/












Text
А. С. ВОЛЬМИР
УСТОЙЧИВОСТЬ
ДЕФОРМИРУЕМЫХ
СИСТЕМ
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
ОД
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
/МОСКВА 1 9 6 7
Арнольд Сергеевич Волъмар
Устойчивость деформируемых систем
В 71
УДК 539.371+539.374 м- 1967 г" 984 стр- с илл'
Редактор И. К. Снитко
Техн. редактор И. U1. Акселърод Корректоры А. С. Бакулова и Е. Я. Строева
Сдано в набор 2/IX 1966 г. Подписано к печати 6/1 1967 г. Бумага 60х9Э'/ц.
Физ. печ. л. 61,5. Услови. печ. л. 61,5. Уч.-изд. л. 62,96. Тираж 6500 экз. Т-01707.
Цеиа книги 4 р. 17 к. Заказ № 333.
Издательство «Наука»
Главная редакция физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Ленинградская типография № 2 имени Евгении Соколовой Главполиграфпрома
Комитета по печати при Совете Министров СССР. Измайловский проспект, 29.
2-4-2
156-66
ОГЛАВЛЕНИЕ
Стр.
Из предисловия к первому изданию 11
Предисловие ко второму изданию 12
Глава I. Устойчивость сжатых стержней в пределах упругости . 15
§ 1. Основные понятия 15
§ 2. Устойчивость стержня, шарнирио опертого по концам.
Формула Эйлера 17
§ 3. Другие случаи закрепления концов 22
§ 4. Пределы применимости формулы Эйлера 27
§ 5. Равновесные формы в закритической области 27
§ 6. Различные критерии устойчивости и методы решения задач . 33
§ 7. Приложение принципа возможных перемещений 37
§ 8. Энергетический критерий устойчивости 39
§ 9. Методы Ритца и Тимошенко 41
§ 10. Применение метода множителей Лагранжа 46
§ 11. Метод Бубнова — Галеркина 47
§ 12. Метод конечных разностей. Упругая шарнирная цепь .... 49
§ 13. Метод коллокации 52
§ 14. Метод последовательных приближений 53
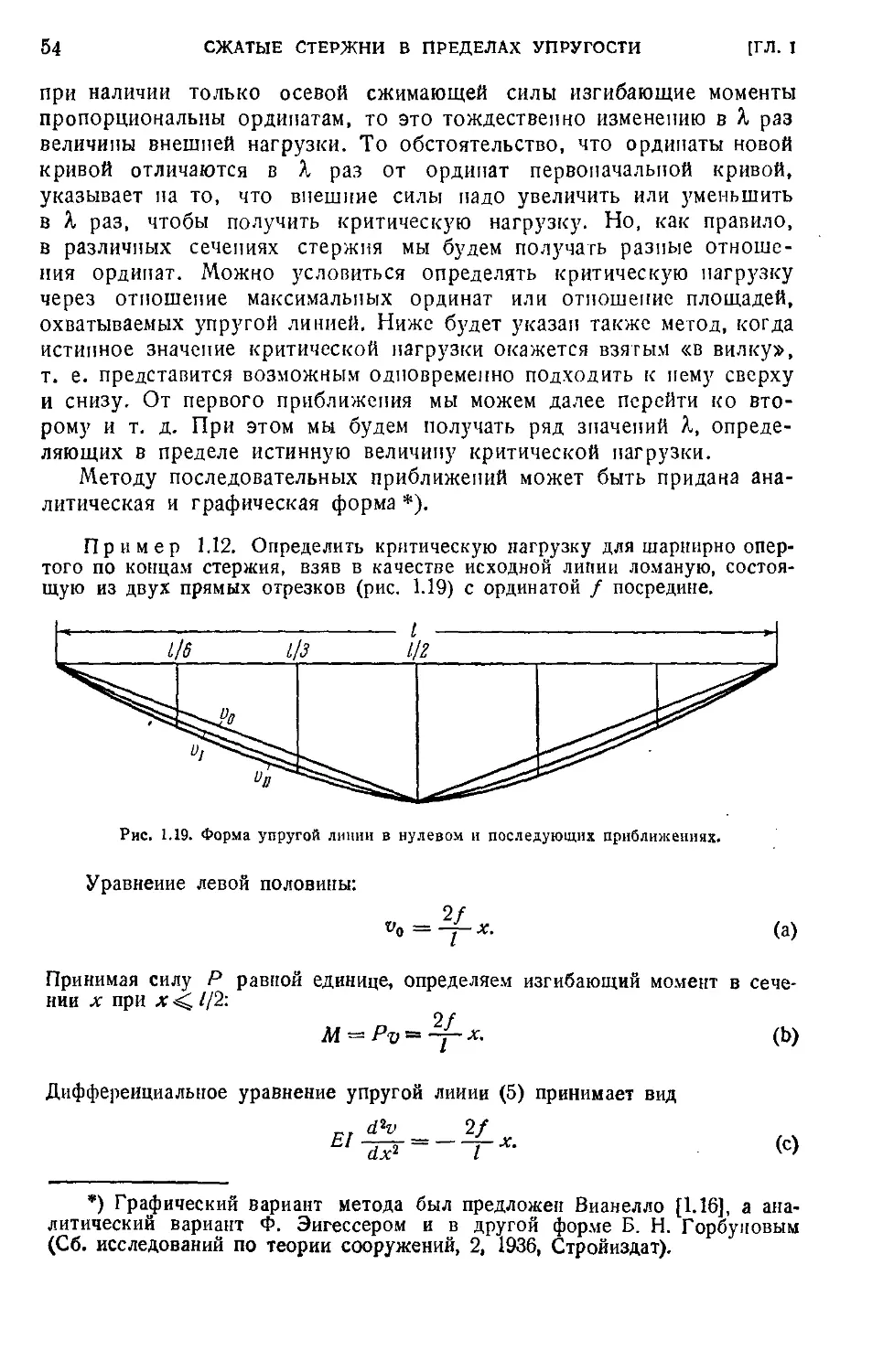
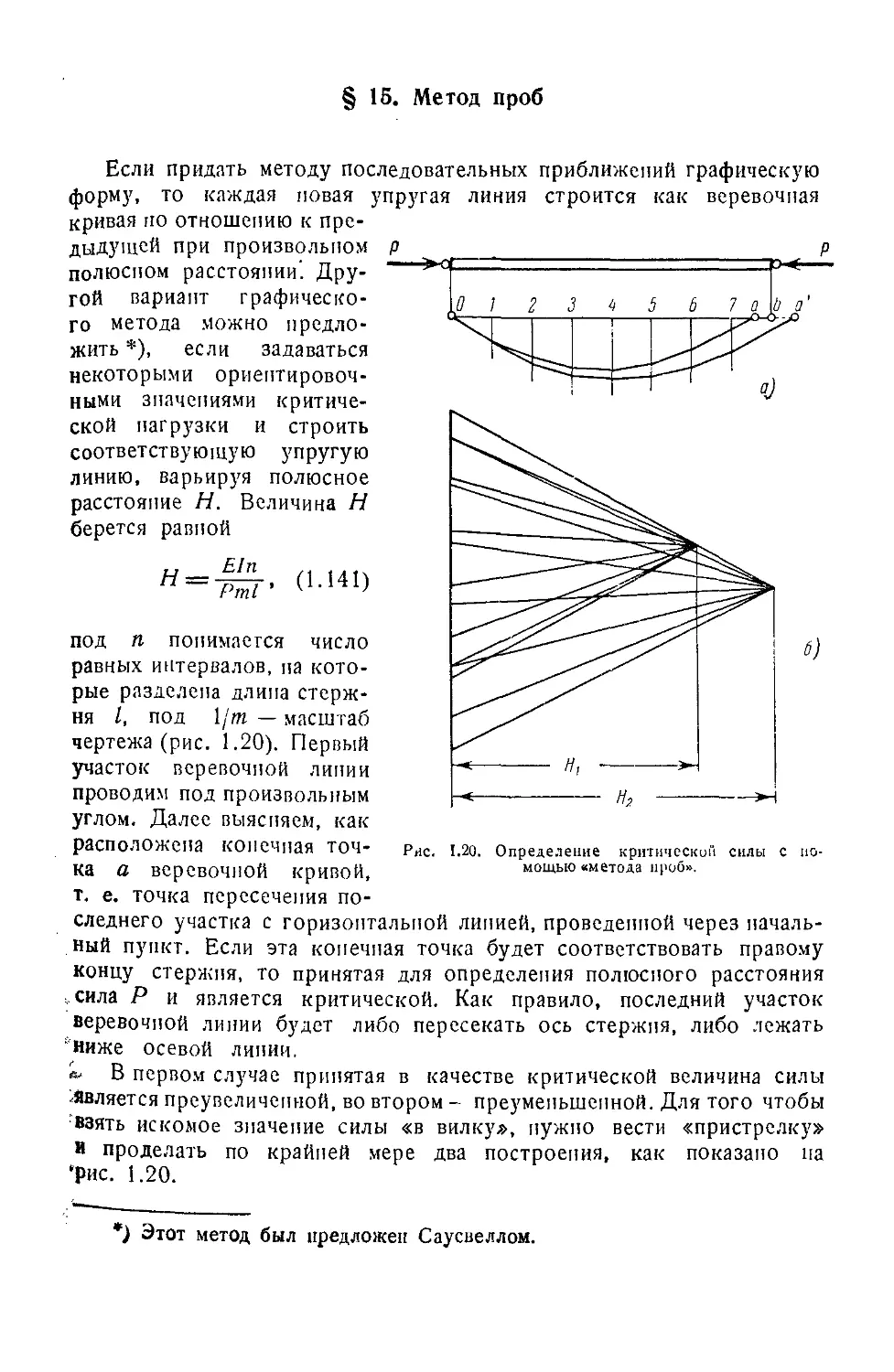
§ 15. Метод проб 57
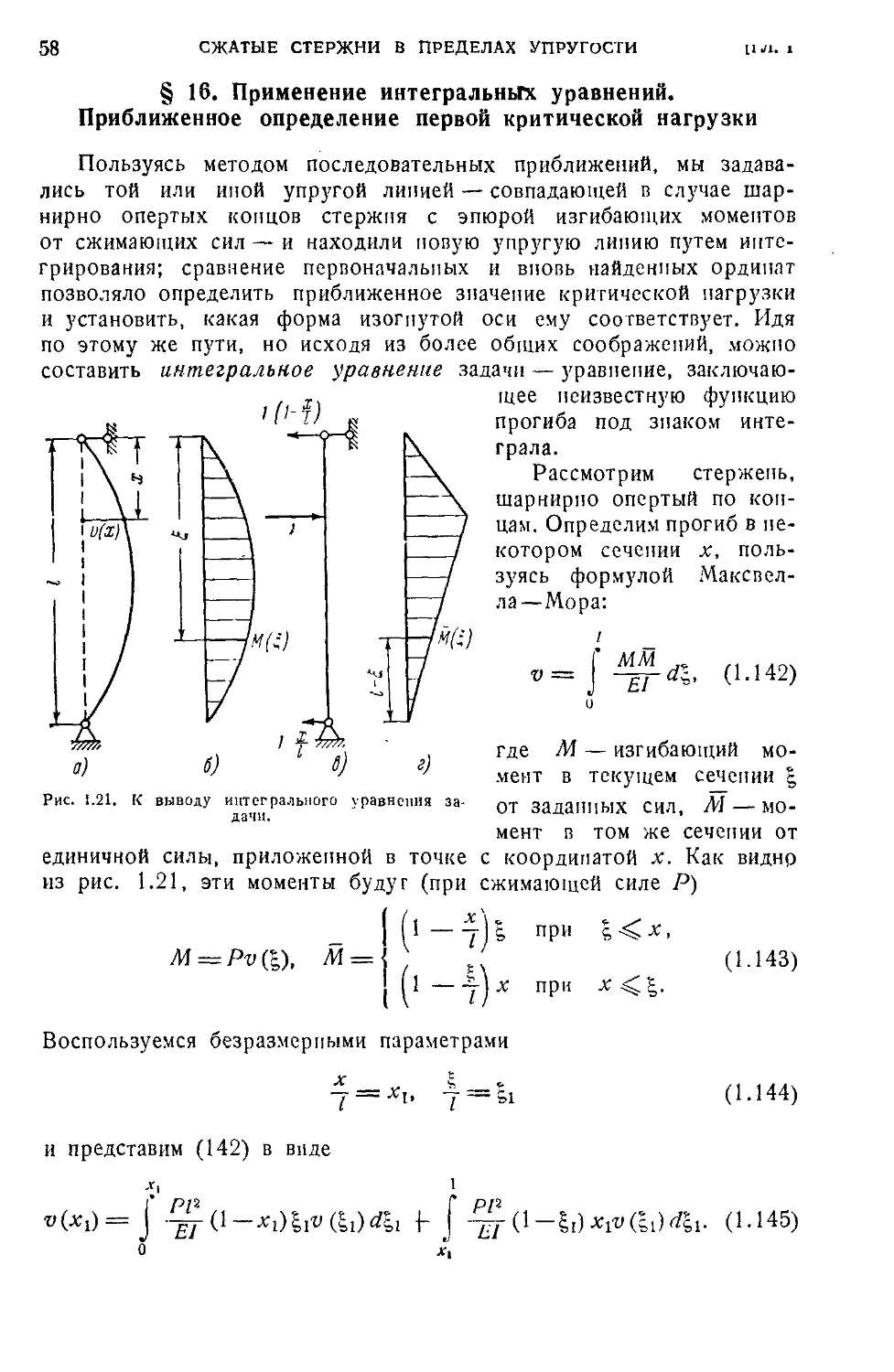
§ 16. Применение интегральных уравнений. Приближенное
определение первой критической нагрузки 58
§ 17. Динамический критерий устойчивости 61
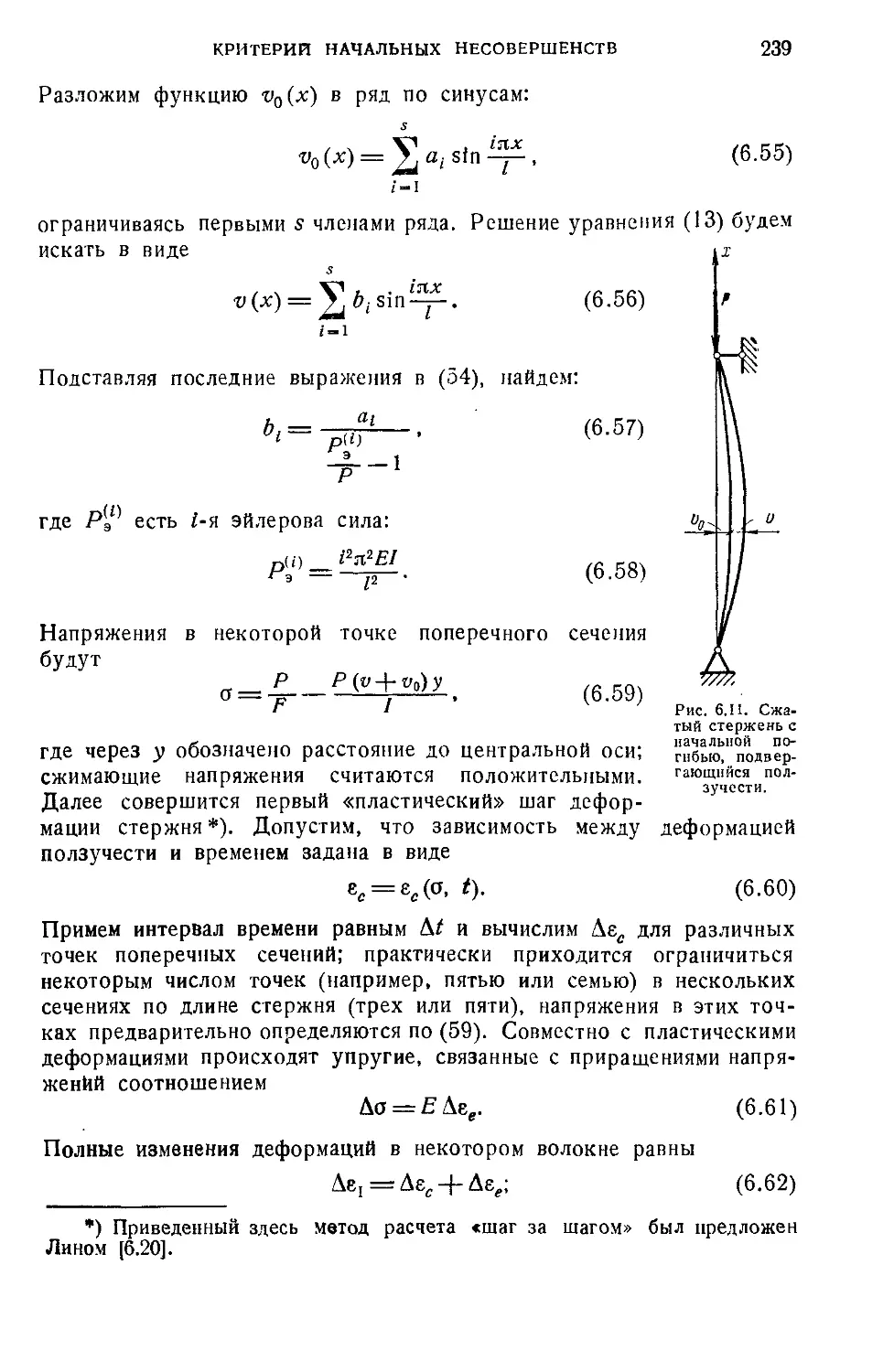
§ 18. Критерий начальных несовершенств 64
§ 19. Эксцентричное сжатие. Приближенное решение 67
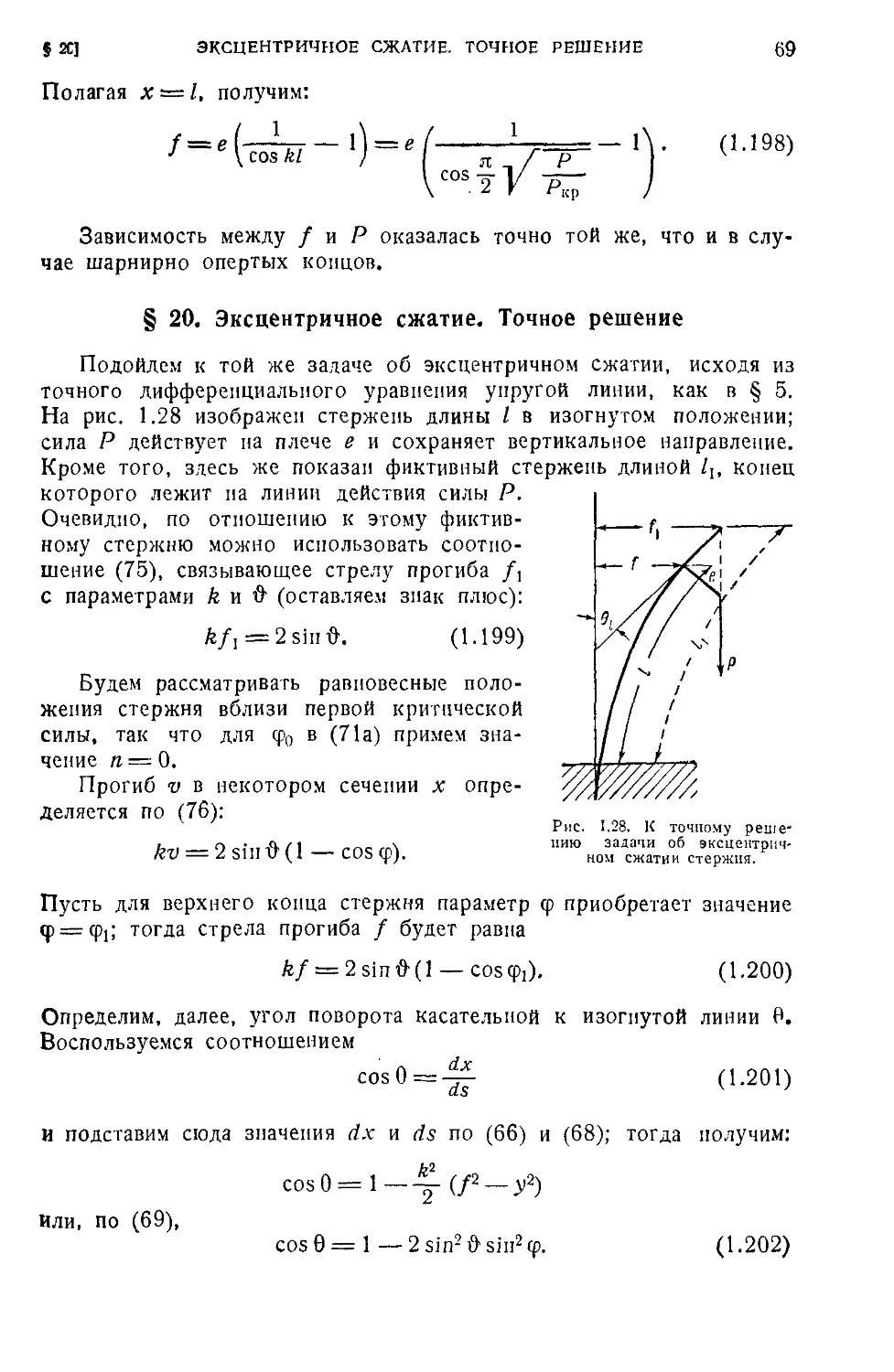
§ 20. Эксцентричное сжатие. Точное решение 69
§ 21. Влияние поперечной нагрузки ; 71
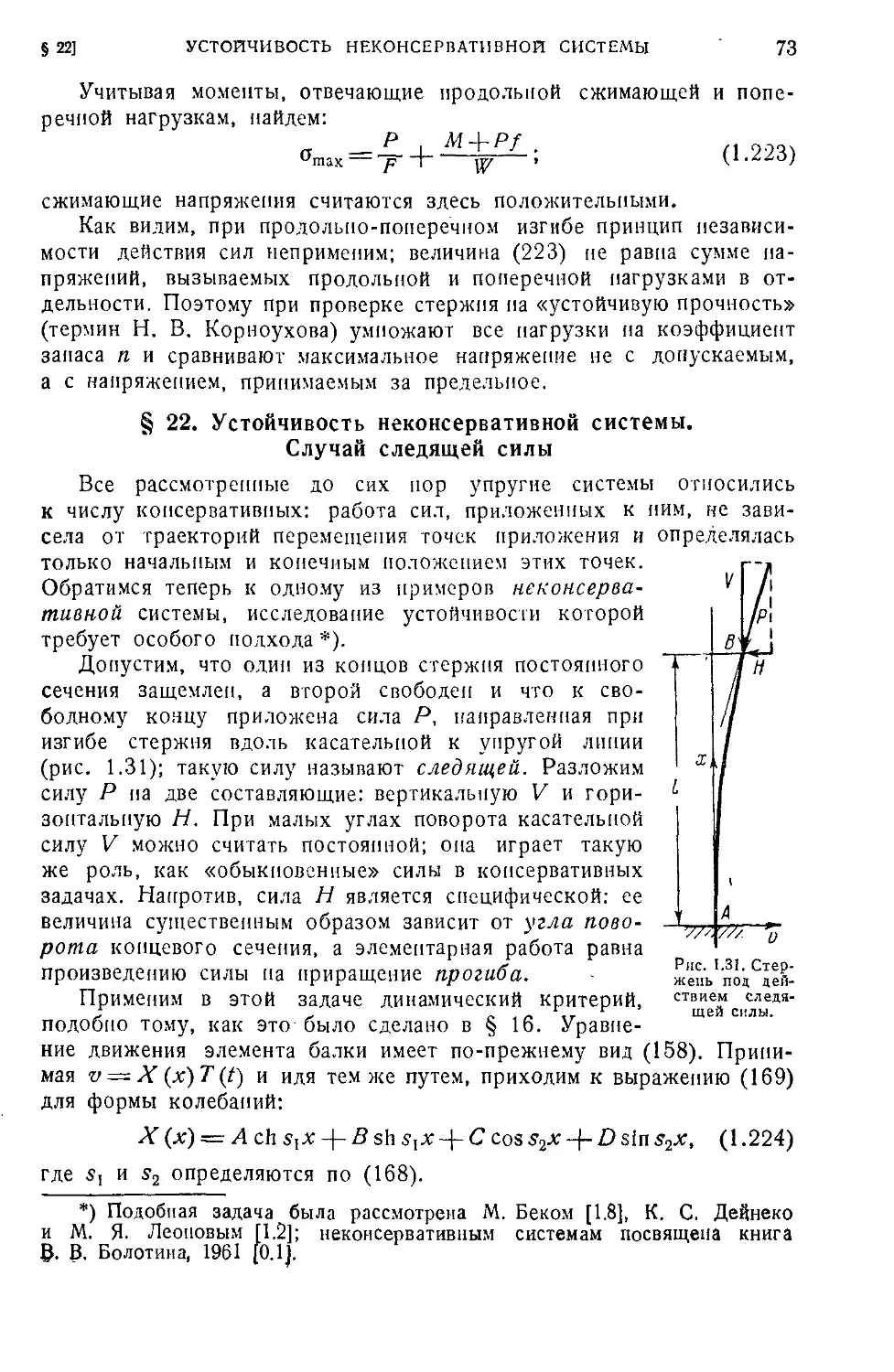
§ 22. Устойчивость иекоисервативной системы. Случай следящей
си.-.ы 73
§ 23. Особенности краевых задач для консервативных систем ... 76
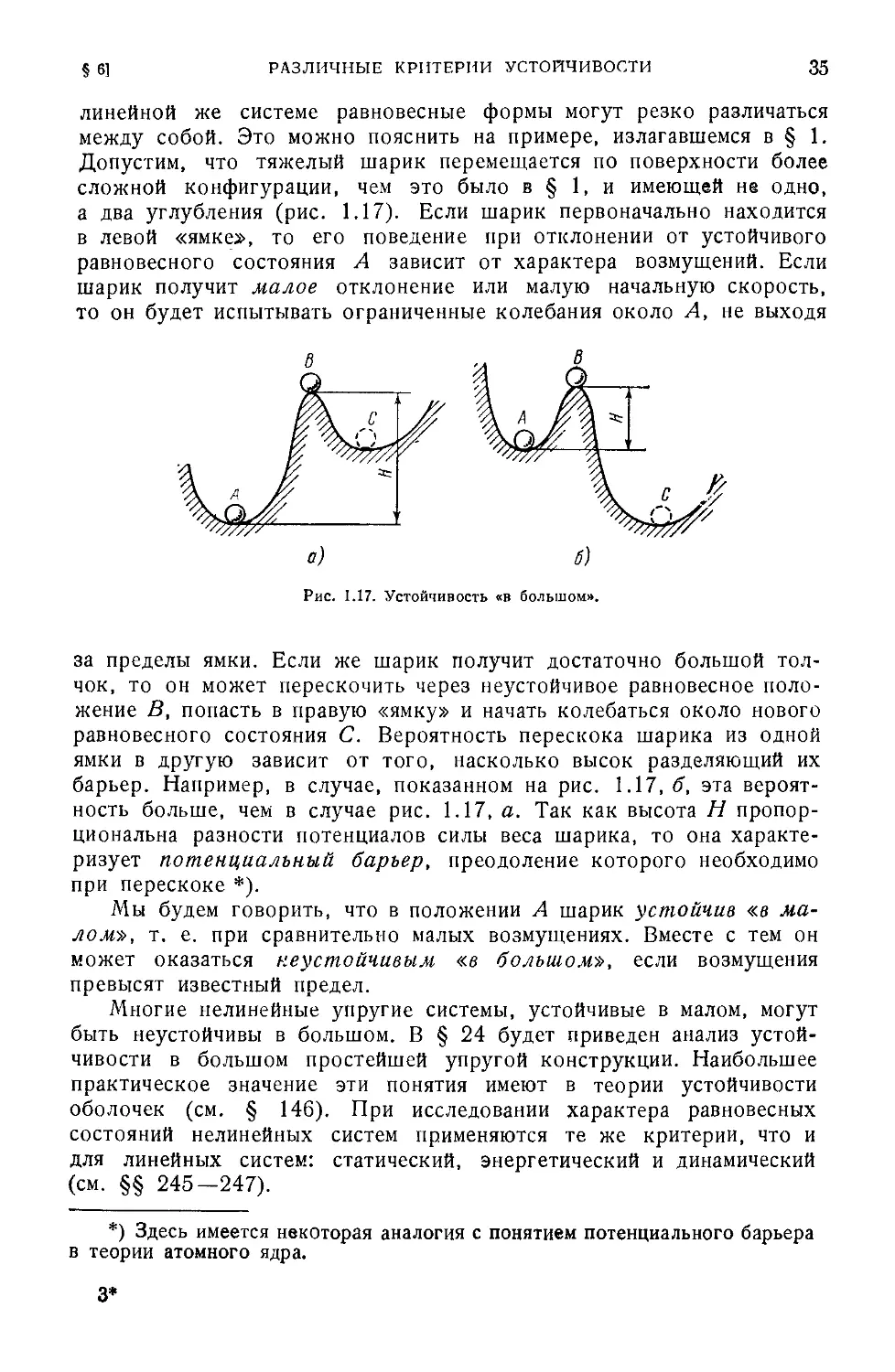
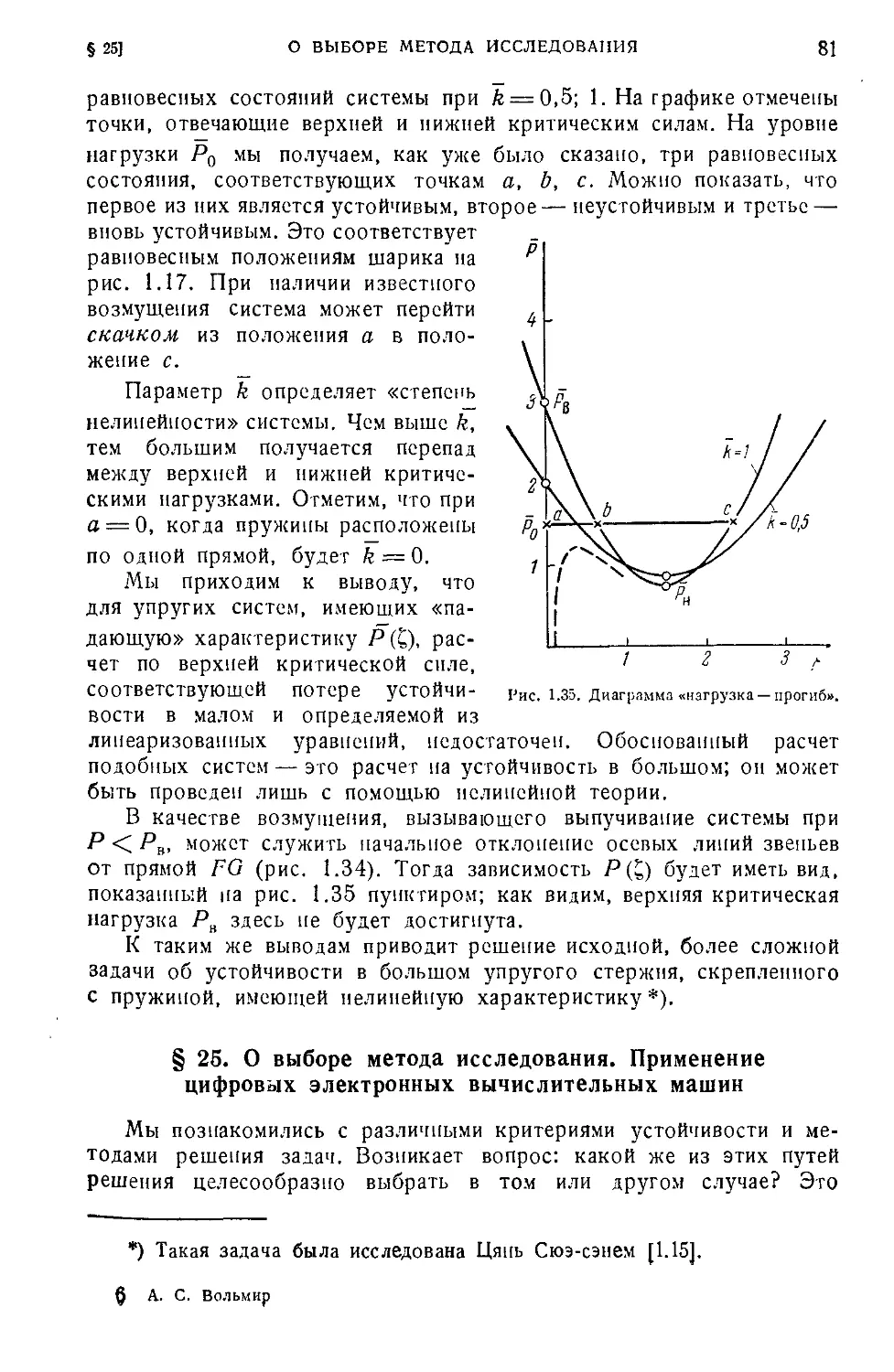
§ 24. Явление потери устойчивости «в большом» 78
§ 25. О выборе метода исследования. Применение цифровых
электронных вычислительных машии 81
§ 26. Метод случайного поиска . 84
§ 27. Метод динамического программирования . 86
§ 28. Использование аналоговых машин 89
Глава II. Устойчивость сжатых стержней за пределами упругости 93
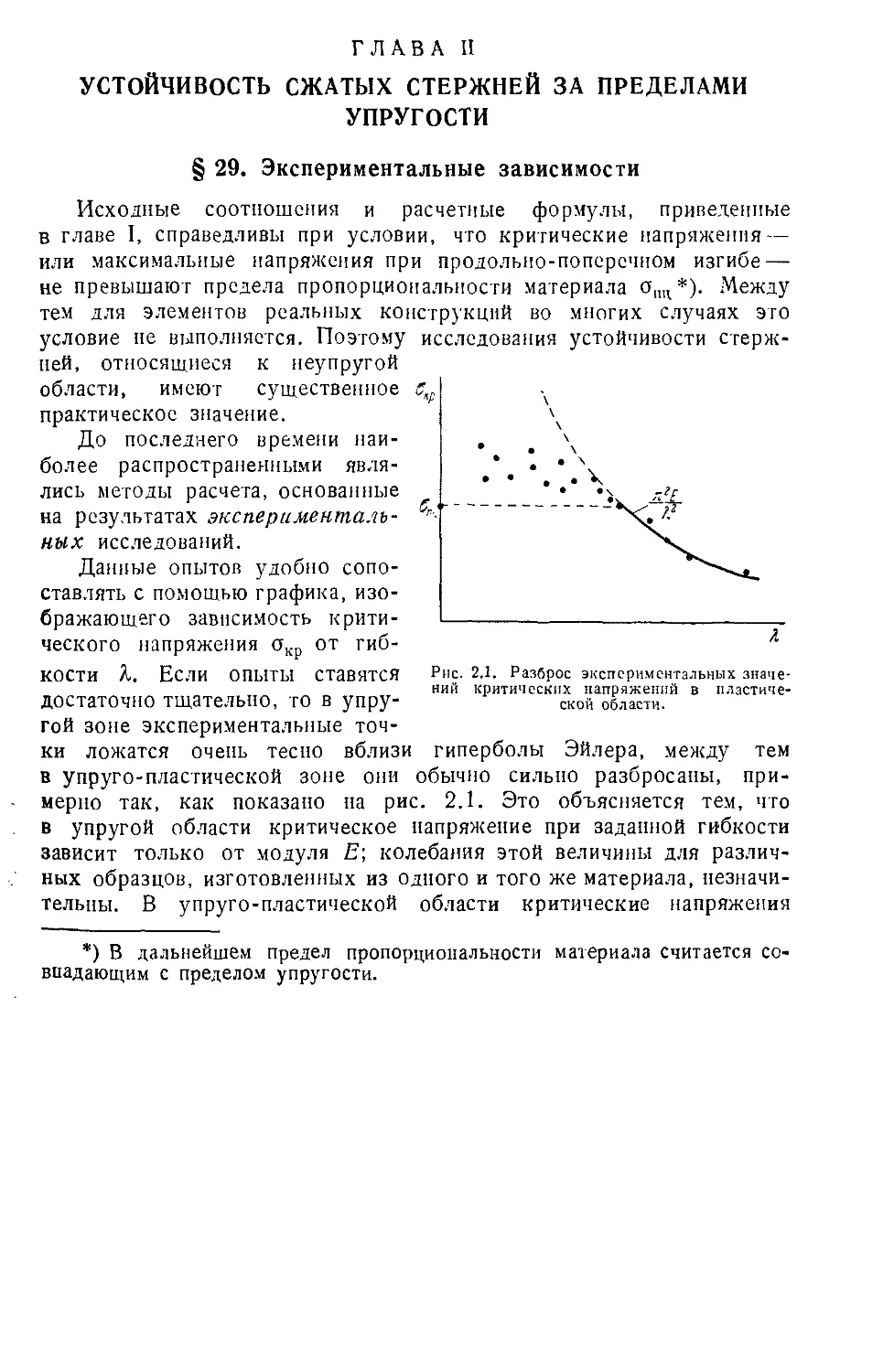
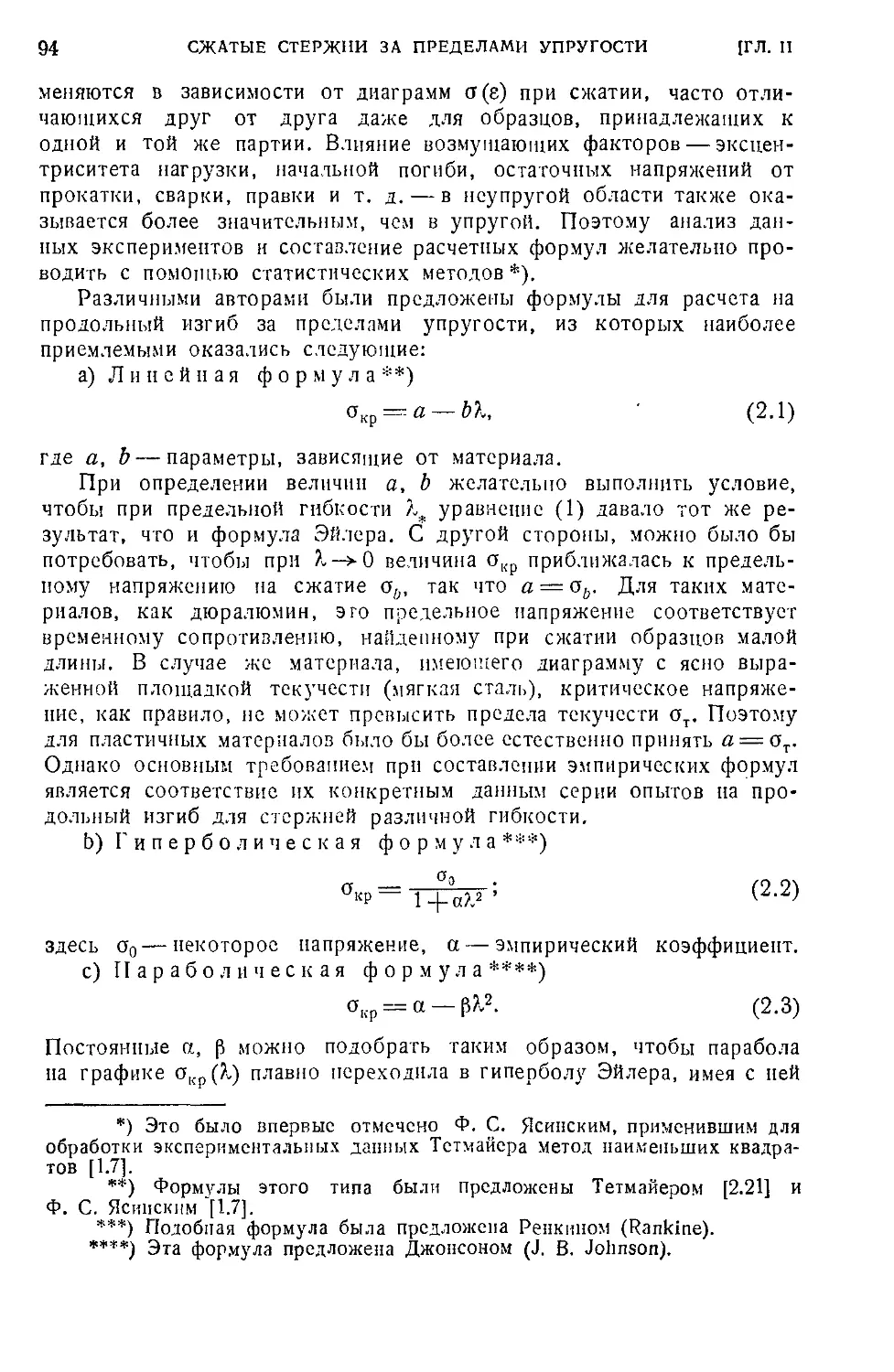
§ 29. Экспериментальные зависимости 93
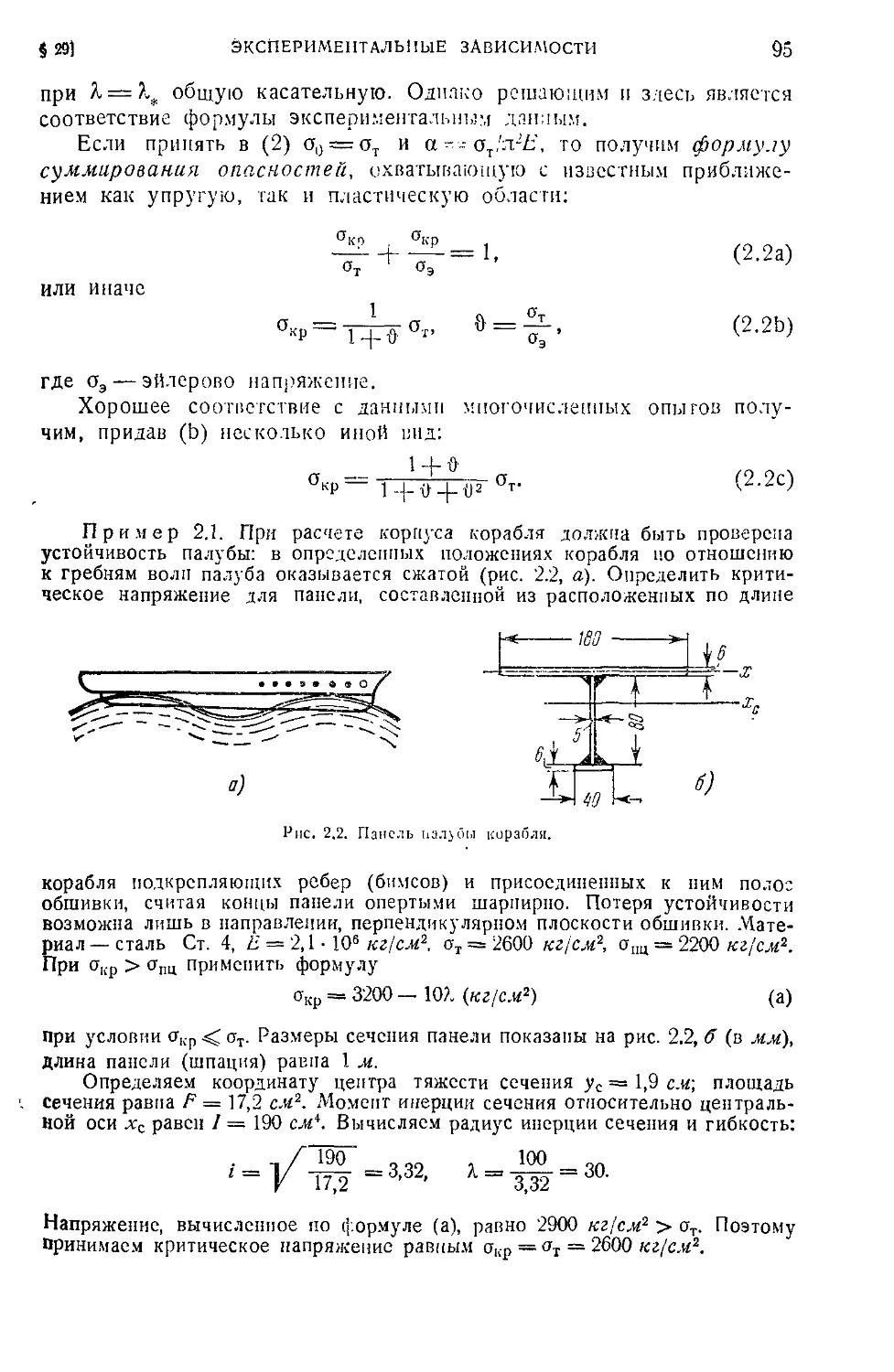
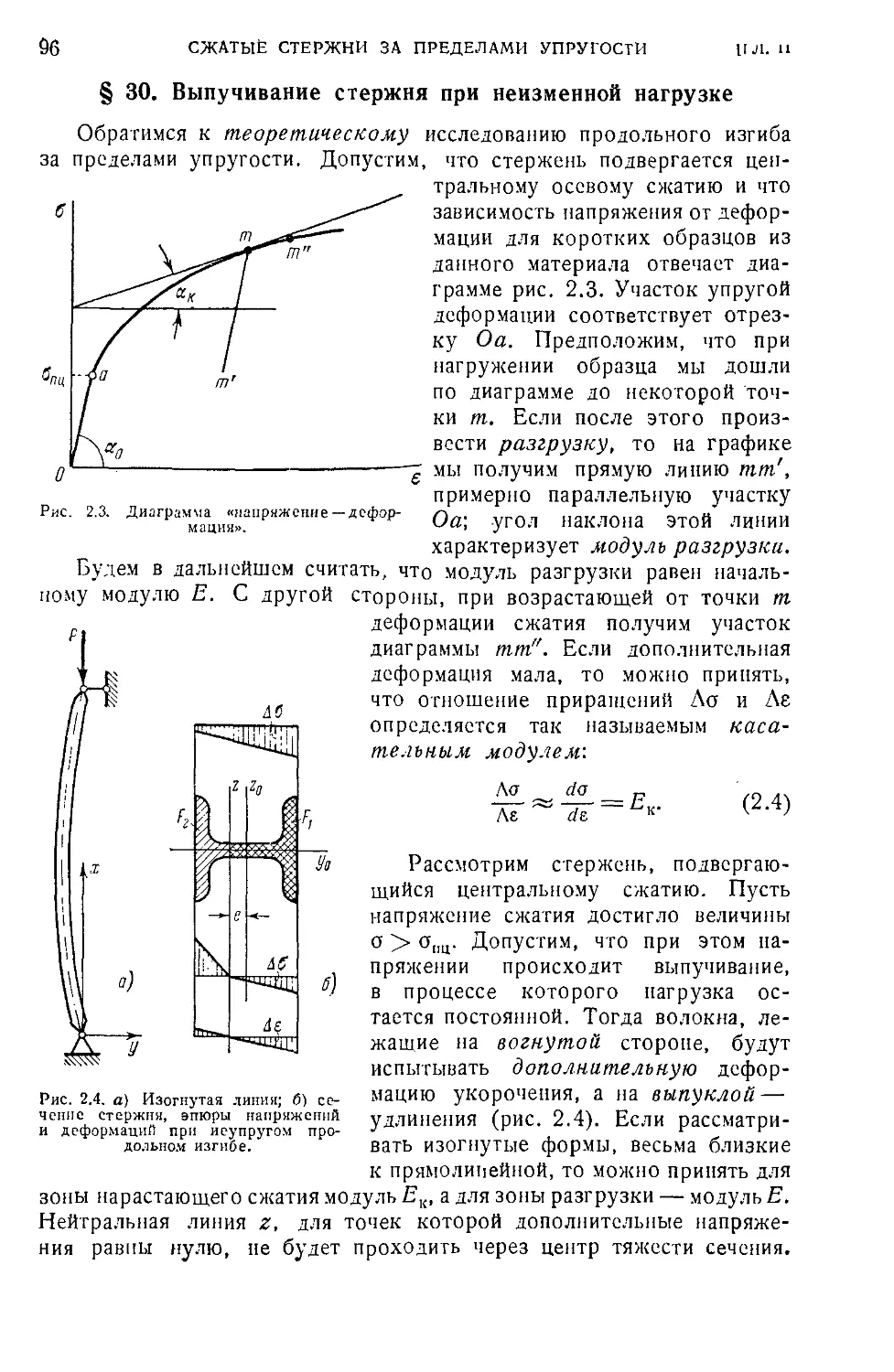
§ 30. Выпучивание стержня при неизменной нагрузке 96
§ 31. Влияние формы сечения. Случаи двутаврового и
прямоугольного сечений 98
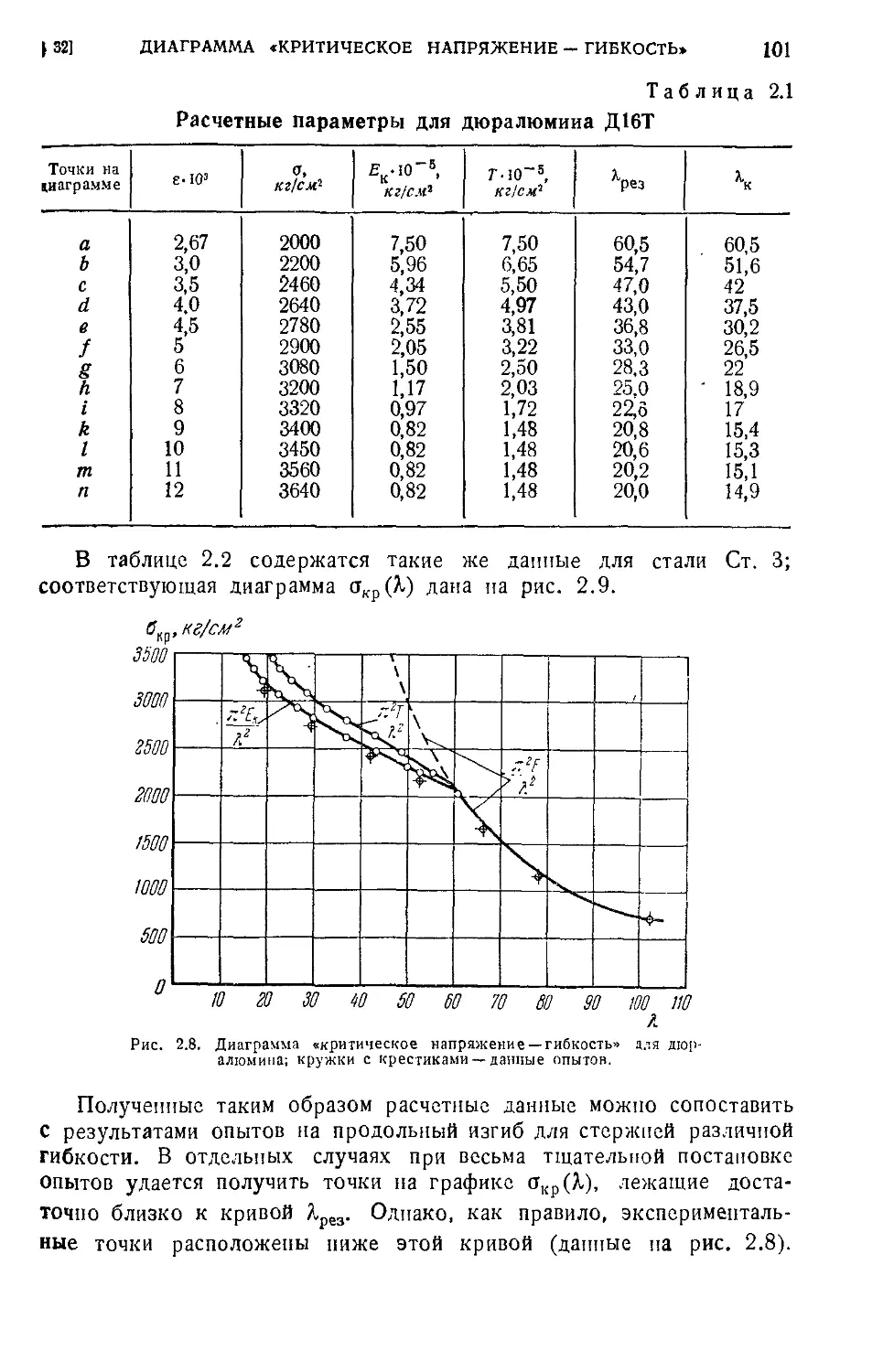
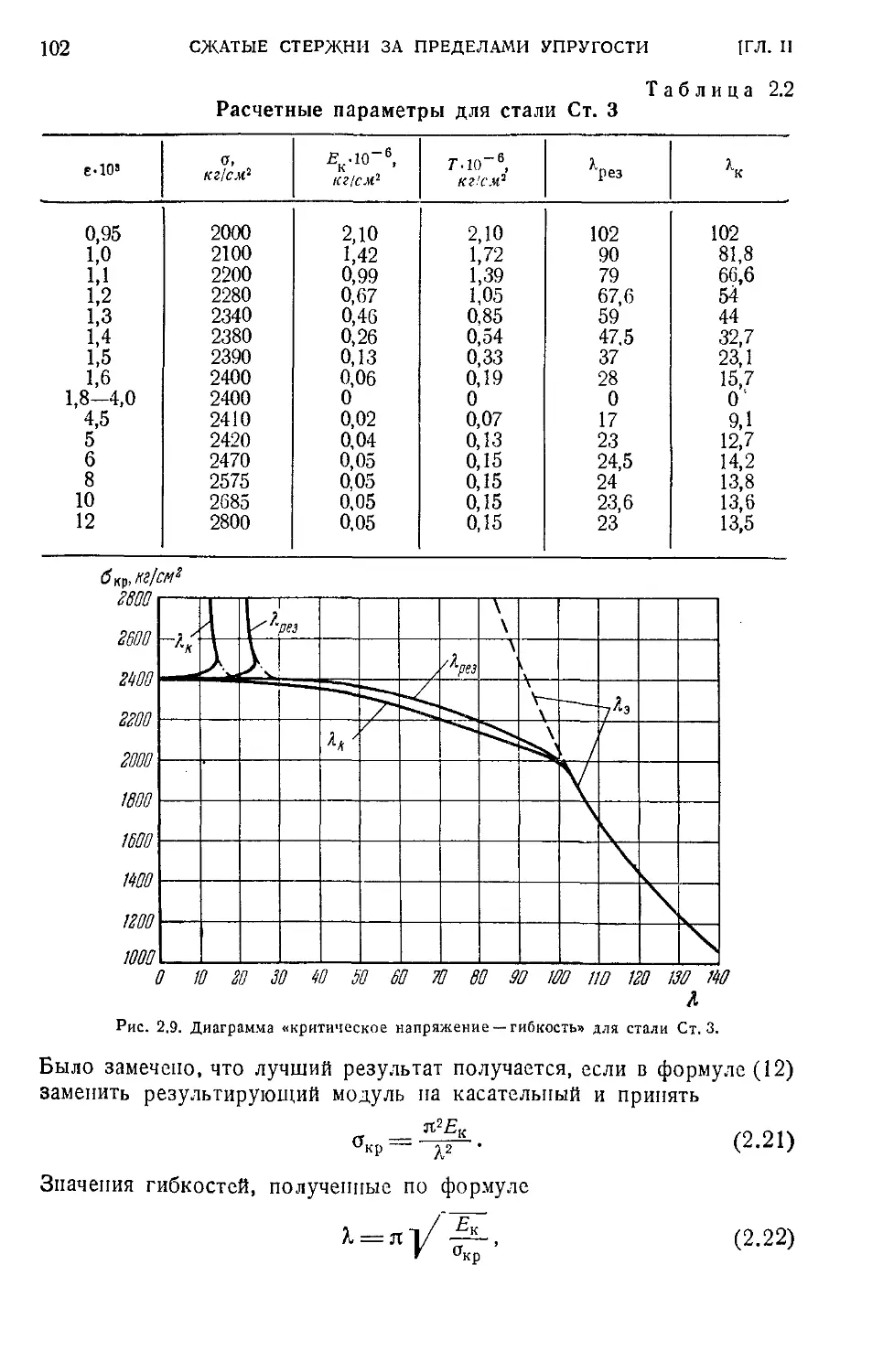
§ 32. Построение диаграммы «критическое напряжение — гибкость» 100
4
ОГЛАВЛЕНИЕ
§ 33. Выпучивание стержня при возрастающей нагрузке 103
§ 34. Стержни двутаврового н прямоугольного сечений при
возрастающей нагрузке 108
§ 35. Выпучивание стержня при уменьшающейся нагрузке .... 113
§ 36. Выбор критерия устойчивости и расчетной нагрузки 115
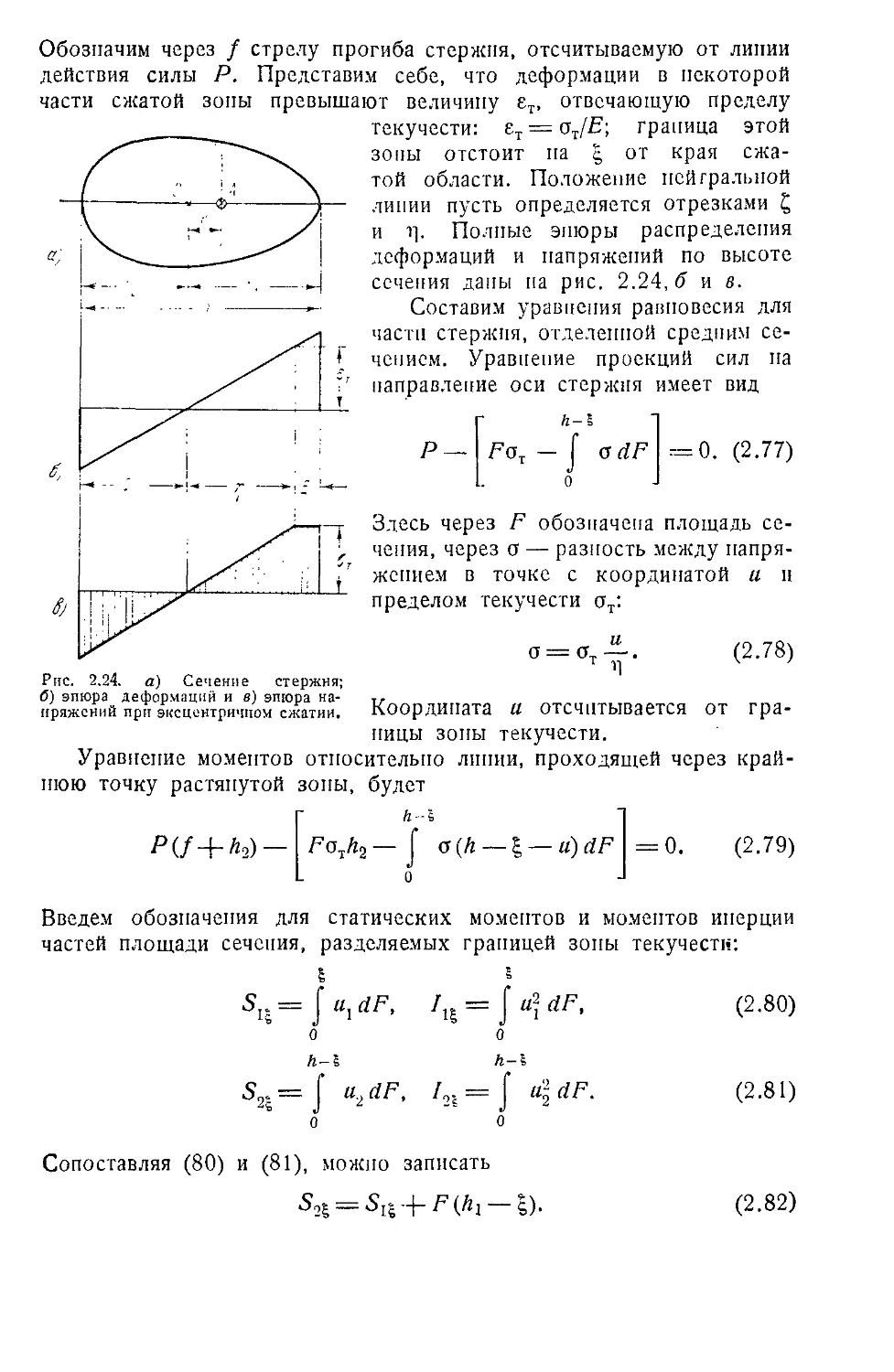
§ 37. Внецентреиное сжатие в иеупругой области. Приближенное
решение 117
§ 38. Внецентреиное сжатие стержней прямоугольного и таврового
сечений 120
Глава III. Более сложные задачи устойчивости стержней .... 124
§ 39. Стержни неременного сечения. Ступенчатое изменение
жесткости 124
§ 40. Случай непрерывного изменения жесткости по длине.
Стержень наименьшего веса 126
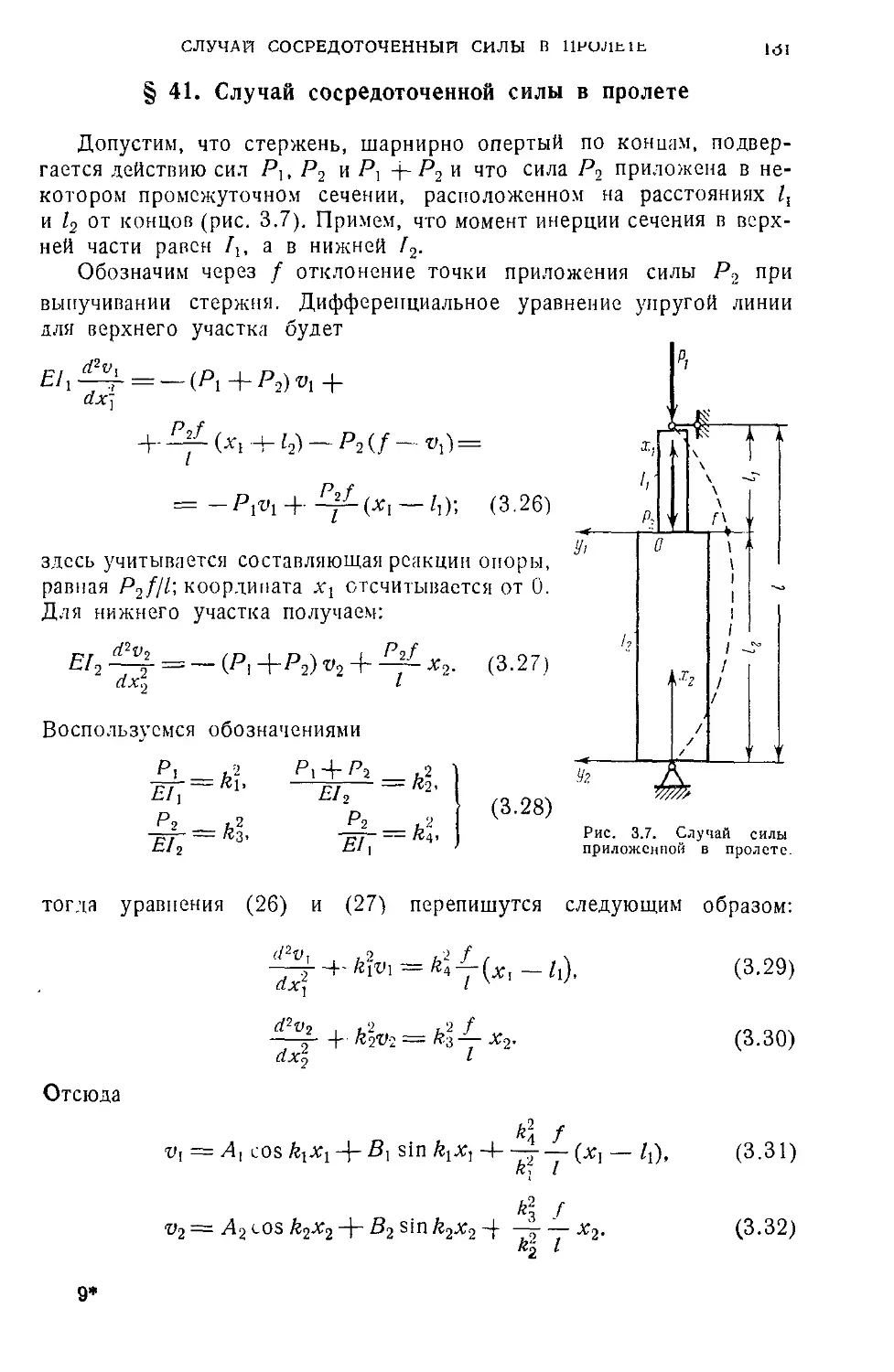
§ 41. Случай сосредоточенной силы в пролете 131
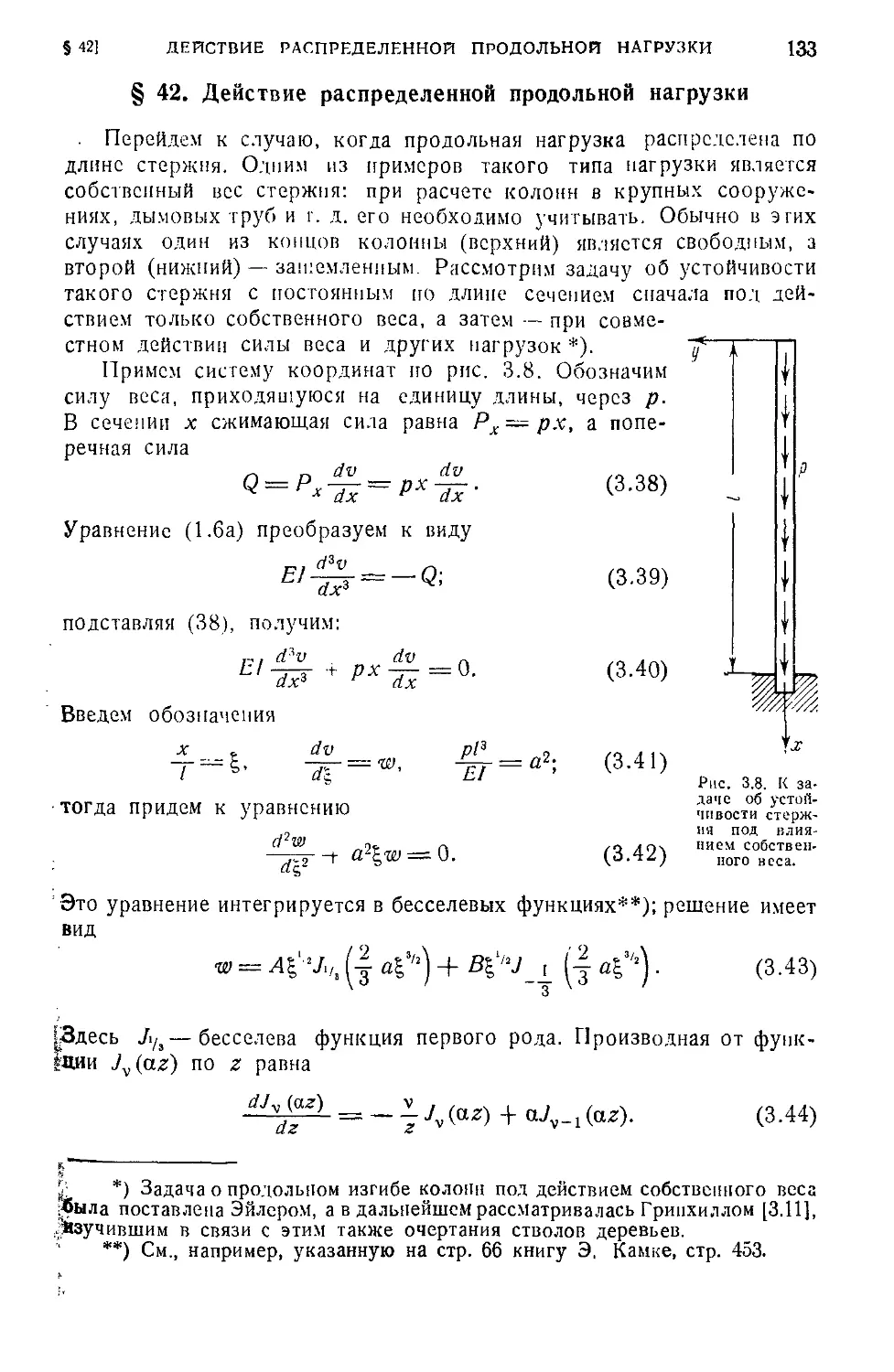
§ 42. Действие распределенной продольной нагрузки 133
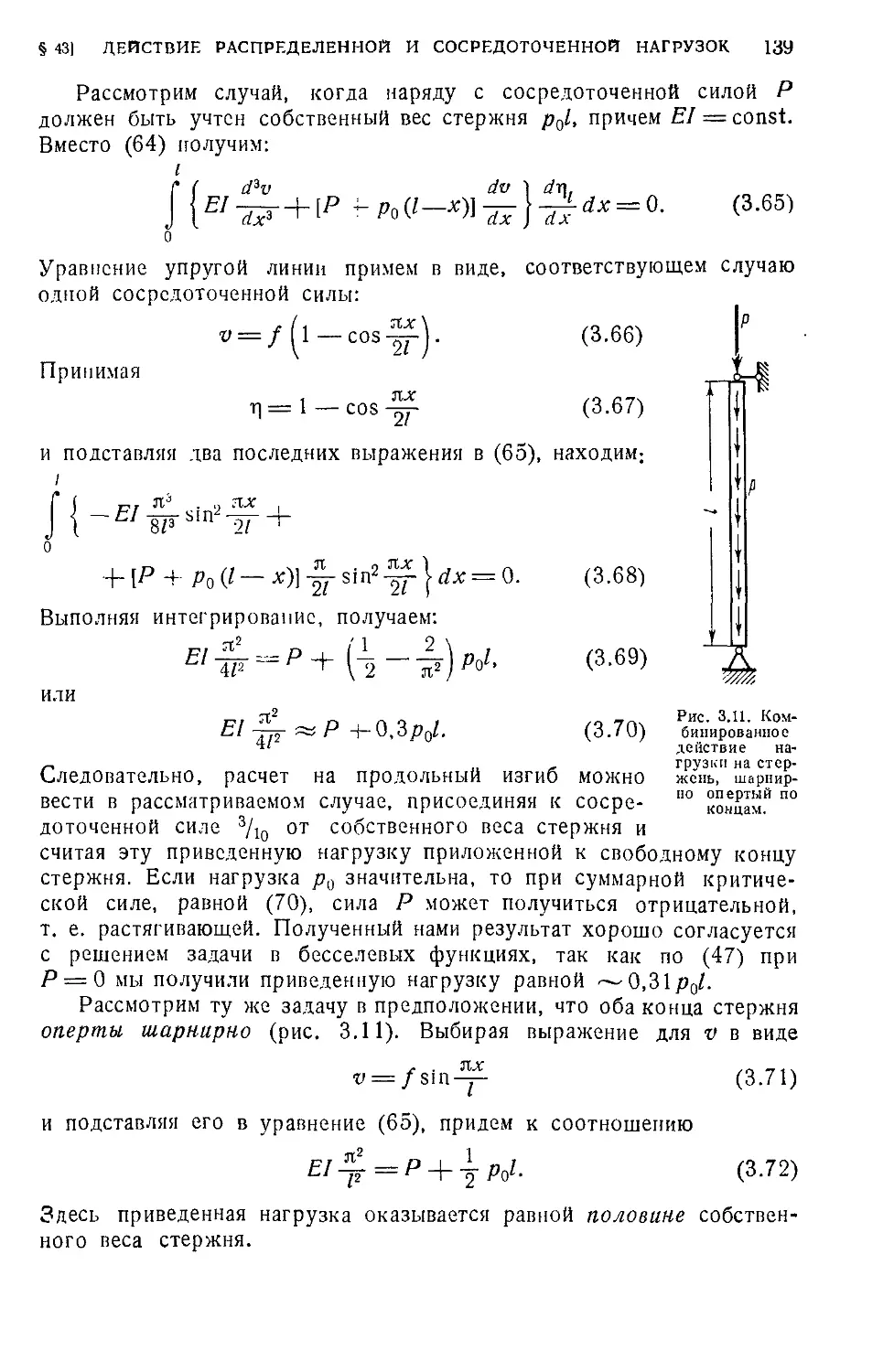
§ 43. Одновременное действие распределенной и сосредоточенной
нагрузок 137
§ 44. Стержень, подвергающийся действию осевой силы и концевых
пар 140
§ 45. Стержень, лежащий иа нескольких жестких опорах 141
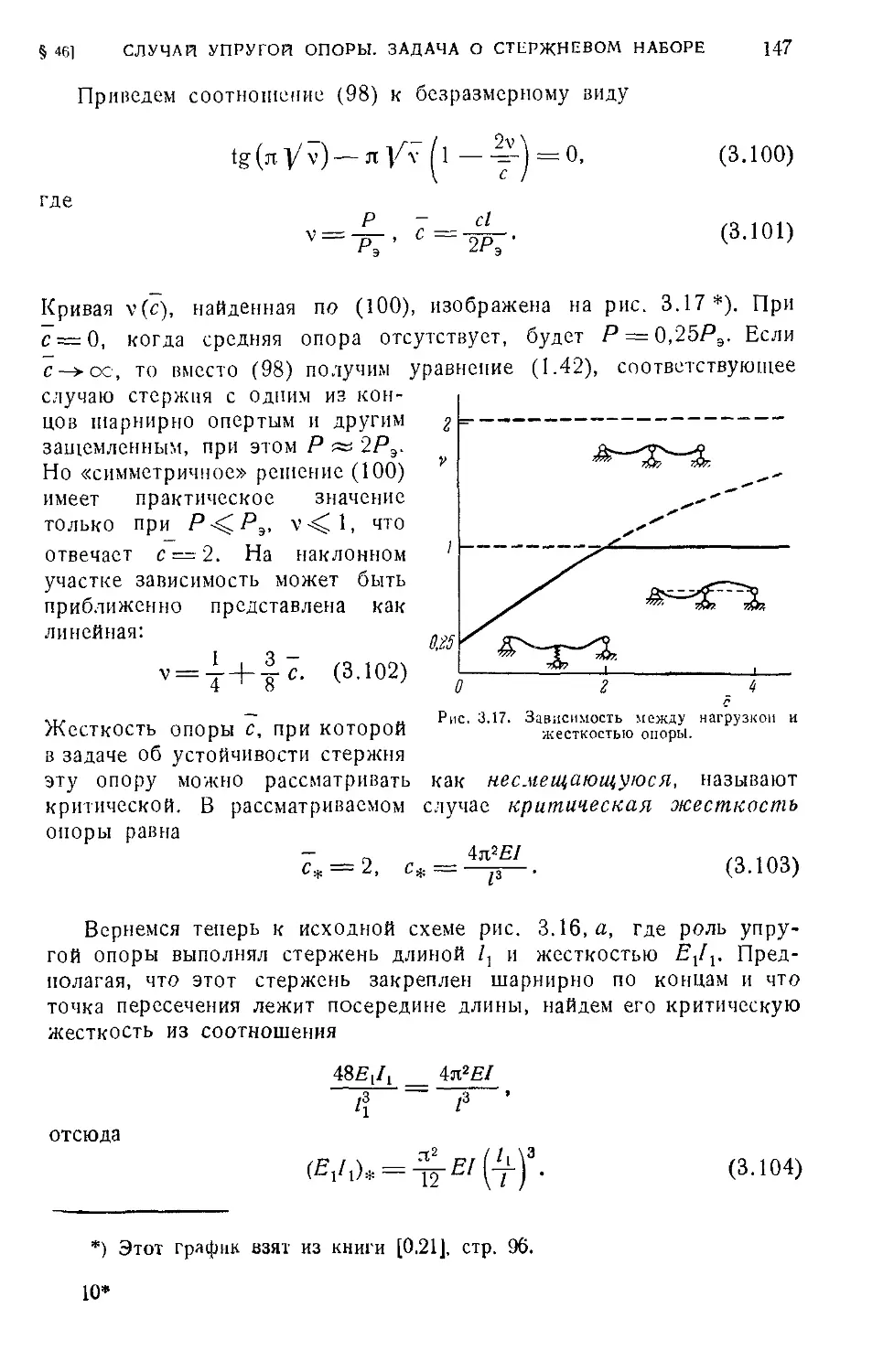
§ 46. Случай упругой опоры. Задача о стержневом наборе .... 146
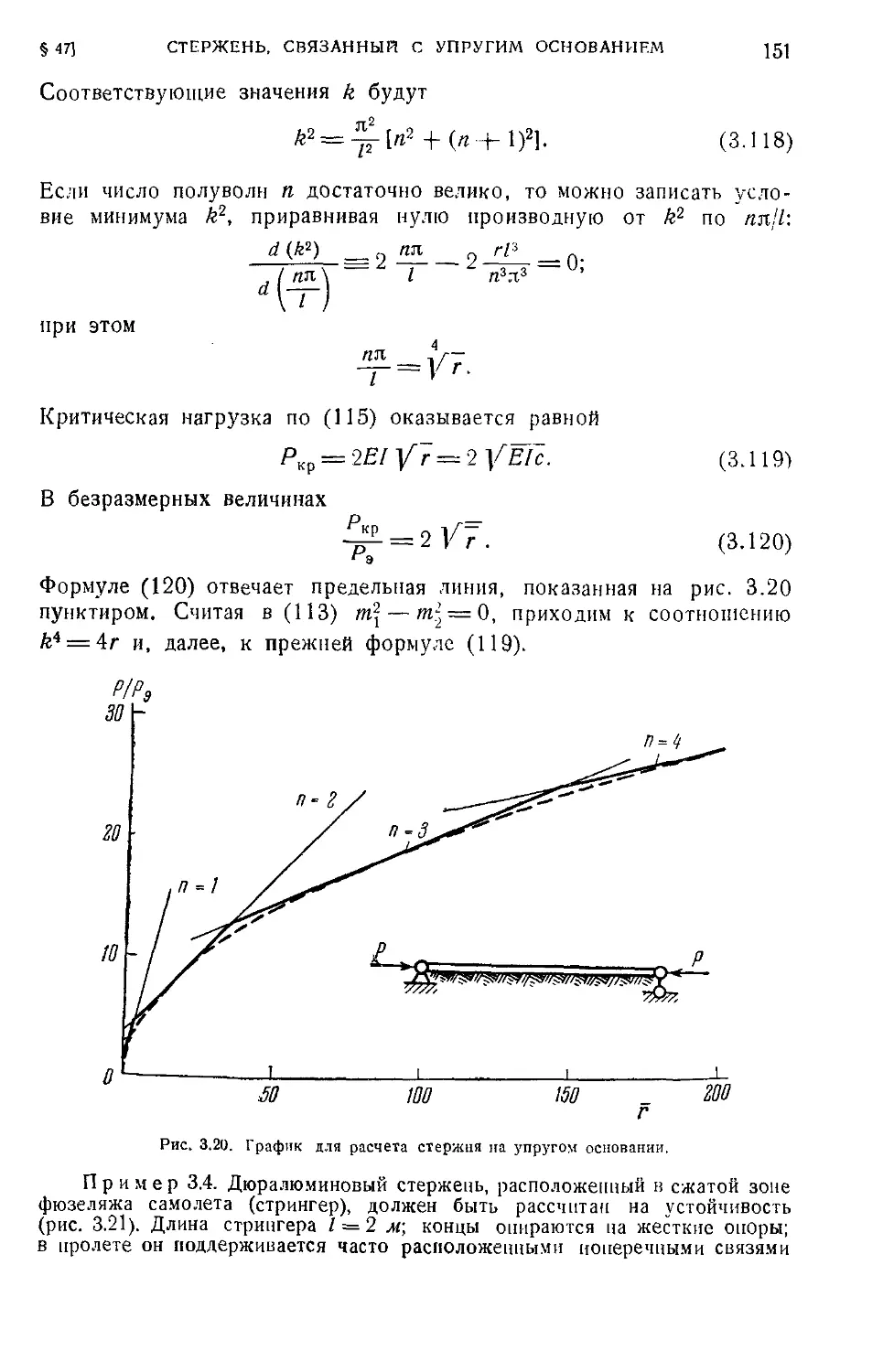
§ 47. Устойчивость стержня, связанного с упругим основанием . . 149
§ 48. Влияние поперечной силы иа критическую нагрузку 152
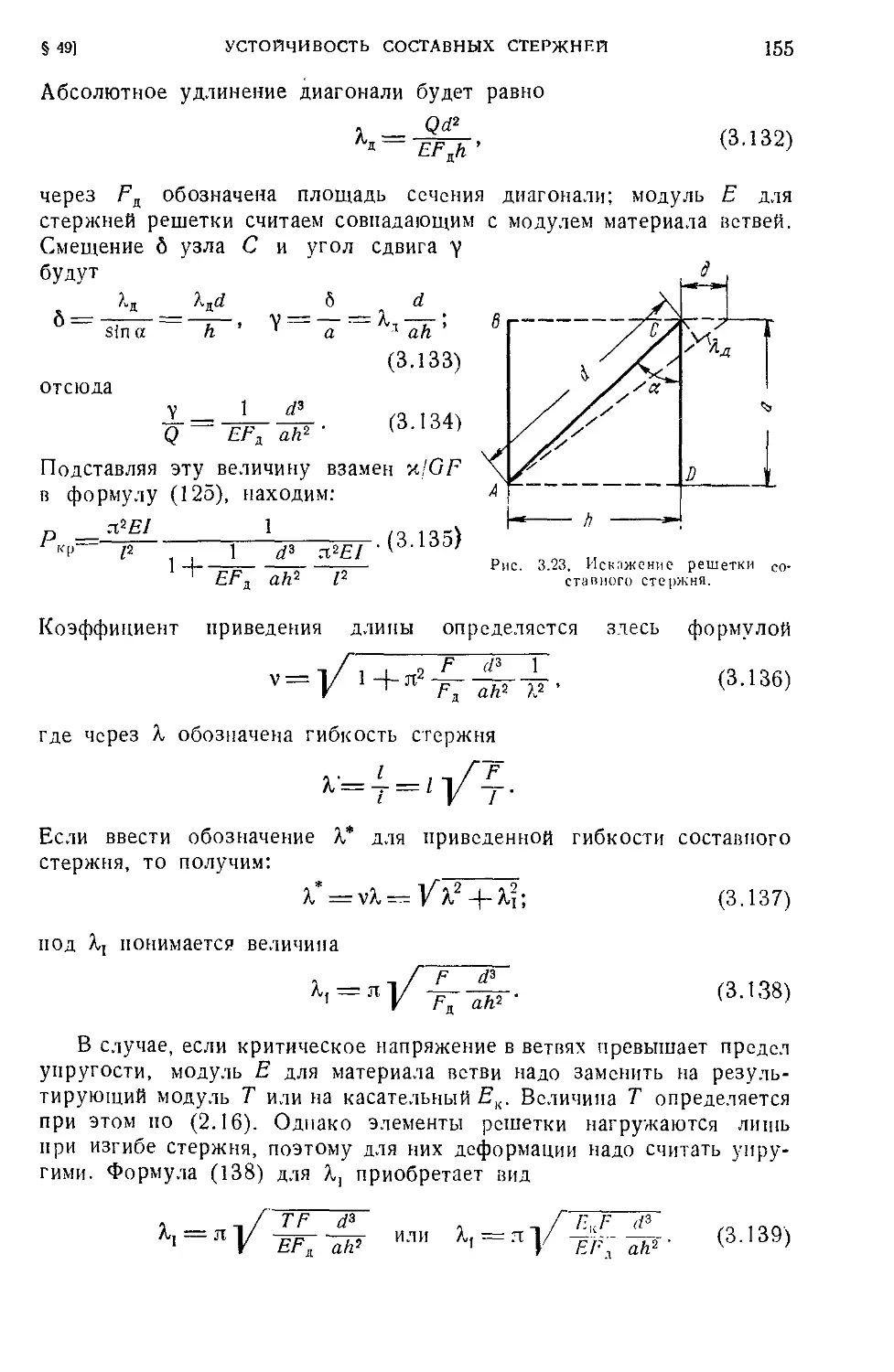
§ 49. Устойчивость составных стержней 154
§ 50. Устойчивость стержней, воспринимающих крутящий момент.
Совместное действие осевого сжатия и кручения 159
§ 51. Устойчивость кругового кольца и арки 162
Глава IV. Устойчивость стержневых систем 166
§ 52. Различные подходы к задаче об устойчивости стержневой
конструкции 166
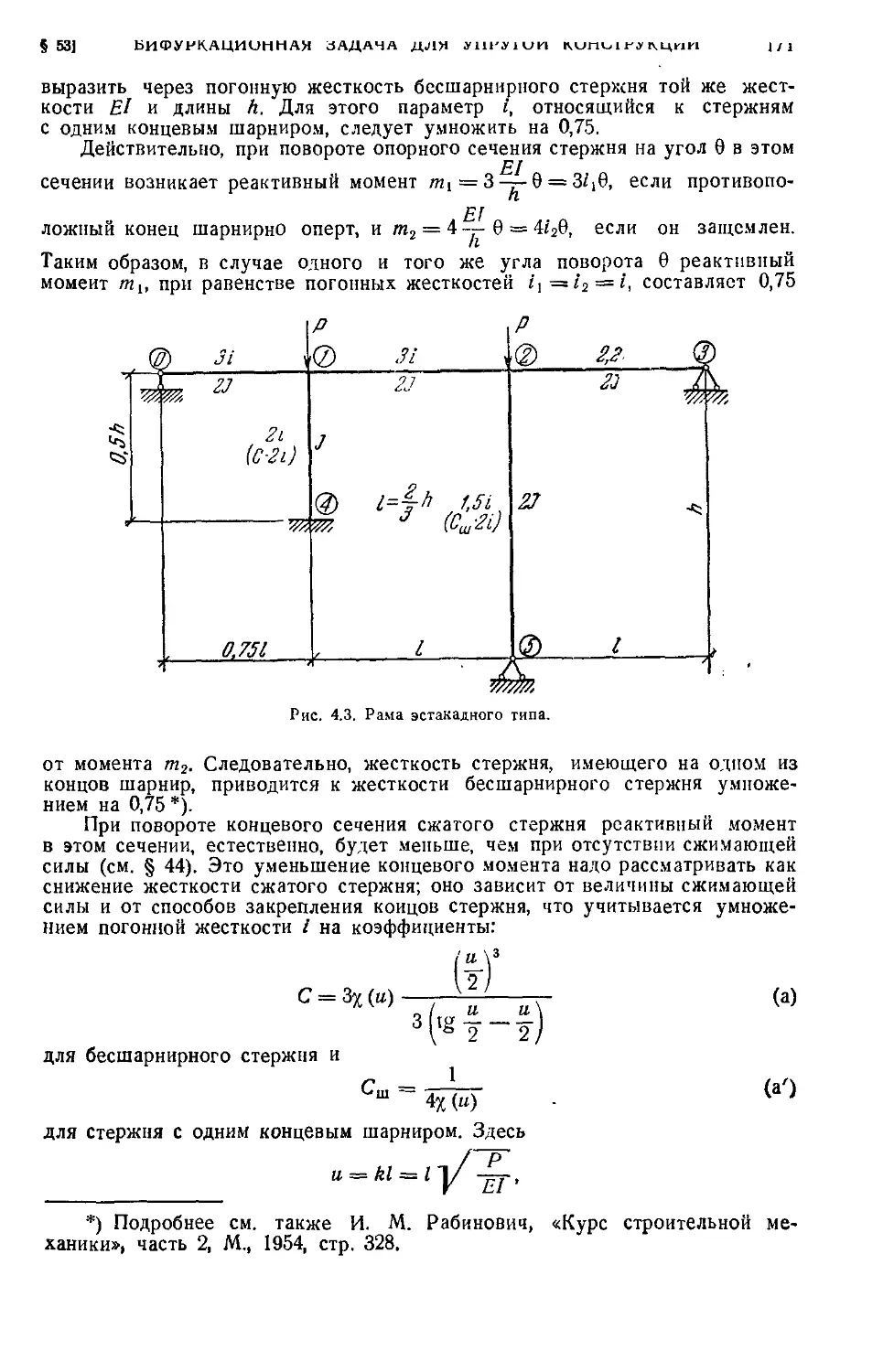
§ 53. Бифуркационная задача для упругой конструкции 168
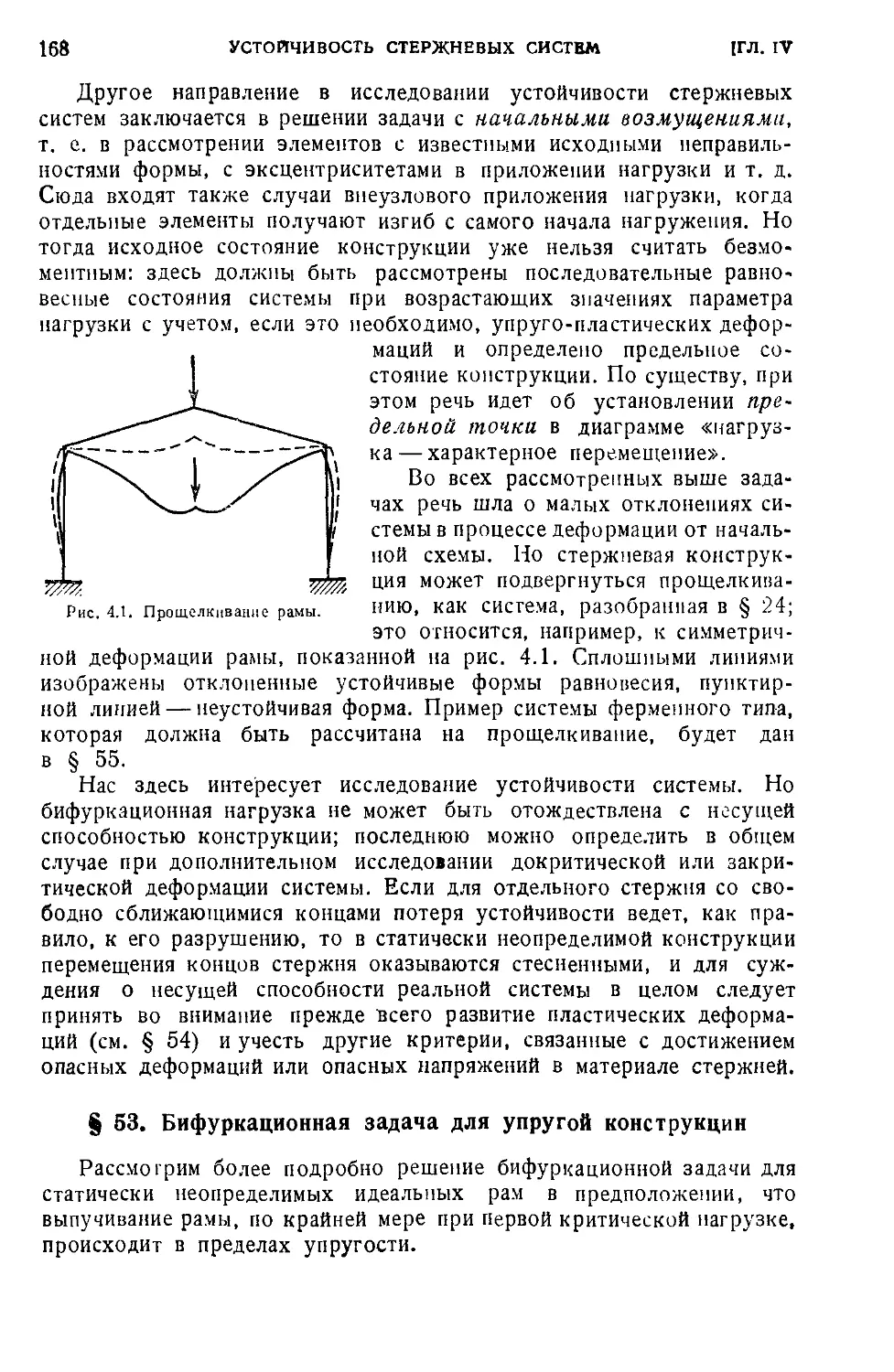
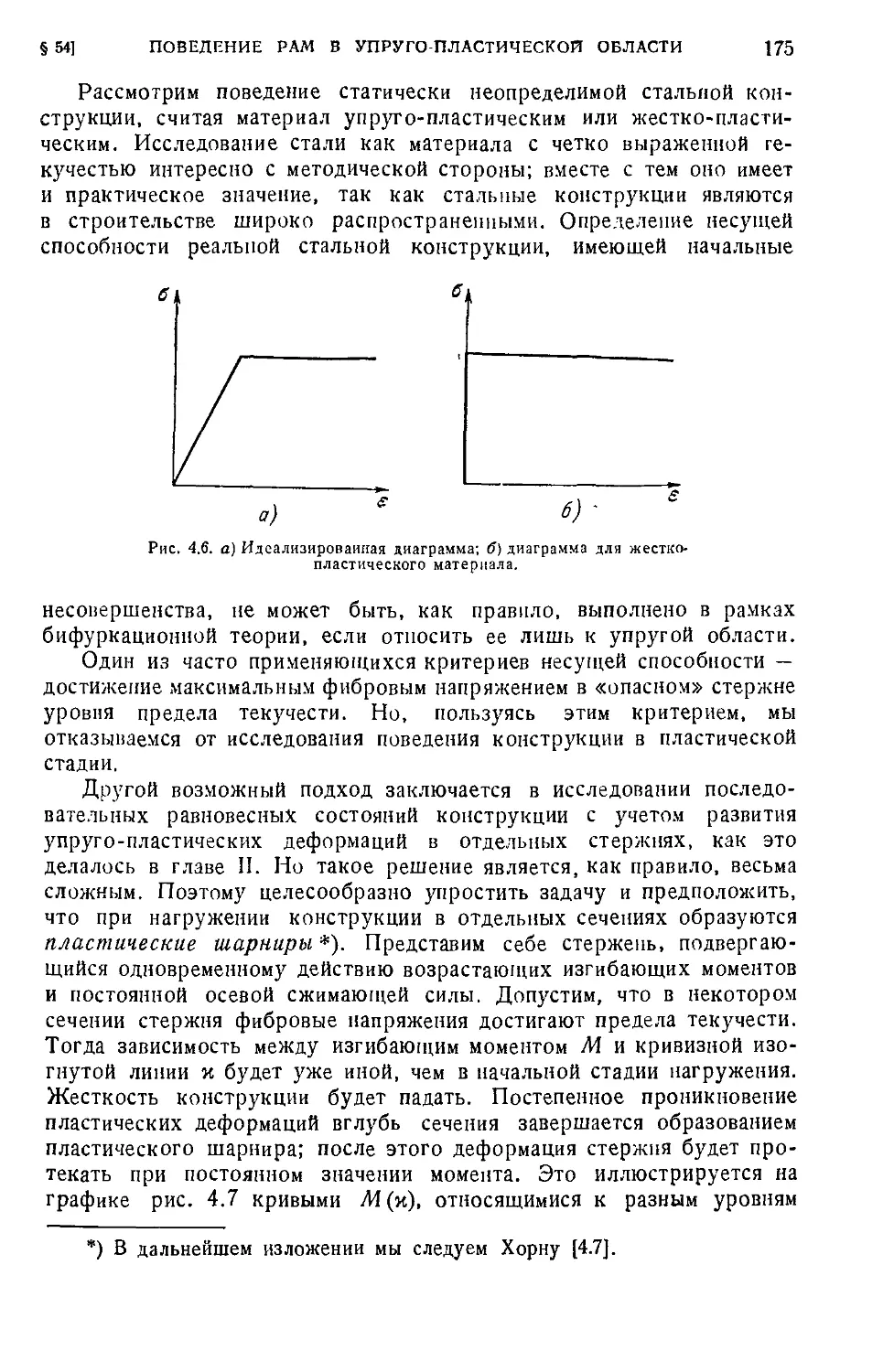
§ 54. Поведение рам в унруго-нластической области 174
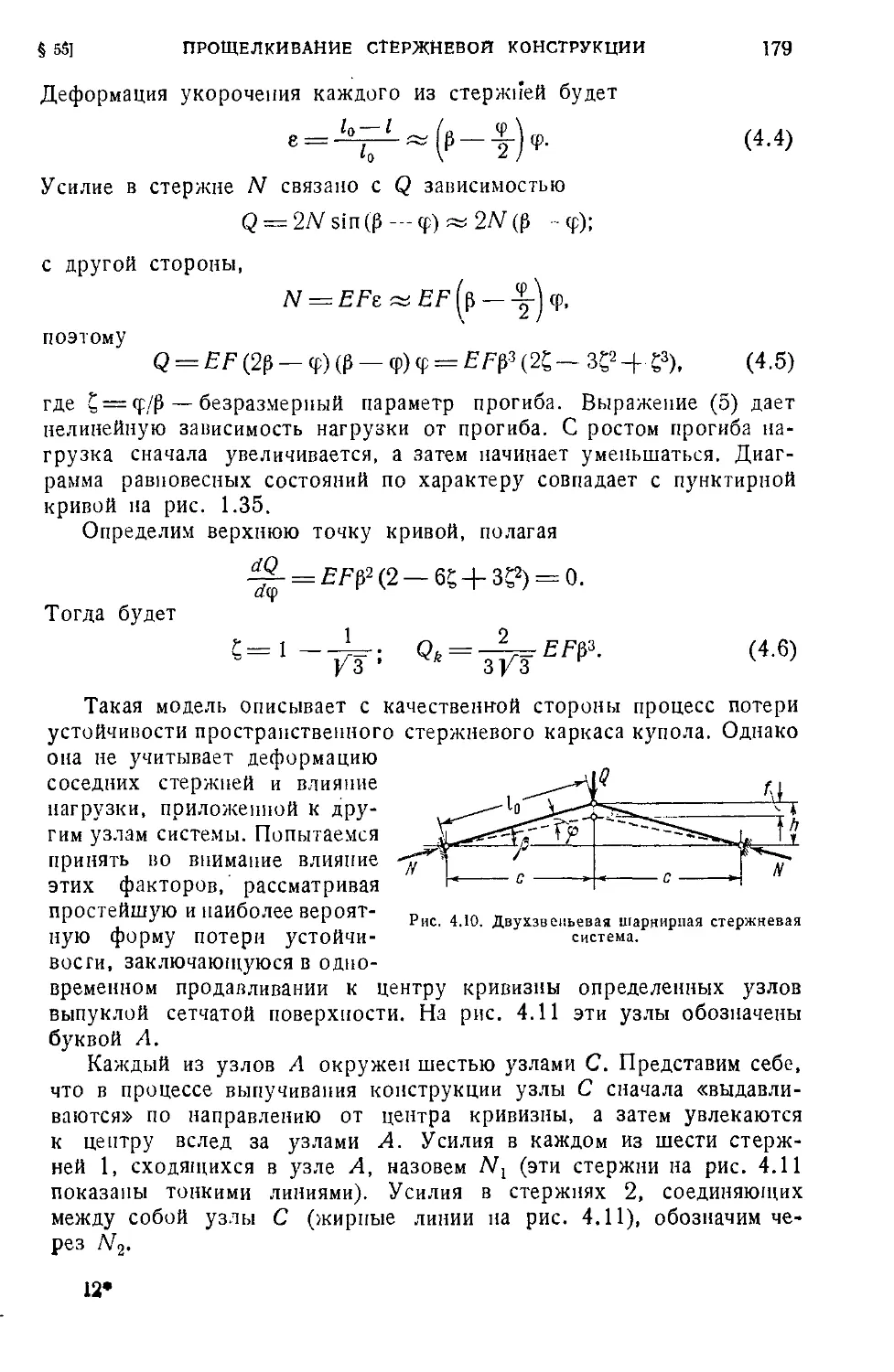
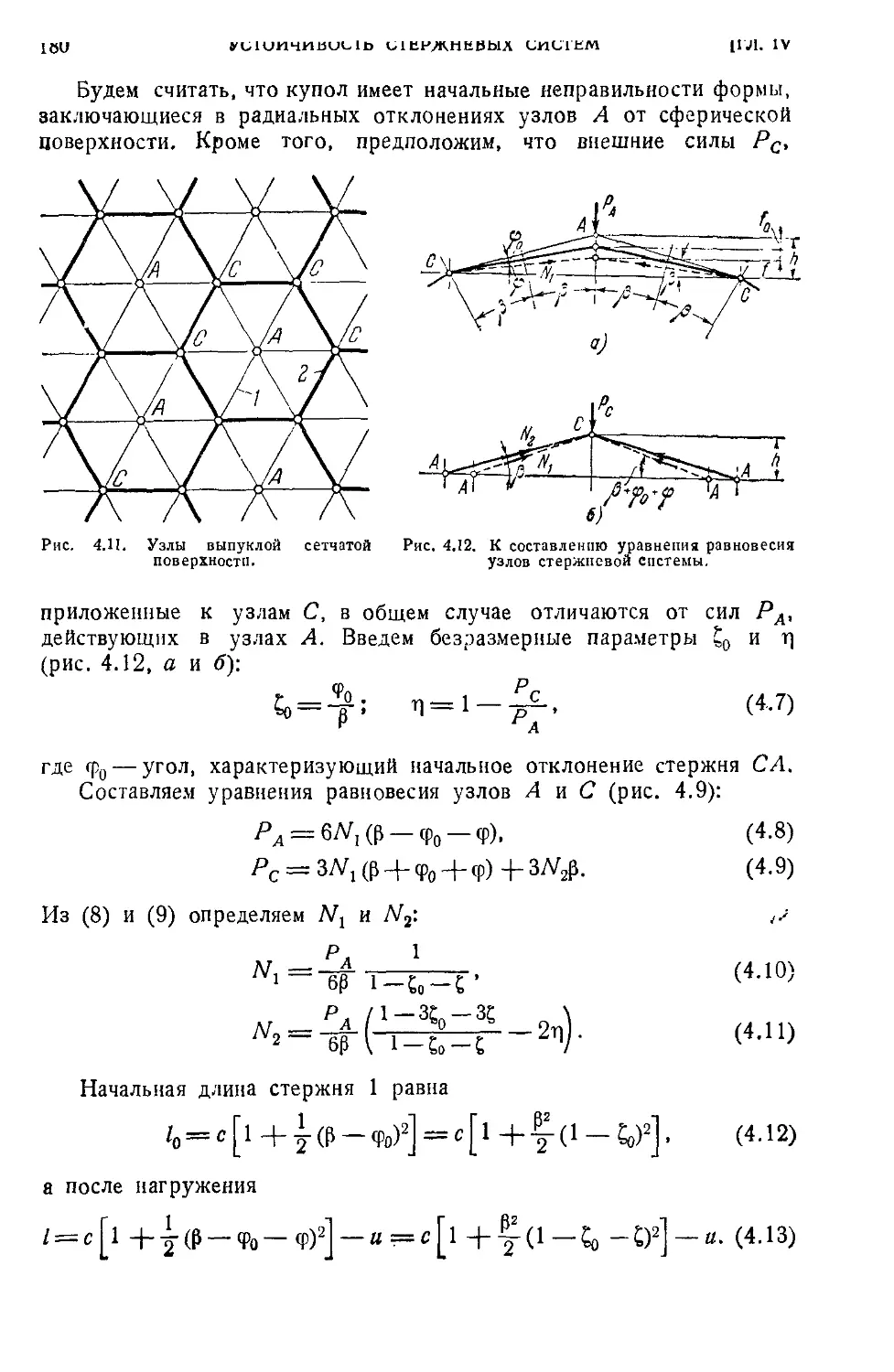
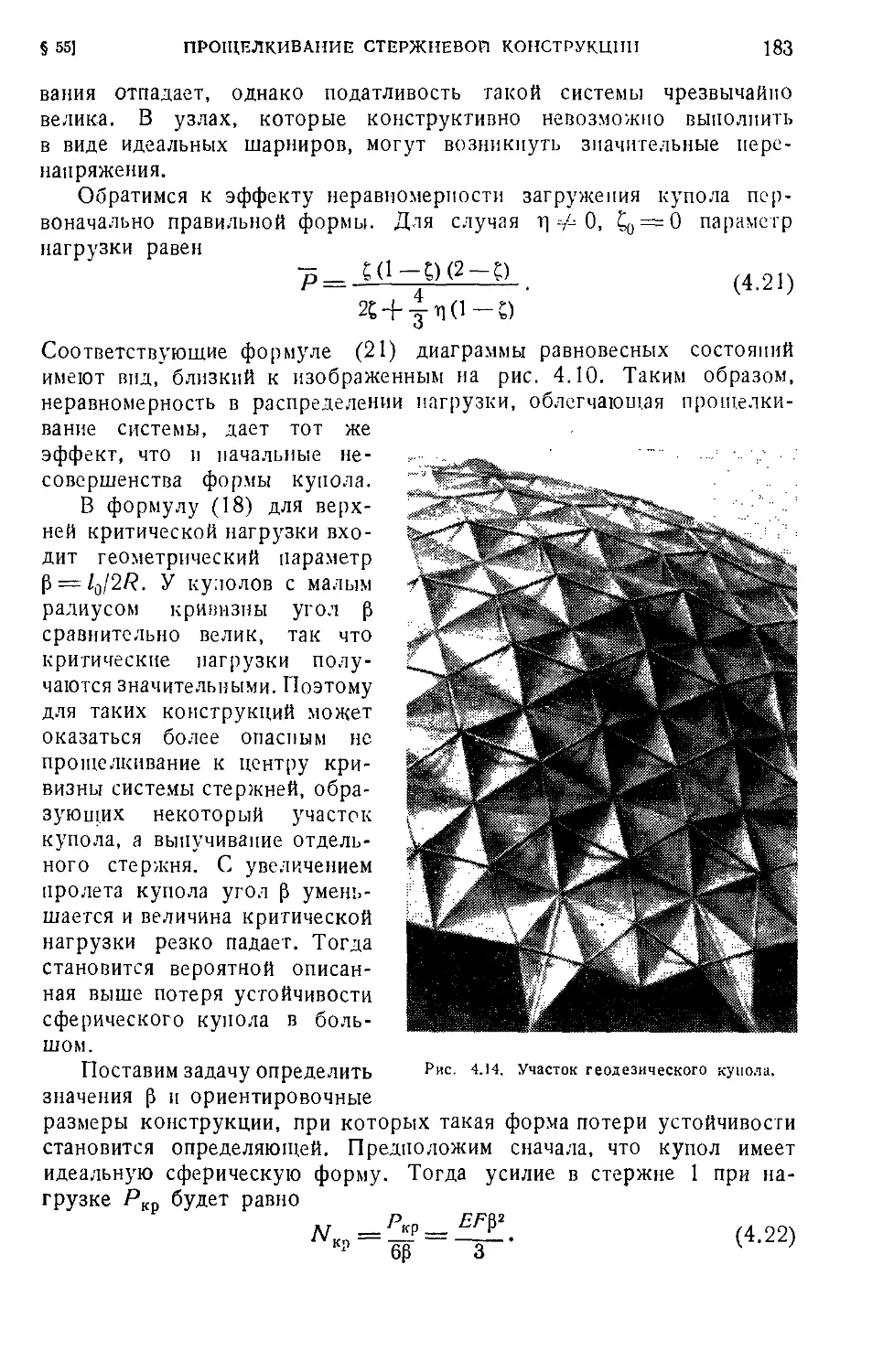
§ 55. Прощелкивание стержневой конструкции 177
Глава V. Тонкостенные стержни. Устойчивость плоской формы
изгиба 185
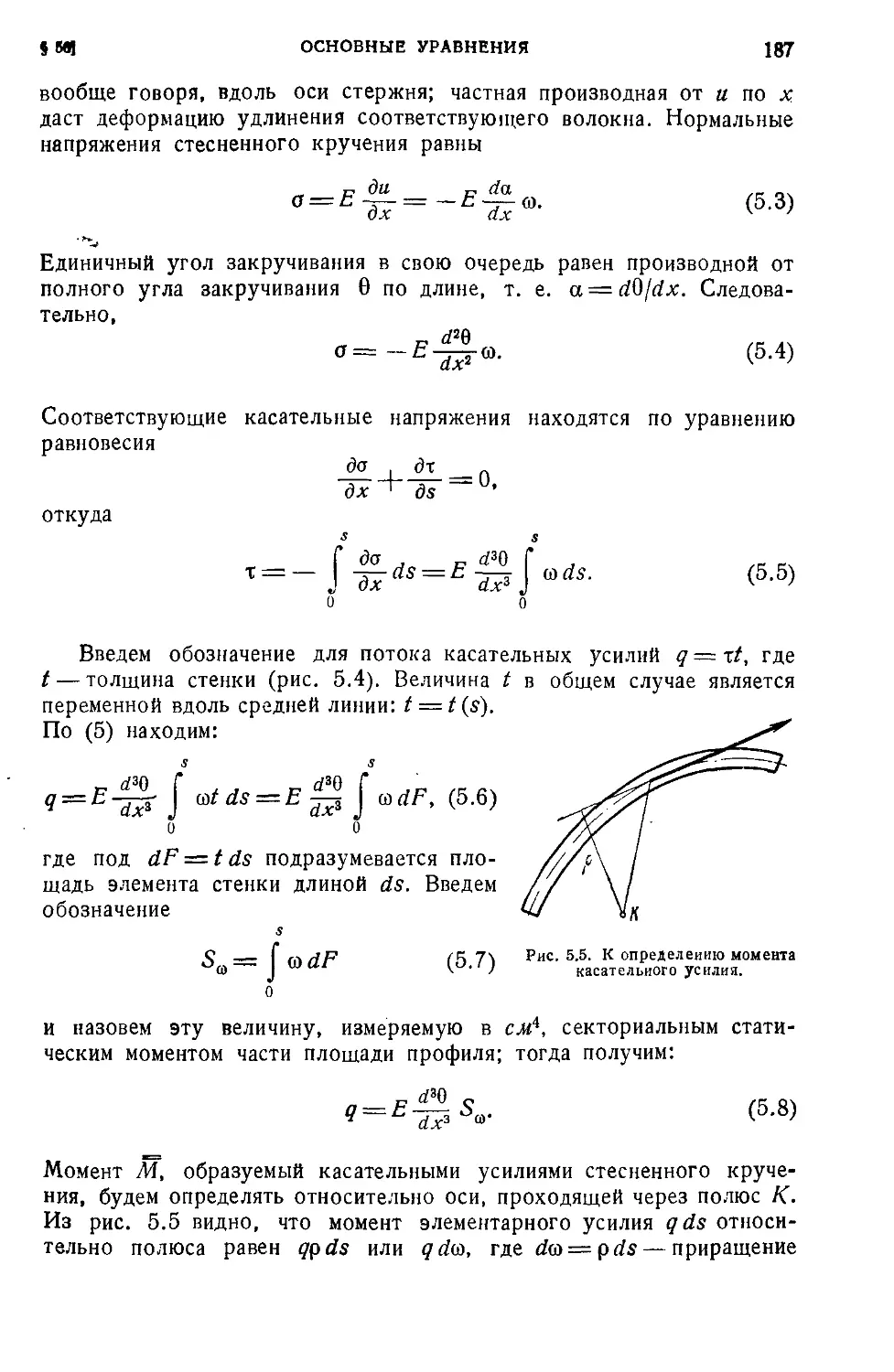
§ 56. Основные уравнения 185
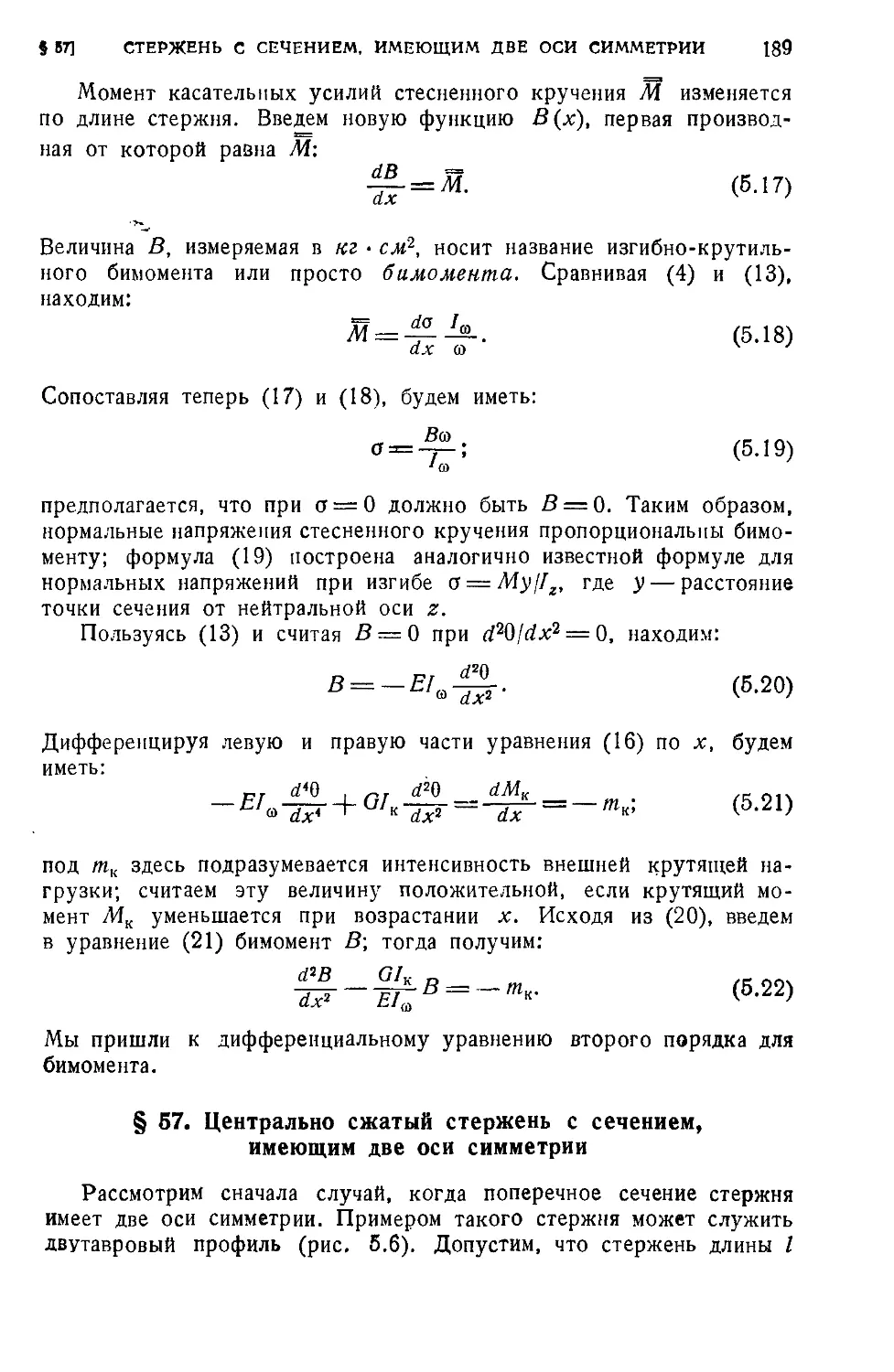
§ 57. Центрально сжатый стержень с сечением, имеющим две оси
симметрии ■ 189
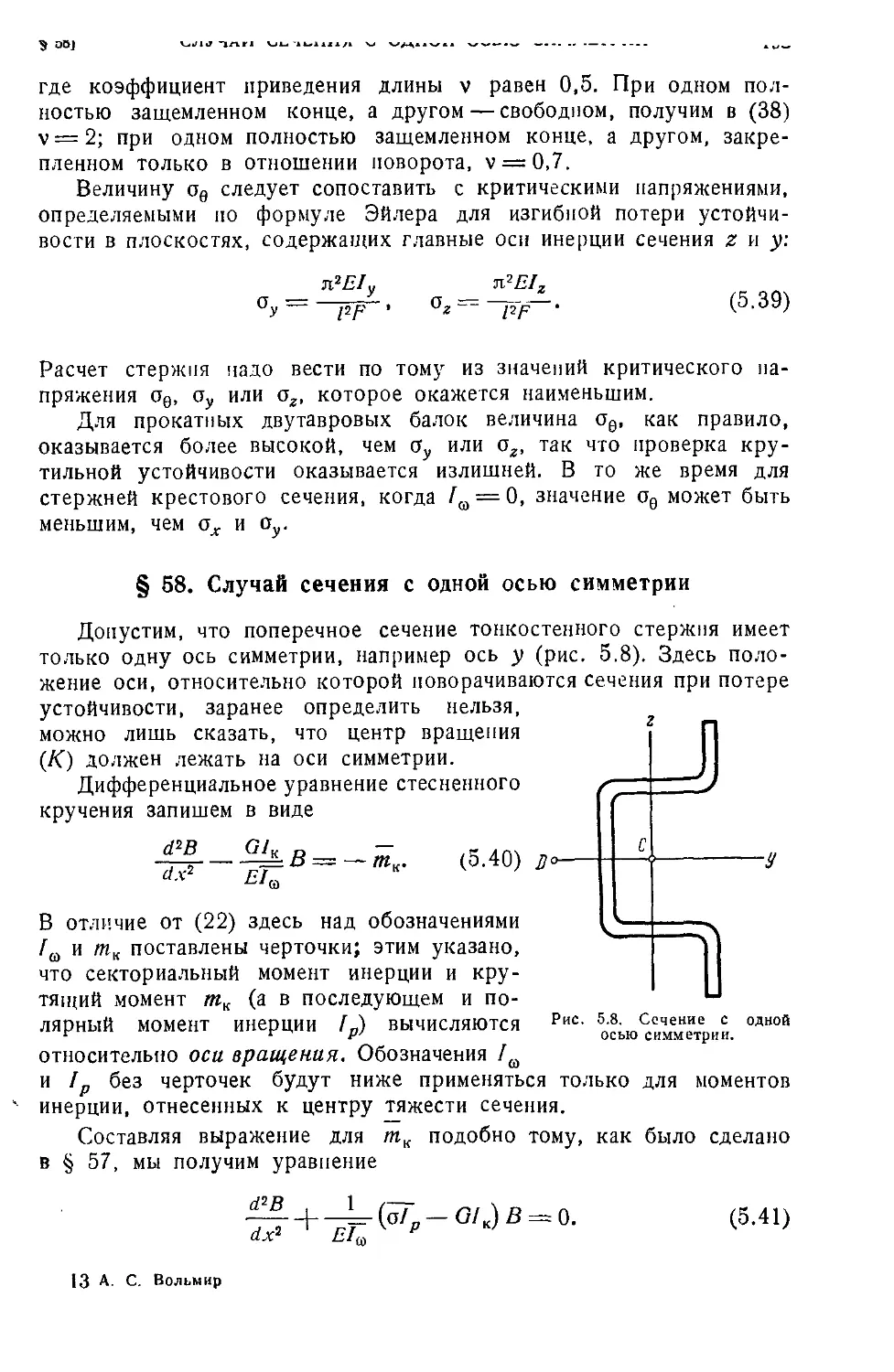
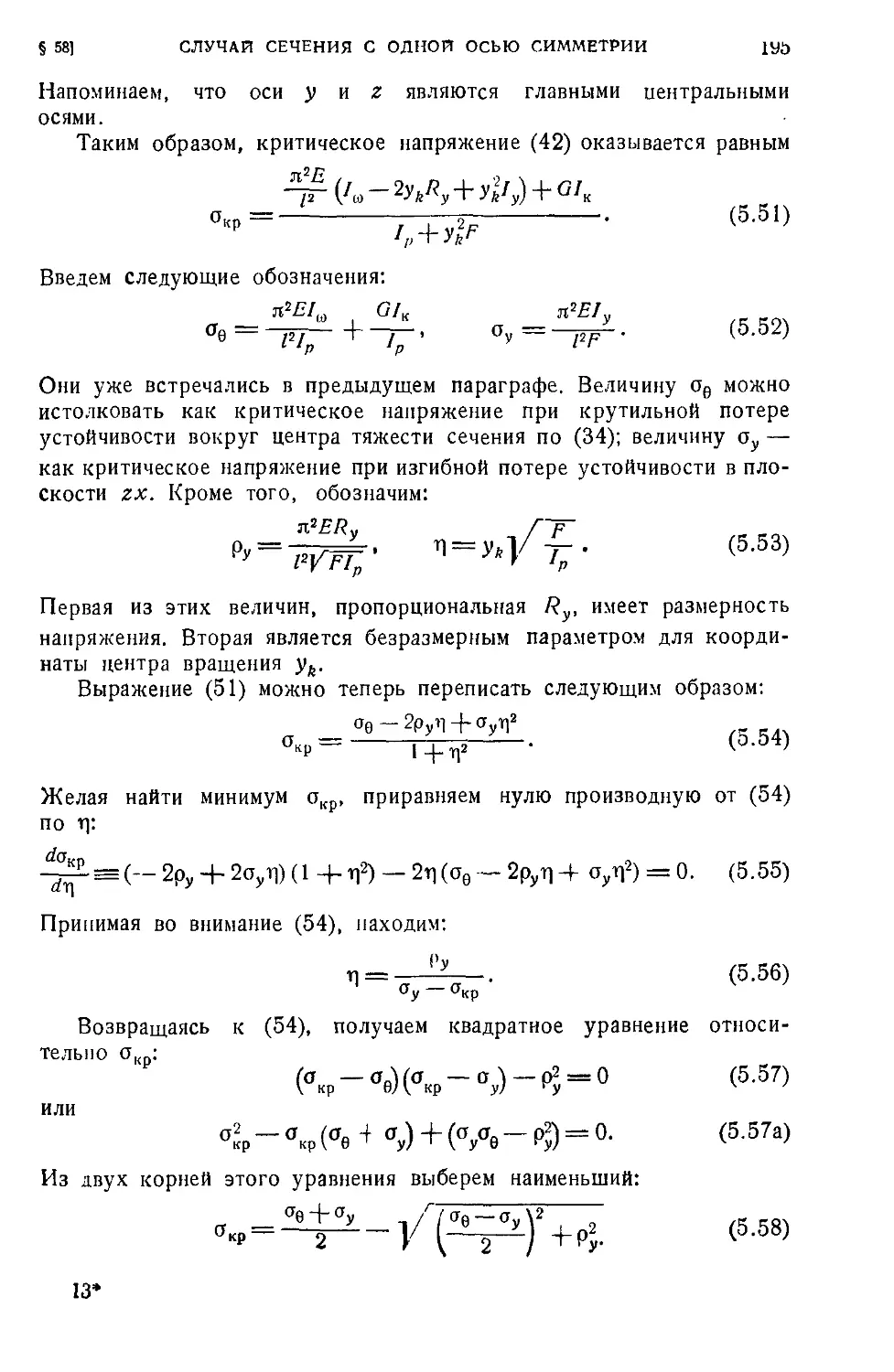
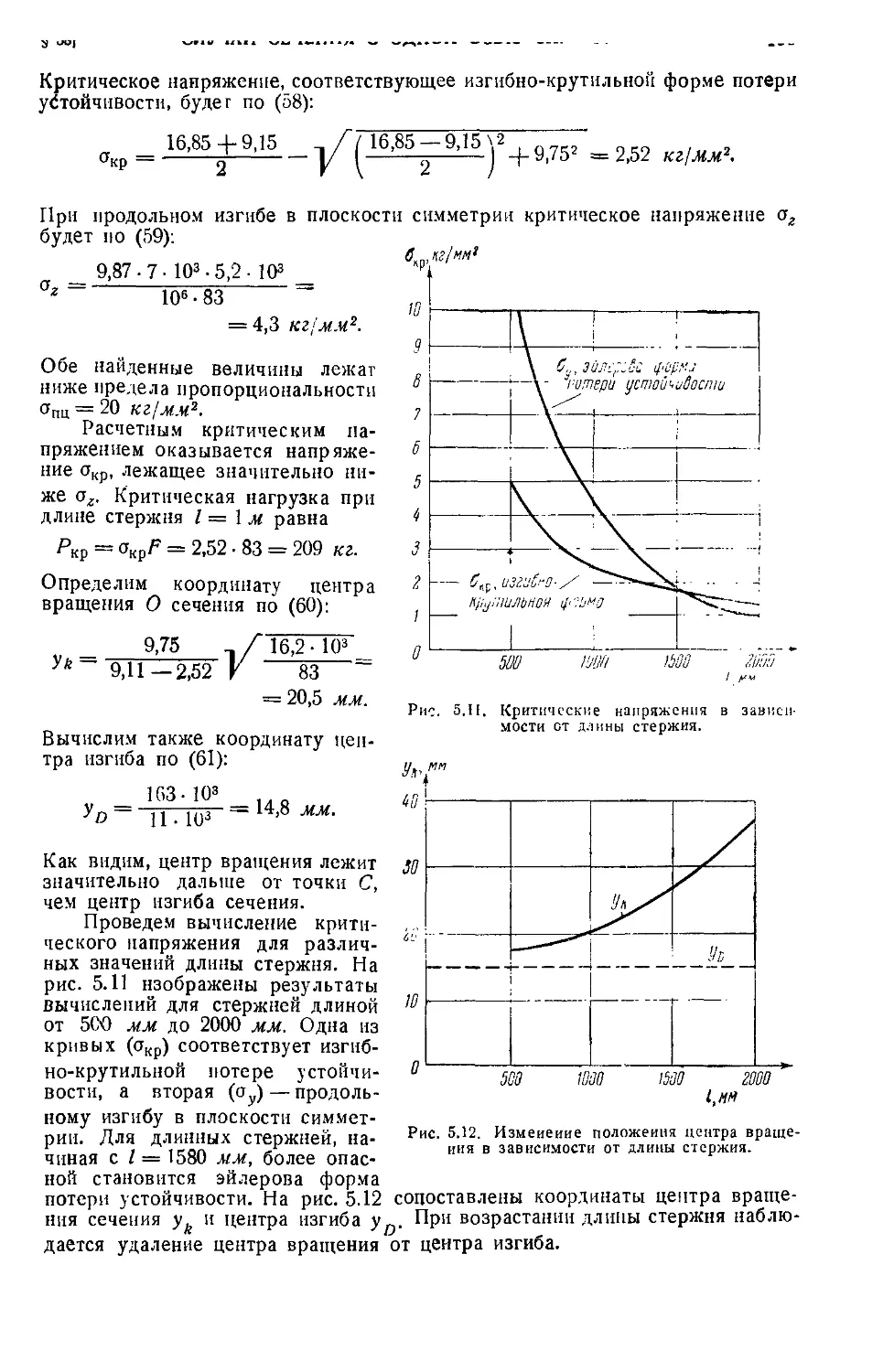
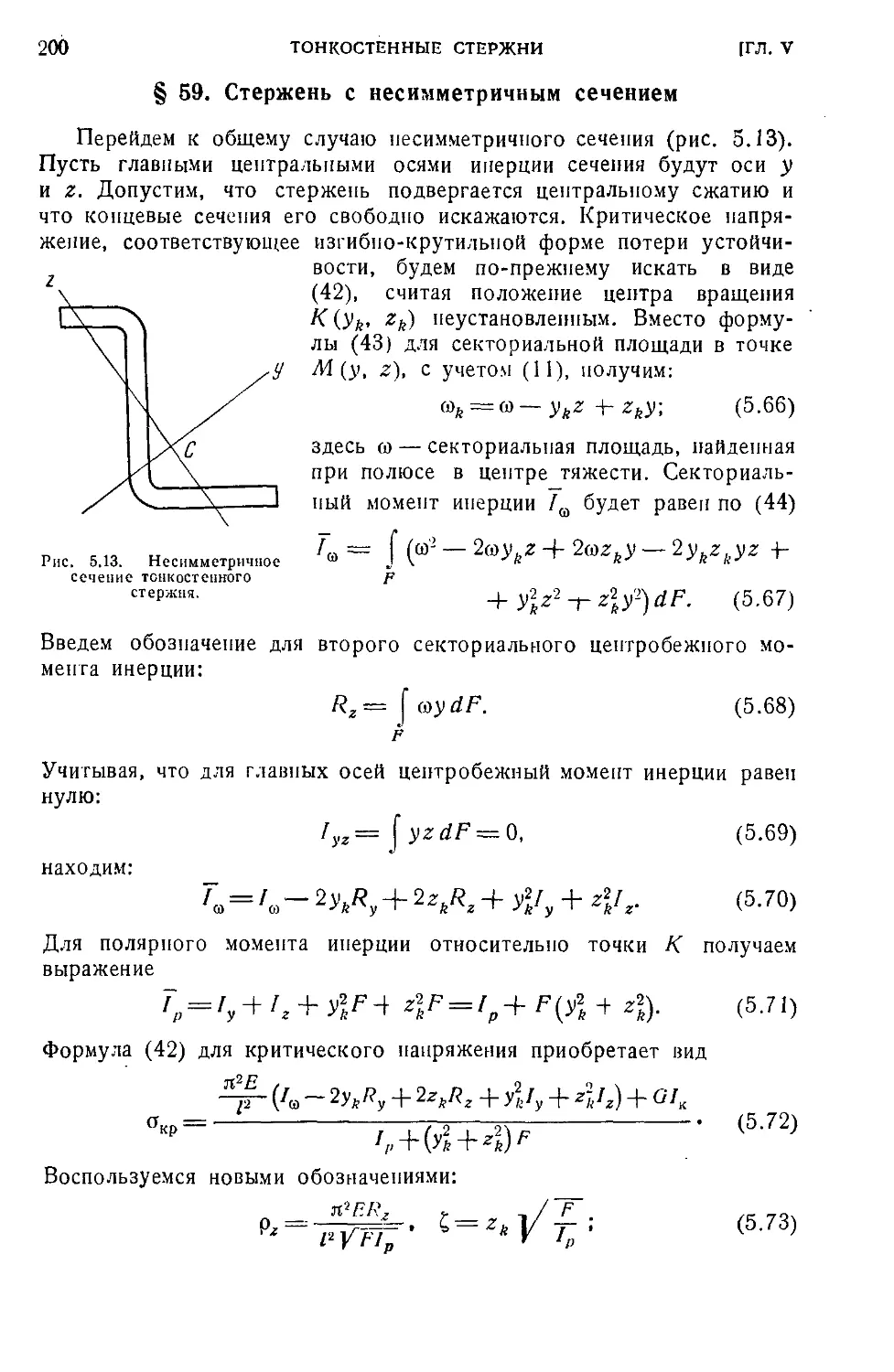
§ 58. Случай сечеиия с одной осью симметрии 193
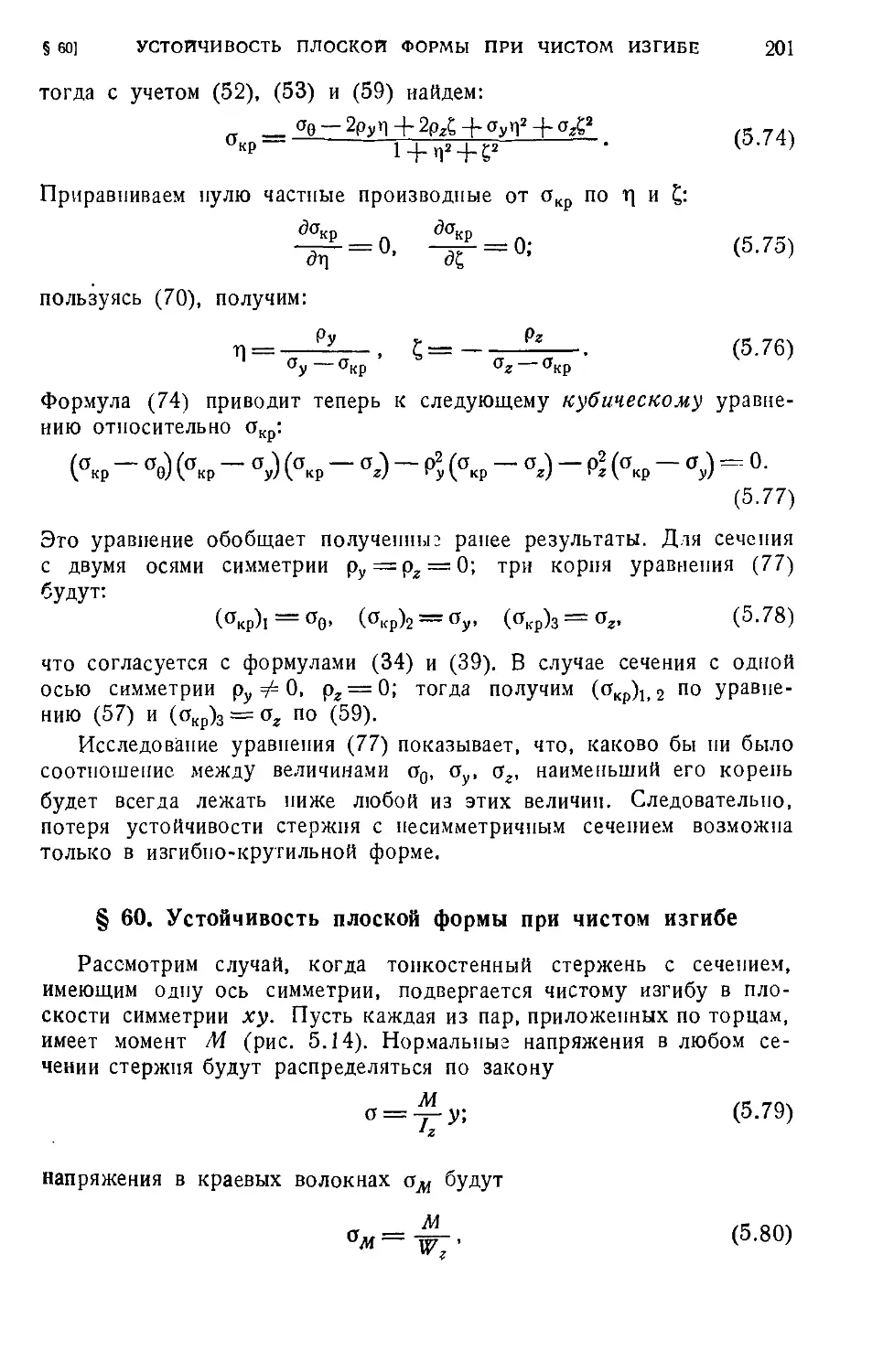
§ 59. Стержень с несимметричным еечеиием 200
§ 60. Устойчивость плоской формы при чистом изгибе 201
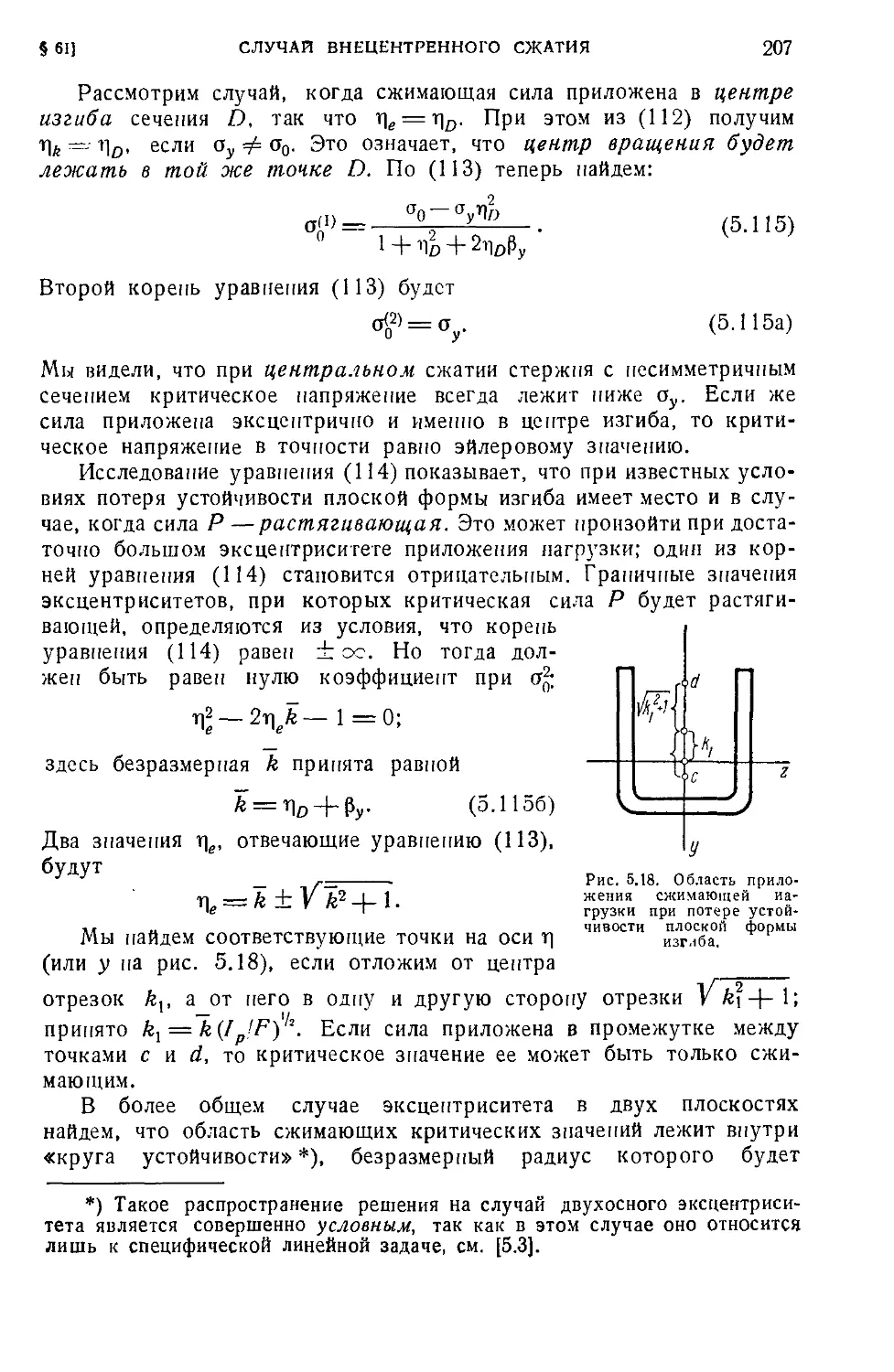
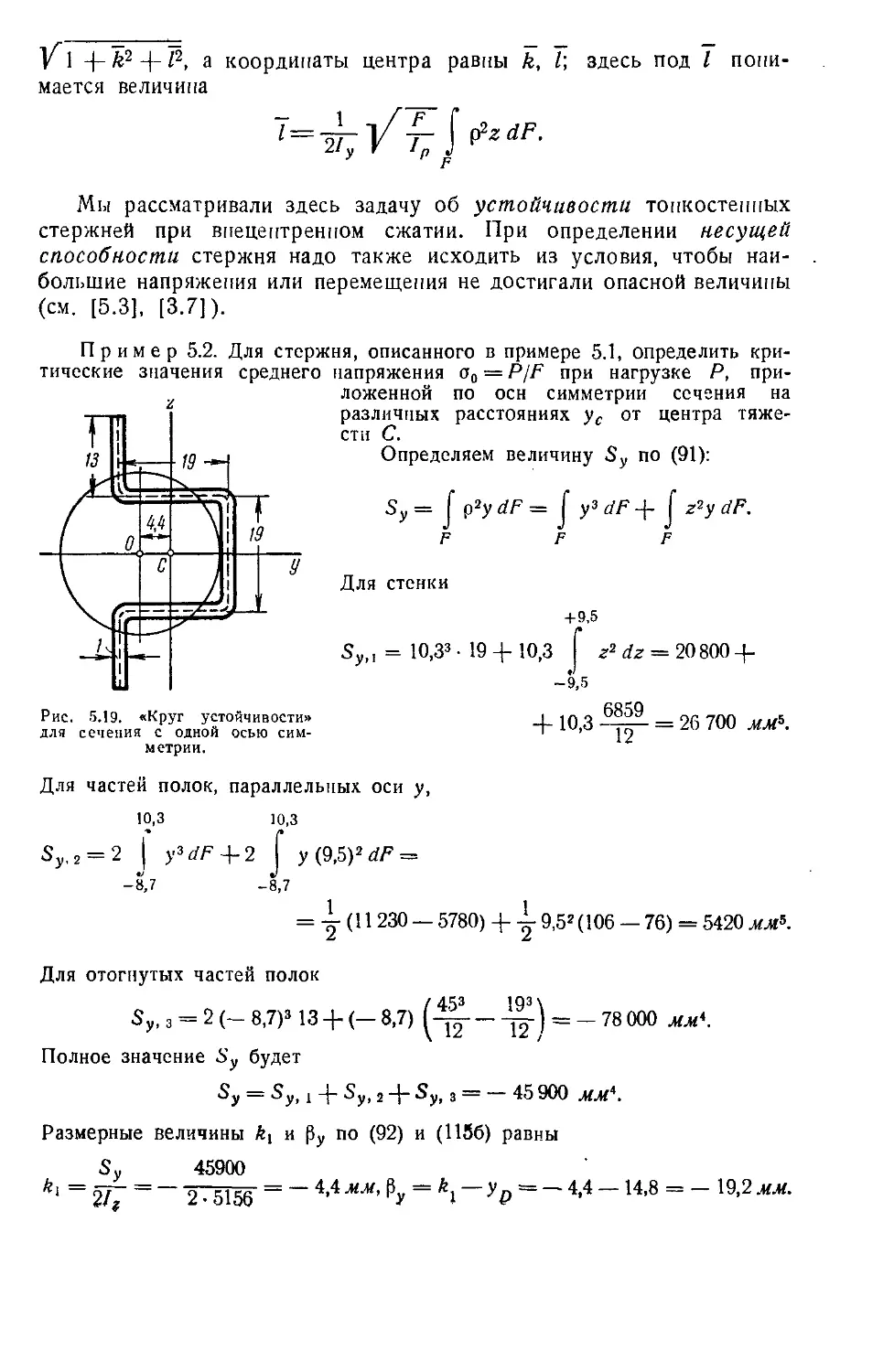
§ 61. Случай виецеитренного сжатия 205
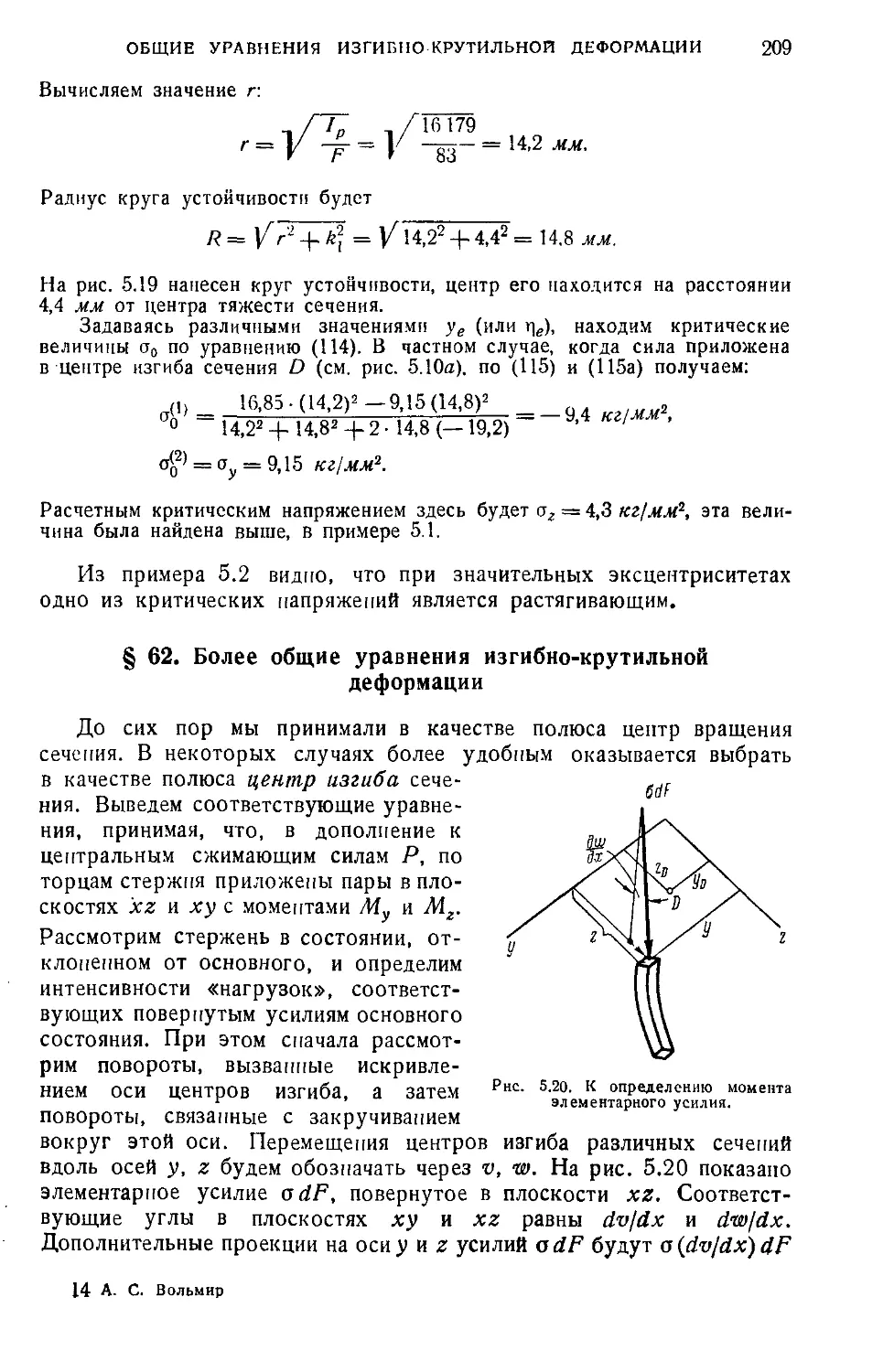
§ 62. Более общие уравнения изгибно-крутильной деформации . . . 209
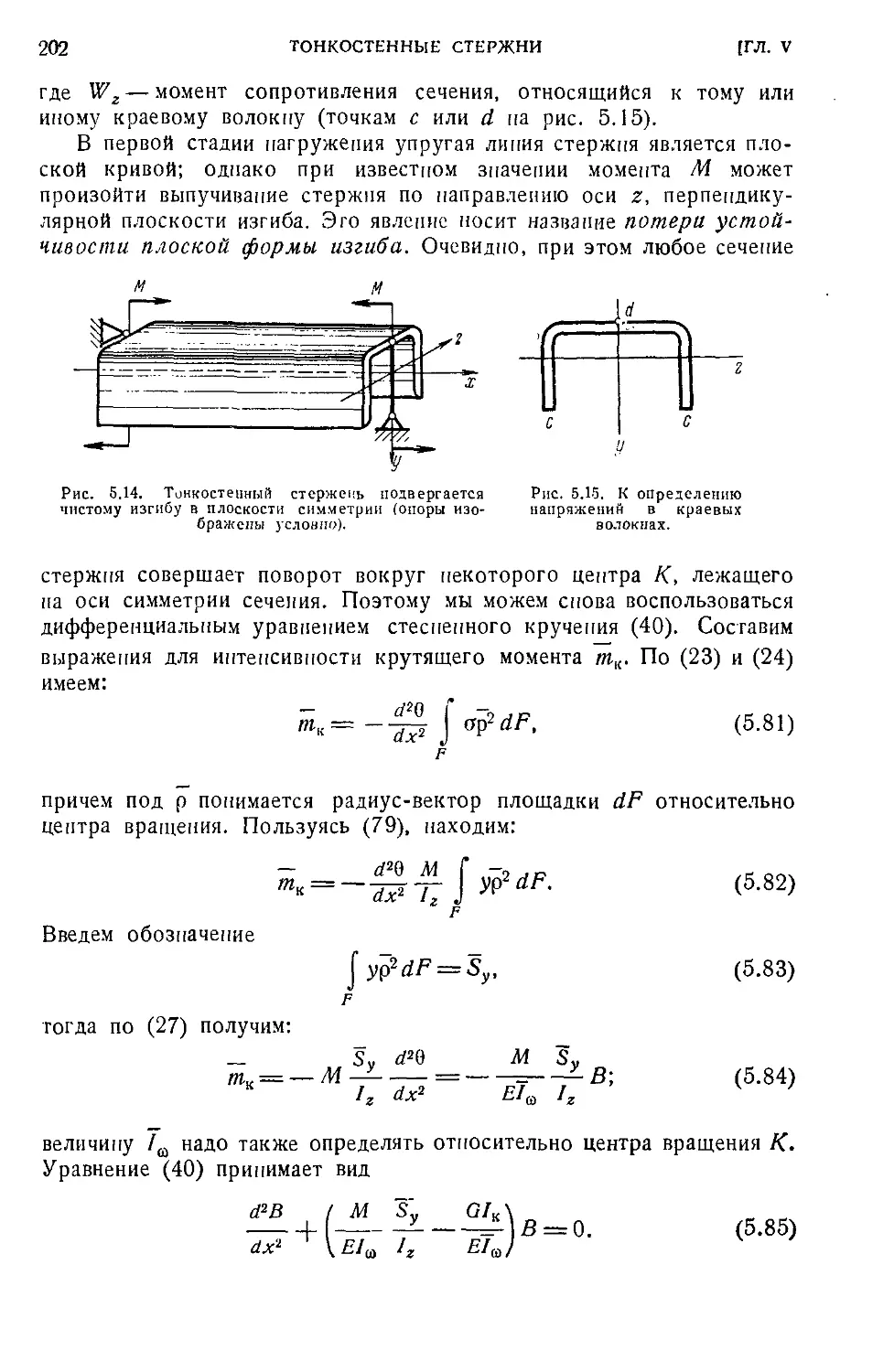
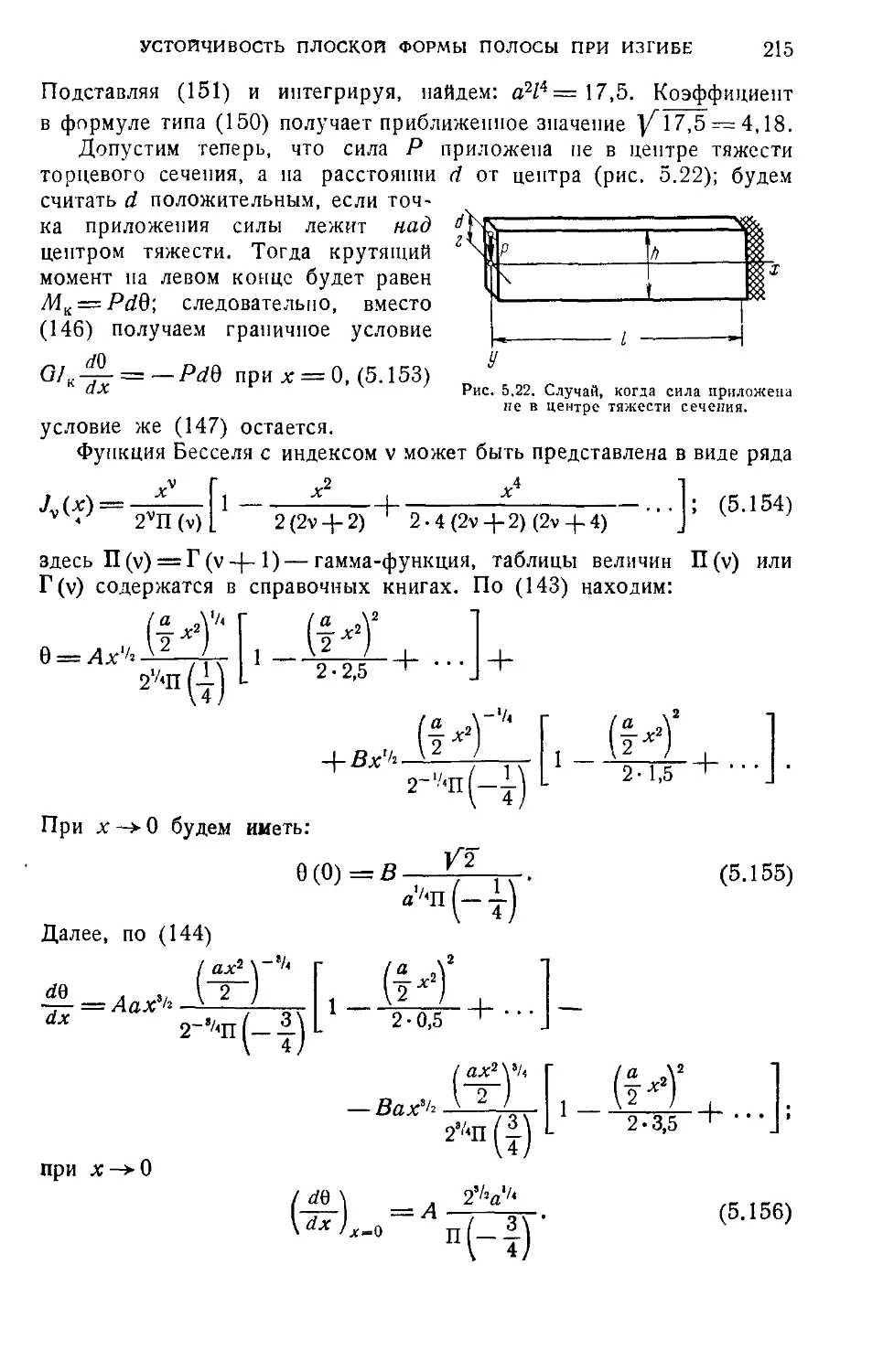
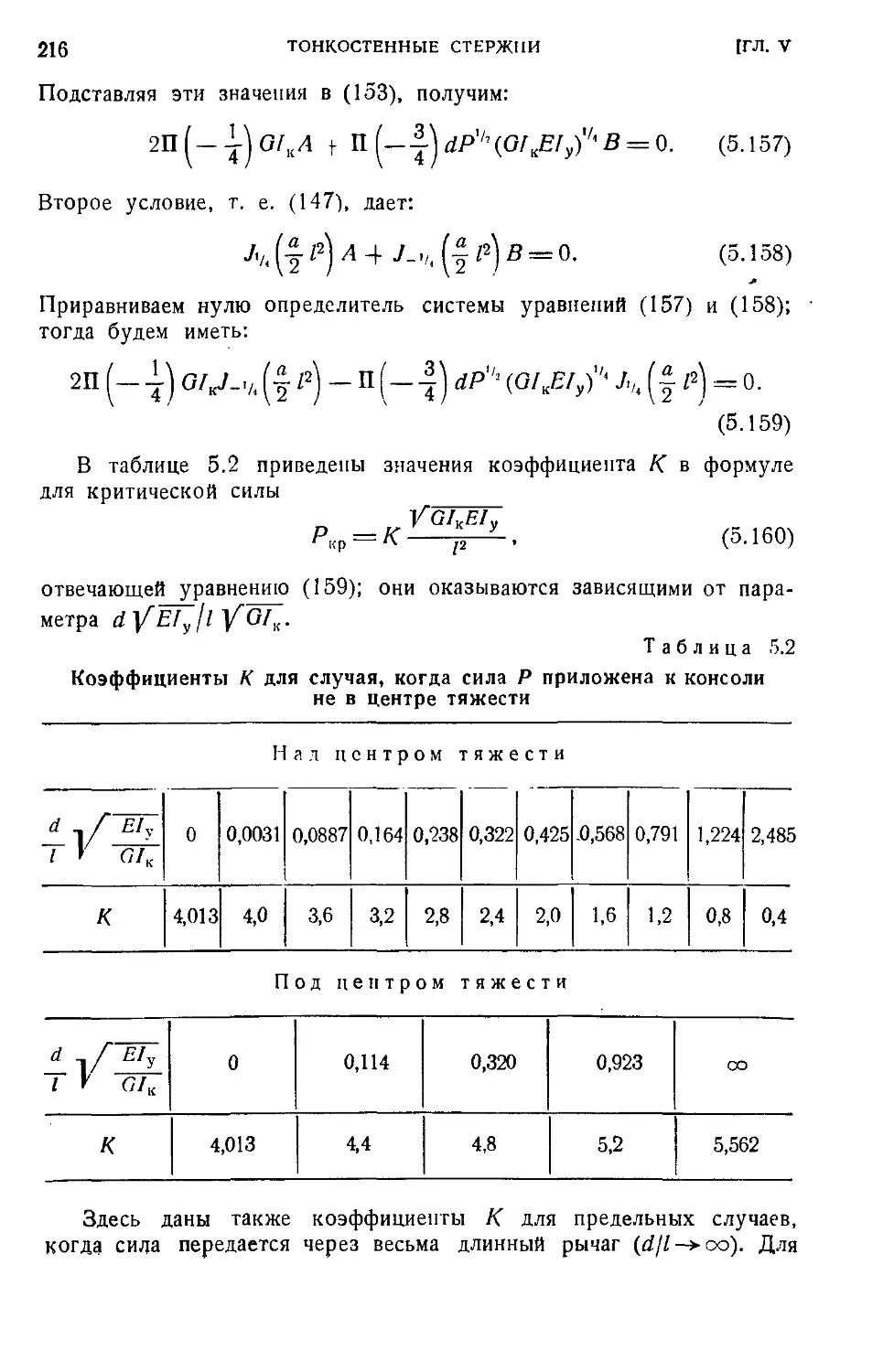
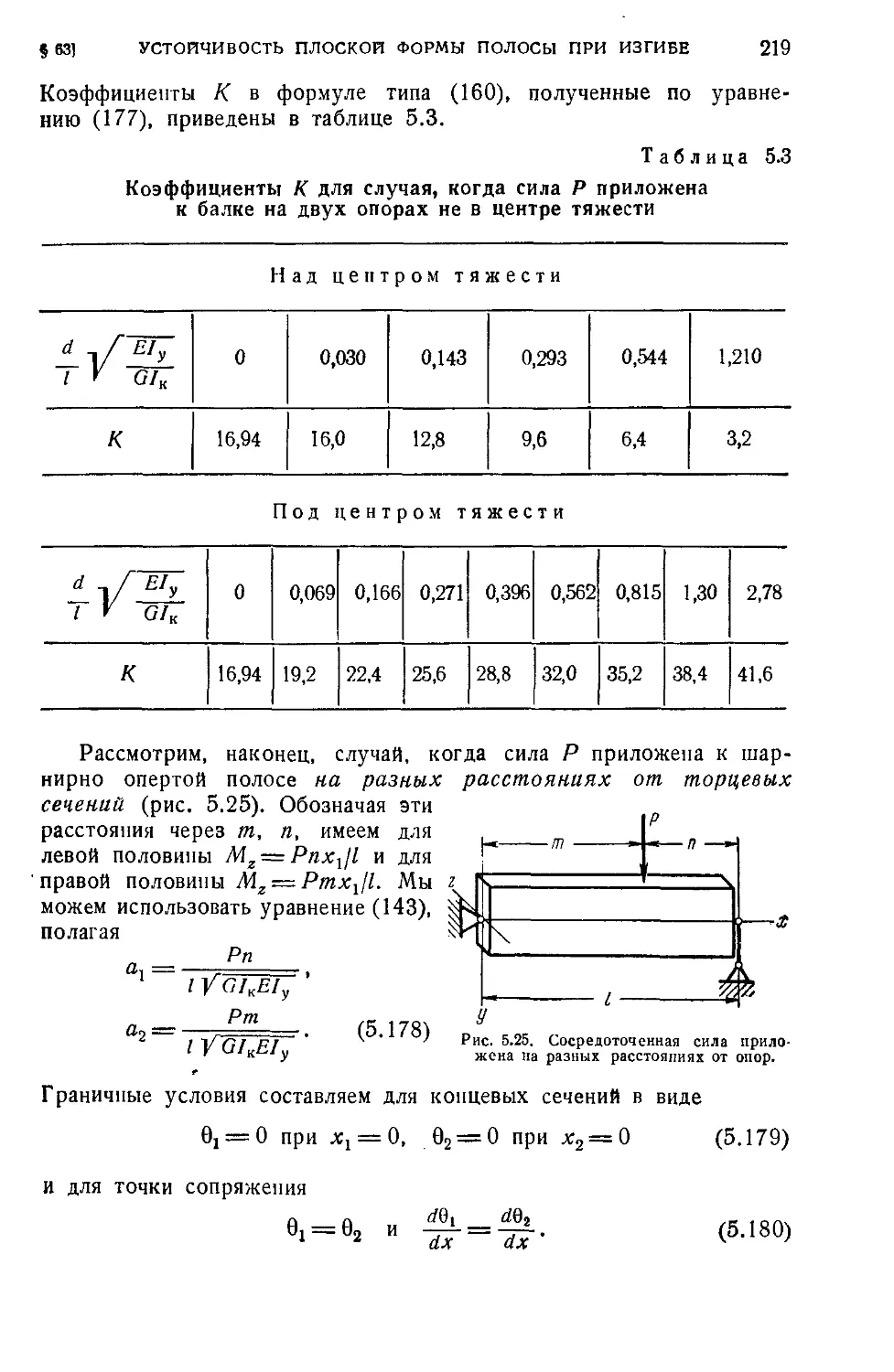
§ 63. Устойчивость плоской формы полосы при изгибе 212
§ 64. Поперечный изгиб балок с сечением, имеющим две оси
симметрии 220
Глава VI. Влияние температуры. Продольный изгиб при
ползучести 223
§ 65. Задачи об устойчивости стержней, связанные с учетом
температуры 223
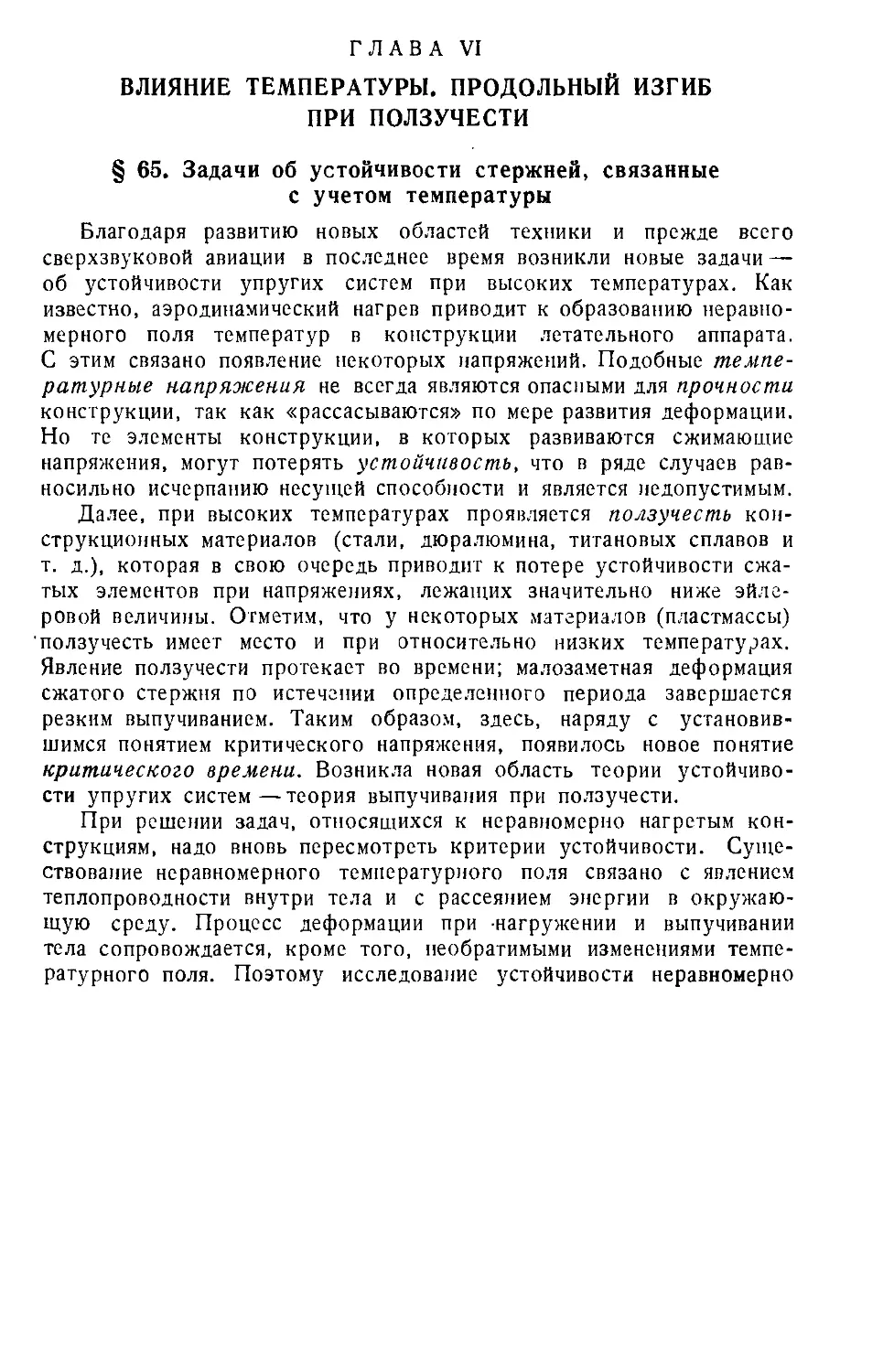
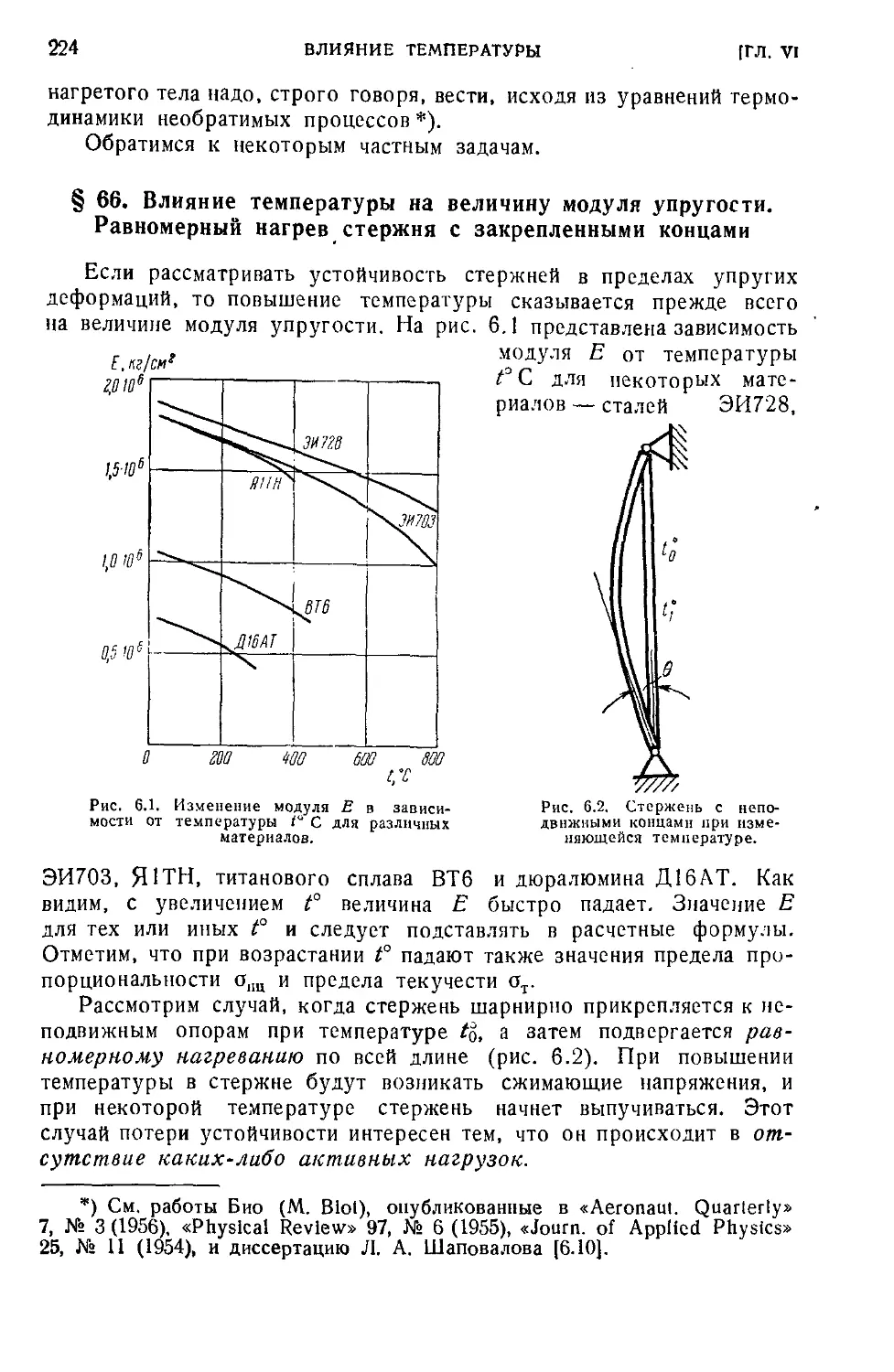
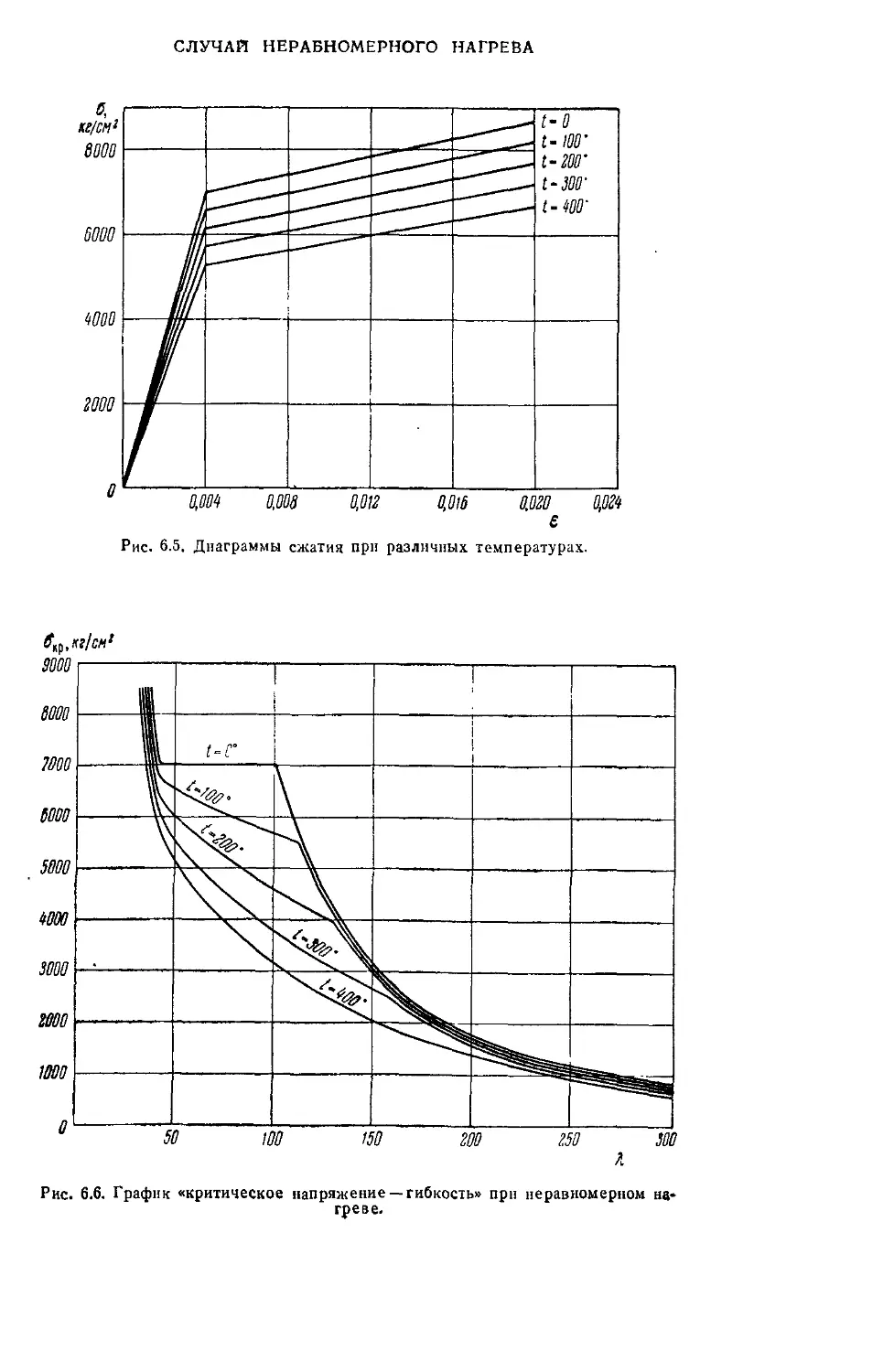
§ 66. Влияние температуры на величину модуля упругости.
Равномерный нагрев стержня с закрепленными концами 224
ОГЛАВЛЕНИЕ
5
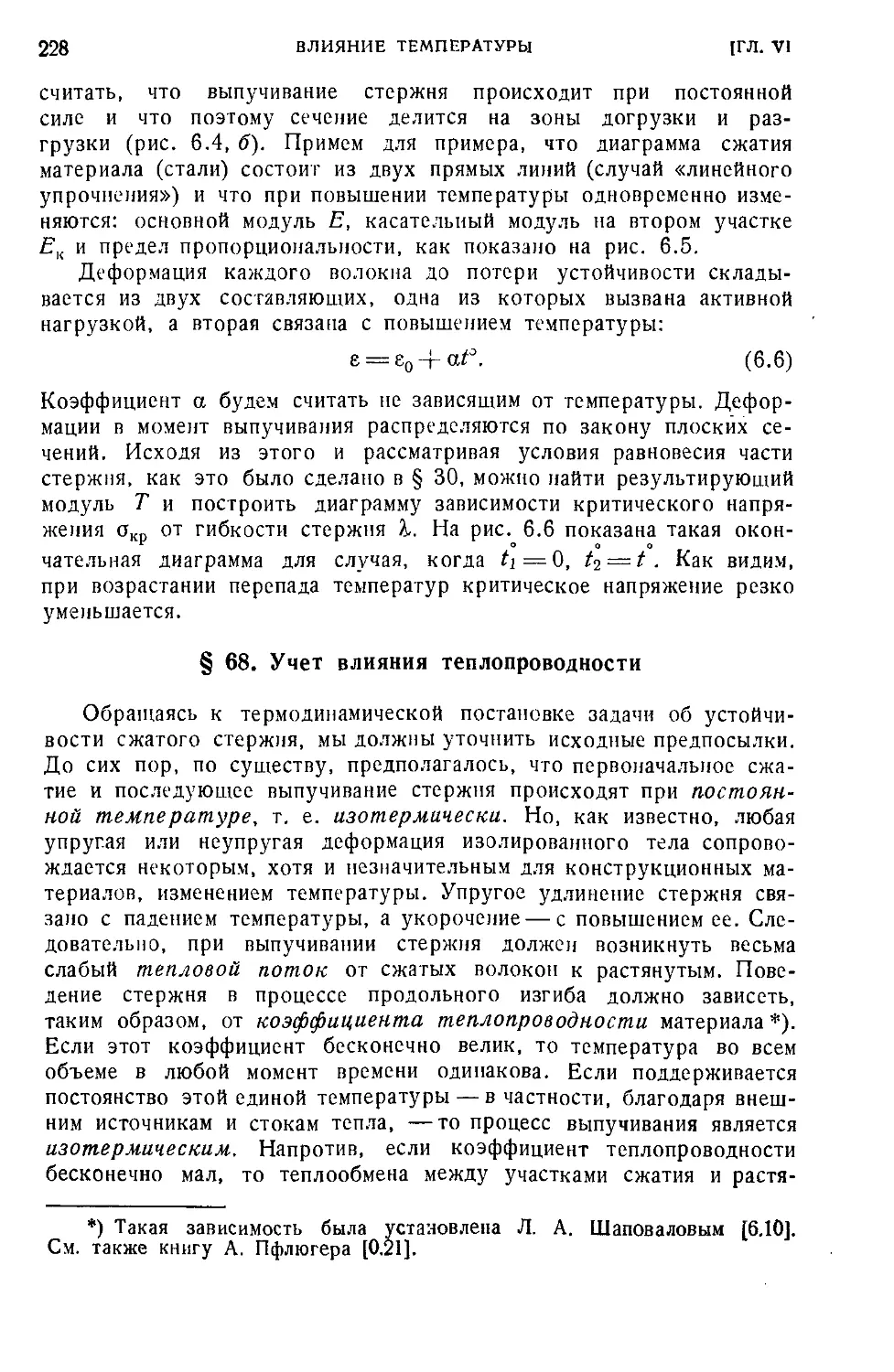
s 67. Случай неравномерного нагрева 226
I 68. Учет влияния теплопроводности 228
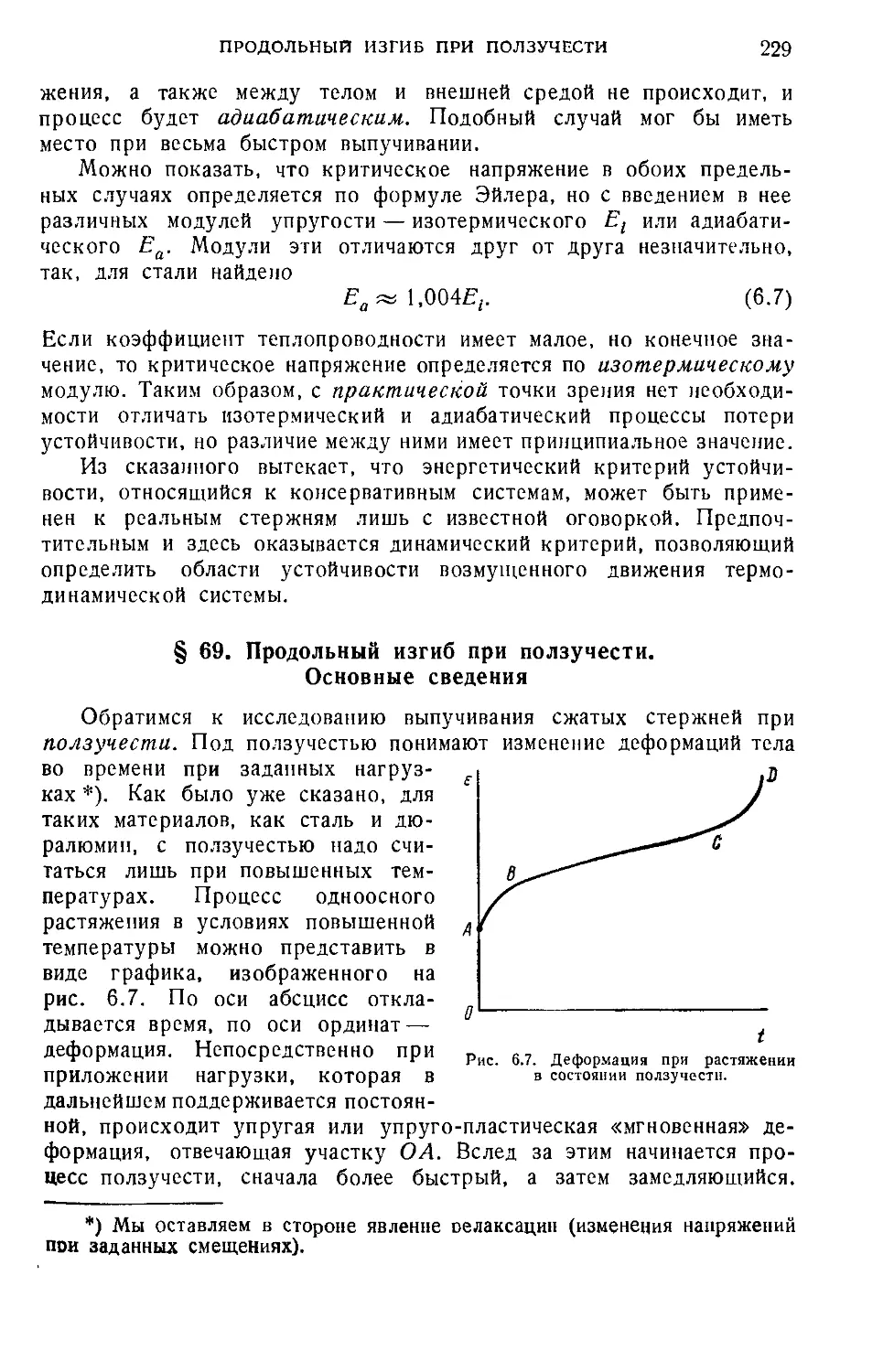
I 69. Продольный изгиб при ползучести. Основные сведения . . . 229
I 70. Критерии выпучивания при ползучести 233
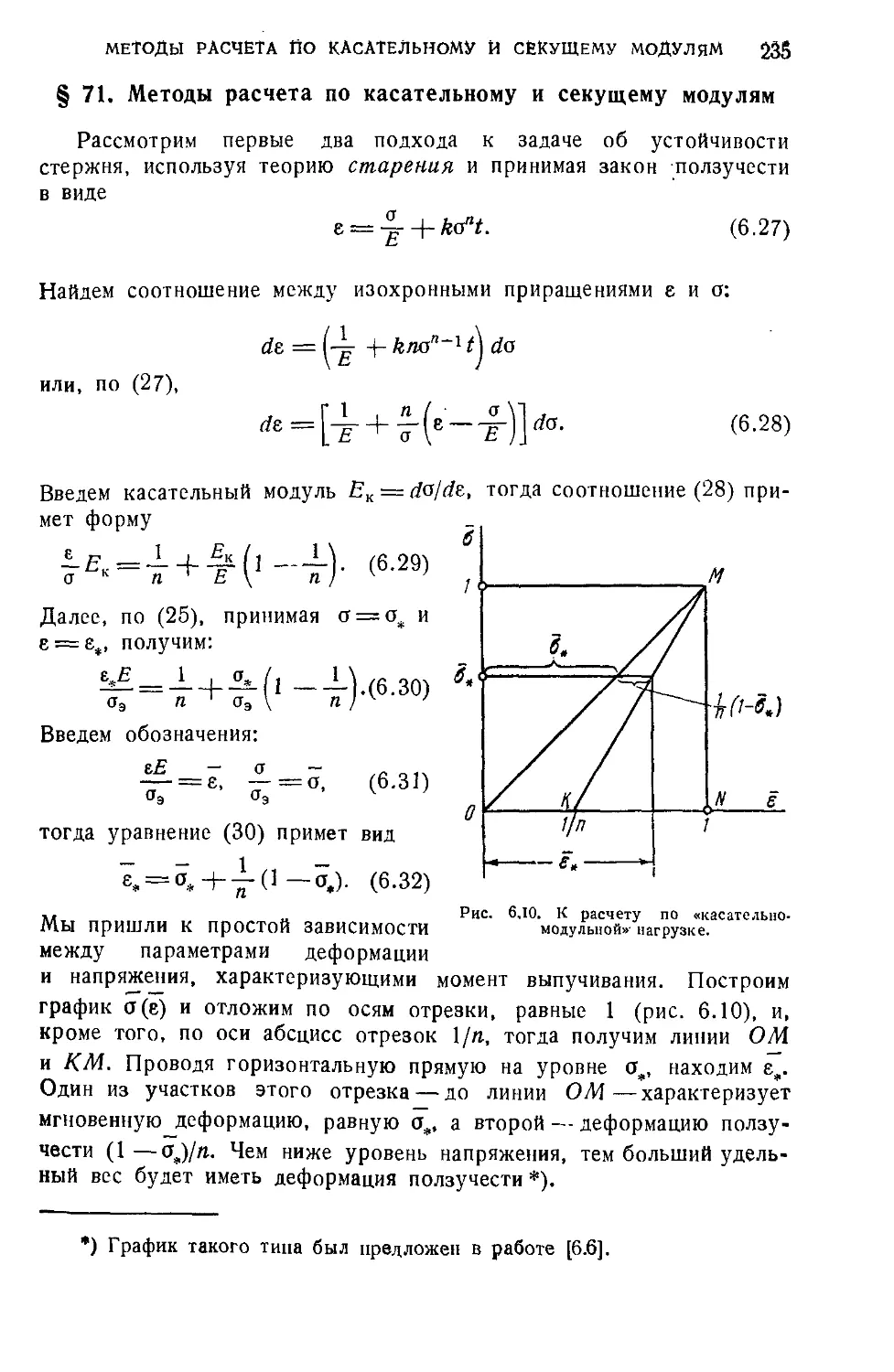
I 71. Методы расчета но касательному и секущему модулям . . . 235
§ 72. Динамический критерий . • • 237
8 73. Критерий начальных несовершенств 238
8 74. Формулы для критического времени в случае двутаврового
сечения 249
§ 75. Сопоставление различных' критериев выпучивания 256
Глава VII. Устойчивость стержней при динамическом нагружении 258
§ 76. Классификация динамических задач 258
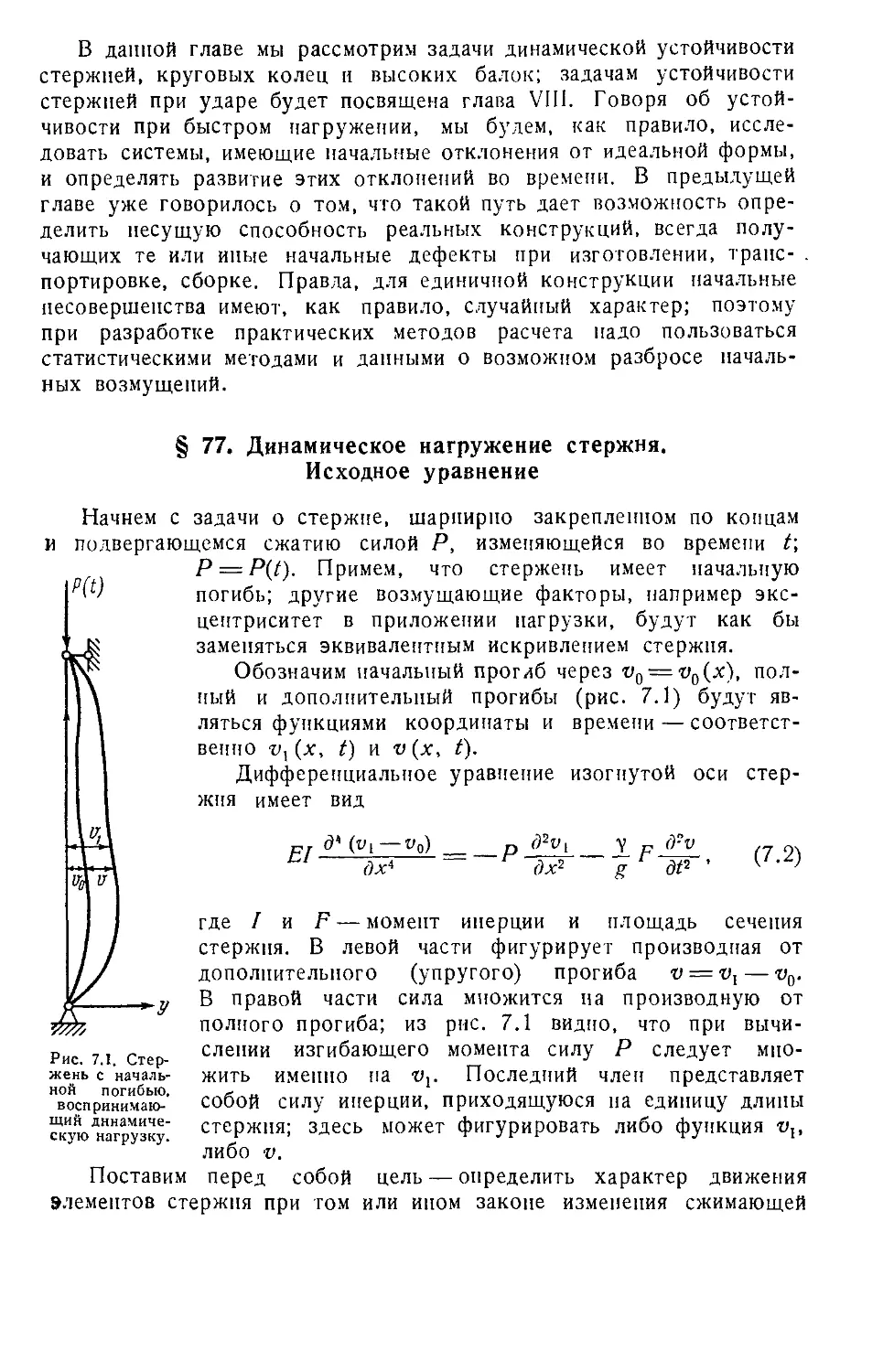
§ 77. Динамическое нагружение стержня. Исходное уравнение . . . 260
§ 78. Случай внезапного приложения нагрузки 262
§ 79. Нагрузка, быстро возрастающая во времени 264
§ 80. Исследование энергии системы 266
§ 81. Решение в бесселевых функциях 269
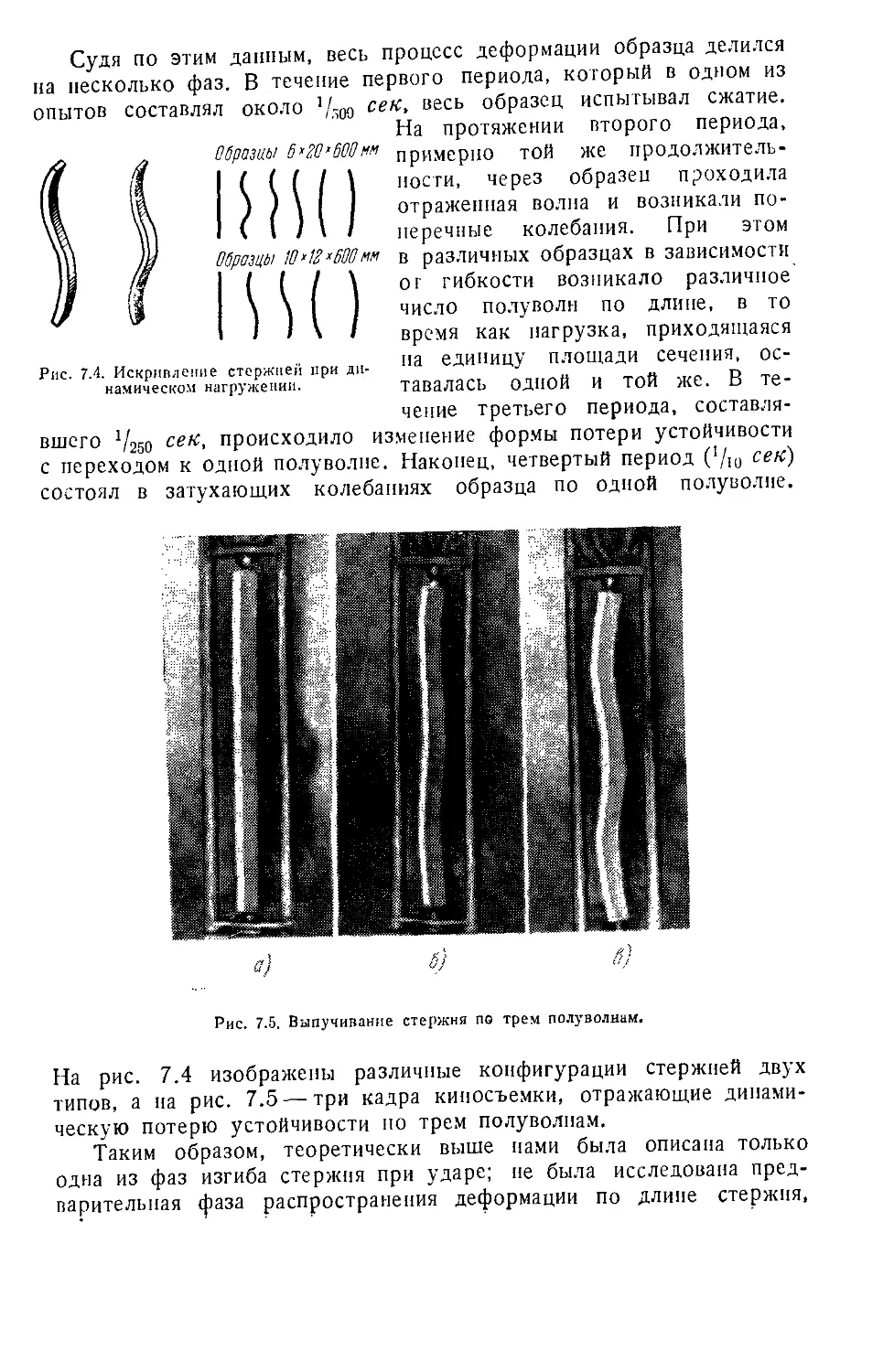
§ 82. Эксперименты но продольному удару 271
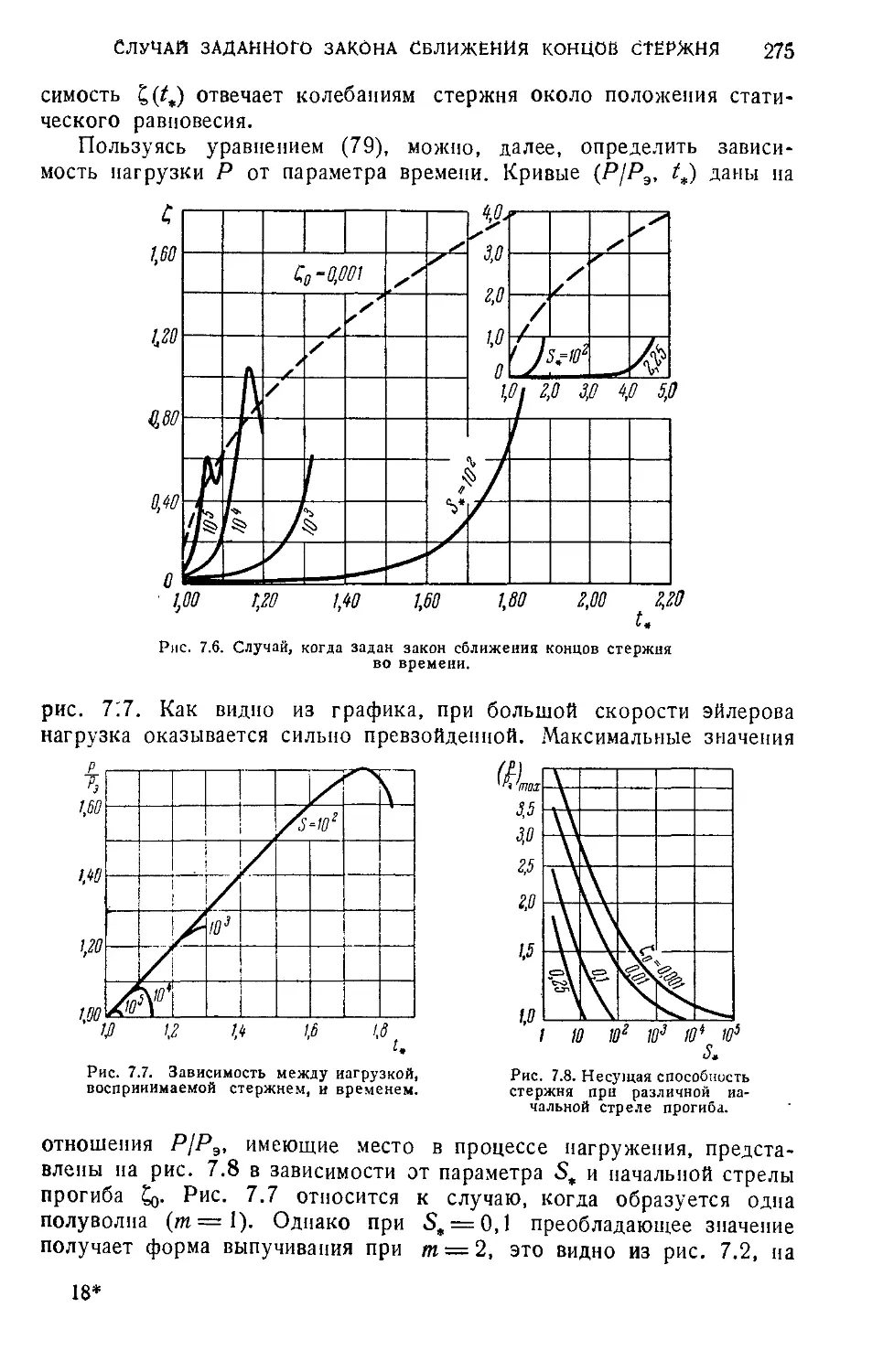
§ 83. Случай заданного закона сближения концов стержня .... 273
§ 84. Поведение стержня при действии импульсивной нагрузки . . 276
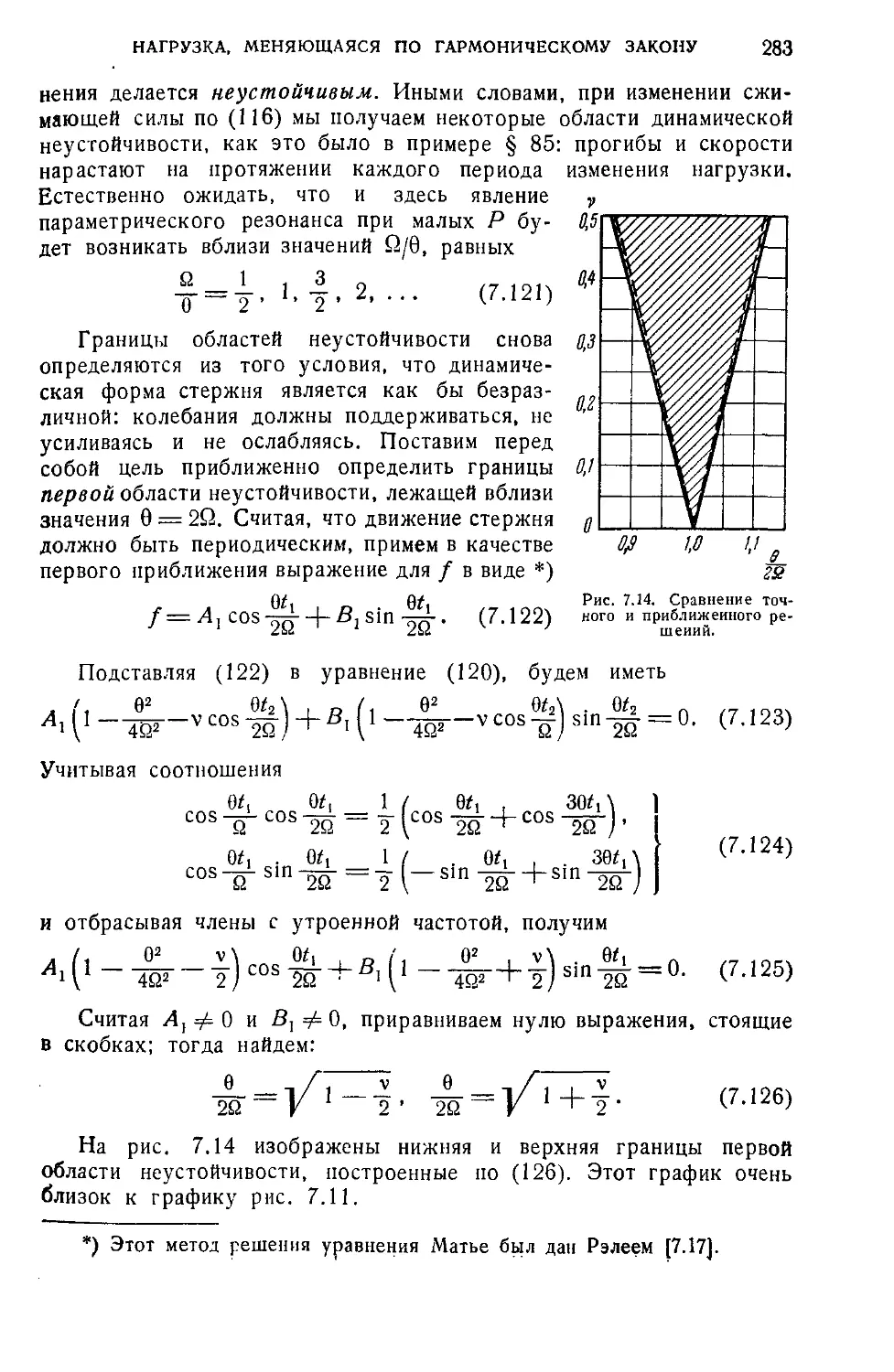
§ 85. Случай пульсирующей нагрузки. Приближенное решение . . 277
§ 86. Нагрузка, меняющаяся но гармоническому закону.
