5.6), являются одинаковыми. Также одинаковыми являются огра-
ничения (5.7) на правом конце траектории полета КА. Однако моменты
времени определения этих условий и t3N для рассматриваемых схем
могут отличаться.
Для получения искомого энергетического выигрыша необходимо:
1) для каждой анализируемой схемы полета определить такие зна-
чения параметров и* и р*, при которых энергетические затраты F*
будут минимальными;
2) определить такую схему полета из множества возможных, за-
даваемых через внешние факторы влияния qj, для которой значение
энергетических затрат F* — f(u*,p*) будет минимальным из множе-
ства полученных значений F*, где и* и р* — параметры оптимальной
схемы полета:
Д* = f(u*,p*) = min F*(uj,pj,qj). (5.9)
Тогда математическая постановка задачи может быть сформулиро-
вана следующим образом:
Для множества вариантов схемы полета к Главному поясу асте-
роидов, задаваемых через внешние факторы влияния q, определить
схему полета и соответствующие ей такие параметры и* нр', которые
при условии выполнения соотношений (5.1)—(5.8) обеспечат минимум
функционала (5.9).
Особенности поставленной задачи:
1. Исходное множество анализируемых схем полета к Главному по-
ясу астероидов будет включать схему прямого полета и схемы
полета с использованием орбит искусственного спутника Марса
для различных астероидов.
2. Определяемые значения энергетических затрат и параметров по-
лучаемых орбит являются случайными величинами, поэтому при
решении задачи используются математические ожидания (сред-
ние значения) этих величин.
3. Исследуемая задача является многоэкстремальной. Ни один
из разработанных методов оптимизации, основанных на малой
вариации параметров (классическое вариационное исчисление
5.1. Постановка задачи
165
Эйлера-Лагранжа, принцип максимума Л. С. Понтрягина,
динамическое программирование Веллмана и др.) не в состоянии
найти глобальный экстремум функции. В связи с этим при
поиске локального минимума функции (5.8) варьирование
параметров схемы полета р будет проводиться в некоторой
области, ограниченной значениями р е PL, определяемыми
согласно некоторым разумным предположениям.
В результате общая процедура решения задачи, характеризующая
искомую методику синтеза и оптимизации траекторий для выбранного
набора схем полета, будет включать следующую последовательность
действий:
1. Составление общей аналитической модели (5.8) для определения
энергетических затрат рассматриваемых схем полета (прямого
и с использованием орбит ИСМ).
2. Уточнение внутренних факторов влияния р и диапазона PL, необ-
ходимых для определения энергетических затрат каждой анали-
зируемой схемы полета.
3. Разработка методики расчета энергетических затрат, соответству-
ющих анализируемой схеме полета, и позволяющей установить
соотношения Fj = fj (и,р).
4. Разработка методики оптимизации, с помощью которой опреде-
ляется минимум суммарных энергетических затрат для каждой
схемы полета в соответствии с (5.8).
5. Определение наилучшей схемы полета и ее характеристик
[и*,р*], обеспечивающей минимальные энергетические затраты
согласно (5.9).
6. Оценка влияния полученных характеристик схемы полета F*
на массу КА на всех этапах полета и принятие решения о це-
лесообразности внедрения полученной схемы полета в практику
планирования полета КА к Главному поясу астероидов.
С целью постепенного уточнения и усложнения задачу поиска оп-
тимальной траектории перелета к выбранному небесному телу можно
решать следующим образом:
— расчет сравниваемых схем полета на упрощенных моделях для
выяснения принципиального выигрыша или проигрыша одной
из траекторий;
— в случае если упрощенный расчет показывает, что схема полета
с использованием орбиты ожидания обладает энергетическим вы-
игрышем по сравнению со схемой прямого перелета, выполняется
расчет обоих траекторий для более сложных моделей, учитываю-
щих различные возмущающие факторы.
166
Гл. 5. Схема полета к астероидам Главного пояса
5.2. Аналитическая модель
расчета энергетических затрат
5.2.1. Упрощающие предположения. Сначала посмотрим, есть
ли принципиальная выгода от использования орбит ИСМ для перелета
к астероидам.
Для оценки энергетических затрат экспедиции можно воспользо-
ваться некоторыми допущениями, упрощающими моделирование ре-
альных условий полета. Согласно им можно применить метод «точеч-
ных сфер действия».
Согласно этому методу межпланетный полет представляется по-
следовательностью участков траекторий движения КА в центральном
гравитационном поле Солнца между центрами масс небесных тел (пла-
нет и астероидов), около которых проводятся активные или пассивные
маневры в их гравитационном поле, условно «сжатые» в точку. Пассив-
ный полет КА моделируется согласно законам Кеплера и представляет
собой фрагменты круговых, эллиптических, параболических или гипер-
болических орбит, в одном из фокусов которых находится Солнце или
соответствующее небесное тело.
Также считается, что выполняемые импульсы скорости, изменяю-
щие векторы состояния КА, происходят только под действием цен-
трального гравитационного поля данного небесного тела и реализуются
мгновенно по отношению к длительности полета по данному участку
траектории.
Дополнительно будем использовать следующие упрощающие пред-
положения (составляющие вектора ограничений PL):
• планеты (Земля и Марс) и астероиды движутся по круговым
гелиоцентрическим орбитам в плоскости эклиптики;
• Главный пояс астероидов представляет собой множество упомяну-
тых тел, движущихся по круговым орбитам радиусом 2,0-3,6 а. е.;
• фазы движения планет и астероида не учитываются, поэтому
траектория межпланетного перелета всегда представляет собой
полуэллипс Гомана, перицентр и апоцентр которого совпадают со
средними гелиоцентрическими радиусами орбит планет (Земли,
Марса) и астероида соответственно.
В вектор PL также входит ограничение на радиус орбиты ожидания
у Марса. Он не может быть меньше величины радиуса Марса с учетом
атмосферы, а сверху ограничен величиной сферы Хилла (немногим
более 1 млн км). Значения параметров, необходимых для расчетов схем
полета и являющихся элементами вектора PL, приведены в табл. 5.1.
Данные взяты из [13, 14].
5.2. Аналитическая модель расчета энергетических затрат
167
Таблица 5.1.
Параметр, размерность Обозначение Значение
Высота опорной орбиты ИСЗ Кез 200 км
Радиус Земли г 6371 км
Высота перицентра ОИСМ Нтг 500 км
Радиус Марса Гм 3397 км
Радиус орбиты Земли Я1 1 а. е. = 1,495 978 706 91 108 км
Радиус орбиты Марса R? 1,52371034 а. е. = 2,279438 228 8 108 км
Гравитационная постоянная Солнца До 1,327 124400 18 • 10" км3/с2
Гравитационная постоянная Земли Д1 3,986004415 • 106 км3/с2
Гравитационная постоянная Марса Д2 4,282 828 7 • 105 км3/с2
Ниже приведены методики расчета энергетических затрат для рас-
сматриваемых схем перелета.
5.2.2. Аналитическая модель расчета прямого перелета. Этот
вариант, как было указано при постановке задачи, является базовым
при сравнении [8]. Траектория оптимального перелета космического
аппарата — гомановский полуэллипс. Энергозатраты на перелет Vs
в таком случае складываются из импульса ухода ДУцсз с круговой
орбиты ИСЗ высотой /гцсз при последующем уходе от Земли по ка-
сательной к ее орбите, и из импульса VqoA- гасящего скорость КА
относительно круговой орбиты астероида.
Пусть космический аппарат уходит с орбиты ИСЗ по геоцентриче-
ской гиперболе, имеющей радиус в перигее гцсз = гз + /гисз- Упрощая,
положим на геоцентрическом участке движения радиус сферы дей-
ствия (СД) Земли бесконечным. Тогда геоцентрическая скорость КА
в СД Koi связана со скоростью Кп аппарата в перигее указанной
орбиты соотношением
Кг|==vK+•
у 'ИСЗ *
где Vni — вторая космическая скорость КА в СД Земли на удалении
гисз и — гравитационный параметр Земли. Импульс ухода аппарата
168 Гл. 5. Схема полета к астероидам Главного пояса
с орбиты ИСЗ ДУисз равен разности скорости геоцентрических скоро-
стей КА при движении по гиперболической и круговой орбитам
ДУ’исз = К 1 - Уисз = Кп - < = \/v£>i + — -
V гисз V гисз у гисз
(5.10)
Далее, отнесем вектор асимптотической скорости КА относительно
Земли Уоо) к ее центру, допустив, что, по сравнению с протяженностью
гелиоцентрического участка перелета, размеры СД Земли пренебре-
жимо малы. Таким образом, сфера действия Земли (как СД планет
и астероидов) на гелиоцентрических участках перелетов положена то-
чечной. Поэтому гелиоцентрический полуэллипс перелета проходит че-
рез центры Земли и астероида. Влиянием тяготения астероида в его СД
пренебрежем ввиду того, что масса и фигура астероида незначительно
влияют как на подлетную траекторию, так и на характеристическую
скорость выхода на его орбиту.
Сложив Уоо1 и Wj (орбитальная скорость Земли относительно
Солнца), получим гелиоцентрическую скорость КА в момент отлета
от Земли:
У1 =1У1 + У001,
следовательно,
Уоо! =У1 -1У1.
В афелии полуэллипса, радиус которого можно задать, скорость КА
по отношению к находящемуся там астероиду УД.а связана с его
орбитальной скоростью Уд соотношением
VooA = Wa-Va. (5.11)
Схема перелета показана на рис. 5.1.
В случае гелиоцентрического движения [6] справедливы соотно-
шения ___ _____________
rr _ / . т/ ___ /
' ~ V /?,(/?! +Яа) ’ А V да(Л! +Ла) ’
где /го — гравитационный параметр Солнца, R\ = la.e. — радиус
круговой отбиты Земли, RA — радиус круговой орбиты астероида
и одновременно — радиус афелия орбиты перелета.
Энергозатраты перелета У^ записываются в виде суммы характе-
ристических скоростей разгона КА с опорной орбиты ИСЗ на меж-
планетную траекторию ДУисз (5.10) и выхода на заданную ор-
биту вокруг астероида (торможения с подлетной гиперболической
5.2. Аналитическая модель расчета энергетических затрат
169
траектории) ДУиса. принятую равной подлетной асимптотической ско-
рости V^a (5.11):
Vs = Д 1-исз + Код =
у2 । 2/11 _ / /и \ / / /io _ / 2/1рД|
°°' тисз у тисз J \у Ла у Да (Ri + Яд)
(5.12)
Результаты расчетов по формуле (5.12) будут представлены ниже при
сравнении с другими рассмотренными схемами.
5.2.3. Аналитическая модель расчета полета с использованием
орбит спутника Марса. Общие подходы к формированию орбиты
ожидания у промежуточной планеты изложены, например, в [3] и [6].
В частности, в [6] описан бипараболический переход космического
аппарата с гиперболы Г1 подлета к планете на гиперболу Г2 выхода
из СД этой планеты. Переход — 4-импульсный. Первый импульс дается
в перицентре 7г1 подлетной гиперболы Г1 и переводит КА на пара-
болу подъема. Второй импульс реализуется на большом расстоянии
от планеты (как бы на границе СД) и обеспечивает переход аппа-
рата на орбиту ожидания бесконечно большого радиуса К^. Третий
импульс переводит КА с на параболу спуска и четвертый —
170
Гл. 5. Схема полета к астероидам Главного пояса
дается в перицентре тг2, за счет чего аппарат переходит на отлетную
гиперболу Г2.
Такой сложный компланарный переход выгоднее «прямого» перехо-
да Г1-Г2 при больших углах между направлениями асимптот подлет-
ной и отлетной гипербол.
По аналогии с бипараболическим рассмотрим реальный биэллипти-
ческий (БЭ) переход, когда вместо Кж берем круг радиуса гп, рав-
ного радиусу апоцентра эллипса подъема Э1, а вместо парабол подъема
и спуска берем вытянутые эллипсы Э1 и Э2 с теми же перицентрами,
что и у П и Г2 радиуса гп.
Если бипараболический переход был выгоднее «прямого», то при
достаточно большом значении гп, как будет показано далее, биэл-
липтический переход выгоден также, а перелет Земля-Марс-астероид
с таким маневром у Марса по пути к астероиду оказывается энергети-
чески всегда выгоднее, чем описанный перелет Земля-астероид.
Оказались выгодными орбиты космического аппарата Земля-Марс
и Марс-астероид, в проекции на плоскость эклиптики касающиеся,
как гомановские полуэллипсы, круговых орбит Земли, Марса и астеро-
ида (при заданном радиусе орбиты астероида ад). Орбита Земля-Марс
является стандартной. Перед отлетом от Марса КА «ждет», чтобы
астероид оказался в узле своей орбиты тогда, когда ожидается подлет
к нему аппарата. Орбиты планет положим лежащими в плоскости
эклиптики. Подлет к Марсу происходит в афелии орбиты КА, подлет
к астероиду — так же. Схема межпланетного участка траектории
приведена на рисунке 5.2.
Схема околомарсианского участка полета показана на рис. 5.3. Все
орбиты расположены в одной плоскости, совмещающей векторы от-
летной и подлетной асимптотической скорости. Следовательно, все
переходы между орбитами являются компланарными.
Космический аппарат входит в сферу действия Марса по ареоцен-
трической гиперболе Г1, и в ее перицентре дается тормозной импульс
ДУгэь переводящий КА на эллиптическую орбиту подъема Э1 с за-
данным радиусом апоцентра гп. По достижении апоцентра выполня-
ется разгонный импульс ДУэк (тем меньший, чем больше rQ) для
перехода аппарата на круговую орбиту ожидания . В момент времени,
благоприятный для начала движения к астероиду-цели, КА сходит
с орбиты с помощью импульса ДЕкэ — ДУэк на идентичную Э1
эллиптическую орбиту спуска Э2. В перицентре дается разгонный
импульс ДУЭГ2, обеспечивающий перевод аппарата на гиперболу от-
лета Г2 со скоростью в перицентре У^гг- Потом КА выходит из СД
Марса, имея гиперболическую скорость относительно Марса Уосгг-
Далее космический аппарат движется к астероиду по полуэллипсу.
В афелии полуэллипса с помощью последнего, шестого импульса
5.2. Аналитическая модель расчета энергетических затрат
171
Рис. 5.2. Схема перелета Земля-Марс-астероид с использованием
орбиты ожидания у Марса
гасится скорость У^д КА относительно астероида. Таким образом,
характеристическая скорость перелета равна
Ге = (ДУисз + ДУэп + 2AV3K)const + (ДГэгг + Коа) (5.13)
В ходе расчета положим орбиты Земли и Марса также круговыми ком-
планарными, лежащими в плоскости эклиптики. Романовские полуэл-
липсы Земля-Марс и Марс-астероид также лежат в плоскости эклип-
тики. Орбита Земля-Марс стандартна, неизменны импульсы ДГисз-
ДУгэ и ДУкэ — ДУэк- Для минимизации Ve остается минимизировать
сумму (ДУэг + Г^д), зависящую от ад.
Для вычислений примем гп = 3900 км (h.n = 500 км).
Расчет перелета Земля-Марс будет аналогичен рассмотренному ра-
нее перелету Земля-астероид. Затраты характеристической скорости
на перелет можно представить в виде
ДУщ = ДУисз + ДУэп,
где ДУисз определяется уже из условия перелета Земля-Марс. Им-
пульс скорости торможения КА [15] (перехода с П на Э1)
дГэп = + - J ^--2 < , (5.14)
у Гл- °° у ТтАГтг + Та)
172
Гл. 5. Схема полета к астероидам Главного пояса
где Vocfi = WZ2 — V21 — асимптотическая скорость подлета к Марсу;
H'2 = -i/vr ~ орбитальная скорость Марса на круговой гелиоцентри-
V Л?
ческой орбите радиусом ~ 1,524 а.е.;
V21
2//Q 7?1
R?(Ri + R?)
— скорость в апоцентре перелетного гомановского полуэллипса Земля-
Марс.
Импульсы выхода космического аппарата на круговую орбиту ради-
уса с эллипса Э1 и дальнейшего схода на эллипс Э2
ДУэк = AVK3 = . - л Д
У га (Гп + Г~ ) у Га
(5.15)
5.2. Аналитическая модель расчета энергетических затрат 173
Для перелета Марс-астероид справедливы следующие соотношения:
у _ I
V Ла(Й2 + Да) ;
VocA = Va - Wa = </ ' - a/¥;
у Па^ЛАТЛ2) у /гд
где Vqc 2 — асимптотическая скорость КА на отлетном от Марса участ-
ке траектории Марс-астероид; V22 — скорость аппарата в перицентре
гелиоцентрического полуэллипса Марс-астероид; VA — скорость в апо-
центре этого участка; У^д — асимптотическая скорость при подлете
к астероиду.
5.2.4. Сравнение результатов. Определение оптимальной схе-
мы полета. Можно отметить, что в разработке достаточно сложной
методики оптимизации параметров схемы полета в данном случае нет
необходимости, так как варьируемой переменной для схемы полета
с орбитой ожидания является только радиус этой орбиты, остальные
параметры входят в вектор параметров внутренних факторов влияния
р. Суммарная характеристическая скорость при прямом перелете при
заданном радиусе орбиты астероида является детерминированной.
Для определения схемы полета, отвечающей минимальным энер-
гетическим затратам, необходимо сравнить значения суммарных ха-
рактеристических скоростей экспедиций при прямом перелете F, —
= f\(x,u,p) согласно (5.12) и при полете с орбитой ожидания у Марса
F2 = f2(x<u,p) по (5.13). При этом варьируемых параметров р только
два: ареоцентрический радиус орбиты ожидания и гелиоцентрический
радиус орбиты астероида. В связи с этим результаты удобно предста-
вить в виде графика. Результаты расчетов суммарной характеристиче-
ской скорости для исследуемых схем полета представлены на рис. 5.4
и 5.5 на цветной вклейке.
На рис. 5.5 на цветной вклейке графически представлена функ-
ция выигрыша от использования схемы полета с маневрами у Марса
в зависимости от радиуса гелиоцентрической орбиты астероида 7?а
и радиуса орбиты ожидания га:
AF(Rk,rn) = F2(R\,ra) - Fi(-Ra)-
Как видно из полученных результатов, вариант полета с использо-
ванием орбиты ожидания выгоднее перелета Земля-астероид «напря-
мую». Чем больше радиус орбиты ожидания, тем выгоднее маневры
у Марса при полетах в Главный пояс астероидов.
174
Гл. 5. Схема полета к астероидам Главного пояса
5.3. Численная модель расчета
энергетических затрат схем полетов
5.3.1. Выбор астероидов — целей экспедиции. Предположения
о чисто круговом характере движения планет и астероидов, сделан-
ные в разд. 5.2, могут помочь только при проведении упрощенных
оценочных расчетов. Использование же более точных моделей дви-
жения рассматриваемых небесных тел приводит к постановке более
сложной расчетной задачи, решаемой уже только численными метода-
ми. В связи с этим межпланетный участок траектории уже не будет
представлять собой гомановский полуэллипс. В этом случае моделиро-
вание движения КА на гелиоцентрическом участке траектории может
осуществляться путем решения задачи Ламберта [16]. Оно сводится
к решению трансцендентного уравнения (уравнения Ламберта). Это
уравнение связывает параметры кеплеровой орбиты КА в центральном
гравитационном поле притягивающего небесного тела с начальным R\
и конечным /?2 радиусами-векторами этой орбиты и временем переле-
та г между ними.
Использование уточненных моделей движения астероидов, прини-
маемых для расчетов, заставляет отойти от упрощенной абстрактной
модели Главного пояса астероидов, принятой во второй главе. В связи
с этим возникает необходимость конкретизировать орбиты астероидов,
для которых будут выполняться дальнейшие исследования. С целью
проверки истинности полученных выше результатов следует выбирать
такие астероиды, параметры орбит которых будут, в общем, соответ-
ствовать принятой ранее идеологии. Представляется разумным выдви-
нуть следующие критерии, применяемые для выбора астероидов —
целей экспедиции:
— орбита астероидов близка к круговой (е < 0,15);
— наклонение к плоскости эклиптики невелико (г < 10°);
— одно из тел должно находиться вблизи ближней границы Глав-
ного пояса астероидов (а «2,2 а.е.), второе — у дальней (а «
« 3,2 а.е.).
Дальнейшие исследования энергетических затрат рассматриваемых
схем перелетов будут проведены для полетов в область астероидов (24)
Фемида и (40) Гармония. Элементы их орбит взяты из [14] и приведены
в табл. 5.2.
Для решения задачи Ламберта необходимо задаться радиусами-
векторами в точках старта и прилета. Определить их можно следу-
ющим образом. Для больших планет Солнечной системы их коорди-
наты и проекции скорости определяются согласно системам эфемерид
(например, типа DE/LE) или из приближенных рядов, в качестве
5.3. Численная модель расчета энергетических затрат схем полетов 175
Таблица 5.2.
Характеристики орбит астероидов (24) Фемида и (40) Гармония
Элементы орбиты Астероид
(24) Фемида (40) Гармония
Эпоха, юлианская дата
2 456 000,5 (0 ч. 14 марта 2012 г.)
Большая полуось 3,136 150 9943 а.е. 2,2672606 а.е.
Эксцентриситет 0,128 932813 1 0,047 257 91
Наклонение 0,757 54° 4,257 48°
Долгота восходящего узла 36,123 67° 94,241 55°
Аргумент перицентра 106,979 24° 269,157 69°
Средняя аномалия 253,953 001 8° 77,444 912 8°
Период 2028,588 сут. = 5,55 г. 1246,954 сут. = 3,41 г.
параметров в которых служит время, на которое нужно определить
вектор состояния данного небесного тела. Вектор состояния астероида
рассчитывается по исходным данным либо путем численного инте-
грирования уравнений его движения, либо приближенно по формулам
кеплерового движения.
В качестве опорной принята круговая орбита ИСЗ высотой 200км.
Рассматривалась схема полета с угловой дальностью менее 360° и стар-
том с Земли в 2011 г. Эти два параметра добавляются в вектор
ограничений PL.
5.3.2. Численные модели и методика оптимизации схемы пря-
мого перелета к астероиду. Рассмотрим сначала схему прямого
перелета Земля-астероид.
При наличии достаточно точной информации об эфемеридах планет
и астероидов и задаваясь датой старта от Земли и датой прилета к асте-
роиду, можно определить исходные данные для решения задачи Лам-
берта — гелиоцентрические радиусы Земли и астероида на моменты
отлета от Земли R\(Tq) и прилета к астероиду /?д(Тд) и длительность
межпланетного участка перелета:
т = Та - То.
Суммарная характеристическая скорость, сообщаемая КА посред-
ством его ДУ AVs, может быть получена как сумма характеристиче-
ских скоростей разгона КА с опорной орбиты ИСЗ на межпланетную
176
Гл. 5. Схема полета к астероидам Главного пояса
траекторию ДУисз и выхода на заданную орбиту вокруг астероида
(торможения с подлетной гиперболической траектории) ДУиса:
ДГе(Т0,7а) = Д^исз (Koi) + ДУиса (Н^), (5.16)
где Vooi и Voo2 — асимптотические скорости отлета КА от Земли
и подлета к астероиду. Они определяются как разности гелиоцентриче-
ских скоростей КА и планеты (астероида) на соответствующий момент
полета (г — 1,2; 1 — отлет от Земли, 2 — прилет к астероиду):
Vooi = |К - Wi\ ,
где V — гелиоцентические скорости КА в г-й момент времени, рас-
считываемый при решении задачи Ламберта, Wi — гелиоцентрическая
скорость соответствующего небесного тела (планеты или астероида).
Импульс ухода аппарата с орбиты ИСЗ ДУисз равен разности гео-
центрических скоростей КА при движении по гиперболической и кру-
говой орбитам в перигее:
ДКисз = А/У-1 + — (5.17)
V гисз у гисз
где щ — гравитационный параметр Земли, гцсз ~ радиус круговой
опорной орбиты ИСЗ, на которой выполняется маневр выведения КА
на межпланетную траекторию перелета к астероиду.
В случае астероида импульс скорости, переводящий КА на орбиту
его искусственного спутника, рассчитывается аналогично (5.17). Одна-
ко влияние гравитационной постоянной астероида на скорость выхода
космического аппарата на орбиту вокруг него пренебрежимо мало. По-
этому в качестве последней принята асимптотическая скорость подлета
к астероиду «на бесконечности»:
ДУиса^ооа. (5.18)
Для оптимизации схемы полета по энергетическим затратам в качестве
минимизируемого функционала F\ согласно (5.8) была выбрана сум-
марная характеристическая скорость миссии в виде (5.16), зависящая
от дат старта и прилета:
F, - ДПе(7о,2а). (5.19)
5.3.3. Результаты оптимизации схемы прямого перелета. Даты
старта КА, его прилета, продолжительность перелета аппарата, необ-
ходимые затраты его характеристической скорости при использовании
схемы прямого перелета представлены в табл. 5.3.
На рис. 5.6 и 5.7 приведены схемы прямых перелетов к данным
астероидам.
5.3. Численная модель расчета энергетических затрат схем полетов 177
У, а.е.
Рис. 5.6. Схема прямого перелета к астероиду Фемида
Рис. 5.7. Схема прямого перелета к астероиду Гармония
С данными табл. 5.3 ниже будут сравниваться результаты расчетов
энергетических затрат для схемы полета с использованием орбит ИСМ.
178
Гл. 5. Схема полета к астероидам Главного пояса
Таблица 5.3.
Перелет Земля-Фемида Земля-Гармония
Время перелета 06.10.2018- 30.01.2020 (482 суток) 02.08.2018- 08.10.2019 (432 суток)
Скорость разгона с ОИСЗ, км/с 5,107 5,964
Скорость торможения у астероида, км/с 5,763 4,439
Суммарные затраты скорости на перелет, км/с 10,869 10,403
5.3.4. Методика оптимизации схемы полета с использованием
орбиты ожидания у Марса. Декомпозиция задачи синтеза опти-
мальной схемы полета с использованием орбиты ожидания. Для
схемы полета с использованием орбит ИСМ функционал (5.8) будет
иметь более сложный вид, чем для схемы прямого перелета:
F2 = ДУе (То, Tmi , ТМ2, ТА, Еисм) =
= ДУисз + ДСР'М + ЕДУисм + Д<32г + ДКс-А. (5.20)
где ДУ^Д — импульс торможения при перелете Земля-Марс (пере-
хода с гиперболической орбиты подлета на начальную орбиту ИСМ);
ДЦ^зг ~ импульс разгона с конечной орбиты ИСМ на гелиоцентриче-
скую орбиту перелета к астероиду; ЕДУисм — сумма импульсов, необ-
ходимых для маневров перехода и стыковки начальной и конечной ор-
бит ИСМ; Tmi — момент прилета к Марсу (при перелете Земля-Марс);
Тм2 — момент отлета от Марса (при перелете Марс-астероид), Еисм —
элементы орбит начальной, конечной и одной или нескольких проме-
жуточных орбит ИСМ.
Проанализировав выражение (5.20), можно разбить всю схему пе-
релета на три этапа:
— перелет Земля-Марс;
— полет по орбитам ИСМ;
— перелет Марс-астероид.
В таком случае суммарные энергетические затраты на перелет сос-
тоят из суммы импульсов скоростей на каждом из этапов:
F? = ДУе (?о,Tmi,Тм2,Fa, Еисм) = ДУ^Г (Fq.Tmi) +
+ ДУ2м2а (Тм2,Та) + ДУ23СМ (Т0,Тм1,Тм2,ТА,Еисм) • (5.21)
5.3. Численная модель расчета энергетических затрат схем полетов 179
При этом
дп21 - ДУисз; Д1Д2 = ДУоса;
ДКз = Д См + ^исм + ДС.
Видно, что ДУ21 зависит только от времени отлета космического
аппарата от Земли и прилета его к Марсу, ДУ22 — от соответствую-
щих временных характеристик перелета Марс-астероид. Следователь-
но, выражение для расчета суммарных энергетических затрат можно
представить двумя слагаемыми:
ДУ2 = ДУ2(1+2) + ДУ2з-
Значит, задачу условно можно разделить по отношению к Марсу
на «внешнюю» — гелиоцентрические участки перелета, их характери-
зует ДУ2(1+2), и «внутреннюю» (ареоцентрическую, ДУ2з). Конечный
участок перелета Земля-Марс и начальный участок перелета Марс —
астероид являются соответственно начальным и конечным участком
для решения последней задачи путем стыковки подлетного и отлетного
околомарсианского этапов.
Таким образом, решение задачи можно разбить на две части. К тому
же это благоприятно с точки зрения уменьшения размерности решае-
мой задачи. Количество переменных «внутренней» задачи по отноше-
нию к околомарсианскому участку полета при этом уменьшается на 4,
так как две пары времен старта и прилета находятся при решении
«внешней» задачи.
Задачу синтеза околомарсианского этапа будем решать в следую-
щей последовательности.
1. Сначала определяются асимптотические скорости подлета к Мар-
су и отлета с орбиты ИСМ и соответствующие им моменты времени,
обеспечивающие минимум ДУ2(1+2):
min AV'v(| +2)(То, Тл) —> {V^!, Tmi, V-2, Тм2} . (5.22)
Обе части «внешней» задачи можно решать почти независимо, только
ограничившись весьма разумным неравенством
Tmi < Тц12,
так как прилет от Земли к Марсу не может быть раньше отлета
от Марса к астероиду.
2. Исходя из найденных из (5.22) параметров, считающихся по-
стоянными при решении «внутренней» задачи, находим элементы всех
орбит ИСМ, приводящих к минимуму энергетических затрат на аре-
оцентрическом участке ДУ2з:
min AVs3 Vm2,?m2) —* Еисм- (5.23)
180
Гл. 5. Схема полета к астероидам Главного пояса
Таким образом, весь вектор независимых переменных
X = {То-Тш, ГМ2, ТА, ЕИсм}
будет найден.
5.4. Оптимизация межпланетных участков перелета
Теперь рассмотрим вариант перелета с использованием маневров
на орбите Марса. Задачу, как показано выше, можно разделить по от-
ношению к Марсу на «внешнюю» (гелиоцентрические участки пере-
лета) и «внутреннюю» (использование орбиты ожидания). При этом
сначала необходимо найти решение внешней задачи. Для этого необ-
ходимо определить оптимальные по энергетическим затратам варианты
перелета Земля-Марс и Марс-астероид с помощью решения задачи
Ламберта.
Для таких расчетов оба межпланетных участка траектории могут
быть рассчитаны аналогично прямому перелету Земля-астероид. При
этом скорость разгона с ОИСЗ на межпланетную траекторию перелета
к Марсу определяется по формуле (5.17), а для вычислений характе-
ристической скорости выхода КА на ОИСА воспользуемся формулой
(5.18). Как и в предыдущем случае, в качестве опорной рассматрива-
лась круговая орбита ИСЗ высотой 200 км.
Для дальнейшего описания ареоцентрического участка полета вос-
пользуемся приведенными ниже обозначениями орбит.
Эллиптическую орбиту, формируемую импульсом торможения
у Марса, назовем начальной. Она является переходной между
подлетной траекторией при перелете от Земли и орбитой ожидания.
В случае, если для рассматриваемой схемы полета используется
несколько переходящих друг в друга схожих по параметрам орбит
ожидания, будем называть их в порядке формирования — первой,
второй и т. д. Переходную эллиптическую траекторию, связывающую
орбиту ожидания (единственную или последнюю в случае нескольких
подобных орбит) и гиперболическую отлетную траекторию для
перелета к астероиду, назовем предстартовой.
Как видно из формулы (5.20), для расчетов характеристической
скорости на торможение у Марса на начальную орбиту ДУ/^ необ-
ходимо задаться высотами перицентра и апоцентра этой орбиты. Эти
же параметры необходимо указать и для предстартовой орбиты ИСМ
для расчета ДУр”2. Высота перицентра обоих орбит должна быть выше
верхней границы атмосферы. Радиус орбиты ожидания, являющийся
одновременно радиусом апоцентра начальной и предстартовой орбит,
представляет собой один из оптимизируемых параметров. Поэтому
для исключения его из расчетов внешней задачи, можно заменить
5.4. Оптимизация межпланетных участков перелета
181
в функционале (5.20) сумму скоростей разгона и торможения на этапах
Земля-Марс и Марс-астероид на сумму асимптотических скоростей
отлета и прилета на этих этапах:
^2Внеш = AVL (Т0,ТМ1,ТМ2>Та) =
3= (AV^ + AV”1) + (AV”2 + AV*), (5.24)
где AV^, — асимптотическая скорость отлета от Земли; AV.”1 —
асимптотическая скорость при подлете к Марсу; A V,”2 — асимптоти-
ческая скорость отлета от Марса; AV^ — асимптотическая скорость
подлета к астероиду.
5.4.1. Математическая модель полета КА на околомарсиан-
ском участке траектории. Систему уравнений ареоцентрического
движения КА внутри сферы влияния Марса можно записать в следу-
ющем виде
f f = V,
5 _ г □_ □_ (525)
V — —р^ -у + apm + aef,
< г
где г — радиус-вектор КА; V — вектор скорости КА; рц — грави-
тационная постоянная Марса; арт — ускорение, вызванное влиянием
притяжения со стороны Солнца и планет; agf — ускорение, вызванное
нецентральностью гравитационного поля Марса.
Ускорение, вызванное гравитационным влиянием Солнца и планет,
вычисляется по формуле
где pi — гравитационные постоянные небесных тел; i\ — координаты
этих небесных тел в ареоцентрической системе координат. Индекс г
соответствует небесным телам, приведенным в табл. 5.4.
Таблица 5.4.
Индекс Небесное тело Индекс Небесное тело
0 Солнце 5 Юпитер
1 Меркурий 6 Сатурн
2 Венера 7 Уран
3 Земля 8 Нептун
4 Марс 9 Плутон
182
Гл. 5. Схема полета к. астероидам Главного пояса
Однако, как показывают детальные исследования, для практиче-
ских нужд можно ограничиться только учетом влияния Солнца и Юпи-
тера.
Для расчета ускорения а9у, вызванного нецентральностью гравита-
ционного поля Марса, используется модель GMM-2B [17].
5.4.2. Синтез ареоцентрического участка полета. Рассмотрим
.V-импульсную траекторию КА на некотором заданном промежутке
времени [4]:
t 6 [i 1, tx],
где величины t\ и представляют собой времена прохождения КА
перицентра гиперболических орбит подлета к Марсу и отлета к асте-
роиду соответственно. Эти времена соответствуют моментам t\ = 7м i
и f,.y = ТМ2 из (5.24).
В начальный момент времени t\ аппарат находится в перицентре
подлетной траектории с параметрами
Ео = {<0- РооО, ^ооО» ^ооО До’ АгО} » (5.26)
где г*0 — радиус перицентра подлетной гиперболической траектории,
являющийся одновременно радиусом перицентра начальной орбиты;
Коо — модуль асимптотической скорости подлета к Марсу при пере-
лете от Земли (модуль вектора V^1 из формулы (5.24)); а^о и б^о —
прямое восхождение и склонение асимптотической скорости подлета
V^1; ’о — наклонение подлетной гиперболической траектории (и на-
чальной эллиптической орбиты), т„о — момент прохождения перицен-
тра орбиты, в данном случае он совпадает с моментом tr.
t].
В конечный момент времени £дг КА должен выйти на отлетную гипер-
болическую орбиту с параметрами
E;V = {г*дг, VxN, OtooN ,6ooN, i*N, Т^дг} ,
набор элементов которой аналогичен формуле (5.26). К тому же
1~ttN = tN
Для расчетов значения параметров КД о, сьх,о, Доо, К^дг,
и должны использоваться значения, полученные согласно формуле
(5.26). Высоту перицентра примем равной hv = 500 км (г^ « 3900 км).
Наклонения орбит являются оптимизируемыми параметрами и бу-
дут определены далее. При их формировании необходимо учитывать
следующие ограничения:
5.4. Оптимизация межпланетных участков перелета 183
1) наклонение подлетной гиперболы не может быть меньше угла
склонения подлетной асимптотической скорости:
io <5о;
2) наклонение отлетной гиперболы не может быть меньше угла
склонения отлетной асимптотической скорости:
&N-
Приложение импульса AVj моделируется импульсным изменением
скорости в момент t0 прохождения КА перицентра гиперболической
орбиты:
Г Ri(t0) = R-o(io),
( Vl(fo) = Vo(to) + AVl,
где Ro и Vq — соответственно радиус-вектор и скорость при нахожде-
нии КА на подлетной орбите Eq; R, и Vj составляют вектор состояния
КА на начальной эллиптической орбите Eb Для негиперболических
околомарсианских орбит состав набора Еу (J = 1,...,TV — 1) будет
следующим:
Ej =
j = i w-i
где raj — радиус апоцентра j-й орбиты, Qj и Wj представляют собой
ее долготу восходящего узла и аргумент перицентра.
В случае начальной (J = 1) и предстартовой (j = N — 1) орбит,
моменты тп соответственно равны
^~7Г 1 ТтгО i 1 ’
Для других орбит Ej (j — 2,..., N — 2) параметр находится, в прин-
ципе, в результате решения оптимизационной задачи. Но он весьма
слабо влияет на оптимизируемый функционал (5.23). Поэтому вместо
Тл- удобнее воспользоваться истинной аномалией через текущее
время однозначно связанной с через решение уравнения Эйлера.
По сути, значения 4) нужны только на времена перехода между орби-
тами — выдачи импульсов ДУ)(<7).
Импульс AV|, как следует из формулы (5.27), вычисляется как
разность скоростей в перицентрах гиперболической и начальной орбит:
AV, =Vi(<o)-Vo(<o). (5.28)
Следует заметить, что для расчета функционала (5.23) используется
модуль вектора AV,.
184
Гл. 5. Схема полета к астероидам Главного пояса
Аналогично получим импульс перехода с предстартовой эллиптиче-
ской орбиты E/v-i на отлетную к астероиду Едг, выданный в момент
времени In'.
AV N = V n^n) — Vyv-i(iyv).
В этих двух случаях моменты to и tn фиксированы. Остальные момен-
ты времени tj (j — 2,..., N — 1) являются результатом оптимизации.
При решении задачи синтеза орбит ИСМ предлагается воспользо-
ваться следующей методикой:
— задаемся определенными значениями радиусов апоцентра и пери-
центра для эллиптических орбит «подъема» и «спуска»;
— начальное значение наклонения выбирается таким образом, что-
бы полет по околомарсианским траекториям происходил в одной
плоскости: , „ .
/ Q& \
С — in = arcsin I т-А-г ),
\ |Cv| /
где Cv — Voei х Уоо2 — произведение векторов асимптотических
скоростей подлета к Марсу и отлета от Марса к астероиду;
— из этих данных определяются полные векторы состояния в пери-
центрах эллиптических и гиперболических траекторий, где и вы-
полняются переходы между орбитами;
— импульсы перехода между орбитами рассчитываются аналогично
(5.28) как разности между векторами скоростей в точках орбиты,
соответствующих моментам tj:
AVj(fj) — Vj-i ((j) Vj(i;);
— решается краевая задача перелета из около апоцентрального
участка начальной орбиты на аналогичный участок предстартовой
орбиты; результатом является околокруговая орбита ожидания;
— так как в процессе полета на космический аппарат действу-
ют различные возмущения (влияние Солнца, больших планет,
нецентральность гравитационного поля Марса и др.), суммарные
энергетические затраты на реализацию всей схемы перелета мо-
гут отличаться от номинальных. Поэтому необходимо провести
расчеты для различных наборов исходных данных и определить
оптимальную последовательность выдачи импульсов.
В принятых здесь обозначениях оптимальный околомарсианский уча-
сток полета будет соответствовать минимуму функционала
N
рвнутр = (5 29)
,7 = >
5.4. Оптимизация межпланетных участков перелета
185
5.4.3. Результаты оптимизации схемы полета вблизи Марса.
Результаты оптимизации межпланетных траекторий Земля-Марс
и Марс-астероид (даты старта КА, его прилета, продолжительность
полета аппарата и асимптотические скорости на различных этапах)
даны в табл. 5.5.
На рис. 5.8, 5.9 и 5.10 приведены схемы траекторий перелета
Земля-Марс, Марс-Фемида и Марс-Гармония соответственно.
Таблица 5.5.
Результаты оптимизации межпланетных траекторий
Характеристики перелета Перелет
Земля-Марс Марс-Фемида Марс-Гармония
Время перелета 12.05.2018- 02.12.2018 (204 суток) 18.11.2021- 06.01.2024 (779 суток) 04.03.2023- 20.07.2024 (504 суток)
Асимптотическая скорость отлета, км/с 2,799 3,938 2,851
Асимптотическая скорость подлета, км/с 2,974 3,186 1,897
Сумма асимптотических скоростей, км/с 5,773 7,124 4,748
186
Гл. 5. Схема полета к. астероидам Главного пояса
Рис. 5.10. Схема перелета Марс-Гармония
В результате проведения этих расчетов (решения «внешней» задачи)
определены исходные данные для решения «внутренней» по отношению
к Марсу задачи — оптимальный с точки зрения затрат характеристи-
ческой скорости перелет между двумя гиперболическими траектория-
ми за заданное время. Рассчитанные исходные данные представлены
в табл. 5.6.
5.4. Оптимизация межпланетных участков перелета
187
Таблица 5.6.
Результаты решения «внешней» задачи
Этап полета Дата Вектор асимптотической скорости
Модуль Склонение Прямое восхождение
Прилет к Марсу 02.12.2018 2,974 км/с -24,48° -69,19°
Отлет к Фемиде 18.11.2021 3,938 км/с -18,09° -51,62°
Отлет к Гармонии 04.03.2023 2,851 км/с -2,96° -129,77°
Результаты оптимизации целевой функции (5.29) для всей схемы
перелета с применением орбит ИСМ представлены в таблице 5.7.
Таблица 5.7.
Результаты оптимизации целевой функции
Маневр Полет к Фемиде Полет к Гармонии
ДУ|, км/с 0,874 0,874
ДУ, км/с 1,401 0,781
ДУз, км/с 0,304 0,295
ДУ, км/с 0,241 0,237
ДУз, км/с 0,075 0,025
5 Е AVj(tj), км/с J = 1 2,895 2,212
Здесь импульс AV] представляет собой характеристическую ско-
рость маневра перехода с гиперболической подлетной орбиты на на-
чальную эллиптическую, АУ — с предстартовой на отлетную траек-
торию. Маневр Д’Из переводит КА на первую орбиту ожидания, далее
с помощью импульсов ДУ4 и ДИэ реализуется предстартовая орбита.
Импульс AVj необходим для синхронизации по времени прилета КА
на предстартовую орбиту, а также для реализации ее некоторых па-
раметров — наклонения, аргумента перицентра и момента его прохож-
дения.
Вид околомарсианских участков траектории для полета к рассмат-
риваемым астероидам представлен на рис. 5.11 и 5.12 на цветной
вклейке.
На рис. 5.13 приведен пример эволюции большой полуоси и экс-
центриситета для всей траектории ареоцентрического участка. Графики
построены для полета к астероиду Гармония.
188
Гл. 5. Схема полета к астероидам Главного пояса
Время, земные сутки
Рис. 5.13. Эволюция элементов орбиты для полета к астероиду Гармония
Энергетические затраты на всю экспедицию, согласно разделению
задачи на «внешнюю» и «внутреннюю» по отношению к Марсу (5.21),
являются суммой следующих характеристических скоростей:
— разгона с опорной орбиты ИСЗ ДУисз. рассчитанной по форму-
ле (5.17), в которую подставляется значение ДУ^, полученное
из оптимизации межпланетного участка траектории (5.24);
— торможения у астероида ДУиса. определяемая через ДУ^, также
из (5.24);
— суммарной на околомарсианском участке траектории соглас-
но (5.29).
Таким образом, суммарная характеристическая скорость экспедиции
рассчитывается по формуле
F2(7q. Та. = ДУисз + ДУму + ДУиса- (5.30)
з
Результаты расчетов для всей схемы перелета с применением ор-
бит ИСМ представлены в табл. 5.8.
5.4.4. Определение схемы полета, обеспечивающей минималь-
ные энергетические затраты. В табл. 5.9 сведены итоговые ре-
зультаты оптимизации прямой схемы перелета из табл. 5.3 и схемы
5.4. Оптимизация межпланетных участков перелета
189
Таблица 5.8.
Результаты расчета схемы перелета
Характеристики перелета Перелет
Земля-Марс Марс-Фемида Марс-Гармония
Время перелета 09.11.2011- 11.09.2012 (306 суток) 10.08.2013- 05.01.2015 (513 суток) 05.10.2014- 10.01.2016 (462 суток)
Скорость разгона ДЦ, км/с 3,576 1,401 0,781
Скорость торможения ДГг, км/с 0,874 3,186 1,897
Суммарный импульс маневров на орбите ИСМ F2BHyTp, км/с — 0,620 0,557
Суммарные затраты скорости на перелет, км/с 4,450 5,207 3,236
Суммарные затраты скоро- сти на миссию Fi, км/с — 9,657 7,686
Таблица 5.9.
Схема полета Цель экспедиции
Фемида Гармония
Прямая 10,869 10,403
С использованием орбиты ожидания у Марса 9,657 7,686
Выигрыш по сравнению со схемой прямого перелета, км/с 1,212 2,717
с использованием орбиты ожидания из табл. 5.8; и выполнено сравне-
ние этих схем.
Как видно из табл.5.9, схема перелета с использованием ор-
биты ИСМ дает выгоду по энергетическим характеристикам по срав-
нению с прямым перелетом Земля-астероид.
5.4.5. Оценка массы КА. Для проведения расчетов массы пред-
положим, что:
— КА в составе головного блока (ГБ — связка КА и РБ) с помощью
PH выводится сначала на опорную орбиту ИСЗ;
190
Гл. 5. Схема полета к астероидам Главного пояса
— после этого РБ выполняет маневр разгона на отлетную траекто-
рию, после чего РБ отделяется;
— дальнейший полет КА осуществляет самостоятельно, т. е. осталь-
ные маневры совершаются с помощью его ДУ и топлива из его
баков.
Исходя из этой идеологии схемы построения маневров, массовые
характеристики КА на соответствующем этапе могут быть рассчитаны
для предварительных оценок согласно приведенной ниже методике.
1. Конечная масса ГБ после реализации маневра разгона с опорной
орбиты ИСЗ на межпланетную траекторию рассчитывается согласно
формуле Циолковского:
= (5.31)
где М™ — масса ГБ после реализации маневра; М®ъ — начальная
масса ГБ; ДУисз — скорость разгона с опорной орбиты ИСЗ; с —
скорость истечения газов из сопла двигателя РБ:
с = Р™-д0,
РРБ — удельный импульс ДУ РБ; до — модельное ускорение свобод-
ного падения, равное 9,806 65 м/с2.
2. Масса топлива на реализацию отлетного маневра представляет
собой разность масс ГБ до и после проведения включения ДУ РБ,
при этом она не должна превышать предельную заправку топливом
баков ДУ РБ:
<Б = М0ГБ - МРБ «Б < МРБ,ах)-
3. После отработки импульса выведения РБ отделяется, и масса КА
становится равной
м0КА = м™ - м£Б,
что представляет собой начальную массу КА на отлетной гиперболи-
ческой траектории.
4. Все остальные маневры, согласно схеме полета, выполняются
на ДУ КА. Масса КА в ходе дальнейшего полета рассчитывается
также согласно формуле Циолковского (5.31), только вместо ДУисз
нужно подставить характеристическую скорость данного маневра ДУ
(г = 2,... ,N) (где N — число маневров в рассматриваемой схеме
полета), а вместо удельного импульса ДУ РБ — аналогичную характе-
ристику ДУ КА:
МКА = <А-е“^.
5.4. Оптимизация межпланетных участков перелета
191
5. Затраты топлива, необходимого на выполнение активных манев-
ров, также вычисляется аналогично п. 2, и масса этого топлива должна
удовлетворять заправке КА:
<А = <А - <СА (Мт<МтКАах).
6. Масса КНА является разностью между массой КА на момент
выхода на ОИСА, рассчитанной в предыдущем пункте, и оценочной
массой КА МКА, представляющей собой сумму сухой массы КА и за-
паса топлива для работы на орбитах ИСА:
Мкна = <АА - м^.
При этом отрицательное значение массы КНА говорит о невозможно-
сти реализации экспедиции при данных массово-энергетических ха-
рактеристиках средств выведения и самого КА.
Выполним баллистическую оценку массы КА на различных этапах
полета вплоть до конечной астероидоцентрической орбиты. В качестве
средств выведения рассмотрим три варианта комплексов PH и РБ: PH
«Протон-К» и РБ «Бриз-М», PH «Зенит-2БББ» и РБ «Фрегат-СБ»,
PH «Союз 2-16» и РБ «Фрегат». Вычисления может упростить следую-
щий факт: у всех перечисленных выше разгонных блоков используется
один и тот же маршевый двигатель — С5.98М с удельном импульсом
РРБ = 331 с. Также для расчетов примем, что удельный импульс КА
равен Ру^А = 308 с.
Характеристики рассматриваемых комплексов средств выведения
взяты из [15,18-22] и представлены в табл. 5.10, где — мак-
симальная масса выводимого головного блока на опорную орбиту;
^Ттах — максимальная масса рабочего топлива РБ; — конечная
масса РБ (с учетом массы адаптера, системы разделения, топлива
гарантийного запаса и невырабатываемых остатков).
Таблица 5.10.
Средство выведения кг ЛТтБтах, кг МКРБ, кг
«Протон»/«Бриз» 21 600 18000 2700
«Зенит» / «Фрегат-СБ» 14 000 10180 1500
«Союз» / «Фрегат» 8250 5600 920
Результаты расчетов по этой методике для схемы прямого полета
к астероиду Фемида представлены в табл. 5.11, для схемы полета
с использованием орбиты ожидания у Марса — в табл. 5.12.
192
Гл. 5. Схема полета к астероидам Главного пояса
Данные по аналогичным расчетам для Гармонии представлены
в табл. 5.13 и 5.14. Для расчета массы научной аппаратуры, доставля-
емой к астероиду ЛГкна, масса конструкции КА Мк* принята равной
800 кг.
Таблица 5.11.
Средство выведения «Протон»/«Бриз» «Зенит» / «Фрегат-СБ» «Союз»/«Фрегат»
МоБ, кг 21600 14 000 8250
М^, кг 4521,4 2930,5 1726,9
М0КА, кг 1821,4 1430,5 806,9
ЛГЙсА' КГ 270,3 212,3 119,7
ЛТкна, кг -529,7 -587,7 -680,3
Таблица 5.12.
Средство выведения «Протон»/«Бриз» «Зенит»/«Фрегат-СБ» «Союз»/«Фрегат»
<Б, кг 21600 14 000 8250
МКГБ, кг 7225,7 4683,3 2759,8
М0КА, кг 4525,7 3183,3 1839,8
ЛГисмО’ кг 3388,6 2383,5 1377,6
А^йсмК" кг 1735,5 1220,7 705,5
^ИСА- КГ 604,4 425,1 245,7
ЛТкна, КГ -195,6 -374,9 -554,3
Таблица 5.13.
Средство выведения «Протон» / «Бриз» «Зенит»/«Фрегат-СБ» «Союз» / «Фрегат»
М0ГБ, кг 21600 14000 8250
ЛДЬ, кг 4672,0 3509,4 2657,0
М0КА, кг 1972,0 2469,4 1737,0
миса- кг 329,6 339,5 189,4
ЛТкна- кг -470,4 -460,5 -610,6
Список, литературы к главе 5
193
Таблица 5.14.
Средство выведения «Протон»/ «Бриз-М» «Зенит»/ «Фрегат-СБ» «Союз»/ «Фрегат»
М0ГБ, кг 21600 14000 8250
ЛДБ. кг 7225,7 4683,3 2759,8
М0КА, кг 4525,7 3183,3 1839,8
МКА 0, кг 3388,6 2383,5 1377,6
Мисмк> кг 2175,9 1530,5 884,6
М^д, кг 745,3 524,3 303,0
МКНЛ, КГ -54,7 -275,7 -497,0
В табл. 5.12 и 5.14 также используются следующие обозначе-
ния: Л^исмо масса КА после выхода на начальную орбиту ИСМ;
*^исмк — масса КА после выведения на траекторию полета к асте-
роиду. Из представленных данных видно, что выигрыш от использова-
ния схемы полета с орбитой ожидания у Марса по сравнению с прямым
перелетом в случае экспедиции к астероиду Фемида и выведения КА
на отлетную траекторию с помощью PH «Протон» с РБ «Бриз» дос-
тигает около 380 кг, в аналогичном случае для Гармонии — примерно
400 кг.
Список литературы к главе 5
1. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космиче-
ского полета. — М.: Наука, 1990.
2. Дубошин Г. И. Небесная механика. Основные задачи и методы. —
М.: Наука, 1975.
3. Иванов И. М., Лысенко Л. Н. Баллистика и навигация космиче-
ских аппаратов. — М., Дрофа, 2004, 544 с.
4. Ильин В.А., Кузмак Г.Е. Оптимальные перелеты космических
аппаратов. — М.: Наука, 1976.
5. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Системный ана-
лиз вариантов миссии и синтез программы прямых исследований
ближайшего околосолнечного пространства. — М.: Изд-во МАИ,
2006.
6. Соловьев Ц. В., Тарасов Е. В. Прогнозирование межпланетных
полетов. — М.: Машиностроение, 1973.
7. Эльясберг И. Е. Введение в теорию полета искусственных спут-
ников Земли. — М.: Наука, 1965.
7 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
194
Гл. 5. Схема полета к. астероидам Главного пояса
8. Ливанов Л. Б. Приближенные расчеты полетов на астероиды
с импульсными или аэродинамическими маневрами у Земли, Ве-
неры, Марса, Юпитера. — М.: Препринт ИПМ им. М. В. Кел-
дыша, 1995, 28 с.
9. Малышев В.В., Усачов В.Е. Математическое моделирование
управляемого движения космических аппаратов. — М.: Изд-во
МАИ, 1994.
10. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Оптимизация кос-
мической миссии в корону Солнца. - М.: Изд-во МАИ, 2006.
И. Малышев В.В., Пичхадзе К.М., Усачов В.Е., Тычинский Ю.Д.
Методы и алгоритмы синтеза и оптимизации вариантов миссии
в ближайшее околосолнечное пространство. — М.: Изд-во МАИ,
2006.
12. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Системный ана-
лиз вариантов миссии и синтез программы прямых исследований
ближайшего околосолнечного пространства. — М.: Изд-во МАИ,
2006.
13. Standish Е. М. JPL Planetary and Lunar Ephemerides, DE405/
LE405. 1998. JPL ЮМ 312.F-98-048.
14. JPL Small-Body Database Browser. URL: http://ssd.jpl.nasa.gov.
15. Руководство пользователя PH «Союз» при запуске из РКЦ. URL:
http://www.arianespace.com/launch-services-soyuz/Soyuz_Users_
Manual_CSG_JuneO6.pdf
16. Механика космического полета / Под ред. В.П. Мишина. —
М.: Машиностроение, 1989.
17. F. G. Lemoine, D. Е. Smith, D. D. Rowlands, М. Т. Zuber, G. А.
Neumann, and D. S. Chinn An improved solution of the gravity
field of Mars (GMM-2B) from Mars Global Surveyor, J. Geophys.
Res., 106(E10), 23359-23376, October 25, 2001.
18. Land Launch User Guide. URL: http://www.sea-launch.com/land-
launch/index.html
19. Proton Launch System Mission Planner’s Guide. URL: http://www.
ilslaunch.com/protonmpg
20. Тактико-технические характеристики разгонного блока «Бриз-М».
URL: http://www.khrunichev.ru/main.php?id=49
21. Основные характеристики РБ «Фрегат» различных модифика-
ций. URL: http://www.laspace.ru/rus/fregat_construction.php
22. Разгонный блок «Фрегат-СБ». URL: http://www.laspace.ru/rus/
fregat_blocksb.php
Глава 6
ВЫБОР ТРАЕКТОРИЙ
МЕЖПЛАНЕТНЫХ ПИЛОТИРУЕМЫХ
ИССЛЕДОВАТЕЛЬСКИХ МИССИЙ
Пилотируемые исследования за пределами орбиты Луны могут быть
выполнены путем стыковки на высокоэнергетических орбитах [1] (на-
пример, в окрестности L2 системы Земля-Солнце), что включает сбли-
жения на «фазирующих орбитах» и, по существу, использует методы,
отработанные на миссии ISEE-3 [2], траектории WIND с двойным об-
летом Луны [3], разработках по предложенной миссии «Реликт-?» [4],
и фазирующих орбитах STEREO [5]. В реалиях современного мира
представляется крайне маловероятным успешное осуществление про-
граммы пилотируемых исследований Солнечной системы силами одной
страны. Таким образом, это должно стать международной программой,
такой как Международная космическая станция. Сегодня уже суще-
ствует такая международная база, и эти идеи во многом воплощаются
исследовательской группой Международной академии астронавтики.
Работа [1] была представлена на собрании этой исследовательской
группы, проводившемся на Международном конгрессе по астронавтике
в 2008 г. Далее планируется детальное развитие этих идей, включая
расчеты с использованием полных моделей сил. Особое значение будет
уделено миссиям к ОЗО и составлению оптимальных стратегий избе-
жания потенциально опасных объектов (ПОО).