Параметрические колебания 282
§ 87. Устойчивость сжатого кольца при динамическом нагружении 285
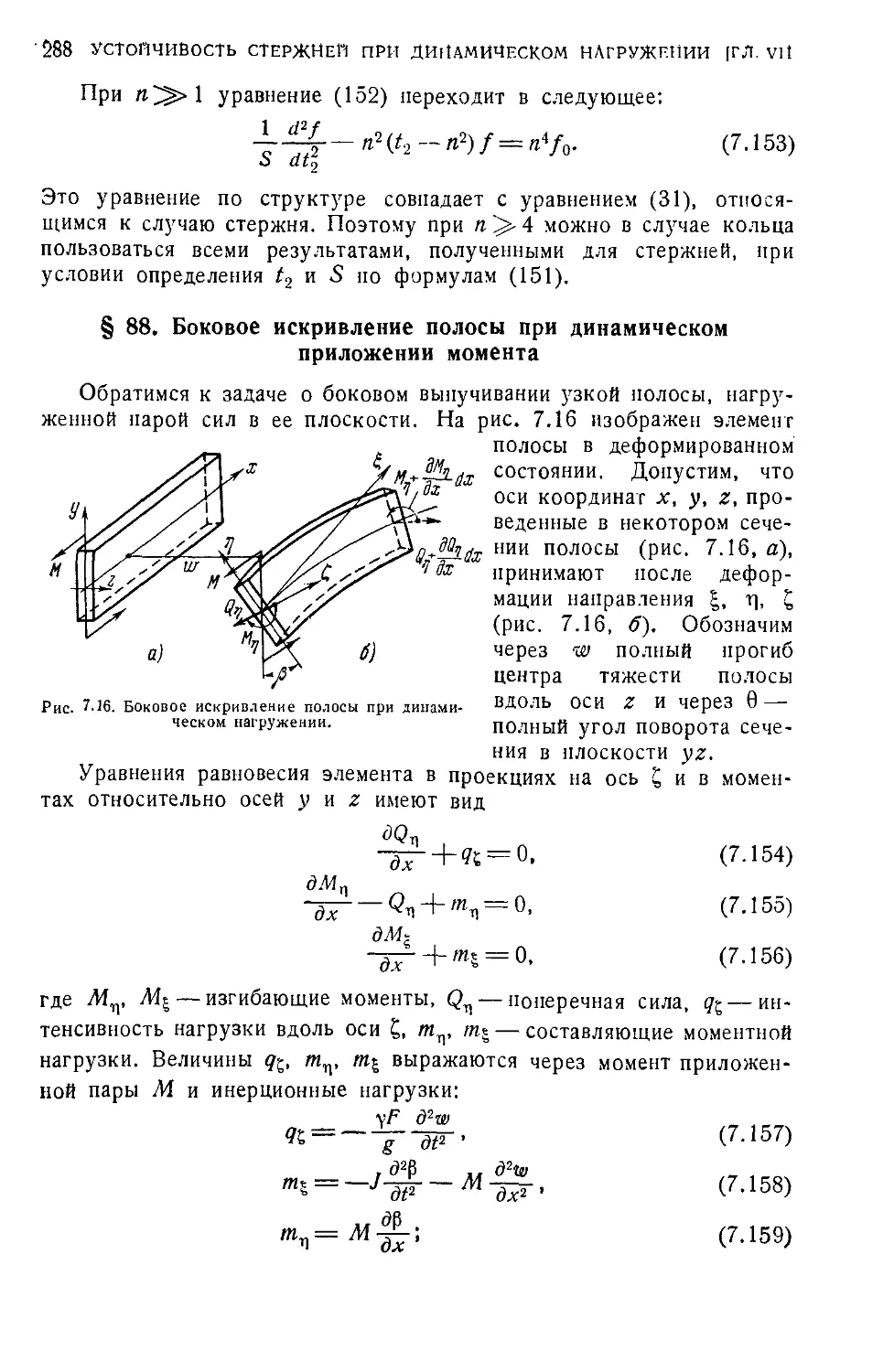
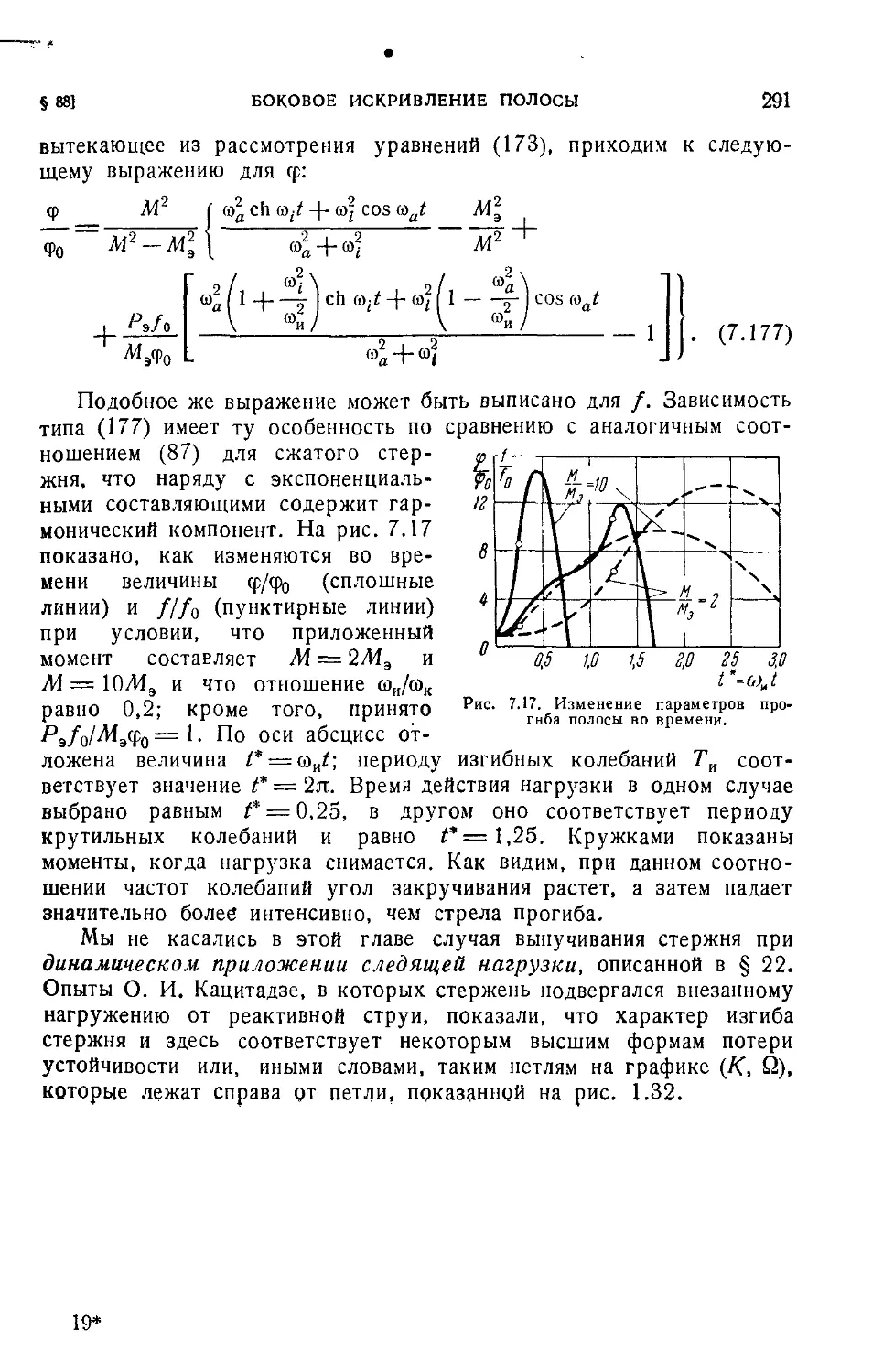
§ 88. Боковое искривление полосы при динамическом приложении
момента 288
Глава VIII. Упругие волны и устойчивость 292
§ 89. Упругие волны в сжатых стержнях 292
§90. Критерии устойчивости стержней при ударе 299
§ 91. Выпучивание стержня с начальной ногибью. Исходные
уравнения 301
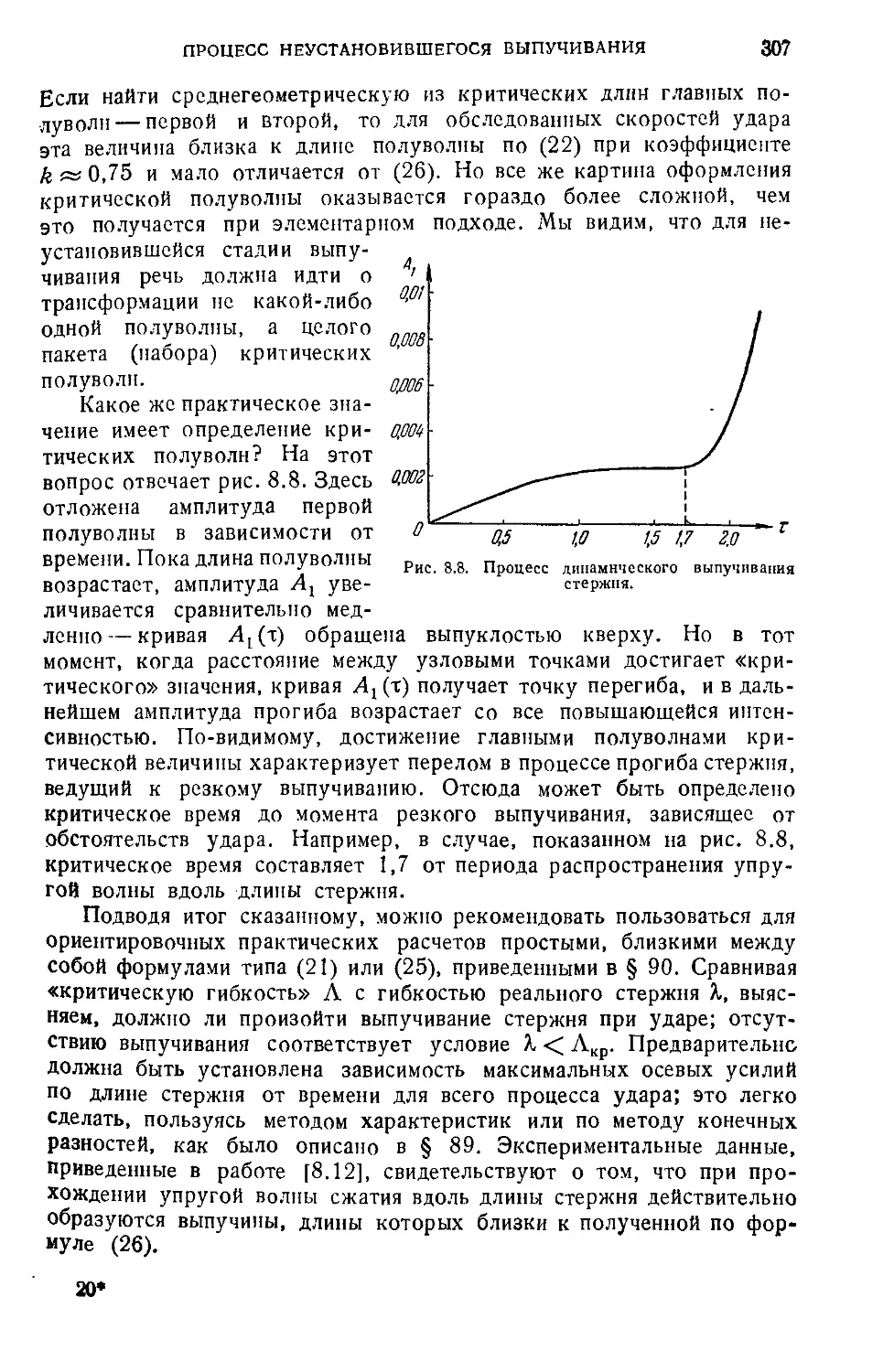
§ 92. Процесс неустановившегося выпучивания. Пакет критических
полуволн 304
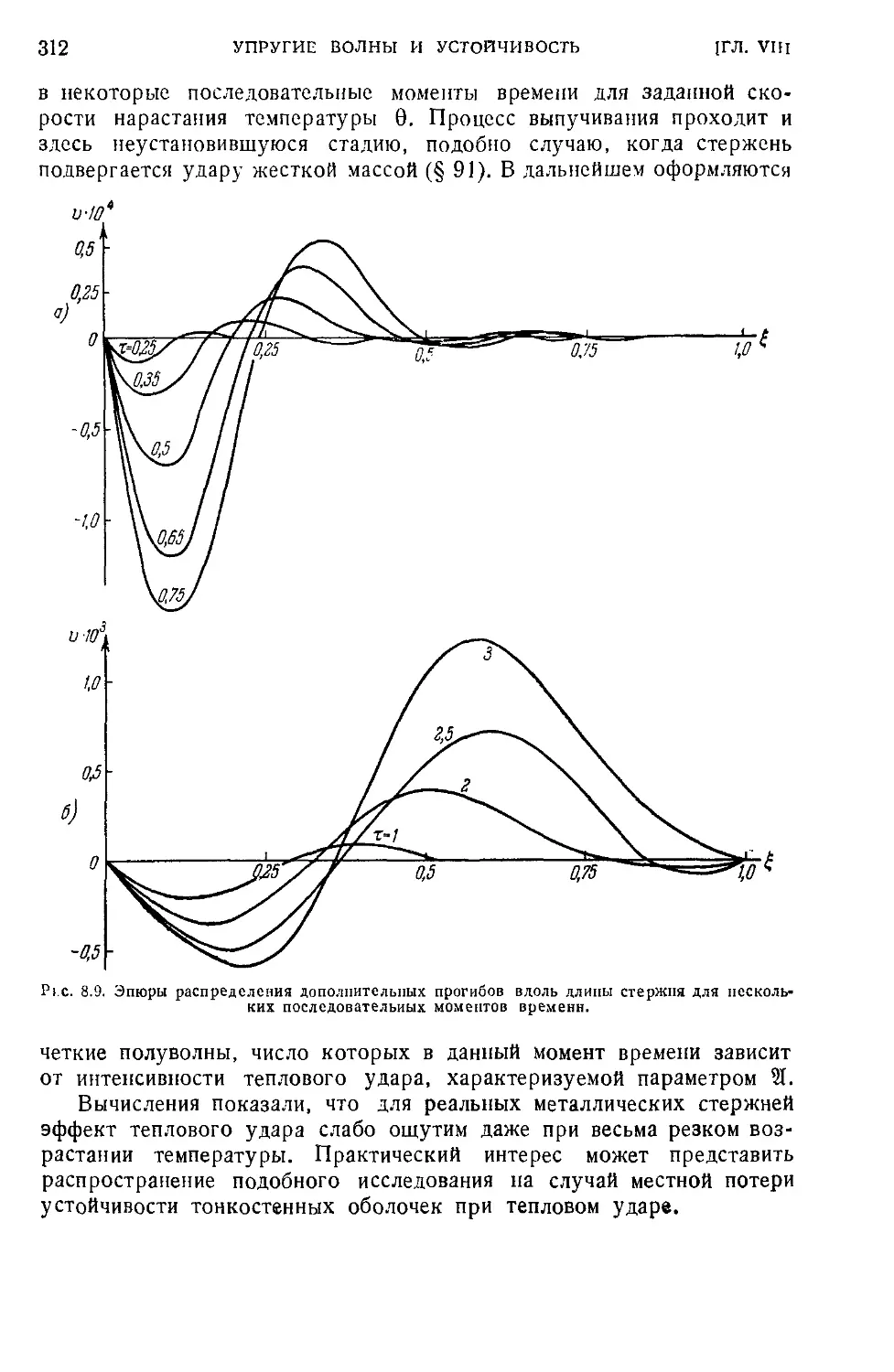
§ 93. Термоунругие волны. Поведение стержня при тепловом ударе 308
Глава IX. Устойчивость прямоугольных пластинок в пределах
упругости 313
§ 94. Основные зависимости теории жестких пластинок 313
§ 95. Гибкие нластннки 325
§ 96. Устойчивость шариирно опертой нластннки, сжатой в одном
направлении 328
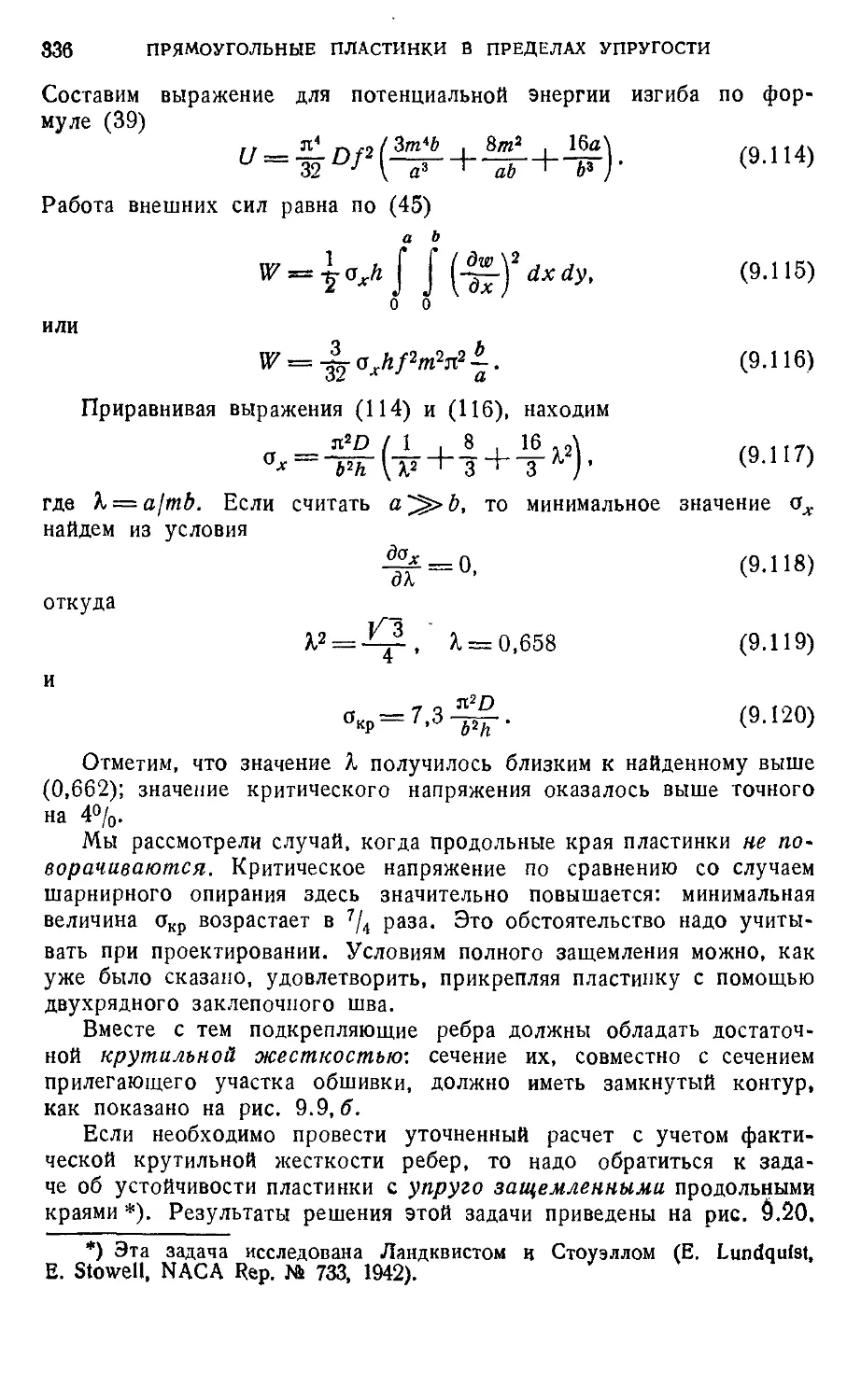
§ 97. Случай защемленных продольных краев 332
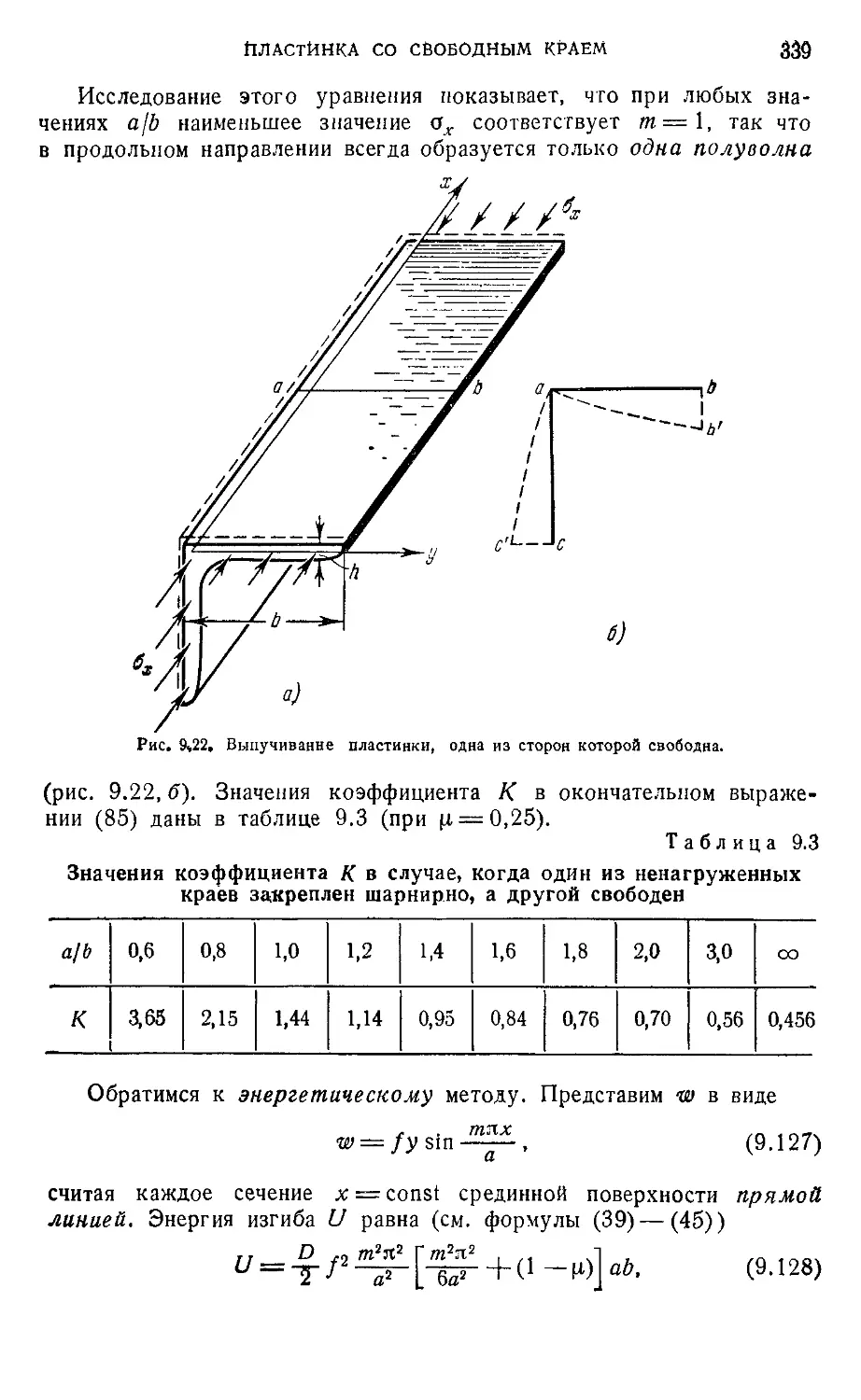
§ 98. Пластинка со свободным краем. Сводка расчетных данных . 338
§ 99. Пластинка под действием сосредоточенных сил 342
§ 100. Устойчивость пластинок при сдвиге 344
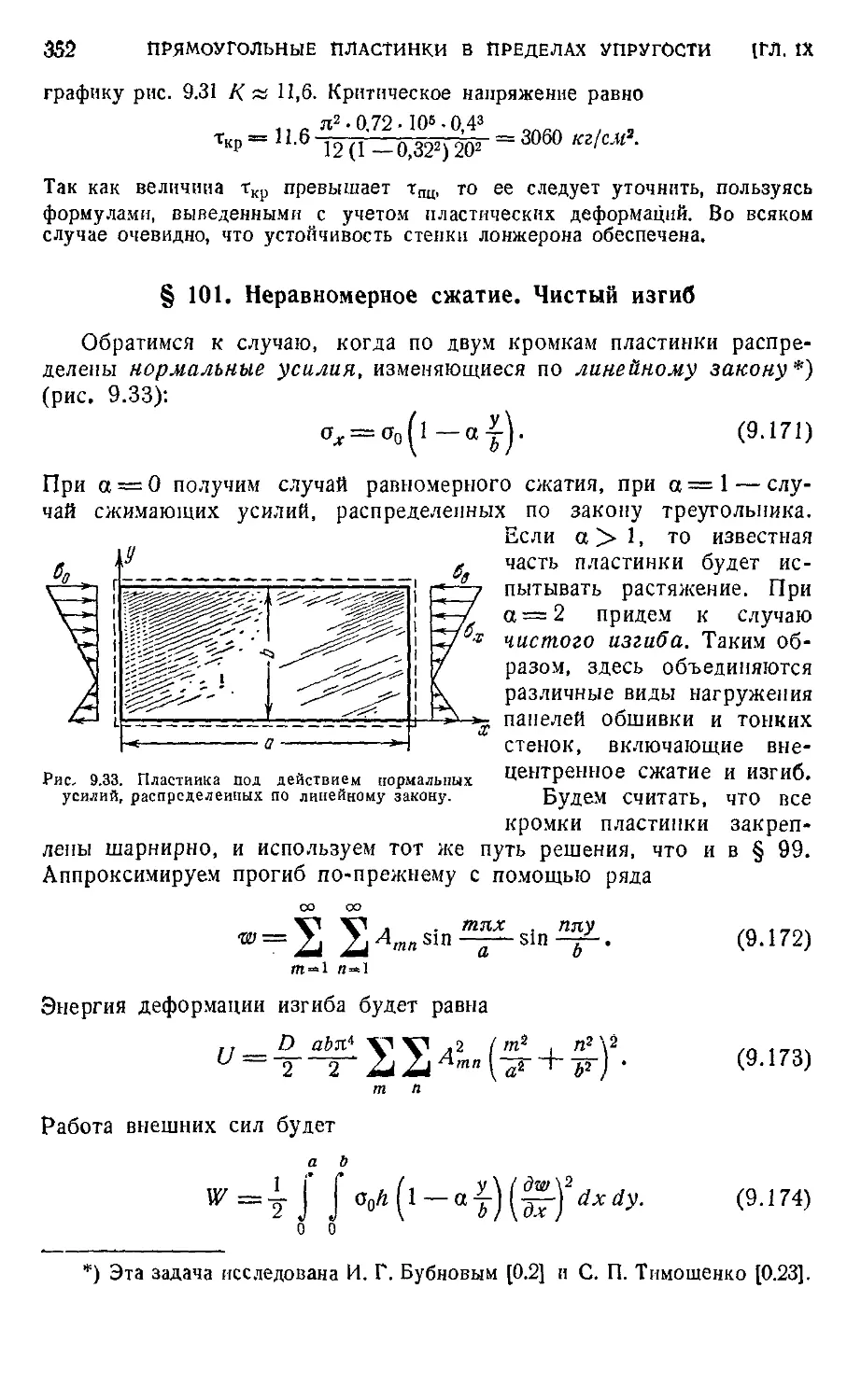
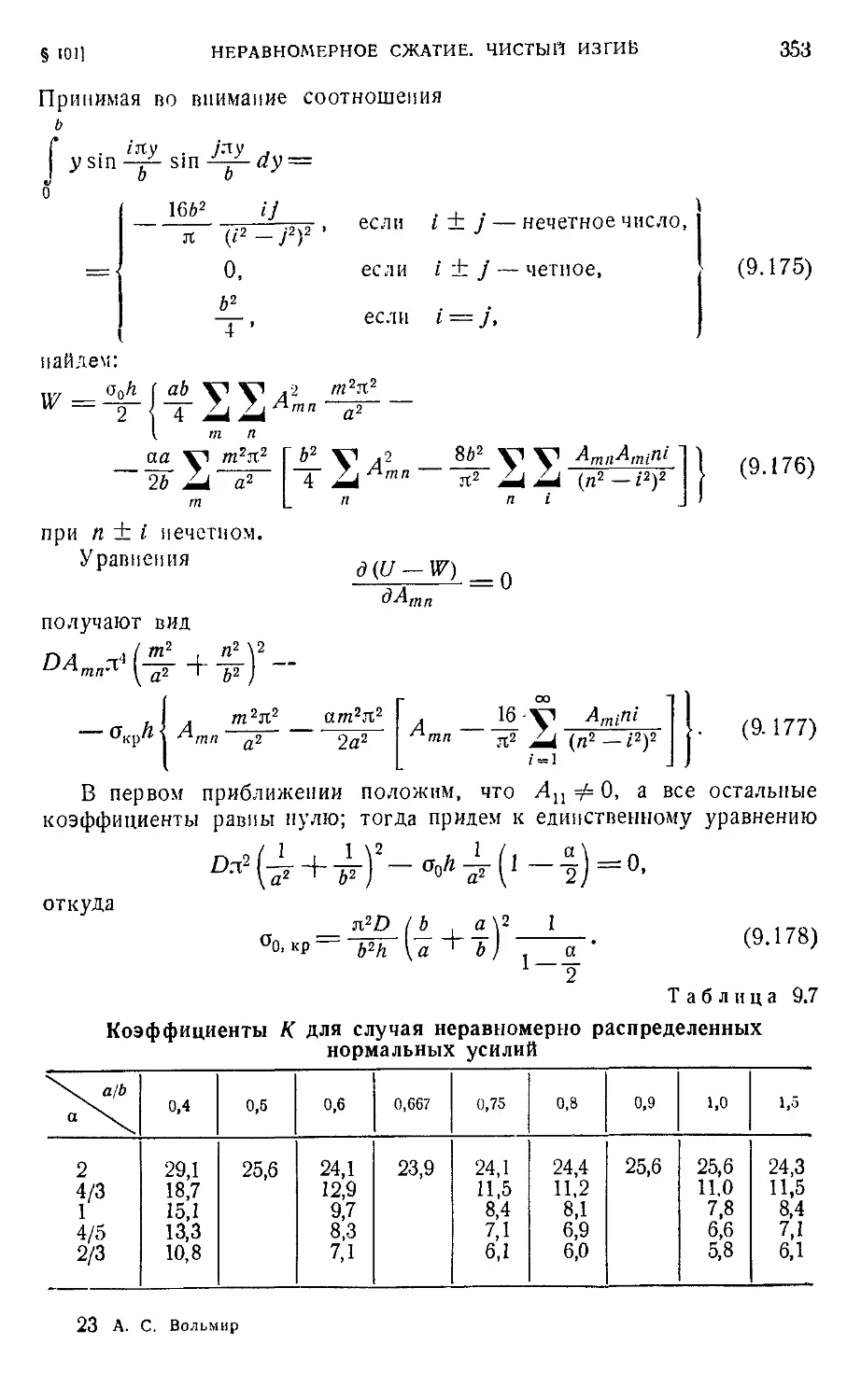
§ 101. Неравномерное сжатие. Чистый изгиб 352
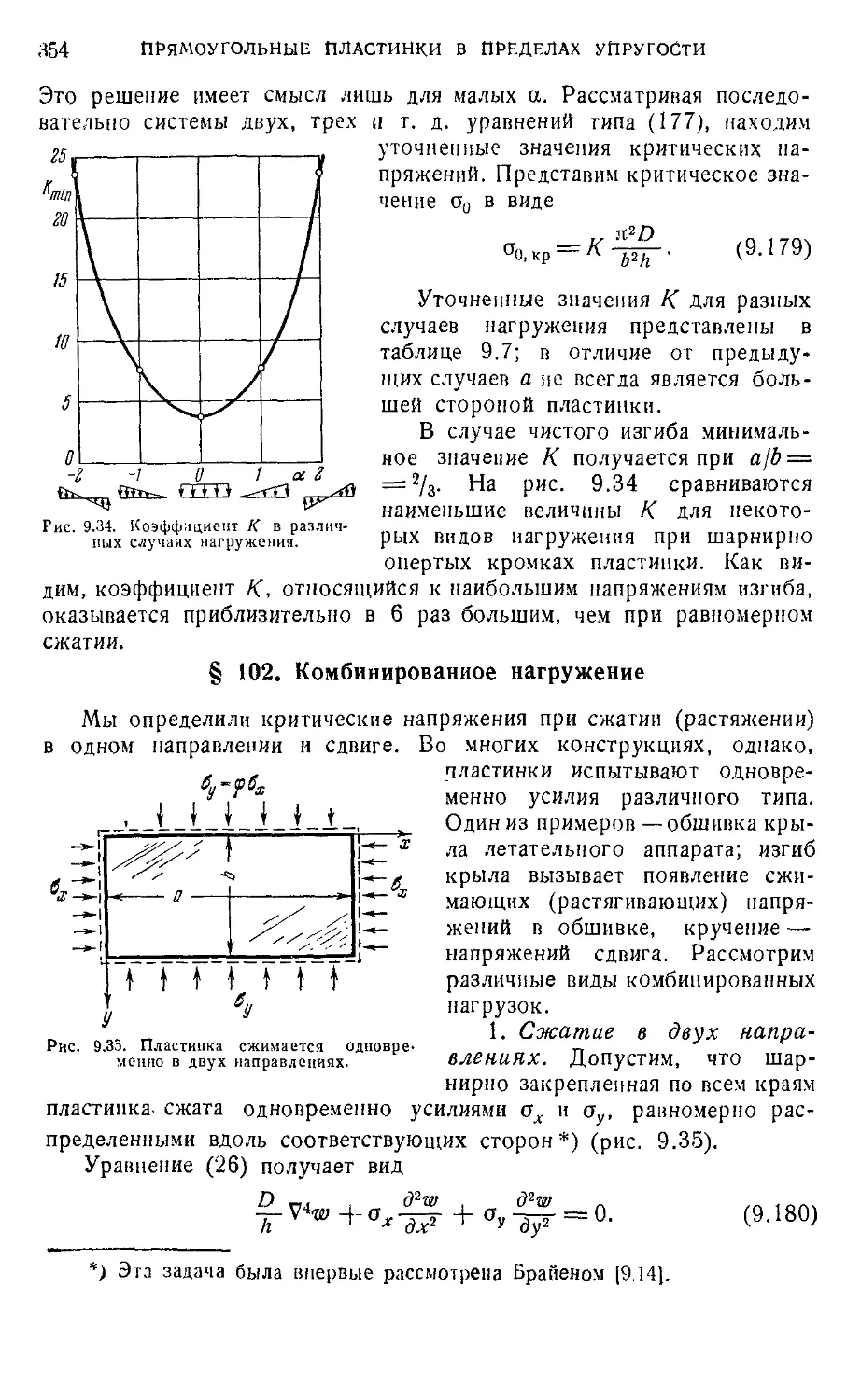
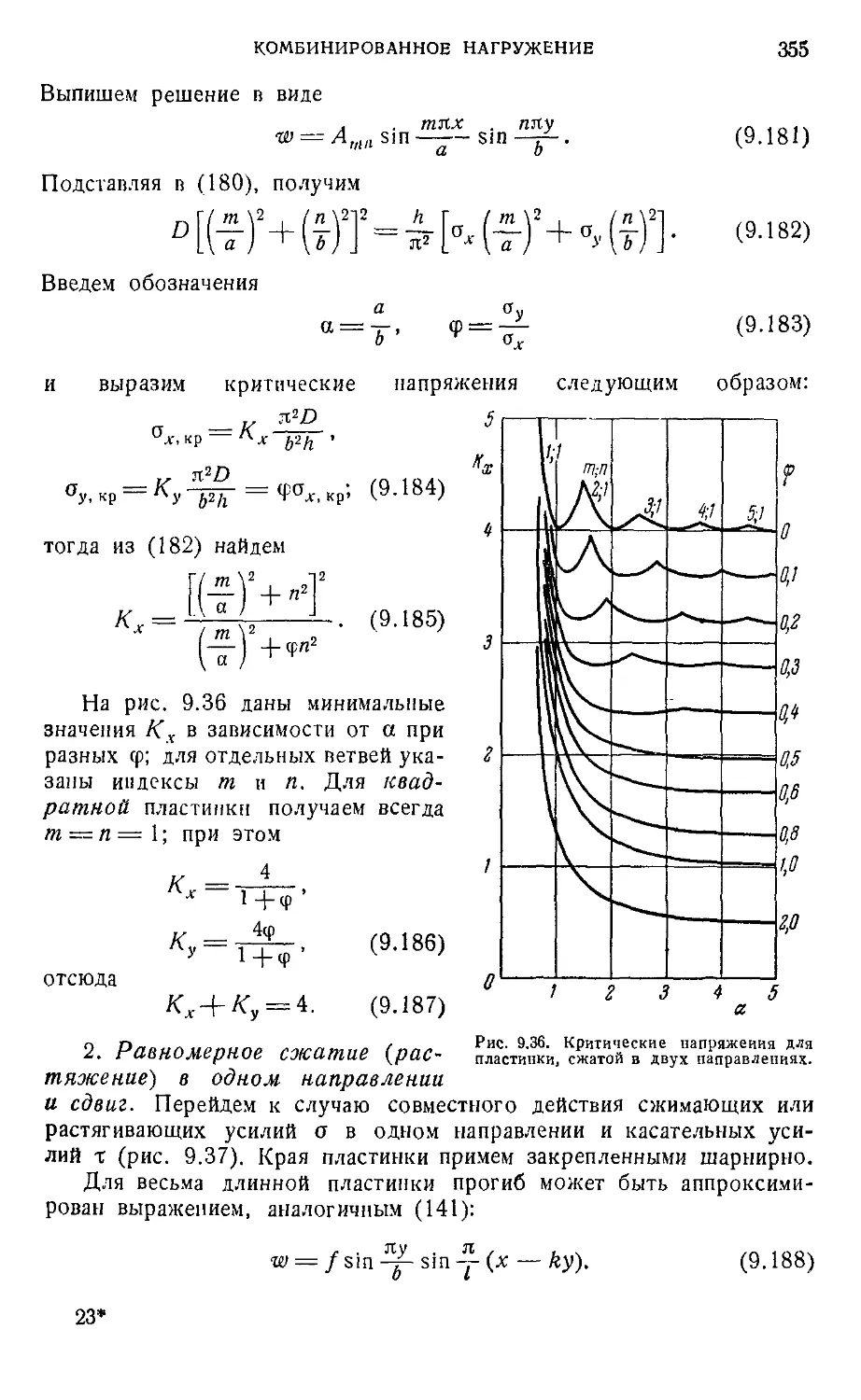
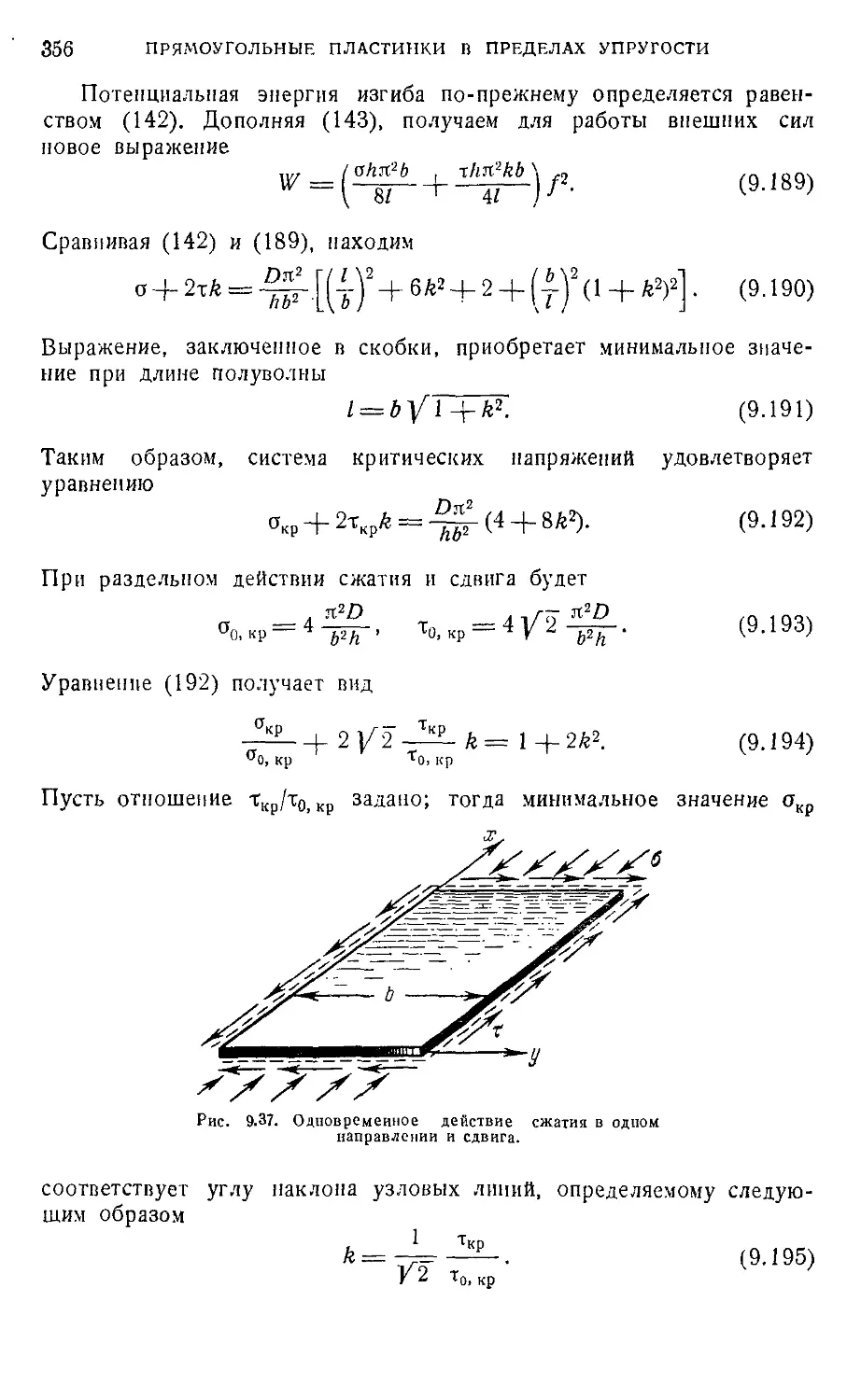
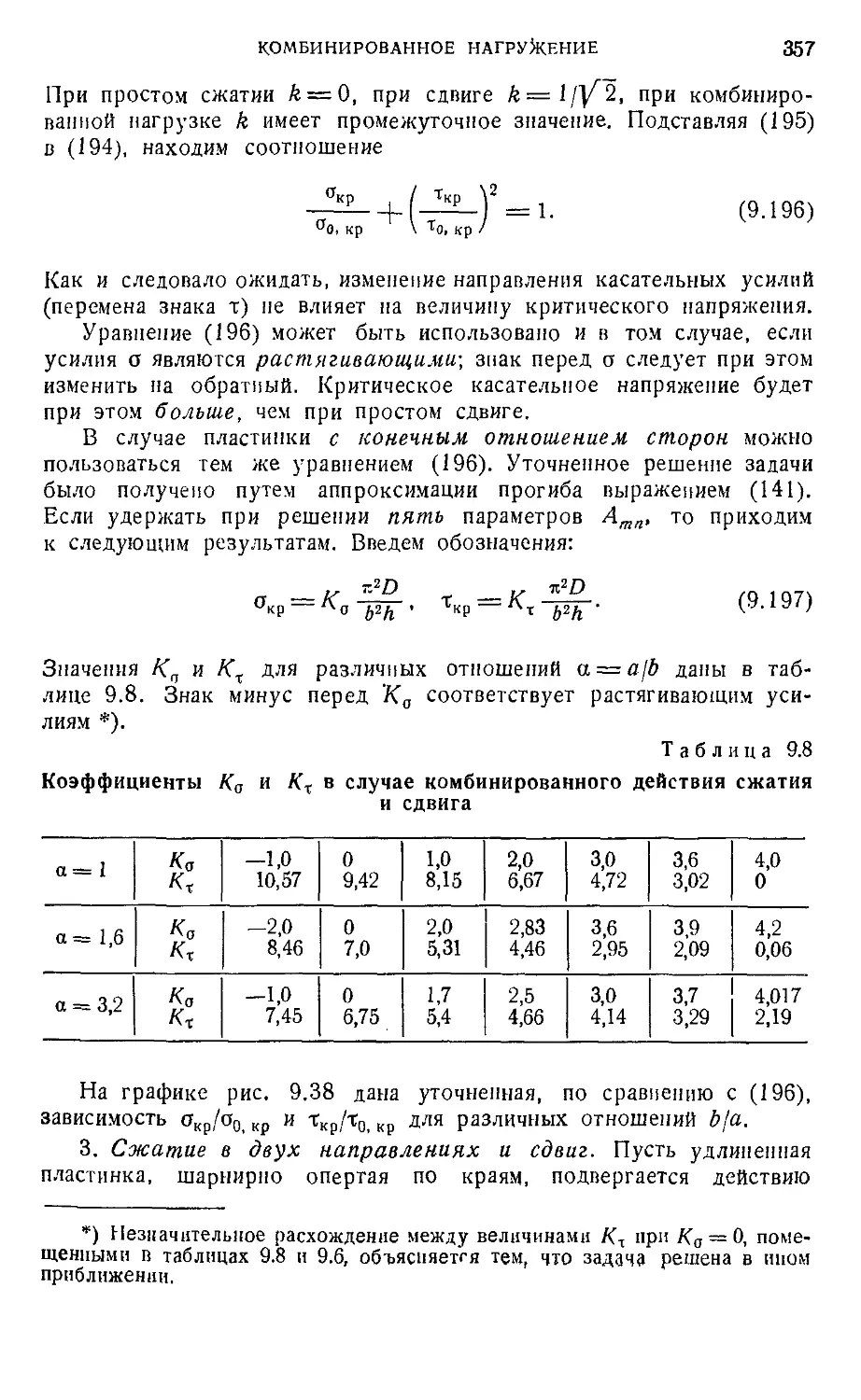
§ 102. Комбинированное нагружение 354
§ 103. Закритическая деформация пластинки при сжатии 359
§ 104. Приложение теории гибких пластинок 363
§ 105. Решение задачи с помощью цифровой электронной машины 367
§ 106. Случай искривляющихся кромок 372
§ 107. Данные для-практических расчетов 373
§ 108. Анизотропные пластинки 374
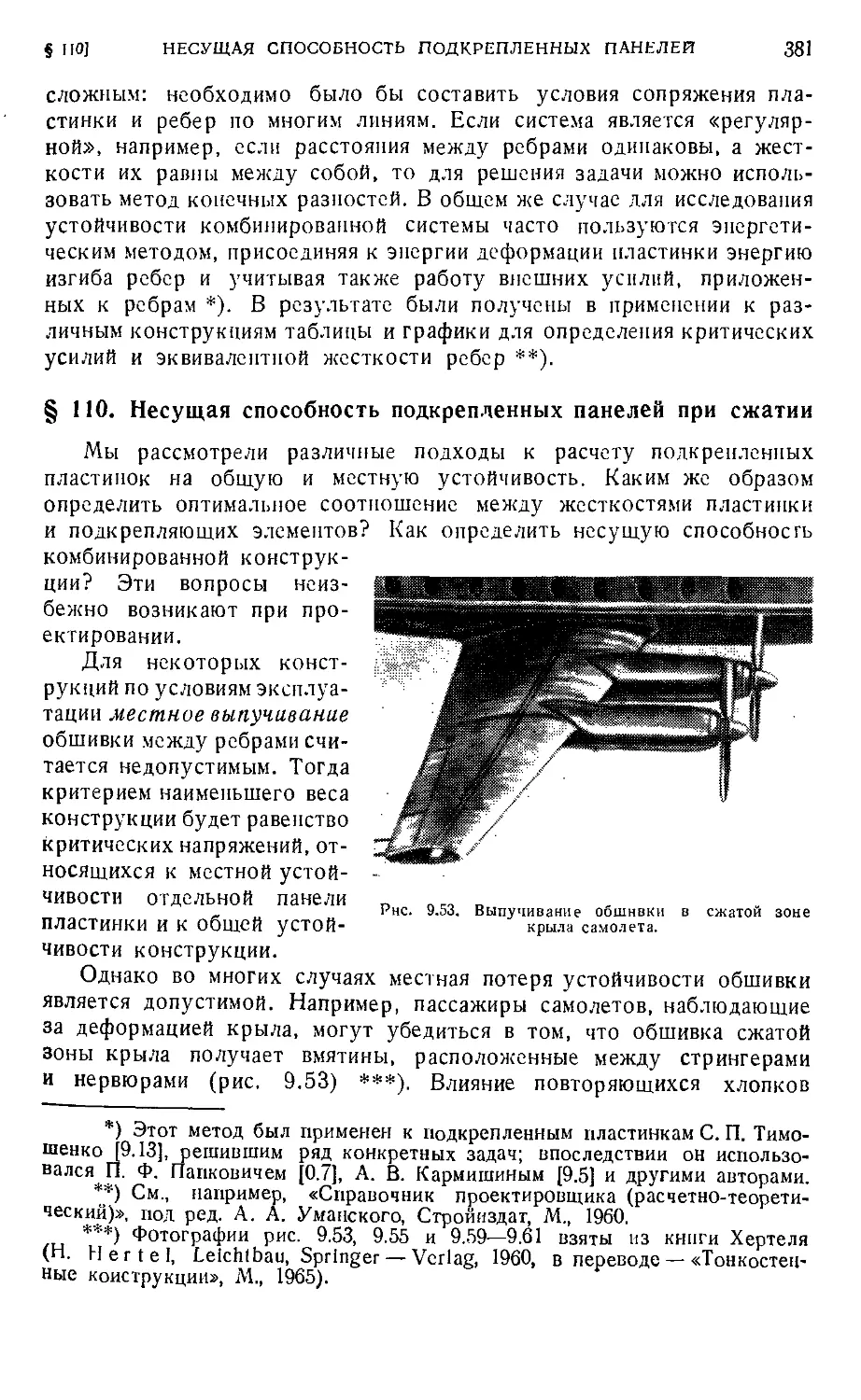
§ 109. Подкрепленные пластинки 377
§ 110. Несущая способность подкрепленных панелей при сжатии . 381
б
ОГЛАВЛЕНИЕ
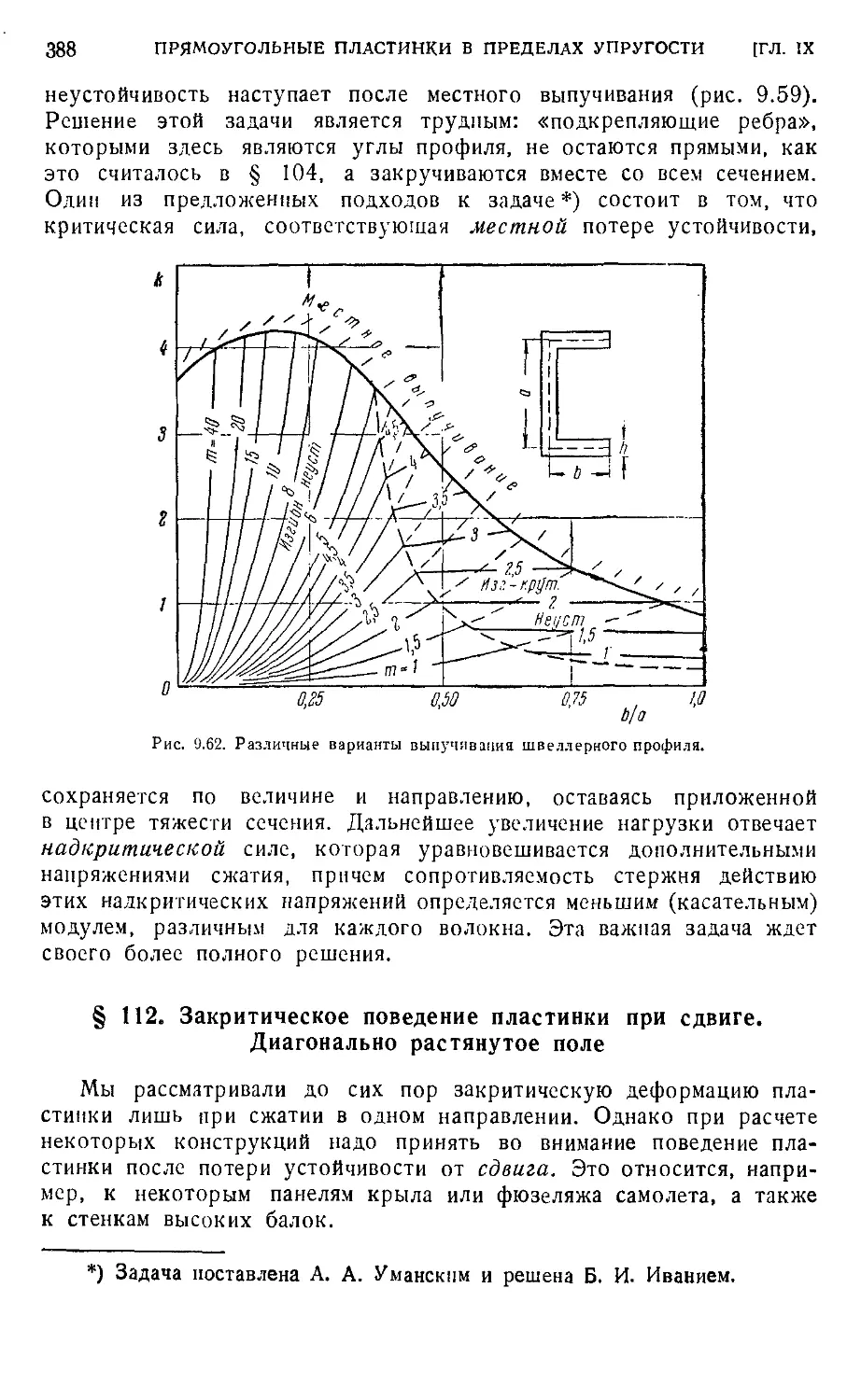
§ 111. Несущая способность сжатых тонкостенных стержней . . . 386
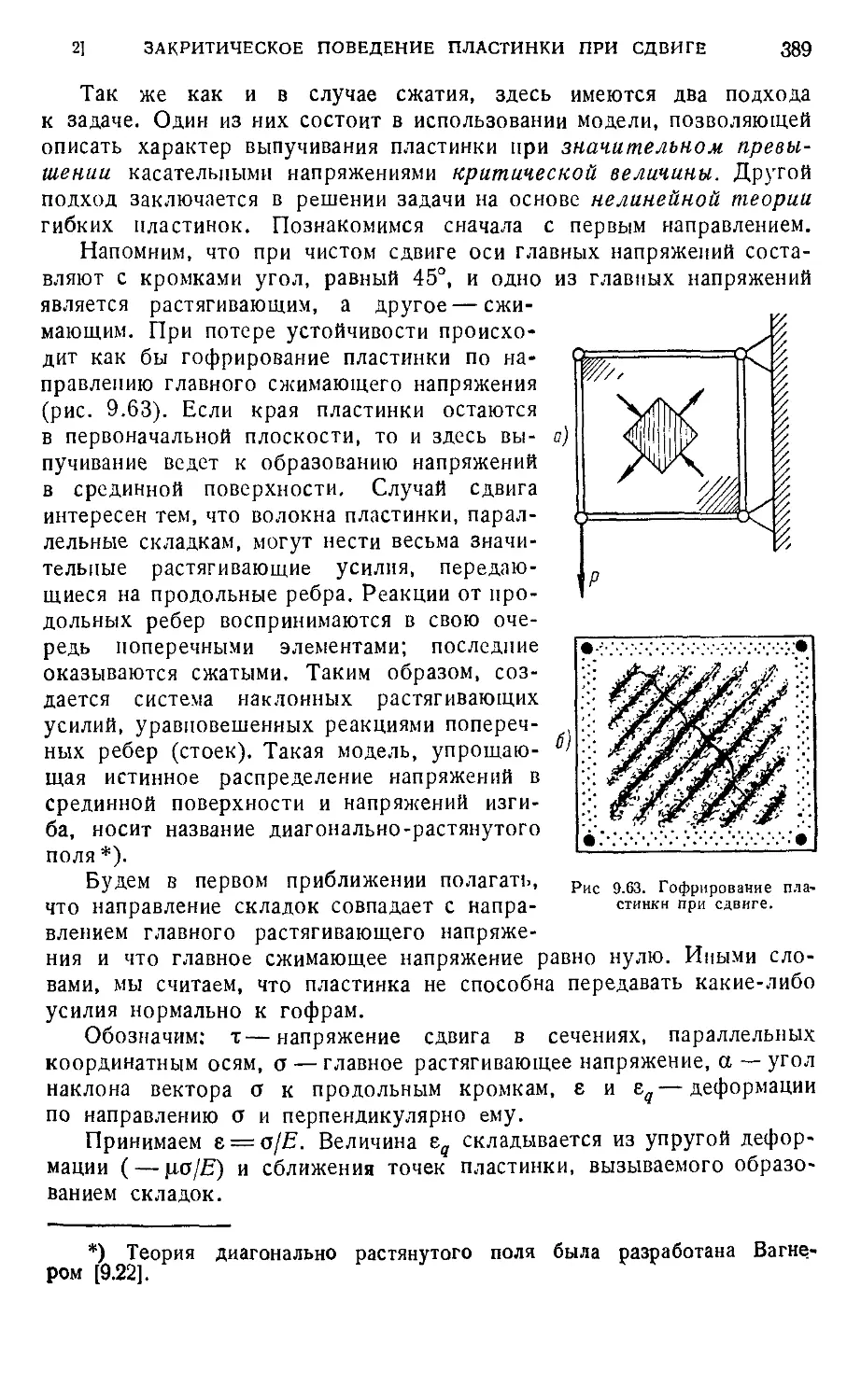
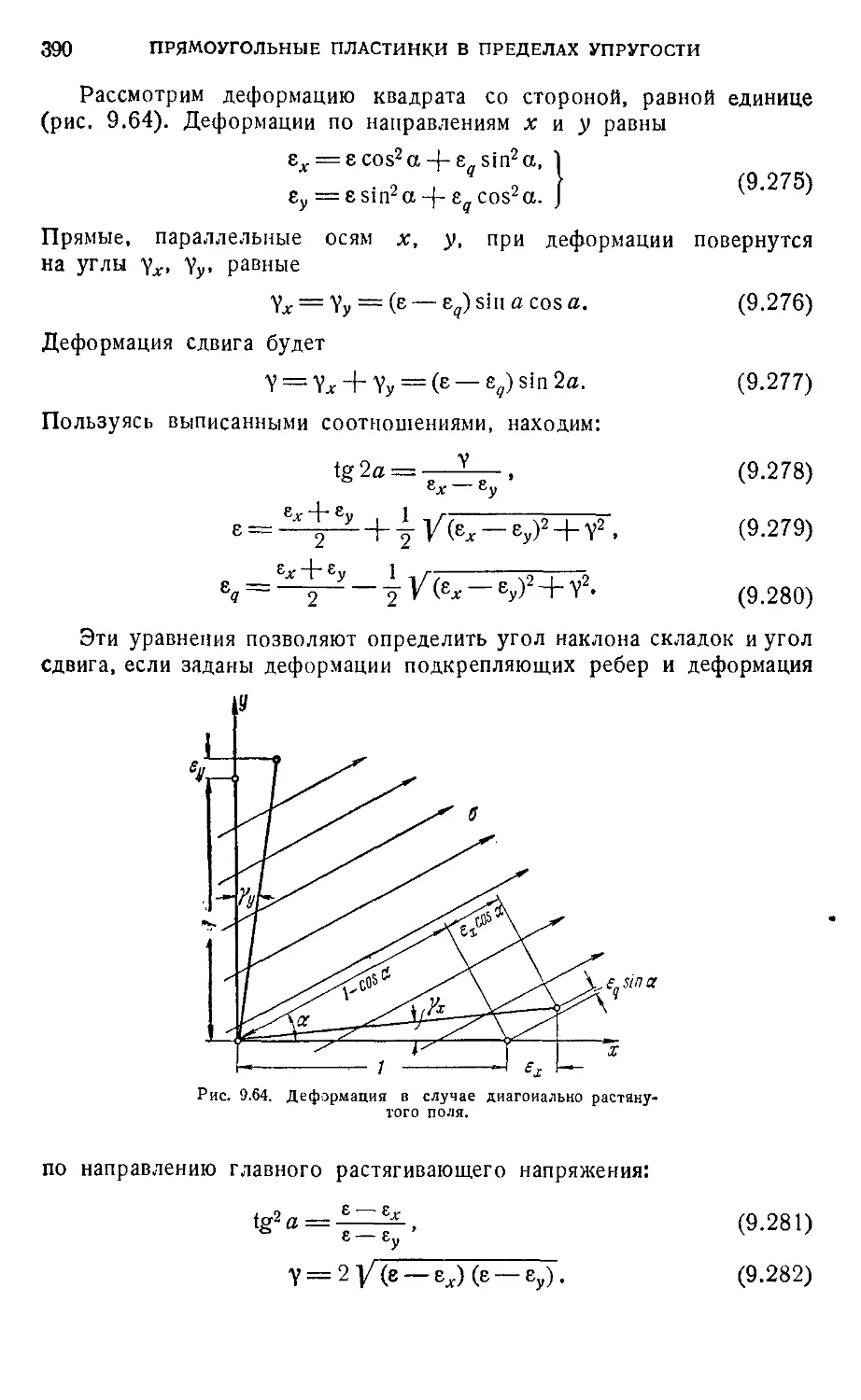
§ 112. Закритическое поведение пластинки при сдвиге. Диагонально
растянутое поле 388
§ 113. Исследование закритического сдвига с помощью теории
гибких пластинок 391
Глава X. Устойчивость прямоугольных пластинок за пределами
упругости 394
§ 114. Применение теории пластичности к задачам об устойчивости
пластинок 394
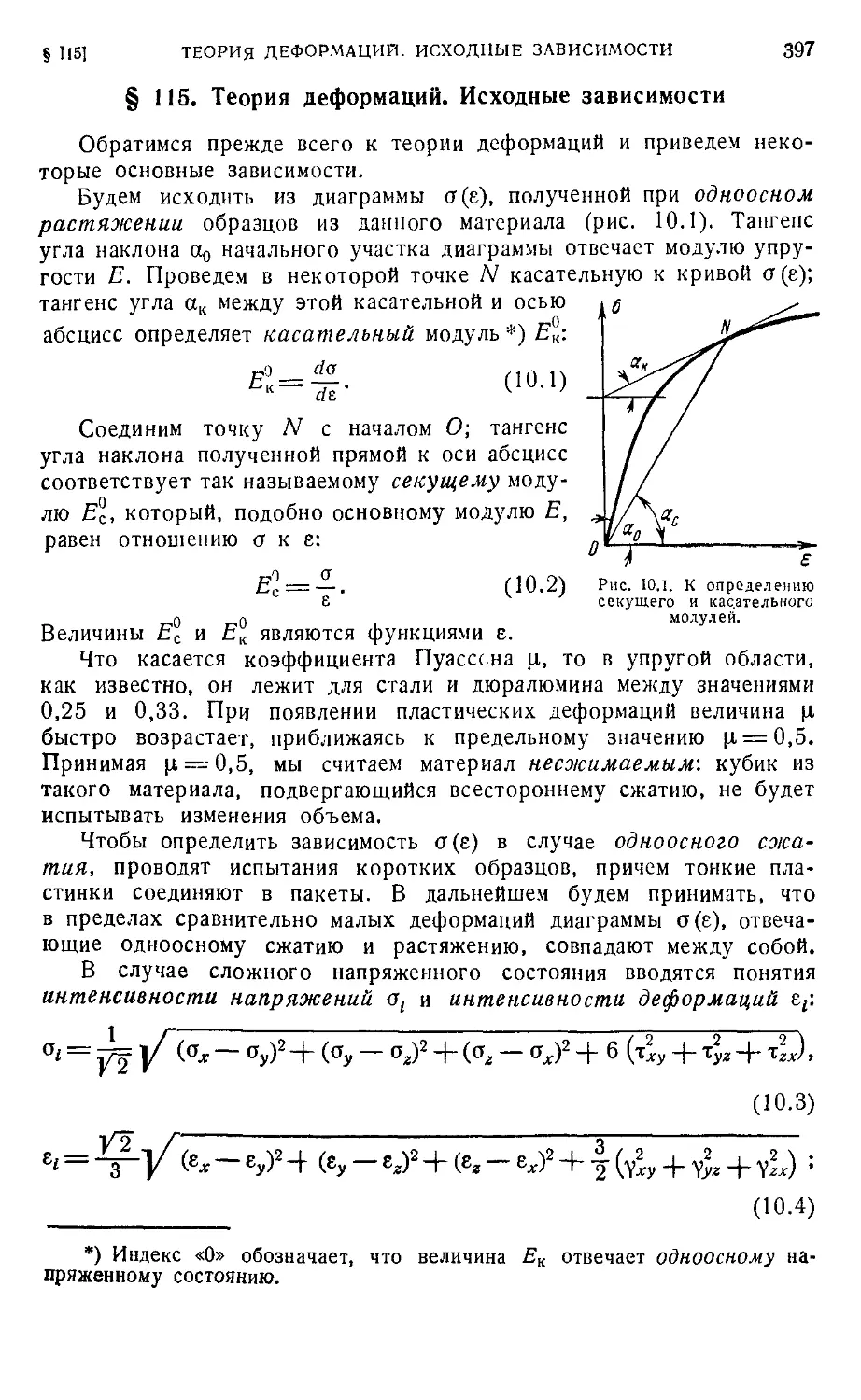
§ 115. Теория деформаций. Исходные зависимости 397
§ 116. Основное дифференциальное уравнение в случае
несжимаемого материала 400
§ 117. Приложение вариационных методов 410
§ 118. Решение частных задач 412
§ 119. Вывод основного уравнения без учета эффекта разгрузки . . 414
§ 120. Выпучивание сжатой нластиики 417
§ 121. Выпучивание пластинки при сдвиге 421
§ 122. Обобщение теории деформаций на случай сжимаемого
материала 423
§ 123. Применение теории течения 428
§ 124. Влияние сжимаемости материала по теории течения .... 431
§ 125. Применение теории локальных деформаций 433
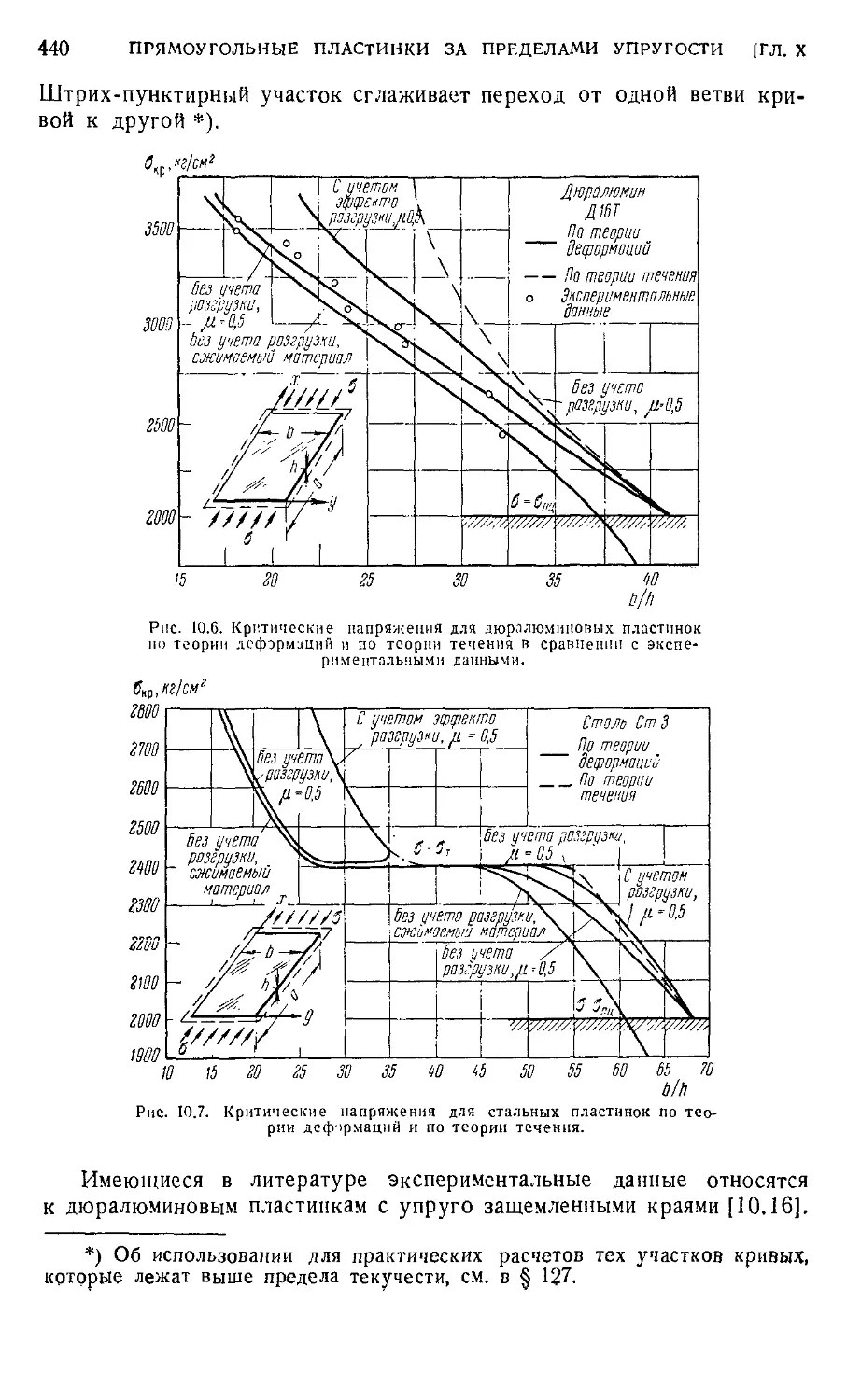
§ 126. Сопоставление расчетных формул для дюралюмииа и стали . 4с8
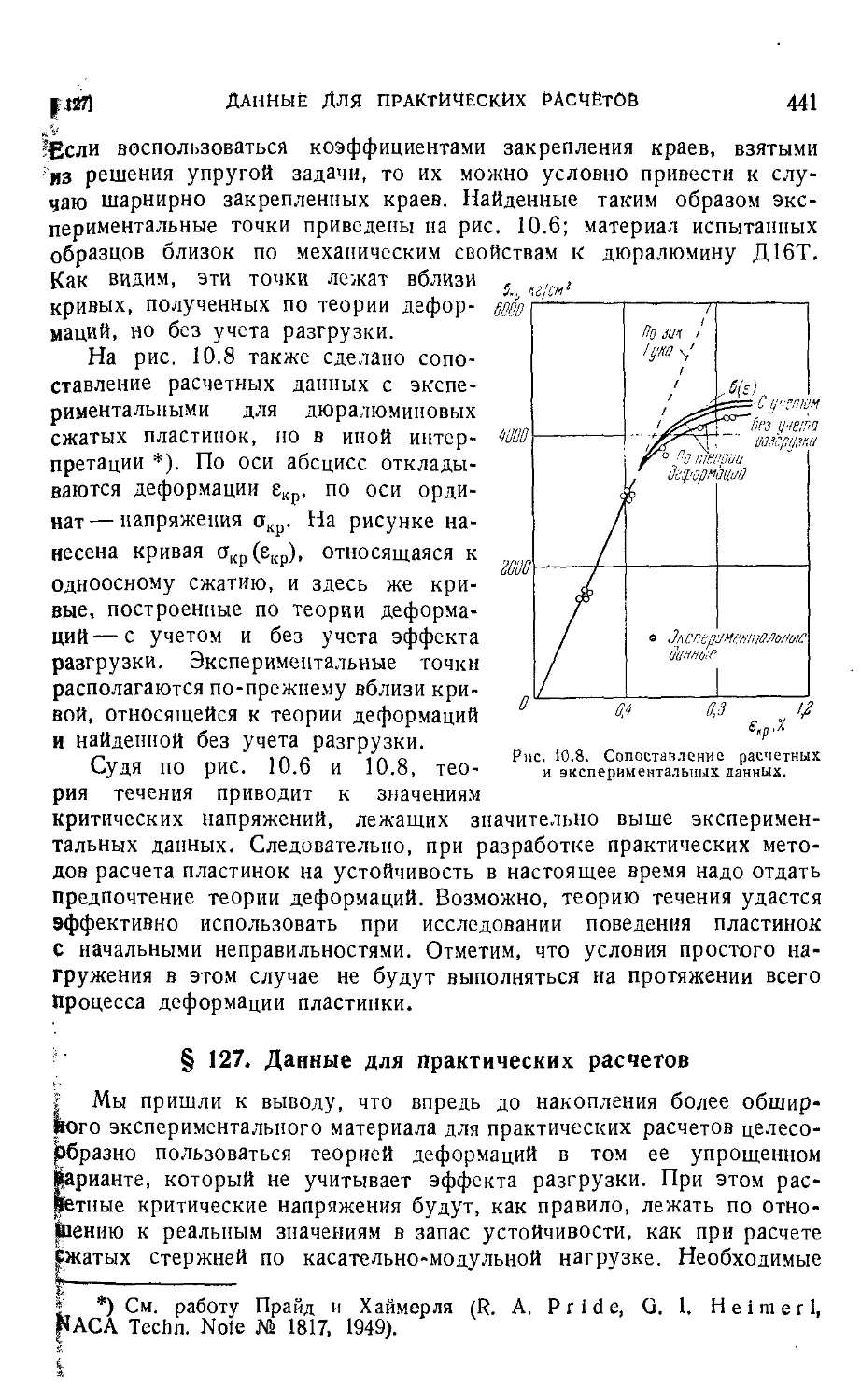
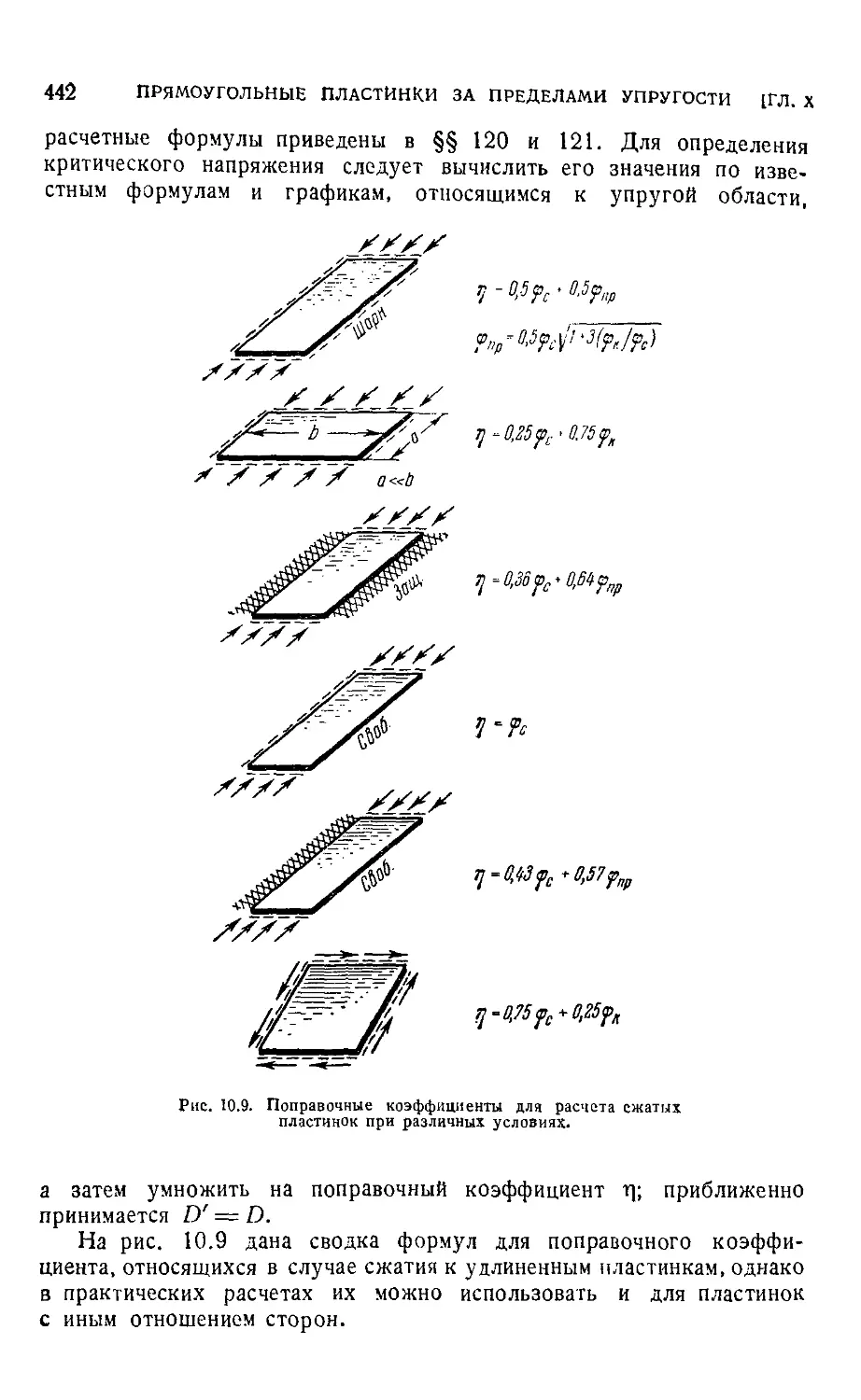
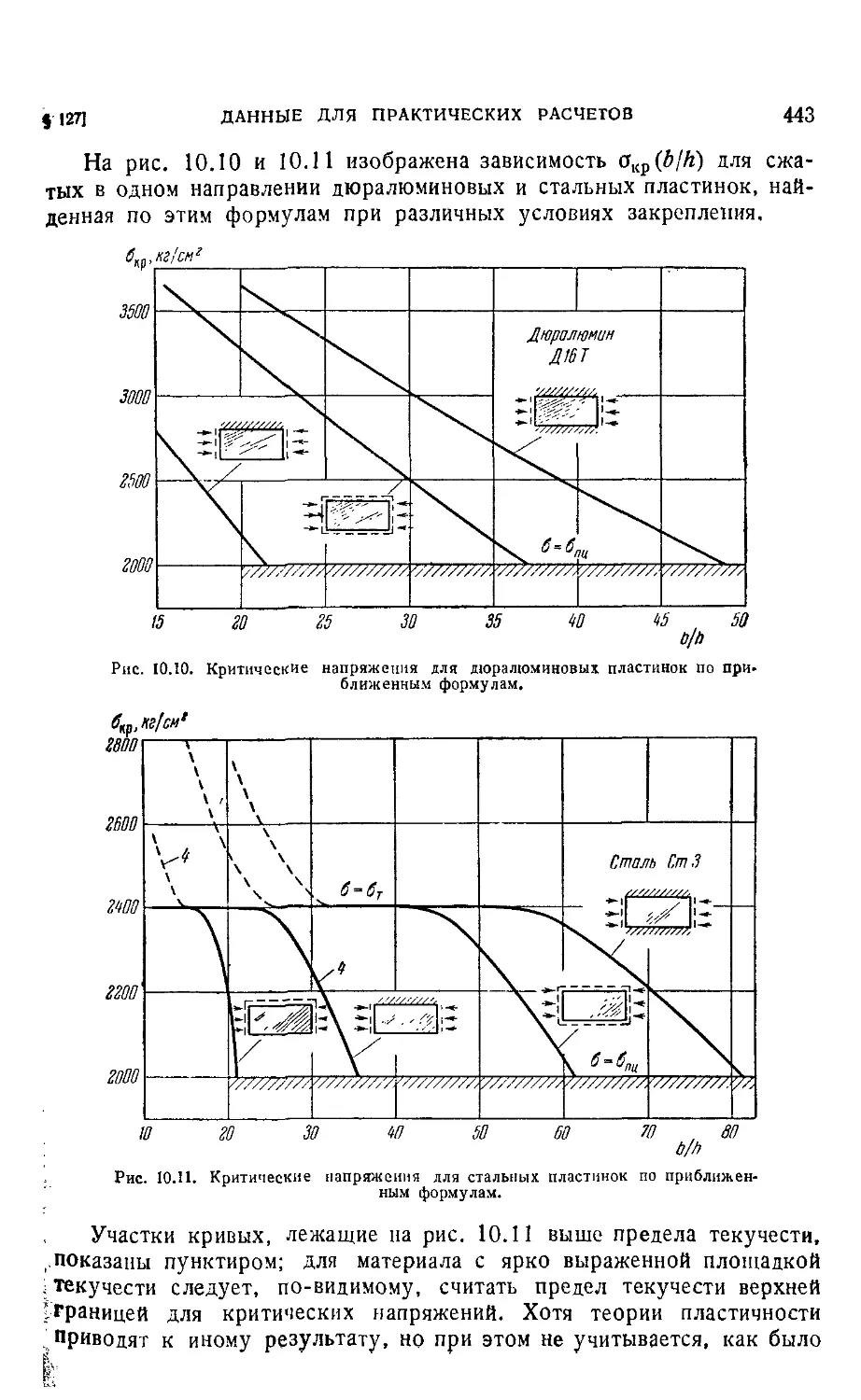
§ 127. Данные для практических расчетов 441
Глава XI. Круглые пластинки 445
§ 128. Основные зависимости для жестких и гибких пластинок . . 445
§ 129. Защемленная по контуру пластинка под действием
радиального сжатия 450
§ 130. Случай шарнирного закрепления по контуру 453
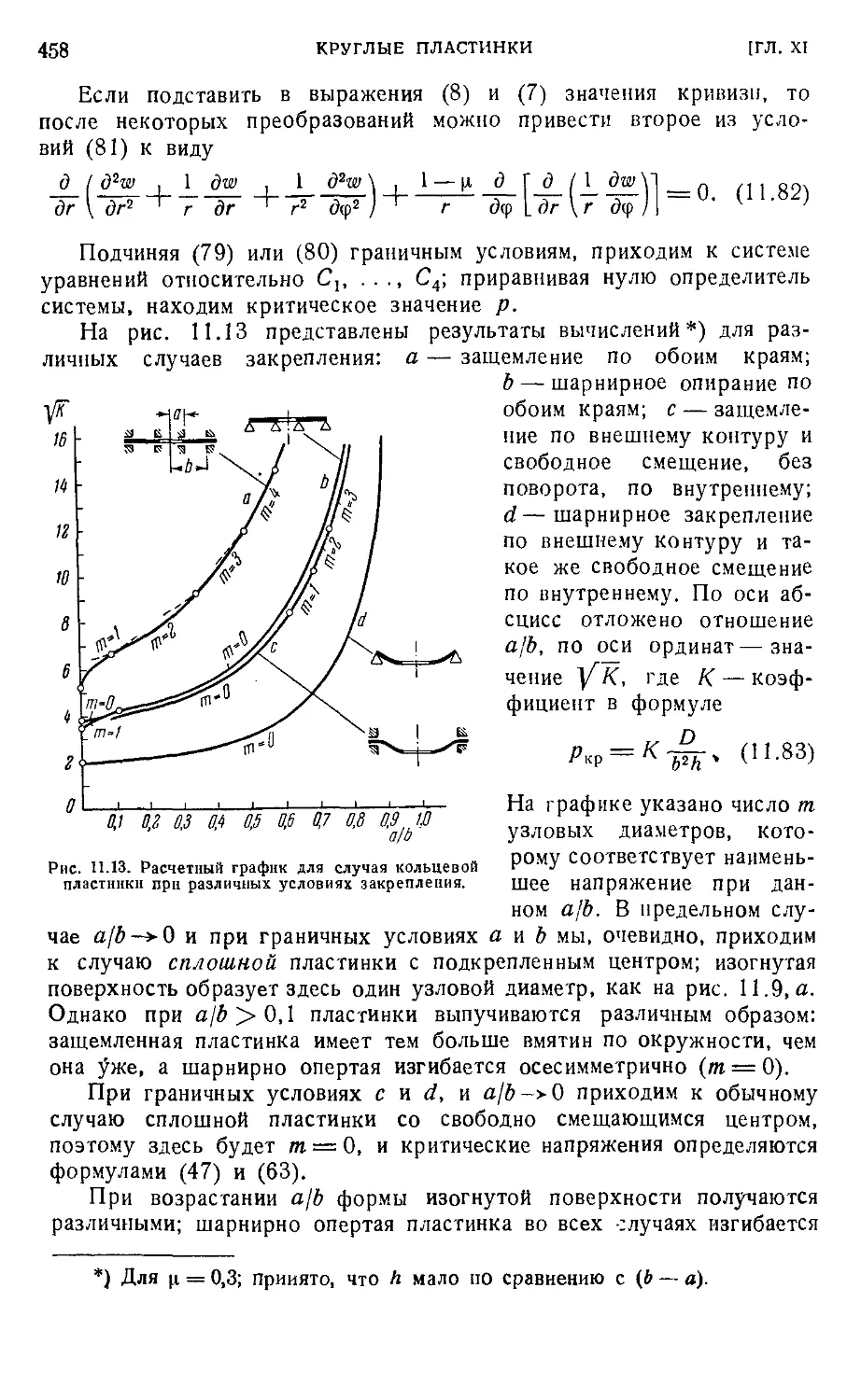
§ 131. Асимметричное выпучивание пластинки 454
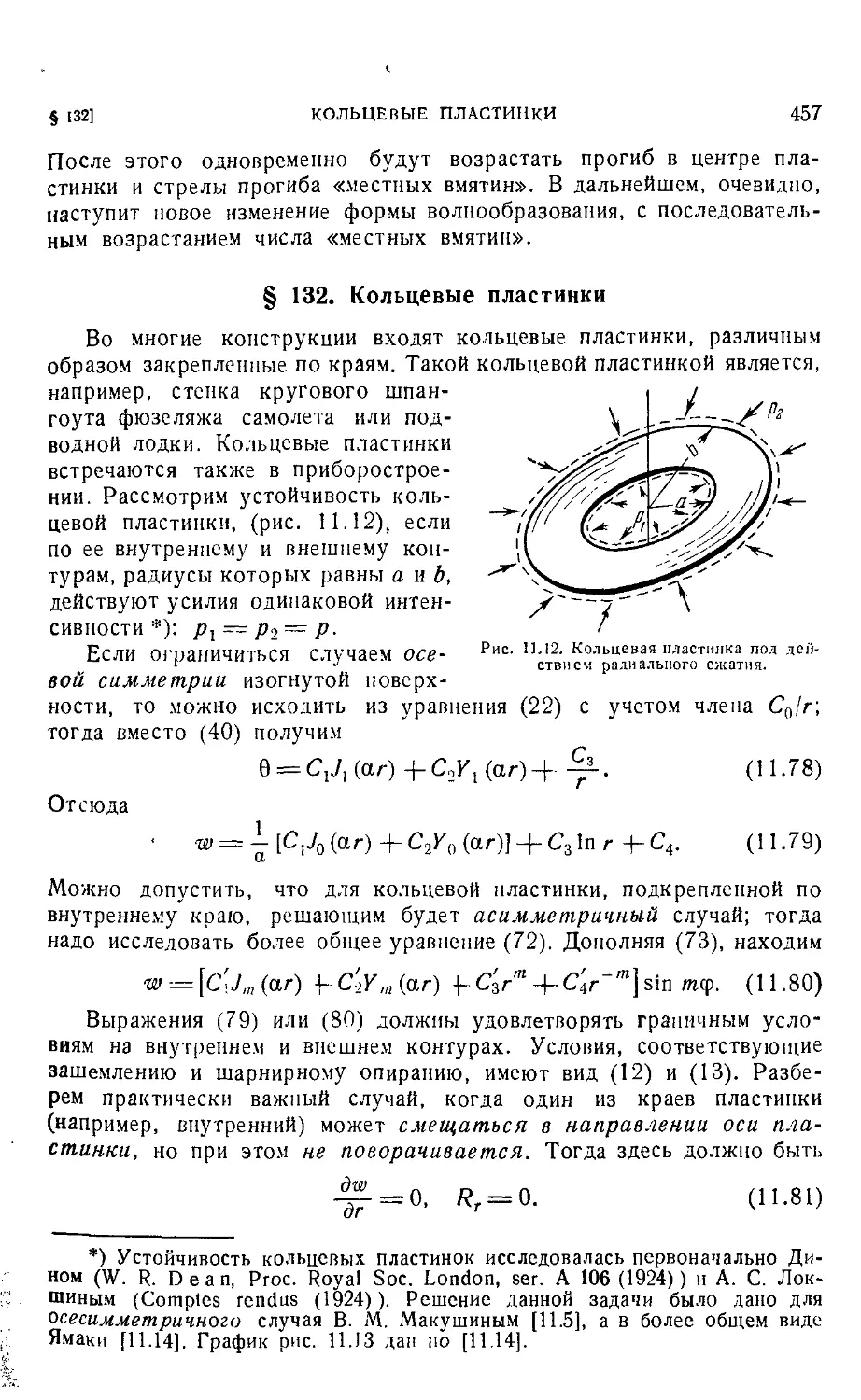
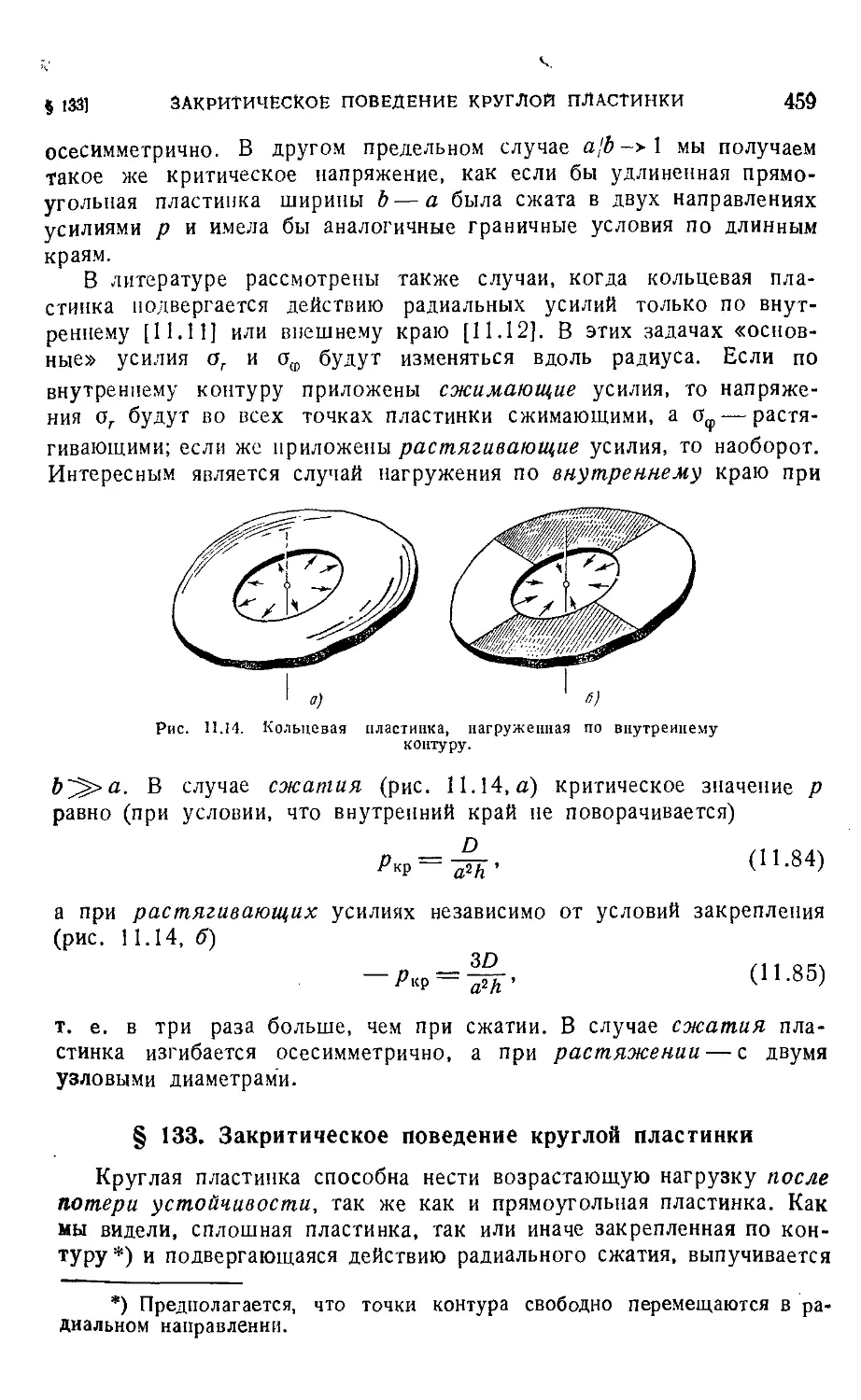
§ 132. Кольцевые пластинки 457
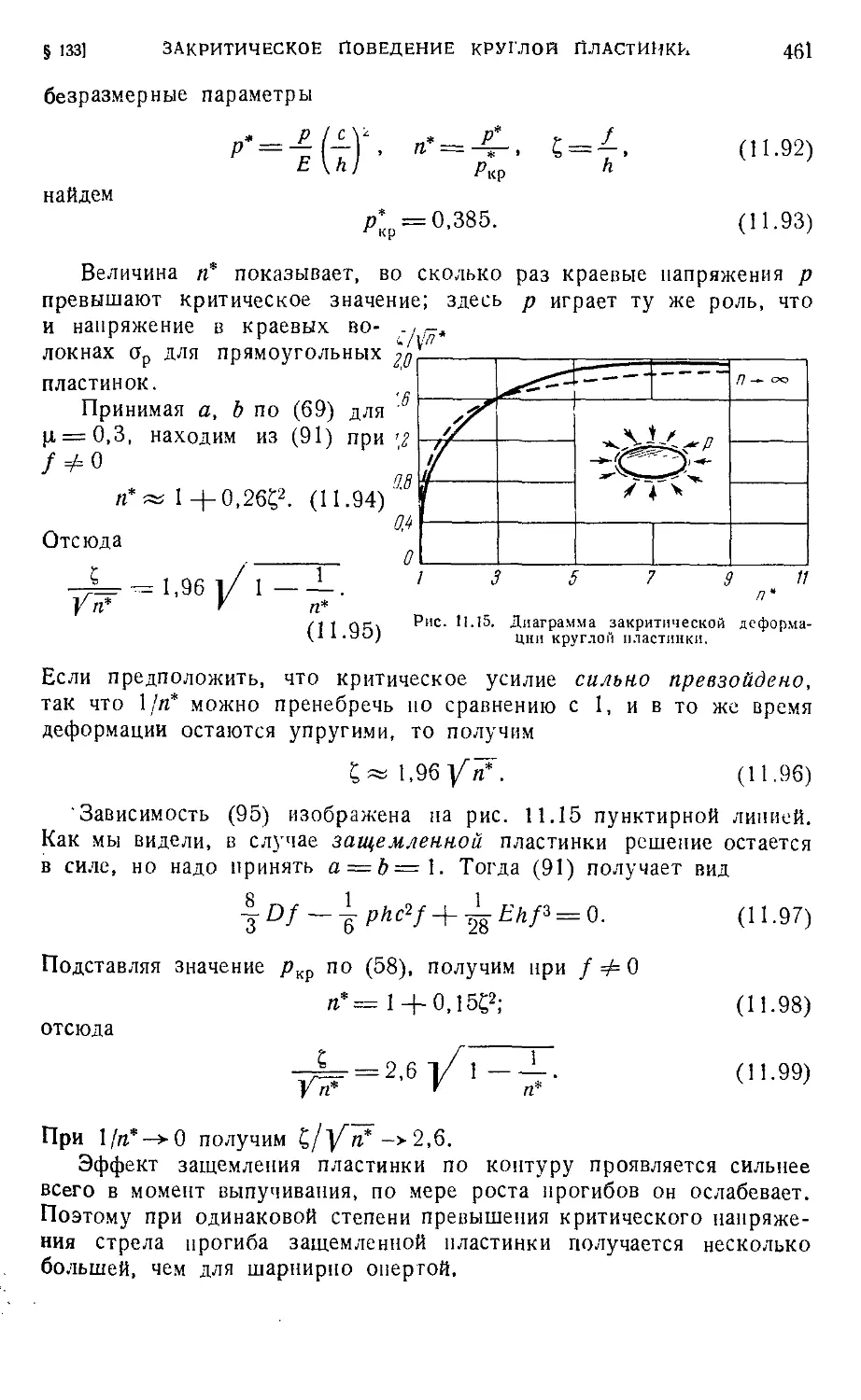
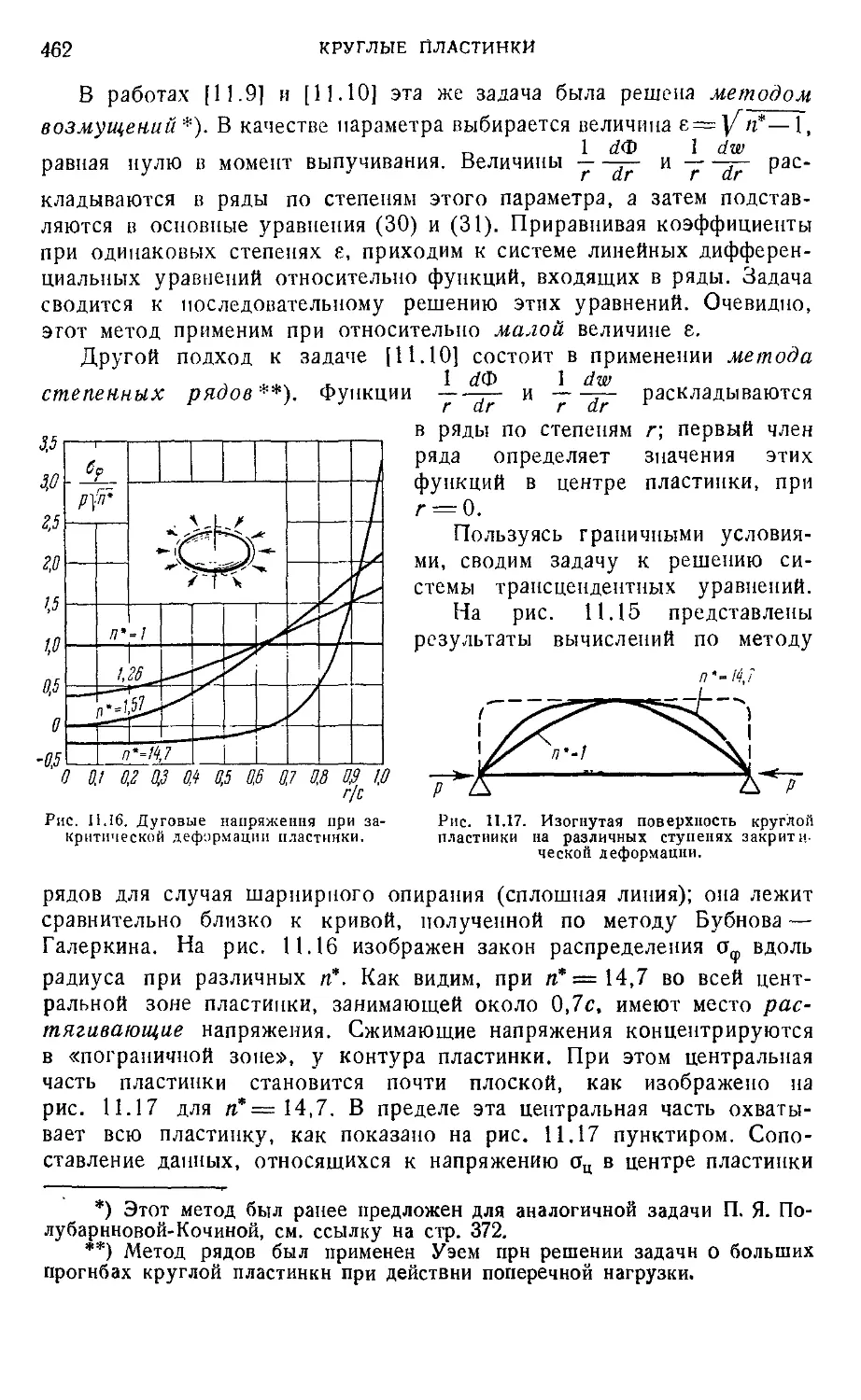
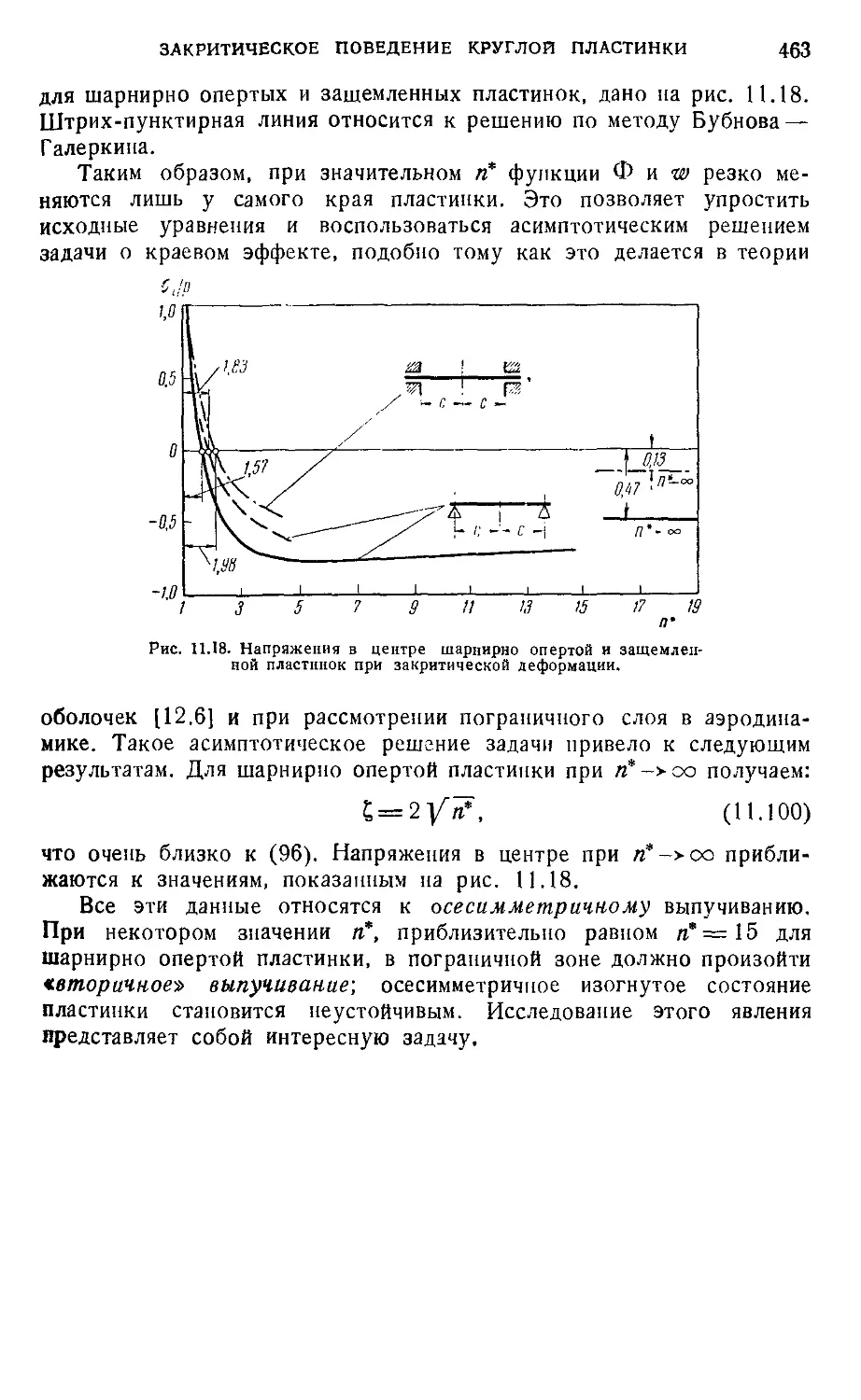
§ 133. Закритическое поведение круглой пластинки 459
Глава XII. Общие сведения об оболочках 464
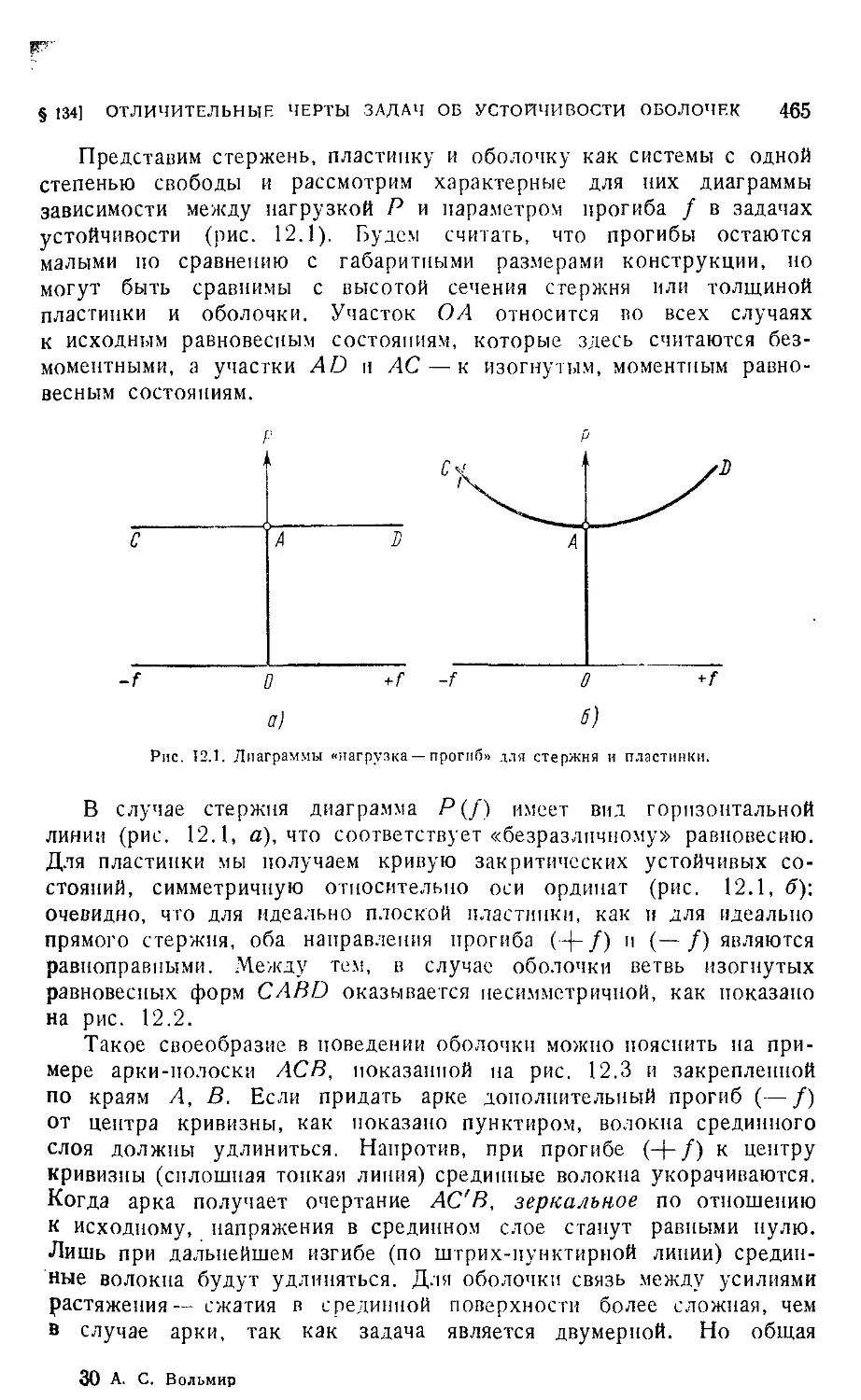
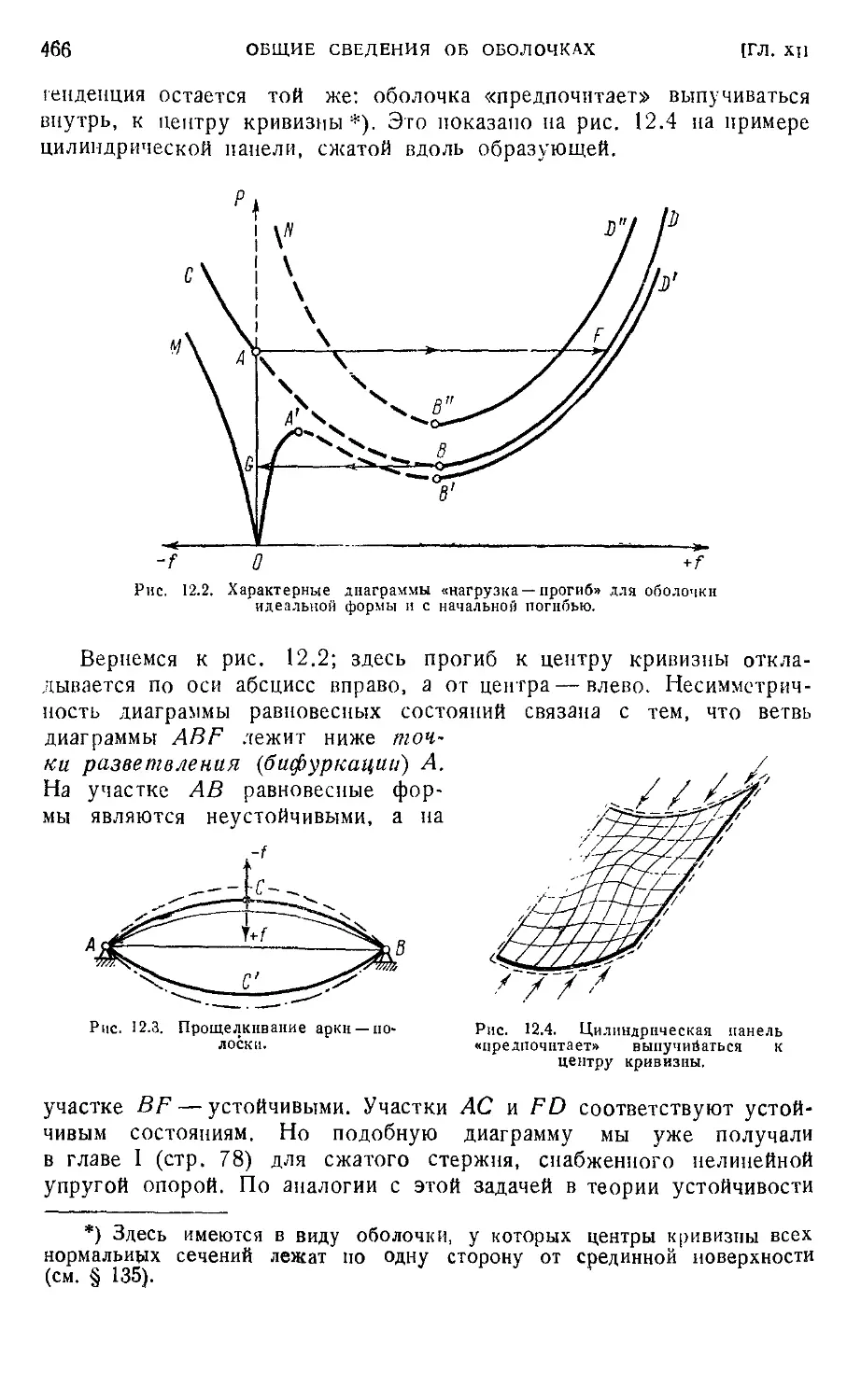
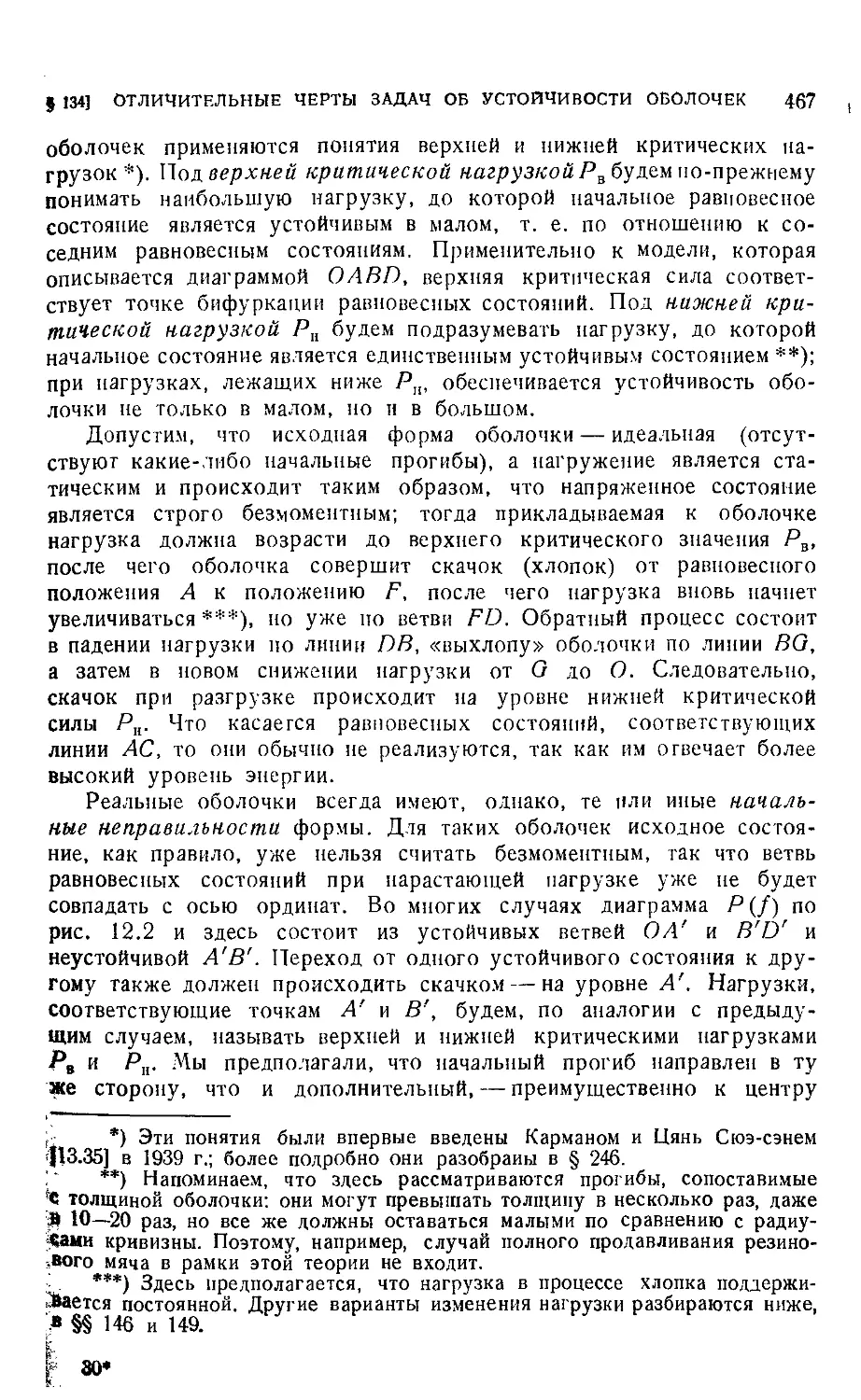
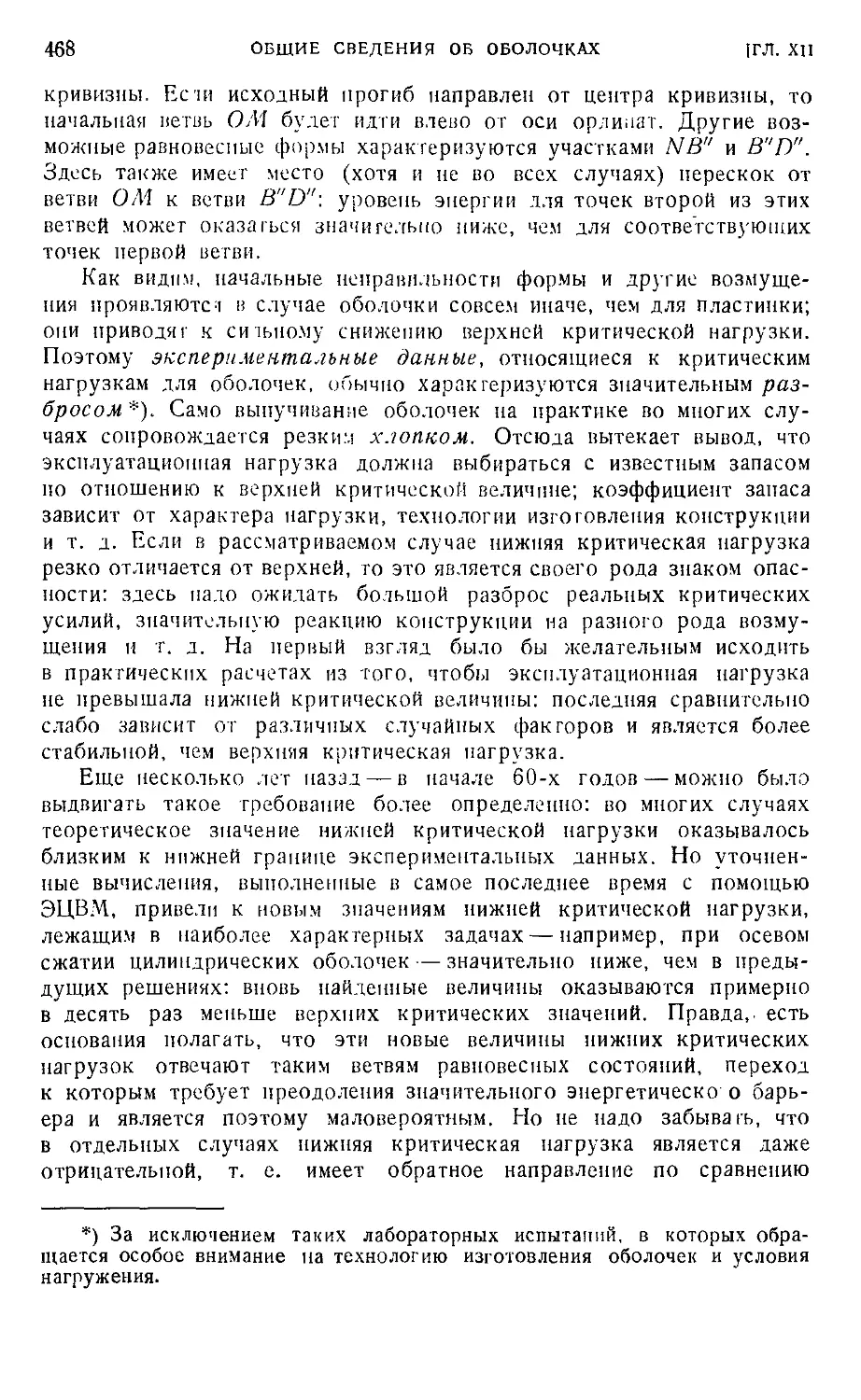
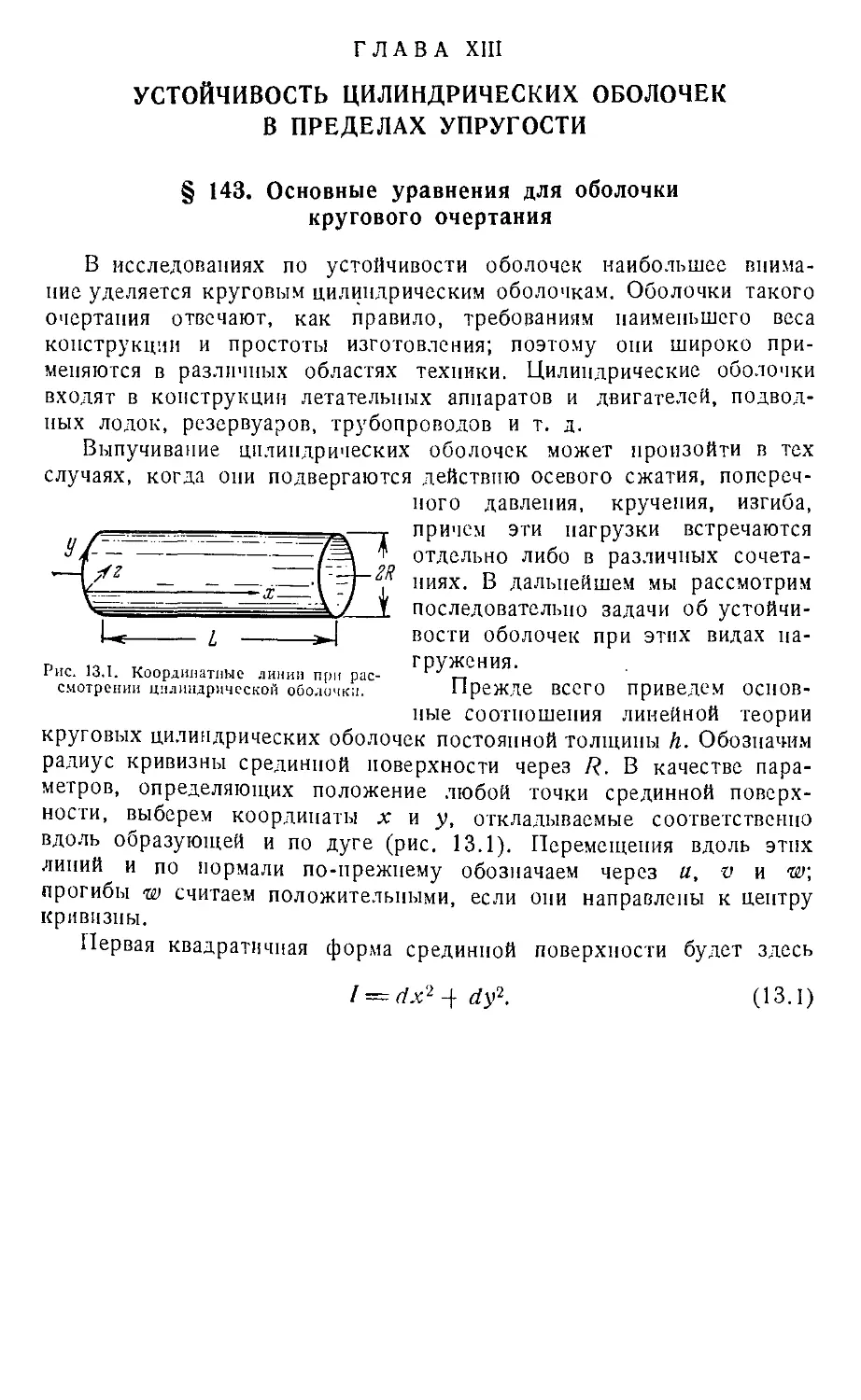
§ 134. Отличительные черты задач об устойчивости оболочек . . . 464
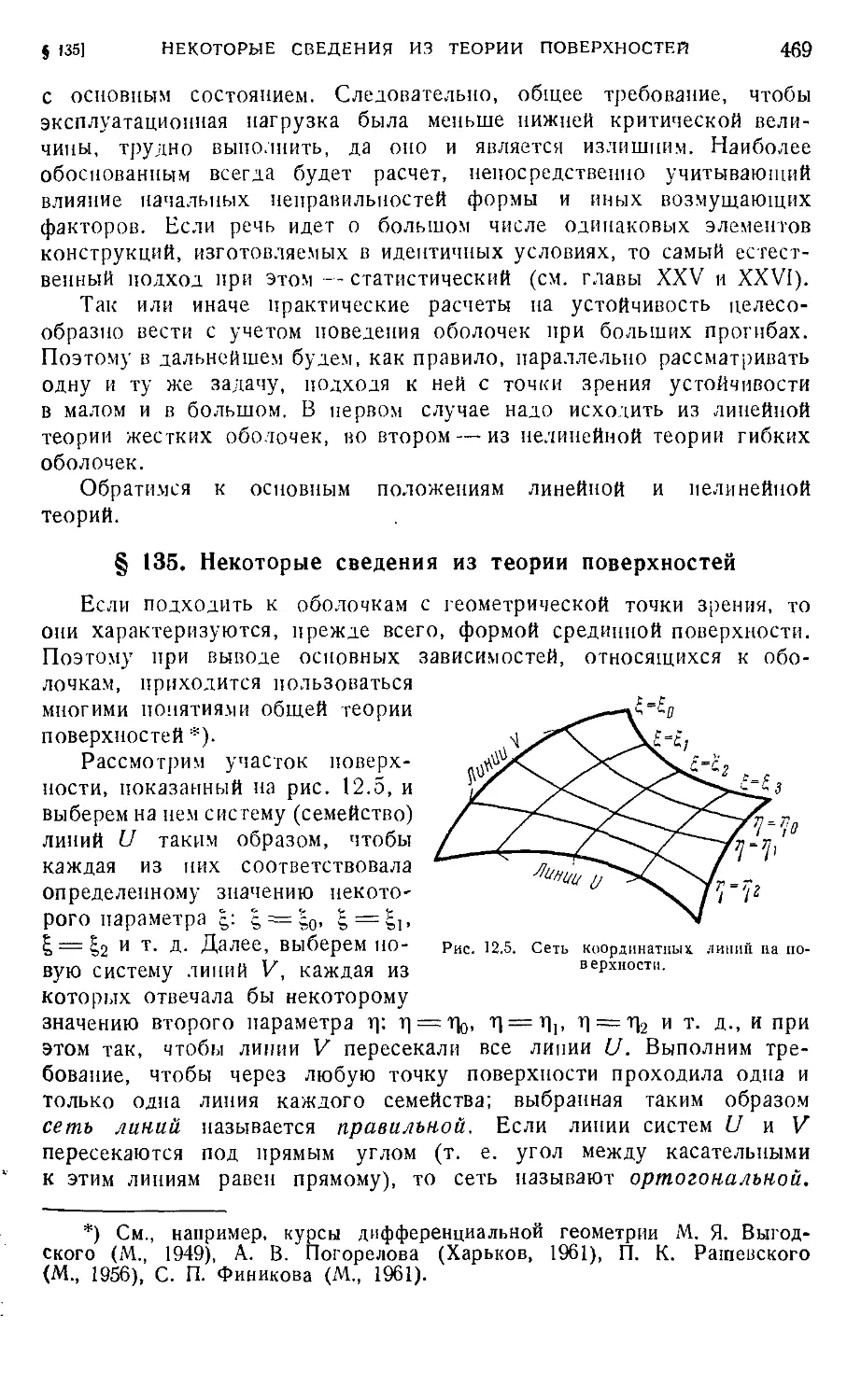
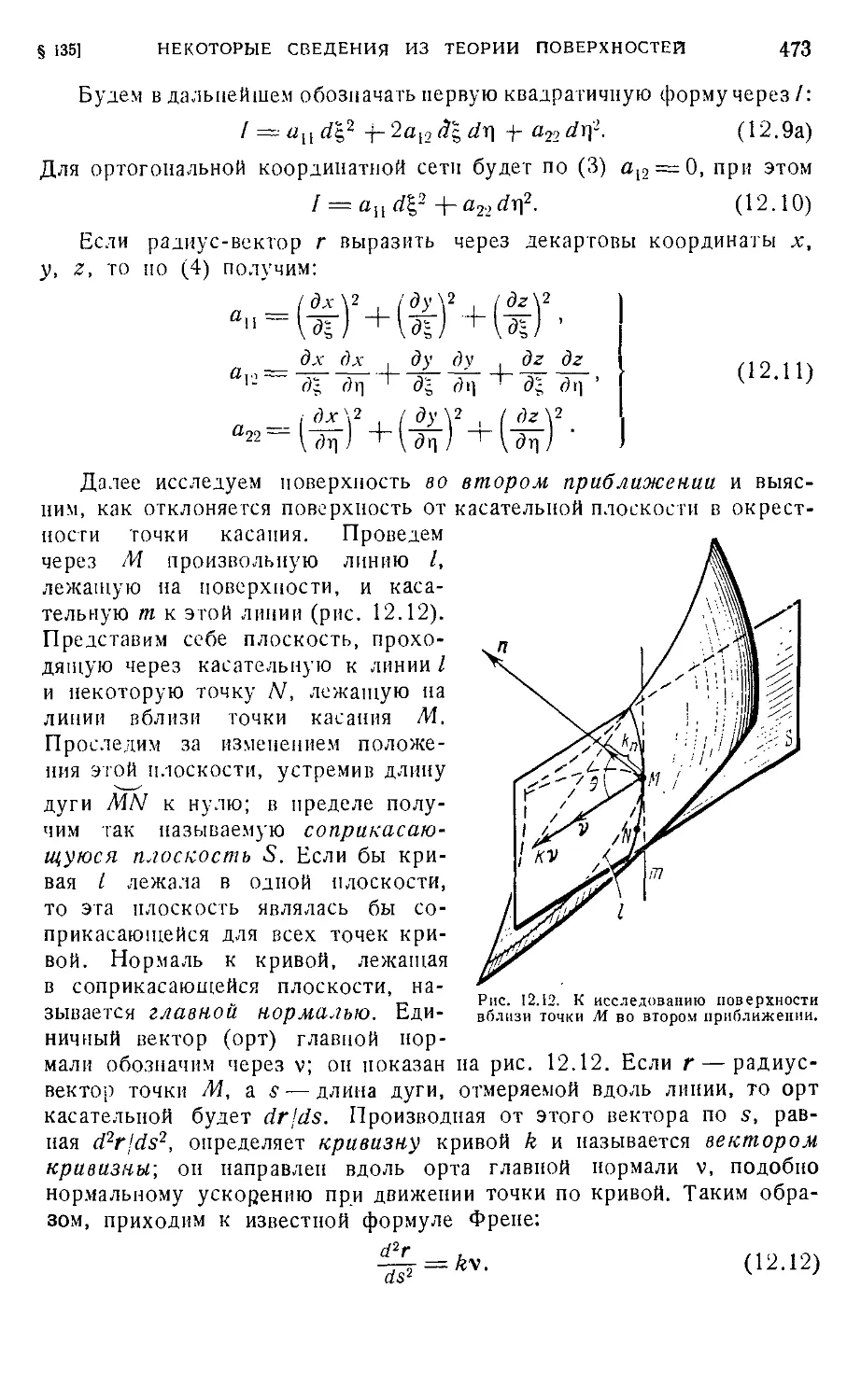
§ 135. Некоторые сведения из теории поверхностей 469
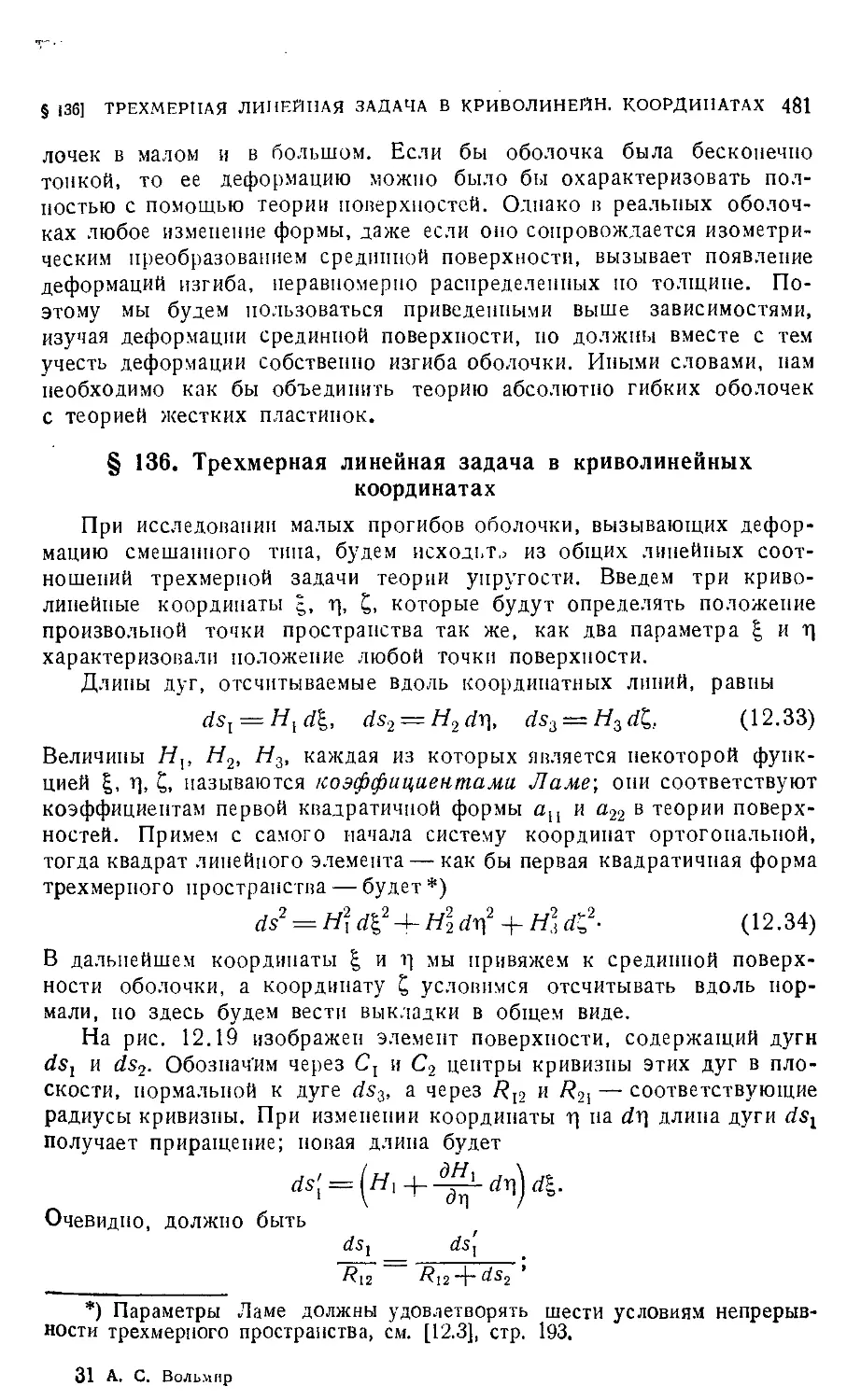
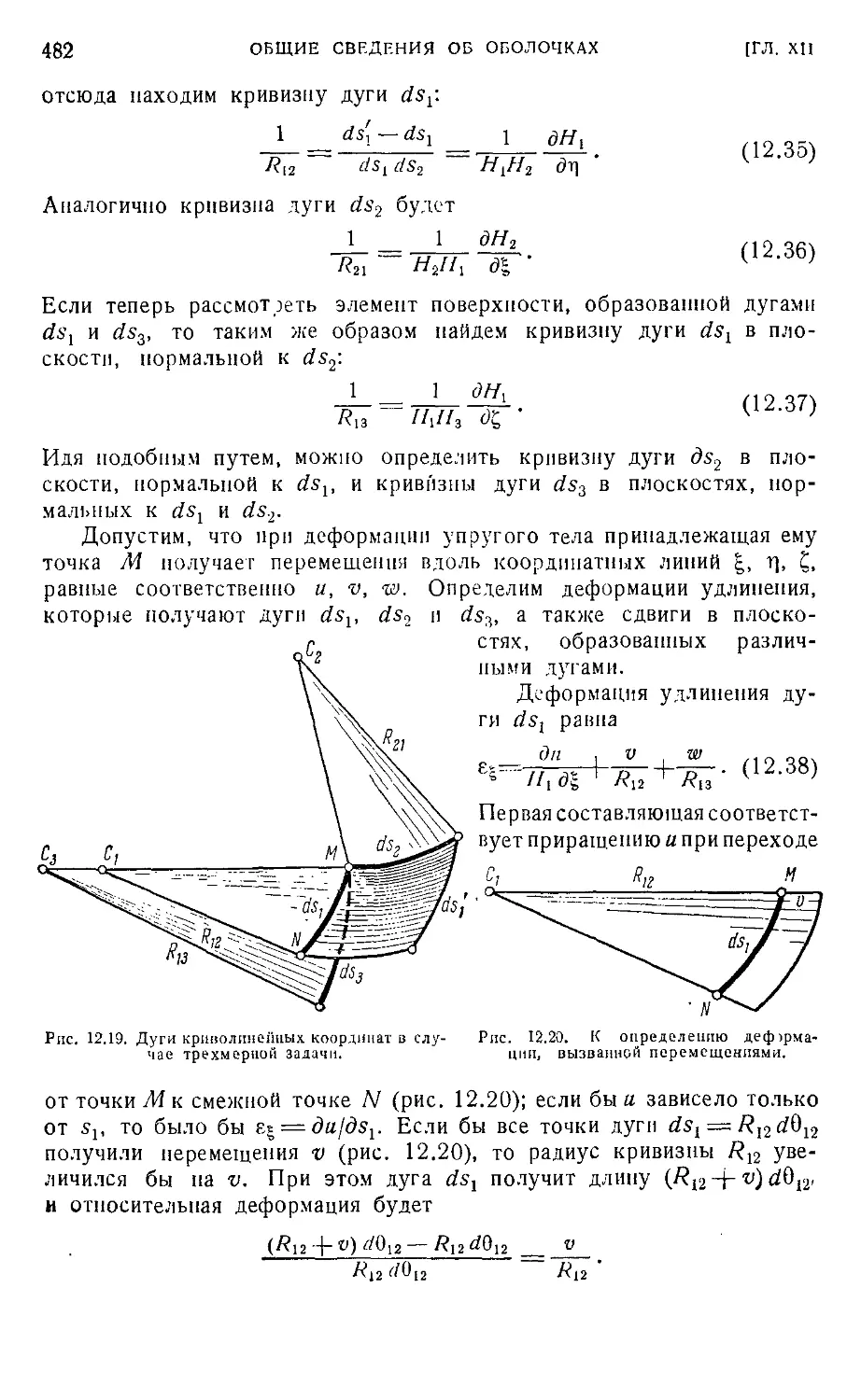
§ 136. Трехмерная линейная задача в криволинейных координатах . 481
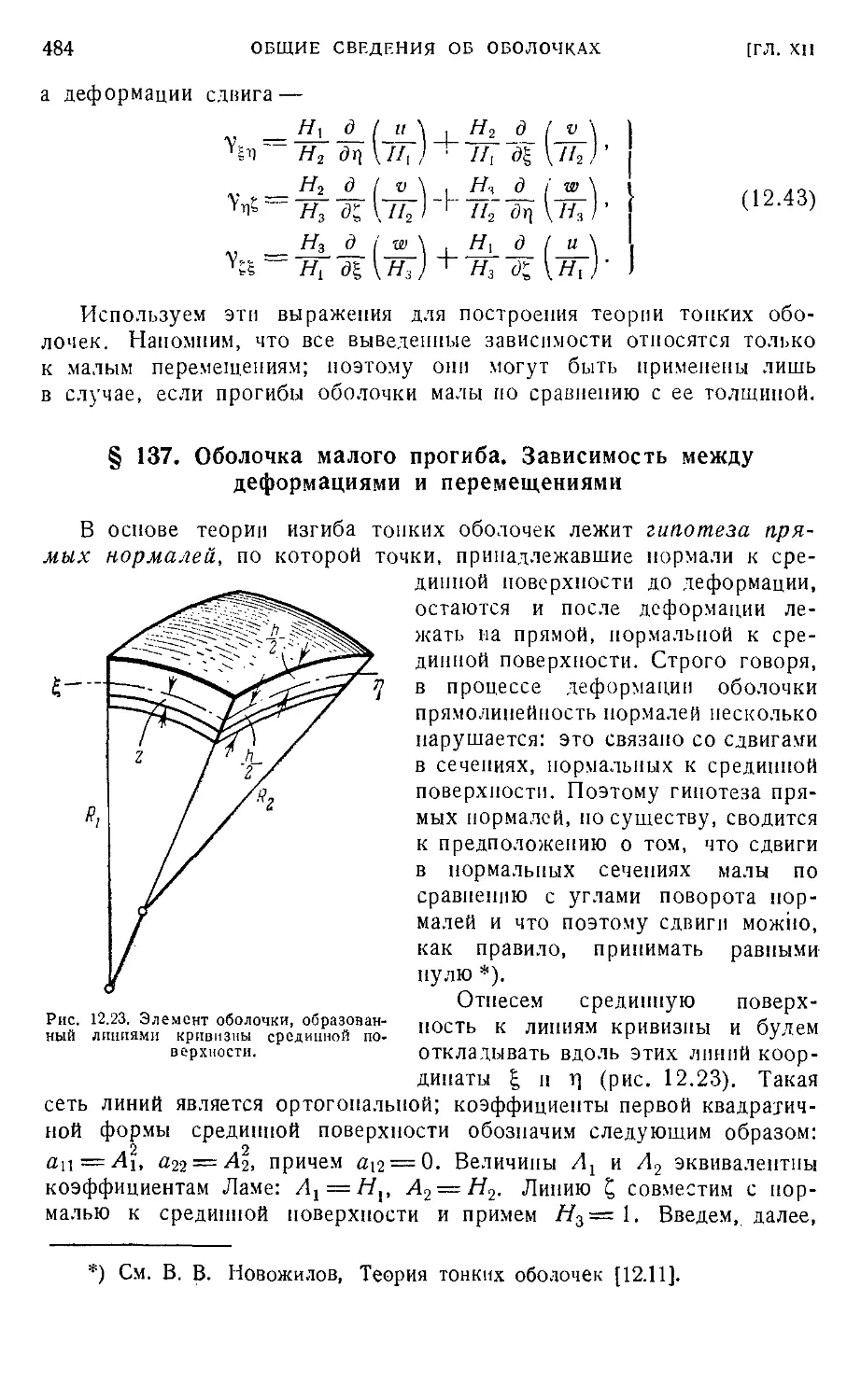
§ 137. Оболочка малого прогиба. Зависимость между деформациями
и перемещениями 484
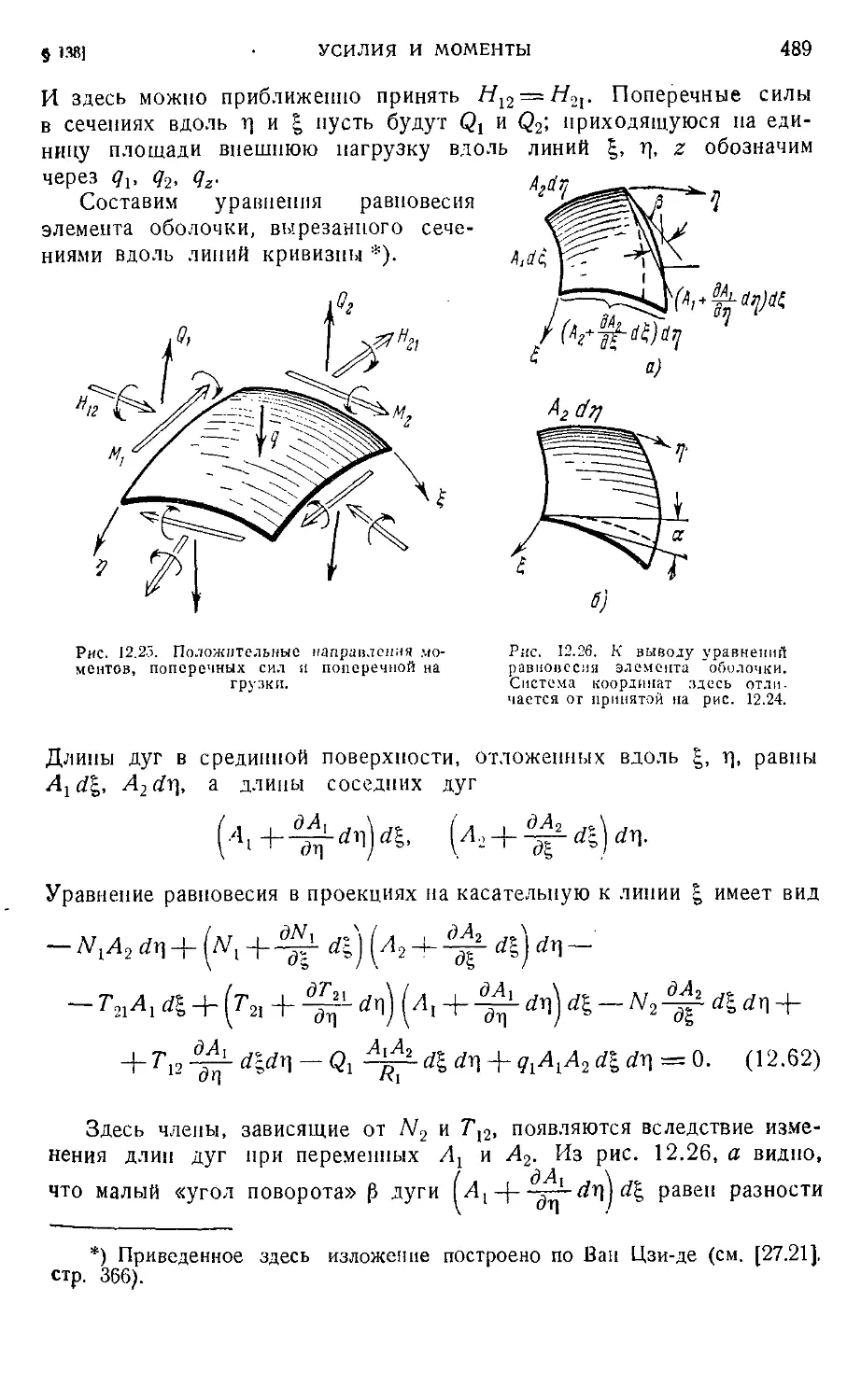
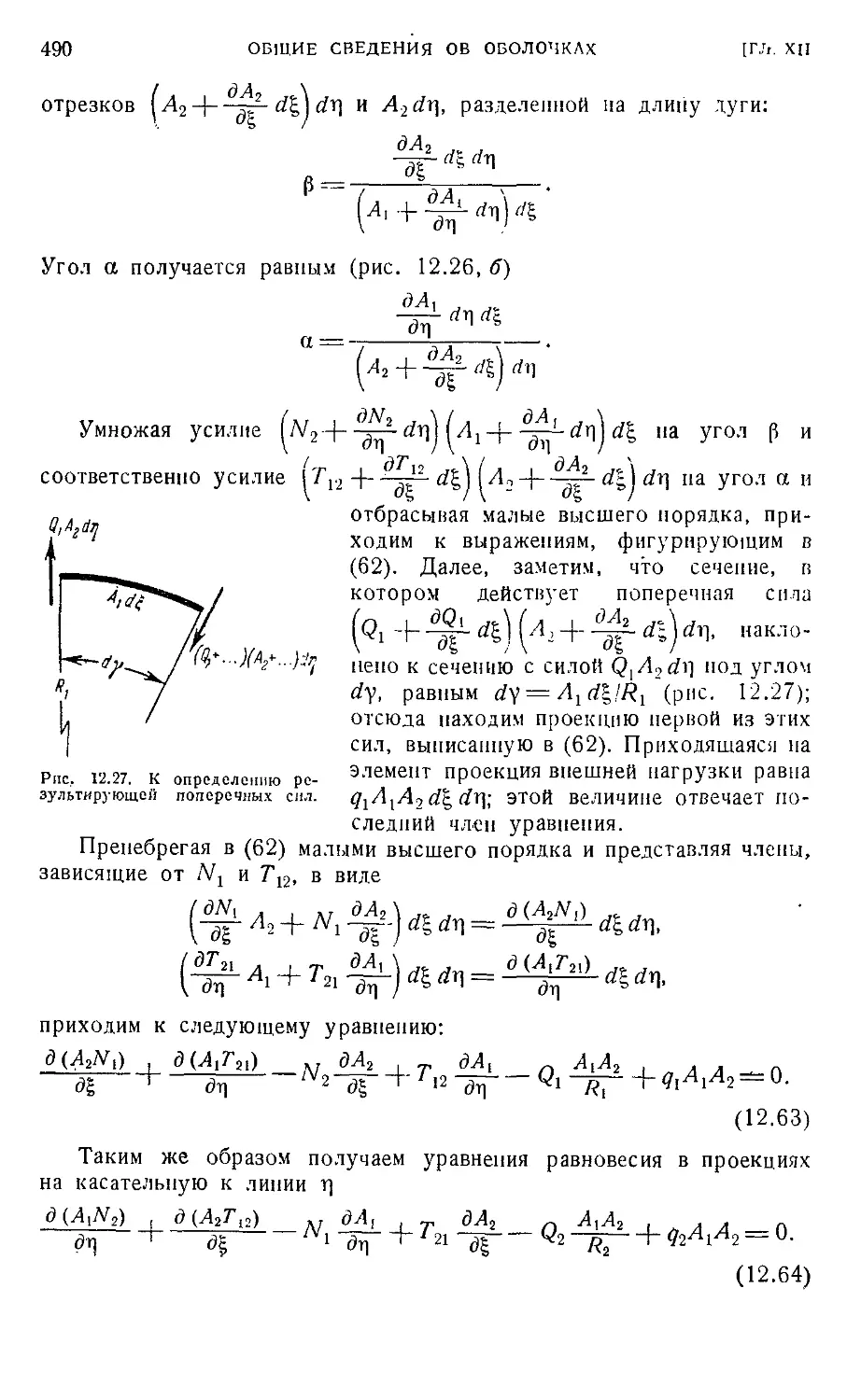
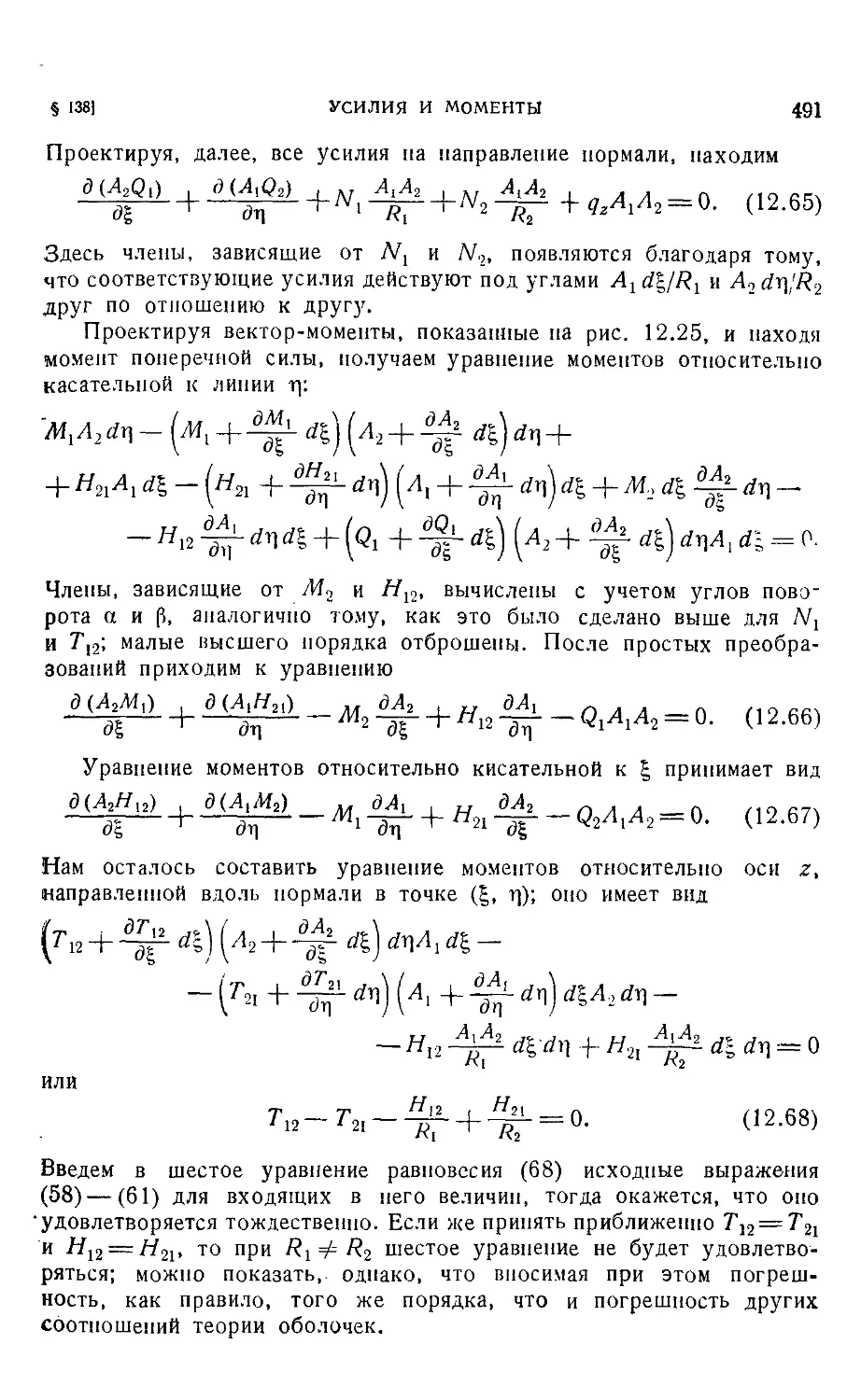
§ 138. Усилия и моменты. Уравнения равновесия элемента оболочки 488
§ 139. Упрощенный вариант основных уравнений линейной теории
оболочек 493
§ 140. Оболочка большого прогиба. Деформации и перемещения . . 497
§ 141. Оболочка большого прогиба. Уравнения равновесия.
Различные подходы к решению задачи 500
§ 142. Упрощенные зависимости для оболочки большого прогиба . 503
Глава XIII. Устойчивость цилиндрических оболочек в пределах
упругости 506
§ 143. Основные уравнения для оболочки кругового очертания . . 506
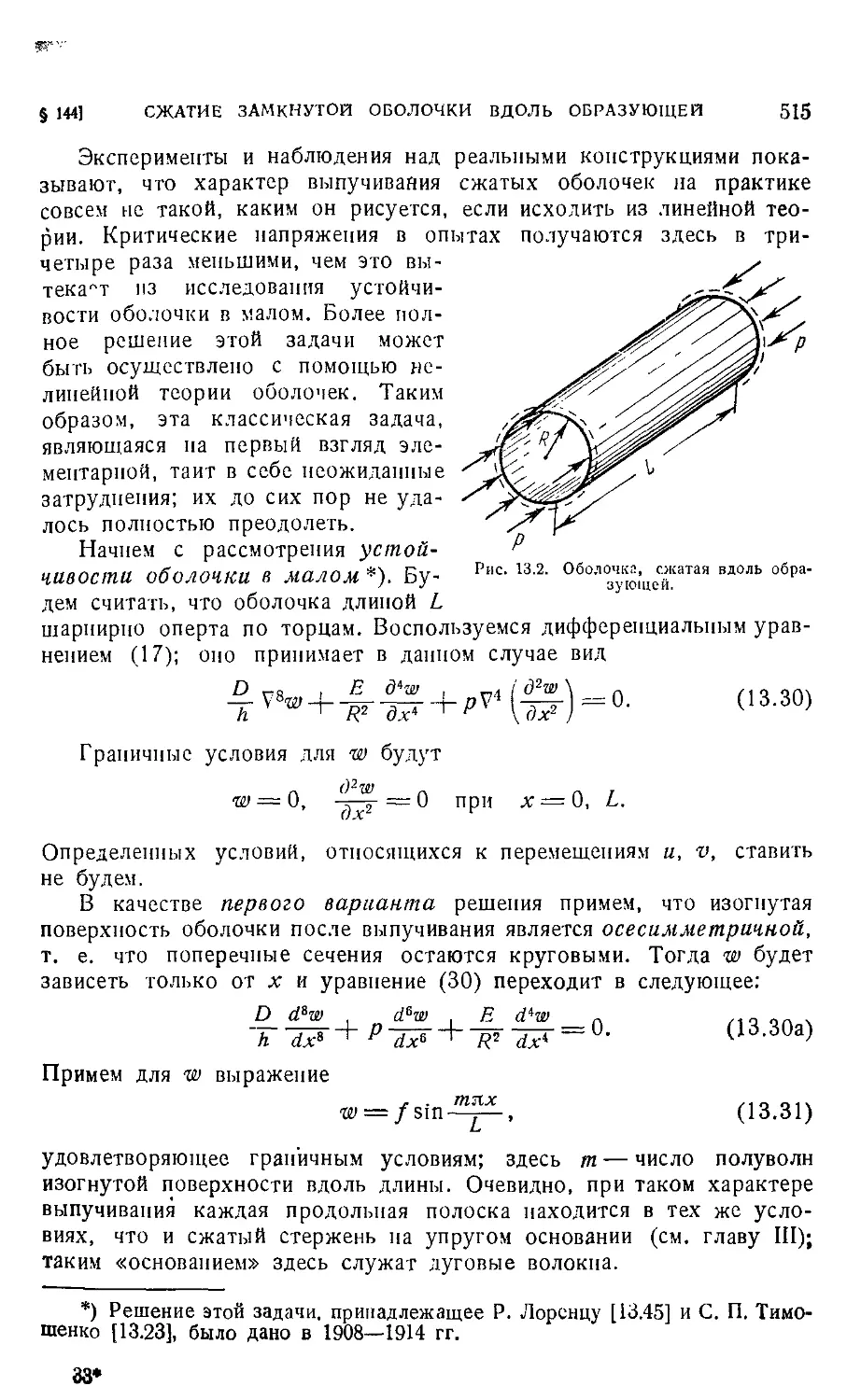
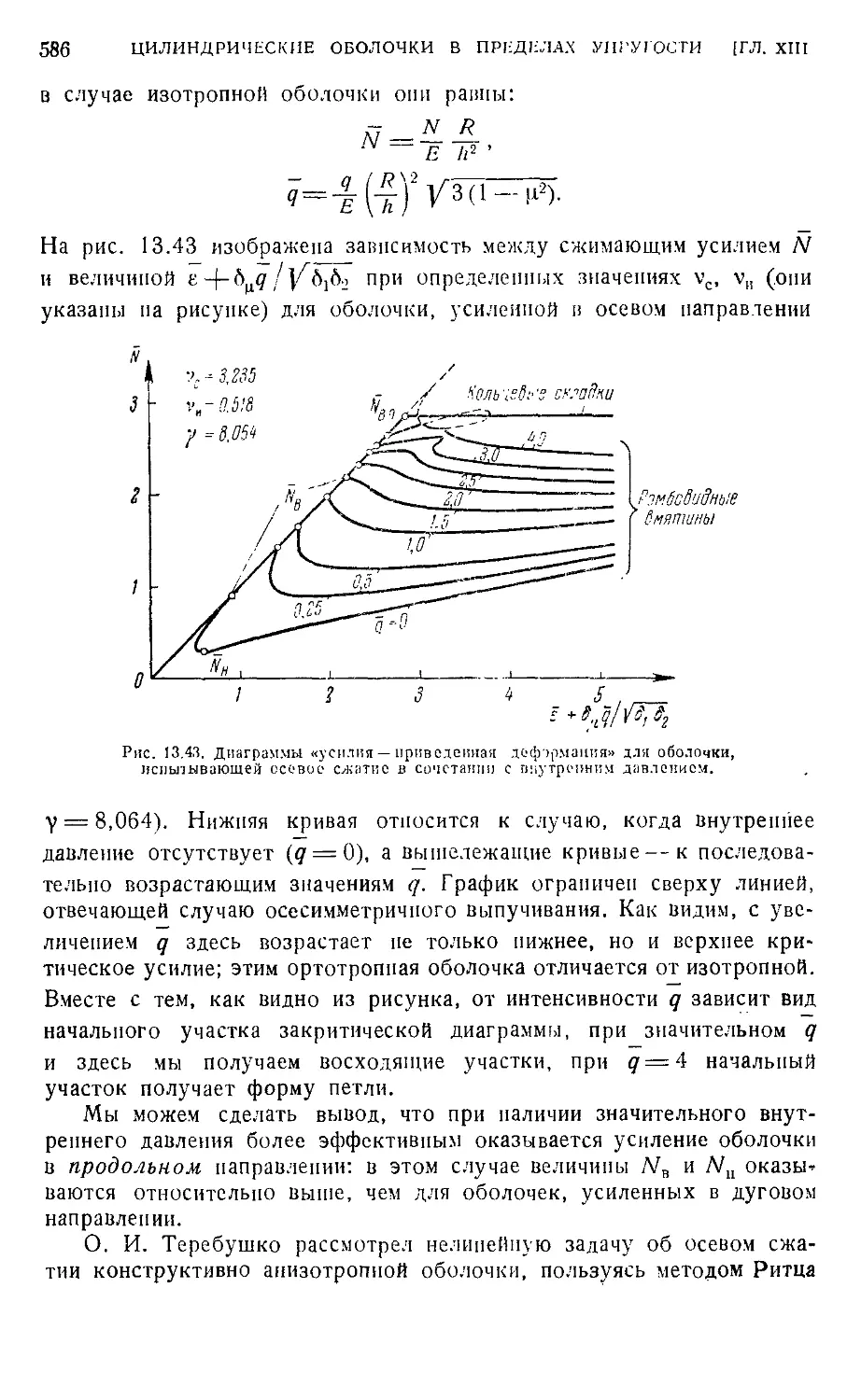
§ 144. Сжатие замкнутой оболочки вдоль образующей. Линейная
задача 514
ОГЛАВЛЕНИЕ
7
s 145. Влияние граничных условий в случае осезого сжатия . . . 521
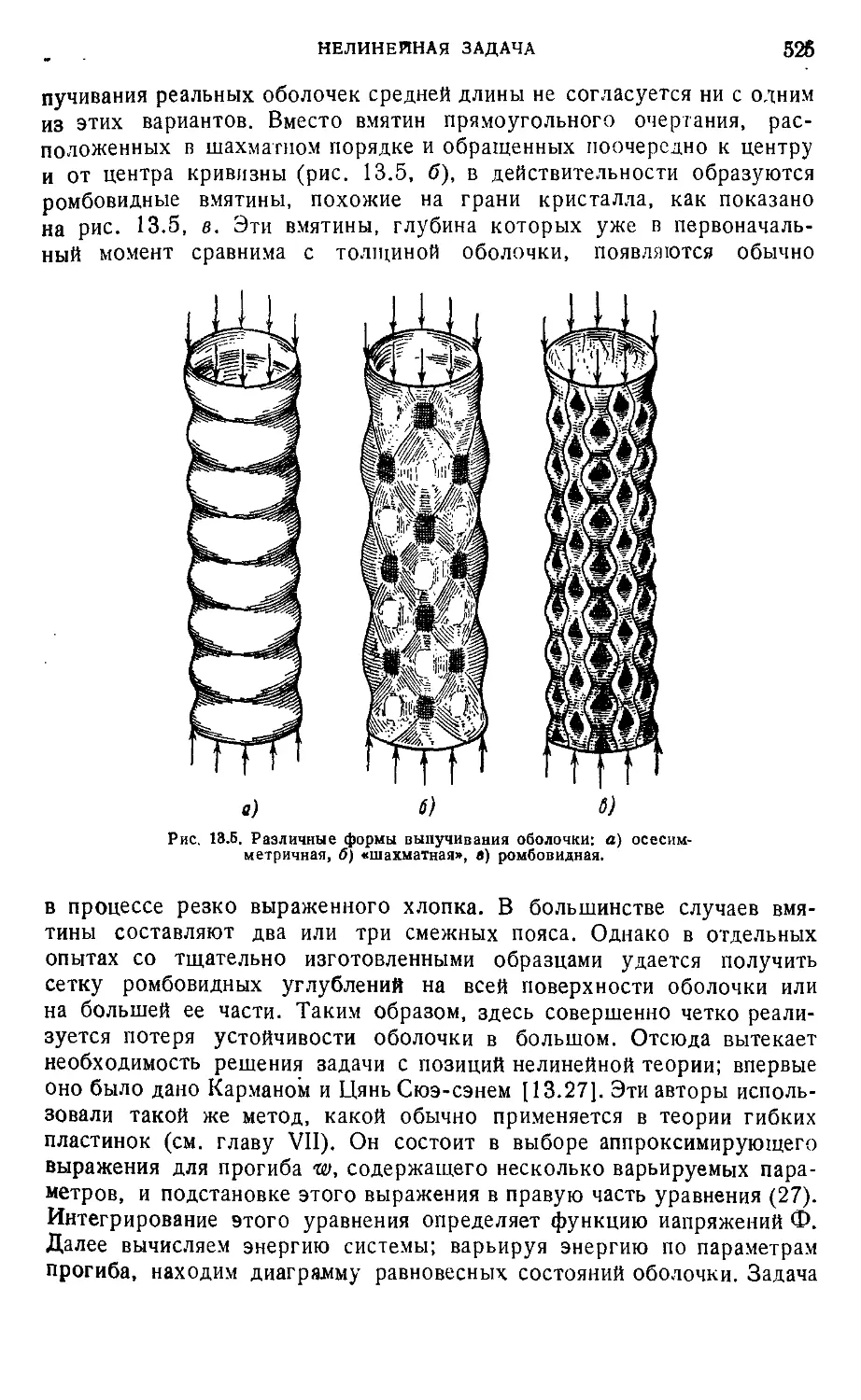
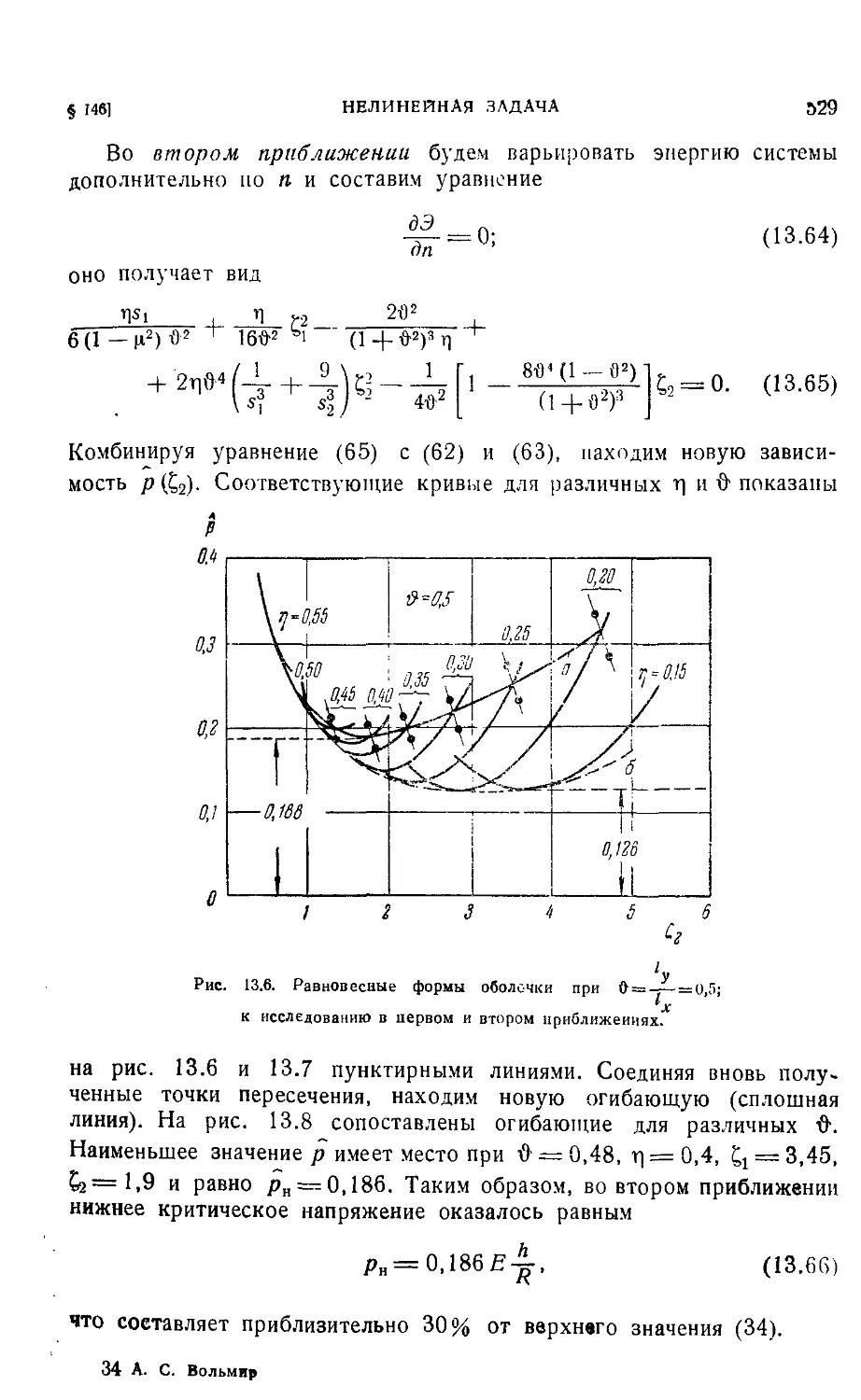
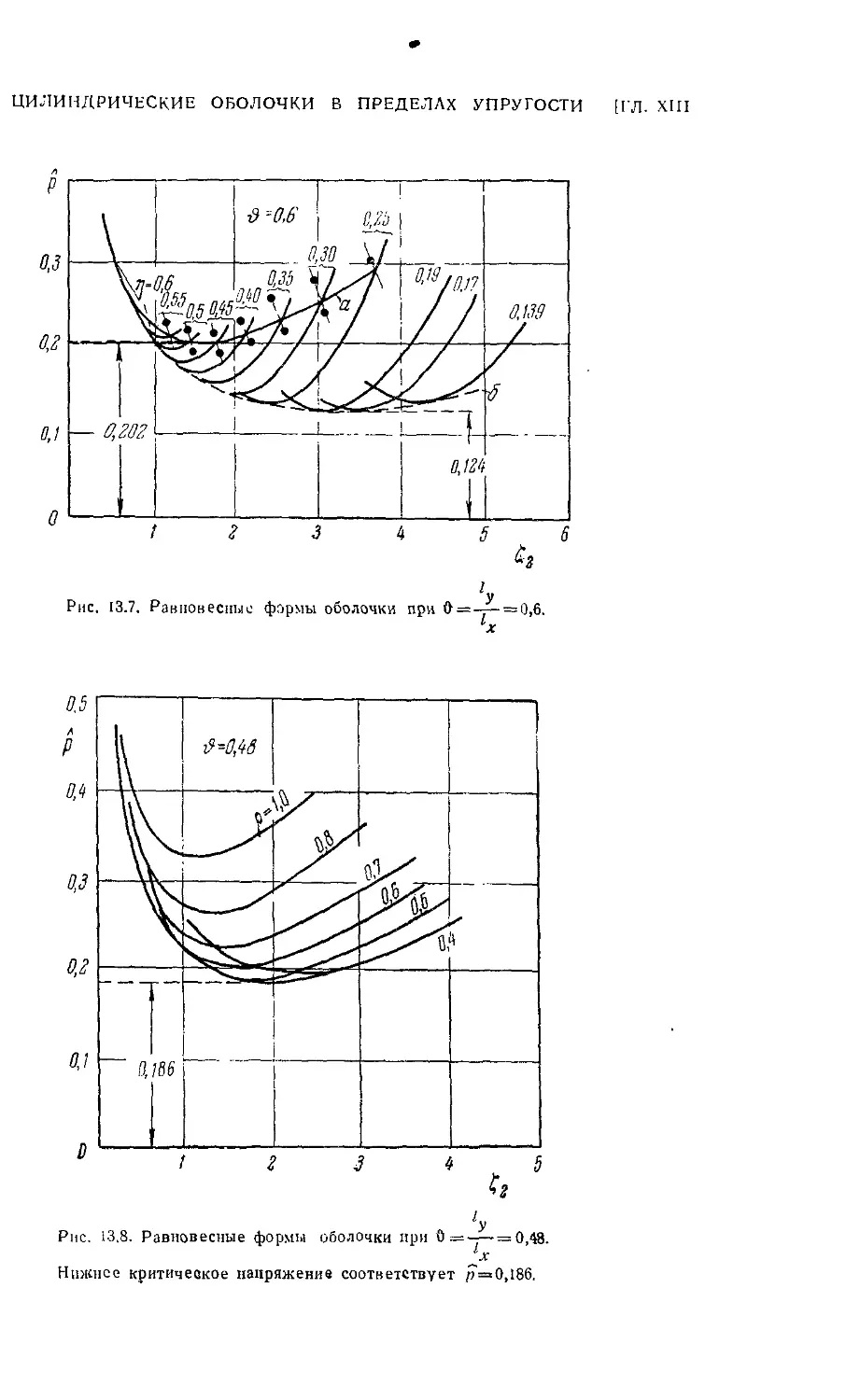
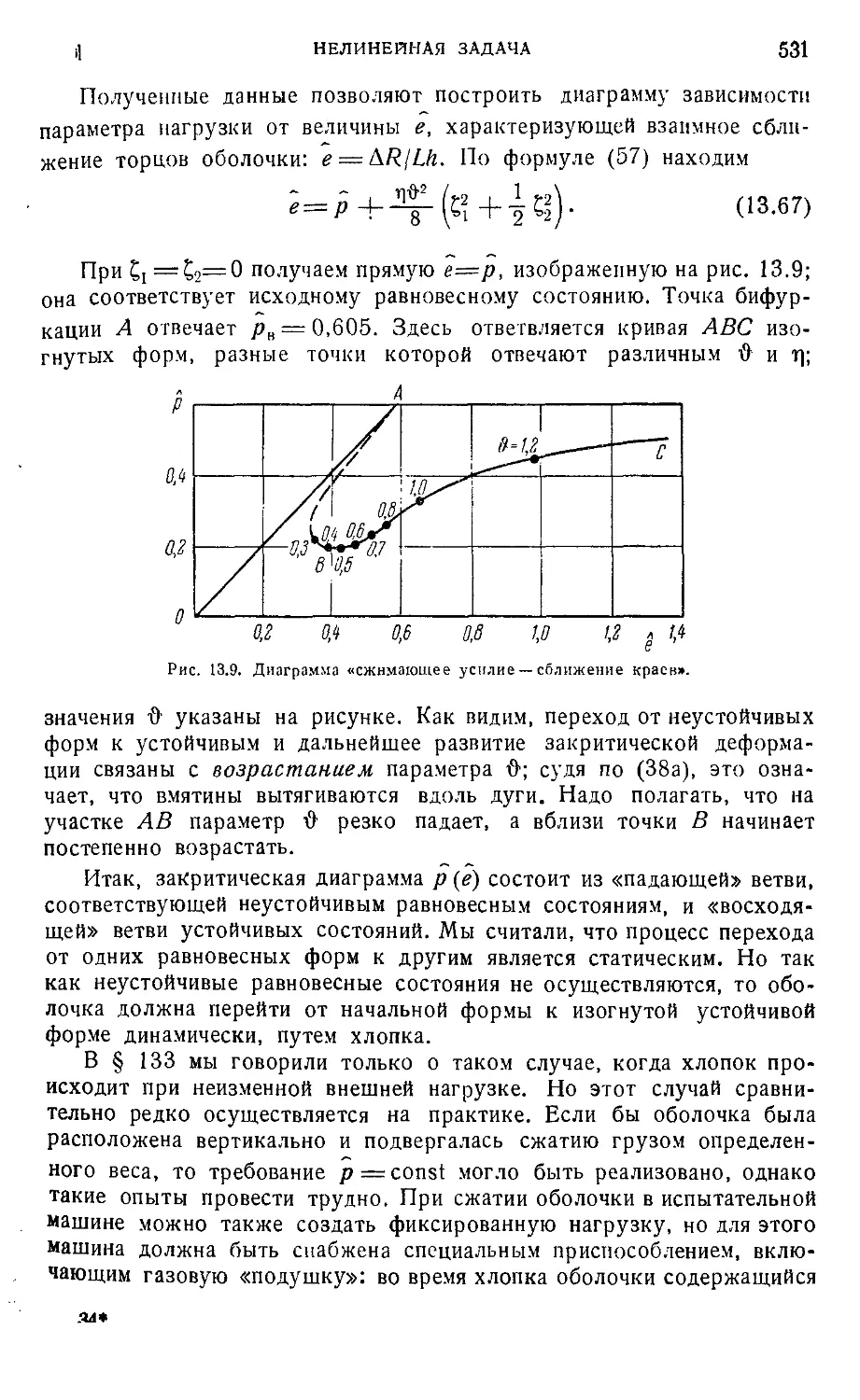
1 146. Нелинейная задача 524
I 147. Геометрический подход к задаче 534
§ 148. Влияние начальных неправильностей при осевом сжатии . . 537
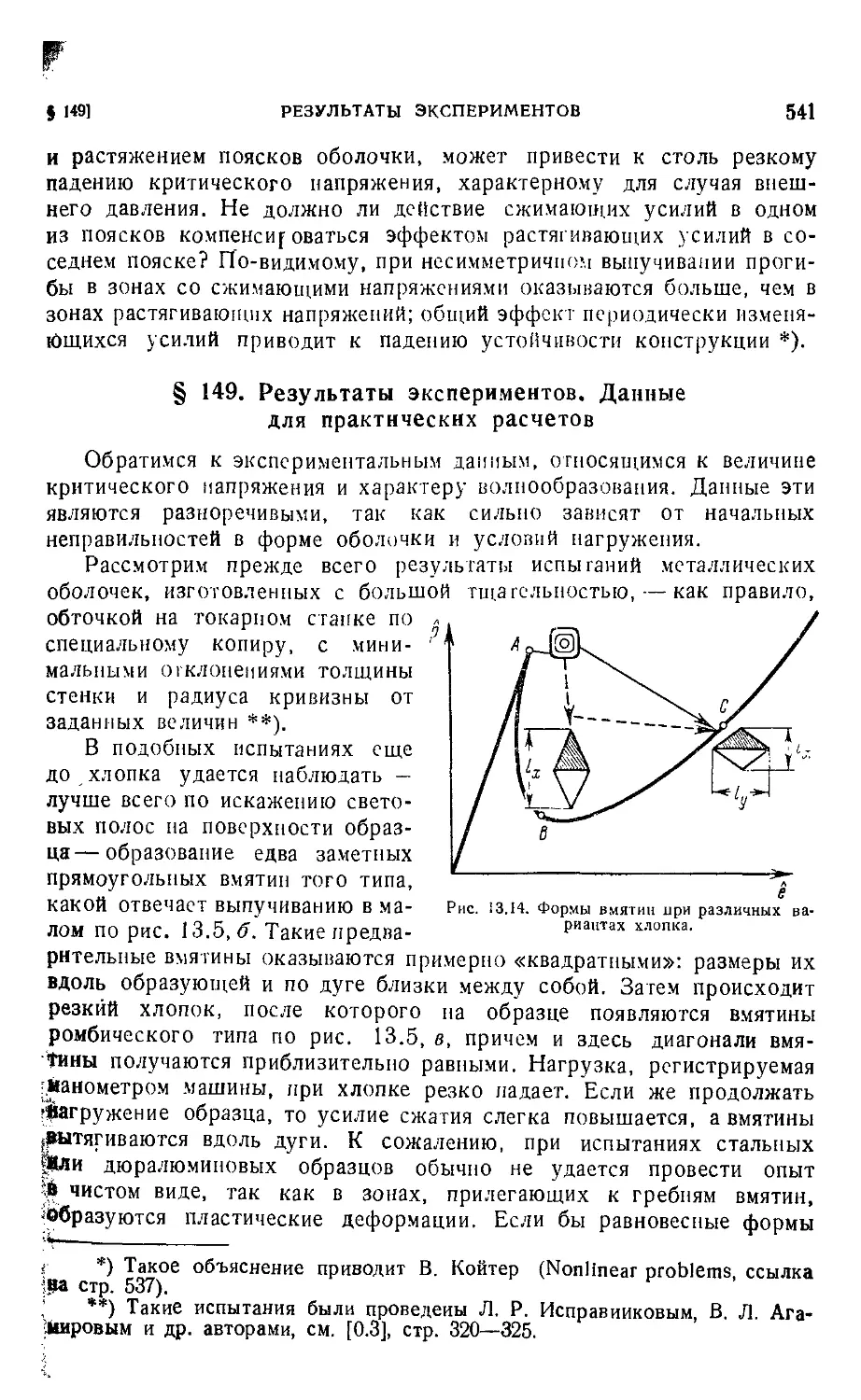
§ 149. Результаты экспериментов. Данные для практических
расчетов 541
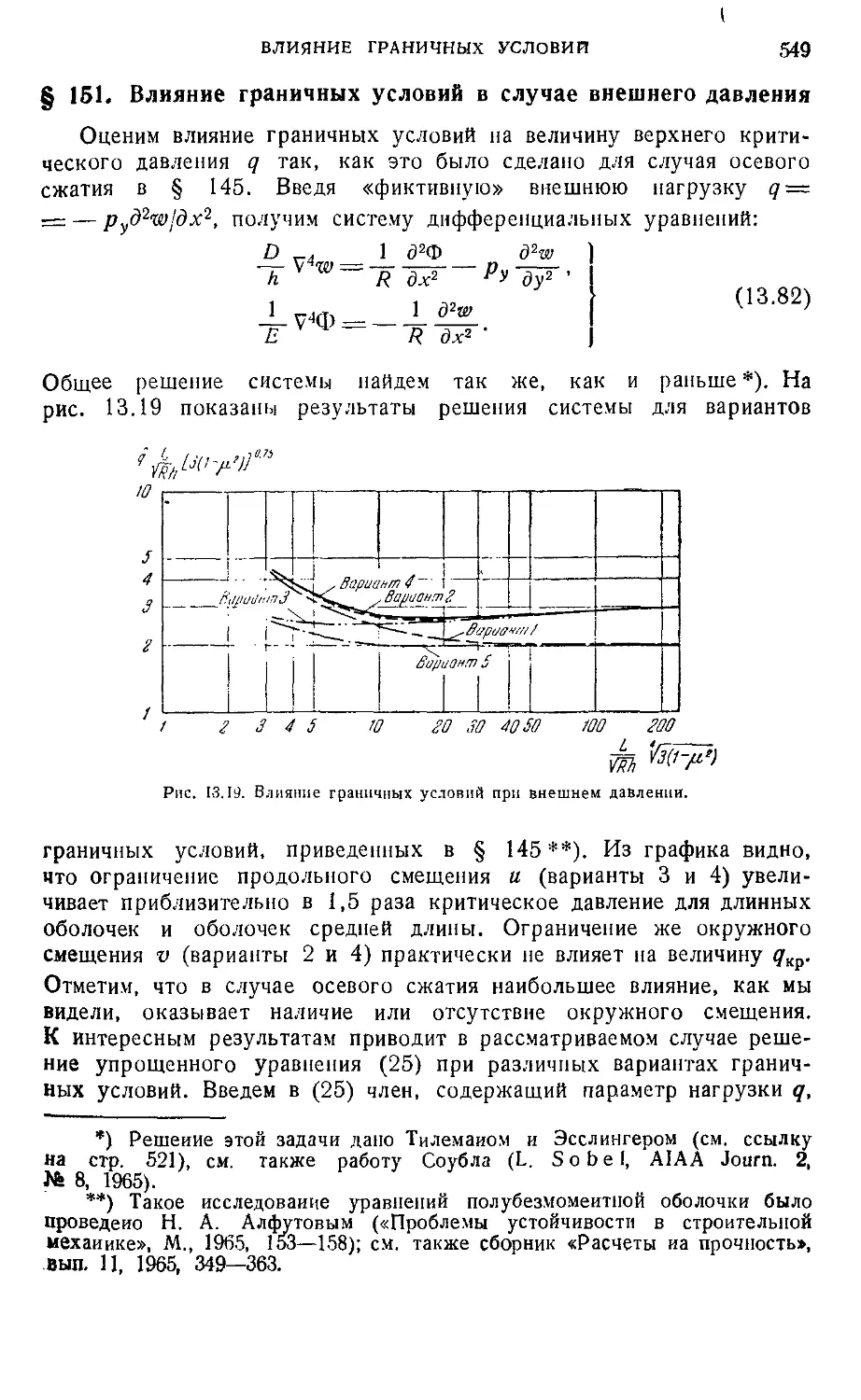
§ 150. Случай внешнего давления. Линейная задача 545
§ 151. Влияние граничных условий в случае внешнего давления . . 549
§ 152. Случай внешнего давления. Нелинейная задача 551
§ 153. Эксперименты с оболочками, подвергающимися внешнему
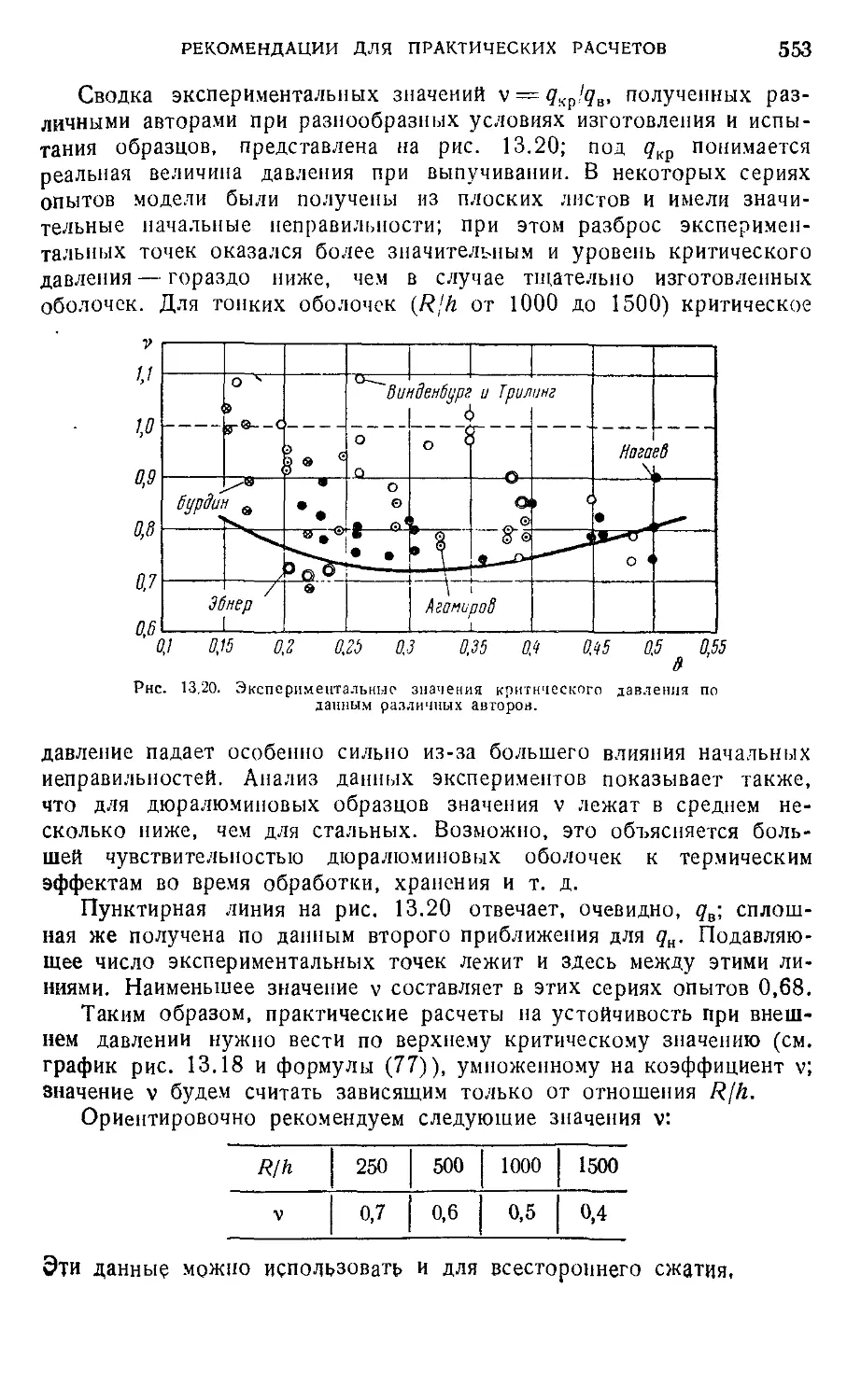
давлению. Рекомендации для практических расчетов .... 552
§ 154. Влияние начальных неправильностей при внешнем давлении 554
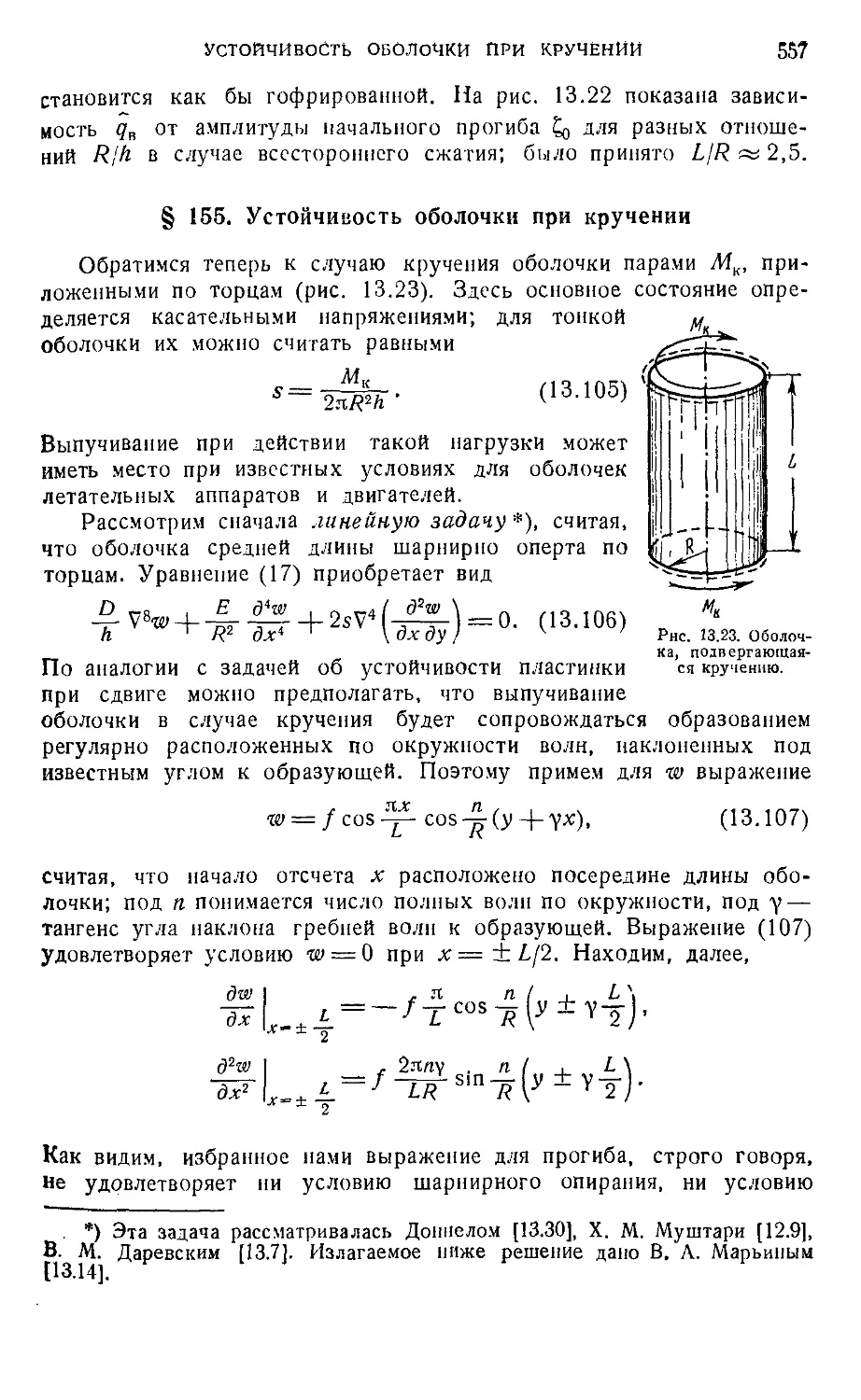
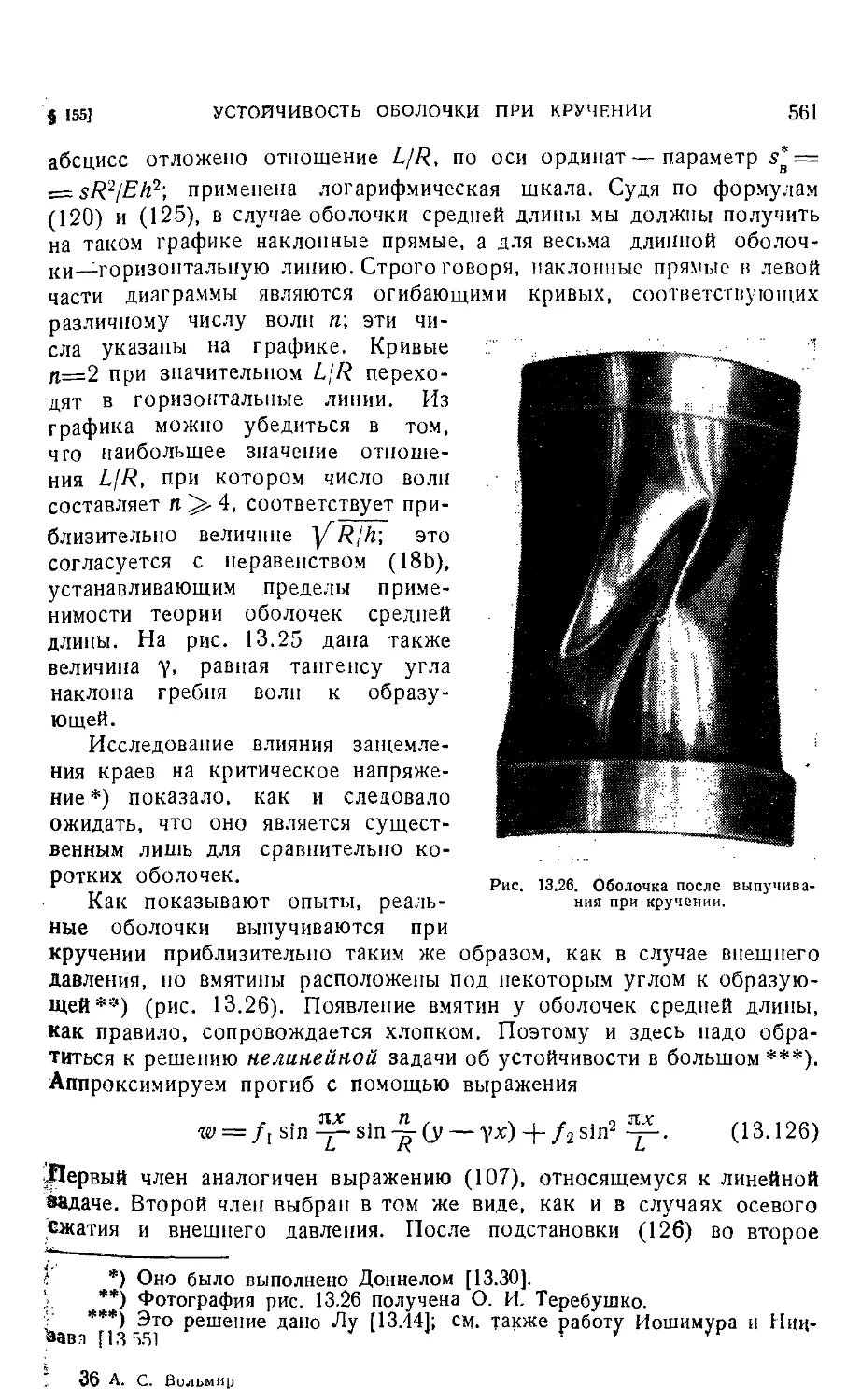
§ 155. Устойчивость оболочки при кручении 557
§ 156. Устойчивость при изгибе 564
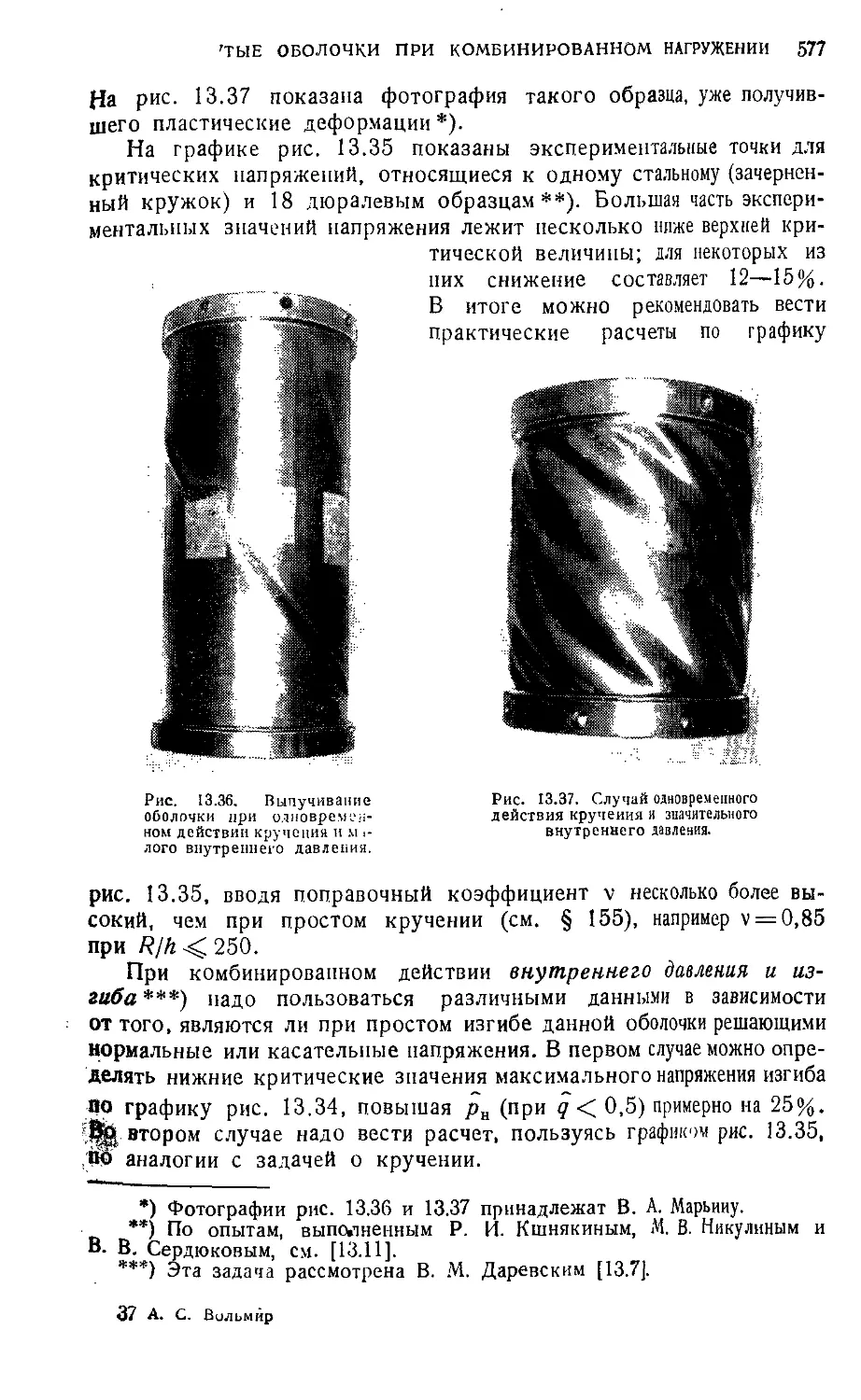
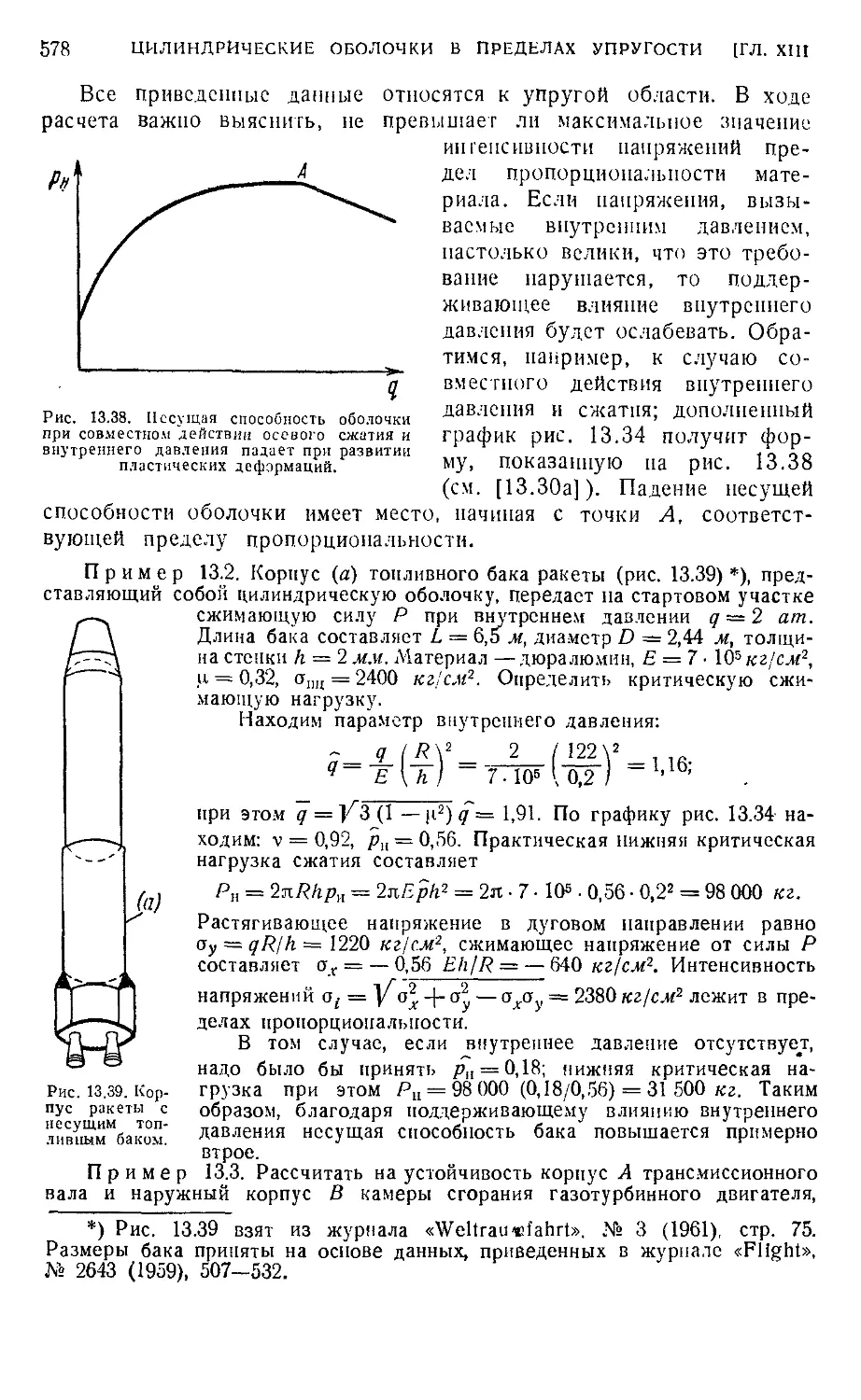
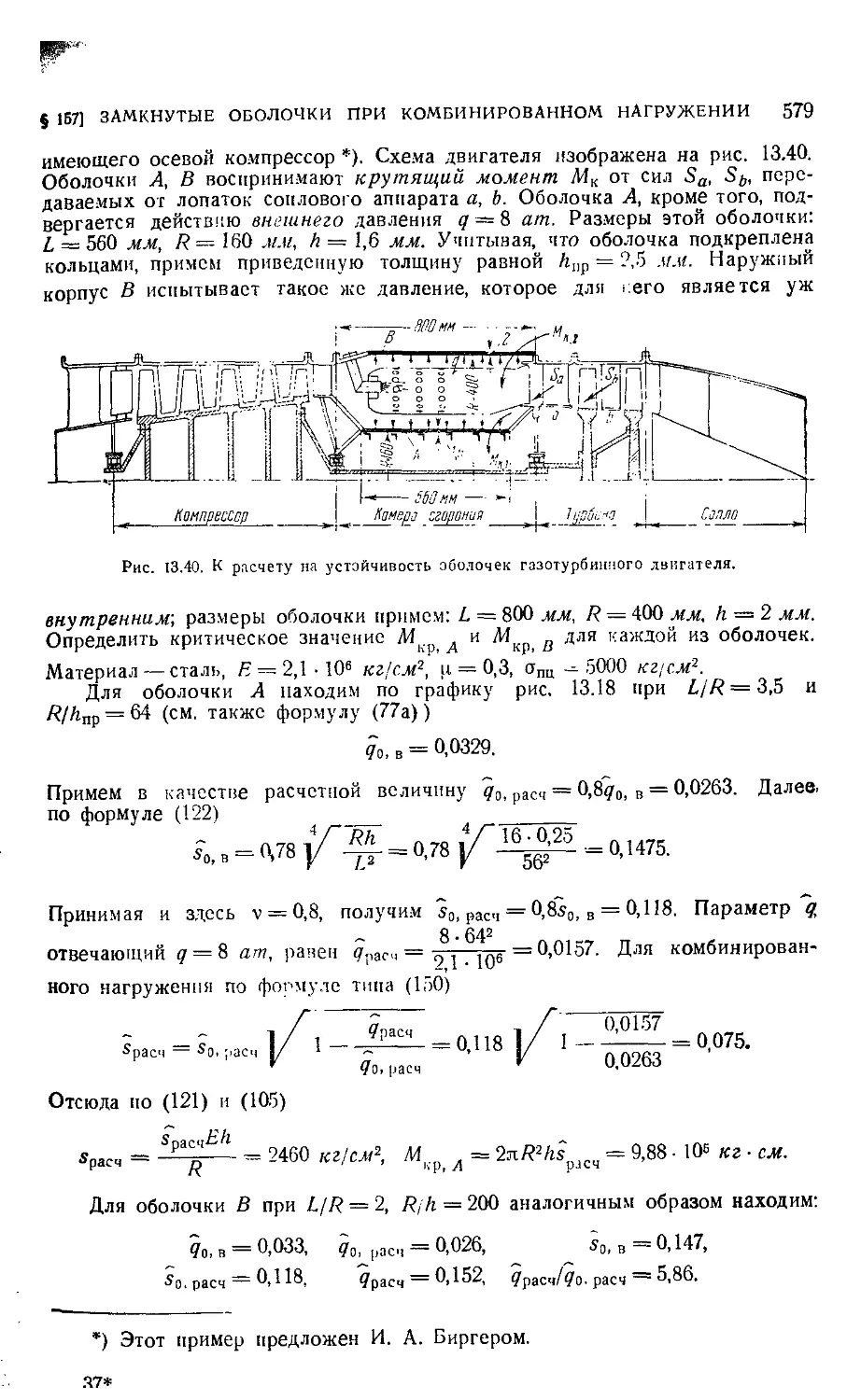
§ 157. Замкнутые оболочки при комбинированном нагружении . . . 570
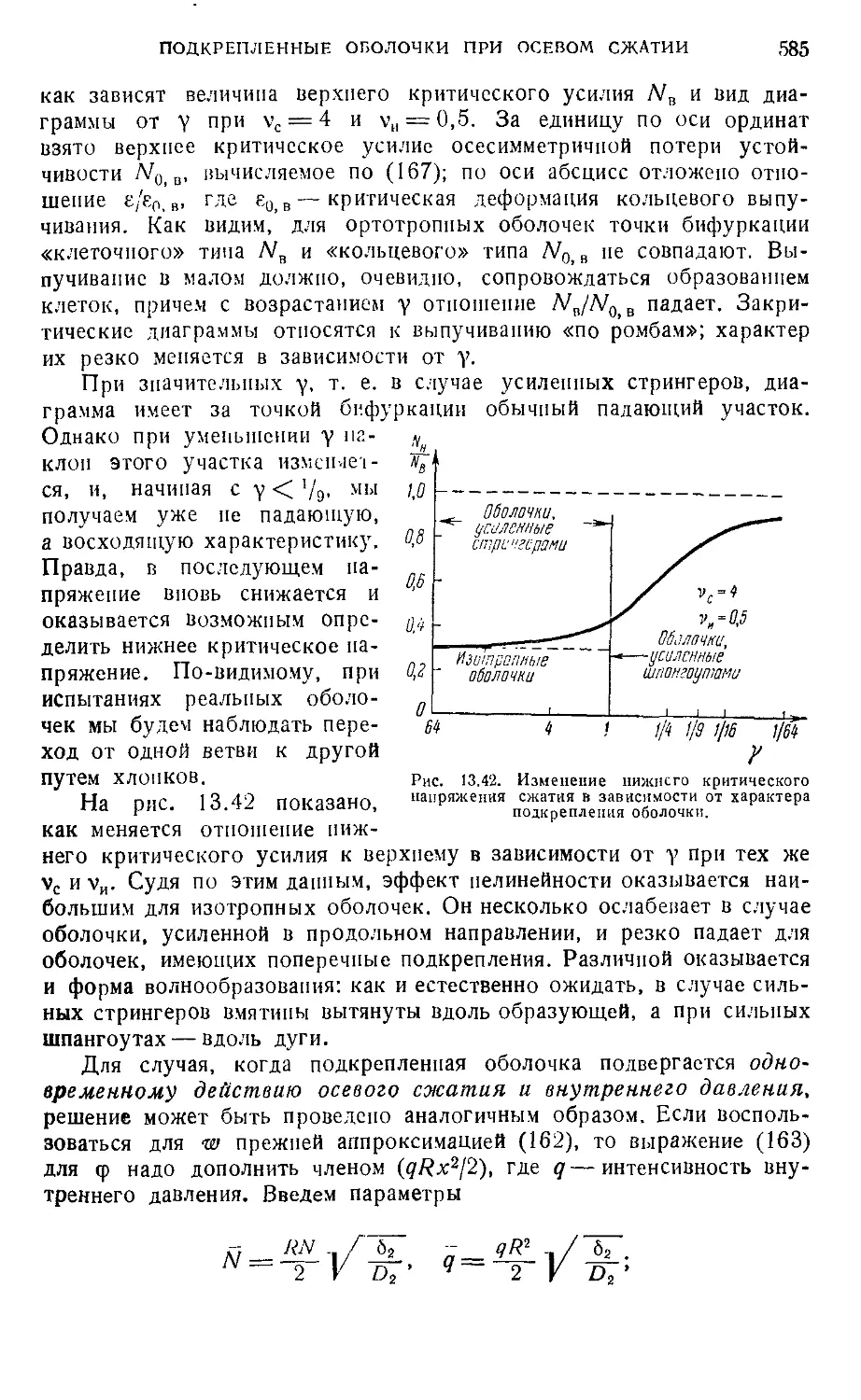
§ 158. Подкрепленные оболочки. Общие уравнения 580
§ 159. Подкрепленные оболочки при осевом сжатии.