Программа Apollo показала, что важное значение имеют системный
подход к проектированию миссий и извлечение максимальной выгоды
из наиболее эффективных траекторий. Экономия массы и AV при
использовании оптимальных комбинаций траекторий могут не только
быть очень существенными, но и вообще позволить выполнить миссию,
поэтому проектирование траектории имеет первостепенное значение
при планировании любой миссии. Программа Apollo не смогла бы быть
успешной без применения принципов сближения на окололунной орби-
те, и этот опыт будет учитываться в данном анализе.
Для распространения пилотируемых исследований вне системы
Земля-Луна с использованием описанного ниже поэтапного подхода
предстоит детально проработать предполагаемые траектории, чтобы
7*
196 Гл. 6. Выбор траекторий межпланетных миссий
подтвердить их осуществимость и оценить фактические требования
по ДУ. На первом этапе должна быть получена возможность перехода
с высокоэллиптических околоземных орбит к другим точкам в сфе-
ре влияния Земли, к окрестностям точек либрации Ц и L2 систе-
мы Земля-Солнце, к Луне и точкам либрации системы Земля-Луна.
На втором этапе необходимо тщательно изучить ОЗО и их опасность
для Земли посредством автоматических миссий для сбора гораздо
более подробных данных об их свойствах и распределении, чем могут
быть получены с Земли. Наконец, на третьем этапе пилотируемые мис-
сии смогут посетить ОЗО, испытать технологии их отклонения и до-
стичь Фобоса, Деймоса и Марса. В следующих разделах приводятся
подходы для расчета оптимальных траекторий на каждом из описанных
этапов.
6.1. Миссии в сфере влияния Земли
6.1.1. С околоземной — на гало-орбиту вокруг Ьг системы
Земля-Луна. Несмотря на то, что наблюдения обратной стороны
Луны с лунной орбиты показывают огромную научную ценность этого
района [6], ни одна миссия не привела пока к посадке в нем кос-
мического аппарата. В связи с этим, гало-орбита вокруг L2 системы
Земля-Луна оказывается легкодоступной и, вместе с тем, полезной
целью для миссий первого этапа, так как эта орбита позволяет с лег-
костью управлять мобильными роботами и аппаратами для возврата
образцов с обратной стороны Луны.
Рис. 6.1. Прямой переход с низкой околоземной орбиты к точке L2 системы
Земля-Луна в плоскости лунной орбиты во вращающейся системе отсчета,
в которой отрезок Земля-Луна неподвижен [8, 10]
Гало-орбиты вокруг L2 Луны детально изучались в 1970-х гг.
как возможное место размещения спутников связи для обеспече-
ния планировавшейся последней миссии Apollo на обратную сторо-
ну Луны [7-10]. Как показано на рис. 6.1, прямой переход к точке
либрации L2 системы Земля-Луна требует ДУ приблизительно рав-
ное 1230 м/с.
6.1. Миссии в сфере влияния Земли
197
Вместе с тем, была найдена непрямая траектория перехода с исполь-
зованием гравитационного маневра вблизи Луны, которая позволяет
уменьшить ДУ для достижения L2 более чем в три раза, что является
существенной экономией массы КА (рис. 6.2).
Рис. 6.2. Непрямой переход с низкой околоземной орбиты к точке I.j системы
Земля-Луна [8, 10]. Система координат аналогична рис. 6.1
Траектории, показанные на рис. 6.1 и 6.2, были получены как ре-
шения ограниченной задачи трех тел для достижения точки L2 в пред-
положении кругового движения Луны, причем точка L2 оказывается
закрыта Луной при наблюдении с Земли. Главный автор данной работы
впервые произвел вычисление непрямой траектории (рис. 6.3) перехода
к гало-орбите вокруг L2 системы Земля-Луна (вместо самой L2) при
использовании запуска из Космического центра им. Кеннеди (КЦК)
в восточном направлении с реалистичными моделями сил со стороны
Солнца, Земли и Луны, полученными из эфемерид JPL DE405. Полное
ДУ после выведения на траекторию составило 336 м/с — всего на 4 м/с
больше, чем для траектории на рис. 6.2.
Дата выведения на гало-орбиту была выбрана непосредственно пе-
ред последней четвертью Луны, так что в течение первых двух недель
после этого аппараты, действующие на обратной стороне Луны, будут
получать максимальный световой поток от Солнца. При этом, как
видно на рис. 6.4, такая траектория проходит в тени Земли, испытывая
затмение длительностью 101 минута, начиная с 86-й минуты после
выведения на отлетную траекторию.
При необходимости, затмение можно уменьшить, производя запуск
на более наклоненную к эклиптике траекторию в другое время, либо
отложив запуск на 2-3 дня, когда проход через тень Земли произойдет
ближе к ней и быстрее. Моменты времени, соответствующие основным
событиям полета, приведены в табл. 6.1.
198
Гл. 6. Выбор траекторий межпланетных миссий
17 июля
ДУ = 96 м/с
Рис. 6.3. Непрямой переход при запуске из КЦК на гало-орбиту вокруг L2
системы Земля-Луна. Система координат аналогична рис. 6.1
Рис. 6.4. Траектория, показанная на рис. 6.3, изображенная в плоскости
эклиптики при фиксированном направлении на Солнце
Более подробно эта траектория показана на рис. 6.5 и 6.6 для
области вблизи Луны. После облета Луны аппарат совершает более
одного оборота вокруг точки либрации L2 системы Земля-Луна для
финального перехода на гало-орбиту, что позволяет уменьшить ДУ
двух импульсов, необходимых для выполнения этого перехода.
Несмотря на то, что в плоскости XY (на рис. 6.5) такое выравни-
вание выглядит достаточно близким, на рис. 6.6 (вид с Земли, плос-
кость YZ) видно, что различие весьма существенно. Так происходит
потому, что облет Луны заставляет траекторию начинаться вблизи
центра плоскости YZ (вблизи самой Луны), так что сразу после облета
6.1. Миссии в сфере влияния Земли
199
Таблица 6.1.
Ключевые моменты времени для траектории, показанной на рис. 6.3
Дата, 2021 г. UTC Событие
23 июня 18:12 Запуск
23 июня 18:23 Выведение на околоземную орбиту h = 185 км
23 июня 18:24 Выведение на отлетную траекторию Сз — 2,00 км2/с2
23 июня 19:51 Начало затмения
23 июня 21:32 Конец затмения
27 июня 06:44 Облет Луны, h = 54 км, ДУ = 186 м/с
14 июля 04:19 ДУ = 54 м/с
17 июля 18:44 Выведение на гало-орбиту, ДУ = 96 м/с
14 июля
ДУ = 54 м/с
4
Переход
на гало-орбиту
17 июля
ДУ = 96 м/с
Рис. 6.5. Увеличенная картина траектории, показанной на рис. 6.3,
вблизи Луны; система координат аналогична рис. 6.1
траектория является узкой орбитой Лиссажу, сильно отличающейся
от гало-орбиты.
Обычно, при прямом переходе затраты ДУ на выведение на гало-ор-
биту оказываются значительно меньше, чем для помещения КА точно
в L2, но в данном случае, затраты на переход с узкой орбиты Лис-
сажу на гало-орбиту увеличивают ДУ, приблизительно компенсируя
эту выгоду. Тем не менее, в данном случае возможно дополнительное
200
Гл. 6. Выбор траекторий межпланетных, миссий
h = 54 км
ДУ = 186 м/с
Рис. 6.6. Вид с Земли на траекторию, показанную на рис. 6.5. Горизонтальное
направление совпадает с плоскостью орбиты Луны, а вертикальное перпенди-
кулярно к ней
уменьшение ДУ за счет изменения наклонения траектории облета
Луны и моментов времени совершения двух маневров после облета.
При определении лунных гало-орбит с реалистичными моделя-
ми сил возникают трудности, связанные с сильными возмущениями
со стороны Солнца. В результате этого, гало-орбита, показанная выше,
была вычислена по методу выравнивания орбитальной энергии [11],
но для точки, отстоящей от теоретической гало-орбиты. Такая траекто-
рия, находясь весьма близко от периодической гало-орбиты, является
при этом орбитой Лиссажу, которая, тем не менее, в течение несколь-
ких месяцев не будет проходить за Луной, что достаточно для веро-
ятной лунной пилотируемой миссии. Такая «гало»-орбита несомненно
находится достаточно близко к настоящей гало-орбите чтобы корректно
рассчитать величину требований ДУ.
6.1.2. С околоземной орбиты — в точку Ьг системы Земля-
Солнце. Переходы между высокими эллиптическими околоземными
орбитами и точкой либрации L2 системы Земля-Солнце могут быть
с легкостью выполнены путем многократного облета Луны, как это
было реализовано в миссии ISEE-3 и нескольких других. Так как
окрестность L2 системы Земля-Солнце представляет большой научный
интерес, она является целью многих планируемых и текущих мис-
сий [4, 12]. Предполагается, что на эллиптической околоземной орбите
может быть построен межпланетный транспортный корабль (МТК), до-
ступный для посещения космонавтами, который может быть отправлен
6.1. Миссии в сфере влияния Земли
201
к окрестности L2 системы Земля-Солнце с помощью лунного гравита-
ционного маневра.
6.1.3. Из точки L2 системы Земля-Солнце — к более удален-
ным целям. Несмотря на то, что МТК в основном рассчитан на пре-
бывание на гало-орбите вокруг L2 системы Земля-Солнце в непи-
лотируемом режиме с автоматическим управлением, он также может
быть отправлен к другим целям в околоземном пространстве и вне
его посредством лунных гравитационных маневров с малыми затрата-
ми ДУ. Облет луны с применением небольших ДУ может перевести
МТК на высокую эллиптическую околоземную орбиту с апогеем 50-90
радиусов Земли R, направленную вдоль требуемой отлетной траекто-
рии. Экипаж должен прибыть на МТК, находящийся на эллиптической
орбите, за 2-3 витка до отлетного маневра, что также может включать
доставку топлива и других грузов на МТК; в дальнейшем, такая схема
обозначается как «стыковка на фазирующей орбите» (СФО).
В данном исследовании будут рассмотрены следующие траектории,
которые могут быть достигнуты вышеописанным способом:
— орбиты вокруг точки Li системы Земля-Солнце; Ц и L2 системы
Земля-Луна;
— эллиптические окололунные орбиты с высотой приблизительно
100 км;
— траектории двойного облета Луны.
Двойной облет Луны (ДОЛ) позволяет попеременно опускать и под-
нимать апогей эллиптической орбиты (до величины около 2407?,
или 1,5 млн км, т. е. до расстояния до точек Li и L2 системы
Земля-Солнце), поворачивая при этом линию апсид с угловой скоро-
стью, соответствующей движению Земли вокруг Солнца. Траектории
ДОЛ находят широкое применение в исследованиях протяженных об-
ластей магнитного поля Земли и использовались в миссиях ISEE-3,
Geotail и WIND.
Ниже приведен пример детальной проработки предполагаемой тра-
ектории, которая может быть использована для подтверждения осуще-
ствимости и оценки фактических требований на ДУ для распростра-
нения пилотируемых исследований вне системы Земля-Луна с приме-
нением описанного выше поэтапного подхода.
Переходы между высокой эллиптической околоземной орбитой
и точкой либрации L2 системы Земля-Солнце легко могут быть вы-
полнены с помощью облета Луны: облет по передней стороне позво-
ляет достичь L2, а облет по задней стороне — уменьшить энергию
КА и вернуться к Земле. Примером практического применения такой
траектории может являться обслуживание космонавтами космических
обсерваторий, находящихся на орбитах вокруг Ьг- Одно из решений
202
Гл. 6. Выбор траекторий межпланетных, миссий
этой задачи, вычисленное методом сфер действия, показано на рис. 6.7.
Аналогичные траектории с ДОЛ и многократными маневрами были
получены с использованием реалистичных моделей сил и успешно
применялись в миссиях ISEE-3, Geotail, WIND и других.
Траектория показана в системе, неподвижной относительно направления на Солнце
Рис. 6.7. Упрощенный вариант траектории с двойным облетом Луны
(вычисление методом сфер действия)
Таким образом, на эллиптической околоземной орбите с периодом
12 дней могут быть собраны достаточно большие аппараты, которые
будут легко доступны для посещения экипажем и для отправки к точ-
ке L2 системы Земля-Солнце посредством облета Луны в точке Sj.
Большая обсерватория, находящаяся на гало-орбите вокруг L2, также
может быть переведена с малым ДУ на траекторию аналогичную
рис. 6.7, которая направит ее на эллиптическую околоземную орбиту
посредством облета Луны в точке S2; затем в течение двух или трех
месяцев может проводиться обслуживание, после чего облет Луны
в точке Si вернет ее в Бг. Кроме того, МТК, собранный на эллипти-
ческой околоземной орбите, может быть переведен на орбиту вокруг
L2 системы Земля-Солнце для использования в будущем в качестве
«перевалочного пункта» или для достижения более удаленных целей,
как это описано в следующем разделе. Таким образом, экипаж мо-
жет достигнуть окрестности L2 достаточно быстро (приблизительно
за 2 недели), с применением небольших кораблей и затрат ДУ [1].
6.2. Миссии за сферой влияния Земли.
Межпланетный транспортный корабль (МТК)
Типичный план миссии [1] с использованием стыковки в точке L2
приведен ниже. Он начинается с отправки МТК без экипажа с орбиты
вокруг L2 на эллиптическую околоземную орбиту с помощью малых
6.3. Миссии к околоземным астероидам 203
импульсов тяги (ДУ не более 50 м/с) и лунного гравитационного ма-
невра. Примерно за две или три недели до предполагаемого отлетного
маневра экипаж прибывает на МТК с низкой околоземной орбиты
в корабле-челноке, который затем возвращается на низкую орбиту пу-
тем торможения в верхних слоях атмосферы. После этого применяется
импульс, переводящий МТК (с находящимся теперь на нем экипажем)
на отлетную траекторию к требуемой цели. После завершения межпла-
нетной миссии МТК доставляет экипаж в окрестность Земли, и экипаж
возвращается напрямую на поверхность Земли в спускаемом аппарате.
Наконец, МТК выполняет маневр в перигее траектории для его захвата
гравитационным полем Земли и совершает маневр по облету Луны
с применением небольших импульсов тяги для возвращения на орбиту
вокруг L2.
В одном из вариантов описанной выше миссии для стыковки
и посадки экипажа МТК переводится в одну из коллинеарных точек
либрации системы Земля-Луна (вместо эллиптической околоземной
орбиты). Такой метод позволяет ослабить некоторые траекторные огра-
ничения на перелет челнока с низкой околоземной орбиты, но замет-
но увеличивает его затраты ДУ. Кроме того, увеличивается отлет-
ное ДУ самого МТК: на 350 м/с для точки L2 системы Земля-Луна
и на 700 м/с — для точки Ц. С другой стороны, если экипаж не на-
ходится на МТК, переходы между точками L2 систем Земля-Луна
и Земля-Солнце могут быть выполнены с очень малыми ДУ за счет
увеличения продолжительности маневра до нескольких месяцев.
Еще в 1969 г. была предложена схема, в которой МТК курсиро-
вал между коллинеарными точками либрации систем Земля-Солнце
и Марс-Солнце, а сообщение между точкой либрации системы Марс-
Солнце и поверхностью Марса осуществлялось отдельным аппара-
том [13]. Такие дополнительные стыковки внесли бы значительную
экономию ДУ для МТК между Землей и Марсом и давали бы большие
преимущества для регулярных пилотируемых полетов на Марс.
6.3. Миссии к околоземным астероидам
Для понимания преимуществ базирования МТК в точке L2 системы
Земля-Солнце по сравнению с низкой околоземной орбитой полезно
сравнить для них затраты ДУ для миссии к околоземным астерои-
дам. Например, отличной возможностью такой (пилотируемой) миссии
в ближайшее время является полет к астероиду 1999 АО 10 с запуском
в 2025 г. На рис. 6.8 показана схема этой миссии, причем следует отме-
тить, что МТК, использующий L2, может выполнить ее с затратами ДУ
только 4,9 км/с, что меньше половины затрат МТК, использующего
низкую околоземную орбиту.
204 Гл. 6. Выбор траекторий межпланетных миссий
После опубликования первой работы на эту тематику в 2008 г. [ 1 ]
было обнаружено множество новых легко доступных и некоторых по-
тенциально опасных околоземных астероидов и опубликовано несколь-
ко статей, дающих хороший обзор возможных пилотируемых миссий
к ним [14, 15]. Внушительную работу также проделала А. Циммер [16],
которая, используя точки Lg системы Земля-Солнце для стыковки
в миссиях к астероидам, нашла некоторые траектории с низким AV
за счет больших изменений орбиты, реализуемых маневрами в об-
ластях слабой устойчивости около Lg. Появившийся недавно в сети
Интернет инструмент NHATS, совмещенный с последними базами дан-
ных астероидов, также позволит находить приемлемые миссии к асте-
роидам.
Рис. 6.8. Миссия к околоземному астероиду 1999 АОЮ
длительностью 5 месяцев [1]
Наступает время новых планов пилотируемых космических полетов,
вдохновляющих людей на шаги, никогда ранее не предпринимавшие-
ся. Такие планы должны, тем не менее, удовлетворять ограничениям
доступных ресурсов, времени и финансирования, чтобы обеспечить
успешное выполнение поставленных научных целей.
Предложенная программа имеет в этом смысле следующие преиму-
щества:
Список литературы к главе 6
205
• Предусмотрена перспектива создания космического корабля-
челнока, который проложит путь пилотируемым миссиям
за орбиту Луны. Первые полеты могут включать облет Луны
и работу на геостационарной и гало-орбите вокруг точки L2
системы Земля-Луна.
• Уделяется особое внимание высокому приоритету научных ис-
следований, выполняемых космическими обсерваториями около
точки L2 системы Земля-Солнце.
• Обосновано развитие МТК многоразового использования для пи-
лотируемых полетов к околоземным астероидам и Марсу. МТК
должен иметь необходимую защиту от излучений и внутреннее
пространство для безопасного и удобного путешествия экипажа
к Марсу.
• Имеется практическая возможность совершения пилотируемого
полета на Марс к 2050 г. без значительных издержек во вред
другим научным программам.
В ближайшие годы планируется развить принципы построения ор-
бит для защиты Земли от астероидной опасности и расширить меж-
дународное сотрудничество между Россией, США и другими космиче-
скими державами для математических расчетов траекторий и проекти-
рования межпланетных миссий.
Список литературы к главе 6
1. Farquhar R., Dunham D., and Veverka J. «An Affordable Pro-
gram of Human Missions beyond Low Earth Orbit», Paper IAC-08-
A5.3.02 presented at the 59th International Astronautical Congress,
Glasgow, United Kingdom, September 29 - October 3, 2008.
2. Farquhar R. The Flight of ISEE-3/\CE'. Origins, Mission History,
and a Legacy // Journal of the Astronautical Sciences. 2001. V. 49.
P. 23-73.
3. Franz H., Sharer P., Ogilvie K., and Desch M. WIND Nominal
Mission Performance and Extended Mission Design // Journal
of the Astronautical Sciences. 2001. V. 49. P. 145-167.
4. Eismont N., Dunham D., Jen S., and Farquhar R. Lunar Swingby
as a Tool for Halo-Orbit Optimization in Relict-2 Project 11 in ESA
Special Publication (SP)-326, “Proceedings of the ESA Symposium
on Spacecraft Flight Dynamics”, 1991.
5. Dunham D., Guzman J., Sharer P., and Nitzkorski Z. STEREO
Phasing Orbits // in “Astrodynamics 2007”, Advances in the Astro-
nautical Sciences (Univelt, San Diego). 2008. V. 129. P. 2009-2025.
206
Гл. 6. Выбор траекторий межпланетных миссий
6. Spudis P.D. Physiography and Geology of the Moon», NASA John-
son Space Center, 2008, http://www.spudislunarresources.com/
moon 10 l/moon_10 l_geology.pdf
7. Farquhar R.W. Lunar Communications with Libration-Point Satel-
lites // Journal of Spacecraft and Rockets. 1967. V. 4, No. 10.
P. 1383-1384.
8. Farquhar R.W. «The Utilization of Halo Orbits in Advanced Lunar
Operations», NASA TN D-6365, 1971.
9. Farquhar R.W. and Kamel A.A. Quasi-Periodic Orbits About the
Translunar Libration Point // Celestial Mechanics. 1973. V. 7, No. 4.
P. 458-473.
10. Farquhar R.W. Fifty Years on the Space Frontier: Halo Orbits,
Comets, Asteroids, and More. — Denver, Colorado: Outskirts Press,
Inc., 2011.
11. Dunham D.W., and Roberts C. Stationkeeping Techniques for
Libration-Point Satellites // Journal of the Astronautical Sciences.
2001. V. 49, No. 1. P. 127-144.
12. Farquhar R.W., and Dunham D.W. Use of Libration-Point Or-
bits for Space Observatories // in Observatories in Earth Orbit
and Beyond I Y. Kondo, ed. Kluwer Academic Publishers. 1990.
P. 391-395.
13. Farquhar R.W. Future Missions for Libration-Point Satellites //
Astronautics and Aeronautics. May 1969. V. 7, No. 5. P. 52-56.
14. Zimmer A. and E. Messerschmid Going Beyond: Target Selection
and Mission Analysis of Human Exploration Missions to Near-Earth
Asteroids // Acta Astronautica. 2011. V. 69, No. 11-12. P. 1096—
1109.
15. Genova A.L., Foster C., Colaprete A., Lee P., Battat J., and
Dunham D.W. Entering the Interplanetary Gateway: Short-Duration
Human Missions to Near-Earth Objects, Paper IAC-11-A5.4.1, In-
ternational Astronautical Congress, Cape Town, South Africa, 2011.
16. Zimmer A.K. and Messerschmid E. Improving Vehicle Reusability
for Human Exploration of Near-Earth Asteroids, Paper AAS 12-186,
Space Flight Mechanics Symposium, Charleston, South Carolina,
February 2012.
Глава 7
ПЛАНЕТАРНАЯ ЗАЩИТА
Проблема астероидной и кометной опасности признается в настоя-
щее время не только на уровне специалистов в этой области, но и ми-
ровым сообществом. Подтверждением этого служит включение этой
проблемы в состав задач научно-технического подкомитета комитета
ООН по мирному использованию космического пространства COPUOS.
В состав этого подкомитета входят не только страны и их объединения,
являющиеся основными участниками космической деятельности, такие
как США, Россия, Европейский Союз, но и значительная часть других
государств — членов ООН.
Для решения проблемы астероидной опасности предпринимаются
конкретные шаги, например в США разработана и успешно выполня-
ется в рамках NASA программа по околоземным опасным объектам.
Аналогичная программа финансируется и действует в Европейском
Союзе. В кооперации с другими странами проводятся работы по этому
направлению в России.
Как результат осознания уровня астероидной опасности исследо-
вания по данной проблеме приняли более систематический и целе-
направленный характер. Проблема может быть разделена на две тес-
но связанные части: обнаружение опасных небесных объектов (в ос-
новном — это астероиды) с последующим определением параметров
их движения, размеров и физических характеристик, с тем, чтобы
оценить вероятность их столкновения с Землей и последствия такого
события. И, затем, оценки возможностей и способов предотвращения
столкновения.
В настоящее время предлагается много способов изменения орбиты
астероидов с целью отклонения их от траектории встречи с Землей,
среди которых могут быть упомянуты такие, как направление на асте-
роид КА [1], изменение отражательных характеристик поверхности
астероидов [2].
Предлагается направлять на опасный астероид другой астероид,
достаточно малого размера, чтобы в рамках имеющихся технических
возможностей управлять параметрами его пролета Земли в режи-
ме гравитационного маневра. Цель последнего состоит в изменении
208
Гл. 7. Планетарная защита
траектории малого астероида таким образом, чтобы результирующая
орбита проходила через опасный астероид.
Внимание к этой проблеме в последнее время было вновь привле-
чено астероидом Апофис, который периодически сближается с Землей.
Этот сравнительно большой объект размером около 270 метров 13 ап-
реля 2029 г. сблизится с Землей на расстояние около 5 земных ради-
усов, т. е., настолько, что его можно будет наблюдать невооруженным
глазом. При этом в случае, если он окажется в пределах некоей «щели»
шириной в 600 метров, то в 2036 г. он столкнется с Землей.
По современным оценкам число околоземных астероидов с раз-
мерами более 70 м превышает двадцать тысяч, и такие астероиды
представляют опасность при столкновении с Землей. Более 90% этих
астероидов еще не обнаружены. И их опасность состоит именно в том,
что они слишком малы, чтобы легко обнаружить их современными
наблюдательными средствами, но достаточно велики, чтобы рассмат-
риваться как опасные.
Поэтому предлагаются космические средства обнаружения и ката-
логизации таких объектов. В качестве орбит аппаратов, предназначен-
ных для решения этих задач, рассматриваются орбиты в окрестности
солнечно-земных коллинеарных точек либрации, либо, что еще более
эффективно, такого же рода орбиты в окрестности Венеры. Как пример
эффективного использования космических аппаратов можно упомянуть
аппарат, используемый в рамках американской программы наблюде-
ний за опасными околоземными объектами Wide-field Infrared Survey
Explorer (WISE), с помощью которого были открыты 17 комет и 132
околоземных объекта.
Ключевой моментом в задаче астероидной опасности является полу-
чение необходимой точности прогноза движения астероида. Для этой
цели предлагаются радарные измерения. Как радикальный метод рас-
сматривается размещение на поверхности астероида соответствующего
радиопередатчика, позволяющего определять орбиту астероида с точ-
ностями, сопоставимыми с точностью определения параметров орбиты
космических аппаратов.
7.1. Наведение малых астероидов на опасные
околоземные объекты
Опубликовано заметное число работ, посвященных задаче наве-
дения КА на астероид. Целью этих работ является, как правило,
выбор при существующих ограничениях такой орбиты попадания ап-
парата в астероид, которая приводит к максимальному расстоянию
пролета астероидом Земли. В значительной мере это эквивалентно
7.1. Наведение малых астероидов на опасные околоземные объекты 209
минимизации вероятности встречи астероида с Землей после удара
аппарата о поверхность астероида. Однако такая постановка задачи
встречается с существенными трудностями. В частности, требуется
знание физических характеристик астероида, определяющих, каков бу-
дет характер разрушения астероида и, соответственно, вектор импуль-
са скорости, получаемый астероидом в результате удара. Последний
зависит также от угла встречи аппарата с поверхностью астероида.
В рамках предположения о полностью неупругом ударе без выброса
образуемого при столкновении вещества мы получаем наиболее про-
стой случай, когда астероид получает импульс аппарата, вычисляемый
по его скорости относительно астероида.
Отметим, что максимальная скорость встречи аппарата с асте-
роидом не означает автоматически максимального увода астероида
от Земли при пролете. Процесс оптимизации заключается в выборе
параметров старта разгонной ступени носителя с низкой околоземной
орбиты, которые при попадании аппарата в астероид максимально
увеличивают расстояние пролета. Такой подход может рассматриваться
как классический. Вместе с тем в литературе предлагаются и иные
концепции, например, использование двигателей малой тяги на следу-
ющих за выведением аппарата фазах полета.
В статье D. Dunham, A. Genova [3] упоминается предложение для
наведения КА на опасные астероиды использовать гравитационные
маневры у Земли. Эта идея была предложена в рамках программы
NEOShield [4]. В дежурном режиме такие аппараты находятся на высо-
коэнергетических гелиоцентрических орбитах, в случае необходимости
с помощью небольшого импульса скорости аппарат переводится на тра-
екторию пролета Земли. Выбор параметров пролета осуществляется
таким образом, чтобы результирующая траектория аппарата проходила
через астероид.
Реализация такого подхода позволяет с относительно небольшими
расходами рабочего тела получить значительно большие по сравнению
с классическим случаем скорости удара КА о поверхность астероида,
измеряемые от нескольких единиц до десяти и более километров в се-
кунду.
Однако даже при столь высоких скоростях встречи изменение ско-
рости астероида очень мало из-за огромной разности в массах аппарата
и астероида. Так, масса Апофиса, при диаметре 270 м и плотности по-
роды, из которой он состоит, оценивается величиной около 25 миллио-
нов тонн [5], в то время как КА, запускаемый на траекторию перехвата
астероида, может иметь массу, не превышающую 5 тонн. Это означает,
что модуль вектора изменения скорости астероида в результате удара
будет равен (при скорости удара 10 км/с) 0,002 м/с.
210
Гл. 7. Планетарная защита
В работе В. Ивашкина [1] оцениваются получаемые отклонения
астероида от Земли вследствие удара КА, разгоняемого электроре-
активным двигателем до достижения скоростей удара, превышающих
20 км/с для достаточно обширного списка астероидов, по размерам
приближающихся к Апофису. Космический аппарат предполагается
по массе близким к принятому в наших оценках. Время полета после
удара принимается равным одному-двум годам. При этом получаемые
отклонения астероида не превышают нескольких тысяч километров
(для неупругого удара), что нельзя оценить, как достаточно убедитель-
ный аргумент в пользу применения описанного способа отклонения
астероидов на практике.
В то же время предлагаемые в упомянутых работах способы предот-
вращения столкновения астероидов с Землей рассматриваются как
практически осуществимые в рамках современных технологий косми-
ческих миссий, в том числе для случая наведения аппаратов на асте-
роиды с применением гравитационных маневров у Земли. Как подтвер-
ждение этой точки зрения можно рассматривать проект Европейского
космического агентства Rosetta [6], конечной целью которого является
посадка на ядро кометы Чурюмова-Герасименко в 2014 г. В процессе
выполнения этой продолжающейся миссии было проведено три грави-
тационных маневра у Земли и один — у Марса. При этом эти маневры
планировались таким образом, чтобы помимо решения основной зада-
чи — сближение с ядром кометы и посадки на поверхность ядра —
обеспечить пролеты астероидов на достаточно близком для наблюдений
расстоянии.
Примером успешного решения задачи попадания с большой относи-
тельной скоростью в малое небесное тело — ядро кометы — является
проект NASA Deep Impact [7]. В рамках этого проекта 12 января
2005 г. был запущен КА к ядру кометы 9P/Tempel. Задачей проекта
было попадание в ядро специального ударника из меди с целью со-
здания в результате удара облака газов (рис. 7.1 на цветной вклейке)
и последующих спектрометрических измерений свечения этого обла-
ка приборами на борту пролетного аппарата. Аппарат достиг ядра
кометы 4 июля 2005 г. Номинальное минимальное расстояние про-
летного модуля составляло 500 км. Ударник отделялся от пролетного
аппарата за сутки до встречи с ядром. До отделения выполнялось
наведение аппарата на ядро кометы с погрешностью ±50 км. Это до-
стигалось за счет корректирующих импульсов, при этом сумма двух
финальных импульсов равнялась 6 м/с. После отделения проводил-
ся маневр увода пролетного модуля с траектории попадания в ядро.
Аппарат-ударник был снабжен собственной автономной системой на-
ведения, и за счет трех корректирующих импульсов (рис. 7.2), опре-
деляемых и выполняемых этой системой, было обеспечено попадание
7.1. Наведение малых астероидов на опасные околоземные объекты 211
Рис. 7.2. Заключительные операции по наведению ударника на ядро кометы
и получению научной информации через пролетный аппарат: 1 — наблюдения
после пролета через 30 мин после точки пролета; 2 — зона использования
защитного экрана; 3 — передача данных пролета (запись); 4 — передача
данных пролета (реальное время); 5 — пролетный аппарат в момент удара;
6 — маневр увода пролетного аппарата; 7 — маневр ударника за 12,5 мин;
8 — маневр ударника за 35 мин; 9 — маневр ударника за 90 мин; 10 — начало
автономной навигации за 2 часа; 11 — отделение ударника за 24 часа до удара
ударника в ядро кометы размерами 7,6 на 4,9 км. Скорость встречи
составила 10,3 км/с.
7.1.1. Гравитационный маневр как основной инструмент наве-
дения астероида-снаряда на опасный объект. Астероиды, которые
рассматриваются как малые, имеют массу не менее 1500 т, поэтому
управлять их движением в классическом понимании этого процесса,
т. е. с помощью приложения реактивной тяги, не представляется воз-
можным. Однако если использовать гравитационный маневр как ин-
струмент «усиления» в изменении параметров орбиты, когда небольшой
импульс скорости позволяет изменить высоту перицентра управляемого
тела (астероида-снаряда) у планеты пролета (Земли) в достаточной
мере для того, чтобы повернуть вектор относительной скорости астеро-
ида на десятки градусов, то мы получаем исключительно эффективный
инструмент управления орбитальным движением небесного тела столь
значительной массы.
Выбором положения вектора относительной скорости тела на бес-
конечности относительно планеты пролета (при фиксированном ради-
усе перицентра) мы получаем любую требуемую плоскость относи-
тельной траектории пролета с соответствующим направлением вектора
относительной скорости после пролета. Это иллюстрируется рис.7.3
на цветной вклейке, где изображен цилиндр возможных векторов
212
Гл. 7. Планетарная защита
относительной скорости подлета (на бесконечности) и результирующий
конус векторов скорости отлета. Выбирая положение вектора подлетной
скорости на цилиндре подлета, мы получаем вектор относительной
скорости на конусе отлета.
Идея маневра базируется на использовании гравитационного при-
тяжения планеты при ее пролете участвующим в этой операции телом.
Проще всего представить этот маневр в предположении, что
на некоторой сфере влияния планеты гравитационное поле планеты,
около которой реализуется маневр, становится настолько доминиру-
ющим, что притяжением Солнца можно пренебречь. Предполагаются
маневры около планет солнечной системы. Обычно в качестве участ-
вующего в маневре тела имеется ввиду космический аппарат с массой,
которой можно пренебречь при анализе его движения в гравитацион-
ном поле.
В рамках принятого допущения мы имеем кеплерово движение в си-
стеме отсчета, связанной с Землей, при ненулевой скорости на сфере
влияния — это движение по гиперболе. Вектор скорости движения
на бесконечности относительно планеты вычисляется как разность век-
торов аппарата (астероида) и планеты. Он полагается равным вектору
скорости аппарата в точке встречи планеты и аппарата и вычисляется
в предположении, что гравитационное поле планеты не воздействует
на аппарат. Геометрия гравитационного маневра в целом иллюстриру-
ется рис. 7.4 на цветной вклейке.
На рисунке изображен вектор скорости планеты облета Vp, вектор
скорости астероида V,, в системе отсчета, связанной с Солнцем, (так
сказать, векторы «абсолютной» скорости) и вектор Vo скорости асте-
роида относительно планеты на бесконечности (вектор относительной
скорости астероида). После пролета вектор относительной скорости
(на бесконечности) поворачивается на угол а, который определяется
формулой
, (7.1)
1 + ^0.
/'
где г — радиус перицентра, Vq — относительная скорость астероида
на бесконечности, // — гравитационная постоянная планеты (Земли).
Как видно из формулы, с уменьшением радиуса перицентра угол
поворота вектора относительной скорости растет, достигая 180° при
нулевом его значении. Таким образом, если нет ограничений снизу
по радиусу перицентра, вектор относительной скорости пролетающего
тела может изменить направление на противоположное. Все семейство
возможных векторов скорости образует в этом случае сферу радиу-
са Vq- Скорость астероида в системе отсчета, связанной с Солнцем,
является суммой векторов скорости планеты (Земли) Vp и вектора
Солнце
200 FOR
доступная для
Обсерватория обзора
объектов NEO /з
Тысячи объектов, наблюдение
которых с Земли может занять
от 10 до 20 лет -
Область поиска.
ПК-обсерватории
на орбите, подобной орбите Венеры
Область с плохой эффективностью
обнаружения
/ с Земли
Номинальная
s область
. поиска.
с Земли
Рис. 1.5. Проект фирмы Ball
Рис. 1.6. Оптимальная траектория перехода от орбиты Земли к орбите Венеры,
вид в инерциальной эклиптической плоскости
Рис. 1.7. Траектория полета вблизи
Венеры
Рис. 1.8. Гало-орбита вблизи точки
либрации La системы Солнце-Венера
Пролет Земли с гравитационным
маневром 23.01.1998
539 км ТСМ|’
ТСМ-10
Положение Земли
ТСМ-20 С
ТСМ-21*
при завершении
миссии
Завершение миссии
12.02.2001
ТСМ 23
TCM-1S
тем 2
307.1997
DSM-I
ТСМ 7
Пролет Матильды
1226 км. 9.93 км/ч
27.06.1997
Полет Эроса _
3828 км, 965 м/с
23.12 1998
КА NEAR
• за Солнцем
относительно
Земли
19.02.1997
оемз
ОСМ-4
ОСМ-5 ’ '
ОСМ-6
ОСМ-20
Ф ОСМ -19
ОСМ 13
ОСМ-12
ОСМ-II
ОСМ 10
ОСМ-9
ОСМ-8
ОСМ-7
Вывод на осм2
орбиту вокруг
Эроса
325 км
14.02.2000
Запуск
17.02.1996
ГММ I-S
ОСМ-25 ^.ОСМ-24
ОСМ-22.23^ ...
Пересечение хвоста
геомагнитного поля
Земли 13.05.1996
< OCM-I4
ГСМ 16
DSM-2
ТСМ-17 / осм
XPCM IS * OCM-I6-I7
тсм-з
Рис. 2.6. Полная схема реализованной гелиоцентрической траектории полета КА NEAR-Shoemaker в проекции на плоскость
эклиптики. DSM: маневры в дальнем космосе; ТСМ: маневры коррекции траектории; ОСМ: маневры коррекции орбиты
вокруг Эроса; ЕММ: маневры завершения миссии (посадки на Эрос)
Малонапра пленная
антенна
Солнечный
датчик
Высоконаправленная
антенна
Ионные
дннгатели
ковш
Рис. 2.7. Космический аппарат Hayabusa
Рис. 2.8. Траектория полета космического аппарата Hayabusa к астероиду
Итокава; проекция на плоскость эклиптики, вид с севера
Рис. 2.9 Маркер-целеуказатель КА Hayabusa
Рис. 2.11. Возвращаемая капсула КА Hayabusa, найденная после посадки
Рис. 3.14. Точки Лагранжа и эквипотенциальные поверхности
системы двух тел
Рис. 4.10. Структура солнечного паруса (а) и распределение прозрачных
и непрозрачных участков (б)
II
Рис. 5.4. Сравнение требуемых скоростей КЛ при различных схемах перелета
(для соответствующих радиусов орбиты ожидания у Марса)
Рис. 5.5. Выигрыш в суммарной характеристической скорости схемы с манев-
рами у Марса в зависимости от радиуса орбиты астероида и радиуса орбиты
ожидания
Рис. 5.11. Траектория КА у Марса для полета к астероиду Фемида
z. км
-3,375-10s
1.4 10s
-4,25-104
—5.5-Ю4
-1,525-10s
-2,5-105
4,3-105
2,35-1О5
4,00 IО4
X, км
-1,55-10*
-3,5 10s
5.6 10s
Рис. 5.12. Околомарсианская траектория КА для полета к астероиду Гармония
Рис. 7.1. Столкновение ударника космического аппарата Deep Impact
с ядром кометы 9Р/Тетре1
V эоприлета
V эоприлета
Конус
вектора
отлета
Угол поворота вектора
относительной скорости
за счет гравитационного
маневра
Рис. 7.3. Картина преобразования цилиндра векторов скорости подлета
в конус векторов скорости отлета при гравитационном маневре
Рис. 7.4. Геометрия гравитационного маневра в системе координат, связанной
с Солнцем
Рис. 7.5. Астероид Итокава
Рис. 7.6. Астероид Эрос
, АЕ
Рис. 7.10. Полная схема миссии с использованием астероида 2010 FD (3511916) в проекции на плоскость XY эклиптической
системы координат
, АЕ
Орбита Земли
Орбита Венеры
Орбита Марса
Орбита 2012 НВ25
Орбита Апофиса
Орбита перелета КА
от Земли к 20)2 НВ25
Орбита 2012 НВ25 после
коррекции
-1
X, АЕ
Рис. 7.11. Полная схема миссии с использованием астероида 2012 НВ25 (3602980) в проекции на плоскость XY
эклиптической системы координат
, АЕ
1,5
Орбита Земли
Орбита Венеры
Орбита Марса
Орбита 2009 WR52
Орбита Апофиса
Орбита перелета КА
от Земли к 2009 WR52
Орбита 2009 WR52 после
коррекции
X, АЕ
Рис. 7.12. Полная схема миссии с использованием астероида 2009 WR52 (3478352) в проекции на плоскость XY
эклиптической системы координат
, ЛЕ
------ Орбита Земли
------ Орбита Венеры
------ Орбита Марса
------ Орбита 2009 WR52
------ Орбита Апофиса
. Орбита перелета КА
от Земли к 2009 WR52
.а., , ,и. Орбита 2009 WR52 после
коррекции
Рис. 7.13. Полная схема миссии с использованием астероида 2011 ES4 (3558279) в проекции на плоскость XY эклиптической
системы координат
Рис. 8.1. Аризонский кратер
Рис. 8.5. Место падения осколка Челябинского
метеорита в оз. Чебаркуль
Рис. 8.7. Почтовая марка
СССР, 1957 г.
7.1. Наведение малых астероидов на опасные околоземные объекты 213
скорости астероида относительно Земли Vo. Таким образом, вектор
скорости астероида в системе отсчета, связанной с Солнцем, после
пролета планеты может быть любым вектором с началом в начале
векторов скорости планеты (то же начало для «абсолютного» вектора
астероида) и концом на упомянутой сфере. Но это — при условии, что
планета имеет нулевой диаметр. Если учесть ограничение по радиусу
планеты, то область достижимых векторов после пролета занимает
только часть сферы, ограниченную конусом. Полуугол раствора этого
конуса равен атах, где атах определяется по приведенной выше фор-
муле для радиуса перицентра, равного минимально допустимому. Ось
конуса проходит вдоль вектора относительной скорости астероида при
подлете. При увеличении допустимого радиуса перицентра пролетной
траектории от нуля до бесконечности область возможных векторов
относительной скорости после пролета уменьшается от сферы до точ-
ки положения конца вектора прилета. Соответственно уменьшается и
область возможных значений вектора «абсолютной» скорости облетаю-
щего планету тела (астероида-снаряда).
Для принятого радиуса перицентра пролетной траектории и из-
вестной скорости пролета на бесконечности однозначно определяется
расстояние Ь прямой, идущей вдоль этого вектора, от центра планеты.
Множество таких прямых образуют круговой цилиндр с осью, прохо-
дящей через центр планеты. Радиус этого цилиндра обозначим через Ь.
Эта величина легко определяется из соотношения (7.2) сохранения
момента количества движения:
bVA=rVv, (7.2)
где — скорость в перицентре, вычисляемая из соотношения сохра-
нения энергии:
К2 = 2ц/г + У2. (7.3)
Таким образом, выбирая радиус перицентра, мы выбираем угол по-
ворота а вектора относительной скорости на бесконечности, а выбирая
положение вектора на цилиндре скоростей, мы выбираем плоскость
поворота вектора относительной скорости. Для выбранного а мы по-
лучаем множество возможных векторов V относительной скорости,
образующих конус с осью вдоль начального (до маневра вектора отно-
сительной скорости), при этом длина образующих этого конуса равна
модулю вектора относительной скорости. Если угол а может быть
получен в пределах от нуля до 180°, то возможные положения вектора
относительной скорости покрывают всю сферу с радиусом, равным
модулю этого вектора. Центр сферы располагается в конце вектора
скорости планеты. Соответственно, на этой сфере находятся концы
результирующих векторов скорости аппарата (управляемого астероида)
214
Гл. 7. Планетарная защита
после гравитационного маневра в гелиоцентрической системе отсчета.
В действительности, угол поворота вектора V ограничен в силу того,
что радиус перицентра при пролете планеты не является нулевым. Если
принять этот радиус равным 7500 км, то для относительной скорости
на бесконечности, равной 3, 6, 10 км/с, угол а равен 117,6, 73,2,
40,6°, соответственно. Эти величины ограничивают сферу возможных
относительных векторов скорости до сферических секторов указанных
размеров. Тем не менее, как легко вычислить, получаемые при этом
максимальные импульсы скорости достигают довольно больших вели-
чин, если сравнивать их с классическими, получаемыми с помощью
ракетных двигателей: 5,13, 7,08, 6,94 км/с, соответственно.
7.1.2. Задача Ламберта как основная составляющая проек-
тирования траекторий с использованием гравитационных манев-
ров. Важной составляющей проектирования гравитационного маневра
является оценивание необходимых корректирующих импульсов, ком-
пенсирующих ошибки в силу неточных измерений, неточной моде-
ли действующих естественных сил и управляющих воздействий при
предыдущих маневрах. Особенно это существенно для фаз миссии,
когда управляемым объектом становится астероид-снаряд. Оценки тре-
буемых корректирующих импульсов при решении задачи отклонения
опасных небесных объектов от столкновения с Землей имеются уже
сейчас. Они базируются на имеющемся опыте успешного наведения
аппарата-ударника на ядро кометы Tempel в рамках проекта Deep
Impact и посадками на астероиды Эрос и Итокава в рамках проектов
NEAR и Haybusa. Фотографии этих астероидов приводятся на рис. 7.5
и 7.6 на цветной вклейке.
Сценарий миссии по отклонению опасного околоземного объекта
от столкновения с Землей состоит из следующих этапов:
1) старт космического аппарата с Земли и перелет к астероиду,
который планируется использовать как управляемый аппарат для его
наведения на опасный объект;
2) посадка и закрепление космического аппарата на этом астероиде
за счет гашения относительной скорости аппарата и выполнения про-
цедуры «стыковки» с астероидом;
3) полет управляемого астероида в пассивном режиме по прежней
его траектории до момента старта его к Земле;
4) сообщения астероиду сравнительно небольшого импульса ско-
рости за счет использования ракетных двигателей пристыкованного
к астероиду аппарата, переводящего астероид на траекторию полета
к Земле для выполнения гравитационного маневра у Земли;
7.1. Наведение малых астероидов на опасные околоземные объекты 215
5) выполнение гравитационного маневра у Земли, переводящего
управляемый астероид на траекторию столкновения с опасным объек-
том, в качестве которого в нашем случае выбран астероид Апофис;
6) перелет к Апофису с последующим столкновением с ним.
Очевидно, что на всем протяжении нашей миссии производятся кор-
рекции параметров траектории — сначала аппарата при его движении
к астероиду, выбранного в качестве управляемого снаряда, затем —
коррекции параметров этого управляемого астероида с целью его по-
падания в заданную окрестность около Земли, координаты которой
позволяют получить параметры траектории отлета от Земли, которая
является траекторией попадания в астероид-цель. На финальной тра-
ектории также выполняются необходимые корректирующие маневры.
Задача проектирования миссии в целом состоит в том, чтобы вы-
брать все имеющиеся у нас свободные параметры, которые при задан-
ной максимально достижимой имеющимися носителями массе аппара-
та, выводимого на низкую околоземную орбиту, позволяют получить
максимальное изменение вектора скорости астероида-цели после столк-
новения с ним управляемого астероида-снаряда.
Эта задача многопараметрическая, поэтому ее решение разбивается
на несколько этапов.
Эти этапы — это получение траекторий перелетов, начиная от стар-
та с низкой круговой орбиты и кончая столкновением с опасным
околоземным объектом: т. е. траектории перелета Земля-управляемый
астероид, управляемый астероид - Земля, Земля - астероид-цель.
Задача Ламберта состоит в решении именно таких задач построения
траектории перелетов, когда задаются начальное положение аппарата,
конечное положение аппарата и время перелета. В нашем случае это
означает задание времени старта сначала от Земли к управляемому
астероиду и времени прибытия к нему. Задача Ламберта, по существу,
является краевой задачей, когда задаются координаты движущейся
точки в начальный и конечный моменты времени и требуется найти
полный набор параметров движения, скажем, в начальный момент
времени. Особенности этой задачи состоят в том, что поле сил прини-
мается центральным с гравитирующим центром в центре Солнца.
Существует большое число алгоритмов и соответствующих про-
грамм решения задачи Ламберта. Каждый из них имеет свои пре-
имущества и недостатки, например, один из приводимых алгоритмов
имеет высокую скорость получения решений, но не всегда устойчив
в процессе поиска, другой лишен этого недостатка, но работает заметно
медленнее. В зависимости от фазы решения общей задачи выбора оп-
тимальной траектории перелета применяется тот или другой алгоритм.
Ниже приводятся два примера таких алгоритмов.
216
Гл. 7. Планетарная защита
Ключевой идеей проектирования гравитационного маневра являет-
ся следующая. Даты старта управляемого астероида и его прибытия
сначала к Земле, а затем к астероиду-цели выбираются таким обра-
зом, чтобы в решении задачи Ламберта по выбору траектории отлета
к целевому астероиду (выбирается дата прилета к этому астероиду)
модули относительной скорости подлета к Земле и отлета от нее были
равны. При этом угол поворота вектора относительной скорости дол-
жен удовлетворять требованию по минимально допустимому радиусу
перицентра пролетной траектории.
В излагаемом ниже описании алгоритма условие равенства моду-
лей скорости достигается в процессе минимизации суммы импульса
изменения скорости управляемого астероида (момент выдачи этого
импульса принимается за момент старта перелета к Земле) и импульса
изменения гиперболической скорости управляемого астероида для его
перевода на траекторию попадания в опасный астероид.
Ясно, что применяемый метод не дает точного решения, но как
показывает практика построения межпланетных траекторий, этот ме-
тод является достаточно точным для получения оценок необходимых
импульсов маневров и времени перелетов между телами Солнечной
системы.
Следующим этапом, на котором строится точная траектория, явля-
ется использование методов численного интегрирования, когда учиты-
вается реальное поле сил. При этом в качестве начального прибли-
жения для решения возникающих краевых задач берутся результаты,
полученные решением задачи Ламберта.
7.1.3. Вариант 1 решения задачи Ламберта для проектиро-
вания межпланетной миссии. Постановка задачи. Задача Лам-
берта — это нахождение орбиты перелета между двумя заданными
положениями в пространстве за заданное время.
На рис. 7.7 го и гу определяют первое заданное положение плане-
ты (Ро), в момент старта космического аппарата, и второе заданное
положение планеты (Ру), на время прилета КА. Для этих положений
и времени перелета решением задачи Ламберта является определение
орбитальных элементов переходной орбиты и вычисление скоростей
в момент отлета и прилета.
Теорема Ламберта. Согласно Теореме Ламберта, время переле-
та А/ из Ро в Ру не зависит от эксцентриситета орбиты и зависит
только от величины суммы радиусов-векторов, большой полуоси и дли-
ны хорды, соединяющей Pq и Ру.
В литературе можно найти много решений задачи Ламберта.
В данном материале оно будет сформулированно в универсальных
7.1. Наведение малых астероидов на опасные околоземные объекты 217
Таблица 7.1.
Обозначения
а Большая полуось
е Эксцентриситет
Е Эксцентрическая аномалия
i Наклонение
к Целое число витков
Г Величина радиуса-вектора (г = г/ |г|)
At Время полета
Гравитационный параметр
У Истинная аномалия
переменных. Обозначения, используемые в этом материале, можно
найти в табл. 7.1 [8, 9].
Начнем с общего вида уравнения Кеплера:
tf - to = At =
(7.4)
где индексы «О» и «/» относятся к начальному и конечному положению
соответственно. В этой постановке задачи у нас нет нескольких витков,
поэтому далее мы будем игнорировать 2irk. Получим преобразованное
218
Гл. 7. Планетарная защита
уравнение:
у/р.At = '/ai [ДЕ1 + e(sinE'o — sin Еу)]. (7.5)
Мы будем использовать универсальную переменную х-
Х = Va(Ef ~ Eq) = у/аАЕ (7.6)
кроме того, определяем константы и сз как
1 — cos ДЕ
С2 = ------5--.
ДЕ2
ДЕ — sin ДЕ
С3 ” ДЕ3
Величина х3сз вычисляется и преобразовывается:
з i г- л п\зДЕ — sin ДЕ
/с3 = (УДДЕ)3---------------------------,
LA£j
откуда следует:
у/a? АЕ = х3сз + ''/a? sin ДЕ. (7.7)
Подставляя (7.7) в (7.5), получаем:
УД At = х3сз + "/а? sin ДЕ + yfofi е (sin Eq — sin Еу). (7.8)
Используя тригонометрическое тождество
sin ДЕ = sin Еу cos Eq — cos Еу sin Eq, (7.9)
уравнение (7.8) приводим к виду:
У/7 At = х3сз + (sin Еу cos Eq — cos Еу sin Eq + e sin Eq — e sin Ey),
или
УДД/. = х3сз + Va? [sin Eq (e — cos Ey) — sin Ey (e — cos Eq)] . (7.10)
Функции синус и косинус для истинной аномалии имеют вид:
cos и —
е — cos Е
е cos Е — 1 ’
(7.11)
sin v =
У1 — е2 sin Е
1 — е cos Е
(7.12)
Выразим переменные в (7.10) в переменных эксцентрической и истин-
ной аномалии. Для этого мы умножим последнюю переменную в (7.10)
на (5, где
@ _ I _ У1 — е2 (1 — е cosEo) (1 — ecos Ef)
У1 — е2 (1 — еcos Ео) (1 — еcos Еу)
7.1. Наведение малых астероидов на опасные околоземные объекты. 219
Умножая на /3 и переставляя, получаем:
= /с3 + Vo3
sinEp(e — cosEf) — sinEy(e — cosEp) x
(1 — e cos Eq)(1 — e cos Eу)
x (1 —ecosE0)(l — ecosEy) \/l - e2
/1 — e2
Преобразуем (7.14) с учетом соотношений (7.11) и (7.12). Получим:
= /с3 + Va?
\/1 — e2 sin Eq e — cos Eу
(1 — ecosEp) (1 — ecosE/)
д/1 — e2 sin Ef e — cos Eq
(1 — ecosEy) (1 — ecosEp)
a, (7.15)
где
_ (1 — e cos Eq) (1 — ecosEy)
Запишем уравнение (7.15) в переменных sinp и cosp:
— /c3 + /a3 (sin Pg (—cosp/) — sinp/ (cospq)) x
(1 — e cos Eq) (1 — ecosEy)
Используя тригонометрическое тождество, записанное в (7.9), и тот
факт, что у/оЗ /у/а = л/о3, получим:
^д, 3 , • /д \ а (1 - ecosEp) а (1 - ecosEy)
у/Д At = х с3 + sin (Др) —v (7.17)
VQU ~е2)
Величина радиуса-вектора может быть выражена в переменных а, е
и Е следующим образом:
г = а (1 — ecosE). (7.18)
Следовательно,
^At = /Сз + ^/sinAp (7 19)
уа(1 — е2) V1 -cosAp
откуда получаем:
^At = X3c3+ ^V1~C°sAt/ . (7.20)
VI-cosAp уа(!_е2)
Пусть переменные Ану будут определены как
4_y^7sinAp (721)
Vl — cosAp
220
Гл. 7. Планетарная защита
_ rorf (1 — cos Az/)
У~ а (1-е2)
Тогда (7.20) может быть записано в виде
V^At = у3с3 + Ay/у .
(7.22)
(7.23)
Выражаем время перелета в универсальных переменных:
At = У‘Сз . (7.24)
V М
Многие из этих переменных могут быть также выражены аналогично
с использованием переменной сг, приведенной в (7.5):
*=Д (7-25)
А = DM^Jr^rp (1 + cos Az/), (7.26)
А (аЕ2с3 - 1)
У = ГО + rf-\--i—-=-----— (7.27)
VC2 •
где
,, f +1, если Az/< тг,
DM = направление движения = < , .
I — 1, если Аг/ > тг.
Обозначим ip = АЕ2. Решение задачи Ламберта — это итеративный
процесс, в котором переменные с^, сз и у вычисляются для каждого
нового значения ip. Итерации повторяются до тех пор, пока не будет
достигнуто желаемое время полета. Обратим внимание, что значение
А является функцией расстояний в двух точках и изменения истиной
аномалии, и не обновляется.
Алгоритм
На входе:
го — начальный вектор положения,
гу — конечный вектор положения,
Ato — желаемое время перелета,
DM — направление движения (—1 или +1).
Инициализация:
cos Az/ =
ГрГ/
kor/i
А = DMUrtf-f (1 + cos Az/)
IF (Az/ = 0, A = 0)
Траектория не может быть вычислена.
7.1. Наведение малых астероидов на опасные околоземные объекты 221
END IF
^ = 0
С2 - 1/2
Сз = 1/6
'Фир —
— 4?Г
WHILE
|At — At0| > 1 • 10“6
Аффсч, - 1)
у = г о + г о Ч-
у/с2
IF (А > 0,0 & у < 0,0)
Readjust tpiow until у > 0,0
END IF
t - to = 4 IF (At Ato) ELSE END IF IF (V’ > 1 10~6) END IF / — [2/стг + (E — e sin E) — (Eq - e sin Eb)] V’Zow — Ф Фир = Ф I Фир “h ф1оии ' 2 1,0 — cos с? = 1 sin H \/—il> — \Z—ib c3= v V4-<
END WHILE
222
Гл. 7. Планетарная защита
Вычисление промежуточных величин:
/ = 1 -
Го
Вычисление конечного результата:
_ г/ - fr0
Vo — -------,
9
9
7.1.4. Вариант 2 решения задачи Ламберта — с использова-
нием универсальных переменных. В задаче Ламберта начальное
и конечное положение, а также необходимое время для перелета
между двумя точками известно. Решая задачу Ламберта, необходимо
определить элементы орбиты (с учетом расчета скоростей в начальном
и конечном положении). На рис. 7.8 показана траектория перелета
Земля-Марс.