Одновременное действие осевого сжатия и внутреннего давления .... 583
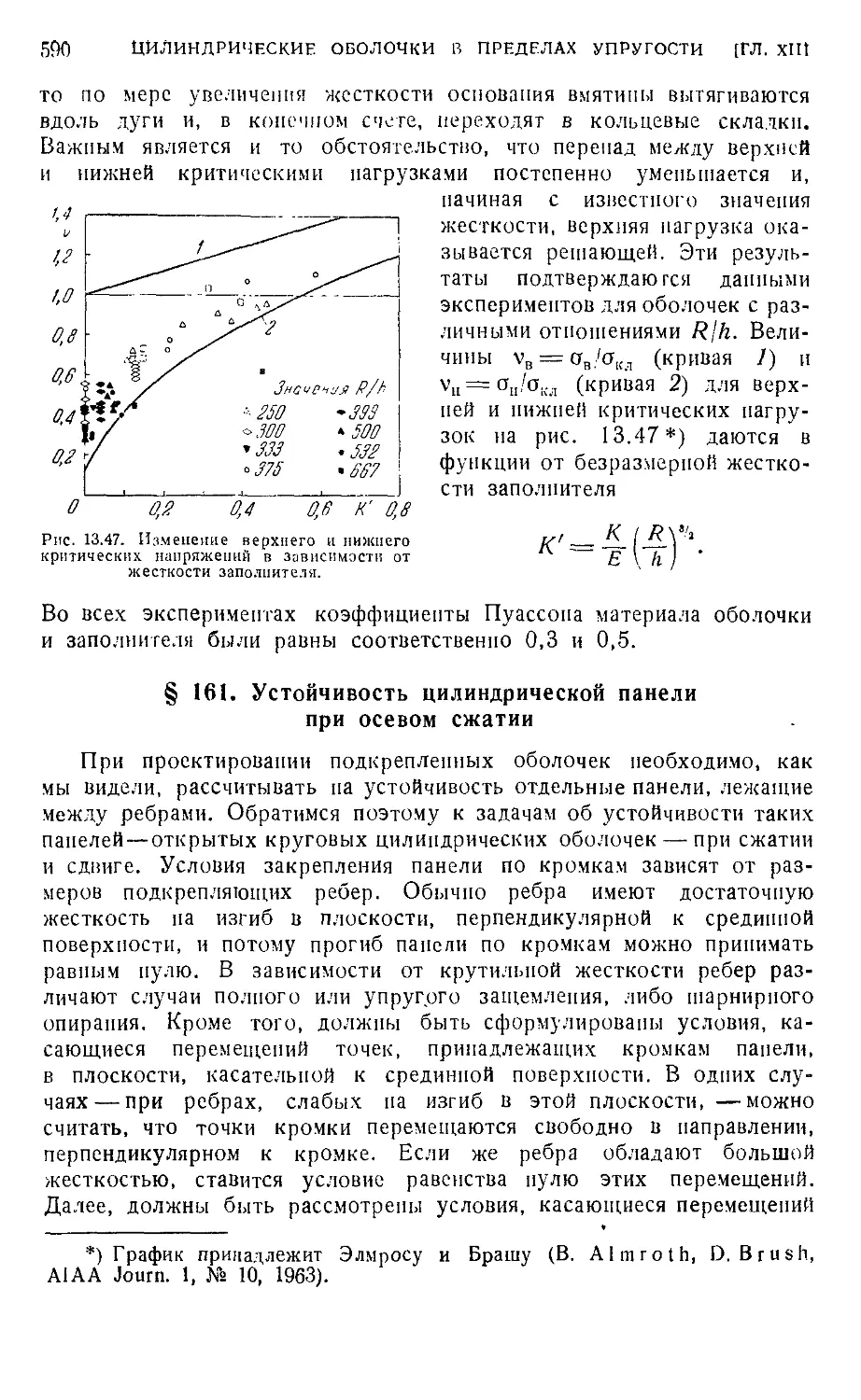
§ 160. Устойчивость оболочек, связанных с упругим заполнителем 589
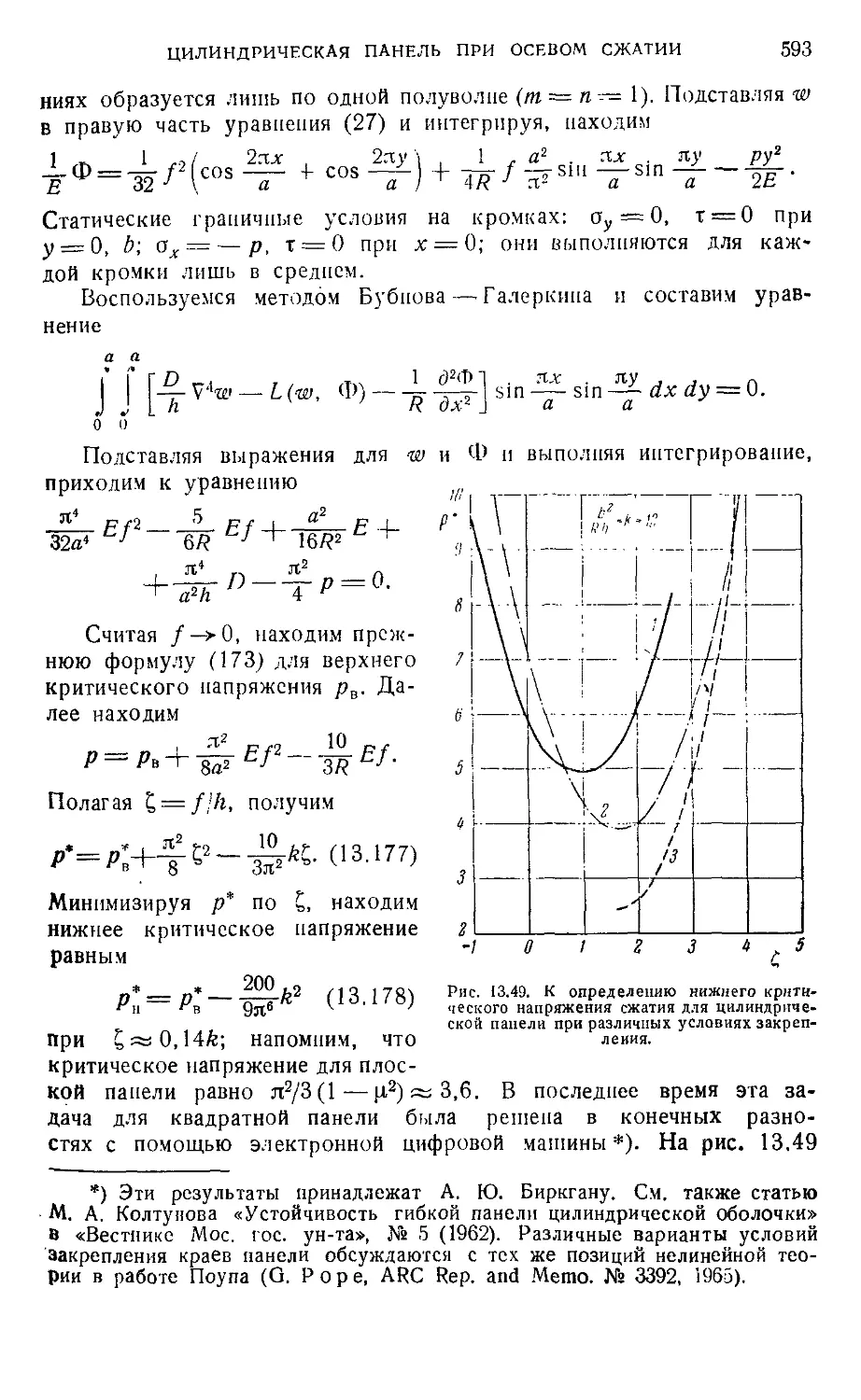
§ 161. Устойчивость цилиндрической панели при осевом сжатии . . 590
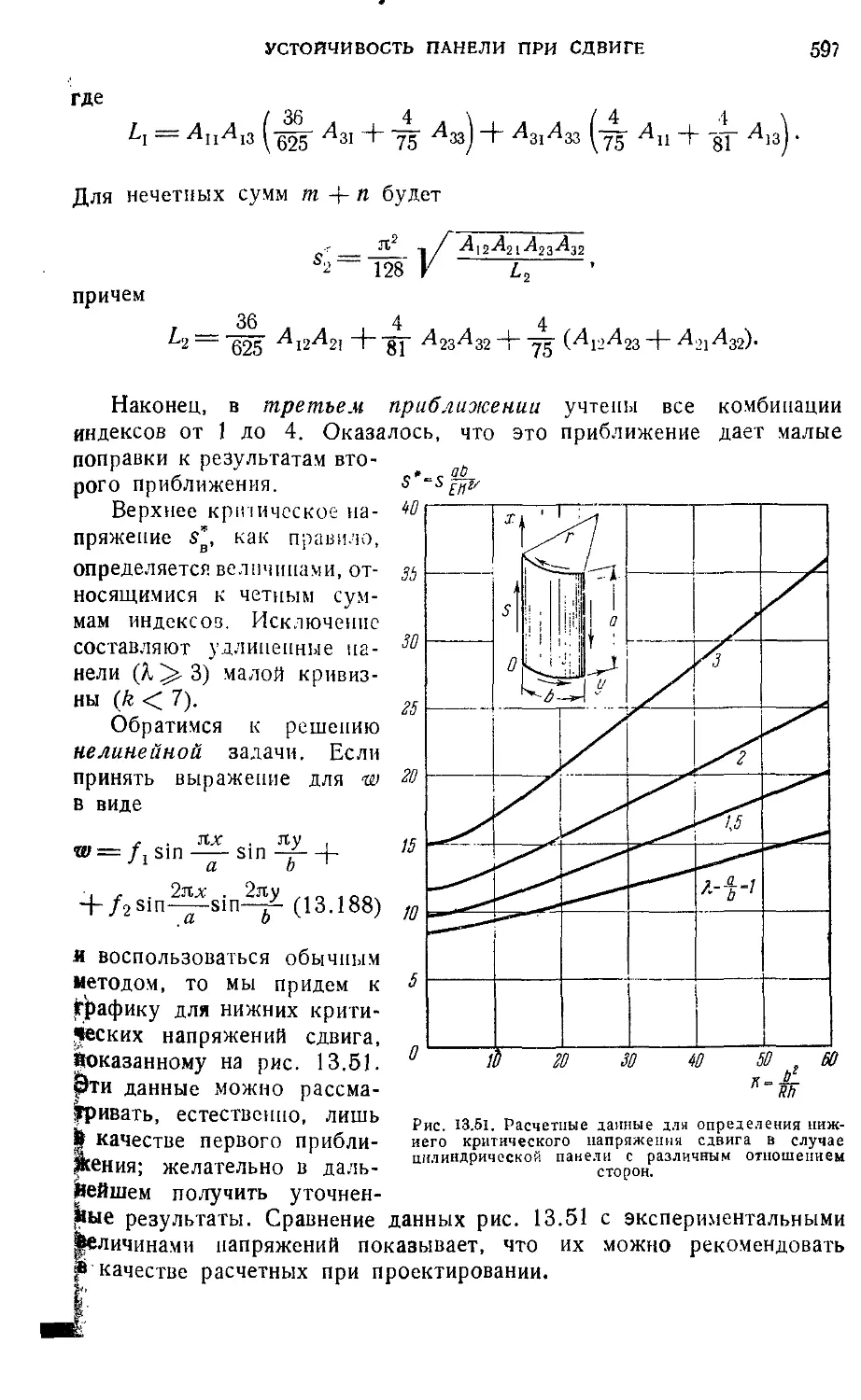
§ 162. Устойчивость панели при сдвиге 594
§ 163. Устойчивость оболочек в зоне приложения сосредоточенных
нагрузок 598
Глава XIV. Устойчивость цилиндрических оболочек за пределами
упругости 601
§ 164. Задача об устойч mocri в малом 601
§ 165. Выпучивание замкнутой оболочки при осевом сжатии . . . 604
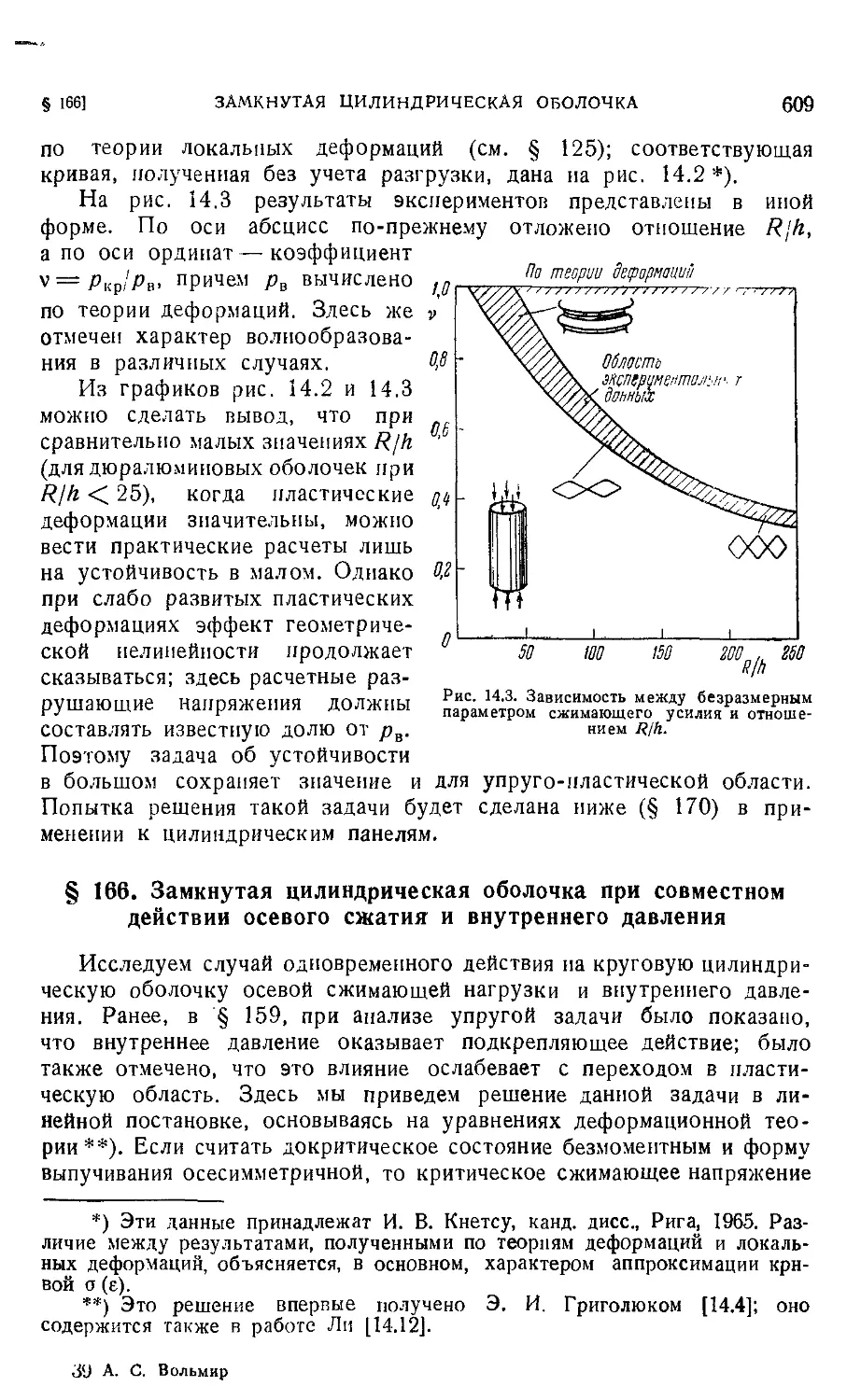
§ 166. Замкнутая цилиндрическая оболочка при совместном
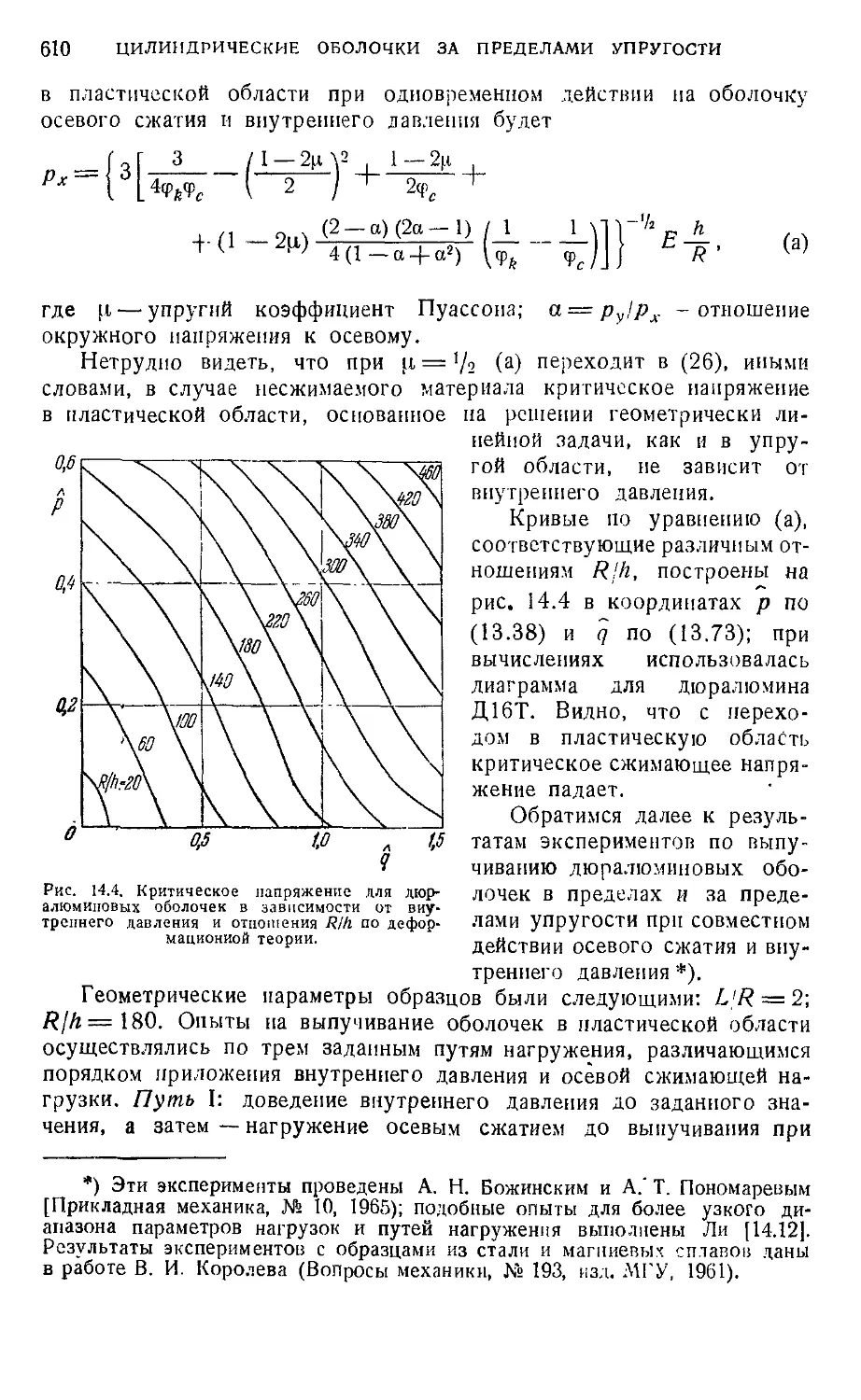
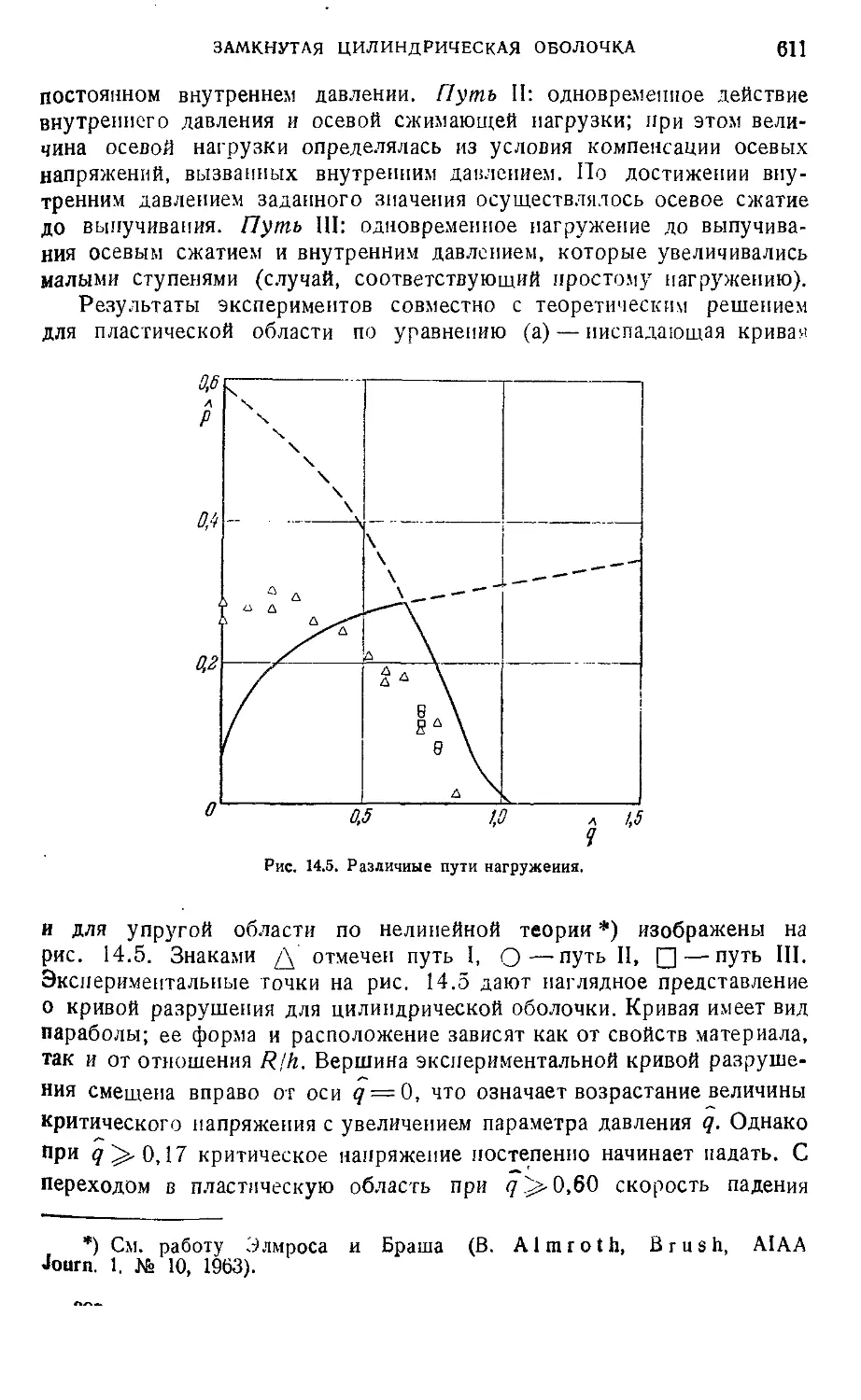
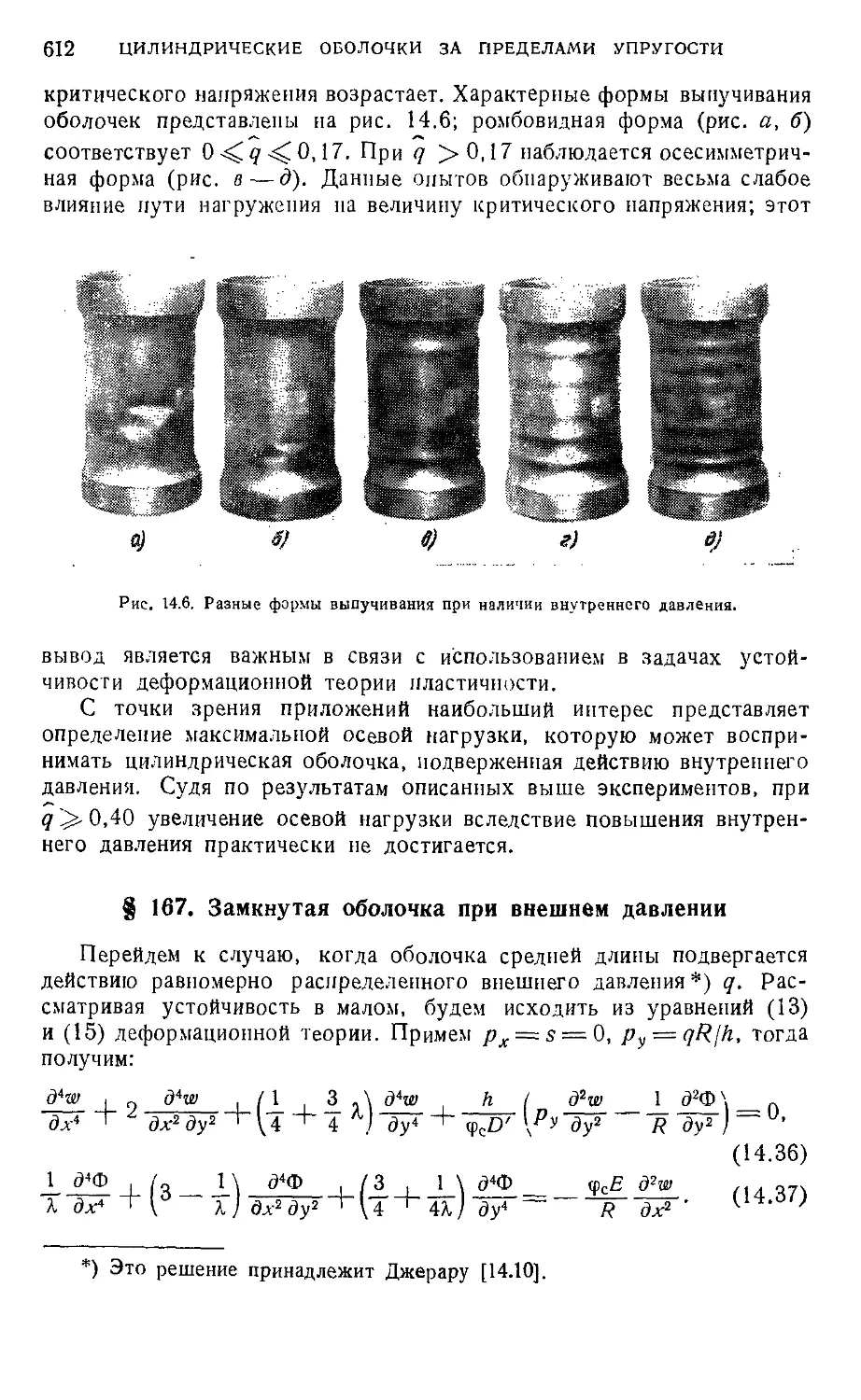
действии осевого сжатия и внутреннего давления 609
§ 167. Замкнутая оболочки при внешнем давлении 612
§ 168. Кручение замкнутой оболочки 614
§ 169. Цилиндрическая панель при осевом сжатии. Устойчивость
в малом 615
§ 170. Цилиндрическая панель при осевом сжатии. Устойчивость
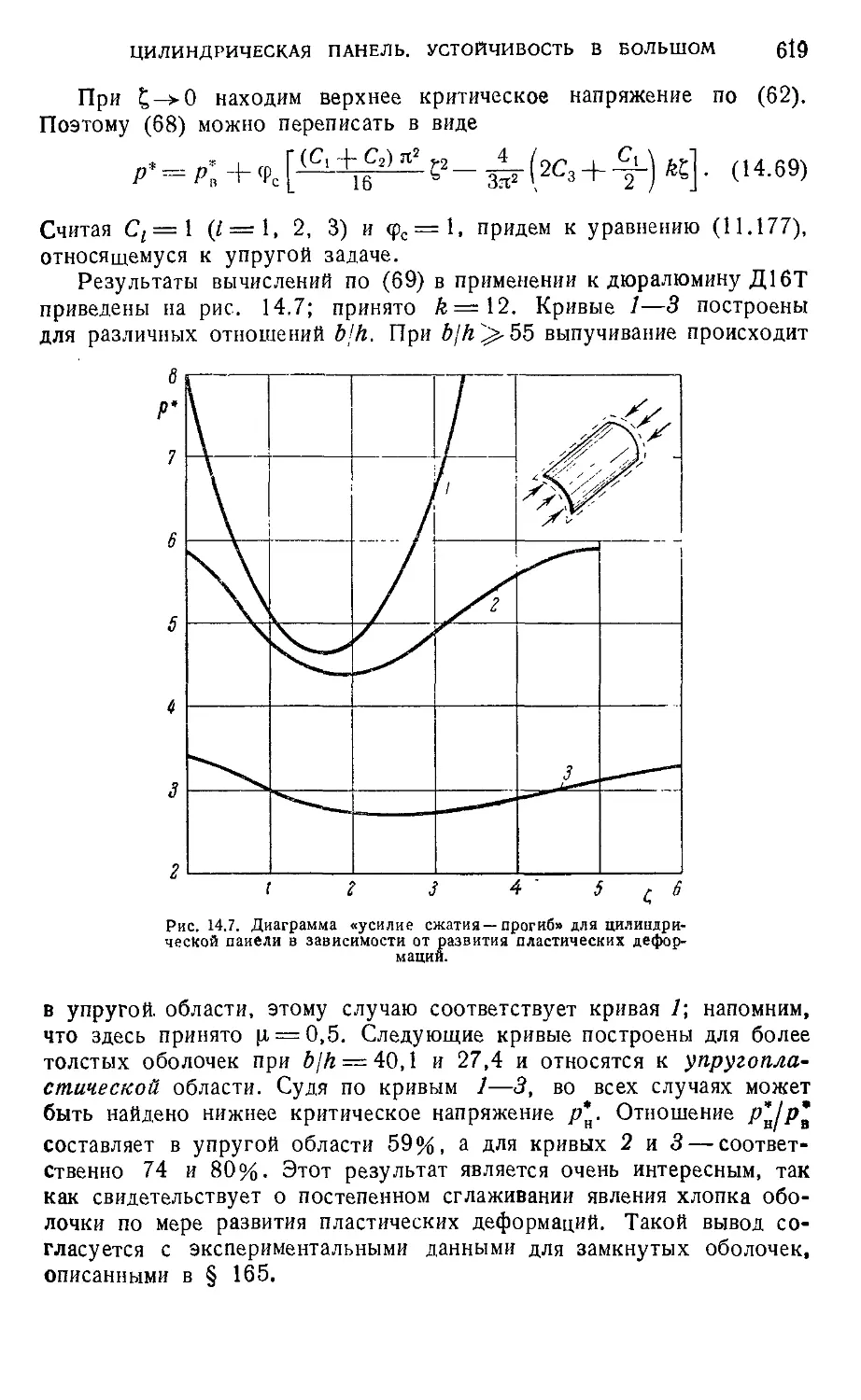
в большом 617
Глава XV. Конические оболочки 622
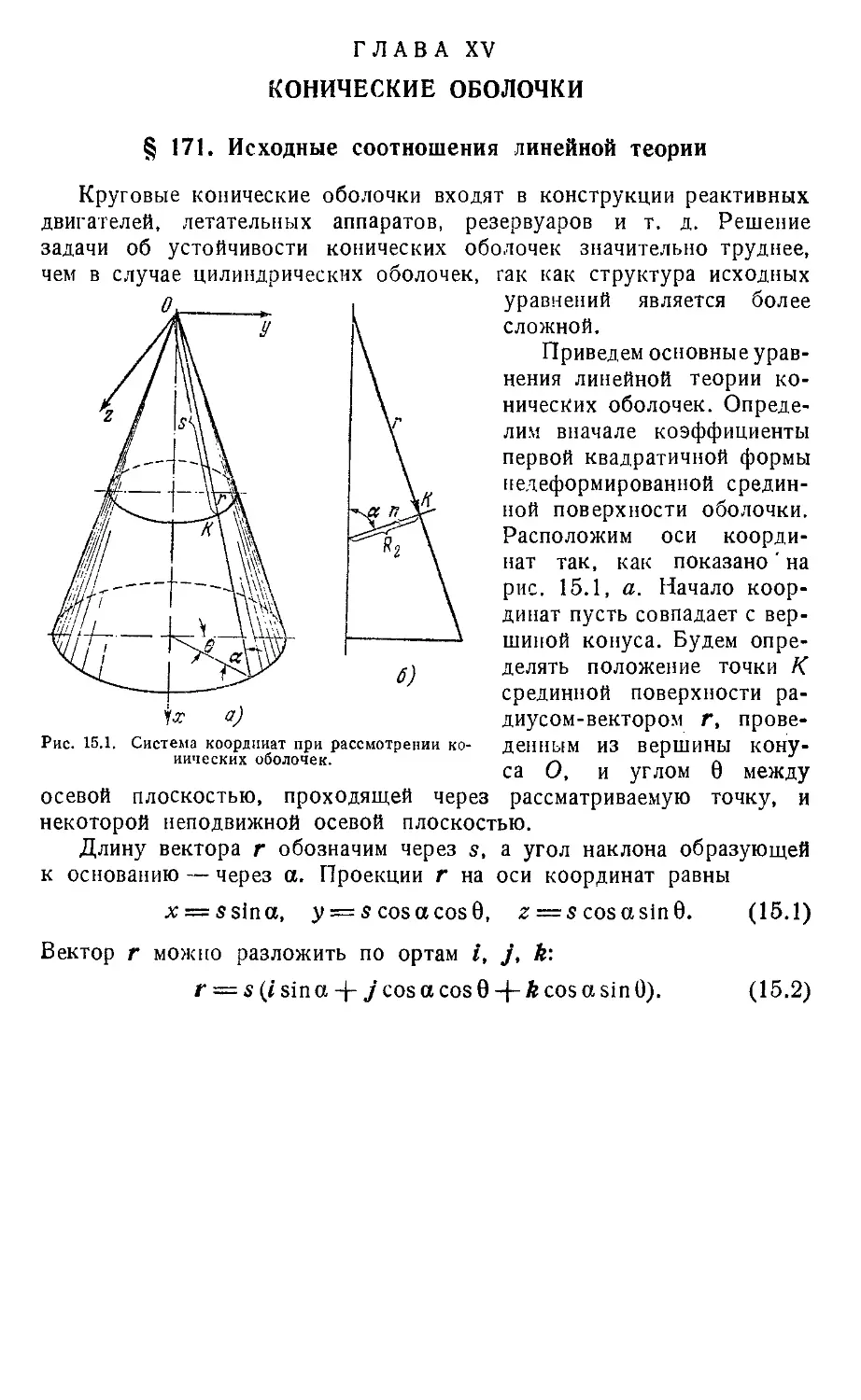
§ 171. Исходные соотношения линейной теори i 622
§ 172. Осевое сжатие конической оболочки 625
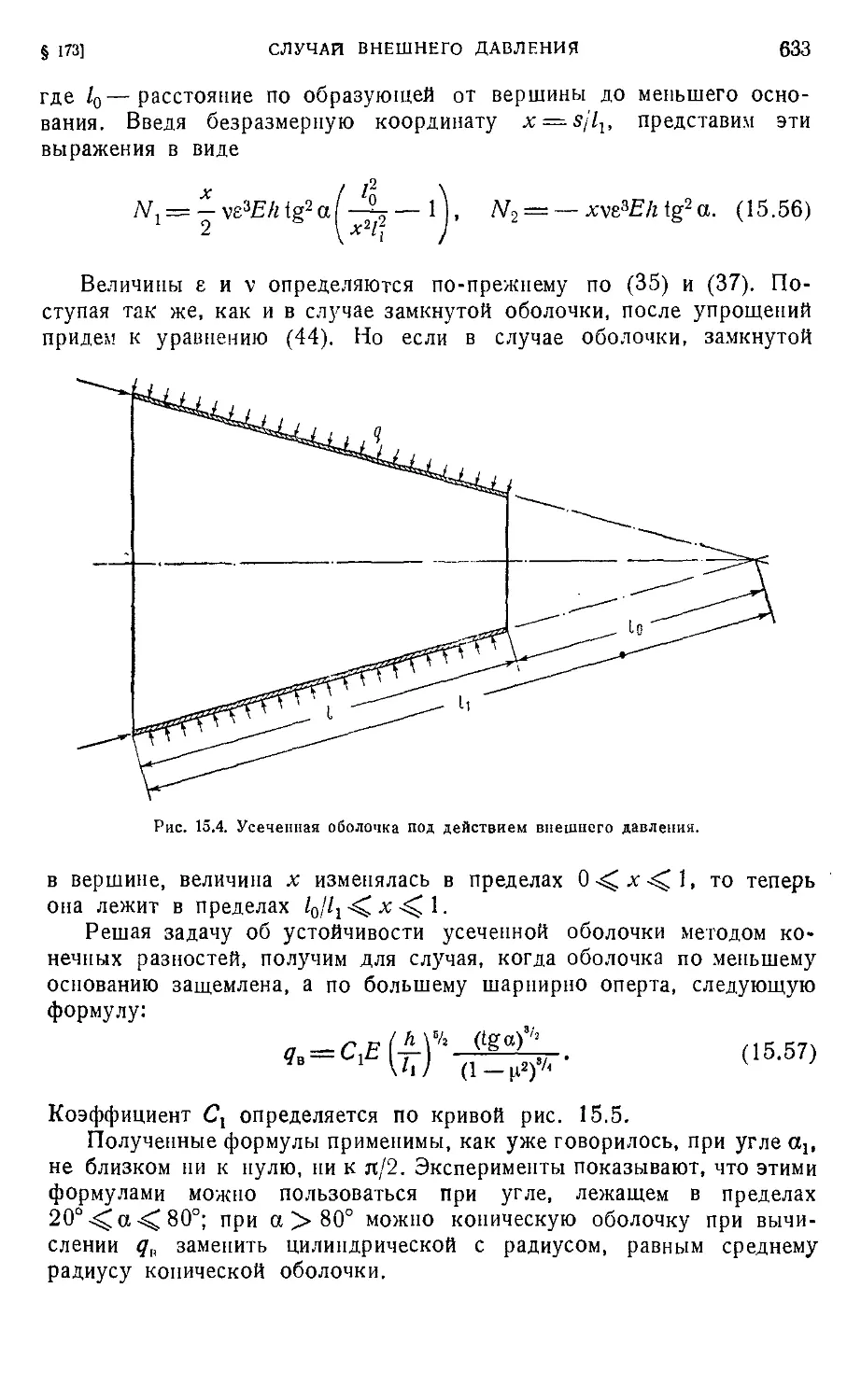
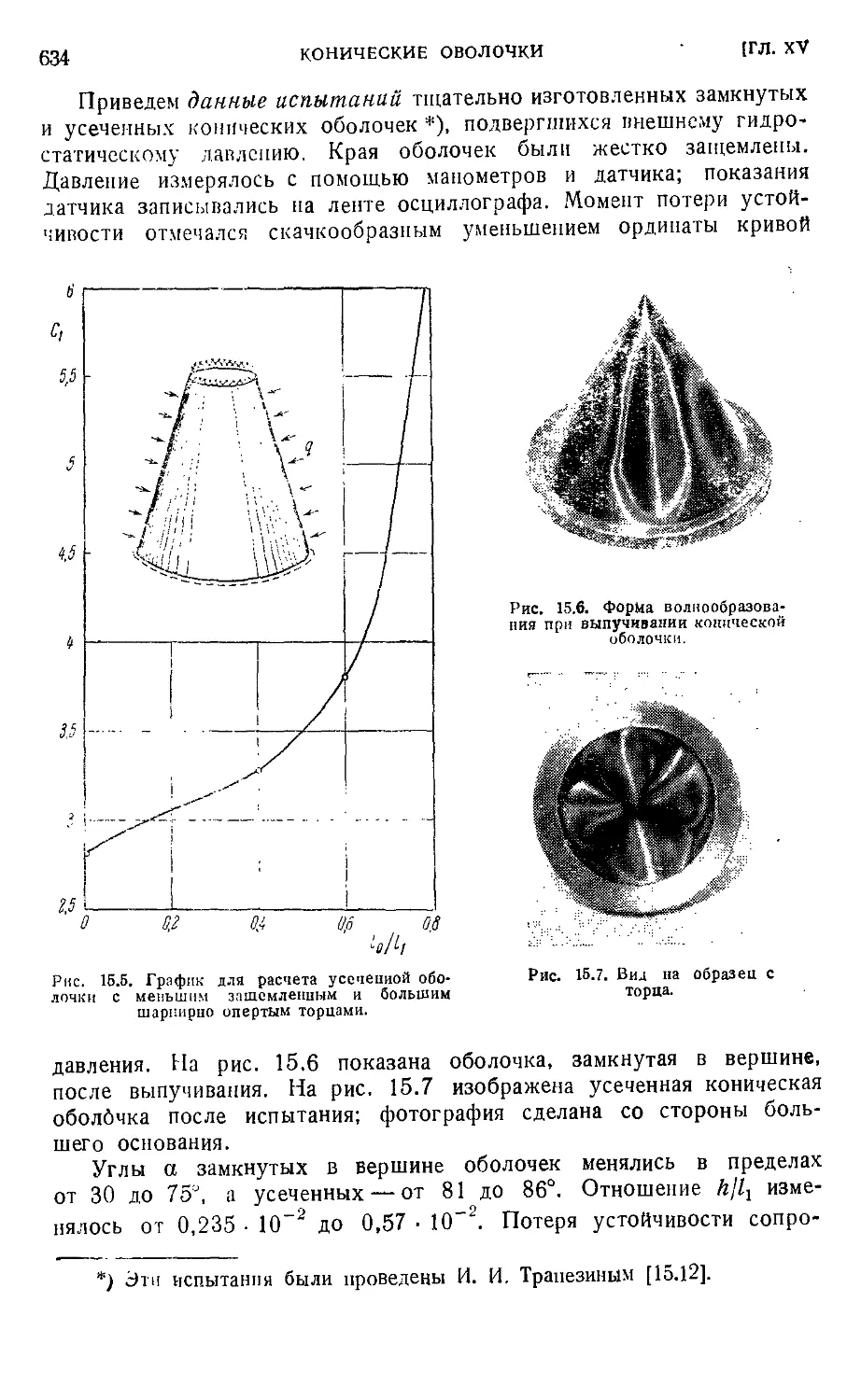
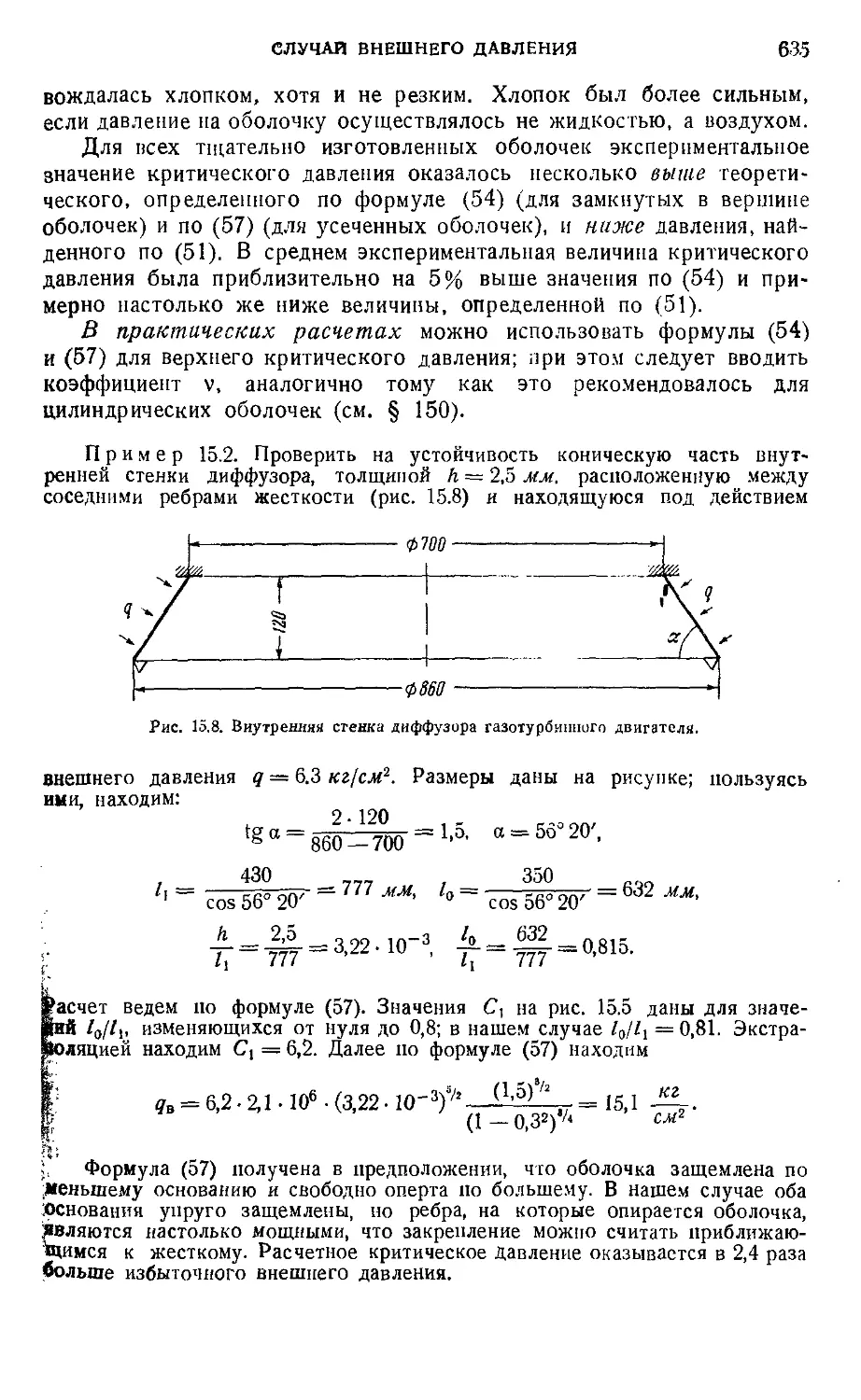
§ 173. Случай внешнего давления 629
§ 174. Случай кручения 636
§ 175. Подкрепленные конические оболочки под действием
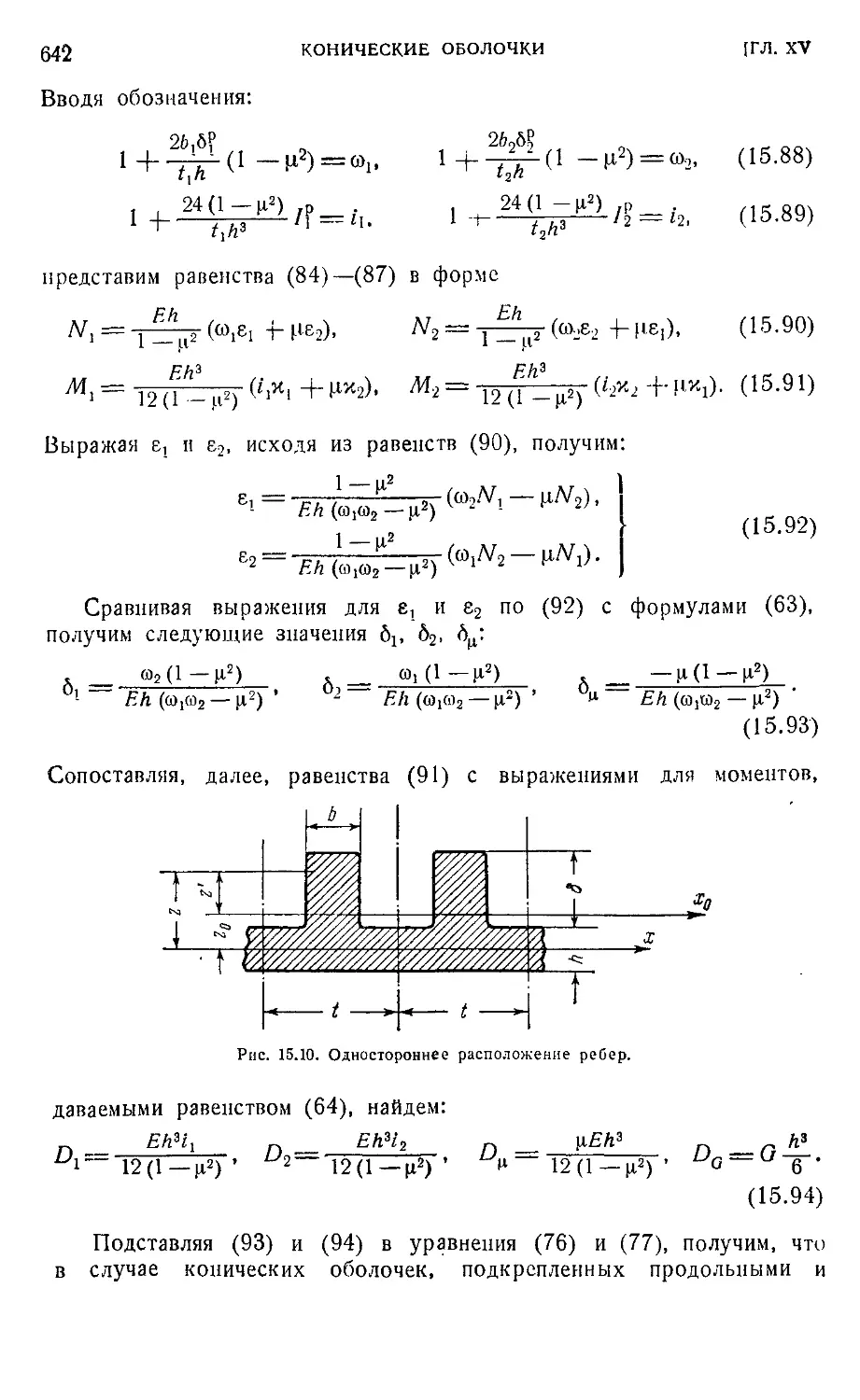
внешнего давления 637
§ 176. Конические оболочки большого прогиба 645
§ 177. Коническая оболочка, находящаяся под действием
внутреннего давления и сжатия вдоль образующей 646
Глава XVI. Сферические оболочки 649
§ 178. Устойчивость в малом сферической оболочки при внешнем
давлении. , 649
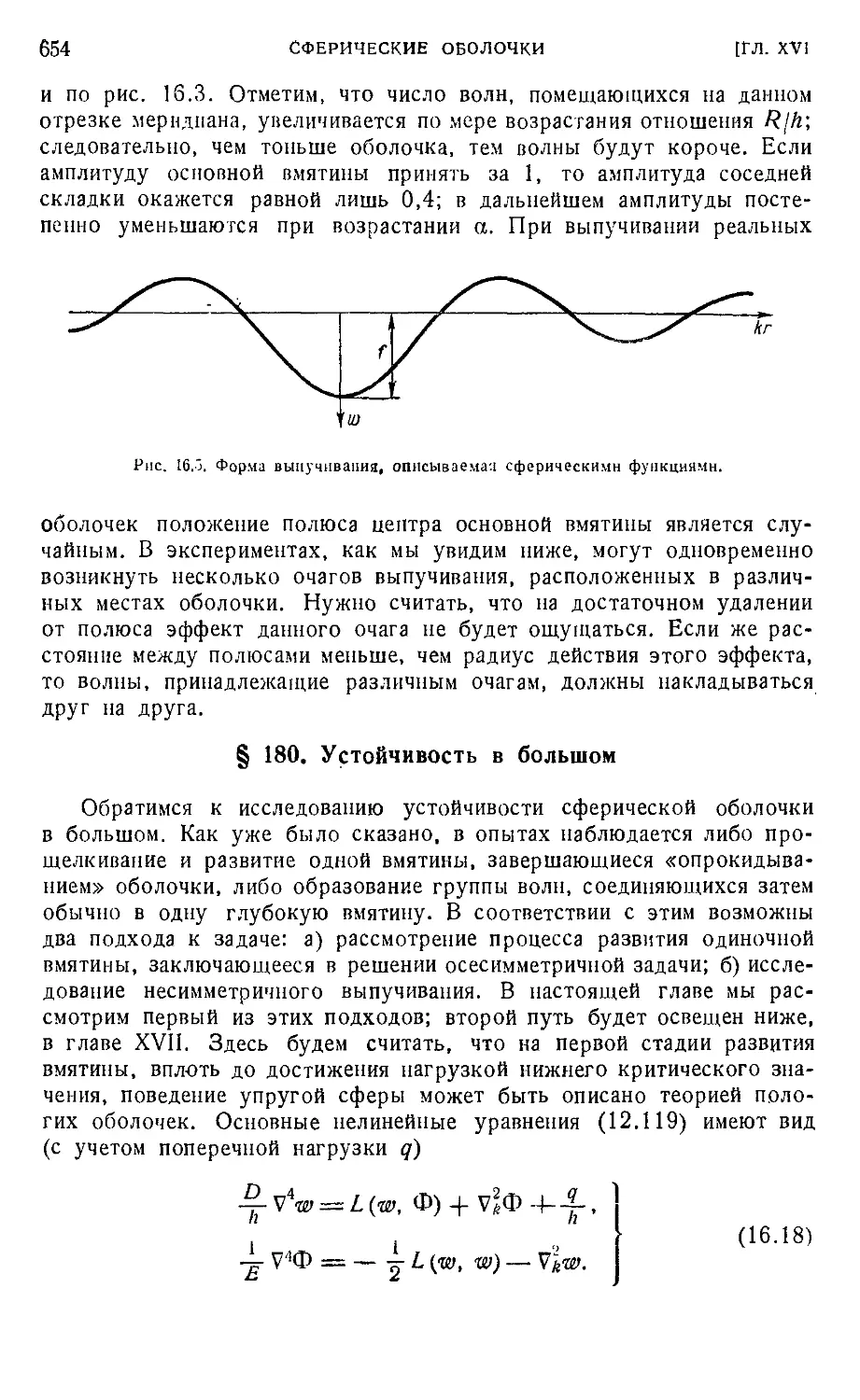
§ 1J9- Случай осёсимметричного выпучивания. Линейная задача . . 652
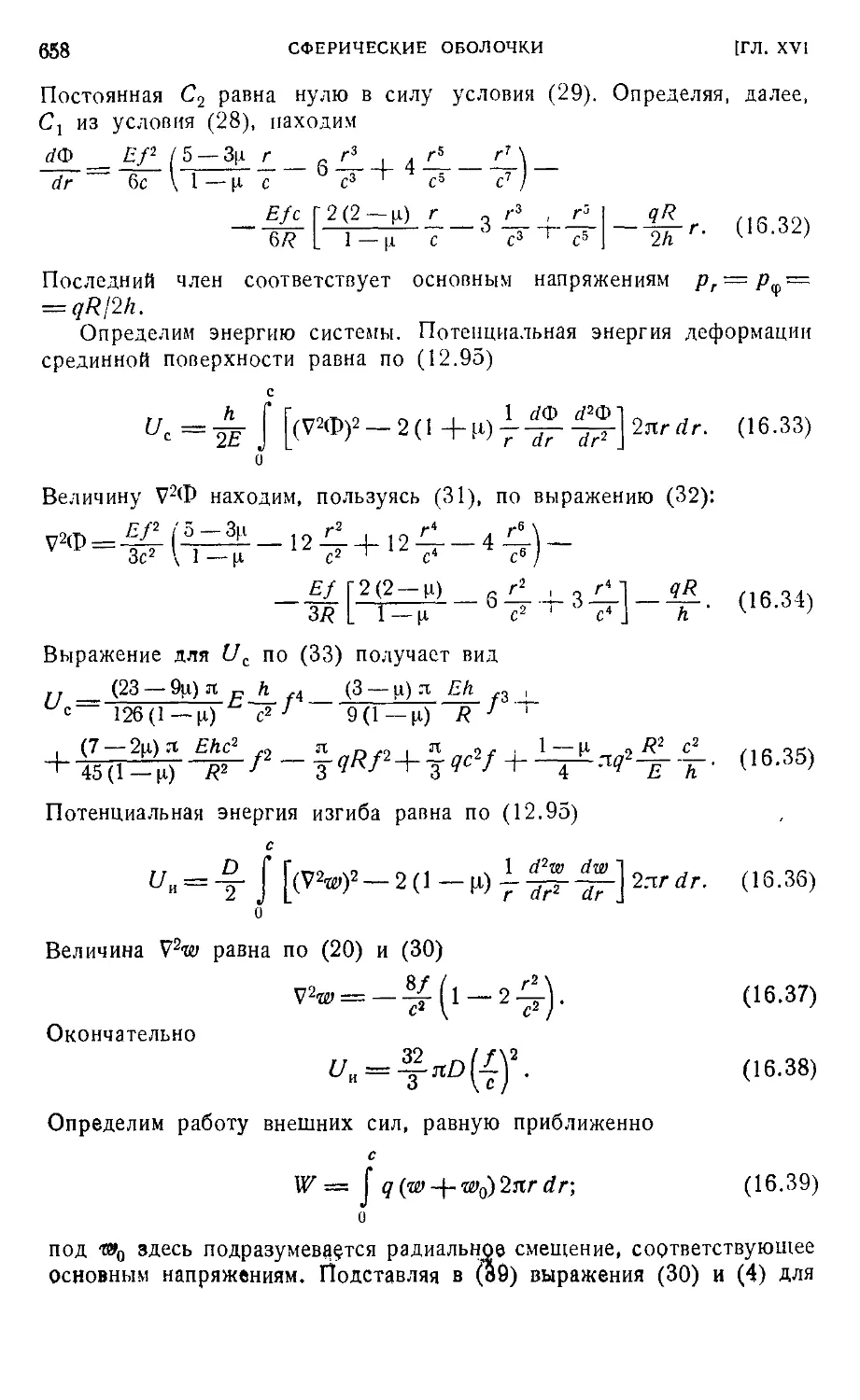
§ |°0- Устойчивость в большом .- 654
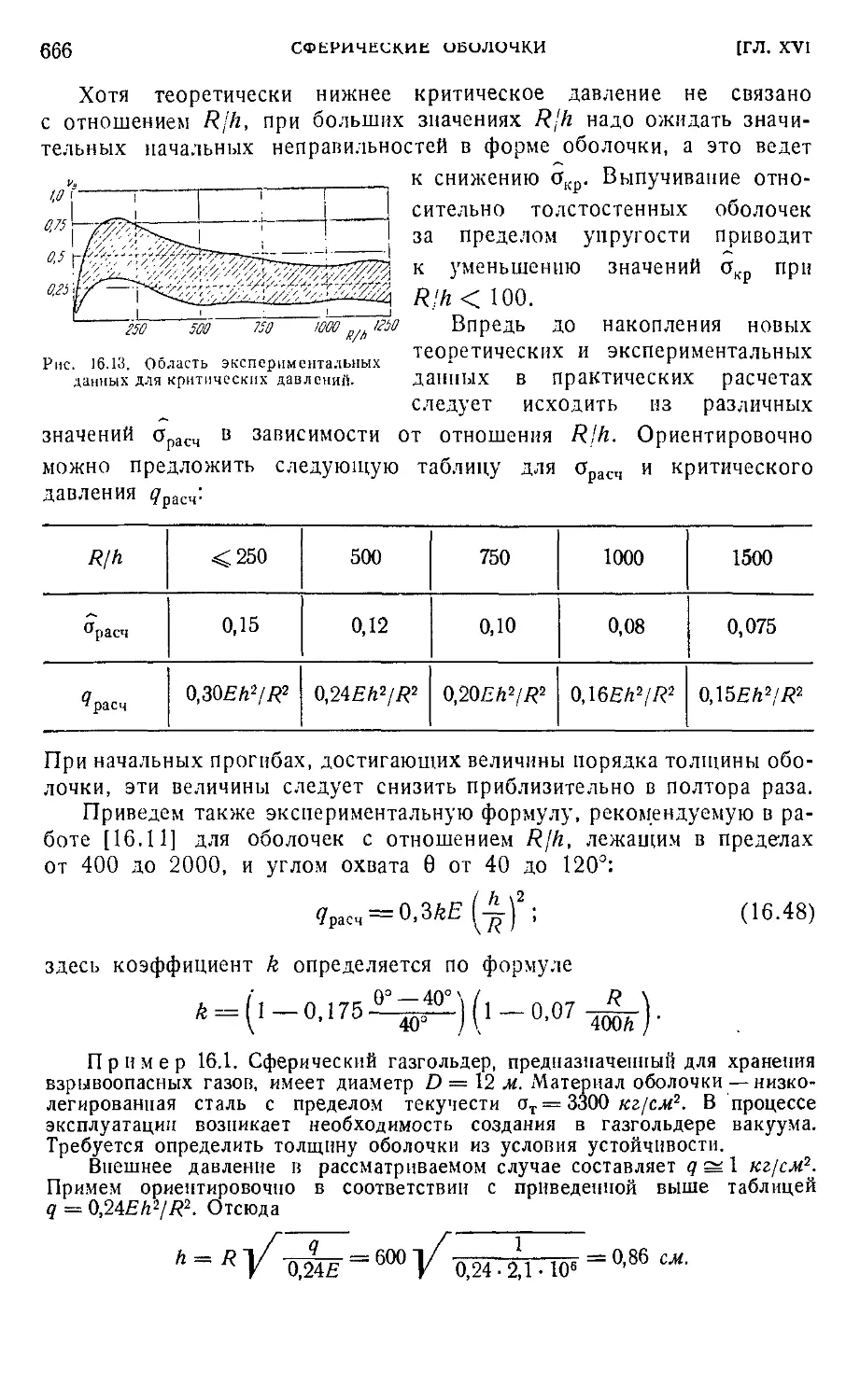
§ ]°'- Данные опытов и рекомендации для практических расчетов 663
§ 182. Эллипсоидальные оболочки 667
8
ОГЛАВЛЕНИЕ
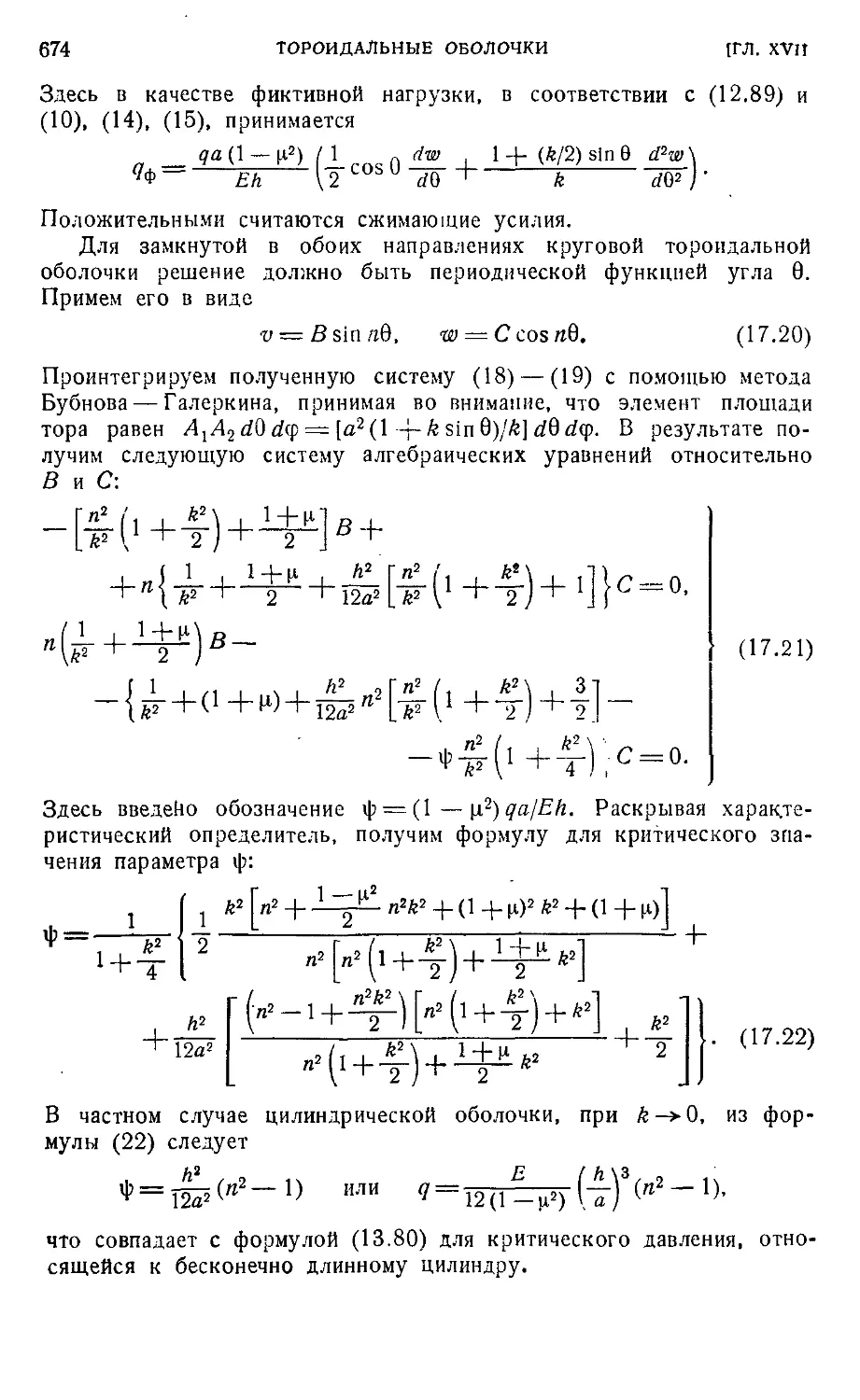
Глава XVII. Тороидальные оболочкч 669
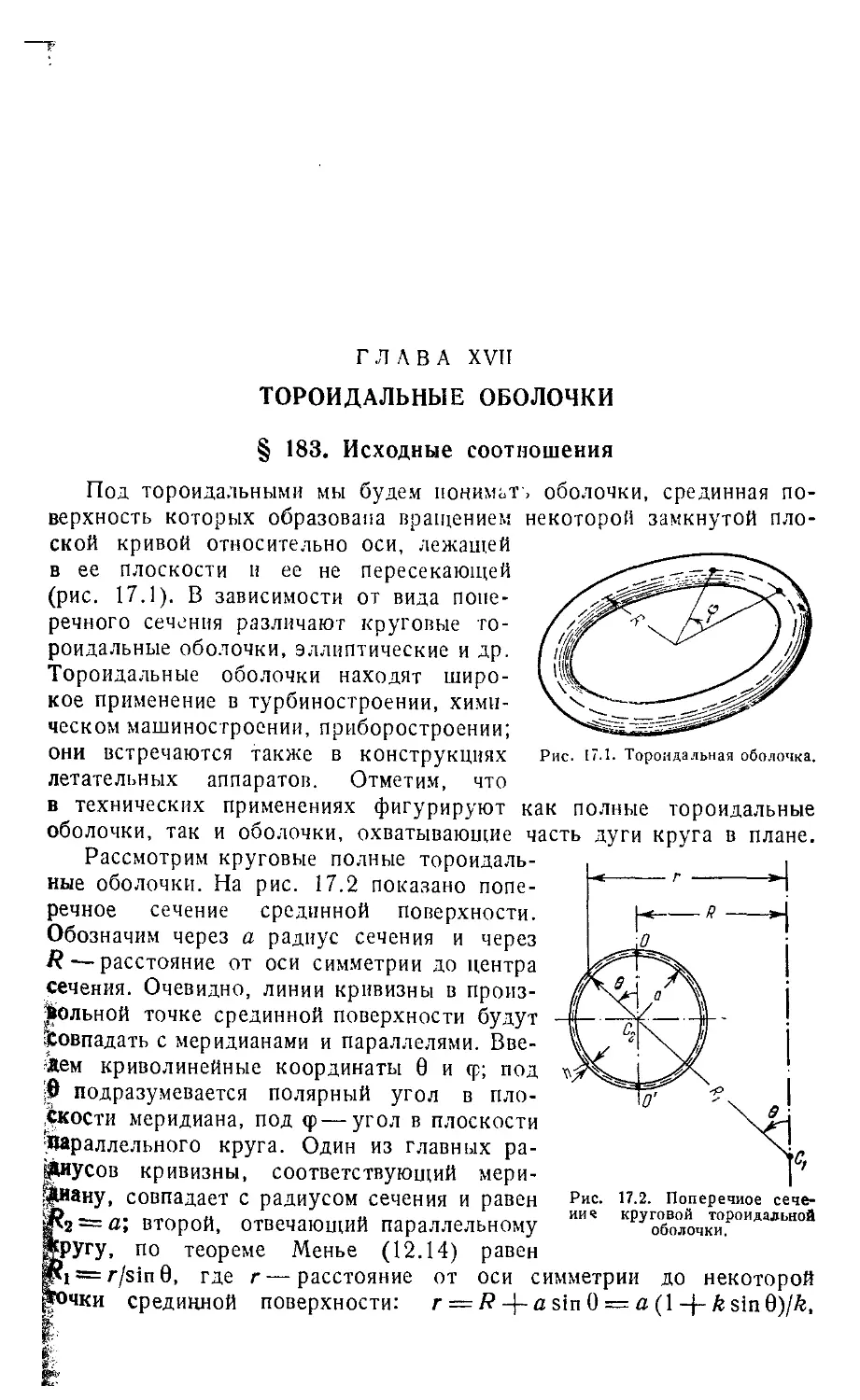
§ 183. Исходные соотношения 669
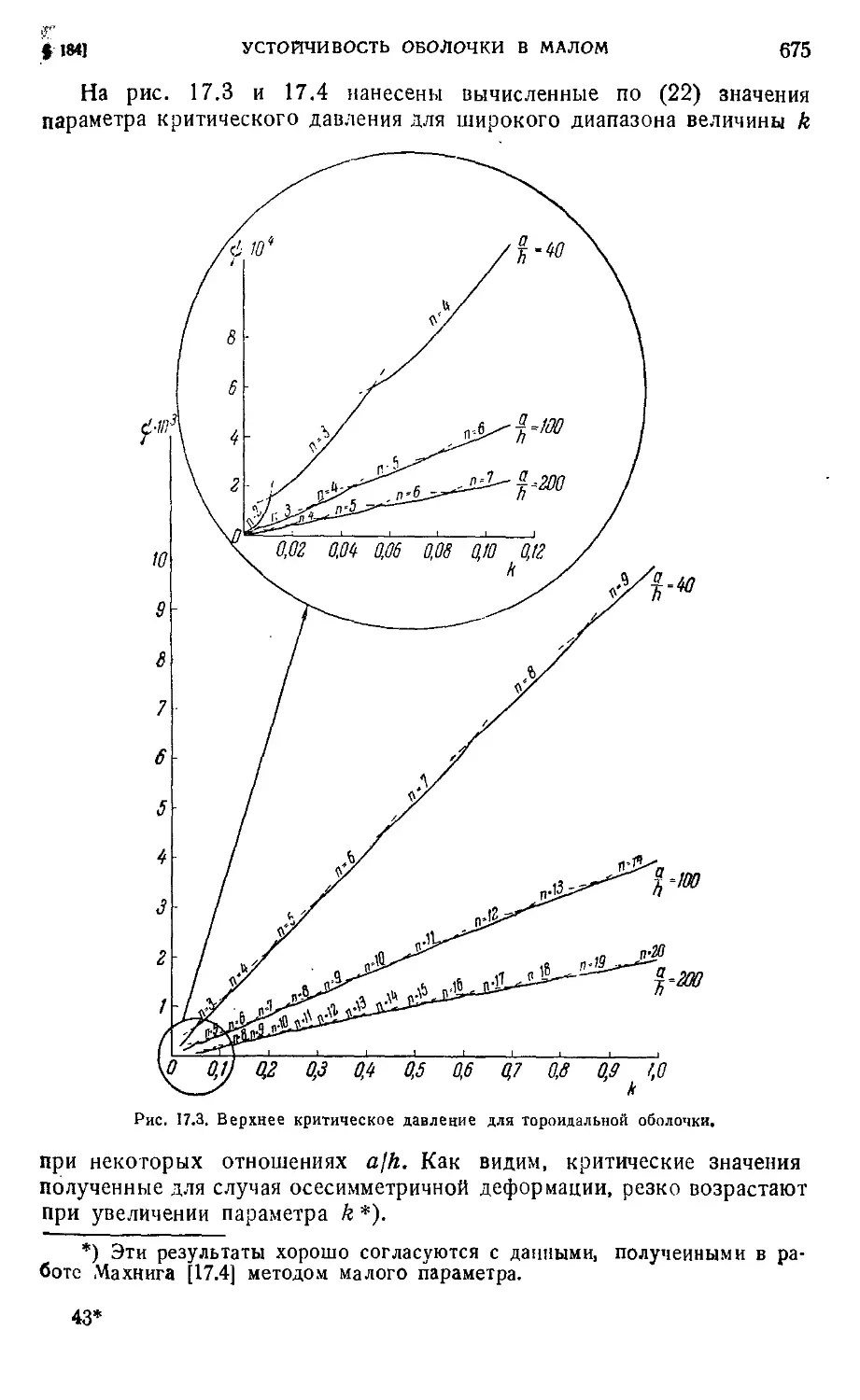
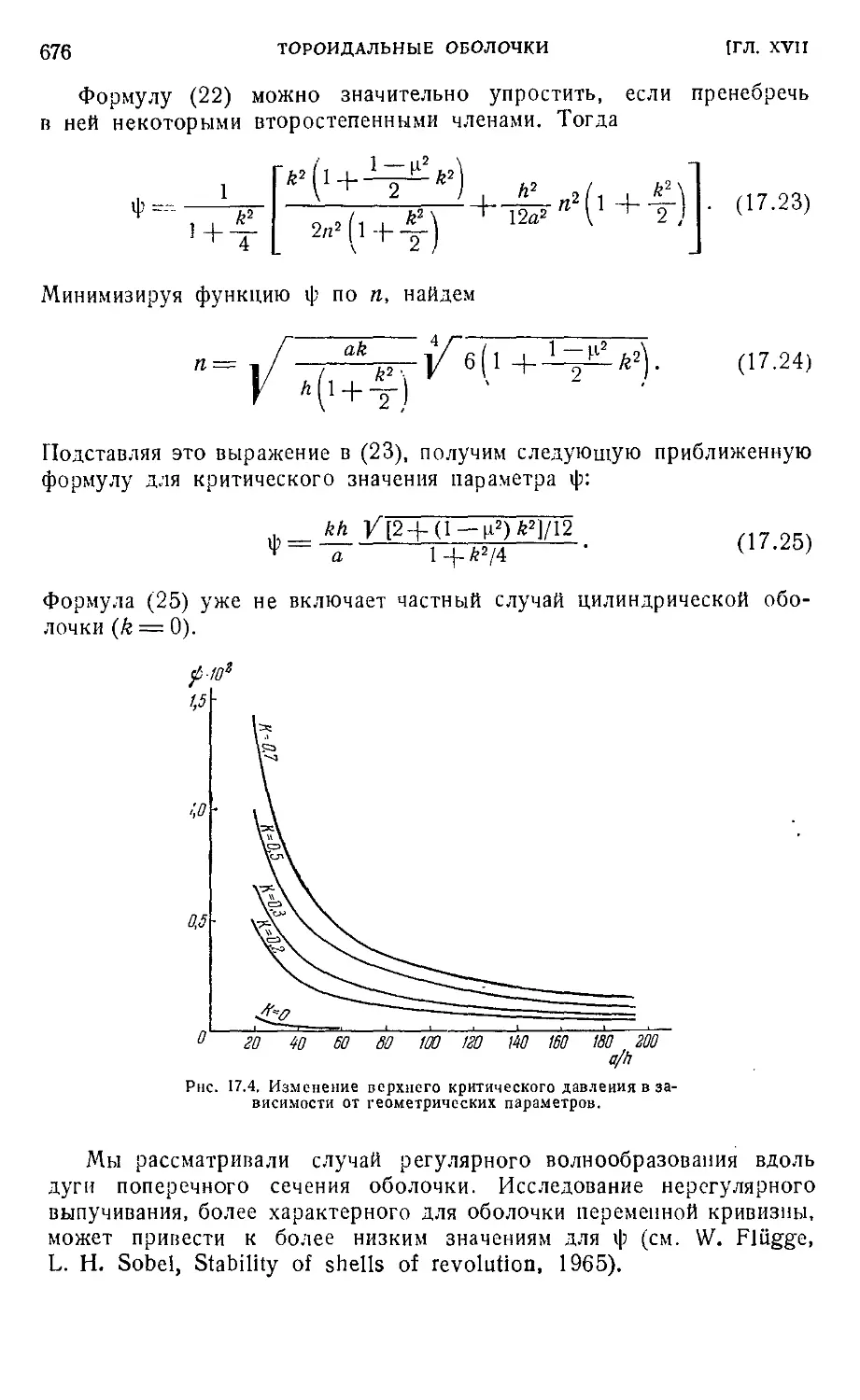
§ 184. Устойчивость оболочки в малом. Случай внешнего давления 672
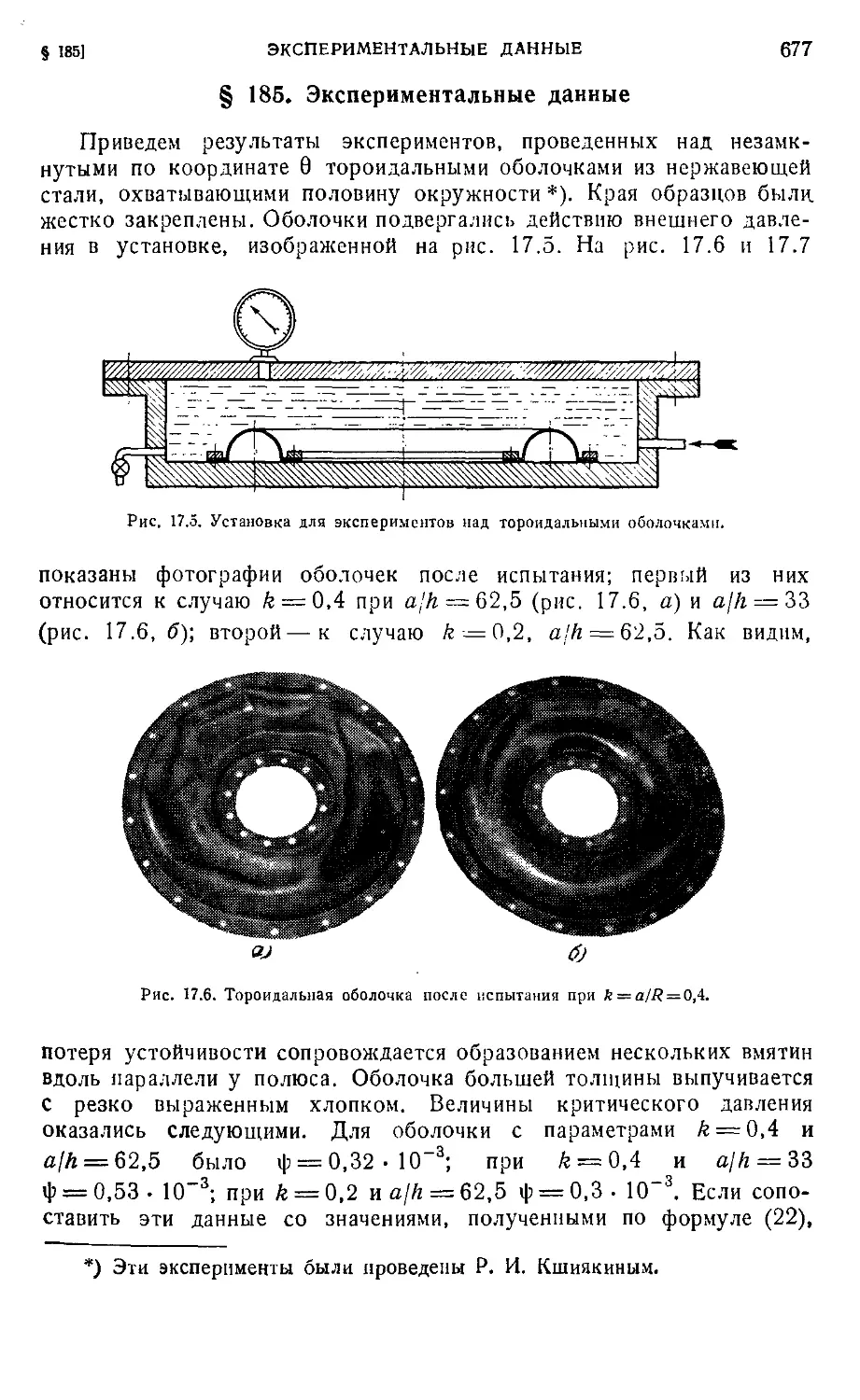
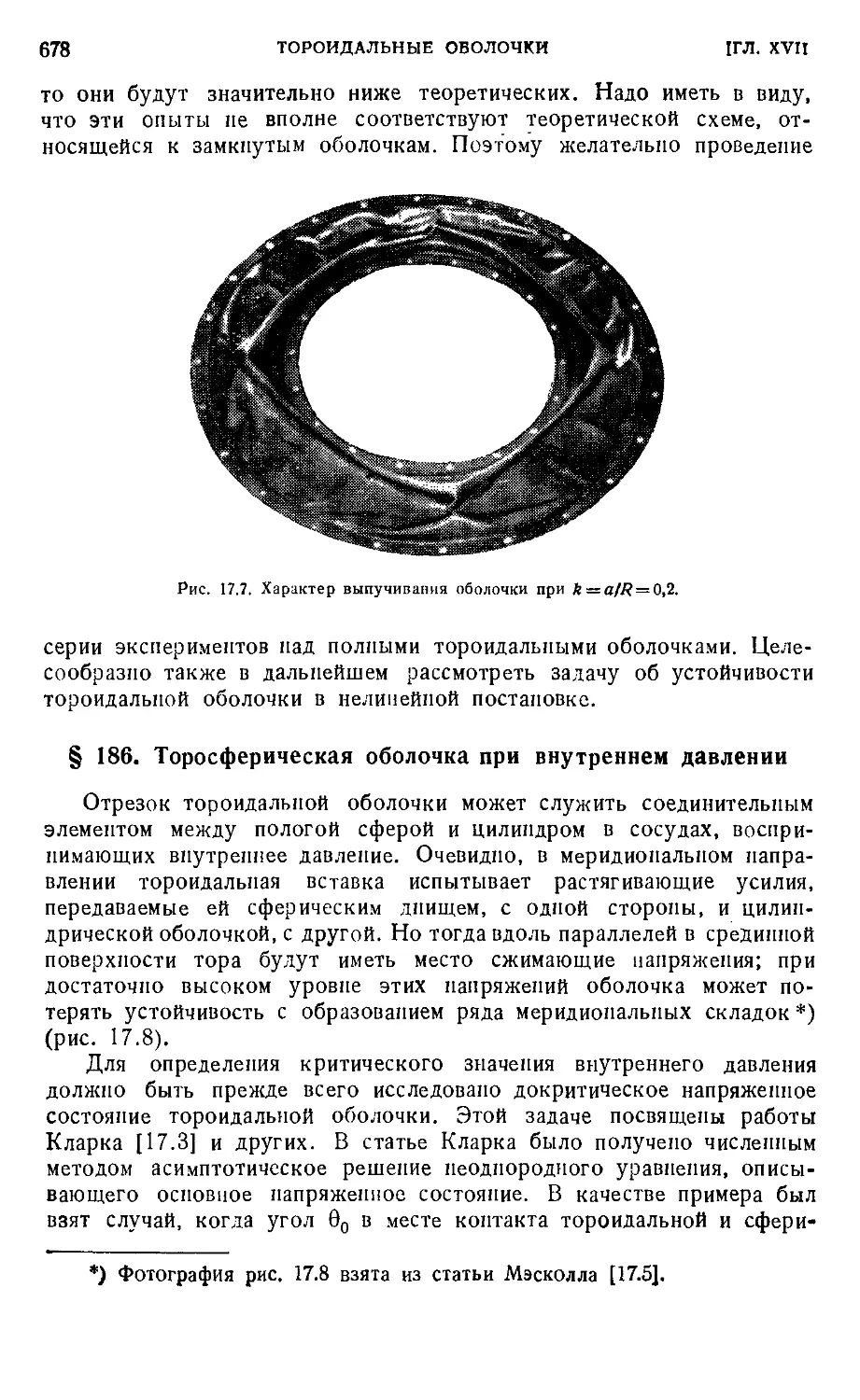
§ 185. Экспериментальные данные 677
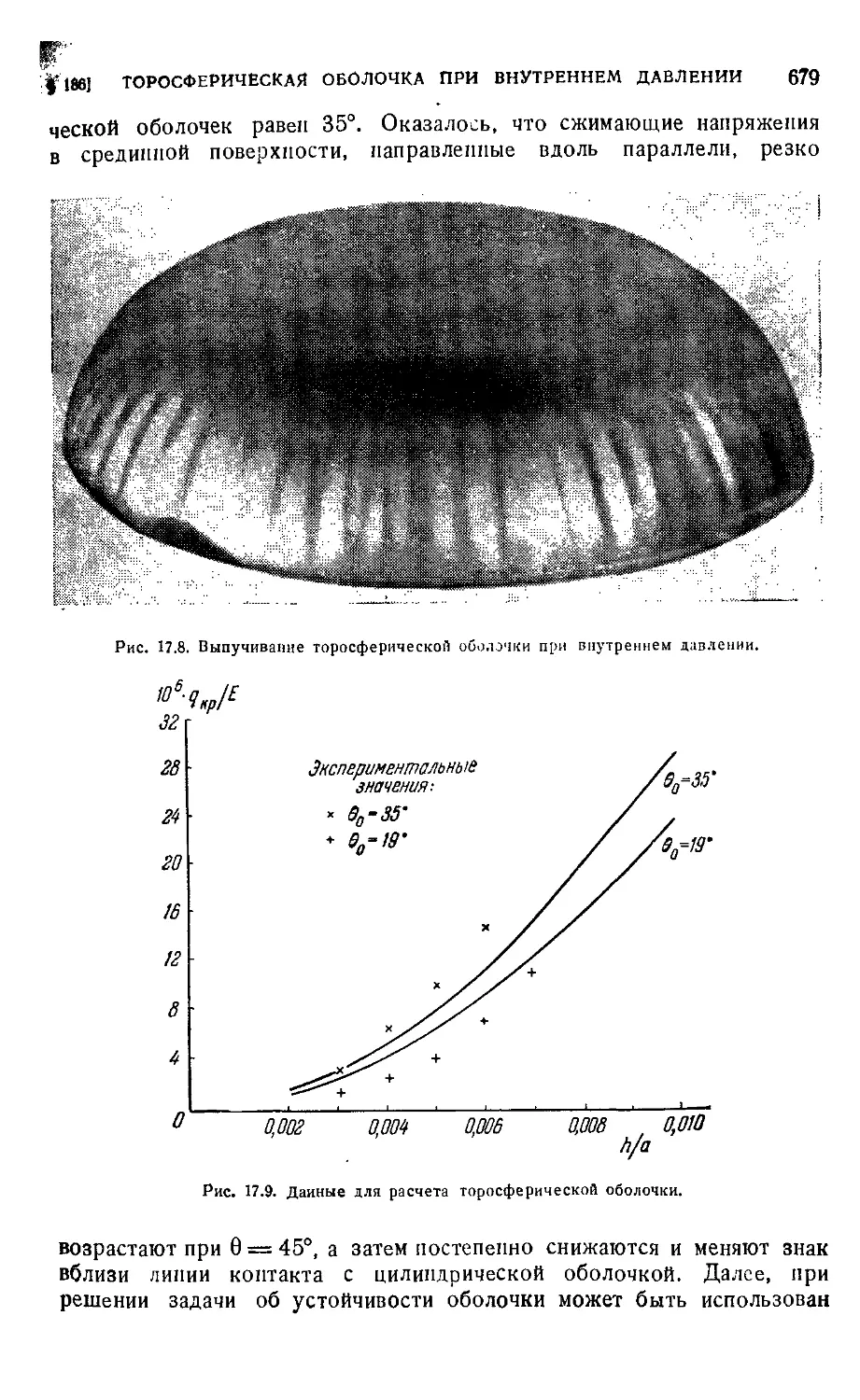
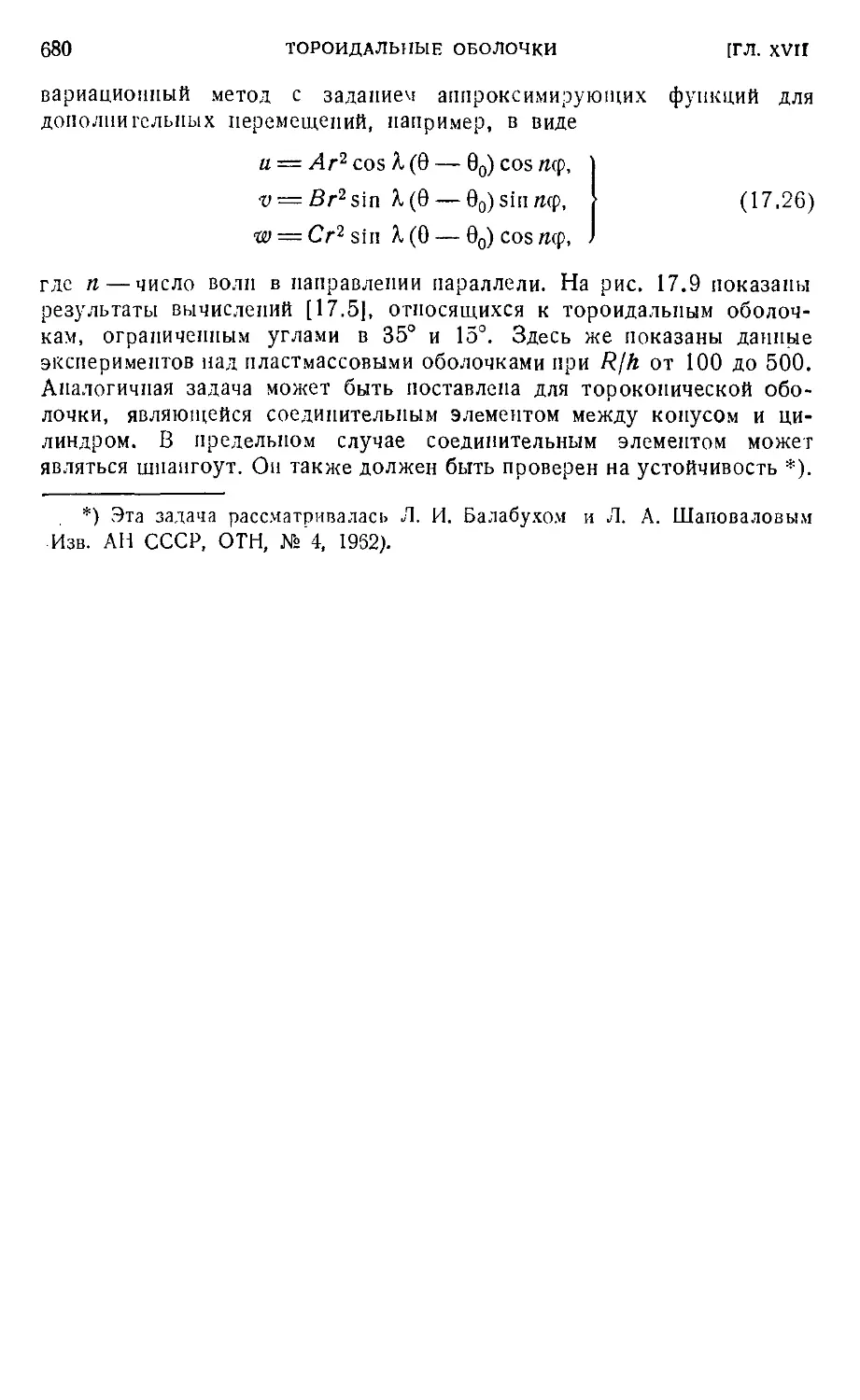
§ 186. Торосферическая оболочка при внутреннем давлении .... 678
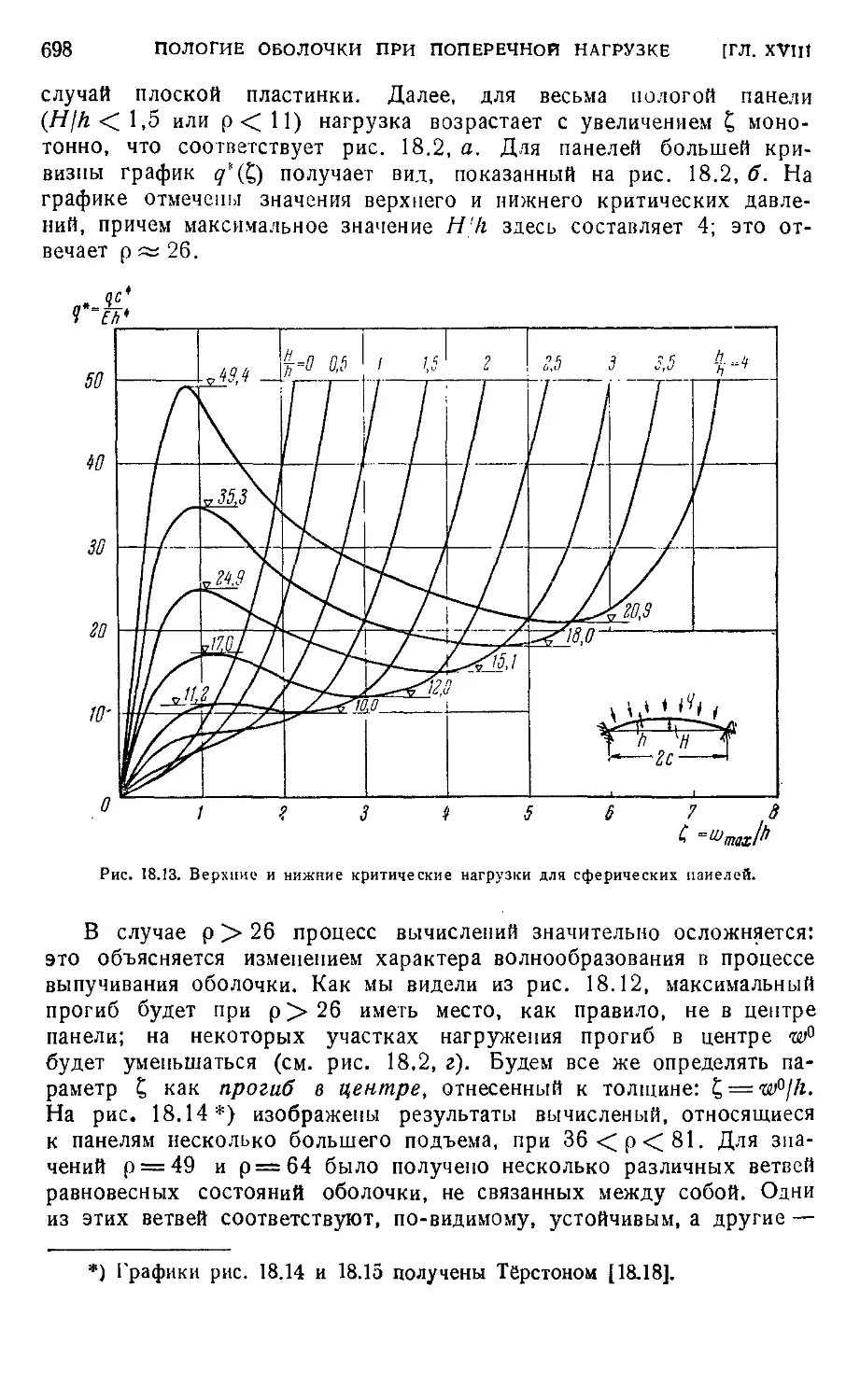
Глава XVIII. Устойчивость пологих оболочек при действии
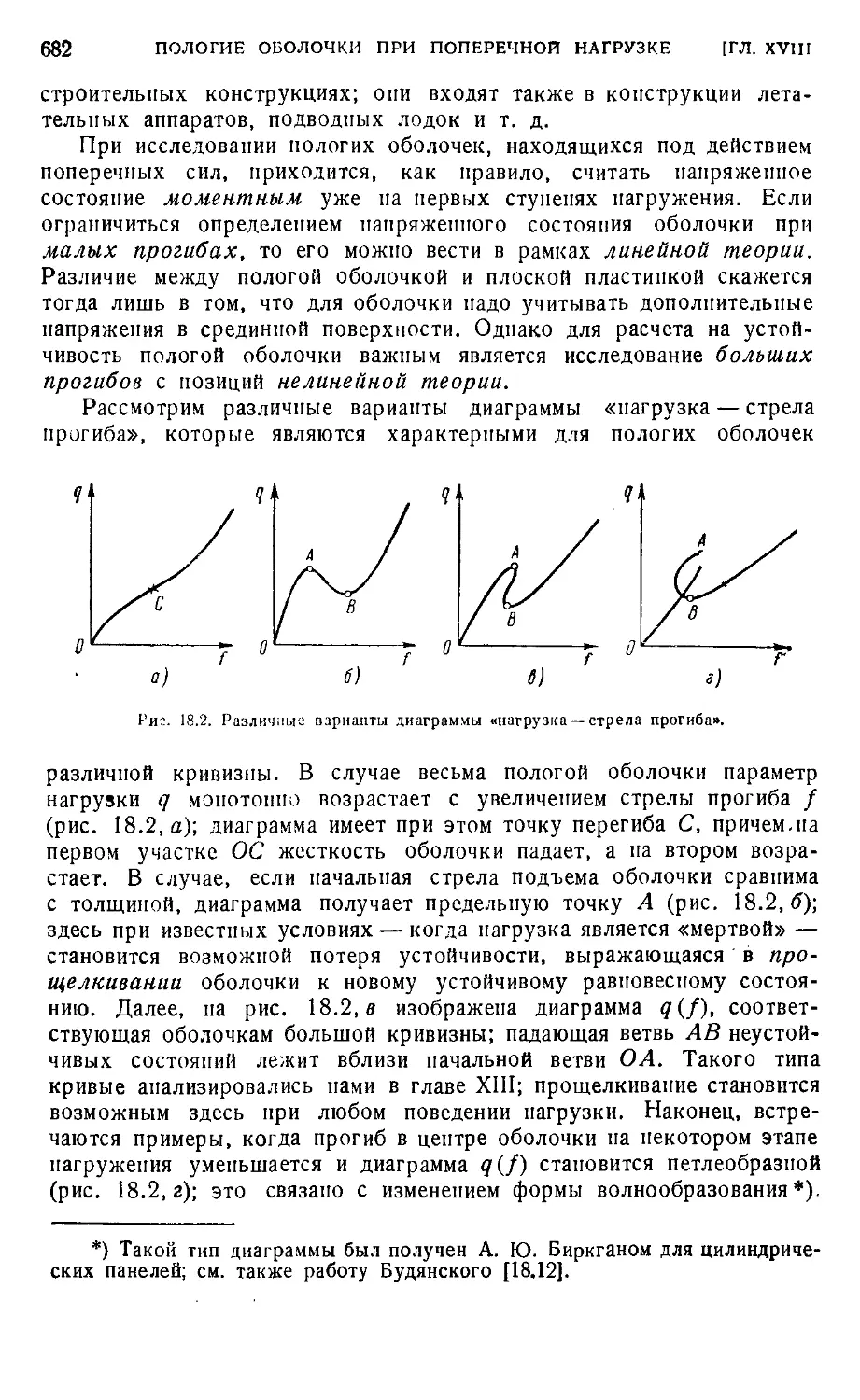
поперечной нагрузки 681
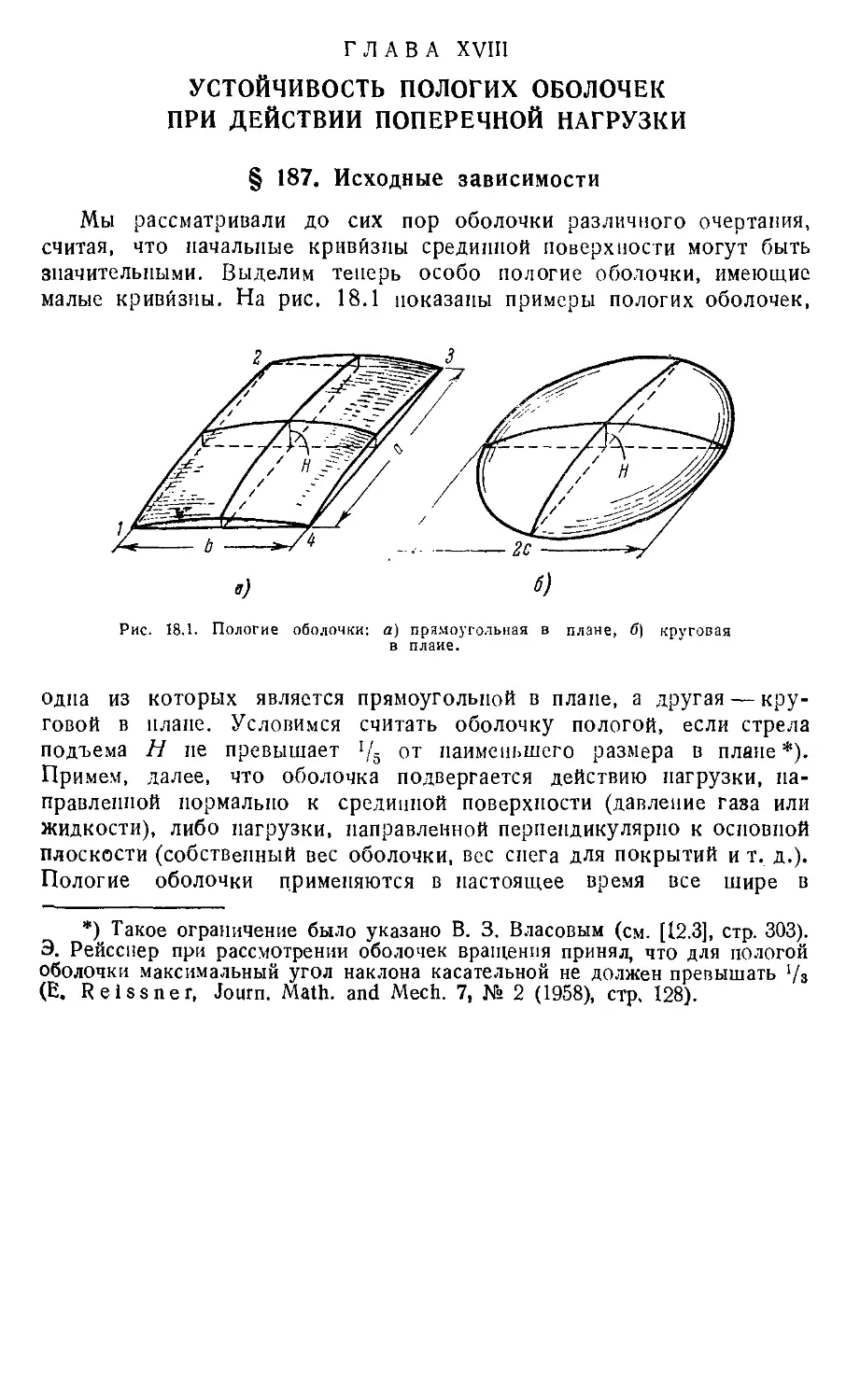
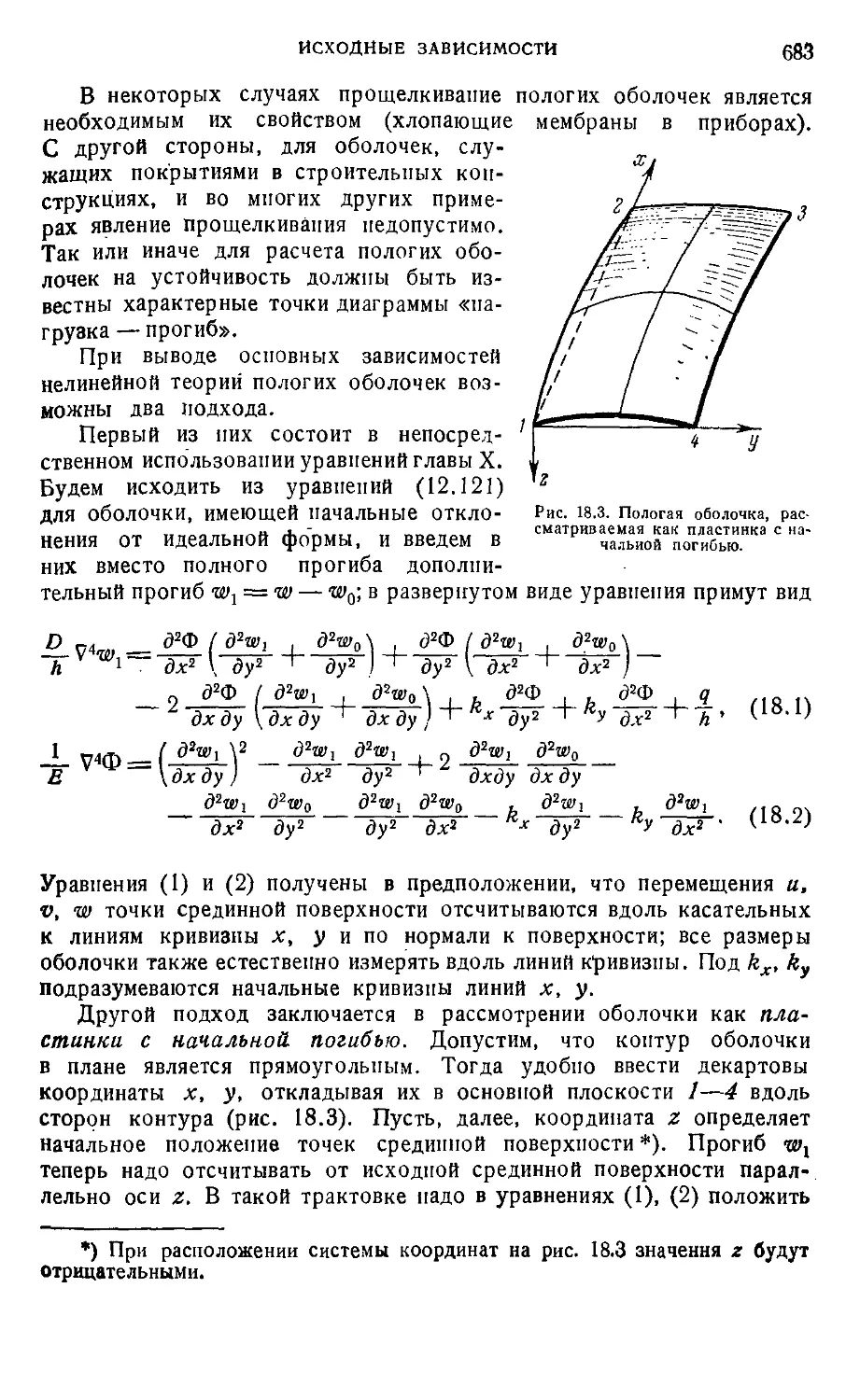
§ 187. Исходные зависимости 681
§ 188. Панель, прямоугольная в плане 684
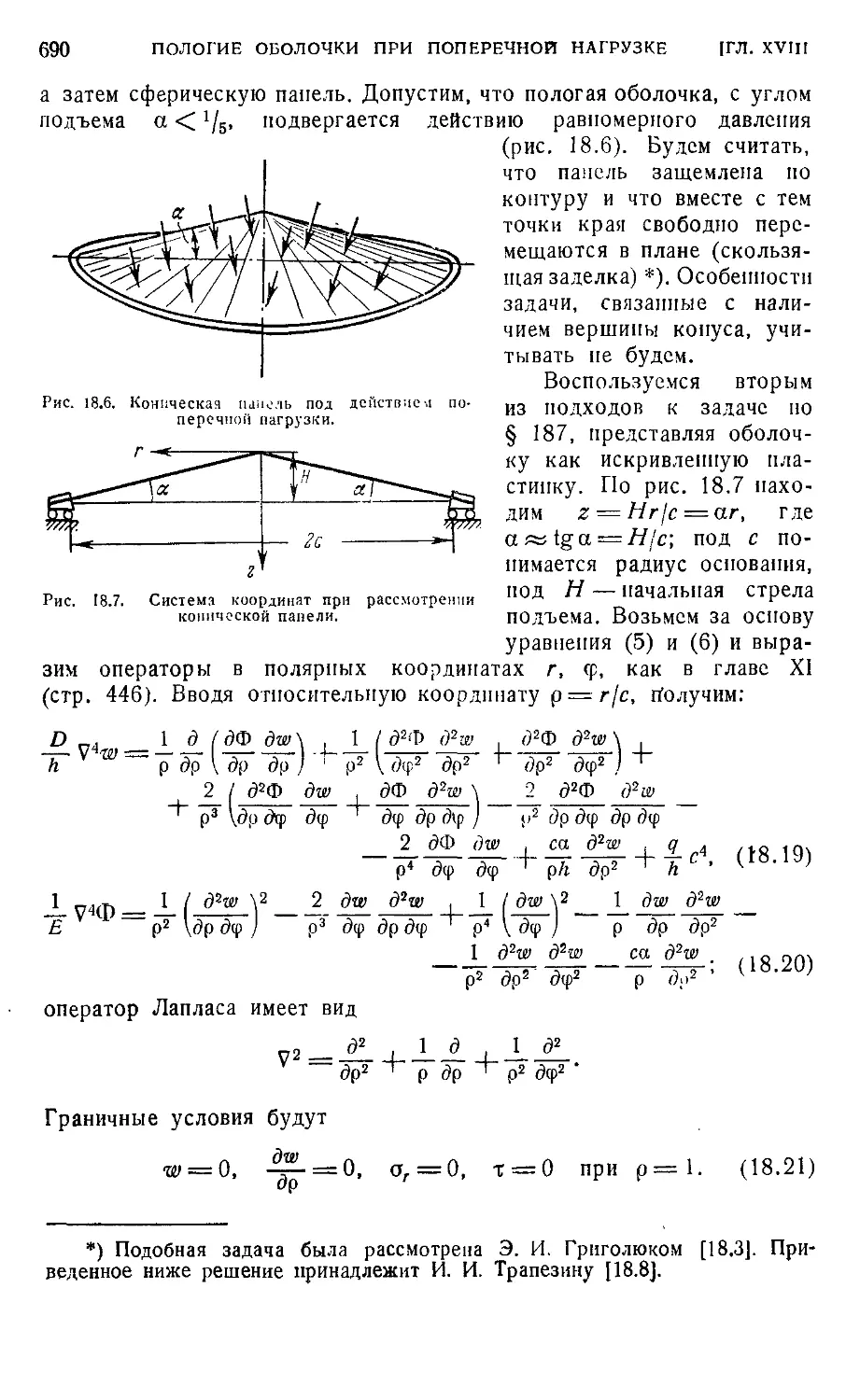
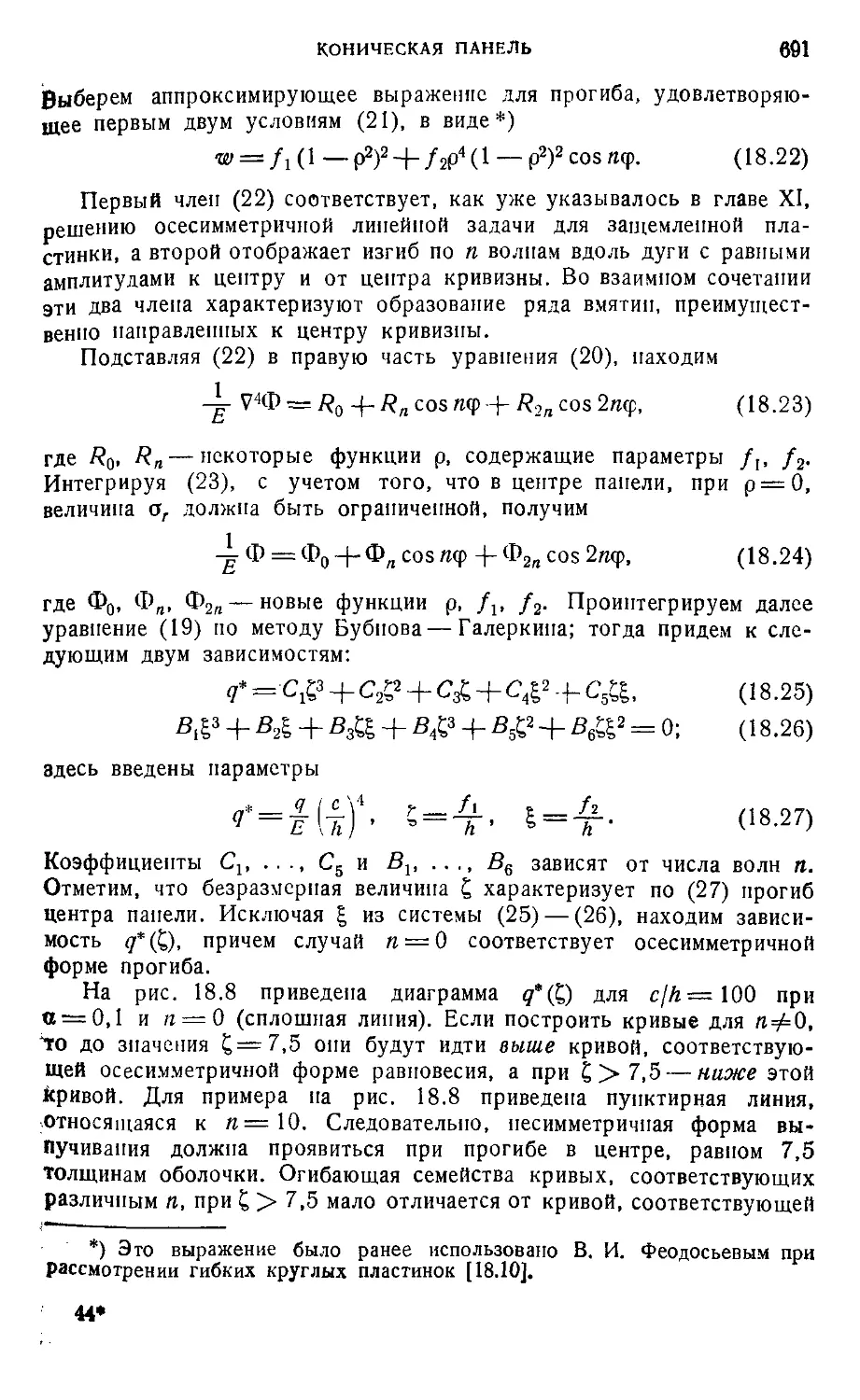
§ 189. Коническая наиель 689
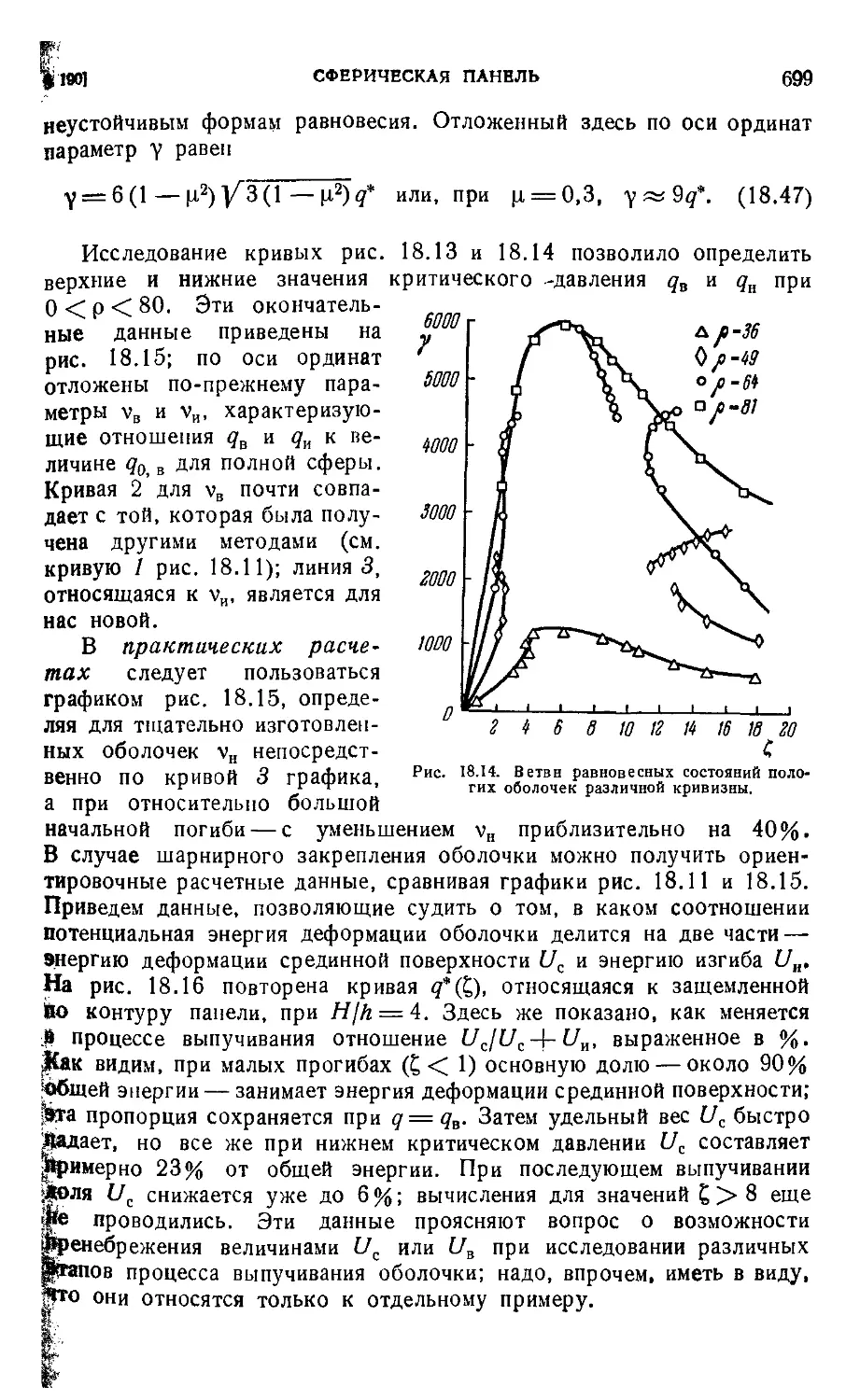
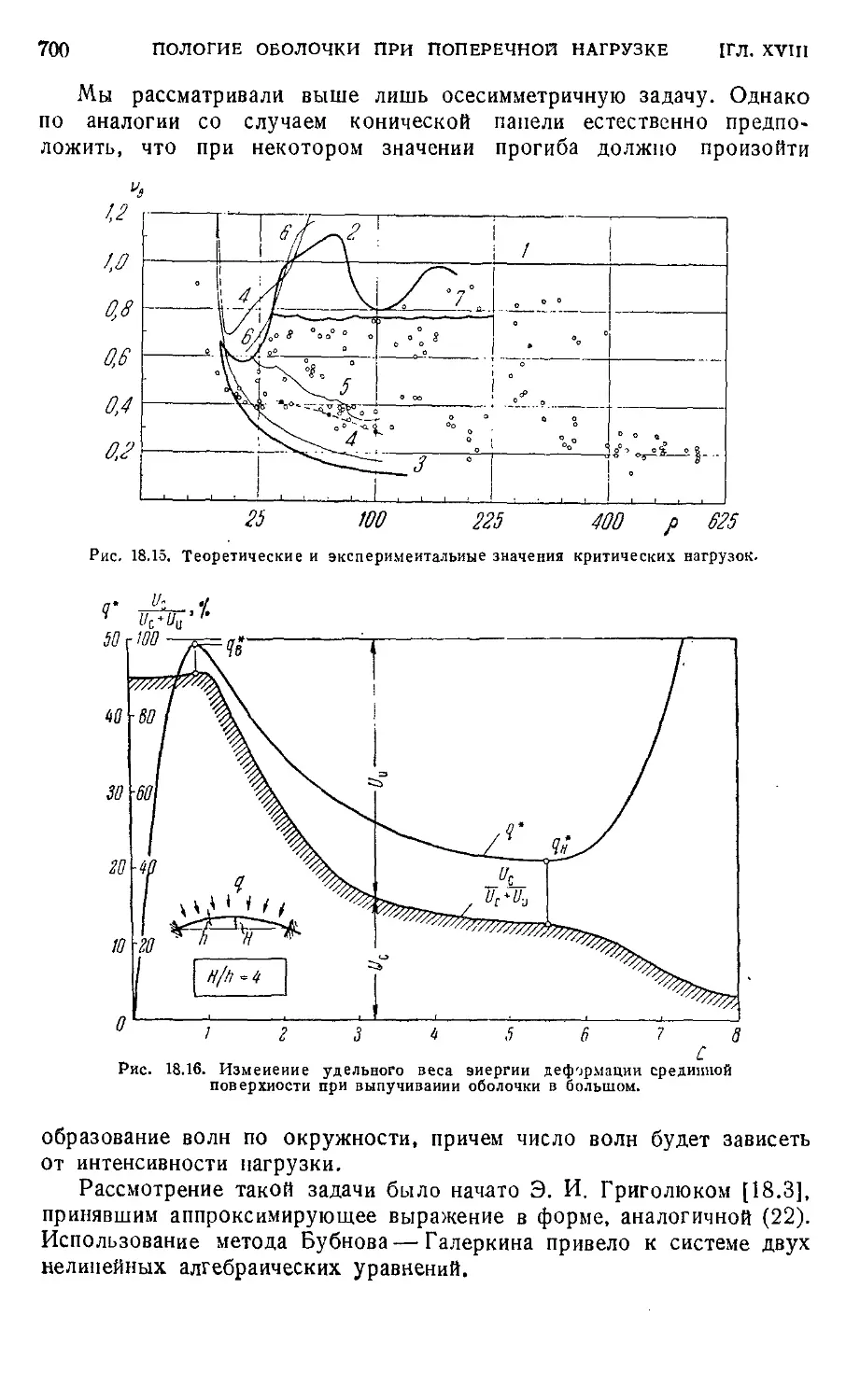
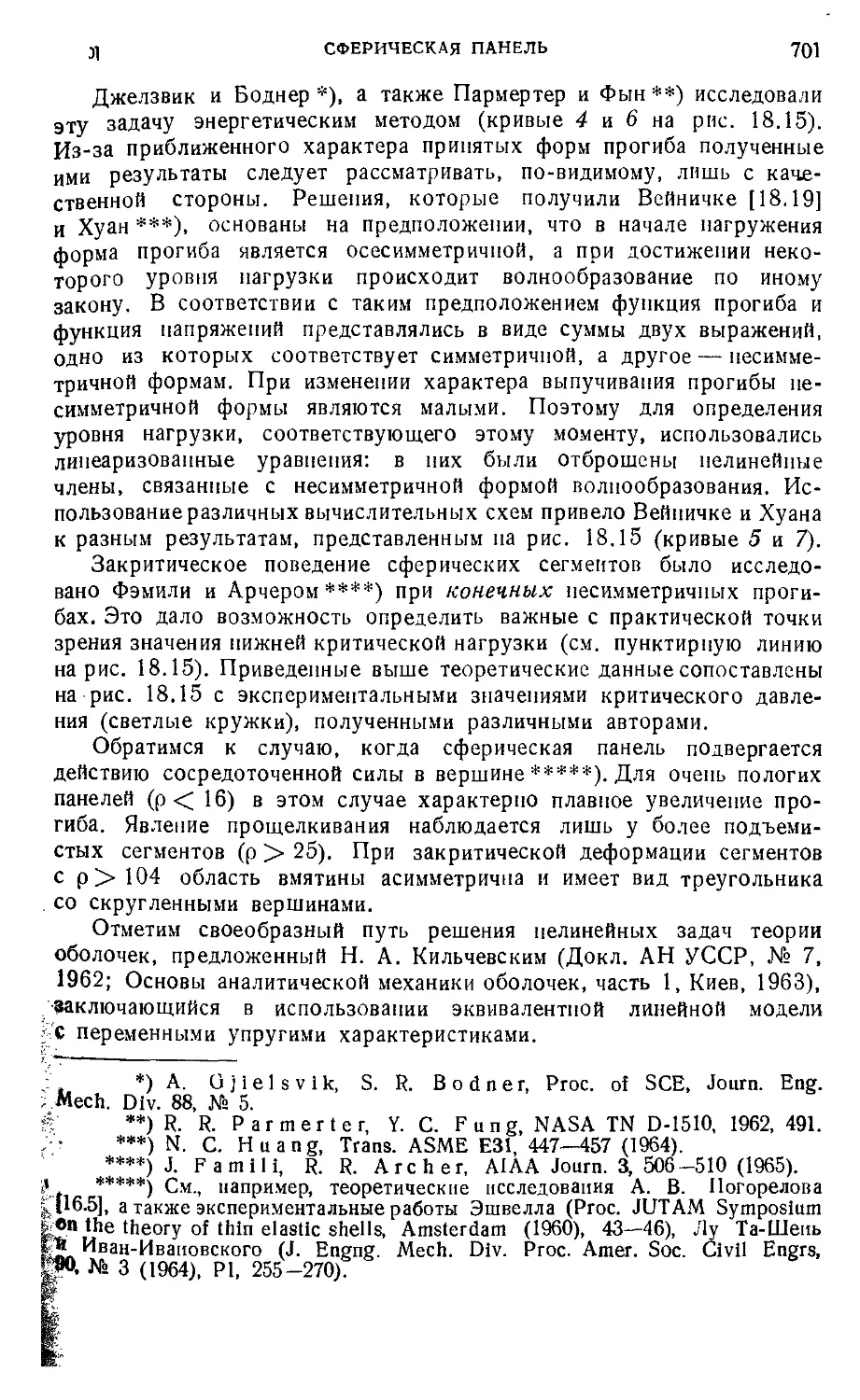
§ 190. Сферическая панель 692
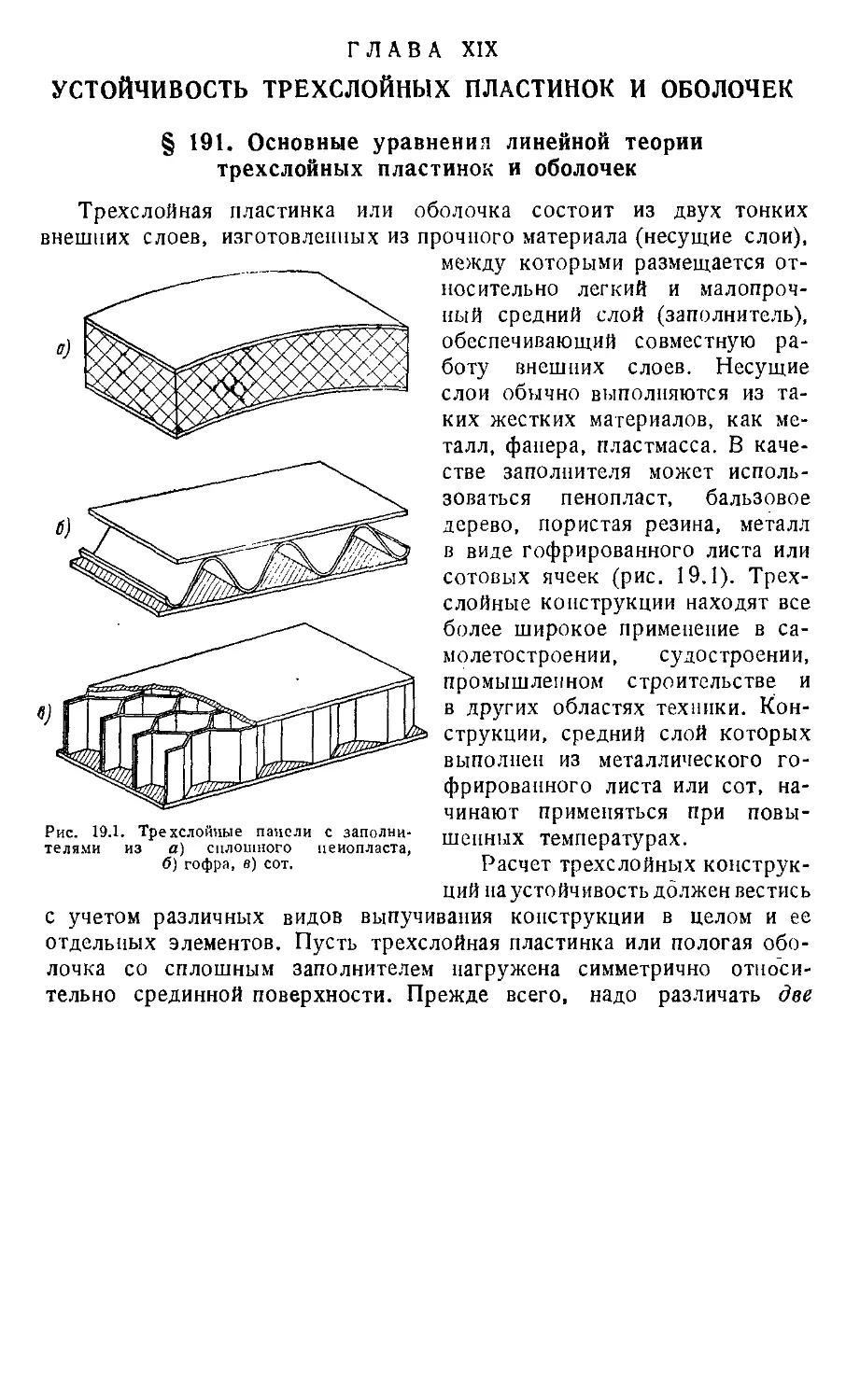
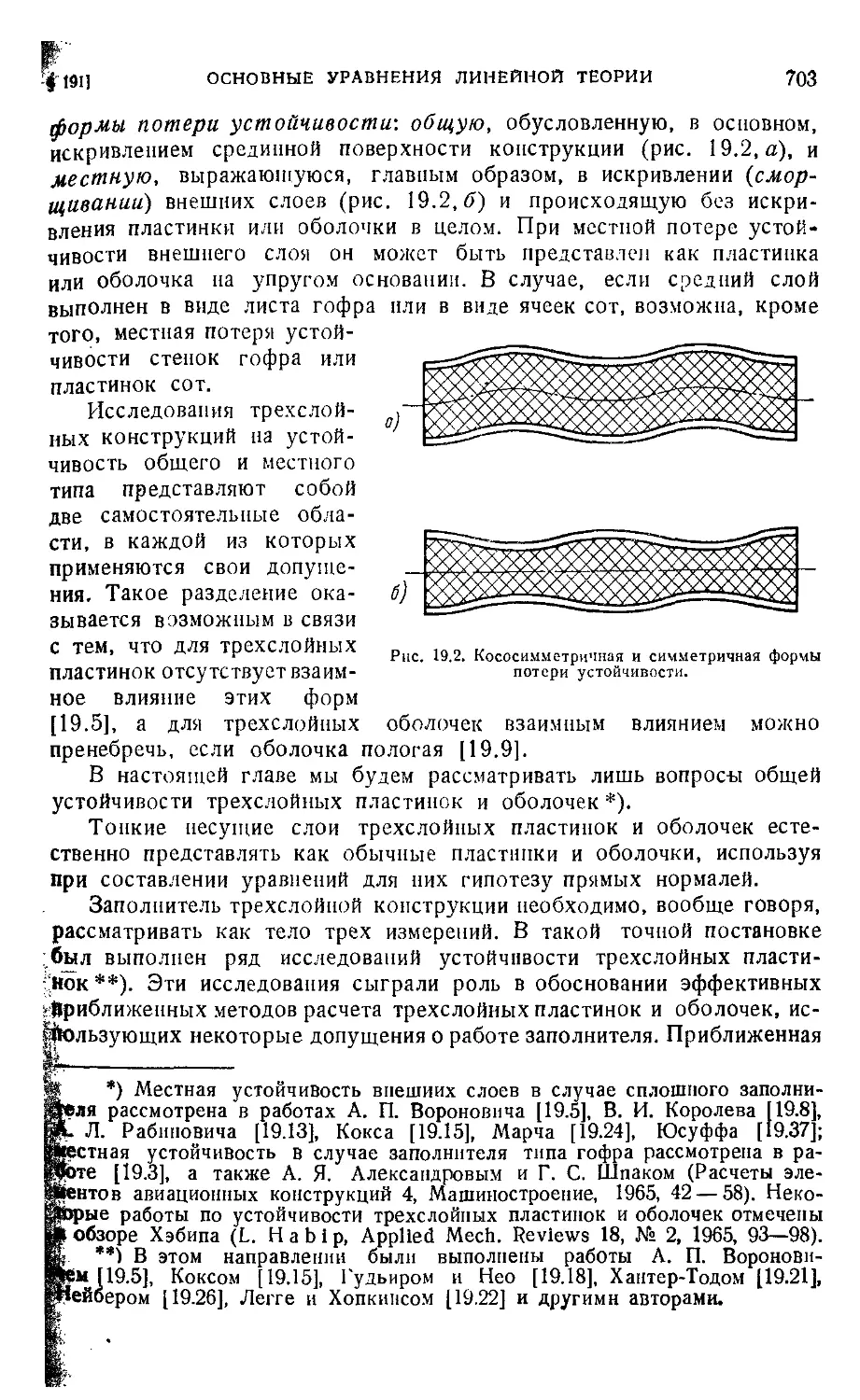
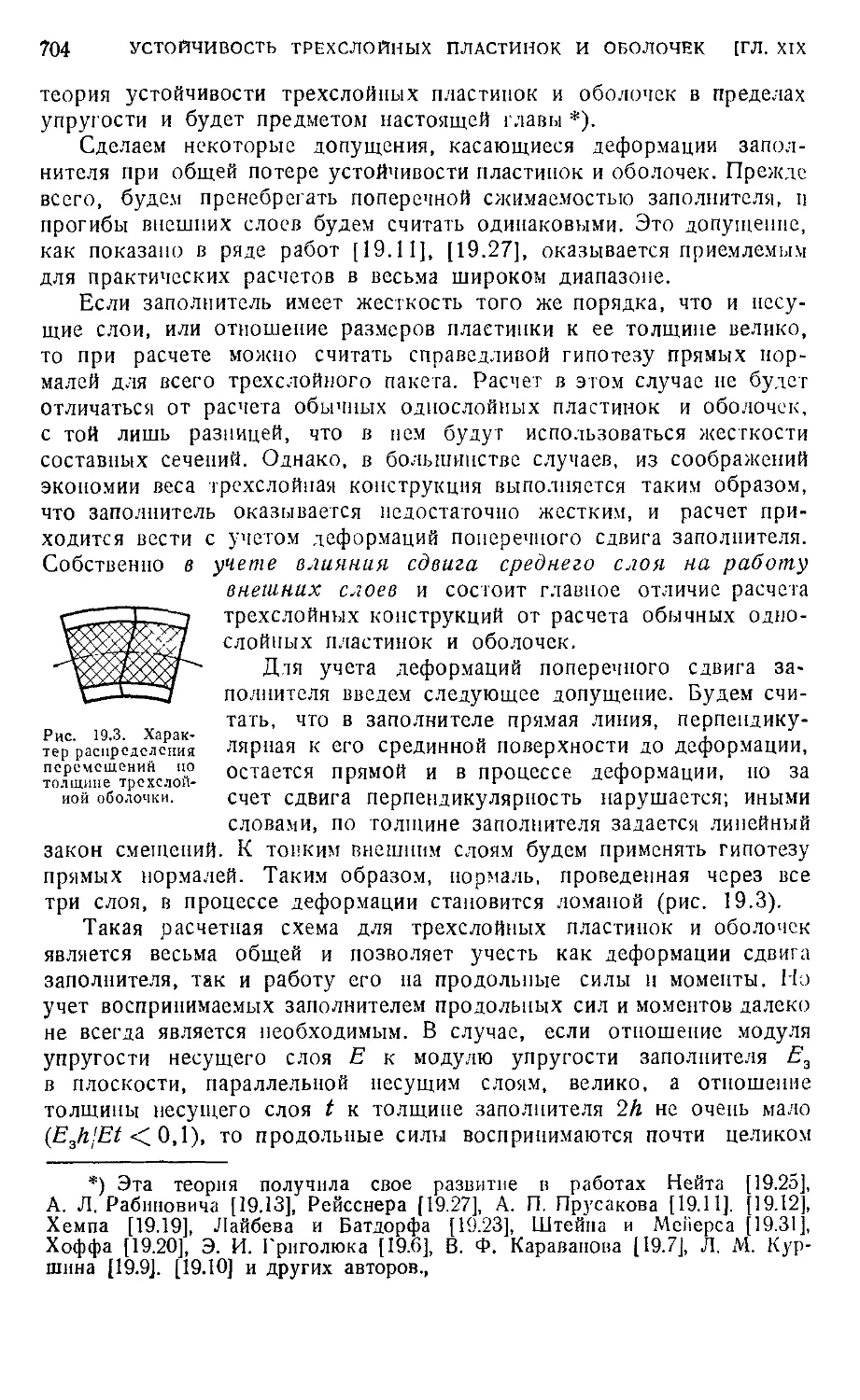
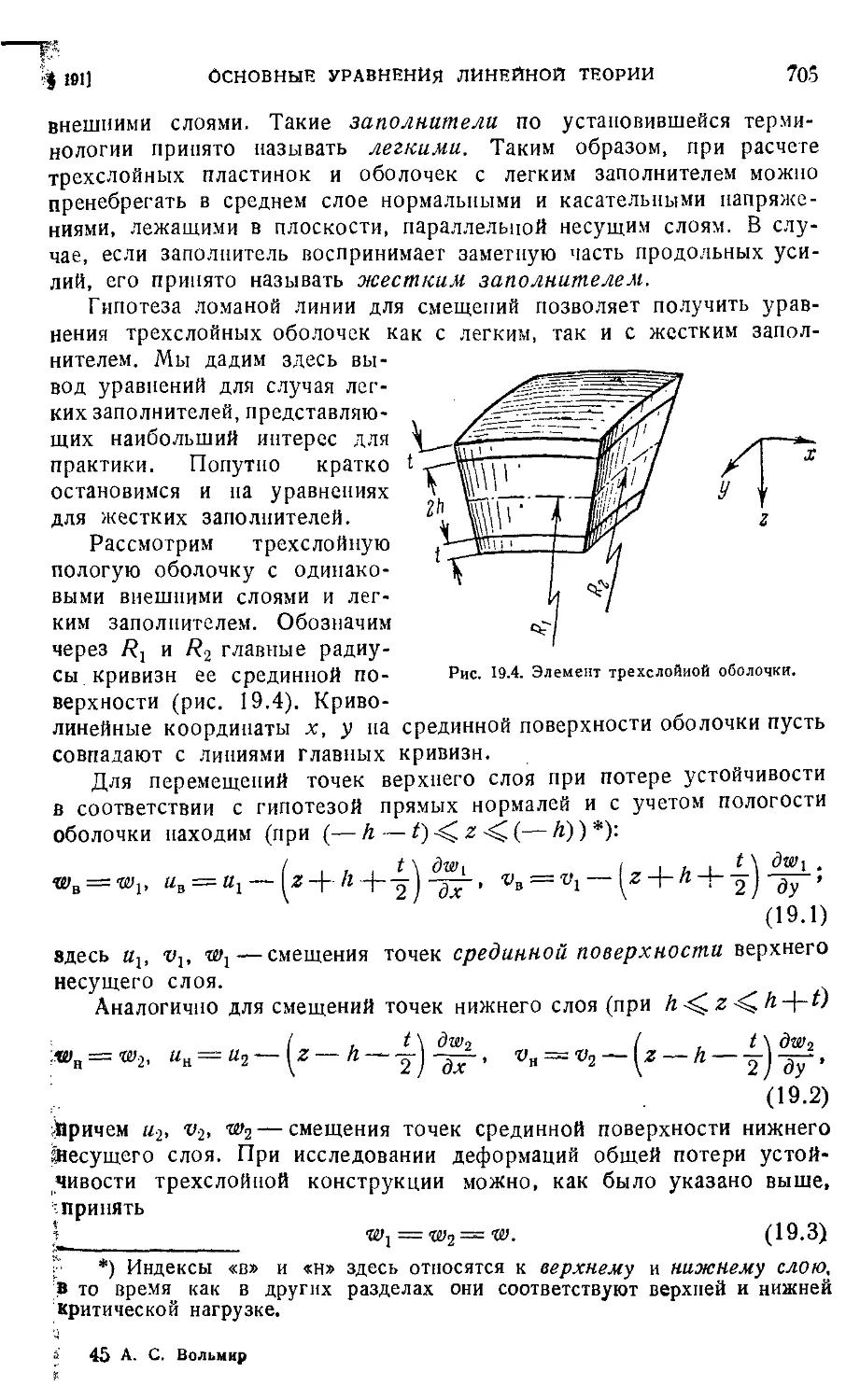
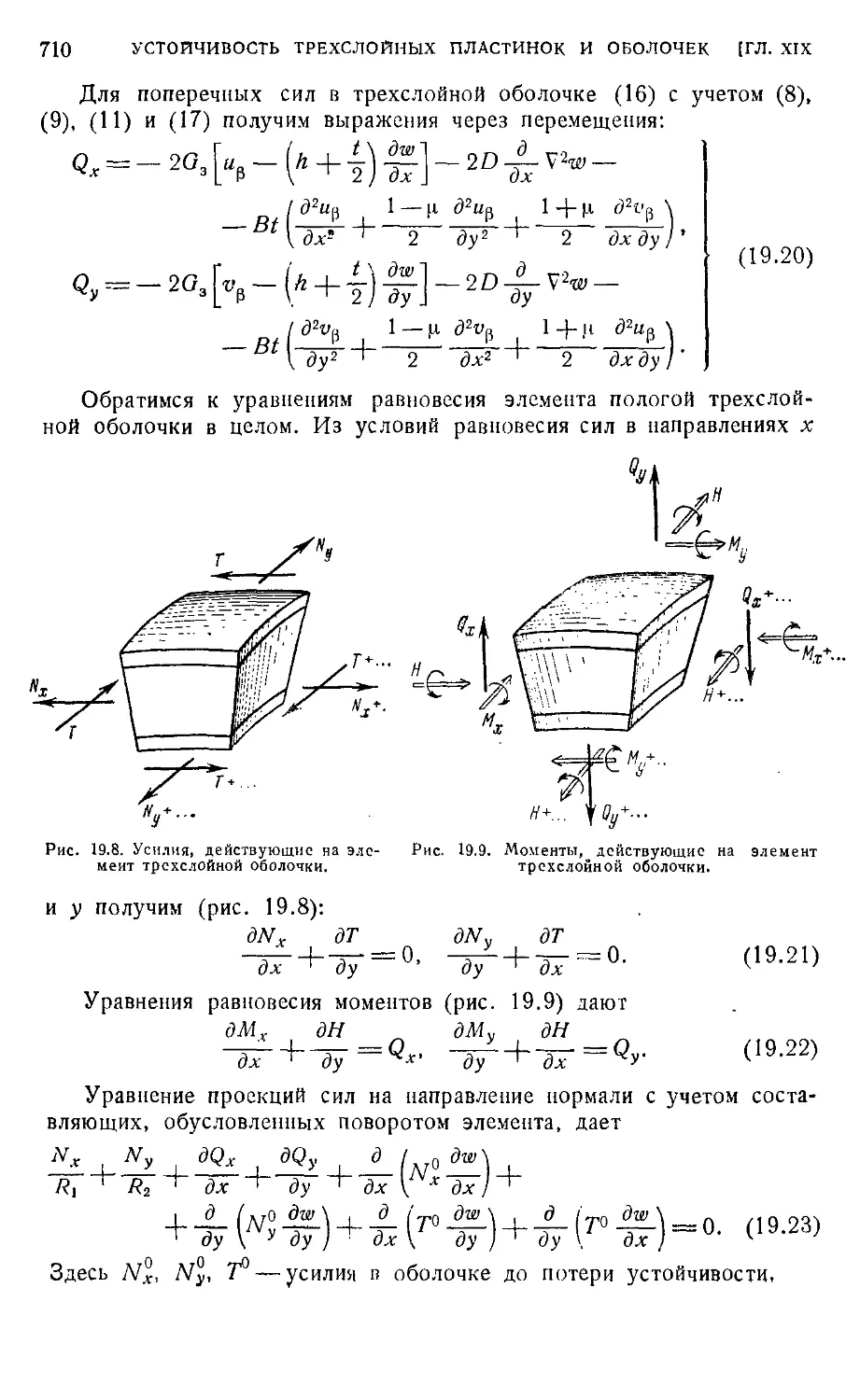
Глава XIX. Устойчивость трехслойных пластинок и оболочек . . 702
§ 191. Основные уравнения линейной теории трехслойных
пластинок и оболочек 702
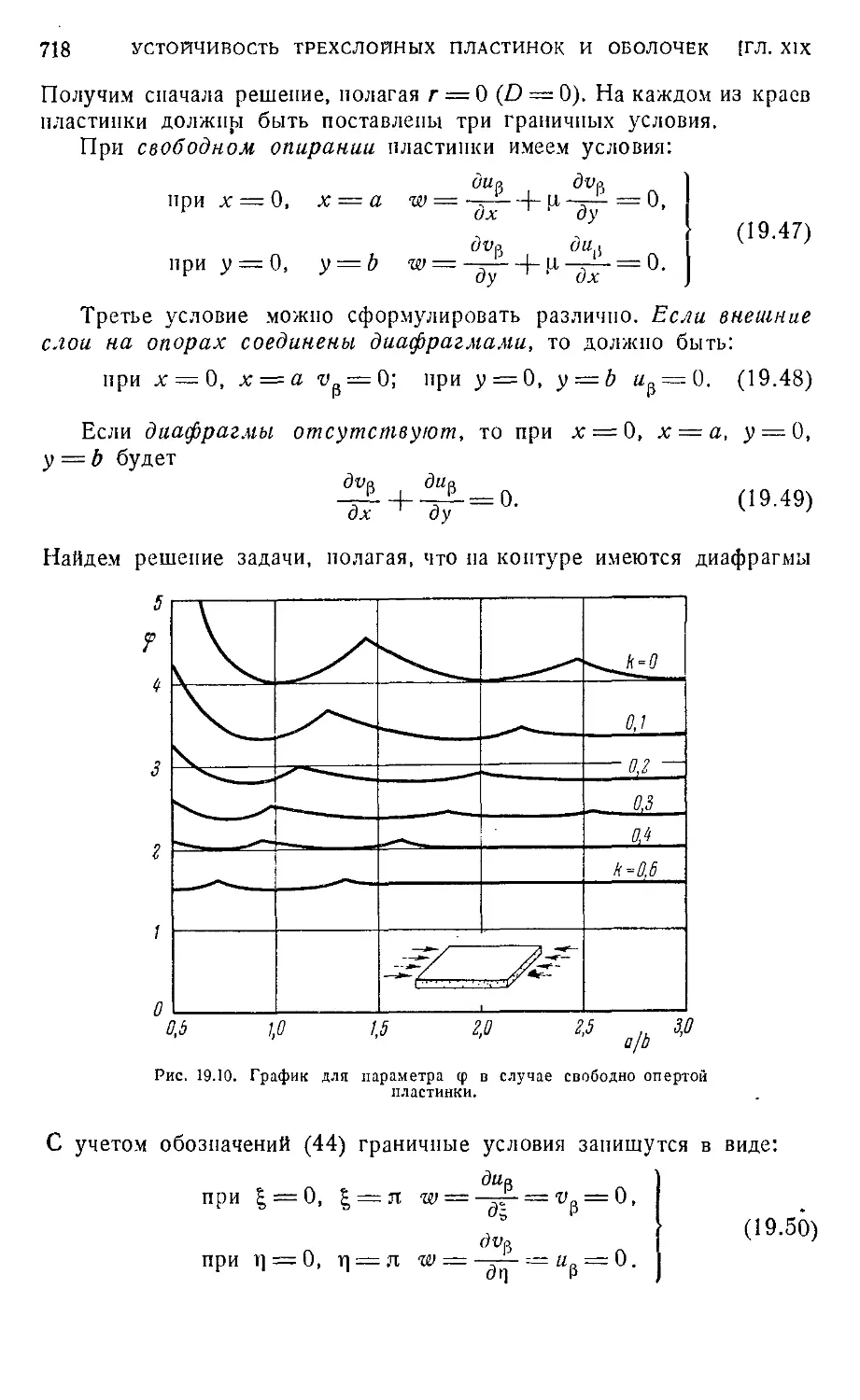
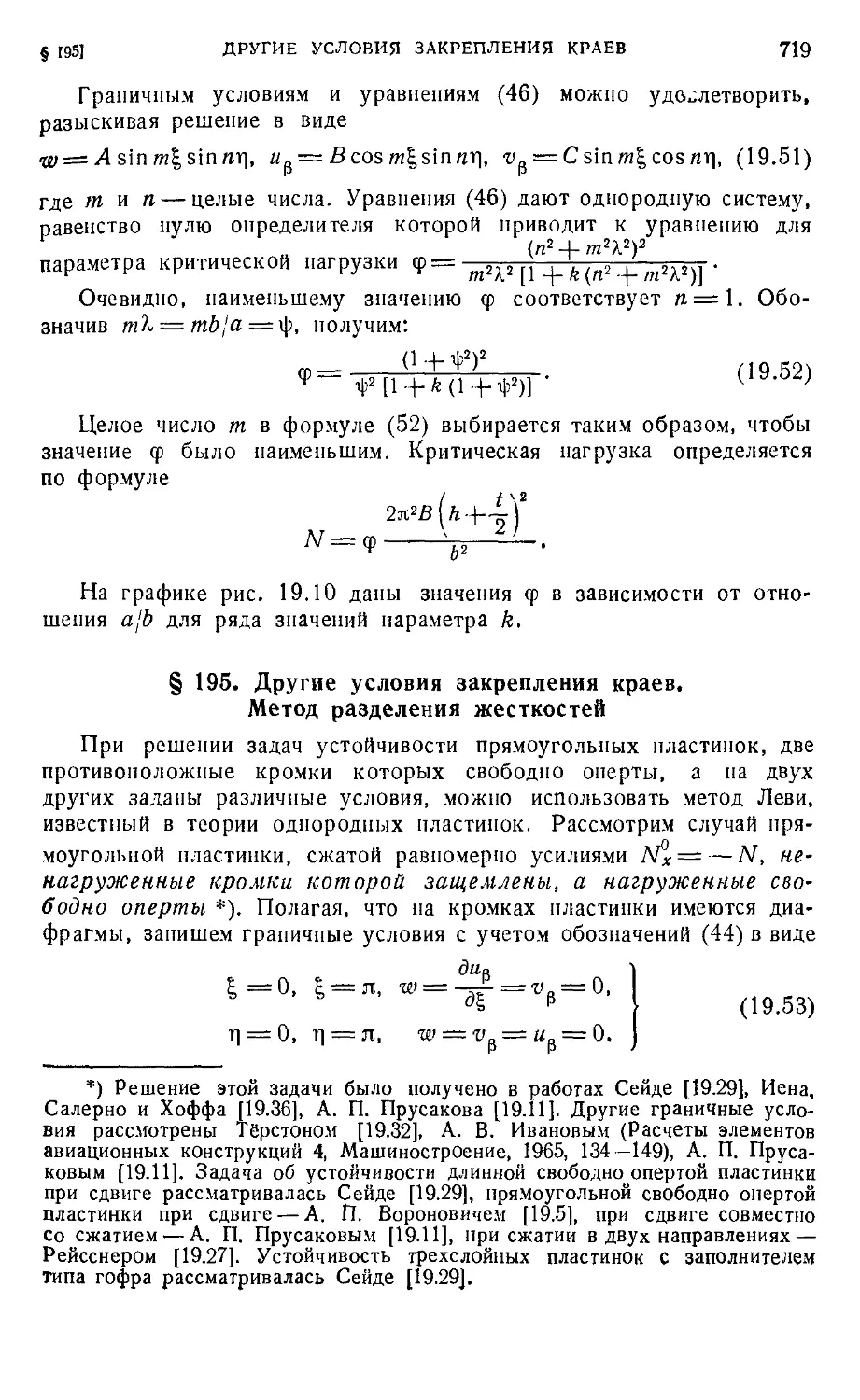
§ 192. Граничные условия 714
§ 193. Устойчивость бесконечно широкой пластинки с легким
заполнителем при сжатии 715
§ 194. Прямоугольная свободно опертая пластинка при продольном
сжатии 717
§ 195. Другие условия закрепления краев. Метод разделения жест-
костей 719
§ 196. Устойчивость цилиндрической трехслойной панели при сжатии 724
§ 197. Устойчивость трехслойного цилиндра при продольном сжатии
и внешнем давлении 726
Глава XX. Пластинки и оболочки при высоких температурах . . 728
§ 198. Общие уравнения 728
§ 199. Плоская подкрепленная панель 731
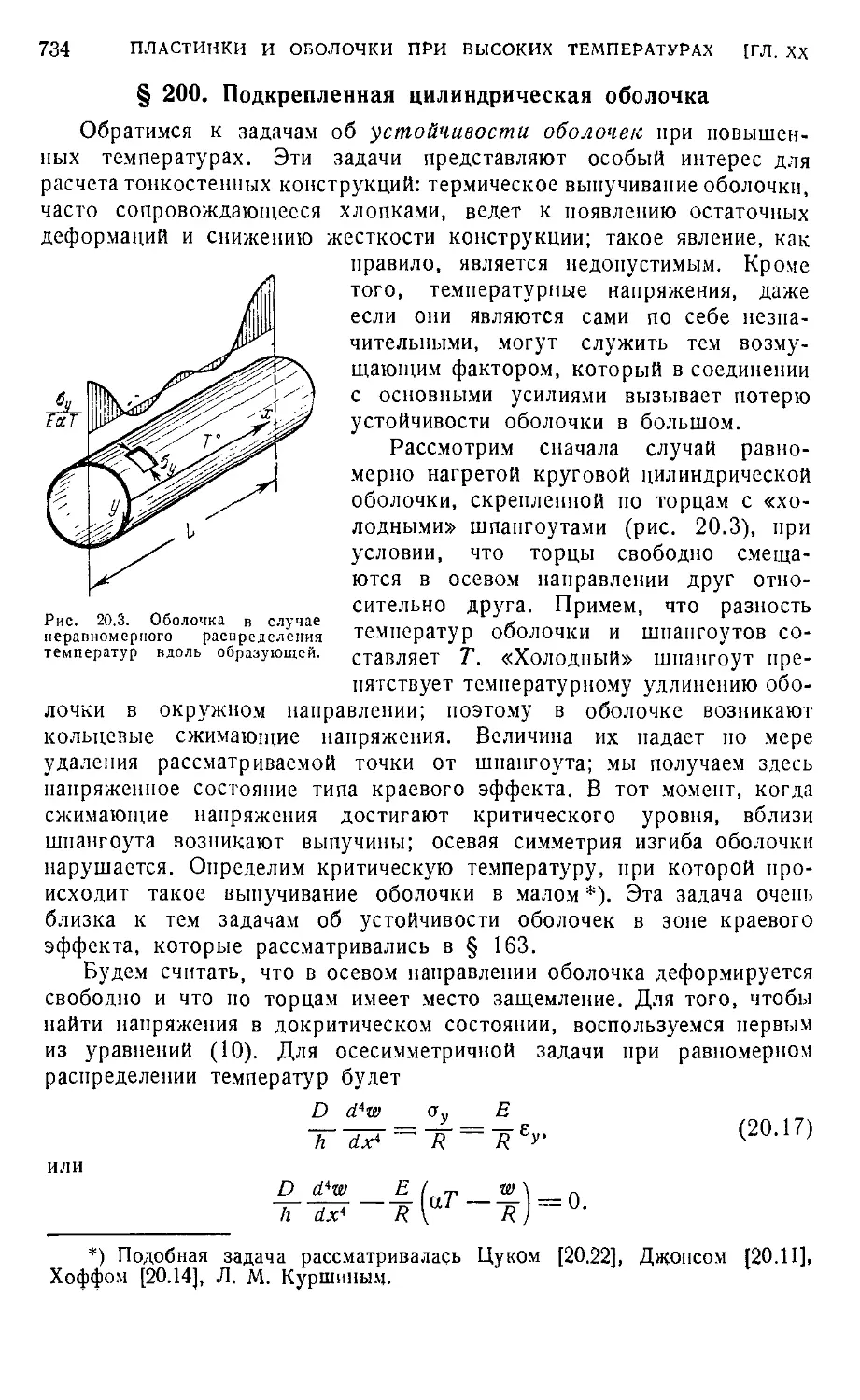
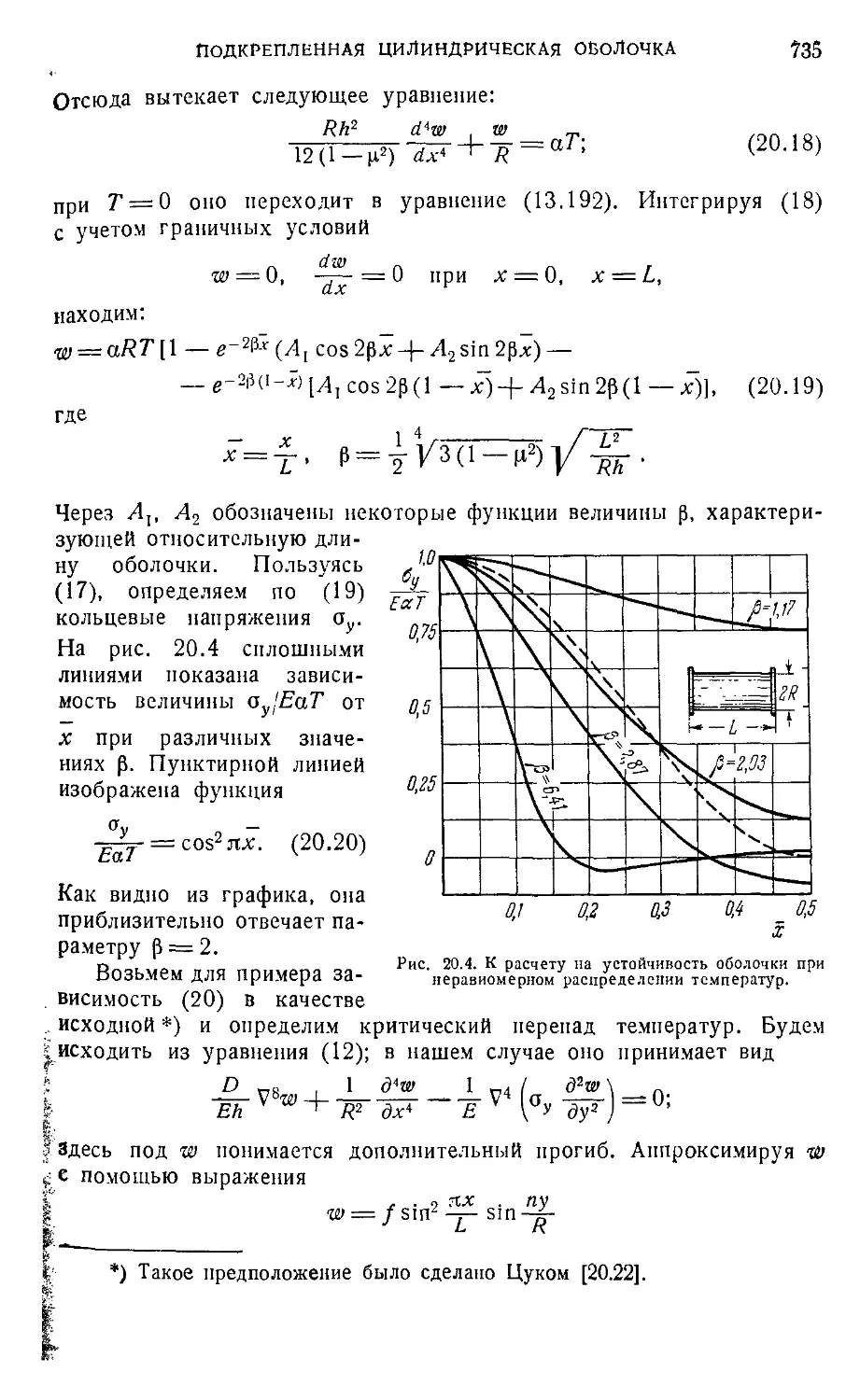
§ 200. Подкрепленная цилиндрическая оболочка 734
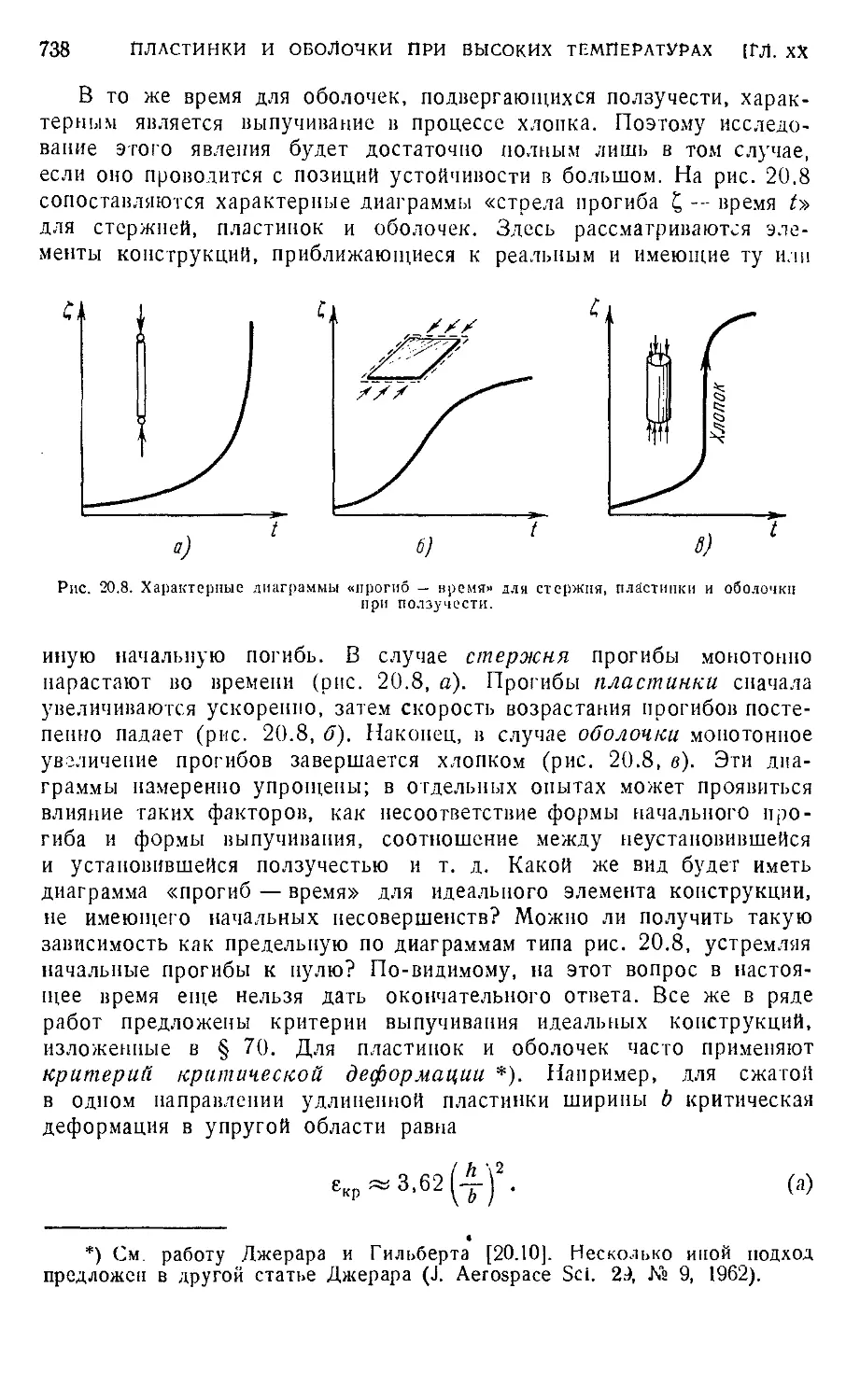
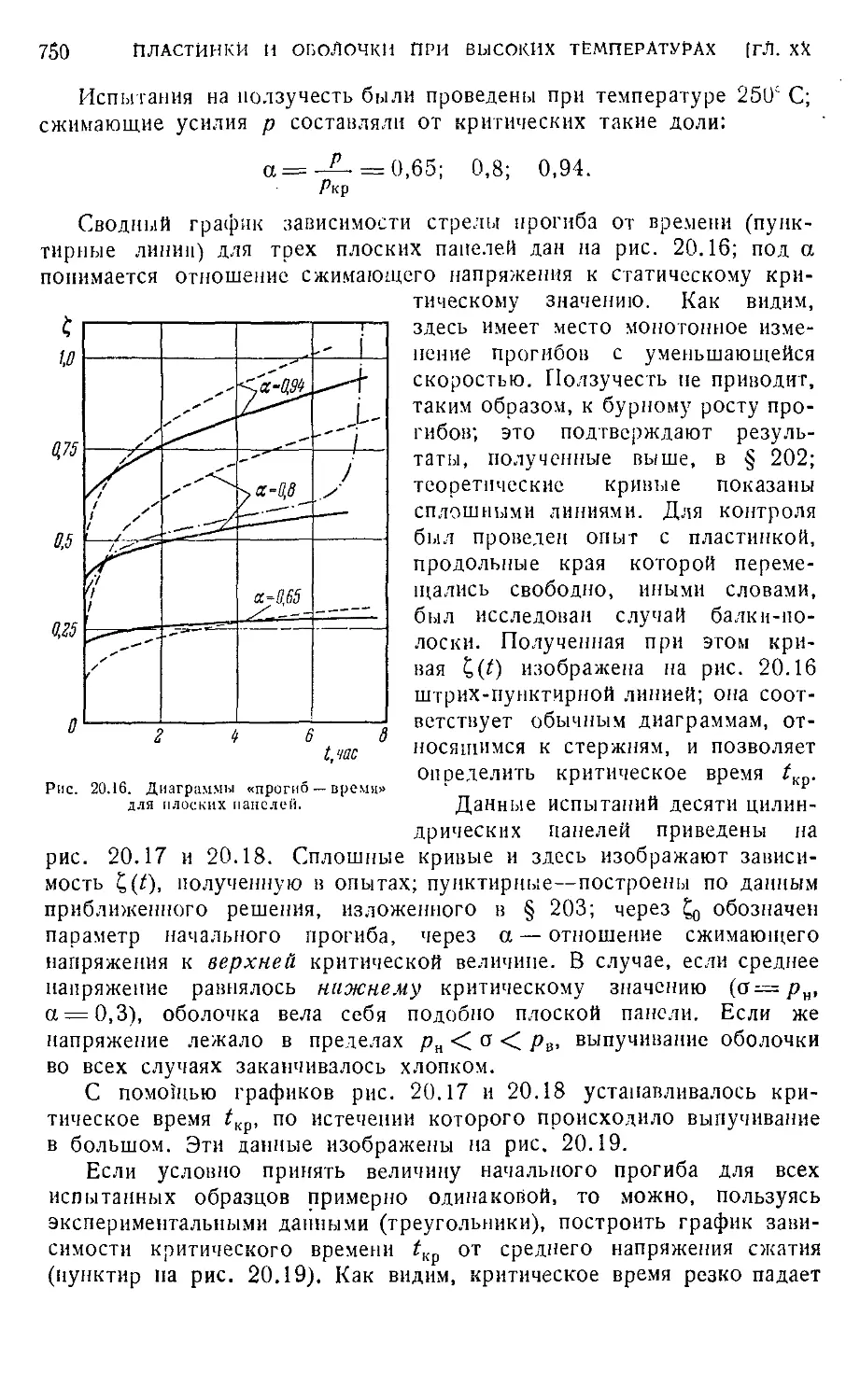
§ 201. Выпучивание пластинок и оболочек при ползучести .... 737
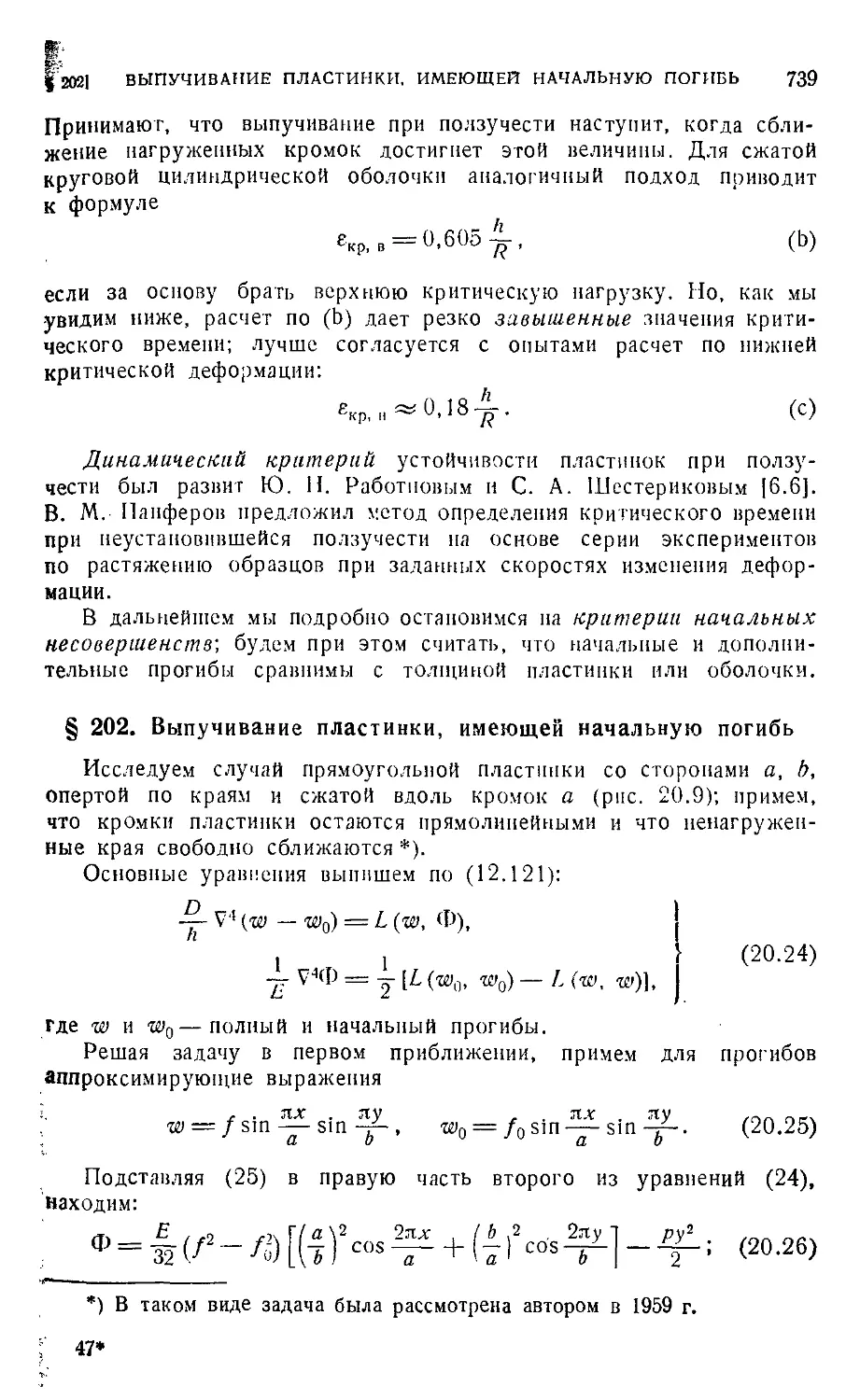
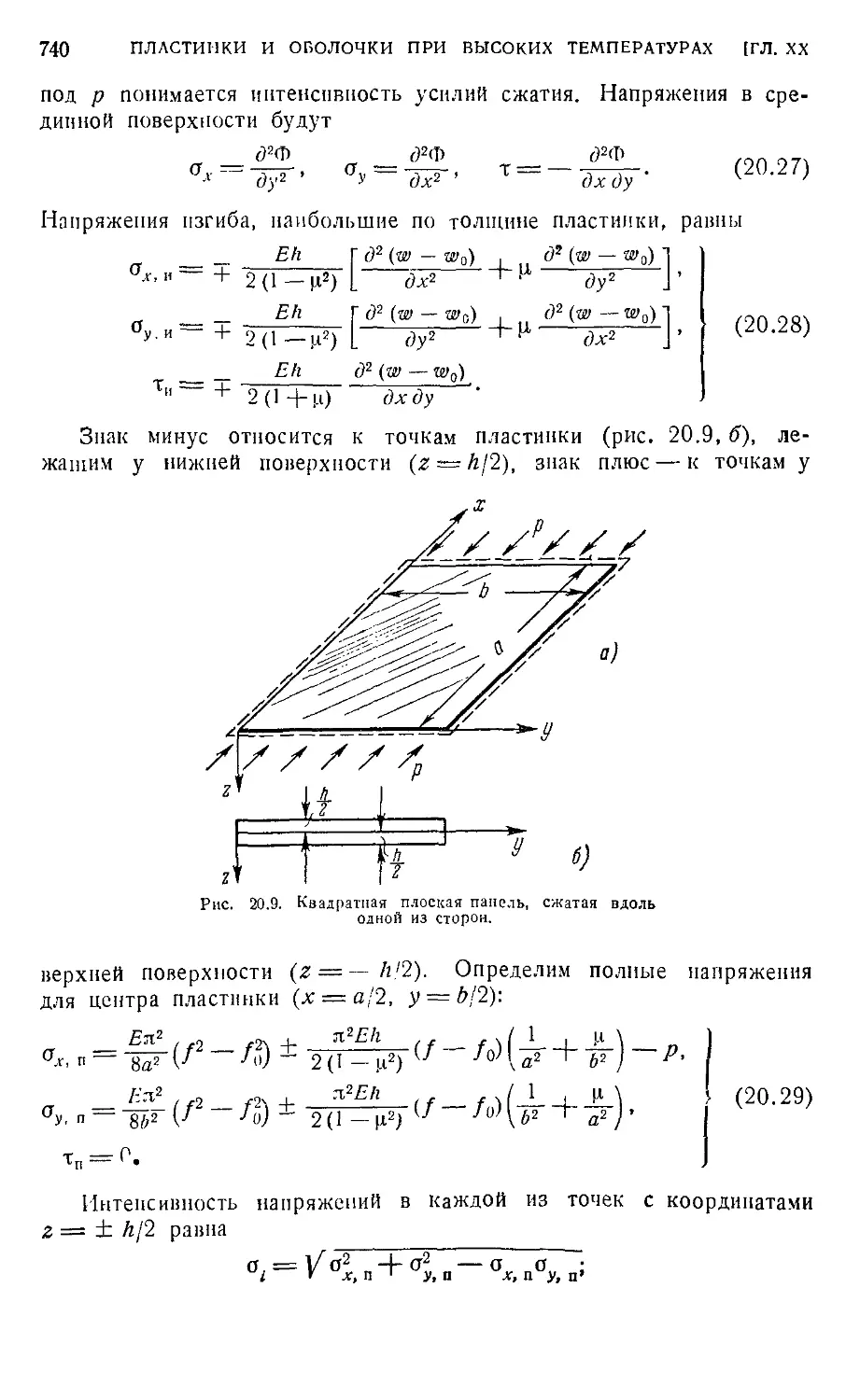
§ 202. Выпучивание пластинки, имеющей начальную погибь .... 739
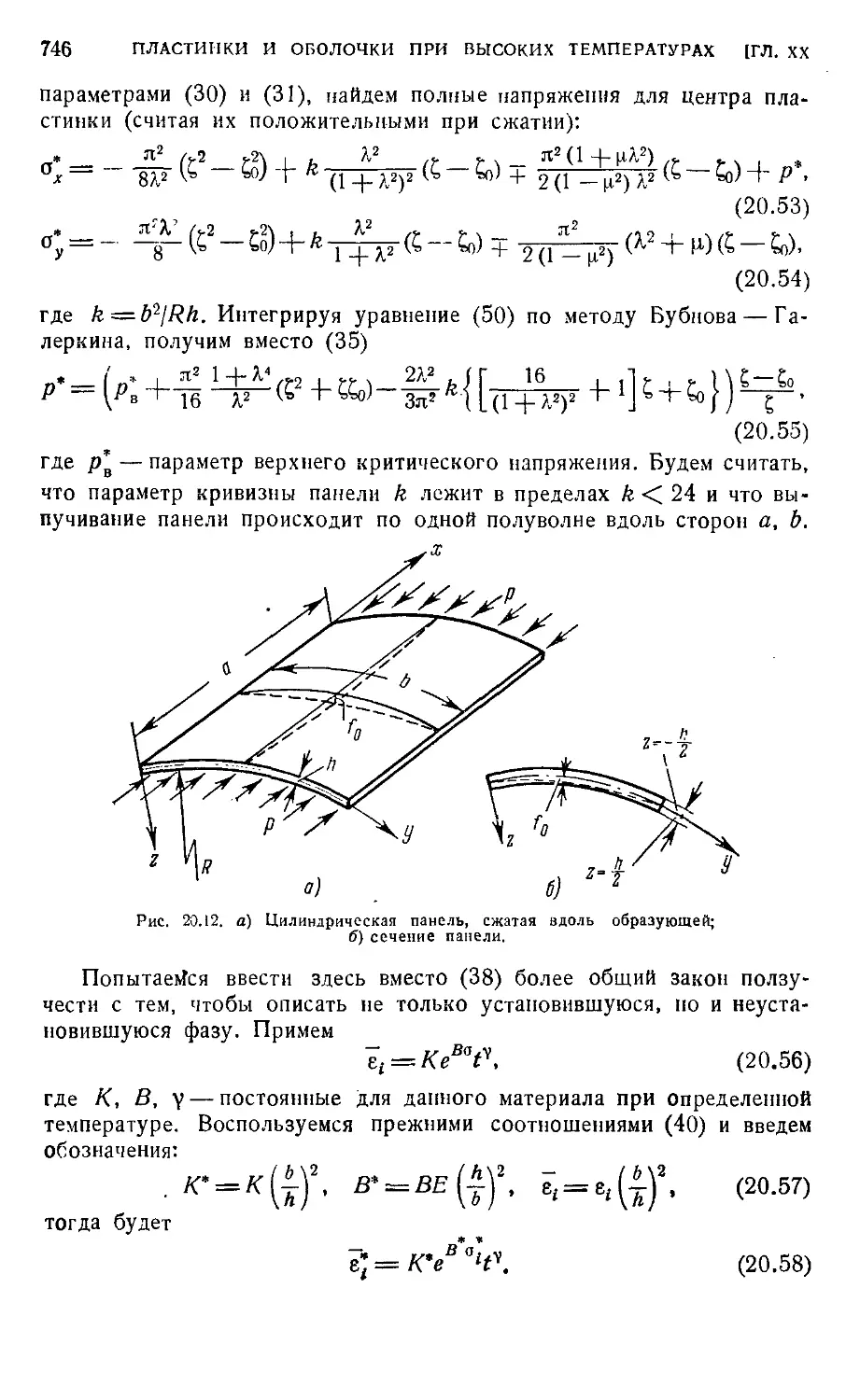
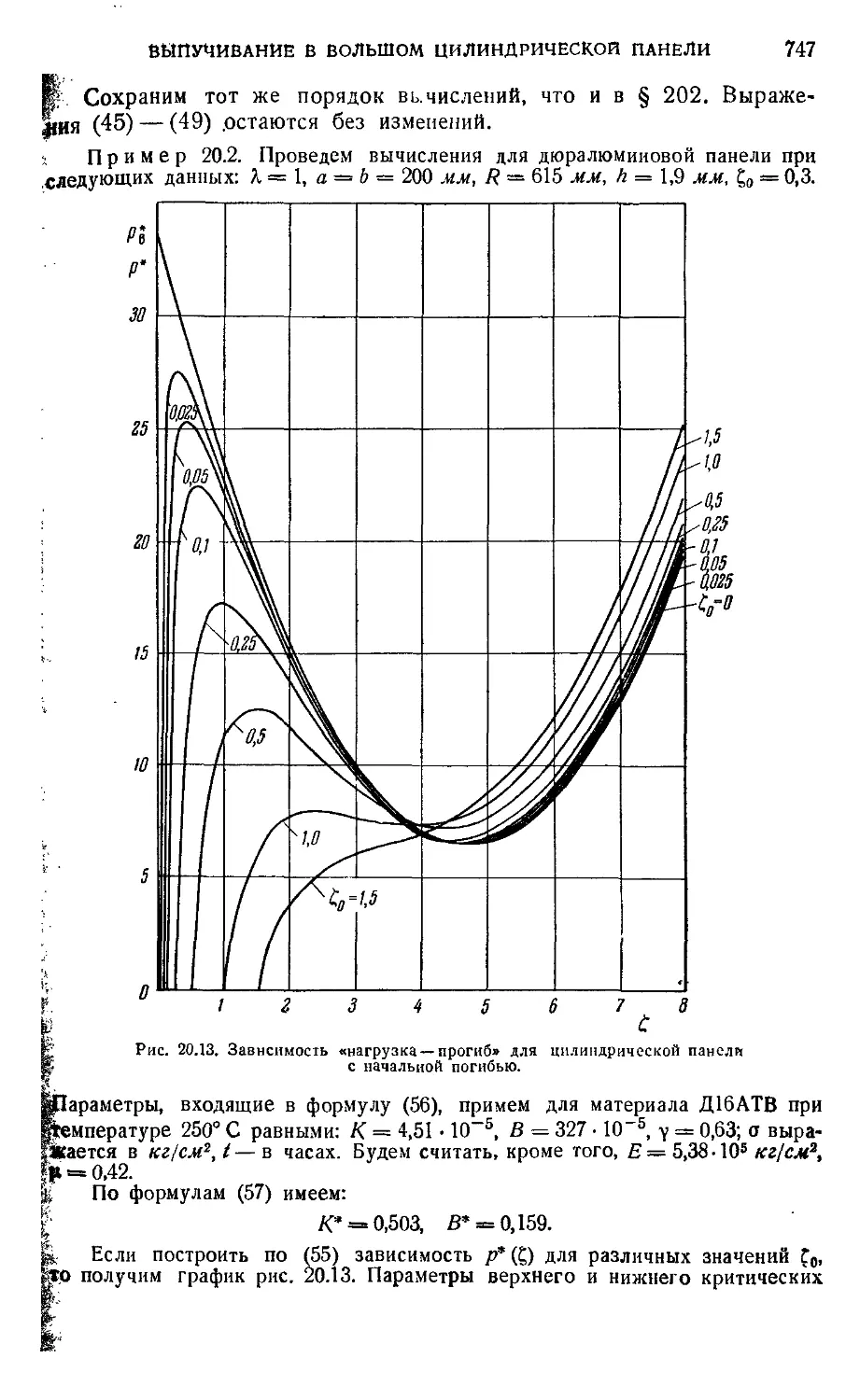
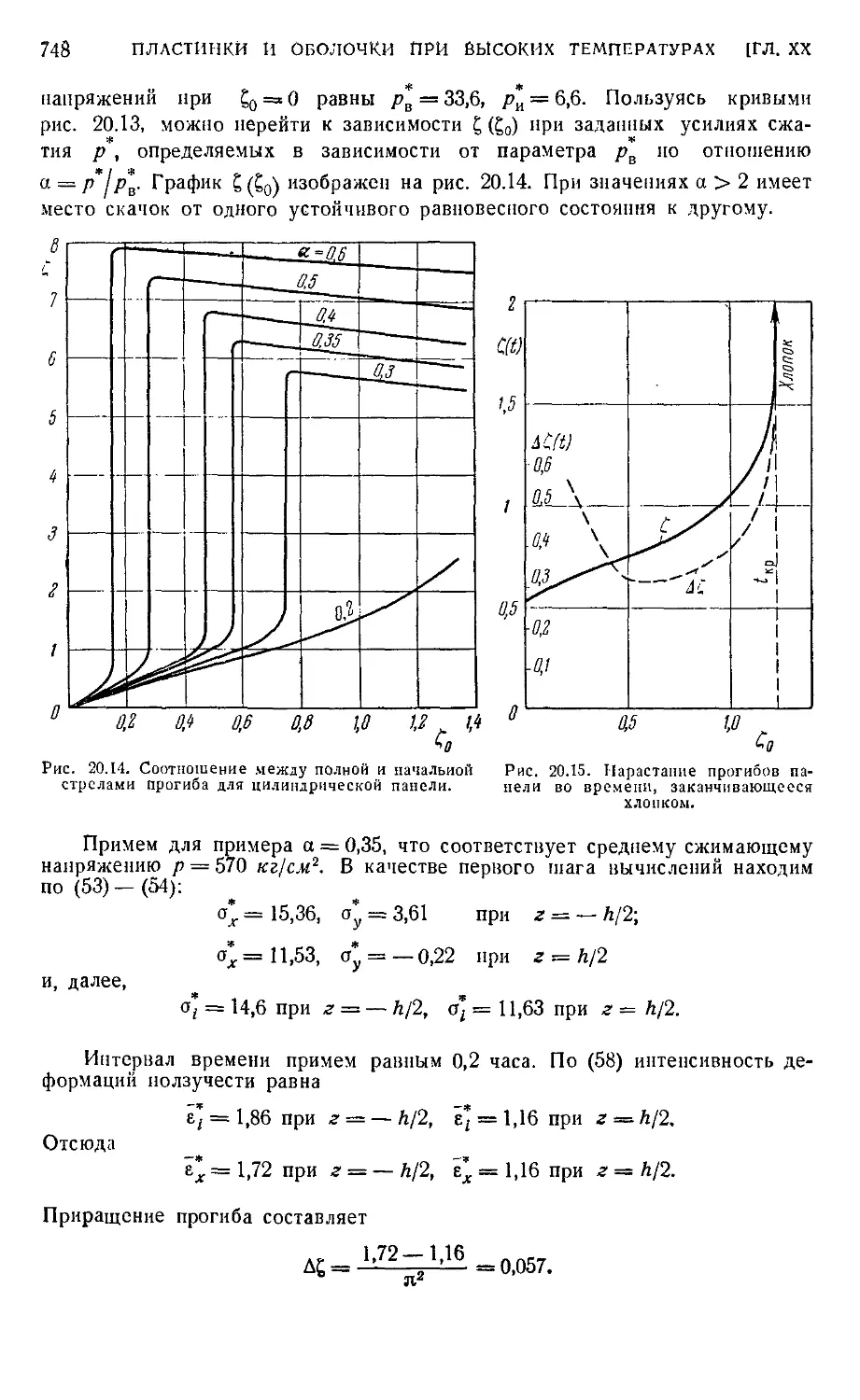
§ 203. Выпучивание в большом цилиндрической панели 745
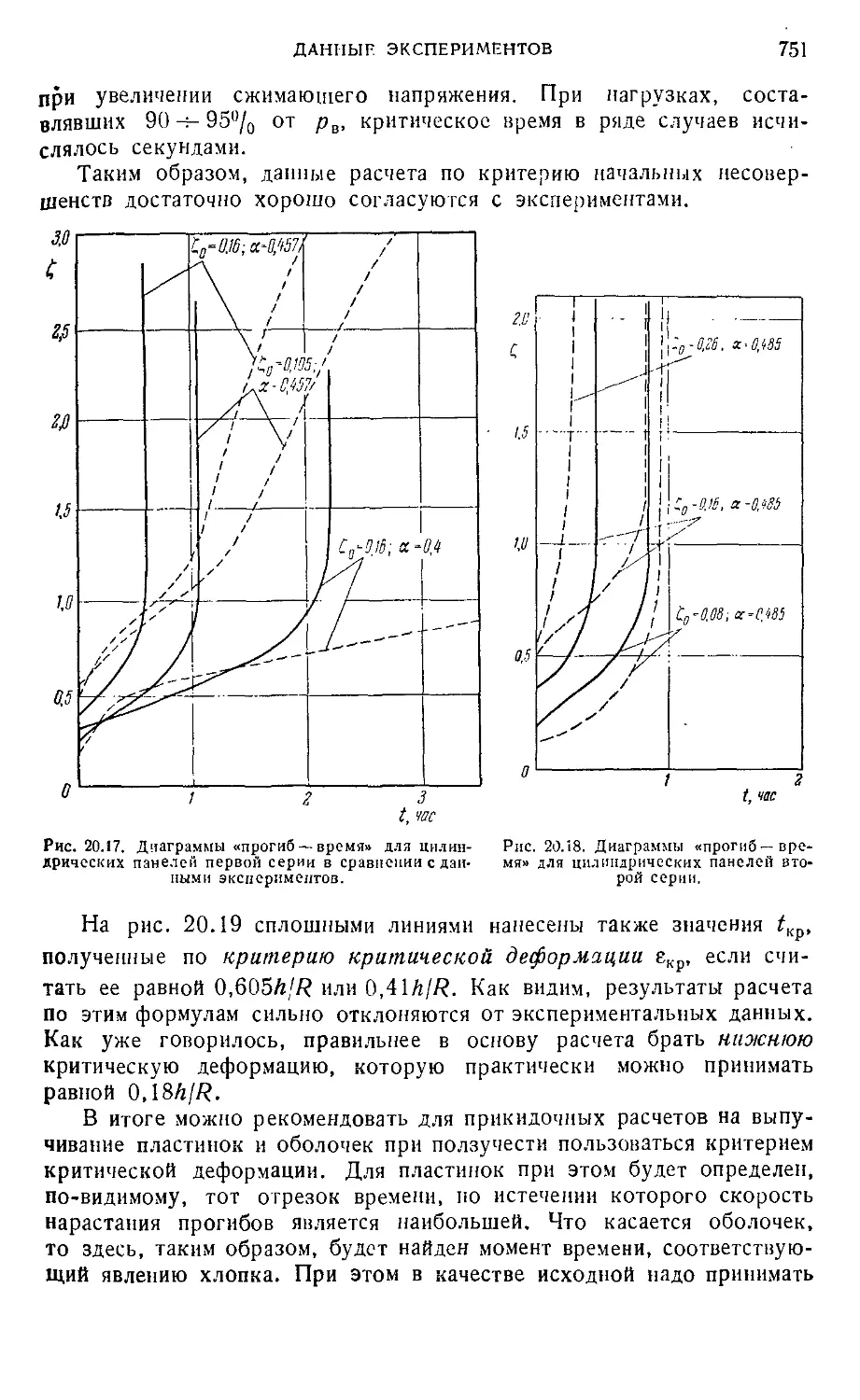
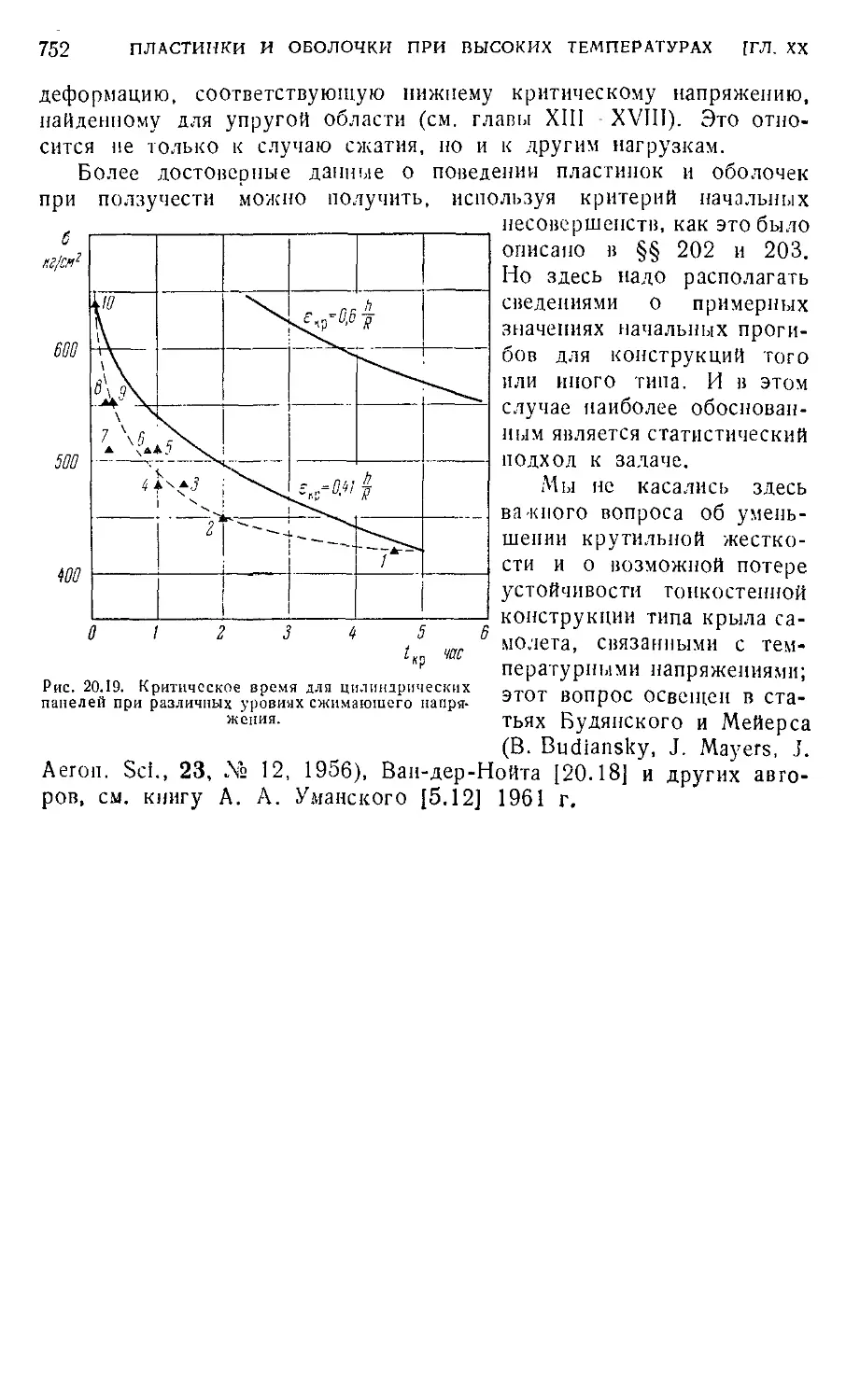
§ 204. Данные экспериментов и рекомендации для практических
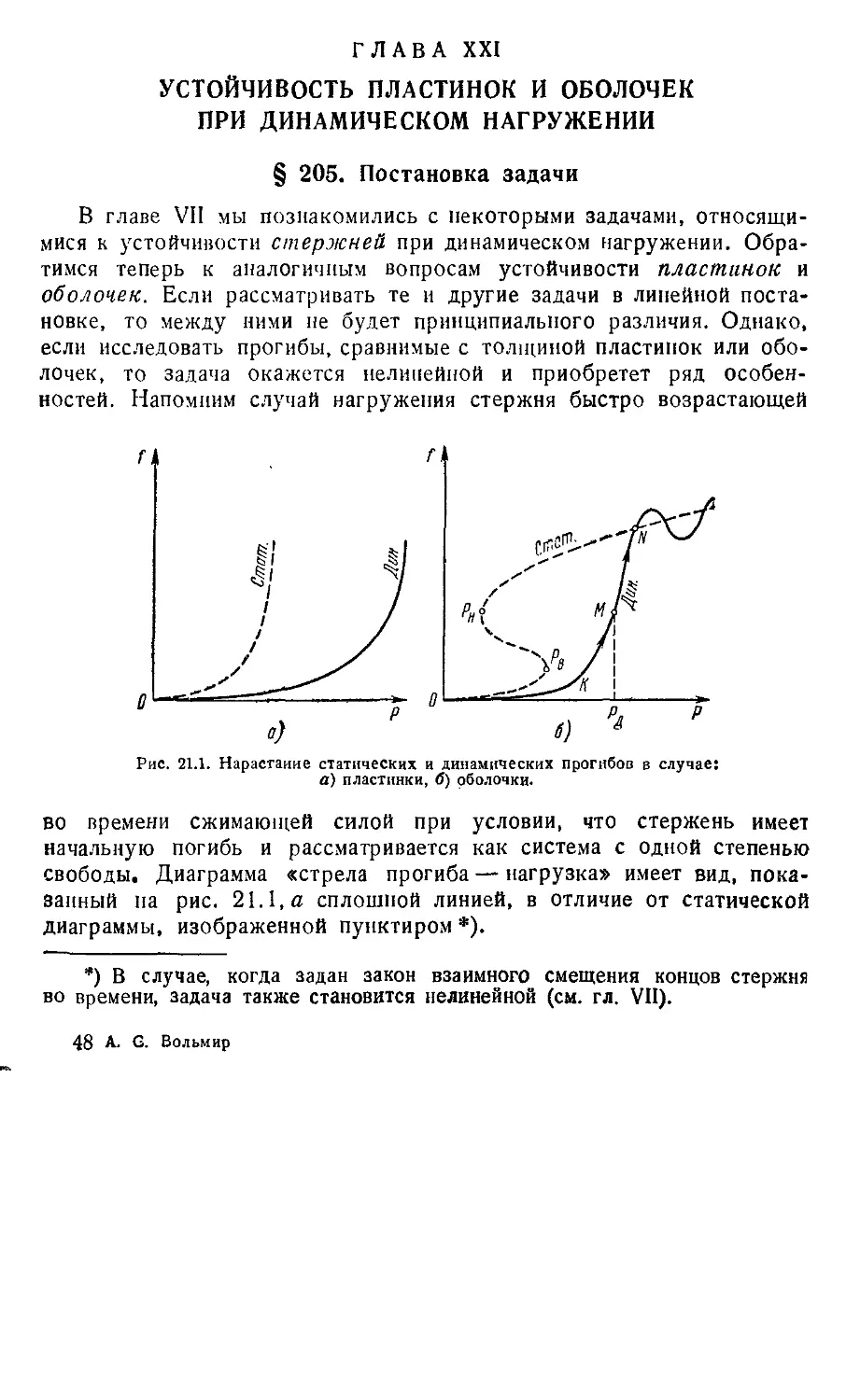
расчетов 749
Глава XXI. Устойчивость пластинок и оболочек при
динамическом нагружении 753
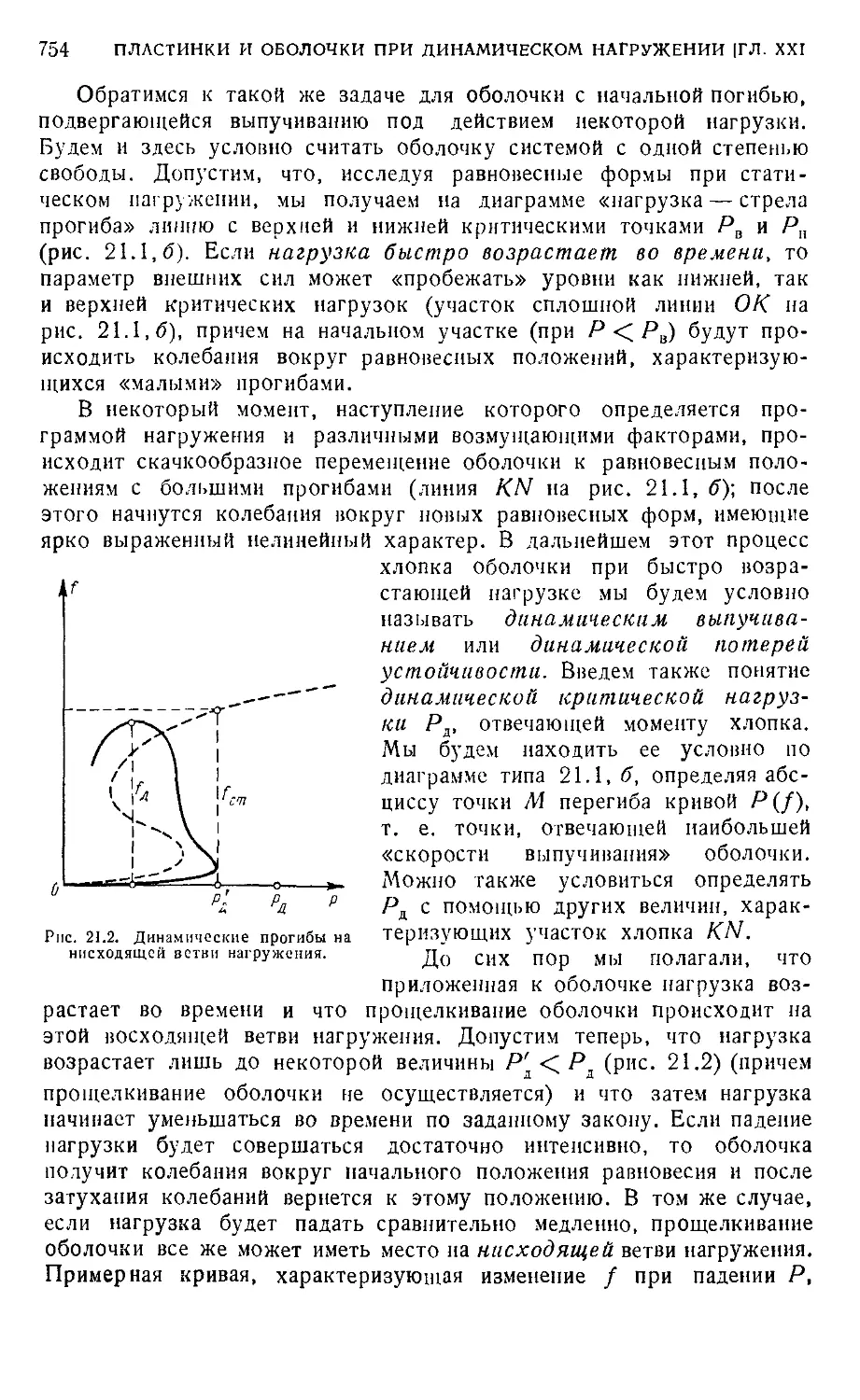
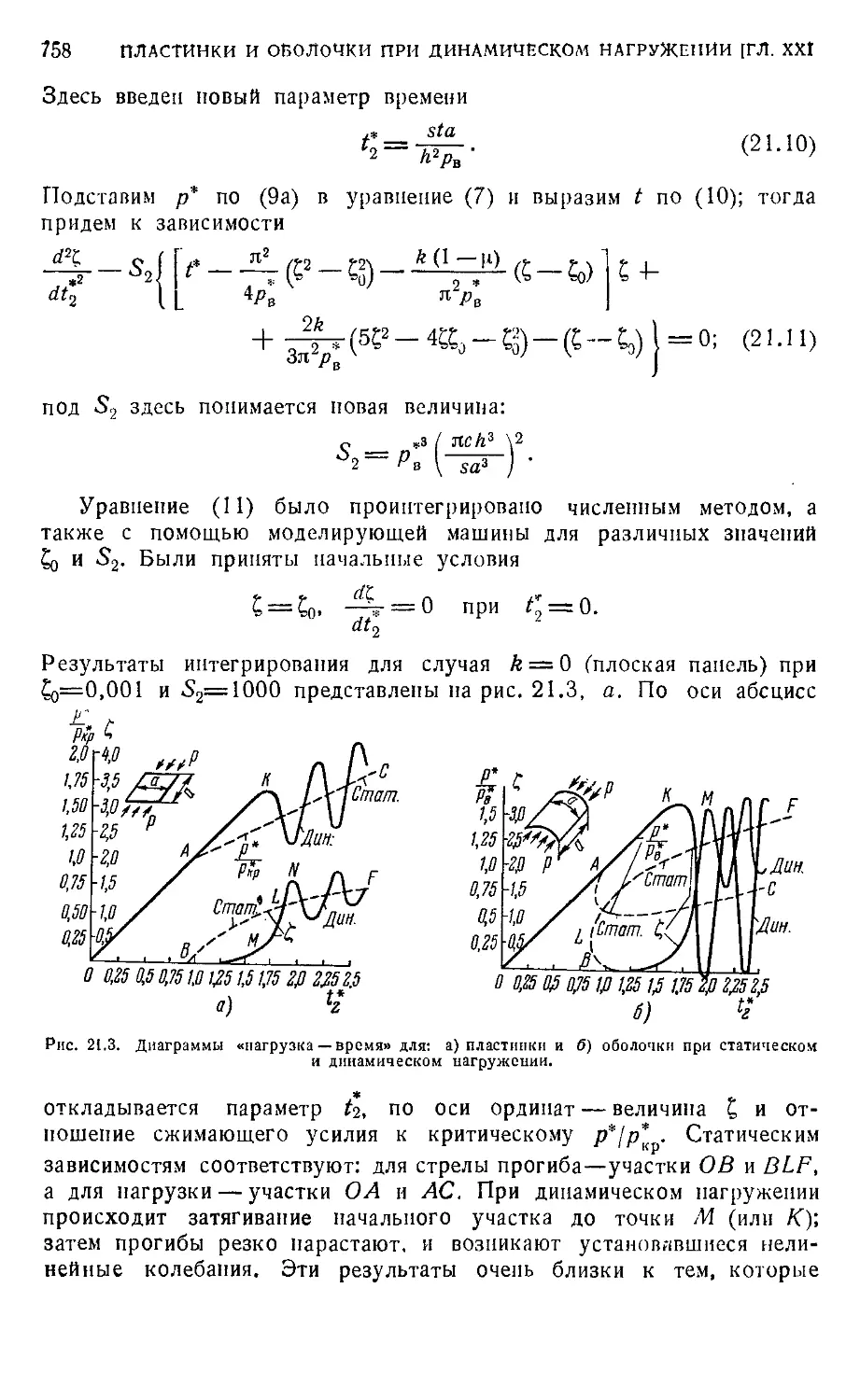
§ 205. Постановка задачи 753
§ 206. Устойчивость нластииок и цилиндрических панелей при
действии сжимающей нагрузки 755
§ 207. Применение цифровых машин 759
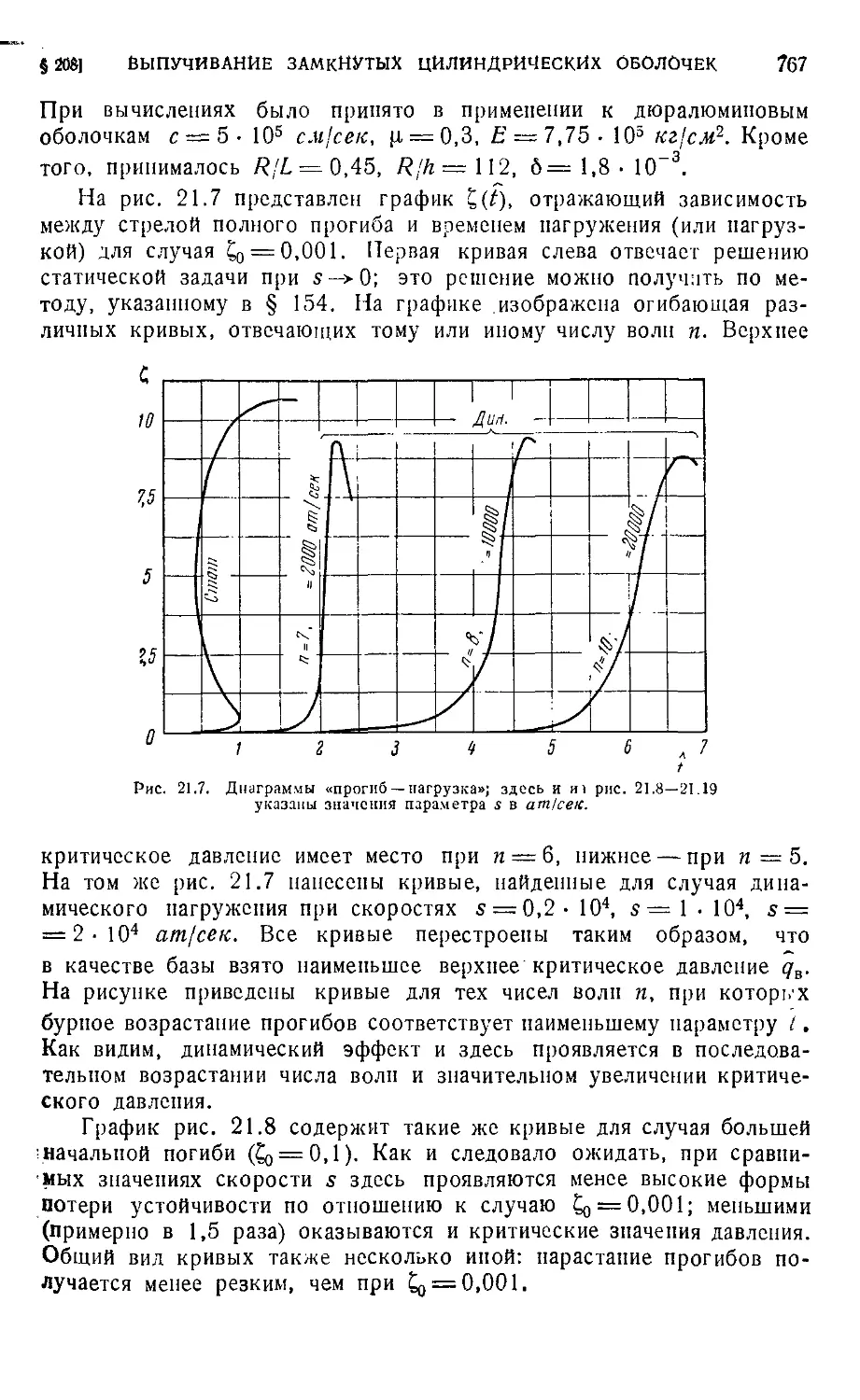
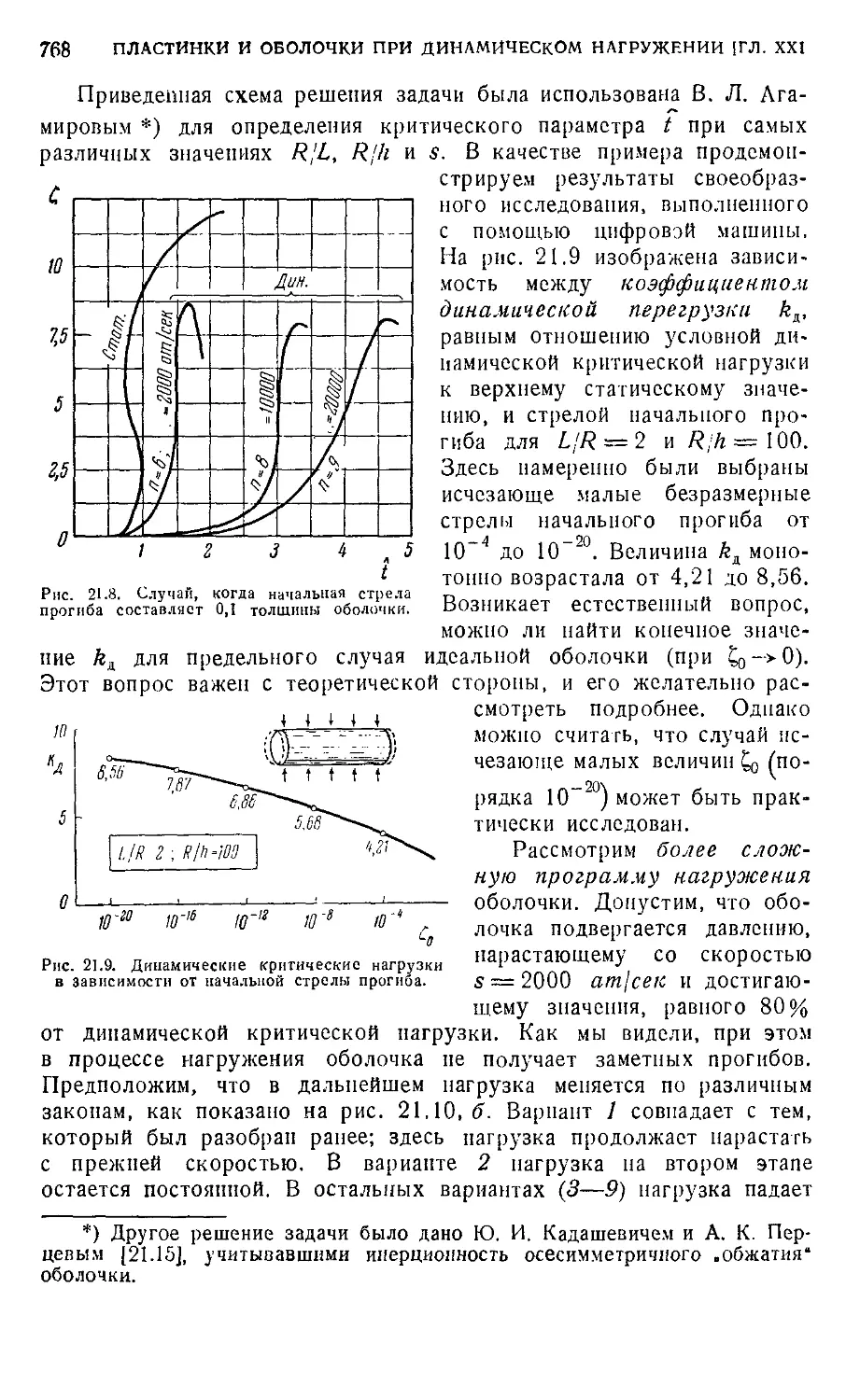
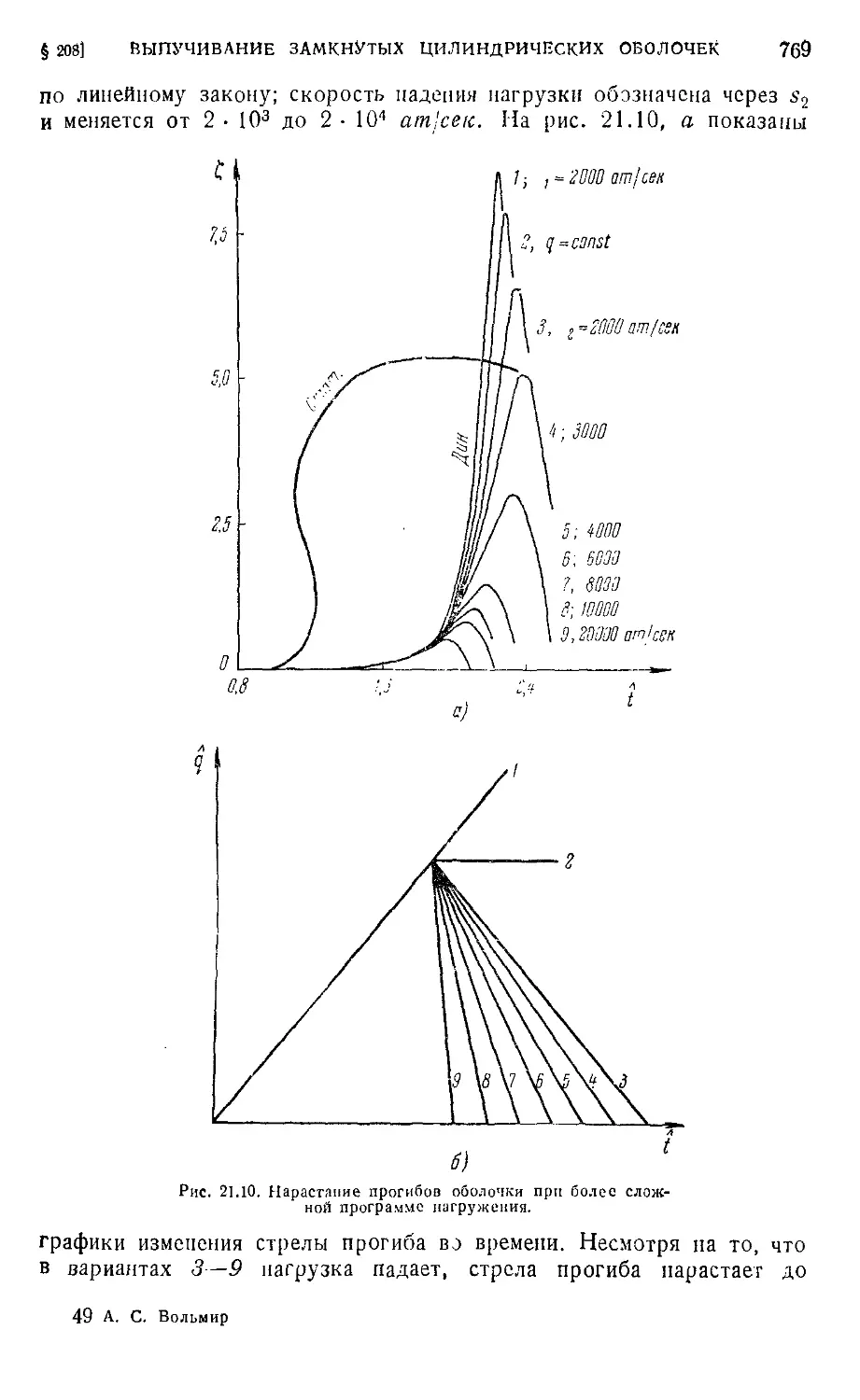
§ 208. Выпучивание замкнутых цилиндрических оболочек при
всестороннем давлении 764
§ 209. Решение с помощью аналоговых машин 770
§ 210. Экспериментальные исследования выпучивания оболочек при
всестороннем давлении 772
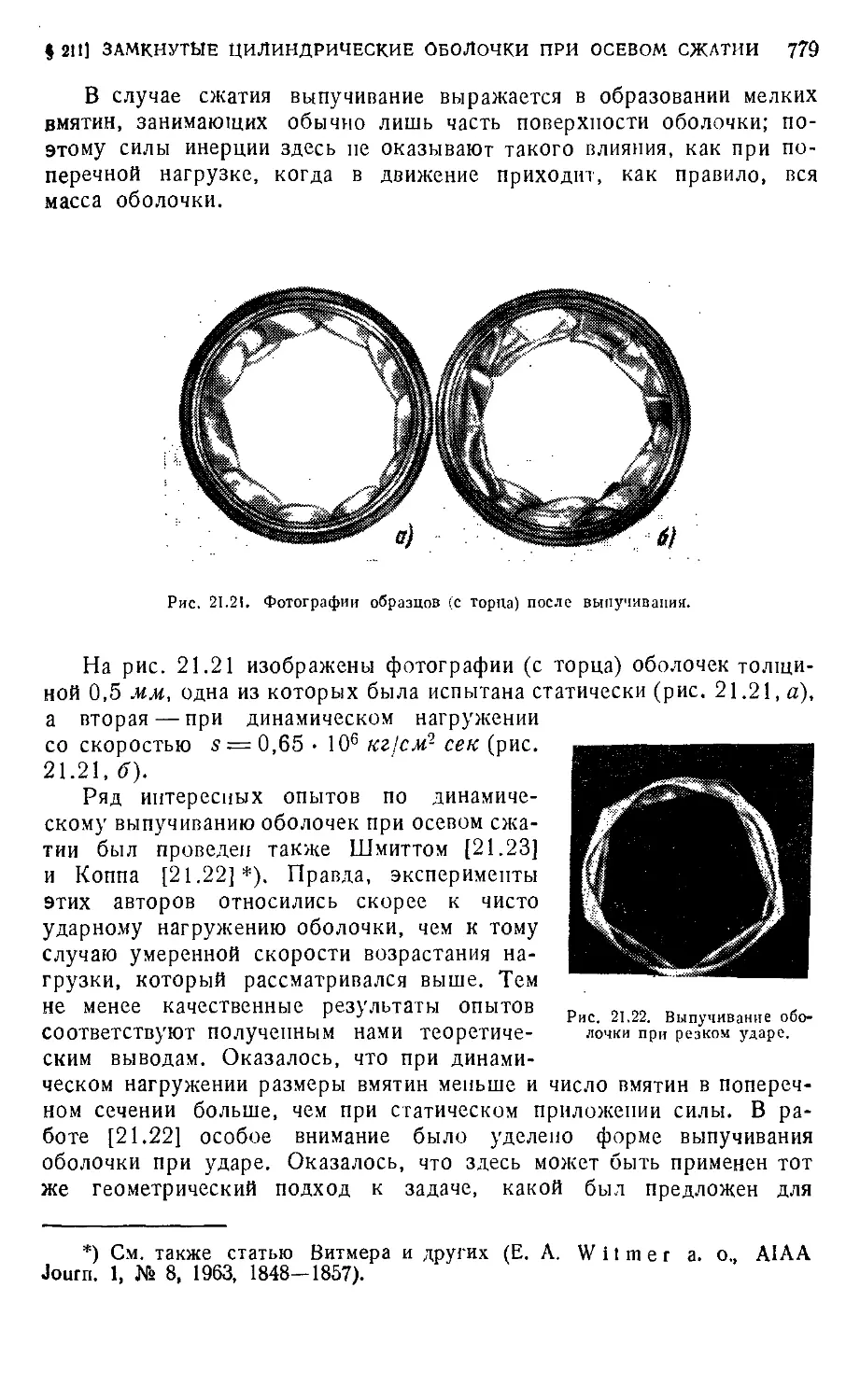
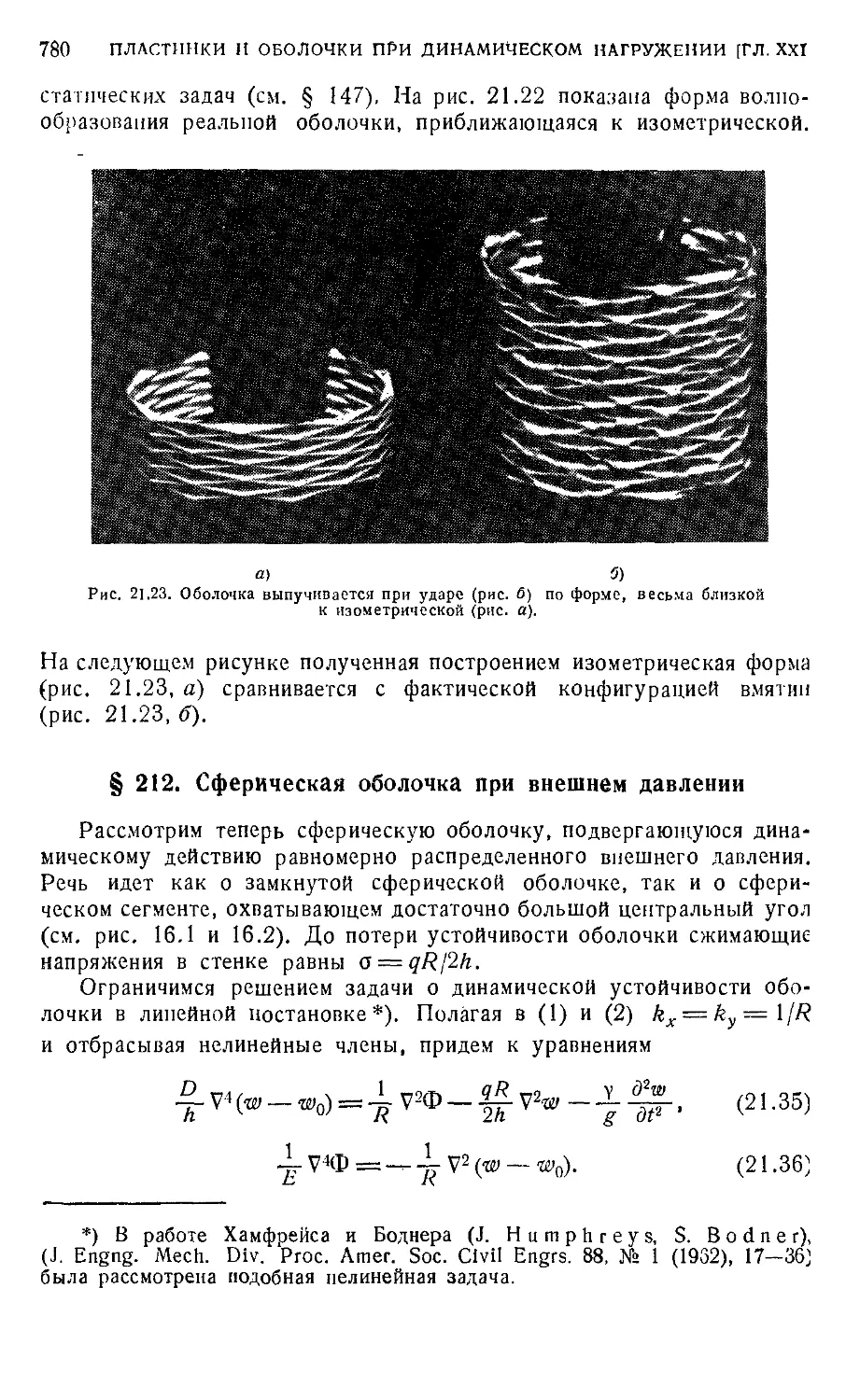
§ 211. Замкнутые цилиндрические оболочки при осевом сжатии . . 775
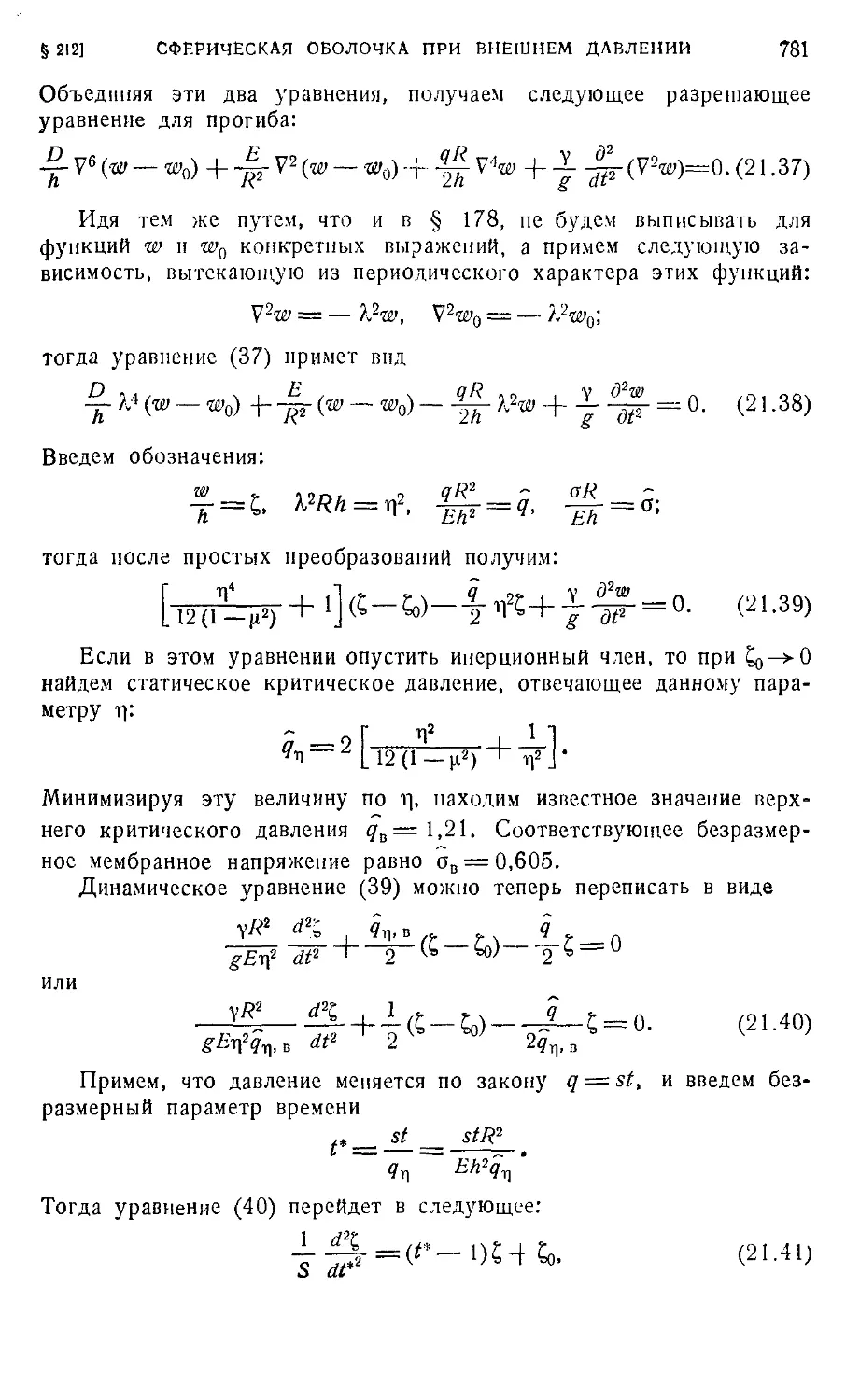
§ 212. Сферическая оболочка при внешнем давлении 780
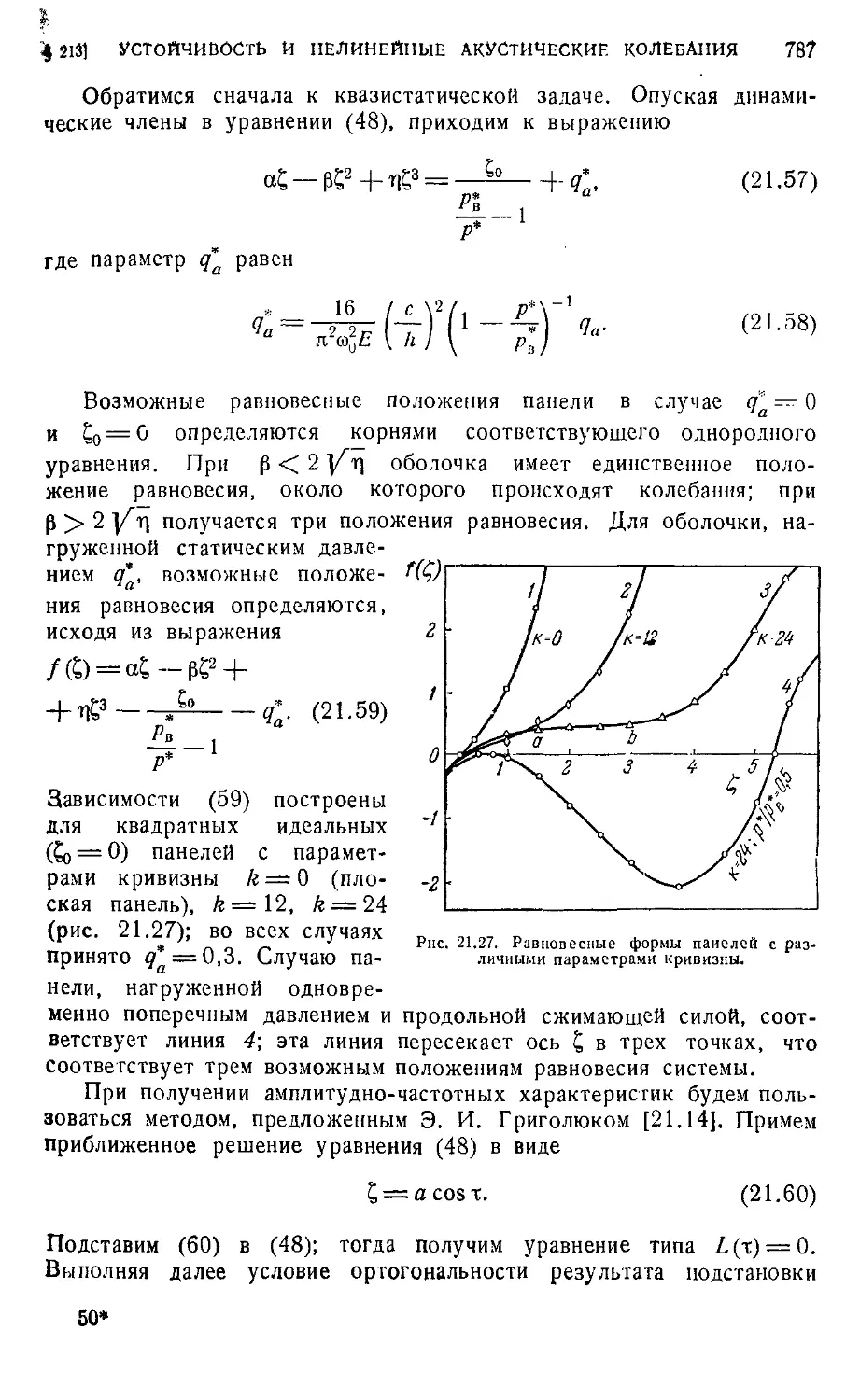
§ 213. Устойчивость и нелинейные акустические колебания
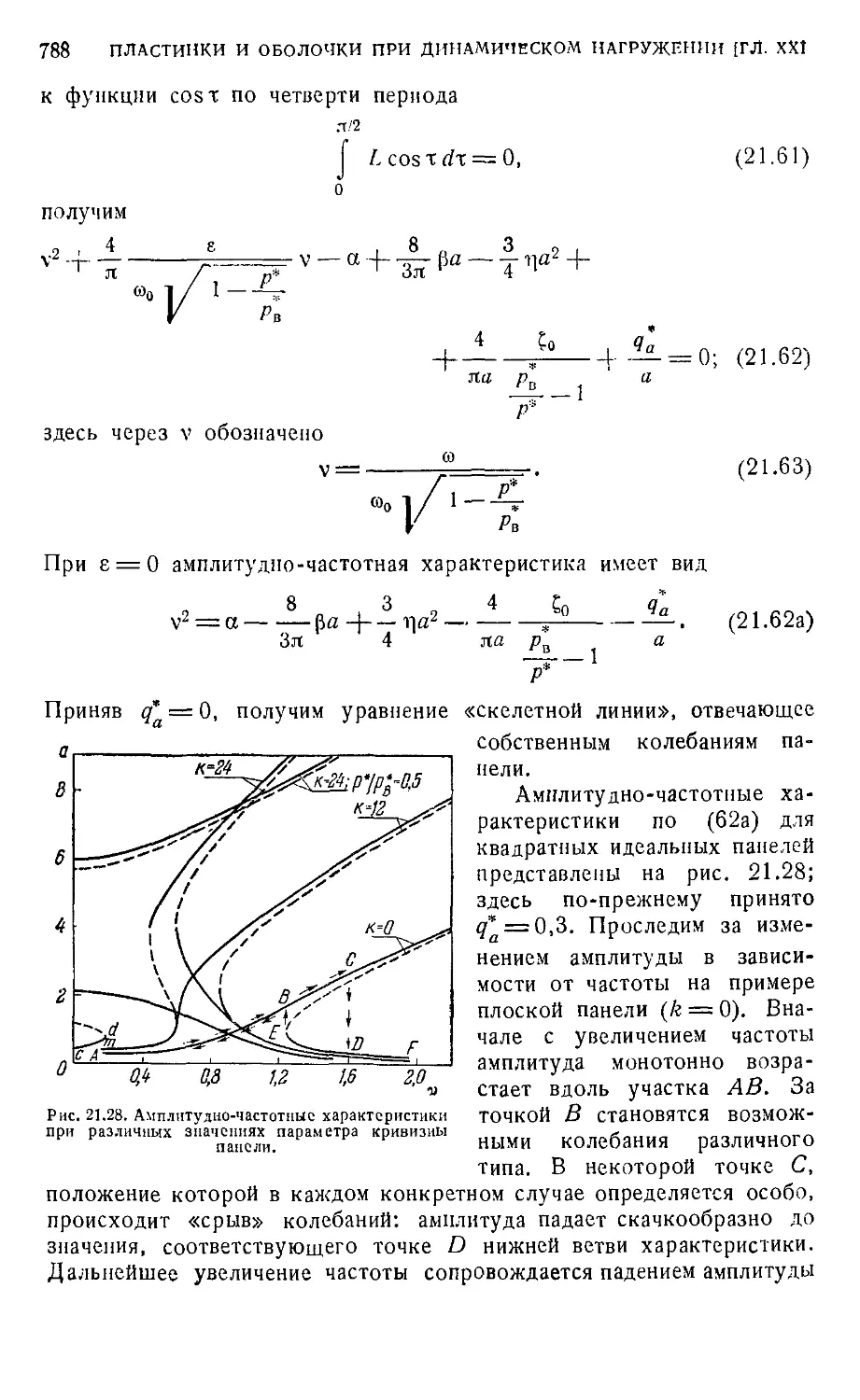
цилиндрической оболочки 783
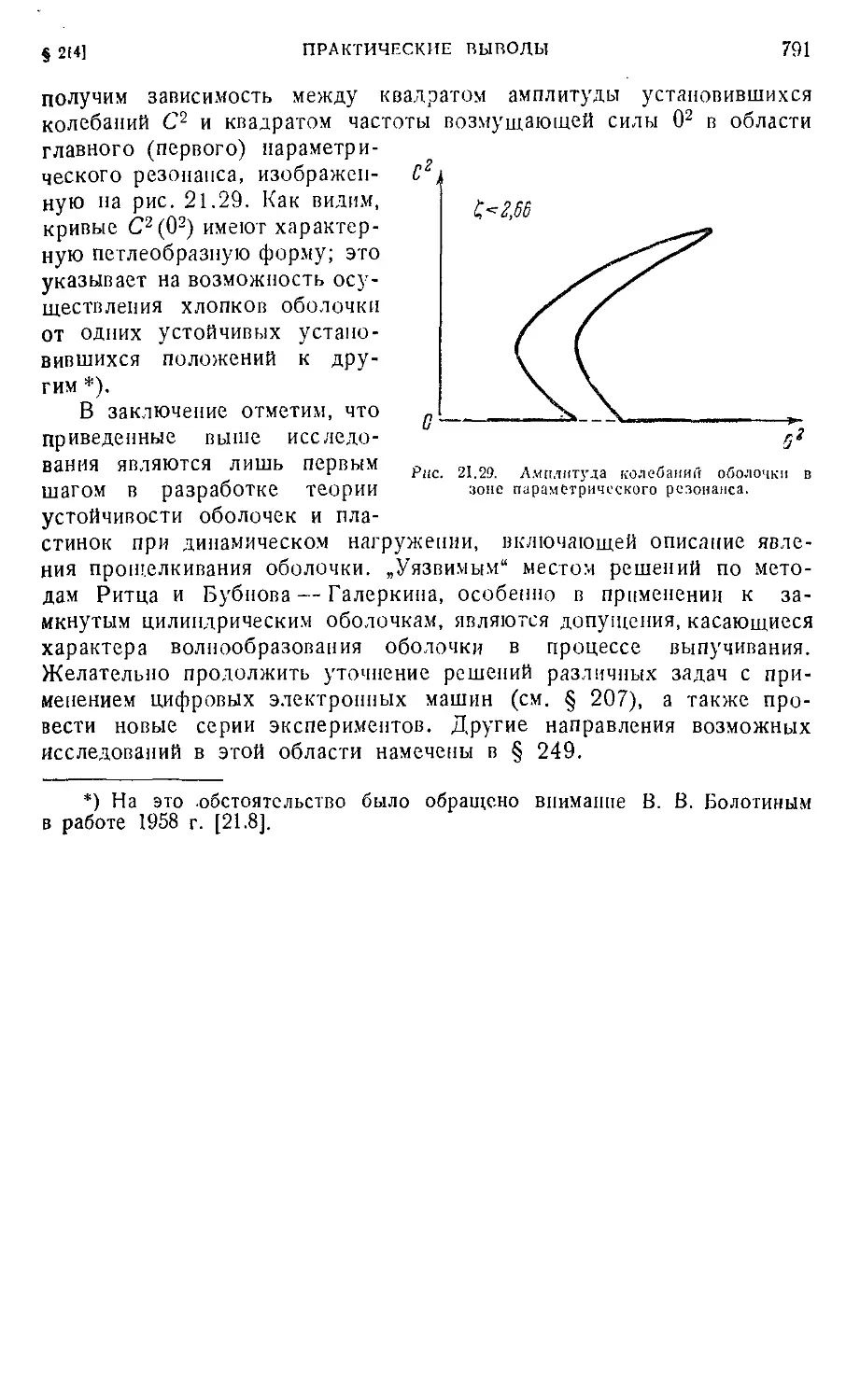
§ 214. Практические выводы. Другие динамические задачи .... 789
ОГЛАВЛЕНИЕ 9
Глава XXII. Устойчивость пластинок и оболочек при ударе . . . 792
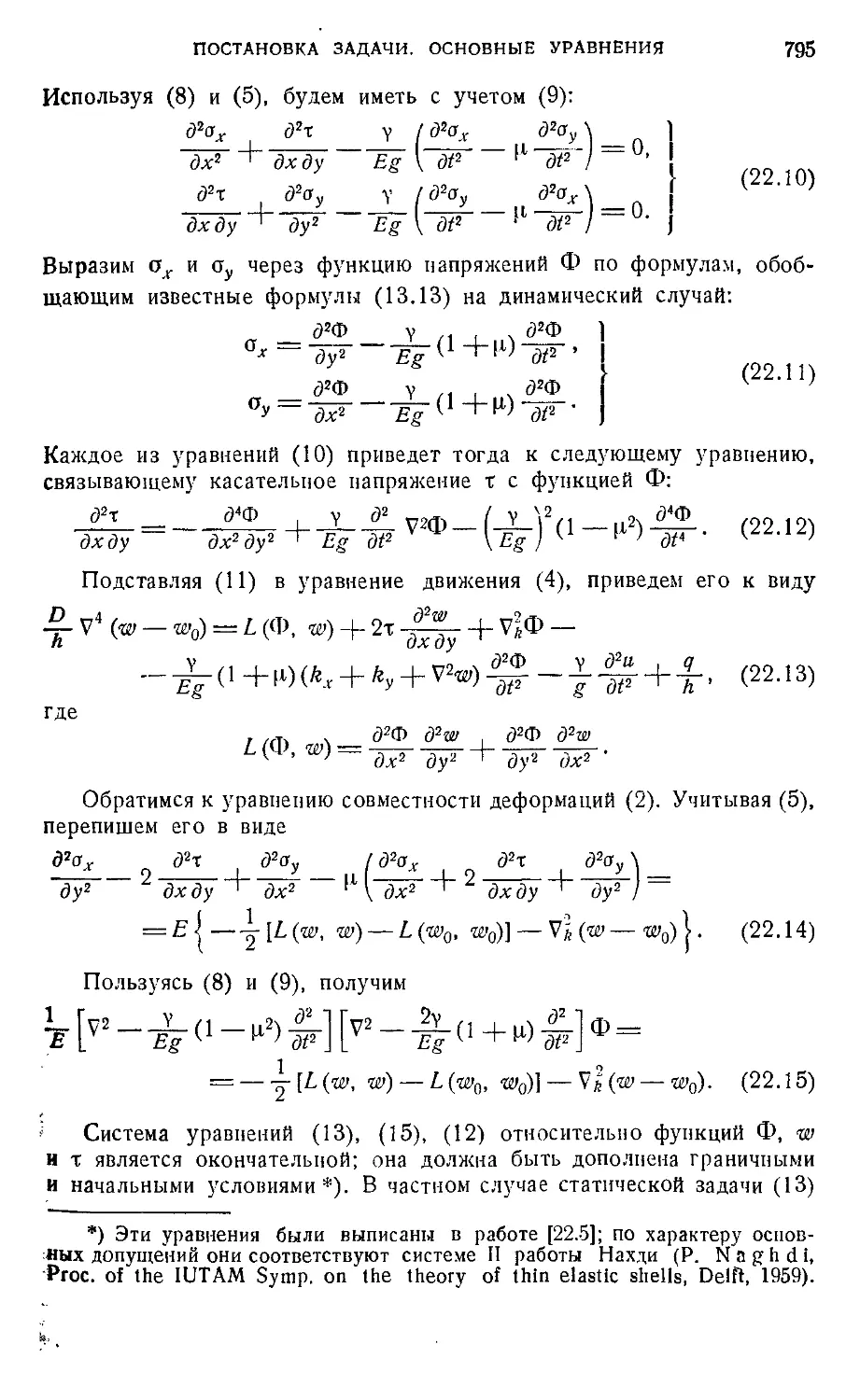
« 215. Постановка задачи. Основные уравнения 792
§ 216. Пластинка и цилиндрическая панель при продольном
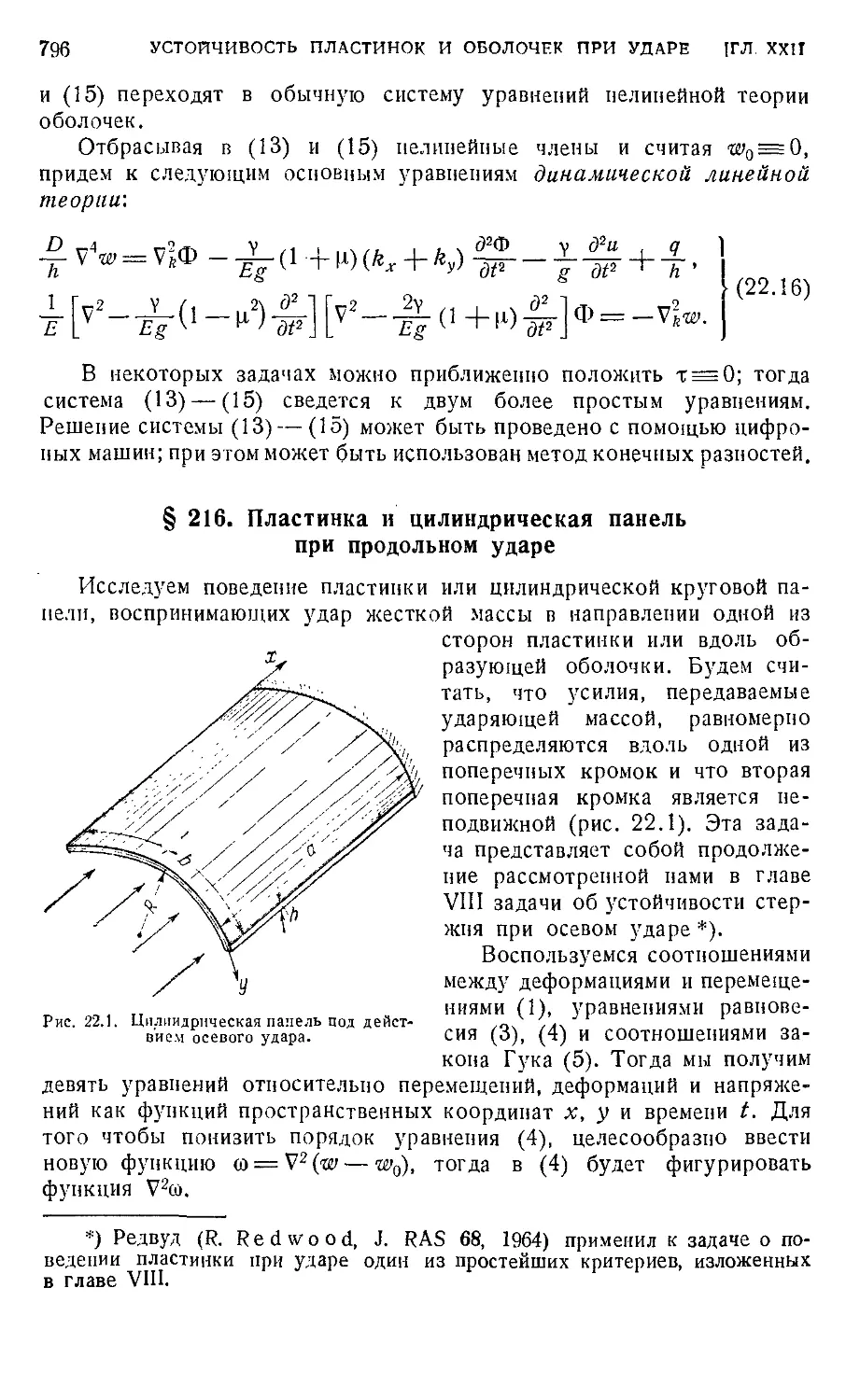
ударе • 796
§ 217. Различные подходы к приближенному решению задачи.