Теорема Ламберта показывает, что требуемое время для перелета
зависит только от большой полуоси, суммы двух радиусов и расстояния
Рис. 7.8. Задача Ламберта. Траектория Земля-Марс в задаче Ламберта
7. /. Наведение малых астероидов на опасные околоземные объекты 223
между начальным и конечным положением (длины хорды). Время,
необходимое для перелета, можно записать как
t-t0 = ^. (7.28)
Таблица 7.2.
Обозначения
а Большая полуось
е Эксцентриситет
i Наклонение
к Целое число витков
г Величина радиуса-вектора
t Время
Е Эксцентрическая аномалия
L Средняя долгота
М Средняя аномалия
м Гравитационный параметр
17 Истинная аномалия
р Долгота перигелия
W Долгота восходящего узла
Здесь индекс «О» показывает, что значения относятся к начально-
му моменту времени, а отсутствие индекса — к конечному моменту
времени. Задача заключается в том, чтобы найти правильные значения
а, Е, Eq и е, которые дадут желаемое время перелета. Однако время
перелета зависит только от трех величин, о которых было упомянуто
ранее. Оба радиуса и длина хорды уже известны из постановки задачи.
Большая полуось является единственным неизвестным параметром,
и из этого следует, что должна быть возможность написать время
перелета как функцию большой полуоси (t — t0 = /(а)). Все осталь-
ные переменные в уравнении должны бить известны. Время перелета
можно записать как функцию от некоторых других параметров, таких
как р или ДЕ. Использование (ДЕ)2 удобно при последовательном
приближении.
224
Гл. 7. Планетарная защита
Вывод уравнений с универсальными переменными
Следующий вывод показывает, как получить уравнения, используя
универсальные переменные. Слагаемое 2/стг используется для обозна-
чения нескольких витков, поэтому, сейчас мы его не будем учитывать.
Обозначения в (7.28) могут быть немного изменены для получения
результата в (7.29):
Ai = (ДЕ + е sin Eq — sinE),
V М (7.29)
у/p At = \/~а? (АЕ + е sin Eq — sin E).
Теперь универсальная переменная х и другая переменная S могут быть
определены как
х = (Е - Ео) = ДЕ, S = (7.30)
Далее величина x3S может быть вычислена следующим образом:
x3S = Va? АЕ3^^—, или Уа3 ДЕ = x3S + Va3 sin ДЕ.
ДЕ3
Подставляя последнее выражение в (7.29), имеем:
AZ = x3S + х/~а? sin ДЕ + x/~a? (e sin Eq — sinE). (7.31)
Так как
sin ДЕ = sin(E — Eq) = sin E cos Eq — cos E sin Eq, (7.32)
уравнение (7.31) приобретает следующий вид:
у/p AZ = rr3S + x/a3 (sin E cos Eq — cos E sin Eq + e sin Eq — e sin E).
(7.33)
Умножив и разделив второе слагаемое в равенстве (7.33) на выражение
л/1 - е2 (1 — ecosEo)(l — ecosE), получим
sinEo(e — cosE) — sinE(e — cosE0)A
(1 — ecosE0)(l — ecosE) J
* (1 — e cos Eq)(1 — e cos E) y21 — e2 (7 34)
\/~] —
или, собирая члены, имеем:
у/p At = x3S+
г~г ( х/1 — e2 sin Eo e — cos E
т V (1° I_______________________
у (1—ecosEq) (1—ecosE)
\/1 — е2 sin Е е — cos Eq \
(1 — е cos Е) (1 — е cos Eq) I
(1 — ecosEo)(l — ecosE)
х/1 — е2
7.1. Наведение малых астероидов на опасные околоземные объекты 225
Теперь,
cos и =
е — cos Е
е cos Е — 1 ’
sin v =
1/1 — е2 sinE
1 — е cos Е
(7.35)
что дает
д/Д At = x3S + у/a? (sini/q(— cosi/) — sini/(0cos i/q))x
x (1 — ecosEp)(l — ecosE) (73g)
-e2
Используя тригонометрическое тождество в уравнение (7.32) для
истиной аномалии вместо эксцентрической аномалии и используя
у/а? /у/а = у/о? , имеем:
= x3S + (sin Ai/)a( 1 ~ eCOSJ2M1Z- C0-£). (7.37)
V«(l-e2)
По определению г = а(1 — ecosE), тогда
д/Д At = x3S +
tqt sin Ai/ у/1 — cos Ai/
a(l — e2) V1 — cos Ai/
= x3S +
y/rgr sin Al/ y/rgr д/1 — COS Al/
V1 — COS Ai/ Ja(i _e2)
(7.38)
Теперь, две новые переменные могут быть определены как
_ угуг sin Ai/ _ ror(l - cos Ai/)
у/1 — cos Ai/ a(l — e2)
Подставляя (7.39) в (7.38), получим:
'/pM~-x3S + Ay/у (7.40)
или
At =
x3S + A^/y
y[^
(7.41)
Эта форма универсальных переменных найдена Bate, Mueller, & Whi-
te [8] и Vallado [9].
Мы считаем, что время перелета является функцией х, S, А и у.
Эти переменные могут быть выражены как функции известных пара-
метров и z (z = ДЕ2) следующим образом:
41
х =
s =
А.Е - sin АЕ
АЕ3
А = DMy/ror( \ + cos Ai/),
(7.42)
(7.43)
(7.44)
8 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
226
Гл. 7. Планетарная защита
где DM — направление движения, равное +1 для Др < тг и — 1 для
ЛР>7Г' , . A(zS — I)
у — ГО+г ---у—=—(7.45)
V С
где
С = (7.46)
Z
Похоже, что самый простой способ получить эти уравнения в пере-
менных z это использовать выражения для f и д. Вывод может быть
получен из работы [8] (стр. 198-200, 217-219, 231-233). Сейчас задача
заключается в том, чтобы последовательными приближениями z до-
стичь желаемого времени перелета. Bate, Mueller, и White используют
итерационный численный метод Ньютона, но Vallado [9] использует ме-
тод секущих, который, вроде бы, показывает лучший результат. Инте-
ресно отметить, что величина А является функцией расстояний в двух
точках и изменения истиной аномалии, и не обновляется, она может
быть посчитана по известным данным. Таким образом, А не должно
быть включено в итерации. Следовательно, решение задачи Ламберта
в данном случае содержит некоторый метод перебора z и пересчет х, S
и у для нового z. Этот процесс продолжается до тех пор, пока желаемое
время не будет достигнуто.
7.1.5. Алгоритм Bate, Mueller, & White и Vallado.
На входе:
го — начальный вектор положения,
г — конечный вектор положения,
Д£о — необходимое время перелета,
DM — направление движения
(Др < тг => DM = +1, Др > тг => DM = —1).
Расчеты:
/А X 1*0Г
cost ДИ = —
ror
А — DMy/rro(\ + соз(Др))
IF Др = 0, А = 0
Траектория не может быть посчитана.
Присвоение:
z = 0,0
С = 1/2
S= 1/6
zup = 4тг2
Zlow
— —4%
7. /. Наведение малых астероидов на опасные околоземные объекты 227
WHILE |At - At0| > 1 • 10-6
у = rO + г + A(zS - 1)/у/(С)
IF (Л > 0,0 и у < 0,0)
Increment (увеличение) Z[ow until (до) у > 0,0
AND IF X~^c = x3S + Av'y у/У
IF (At < At0) Ziow =
ELSE %up %
END IF Z-цр И- Zlovj Z~ 2
IF (z > 1 • 10"6) _ 1,0 — cos y/z z g _ \J~z — sin yfz y/~^
ELSE IF (z < -1 10-6) _ 1,0 — ch yf^z z _ sh yf—z — V—z
ELSE C = 0,5 S= 1,0/6,0
END IF
END WHILE
8=
228
Гл. 7. Планетарная защита
Результат:
_ г - /г0
V°-^-
v = gr-rp
9
7.2. Выбор астероида
в качестве управляемого снаряда
Концепция использования малых астероидов для отклонения опас-
ных околоземных объектов от траектории столкновения с Землей впер-
вые была предложена российскими учеными на Симпозиуме по опас-
ным околоземным объектам, проведенным в октябре 2009 г. на Мальте.
Предложенный способ является почти на два порядка более эффектив-
ным по сравнению с реализацией наведения на астероид космического
аппарата с последующим его столкновением с опасным астероидом, ес-
ли эффективность оценивать в терминах отношения изменения скоро-
сти опасного астероида к массе используемого для этого космического
аппарата.
Однако был оставлен открытым вопрос, а возможно ли найти среди
достижимых астероидов такой астероид, который малым импульсом
и с помощью гравитационного маневра возможно вывести на траек-
торию столкновения с Апофисом. Предполагалось, что в силу того,
что астероидов подходящего размера насчитывается достаточно мно-
го — сотни тысяч по современным оценкам, выбрать подходящий для
решения нашей задачи — решаемая проблема. Вместе с тем, следу-
ет отметить, что обнаружить столь малые астероиды и определить
параметры их орбит — это, в значительной мере, задача, которую еще
предстоит решить. И решение ее в настоящее время идет с очень
большой скоростью: за счет реализации соответствующих программ
в США и в Европе в последнее десятилетие открыто околоземных
астероидов больше, чем за весь предшествующий период наблюдений.
В 2013 г. Европейское космическое агентство планирует запустить
в окрестность солнечно-земной точки либрации астрометрический кос-
мический аппарат Gaia, с помощью которого предполагается открыть
и каталогизировать орбиты нескольких тысяч новых околоземных объ-
ектов.
Тем более важным представляется ответ на вопрос, существуют ли
астероиды в имеющемся в настоящее время каталоге, которые можно
перевести на траекторию столкновения с Апофисом до ожидаемой
его встречи с Землей в 2036 г., используя при этом существующие
в настоящее время возможности по носителям и технологиям управ-
ления орбитальным движением. Имеется в виду реализация сценария,
7.2. Выбор астероида в качестве управляемого снаряда
229
когда к малому астероиду-снаряду направляется космический аппарат
с рабочим телом достаточной массы, далее осуществляется его посадка
на этот астероид, закрепление на астероиде и сообщение астероиду
необходимого импульса скорости, который переводит его на траекто-
рию столкновения с Апофисом за счет гравитационного маневра при
пролете Земли.
Современные исследования показывают, что реализация такого
сценария возможна, поскольку в существующем в настоящее время
каталоге удовлетворяющие вышеприведенным требованиям астероиды
имеются. В последующее время можно ожидать только улучшения
ситуации с выбором подходящих астероидов в силу непрерывного по-
полнения каталога околоземных объектов.
Выбор астероида как платформы, предназначенной для установки
систем, которые позволят навести его на небесный объект с целью
отклонения последнего от траектории столкновения с Землей, опре-
деляется возможностью выполнения ряда требований. С одной сто-
роны астероид должен иметь достаточные размеры, чтобы быть об-
наруженным имеющимися или технически реализуемыми средствами
наблюдения с последующим определением параметров его орбиты с
точностью, необходимой для осуществления посадки КА на его поверх-
ность. С другой стороны аппарат должен иметь достаточную массу для
решения основной задачи: достаточное отклонение астероида-цели от
его изначальной траектории.
Кроме того, орбита астероида должна быть таковой, чтобы реа-
лизация посадки КА на его поверхность не требовала чрезмерного
расхода рабочего тела. В частности, предполагается, что характери-
стическая скорость, необходимая при старте с низкой околоземной
орбиты не будет превышать 3,5 км/с (примерно то, что требуется
для миссий к Марсу или Венере), а скорость для реализации по-
садки на поверхность астероида с перелетной от Земли к астероиду
не превышает 2 км/с. В этом случае, как показывают приблизительные
оценки, опирающиеся на опубликованные характеристики носителя
«Протон-М» с разгонным блоком «Бриз» и на предположение, что
удельный импульс двигателя перелетного аппарата равен 3000 м/с,
на поверхность астероида можно доставить аппарат полной массы
2800 кг. Если далее предположить, что из этой массы 2000 кг прихо-
дится на рабочее тело для последующих операций, то можно сделать
оценку возможностей маневра такого управляемого астероида, прини-
мая некоторую минимально допустимую по возможностям наблюдений
оценку его размеров.
Как известно [10], 10 января 2010 г. Лабораторией Линкольна
Массачусетского технологического университета был открыт астероид
(2010) AL30. Этот астероид пролетел около Земли на минимальном
230
Гл. 7. Планетарная защита
Рис. 7.9. Траектория близкого пролета Земли малым астероидом (2010) AL30
12-13 января 2010 г. Шаг меток на траектории 2 часа
расстоянии 128 тыс. км в 13:46 по Гринвичу 13 января 2010 г. Тра-
ектория его пролета показана на рис. 7.9. Как показала обработка
наблюдений астероида, его перигелий находится в районе орбиты Ве-
неры, афелий — в районе орбиты Марса, а период орбиты близок
к земному. Размеры этого астероида, отнесенного к классу околозем-
ных, составляют 10-15 метров в поперечнике. Число таких астеро-
идов в околоземном пространстве составляет примерно 2 миллиона.
Можно полагать, что астероид такого размера пролетает около Земли
на расстояниях в пределах лунной орбиты приблизительно один раз
в неделю в среднем.
Это дает основания полагать, что в дальнейшем будут открыты
новые астероиды таких размеров, и для наших оценок можно предпо-
ложить возможность их использования в указанных выше целях.
Предполагая, что астероид имеет диаметр 12 метров и плотность
образующего его вещества 2 г/см3 (как пример укажем астероид
(4179) Таутатис с плотностью 2,1 г/см3), получаем его массу, равную
1810 тоннам. При размещении на поверхности такого астероида ра-
кетных блоков, доставляемых двумя носителями «Протон», с массой
рабочего тела 4 тонны, запас характеристической скорости для манев-
ров управляемого астероида составляет 6,6 м/с.
7.2.1. Ограничения по наведению астероида-снаряда на ас-
тероид-мишень. Рассмотрим задачу перевода выбираемого на роль
снаряда астероида с первоначальной орбиты на орбиту пролета Земли
с параметрами, соответствующими требованию гравитационного ма-
невра для попадания в астероид-мишень.
7.2. Выбор астероида в качестве управляемого снаряда
231
Для оценки возможностей наведения с ограничениями по распола-
гаемому запасу характеристической скорости введем, как это обычно
делается при проектировании миссий к планетам, понятие картинной
плоскости. Эта плоскость проходит через центр небесного тела (в на-
шем случае - это Земля), к которому направляется аппарат, и орто-
гональна вектору относительной скорости на бесконечности аппарата,
приведенному к центру тела, как это было описано ранее. В этой
плоскости одну ось (У) направим вдоль линии пересечения картинной
плоскости с эклиптикой, вторую (Z) — ортогонально Y в картинной
плоскости. Предположим, орбита выбранного на роль снаряда асте-
роида близка к земной. Тогда при угловом расстоянии в 90° точки
маневра картинной плоскости в момент ее достижения импульс в 4 м/с
поворачивает плоскость орбиты астероида на величину, соответству-
ющую изменению координаты Z астероида при пролете на 20 000 км.
Импульс скорости, равный 1 м/с, смещает другую координату при
пролете на 88 000 км, если он сообщается за один виток до достижения
картинной плоскости. Учитывая приводившуюся выше оценку числа
астероидов (2 миллиона), подходящих по размерам для нашей задачи
и пролетающих на расстояниях менее 400 тысяч от Земли, можно
надеяться на возможность выбора астероида, пригодного на роль сна-
ряда для отклонения опасных объектов. Однако следует учесть, что
помимо расхода характеристической скорости, необходимой для вы-
ведения на номинальную орбиту гравитационного маневра, требуется
учитывать расходы на проведение коррекций орбиты как до гравитаци-
онного маневра, так и после. Достаточно аккуратная оценка величины
корректирующих импульсов требует более детального и конкретного
анализа. В наших предположениях на коррекцию суммарно остается
1,6 м/с, чего, если сравнивать, например, с миссией Deep Impact, недо-
статочно. При наиболее оптимистических оценках достижимых точно-
стей определения параметров движения как управляемого астероида,
так и астероида-мишени, на коррекцию может потребоваться 8-10 м/с.
Это означает, что на астероид предполагаемой массы потребуется до-
ставить около 8 тонн рабочего тела, что означает 4 запуска носителя
класса «Протон». Альтернативой такому решению является повыше-
ние точности определения параметров орбиты управляемого астероида
и мишени. Приближенно расход рабочего тела пропорционален погреш-
ности определения параметров орбит.
7.2.2. Сценарий подготовки и выполнения миссии. При раз-
работке сценария миссии возможны два типа базовых концепций:
одна концепция исходит из универсального подхода в части выбора
астероида-мишени, когда управляемый астероид выбирается не для
отклонения конкретного опасного астероида, а некоторого класса
232
Гл. 7. Планетарная защита
небесных объектов, вторая — когда миссия планируется под задачу
отклонения конкретного астероида, признанного опасным. Второй тип
представляется более понятным для анализа.
Поскольку астероидов подходящего размера, несмотря на их огром-
ное количество, до сих пор практически не обнаружено (авторам из-
вестен только один: (2010) AL30), то в первую очередь необходимо
реализовать программу по обнаружению и каталогизации таких астеро-
идов. Далее осуществляется выбор наиболее подходящего кандидата,
как это было описано в предыдущем параграфе.
Запуск и посадка аппаратов на астероид реализуется по прак-
тически отработанной технологии, как это было сделано в проекте
NEAR-Shoemaker при посадке аппарата на поверхность астероида [11].
Однако здесь возникают новые задачи, связанные с малостью астеро-
ида и необходимостью применения двигательной установки, позволяю-
щей выполнять орбитальные маневры астероида. С размещением всех
необходимых для управления движением систем на астероиде прихо-
дим к задачам наведения непринципиально отличающимися от таковых
для космических аппаратов.
Если стоит задача отклонения опасного небесного тела от траек-
тории столкновения с Землей путем наведения на него сравнительно
небольшого астероида, который можно обнаружить и определить его
орбиту, то технически реализуемым, скорее всего, является размеще-
ние на таком астероиде необходимых систем навигации и управления,
а также двигательной установки, с последующим выполнением гра-
витационного маневра управляемого астероида у Земли. При оценке
эффективности такого подхода в качестве критерия сравнения можно
взять изменение количества движения опасного тела при одной и той
же скорости встречи и одинаковой массе выводимых на траекторию
перелета космических аппаратов. В случае выбора в качестве управ-
ляемого снаряда астероида с массой около 1800 тонн и скорости
встречи 10 км/с изменение количества движения астероида-мишени
будет 1,8- Ю10кг-м/с. При этом реалистично решить задачу выведе-
нием на переходную орбиту четырех космических аппаратов с массой
по 5500 кг каждый. Непосредственное их наведение на опасный астеро-
ид позволяет изменить его импульс на 2,2 108 кг-м/с. Таким образом,
использование предлагаемого способа отклонения астероида от тра-
ектории столкновения с Землей может быть в 18 раз эффективнее.
В случае если более детальный анализ покажет, что для реализации
описанной миссии потребуется больший запас характеристической ско-
рости для коррекций параметров движения, предлагаемый способ все
еще будет выигрывать по эффективности.
Очевидно, что этот способ заметно сложнее, чем используемый для
сравнения, и наиболее неопределенной его частью является оценка
7.3. Эфемериды планет
233
возможностей каталогизации пригодных для использования в роли
снарядов астероидов. Однако разворачиваемые в настоящее время в ми-
ре программы поиска и наблюдений опасных астероидов позволяют
надеяться на преодоление существующих трудностей в решении этой
проблемы.
7.3. Эфемериды планет
Для межпланетных траекторий начальное и конечное положение,
как правило, определяется положением планет, а время отлета и при-
лета — заранее оговоренные параметры. Положение планет в гелио-
центрической системе координат может быть посчитано как функция
времени с помощью эфемерид. Поэтому, выбранная дата определяет
положение для планеты (и космического аппарата). Meeus [12] пред-
лагает метод для расчета орбитальных элементов планет как функцию
времени. Каждый орбитальный элемент может быть посчитан при
помощи уравнения
Элемент = ао + а\Т + а^Т2 + азТ3,
где
(JDE - 2451 545,0)
“ 36 525 '
Коэффициенты для орбит Земли и Марса представлены в табл. 7.2
и 7.3 для эпохи J2000. В этих таблицах: L — средняя долгота планеты,
а — большая полуось, е — эксцентриситет орбиты, i — наклонение
плоскости орбиты к эклиптике, Q — долгота восходящего узла, П —
долгота перигелия.
Таблица 7.2.
Коэффициенты для орбитальных элементов Земли
Орбит. элементы ао ai аг аз
L, ° 100,466449 35999,3728519 -0,00000568 0,0
а, а. е. 1,000001018
е 0,01670862 -0,000042037 -0,0000001236 0,00000000004
г, ° 0 0,0130546 -0,00000931 -0,000000034
П, ° 174,873174 -0,2410908 0,00004067 -0,000001327
П, ° 102,937348 0,3225557 0,00015026 0,000000478
234
Гл. 7. Планетарная защита
Таблица 7.3.
Коэффициенты для орбитальных элементов Марса
Орбит. элементы оо О1 (19 оз
L, ° 355,433275 19140,2993313 0,00000261 -0,000000003
а, а. е. 1,523679342
е 0,09340062 0,000090483 -0,0000000806 -0,00000000035
i, ° 1,849726 -0,0081479 -0,00002255 -0,000000027
П, ° 49,558093 -0,2949846 -0,00063993 -0,000002143
П, ° 336,060234 0,4438898 -0,00017321 0,000000300
7.4. Поиск оптимальных орбит перелета
Ключевой стадией расчета и оптимизации орбит перелета к астерои-
дам является так называемая задача Ламберта, которая состоит в опре-
делении оптимальных траекторий перелета между телами Солнечной
системы. Определялись траектории перелета от Земли к астероидам.
Оптимизация велась по гиперболической скорости отлета от Земли.
Разработанный комплекс программ позволяет проводить оптими-
зацию по сумме скоростей отлета от Земли и подлета к астероиду.
В книге публикуются результаты расчетов, выполненных с помощью
упомянутого комплекса. В таблицах приводятся гиперболические ско-
рости отлета, а также даты отлета и прилета для интервала старта
вплоть до 2030 года. Список этих данных ограничивается по мак-
симальной скорости отлета, равной 1 км/с, что может рассматривать-
ся как достаточно скромная величина, поскольку для реализованных
и планируемых межпланетных миссий гиперболическая скорость отле-
та обычно превышает 3 км/с.
Обозначения:
Л, — управляемый астероид,
.4 2 — целевой астероид,
Н — абсолютная звездная величина астероида Л],
Т\ — время отлета КА от Земли,
С*з — квадрат гиперболического избытка скорости Сз = КД, при
старте с околоземной орбиты,
Т2 — время прибытия КА к астероиду Л,,
ДЦ — импульс уравнивания скорости КА для стыковки с астерои-
дом Л1,
Тз — время выполнения маневра коррекции скорости астероида Л,,
7.4. Поиск, оптимальных орбит перелета
235
А Уз — импульс изменения скорости астероида А\ для наведения
его в окрестность Земли с цель выполнения гравитационного маневра,
Т4 — время пролета Земли астероидом А] (соответствует минималь-
ному расстоянию между центрами масс Земли и астероида AJ,
Rn — минимальное расстояние между центрами масс Земли и асте-
роида А[,
ДУ4 — дополнительный импульс изменения скорости астероида А\
при выполнении гравитационного маневра,
Т5 — время встречи астероидов А, и Аг,
AV5 — скорость контакта А\ с Аг-
На начальном этапе поиска траекторий критерием оптимальности
являлся сумма модулей AVS требуемого изменения скорости управля-
емого астероида AV3 и модуля изменения модуля скорости пролета
астероидом А\ Земли ДУ4 при выполнении гравитационного маневра
для отлета по траектории сближения с целевым астероидом А?. При
этом рассматривались траектории полетов, полученные в результате
решения задачи Ламберта:
Траектория 1: Из точки Я3, в которой астероид А\ находился
в момент времени Т3, в точку Я4, в которой Земля будет находиться
в момент времени пролета (гравитационного маневра) Т4. При этом
скорость AVg астероида А] в момент времени Т3 принимается равной
скорости, получаемой в результате решения задачи Ламберта о пе-
релете из точки /?3 в точку Я4 в гравитационном поле Солнца, т. е.
это скорость астероида А\ после выполнения маневра изменения его
траектории. Скорость астероида А\ до выполнения маневра обозначим
V3, при этом время выполнения маневра изменения скорости прини-
мается равным 0. Значения векторов из центра Солнца в Я3 и R4
и вектора скорости V3 астероида А\ относительно центра Солнца
в солнечно-эклиптической системе координат получаются с использо-
ванием системы SPICE [13]. Траектория 1 является решением задачи
Ламберта перелета из Я3 в Я4 за время Т4-Т3. В результате решения
этой задачи находятся векторы скоростей V( и V^, где V4 есть ско-
рость прибытия астероида А\ к Земле.
Траектория 2: Из точки Я4, в которой астероид А\ находился
в момент времени Т4 в точку Я5, в которой целевой астероид Аг
будет находиться в момент Т5 времени прибытия А\ к Аг, т. е. прямого
попадания астероида А\ в астероид Аг, что и является задачей проекта.
Значения вектора из центра Солнца в Й5 и вектора скорости VЕ.
Земли относительно центра Солнца в солнечно-эклиптической си-
стеме координат получаются с использованием системы SPICE. Тра-
ектория 2 является решением задачи Ламберта перелета из У?4 в Я5
за время Т5-Т4. В результате решения этой задачи находятся векторы
скоростей V4 и V5, где есть скорость астероида А\ после пролета
236
Гл. 7. Планетарная защита
Земли, a V5 есть скорость астероида А\ в момент его прибытии
к целевому астероиду А%, имеющему скорость Уд,.
Введем обозначения:
ДУз = |V' - V3|,
y4 = |v4-v£|, v4' = |v;-v£|,
ду4 = |у;-у4|, ду5 = |у5-уЛ2|,
ДУ5 = ДУз + Д'У4, ДУ, = min(T3, Т4, Т5).
Поиск оптимальных траекторий был проведен для перелетов с датой
отлета на интервале времени с 1 января 2015 г. по 1 января 2033 г.
и выполнялся в 4 этапа:
1. Решение задачи Ламберта для каждого из «управляемых» асте-
роидов с датами отлета с исходной орбиты, начиная с 1 января 2015 г.
с шагом 7 суток до 1 января 2033 г. Для каждой даты отлета решался
ряд задач Ламберта для длительностей перелета от 60 до 1200 суток
с шагом 3 суток, при этом задача решалась как для перелета по корот-
кой, так и по длинной дугам. Каждый полученный массив решений,
приведенных к интересующим нас значениям ДУ3 и ДУ4 на сетке
моментов времени Т3 и Т4, записывался в отдельный для каждого
астероида файл для дальнейшего анализа. Обозначим этот массив для
астероида с порядковым номером п как М[п.
2. Решение задачи Ламберта для «целевого» астероида, в качестве
которого рассматривался астероид Апофис, с датами отлета от Земли,
начиная с 1 января 2015 г. с шагом 1 сутки до 1 января 2040 г. (чтобы
перекрыть интервал возможных дат прибытия астероида к Земле). Для
каждой даты отлета решался ряд задач Ламберта для длительностей
перелета от 60 до 1200 суток с шагом 1 сутки, при этом задача
решалась как для перелета по короткой, так и по длинной дугам. По-
лученный массив решений М2, приведенных к значениям Д'У4 и ДУ5
на сетке моментов времени Т4 и Т5, был записан в отдельный файл для
дальнейшего анализа.
3. В каждом полученном на первом этапе файле (массив М\п
значений ДУ3 и ДУ4 на сетке моментов времени Т3 и Т4)выполнялся
поиск решений, для которых величина ДУ3 не превосходит заданно-
го значения ДУтах. При данном исследовании ДУтах было принято
равным 150 м/с, что превосходит допустимые в данной задаче (управ-
ления полетом астероида) значения, но учитывалось, что в результате
оптимизации окончательная величина ДУ3 будет меньше полученной
поиском по сетке дискретных значений (Т3, Т4, Т5).
7.4. Поиск оптимальных орбит перелета
237
4. Для отобранных значений пар (7з, Т4) находились соответствия
в массиве решений М2 для траекторий Земля - астероид Д2. Критери-
ями соответствия являлись:
— момент времени прилета астероида А) к Земле из массива М1п
совпадает с моментом времени отлета астероида А\ от Земли
к целевому астероиду А2 в массиве Л72;
— модуль разности значений Д14 и в сумме со значением ДУ3
не превосходит значения ДУтах, так как важным является сум-
марное значение импульса коррекции скорости при своде астеро-
ида А\ с исходной орбиты (импульс ДУ3) и импульса коррекции
скорости при пролете астероида Ai мимо Земли для вывода его
на траекторию встречи с целевым астероидом А2 (импульс Д'Т^).
5. Для отобранных решений выполнялась оптимизация времен от-
лета и прилета с целью минимизации ДУд. Оптимизация выполнялась
поиском минимума функции
F(T3,T4,T5) = ДУ3 + Д'У4.
Для решения задачи Ламберта использовалась программа для си-
стемы MATLAB [14], реализующая устойчивое решение задачи с помо-
щью двух отдельных алгоритмов. Сначала пробуется решение методом,
относительно недавно разработанным D. Izzo (Европейское космиче-
ское агентство) [15]. Этот алгоритм является чрезвычайно быстрым,
но все еще достаточно часто не сходится (особенно в случае много-
витковых перелетов). В случае неудачи расчета по алгоритму D. Izzo
проводится расчет по гораздо более устойчивому алгоритму (Lan-
caster/Blancard [16] с модификациями, начальными значениями и про-
чими улучшениями, предложенными R. Gooding [17]), который выпол-
няется существенно дольше, в том числе и в силу своей надежности.
Для решения задачи оптимизации использовался метод Нелдера-
Мида. Использовалась реализация этого метода в виде функций систе-
мы MATLAB, при этом задачи решались параллельно для отдельных
групп астероидов. Для повышения скорости и устойчивости поиска
решений на первом этапе оптимизации уточнялись значения моментов
времени Т3 и Т4 при фиксированном значении Т5, а для лучших
решений, полученных на первом этапе, была выполнена полная опти-
мизация по всем 3 переменным Т3, Т4, Т$.
Для контроля решения задачи поиска оптимальных траекторий пе-
релета была использована бесплатно распространяемая, но основанная
на закрытом коде программа Trajectory Optimization Tool, использую-
щая метод Гудинга для решения задачи Ламберта.
238
Гл. 7. Планетарная защита
Эта программа использовалась для проверки полученных решений,
но не была использована для проведения основных работ по причине
закрытости кода, отсутствия режима пакетного исполнения для мас-
совых расчетов и возможности ее использования только на платформе
Microsoft Windows.
Результаты первого этапа отбора и оптимизации представлены
в табл. 7.4. Для нее были отобраны решения, удовлетворяющие следу-
ющим критериям:
1) Общий импульс коррекции A Vs не превышает 50 м/с;
2) Минимальное расстояние астероида от центра Земли (радиус
перигея) не меньше 6700 км.
В таблицах и рисунках для компактности указываются даты £>]...
...£>5, соответствующие календарным датам соответствующих времен
Т1...Т5 в формате Год/Месяц/День, например, 15 апреля 2020 г. обо-
значается как 2020/04/15.
Обозначения столбцов таблицы:
Н — абсолютная звездная величина объекта (астероида А)),
— радиус перигея траектории астероида А],
Ф — угол поворота вектора скорости астероида А\ после выполне-
ния гравитационного маневра,
£>3 — дата выполнения маневра коррекции скорости астероида А[,
£>4 — дата пролета Земли астероидом А, (выполнения гравитаци-
онного маневра),
£>5 — дата встречи астероидов А] и Аг.
В табл. 7.5 приведены основные орбитальные и физические парамет-
ры отобранных астероидов.
Для рассматриваемой задачи важнейшее значение имеет масса
управляемого астероида. Практически для всех астероидов их масса
может быть только оценена через их средний диаметр, который, в свою
очередь, можно оценить по абсолютной звездной величине Н, приве-
денной в табл. 7.5. Чем меньше абсолютная звездная величина, тем
в среднем больше объект. Однако, оценка размера астероида по его
абсолютной звездной величине требует также знания альбедо (отра-
жающей способности) поверхности объекта, которое для большинства
объектов неизвестно и обычно принимается находящимся в пределах
от 0,05 до 0,25. В табл. 7.6 приведены оценки диаметров астероидов D
в зависимости от значений их абсолютных звездных величин Н.
Оптимальные траектории перелета
Таблица 7.4.
Код объекта Н A Vs, м/с A V|, м/с Д'Е|, м/с AV4, км/с км О3 d4 D-,
1997 XF11 16,90 10,7 10,7 0.0 14,084 64691,3 3,5 2027/04/05 2028/10/26 2031/10/29
2011 ES4 25,67 11,0 11,0 0,0 7,737 21301.6 27,6 2027/10/28 2028/09/01 2028/12/11
1997 XF11 16,90 11,3 11.3 0,0 14,083 140570,7 1,6 2027/03/20 2028/10/26 2030/08/06
2011 AG5 21,85 11,4 11.4 0,0 9,517 11931,4 31,3 2021/09/22 2023/02/05 2024/05/11
2006 SU49 19,54 11.6 11,6 0,0 5,036 311119,8 5,5 2027/08/25 2029/01/23 2029/10/06
2006 XV4 24,87 14.5 14,5 0,0 9,538 86237,8 5,5 2028/09/29 2031/12/10 2034/04/09
2012 НВ25 24,93 16,0 16,0 0,0 9,670 21712,6 18,9 2024/06/16 2027/07/10 2028/02/09
2010 FD 26,02 16,4 16,4 0,0 9,896 14475,1 25,4 2030/04/17 2034/03/06 2035/07/03
2011 UK10 24,91 16,4 16,4 0,0 7,450 198561,7 4.0 2025/09/28 2026/10/10 2027/08/06
2009 JG2 22,57 17,4 17.4 0,0 18,418 30090,8 4,3 2030/06/19 2032/10/25 2033/10/15
2005 GK141 22,17 19,8 19,8 0,0 14,915 8147,9 20,8 2020/10/21 2023/04/24 2023/09/13
2012 НВ25 24,93 20.6 20,6 0,0 9,526 51968,4 8,9 2024/01/12 2027/07/09 2027/11/14
1994 GV 27,46 21,8 21,8 0,0 8,348 81103,0 7,6 2029/01/02 2031/04/12 2031/12/25
2010 СА 24,47 22,7 22,7 0,0 14,617 20047,2 9,8 2027/02/24 2028/08/06 2031/07/30
2009 JG2 22,57 22,9 22,9 0,0 18,399 30188,2 4,3 2030/10/10 2032/10/25 2033/10/16
2009 BF58 27,24 24,6 24,6 0,0 6,754 54538,3 15,9 2020/06/28 2022/01/21 2023/08/17
2009 JG2 22,57 24,9 24,9 0,0 18,371 252711,4 0,5 2030/11/24 2032/10/25 2035/03/02
2010 СА 24,47 25,3 25,3 0,0 14,567 20296,7 9,7 2027/05/21 2028/08/06 2031/07/30
2011 YH28 20.41 25,8 25,8 0,0 18,904 10637,4 10,9 2030/03/02 2033/07/05 2034/06/03
2009 BF58 27,24 27,2 27,2 0,0 6,754 54538,6 15,9 2020/05/29 2022/01/21 2023/08/17
2002 MN 23,32 27,9 27,9 0,0 10,321 136070,1 3,1 2022/03/04 2024/06/14 2027/06/06
2009 WR52 28,32 28,4 28,4 0,0 5,366 77692,4 17,4 2028/01/02 2028/05/21 2028/09/06
2006 WV29 26,51 28,8 28,8 0,0 16,796 114985,0 1,4 2026/12/25 2028/06/04 2029/11/01
2011 AG5 21,85 29,0 29,0 0,0 9,536 15874,8 25,0 2022/01/01 2023/02/04 2026/03/27
2006 HQ30 21,17 29,8 29,8 0,0 10,754 16655,2 19,7 2024/09/21 2027/06/17 2030/04/26
2001 WN5 18,23 31,1 31,1 0,0 10,113 11085,1 30,2 2027/08/30 2028/06/26 2030/03/24
2002 MN 23,32 31,4 31,4 0,0 10,315 201844,1 2,1 2022/04/29 2024/06/14 2027/07/26
2009 TD17 27,68 32,2 32,2 0,0 6,504 235001,1 4,4 2032/04/17 2033/05/07 2033/11/28
2008 GY21 27,60 32,3 32,3 0,0 11,053 56958,2 6,2 2017/09/15 2018/04/09 2020/12/22
2001 WN5 18,23 32,4 32,4 0,0 10,112 11088,2 30,2 2027/07/31 2028/06/25 2030/03/24
2009 TD17 27,68 32,4 32,4 0,0 6,506 42356,7 21,0 2032/04/13 2033/05/07 2034/08/19
2009 BE 26,11 32,8 32,8 0,0 11,429 7253,8 34.5 2016/06/25 2018/01/23 2020/11/10
№
СО
СО
Продолжение табл. 7.4
Код объекта н AVs, м/с Д Ц, м/с Д'У<1, м/с ДУ^, км/с , КМ Ф.Ь Di D,| 'Л,
2011 AG5 21,85 33,4 33,4 0,0 9,478 16326,0 24,7 2022/03/28 2023/02/05 2026/03/27
2008 ED8 23.98 33,9 33.9 0,0 8,560 33310,4 16,1 2018/08/11 2021/03/10 2022/08/31
1994 GV 27.46 34,3 34.3 0,0 8,353 81179,1 7.5 2029/06/16 2031/04/13 2031/12/25
2005 XN27 24,41 34,6 34,6 0,0 12,573 31483,4 8,5 2018/08/13 2020/11/29 2021/09/20
2009 VT1 29.55 36,3 36,3 0,0 6,942 164107,3 5,5 2021/04/29 2023/10/16 2024/03/08
1998 НН49 21.30 36,4 36,4 0,0 14,622 16791,9 11,5 2023/01/14 2023/10/16 2024/10/20
2011 LJ19 21.36 36,7 36,7 0,0 10,025 14224,9 25,2 2027/01/17 2028/07/23 2030/06/08
2009 ХО 20,53 37,4 37,4 0,0 12,110 57780,1 5,1 2018/07/09 2020/05/05 2020/08/20
1993 VB 19,40 37,5 37,5 0,0 9,880 18953,6 20,4 2020/12/10 2023/02/15 2026/05/10
1994 VH8 27,68 37,7 37,7 0,0 9,676 89517,6 5,2 2028/04/11 2029/10/30 2031/11/18
2010 HS20 23,34 37,8 37,8 0,0 8,604 70544,5 8,1 2030/07/09 2033/07/02 2034/11/05
2011 ВР40 25,43 37,9 37,9 0,0 3,423 338169,7 10,5 2028/09/12 2029/09/09 2030/03/10
2011 ES4 25.67 39,1 39,1 0,0 7,790 102900,0 6.9 2019/09/03 2020/09/01 2021/06/26
2001 ЕС 18.50 38,0 38,0 0,0 21,374 27780,5 3.5 2023/01/29 2026/02/23 2028/09/14
2009 НТ2 26.47 38,3 38,3 0,0 9,558 19775,2 20,8 2018/08/08 2022/04/18 2022/10/05
2005 XN27 24,41 38,4 38,4 0,0 12,565 31355,9 8,5 2017/12/15 2020/11/29 2021/09/20
2003 МК4 20,80 38,7 38,7 0,0 12,881 9850,4 22,6 2031/01/17 2032/01/03 2034/03/30
2009 НТ2 26,47 38,8 38,8 0,0 9,558 19776,6 20,8 2018/08/23 2022/04/18 2022/10/05
2011 ВР40 25,43 38,9 38,9 0,0 3,419 553935,4 6,6 2028/09/19 2029/09/10 2030/01/10
2008 VB4 28,32 39,5 39,4 0,0 11,853 39617,2 7.7 2023/06/28 2026/11/02 2027/04/30
1997 GL3 19,39 39.6 39,6 0,0 24,256 6771,1 10,4 2018/04/09 2021/04/04 2023/06/03
2012 ЕК5 25,54 39,7 39,7 0,0 14,890 13660,8 13,4 2032/09/28 2034/03/25 2034/09/26
2008 XU2 25.57 39,9 39,9 0,0 10,373 42482,9 9,2 2028/08/30 2031/11/28 2032/12/12
2008 KZ5 20.08 40,1 40,1 0,0 8,056 30814,5 19,1 2016/05/15 2018/08/15 2019/09/03
2002 TZ66 25,89 40,2 40,2 0,0 5,478 67116,8 19,0 2028/04/06 2028/10/05 2029/02/03
2010 FD 26,02 40,4 40,4 0,0 9,548 64994,3 7,2 2031/06/06 2034/03/09 2035/12/18
2008 UA202 29,44 40,7 40,7 0,0 2,416 835447,8 8,7 2029/02/04 2029/10/22 2030/10/24
2006 QV89 25,26 41.1 41,1 0,0 5,139 82010,0 17,9 2018/07/25 2019/09/08 2020/02/13
2009 BF58 27,24 41,7 41.7 0,0 6,956 38711,9 20,2 2021/01/05 2022/01/24 2022/09/28
1998 DV9 18,20 41,8 41,8 0,0 7,579 76314,3 9.6 2026/02/23 2028/01/30 2030/12/26
2006 HU50 24,67 41,8 41,8 0,0 6,117 49314,3 20,5 2024/03/18 2025/05/07 2026/04/03
2009 ХО 20,53 42,4 42,4 0,0 12,286 76738,0 3,8 2018/08/18 2020/05/06 2022/10/08
2008 LD 28,86 43,4 43,4 0,0 4,146 606305,5 4,2 2023/10/14 2024/05/31 2025/07/31
240 Гл. 7. Планетарная защита
Окончание табл. 7.4
Код объекта Я A Vs, м/с АУ|, м/с Д' У», м/с ДУд, км/с Атт, км Ф.и D3
2009 КСЗ 17,96 43,5 43,5 0,0 12,239 18647,3 14,3 2027/12/24 2032/09/02 2035/03/27
2002 UV36 26,68 43,9 43.9 0,0 8,087 70518,4 9.1 2027/12/19 2029/10/26 2031/11/29
2000 GV147 19,09 44,1 44,1 0,0 10,666 9756,8 30,6 2028/05/03 2030/05/30 2032/06/02
2010 NN 28,35 44,1 44,1 0,0 7,556 34560,3 19,4 2027/07/01 2029/07/01 2029/10/29
2006 HU50 24,67 44,3 44,3 0,0 6,129 48968,2 20,5 2024/02/29 2025/05/07 2026/04/03
2002 UV36 26,68 44,5 44,5 0,0 8,086 70647,5 9,1 2028/02/22 2029/10/25 2031/11/29
2009 WR52 28,32 44,8 44,8 0,0 5,410 147109,9 9,7 2027/07/24 2028/05/20 2028/10/23
2009 FK 28,35 44,9 44,9 0,0 7,018 97856,6 8.8 2022/06/14 2024/03/20 2026/06/06
2008 ED8 23.98 45,1 45,1 0,0 8,558 33369,7 16,1 2018/12/20 2021/03/10 2022/08/31
2010 TN55 26,99 45,6 45,6 0.0 25,040 25398,8 2,8 2028/10/22 2031/10/10 2033/09/25
2011 WN69 26.20 45,9 45,9 0,0 23.944 8791,8 8,4 2016/01/19 2019/11/25 2022/04/05
2012 BV1 30,98 47,6 47,6 0.0 8,459 1110888,6 0,6 2021/11/30 2023/01/20 2023/06/05
2007 EN88 26.45 47,7 47.7 0.0 12,533 22789,7 11,5 2020/04/14 2023/03/15 2025/04/21
2010 TN55 26,99 47,7 47.7 0,0 25,339 21939,6 3.2 2015/01/01 2017/10/10 2020/04/17
2010 WB 24,07 48,3 48,3 0,0 6,267 223397.6 5.0 2028/11/01 2029/11/13 2031/12/21
2006 QV89 25.26 48,7 48.7 0,0 5,172 80085,7 18,1 2018/08/29 2019/09/07 2020/02/11
2005 AU3 25,98 49,2 49,2 0,0 14,556 31784,9 6,4 2028/12/23 2030/01/05 2033/02/03
2010 PR66 19,36 49,6 49,6 0,0 16,372 10849,6 13,8 2016/10/17 2020/07/15 2022/11/12
2010 UH 27,08 49,7 49,7 0,0 6,714 41155,3 20,4 2017/03/11 2018/07/13 2019/04/15
2010 NN 28,35 49,8 49,8 0.0 7,556 34566,0 19,3 2027/09/04 2029/07/01 2029/10/28
2009 HG60 22,74 49,9 49,9 0,0 17,300 21532,9 6.7 2020/09/11 2023/04/22 2024/04/21
7.4. Поиск, оптимальных орбит перелета
242
Гл. 7. Планетарная защита
Таблица 7.5.
Основные орбитальные и физические параметры отобранных астероидов
Код объекта SPICE ID А, а. е. е г, ° Р, годы Н Класс
1997 XF11 2035396 1,44 0,484 4,1 1,73 16,90 АРО*
2011 ES4 3558279 1,09 0,243 3,4 1,14 25,67 АРО
1997 XF11 2035396 1,44 0,484 4,1 1,73 16,90 АРО*
2011 AG5 3555071 1,43 0,390 3,7 1,71 21,85 АРО*
2006 SU49 2292220 1,41 0,312 2,5 1,68 19,54 АРО*
2006 XV4 3363722 2,59 0,625 4,0 4,17 24,87 АРО
2012 НВ25 3602980 2,42 0,599 1,5 3,76 24,93 АРО
2010 FD 3511916 2,87 0,632 0,3 4,87 26,02 А МО
2011 UK10 3582088 1,23 0,259 6,1 1,36 24,91 АРО
2009 JG2 3459656 2,03 0,659 2,7 2,90 22,57 АРО
2005 GK141 3276917 2,74 0,658 14,0 4,53 22,17 АРО
2012 НВ25 3602980 2,42 0,599 1,5 3,76 24,93 АРО
1994 GV 3092125 2,01 0,522 0,5 2,84 27,46 АРО
2010 СА 3506746 1,32 0,460 9,9 1,51 24,47 АРО
2009 JG2 3459656 2,03 0,659 2,7 2,90 22,57 АРО
2009 BF58 3445071 1,51 0,377 1,0 1,86 27,24 АРО
2009 JG2 3459656 2,03 0,659 2,7 2,90 22,57 АРО
2010 СА 3506746 1,32 0,460 9,9 1,51 24,47 АРО
2011 YH28 3591721 2,63 0,712 8,6 4,26 20,41 АРО*
2009 BF58 3445071 1,51 0,377 1,0 1,86 27,24 АРО
2002 MN 3127411 1,81 0,499 1,0 2,44 23,32 АРО
2009 WR52 3478352 1,03 0,155 4,2 1,05 28,32 АРО
2006 WV29 3360541 1,38 0,560 1,2 1,63 26,51 АРО
2011 AG5 3555071 1,43 0,390 3,7 1,71 21,85 АРО*
2006 HQ30 3330680 2,61 0,600 12,0 4,22 21,17 АМО*
2001 WN5 2153814 1,71 0,467 1,9 2,24 18,23 АРО*
2002 MN 3127411 1,81 0,499 1,0 2,44 23,32 АРО
7.4. Поиск оптимальных, орбит перелета
243
Продолжение табл. 7.5
Код объекта SPICE ID A, a. e. e i, ° P, годы H Класс
2009 TD17 3471976 1,13 0,220 0,1 1,20 27,68 APO
2008 GY21 3409125 1,07 0,378 1,9 1,11 27,60 APO
2001 WN5 2153814 1,71 0,467 1,9 2,24 18,23 APO*
2009 TD17 3471976 1,13 0,220 0,1 1,20 27,68 APO
2009 BE 3444298 1,48 0,448 0,9 1,80 26,11 APO
2011 AG5 3555071 1,43 0,390 3,7 1,71 21,85 APO*
2008 ED8 3405174 2,19 0,549 7,7 3,24 23,98 APO
1994 GV 3092125 2,01 0,522 0,5 2,84 27,46 APO
2005 XN27 3306659 2,41 0,635 0,3 3,75 24,41 APO
2009 VT1 3475468 1,98 0,503 0,3 2,80 29,55 APO
1998 НН49 3013045 1,55 0,502 8,4 1,93 21,30 APO*
2011 LJ19 3567995 2,62 0,620 1,5 4,25 21,36 APO*
2009 ХО 3482447 1,86 0,542 0,4 2,53 20,53 APO*
1993 VB 2037638 1,91 0,519 5,1 2,64 19,40 APO*
1994 VH8 3092131 1,62 0,438 3,3 2,06 27,68 APO
2010 HS20 3518258 2,21 0,553 2,2 3,29 23,34 APO
2011 ВР40 3556018 1,12 0,151 0,9 1,19 25,43 APO
2001 ЕС 3070541 2,58 0,773 0,6 4,14 18,50 APO*
2009 НТ2 3457436 2,68 0,606 8,7 4,38 26,47 AMO
2005 XN27 3306659 2,41 0,635 0,3 3,75 24,41 APO
2003 МК4 3157028 1,08 0,181 22,3 1,12 20,80 APO*
2009 НТ2 3457436 2,68 0,606 8,7 4,38 26,47 AMO
2011 ВР40 3556018 1,12 0,151 0,9 1,19 25,43 APO
2008 VB4 3437792 2,35 0,618 0,1 3,61 28,32 APO
1997 GL3 3013066 2,28 0,781 6,7 3,44 19,39 APO*
2012 ЕК5 3601278 1,82 0,557 9,9 2,45 25,54 APO
2008 XU2 3441169 2,44 0,622 3,0 3,82 25,57 APO
244
Гл. 7. Планетарная защита
Продолжение табл. 7.5
Код объекта SPICE ID А, а. е. е г, ° Р, годы Н Класс
2008 KZ5 3412889 1,84 0,453 8,4 2,49 20,08 АРО*
2002 TZ66 3137844 0,93 0,121 8,5 0,90 25,89 АТЕ
2010 FD 3511916 2,87 0,632 0,3 4,87 26,02 АМО
2008 UA202 3435539 1,03 0,069 0,3 1,05 29,44 АРО
2006 QV89 3339667 1,19 0,224 1,1 1,30 25,26 АРО
2009 BF58 3445071 1,51 0,377 1,0 1,86 27,24 АРО
1998 DV9 2027002 1,74 0,433 8,7 2,30 18,20 АРО*
2006 HU50 3330687 1,29 0,247 5,9 1,46 24,67 АРО
2009 ХО 3482447 1,86 0,542 0,4 2,53 20,53 АРО*
2008 LD 3413076 0,89 0,155 6,5 0,84 28,86 АТЕ
2009 КСЗ 3461187 3,21 0,699 10,0 5,74 17,96 АРО*
2002 UV36 3141528 2,46 0,597 2,9 3,86 26,68 АРО
2000 GV147 3035243 1,75 0,456 10,6 2,31 19,09 АРО*
2010 NN 3536571 1,78 0,449 2,3 2,38 28,35 АРО
2006 HU50 3330687 1,29 0,247 5,9 1,46 24,67 АРО
2002 UV36 3141528 2,46 0,597 2,9 3,86 26,68 АРО
2009 WR52 3478352 1,03 0,155 4,2 1,05 28,32 АРО
2009 FK 3451794 1,52 0,369 2,8 1,88 28,35 АРО
2008 ED8 3405174 2,19 0,549 7,7 3,24 23,98 АРО
2010 TN55 3548892 2,31 0,788 0,3 3,50 26,99 АРО
2011 WN69 3589544 2,52 0,780 6,0 3,99 26,20 АРО
2012 BV1 3595926 1,24 0,316 0,8 1,37 30,98 АРО
2007 EN88 3371142 2,18 0,588 8,9 3,22 26,45 АРО
2010 TN55 3548892 2,31 0,788 0,3 3,50 26,99 АРО
2010 WB 3552163 1,36 0,288 5,5 1,58 24,07 АРО
2006 QV89 3339667 1,19 0,224 1,1 1,30 25,26 АРО
2005 AU3 3265469 1,25 0,473 3,8 1,39 25,98 АРО
7.4. Поиск оптимальных орбит перелета
245
Окончание табл. 7.5
Код объекта SPICE ID А, а. е. е г, ° Р, годы Н Класс
2010 PR66 3544979 2,92 0,695 16,5 4,98 19,36 АРО*
2010 UH 3549638 1,36 0,307 0,6 1,59 27,08 АРО
2010 NN 3536571 1,78 0,449 2,3 2,38 28,35 АРО
2009 HG60 3458972 1,98 0,643 7,0 2,80 22,74 АРО
Таблица 7.6.
Оценка диаметра астероида по его абсолютной
звездной величине (начало)
Н D Н D
3,0 670-1490 км 17,0 1-2 км
3,5 530-1190 км 17,5 1-2 км
4,0 420-940 км 18,0 670-1500м
4,5 330-750 км 18,5 530-1200 м
5,0 270-590 км 19,0 420-940 м
5,5 210-470 км 19,5 330-750 м
6,0 170-380 км 20,0 270-590 м
6,5 130-300 км 20,5 210-470м
7,0 110-240 км 21,0 170-380м
7,5 85-190 км 21,5 130-300м
8,0 65-150 км 22,0 110-240м
8,5 50-120 км 22,5 85-190 м
9,0 40-90 км 23,0 65-150 м
9,5 35-75 км 23,5 50-120м
10,0 25-60 км 24,0 40-95 м
10,5 20-50 км 24,5 35-75 м
11,0 15-40 км 25,0 25-60 м
11,5 13-30 км 25,5 20-50 м
12,0 11-24 км 26,0 17-37м
246
Гл. 7. Планетарная защита
Таблица 7.6.
Окончание табл. 7.6
н D Н D
12,5 8-19 км 26,5 13-30м
13,0 7-15 км 27,0 11-24 м
13,5 5-12 км 27,5 8-19м
14,0 4-9 км 28,0 7-15 м
14,5 3-7 км 28,5 5-12 м
15,0 3-6 км 29,0 4-9 м
15,5 2-5 км 29,5 3-7 м
16,0 2-4 км 30,0 3-6 м
16,5 1-3 км
7.5. Оптимальные схемы полной миссии
со стартом КА с Земли
Для подробного исследования из табл.7.4 были отобраны асте-
роиды, для которых оценка диаметра не превышает 70 м и суммар-
ный импульс управления скоростью не превышает 30 м/с. Для этих
астероидов был выполнен поиск траекторий перелета Земля-астероид,
оптимальных по суммарным затратам импульса скорости, складыва-
ющимся из импульса скорости старта с промежуточной околоземной
орбиты и импульса скорости уравнивания скоростей для стыковки
КА с астероидом А\ (рис. 7.10-7.13 на цветной вклейке). Величина
импульса скорости старта с промежуточной околоземной орбиты тра-
диционно выражается через характеристическую энергию Сз (квадрат
гиперболического избытка скорости Сз = V^).
Приводимая табл. 7.7 позволяет выполнить оценки получаемого из-
менения скорости астероида-цели при заданной начальной массе ап-
парата на низкой круговой околоземной орбите при некоторых пред-
положениях о характеристиках космического аппарата, отправляемого
к астероиду-снаряду из выбранного списка. При этом очевидно, что
существенную роль играет скорость встречи астероидов, а не только
сообщаемые двигательной установкой импульсы изменения скорости
космического аппарата и астероида-снаряда.
Таблица 7.7. Оптимальные схемы полных миссий от старта КА с промежуточной околоземной орбиты
до поражения целевого астероида
Код объекта SPICE ID Н Г>1 Сз, км2/с2 Г2 ДУ2, км/с Оз ДЦ, м/с Di Rn, км d5 ДУ5. км/с
2012 НВ25 3602980 24,93 2022/07/11 4,0 2023/10/05 7,9 2024/02/19 1,3 2027/07/10 51790,3 2027/11/13 19,2
2011 ES4 3558279 25,67 2026/10/31 3.1 2027/06/18 4,1 2027/10/19 11,4 2028/09/01 21275,8 2028/12/11 5,4
2006 XV4 3363722 24,87 2027/01/02 3.7 2027/10/03 9,6 2028/09/30 11,4 2031/12/11 86510,2 2034/04/08 15.3
2010 FD 3511916 26.02 2028/03/26 5,2 2029/06/21 7,6 2030/05/11 15,9 2034/03/06 14246,2 2035/07/02 16,5
2011 UK10 3582088 24,91 2021/12/10 1.5 2022/08/25 5,6 2025/09/13 15,9 2026/10/10 198674.3 2027/08/06 2,3
1994 GV 3092125 27,46 2027/03/17 2,5 2028/04/22 6.9 2028/09/11 17.7 2031/04/13 80270,5 2031/12/24 14,1
2009 BF58 3445071 27,24 2019/01/01 2,6 2020/01/10 5,1 2020/06/26 24,5 2022/01/22 54422,4 2023/08/17 11,5
2009 WR52 3478352 28,32 2026/05/29 0.6 2027/05/02 5,1 2028/01/01 28,4 2028/05/21 77684,2 2028/09/06 12,2
.5. Оптимальные схемы полной миссии со стартом КА с Земли
248
Гл. 7. Планетарная, защита
Заметный вклад в расход рабочего тела дают необходимые для
выполнения задач наведения корректирующие импульсы, а именно,
импульсы скорости, компенсирующие ошибки определения параметров
орбиты и ошибки исполнения предыдущих коррекций. При коррекции
орбиты космического аппарата, направляемого к астероиду-снаряду,
расход рабочего тела на эти коррекции заметно меньше по сравнению
с расходом рабочего тела на номинальные операции (выведение на
орбиту перелета к астероиду требует характеристической скорости
около 3500 м/с, в то время как расход характеристической скорости
на выполнение всех необходимых коррекций параметров орбиты кос-
мического аппарата не превышает 80 м/с. Для управляемого астероида
расходы на коррекцию сравнимы или превышают расходы характе-
ристической скорости на номинальные маневры. Поэтому сравнение
различных малых астероидов как кандидатов на роль управляемых
объектов требует достаточно надежных оценок необходимых затрат
на коррекцию траектории. Но уже сейчас представляется очевидным,
что в случае использования управляемых астероидов вопросы точности
определения и достижения заданных параметров орбит имеют перво-
степенное значение.