Выделение узкой зоны оболочки 798
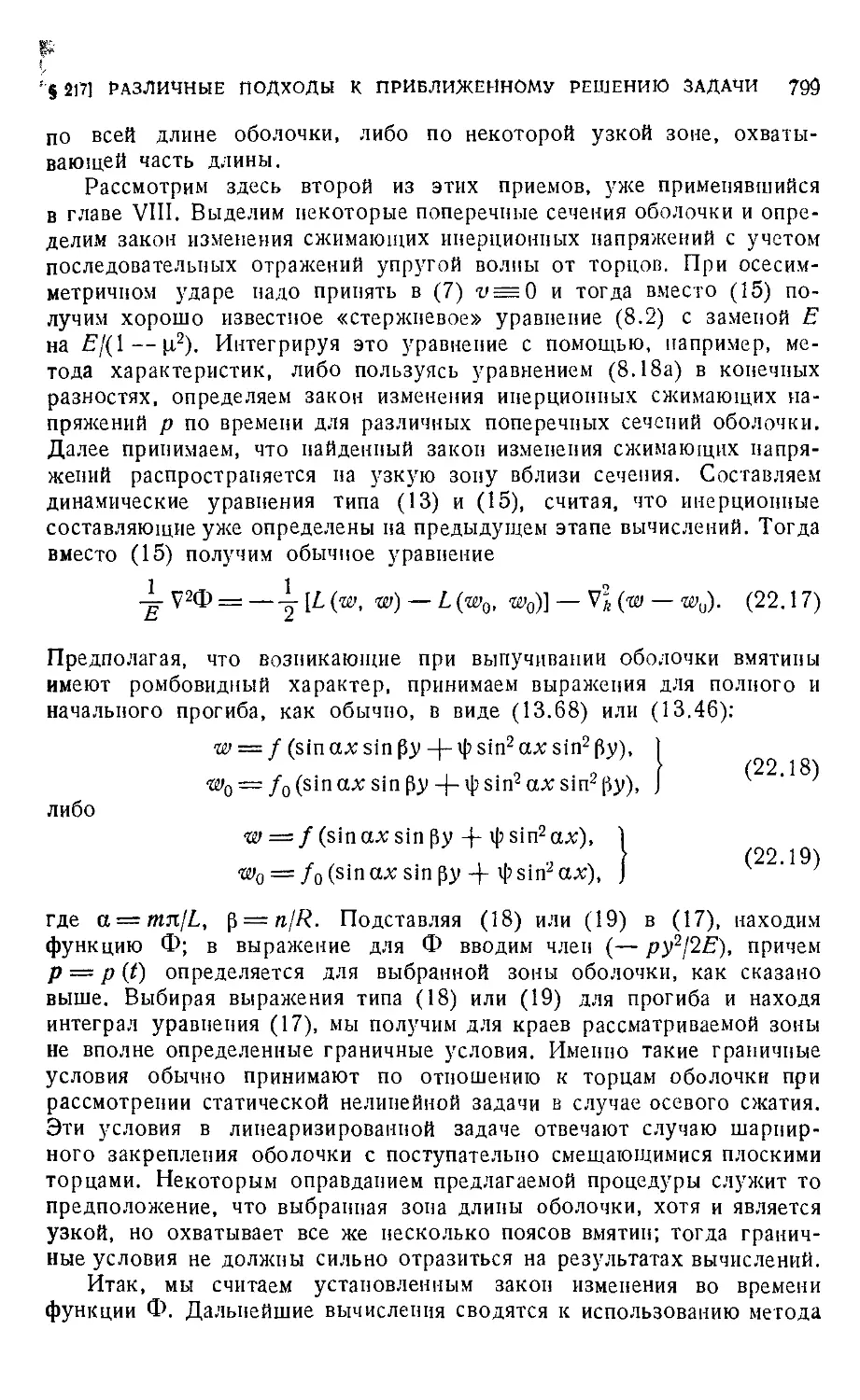
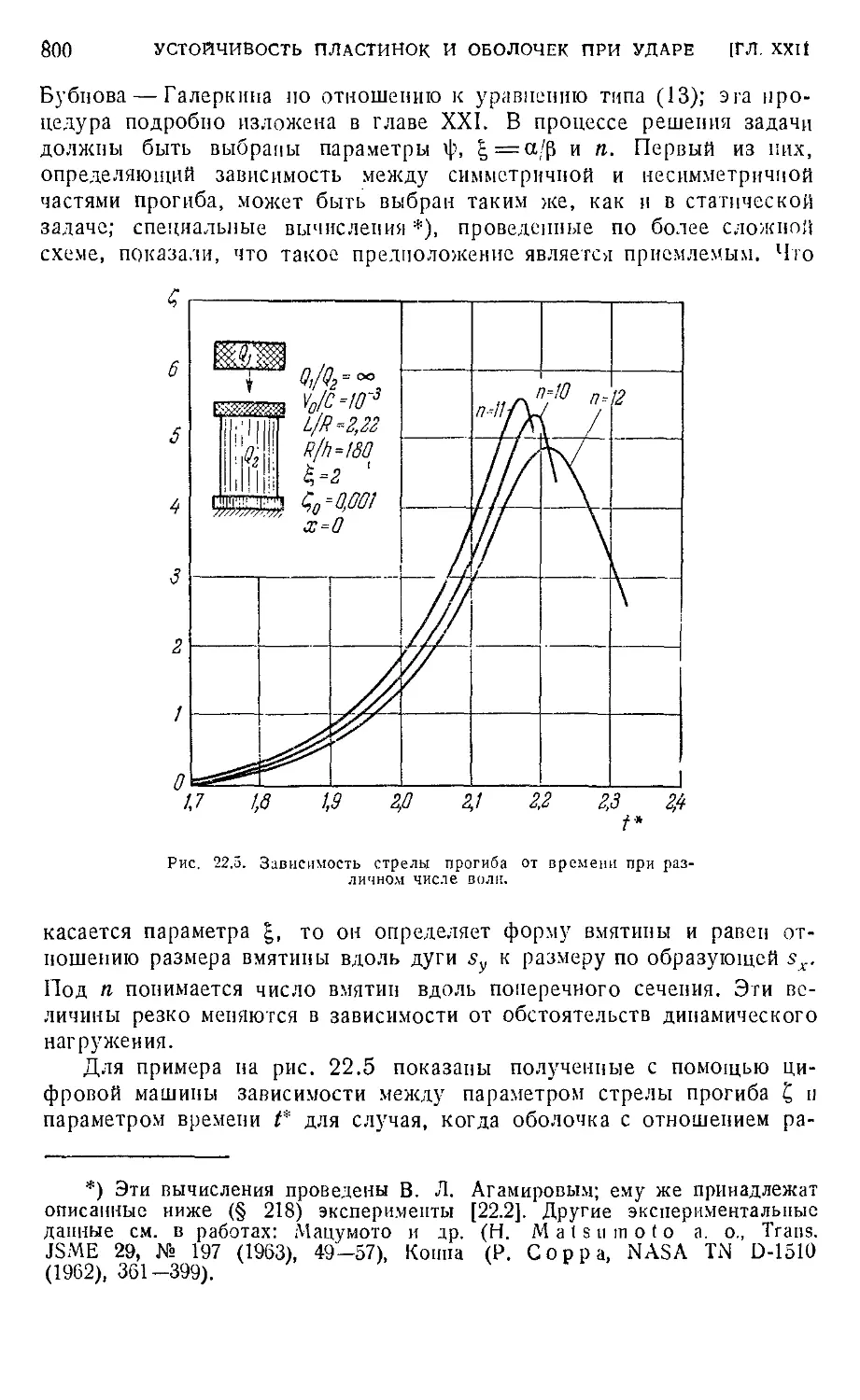
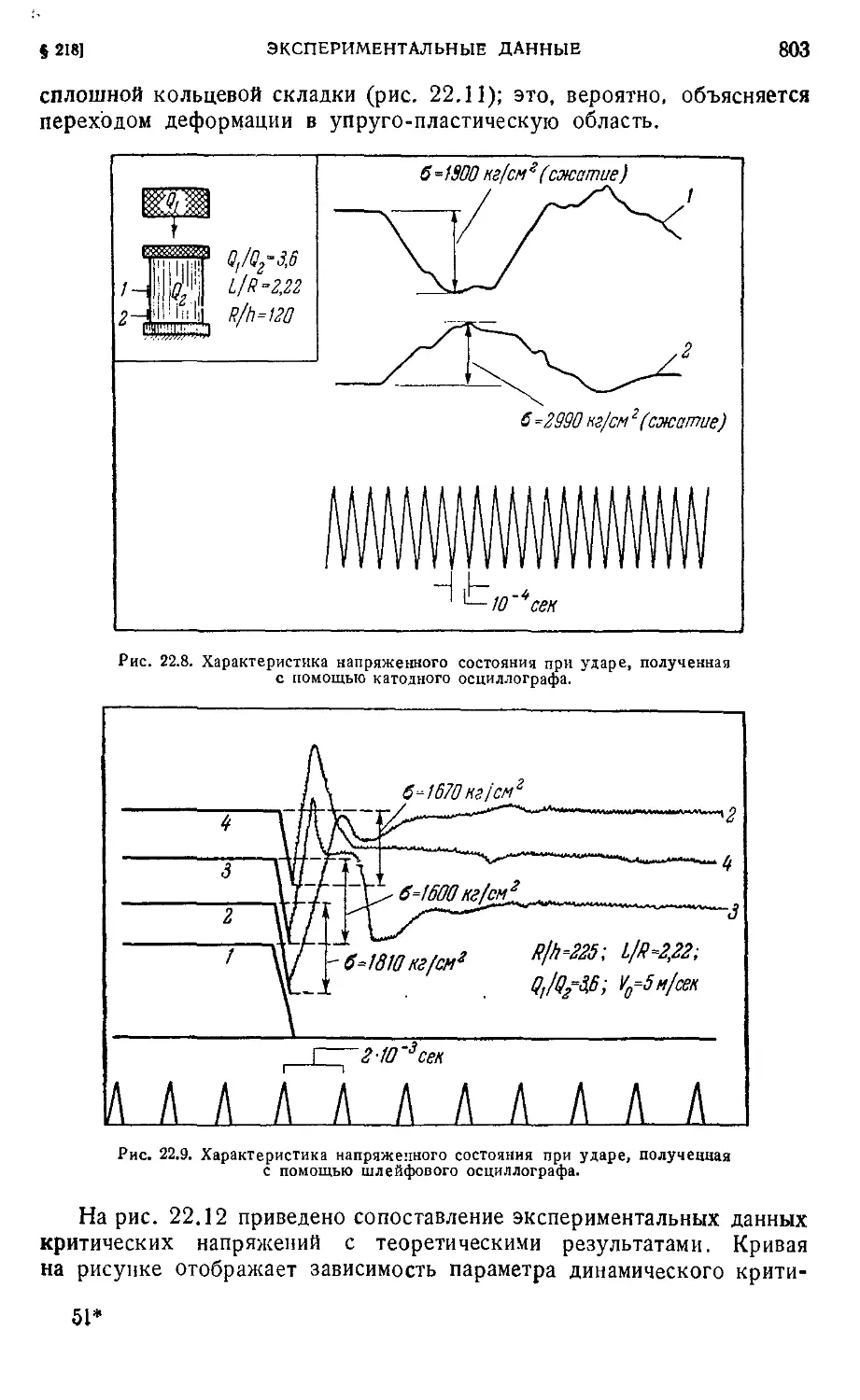
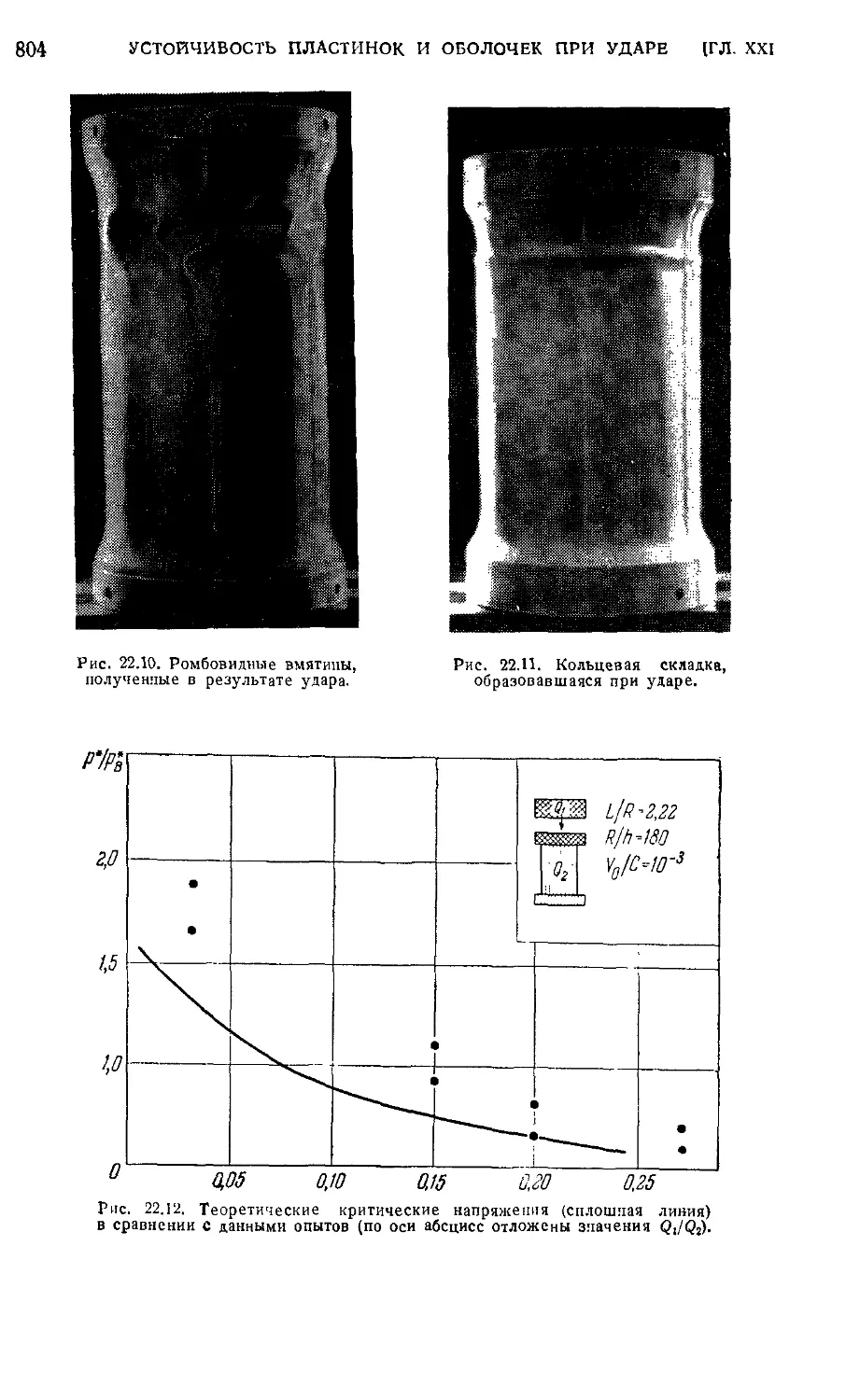
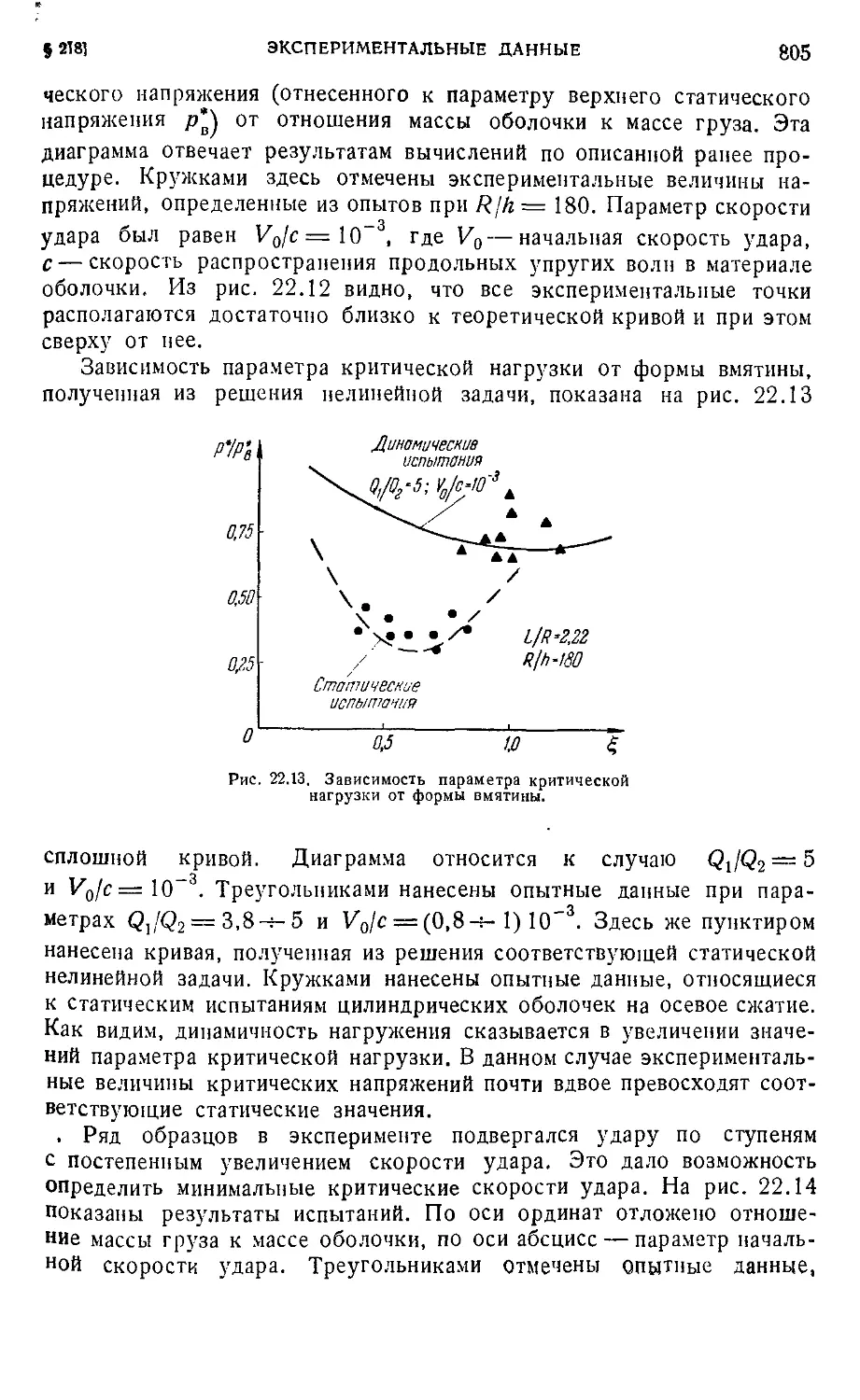
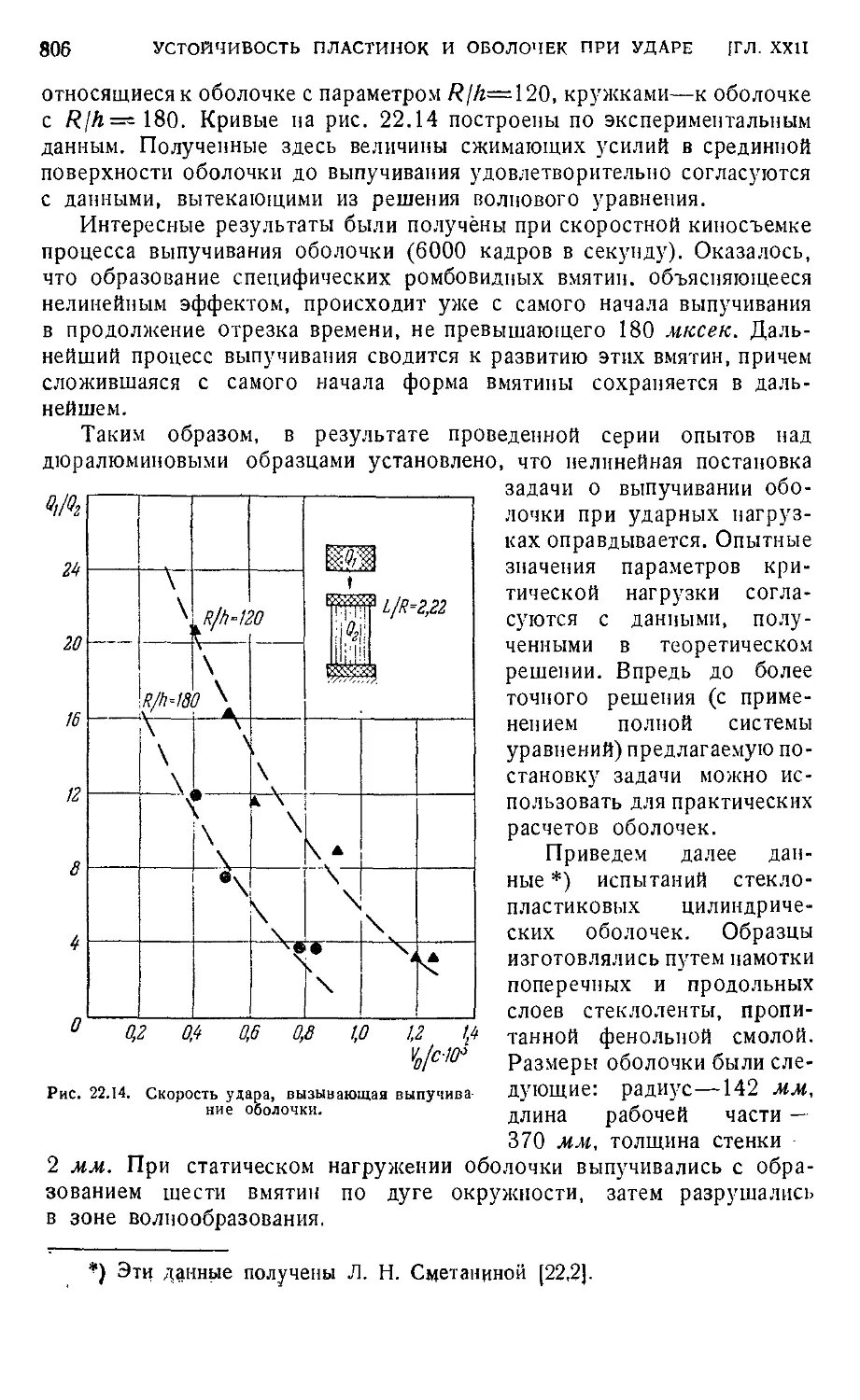
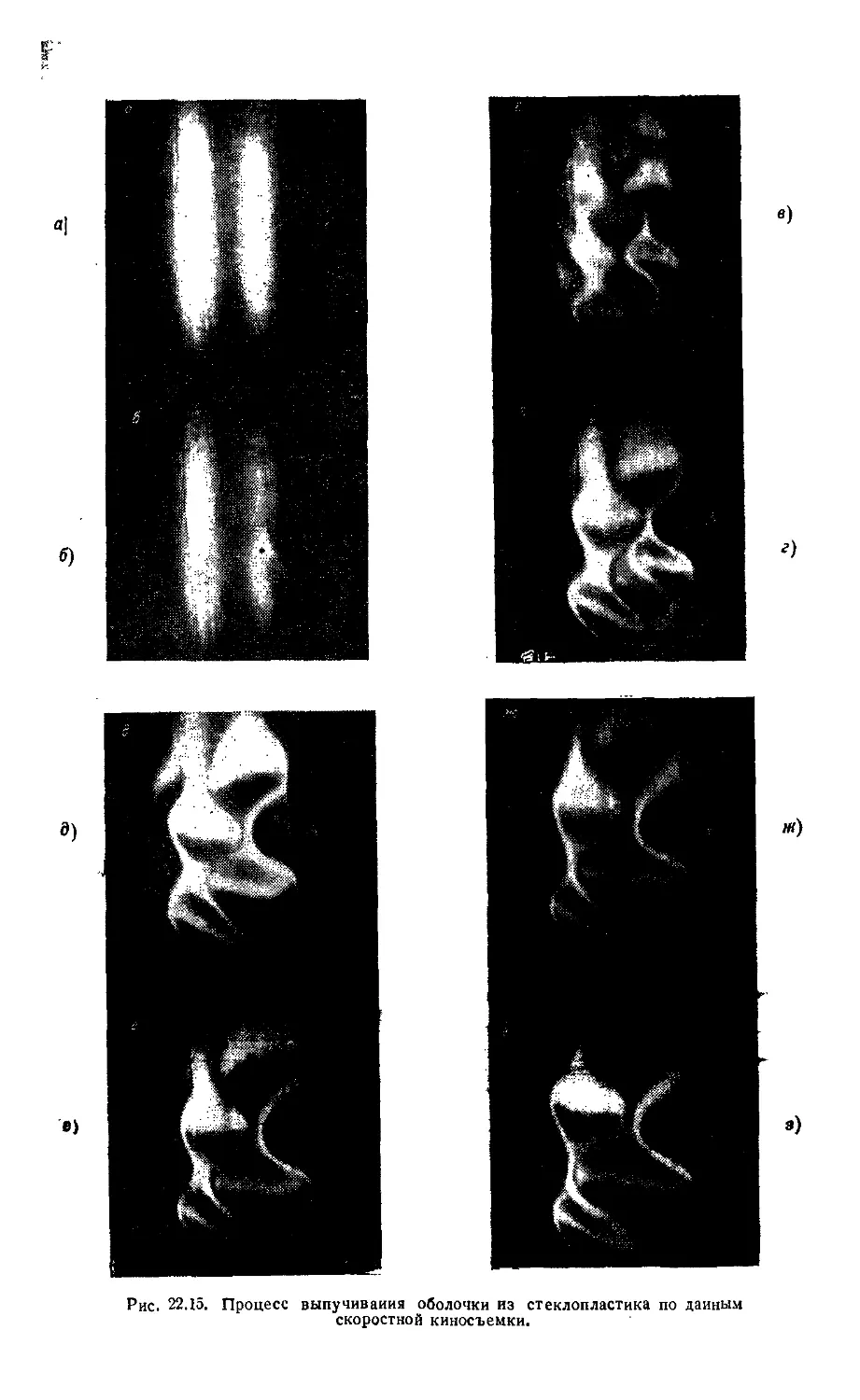
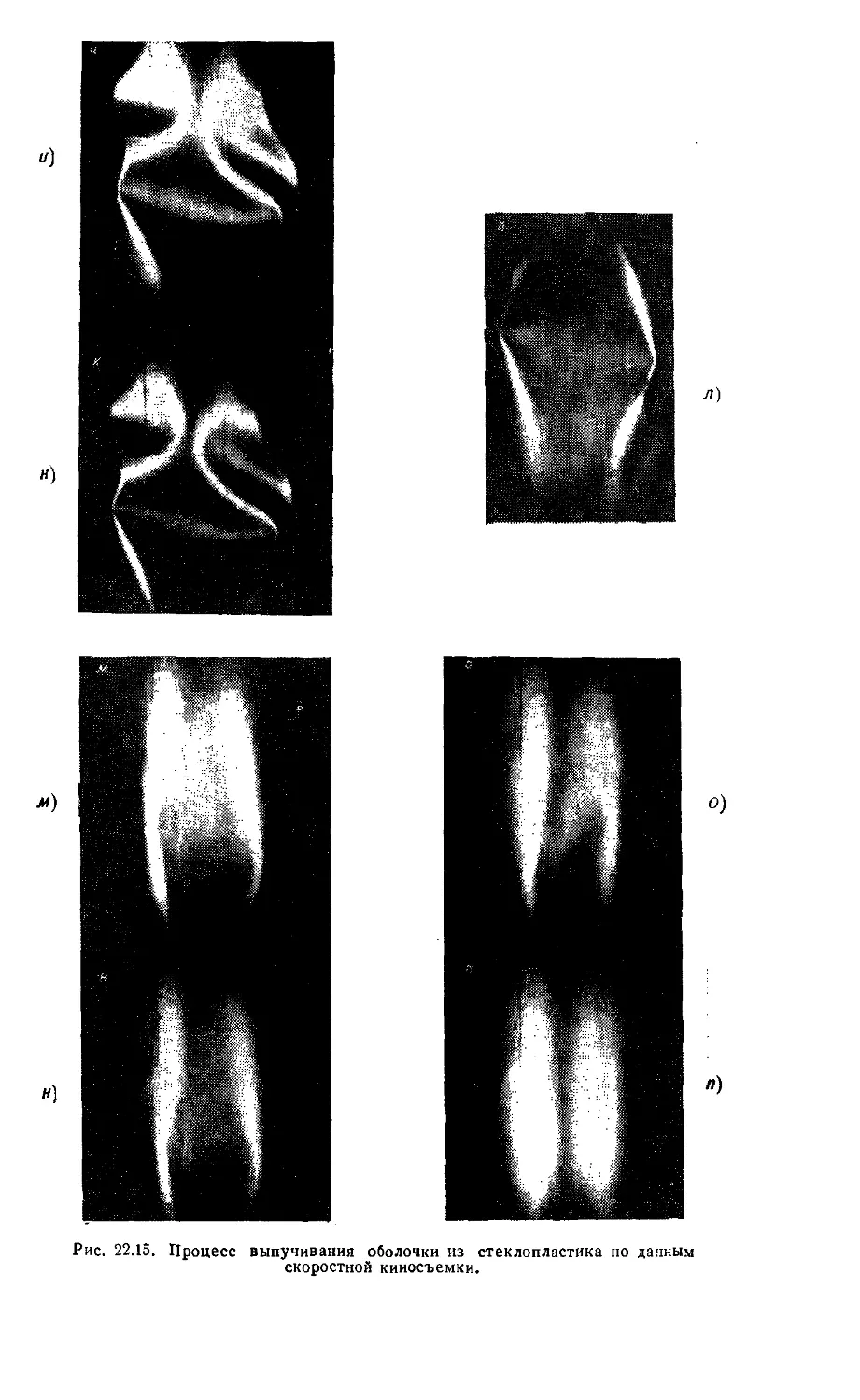
§ 218. Экспериментальные данные 802
Глава XXIII. Некоторые задачи гидроупругости 810
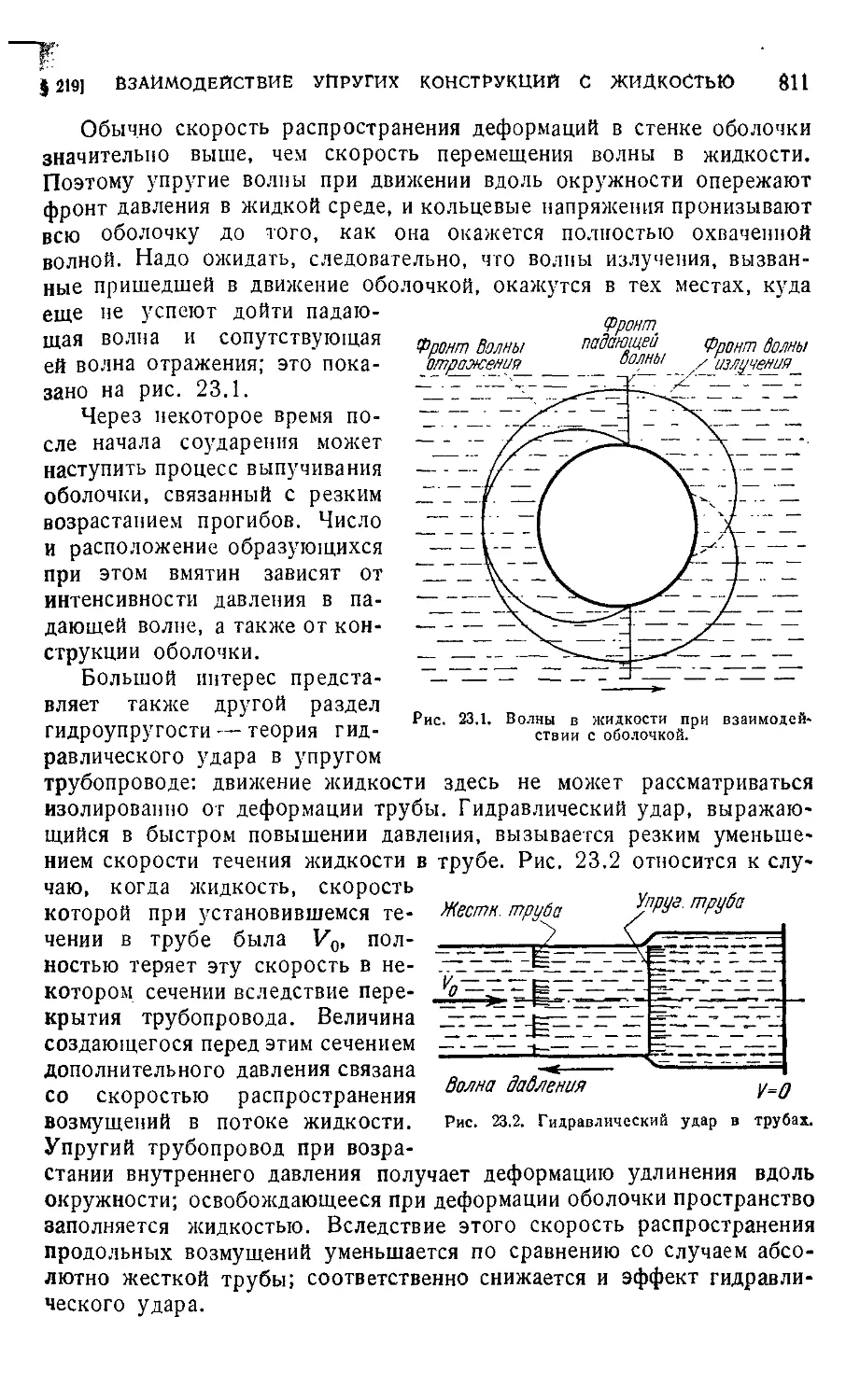
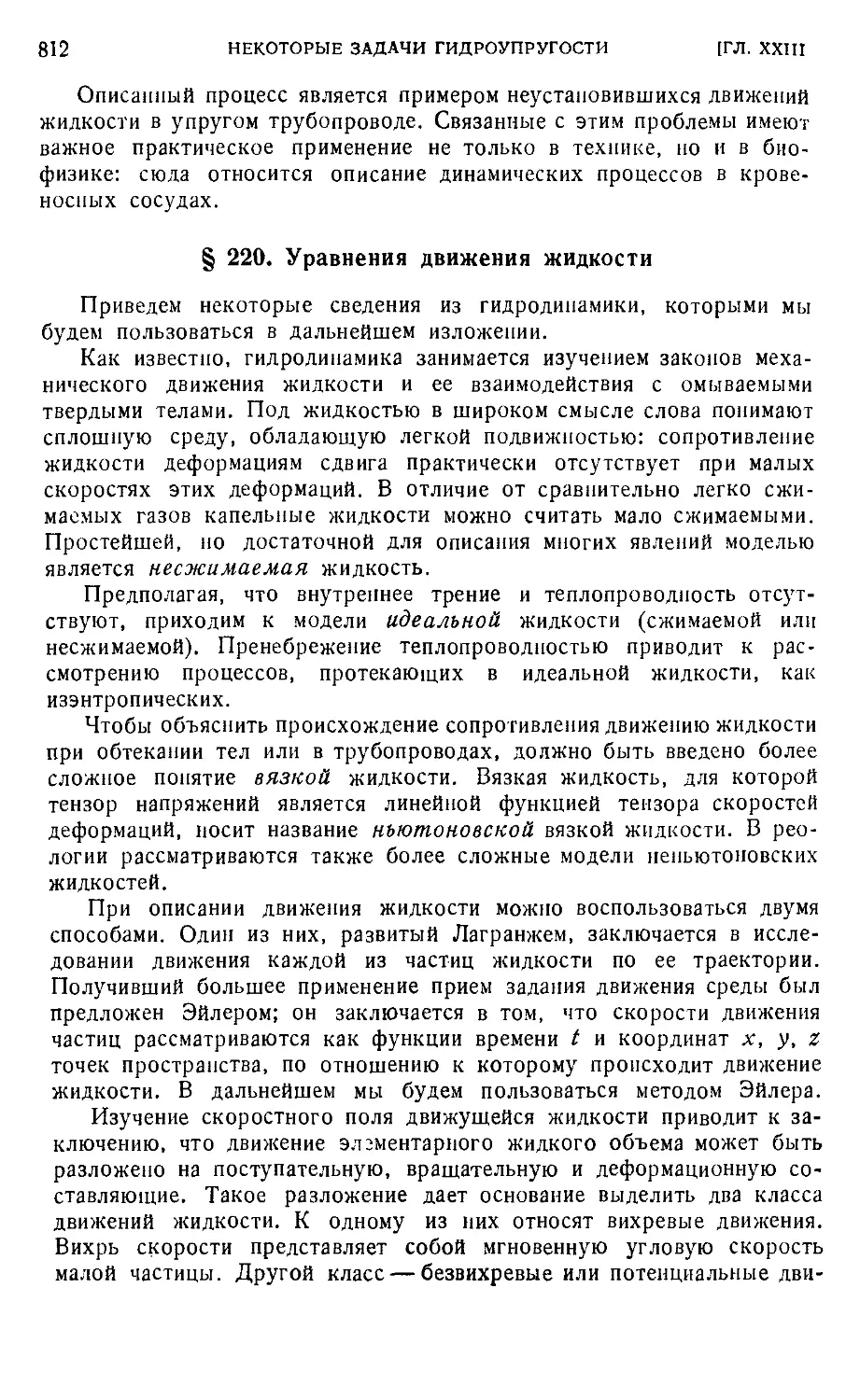
§ 219. Взаимодействие упругих конструкций с жидкостью 810
§ 220. Уравнения движения жидкости 812
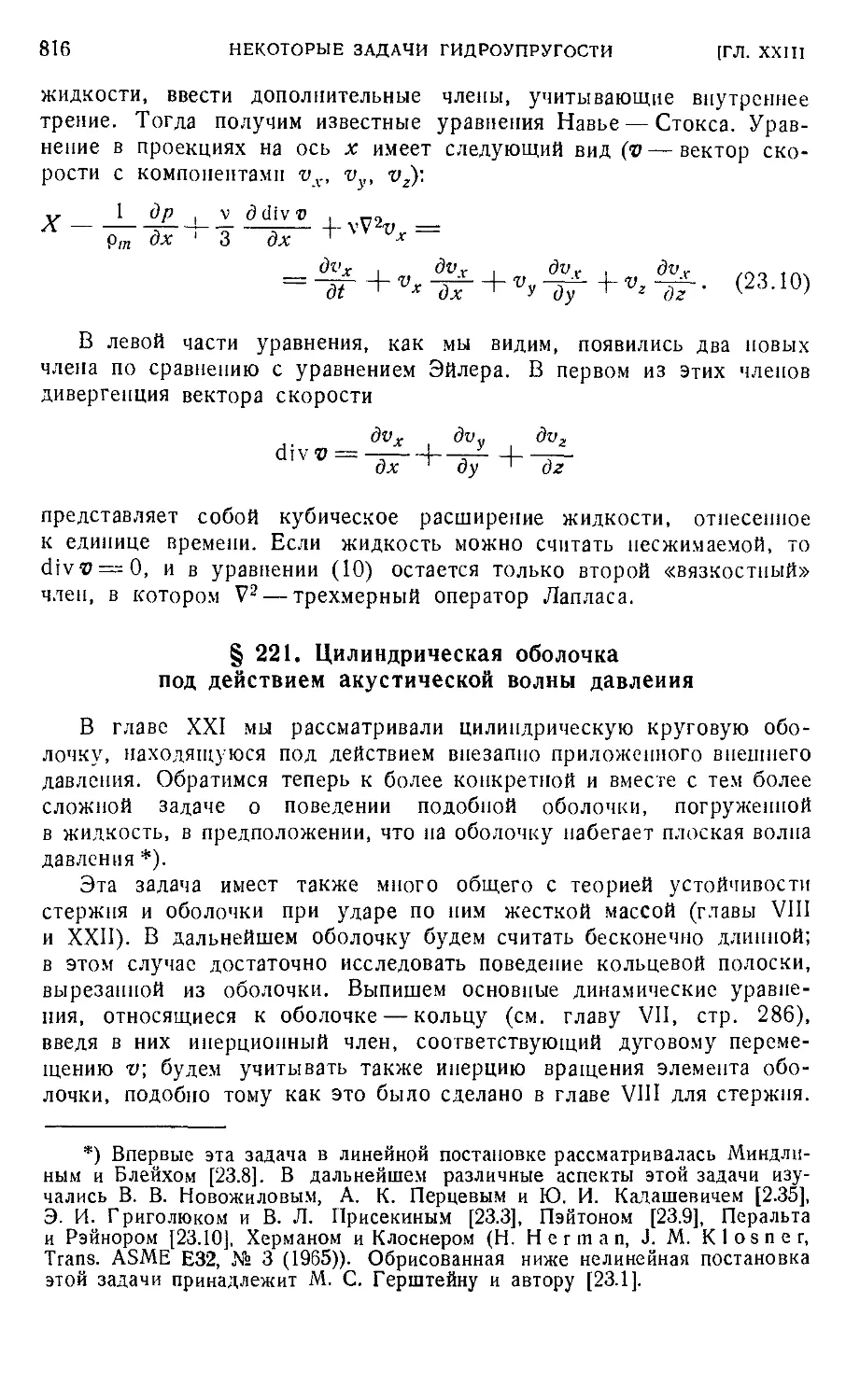
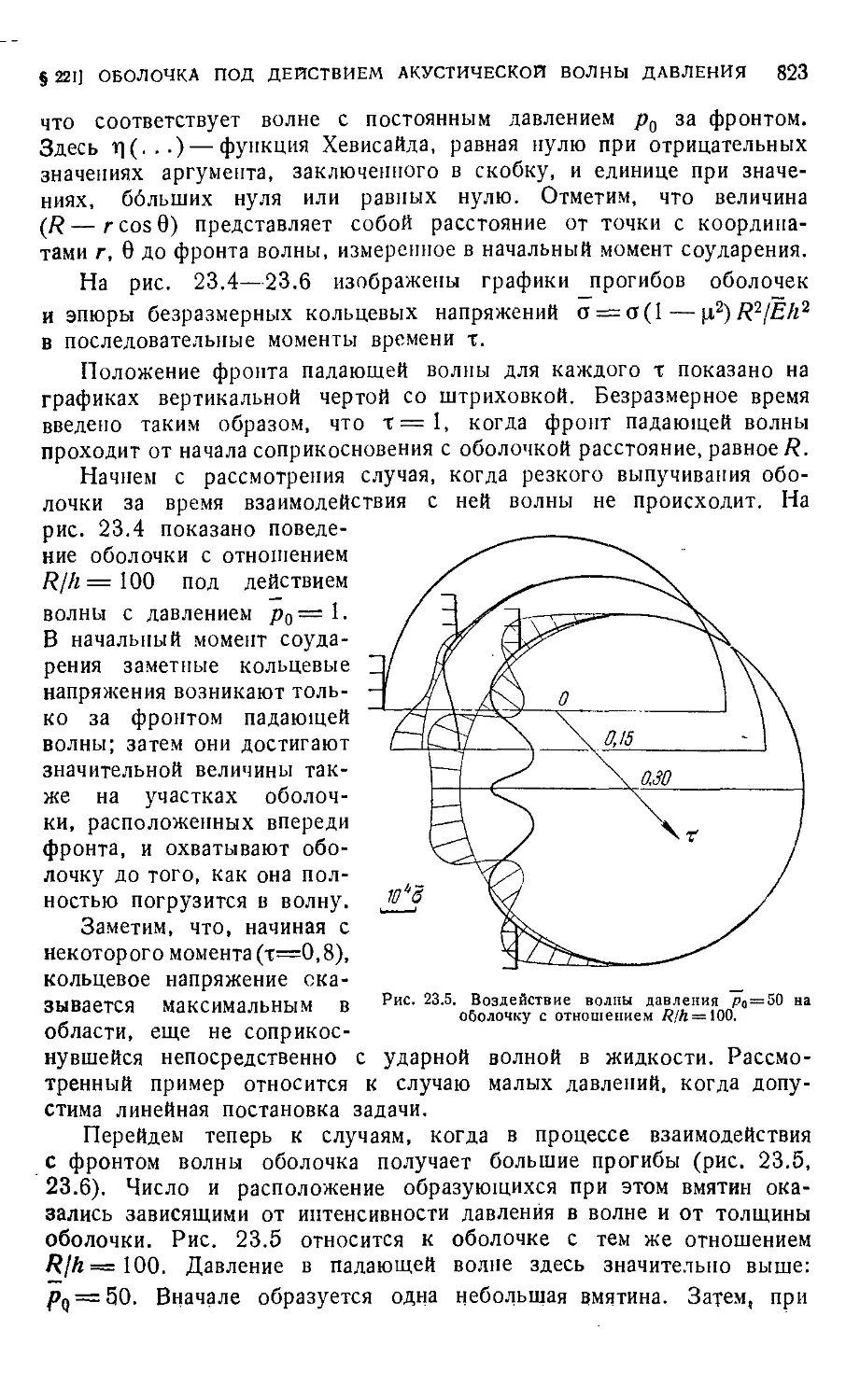
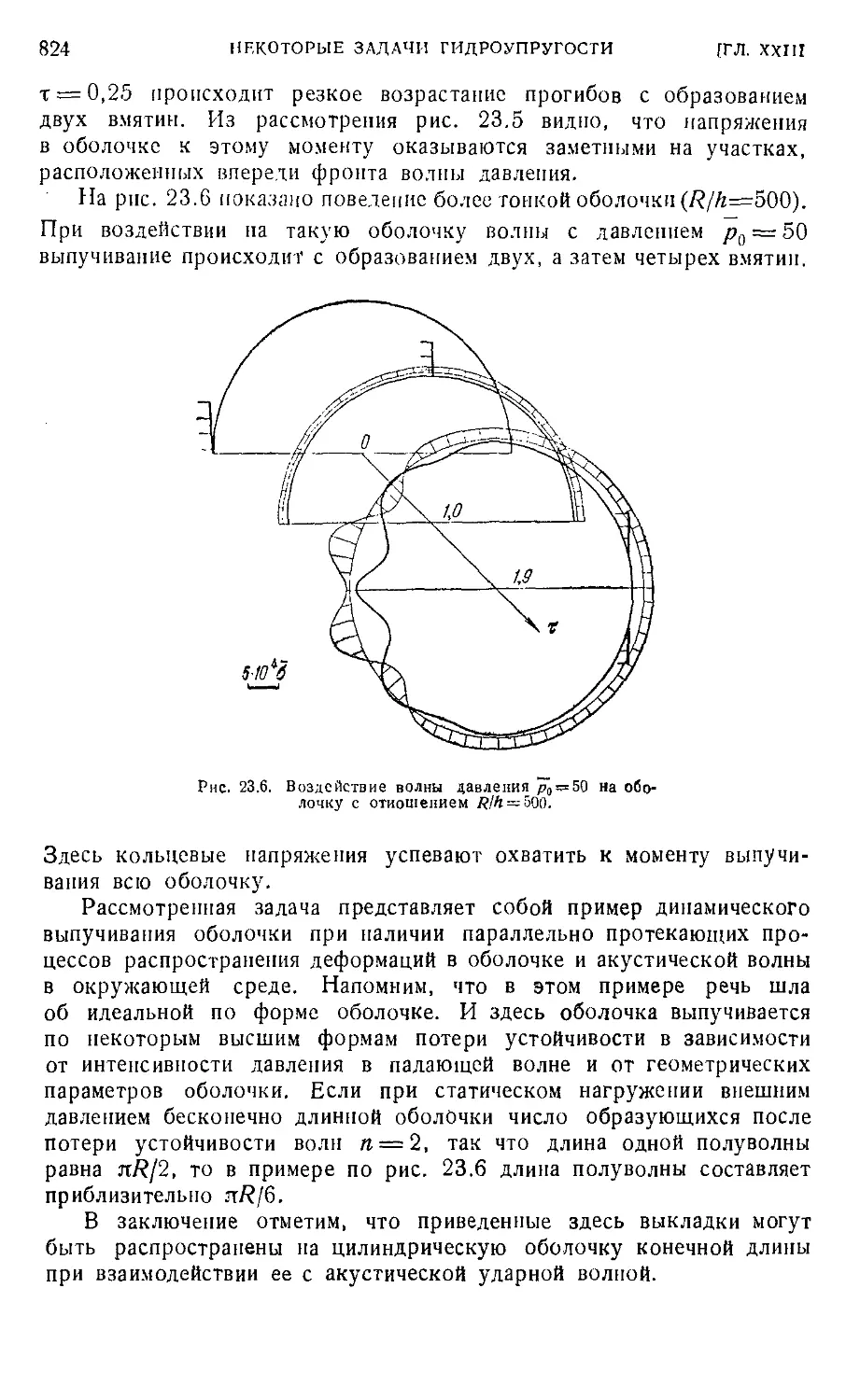
§ 221. Цилиндрическая оболочка под действием акустической волны
давления 816
§ 222. Неустановившееся течение жидкости в упругом
трубопроводе 825
§ 223. Приложения в биофизике 828
Глава XXIV. Некоторые задачи аэроупругости 831
§ 224. Дивергенция и флаттер панели в потоке газа 831
§ 225. Определение нормального давления но поршневой теории . 832
§ 226. Исходные уравнения для пологой оболочки, обтекаемой
сверхзвуковым потоком 839
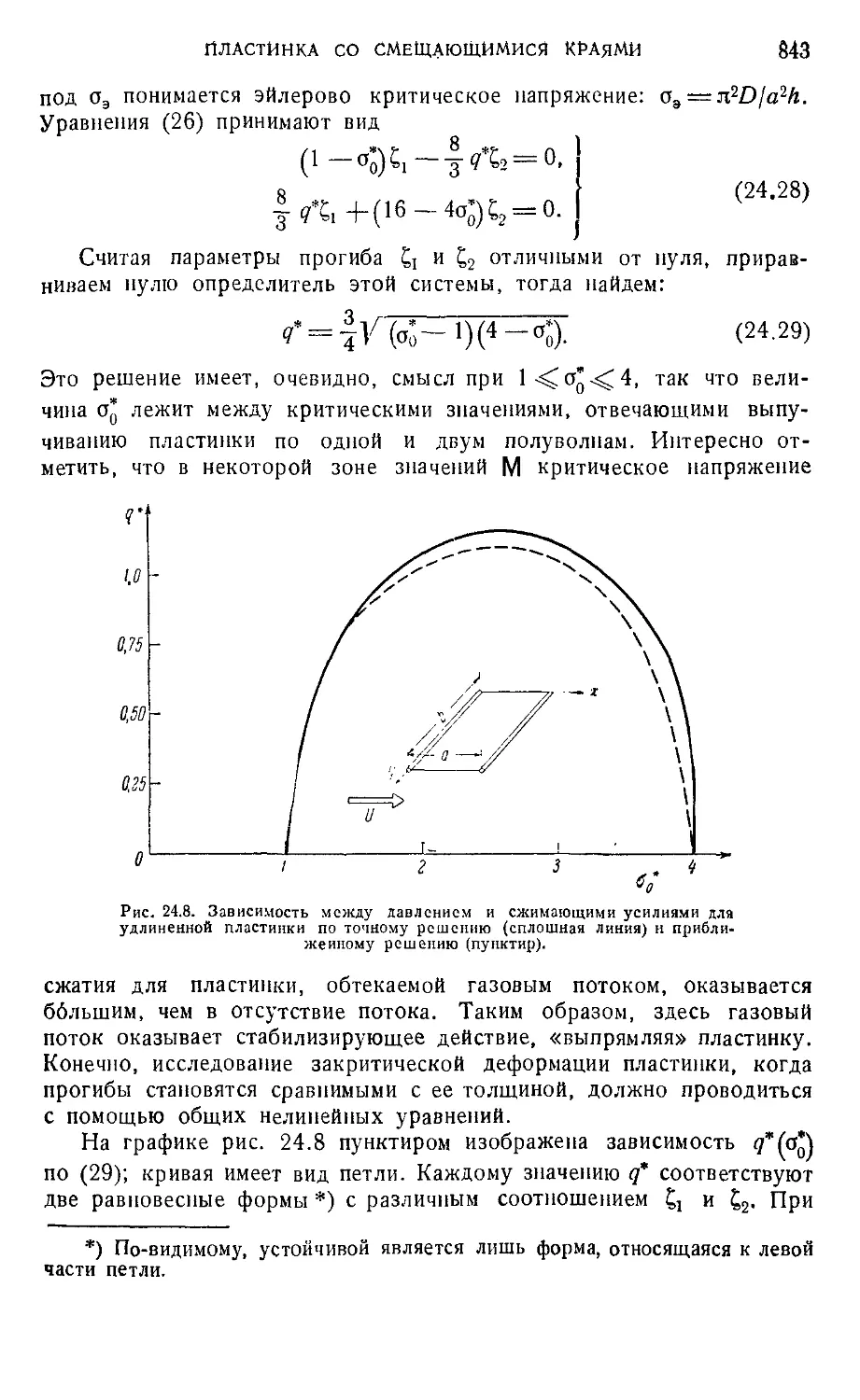
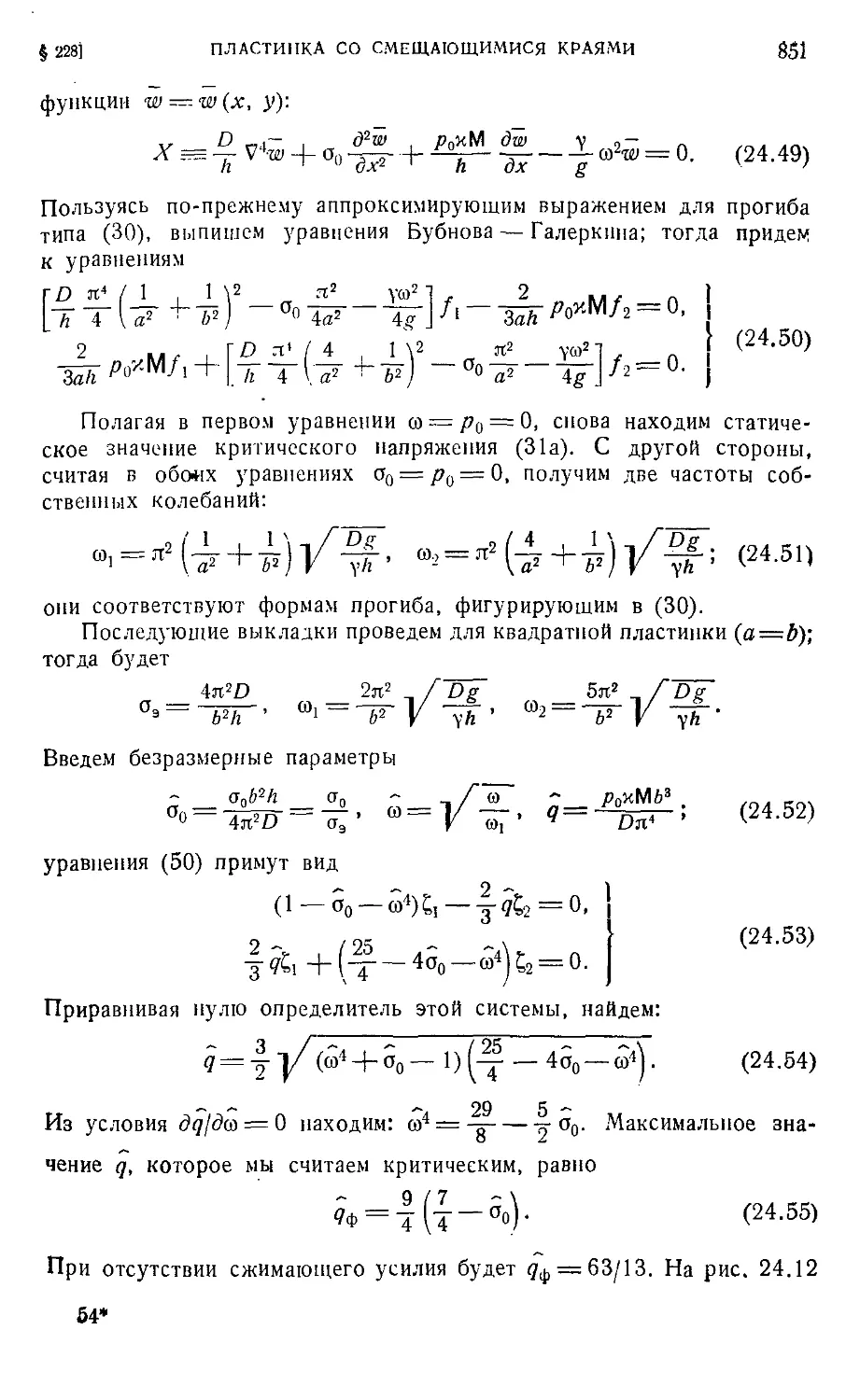
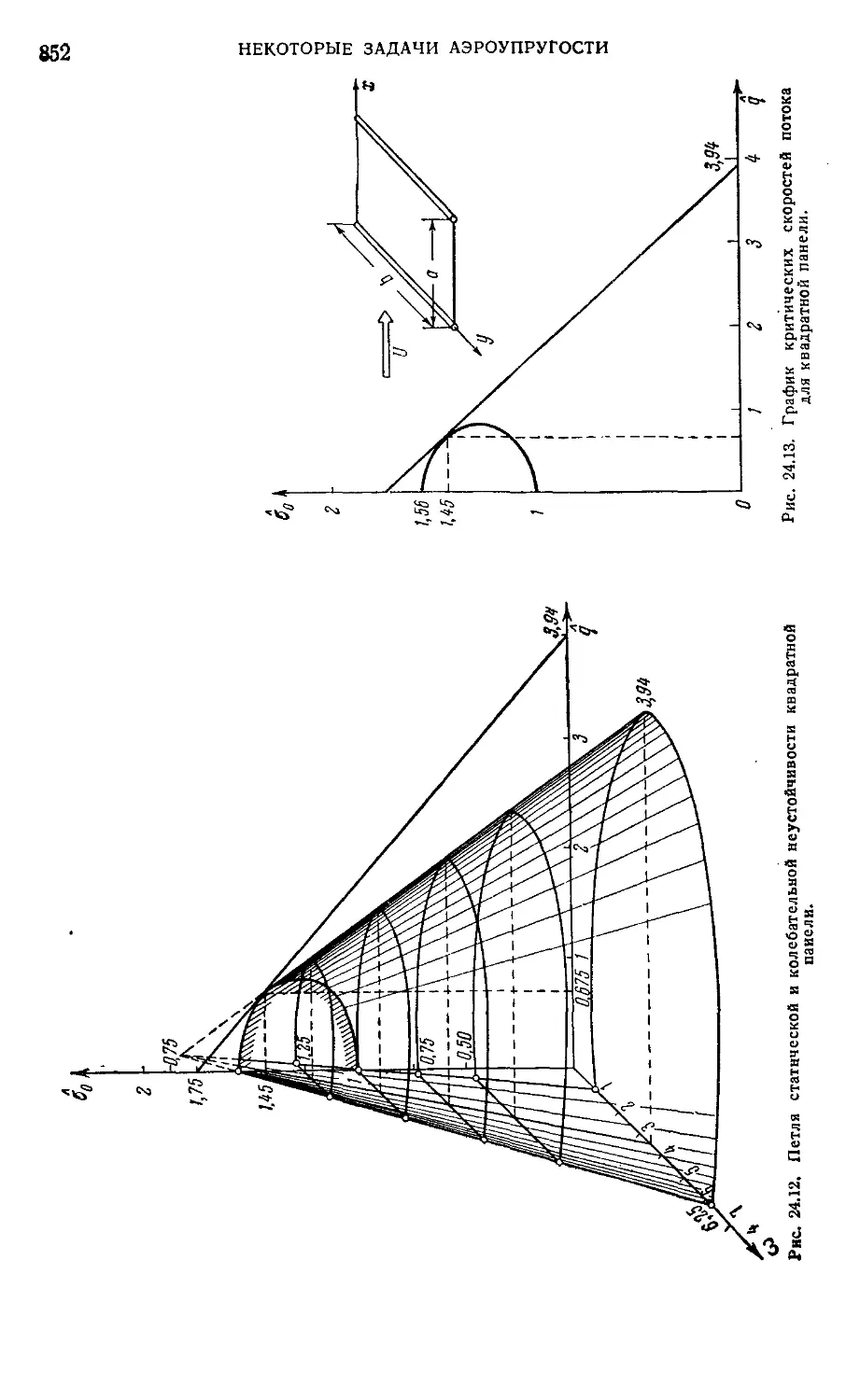
§ 227. Равновесные формы пластинки со смещающимися краями . . 841
§ 228. Динамическая задача для пластинки со смещающимися
краями 846
§ 229. Пластинка с закрепленными краями 853
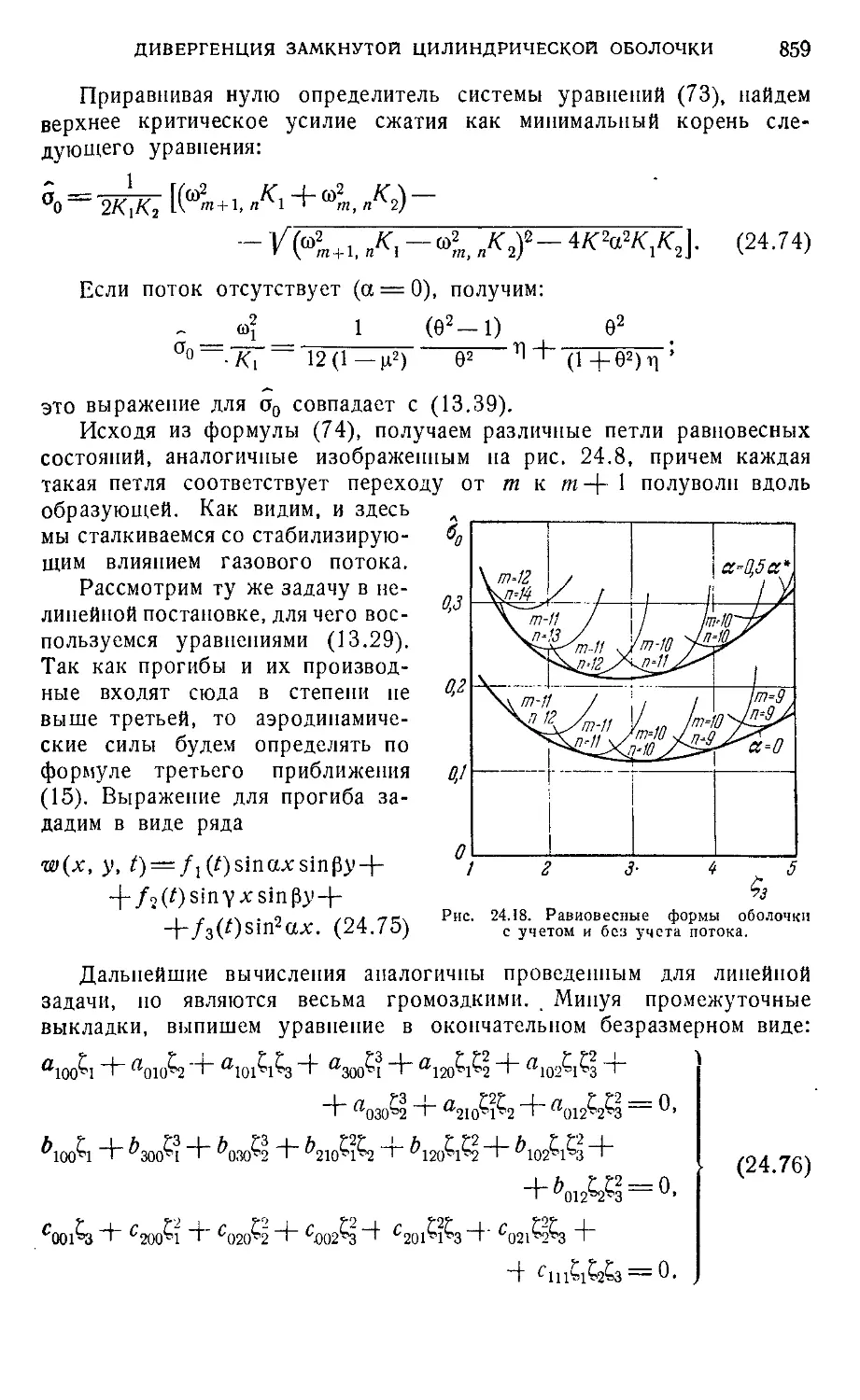
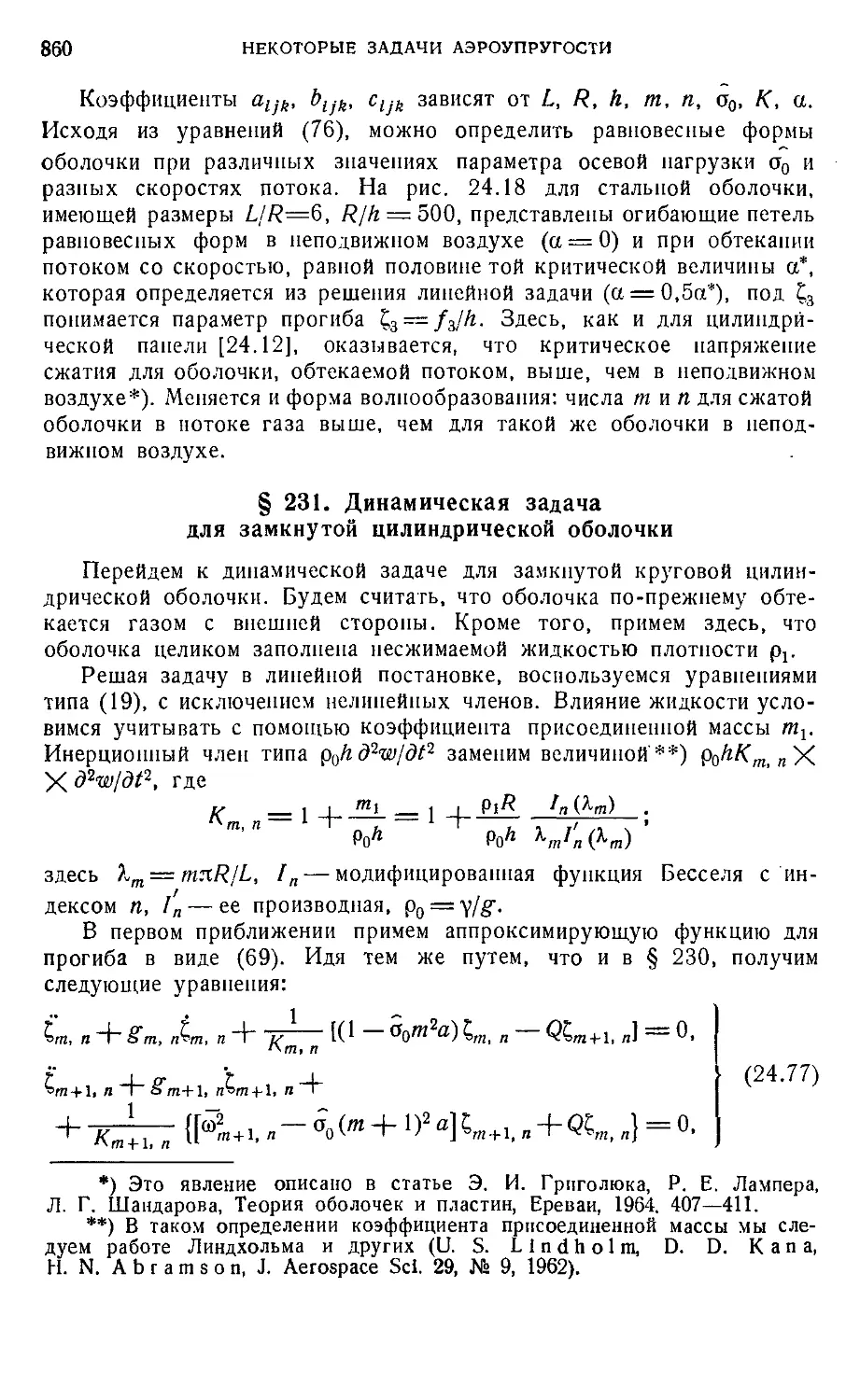
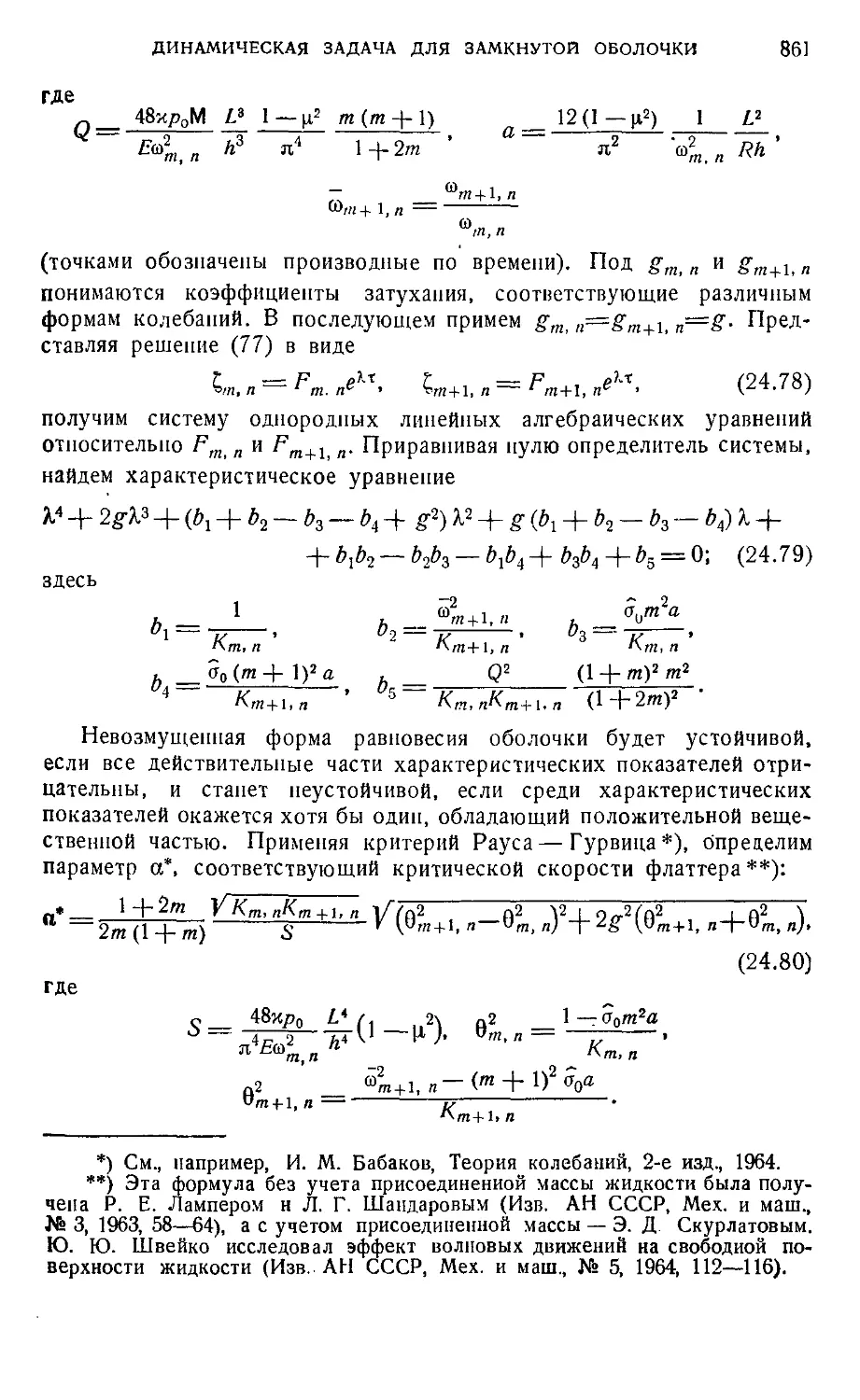
§ 230. Дивергенция замкнутой цилиндрической оболочки 857
§ 231. Динамическая задача для замкнутой цилиндрической
оболочки 860
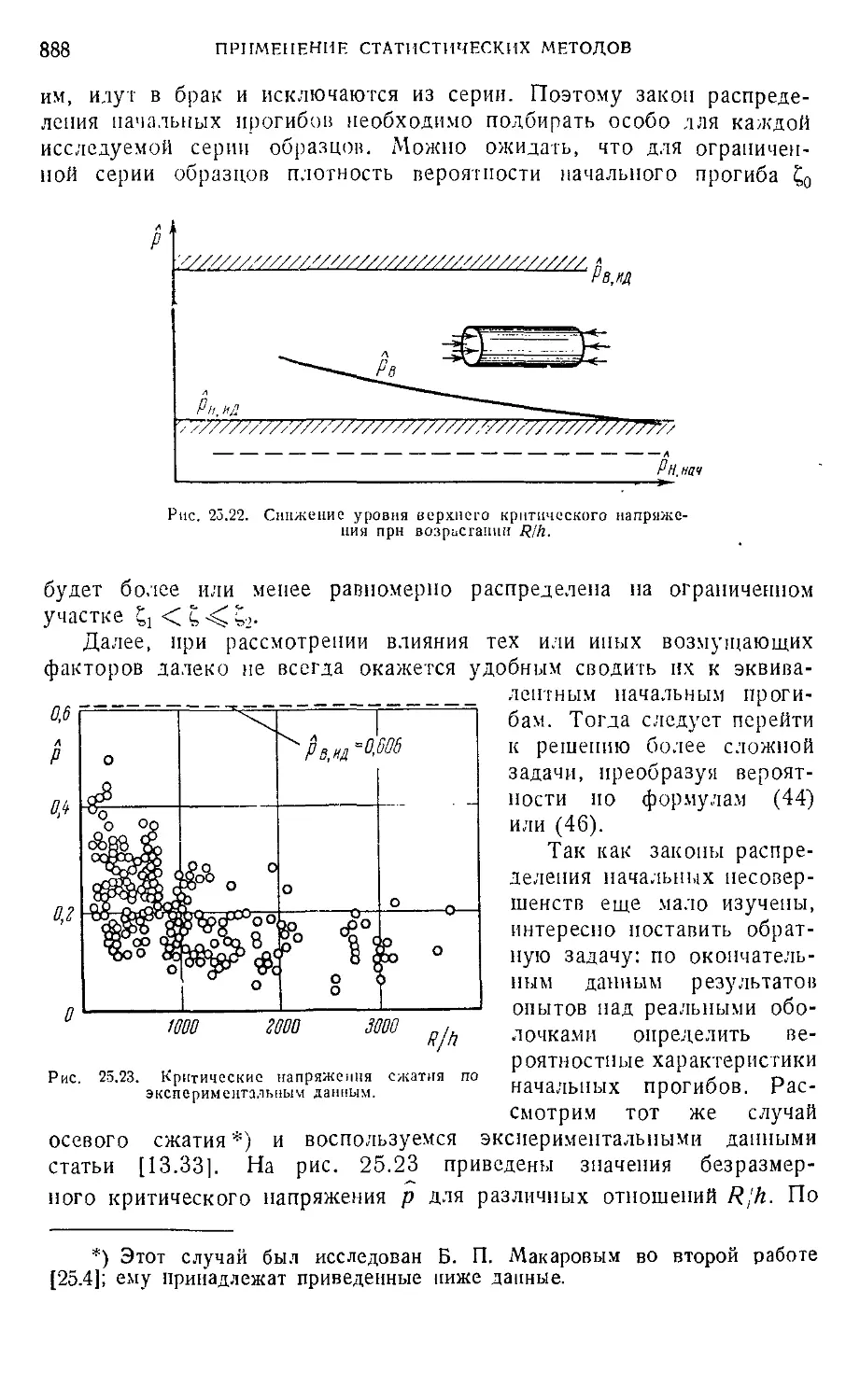
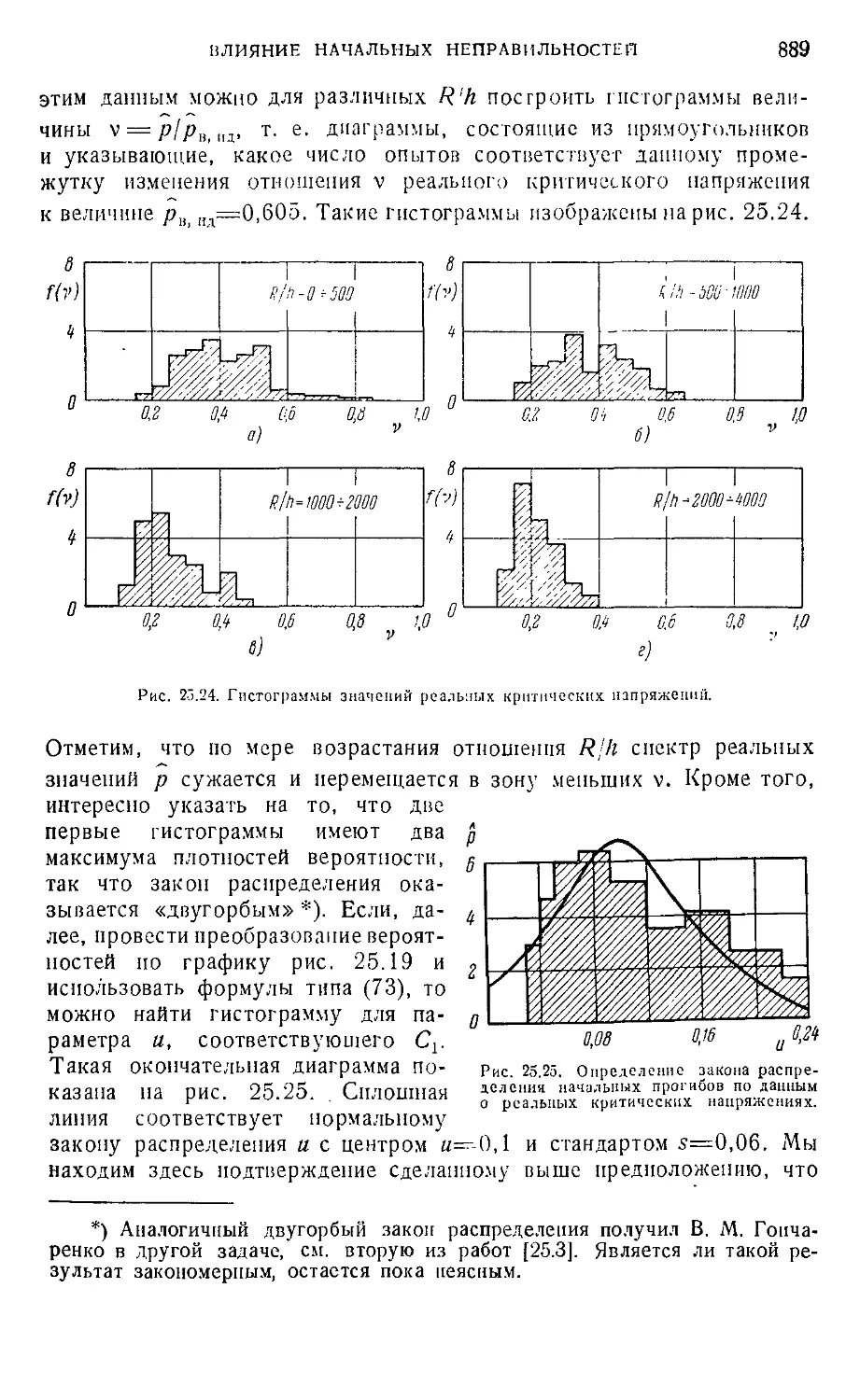
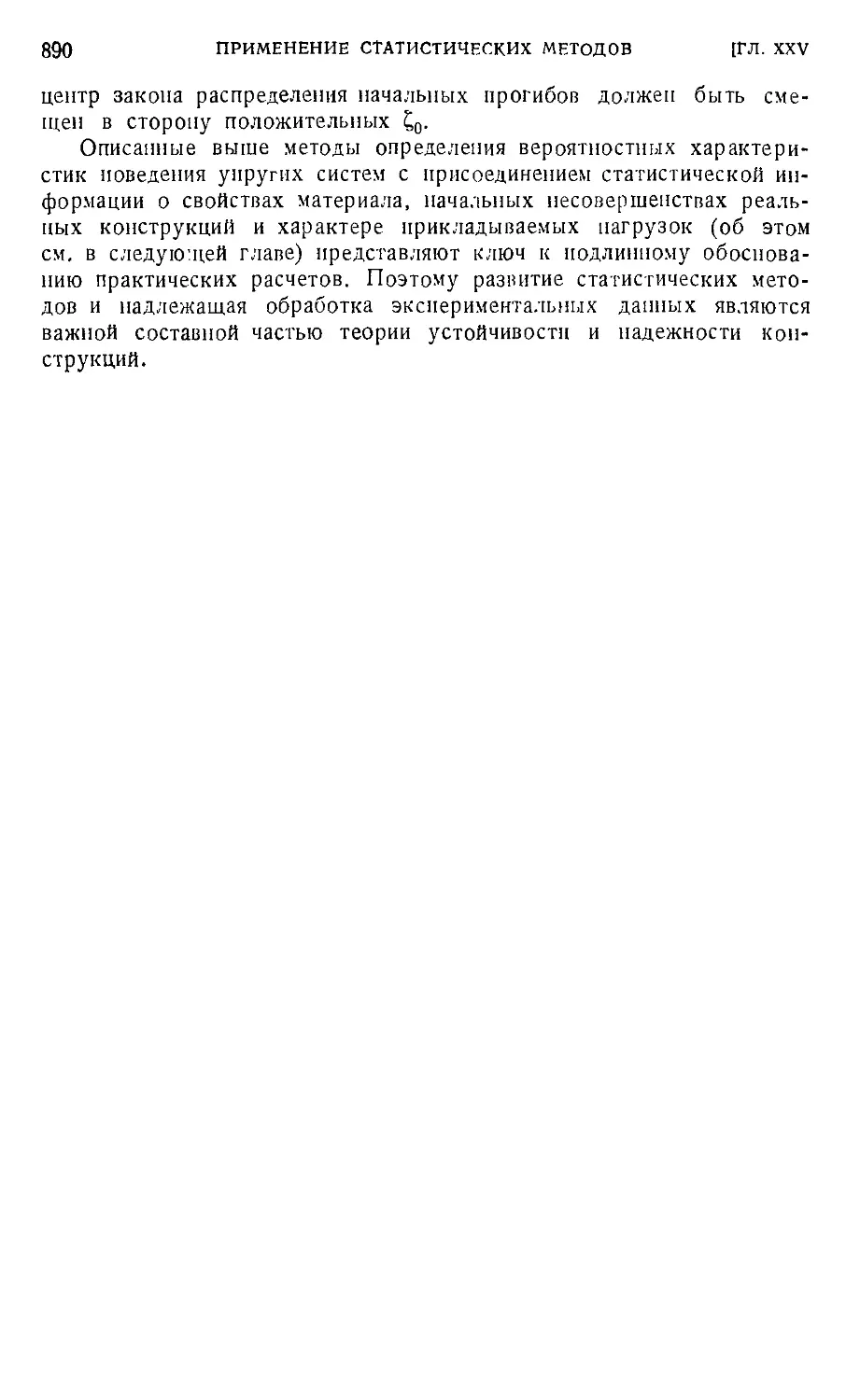
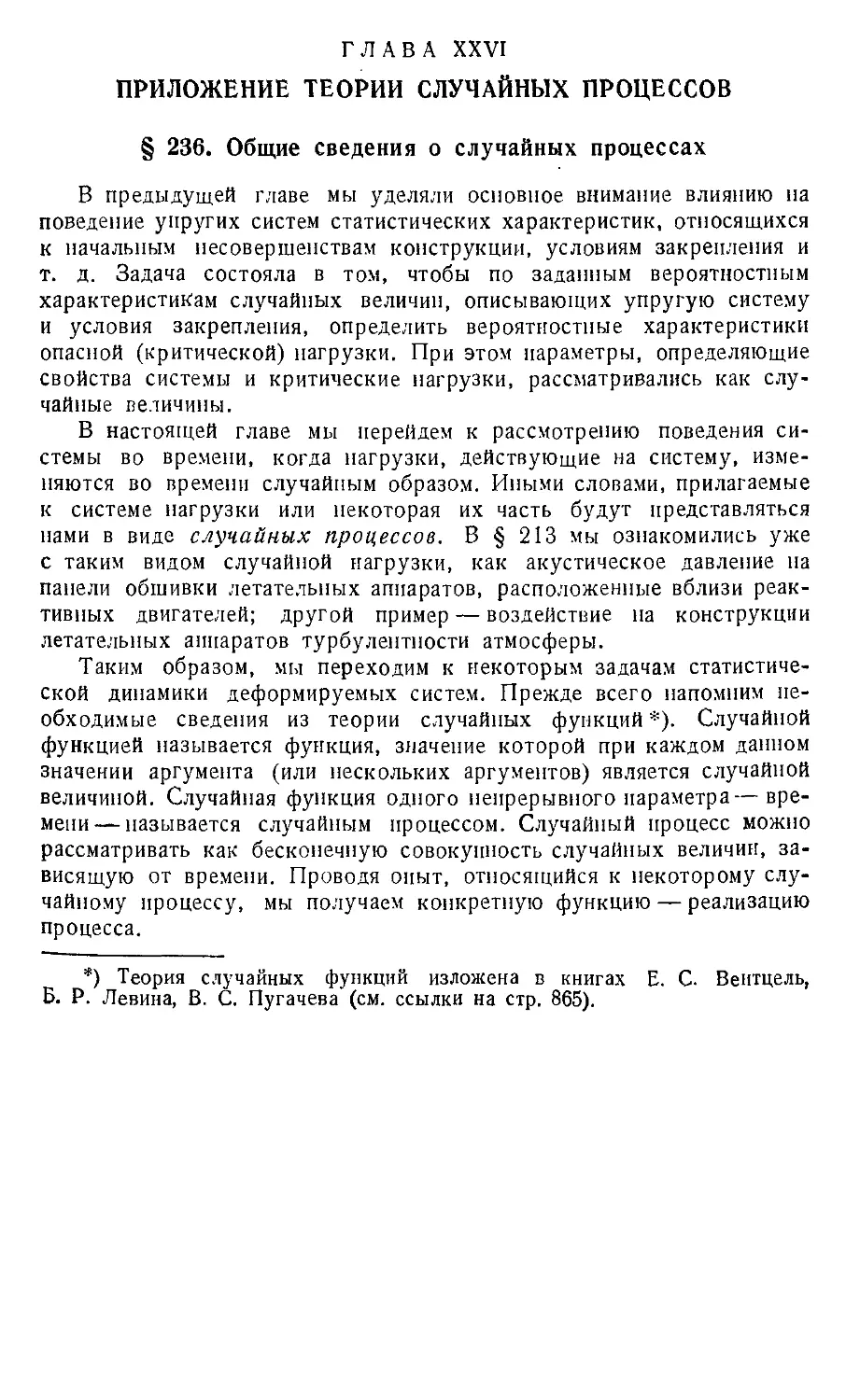
Глава XXV. Применение статистических методов 865
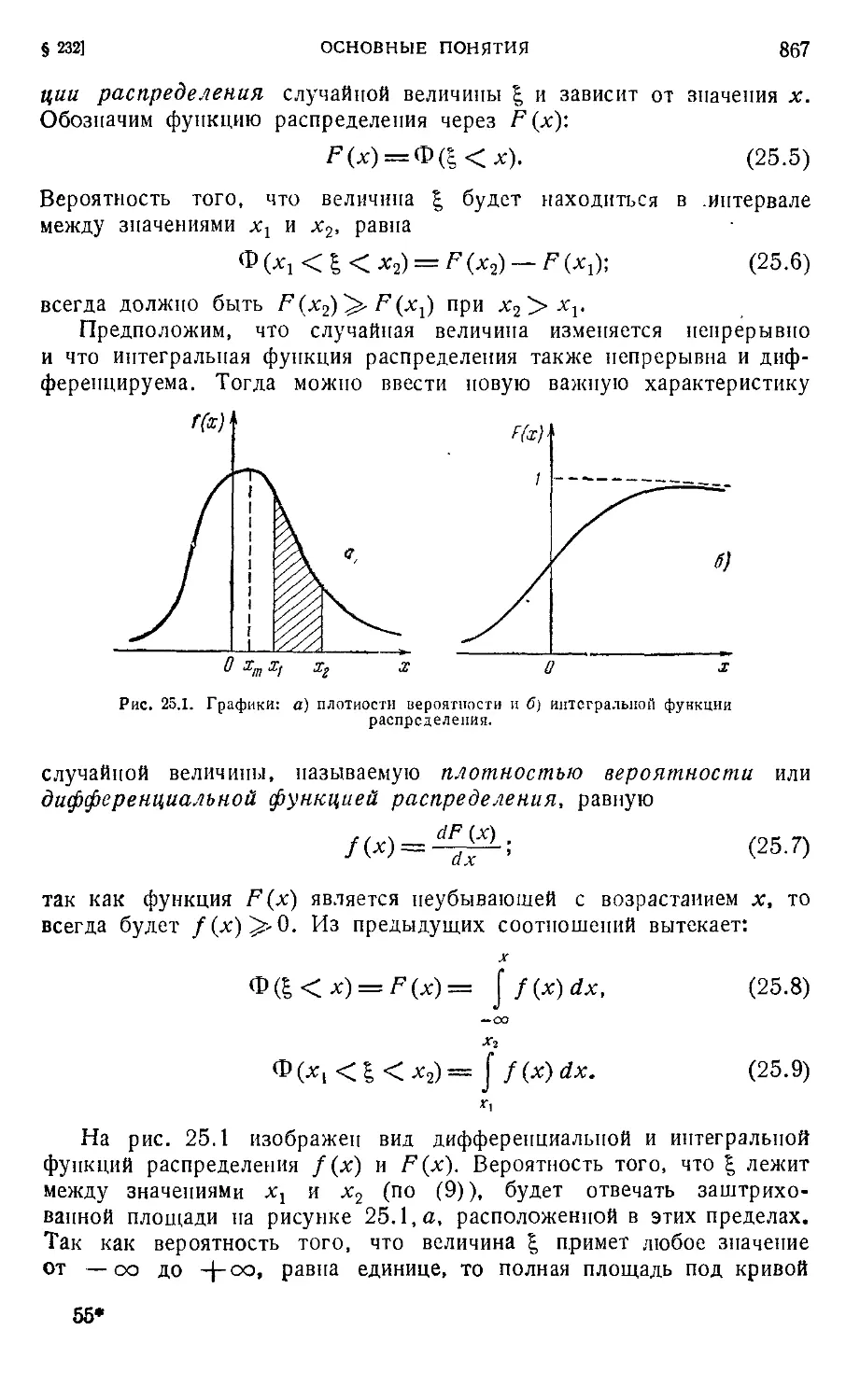
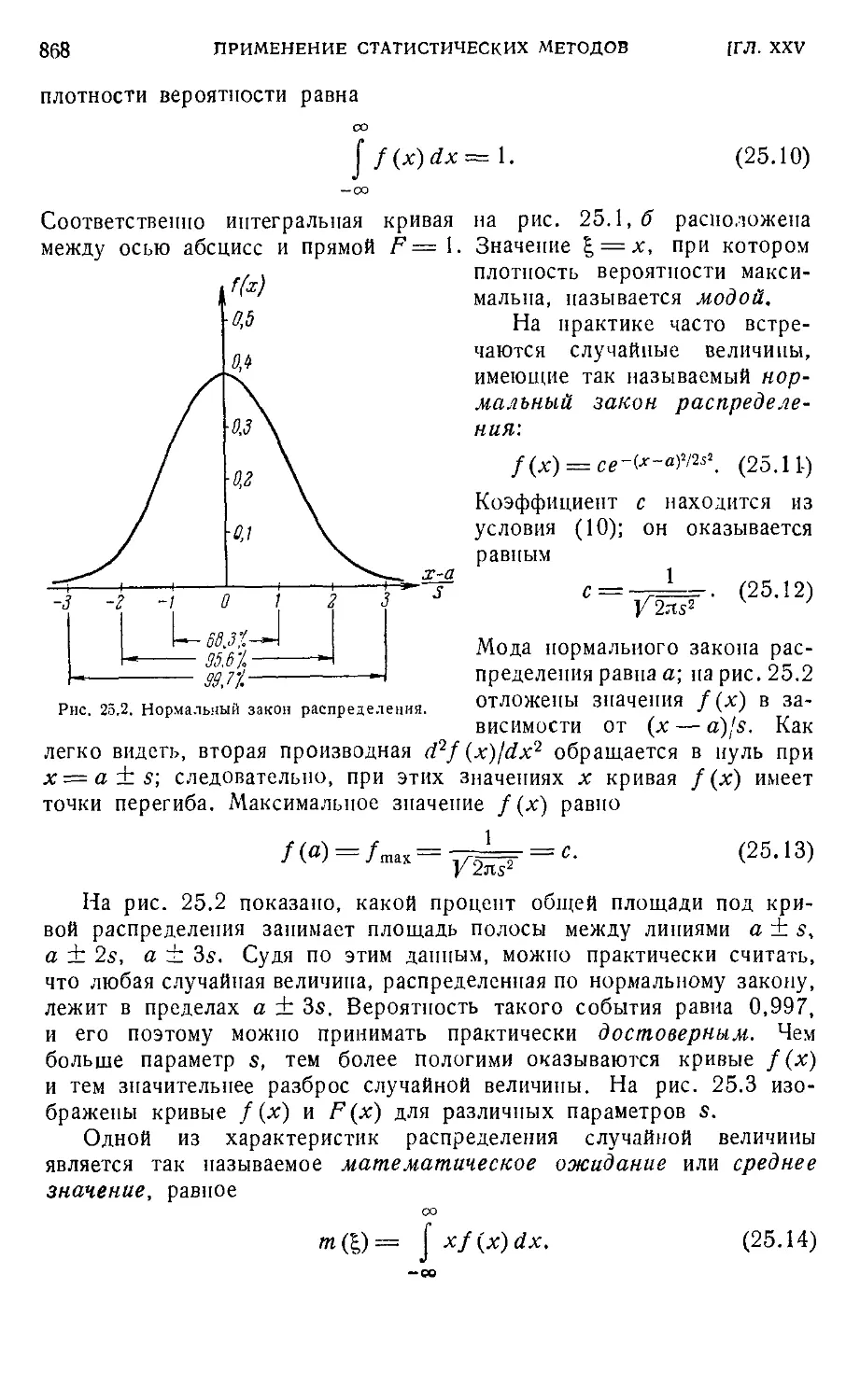
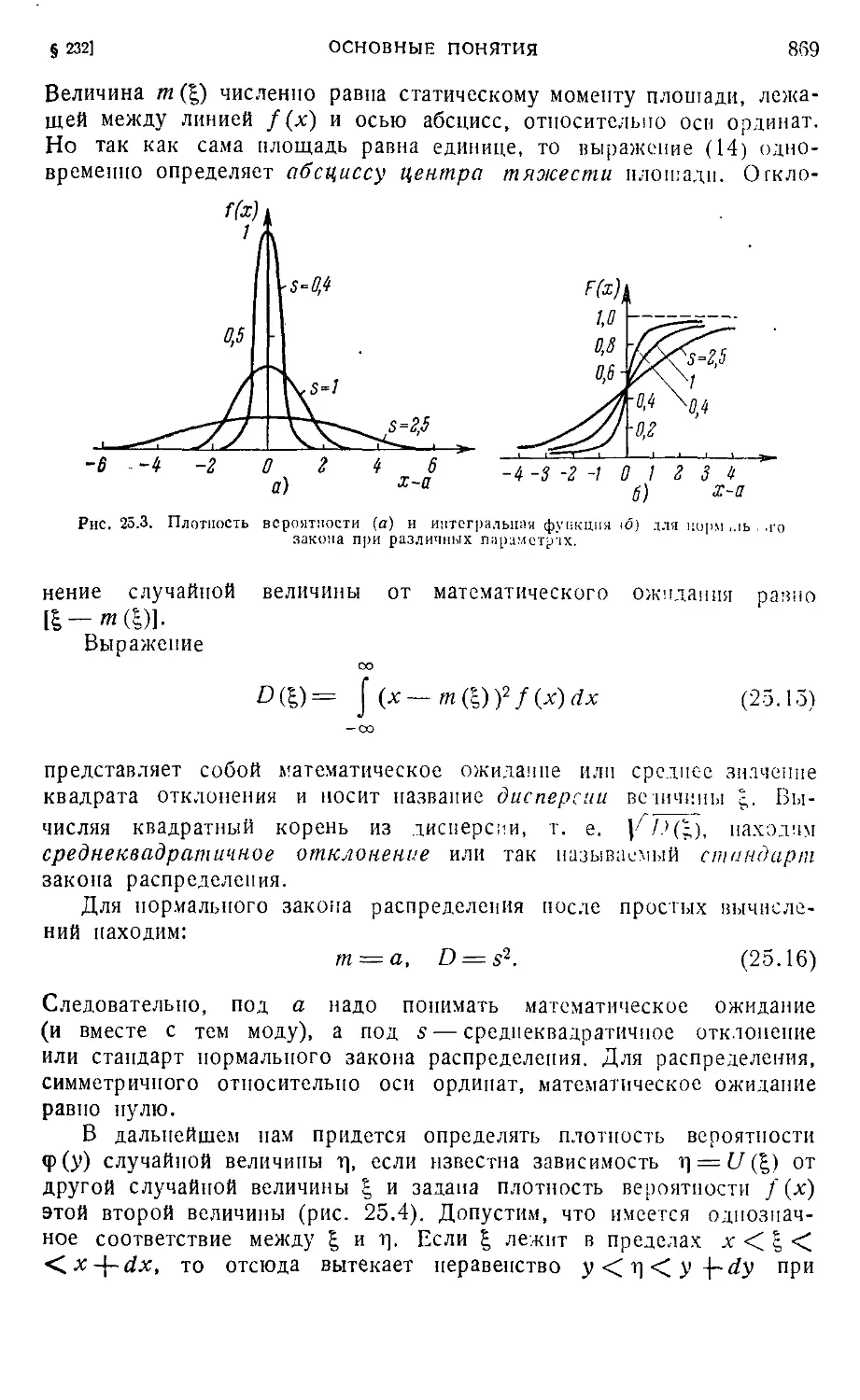
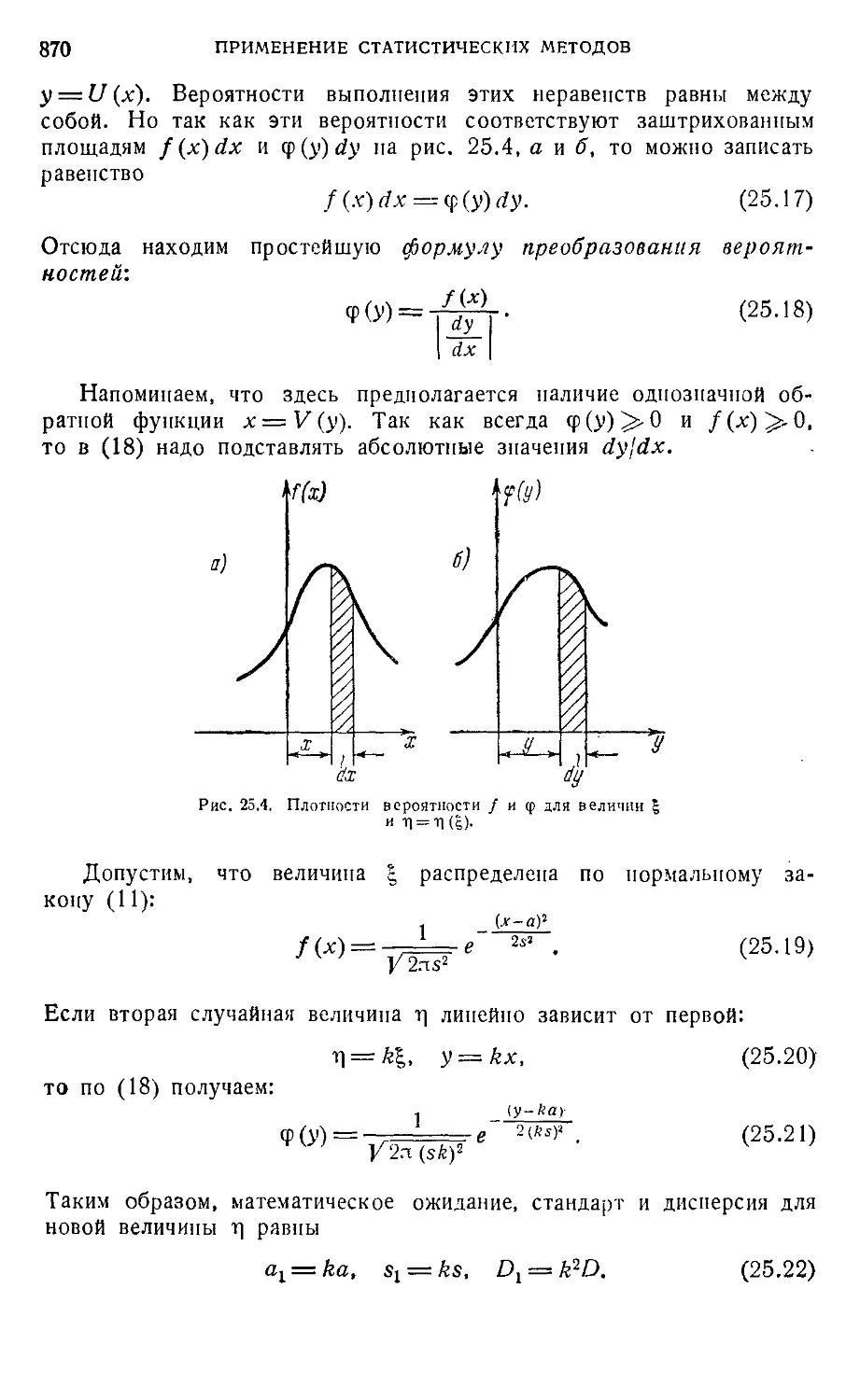
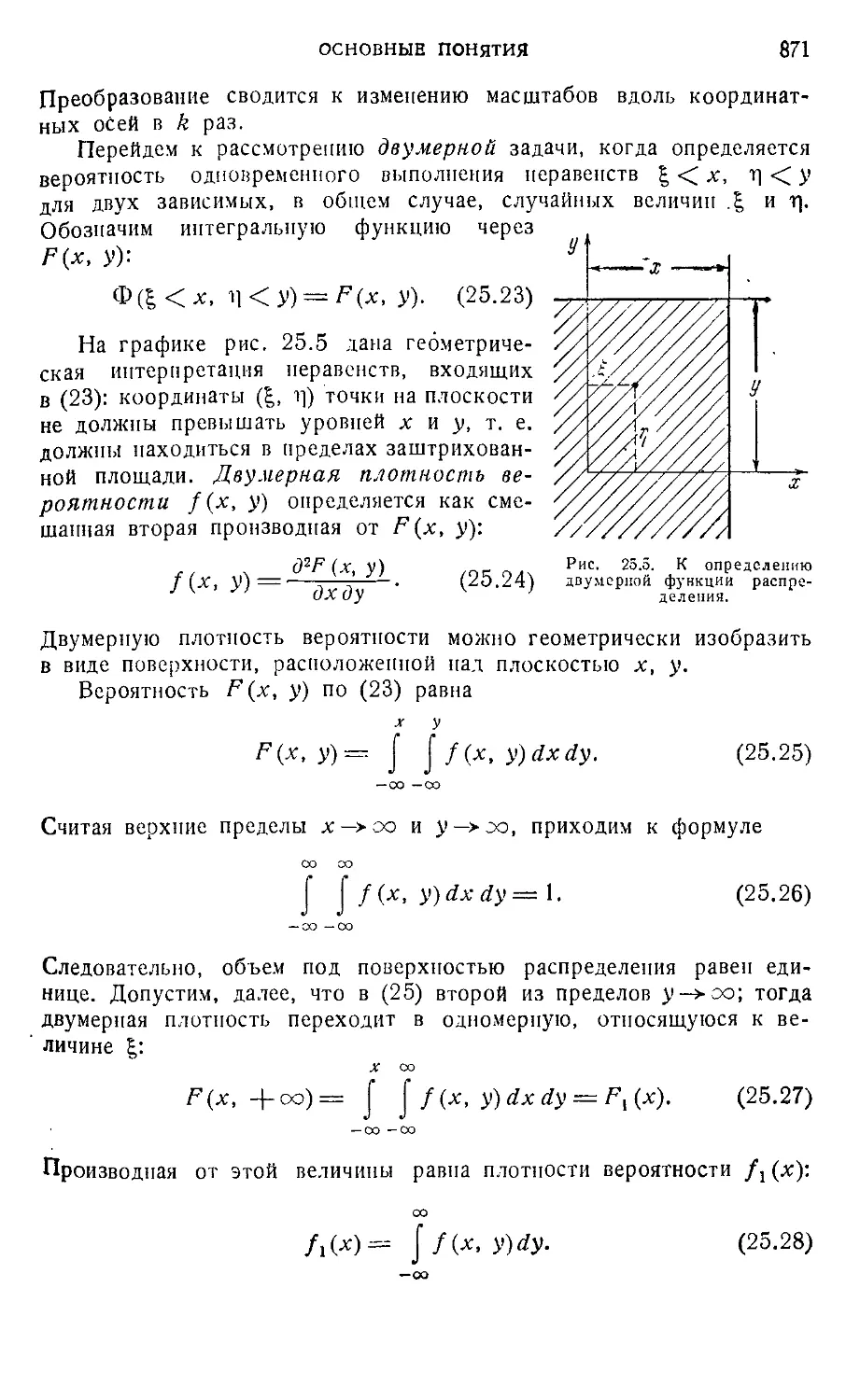
§ 232. Основные понятия 865
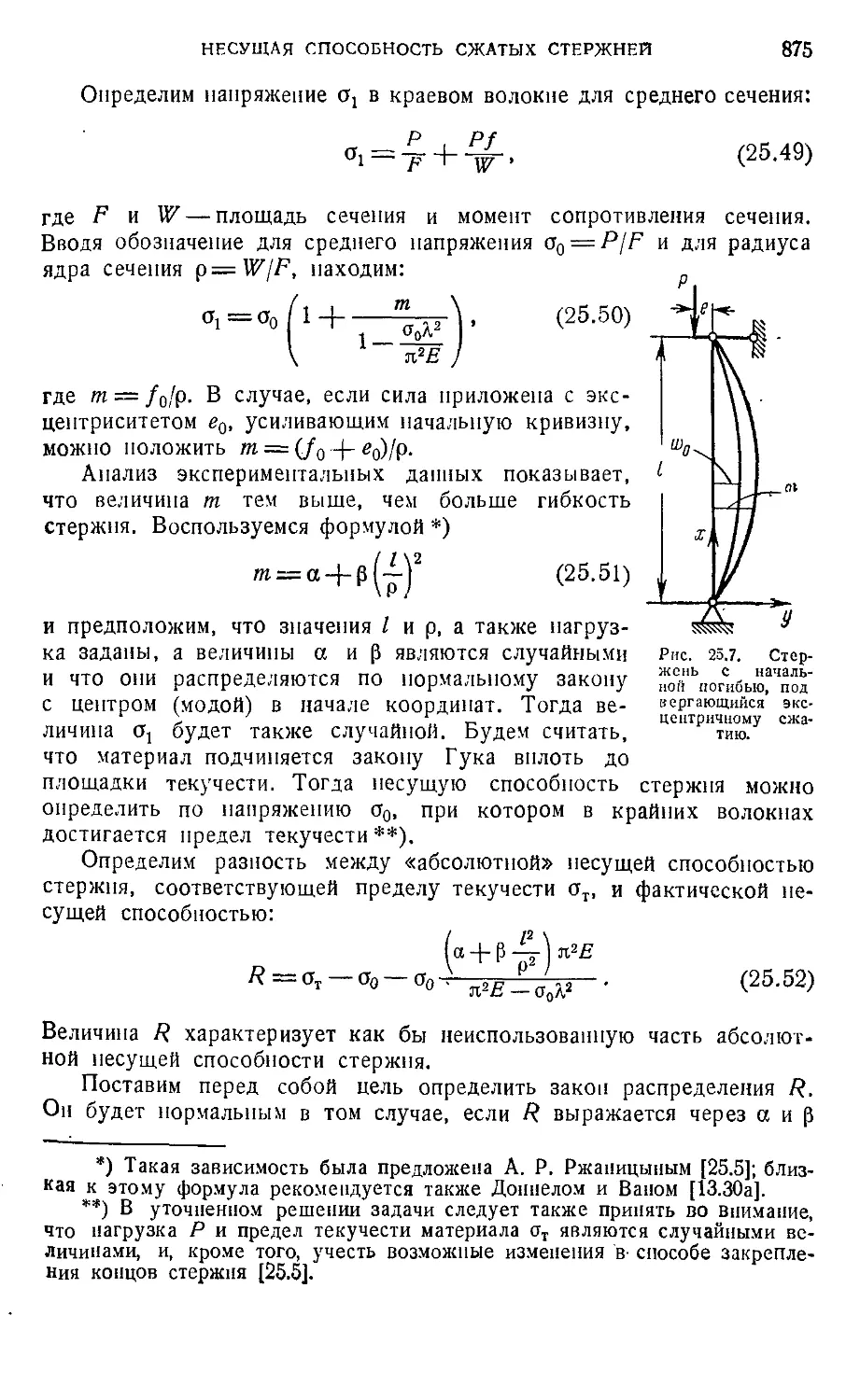
§ 233. Несущая способность сжатых стержней 874
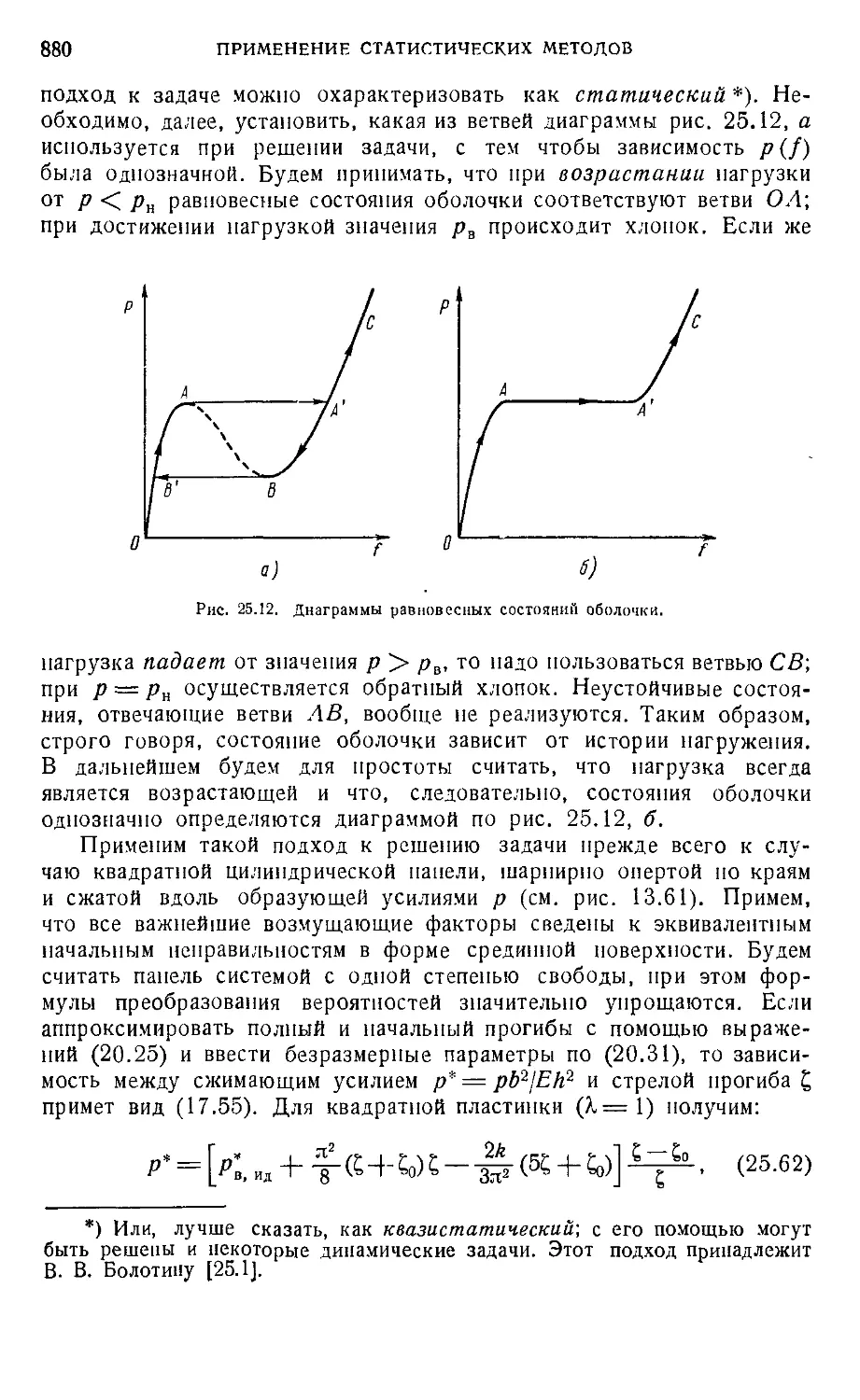
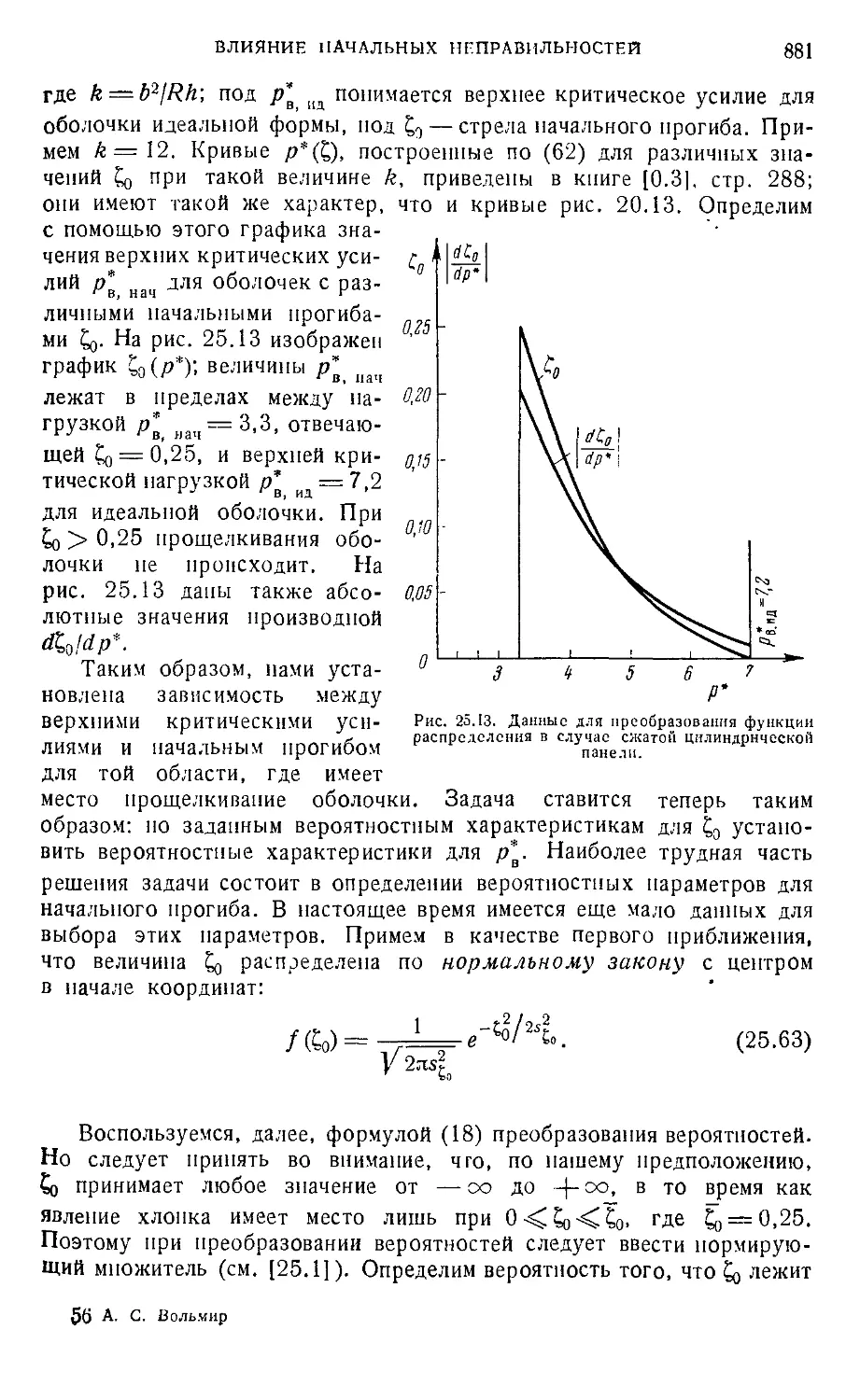
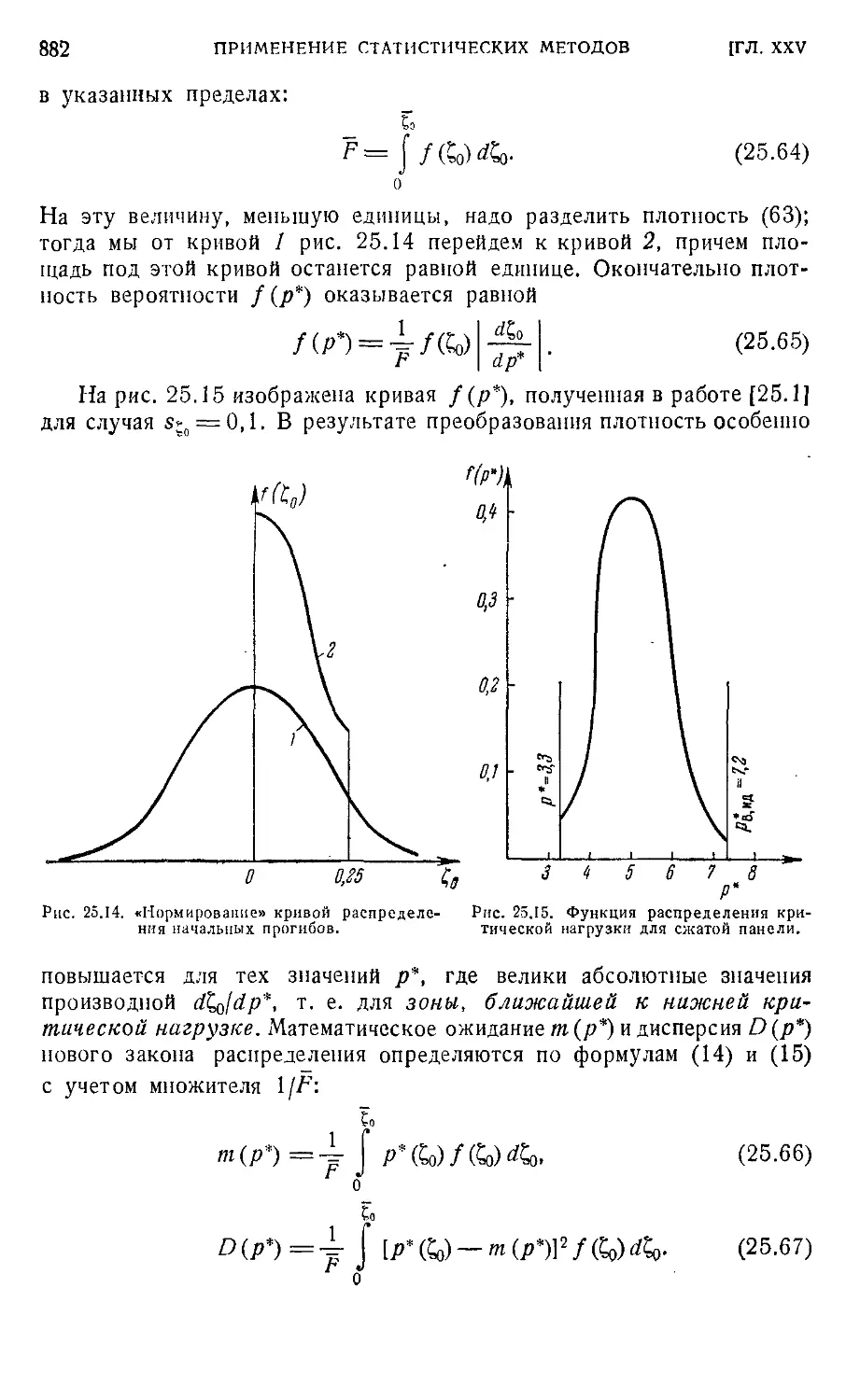
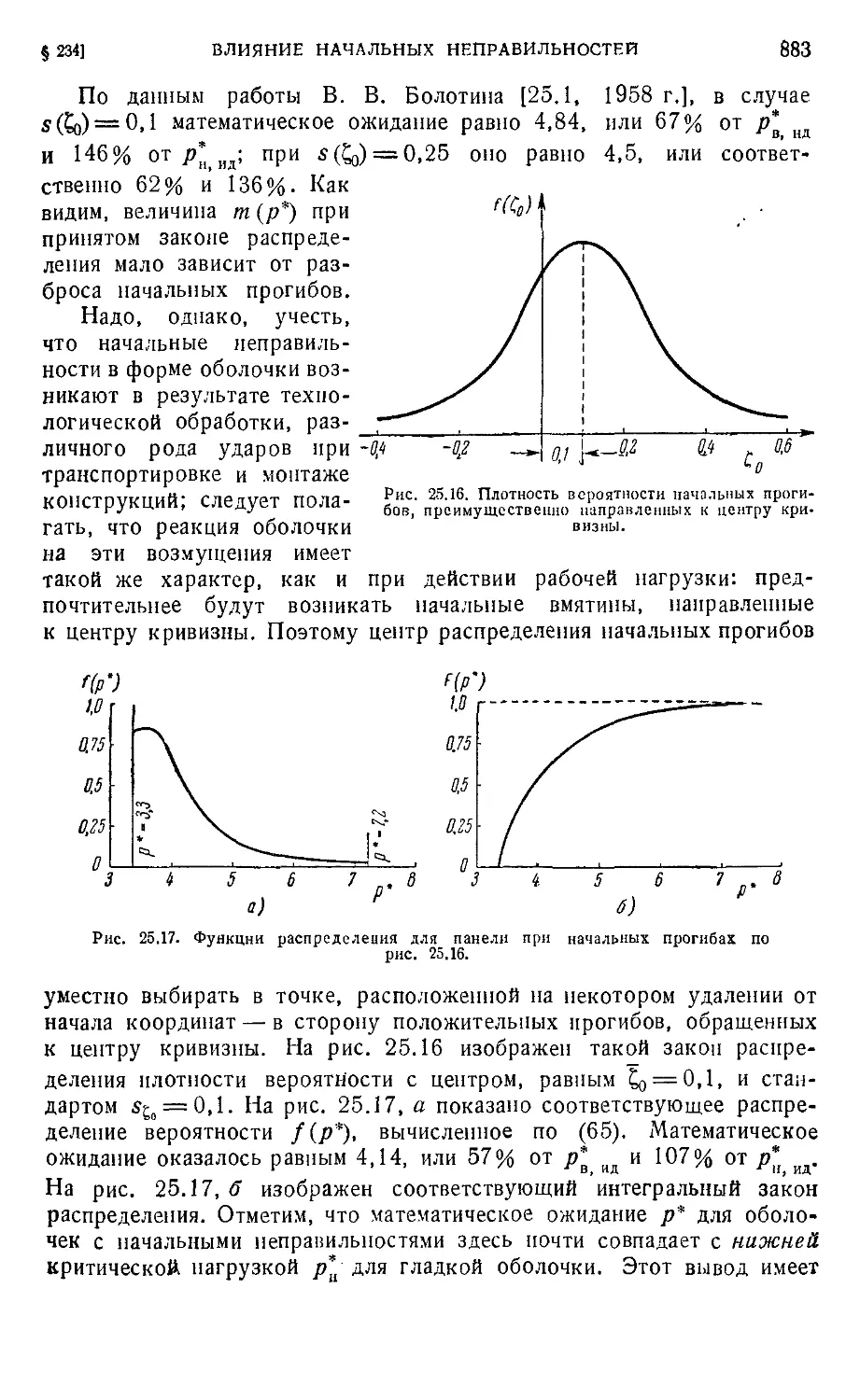
§ 234. Влияние начальных неправильностей на поведение оболочек.
Цилиндрическая панель 879
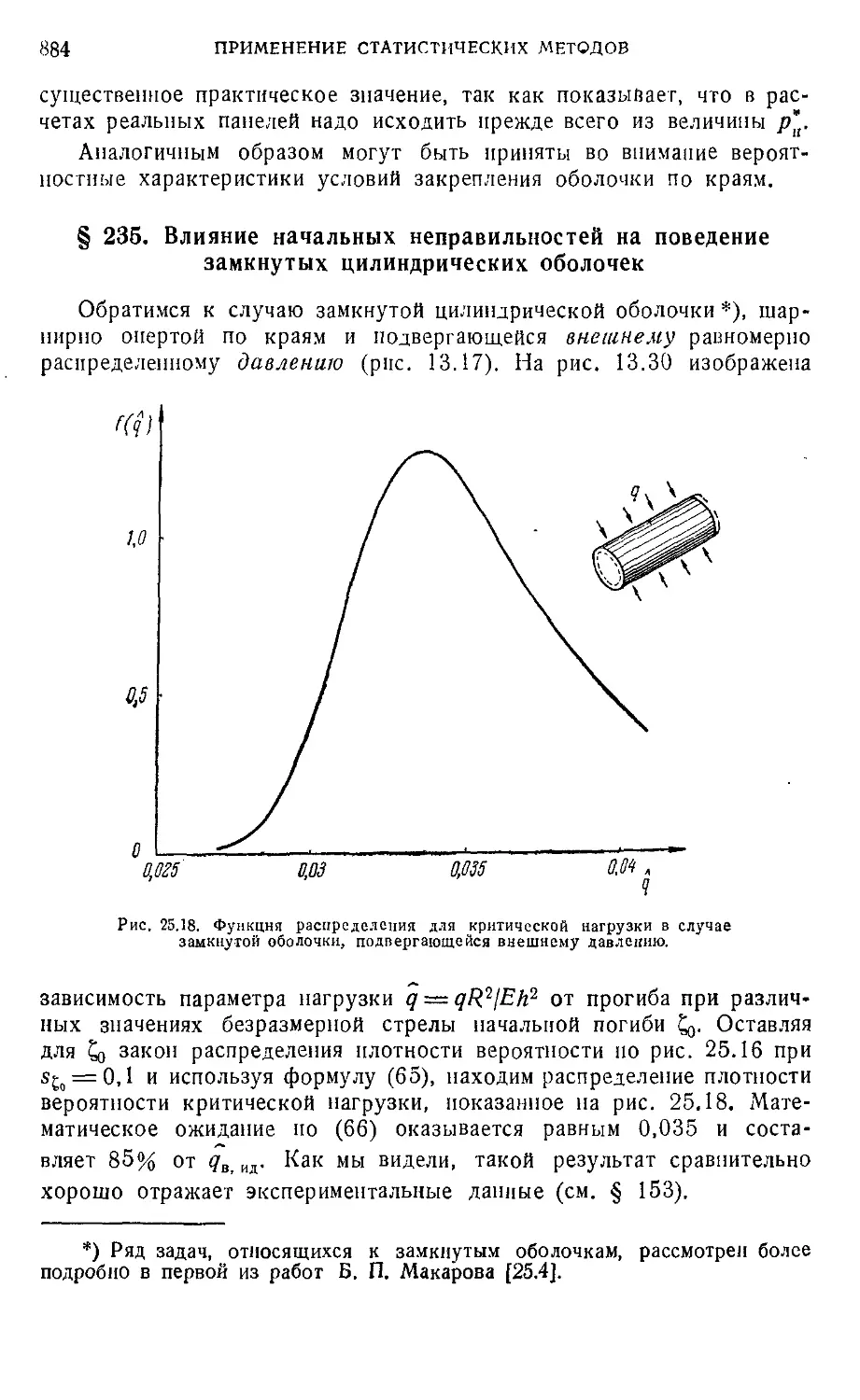
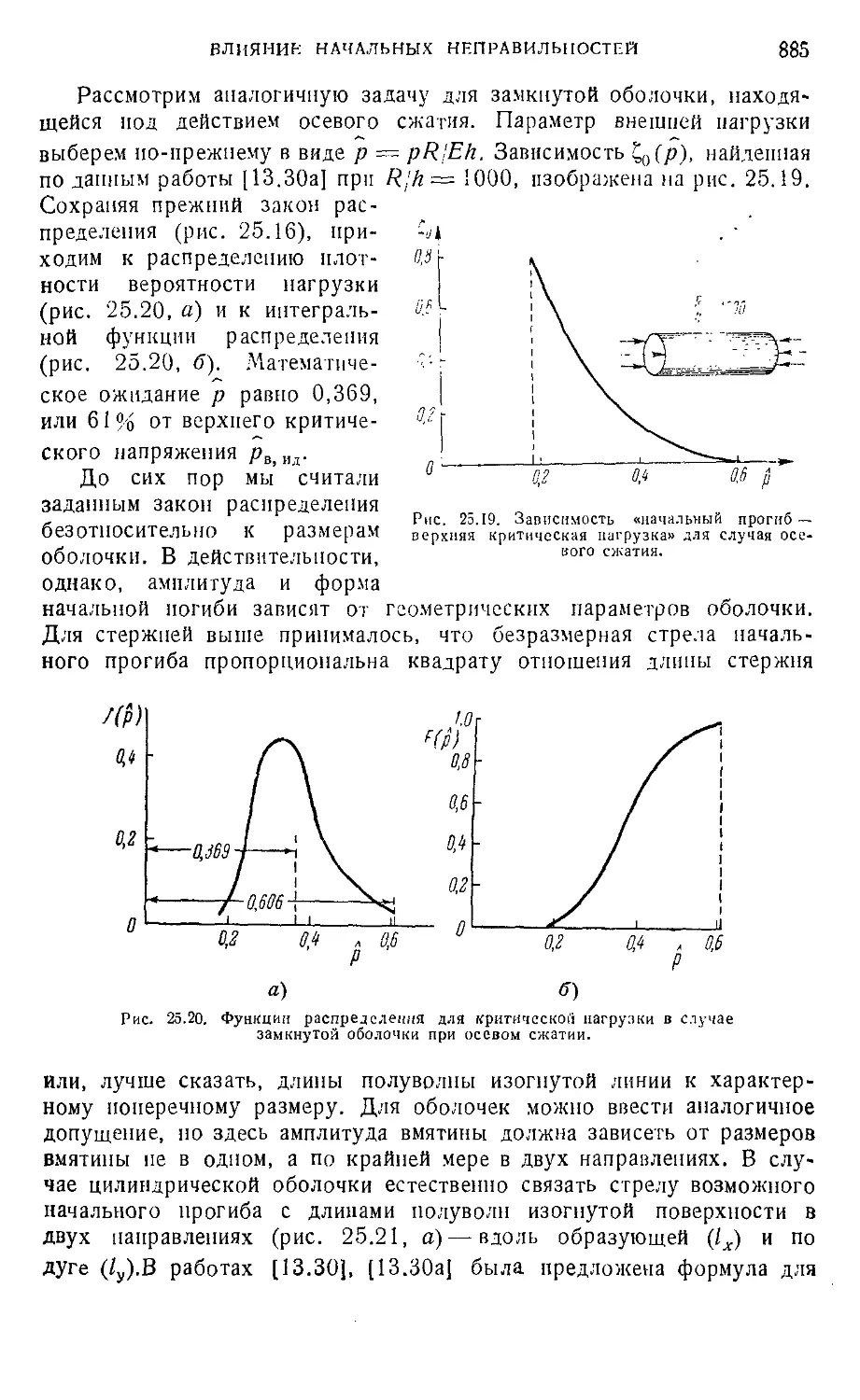
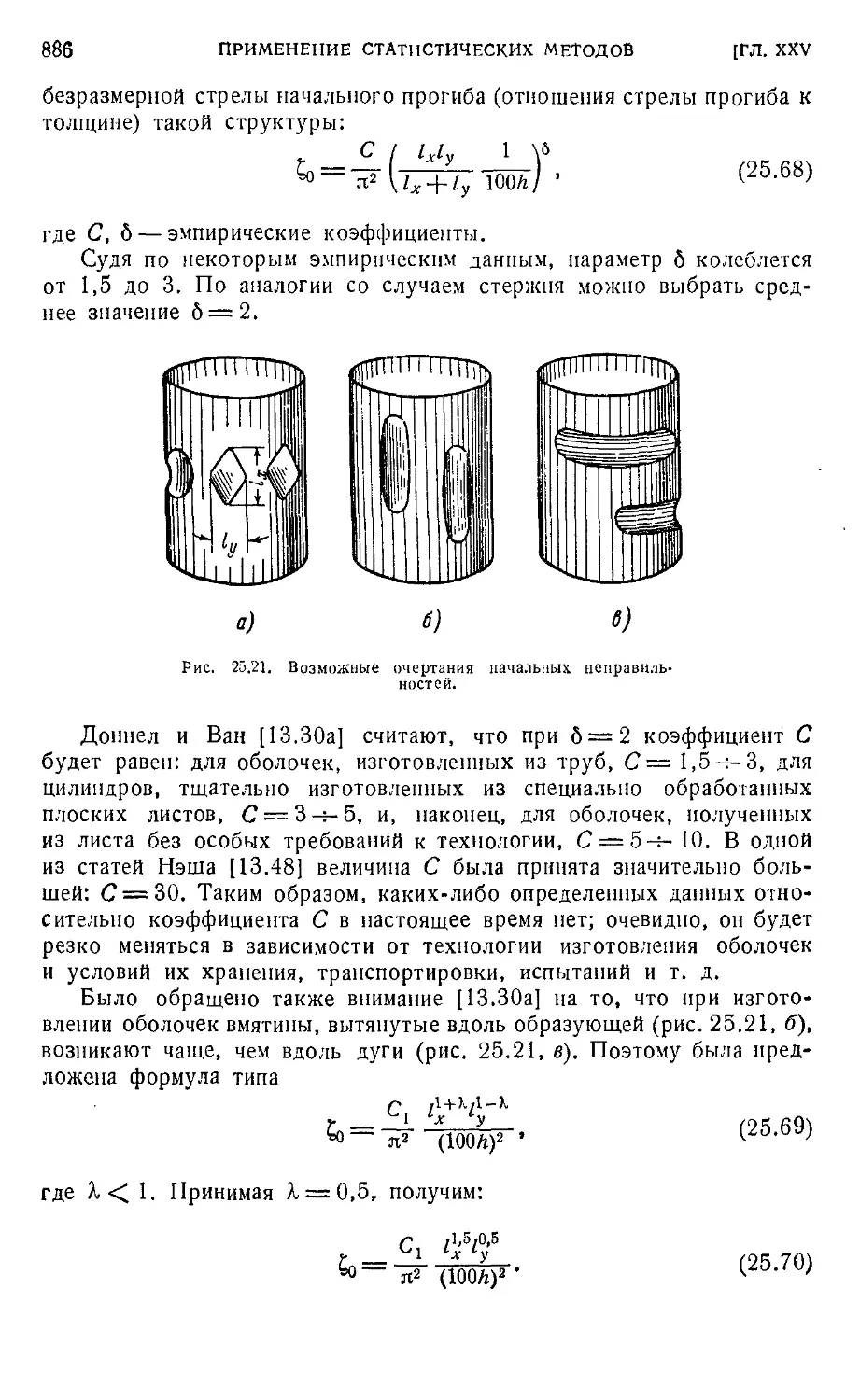
§ 235. Влияние начальных неправильностей на поведение замкнутых
цилиндрических оболочек 884
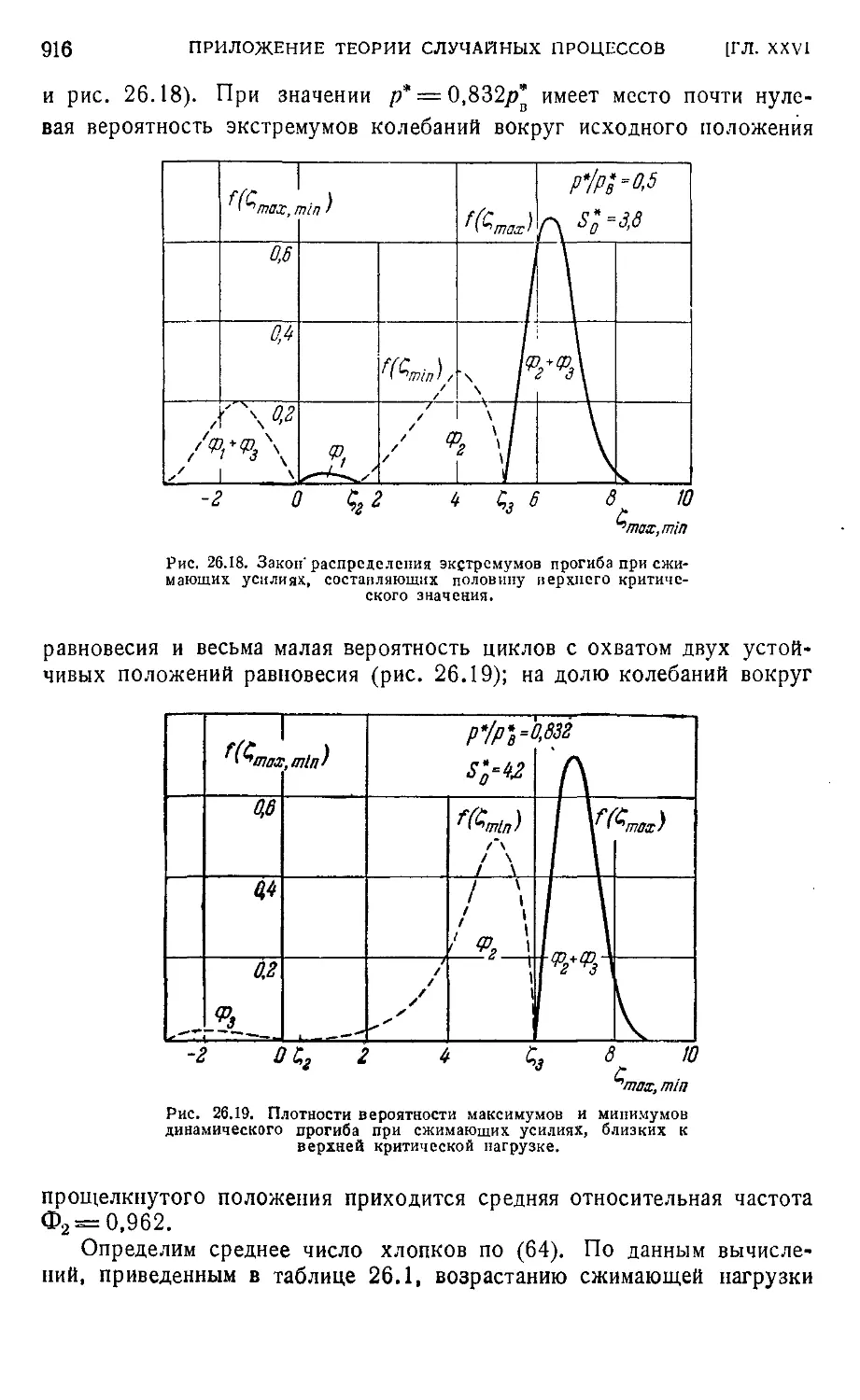
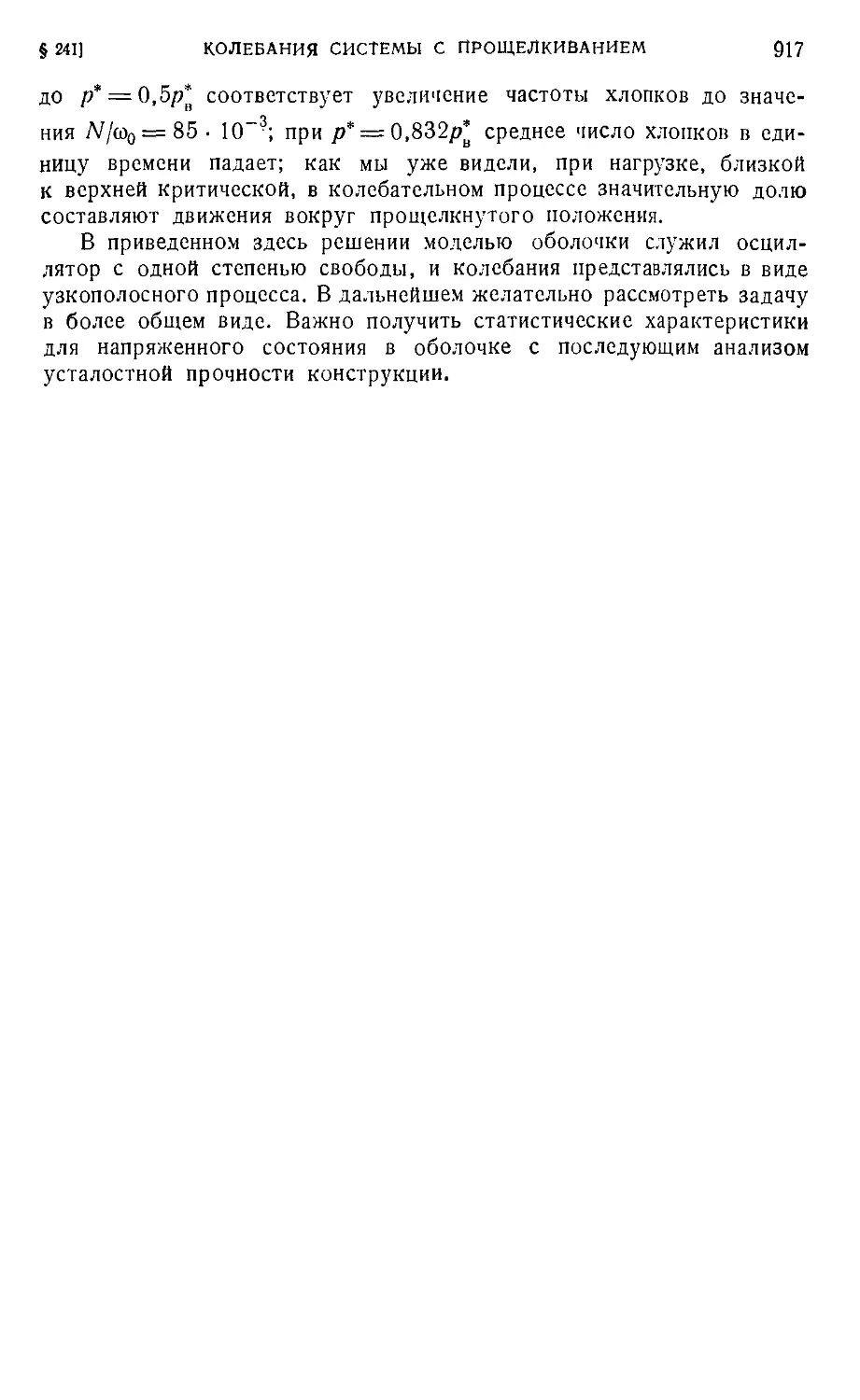
Глава XXVI. Приложение теории случайных процессов 891
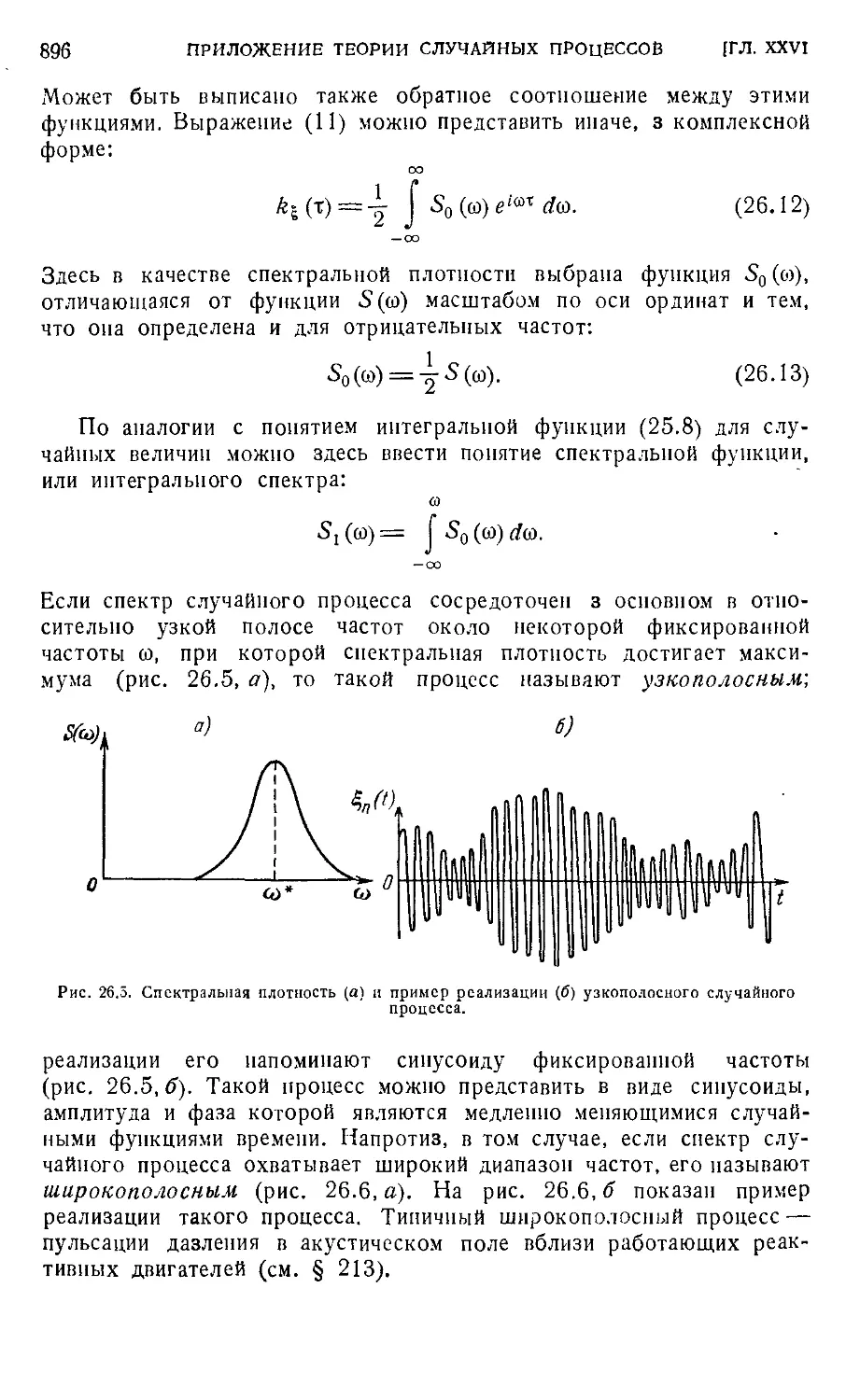
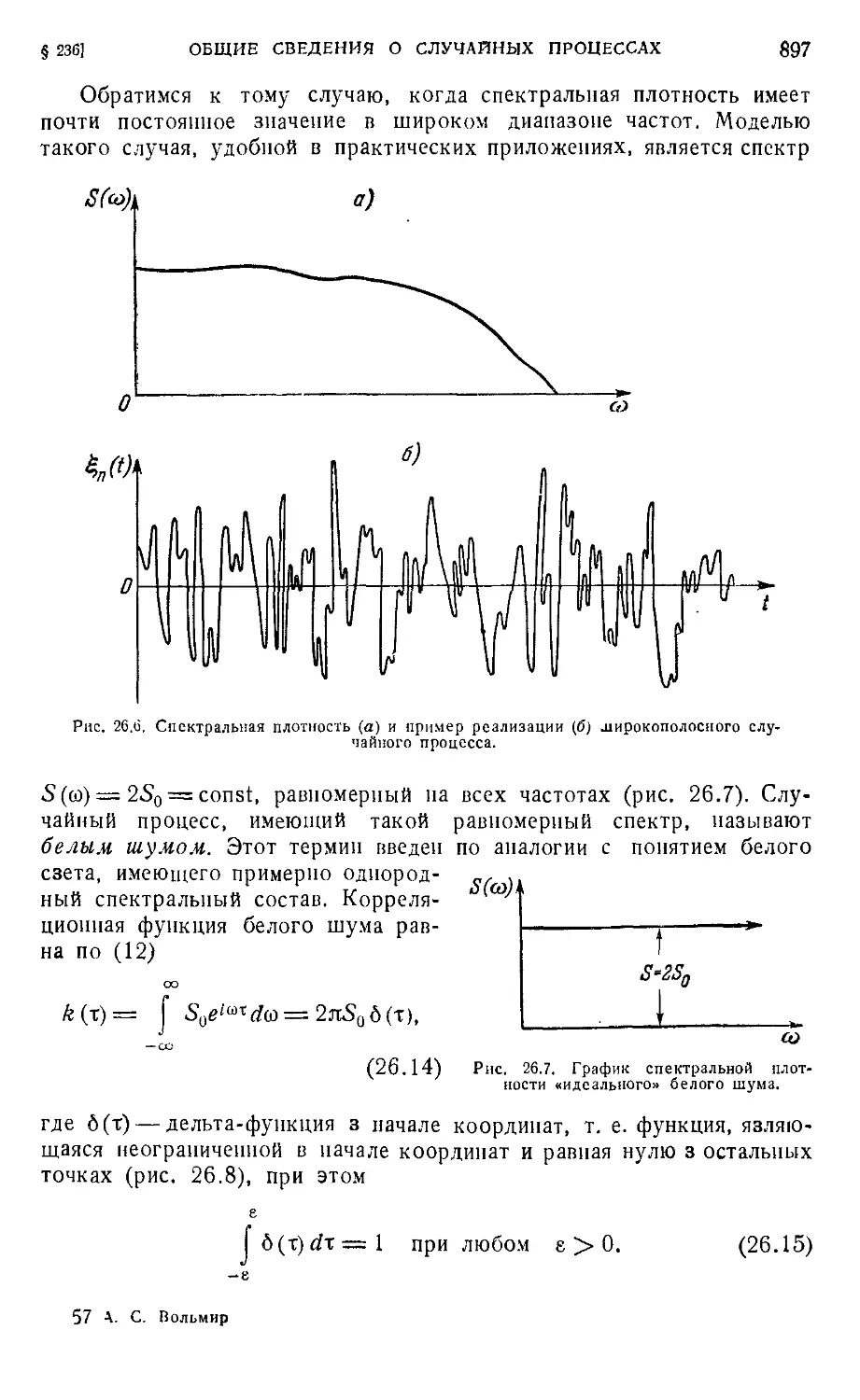
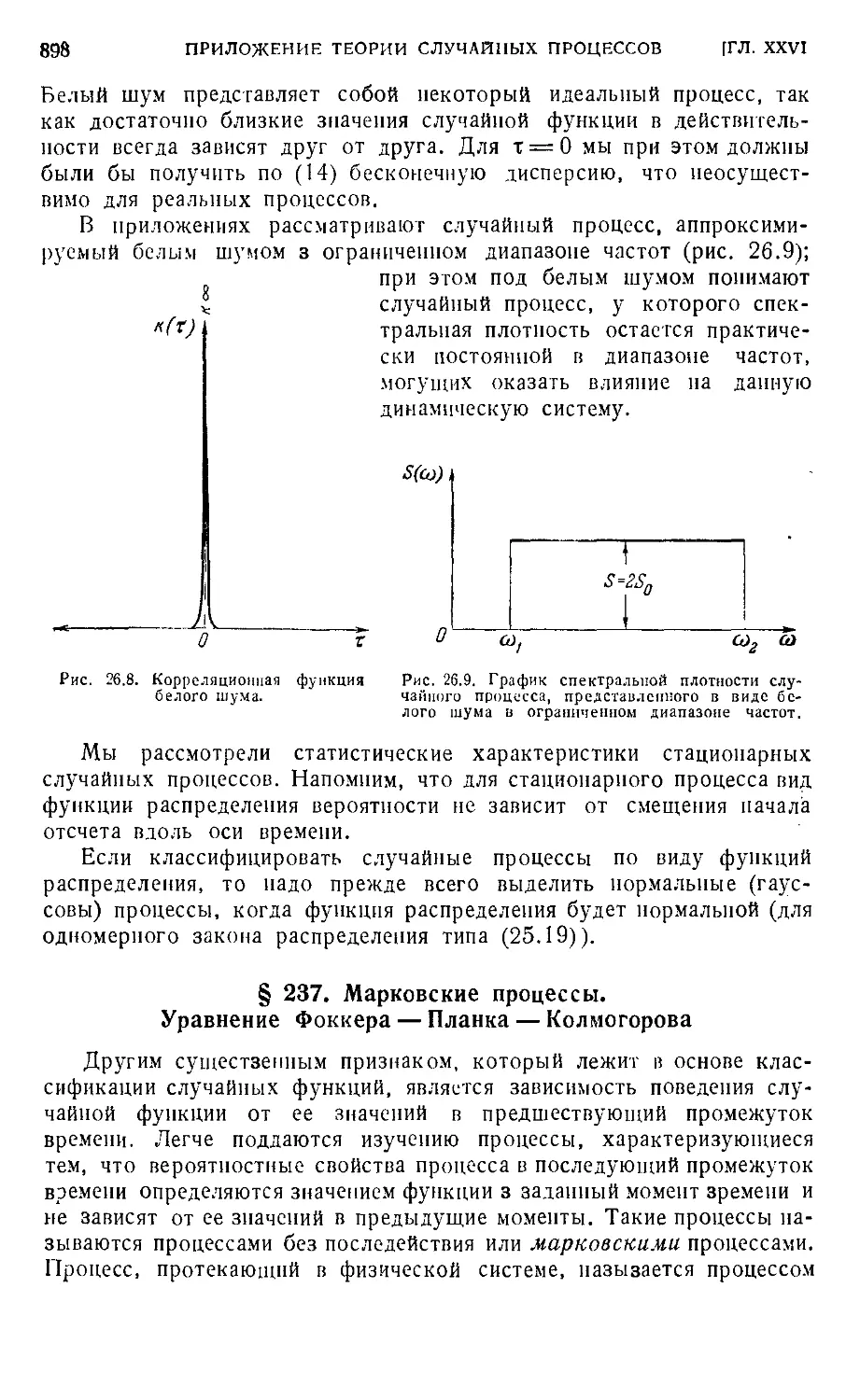
§ 236. Общие сведения о случайных процессах 891
§ 237. Марковские процессы. Уравнение Фоккера—Планка —
Колмогорова 898
§ 238. Выбросы случайных процессов. Формула Раиса 903
§ 239. Некоторые нелинейные задачи статистической динамики
упругих систем 904
§ 240. Применение уравнения Фоккера — Плаика — Колмогорова для
описания случайных нелинейных колебаний оболочки .... 906
§ 241. Исследование вероятностных характеристик колебаний
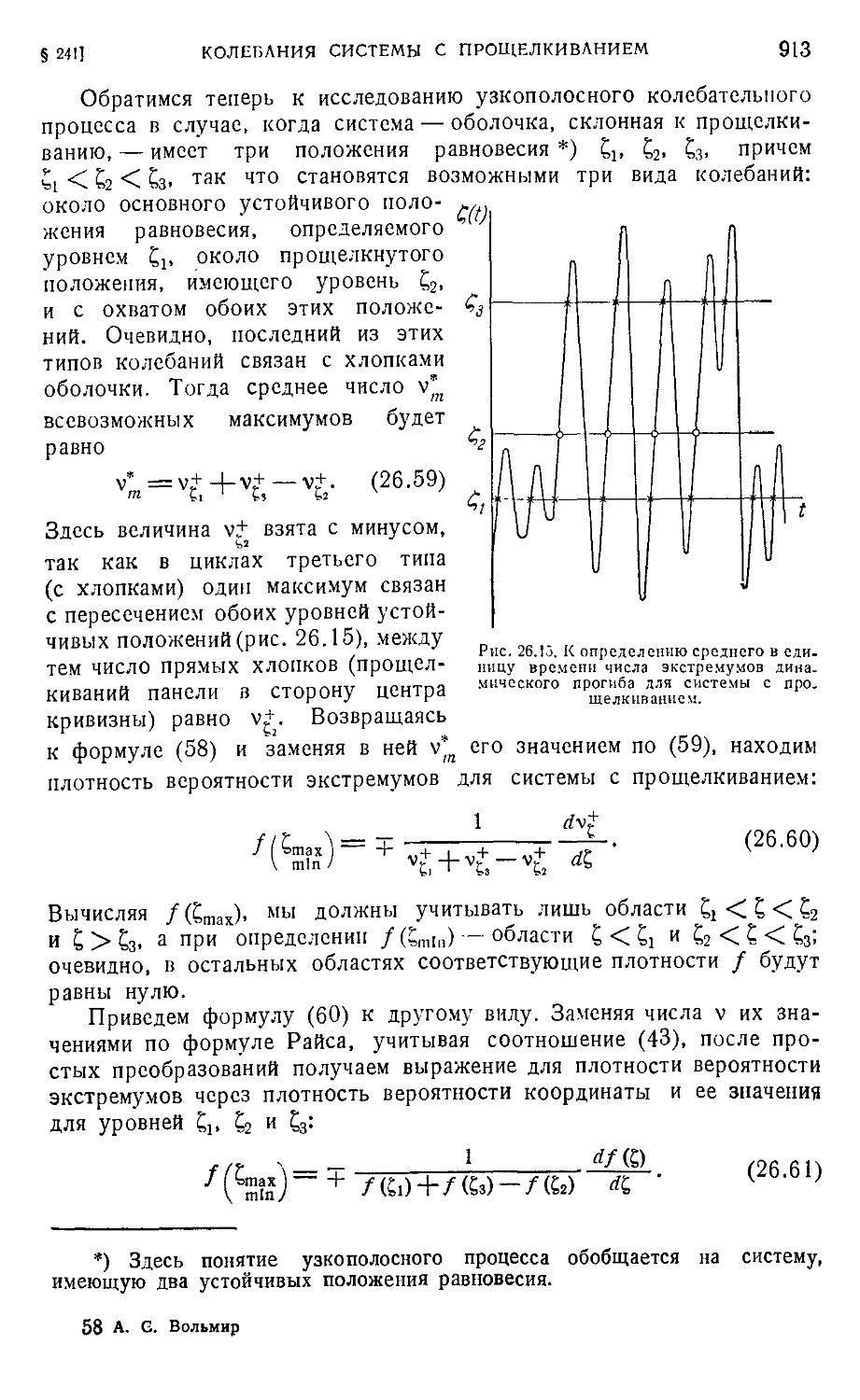
системы с прощелкиванием. Приложение формулы Раиса . . . 911
Глава XXVII. Общие критерии устойчивости упругих систем . . 918
| о4?' Динамическнй критерий устойчивости 918
§ 243. Статический критерий устойчивости. Исследование смежных
равновесных форм для трехмерной задачи 920
10
ОГЛАВЛЕНИЕ
§ 244. Энергетический критерий устойчивости. Теорема Лагранжа —
Дирихле 926
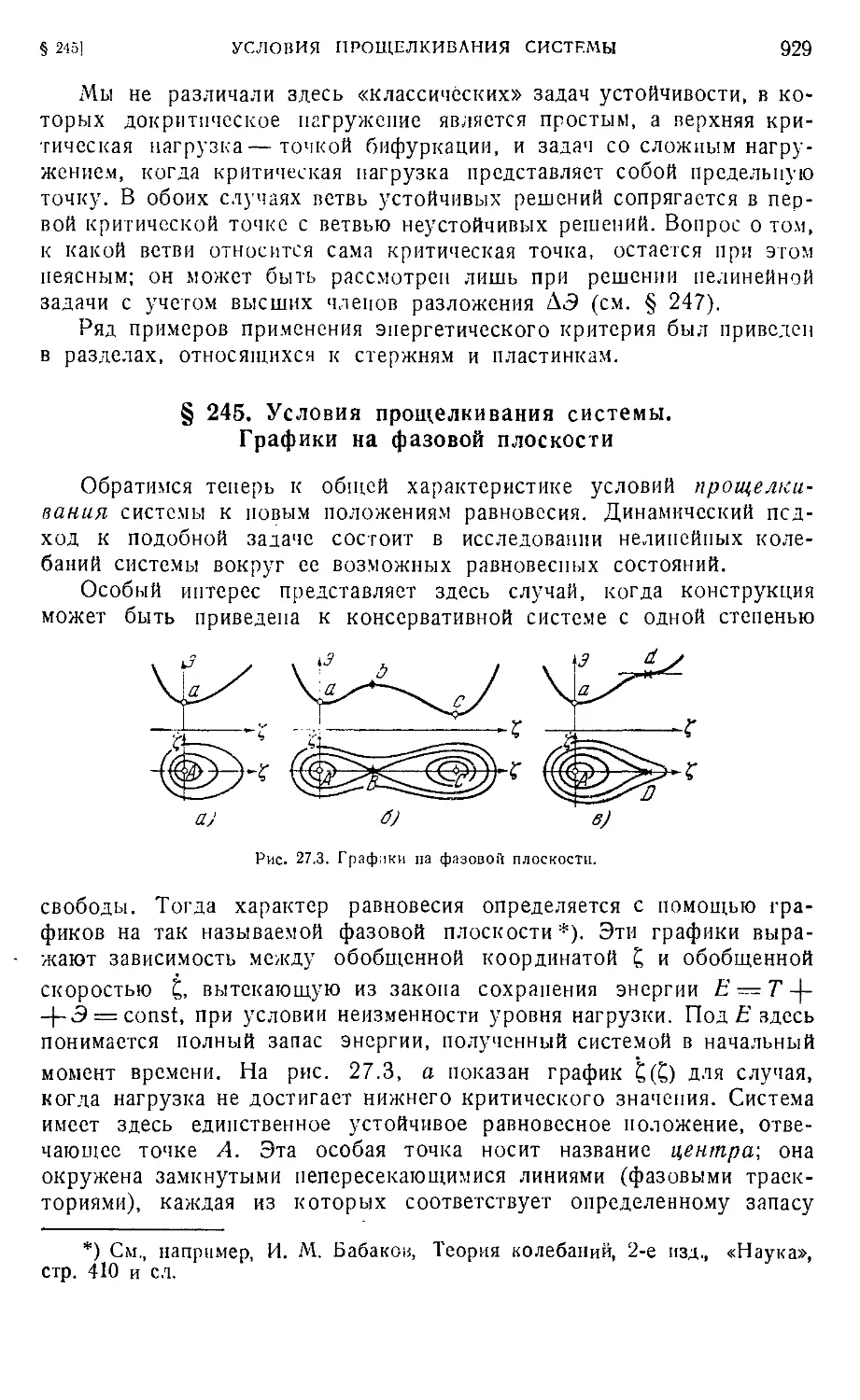
§ 245. Условия прощелкиваиия системы. Графики иа фазовой
плоскости 929
§ 246. Трехмерная нелинейная задача 930
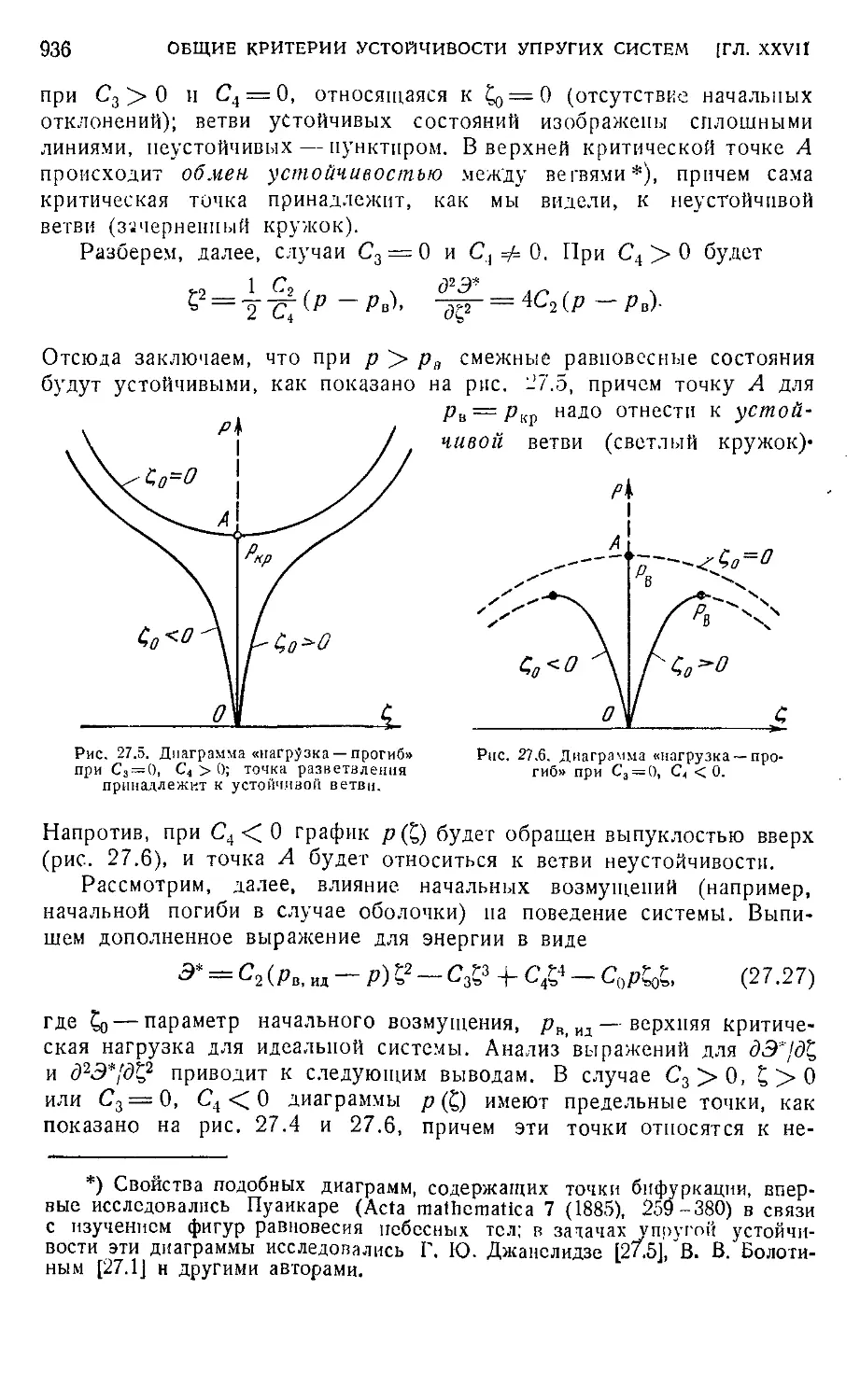
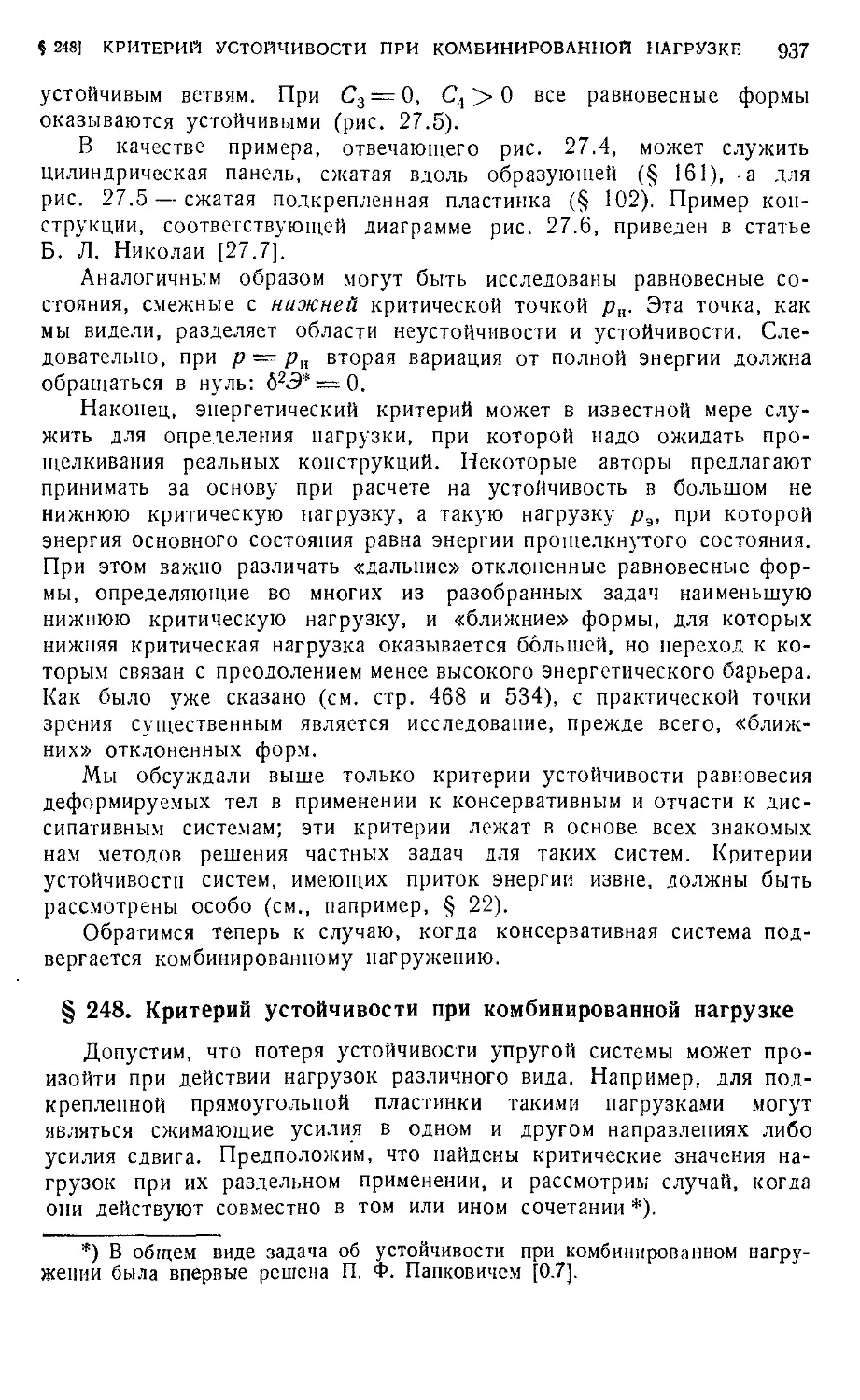
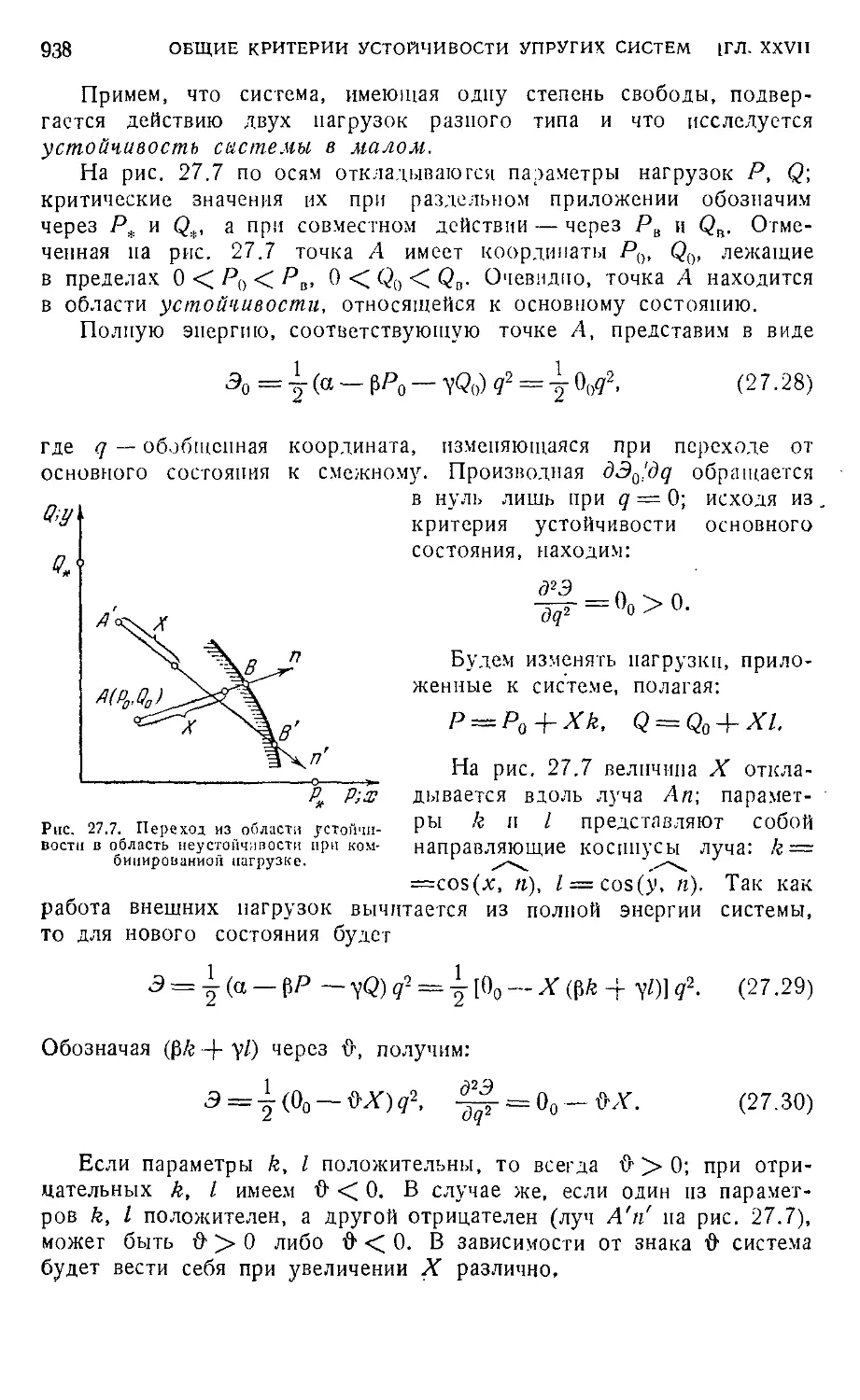
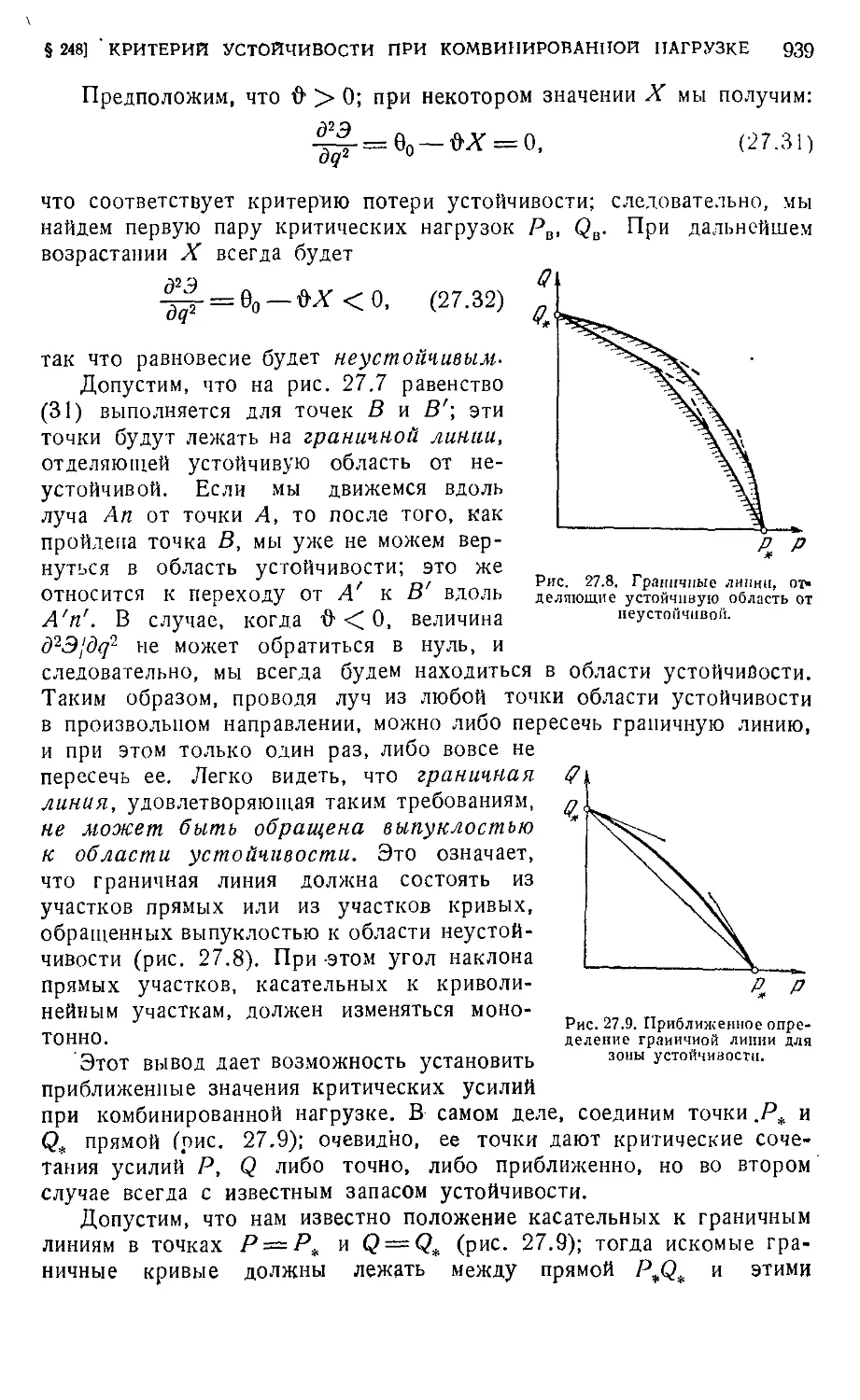
§ 247. Равновесные формы вблизи точек бифуркации 934
§ 248. Критерий устойчивости при комбинированной нагрузке . . . 937
§ 249. Некоторые задачи для дальнейших исследований 940
Литература 945
Именной указатель 976
Предметный указатель 981
ИЗ ПРЕДИСЛОВИЯ К ПЕРВОМУ ИЗДАНИЮ
Теории устойчивости упругих систем посвящен ряд монографий,
опубликованных в СССР и за рубежом. В 1935—1950 гг. были
изданы книги А. Н. Динника «Устойчивость упругих систем»,
«Продольный изгиб» и «Устойчивость арок». В 1936 г. была опубликована
книга С. П. Тимошенко «Устойчивость упругих систем», перевод
которой дважды издавался в Советском Союзе. В 1939 г. вышла
книга И. Я. Штаермана и А; А. Пиковского «Теория устойчивости
упругих систем».
В известных курсах строительной механики корабля,
принадлежащих И. Г. Бубнову A912—1914 гг.) и П. Ф. Папковичу A941 г.),
много внимания уделено расчетам на устойчивость стержней и
пластинок. В книгах В. 3. Власова «Тонкостенные упругие стержни»
A-е изд.—1940 г.) и «Общая теория оболочек» A949 г.) изложены
его исследования по устойчивости тонкостенных стержней и оболочек.
А. А. Ильюшин отвел значительное место в монографии
«Пластичность» A948 г.) задачам об устойчивости стержней и пластинок
за пределами упругости. Вопросы устойчивости различных
конструкций рассмотрены в книге К. Бицено и Р. Граммеля «Техническая
динамика» A940 г.) и в труде «Расчеты на прочность в
машиностроении» под ред. С. Д. Пономарева A952—1959 гг.). В
последние годы были опубликованы монографии В. В. Болотина, X. М. Му-
штари и К. 3. Галимова, А. Р. Ржаницына, Н. С. Стрелецкого,
Ф. Блейха, К. Колбруннера и М. Мейстера, В. Пфлюгера и других
авторов, посвященные актуальным областям теории устойчивости
и практическим методам расчета элементов конструкций.
От многих из перечисленных монографий эту книгу отличает
прежде всего ее общая направленность. Автор поставил перед собой
цель подытожить исследования по тем разделам теории устойчивости
стержней, пластинок и оболочек, которые имеют в настоящее время
наибольшее практическое значение. В книге рассмотрен ряд новых
задач, возникших в последние годы в связи с требованиями
промышленности, в особенности авиастроения и строительства.
Изложены, в частности, теоретические и экспериментальные данные,
полученные автором и его сотрудниками по динамической устойчивости
упругих систем, выпучиванию оболочек при ползучести и т. д.
12
ИЗ ПРЕДИСЛОВИЯ К ПЕРВОМУ ИЗДАНИЮ
В книге приведены таблицы и графики, которые могут быть
непосредственно использованы в практических расчетах. Даны
некоторые числовые примеры.
В конце книги приведена библиография ко всей книге и по
отдельным разделам. В списке литературы представлены далеко не все
опубликованные работы. Автор стремился привести прежде всего
те источники, в которых дана более подробная библиография по тем
или иным частным задачам.
Формулы и рисунки нумеруются по главам. Ссылки па формулы
в пределах данной главы даются без указания номера главы.
Глава XIII (во втором издании — XV) и § 160 главы XV (во втором
издании —§ 189 главы XVIII) написаны по просьбе автора И. И. Тра-
пезиным, глава XVI (во втором издании — XIX)—Л. М. Куршнным.
Рукопись книги была внимательно прочитана В. И. Феодосьевым.
Он сделал ряд ценных замечаний, учтенных при окончательном
редактировании книги. Отдельные разделы книги были просмотрены
В. В. Болотиным, И. И. Воровичем, В. М. Даревским, Б. Г.
Кореневым, Г. Ф. Лаптевым, Б. П. Макаровым, Р. Г. Суркиным,
А. А. Уманским. Помощь автору по техническому оформлению
рукописи была оказана И. Н. Землянских, И. Г. Кильдибековым
и Э. Д. Скурлатовым. Всем этим лицам автор выражает глубокую
благодарность.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Со времени, когда появилось первое издание этой книги
(«Устойчивость упругих систем», Физматгиз, 1963), прошло три года.
За такой короткий срок в теории устойчивости упругих систем
возникло много новых вопросов, новых направлений. Подготавливая
второе издание, автор стремился отразить эти современные проблемы
и методы их решения*).
Прежде всего запросы ракето- и авиастроения,
кораблестроения и других областей техники заставили усиленно заниматься
теорией динамической устойчивости в широком смысле слова.
Речь идет о поведении конструкций при действии быстро
меняющихся во времени и собственно ударных нагрузок. Отсюда — две
новые главы в книге, посвященные устойчивости стержней, пластинок
и оболочек при ударе. Поведение сооружений часто надо
рассматривать, учитывая их взаимодействие с окружающей средой. К главе
первого издания, посвященной вопросам аэроупругости,
присоединилась теперь глава, относящаяся к гидроупругости. Здесь рас-
*) Изменение названия книги объясняется тем, что ряд разделов в ней,
дополненных во втором издании, посвящен упруго-пластическим
конструкциям. Термин «деформируемые системы» трактуется здесь условно: речь идет
о твердых деформируемых телах.
ПРЕДИСЛОВИИ КО ВТОРОМУ ИЗДАНИЮ 13
смотрены вопросы о поведении оболочек, погруженных п жидкость,
под действием акустической ударной волны, а также о
динамических явлениях в трубопроводе со сжимаемой жидкостью; в связи
с этим затронуты некоторые задачи биофизики. Динамические
процессы нагружения конструкций во многих случаях надо
рассматривать как случайные. Эго относится, например, к влиянию шума,
излучаемого реактивными двигателями, на элементы конструкции
летательного аппарата. В дополнение к главе первого издания по
статистическим методам дана теперь глава, посвященная случайным
процессам.
Теория устойчивости оболочек привлекает к себе в последние
годы наибольшее внимание. Были получены, па'первый взгляд,
неожиданные результаты, касающиеся решения классических задач по
устойчивости круговых цилиндрических оболочек, в связи с учетом
граничных условий. Кроме того, большое практическое значение имеет
рассмотрение оболочек сравнительно сложной конфигурации, все
шире применяемых ныне в инженерных сооружениях. В настоящей
книге введена в связи с этим глава, относящаяся к тороидальным
оболочкам.
В небольшой главе, относящейся к рамам и фермам, освещены
некоторые новые вопросы расчета па устойчивость современных
строительных конструкций.
В методическом отношении теория устойчивости упругих
систем претерпевает в настоящее время резкие сдвиги. Они связаны,
с одной стороны, с более строгой формулировкой критериев
устойчивости— прежде всего для нелинейных задач. С другой стороны,
сильное влияние па методы решения различных задач оказало
использование электронных цифровых быстродействующих машин. .Машину
гораздо проще применить для решения задачи с начальными
условиями, чем для непосредственного определения собственных значений
при заданных граничных условиях. Это предопределяет
тенденцию отказа от классической постановки задачи о собственных
значениях; предлагается находить критические нагрузки как бы
косвенным путем — с описанием всей истории деформации конструкции,
при определенных заданных возмущениях. Такое направление
отражено в некоторых дополнительных разделах первых глав книги.
Специфическими в связи с применением вычислительных машин являются
и методы математического оптимального программирования —
в частности, динамического программирования,—освещенные в
первой главе. Надо обратить внимание также на метод множителей
Лагранжа, успешно использующийся в последние годы для
решения ряда задач устойчивости.
Широкое применение электронных машин к решению
нелинейных задач по теории устойчивости оболочек позволило получить
в последние годы уточненные значения нижних критических
нагрузок. Это заставляет в известной мере пересмотреть рекомендации
14 ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
для практических расчетов оболочек на устойчивость. Относящиеся
сюда новые данные приведены в главах XII, XIII и XVI.
Упруго-пластические системы изучаются в настоящее время прежде
всего с точки зрения их поведения при различной истории нагру-
жения; представляет интерес исследование так называемых
разгружающих систем. Получают применение к задачам устойчивости новые
теории пластичности. Эти вопросы освещены дополнительно во
второй и десятой главах.
Библиография в книге доведена до середины 1966 г.; ссылки на
работы 1963— 1966 гг. даны главным образом в подстрочных
примечаниях.
Материал второго издания был тщательно просмотрен Л. И. Ба-
лабухом и И. К. Снитко; их замечания были для автора очень
важными. Существенную помощь автору при составлении отдельных
разделов оказали М. С. Герштейн, И. Г. Кильдибеков, Э. Д. Скур-
латов. Автор учел также некоторые указания читателей первого
издания книги. Всем им автор приносит искреннюю благодарность.
Москва, ноябрь 1966 г.
А. Вольмир
Теория, мой друг, суха.
Но зеленеет жизни древо.
ГЕТЕ, «ФАУСТ».
ГЛАВА I
УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ В ПРЕДЕЛАХ
УПРУГОСТИ
§ 1. Основные понятия
С понятием устойчивости, которое будет неоднократно
встречаться в этой книге, каждый читатель сталкивается повседневно.
Рассмотрим, например, равновесные положения тяжелого шарика,
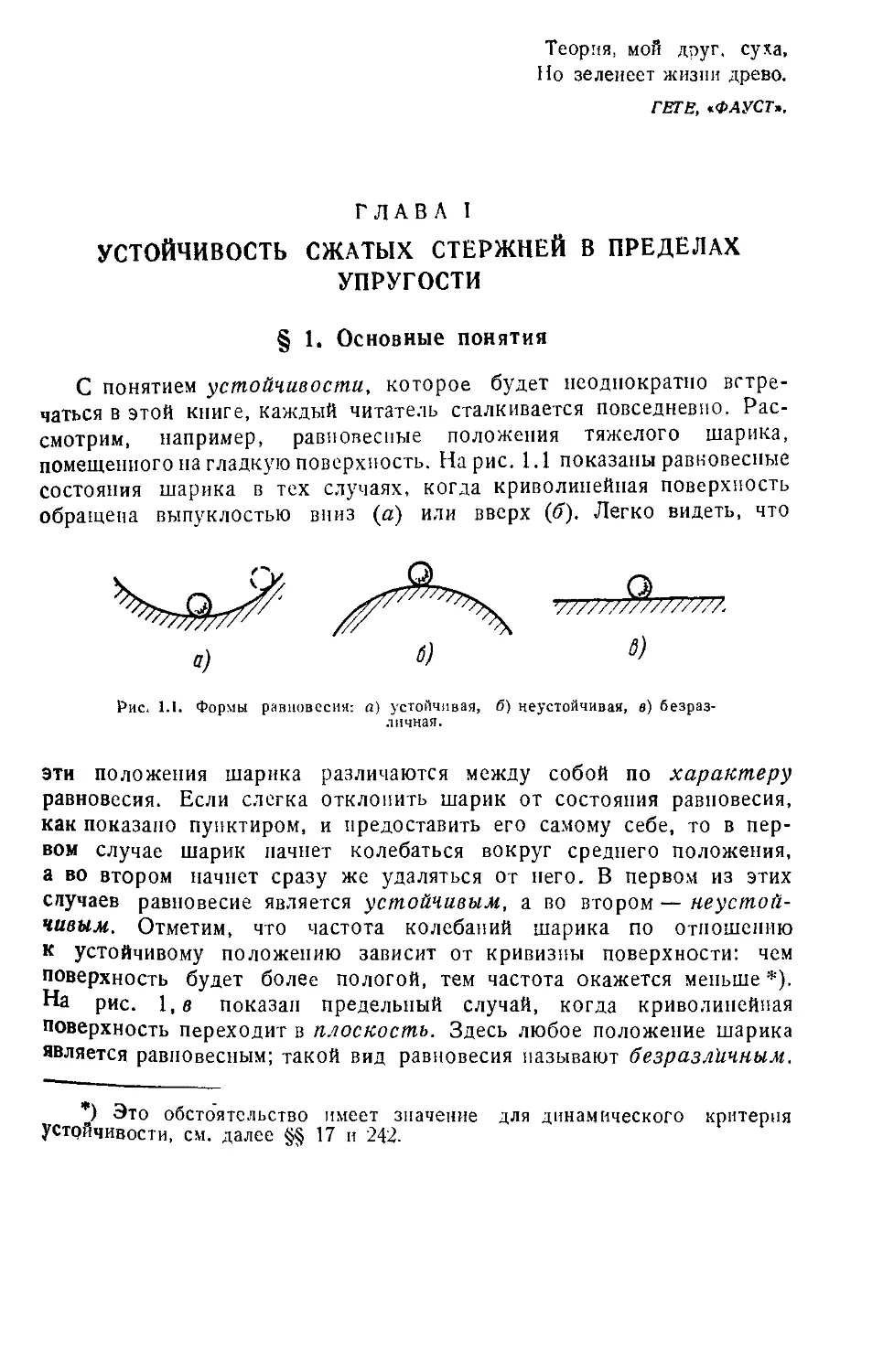
помещенного на гладкую поверхность. На рис. 1.1 показаны равновесные
состояния шарика в тех случаях, когда криволинейная поверхность
обращена выпуклостью вниз (а) или вверх (б). Легко видеть, что
VaJ^ /f^\, •"»"%»'""■
,> a s>
Рис. 1.1, Формы равновесия: й) устойчивая, б) неустойчивая, в)
безразличная.
эти положения шарика различаются между собой по характеру
равновесия. Если слегка отклонить шарик от состояния равновесия,
как показано пунктиром, и предоставить его самому себе, то в
первом случае шарик начнет колебаться вокруг среднего положения,
а во втором начнет сразу же удаляться от него. В первом из этих
случаев равновесие является устойчивым, а во втором —
неустойчивым. Отметим, что частота колебаний шарика по отношению
к устойчивому положению зависит от кривизны поверхности: чем
поверхность будет более пологой, тем частота окажется меньше *).
™ рис. 1,в показан предельный случай, когда криволинейная
поверхность переходит в плоскость. Здесь любое положение шарика
является равновесным; такой вид равновесия называют безразличным.
) Это обстоятельство имеет значение для динамического критерия
устойчивости, см. далее §§ 17 и 242.
16
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
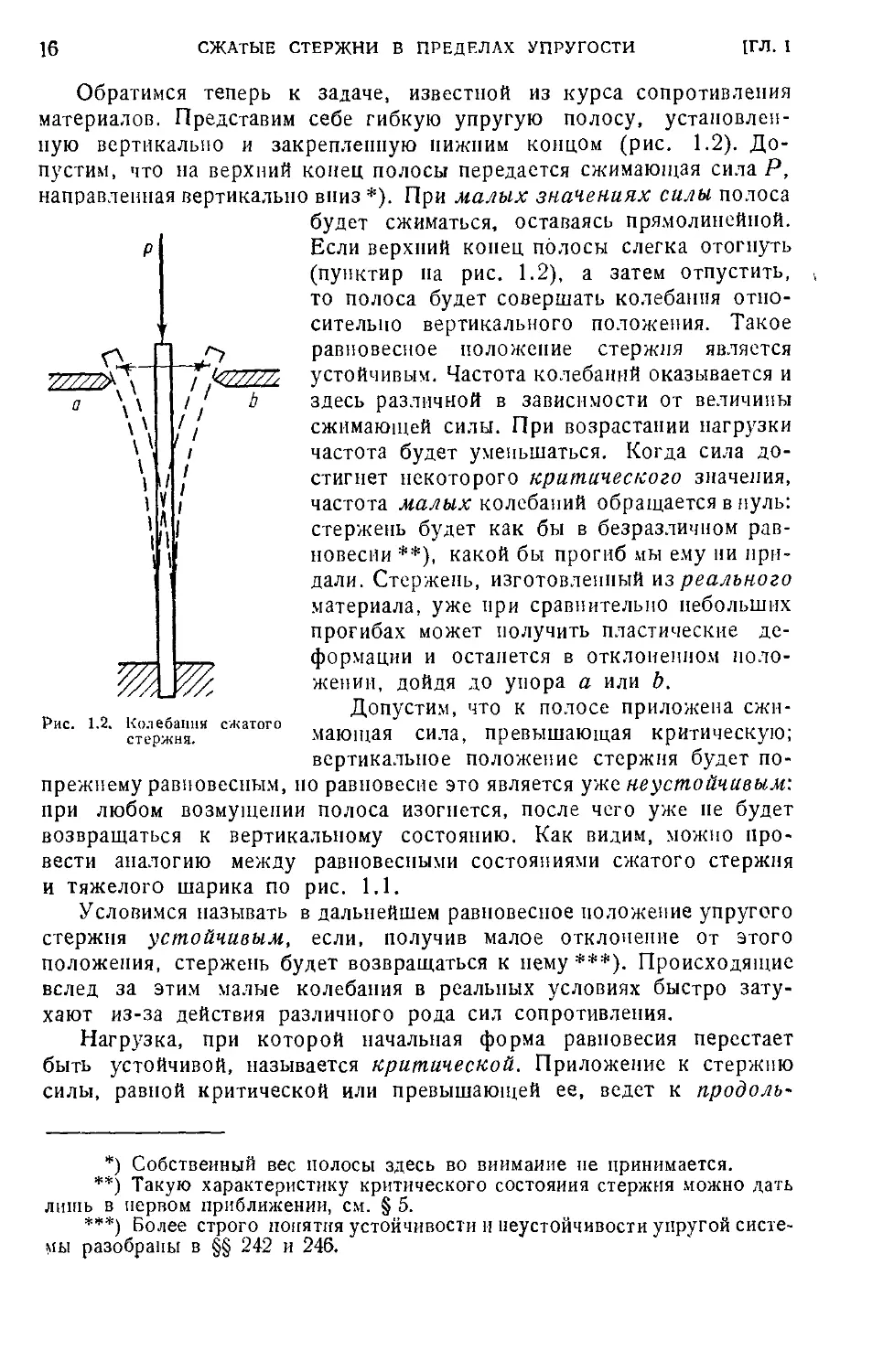
Обратимся теперь к задаче, известной из курса сопротивления
материалов. Представим себе гибкую упругую полосу,
установленную вертикально и закрепленную нижним концом (рис. 1.2).