Необходимо обратить внимание на еще одну важную характеристи-
ку построенных орбит — перигейное расстояние траектории пролета
астероидом окрестности Земли при выполнении гравитационного ма-
невра. В нашем случае практически для всех отобранных астероидов
оно составляет десятки тысяч километров (минимальное расстояние
в 14 246 километров наблюдается для одного астероида). Этот пара-
метр важен с точки зрения безопасности выполнения наших операций:
если перигей ниже некоторого технически и психологически опасного
предела, то реализация такого варианта вряд ли будет одобрена раз-
решающими инстанциями. В этой связи, а также в качестве расшире-
ния пространства возможных вариантов в дальнейших исследованиях
предполагается рассмотреть гравитационные маневры у других планет,
например, Марса и Венеры.
Список литературы к главе 7
1. Ivashkin V.V., Chernov А. V. Optimal Trajectories for Space Flight
to Near. Proc, of 17th Iternational Symp. on Space Flight Dynamics.
Keldysh Institute of Applied Mathematics. 2003. V. 2. P. 328-342.
2. Hyland D.C., Altwaijry H.A., Ge S. et al. Permanently-Acting NEA
mitigation technique via the Yarkovsky Effect // Cosmic Research.
2010. V. 48. No. 5.
Список литературы к главе 7
249
3. Dunham D. W., Genova A.L. Using Venus for Locating Space Ob-
servatories to Discover Potentially Hazardous Asteroids // Cosmic
Research. 2010. V. 48. No. 5.
4. Gold R.E. SHIELD: a comprehensive earth-protection archi-
tecture // Advances in Space Research. 2001. V. 28. No. 8.
P. 1149-1158.
5. JPL Small http://ssd.jpl.nasa.gov/sbdb.cgi?sstr=99942.
6. ESA Science and Technology: http://sci.esa.int/science(e/www/
area/index.cfm?fareaid=13.
7. Lakdavala E. Deep Impact Successfully Splits in Final Hours Before
Comet Encounter, July 3, 2005. Planetary News: Asteroids and
Comets (2005), http://www.planetary.org/news/2005/0703_Deep_
Impact_Successfully_Splits_in.html.
8. Bate R.R., Mueller D.D., White J.E., Saylor W. W. Fundamentals
of Astrodynamics. — Dover Publishing, Inc., 2013.
9. Vallado D.A. Fundamentals of Astrodynamics and Applications. —
Microcosm Press, 2013.
10. Don Yeomans, Chodas P., Chesley S., Giorgini J. Small Asteroid
2010 AL30 Will Fly Past The Earth. 2010. http://neo.jpl.nasa.gov/
news/news 167.html
11. NASA Science Missions: http://nasascience.nasa.gov/missions/near.
12. Meeus J. Astronomical Algorithms. — Willmann-Bell, Inc., 1991.
13. NAIF/SPICE ancillary information system, http://naif.jpl.nasa.
gov/naif/about.html
14. Oldenhuis R.P.S. «Robust solver for Lambert’s orbital-boundary
value problem», www.mathworks.com/matlabcentral/fileexchange/
26348-robust-solver-for-Iamberts-orbital-boundary-value-problem
15. Izzo D. ESA Advanced Concepts team, http://www.esa.int/gsp/
ACT/inf/op/globopt.htm
16. Lancaster E.R., Blanchard R.C. A unified form of Lambert’s theo-
rem // NASA technical note TN D-5368. 1969.
17. Gooding R.H. A procedure for the solution of Lambert’s orbital
boundary-value problem // Celestial Mechanics and Dynamical As-
tronomy (ISSN 0923-2958). 1990. V. 48, No. 2. P. 145-165.
Глава 8
ВЗРЫВ МЕТЕОРА НАД ЧЕЛЯБИНСКОМ: НОВОЕ
ПОДТВЕРЖДЕНИЕ НЕОБХОДИМОСТИ
ПЛАНЕТАРНОЙ ЗАЩИТЫ
Астрономы всего мира с нетерпением ждали 15 февраля 2013 г.,
когда 50-метровый астероид 2012 DA14, открытый за год до этого,
должен был пролететь всего в 27 700 км над поверхностью Земли.
Из когда-либо предсказанных, этот астероид занимает второе место
по близости пролета. Вспышка интереса после его открытия возникла
из-за того, что первичное определение его орбиты, основанное на ма-
лом числе наблюдений, показало некоторую вероятность столкновения
его с Землей в 2013 г. или в последующие годы. Падение астероида
такого размера на Землю могло бы разрушить небольшую страну,
вероятнее всего, уничтожив все живое в радиусе 100 км и вызвав
обширные разрушения в сотнях километров.
Астероид, образовавший Аризонский кратер 50000 лет назад
(рис. 8.1 на цветной вклейке), был немного меньше. Тем не менее,
новые наблюдения астероида 2012 DA14 позволили вскоре точнее
определить его траекторию и показали, что он не столкнется с Землей
в 2013 г. (с вероятностью столкновения после 2040 г. — всего 1/3000),
что предоставило великолепную возможность детально изучить этот
небольшой астероид вблизи.
8.1. Два астероида направляются к Земле
15 февраля 2013 г.
В течение нескольких дней перед 15 февраля 2013 г. астрономы
сделали сотни снимков и видеозаписей астероида 2012 DA14, при-
ближавшегося к Земле с ночной стороны. В то же время, оставаясь
никем незамеченным, другой астероид размером 17 м летел по траекто-
рии, гораздо точнее нацеленной на Землю. Он проник во внутреннюю
область Солнечной системы из пояса астероидов и пересек орбиту
Земли в конце 2012 г. Астероид находился тогда в 0,3 а.е. от Зем-
ли и оставался слишком тусклым чтобы быть обнаруженным любым
8.1. Два астероида направляются к Земле 15 февраля 2013 г.
251
из обзорных телескопов, описанных в разд. 1.1.1. Он был на 4 звездных
величины слабее 100-метрового объекта в табл. 1.2 и, вероятно, слабее
25 величины, составляя угол не больше 60° с направлением на Солнце
при наблюдении с Земли, оставаясь, таким образом, вне зоны действия
всех обзорных телескопов. Скорее всего Большой обзорный телескоп
(Large Synoptic Survey Telescope — LSST), находящийся в Чили, мог
бы его обнаружить, но он находится пока в стадии строительства
и этот 8-метровый телескоп начнет производить наблюдения не раньше
2021 г. [1].
Рис. 8.2. Траектория Челябинского метеора
В декабре 2012 г. неизвестный астероид достиг перигелия, который
оказался ближе к орбите Венеры, чем к орбите Земли (рис. 8.2). Затем
он начал неотвратимо двигаться к Земле, приближаясь по направлению
от Солнца, где никакие наши средства не могли его заметить. Военные
радары могли обнаружить его всего за несколько минут до столкнове-
ния, большинство жителей Челябинска узнало о нем только по осле-
пительной вспышке, которая была ярче всходившего Солнца. Метеор
взорвался на высоте 20 км над их городом с энергией около половины
мегатонны тротила, что эквивалентно 30 бомбам, сброшенным на Хи-
росиму. Эта совершенно внезапная катастрофа оказалась буквально
«громом среди ясного неба».
Чуть менее чем через три минуты после вспышки сильная ударная
волна достигла Челябинска, выбив окна и повредив по крайней мере
252
Гл. 8. Взрыв метеора над Челябинском
Рис. 8.3. Причиненный ущерб в Челябинске
Рис. 8.4. Раненые в Челябинске
4000 зданий, причинив ущерб около 1 млрд руб. и ранив осколками
стекла примерно 1500 человек (см. рис. 8.3 и 8.4). Так как температура
воздуха составляла около —15 °C, окна должны были быть заменены
в срочном порядке. Падение метеорита вызвало обрушение крыши
склада Челябинского цинкового завода, что сразу же привело к росту
цены этого металла. В современном тесно связанном мире падение
даже 17-метрового астероида может иметь глобальные последствия.
Место падения осколка Челябинского метеорита в оз. Чебаркуль
изображено на рис. 8.5 на цветной вклейке.
8.2. Хронология других случаев падения астероидов
253
Рис. 8.6. Последствия Тунгусского метеорита
Челябинский метеор стал наиболее подробно описанным случаем
с сильными разрушительными последствиями на Земле после взрыва
Тунгусского метеорита 17 (30) июня 1908 г. Считается, что падение
метеоритов подобных Челябинскому происходит во всем мире примерно
раз в 100 лет, хотя и остается странным, что и Тунгусское, и Челя-
бинское события произошли в России. С другой стороны, феномен,
аналогичный Тунгусскому, когда были выжжены и повалены деревья
на площади размером 50 км в поперечнике и на высоте около 18 км
была выделена энергия примерно 10-15 мегатонн тротила, можно ожи-
дать примерно раз в 300 лет (см. рис. 8.6).
8.2. Хронология других случаев падения астероидов
Работа над этой книгой была завершена до 15 февраля 2013 года,
поэтому в предыдущих главах не упоминаются ни Челябинское собы-
тие, ни выводы, которые из него следуют. Но если события такого
масштаба происходят только раз в столетие, возможно, в течение
нашей жизни мы можем чувствовать себя теперь в безопасности? Тем
не менее, как в любой игре, существует одно обстоятельство: одно
дело — вероятность события, а другое — происходящее в действитель-
ности. В следующий раз падение метеорита, аналогичного Челябинско-
му, может произойти через 200 лет, а может — и завтра. Кроме того,
событие может быть значительно более крупномасштабным, принеся
254 Гл. 8. Взрыв метеора над Челябинском
гораздо больше ущерба и жертв. С ростом численности населения
и заселением новых территорий угроза повреждений при падениях
астероидов также становится более существенной. Известны случаи,
когда объекты меньшего размера, падающие на Землю чаще, нано-
сили заметный ущерб. Рассмотрим в качестве примера 4-метровый
астероид, упавший в Сихотэ-Алине к северо-востоку от Владивостока
12 февраля 1947 г. (рис. 8.7 на цветной вклейке). Несмотря на то, что
этот астероид был небольшим, он состоял почти целиком из железа
и стал крупнейшим из когда-либо наблюдавшихся падений железного
метеорита. В результате он достиг в атмосфере высоты 5 км и произвел
взрыв, который по описаниям очевидцев был ярче Солнца. На необи-
таемой области размером в 2 км был поврежден лес и образовано
более 100 кратеров, наибольший из которых имел диаметр 26 м. Было
собрано приблизительно 23 тонны фрагментов железного метеорита
при исходной его массе в 70 тонн. Если бы такой объект упал не в лесу,
а на крупный город, были бы убиты сотни или даже тысячи лю-
дей. Кроме перечисленных трех крупных событий в течение столетия
в России наблюдались и другие известные случаи падения метеоров
(см. табл. 8.1).
Таблица 8.1.
Другие случаи метеоров в России
Дата Место Описание
19 ноября 1881 г. Гросслибенталь Сообщается об одном раненом
22 сентября (4 октября) 1893 г. Забродье Повреждено здание
2 апреля 1936 г. Юртук Повреждено здание
9 апреля 1941 г. Челябинская обл. «Катавский болид». Найдено несколько фрагментов метеорита. Полным исследова- ниям помешала война.
24 сентября 2002 г. Бодайбо, около Иркутска Охотники обнаружили кратер и выгоревший лес.
10 января 2007 г. Алтайский край Найден кратер и примерно 50 фрагментов метеорита.
В других странах мира также отмечались сильные взрывы в ат-
мосфере, вызванные метеорами. В табл. 8.2 перечислены некоторые
из наиболее важных случаев, произошедших за последние 100 лет,
которые вызвали разрушения либо могли нанести ущерб и ранения
если бы произошли в населенных районах [2].
8.2. Хронология других случаев падения астероидов
255
Таблица 8.2.
Падения метеоров за пределами России, которые вызвали,
или могли вызвать разрушения
Дата Место Описание
9 января 1914 г. Западная Франция Взрыв метеора выбил окна
26 ноября 1919 г. Юг шт. Мичиган, север шт. Индиана, США Разбитые окна и повреждения на большой площади
24 апреля 1922 г. Барнегат, Нью-Джерси, США Разбиты окна
13 августа 1930 г. Рио Курака, Бразилия 1-км кратер, назван «Бразильская Тунгуска»
11 декабря 1935 г. Рупуни, Британская Гвиана Пилот самолета сообщил об уничтоженной полосе джунглей длиной 32 км
7 января 1954 г. Дьепп, Франция Выбиты окна
5 декабря 1984 г. Кунео, Италия Сильный взрыв, выбиты окна
15 сентября 2007 г. Каранкас, Перу 200 жителей отравлены дымом из 15-метрового кратера
8 октября 2009 г. Южный Сулавеси, Индонезия 10-метровый околоземный астероид взорвался с силой 50 кт ТНТ
11 февраля 2010 г. Центральная Мексика Образован 30-метровый кратер, повреждена дорога
Надо отметить, что число случаев, подобных отраженным
в табл. 8.2, увеличилось в последнее время в связи с тем, что население
Земли растет и становится более тесно связанным посредством Интер-
нета, спутниковой связи и т. д. Кроме того, здесь перечислены только
взрывы над сушей, в то время как 70% поверхности Земли покрыто
океаном. Начиная с 1990-х гг., появилась, наконец, возможность
обнаруживать значительные взрывы в атмосфере с помощью военных
спутников, отслеживающих запуски ракет и испытания атомного
оружия по всему миру, а также метеоспутников. Например, 6 июня
2002 г. произошел взрыв мощностью 12-20 кт тротила в атмосфере
над восточной частью Средиземного моря. Генерал США Саймон
Уорден тогда отметил, что если бы взрыв произошел над Индией или
Пакистаном, находившихся тогда в состоянии близком к войне, он мог
256
Гл. 8. Взрыв метеора над Челябинском
бы спровоцировать обмен ядерными ударами, который бы привел
к гибели миллионов людей на обширной территории [3].
8.3. Ранения и жертвы при падениях метеоритов
До 2013 г. был только один хорошо описанный случай ранения
человека метеоритом. Он произошел 28 ноября 1954 г. в городе
Силакога, штат Алабама (США), когда Энни Ходжез была ранена
4-килограммовым метеоритом, который пробил крышу ее дома, раз-
бил радиоприемник и травмировал ее, пока она отдыхала на диване
(см. рис. 8.8). Этот дневной метеорит, который наблюдали в трех шта-
тах, двигался к Земле по направлению от Солнца.
Рис. 8.8. Ранение Энни Ходжез метеоритом
Скорее всего, за историю человечества были и другие случаи ране-
ний и жертв в результате ударов метеоритов или взрывов их в воздухе.
Существует несколько таких свидетельств, но ни одно из них не может
быть неоспоримо подтверждено. Например, в 1511 и 1654 гг. н.э.
были сообщения о смерти монахов в различных итальянских городах
от упавших метеоритов. Самый недавний случай — смерть 43-летней
Сильвины Эспинозы при взрыве ее дома в Монте Гранде рядом
с Буэнос-Айресом в Аргентине 26 сентября 2011 г. Были также ранены
8 ее соседей. Так как полиция обнаружила, что газовые баллоны
и трубы не были повреждены, взрыв газа был исключен из возможных
8.4. Гибель динозавров
257
причин происшествия. Соседи сообщали, что причиной взрыва был
огненный шар, упавший с неба. С другой стороны, если бы это был
достигший Земли метеорит с достаточной для такого взрыва массой,
должен был бы также произойти сильный взрыв в атмосфере на боль-
шой высоте. Сведений о таком взрыве не поступало.
Самый, вероятно, поразительный случай отмечен 3 февраля 1490 г.
в Чинь-Янь, Шаньси (Китай), когда «камни падали дождем». По неко-
торым свидетельствам было убито более 10000 людей. Несмотря на то,
что официальная История династии Мин содержит описание этого
события, включая «падающие как дождь камни», в ней нет упоминания
о жертвах, что было бы странным упущением, если действительно
погибло много людей. Кроме того, существуют метеориты сохранивши-
еся от падений гораздо раньше 1490 г., но почему-то ни один не был
сохранен при событиях в Чинь-Янь.
В последнее время иногда утверждается, что некоторые более ран-
ние легенды объясняются падениями околоземных астероидов, как,
например, разрушение Содома и Гоморры («серой и огнем с неба»),
легенды об Атлантиде и Всемирном потопе, причиной которых могли
быть мега-цунами, вызванные падением крупных астероидов в океан.
Тем не менее, более правдоподобным объяснением легенды об Атлан-
тиде является мощное извержение вулкана Санторини, уничтожившее
Минойскую цивилизацию приблизительно в 1600 г. до н.э. А легенда
о библейском потопе предположительно сформировалась после затоп-
ления огромной территории суши и образовавшегося Черного моря.
Это произошло примерно 7000 лет назад после того, как пролив Бос-
фор внезапно пропустил на эту территорию большое количество воды
из Средиземного моря.
8.4. Гибель динозавров
Несмотря на то, что свидетельства падения крупных метеоров
(за исключением последних двух столетий) не однозначны, существуют
многочисленные неоспоримые геологические свидетельства — крате-
ры, образованные большими околоземными астероидами в древности.
На рис. 8.9 показан один такой пример (хотя и вызванный, очевидно,
двойным объектом).
С другой стороны, по сравнению с Луной на Земле сохранилось
гораздо меньше кратеров от ударов астероидов. Около 70% Земли
покрыто океанами, дно которых непрерывно претерпевает субдукцию
на границах континентов, что уничтожает любые следы от столкно-
вений, произошедших ранее 200 миллионов лет назад (не говоря уже
о том, что они покрыты водой и толстым слоем отложений и ила).
На суше следы большинства кратеров стерты процессами образования
9 Д. У. Данхэм, Р. Р. Назиров, Р. У. Фаркуар и др.
258
Гл. 8. Взрыв метеора над Челябинском
Рис. 8.9. Кратер Клируотер
гор и эрозией, но они иногда проявляются в виде больших подземных
кольцевых образований при геологической разведке нефти и других по-
лезных ископаемых. Во второй половине 1970-х гг. мексиканская госу-
дарственная нефтяная компания Ретех обнаружила 180-километровый
кратер с центром на побережье Юкатана близ города Чиксулуб. Его
возраст оказался равным 65 миллионам лет, что совпадает с возрас-
том мел-палеогеновой границы (или границы К-Т) — тонкого слоя
богатых иридием осадочных пород, разделяющих отложения мелового
и палеогенового периода по всему миру [4]. Основная часть иридия,
который является тяжелым элементом, опустилась к центру Земли при
ее формировании, когда наша планета находилась в расплавленном
состоянии. В современной земной коре содержится очень мало ири-
дия. С другой стороны, иридий широко распространен в метеоритах,
поэтому в 1991 г. была предположена связь между кратером Чиксулуб
и границей К-Т [5]. Кратер был образован ударом 10-километрового
астероида (рис. 8.10), который уничтожил 70% жизни на Земле, вклю-
чая динозавров. Из точки удара распространялись большие цунами
и мощные ударные волны, но наиболее разрушающим было выпаде-
ние на всей планете многих кубических километров выброшенных
при ударе пород. Это повысило температуру атмосферы настолько,
8.5. Сравнение вероятностей
259
Рис. 8.10. Художественное изображение падения 10-километрового астероида
в Чиксулуб, положившее конец эпохе динозавров 65 миллионов лет назад
что породило множество лесных пожаров. Большинство крупных жи-
вотных было уничтожено в первые часы после падения, но мелкие жи-
вотные, включая млекопитающих того времени, выжили в подземных
норах. Оставшаяся в атмосфере пыль вызвала многолетнее понижение
температуры (эффект «ядерной зимы»), что существенно замедлило
фотосинтез и лишило пищи остальных крупных животных, которые
нуждались в богатых запасах растительности для своего выживания.
Люди сейчас находятся на вершине пищевой цепочки только из-за
того, что у динозавров не было возможности реализовать космическую
программу по эффективному отклонению околоземных астероидов. Так
же как и взрыв, потрясший жителей Челябинска утром 15 февраля
2013 г., гораздо более мощный взрыв Чиксулуб 65 миллионов лет
назад был «громом среди ясного неба» — катастрофой, пришедшей без
предупреждения.
8.5. Сравнение вероятностей
Вероятность гибели конкретного человека в результате падения
астероида чрезвычайно низка. Как было описано выше, в прошлом
могли быть случаи смерти от метеоритов, но о таких событиях не со-
хранилось надежных свидетельств. С другой стороны, большинству
людей трудно оценить настоящий риск. Его необходимо усреднить
по столетиям или даже тысячелетиям. Могут пройти сотни лет без
9*
260
Гл. 8. Взрыв метеора над Челябинском
существенных жертв от метеоров, после чего падение крупного асте-
роида может привести к гибели миллионов людей. В табл. 8.3 срав-
ниваются вероятности столкновения астероидов различных размеров
с Землей со смертностью от разнообразных причин. При этом удар
140-метрового астероида может уничтожить страну размером с Фран-
цию, а удар 1-километрового астероида будет иметь глобальные по-
следствия, вызвав похолодание от распространения пыли, что нарушит
ведение сельского хозяйства и развитие современной цивилизации.
На рис. 8.11 приведен более подробный график, включающий ло-
гарифмическую шкалу ожидаемого числа и числа уже открытых к се-
редине 2010 г. околоземных.астероидов различных размеров, среднего
времени между их падениями где-либо на Земле, и т. д. Как видно
из графика, нам уже известны почти все ОЗА с диаметром больше
1 км (именно они могли бы привести к всемирному уничтожению
цивилизации), но наши сведения о меньших астероидах, которые могут
принести существенные местные разрушения, гораздо более ограниче-
ны. Например, известно около 1% ОЗА с размером 45 м, подобных
вызвавшему Тунгусское событие в 1908 г., и менее 0,1% астероидов
с размером меньше 17 м (подобных Челябинскому).
Таблица 8.3.
Вероятность падения астероида, соотнесенная с уровнем смертности
от других событий
Энергия удара и размер астероида Вероятность в течение 100 лет Вероятность в течение жизни (по данным Национального совета безопасности США, 2008 г.)
5 мегатонн (Тунгусский — 45 м) 30% 23% — смерть от рака
100 мегатонн (140 м) 1% 1% — смерть в автокатастрофе
40 гигатонн (1 км) 0,01% 0,014% — смерть в авиакатастрофе
По существу, падения ОЗА, которые могут привести к гибели боль-
шого числа людей и обширным разрушениям, достаточно редки. При
этом из истории падений метеоритов известно, что относительно малые
объекты способны вызывать серьезные местные разрушения каждые
10-20 лет, и при более плотном распространении людей по планете
вероятность ранений и жертв увеличивается. Нам неизвестно, когда,
где и насколько мощным будет следующее падение ОЗА. В своей
книге [6] глава Отдела околоземных объектов НАСА Дональд Иоманс
отметил, что эта ситуация похожа на вождение автомобиля вслепую
с затемненным ветровым стеклом. Следующее событие будет, вероятно,
слабее Челябинского, сопровождаясь взрывом в воздухе и разбитыми
8.6. Как. найти астероиды до того, как они найдут нас
261
Рис. 8.11. График распределения ОЗА различных размеров по численности
(фактической и открытых астероидов), среднему времени между столкнове-
ниями, энергии удара (мегатонны тротилового эквивалента) и абсолютной
звездной величине
окнами на площади всего несколько квадратных километров. Но оно
может быть и достаточно сильным чтобы разрушить область размером
с Францию. Оно может произойти через 20 лет (либо несколько столе-
тий для большого объекта), но может произойти и завтра. Получение
более раннего предупреждения о событии вроде Челябинского не про-
сто желательно — оно необходимо (хотя бы за десятилетия до события)
для эффективного выполнения миссии по отклонению потенциально
опасных объектов размером более 100м. Используя человеческий ра-
зум, мы может избежать участи динозавров. Потребуется политическая
воля для привлечения ресурсов достаточных для предотвращения па-
дения крупного ОЗА. Конечно, такое событие маловероятно, но тем
не менее, оно способно уничтожить нашу цивилизацию. Мы не можем
об этом не думать.
8.6. Как найти астероиды до того,
как они найдут нас. Первый случай: 2008 ТСЗ
До 1801 г. людям не было известно об астероидах. В разд. 1.2 об-
суждалось открытие ОЗА, в особенности, угрожающих Земле, несколь-
ко тысяч из которых сейчас уже известно. Несмотря на то, что
262
Гл. 8. Взрыв метеора над Челябинском
миллионы ОЗА остаются еще не обнаруженными, списки астероидов
постепенно расширяются. По мере того, как обнаруживались новые
объекты, пролетающие вблизи Земли, были разработаны программы
для быстрого вычисления траекторий вновь открытых астероидов. Если
они пролетают слишком близко к Земле, рассчитываются вероятности
столкновения с ними с учетом погрешностей измерения орбитальных
параметров ОЗА в существующих наблюдениях. Вычисленные вероят-
ности были всегда низкими, но иногда предсказывалось столкновение
через несколько десятков лет с вероятностью 1 на несколько сотен.
После уточнения орбитальных параметров с помощью более свежих
и точных наблюдений вероятности столкновения всегда становились
очень малыми, порядка 1 на миллион.
6 октября 2008 г. директор Центра малых планет в Кэмбридже
(шт. Массачусетс, США) Тим Спар не поверил своим глазам: после
того как он ввел в программу данные наблюдений недавно откры-
того астероида 2008 ТСЗ, полученные Ричардом Ковальски из Ари-
зоны, найденная вероятность столкновения оказалась равна 100%!
Он незамедлительно связался с Офисом околоземных объектов при
Лаборатории реактивного движения NASA; там подтвердили расчеты
Спара и определили, что этот астероид упадет в пустынной мест-
ности на северо-востоке Судана всего через 20 часов после обнару-
жения. Чтобы определить свойства объекта были срочно запрошены
и получены сотни новых наблюдений, в основном — из европейских
обсерваторий, которые показали, что 2008 ТСЗ является, вероятно,
каменным астероидом размером всего 5 м и должен взорваться высоко
в атмосфере, не причинив никакого вреда. В Государственный депар-
тамент США было направлено предупреждение, но, так как события
происходили в нерабочее время, никто не смог отправить сообщение
о приближающемся астероиде в Судан. Были предупреждены несколь-
ко авиалиний, которые передали прогноз своим пилотам, совершающим
полет над Африкой. Пилот одного из рейсов компании KLM в 1400 км
от места падения действительно заметил вспышку на горизонте в на-
правлении северного Судана в предсказанный момент времени, причем
сама вспышка была зарегистрирована европейским метеоспутником
(см. рис. 8.12). Это оказалось первым и единственным случаем прогно-
зирования падения ОЗА (по состоянию на март 2013 г.).
Питер Дженнискенс из института SETI в США при содействии Му-
авиа Шаддада из Хартумского университета немедленно организовал
экспедицию в район падения и собрал около 600 небольших метеоритов
с общей массой более 10 кг. В настоящее время эти метеориты имеют
общее название Альмахата Ситта по названию ближайшей желез-
нодорожной станции [7]. Кроме того, один местный житель сделал
фотографию облака пыли от взрыва на камеру мобильного телефона.
8.6. Как найти астероиды до того, как они найдут нас
263
Рис. 8.12. Снимок вспышки при падении 2008 ТСЗ со спутника Meteosat 8
Астероид 2008 ТСЗ был обнаружен благодаря тому, что он прибли-
жался к Земле с ночной стороны и мог быть зарегистрирован назем-
ными обсерваториями с большими телескопами. В противоположность
этому, гораздо более крупный объект, взорвавшийся над Челябинском,
приближался по направлению от Солнца, и никакая наземная обсерва-
тория не могла бы его заметить. Существует ли в таком случае способ
обнаруживать такие объекты хотя бы за несколько часов до столкно-
вения? Ниже описан наш план того, как это сделать.
Миссия обзора околоземных объектов, описанная в разд. 1.2.5,
не получила финансирование NASA, в связи с чем организация В612
Foundation планирует теперь реализовать ее в рамках проекта Sen-
tinel [8]. Целью проекта является обнаружение почти 90% всех ОЗА
крупнее 140 м и почти половины ОЗА крупнее 50 м при наблюдениях
с орбиты, близкой к орбите Венеры, в течение 6,5 лет. Для этих
целей В612 Foundation намеревается привлечь частное финансирование
и произвести запуск аппарата в 2018 году.
Конструкция аппарата Sentinel будет основана на конструкциях
космических обсерваторий Kepler и Spitzer, спроектированных ком-
панией Ball Aerospace, и будет иметь специальные средства для съе-
мок ОЗА в инфракрасном диапазоне. Наше предложение заключа-
ется в том, чтобы такой же космический аппарат был бы помещен
на гало-орбиту вокруг точки либрации Ц системы Солнце-Земля
(см.разд. 1.3) и мог бы следить за ограниченной двумя конусами
264
Гл. 8. Взрыв метеора над Челябинском
\ I Гало-орбита
7 (период ~6 месяцев)
Рис. 8.13. Наблюдение окрестности Земли с гало-орбиты вокруг точки
L, системы Солнце-Земля для обнаружения астероидов, приближающихся
к Земле по направлению от Солнца
кольцевой областью вокруг Земли для обнаружения астероидов, при-
ближающихся со стороны Солнца (рис. 8.13).
Полностью такая кольцевая область будет детально просматривать-
ся каждые несколько часов для поиска пересекающих ее астерои-
дов. Даже астероиды размером всего несколько метров будут заме-
чены аппаратом Sentinel, помещенным на гало-орбиту вокруг точки
Li системы Солнце-Земля. Мы назвали эту концепцию SEntineLl,
по названию исходного аппарата и его нахождению вблизи точки L,
системы Солнце-Земля (Sun-Earth, SE). Наблюдение также возможно
с помощью других космических аппаратов, но наиболее эффективным
и быстрым будет использование хорошо проработанной конструкции
Sentinel. В ближайшие несколько месяцев (после выхода книги) будут
проведены исследования этого способа методами Монте-Карло с при-
менением обширного каталога возможных траекторий столкновения
с Землей. Мы исследуем и сравним общую частоту успешной регистра-
ции ОЗА, прилетающих с любых направлений, в данном подходе, при
ночном наблюдении наземными обсерваториями и при покрытии всего
неба кроме области до 45° от направления на Солнце, которое будет
обеспечиваться недавно запущенным аппаратом NEOSSat, описанным
в разд. 1.2.3. Таким образом, мы надеемся увеличить вероятность
обнаружения ОЗА, приближающихся к Земле со стороны Солнца,
от почти нулевой в настоящее время до существенной доли единицы.
Это должно значительно уменьшить число случаев «грома среди ясного
8.7. Заключение: нам нужна надежная планетарная защита
265
неба» в будущем и обеспечить предупреждение за несколько часов
до событий вроде Челябинского вместо 3-минутного, которое было
у жителей Челябинска между вспышкой в небе и ударной волной,
выбившей их окна. Тогда они могли бы закрыть окна ставнями либо
отойти от них на безопасное расстояние, а в случае более крупного
объекта, имели бы достаточно времени для эвакуации в укрытия в под-
валах или метро. Теоретически становится также возможной защита
с использованием небольших астероидов, помещенных на околозем-
ную орбиту и отклоняемых к траектории приближающегося астероида
(что-то подобное описанному в главе 7). Более реалистичным кажется
размещение мощных атомных бомб на тяжелых ракетах так, чтобы
одна из них всегда могла бы быть направлена к приближающемуся
ОЗА, например, в количестве 4 штук, всегда готовых к запуску —
по 2 на побережьях России и США. Вместе с тем, такое решение
привлекает военные силы и выходит за рамки этой книги. Для событий
масштаба Челябинского более целесообразным оказывается не предот-
вращать столкновение, а просто уменьшить ущерб и ранения упомя-
нутыми выше способами. С другой стороны, при опасности разруше-
ния крупного города астероидом большего размера необходимо будет
попытаться его отклонить или раздробить на мелкие части: падение
несколько десятков Челябинских метеоритов гораздо предпочтительнее
катастрофы масштабов той, которая образовала Аризонский кратер.
8.7. Заключение: нам нужна надежная
планетарная защита
В целом, мы надеемся, что Челябинское событие разбудит государ-
ственный интерес к проблеме угрозы, исходящей от околоземных асте-
роидов, и проведению серьезных мероприятий по созданию надежной
планетарной защиты от них. В первую очередь потребуется открыть
как можно больше самых крупных из них при помощи наземных об-
серваторий вроде Большого обзорного телескопа (LSST) и космических
миссий типа Sentinel на орбите, близкой к Венере. Вслед за этим
нам нужно создать систему обнаружения большого числа меньших,
но все еще опасных ОЗА, таких как астероид, вызвавший Челябинское
событие, при приближении их к Земле с любого направления, в том
числе — от Солнца (например, миссия SEntineLl). Наконец, потребу-
ется испытать некоторые способы отклонения астероидов, разумеется,
сначала на относительно мелких безобидных объектах с нулевой веро-
ятностью столкновения их с Землей в ближайший миллион лет даже
при некотором изменении их орбиты. При выделении космическими
агентствами мира 2 % их бюджета на эти направления планетарной
266
Гл. 8. Взрыв метеора над Челябинском
защиты мы сможем выполнить эту программу в течение ближайших
десятилетий и быть готовыми ко всему, что может упасть на нас
из космоса. Как написал Джеффри Клугер в своей статье в известном
американском журнале «Тайм», «...когда на карту будет поставлена
судьба планеты, нам придется постараться. Одна жизнь может быть
и скоротечной, но астероиды будут существовать всегда. Наша защита
от них должна быть такой же» [9].
Список литературы к главе 8
1. Krabbendam V., et al. LSST Telescope and Site Developments. Bul-
letin American Astronomical Society. 2012. V. 221. Abstract 156.02.
2. Составлено в основном по таблице воздушных взрывов метеоров
Wikipedia http://en.wikipedia.org/wiki/List_of_meteor_air_bursts
2013.
3. Wikipedia, «2002 Eastern Mediterranean event», http://en.wikipedia.
org/wiki/Eastern_Mediterranean_event 2013.
4. Alvarez W., Alwarez L.W., Asaro F., Michel H.V. «Anomalous
iridium levels at the Cretaceous/Tertiary boundary at Gubbio, Italy:
Negative results of tests for a supernova origin». In Christensen,
W.K., and Birkelund, T.. Cretaceous/Tertiary Boundary Events
Symposium. 2. University of Copenhagen. 1979. pp. 69.
5. Hildebrand A.R. et al.. «Chicxulub Crater; a possible Creta-
ceous/Tertiary boundary impact crater on the Yucatan Peninsula,
Mexico». Geology V. 19, No. 9, September 1991. P. 867-871.
6. Yeomans D. Near-Earth Objects: Finding Them Before They Find
Us. — Princeton, New Jersey, USA: Prine. Un. Pr., 2013.
7. Jenniskens, P., et al. The impact and recovery of asteroid 2008
TC3 11 Nature. 2009. V. 458. P. 485-488.
8. Lu E.T., Reitsema H., Troeltzsch J., Hubbard S. The B612 Founda-
tion Sentinel Space Telescope // New Space. 2013. V. 1, in press.
9. Kluger, J. (Very) Close Encounter // Time. 25 February 2013.
V. 181, No. 7. P. 38-41.
Об авторах
Дэвид Уоринг ДАНХЭМ. Бакалавр
в области астрономии, Калифорнийский
университет, Беркли (1964). Доктор наук
в области астрономии (Ph.D.), специаль-
ность — небесная механика, Йельский уни-
верситет (1971). Иностранный член РАЕН
(2012).
Имеет значительный опыт работы в аст-
родинамике, проектировании орбит кос-
мических аппаратов, астрономии и ком-
пьютерному программированию. Этот опыт
включает многочисленные сложные меж-
планетные и лунопролетные траектории для нескольких миссий, вклю-
чая миссию по встрече с околоземным астероидом (NEAR, включая
номинальный и внештатный варианты полета), Обсерваторию по ис-
следованию солнечно-земных связей (STEREO), миссию к ядру кометы
CONTOUR, Международный исследователь комет (ICE, ISSE-3, пер-
вая миссия к точке либрации, которая предшествовала серии облетов
Луны, явившихся настоящим научным вызовом и позволившим изме-
нить траекторию таким образом, чтобы направить аппарат на перехват
кометы Джакобини-Циннера в 1985 г.), Солнечная и гелеосферная об-
серватории (SOHO), продленная миссия Sakigake, WIND и несколько
планируемых миссий.
В настоящее время работает с проектной командой над мисси-
ей MESSENGER вместе с коллегами Лаборатории прикладной фи-
зики Университета имени Джона Хопкинса. Является Президентом
Международной ассоциации по измерениям времени затмений (ЮТА).
Он определил небольшие вариации диаметра Солнца и размеры и фор-
мы нескольких астероидов по наблюдениям. Он получил первые под-
твержденные наблюдения вспышки при ударе метеора о поверхность
Луны в ноябре 1999 г.
David Waring Dunham. Bachelor in Astronomy, University of Cali-
fornia, Berkeley (1964). Ph.D. in Astronomy (Ph.D.), specialty — celes-
tial mechanics, Yale University (1971). Foreign Member of the Russian
Academy of Natural Sciences (2012).
Has significant experience in astrodynamics, designing spacecraft
orbits, astronomy and computer programming. This experience includes
numerous complex interplanetary and translunar trajectories for several
missions, including missions to rendezvous with a near-Earth asteroid
(NEAR, including nominal and recovery flight options), the Observatory
268
Об авторах
for the study of solar-terrestrial relationships (STEREO), the nucleus
of the comet mission CONTOUR, International Cometary Explorer (ICE;
first named the third International Solar-Terrestrial Explorer, or ISSE-3,
the first mission to a libration point, before a challenging series of lunar
swingbys were used to change the trajectory to intercept Comet Giacobini
Zinner in 1985), the Solar and Heliospheric Observatory (SOHO), exten-
sion of the Sakigake mission, WIND and several planned missions.
He is currently working on the MESSENGER mission to Mercury
with colleagues at the Applied Physics Laboratory at Johns Hopkins Uni-
versity. In addition, as President of the International Occultation Timing
Association (IOTA), he organized and continues to work on the prediction,
observation, and analysis of solar eclipses, lunar grazing occultations
and occultations by asteroids. He has determined small variations in the
diameter of the Sun and the sizes and shapes of several asteroids from
the observations. He obtained the first confirmed observations of lunar
meteor impact flashes in November 1999.
Равиль Равильевич НАЗИРОВ. Про-
фессор кафедры «Механика и математиче-
ское моделирование» МИЭМ НИУ ВШЭ,
доктор технических наук (в области небес-
ной механики), Заслуженный деятель нау-
ки РФ.
Образование: 1974 г. — закончил с отли-
чием механико-математический факультет
МГУ им. М.В. Ломоносова; 1979 г. — кан-
дидат технических наук, Институт косми-
ческих исследований АН СССР; 1989 г. —
доктор технических наук, Институт кос-
мических исследований АН СССР. Профессиональная деятельность
с 1974 г. в Институте космических исследований РАН: инженер, млад-
ший научный сотрудник, старший научный сотрудник, заведующий
отделом, заведующий компьютерным отделением института, зам. ди-
ректора института по науке. Заслуженный деятель науки Российской
Федерации. С 2008 года профессор кафедры «Механика и Математи-
ческое моделирование» МИЭМ НИУ ВШЭ (по совместительству), на-
учный руководитель НОЦ КОСМОС, учрежденного совместно МИЭМ
и ИКИ РАН.
Научные интересы связаны с исследованиями в области матема-
тического моделирования механических систем, определения движе-
ния и управления им при дискретном характере измерительной ин-
формации и корректирующих воздействий, гарантирующим подходом
к оценке надежности результатов функционирования информационно-
Об авторах
269
измерительных систем, создания автоматизированных информацион-
ных систем дистанционного зондирования Земли из космоса, разра-
боткой и созданием телекоммуникационных сетей и систем, а также
исследованиями в области систем навигационного обеспечения и пла-
нирования космических экспериментов.
Основные научные результаты:
- С использованием телекоммуникационных технологий решена
задача автоматизации проектирования системы мониторинга
по данным дистанционного зондирования Земли и наземным
измерениям.
- Исследованы и разработаны методы гарантирующего подхода
к оценке надежности результатов функционирования информаци-
онно-измерительных систем.
- Разработана, спроектирована и реализована Российская косми-
ческая научная сеть/ИНТЕРНЕТ, объединяющая наряду с ос-
новными научно-космическими организациями многие институты
РАН.
- Создана система распределенной обработки данных космических
экспериментов, их архивации и распределения, а также инфор-
мационная система навигационного обеспечения и планирования
сложных многоспутниковых экспериментов.
Ravil Ravilyevich Nazirov. Professor, Department of Mechanical
and mathematical modeling MIEM HSE, PhD (in celestial mechanics),
Honored Worker of Science.
Education: 1974 — graduated with honors from the Mechanics and
Mathematics Faculty of Moscow State University; 1979 — Doctor of Sci-
ence, Space Research Institute, Academy of Sciences of the USSR;
1989 — Doctor of Science, Space Research Institute, Academy of Sciences
of the USSR. Professional activities in 1974 at the Space Research
Institute: Engineer, Research Associate, Senior Research Fellow, Head
of Department, Head of the Department of Computer Institute, Deputy.
Director of the Institute for Science. Honored Scientist of the Russian Fed-
eration. Since 2008 (part-time) Professor of “Mechanics and Mathematical
Modeling” MIEM HSE, scientific director of REC “COSMOS”, joint
MIEM and Space Research Institute of the Russian Academy of Science.
Research interests are related to research in the field of mathemati-
cal modeling of mechanical systems, motion detection and management
in the discrete nature of data measurement and the corrective action
to guarantee the approach to assessing the reliability of the results
of operation of information-measuring systems, the creation of automated
systems for remote sensing of the Earth from space, the development and
creation of telecommunication networks and systems, as well as research
in the field of navigation support and planning of space experiments.
270
Об авторах
The main scientific results:
• With the use of telecommunications technology, to solve the prob-
lem of system design automation monitoring using remote sensing
and ground measurements.
• Investigate and develop methods of guaranteeing approach to as-
sessing the reliability of the results of the operation of information-
measuring systems.
• Developed, designed and implemented by Russian Space Research
Network I Internet, uniting together with the main scientific
and space organizations, many institutions of RAS.
• A system of distributed computation for space experiments, archiv-
ing, and distribution, as well as information system navigation
support and planning of complex multi-satellite experiments.
Роберт Уиллард Фаркуар. Бакалавр
аэронавтики, университет Иллинойса
(1959 г.); магистр прикладных наук, Кали-
форнийский университет в Лос-Анджелесе
(1961 г.); доктор наук в области аэронавти-
ки и астронавтики (Ph.D.), Стэнфордский
университет (1969 г.).
Является руководителем планетарных
исследований в компании KinetX, а также
создателем и первооткрывателем имеющих
большое практическое значение гало-орбит
у точек либрации (применяющихся NASA
в миссиях ISEE-3, SOHO, WMAP, а также ESA — в миссиях Herschel
и Planck) и технологии двойного облета Луны, которая использовалась
NASA в миссиях ISEE-3 и WIND и в японских миссиях Hiten и Geotail.
Выступал руководителем полета миссии ISEE-3 / ICE, заведующим
программой NASA Discovery (1989-1990 гг.), руководителем миссий
NEAR, CONTOUR и New Horizons (до 2006 г.), а также заведующим
миссией MESSENGER (до 2006 г.). Участие Роберта У. Фаркуара
в этих проектах позволило впервые совершить ряд достижений, вклю-
чая первый аппарат на гало-орбите, первое исследование удаленной
части магнитного хвоста Земли, первый облет кометы и первое вра-
щение по орбите вокруг астероида и высадка на него. Обладатель
многих наград и почетных должностей: почетный доктор, Льежский
университет (2010 г.); Премия Чарльза Линдберга, Национальный му-
зей авиации и космонавтики (2007 г.); медаль NASA за выдающиеся
инженерные достижения (миссия NEAR, 2002 г.); лауреат награды
в области космоса, Еженедельник авиации и космических техноло-
гий (2002 г.); Премия Тихо Браге, Институт навигации (2001 г.);
Об авторах
271
Премия первопроходцев космоса, Национальное космическое общество
(2001 г.); докладчик Лекций памяти Джона В. Брейкуэлла (1998 г.);
член Международной академии астронавтики (1996 г.); рекомендатель-
ное письмо президента США Рональда Рейгана (1984 г.). В 1992 году
в его честь был назван астероид 5256 Фаркуар.
Robert Willard Farquhar. Bachelor in Aeronautical Engineering,
University of Illinois (1959); Master in Engineering, University of Califor-
nia, Los Angles (1961); Ph.D. in Aeronautics and Astronautics, Stanford
University (1969).
He is KinetX’s Executive for Planetary Exploration, is the discoverer
and creator of important Libration Point HALO orbits (used by NASA’s
ISEE-3, SOHO, and WMAP missions, and by ESA’s Hershel and Planck
missions) and of the double-lunar swing by technique that has been used
by NASA’s ISEE-3 and Wind missions, and by the Japanese Hiten and
Geotail missions). He was Flight Director of the ISEE-3/ICE mission;
Program Manager of NASA’s Discovery Program (1989-1990); Mission
Director for NEAR, CONTOUR, and (until 2006) New Horizons; and
Mission Manager for MESSENGER until 2006. In these roles, he was
instrumental in accomplishing several spacecraft “firsts”, including the
first halo orbiter; the first exploration of the distant geomagnetic tail;
the first comet flyby; and the first orbiting and landing on an asteroid.
He has received several awards and honorary positions, including Hon-
orary Doctorate, University of Liege 2010, Charles A. Lindbergh Chair
(National Air &Space Museum) 2007, NASA Medal for Exceptional En-
gineering Achievement (NEAR) 2002, Tycho Brahe Award (The Institute
of Navigation) 2001, Laureate Award for Space (Aviation Week & Space
Technology) 2001, Space Pioneer Award (National Space Society) 2001,
The John V. Breakwell Memorial Lecture 1998, Member of International
Academy of Astronautics 1996, and Letter of Commendation from Pres-
ident Ronald Reagan 1984. Asteroid #5256 was named Farquhar in his
honor in 1992.
Евгений Николаевич ЧУМАЧЕНКО.
Заведующий кафедрой «Механика и мате-
матическое моделирование» МИЭМ НИУ
ВШЭ, академик РАЕН, профессор, доктор
технических наук (в области механики кон-
тинуума), Заслуженный деятель науки РФ,
лауреат премии Правительства РФ в обла-
сти науки и техники.
В 1974 г. окончил механико-математи-
ческий факультет МГУ и по распределе-
нию направлен на работу в Спецсетьстрой
272
Об авторах
Министерства Энергетики СССР. Занимался разработкой автоматизи-
рованных систем управления. С 1978 г. по 1982 г. учился в аспирантуре
и работал в Московском институте стали и сплавов. В 1981 г. защитил
кандидатскую диссертацию, посвященную разработке методов модели-
рования и расчета формоизменения материалов в условиях сверхпла-
стичности. С 1982 по 1989 г. работал в НПО ВНИИМетмаш Минтяж-
маша СССР заместителем началвника отдела САПР. В 1989 г. пришел
на работу в МИЭМ. В 1994 г. защитил докторскую диссертацию.
С 1996 г. — профессор по кафедре математического моделирования.
В апреле 2004 г. избран в Российскую академию естественных наук.
В 2006 г. присвоено звание «Почетный работник высшей школы».
С 2007 г. работает ведущим научным сотрудником (по совместитель-
ству) Института космических исследований Российской академии на-
ук. В ИКИ РАН организована специальная группа, выполняющая про-
екты, связанные с освоением космического пространства, разработками
нового оборудования и систем управления, исследованиями Земли из
космоса, изучением поверхности планет Солнечной системы, управля-
емыми миссиями и созданием робототехники. Является руководителем
НОЦ КОСМОС, учрежденного совместно МИЭМ и ИКИ РАН.
Автор 10 книг и более 300 статей в научных журналах в области
математического моделирования физико-механических систем и про-
цессов, механики континуума, космических исследований, биомехани-
ки. За научные достижения и серию книг по математическому модели-
рованию в нелинейной механике награжден орденом Российской ака-
демии естественных наук «За пользу Отечеству» им. В.Н. Татищева.
За многолетнюю высокоэффективную научно-педагогическую деятель-
ность — орденом «За вклад в развитие общества».
Evgeny Nickolaevich Chumachenko. Head of Department of Me-
chanical and mathematical modeling MIEM HSE, the member of Academy
of Natural Sciences, professor, doctor of technical sciences (in continuum
mechanics), Honored Scientist of Russia, winner of the award of the Gov-
ernment of the Russian Federation in the field of science and technology.
In 1974 he graduated from the Mechanics and Mathematics Faculty
of Moscow State University and was assigned to work at the Ministry
of Energy USSR. Engaged in the development of automated control
systems. From 1978 to 1982, he attended graduate school and worked
at the Moscow Institute of Steel and Alloys. In 1981 he defended his thesis
on the development of methods for modeling and calculation of deforma-
tion of materials under conditions of superplasticity. From 1982 to 1989
he worked in the SIO VNIIMetmash Mintygmash of the USSR, Deputy
Head of CAD. With decision of WAC of the USSR he was awarded the
title of “senior researcher” in the field of mechanics of machines. In 1989
he joined the MIEM. In 1994 he defended his doctoral thesis. In 1996,
Об авторах
273
with the decision of the WAC Russia, he received the title of “Professor”
in the department of mathematical modeling. In April 2004 he was
elected to the Russian Academy of Natural Sciences. In 2006 he was
awarded the title “Honored Worker of Higher School”. Since 2007 — Head
of the Department of Mechanical and Mathematical Simulation.
From 2007, he was a leading scientific researcher (part-time), Space
Research Institute (IKI) of the Russian Academy of Sciences. In the Space
Research Institute he organized a special group that performs projects
related to space exploration, development of new equipment and systems,
study of the Earth from space, the study of the surface of the solar
system, guided visits and the creation of robotics. Director of REC
“COSMOS”, joint MIEM and Space Research Institute of the Russian
Academy of Science.
The author of 10 books and over 300 articles in scientific journals
in the field of mathematical modeling of physical and mechanical systems
and processes, continuum mechanics, space research, and biomechanics.
For his scientific achievements, and a series of books on mathemati-
cal modeling of non-linear mechanics, the Russian Academy of Natu-
ral Sciences awarded him the Order “For the Fatherland” of a name
of V.N. Tatishchev. For long-term high-performance scientific and peda-
gogical activity — the Order “For his contributions to the development
of society”.
Натан Андреевич ЭЙСМОНТ. Веду-
щий научный сотрудник Института косми-
ческих исследований РАН, кандидат тех-
нических наук (в области небесной меха-
ники).
В 1962 г. закончил факультет летатель-
ных аппаратов МАИ. С 1962 г. работал
в Ракетно-космической корпорации «Энер-
гия» в должности инженера и старшего
инженера. Область профессиональной дея-
тельности пролегала от создания межкон-
тинентальных ракет до ракет-носителей для
советской миссии на Луну — так называемого Проекта N-1. Кроме
того, принимал участие в создании разгонного блока для запуска
космического аппарата к Марсу и Венере. В 1968 г. окончил факультет
механики и математики МГУ им. М.В. Ломоносова. С 1968 г. работает
в Институте космических исследований РАН в отделе Динамики по-
летов и управления космическими аппаратами в должности научного
сотрудника и впоследствии ведущего научного сотрудника. В 1972 году
защитил диссертацию на степень кандидата технических наук.
274
Об авторах
Принимал участие в разработке траекторий практически всех кос-
мических аппаратов, запущенных для научных исследований, таких
как аппараты серии «Прогноз», «Активный», APEX, «Interball-1,2»,
«Ресурс». Было разработано программное обеспечение для определе-
ния параметров местоположения этих космических аппаратов. Системы
контроля местоположения и орбиты были разработаны для субспутни-
ков проекта «Interball», включая программное обеспечение. Для про-
екта «Реликт» была разработана очень высокая эллиптическая орбита
с высотой начального апогея 700000км для обеспечения измерения
микроволнового фонового излучения. Участвовал в разработке проекта
ESA INTEGRA в части, связанной с разработкой орбиты и сценария
запуска.
В последние годы работает над проблемой орбит в окрестностях
точек либрации для космических аппаратов, оборудованных солнечны-
ми парусами, и созданием методов контроля орбит таких аппаратов.
Результаты упомянутых выше работ были опубликованы в более чем
70 статьях.
Natan Andreevich Eismont. Leading researcher, PhD (in celestial
mechanics). He graduated from the Faculty of aircraft MAI in 1962.
After 1962, he worked at the Rocket and Space Corporation “Energia”
as an engineer and senior engineer. Occupational field ran from the
creation of intercontinental missiles to launch vehicles for the Soviet
mission to the moon — a so-called N-l. He was involved in the creation
of the upper stage to launch a spacecraft to Mars and Venus.
In 1968 he graduated from the Faculty of Mechanics and Mathematics
at Moscow State University. Since 1968 he has been working at the
Institute of Space Research in the Department of flight dynamics and
control of spacecraft as a researcher and subsequently leading researcher.
In 1972 he defended his PhD.
He was involved in the development of almost all trajectories of space-
craft, launched for scientific research, such as- the “Prognoz” series,
“Activniy”, “Apex”, “Interball-1,2”, “Resurs”. He developed software to de-
termine the orbital parameters of the spacecraft. He designed positional
control systems to orbit sub-satellites of the “Interball” project, including
the software. He designed a very highly elliptical orbit with an ini-
tial apogee of 700000 km for the “Relict” project to provide measure-
ments of microwave background radiation. He participated in the design
of the orbit and launch sequence for ESA’s INTEGRAL spacecraft.
In recent years, he worked on the problem of orbits around libration
points for spacecraft equipped with solar sails, and the creation of methods
to control the orbits of these devices. The results of this work have been
published in more than 70 articles.
Об авторах
275
Александр Владимирович СИМОНОВ.
В 2005 г. закончил МГТУ им. Н.Э. Баумана
по специальности «Системы управления ле-
тательными аппаратами».
С 2004 г. работает в НПО им. С.А. Ла-
вочкина в отделе баллистики средств выве-
дения и межпланетных космических аппа-
ратов. В настоящий момент занимает долж-
ность заместителя начальника отдела. Зани-
мается баллистико-навигационным обеспе-
чением полетов разгонного блока «Фрегат».
Принимает участие в разработке перспективных межпланетных косми-
ческих аппаратов для исследования Марса, Венеры, околосолнечного
пространства, астероидов, системы Юпитера. Работает над вопросами
противодействия по проблеме астероидно-кометной опасности.
Результаты исследований опубликованы в 16 статьях. Является
соавтором книги.
Alexander Vladimirovich Simonov. 2005 — he graduated from Bau-
man Moscow State University with specialty “Aircraft Control Systems”.
Since 2004 he has been working in the Lavochkine Assotiation, in de-
partment of ballistics of launch vehicles and interplanetary spacecrafts.
Currently holds the position of deputy chief of the department. Engaged
in works of ballistic and navigation for “Fregat” Upper Stage. Takes part
in the development of future interplanetary spacecraft to explore Mars,
Venus, the nearsolar space, asteroids, Jupiter system. Working on issues
of countering the problem of asteroids and comets threat.
The results were published in 16 articles. He is the co-author of the
book.
Научное издание
ДАНХЭМ Дэвид Уоринг
ФАРКУАР Роберт Уиллард
ЭЙСМОНТ Натан Андреевич
НАЗИРОВ Равиль Равильевич
ЧУМАЧЕНКО Евгений Николаевич
СИМОНОВ Александр Владимирович
КОСМИЧЕСКИЕ МИССИИ И ПЛАНЕТАРНАЯ ЗАЩИТА
Редактор О.В. Салецкая
Оригинал-макет: Е.В. Макеев
Оформление переплета: В.Ф. Киселев
Подписано в печать 30.08.2013. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 17,25 + вклейка 1 печ. л.
Уч.-изд. л. 18,9. Тираж 400 экз. Заказ №1547.
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с электронных носителей издательства
в ООО «Чебоксарская типография № 1»
428019, г. Чебоксары, пр. И. Яковлева, 15
Тел.: (8352) 28-77-98, 57-01-87
Сайт: www.volga-print.ru
ISBN 978-5-9221-1495-0