Допустим, что на верхний конец полосы передается сжимающая сила Р,
направленная вертикально вниз *). При малых значениях силы полоса
будет сжиматься, оставаясь прямолинейной.
Если верхний конец полосы слегка отогнуть
(пунктир на рис. 1.2), а затем отпустить,
то полоса будет совершать колебания
относительно вертикального положения. Такое
равновесное положение стержня является
устойчивым. Частота колебаний оказывается и
здесь различной в зависимости от величины
сжимающей силы. При возрастании нагрузки
частота будет уменьшаться. Когда сила
достигнет некоторого критического значения,
частота малых колебаний обращается в нуль:
стержень будет как бы в безразличном
равновесии **), какой бы прогиб мы ему ни
придали. Стержень, изготовленный из реального
материала, уже при сравнительно небольших
прогибах может получить пластические
деформации и останется в отклоненном
положении, дойдя до уиора а или Ъ.
Допустим, что к полосе приложена
сжимающая сила, превышающая критическую;
вертикальное положение стержня будет по-
прежнему равновесным, но равновесие это является уже неустойчивым:
при любом возмущении полоса изогнется, после чего уже не будет
возвращаться к вертикальному состоянию. Как видим, можно
провести аналогию между равновесными состояниями сжатого стержня
и тяжелого шарика по рис. 1.1.
Условимся называть в дальнейшем равновесное положение упругого
стержня устойчивым, если, получив малое отклонение от этого
положения, стержень будет возвращаться к нему ***). Происходящие
вслед за этим малые колебания в реальных условиях быстро
затухают из-за действия различного рода сил сопротивления.
Нагрузка, при которой начальная форма равновесия перестает
быть устойчивой, называется критической. Приложение к стержню
силы, равной критической или превышающей ее, ведет к продоль-
Рис. 1.2.
Колебания сжатого
стержня.
*) Собственный вес полосы здесь во внимание не принимается.
**) Такую характеристику критического состояния стержня можно дать
лишь в нервом приближении, см. § 5.
***) Более строго понятия устойчивости и неустойчивости упругой
системы разобраны в §§ 242 и 246.
«я
СТЕРЖЕНЬ, ШАРНИРНО ОПЕРТЫЙ ПО КОНЦАМ
17
О L
ному изгибу (изгибу, совершающемуся под действием продольных
сил) *)• *. *
Устойчивыми в закритической области будут уже искривленные
формы равновесия; в критической точке происходит разветвление
(бифуркация) равновесных форм, характеризующееся обменом
устойчивостью между этими формами (см. § 243).
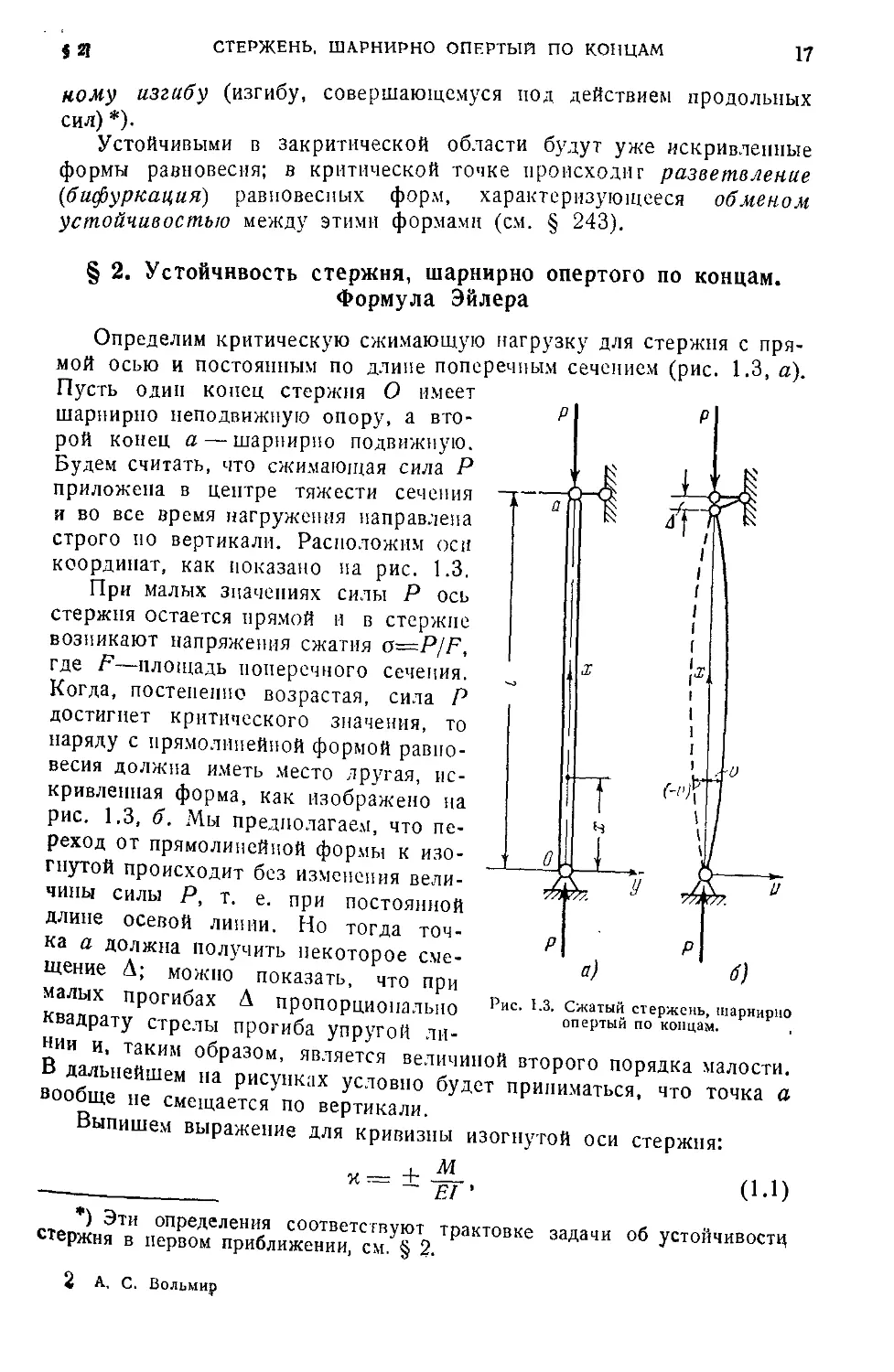
§ 2. Устойчивость стержня, шарнирно опертого по концам.
Формула Эйлера
Определим критическую сжимающую нагрузку для стержня с
прямой осью и постоянным по длине поперечным сечением (рис. 1.3, а).
Пусть один конец стержня О имеет
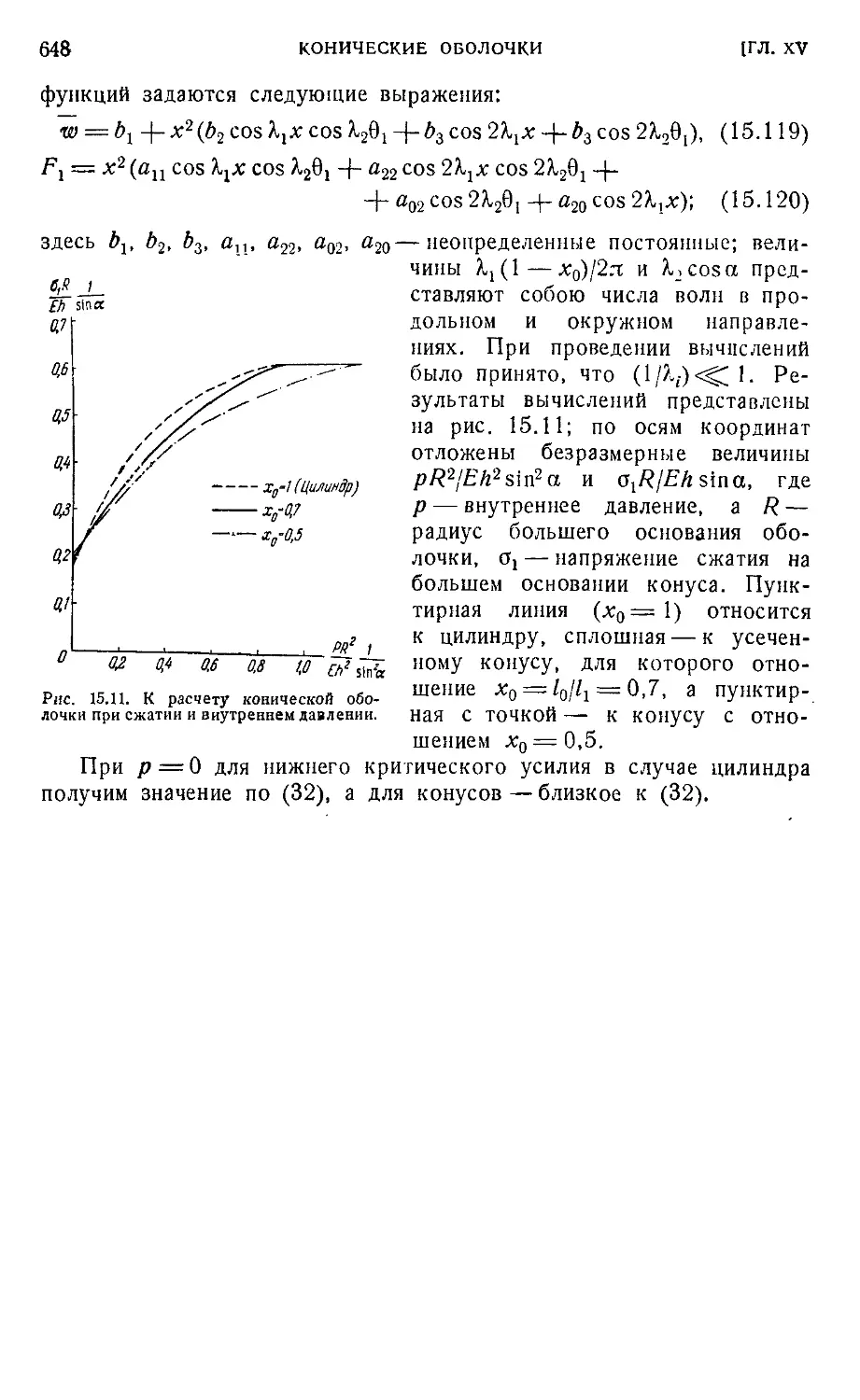
шарнирно неподвижную опору, а
второй конец а — шарнирно подвижную.
Будем считать, что сжимающая сила Р
приложена в центре тяжести сечения
я во все время нагруженмя направлена
строго но вертикали. Расположим оси
координат, как показано на рис. 1.3.
При малых значениях силы Р ось
стержня остается прямой и в стержне
возникают напряжения сжатия o=P/F,
где F—площадь поперечного сечения.
Когда, постепенно возрастая, сила Р
достигнет критического значения, то
наряду с прямолинейной формой
равновесия должна иметь место другая,
искривленная форма, как изображено на
рис. 1.3, б. Мы предполагаем, что
переход от прямолинейной формы к
изогнутой происходит без изменения
величины силы Р, т. е. при постоянной
длине осевой линии. Но тогда
точка а должна получить некоторое
смещение А; можно показать, что при
У/Ш//.
-L
У
а)
МаЛЫХ ПрОГИбаХ А ПрОПОрцИОНалЫЮ Рис- '-3- Сжатый стержень, шарнирно
опертый по концам.
квадрату стрелы прогиба упругой
линии и, таким образом, является величиной второго порядка малости.
В дальнейшем на рисунках условно будет приниматься, что точка а
вообще не смещается по вертикали.
Выпишем выражение для кривизны изогнутой оси стержня:
М
к — ±
FJ '
A.1)
) Эти определения соответствуют трактовке задачи об устойчивости,
стержня в первом приближении, см. § 2.
2 А, С. Вольмир
18
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
где / — момент инерции поперечного сечения, М — изгибающий
момент в некотором сечении.
Общее выражение для кривизны имеет вид
d2v
ыт
где v — прогиб в сечении х; v — v(x).
Будем считать здесь прогибы малыми по сравнению с длиной
стержня. Изогнутая ось будет тогда пологой кривой; считая
{dvjdxJ <^ 1, можно при этом принять
к= + -Ш. A-3)
Изгибающий момент в сечении х равен
M=±Pv. A.4)
Получаем дифференциальное уравнение изогнутой оси в виде
m^^-Pv. A.5)
Как видно из рис. 1.3, при изгибе стержня, соответствующем
сплошной линии, прогиб v положителен, а вторая производная
отрицательна; таким образом, в уравнение типа E) прогиб и вторая
производная входят с разными знаками. Исходя из этого, мы,
независимо от правила знаков для и и М, приходим к одному и тому же
уравнению.
В курсах сопротивления материалов последующее решение задачи
ведут, исходя из уравнения второго порядка типа E). Здесь мы
перейдем от E) к уравнению четвертого порядка, так как это придаст
решению более общий характер и позволит распространить его на
другие граничные условия.
Принимая El — const, продифференцируем E) дважды по х; тогда
получим:
Это соотношение можно также непосредственно получить, исходя
из известного уравнения упругой линии
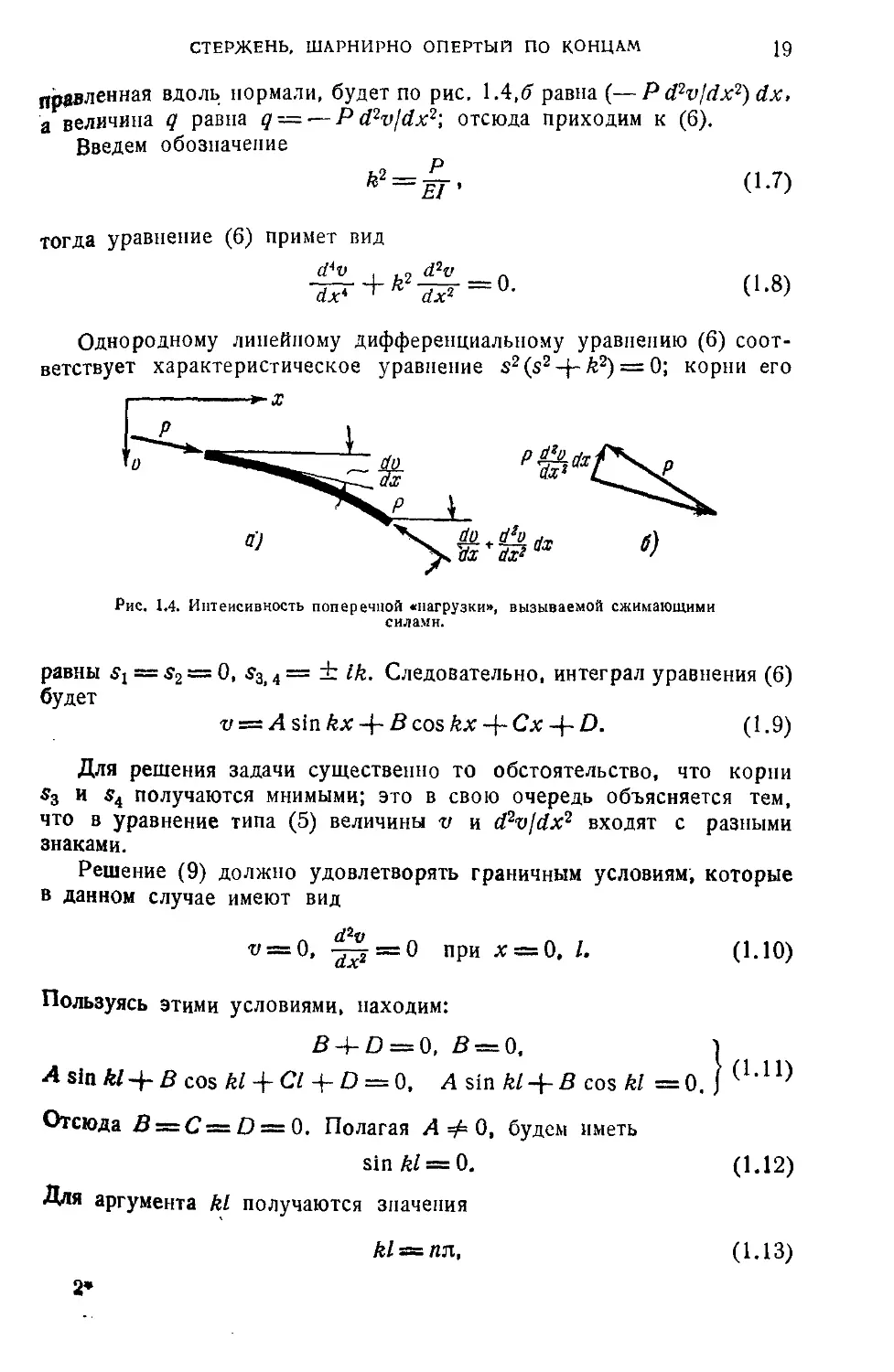
вводя фиктивную поперечную нагрузку интенсивностью q. Рассмотрим
деформированный элемент стержня, находящийся под действием
сжимающих усилий Р (рис. 1.4, а); равнодействующая этих усилий, на-
СТЕРЖЕНЬ, ША.РНИРНО ОПЕРТЫЙ ПО КОНЦАМ
19
правленная вдоль нормали, будет по рис. \Л,б равна (—Pd2v/dx2)dx,
а величина q равна д = — Р d2v\dx2\ отсюда приходим к F).
Введем обозначение
тогда уравнение F) примет вид
d*v . , 9 <Pv
т-т-&2-
dx
dx2
= 0.
A.7)
A.8)
Однородному линейному дифференциальному уравнению F)
соответствует характеристическое уравнение s2(s2-f-ft2) = 0; корни его
Рис. 1.4. Интенсивность поперечной «нагрузки», вызываемой сжимающими
силами.
равны Si = s2 = 0, s3, 4 == — lb" Следовательно, интеграл уравнения F)
будет
v = A sin kx -f £ cos ft* -f Сл; -f D. A.9)
Для решения задачи существенно то обстоятельство, что корни
s3 и s4 получаются мнимыми; это в свою очередь объясняется тем,
что в уравнение типа E) величины v и dtvjdx2 входят с разными
знаками.
Решение (9) должно удовлетворять граничным условиям, которые
в данном случае имеют вид
d*v
A.10)
т/ = 0, -7-z = 0 при х = 0, I.
Пользуясь этими условиями, находим:
£4-D = 0, 5 = 0,
Aslakl-i- Я cos й/+ С'4-£> = 0. A sin kl -f В cos kl =0.) (U1)
Отсюда j5 = C = D = 0. Полагая /i =£ 0, будем иметь
sin kl = 0.
Для аргумента kl получаются значения
kl = «л,
2»
A.12)
A.13)
20 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
где п — произвольное целое число. Отбрасывая решение &/ —0, как
не отвечающее исходным данным задачи, находим:
или, по F),
A2 = JLIL, я= 1, 2, 3, ... A.14)
Р = ^-. 0.15)
Изменяя число п, получаем последовательный ряд значений силы Ру
которым соответствуют различные искривленные равновесные формы.
Под критической силой мы условились понимать силу, при
которой прямолинейная форма равновесия стержня перестает быть
устойчивой. Следовательно, из всех возможных значений силы надо
выбрать наименьшее и принять я=1. Считая, что продольный изгиб
произойдет в плоскости наименьшей жесткости стержня, будем под /
понимать минимальный момент инерции сечения /mIn.
Вводя для критической силы обозначение Рк получаем:
р^=^^-- 0.16)
Формула такого вида была получена Л. Эйлером [1.9], [1.10] и
носит его имя.
Вернемся к уравнению изогнутой оси стержня
т/= A smkx = A sin-pjf. A-17)
Мы получили синусоиду, имеющую, вообще говоря, п полуволн.
Критической силе (при п= 1) соответствует синусоида с одной
полуволной:
v==Asin^ = fsin~; A.18)
здесь A = f — стрела прогиба.
Принимая последовательно п = 2, 3 и т. д., получим
искривленные формы равновесия в виде синусоиды с двумя, тремя и более
полуволнами в пределах длины стержня. При этом сила Р будет
в четыре, девять и т. д. раз превышать критическую величину.
Эти формы равновесия, вообще говоря, неустойчивы, по их можно
осуществить, если перейти к новой системе, поставив в точках
перегиба синусоиды дополнительные шарнирные подкрепления.
Нами подразумевалось, что сжимающее напряжение в стержне
лежит в пределах действия закона Гука, т. е. не превышает предела
пропорциональности материала; следовательно, формулой Эйлера
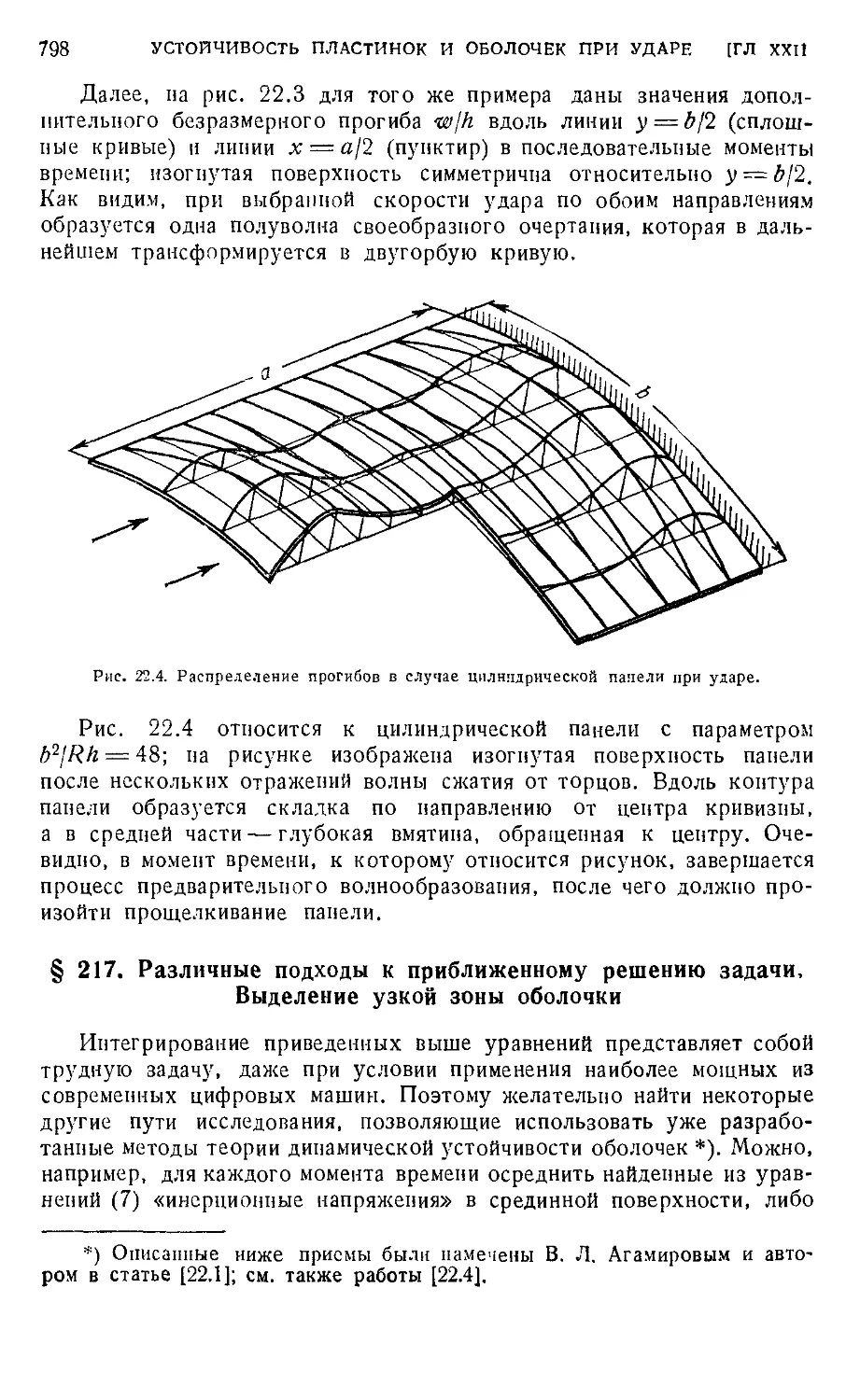
можно пользоваться лишь при этом условии. Напомним также, что
мы применяем приближенное выражение C) для кривизны изогнутой
оси, что является уместным лишь при прогибах, достаточно малых
по сравнению с длиной стержня. Именно поэтому величина стрелы
СТЕРЖЕНЬ, ШАРНИРНО ОПЕРТЫЙ ПО КОНЦАМ
21
Впогиба / осталась в конечном счете неопределенной. В § 5 будет
доказано, что если исходить из «точного» уравнения упругой линии,
то результат получится иной: каждому значению силы Р > Ркр будут
отвечать равновесные формы со вполне определенными прогибами.
Однако в окрестности точки разветвления равновесных состояний
изогнутые формы стержня сколько угодно близки к прямолинейной
форме, и поэтому при определении критической силы мы вправе
исходить из приближенного выражения для кривизны.
С математической точки зрения рассмотренная нами задача
представляет собой задачу о собственных значениях линейного
однородного уравнения типа E). Тривиальное решение w = 0 относится
к начальному, пеискривлеппому равновесному состоянию стержня.
Нетривиальное решение соответствует так называемым
собственным функциям задачи, которые в данном случае имеют вид A7).
Первая и высшие критические силы A5) являются собственными
значениями параметра Р, входящего в основное уравнение, т. е. такими
значениями Р, при которых это уравнение имеет нетривиальное
решение, удовлетворяющее всем граничным условиям задачи *).
Приведем два примера определения критической силы по формуле
Эйлера.
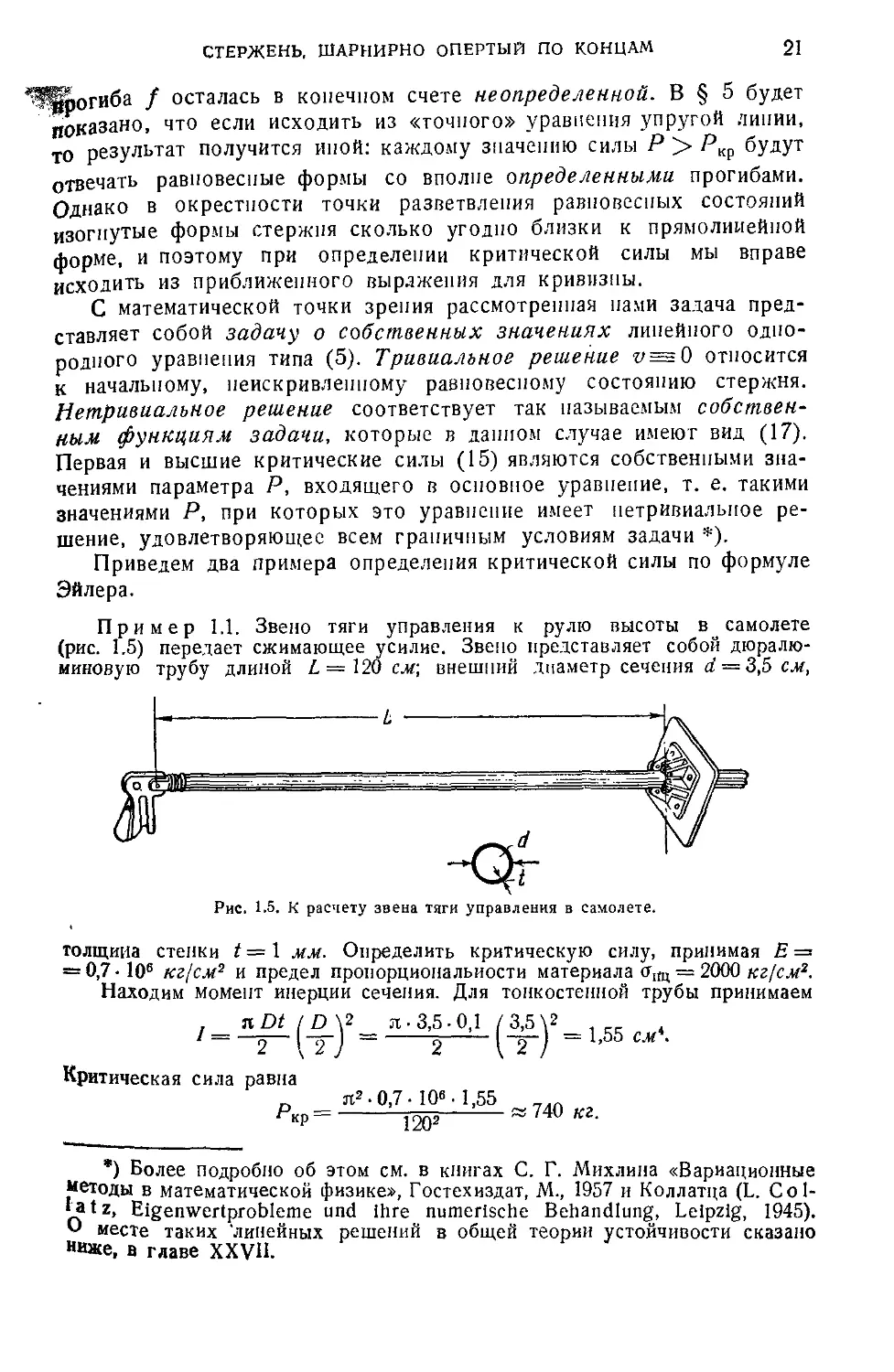
Пример 1.1. Звено тяги управления к рулю высоты в самолете
(рис. 1.5) передает сжимающее усилие. Звено представляет собой дюралю-
миновую трубу длиной L = 120 см; внешний диаметр сечения d = 3,5 см,
Рис. 1.5. К расчету звена тяги управления в самолете.
толщина стенки t = 1 мм. Определить критическую силу, принимая Е =
= 0,7- 10е кг/см2 и предел пропорциональности материала сг1[ц = 2000 кг/см2.
Находим момент инерции сечения. Для тонкостенной трубы принимаем
Критическая сила равна
0 JtJ.0,7. 106.155
Ркр = Т9П2 ~ 740 «г.
*) Более подробно об этом см. в книгах С. Г. Михлина «Вариационные
«етоды в математической физике», Гостехиздат, М., 1957 и Коллатца (L. Col-
О iZ' ^'Senwertprobleme und ihre numerische Behandlung, Leipzig, 1945).
w месте таких 'линейных решений в общей теории устойчивости сказано
"иже, в главе XXVII.
22
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
1ГЛ. I
Площадь сечения F«nfl< = .i. 3,5 • 0,1 = 1,07 см2. Критической силе
соответствует напряжение
740 СПП / 2
а = утг=- = 690 кг/см2,
лежащее ниже предела пропорциональности.
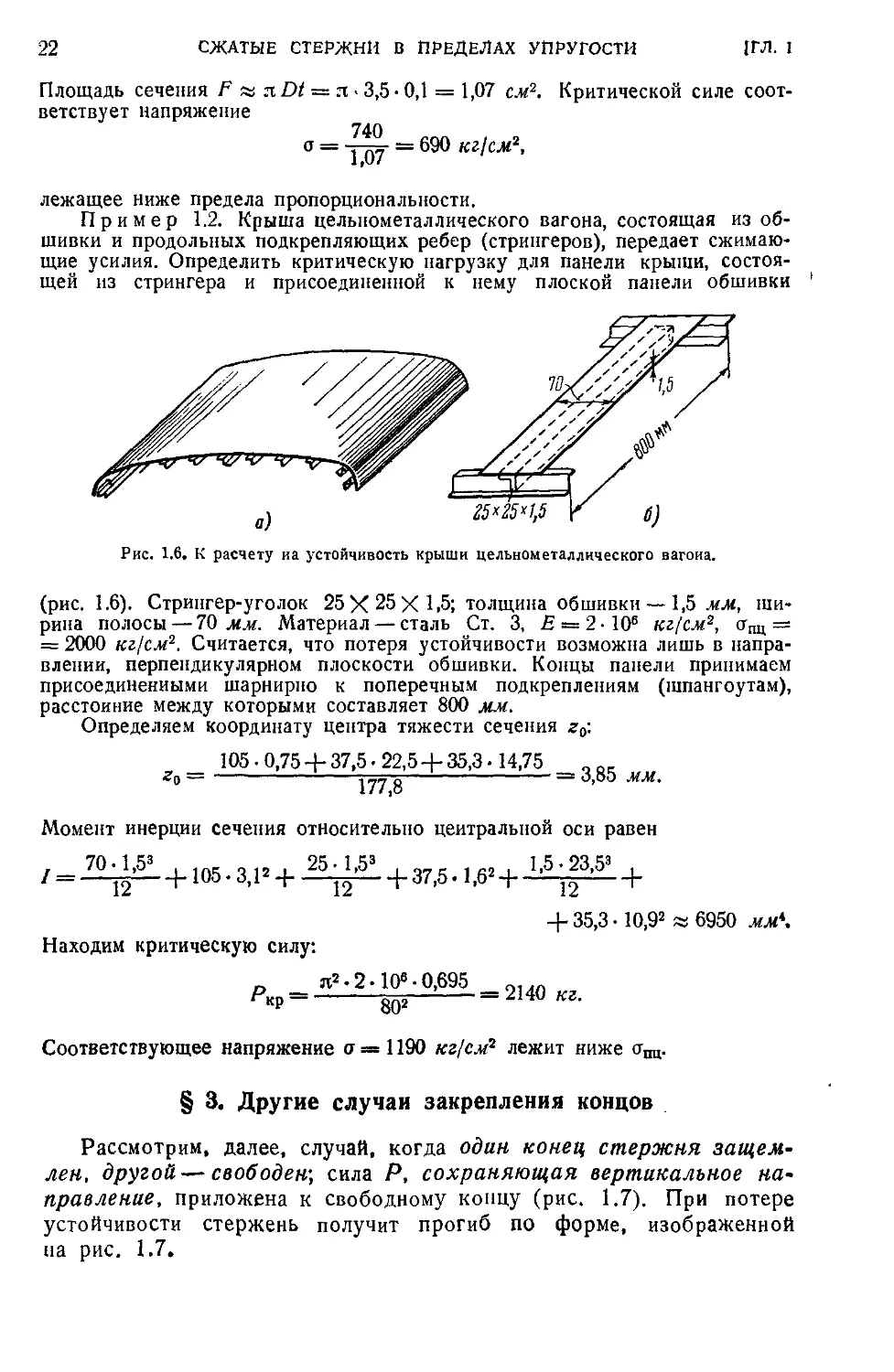
Пример 1.2. Крыша цельнометаллического вагона, состоящая из
обшивки и продольных подкрепляющих ребер (стрингеров), передает
сжимающие усилия. Определить критическую нагрузку для панели крыши,
состоящей из стрингера и присоединенной к нему плоской панели обшивки
д) Ы*Ы*1,-> Г 6)
Рис. 1.6. К расчету иа устойчивость крыши цельнометаллического вагона.
(рис. 1.6). Стрингер-уголок 25X25X1,5; толщина обшивки —1,5 мм,
ширина полосы — 70 мм. Материал — сталь Ст. 3, Е — 2- 10е кг/см3, стПц =
= 2000 кг/см2. Считается, что потеря устойчивости возможна лишь в
направлении, перпендикулярном плоскости обшивки. Концы панели принимаем
присоединенными шарнирно к поперечным подкреплениям (шпангоутам),
расстоиние между которыми составляет 800 мм.
Определяем координату центра тяжести сечения г0:
105-0,75 +37,5-22,5 +35,3-14,75 _
177,8
3,85 мм.
Момент инерции сечения относительно центральной оси равен
/ = 2?_^l+105.3,l2+i5-#l + 37>5.1,62+ 1'5-23'53 ■
12
Находим критическую силу:
12 '
+ 35,3 -10,92 « 6950 мм*.
я2-2-10е-0,695
: 2140 кг.
КР— 802
Соответствующее напряжение а = 1190 кг/см2 лежит ниже ат.
§ 3. Другие случаи закрепления концов
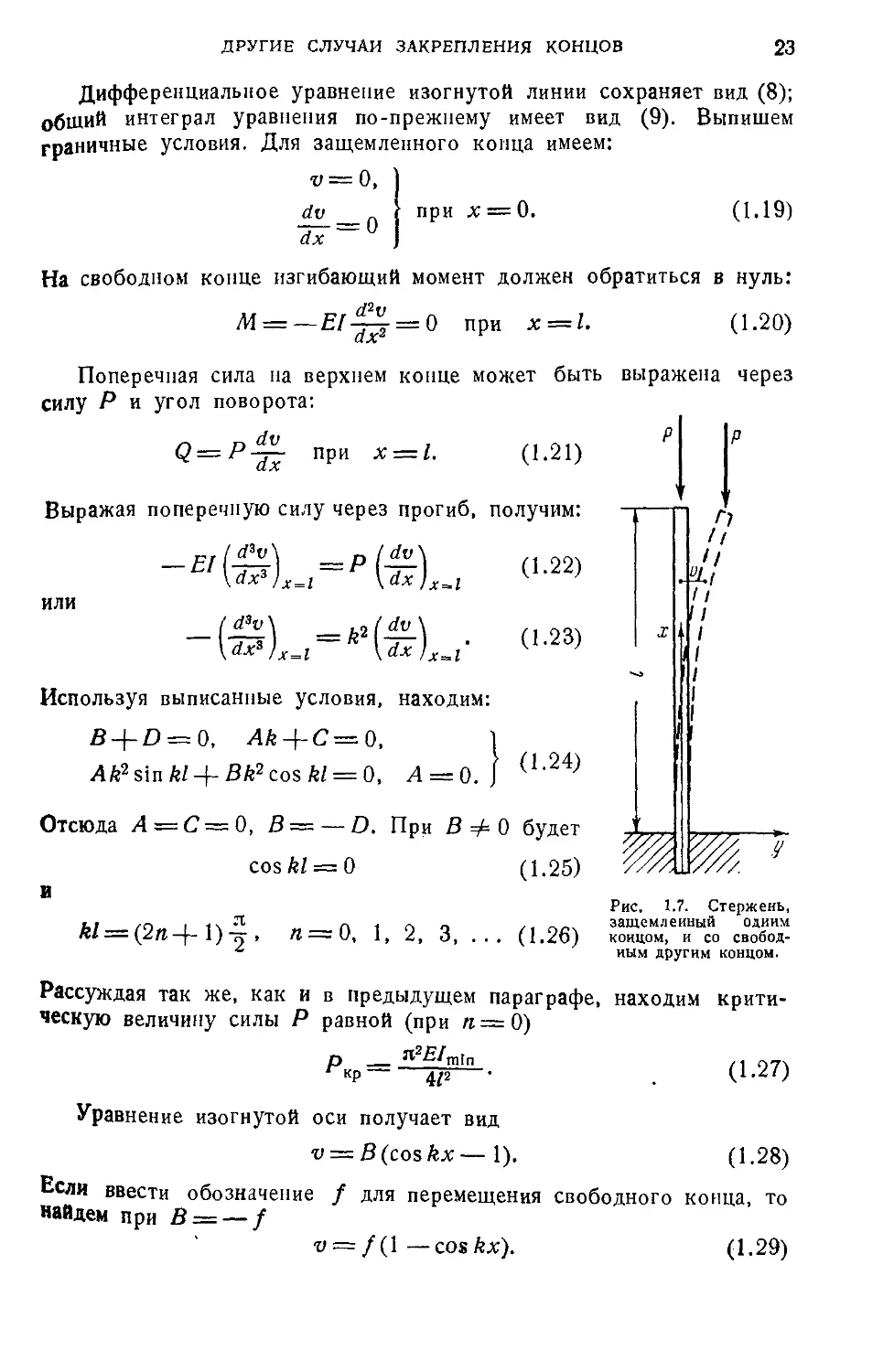
Рассмотрим, далее, случай, когда один конец стержня
защемлен, другой — свободен; сила Р, сохраняющая вертикальное
направление, приложена к свободному концу (рис. 1.7). При потере
устойчивости стержень получит прогиб по форме, изображенной
на рис. 1.7.
ДРУГИЕ СЛУЧАИ ЗАКРЕПЛЕНИЯ КОНЦОВ
23
Дифференциальное уравнение изогнутой линии сохраняет вид (8);
обший интеграл уравнения по-прежнему имеет вид (9). Выпишем
граничные условия. Для защемленного конца имеем:
v = 0, \
dv
dx
= 0
при х = 0.
A.19)
На свободном конце изгибающий момент должен обратиться в нуль:
d2v
Л4 = —£/-j-j- = 0 при х = 1.
A.20)
Поперечная сила на верхнем конце может быть выражена через
силу Р и угол поворота:
Q-
dv
dx
при X = l.
A.21)
Выражая поперечную силу через прогиб, получим:
■EI
d3v\
dx3)
x=i
\dx jx=,i
или
\tt-xs/x=i \dx)x„t
A.22)
A.23)
A.24)
П
It
ж!
7/
i
i
i
Используя выписанные условия, находим:
B-\-D = 0, Л/г + С = 0,
Ak2 sin kl + 5ft2 cos kl = 0, A = 0.
Отсюда А = С — 0, B — — D. При ВфО будет
cosfc/ = 0 A.25)
в
Рис. 1.7. Стержень,
Ы /о i 1\ л г\ 1 г. о /л г.^ч защемленный одним
"»— \*tl —(- 1) -к > Л = U, 1, 2, о, ... A.26) концом, и со свобод-
^ иым другим концом.
Рассуждая так же, как и в предыдущем параграфе, находим
критическую величину силы Р равной (при п=0)
Ркр=-
4/2
A.27)
Уравнение изогнутой оси получает вид
v = B(coskx—1). A.28)
Если ввести обозначение / для перемещения свободного конца, то
найдем при В = — /
v = f{\ —cos kx). A.29)
24 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. 1
х — 0, /,
л; = 0, /.
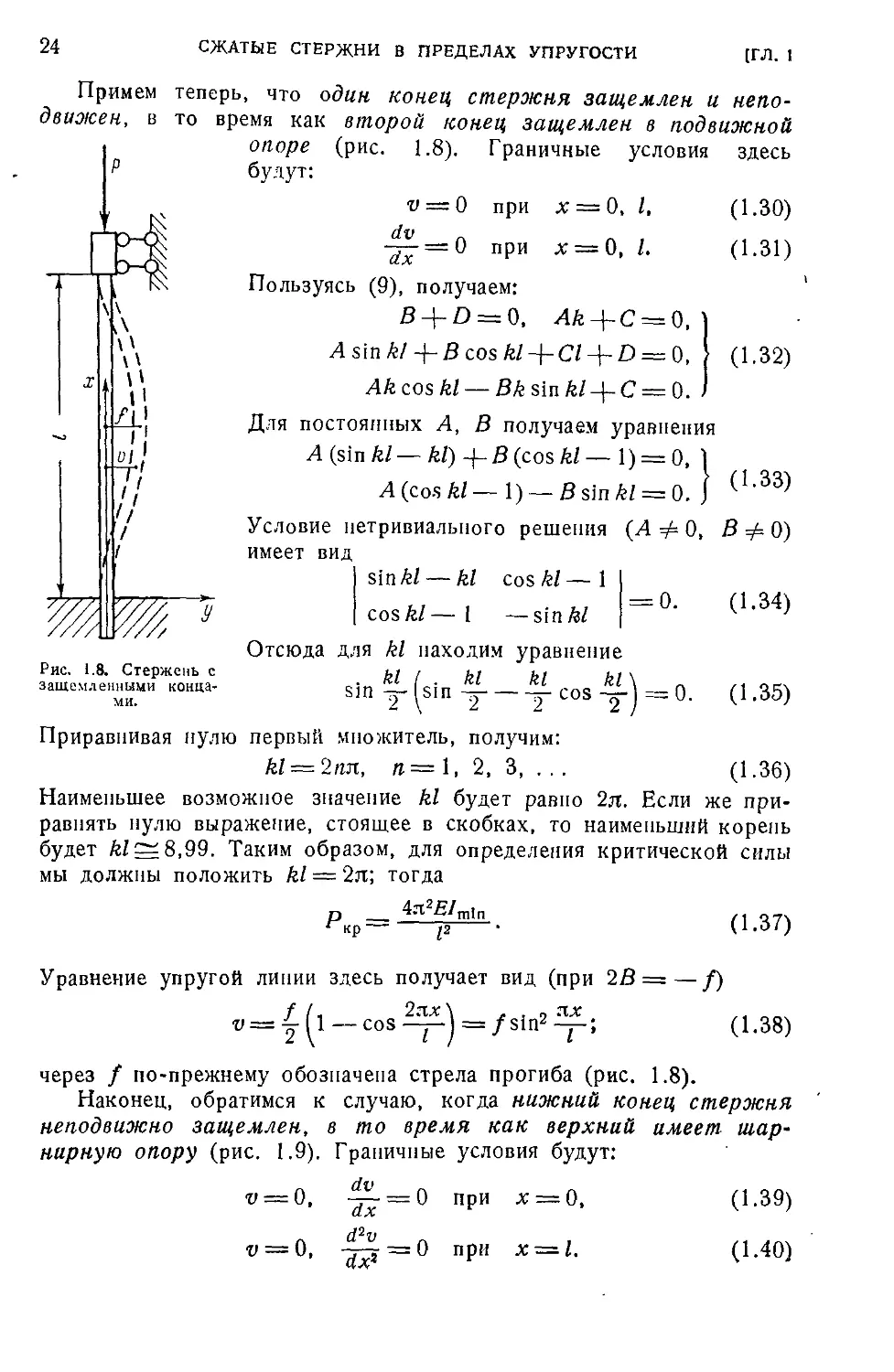
Примем теперь, что один конец стержня защемлен и
неподвижен, в то время как второй конец защемлен в подвижной
опоре (рис. 1.8). Граничные условия здесь
будут:
■у = 0 при
dv „
^ = 0 при
Пользуясь (9), получаем:
fl-|-O = 0. Ak-{-C = 0,
Asmk/-\-Bcoskl + Cl + D = 0,
Ak cos kl — Bk sin kl-\-C — Q.
Для постоянных А, В получаем уравнения
A (sin kl —kt)-\-B (cos kl — 1) = 0,
Л (cos/г/— 1) — £sin&/ = 0.
Условие нетривиального решения (Л Ф О, В ФО)
имеет вид
sin/%/ — A:/ cos kl — 1
cos kl— I —sin As/
A
W
\\
И
11
7/
У
= 0.
A.30)
A.31)
A.32)
A.33)
A.34)
Рис. 1.8. Стержень с
защемленными
концами.
Отсюда для kl находим уравнение
kl 1_._ kl
sin -J- I sin l?
kl kl \ n
~Y cos —1 = 0.
A.35)
A.36)
Приравнивая нулю первый множитель, получим:
М — 2пя, п=\, 2, 3, ...
Наименьшее возможное значение kl будет равно 2л. Если же
приравнять нулю выражение, стоящее в скобках, то наименьший корень
будет kl ^8,99. Таким образом, для определения критической силы
мы должны положить kl = 2jt; тогда
Р = ■
' кр —
/2
A.37)
/)
A.38)
Уравнение упругой линии здесь получает вид (при 2В =
/ /, 2пх\ , . 0 пх
« = ^^l-cos-r) = /sm'-r;
через / по-прежнему обозначена стрела прогиба (рис. 1.8).
Наконец, обратимся к случаю, когда нижний конец стержня
неподвижно защемлен, в то время как верхний имеет
шарнирную опору (рис. 1.9). Граничные условия будут:
= 0, 4^ = 0 ПРИ * = 0. A.39)
х/ = 0,
dx
d2v
dx3
= 0
= 0
при
х — 0,
х=-1.
A.40)
ДРУГИЕ СЛУЧАИ ЗАКРЕПЛЕНИЯ КОНЦОВ
25
Между постоянными выражения (9) получим соотношения:
B-\-D = 0, Ak+C = 0,
A sin kl -4- В cos kl -4- CI -f D = 0,
Asinkl-{-Bcoskl=Q.
При Л =£ 0, — D = fi = — Л&/, С = — Ak будем иметь
sin kl — kl cos A/ -— 0
A.41)
или
\gkl = kl.
A.42)
j—m
w
/
7777Л
'////.
_L_t
v-ZO
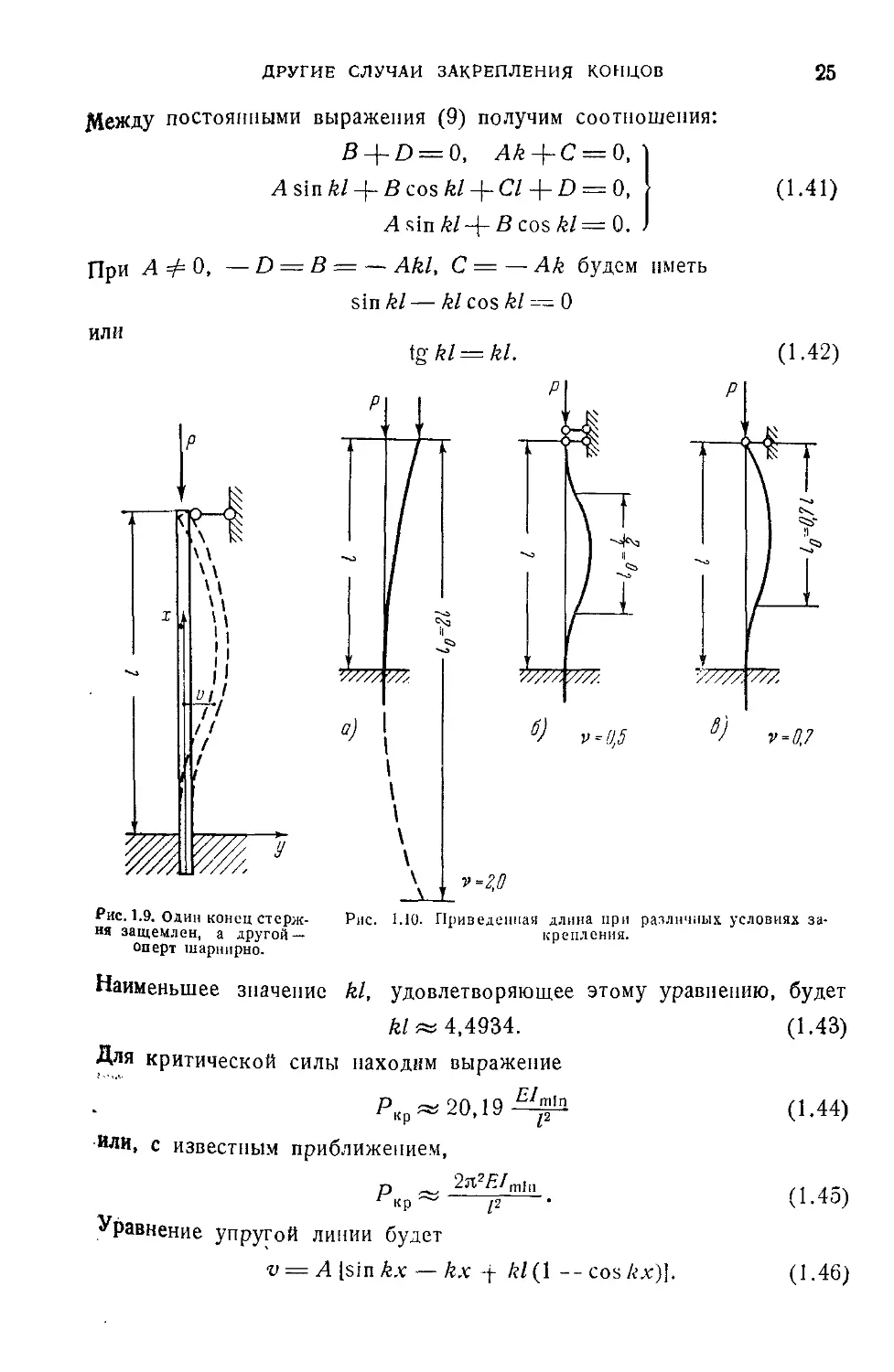
Рис. 1.9. Один конец стерж- Рис. 1.10. Приведенная длина при различных условиях за-
ня защемлен, а другой— крепления.
оперт шарнирно.
Наименьшее значение kl, удовлетворяющее этому уравнению, будет
А/« 4,4934. A.43)
Для критической силы находим выражение
Ркр~ 20,19^ A.44)
Или, с известным приближением,
Уравне]
' Up ~ /2
ние упругой линии будет
■у = Л [sin /fe.v — &.v -f W(l -- cos/ex)].
A.45)
A.46)
26
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. t
На рис. 1.10 сопоставлены упругие линии для рассмотренных
случаев закрепления. Формулу Эйлера можно записать теперь в
обобщенном виде:
или
кр-
Р =
* Кр
1с\
я*£/„
(v*J
A.47)
A.48)
Под /0 понимается приведенная длина стержня. При произвольных
граничных условиях ее можно трактовать как длину эквивалентного
стержня, имеющего по концам шарнирные опоры. Величину \ = l0jl
называют коэффициентом приведения длины *); он равен
отношению длины полуволны синусоиды к действительной длине стержня;
на рис. 1.10 полуволна сину-
г'* соиды выделена; здесь же
приведены значения v.
Величине Ркр по
D7)соответствует критическое
напряжение в поперечном сечении,
равное
^//////7///////.
JKP"
_кр
F
л2£/
mln
(xlf F
A.49)
Обозначим через imln
минимальный радиус инерции
поперечного сечения:
Рис.
*;
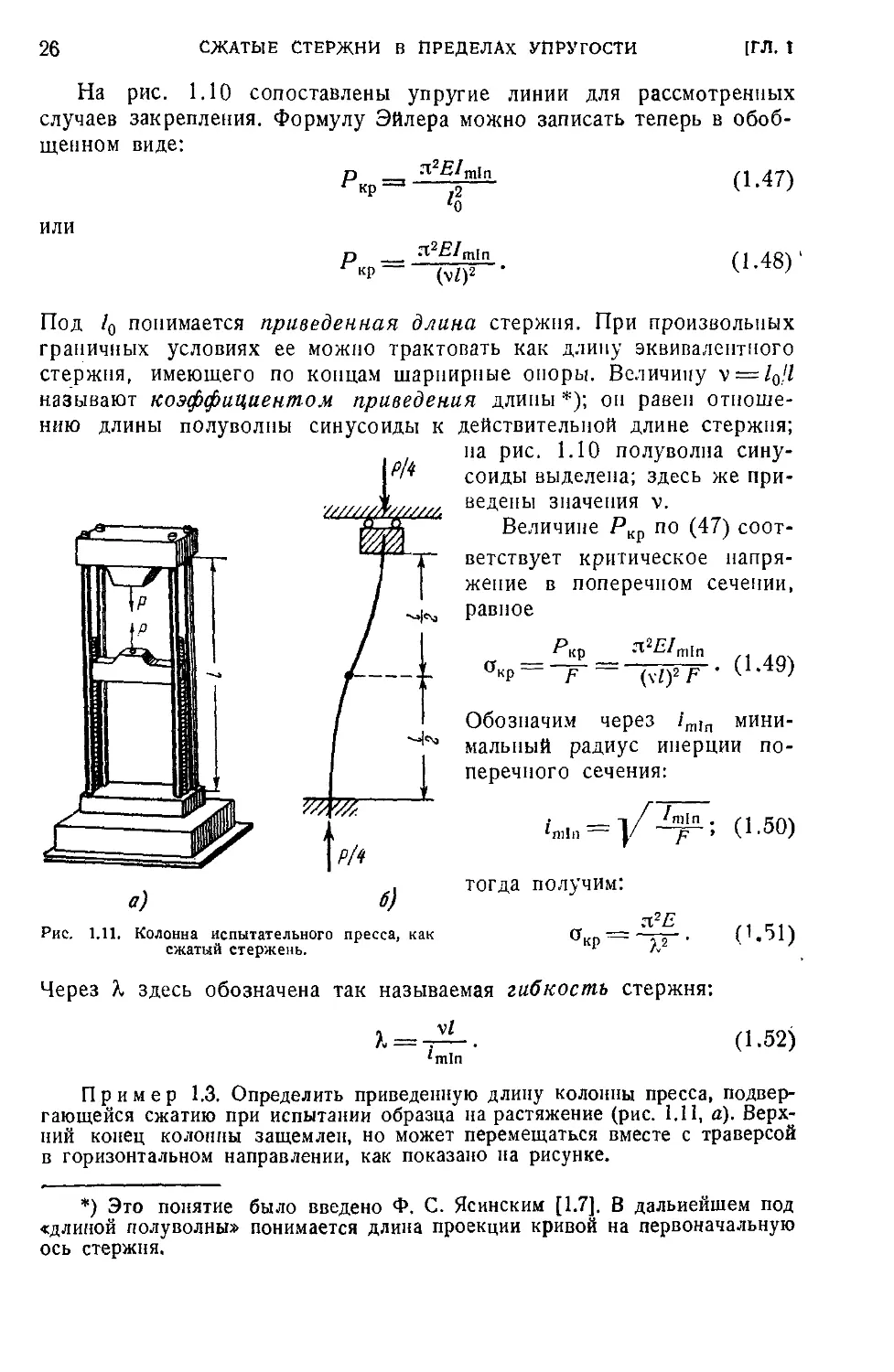
1.11. Колонна испытательного пресса, как
сжатый стержень.
'mln — "J/
тогда получим:
<т,
Л2Е
кр
>.2
Через X здесь обозначена так называемая гибкость стержня:
vl
'mln
А,
A.50)
A.51)
A.52)
Пример 1.3. Определить приведенную длину колонны пресса,
подвергающейся сжатию при испытании образца на растяжение (рис. 1.11, а).
Верхний конец колонны защемлен, но может перемещаться вместе с траверсой
в горизонтальном направлении, как показано на рисунке.
*) Это понятие было введено Ф. С. Ясинским [1.7]. В дальнейшем под
«длиной полуволны» понимается длина проекции кривой на первоначальную
ось стержня.
вд}. РАВНОВЕСНЫЕ ФОРМЫ В ЗАКРИТИЧЕСКОИ ОБЛАСТИ 27
Изогнутая ось имеет одну точку перегиба. Каждую половину колонны
можно уподобить стержню, один конец которого защемлен, а второй
свободен (рис. 1.Ю а). Следовательно, коэффициент приведения длины для
половины колонны будет v,/ = 2. Для всей колонны получаем v = 1.
§ 4. Пределы применимости формулы Эйлера
Как уже говорилось, формула Эйлера справедлива при условии,
что деформация сжатия стержня вплоть до момента потери
устойчивости подчиняется закону Гука. Иными словами, критическое
напряжение не должно превышать предела пропорциональности для данного
материала:
<ТКР<<ТШ1, О'53)
ИЛИ
-^<<W A-54)
Предельная «упругая» гибкость стержня, т. е. наименьшая
гибкость, при которой еще можно пользоваться формулой Эйлера, будет
h = *V-^- A-55)
Г опц
Условие E3) получает вид
1>К. A.56)
Пример 1.4. Определить предельные гибкости А, для стержней из
стали и дюралюмина. Примем для стали марки Ст. 3 Е = 2 • 10е кг/см2 и
<Тпд = 2000 кг/см2. Тогда А„ = л У1000 « 100. Для дюралюмина будем считать
Е = 7,5• 105 кг/см2 иаи= 2000 кг/см2. При этом А, = яУШ « 60.
§ б. Равновесные формы в закритической области
До сих пор мы ставили перед собой цель определить первую
критическую силу, предполагая, что для сжатого стержня она является
предельной. Действительно, для элементов металлических конструкций
достижение нагрузкой критической величины сопропождается
значительными деформациями и, как правило, приводит к исчерпанию их
несущей способности. Однако в некоторых случаях, например для
гибких тонких полос, приходится вести расчет, исходя из того, что
элемент конструкции подвергается действию нагрузок, превосходящих
критическую. Перемещения концевых сечений такого стержня обычно
ограничивают, исходя из конструктивных соображений.
Таким образом, для практических целей важно исследовать закри-
тическую деформацию сжатых стержней. Кроме того, этот вопрос
имеет большое теоретическое значение, так как позволяет установить
случаи неприменимости линейных уравнений и уточнить критерия
устойчивости *).
_ ) Равновесные закритические формы сжатых стержней были впервые
«одробно исследованы Лагранжем [1.12].
28
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
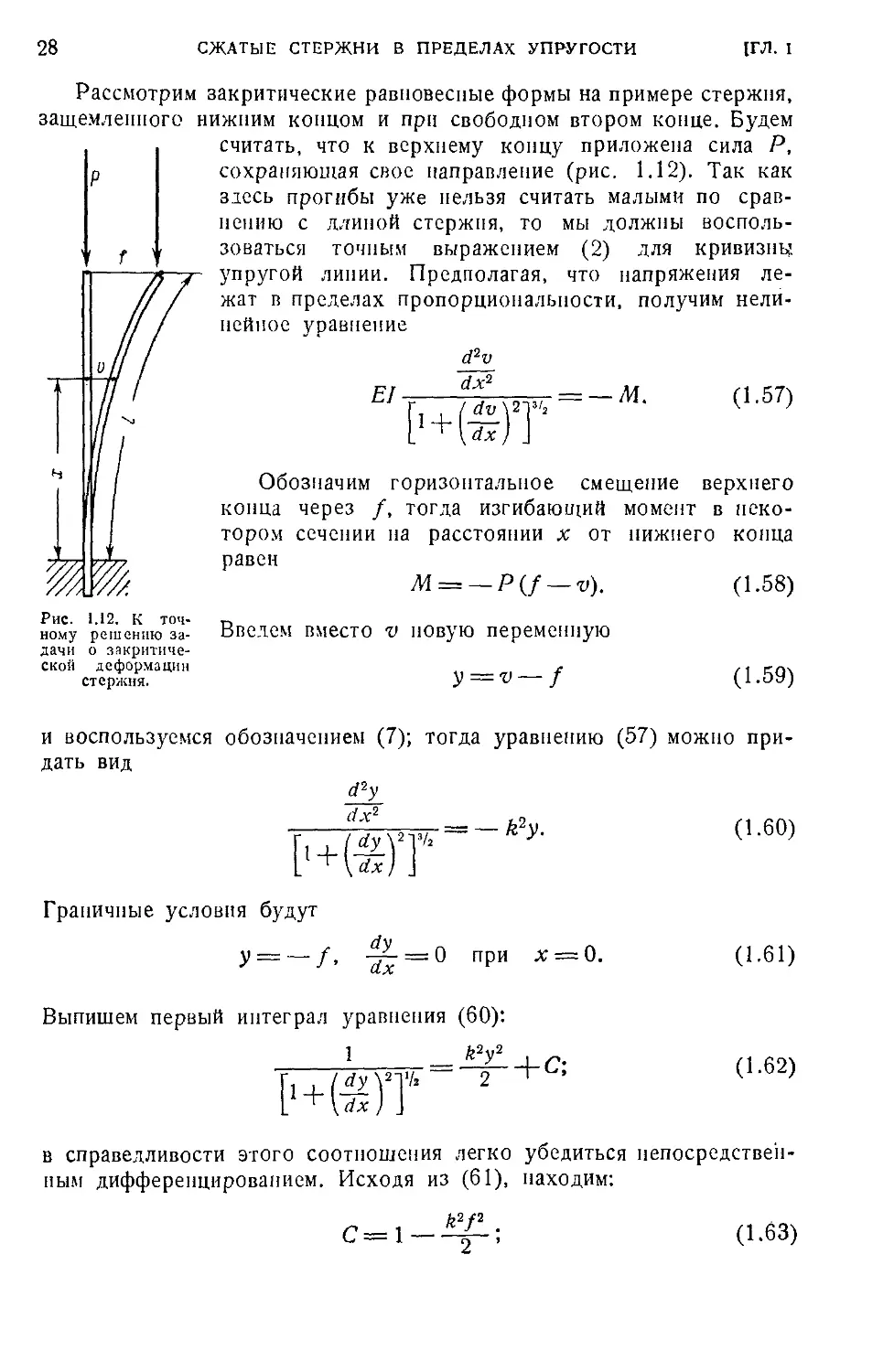
Рассмотрим закритические равновесные формы на примере стержня,
защемленного нижним концом и при свободном втором конце. Будем
считать, что к верхнему концу приложена сила Р,
сохраняющая свое направление (рис. 1.12). Так как
31есь прогибы уже нельзя считать малыми по
сравнению с длиной стержня, то мы должны
воспользоваться точным выражением B) для кривизну,
упругой линии. Предполагая, что напряжения
лежат в пределах пропорциональности, получим
нелинейное уравнение
dx2 " A.57)
EI
И£)Т
■ м.
Обозначим горизонтальное смещение верхнего
конца через /, тогда изгибающий момент в
некотором сечении на расстоянии х от нижнего конца
равен
M = — P(J — v). A.58)
Рис. 1.12. К
точному решению
задачи о закритиче-
ской деформации
стержня.
Введем вместо v новую переменную
A.59)
и воспользуемся обозначением G); тогда уравнению E7) можно
придать вид
dx* _«-ft2y. A.60)
Граничные условия будут
y=—f' U^0 при х=0-
A.61)
Выпишем первый интеграл уравнения F0):
1 62у2
мж
-С;
A.62)
в справедливости этого соотношения легко убедиться
непосредственным дифференцированием. Исходя из F1), находим:
С=\
:2/2
2 '
A.63)
т.
РАВНОВЕСНЫЕ ФОРМЫ В ЗАК.РИТИЧЕСК.ОЙ ОБЛАСТИ
авнение F2) принимает вид
= 1
/>+(£
4(/2-у2)-
29
A.64)
Отсюда вытекает
dx
•ур-у* y~\-*L(p-
У2)
i-^-(/2-y2)
A.65)
Разделяя переменные, получим:
dx = -
11
2
(/2-У2)
■ dy.
кГГ-у2~у 1--^-(/2-у2)
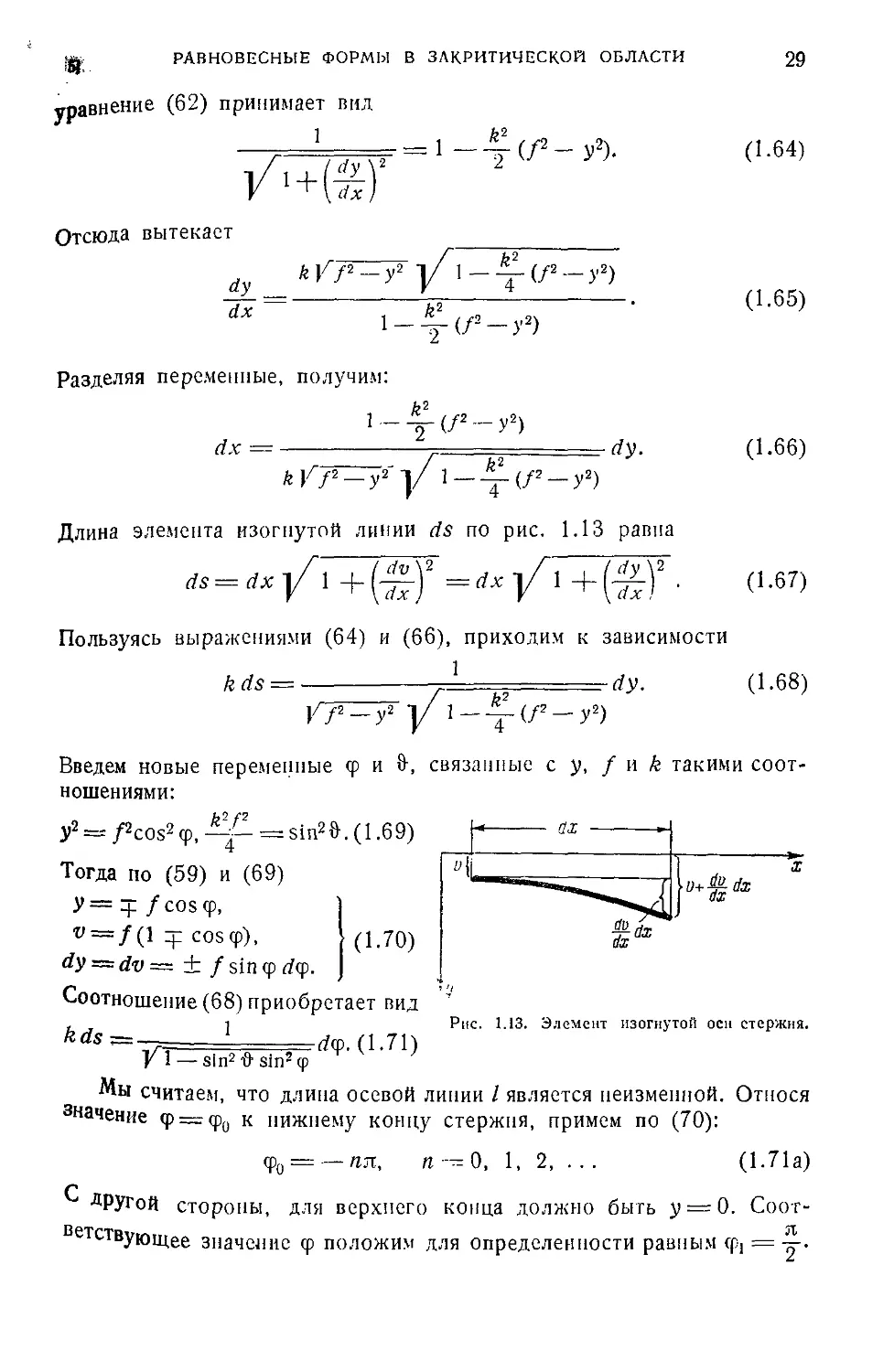
Длина элемента изогнутой линии ds по рис. 1.13 равна
Пользуясь выражениями F4) и F6), приходим к зависимости
kds--
\ff-y><
■/'-£
■dy.
A.66)
A.67)
A.68)
(/2 - У2)
Введем новые переменные ф и 9, связанные с у, f и к такими
соотношениями:
y»=/»cos29.—4~ = sln2*-A-69)
Тогда по E9) и F9)
У— + /совф, |
w = /(l + соБф), 1 A.70)
dy = dv— ± fsinydy. J
Соотношение F8) приобретает вид '
kds ~-т= * dtp. A.71)
V 1 — sin2 d sin5 ф
Мы считаем, что длина осевой линии / является неизменной. Относя
качение ф = ф0 к нижнему концу стержня, примем по G0):
Ф0 = — гея, п -- 0, 1, 2, ... A.71а)
дРУгой стороны, для верхнего конца должно быть у = 0. Соот-
СТвующее значелис ф положим для определенности равным ф1 = -^-.
Рис. 1.13. Элемент изогнутой оси стержня.
30 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
Интегрируя левую и правую части G1) по всей длине стержня, получим:
Я/2
Выражение типа
fd = Г d<? A.72)
J Vl — sin2 ©sin2 ф
я'2
F(*ty)^[ *P A.73)
\2 / J у 1 — sin2 0-sin2 ф
носит название полного эллиптического интеграла первого рода.
Так как нижний предел интеграла G2) равен (— пл), то этот
интеграл будет в Bп-\-1) раз больше выражения G3):
kl = Bn-irl)F(j,$}. A.74)
Интегралы вида G3) табулированы и приводятся во многих
справочных книгах.
Вернемся теперь к соотношениям F9); второе из них дает
kf=±2sinb. A.75)
Сравнивая G0) и G5) и оставляя один из знаков, находим:
kv = 2sinb(l — cos<p). A.76)
Взятые вместе, соотношения G4) и G5) позволяют установить
зависимость между отклонением верхнего конца стержня / и
нагрузкой Р. Пусть известны жесткость стержня EI и длина /. Допустим,
что задана величина нагрузки Р; тогда по G) можно найти k и из
G4), при том или ином к, определить параметр Ь. Наконец, по G5)
может быть найдено отклонение /. Таким образом определяется
соотношение P = P(f) для каждого значения п.
Если положить д=0, то при k Ф О получим /=0. В этом
предельном случае выражение G3) становится F(n/2, 0) = я/2. Равенство
G4) тогда дает
Рп=^-Bп+1)* A.77)
или, по B6),
Ря=(?п+1)*Ркр, A.78)
где Ркр — первая критическая сила. Значения Р„ при п=\, 2, 3
и т. д, будут соответствовать другим точкам разветвления
равновесных состояний по B6), т. е. высшим критическим силам.
Соотношениям G4) и G5) можно придать вид
y^iettii.,^.»). (,.79,
РАВНОВЕСНЫЕ ФОРМЫ В ЗАКРИТИЧЕСКОЙ ОБЛАСТИ 31
•W*
Положим, например, Р = ЪРкр. Тогда при п = 0 из G9) будем
иметь
F [%,*,) = % ]f3 =2,72.
По таблице эллиптических интегралов*) находим & = 74,5° и, далее,
= 2
sin 74,5°
2,72
2-0,96 _n7nR
-272~ ~ 0,706.
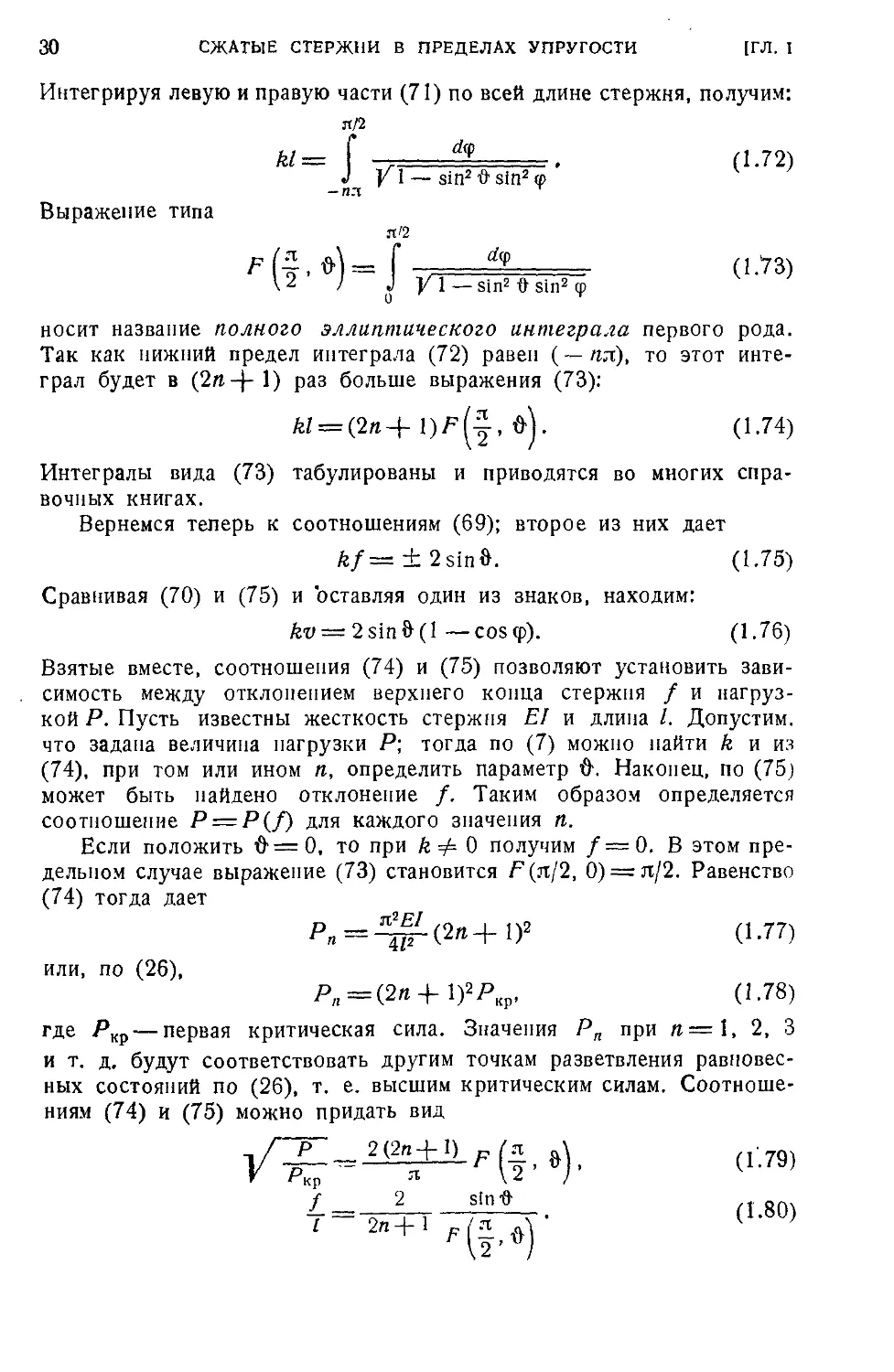
На рис. 1.14 изображена зависимость между величинами Р[Ркр
и f\l для й = 0. С увеличением нагрузки прогиб верхнего конца
вначале возрастает до значе-
Г/1
0,8
0,6
0,4
0,2
О
Рис.
/
1 *
1 1
I'
175 2
ния 0,806/, а затем начинает
уменьшаться. В пределе, при
Р->оо, должно быть /—>0.
Аналогичным образом
может быть получена
зависимость между нагрузкой и
прогибом верхнего конца
для я = 1, 2, 3 и т. д.
Отметим, что точки
соответствующих кривых могут быть
получены по точкам первой
кривой (для п — 0), если
абсциссы их умножать на Bn-\-lf, а ординаты делить на Bй-{-1);
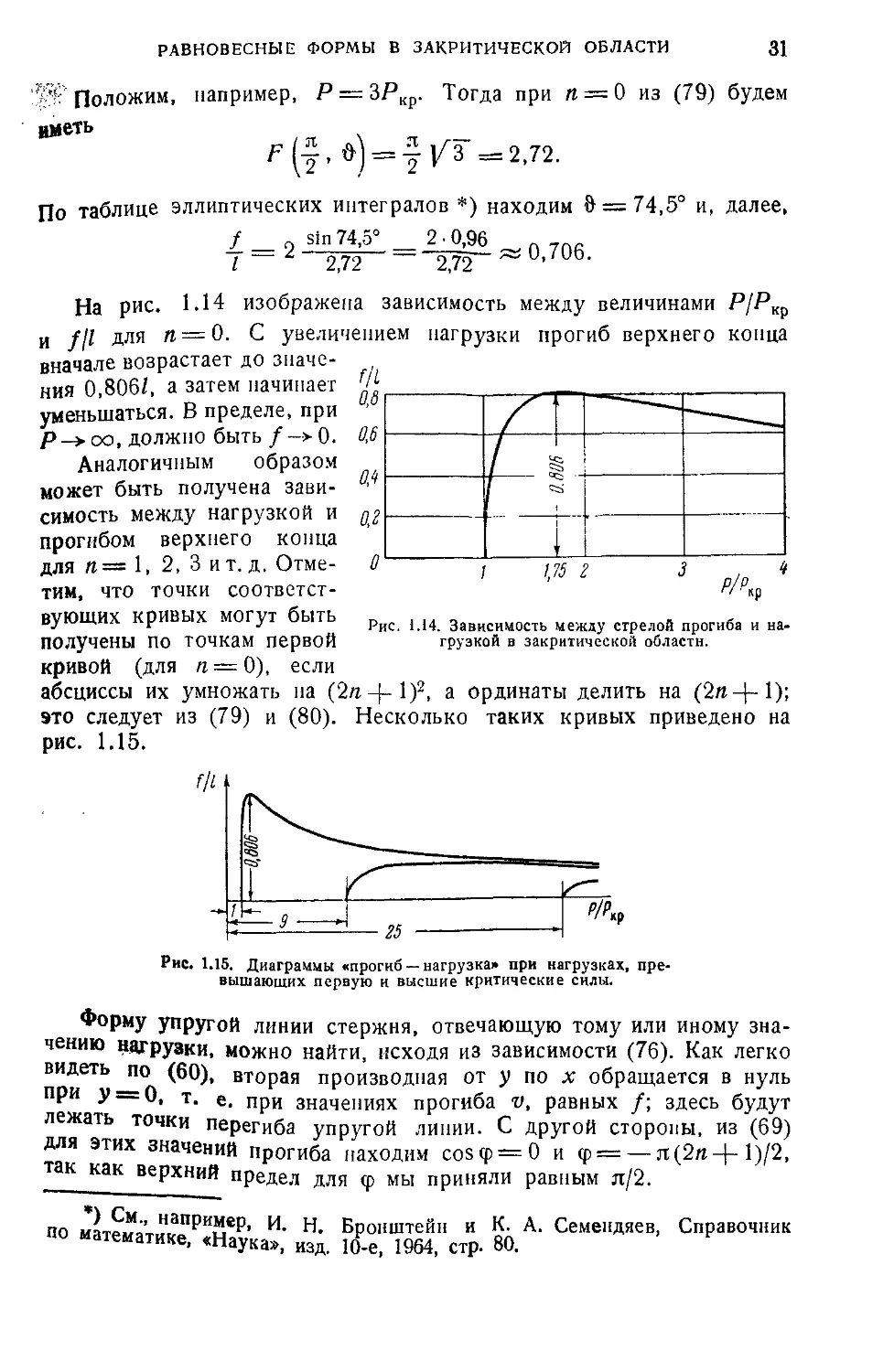
это следует из G9) и (80). Несколько таких кривых приведено на
рис. 1.15.
fji
Р/р«
1.14. Зависимость между стрелой прогиба и
нагрузкой в закритической области.
S
1
-*
г
-* »
р/%
Рис. 1.15. Диаграммы «прогиб — нагрузка» при нагрузках,
превышающих первую и высшие критические силы.
Форму упругой линии стержня, отвечающую тому или иному
значению нагрузки, можно найти, исходя из зависимости G6). Как легко
пои6ТЬ—°(\ ^^' ВТ0Рая производная от у по х обращается в нуль
лежат Т" е" ПРИ значеииях прогиба v, равных /; здесь будут
л™ * Т°ЧКИ пеРегиба упругой линии. С другой стороны, из F9)
для этих значений прогиба находим coscp-О и Ф = -яBя+1)/2.
ак веРх"ий предел для <р мы приняли равным я/2.
по матема'ти1?ГР!!иер' И- н- Бронштейн и К. А. Семендяев, Справочник
«тематике, «Наука», изд. 10-е, 1964, стр. 80.
32 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ |ГЛ. I
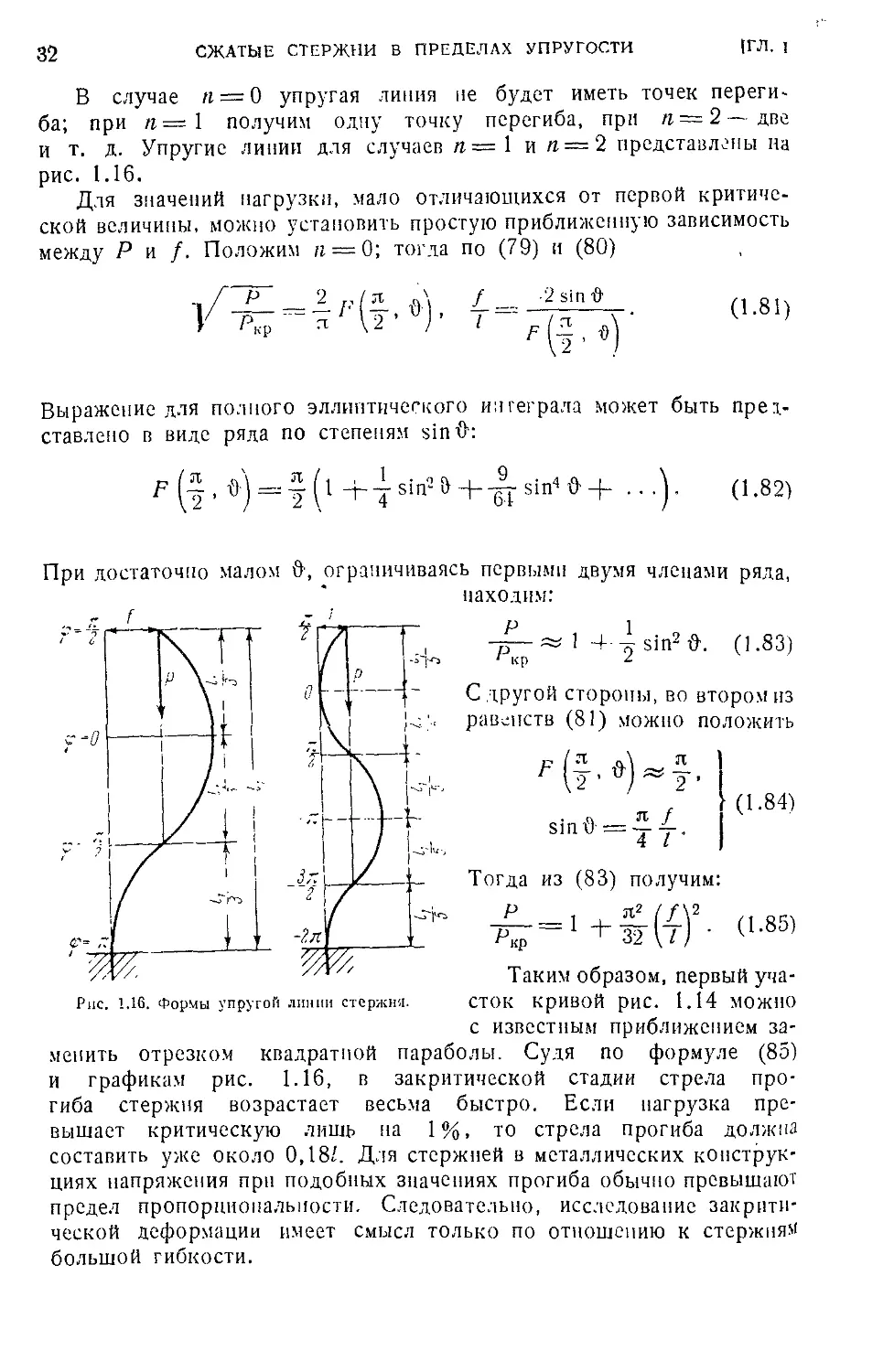
В случае я = 0 упругая линия не будет иметь точек
перегиба; при п=\ получим одну точку перегиба, при п = 2— две
и т. д. Упругие линии для случаев п=\ и п — 2 представлены на
рис. 1.16.
Для значений нагрузки, мало отличающихся от первой
критической величины, можно установить простую приближенную зависимость
между Р и /. Положим к = 0; тогда по G9) и (80)
•О'
■ 2 sin ■&
F
.м
A.81)
Выражение для полного эллиптического интеграла может быть
представлено в виде ряда по степеням sin ft:
f(^.o) = 5 (i+lsitfa+Asin4^+ ...у A>82)
При достаточно малом О, ограничиваясь первыми двумя членами ряда,
находим:
Я
я,
кр
sin2 d.
A.83)
С другой стороны, во втором из
равенств (81) можно положить
F
* »-£
smr) = — 4-.
4 /
Тогда из (83) получим:
Я
я,
кр
1 +
51
32
Ф'-
A.84)
A.85)
Рис. 1.18. Формы упругой линии стержни.
Таким образом, первый
участок кривой рис. 1.14 можно
с известным приближением
заменить отрезком квадратной параболы. Судя по формуле (85)
и графикам рис. 1.16, в закритической стадии стрела
прогиба стержня возрастает весьма быстро. Если нагрузка
превышает критическую лишь на 1%, то стрела прогиба должна
составить уже около 0,18/. Для стержней в металлических
конструкциях напряжения при подобных значениях прогиба обычно превышают
предел пропорциональности. Следовательно, исследование
закритической деформации имеет смысл только по отношению к стержням
большой гибкости.
t'«
КЛО.ЛПЧ! IJJIU. ivi xi i t^* i »i *
§ 6. Различные критерии устойчивости
и методы решения задач
Рассматривая сжатый стержень, различным образом закрепленный
по концам, мы использовали один из наиболее употребительных
критериев потери устойчивости: мы исследовали, при каких условиях
наряду с начальным состоянием равновесия возникают соседние, новые
равновесные формы. Такой подход к решению задач устойчивости
будем называть статическим.
Другой критерий относится к потенциальной энергии,
накапливаемой системой, и может быть назван энергетическим. Исследуем
переход от начального равновесного состояния к изогнутому и
определим приращение потенциальной энергии деформации, а также
работу внешних сил. Если энергия деформации окажется больше
работы внешних нагрузок, то, очевидно, система будет возвращаться
к начальному положению равновесия; следовательно, эго положение
можно считать устойчивым. Напротив, условие неустойчивости
состоит в том, что работа внешних сил превышает потенциальную
энергию деформации. При безразличном равновесии (в линейной
постановке задачи) приращение энергии деформации должно быть
равно работе внешних сил. Если внешние силы являются
консервативными, т. е. если работа их зависит только от начального и
конечного положений точек приложения и не зависит от траекторий
перемещения этих точек, то можно ввести понятия потенциала
внешних сил и полной потенциальной энергии системы. Тогда данный
критерий можно формулировать в применении к полной энергии
системы, вернее, к ее приращению при переходе от начального
равновесного состояния к соседнему.
Третий, наиболее общий путь состоит в исследовании движения
системы, вызываемого некоторыми малыми возмущениями начального
равновесного состояния. Такой критерий может быть назван
динамическим. Если малые возмущения вызывают динамические
перемещения системы, лежащие в определенных пределах, то начальное
состояние является устойчивым. Точнее, при наличии устойчивости
всегда можно подобрать такие начальные возмущения, чтобы при
последующем движении системы перемещения ее точек не вышли
за некоторые, наперед заданные границы (см. § 242). Если речь
идет о консервативной системе, на которую действуют
консервативные заданные силы, а работа реакций связей и сил сопротивления
равна нулю, то такая система будет совершать собственные колебания
около положения равновесия. Критерием потери устойчивости будет
При этом — как уже было сказано в § 1 — обращение в нуль частоты
собственных колебаний.
Энергетический критерий, как он был формулирован выше, является,
°о существу, статическим, так как относится только к
потенциальной энергии системы и позволяет анализировать лишь различные
3 А. С. Вольмир
34
UUVAlfilb 1ЛЬНЖНИ В НРЬДИЛЛЛ ГНРУШИИ
UJI. I
равновесные формы. Однако энергетический критерий можно
применить и при динамической постановке задачи, если ввести в
рассмотрение кинетическую энергию системы и исследопать изменение
функции, включающей как потенциальную, так и кинетическую энергии.
Определяя критическую нагрузку, отвечающую точке
разветвления равновесных состояний, мы имеем в виду некоторую идеальную
систему. Мы считаем, например, что ось сжатого стержня является
строго прямолинейной, что нагрузка приложена в центре тяжести
сечения, что материал является однородным и т. д. В реальных
конструкциях такие условия, как правило, не выполняются. Можно
определить характер устойчивости идеальной системы, изучая
поведение близкой к ней несовершенной системы и устремляя параметры,
характеризующие эти несовершенства, к нулю. Как мы увидим ниже,
влияние начальных несовершенств резко возрастает, когда нагрузка
приближается к критической величине, вычисленной для
соответствующей идеальной конструкции, это и служит критерием устойчивости
идеальной системы, который можно назвать критерием начальных
несовершенств.
Приводят ли перечисленные выше критерии устойчивости той или
иной системы к одному и тому же результату? Как мы убедимся
ниже, в задачах, относящихся к консервативным системам, такое
совпадение имеет место, поэтому применение различных критериев
может служить для проверки правильности решения задачи. В случае же
неконсервативной системы следует, вообще говоря, пользоваться
динамическим критерием, так как статический (или энергостатический)
подход может в ряде случаев привести к ошибочным результатам *).
Это будет показано на одном из примеров в § 22.
Определение критической нагрузки как точки бифуркации
равновесных форм сводится, как мы видим, к решению линейной задачи;
к такой задаче и относились перечисленные нами критерии
устойчивости. Если же исследуется послекритическое поведение системы,
как в § 5, то задача является нелинейной. Своеобразие нелинейной
задачи состоит в том, что здесь одной и той же системе нагрузок
может соответствовать несколько различных деформированных
состояний, одни из которых являются устойчивыми, а другие —
неустойчивыми. Так, например, в случае сжатого стержня при нагрузках,
незначительно превышающих первую критическую величину, мы
получали в § 5 две устойчивые изогнутые формы стержня (при изгибе
стержня в одну и другую сторону) и неустойчивую форму —
прямолинейную. Правда, при определении точки бифуркации мы также
сталкиваемся с серией различных равновесных состояний, но от каждого
из них можно непосредственно перейти к другому, соседнему; в не-
*) Об использовании статического критерия к неконсервативным
задачам см. в статьях Лайпгольца (Н. L e i p h о [ z, Ing.-Archiv 32, Ш 3, 214—220,
№ 4, 286-296, 1963).
36
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
11 л. 1
Выбрав тот или иной критерий, мы должны, далее, принять
определенный метод решения задачи. Если применяется статический или
динамический критерий, то можно исходить из дифференциальных
уравнений равновесия или движения для отклоненных положений и
непосредственно интегрировать эти уравнения. Этот путь возможен,
однако, лишь в простейших задачах. В более сложных случаях
приходится пользоваться различными приближенными методами
определения критической нагрузки. Так, например, дифференциальное
уравнение равновесия или движения может быть заменено уравнением
в конечных разностях; в зависимости от числа интервалов задача
будет решена с той или иной степенью точности. Другой путь
заключается в том, что дифференциальное уравнение — линейное или
нелинейное —заменяется интегральным, т. е. таким, которое
включает под знаком интеграла функции, характеризующие отклоненные
состояния системы. Тогда для решения задачи можно применить метод
последовательных приближений, позволяющий шаг за шагом
уточнять характер равновесных форм системы и, в линейных задачах,
величину критической нагрузки. Теория интегральных уравнений
содержит также ряд других путей определения наименьшего
параметра, характеризующего разветвление (бифуркацию) решений; это
значение параметра соответствует интересующей нас критической
нагрузке (см. § 16).
Пользуясь энергетическим критерием, мы должны представить
себе, какой характер имеют отклоненные положения системы, п
составить выражения для потенциальной энергии деформации и работы
внешних сил. В линейных задачах критическая нагрузка приближенно
определяется путем непосредственного сопоставления этих величин.
Чаще всего энергетический подход осуществляется с помощью метода
Ритца, в котором отклоненное положение равновесия или движения
характеризуется с помощью нескольких независимых параметров.
Подобная аппроксимация отклоненного состояния применяется и
в методе Бубнова — Галеркана, который может быть обоснован
из энергетических соображений — исходя из принципа возможных
перемещений, — но, с другой стороны, может трактоваться как
«формальный» прием приближенного интегрирования дифференциальных
уравнений, когда форма интегральной кривой может быть заранее
оценена из физических представлений.
Все перечисленные выше методы позволяли приближенно решать
те или иные краевые задачи теории упругости, поскольку вместе
с дифференциальными уравнениями задачи должны быть заданы
граничные условия для перемещений или усилий. Существует, однако,
путь — он назван ниже методом проб, — когда задача ставится как
задача с начальными условиями: например, для стержня задается
прогиб и угол поворота для одного из концевых сечений. Граничные
условия, относящиеся ко второму концевому сечению, выполняются
после пробных попыток путем варьирования параметра нагрузки,
ПРИЛОЖЕНИЕ ИСИНШША ошгаилпшд искачг.щшгш о;
входящего в дифференциальное уравнение. Трактовка проблемы
собственных значениях как задачи с начальными условиями имеет
особенно большое значение в связи с применением электронных
вычислительных машин; здесь могут быть успешно применены
методы оптимального программирования (см. § 27).
Мы познакомились уже с одним из «статических» методов
исследования устойчивости сжатого стержня — непосредственным
интегрированием дифференциального уравнения упругой линии для
отклоненного положения. В последующих разделах мы на том же простом
примере познакомимся с другими критериями устойчивости и
методами решения задач.
§ 7. Приложение принципа возможных перемещений
Как известно, наиболее общим принципом, позволяющим
исследовать равновесные состояния упругих систем, является принцип
возможных перемещений: он относится не только к линейным, но и
к нелинейным статическим задачам; в соединении с принципом Далам-
бера его можно использовать и в динамических задачах. Поэтому
изложение энергетических соотношений мы начнем с применения
принципа возможных перемещений. Согласно эгому принципу
равновесное состояние упругой системы характеризуется тем, что сумма
работ всех внешних и внутренних сил на любых кинематически
возможных перемещениях точек упругой системы равна нулю.
Допустим, что стержень длиной /, известным образом
закрепленный по концам, подвергается действию сжимающей силы Р.
Обозначим через 6Л работу внутренних сил при переходе от данной
искривленной формы к другой, близкой к ней, а через bW —
соответствующую работу сжимающей нагрузки. Если исходная форма
стержня является равновесной, то должно удовлетворяться равенство
M-f 611^=0. A.86)
Работа внутренних сил может быть представлена выражением
ЬЛ = —\мЬк<1х, A.87)
о
где через 6и обозначена вариация кривизны упругой линии. Примем
Для кривизны значение C), так как речь идет о малом отклонении
Уругой линии стержня от оси х; тогда
38 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УИНУИл-щ ,
Интегрируя это выражение по частям, получим:
о
Повторное интегрирование дает
о
Пользуясь соотношениями
-_. = <?. М = -Е1—2, A.89)
находим:
ЬА=[т{Шо~[С1^~\Е1^ЬЧ,йХ- °
90)
о
Работа внешней нагрузки на возможном перемещении будет
bW = Pbe, A.91)
где через е обозначена проекция взаимного смещения концов стержня,
имеющего место при искривлении, на направление силы Р; величина е
считается положительной при сближении концов. Напомним, что
величина и направление сжимающих сил считаются неизменными.
Воспользуемся соотношением F7) между длиной элемента изогнутой
линии ds и проекцией его dx на направление Р:
*-"[ч-(£П
Развертывая множитель при dx в ряд по формуле бинома Ньютона
и ограничиваясь первыми двумя членами ряда, находим:
Полная длина изогнутой линии, равная длине стержня до
искривления, будет
/ = /■
■ + 7 J (£)'*" <>М>
здесь через /j обозначена длина проекции изогнутой линии на
направление оси х. Проекция смещения краев оказывается равной
e = l-h = ^\[^Jdx. A.94)
о
41) СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАЛ »ni-ji^i..
ИЛИ
/
М/=4б \El@Jdx. A.99)
о
Отсюда вытекает известное выражение для потенциальной энергии
деформации изогнутого стержня: <
i
и = ъ1ЕГ[т£?ах- ".100)
о
Это выражение можно также записать в виде
1
U
i
б
-!№• оло.,
С другой стороны, по (95) находим работу внешней нагрузки,
производимую силой Р при искривлении стержня:
о
Величина W равна взятому со знаком минус изменению потенциала
нагрузки:
vr—r—iP/(£)■<,. „,оз,
о
Сумма потенциальной энергии деформации и изменения потенциала
нагрузки представляет собой полную энергию упругой системы Э:
3 = U + V = U~W. A.104)
Таким образом, в рассматриваемом случае полная энергия равна
о о
При возможном отклонении стержня от равновесного положения
первая вариация от полной энергии должна быть равна нулю:
63 = 0, A.106)
что соответствует равенству (86).
Ч'Я
МЕТОДЫ РИТЦА И ТИМОШЕНКО 41
Об устойчивости равновесного положения можно судить по знаку
второй вариации от полной энергии. Если исходное положение
устойчиво, то вторая вариация положительна:
62Э>0. A.107)
При этом энергия прямолинейной формы стержня будет минимальной
по отношению к значениям энергии для близких к ней
искривленных форм.
Если вторая вариация от энергии отрицательна,
62Э<0, A.108)
то рассматриваемая равновесная форма будет неустойчивой.
Безразличному равновесию стержня соответствует равенство
нулю второй вариации:
62Э = 0. A.109)
Рассмотрим случай шарпирно закрепленного по концам стержня,
сжатого силами Р по концам. Принимая для искривленной упругой
линии уравнение A8), получим из A05):
A.110)
A.111)
A.112)
A.113)
A.114)
Любая прямолинейная форма является равновесной; при £ = 0
будет всегда 6Э*—0. Устойчивость равновесия зависит от
соотношения между Р и Ркр; при Р < Ркр, Р > Ркр и Р ■= Ркр будут
соответственно выполняться равенства A07), A08) и A09).
§ 9. Методы Ритца и Тимошенко
Энергетический критерий служит основой для эффективных
приближенных методов решения задач устойчивости, кратко
охарактеризованных выше. Рассмотрим эти методы более подробно.
тт4 Р
5 = XE/"F-
Введем безразмерные параметры
9*_ 2 Р
— л' /-//г2 '
где h — высота сечения стержня. Т
Э' = ±[1-
Первая вариация от Э* равна
ЬЗГ = A
а вторая вариация
623*=(l -
_ HL р f2
4 I
-. •»- h •
'orда по A'.
pJ^
л кр /
42 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
Примем, что изогнутая линия стержня при потере устойчивости
приближенно может быть представлена с помощью ряда
п
V = /,ili -f /2% +- • • • -г /Л = 2 М- 0.115)
Здесь под r\i понимаются функции х, удовлетворяющие
геометрическим граничным условиям задачи, т. е. таким условиям, которые
относятся к прогибам или углам поворота. Подставим A15) в
выражение для полной энергии системы A04). Тогда энергия окажется
зависящей от параметров прогиба /,. Вариацию ЬЭ можно при этом
представить как сумму вариаций, соответствующих возможным
изменениям параметров ft:
п
ьэ=%жьи AЛ!6)
1-1
Так как рассматриваемые нами изогнутые состояния являются
равновесными, то вариация 6Э по A05) должна быть равна нулю:
%ж^=°- (U!7)
Но вариации б/, можно считать независимыми друг от друга; поэтому
равенство A17) будет иметь место, если каждый из множителей
при б/,- будет равен нулю:
-11---= 0, /=1. 2, .... п. A.П8)
dfi
Судя по A05), энергия должна являться квадратичной функцией
параметров ft. Вычисляя производные по /;, мы получим линейные
функции ft. Следовательно, равенства (П8) представляют собой
систему п линейных алгебраических однородных уравнений
относительно fi, в коэффициенты при /; входит нагрузка Р. Если
считать ft Ф®, то условием наличия решения системы A18)будет являться
равенство нулю определителя, составленного из коэффициентов при ft:
Д=0. A.119)
Уравнение A19) будет содержать нагрузку в степени п. Решая это
уравнение, мы получим п значений Р. Наименьшее из этих значений
и будет приближенно отвечать первой критической силе. Подобный
метод решения вариационных задач носит название метода Ритца *).
*) W. Ritz, Ober eine neue Methode zur Lasting gewisser Varialionspro-
blerae der math. Physlk, Journ. f. d. reine und angew. Math. 135, № 1 A908);
Qesararaelle Werke, Paris, 1911.
«91
МЕТОДЫ РИТЦЛ И ТИМОШЕНКО
43
Пример 1.5. Определить критическую силу для сжатого стержня,
защемленного одним концом и с другим свободным концом. Представим
упругую линию в первом приближении в виде отрезка квадратной параболы
v = /2-*2; (а)
координата х отмеряется от защемленного конца. Нетрудно убедиться в том,
что это выражение удовлетворяет геометрическим граничным условиям-
прогиб v и угол поворота dvjdx обращаются в нуль для точки х = 0.
Вычислим энергию системы по формуле A05):
Э = ~Е1
или
\f\dx — y Щх-dx,
и
I3
Э = lEIfu — 2Р/;
2 3
Приравнивая нулю производную дЭ/д/2, находим:
ЗЯ/
кр-
р
(Ь)
(с)
Точное решение B8) приводит для этого случая к коэффициенту
^2/4 = 2,47; таким образом, ошибка составляет около 20%.
Во втором приближении введем новый независимый параметр /4 и
примем
v = f2x2 + f^. (d)
Энергия будет равна
Э = ЧЕП [Д + 4V/ + Щ- f/) - 2Р/3 (I f\ +1 /2// + у /2/
(е)
Если приравнять нулю первые производные от Э по /2 и /4, то придем
к уравнениям:
(ei - L /*) /, + (ieii* - Щ. /<) /4 = о,
я/ - ^ '2) Л + D £ - ^ *4) /* = о.
@
Если принять f2 Ф 0 и /%ф 0, то определитель, составленный из
коэффициентов при /2 и /4, должен быть равен нулю:
где
Разв
1 —
1 —
р*
3
р*
/
2Р*
5
18 2Р*
5 7
D/2
= 0,
я/ •
(g)
(h)
азвертывая этот определитель, придем к квадратному уравнению
относительно Р;
-3*2
• 45Р* + 105 = 0.
A)
44
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. !
Наименьший корень этого уравне тя определяет критическую силу:
EI
Ркв = 2,50-
,2 •
(к)
здесь ошибка по отношению к точному значению составляет лишь ],2%.
Вводя в третьем приближении параметр /6, примем
Идя тем же путем, получим окончательное уравнение в виде
__ Р* 9
" 3
±Р* J8
5
5
2Р*
3-у Р*
6 р*
' 7
180
7
3
_45
7
р*
Т
50 — -f Р4
о
= 0.
(О
(т)
Определяя наименьший корень этого кубического уравнения, найдем:
EI
12 •
Ошибка снижается до 0,4%.
Якр = 2,4
(п)
Как видим, увеличивая число параметров /г, мы можем сколь
угодно близко подойти к точному решению. Отметим, что в
приведенном примере все приближенные решения были выше точного.
Это не является случайным. Реальный стержень представляет собой
систему с бесконечно большим числом степеней свободы. Между тем,
пользуясь методом Ритца, мы вводим лишь один или несколько
варьируемых параметров, как бы ограничивая число степеней свободы
системы, т. е. накладывая на нее лишние связи. Это приводит
к искусственному завышению жесткости стержня, так что
критическая нагрузка получается более высокой.
Результаты, получаемые с помощью первых приближений по методу
Ритца, можно несколько улучшить, представив выражение для
энергии A05) в ином виде. Пользуясь вторым из соотношений (89),
напишем:
Э =
1
М* dx
1
EI
(£)'<*■
A.120)
Изгибающий момент М в некотором сечении можно выразить через
сжимающую силу Р и прогиб v. Затем следует идти тем же путем,
что и при использовании выражения A05). В этом случае нам не
приходится вычислять вторых производных от v, как это
приходилось делать раньше. Но при аппроксимации изогнутой линии обычно
более или менее хорошо улавливается лишь общее очертание кривой,
в то время как приближенные значения вторых производных сильно
отличаются от истинных. Этим объясняется преимущество
применения выражения A20) по сравнению со A05).
Kg МЕТОДЫ РИТЦА II ТИМОШЕНКО 4S
Пример 1.6. Решим пример 1.5, пользуясь выражением для
энергии A20). Изгибающий момент в сечении, лежащем на расстоянии х от
защемленного конца, будет равен [—Р (г>/— «)], где через vt обозначено
отклонение свободного конца. В первом приближении, принимая v-—f2x2,
находим: vt = f2P, отсюда ^
М-■=-.— Р/2(/2— х3). (а)
Энергия будет раина
Vf*2-*2J/? Г 2,
£7 -dx — P \f\x~dx (b)
ИЛИ
9 - -- . EL f-p _ р . 1 /V ,<л
Если теперь приравнять нулю производную от Э по /2, то, считая /2 =/= 0,
Р ф0, найдем:
^кр = 2,5^- W
Мы получили такой результат, который в примере 1.5 был получен лишь
во втором приближении.
Метод Ритца в приложении к линейным задачам устойчивости
может быть использован и в другой форме, указанной С. П.
Тимошенко [0.23]. Как мы видели, при безразличном равновесии должно
быть 6Э = 0, б2Э = 0. Если рассматривать весьма малые отклонения
стержня, то можно принять полную энергию постоянной: Э = const.
Условимся, что нулевой уровень будет соответствовать критической
силе, и примем для Р = Рк
Э=£/—Г = 0. A.121)
Это можно пояснить таким образом, что при продольном изгибе
потенциальная энергия деформации изгиба U оказывается в точности
равной работе внешней сжимающей нагрузки W. Пользуясь теперь
выражением A05), находим:
(
d2v \2 J
ах
Лср^-5-] • A-122)
о
Можно также воспользоваться вторым выражением для
энергии A20). Обозначим через т изгибающий момент в некотором
сечении, отвечающий силе Р = 1. Тогда вместо A20) можно написать
46 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
Исходя из A21), находим теперь *)
К
dvy
, i dx
dx J
ркр=^Ч • ■ с-124)
Г т2 dx
J ~ЁГ
о
Допустим, что изогнутая линия стержня приближенно
представлена в виде ряда A15). Тогда в числителе и знаменателе дроби A22)
или A24) мы получим функции параметров ft. Желая найти
наименьшее значение нагрузки, приравняем нулю производные от Р по f {.
4£- = 0. 1=1, 2, .... п. A.125)
Для линейных задач мы получим тогда точно те же результаты
что и по уравнениям A18).
§ 10. Применение метода множителей Лагранжа
Пользуясь методом Ритца и аппроксимируя изогнутую линию
с помощью ряда A15), мы выбирали функции т),(лг) таким образом,
чтобы каждая из них удовлетворяла геометрическим граничным
условиям. Но в некоторых случаях подобное требование выполнить
затруднительно. Тогда можно ввести так называемые неопределенные
множители Лагранжа, с тем чтобы геометрические граничные условия
выполнялись не каждой из функций т)г (х), а рядом A15) в целом.
Но при этом коэффициенты ft ряда A15) должны будут
удовлетворяться некоторым дополнительным соотношениям типа
F{fu /2 /в) = 0; (а)
допустим, что число этих соотношений равно т. Тогда по Лаграпжу
надо составить функцию
/77
э, = э-2у/ (Ь)
j-i
и выписать условия экстремума этой функции:
7*77 = °. 1' = 1-2 п' (с)
фигурирующие в этих уравнениях параметры должны удовлетворять
уравнениям (а). Мы получим, следовательно, не п, а п~\-т уравне-
*) Важные особенности формул A22) и A24) отмечены в книге
Я. Г Пацовко и И. И. Тубановой «Устойчивость и колебания упругих
систем», 2-е изд., «Наука», М., 1966.
48
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
функций Г), удовлетворяет не только геометрическим, но и
статическим граничным условиям задачи. Подставим выражение A15)
в уравнение (97). Внепнтегральные члены, отвечающие статическим
граничным условиям, должны тогда выпасть. Вместо bv можно
подставить выражение
/-1
тогда уравнение (97) приобретет вид
t J(£/S-+pSb6^=°- «Л27)
Но если вариации б/,- независимы и произвольны, то отсюда
вытекает система п уравнений тина
i
I(E/S+p-Sb^=°- t=i-2 «■ AЛ28>
о
Под v в выражении, стоящем в скобках, здесь понимается ряд A15).
После интегрирования мы снова получим систему однородных
линейных алгебраических уравнений относительно ft, из условия
совместности которых (при нетривиальном решении) находим критическую
нагрузку. Так как уравнения A28) метода Бубнова — Галеркина и
уравнения A18) метода Ритца отвечают одним и тем же
энергетическим зависимостям, то получаемые по этим методам результаты
должны совпадать.
Как легко заметить, в скобках под знаком интеграла в A28)
содержится левая часть дифференциального уравнения,
соответствующего уравнению (8). Метод Бубнова — Галеркина можно обобщить,
подставляя вместо этих скобок другие операторы. Такой оператор
может, например, отвечать уравнению E); тогда будет
{(El^+Pv^dx^O A.129)
о
или, в более общей форме,
i
j (EI-^-M)^dx = 0. A.130)
u
Но при этом результаты вычислений уже не будут, вообще говоря,
совпадать с данными, полученными по методу Ритца. Если в основу
вычислений берется уравнение A30), то уравнение избранной упругой
линии должно быть подчинено лишь геометрическим граничным
условиям для прогиба.
МЕТОД КОНЕЧНЫХ РАЗНОСТЕЙ. УПРУГАЯ ШАРНИРНАЯ ЦЕПЬ 49
Пример 1.8. Найти критическую нагрузку для шарнирно опертого
по концам стержня, взяв в качестве исходной кривой параболу »
v = fx(l — х). (а)
Составляем уравнение типа A29):
\-2f + -gj-fx{l-x)\x(l-x)dx*=Q. (b)
и
После интегрирования, при / ф О, находим:
Я-Т- (О
§ 12. Метод конечных разностей.
Упругая шарнирная цепь
Вернемся теперь к приближенным методам, относящимся по нашей
классификации к статическому критерию устойчивости. Остановимся
прежде всего на методе конечных разностей.
Пусть имеется в виду уравнение E). Разделим общую длину
стержня на п равных частей, длину каждого интервала обозначим
через s. Вторую производную для некоторой точки, разделяющей
два соседних интервала, можно заменить приближенно с помощью
так называемой центральной разности:
(S),.^^-^-'-2^+^+i):
под Vi_i, vt, -Уг + 1 понимаются прогибы в соответствующих точках.
Этому значению второй производной отвечает изгибающий момент
от силы Р в г'-й точке: /И — (—Put). Тогда уравнение E) получит вид
EI±(vl_l-2vl-+vul) = -Pvl. A.131)
Таких уравнений можно составить (п—1); в них будут входить
значения прогибов в концевых точках. Таким образом, получаем
систему (п— 1) алгебраических линейных уравнений относительно vt\
условие совместности этих уравнений (при ненулевом решении) снова
Приводит к определению критической нагрузки.
Пример 1.9. Определить приближенное значение критической силы
Для шарнирно опертого сжатого стержня. Делим длину стержня на четыре
части (рис. 1.18). Составляем уравнения A31) для точек i = 1 и г =2, считая
« = //4: J
1 fi
EI-ir(v0 — 2vl + v2)= — Pvi, (a)
£/^J(w,-2w2 + 0,)=-Pw1. (b)
4 A. G. Вольмир
50 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
Для левой концевой точки
Кроме того, в силу симметрии упругой линии
Введем обозначение
РР
16Я/
Тогда уравнения (а), (Ь) примут вид
(а — 2) «, -f i'i= 0,
2«, + (а— 2) w2=0.
[гл. I
4
(С)
(d)
(е)
@
Приравнивая нулю определитель этой системы, получаем квадратное
уравнение относительно а:
(g)
Наименьший корень равен
а2 — 4а + 2 = 0.
а = 2 — /2 ~ 0,586.
Приближенное значение критической силы оказывается равным
РК1)= 0,586-16-^-= 9,38
El
I2
@
Это значение отклоняется от точного на 4,3%; в отличие от предыдущих
примеров здесь критическая нагрузка получилась с преуменьшением.
1
ч
Щ
jL
*
1
"г
1 Л
i>
h
с
Т
'
Рис. 1.18. К решению задачи в конечных разностях.
Другой вариант метода конечных разностей, который получил
в литературе название метода упругой шарнирной цепи *), состоит
в следующем. Разделим длину стержня на п равных частей.
Обозначим прогибы в узлах через v0, v{, ..., i>„_i, v„. Выпишем
дифференциальное уравнение для шарнирно опертого стержня в виде
Д«' Р
ЕЛ
v.
где s = l/n, или, представляя производную v' через разность,
«взятую вперед»,
Д(р< + |— vj) Р_
Р ~~ ЕЛ *•
*) Этот метод был предложен Г. Генки.
52 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ (ГЛ. I Щ
сечения; очевидно, должно быть va = vt. По формулам A32)
1 f C)
vi = avl—^P»{2vl+vt).
Отсюда
«, = 3«, --^/» (to,---L/*«,). (b)
Считая f, ф О, приходим к уравнению
р*2 _ 64Р* -f 512 = 0. (с)
Параметр критической силы оказывается равным Р* = 9,44; ошибка по
отношению к точному решению составляет около 4,4%. Другой пример
применения этого метода будет приведен в § 24.
§ 13. Метод коллокации
Обратимся к методу коллокации *), который занимает как бы
промежуточное положение между методом Бубнова — Галеркина и
методом конечных разностей. Выражение для прогиба
аппроксимируем снова с помощью ряда (И5),
п
причем каждая из функций т)г должна соответствовать всем
граничным условиям задачи. Параметры ft определяются таким образом,
чтобы после подстановки выражения A15) основное
дифференциальное уравнение задачи удовлетворялось для п значений
независимой переменной. Точки, в которых выполняется уравнение,
называются «точками коллокации». Они могут быть выбраны, вообще
говоря, произвольным образом, но обычно их располагают на равных
расстояниях друг от друга. Если имеется характерный участок
резкого изменения функции, то желательно здесь располагать точки
коллокации более часто; при использовании метода конечных
разностей интервалы в такой области также «размельчают».
Пример 1.11. Вновь определим критическую силу для стержня, один
конец которого защемлен, а второй свободен. Дифференциальное уравнение
задачи выпишем в виде (см. пример 1.6)
Аппроксимирующему выражению для v придадим форму
» = /,*»+/«*, (Ь)
*) Коллокация (collocation)—буквально расположение, размещение. Речь
идет о размещения точек, в которых выполняется определенное условие.
$ н) метол последовательных приближений 53
как в одном мз вариантов примера 1.5. Расположим точки коллокации
в пунктах х = 1/2 и * = I. Подставляя выражение (Ь) для этих точек в (а),
получим следующие уравнения:
/2+6^/4=0, (С)
B-|^)/2+(з-{|р*)^/4=0. (d)
Отсюда
Р1г 48
р,=^Г = Т9^2-53- &
Этот результат отклоняется от точного на 2,4% и очень близок к тому,
который при том же аппроксимирующем выражении был получен нами
по методу Ритца.
Энергетические методы, метод конечных разностей и метод
коллокации можно объединить в том отношении, что при их
применении задача сводится к рассмотрению системы алгебраических
уравнений. Подобные методы в математической физике называют
прямыми.
§ 14. Метод последовательных приближений
При использовании энергетических методов лам приходилось
аппроксимировать упругую линию, причем погрешность результата
зависела от того, насколько удачно выбрано выражение для прогиба.
Правда, в примере 1.5 мы могли сколь угодно близко подойти
к точной величине критической силы, по для этого нужно было
всякий раз вводить новый параметр прогиба. Характер
дополнительной составляющей мог быть выбран нами по тем или иным
соображениям. Перейдем теперь к рассмотрению метода последовательных
приближений, при котором каждое повое приближение целиком
основывается па предыдущем и вытекает из пего, не будучи связано
с интуицией автора расчета.
Сущность этого метода состоит в том, что в качестве исходной
упругой линии берегся любая кривая, удовлетворяющая условиям па
концах. Абсолютные значения ординат этой кривой могут быть
выбраны произвольно, так как при критической нагрузке (если исходить
из приближенного дифференциального уравнения упругой линии)
они определяются с точностью до постоянного множителя. Далее
решается задача об изгибе стержня под действием данной системы
внешних продольных сил. Если бы кривая была нами сразу
подобрана правильно, то, определив изгибающие моменты и
проинтегрировав дифференциальное уравнение упругой линии, мы должны
были бы получить ту же кривую. Если же первоначальная кривая
была подобрана лишь приближенно, то вторая кривая будет
отличаться от первой. Иными словами, новая равновесная изогнутая
форма окажется не той, что мы выбрали раньше. Чтобы прийти
к новой упругой линии, надо изменить ординаты прежней. Но так как
54
сжатые стержни в пределах упругости
[ГЛ. I
при наличии только осевой сжимающей силы изгибающие моменты
пропорциональны ординатам, то это тождественно изменению в Я раз
величины внешней нагрузки. То обстоятельство, что ординаты новой
кривой отличаются в Я раз от ординат первоначальной кривой,
указывает па то, что внешние силы надо увеличить или уменьшить
в Я раз, чтобы получить критическую нагрузку. Но, как правило,
в различных сечениях стержня мы будем получать разные
отношения ординат. Можно условиться определять критическую нагрузку
через отношение максимальных ординат или отношение площадей,
охватываемых упругой линией. Ниже будет указан также метод, когда
истинное значение критической нагрузки окажется взятым «в вилку»,
т. е. представится возможным одновременно подходить к нему сверху
и снизу. От первого приближения мы можем далее перейти ко
второму и т. д. При этом мы будем получать ряд значений Я,
определяющих в пределе истинную величину критической нагрузки.
Методу последовательных приближений может быть придана
аналитическая и графическая форма *).
Пример 1.12. Определить критическую нагрузку для шарнирно
опертого по концам стержня, взяв в качестве исходной линии ломаную,
состоящую из двух прямых отрезков (рис. 1.19) с ординатой / посредине.
■ч ' ■' ■■■■
S
1/8 ф
^
ч»
^
— 1
1/2
^
^
— . *-
\^
Рис. 1.19. Форма упругой линии в нулевом и последующих приближениях.
Уравнение левой половины:
2/
v0 =-j-x.
(а)
Принимая силу Р равной единице, определяем изгибающий момент в
сечении х при х < 1/2:
If
M-=Pv=*-j~x-
(b)
Дифференциальное уравнение упругой линии E) принимает вид
ni d%v 2/
(с)
*) Графический вариант метода был предложен Вианелло [1.16], а
аналитический вариант Ф. Эигессером и в другой форме Б. Н. Горбуновым
(Сб. исследований по теории сооружений, 2, 1936, Стройиздат).
56
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
приближения, по собственным формам потери устойчивости:
«о —/1Ч1 +-Мг +/зЛз ■+- ••• A.135)
Напомним, что каждая из собственных форм соответствует своей
критической силе — первой, второй и т. д. Для /-й собственной
формы уравнение A33) принимает вид
_1 = -V„. A.136)
Принимая 1-ю форму в качестве эпюры моментов и находя отношение
ординат предыдущей и последующей кривых, мы будем получать 1-ю
критическую силу. Так как исходная криваяA35)являласьпроизволыюй,
то в первом приближении мы получим следующее разложение:
г'> = ТГГ1,+-'-&112 + 1Г11з+--- A.137)
Повторяя такой никл п раз, придем к уравнению
»« = -£-4i + -£% +■£-%+■.. A-138)
Aj A2 л3
ИЛИ
«X = /Л +- /, (£)" Ъ + /a (£■)" Ъ + • • • A.139)
Но так как вторая, третья и последующие критические силы лежат
всегда выше первой, то при увеличении числа циклов второй, третий
и т. д. члены в правой части равенства A39) будут неизменно
уменьшаться, так что в пределе получим:
*>пК~»/Л- A-140)
Как видим, по мере возрастания номера п приближения vn с
точностью до некоторого множителя приближается к первой
собственной форме.
Критическую силу обычно вычисляют, сравнивая максимальные
ординаты упругой линии в двух последовательных приближениях.
Однако важная особенность метода состоит в следующем. Если найти
отношение ординат в двух приближениях для одной точки, затем
для второй и т. д., то истинное значение критической силы будет
лежать между значениями, определяемыми максимальными и
минимальными отношениями. Таким образом, точную величину критической
силы удается взять «в вилку», которая сужается для каждого нового
приближения *).
Так, делая вычисления в примере 1.11 для точек //б, 1/3 и 1/2,
получаем в первом приближении 7,9 < P^JP/El < 12, во втором приближении
9,8 < Ркр12/Е[ < 10 и т. д.
*) На это свойство метода последовательных приближений было
указано С. Н. Каном; см. также книгу С. П. Тимошенко [0.23], изд. 1961 г.
§ 15. Метод проб
Если придать методу последовательных приближений графическую
форму, то каждая новая упругая линия строится как веревочная
кривая по отношению к
предыдущей при произвольном
полюсном расстоянии'.
Другой вариант
графического метода можно
предложить *), если задаваться
некоторыми
ориентировочными значениями
критической нагрузки и строить
соответствующую упругую
линию, варьируя полюсное
расстояние Н. Величина Н
берется равной
Е1п
Я = -§^-, A.141)
под п понимается число
равных интервалов, па
которые разделена длина
стержня I, под \jm — масштаб
чертежа (рис. 1.20). Первый
участок веревочной линии
проводим под произвольным
углом. Далее выясняем, как
расположена конечная
точка а веревочной кривой,
т. е. точка пересечения
последнего участка с горизонтальной линией, проведенной через
начальный пункт. Если эта конечная точка будет соответствовать правому
концу стержня, то принятая для определения полюсного расстояния
^сила Р и является критической. Как правило, последний участок
веревочной линии будет либо пересекать ось стержня, либо лежать
"ниже осевой линии.
& В первом случае принятая в качестве критической величина силы
-Является преувеличенной, во втором - преуменьшенной. Для того чтобы
взять искомое значение силы «в вилку*, нужно вести «пристрелку»
и проделать по крайней мере два построения, как показано па
*Рис. 1.20.
Рис. 1.20. Определение критической силы с
помощью «метода проб».
*) Этот метод был предложен Саусвеллом.
58
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
II л. 1
§ 16. Применение интегральных уравнений.
Приближенное определение первой критической нагрузки
Пользуясь методом последовательных приближений, мы
задавались той или иной упругой линией — совпадающей в случае шар-
нирно опертых концов стержня с эпюрой изгибающих моментов
от сжимающих сил — и находили новую упругую линию путем
интегрирования; сравнение первоначальных и вновь найденных ординат
позволяло определить приближенное значение критической нагрузки
и установить, какая форма изогнутой оси ему соответствует. Идя
по этому же пути, но исходя из более общих соображений, можно
составить интегральное уравнение задачи — уравнение,
заключающее неизвестную функцию
прогиба под знаком
интеграла.
Рассмотрим стержень,
шарнирпо опертый по
концам. Определим прогиб в
некотором сечении х,
пользуясь формулой
Максвелла—Мора:
4г^- AЛ42>
где М — изгибающий
момент в текущем сечении \
от заданных сил, М —
момент в том же сечении от
единичной силы, приложенной в точке с координатой х. Как видно
из рис. 1.21, эти моменты буду г (при сжимающей силе Р)
Рис. 1.21. К выводу интегрального уравнения за
дачи.
М — PV (|), М :
-7)
(■-4)
I при IO,
х при х <£.
Воспользуемся безразмерными параметрами
-j = x\' t — Sl
A.143)
A.144)
и представим A42) в виде
-V, 1
»(*i)= J -^-U-*i)&i«a,)<*!i f J iErO-&i)*i«(si)<*!i. A-H5)
*i
60
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
ИЛ. I
А,— параметра уравнения. Уравнение A61) имеет, вообще говоря,
тривиальное решение: у(;с)е=0, отвечающее прямолинейной форме
равновесия стержня. Нетривиальное решение у(х) появляется в точках
разветвления (бифуркации) равновесных состояний (см. стр. 17);
соответствующие этим точкам значения параметра X называются
характеристическими или фундаментальными числами, а также особыми
или собственными значениями параметра (см. стр. 21), а
нетривиальные решения—собственными, характеристическими или
фундаментальными функциями. Характеристические числа
уравнения A51) определяют в пашем случае первую и высшие критические
нагрузки.
Таким образом, для определения первой критической нагрузки
необходимо определить наименьшее характеристическое число
интегрального уравнения; последнее заменяет дифференциальное уравнение
задачи вместе с граничными условиями.
Интегральные уравнения решаются с помощью различных
приближенных методов. Одним из наиболее распространенных методов
является метод последовательных приближений, который уже
рассматривался в § 14. Другой метод заключается в замене интегрального
уравнения конечной системой линейных алгебраических уравнений,
для чего правая часть A51) преобразуется по одной из формул
приближенного интегрирования*).
Но для определения характеристических чисел можно
воспользоваться также теорией симметричных интегральных уравнений
Гильберта— Шмидта**). Этот путь приводит
к примечательным формулам, выражающим
первое характеристическое число через так
называемые следы ядра. В первом
приближении можно принять
A.154)
Х? =
1
где 52 — второй след ядра, определяемый
по формуле A53). Такой метод интересен
тем, что определение критической нагрузки
(характеристического числа) как бы
отделяется от установления формы потери
устойчивости (собственной функции), в то время как
в предшествующих случаях эти задачи
выполнялись одновременно. Можно показать, что приближенное
значение критической нагрузки по A54) всегда лежит ниже истинного.
Формулу A53) для двойного интеграла можно преобразовать
следующим образом. Разделим площадь интегрирования на два равных
Рис. 1.22. К определению
величины 5 при симметричном
ядре.
*) См. Л. В. Канторович, В. И. Крылов, Приближенные методы
высшего анализа, 1962, стр. ПО.
**) См. указанную выше книгу С. Г. Михлина, стр. 108.
62 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ цл. t
в качестве интенсивности распределенной нагрузки силу инерции
массы стержня, приходящуюся на единицу длины. Обозначая через р
вес единицы длины стержня, получим:
F/i!lL i P———-£ — П 157^
Ш дх* +/ дх*~ g dt* ' (l.ioi)
где g — ускорение силы тяжести. Вводя обозначение k2 = PjEf,
придем к уравнению
Будем искать решение уравнения A58) в виде произведения двух
функций:
v(x, t) = X(x)T(t); A.159)
тогда вместо A58) получим:
или
т d<X
dx*
1 d*X
X dx* '
,, 1 d*X
П X dx*
P у d*T
Elg dt*
p 1 d4
Elg T dt*
A.160)
Левая часть этого уравнения зависит только от х, а правая — только
от t\ уравнение может удовлетворяться лишь в том случае, если
левая и правая части являются постоянными величинами:
1 d*X , ,, 1 rf2X . ., 1Й1.
k^-J7i=X- A.161)
X dxi ' X dx*
p 1 d4
A.162)
Elg T dt2
Второе из этих уравнений преобразуется к виду
-ж + -^^ = о- О-163)
Интеграл этого уравнения представим в форме
Т — Л sin (wf 4-а); A.164)
частота колебаний со определяется формулой
еР — ИМ-Х. A.165)
Уравнение A61) перепишем в виде
4£+*24£-**=°: A.166)
соответствующее характеристическое уравнение будет
s4 + &V — % = 0. A.167)
(L WH,A1D1C OiCI-ЛПИ D ИГСДИтл »ч. „.
ческий критерий приводит в данном случае к тому же значению
критической нагрузки, что и другие критерии—статический или
энергетический. Однако, как уже было сказано, такое совпадение
имеет место не для любой упругой системы.
§ 18. Критерий начальных несовершенств
До сих пор нами рассматривались идеальные стержни с
прямолинейной осью, нагруженные сжимающей силой строго по центру
тяжести поперечного сечения. Между тем реальные элементы
конструкций всегда обладают известной начальной погибыо;
приложенные к ним сжимающие силы обычно действуют с некоторым
эксцентриситетом; наряду с осевыми силами могу г быгь приложены те
или иные поперечные нагрузки. Все эти факторы играют роль
«возмущений», влияющих на поведение системы. Исследование
«несовершенных» систем важно, прежде всего, с практической стороны,
так как позволяет приблизить расчетную схему к реальным
конструкциям. Правда, все перечисленные факторы являются, как правило,
случайными, поэтому обоснованно оценить их эффект можно лишь
с привлечением статистических методов. Подобные методы будут
изложены ниже, в главах XXV и XXVI. Однако построение
статистических зависимостей требует предварительного определения того, как
ведет себя система при некотором заданном возмущении*). Кроме
того, рассмотрение несовершенной системы в ряде случаев позволяет
определить критическую нагрузку для ее идеальной модели: мы знаем
уже, что эффект различных возмущений особенно сильно сказывается
вблизи критической нагрузки.
Рассмотрим последовательно влияние всех важнейших
возмущающих факторов. Начнем со случая, когда стержень, шарнирно
опертый по краям, имеет начальную погибь
v0 = v0{x) A.175)
и сжимается силой Р, направление которой проходит через концевые
шарниры. Дифференциальное уравнение E) получает вид
£/S=~p^ Aл76)
где под v понимается дополнительный прогиб, возникающий в
процессе деформации, под Vi — полный прогиб:
V]=v + v0. A.177)
Вводя прежнее обозначение k2 = PjEI, получим:
**+k*v=*-k*v0. A.178)
:) Более подробно об этом см. в § 232.
66 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
1.0-
0,3
инвариантного вложения *). Решая задачу об устойчивости стержня,
допустим, что стержень имеет начальную погибь, либо что сила
приложена с некоторым эксцентриситетом. Тот результат, что при силе,
приближающейся к критической, для стержня заданной длины
прогибы стремятся к бесконечности, можно трактовать иначе, считая
заданной силу и варьируя длину стержня: при длине, близкой
к «критической», прогибы также должны бесконечно возрастать.
Для стержня длиной I, имеющего
шарнирные опоры, наряду с
координатой х, характеризующей
положение некоторой точки
стержня вдоль оси, введем
переменную z. Длина отрезка оси,
определяемая z, как бы
«вкладывается» в фактическую длину
стержня / и является основным
варьируемым параметром —
длиной воображаемого стержня.
Далее, используя исходное
уравнение и граничные условия
задачи, можно составить уравнение
относительно какой-либо
характерной функции, обращающейся
в бесконечность при z -> zKp. В
качестве такой функции можно
избрать, например, угол наклона
упругой линии на одном из концов отрезка z. Задача сводится к
определению такого наименьшего значения z, при котором характерная
функция станет бесконечной, т. е. определяет критическую длину
стержня при заданной нагрузке. Описанный путь решения интересен
тем, что позволяет рассматривать задачи самого широкого класса.
Особенность метода инвариантного вложения состоит в приведении
исходной задачи — в данном случае об определении собственных
значений—к своеобразной задаче с начальными условиями, легко
решаемой с помощью ЭЦВМ. В рассматриваемом примере уравнение
для угла наклона упругой линии в фиксированной точке решается при
возрастающих значениях z, начиная с г = 0. При этом в общем
случае стержня переменного сечения мы получаем известное уравнение
Риккати**). Величины критической длины стержня при заданной на-
0.6
Dfi
0,2
О
/Ъ
Па-3,5
^-
02
Ofi 0,5 0,5 С, 1,0
Рис. 1.25. Диаграмма «дополнительный
прогиб—нагрузка» для стержня с начальной
noriiobio.
*) Идея этого метода принадлежит В. А. Амбарцумяну
(«Теоретическая астрофизика», 1952), разработавшему его в связи с некоторыми
задачами астрофизики. В последнее время этот путь широко использовался
Беллманом и другими авторами в различных областях математической
физики. См., например, Е. М. Shoemaker, Journ. Appl. Mech. 32, № 1 A965).
**) См., например, Э Камке (Е. Кашке), Справочник по
обыкновенным дифференциальным уравнениям, 3-е изд., «Наука», 1965, стр. 44.
F
I9J
ЭКСЦЕНТРИЧНОЕ СЖАТИЕ. ПРИБЛИЖЕННОЕ РЕШЕНИЕ
07
'грузке представляют собой последовательность положительных
значений zn, при которых функция, являющаяся решением уравнения,
принимает бесконечно большие значения.
В заключение отметим, что формула A81) может быть
использована для определения критической силы при экспериментах со
стержнями, имеющими начальную погибь *). Представим A81) в виде
1~Р
Р ' кр
■/ = /о.
A.181а)
Строим график, откладывая по оси абсцисс измеренные значения /,
а по оси ординат—значения f/P. Тогда мы на графике должны
получить прямую, причем величина, обратная угловому коэффициенту
прямой, даст критическую силу.
§ 19. Эксцентричное сжатие. Приближенное решение
Рассмотрим, далее, другой возмущающий фактор — эксцентриситет
в приложении нагрузки. Пусть стержень, шарнирно опертый но
концам, подвергается действию сил Р, точка приложения
которых отстоит от центра тяжести сечения на
расстоянии е. Предполагается, что плечо е лежит в
плоскости наименьшей жесткости стержня (рис. 1.26).
Дифференциальное уравнение E) получит здесь вид
EI
d2v
dx2
■P{v-\-e)
или
cPv
dx2-
-\-k2v — — k2e.
A.184)
A.185)
Общее решение соответствующего однородного
уравнения будет
v = A cos kx-\-Bsinkx. A.186)
Сюда надо присоединить частное решение v~ — е;
полное решение получает вид
v = A cos kx -\-Bsinkx— е.
A.187)
; Удовлетворяя граничным условиям задачи v — 0 при Рис' '-26- Шар_
& = 0, /, найдем: тый стержень
I под действием
л п i kl ,, inn4 эксцентрично
А—е, B = eig-^-. A.188) приложенных
* ^ сил.
Решение A87) теперь можно представить в следующем виде:
; V— eicoskx-^tg-j-sinkx—1] A.189)
*) Этот метод был предложен Саусвеллом.
5*
68
или
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
v = e
cos
(*-*)
cos
kl
Стрела прогиба равна при X — IJ2
г 1
/■■
COS •
kl
\\=е
cos-
V
/—р~
[ГЛ. I
A.190)
A.191)
"ко
Отметим, что и здесь зависимость между / и Р будет нелинейной
и что при Р->Ркр получим /—>со.
Решим ту же задачу с помощью метода
Бубнова—Галеркина (см. § 11). Примем уравнение
упругой линии в виде
« = /sin-^£. A.192)
Составим уравнение типа
J[E/0-j-P(o + e)]s!n*irf* = O A.193)
о
и подставим вместо v выражение A92); после
интегрирования получим:
J TT
Л Р,
кр
A.194)
— 1
Это уравнение имеет ту же структуру, что и за-
^ш'ем'Диным^^оицом в11СИМОСТЬ A81), ОТНОСИВШЭЯСЯ К СИНусОИДаЛЬНОЙ
под действием эксцеи- начальной ПОГИби.
^""""нагрТкТ6"" Если такого же типа нагружеиию
подвергается стержень с одним защемленным концом и
другим свободным концом (рис. 1.27), то уравнение A84) получит вид
EI
dx*
P(e+f-v)
или
iPv
^- + ^ = £2 (* + /)•
dx'
A.195)
A.196)
Подчиняя решение условиям v = 0, dvldx = 0 при х = 0, найдем:
v=--(e + /)A — cos/гх). A.197)
§2CJ
ЭКСЦЕНТРИЧНОЕ СЖАТИЕ. ТОЧНОЕ РЕШЕНИЕ
69
Полагая х = 1, получим:
2 V РКР
A.198)
Зависимость между / и Р оказалась точно той же, что и в
случае шарнирно опертых концов.
§ 20. Эксцентричное сжатие. Точное решение
Подойдем к той же задаче об эксцентричном сжатии, исходя из
точного дифференциального уравнения упругой линии, как в § 5.
На рис. 1.28 изображен стержень длины I в изогнутом положении;
сила Р действует на плече е и сохраняет вертикальное направление.
Кроме того, здесь же показан фиктивный стержень длиной /ь конец
которого лежит на линии действия силы Р.
Очевидно, по отношению к этому
фиктивному стержню можно использовать
соотношение G5), связывающее стрелу прогиба f\
с параметрами /г и Ф (оставляем знак плюс):
/j/I = 2sinf>.
A.199)
Будем рассматривать равновесные
положения стержня вблизи первой критической
силы, так что для ср0 в G1а) примем
значение ге = 0.
Прогиб v в некотором сечении х
определяется по G6):
kv = 2 sin f> A — cos ф).
Рис. 1.28. К точному
решению задачи об
эксцентричном сжатии стержня.
Пусть для верхнего конца стержня параметр ф приобретает значение
<p = (pj; тогда стрела прогиба / будет равна
kf = 2 sin ФA — соэфО.
A.200)
Определим, далее, угол поворота касательной к изогнутой линии Р.
Воспользуемся соотношением
A.201)
п Лх
cos 0 = -г-
ds
и подставим сюда значения dx и ds по F6) и F8); тогда получим:
/г2
Или, по F9),
COSO=1—у (/2-Я
cos 0 = 1 — 2 sin2 б- sin2 ф.
A.202)
70 сжатые стержни в пределах упругости [гл. i
Угол наклона верхнего торца при х = 1 найдется тогда по формуле
cos9(=l— 2sin2^sin29I. A.203)
Рассматривая рис. 1.28, выпишем зависимость между / и Д:
/,=/ + е cos 0г. A.204)
Подставляя сюда выражения A99), B00) и B03), находим:
2 stn ft cos ф.
ke —
1 —2 stn2 -9- sin2(pi "
A.205)
Интегрируя выражение G1) для ds, получим полную длину стержня I:
kl =
dtp
— sin2# sin2 ф
F(9„ b).
A.206)
Подобный интеграл, в отличие от G3), носит название неполного
эллиптического интеграла первого рода. Эти интегралы также
табулированы.
Уравнения B04), B05) и B06) содержат три неизвестные
величины: стрелу прогиба /, параметры Ф и ср]. Пользуясь ими, можно
для каждого заданного эксцентриситета е установить
зависимость между нагрузкой Р и
стрелой прогиба /. Такие кривые для
е = 0,\1 и е —0,01/ изображены
т
0,&
0,4
0,2
о
<\\^-/
р-
у
л\./Ь>
уи
■^v
на рис. 1.29 в сопоставлении с
кривой, относящейся к случаю
центрального сжатия (е = 0).
Наибольшее расхождение между
а? 0,4 0,6 0,8 W 1,2 1.4 1,6 18 гл кривыми получается в области,
' "Р лежащей вблизи критической на-
Ряс. 1.29. Зависимость между стрелой про ГрузКИ; При Р > Р„„ ВЛНЯНИв
гиба и нагрузкой по точному решению задачи. Г г У
эксцентриситета падает.
Эти данные можно сопоставить с приближенным решением. Если
считать, что параметр Ф мал для незначительных прогибов, то
в B05) и B06) можно пренебречь sin2Фsin2ф по сравнению с 1;
тогда получим:
kl = F((pu flO«q>„ A.207)
ke zxls'mbcostyxm 2sindcosW. A.208)
Сравнивая с B00), найдем:
f = e{-dkl~1)'
что совпадает с A98).
«211
ВЛИЯНИЕ ПОПЕРЕЧНОЙ НАГРУЗКИ
71
§ 21. Влияние поперечной нагрузки
Перейдем к случаю, когда наряду с осевой силой действует
некоторая поперечная нагрузка. Пусть шарнирно опертый стержень,
Рис. 1.30. Стержень при продольно-поперечном изгибе.
сжатый силой Р, подвергается действию равномерно распределенной
нагрузки интенсивности q (рис. 1.30). Уравнение E) получает вид
EI
d2v
dx*
ql
дхг
-Pv-^x+^
или, при k2 = P/EI,
dh>
dx
±4-f k*V=-^\-xX.
P \2
A.209)
A.210)
Соединяя общее решение однородного уравнения и частное решение,
находим:
qk* I I
X ■
В — 4r tff -7Т-
k2v — A cos kx -j Bsin/гх— „ .
Из граничных условий получаем:
Р f ~ z
Окончательно:
k2v = -р ({S 4f si" kx -г- cos kx — 1 j — Ai- ^ g- x — ~^j
Стрела прогиба равна
4-- A.2П)
/=■
р/г2 kl
■ I cos-2-
1 P 8
A.212)
A.213)
A.214)
Мы получили зависимость между / и Р того же типа, что и для
Эксцентрично сжатого стержня.
В случае, если вместо распределенной нагрузки имеется
сосредоточенная сила Q посередине пролета, таким же путем находим
уравнение упругой линии для одной из половин стержня
Q ( 1
v =
2Р \ и kl
k COS -у
shikx ■
A.215)
72 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. 1
и стрелу прогиба
л/ / £ о \
A.216)
Решим ту же задачу об одновременном действии осевой и
поперечной нагрузок с помощью метода Бубнова — Галеркина. В случае
равномерно распределенной нагрузки выпишем уравнение
Вводя в качестве аппроксимирующей кривой полуволну синусоиды
v^fsm^f-, A.218)
придем к уравнению
i
CI d*v , „ d2v \ . юс , г, „ „1П,
ШТ^±РТ&~ qjsm-j-dx^O. A.219)
о
Подставляя вместо v B18) и интегрируя, находим:
4 ql*
f=^ZE' A,220)
Числитель представляет собой здесь приближенное значение стрелы
прогиба стержня при действии одной поперечной нагрузки:
/о=4тй A-221)
коэффициент равен 1/76,7 вместо известного значения 5/384 =
= 1/76,8. Поэтому формулу B20) можно переписать в виде
/ = fjLp~< A.222)
1-^~
что совпадает по структуре с A82). Эта простая формула может быть
распространена и на другие случаи продольно-поперечного изгиба.
Для определения максимальных нормальных напряжений надо
воспользоваться формулой
_ _ Мта_х
°тах — у/ '
где W—момент сопротивления сечения.
§22]
УСТОЙЧИВОСТЬ НЕКОНСЕРВАТИВНОИ СИСТЕМЫ
73
Учитывая моменты, отвечающие продольной сжимающей и
поперечной нагрузкам, найдем:
"max — р ~Г ^ '
A.223)
н
сжимающие напряжения считаются здесь положительными.
Как видим, при продольно-поперечном изгибе принцип
независимости действия сил неприменим; величина B23) не равна сумме
напряжений, вызываемых продольной и поперечной нагрузками в
отдельности. Поэтому при проверке стержня на «устойчивую прочность»
(термин Н. В. Корноухова) умножают все нагрузки на коэффициент
запаса п и сравнивают максимальное напряжение не с допускаемым,
а с напряжением, принимаемым за предельное.
§ 22. Устойчивость неконсервативной системы.
Случай следящей силы
Все рассмотренные до сих пор упругие системы относились
к числу консервативных: работа сил, приложенных к ним, не
зависела от траекторий перемещения точек приложения и определялась
только начальным и конечным положением этих точек.
Обратимся теперь к одному из примеров
неконсервативной системы, исследование устойчивости которой
требует особого подхода *).
Допустим, что один из концов стержня постоянного
сечения защемлен, а второй свободен и что к
свободному концу приложена сила Р, направленная при
изгибе стержня вдоль касательной к упругой линии
(рис. 1.31); такую силу называют следящей. Разложим
силу Р на две составляющие: вертикальную V и
горизонтальную Н. При малых углах поворота касательной
силу V можно считать постоянной; она играет такую
же роль, как «обыкновенные» силы в консервативных
задачах. Напротив, сила Н является специфической: ее
величина существенным образом зависит от угла
поворота концевого сечения, а элементарная работа равна
произведению силы на приращение прогиба.
Применим в этой задаче динамический критерий,
подобно тому, как это было сделано в § 16.
Уравнение движения элемента балки имеет по-прежнему вид A58).
Принимая v — X (х) Т (t) и идя тем же путем, приходим к выражению A69)
для формы колебаний:
Х(х) = A ch s,x -f- В sh s,x-f- С cos s2x -j- D sin s2x, A.224)
где s, и s2 определяются по A68).
*) Подобная задача была рассмотрена М. Беком [1.8], К. С. Децнеко
и М. Я. Леоновым [1.2]; некоисервативным системам посвящена книга
8. В. Болотина, 1961 [0.1].
L
~77?.777.
и
Рис. 1.31.
Стержень под
действием
следящей силы.
74 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
В сечении х = О обращаются в нуль прогиб и угол поворота,
а в сечении х = 1 — момент и поперечная сила; следовательно,
граничные условия для функции X (х) будут:
х==0, -£г=0 при х==°- ш = 0' ё=° "Р" X=L (L225)
Первые два условия дают:
A-\-C = 0, s,B+s2D = 0. A.226)
Остальные условия приводят к уравнениям:
(s^chs,/ -(-55 coss/) Л -(-5,E, sh A,,Z -f-s2sin \l)B — 0, 1
(sjshs,/ —^sin^M-f s,(^chV+s=sinA.2Z)fl = 0. | (L227)
Приравнивая нулю определитель этой системы, приходим к
следующему уравнению:
s\-\-s\ + 2s\s\ch s{l coss2l — s}s2(s2{ — s--)sh SjZsins2Z = 0. A.228)
Пользуясь выражениями A68), находим:
sl-\-s*=k*-\-2k, ф| = I, 52 — *2= —k2- A.229)
Уравнение B28) принимает теперь вид
k*-\-2X-\- 21 ch s,Z cos 52Z -f- У^&2sh SjZ sin s2Z = 0. A.230)
Перейдем к безразмерным параметрам
S\ —- о it, 09 09/,
A.231)
тогда получим зависимость
F(K, Q)=s/C2+-2Q-f 2QchsIcoss2+-/U/CshiIsin72 = 0. A.232)
Параметр К представляет сжимающую силу, a Q — частоту
колебаний.
На рис. 1.32 приведен график, изображающий зависимость
между К и Q по уравнению B32).
Интересно сравнить его с аналогичным графиком рис. 1.23,
относившимся к консервативной задаче. Тогда точка бифуркации
равновесных состояний соответствовала «нулевой» частоте; теперь же на
оси Й=0 мы не получаем точек бифуркации. Поэтому, если
пользоваться только статическим критерием, то можно прийти к тому
заключению, что потеря устойчивости стержня в данном Случае
вообще невозможна.
Другой результат мы получаем, пользуясь динамическим
критерием, приобретающим при этом новую интерпретацию. Кривая (К, Q)
§ 22] УСТОЙЧИВОСТЬ НЕКОНСЕРВАТИВНОЙ СИСТЕМЫ 75
имеет вид петли. Точки, лежащие на оси абсцисс, соответствуют
двум первым собственным частотам изгибных колебаний стержня,
не несущего сжимающей нагрузки. Если положить Р = 0, то
уравнение B28) переходит в следующее:
- К
chs1coss2 = —1; A.233) 25
корни его, как известно, определяют
частоты собственных колебаний стержня с
одним защемленным и другим свободным
концом; формы этих колебаний показаны
на рис. 1.33. При РфО упругая линия
стержня сочетает первую и вторую
собственные формы; для левой части петли
преобладающей является первая форма
колебаний, для правой — вторая. В предельной
точке петли частоты сливаются; этой точке
соответствует значение К
К «20. A.234)
При К > 20 система окажется неустойчивой и будет раскачиваться,
снабжаясь дополнительной энергией за счет работы неконсервативной
составляющей силы Р. Заметим, что изменение направления силы Р,
вытекающее из условия задачи, должно
происходить благодаря некоторому внешнему для системы
источнику энергии.
Если искать дополнительные корни уравнения
B28), то мы, по-видимому, получим новые петли,
соединяющие третью и четвертую собственные
частоты, пятую и шестую и т. д. Однако
предельная точка для первой петли получается
наименьшей; она и определяет критическую нагрузку,
равную приблизительно
9тт2Р/
A.235) ^
Рис. 1.32. «Петля» частот
колебаний при различных сжимающих
силах.
РкР = -
/2
а)
6)
Рис. 1.33. Формы
колебаний при действии
следящей силы.
Сравнение с формулой B7) показывает, что при
следящей нагрузке критическая сила получается
примерно в восемь раз большей, чем при нагрузке
постоянного направления.
Отметим также интересную задачу об устойчивости стержня
с обоими свободными концами, нагруженного на одном из торцов
сжимающей следящей силой; центр тяжести стержня совершает при
этом равноускоренное движение. Критическое состояние наступает *)
при значении силы Р г» 11 OEIjl2.
*) По вычислениям В. И. Феодосьева (Прикл. мат. и мех. 29, № 2,
1965,391—392); см. также К. Н. Гопак, Изв. АН СССР, Мех. и маш., № 4, 1960.
76 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ |ГЛ. I
Мы рассматривали колебания стержня, не принимая во внимание
влияние сил сопротивления. Учет этих сил может сказаться на
величине критической силы и привести к ее уменьшению.
Другие примеры неконсервативных задач, связанные с задачами
флаттера упругой системы, будут приведены в главе XXIV.
§ 23. Особенности краевых задач
для консервативных систем
Мы видели, что задачи об устойчивости консервативных и неконсерва-
тивиых систем требуют, как правило, различного подхода. Это можно
пояснить, исходя из структуры дифференциальных уравнений, описывающих
поведение системы, и, что не менее важно, из характера граничных условий.
Допустим, что используется статический критерий устойчивости; тогда
определение критической нагрузки сводится к отысканию первого собственного
значения для некоторого линейного однородного уравнения в сочетании
с граничными (краевыми) условиями, которые мы также будем считать
однородными. Иными словами, речь идет о вычислении одного из собственных
значений однородной краевой задачи. С точки зрения теории
дифференциальных уравнении при этом важно установить, является ли
рассматриваемая краевая задача «самосопряженной». Здесь мы должны обратиться к
понятиям сопряженных дифференциальных уравнений и сопряженных
граничных условий *).
Рассмотрим однородную дифференциальную форму, содержащую
некоторую функцию v (х) и ее производные различного порядка (обозначаемые
индексами v), до л-й включительно:
п
м«)=/»(-*)-0+/»-1 (■*)-£?=?•+ ••• +/oW« = S/vw(v); (a)
v=0
коэффициенты /v будем считать в общем случае функциями **) х. Составим
новую дифференциальную форму но следующему правилу (v заменяем
условно на w):
l* (w) = 2 (-i)v lAw](v); (b)
V-0
эта форма называется сопряженной с (а). При постоянных коэффициентах /v
получим, очевидно,
л
L* (w) = 2 (-l)v /vw(v); (с)
v-0
отметим, что члены с нечетными производными в (а) меняют здесь знак.
Дифференциальной формой £.**, сопряженной с L*, будет первоначальная
форма: L** = L.
*) См., например, указанную на стр. 66 книгу Э. Камке, стр. 101, 189
и ел.; там же даны ссылки на литературу.
**) Предполагается, что на некотором участке а^х^,Ь эти функции
и их л производных по х являются непрерывными.
§ 23J KFAE£i£>l£ ДЛДЛЧЛ /VITi Л.»-»! 1\^иг ил i /Jul ллл wh.ilj'1 /i
Сопряженные дифференциальные формы удовлетворяют тождеству Лаг-
ранжа:
w/. (v) — «Z.* (да) = -г- F [v, w]\ (d)
под F понимается билинейная форма
/> [«,«]= 2 2 (-l)P«W(/v^)<P)- (e)
v-I p+5-v-I
При постоянных /v будет
/* [«.»] = 2 2 (-Dp/v«<*,«<p). (f)
V™1 p 1 G-V-I
Например, для формы четвертого порядка (п = 4) получим (штрихи
обозначают дифференцирование по х):
F [v, w] — v (fiw — f2w' + fdw" — ftw'") +
+ V' (f2W — f3w' + ftw") -f V" (f3W - ftW') 4- ftv'"W. (g)
Если дифференциальная форма совпадает с сопряженной ей (L = L* при
1> = а0, то она носит название самосопряженной. Сравнение (с) и (а)
показывает, что в самосопряженную форму с постоянными коэффициентами могут
входить лишь сама функция и ее четные производные.
Но нас интересует не только вид дифференциального уравнения, ио и
формулировка граничных условий — как мы предположили, однородных —
при некоторых значениях х, например х = а и х = Ь. Граничным условиям
для функцип v соответствуют сопряжеипые граничные условия для w; их
можно найти, интегрируя (d) в пределах от а до b (формула Грина):
ь
[wL(v) — vL*(w)]dx = F[v,w]\ . (h)
J la
a
Граничные условия, эквивалентные сопряженным с ними, называются
самосопряженными.
Дифференциальная форма совместно с граничными условиями образует
дифференциальный оператор, а соответствующее уравнение в совокупности
с граничными условиями определяет краевую задачу. Если дифференциальная
форма, а вместе с тем и граничные условия являются самосопряженными,
то отвечающие им дифференциальный оператор и краевая задача также
будут самосопряженными. Следовательно, для того чтобы судить о том,
будет ли однородная краевая задача самосопряженной, надо выяснить прежде
всего, обладает ли этим свойством описывающая задачу дифференциальная
форма. Но, кроме того, необходимо исследовать заданные граничные
условия; требование самосопряженности будет удовлетворено, если выполняется
равенство
F[v,w]\ba=0. (i)
Обратимся, для примера, к первой из задач § 3 со стержнем,
защемленным одним из концов и со свободным вторым концом. Основное уравнение
имеет вид (8); построив форму (с) при /4=1 и /2 — к2, убеждаемся в том,
78 сжатые стержни в пределах упругости 1гл. i
что она совпадает с исходной и, следовательно, является самосопряженной.
Переходам к граничным условиям B3), B0) и A9):
v = 0 и v' = 0 при х = 0;
»" = 0 и v'"-\-k?v' = Q при х=1.
Развернув условие A) по формуле (g), получим:
F [v, w]l0 =[—v {w'" -f kn-w') -f w (v'" + k2v') -f v'w" — v"w'\ \lQ = 0;
оно выполняется, если будет w = 0 и да'=0 при х — 0; w"'-\-№w' = 0 и
да" = 0 при х = I. Таким образом, заданные условия эквивалентны
сопряженным. Краевая задача в целом оказывается самосопряженной.
В качестве другого примера выберем задачу § 22 со следящей силой.
Статическое дифференциальное уравнение по-прежнему будет тина (8) и,
следовательно, остается самосопряженным. Граничные условия имеют вид
B23): v = v' = 0 при х — 0, v" = v'" = 0 при х = 1. Если бы критерий (f)
выполнялся, то должно быть: w = w'=0 при х = 0; w"' -j-№т' = 0,
w" -\- k2w = 0 при х = I. Но последние два равенства не совпадают с
исходными условиями; следовательно, данная краевая задача является
несамосопряженной.
Краевые задачи, описывающие консервативные системы (и
соответствующие им дифференциальные операторы), являются всегда самосопряженными.
Это обстоятельство позволяет использовать в задачах устойчивости
консервативных систем аппарат теории самосопряженных дифференциальных
операторов *). Можно показать, что все собственные значения X; в таких краевых
задачах вещественны **), а собственные функции, отвечающие различным X;,
ортогональны и образуют полную систему функций. Это означает, что
произвольная функция и (х), удовлетворяющая заданным граничным условиям,
может быть в интервале (а, Ь) разложена в ряд по таким собственным
функциям:
«(•*)= 2 cvvv (x),
V
причем, удерживая нужное число членов ряда, можно аппроксимировать и(х)
с любой наперед заданной степенью точности. Примером полной системы
в интервале 0; / является последовательность функций sin (nnx/l) (и = 1,
2,3,...), отвечающая, как мы знаем, самосопряженному однородному
дифференциальному оператору в задаче Эйлера об устойчивости шарнпрно
опертого сжатого стержня.
Другими словами, собственные функции самосопряженной краевой задачи
образуют некоторое бесконечномерное функциональное пространство, по
различным «направлениям» которого может быть разложена некоторая
заданная функция и (х).
§ 24. Явление потери устойчивости «в большом»
Познакомимся более подробно с явлением выпучивания упругой
системы «в большом». В качестве примера такой системы может
служить сжатый стержень, скрепленный с пружиной, имеющей
нелинейную характеристику. Для упрощения задачи заменим упругий
*) См., например, М. А. Наймарк, Линейные дифференциальные
операторы, Гостехиздат, М., 1954.
**) Точнее, это относится к так называемым нормальным краевым
задачам, см. книгу Э. Камке (ссылка на стр. 66).
S ■'"•I
стержень двумя абсолютно жесткими звеньями длиной 1/2,
соединенными упругим шарниром; два других конца звеньев будем считать
свободно поворачивающимися (рис. 1.34). Примем, что шарнир А
присоединен к двум пружинам
АВ и АС, расположенным под
некоторым углом друг к другу.
Жесткость каждой пружины с
линейной характеристикой
обозначим через k. Пусть
первоначальная длина каждой пружины
равна г, а расстояние от
шарнира А до линии ВС равно а.
Реакция каждой пружины при
перемещении шарнира равна
S = k(r — rx). A.236)
где /■] — длина пружины после
деформации. Суммарная реакция
обеих пружин равна (см. рис. 1.34):
= 2ft(^-- l)(a-/); A-237)
под f — AD понимается перемещение точки А, характеризующее
прогиб стержня. Рассматривая треугольник ABD, находим:
/■1=/-)Л -{Ц£--£)- (I-238)
(я-/)~|гBя2/-Зя/24-/3).
A.239)
Таким образом, при линейной характеристике каждой пружины
в отдельности общая их реакция изменяется в зависимости от / по
нелинейному закону.
Допустим, что стержни передают сжимающую нагрузку Р и что
произошла потеря устойчивости системы. Условие равновесия каждого
звена имеет вид
M = Pf-£sBa?f-bap + p)l. A.240)
Считая отношение /// малым, примем взаимный угол поворота в
шарнире ф равным 2//~2 = 4///. Жесткость шарнира С = М/ф подберем
Рис. 1.34. Модель, иллюстрирующая явление
потери устойчивости в «большом».
Q = 2k
Ы¥-ж
80 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
из условия, чтобы при отсутствии пружин критическая сила равнялась
эйлеровой:
C = -^L=^-. A.241)
Ф 4
При наличии пружин будет
Pf -*^Bа*Г-Ъар + Р)=?£Ц-\ A.242)
отсюда при / Ф О
Р = Рэ + ^<2а?-Ъа/-+рI. A.243)
При потере устойчивости в малом нужно считать f<^_a, тогда
получим критическую силу равной
p*=p*+^f- с1-244)
Как видно из уравнения B43), при возрастании / сжимающая сила
вначале падает (влияние среднего члена в скобках), а затем
начинает снова возрастать (влияние третьего члена). Определим
наименьшее значение Р = РН\ .приравнивая нулю производную от Р по /,
найдем: /=1,5а. Отсюда
р ~р _ ka.4 p ?__^£i/ /j 2451
При всех значениях силы Р, лежащих между Рн и Рв, система имеет
три равновесных положения: одно, соответствующее начальному,_ и
два смещенных. Начальное состояние становится неустойчивым при
Р > Рп, поэтому по терминологии, принятой нами в § 6, нагрузка Ря
соответствует потере устойчивости п малом и может быть названа
верхней критической силой. С другой стороны, сильно изогнутые
равновесные формы возможны при всех значениях Р > Рн\ при
наличии известных возмущений возможен скачок системы от начального
положения к изогнутому, характеризующий потерю устойчивости
в большом. Нагрузку Рп называют нижней критической силой *).
Введем обозначения
£*=?•■$; = *• 4=t с1-246)
и перепишем уравнение B43) в виде
Р = l + ftB — 3£-h£2). A.247)
На рис. 1.35 показана зависимость Р(£,) между безразмерными
параметрами нагрузки и прогиба, или, иными словами, диаграмма
*) Это понятие более подробно рассмотрено ниже, в § 246.
§25]
О ВЫБОРЕ МЕТОДА ИССЛЕДОВАНИЯ
81
равновесных состояний системы при k = 0,5; 1. На графике отмечены
точки, отвечающие верхней и нижней критическим силам. На уровне
нагрузки Р0 мы получаем, как уже было сказано, три равновесных
состояния, соответствующих точкам а, Ь, с. Можно показать, что
первое из них является устойчивым, второе— неустойчивым и третье —
вновь устойчивым. Это соответствует
равновесным положениям шарика на р
рис. 1.17. При наличии известного
возмущения система может перейти
скачком из положения а в
положение с.
Параметр k определяет «степень
нелинейности» системы. Чем выше k,
тем большим получается перепад
между верхней и нижней
критическими нагрузками. Отметим, что при
а = 0, когда пружины расположены
по одной прямой, будет k — 0.
Мы приходим к выводу, что
для упругих систем, имеющих
«падающую» характеристику Р(£),
расчет по верхней критической силе,
Соответствующей ПОТере уСТОЙЧИ- Рис. 1.35. Диаграмма «нагрузка- прогиб».
вости в малом и определяемой из
линеаризованных уравнений, недостаточен. Обоснованный расчет
подобных систем — это расчет на устойчивость в большом; он может
быть проведен лишь с помощью нелинейной теории.
В качестве возмущения, вызывающего выпучивание системы при
Р < Рв, может служить начальное отклонение осевых линий звеньев
от прямой FG (рис. 1.34). Тогда зависимость Р(£) будет иметь вид,
показанный на рис. 1.35 пунктиром; как видим, верхняя критическая
нагрузка Ря здесь не будет достигнута.
К таким же выводам приводит решение исходной, более сложной
задачи об устойчивости в большом упругого стержня, скрепленного
с пружиной, имеющей нелинейную характеристику*).
§ 25. О выборе метода исследования. Применение
цифровых электронных вычислительных машин
Мы познакомились с различными критериями устойчивости и
методами решения задач. Возникает вопрос: какой же из этих путей
решения целесообразно выбрать в том или другом случае? Это
*) Такая задача была исследована Цянь Сюэ-сэнем [1.15].
§ А. С. Вольмир
82 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [1J1. 1
зависит от цели решения задачи и от характера вычислительных средств,
имеющихся в распоряжении расчетчика.
Если необходимо хотя бы грубо оценить величину критической
нагрузки для консервативной системы, то уместно воспользоваться
одним из энергетических методов, вводя минимальное число
варьируемых параметров; обычно начинают с одного параметра. Результат
решения здесь будет зависеть от инженерной интуиции автора
расчета, позволяющей более или менее удачно аппроксимировать форму
потери устойчивости. При увеличении числа независимых параметров
вычисления сильно затрудняются.
В случае, когда желательна большая точность расчета (в
пределах нескольких процентов), целесообразно применить метод
последовательных приближений; он позволяет оцепить сходимость
вычислений и установить порядок погрешности. Для стержня переменной
жесткости аналитическое определение упругой линии в каждом новом
приближении является весьма трудоемким, поэтому целесообразно
использовать графический или графоаналитический варианты метода
последовательных приближений.
Для исследования некопсервативпых систем следует применять
наиболее обший критерий — динамический.
Все рекомендации, относящиеся к выбору метода решения, должны
быть пересмотрены в том-случае, если для выполнения расчетов
используются электронные цифровые вычислительные машины (ЭЦВМ)
или аналоговые машины.
Остановимся сначала па применении цифровых машин. Как
известно, ЭЦВ.М выполняют только простейшие арифметические действия,
а также логические действия и операции управления вычислительным
процессом. Поэтому выбранный метод расчета должен сводить
решение задачи к выполнению последовательности простейших
операций.
Далее, необходимо обеспечить циклический ход решения задачи,
т. е. многократное повторение расчетов по одним и тем же
формулам с подстановкой в них при каждом повторении цикла новых
числовых данных. Наконец, должна быть предусмотрена возможность
контроля правильности решения задачи на машине.
При выборе численного метода надо учитывать «вычислительные
возможности» применяемой машины*). Современные
быстродействующие универсальные цифровые машины выполняют в секунду
десятки и сотни тысяч операций. Числа, над которыми производятся
арифметические действия, представляются в машинах с высокой
степенью точности — от семи до десяти цифр в десятичной системе
счисления. Оперативное запоминающее устройство большинства
машин позволяет хранить одновременно две—четыре тысячи и более
*) См., например, Н. А. Кршгицкий, I". А. Миронов, I". Д. Фролов, Про
граммирование, Физматгиз, М., 1963.
§25]
О ВЫБОРЕ МЕТОДА ИССЛЕДОВАНИЯ
83
чисел или команд программы, в то время как работающие с
меньшей скоростью дополнительные (внешние) запоминающие устройства
обладают практически безграничной емкостью. Следует также
учитывать, что скорость ввода в машину исходной информации и
вывода результатов является малой по сравнению со скоростью
вычислений.
Электронные цифровые машины могут быть использованы, в
принципе, для решения задач устойчивости любым из перечисленных выше
методов. Однако некоторые из них являются предпочтительными.
Укажем, прежде всего, на метод конечных разностей: характерным
для него является многократное циклическое повторение расчетов
по формулам, имеющим один и тот же вид для каждого интервала.
Этот метод позволяет легко повысить точность расчета, так как
дробление шага не вызывает принципиальных затруднений.
Как известно, при определении критической нагрузки с помощью
метода конечных разностей мы получаем систему однородных
линейных алгебраических уравнений относительно параметров прогиба.
Условие нетривиальности решения этой системы состоит в том, что
главный определитель системы равен нулю. Раскрывая определитель,
мы приходим к нелинейному алгебраическому уравнению. Требуется
найти наименьший вещественный корень уравнения. Такой процесс
раскрытия определителя для нахождения коэффициентов нелинейного
уравнения поддается программированию. Отыскание наименьшего корня
алгебраического уравнения также выполняется на ЭЦВМ, например,
Одним из итерационных методов.
Аналогичный ход вычислений будет и при использовании других
прямых методов—Ритца или Бубнова — Галеркина. Отметим, однако,
что применение машин для решения задач в тригонометрических
рядах не вполне рационально, так как получение тригонометрических
функций в машине требует вспомогательных вычислений по
специальным подпрограммам или приводит к необходимости хранения в
запоминающих устройствах громоздких таблиц.
Весьма удобными для программирования являются косвенные пути
определения критической нагрузки. Целесообразно пользоваться
критерием «начальных несовершенств», позволяющим ввести в уравнение
«возмущающие» члены; само же уравнение может быть представлено
в конечных разностях. Решение на ЭЦВМ позволяет определить
равновесные формы стержня для различных начальных прогибов.
Последовательно уменьшая параметр возмущения, определяем
критическую нагрузку для «идеальной» конструкции.
Другой вариант заключается в применении метода
последовательных приближений с заданием начальной аппроксимирующей функции.
Этот же метод целесообразно применять при решении нелинейных
задач, например при анализе закритических равновесных форм.
Динамические задачи с начальными условиями хорошо поддаются
программированию, и поэтому применение динамического критерия
6*
84 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ТП. !
для определения критической нагрузки на ЭЦВМ также вполне
возможно.
Рассмотрение задачи о выпучивании стержня, как
квазистатической, позволяет определить с помощью ЭЦВМ всю историю
деформации стержня не только в упругой, но и в упруго-пластической
области, вплоть до исчерпания несущей способности, а также
описать явление прощелкивания системы; при этом, как правило, в
основное уравнение должны быть включены нелинейные члены *).
Такой путь дает возможность исследовать как случай нагружения,
близкий к статическому, так и случай быстрого или внезапного
нагружения.
Применение ЭЦВМ открыло перед различными областями
механики и, в частности, перед теорией устойчивости упругих систем
новые перспективы. Те задачи, которые раньше представлялись
«недоступными» ввиду вычислительных трудностей, теперь
оказываются вполне выполнимыми. Если в прошлом во многих случаях
приходилось оставаться в пределах первого или второго
приближения, то ЭЦВМ позволяют осуществить практически неограниченное
число приближений. В настоящее время основное внимание,
следовательно, надо уделить уточнению исходных уравнений, с тем чтобы
они возможно полнее отображали свойства и условия нагружения
реальных конструкций.
§ 26. Метод случайного поиска
Опишем некоторые новые методы, связанные с приложением ЭЦВМ.
Одним из них является метод случайного поиска (метод Монте-
Карло)**). В качестве примера рассмотрим случай стержня с шар-
нирио опертыми концами. Воспользуемся формулой для критической
силы в форме A24); в данном случае, при m = v, она приобретает
вид
Р«р = -Т (Ю
о
при граничных условиях v@) = v(l) = 0. Полагаем для общности,
чго момент инерции является переменным; т. е. 1 = 1 (х). Перейдем
к безразмерным переменным v = v/i, I = I/l0, x = x/l, PKp = PKpl2/E0f0.
*) См. работы В. И. Феодосьева, Прикл. матем. и мех. 27, № 2
A9G3), 265—274; № 5 A963), 833—841.
**) См., например, Л. А. Растригин, Случайный поиск, Рига, 1965.
§26] mtnu,u wi.y ч/rnnui w uunvyivi 0lJ
Опуская черточки над буквами, получим в новых переменных:
Г v'2 dx
Ркр^-Т2 , (Ь)
о
где v' = dvldx, при условии г/@) = г/A) = 0. Мы должны,
следовательно, определить такую функцию v(x), при которой Ркр
приобретает минимальное значение. Будем трактовать эту задачу
следующим образом: определить относительный минимум функционала *)
1
J(v)=jv'3dx (с)
о
при условии
1
о
Функции v должны удовлетворять условиям
«@) = «A) = 0. (е)
Перейдем в (с) к конечным разностям, разделив длину стержня,
равную 1, на N-\-I интервалов; тогда задача сведется к разысканию
минимума квадратичной формы
при условии
N
Х^ 1
»?=!. (£)
JU El,
i = l
причем v0 = vN+x — 0.
Примем, что величины vt могут принимать любые значения от
0 до 1, и будем рассматривать их как случайные величины.
Пользуясь ЭЦВМ, составим программу, которая позволяла бы получать
последовательность случайных чисел с равномерным законом
распределения в интервале @; 1). В каждом цикле вычислений
определяются N случайных чисел, принимаемых за значения переменных
«J, v2, ..., vN. Далее проводится проверка, выполняется ли
равенство (g) с заданной степенью точности; в противном случае
соответствующая совокупность vl отбрасывается. Если же какая-либо
*) Другой путь, приводящий к этой формулировке задачи, дан в книге
С. Г. Михлина, Вариационные методы в математической физике, М.,
1957, стр. 220.
86 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. 1
комбинация vt удовлетворяет с выбранной точностью условию (g),
то вычисляется и запоминается функция F (v) по условию (f). Из
множества полученных таким образом функций F (v) выбирается
минимальная; она и будет представлять собой некоторое приближение
к наименьшему критическому усилию для данного стержня;
соответствующие этой функции значения vl определяют вид упругой
линии. Решение задачи для стержня постоянного сечения, проведенные
по этому алгоритму на ЭЦВМ при 6- 106 операций*), привело к
значению коэффициента в формуле Эйлера, равному 10,48 вместо
точного я2. Для получения уточненного результата необходимо
значительно увеличить время счета и использовать более совершенную
программу, обеспечивающую последовательное сужение области поиска.
Более экономичными по объему вычислений являются методы
организованного поиска, с одним из которых мы познакомимся
ниже.
§ 27. Метод динамического программирования
Обратимся к методу динамического программирования, по
которому оптимизация функционала, приведенного в § 26, происходит
последовательно, от этапа к этапу, причем на каждом этапе
оптимизируется один шаг **).
Покажем, как можно применить метод динамического
программирования к определению первой критической нагрузки. Рассмотрим
снова стержень с шарнирно закрепленными концами. Как было
показано в предыдущем параграфе, задача об определении критической
нагрузки сводятся к отысканию минимума функционала
1
J(v)= J v'2dx; (a)
о
при этом должны быть выполнены условия
1
и
и@) = 0, г/A) = 0. (с)
*) Это решение выполнено Э. Д. Скурлатовым; ему же принадлежат
данные, приведенные в §§ 27 и 28.
**) В описанном здесь варианте этот метод развит Беллманом (см.,
например, R. Bellman, S. Dreyfus, Applied dynamic programming,
Princeton, 1962, в переводе: Р. Беллман, С. Дрейфус, Прикладные
задачи динамического программирования, «Наука», 1964). Другой путь
организованного поиска предложен Н. Н. Моисеевым (Жури. выч. мат. и
мат. физ. 4, № 3, 1964, 485 — 494; 5, № 1, 1965, 44 — 56); он использован
для решения задачи о закритической деформации сжатого стержня И. А.
Крыловым и Ф. Л. Черноусько (там же 6, № 2, 1956, 203 — 217).
§ 27] МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ 87
Введем в процессе счета некоторый входной параметр а. Если
рассматривается вся длина стержня, то надо считать г/@) = а. Возвращаясь
к дискретной форме (см. § 26), запишем:
ЛЧ1
F (г/1, г/2, .... vN) =■■ S (vt — vt_{? (d)
/-1
с ограничением
при
N
V 1
Еж*?-1 (е)
г-i
г/0 = а, г/ЛГ+1 = 0. (f)
Далее выпишем условие оптимальности, относящееся к
некоторой совокупности этапов, начиная с k-vo при k=l, 2, ..., N—1.
Это условие имеет вид
ЛГ+1
h (»o) = min 2 (»/ — г/f-iJ. (g)
I'd '"*
где г/г подчинены условиям
Л'
1 -г»;=1, k=\, 2 iV —1, (h)
2u Eh T
при г/4_1 = о, i/W4l = 0.
Образно говоря, мы должны решить задачу распределения
ресурса, равного 1 по условию (h), для некоторого числа этапов
таким образом, чтобы был выполнен критерий оптимальности (g).
Введем динамический процесс распределения ресурсов, т. е. выделим
некоторый ресурс сначала для &-го этапа, затем для (k-\-\)-ro
и т. д. Пусть ресурс, выделенный для k-ro этапа, составляет
величину v2kIElk- Тогда на оставшиеся этапы — от (ft-f- 1)-го до iV-ro —
приходится ресурс П — v\IEI\, потребуем, чтобы он был
распределен оптимальным образом. Условие (h) запишется в виде
Ei^1-^ (i)
Введем новую переменную ut:
Vl-tfo EIk
Тогда условие (i) примет вид
Ф* = • GO
N
*-* + ?
88 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
Подставляя (к) в (g), получим:
fk(a) = mmUvk-af + (l-vl%)
Vk
"к + 1
' +
••• +K-",v-,J + 4]}- (m)
Рассмотрим выражение, стоящее в квадратной скобке. По
аналогии с (g) можно записать:
vk
fk+
V^=
<рА
= min
■k^\-
Щ
VT-
■ vl<S>k
+ ••■ +K—"w-iJ+-*
(n)
при ограничении (/). Таким образом, используя принцип
оптимальности, приходим к следующему рекуррентному соотношению:
Vk \2 ,
fk («) = min (vk — af+ min 0 — v\Vk)
k+\
VT
Vl<PkJ
+K-**-iJ+*&]}'- (°)
с учетом (п) получим:
/,(fl) = min((z/,-aJ + (l
'vl%)f,
k~\ i
vk
/l
■ vhk,
(p)
Соотношение (р) дает возможность получить последовательность
{/*(а)Ь если известна величина fN(a). Действительно, по f^(a)
определяем /jV_i (а), затем fN-2(a) и т. д. В результате, считая а^О,
придем к значению /i @), которое и будет некоторым приближением
к наименьшему критическому усилию для рассматриваемого стержня;
при этом необходимо учесть избранное число интервалов.
Значение vk считаем лежащим в пределах 0 ^ vk ^ 1 |/"(pft.
Примем, для примера, N = 20. Исходя из (g) и считая vN+1 =
— О, имеем для k = iV =
: 20 при v2q-
1 \2
^/ф»:
\ У <Р20 / Ф20
Выпишем следующую функцию:
/»(«) =
: min
К - «J + A - <Ф19) /20 f-7=т=-У
V К 1 —«19Ф19/.
Этот минимум находится перебором значений v\$ в диапазоне 0^!
-^fi9<^ У^фш- Дальнейшие вычисления проводятся по тому же
алгоритму. Описанный метод был применен для решения задачи § 39,
I 281
ИСПОЛЬЗОВАНИЕ АНАЛОГОВЫХ МАШИН
89
относящейся к стержню со ступенчатым изменением жесткости
(см. рис. 3.1). В одном из выполненных примеров наибольшая
погрешность, полученная для различных значений a = IJI2 по
таблице 3.1, не превосходила 0,5%. В случае а=1 был
получен коэффициент в выражении для критической силы, равный 9,85
вместо точного я2. Отметим, что все расчеты по этому методу
могут быть осуществлены на ЭЦВМ одним набором команд для всех
шагов. Желательно в дальнейшем провести подробное исследование
вычислительных погрешностей метода, связанных с повторным
применением основного рекуррентного соотношения; очевидно, эта
погрешность связана с выбранным числом шагов iV. Кроме того,
существенное влияние на результаты вычислений оказывает принятый
метод интерполяции при определении минимума по (р).
Наряду с методом динамического программирования могут быть
предложены и другие пути решения данной задачи, относящиеся
к общему циклу оптимального программирования, например, метод
наискорейшего спуска.
§ 28. Использование аналоговых машин
Обратимся к аналоговым (электромоделирующим) машинам.
Основным элементом таких машин является операционный усилитель,
схематически показанный на рис. 1.36. С помощью усилителя можно
умножить некоторое напряжение на постоянное число, суммировать
несколько напряжений и, наконец, произвести интегрирование. В
качестве операционного усилителя может быть использован усилитель
постоянного тока (ламповый, полупроводниковый, магнитный) с
достаточно высоким коэффициентом усиления, в сочетании со входным
сопротивлением Z,- и сопротивлением обратной связи Z,. Основное
соотношение, описывающее режим операционного усилителя, имеет вид
е2= — -^-ех, A.248)
где е-[ — подающееся на усилитель напряжение, е2 — выходное
напряжение (рис. 1.36, а).
Если мы хотим умножить некоторое напряжение на величину k,
то необходимо принять соотношение между входным сопротивлением
и сопротивлением обратной связи, равным RJRt = k. Подавая на
усилитель несколько напряжений, можно выполнить операцию
суммирования (рис. 1.36, б).
Если в обратную связь включить конденсатор емкости С, а на
входе ввести омическое сопротивление R, то выходное напряжение
будет пропорционально интегралу по времени от входного (рис. 1.36, в):
ва = -^-|в1Л. A.249)
90
СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. I
Вход
±
к
Выход
в)
rU х
Усилитель
постоянного mono
Вычислительная машина включает также блоки произведений (БП) и
блоки нелинейности (БН), которые позволяют решать нелинейные
задачи. Блок произведений перемножает две входящие в него
переменные величины, при его помощи можно образовать, например,
такие члены, как х2, х4, ху и т. д. Блок нелинейности позволяет
аппроксимировать данную функцию одного аргумента
кусочно-линейной. Например, на машине МН-7
заданную функцию можно
аппроксимировать десятью линейными
участками. Блок переменных
коэффициентов используется для набора
заданных функций времени.
Усилители, интеграторы, блоки
произведений и нелинейности
работают по 100-вольтовой шкале;
характерной особенностью блока
произведений является то
обстоятельство, что он алгебраически
перемножает входящие величины и делит
полученный результат на 100.
Для решения на вычислительной
машине заданную систему уравнений
обычно приводят к системе
уравнений первого порядка в безразмерных
величинах и далее к машинному виду.
Для этого необходимо знать
порядок ожидаемых величин и диапазон
изменения времени (или другого
параметра, являющегося независимой
переменной) и провести следующее
линейное преобразование:
^ = ^тах^. t—оГ, A-250)
о—vw—'
Вход
6)
— nf
Рис. 1.36. Элементы аналоговых машин.
машинная переменная,
где v
vmax — ожидаемое максимальное
значение функции, Т — машинное время в секундах, максимальное
значение которого обычно ограничивается величиной порядка 50—100 сек.
Аналоговые машины общего типа приспособлены главным
образом для интегрирования дифференциальных уравнений с начальными
условиями. Поэтому для решения задач о собственных значениях,
например, об определении критических нагрузок, приходится
прибегать к специальным приемам. Одним из таких приемов является
метод проб, описанный в § 15 как графический.
В качестве примера рассмотрим стержень, шарнирно опертый по
концам. Исходное уравнение E) заменяем двумя уравнениями первого порядка
«28]
ИСПОЛЬЗОВАНИЕ АНАЛОГОВЫХ МАШИН
91
и приводим их к безразмерному виду, вводя переменные х = x/l, v — v/i,
где i — радиус инерции сечения. Уравнения получают вид
dv
dx
■ kvit
dvi -7-
dx
(a)
где Ъг = Pl2jEI. Задаемся параметрами сжимающей нагрузки k2 и
принимаем начальные условия v = 0, dv/dx = а при х — О, причем величина а
выбирается произвольно. Интегрируя уравнения (а), проверяем,
удовлетворяется ли условие v = 0 при х = I или х = 1, и повторяем вычисления,
варьируя параметр £. Вводим машинные переменные i/ = v/vmax, й^~*/*max;
в качестве максимальных значений принимаем i/max = 0,2, £max = Ю> i/b max =
= 0,628. Вместо (а) выпишем следующие зависимости:
(Ь)
0,2^ = - J" (\0kN) @,6281/j „) dx,
0,628^ ^ = J A0*jV) @,%) A*.
Принимаем интервал интегрирования (длину стержня) соответствующим
п=0,3!8
пААН
+,-\AMl!i^
/77=7
Рис. 1.37. Структурная схема для определения критической нагрузки
по методу проб.
10 секундам машинного времени. Структурная схема, отвечающая
уравнениям (Ь), изображена па рис. 1.37. Через Я обозначены спиральные
потенциометры, с помощью первых двух (П{ и Я2) варьируется параметр &„, а
третий (Я3) вводится для задания начальных условий. Значения проводи-
мостей л в усилителях I я 2 имеют размерность [l/Мом], они
соответствуют величинам
10-0,628-0,1
- — о, 14,
0,2
10-0,2-0,1
0,628
= 0,318,
92 СЖАТЫЕ СТЕРЖНИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. I
усилитель 3 служит для изменения знака. На рис. 1.38 представлены
совмещенные осциллограммы, полученные с помощью приведенной схемы при
различных параметрах ft; эйлерова нагрузка отвечает ft = 3,14. При меньших
значениях ft получаем решение «с
недолетом», при ббльших — «с
перелетом».
Этот путь может служить
также для определения
критических нагрузок в случае стержня
переменного сечения.
Другой метод состоит в
использовании специального блока реги-
Рис. 1.38. Осциллограмму полученные при страции и вОСПрОИЗведенНЯ (БРВ),
служащего для решения
линейных однородных интегральных уравнений типа Фредгольма; в данной
задаче это уравнение имеет вид A51). При этом применяется метод
последовательных приближений, описанный-в § 14. На машине
проводятся следующие операции: образование ядра К(х, £),
перемножение функций К(х, |) и у,)(Е,) по A51), интегрирование в пределах
от 0 до 1 и умножение интеграла на варьируемый параметр X.
В результате находим функцию У[ (х), которую вновь подставляем
в правую часть уравнения. Блок БРВ служит для запоминания
промежуточных решений интегрального уравнения, поступающих от
модели, и для выдачи их в модель с целью получения новых
приближений. Блок имеет электронно-лучевую трубку с послесвечением;
она позволяет фиксировать формы упругой линии для каждого
приближения. При этом последовательно уточняются значения
критического параметра Я.
Наконец, могут быть составлены электрические моделирующие
цепи, не содержащие операционных усилителей и осуществляющие
так называемое прямое моделирование *). Критические нагрузки для
различных конструкций определяются и здесь путем
последовательных приближений, как описано в § 14.
*) Подобные схемы описаны в работе Сканлана [1.14]. Этому
направлению посвящен ряд работ К. К. Кероияна, Г. Е. Пухова и других авторов.
ГЛАВА II
УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ ЗА ПРЕДЕЛАМИ
УПРУГОСТИ
§ 29. Экспериментальные зависимости
Исходные соотношения и расчетные формулы, приведенные
в главе I, справедливы при условии, что критические напряжения —
или максимальные напряжения при продольно-поперечном изгибе —
не превышают предела пропорциональности материала о|Щ*). Между
тем для элементов реальных конструкций во многих случаях это
условие не выполняется. Поэтому исследования устойчивости
стержней, относящиеся к неупругой
области, имеют существенное
практическое значение.
До последнего времени
наиболее распространенными
являлись методы расчета, основанные
на результатах
экспериментальных исследований.
Данные опытов удобно
сопоставлять с помощью графика,
изображающего зависимость
критического напряжения окр от
гибкости Я. Если опыты ставятся
достаточно тщательно, то в
упругой зоне экспериментальные
точки ложатся очень тесно вблизи гиперболы Эйлера, между тем
в упруго-пластической зоне они обычно сильно разбросаны,
примерно так, как показано на рис. 2.1. Это объясняется тем, что
в упругой области критическое напряжение при заданной гибкости
зависит только от модуля Е; колебания этой величины для
различных образцов, изготовленных из одного и того же материала,
незначительны. В упруго-пластической области критические напряжения
*) В дальнейшем предел пропорциональности материала считается
совпадающим с пределом упругости.
Рис. 2.1. Разброс экспериментальных
значений критических напряжений в
пластической области.
94 СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
меняются в зависимости от диаграмм сг(е) при сжатии, часто
отличающихся друг от друга даже для образцов, принадлежащих к
одной и той же партии. Влияние возмущающих факторов —
эксцентриситета нагрузки, начальной погиби, остаточных напряжений от
прокатки, сварки, правки и т. д. — в неупругой области также
оказывается более значительным, чем в упругой. Поэтому анализ
данных экспериментов и составление расчетных формул желательно
проводить с помощью статистических методов *).
Различными авторами были предложены формулы для расчета на
продольный изгиб за пределами упругости, из которых наиболее
приемлемыми оказались следующие:
a) Линейная формула **)
окр = а — Ьк, ■ B.1)
где а, Ъ — параметры, зависящие от материала.
При определении величин а, Ь желательно выполнить условие,
чтобы при предельной гибкости /^ уравнение A) давало тот же
результат, что и формула Эйлера. С другой стороны, можно было бы
потребовать, чтобы при к—>-0 величина окр приближалась к
предельному напряжению на сжатие ой, так что а = аь. Для таких
материалов, как дюралюмин, эго предельное напряжение соответствует
временному сопротивлению, найденному при сжатии образцов малой
длины. В случае же материала, имеющего диаграмму с ясно
выраженной площадкой текучести (мягкая стал:,), критическое
напряжение, как правило, не может превысить предела текучести от. Поэтому
для пластичных материалов было бы более естественно принять а = ат.
Однако основным требованием при составлении эмпирических формул
является соответствие их конкретным данным серии опытов на
продольный изгиб для стержней различной гибкости.
b) Гиперболическая формула ***)
°кр= 14-а?.2 ' B-2)
здесь а0—некоторое напряжение, а — эмпирический коэффициент.
c) Параболическая формула****)
акр==а-E?Я B.3)
Постоянные а, [5 можно подобрать таким образом, чтобы парабола
на графике окр(Х) плавно переходила в гиперболу Эйлера, имея с ней
*) Это было впервые отмечено Ф. С. Ясинским, применившим для
обработки экспериментальных данных Тетмайера метод наименьших
квадратов [1.7].
**) Формулы этого типа были предложены Тетмайером [2.21] и
Ф. С. Ясинским [1.7].
***) Подобная формула была предложена Ренкшюм (Rankine).
****) Эта формула предложена Джонсоном (J. В. Johnson).
. 29]
ЭКСПЕРИМЕНТАЛЬНЫЕ ЗАВИСИМОСТИ
при h = kt общую касательную. Однако решающим и здесь является
соответствие формулы экспериментальным данным.
Если принять в B) oi:i~ot и а -•-- от,'л-£", то получим формулу
суммирования опасностей, охватывающую с известным
приближением как упругую, так и пластическую области:
От
л-
"кр
о,
или иначе
'кр-
1 + ф
1.
» = ■
B.2а)
B.2Ь)
где оэ— эйлерово нап))яженне.
Хорошее соответствие с данными многочисленных опытов
получим, придав (Ь) несколько иной «ид:
1 + Ф
°кр 1 .4_il_l_<B °т-
I - J— Ч> —f- -02
B.2с)
Пример 2.1. При расчете корпуса корабля должна быть проверена
устойчивость палубы: в определенных положениях корабля но отношению
к гребням волн палуба оказывается сжатой (рис. 2.2, а). Определить
критическое напряжение для панели, составленной из расположенных по длине
■180
й-31
и
^—х
•)
хпл~ »
Рис. 2,2. Панель пал>би корабля.
корабля подкрепляющих ребер (бимсов) и присоединенных к ним полос
обшивки, считая концы панели опертыми шарпирно. Потеря устойчивости
возможна лишь в направлении, перпендикулярном плоскости обшивки.
Материал—сталь Ст. 4, Е = 2,1 • 106 кг/см2, от = 2600 кг/см2, опц = 2200 кг/см2.
При аКр > апц применить формулу
окр = 3200 — 10?. (кг/см2) (а)
при условии акр < от. Размеры сечения панели показаны на рис. 2.2, б (в мм),
длина панели (шпация) равна 1 м.
Определяем координату центра тяжести сечения ус = 1,9 см; площадь
сечения равна F = 17,2 см2. Момент инерции сечения относительно
центральной оси хс равен /= 190 см4. Вычисляем радиус инерции сечения и гибкость:
• i/19(
190_
2
: 3,32,
Я =
100
3,32
= 30.
Напряжение, вычисленное по формуле (а), равно 2900 кг/см2 > от. Поэтому
принимаем критическое напряжение равным сгкр = °т = 2600 кг/см2.
96
СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ И Л. и
§ 30. Выпучивание стержня при неизменной нагрузке
Обратимся к теоретическому исследованию продольного изгиба
за пределами упругости. Допустим, что стержень подвергается цеп-
тральному осевому сжатию и что
зависимость напряжения от
деформации для коротких образцов из
данного материала отвечает
диаграмме рис. 2.3. Участок упругой
деформации соответствует
отрезку Оа. Предположим, что при
нагружении образца мы дошли
по диаграмме до некоторой
точки т. Если после этого
произвести разгрузку, то на графике
g мы получим прямую линию mm',
примерно параллельную участку
Оа; угол наклона этой линии
характеризует модуль разгрузки.
Будем в дальнейшем считать, что модуль разгрузки равен
начальному модулю Е. С другой стороны, при возрастающей от точки т
деформации сжатия получим участок
диаграммы mm". Если дополнительная
деформация мала, то можно принять,
что отношение приращений Ло и Ле
определяется так называемым
касательным модулем:
Рис. 2.3. Диаграмма
«напряжение—деформация».
Лет
Ле
do „
de K"
B.4)
Рассмотрим стержень,
подвергающийся центральному сжатию. Пусть
напряжение сжатия достигло величины
о > апц. Допустим, что при этом
напряжении происходит выпучивание,
в процессе которого нагрузка
остается постоянной. Тогда волокна,
лежащие на вогнутой стороне, будут
испытывать дополнительную
деформацию укорочения, а на выпуклой —
удлинения (рис. 2.4). Если
рассматривать изогнутые формы, весьма близкие
к прямолинейной, то можно принять для
зоны нарастающего сжатия модуль Ек, а для зоны разгрузки — модуль Е.
Нейтральная линия z, для точек которой дополнительные
напряжения равны нулю, не будет проходить через центр тяжести сечения.
Рис. 2.4. а) Изогнутая линия; б)
сечение стержня, эпюры напряжений
и деформаций при иеупругом
продольном изгибе.
Такая концепция «двух модулей» была впервые предложена *)
Ф. С. Ясинским [2.14] и Ф. Энгессером, а в дальнейшем развита
Т. Карманом [2.15].
Пусть главные центральные оси инерции сечения будут у0 и ZQ
(рис. 2.4); примем, что выпучивание происходит в направлении у0.
Считая, что поперечные сечения остаются при изгибе стержня
плоскими, и отсчитывая у от нейтральной линии z, получим:
Ле = -*,
Р
где р—радиус кривизны упругой линии. Напряжения в зонах
догружения и разгрузки будут соответственно
А01 = ЕК1, Ло2 = £|. B.5)
Результирующая дополнительных усилий должна быть равна нулю,
поэтому
F, F2
ИЛИ
EKS1-4-ES2 = Q. B.6)
Здесь через Fj и St обозначены площадь и статический момент
относительно нейтральной оси той части сечения, в которой имеет
место догружение, а через F2 и S2 — части сечения, в которой
происходит разгрузка. Приравнивая сумму моментов внутренних сил
относительно нейтральной линии внешнему моменту, находим:
Ь. j fdF + fj fdF = M,
9.(EJX + EI2)=:M. B.7)
Обозначим через Т результирующий или приведенный модуль,
равный
Т= £' + £/г , B.8)
где / — момент инерции всего сечения относительно оси,
проходящей через центр тяжести. Величину Т называют также модулем
Кармана. Уравнение изогнутой оси приобретает вид, аналогичный A.5):
П-0 =-Ж. B.9)
или
F,
1
*) Возникшая в связи с этим дискуссия между Ф. С. Ясинским и
Ф. Энгессером освещена в статье А. Н. Митинского (см. книгу [1.7], изд.
7 А. С. Вольнир
98 СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
Полагая для случая шарнирного опирания концов стержня М =
= Pv, придем к уравнению
77-g-+/>iF = 0. B.10)
Величину Т можно при 1= const считать не зависящей от х, так
что все данные, полученные в главе I для упругого продольного
изгиба, можно распространить на упруго-пластическую область при
условии замены Е на Т. Сюда же относятся результаты, полученные
с помощью энергетических методов, так как для любого волокна
стержня по-прежнему принята линейная зависимость между
приращениями напряжений и деформаций.
В обобщенном виде выражения для критической силы и
критического напряжения будут
п2Т1
ЫJ
^р = ^Ь BЛ1)
°«Р = ^т- B-12)
Коэффициент v здесь следует принимать так^г же, как и в упругой
области.
§ 31. Влияние формы сечения. Случаи двутаврового
и прямоугольного сечений
Судя по формулам F) и (8), результирующий модуль Т должен
зависеть от формы сечения стержня. Вычислим величину Т для
двутаврового сечения с тонкой стенкой (рис. 2.5) в предположении,
что изгибающий момент воспринимается только полками двутавра и,
благодаря определенным условиям закрепления стержня, выпучивание
происходит в направлении оси у. Обозначим через h расстояние
между центрами тяжести полок, площадь каждой из полок равна
половине площади сечения, т. е. F/2. Пусть расстояние h делится
нейтральной при изгибе линией на отрезки hx (со стороны
догружения) и h2 (со стороны разгрузки). Из F) получаем:
отсюда
— F\h\EK -f- F2h2E = 0;
Ai = A-iTXTr. *2 = A1Af. B.13)
Ек + Е ' —"£к + £
Моменты инерции Д и /2 равны
/! = •£*»• I2=~-h\. B.14)
§311
ВЛИЯНИЕ ФОРМЫ СЕЧЬНИИ
Момент инерции всего сечения относительно центральной оси будет
B.15)
4
Формула (8) приобретает вид
Т —
2ЕКЕ
Е-+Е- <2Л6)
Для упругой области Т = ЕК = Е. В общем случае
результирующий модуль имеет некоторое среднее значение между Е и Ек. Для
материала с ясно выраженной площадкой текучести, в пределах
которой угол ак = 0 (см. рис. 2.3),
величины Ек и Т приближаются к
нулю, как только сжимающее
напряжение будет приближаться к
Ф
Ь\Ф
Рис. 2.5. Зоны догружения и
разгрузки в случае двутаврового
сечении.
Рис. 2.6. Зоны догружения
и разгрузки в случае
прямоугольного сечения.
пределу текучести. Это означает, что для сжатого стержня
критическое напряжение практически не может превысить предела
текучести.
В случае прямоугольного сечения (рис. 2.6) уравнение F)
получает вид
и, следовательно,
ад, —ей2 = о
_/ё _ h _k _VTK
Vek+Ve • 2 Vek+V~e
Моменты инерции будут
h = -
Окончательно
ЬЩ
Т
Т:
4££„
7 = Т5-
B.17)
B.18)
B.19)
Отклонения в величине Т для разных форм сечения незначительны,
так что в практических расчетах и для других видов сечения можно
пользоваться формулой A6) либо A9).
7*
100 СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
§ 32. Построение диаграммы «критическое
напряжение — гибкость»
Представим формулу A2) в виде
Задаемся последовательными значениями акр; зная соответствующие
величины Т, находим по B0) связь между акр и X. Но для
установления зависимости Т(а) должна быть известна диаграмма сг(е).
полученная при испытании на сжатие коротких образцов из данного
Рис. 2.7. Эпюра сжатия для дюралюмина Д16Т.
материала*). На рис. 2.7 изображена подобная диаграмма для
дюралюмина Д16Т. Модуль упругости принят равным £'=7,5 • 105 кг[см2,
предел пропорциональности (Тпц = 2. 103 кг/см2. Для определения ZJK
в различных точках диаграммы (а, Ь, с и т. д.) проводим
касательные и находим тангенсы углов их наклона к оси абсцисс.
Величины Ек, соответствующие некоторым значениям а и е, приведены
в таблице 2.1. Здесь же даны вычисленные по формулам A6) и B0)
величины результирующего модуля Т и гибкости Ярез (индекс «рез»
указывает па то, что значение X соответствует результирующему
(приведенному) модулю). Полученная таким образом зависимость сгкр(Я-)
представлена па рис. 2.8. Для упругой области, при Я>60,
кривая отвечает формуле Эйлера.
*) Эти данные для дюралюмина и стали Ст, 3 получены автором в 1948 г.
\зг)
ДИАГРАММА «КРИТИЧЕСКОЕ НАПРЯЖЕНИЕ - ГИБКОСТЬ»
101
Таблица 2.1
Расчетные параметры для дюралюмииа Д16Т
Точки на
(иаграмме
а
Ь
с
d
е
f
g
h
i
k
I
m
n
2,67
3,0
3,5
4.0
4,5
5
6
7
8
9
10
11
12
0,
кг/см2
2000
2200
2460
2640
2780
2900
3080
3200
3320
3400
3450
3560
3640
£K.I0-5,
кг/см2
7,50
5,96
4,34
3,72
2,55
2,05
1,50
1,17
0,97
0,82
0,82
0,82
0,82
r-io~5,
KljCM1
7,50
6,65
5,50
4,97
3,81
3,22
2,50
2,03
1,72
1,48
1,48
1,48
1,48
%
рез j
60,5
54,7
47,0
43,0
36,8
33,0
28,3
25,0
22,o
20,8
20,6
20,2
20,0
X
к
60,5
51,6
42
37,5
30,2
26,5
22
' 18,9
17
15,4
15,3
15,1
14,9
В таблице 2.2 содержатся такие же данные для стали Ст. 3;
соответствующая диаграмма окр(Х) дана на рис. 2.9.
0п, кг/см2
3500
300A
2500
2000
1500
W00
500
0 10 Ш 30 40 50 60 70 80 80 100 ПО
Л
Рис. 2.8. Диаграмма «критическое напряжение —гибкость» для
дюралюмииа; кружки с крестиками —данные опытов.
Полученные таким образом расчетные данные можно сопоставить
с результатами опытов на продольный изгиб для стержней различной
гибкости. В отдельных случаях при весьма тщательной постановке
опытов удается получить точки па графике окр(Х), лежащие
достаточно близко к кривой Ярез. Однако, как правило,
экспериментальные точки расположены ниже этой кривой (данные на рис. 2.8).
\
\
\
\
V
\ /
102
СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
Таблица 2.2
Расчетные параметры для стали Ст. 3
£.10»
0,95
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,8-4,0
4,5
5
6
8
10
12
о,
кг!см?
2000
2100
2200
2280
2340
2380
2390
2400
2400
2410
2420
2470
2575
2685
2800
£к.ю-6,
кг/см2
2,10
1,42
0,99
0,67
0,46
0,26
0,13
0,06
0
0,02
0,04
0,05
0,05
0,05
0,05
г.ю-6,
кг!см'
2,10
1,72
1,39
1,05
0,85
0,54
0,33
0,19
0
0,07
0,13
0,15
0,15
0,15
0,15
рез
102
90
79
67,6
59
47.5
37
28
0
17
23
24,5
24
23,6
23
\
102
81,8
66,6
54
44
32,7
23,1
15,7
0
9,1
12,7
14,2
13,8
13,6
13,5
tf кр, кг/смг
то
0 10 20 30 40 50 SO 70
90 100 НО 120 130 №0
Рис. 2.9. Диаграмма «критическое напряжение —гибкость» для стали Ст. 3.
Было замечено, что лучший результат получается, если в формуле A2)
заменить результирующий модуль па касательный и принять
я2£к
а = —.
"кр ^2
Значения гибкостей, полученные по формуле
X:
f икп
B.21)
B.22)
§ 33] ВЫПУЧИВАНИЕ СТЕРЖНЯ ПРИ ВОЗРАСТАЮЩЕЙ НАГРУЗКЕ 103
будем отмечать индексом «к»; они помещены в последних графах
таблиц 2.1 и 2.2. Соответствующие кривые нанесены па рис. 2.8
и 2.9.
Формула B1) отвечает первоначальным представлениям о
выпучивании стержней за пределами упругости, изложенным в одной из
статей Ф. Эигессера [2.11]. По этой концепции эффект разгрузки
не учитывается; принимается, что во всем сечении соотношение между
приращениями напряжений и деформаций содержит касательный
модуль Ек. Но если это допущение относится к реальному материалу,
то надо считать, что напряжения сжатия получают приращение во
всех точках сечения, например, как показано на рис. 2.4 вверху.
Иными словами, надо допустить, что одновременно с изгибом
стержня имеет место возрастание сжимающей нагрузки*). Рассмотрим
эту задачу в квазистатической постановке и исследуем изогнутые
равновесные формы стержня.
§ 33. Выпучивание стержня при возрастающей нагрузке
Будем считать, что сечение шариирио закрепленного по концам
стержня имеет по крайней мере одну ось симметрии у (рис. 2.10а)
и что упругая линия стержня лежит в
плоскости ху.
Допустим, что выпучивание стержня
началось при силе Р„ и что при изгибе
стержня нагрузка получает приращение.
Тогда в некоторых сечениях может иметь
место только догружение, а другие
сечения разделятся на зоны догружения н
разгрузки. Примем здесь в качестве
первого приближения, что появление
разгрузки совпадает с началом
выпучивания
')■
Рис. 2.10. а) Сечеиие стержня,
подвергающегося выпучиванию;
б) эпюра напряжений.
Обозначим через с расстояние от
центра тяжести сечения С до крайних
волокон, лежащих на выпуклой стороне.
Зоны догружения и разгрузки делятся
нейтральной при изгибе линией тп,
отстоящей от крайних волокон па
расстоянии s; эта величина меняется, вообще
говоря, по длине: s = s(x). Площадь сечения F делится линией тп
на площади Fx и F2- Примем, что при выпучивании стержня деформация
*) Такая гипотеза была выдвинута Ф. Шеи ли [2.19] и затем Ю. Н. Ра-
ботновым [2.8] и развита рядом других авторов.
**) Такая постановка задачи принадлежит А. Пфлюгеру [2.17]; ему
принадлежат графики 2.16 — 2.20. Решение задачи в иной постановке дано
Ю. Р. Лепиком [8.5] и И. С. Малютиным (канд. дисс, Москва, 1958).
104 СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
в каждой части сечения характеризуется неизменными
модулями: Ек при догружении и Е при разгрузке; эти модули
определяются по диаграмме а(е) и соответствуют исходному напряжению
a = at = PJF (рис. 2.10,6'). В тех же сечениях, где зона разгрузки
отсутствует, деформация полностью определяется модулем Ек.
Обратимся к сечениям со смешанным законом деформации и
введем обозначение EjEK = n. Представим себе некоторое
преобразованное сечение, в котором ширина всех
элементарных полосок, расположенных
в зоне разгрузки, увеличена в п раз
(рис. 2.11). Площадь такого приведенного
сечения Fe равна
Fe = Fi + nF2. B.23)
Определим расстояние е между
центрами тяжести исходного и приведенного
сечений:
e=S,+nS2, B24)
Рис. 2.11. Приведенное сечение о о л
стержня. через о1 и 62 обозначены статические
моменты площадей F\ и F2 относительно
центральной оси исходного сечения. Обозначим, далее, через /е
момент инерции приведенного сечения относительно оси, проходящей
через центр тяжести С1 этого «нового» сечения:
/ =/
1е
+ п12е = \?.dF+n\
fdF;
(■2.25)
координата уе отсчитывается от повой центральной оси.
Примем, что нагрузка Pt получила приращение АР и достигла
величины Р:
/> = />,+ Д/>. B.26)
Для преобразованного сечения деформацию можно определять, исходя
из единого модуля Ек. Дополнительная деформация произвольного
волокна равна
Де = Аге ■
1л.
Р
B.27)
где Аге — деформация волокна, проходящего через центр тяжести
приведенного сечения, р—радиус кривизны изогнутой оси.
Приращение напряжения равно
Да = Ек Ае. — ■
B.28)
\ 33] ВЫПУЧИВАНИИ (ЛИР/ПНИ ПРИ BUOl-A^lniuiniiri ишг.ом.
Дополнительное усилие в сечении будет приложено в центре тяжести
1риведепного сечения и равно
АР = j AodFe = EKFeAse; B.29)
р,
}десь деформация укорочения считается положительной. Рассмотрим,
галее, условие равновесия части стержня, показанной па рис. 2.12.
3 концевом сечении точка
приложения полной силы Р сов- й
1адает с центром тяжести
исходного сечения; в произ-
золыгом же сечении равиодей-
:твующая основных усилий
■тылп1)/рття r тпм жA иртттпр рис. 2.12. Внешняя сила и внутренние усилия
.триложепа в том же центре при выпучиваннн стержня.
тяжести, в то время как
равнодействующая дополнительных усилий оказывается приложенной
в новом центре тяжести приведенного сечения.
Сумма моментов сил Р и Pt относительно новой центральной оси
Me = P(v + e) — Pte, B.30)
Me = Pv + bPe. B.31)
Приравнивая этот момент сумме моментов дополнительных внутренних
усилий, получим по B8):
или
М.
= - j boytdFe =%-/,. B.32)
Принимая для пологой изогнутой линии
1 dsv
приходим к уравнению
EJe^ + Pv±APe = 0. B.33)
В этом уравнении величины е, 1е являются функциями х. Для той
части длины стержня, где область разгрузки отсутствует, нейтральная
пиния будет проходить через центр тяжести реального сечения и,
следовательно, е = 0, 1е — 1, где / — момент инерции исходного
сечения относительно центральной оси. Уравнение C3) принимает
на этих участках вид
^7-£r + Pt,o = 0- B-34)
Граничные условия для концов стержня имеют вид:
«о = 0. ~}- = 0 при х = 0, I. B.35)
lOg сжатьш сткржни за ш'идилами ymjyi иыи iiji. и
Кроме того, должны быть выполнены условия сопряжения па
границе области, включающей разгрузку. Обозначая длину этой области
через а (рис. 2.13), получим:
v = vn
dv
dx
dv„
при x==-
l + a
2
dx ■•K" ~ - 2
Из C4) и C5) для концевых участков стержня получаем:
v0 = As\ny -gjx.
Для точек нейтральной линии имеем:
с — е — s
0 = Ле„
отсюда
Дее = — (с — е — s)
Сопоставляя это уравнение с B9), находим:
AP = — EKFe(c — e~s)
d2v
7^
Исключая d2v[dx2 из C3) и D0), будем иметь:
ДР v~ F, с-
B.36)
B.37)
B.38)
B.39)
B.40)
B.41)
Так как по концам стержня изгибающий момент обращается
в пуль, то из C1) вытекает:
ДРе = 0 при х = 0. х = 1. B.42)
Рассмотрим два предельных случая. Предположим, что область
разгрузки занимает всю длину стержня, как это было принято
в § 32. Тогда в концевых
сечениях должно быть е Ф 0.
Отсюда вытекает условие
ДР = 0. Идя по этому пути,
мы получаем формулу для
критической силы A1),
включающую результирующий модуль Т.
Примем теперь, что область
разгрузки занимает лишь
некоторую часть длины стержня и что концевые участки деформируются
чисто пластически. Тогда для х = 0, х = / должно быть е = 0 и,
следовательно, АР ф 0. Этот путь приводит к решению с возрастающей
Рис. 2.13. Граница зоны разгрузки.
нагрузкой. Предположим, что в момент начала выпучивания весь
стержень находится в чисто пластическом состоянии, так что для
всех сечений модуль равен Ек. Зона разгрузки стягивается при этом
в крайнюю точку среднего сечения, так что а—>0. Понимая ниже
под v прогиб среднего сечения, получим по D1):
-&Av=w-
B.43)
Таким образом, точка разветвления равновесных состояний, найденная
при условии ЛР Ф 0, соответствует критической силе
кр-
B.44)
лежащей всегда ниже силы, определенной из A1). Отсюда вытекает
формула B1), составленная ранее «интуитивно».
Будем называть критическую силу Ркр, находимую с помощью
модуля Ек, касательно-модульной в отличие от приведенно-мо-
дульной Ррез, определяемой с помощью
результирующего модуля Т.
Принципиальное различие между этими
понятиями можно видеть из рис. 2.14. По
оси абсцисс здесь отложен
безразмерный параметр прогиба v = vjc, по оси
ординат —параметр нагрузки P = PjPKf.
Приведеппо-модульпой критической силе
отвечает безразличное равновесие, так
что прогиб остается неопределенным;
па графике получаем горизонтальную
прямую. Ветвь равновесных состояний,
отходящая от касательно-модульпой
критической точки, имеет в этой точке
наклонную касательную. Наклон этой касательной
лить, пользуясь уравнением D1). Считая s = e = 0,
получим:
или
Рис. 2.14. Касательно-модульная а
приведенно-модульная нагрузки.
МОЖНО
' Дг>->0
опреде-
Р. = Р.
B.45)
dP Fc2
iga.! =-= = -—.
dv I
B.46)
Если точка разветвления лежит между Ркр и Ррез, то наклон
касательной окажется меньшим; по мере приближения исходной силы
к приведепно-модулыюй нагрузке угол наклона приближается к нулю.
§ 34. Стержни двутаврового и прямоугольного сечений
при возрастающей нагрузке
Рассмотрим случай двутаврового сечения с весьма топкой стенкой.
Приведенное сечение показано па рис. 2.15. Эксцентриситет центра
тяжести этого сечения равен по B4)
е =
1_( ь.,±\
2 \ 2 +n2J h л-1
y(i + «)
2 л+1 *
B.47)
Площадь и момент инерции приведенного сечения будут по B3)
и B5) равны
, F А* Г/, , л — 1\2 / n— l\2l F ич п
+ 1
Уравнение C3) принимает вид
£„/
'к л+1 d.v2
Вместо D0) получим:
+ Рг> -j- АР
2 л+1
= 0.
f l)s] d2v
h J rf.x2 '
B.48)
B.49)
B.50)
B.51)
1
ЧТО СООТ-
При ДР = 0 и (Pvldx2=hQ из E1) находим |. = ---д-г
ветствует A3). Уравнение E0) принимает
вид
ftl
aFli
щ
\\ф
Е'*т%ттп?+Р*=0- <2-52>
откуда находим приведенпо-модульиую
критическую силу:
n2Ej In
Рис. 2.15. Приведенное
двутавровое сечение.
рез'
I2
Л+1 '
B.53)
это согласуется с формулой A6) для Т.
Касательно-модульпая критическая сила равна
Ркр = -^-- B-54)
Следовательно,
рез
°кр
2л
тг+т
B.55)
Введем обозначения
kb
Р п+1
ъ1 р
«2 =
КГ'
EKI 2л '
Уравнение E0) принимает вид
АР рп п — 1
d2v , , 2
Интеграл его будет
v = Л, sin Ajx -f 5| cos /^js —
Р 2£к/ 2л '
ДЯ Л л — 1
Р 2 л+1
Выпишем условие симметрии упругой линии:
dv п I
_=0 при х = 1,
Пользуясь этим условием, из E8) получим:
Ах = Я, \g ki 4 ;
выражение для v принимает вид
cos k{ |
v = B
cosfti \-к — ■*)
ДР h n — 1
COS k\
I
P 2 л + 1
Уравнение C7), относящееся к концевым участкам, будет
Vq ■= А0 sin k2x.
Условия сопряжения C6) приводят к соотношениям:
Л) sin 2 ._. А,г
ДР /г л—1
cos
Р 2 л+1 '
Л0^2 COS &2 —~— = Biki
sin
/Wa
cos
ft,/ '
отсюда
kxl
в = — ^-~ n_1 C°s 2
1
P 2л+1 CQSM |LtgMtg.2i^-l
B.56)
B.57)
B.58)
B.59)
B.60)
B.61)
B,62)
B.63)
B.64)
ИО СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. II
Обратимся к уравнению E1). Подставляя вместо v выражение F1).
находим:
AP^Blki-ifh[l~Sl±Jl±
cosfc, (у — х]
к,1
COS-j-
B.65)
На границе зоны разгрузки должно быть
2
s = 0 при х = ^~-; B.66)
пользуясь F5) и E6), получим:
о _ АР A In cos 2 „ ■„
Б1~-РТ7НГГ м- B'67)
C0S"T
Приравнивая выражения F4) и F7), будем иметь:
По E6) будет
к\ , к\а , , I — а п-\-\ ,л л0\
i^-T^k,-r-=-^r. B.68)
р
л2
/2
л+1
Чп '
,2 Р Л2
' кр *
V п+1 '
и вместо F8) получим:
te^**»^=/5j|r. B-69)
Выражение E6) можно переписать в виде
B.70)
Уравнение F9) позволяет определить длину пластического
участка а, если задано, с одной стороны, значение я и, с другой
стороны, отношение PlPKp.
Рассмотрим предельные случаи. Если область разгрузки
отсутствует, должно быть а — 0, отсюда
tg^ = oo, k2 = ~; B.71)
по G0) это дает Р — Ркр. Предполагая, с другой стороны, что
область разгрузки занимает .всю длину стержня (а —Г), получим:
Tg^. = oo. A, = -J; B.72)
отсюда по G0)
/> = /,кр7^Т=/>ре.- С2'73)
S о»)
\j i iJ.FSI\l 1Г1 дыи iJ-iiSM <^r*.
На графике рис. 2.16 представлена зависимость между Р^=Р[Р
и ajl при ге—2; 4; 6 для промежуточных значений а/1. Пунктиром
показан уровень, соответствующий силе Ррез по G3).
Pi
1,8
1,5
1/1
hi
OR
I
■.
-
~
7
—
i
оя
1,7fS
_ i/^_._
UJ.J
1 1
tlfi 0,6
—
\
0,8
~~t\H
'/\Ч
1
1
1
(
1
1 -w
1,0 *
Pl\
1.8-
1,6
Ui
1,0
0,8
Рис. 2.16. Длина зоны разгрузки в случае
двутаврового сечения.
П = 6
0,2
0.4
0,6
0.д 1,0
1,2 1А
Рис. 2,1?, Диаграмма «нагрузка—прогиб» в случае двутаврового
сечения.
Пользуясь выражениями F1) и F7), находим стрелу прогиба стержня:
2л
/ = V|=A""^)W^(
COS-
k,a
•л-1-1
B.74)
На рис. 2.17 показано, как меняется отношение v — f -^ в
зависимости от Р = Р/Ркр для различных п. Наклон касательной
112
СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
[ГЛ. II
определяется выражением
dP __2(п+\) Р2
df h
кр
2п
k\a
-п+1
B.75)
В точке разветвления будет Р = Р Р=1, а = 0; отсюда
dP\
df
2Р,
кр
р-р,
= -^-, B.76)
кр
что соответствует
выражению D5).
В случае
прямоугольного сечения выкладки
02 (Ifi
03 КО
а/1
Рис. 2.18. Длина зоны разгрузки для стержня
прямоугольного сечения.
Рис. 2.19. Распространение
зоны разгрузки при
выпучивании стержня.
2,0
1,8
IF
Ifi
1,2
1,0
Oft
|__ j7-£
._.j
L.^^Z
A^"
r
1 1 1
.
1
_
/?
/,
1_^ 1 L>_
0,2 0,4 0,6 0,8
1,0
1,2 IA
и
Рис. 2.20. Диаграмма «нагрузка — прогиб» для стержня
прямоугольного сечения.
значительно усложняются. На рис. 2.18 представлен окончательный
график зависимости Р = Р/Ркр от ajl. Из рис. 2,19 видно, насколько
§35] ВЫПУЧИВАНИЕ СТЕРЖНЯ ПРИ УМЕНЬШАЮЩЕЙСЯ НАГРУЗКЕ ЦЗ
глубоко по сечению распространяется зона разгрузки в различных
сечениях для того или иного уровня закритической деформации;
принято п = 4. На рис. 2.20 дано изменение относительной стрелы
прогиба v при возрастании нагрузки, начиная от Ркр.
§ 35. Выпучивание стержня при уменьшающейся нагрузке
Мы предполагали выше, что вслед за начавшимся выпучиванием
стержня приложенная к нему осевая сила возрастает. Сделаем теперь
обратное допущение: примем, что передаваемая па стержень осевая
нагрузка при выпучивании стержня падает *). Исследование этого
случая приводит к новым результатам при условии учета эффекта
разгрузки для материала стержня. Допустим, что, в отличие от
рис. 2.13, зона разгрузки
занимает значительную часть
объема стержня (рис. 2.21),
а область догрузки — лишь
часть объема у среднего
СечеПИЯ. 1 ОГДЗ ДЛЯ ООЛЬ- рис 2.21. Упругая зоиа разгрузки занимает почти
ШеЙ ЗОНЫ объема СТерЖПЯ, весь объем стержня.
испытывающей разгрузку,
зависимость Да (As) будет соответствовать основному модулю Е,
а для меньшей зоны догрузки — касательному модулю Ек. Иными
словами, концевые части будут деформироваться чисто упруго.
Естественно, что при такой зависимости между изменениями
напряжений и деформаций каждая проба устойчивости стержня,
ваключающаяся в переводе его из прямолинейного состояния
в соседнее, изогнутое, будет сопровождаться резким возрастанием
общей жесткости стержня. Следовательно, точки бифуркации, если
их изобразить па оси ординат рис. 2.14, будут лежать над линией
Ррез, а соответствующие критические силы будут превышать Ррез-
Представим себе, что упругая зона разгрузки (рис. 2.21) занимает
почти весь объем стержня; при этом точка бифуркации будет
приближаться к эйлеровому значению нагрузки.
Мы приходим к выводу, который па первый взгляд представляется
парадоксальным: в случае уменьшающейся при выпучивании стержня
осевой силы возможные точки бифуркации занимают на оси
нагрузок всю область между точками, соответствующими приве-
денно-модульной и эйлеровой нагрузкам (не включая последнюю)]
Но, естественно, после начала выпучивания зона догрузки будет
*) Эта задача была впервые рассмотрена А. А. Ильюшиным и В. Г. Зуб-
чаниновым. (Инж. сб. 27, 1960). Дальнейшие работы в этой области
принадлежали Я. Г. Пановко (Изв. АН СССР, мех.'и маш., № 2, 1962) и В. Г. Зуб-
чанинову (Инж. сб. 28, 1960; Инж. журнал 1, № 3, 1961; 5, № 5, 1965).
9 А. С. Вольмир
114 СЖАТЫЕ СТЕРЖНИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ |l л. II
расширяться и равновесные кривые (Р, v) должны быть, в отличие
от линий рис. 2.14 или 2.17, обращены выпуклостью вниз; с
возрастанием прогиба они будут приближаться к горизонтали приве-
деппо-модульпой нагрузки (штрих-пунктирная линия па рис. 2,14).
Возникает вопрос: может ли быть реально осуществлена такая
конструкция с упруго-пластическим сжатым стержнем, в которой
происходило бы уменьшение осевой силы при выпучивании стержня?
Такую конструкцию называют разгружающей в отличие от
догружающей системы по § 33. Отметим, что деформация стержня при
сжатии и продольном изгибе сопровождается сближением его торцов;
если допустить, что связанные со стержнем части конструкции,
например, плиты испытательной машины, «не успевают» переместиться
вслед за торцами, то тогда, в самом деле, стержень может
испытывать разгрузку.
Но здесь важно выяснить еще, действию каких сил подвергается
конструкция в целом. Допустим сначала, что выпучивание стержня
происходит при неизменных внешних силах, действующих па
конструкцию. Тогда для разгружающей конструкции «верхняя» критическая
нагрузка будет всегда больше приведенно-модульного значения, а
для догружающей — всегда меньше. Если же внешние силы,
действующие па конструкцию в целом, продолжают возрастать, то эффект
разгрузки для стержня может не сказаться вообще.
Наибольшее «разгружающее» влияние на стержень будет
оказывать достаточно упругая конструкция, в которой выпучивание
стержня сопровождается ярко выраженным хлопком. Скорость сближения
торцов стержня будет резко возрастать при этом из-за упругости
конструкции и в связи с нелинейной зависимостью о (г) в упруго-
пластической области для материала стержня. Экспериментально
такой эффект был обнаружен с помощью простейшей статически
неопределимой конструкции, снабженной разгружающей поперечной
балкой (рис. 2.22)*). Нижняя балка служила для увеличения
упругости испытательной машины. На этой установке были получены
значения критической силы, заметно превышающие приведенио-мо-
дульиую величину; на рис. 2.22 изображен стержень в процессе
выпучивания. Исключение составляли очень короткие стержни, для
которых не наблюдалось значительного изменения скорости
сближения торцов в процессе выпучивания.
Опыты показали, что эффект увеличения критических напряжений
сверх приведенно-модульного значения может быть уловлен при
условии, что конструкция обладает достаточной упругостью,
обеспечивающей «взрывной» характер процесса выпучивания, и
определенной разгружающей жесткостью.
Приведенная выше трактовка задачи уязвима в том смысле, что
вначале речь идет о точках бифуркации при статическом процессе
!) Этот опыт принадлежит В. Г. Зубчанинову.
пагружеиия, а затем условие достижения бифуркационной нагрузки
связывается с динамическим явлением хлопка. Желательно
дальнейшее исследование процесса выпучивания стержня, помещепчого
Рис. 2.22. Установка для испытания стержней иа устойчивость при наличии
эффекта разгрузки.
в разгружающую конструкцию, с учетом сил инерции для стержня и
конструкции в целом; следует принять во внимание и образование
вторичных пластических деформаций в зоне разгрузки.
§ 36. Выбор критерия устойчивости и расчетной нагрузки
Задача о выпучивании сжатого стержня за пределами упругости
на первый взгляд представляется несложной. В самом деле, мы
изучаем деформацию стержня, принимая прогибы малыми по сравнению
с длиной, т. е. в геометрически линейной постановке. Закон
распределения деформаций по сечению определяется гипотезой плоских
сечений. Мы можем рассматривать стержень как систему продольно
расположенных волокон, поскольку напряженное состояние считается
одноосным. Закон напряжение — деформация принимается известным.
И тем не менее, как мы видим теперь, задача эта таит в себе
многие «подводные камни».
Первое затруднение состоит в распространении на
упруго-пластическую область самого понятия устойчивости. Допустим, что
сжимающее напряжение в стержне превзошло предел
пропорциональности, по критическая нагрузка еще не достигнута, очевидно,
прямолинейное состояние стержня должно быть устойчивым. Однако, если
8*
какое-либо возмущение вызовет искривление стержня, то в нем
возникнут некоторые остаточные деформации. Можно понимать под
устойчивым в малом такое равновесное положение системы,
которое не имеет соседних искривленных равновесных форм. Под
критической нагрузкой надо подразумевать тогда такую минимальную
силу, при которой появляются соседние равновесные формы; по
при этом надо исключить из рассмотрения те формы, которые
соответствуют остаточным деформациям (см. [27.5а, 27.11]).
Такое определение может также вызвать возражения, если учесть,
что пластическая деформация при пагружении конструкции
представляет собой, в той или иной мере, процесс течения, развивающийся
во времени. С этой точки зрения, говоря об устойчивости, надо
сопоставлять величину малого возмущения, выводящего систему из
рассматриваемого положения, с тем эффектом, который оно вызовет.
Если этот эффект, заключающийся в искривлении стержня, является
ограниченным и малым, то исходное состояние следует считать
«устойчивым».
Как правило, мы будем все же считать, что процесс
пластической деформации протекает весьма медленно и что использование
понятия равновесного состояния системы является правомерным.
Вернемся поэтому к определению критической нагрузки как точки
разветвления равновесных форм. Здесь мы сталкиваемся с повой
особенностью неупругого выпучивания: вместо определенной точки
бифуркации, соответствовавшей первой критической нагрузке в упругой
области, здесь возможные точки бифуркации заполняют весь
промежуток, лежащий между касательпо-модульпой и приведеппо-модуль-
пой нагрузками, при возрастающей силе и от приведепио-модульпой
до эйлеровой нагрузки — при уменьшающейся силе. В какой же
точке должно произойти выпучивание образца, подвергающегося
испытанию в лаборатории, либо элемента конструкции в реальных
условиях? Это зависит от характеристики машины или связанных
со стержнем частей конструкции. В предыдущих выкладках
отношение ДР/Дг> не определялось, но его можно найти, если известны
реакция сопряженных с образцом элементов конструкции при
заданной стреле прогиба и характеристика нагрузки, приложенной к
конструкции в целом.
Возникает вопрос: какую же нагрузку надо принимать в качестве
расчетной при проектировании? Как мы видели, касателыю-модуль-
ная нагрузка может при известных условиях соответствовать точке
бифуркации равновесных форм, она всегда лежит ниже приведеипо-
модульпой и лучше соответствует экспериментальным данным. Правда,
различие между касательно-модулыюй и приведеипо-модульпой
нагрузками невелико; поэтому, как уже отмечалось Хоффом [7.13],
существенного влияния на результаты расчета этот выбор не
оказывает. Что же касается случаев возможного превышения нагрузкой
приведеино-модульного значения, то определение несущей способ-
ности стержня с учетом этого эффекта сулит экономию веса
конструкции; по каждый из этих случаев требует специального анализа.
В итоге надо рекомендовать вести практические расчеты в
запас устойчивости по касательно-модульной нагрузке. Принимая
в основу эту величину, мы как бы отказываемся учитывать эффект
разгрузки при выпучивании. Это предположение сильно упрощает
расчеты, особенно в более сложных задачах устойчивости пластинок
и оболочек, и мы будем к нему в дальнейшем неоднократно
прибегать.
Независимо от того, какой модуль принять расчетным — Т или
Ек> — для решения задач мы вправе применять приближенные
методы, описанные в главе I. В случае стержня переменного сечения
надо учитывать при этом изменение модуля Т или Ек по длине,
зависящее от изменения напряжения о в сечении. Но так как само
критическое напряжение обычно подлежит определению, то расчет
приходится проводить путем нескольких проб.
§ 37. Внецентренное сжатие в неупругой области.
Приближенное решение
Исследование форм равновесия стержней, подвергающихся впе-
цеитреппому сжатию за пределами упругости, встречает новые
затруднения. Здесь приходится рассматривать различные варианты
расположения по сечению упругой и пластической зон при
различных нагрузках. Поэтому был предложен ряд
приближенных решений, вносящих зпачи- ^
тельные упрощения уже в самую постановку s =5r
задачи *).
Одним из существенных допущений
является введение модели идеально пластичного
материала. Под этим понимается
воображаемый материал, диаграммы сжатия и
растяжения которого имеют вид, показанный па
рис. 2.23. Считается, что пределы
текучести при сжатии и растяжении одипа- Рис' 2"^T*ls°™a™
ковы.
Второе допущение состоит в том, что изогнутая линия для шар-
нирио опертого стержня представляет собой полуволну синусоиды.
На рис. 2.24, а изображено поперечное сечение стержня,
имеющее ось симметрии. Будем считать, что точка А приложения силы Р
лежит па этой оси и отстоит от центра тяжести С на расстоянии е.
Пусть высота сечения h делится точкой С на отрезки /zj и А2.
*) Эта задача рассматривалась Рошем [2.18], Хвалла [2.10], Фриче [2.12],
Ежеком [2.13], А. В. Геммерлингом [2.3], В. В. Пинаджяном [2.7]. Здесь
изложение построено но книге Ежека [2.13].
Обозначим через / стрелу прогиба стержня, отсчитываемую от линии
действия силы Р. Представим себе, что деформации в некоторой
части сжатой зоны превышают величину ет, отвечающую пределу
текучести: ет = ат/Е; граница этой
зоны отстоит па | от края
сжатой области. Положение нейтральной
линии пусть определяется отрезками £
и 1]. Полные эпюры распределения
деформаций и напряжений по высоте
сечения даны па рис. 2.24,6' и в.
Составим уравнения равновесия для
части стержня, отделенной средним
сечением. Уравнение проекций сил па
направление оси стержня имеет вид
ft-!
р
Fa,
-h
dF
= 0. B.77)
—г Здесь через F обозначена площадь се-
1 ; чения, через а — разность между папря-
т'г жепием в точке с координатой а и
пределом текучести от
о
и
0Х—.
B.78)
Рис. 2.24. а) Сечение стержня;
б) эпюра деформаций и в) эпюра на- ,,
пряжений при эксцентричном сжатии. Координата а отсчптывается от
границы зоны текучести.
Уравнение моментов относительно линии, проходящей через
крайнюю точку растянутой зоны, будет
ft-i
P(f + h)— F^ih— \ o{h — l — u)dF
■О.
B.79)
Введем обозначения для статических моментов и моментов инерции
частей площади сечения, разделяемых границей зоны текучести:
Sl% = J «, dF, Il% = J" «2 dFf B.80)
о
h-l
0
h-l
S2l=j a,dF, /2l=J «;
о о
Сопоставляя (80) и (81), можно записать
SoA = Sli-\-F(h1-l).
I dF.
B.81)
B.82)
Момент инерции /^ всей площади относительно границы зоны
текучести и момент инерции / относительно параллельной ей
центральной оси связаны соотношением
fl = Ill + I2l = I + F(hl-lf. B.83)
Обозначим через а0 = PjF среднее сжимающее напряжение в
сечении; тогда из G7) вытекает:
Пользуясь (82) и (83), из уравнения G9) находим:
f = -^V-fil-(h1-l)Sll]. B.85)
Для определенной формы сечения уравнение (85) вместе с (84) дают
зависимость между стрелой прогиба / и средним напряжением а0.
Рассмотрим теперь геометрическую сторону задачи. Обозначим
через р радиус кривизны упругой линии для среднего сечения, тогда
1 ет
~Р~ ~*Г'
Пользуясь A.3), для этого сечения получим:
dx2 Et\
Уравнение изогнутой линии стержня запишем в виде
v=e -f-(/— e) sin ~, B.88)
причем начало координат совпадает с точкой приложения одной из
сил Р; при х = //2 будет:
15-=-■£(/—>. <2-89>
Сравнивая (87) и (89), находим:
Г- = Ц(/-е)^. B.90)
B.86)
B.87)
Окончательно по (84) и (85) имеем
п2£
Р =
Fon
/_/u_(A, —|)SU gT_go <VJ- С2-91)
Мы получили соотношение между средним напряжением а0 и
шириной пластической области £,. Анализ его показывает, что величина а0
вначале возрастает, а затем, после достижения некоторой
предельной точка, падает. Поставим себе целью найти такое значение |,
при котором а0 является наибольшим; для этого приравняем нулю
производную от 1? по | при заданном а0; тогда получим
-И — -т^- 5iH # = 0. B.92)
Определяя отсюда |, по (84) найдем «критическое» значение среднего
напряжения, а по (85) соответствующую стрелу прогиба.
§ 38. Внецентренное сжатие стержней прямоугольного
и таврового сечений
Рассмотрим случай прямоугольного сечения by^h. По
формулам (80) при /?! = Л/2 находим:
Ч = Щ-> 'ц = -т- B-93>
Подставляем эти значения в (92), тогда получим значение ширины
пластической зоны при критическом значении среднего напряжения
ао = <V
1 = 2 -JZZL-. B.94)
°т — акр
Обозначим через k радиус ядра сечения:
А = -£, B.95)
где W-—момент сопротивления сечения, и введем понятие меры
эксцентриситета т:
™=т=--ж- B-96)
В данном случае
А =4- т = ^- B-97)
Вместо (94) будем иметь:
B.98)
h 3 ат — (ткр
Подставим это выражение в уравнение (91); игла получим:
Гибкость стержня равна
?v = l=iJ^li. B.100)
Равенству (99) придадим вид
_ л2Е
°КР Я2
(l-i-K- <2Л01)
стержни Прямоугольного и таврового сечении 121
Отметим, что при | = 0, когда пластическая зона отсутствует, мы
получаем обычную формулу Эйлера. Пользуясь выражением (98), получим:
?v2 =
я?Е
т
>кр
.—1
B.102)
-"кр
Мы пришли к уравнению относительно сгкр, позволяющему
определить критическое напряжение при заданном относительном
эксцентриситете. Соответствующие значения ц и / по (84) и (85) будут:
Лкр =
2т
/,
mh
'-*
■++-2
-'кр
А2
кр"
18
B.103)
B.104)
Сюда надо подставить выражение для \\h по (98). На графике
рис. 2.25 представлены кривые 0KP(?v), построенные по
уравнению A02) для различных параметров т\ принято £ = 2,1 ■ 106 kzjcm2,
бц, кг 1см
20 10 ВО
100 120 МО 160 /80 200
Л
Рис. 2.25. Диаграмма а (?.) в случае эксцентричного сжатия
стального стержня прямоугольного сечения.
ат = 2400 кг/см2. При т = 0 мы получаем горизонтальную прямую
в пределах А. < kt и гиперболу Эйлера для Х^-Хф; здесь ?^ = 94.
Небольшой левый участок диаграммы отвечает случаю двусторонней
текучести, когда пластические деформации возникают не только
в сжатой, но и в растянутой зоне.
В книге [2.13] рассмотрены аналогичным образом случаи
поперечных сечений иной формы. Сопоставление результатов показало,
что при значительных т критическое напряжение получается
наименьшим для стержней таврового сечения, когда точка
приложения силы лежит на оси стенки, по другую сторону от полки
(рис. 2.26). Разберем тот случай, когда пластическая зона имеется
лишь па стороне сжатия и охватывает только
часть полки. Выражения для S^ и 1ц будут
снова иметь вид (93), причем под Ь надо
понимать ширину полки. Уравнение (92)
т
]
оказывается квадратным относительно |
приводится к форме
кр
I2
*кр
■2 А
еа.
кр
JKp
2Fea,
Sl<p —Г
кр
Рис. 2.26. Тавровое сечение
стержня.
Ь @Т — (Ткр)
:0. B.105)
■■Wi-.
Воспользуемся снова обозначением для меры
эксцентриситета (96), причем здесь W =
I\hx (см. рис. 2.24). Тогда наименьший корень уравнения
A05) можно представить в виде
1кР = Р — Ур^—Я-
где
= Л1
mWiaKp
F (°т — °кР)
2mlF,0Kp
Сопоставляя A06)-
4 Ъ (стт — а,
-A08), находим:
кр.
)'
■я-
qb_
2F '
B.106)
B.107)
B.108)
B.109)
Подставим выражения A06) и A09) в уравнение (91); тогда после
упрощений получим:
"-^{'-■ffI''-^-^-т-^]}- <2-110>
■^кр
Отсюда при Х — Щ
?2_i^!£ii *_
Л — (Ткр Г 3/
Развернем выражение (р2 — q)
(Р2-Я)''* = Р3
73 _
(Р2
■9)*-Т
4 F
B.111)
в ряд:
3
--$ ря-
8 р
B.112)
После некоторых преобразований уравнение A11) примет вид
СТЕРЖНИ ПРЯМОУГОЛЬНОГО И ТАВРОВОГО СЕЧЕНИЙ
123
Если принять размеры сечения по рис. 2.27 при b = h, то
коэффициент, содержащий W\ и h\, будет равен 0,38. Заметим, что
разрешающее уравнение A02) для случая
прямоугольного сечения можно также
привести к форме
Л2 =
я2£
1
JKp L "т "кр
+т(ъ=к)-•■■]• BЛ14)
*
t
■* *
*-
1 м
t
-*4
II
~Ц-
Рис. 2.27. Размеры таврового
сечення в численном примере.
оно отличается от A13) только
коэффициентом при третьем члене ряда. Зависимость
окр(Х) по A13) для сечения по рис. 2.27
представлена на графике рис. 2.28; здесь
даны также участки кривых,
соответствующих другим сочетаниям упругой и
пластических зон сечения.
В. В. Пинаджяном [2.7] была решена более сложная задача
в предположении, что в диаграмме о (е) участок пластичности является
не горизонтальным, а слегка наклонным (рис. 2.29). Такая
зависимость о(е) лучше отвечает
^ г обычной диаграмме для стали
\| ~*^|*" Ст. 3. Вычисления показали,
что критическое напряжение
для такого материала лежит на
5—7% выше, чем в случае
«идеальной пластичности».
Исследования устойчивости
упруго-пластических стержней
б
го w so ва wo т т ню да т i
Рис. 2.28. Зависимость <т (?.) в случае стержня
кр
таврового сечения при эксцентричном сжатии.
Рис. 2.29. Приближенная
диаграмма сжатия для стали.
с учетом различных возмущений (внецентренность нагружения, начальная
погибь) лежат в основе современных норм расчета сжатых и сжато-
изогнутых элементов строительных конструкций. Это направление
освещено в книгах А. В. Геммерлинга [2.3], А. А. Пиковского [3.7], Г.Бюр-
гермейстера и Г. Штойпа [0.16], К. Колбруннера и М. Мейстера [0.19].
ГЛАВА III
БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ
гт%
t
§ 39. Стержни переменного сечения. Ступенчатое
изменение жесткости
Мы рассматривали до сих пор только такие стержни, жесткость
которых по длине является постоянной. Однако с точки зрения
облегчения конструкции целесообразно применять сжатые стержни
переменной жесткости, с увеличением ее в той
зоне, где изгибающие моменты и нормальные
усилия оказываются наибольшими. Правда, изготовление
стержней переменной жесткости требует более
сложной технологии. Но для крупных сооружений это
заведомо окупается экономией материала,
затрачиваемого на конструкцию. Особенно удобным является
применение составных стержней переменной
жесткости, имеющих две или несколько ветвей; такие
стержни часто встречаются в конструкциях башен,
мачтах, стрелах подъемных кранов и т. д.
Приведем решение нескольких задач,
относящихся к устойчивости стержней переменной
жесткости, шарнирно опертых по концам. Очевидно, в этом
случае жесткость должна быть повышенной в средней
части.
На рис. 3.1 представлен стержень, состоящий
мз трех частей. Крайние части, каждая длиной 1\,
имеют жесткость Е1и а средняя, длиной а = 2/2, —
жесткость Е12, причем /2>Л'> ' — общая длина
стержня. Составим дифференциальные уравнения
изогнутой оси для каждой части. Будем,
отсчитывать координату Х\ от конца стержня О,
точки сопряжения участков. Уравнения будут иметь вид
El d2v> I
%
-Иг
01
'И:
Рис. 3.1. Случай
ступенчатого
изменения сечения.
а Хс, — ОТ
EL
dxf
d2v2
dx\
Pv,=0,
+ Pv2 = Q.
C.1)
C.2)
СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
125
Вводя обозначения
г «,2 г и*
£/
£/,
C.3)
запишем интегралы уравнений A) и B):
•у, = A sinA,jfi -\-BcoskxX\, C.4)
v2 — Cs\nk2x2 -\- Dcosk2x2. C.5)
Граничные условия по концам и в точке сопряжения участков будут:
C.6)
C.7)
C.8)
г>1 = 0
Vi—V2
dvx dvi
dxx dx%
dx2
при
при
при
при
х1=0.
xl=ll
xl = l1
•^г== '2 •
и
и
х2 = 0,
*2=°
C.9)
Из этих условий находим:
5 = 0,
Aki COS k1ll = Ck2, С COS k2l2 — lj ain /c2t2
Сопоставляя уравнения A0), приходим к трансцендентному уравнению
Л sin &i/i = D, 1
, — Dsin&,/2 = 0. J
10)
*i
tg /S)/) J Ь ^ J
Представим критическую нагрузку в виде
Рк
кр-
■ к—.
C.11)
C.12)
В таблице 3.1 приведены значения коэффициента К для
некоторых отношений
C.13)
2/2 , /,
= — = *" -/7=а-
Приведем пример решения той же задачи с помощью метода
последовательных приближений.
Таблица 3.1
Значения коэффициента К для стержня
со ступенчатым изменением жесткости
и ^^\^^
од
0,2
0,4
0,6
08
0,2
1,47
2,796
5,089
6,978
8,550
0,4
2,40
4,222
6,680
8,187
9,177
0,6
4,50
б, 694
8,512
9,240
9,632
0,8
8,59
9,330
9,675
9,790
9,840
Пример 3.1. Определить критическую нагрузку для стержня со
ступенчатым изменением жесткости при X = 0,8. Примем начальное уравнение
упругой линии в виде
-•- J (lx — x2). (a)
Уравнения A) и B) перепишутся тогда следующим образом:
Интегрируя эти уравнения и используя условия F) — (9) с учетом того,
что х теперь отсчитывается от точки О, находим:
--^(тКЮ'+тт+Л^-1)]- <«.
Стрела прогиба будет
Критическая сила оказывается равной
Е^ 3-W
КР 12 .3088 + ^1 П
1 а
Для случаев, приведенных в таблице 3.1, получим следующие значения К:
а 0,1 0,2 0,4 0,6 0,8
К 8,77 9,17 9,41 9,52 9,58
Ошибка по отношению к табличным значениям не превышает 5%.
§ 40. Случай непрерывного изменения жесткости
по длине. Стержень наименьшего веса
Перейдем к случаю, когда жесткость стержня непрерывно
изменяется вдоль длины *). Рассмотрим шарнирно опертый по концам
стержень, для каждой половины которого момент инерции изменяется
по степенному закону:
' = 'я(тГ' (з-14)
х отсчитывается от точки, находящейся от середины стержня на
расстоянии Ь. Если, например, стержень состоит из двух ветвей
(рис. 3.2), имеющих прямолинейное очертание, и расстояние между
ветвями h равно
А = А24.
*) Подобные задачи были впервые решены Лагранжем, ряд случаев
стержней переменной жесткости был рассмотрен А. Н. Динником [3.1].
СЛУЧАЙ НЕПРЕРЫВНОГО ИЗМЕНЕНИЯ ЖЕСТКОСТИ ПО ДЛИНЕ 127
то момент инерции сечения, если не учитывать собственного момента
инерции сечения ветви, будет изменяться по соотношению A4) при
/я=2. Дифференциальное уравнение
упругой линии будет
EI,
(т)'
d2v
dx2
Ц-*:
-\-Pv = 0; C.15)
граничные условия имеют вид
_ = 0 при х = Ъ;
I
г> = 0 при х — Ь— -J =6,. C.16)
Обозначим
pbm
EI,,
■=*k\
тогда вместо A5) получим:
C.17)
Рассмотрим сначала случай, когда /я =
= 2; при этом решение уравнения A7)
будет
v = А У х sin (s In х) -\- В Yх cos (s 'n x),
C.18)
где
C.19)
52 = fe2_J.;
Рис. 3.2. Момент инерции
сечения изменяется по степенному
закону.
в этом легко убедиться непосредственным дифференцированием.
Производная dv/dx равна
— = А\ —7=r sin (s In х) -j—-~=- s cos (s In x) -I-
dx l'2y x V x J
-А-В —7=^cos(slnx) j=- s sin (s In x) . C.20)
[ '2y x У x J
Используем граничные условия A6). По второму из этих условий
B — — Atg(slnb{).
Первое условие дает
Л [| tg (s In £) + s] + Я [i - s tg (s In £)] == 0.
Отсюда получаем уравнение относительно s:
tg{s\aty = 2s. C.21)
Наименьший корень этого уравнения определяет критическую
нагрузку:
Ркр^Ъ^, где /Ci —= (*2+|) (jj- C-22)
При т Ф 2 решение уравнения A7) выписывается следующим образом:
v = A YxJy Bkvx1Uv) + В Y*J-vBfevJc'/2v), C.23)
если v = 1/B — т) — дробное число, и
v=A YxJvBfevx1/2v) + В Yxlv{2kvxl/2v)
C.23a)
если v—целое число.
Под Jv и /v понимаются бесселевы функции, соответственно,
первого и второго рода с индексом v. Отметим, что при v = n -f- 1/2,
где п—целое число, функции Jv и 7_v могут
? быть выражены через элементарные функции.
Пусть, далее, шарнирно опертый стержень
состоит из трех частей (рис. 3.3), причем
1.0
0,8
0,6
ОЛ
02
-1.0
0,9
0J
0,1
0,0
0,5
ОЛ
0,0
О,!
005
ЦС1
0,1
02
0,3
О?
Рис. 3.3. Стержень,
состоящий из трех частей;
средняя часть имеет
постоянное сечение.
Рис. 3.4. График для расчета стержня переменного
сечения.
на среднем участке /2 момент инерции постоянен и равен У2,
а в крайних частях, длиной llt момент инерции меняется по закону
A4). Тогда для среднего участка уравнение упругой линии запишется
в виде E) при / = /2, а для крайнего участка — в форме A5).
СЛУЧАИ НЕПРЕРЫВНОГО ИЗМЕНЕНИЯ ЖЕСТКОСТИ ПО ДЛИНЕ 129
Учитывая условия для концевого сечения, среднего сечения и точки
:опряження участков, определяем критическую нагрузку.
Д-1Я случаен т = 1, 2, 3, 4, а также для других законов
изменения момента инерции сечения по дл.ие стержня имеются расчетные
таблицы, составленные Л. Н. Дппником [3.1].
Данные для расчетов, относящиеся к случаю т — 2, приведены
на графике рис. 3.4 [0.21]. Здесь по оси абсцисс отложено
отношение /]//, по оси ординат—коэффициент К\ из формулы B2) при
!=12; серия кривых дана для различных отношений моментов
инерции /i//2- Формулу B2) можно также представить в виде
°кр = "(v/J ' C.24)
коэффициент приведения длины равен v=l/]/"/C,.
Пример 3.2. Стрел;) АВ портального крана (рис. 3.5) состоит из
четырех равнобои'нх уголков 75 У 75 < 6, связанных решеткой. Полная длина
Рис. 3.5. К расчету стрелы портального крана.
стрелы /= 17,5 м. Габаритные размеры сечения средней части DO
постоянны, а на протяжении каждой из крайних частей меняются по линейному
закону в зависимости от расстояния до опоры А или В. Размеры сечений
в средней части и у опор показаны на рисунке Требуется определить
критическую нагрузку при £ = 2,1 ■ 106 кг/см*, стпц — 2000 кг/см2, 'рассматривая
устойчивость ■■•■ре ты а плоскости ABC.
9 А. С. Вильмнр
Площадь сечения профиля равна 8,78 см2, расстояния от оси до центра
тяжести сечения уголка в средней части — 17,94 см, у опор — 6,94 см.
Момент инерции сечения в средней части
у опор
/2 = 4 D6,7 -f- 8,78 • 17,942) =11 500 см\
/, = 4 D6,7 -f- 8,78 • 6,942) = 1900 см*;
здесь учтен собственный момент инерции профиля, равный 46,7 см*.
Отношение /,// = 0,165, J^V,//= 0,405. Из рисунка находим:
Л
17,5
= 0,4.
По графику рис. 3.4 при этих значениях Vlt/I и /,// будет К\ ~ 0,73.
Критическую нагрузку без учета влияния поперечной силы (см. ниже, § 48)
получаем равной
0,73 • я2 ■ 2,1 ■ 10е • 11 500 ._ ппп
Ркр = п^ = о9 000 кг.
Соответствующее напряжение сгкр = 59 000/4 • 8,78 = 1570 кг/см2 лежит
ниже 0ПЦ.
Естественно поставить вопрос: какое очертание должен иметь
сжатый стержень переменного сечения для того, чтобы при
определенной нагрузке он имел наименьший вес *)? Приведем результаты
^ решения такой задачи для случая,
Ss § tj 8 §• когда стержень имеет сплошное
круглое сечение и шарнирно
опирается но концам. Наивыгоднейшее
;s_ очертание стержня отвечает закону
arcsinT) — т]\Л —if =-у~, C.25)
где т) — отношение текущего
диаметра к диаметру среднего сечения,
х отсчитывается от конца стержня.
Форма стержня показана на рис. 3.6, здесь отмечены значения ц
в некоторых сечениях [1.13]. Вес такого «идеального» стержня
оказывается на 13% меньше, чем вес стержня постоянного сечения.
В случае трубчатого сечения экономия в весе может оказаться
значительно большей.
Рис. 3.6. Очертание стержня наименьшего
веса.
*) Эта задача была впервые поставлена Лаграпжем и в дальнейшем
исследовалась Е. Л. Николаи (Труды по механике, Гостехиздат, М., 1955),
Н. Г. Ченцовым [3.10], А. Ф. Смирновым [0.11], А. И. Лурье (Труды
Ленинградского полит, ин-та, № 252, 1965) и другими авторами.
СЛУЧАЙ СОСРЕДОТОЧЕННЫЙ СИЛЫ В HFUJltlt
1<Я
§ 41. Случай сосредоточенной силы в пролете
Допустим, что стержень, шарнирно опертый по концам,
подвергается действию сил Р,, Р2 и Р, -j-Р2 и что сила Р2 приложена в
некотором промежуточном сечении, расположенном на расстояниях /,
и 12 от концов (рис. 3.7). Примем, что момент инерции сечения в
верхней части равен /ь а в нижней /2.
Обозначим через / отклонение точки приложения силы Р2 при
выпучивании стержня. Дифференциальное уравнение упругой линии
для верхнего участка будет
ElA = -(P1 + P2)vl +
dx\
Pif
р,
P*f
= -Plvl + -f-(x] — /,); C.26)
здесь учитывается составляющая реакции опоры,
равная P2f/i; координата xt отсчитыиастся от 0.
Для нижнего участка получаем:
EI.
d4>,
2 dX\
.(Pl+P.2)v2 + -?fx2.
Воспользуемся обозначениями
П ui
EI г
kl
Рх + Р,
EI г
Р2
EI,
ki
C.27)
C.28)
л;
\
\
,vh
\
Рис. 3.7. Случай силы
приложенной в пролете.
тогда уравнения B6) и B7) перепишутся следующим образом:
d2v,
dx\
d42
dx%
■if
-+-*iwi = *i^-(je1_/1)
+ k{v2 = ki^- X2.
Отсюда
k f
Vi = A, cos kxxx -\- 5] sin Л|ЛГ] -I—j — (jc, — l{),
k\ f
v2 = A2 tos k2x2 + B2 sin k2x2 -f 4r — x2.
ki I
C.29)
C.30)
C.31)
C.32)
9*
132
БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ
[ГЛ. III
Граничные условия для концов стержня и точки сопряжения будут:
Vx = 0 при *,=/,, г»2 = 0 при х2
■О,
Vi=V2=f И
dv\
dv,
rt.X\ d.x2
Пользуясь этими условиями, находим:
О,
К /,
Л,=/A4--7],
Si=-
tgVi
1 +
k\l
5о
/
sin W2
41*
I
при #1 = 0 и x2 — l2. 1
C.33)
и, наконец, приходим к окончательному уравнению
k'-4 й'^ + ед
ki
kit - k\l2
k2ig k.2l2
C.34)
При заданном отношении сил и моментов инерции находим путем
проб значения ft,, .., ft,, отвечающие наименьшим значениям сил Рх
и Р2. Представим критическую величину Р, -j- P2 в виде
Pi+P2 = K-j£
и обозначим
Р,+Р2 _
т,
C.35)
C.36)
Коэффициенты К для случая /1 = /2, найденные по уравнению C4),
даны в таблице 3.2.
Таблица 3.2
Коэффициенты К для случая сил, приложенных
по концам и посередине пролета
^Ч. ™
п \^
1,00
1,25
1,50
1,75
2,00
1,00
9,87
8,81
7,90
7,11
6,40
1,25
10,9
9,77
8,86
8,04
7,30
1,50
11,9
10,5
9,53
8,52
7,90
1,75
12,5
11,2
10.1
9,10
8,43
2,00
13,0
11,6
10,7
9,77
8,97
3,00
14,7
—
—
—
Случай т= 1 относится к стержню переменного сечения, на
который действуют только силы Pi ио концам. Уравнение C4)
переходит в следующее:
tgMi
ig Мг
C.37)
§42]
действие распределенной продольной нагрузки
133
§ 42. Действие распределенной продольной нагрузки
Перейдем к случаю, когда продольная нагрузка распределена по
длине стержня. Одним из примеров такого типа нагрузки является
собственный вес стержня: при расчете колонн в крупных
сооружениях, дымовых труб и г. д. его необходимо учитывать. Обычно в эгих
случаях один из концов колонны (верхний) является свободным, а
второй (нижний) — защемленным. Рассмотрим задачу об устойчивости
такого стержня с постоянным по длине сечением сначала под
действием только собственного веса, а затем — при
совместном действии силы веса и других нагрузок *).
Примем систему координат по рис. 3.8. Обозначим
силу веса, приходящуюся на единицу длины, через р.
В сечении х сжимающая сила равна Рх — рх, а
поперечная сила
Уравнение A.6а) преобразуем к виду
d3v
El
dx3
■Q;
подставляя C8)
получим:
d*v
El
dx3
4 px
dv
dx
= 0.
Введем обозначения
/ 5'
dv
■ w,
EI
— />2.
• тогда придем к уравнению
d7w
"Si*
й2|те> —0.
C.39)
C.40)
C.41)
C.42)
Рис. 3.8. К
задаче об
устойчивости
стержня под
влиянием
собственного нсса.
Это уравнение интегрируется в бесселевых функциях**); решение имеет
вид
w = Л|'%, (| at3») + B^"J_L (| at) . C.43)
[Здесь Ji/a—бесселева функция первого рода. Производная от фупк-
рши Jv(az) no z равна
^i^ = -lyv(a,) + a7v.
dz
i (az).
C.44)
Ji *) Задача о продольном изгибе колонн под действием собственного веса
Збыла поставлена Эйлером, а в дальнейшем рассматривалась Грипхиллом [3.11],
лязучившим в связи с этим также очертания стволов деревьев.
**) См., например, указанную на стр. 66 книгу Э, Камке, стр. 453.
134 Г-ОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
Основываясь на этой формуле, находим:
)'"М4 ()""]=<".„ D <*'•)■
dz
Дифференцируя D3), получаем
dw
~dT
Aa\J_iu (| af2) - Ba\ly, (| af') .
Граничные условия задачи будут:
M = — EI-j£- = 0 при х = 0,
dv „ ,
—— = 0 при х = I
dx r
или
■^ = 0 при | = 0, ?0 = О при |=1. (а)
Как известно, функции Jv(|) обращаются в нуль при \ = 0, если
индекс v > 0; если же v < 0, то функция Jv@) = oc. В нашем
случае у=1/з> следовательно, величина JiA@)=0, в то время как
У_2/,@)= со. Но тогда первое из условий (а) может быть
выполнено лишь при А = 0. Считая В Ф 0, из второго условия находим:
У_
,-3(|й) = 0. C.45)
Наименьшее значение аргумента, при котором функция У_1,з
обращается в нуль, будет
•| а =1,866. C.45а)
По D1) находим:
рК9 = а*-^г = 7М~. C.46)
Введем понятие приведенной нагрузки, понимая под этим силу Р,
сосредоточенную в известной точке и эквивалентную распределенной
нагрузке в задаче устойчивости. Выберем центр приведения у
свободного конца, тогда
V1 я2 7,84 р
и окончательно
P=lkpL C-47)
Следовательно, приведенная сила составляет 1/3,18 часть от
полного веса.
Познакомимся с решением этой же задачи без непосредственного
применения бесселевых функций, с помошью метода степенных
рядов; этот метод широко применяется в аналогичных задачах.
§ 421 ДЕЙСТВИЕ РАСПРЕДЕЛЕННОЙ ПРОДОЛЬНОЙ НАГРУЗКИ 135
Выпишем решение уравнения D2) в виде
w = C^Cx\ +-С2|2+С3|3-Ь ... C.48)
Подставляя это выражение в D2), получим:
2С, + 2.3С(|+-3-4С4|2+ ... +й2(С0| + С,£2^С2^+ ...)==0.
C.49)
Сравнивая коэффициенты при одинаковых степенях £, приходим
к следующим соотношениям:
С2 = 0, 2 • ЗС3 = -й2С0, 3-4С4=—я2Сь j
4 • 5С5 = - й2С„ -= 0, 5 • 6С6 = — а2С3 == й4 —^ j (З.оО)
Таким образом, коэффициенты с индексами 2, 5, 8, 11 и т. д.
обращаются в нуль:
С2+зп = 0 ПРИ га = 0. 1. 2, ...
Остальные коэффициенты связаны зависимостями
Можно видеть, что все эти коэффициенты могут быть выражены
через С0 и Сх:
а2 п4
г С С — С
Сз~ 2-3 С°' C(i— 2-3-5-6 °' •••
/72 Д4
W — з-4 ь ^т~~ 3-4-6-7 °ь •••
Выражение для да принимает вид
■•-^O-A-^ + TTFTb6----)- C-51)
Производная по | будет равна
~W °
+ С1A-^.6з+т5_6._...). C.52)
Пользуясь первым из граничных условий (а), находим С: = 0. Второе
из этих условий при С0 Ф О приводит к уравнению
а2 а4 а6
1—ТЗ+2.3.5.6~2.3.5-6.8.9+ '•• = 0> ^3,53)
которое можно переписать в виде
3 / 2 \2 З2 / '1 \4 З3 /2 \6
1 "IT! ГЗ Й) + 21TS U ") ~ 2-4.4.6.10.16 U й) + • • " =°-
C.54)
= с«(-4ь2+2ТТЬ5---) +
136 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
В левой части этого уравнения содержится ряд, соответствующий
бесселевой функции -/_■,, Bя/3). Таким образом, мы получили
уравнение, эквивалентное D5); наименьший корень его определяется
по D5а).
Рис. 3.9. К расчету телевизионной башни па устойчивость.
Реальные колонны больших размеров имеют, как правило,
переменное сечение. В этом случае Heiu следственное интегрирование
уравнения упругой линии усложняется, и потому расчет на
устойчивость необходимо проводить с помощью приближенных методов.
В качестве примера рассмотрим воздвигаемую в настоящее время в
/Москве телевизионную башню высотой в 520 м*) (рис. 3.9, а, б).
*) Этот расчет принадлежит В. Ханджи. Ординаты эпюр в) и г)
отвечают сечениям, показанным точками на рис. 3.9, а.
§43] ДЕЙСТВИЕ РАСПРЕДЕЛЕННОЙ И СОСРЕДОТОЧЕННОЙ НАГРУЗОК 137
На рис. 3.9, в приведена эпюра продольного сжимающего усилия
(в тоннах). Определение коэффициента запаса устойчивости башни
было выполнено с помощью метода последовательных приближений;
одновременно устанавливалась форма упругой линии. Ордината vmax
кривой первого приближения в точке у вершины антенны
принималась равной единице. Далее определялись изгибающие моменты от
вертикальных сил для ряда сечений. Считалось, что в этих сечениях
имеются упругие шарниры, жесткость которых (в тонна-метрах)
соответствует эпюре рис. 3.9, г; отсек, расположенный между расчетными
сечениями, принимался абсолютно жестким (§ 12). Далее
определялась новая упругая линия; сравнение полученной стрелы прогиба
с исходной давало возможность найти запас устойчивости. На рис. 3.9, д
пунктиром показана кривая третьего приближения,
причем прогибы v вновь были отнесены к х»шах.
Р
§ 43. Одновременное действие распределенной
и сосредоточенной нагрузок
Перейдем к тому случаю, когда стержень
подвергается действию не только распределенной нагрузки р,
но и сосредоточенной силы Р, приложенной к
свободному концу (рис. 3.10). Для общности будем считать,
что величина р является переменной: р — р(х).
Воспользуемся методом Бубнова — Галеркина;
предварительно выведем исходное уравнение с учетом
распределенной нагрузки. Обратимся к вариационному
уравнению, полученному в § 7. Выражение для вариации
работы внутренних сил представим в виде A.88а):
i
"-M£)t+J
dx
EI
d2v
Их*
^{bv)dx;
C.55)
ш
I '■/
Рис. ЗЛО.
Одновременное
действие
сосредоточенной силы
и собственного
веса для
стержня с
защемленным концом.
в отличие от § 42 координата х отсчитывается от нижнего конца
стержня.
Вычислим работу распределенной нагрузки, считая ее интенсивность
переменной по длине. На элемент dx приходится нагрузка р dx;
смещение центра тяжести элемента по отношению к нижнему концу равно
** = \ \{l$dx'
C.56)
Полная работа распределенной нагрузки равна
W
±Ы/
dv\3
da
da
dx.
C.57)
138
БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
Введем обозначения Rx, Rt_x, Rt для результирующих нагрузки
в пределах от 0 до х, от х до / и по всей длине:
х i i
Rx=jpdu, Я,_.г= J pdu = Rr~Rx, Rt = J p dx. C.58)
о л о
Интегрируя выражение E7) по частям, получим:
*• = !
О Jo
7 J *' liF)" "*•
dv \2
или
Окончательно
*-Ы (#)•<*-; №)'<*•
и и
Вариация 6W равна
6Г
= K.^i«rf-
C.59)
C.60)
C.61)
Эту величину надо прибавить к выражению A.95а); полная вариация
работы внешних сил будет
бГ== | (P+Rl_x)*LA.{6v)dx. (з.б2)
Вариационное уравнение можно, следовательно, представить в виде
И> Ш, + /[■£(*'£)+<"+*-> &] i « ** - *■■
C.63)
жесткость £7 здесь для общности принята переменной. Подставляя
вместо 6v выражение A.126) и принимая внеинтегральпый член
равным нулю, получим основное уравнение метода Бубнова •— Галеркина:
С \ d I d2v\ dv~\ dr\,
. [1й{Е1ТПг) + Р + *1-11йЫ*х = *- '=1.2. ....я.
C.64)
§ 43| ДЕЙСТВИЕ РАСПРЕДЕЛЕННОЙ И СОСРЕДОТОЧЕННОЙ НАГРУЗОК 139
Рассмотрим случай, когда наряду с сосредоточенной силой Р
должен быть учтен собственный вес стержня р01, причем EI = const.
Вместо F4) получим:
Л
EI
d3v
dx3
[Р f М'—*I
dv
dx
J dx
C.65)
Уравнение упругой линии примем в виде, соответствующем случаю
одной сосредоточенной силы:
v = f\\
Принимая
■cos
21
1 — COS-jjj-
C.66)
C.67)
и подставляя два последних выражения в F5), находим:
Л
rV*
~EIjjr^2-jf +
•\-[P + Po(l-
ч, Jt .о ТьХ
dx = 0.
Выполняя интегрирование, получаем:
El
4Р
P+(-2—t*)P*
или
F1 —
С/ 4/2
-0,3р0/.
C.68)
C.69)
C.70)
Следовательно, расчет на продольный изгиб можно
вести в рассматриваемом случае, присоединяя к
сосредоточенной силе
/ю
Рис. 3.11.
Комбинированное
действие
нагрузки на
стержень,
шарнирно опертый по
концам.
от сооственного веса стержня и
считая эту приведенную нагрузку приложенной к свободному концу
стержня. Если нагрузка р0 значительна, то при суммарной
критической силе, равной G0), сила Р может получиться отрицательной,
т. е. растягивающей. Полученный нами результат хорошо согласуется
с решением задачи в бесселевых функциях, так как по D7) при
Р = 0 мы получили приведенную нагрузку равной — 0,31 р0/.
Рассмотрим ту же задачу в предположении, что оба конца стержня
оперты шарнирно (рис. 3.11). Выбирая выражение для v в виде
:/sin-
I
и подставляя его в уравнение F5), придем к соотношению
£/-
1
C.71)
C.72)
-[г ■= р + J Ро1-
Здесь приведенная нагрузка оказывается равной половине
собственного веса стержня.
140 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
§ 44. Стержень, подвергающийся действию осевол силы
и концевых пар
Допустим, что стержень, шарнирно опертый по концам,
подвергается совместному действию осевой силы Р и пары, приложенной
к концевому сечению В, момент которой равен Л!0. Определим
упругую линию стержня; это окажется важным и дальнейшем при
исследовании устойчивости сгерж-
'" ней, лежащих на несколь-
J-*—) (сих опопах. Считая силу
Ж, " vhz-S сжимающей (рис. 3.12), па-
-* ' ■ -*-f ходим изгибающий момент
у в сечениях:
Рис. 3.12. Изгиб стержня под действием осевой «д Мр . р ,п yqs
силы и пары. JV1 — 1 ' ^ '
Дифференциальное уравнение упругой линии имеет вид
El^+Pv^-lb-x C.74)
или
Здесь по-прежнему k2=P;'E/. Решение уравнения G5) имеет вид
v = A cos kx -f Z?sin kx —-=-— у . C.76)
Учитывая граничные условия г> = 0 при х = 0, х —/, находим:
„,__Мо /sinbc х\ .„ 77
v=zTjw\-^nn--j)- C-77>
Угол поворота у левой опоры будет
ft — l*L\ —MAI—1 М
А ~ \ dx )A ~ EI \ kl sin kl £2/2 )'
у правой опоры
ft — {_ *l\ —M*L M L_\
B —\ dx)B~~ EI \k42 kligklj-
Воспользуемся обозначениями:
и = kl = l у -pj-,
, , 1 1
ф (U) = : Г .
^ v ' и sin и и2
тогда получим:
вл=-^-ф("). 8в = #Х(«). C-83)
C.78)
C.79)
C.80)
C.81)
C.82)
§ 45J L.J ЬКЛУЬЛО, лг./1\гмцмм ил ....V..4W-. . жж_
Допустим, что сила Р является растягивающей. Сопоставляя
уравнения G4) и G5), заключаем, что в этом случае мы можем
воспользоваться всеми расчетными формулами, заменив k2 на ( k2), k на ik
и и на Ш, где / = ]/— 1. Тогда вместо (81) и (82) найдем:
Ф,(</)= {- 1-Л. C-84)
11 v ' ushu ' и2 ч
На стр. 142 приведена таблица для функций гр, /, ф, и Xi при
различных значениях и.
§ 45. Стержень, лежащий на нескольких жестких опорах
На рис. 3.13 изображен стержень, лежащий на трех шарнирных
опорах. Будем полагать, что в леном пролете длиной /, жесткость
стержня равна £Уь а в правом длиной /2 равна £Уг. и что
сжимающие силы Р1 и Р2 различны.
а й С
»-<„ Ъ-л " —J~* -
w&fi. Vfiffi
l>
4 ~п
Рис. 3.13. Двухпролетиый стержень.
Чтобы рассмотреть устойчивость такого стержня, воспользуемся
формулами, полученными в § 44.
Для каждого пролета можно написать уравнение упругой линии
типа G7), так как влияние соседнего пролета выражается в действии
опорного момента М0. Угол поворота слева от опоры В будет
4 __ М*1
1в, 1 "
■jrr'AiUi).
а справа от опоры
вв.2 = -г¥-Х(И2);
с2'2
здесь обозначено:
"'-'•/Sr- «'-ьУ-щк- C-86)
Углы 0В] 1 и 0В2 должны быть равны по величине и обратны по
знаку; следовательно, при М0 Ф О это условие запишется в виде
£77 *(".)■+ ■^■Х(«2)==0. C.87)
142 ВОЛНЕ СЛОЖНЬШ ЗАДАЧИ УСТОЙЧИВОСТИ СТИРЖНИЙ [ГЛ. III
Из уравнения (87) можно определить критическое сочетание
нагрузок Р] и Р.. Предположим, что жесткости пролетов одинаковы;
тогда по (87) находим:
X("i) _ _h_
C.88)
м,
'а-1 \
Если же и длины пролетов равны, то условие (87) не может быть
выполнено; при этом надо положить Мо = 0. Отсюда "/("О —
= Х(М2) —°°; н0 тогда будет
п~1 У- п, г, „ -^.7*/ и = ^ |, критическая нагрузка
1д, определится по обычной фор-
1а —*\' ' муле Эйлера A.15).
Уравнение (88) можно истолковать
Рис. 3.14. Два участка многопролетного стержня. TaKi цт0 в бОЛСС КОрОТКОМ
пролете опорный момент
«помогает» сжимающим силам Р изогнуть стержень, а в более
длинном — «препятствует» им.
Если допустить, что в одном из пролетов (например, левом)
сила Р является сжимающей, а в другом (правом) — растягивающей,
то вместо (87) получим:
~ЁТ /-(«i)+ £7~"/л():
:0.
C.89)
Уравнения (88) или (89) решаются путем пробных попыток с
помощью таблицы 3.3.
Предположим теперь, что число пролетов превышает два.
Тогда можно рассмотреть два соседних пролета п— 1 и я (рис. 3.14)
Вспомогательные функции
Таблица 3.3
и
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0.8
0,9
1,0
1,1
1,2
Для сжатых
ф(«)
0,1667
0,1669
0,1674
0,1684
0,1698
0,1717
0,1739
0,1767
0,1800
0,1839
0,1884
0,1936
0,1997
элементов
Х(")
0,3333
0,3336
0,3342
0,3354
0,3369
0,3390
0,3416
0,3448
0,3485
0,3528
0,3579
0,3637
0,3705
Для растянутых элементов
Ч, (и)
0,1667
0,1665
0,1659
0,1649
0,1636
0,1619
0,1599
0,1576
0,1550
0,1522
0,1491
0,1458
0,1424
7л («О
0,3333
0,3331
0,3324
0,3314
0,3298
0,3279
0,3256
0,3229
0,3199
0,3166
0,3130
0,3092
0,3052
О) ел ел ел ел ел ^л pi _сл ел сл^.4^ н^^_4^_4^^. ^ 4^^ со Со „со .со „со Со со со со со tojo jojo ьэьэюхоьоьо^^-ч-*^^?^^
*о"соЪо^]^Т^~4^Ъл^0^1э*СоЪо^ 4^'Со Ю —'о *.D GO ~-4~Ъ} СЛ ^ОЮ-'ООСО^ЭСЛ^СО
:|!!И,,
о о о о о ор*-0.?
*СП > 4^ "со 'со То~Ю ГО
L
\Р> о о о о о о о о борРрор-рсл^^^оорроррооорррррр
I I I Ч 11
р_о о o,op>_op2jo_pp>_p_pjD.o_p ©„о „о „о „о „о „о
aulo'-Vb-.'l-.b'oVoboboo'^'-'b'i
, ! I I
о о о —»-
Wco "■**•■ Ъэ о с» кГоо"^ ел —»о~~-а Ъэ "а^ ел ел ел ^ 4а^^^Ълсо*"со
- . /-— лл лл . ^ f—ч .г, |~П Г^ . ■ Г 1 К -Л <-*-. ?Л К1 ^1 ■• 1 *~ч .^ * J- .. ,- .. « •> —- ..— —^. _ .
ОФ^елЮСЛ—'COOlCOi—'C000OJi4^tOOtO4^^4—'СЛОЧСЛООСОЮО^СЛ^^СОКЭООСОЮ^СОО^ОЧСОЮОСОСОЧ
о оо оо орррррорр о о о орорр о „о о о о_о
о 'о"о"о о "о"о"о 'о о о "о "о о о "о'о"—'"■—*""■—•""■—' "*■— '*— "►---»—"►—"^-"I—
0i0i0i0iO0)aiOL 4s00CDCDOOt0OOO — — .—'tOtOCoCoCO
со ел s ^> ю ^ от со ю *» ч Оь^чосоЧ'-ьй'Оою^осоч — ел ао
С0ч*0ЛЧОь(^ОФ'^О00С0ОЮ01СО^ОаЗьР»^О00ЧСЛ^1>-'00
р,р^ООр>_Ор О О О О О О^О^ОО О О 0_рр О О О 0.0^0,0
^—'"*—/■—it-^ToTo f о То То То То То То to То То То То То То То юТоТоТоТ-оТоЪо
сосососоооо^'-^ююсосо^Ф'Ок^о^эччсооотсоо
ЧО^Ч^ь^хЮ01С0С0С0Ю0)^СЛОм^С0С0С0С0ХЮЧ ЮЭО
чоюслоазсоосоооооюсло^оа^юсоч^^со^ — азо
144 волне сложные злдлчи устойчивости стержней [гл. in
и снова выписать условие 0„>, -+- 0Я> 2 = 0; но при этом надо учесть
влияние второго опорного момента. Для трех соседних опор будем
применять индексы п—1, п и /г -{— 1. Слева от средней опоры
угол 0„л 1 будет равен
0„. 1 - |^~^- Ф(«в_0 +- ^К(«»-1). C.90)
справа же от опоры угол 0П]2 будет
Ъп.^ЩФ-^'^+Щ'-уМп)- C.91)
Приравнивая нулю сумму этих выражений, получаем уравнение трех
моментов
^f^- ф(и+^[£;7 ХК-0 4-^х(ияI +
+ #9W = 0. C.92)
Выписывая подобные уравнения для каждой пары пролетов, получаем
систему однородных трехчленных линейных уравнений относительно
моментов Мь М2 и т. д. Система критических нагрузок будет
найдена, если приравнять нулю определитель, составленный из
коэффициентов при /Иь М., п т. д. в этих уравнениях.
Допустим, что крайние опоры являются шарнирными. Введя
обозначение
s^-L, C.9d)
найдем окончательное уравнение в виде
■V/(«oH-SiX<"l) s.(f(Ui) 0 О
Sl<P("l) sa(lh)+S2X(U2) S2<p(«?) °
0 s2tp(a2) *Л (Ui)+s3y.X'h) «зф («>) =0,
0 0 s3(p(H3) s3%(u3)-\-sa(U4)...
C.94)
Для двухпролетного стержня определитель будет состоять только
из одного члена, для трехпролетного надо взять по два первых члена
в первой и второй строках и т. д.
Расчет стержня можно проводить по (87) или (89) и в том
случае, если во всех пролетах или в некоторых из них критическое
напряжение превышает предел упругости. В формулы (86) и
последующие следует тогда ввести вместо модулей Е результирующие
модули 7' или касательные Ек. Пало иметь в виду, что величины
этих модулей зависят от искомых критических напряжений; поэтому
расчет может быть осуществлен лишь после нескольких попыток.
§ 45] СТЕРЖЕНЬ, ЛЕЖАЩИЙ НА НЕСКОЛЬКИХ ЖЕСТКИХ ОПОРАХ. 1<Ю
Пример 3.3. Ходовой пинт АВ токарно-пинторезного станка
воспринимает усилие подачи, передающееся ему от режущего инструмента через
перемещающуюся вдоль винта гайку С (рис. 3.15). Винт толжеп быть _рас-
считап на устойчивость в предположении, что гайка находится в крайнем
нравом положении, на расстоянии /2 от опоры С, и передает участку винта
АС, имеющему длину 1\,
сжимающую силу Р. Определить
внутренний диаметр d винта в двух
случаях: 1) гайка имеет малую
длину и должна рассматриваться
как промежуточная шарнирная
опора (рис. 3.15, а); 2) длина
гайки нелика, и винт следует
считать защемленным в опоре С
(рис. 3.15, И).
Концы пинта Л, В в обоих
случаях принимаются
закрепленными шарнирио. Принять Р =
--- 900 кг, коэффициент запаса
устойчивости п = 3,5, 1Х — 150 см.
\ — 50 см. Материал—сталь Ст. 5, £ = 2,1-106 кг;см2..
При вычислении момента инерции сечения влиянием нарезки пренебречь.
В первом случае получаем стержень с тремя опорами, усилие в нервом
участке равно Ркр, во втором -равно нулю. Так как жесткость по длине
постоянна, воспользуемся уравнением (88):
Х(н,_)_^ _ U_
X @) " ' 7, •
Рис. 3.15
К расчету ходового винта токарно
винторезного станка.
= 2800 кг/см*.
По таблице 3.3 находим: х @) = 0.333. Следовательно,
КГ)
Х(»1) = ~-щ-0,333 = -0,1 П.
Этому значению у. отвечает и, яз 4,1. По формуле (80)
(А,/,J = «2=16,81.
Критическая сила должна быть равна Ркр = яР = 3150 кг. Момент инерции
сечения будет
__ Ркр1\ 3150 ■ 1502
16,81£ 16,81-2,1 • 106
2 см4;
отсюда диаметр винта d = 26 мм, площадь сечения 5,3 см2. Критическое
напряжение
3150 «™ . 2
■ Ь00 кг см1
а*г= 5,3
считать обе опоры А, С
2- критическая нагрузка
лежит в пределах пропорциональности.
Если не учитывать влияние участка СВ и
шарнирными, то получим параметр и] равным л
оказалась бы на 41 96 меньше.
Во втором случае винт на участке АС надо рассматривать как
стержень, одни конец которого закреплен шарнирио, а другой защемлен.
Параметр и\ равен 2.1 . Находим: /=1,7
см'
(I = 24 мм.
146 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
£,/ В
§ 46. Случай упругой опоры. Задача о стержневом наборе
Мы считали до сих пор промежуточные опоры жесткими. Однако
в практических расчетах такое допущение не всегда можно сделать.
Представим себе, например, стержень АВ (рис. 3.16, а), сжатый
силами Р и связанный посередине
длины с перпендикулярно к нему
расположенным поперечным
стержнем CD. При выпучивании
первого из этих стержней второй
является для него упругой
опорой. В более общем случае вместо
поперечного стержня можно
представить себе некоторую линей-
п ( ную упругую опору жесткости с
~^г7 р (рис. 3.16,6"). Определим крити-
0) ческую силу для стержня АВ, счи-
„ ,„ „ „ тая сначала упругую линию сим-
Рис. 3.16. Стержень с упругой опорой. j rj j
метричной относительно
среднего сечения. Обозначим прогиб посередине длины через /; тогда
составляющие реакций опор будут Р и с//2. Дифференциальное
уравнение упругой линии для левой половины получает вид
а)
El
d2v
dx2
=-- — Pv -+-
c/
решение его будет
: A coskx -+- В sin kx
■х;
cf_
2Р
х,
где k2=PjEl. Подчиним это решение условиям:
dv
dx
„ „ dv r. , /
v = 0 при х = 0, -т— = 0 и v = f при х=гг—.
C.95)
C.96)
C.97)
Из первых двух условий находим:
А = 0, В = -
с/
IPk cos
kl
а третье при / Ф 0 приводит к соотношению
tg-
kl
2 V
1—4
с/
= 0.
C.98)
Если же упругая линия антисимметрична, то среднее сечение
не получает прогиба. Но тогда каждая половина стержня
выпучивается как самостоятельный стержень, шарнирно опертый по копнам;
критическая сила будет
р = . rt2f{ . C.99)
э (//2J ^ '
§ 461 СЛУЧАЙ УПРУГОЙ ОПОРЫ. ЗАДАЧА О СТЕРЖНЕВОМ НАБОРЕ 147
Приведем соотношение (98) к безразмерному виду
2v'
tg(nl/v) —я/v 1
= 0,
где
Р - cl
v = -=- , с~
2РЯ-
C.100)
C.101)
Кривая v(c), найденная по A00), изображена на рис. 3.17*). При
с = 0, когда средняя опора отсутствует, будет Р = 0,25РЭ. Если
с->сс, то вместо (98) получим уравнение A.42), соответствующее
случаю стержня с одним из
концов шарнирно опертым и другим
защемленным, при этом Р як 2РЭ.
Но «симметричное» решение A00)
имеет практическое значение
только при Р^РЭ, v<^l, что
отвечает с = 2. На наклонном
участке зависимость может быть
приближенно представлена как
линейная:
I
0.25
+ тс (З.Ю2)
'**' "X г&
ТО? |
8
о
Рис. 3.17. Зависимость между нагрузкой и
жесткостью опоры.
Жесткость опоры с, при которой
в задаче об устойчивости стержня
эту опору можно рассматривать как нес метающуюся, называют
критической. В рассматриваемом случае критическая жесткость
опоры равна
с«, = ±^-. C.103)
с* = 2,
г3
Вернемся теперь к исходной схеме рис. 3.16, а, где роль
упругой опоры выполнял стержень длиной /, и жесткостью ЕХ1Х.
Предполагая, что этот стержень закреплен шарнирно по концам и что
точка пересечения лежит посередине длины, найдем его критическую
жесткость из соотношения
48£,/, _ 4я2£/
отсюда
сед* = ig-£/(AK
C.104)
*) Этот график взят из книги [0.21], стр. 96.
10*
148 BOJIliE СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. Ill
Эту же задачу легко решить с помощью энергетического метода.
Примем для случая симметричного прогиба
и выпишем уравнение энергии
энергию упругой опоры:
f J (£)*"-
тогда окончательно получим:
что мало отличается от A02).
Аналогичное исследование может быть проведено для более
сложной системы — стержневого набора (рис. 3.18), составленного из
Рис. 3.18. Перекрестный стержневой набор.
сжатых балок глазного направления и поддерживающих их
балок—поперечных связей. Задача об устойчивости такой системы
имеет практическое значение для многих конструкций, как, например,
перекрытий в корпусе корабля, и была впервые поставлена
И. Г. Бубновым [0.2]. Основная цель и здесь состояла в
определении критической жесткости поперечных связей. П. Ф. Папкович
применил для решения этой задачи энергетический метод [0.7], а
А. М. Пеньков — метод конечных разностей [3.6]. А. А. Курдюмов
предложил рассматривать часто расположенные поперечные связи
как сплошное упругое основание (см. § 47) для балок главного
направления *).
Мы считали выше, что взаимодействие между пересекающимися
стержнями выражается только в силе, нормальной к образуемой ими
*) См. работы А. Л. Курдюмова в «Трудах Ленингр. кораблестр.
ин-та», № 11 A953) и в журнале «Судостроение», № 11 — 12 A941).
по A.121), учитывая потенциальную
F.I { < iPv\2 , , с/2
Vvl Uf/lNCnD, UDnOrtnnfflKl 1-. * 1 J Г rf I tl 14
плоскости. В некоторых случаях, однако, необходимо учесть, что
поперечные связи препятствуют не только нормальным смещениям,
но и поворотам соответствующих сечений балок главного
направления: в этом случае следует принять во внимание жесткость
поперечных связей на кручение; кроме того, приходится учитывать
условия закрепления балок одного н другого направления, отличные
от шарнирного *).
В случае, если балки перекрестного набора расположены
достаточно часто, набор может быть заменен анизотропной пластинкой **);
тогда для расчега набора могут быть использованы уравнения теории
устойчивости пласгинок, см. ниже главу IX.
§ 47. Устойчивость стержня, связанного
с упругим основанием
Представим себе, что стержень, шарпирно опертый по концам,
связан со сплошным упругим основанием (рис. 3.19). Пусть реакция
основания, приходящаяся па
/
единицу длины стержня, будет
пропорциональна перемещению; £«^——«»—■■•■■«.
ШТТТТТТТТТТ
R = cv; C.105) i^'
раЗМерНОСТЬ Коэффициента С Рис- ЗЛ9' Стержень на упругом основании.
будет кг'см1.
Дифференциальное уравнение упругой линии примем в виде A.6а).
d2v
При q = — P-fjp—R получим:
Если воспользоваться обозначениями
~=k\ ~=r, C.107)
то вместо A06) будем иметь следующее однородное линейное
уравнение:
Соответствующее характеристическое уравнение имеет вид
р4 + k2p2 + г = 0; C.109)
*) Подобные задачи рассматривались с помощью метода конечных
разностей Е. В. Войт в работе «Исследование устойчивости перекрестного
стержневого набора» (канд. дисс, М., 1951) и Н. А. Венцель (Сб. трудов
Ин-та строит, мех. АН УССР, № 15, 1950).
**) Такой метод был предложен Л. Я. Резчицким.
150 БОЛЕН СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ
его корни будут
Примем р — + ш, где
шх = — т3
m9:
■тА
[ГЛ. III
C.110)
C.111)
Решение уравнения A08) получает форму
■у = A sin miJC-r-Bsin m2x -f-CcosmiX + D cosm2x. C.112)
Исходя из граничных условий A.10), получим следующее уравнение
0
0
sin mxl
wi'^sin mxl
0
0
sin т21
m^sin т21
1
■mi
cos mxl
m\cosmxl
1
— m%
cos m-2l
m^cos m2l
= 0,
или
(m'j— m}\(ni\ — m:[)sinm1/sinm2/ = 0.
Приравнивая нулю sin тх1 и sin m2l, получим:
т^ = ял, й= 1, 2, 3, ...
Определяя k2 по A11) и пользуясь A14), находим:
Ь2 — -Е- — jl2
EI ~ P
Изогнутая линия состоит из п полуволн синусоиды
. . пл
■■ A sin —л:.
C.113)
C.114)
C.115)
(З.П6)
В отличие от свободно прогибающегося стержня здесь число
полуволн п ф 1, оно должно быть определено из условия минимума
нагрузки. На рис. 3.20 по оси абсцисс отложены значения г — г (//яL,
а по оси ординат — отношение PjP3, где Рэ — эйлерова сила для
стержня, не имеющего упругого основания. Принимая п= 1, 2, 3,
получим серию прямых; участки этих прямых, показанные жирной
линией, являются расчетными. Переход от и-й ветви к (ге-|-1)-й
соответствует величине г, определяемой из равенства
«zjiz
rl2
/г2я2
(гс + 1Jл.2
rl2
(л-f- 1Jя:
2 „2 >
отсюда
/■ = «2(«+lJ~
C.117)
§ 47] СТЕРЖЕНЬ, СВЯЗАННЫЙ С УПРУГИМ ОСНОВАНИЕМ 151
Соответствующие значения k будут
*8 = -^-[«2 + (я-г-1Я.
C.118)
Если число полуволн п достаточно велико, то можно записать
условие минимума k2, приравнивая нулю производную от k2 no nn'l:
(т)
I П3Л3
при этом
ял.
1Л г—
Критическая нагрузка по A15) оказывается равной
кр-
:2£/]Лг = 2/£/с.
В безразмерных величинах
'кр
:2VT
C.119)
C.120)
Формуле A20) отвечает предельная линия, показанная на рис. 3.20
пунктиром. Считая в A13) т\ — /м* = 0, приходим к соотношению
fe4 = 4r и, далее, к прежней формуле A19).
Р/Р.
30
20
Л=4
п-2
п-3^
,/7 = /
10 -
О1-
aw&i&//&//$!iiiwwi&v/gi'//§
SO
100
ISO
Рис. 3.20. График для расчета стержня на упругом основании.
Пример 3.4. Дюралюминовый стержень, расположенный в сжатой зоне
фюзеляжа самолета (стрингер), должен быть рассчитан на устойчивость
(рис. 3.21). Длина стрингера 1 = 2 м; концы опираются на жесткие опоры;
в пролете он поддерживается часто расположенными поперечными связями
152 БОЛИЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ (ГЛ. III
(нервюрами), лежащими на равных расстояниях одна от другой: s = 20 см-
Нервюры можно рассматривать как балки на двух опорах, шарнирно
опертые но концам, длиной а = 50 см. Момент инерции сечения стрингера
/= I си4, а нервюры --У, —0,1 см\ площадь сечения стрингера F = 1,5 см2.
Е = 0,7 • 10е кг см1, ат = 2200 кг/см*. Определить критическую силу Ркр для
стрингера и длину полуволны /Кр "ри потере устойчивости.
Будем рассматривать стрингер как сжатую балку, лежащую на упругом
основании. Реактипные силы, передающиеся на стрингер от нервюр, будем
считать равномерно распределенными по
длине стрингера. Реактивная сила для
каждой нервюры равна
R = 5~L v,
а3
где v — прогиб стрингера. Коэффициент
жесткости упругого основания будет
R_
у _ 48£/i _ 48-0,7- 10а -0,1 _
s ~~ a*s ~~ 503-20 ~~
— 1 чд кг1см прогиба
' см длины
Рис. 3.21. К расчету стрингера в
сжатой зоне'фюзеляжа самолета.
Отсюда
г = г \ —
\л
F.I
л
1,34 • 2004
0,7 • 10« ■ 1 • лг
19,5
Значение г = 19,5 лежит между величинами г = 1 • 22 и 22 • З2;
следовательно, при потере устойчивости стрингера должно образоваться две
полуволны длиной /Кр = 1 м. Находим но A15) (см. также график рис. 3.20)
Г *Р
г 19,5
' п2 '4
где Рэ — эйлерова сила:
я2£/ я2 • 7 • 106. 1
I2
2002
173 кг.
Окончательно Ркр = 1540 кг; соответствующее напряжение акр = PK?jF —
= 1150 кг/см1 не превышает предела пропорциональности а,т.
§ 48. Влияние поперечной силы на критическую нагрузку
Мы пользовались до сих нор уравнением ивогнутой оси стержня,
составленным без учета влияния поперечной силы. Как известно
из теории изгиба балок, влияние это в случае сплошного сечения
пренебрежимо мало. Однако для составных стержней со сравнительно
слабой решеткой влияние поперечной силы надо принимать во
внимание.
Выясним, насколько изменится величина критической нагрузки,
если учесть влияние касательных напряжений на прогибы стержня.
§48] ВЛИЯНИЕ ПОПЕРЕЧНОЙ СИЛЫ НА КРИ 1 ИЧЬСКУЮ MAI PydKy [33
Д'1я этого воспользуемся уточненным дифференциальным уравнением
упругой линии
dh< M 1 (РАЛ
здесь х — численный коэффициент, зависящий от формы
поперечного сечения. Дш случая стержня с шарпирно опертыми концами
будет M=Pv; уравнение A21) принимает вид
AЧ< v. d2v P
Решением этого уравнения, отвечающим условию v — 0 при х — О,
будет
v^=As\nkxx, C.123)
где
*=-£гт-^- <зл24>
OF
Условие v — 0 при х = 1 дает k1 = nnll. Принимая п=1 и
определяя Я по A24), находим критическую нагрузку равной
^Р = ^ , , J Я.£/ C-125)
1 +
ОТ /2
или
л.2/7/ 1
^kp = JM£ ^' (ЗЛ26)
1+2A + 10-/--^
где и, — коэффициент Пуассона, X, — гибкость стержня. Таким
образом, желая определить критическую нагрузку с учетом влияния
касательных напряжений, мы должны вместо длины стержня I
подставить в формулу Эйлера приведенную длину /0 = vZ; коэффициент
приведения равен
r w
V-]/ 1+2A t!0«-j- C.127)
Как видим, значение критической силы получается несколько
меньшим, чем вычисленное по формуле Эйлера. Формулу A25) можно
распространить па упруго-пластическую область, заменив модуль Е
на результирующий или касательный модули. Подставляя вместо [i
наибольшее возможное значение 0,5 и считая и для прямоугольного
сечения равным 1,2, получим:
154 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
При А.= 100 приведенная длина будет лишь на 0,18% превышать
истинную длину стержня. Для коротких стержней значение будет
бблыним; но для них критическое напряжение сравнительно слабо
меняется в зависимости от гибкости.
§ 49. Устойчивость составных стержней
В качестве сжатых элементов различных конструкций часто
применяются стержни, составленные из двух ветвей, соединенных
решеткой или планками *). Рассмотрим подобный стержень с решеткой,
состоящей из диагоналей, как показано на рис. 3.22.
Расстояние между центрами тяжести сечений ветвей
обозначим через h\ длину отсека — через а, длину
диагонали — через d. Будем считать, что величина h
значительно превышает высоту сечения отдельной
ветви и что момент инерции всего сечения можно
приближенно определять по формуле
/ = 1f,a2 = Ifa2.
C.129)
где Fx—площадь сечения ветви, F—полная
площадь сечения.
Влияние поперечной силы, вызывающей
деформацию стержней решетки, можно учесть, пользуясь
данными предыдущего параграфа. Исходное
уравнение A21) выведено в предположении, что средняя
но сечению стержня деформация сдвига у связана
с поперечной силой соотношением
Ч = 'ЛШ
C.130)
Для составных стержней в формулы § 48 можно
подставить вместо kjGF соотношение yjQ, отвечающее
тому или иному типу соединительной решетки. На
рис. 3.23 изображено, как меняется конфигурация
отсека стержня при деформации диагонали; число
отсеков но длине считаем достаточно большим.
Усилие в диагонали NA может быть выражено через поперечную силу:
d
Рис. 3.22.
Составной стержень с
решеткой, состоящей
из диагоналей.
N, = Q-
C.131)
*) Принятый здесь путь решения задачи принадлежит (в различных
вариантах) Ф. Энгессеру [2.11], С. П. Тимошенко (Изв. Киевск. полит, ин-та,
1908), Л. Прандтлю (Z. VDI, 1907), Ф. Блейху [0.15]. Другое направление,
основанное на расчетной модели с непрерывными связями сдвига, развито
А. Р. Ржаницыным [3.8]; см. также его книгу [0.10].
§49]
УСТОЙЧИВОСТЬ СОСТАВНЫХ СТЕРЖНЕЙ
155
Абсолютное удлинение диагонали будет равно
а..
Qrf2
EFJi*
C.132)
через Ft обозначена площадь сечения диагонали; модуль Е для
стержней решетки считаем совпадающим с модулем материала ветвей.
Смещение 6 узла С и угол сдвига у
будут
М
sin a
отсюда
d
C.133)
У_
Q
1
Et\ ah2
C.134)
Подставляя эту величину взамен и/0/7
в формулу A25), находим:
я2£/ 1
К[>-
р
1
1
я2£/
.C.135)
Рис. 3.23. Искажение решетки
составного стержня.
EFA ah* /2
Коэффициент приведения длины определяется здесь формулой
v=/l+rf-£ _*__£. C.136)
где через X обозначена гибкость стержня
Если ввести обозначение X* для приведенной гибкости составного
стержня, то получим:
X* = vX=Vx2 + Xb, C.137)
под Х1 понимается величина
В случае, если критическое напряжение в ветвях превышает предел
упругости, модуль Е для материала ветви надо заменить на
результирующий модуль Т или на касательный Ек. Величина Т определяется
при этом но B.16). Однако элементы решетки нагружаются лишь
при изгибе стержня, поэтому для них деформации надо считать
упругими. Формула A38) для А,, приобретает вид
156 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. Ill
Для упрощения расчета можно в запас прочности принять вместо (.139)
прежнюю формулу A38).
Если решетка состоит из диагоналей и стоек, как показано на
рис. 3.24, то надо принять во внимание также деформацию стоек.
Считая усилие в стойке равным /VrT = Q, находим угол сдвига:
а.
Qh
EFQTa
C.140)
где Я,ст и /\т-- удлинение и площадь сечения стойки. Формула A35)
приобретает вид
я2£/
1
кр"
1
1
Eah*
~F ' ~~F
' д 'от
^-FA
C.141)
Для применяемых на практике конструкций дополнительный член
в скобках мал по сравнению с членом, содержащим d3, поэтому
. в расчетах можно пользоваться и
\ р[, здесь прежней формулой A38).
Для составного стержня
рамного типа (рис. 3.25) надо прежде
всего принять во внимание
информацию ветвей, вызываемую
поперечной силой, планки же в
первом приближении будем считать
_г
Рис. 3.24. Случай
решетки,
состоящей из диагоналей
и стоек.
Рис. 3.25.
Стержень рамного
типа.
Рис. 3.26. Искажение панели стержня
рамного типа.
жесткими. Точки, делящие длину каждой панели пополам, будут,
очевидно, точками перегиба упругой линии при местном изгибе ветви
(рис. 3.26). Поэтому мы можем приложить в этих точках
поперечные силы Q/2 и определить прогиб ветви в пределах полуотсека:
§ 49J
УСТОЙЧИВОСТЬ СОСТАВНЫХ СТЕРЖНЕЙ
157
где /j — момент инерции сечения ветви. Соответствующий «средний»
угол поворота будет
2Ь_
а
Qa?
24£/,
C.143)
Подставляя отношение y/Q вместо y.iGF в форму.)}' A25), получим:
я2£/ 1
кр
F
а1 л2Е1
24£/, /2
C.144)
Формулу A44) можно уточнить, приняв но внимание деформацию
планок Средняя точка планки гакже являеюя точкой перегиба; в ней
следует приложить поперечную силу тля планки QIM, равную
Qnil = Qajh. Прогиб одной из частей планки как балки длиной й/2
будет равен
{=-Ш'ж^ C145>
— момент инерции планки. Если планки лежат в двух пло-
как на рис. 3.27, то под /„, надо понимать суммарный
инерции двух планок. Угол поворота
и скрепленного с ней участка ветви
где /,1Л
скостях,
момент
планки
будет
Yi=t
26
h
Qah
C.146)
12£/!U •
Кроме того, следует учесть деформацию сдвига
планки. Если планка выполнена в виде
пластинки, то угол сдвига равен
1
Оа
GF„
C.147)
Рис. 3.27. Сечеиие
составного стержня с
решеткой в двух плоскостях.
где Fa!i— площадь сечения планки (или двух планок, лежащих
в разных плоскостях). Вводя отношение (Yi 4- y2)/Q в формулу A44),
найдем:
л2Е1 1 C.148)
Р = ■
1 Кр
/2
1 +
ah
24£/,
12£/„,
OhF
_\ л2£/
•л / F
Для обычных конструкций дополнительными членами,
отвечающими деформации планок, можно пренебречь. Пользуясь
формулой A44), снова найдем приведенную гибкость:
К*.
|Л*
-4- .т
Fa2
24/,
C.149)
Но полная площадь сечения составляет F=2F]; отношение /l/Fl
дает квадрат радиуса инерции сечения ветви; поэтому во второй
158 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
член в A49) можно ввести гибкость ветви А., в пределах отсека:
У 2/,
C.150)
Считая приближенно л2 «12, придем к прежней формуле A37):
A,* = W + A,i C.151)
с тем отличием, что под А,, понимается теперь реальная гибкость
ветви. В упруго-пластической области можно и здесь в запас
устойчивости пользоваться формулой A51).
Пример 3.5. Катастрофа крупного сооружения (газохранилища)
произошла в результате потери устойчивости сжатого раскоса,
сконструированного из двух ветвей швеллерного сечения, соединенных планками (рис. 3.28)
Общая длина стержня 3600 мм. Расстояние между осями планок а= 1200 мм.
Сечение стержня составлено из швеллеров, рас-
1Р стояние в свету между которыми равно A = 28мм.
Планки изготовлены из полосы толщиной t — 7 мм;
U.I*,;-.-! ширина их h = 140 мм. Для материала швеллеров и
планок £ = 2,03 • 106 кг/см, а1Щ = 2700 кг/см1. Найти
критическую силу: а) не учитывая влияния
поперечной силы, б) с учетом поперечной силы.
Моменты инерции швеллера:
= 934,5 см\
А с^:
1
i О
* О
1
сз
т о
1 "
1
J
1 к
1
р
">,
о
°
1
о
^J
\
3
-*;
И
• i
о1
1
ы
5д
\
-н
г
[
1
Г
с
1
1
■зз
к
/у = 83,4 см\
расстояние от кромки до центра тяжести г0 = 1.75 см,
площадь сечения Z7, = 25,15 см2, h = d 4- 2г0 = 6,3 см.
Определяем моменты инерции всего сечения:
/х= 1869 см\
/у = 2[/5, +/*A,4 + г0J] =
= 2[83,4 + 25,15-3,152] =
■■ 670 см*.
Рис. 3.28. Сжатый раскос
в конструкции газохранп-
Сравнение 1Х и 1у показывает, что продольный
изгиб произойдет в плоскости решетки. Радиус инерции
1 /~ЛГ -, /670
/,= У ^=У -5^=3,64^.
Гибкость стержня в целом
радиус инерции
I = /// = 360/3,64 = 99. Для отдельной ветви
v±=v\
83,4
2575"
= 1,82 см.
Гибкость о пределах отсека равна
» « _ 120 _
Опасной является, таким образом, общая потеря устойчипости стержня.
§ S0| СТЕРЖНИ, ВОСПРИНИМАЮЩИЕ КРУТЯЩИЙ МОМЕНТ E9
Эйлерово напряжение
л2£ 9,87 • 2,03 • 10"
= 2020 кг,!см\
э_ А2 ~~ 992
и, следовательно, аэ < а1Щ.
Критическая сила, вычисленная для стержня сплошного сечения, равна
/>;! = „эР = 2020 ■ 50,3 = 101 600 кг. (а)
С учетом влияния поперечной силы но формуле A48) будет
кр КР , , / а2 , ай , а \ л"Е1 v '
/ а2 . а/г . а \ л?Е1
■ 11417Г Т2"£Л7Г ' ~Oh~F~)~V~
Учитывая, что планки стоят в двух плоскостях, находим:
/„л = 2°'712143 = 320 с.«4, /=7, = 2 • 0,7 • 14 = 19,6 см2.
По формуле (Ь), принимая G/E = 0,4, получим:
Р«Р=101600 9,87 670 / 120 \2 . 9.87 670 120-6,3 9.87 670-120 =
+ 24 83,4 \ 360 I + 12 320 3602 + 0,4 19,6 • 6,3 - 3602
= 101 60° 1+0,368 + 0,010 + 0,122 = iTf^ = 67 60° кг- (С)
Ослабление стержня из-за деформации решетки составляет 34%. Величина
эта не является вполне точной, так как формула A48) для критической
силы составлена в предположении, что число панелей сравнительно велико
Ясно, однако, что стержень сконструирован неудачно.
Рассмотрение выражения (с) позволяет оценить удельный пес отдельных
членов в знаменателе. Как видим, основную роль играет член, учитывающий
деформацию ветвей, но все же влияние деформации сдвига планки
относительно велико.
Найдем приведенную гибкость ослабленного стержня:
х* = я/т£гя/
2,03- 10е - 50,3 =
67 600
Воспользуемся приближенной формулой A51), тогда получим:
X* = У*? + Ц = ]Л)92 + 662 = 119,
что почти совпадает с прежним результатом. Если вместо двух
промежуточных планок поставить пять, т. е. уменьшить вдвое длину отсека, то
получим РКря:92 000 кг; ослабление стержня составит всего 9%
§ 50. Устойчивость стержней, воспринимающих крутящий
момент. Совместное действие осевого сжатия и кручения
Длинный стержень, подверженный действию скручивающих пар,
может потерять устойчивость; ось стержня образует при этом
пространственную кривую. Допустим, что концы стержня закреплены
шарнирно и что пары, моменты которых равны Мк, приложены по
160 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. HI
концам стержня (рис. 3.29), причем век горы-моменты пар сохраняют
свое направление вдоль начальной осп стержня.
Моменты инерции сечения стержня относительно всех
центральных осей пусть будут одинаковы и равны /.
Рассматриваемая система является иекоясервативной, так как
в разных вариантах перехода стержня из начального положения
в изогнутое, включающих поворот концевых сечений вокруг оси х,
нары могут произвести различную работу. Следовательно, данная
задача требует динамического подхода, см. [21.23]. Однако
статический метод приводит з.тесь, в виде исключения, к правильным
результатам, и мы им воспользуемся.
Выберем ncnoiivio и «местную» системы координат, как
показано на рис. 3.,!9. Обозначим через v н w перемещения вдоль у
и z некоторой точки, принадлежащей
осевой липни стержня. Определяя проекции
иск 14
-момента на оси
и
<-\<
ПРИХОДИМ к следующим дифференциальным
уравнениям:
A2У
(/.V2 :"
d2w ,. и'-и
Zv2~ " » ~Тх~
El-
EI
dw
Л' ЧТ'
C.152)
Пользуясь обозначением
C.153)
перепишем систему уравнений A52) в виде
Рис. 3.29. Выпучивание
стержня при кручении.
_12
tly
tlhe
rf.v2"
~-\-k
■Iw
"J~\-~
dv_
dx'
I
C.154)
Этим уравнениям удовлетворяют следующие выражения для v и w:
v = A sin kx 4- В cos kx -t-C,
w - -- ■■- A cos kx -\- В sin kx -j- D.
Воспользуемся граничными условиями:
v = 0 при х ~ 0, х = I,
■w=Q при х =- 0, х-~1.
Условия, относящиеся к точке л' = 0, дают:
С = — В, D-^A. C.157)
C.155)
C.15Г>)
Другие условия приводят к уравнениям:
A sin kl — В A — cos kl) = О,
Л A —cos A/) -\-B sir
s А/) = 0, 1
in kl = 0.)
C.158)
Считая А Ф О и В ФО, приравниваем нулю определитель этой
системы; получим:
sin2 kl 4- A— cos klf = 0.
откуда
cos kl =1. C.159)
Наименьшее значение ft/, удовлетворяющее этому уравнению и не
равное нулю, будет
2я
k=-
I
C.160)
Следовательно, критическое значение крутящего момента равно
EI
Мк,кР = 2л- г
C.161)
Допустим теперь, что стержень подвергается совместному
действию осевого сжатая силой Р и кручения (рис. 3.30).
Уравнения A52) получат тогда вид
£'^=-
■ М
dx2 K dx
к dx
dv
— Pv.
■Pw.
Полагая
EI ~R' El ~b '
C.162)
C.163)
M,KSU
приходим к системе уравнений
d2v
dx2
dsw
dx2
и dw . ,
■0,
dx '
C.164)
Решение этих уравнений будем искать в виде
v = ^4sin rxx -f- В cos rxx -f-
-f- С sin r2x -f- D cos /v*:,
«B = — Л COS/-!^-)-
-\- В sin г,* — С cos /-2Jf + £> sin r2x.
i».
C.165)
Рис. 3.30.
Одновременное действие осевой
силы и скручивающих
пар.
Подставляя эти выражения в A64), находим, что величины гх и г2
должны удовлетворять одному и тому же квадратному уравнению
r2-\-kr — s2 = 0. C.166)
11 К. С. Вольмяу
C.169)
162 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УиЮИЧИЫЛЛИ UlttVlUltH |1Л, 111
Считая г, Ф г2, находим:
rl==-!L±Y^ + s\ r2 = --|T|/^+s2. (ЗЛ67)
Принимая во внимание граничные условия A56) для л: = 0,
будем иметь:
5-|~D = 0, Л+-0 = 0. C.168)
Другие два условия приводят к уравнениям:
A (sin rxl — sin r2l) + # (cos rj — cos r2l) = 0,
— A (cos rxl — cos r2l) -+- В (sin /-jZ — sin r2l) = 0.
Приравнивая нулю определитель этой системы, получим:
(sin r J. — sin r2lf ■+- (cos rxl — cos r2lJ = 0,
или
cos(ri — r2)l=l. C.170)
Наименьшая величина аргумента, не равная нулю, будет
('i — r2) I = 2я. C.171)
Но по A67) находим: ____„
'i-'2 = 2]/^ + *2; C.172)
следовательно,
зт2 Ь2
^ = X + s2- (ЗЛ73>
Критические значения крутящего момента и сжимающей силы
удовлетворяют уравнению:
В частных случаях простого кручения и сжатия получаем прежние
формулы A61) и A.16). Соотношение A74) может быть применено
также при одновременном действии кручения и осевого растяжения;
в этом случае перед Р следует поставить знак минус.
§ 61. Устойчивость кругового кольца и арки
Большое практическое значение имеет задача об устойчивости
замкнутого кругового кольца, находящегося под действием
радиальной нагрузки, равномерно распределенной вдоль окружности (рис.
3.31). Такие кольца (шпангоуты) служат обычно для восприятия
радиальных сил, передающихся на скрепленную с ними
цилиндрическую оболочку, или в качестве ребер, подкрепляющих оболочку.
SI]
УСТОИЧИЫЛЛЬ lU-tflUBUlU кшюцл л лпчп
Обозначим через q силу, приходящуюся на единицу длины
окружности, через М, Q и N — изгибающий момент, поперечную и
осевую силы в сечении кольца, сила N считается положительной
при сжатии. Составим уравнения равновесия элемента длиной dy
(рис. 3.32), определяя проекции сил на направления касательной и
нормали, а также моменты относительно центра:
dN . Q . .
-Ж + ^ + ?у = 0,
dy
dQ
dy
+
N
О,
dM
dy
■*£-«.,-*
C.175)
C.176)
C.177)
координата у отсчитывается вдоль дуги, z — к центру; через R
обозначен радиус окружности, проходящей через центр тяжести сечения,
Рис. 3.31. Кольцо под
действием радиальной нагрузки.
Рис. 3.32. К выводу уравнений равновесия
элемента кольца.
через <7У и qz — проекции внешней нагрузки на соответствующие
направления. Принимается, что нагрузка q всегда направлена вдоль
нормали. Сопоставляя уравнения A75)—A77), получим:
Q = 4?!r> C.178)
dy •
d3M .1 dM , qy _ dqz
4y*~ ~R* ~dy~ ~R ~dy~
0.
C.179)
До момента выпучивания кольца осевая сила равна
N0 = qR. C.180)
Изменение кривизны выражается через прогиб w следующим образом
C.181)
d2w . w
dy2
w
и»
164 БОЛЕЕ СЛОЖНЫЕ ЗАДАЧИ УСТОЙЧИВОСТИ СТЕРЖНЕЙ [ГЛ. III
Первый член в этом выражении тот же, что и в случае прямой бал
ки, второй находится по рис. 3.33 с учетом изменения радиуса кри
визны:
J_
Л,
Момент М равен
1Г = ТГГ^ ~ТГ~ W-C,182)
м
= */к = £/(|-.+-£). C.183)
Подставляя это выражение в A79),
получим следующее дифференциальное
уравнение для w.
p. I dbw 2 d3w l d,w
\dy*
Рис. 3.33. К определению кривизны
изогнутой линии.
R2 dy3
Ь
+
R* dy
dqz
•) =
R „, <SJ84>
В задачах устойчивости надо учесть радиальную составляющую
усилий N, возникающую при выпучивании кольца:
., I d2w . w \ „ / d2w , w \ ,0 101-ч
4z = Nb\liyT + iv)-4R\iif+-wy (ЗЛ85>
•Считая q = 0, находим окончательное дифференциальное уран-
пение:
dbw , 2 d3w
dy*
+
R2 dy'
qR I d3w
1 dot
~№Чу~
1 йи>
-r
£/ \ dy3 "Г" tf2 dy
Примем для да выражение
"У
= 0. C.186)
C.187)
Рис. 3.34. Круговая арка под
действием поперечной нагрузки.
■K> = /sin-^-,
где п—число полных волн,
образующихся по окружности. При я=1
получим перемещение кольца как
твердого тела. Исключая этот случай,
примем п^-2. Подставляя выражение A87) в A86) и считая /=£0,
приходим к следующей зависимости:
? = (-1)-|-- C.188)
Минимальная критическая нагрузка qKp соответствует двум волнам по
окружности (я = 2) и равна
3/7/
9кр = ~вг- C-189)
R3
Мы получили известную формулу для критического давления,
часто применяемую в практических расчетах.
5 511
УСТОЙЧИВОСТЬ КРУГОВОГО КОЛЬЦА И АРКИ
165
Перейдем к случаю круговой арки (рис. 3.34), охватывающей
центральный угол 2а и шарнирно закрепленной по концам. Примем
выражение для прогиба в виде
w = fsln~2-, C.190)
где / = 2/?а — длина средней линии. Подставим A90) в уравнение
A86), тогда получим:
au^Jn^L—L. C.191)
El ~~ I2 R2
Число полуволн т определим из того условия, что полная длина
осевой линии остается неизменной. Деформация средней линии равна
где v — перемещение вдоль дуги. Второй член в этом выражении
учитывает укорочение дуги по рис. 3.33. Полагая еу = 0, найдем:
£-*• <ЗЛ93>
Оба конца арки останутся неподвижными при условии
i
[wdy = 0. C.194)
о
Наименьшее число т, при котором выполняется равенство A94),
будет т — 2. Критическая нагрузка оказывается равной
Лр = |£(-£—!)■ &.19S)
Отсюда можно получить формулу A89) для кольца, если положить
а = я/2; этот угол соответствует дуге, расположенной между точками
перегиба упругой линии кольца.
Как мы видели, шарнирно закрепленная арка с нерастяжимой
осью выпучивается по двум полуволнам. Однако для пологой арки
может оказаться, что выпучивание произойдет при меньшей нагрузке,
если считать среднюю линию деформируемой. Этот случай будет
разобран в дальнейшем.
Здесь были освещены лишь простейшие задачи устойчивости
колец (шпангоутов) и арок. Более подробно эта область
представлена в книгах А. Н. Дипника [3.1, 1946], С. П. Тимошенко [0.23],
П. Ф. Папковича [0.7], А. Ф. Смирнова [0.11], А. Пфлюгера [0.21].
Г Л А В А IV
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
§ 62. Различные подходы к задаче об устойчивости
стержневой конструкции
До сих пор мы рассматривали главным образом отдельные стержни,
являющиеся элементами различных конструкций. Обратимся теперь
к стержневым конструкциям, взятым в целом, и наметим пути
исследования их устойчивости. Основными видами стержневых
конструкций— плоских и пространственных — являются, как известно,
фермы и рамы. Для элементов идеальных ферм напряженное состояние
является безмоментным, т. е. сводится к осевому растяжению или
сжатию, в то время как для стержней рам характерно моментное
напряженное состояние, сводящееся к совместному действию изгиба и
продольных усилий; элементы пространственных систем подвергаются
также кручению. К рамам относятся, по существу, и так называемые
безраскосные фермы. Конструкции ферменного типа встречаются в
таких сооружениях, как мосты, мачты, башни и т. п.; рамы
используются в каркасах зданий, эстакад и т. д. Многие конструкции
являются комбинированными: одни стержни находятся в безмоментном,
другие, напротив, в моментном напряженном состоянии.
Так как в стержневых системах широко представлены сжатые
элементы, расчет на устойчивость имеет для них существенное
значение. Отметим, что в реальных сооружениях расчетная схема фермы
или рамы осуществляется лишь с известным приближением: узлы фермы
не являются шарнирными, как в идеальной схеме; стержни рам и
ферм имеют начальные несовершенства.
Один из возможных подходов к задаче об устойчивости
стержневой конструкции состоит в рассмотрении совершенной схемы в
предположении, что докритическое состояние является безмоментным.
Стержни конструкции должны обладать при этом идеальной
начальной формой; внешние силы предполагаются приложенными только
в узлах конструкции или направленными строго вдоль осевых линий*).
*) Предполагается, что докритические продольные деформации
элементов конструкции не ведут к нарушению безмоментиости.
§52] РАЗЛИЧНЫЕ ПОДХОДЫ К. ЗАДАЧЕ иь о<1,1иичивиыи 10/
Для определения усилий в стержнях системы, если она является
статически неопределимой, служат известные методы строительной
механики, связанные с принципом возможных перемещений (метод
перемещений) и принципом возможных изменений напряженного состояния
(метод сил). Допустим, что в результате применения того или иного
метода докригические усилия во всех стержнях выражены через
параметр внешней нагрузки. Если пользоваться статическим критерием
устойчивости, то может быть поставлена задача об определении
бифуркационных нагрузок, в том числе первой, минимальной из них *).
В случае фермы переход к смежному равновесному состоянию
сопровождается либо изгибом одного стержня или группы стержней — по
аналогии с эйлеровой задачей об изолированном стержне—и
одновременно осевой деформацией остальных стержней, либо только
продольными деформациями всех элементов. Если же речь идет о раме,
то переход к соседнему равновесному состоянию сопровождается
изгибом, причем выпучивание любого стержня вызывает здесь в
большей или меньшей мере изгиб других элементов конструкции,
связанных с данным стержнем и между собой жесткими узлами. В
пространственных системах потеря устойчивости сопровождается и
кручением; для тонкостенных элементов деформация может быть также
изгибно-крутилыюй. Отметим, что при рассмотрении отклоненного
положения рамы важно учитывать, являются ли при переходе к этому
состоянию все узлы неподвижными, либо они смещаются на величины
второго порядка малости по сравнению со стрелами прогиба
стержней, или же для всех узлов (либо некоторых из них) возможны
конечные смещения.
Обычный путь использования бифуркационного критерия состоит
в составлении уравнений метода перемещений или метода сил для
отклоненного состояния с учетом эффекта докритических продольных
усилий; этот путь более подробно описан в § 53.
Далее, бифуркационная задача для ферм и рам может быть
решена с помощью энергетического критерия **). Наконец, для
вычисления критической нагрузки может служить динамический критерий
(см. § 17) с использованием условий обращения в пуль частот
собственных колебаний системы***).
В реальных конструкциях чаще встречается случай, когда стержни
имеют «среднюю длину» и выпучивание имеет место в
упруго-пластической области. Тогда для определения критической нагрузки
должен быть использован критерий, указанный в главе II.
*) Бифуркационный подход в задачах об устойчивости рам развит в
работах Р. Р. Матевосяна [4.3], и А. А. Петропавловского (Труды МИИТ,
Строит, мех. 155, 1962), И. М. Рабиновича [4.4], А. Ф. Смирнова [0.11] и
других авторов.
**) См., например, Б. И. Худобец, Инж. сб. 13, 1952; А. В.
Александров, Труды МИИТ, Строит, мех., 91, 1957.
***) Динамический критерий был развит в применении к рамам В. Г. Чуд-
новским [0.Г2], В. А. Киселевым [4.2] и другими.
168
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
[ГЛ. IV
Другое направление в исследовании устойчивости стержневых
систем заключается в решении задачи с начальными возмущениями,
т. е. в рассмотрении элементов с известными исходными
неправильностями формы, с эксцентриситетами в приложении нагрузки и т. д.
Сюда входят также случаи впеузлового приложения нагрузки, когда
отдельные элементы получают изгиб с самого начала нагружения. Но
тогда исходное состояние конструкции уже нельзя считать безмо-
мептпым: здесь должны быть рассмотрены последовательные
равновесные состояния системы при возрастающих значениях параметра
нагрузки с учетом, если это необходимо, упруго-пластических
деформаций и определено предельное
состояние конструкции. По существу, при
этом речь идет об установлении
предельной точки в диаграмме
«нагрузка — характерное перемещение».
Во всех рассмотренных выше
задачах речь шла о малых отклонениях
системы в процессе деформации от
начальной схемы. Но стержневая конструк-
%Ы. ТЙ% ция может подвергнуться прощелкина-
Рис. 4.1. прощелкивание рамы. "ию, как система, разобранная в § 24;
это относится, например, к
симметричной деформации рамы, показанной на рис. 4.1. Сплошными линиями
изображены отклоненные устойчивые формы равновесия,
пунктирной линией — неустойчивая форма. Пример системы ферменного типа,
которая должна быть рассчитана на прощелкивапие, будет дан
в § 55.
Нас здесь интересует исследование устойчивости системы. Но
бифуркационная нагрузка не может быть отождествлена с несущей
способностью конструкции; последнюю можно определить в общем
случае при дополнительном исследовании докритической или закри-
тической деформации системы. Если для отдельного стержня со
свободно сближающимися концами потеря устойчивости ведет, как
правило, к его разрушению, то в статически неопределимой конструкции
перемещения концов стержня оказываются стесненными, и для
суждения о несущей способности реальной системы в целом следует
принять во внимание прежде 'всего развитие пластических
деформаций (см. § 54) и учесть другие критерии, связанные с достижением
опасных деформаций или опасных напряжений в материале стержней.
§ 63. Бифуркационная задача для упругой конструкции
Рассмотрим более подробно решение бифуркационной задачи для
статически неопределимых идеальных рам в предположении, что
выпучивание рамы, по крайней мере при первой критической нагрузке,
происходит в пределах упругости.
§ 53] БИФУРКАЦИОННАЯ ЗАДАЧА ДЛЯ УПРУГОЙ КОНСТРУКЦИИ 169
Мы считаем, что в случае идеальной конструкции внешние силы
приложены только в узлах; тогда при выпучивании рамы каждый
стержень должен находиться под действием осевого усилия,
концевых пар и соответствующих поперечных реакций. Но случай
совместного действия продольных сил и концевых моментов был уже
исследован в § 44. Углы поворота по концам выражаются через концевой
момент по формулам C.83); зависимости эти являются нелинейными
и содержат осевую силу Р. Относящиеся сюда вспомогательные
функции даны в таблице 3.3.
Будем пользоваться статическим критерием устойчивости рамы
в целом; примем, что узлы рамы являются неподвижными или
получают при переходе в отклоненное положение смещения лишь второго
порядка малости. Основное состояние рамы считается безмоментным.
Составим канонические уравнения метода сил, полагая, что для точек
бифуркации внешние силы являются заданными; тогда свободные члены
обратятся в нуль; уравнения получают вид
^ Al + ^2&12+ • • • + X Ал = °.
* А.1 + *2в«2+•••+* А» = °.
D.1)
где п—степень статической неопределимости, Ьр{ — перемещения от
единичных сил, найденные с учетом моментов от основных осевых
усилий. Условием того, что рама получает дополнительное
равновесное напряженное состояние, заключается,
как уже было сказано, в равенстве нулю
определителя системы A):
Д =
6И612. . .61я
6ЯА
л2-
D.2) /
Рис. 4.2. К расчету
стержневой системы иа устойчивость.
Корни этого уравнения определяют
бифуркационные нагрузки.
Пример 4.1*). Найти критическую силу
РКр для системы, изображенной на рис. 4.2.
Осевые усилия — сжимающая в одном и
растягивающая во втором из стержней — равны Р. В
качестве единственной лишней неизвестной примем момент в узле 1,
появляющийся при выпучивании. Обобщенное перемещение, соответствующее
единичным моментам в узле, будет равно по C.82) — C.85), если жесткости EI
обоих стержней одинаковы,
б'1 = яГх(м) + яГ Xi (») =» 0.
По таблице 3.33 находим первое значение корня этого уравнения и = 3,94.
*) Дан по книге В. Г. Чудновского [0.12], стр. 194.
170 УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ [ГЛ. IV
Соответствующая критическая сила /\р = 15,4 EI/12. Если бы жесткий узел
был заменен шарнирным, критическая нагрузка была бы равна Ркр = 9,87 EI/12,
т. е. оказалась бы в 1,56 раза меньше.
Вычисление корней уравнения типа B) может представить
значительные трудности, хотя применение электронных машин при
наличии стандартных программ облегчает задачу. В случае статически
неопределимой конструкции большое внимание надо уделить выбору
основной системы. Желательно представить ее в виде сочетания
определенным образом подобранных секций, тогда структура уравнений
может быть значительно упрощена *).
В трудных задачах следует все же обратиться к приближенным
методам, широко разработанным в строительной механике в связи
с общим расчетом рам. Эти методы известны как релаксационные **);
в интересующих нас случаях они должны быть построены с учетом
эффекта осевых сил. В релаксационных методах обычно используется
основная система метода перемещений. Канонические уравнения этого
метода представляют собой уравнения равновесия отдельных узлов,
выраженные в перемещениях. Идея релаксационного метода
заключается в том, что эти уравнения не составляются в явном виде, а
решение состоит в уравновешивании узлов путем последовательных
приближений. Допустим, что параметр нагрузки соответствует
бифуркационной точке; тогда при введении «уравновешивающих» моментов
в линеаризированной задаче мы должны получить бесконечно
большие перемещения; иными словами, жесткость системы обращается
в нуль. Это условие и приводит к определению критических нагрузок.
Пример 4.2 ***). Рассчитать на устойчивость раму эстакадного типа,
расчетная схема которой дана на рис. 4.3. Прежде всего оценим степень
сложности задачи с точки зрения разных способов расчета. Число опорных
реакций (соответственно опорам 0—4— 5 — 3) равно 2R — 1 -f- 3 -}- 2 -J— 2 = 8.
Три из них могут быть найдены с помощью уравнений статики.
Следовательно, степень статической неопределимости рамы равна
S = 2/<? — 3 = 8 — 3 = 5. Столько же уравнений необходимо для решения
задачи методом сил.
Для применения способа угловых перемещений потребуется составить
только два уравнения, поскольку лишними неизвестными будут углы
поворота двух промежуточных узлов рамы: 1 и 2. Следовательно, расчет
данной рамы выгоднее провести методом перемещений. При использовании
приближенных способов можно обойтись без составления канонических
уравнений, применяя особые приемы. Сначала обратимся к методу
перемещений. Основная система приведена на рис. 4.3. Там же надписаны против
каждого стержня величины расчетных погонных жесткостей. При этом за
общий параметр жесткости принята величина I, равная EI/h. Расчетные
погонные жесткости стержней, имеющих на одном из концов шарнир, следует
*) Рекомендации по определению нужного корня уравнения типа B)
методом попыток содержатся в книге С. А. Рогицкого [4.5].
**) Они изложены рядом авторов, ссылки на работы которых см.,
например, в книге И. К. Снитко [4.6].
***) Ряд более сложных примеров дан в кннге И. П. Прокофьева и
А. Ф. Смирнова, «Теория сооружений» т. 3, М., 1948.
5 53]
БИФУРКАЦИОННАЯ ЗАДАЧА ДЛЯ yill'yiun лит,1Г1лцкш
выразить через погонную жесткость бесшарнирного стержня той же
жесткости £/ и длины h. Для этого параметр I, относящийся к стержням
с одним концевым шарниром, следует умножить на 0,75.
Действительно, при повороте опорного сечения стержня на угол 9 в этом
El
сечении возникает реактивный момент /щ =3-г-9 = 3^0, если противопо-
ЕГ
ложный конец шарнирно оперт, и т2 = 4 — 0 = 4г20, если он защемлен.
Таким образом, в случае одного и того же угла поворота 0 реактивный
момент и,, при равенстве погонных жесткостей ix=*i2^i, составляет 0,75
2J
2i
(C-2i)
0,751
®
Л
@
32 5^
2J
l=~-h 1,51
2J
SL
Рис. 4.3. Рама эстакадного типа.
2,2
23
от момента т2. Следовательно, жесткость стержня, имеющего на одном из
концов шарнир, приводится к жесткости бесшарнирного стержня
умножением на 0,75 *).
При повороте концевого сечения сжатого стержня реактивный момент
в этом сечении, естественно, будет меньше, чем при отсутствии сжимающей
силы (см. § 44). Это уменьшение концевого момента надо рассматривать как
снижение жесткости сжатого стержня; оно зависит от величины сжимающей
силы и от способов закрепления концов стержня, что учитывается
умножением погонной жесткости / на коэффициенты:
С = 3Х(и)
(т
для бесшарнирного стержня и
3 tg-
f)
Cm —
1
(а)
(а')
Ч (")
для стержня с одним концевым шарниром. Здесь
EI •
*) Подробнее см. также И. М. Рабинович, «Курс строительной
механики», часть 2, М., 1954, стр. 328.
и = М = I у -
172
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
[ГЛ. IV
Р — сжимающая сила. Под % понимается функция
1 1
X (») = •
и tgii '
величины которой даны в таблице 3.3.
Значения функций С и Сш для некоторых параметров и приведены
в следующей таблице.
Таблица 4.1
и
С
^ш
U
с
£>ш
0
1,000
0,750
я
0,616
0
0,5
0,992
0,737
8,5
0,502
—0,368
1,0
0,966
0.698
3,8
0,385
—0,922
я
2
0,915
0,616
5я
Т
0,329
—1,307
2,0
0,859
0,522
4,2
0,188
-3,235
Зя
4
0,800
0,413
4,5
—0,005
170,400
2,5
0,772
0,359
зя
2
—0,173
5,608
3,0
0,656
0,102
5,0
—0,477
2,520
На рис. 4.4 представлены эпюры моментов Мх и М2 в основной системе
(см. рис. 4.3), связанные с единичными углами поворота узлов 1 и 2;
повороты даны по часовой стрелке, ординаты отложены со стороны растянутого
волокна. Канонические уравнения имеют вид
«,i'"i1 + ?2r12 = 0;
г1ги -\~ггГ22 — 0,
а условием потери устойчивости будет обращение в нуль определителя:
D= Г" 4 = 0. (в)
/*21 /2 I
Вычисляемые с помощью эпюр рис. 4.4 коэффициенты уравнений имеют
следующие значения:
г11 = 4г[3 + 3 + 2С(м1)]; /■„=./■„ = 4/. 1,5;
/-22 = 4/[3 + 2,25 + 2Сш(«2)],
причем коэффициентам С соответствуют аргументы (см. формулу C.80)):
для стойки 1—4
для стойки 2—5 I ^с>
Ui = l2
У 2EI V2 У EI
i 53]
БИФУРКАЦИОННАЯ ЗАДАЧА ДЛЯ У11ИУЮЯ КОНСТРУКЦИИ
и а
откуда
Подставляя значение г в условие устойчивости, получаем:
[6 + 2С (в,)] [6,25 + 2СШ (в,)] - 2,25 = О,
2,25
6 + 2С(В,):
5,25 + 2Сш(и,)"
Необходимое и1 отыскиваем подбором с помощью таблиц 3.3 и 4.1. При
и, = 2,92 и в2 = 4,12 имеем С (в,) = 0,677, а Сш (в2) = —2,40; тогда левая часть
условия устойчивости равна +7,354, а правая +5. При и, = 2,93 и в2 = 4,13
получаем С(и[) = 0,674, а Сш (в2) = — 2,48, и левая часть равна +7,350,
а правая +7,80. Следовательно, последние параметры пригодны для
окончательного определения Ркр. По формуле
(с) находим Ркр для 2-й стойки, как более
слабой:
.л h* Р,
К£
2 £/
°кр — ■
4.132 • 2EI
h*
= 34-^.
Применим теперь приближенный прием,
сводящийся к использованию такого
критерия устойчивости: в критическом
состоянии числовые параметры расчета, через
которые выражены усилия н деформации
слабых элементов конструкции, будут
устремляться к бесконечности. Используем один
из таких параметров — коэффициент
распределения узлового момента, как его
понимают в простейшем варианте способа
распределения неуравновешенных моментов *).
Для узла 2 рамы запишем коэффициент
распределения ц21, относящийся к
стержню 1—2:
hi + hb + h
3/
5 ЗТ+ 2(СШ (в2) + 2,25/
Рис. 4.4. К расчету рамы на
устойчивость по методу перемещений.
Условие потери устойчивости выполнится, если знаменатель равен нулю,
откуда
3 + 2СШ (в2) + 2,25 = 0. Сш(и2)= —2,62.
Используя те же таблицы, что н прежде, находим и2 — 4,15. Следовательно,
"til
h2 ' " '•' h*
что мало отличается от ранее полученной величины.
При использовании метода сил целесообразно несколько упростить
задачу, отбросив некоторые из лишних связей. Можно, например, сохранить
вторую стойку и смежные с ней элементы н исключить левый крайний
пролет. Основная система может быть выбрана по рис. 4.5, число лишних
неизвестных снижается до трех.
р 41У.2Д/ ,. . BI
*) См. книгу [4.6], стр. 203.
174
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
(ГЛ. IV
Условие потери устойчивости имеет вид B) при п = 3.
Для вычисления коэффициентов 6 необходимы эпюры моментов от
действия единичных усилий Х^ 2, з- В соответствии с выбранной основной
системой все коэффипнеиты б являются углами поворота узловых сечений
стержней; при этом стержни рамы, подверженные действию продольных сил,
имеют углы поворота, определяемые формулами C.82)—C.83) и
коэффициентами из таблицы 3.3. Углы пово-
Р рота в стержнях, не испытывающих
Xlt X сжатия, определяются, как обычно, по
" ' ' правилу Верещагина *). Определим
угол бп, обращаясь к эпюре М^\
*■> (Т '"""" . A-x(b2) , I
:4^Щ
А-Х(иг) ,
°п — оТт? г
2Е1
3-2EI'
учитывая,
имеем:
б,
что г = 2Л/3 и EI/h — i,
аналогично
21 ' 9;
1 2
°i2 = -gj-; 6i3 = 0; б22 = -g-г
б23 =
18;:
Рис. 4.5. К расчету рамы по методу снл.
_0,5hxi.ui) , 1
EI
9i
X(«i) i 1
2( ■" 9Г
Внося полученные величины б в определитель, после умножения на 9/,
получим:
4,5х(«2) + 1 1 0
£>= 1 2 0,5 =0.
0 0,5 4,5Х (и,) + 1
Попытками, назначая последовательно параметр и2, определяем его
значение «2 — 4,11, что мало отличается от предыдущих ответов D,13 и 4,15).
§ 64. Поведение рам в упруго-пластической области
Обратимся к определению критических нагрузок для стержневых
конструкций с учетом пластической деформации материала. Наиболее
ярко выражены пластические свойства у строительной
малоуглеродистой стали. Как видно из таблицы 2.2, мы можем в известных
пределах (скажем, при деформации до 1%) принять в этом случае
идеализированную диаграмму «напряжение — деформация»,
отождествляя, как на рис 2.23, предел пропорциональности с пределом
текучести и считая площадку текучести неограниченной (рис. 4.6, а).
Более того, при исследовании стальных конструкций оказывается
полезной модель жестко-пластического тела, для которого упругая
деформация считается пренебрежимо малой по сравнению с
пластической (рис. 4.6,6), и начальный наклонный участок диаграммы
принимается совпадающим с отрезком оси ординат.
*) Построение единичных эпюр моментов предоставляется выполнить
читателю.
§ 54] ПОВЕДЕНИЕ РАМ В УПРУГО-ПЛАСТИЧЕСКОЙ ОБЛАСТИ 175
Рассмотрим поведение статически неопределимой стальной
конструкции, считая материал упруго-пластическим или
жестко-пластическим. Исследование стали как материала с четко выраженной
текучестью интересно с методической стороны; вместе с тем оно имеет
и практическое значение, так как стальные конструкции являются
в строительстве широко распространенными. Определение несущей
способности реальной стальной конструкции, имеющей начальные
бк бк
Рис. 4.6. а) Идеализированная диаграмма; б) диаграмма для жестко-
пластического материала.
несовершенства, не может быть, как правило, выполнено в рамках
бифуркационной теории, если относить ее лишь к упругой области.
Один из часто применяющихся критериев несущей способности —
достижение максимальным фибровым напряжением в «опасном» стержне
уровня предела текучести. Но, пользуясь этим критерием, мы
отказываемся от исследования поведения конструкции в пластической
стадии.
Другой возможный подход заключается в исследовании
последовательных равновесных состояний конструкции с учетом развития
упруго-пластических деформаций в отдельных стержнях, как это
делалось в главе II. Но такое решение является, как правило, весьма
сложным. Поэтому целесообразно упростить задачу и предположить,
что при нагружении конструкции в отдельных сечениях образуются
пластические шарниры *). Представим себе стержень,
подвергающийся одновременному действию возрастающих изгибающих моментов
и постоянной осевой сжимающей силы. Допустим, что в некотором
сечении стержня фибровые напряжения достигают предела текучести.
Тогда зависимость между изгибающим моментом М и кривизной
изогнутой линии и будет уже иной, чем в начальной стадии нагружения.
Жесткость конструкции будет падать. Постепенное проникновение
пластических деформаций вглубь сечения завершается образованием
пластического шарнира; после этого деформация стержня будет
протекать при постоянном значении момента. Это иллюстрируется на
графике рис. 4.7 кривыми Ж (и), относящимися к разным уровням
*) В дальнейшем изложении мы следуем Хорну [4.7].
176
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
[ГЛ. IV
0,2
0,4
0,6
сжимающей силы (на графике указано отношение а сжимающего
напряжения к пределу текучести). В случае а = 0 уровень а
соответствует началу развития пластических деформаций, а уровень Ъ —
образованию пластического шарнира.
При наличии сжимающей силы эти
уровни снижаются.
Представим себе теперь
многократно статически неопределимую раму.
Рост нагрузки будет сопровождаться
0,8 последовательным образованием
первого, второго и последующих
шарниров в различных местах, вплоть до
превращения конструкции в механизм.
Интересным является при этом
проследить за диаграммой «параметр
нагрузки — характерное перемещение»,
соответствующей каждой из
последовательно проходимых стадий деформации рамы (рис. 4.8). Тогда
в упругой стадии зависимость между нагрузкой и
перемещением будет отвечать некоторой кривой OAGH, асимптотически
Рис. 4.7. Образование пластических
шарниров в конструкции при разном
уровне сжимающей силы.
Рис. 4.8. Диаграмма «параметр нагрузки —характерное
перемещение» на различных стадиях деформации рамы.
приближающейся к горизонтальной линии на уровне Хе
первой упруго-бифуркационной точки. Допустим теперь, что первый
пластический шарнир образуется при нагрузке с параметром Хр ,;
обычно она лежит значительно ниже уровня Хв. Будем снова следить
§ 55] ПРОЩЕЛКИВАНИЕ СТЕРЖНЕВОЙ КОНСТРУКЦИИ 177
за поведением конструкции, считая ее упругой, но имеющей
дополнительный шарнир; тогда получим новую кривую АВ/К, асимптота
которой лежит на уровне некоторой «сниженной» бифуркационной
нагрузки XDi j. Продолжаем построение до тех пор, пока новая
сниженная нагрузка не окажется меньше текущего значения, так что
диаграмма пойдет не вверх, а вниз; это будет означать переход к
неустойчивости. Максимальная ордината определяет несущую
способность сооружения *).
Исследование упругой деформации сооружения на различных
этапах может быть связано с кропотливыми вычислениями. В этих
случаях может оказаться полезным рассмотрение конструкции как
жестко-пластической. Разработаны методы, позволяющие определить
несущую способность такой жестко-пластической конструкции как
нагрузку, лежащую на грани уравновешенной системы и механизма,
при условии, что пластический момент не превзойден ни в одном из
сечений.
Обозначим параметр «жестко-пластической» несущей способности
через Хр. Величина Хр является одной из характерных критических
нагрузок, определяющих несущую способность исходной реальной
конструкции. Уточненное значение критической нагрузки Хкр с учетом
упругих свойств конструкции может быть найдено, например, с
помощью следующей формулы суммирования опасностей, аналогичной
B.2а):
*<кр . ^кр
Т~ +1~ = * • (а)
где Хе — первый «упруго-бифуркационный» параметр. Ряд
экспериментов над одно-, двух-, трех-, пяти- и семиярусными рамами
привели к результатам **), близким к Хкр по (а), причем эт*а формула
определяла несущую способность, как правило, с известным запасом
устойчивости.
§ 55. Прощелкивание стержневой конструкции
Простейшая модель стержневой конструкции, подвергающейся
потере устойчивости в большом, была рассмотрена в § 24. Обратимся
теперь к конструкциям ферменного типа, лежащим в основе сетчатых
куполов с треугольной решеткой (рис. 4.9). Купол имеет
сферическую форму в том смысле, что представляет собой многогранник,
вписанный в сферу радиуса R. Подобные сетчатые купола
применяются в качестве покрытий промышленных и общественных зданий,
*) Метод «сниженных нагрузок» был предложен Вудом (R. Woo d,
Proc. Inst. Oivil Eng. 11, 1957—58, 69).
**) Эти данные принадлежат Мерченту (W. Merchant, Structural Eng.
32, 1954, 185; 33, 1955, 85).
12 А. С. Вольмир
178
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
[ГЛ. IV
имеющих круговое очертание в плане. В таких конструкциях при
поперечной равномерной нагрузке начальное равновесное состояние
является безмоментным;
поэтому сетчатые купола легки
и экономичны. В настоящее
время построено несколько
куполов диаметром 100—
120 м\ можно ожидать, что
пролеты будут увеличены
до 200—400 м. В связи
с этим представляет интерес
проблема устойчивости
куполов.
Предположим, что все
стержни прямолинейны и
шарнирно соединены в узлах.
К каждому узлу будем
считать приложенной
вертикальную нагрузку Р.
Примем, что отношение стрелы
к пролету составляет менее
У5 и что, следовательно,
купол в целом можно
отнести к категории пологих
(см. §§ 142 и 187).
Явление потери
устойчивости такой конструкции
состоит в прошелкивапии
в направлении центра
кривизны одного или
нескольких узлов *). у
Решим сначала упрощенную задачу о хлопке двухзвепьевой
шарнирной системы, изображенной на рис. 4.10. Из рисунка находим:
I = yc2+{h_fJ = c^l+tg2(p —ф).
Рис. 4.9. Конструкция ферменного типа и виде
сетчатого купола сферической формы.
Считая угол р малым, примем
/0«c-^лпFF~c(l^-1U2)•
/«cyi+(P-q>J «c[l+i(p-q>)»].
D.3)
*) Приведенное ниже решение задачи принадлежит В. А. Савельеву.
«55]
ПРОЩЕЛКИВАНИЕ СТЕРЖНЕВОЙ КОНСТРУКЦИИ
179
Деформация укорочения каждого из стержней будет
lQ-l
Р-
ф.
D.4)
Усилие в стержне N связано с Q зависимостью
Q = 2Nsin(p —ф)«2ЛГ(р ср);
с другой стороны,
N = EFe т EF
('■
поэтому
Q = EF Bр — Ф) (р — Ф) Ф = EFp BC — 3£2 -+■ S3).
D.5)
где £==ф/р— безразмерный параметр прогиба. Выражение E) дает
нелинейную зависимость нагрузки от прогиба. С ростом прогиба
нагрузка сначала увеличивается, а затем начинает уменьшаться.
Диаграмма равновесных состояний по характеру совпадает с пунктирной
кривой на рис. 1.35.
Определим верхнюю точку кривой, полагая
dQ
= £/^B — 6£ + 3£2) = 0.
Тогда будет
С=1
f3 •
Qk
з/з
EFp3
D.6)
Рис. 4.10. Двухзвеиьевая шарнирная стержневая
система.
Такая модель описывает с качественн-ой стороны процесс потери
устойчивости пространственного стержневого каркаса купола. Однако
она не учитывает деформацию
соседних стержней и влияние ^-*Л1.#
нагрузки, приложенной к
другим узлам системы. Попытаемся
принять во внимание влияние
этих факторов, рассматривая
простейшую и наиболее
вероятную форму потери
устойчивости, заключающуюся в
одновременном продавливании к центру кривизны определенных узлов
выпуклой сетчатой поверхности. На рис. 4.11 эти узлы обозначены
буквой А.
Каждый из узлов А окружен шестью узлами С. Представим себе,
что в процессе выпучивания конструкции узлы С сначала
«выдавливаются» по направлению от центра кривизны, а затем увлекаются
к центру вслед за узлами А. Усилия в каждом из шести
стержней 1, сходящихся в узле Л, назовем Nx (эти стержни на рис. 4.11
показаны тонкими линиями). Усилия в стержнях 2, соединяющих
между собой узлы С (жирные линии на рис. 4.11), обозначим
через N2.
12»
1»U
»01иПЧИЫЛ*11> ^Ш^ДНКВЫД (JH(J1CM
[1J1. IV
Будем считать, что купол имеет начальные неправильности формы,
заключающиеся в радиальных отклонениях узлов А от сферической
поверхности. Кроме того, предположим, что внешние силы Рс,
Рис. 4.11. Узлы выпуклой сетчатой Рис. 4.12. К составлению уравнения равновесия
поверхности. узлов стержневой системы.
приложенные к узлам С, в общем случае отличаются от сил РА,
действующих в узлах А. Введем безразмерные параметры £0 и г\
(рис. 4.12, а и б);
£, = ■&; т,= 1—£-. D.7)
ГА
где ф0 — угол, характеризующий начальное отклонение стержня С А.
Составляем уравнения равновесия узлов А а С (рис. 4.9):
/>А = 6^1(р-Фо-ф),
/>с = ЗЛ^1(р + Фо + ф)-г-3^2р.
Из (8) и (9) определяем Nt и N2:
Р. 1
N,=
N,
6C 1-£0-Г
Р. /1—ЗС_ —ЗС
■2л).
D.8)
D.9)
D.10)
D.11)
ра Z1-3^-
~~ бр I 1-Ь>-
Начальная длина стержня 1 равна
/0 = с[1+7(Р-ФоJ] = 41+ТA-И' DЛ2)
а после нагружения
/ = с[1-)-1ф-ф0-фJ]-и==С[1+^A_С0-^]-«. D.13)
§ щ
llf иШ,ЕЛ1\ПГтп|Г1Е ^.IcrAncDuri i\kju\ji ro iM_^rijri
101
Здесь а—перемещение узла С, вызываемое продольной
деформацией стержня 2:
и~М2-±. D.14)
Деформация укорочения стержня .1 равна
е, = ^ = -|Ч2£-2^-£2) + 7- D.15)
Это укорочение соответствует нагрузке Р = РА, равной
2(Со + СL-д-ЧA-Со-0
Выражение A6) определяет общую нелинейную зависимость величины
усилия, приложенного к узлу А, от параметра прогиба этого узла £
с учетом неравномерности в распределении нагрузки и
несовершенства формы.
Рассмотрим сначала идеальную систему, предполагая параметры £д
и Г| равными нулю; тогда
P=2EF^-\B — Zl + t?). D.17)
Выражение такого типа было получено нами выше при рассмотрении
устойчивости двухзвеньевого стержня с пружинами (§ 24).
Множитель, стоящий в скобках A7), в точности равен второму члену
выражения A.247). Таким образом, рассматриваемый случай потери
устойчивости сферического купола является типичным примером
выпучивания в большом.
Если считать прогибы малыми по сравнению с А и полагать С<^ 1,
то мы найдем верхнюю критическую нагрузку
PB = 2EFp. D.18)
Введем обозначение Р — Р/Рв. Из выражения A7) получим:
Р = 1B-3$+?2). D.19)
Диаграмма равновесных состояний Р"(£) идеальной системы показана
на рис. 4.13 жирной линией. С ростом прогибов нагрузка падает до
нижней критической точки, а затем снова начинает возрастать. В
данном случае нижнее критическое давление отрицательно и равно
Р„ = — 0,125.
Исследуем влияние начальных отклонений на величину критиче.
ской нагрузки, предполагая по-прежнему, что внешние силы распре.
182
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
11 Л. IV
делены равномерно. Принимая т) = 0 в выражении A6), получим:
р_ еа—Со—0B—2с0—о
D.20)
2(So + £)
Кривые /*(£), соответствующие различным значениям Со. приведены
на рис. 4.13. С самого начала загружения система ведет себя как
1\ш
ЦП V
\\П \'
1 \\\ \
>\ \И
-0,05 \Л\Ю
-т\\ i
\\\\
Рис. 4.13. Диаграмма равновесных состояний для идеальной системы и при наличии иачаль
них отклонений в случае равномерного распределения внешних сил.
нелинейная. Если начальный прогиб направлен к центру кривизны, то
имеет место быстрое снижение параметра верхней критической нагрузки
с ростом начальных отклонений. При Zq = 1 зависимость Р (£) имеет
уже монотонный характер, так что опасность внезапного прощелки-
§55]
ПРОЩЕЛКИВАНИЕ СТЕРЖНЕВОЙ КОНСТРУКЦИИ
183
вания отпадает, однако податливость такой системы чрезвычайно
велика. В узлах, которые конструктивно невозможно выполнить
в виде идеальных шарниров, могут возникнуть значительные
перенапряжения.
Обратимся к эффекту неравномерности загружеиия купола
первоначально правильной формы
нагрузки равен
Для случая г| ф 0, ^0 = 0 параметр
■ji= c(i-c)B-e)
2С +-g-TI A — С)
D.21)
- "'"чГ*"*'1"*"'
«ЦЯР^Г Ч*' "ill,^
Соответствующие формуле B1) диаграммы равновесных состояний
имеют вид, близкий к изображенным на рис. 4.10. Таким образом,
неравномерность в распределении нагрузки, облегчающая
проталкивание системы, дает тот же
эффект, что и начальные
несовершенства формы купола.
В формулу A8) для
верхней критической нагрузки
входит геометрический параметр
Р = /0/2/?. У куполов с малым
радиусом кривизны угол р
сравнительно велик, так что
критические нагрузки
получаются значительными. Поэтому
для таких конструкций может
оказаться более опасным не
прошелкивание к центру
кривизны системы стержней,
образующих некоторый участок
купола, а выпучивание
отдельного стержня. С увеличением
пролета купола угол E
уменьшается и величина критической
нагрузки резко падает. Тогда
становится вероятной
описанная выше потеря устойчивости
сферического купола в
большом.
Поставим задачу определить
значения E и ориентировочные
размеры конструкции, при которых такая форма потери устойчивости
становится определяющей. Предположим сначала, что купол имеет
идеальную сферическую форму. Тогда усилие в стержне 1 при
нагрузке Ркр будет равно
°JLp = £^l. D.22)
бр 3 v '
Рис. 4.14. Участок геодезического купола.
^кр = :
184
устойчивость стержневых систем
[ГЛ. IV
Приравнивая B2) эйлеровой силе для отдельного стержня A.16),
получим Р[ = л^3/Я,. Если р < Рц то должна произойти общая
потеря устойчивости системы стержней; если же р < р^ то
прежде устойчивость потеряет отдельный стержень.
Одним из приемов, ведущих к повышению общей устойчивости
купола, может явиться придание больших начальных отклонений
отдельным узлам в направлении, противоположном ожидаемому
выпучиванию. Это позволит использовать ветви устойчивых равновесных
состояний при отрицательных значениях £0 (пунктирные линии на
графике рис. 4.10).
Можно также заранее придавать куполу как бы прощелкнутую
форму, и в этом случае зависимости «нагрузка—прогиб» имеют вид
восходящих устойчивых ветвей (£q = 2, £q = 4 на рис. 4.10).
Примером конструкции, в какой-то мере иллюстрирующим эту идею,
может служить изображенная на рис. 4.14 часть геодезического
купола диаметром 60 м; он состоит из ромбовидных изогнутых
алюминиевых листов с распорками *). Грани панелей и распорки можно
рассматривать как отдельные стержни сетчатой поверхности с
треугольными ячейками.
*) Это сооружение конструкции Р. Фуллера возведено в Москве
(Сокольники).
ГЛАВА V
ТОНКОСТЕННЫЕ СТЕРЖНИ. УСТОЙЧИВОСТЬ
ПЛОСКОЙ ФОРМЫ ИЗГИБА
§ 56. Основные уравнения
Обратимся к задаче об устойчивости стержней, состоящих из
тонких стенок и образующих незамкнутый (открытый) профиль.
Такими профилями являются стержни уголкового, корытного,
крестового, таврового (рис. 5.1), двутаврового, зетового сечений (рис. 5.2).
4
п
U ,;
Рис. 5.1. Виды сечеиий тонкостенных стержней.
о)
б)
Стержень корытного сечения представляет собой пример простого
профиля, а стержень двутаврового сечения — пример разветвленного
профиля. Стержни уголкового,
крестового сечений образуют профиль
в виде пучка. Особенность таких
стержней по сравнению со
стержнями замкнутого профиля
(например, трубчатого) или сплошного
сечения состоит в их относительно
слабой сопротивляемости кручению.
Поэтому мы должны будем изучить
не только изгибную форму потери
устойчивости сжатых стержней, но
и такую форму, которая сопровождается скручиванием профиля или
совместными деформациями изгиба и кручения.
Напомним некоторые определения и зависимости, относящиеся
к общей теории тонкостенных стержней открытого профиля *). При
*) Эта теория изложена в книгах В. 3. Власова [5.4] (см. там же
библиографию) и А. А. Уманского [5.12], см. также книгу Г. Ю. Джанелидзе к
Я. Г. Пановко «Статика упругих тонкостенных стержней», Гостехиздат, 1948.
Рис. 5.2. Дюралюмшювые профили,
получаемые прессованием или штамповкой.
186
ТОНКОСТЕННЫЕ СТЕРЖНИ
[ГЛ. V
скручивании таких стержней — если только они не образуют профиля
в виде пучка — поперечные сечения искривляются: различные точки
сечения получают разные перемещения вдоль оси стержня. Это
продольное смещение называют искажением или депланацией. Если
депланация сечений стержня не осуществляется свободно, то при
кручении образуются нормальные напряжения, направленные вдоль
оси. Нормальным напряжениям стесненного кручения сопутствуют
касательные напряжения, распределяющиеся равномерно по толщине
стенки (рис. 5.3) и накладывающиеся на касательные напряжения
Рис. 5.3. Касательные напряжения: а) стесненного кручения;
б) свободного кручения.
свободного крученая. Как известно, эпюра касательных напряжений
свободного кручения вдоль толщины стенки состоит из двух
треугольников; средняя линия профиля оказывается свободной от
напряжений в точках, достаточно удаленных от края профиля (рис. 5.3).
Касательные усилия стесненного кручения образуют пару; момент этой
пары обозначим через М. Касательные усилия свободного кручения
дают в свою очередь пару с моментом М.
Суммируя их, получим полный крутящий
момент Мк:
M-t-M = MK. E.1)
Депланация любой точки поперечного
сечения и может быть выражена через
единичный угол закручивания стержня а и так
называемую секториальную площадь со:
Рис. 5.4. Секториальная площадь. В= СХ (ЛГ) C0(S). (.O.Z)
Величина а является функцией координаты х, откладываемой вдоль
оси стержня; сечение стержня считается в своей плоскости вполне
жестким, неизменяемым. Под секториальной площадью со понимается
удвоенная площадь, образуемая при перемещении радиуса-вектора,
причем начало радиуса совпадает с некоторым полюсом К, а конец
скользит вдоль средней линии профиля (рис. 5.4); очевидно,
величина со будет функцией координаты s, отсчитываемой по средней
линии. Знак минус в формуле B) отвечает вращению
радиуса-вектора против часовой стрелки. Мы считаем, что депланация и меняется.
«84
ОСНОВНЫЕ УРАВНЕНИЯ
187
вообще говоря, вдоль оси стержня; частная производная от и по х
даст деформацию удлинения соответствующего волокна. Нормальные
напряжения стесненного кручения равны
а = Е
ди
~дх
с. da
-t -т-ft».
dx
E.3)
Единичный угол закручивания в свою очередь равен производной от
полного угла закручивания 0 по длине, т. е. a = dO/dx.
Следовательно,
E.4)
Соответствующие касательные напряжения находятся по уравнению
равновесия
откуда
дх ^ ds '
Г да . „ йЩ f ,
:=-J -dx-dS = Elx^i а^
E.5)
Введем обозначение для потока касательных усилий q = xt, где
t — толщина стенки (рис. 5.4). Величина t в общем случае является
переменной вдоль средней линии: t = t(s).
По E) находим:
S S
q = E^ J <*tds = Egsj<udF, E.6)
о о
где под dF = tds подразумевается
площадь элемента стенки длиной ds. Введем
обозначение
S-J
d)dF
E.7)
Рис. 5.5. К определению момента
касательного усилия.
и назовем эту величину, измеряемую в см4, секториальным
статическим моментом части площади профиля; тогда получим:
* = E-d*S»-
E.8)
Момент М, образуемый касательными усилиями стесненного
кручения, будем определять относительно оси, проходящей через полюс К.
Из рис. 5.5 видно, что момент элементарного усилия q ds
относительно полюса равен qpds или qda, где da> = pds — приращение
188 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
секториальной площади. Полный момент будет равен
S
Л= J qd& = E-~ [rfco fwd/7; E.9)
F F 0
интеграл распространяется на всю площадь сечения F. Интегрируя
по частям, имеем:
I- F F
Ж = £-0-|со I corfF— | co2rfF
E.10)
Начальное положение радиуса-вектора при определении
секториальной площади будем ниже выбирать из условия, что полный секто-
риальный статический момент площади сечения равен нулю:
Su,P=jetdF = 0. E.11)
F
Секториальным моментом инерции профиля называют величину
/ffl= jtfdF, E.12)
F
она измеряется в см6. Вместо A0) теперь получим:
M = -EI№^L. E.13)
Что касается момента, образуемого касательными усилиями
свободного кручения, то он равен
M = G/Ka = G/K|L, E 14)
здесь G/K — крутильная жесткость профиля, /к — момент инерции
сечения при кручении. Для профиля, состоящего из п
прямоугольников, величина /к равна
i-i
где s{ — длина и tt — толщина i-й стенки; у — коэффициент,
зависящий от формы сечения; /к измеряется в см*.
Общий крутящий момент должен по A) складываться из A3) и A4):
Мы получили дифференциальное уравнение стесненного кручения для
стержня открытого профиля.
$ 57] СТЕРЖЕНЬ С СЕЧЕНИЕМ, ИМЕЮЩИМ ДВЕ ОСИ СИММЕТРИИ 189
Момент касательных усилий стесненного кручения М изменяется
по длине стержня. Введем новую функцию В(х), первая
производная от которой разна М:
£ = М. F.17)
Величина В, измеряемая в кг • см2, носит название изгибно-крутиль-
ного бимомента или просто бимомента. Сравнивая D) и A3),
находим:
М = ~^-. E.18)
dx со х '
Сопоставляя теперь A7) и A8), будем иметь:
сг = -т-; E.19)
1 (Л
предполагается, что при о = 0 должно быть 5 = 0. Таким образом,
нормальные напряжения стесненного кручения пропорциональны бимо-
менту; формула A9) построена аналогично известной формуле для
нормальных напряжений при изгибе о" = Му//г, где у— расстояние
точки сечения от нейтральной оси z.
Пользуясь A3) и считая 5 = 0 при d20ldx2 = 0, находим:
5 = -£/ffl-gL. E.20)
Дифференцируя левую и правую части уравнения A6) по х, будем
иметь:
-».-&+<».-&-£—«- <5-2"
под тк здесь подразумевается интенсивность внешней крутящей
нагрузки; считаем эту величину положительной, если крутящий
момент Мк уменьшается при возрастании х. Исходя из B0), введем
в уравнение B1) бимомент В; тогда получим:
йхг Е1(л — "• @'ZZ)
Мы пришли к дифференциальному уравнению второго порядка для
бимомента.
§ 57. Центрально сжатый стержень с сечением,
имеющим две оси симметрии
Рассмотрим сначала случай, когда поперечное сечение стержня
имеет две оси симметрии. Примером такого стержня может служить
двутавровый профиль (рис. 5.6). Допустим, что стержень длины /
190
ТОНКОСТЕННЫЕ СТЕРЖНИ
И Л. V
LXJ
гп
Рис. 5.6.
Двутавровое
сечение.
подвергается действию осевой силы Р, приложенной в центре
тяжести сечения.
Предположим, что при критической нагрузке становится
возможной, наряду с первоначальной формой равновесия стержня, другая,
искривленная форма, причем искривление
получают все продольные волокна стержня,
кроме центрального. И 1ыми словами, будем
иметь в виду чисто крутильную форму
потери устойчивости стержня, без изгиба
центрального волока.
Угол поворота произвольного сечения 8
будем считать положительным при
вращении против часовой стрелки, если смотреть
от верхнего конца стержня (против направления оси х). В качестве
исходного дифференциального уравнения примем уравнение B2).
Распределенная по длине крутящая нагрузка
возникает в результате действия
основных сжимающих напряжений a = P/F,
где F— площадь сечения. Выделим
некоторое волокно стержня, параллельное
до деформации оси х; в поперечном
сечении пусть этому волокну отвечает
элемент площади dF. После закручивания
стержня волокно примет вид кривой
линии, расположенной на круговом цилиндре
радиуса р (рис. 5.7).
Обозначим через ф малый угол между
касательной, проведенной к
искривленному волокну в точке на расстоянии х от
нижнего конца, и вертикалью. Этот угол
будет, вообще говоря, переменным по
длине стержня. Передаваемое волокном
нормальное усилие a dF окажется после
искривления волокна наклоненным к
вертикали под тем же углом гр.
Горизонтальная проекция усилия будет равна
etydF. Момент, создаваемый усилием о dF
относительно оси х, будет равен произведению усилия на плечо р,
или atypdF. Весь крутящий момент, передаваемый сжимающими
усилиями в некотором сечении стержня, будет равен интегралу
foi|>p dF,
Рис. 5.7. К вычислению момента
сжимающего усилия.
распространенному на всю площадь сечения. Если теперь взять
соседнее сечение, удаленное от первого на расстояние dx, то угол гр
i^mtviMinD i^ шчшисм, имьющит двь и^и ^nmmcifian iai
получит приращение </ф, а крутящий момент возрастет на величину
jodtypdF.
/•■
Интенсивность крутящей нагрузки отк определим, разделив эту
величину на dx:
от,
--Jo^-prfF. E.23)
Знак минус здесь взят потому, что момент вращает относительно
оси х но часовой стрелке, в то время как углы 0 и ф мы считаем
положительными при вращении против часовой стрелки.
Заметим, что между приращениями углов ф и О имеется зависимость
р rfO = ф dx;
отсюда
Ф = Р"|г- E-24)
Подставляя эти величины под знак интеграла в B3), получим:
т*==~а45' J ^dF' E.24a)
г
или
под Iр здесь понимается полярный момент инерции относительно
центра:
Ip^\^dF. E.26)
г
Но вторая производная от 0 по х связана зависимостью B0) с би-
моментом В. Так как положительными мы теперь считаем
сжимающие напряжения, то по A9) надо в B0) изменить перед В знак па
обратный и положить
Я»1П? = В. E.27)
Окончательно для интенсивности отк получаем выражение
о/,
тк = --^В. E.28)
(Л
Подставляя это значение тк в уравнение B2), получаем:
d2B I а/„ 0/„
иХ \ м~,1 {Л i-л ^
192
ТОНКОСТЕННЫЕ СТЕРЖНИ
Примем, что концевые сечения стержня свободны от нормальных
напряжений стесненного кручения, т. е. что депланация этих
сечений осуществляется свободно. Исходя из A9), мы можем
формулировать граничные условия задачи следующим образом:
5 = 0 при х = 0, х — 1. (б.30)
Полагая
oI„ GIK
-т—ЁГ = к*- <б-31)
получим решение уравнения B9) в виде
B — C^inkx-\-C2coskx. E.32)
Из граничных условий находим С2 = 0. При С, Ф 0 будет
Ы = пл, п= 1, 2, 3,. .. E.33)
Принимая я=1, определяем по C1) наименьшее критическое
значение напряжения ое:
ffe = i^ + -^- F.34)
Эта формула справедлива, очевидно, лишь в пределах упругости.
Если сечение состоит из относительно тонких стенок, то вторым
членом в C4), учитывающим напряжения свободного кручения, можно
пренебречь по сравнению с первым, отвечающим напряжениям
стесненного кручения. Тогда получим формулу
E.35)
1 'р
по структуре аналогичную формуле Эйлера.
Для тех случаев, когда граничные условия C0) не выполняются,
удобнее пользоваться дифференциальным уравнением в форме B1).
Подставляя B5) в B1) и меняя знак перед а на обратный, получим:
l^ + -i^-G/«>-S = 0- <5-36>
Пусть, например, задано, что торцевые сечения не поворачиваются
и остаются плоскими. Исходя из B), получаем граничные условия:
0 = 0 при х = 0, х — 1, )
——=0 при х = 0, х = 1.
По аналогии с задачей об устойчивости стержня сплошного сечения
с защемленными концами (§ 3) находим:
°e = wt + -^. E-38)
Э oej
v^i/itT -in. г
где коэффициент приведения длины v равен 0,5. При одном
полностью защемленном конце, а другом—свободном, получим в C8)
v = 2; при одном полностью защемленном конце, а другом,
закрепленном только в отношении поворота, v = 0,7.
Величину ое следует сопоставить с критическими напряжениями,
определяемыми но формуле Эйлера для изгибиой потери
устойчивости в плоскостях, содержащих главные оси инерции сечения z и у.
л2Е/у
РР
о, = ■
п2Е1г
E.39)
Расчет стержня надо вести по тому из значений критического
напряжения ое, оу или ог, которое окажется наименьшим.
Для прокатных двутавровых балок величина ое, как правило,
оказывается более высокой, чем ау или ог, так что проверка
крутильной устойчивости оказывается излишней. В то же время для
стержней крестового сечения, когда ^га = 0, значение ое может быть
меньшим, чем ах и оу.
§ 58. Случай сечения с одной осью симметрии
Допустим, что поперечное сечение тонкостенного стержня имеет
только одну ось симметрии, например ось у (рис. 5.8). Здесь
положение оси, относительно которой поворачиваются сечения при потере
устойчивости, заранее определить нельзя,
можно лишь сказать, что центр вращения
(К) должен лежать на оси симметрии.
Дифференциальное уравнение стесненного
кручения запишем в виде
rf2B
GIK
dxi
EI,,
В = — т„
E.40) л*-
J
Ч-
U
В отличие от B2) здесь над обозначениями
1а и тк поставлены черточки; этим указано,
что секториальный момент инерции и
крутящий момент тк (а в последующем и
полярный момент инерции 1р) вычисляются
относительно оси вращения. Обозначения Ia
и Iр без черточек будут ниже применяться только для моментов
инерции, отнесенных к центру тяжести сечения.
Составляя выражение для пгк подобно тому, как было сделано
в § 57, мы получим уравнение
Рис. 5.8. Сечение с одной
осью симметрии.
d*B
dx1
EL
1 (o7p-G/K)£ = 0.
E.41)
13 А. С. Вольмир
Примем, что торцевые сечения стержня свободно депланируют.
Тогда интегрирование уравнения D1) приведет к выражению типа C4):
оК9=*^ + Я±. E-42)
' 'р 'р
Поставим себе целью найти координату центра вращения yk, исходя
из выражения D2); начало координат выберем в центре тяжести.
Примем, что из всех возможных положений центра вращения на оси
симметрии у должно осуществиться такое его положение, при
котором критическое напряжение будет наименьшим. Секториальная
площадь aft, вычисленная при полюсе в некоторой точке К, выражается
через секториальную площадь а, взятую при полюсе в центре тяжести,
следующим образом [с учетом A1)]:
coft = co — ykz. E.43)
Подставим D3) в формулу для секториалыюго момента инерции
сечения:
7"e= Ja>2rfF; E.44)
F
тогда получим:
Та = j о2 dF — 2yk J az rf/5, + y2k J 22 dF. E.45)
F F 1-
Первый интеграл равен секториальному моменту инерции /w,
вычисленному относительно центра тяжести. Для второго интеграла введем
обозначение
Ry=(b)zdF; E.46)
F
его можно назвать секториальным центробежным моментом инерции.
Наконец, последний интеграл представляет собой момент инерции
сечения /у. Вместо D5) находим:
U = Ia — 2ykRy-\-&y- E.47)
Полярный момент инерции относительно точки К равен сумме
осевых моментов инерции:
7 =Г_ + /1; E.48)
руг
ось у совпадает с у, а ось z проходит через точку К. Имеем:
/"_ = /. /"- = / +y2kF; E.49)
у у г г "
следовательно,
Tp = Iy + Iz-i-ytF = Ip+yiF. E.50)
§ 58] СЛУЧАИ СЕЧЕНИЯ С ОДНОЙ ОСЬЮ СИММЕТРИИ 1УЙ
Напоминаем, что оси у и z являются главными центральными
осями.
Таким образом, критическое напряжение D2) оказывается равным
°'<р= vh^ ' E'51)
Введем следующие обозначения:
°в = -!%-+П^' av=-FF-- E-52)
Они уже встречались в предыдущем параграфе. Величину ов можно
истолковать как критическое напряжение при крутильной потере
устойчивости вокруг центра тяжести сечения по C4); величину ау —
как критическое напряжение при изгибной потере устойчивости в
плоскости zx. Кроме того, обозначим:
Первая из этих величин, пропорциональная Ry, имеет размерность
напряжения. Вторая является безразмерным параметром для
координаты центра вращения yk.
Выражение E1) можно теперь переписать следующим образом:
Желая найти минимум окр, приравняем нулю производную от E4)
по г\:
dovn
—- = (- 2ру + 2оул) A + Ч2) - 2л (ов - 2рут1 + оуг?) = 0. E.55)
Принимая во внимание E4), находим:
т| = —-—. E.56)
1 сгу — акр
Возвращаясь к E4), получаем квадратное уравнение относи-
(«кр-«е)(%-°у)-Ру = 0 E.57)
<*% ~ % (<>е + °>) + (Ve - РЭ = 0. E.57а)
Из двух корней этого уравнения выберем наименьший:
ае + ау ^//(Те —crv\2
телыю окр
или
окр = -
V^P-J+K- <5-58>
13»
196
ТОНКОСТЕННЫЕ СТЕРЖНИ
|ГЛ. V
Корни уравнения E7) можно найти с помощью графического
построения, аналогичного кругу напряжений в плоской задаче (рис. 5.9)
Откладываем по оси абсцисс отрезки АВ = ау и АС = ов, по
вертикали СС/ = ру (вверх) и ВВ' — ру (вниз). Отрезок AF отвечает
в том же масштабе величине E8). Из рассмотрения рис. 5.9
заключаем, что критическое напряжение сгкр
для профиля с одной осью симметрии
будет меньше величин сге и ау.
Наряду с изгибно-крутильной
формой потери устойчивости для профиля
с одной осью симметрии возможна и
чисто изгибная потеря устойчивости
в плоскости ху. Соответствующее
критическое напряжение ог определяется
по C9):
e» L
fI
4ф \
в"
/*
/а
с
С If
Рис. 5.9. Построение для
определения параметров критических
напряжений.
Расчетное критическое напряжение определяется как наименьшее из
величин E8) и E9).
С помощью формул E3) и E6) мы можем теперь определить
координату центра вращения:
о„ — акп У F
у*:
E.60)
JKp
Как видим, центр вращения не лежит в центре тяжести сечения.
Вместе с тем он не совпадает с другой характерной точкой —
центром изгиба сечения D (рис. 5.8). Это можно показать следующим
образом. Координата центра изгиба в случае тонкостенного стержня
равна
ъ=т~- E-61)
'у
- = ОуУо у гр = °у*10. С5-62)
E.63)
По E3) находим:
где
Формула F0) принимает вид
Отсюда заключаем, что в общем случае yk ф yD. Вместо F4) можно
также записать
Ц-
Пп°
в>
JKp
E.65)
i 58]
СЛУЧАИ UtltHHH О идпии uvjDIU LnmniEirnr.
Пример 5.1. Определить критическую нагрузку для дюралевого стержня
длиной / = 1 м, подвергающегося сжатию центральной силой Р. Сечение
стержня имеет вид швеллера с отогнутыми полками. Толщина стенки и
полок профиля равна 1 мм; остальные размеры (в мм) указаны на рис. 5.10, я.
Допустим, что торцевые сечения стержня свободно депланируют. Примем
Е = 7 • 103 кг/мм2, О = 2,8 • 103 кг/мм2, ат = 20 кг/мм2.
Определим положение центра тяжести О. Расстояние от точки О до
средней линии отогнутых частей полок равно
19-19 + 2-19-9,5 __
е= 3-19 + 2-13 =8'7-**
Проведем через центр тяжести главные оси у, г, из которых первая
совпадает с осью симметрии сечения. Вычислим главные центральные моменты
22,5
^
9,5
lllilillllli
0 s
щ
ИНН
■9,5
\
Ji
\
==^
225
6)
Рис. 5.10. К определению геометрических характеристик сечения.
инерции, считая площадь сечения сосредоточенной на средней линии
профиля (пунктирная линия на рис. 5.10):
/у =
Ы93
12
ч
193
12
-2-19-9,52-|~2(-!^2- + 13- 162] = 11-103 мм*.
19 ■ 0,82 Ц- 2 • 13 • 8,72 -f 19 • 10,32 = 5,2 • 103 мм*.
Полярный момент инерции относительно центра тяжести равен
1р = /у + 1г = 16,2 • 103 мм*.
/=■ = 3 -19-|-2 ■ 13 = 83 мм2.
Площадь сечения
Величину /к вычисляем по формуле A5):
Ik = -I B • 13 -(- 3 • 19) = 28 мм*.
о
Определим секториальный статический момент Ry при полюсе в центре
тяжести сечения. Вычисления сокращаются, если сначала найти значение Л„д
198 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
при полюсе А, лежащем посередине стенки:
Ry, A = J" °V dF- <а>
F
Для вычисления этого интеграла воспользуемся известным правилом
Верещагина, построив предварительно эпюру секториальных площадей <в.
(рис. 5.10,<?) и эпюру величины г (рис. 5.10, в). Перемножая площади эпюри,
(здесь толщина t= 1) и ординаты эпюр г, лежащие под центрами тяжести
первых эпюр, получим:
Д..
^_2[J8»fliiw + i»^12.7-^2W]-4W.10i м*. .(b)
Для перехода к полюсу, совпадающему с центром тяжести, запишем
зависимость между секториальньши площадями прн переносе полюса по оси
симметрии:
»л = » —У0г; (с)
здесь через уо обозначено расстояние между центром тяжести О и
прежним полюсом А: уа = 10,3 мм. Величина Ry равна
Ry = J az dF = J (Щд + у0г) zdF=R>iA + y0/y (d)
P P
или
Ду = 49,3 • 103 _j_ 10,3 . И . Юз = 163 • ]0s MMs,
Для определения секгориального момента инерции поступим таким же
образом. При полюсе в точке А находим:
F
Перемножаем эпюру <вд на ее же ординаты, получаем:
„/181-19 2 101 , 181-9,5 2 10) , 66-3,5 2 __\ „, .
а, А = 2 \ 2— " ' 2 ' 2— " ) = ^ мм
Для перехода к величине /и, отнесенной к центру тяжести О, воспользуемся
формулой D7), полученной при переносе полюса. Заменяя в ней Г иа /
и у к на у0, имеем:
'га-'а, Л ,^-'0'чу -'О'у
'» = '». а+ 2у0*»-Уо2'у @
Находим:
/w = 633 • 103 -f 2 • 10,3 ■ 163-103 - A0,3J • 1 ЫОз = 282 • W ммд.
Определим величины ау и о$ по E2):
9,87-7. 103. ц .юз
106 ■ 83
= 9,15 кг/мм2,
9,87 • 7 • 103 • 282 • 10« . 2,8 ■ 103 • 28 ,„ . . п„ ,„„..
ае = 10б. i6|2. юз ' 16,2- 103 = + ,85 ^ 16'8° кг/мм-
Далее, по формуле E3):
9,87-7- 1С»-163-10» „7, . .
р = ,- ==- = 9,75 кг мм*.
106j/83-16,2-103
Критическое напряжение, соответствующее изгибно-крутилыюй форме потери
устойчивости, будет по E8):
16,85
JKp
^9Л5__ ^16,85-9,15 j2 + 9|752 =2>52 кг/ммК
При продольном изгибе в плоскости симметрии критическое напряжение аг
будет но E9):
_ 9,87 ■ 7 ■ 103 • 5,2 ■ 103
106•83
= 4,3 кг;мм2.
Обе найденные величины лежат
ниже предела пропорциональности
апц = 20 кг/мм2.
Расчетным критическим
напряжением оказывается
напряжение сгкр, лежащее значительно
ниже az. Критическая нагрузка при
длине стержня I =\ м равна
ркР = oKpF = 2'52' 83 = 209 кг.
Определим координату центра
вращения О сечения по F0):
Ун
9,75 -./16,2-Ю3 _
~ 9,11—2,52 V 83 ~~
= 20,5 мм.
Вычислим также координату
центра изгиба по F1):
1G3-103
уо~ Ц.103
Рис. 5.II.
ffn-f
Критические напряжения в
зависимости от длины стержня.
: 14,8
10
Как видим, центр вращения лежит
значительно дальше от точки С,
чем центр изгиба сечения.
Проведем вычисление
критического напряжения для
различных значений длины стержня. На
рис. 5.11 изображены результаты
вычислений для стержней длиной
от 500 мм до 2000 мм. Одна из
кривых (акр) соответствует
изгибно-крутилыюй потере
устойчивости, а вторая (ау) —
продольному изгибу в плоскости
симметрии. Для длинных стержней,
начиная с / = 1580 мм, более
опасной становится эйлерова форма
потери устойчивости. На рис. 5.12 сопоставлены координаты центра
вращения сечения yft и центра изгиба у При возрастании длины стержня
наблюдается удаление центра вращения от центра изгиба.
i
hS
-
h
500
woo
то
i,w
гооо
Рис. 5.12. Изменение положения центра
вращения в зависимости от длины стержня.
200 ТОНКОСТЕННЫЕ СТЕРЖНИ
§ 59. Стержень с несимметричным сечением
[ГЛ. V
Перейдем к общему случаю несимметричного сечения (рис. 5.13).
Пусть главными центральными осями инерции сечения будут оси у
и z. Допустим, что стержень подвергается центральному сжатию и
что концевые сечения его свободно искажаются. Критическое
напряжение, соответствующее изгибио-крутилыюй форме потери
устойчивости, будем по-прежнему искать в виде
D2), считая положение центра вращения
^C4- zk) неустановленным. Вместо
формулы D3) для секториальной площади в точке
'У М(у, z), с учетом A1), получим:
E.66)
й)ь
■■а-
ykz +- zky;
здесь ю — секториальиая площадь, найденная
при полюсе в центре тяжести. Секториаль-
пый момент инерции /га будет равен по D4)
Рис. 5.13. Несимметричное
сечение тонкостенного
стержня.
'.= О
2(oykz -f- 2azky — 2ykzl;yz +-
+ y\z^z\f)dF. E.67)
Введем обозначение для второго секториального центробежного
момента инерции:
Rz=[(i>ydF. E.68)
F
Учитывая, что для главных осей центробежный момент инерции равен
нулю:
/уг= \yzdF = 0, E.69)
находим:
Для полярного момента инерции относительно точки К получаем
выражение
/~) = /у + /г + ^+ z\F = lp+F{&+ 4)- E-71)
Формула D2) для критического напряжения приобретает вид
я2£
^кр-
E.72)
Воспользуемся новыми обозначениями:
§ 60] УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ПРИ ЧИСТОМ ИЗГИБЕ 201
тогда с учетом E2), E3) и E9) найдем:
ае — 2рут] -[- 2PzC -f qy12 + qzS2
1 + Л2 + £
п _ »0 — ^Ру '1 i- 4>zfa -f PyT i- ргЬ- /с 74s
Приравниваем нулю частные производные от окр по ц и £:
пользуясь G0), получим:
Л= Ру , С= —• E.76)
Ру—сгкр * az — <ткр
Формула G4) приводит теперь к следующему кубическому
уравнению относительно окр:
(% - °о) (°кр - °») (% - <*,) ~ Ру (°кр - <*,) - Рг (% ~ *,) = 0-
E.77)
Это уравнение обобщает получении:: ранее результаты. Для сечения
с двумя осями симметрии ру=рг=:0; три корня уравнения G7)
будут:
(°KP)l = °G> (°kPJ = <V (Окр)з = °г. E-78)
что согласуется с формулами C4) и C9). В случае сечения с одной
осью симметрии ру ф 0, рг = 0; тогда получим (окрI( 2 по
уравнению E7) и (окр)з = ог по E9).
Исследование уравнения G7) показывает, что, каково бы ни было
соотношение между величинами о0, ау, аг, наименьший его корень
будет всегда лежать ниже любой из этих величин. Следовательно,
потеря устойчивости стержня с несимметричным сечением возможна
только в изгибио-крутильной форме.
§ 60. Устойчивость плоской формы при чистом изгибе
Рассмотрим случай, когда тонкостенный стержень с сечением,
имеющим одну ось симметрии, подвергается чистому изгибу в
плоскости симметрии ху. Пусть каждая из пар, приложенных по торцам,
имеет момент /И (рис. 5.14). Нормальиыг напряжения в любом
сечении стержня будут распределяться по закону
о = ^-у, E.79)
'г
напряжения в краевых волокнах ам будут
ом=-^-, E.80)
202
ТОНКОСТЕННЫЕ СТЕРЖНИ
[ГЛ. V
где w'г — момент сопротивления сечения, относящийся к тому или
иному краевому волокну (точкам с или d па рис. 5.15).
В первой стадии пагружепия упругая линия стержня является
плоской кривой; однако при известном значении момента /И может
произойти выпучивание стержня по направлению оси z,
перпендикулярной плоскости изгиба. Эго явление носит название потери
устойчивости плоской формы, изгиба. Очевидно, при этом любое сечение
J
Рис. 5.14. Тонкостенный стержень подвергается
чистому изгибу в плоскости симметрии (опоры
изображены условно).
Рис. 5.15. К определению
напряжений в краевых
волокнах.
стержня совершает поворот вокруг некоторого центра К, лежащего
на оси симметрии сечения. Поэтому мы можем снова воспользоваться
дифференциальным уравнением стесненного крученая D0). Составим
выражения для интенсивности крутящего момента тк. По B3) и B4)
имеем:
йГг0
от„ = —
dx2
J atfdF,
E.81)
причем под р понимается радиус-вектор площадки dF относительно
центра вращения. Пользуясь G9), находим:
т„
rf20 М Г
' dxl 1г J
ур2 dF.
Введем обозначение
тогда по B7) получим:
( yp2dF — Sy,
_ ш Sy d2Q M Sy
dx2
£i' (й tv
E.82)
E.83)
E.84)
величину /и надо также определять относительно центра вращения К.
Уравнение D0) принимает вид
§60] УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ПРИ чиоилп Исниьс /\)о
Считая, что концевые сечения свободно депланируют, получим
решение уравнения (85) снова в виде C2), причем
А»- М Sy-
P-U h
Принимая по C3) Ы = пп и п—\.
момента:
Мкр я2£/ш
/* ~~ 1%
E 4fV>
. @.50)
найдем критическое значение
G/K
. (O.O/j
by
Мы пришли к формуле той же структуры, что и для критического
напряжения при центральном сжатии по D2), по вместо //; входит
величина 5 Координату центра вращения будем по-прежнему
обозначать через yk, тогда для /ш сохранится выражение D7).
Воспользуемся далее соотношением между радиусами-векторами, отнесенными
к центру вращения и центру тяжести:
?=? + «2 = (y-yftJ+«2 = p2-2yfty+y|; E.88)
отсюда по (83)
Sy=l (Р2- 2у,у-+-у\)ydF = Sy- 2ykIz. E.89)
F
Вместо (87) находим:
Мкр _
I, ~
где
^D-2уА + у1/у) + 0/к
E.90)
/« ~ Sy-2ykIz
Sy=jp2ydF. E.91)
F
Введем наряду с F3), F3) и (80) обозначения
{Sv \ ГТ~ W2
*>-(■£-*)Vt,- s=777; E'92>
тогда от (90) можно перейти к критическому значению напряжения
в краевом волокне:
_qB-2WU + V1f
S<yM~ щ + ^-цд • E.93)
Определяем положение центра вращения, приравнивая нулю
производную от (saM) no r\k; тогда получим при ру -(- Лд — Л* ¥= 0
— 2ауцв + 2ayrift + 2saM — 0,
откуда
r\A = rb-s^L. F.94)
204 Тонкостенные Стержни (гл. V
Подставляем теперь (94) в (93); для критического напряжения будем
иметь квадратное уравнение
Ил.J + 2ел (s°m) -+- °,чь - Wy=°; E-95)
корпи его будут
з°м = °у{- Р, - V Ру + I0- - ЛЬ) • E-96)
Критические величины момента оказываются равными
ру (- ъ± Yt+Р-г2 - &) • E-97)
м
где
'г
yD, Py = ayF, P0 = a0F.
F.98)
2/ — д-d- ' у — "у
Отрицательный знак М относится к парам, придающим упругой
линии стержня выпуклость не вниз, как на
Ffi Н рис. 5.14, а вверх.
I Обратимся к частному случаю, когда се-
->[«-' чепие стержня имеет две оси симметрии.
~"Чш\ г Тогда будет Ry = Sy = py = yD = 0; для
^г%Я критических значений ам и М получим про-
Т стые формулы:
У 1 . ,
Рис. 5.16. К вычислению сек- °Л1, кр = "Г У °0оу ^"Р = г У Р^Ру E.99)
ториалыюй площади. s
Для профиля, состоящего из пучка полос, будет
следовательно,
°м, ч =-ъ^УоЩ;. мкр=$уЩЕГу. E.Ю0)
При изгибе полосы прямоугольного сечения b X п парами,
лежащими в ее плоскости, получим IK = bh3j3, /y = M3/12 и
ом -=nYGE- = -?=JL=E-. E.101)
л!,кр г I /2A4-jx) I v ;
В случае двутавровой балки (рис. 5.16) секториальный момент
инерции сечения может быть определен по A2). Для точек стенки
секториальпая площадь ю обращается в пуль. Для точек полки имеем:
(о = у/г/2, где h — высота профиля; у отсчитывается от средней линии
§ 611 СЛУЧАЙ ВНЕЦЙНТРеННОГО СЖАТИЯ 205
стенки, и начальный радиус-вектор совпадает с этой же линией.
Следовательно,
_ о т^
/,/г2
E.102)
интеграл распространяется на площадь полки, /t — момент инерции
полки относительно оси стенки. По E2) и (92) будет
J. = (_-* +О/,)-_, сгу = ^-; E.103)
отсюда
«M.^^rVv^' + 'wrn;
E.104)
Эта формула относится к случаю, когда изгибающие пары лежат
в плоскости стенки.
§ 61. Случай внецентренного сжатия
Допустим, что стержень подвергается внецентренному сжатию
силами Р, причем точка приложения силы лежит на оси у; эту ось
будем считать осью симметрии сечения (рис. 5.17). При малых па-
грузках и здесь упругая линия окажется плоской. Однако, если
U
Лш>.
ш
•;
* 6)
Рис. 5.17. Тонкостенный стержень, подвергающийся
внецентренному сжатию.
сила Р превысит известную критическую величину, может произойти
потеря устойчивости плоской формы, так что стержень начнет
выпучиваться по направлению оси z. Для разыскания критического
значения Р воспользуемся тем же методом, что и в предыдущих
параграфах. Предположим, что в момент потери устойчивости сечение
стержня вращается вокруг точки К, удаленной от центра тяжести
на yk, и определим это расстояние. Нормальные напряжения в любом
сечении до выпучивания будут равны
я=^уУ = о0A4^); E.105)
здесь o0 = P!F, iz = IzjF< сжимающие напряжения по-прежнему
считаем положительными. Интенсивность крутящего момента по (81)
206 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
равна
<зГ20
lb? 4jS
o,7Jp?d/> + JL jyp^A
или
2 _ _ 'p+4sv
:-i°f ^К'Ч-8' EЛ06)
Вместо (85) и (86) получаем:
dx2
~ + k*B = 0, E.107)
^-a0 -± Щ±. E.108)
EI,,
'oo
При k = n/L будем иметь:
",£/m 'G/„
o0 = J' , _ • E.Ю9)
Воспользуемся прежними формулами перехода D7), (89) и введем
дополнительно обозначение
*='/£•
E.110)
' р
тогда получим:
0п = 5 • E.1 1)
1 + П*+2г)е(Ру + %-г)*)
Приравнивая нулю производную от о0 по цк, найдем:
Ч* = a -a ==T1o+ g -a • E-112)
В частном случае центрального сжатия при т)е = 0 придем к
формуле F5). Подставим A12) в выражение A11); это приведет к
квадратному уравнению относительно о0:
(о0 - 0„) (а„ — оу) + 2а0 (ст0 — ау) л, (ру + r\D) — (о0У)е — ayTiDJ == 0
E.113)
или
11 + 2л, (Ру + 4D) - rg] °1-(°0 Ч- ау 4- 2аурЛ) а0 + о0ау - 0^=0.
E.114)
Отсюда при г|е = 0 вытекают уравнения E7) и F7а).
§61]
СЛУЧАИ ВНЕЦЕНТРЕННОГО СЖАТИЯ
207
Рассмотрим случай, когда сжимающая сила приложена в центре
изгиба сечения D, так что i\e = r\D. При этом из A12) получим
y]k =.- цв, если оу Ф о0. Это означает, что центр вращения будет
лежать в той же точке D. По A13) теперь найдем:
<> =
уПп
Второй корень уравнения A
l + 4D + 2TiDpy
3) будет
E.115)
E.115а)
Мы видели, что при центральном сжатии стержня с несимметричным
сечением критическое напряжение всегда лежит ниже ау. Если же
сила приложена эксцентрично и именно в центре изгиба, то
критическое напряжение в точности равно эйлеровому значению.
Исследование уравнения A14) показывает, что при известных
условиях потеря устойчивости плоской формы изгиба имеет место и в
случае, когда сила Р —растягивающая. Это может произойти при
достаточно большом эксцентриситете приложения нагрузки; один из
корней уравнения A14) становится отрицательным. Граничные значения
эксцентриситетов, при которых критическая сила Р будет
растягивающей, определяются из условия, что корень
уравнения A14) равен ± ос. Но тогда
должен быть равен нулю коэффициент при 0%; г$</
п2.
к
2т1&— 1=0;
Цц
^
Рис. 5.18. Область
приложения сжимающей
нагрузки при потере
устойчивости плоской формы
изгиба.
здесь безразмерная k принята равной
* = *1о + Ру E.1156)
Два значения т)е, отвечающие уравнению (ИЗ),
будут
r\e = k±Vk2-{-l.
Мы найдем соответствующие точки на оси ц
(или у па рис. 5.18), если отложим от центра
отрезок &,, а от пего в одну и другую сторону отрезки V&i-|-1;
принято k) = k(fp!F) . Если сила приложена в промежутке между
точками с и d, то критическое значение ее может быть только
сжимающим.
В более общем случае эксцентриситета в двух плоскостях
найдем, что область сжимающих критических значений лежит внутри
«круга устойчивости» *), безразмерный радиус которого будет
*) Такое распространение решения на случай двухосного
эксцентриситета является совершенно условным, так как в этом случае оно относится
лишь к специфической линейной задаче, см. [5.3].
У 1 -f- № + Р, а координаты центра равны k, l; здесь под /
понимается величина
~1=-щУт,\***р-
Мы рассматривали здесь задачу об устойчивости тонкостенных
стержней при внецептренпом сжатии. При определении несущей
способности стержня надо также исходить из условия, чтобы
наибольшие напряжения или перемещения не достигали опасной величины
(см. [5.3], [3.7]).
Пример 5.2. Для стержня, описанного в примере 5.1, определить
критические значения среднего напряжения а0 = P/F при нагрузке Р,
приложенной по осн симметрии сечения на
различных расстояниях ус от центра
тяжести С.
Определяем величину Sy по (91):
Sy = Г р2у dF = Г уз dF + Г г2у dF.
Для стенки
+ 9,5
Sy>, = 10.33 ■ 19 + 10,3 Г г2<1г = 20800 +
Рис. 5.19. «Круг устойчивости»
для сечения с одной осью
симметрии.
Для частей полок, параллельных оси у,
10,3 10,3
-9,5
+ 10,3 -^р- = 26 700 мм*.
"JI. 2 — '
) y'dF+2 y(9,5Jrf/?-.
-8,7 -8,7
= -j A1 230 — 5780) + -i- 9,52 A06 — 76) = 5420 мм\
Для отогнутых частей полок
Sy, з = 2 (- 8,7)» 13 + (- 8,7) \-^- jg-J = — 78 000 мм*.
Полное значение Sy будет
Sy = Si,,l+Sy,2 + Sy,i = -4:5m мм*.
Размерные величины кх и ру по (92) и A156) равны
Sy 45900
*i = 2/- = — 2. 5156 = ~~ 4'4 мм' ^у = к\ ~~ УР ^ ~~ 4'4 — 14,8 = — 19,2 мм-
ОБЩИЕ УРАВНЕНИЯ ИЗГИБНО КРУТИЛЬНОЙ ДЕФОРМАЦИИ 209
Вычисляем значение г:
,-/1
у
16 179
83
■ = 14,2 мм.
Радиус круга устойчивости будет
R = j/V2 + k] = /14,22 + 4,42= 14.8 мм.
На рис. 5.19 нанесен круг устойчивости, центр его находится на расстоянии
4,4 мм от центра тяжести сечения.
Задаваясь различными значениями уе (или х\е), находим критические
величины а0 по уравнению A14). В частном случае, когда сила приложена
в центре изгиба сечения D (см. рис. 5.10а). по A15) и A15а) получаем:
16,85 -A4,2J — 9,15 A4.8J
= 14,22 + 14.82 + 2 ■ 14,8 (— 19,2):
■ о =9,15 кг/мм2.
■9,4 кг/мм2,.
Расчетным критическим напряжением здесь будет аг ■
чина была найдена выше, в примере 5.1.
■■ 4,3 кг/мм2, эта вели-
Из примера 5.2 видно, что при значительных эксцентриситетах
одно из критических напряжений является растягивающим.
§ 62. Более общие уравнения изгибно-крутильной
деформации
До сих пор мы принимали в качестве полюса центр вращения
сечения. В некоторых случаях более удобным оказывается выбрать
в качестве полюса центр изгиба
сечения. Выведем соответствующие
уравнения, принимая, что, в дополнение к
центральным сжимающим силам Р, по
торцам стержня приложены пары в
плоскостях xz и ху с моментами Му и Мг.
Рассмотрим стержень в состоянии,
отклоненном от основного, и определим
интенсивности «нагрузок»,
соответствующих повернутым усилиям основного
состояния. При этом сначала
рассмотрим повороты, вызванные
искривлением оси центров изгиба, а затем
повороты, связанные с закручиванием
вокруг этой оси. Перемещения центров изгиба различных сечений
вдоль осей у, z будем обозначать через v, w. На рис. 5.20 показано
элементарное усилие odF, повернутое в плоскости xz.
Соответствующие углы в плоскостях ху и xz равны dv/dx и dwfdx.
Дополнительные проекции на оси у и z усилий odF будут a (dv/dx) dF
Рнс. 5.20. К определению момента
элементарного усилия.
14 А. С. Вольмир
210 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
и a(dw/dx)dF\ эти проекции дают моменты относительно центра
изгиба, равные
через yD и zD обозначены координаты центра изгиба. На единицу
длины осевой линии будут приходиться нагрузки
F F
и момент интенсивностью
т
= 1а[5^-^)-^(У-Уо)]^. E.117)
интегралы относятся ко всему сечению.
При действии сжимающей центральной силы Р и моментов Му,
Мг напряжение а в точке у, z равно
0*=Т-*у+>г. E.118)
Подставляя это выражение в A16), найдем:
«,—'£-. ..—"S- <»■"*>
остальные интегралы обращаются в пуль. Момент A17) будет равен
m = -(PzD-My)^L + {PyD + Mz)^L. E.120)
Обратимся к поворотам усилий, вызванных закручиванием стержня.
Приращение составляющей элементарного усилия в плоскости yz
оказалось равным (стр. 191)
odtydF, или о dl-r-)pdF;
проекции его на оси у и z будут
под р, понимается радиус-вектор, проведенный из центра изгиба
к элементу dF. Погонные интенсивности нагрузок равны
^= J aU?(z~zD)dF, q,= -] o^^iy—y^dF.
F F
Подставляя A18), получим:
b = -lP*D-My)£. Я^РУ0 + К)^- EЛ21)
§ 62] ОБЩИЕ УРАВНЕНИЯ ИЗГИБНО-КРУТИЛЬНОЙ ДЕФОРМАЦИИ 211
Составим дифференциальные уравнения для перемещений v, w и угла
поворота 6:
E.122)
Здесь под I* понимается секториальный момент инерции относительно
центра изгиба. Исходя из формулы перехода D7), находим:
С = '«,- 2У/Л + 2ZoK + УУ у + *У,
Но по F1) имеем:
#y=Vy. Я,= —2D/«. E-123)
следовательно,
C = /a>-VD-^4. E-124)
Крутящий момент B5) равен
d26 Г IP Мг Mv \
или
По формуле G1)
/;=/,+№+4)/7; E.126)
отсюда
r*2 = ^=r2 + y2D+4- EЛ27)
Величины Оу и Sz по (89) равны
5; = Sy — 2yD!z, Sl = Sz~2zDIr E.128)
Выражение A26) приобретает вид
.__[,>•-**.(&-*,)+»*,(£■-.„)]£•
Вводя обозначения типа (92):
получим
ш = - (/>гч - 2ЖгРу +- 2/ИуРг) -g. E.129)
14*
Собирая выражения для погонных нагрузок A19) и A21), а также
для моментов A20) и A29) и подставляя их в уравнения A22),
приходим к следующей системе дифференциальных уравнений:
с, d4v . п d2v . /п . rf20
EI
d4w
n d*w .„ , w . d4)
+ (Pr** - 2/W,|5y 4 2МЖ - GlK)
El\ 4^ A-iPr*1 - 2/WA, 4 2МЖ - С/к) 4^ 4
j E.130)
«> dx4
dx*
+ (PzD _ M ) -££ - {PyD + MZ)^L = m.
dx*
Аналогичные уравнения для случая переменных по длине
моментов имеют несколько иную структуру ([5.4], стр. 369). В
бифуркационных задачах пользоваться уравнениями такого типа следует
с осторожностью (см. сноску на стр. 207).
§ 63. Устойчивость плоской формы полосы при изгибе
Рассмотрим частный случай полосы прямоугольного сечения,
подвергающейся изгибу в плоскости ху.
Мы должны при этом положить /^ = 6 =p^ = 0. Примем в A30)
Р= Му = qz= m = 0 и проинтегрируем дважды второе из этих
уравнений, считая постоянные интегрирования равными нулю.
Окончательно второе и третье уравнения примут вид
£/„4^- — М.в = 0. E.131)
О/к
У dx2
d2Q
dx2 "+"
М
Жг0
d2w
z dx2
= 0.
E.132)
Исключая отсюда w, получаем одно уравнение второго порядка
относительно 9:
d4
"rfF
Mi
G/K Ely
0 = 0.
E.133)
При чистом изгибе Mz = const; решение уравнения имеет вид
0 = A sin kx 4- В cos kx, E.134)
Mz
где
k = -
yaiKEi;
Граничные условия выберем в виде
0 = 0 при л; = 0, х = 1;
E.135)
E.136)
УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ПОЛОСЫ ПРИ ИЗГИБЕ 213
тогда первое критическое значение k будет л/7; отсюда по A00)
Мкр = ^уЩЁГу. E.137)
Уравнениями A31) — A32) можно пользоваться в нашем случае
и при переменном по длине моменте.
Пусть, например, правый торец полосы защемлен, а левый свободен.
Предположим, что в центре тяжести левого торцевого сечения
приложена сила Р, направленная по вертикали (рис. 5.21). В этом случае
М2= — Рх, вместо A33) будем
иметь
//20 D2 г\
Введя обозначение
а = 7ЩЩ' Eл38а)
у
мы приведем уравнение A38) к виду
J20 Рис. 5.21. Изгиб полосы сосредоточенной
£JL_|_e2*"+18 = 0, E.139) силой-
с которым мы уже встречались в § 40 и 42. Если положить
v^^ E.140)
и учесть, что v является дробным числом, то решение уравнения A39)
принимает вид C.23):
0 = А \[1с Jv Ba\x^) +BY* J-v Bavx]'2v), E.141)
где 7V — бесселева функция первого рода с индексом v. Производная
от выражения типа A41) была нами уже вычислена; по C,44) имеем:
•Ц = ^ax1-v/2vy_A_v) Bav*1'Sv) — Вах1-***^ pavx1'**). E.142)
В разбираемом нами примере я=1, \ = у4; следовательно,
0 = ЛУ"хУ.л(|-^) + б^У_,/4(|х2), E.143)
3 3
•Ц = А ах5"У_8/4 (| **) - Вах~*\ (|х>). E.144)
Будем считать, что на левом конце обращается в нуль крутящий
момент Мк. По зависимостям A3) и A4) эта величина, при /ш = 0,
равна
MK = M = G/K-g-. E.145)
Следовательно, на этом конце должно быть
dQ
dx
= 0 при х = 0.
E.146)
С другой стороны, на защемленном торце должен быть равен нулю
угол закручивания:
0 = 0 при х = 1. E.147)
Как известно (см. § 42), функция У_»/4@) = оо, в то время как
величина Уз/ДО) обращается в нуль. Поэтому условие A46) дает Л = 0.
При ВфО из условия A47) находим:
.(!")'
:0.
E.148)
Определив наименьший корень этого уравнения, мы найдем
критическую нагрузку. В следующей таблице приведены корни
уравнений, аналогичных A48), для функций с различными индексами.
Таблица 5.1
Корни
ч
2,781
5,910
■"/,
3,492
6,650
'-'/,
2,006
5,120
J-лц
1,058
4,290
Таким образом, в данной задаче имеем:
2 2VEIyGIK
/2=2,006;
следовательно, первая критическая нагрузка равна
4,01
P = ^-VGI«EIy
E.149)
E.150)
По структуре зависимость A50) сходна с формулой Эйлера.
Эту же задачу можно решать также приближенными методами.
Примем, например, для функции 9 зависимость
О = 0О(/2—л2), E.151)
удовлетворяющую граничным условиям. Уравнение метода Бубнова —
Галеркина, отвечающее A38), будет
i
J (S-+fl2*2e) (/2 -х2) dx=°- <5- * 52>
УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ПОЛОСЫ ПРИ ИЗГИБЕ 215
Подставляя A51) и интегрируя, найдем: а214= 17,5. Коэффициент
в формуле типа A50) получает приближенное значение |Л17,5 —4,18.
Допустим теперь, что сила Р приложена не в центре тяжести
торцевого сечения, а на расстоянии d от центра (рис. 5.22); будем
считать d положительным, если
точка приложения силы лежит над ^bfjj
центром тяжести. Тогда крутящий ^
момент на левом конце будет равен
Мк = PdB; следовательно, вместо
A46) получаем граничное условие
\
-А
G/K-^ = —PdQ при х = 0,E.153)
Рис. 5.22. Случай, когда сила приложена
не в центре тяжести сечения.
условие же A47) остается.
Функция Бесселя с индексом v может быть представлена в виде ряда
Ux) =
2vn (v)
1
E.154)
2Bv + 2) 2-4Bv-}-2)Bv-f 4)
здесь П (v) = Г (v -(- 1) — гамма-функция, таблицы величин П (v) или
Г(у) содержатся в справочных книгах. По A43) находим:
0 _ лхЧг _1?_ /_
1
м
2-2,5
+
+ Я*'А
(ix'-
При х->0 будем иметь:
9@) =5
-'■'«п(-
V2
1
(И
2-1,5
Далее, по A44)
■г\-ги г
dx
т
г'"п(-|)
(И* ,
E.155)
2-0,5
-Бах''*
при х—>0
тч (и
2'<<П(£) I- 2-«
216 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
Подставляя эти значения в A53), получим:
2П(-1H/кЛ t n(_|)dP'/'(G/K£//<5 = 0. E.157)
Второе условие, т. е. A47), дает:
У.,, (-J /2) А 4 У_.,, (| /2) 5 = 0. E.158)
Приравниваем нулю определитель системы уравнений A57) и A58);
тогда будем иметь:
2П (-1) 0/кУ_-/4 (■£ /2) - П (_ |) <#>"• @/к£/у)"' У„, (f /2) = 0.
E.159)
В таблице 5.2 приведены значения коэффициента К в формуле
для критической силы
Р«р = К £-^ E-160)
отвечающей уравнению A59); они оказываются зависящими от
параметра dVEfyllVOfK.
Таблица 5.2
Коэффициенты К для случая, когда сила Р приложена к консоли
не в центре тяжести
Нал центром тяжести
d Г Е1%.
1 У Шк
к
0
4,013
0,0031
4,0
0,0887
3,6
0,164
3,2
0,238
2,8
0,322
2,4
0,425
2,0
-0,568
1,6
0,791
1,2
1,224
0,8
2,485
0,4
Под центром тяжести
d / Е1у
1 У G/K
К
0
4,013
0,114
4,4
0,320
4,8
0,923
5,2
оо
5,562
Здесь даны также коэффициенты К для предельных случаев,
когда сила передается через весьма длинный рычаг (d/Z->-oo). Для
УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ПОЛОСЫ ПРИ ИЗГИБЕ
217
малых отношений d/l может быть использована простая
приближенная формула
кр-
4,01
это можно легко проверить по таблице 5.2.
Перейдем к случаю, когда консоль подвергается действию
равномерно распределенной по всей длине нагрузки q== const (рис. 5.23).
При этом Mz = qx2j2; уравнение
A33) получает вид
cm
dx2 "+'
OIKEIy 4
■0 = 0. E.162)
Если принять
Я
1 I 1 I I 1 I 1 1 1
E.163)
2 V OIKEIy e
,, ол\ Рис. 5.23. Полоса подвергается действию
ПОЛУЧИМ уравнение ТИПа A39) при равномерно распределенной нагрузки.
п = 3 и v — 7б- Повторяя выкладки,
приведенные для случая сосредоточенной силы, приходим вместо
A48) к уравнению
J_„t(|/3)=0. E.164)
Наименьший корень этого уравнения будет 2,142; критическое
значение интенсивности распределенной нагрузки равно
q = 2a ]fGlkEI =12,85
VGIKEIy
I3
E.165)
Если нагрузка распределена вдоль длины балки по закону
треугольника 9 = 9ох/'> т0 получим уравнение типа A39) при
а = rq° E.166)
6/ V0IKEIy
При п = 5 и v = 1/8 вместо A64) будем иметь
У_.Л(|/«) = 0. E.167)
Наименьший корень уравнения A67) равен —2,2; поэтому критиче-
Vgikei,
ское значение q0 будет
<70=52,8-
/3
E.168)
Приведем значения коэффициента Кх в формуле для критического
максимального изгибающего момента:
^max = Kl
VQUEiy
E.169)
218
ТОНКОСТЕННЫЕ СТЕРЖНИ
(ГЛ. V
При чистом изгибе /С1==я, в случае сосредоточенной силы К\ = 4,01,
при равномерно распределенной нагрузке /^ = 6,43, в случае па-
грузки, распределенной по закону треугольника, /С1 = 8,8.
Обратимся к случаю, когда полоса шарнирно оперта по
торцам, а сила Р сосредоточена посередине пролета (рис. 5.24).
Расположим начало координат у
l-f-
■f
левого конца, тогда момент /И для
левой половины балки будет равен
М = ^х.
Уравнение A33) приобретает вид
Р2
Рис. 5.24. Случай сосредоточенной силы,
приложенной посередине пролета.
d2Q
dx2 "+" '4GIKW.
-x2Q = 0. E.170)
Решение его можно по-прежнему выписать в форме A43), но
вместо A38) надо положить
« = — Р E.171)
2V0IKEIy
Будем считать, что опорное сечение не поворачивается:
9 = 0 при х = 0. E.172)
С другой стороны, при искривлении по одной полуволне угол
поворота среднего сечения должен быть максимальным, так что здесь
должно быть
-Ц = 0 при х = ~. E.173)
Пользуясь выражением A43), из первого условия находим Я = 0.
Второе условие дает
У_8/1(^1) = 0. E.174)
Судя по таблице 5.1 (стр. 214), первый корень этого уравнения
равен 1,058; следовательно, критическая сила равна
V0IKEIy
Р= 16,94
I2
E.175)
Допустим, что сила Р приложена в точке, удаленной от центра
тяжести сечения на расстояние d. Тогда граничное условие A72)
остается, а условие A73) надо заменить на следующее:
О/,
к dx
Р ал '
■■-TrQd при х — —
E.176)
Принимая 5 = 0, получим отсюда
2d^f~EJ7 lal2\ fat2\ ,,-.,,
тУт^-/'Ч-г)=яУ-'Чтг)- EЛ77)
§63]
устойчивость плоской формы полосы при изгибе
219
Коэффициенты К в формуле типа A60), полученные по
уравнению A77), приведены в таблице 5.3.
Таблица 5.3
Коэффициенты К для случая, когда сила Р приложена
к балке на двух опорах не в центре тяжести
Над центром тяжести
ч гёт;
1 У G/K
0
К 16,94
0,030
16,0
0,143
12,8
0,293
9,6
0,544
6,4
1,210
3,2
Под центром тяжести
Т V ~ш7
к
0
16,94
0,069
19,2
0,16(
22,4
5 0,271
25,6
0,396
28,8
0,562
32,0
0,815
35,2
1,30
38,4
2,78
41,6
Рассмотрим, наконец, случай, когда сила Р приложена к шар-
нирно опертой полосе на разных расстояниях от торцевых
сечений (рис. 5.25). Обозначая эти
расстояния через т, п, имеем для
левой половины Mz = Pnx^jl и для
правой половины Mz=^Pmxljl. Мы г
можем использовать уравнение A43), ^
полагая $*
Рп
ах = — -, =
/ V0IKE/y
Рт
\
Ш,
i—'£
у
__ г/" (К 1704
2 , ~\f Gl F1 ' '>ис' ^'^" Сосредоточенная сила прило-
г и/к£,/у жена на пазпых оасстояниях от опоо.
жена на разных расстояниях от опор.
Граничные условия составляем для концевых сечений в виде
0! = О при х1 = 0, 02 = О при х2 = 0 E.179)
и для точки сопряжения
el = e2
dx
dQz
dx *
E.180)
220 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
Уравнение для определения критической нагрузки будет
M^Mt)W^M^H. E.181)
В таблице 5.4 приведены значения коэффициента К для разных
отношений т/1, вычисленные по A81).
Таблица 5.4
Коэффициенты К для случая сосредоточенной силы, приложе
на различных расстояниях от опор
т
Т
К
0,5
16,94
0,45
17,15
0,40
17,82
0,35
19,04
0,30
21,01
0,25
24,10
0,20
29,11
0,15
37,88
0,10
56,01
иной
0,05
111,6
В случае, если концы полосы защемлены, а сила Р приложена
посередине пролета, коэффициент К в формуле типа A75)
оказывается равным 26,6, а в формуле типа A69)—равным 3,54.
При действии равномерно распределенной нагрузки на шарнирно
опертую по концам балку коэффициент К в формуле A69) равен
28,3/8 = 3,54.
§ 64. Поперечный изгиб балок с сечением,
имеющим две оси симметрии
Обратимся к более общему случаю, когда стержень представляет
собой произвольный профиль, имеющий две оси симметрии; примером
может служить двутавровая балка. Для такого профиля центр изгиба
совпадает с центром тяжести и ру = 0. Если балка подвергается
поперечному изгибу в плоскости ху, то дополненные уравнения A31)
и A32) примут по A30) вид
■■Чг< I
} E.182)
El
у dx2
— М,
Ff i!i_r/ —
m dx* K dx2
.. d2w
Считая ^ = 0 и исключая w, придем к уравнению четвертого порядка
dqQ
d4
Mi
El^-r-i-Gl^-r-r- -^-0= m
dx2
EL,
E.183)
Если на балку действует распределенная нагрузка q, приложенная
на расстоянии d от центра тяжести (рис. 5.23), то интенсивность
момента т равна (— qd ■ 9); учитывая зависимость между q и Mz,
получим вместо A83)
d%
Ff
^/<в dx*
GL
d4
d2M,
dx2
1-й 0 = 0.
E.184)
ПОПЕРЕЧНЫЙ ИЗГИБ БАЛОК 221
Интегрирование этого уравнения в общем случае может быть
выполнено лишь с помощью приближенных методов.
Рассмотрим случай балки на двух опорах, к которой приложена
сосредоточенная сила Р посередине пролета (рис. 5.24). Тогда
уравнение A84) примет вид (при 0<Сх<^/2)
d& ~ " "-"""^0 = 0; E.185)
здесь Mmax — момент в среднем сечении. Будем считать, что угол
поворота торцевых сечений равен нулю:
0 = 0 при х = 0, х — 1. E.186)
Кроме того, допустим, что бимомент в торцевых сечениях
обращается в нуль. Тогда должно быть
^1 = 0 при х = 0, х = 1. E.187)
Примем для 0 приближенное выражение
0 = -4sinT, E.188)
удовлетворяющее граничным условиям. Уравнение Бубнова — Галер-
кина будет
J [-jr Я* + -JT OfK p§f*- x2J sin2 — dx = 0
ИЛИ
//я4 я2 \ 4M2//3 Г» \
Tlir^+irO/J—7i^D8 +85rj = 0. E.189)
Отсюда критическое значение Мт
/l+i^. E.190)
У s + i?
^тах — / , „
Для частного случая, когда /и = 0, получим
4,28
М,
max
= ^уО[кЕГу. E.191)
В § 63 мы получили точное значение коэффициента в этой
формуле, равное 4,23. Воспользуемся формулой A90), чтобы оценить
влияние дополнительного множителя, содержащего /ш. Отметим, что
222 ТОНКОСТЕННЫЕ СТЕРЖНИ [ГЛ. V
в случае чистого изгиба наш прием привел бы к точному
результату A04):
Мт^= / УЬ E.192)
где под X понимается выражение
Это дает основание представить расчетную формулу для
рассматриваемого случая сосредоточенной силы в форме
Mmax = 4,23 ^-JLx. E.194)
По-видимому, этот же множитель х может быть использован и в
других случаях загружения шарнирно опертой балки. Например, при
действии равномерно распределенной нагрузки, приложенной по
центральной линии, мы получим:
Мта=^^-УЩЁГу1. E.195)
Если нагрузка приложена не в центре тяжести, а по верхней или
по нижней полкам, то вместо A95) получим:
Mmax = ^-VGTJi;ik. E.196)
Дополнительный множитель k оказывается равным
Знак минус относится к случаю, когда нагрузка передается на верхнюю
полку, а знак плюс — при нагружении нижней полки.
ГЛАВА VI
ВЛИЯНИЕ ТЕМПЕРАТУРЫ. ПРОДОЛЬНЫЙ ИЗГИБ
ПРИ ПОЛЗУЧЕСТИ
§ 65. Задачи об устойчивости стержней, связанные
с учетом температуры
Благодаря развитию новых областей техники и прежде всего
сверхзвуковой авиации в последнее время возникли новые задачи —
об устойчивости упругих систем при высоких температурах. Как
известно, аэродинамический нагрев приводит к образованию
неравномерного поля температур в конструкции летательного аппарата.
С этим связано появление некоторых напряжений. Подобные
температурные напряжения не всегда являются опасными для прочности
конструкции, так как «рассасываются» по мере развития деформации.
Но те элементы конструкции, в которых развиваются сжимающие
напряжения, могут потерять устойчивость, что в ряде случаев
равносильно исчерпанию несущей способности и является недопустимым.
Далее, при высоких температурах проявляется ползучесть
конструкционных материалов (стали, дюралюмина, титановых сплавов и
т. д.), которая в свою очередь приводит к потере устойчивости
сжатых элементов при напряжениях, лежащих значительно ниже
эйлеровой величины. Отметим, что у некоторых материалов (пластмассы)
'ползучесть имеет место и при относительно низких температурах.
Явление ползучести протекает во времени; малозаметная деформация
сжатого стержня по истечении определенного периода завершается
резким выпучиванием. Таким образом, здесь, наряду с
установившимся понятием критического напряжения, появилось новое понятие
критического времени. Возникла новая область теории
устойчивости упругих систем—теория выпучивания при ползучести.
При решении задач, относящихся к неравномерно нагретым
конструкциям, надо вновь пересмотреть критерии устойчивости.
Существование неравномерного температурного поля связано с явлением
теплопроводности внутри тела и с рассеянием энергии в
окружающую среду. Процесс деформации при нагружении и выпучивании
тела сопровождается, кроме того, необратимыми изменениями
температурного поля. Поэтому исследование устойчивости неравномерно
224
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
нагретого тела надо, строго говоря, вести, исходя из уравнений
термодинамики необратимых процессов *).
Обратимся к некоторым частным задачам.
§ 66. Влияние температуры на величину модуля упругости.
Равномерный нагрев стержня с закрепленными концами
Если рассматривать устойчивость стержней в пределах упругих
деформаций, то повышение температуры сказывается прежде всего
на величине модуля упругости. На рис. 6.1 представлена зависимость
модуля Е от температуры
f С для некоторых
материалов — сталей ЭИ728,
Е, пг/смг
I.5-W1
10 Г
0,5 Г
Л7//Л
■J1ISAT
знт
^вТ6
~\M7ffJ
ш
W
ГС
Рис. 6.1. Изменение модуля Е в
зависимости от температуры f С для различных
материалов.
Рис. 6.2. Стержень с
неподвижными концами при
изменяющейся температуре.
ЭИ703, Я1ТН, титанового сплава ВТ6 и дюралюмина Д16АТ. Как
видим, с увеличением t° величина Е быстро падает. Значение Е
для тех или иных t° и следует подставлять в расчетные формулы.
Отметим, что при возрастании t° падают также значения предела
пропорциональности о11Ц и предела текучести от.
Рассмотрим случай, когда стержень шарнирно прикрепляется к
неподвижным опорам при температуре to, а затем подвергается
равномерному нагреванию по всей длине (рис. 6.2). При повышении
температуры в стержне будут возникать сжимающие напряжения, и
при некоторой температуре стержень начнет выпучиваться. Этот
случай потери устойчивости интересен тем, что он происходит в
отсутствие каких-либо активных нагрузок.
*) См. работы Био (М. Biol), опубликованные в «Aeronaut. Quarterly»
7, № 3 A956), «Physical Review» 97, № 6 A955), «Journ. of Applied Physics»
25, № 11 A954), и диссертацию Л. А. Шаповалова [6.10].
ВЛИЯНИЕ ТЕМПЕРАТУРЫ НА ВЕЛИЧИНУ МОДУЛЯ УПРУГОСТИ 225
Если бы стержень удлинялся свободно, то продольная
деформация его при температуре t'x была бы равна
е( = а(£ — &У F.1)
где а — коэффициент линейного расширения. В случае закрепленных
концов имеют место сжимающие напряжения, равные
ot = Eet = Eu{tl- $• F-2)
После того как величина ot достигнет эйлерова значения я^Е/л,2,
прямолинейная форма равновесия стержня станет неустойчивой. При
шарнирном закреплении концов стержня разность температур,
соответствующая критическому напряжению, будет равна
t\ — А) =
я' ■
F.3)
где Х-—гибкость стержня. Так, например, для дюралюмина Д16АТ
коэффициент а составляет 25-10". В случае стержня, гибкость
которого равна Л, = 100, выпучивание начнется, когда разность тем-
ператур достигнет величины t\ —£о=40 .
Соответствующее сжимающее напряжение
составляет около 700 кг/см2.
Если напряжения в стержне
превосходят предел пропорциональности, то
деформации A) будет отвечать напряжение,
равное
at = Ecet, F.2')
где Ес — секущий модуль, отвечающий
о
температуре t\. Пользуясь формулой для
критического напряжения с касательным
модулем Ек, найдем разность температур,
при которой возникает выпучивание:
F.4)
Рнс. 6.3. Зависимость между
нагрузкой и прогибом после потери
устойчивости.
Модуль Ек также вычисляется для темпе-
о
ратуры t\.
Своеобразие этой задачи состоит в том,
что, как только начнется выпучивание
стержня, реакции опор, равные сжимающему усилию в стержне,
будут уменьшаться; поэтому интенсивное выпучивание может иметь
место лишь при продолжающемся возрастании температуры.
Это обстоятельство иллюстрируется графиком рис. 6.3 *). По оси
абсцисс здесь отложен угол 9 наклона касательной к упругой линии
*) Этот график составлен В. И. Усюкиным.
15 А С. Вольмир
226 ВЛИЯНИЕ ТЕМПЕРАТУРЫ [ГЛ. VI
стержня в концевом сечении (см. рис. 6.2), по оси ординат —
температурное усилие
которое должно иметь место в прямом стержне для того, чтобы
после искривления угол поворота достиг значения 9; величина РТ
отнесена к эйлеровой силе Рэ. Как видно из графика, соотношение
между PJP3 и 9 зависит от гибкости стержня к. Например, при
А,= 100 и 9 = 0,015 усилие Р7 на 6% превышает критическую
величину. Для сравнения здесь приведена диаграмма закритической дефор- '
мации стержня с верхним подвижным шарниром для постоянной
температуры. При прежнем значении 9 = 0,015 сжимающее усилие Р°
превысило бы эйлерову величину лишь на 0,003%.
§ 67. Случай неравномерного нагрева
Перейдем теперь к случаю, когда температурное поле не является
равномерным. Рассмотрим центрально сжатый стержень
прямоугольного сечения, защемленный по концам.
Допустим для примера, что подобный
образец установлен между плитами
испытательной машины при температуре tl,
после чего подвергается нагреванию до
температуры, изменяющейся вдоль одного
из размеров сечения (рис. 6.4) по
линейному закону; приращение температуры
равно
Р
*2+*1
У, F.5)
вдоль каждого продольного волокна
величина Р является постоянной *).
Так как концы стержня защемлены,
то ось его останется прямой до момента
выпучивания. Допустим, далее, что на
стержень передается возрастающая
нагрузка; требуется определить ее
критическую величину. Подобная задача
представляет особый интерес в случае, если
напряжение в стержне превосходит
предел пропорциональности. Каждому
волокну стержня будет тогда соответствовать своя диаграмма 0(e),
характер которой изменяется в зависимости от температуры. Будем
в)
Ю
Рис. 6.4. Стержень,
подвергающийся неравномерному нагреву.
*) Эта задача была поставлена Л. И. Балабухом и решена Л. А.
Шаповаловым [6.10].
СЛУЧАЙ НЕРАБНОМЕРНОГО НАГРЕВА
е
Рис. 6.5. Диаграммы сжатия прн различных температурах-
6ц,хг1см!
9000 |
" 50 100 ISO 200 250 500
Л
Рис. 6.6. График «критическое напряжение —гибкость» прн неравномерном
нагреве.
228
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
считать, что выпучивание стержня происходит при постоянной
силе и что поэтому сечение делится на зоны догрузки и
разгрузки (рис. 6.4, б). Примем для примера, что диаграмма сжатия
материала (стали) состоит из двух прямых линий (случай «линейного
упрочнения») и что при повышении температуры одновременно
изменяются: основной модуль Е, касательный модуль на втором участке
Ек и предел пропорциональности, как показано на рис. 6.5.
Деформация каждого волокна до потери устойчивости
складывается из двух составляющих, одна из которых вызвана активной
нагрузкой, а вторая связана с повышением температуры:
e = e0 + af. F.6)
Коэффициент а будем считать не зависящим от температуры.
Деформации в момент выпучивания распределяются по закону плоских
сечений. Исходя из этого и рассматривая условия равновесия части
стержня, как это было сделано в § 30, можно найти результирующий
модуль Т и построить диаграмму зависимости критического
напряжения окр от гибкости стержня %.. На рис. 6.6 показана такая
окончательная диаграмма для случая, когда ^i=0, t2 = t . Как видим,
при возрастании перепада температур критическое напряжение резко
уменьшается.
§ 68. Учет влияния теплопроводности
Обращаясь к термодинамической постановке задачи об
устойчивости сжатого стержня, мы должны уточнить исходные предпосылки.
До сих пор, по существу, предполагалось, что первоначальное
сжатие и последующее выпучивание стержня происходят при
постоянной температуре, т. е. изотермически. Но, как известно, любая
упругая или неупругая деформация изолированного тела
сопровождается некоторым, хотя и незначительным для конструкционных
материалов, изменением температуры. Упругое удлинение стержня
связано с падением температуры, а укорочение — с повышением ее.
Следовательно, при выпучивании стержня должен возникнуть весьма
слабый тепловой поток от сжатых волокон к растянутым.
Поведение стержня в процессе продольного изгиба должно зависеть,
таким образом, от коэффициента теплопроводности материала*).
Если этот коэффициент бесконечно велик, то температура во всем
объеме в любой момент времени одинакова. Если поддерживается
постоянство этой единой температуры — в частности, благодаря
внешним источникам и стокам тепла, —то процесс выпучивания является
изотермическим. Напротив, если коэффициент теплопроводности
бесконечно мал, то теплообмена между участками сжатия и растя-
*) Такая зависимость была установлена Л. А. Шаповаловым [6.10].
См. также книгу А. Пфлюгера [0.21].
ПРОДОЛЬНЫЙ ИЗГИБ ПРИ ПОЛЗУЧЕСТИ
229
жения, а также между телом и внешней средой не происходит, и
процесс будет адиабатическим. Подобный случай мог бы иметь
место при весьма быстром выпучивании.
Можно показать, что критическое напряжение в обоих
предельных случаях определяется по формуле Эйлера, но с введением в нее
различных модулей упругости — изотермического Е1 или
адиабатического Еа. Модули эти отличаются друг от друга незначительно,
так, для стали найдено
1.004Е,.
F.7)
Если коэффициент теплопроводности имеет малое, но конечное
значение, то критическое напряжение определяется по изотермическому
модулю. Таким образом, с практической точки зрения нет
необходимости отличать изотермический и адиабатический процессы потери
устойчивости, но различие между ними имеет принципиальное значение.
Из сказанного вытекает, что энергетический критерий
устойчивости, относящийся к консервативным системам, может быть
применен к реальным стержням лишь с известной оговоркой.
Предпочтительным и здесь оказывается динамический критерий, позволяющий
определить области устойчивости возмущенного движения
термодинамической системы.
§ 69. Продольный изгиб при ползучести.
Основные сведения
Обратимся к исследованию выпучивания сжатых стержней при
ползучести. Под ползучестью понимают изменение деформаций тела
во времени при заданных
нагрузках *). Как было уже сказано, для
таких материалов, как сталь и дю-
ралюмин, с ползучестью надо
считаться лишь при повышенных
температурах. Процесс одноосного
растяжения в условиях повышенной
температуры можно представить в
виде графика, изображенного на
рис. 6.7. По оси абсцисс
откладывается время, по оси ординат —
деформация. Непосредственно при
приложении нагрузки, которая в
дальнейшем поддерживается
постоянной, происходит упругая или упруго-пластическая «мгновенная»
деформация, отвечающая участку ОА. Вслед за этим начинается
процесс ползучести, сначала более быстрый, а затем замедляющийся.
Рис. 6.7. Деформация при растяжении
в состоянии ползучести.
*) Мы оставляем в стороне явление селаксацин (изменения напряжений
пои заданных смещениях).
230
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[гл. vi
На диаграмме получим криволинейный участок АВ, носящий название
первичной или неустановившейся фазы ползучести. В последующем
скорость ползучести делается почти постоянной, так что диаграмма
принимает вид прямой линии (участок ВС). Эта вторичная фаза
процесса называется установившейся ползучестью. Затем на образце
появляется шейка, и деформация ускоряется (участок CD), после
чего происходит разрушение. В случае, если короткий образец
подвергается центральному сжатию, диаграмма е(£) имеет такие же
участки, отвечающие «мгновенной» деформации, первичной и
вторичной фазам ползучести.
Будем полагать, что постоянное сжимающее напряжение равно о.
Упругая деформация равна е = а/Ег, причем модуль Ег отвечает
заданной температуре t°. Деформация ползучести гс, соответствующая
установившейся фазе *), зависит от времени, свойств материала и
величины приложенного напряжения. Предложен ряд приближенных
формул, описывающих этот участок диаграммы, например:
ec = kont, F.8)
где k и п—коэффициенты, зависящие от свойств материала**).
Другая приближенная формула имеет вид
ee = Ae*>t, F.9)
где А, В — постоянные материала, е — основание натуральных
логарифмов. Если принять уравнения (8) или (9) и считать здесь о не
зависящим от t, то скорость изменения деформации во времени будет
величиной постоянной:
гс = ^- = ко", F.10)
или
бс = Лев". F.11)
Фазу неустановившейся ползучести можно объединить с мгновенной
пластической деформацией, появляющейся при приложении нагрузки.
Эту деформацию представляют с помощью зависимости типа
е/, = *1от, F.12)
включающей параметры материала kl и т; при этом напряжение о
считается зависящим от t. Так как эта деформация является
необратимой, то в случае разгрузки коэффициент kl надо считать равным
*) Мы применяем здесь обозначения для составляющих деформации,
принятые в книге Л. М. Качанова [6.3], 1960.
**) Значения их приведены, например, в «Справочнике машиностроителя»,
изд. 2-е, т. 3, 1956, стр. 290.
ПРОДОЛЬНЫЙ ИЗГИБ ПРИ ПОЛЗУЧЕСТИ 231
пулю. Скорость деформации для этой фазы равна
гр= mkla'"-] -^г = mkxam-xa.
F.13)
Во многих случаях принимают т = 2.
Если учитывать все составляющие деформации, то скорость е можно
представить в виде
1
о -4- roso -f- ko";
F.14)
здесь принято r = mkl и s = m— 1. Принимая во внимание только
упругие деформации и установившуюся ползучесть, получим:
Е
F.15)
Считая га — 1, мы придем к известному уравнению Максвелла для
скорости течения упруго-вязкой среды:
1-0
F.16)
где \л— коэффициент вязкости. Поведение такой среды может быть
описано с помощью механической модели, представленной на рис. 6.8.
Она состоит из пружины, жесткость которой отвечает
модулю материала Е, и поршня; последний движется
в цилиндре с жидкостью. Оба эти элемента, упругий
и вязкий, соединены последовательно и нагружены
постоянным усилием, пропорциональным о. Скорость
деформации этой системы отвечает формуле A6).
Формулам типа (8) и (9) придают также вид
ес = коЧщ F.17)
или
F.18)
.= Aemt'h
Рис. 6.8.
Механическая МО
дель упруго-
вязкой среды.
при у> 1; это дает возможность учесть одновременно
первичную и вторичную фазы ползучести.
Мы привели некоторые соотношения, описывающие
процесс ползучести. Уравнения (8), (9) или A7), A8)
связывают деформацию ползучести с напряжением и временем.
В более общем виде эту зависимость можно представить следующим
образом:
Ф(ес, о, 0 = 0, F.19)
где Ф—некоторая функция величин гс, о и t. Уравнение A9)
соответствует так называемой теории старения в ее деформационном
варианте. Название теории объясняется тем, что с течением времени
механические свойства материала меняются, он «стареет». Можно
232 ВЛИЯНИЕ ТЕМПЕРАТУРЫ [ГЛ. VI
также предложить другой вариант теории, связывающий скорость
изменения деформации ползучести, ес, напряжение и время:
Ф(ёс, о, 0 = 0; F.20)
его можно назвать вариантом течения. В обоих уравнениях A9)
и B0) явно содержится время t. Недостаток этих теорий
заключается в том, что при описании отдельных участков процесса
ползучести надо учитывать, от какого момента отсчитывается параметр
времени; иными словами, уравнения не являются инвариантными
относительно начала отсчета времени t.
Другая теория ползучести—так называемая теория
упрочнения — описывает деформацию с помощью уравнения
Ф(е„ ёе. о) = 0. F.21)
Подобное уравнение может, например, иметь вид
scel = ae^. F.22)
где а, р, у— параметры материала*). В это уравнение параметр t явно
не входит, но оно позволяет установить закон изменения гс во
времени.
Эксперименты со сжатыми стержнями, подвергающимися
ползучести, проводят обычно с помощью специальных установок, в
которых автоматически обеспечивается постоянство усилия и
температуры либо изменение этих величин по заданному закону. Как
показывают опыты, процесс ползучести сжатого стержня завершается
явлением быстрого выпучивания с резким нарастанием стрелы
прогиба **). Напряжение в стержне, которое считается постоянным,
может быть значительно меньше критического напряжения,
соответствующего данной температуре при «мгновенной» деформации.
Теоретические исследования в этой области велись на
протяжении последних 15—20 лет***), и их нельзя еще считать
завершенными. Познакомимся с основными направлениями этих исследований.
*) Во многих работах вместо гс здесь фигурирует пластическая
деформация, объединяющая деформацию ползучести с мгновенной пластической
деформацией (см. [6.3]). Параметры, соответствующие уравнению B1) для дюр-
алюмина Д16Т, приведены в статье Н. Г. Торшенова [Жури, нрикл. мех.
и техн. физ., № 6 A961), 158—159].
**) Описание таких экспериментов дано ниже, в главе XX. См. также
работу [6.4].
***) Они принадлежат А. Р. Ржаницыну [6, 7], [0.9], Ю. Н. Работнову
[6.6], [21.8а], С. А. Шестерикову [6.11], В. И. Розенблюму [6.8], Хоффу
[6.14], Джерару [6.13] и другим. См. также обзоры литературы,
принадлежащие А. М. Локощенко и С. А. Шестерикову (Сб. «Итоги науки»,
Механика, М., 1935) и второму из этих авторов (докт. дис, М., 1966).
КРИТЕРИИ ВЫПУЧИВАНИЯ ПРИ ПОЛЗУЧЕСТИ 233
§ 70. Критерии выпучивания при ползучести
В литературе предложены различные критерии устойчивости
при ползучести. Рассмотрим сначала те, которые относятся к
совершенным элементам конструкций, для которых основная
равновесная форма сохраняется вплоть до момента выпучивания.
Один из вариантов статического решения задачи заключается
в следующем *). Допустим, что известна зависимость между полной
деформацией, напряжением и временем по той или иной теории
ползучести. Построим изохронные кривые о(е) для фиксированных
моментов времени t0, tv t2,.. ■
(рис. 6.9). Условно примем,
что критическоенапряжение
определяется по формуле
касательного модуля для
изохронных кривых
я2£к
или
°кр = -
Окр = Оэ:§.
F.23)
F.24)
Рнс. 6.9. Изохронные диаграммы сжатия при
ползучести.
где аэ - эйлерово
напряжение, равное л2£уА,2; эффект
разгрузки здесь не учитывается. Основное напряжение сжатия о^,
действующее в стержне, считается заданным; принимается а^ < сгэ.
Через некоторый промежуток времени напряжение о, по
предположению оказывается критическим: о„~вкр. Следовательно, в момент
выпучивания касательный модуль должен стать равным
Ек=*± = 2±.е.
к de, оэ
F.25)
Отложим по оси абсцисс рис. 6.9 величину еэ = оэ/£', а по оси
ординат а,. Величина модуля Ек по B5) характеризуется углом а
наклона линии О А. Изохронные кривые пересекают линию о% под
разными углами. Выпучивание, очевидно, произойдет в тот
момент (на рисунке t2), когда касательная к кривой о(е),
проведенная на уровне ot, станет параллельной линии ОА. Период
времени t2 по этой теории и будет критическим. Итак, первый
подход к задаче соответствует касательно-модульной теории.
Во втором случае в качестве основного критерия выбрана
критическая деформация**). Принимается, что элемент конструкции
теряет устойчивость при определенной полной деформации
независимо от того, является ли она упругой или упруго-пластической, и
*) Подобный путь был предложен Шенли [0.22].
*) Этот подход был предложен Джераром [6.13].
234
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
от того, какими факторами она вызвана. Если вернуться к рис. 6.9,
то по этой теории выпучивание стержня должно иметь место в тот
момент (на рисунке /3). когда изохронная кривая а (г) пройдет
через точку А; последняя как раз соответствует эйлеровой
критической деформации еэ. Очевидно, критическое время по этой теории
окажется всегда большим, чем по касательно-модульному варианту.
Угол а характеризует наклон секущей для диаграммы о(е), поэтому
мы, по существу, пользуемся секущим модулем Ес, считая
критическое напряжение равным
<ткр = ^. F-26)
Отметим, что формула типа B6) может быть выведена с помощью
деформационной теории пластичности в применении к некоторым
случаям упруго-пластической теории устойчивости пластинок и
оболочек (см. главы X и XIV).
Третий критерий устойчивости является динамическим *); он
сводится к исследованию движения стержня, происходящего в
результате некоторого малого возмущения. Составляется уравнение,
связывающее стрелу прогиба со временем; после линеаризации этого
уравнения ищется условие, при котором стрела прогиба остается
ограниченной.
Наконец, четвертый подход к задаче относится к- несовершенной
системе и распространяет на случай ползучести критерий начальных
неправильностей **). Допустим, что ось стержня до деформации
слегка искривлена либо что усилие приложено с некоторым
эксцентриситетом. Тогда в различных сечениях стержня будет с самого
начала действовать не только осевая сила, но и изгибающий момент.
В процессе ползучести деформации будут возрастать — как на
вогнутой, так и на выпуклой стороне искривленного стержня. Но
деформации эти не будут одинаковыми, так как скорость ползучести
зависит от уровня напряжения в данном волокне. Поэтому
произойдет увеличение кривизны изогнутой оси, что в свою очередь связано
с возрастанием изгибающего момента и напряжений в различных
волокнах. Это приведет к быстрому нарастанию прогибов,
равносильному явлению выпучивания стержня. Критическое время можно
здесь условно определить, выбрав некоторое предельное значение
для стрелы прогиба стержня либо для скорости возрастания
прогиба. В некоторых же случаях удается найти «истинное»
критическое время, по истечении которого скорость возрастания прогиба
становится бесконечно большой.
Познакомимся более подробно с каждым из критериев
устойчивости.
*) Он был предложен Ю. Н. Работновым и С. А. Шестериковым [6.6].
**) Такой подход был развит в работах Хоффа [6.14] и других
авторов [6.18], [6.22].
МЕТОДЫ РАСЧЕТА ПО КАСАТЕЛЬНОМУ И СЕКУЩЕМУ МОДУЛЯМ 235
§ 71. Методы расчета по касательному и секущему модулям
Рассмотрим первые два подхода к задаче об устойчивости
стержня, используя теорию старения и принимая закон ползучести
в виде
е = ~ + kant.
F.27)
Найдем соотношение между изохронными приращениями е и о:
или, по B7),
de = [-^ ^knan-lt\do
*-[т + г(-т)]*-
F.28)
Введем касательный модуль Ек = do/de, тогда соотношение B8)
примет форму
7E« = T + ^(j-ir\ <6-29)
Далее, по B5), принимая 0 = 0^ и
е = еф, получим:
е„£ 1 , а*
сгэ
сгэ
4)-(б-з°)
Введем обозначения:
гЕ - а_
о,
F.31)
тогда уравнение C0) примет вид
ё. = о,-г--[-A—о,). F.32)
б
4/»i
и
L М
б. //
)(—~j
/ к/
1/п
'* <•* *
ifl-3.)
.n ё
/
Рис. 6,10. К расчету по «касателыю-
модульной»- нагрузке.
Мы пришли к простой зависимости
между параметрами деформации
и напряжения, характеризующими момент выпучивания. Построим
график а(е) и отложим по осям отрезки, равные 1 (рис. 6.10), и,
кроме того, по оси абсцисс отрезок 1/п, тогда получим линии ОМ
и КМ. Проводя горизонтальную прямую на уровне а„, находим е„.
Один из участков этого отрезка — до линии ОМ—характеризует
мгновенную_деформацию, равную а„, а второй — деформацию
ползучести A—а»)/я- Чем ниже уровень напряжения, тем больший
удельный вес будет иметь деформация ползучести *).
*) График такого типа был предложен в работе [6.6].
236
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
Исходя из C2), можно и непосредственно определить
«критическое время» /„. Представим B7) в виде
г=в-{- Eke"lo"-1. F.33)
По C2) получим:
*„ = - L-*7'- . F.34)
* з
Примем, далее, закон ползучести в более общем виде A9) и введем-
обозначения:
Тогда находим:
Ido + vdU — •£-) = (); F.36)
отсюда, идя тем же путем, находим:
тг = °.=—Цг- <6-37)
v
В нашем примере было
l/v = — krwf-Ч; F.38)
исходя из C7), снова приходим к C4).
Формула C7) относится, в частности, к зависимости A7) с
коэффициентом уФ1. При определении критического времени по
формуле типа C4) следует вместо tt подставить f|/Y.
Обратимся ко второму варианту решения задачи и примем
в качестве критерия устойчивости полную деформацию; тогда во всех
случаях должно быть
е. = 7Г. ё.= 1. F.39)
На графике рис. 6.10 критической деформации будет отвечать
вертикальный отрезок MN. Из частного закона B7) вытекает формула
для критического времени
J_
Ekonal
**= Jc-Ли • F-40)
'э
Таким образом, период времени до выпучивания по теории
критической деформации получается при у— 1 в л раз больше, чем по
касательно-модульной теории. При у Ф 1 по A7) надо в D0) снова
заменить t„ на tlly.
ДИНАМИЧЕСКИЙ КРИТЕРИЙ
237
§ 72. Динамический критерий
Рассмотрим, далее, возмущенное движение стержня, исходя из
теории упрочнения и считая по B1) Ф(ес, гс, о) = 0. Введем
обозначения типа C5) и примем здесь условно гс неварьируемой
величиной. Тогда получим по-прежнему
(EX — v)da 4- Evde = 0. F.41)
Согласно закону плоских сечений 6е = ху, где у. - кривизна
изогнутой оси стержня, у — расстояние от нейтральной оси до некоторой
точки сечения. Интегрируя по площади сечения, придем к
соотношению
(ЕХ — v) М 4 EIw. = 0 F.42)
или
(&-v)gi + £/vg = 0, F.43)
где v -— прогиб. Считая, что «погонная нагрузка» q = д2М(дх2
соответствует сжимающим усилиям oF и силе инерции, найдем:
-<«-*> («"■£+*'£)+*"£-«>• сел)
Примем для шарнирно опертого стержня
V — T(/)sin-^, F.45)
тогда будет
т.2г
(v — EX) T + 2JL [ЕХо 4- v (оэ — о)] т = 0. F.46)
Частота колебаний обращается в нуль при
= 0,
^v — си,
отсюда
Ека-\-у
п -
и*
^@Э-
-£А,
1-
-<*) _
1
V
F.47)
что по форме совпадает с C7).
Воспользуемся для примера зависимостью
ссос
Находим:
ф = е°ё— kea/A=0. F.48)
Отсюда по D7)
Я, = -^-еа/А. v = ^ea/A. F.49)
1
■+¥
F.50)
Критическое значение безразмерной деформации ползучести будет
ес = =—. F.51)
<?э о.
Отсюда можно сделать заключение, что динамический подход
в применении к теории упрочнения приводит снова к касательно-
модульному критерию. Отметим, что приведенный здесь вывод
содержал, но существу, те же выкладки, что и в § 17, но для упруго-
пластической задачи, без учета эффекта разгрузки.
В статье Ю. Н. Работнова и С. А. Шестерикова [6.6]
содержалась иная, более обоснованная трактовка динамического критерия,
хотя конечные зависимости имели тот же вид. Эти авторы считали
вначале гс варьируемой величиной и получили вместо D6)
уравнение третьего порядка для т. В более поздней работе [27.8а]
Ю. Н. Работнов предложил другой вариант вывода аналогичных
зависимостей — квазистатический.
Допустим, что в некоторый момент процесса ползучести стержень
переведен в смежное изогнутое положение и предоставлен самому
себе. Если характерный прогиб v после этого начнет уменьшаться,
то критическое состояние не достигнуто. При возрастании прогиба
критическое состояние будем считать превзойденным. Следовательно,
об устойчивости можно судить по знаку скорости v. В том же
случае, если стержню придана начальная поперечная скорость v, то об
устойчивости следует судить по знаку ускорения v. Обсуждение
критериев устойчивости при ползучести содержится также в работах
Г. В. Иванова [27.5а] и Л. М. Куршина [6.5].
§ 73. Критерий начальных несовершенств
Примем, что до нагружения стержень имеет некоторую
начальную погибь (рис. 6.11)
v0 = v0(x). F.52)
Приложим к стержню центральную сжимающую нагрузку, лежащую
ниже эйлеровой силы Рэ; тогда прогибы различных сечений сразу
возрастут. Обозначая через v(x) дополнительный прогиб, найдем
изгибающий момент в произвольном сечении:
M = P(y + vQ). F.53)
Дифференциальное уравнение A.178) перепишем в виде
d2v Р Р
КРИТЕРИЙ НАЧАЛЬНЫХ НЕСОВЕРШЕНСТВ
239
Разложим функцию vQ(x) в ряд по синусам:
s
, . V , inx
v0(x) = 2ja'sin_r'
F.55)
ограничиваясь первыми s членами ряда. Решение уравнения A3) будем
искать в виде
v(x) = ^?ibism~.
F.56)
i-i
Подставляя последние выражения в E4), найдем:
э
р
Ч
F.57)
yd)
где Рэ есть 1-я эйлерова сила:
V-
F.58)
Напряжения в некоторой точке поперечного сечения
будут
D РГ..Х»,Ли
F.59)
Р P(v + vo)y
о— Р - j
Рис. 6.11.
Сжатый стержень с
начальной по
гнбью,
подвергающийся
ползучести.
где через у обозначено расстояние до центральной оси;
сжимающие напряжения считаются положительными.
Далее совершится первый «пластический» шаг
деформации стержня *). Допустим, что зависимость между деформацией
ползучести и временем задана в виде
ее = ее(о, t). F.60)
Примем интервал времени равным А/ и вычислим Аей для различных
точек поперечных сечений; практически приходится ограничиться
некоторым числом точек (например, пятью или семью) в нескольких
сечениях по длине стержня (трех или пяти), напряжения в этих
точках предварительно определяются по E9). Совместно с пластическими
деформациями происходят упругие, связанные с приращениями
напряжений соотношением
Ьз = Е^е. F.61)
Полные изменения деформаций в некотором волокне равны
Ае, = Дес -f- ⅇ F.62)
•) Приведенный здесь метод расчета <шаг за шагом» был предложен
Лином [6.20].
240
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
F.63)
F.64)
ибающего '
F.65)
F.66)
они должны удовлетворять закону плоских сечений. Если обозначить
приращение деформации волокна, проходящего через центры Тяжести
сечений, через Де°, а изменения кривизны через Дх, то приращение
деформации произвольного волокна, удаленного от центра тяжести
на расстояние у, будет
A£j = Ае° — Дху.
Вместо F1) имеем:
До = Е (Ае° — Аху — Дес).
Составим выражения для изменений осевой силы и
момента в произвольном сечении:
ДР= J badF = Ebe*F—E \zcdF,
F F
ДМ = — J Aoy dF = EI Ax -f- E \ гсу dF.
F F
Так как статический момент относительно центральной оси равен
нулю, то при составлении F5) и F6) соответствующие выражения
выпадают; под / понимается момент инерции сечения относительно
центральной оси.
По предположению осевая сила считается неизменной, так что
АР = 0; отсюда получаем:
Де°= — у- f eedF. F.67)
F
Составим дифференциальное уравнение для функции приращения
прогиба Av(x). Изменение кривизны равно
с другой стороны, имеем:
A/W = PAt;. F.69)
Таким образом, по F6) получаем:
4^ + £At,= -^(-4/^). F.70)
Уравнение G0) имеет ту же структуру, что и E4); для
интегрирования его применяем прежний прием. Разложим выражение,
стоящее в скобках и имеющее размерность [см], в тригонометрический
ряд:
-~ j"eeyd/f = J2Afl'sinTE- F.71)
КРИТЕРИЙ НАЧАЛЬНЫХ НЕСОВЕРШЕНСТВ
241
Представляя решение уравнения G0) в виде
S
найдем по-прежнему
-2- —1
Р
Таким образом определяются приращения коэффициентов bt в
разложении E6) для функции прогиба v; зная их, находим новую
упругую линию. Стрела прогиба после первого шага получит
приращение
.9
A/ = 5]A£,sin-£ =Д*1_Д*8-|- А65- ... F.74)
(-1
Пользуясь G2), определим изменение кривизны в каждом нз
рассматриваемых сечений:
^ = ~ 4^ = 24 A^shi—. F.75)
i-i
Изменение деформации волокна, удаленного на расстояние у от
центра тяжести, вычисляем по F3), а приращение напряжения —
по F4). Новые полные напряжения будут равны
о, =o-f-Ao. F.76)
Переходя ко второму шагу, рассматриваем следующий отрезок
времени At; по F0) определяем изменения пластических
деформаций Аес, отвечающие напряжениям alt и т. д. Продолжая этот
процесс, находим зависимость между стрелой прогиба стержня и
временем. Непосредственно после приложения нагрузки напряжения
распределяются в сечении по линейному закону E9). Однако по мере
развития пластических деформаций эпюра напряжений в любом
сечении будет все более отходить от прямой линии.
Пример 6.1. Дюралюминовый стержень длиной / = 21,4 см
прямоугольного поперечного сечения (ft = 2 см, h = 0,8 см) с шарнирно опертыми
концами подвергается действию центральной сжимающей силы Р = 500 кг
при температуре 300° С. Осевая линия изогнута до приложения нагрузки по
полуволне синусоиды:
v = 0,01 sin —j- см. (а)
При Р = 300° С считаем модуль Е = 4 ■ 105 кг/см2. Определить зависимость
стрелы прогиба от времени с учетом упругих деформаций н установившейся
242 ВЛИЯНИЕ ТЕМПЕРАТУРЫ [ГЛ. VI
ползучести; для заданной температуры закон ползучести представляем в виде
ес=5- КГ12<А, (Ь)
причем а измеряется в кг/см2, at — в часах.
Раднус инерции сечения равен
I = -^L = 0,232 см.
Гибкость стержня составляет
Эйлерово напряжение равно
Л i 0,232 УЛ
л2-4-105 л_л , ,
= 470 кг/смг;
э ~ 922
ему соответствует нагрузка
pW = o3F = 470 • 1,6 = 750 кг.
Разобьем длину стержня / на шесть равных частей, а высоту сечения h —
на четыре равные части. Определим напряжения в каждой из пяти точек
с координатами
-ff *(-4И-4)-
По формуле E7) находим стрелу дополнительного прогиба:
L а\ 0,01
Ь, = —тт—■ = = 0,02 см.
Я'1» 750
__£ 1 ]
Р 500
Полная стрела прогиба равна / = 0,03 см. Напряжения определяются по E9):
или
a = 310 A + 0,56у sin ^-\. (с)
Полученные по (с) значения а выписаны в первой строке таблицы 6.1.
Первый интервал времени выберем равным 30 минутам. Находим
пластические деформации Аее по (Ь), подставляя t = 0,5 и значения
напряжений (с). Величины Аее-105 даны во второй строке таблицы. Далее находим
удлинение осевой линии по F7), используя в каждом случае формулу
Симпсона:
Т J гс dF = 12 (г»'2 + 4*т + 28о + 4е~ V* + е- А^'
(Л)
индексы Л/2, Л/4 и т. д. соответствуют координатам точек сечения.
Значения Двс занесены в третью строку таблицы.
,73]
Критерий начальных несовершенств
243
а
к
ч
-|с*
1!
ч
-~|т
II
~|»
II
Ч
о
1
О
1
1
о
■«К
■с|^
■Cl^N
1
•ч|-т
1
С
■Ч|*г
•Ч|СЧ
1
*1'
1
•в|»
«|<м
1
X
Я
8
а
о
оо
со
00
со
о
со
СО
1^
3
О)
со
со
о
со
о
00
8
00
3
00
О)
со
о
со
3
§
еч
о
00
со
I—I
ю
о
'"■'
t-
ю
О)
ю
ю
■*
со
О)
О)
ю
00
О)
ю
■*
с^
ю
8
СО
ю
о"
о
00*
С^
СО
о
со
<
8
t-
ю
t^
Г-."
о
«5
С^
о
I—I
i
<
8
05
8
1^
8
w
in
2
"Ч
1»
4Г
5S
J_^
ю
со
со
см"
со
■*
tN."
о
<
О)
О)
О)
■*
ю
I—'
О)
1^
Tf
О
г-1
1^
!
t^
8
со
1—1
ю
t^
t^
ю
О)
—
ю
О)
т
со
■*
t-H
т—'
S
t^
о
о
to
о
т
О
<
_
<3>
<3>
rf
О
ю
00
"*
1
to
о
1
00
<3>
ю
rf
rf
СО
О
8
т
ю
т—'
°|
»-ч
rf
СО
сГ
1С
о"
?
«5
|
-а
•*
СО
СО
ю
о"
'-'
t^
~
ю
о>
1
<N
т
О)
со
00
N."
О)
—
о
1
со
to
7
Tf
t-H
tN
о
CO
o*
00
T
m
00
7
кг/см
4f
to
5
00
%
O)
CO
to
00
OS
00
^
CO
CO
to
te
-,i
r—*
О
■*
я
8
J
Определим интеграл G1) для рассматриваемых сеченнй, пользуясь
той же формулой:
-м
ееу dF = -
4- 10s-2-0,8
500-12
/ h ,
4е,
'Л/4"
Е Г /1
'73- J ад"^ = -86|д ей/2 + 1
'4E~h/i~4'~ е-Л/2
'Л/4— с-Л/4"
4).
"г-6-"/2)-
(е)
(f).
По выражению (f) получена следующая строка таблицы. Пользуясь этими
данными, мы должны определить коэффициенты тригонометрического ряда G1)
Да; при i, меняющемся от 1 до 6. Так как функция симметрична
относительно точки х=1/2, то величины Аа{ с четными индексами равны нулю.
Таким образом, будет
Г .,, . . лх . А . Злл: . А , Ълх
есу аг = Да, sin —-.—(- Да3 sin —. (- Дй5 si" —т~
(g)
Заметим, что для всех точек концевых сечений а = const = P/F. Но тогда
в этих сечениях и ес = const, так что интеграл G1) обратится в нуль.
Окончательно для точек 0, 1, ..., 6, отстоящих на //6 одна от другой, получаем
следующие значения функции (умноженные на 10s):
у = у6 = 0, у1 = у6 = 360, у2 = у4 = 760, уз = 900.
Дополняя интервал 0<д:</ участком 1^x^.21, будем иметь следующие
шесть точек с ординатами у7 = Уп = — Уь У8 = Ук> = —Уг, Уэ = — Уз-
Находим коэффициенты Да* по формулам Бесселя (при числе участков,
равном 12, на длине 21)
и
6Aa( = SyisiniT'"
(h)
В нашем случае получим:
Да, = -g- ( 4y, sin -^- + 4у2 sin -^- + 2y3J,
Да3 = -£ Dyi— 2y3),
Да5 = -g- Dу 1 sin -j — 4у2 sin у + 2у3 j.
(О
Подставляя значения ординат, имеем:
Да, = «55 • 10 ~5 см, Дй3 = — 60 • 10-5 см, Да6 = — 16,5 • Ю-5 см.
КРИТЕРИЙ НАЧАЛЬНЫХ НЕСОВЕРШЕНСТВ
245
Теперь по G3) можно определить приращения Aft;:
Да, 855-Ю-5 ,_,. 1П_5
A*i = —ттт-1— = = 1710 •10 см<
Р^ 750
~р ] ~Ш ~1
А«з 60- Ю-5 . 1Л_5
А*з- ,(8, =-— = -5-10 5см.
Pf . 9-750
1
Р 500
А«5 3,3- Ю-5 .. 1л-5
Aft5 = —ft-5— = ■ = — 0,5 • 10 см.
Я1°> 25 • 750
t- Л 500 Х
Изменение кривизны в каждом сечении определяем, пользуясь формулой G5).
Так, например, для сечения х — 1/6 имеем:
а / л i л2 , л . ., 9л2 л , А, 25л2 . 5л \
АЗС = [М, -р- sin -g- + Aft3 — sin— + Afts —^- sin-g-) =
= П2" (°'5 A*i + 9 А*з + 12,5 Afts) = 17,5 - Ю-5.
Таким же путем вычисляем значения Ах для сечений х = 1/3, х — 1/2; они
выписаны п таблице 6.2. Зная Ах, мы можем по B3) найти полные
деформации f.j и каждой из рассматриваемых точек. Так, например, для точки
с координатами х=1/6, у = Л/2 получаем:
Ае, ■ 105 = 7,6 — 17,4 • 0,4 = 0,6.
В таблице 6.2 помещены приращения полных и упругих деформаций Аге =
= Ае, — Аес для каждой точки. Здесь же даны приращения напряжений
Аа = Е Аее и полные напряжения, имеющие место к концу 30-й минуты:
а, = а -(- До. Стрела прогиба получает приращение Aft, = 1710 • Ю-6 см н,
следовательно, составляет
/, = / + Aft, = 0,0471 см.
Судя по таблице 6.1, в данном случае, когда исходная изогнутая ось
стержня была полуволной синусоиды, можно принять, что и вновь
полученная упругая линия является полуволной синусоиды. Иными словами, мы
могли бы вести вычисления только для среднего сечения, считая Да, ^0 и
Аа3 = Аа5 = 0; тогда величина Да, находится по формуле
Ад1 = ~ -р J У tecdF, (k)
f
причем интеграл относится именно к среднему сечению. Это дает в нашем
примере Аа, =900-Ю-5. Отсюда
Д*, = ^ Ш = 1800 • Ю-5 см.
00 ~
Изменение кривизны в сечении х = 1/1 теперь будет
Дк = iL Aft, <= 39 • Ю-5
246 ВЛИЯНИЕ ТЕМПЕРАТУРЫ [ГЛ. VI
Таблица 6.2
Координаты у
h
1
4
А
4
h
1
Интервал 0—30 мин
а, кг/см2
Аее • 106
Де° • 10s
(—Jp- JyAEedfVlO»
Дк • 10»
Аес • 10s
Аее • 106
Да, кг/см2
/,, еж
240
3,45
276
5,25
310
7,45
348
10,5
380
13,8
7,90
900
39
—7,6
—10,1
—40
0,15
-4,4
-16
7,90
0,45
1,8
15,7
5,2
21
23,4
9,6
38
0,048
Интервал 80—60 мин
ah кг/см2
&ес • 106
Де° • 105
Ах • 10»
Аес • 106
Аее ■ 106
Да, кг/см2
/2, см
200
2,0
260
4,4
312
7,66
369
12,6
418
18,3
8,80
1870
68
-ш
-20,2
—81
-4,7
-9,1
—36
8,8
1,24
5,0
0.0Г9
22,3
39
35,8
17,5
70
КРИТЕРИЙ НАЧАЛЬНЫХ НЕСОВЕРШЕНСТВ 247
Продолжение
Координаты у
4 И- 1 °
л
4
й
Интервал 60—90 мин
а2, кг/см2
Дес • 10s
Де° • 10s
Дх • 10s
Дес ■ 10s
Дее • 10s
Да, кг/см2
/з, еж
119
0,42
224
2,8
317
8
408
17
488
29
10,6
2740
118
—36,4
-36,8
-147
—12,9
-15,7
-63
10,6
2,6
10
34,1
17,1
68
57,6
28,6
114
0,134
Интервал 90—120 мин
а3, кг/см2
Де,- 10s
Де° • 106
Ди • 105
Дес • 105
Дее • 105
Да, кг/смг
ft, см
—28
-0,005
161
1,04
327
8,75
476
27
602
54,5
16,0
5120
220
—72
—72
—284
—28
—29
—126
16
7
28
60
33
132
104
50
200
0,236
Продолжение
Координаты у
Интервал 120—150 мин
а4, кг/см2
Лес-105
Ае° • 10s
Ах. • 105
Аес ■ 105
Аее-105
Да, кг/см2
/s, см
а5, кг/см2
-312
-7,6
—168
-160
-640
-952
35
0,01
—68
-68
—272
—237
355
11,2
32
11600
500
32
21
84
0,468
439
608
5'5
132
76
304
912
802
129
232
103
412
1214
вместо ранее полученной величины 37,5 ■ Ю-5. Новые значения деформаций
и напряжений для среднего сечения представлены в таблице 6.2. Как видим,
принятое нами допущение вполне
приемлемо. Поэтому продолжим
вычисления для следующих интервалов
времени: от 30-й минуты до 60-й,
от 60-й до 90-й и т. д., считая, что
упругая линия остается полуволной
синусоиды. Результаты вычислений
приведены в той же таблице 6.2.
На рис. 6.12 изображено
изменение стрелы прогиба во времени.
Величина / быстро растет; можно
считать, что в течение 150 минут
несущая способность стержня будет
исчврпанной. Эпюры распределения
напряжений по высоте среднего
сечения представлены на рис. 6.13. Как
видим, неравномерность распределения напряжений усиливается на каждой
ступени. Таким образом, данный критерий приводит к значению
критического времени, приблизительно равному
t 2.5
Рис. 6.12. Изменение стрелы прогиба / при
ползучести (/ — в см, t — a часах).
t. — 2,5 часа.
КРИТИЧЕСКОЕ ВРЕМЯ В СЛУЧАЕ ДВУТАВРОВОГО СЕЧЕНИЯ
249
Определим критическое время для того же примера, считая стержень не
имеющим начальной погиби и пользуясь первыми двумя критериями
выпучивания. Основные параметры равны
аэ = 470 кг 1см2, а =
500
16 ■ 470
причем .' измеряется в часах
= 0,67, k = 5 • 10~,2, п = 3, Е = 4 • 105 kzjcm2,
Ж
—Р^
»1
1*0
2W
Рис. 6.13. Эпюры распределения напряжений в различные
моменты времени.
Воспользуемся касательно-модульной теорией. По формуле C4) находим:
*.-!
1—0,67
3 4 • 105 • 5 • Ю-12 ■ 0,673 - 4702
= 0,83 часа.
Если, далее, воспользоваться теорией критической деформации, то по D0)
получим:
tt = 2,5 часа.
Совпадение со значением, найденным для стержня с начальной погибью,
является, конечно, случайным.
§ 74. Формулы для критического времени
в случае двутаврового сечения
Рассматриваемая нами задача может быть решена и иным путем
для «идеализированного» двутаврового сечения *), состоящего из двух
одинаковых полок, соединенных тонкой стенкой высотой h (рис. 6.14).
Момент инерции сечения будем считать равным
2 \2.
Fh*
F.77)
радиус инерции равен i=hf2.
Рассмотрим сечение стержня на расстоянии х от левого конца.
На рис. 6.15 изображена одна из его частей в изогнутом положении.
Обозначим через а, напряжение в полке, находящейся на вогнутой
*) Решение, приведенное здесь и в следующем параграфе, принадлежит
Н. Хоффу [6.14].
250
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
стороне, а через а2 — напряжение в полке, лежащей на выпуклой
стороне. Условие равновесия в проекциях на ось х дает
(о, + о2)у = />. F.78)
где Р—сжимающая сила, принимаемая нами постоянной. Определяя
моменты относительно центральной линии сечения (рис. 6.15), найдем:
(о, —02)-^ = М = /Ч F-79)
где М — изгибающий момент, равный произведению силы на прогиб v.
Рис. 6.14. Сечение
двутавра с тонкой стеикой.
6,F/i
В, Г/2
Рис, 6.15. Силы, действующие на отсеченную часть
сжатого стержня.
В настоящем параграфе под v понимается полный прогиб в
сечении х. Сопоставляя G7) и G9), найдем:
Р (, , 2i>',
('-т
F.80)
Примем зависимость A4) между скоростью деформации и
напряжением, исключив вначале мгновенные пластические деформации и
первичную фазу ползучести. Тогда будет
e = -p-a + A:o-";
F.81)
показатель степени п будем считать нечетным. Для полки на
вогнутой стороне получим (при Р = const):
• _ 2Р dv
El ~~ EFh dt
+ *(Я"A + х)"=
F.82)
для второй полки
ё2 = -
2Р dv
EFh dt
+*(Я'('-хГ <6-83»
Выразим кривизну изогнутой линии стержня через деформации
волокон, принадлежащих полкам:
* = *Ч*- F-84)
i 74] КРИТИЧЕСКОЕ ВРЕМЯ В СЛУЧАЕ ДВУТАВРОВОГО СЕЧЕНИЯ 251
Учитывая зависимость
находим:
d2v e2 — е,
дх*
F.86)
Дифференцируя левую и правую части по t и подставляя (82), (83),
получим:
d3v _ АР dv , ,_1Р\п\\1, 2v\n I, , 2v\n]
dx2dt ~ WK-
■S+*(£)"±[(-¥)"-(>+x)"l- <6-87»
В дальнейшем примем ге = 3. После простых преобразований
с учетом (87) придем к основному дифференциальному уравнению
задачи:
d3v , P dv , ., /Р\з 1 / v , . vz\ n /й ооч
Это уравнение является нелинейным. Допустим, что концы стержня
оперты шарнирно и что изогнутая линия является полуволной
синусоиды:
v = f(t)sla~. F.89)
Подставим (89) в уравнение (88) и проинтегрируем его по методу
Бубнова — Галеркина; получим:
i
Г Г д/ я2 . лх . Р д/ . лх .
J |.-^-Fsin-r+£rwsin-r+
о
+ 4k(^K±C^sin^+4£sm*^)]sin^dx = 0. F.90)
Вычислим интеграл
/
J
sin4 •£!</*= 4-f; F.91)
о
тогда вместо (90) будем иметь:
df [л2Е/
Подставляя вместо / выражение G7) и деля на F, получим
следующее дифференциальное уравнение относительно /:
^•-^ж=3к^ЕН(т+^)- F,93)
252
ВЛИЯНИЕ ТЕМПЕРАТУРЫ
[ГЛ. VI
где аэ — по-прежнему эйлерово напряжение. Здесь введен знак
полной производной, так как стрела прогиба / зависит только
от времени.
Вводя безразмерный параметр прогиба £=//Л, получим:
Будем считать, что в момент времени ^ = 0 относительная стрела
прогиба равна ^=:^0 = /0/й. Интегрируя уравнение (94) для
промежутка времени от 0 до t, найдем:
и
Как легко убедиться непосредственным дифференцированием,
входящий сюда интеграл равен
Выражение для t принимает вид
о—о £ 14-й
t = -l—T\n^-^r. F.97)
6£to3 £o 1+е2
Таков промежуток времени, необходимый, чтобы стрела прогиба
стержня возросла от значения ^ до £. Определим время t, при
котором прогиб сделается бесконечно большим, и будем считать его
критическим. Полагая в (97) £->оо, найдем:
аа — а 14- Й
*,= -!_ In—^-. F.98)
Это выражение можно упростить, если считать, что начальная стрела
прогиба мала по сравнению с высотой сечения (£0<dl); тогда будет
Иной результат мы получим, если характеристика ползучести
материала является линейной, т. е. если показатель степени в (81) равен
единице. Считая в зависимости (87) п=\, придем к линейному
дифференциальному уравнению
dsv . Р dv . , Р ■ п е 1rvrv.
Принимая v в форме (89), получим:
df
dt
(Pa-PL?r = kEPf> FЛ01)
§ 74] КРИТИЧЕСКОЕ ВРЕМЯ В СЛУЧАЕ ДВУТАВРОВОГО СЕЧЕНИЯ 253
так что скорость возрастания / пропорциональна самой величине /.
Интегрирование A01) дает
Из формулы A02) следует, что бесконечно большой прогиб можег
быть достигнут лишь в течение бесконечно большого времени.
Поэтому в данном случае должен быть введен иной критерий для
определения критического времени.
Пример 6.2. Определить критический промежуток времени для стержня
двутаврового сечения с площадью сечения Л = 1,6 см2, сжатого силой
Р = 500 кг, так что а = 310 кг/см2. Высоту сечения /г подберем таким
образом, чтобы радиус инерции двутаврового сечения i был равен радиусу-
инерции прямоугольного сечения стержня, рассмотренного в примере 6.1:
h = 2 • 0,23 = 0,46 см. Тогда гибкость стержня останется тон же: ?. = 92;
эйлерово напряжение будет равно аэ = 470 кг/см2. По-прежнему примем
/0 = 0,01 см, п = 3, Е = 4 • 105 кг/см2, ft = 5 • 10-12. Имеем /„ <С h; по
формуле (99) находим:
, 310-470 . / 1 \ ,,
К = г Р5 г In —к- = 3,4 часа.
6-4 • 105- 5- 10_12-3103 1,462/
Мы пришли к результату, близкому к тому, который был найден
численным методом в примере 6.1; здесь величина t^ должна была получиться
большей, так как мы применили несколько иной критерий выпучивания.
Формулы (98) и (99) можно для «прикидочных» расчетов применить к
стержням любой формы сечения, считая гибкость фиктивного стержня
двутаврового сечения равной гибкости рассматриваемого стержня.
Напомним, что для соответствующего «идеального» стержня мы нашли
по касательно-модульной теории t^ — 0,83 часа и по теории критической
деформации tt = 2,5 часа.
Обратимся к более общему случаю, когда мгновенные деформации,
появляющиеся вслед за приложением нагрузки или при последующем
возрастании напряжений, не будут чисто упругими. Исходную зависимость (81)
мы должны, следовательно, дополнить членом rasa, фигурирующим в
уравнении A4). Как было уже сказано, введение этого члена дает также
возможность учесть фазу неустановившейся ползучести. Будем принимать и
здесь, что показатель степени s является нечетным. Новый член должен
вводиться со знаком плюс в том случае, если происходит возрастание
напряжений сжатия, т. е. при а>0 иа>0, и со знаком минус при
возрастании растягивающих напряжений. При разгрузке мгновенные пластические
деформации будут отсутствовать, так что для процесса разгрузки надо
принимать г = 0.
Если стержень двутаврового сечения имеет легкое искривление до
приложения нагрузки, то можно считать, что на первой стадии нагружения
в.обеих полках будут иметь место напряжения сжатия, причем на
вогнутой стороне они будут возрастать (дополнительное нагружение), а на
выпуклой — уменьшаться (разгрузка). Примем для e,t дополнительный член
Ы 11+т) T-W Fл03)
, да //J\s+1/, , 2v\s 2 dv
254 ВЛИЯНИЕ ТЕМПЕРАТУРЫ [ГЛ. VI
это выражение надо ввести в (82); значение же е2 по (83) останется без
изменений. Уравнение (87) примет теперь вид
d3v _ 4Р dv ,(Р\" 1 Г/, 1v\n Л . 2w\"l
шж—-Ет-дГ+к\т) т[[1—г) -~V+—) \~
-'(тГО+т)'!*- <-«>
Примем в последующих выкладках /г=3 н s=l; значения отвечают
данным опытов над некоторыми сталями, а также алюминиевыми сплавами.
Кривая е(о) будет представлена в этом случае квадратной параболой
е = £■ — та2. F.105)
Примем v (t, х) по (89); тогда левая часть уравнения (90) должна быть
дополнена выражением
Г 2/- (Р\2(д/
Ю \F I \dt'sx
о
Вычисляя интеграл
о
получим вместо (92) уравнение
-т + т'**-")'1» <в'"*>
¥■**=§■ <6107>
[Т->-»&)'Ш-
или
(°- - ° - тН § - 4 ro2£s -§ -3каЗЕ (£+£3)- FЛ09)
Введем обозначения
^ra2E=l, 3£a3£ = v F.110)
н приведем A09) к виду
q3-q_?. dg 16 К rig
v £ + £з зя v 1+C»- <0Л11'
Найдем интеграл
?
у^ = arctg 5 - arctg £„ = arctg 1=^,
So
J
F.112)
Вместо (96) получим теперь новое выражение для t:
t=^—— In |-J±§- —~ arctg Jl—=.. F.113)
2v ""^ 1+C2 Зя v '■" 1+Sgg
§ 741 КРИТИЧЕСКОЕ ВРЕМЯ В СЛУЧАЕ ДВУТАВРОВОГО СЕЧЕНИЯ 255
Судя по уравнению A13), эффект упругой деформации и первичной фазы
ползучести сводится здесь к уменьшению времен», необходимого для
достижения заданного значения £.
Скорость поперечного перемещения d^fdt становится бесконечно
большой в том случае, если коэффициент при ней в левой части уравнения A09)
обращается в нуль:
а3-а-}.—^К = 0. F.114)
Отсюда находим «критическое» значение относительной стрелы прогиба:
е. = -щ-(°9-0~Х)- FЛ15>
Подставляя выражение A15) в A13), находим критический промежуток
времени t^. Если принять ?. = 0, т. е. предположить, что мгновенные
пластические деформации отсутствуют, то A15) дает £*->оо, и формула для
критического промежутка времени A13) перейдет в формулу (99) предыдущего
параграфа.
Мы принимали здесь, что напряжения на выпуклой стороне
изогнутого стержня являются сжимающими. В действительности, как
это мы видели в примере 6.1, они могут перейти в растягивающие.
Тогда вместо разгрузки на выпуклой стороне мы получим уже
догружение; в выражение (83) для е2 придется ввести дополнительный
член, учитывающий мгновенные пластические деформации. Как видно
из формул (80), величина а2 меняет знак при 2v = h. В среднем
сечении напряжение изменит знак при / = й/2 или при £ = 0,5.
Таким образом, все предыдущие соотношения справедливы, строго
говоря, лишь для £^0,5. Если пользоваться расчетными
формулами A13) и A15) при С> 0,5, то мы получим несколько
преувеличенное значение tt. В одной из работ [6.14] предложена
аналогичная формула, дающая преуменьшенное значение tt; она выведена
в предположении, что во всех точках полки, лежащей на выпуклой
стороне, мгновенные пластические деформации растяжения возникают
одновременно.
Пример 6.3. Определить критический промежуток времени для
стержня, описанного в примере 5.2, принимая п = 3, s = 1, Е = 4 • 10s кг/см2,
ft = 5-Ю-1, /" = 3-10-10. При таком значении г зависимость а(е) имеет
вид (напряжение выражено в кг/см1)
106е = 2,5а — 1,5 • 1 (Г V. (а)
Величины ?. и v составляют по (ПО):
X = -i-3-10~l0-31°2,4-lo5 = 5-8' v = 3 - 5 - Ю-12 • 3103 - 4 -105 = 179. (Ь)
По формуле A15) критическое значение безразмерной стрелы прогиба будет
е*= Тб?Ь" D7°~~ 31°~~ 5|8) = 15Д (с)
256
влияние тпмппратуры
[ГЛ. VI
Мы получили £, > 0,5. Воспользуемся исе же формулой A13), чтобы найти
приближенное значение критического промежутка времени; найдем:
_ 470 — 310-5,8 15,6= 1 + 14б) 16 5,8 15'6~1б __
2-179 М\2 1 + 15.62 Зл 179ar°S . 15,6
1,46/ + 46
= 3,3 + 0,1 =3,4 часа. (<1)
Результат получился в данном случае тот же, что и в примере 6.2, когда
мгноиенные пластические деформации во внимание не принимались. Это
объясняется тем, что мгновенные пластические деформации при заданном
значении а малы по сравнению с упругими деформациями: второй член
в выражении (а) для е. составляет лишь около 2% по сравнению с первым.
§ 75. Сопоставление различных критериев выпучивания
Мы познакомились с различными подходами к задаче об
устойчивости стержней при ползучести. Каждый из них обладает своими
преимуществами и недостатками.
Критерий касательного модуля согласуется в известной мере
с общей теорией устойчивости сжатых стержней при пластических
деформациях. Расчетные формулы получаются простыми по
структуре и позволяют использовать разные теории и законы ползучести.
Вместе с тем вывод основных зависимостей этого критерия содержит
некоторые допущения, требующие дополнительного анализа.
Возможно, что закон ползучести, хорошо описывающий общий процесс
изменения деформации во времени, нельзя распространять на
изохронные деформации, являющиеся следствием малых возмущений;
особенно это относится к деформации на стороне разгрузки.
Критерий критической деформации является предельно простым
с точки зрения практического применения. Однако, как уже было
сказано, он не соответствует теории упруго-пластического
выпучивания стержней и не имеет, по существу, определенного обоснования,
являясь своего рода «догадкой». Значения критического времени
получаются но этой теории в несколько раз большими, чем по
предыдущей. Надо вместе с тем отметить, что имеющиеся
немногочисленные экспериментальные данные довольно хорошо согласуются
с критерием критической деформации *).
Динамический критерий, который мог бы служить для оценки
всех других методов, разработан в настоящее время лишь в
применении к теории упрочнения. Здесь он приводит практически к тем же
результатам, что и «касательно-модульный» подход. Желательно
найти непротиворечивые пути приложения этого критерия к
зависимостям теории старения.
*) Об этом свидетельствуют результаты экспериментального
исследования, принадлежащие А. П. Кузнецову [6.4].
§ 75] СОПОСТАВЛЕНИИ РАЗЛИЧНЫХ КРИТЕРИЕВ ВЫПУЧИВАНИЯ 257
Наконец, критерий начальных несовершенств полностью
основывается на известных соотношениях теории изгиба стержней и с точки
зрения логики расчета является вполне оправданным. Однако
исходные данные — характер и стрела начальной ногиби — зависят от
многих обстоятельств, которые трудно учесть при конструировании.
Можно рекомендовать пользоваться приближенными формулами для
стрелы начальной ногиби в зависимости от гибкости стержня (см.
главу XXV) и применить статистический подход к задаче. Надо
отметить также, что вычисления, необходимые для решения задачи
численным методом, «шаг за шагом», являются сравнительно
трудоемкими. Правда, они легко поддаются программированию для
выполнения на цифровых электронных машинах, в этом случае нет
необходимости искать аналитические зависимости, аппроксимирующие
процесс ползучести; можно непосредственно использовать табличные
данные или диаграммы, полученные экспериментально.
В итоге надо рекомендовать для «прикидочных» расчетов
пользоваться теорией касательного модуля или критической деформации,
помня, что первая из них дает, как правило, преуменьшенные
значения критического времени и определяет возможный исходный момент
выпучивания. Дш более обоснованного определения ресурса
реального стержня следует применить критерий начальных несовершенств.
Крайне важно накопить экспериментальные данные в сопоставлении
с результатами расчетов.
Другое направление в теории устойчивости при ползучести,
важное прежде всего для расчета бетонных и железобетонных
конструкций, связано с использованием так называемой теории
наследственности, представляющей связь между полной деформацией,
напряжением и временем с помощью уравнения Больцмана — Воль-
терра; оно выражает влияние на процесс ползучести единичных
«импульсов», действовавших в моменты времени, предшествовавшие
данному (см. книги Л. Р. Ржаницына [0.9], Н. X. Арутюняна
«Некоторые вопросы теории ползучести», Москва, 1952 и Л. М. Кача-
нова [6.3]). Это направление развивается Г. С. Григоряном («Теория
оболочек и пластин», Ереван, 1964).
ГЛАВА VII
УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ
НАГРУЖЕНИИ
§ 76. Классификация динамических задач
Все задачи, которые мы рассматривали до сих пор, являлись
статическими и относились к устойчивости равновесных форм.
Правда, при исследовании устойчивости стержней в пластической
области, или в состоянии ползучести, фигурировали процессы,
происходящие во времени; но они считались настолько медленными,
что силами инерции элементов тела можно было пренебречь.
Обратимся теперь к динамическим задачам, в которых необходимо
учитывать ускорения элементов тела.
Одна из таких задач состоит в исследовании поведения сжатого
стержня при быстром нагружении. Если скорость возрастания
сжимающей силы достаточно велика, то элементы стержня не
успевают переместиться в направлении, нормальном к оси стержня.
Благодаря этому сжимающее усилие может достигнуть первой
критической величины и даже значительно превысить ее, раньше чем
прогибы достигнут заметных значений. Поскольку в таком
динамическом процессе сжимающая сила может пробежать не только
первое, но и более высокие критические значения, то при этом следует
ожидать появления высших форм потери устойчивости. Эта
особенность процесса быстрого нагружения является важной, так как
связана с существенным повышением несущей способности стержня.
Подобно тому как это было в задаче о ползучести, нас здесь будет
интересовать критическое время, по истечении которого
напряжения или перемещения достигают предельных значений, определяемых
из условий эксплуатации конструкции.
При решении задач, относящихся к поведению стержня при
быстром нагружении, мы будем пользоваться принципом Даламбера,
в уравнение «.равновесия» элемента стержня будут вводиться силы
инерции. В дальнейшем учитываются, как правило, лишь силы
инерции, соответствующие поперечным перемещениям (прогибам)
элементов стержня. Легко убедиться в том, что такое решение
справедливо только для сравнительно быстрого, но не ударного нагружения.
§76]
КЛАССИФИКАЦИЯ ДИНАМИЧЕСКИХ ЗАДАЧ
259
Допустим, что импульсивно приложенная сжимающая нагрузка
воспринимается одним из концов стержня. Примыкающие к этому
концу элементы стержня будут испытывать упругую деформацию,
которая начнет распространяться по длине стержня со скоростью,
совпадающей со скоростью звука в материале стержня, равной
< = /¥• <™>
где у — удельный вес материала. Для стали и дюралюмина эта
величина составляет с = 5- 105 см/сек.
Примем, что отрезок времени, необходимый для распространения
упругой волны по длине стержня, мал по сравнению с
интересующим нас «критическим временем». Тогда можно рассматривать
поперечные смещения как относительно медленные и условно принять,
что сжимающая сила в каждый момент времени имеет во всех
сечениях стержня одно и то же значение, передаваясь по длине как бы
мгновенно.
Иначе должна ставиться задача об устойчивости стержня в
случае собственно ударной нагрузки, передающейся на стержень в
течение весьма короткого промежутка времени. Здесь существо задачи
состоит в том, чтобы проследить процесс передачи усилий вдоль
длины стержня. Иными словами, в этом случае необходимо
дополнительно учитывать силы инерции элементов стержня, отвечающие
продольным перемещениям.
Наряду с задачами о быстром или ударном нагружении,
состоящем в однократном приложении силы, большое значение имеют
также задачи, в которых сжимающая сила является периодической
функцией времени. Возникающие в этом случае поперечные
колебания стержня носят название параметрических. Они имеют
своеобразные черты, отличающие их от обычных вынужденных
колебаний. В зависимости от характера параметрических колебаний
стержень может быть динамически устойчив либо неустойчив. Термин
динамическая устойчивость в литературе часто связывают именно
с поведением конструкций под действием периодической силы. В
дальнейшем мы будем иногда применять этот термин и в более общей
трактовке, распространяя его на случай импульсивного приложения
нагрузки.
Промежуточное место занимают случаи, когда нагрузка
изменяется не периодически, а по определенной заданной программе
либо когда ее изменение отчасти задано, а отчасти зависит от
поведения самой упругой системы.
Исследования, относящиеся к устойчивости упругих систем при
динамическом нагружении, привлекли к себе внимание главным
образом в связи с требованиями современной авиационной техники и
машиностроения. Опасные для конструкций параметрические
колебания наблюдались также в висячих мостах.
17*
В данной главе мы рассмотрим задачи динамической устойчивости
стержней, круговых колец и высоких балок; задачам устойчивости
стержней при ударе будет посвящена глава VIII. Говоря об
устойчивости при быстром нагружении, мы будем, как правило,
исследовать системы, имеющие начальные отклонения от идеальной формы,
и определять развитие этих отклонений во времени. В предыдущей
главе уже говорилось о том, что такой путь дает возможность
определить несущую способность реальных конструкций, всегда
получающих те или иные начальные дефекты при изготовлении,
транспортировке, сборке. Правда, для единичной конструкции начальные
несовершенства имеют, как правило, случайный характер; поэтому
при разработке практических методов расчета надо пользоваться
статистическими методами и данными о возможном разбросе
начальных возмущений.
§ 77. Динамическое нагружение стержня.
Исходное уравнение
Начнем с задачи о стержне, шарнирно закрепленном по концам
и подвергающемся сжатию силой Р, изменяющейся во времени t;
P = P(t). Примем, что стержень имеет начальную
погибь; другие возмущающие факторы, например
эксцентриситет в приложении нагрузки, будут как бы
заменяться эквивалентным искривлением стержня.
Обозначим начальный прогиб через v0 = v0(x),
полный и дополнительный прогибы (рис. 7.1) будут
являться функциями координаты и времени —
соответственно г/, (х, t) и v (x, t).
Дифференциальное уравнение изогнутой оси
стержня имеет вид
Л г*
E2i/,
Ох
дх*
If
G.2)
где / и F— момент инерции и площадь сечения
стержня. В левой части фигурирует производная от
дополнительного (упругого) прогиба v = vl — v0.
В правой части сила множится на производную от
полного прогиба; из рис. 7.1 видно, что при
вычислении изгибающего момента силу Р следует
множить именно па vl. Последний член представляет
собой силу инерции, приходящуюся на единицу длины
стержня; здесь может фигурировать либо функция ©,,
либо v.
Поставим перед собой цель — определить характер движения
элементов стержня при том или ином законе изменения сжимающей
V/
Рис. 7.1.
Стержень с
начальной погибью.
воспринимающий
динамическую нагрузку.
ДИНАМИЧЕСКОЕ НАГРУЖЕНИЕ СТЕРЖНЯ
261
силы во времени. Как было уже сказано, сжимающее усилие во всех
сечениях стержня считается равным Р *),
Уравнение B) выписано в предположении, что прогибы а, и vQ
весьма малы по отношению к длине стержня. При рассмотрении
прогибов, сравнимых с длиной, следует составить нелинейное уравнение,
пользуясь точным выражением для кривизны упругой линии.
Функцию v0(x) можно в общем случае разложить в ряд Фурье
по формам статической потери устойчивости или по формам
колебаний; в случае стержня эти формы совпадают между собой. В
зависимости от обстоятельств изгиба наибольшее значение может иметь
форма начальной погиби с определенным числом полуволн т.
Поэтому в дальнейшем мы будем принимать для v0 и vx выражения:
. . тпх . . тпх 1 о о /-г о\
•w0 = /0sin—-.—, vx = fxsm—-.— , m=l, 2, 6,... G.3)
Стрелу начального прогиба /0 считаем заданной; стрела полного
прогиба fi является функцией времени: fl=f1(t). Подставим
выражение C) в уравнение B); тогда получим:
м* n P it у lAF d?fi D n*EI ._ ..
m(f\-fo^ — -p-;mfi==~-i^^r-dF-' где рэ = -[2-- G-4)
Если считать Р = 0, получим отсюда уравнение собственных
поперечных колебаний стержня, имеющего начальную погибь:
# + -f^(/.-/o) = 0- G-5)
Частота m-го главного колебания равна
ka = m'%-)/lI/L. G.6)
Частоту основного тона колебаний обозначим через k (без индекса);
она равна
Здесь под Р* понимается безразмерный параметр эйлеровой нагрузки
(равный соответствующей деформации), под i — радиус инерции
сечения, а именно:
величина с выражается формулой A).
Полагая в D) инерционный член равным нулю, найдем полную
стрелу прогиба стержня, имеющего до загружения силой Р начальное
) Подобная задача была поставлена И. М- Рабиновичем в 1947 г<
искривление по т полуволнам и получившего дополнительный
прогиб по той же форме:
/i= /op • G-9)
1 _
т*Рэ
Введем безразмерный параметр времени
tk^=kt = ~t, G.10)
где Т — период основного тона колебаний; тогда исходное
уравнение D) примет вид
-^-f*2('»2--£-)/i = *4/o. G-11)
Используем это уравнение для решения ряда частных задач.
§ 78. Случай внезапного приложения нагрузки
Предположим, что стержень подвергается действию внезапно
приложенной силы Р, которая затем остается постоянной *).
Такая постановка задачи не вполне согласуется со сделанными
выше допущениями. Мы считали, что скорость нарастания
сжимающего усилия находится в известных пределах, в связи с чем можно
пренебречь инерцией продольных перемещений; между тем в данной
задаче принимается, что в начальный момент времени сжимающее
усилие по всей длине стержня возрастает мгновенно до величины Р.
Однако изучение этого простейшего случая важно с методической
стороны.
Воспользуемся уравнением A1), принимая следующие начальные
условия:
Л = /о. ^ = 0 при /й = 0. G.12)
Рассмотрим случай, когда Р/Рэ < т2; тогда вместо A1) получим
di
di5L + ffl2/is=«7o. G-13)
где
co2 = m2fm2_^L\. G.14)
Интеграл этого уравнения будет
/,=^sin(offt-f£cosGrfft-|-—5-/0. G.15)
*) D излагаемой здесь постановке эта задача была впервые исследована
М, А. Лаврентьепым и А. Ю. Ишлинским [7.4J в 1949 г,
СЛУЧАЙ ВНЕЗАПНОГО ПРИЛОЖЕНИЯ НАГРУЗКИ
263
Пользуясь условиями A2), находим
/i = | р -^гр\ cos <s>tЛ /0. G.16)
Мы пришли к уравнению собственных колебаний стержня около
положения равновесия, характеризуемого стрелой прогиба (9).
Колебания делаются невозможными при Р\Ръ^т2. При Р/Р3 =
= т1 получим
•^- = «70. GЛ7)
atk
откуда
/i = /o(l-r-^4). G.18)
При PjPb > т2 уравнение A1) принимает вид
££_£22/1==т4/о> G.19)
где
Q2 = m2/^_.m2J. G_20)
Решение уравнения A9) будет
J
т2Р
/i = f- S^p-chQ/ft--p-: Uo- G-21)
Рэт2 У
Таким образом, при PjP3^-m2 стрела прогиба неограниченно
возрастает во времени. Как только нагрузка достигнет эйлерова
критического значения Рэ, начнет развиваться форма с одной
полуволной (т— 1). При Р = 4РЭ возможно нарастание стрелы прогиба для
форм с одной, двумя полуволнами (т=1, 2) и т. д. Темп
возрастания прогиба определяется величиной О2. Если при достаточно
большом числе т считать его непрерывно изменяющимся, то условие
максимума Q2 получит вид
dQ2 0 или -§- — 2т2 = 0. G.22)
dm2 Рэ
Следовательно, максимум Q2 имеет место при значении т*, равном
либо при т*, равном ближайшему к |/Р/2Рэ целому числу.
Между тем статическая высшая равновесная форма стержня имеет
номер, равный
Р G.24)
л = |Л
или ближайший к этой величине.
Как видим, наибольшим темпом нарастания будут обладать
не те формы, которые соответствуют числу ц, а формы с меньшим
номером, равным приблизительно 0,7ц. Допустим, например, что
к стержню внезапно приложена сила Р = 9РЭ. Тогда имеем т]=3,'
с наибольшей интенсивностью будет нарастать форма прогиба по двум
полуволнам (т* —2); при Р= 16ЯЭ будет т* = 3 и т. д. Этот вывод
имеет существенное значение для последующих разделов.
Мы считали, что начальная упругая линия может быть
представлена с помощью ряда Фурье и что все составляющие гармоники
являются равновозможпыми. Если же характер начальной погиби
является вполне определенным, то сравнение различных вариантов
искривления стержня теряет смысл. Отметим, однако, чго форма
прогиба, развивающаяся в соответствии с начальной погибью, может
в результате малых возмущений, возникших уже в процессе движения,
перейти в другую форму, с преобладанием гармоники, характерной
для данной скорости пагружепия.
§ 79. Нагрузка, быстро возрастающая во времени
Рассмотрим далее случай, когда сила Р возрастает
пропорционально времени: P = ktF; величина k, измеряемая в кг\см2 ■ сек,
характеризует скорость изменения сжимающего напряжения *).
Введем новый параметр времени
'•=■£- = -^-1 G.25)
он связан с величиной tk A0) соотношением
£'=■£-'*■ G-26>
Воспользуемся безразмерным параметром скорости изменения
напряжения
SW.-(^)'; G.27)
*) Эта задача разобрана автором [7.2а]. Ряд задач подобного тина был
ранее рассмотрен И. А. Бурнашевым (Докл. АН Узб. ССР, № 11, 1951),
Ш. С. Мазитовым (Изв. Отд. ест. наук АН Таджикской ССР, № 16, 1956),
Н. Л. Мошенским (Труды Ленингр. корабл. ин-та, № 12, 1954), А. И. Оселедько
(Труды Воронеж, инж. стр. ин-та, № 4, 1958), У. Р. Унманпсом
(Динамический продольный изгиб, канд. дис, Рига, 1964) и другими.
НАГРУЗКА, БЫСТРО ВОЗРАСТАЮЩАЯ ВО ВРЕМЕНИ 265
тогда получим
Уравнение A1) приобретает вид
-~^-'»3('*-'»2)/i = '»4/o-
G.28)
G.29)
Разделим каждый член па радиус инерции сечения / и обозначим:
/
/о
у у 1 у J °
тогда получим
1 d\
s* at*2
■m2(t* — m2)t, = m%.
G.30)
G.31)
Уравнение C1) может быть проинтегрировано в бесселевых
функциях (см. § 81). Кроме того, интегрирование уравнения C1) и более
1-у
0
-It
m-Z
._
—
—
;\
\
J
t\
S'-OJ
Со -0.001
^>
/V
\s
m~z4L/
1 1 7
/4
JjL
'/
/'/
//
' 1
1
'
SS"-
£&
\
л
У
'l/~
//
'
1 1
//
7
i
1
1
' 3
W
13 14
1 "Т.
Рис. 7.2. Изменение стрелы прогиба во времени при
различном числе полуволи.
сложных уравнений такого типа может осуществляться численными
методами, а также с помощью аналоговых и цифровых машин.
На рис. 7.2 представлены результаты вычислений, проведенных
численным методом Адамса, для случая S* = 0,1, Со = 0,001. По оси
абсцисс отложен параметр Г, равный отношению переменной величины
сжимающей силы к эйлеровой нагрузке, а по оси ординат
-безразмерная стрела прогиба £. Различные кривые отвечают
значениям т—1, 2, 3. Как видим, резкое увеличение прогибов имеет
место раньше всего при изгибе стержня по двум полуволнам (т = 2);
правее лежат кривые для т = 1 и т — Ъ. Судя по кривой т — 2,
прогибы начинают резко возрастать лишь при силе, в семь раз
превышающей эйлерову нагрузку. Прогиб, равный радиусу инерции
сечения, достигается при нагрузке Р = 9,6РЭ.
Если воспользоваться формулой (9), то можно определить зави-.
симость £ от Р!РЭ для статического пагружепия при разных т. Левее
всего здесь лежит кривая т=\, изображенная па рис. 7.2
пунктиром. Прогиб £= 1 достигается при Р(РЪ ~ 1.
Интересно отметить, что нагрузке Р « 9РЭ отвечает статическая
форма потери устойчивости с тремя полуволнами, в то время как
динамический процесс происходит при двух полуволнах; объяснение
этому было дано выше, в § 78.
Таким образом, мы здесь в качестве критерия, определяющего
критическое время — а вместе с тем и критическую нагрузку,—
приняли условие, что стрела прогиба не должна превысить радиуса
инерции сечения. Этот критерий является, конечно, условным; можно
исходить из предельного значения максимального напряжения либо
наибольшей деформации и т. д.
§ 80. Исследование энергии системы
Проведем сопоставление различных форм динамической потери
устойчивости с энергетической точки зрения. Кинетическая энергия
стержня равна
Подставляя выражение C), найдем
*-£Wi- G-33>
Воспользуемся безразмерным параметром
и введем параметр времени по B5); тогда будет
Г=±(Щ3 G
S* \dt*J ' Л
ИССЛЕДОВАНИЕ ЭНЕРГИИ СИСТЕМЫ 267
Потенциальная энергия деформации складывается из энергии
изгиба и сжатия:
о
Чтобы вычислить потенциал нагрузки, определим сближение
концов стержня А. Начальное расстояние между шарнирами равно
k — l---^
i
1
о
а конечное расстояние
I (&)'<*■ еда
/
О
где I—длина стержня в прямолинейном состоянии. Сближение краев
равно
Пользуясь C), находим
A = -S-+-*TmV(/i-/5)- G'40)
Потенциал нагрузки будет иметь вид
У = -Р^-д—£тЧ(Д-Я. G.41)
Общая потенциальная энергия равна
Э = и +V = ^^(f1-f0)*--^-£rm4{fl-fl). G.42)
Отсюда в безразмерных величинах
Э* = -^ Э = т4 (С - СоJ - mV (С2 - Й) - 2Л G.43)
Определим безразмерную функцию Лаграпжа
Z.» = г - Э* = ^ С2 - т* (£ - Q2 + тЧ* (С2 - С2) + 2*,г. G.44)
где t, — dt,ldt, и составим уравнение Лаграпжа
d dL* ^ = (); GЛ5)
dt* dt, di
тогда придем к основному уравнению C1).
268 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. Vll
Найдем, далее, полную энергию системы
П* = Г + Э* = -^- С2 + т4 (£ - д2 - «V (£2 - С2) - 2г*2. G.46)
Рассматриваемая нами система не является консервативной —
заданная сила явно зависит от времени, — и потому полная энергия
не остается здесь постоянной.
Введем обозначение
П1 = П + It . G.47)
На рис. 7.2 вверху изображена зависимость H.i{t) для различных
значений от. Судя по графику, в любой момент времени уровень
полной энергии, отвечающий от = 2, ниже, чем уровень энергии для
т= 1 или т = 3. По-видимому, форма потери устойчивости по двум
полуволнам является при данном значении 5* наиболее вероятной.
Графики, аналогичные рис. 7.2, были построены для различных
значений S*; были найдены кривые, отвечающие такому значению т,
при котором возрастание прогибов является наиболее интенсивным.
Рис. 7.3. Диаграмма «прогиб —нагрузка» при различных скоростях
нагружения.
На рис. 7.3 дан сводный график функций £(Г) при ^ = 0,001 для
последовательно возрастающих скоростей пагружепия с; напомним,
что параметр 5* обратно пропорционален с2. Значение т для каждой
кривой указано.
Из графика видно, что при относительно малой начальной стреле
прогиба и большой скорости пагружепия сила, воспринимаемая
стержнем, может во много раз превзойти эйлерову нагрузку. Прогибы
развиваются преимущественно прн некоторой определенной форме
упругой линии, зависящей от скорости нарастания сжимающей силы;
чем выше эта скорость, тем большее число полуволн образуется
по длине стержня.
РЕШЕНИЕ В БЕССЕЛЕВЫХ ФУНКЦИЯХ 269
§ 81. Решение в бесселевых функциях
Мы уже говорили о том, что рассматриваемая задача может быть
решена точно без применения численных методов. Обратимся к такому пути
решения.
Представим уравнение C1) в виде
-^% - S*m2 {t* ~ т2) ; = S*m%0. G.48)
dt*
Воспользуемся подстановкой
f- = т2 — г (S*m2) ~* G.49)
и введем новую переменную г. Имея в виду соотношения
S*m2 (m2 — t*) = (S*m2) 2г, G.50)
__2
{dt*J = (dzJ (S*m2) 3, G.51)
получим:
-Ц- + г£=Л£0, G.52)
где
А=у S*ma. G.53)
Рассмотрим сначала случай, когда
t* <m\ г> 0. G.54)
Эти соотношения справедливы для первого этана движения, когда
сжимающая нагрузка не превосходит т-и статической эйлеровой силы:
Р < т2Рэ. G.55)
Общее решение уравнения E2) может быть представлено в виде
&=с,е, + с,ь+е». G,56)
Под £i и £j понимаются линейно независимые решения однородного
уравнения
d%
dz
2 , *с = 0, G.57)
образующие так называемую фундаментальную систему решения; под £3
подразумевается частное решение исходного уравнения.
С уравнением типа E7) мы уже встречались в § 42; как мы видели,
оио имеет решения *):
Cl = A/1/a(!^, ?2=^y_7.(l^), G.58)
где /,п J_\, —бесселевы функции первого рода с индексами 1/3 и —1/3,
*) См. указанную на стр. G6 книгу Э. Камке, стр. 453.
Частное решение £3 можно выписать в виде
Сз=^.(ь|-^Л-С, \^Лг),
где W — определитель Вронского:
W =
fel fe2
dz dz
G.59)
G.60)
G.61)
G.62)
Вычислим производные от функций £,, £2:
*-т«-% (*•*)+< (§4
f4»-^_,„(|,".)+,/„.(l/'.).
Подставляя эти выражения в F0), получим:
w - -° К D «*) ^-v, D ^) - '-* (! *"■) а. A «*)] • <7-бз>
Выражение F3) может быть представлено через гамма-функции с помощью
формулы типа
W0 = yv (г) j'_y (г) - /_v (г) /£ (г) =
= T[r(v + l)r(-v) — r(v)T(—v + l)J' G,64)
В нашем случае
W=-
Воспользуемся известными соотношениями для гамма-функции *)
Г(г+1) = гГ(г), Г(г)ГA — г) = ^—,
v ' ' ч ' ' v ' sin яг
тогда найдем
и, далее,
^М-4)=-''Ш'
sin-
Г = -
Окончательно имеем
IYH)
3]/
я
3
Г
2я
G.65)
G.66)
G.67)
G.68)
G.69)
*) См., например, Н. Н. Лебедев, Специальные функции и их
приложения, Гостехиздат, М., 1958, стр. 13.
ЭКСПЕРИМЕНТЫ ПО ПРОДОЛЬНОМУ УДАРУ
271
Выполняя интегрирование *) но E9), подставляем найденпоэ выражение
для £3 в решение E6); постоянные С, и С2 должны быть определены из
начальных условий:
£=£о, Jjr = 0 нри ** = 0 и г = (S*m»)''». G.70)
Функции E6) изменяются периодически, так что движение системы на
протяжении первого этана имеет колебательный характер. Изменение £
происходит с амплитудой порядка £0; поэтому на графике рис. 7.3, составленном
для £0 = 0,001, колебания незаметны.
При возрастании параметра времени t* величина z падает. Определив £
и dt,/dz для z — 0, мы получим начальные данные для следующего, второго
этапа движения. Уравнение E2) для второго этапа принимает вид
-^-_7£=Л£0, G.71)
dz2
где
7 = — z = (С — т2) (S*m2)'''. G.72)
Решение уравнения G1) выпишем в виде
С=С,С, + С2С2 + С3. G.73)
Решения однородного уравнения
-^L — 7? = 0 G.74)
dz*
будут * *)
где /,/, /_i, —модифицированные (видоизмененные) бесселевы функции
первого рода. Эти функции меняются моното шо; амплитуда прогиба будет
при t* > т2 неограниченно возрастать. К этому результату мы уже пришли
в § 79, пользуясь численным методом. Частное решение £3 определяется но
формуле тина E9); определитель Вронского по-прежнему выражается
формулой F8).
§ 82. Эксперименты по продольному удару
Особенности явления динамической потери устойчивости,
отмеченные выше, обнаруживаются и в экспериментах. В работе [7.5]
описаны интересные опыты над деревянными стержнями,
подвергавшимися ударному пагружеиию падающим грузом. Была применена
скоростная киносъемка последовательных конфигураций стержня
(от 2200 до 2700 кадров в секунду); кроме того, проводилось осцилло-
графировапие деформаций в отдельных точках.
*) Подробные выкладки для частного примера приведены Н. Хоф-
фом [7.12]. Другой закон изменения нагрузки рассмотрен с помощью
подобного метода Б. А. Олисовым.
**) См. указанную выше книгу Э. Камке, стр. 453.
Судя по этим данным, весь процесс деформации образца делился
на несколько фаз. В течение первого периода, который в одном из
опытов составлял около V.-,oo сеК> весь образец испытывал сжатие.
Обрашы 6'20'60/Jmm
На протяжении второго периода,
примерно той же
продолжительности, через образен проходила
отраженная волна и возникали
поперечные колебания. При этом
Образцы 10'12*600им в различных образцах в зависимости
or гибкости возникало различное
число полуволн по длине, в то
время как нагрузка, приходящаяся
на единицу площади сечения,
оставалась одной и той же. В
течение третьего периода,
составлявшего 1/250 сек, происходило изменение формы потери устойчивости
с переходом к одной полуволне. Наконец, четвертый период ('/to ceK)
состоял в затухающих колебаниях образца по одной полуволне.
Ж(
щщы 10>!2>
Рис. 7Л. Искривление стержней при
динамическом нагружении.
Рис. 7.5. Выпучивание стержня по трем полуволнам.
На рис. 7.4 изображены различные конфигурации стержней двух
типов, а на рис. 7.5 — три кадра киносъемки, отражающие
динамическую потерю устойчивости по трем полуволнам.
Таким образом, теоретически выше нами была описана только
одна из фаз изгиба стержня при ударе; не была исследована
предварительная фаза распространения деформации по длине стержня,
СЛУЧАЙ ЗАДАННОГО ЗАКОНА СБЛИЖЕНИЯ КОНЦОВ СТЕРЖНЯ 273
и не нашел отражения переход от большего числа полуволн к
меньшему в заключительной фазе.
Судя по данным опытов, работа падающего груза, затраченная
в процессе выпучивания стержня, может оказаться для более гибких
стержней выше, чем для жестких, так как в случае гибкого стержня
образуется большее число полуволн *).
§ 83. Случай заданного закона сближения
концов стержня
Перейдем к другому случаю, когда заданной переменной
величиной является не сжимающая сила Р, а взаимное смещение концов
стержня А. Такой случай характерен для нагружения стержня с
помощью «жесткой» испытательной машины **). Если одна из траверс
машины приводится в движение от электродвигателя через редуктор,
то можно считать, что взаимное сближение концов стержня
возрастает пропорционально времени. Пользуясь силоизмерителем машины,
определяем зависимость между нагрузкой и взаимным перемещением
концов образца.
Обозначим скорость взаимного смещения концов стержня через
5 см!сек, примем
\ = st. G.76)
По D0) получим
W = st—*r«2*2(/i-/o)- <7-77)
Введем новый параметр времени
t = Af. G.78)
*
Разделив обе части уравнения G7) на 1РЭ, будем иметь
£ = '.—T^-©- G.79)
Сравнивая выражения B5), B6) и G8), находим
/я:
отсюда
i
Pfcl
G.80)
'* = '.-йг- <7-81)
*) Интересные эксперименты но устойчивости стержней при ударе были
выполнены также О. И. Кацитадзе [8.5].
**) Этот случай был рассмотрен в ряде работ Хоффа и других
авторов [7.12], [7.13] при условии, что по длине стержня образуется одна
полуволна.
18 А- С. Вольмип
Подставим выражения G9) и (81) в уравнение C1); тогда придем
к следующему основному уравнению:
i-5- + m2[(m2-OS + -ffe2-^)CU^o; G.82)
здесь через Sf обозначен параметр
Отметим, что величина 5, зависит от отношения скорости взаимного
смещения концов стержня s к скорости распространения звука
в материале. По принятому выше основному допущению это
отношение должно быть малым.
Положим инерционный член в уравнении (82) равным нулю; тогда
получим зависимость £(£„), отвечающую статическому нагружению:
[«2-'. + -iL(C-©]C = msb.. G.84)
Значение ^„=1 соответствует по G8) эйлеровой деформации.
Заметим, что, в отличие от случая заданной нагрузки (§ 79), здесь
величина £ при tt=\ и т= 1 не становится бесконечно большой.
Стрела прогиба остается конечной при любом конечном параметре tt,
поскольку в данном случае фиксировано сближение концов стержня.
Если положить ^ = 0, то получим
£=0 либо HlLg = t,— m2. G.85)
При tt<.m2 будет £ = 0, а при t, > т2 возможны три значения £:
одно из них будет £=0, а два других определяются вторым
уравнением (85).
Поведение стержня при динамическом нагружении описывается
уравнением (82). Оно было проинтегрировано численным
методом *) [7.13]; результаты для случая т=1 и Sq = 0,001
представлены на рис. 7.6.
Сплошными линиями здесь дана зависимость £(',) при различных
значениях параметра Sx. Напомним, что под tr понимается
отношение переменного сближения концов стержня к укорочению прямого
стержня при эйлеровой нагрузке, равному {iPl). Пунктиром показана
статическая кривая (84). Общий характер кривых £(tt) на первом
участке — до момента резкого возрастания £ — тот же, что и на
рис. 7.3. Рост прогибов имеет место при значении Л, значительно
превышающем эйлерову величину 1РЭ. «Затягивание» прогибов
проявляется тем сильнее, чем выше скорость s. В последующем зави-
*) В статьях [7.13] изложены другие методы интегрирования
уравнения (82), при т = 1,
случай заданного закона сближения концов стержня
275
симость t,(tt) отвечает колебаниям стержня около положения
статического равновесия.
Пользуясь уравнением G9), можно, далее, определить
зависимость нагрузки Р от параметра времени. Кривые (Р/Рэ, tt) даны на
1,60
Щ
Ц60
ОАО
■ 100 120 Ш 1,60 1,80 2,00 2,20
t
Рис. 7.6. Случай, когда задан закон сближения концов стержня
во времени.
рис. 7:7. Как видно из графика, при большой скорости эйлерова
нагрузка оказывается сильно превзойденной. Максимальные значения
t
in
V
1
%
Q -0,001
/
/
у
/
У
s
^S
S
в
V
>
'з,о
2,0
1,0
0
*-■■ ■■■
/
''Js.=io2
У
'
л
1,0/ 2,0 3$ 4,0 5,0
\i
р
ъ
w
ш ■
120
Щ
до
\
/
/ 1
т1
\/
ш3
/S'lO2
(й
'Л
1.2
?*
1,3
V
\\
А
^v
\
Рис. 7.7. Зависимость между нагрузкой,
воспринимаемой стержнем, и временем.
max
5,5
3,0
2,5
2,0
IS
1,0 . ....
I 10 10г Ю3 Ю* 10s
s.
Рис. 7.8. Несущая способность
стержня при различной
начальной стреле прогиба.
отношения Р/Рэ, имеющие место в процессе нагружения,
представлены на рис. 7.8 в зависимости от параметра S, и начальной стрелы
прогиба Со- Рис- 7.7 относится к случаю, когда образуется одна
полуволна (т=1). Однако при S, = 0,1 преобладающее значение
получает форма выпучивания при т = 2, это видно из рис. 7.2, на
18*
2?6 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ ГГЛ. VI!
котором к рассматриваемому типу нагружения относятся пунктирные
линии; обозначения 5* и f надо в данном случае заменить на St
и t, по (83) и G8).
Фронт кривой в случае т = 2 лежит значительно левее, чем
при т = I.
Рассмотренный здесь случай заданного закона сближения концов
стержня представляет собой пример нагружения, при котором
величина сжимаюшей силы зависит от поведения образца, от его
деформации.
§ 84. Поведение стержня при действии импульсивной нагрузки
Мы полагали до сих пор, что нагрузка — постоянная или
переменная, заданная или определяемая деформацией стержня — действует
на протяжении всего рассматриваемого периода; нас интересовал
«критический» промежуток времени, за который несущая способность
стержня считается исчерпанной.
Для практических расчетов интересен также случай нагрузки
типа взрывной, которая вначале возрастает, а затем падает по
некоторому закону. В качестве простейшего примера рассмотрим
поведение стержня при условии, что к нему внезапно приложена
сжимающая сила Р, остающаяся постоянной на протяжении короткого
промежутка времени т и затем исчезающая. Форму начальной погиби
считаем по-прежнему совпадающей с формой дополнительного прогиба.
Поведение стержня в период т описывается уравнением A3)
при Р < Рэ и уравнением A9) при Р > Рэ; переменная tk по A0)
меняется от 0 до &т —2:тт/7\ где Т — период колебаний в
отсутствие сжимающей силы.
Для участка 0 < tk < kx уравнение движения будет
/1 = C1cosVft-t-C2sin^ft-f^r/o при Р<РЭ G.86)
или
/я4
/I = C1chV*-bC8shV* + -^-/o ПРИ Р>Р*\ G.87)
постоянные Си С2 определяются из начальных условий. Для
последующего периода дифференциальное уравнение имеет вид
-^Т--г-«71 = '?14; G.88)
dtk
решение его запишем в виде
/, = С3 cos m4k + C4 sin m4k -\- /0. G.89)
Постоянные С3, С4 находим, приравнивая значения прогибов и
скоростей при tk — k%.
8 85] СЛУЧАЙ ПУЛЬСИРУЮЩЕЙ НАГРУЗКИ. ПРИБЛИЖЕННОЕ РЕШЕНИЕ 27?
Как видим, во втором случае стрела прогиба, вообще говоря,
получает максимальное значение в момент времени, не совпадающий
с моментом прекращения действия силы Р. В дальнейшем имеют
место колебания относительно начальной изогнутой линии.
Рис. 7.9. Закон изменения
нагрузки во времени.
§ 85. Случай пульсирующей нагрузки. Приближенное решение
Перейдем к случаю, когда импульсы повторяются один за другим
и стержень подвергается действию периодической нагрузки, равной Р
в одни промежутки времени и падающей до нуля в другие
промежутки (рис. 7.9). Обозначим через 0 частоту приложения силы Р и
через т = л/0—полупериод изменения силы. Л^
Первые два интервала мы уже изучали в § 65.
Новое условие состоит в том, что отрезок
времени th > kx является ограниченным и
завершается в момент tk = 2kx новым
приложением силы Р.
Важно выяснить, какой характер будут
носить колебания стержня, вызываемые
такой пульсирующей нагрузкой. Если
колебания будут затухать, то начальную
форму стержня можно назвать
динамически устойчивой. При колебаниях, нарастающих от одного
импульса к другому, начальная форма является динамически
неустойчивой. В промежуточном случае, когда колебания стержня
будут периодическими или близкими к периодическим, исходную
форму можно считать динамически безразличной. Отметим, что в
дифференциальное уравнение движения стержня A3) нагрузка входит не
в качестве возмущающей силы, а в качестве параметра,
определяющего жесткость системы. Поэтому колебания, возникающие при
периодическом изменении силы Р, называют параметрическими
колебаниями.
Для того чтобы исследовать характер движения стержня,
достаточно проследить изменение прогибов и скоростей в течение одного
полного периода 2т. Очевидно, при Р > Рэ прогибы, вызванные
повторной нагрузкой, всегда будут нарастать. Поэтому рассмотрим
случай Р<^.РЭ. При этом надо принять т = 1.
Для первого полупериода уравнение A3) примет вид
где
Отсюда
dti
ш2=1
Р
f1 = Ах cosotfA -)-/?! sino)/A.
G.90)
G.91)
17.92)
278 устойчивость стержней при динамическом нагружении [гл. vit
Для второго полупериода будет со2= 1 и, следовательно,
/, = /l2cos^ + fi2sin^- G.93)
Допустим, что при tk = 0 начальная стрела прогиба составляет /0,
а производная по tk будет равна /0, причем начальная скорость будет
v0=/0k. Тогда по (92)
:/о- B\ = izh
G.94)
В конце полного периода параметр tk по A0) равен tk — 2kxl = 2л£/0.'
Примем*), что прогиб и скорость изменяются к концу периода
в одно и то же число раз s:
dfx
/i = */о
Тогда по (93) будет
A2cos
2як
dt„
2лк
= */o
fi2sin
:*/о
■ . 2як . D 2nk •
— A2 sin —д- -+- B2 cos —jr- = s/0.
e
Отсюда
A2 = s/o cos
2яй
B,
:s/0sin
9
2як
s/0sin
2як
e
; 2як
- sfo cos —g-
G.95)
G.96)
G.97)
В конце первого полупериода, при tk = nklO, стрела прогиба и
скорость, вычисленные по (92) или (93), должны быть одними и теми же;
это условие приводит к равенствам:
. яык , D . пак
Л, cos —к- -f- °i sin —f
, як , D . як
А2 cos -н—|- £>2 s'n
0
9
© —A, sin
JKOft
г, . пак \
■#,sin—— I =
е
2sin-g- -r-fi2cos-g-.
G.98)
Подставляя в (98) выражения (94) и (97), приходим к следующим
уравнениям:
(в-»*)/о+(с + 4)/о = 0. |
где
(с -|- ак0/0 — (в — А.) Л = 0. |
2я£ яш£ я£ , . nak . як
■-SCOS—5 COS—Q-COS-jT", £ = Sin—77- Sin -тг-
2я£ jiofc .я/г , . nwfe як
■ ssm—-к cos—-rr- sin-g-i a = sin—q-cos-g-
G.99)
G.100)
*) Такой путь решения задачи принят в книге Деи-Гартога [7.10].
§ 85] СЛУЧАЙ ПУЛЬСИРУЮЩЕЙ НАГРУЗКИ. ПРИБЛИЖЕННОЕ РЕШЕНИЕ 279
Если принять /0 ФО, /0Ф 0, то определитель системы (99)
должен быть равен нулю:
£
ш
Ъ_
(О
а
ix)b С -|--
(с + a>d) a
= 0.
G.101)
Развертывая этот определитель, приходим к уравнению
a2 + *2+c2 + d2 + (<o + -^)(crf — ab) = 0. G.102)
По A00) находим:
a2 -+ Ъ2 -f с2 -f ^2 = $2—2s cos-^5-cos Д-+ 1. |
, . . шя& . я/г
са — ab = ssm —s- sin-^-
Уравнение A02) принимает вид
s2— 2ns + 1=0,
где
1
лтк
як
1
G.103)
G.104)
G.105)
G.106)
ЛЯ II , 1 \ . ЛИК . ЯК
„ = cos___cos__-_(eL-_)sin-rsm-r
Коэффициент s оказывается равным
s = n± Уп2 — 1.
Если величина га2 меньше 1, то для s получаем комплексное
выражение. Очевидно, исходное допущение об одновременном
возрастании прогиба /0 и скорости /0 в s раз в этом случае
невыполнимо. Однако вещественная часть s оказывается правильной дробью;
колебания стержня не будут нарастать, так что начальную форму
движения стержня надо считать устойчивой.
Напротив, при га2 > 1 коэффициент s будет больше 1, так что
колебания к концу каждого периода будут усиливаться;
следовательно, начальная форма окажется неустойчивой.
Промежуточный случай п2= 1 отвечает как бы безразличной
форме движения. Таким образом, равенство
ne>k nk 1 / , 1\ . пая . nk , . ._ . п_.
ra = cos-g-cos-g -g-^o-f-—jsin —sin-g- = ± l G.107)
определяет границу, отделяющую зону устойчивого движения от зоны
неустойчивости. Отметим, что при га < 1 прогиб и скорость меняют
знак в конце периода по отношению к началу того же периода,
а при п > 1 сохраняют знак.
Допустим, что величина пульсирующей нагрузки весьма мала
по сравнению с эйлеровой: Р<^.Р9; тогда можно считать ю-> 1.
280 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. VII
Условие A07) принимает вид
cos-^=+I. G.108)
Отсюда получаем следующие две серии значений kjQ:
Т = Т'1> 1' ■■• ПРИ * = -!. |
k \ G-109)
-f= 1, 2, 3, ... при k= 1.
Первая зона неустойчивости имеет место при частоте
пульсирующей нагрузки 9, вдвое превышающей частоту свободных
колебаний стержня k. Это можно пояснить следующим образом. Допустим,
что сила Р прикладывается к стержню в те интервалы времени,
когда, искривляясь, он перемещается от среднего положения к
крайнему; так как точка приложения силы будет перемещаться вниз, то
сила совершит положительную работу. В те же интервалы времени,
когда стержень выпрямляется, перемещаясь к среднему положению,
сила Р снимается, так что работа совершаться не будет. За
полный период колебаний стержня сила окажется приложенной дважды,
что отвечает значению 0/& = 2. Работа силы Р будет, таким образом,
непрерывно возрастать, и это должно сопровождаться нарастающими
колебаниями стержня.
Рассмотрим второй предельный случай, когда сила Р близка
к эйлеровой: Р-+Рэ и и-^-0. Соотношение A07) перепишется в виде
ясо/г \
и= lim
со-» 0
sin -
ясо/г я/г ( <»_._ яы/г л/г 0 |_, я/г
со/
cos__cos_—_sln_______ )sin
= ±1
или
я/г л/г . я/г ,
« = cos-g 2o"Sin-g-= ± 1. G.110)
Найдем первые два корня уравнения (ПО). Первый из них
соответствует отношению kj% = 0,548, тогда будет
ге = — 0,157 — -^0,548я- 0,988 я* — 1.
Второй корень отвечает &/0—I; при этом вновь п = —1.
Результаты вычислений для других значений ш приведены на
рис. 7.10*). Для всех значений kjQ, заключенных внутри
заштрихованных областей, величина п будет либо меньше (■ —I), что имеет место
в первой, третьей и т. д. зонах, либо больше (+1) — во второй,
четвертой и т. д. зонах. В точках граничных линий будет п=+ 1.
*} Подобный график приведен в работе 3- М. Макушина [7.6], стр. §5.
185] случай Пульсирующей нагрузки, приближенное решение 281
Таким образом, при ш Ф 0 мы получаем области значений k[0,
для которых имеет место динамическая неустойчивость. Надо
оговориться, что нами не принимались во внимание силы сопротивления,
оказывающие влияние на колебательный процесс. При учете этих
сил зоны неустойчивости оказываются
несколько иными (см. § 86).
Представим полученные результаты
в другой форме. Отнесем частоту
пульсирующей нагрузки 9 к частоте
собственных колебаний Q стержня при
среднем значении силы Р, равном Р/2.
Как легко видеть, будет
Q
=kVi~4r=kY
1+«2
С другой стороны, введем
нагрузки
v = -
р
2РЭ
1-
2 •
G.111)
параметр
G.112)
2РЭ
Рис. 7.10. Области неустойчивости
при параметрических колебаниях.
характеризующий отношение между переменной частью нагрузки и
ее средним значением. В координатах (v, 0/2Q) первая область
неустойчивости имеет вид, показанный на рис. 7.11. Границы области
представляют собой линии,
близкие к прямым.
0 0,2 Ofi 0,6 0,8 Ifl
Рис. 7.11. Первая aoifa неустойчивости.
Рис. 7.12. Характер изменения
нагрузки.
Аналогичное исследование можно провести для случая, когда
пульсирующая нагрузка меняется по тому же закону относительно
некоторого среднего значения Р0, а переменная часть ее равна Pt
(рис. 7.12), причем Р0_|-Р, <РЭ. Частоты колебания стержня для
двух интервалов периода изменения силы будут
Условие A07) получает вид
1
п-
: COS—— COS — -
о
0
(£L+PL)sla*PLsln
npi
0
± 1; G.114)
отсюда определяются граничные линии зон неустойчивости. Как легко
видеть, для разобранного выше примера надо принять
Параметры Q и v в общем случае равны
Q = ftj/
Рэ
1
G.115)
§ 86. Нагрузка, меняющаяся по гармоническому закону.
Параметрические колебания
Мы исследовали поведение стержня при ступенчатом
периодическом изменении сжимающей силы. Естественно перейти отсюда
к случаю, когда величина нагрузки
следует гармоническому закону (рис. 7.13)
или
Р = Р0 + Pt cos Ы G.116)
P = PQ + Ptcos^tk, G.117)
Рис. 7J3. Нагрузка изменяется
по гармоническому закону.
где tk определяется по-прежнему по
A0).
Уравнение A1) при /0 = 0 и т = 1 приобретает вид
d2f , Л Р,
dti
1—JS-.
-£*-cos-fft\/—0.
G.118)
Воспользуемся обозначениями A15) и введем новый параметр
времени
/ W о
G.119)
л = у
1
Рэ
О.
h = ~-tk = Qt,
тогда вместо A18) получим
d*f
dt\^\ a)J
G.120)
Уравнение такого типа носит название уравнения Матье; оно
встречается в астрономии и в некоторых задачах математической
физики. Подробные исследования показали, что при отношениях 0/Q,
лежащих внутри некоторых определенных областей, решение урав-
НАГРУЗКА, МЕНЯЮЩАЯСЯ ПО ГАРМОНИЧЕСКОМУ ЗАКОНУ 283
нения делается неустойчивым. Иными словами, при изменении
сжимающей силы по A16) мы получаем некоторые области динамической
неустойчивости, как это было в примере § 85: прогибы и скорости
нарастают на протяжении каждого периода изменения нагрузки.
Естественно ожидать, что и здесь явление
параметрического резонанса при малых Р
будет возникать вблизи значений Q/0, равных
3
_Q_ 1_ ,
О ~ 2 ' '
2,
G.121)
Границы областей неустойчивости снова
определяются из того условия, что
динамическая форма стержня является как бы
безразличной: колебания должны поддерживаться, не
усиливаясь и не ослабляясь. Поставим перед
собой цель приближенно определить границы
первой области неустойчивости, лежащей вблизи
значения 9 = 2Q. Считая, что движение стержня
должно быть периодическим, примем в качестве
первого приближения выражение для / в виде *)
f=A
cos_ + JeiSln_>..
Рис. 7.14. Сравнение точ-
G.122) ного и приближенного
решений.
Подставляя A22) в уравнение A20), будем иметь
АЛ
о2
-vcos-
4Й2 2Q
Учитывая соотношения
0*,
f)+M'
е2
4Q2
-vcos-
Ы.
\ ■ 0*2
0*,
C0S1TC0SEI
■(<
9*,
2lcosla
cos
30*,
2Q
)•
0*, .0*, 1 / . 0*, . . 39*, \
C0S"Q- smla =7 l-Sln TQ-+S,n-2Q-j
0. G.123)
G.124)
и отбрасывая члены с утроенной частотой, получим
О2 v\ .__ О*, , „ /, 0:
■О
АЛ1
4Q2
v\ 0*,
т)С05ж-
5,A
4Q2
bir)sinilr=0- <7-125>
Считая А} Ф 0 и Б, =£ 0, приравниваем нулю выражения, стоящие
в скобках; тогда найдем:
2Q
-/
v
'
2Q
=/'+т-
G.126)
На рис. 7.14 изображены нижняя и верхняя границы первой
области неустойчивости, построенные по A26). Этот график очень
близок к графику рис. 7.11.
*) Этот метод решения уравнения Матье был дан Рэлеем [7.17].
284 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. VII
Уточненное решение задачи можно получить, принимая
выражение для / в виде ряда
и удерживая новые члены ряда дополнительно к Л, и Bv
Подробное исследование показывает [7.2], что при значениях v-^0,6
поправка к формулам A26) лежит в пределах 1%.
Выражениям A26) можно придать иной вид, раскладывая правую
часть по формуле бинома Ньютона. В первом приближении получим *):
О
2Q
'-т-
2й
1 +
4 *
G.128)
Формулам A26) соответствуют на рис. 7.14 пунктирные линии.
При выводе формул не учитывались силы сопротивления
колебаниям. Чтобы оценить влияние этих сил, будем считать их
пропорциональными скорости движения и выпишем исходное уравнение
в более полном виде:
d2f
2е
df
-\-&(\ — A — ACosсо/)/ = 0. G.129)
dt* ' dt
Переходя к переменной t} no A19), получим вместо A20)
d*f
dti
+ 2il + A-VC0Sf)/ = °- GЛ30)
Воспользуемся снова решением A22); тогда уравнение A30)
примет вид
ы
о2
4Q2
■-H-t-я
9е]
1W\
cos -т~ +
2Q
+["■(
О2
4Q2
i)~A^]slaw=°- GЛ31)
Приравнивая нулю выражения, стоящие в квадратных скобках,
получим два уравнения относительно А} и В}; условия А1Ф 0
и Вх Ф 0 приводят к уравнению
1
е2
4Q2
0е_
Q2
бе
Q2
О2 . v
4Q2 "+" 2
= 0
или
16Q4
1 4Q2 \ Q2,M 4 и*
G.132)
G.133)
*) Эти формулы были предложены Н. М. Беляевым [7.1].
§ 87] СЖАТОЕ КОЛЬЦО ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ 285
Считая величину e/Q малой и отбрасывая члены высшего порядка
малости, представим решение уравнения A33) в виде
ж=к 1 + У т—w
G.134)
v
0,5
При е = 0 получим прежние формулы A26). Если же е Ф О, то
границы областей неустойчивости несколько перемещаются. Так,
например, при V—0 мы здесь не получаем той
точки на оси 9/2Q, от которой разветвлялись
кривые рис. 7.14. Вещественные значения
0/2Q имеют место при условии „.
v>if- GЛ35)
0,3
0,2
0,1
О
JS/////////////At
\
У////////А1
i \й
Л
w<
W/
Ул*
/п
\V//
\
~т
1
1
w
'4
А\
У/
'
0,3 0£
ко
и
Новые очертания первой области
неустойчивости показаны на рис. 7.15 сплошной
линией. Они мало отличаются от границ той
же области при е = 0, показанных на
графике пунктиром.
Значительно большим оказывается влияние
сопротивления на очертания второй и
последующих областей неустойчивости. Они сильно
отодвигаются от оси абсцисс рис. 7.15, так
что неустойчивость может появиться лишь
при значительной величине параметра v.
Поэтому практическое значение для расчета
реальных конструкций имеет главным образом определение первой
области. Более подробное изложение теории динамической
устойчивости выходит за рамки данной книги. Интересующиеся этой теорией
могут обратиться к специальной литературе и прежде всего к книге
В. В. Болотина 1956 г. [0.1].
1й
Рис. 7.15. Влияние затухания
иа границы первой области
неустойчивости.
§ 87. Устойчивость сжатого кольца
при динамическом нагружении
Мы познакомились с различными направлениями теории
динамической устойчивости сжатых стержней. Перейдем теперь к
динамическим задачам, относящимся к другим конструкциям. Исследуем
прежде всего поведение кругового замкнутого кольца при быстром
нагружении радиальными усилиями (рис. 3.31). Эта задача
представляет интерес для расчета шпангоутов в подкрепленных оболочках,
подвергающихся динамическому приложению внешнего давления.
Сохраним прежний подход к решению задачи и допустим, что
кольцо имеет некоторые начальные отклонения w0 от круговой формы.
Воспользуемся основными зависимостями, выведенными для «идеаль-
233 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. VII
ного» кольца в § 51, и дополним их, учитывая начальный прогиб.
Под w в дальнейшем будем понимать полный прогиб.
Уравнения равновесия C.175) — C.177) остаются в силе, однако
полные производные по у надо заменить на частные. Изменение
кривизны х по C.181) теперь будет определяться выражением
д2 (да — да0) . да — да0
G.136)
ду2 ' У?2
изгибающий момент М в произвольном сечении равен
Л|дД/[*<--»о) + .^]. G.137)
Пользуясь C.179), получим вместо C.184) дифференциальное
уравнение для w в таком виде:
' д5 (да — да0) 2 д3 (да — да0) 1 д (да — да0) 1 Qy dqz
EI
о) 1 _ Qy
J~ R
ду5 ' Я3 ду3 п Я4 ду 1 R ду '
G.138)
В динамических задачах должны быть учтены составляющие силы
инерции
ai — — lL^L ai — _yL^L- G 139^
qz~ ^Г dt* ' qy— g dt* ' (/.юу;
здесь v — перемещение вдоль дуги, F — площадь сечения, у —
удельный вес материала.
Выпишем выражение для деформации вдоль дуги:
d(v Vo) _w -да
у ду R v
и примем по-прежнему ось кольца нерастяжимой: еу = 0, тогда будет
d (f — f 0) да— да0 ,-, ]4П
бу ~ R * v ' ;
Пользуясь A38) — A41), приходим к следующему окончательному
дифференциальному уравнению:
р. Г д6 (да — да0) . 2 д4 (да — да0) . 1 d2(w — w0)~\ ,
L йу6 "•" /?2 бу4 ~*~ У?4 ду2 J ~
J-^ff^4® _i_ ! й2®\ , V/7/ <?4да 1 й2да\_0 _ 14„
+^11?-+^--^]+^-1^"ж--ж^г]-0- Gл42)
Примем для да и wQ выражения
Считая «>-2, получим
(/-/0)(-1J-/^- „*(«*_ 1)+Jg*l ^(„2+l) = 0.
G.144)
<* = /sin-^. ^0 = /0 sin-^- G.143)
СЖАТОЕ КОЛЬЦО ПРИ ДИНАМИЧЕСКОМ НАгРУЖЕНИИ 287
Вводя выражение C.188) для статического критического
давления д3, представим A44) в виде
d2f i 0 пЧп*-\) ^2 _ 1 _ я JL\ / _ „ t±n2 Z-JJ1
(it2 ~ ГС2 + 1
здесь введено обозначение
^-l-ij^f-al^lS.fy (г.,45,
"=-Sh- (''"б)
Предположим сначала, что кольцо подвергается внезлпному
нагружению*). При <7 < <7э получим колебания около положения
статического равновесия. При q > q3 стрела прогиба начнет
неограниченно возрастать. Рассуждай таким же образом, как в § 79, найдем
формы с наибольшим темпом возрастания. Будем считать я^>1,
тогда в уравнении A45) можно пренебречь 1 по сравнению с п2,
и оно примет вид
^—k\f = an%. G.147)
где
Щ = ап2(з-^ п2\. G.148)
Приравнивая нулю производную dk^jdn, найдем значение п:
Мы получили тот же результат, что и в § 79: наиболее бурно
возрастает та форма потери устойчивости, номер которой составляет
около 0,7 от номера статической формы, отвечающей данному уровню
нагрузки.
Примем, далее, что давление возрастает во времени по закону
q—kt. Тогда уравнение A45) перепишется в виде:
7dC+ «2-fl [П l 6 gjf — „я + 1 /О- С7'150'
Воспользуемся параметрами
a U q\ I cEF \2
под с по-прежнему подразумевается скорость звука, под z3 — q3RjEF—
дуговая деформация, соответствующая давлению q3. Уравнение A50)
получает вид
s <it$+ «2+i ( 2)/ ^Ги ( }
*) Эта задача была исследована М. А. Лаврентьевым и А. Ю. Ишлин-
ским (см. сноску на стр. 262).
288 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НЛГРУЖППИИ [ГЛ. VII
При ге^>1 уравнение A52) переходит в следующее:
-)/ = /о-
1 d2f nHt
S dti
G.153)
Это уравнение по структуре совпадает с уравнением C1),
относящимся к случаю стержня. Поэтому при п'^-А можно в случае кольца
пользоваться всеми результатами, полученными для стержней, при
условии определения t2 и 5 по формулам A51).
§ 88. Боковое искривление полосы при динамическом
приложении момента
Обратимся к задаче о боковом выпучивании узкой полосы,
нагруженной парой сил в ее плоскости. На рис. 7.16 изображен элемент
полосы в деформированном
состоянии. Допустим, что
оси координат х, у, z,
проведенные в некотором сече-
.Jlfa нии полосы (рис. 7.16, а),
'''их принимают после
деформации направления |, ц, £
(рис. 7.16, б). Обозначим
через w полный прогиб
центра тяжести полосы
вдоль оси z и через 0 —
полный угол поворота
сечения в плоскости yz.
и в момен-
У
' у
а)
у У
ш
' i л
м,
Рис. 7.16. Боковое искривление полосы при
динамическом нагружении.
Уравнения равновесия элемента в проекциях на ось ?
тах относительно осей у и z имеют вид
дМп
дх
-?с = о.
дх
■<?„ + «„ = О,
дЩ
дх
■-\-щ = о,
G.154)
G.155)
G.156)
где Mv Mi — изгибающие моменты, Qn — поперечная сила,
q^—интенсивность нагрузки вдоль оси £, mv >щ — составляющие моментной
нагрузки. Величины q^, тц, т^ выражаются через момент
приложенной пары М и инерционные нагрузки:
yF d2w
п — -
g dt*
. д'$ .. д*ъ>
G.157)
G.158)
G.159)
БОКОВОЕ ИСКРИВЛЕНИЕ ПОЛОСЫ
289
здесь F— площадь сечения полосы, J — момент инерции массы
балки, приходящейся на единицу длины.
Изгибающие моменты могут быть выражены через полные
перемещения w, p и их начальные значения w0, p0:
д2 (w — w0)
М^Е1у
A1E = G/K
дх2
Д@-90) .
дх
G.160)
G.161)
под /у понимается момент инерции сечения относительно оси у,
под G/K—крутильная жесткость.
Сопоставляя выписанные выше соотношения, приходим к
следующим уравнениям:
Е. д< (w — w0) | Л4 d2Q , \F d2w
у дх4
д2 @ - е„)
GL
дх*
М
-М
дх2
d2w
'дх2'
g dt2
:0,
■'■£-*
G.162)
G.163)
Если принять да0 —90—0 и исключить инерционные члены, получим
статические уравнения E.131), E.132), выведенные другим путем
в главе V.
Предполагая, что торцы полосы оперты шарнирно, и
рассматривая основную форму выпучивания, положим:
W-
:/sin^y-, ™0 = /Osin^-,
а . ПХ „ . ЯХ
Н —cpsm-т-, H0 = cp0sin —j-\
тогда уравнения A62) и A63) получат вид
J
d2(f
dt2
G/„
-7Г (Ф— Фо)— M~j2 f"
:0.
G.164)
G.165)
G.166)
Полагая инерционные члены равными нулю и считая (р0 = /0 = 0,
находим отсюда статическую критическую нагрузку:
Ма
f У"£/уо/к = У>эо/к,
G.167)
где через Рэ по-прежнему обозначена эйлерова сила; эта формула
совпадает с E.100).
С другой стороны, принимая Ж = 0, определяем основные
частоты сои и сок изгибных и крутильных колебаний:
я2 -,/" Elg л ,/G/K
G.168)
19 А. С. Вольмир
290 УСТОЙЧИВОСТЬ СТЕРЖНЕЙ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. VII
1 rf2/
< dt'2"
1 d2<f
< dt'2
M M3 , , ,
мэ мэ
Пользуясь этими обозначениями, придадим уравнениям A62) и A63)
окончательную форму:
G.169)
Допустим, что момент приложенной пары изменяется во времени
по закону M = M(t). Интегрируя уравнения A69), можно тогда
определить величины / и р как функции времени.
Рассмотрим случай, подобный тому, который исследовался в § 78,
когда полоса подвергается внезапному нагружению моментом М > Мэ,
сохраняющим постоянную величину в течение периода т и затеи'
падающим до нуля *). Начальные условия примем следующими:
/ = /о. Ф = Фо. -Jr = °
d(f
ИГ
= 0 при * = 0. G.170)
Исключая / из A69), получим уравнение для ср:
£+« +*>%+<«(* -f).«w(*+/.^f
Интеграл этого уравнения выпишем в форме
Ф _ М2
Ф0 М2 — М
{A ch att -\- В sh (dtt -\- С cosaat -f- D sin a>J) -
M2
Л*ф0 / '
причем
2@2 = CO2 + &l + j/ ((О2 - CD2) + 4t02CD2
Л42
Л?2
Принимая во внимание начальные условия, находим:
Aafi. — C&l —
Ра Л*2-АГ2 /,
Учитывая соотношение
М\
М2
м
»:.
@2@2 | 1 й = — 0)?(О2,
к и| д|2 | i а'
G.171)
G.172)
G.173)
G.174)
G.175)
G.176)
*) Эта задача была исследована Дэвидсоном [7.9].
§88]
БОКОВОЕ ИСКРИВЛЕНИЕ ПОЛОСЫ
291
вытекающее из рассмотрения уравнений A73), приходим к
следующему выражению для ср:
Ф
М2
Фо
M'-Mi
P,fo
а2а ch (Oft + a?t cos (oj
«& + »?
Щ
Г75" i
M*
M3% L
о* 1+4 ch^ + fi)? 1
-2 j cos wat
»a+ffll
G.177)
/г
г'—i
5/
"* 1 \
^ч
Л-":
/
у
'" r^v
V- # -
1 1
>
N
N
\
0,5 !,0 1,5 2,0
О „с .л .с on 25 3,0
Рис. 7.17. Изменение параметров
прогиба полосы во времени.
Подобное же выражение может быть выписано для /. Зависимость
типа A77) имеет ту особенность по сравнению с аналогичным
соотношением (87) для сжатого
стержня, что наряду с
экспоненциальными составляющими содержит
гармонический компонент. На рис. 7.17
показано, как изменяются во
времени величины ср/<р0 (сплошные
линии) и ///0 (пунктирные линии)
при условии, что приложенный
момент составляет М = 2МЭ и
М = 1(ШЭ и что отношение сои/(Ок
равно 0,2; кроме того, принято
Рэ/о/Мэ(р0 = 1. По оси абсцисс
отложена величина t* = aj; периоду изгибных колебаний Ти
соответствует значение t*=2n. Время действия нагрузки в одном случае
выбрано равным t* = 0,25, в другом оно соответствует периоду
крутильных колебаний и равно t* =1,25. Кружками показаны
моменты, когда нагрузка снимается. Как видим, при данном
соотношении частот колебаний угол закручивания растет, а затем падает
значительно более интенсивно, чем стрела прогиба.
Мы не касались в этой главе случая выпучивания стержня при
динамическом приложении следящей нагрузки, описанной в § 22.
Опыты О. И. Кацитадзе, в которых стержень подвергался внезапному
нагружению от реактивной струи, показали, что характер изгиба
стержня и здесь соответствует некоторым высшим формам потери
устойчивости или, иными словами, таким петлям на графике (К, Q),
которые лежат справа от петли, показанной на рис. 1.32.
19*
ГЛАВА VIII
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
§ 89. Упругие волны в сжатых стержнях
Изучая выпучивание стержней в главе VII, мы определяли
поведение стержня при динамическом нагружении, считая, что деформации
и напряжения охватывают мгновенно всю длину стержня. Но на
практике нагружению подвергается обычно один из торцов стержня
и передача деформаций и напряжений по длине является процессом,
протекающим во времени. Этот процесс имеет, как известно, волновой
характер: колебательные перемещения различных элементов стержня
происходят по определенному закону, передаваясь от данного элемента
другому, с ним соседнему. В результате такой последовательной
передачи волна деформации, имеющая источник у одного из концов
стержня, доходит до второго конца, отражается от него,
перемещается в обратном направлении, снова отражается и т. д. Проследить
за распространением волны сжатия особенно важно в случае, если
время, в течение которого упругая волна проходит вдоль длины
стержня, сравнимо с критическим временем — от момента
приложения ударной нагрузки к одному из торцов до начала интенсивного
выпучивания.
Желая принять во внимание особенность распространения осевой
деформации, мы должны дополнить основные уравнения задачи
силами инерции, отвечающими продольным перемещениям элементов
стержня. При изучении движения стержня в поперечном направлении
могут также оказаться значительными и силы инерции вращательного
движения отдельных элементов вокруг поперечной оси, проходящей
через их центр тяжести. Механизм последовательных поперечных
смещений элементов стержня должен изучаться также с учетом
сдвигающих усилий, подобно тому как это делалось в § 49 для
составных стержней; влияние прогиба, связанного со сдвигами, особенно
ощутимо при описании поперечного удара.
Следовательно, исходные дифференциальные уравнения становятся
значительно более сложными, чем применявшиеся в главе VII.
Впрочем, как мы увидим ниже, постановка некоторых практически
важных задач, относящихся к выпучиванию при продольном ударе,
может быть упрощена.
УПРУГИЕ ВОЛНЫ В СЖАТЫХ СТЕРЖНЯХ
293
и.
Ш
tr
CF
\
t
y-Fdxd^
9Fdxdt>
Приведем некоторые элементарные зависимости, относящиеся
к процессу распространения упругих волн в сжатых стержнях *).
Рассмотрим случай, когда упругий стержень, закрепленный одним
концом, подвергается удару по второму концу со стороны
поступательно движущегося вдоль осевой
линии стержня абсолютно жесткого ^
груза Q] (рис. 8.1, а);
выпучивание стержня будем здесь считать
исключенным.
Условимся считать, что
ударяющий груз и стержень соприкасаются
по гладким параллельным
плоскостям; откажемся от исследования
местной деформации в зоне удара.
Тогда эффект собственно удара
выразится в придании элементу
стержня, прилегающему к верхнему
торцу, некоторой скорости V0, равной
скорости ударяющего груза. Будем
в дальнейшем понимать под
«ударом» весь последующий процесс
вплоть до момента отделения груза
от стержня, когда деформация
сжатия у верхнего торца стержня
обратится в нуль.
Выпишем дифференциальное
уравнение для перемещений и точек
стержня вдоль оси х; координату х
условимся откладывать от верхнего торца. Осевая деформация равна
е = ди/дх; перемещение и зависит от координаты х и времени t:
и = и(х, t). Уравнение равновесия элемента стержня по рис. 8.1, б,
содержащее осевое напряжение и продольную силу инерции, имеет вид
до y д2и
~dx~~"gHW
F^X)F
6)
Рис. 8.1. Шарнирно закрепленный
стержень, подвергающийся удару.
(8.1)
Через F на рис. 8.1, б обозначена площадь поперечного сечения
стержня, через у — удельный вес материала.
*) Теория упругого продольного удара была дана Сен-Венаном в
одном из примечаний и в приложении к книге Клебша (Clebsch, Theorle
de l'elasticite des corps solldes, 1883, стр. 480). Последующие работы
в этой области принадлежат Похгаммеру (L. Р о с h h a m m e r, J. reine und
angew. Math. 81, 1876, 324—336), Ляву (А. Е. Love, The math, theory of
elasticity, Cambr, 1927, Матем. теория упругости, М., 1935) и другим
авторам: см., например, обзор Кольского (Н. К о 1 sky, J. of sound and vibr-
1, № \t 1964) 88—110) или книгу Редвуда (М. Redwood, Mechanical wave
guides, 1960).
294
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
Принимая а = Еъ, приходим к известному волновому уравнению*)
д2и _ jy_ д2и ,q 2s
дх2 ~ Eg dt2 * к }
Аналогичные уравнения можно выписать для напряжения о и для
скорости перемещения элемента стержня V — dujdt. Пользуясь
обозначением G.1)
уц-
получим уравнение B) в виде
д2и дЧ
dt*2 дх2
(8.3)
(8.4)
где t* — ct. Представим общее решение уравнения D) в виде суммы
функций fx и /2, одна из которых зависит от t* — х, а вторая —
от t*-\-x:
u = f1(t* — x) + f2(t* + x); (8.5)
как легко видеть, вторые производные от каждой из этих функций
по t* и х равны между собой, что отвечает D).
Предположим, что наблюдатель отмечает последовательно те
сечения стержня, для которых х = t*, или, иными словами, следит
за деформацией стержня, двигаясь в направлении х со скоростью с.
Но при x = t* будет fi = const; поэтому для такого наблюдателя
характер деформации стержня, определяемый перемещением и, окажется
неизменным. Отсюда вытекает, что решение /; определяет
перемещение волны деформации в сторону возрастающих координат х — от
подвижного конца стержня к неподвижному—со скоростью с.
Следовательно, под с надо понимать скорость распространения
продольной волны деформации в стержне; с точки зрения акустики — это
скорость распространения звука в материале стержня. Отметим, что
скорость упругой волны с отличается от местной скорости некоторой
точки стержня V = dujdt **). Таким же образом убеждаемся в том,
что решение /2 характеризует перемещение волны деформации
со скоростью с в сторону убывающих координат х, т. е. от
неподвижного конца стержня к подвижному.
Производные от E) по t и х определяют скорость перемещения
любой точки и деформацию в ней:
у=-ж=«-^='[/;(*•-*)+/; (*•+*)]. (8-6)
z = ~=-f\{t*-x)-+f'2{f + x); (8.7)
*) Оно относится, как известно, к уравнениям гиперболического типа.
**) Это относится также к скорости перемещения морской волны, не
совпадающей со скоростью отдельной частицы воды.
УПРУГИЕ ВОЛНЫ В СЖАТЫХ СТЕРЖНЯХ
295
штрихи здесь означают дифференцирование /1 по (t* — х) и /2
по (t* + х).
Решение E) уравнения D) должно удовлетворять граничным и
начальным условиям задачи. В рассматриваемом нами случае граничное
условие для подвижного конца вытекает из уравнения движения
ударяющего груза:
aF = -T4F при х==0- (8-8)
С другой стороны, для закрепленного конца
и = 0 при х = 1. (8.9)
Пользуясь соотношением A) и считая о = £е, представим (8)
в виде
д2и с2 ди „ б2и \ ди п ,„ )т
= 0, или —г =0 (8.10)
dt2 -л1 дх dt*2 y.I дх
при л: = 0;
здесь через х обозначено отношение веса груза Q, к весу стержня Q2,
т. е. K = Q1/Q2 = Ql/yFl.
Выпишем далее начальные условия; условимся считать момент
времени / = 0 совпадающим с окончанием собственно удара,
когда подвижный конец стержня приобретает скорость V0:
(8.11)
Рассмотрим начальный период деформации стержня, на
протяжении которого упругая волна впервые перемещается от подвижного
конца к неподвижному; при этом 0-^.t-^.l/c или 0^f*<^/. Здесь
надо положить, очевидно, /2 = 0. Определим закон движения
верхнего конца стержня (л: = 0). Подставляя решение E) в A0),
приходим к уравнению
/: (о+-^-/; (о=о.
Отсюда
f[(t*) = Ce-t*>*1.
Пользуясь первым из условий A1), находим C — V0jc и
окончательно
f'1(t*)=^-e-t''M. (8.12)
*L — v
dt —v°
dt
u = 0
или
для
для
ди V0
dt* ~ с
0<лг</
0<лг</
для лг = 0;
при t = 0;
при t = 0.
296
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
[ГЛ. VIII
Скорость перемещения верхней концевой точки оказывается равной
к = ^- = с/;(о = ^ое"'*/>('- (8ЛЗ)
Деформация у верхней точки будет при х = О
е = ^ = -Г}(П=-~е-'*<*>. (8.14)
Таким образом, в момент окончания собственно удара элемент
стержня, прилегающий к подвижному концу, получает деформацию
сжатия, равную VQ/c, т. е. отношению скорости удара к скорости
звука в материале стержня. Если при этой величине деформации не
будет превышен предел пропорциональности для материала, то
применение закона Гука окажется оправданным.
Перемещение верхнего конца получаем интегрированием A2);
используя A1), находим
*Uo = iTL(i-«-"/Jd)- (8Л5)
В случае, когда вес груза настолько велик по сравнению с весом
стержня, что его можно считать бесконечно большим, полагая х = со,
при х = 0 получим
V = V0, г = -^-. (8.16)
Но при V = const будет u — V0t. Пользуясь приведенными выше
выражениями для перемещения, скорости и деформации у концевого
сечения, можно определить эти величины для произвольной точки
стержня.
Если теперь перейти к следующему периоду l-^t*<^21, когда
фронт ударной волны, отразившись от неподвижного торца,
перемещается в обратном направлении, то, чтобы охарактеризовать его,
надо использовать функцию /2 по E) и условие (9). Таким образом,
прямой путь интегрирования E) приводит к функциям, получающим
новый вид для каждого периода прохождения волны от одного конца
стержня к другому *). Это является неудобным, и в литературе
излагаются различные другие методы решения задачи. Наиболее
употребительным из них является метод характеристик**).
В дальнейшем, при исследовании выпучивания стержня в процессе
удара, для интегрирования основных уравнений будет использован
*) Метод определения этих функций дан в книге А. И. Лурье
«Операционное исчисление», М., 1951, стр. 330.
**) Подробное изложение этого метода см. в книге [0.8], стр. 502
§ 89]
УПРУГИЕ ВОЛНЫ В СЖАТЫХ СТЕРЖНЯХ
297
метод конечных разностей. Поэтому остановимся здесь более
подробно на приложении этого метода к интегрированию волнового
уравнения.
Введем безразмерные параметры для координаты, времени,
начальной скорости и величин, характеризующих деформацию стержня:
х с, t t*
>~Т' т~~7 Т~Т
V*
и* = —
/ Vn
и
*
IV п
у* = -
vn
е" = е-
Vn
Тогда уравнения B) и D) получат вид
д2и* __ д*и*
дх2 ~~ дс? '
(8.17)
(8.18)
Безразмерная скорость будет равна V* = ди*/дх, а безразмерная
деформация е* = ди*/д%.
Граничные условия (9) и A0) получат вид
д2и*
дх2
1 ои* .
т^-=0 при
у. dl
1 = 0;
.0 при |=1. (8.19)
Начальные условия буд}т:
^■=1 для | = 0; ^=0 для 0<|<1;
а* = 0 для 0 < £ < 1
при t = Q. (8.20)
Разделим длину стержня на п равных интервалов, а период
прохождения упругой волны вдоль длины — на m интервалов; тогда
«безразмерные» шаги для координаты и времени будут Sg= 1/re, sx= \jm.
Для некоторого узла, имеющего номер i вдоль | и номер j по т,
представим производные от и в виде
дх ~ Wx '
д2и* аи j+, — 2ии j -f- uL j_ i
ди*
"(+i. j — ui-i,j
dl - 2st
d2u* ul+i,j — 2ult]-b-m_i,j
d?
дх'
(8.20 a)
Обозначим через а отношение шагов: a = sT/st. Тогда уравнение A8)
можно представить в виде
ai,]+i = 2ai, / — «г, ;-i+a2(«(+i, j— 2«;,/4-*j-i,/)- (8.18а)
Примем A8а) в качестве рабочей формулы и будем определять иг, j,
предполагая, что значения uit j, стоящие в правой части A8а),
известны из предыдущих вычислений.
298
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
[ГЛ. VIII
Что касается граничных условий A9), то они получат в
конечных разностях вид
"о, j+1 — 2Ц0, / + цо, ;-1 1 «i,y — «о,/
:0
при | = 0, uliJ-=0 при 1=1.
Начальные условия приобретают форму
"о, о — **-1, о
= 1, аи0=а2>0 = . . . =u„i0 = 0.
Значение и_1|0 во внеконтурном узле принимается равным нулю,
поэтому для начала счета полагаем u0i0 — sx.
При составлении программы вычислений с помощью метода
конечных разностей для интегрирования уравнений типа A8) должно
быть обращено особое внимание на выбор отношения шагов а.
Специальные исследования
показали *), что процесс вычисле- г
ний будет сходящимся лишь
при а<^ 1.
Приведем результаты реше- s
ния уравнения A8) для того 7
4 6
'I--' ■ « ■ » ■ 5
4
3
2
I
сКонец уо
--—^~
х-9
\
\
\
ipa
'"-^-^^^
V
,S-°\
.. ,
v>o-
, .^
ч
S-t
"■> —
^
12 3 4 5 6
t
Рис. 8.2. Значение
приведенной деформации сжатия для
различных сечений стержня
в разные моменты времени.
/
Рис. 8.3. Зависимость приведенной
деформации стержня у торца, подвергающегося
удару, и у закрепленного конца стержня от
времени.
случая, когда стержень воспринимает удар бесконечно большой массы
(и = оо). На графике рис. 8.2 показаны значения приведенной
деформации сжатия е* по A7) для различных сечений стержня,
характеризуемых безразмерной координатой Ъ, = х/1, в разные моменты времени
х= t/T — ct/l. Для сечения £ = 0, по которому производится удар,
деформация будет е* = 1 вплоть до момента т = 2, когда упругая
волна вновь отразится от этого конца; при этом деформация
возрастает скачком до значения е* = 3. При т = 4 получим е*=5ит. д.
*) См. обзор О. А. Ладыженской, Успехи матем. наук 12, № 5 A957),
123—148.
критерий устойчивости стержней при ударе Й9
у закрепленного конца будет е* = 0 вплоть до момента т= 1; после
прибытия волны произойдет скачок до е* = 2, затем новый скачок
до е* = 4 и т. д.
Если стержень подвергается удару конечной массы, то в момент
контакта массы со стержнем в сечении л: = 0 деформация у сечения
х = 0 равна, как было найдено, V0/c или е*=1. Далее
деформация в этой точке падает и после прибытия отраженной волны
изменяется скачкообразно. На рис. 8.3, для примера, пунктирной
линией показана зависимость е*(т) для сечения у торца,
подвергающегося удару (| = 0), а штрих-пунктирной — у закрепленного торца
(£ = 1); принято х=9. Как видим, в результате ряда таких
скачкообразных изменений деформация у сечения лг = 0 возрастает, а
затем начинает уменьшаться и становится равной нулю в тот
момент, когда ударяющая масса отделяется от стержня (конец всего
процесса удара)*).
§ 90. Критерии устойчивости стержней при ударе
Рассмотрим возможные критерии устойчивости стержней при
действии ударной нагрузки на примере стержня, один конец
которого имеет шарнирно подвижную опору, а второй—шарнирно
неподвижную; примем по-прежнему, что стержень испытывает осевой удар
жесткой массой, имеющей в момент контакта со стержнем
скорость V0.
Попытаемся прежде всего определить момент выпучивания для
некоторой узкой зоны стержня по длине. Предположим, что эта
зона постепенно охватывается проходящей вдоль стержня упругой
волной сжатия. Примем условно, что напряжения сжатия на данном
участке постоянны по величине; такое предположение отвечает, как
мы видели, точному решению задачи в случае х = оо (см. рис. 8.2).
Судя по данным § 89, область первичного выпучивания должна
примыкать либо к концу стержня, испытывающему удар, либо к
закрепленному концу, так как именно на этих участках происходит прежде
всего скачкообразное изменение напряжений. Считая, что стержень
выпучивается в выделенной зоне по коротким полуволнам,
рассмотрим одну из таких полуволн. Если условно принять, что
выпучивание стержня состоит в образовании хотя бы одной полуволны,
то задача сводится к определению связанных между собой
критических величин деформации и длины полуволны. Тогда можно найти
и критическое время, в течение которого упругая волна пройдет
расстояние, равное длине полуволны.
Один из «интуитивных» методов определения критических
параметров полуволны состоит в следующем. Допустим, что выпучивание
*) Повторных соударений массы со стержнем мы рассматривать не
будем.
300 УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ [ГЛ. Vllt
происходит на участке, примыкающем к месту удара в период
прохождения вдоль длины стержня первой упругой волны сжатия.
Будем считать, что на всем участке возможного выпучивания
деформация равна е = VQ/c. Далее, примем, что критическая деформация
определяется обычной статической формулой Эйлера*) и равна екр =
= n2/(kL/i)'2, где L — длина полуволны, подлежащая определению;
k — коэффициент, зависящий от условий закрепления краев.
Принимая, например, что один из концов участка, на котором
происходит выпучивание, закреплен шарнирно, а второй, находящийся на
стыке с недеформированной зоной, защемлен, условно можно
положить k — 0,7. Считая 8 = екр, находим критическую гибкость
Длина участка выпучивания, соответствующая B1), будет
Z.KD = — i —с= = — iy . (8.22)
Критическое время оказывается равным
с
kVcV0
Если полная длина I стержня проходится волной за период
времени Т, то параметр r = t/T будет
711
Y-k-^Yb (8-24)
где \ = 1Ц — гибкость стержня в целом, при шарнирном
закреплении концов.
Выпучивание, по этой концепции, должно произойти в том случае,
если l^kLKp или Я,^-Л. Если же скорость удара V0 настолько
мала, что будет Я, < Л, то при прохождении первой упругой волны
вдоль стержня выпучивание осуществиться не может, и необходимо
исследовать моменты последующих отражений упругих волн
попеременно от каждого конца стержня. Например, при и = схз надо
принять e = (ra+l)V0/c, где п—число отражений от концов.
Другой возможный подход к задаче учитывает те особенности
динамического выпучивания, которые были изучены в предыдущей
главе. Мы условились принимать, что усилие в стержне постоянно
по длине выбранной узкой зоны. Будем также считать, что оно
*) Этот подход был предложен Джераром и Беккером [8.9], С. Кали-
ским [7.14], О. И. Кацитадзе [8.5], Г. Н. Размадзе [8.6], [8.7] и другими
авторами; подобный критерий при выпучивании в состоянии ползучести
изложен в главе VI, стр. 233.
§ 91] ВЫПУЧИВАНИЕ СТЕРЖНЯ С НАЧАЛЬНОЙ ПОГИБЬЮ 301
является постоянным на протяжении критического периода
времени tKp. Тогда можно определить длину «динамической» полуволны,
исходя из данных § 78. По формуле G.23) число полуволн, на
которое делится вся длина стержня при наибольшем темпе нарастания
прогибов, т* = У"е/2еэ, где еэ ■= п2/Х'2. Следовательно, критическая
гибкость в пределах полуволны оказывается равной
Лм = -±- ^
ч<р-
ПГ1
пу-2^~- (8.25)
V* V V V0
Длина полуволны будет
LKp = n V2i |/i = л yil -]/—, (8.26)
о
а параметр критического времени —
V,
V\=^Y~-
(8.27)
По-прежнему выпучивание может осуществиться в процессе первого
прохождения упругой волны вдоль стержня лишь при условии Х^А.
Интересно отметить, что если выбрать ft = 0,7, то оба подхода
приведут к одинаковым численным результатам; как будет сказано
ниже, они соответствуют и некоторым экспериментальным данным.
Все же эти подходы к решению задачи надо рассматривать в
качестве первых приближений, так как они относятся лишь к
отдельному отрезку стержня и не учитывают характера выпучивания
стержня в целом. Поэтому обратимся к более обоснованному решению
задачи.
§ 91. Выпучивание стержня с начальной погибью.
Исходные уравнения
Примем, что стержень, имеющий некоторую начальную погибь,
испытывает удар жесткой массой по одному из концов. Поставим
перед собой цель выяснить, как будет развиваться выпучивание
стержня в зависимости от обстоятельств удара и характеристик
стержня. Составим исходные уравнения с учетом инерции движения
элементов стержня вдоль оси и нормально к ней; кроме того, желая
поставить задачу в более общем виде, примем во внимание, как об
этом говорилось в § 89, эффект инерции вращения и прогибов,
вызванных поперечной силой.
Выпишем выражения для деформации удлинения осевого волокна,
деформации сдвига Yi и изменения кривизны %х:
(8.28)
е=
Yi =
да
дх
dv
дх
+
,
1
~2
%
1 dv у
\дх)
1 —
1
2
d2v
дх2
1 dv0
\ дх
, V
\ 2
"J
=
'
v-\-v
+ ^0-
302
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
[гл. vm
Через v и г»0 обозначаются, как обычно, полный и начальный
прогибы; под v и v понимаются составляющие прогиба, отвечающие,
соответственно, изгибающему моменту и поперечной силе.
Координата х по-прежнему отсчитывается вдоль оси от конца,
воспринимающего удар, к закрепленному концу.
lFdxi» до дги,т
дх дх
' dxdx
F не. 8.4. К составлению уравнений движения элемента
стержня в продольном и поперечном направлениях.
Составим далее уравнения движения элемента стержня в
продольном и поперечном направлениях по рис. 8.4:
дх g дР
dQ
дх
дх\ дх) g dt2 u' J
(8.29)
через Р здесь обозначено осевое усилие, положительное при
сжатии, через Q— поперечная сила. Первое уравнение, по существу,
91а1дМдх)
Рис. 8.5 К составлению уравнения вращательного
движения элемента стержня.
повторяет A); член, содержащий Р, во втором уравнении нельзя
записать в виде Р d2v/dx2, как это обычно делается, так как здесь
величина Р является переменной по длине стержня.
Составим, далее, уравнение вращательного движения элемента
стержня вокруг поперечной оси, проходящей через центр тяжести (рис. 8.5):
дх Q^g' W[dx)— °'
(8.30)
ВЫПУЧИВАНИЕ СТЕРЖНЯ С НАЧАЛЬНОЙ ПОГИБЬЮ
303
где М — изгибающий момент, / — момент инерции сечения. Величина
у[ dx/g представляет собой массовый момент инерции элемента
относительно центральной поперечной оси; в целом третий член в C0)
учитывает инерцию вращения элемента стержня.
Приведем, наконец, зависимости между упругими деформациями
и усилиями:
EFe = -P, nFOyl^=Q, ЕЫХ = М; (8.31)
здесь п—коэффициент, зависящий, как известно, от формы сечения.
Сопоставляя соотношения B9) — C1) и пренебрегая некоторыми
несущественными членами, приходим к следующей системе нелинейных
дифференциальных уравнений относительно перемещений *) a, v:
дх [ дх ~т~ 2 \ дх ) \ с2 dt2 — 2 дх Ц дх ) J ' У°-0^>
дх4 [с2^ с2) dx2dt2 + с2с2 dt4
P дх U дх ~i~ 2 [дх } 2 \ дх I | дх f~~*~
~^^"p'dlr^~d^L- (8-33)
Здесь введено обозначение
v = yn°f (8.34)
C Y
для скорости распространения волн сдвига в материале стержня;
под i = yf/F понимается по-прежнему радиус инерции поперечного
сечения.
Выпишем граничные условия:
—-pr-f-P = 0 при х = 0; и = 0 при x = l, |
8 w \ (8-35>
I
v = 0, -r-j- = 0 при х —0, х = Л
Первые два из этих условий повторяют (8) и (9). Дополняя A1)
получим начальные условия:
и = 0 при 0-<х</; 1
$- = V0 при х-0; -|i = 0 при 0<х<г; | При f = 0. (8.36)
dv _
*) Подобные уравнения приведены, например, в работах Д. Г. Боло-
нина [8.1] и Хаффингтона [8.11]. Соответствующие линейные соотношения
принадлежат С. П. Тимошенко («Колебания в инженерном деле», М., 1959).
См. также статью Я. С. Уфлянда (Прикл. мат. и мех. 12, N» 3, 1948, 287).
304 УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ [ГЛ. VIII '
Мы считаем здесь, что поперечные скорости точек стержня в
начальный момент равны нулю.
Наряду с A7) введем следующие безразмерные параметры:
v' = Y' wo = -T' Ь = -у- (8-37)
Тогда уравнения C2), C3) примут вид
где т =E/nG.
В дальнейшем мы будем пренебрегать подчеркнутыми членами
в C8) и C9), учитывая, что в интересующий нас период
неустановившегося выпучивания стержня прогибы сравнительно невелики.
Зависимость C8) примет при этом вид обычного волнового
уравнения A8). Между тем в C9) остается член, учитывающий влияние
продольных сил инерции на выпучивание и на поперечные колебания
первоначально искривленного стержня.
Задача, таким образом, сводится к интегрированию упрощенного
нелинейного уравнения C9); при этом целесообразно применить
метод конечных разностей *).
§ 92. Процесс неустановившегося выпучивания.
Пакет критических полуволн
Алгоритм метода конечных разностей был рассмотрен в
применении к уравнению типа C9) в § 89. Поэтому мы приведем здесь,
лишь окончательные данные вычислений**), проведенных по конечно-
разностной схеме на машине БЭСМ 2М. Были использованы обычные
формулы для производных типа B0а) и введены внеконтурные узлы.
Вычисления осуществлялись по строкам с определением vl,+l, исходя
из значений и и v в смежных узлах***). Считалось, что в
начальный момент времени стержень искривлен по полуволне синусоиды.
*) К нелинейным задачам такого типа метод конечных разностей был
предложен Совиным [8.14] и Хаффингтоном [8.11].
**) Эти результаты были получены автором [8.2] и проанализированы
им совместно с И. Г. Кильдибековым [8.3].
***) При составлении программы вычислений было обращено особое
внимание на выбор шага по * и т. Оказалось, что при выбранных здесь
параметрах шаг по нормированному времени т должен составлять от 0,2
до 0,9 от шага по осевой координате в зависимости от числа интервалов
по |; это число выбиралось в интервале от 16 до 60.
§ 92] ПРОЦЕСС НЕУСТАНОВИВШЕГОСЯ ВЫПУЧИВАНИЯ 305
На рис. 8.6 изображены упругие линии стержня, отвечающие
дополнительным прогибам для некоторых последовательных моментов
времени. Напомним, что под т понимается отношение «физического
времени» к периоду распространения упругой волны вдоль длины
стержня. Как видим, упругая линия носит вначале ярко выраженный
характер бегущей вояны. Узловые точки смещаются в различных
направлениях: сначала от конца, по которому производится удар.
к закрепленному концу, т. е.
слева направо, а затем, после
отражения волны, и справа
налево. Сразу же после удара
оформляются две ярко
выраженные полуволны, амплитуды
которых постепенно
возрастают; но темп нарастания
амплитуды, как мы увидим
ниже, в процессе выпучивания
стержня резко меняется. В
дальнейшем узловые точки как бы
фиксируются и в пределах
некоторого отрезка времени
упругая линия оказывается
близкой к стоячей волне.
На рис. 8.7 показано
изменение длин /(- различных
полуволн в долях от полной длины /: сверху
рости удара, снизу
например
Рис. 8.6. Упругие линии стержня, отвечающие
дополнительным прогибам, для нескольких
последовательных моментов времени.
для относительно малой ско-
для большей скорости. Проследим по рис. 8.7, а,
за первой полуволной, образующейся у левого торца-
Сначала длина ее возрастает, затем начинает падать, причем изменение
длины происходит как бы рывками. Изменение длин других полуволн
имеет несколько иной характер, но важно то, что во всех случаях
удается определить «критическую длину» каждой полуволны —такую,
которая является максимальной за всю историю выпучивания стержня.
Если бы эти критические длины не зависели от амплитуды начальной
погиби, то их можно было бы считать характеристиками
устойчивости конструкции при ударе. Результаты вычислений показывают,
что, действительно, длины полуволн практически не зависят от
амплитуды начальной погиби: они оказываются одними и теми же
при стреле начальной погиби, составляющей 1/100 и 1/1000 от
радиуса инерции сечения. Вероятно, эти данные могут быть
распространены и на идеальный стержень как на предельный случай.
Интересно отметить, что, как видно из рис. 8.7, а, б, перелом
в изменении длины первой полуволны, отмеченный на диаграмме /г(т),
относится к моменту оформления новой «нулевой» полуволны 10 у
левого торца, когда упругая линия как бы прощелкивает вверх; при этом
происходит своеобразный хлопок стержня к новой изогнутой форме.
20 А. С. Вольмир
306
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
[ГЛ. VIII
Но вернемся к процессу изменения длин различных полуволн. Больше
всего нас здесь интересует неустановившаяся, переходная стадия
волнообразования, связанная с первыми этапами прохождения волн
сжатия вдоль длины стержня. В дальнейшем длины полуволн
выравниваются между собой, после чего изменяются одновременно. Для
Рис. 8.7. Пакет критических длин полуволн.
последнего из отмеченных на рис. 8.7 моментов времени длина
унифицированной полуволны составляет вверху 0,25, а внизу — 0,2 от
полной длины стержня. В тех задачах по динамическому
выпучиванию, которые рассматривались в главе VII, исследовалась — по пути,
указанному в свое время М. А. Лаврентьевым и А. Ю, Ишлинским,—
лишь установившаяся стадия с унифицированными полуволнами.
Между тем критические полуволны появляются и исчезают в
предшествующей, неустановившейся стадии.
Сравним эти данные с теми интуитивными значениями
критических полуволн, которые определяются по формулам B2) или B6).
ПРОЦЕСС НЕУСТАНОВИВШЕГОСЯ ВЫПУЧИВАНИЯ
307
Если найти среднегеометрическую из критических длин главных
полуволн— первой и второй, то для обследованных скоростей удара
эта величина близка к длине полуволны по B2) при коэффициенте
k « 0,75 и мало отличается от B6). Но все же картина оформления
критической полуволны оказывается гораздо более сложной, чем
это получается при элементарном подходе. Мы видим, что для
неустановившейся стадии
выпучивания речь должна идти о
трансформации не какой-либо
одной полуволны, а целого
пакета (набора) критических
полуволн.
Какое же практическое
значение имеет определение кри-
0,01
от ■
0,002
О
Ц5
1,0
1,5 1,7 2.0
Рис.
Процесс динамического выпучивания
стержня.
тических полуволн? На этот
вопрос отвечает рис. 8.8. Здесь
отложена амплитуда первой
полуволны в зависимости от
времени. Пока длина полуволны
возрастает, амплитуда Ах
увеличивается сравнительно
медленно— кривая А1(т) обращена выпуклостью кверху. Но в тот
момент, когда расстояние между узловыми точками достигает
«критического» значения, кривая Ау (т) получает точку перегиба, и в
дальнейшем амплитуда прогиба возрастает со все повышающейся
интенсивностью. По-видимому, достижение главными полуволнами
критической величины характеризует перелом в процессе прогиба стержня,
ведущий к резкому выпучиванию. Отсюда может быть определено
критическое время до момента резкого выпучивания, зависящее от
обстоятельств удара. Например, в случае, показанном на рис. 8.8,
критическое время составляет 1,7 от периода распространения
упругой волны вдоль длины стержня.
Подводя итог сказанному, можно рекомендовать пользоваться для
ориентировочных практических расчетов простыми, близкими между
собой формулами типа B1) или B5), приведенными в § 90. Сравнивая
«критическую гибкость» Л с гибкостью реального стержня X,
выясняем, должно ли произойти выпучивание стержня при ударе;
отсутствию выпучивания соответствует условие к < Лкр. Предварительно
должна быть установлена зависимость максимальных осевых усилий
по длине стержня от времени для всего процесса удара; это легко
сделать, пользуясь методом характеристик или по методу конечных
разностей, как было описано в § 89. Экспериментальные данные,
приведенные в работе [8.12], свидетельствуют о том, что при
прохождении упругой волны сжатия вдоль длины стержня действительно
образуются выпучины, длины которых близки к полученной по
формуле B6).
20*
308
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
Случай, когда расчетная величина e = V0/c лежит за пределами
пропорциональности для материала стержня, может быть также
исследован с помощью теории упруго-пластических волн. Если пренебречь
при этом эффектом разгрузки, то легко вывести формулы типа B2)
по аналогии с касагелыю-модульными формулами в теории
статической устойчивости стержней. Надо иметь в виду, что скорость
распространения упруго-пластических волн будет также зависеть от
касательного модуля. Желательно, чтобы эта задача была исследована
более подробно.
Уточненное решение задачи состоит в интегрировании уравнений
типа C8) — C9), как это было показано в начале параграфа.
Отметим, что, судя по данным вычислений, члены в уравнении C9),
отражающие инерцию вращения и влияние поперечной силы, оказывают
пренебрежимо малое влияние на результаты решения задачи о
продольном ударе *). По существу, для данной задачи эти члены можно
было бы с самого начала исключить. Если, кроме того, пренебречь
нелинейными членами, то мы придем к следующей упрощенной
системе уоавнений:
дги* д2а*
4fr-4rV = °, (8.38а)
-w-}^wA-w-wh12^-^' (8-39a)
которую и можно использовать для решения отдельных задач.
§ 93. Термоупругие волны. Поведение стержня
при тепловом ударе
В главе VI мы рассматривали статические задачи теории
устойчивости стержней, связанные с температурным эффектом. Но в
некоторых случаях элементы конструкций подвергаются внезапному
нагреванию, вызывающему появление термоупругих волн сжатия и
приводящему к выпучиванию. Здесь мы сталкиваемся уже с
динамическими задачами термоупругости.
Напомним прежде всего основные соотношения, относящиеся
к распространению температурных напряжений в стержнях**).
Предположим, что элемент стержня нагревается от некоторой абсолютной
температуры в до температуры 0-f-0 и вместе с тем испытывает
напряжение а. Общая деформация в пределах упругости будет е =
= ди/дх = а/Е -j- a0; здесь а—коэффициент линейного расширения.
*) К этому выводу пришел Хаффингтон [8.11]. Надо указать, однако,
на то, что укороченное таким образом уравнение (после линеаризации) уже
не будет относиться к гиперболическим.
**) См., например, А. В. Лыков, Теория теплопроводности, ГТТИ,
М., 1952. Ниже изложение построено, в основном, по статье Снеддона
(I. N. Sneddon, Proc. Roy. Soc. Edinburgh 65A, 1958—1959, 121—142).
ТЕРМОУПРУГИЕ ВОЛНЫ. ТЕПЛОВОЙ УДАР
309
Величины Е и а зависят, вообще говоря, отб-j-O, но здесь мы будем
считать их неизменными. Находим:
o = E($L-aa). (8.40)
Допустим, что повышение температуры 0 невелико по
сравнению с в (например, 0 меняется в пределах 100° С при 6 = 293°К)
и деформация е мала. Тогда количество тепла, аккумулируемое
в единице объема, можно считать равным
/г = с^0 + а£ее = с-^-0 + а£0-^-, (8.41)
g ' g ' дх '
где с— удельная теплоемкость материала. Второй член в D1)
отражает обратное влияние упругой деформации на термодинамический
процесс.
Составим уравнение, описывающее одномерный поток тепла в
стержне, при условии, что боковая поверхность стержня не излучает
тепла. Обозначим через т коэффициент теплопроводности, т. е.
количество тепла, протекающего в одну секунду между двумя
сечениями в 1 см2, расположенными на расстоянии в 1 см, при
перепаде температур в ГС; для дюралюмина, например, при 20°С
т. « 0,394 кал/см • сек ■ град. В случае, если градиент температуры
в данном единичном сечении составит dQ/dx, количество тепла,
протекающего через сечение через одну секунду (тепловой поток), будет
я = -т~; (8.42)
здесь принято, что 0 возрастает с увеличением х.
Рассмотрим элемент стержня, расположенный между единичными
сечениями х и x-\-dx. Пусть поток тепла, проходящий в одну секунду
через первое сечение, равен q, а через второе — q-\-(dq/dx)dx.
С другой стороны, аккумулированное в элементе на протяжении
одной секунды количество тепла равно по D1)
dh , / cv д0 „ ft \
•ждх= -^--сг Л-aEQ-r-rr )dx.
По закону сохранения тепловой энергии должно быть
dq , / с\ ае д2и \
Пользуясь D2), приходим к следующему уравнению:
Здесь введены обозначения и = tnglcy и р = aEQgJcy. Величина и
носит название коэффициента температуропроводности или
310
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
коэффициента диффузии; он определяет изменение температуры
для кубика объемом в 1 см3 при потоке тепла, протекающем
в одну секунду вдоль одного из ребер кубика, если разность
температур вдоль ребра составляет 1° С. Коэффициент
температуропроводности характеризует теплоинерционные свойства материала;
для дюралюмина % » 0,645 см21сек.
Присоединяя к D0) и D3) уравнение движения элемента A)
да y д2и
дх ~ ~g~ dt2 '
получаем систему уравнений относительно функций о, и, 0,
описывающую термоупругий волновой процесс. Исключая из этой системы а,
придем к следующим уравнениям:
(8.44)
д2и
дх2
дО
dt
дО _
дх
а2о
1
1й~ %7П*— Р
д2и
dt2 *
д2и
(8.45)
дх2 *" dxdt
Если во втором из этих соотношений опустить член, выражающий
обратное влияние упругой деформации на термический процесс, то
получим известное дифференциальное уравнение теплопроводности
<?0 д20 ,0 ,„ч
Обратимся теперь к случаю, когда температурная деформация
стержня сопровождается появлением сжимающих напряжений,
вызывающих в свою очередь выпучивание конструкции. Тогда вместо D4)
надо воспользоваться зависимостями B9) и C0). Полная система
уравнений примет вид
дО 1 д Г/i
d4v
дх4
д Г ди J_ (dvY2! I_ (Pu_ _
дх [ дх ~1- 2 [дх J J с2 dt2 a
__(\ . 1 \ d4v . I d4v . '
[с2^~ с2) » 2-2+ 2-2 *л +
dx2dt2 "^ сЧ
дх
1 d2v
Р dt2
2 ах |Д
Ш ^
1_ д Пди
i2 дх \[дх
д0_
dt
i 1 (dvY _ 1 (ОНА2] йЦА
~1~ 2 [ дх ) 2 [дх ) \ дх Г
д4у0
д2в
дх2
+-Р
2
д2и
dxdt
дх4
= 0.
(8.48)
(8.49)
Упрощенную систему получим, пренебрегая второстепенными членами,
аналогично C8а), C9а):
д4у 1 д I
дх4 i2 дх [
д2и
дх2 '
ди
1
д2и
dt2
дв
а17 = 0'
dv_\ , _1_ J_ dh>_ __ d4v0
дх дх I
dt
dt2
д20
дх2
дх4
= 0.
(8.50)
ТЕРМОУПРУГИЕ ВОЛНЫ. ТЕПЛОВОЙ УДАР
311
Интегрируя последовательно третье, первое и второе из этих
уравнений, определим 0, и и г» как функции х и t.
Граничные и начальные условия для функций «иг» уже
обсуждались выше; выясним, какими могут быть эти условия для
функции 0. Может быть задана температура у одного из торцов как
функция времени: 9 = вх (/). Второй возможный случай состоит
в задании теплового потока q, проходящего через торец. По D2) это
граничное условие получает вид dQjdx = / (t). При полной
теплоизоляции торца, когда перенос тепла через торцевое сечение не
происходит, будет д%\дх = 0.
Воспользуемся безразмерными параметрами A7) и C7) и, кроме
того, положим
0« = -1, с = ■£%■, Ь=~, (8.51)
е0 v* a
*
где 0о и Vo — температура и безразмерная скорость перемещения,
принятые в качестве исходных. Тогда система E0) примет вид (если
исключить члены, отражающие инерцию вращения и эффект сдвига):
д2и* д2и* дО* .
а -тг- = О,
д¥ at2 " dl
=4 *
06 di \ di di J ^ at2 — d? '
dO* .d20* .
-aT-bw==0-
(8.52)
Эти уравнения мы примем в качестве исходных при решении
конкретной задачи.
Рассмотрим случай, когда стержень с начальной погибью имеет
по торцам неподвижные шарнирные опоры и подвергается тепловому
удару, выражающемуся в весьма быстром нагреве у одного из торцов
стержня. Термоупругие волны, распространяющиеся по длине стержня,
явятся волнами сжатия. Примем для примера граничные условия
в виде
0 = 21/. и = 0, г>=0, |^- = 0 при х = 0,
0 = 0, и = 0. г> = 0, |р- = 0 при х = 1.
(8.53)
Начальные условия пусть соответствуют случаю недеформированного
стержня при 0 = 0. Уравнения E2) с учетом этих граничных и
начальных условий были проинтегрированы в конечных разностях.
На рис. 8.9, а, б приведены полученные в результате вычислений*)
эпюры распределения дополнительных прогибов вдоль длины стержня
*) Эта задача была рассмотрена А. Н. Божинским, А. Т.
Пономаревым и автором (Изв. вузов, Машиностроение, № 4, 1966).
312
УПРУГИЕ ВОЛНЫ И УСТОЙЧИВОСТЬ
[ГЛ. VIII
в некоторые последовательные моменты времени для заданной
скорости нарастания температуры 0. Процесс выпучивания проходит и
здесь неустановившуюся стадию, подобно случаю, когда стержень
подвергается удару жесткой массой (§ 9]). В дальнейшем оформляются
Р^с. 8.9. Эпюры распределения дополнительных прогибов вдоль длины стержня для
нескольких последовательных моментов времени.
четкие полуволны, число которых в данный момент времени зависит
от интенсивности теплового удара, характеризуемой параметром 91.
Вычисления показали, что для реальных металлических стержней
эффект теплового удара слабо ощутим даже при весьма резком
возрастании температуры. Практический интерес может представить
распространение подобного исследования на случай местной потери
устойчивости тонкостенных оболочек при тепловом ударе.
ГЛАВА IX
УСТОЙЧИВОСТЬ ПРЯМОУГОЛЬНЫХ ПЛАСТИНОК
В ПРЕДЕЛАХ УПРУГОСТИ
§ 94. Основные зависимости теории жестких пластинок
Пластинки прямоугольного очертания входят в состав различных
конструкций — крыла самолета, днища, палубы и бортовых стенок
корабля, стенок цельнометаллического вагона и т. д. — обычно в виде
панелей обшивки, скрепленных с системой подкрепляющих ребер.
Обшивка подвергается в этих конструкциях действию той или иной
«местной» поперечной нагрузки, например аэродинамического
давления, и кроме того воспринимает «основные» усилия вместе с
другими элементами конструкции — от общего изгиба крыла самолета,
корпуса судна или вагона. Во многих случаях эти основные усилия
являются превалирующими: они вызывают сжатие, изгиб либо сдвиг
пластинки в ее плоскости и приводят, при известных условиях,
о) б) б)
Рис. 9.1. Выпучивание пластинки при сжатии, изгибе, сдвиге.
к выпучиванию пластинок (рис. 9.1); поэтому расчет пластинок на
устойчивость представляет собой неотъемлемую часть общего расчета
конструкции. Пластинки, подкрепленные по продольным краям,
способны и после потери устойчивости нести возрастающую нагрузку.
Для некоторых конструкций считается вполне допустимым, чтобы
обшивка получала относительно мелкие вмятины, с тем, однако,
условием, чтобы подкрепляющие ее элементы оставались достаточно
314 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
жесткими. Следовательно, конструктора должно интересовать
не только само явление потери устойчивости пластинок, но и их
закритическое поведение. Стенки высоких балок, а также элементы
различных тонкостенных стержней и балок также представляют
собой прямоугольные пластинки, подвергающиеся выпучиванию,
следовательно, и здесь расчет на устойчивость имеет первостепенное
значение.
При определении критических нагрузок, когда исследуются
равновесные состояния, соседние с исходным, можно полагать, что
появляющиеся в процессе
выпучивания напряжения в
срединной поверхности пластинки
малы по сравнению с
напряжениями собственно изгиба;
прогибы пластинки считаются
также малыми по сравнению
с толщиной. В некоторых
задачах при этом можно
пользоваться теорией эюестких
пластинок, пренебрегающей
напряжениями в срединной
поверхности пластинки. Если же исследуется закритическое поведение
пластинки, то надо исходить из более общей теории гибких
пластинок, учитывающей одновременно напряжения в срединной
поверхности и напряжения изгиба *).
Напомним сначала важнейшие положения теории эюестких
пластинок. Рассмотрим прямоугольную пластинку со сторонами а, Ь и
толщиной h (рис. 9.2). Пусть координатная плоскость ху совпадает
Рис. 9.2. Система координат при рассмотрении
прямоугольной пластинки.
Рис. 9.3. Сечение изогнутой поверхности пластинки.
со срединной плоскостью пластинки; ось х будем, как правило,
проводить вдоль длинной стороны а, ось у — вдоль короткой стороны Ъ.
Обозначим перемещения точек срединной поверхности вдоль осей х,
у, z через и, v, w.
Рассечем срединную поверхность изогнутой пластинки плоскостью,
параллельной плоскости xz (рис. 9.3). Так как прогибы малы, то
в сечении мы получим пологую кривую. Угол наклона 0^
касательной к кривой равен
е, = £. (9Л)
*) Более подроОио об этом см. в книге [0. 3], стр. 13.
$ 94] ОСНОВНЫЕ ЗАВИСИМОСТИ ТЕОРИИ ЖЕСТКИХ ПЛАСТИНОК 315
аналогично для сечения, параллельного плоскости yz,
й dw
(9.2)
Кривизну сечения будем считать положительной, если выпуклость
обращена в сторону положительного направления оси z. Тогда
кривизны в сечениях, параллельных плоскостям xz и yz, будут равны
дОх
*х~ дх '
и, = -
или
d2w
Тх7' ху:
W
d2w
~df~'
(9.3)
(9.4)
При изменении у угол 0^ в общем случае также меняется; относя
приращение угла 0^ к
приращению координаты у (или
приращение 0у к приращению л:),
находим кручение срединной
поверхности:
дОх dQv
Х-
ду
дх •
ИЛИ
Х:
d2w
дхду
(9.5)
(9.6)
Рис. 9.4. Нормальные и касательные
напряжения при изгибе.
Если речь идет о жестких
пластинках, то срединная
поверхность считается свободной от
.деформаций, сопровождающих
изгиб. Для произвольного слоя
пластинки, лежащего на расстоянии z от срединной поверхности,
деформации удлинения е^ и и еу> и равны
(9.7)
; ZKx' еу, и :
; ZK.,
деформация сдвига будет
Yh=^*X-
(9.8)
Этим деформациям соответствуют нормальные напряжения ах, оу
и касательные напряжения т (рис. 9.4). Пользуясь законом Гука и
пренебрегая напряжениями ог, получим:
£ , , . Е . , Е
■Т=£Лех + \**у)' °у,и = 1-1Г^2(еу + ^ел.), ти = 2
A+1*)
Y. (9-9)
или
■ 1=^(^+И-Ку). oyiB = r^j(xy4-|Axjr), ти=щ^Х- (9.10)
316
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
В сечениях пластинки, параллельных осям х и у, выделим полоски
длиной, равной единице. Усилия ах и ау образуют изгибающие
моменты, приходящиеся на единицу длины сечения:
ft/2 ft/2
Мг= Г aXiUzdz, My= J aytKzdz,
-Л/2
ИЛИ
м.
Л1,
:D(y.v + nxy), ,„у_^,.у
где D—цилиндрическая жесткость пластинки:
D: Eh%
/г/2
(9.11)
(9.12)
12A-f*2) '
Касательные усилия т образуют крутящий момент, приходящийся
на единицу длины сечения
ft/2
Н= \ izdz, (9.13)
-ft/2
ИЛИ
# = DA—ц)х- (9.14)
Введем, далее, обозначения Qx, Qy для поперечных сил в
сечениях xz и уг, также приходящихся на единицу длины.
%.%ta)dy
Щ "pa)"
Рис. 9.5. Усилия, приложенные к деформированному элементу
пластинки.
Допустим, что пластинка подвергается действию поперечной
нагрузки интенсивностью д. На рис. 9.5 показан элемент пластинки dx dy
с действующими на него силами. Двойными стрелками обозначены
вектор-моменты. Если в сечении с координатой х действует мо-
ОСНОВНЫЕ ЗАВИСИМОСТИ ТЕОРИИ ЖЕСТКИХ ПЛАСТИНОК 317
мент Mxdy, то в соседнем сечении, имеющем координату x-\-dx,
будет действовать момент (Мх -\--jJL dx\dy. Аналогичные
приращения получают остальные компоненты моментов и поперечных сил.
Составим уравнения равновесия элемента в проекциях на ось г
и в моментах относительно осей х и у. После простых
преобразований эти уравнения
приобретают вид:
dQ.
,dQy
дх ду
Ч,
дх ' ду ^*
дН , дМ
Отсюда
д2Мх . _ дгН
дх2
+ 2
дхду
д2М,
ду2
Ц. (9.18) Рис 9.6. Усилия в срединной поверхности.
Пользуясь выражениями для моментов и кривизн, приходим к извест
ному дифференциальному уравнению изгиба жестких пластинок
п I d*w , „ d*w , d*w
\ дх* "Т
V дх*
или
где
дх2 ду2
DV4w
Я.
ду*
д2
Я
v%> = v2v2w, v2 = ~ 4-
д2
ду2
(9.19)
(9.20)
(9.20а)
— двумерный оператор Лапласа.
В «классических» задачах устойчивости внешняя поперечная
нагрузка не учитывается: начальное напряженное состояние считается
безмоментным. Но вместе с тем при рассмотрении «соседних»
изогнутых состояний пластинки надо принять во внимание проекции
повернутых внутренних усилий на оси неподвижной системы
координат. На рис. 9.6 показан элемент пластинки dx dy после изгиба
с действующими на него нормальными усилиями ах, ау и
касательными т. Напряжения ох, ау считаются положительными при сжатии;
касательные напряжения будем принимать положительными, если они
направлены, как показано на рис. 9.6; соответствующая им
деформация сдвига увеличивает угол между гранями элемента,
расположенными ближе к началу координат. Определим результирующую
усилий вхп dy. Левая грань элемента поворачивается вокруг оси у на
угол dwjdx, а правая — на угол ~-{--^- dx (рис. 9.7). Суммарная
318
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
[ГЛ. IX
проекция сил axhdy на ось z, равная, с точностью до малых
высшего порядка, их равнодействующей, будет (оси координат на
рис. 9.7, 9.8 отличаются от принятых на рис, 9.6):
~ и dw , „ , / dw
-^-dx\dy = — axh~-dxdy. (9.21)
Аналогичное выражение для усилий ау имеет вид
— Oy/z-y-j- dydx. (9.2] а)
Найдем, далее, равнодействующую касательных усилий т/г, также
получивших новые направления. Если одна из граней, параллельных у,
б7Щ
дх дх* г
to+ дгш rir
■t My
Рис. S.7. К определению результирующей
повернутых усилий сжатия.
Рис. 9.8. К определению результирующей
повернутых усилий сдвига.
повернулась вокруг оси х на угол dwjdy, а вторая, ближайшая к чи-
dw , d2w
тателю (рис. 9.8), — на угол
суммарную проекцию, равную
ду
. . dx, то силы т/г dy дадут
d2w
— т/г . д ■ dx dy.
(9.22)
Левая грань поворачивается вокруг оси у на угол dwjdx, а правая —
на угол ~j—~\- a dv dy. Полная проекция усилий xhdx будет также
равна
d2w
-xfl-d7dy-dXdy- (9'22а)
Найдем сумму проекций «повернутых» усилий и разделим ее на dx dy;
эту величину надо ввести в левую часть уравнения A5); при q = О
оно получает вид
dQx . dQ>
d2w
d2w
Отсюда
дх
ду
oxh-^-oyh-dy2
d2w
2T/W = °- ^Ъ)
дх
ду
-(,
d2w
d2w
х ~дх*~ +" °У р"
d2w
2та^-
(9.24)
ОСНОВНЫЕ ЗАВИСИМОСТИ ТЕОРИИ ЖЕСТКИХ ПЛАСТИНОК 319
Сравним это уравнение с A5); как легко видеть, выражение, стоя-
цее в скобках, можно трактовать как интенсивность фиктивной
чоперечной нагрузки
f = - (а* "S" + °у^ + 2т аЙг) A=(ojr«jrr-ay«y+2T3c) h. (9.25)
дх2 ' "У ду2
Окончательно уравнение B0) получает вид (при 9 — 0)
д2да
D п4 . I d2w
2т
дх ду
i « ^2w\ п
(9.26)
При интегрировании уравнения B6) мы должны удовлетворить
граничным условиям. Рассмотрим некоторые из вариантов таких
условий.
1. Один из краев, например край х = 0, шарнирно оперт.
Такое предположение можно сделать, если пластинка соединена
с подкрепляющим ребром, имеющим малую жесткость на кручение
Рис. 9.9. Граничные условия: а) шарнирное закрепление; б)
защемление.
(тонкостенный стержень открытого профиля), либо если
прикрепление пластинки к ребру осуществляется по узкой полосе (один ряд
заклепок, точечная сварка) (рис. 9.9, а). Тогда граничные условия
имеют вид:
w = 0, (9.27)
М
n / d2w , d*w \
(9.28)
Если выполнено условие B7), то вдоль края х = 0 заведомо д2да/ду2==0;
следовательно, условие B8) перепишется в виде
d2w
дх2
= 0.
(9.29)
2. Край х = 0 защемлен. Такое допущение соответствует
случаю пластинки, прочно сочлененной (например, с помощью двухрядного
320 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
заклепочного шва) с ребром, достаточно жестким на кручение
(рис. 9.9, б). Граничные условия будут:
да=0, (9.30)
&=«■ <•■»>
3. Пластинка скреплена по краю х = 0 с упругим ребром,
имеющим изгпбную жесткость El. Одно из условий сопряжения
состоит в равенстве прогибов:
wl=(w)x=0; (9.32)
через wl обозначен прогиб ребра. Второе условие выражает
равенство погонного усилия, передающегося от пластинки на ребро,
реакции со стороны ребра. Можно показать (см. [0.3], стр. 40), что
погонная реактивная сила, нормальная к поверхности пластинки, будет
для рассматриваемого края
£., = <?,+ ^. ^-зз)
или
Второе граничное условие приобретает вид
с, ft, r.[ d3w . ,.-. . d3w I .„ ос,
Е1-й^--0Ы+^-^-ш^1^ (9-35)
4. Край х = 0 свободен. Тогда должно быть
MX = Q, Rx = 0, (9.36)
или
l£ + l*4? = 0- (9.37)
Определим работу внутренних усилий на возможном
перемещении пластинки. Если кривизна %х получает приращение Ьу.х, то
работа момента Мх dy, приходящаяся на длину элемента dx, будет
равна (—Mxb-Axdxdy). Вычисляя таким же образом работу
остальных усилий и интегрируя по площади пластинки F = ab, получим
ЬА = - f f (Мх Ьу.х +■ Му Ьиу -t- 2И Ьг) dx dy.
ОСНОВНЫЕ ЗАВИСИМОСТИ ТЕОРИИ ЖЕСТКИХ ПЛАСТИНОК
321
Приращение потенциальной энергии равно Ш = — 6Л;
пользуясь выражениями для моментов и кривизн, находим
Ш
-*Ш(-
d2w
дх2
d*w \ , / а2да \ , / d*w . а2да
ду2
дх*
■2A-ИЬЙгб(-
дх ду \ дх ду
dx dy,
d2w
или
«/=>/!{(
а2да
а^2
d2w\2
дуЧ '
~^1-^[-дхг^-Ыду)\\ахау-
Полная энергия изгиба равна
U = ~D J J {(V2wJ — A— ц)£(да. w)}dA:rfy; (9.39)
под А(ю, w) понимается выражение
' d2w d2w
L(w, w) = 2 ■
dx2 dy2
f а2да \2-[
(9.40)
Вычислим, далее, работу внешних сил, совершающуюся при
выпучивании пластинки. Допустим, что пластинка подвергается
действию усилий ах, ау, т,
приложенных в срединной
плоскости. Обозначим через и, v ^—"~-r
перемещения некоторой точки
срединной плоскости вдоль
осей х, у. Найдем взаимное
смещение кромок пластинки,
к которым приложены
усилия ах. Выделим элемент АВ
волокна, параллельного оси х
(рис. 9.10). Пусть
перемещения точки А вдоль осей х
и z будут и и w, а точки В — u-\--^—dx и w ■]--*—dx: новые
положения точек обозначим через Л, и В1. Длина ds1 элемента после
деформации будет
Рис. 9.10. К определению работы сжимающих
сил при выпучивании пластинки.
dst
= [(</* +
*Lrfxl4(*i
дх
dx\ 4"
\~П
dx)f.
или
*.-"[«+»ё+(ё)'+(#)т
21 А. С. Вольмир
322 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Раскладывая это выражение в ряд и ограничиваясь первыми членами
разложения, получим
<•>-[•+£+7(£)'+т(£)>-
Мы рассматриваем случай, когда пластинка выпучивается из своей
плоскости; поэтому величиной (ди/дхJ можно пренебречь по
сравнению с (dwjdxJ. Окончательно находим
ди , 1 (dw\% ,n ...
По аналогии выпишем выражение для деформации удлинения
элемента, параллельного оси у:
\2
&У~ 1у~~*~ 2\ду )
(9.42)
Примем условно, что деформации в срединной поверхности при
выпучивании е^, еу равны нулю (см. первую сноску на стр. 324). Тогда
ди 1 / дгг> \2 dv 1 / Ow \2 Q .„
'Ш [Ж) ' ly~-~~l{W)' С }
Взаимное смешение точек, принадлежащих кромкам х = 0 и х = а,
отнесенное к размеру а, равно
**=—s-Jlrdx=r-2Tj [wfdXi (9-44>
величину ех считаем положительной при сближении кромок. Будем
принимать, что в процессе выпучивания усилия ох остаются
постоянными. Тогда их работа будет равна
о L о
(/ Г ы
dy;
(9.45)
величина ах оставлена под знаком интеграла, так как здесь принято,
что усилия ах меняются вдоль размера Ъ. Аналогично взаимное
смещение кромок у = 0, у = Ь будет
1 Г dv , 1 Г
dv ,„=± [ (^-Ydy,
\*У)
а работа усилий ау
г b
».~iN \ШЬ>
dx.
(9.46)
(9.47)
ОСНОВНЫЕ ЗАВИСИМОСТИ ТЕОРИИ ЖЕСТКИХ ПЛАСТИНОК
323
Перейдем к определению работы касательных усилий xh.
Найдем деформацию сдвига у' элемента dxdy, соответствующую
перемещениям
и. v. Как
видно из рис. 9.11, она
равна у
, ди , dv
дх -
(а)
На следующем рис. 9.12
показано, как искажается
треугольник OMN со
СТОрОнаМИ dx, dy При Рис. 9.11. Деформация сдвига в срединной поверх-
деформации сдвига у", пости'
вызванной перемещениями w. Рассматривая рисунок, находим
WW< = \(dx)^ (^-dxJ + (dyf + (^-dyJ-
- 2 Yidxf + ^dxJ Yidyf + ^dyJcos (£- y»)j (b)
или, приближенно,
С другой стороны, из рассмотрения треугольника N'N"M"
вытекает
+(£«-£*■)?• (с) ' 'У/'Z.
Сравнение выражений (Ь') и (с) к /^г* ' {,
дает
Y дх ду К)
Полная деформация сдвига
будет
ди , dv . dw dw .„ ,оч
у=-а —з —5 г-• (У.4о) Рис. 9.12. К определению работы сдвигающих
Оу ОХ ОХ иу усилий.
Считая и здесь условно Y = 0, находим Y' =— У"> или
, dw dw
дх ду
(9.49)
Примем, что касательные усилия т постоянны вдоль кромок
пластинки а, Ъ. Им соответствует «интегральное» искажение
21»
324
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
пластинки
а Ъ
С Г dm dw . .
g== J 17S7dxdy'
о о
Работа сил xh будет
о о
Окончательное выражение для работы внешних сил получает вид
*-4|Ы/(£)Ч*+Ь[/№
(9.50)
(9.51)
L О
dx |-f-
+* Я ££*"»• <9-52>
о о
Полная энергия системы равна
Э = и — W. (9.53)
Приведенными выше выражениями для U и W мы воспользуемся при
решении задач устойчивости пластинок с помощью энергетического
метода.
В этом выводе мы понимали под W работу внешних сил,
приложенных к кромкам пластинки и подчиненных определенным условиям.
Но в некоторых задачах такая трактовка оказывается недостаточной *).
Тогда величину W надо трактовать иначе — как работу усилий в
срединной плоскости, накопившихся к моменту потери устойчивости, на
дополнительных перемещениях, вызванных выпучиванием. Считая поле
начальных усилий переменным по обоим направлениям, можно придти
к следующей формуле, обобщающей E2):
*-*//м£)'+«.(эг)'+*££]<»'* (9-52а)
о о
Под ох, су, т здесь понимаются заданные начальные напряжения
в срединной плоскости **). Проводя интегрирование по частям в C9)
и E2а), можно получить основное дифференциальное уравнение B6)
и статические граничные условия.
*) Надо иметь в виду, что равенства D3) и D9) служили лишь для
вывода формулы E2) и не могут быть использованы, например, для
определения перемещении и, v при выпучивании.
**) Энергетический критерий устойчивости в приложении к пластинкам
обсуждался Брайеном [9.14], С. П. Тимошенко (Z. f. Math, und Physik 58.
1910; Ann. des ponts et chaussees, № 3—5, 1913), X. Рейсснером (H. Rels-
s n e r, Z. angew. Math. 5, 1925, 475).
§95]
ГИБКИЕ ПЛАСТИНКИ
325
§ 95. Гибкие пластинки
Приведем зависимости, относящиеся к гибким пластинкам; как
уже было сказано, они понадобятся нам при изучении поведения
пластинок в закритической области. Выпишем выражения для
деформаций в срединной поверхности, которые только что были выведены:
ди 1 (дту
"*~ 2 {17) '
дх
dv
/ dw у
Ey~W~^^\W)
ди . dv
. dw dw
дх * дх ду
(9.54)
Положительными здесь считаются деформации удлинения. Отметим,
что правые части всех этих выражений содержат одни и те же
функции и, v, w, следовательно, величины ех, гу, у не являются
независимыми. Связывающее их уравнение совместности, или
непрерывности деформаций, имеет вид
д*г*
d4v
д'у
ду2 ~ дх*
d2w \%
-(
дхду
дх ду
d2w d2w
дх* ду2
(9.55)
ШЩЩШр'&м
или, если воспользоваться
оператором L,
д*гх
d4v
д2у
ду*
дх*
дхду
1
= — -^L(w,w). (9.56)
Рис.
9.13. Усилия в срединной поверхности
гибкой пластинки.
В справедливости соотношения E6) легко убедиться непосредственным
дифференцированием. С физической точки зрения оно означает, что
соседние элементы пластинки не могут деформироваться
самостоятельно, как изолированные, так как в этом случае между ними
возникнут пустоты и будет нарушена непрерывность материала.
Деформации гх, Еу, у связаны с напряжениями в срединной поверхности ох,
ау, т выражениями:
= х-и-
ц-
2A+ ц)
Y= в т
(9.57)
или
,{zx]-\izy), ау
,(E, + [i£x), %■-
2(l + rt
у. (9-58)
Эти напряжения должны удовлетворять уравнениям равновесия.
На рис. 9.13 изображены усилия, действующие по граням dx, dy.
Направления усилий, показанные на рисунке, принимаются положи-
326 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
тельными. Проектируя все силы на оси х, у, находим:
дох дх дх дау
дх ""• ду ' дх ~~* ду ~~~ \ ■ )
Уравнения E9) будут автоматически выполняться, если
выразить ох, ау, т через функцию напряжений Ф следующим образом:
д*Ф д*Ф <Э2Ф /п спч
^ = ^г- Ъ = -м- X = —Wdy-- (9-6°)
Обратимся теперь к уравнению равновесия в проекциях на ось z.
Здесь элемент пластинки должен быть рассмотрен в деформирован'
ном состоянии. Но это было сделано нами уже раньше. Поэтому
мы можем воспользоваться уравнениями B3) и B6); надо только
изменить перед ах, ау, т знак на обратный, так как при выводе
этих уравнений положительными считались обратные направления
усилий. Окончательно уравнение .B6) принимает вид
D „. дгт . д2т . п d*w .. „,ч
Т^ = а*1)хТ + ау7уТ+2х-Шу- (9-б1)
Выразим напряжения ах> ау, т через функцию Ф по F0) и введем
оператор L(w, Ф)
тогда уравнение равновесия F1) примет вид
— ^■w = L(w, Ф). (9.63)
Если, далее, подставить в уравнение совместности деформаций E6)
выражения E4) для ех, еу, у, то оно примет вид
1 у4Ф = — i-L (w, w). (9.64)
Отметим, что операторы L(w, Ф) по F2) и L(w, w) no D0) имеют
одну и ту же структуру.
Уравнения F3) и F4), связывающие функцию Ф напряжений
в срединной поверхности и функцию прогиба w, являются основными
в теории гибких пластинок. При интегрировании этих уравнений надо
удовлетворить тем или иным граничным условиям. Условия,
зависящие от прогиба пластинки, имеют такой же вид, что и для жестких
пластинок. Что касается условий, относящихся к деформации в
срединной поверхности, то они формулируются следующим образом.
1. Точки края х = 0 свободно смещаются вдоль осей хну.
Тогда здесь должны равняться нулю напряжения ах и т:
ду3 ' дх ду
§ 95] ГИБКИЕ ПЛАСТИНКИ 327
2. Точки края х = О остаются неподвижными; тогда должно
быть при х =0:
н = 0, v=0.
3. Кромки пластинки остаются прямолинейными. Если
полагать, что одна из кромок, например х = 0, неподвижна, при этом
получится, что взаимное смещение кромок х = 0 и х = а должно
иметь фиксированное значение. Обозначая через ех относительное
сближение краев:
по E4) получим
а
ИЛИ
о
а
J Ьт" ~ ^ *?- - т Ы Jd*=const- (9-6 7^
Как показал П. Ф. ■ Папкович *), условие может быть упрощено,
если считать, что изогнутая поверхность симметрична относительно
осей симметрии пластинки, или, иными словами, если функции w и Ф
имеют одни и те же значения в симметричных точках. Тогда
условие F7) переходит в следующее
-^- = 0 при х = а.
Потенциальная энергия деформации гибкой пластинки
складывается из двух составляющих: энергии изгиба Ux и энергии
деформации в срединной поверхности U2- Первая из этих величин
определяется по-прежнему формулой B6). Энергия U% равна
u2=^h J J (<*Аг-Ь ау£у + TV) dx dy,
F
или, по формулам E7),
*) См. книгу 10.7], стр. 899.
328 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
Вподя функцию напряжений Ф, получим
U^W) j Ib^ + lp") ~
_2(l+u)|^-^_^) J}^^. (9-68)
U* = IT I J 1(?2ФJ ~ (! + ^ L (Ф> Ф)] dx dy' (9'69>
или
Перейдем к различным частным задачам устойчивости и закритиче-
ской деформации пластинок *).
§ 96. Устойчивость шарнирно опертой пластинки,
сжатой в одном направлении
Выпучивание пластинок в авиационных и судовых конструкциях
чаще всего вызывается действием сжимающих усилий, расположенных
в плоскости пластинки. Так
как ширина пластинки,
являющейся панелью крыла
самолета, палубы судна и
т. д., обычно мала по
сравнению с габаритами
конструкции, то во многих
случаях сжимающие усилия
можно считать равномерно
распределенными по ширине
пластинки. Поэтому задача
об устойчивости пластинок
при равномерном сжатии
является той «классической»
задачей, которая привлекает
к себе наибольшее
внимание; решение ее **) является отправным пунктом для
формулировки и исследования других, более сложных задач.
Рассмотрим сначала пластинку, удлиненную вдоль оси х (а~^§>Ь)
и сжатую вдоль длинной стороны усилиями ах (рис. 9.14). Допустим,
*) Обзор исследований в этой области дан в книге Колбруннера и
Мейстера [0.19], 1958; из этой книги взяты некоторые из приведенных далее
графиков. Решение ряда задач о закритическом поведении пластинок
принадлежит Дюбеку и Коднару (J. D j u b e k, R. К о d n a r, Riesenie nelinear-
nych uloh teorle stihlych stlen, Bratislava, 1965).
**) Эта задача была впервые решена Брайеном [9.14] в 1888 г. с помощью
энергетического метода. Уравнение типа [70] было составлено Навье еще
в 1823 г.
)<// /
Рнс. 9.14. Пластинка, сжатая в одном направлении.
УСТОЙЧИВОСТЬ ШАРНИРНО ОПЕРТОЙ ПЛАСТИНКИ
329
что пластинка шарнирно закреплена по длинным краям; граничные
условия по коротким краям в данном случае являются несущественными.
Уравнение B6) получает вид
T-V% + o-,Jj- = 0. (9.70)
Граничные условия становятся:
0- = О при у = 0, Ъ. (9.71)
Выпишем решение, удовлетворяющее этим условиям, в виде
w = /sin-^sin-^. (9.72)
lb
Мы считаем, что вдоль короткой стороны образуется п полуволн.
Так как для удлиненной пластинки можно принять, что
волнообразование осуществляется по направлению х свободно, то через /
обозначена длина полуволны по этому направлению. Подставляя G2)
в G0), получим
Отсюда
т+4Т#- <9-74>
Для того чтобы наРти критическое напряжение, надо положить
п=\. Считая, далее, напряжение ах функцией переменной ЦЪ и
желая найти минимум ах, приравниваем нулю производную:
да =0. (9.75)
'(т)
Тогда
/ = *. (9.76)
Таким образом, изогнутая поверхность удлиненной пластинки состоит
в данном случае из квадратных участков размером Ь X Ь, в
пределах каждого участка по направлениям хну образуется одна
полуволна синусоиды. Для смежных участков выпуклость синусоиды
направлена в разные стороны, как показано па рис. 9.15.
Подставляя G6) в G4), находим критическое напряжение равным
или
°ч = щ£&Е(т)'- (9J8)
330 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Принимая ця»0,3, получим
акр~3,6£(})\ (9.79)
Эта формула справедлива лишь в том случае, если критическое
напряжение лежит в пределах упругости.
Предположим, далее, что стороны пластинки сравнимы между
собой по величине. Принимая прежние граничные условия G1),
выберем решение уравнения G0) в виде
te> = / sin —— sin—-, (9.80)
где т, п—числа полуволн по направлениям х, у. После подстановки
этого выражения в G0) имеем
_ D=x2 Imb , п2а\2
Здесь надо положить п=\. Считая, что т достаточно велико,
найдем, что минимум выражения (81) имеет место при
m = j. (9.82)
Подставляя (82) в (81), находим, что критическое напряжение
по-прежнему определяется выражениями G7), G9). Этот результат
Рис. 9.15. Волнообразование удлиненной шарнирно опертой пластинки.
легко было предвидеть: мы как бы отсекаем от удлиненной пластинки
(по рис. 9.15) столько квадратов, сколько раз ширина пластинки
укладывается вдоль длины.
Выражения G7) — G9) являются точными в том случае, если
отношение alb является целым числом. В случае не целого числа
следует по-прежнему принять я=1, а из двух ближайших
значений т взять такое, которое придает выражению (81) наименьшую
УСТОЙЧИВОСТЬ ШАРНИРНО ОПЕРТОЙ ПЛАСТИНКИ 331
величину. Переход от от к от-)-1 полуволнам будет иметь место при
IJ
1 I2
(Л±л.±У Г(^+')г . Ч
\аг "*" U2J __ 1. аг "^П
от2 (от-)- 1)г
отсюда
! = /m(OT-f-l).
(9.83)
Например, при а\Ъ < У 2 будем иметь от = 1, а при а\Ъ > У 2 от = 2.
При а/6 = У2 одинаково я
возможно образование одной
и дпух полуволн.
Введем обозначение
*-(т+-
mb
(9.84)
Тогда выражение для
критического напряжения можно
представить в виде
акр = К
b2h
(9.85)
lw-;
\
\
V
/
т-2 /
\ /
\ / ч т~3 ,
ф г
Vfi i
1
tf/S
В таблице 9.1 и на
графике рис. 9.16 приведены „„,.„..
,, Рис. 9.16. Коэффициент К при разном числе полу.
значения К, вычисленные по волн,
формуле (84).
В случае, если ширина пластинки Ъ велика по сравнению с
продольным размером а, надо принять от = /г—1; формуле (85) удобнее
Таблица 9.1
Значения коэффициентов К для пластинки, шарнирно закрепленной
по всем краям
а
Т
К
а
Т
К
0,2
27,0
1,2
4,13
0,3
13,2
1,3
4,28
0,4
8,41
1,4
4,47
0,5
6,25
1,5
4,34
0,6
5,14
1,6
4,20
0,7
4,53
1,7
4,08
0,8
4,20
1,8
4,05
0,9
4,04
1,9
4,01
1,0
4.00
от 2 до оо
~4,00
1.1
4,04
332 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
придать вид
где
°«Р = *1-§7Г" (9'86)
^1=1+(|J- (9-87)
При достаточно большом значении Ъ\а можно пренебречь вторым
членом в выражении (87), или, иными словами, считать продольные
края свободными. Тогда получим К\ = 1; выражение (86) будет
иметь вид
__ nW _ ягДЛг _
акР~ аЧ — 3A-м-2) а2 ' { '
Пластинка здесь переходит в стержень прямоугольного сечения 1 X h,
шарнирно опертый по концам; выражение (88) отличается от обычной
формулы Эйлера лишь тем, что модуль заменяется на «приведенный»
модуль £A — [х2).
§ 97. Случай защемленных продольных краев
Перейдем к случаю, когда нагруженные кромки пластинки
закреплены шарнирно, а ненагруженные жестко защемлены. На
примере этой практически важной задачи мы познакомимся с методом
решения, который часто применяется в теории устойчивости
пластинок. Расположим оси координат по рис. 9.14. Представим интеграл
уравнения G0) в виде
w = Y (у) sin S— , (9.89)
где Y (у)—искомая функция, зависящая только от у. Очевидно,
выражение (89) удовлетворяет граничным условиям для краев л; = 0,
х = а. Подставляя (89) в G0) и сокращая на s'm(mnxja), получим:
От уравнения G0) в частных производных мы перешли, таким
образом, к обыкновенному дифференциальному уравнению
относительно функции К; в этом и заключается основной шаг.
Интегрирование уравнения (90) в данном случае не представляет трудностей;
в более же сложных задачах оно может быть выполнено с помощью
различных приближенных методов, например метода Бубнова — Га-
леркина.
Обращаясь к уравнению (90), введем обозначение
— =А, (9.91)
СЛУЧАЙ ЗАЩЕМЛЕННЫХ ПРОДОЛЬНЫХ КРАЕВ 333
и составим характеристическое уравнение
ft«—2AAfea + (tf—2*р)л» = 0; (9.92)
корни его будут
4* = /* (* + /?). К^/^-У'Щ- (9.93)
Как мы видели, в предельном случае пластинки со свободными
продольными сторонами критическое напряжение определяется
формулой (88); при закреплении продольных сторон должно быть
ах > XW/h. (9.94)
Следовательно, корни fe34 являются мнимыми. Полагая
«=/4+7¥)' р=/*■(/¥-"*)• (9-95)
получим интеграл уравнения (90) в виде
Y (у) = С, ch ay + С2 sh ay -j- C3 cos py -f- C4 sin py.
Граничные условия имеют вид
К = 0, -^ = 0 при у = 0, у = Ь.
Пользуясь этими условиями, находим:
С1 + С8 = 01 aC2 + pC4 = 0
и, далее,
С, (ch a* — cos §b) -f- C2 (sh a* — ~ sin p#] — 0,
Cl(shob-{-£smf!,b\-{-C2(chab — cos$b) = 0. (9.100)
Система уравнений (99), A00) имеет решения, отличные от нуля,
при условии
(9.96)
(9.97)
(9.98)
(9.99)
ch ab — cos |
P
sha£— -s-sinp#
p
sha£ + — sinp* cha£— cosp*
= 0;
(9.101)
отсюда получаем
(ch a* — cos p*J — (sh a* -j- -| sin p&) (sh ab — j sin p&) = 0. (9.102)
Из (95) имеем:
a2 + p2 = 2^-j/-^-, a2 —р2 = 2Я2. (9.103)
334
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Пользуясь уравнениями A02) и A03), определяем критическое
напряжение.
Задача упрощается, если учесть симметрию упругой поверхности
пластинки относительно оси х' (рис. 9.17). Выражение (96)
перепишется в виде
KC,) = ^chay + Ccospy.(9.104)
Граничные условия будут:
Y'^0' 7 при У = 1-
(9.105)
Вместо уравнений A00) получаем
следующие:
Лсп^ + Ссо8-^-=0,
Рис. 9.17. Пластинка с защемленными
продольными краями.
Aash
ab
-C|}sJn-^ = 0.
Приравнивая нулю определитель системы A06), находим
ath
ab
-r-ptg^-0.
Следуя Гартману [0.18], введем обозначения:
, ab p&
Тогда вместо A07) будем иметь
— |th|= riigri.
Уравнения A03) получают вид:
°х h я26г \тЬ) ^ + Ц > •
(9.106)
(9.107)
(9.108)
(9.109)
(9.110)
(9.111)
Определяем величины \ и ц из уравнений A09) и A11) и по (ПО)
находим критическое значение ах. На рис. 9.18 по оси абсцисс
отложены значения |, а по оси ординат т|. Кривые Г|(£) по
уравнению A09) пересекают ось ординат в точках Т1 = я, 2л, Зя, .. . и
располагаются одна над другой. Величина ах по (ПО)
пропорциональна (|2-f-ri2J; следовательно, мы должны выбрать кривую,
имеющую наименьшие ординаты; она изображена на рис. 9.18 и
обозначена через S. Здесь же даны кривые — гиперболы, — соответствующие
СЛУЧАЙ ЗАЩЕМЛЕННЫХ ПРОДОЛЬНЫХ КРАЕВ
335
уравнению A11), при различных значениях mbja. Точки пересечения
этих кривых с линией S определяют искомые величины £ и ц; они
даны в скобках.
Представим критическое напряжение '
формулой (85); коэффициент
К будет равен
(9.112)
При a\mb—\ получаем
АГ=8,67; при ajmb — Ofil
К =7,00; при a/mb = 0,5
К = 7,80. Более подробное
исследование показывает,
что напряжение получается
наименьшим при ajmb =
==0,662, причем К = 6,97.
В таблице 9.2 приведены значения К для различных отношений alb.
В случае а~^>Ь изогнутая поверхность пластинки состоит из вмятин,
Таблица 9.2
Значения коэффициента К в случае шарнирного опирания
нагруженных краев и защемления ненагруженных
f 4 *vr nf
Рис. 9.18. К определению критического напряжения
в случае защемленных краев
а'Ь
К
0,4
9,44
0,5
7,69
0,6
7,05
0,7
7,00
0,8
7,29
0,9
7,83
1.0
7,69
длина которых l = ajm составляет приблизительно 2/3 ширины Ъ
(рис. 9.19).
Рис. 9.19. Волнообразование удлиненной пластинки, защемленной
по длинным краям.
Применим для решения этой же задачи метод Ритца. Граничные
условия задачи удовлетворяются, если выбрать выражение для
прогиба в виде
•W = / sin sirr —~
' п h
(9.113)
336 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Составим выражение для потенциальной энергии изгиба по
формуле C9)
Работа внешних сил равна по D5)
а Ь
W"ia*kj \Ш2аха*' (9Л15)
или
W^-LaJiptiM*-. (9.116)
32 "*"J '" " а
Приравнивая выражения A14) и A16), находим
пЮ I 1
(■хг+4+М- (9Л17)
* b*h
где к = а\тЪ. Если считать а ~^§> Ь, то минимальное значение ох
найдем из условия
откуда
4^ = 0, (9.118)
Jl» = i^," X = 0,658 (9.119)
и
°«p=7-3W- (9Л20)
Отметим, что значение к получилось близким к найденному выше
@,662); значение критического напряжения оказалось выше точного
на 4%.
Мы рассмотрели случай, когда продольные края пластинки не по-
ворачиваются. Критическое напряжение по сравнению со случаем
шарнирного опирания здесь значительно повышается: минимальная
величина акр возрастает в 7/4 раза. Это обстоятельство надо
учитывать при проектировании. Условиям полного защемления можно, как
уже было сказано, удовлетворить, прикрепляя пластинку с помощью
двухрядного заклепочного шва.
Вместе с тем подкрепляющие ребра должны обладать
достаточной крутильной жесткостью: сечение их, совместно с сечением
прилегающего участка обшивки, должно иметь замкнутый контур,
как показано на рис. 9.9,6.
Если необходимо провести уточненный расчет с учетом
фактической крутильной жесткости ребер, то надо обратиться к
задаче об устойчивости пластинки с упруго защемленными продольными
краями *). Результаты решения этой задачи приведены на рис. §.20.
*) Эта задача исследована Ландквистом и Стоуэллом (Е. Lundqufst,
Е. Stowell. NACA Rep. № 733, 1942).
СЛУЧАИ ЗАЩЕМЛЕННЫХ ПРОДОЛЬНЫХ КРАЕВ
337
Каждая серия кривых относится к определенному значению
коэффициента а, равного
bD
а =
О/к'
где b — ширина пластинки, 0/к — крутильная жесткость продольных
ребер. При а = оо и а = 0 получаем предельные случаи,
соответственно, шарнирного опирания и жесткого защемления.
Рис. 9.20. Коэффициент К для пластинки с упруго
защемленными краями.
Пример 9.1. Определить критическое напряжение и форму
выпучивания для панели обшивки верхней части крыла самолета, шарнирно
скрепленной с жесткими ребрами и сжатой вдоль длинных сторон *) (рис. 9.21, а)
Размеры панели: а — 200 мм,
b — 120 мм, h — 2 мм. Как
изменится величина критического
напряжения, если принять, что
пластинка защемлена по продольвым
краям, и учесть крутильную
жесткость ребер? Ребра
изготовлены из прессованных уголковых
профилей (рис. 9.21, б). Материал
обшивки и ребер — дюралюмин;
Е = 0,72 ■ 106 кг /см1, ц = 0,34.
Цилиндрическая жесткость
пластинки равна
0,72 .10». 0,23 5И
12 A — 0,342) ~ 0ад Кг см>
Рис. 9.21. Панель крыла самолета.
отношение сторон а/6 =1,67.
Для случая шарнирного закрепления по таблице 9.1 /( « 4,12.
Критическое напряжение будет
Скр = К
п2Р
b2h
= 4,12
•545
122 • 0,2
= 775 кг/см2.
*) Примеры 9.1—9.3 составлены Ю. П. Григорьевым.
22 А. С. Вольмир
338 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Обращаясь ко второму случаю, вычисляем крутильную жесткость ребра:
G/« * 1ЩТЮ 7 2sh3- 2A+о,з64) I!'5• °'23"^•106• *«*
Коэффициент а равен
6D _ 12-545 _ 0
Я G/K ~ 0,27 • 106 • 0,008 - ■
По графику рис. 9.20 находим:
К = 5,2, акр = 5,2 • "y ™2 = 970 кг/сл*2.
Таким образом, при упругом защемлении по продольным краям
критическое напряжение повышается на 25%.
§ 98. Пластинка со свободным краем. Сводка
расчетных данных
Рассмотрим сочетания граничных условий, когда один из краев
пластинки является свободным.
1. Нагруженные края закреплены шарнирно; один из нена-
груженных краев закреплен шарнирно, а второй свободен. Такие
граничные условия имеют место, например, для каждой из полок
равнобокого уголка, сжатого вдоль оси (рис. 9.22, а). Для продольных
краев соотношения пп. 1 и 4 § 94 принимают вид:
п д*т . с12» „ п /г> 1 о 1 \
« = о, ip--^"^ при у • ( ■ >
tf+>»S=°. 4f+<2-»w=° °"" »-»■ (9J22>
Представляя w по-прежнему в форме (89), находим для Y
выражение (96). Условия A21) дают:
С^ + Сз^О. (9.123)
C^-C^-ii-^^ + C-O^O. (9.124)
откуда С, = С3 = 0. Из условий A22), далее, получим:
С2 (а2 — ц т " ) sh а£ — С4 (а2-f-М> т * ) sin р* = 0,
Сза [а2 - B - И)-^] ch а& - С4р [р2 + B - ц) -^-] cos p* = 0.
(9.125)
Приравнивая нулю определитель этой системы, приходим к
уравнению
В2-ц^
Г1ЛАСТЙНКА СО СВОБОДНЫМ КРАЕМ
339
Исследование этого уравнения показывает, что при любых
значениях а\Ъ наименьшее значение ах соответствует т=\, так что
в продольном направлении всегда образуется только одна полуволна
Рис. 9»22, Выпучивание пластинки, одна из сторон которой свободна.
(рис. 9.22, б). Значения коэффициента К в окончательном
выражении (85) даны в таблице 9.3 (при ц —0,25).
Таблица 9.3
Значения коэффициента К в случае, когда один из ненагруженных
краёв закреплен шарнирно, а другой свободен
ajb
К
0,6
3,65
0,8
2,15
1,0
1,44
1,2
1,14
1,4
0,95
1,6
0,84
1,8
0,76
2,0
0,70
3,0
0,56
оо
0,456
Обратимся к энергетическому методу. Представим w в виде
тлх
w = fy sin ■
(9.127)
считая каждое сечение х =const срединной поверхности прямой
линией. Энергия изгиба U равна (см. формулы C9) — D5))
tf = £/2£^[igi + (l-^a». (9.128)
340 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
работа внешних сил
w==^f2j^^.. (9.129)
Приравнивая эти выражения, находим
Очевидно, здесь надо принять /и=1. При р.—. 0,3 коэффициент К
оказывается равным
К= 1,03 Ц\2 4-0,427. (9.131)
Эта формула дает значения К, весьма близкие к тем, которые
помещены в таблице 9.3.
2. Один из ненагруженных краев защемлен, другой — свободен.
В этом случае условия A21) приобретают вид
в = 0, Х^" = ° ПРИ У = 0, (9.132)
условия A22) остаются прежними. Из A32) следует
С3 = -(?!, С4=-|С2. (9.133)
По A22) находим:
Cjd2 ch аб + С2а2 sh аб 4~ Cxp2 cos рб -f- С2ар sin рб —
— H-~^-(cicha&-r-C2sha& —Cjcospft —yC2sinp&) = 6. (9.134)
Cjtx3 sh ab + C2a3 ch ab — CjP3 sin рб + C2ap2 cos рб +
m2JI2
-f B — Ю~г- (Cia sh ab — C2a ch a* +
+ C1psinp£ — C2acosp6) = 0. (9.135)
Приравнивая нулю определитель этой системы, получим уравнение
2уЬ + ("V2 + б2) ch ab cos рб = я Y ~p sh a* sin рб, (9.136)
где
■> /г. ч /К2Л2 1
Y = a2 — B — (г)
«W [ <9Л37)
6 = р24-B-Ю^~. j
Анализ уравнения A36) показывает, что при а~^>Ь изогнутая
поверхность делится на полуволны длиной 1,646. Значения
коэффициента К при различных отношениях а/6 даны в таблице 9.4 Qa = 0,25).
ПЛАСТИНКА СО СВОБОДНЫМ КРАЕМ 341
Таблица 9.4
Значения коэффициента К в случае, когда один из ненагруженных
краев защемлен, а другой свободен
ajb
К
0,8
2,70
1,0
1,70
1,2
1,47
1,4
1,36
1,6
1,33
1,8
1,34
2,0
1,38
3.0
1,36
оо
1,33
Решение этой же задачи энергетическим методом можно
получить, полагая
•ay = /sln
mux
■ sin'
згу
IF'
(9.138)
Выражение для К получает вид
+ 0,684. (9.139)
При а~^>Ь дшнималыюе значение
К соответствует a/mb=\,64 и
равно К =1,43. Ошибка по
отношению к точному решению составляет
около 8°/0.
На рис. 9.23 приведены
значения К в зависимости от
отношения ajb для случаев, разобранных
выше, а также для тех случаев,
когда нагруженные края
защемлены, а ненагруженные закреплены
шарнирно или защемлены *).
Приводим также сводку
значений минимальных критических
напряжений; наряду с величиной К
в таблице 9.5 помещены вначения
коэффициента k к формуле,
удобной для практических расчетов:
, / 100й \2 Рис. 9.23. Коэффищ
^кр =z « (—X— I > ("• * 40) ных условиях закр
\ " / сжатой в одно!
Коэффициент К при различ-
закрепления пластинки,
одном направлении.
в применении к стали (принято Е — 2,1 ■ 10е кг/см2, ц = 0,3) и дюра-
люмину (Е = 0,7 . Ю6.кг/см2, jx = 0,3).
*) Некоторые расхождения в значениях К, указанных в таблице 9.5 и
предыдущих таблицах и графиках, объясняются различием в величинах ц и
тем, что задачи решались в разных приближениях.
•342
ПРЯМОУГОЛЬНЫЕ ПЛАйТЙНКИ В ПРЕДЕЛАХ УПРУГОСТИ [Гл. IX
Таблица 9.5
Минимальные критические напряжения при сжатии
в одном направлении
Граничные условия для ненагруженных
кромок
К
И = 0,3
к в кг/см*
дюралюмин
Шарнирное опирание
Защемление
Один из краев шарнирно оперт,
другой — свободен
Один из краев защемлен, другой —
свободен
4,00
6,97
0,425
1,28
760
1320
80,5
243
253
440
26,8
80,8
§ 99. Пластинка под действием сосредоточенных сил
Исследуем устойчивость пластинки, сжатой двумя
сосредоточенными силами Р, как показано на рис. 9.24. Допустим, что размер а
значительно превышает Ь, так что
пластинку можно считать бесконечно
длинной в направлении х *). Края
пластинки у =0; b принимаем шарнирно
опертыми. Считая изогнутую
поверхность симметричной относительно у,
рассмотрим лишь область х^0.
Выделим в этой области узкую
полоску вдоль линии действия сил Р
шириной е. Если выписать для этой
полоски @ < х < е) основное
уравнение B6) и проинтегрировать его по
х, то, учитывая симметрию задачи и принимая затем е->0, придем
к соотношению
Рис. 9.24. Удлиненная пластинка,
сжатая сосредоточенными силами.
D
d3w
13с5"
Р d'w
2 ду2
— 0 при я —0, 0<у<£.
(а)
Для области л; > 0, 0 < у < £ уравнение B6) принимает вид
V% = 0. (b)
Граничные условия будут следующими: •о> = 0, d2wjdy2 = 0 при
у = 0, y = b\ dwjdx = 0 при х = 0 — по симметрии. Кроме того,
считаем w = 0, dwjdx = 0 для х -> оо.
*) Здесь приводится приближенное решение задачи по А. Зоммерфельду
(A. S о m m е г f.e 1 d, Zeitschr. i. Math, und Physik 54, 1907, 113—121); см.
также сноску на стр. 343).
§ 99] ПЛАСТИНКА ПОД ДЕЙСТВИЕМ СОСРЕДОТОЧЕННЫХ СИЛ 343
Примем по аналогии с (89) следующее выражение для прогиба,
удовлетворяющее выписанным условиям для краев у = 0, Ь:
w = X (х) sin (jiyjb). (с)
Подстановка (с) в (Ь) дает
d*X
дх*
■>®'%
Х = 0.
Решением уравнения (d) будет
X = (Л + Вх) ехр (— nxjb) + (С + Dx) exp (лх/Ь).
Из двух условий, относящихся к х->оо, находим C = D:
условия симметрии В = лА\Ь. Окончательно, „
по (с) и (е)
(d)
(е)
а из
яу
(О
« = ^(l 4-^)exp(— -y^sin
Пользуясь условием (а), приходим к вы
раженню для критической силы
„ ' 4яО
кр-
(g)
LU
Л"
=?
р
■ а
Для бесконечно длинной пластинки, жестко
защемленной по краям х = 0, £, будет
PKp = 8.iD/£.
Теперь перейдем к пластинке конечной
длины *). При решении воспользуемся
методом Ритца. Совмещая начало координат с центром пластинки
(рис. 9.25), аппроксимируем прогиб следующим выражением,
удовлетворяющим условиям шарнирного опирания:
Рис. 9.25. Пластинка с
конечным отношением сторон,
сжатая сосредоточенными силами.
W
= S 2 '
т-1,3, 5 я-1, 3,5
тлх ля у
COS COS —г—
GO
При определении величины W в выражении E3) используем
формулу E2а); входящие сюда значения ах, ау, т определим из
решения плоской задачи для докритического состояния. Результаты
вычислений с учетом четырех членов ряда по (h) сведены в таблицу.
*) Эта задача рассматривалась С. П. Тимошенко (см. книгу [0.23]
и Zeitschr. Math, und Physik 58, 1910), А. И. Лурье (Труды Ленингр.
индустр. ин-та, № 3, 1939), А. П. Филипповым (Изв. АН СССР, Отд.
матем. и естеств. паук, № 7, 1933), А. Ш. Божеповым (Сб. «Техн. науки»,
Алма-Ата, 1965), Леггет (Legget, Ргос. Camb. Phil. Soc. 33, 1937). Здесь
даются результаты решения, полученного Ямаки (N. Y a m a k I, Kep. Inst.
High Speed Mech., Tohoku Univ. 4, 1954).
344 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
приведенную ниже. Пользуясь этими данными, можно определить
величину критической силы по формуле
р —isnD
A)
К = а/Ь
К
0,5
17,68
0,75
11,96
1
8,17
1,5
5,27
2
4,73
3
4,6
Как видим, с увеличением X величина К уменьшается, приближаясь
к значению К — 4, полученному выше для пластинки бесконечной
длины *).
§ 100. Устойчивость пластинок при сдвиге
Вторая классическая задача теории устойчивости пластинок
относится к случаю чистого сдвига (рис. 9.26). В таком напряженном
состоянии находится панель коробчатой (кессонной) конструкции,
передающей крутящий момент. Другой пример — тонкие стенки
балок, воспринимающие поперечную
силу, при условии, что нормальными
напряжениями в стенке можно
пренебречь.
Определение критических усилий
для пластинки при сдвиге — задача
более трудная, чем в случае
равномерного сжатия, так как вмятины,
/// //f/ образующиеся при потере устойчи-
^^^^и—/'' -I ■■ вости, имеют своеобразную форму,
сильно меняющуюся в зависимости
от отношения сторон пластинки.
Рассмотрим и здесь прежде
всего случай удлиненной, пластинки
{а~^>Ь), шарнирно опертой по длинным краям, и приведем
приближенное решение задачи. Эксперименты показывают [9.22], что
при выпучивании такой пластинки образуются наклонные складки,
близкие к прямолинейным. Поэтому изогнутую поверхность можно
представить с помощью выражения
Рис. 9.26. Пластинка, подвергающаяся
сдвигу.
W-
, , яу . я .
:/sin -г-sin -г(х-
ky).
(9.141)
*) Данные, относящиеся к иным условиям опирания пластинки, см.
в статье Ямаки (ссылка на стр. 343).
УСТОЙЧИВОСТЬ ПЛАСТИНОК ПРИ СДВИГЕ
345
Прогиб обращается здесь в нуль по продольным краям пластинки и,
кроме того, по «узловым» линиям у = kx, наклон которых
характеризуется параметром k; величина / представляет здесь расстояние
между узловыми линиями.
Потенциальная энергия по C9) оказывается равной
и = Dm[(rJ+*k2 +2 + [т)* v +ка?]р' <9Л42>
работа внешних сил по E1) будет
W^=x^-hp. (9.143)
Приравнивая эти величины, находим
-51К+2+(!Г + (т)!<'+*!>!]- 9.т
Определяем параметры k, l из условий, что т принимает
наименьшее значение при
Ц-=0. ^=0; (9.145)
отсюда
Л = 4^. /=1,22*. (9.146)
Таким образом, угол наклона узловых линий к оси равен
приблизительно 35°. Подставляя A46) в выражение A44), определяем
коэффициент К в формуле
x^Ki£r' (9Л47>
он оказывается равным /0 = 4^2 = 5,64. Решение задачи в
замкнутом виде*) приводит к точному значению К = 5,34; таким
образом, погрешность приближенного решения составляет около 6%.
Форма горизонталей изогнутой поверхности и изогнутых линий в
сечениях, нормальных к оси х, соответствующая точному решению,
показана на рис. 9.27; расстояние между «узловыми» линиями
составляет /= 1,25*.
В случае жестко защемленной по длинным краям пластинки
коэффициент К достигает величины 8,98; таким образом, эффект
«заделки» краев оказывается приблизительно таким же, как и при
сжатии. Изогнутая поверхность для этого случая изображена на
*) Оно было получено Саусвеллом и Скэн (R. V. Southwell, Sylvia
W. Skan, Proc. Roy. Soc. London, Ser. A 105 A924), 582).
346
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
рис. 9.28; узловые линии здесь также сближаются, и расстояние
между ними снижается до / = 0,8£.
Рис. 9.27. Волнообразование удлиненной пластинки с шарнирно
опертыми краями при сдвиге.
Перейдем к задаче о выпучивании пластинки с конечным
отношением сторон; решение ее оказалось особенно сложным.
Сечения
Рис. У.28. Волнообразование удлиненной пластинки с
защемленными краями при сдвиге.
Воспользуемся методом Ритца, аппроксимируя выражение для
прогиба с помощью ряда
оо оо
W
\^ \^ я птх . ляу
(9.148)
т — 1 л*-!
Вычислим энергию изгиба по C9), принимая во внимание
соотношения
а
ппи т = I. i
(9.149)
(9.150)
. тпх . 1лх . . -g- при /и = 1,
sin sin dx — \ *
а а I 0 при т ф i;
тогда получим
u-$*mAL&+$i
§ 1001 УСТОЙЧИВОСТЬ ПЛАСТИНОК ПРИ СДВИГЕ 847
Далее определим работу внешних сил по E1); учитывая
соотношения
f . Inx mnx . . Ilfi» —m» при нечетной сумме £-f», ]
sin cos dxdy = { ' m \
\ D при четной сумме г-(-/и, J
(9.151)
найдем
W = 4тй % % % g 4m„4,y (.2_ Д"(^2 _ д2) ; (9.152)
m я / /
здесь должны быть приняты во внимание лишь те сочетания
индексов т-\-1 и n-\-j, которые одновременно являются нечетными.
Условия экстремума энергии
илтП илтп
получают вид
-»а11^^.-^-л=1' <9Л54>
суммы ffi-j-Z, я-f-/ должны быть нечетными.
В первом приближении выберем следующие сочетания индексов:
т,
1;
2;
я
1
2
/,
2;
1;
У
2
1
Система A54) сведется к двум уравнениям:
^тЫп-4я*ОвМм(-1-4"^J = 0. (9.156)
Введем обозначения:
32atb2h '
« = т. ^ = ^Stt: (9-!57)
тогда уравнения A55), A56) примут следующую форму
_4
9
^A+а2)Мп + |л22 = 0, (9.158)
4 Ai+^(l+a2)M22 = 0. (9.159)
348
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
Приравниваем нулю определитель системы:
2\2
^О+а2?
16Я
A+а2J
= 0,
отсюда
Л=±
9 A+а2J '
Критическое напряжение ткр будет равно
__ 9я4РA+а2J
ТкР ~~ 32а362/г
Для квадратной пластинки получим
— 111 я2/?
(9.160)
(9.161)
(9.162)
(9.163)
Далее из A58) можно найти соотношение между Ли и Л22; при
а = Ь будет Л22=;0,25Л11.
Во втором приближении возьмем такие сочетания индексов:
I /. ]
т, п
1,1; 1,3; 3,1; 3,3
2,2
2,2
1,1; 1,3; 3,1; 3,3
Определитель системы A49) имеет вид
(I+ct2J
_4
9
0
О
0
4
™ <■+">■ -т
_36
25
4 A + 9а2J
(9+а2J
36
25
0
0
^0 + «2)*
(9.164)
Во всех строках, кроме одной, здесь содержится только по два
члена. Благодаря этому уравнение, полученное после развертывания
определителя, можно сократить на ДА В итоге находим
с*
+
9A+а2J
s,
где
-уЛ
81 _81_ A + а2J _81_ A + а2J .
625 + 25 A + 9а2J + 25 (9 +а2J '
(9.165)
(9.166)
§ 100]
УСТОЙЧИВОСТЬ ПЛАСТИНОК ПРИ СДВИГЕ
349
этому соответствует критическое напряжение
_ 9я"РA + «2J
-кр"
32a3b*hs
(9.167)
Поправочный коэффициент по отношению к значению первого
приближения A61) равен s. Для квадратной пластинки он составляет
s=l,18; поэтому во втором приближении вместо A63) получим
71 G.163а)
КР у' b*h
Мы исследовали только тот случай, когда сумма индексов т-\-п
является четной. В общем случае определитель типа A64)
представляет собой произведение двух определителей, из которых один
содержит четные т-\-п, а другой — нечетные. В случае 1 <<х<2,5
наименьшее значение дает определитель с четными т-\~п; при
бблыних а надо попеременно учитывать первый и второй
определители *).
В итоге критическое напряжение ткр можно по-прежнему
представить в виде
(9.168)
-кр-
■ К-
ьч
Уточненные значения коэффициента К даны в таблице 9.6.
Таблица 9.6
Коэффициенты К в случае шарнирно опертой пластинки при сдвиге
а/Ь
К
1,0
9,34
1,1
8,47
1,2
7,97
1,3
7,57
1,4
7,30
1,6
6,90
1,8
6,64
2,0
6,47
3,0
6,04
5,0
5,71
со
5,34
Для определения К можно также пользоваться приближенной
формулой (а!> 1)
/С = 5,344-^-. (9.169)
Для предельных значений а=1 и а = оо эта формула дает
величины К, совпадающие с приведенными в таблице 9.6. На рис. 9.29
показана форма изогнутой поверхности пластинки при а = 0,5 и
а=1,0.
Если пластинка защемлена по всем кромкам, то формула A69)
принимает вид (а^-1)
/f=8,98-t--|r- (9.170)
*) Это исследование было проведено Зейделем [9.19], Гартманом [0.18]
и Штейном и Неффом (Н. Stein, J. Neff, NACA TN 1222, 1947).
350 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
В заключение приведем фотографии удлиненной пластинки,
подкрепленной по краям, в момент потери устойчивости (рис. 9.30, а)
Рис. 9.29. Волнообразование пластинки с от- Рис. 9.30. Выпученная поверхность
подношением сторон 0,5 и 1 при сдвиге. крепленной пластинки при сдвиге: а) в
момент потери устойчивости; б) при за-
критической деформации.
и при значительном превышении сдвигающими усилиями критической
величины (рис. 9.30, б).
Сводный график для определения К в зависимости от а\Ь дан
на рис. 9.31. Здесь приведены расчетные кривые не только для
Рис. 9.31. Коэффициент К при различных условиях
закрепления пластинки, подвергающейся сдвигу.
рассмотренных выше граничных условий, но и для случаев, когда
два края пластинки (длинные или короткие) защемлены, а два
других— закреплены шарнирно.
4 100] УСТОЙЧИВОСТЬ ПЛАСТИНОК ПРИ СДВИГЕ 351
Пример 9.2. Подкрепленная цилиндрическая оболочка (рис. 9.32)
испытывает действие крутящего момента Мк = 5000 кгм. Нервюры
располагаются на расстоянии а = 250 мм друг от друга. Определить максимальный
шаг b стрингеров из условия, что критическое напряжение сдвига в обшивке
достигает предела пропорциональности т1Щ = 2000 кг/см2; толщина обшивки
h = 2 мм. Проверить на устойчивость вертикальные стенки лонжеронов,
толщина которых равна h = 4 мм. Принять, что панели обшивки жестко
Лонже)
НерВюра
/..У / А А /-.
/•--
"Стрингер
Рис. 9.32. К расчету на устойчивость при сдвиге оболочки
типа крыла самолета.
защемлены по краям, прикрепленным к поясам лонжеронов, и шарнирно за
креплены по двум другим краям. Материал — дюралюмин, £ = 7,2-105 кг/см2
ц = 0,32.
Принимаем, что крутящий момент передается центральным отсеком
оболочки, имеющим размеры 600 X 200 мм. Погонное касательное усилие
по формуле Бредта равно
т 5-Ю6 опо ,
Т= 2-20-60 -Я» «'А*-
Напряжение в обшивке будет
Т
Лоб
*об;
208
0,2
1040 кг/см2.
Шаг стрингеров находим из условия
я*- 0,72-10° .0,23
л 12A —0,322N2 ~1WU-
отсюда 62//< = 25. Так как К зависит от отношения а/6, то при а= 260 мм
решение приходится искать путем проб, задаваясь значением b и оценивая
по графику рис. 9.31 соответствующую величину К. Окончательно получаем:
К яа 6,7, b = 130 мм.
Напряжения в стенке лонжерона
Т 908
т- = -7^ = -оТ = 520*г/сл2-
Стенку лонжерона рассматриваем как пластинку, защемленную на поясах
и шарнирно опертую но смежным стойкам. При а/Ь = 26/20 = 1,3 по
352 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ 1ГЛ. IX
графику рис. 9.31 К ~ 11,6. Критическое напряжение равно
я2.0.72 • 10= • 0,43
— 3060 кг/см1.
ткр Н.6 12A_о,322J02
Так как величина ткр превышает твд, то ее следует уточнить, пользуясь
формулами, выведенными с учетом пластических деформаций. Во всяком
случае очевидно, что устойчивость стенки лонжерона обеспечена.
§ 101. Неравномерное сжатие. Чистый изгиб
Обратимся к случаю, когда по двум кромкам пластинки
распределены нормальные усилия, изменяющиеся по линейному закону*)
(рис. 9.33):
а, = а0A-а£). (9Л71)
При а = 0 получим случай равномерного сжатия, при а = 1 —
случай сжимающих усилий, распределенных по закону треугольника.
Если а > 1, то известная
часть пластинки будет
испытывать растяжение. При
сс = 2 придем к случаю
чистого изгиба. Таким
образом, здесь объединяются
различные виды нагружения
панелей обшивки и тонких
стенок, включающие вне-
центренное сжатие и изгиб.
Будем считать, что все
кромки пластинки
закреплены шарнирно, и используем тот же путь решения, что и в § 99.
Аппроксимируем прогиб по-прежнему с помощью ряда
Рис. 9.33. Пластинка под действием нормальных
усилий, распределенных по линейному закону.
W
т2 2-
. тпх . ппу
.sin -sin —t-
Энергия деформации изгиба будет равна
D аЬлА
и-
Лг\2
2и Ъ А%тп (it + w)
(9.172)
(9.173)
Работа внешних сил будет
Ш=У\ \ouh{l-a\){^Jdxdy. (9.174)
*) Эта задача исследована И. Г. Бубновым [0.2] и С. П. Тимошенко [0.23].
10!)
НЕРАВНОМЕРНОЕ СЖАТИЕ. ЧИСТЫЙ ИЗГИВ
353
Принимая во внимание соотношения
1
. (JtV . /Лу ,
у sin ~- sin +-ф- ау=
U
1662
я (/2 - у2J '
0,
.*!
4 '
если / ± j — нечетное число,
если / ± / — четное,
если i = j.
(9.175)
найдем:
..,, __ oah t ab VI VI .2 mbt
w — — \-т2и2иАтп~ж
2jt2
2
аа VI m2jt2
— lb 2л~~аР~
т
при л ± I нечетном.
Уравнения
получают вид
DA W-^ +^2
_ . I . т2я2
°"кр" ■{ лтп „1
ilV/12 8&2 VI VI AmnAmini 1
4 J^/lmn tf Z±Lk (л2-г2J
<? (t/ — W)
(9.176)
Л4т„
2а2
(=1
Amini
(л2—/2J
г
(9.177)
В первом приближении положим, что Ап Ф 0, а все остальные
коэффициенты равны нулю; тогда придем к единственному уравнению
откуда
J0, кр'
Таблица 9.7
Коэффициенты К для случая неравномерно распределенных
нормальных усилий
^\. а1ь
а \^
2
4/3
1
4/5
2/3
0,4
29,1
18,7
15,1
13,3
10,8
0,5
25,6
0,6
24,1
12,9
9,7
8,3
7,1
0,667
23,9
0,75
24,1
11,5
8,4
7,1
6,1
0,8
24,4
11,2
8,1
6,9
6,0
0,9
25,6
1,0
25,6
п.о
7,8
6,6
5,8
1,5
24,3
11,5
8,4
7,1
6Д
23 А. С. Вольмир
354 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Это решение имеет смысл лишь для малых а. Рассматривая
последовательно системы двух, трех и т. д. уравнений типа A77), находим
уточненные значения критических
напряжений. Представим критическое
значение о0 в виде
(9.179)
"min
20
IS
to
5
0
°0, кр = К
b*h
Уточненные значения К Для разных
случаев нагружения представлены в
таблице 9.7; в отличие от
предыдущих случаев а не всегда является
большей стороной пластинки.
В случае чистого изгиба
минимальное значение К получается при aft —
= 2/з- На рис. 9.34 сравниваются
наименьшие величины К для
некоторых видов нагружения при шарнирпо
опертых кромках пластинки. Как
видим, коэффициент К, относящийся к наибольшим напряжениям изгиба,
оказывается приблизительно в 6 раз большим, чем при равномерном
-г -I о/
ли
Гис. 9.34. Коэффициент К в
различных случаях нагружения.
сжатии.
§ 102. Комбинированное нагружение
v
{{lilt
Мы определили критические напряжения при сжатии (растяжении)
в одном направлении и сдвиге. Во многих конструкциях, однако,
пластинки испытывают
одновременно усилия различного типа.
Один из примеров — обшивка
крыла летательного аппарата; изгиб
крыла вызывает появление
сжимающих (растягивающих)
напряжений в обшивке, кручение —
напряжений сдвига. Рассмотрим
различные виды комбинированных
нагрузок.
1. Сжатие в двух
направлениях. Допустим, что
шарнирпо закрепленная по всем краям
пластинка, сжата одновременно усилиями ох и оу, равномерно
распределенными вдоль соответствующих сторон*) (рис. 9.35).
Уравнение B6) получает вид
D „Л . d2w , d2w
XV%+°*lir + tfylF = 0. (9Л80)
3
1
—\
t t т
5
/С^,
I М t
Рис. 9.35. Пластинка сжимается
одновременно в двух направлениях.
*) Эта задача была впервые рассмотрена Брайеном (9.14]
КОМБИНИРОВАННОЕ НАГРУЖЕНИЕ
355
Выпишем решение в виде
w = А„
sin-
sm
плу
Подставляя в A80), получим
Введем обозначения
выразим
а
а =
критические
Ь '
Ф *х
х, кр "
■к.
напряжения
5
следующим
(9.181)
(9.182)
(9.183)
образом:
ЬЧ
°У, Кр ^у £2Д Ф°ЛГ, Кр'
тогда из A82) найдем
[(т)' + -Г
кУ
№
(9.184)
(9.185)
+ Ф«2
На рис. 9.36 даны минимальные
значения Кх в зависимости от а при
разных ф; для отдельных ветвей
указаны индексы т и п. Для
квадратной пластинки получаем всегда
т ~п = I; при этом
К,
отсюда
1+Ф'
К =~^-
у 1 + Ф'
/Сх + ^у = 4.
(9.186)
(9.187)
О Рпаипио ип лт о С *>ИС' '-^" Критические напряжения для
2. гивНОМврНОв COtCdtHUB ypQC- пластинки, сжатой в двух направлениях.
тяжение) в одном направлении
и сдвиг. Перейдем к случаю совместного действия сжимающих или
растягивающих усилий о в одном направлении и касательных
усилий х (рис. 9.37). Края пластинки примем закрепленными шарнирно.
Для весьма длинной пластинки прогиб может быть
аппроксимирован выражением, аналогичным A41):
w = / sin -г- sin -.- (х — ky).
(9.188)
23*
356 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Потенциальная энергия изгиба по-прежнему определяется
равенством A42). Дополняя A43), получаем для работы внешних сил
новое выражение
W = [?!^ + l!!pL)f*. (9.189)
Сравнивая A42) и A89), находим
a + 2Tfe = -^.[(lJ + 6fe2 + 2 + (yJ(l + fe2J]- (9.190)
Выражение, заключенное в скобки, приобретает минимальное
значение при длине полуволны
l = bYT+W. (9.191)
Таким образом, система критических напряжений удовлетворяет
уравнению
ОкР + 2ткр£ = ^D + 8*2). (9.192)
При раздельном действии сжатия и сдвига будет
30, кр 4 £2Д > Т0, кр q V * £2д
Уравнение A92) получает вид
2|/2-^- k= 1+2&2. (9.194)
°о.кР=4^5?- 4kP = 4/2w-. (9-193)
^о, кр
Пусть отношение ткр/т0_кр задано; тогда минимальное значение акр
2ууууу6
'У УХУ
Рис. 9.37. Одновременное действие сжатия в одном
направлении и сдвига.
соответствует углу наклона узловых линий, определяемому
следующим образом
к = 7Т-Г- (9'195)
г *• ^о, кр
КОМБИНИРОВАННОЕ НАГРУЖ.ЕНИЕ
357
При простом сжатии k = 0, при сдвиге k= 1/1^2, при
комбинированной нагрузке k имеет промежуточное значение. Подставляя A95)
в A94), находим соотношение
-f^ + p^J^!. (9.196)
°0, Кр V Т0, Кр /
Как и следовало ожидать, изменение направления касательных усилий
(перемена знака т) не влияет на величину критического напряжения.
Уравнение A96) может быть использовано и в том случае, если
усилия о являются растягивающими; знак перед о следует при этом
изменить на обратный. Критическое касательное напряжение будет
при этом больше, чем при простом сдвиге.
В случае пластинки с конечным отношением сторон можно
пользоваться тем же уравнением A96). Уточненное решение задачи
было получено путем аппроксимации прогиба выражением A41).
Если удержать при решении пять параметров Атп, то приходим
к следующим результатам. Введем обозначения:
0Kp = Ko-Sr. *кр = *т-Ж- (9Л97)
Значения Кп и Кх для различных отношений а = а\Ь даны в
таблице 9.8. Знак минус перед К„ соответствует растягивающим
усилиям *).
Таблица 9.8
Коэффициенты АГ0 и ЛГГ в случае комбинированного действия сжатия
и сдвига
а=1
а= 1,6
а = 3,2
Ко
Кх
Ка
Кх
Ко
Кх
—1,0
10,57
-2,0
8,46
—1,0
7,45
0
9,42
0
7,0
0
6,75
1,0
8,15
2,0
5,31
1,7
5,4
2,0
6,67
2,83
4,46
2,5
4,66
3,0
4,72
3,6
2,95
3,0
4,14
3,6
3,02
3,9
2,09
3,7
3,29
4,0
0
4,2
0,06
4,017
2,19
На графике рис. 9.38 дана уточненная, по сравнению с A96),
зависимость aKp/a0i Kp и tKp/t0i Kp для различных отношений Ъ\а.
3. Сжатие в двух направлениях и сдвиг. Пусть удлиненная
пластинка, шарнирно опертая по краям, подвергается действию
*) Незначительное расхождение между величинами Кх при Ка — 0,
помещенными в таблицах 9.8 и 9.6, объясняете тем, что задача решена в ином
приближении.
358 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
сжимающих (растягивающих) усилий вдоль длинной стороны ах, вдоль
короткой стороны ау, а также касательных усилий т. Пользуясь
1,0 0,8 0,6 0,1 0,2 0 -0,2 -0,4 -0,6 -0,3 -IJJ
кб/кМ
Рис. 9.38. Критические напряжения в случае совместного
действия сжатия и сдвига.
тем же методом, что и в предыдущем случае, приходим к следующей
зависимости между критическими напряжениями:
(^-)» = [4(" + /,_4>a)_i
кр
кр
X
Х[1(з + /П3)-^-
(9.198)
П°Д ^о, кр и а0>кр понимаются критические напряжения при раздельном
действии сдвига и сжатия в направлении х; под о—величина
я2£>
а =■
b2h '
(9.199)
4. Чистый изгиб и сдвиг. Рассмотрим, далее, шарнирно опертую
пластинку, находящуюся под действием нормальных усилий по двум
кромкам,
(9.200)
'-'М-Ч-)-
ЗАКРИТИЧЕСКАЯ ДЕФОРМАЦИЯ ПЛАСТИНКИ ПРИ СЖАТИИ
359
и равномерно распределенных усилий сдвига т. Критические
напряжения выразим с помощью соот- „ ,,
ношений
Jli КР '
Кс
b*h
Обозначим значения
коэффициентов К0 и Кт при раздельном
действии изгиба и сдвига через
Ко,0, %х, о- Величины К0 и А"т
могут быть определены из
приближенного соотношения
hlhfi
Рис. 9.39. Критические напряжения в случае
совместного действия изгиба и сдвига.
Уточненные значения Ка и Кх
для различных отношений
сторон пластинки а = а\Ь приведены в таблице 9.9 и на графике
рис. 9.39.
Таблица 9.9
Коэффициенты Ка и Кх при совместном действии изгиба и сдвига
а =
К
X
0
2
4
6
8
9
9,42
= 1
Кс
25,6
24,6
22,2
18,4
12,4
6,85
0
а =
кх
0
4
8
10
11
12
12,26
4/5
ко
24,5
22,8
17,7
13,25
10,01
4,61
0
а =
Кх
0
4
8
12
14
15
16,09
2/3
ко
23,9
23,05
20,35
15,23
11,04
8,0
0
а =
кх
0
4
8
12
16
20
24
26
26,9
1/2
ко
26,6
25,4
24,3
22,55
19,94
16,13
10,26
5,44
0
§ 103. Закритическая деформация пластинки при сжатии
Мы определяли до сих пор напряжения, при которых плоская
форма пластинки перестает быть устойчивой. Однако, если пластинка
скреплена по краям с достаточно жесткими ребрами, то несущая
способность ее в момент потери устойчивости не исчерпывается;
пластинка в состоянии и после этого нести возрастающую нагрузку.
Поэтому для того, чтобы судить о несущей способности пластинки,
необходимо исследовать ее закритическое поведение.
36Т ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
Как мы видели, в момент выпучивания пластинки в ней возникают
только напряжения изгиба; при вычислении потенциальной энергии
деформации можно было ограничиться определением энергии,
соответствующей изгибным напряжениям. В послекритической стадии,
когда прогибы становятся сравнимыми с толщиной пластинки, важную
роль начинают играть напряжения в срединной поверхности.
В каждой точке пластинки напряжения будут складываться из
напряжений собственно изгиба и напряжений в срединной поверхности; по
мере развития выпучин роль последних возрастает.
Напряжения в срединной поверхности появляются благодаря двум
обстоятельствам. С одной стороны, при больших прогибах непод-
крепленной пластинки заметно искривляются ее края, как показано
на рис. 9.40, а; здесь принято, что краевые волокна остаются
///////
/////// /''///"/
о) 6)
Рис. 9.40. Усилия в срединной поверхности при выпучивании
пластинки.
в первоначальной плоскости пластинки. Но в том случае, когда
пластинка снабжена жесткими ребрами, они сопротивляются
искривлению краевых полос. При выпрямлении краев образуются
дополнительные усилия — сжимающие вблизи углов и растягивающие в средней
части (рис. 9.40, б); при этом накапливается дополнительная
потенциальная энергия. С другой стороны, выпучивание пластинки
происходит таким образом, что срединная плоскость переходит в нериз-
вертывающуюся поверхность; это вызывает новые напряжения,
зависящие от характера искривления пластинки в той или иной точке.
Как мы увидим ниже, влияние на поведение пластинки первого
фактора — жесткости подкрепляющих ребер — значительно больше, чем
эффект, связанный с волнообразованием срединной поверхности.
Характерная особенность закритической деформации пластинки
состоит в изменении формы вмятин: если в момент потери
устойчивости удлиненной пластинки вмятины являются квадратными, то затем
длина их уменьшается, причем переход от одного числа волн к дру-
§ 103] ЗАКРИТИЧЕСКАЯ ДЕФОРМАЦИЯ ПЛАСТИНКИ ПРИ СЖАТИИ 361
гому сопровождается обычно хлопками. На рис. 9.41 показана форма
волнообразования пластинки для момента, когда напряжение в
подкрепляющих ребрах в 40 раз
превышает критическое напряжение для
пластинки *).
Рассмотрим сначала закритиче-
скую деформацию пластинки, шар-
нирно скрепленной по краям с
жесткими ребрами и сжатой в одном
направлении. Будем принимать, что
подкрепляющие ребра остаются
прямолинейными, но что точки
пластинки могут свободно скользить
вдоль ребер. Рассмотрим сечение
пластинки, перпендикулярное к направлению сжатия. Если до потери
устойчивости пластинки напряжения сжатия распределяются по
ширине равномерно, то после выпучивания они
более интенсивно возрастают у краев; в
центральной же части напряжения мало отличаются
от критического значения (рис. 9.42, а).
Обозначим через ар напряжение в краевом
волокне пластинки, расположенном в
срединной поверхности, а через о—среднее
напряжение по ширине:
Рис. 9.4!. Закритическое
волнообразование пластинки при сжатии.
и
dy.
(9.203)
Полное сжимающее усилие, передающееся
пластинкой, равно Р = bh<3. Выразим его через
краевое напряжение
P = <pbhep, (9.204)
введя так называемый редукционный
коэффициент ф. Этот коэффициент равен
a
(9.205)
Рис. 9.42. Распределение
напряжений при закрити-
ческой деформации
пластинки.
Можно условно принимать, что работаю
Щими частями пластинки являются только по
лосы, прилегающие к краям, как показано на рис. 9.42, б;
суммарную ширину этих двух полос назовем приведенной шириной и
*) По Ладе и Вагнеру (R. Lahde, II. Wagner, Lufifahrlforscliung 13,
№7 A936)).
362 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
обозначим через Ь0 = Ьар; тогда будет
<Р = -^-. (9.206)
Если известно, как меняется редукционный коэффициент при
возрастании 0р, то можно определить сопротивление пластинки
сжимающей силе на каждом этане нагружения. В свою очередь
величина 0р связана с деформацией подкрепляющих ребер. В зависимости
от условий деформации ребер надо принять
а? = Т=~? или °p = £p<V (9-207)
где £р — модуль упругости материала, ер — деформация укорочения
ребер. Определение редукционных коэффициентов позволяет
установить роль, которую играет пластинка в качестве элемента той или
иной конструкции, например корпуса летательного аппарата или
корабля.
Приведем вывод простой приближенной формулы для
редукционного коэффициента, не претендующий на учет всех
обстоятельств закритической деформации пластинки *). Выделим работающие
краевые полосы пластинки и мысленно сочленим их между собой;
тогда получим пластинку шириной Ьпр. Будем считать, что
напряжения ор в приведенной таким образом пластинке таковы, что пластинка
находится на грани выпучивания; иными словами, примем, что
величина Ор равна критическому напряжению для пластинки шириной 6пр:
"p^K-St- (9-208)
йпр"
С другой стороны, в момент выпучивания исходной пластинки
критическое напряжение равно
Сопоставляя B08) и B09), находим
Ф = 1/"^/1. (9.210)
Здесь через п* обозначено отношение напряжения в краевом
волокне к критическому напряжению:
с,
р
л* = —; (9.211)
°кр
эта величина характеризует уровень развития закритической
деформации. Отметим, что при ге*—>эо редукционный коэффициент при-
*) Этот вывод принадлежит Карману, Зехлеру и Доннеллу [9.16].
ПРИЛОЖЕНИЕ ТЕОРИИ ГИБКИХ ПЛАСТИНОК
363
ближается к нулю. Во всех рассуждениях здесь принимается, что
напряжения в пластинке и ребрах лежат в пределах упругости.
Приближенная формула B10) часто применяется в практических
расчетах. Ниже дано более строгое решение задачи о закритическом
поведении пластинки.
§ 104. Приложение теории гибких пластинок
После выпучивания пластинки прогибы ее нельзя считать малыми
по сравнению с толщиной. Поэтому при исследовании закритической
деформации надо исходить из общих уравнений теории гибких
пластинок F3), F4). Примем, что все края пластинки остаются
прямолинейными и что продольные края при изгибе пластинки свободно
смешаются друг по отношению к другу; кроме того, будем считать,
что точки, принадлежащие кромкам пластинки, свободно скользят
вдоль подкрепляющих ребер. Это последнее предположение не
соответствует, как правило, реальным условиям прикрепления пластинок
к ребрам, но значительно облегчает вычисления. Более строгое
решение [9.11], принадлежащее Г. Г. Ростовцеву, показало, что
погрешность, вносимая этим допущением для таких «интегральных»
характеристик, как редукционный коэффициент, невелика.
Решение системы нелинейных уравнений F3), F4) при принятых
граничных условиях выполняется с помощью различных
приближенных методов. Чаще всего принимают следующий путь.
Выберем аппроксимирующее выражение для прогиба w в виде ряда
(X) СО
\1 V . тпх ялу ._ п1п
т-\ я-=1
Подставим это выражение в правую часть уравнения F4); тогда
получим линейное дифференциальное уравнение относительно
функции Ф. Интеграл его имеет вид
оо оо
р=0 G = 0
Отсюда по F0) находим напряжения ах, оу, т. Коэффициенты В
выражаются через Атп; под о понимается среднее сжимающее
напряжение по ширине пластинки.
Полная сжимающая сила в любом сечении пластинки,
параллельном у, будет
ь
Р= f haxdy = obh; (9.214)
о
отметим, что эта величина не зависит от координат и, таким
образом, остается постоянной по всей длине пластинки.
364 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Определим, далее, взаимное смещение точек пластинки, имеющих
координаты (х, 0) и (х, Ь), но E4)
а
Деформация гх но E7) и F0) равна
1 1д2Ф
£ [ ду* ^ дх2)
Подставляя B12) и B13), получим
6^7Ь-^' (9-216)
СО СО
аа
ISS™24™»- (9-217)
т = \ я = 1
Аналогичным образом найдем взаимное смещение точек с
координатами @, у) и (а, у):
— П''-т(£)']<» <9-218»
ИЛИ
со со
аЬ я2
v = ^~-~Yi^nA2mn. (9.219)
Как видим, величины и и v не зависят от координат; следовательно,
условие прямолинейности кромок выполняется.
Пользуясь выражениями для w и Ф, приближенно интегрируем
уравнение F3). Для этого можно применить метод Ритца или
Бубнова — Галеркина *). При этом находятся коэффициенты Атп и В
определяющие прогиб и напряжения в срединной поверхности. Далее
по формуле B05) вычисляется редукционный коэффициент.
Рассмотрим для простоты квадратную пластинку со стороной b
и примем в первом приближении АиФ0 и все остальные
коэффициенты равными нулю. Иными словами, будем полагать, что пластинка
искривляется по одной полуволне вдоль осей л; и у. Тогда для
выражения B13) получим
ЕА2
#20 = #02 = -^. (9.220)
другие коэффициенты обращаются в нуль. Как легко видеть,
параметр Ап представляет собой здесь стрелу прогиба пластинки, по-
*) Такой путь решения задачи разработан в исследованиях П. Ф. Пап-
ковича, первое из которых относится к 1920 г., П. А. Соколова и других
авторов; обзор этих работ см. в книге [0. 3], стр. 390.
Приложение теории гибких пластинок 365
этому обозначим дааее Л,,=/. По B17) находим
Взаимное сближение нагруженных кромок, отнесенное к стороне
пластинки, будет
Примем, что эта величина отвечает деформации продольного ребра
и что модули упругости пластинки и ребер одинаковы (Е? = Е); по
B07) напряжение ор оказывается равным
aP=a+Eir(iJ' (9-223)
множитель 1/A—\i2) здесь опущен.
Применяя для интегрирования уравнения F3) метод Бубнова —
Галеркина, выпишем соотношение
а ь
j f Xs\n~sm^-dxdy = 0, (9.224)
о о
где
X = ^-^w — L(w, Ф). (9.225)
Подставляя значения w и Ф и проводя вычисления, приходим
к следующей зависимости:
o/-i^/-£-g-/3 = 0. (9.226)
Примем f Ф0 и учтем, что во втором члене фигурирует
критическое напряжение окр; тогда найдем
a = aKp + £^(i-J. (9.227)
Сравнивая формулы B23) и B27), получим
o = |-(aKp+ap). (9.228)
Редукционный коэффициент по B05) оказывается равным *)
Ф = 0.5+^-, (9.229)
где под п* по-прежнему понимается отношение B11). Эта зависимость
отличается от формулы Кармана B10) уже тем, что при ге*—>оо
*) Эта формула была указана Маргерром [9.18].
366 прямоугольные пластинки в Пределах упругости
редукционный коэффициент приближается к значению 0,5, а не к нулю
вообще же величина ф получается значительно выше, чем по B10).
Уточненные решения можно строить, увеличивая число
варьируемых параметров Атп. В книге [0.3] проведены выкладки, сделанные
с учетом двух параметров: Ли и Л31 (первый индекс —число
полуволн в направлении х, второй —вдоль у); оказалось, чго значения
редукционных
коэффициентов лежат несколько ниже,
чем но данным первого
приближения.
В статье Маргерра [9.18]
были проведены также
вычисления с удержанием коэф-
фициенгов Ли, Al3, Л31.
В результате была получена
следующая приближенная
формула для редукционного
коэффициента:
Ф = |Г~;
(9.230)
Рис. 9.43. Значения редукционных коэффициентов
по результатам различных решений.
очевидно, она также дает
более высокие значения ф,
чем формула Кармана B10).
Далее, в работе Леви
[9.17] содержатся данные,
полученные с сохранением
коэффициентов Л„, Л13, Л33, Л1Г), Л51. Найденная при этом зависимость
(f(n') изображена на рис. 9.43 в сопоставлении с формулами B10) и
B30). Кривую Леви, на первый взгляд, можно считать наиболее
обоснованной. Однако решение С. А. Алексеева [9.1], выполненное с
помощью метода последовательных приближений, привело к иным
результатам. Оказывается, в тех вычислениях, которые были до сих пор
выполнены по методу Ритца, выпадали коэффициенты, относящиеся к
четным числам полуволн (например, Л21). Между тем, как было
показано С. А. Алексеевым, кривая т = 2 (т — число полуволн по длине)
дает в определенной области изменения п* меньшие значения ф, чем
соседние кривые т = 1 и т = 3. Поэтому решение Леви давало при
«*> 3,5 преувеличенные значения редукционного коэффициента.
Простые опыты, в которых осуществляется сжатие
подкрепленной пластинки в пределах упругости, подтверждают этот вывод. При
незначительном превышении критического напряжения квадратная
пластинка выпучивается таким образом, что по длине образуется
одна полуволна. Дальнейшее нагружение пластинки приводит, как мы
уже видели, к хлопку в процессе которого появляются две
полуволны; в последующем образуются три полуволны и т. д.
РЕШЕНИЕ С ПОМОЩЬЮ ЦИФРОВОЙ ЭЛЕКТРОННОЙ МАШИНЫ 367
§ 105. Решение задачи с помощью цифровой
электронной машины
Применение метода Ритца или Бубнова — Галеркина к задаче
о закритическом поведении пластинки приводит к решению системы
кубических уравнений типа B26) относительно параметров прогиба.
При значительном числе удерживаемых параметров вычисления
оказываются весьма трудоемкими. Сложные выкладки приходится
осуществлять также при использовании метода последовательных
приближений. Поэтому решение этой задачи желательно выполнять с помощью
электронных цифровых машин. Процесс вычислений, связанный
с применением метода Ритца или метода последовательных
приближений, поддается, вообще говоря, программированию. Однако
наиболее удобным здесь оказывается применение метода конечных
разностей или метода коллокации. Ниже излагается решение
задачи о закритическом поведении пластинки, проведенное с помощью
метода конечных разностей *).
Введем в основные уравнения F3) и F4) безразмерные величины:
— х — у 1 а — w 1 )
a J о о h 12A—(л2) |
— Ф - ал (by °у(а\2 -х ab \
Ф=~Ш' °^уЫ' ау=-Б[т)' %==Т1?')
тогда эти уравнения примут вид:
/ 1 d*w . 0 d*w . ,, d4w\ r.— TRs
v I =—\~ 2 ——=- -4- А2 ^^- )=■ L(w, Ф),
U2 дх' дх2ду2 дуЧ
1 <?<Ф , 0 д*Ф , ., дАФ I -. . ,
= V- 2 ——— т- К1 ~=г- = L(w, w);
I2 дх* дх2ду2 ду* 2
операторы L включают производные по х и у. Напряжения в
срединной поверхности равны:
д2Ф - дгФ - д2Ф ,„„„,-
ах=-^, av = ^=-, %— =^-. (9.234)
х ду2 у дх2 дхду
Наибольшие по толщине напряжения изгиба будут:
°х, и
°у,и
(9.231)
(9.232)
(9.233)
1
1 d2w
!*■
d2w
2A—р,2) U2 дх2 ' ' ду2
1 / 1 d2w , d2w
2A— р2) U2 ду2 дх2
1
d2w
2-fl-fii) дхду
(9.235)
(9.236)
.9.237)
*) Это решение принадлежит А. Ю. Биркгану.
368 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Заметим, что в безразмерных переменных х, у прямоугольная
область с любым отношением сторон X отображается в квадратную
со стороной, равной единице. Систему уравнений B32), B33)
представим в конечных разностях. Воспользуемся квадратной сеткой и
разделим каждую сторону на т равных частей. Шаг сетки будет
c=\jm. Введем также внеконтурные узлы на расстоянии с и 2с
от кромок (рис. 9.44).
Исследуем по-прежнему случай пластинки, шарнирно
закрепленной по всем сторонам и загруженной усилиями о, равномерно
распределенными вдоль кромок х = 0 и х=1. Очевидно, изогнутая
,
1/6
0
У
~с~
{
Иг
X
Рис. 9.44. К применению метода
сеток.
Рис, 9.45. Расчетная ячейка.
поверхность будет симметричной относительно линии у = >/2 и
симметричной или антисимметричной относительно линии х = 112, поэтому
достаточно рассмотреть >/4 часть пластинки.
Для перехода к конечным разностям применим центральные
операторы, имеющие погрешность квадрата шага (черточки над w и Ф
далее опускаем):
d2w 1
-j^r ~ 72- К — 2wo -f- w3),
d2w
1
ду2
d2w
(щ — 2w0 -f- w4).
д""ш
дх*
d*w
(9.238)
dy4
■ (wl0 — 4w2 + 6щ — 4гг>4 + wi2).
d^w 1
JT = 7? 14^0 — 2 01+^2 + ^3+'K'4)+^sH-^6+ ^7+^81 •
(9.239)
дх2 ду2 с
Нумерация узлов в расчетной ячейке дана на рис. 9.45.
Аналогичные формулы составляем для функции напряжений Ф. Подставляя
РЕШЕНИЕ С ПОМОЩЬЮ ЦИФРОВОЙ ЭЛЕКТРОННОЙ МАШИНЫ 369
разностные операторы в уравнения B32) и B33), находим значения
прогиба и функции напряжений в текущем узле, являющемся
«центром» расчетной ячейки (при А,= 1):
^о = {К + Щ) (ф2 — 2Ф0 +- Ф4 4 8v) +
+ (щ + w4) (Ф, — 2Ф0 + Ф3 + 8v) -
-1К + w7) (Ф5 - Ф6 + Ф7 - Ф8 4• 16v) -
- (w6 + Щ) (Ф5 - Ф6 + Ф7 - Ф8 - 16v) -
- v (wg -f «»,o 4 w„ +- *»«)} : 2 (Ф, +- Ф2 + Ф3 + Ф4 - 4Ф0 -И0v).
(9.240)
Фо=^-[8(Ф,4-Ф2+-Ф3 + Ф4)-2(Ф5 + Ф6 + Ф7+ Ф8)-
- (Ф9 -t- Ф10 4- Ф,1 + Ф12) 4- 4- (Щ - п 4- щ - щ? -
— (и»! — 2гг»0 -f гг»3) (гг>2 — 2гг»0 -f Щ)Ь (9.241)
Составляем столько нелинейных алгебраических уравнений тина
B40), сколько значений прогиба необходимо найти во внутренних
узлах сеточной области. Функция напряжений определяется во
внутренних и граничных узлах; в угловой точке х = 0, у = 0
принимается Ф — 0.
Величины w и Ф во внеконтурных узлах выражаются через
значения во внутренних узлах с помощью граничных условий. Примем,
что края пластинки шарнирно оперты и что перемещения точек
каждой кромки в плоскости пластинки не стеснены; тогда граничные
условия для краев х = 0 и х = 1 имеют вид:
Этим условиям соответствует нечетное продолжение функции w и
четное продолжение функции Ф за контур пластинки; в точках
контура w = 0. Если учесть эти соотношения, то значения w и Ф
в узлах, лежащих на прямых х = 1 -j- с, х= I -\-2с, _у = 1 —f— с,
у = 1 —f-2c, не будут являться дополнительными неизвестными.
Решение системы разностных уравнений B40), B41) можно искать
путем последовательных приближений но следующей схеме. Задаемсл
в узлах сеточной области начальным (нулевым) приближением
функций w и Ф. Выбрав направление обхода сетки (например, от узла
jc = c, у = 0 вдоль строки у = const с переходом между строками
в сторону возрастания у), подставляем принятые значения -и»@) и Ф(о:
в уравнение B41). Первое приближение ФA) и нулевое
приближение функций в остальных двенадцати соседних точках используем
Для определения функции напряжений в узле X —2с, у = 0 и
т. д. Найдя Ф(|) в первой строке, переходим к строке у = с. Во
24 А- С. Вольмир
370 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
внутренних узлах сетки вычисления начинаются с применения
формулы B40), причем найденное значение прогиба используется для
вычисления функции напряжений в той же точке. Одно приближение
заканчивается, если вычислены значения функций во всех узлах
области, включая внеконтурные. При выбранном порядке обхода
рабочие формулы имеют вид:
Щ
= ф(™5>5>в>9..0. «№.8,11.12. Ф^.2.5,6. Ф(ЗЛ'). V. С),
ФГ^фМ^М. <j,'b,8, ФA?2,5,6,9,10, Ф££%,П.«. С),
где v — номер приближения. Значения, относящиеся к (v -(- 1)-му
приближению, используем для ускорения итерационного процесса.
Итерации повторяются до тех нор, пока не будет получено
решение системы разностных уравнений с необходимой степенью
точности. Погрешность решения приблизительно пропорциональна
квадрату шага. Проведя вычисление для различных значений шага,
например, '/6, '/8, '/,2, можно косвенно оценить погрешность
решения с любым шагом. Пробные расчеты показали, что погрешность
в определении прогиба и напряжений в различных точках квадратной
пластинки составляет около 1,5—2,5% при шаге с = г/,2 и 3—5%
при шаге с = '/8.
Описанный метод был использован для исследования закритиче-
ской деформации пластинки в предположении, что края ее
закреплены шарнирно и остаются прямолинейными и что точки каждой
кромки свободно смещаются вдоль нее. Этому случаю отвечают, как
мы видели, граничные условия:
для кромок а' = 0, х=1.
Надо помнить, что решение системы основных уравнений гибкой
пластинки в закритической области является многозначным. Важно
составить такой план вычислительного процесса, чтобы не были
потеряны решения, относящиеся к устойчивым формам равновесия
пластинки при заданной нагрузке. Целесообразно, например, строить
процесс вычислений, исходя из форм выпучивания пластинки
с одной, двумя, тремя и т. д. полуволнами в направлении сжатия
(т— 1, 2, 3, . . .) и с одной полуволной (ге— 1) в перпендикулярном
направлении. Эти формы соответствуют первым собственным
значениям линейной задачи об устойчивости пластинки:
__ лЦт2 + п2J
°* ~~ 12 A — ц2) /п2 '
Приведем результаты вычислений, выполненных па электронной
цифровой машине «Стрела» с шагом с = '/8. На рис. 9.46
изображена зависимость между нагрузкой о и прогибом в центре пластинки
РЕШЕНИЕ С ПОМОЩЬЮ ЦИФРОВОЙ ЭЛЕКТРОННОЙ МАШИНЫ 371
25
20
15
Ш
т-Зу
,-y^-j
5J5_ .
Ш—-?
т-2^.
^2
-Щ/
—~/
L^_i__^
m°Lg£
< 1
Зг.спериштоль-
ные damwe
0,5
1,0
1,5
2,0
2,5
5,0
Р,с.
(при т = 1 и 3) либо в центре половины пластинки (при т = 2).
Для случая т = 3 прогиб отложен с обратным знаком. Как видно из
графика, на первом этапе
закритической
деформации, при 3,62 < о < 5,65,
имеется единственная
равновесная форма
пластинки с одной полуволной
в направлении сжатия.
С ростом сжимающей
нагрузки в центральной
части пластинки постепенно
развивается вмятина,
направленная в обратную
сторону но отношению
к «основному» прогибу.
Поэтому рост стрелы
прогиба замедляется; при
а>16 стрела прогиба
начинает уменьшаться.
Наконец, при а =18,5
первая форма становится
неустойчивой, но крайней мере в «вычислительном смысле»:
итерационный процесс сходится здесь уже к форме выпучивания с тремя
полуволнами. Идя по ветви решения для р /^
ти=3 вниз, не удается дойти до тре- £
тьего собственного значения
(пунктирная часть кривой т = 3 проведена 5
предположительно); при о < 12 мы
снова приходим к форме изгиба но одной ^
полуволне. Можно полагать, что две
ветви устойчивых равновесных форм 3
связаны ветвью неустойчивых
состояний пластинки.
При нагрузке, превышающей
второе собственное значение 0 = 5,65, мы
получаем также ветвь
антисимметричных форм выпучивания (т = 2);
Это подтверждает вывод, сделанный
С. А. Алексеевым.
На рис. 9.46 нанесены также
экспериментальные точки Ямаки [9.23]; они
хорошо согласуются с результатами вычислений по методу сеток при
iw < 2.
*__ На рис. 9.47 представлена зависимость между нагрузкой,
отнесенной к первому критическому значению, и взаимным перемещением
46. Зависимость «усилие сжатия —прогиб» по
данным вычислений на цифровой машине.
«Р
О
m-U
!
По
л.
Ямаки
\
/У
\Memo
сетоь
/у
/т-2
д
10
Рис. 9.47.
тня
го w to so
Зависимость «усилие ежа-
— сближение кромок».
9.1*
372 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
нагруженных кромок, также отнесенным к критической величине;
здесь же представлены результаты вычислений Ямаки. Исходя из этих
данных, можно определить редукционный коэффициент; его значения
даны на рис. 9.43. Как видим, введение в рассмотрение
антисимметричной формы позволило уточнить величину ф по сравнению с
решением Левп. Характерно, что, в отличие от прежних решений, мы
получаем здесь несколько ветвей соответственно различным
«порождающим» формам выпучивания пластинки.
§ 106. Случай искривляющихся кромок
Все предыдущие выкладки относились к случаю, когда кромки
пластинки остаются прямолинейными, или, иными словами, когда
подкрепляющие ребра являются достаточно жесткими. Чтобы выяснить,
каково значение этого условия, рассмотрим ту же задачу для
квадратной пластинки (а = Ь) в предположении, что шарнирно закрепленные
кромки свободно искривляются, оставаясь в плоскости опорного
контура*).
При этом напряжения ох, оу в срединной поверхности должны
для точек кромок быть такими:
ог= — о при х = 0, Ь\ 1
п п и \ (9.244)
0у = О при у = 0, Ь. ) v
Будем считать, кроме того, что касательные напряжения равны
нулю «в среднем» вдоль каждой кромки пластинки:
ь
-I Г trfy = 0 при х = 0, Ь, у = 0, Ь. (9.245)
о
Выберем путь решения задачи, отличающийся от принятого в § 89:
будем применять метод Бубнова — Галеркина не только по отношению
к уравнению равновесия F3), как это было раньше, но и к
уравнению совместности деформаций F4) **).
В первом приближении выберем для функций w и Ф выражения
, . пх . яу .». D . ях . яу ау2 ,п 0,сч
w = fsm—r- sin-;—, <P = fisin—sm-r- &-• (9.246)
J b b a b 2 x '
Как легко видеть, все принятые граничные условия будут при этом
выполнены.
*) Эта задача была исследована П. Я. Полубариновой-Кочиной (Прикл.
матем. и мех. 3, № 1 A936), 16—22), применившей для ее решения
оригинальный метод, получивший название «метода возмущений».
**) Этот путь был (гредложен В. 3. Власовым [12.3] и применен в
работах М. А. Колтунова [9.6] и других авторов.
ДАННЫЕ ДЛЯ ПРАКТИЧЕСКИХ РАСЧЕТОВ
3?3
Составим уравнения
ь ь ь ь
X s'm^-sin ^j-dxdy = 0, К sin ^y-sin Щ-dx dy = 0,
О и 0 U
(9.247)
где через X обозначено по-прежнему выражение B25), а под Y
понимается но F4) выражение
F = i-V^ + |i(®, w). (9.248)
Подставляя B46) в B47) и считая / Ф 0, приходим к следующим
соотношениям:
4л20 32 В г, 4,,,, .. 0.„ч
а = -рА -TV B = ~WEf2- (9-249)
Отсюда
°=°«p+Se{tJ- (9-25°)
Сравним эту формулу с B27); коэффициент во втором члене,
равный здесь приблизительно 1,44, при прямолинейных кромках был
равен 1,23*). Сопоставление этих величин надо проводить с
осторожностью, так как они получены различными методами. Желательно
продолжить приведенное здесь решение и найти уточненные
результаты, как это сделано для другой задачи М. А. Колтуновым (см.
§ 188).
§ 107. Данные для практических расчетов
Мы познакомились с некоторыми методами решения задачи о за-
критическом поведении пластинки, приводящими к различным
расчетным графикам и формулам. Какие же из них надо рекомендовать
Для практических расчетов?
Сравнение результатов, полученных для случаев прямолинейных
и искривляющихся кромок, показывает, что работоспособность
обшивки после потери устойчивости в большой мере определяется
жесткостью подкрепляющих ребер. В том случае, если ребра являются
Заведомо жесткими и обшивка делится на ряд смежных панелей,
редукционные коэффициенты следует определять по кривой на
рис. 9.43, полученной с помощью метода сеток; это решение надо,
по-видимому, считать наиболее обоснованным.
Решения Леви и Маргерра дают для этой области изменения я*
(которая охвачена графиком рис. 9.43) значения ф, близкие к
кривой метода сеток.
*) В работе П. Я. Полубариновой-Кочиной (см. ссылку на стр. 372) при
той же структуре формулы был получен несколько иной коэффициент,
равный 1 яги
374 прямоугольные пластинки в Пределах упругости
Однако в случае относительно слабых подкрепляющих ребер и
если панель является изолированной, так что нет уверенности, что
условие прямолинейности кромок будет выполнено, надо пользоваться
формулой Кармана B10):
дающей обычно значения ф в запас устойчивости. Подставляя
минимальное значение окр по G9), получим
(р=1-9/^т- (g-210b)
Приведенная ширина равна тогда
Ьпр=1М\/Г^. (9.210с)
Для случая, когда одна из ненагруженных сторон пластинки
закреплена шарнирно, а другая свободна, рекомендуется формула,
близкая к B29):
ф = 0,44 4-0,56-^. (9.210d)
Все эти методы расчета относятся к упругой области.
§ 108. Анизотропные пластинки
Исследование устойчивости пластинок, обладающих различными
механическими свойствами по разным направлениям, привлекло к себе
первоначально внимание в связи с применением в конструкциях такого
материала, как фанера, обладающая резкой анизотропией *). В
настоящее время эта область приобрела особенную актуальность благодаря
быстрому внедрению стеклопластиков, также являющихся
анизотропными. Это подчеркнуто в названии одного из видов пластмассы —
«СВАМ», что означает: «стекловолокнистый анизотропный материал».
Кроме того, некоторые пластинки могут рассматриваться как
«конструктивно-анизотропные» (см. § 109).
Рассмотрим ортотропные пластинки, упругие свойства которых
характеризуются четырьмя независимыми величинами: модулями
упругости Е1 и Е2 по двум взаимно перпендикулярным главным
направлениям х и у, модулем сдвига О и коэффициентом Пуассона и,,,
отвечающим поперечной деформации вдоль оси у. Второй коэф-
*) Основные работы в этой области принадлежат Губеру (М. Т. Н u b e г,
Teoria sprezyst6scl, Варшава, 1950) и С. Г. Лехницкому, Анизотропные
пластинки, Гостехиздат, М., 1947.
АНИЗОТРОПНЫЕ ПЛАСТИНКИ
375
фициент (i2, соответствующий поперечной деформации по
направлению х, связан с ц, соотношением
Е2
V-2 ■■
Ех
Н-
(9.251)
Уравнения закона Гука принимают вид
_ °х Су
«у их
т
G"'
9.252)
или
1_ц1A, (ех + ^2еу)-
2 (еу + ИАг).
1— HiH2
0Y.
(9.253)
Введем обозначения для изгибных жесткостей по главным
направлениям
£,А3 п £2й3
D'-12A-ц,|1,) '
и для крутильной жесткости
Db
12
°2 12A — м-1^2)
Gft3;
(9.254)
(9.255)
тогда вместо A1) получим следующие выражения для изгибающих
и крутящего моментов:
Мх = Dx (кх + цаху). Жу = D2 (и, + ц,хж). Н = 2DftX. (9.256)
Из уравнений равновесия элемента пластинки A6), A7) находим:
Qx = -^(Dlnx + D3ny), Qy=±-{Dpy + D3Kxy, (9.257)
под D3 понимается приведенная жесткость:
D3 = D1[i2 + 2Dft=-i(D1[i2+D2h+4Dft). (9.258)
Для ортотропной пластинки уравнение B3) принимает вид
'd,^+2£>3- д*» , „ V» ,
дх2ду2
+ й(
2 ду* '
д2т
-М,
d2w
Jjc дх2 "г" у ду2
что соответствует уравнению B6).
+ 2т
d2w
дхду
= 0, (9.259)
376 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ 1ГЛ. IX
Уравнения F3) и F4), относящиеся к гибким пластинкам, надо
заменить на следующие [0.3]:
. <34Ф . „. д4Ф . „ д4Ф 1 ,. . ,„„„.,
^lF + 2^5Fdy5 + fi4F==_2-^^^ (9-261)
где
b=h 6*=i- 2*3=T-|~t- (9-262)
Исследуем устойчивость ортотроппой пластинки, шарнирно
закрепленной но краям и сжатой в одном направлении; координатные
оси расположим по рис. 9.14. Граничные условия имеют вид:
w==0, iw^^w^ "ри x ' х = й'
„ d2w , d2w _ _ ,
w = 0> l^T+^i-SF^0 При У = 0* У = 6- •
Принимая для w прежнее выражение (80) и полагая в
уравнении B59) ау — т = 0, получим
л^О^гГ- /~ Л, / т6\2 2D, „ _/'D. / а \2
(9.263)
Очевидно, в этом выражении надо положить п=\. Критическое
напряжение окр определим, варьируя число полуволн т. Для
пластинки, удлиненной вдоль оси х(а^>Ь), будет
__ 2л2У'Р1Р2
°кр £2
A+твж)' (9-264)
Считая D,, D2, D3 равными D, придем к прежней формуле G7) для
изотропной пластинки. Дтя пластинки с конечным отношением
сторон следует принимать:
т=\ при 0<-|<у/ 4-—L,
т
2 при V/Pi<|<f^I,
= 3 при уГз"Ц^<|<уЛ7^1и
т = 3 при J/ 6b-D--<1<y l^~ и т. д.
Отметим, что число полуволн, образующихся по направлению
сжатия, существенным образом зависит от отношения жесткостей
DJD2. Пластинка с малой жесткостью D, выпучится, при прочих
равных условиях, но большему числу полуволн, чем изотропная
пластинка.
ПОДКРЕПЛЕННЫЕ ПЛАСТИНКИ
377
§ 109. Подкрепленные пластинки
Пластинки, входящие в конструкцию корпуса самолета, корабля,
цельнометаллического вагона и т. д., как правило, подкреплены
ребрами жесткости. В практических расчетах приходится определять
критическую нагрузку не
только для полосы
пластинки, лежащей между
ребрами, но и для
подкрепленной пластинки в
целом. Здесь возможны
два подхода к задаче.
Первый из них состоит
в рассмотрении
приведенной анизотропной
пластинки с
«разнесенной» вдоль сечения
жесткостью ребер. Если пластинка снабжена только продольными
ребрами, как «оказано на рис. 9.48, то жесткости эквивалентной
анизотропной пластинки можно считать равными
Е1_ . Eh3 „ Eh?
Т
К определению приведенной жесткости
подкрепленной пластинки.
£), = ■
12A-|х2)
D2— D3— 12A —ц*) •
(9.265)
\\\
где /—момент инерции сечения ребра относительно оси,
проходящей через центр тяжести сечения, I—расстояние между ребрами.
Очевидно, этот путь расчета
применим в том случае, если ребра
расположены достаточно часто:
величина 1/ге, где п — число ребер,
приходящихся на всю ширину
пластинки, должна быть малой
по сравнению с единицей [9.5].
Жесткость ребер на кручение в
формулах B65) не учитывается.
Другой подход состоит в
исследовании пластинки с
дискретно расположенными ребрами.
Рассмотрим в качестве примера
задачу об устойчивости пластинки,
шарнирно закрепленной по краям и подкрепленной одним
продольным ребром, расположенным посередине пролета *) (рис. 9.49). Будем
учитывать лишь жесткость ребра на изгиб в плоскости,
перпендикулярной плоскости пластинки. Выпишем дифференциальное уравнение G0)
Рис. 9.49. Пластинка, подкрепленная одним
продольным ребром.
*) Эта задача рассматривалась С. П. Тимошенко (Изв. Ин-та инж.
путей сообгц., Петербург, 1915) и Барбре (R. В а г b г 6, lngenleur-Archiv, 1937,
стр. 117). Графики рис. 9.50, 9.52 взяты из книги [0.19].
378 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
в применении к одной из половин пластинки. Интеграл его
представим в виде (89):
w = Y (у) sin -^bl, (9.266)
тогда придем к уравнению (90) для функции Y (у). Решение его
имеет форму (96):
Y (у) = С, ch ay --j- C2 sh ay 4- C3 cos Py + C4 sin Py; (9.267)
аир определяются выражениями (95). Граничные условия для края
у — Ь/2 будут
да = 0. 4уХ = 0 «РИ У = |- (9-268>
Если считать, что пластинка выпучивается вместе с ребром, то,
очевидно, изогнутая поверхность должна быть симметрична
относительно линии у = 0; это приводит к условию
^- = 0 при у = 0. (9.269)
Далее, на ребро будет передаваться разность реактивных усилий от
двух полос пластинки, определяемая но формуле тина C4):
*>—в[-£+«-»£Ы- (9'2Г0)
Как легко видеть, при составлении разности усилий следует
учитывать только первые члены в квадратных скобках. Если считать, что
ребро вместе с пластинкой подвергаются действию сжимающих
напряжений ах, то для изогнутой линии ребра получим следующее уравнение:
i„, d4w „ d2w , nr. d3w\ n ,_ __,.
l£/^F + fo-vlir-+2D^3-)y=o = 0; (9.271)
здесь / и F — момент инерции и площадь сечения ребра.
Воспользуемся параметрами
Величины б и Y характеризуют соотношение между жесткостями и
площадями сечений ребра и пластинки. Вводя в условия B68)—B72)
выражение B66), получим систему уравнений относительно С, С4.
Приравнивая нулю определитель этой системы, приходим к.
следующему уравнению:
&*-?-**4-)(^-«)^-«£>Т?-С«.27«,
ПОДКРЕПЛЕННЫЕ ПЛАСТИНКИ 379
Под К здесь подразумевается отношение критического напряжения
к эйлерову напряжению, определяемому для пластинки со
свободными краями:
Уравнение B73) решается путем проб. Результаты решения для
случаев 6 = 0, 6 = 0,2 представлены на рис. 9.50. Каждой паре
значений у. 6 соответствует серия кривых, построенных для различных
3 7, *
о/в
I г 3 k ! 2
о) a/i . 6)
Рис. 9.50. Данные для расчета подкрепленных пластинок.
чисел полуволн т. Кривые Y = 0. 6 = 0 отвечают ненодкрепленной
пластинке и повторяют график рис. 9.15. Интересно отметить, что
при Y = 0, 6 = 0,2 мы получаем значения К, лежащие ниже, чем для
гладкой пластинки. В этом случае, очевидно, ребро уже ire является
подкрепляющим элементом, а само поддерживается пластинкой.
Постепенно повышая жесткость ребра, можно добиться того, чтобы
критическое напряжение местного выпучивания каждой половины
пластинки (рис. 9.51, а) было меньше, чем критическое напряжение общей
потери устойчивости пластинки вместе с ребром (рис. 9.51,5).
Кривые местной потери устойчивости ограничивают на рис. 9.50
серию кривых, характеризующих общую потерю устойчивости; в
случае а> b минимальное значение К близко к 16. По аналогии с
задачей об устойчивости стержня на упругих опорах назовем критической
или эквивалентной такую жесткость ребра, при которой оно может
рассматриваться как абсолютно жесткое. Эквивалентная жесткость
ребра YaKB определяется, очевидно, по точке пересечения кривых,
относящихся к общей и местной потере устойчивости, на графиках
типа рис. 9.50. Например, при 6 = 0,2 и ajb=\ находим уэкз да 10.
На рис. 9.52 даны значения уэкв в зависимости от параметров а и 6
380 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
по B72). Так как критические напряжения общей и местной потери
устойчивости зависят от числа полуволн изогнутой поверхности,
\ \ \ \ \ \ \ \ \ \
\ \ \ \ \ \ \ \ \ \
а) 6)
Рис. 9.5]. Различные формы потери устойчивости
подкрепленной пластинки.
то кривые рис. 9.52 имеют «впадины». Практически эти кривые
сглаживаются за первым максимумом, как показано пунктирными
линиями.
Рнс. 9.52. Эквивалентная жесткость ребер.
Мы разобрали простейший пример пластинки, соединенной с одним
упругим продольным ребром. Допустим теперь, что пластинка
подкреплена системой, продольных и поперечных ребер. Тогда путь
решения задачи, которым мы воспользовались, оказался бы весьма
§ НО] НЕСУЩАЯ СПОСОБНОСТЬ ПОДКРЕПЛЕННЫХ ПАНЕЛЕЙ 381
сложным: необходимо было бы составить условия сопряжения
пластинки и ребер по многим линиям. Если система является
«регулярной», например, если расстояния между ребрами одинаковы, а
жесткости их равны между собой, то для решения задачи можно
использовать метод конечных разностей. В общем же случае для исследования
устойчивости комбинированной системы часто пользуются
энергетическим методом, присоединяя к энергии деформации пластинки энергию
изгиба ребер и учитывая также работу внешних усилий,
приложенных к ребрам *). В результате были получены в применении к
различным конструкциям таблицы и графики для определения критических
усилий и эквивалентной жесткости ребер **).
§ 110. Несущая способность подкрепленных панелей при сжатии
Мы рассмотрели различные подходы к расчету подкрепленных
пластинок на общую и местную устойчивость. Каким же образом
определить оптимальное соотношение между жесткостями пластинки
и подкрепляющих элементов? Как определить несущую способность
комбинированной
конструкции? Эти вопросы
неизбежно возникают при
проектировании.
Для некоторых
конструкций по условиям
эксплуатации местное выпучивание
обшивки между ребрами
считается недопустимым. Тогда
критерием наименьшего веса
конструкции будет равенство
критических напряжений,
относящихся к местной
устойчивости отдельной панели
пластинки и к общей
устойчивости конструкции.
Однако во многих случаях местная потеря устойчивости обшивки
является допустимой. Например, пассажиры самолетов, наблюдающие
за деформацией крыла, могут убедиться в том, что обшивка сжатой
зоны крыла получает вмятины, расположенные между стрингерами
и нервюрами (рис. 9.53) ***). Влияние повторяющихся хлопков
*) Этот метод был применен к подкрепленным пластинкам С. П.
Тимошенко [9.13], решившим ряд конкретных задач; впоследствии он
использовался П. Ф. Папковичем [0.7], А. В. Кармишиным [9.5] и другими авторами.
**) См., например, «Справочник проектировщика (расчетно-теорети-
ческий)», под ред. А. А. Уманского, Стройиздат, М., 1960.
***) Фотографии рис. 9.53, 9.55 и 9.59—9.61 взяты из книги Хертеля
(п. Hert el, Lelchlbau, Springer — Verlag, 1960, в переводе —
«Тонкостенные конструкции», М., 1965).
Рнс. 9.53. Выпучивание обшивки в сжатой зоне
крыла самолета.
382 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
обшивки на усталость конструкции должно быть рассмотрено
особо.
Процесс деформации подкрепленной пластинки при постепенном
нагружении сжимающими силами состоит в следующем. Если
пластинка является достаточно тонкой, то местное выпучивание ее
наступает при сравнительно небольших сжимающих напряжениях (рис. 9.54).
///// jl"^ ^П
//// //// //// ////
6)
в)
г)
Рис. 9.54. Последовательные стадии выпучивания пластинки, подкрепленной
тонкостенными ребрами.
В дальнейшем вмятины углубляются; при этом время от времени
происходит изменение числа вмятин, нередко сопровождающееся
хлопками. В том случае, если обшивка делится на панели различной
ширины, например при
подкреплении П-образными ребрами, то
на более поздней стадии
происходит потеря устойчивости
«узких» панелей (рис. 9.55). Если
подкрепляющее ребро является
тонкостенным, то следующий этап
состоит в местной потере
устойчивости элементов ребра —
стенки или полок. На отдельных
этапах нагружения в обшивке и
стенках подкрепляющих профилей
возникают пластические
деформации. Наконец, наступает общая потеря устойчивости конструкции:
она выпучивается в целом, как сжатый стержень либо как
закрепленная по краям пластинка; вместе с этим дополнительно изгибаются
обшивка и стенки профилей. В этот момент несущая способность
конструкции оказывается исчерпанной.
Таким образом, определение несущей способности конструкции
сводится к расчету ее на общую устойчивость, причем обшивка,
а в отдельных случаях и стенки подкрепляющих профилей должны
приниматься во внимание с учетом редукционных коэффициентов. Так
как редукционные коэффициенты зависят от величины сжимающих
Рис. 9.55. Выпучивание различных полос сжа>
той подкрепленной панели.
§ ПО]
НЕСУЩАЯ СПОСОБНОСТЬ ПОДКРЕПЛЕННЫХ ПАНЕЛЕЙ
383
напряжений в ребрах, то расчет проводят путем последовательных
приближений: задаются ориентировочным значением максимальной
нагрузки, находят редукционные коэффициенты, вновь определяют
нагрузку и т. д. При рассмотрении общей устойчивости
редукционные коэффициенты для обшивки и стенок профилей принимают обычно
теми же самыми, что и в случае «статического» сжатия *), т. е, по
данным § 107.
Пример 9.3. Определить несущую способность для панели шириной
В = 450 мм, толщиной h = 1 мм (рис. 9.56, а), подкрепленной четырьмя
стрингерами и сжатой в продольном направлении. Сечение стрингера
показано на рис. 9.56, б, под С
понимается центр тяжести. Материал
обшивки и стрингеров — дюралю-
мпн, Е = 0,72 • 1G6 кг/см2, у, = 0,32,
0ПЦ = 28ОО кг/см2. Вычислить
толщину обшивки в предположении,
что два промежуточных
стрингера удалены, а несущая
способность осталась прежней. Сравнить
вес новой панели с весом
исходной.
Примем сначала, что несущая
способность определяется
местной потерей устойчивости
свободной полки стрингера.
Рассматривая эту полку как пластинку,
у которой один из ненагруженных краев защемлен, а другой свободен,
находим критическое напряжение по рис. 9.23 равным
Рис. 9.56. К вычислению несущей способности
панели, подкрепленной четырьмя стрингерами.
стстр — '
0,46я2£) 0,46-я2.0,72.10в.0,152 ,„.„ , ,
-Щ-" 12A-0,32*J0* = 168° Кг/См2-
Вычисляем редукционный коэффициент для обшивки (при этом напряжении
в ребре) по B10Ь):
0И_ / 0,72 • 106
15 V
1,9
1680
> 0,262.
Несущая способность панели равна
Р = 1680 D • 0,584 + 0,262 • 0,1 • 45)
1680.3,52 = 5900 кг.
Определим критическую нагрузку общей потери устойчивости,
рассматривая панель как сжатый стержень. Будем условно учитывать площадь обшивки
с прежним редукционным коэффициентом 0,261. а сечение стрингера —с
коэффициентом 1. Вычислим координату центра тяжести редуцированного
сечения уц т, отсчитывая ее от осп у„, проходящей через центры тяжести
угольников (рис. 9.57):
Ун.-
0,1-45-0,262-0,6
3,52
= 0,2 см.
*) Более строгий подход к задаче требует определения редукционных
коэффициентов с учетом того, что сжатые края пластинки перемещаются
друг относительно друга (см 10.31. стр. 155)
384 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Момент инерции редуцированного сечения равен
45. О 962.013
/ = 4 ■ @,222 -f 0,584 ■ 0,22) + 0,1 • 45 • 0,262 • 0,42 _|_ ^ и'' ^ i_ ;7 См\
Ориентировочное значение критической эйлеровой силы оказывается равным
л2 -0,72- 10е- 1,17
402
: 9250 кг.
а соответствующее напряжение будет
9250
3,52
<Ь = тй = 2600 кг/см2 < 01Щ.
Таким образом, разрушающая нагрузка соответствует общей потере
устойчивости конструкции. Чтобы уточнить величину Рэ, следует найти
новые редукционные коэффициенты для обшивки, исходя из напряжения
0р = 2600 кг/см2, а затем провести новое приближение (см. след. пример).
Рис. 9.57. К определению редукционных коэффициентов.
Рассмотрим далее случай, когда два промежуточных стрингера удалены
и допустим, что несущая способность определяется местной устойчивостью
стрингера, так что напряжение 0р равно 1680 кг/см2. Найдем толщину
обшивки h\ из условия, что нагрузка составляет Р — 5900 кг:
5900 = 1680 B • 0,584 + <p,ft,45); (a)
редукционный коэффициент tpt для обшивки равен
,. Л, -,/0,72-10е ЛЯ„,
ъ = 1-9!ьУ ^б80-=0'875/г"
Подставляя это значение (pt в (а), приходам к уравнению
3,5= 1,168-)_39,ЗЛ?.
Отсюда ft[ = 0,224 см. Выбираем стандартную толщину ft, =0,25 см.
Определяя, аналогично предыдущему случаю, эйлерову силу для панели и целом,
находим Ръ = 6450 кг.
Веса исходной и новой панелей относятся, как площади их сечений;
£±. - 4-0,584 + 0,1.45 ,
G2 ~~ 2 • 0,584 + 0,25 • 45 — '
Таким образом, при одинаковой несущей способности панель с тонкой
обшивкой и четырьмя стрингерами оказывается приблизительно вдвое более легкой,
чем панель с толстой обшивкой н двумя стрингерам 1.
Пример 9.4. Вычислить несущую способность на сжатие для дюралю-
миновой панели, изображенной на рис. 9.58, а. Сечение продольных ребер
показано на рис. 9.58, б; площадь сечения F = 0,684 см2, момент инерции
относительно центральной оси / = 0,204 см4. Принять Е~ 0,72 • 106 кг/см2,
ц = 0,32, 01Щ = 2800 кг/см2. Насколько увеличится предельная нагрузка,
если длину панели уменьшить до ^= 150 мм!
НЕСУЩАЯ СПОСОБНОСТЬ ПОДКРЕПЛЕННЫХ ПАНЕЛЕЙ 385
Определим нагрузку, соответствующую местной потере устойчивости
свободной стенки стрингера:
0,46 • п2 ■ 0,72 ■ 106 • 0,22
12A—0.322) 182
:3680 кг/см2.
Эта величина превышает предел пропорциональности материала, поэтому ее
необходимо уточнить, исходя из теории устойчивости пластинок в
пластической облает» (см. главу X). Примем в качестве предельного
напряжения сгпц = 2800 кг/см2. Редукционный коэффициент для обшивки равен
<р=1,9
0,2
20
V 28С
106
2800
= 0,3,
при этом нагрузка будет
Р = 2800 B • 0,684 -4- 0,2 • 20 • 0,3) = 7200 кг.
Рассмотрим, далее, общую устойчивость панели, принимая для обшивки
в качестве исходного тот же редукционный коэффициент ср = 0,3, а для
Рис. 9.58. К расчету панели, подкрепленной двумя стрингерами.
полки стрингера ф= 1. Центр тяжести редуцированного сечения будет
находиться па расстоянии от центра тяжести сечения стрингера, равном
_ 0,2 ■ 20 ■ 0,3 • 0,62
Уц-т 2Т57
0,3 см.
Момент инерции редуцированного сечения оказывается равным (см.
вычисления в предыдущем примере) / = 0,66 см4. Критическая сила для панелей
разной длины:
p(D = -0-72602106-°'66 = 1300 кг, Р<2> = 16Р'1) = 20 800 кг.
Для первой панели местная потеря устойчивости полки стрингера,
очевидно, исключена. В следующем приближении примем напряжение 0р равным
1300
2,57
:500 кг/см2;
тогда редукционный коэффициент по B10Ь) будет ф = 0,72 и Р = 2130 кг.
Снова вычислим координату центра тяжести редуцированного сечения
уцт = 0,42 см и найдем момент инерции сечения / = 0,77 см*.
Эйлерова сила равна Р = 1520 кг. Это значение все же сильно отличается от
?Я А. С. Вольмчо
386 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
предыдущего B130 кг), поэтому необходимо сделать еще одно приближение,
принимая
1520 ЧИП / 2
- = 360 кг/см2,
тогда ф = 0,85, Р — 1720 кг. Новая координата центра тяжести уц т = 0,44 см,
при этом / = 0,792 см*. Значение критической силы Р = 1570 кг, что
отличается от исходного на 9%. Ограничиваясь этим приближением, находим
окончательно несущую способность панели равной Р да 1600 кг.
Несущую способность второй панели необходимо уточнить, учитывая
местную потерю устойчивости полки стрингера. Принимая условно для этой
панели в качестве предельной нагрузки Р = 7200 кг. приходим к
заключению, что укорочение панели привело к увеличению несущей способности
в 7200/1600 = 4,5 раза.
§111. Несущая способность сжатых тонкостенных стержней
В главе IV мы выяснили, что общая потеря устойчивости для
сжатых тонкостенных стержней происходит в изгибно-крутильной
либо изгибной форме; при этом предполагалось, что сечение стержня
сохраняет свое очертание. Теперь мы можем учесть новое
обстоятельство—местную потерю устойчивости
стенок профиля, причем каждая стенка здесь не
может выпучиться изолированно, а лишь
совместно с другими. Это явление приводит к
искажению формы сечения; оно либо
предшествует общей потере устойчивости, либо
происходит после нее, в зависимости от
соотношения между размерами сечения и длиной
профиля.
Рассмотрим случай стержня швеллерного
сечения. При достаточно большой длине
стержня наиболее опасной оказывается изгибная
либо изгибно-крутильная форма потери
устойчивости. Если ширина полки Ь сравнима с
шириной стенки а, то профиль теряет
устойчивость в изгибно-крутильной форме, при
Ь<^~а — в изгибной. На рис. 9.59, а, б
показан случай изгибной потери устойчивости;
в процессе продольного изгиба может
дополнительно произойти местное выпучивание, если
полки оказываются на вогнутой стороне (рис. 9.59, а).
Для более коротких стержней сначала происходит местное
выпучивание полок и стенки (рис. 9.60, а), а затем закручивание
профиля (рис. 9.60, б). Наконец, в случае короткого стержня
опасным будет местное выпучивание (рис. 9.61, а и б).
Исследование местного выпучивания швеллерного профиля
проводится с учетом одновременного изгиба полок и стенки *) в пред-
Рис. 9.59. Изгибная форма
потери устойчивости
тонкостенного стержня.
*) Оно было выполнено Киммом (К i m m, Luftfahrtforschung, № 5 A941)).
НЕСУЩАЯ СПОСОБНОСТЬ СЖАТЫХ ТОНКОСТЕННЫХ СТЕРЖНЕЙ 387
положении, что углы профиля остаются прямыми. Для каждого
из этих элементов выписываются дифференциальные уравнения изгиба
типа G0), а также условия сопряжения. Результаты вычислений для
Рис. 9.60. Выпучивание
тонкостешгого стержня,
сопровождающееся
закручиванием.
швеллера с постоянной толщиной стенки показаны *) на рис. 9.62.
Критическое напряжение сжатия представлено формулой
По оси абсцисс на рис. 9.62 отложено отношение b/а, по оси
ординат — значения k. Вверху расположена зона местной
неустойчивости. Здесь же приведены кривые, определяющие наступление изгиб-
ной либо изгибно-крутильной неустойчивости, параметром служит
величина
а а Ь а2
b I h lh
Как и следовало ожидать, при малых значениях т опасной
оказывается общая потеря устойчивости. Зона изгибно-крутильной
неустойчивости выделена.
График рис. 9.62 позволяет лишь определить начальное
критическое состояние. Важным является определение несущей
способности для того случая, когда изгибная или изгибно-крутильная
*) Они принадлежат Винклеру (по книге Хертеля, см. ссылку на стр. 381).
в) 6)
Рис. 9.61. Местное выпучивание
стенок стержня.
25*
388 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. IX
неустойчивость наступает после местного выпучивания (рис. 9.59).
Решение этой задачи является трудным: «подкрепляющие ребра»,
которыми здесь являются углы профиля, не остаются прямыми, как
это считалось в § 104, а закручиваются вместе со всем сечением.
Один из предложенных подходов к задаче *) состоит в том, что
критическая сила, соответствующая местной потере устойчивости,
0,25 0,50 075 , 1,0
Ь/а
Рис. 9.62. Различные варианты выпучивания швеллерного профиля.
сохраняется по величине и направлению, оставаясь приложенной
в центре тяжести сечения. Дальнейшее увеличение нагрузки отвечает
надкритической силе, которая уравновешивается дополнительными
напряжениями сжатия, причем сопротивляемость стержня действию
этих надкритических напряжений определяется меньшим (касательным)
модулем, различным для каждого волокна. Эта важная задача ждет
своего более полного решения.
§ 112. Закритическое поведение пластинки при сдвиге.
Диагонально растянутое поле
Мы рассматривали до сих пор закритическую деформацию
пластинки лишь при сжатии в одном направлении. Однако при расчете
некоторых конструкций надо принять во внимание поведение
пластинки после потери устойчивости от сдвига. Это относится,
например, к некоторым панелям крыла или фюзеляжа самолета, а также
к стенкам высоких балок.
*) Задача поставлена А. А. Уманскпм и решена Б. И. Иванием.
2] ЗАКРИТИЧЕСКОЕ ПОВЕДЕНИЕ ПЛАСТИНКИ ПРИ СДВИГЕ 389
Так же как и в случае сжатия, здесь имеются два подхода
к задаче. Один из них состоит в использовании модели, позволяющей
описать характер выпучивания пластинки при значительном
превышении касательными напряжениями критической величины. Другой
подход заключается в решении задачи на основе нелинейной теории
гибких пластинок. Познакомимся сначала с первым направлением.
Напомним, что при чистом сдвиге оси главных напряжений
составляют с кромками угол, равный 45°, и одно из главных напряжений
является растягивающим, а другое —
сжимающим. При потере устойчивости
происходит как бы гофрирование пластинки по
направлению главного сжимающего напряжения
(рис. 9.63). Если края пластинки остаются
в первоначальной плоскости, то и здесь
выпучивание ведет к образованию напряжений
в срединной поверхности. Случай сдвига
интересен тем, что волокна пластинки,
параллельные складкам, могут нести весьма
значительные растягивающие усилия,
передающиеся на продольные ребра. Реакции от
продольных ребер воспринимаются в свою
очередь поперечными элементами; последние
оказываются сжатыми. Таким образом,
создается система наклонных растягивающих
усилий, уравновешенных реакциями
поперечных ребер (стоек). Такая модель,
упрощающая истинное распределение напряжений в
срединной поверхности и напряжений
изгиба, носит название диагонально-растянутого
поля*).
Будем в первом приближении полагать,
что направление складок совпадает с
направлением главного растягивающего
напряжения и что главное сжимающее напряжение равно нулю. Иными
словами, мы считаем, что пластинка не способна передавать какие-либо
усилия нормально к гофрам.
Обозначим: т—напряжение сдвига в сечениях, параллельных
координатным осям, о — главное растягивающее напряжение, а — угол
наклона вектора 0 к продольным кромкам, е и е?—деформации
по направлению о и перпендикулярно ему.
Принимаем е — о/Е. Величина eq складывается из упругой
деформации (— jLta/JS-) и сближения точек пластинки, вызываемого
образованием складок.
Рис 9.63. Гофрирование
пластинки при сдвиге.
*) Теория диагонально растянутого поля была разработана
Вагнером [9.22].
390
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
Рассмотрим деформацию квадрата со стороной, равной единице
(рис. 9.64). Деформации по направлениям л; и у равны
ех = е cos2 a -f- £? si n2 а
еу = esin2a-j-e?cos2
a. J
(9.275)
Прямые, параллельные осям х, у, при деформации повернутся
на углы ух, Yy. равные
ух = уу = (г — е?) sin a cos a. (9.276)
Деформация сдвига будет
Y = Y* + Yy = (e — e?)sin2a. (9.277)
Пользуясь выписанными соотношениями, находим:
Y
tg2a:
= -^^- + j/(e,-eyJ + Y2
e*~r ey
1
f(^-eyJ + Y2.
(9.278)
(9.279)
(9.280)
Эти уравнения позволяют определить угол наклона складок и угол
сдвига, если заданы деформации подкрепляющих ребер и деформация
~С~*
Рис. 9.64. Деформация в случае диагонально
растянутого поля.
по направлению главного растягивающего напряжения:
е —е.
1цга-.
е—е„
Y = 2|Л(е — ех)(е — еу).
(9.281)
(9.282)
ИССЛЕДОВАНИЕ С ПОМОЩЬЮ ТЕОРИИ ГИБКИХ ПЛАСТИНОК 391
Последнее выражение можно также представить в виде
Y = 2(e — ex)ctga. (9.283)
Отметим соотношение
е + 8? = е, + 8у. (9.284)
Напряжение сдвига т выражается через главное растягивающее
напряжение следующим образом:
% = jsin2a. (9.285)
Рассмотрим случай, когда подкрепляющие ребра можно считать
недеформируемыми, так что е^=еу = 0. Тогда по B81) получим
tg2a=l. (9.286)
Таким образом, угол наклона складок будет равен 45°. Далее найдем:
т = -|, Y = 2-j. (9.287)
Отсюда
t = 0,25£y- (9.288)
Вводя понятие приведенного модуля О,, характеризующего
жесткость пластинки после потери устойчивости, будем иметь
G1=- = 0,25E. (9.289)
По отношению к начальному модулю сдвига G величина Gt составит
0i=G(l±iO (9-290)
или, при М- = 0,3,
G,=0,65G. (9.291)
Таким образом, при недеформируемых подкрепляющих ребрах
жесткость пластинки на сдвиг падает после потери
устойчивости на 35%; в случае деформируемых ребер это снижение будет
больше.
§ 113. Исследование захритического сдвига с помощью теории
гибких пластинок
Модель диагонально растянутого поля уместна лишь при
достаточно развитой закритической деформации пластинки. В случае,
если критическое напряжение сдвига превышено незначительно,
исследование должно основываться на теории гибких пластинок.
Рассмотрим квадратную пластинку со стороной Ь, шарнирно
опертую по краям, подвергающуюся действию сдвигающих усилий s
по всем кромкам. Предполагается, что края могут искривляться
392 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ В ПРЕДЕЛАХ УПРУГОСТИ
в плоскости опорного контура. Воспользуемся уравнениями B32),
B33); граничные условия для краев х = 0, х = 1 примем в виде:
w = 0.
d2w
= 0,
^ = 0
„2 U-
д2Ф
-=s. (9.292)
дх2 "' ду2 """"• дхду
Представим основные уравнения и условия B92) в конечных
разностях, как это было описано в § 105. Ниже представлены
результаты решения задачи *),
выполненного на цифровой машине «Урал-2», с
шагом сетки с = 1/s. Контур сеточной
области составляют кромки х = 0, у = 0
и диагональ у = 1 — х. Внеконгурные
точки лежали на прямых х = •— с, у = — с.
Считалось, что пластинка изгибается
симметрично относительно диагонали у =
= 1—X.
а
1
1
1
1
— а —
А
<f
Л
<ГГ
^1*
S
г!
Ч*
1 /
/ /
11
\1
ч
1 У
. ... с/-
/
•
..
У
-^6^-
щ
**
га
30
50
S-50-
Рис. 9.65. Диаграмма «прогиб —усилие сдвига» после Рис. 9.66. Выпучивание квадратной
потери устойчивости. пластинки при сдвиге.
На рис. 9.65 сплошными линиями изображена зависимость между
параметром нагрузки s, равным
s (Ь\г
и прогибом w в точках А(х/2, 7г) и BCh> 1/л)> причем величина wB
отложена с обратным знаком. Критическое напряжение составляет
по A61) sKp=9,4. Пунктирные линии представляют данные решения
той же задачи с помощью метода Бубнова — Галеркина (см. [0.3],
*) Оно было проведено А. Ю. Биркганом.
ИССЛЕДОВАНИЕ С ПОМОЩЬЮ ТЕОРИИ ГИБКИХ ПЛАСТИНОК 393
стр. 157) с введением двух варьируемых параметров. Как видим,
погрешность подобного решения оказывается значительной *).
На рис. 9.66 нанесены горизонтали изогнутой поверхности,
относящиеся к различным значениям w, при s= 12 и s = 50. Критическое
напряжение было превзойдено в первом случае в 1,25 раза, а во
втором — в 5,3 раза. Судя по рис. 9.53, при относительно большом
превышении критического напряжения в средней части пластинки
образуются густо расположенные складки, подобные тем, которые
соответствуют модели диагонально растянутого поля.
*) Отметим, что в решении по методу Бубнова — Галеркина граничные
условия B92), относящиеся к функции Ф, выполнялись лишь «в среднем».
ГЛАВА X
УСТОЙЧИВОСТЬ ПРЯМОУГОЛЬНЫХ ПЛАСТИНОК
ЗА ПРЕДЕЛАМИ УПРУГОСТИ
§ 114. Применение теорий пластичности к задачам
об устойчивости пластинок
Формулы для расчета пластинок на устойчивость, выведенные для
упругой области, применимы только при относительно малой толщине
пластинки. Рассмотрим, например, сжатую в одном направлении
удлиненную шарнирно опертую пластинку. Критическое напряжение окр
для такой пластинки определяется формулой (9.79), справедливой
при условии, что величина 0кр не превышает предела
пропорциональности материала: 0К -^ <тпц. Отношение ширины пластинки к толщине
должно составлять
!>l/ 3,6-^-"^ 1,9 l/~—
h -" V а„„ У ffn
Предельное значение b\h оказывается равным для мягкой стали около
60, а для дюралюмииа — 36.
Между тем в реальных конструкциях часто встречаются пластинки,
для которых отношение b\h лежит ниэюе указанного предела. Это
относится, в частности, к авиационным конструкциям: в тяжелых
летательных аппаратах в связи с новыми аэродинамическими
требованиями толщина обшивки в последнее время значительно возросла.
Поэтому исследование устойчивости пластинок при пластических
деформациях является весьма важным, оно необходимо и для
конструкций из стеклопластиков: предел пропорциональности этих
материалов сравнительно низок.
В главе II было показано, как осложняется задача об
устойчивости стержней в упруго-пластической области, если определять
соотношение между зонами догружения и разгрузки в сечении стержня
в зависимости от условий приложения внешних сил. Тем более
трудным является исследование выпучивния пластинок; в каждом слое
пластинки образуется не одноосное, как в случае стержня, а
плоское напряженное состояние.
S 1141
ПРИМЕНЕНИЕ ТЕОРИЙ ПЛАСТИЧНОСТИ
395
В настоящее время имеются два подхода к решению задачи об
устойчивости пластинок при пластических деформациях. Один из них
заключается в рассмотрении пластинки как анизотропной, т. е.
имеющей не ту цилиндрическую жесткость, которая определяется
для упругой области, а различные жесткости на изгиб в двух
направлениях и на кручение. Соотношение между жесткостями зависит
от того, в какой мере превзойден предел пропорциональности теми
или иными «основными» (докритическими) усилиями.
Например, в случае одноосного сжатия вместо дифференциального
уравнения (9.70)*)
n / d4w . _ d*w , d'w \ я . d2w ,
DldF+2^Wr + ^T")==~°^^F C)
предлагается взять за основу следующее:
n /, d*w 0,„ d*w . d*w\ . d2w ...
Коэффициент уменьшения жесткости Я в направлении х одни авторы
считают равным Я = Т/£', где Т—результирующий модуль для
стержня прямоугольного сечения, а другие — X = EKjE, где
Ек—касательный модуль. Коэффициент крутильной жесткости принимают
лежащим в пределах А,<Я*<1; чаще всего считается h* = ]/~\. При
этом предполагается, что пластические свойства материала должны
проявляться главным образом в направлении основного напряжения ах,
величина которого превосходит предел пропорциональности. Что
касается направления у, то здесь материал является как бы «свежим»
и имеющим упругий модуль. Для крутильной жесткости принимается
некоторая промежуточная характеристика. Этот подход позволяет
получить без особых трудностей расчетные формулы для
критических напряжений, но его надо считать лишь приближенным. Хорошо
известно, что при сложном напряженном состоянии пластические
свойства материала в каждой данной точке тела зависят от
некоторых суммарных характеристик, в которые напряжение и
деформация по направлению данной оси входят лишь как некоторые
составляющие. Эти характеристики определяются теориями пластичности.
Поэтому обоснованное исследование выпучивания пластинок в упруго-
пластической области может быть проведено лишь с помощью той
или иной теории пластичности; в этом и состоит второй подход
к решению задачи. Применение теорий пластичности приводит в
конечном счете к дифференциальным уравнениям, близким по форме
к уравнениям типа (Ь) для анизотропных пластинок; но коэффициенты
анизотропии здесь уже не выбираются по интуиции.
Наиболее ценные результаты в этой области были получены,
начиная с 1944 г., с помощью теории малых упруго-пластических
*) Такой подход содержится в книгах С. П. Тимошенко [0.23], Ф. Блейха
и И. Геккелера, а также в ряде работ Колбруннера (см. [0.19]).
396 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
деформаций *). Эта теория **) связывает величины главных
деформаций сдвига с соответствующими касательными напряжениями.
Использование теории деформаций равносильно рассмотрению пластинки
в пластической стадии как нелинейно-упругого тела. Преимуществом
этой теории является сравнительная простота исходных
зависимостей. Все же в задачах о выпучивании пластинок теорией
деформаций надо пользоваться с осторожностью, так как, строго говоря,
она относится лишь к случаю простого нагружения, когда все
составляющие тензора деформаций изменяются пропорционально
одному параметру и, следовательно, направления главных осей
деформации остаются неизменными. Но это допущение выполняется лишь
в процессе нагружения пластинки до момента выпучивания. При
потере устойчивости пластинки в различных точках возникают
дополнительные деформации изгиба, и главные оси деформации меняют
свое направление. Правда, можно считать, что при слабом
искривлении пластинки дополнительные деформации малы по сравнению с
основными и что поэтому нагружение является близким к простому.
Естественное желание освободиться от ограничений
деформационной теории привело к появлению исследований по устойчивости
пластинок, основанных на теории течения; эта теория устанавливает
соотношения между напряжениями и приращениями пластических
деформаций, т. е. скоростями изменения деформаций, в то время как
предыдущая теория оперировала с полными деформациями.
Мы познакомимся с приложением к различным задачам
устойчивости пластинок как теории деформаций, так и теории течения и
сравним результаты вычислений с экспериментальными данными.
Не надо забывать, что термин «устойчивость» применяется к
конструкции, испытывающей упруго-пластические деформации, в условном
смысле. В самом деле, здесь любое малое возмущение вызывает
необратимые деформации конструкции. Выведенная из положения
устойчивого равновесия, конструкция будет совершать затухающие колебания
уже около некоторого нового изогнутого положения, характеризуемого
остаточными прогибами. Поэтому здесь остаются в силе оговорки,
сделанные в § 36 (стр. 115) в связи с определением устойчивости.
Мы будем считать состояние пластинки устойчивым в малом, если
отсутствуют соседние «нетривиальные» равновесные формы.
Эффект цепных напряжений, благодаря которому пластинка
способна воспринимать возрастающую нагрузку после выпучивания,
распространяется и на упруго-пластическую область. Задача о закрити-
ческом поведении пластинок при пластических деформациях является
весьма сложной. Мы познакомимся с возможными подходами к ее
решению в главе XIV; кроме того, в § 126 будет изложен
приближенный прием для определения редукционных коэффициентов.
*) Первые исследования этой задачи принадлежат А. А. Ильюшину
[10.1], [10.2].
**) Ниже она коротко названа теорией деформаций.
§ 115] ТЕОРИЯ ДЕФОРМАЦИЙ. ИСХОДНЫЕ ЗАВИСИМОСТИ 397
§ 115. Теория деформаций. Исходные зависимости
Обратимся прежде всего к теории деформаций и приведем
некоторые основные зависимости.
Будем исходить из диаграммы <т(е), полученной при одноосном
растяжении образцов из данного материала (рис. 10.1). Тангенс
угла наклона Oq начального участка диаграммы отвечает модулю
упругости Е. Проведем в некоторой точке N касательную к кривой сг(е);
тангенс угла ак между этой касательной и осью
абсцисс определяет касательный модуль *) Ек:
£'к=§- (ЮЛ)
Соединим точку N с началом О; тангенс
угла наклона полученной прямой к оси абсцисс
соответствует так называемому секущему
модулю Е°с, который, подобно основному модулю Е,
равен отношению о" к е:
Ес = —. A0.2) Рис. 10.1. К определению
£ секущего и касательного
г, с0 сО i. модулей.
Величины сс и ск являются функциями е.
Что касается коэффициента Пуасссна \i, то в упругой области,
как известно, он лежит для стали и дюралюмина между значениями
0,25 и 0,33. При появлении пластических деформаций величина \i
быстро возрастает, приближаясь к предельному значению ц = 0,5.
Принимая ц —0,5, мы считаем материал несжимаемым: кубик из
такого материала, подвергающийся всестороннему сжатию, не будет
испытывать изменения объема.
Чтобы определить зависимость сг(е) в случае одноосного
сжатия, проводят испытания коротких образцов, причем тонкие
пластинки соединяют в пакеты. В дальнейшем будем принимать, что
в пределах сравнительно малых деформаций диаграммы о (г),
отвечающие одноосному сжатию и растяжению, совпадают между собой.
В случае сложного напряженного состояния вводятся понятия
интенсивности напряжений а1 и интенсивности деформаций ег:
°1 = 75 l/"(°* - °уJ + (О, - °гJ + (О, - °х? + 6 D + Т2у2 + tL) ,
A0.3)
(Ю.4)
*) Индекс «0» обозначает, что величина Ек отвечает одноосному
напряженному состоянию.
398 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
здесь ах, оу, az — нормальные напряжения в координатных
площадках, проходящих через данную точку, тху, ryz, xzx—касательные
напряжения, гх, еу, ez— деформации удлинения, \ху, \yz, yzx —
деформации сдвига.
Допустим, что интенсивность деформаций в данной точке
возрастает и выполняется условие «простого нагружения». Тогда
величины ot и ег связаны между собой, независимо от вида
напряженного состояния, зависимостью
о, = ЕЛ. A0.5)
Под £с здесь понимается секущий модуль в диаграмме оДе^); связь
его с модулем Ес, отвечающим одноосному растяжению, будет
установлена ниже.
Компоненты деформаций связаны в свою очередь с компонентами
напряжений следующими соотношениями:
1
е,—3-6 =
еу—3-6 =
Ъу = -
3 /
3 .
3
-5)
-5)
-ху
A0.6)
Аналогичные выражения могут быть выписаны для остальных
компонентов. Под 0 в F) понимается объемная деформация:
0 = е, + еу + ег,
A0.7)
под
«среднее» нормальное напряжение:
A0.8)
Величины 6 и 5 связаны зависимостью
e=s3(l-2rts
Е
A0.9)
Для несжимаемого материала надо принимать 6 = 0. При
деформации относительно тонкой пластинки в каждом ее слое,
параллельном срединной плоскости, имеет место плоское напряженное
состояние; по известным допущениям теории пластинок можно принимать
°г = 0, V = Yzjr===0. A0.10)
Выражение для интенсивности напряжений C) получает вид
Ol=V<%-°X<>y+°l-\-W.
A0.11)
ТЕОРИЯ ДЕФОРМАЦИИ. ИСХОДНЫЕ ЗАВИСИМОСТИ
Величина 5 будет равна
с aJC + ay
399
A0.12)
Здесь и в последующем введены обозначения: тлгу = т, \ху = У-
Пользуясь (9), перепишем соотношения F) в виде
3 /3 1 —2(х"
3_ _(
' ~~ 2£с Gjc \
2ЕС
')
2Е(
''-(ж-1^)*-
v=r:t-
A0.13)
В выражениях A3) можно выделить составляющие упругой и
пластической деформации, если положить *)
1 1,1
G
Сп
A0.14)
Здесь под G понимается модуль сдвига в пределах упругости, под
Ос — секущий модуль сдвига, под Опл — модуль сдвига для
собственно пластических деформаций. Величина G связана с модулем Е
известной зависимостью:
0 =
2(I+|i)
A0.15)
Для Ос и Опл можно выписать аналогичные соотношения, принимая
ц = 0,5:
0= = 4-' °-л = -1Г- A0Л6)
Вместо A4) можно записать соотношение
1 _2(l+|i) | 1
3£
A0.17)
Вводя A7) и A2) в выражения A3), получим:
1 3
е* = -р (ох — |хоу) + ■?гр— (ох — S),
еу-=-ё(ву — \1вх)-±
2£„л
3
(о, - S),
2A+И)
Т+--Е-Т.
A0.18)
Первый член в каждом из этих выражений отвечает упругой
деформации, а второй—чисто пластической.
*) См. книгу Л. М. Качалова [10.3], стр. 41.
400 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Допустим, что известна диаграмма о (е), относящаяся к одноосному
растяжению или сжатию. Тогда по A8) и B), полагая ах = 0, 0у = О,
будем иметь
о а , 3
£? Е ' 2Е,
отсюда
V 3/
пл ч '
1 1 1
— п • A0.19)
Р F° Е
Зависимость A9) позволяет найти значения £пл по диаграмме,
полученной для одноосного растяжения или сжатия. Пользуясь
соотношением A7), ц\: .:м, далее,
1 _ I 1—2|i A0.20)
Ес £с° 3£
В случае несжимаемого материала всегда будет £с = £с. Иными
словами, считая ij, = 0,5, мы получаем диаграмму at(et) совпадающей
с диаграммой 0(e).
Если выписать выражение для интенсивности деформаций D)
в применении к плоскому напряженному состоянию и положить
ц = 0,5, то оно примет вид
Допустим, далее, что в данной точке тела имеет место разгрузка,
выражающаяся в уменьшении et; тогда в известных пределах
изменения интенсивности напряжений и деформаций будут связаны между
собой законом Гука:
До, = ЕДе„ A0.22)
где Е— основной модуль растяжения — сжатия для данного материала.
§ 116. Основное дифференциальное уравнение
в случае несжимаемого материала
Применим выведенные зависимости к задачам об устойчивости
пластинок в предположении, что материал является несжимаемым.
Будем считать, что в некоторой точке пластинки к моменту потери
устойчивости напряжения имеют значения ах, ау, т, соответствующие
им деформации равны е^, еу, \, и что докритическое нагружение
было простым.
ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ 401
Принимая в соотношениях F) 0 = 0 и пользуясь A2), получим:
г* = Tz (а* ~~ 1 °у)'
(°y~J а*)'
Введем обозначения:
тогда будет
е,
* = ■*"•
ах—-2аг
Sy = Оу •
о •
еу = -е- • V
Пользуясь соотношением E), получим:
%
Зт
Ж*
Зт
A0.23)
A0.24)
A0.25)
A0.26)
В момент потери устойчивости пластинка принимает изогнутое
равновесное положение, бесконечно близкое к первоначальному.
Определим вариации 60^., day бт напряжений, имеющие место при
выпучивании пластинки. Исходя из B3), находим:
1_
2
4 п I ■ 1
о =^£с ey-t -е
A0.27)
Вычислим вариации этих величин, помня, что модуль Ес является
переменным и зависит от ег:
Ьах = -J Сс (tex + j беу) -J- "J (е* +J еу) 4^ 6е<-'
боу = ~ Ес (беу -+■ ^ бе^) +1 (еу + ^ е*) Щ- &j.
A0.28)
6T = T£c6Y + lY^-6e,
По аналогии с A) введем понятие касательного модуля для
диаграммы оДе^):
£„ =
По E) имеем:
d&i '
Е —2i-«
A0.29)
A0.30)
402
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
дифференцируя, находим:
dEc 1 da.
^ = 4-(Ек-Ес).
di, е., at, e^
Зависимости B8) принимают с учетом C1) вид
6о,
: ± Ес (ьгх + \ 6еу) - (£с - Ек) ^ Ьг„
4 / 1 \ ау
6оу = -J Ес Fеу + j texJ — (Ес — Ек) — бе,,
бт =
■£с6у-(Яс-£к)^-6ег.
Вариации составляющих sx, sy no B4) равны
65^ = 60^ — ^6G., bSy = 6ау — — Ьах.
A0.31)
A0.32)
A0.33)
Пользуясь C2), получим:
6sx = Ec6ex — (E„ — Ek)
°t
6sy = Ес 6f.y — (Ес — Ек) — be.,,
flT==|£ceY_(£c_£K)JLeei
A0.34)
Определим вариацию интенсивности деформаций е(-. Пользуясь B1),
получим
6е,=
2 (Ejf бе^ + еу 6еу) + еу бе* + елг беу + f V 6Y
После умножения на 0,- найдем
°г fiej = "J^с [(ех + ^ еу) ве.г +(ey4jе,) 6еу +-4 Y °y] •
Подстановка соотношений B7) дает
a, te, = ах Ьех + оу 6еу + т 6у.
A0.35)
Выражению C5) может быть придан энергетический смысл: оно
равно работе усилий, приложенных к элементу тела, на возможном
перемещении.
Допустим, что при нагружении пластинки до потери устойчивости
интенсивность напряжений во всех точках превысила предел
пропорциональности. В момент выпучивания к основным напряжениям
добавятся напряжения изгиба. Пластинка разделится по толщине на две
ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ 403
зоны: в одной будет происходить догружение, а в другой
—разгрузка (рис. 10.2). Пользуясь гипотезой прямых нормалей, выразим
вариации деформаций в произвольной точке пластинки через вариации
деформаций в срединной поверхности бе,,., беу, by и вариации кри-
6ег — бе -\- zk ,
Догружение
bf = бу +- Izy,- A0.36)
Как и ранее, под z понимается
координата, отсчитываемая от срединной
поверхности вдоль нормали к ней.
Определим положение той
нейтральной точки нормали, которая лежит на
границе зон догрузки и разгрузки.
Очевидно, вариация бе, в этой точке должна
быть равна нулю. Исходя из C5),
находим
<^ое*+ау6е* + т6уг = 0. (Ю.37)
Разгрузка
Рис. 10.2. Зоны догружения и
разгрузки при выпучивании пластинки.
Подставляя значения C6) и обозначая через zQ координату
нейтральной точки, будем иметь
оЛбеж+^г;0) + оу(беу+>:^о) + т(бу + 2х2о) = 0. A0.38)
Отсюда
z0 = — , у Vn • A0.39)
Введем обозначения:
П (а, е) = ах Ых 4- оу 6еу -f- т. 6у,
П (о, и) = ох-лх -f- ayxy + 2тх;
П (а, е)
A0.40)
A0.41)
Вариация бе* для произвольной точки с координатой z оказы-
тогда будет
вается по C5) равной
Д*(Дел: + гИл:)+Ду(беу + гху) + т (бу + 2гХ)
бе?
<*г
A0.43)
-*)
A0.44)
Используя D2), находим
6ег = — П((Т' ")^-
Обратимся к зоне догружения; примем, что она охватывает слой
пластинки между точками г = — Л/2 и z = zQ. Здесь вариации
величин sx и бе* связаны первым из соотношений C4):
6s
*=EFte* — (E — Е)^
X С X \ С К) at
бе?
A0.45)
404 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Используя C6) и D4), получим
К = ЕЛК + ™.) + (Ес-Е«) ''(*'-gU(g'*> ■ A0.46)
По аналогии будет
S = £c(fe,-f-*«,) + (£c-fK)
sv (z0 — г) II (а, •/.)
A0.47)
6тг = 1 £с (fly + 2гХ) 4- (f с - Як) Т(*а *>П(а--£. A0.48)
6 аг
Для зоны разгрузки, лежащей между точками г = zQ и z = Л/2,
надо положить ЕС = ЕК = Е, тогда найдем:
в^ = £(веу + гиу).
6тг=4£(^4-2*)С).
A0.49)
Обозначим через cWx> 6Л/у и 6Т вариации результирующих
усилий, приходящихся на единицу длины сечения пластинки:
Л/2 Л/2 Л/2
6NX= J" floods. 6Л/у = J 6o*dz, 6T== J x/rfz. A0.50)
-Л/2 -Л/2
Введем вспомогательные величины:
-Л/2
Л/2
6# =6Л/
4«,-J
1
По D6) и D9) будет
bs*xdz. 6Ry = ()Ny — j6Nx= J 6syrfz.
Л/2 -Л/2
A0.51)
Л/2
Л/2
6R
•=J E{tex + zKx)dz+ J Ee(tex-\-zxx)dz-\-
-ft/2
-Л/2
?•
(£<■ — £K) s^II (q, и)
(z0— z)rfz; A0.52)
отсюда
6ЛХ = [(£ + £c) A - (£ - £c) z0] fie, +
+ i(E-£c)(^-^^ + (Ec-£jii(|p(| + ,0J. (Ю.53)
ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ 405
Аналогичным путем находим:
6Я, = [(Е -+ Ее) 4 - (Е - Ес) г0] 6еу +
1 I h2 \ lira, k)sv //г \2
+ -(£-£с)^---^иу + (£е-£к) ^ % + *°) ' <10-54)
вГ = 1[(£-г£с)А_(£_£с)го]ву + |(£_£с)^_^х +
+ (^-^)^p(} + ^oJ. (Ю.55)
Примем здесь, что процесс потери устойчивости происходит при
неизменных внешних усилиях. Распространим это допущение на
вариации внутренних результирующих усилий и положим *)
bRx = bRy == ЬТ = 0. A0.56)
Умножим выражения E3) — E5) соответственно на ах, о\, и Зт и
сложим эти произведения между собой. Учитывая соотношение
5Л^5Л + Зт2==0? (Ю.57)
и пользуясь обозначениями D0) и D1), получим
[(£ + Ес)А_(£-_ЕсOо]П@, еL-±.(£_£с)^-г2)П@, xL-
+(Яc-Як)^iD+ZoJ=0•
Деление на П(о, и) с учетом D2) дает
-[(E + Ec)l-(E-Ec)z0]z0 + ±(E-Ec)(-^-zZ) +
+ А:Т^(т+гоJ=0, A0.58)
или
e(^-z0J-Ek(^+z0J = 0. A0.59)
Если обозначить через hx толщину зоны дополнительного нагруже-
ния, а через /г2 — толщину зоны разгрузки, то будем иметь:
Ehl — EKhi = 0. h2 = j—zQ, h^j + zo. A0.60)
Мы получили точно такое же соотношение между hx и Л2, как и
в случае сжатого стержня прямоугольного сечения при использовании
*) Более точное решение задачи, при котором вариации внутренних
усилий не считаются равными нулю, было дано А. А. Ильюшиным [10.2] и
Ю. Р. Лепиком [10.5].
406 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
теории двух модулей (см. § 31). Из F0) находим:
h^hv3fS- h'=hviwf <КШ)
Координата zQ равна
z0 = - T3~T^E. A0.62)
0 2 VE + VEK
Определим, далее, изгибающие и крутящий моменты, приходящиеся
на единицу длины сечения:
Л/2 Л/2 Л/2
Мх= [ azxzdz, My= [ o*zdz, H= j-c*zdz. A0.63)
-Л/2 -Л/2 -Л/2
Введем дополнительные обозначения:
Л/2 Л/2
szyz dz.
Шх = Мх-±Му= ]sxzdz, ЗЯу = Му-±Мх= J
-Л/2 -Л/2
A0.64)
Подставляя выражения D6) и D9), находим
Л/2 г„
9RX = J E(tex + zxx) zdz-\- J £c (fie, -j- zv.x) z dz ■+-
z, -A/2
+ (<E'-E*)s2*a<e'K)(z0-z)zdz. A0.65)
Интегрируя, будем иметь
mx=±(E-Ec)(^-z$6ex + ±[(E + Ec)V--(E-Ec)z^r-
- J- (ge - Дк) П (g' *> ^ (&з - 4zg + 3^2). (Ю.66)
При ц=0,5 цилиндрическая жесткость пластинки в пределах
упругости окажется равной
Вводя обозначения
ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ
перепишем F6) в виде
ю*=и'{3[тA+(Р'>-<1-Ц-тKК +
407
+ — 0 —?c)(j--^jeex —-^-(Фс-Фк)
П (а, и)s
A0.69)
Выразим величину Шх через кривизны. Для этого определим беж,
пользуясь E3) и E6):
1 A-Ус)(~-4)** J (Фс-Ч\с)п<0-х)8*(-2+*оJ
2 0+Фс)|-A-Фс)^0 2 [A+ФсL-A-Фс)го]°? '
A0.70)
Подставляя это значение в F9), находим
а».
. = Д'({з[1A+фс)-A-фс)^]-
0-фсJ(т--о)! l з
~ К*х — -о (Фс — Фк)
4 ъО+%)-0-<Рс)го
A_4,3 + 3,0) +
| 60-Фс)(т + ?оJG-^)
уО+ф^-О-Фс)^
здесь введено обозначение
zo — T-
II (а, х) s*
Ji
A0.71)
A0.72)
Представим G1) в виде
ак*={я'[A-г)К,-A-*)££^1. (Ю.73)
где
1A-фс)ГA + 81з)+1 Q-fj(i-gy J
2 ^ -г 0;-t-4 A+Фс)_2A_ФсИо]
A0.74)
. 1 1, Г - - 3 A—ш)A4-2гпJA —451)"
A0.75)
408 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Аналогичным путем получаем:
II (а, •/) sy
,=^Z)'
H = -D'
A —г)иу —A—s).
2/. ч /, . П (а, и) т
-а —ох—о—о 2
О СТ;
A0.76)
A0.77)
По F4) имеем:
^ = 4(аК,+-^2Ку). Му = ^(ту+±Т1Х). A0.78)
Отсюда
Ж,
г=0'[A-г)(чх+1н,)-1A-)-^
~,Г / 1 \ 3 П(а, x)av
= D|(l-r)(x,+rx)~(l-,)-L^
A0.79)
гиб:
Выразим кривизны и кручение изогнутой поверхности через про-
d2w
d2w
% = ■
ду2 ' л— дх
Тогда выражения G9) и G7) с учетом D1) примут вид
~. A0.80)
Му:
где
(d2w , 1 д2
2 d/ri(l-S)^n(a'W)
2л
а]
, Г fd*w 1 Л\ 3 av „
2
4
3
да)
H — — D'
2 д* <5у
A — 5L-П(а, да)
П (а, да) == а
d2w
д2к>
9 d2w
х дх2 г °У ду2 "+" Т дл: ду '
, A0.81)
, A0.82)
, A0.83)
A0.83а)
Рассматривая малые прогибы пластинки и пользуясь
соотношениями (9.16), (9.17), (9.156), выпишем уравнение равновесия элемента
дх*
д2Н д2М
+ 2-дх-ду-+-ду^- + Ш(а'^ = °- <10-84)
Здесь напряжения ах и ау считаются положительными при сжатии.
Подставляя сюда выражения (81) — (83), приходим к следующему
ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ
409
дифференциальному уравнению для прогиба *):
1
3 1-
■S а.
4 1-
+ 1-
■г а.
3 1-
дх
,2
+ 2
1 —
-s a
4 1 — г о
<У
— 3
3 1 —s ахау-\-2х2
7 \—г а?
1 —s т
д w
1—гв1
дхлду
дх2ду2 '
<54к>
дхдул
+
Уравнение (85) вместе с граничными условиями является исходным
при решении различных частных задач. Если положить фс = фк=1,
то будет г —0, 5=1; тогда вместо (85) получим известное
уравнение, относящееся к устойчивости пластинок в пределах упругости,
если считать в нем и. —0,5:
D'V4w т-ЛЩаг, «0 = 0. A0.86)
Отметим некоторые соотношения, облегчающие вычисление
параметров г и s. Как мы видели, координата F2) слоя, разделяющего
зоны догрузки и разгрузки, получается той же, что и в задаче
об устойчивости стержня прямоугольного сечения. Введем
безразмерную величину, отвечающую результирующему модулю Т в этой задаче:
4£к _ 4фк
Е
следовательно,
По F2) будет
отсюда
(Гё+УЖ? (i + /^J'
1-уг=1-^.
1+/фк
-_ 1 i-WK
4z2
° 2 1+^'
(l — 2i0y = t,
2
VI
V'{^4-\
A0.87)
A0.88)
A0.89)
A0.90)
A0.91)
k-q-m-чг+н (••■»>
l+8z»=2U- 2
Используя эти зависимости, приведем выражение G4) к виду
4 VI
•<Pc(l
VI
A0.93)
*) Это уравнение было впервые выведено А. А. Ильюшиным [10.1],
[10.2]. В его работах содержатся также решения ряда частных задач для
пластинок, сжатых в одном и в двух направлениях.
410
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Обратимся к выражению G5). Представим его в виде
s = A — 2z0J + 4i0(l -~zQ)-\ (<pc - Фк) [A + 2?0JA - г0) +
4
3 A-Фс)A + 2^оJ0-4^)
По (89) имеем
4 О+ФсЭ-^-ФсЭЧ
\1+2г0/
Пользуясь, кроме того, соотношением (90), получим
3 [A + 2JoJ-Фс A -2Г0J] A -q,e) A -4J2)
8 A+Фс) + A-ФсJ5Ь
A0.94)
A0.95)
или
» = ' + ?A-ФО{A + 8*»)-3*0A-4*«)-
3 [A + 210J- Фс A - 2?0J] A -фс) A - 4?2)
8 О+Ф^ + О-Фс)^
A0.96)
A0.97)
Объединяя последние два члена, содержащиеся в скобках, и
сопоставляя полученное выражение с G4), приходим к следующему
простому соотношению:
s = t + r. A0.98)
Располагая для определенного материала пластинки значениями
секущего и результирующего модулей, можно определить параметры г
по (93) и 5 по (98); такие вычисления сделаны в § 125 для дюралю-
мина и стали.
§ 117. Приложение вариационных методов
Составим выражение для работы усилий Мх, Му, Н на
возможных перемещениях, при которых кривизны получают приращения Ьлх,
6иу, бх- Участку пластинки с размерами вдоль осей х, у, равными
единице, будет соответствовать удельная работа
6Л* = — (Мх Ьях -(- Му Ьку -(- 2Я 6х).
Учитывая соотношения G7) и G9), находим
6Л* = - D' {A - г) [(кх 4 у иу) Ьпх 4- (иу 4- J *,) &ку 4 X бх] -
3 ч II (и, а) ((Ту би, 4 Ду бху + 2т бх) ]
--A_S) -g |
A0.99)
A0.100)
ПРИЛОЖЕНИЕ ВАРИАЦИОННЫХ МЕТОДОВ 411
Выражение A00) можно представить в виде полной вариации*):
6Л* = - Z)'6 i {A - г) (к* + >у<у + к* + х2)-
-l(l-s) ["(yH'l. A0.101)
4 <П j
Введем понятие потенциальной энергии деформации, вариация
которой равна
6U* = — ЬА*. A0.102)
Такой шаг является оправданным: как уже было сказано, теорию
малых упруго-пластических деформаций можно рассматривать как
теорию нелинейно-упругого тела. Далее находим
^=f{(l-r)(xJ + x^ + x5 + X»)-|(l-*)-E^-}.
A0.103)
Моменты будут равны частным производным от потенциальной
энергии:
м dU* м W* „„ dU* ,1П ....
M^S^' М> = !^' 2Н=!Ъ' A0Л04)
это отвечает известной теореме Лагранжа.
Полная потенциальная энергия будет
U=[ J U*dxdy>. A0.105)
F
Определим работу внешних сил при малом искривлении
пластинки, считая усилия axh, ayh равномерно распределенными вдоль
соответствующих кромок пластинки. По (9.52) находим
F
Если рассматривать переход от начальной равновесной формы
к изогнутой как возможное перемещение пластинки, то должно быть
6Л + W = 0 A0.107)
или
6(U — W) = iK = 0, A0.108)
где Э = и — W — приращение полной энергии системы при
выпучивании пластинки.
Пользуясь вариационным уравнением A08), можно истолковать
с энергетической точки зрения применение метода Бубнова — Галеркина
*) Напряжения at, ay, т считаются неварьируемыми.
412 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
для приближенного интегрирования исходного уравнения (85).
С другой стороны, при рассмотрении потери устойчивости «в малом»
каждую возможную равновесную форму пластинки надо считать
безразличной; в процессе перехода от начальной формы к изогнутой
полная энергия должна оставаться неизменной. Иными словами,
работа внешних сил при выпучивании пластинки должна равняться
потенциальной энергии, отвечающей возникающим при изгибе
внутренним усилиям. Исходя из этого условия, можно применять для
приближенного решения задач устойчивости пластинки метод Ритца—
Тимошенко (см. § 9).
§ 118. Решение частных задач
Рассмотрим для примера случай шарнирно опертой по краям
пластинки, сжатой в направлении х (см. рис. 9.14). В уравнении (85)
следует положить
0г = 0лг = 0, агу = т = 0. A0.109)
В результате, пользуясь (98), получим
/. 3 1 — t — r\ d*w . „ d*w , d*w . ha d2w
[ T \—r J13er_r" дх2ду2 ~^"дуг i~ A — r) D' дх2 '
Примем решение в виде
A0.110)
, . тпх . плу ,1п ,, ,.
w = fsm sin—т^-; A0.111)
после подстановки в A10) будем иметь
(l I 3 ' \ т* | о wV | ha m* — о- ПО 112}
\4^4 \—r) a4 ^ aW + Ъ" A-гH'а2я2 U' l1"-11^
отсюда
Критическое напряжение определится как минимум выражения A13).
При этом надо прежде всего положить ге= 1; следовательно,
пластинка должна выпучиваться, образуя одну полуволну вдоль стороны Ъ.
Полагая ajbm = к, запишем, далее, условие минимума о в виде
да =0; A0.114)
дХ
это дает
/т + Т-пЬ- 00.115)
Критическое напряжение оказывается равным
°kp = ^W". 00.116)
РЕШЕНИЕ ЧАСТНЫХ ЗАДАЧ
413
где
Д-=2A —r)(|/r-i + |.T-L_-i-i). A0.117)
Формула A17) относится к удлиненной пластинке, для которой
волнообразование вдоль стороны а является свободным. При
значении а, сравнимом с Ь, следует отыскать число волуволн т,
придающее коэффициенту К наименьшее значение.
Допустим, что для квадратной пластинки минимуму К
соответствует т—\, тогда величина К в формуле A16) по A13) равна
/С = (Э,25 -И 4 Т~7") С — О = 13A-4Г) + 3* . A0.118)
В предельном случае упругой задачи надо положить г = 0 и
t=\, тогда формулы A17) и A18) приведут к известному значению
К = 4. Если диаграмма аг(е(), соответствующая данному материалу,
имеет площадку текучести, то для точек этой площадки имеем по
(93) /-==1 —фс, ^ = 0; вместо A17) получим К = Зфс> а вместо A18)
13
^ = -4"^-
В случае удлиненной пластинки выражение для критического
напряжения можно тогда представить в виде
0КР=3-РГ: (,0Л19)
здесь через Dc обозначена, по аналогии с F7), цилиндрическая
жесткость, отвечающая секущему модулю, при и, = 0,5:
^Н-т^т1=0г^- A0Л20)
Напомним, что при t->0 несущая способность сжатых
стержней всегда оказывалась исчерпанной. В теории устойчивости
пластинок мы приходим к иному результату: для точек площадки
текучести величина окр ф 0. Иными словами, переход «порога»
площадки текучести не обязательно сопровождается выпучиванием
пластинки*). Это объясняется тем, что при выпучивании пластинки,
в отличие от случая стержня, образуется двухосное напряженное
состояние. Судя по формулам C2), здесь могут иметь место
приращения ох, 0у и т и в том случае, когда материал находится в
состоянии текучести (при Есф0, ЕК = 0). Допустим, что величины
*) Этот вывод относится к «бесконечно медленному» процессу нагруже-
ния. Если принять во внимание динамический эффект, имеющий место
в упругой испытательной машине при достижении площадки текучести, то
состояние пластинки может все же оказаться неустойчивым.
414 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТ1
о,, оу и т получили приращения, в то время как величина
интенсивности напряжений A1) остается неизменной. Тогда должно быть
(о, + во,)» — (о, + во,) (оу + воу) -f (оу + °°уJ + 3 (т -4- втJ =
==°;-0Л + 0у + 3т2:
пренебрегая малыми высшего порядка, будем иметь
86г29бт
о, B 6о, — воу) 4-
-f- Оу (во, — 2 воу) + Зтвт = 0.
A0.121)
здесь ov = t=0, по-
Полагая
лучим
2во, = воу. A0.122)
Рис. 10.3. К случаю выпучивания пластинки
при напряжении, равном пределу текучести.
Именно такое соотношение
должно быть в рассматриваемой
задаче между во, и воу для точек
диаграммы о(е), лежащих на
площадке текучести (рис. 10.3).
Мы рассмотрели здесь лишь одну частную задачу об устойчивости
сжатой пластинки с шарнирно закрепленными краями. Ряд задач,
относящихся к другим видам нагрузки и иным граничным условиям,
исследован с помощью тех же исходных соотношений Б. М. Броуде
[9.3], С. М. Поповым [10.6] и Ю. Р. Лепиком [10.5].
§ 119. Вывод основного уравнения без учета
эффекта разгрузки
Теория устойчивости пластинок, изложенная выше, в частном
случае сжатого стержня сводится к теории «двух модулей». Судя
по F1), толщина пластинки делится на зоны догрузки и разгрузки
таким же образом, как делится высота прямоугольного сечения стержня
при продольном изгибе. Естественно попытаться распространить на
пластинки другой подход, при котором эффект разгрузки не
учитывается. В применении к стержням эта концепция соответствует, как мы
видели в главе II, случаю, когда сжимающая сила возрастает в
процессе выпучивания.
Итак, будем считать, что соотношения между приращениями
напряжений и деформаций являются в зонах догружения и разгрузки
одними и теми же. Тогда, очевидно, «нейтральная» поверхность,
разделяющая эти зоны, будет совпадать со срединной поверхностью
пластинки. Следовательно, вариации деформаций для точек
срединной поверхности будут при выпучивании пластинки равны нулю.
Воспользуемся соотношениями типа D6) между вариациями напряжений
ОСНОВНОЕ УРАВНЕНИЕ БЕЗ УЧЕТА ЭФФЕКТА РАЗГРУЗКИ
415
и деформаций, найденными выше для зоны догрузки:
^y = Ec^'(Ec~EK)^^f
бг
= \-Е 6уг — (Е —Е) — Ш.
3 с 1 V с к.) et I
Считая Ьгх—Ьгу = Ьу — О, по C6) получим:
Ьех = гкх, бе^ = гиу, f>yz=2zy,.
Вариация интенсивности деформаций D2) равна
(.°х*х + °уАу + 2тх) г II (а, •/)
бе?
Выражения D6)—D8) заменятся на следующие:
к=
Е-л —(Е —Е) S*U (°' к)
с х \ с к) 2
t
te5 =
6тг =
syll (а, •/.)
Е-л —(Е —Е) -^-—,
г.
z,
4есХ-(ес-ек)^И-
3 о,
A0.123)
A0.124)
A0.125)
A0.126)
A0.127)
A0.128)
A0.129)
A0.130)
Как можно видеть, условие E6) выполнено: вариации
результирующих усилий bRx, 6Ry, ЬТ оказываются равными нулю.
Величина ЗЯХ будет равна
-I
bs*z dz =
Е<*л-(Ее-ЕЛ±ЩЩ£
Вводя значение цилиндрической жесткости F7), получим
f0tr = -D'
Фс^дг — (Фс — Фк)
?лг11 (Д, к)
Таким же путем находим:
cm 3 гч, Г 5УП (ff. %
ШУ = Т D Ч>сИУ - («Рс - Фк) " ^
н 3 п/ Г2 , , т11 (а, х)
H = -£D -ФсХ —(Фс~Фк) ^Г-1
A0.131)
A0.132)
A0.133)
A0.134)
416 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Изгибающие моменты по G8) равны:
D'
Фс(**+J*i
3 . . axU (а, и)
7(Фс —Фк) V
4 и,
ffyll (а, и)
Фс (*у + - И,) — ~ (Фс — Фк)
A0.135)
A0.136)
Пользуясь выражениями (80) для кривизн, будем иметь:
Mr = — D'
My = — Df
H^ — D'
ld2w
2,
I д2
2 ду2
ld2w_ 1 д'-
фс1^2 +~~-2
■_1_
2 Ф" дх ду
2 дх'
d2w 3 .
— 7(Фс
4
— Т^с — Фк)^П@, да)
4 а2
_ (ф ф)_У П(а, да)
4 of
— Фк)-ТП@' «0
•
, A0.137)
, A0.138)
A0.139)
Уравнение равновесия (84) приобретает вид*)
4 V ср./ о*
d*w
дх
л +-2
l_lfl_IlVA + 2t
21
сгк>
^ J дхг ду
+
1
1—5l i
4 V Ф, / а2
д w
Ну*
-•('-tO("^7 + "
с'
.5% \_|__А_щ0| w) = 0. A0.140)
дхду6
D
Здесь введена цилиндрическая жесткость A29), соответствующая
секущему модулю.
Все соотношения—от A32) до A40)—мы могли бы
непосредственно получить из зависимостей § 116, считая z0 = h[2, 20=l/2.
В самом деле, при таком значении z0 вся толщина пластинки
оказывается охваченной зоной догрузки. Параметры г и 5 по G4) и G5)
будут равны
г=1-фс. 5=1-(фс-фв). A0.141)
При рассмотрении упругой задачи надо считать
Фк = Фс==1, D'c = D>.
Вариационное уравнение A08) и энергетический критерий остаются
в силе и при решении задачи без учета разгрузки; изменится лишь
выражение для удельной энергии U*, вместо A03) получаем
*) Это уравнение было получено Стоуэллом [10.16]. Им же был решен
ряд частных задач для пластинок, сжатых в одном направлении.
ВЫПУЧИВАНИЕ СЖАТОЙ ПЛАСТИНКИ
417
§ 120. Выпучивание сжатой пластинки
Будем исходить из нового дифференциального уравнения A40).
В случае сжатия пластинки в одном направлении оно принимает вид
\ 4 4 срс ) дх* дхг дуг ду* DQ дхг
Рассмотрим различные условия закрепления.
1. Все края пластинка шарнирно оперты. Принимая w по-
прежнему в виде A11), получим
n2D{.
1+3 Фк\ 1 2 4Jl2
A0.144)
где Х — а/Ьт. Принимаем п=\ и выписываем условие A14) для
удлиненной пластинки; тогда находим
^У^т+т^- A0Л45)
Судя но A45), в упруго-пластической области волны укорачиваются
в направлении сжатия, и тем интенсивнее, чем меньше отношение
фк/фс. Это и естественно: относительная жесткость пластинки вдоль х
при развитии пластических деформаций надает.
Коэффициент К в формуле A16) получает значение
К=2фс(|/1+|^+1). A0.146)
В случае квадратной пластинки, если принять т=1, получим
ЛГ = 3,25фс+0,75фк. A0.146а)
При сильно развитой пластической деформации можно положить
фк = фс, тогда вместо A46) и A46а) получим
n2D'c
<Ч = 4-^; A0.147)
таким образом, критическое напряжение будет определяться «секущим
модулем». Для точек площадок текучести при фк = 0 в случае
удлиненной пластинки будем иметь о = Ъл2Ог jb2h, что совпадает с A24).
Длина полуволн при этом составляет по A45) около 0,7 от ширины
пластинки. Как и следовало ожидать, значение К, найденное без
учета эффекта разгрузки, лежит, как правило, ниже, чем с учетом
разгрузки.
Введем обозначение для «приведенного» коэффициента:
418 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
и перепишем формулу A16) для удлиненной пластинки в виде
сКр = 2^1(Фпр + Фс)- A0.116а)
Для упругой области ф =фс=1. При вычислении D' принимается
ц. = 0,5. Поэтому A16а) не переходит в известную формулу (9.77).
Этот переход будет осуществлен ниже, в § 122; здесь же условно
примем D' = D и обозначим критическое напряжение для упругой
области через акр э; тогда вместо A16а) получим
оКр = т)окр.э, A0.149)
где под т) понимается поправочный коэффициент для
упруго-пластической области:
т] = 0,5(фс+српр)- A0.150)
Для квадратной пластинки по A47)
т) = 0,81фс4-0,19фк. A0.150а)
Рассмотрим, далее, пластинку, сжатую вдоль короткой
стороны, при а<^Ь, ^.2<С^1, тогда
0кр = -4^-(Фс-т- Зфк).
Относя эту величину к значению акр э и принимая D' = D, придем
к поправочному коэффициенту для случая «цилиндрического
выпучивания» пластинки в виде
т) = 0,25фс-(-0,75фк. A0.150Ь)
Напомним, что так как мы не учитываем эффекта разгрузки, то в
предельном случае сжатого стержня должно быть
г\ = %. A0.150с)
2. Нагруженные края пластинки закреплены шарнирно, а не-
нагруженные—защемлены (рис. 9.17). Воспользуемся
энергетическим методом решения задачи. При одноосном сжатии
выражение A42) для U* примет вид
отсюда
2 J J L\ 4 ■" 4 Фс ) \ дх*) "г" dx2 dy* "+"
ВЫПУЧИВАНИЕ СЖАТОЙ ПЛАСТИНКИ 419
Работа внешних сил по A06) будет
ш=тПа*Шахау- A0Л52)
F
Пользуясь A08) и полагая 0^ = 0, находим
A0.153)
Выражение для прогиба выпишем в виде
, . ТЛЯХ . , ПЯУ ,т< ел\
w = fsm smz-j~. A0.154)
После подстановки этого выражения в A53) и интегрирования
находим
яЩ
а=~тг
[\_ 3 Фк\ mV _8л* 1б_ аЧЛ
Величина о будет по-прежнему минимальной при ге=1. Примем, что
пластинка является удлиненной и нагруженные края свободны.
Полагая a/bm — h, получим
0=w
Условие (П4) приводит к соотношению
, _ 1 уз ,9 Фк
отсюда
„ n?D' /1 1 _ f~\ ф~\
°^ = 8-^1з + 2Уз+^)- A0Л56>
При <рк = фс = 1 и D'=D придем к формулам § 97 для упругой
области:
4
. _ V3_ _ 8(/I + l) яЮ
9~ 2 ' 0кр-э— 3 й2/г '
Поправочный коэффициент т) при D' = D получает значение
Фс + ^Фпр
ИЛИ
ti«0,369c+0,649np. A0.157)
420 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
3. Нагруженные края оперты шарнирно, а из ненагружен-
них краев один закреплен шарнирно, а второй свободен. В этом
случае примем такое выражение для w.
w = /4- sin
J b a
A0.158)
оси координат расположены, как показано на рис. 9.22. По
формуле A53) получаем
1 . 3 фк\ п2Ьт* , п2т2'
0 =
<(*+*#■
6а3
2ab
h
лЧт2
6а
A0.159)
Выражение A59) будет наименьшим при т= 1; так же, как в
упругой задаче, здесь вдоль оси х образуется одна полуволна;
следовательно,
n2D'
■'кр-
ЬЧ
4 ~+ 4 ф,- ) \" ) +
В случае удлиненной пластинки при Ь<^а
°кР— b2h — з Ль
A0.160)
A0.160а)
Поправочный коэффициент оказывается при £)' = D равным
Л = фс- A0.161)
Критическое напряжение оказалось здесь пропорциональным
секущему модулю. Это позволяет значительно облегчить практические
расчеты. При заданном отношении bjh находим критическую
деформацию:
екР=-НтJ' A0.162)
и по диаграмме о(е) для данного материала—соответствующее
значение секущего модуля Ес, тогда акр = £секр.
Джерар предложил [10.10] пользоваться этим приемом для
определения критических напряжений при других граничных условиях;
в формуле типа A62) он рекомендует подставлять вместо
коэффициента Уз такои коэффициент k, который вытекает из решения
упругой задачи; например, в случае удлиненной пластинки с шарнирно
закрепленными краями й = 3,6.
Как мы видели, такой расчет по секущему модулю, часто
встречающийся в литературе, вытекает из теории деформаций в
случае одноосного сжатия лишь в одном частном случае. Во всех
других задачах этот прием надо рассматривать как приближенный, причем
погрешность при пользовании им может быть значительной.
ВЫПУЧИВАНИЕ ПЛАСТИНКИ ПРИ СДВИГЕ
'421
4. Нагруженные кромки шарнирно оперты; один из ненагру-
женных краев защемлен, а второй свободен. Пользуясь тем же
методом, что и в п. 3, находим следующее окончательное
выражение для поправочного коэффициента т) при D' = D:
Л = 0,43фс -т-0,57фпр. A0.163)
Значения т) для дюралюминовых и стальных пластинок приведены
ниже, в § 127.
§ 121. Выпучивание пластинки при сдвиге
Обратимся к случаю квадратной пластинки со стороной а,
подвергающейся действию касательных напряжений т по всем кромкам
(см. рис. 9.26). По A1) находим
0. = /Зт. A0.164)
Уравнение A40) приобретает вид
d4w / срк\ <Yw . _сИк>_ , 2h d2w
'дх4' [ "ф7/ дх2 ду2 ду4 + ~5[ Т дх ду
или
d'w . 2h d2w
дх2 ду2 D'c дх ду
Здесь принято
^ + /I+^\_^_ + i^ + ^LTJ^ = 0 A0.165)
A' = V^_*^Lt + ~t^L = 0. A0.166)
ф=1— Is.. A0.167)
фс
Выражение для прогиба примем в виде (9.148)
^=SS/-sin-^sin^- (io-168)
т п
Выпишем уравнение метода Бубнова — Галеркина:
X^n~s\n^-dxdy = 0. A0.169)
' f"
Принимая во внимание соотношения (9.151), получим
_JH Г(«2 + J , 1 _ у у , й„2 mnlj
i J
Введем обозначения:
И
, я4 Г(т2 + п2J , ] VIV f я 2 mniJ п
J тп а< [ 5 A«"J ~ 2и 2Л ;>Га (т«—/«)(л«—^) — U-
A0.170)
^-ет- ? = w^- A0Л71)
422 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Идя тем же путем, что и в § 100, рассмотрим сначала сочетания
индексов: A, 1), B, 2) и B, 2), A, 1); тогда получим систему
уравнений относительно /п и /22. Приравниваем нулю определитель
системы:
= 0.
A0.172)
Параметр т* , отвечающий критическому напряжению сдвига,
оказывается в первом приближении равным
\Р,1 = Ш-Р^1
32
отсюда
ькр, 1
= 12,1 1
A0.173)
A0.173а)
Выберем в качестве второго приближения индексы т, п
следующими: A, 1), A, 3), C, 1), C, 3), а /, j— B, 2), а затем поменяем
их местами. Это приведет к уравнению, обобщающему прежнее
уравнение (9.164) на упруго-пластическую область:
9 я2
0
0
0
128 т* A6-44» р* ±
4 128 .
5 я2 Т
4 128 .
15 я2
4 128 ,
15 я2 т
Определяя отсюда т*
величину с т* v получим
кр, 2
0
128 .
я2 т
-Зф)р*
0
0
второго
0 0
1 128 , 9 128 ,
5 я2 25 я2
0 0
C3 — Щ р* 0
0 C6 — 9гр) р*
= 0.
A0.174)
приближения и сравнива
i эту
1кр, 1
кр,2'
У^Щ
2D —ф) . 1
A0.175)
100 —9\()^25J
В § 100 было видно, что величина, стоящая в знаменателе, при
ф = 0 равна 1,18. Распространяя это значение на случай ф Ф 0,
получим
или
т*р= 10,2£@,75Фс -Н 0,25фк)(АJ. A0.177)
ОБОБЩЕНИЕ НА СЛУЧАЙ СЖИМАЕМОГО МАТЕРИАЛА 423
Поправочный коэффициент оказывается равным
Г| = 0,75фс-Ь0,25фк. A0.178)
Это значение т] примем условно и для пластинок с произвольным
отношением сторон. Отметим, что Джерар рекомендует в случае
сдвига вести расчет по секущему модулю [10. 10] и принимать г| = фс.
§ 122. Обобщение теории деформаций на случай
сжимаемого материала
Предыдущие решения задачи об упруго-пластической
устойчивости пластинок имеют тот недостаток, что для всех точек диаграммы
Oi(tt) коэффициент Пуассона считался равным 0,5. Поэтому основные
дифференциальные уравнения (85) или A40) не сводятся в частном
случае чисто упругой деформации к известному уравнению
классической теории пластинок; это же относится к отдельным расчетным
формулам.
Чтобы получить уточненное решение для материала, сжимаемого
в упругой области, воспользуемся более полными зависимостями § 115
между деформациями и напряжениями *). Ограничимся при этом
случаем одноосного напряженного состояния до потери устойчивости
@у = т=О) и не будем учитывать эффект разгрузки.
Воспользуемся соотношениями
ax4-av 2 2
ax — S = ax ^-^-=1sx, oy — S = 1sy, A0.179)
тогда выражения A8) для деформаций можно переписать следующим
образом:
1 , ч,1
1 / N I 1
еу = -g (°у — №х) Ч—£— sy.
Выразим вариации величин гх, гу, у через вариации напряжений
в таком общем виде:
Ьгх = Ап Ьах + Аа Ьау + А13 6т, j
(>гу = А216ах + А22Ьау-{-А236т, A0.183)
6у = А31 Ьох + А326оу -f- Л336т. J
*) Такое решение было впервые дано Л. А. Толоконниковым [10.8].
Другой путь решения, изложенный ниже, был предложен для случая ау = т = 0
Бижляром [10.9], а в более общем виде —А. П. Прусаковым [19.12].
Последние два автора рассматривали задачу без учета эффекта разгрузки.
A0.180)
A0.181)
A0.182)
424 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
Коэффициенты А,л, Л12> .. . равны соответствующим производным:
А- = к' А*=щ' А"=^г ит-д- A0Л84)
Рассматривая выражения A82), сразу же находим:
А13 = А33=А31 = А32 = 0. A0.185)
Определим остальные коэффициенты. Пользуясь равенством A80),
получим
Аи=р- = ± + -J-P-+sx-£-D-). A0.186)
11 дах Е г Епя дах ^ х дах \ Еил) у '
Производная от sx равна
ds_
да.
X
= 1. A0.187)
Найдем производную от 1/£пл. Исходя из соотношения A7), будем
иметь:
Запишем это выражение в виде
дах \ EQ ) dat \ at ) дах '
Находим:
dat Ц j [da, 'jo? \EK Ec)al
и, далее,
Г -; Vo4 о a +o* + 3т*- "* °' - *Л .
do^ дах у х * >>~ >> i 2at at
Окончательно
д ( 1 \ / 1 Msf
A0.189)
A0.190)
A0.191)
A0.192)
Выражение A86) получает вид
1.1 . / 1 1U
A» = -+ —-Hir—J^' 00.193)
Аналогичным образом вычисляем остальные коэффициенты:
|Л 1 /1 1 \ SXSV
Л12=Л21 = --_ —+(_ __ j_i_iL, (ю.194)
A2=-4-^ г-f-^-—srR. (Ю.195)
£ 2£пл \Л *с/ °/
11/1
£п* ' \Ек Ес J А
ОБОБЩЕНИЕ НЛ СЛУЧАЙ СЖИМАЕМОГО МАТЕРИАЛА
425
Считая основное напряженное состояние одноосным, примем:
2 '
о/ = ох;
тогда получим:
Аи —-£■
_L_ , J _L
F ' F F '
■2 — "-2\ — '
1
1 I 1
^22— T+-^7+t(-^-
JL
if J ±
4 UK Яс
J_
A0.196)
A0.197)
Воспользуемся соотношением A7), тогда выражения A97) можно
привести к виду:
л _ 1 , 1-2Ц.
£„
■2 — ■"г! —
3£
1
I—2ц
и _3 1 , 1 1 ,
*22
4 £с
2ЯК
4 ё:
3£ '
1—2ц
ЗЕ
A0.198)
A0.199)
A0.200)
Коэффициент А33 находим непосредственно по A82);
используя A7), будем иметь
3
Дз8 —-£с
A0.201)
Выразим вариации напряжений через вариации деформаций; в общем
виде будет
6ах = аи бкл. + «12 бЕу -f- au 6Y.
б0у = fl2l 0ел-+ «22 &}> 4-^23^. A0.202)
бт = а3, бе^ 4- «32 беу +- «33 °Y-
Мы должны найти матрицу коэффициентов ап, «12, ..., обратную
матрице величин Аи, Л12, . . . Как легко видеть, в данном случае
«13 а7Л «31 «30 0.
31 "
*32'
Остальные коэффициенты равны
А,
«и=4г- *«
__,2 ^4||
: а21 — д~ • а22 — ~д"~ •
*»—х
A0.203)
A0.204)
Под Д здесь подразумевается определитель, составленный из
коэффициентов Аи, ..
\22-
Д =
12
л21 л22
A0.205)
426 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ, X
Подставляя выражения A98)—B00), после упрощений находим
ь=1т+1^{ж+ж)' A0-206)
Перейдем к безразмерным величинам:
ап=^, а12 = ^, .... Д-А; (Ю.207)
тогда получим:
^ei/_L + _L+±=^V ^ = 1(±+1^Щ, (Ю.208)
Д \4<рс 4фк 3 / Д \Фк 3 /
Ъ^-Ц-^-1-^). *,=*■• A0-209)
где
K=4^^l-H-k+ikY A0-21°)
Если не учитывать эффекта разгрузки при выпучивании
пластинки, то для всех точек по толщине будут справедливы
соотношения B02). Изгибающие и крутящий моменты будут равны
ft/2 ft/2 ft/2
Мх = Г boxzdz, My= Г boyzdz, H= Г dtzrfz. A0.211)
-ft/2 -ft/2 -ft/2
Приращения деформаций изгиба выразим через кривизны:
Ьгх = г%х, bey = ZHy, by = 2z%; A0.212)
тогда получим:
12МХ - - \2Му - - 12Я
-gjp- = auHx-j-a12Hy, -£/рг=а21кх + а22ну, -j^- = 2a3&.
A0.213)
Если воспользоваться выражениями (80) для кривизн, то
уравнение равновесия (84) приобретает вид
— d*w . п,— , п ~ ч d4w , — d*w , 12 d2w n /1rva1.4
Перед последним членом взят знак плюс, так как напряжение
считается положительным при сжатии.
Дифференциальное уравнение B14) справедливо как для чисто
упругой, так и для упруго-пластической области; коэффициент
Пуассона [I может быть выбран в соответствии с данными опытов для
рассматриваемого материала. В предельном случае упругой
деформации надо воспользоваться зависимостью B0). Считая для
одноосного растяжения или сжатия ЕС = Е, получим:
ОБОБЩЕНИЕ НА СЛУЧАЙ СЖИМАЕМОГО МАТЕРИАЛА 427
Аналогичную формулу будем иметь для величины, обратной
касательному модулю в диаграмме аг (ег):
J_ = HL±u; осле,
отсюда
1 _ 1 _ 2A+|г)
Фс фк 3
A0.217)
Формула B10) получает вид
А=1—ц2. A0.218)
Вместо B08) и B09) находим:
an=a22=j—^, а12 = ая = т±ф-, Дзз=2A+|1) • A0.219)
Пользуясь этими значениями, вместо B14) получим известное
уравнение (9.70), относящееся к упругой области.
Если считать материал несжимаемым и положить \i = 0,5, то будет
-гЗ - 1 -2 -4 ~Фс
4^ф7' fl" = 4V + "з <Рс а12 = -фс, л22=з"Фс. азз =-у.
A0.220)
и тогда уравнение B14) приобретает вид
/1 3 Фк\ d*w r, d<w д*ч , a d'w _
U "*" 4 Фс) дх* ~^г дх*ду> ^~ ду< "*" £Л2Фс дх> — и' 1Ш~;
что совпадает с полученным выше уравнением A43).
Рассмотрим случай удлиненной шарнирно опертой пластинки,
сжатой в одном направлении. Примем для прогиба выражение
A11) и подставим его в уравнение B14); полагая п= 1, будем иметь:
о = ^§г [«„ р- + 2 («и + 2а33) + а22^], X = -^. A0.222)
Условие A14) дает
А. = 1/"-^М- -
У «22
Критическое напряжение оказывается равным
n2Eh2 /-.л— — — — \
а*Р = -йГ-{У ana22~{-al2-j-2am). A0.223)
Если воспользоваться значениями коэффициентов B19), то для
упругой области получим известную формулу
°кр—3A-ц2)й2 — b2h ' (lu.-UV
428 Прямоугольные Пластинки за пределами упругости
Подставляя в B23) выражение B20), придем к прежней
формуле A46), относящейся к несжимаемому материалу.
Обратимся к случаю квадратной шарнирно опертой пластинки.
Принимая в B22) /я = и=1, найдем критическое напряжение равным
Окр==-1^-[% + а22+-2(а12+2а3з)]. A0.225)
В упругой области получим формулу, совпадающую с B24).
При ji = 0,5 вновь придем к выражению A46а).
§ 123. Применение теории течения
Приложим к решению задач об устойчивости пластинок другую
теорию пластичности — теорию течения, непосредственно
связывающую приращения деформаций и напряжений с компонентами
напряжений *). Напомним, что в основные зависимости E) и F)
теории упруго-пластических деформаций входили полные значения
деформаций.
Будем считать, что приращения деформаций имеют упругую и
пластическую составляющие. Примем, что обе эти составляющие
определяются для несжимаемого материала при ц = 0,5. Упругие
составляющие в случае плоского напряженного состояния равны
К = ~Ё (б0* ~ 1 6оу) — "£ 6s*'
&;=iD°»-ito/)=i4- i (io-226)
бу' = -q 6t == -g- 6t. j
Пластические составляющие по теории течения определяются
следующим образом [10.3]:
&£ = <>(*,—j a,) = to,, j
*;«(>(а,-1а,) = Ч. | <10-227)
бу" = 3t>t. j
В случае одноосного растяжения полное приращение
деформации будет
Ье.х = -рЪах + Ъох, A0.228)
*Х £ ""*
отсюда
•=£(*.->-)-£(&-*)■ о»-229»
*) Теория течения была приложена к задачам об устойчивости
пластинок Хандельманом и Прагером [10.12], Пирсоном [10.14] и Л. М Кача-
новым [10.3].
ПРИМЕНЕНИЕ ТЕОРИИ ТЕЧЕНИЯ 429
Пользуясь прежним обозначением для касательного модуля
Е°К = ^ = Е%, A0.230)
получим
Е ак. \Фк
Будем в дальнейшем обозначать
A0.231)
* = -!—1.
фк
A0.232)
Соотношение B31) обобщается на случай сложного напряженного
состояния таким образом, что вместо ах сюда вводится интенсивность
напряжений 0г; тогда будет
A0.233)
A0.234)
A0.235)
б0г= """"" ' ''„'/' ' "" . A0.236)
Е <J[ ^
Окончательно приращения деформаций оказываются равными
Находя вариацию от интенсивности напряжений A1), имеем
sx Ь<зх -\-Sy Ь<3у -\- Зт бт
беу=-2?-F$у
6Y =
Пользуясь B36), перепишем выражения B34) и B35) в виде A83);
коэффициентами здесь служат величины
44=4A+4^). Л22=4A + ЧO2), Л33 = |-A+3'Й-
%а = А21 = _ J - - -f ф*, sy) ,
Ри = Л31 = -g- \psxT, A23 = А32 = -g- vp.yy т;
РЗД s^., sy, т понимаются безразмерные параметры
sy -
A0.237)
- "х
Т
A0.238)
НДределим приращения напряжений по формулам B02). Коэффициенты
Шь Oi2. • • • и здесь образуют матрицу, обратную по отношению
4*?**S*«•■;>.<" --
430
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
к матрице коэффициентов Аи, Л,2, ... Обозначим через А главный
определитель системы A83):
Д =
Лп
[1 л12 л13
*21
*22 л23
132 л33
A0.239)
Вычисляя этот определитель, находим
£ЗД = A + ,^)[3 A + ips2)(l + Зф?) - 9ф25ут] +
+ (- ^ + **л) [9Ф2 fe^) - 3 (! 4 Зфт2) (—j + Чзд)] +
+ 3i|)s~ т [(- -g- 4 Ф»*»,) Зф7ут — A -4- ф5&) Зф^т]. A0.240)
Принимая во внимание соотношение
72
^-+^^+!т2 = 1тК + ^-0Л+^ = 7- (Ю-241)
после упрощений будем иметь
Коэффициент ап оказывается равным
A0.242)
■2 -3
-4з2 -^33
4£фк
Д/£
= ^[1+ФD + Зт2)]. A0.243)
Аналогичным образом находим остальные коэффициенты.
Окончательно получим:
а\2 Л"
21-3A+Ф)
4£
йзз~ 3A+*)
[т + тЙ+?,+'Л)].
ai3 — % — з~(Т
#23 — а
32"
-И) Т\2 S^ 8*Г
4£ф
3A-И)
■{^8х+8у).
A0.244)
Будем решать задачу без учета эффекта разгрузки. Тогда для
всех точек по толщине пластинки следует принять соотношения B02).
Выразим приращения деформаций через кривизны по B12) и
придадим выражениям для моментов следующий вид:
12МГ , , а
: а„и, -4- а13ку -4- 2«1зХ.
Л3
12JW„
-р- = а21и, + а22иу -f 2а23х,
12Я
Л3
• = агх%х -+- а32>4 г-2аззХ-
A0.245)
Выразим кривизны через прогиб по формулам (80). Подставляя
выражения B45) в уравнение равновесия (84), получим следующее
дифференциальное уравнение относительно прогиба:
—1~ -
3 S*Sy
+И}
2К+0-ф.)[тЙ+?)
<ЭЛГ4
<Э4до
-2)Т 0«ю
— \ d*w
-4A-Фк)т[(^у + ^)^|г + A5,+ ^)^г] +
-f~^-Ща. да) = 0. A0.246)
Уравнение B46) является исходным при решении частных задач.
Обратимся для примера к задаче о сжатии шарнирно опертой
пластинки в направлении х усилиями а; тогда
■ сг, $v =х —
Вместо B46) получим
/1.3 \ d*w , п
d*w
а
1'
d*w
0.
h d2w
а
A0.247)
:0. A0.248)
дхг дуг ' ду4 ' D' " <Эл:2
Уравнение B48) имеет такую же структуру, что и уравнение A43),
относящееся к теории деформаций; они совпадают, если в
уравнении A43) положить ф = 1, D' = D', т. е. если вместо секущего
:Цодуля подставить модуль Е. Поэтому мы можем воспользоваться
Щри этой замене всеми формулами § 120. Ясно, что теория течения
Приводит к более высоким значениям критического напряжения, чем
реория деформаций; различие будет тем резче, чем ниже модуль Ес
ро сравнению с Е. При слабо развитых пластических деформациях
р|бе теории дают близкие результаты.
§ 124, Влияние сжимаемости материала по теории течения
В § 123 было принято, что материал является несжимаемым как
Р упругой, так и в пластической области. Допустим теперь, что
омпоненты упругой деформации связаны с напряжениями законом
ука в его обычной форме, т. е. будем считать материал сжимаемым,
432 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ ГГЛ. X
Вместо соотношения B26) получим:
fie; = -g-Fajt-|i6oy).
б/=2A_Нх)бт_.
A0.249)
Компоненты пластической деформации по-прежнему определяются
формулами B27).
Рассмотрим случай, когда исходное напряженное состояние
является одноосным: о{ — ох~о, 0у = т —0. Вариация bat по B36)
равна
бог = Ьах — j bOy. A0.250)
Полные приращения деформаций оказываются с учетом B33) равными
6е, = 1[A+фNа,-(|1 + уф)бау],
^^il-^+i^^ + t'+i^H' 1 A0-251)
Определяя отсюда приращения напряжений, получим:
К = X [(«* +1) te, + A + Ф) &у].
бт =
■бу.
где
2A+ц)
5 —4(х ,
A0.252)
A0.253)
В общих формулах B02) мы должны, следовательно, положить:
au = X(l+V)' а22 = -£-A+Ф). ai2 = a21 = ~(\i + fj, ]
_ _ л £ |
«23 — «32~ «13 =«31 — U> «33— 2A+Ц) ' )
A0.254)
§ 125] ПРИМЕНЕНИЕ ТЕОРИИ ЛОКАЛЬНЫХ ДЕФОРМАЦИЙ 433
Дифференциальное уравнение типа B14) получает вид
+ омЬ)°& = 0' A0-255)
где D определяется по G.12). Пользуясь формулами B53) и B32),
после несложных преобразований приводим уравнение B55) к виду
A4-Зфк) A — м2) &w
E—4(х) —A—2|лJФк дх< "т"
2 2A+И)A+Фк) + E-4|г)A-фк) A d*w ,
E —4(х) —A—2(xJ(fK v ^дх2ду*~
I 4A-|г') d*w . ha d*w _
+ E-4(х)-A-2(хJФк ду< ^ D дх*—"- UU-^ob)
В частном случае \i — 0,5 уравнение B56) получит прежний
вид B46), если принять а>р = т = 0.
Воспользуемся уравнением B56) для случая квадратной пластинки.
Примем выражение A11) для прогиба, считая т = п=\. Тогда
получим для критического напряжения формулу (П6) с заменой D' на D,
причем коэффициент К будет равен
к_ (9 + 7Ук)A->х2) + 2A-|л)E-4!х)A-фк) гш 257
E — 4(х) — A— 2|лJфк • К ■ )
Если принять фк=1, то придем к величине К = 4, отвечающей
решению задачи для упругой области.
§ 125. Применение теории локальных деформаций
Мы познакомились с применением к задачам устойчивости теорий
деформации и течения. Обе эти теории являются феноменологическими;
они описывают пластическую деформацию без учета локальных
процессов, происходящих в микрообъемах. Но более подробные данные
о поведении материала можно получить, исходя из современных
представлений физики твердого тела. Одна из первых, условно говоря,
физических теорий пластичности может быть названа теорией
скольжения *). Материал считается состоящим из монокристаллов, каждый
"из которых обладает лить одной системой плоскостей скольжения;
пластический сдвиг в этой системе определяется касательным
напряжением т и происходит, когда т превышает некоторое предельное
*) Она развита Батдорфом и Будяиским (S. В. Ba-tdorf, В. В и-
diansky, NACA TN № 1871 A949), перевод в сб. «Механика», № 1
G1), 1962); см. также работы Лина (сб. переводов «Механика», № 3, 1956;
№ 4, 1960), Будянского и У Тай-те («Механика», № 6, 1964). Приложение
теории к задачам устойчивости дано Чикала (P. Cicala, Attl della Acad.
Lincei, Rendiconti 9, № 1/2, 67—71, 1950).
434 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ II л. А
значение ттах. Другой, более общей теорией, носящей статистический
характер, является теория локальных деформаций *). Считая материал
по-прежнему сплошной и непрерывной средой, эта теория оперирует
с локальными деформациями по определенным направлениям
макрообъема, связанными с деформациями отдельных микрообъемов, и
определяет пластические деформации макрообъема как
среднестатистические деформации, полученные в результате осреднения локальных
пластических деформаций по всевозможным направлениям.
Выпишем основные соотношения теории локальных деформаций.
Пусть напряженное состояние в точке характеризуется тензором akl,
отнесенным к ортогональной системе координат /, у, k, 1=1, 2, 3,
которую будем считать основной. Проведем в этой же точке
вспомогательную ортогональную систему координат а, E, у. 6 = -*, У, z.
При повороте этой системы координат деформации в основных
неподвижных осях будут выражаться через деформации во
вспомогательной системе координат следующим образом:
ei] = ea$hahp (а)
где lla, lt& — направляющие косинусы. При наличии одинаковых
индексов предполагается, как обычно, суммирование. Тензор еар
соответствует локальной деформации при фиксированном положении
вспомогательных осей. Компоненты тензора деформаций макрообъема могут
быть определены при разном положении вспомогательных осей
координат, но при переводе их в основную систему координат по (а)
должны получаться те же значения компонент тензора деформации;
отсюда
п
е«=тЕе°АЧЧ- (Ь)
где п отвечает фиксированному положению вспомогательной системы
координат в пространстве. Суммирование п раз и деление на п
означает, что если одну и ту же величину суммировать п раз, то
делением суммы на п получаем ту же самую величину.
Предполагается, что вспомогательная система координат xyz
соответствует кристаллографическим плоскостям выделенного объема
(зерна). Иными словами, стесненный микрообъем (зерно) имеет
плоскость двойникования **), совпадающую с xz; плоскость ху, относи-
*) Эта теория, принадлежащая А. К. Малмейстеру, связана с
работами Н. А. Афанасьева по статистической теории усталостной прочности
металлов (Журн. техи. физики, № 10, 19, 1940). Обзор работ по теории
локальных деформаций дан в статье А. К. Малмейстера (Механика
полимеров, № 4, 1965, 12—27).
**) См. А. К. Малмейстер, Упругость и неупругость бетона, Рига,
1957, стр. 82. Интересно отметить, что процесс двойникования связан в этой
интерпретации с преодолением энергетического барьера, как в
рассматриваемых здесь задачах устойчивости.
ПРИМЕНЕНИЕ ТЕОРИИ ЛОКАЛЬНЫХ ДЕФОРМАЦИЙ 435
тельно которой происходит двойникование; направление двойникова-
ния, параллельное оси х. Тогда azz = a, azx = т, azy = 0.
Далее принимается, что ось z непрерывно изменяет свое
положение в пространстве и занимает все возможные положения. В этом
случае конец единичного вектора, совпадающего с направлением оси z,
опишет в пространстве сферу. В пределе из выражения (Ь) получаем
£ti = ~S J eapW/0rf^> (с)
s
где 5= 4л — поверхность единичной сферы.
Развернем тензор еар по (с):
Zlj — ~S J ^zzhz^jz ~Ь Zzxhzhx ~Г" exzhxljz Н~
"г ^xxHx'-jx ~T~e,xyhx^jy ~T~£yxhy^jx т ^yyhyljy i
^yzhy'-jz + 4yhzljy) dS. (d)
Если ось х совместить с направлением касательного напряжения ахг,
действующего на произвольно ориентированной площадке с
нормалью z, то независимой останется лишь ось z. Тогда, придавая оси z
всевозможные направления в пространстве, в том числе и направления
осей х, у, получим
Еч = Т J е*АЛ*dS + т J е« У*1* + hxh*)dS- (e)
s s
Направляющие косинусы оси х находим из равенства проекций
на ось / всех компонент заданных напряжений Оц по одной площадке
и напряжений ozz, агх. Поскольку a2y = 0, то
hx = -х— (<*ikhz — °zzhz)- @
°zx
С учетом выражения (f) основные соотношения принимают вид
3 Г 3 Г
ЪЧ~ Т J £zzuudS+-s J ezx®ij<iS. (g)
s s
где
uD=zhzl)z' ®ij — -toz~x~(csiklkzl)zJr Qjkhzhz — loJJjz). (i)
Как известно, zzz определяет изменение объема. Рассмотрим
i в дальнейшем несжимаемый материал при ггг = 0. Величина ггх,
характеризующая деформацию сдвига во вспомогательной системе коор-
| Динат, называется функцией локальных деформаций сдвига и зависит
I 28*
436 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ ГГЛ. X
от напряжения агх. Надо учесть, что нагружение и разгрузка следуют
различным законам, например:
aiazx+anazx ПРИ azX>alsC0S(azj^azx)' №■')
в1°« ПРИ azx<<,C0S((C^a^)- ^k")
где azx — текущее значение касательного напряжения; <fzx — значение
касательного напряжения, достигнутое в предыдущем этапе нагружения.
Если имеет место пропорциональное нагружение, то поверхность
касательных напряжений нарастает пропорционально данному
параметру нагружения; иными словами, по всей поверхности сферы S
выполняется условие агх > ozx. При сложном нагружении
указанное условие будет выполняться только на части поверхности
сферы S(+); на остальной части сферы S( будет иметь место
разгрузка. Для случая сложного нагружения уравнение (g) примет вид
(при егг = 0)
где eiViazx}' ezi4CTzjf) 0ПРеДеляются соответственно выражениями (к'),
(к")- Функция локальных деформаций считается характеристикой
материала, не зависящей от вида напряженного состояния; при простом
нагружении, когда по всем направлениям выполняется условие
догрузки, интегрирование ведется по всей сфере, и теория локальных
деформаций практически совпадает с деформационной теорией.
Теория локальных деформаций при сложном нагружении
проверялась экспериментально; в ряде случаев были достигнуты
удовлетворительные результаты. Поэтому естественно попытаться применить
эту теорию к исследованию устойчивости пластинок и оболочек при
пластических деформациях *).
Рассмотрим задачу об устойчивости сжатой длинной пластинки,
три края которой закреплены шарнирно, а один из ненагруженных
краев свободен **). Примем, что в момент потери устойчивости
возникают только дополнительные напряжения сдвига и что во всех
точках пластинки реализуется один и тот же путь нагружения (рис. 10.4).
Выберем нелинейную, без резкого предела пропорциональности,
диаграмму о(е) при возрастающем о и линейную зависимость
*) Некоторые конкретные задачи в этой области были рассмотрены
Г. А. Тетерсом и И. В. Кпетсом (канд. дисс, Рига, 1965). Сопоставление
различных теорий в применении к задачам устойчивости было выполнено
А Н. Божинским (Механика полимеров, № 6, 1965).
**) Это решение принадлежит А. Ф. Крегерсу (Механика полимеров,
№ 1, 1966).
р(+) =
bzx —
ZX
$ i5S] Применение теории локальных деформаций 437
при разгрузке. Приращение пластической деформации по (к) будет
dzfx = ann^dozx при o^o^cos^oQ. j
Выражение для полной деформации во втором этапе нагруже-
ния АВ будет
(ш)
о г
*ц и = ах°ы п "f "§■ J апа» \£ц i dS +
s
"zx2
И
,-*„
+
a no
zx 11 <; И 1Югг 11
as. (n)
S<.+)°z
Рис. Ю.4. Путь
нагружения.
Первый член представляет собой
линейно-упругую деформацию, зависящую только от текущего
значения тензора напряжений. Второй член
выражает пластическую деформацию, достигнутую в первом этапе ОА,
и является постоянной величиной для второго этапа нагружения.
Третий член дает пластические деформации, накопленные только во
втором этапе нагружения АВ. Пределы интегрирования по сфере Si + )
определяются условием догрузки. Под агх1в(п) подразумевается та
величина azx, начиная с которой на локальной площадке используется
условие догрузки, а через а2х „
обозначено напряжение, при
котором определяются дефор- /so
мации во втором этапе. Для
сложного пути нагружения
(рис. 10.4) условие догрузки
(т) примет вид
w
so
4S
^J
90
г/о
360 V
— Oluhj2z(l—2liz) +
+ а,2(/14&-4/?г&)>0,
Где /,. = COS 8, In, s= Sin 0 COS ф Рис- l0-5- Ровная развертка сферы. Знаком
6* , z T' «+» обозначены начально догружаемые зоны.
и ф — сферические
координаты. Для нахождения компонент тензора податливости dzljjdakt во втором
этапе необходимо иметь выражение (п) в общей форме. Так как нас
интересуют производные в самой точке поворота пути, ограничимся
выражением тензора деформаций, которое справедливо только в
окрестности этой точки, т. е. будем интегрировать только по начально
догруженным зонам сферы 50+). Исследуя условие догрузки при
°12-*0. получаем, что это условие выполняется для зон сферы,
показанных на рис. 10.5. Таким образом, догрузка имеет место по
половине сферы: S[0+)=^Sj2.
438 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ (ГЛ. X
Для п = 3 получаем
ёС\0=*' + т а^Л \ 44A -24J^ =
= а1+28 ап°ш-
Критическое напряжение для пластинки при заданных граничных
условиях равно
•--»(&)" (т)'-
Эта формула получена при условии, что связь между приращениями
напряжений и деформаций одна и та же по всей толщине пластинки.
§ 126. Сопоставление расчетных формул
для дюралюмина и стали
Приведенные выше формулы для критических напряжений можно
применить, если известна зависимость а (г) при одноосном сжатии и
растяжении. От этой зависимости можно перейти к соотношению
между at и е;; как было показано в § 115, диаграммы а(е) и аДе,)
совпадут, если принять jo. = 0,5.
Воспользуемся приведенной выше (§ 32) примерной
диаграммой а(е) для дюралюмина Д16Т (стр. 101) и дополним таблицу 2.1
значениями /, г и \л (см. табл. 10.1). Ниже приведена, также
дополненная, таблица 10.2 для стали (Ст. 3).
Таблица 10.1
Расчетные параметры для дюралюмина Д16Т
е-10»
2,67
3,0
3,5
4,0
4,5
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
о,
кг/см1
2000
2200
2460
2640
2780
2900
3080
3200
3320
3400
3450
3560
3640
£с-ю-6,
кг/см1
7,50
7,33
7,03
6,55
6,18
5,80
5,13
4,57
4,15
3,78
3,48
3,24
3,03
кг/см2
7,50
5,96
4,34
3,72
2,55
2,05
1,50
1,17
0,97
0,82
0,82
0,82
0,82
7М0-5,
кг/см'
7,50
6,65
5,50
4,97
3,81
3,22
2,50
2,03
1,72
1,48
1,48
1,48
1,48
<Рс
1
0,98
0,94
0,87
0,82
0,77
0,68
0,61
0,55
0,49
0,46
0,43
0,40
4>к
1
0,79
0,58
0,50
0,34
0,27
0,20
0,16
0,13
0,11
0,11
0,11
0,11
t
1
0,88
0,73
0,66
0,51
0,43
0,33
0,27
0,23
0,20
0,20
0,20
0,20
г
0
0,01
0,03
0,067
0,10
0,13
0,19
0,24
0,29
0,33
0,35
0,38
0,40
I*
0,320
0,320
0,322
0,323
0,326
0,330
0,338
0,344
0,350
0,352
0,356
0,358
0,360
га э л
1 -о
о
.с
Ж
га со ж
ta
О
Я
8*'3
ш га
^ га
л н
га
-J
ю
5 OVO
№ ft со
-J CU СО
П> -1
•о ^ "О
л а>
Ж '
га _j
•о
со о
'га -1
'ta О
54
■а
" s я
я о п>
со 3 я
3 ™ 5
s °" 2
ж Е
Е ">
2 & "
? я
£ ^ -о
о -0 5
У м Я
га ° Я
S Н ta
s 5 ж
» s ж
я « S
3
<ч>
1*
■е- &
о
н
•о
-1
•о
**<
»
га
ы
. со
^
,»•
?
•га
га
£3
a>
К
ta
О
-i
и
5
■§"£ "
-о *1=
«< о Р
& о
Л О "
-J О
<—ч Ш •,
*. н -
-* ж °
о о о
-J so
S a 2
^ О 54
ш J= о
о » -j
■ И ta в
■ Я Я Й
' rt tD S
3
X
&
SJ
о
X
ш
a
о
о
-J
•о
о
ж
ш
я
о
■в-
о
•о
я
^
ta
п> -о со
U » т
ш О
л "о »
Н « |
(В -
■в-
о 43 ■&
эг га
2 "о
» s
» со
a E
о т
^ га
ta H
га о
a
о
ч СО
а со
СО
о »
га б
S Е
«? га
5 »
? о
га
О
» 3
о
■а
2
ta
ta
ta
54 "а- а>
я о -—-
• чз
Ж га
к ж
-j ^-ч га
s кэ о
•о ю^
Ж СО я
4Q <Ъ
О
Ж 1з
га t?
° с
I §*
°^
° R
■£ *
ш R
ч to
S О
ш ta
ta Я
со
ч_-<
О Ж
^ 2
ж г
о
О Ж
5 №
-j a
о чз
а> &э
v га
6 S
•о s
б „
г Е
ю
га
2
О
а
•о
О I
ел
о
О
о
-J
со
а! н
&э га
га 4з
г s
О №
2 =="
О Ш
4 "а
О S
5 E
■е- Я
га о
К ta
-J 1 н
ш i
•-9 ы
^ч Я
a £
о й
| -° га
s „ ж
Cl О g
s s
» о
о
ta
Ж Р
О.
га S
ж w
s 2.
ГО OV
ж "а
^Ж
ta M
4Q ^
СО
V- S
с^ о
?=. s
* н
S сг
g s
fet га
a *
Э ta
s тз
Ж S
га
° 5
■ 2
a
о
ta
ш
га
£
Е я
га х
ш
J5 О
ж a
Е о
£ <">
ш
со со
ш ш
ж a
ории
ta
га
форм
W
ЦИЙ
крит
S
л
го
СКИХ
^
a
тз
"о*ос5С5"о"оос5Ъ1С5а1Ъ>а1оЪоЪ1Ъ1'*.соТо —о'чО
ЮЮЮЮЮЮЮЮЮЮЮЮЮЮЮЮЮЮЮКЛЮЮЮ
ООСЛОСЛОООООООООООООООООО
^эТоТчаТоЪоЪо'^^ЪдЪаЪ^Ъо^оТоЪо'сп'сп^'оо'чО оо">-•
U0i4!DK3cn-<»if»O(DOCnOUOOOOOO00O
o_o о о о о о о oooooooooooo ©j—jo
"оо"о"о о"ооо"о o'—To'^cn'co'i»"—'
слел елслел слел ^ ю о со о> en -<i со ко о
ООООООООООООООООООО—■— —'Ю
СЛСпСЛСгсСЛСлСЛСО^ ОСч^^СлСДчОЮО
°.° °.°.0 °°° 00000»000-° °°° 0-°'-'
^^^^^^4^^э1чз1ч^>о*СоЪ5-^СлЪ>"^"^'чХ)Ъо"сОЧчО"чО
ОООООООООООООООООООООО—■
о "о о oo"oo о о о "о"—'"ю"со"^"сп
КЗ КЗ Ю КЗ Ю КЗ Ю —■ —' КЗ СП Ю КЗ N3 -J СО
©_о_р о о о о о о о о о о о о о о о о о о о —
ооооооооо о'ч--кзТ^сл'отЪо
-а ^1 -а -ач -а-аспсо юсло — octikd
_ —> — к-. «— — к-■ КЗ СО ^.
о о о о о о о о о о о о о о о о о о о о о о о
"-jVjVjVj'cn'cn'cn'cn en "-а от сп ел ^ со"*—'*— — о о о о
^СО—1ОСОСлСОО<--'<--'ООКЗ^СОСОСОСЛ'—'ччДСПКЗО
СЛ КЗ СЛ СЛ
о о о оооо оо oooooooooooo оо
COK3KDKDKD— —'ОООсО-аСЛСО'—'OCOCOCOCO^JM-a
О00О)*чОЧ*00131ООСЛС0О00^СПОСпО1^ЮО
о
я;
J1"
^" о
JC 1
a
5? о
ie I
" ч. °*
ll
•в
•в
~
■^
■р
440 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
Штрих-пунктирный участок сглаживает переход от одной ветви
кривой к другой *).
б„, «г/си
Рис. 10.6. Критические напряжения для дюралюмнновых пластинок
но теории деформаций и по теории течения в сравнении с экспе-
р!шентальпымн данными.
Cm, т/с»1
С учетом эиирек/по
разгрузки, и =- 0,5
Столь Cm 5
По теории
деформаций
, По теории
течения
чО E 50 55 50 65 70
blh
Рис. 10.7. Критические напряжения для стальных пластинок по
теории деформаций и по теории течения.
Имеющиеся в литературе экспериментальные данные относятся
к дюралюминовым пластинкам с упруго защемленными краями [10.16].
*) Об использовании для практических расчетов тех участков кривых,
которые лежат выше предела текучести, см. в § 127.
fm
ДАННЫЕ ДЛЯ ПРАКТИЧЕСКИХ РАСЧЁТОВ
441
С Ц'-;пюн
без цчет
рахрти
«Если воспользоваться коэффициентами закрепления краев, взятыми
из решения упругой задачи, то их можно условно привести к
случаю шарнирно закрепленных краев. Найденные таким образом
экспериментальные точки приведены на рис. 10.6; материал испытанных
образцов близок по механическим свойствам к дюралюмину Д16Т.
Как видим, эти точки лежат вблизи , , ,
!.. иг см'
кривых, полученных по теории дефор- щ?
маций, но без учета разгрузки.
На рис. 10.8 также сделано
сопоставление расчетных данных с
экспериментальными для дюралюминовых
сжатых пластинок, но в иной
интерпретации *). По оси абсцисс
откладываются деформации екр, по оси
ординат— напряжения окр. На рисунке
нанесена кривая акр(екр), относящаяся к
одноосному сжатию, и здесь же
кривые, построенные по теории
деформаций— с учетом и без учета эффекта
разгрузки. Экспериментальные точки
располагаются по-прежнему вблизи
кривой, относящейся к теории деформаций
и найденной без учета разгрузки.
Судя по рис. 10.6 и 10.8,
теория течения приводит к значениям
критических напряжений, лежащих значительно выше
экспериментальных данных. Следовательно, при разработке практических
методов расчета пластинок на устойчивость в настоящее время надо отдать
предпочтение теории деформаций. Возможно, теорию течения удастся
эффективно использовать при исследовании поведения пластинок
с начальными неправильностями. Отметим, что условия простого на-
гружения в этом случае не будут выполняться на протяжении всего
Процесса деформации пластинки.
е,рЛ
Рис. 10.8. Сопоставление расчетных
и экспериментальных данных.
§ 127. Данные для практических расчетов
| Мы пришли к выводу, что впредь до накопления более
обширного экспериментального материала для практических расчетов
целесообразно пользоваться теорией деформаций в том ее упрощенном
варианте, который не учитывает эффекта разгрузки. При этом
расчетные критические напряжения будут, как правило, лежать по
отношению к реальным значениям в запас устойчивости, как при расчете
Сжатых стержней по касательно-модульной нагрузке. Необходимые
* ) См. работу Прайд и Хаймерля (R. A. Pride, G. 1. Heiraerl,
jjHACA Techn. Note № 1817, 1949).
442
ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
расчетные формулы приведены в §§ 120 и 121. Для определения
критического напряжения следует вычислить его значения по
известным формулам и графикам, относящимся к упругой области,
хххх
? - 0,5^ • 0,5?1Ц
*»Р
■0,5p,y!'J(pJpc)
7j-0,25yc'
^ q - 0,3о^ ♦ OMf,
"Р
ssxx
У//У
ц- 0,75^+0,25рк
Рис. 10.9. Поправочные коэффициенты для расчета сжатых
пластинок при различных условиях.
а затем умножить на поправочный коэффициент ц; приближенно
принимается D' = D.
На рис. 10.9 дана сводка формул для поправочного
коэффициента, относящихся в случае сжатия к удлиненным пластинкам, однако
в практических расчетах их можно использовать и для пластинок
с иным отношением сторон.
§127]
ДАННЫЕ ДЛЯ ПРАКТИЧЕСКИХ РАСЧЕТОВ
443
На рис. 10.10 и 10.11 изображена зависимость акр(Ь[К) для
сжатых в одном направлении дюралюминовых и стальных пластинок,
найденная по этим формулам при различных условиях закрепления.
Сц,к1снг
то
\ Si
Y ^-'-*-
/
1 ~^_
3
////.■у///.
/
w>
1*
'/////////.
'у?///////.
Дюрол
дш
■//////■
юмин
Т
"В
\ 6-бщ Л
УУ//////Л///У/////,
w/7??//,
гооо
25 30 35 40 «5 50
ф
Рис. 10.10. Критические напряжения для дюралюминовых пластинок по
приближенным формулам.
20
бч,кг[см
гооо
2600
2403
то
2000
Рис. 10.11. Критические напряжения для стальных пластинок по
приближенным формулам.
Участки кривых, лежащие на рис. 10.11 выше предела текучести,
..показаны пунктиром; для материала с ярко выраженной площадкой
\ текучести следует, по-видимому, считать предел текучести верхней
'-Границей для критических напряжений. Хотя теории пластичности
^ приводят к иному результату, но при этом не учитывается, как было
444 ПРЯМОУГОЛЬНЫЕ ПЛАСТИНКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. X
уже сказано в § 118, своеобразная «неустойчивость» процесса
пластического течения и чувствительность конструкции, испытывающей
этот процесс, ко всякого рода возмущениям. Возможно, пластинка
окажется в состоянии практически перейти порог площадки текучести,
если она будет скреплена по краям с достаточно жесткими ребрами,
изготовленными из иного материала.
Приведем приближенный прием, позволяющий определять
редукционные коэффициенты для сжатой пластинки после потери
устойчивости в том случае, если напряжения в полосах пластинки,
прилегающих к продольным краям, лежат за пределами упругости *) и
если подкрепляющие ребра остаются прямолинейными **). Допустим,
что деформация гх изменяется вдоль ширины пластинки таким же
образом, как и в упругой области. Тогда по мере развития
пластических деформаций неравномерность распределения напряжений
должна сглаживаться — так же, как и в известной задаче о концзнтрации
напряжений вокруг отверстий. Это обстоятельство можно учесть,
применяя уже известные нам формулы для редукционных
коэффициентов и подставляя вместо критического напряжения акр и
напряжения в крайних волокнах ар их истинные значения — независимо
от того, лежат ли они в пределах или за пределами упругости.
*) См. статью Джерара (О. О е г а г d, Journ. of Aeron. Sciences 10
A946), 518—523) и книгу [0.3], стр. 144.
**) Более подробно об этом см. в главе XIV.
ГЛАВА XI
КРУГЛЫЕ ПЛАСТИНКИ
§ 128. Основные зависимости для жестких
и гибких пластинок
Круглые пластинки в измерительных приборах обычно служат
чувствительными элементами (мембранами), реагирующими на
изменение поперечного давления. В некоторых случаях — при изменениях
температуры, в процессе сборки и т. д. — «мембрана» подвергается
действию радиальных сжимающих усилий со стороны опорного
устройства; это может привести к выпучиванию мембраны. В
конструкциях ускорителей элементарных частиц имеются пластинки,
которые облучаются потоком нейтронов; при этом происходит
деформация пластинок, связанная с тепловым эффектом, ядерными
превращениями и изменением кристаллической решетки [11.6], и здесь
может произойти потеря устойчивости пластинки.
Выпучивание наблюдается и в тех случаях, когда пластинки не
связаны по контуру с жестким кольцом и воспринимают только
поперечное давление. При больших прогибах пластинки вблизи контура
образуется сжатая зона, которая и является очагом потери
устойчивости.
В общем случае при потере устойчивости пластинки может
образоваться ряд мелких вмятин различного направления как вдоль радиуса,
так и по окружности. Такое несимметричное выпучивание имеет
место, например, в случае пластинки, испытывающей большие
прогибы, либо пластинки, подкрепленной ребрами. Однако наибольшее
практическое значение имеют случаи осе симметричного выпучивания,
.когда срединная плоскость пластинки переходит в поверхность
вращения (рис. 11.1); подобные частные задачи мы прежде всего и
рассмотрим.
Напомним предварительно некоторые зависимости теории круглых
рластинок, относящиеся к малым прогибам, для несимметричной
^изогнутой поверхности. Будем пользоваться цилиндрической системой
|*оординат, основная плоскость которой совпадает со срединной
плоскостью пластинки (рис. 11.2). Длину радиуса-вектора обозна-
■чим через г, полярный угол — через ф. Мы можем применить все
446
КРУГЛЫЕ ПЛАСТИНКИ
(ГЛ. XI
известные нам соотношения теории прямоугольных пластинок, перейдя
к новой системе координат. Формулы перехода можно получить,
совместив ось х прямоугольной системы с радиусом-вектором г, как
Рис. ИЛ. Осесимыетричиое выпучивание
круглой пластиики.
Рис. 11.2. Система координат при
рассмотрении круглых пластинок.
показано на рис. 11.2. Производные от некоторой функции Z по х, у
выражаются через производные от Z по г, ф следующим образом:
dZ__dZ_ dZ _ 1 dZ
дх дг ' ду г ду '
d2Z d2Z d2Z д (I dZ\ d2Z 1 dZ
A1.1)
dx2 ~ dr2 ' дхду ~ dr\r dcp J' ду2 ~~ t
Оператор V2Z оказывается равным
d2Z . d2Z d2Z , 1 dZ [ 1 d2Z
r dr - - -
dr
V2Z =
dx2
ду2
dr2
&p2
1 d
= TlF[r
dr )~ r
+%■ <»-2>
1 d2Z
Находим по B) кривизны изогнутой поверхности в сечении вдоль
диаметра и в перпендикулярном направлении:
d2w 1 dw l d2w
и<р —"
дг
d<f2
A1.4)
(П.5)
Г Qr2 - T r
Кручение поверхности будет равно
д_П dw \
* дг \г д<р )'
Изгибающие н крутящий моменты определяются прежними
соотношениями:
Mr = D(Hr-\- цхф). Л!ф = 0(хф + |«д. tf = D(l-|i)X. (П.6)
Определим поперечную силу в дуговом сечении Qr. Если
исходить из условия равновесия элемента пластинки, вырезанного двумя
радиальными и двумя дуговыми сечениями (рис. 11.3), то получим
дМг
Мг - Мц ОН
+
гду '
(П.7)
* 128]
ОСНОВНЫЕ ЗАВИСИМОСТИ
447
По сравнению со случаем прямоугольной пластинки новым является
здесь второй член: он должен быть введен, так как моменты Мг и
Мг-\ г-^rfr действуют по дугам различной длины, а вектор-моменты
дМ„
Л*Ф и Л!ф-
дер
</ф составляют ме-
(Q*frdr)(r.dr)df
(»?%№)<*•
жду собой угол d(p.
Поперечное реактивное усилие
Rr, приходящееся на единицу длины
контура н передающееся на
опорное устройство, складывается из
поперечной силы и производной от
крутящего момента (см. [0.3],
стр. 41)
Rr = Qr + -?k- <"-8>
ДОПУСТИМ, ЧТО ПлаСТИНКа ПОД- рис П.З. Момеиты и поперечные силы.
вергается действию усилий or, x
в срединной поверхности (рис. 11.4); растягивающие усилия будем
считать положительными. Дифференциальное уравнение изгиба
пластинки (9.26) перепишется в виде
■^-V4w = Ur(a, w), A1.9)
где
тт , , d2w , A dw , 1 d2w \ .
+*Ur%) •<"■'»)
Рнс. 11.4. Напряжения в сре-
диииой поверхности.
Основные напряжения в срединной
поверхности можно выразить через функцию
напряжений Ф по формулам типа (9.60), если воспользоваться соот
ношениями
__ 1 дФ
Т г дг
1 д2Ф
Л2 Йф2 '
_ д2Ф
°Ч>~ дг2
Мт^У <»■»>
л dw
■ 0 или ~=0.
дг
A1.12)
Граничные условия на контуре пластинки в случае жесткого
защемления имеют вид
При шарнирном опирании будет
«-0. Жг==0 или ^Н-^^ + .-^^о. A1.13)
Для осесимметричных задач все соотношения значительно
упрощаются: любая функция Z будет зависеть только от г, так что
448 Круглые пластинки [гл. xi
вместо частных производных по г мы получим полные производные.
Формулы перехода A) — C) получают вид
дх2 ~~ Or2 ' дхду ' dy2 " r dr ' (H.io)
V2Z = ~ + ~ — =z- — (r—) A1 16)
dr2 r dr r dr \ dr ) ' \ • )
Кривизны и кручение изогнутой поверхности будут равны
d2w 1 dw /11 1 -74
*' = —3?-' *<г = -7-дГ- х==0- A1Л7)
Пользуясь A6) и считая Z = 42w, перепишем уравнение (9) в виде
D 1 d Г rf /Г79 ч! ^2® , 1 * ,,. |т
Выражения A1) принимают форму
Отсюда вытекает зависимость между радиальным и дуговым
напряжениями
Правую часть уравнения A8) можно, следовательно, представить
в виде
1 d ( dw \
lr~d7)'
— -г\га,
г dr
отсюда вместо A8) получаем
Находим первый интеграл этого уравнения:
D±(Vw) = hor*£+Cz.. A1.22)
Очевидно, постоянная С0 должна обратиться в нуль, если область
интегрирования содержит точку г = 0, т. е. если пластинка не имеет
центрального отверстия.
Введем обозначение 6 для угла поворота нормали к срединной
поверхности (рис. 11.5):
е—£■■ (п.*>)
$ 128]
ОСНОВНЫЕ ЗАВИСИМОСТИ
449
Знак минус объясняется тем, что, как видно из рис. 11.5, отсчет
угла 6 происходит в направлении, обратном повороту от оси г к оси z
или w. Вместо A7) получим:
изгибающие моменты равны
r/ I A1.25)
^^(t + ^J-
Выражение для V2k> по A6)
приобретает форму
V2K> = — (-; 1 1, A1.26) Рис. 11.5. Прогиб при осесимметричном вы
\ О.Г Г ! пучивапим.
поэтому для сплошной пластинки вместо B2) имеем
\ dr2 ' г dr г2 / г
A1.27)
Это уравнение будет являться исходным при решении частных задач.
Уравнения нелинейной теории гибких пластинок по-прежнему
имеют вид (9.63), (9.64); оператор L(w, Ф) здесь равен
d2w /_1_ дФ_ _1_ дЧЛ
\г дг ' г2 Лр2 j "+"
/.(W, Ф):
дг2
\_ dw_ , J_ д2иЛ <32Ф
Т дг ~Т~ г2 дц2 i
дг2
■>Мт%)Мт%-У- <"'28»
заменой Ф на w находим L(w, w). При наличии осевой симметрии
будет
Находим первый интеграл уравнений (9.63) и (9.64) аналогично
тому, как это было сделано по отношению к уравнению B1):
г, с! ._, . h йФ dw
О (V%) — _ __
dr ч ' г dr dr
^г(?2Ф) =
2r \
da>\2
rfr
A1.30)
A1.31)
Здесь принято q = Q.
При использовании метода Бубнова—Галеркина в задачах,
относящихся к круглым пластинкам, надо соблюдать осторожность.
Если речь идет об осесимметричных задачах, то естественно
исходить из тех соотношений, которые являются первым интегралом
исходных упавпений. Однако здесь могут получиться различные
2У А. С. Вильмир
450
КРУГЛЫЕ ПЛАСТИНКИ
[ГЛ. XI
результаты в зависимости от структуры подынтегрального выражения
в разрешающем уравнении.
Рассмотрим для примера линейную задачу. Допустим, что прогиб
аппроксимируется с помощью ряда
™ = %АЛ(г). A1.32)
Введем обозначение
* = °{£ + 7%-$)-*°* <»■*»
тогда уравнение метода Бубнова — Галеркина, отвечающее B2),
лучше всего записать в виде
J X^rdr = 0; A1.34)
F
интеграл распространяется на площадь пластинки F. Можно
показать (см. [0.3], стр. 183), что C4) соответствует вариационному
уравнению, составленному по принципу возможных перемещений.
В литературе часто используется уравнение типа
j Xi\,dr = 0, A1.35)
F
которое приводит к несколько иным окончательным зависимостям.
Аналогичное замечание относится к нелинейным уравнениям C0)
и C1).
Перейдем к решению отдельных задач: начнем с определения
критических усилий при осесимметричиом выпучивании пластинки,
затем обратимся к несимметричным задачам и в заключение
рассмотрим закритическую деформацию пластинок.
§ 129. Защемленная по контуру пластинка
под действием радиального сжатия
Исследуем устойчивость круглой пластинки радиуса с,
защемленной по контуру и находящейся под действием радиальных
сжимающих усилий р,
равномерно распределенных вдоль
контура (рис. 11.6). Будем
считать, что точки кон-
Рис, 11.6. Пластинка, защемленная по контуру, под xvna мпглгт гипбпттнп гмр-
действнем радиального сжатия. Уга MUiyi свииидни lmc
щаться в плоскости
пластинки и что изогнутая поверхность является осесимметричной *).
Принимая ог = — р, вместо B2) получим
. Е223
р~ vzzz\
УЖ\ ^
№%А р
*) Эта задача была впервые рассмотрена Брайеиом [9.14] в 1891 г.
§ 129] ЗАЩЕМЛЕННАЯ ПО КОНТУРУ ПЛАСТИНКА 451
или
Обозначим:
-^- = а2; и = га. A1.38)
Вводя в уравнение C7) вместо г переменную и, придем к уравнению
а2^ + "Ж+(-1)е==0' (П-39)
представляющему собой уравнение Бесселя. Интеграл его имеет вид
8 = С,./, (и) + С2К, (а), A1.40)
где Jx{u) — бесселева функция первого рода с индексом 1, К, (и) —
бесселева функция второго рода с индексом 1.
Функция К, (и) при и — 0 становится бесконечно большой; так как
угол поворота 6 в центре, вообще говоря, ограничен (здесь равен
нулю), то следует положить С2 — 0, поэтому
8 = £?!./, (и). A1.41)
Второе из граничных условий A2) принимает вид
0 = 0 при г = с. A1.42)
Считая С^ФО, из A6) находим
J}(ac) = 0. A1.43)
Функция У] (и) выражается рядом
л«=|[1-тШ+то(!У--4 <"-44>
Уравнение A8) удовлетворяется при следующих значениях и —ас
(если исключить и = 0):
a1c=3,83, a2c = 7,02, а3с =10,2,... A1.45)
Пользуясь первым из этих корней, находим по C8) критическое
напряжение:
или
A1.46)
и it
при
A1.47)
Критические усилия высшего порядка при осесимметричном
выпучивании соответствуют корням а2, а3 и т. д.
Укр
Ркр =
к —
a]D
c2h '
c2h
14,68.
452 КРУГЛЫЕ ПЛАСТИНКИ [ГЛ. XI
Определим изогнутую поверхность пластинки после выпучивания.
Интегрируя D1), находим
«> = —^С, J У1(и)</и = 1с1У0(и) + С0. A1.48)
где У0(«) — бесселева функция с индексом нуль:
Л(Ю=1-AJ+тт^('|Г-1Г^(|)б+ ... (П.49)
Постоянную С0 выражаем через Сх, исходя из первого граничного
условия A0):
w = 0 при и —ас. A1.50)
Воспользуемся для решения той же задачи методом Бубнова —
Галеркина. Представим изогнутую поверхность с помощью выражения
W-
:/A-Я2' (П-51)
удовлетворяющего условиям C7) и D5); оно соответствует решению
задачи о малых прогибах пластинки под действием равномерно
распределенной поперечной нагрузки. Находим
Q — —*ZL=*L(L—lL\. A152)
dr с \ г. с3 ' ' \ • /
dr с \ с с3
Выпишем уравнение Бубнова — Галеркина в виде C4):
с
[*(-£-—£-) г dr = 0. A1.53)
о
Найдем выражение для X по C3):
* = -32D/.£-MA/>£ G—$-)' A1-54)
и воспользуемся обозначением
тогда вместо E3) получим
J [32D/p — 4kpfc2(p~ p3)j(p_p3)p</p = 0. A1.56)
о
Вычисления дают
■|"О/-1//>Ас2 = 0. A1.57)
Отсюда при / ф 0
P*f = -l£r- K=16; A1.58)
отклонение от точного значения D7) составляет около 9°/0.
130]
СЛУЧАЙ ШАРНИРНОГО ЗАКРЕПЛЕНИЯ ПО КОНТУРУ
453
§ 130. Случай шарнирного закрепления по контуру
Решим такую же задачу, что и в § 129, но в предположении,
что пластинка шарнирно закреплен! по контуру (рис. 11.7)*).
Второе из граничных условий A3)
имеет вид
4° -и и - = 0 при г = с. A1.59)
dr ' ' г ' '
dr
Приведем формулу
дифференцирования:
dJi (и)
du
-= Jo (")
J, (и)
A1.60)
Подставляя D1) в E9), получим:
J0(ac)-
1
ас
J, (ttC) = 0. A1.61) ^ис- Ч-?- Пластинка, шарнирно опертая по
контуру, под действием радиального сжатия.
Пользуясь таблицами функций У0(й) и Jl(u), можно определить корни
уравнения F1); первые из них оказываются равными (при ц = 0,3)
ai<:=2,05, a,c.-=5,39, a3c = 8,57.
A1.62)
В выражении для критического напряжения коэффициент К
оказывается равным
К = 4,2. A1.63)
Это значение близко к критическому напряжению для шарнирно
опертой квадратной пластинки со стороной 2с, сжатой в двух
направлениях усилиями р; в этом случае мы получали
л2
4,93.
Обратимся к приближенному решению задачи по методу
Бубнова — Галеркина. Аппроксимирующее выражение для w выберем
по-прежнему таким же, как и в случае малых прогибов пластинки
при поперечной нагрузке:
W--
.fa
где
я —
з + и
5 + ц
£. Ь
._ 1 + 1*
3+ц-
A1.64)
A1.65)
*) Первое исследование этой задачи принадлежит А. Н. Диннику [11.4];
в его работах содержится также решение ряда более сложных задач, как,
например, об устойчивости пластинки, лежащей на упругом основании.
454
КРУГЛЫЕ ПЛАСТИНКИ
[ГЛ. XI
Вместо уравнения E6) получим
J [2,2Dabfp-4hpfc2a(p — £р3)](р — £р3)рй?р = 0. A1.66)
о
После вычислений находим
1 Dab C - 2b) f - р F - 8* + 362) hc4f = 0. A1.67)
Величина К равна
„ 166C-26)
*— 6-86 + 36^' ALb8^
При р. = 0,3 будет
я = 0,623, 6 = 0,394. A1.69)
Отсюда
ЛГ = 4,21, A1.70)
что почти совпадает с точным решением.
Отметим, что выкладки для случая защемленной пластинки
вытекают из приведенных здесь, если положить а = Ь—\.
Критическое напряжение для защемленной пластинки получается примерно
в 3,5 раза большим, чем для шарнирно опертой.
§ 131. Асимметричное выпучивание пластинки
До сих пор мы предполагали, что изогнутая поверхность
пластинки при выпучивании является осесимметричной. Исследуем
теперь случай, когда прогиб изменяется не только вдоль радиуса,
но и по дуге *).
Сначала рассмотрим прежнюю задачу, когда пластинка
подвергается действию радиального сжатия. Принимая
о-л = о-ф= ~ Р (П.71)
и пользуясь прежними обозначениями C8) и A6), приводим
уравнение (9) к виду
V%,4-a2V2w=0. A1.72)
Аналогичное уравнение мы получали в главе VII в случае
прямоугольной пластинки, сжатой в двух направлениях (стр. 311).
Выпишем интеграл уравнения G2) в виде
w=[C,iym(ar)+C3rm]sinm9, A1.73)
*) Эта задача рассматривалась Брайеном [9.14] и Надаи [11.13]. Обзор
исследований по устойчивости круглых пластинок и решение некоторых
новых задач содержатся в работах В. М. Макушина [11.5]. Случай, когда
пластинка на одной части контура защемлена, а на другой шарнирно оперта,
разбирался В. Новацким и 3. Олесяком [11.7].
$ 131] АСИММЕТРИЧНОЕ ВЫПУЧИВАНИЕ ПЛАСТИНКИ 465
где Jm(ar) = уга(й) — бесселева функция с индексами /в=1, 2, 3, .. .
Отметим, что выражение rm sinffup является интегралом
уравнения V2w — 0.
Примем, что пластинка защемлена по контуру. Граничные
условия A2) приводят к следующим уравнениям:
4^L^m(ac)m_I==0-
С^т(ас) + С3(ас)т = 0.
A1.74)
Приравниваем нулю определитель системы G4); тогда получим
Г dJm
. d (ar) \r--
ac—mJm = 0. A1.75)
Воспользуемся формулой
дифференцирования
dJm (и) т
du
— Jm—Jm-iV (П.76)
тогда уравнение G5) перейдет в
следующее:
■ (агЛ П И 1 77\ ^ис' "-И. Несимметричное выпучива-
•'т + 1 1ис) ' и> \*1-'<) ние круглой пластинки.
Находя корни этого уравнения при различных т—\, 2, 3
определяем критические напряжения.
На рис. 11.8 показан характер выпучивания пластинки при
различных значениях т. Число узловых диаметров равно т., число
Рнс. II.9. Волнообразование пластинки: а) при одном узловом
диаметре; б) при одном узловом диаметре н одной узловой окружности.
узловых окружностей зависит также от а. Например, при т=\
первый корень уравнения G7) соответствует коэффициенту К = 26,4;
выпученная поверхность показана на рис. 11.9, а. Второму корню
отвечает К = 70,6, здесь появляется одна узловая окружность
(рис. 11.9,5).
456
КРУГЛЫЕ ПЛАСТИНКИ
[ГЛ. XI
mj И И И I Н Н И И
Как видим, асимметричному выпучиванию отвечают ^более
высокие собственные значения задачи, чем осесимметричному; ноэгому
асимметрия может иметь место лишь в случае подкрепленной
пластинки.
Как было уже сказано, несимметричное выпучивание круглой
пластинки может возникнуть и в другом случае, когда нагрузка является
поперечной*) (рис. 11.10).
'I i i i I I i i Примем, что точки контура
пластинки свободно смещаются
£Ш в радиальном направлении. При
достаточно больших прогибах
у контура появляются
значительные сжимающие
напряжения, это и ведет к потере
устойчивости. Особенность
этой задачи состоит в том, что
основное напряженное состояние, предшествующее выпучиванию,
характеризуется наличием переменных усилий в срединной
поверхности и моментов и что пластинка получила предварительно
искривление. Поэтому здесь надо пользоваться основными уравнениями
теории гибких пластинок, учитывающими влияние начального
прогиба <да0 и функции начальных
Рис. 11.10.
Гибкая пластинка пол действием
поперечной нагрузки.
Г
гооо
won
та
т
о
напряжений в срединной
поверхности
Фп
Зависимость
между параметрами
интенсивности давления q* = qcA Eh*
и стрелы прогиба пластинки
£ = /.'Д, найденная в статьях
[11.8], изображена на рис. 11.11.
При изучении симметричных
форм мы получаем
соотношение типа (см. [0.3], стр. 186)
д* = Л?+В1; (а)
Рис. 11.11.
Образование несимметричных форм
выпучивания.
ему отвечает кривая /.
Исследование несимметричных форм
при тфО приводит к таким
же уравнениям, но с другими коэффициентами А, В. Кривая 2
соответствует числу узловых диаметров, равному т =8; кривые для
ближайших значений т — 7; 9 и т. д. лежат выше линии 2.
В точке пересечения кривых / и 2, соответствующей q* = 880
и £ да 9,6, должна произойти потеря устойчивости осесимметричной
формы прогиба; при этом возникает восемь вмятин вдоль окружности.
*) Эта задача была впервые исследована Д. Ю. Пановым и В. И. Фео-
досьевым [11.8]; см. также работу Боднера [11.9].
§ 132]
КОЛЬЦЕВЫЕ ПЛАСТИНКИ
457
После этого одновременно будут возрастать прогиб в центре
пластинки и стрелы прогиба «местных вмятин». В дальнейшем, очевидно,
наступит новое изменение формы волнообразования, с
последовательным возрастанием числа «местных вмятин».
§ 132. Кольцевые пластинки
Во многие конструкции входят кольцевые пластинки, различным
образом закрепленные по краям. Такой кольцевой пластинкой является,
например, стенка кругового
шпангоута фюзеляжа самолета или
подводной лодки. Кольцевые пластинки
встречаются также в
приборостроении. Рассмотрим устойчивость
кольцевой пластинки, (рис. 11.12), если
по ее внутреннему и внешнему
контурам, радиусы которых равны а и Ь,
действуют усилия одинаковой
интенсивности *): р1 — р2 = р.
Если ограничиться случаем
осевой симметрии изогнутой
поверхности, то можно исходить из уравнения B2) с учетом члена CJr;
тогда вместо D0) получим
Рис. 11.12, Кольцевая пластинка пол
действием радиального сжатия.
9 = С,У, (ar)-\- C2K1(arL
С,
Отсюда
™ = - [<Vo (or) -f C2Y0 (or)] + C3 In r +- C4
A1.78)
A1.79)
Можно допустить, что для кольцевой пластинки, подкрепленной по
внутреннему краю, решающим будет асимметричный случай; тогда
надо исследовать более общее уравнение G2). Дополняя G3), находим
w = \c',,Jin(ar) irC',Y,„{ar) f С'ггт + С'^Гт]sin пир. A1.80)
Выражения G9) или (80) должны удовлетворять граничным
условиям на внутреннем и внешнем контурах. Условия, соответствующие
зашемлению и шарнирному опиранию, имеют вид A2) и A3).
Разберем практически важный случай, когда один из краев пластинки
(например, внутренний) может смещаться в направлении оси
пластинки, но при этом не поворачивается. Тогда здесь должно быть
4^ = 0, /?г = 0. A1.81)
*) Устойчивость кольцевых пластинок исследовалась первоначально Ди-
ном (W. R. Dean, Proc. Royal Soc. London, ser. A 106 A924)) и А. С. Лок-
шиным (Comptes rendus A924)). Решение данной задачи было дано для
осесимметричного случая В. М. Макушиным [11.5], а в более общем виде
Ямакн [11.14]. График рис. 11.13 дан по [11.14].
458
КРУГЛЫЕ ПЛАСТИНКИ
[ГЛ. XI
Если подставить в выражения (8) и G) значения кривизн, то
после некоторых преобразований можно привести второе из
условий (81) к виду
д (d2w , 1 dw , 1 d2w \ , 1 — (х д
дг \ дг*
дг
&р2
^ШШ = °' A,'82)
Подчиняя G9) или (80) граничным условиям, приходим к системе
уравнений относительно С, С4; приравнивая нулю определитель
системы, находим критическое значение р.
На рис. 11.13 представлены результаты вычислений*) для
различных случаев закрепления: а — защемление по обоим краям;
b—шарнирное опирание по
обоим краям; с —
защемление по внешнему контуру и
свободное смещение, без
поворота, по внутреннему;
d—шарнирное закрепление
по внешнему контуру и
такое же свободное смещение
по внутреннему. По оси
абсцисс отложено отношение
ajb, по оси
ординат—значение Y%, где К —
коэффициент в формуле
D
/V = KW, A1.83)
На графике указано число т
узловых диаметров,
которому соответствует
наименьшее напряжение при
данном ajb. В предельном
случае afb-*0 и при граничных условиях а и b мы, очевидно, приходим
к случаю сплошной пластинки с подкрепленным центром; изогнутая
поверхность образует здесь один узловой диаметр, как на рис. 11.9, а.
Однако при а/£>>0,1 пластинки выпучиваются различным образом:
защемленная пластинка имеет тем больше вмятин по окружности, чем
она ^же, а шарнирно опертая изгибается осесимметрично (т — 0).
При граничных условиях с и d, и а/Ь->0 приходим к обычному
случаю сплошной пластинки со свободно смещающимся центром,
поэтому здесь будет т = 0, и критические напряжения определяются
формулами D7) и F3).
При возрастании ajb формы изогнутой поверхности получаются
различными; шарнирно опертая пластинка во всех случаях изгибается
0,1 02 0,3 0,4 0,5 0,6 0,7 03 0.9, 1,0
ajb
Рис. 11.13. Расчетный график для случая кольцевой
пластинки при различных условиях закрепления.
*) Для \i = 0,3; принято, что Л мало по сравнению с F — а).
V
§ 133] ЗАКРИТИЧЕСКОЕ ПОВЕДЕНИЕ КРУГЛОЙ ПЛАСТИНКИ 459
осесимметрично. В другом предельном случае ajb->\ мы получаем
такое же критическое напряжение, как если бы удлиненная
прямоугольная пластинка ширины b—а была сжата в двух направлениях
усилиями р и имела бы аналогичные граничные условия по длинным
краям.
В литературе рассмотрены также случаи, когда кольцевая
пластинка подвергается действию радиальных усилий только по
внутреннему [11.11] или внешнему краю [11.12]. В этих задачах
«основные» усилия аг и аф будут изменяться вдоль радиуса. Если по
внутреннему контуру приложены сжимающие усилия, то
напряжения аг будут во всех точках пластинки сжимающими, а а
—растягивающими; если же приложены растягивающие усилия, то наоборот.
Интересным является случай нагружения по внутреннему краю при
а) 6)
Рис. II.14. Кольцевая пластинка, нагруженная по внутреннему
контуру.
Ь~^>а. В случае сжатия (рис. 11.14, а) критическое значение р
равно (при условии, что внутренний край не поворачивается)
а при растягивающих усилиях независимо от условий закрепления
(рис. 11.14, б)
-р** = ш- (П-85)
т. е. в три раза больше, чем при сжатии. В случае сжатия
пластинка изгибается осесимметрично, а при растяжении — с двумя
узловыми диаметрами.
§ 133. Закритическое поведение круглой пластинки
Круглая пластинка способна нести возрастающую нагрузку после
потери устойчивости, так же как и прямоугольная пластинка. Как
мы видели, сплошная пластинка, так или иначе закрепленная по
контуру*) и подвергающаяся действию радиального сжатия, выпучивается
*) Предполагается, что точки контура свободно перемещаются в
радиальном направлении.
460
КРУГЛЫЕ ПЛАСТИНКИ
[ГЛ. XI
по осесимметричной форме. Естественно, что и в начальной стадии
закрнтической деформации осесимметричность изогнутой поверхности
сохраняется. Однако при дальнейшем возрастании нагрузки происходит
образование более мелких волн и симметрия нарушается. Чел выше
нагрузка, тем большим должно становиться число волн но
окружности. Решение этой задачи относилось до сих нор, как правило,
к осесимметричным формам изгиба*) пластинки.
Рассмотрим шарнирно опертую пластинку радиуса с со
свободно смещающимися кромками, сжатую усилиями р. Для исследования
закрнтической области при осесимметричпом выпучивании мы должны
обратиться к общим уравнениям C0) и C1), относящимся к гибким
пластинкам. Примем для w прежнее аппроксимирующее выражение F4).
Подставляя его в правую часть уравнения C1), находим
и, далее,
"»_ */^_4^+^Wc,^. A1.87)
dr 6c2
Постоянные С, и С2 находим из условия ограниченности d^jdr
в центре пластинки (С2 = 0) и условия
("'>'--(т #)„.— '■ <"-88)
Тогда окончательно
^ = ^[(Ъ~4Ь + Ь^-^+4Ь!;-Ь^)-рг.(П.89)
Воспользуемся методом Бубнова — Галеркина и выпишем
уравнение C4); величины X и dr\\dr по C0) и C2) будут равны
X^D±{V™)--~~, ^=~-К- (П-90)
dr v ' г dr dr dr с с3 v '
После интегрирования приходим к уравнению
~ Db C — 2b) f — 1 р F — 8b + 362) hc2f -j-
-4- ~ Eha2p (84 — 1686 + 14062 — 5663 + %4) = 0. A1.91)
Опуская нелинейный член, найдем критическое напряжение ркр но G0).
Определим зависимость между нагрузкой и стрелой прогиба, вводя
*) Оно было дано Фрндрихсом и Стокером в 1939 г. [11.10], Э. И. Гри-
голюком [11.3], применившим метод Бубнова — Галеркина, И. И. Воровя-
чем [11.1] и Боднером [11.9].
§ 133] ЗАКРИТИЧЕСКОЕ ПОВЕДЕНИЕ КРУГЛОЙ ПЛАСТИНКК 461
безразмерные параметры
"Кр
найдем
р* =0,385.
'кр
A1.92)
A1.93)
Величина я* показывает, во сколько раз краевые напряжения р
превышают критическое значение; здесь р играет ту же роль, что
и напряжение в краевых во- ,-ir*
локнах ар для прямоугольных ^ц]
пластинок.
Принимая a, b по F9) для
(А = 0,3, находим из (91) при 7
08
я*« 1 -j-0,26£2. A1.94)
:s
Отсюда
Д=- -= 1.96 л/ 1 — —.
0А
0
//
1/
^£~-~
П — схз
V'n
A1.95)
п"
Рис. 11.15. Диаграмма закритической
деформации круглой пластинки.
Если предположить, что критическое усилие сильно превзойдено,
так что 1/я* можно пренебречь по сравнению с 1, и в то же время
деформации остаются упругими, то получим
£« 1,96 У~г?. A1.96)
'Зависимость (95) изображена па рис. 11.15 пунктирной линией.
Как мы видели, в случае защемленной пластинки решение остается
в силе, но надо принять а = Ь=\. Тогда (91) получает вид
Подставляя значение ркр по E8), получим при / Ф 0
отсюда
я*=1 + 0,15£2;
L^ = 2,6 l/l — —.
п* ' п*
V7F
A1.97)
A1.98)
A1.99)
При 1/л*->0 получим С/уГя*->2,6.
Эффект защемления пластинки по контуру проявляется сильнее
всего в момент выпучивания, по мере роста прогибов он ослабевает.
Поэтому при одинаковой степени превышения критического
напряжения стрела прогиба защемленной пластинки получается несколько
большей, чем для шарнирно опертой.
462
КРУГЛЫЕ ПЛАСТИНКИ
В работах [11.9] и [11.10] эта же задача была решена методом
возмущений*). В качестве параметра выбирается величина е =]/"«*—1,
рас-
равная нулю в момент выпучивания. Величины —-=— и
dw
4F
кладываются в ряды по степеням этого параметра, а затем
подставляются в основные уравнения C0) и C1). Приравнивая коэффициенты
при одинаковых степенях е, приходим к системе линейных
дифференциальных уравнений относительно функций, входящих в ряды. Задача
сводится к последовательному решению этих уравнений. Очевидно,
этот метод применим при относительно малой величине е.
Другой подход к задаче [11.10] состоит в применении метода
а **ч *. I rfO 1 dw
степенных рядов**). Функции — —^ и — -^- раскладываются
3.5
3,0
13
Ю
',3
',»
0,3
о
-0,5
0 0.1 0,2 0,3 0,4 0,5 8,6 0,7 0,8 OS W
г/с
Рис. 11.16. Дуговые напряжения при за-
критической деформации пластинки.
С
Р
/гул*
_
я*
./
1,26^.
йи
п'-!4,7
1
■—-—*"""
—
г dr r dr
в ряды по степеням г; первый член
ряда определяет значения этих
функций в центре пластинки, при
/■ = 0.
Пользуясь граничными
условиями, сводим задачу к решению
системы трансцендентных уравнений.
На рис. 11.15 представлены
результаты вычислений по методу
' Р
Рис. II. 17. Изогнутая поверхность круглой
пластинки на различных ступенях закрити-
ческой деформации.
рядов для случая шарнирного опирания (сплошная линия); она лежит
сравнительно близко к кривой, полученной по методу Бубнова —
Галеркина. На рис. 11.16 изображен закон распределения аф вдоль
радиуса при различных п*. Как видим, при л* =14,7 во всей
центральной зоне пластинки, занимающей около 0,7с, имеют место
растягивающие напряжения. Сжимающие напряжения концентрируются
в «пограничной зоне», у контура пластинки. При этом центральная
часть пластинки становится почти плоской, как изображено на
рис. 11.17 для л*=14,7. В пределе эта центральная часть
охватывает всю пластинку, как показано на рис. 11.17 пунктиром.
Сопоставление данных, относящихся к напряжению ац в центре пластинки
*) Этот метод был ранее предложен для аналогичной задачи П. Я. По-
лубарнновой-Кочиной, см. ссылку на стр. 372.
**) Метод рядов был применен Уэем при решении задачи о больших
прогибах круглой пластинки при действии поперечной нагрузки.
ЗАКРИТИЧЕСКОЕ ПОВЕДЕНИЕ КРУГЛОЙ ПЛАСТИНКИ 463
для шарнирно опертых и защемленных пластинок, дано на рис. 11.18.
Штрих-пунктирная линия относится к решению по методу Бубнова —
Галеркина.
Таким образом, при значительном п* функции Фит резко
меняются лишь у самого края пластинки. Это позволяет упростить
исходные уравнения и воспользоваться асимптотическим решением
задачи о краевом эффекте, подобно тому как это делается в теории
Рис. П.18. Напряжения в центре шарнирно опертой и
защемленной пластинок при закритической деформации.
оболочек [12.6] и при рассмотрении пограничного слоя в
аэродинамике. Такое асимптотическое решение задачи привело к следующим
результатам. Для шарнирно опертой пластинки при я*->оо получаем:
t, = 2yif, A1.100)
что очень близко к (96). Напряжения в центре при я*->оо
приближаются к значениям, показанным на рис. 11.18.
Все эти данные относятся к осе симметричному выпучиванию.
При некотором значении п*, приблизительно равном п* =15 для
шарнирно опертой пластинки, в пограничной зоне должно произойти
«вторичное» выпучивание; осесимметричное изогнутое состояние
пластинки становится неустойчивым. Исследование этого явления
представляет собой интересную задачу.
ГЛАВА XII
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
§ 134. Отличительные черты задач об устойчивости оболочек
Перейдем к задачам, относящимся к устойчивости оболочек. Эти
задачи представляют особый интерес для многих областей новой
техники, а также для всех тех «устоявшихся» областей, в которых
происходит внедрение облегченных конструкций и новых материалов.
С расчетами на устойчивость оболочек различной формы, гладких
и подкрепленных, изотропных и анизотропных, деформируемых в
пределах и за пределами упругости, мы неизменно сталкиваемся прежде
всего при конструировании летательных аппаратов и их двигателей.
Около полувека тому назад И. Г. Бубнов отмечал, что корпус корабля
почти целиком состоит из пластинок. Теперь мы можем сказать, что
конструкция летательного аппарата состоит главным образом из
оболочек. Криволинейные панели обшивки в этих конструкциях
представляют собой пологие оболочки; вместе с тем, корпус летательного
аппарата в целом можно рассматривать как подкрепленную оболочку.
Запросами авиационной техники прежде всего и объясняется
интенсивное развитие теории устойчивости оболочек в последнее время.
Расчеты оболочек на устойчивость имеют существенное значение при
проектировании надводных и подводных кораблей, тепловозов и
вагонов, трубопроводов, резервуаров, куполов и покрытий в
инженерных сооружениях и т. д.
Поведение оболочек при потере устойчивости существенно
отличается от поведения стержней и пластинок. Выпучивание оболочек,
как правило, сопровождается появлением не только напряжений изгиба,
но и дополнительных напряжений в срединной поверхности (ценных
напряжений), в то время как для стержней и пластинок мы могли
учитывать только напряжения изгиба *). Некоторая часть потенциала
внешней нагрузки «расходуется» в случае оболочки на увеличение
энергии изгиба, а другая часть — на изменение энергии срединной
поверхности. Соотношение между этими величинами зависит от того,
какую конфигурацию принимает оболочка при выпучивании.
*) Как мы видели, при исследовании закритической деформации
пластинок также учитываются напряжения того н другого типа.
£Т'
§ 134] ОТЛИЧИТЕЛЬНЫЕ ЧЕРТЫ ЗАДАЧ ОБ УСТОЙЧИВОСТИ ОБОЛОЧЕК 465
Представим стержень, пластинку и оболочку как системы с одной
степенью свободы и рассмотрим характерные для них диаграммы
зависимости между нагрузкой Р и параметром прогиба / в задачах
устойчивости (рис. 12.1). Будем считать, что прогибы остаются
малыми но сравнению с габаритными размерами конструкции, но
могут быть сравнимы с высотой сечения стержня или толщиной
пластинки и оболочки. Участок ОА относится во всех случаях
к исходным равновесным состояниям, которые здесь считаются без-
моментными, а участки AD и АС — к изогнутым, моментным
равновесным состояниям.
/
,
с
А
D
а)
Рис. 12.1. Диаграммы «нагрузка —прогиб» для стержня и пластинки.
В случае стержня диаграмма P(f) имеет вид горизонтальной
линии (рис. 12.1, а), что соответствует «безразличному» равновесию.
Для пластинки мы получаем кривую закритических устойчивых
состояний, симметричную относительно оси ординат (рис. 12.1, б):
очевидно, что для идеально плоской пластинки, как и для идеально
прямого стержня, оба направления прогиба (•-}-/) и {—f) являются
равноправными. Между тем, в случае оболочки ветвь изогнутых
равновесных форм CARD оказывается несимметричной, как показано
на рис. 12.2.
Такое своеобразие в поведении оболочки можно пояснить на
примере арки-полоски АСВ, показанной на рис. 12.3 и закрепленной
по краям А, В. Если придать арке дополнительный прогиб (—/)
от центра кривизны, как показано пунктиром, волокна срединного
слоя должны удлиниться. Напротив, при прогибе (+/) к центру
кривизны (сплошная тонкая линия) срединные волокна укорачиваются.
Когда арка получает очертание АС'В, зеркальное по отношению
к исходному, напряжения в срединном слое станут равными нулю.
Лишь при дальнейшем изгибе (по штрих-пунктирной линии)
срединные волокна будут удлиняться. Для оболочки связь между усилиями
растяжения— сжатия в срединной поверхности более сложная, чем
в случае арки, так как задача является двумерной. Но общая
30 А. С. Вольмир
466
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
тенденция остается той же: оболочка «предпочитает» выпучиваться
внутрь, к центру кривизны*). Это показано на рис. 12.4 на примере
цилиндрической панели, сжатой вдоль образующей.
Рис. 12.2. Характерные диаграммы «нагрузка —прогиб» для оболочки
идеальной формы и с начальной погибью.
Вернемся к рис. 12.2; здесь прогиб к центру кривизны
откладывается по оси абсцисс вправо, а от центра—влево.
Несимметричность диаграммы равновесных состояний связана с тем, что ветвь
диаграммы ABF лежит ниже
точки разветвления {бифуркации) А.
На участке АВ равновесные
формы являются неустойчивыми, а на
-f
JJjff
/7
Рис. 12.3. Прощелкиваиие арки-
лоски.
Рис. 12.4. Цилиндрическая панель
«предпочитает» выпучиваться к
центру кривизны.
участке BF — устойчивыми. Участки АС и FD соответствуют
устойчивым состояниям. Но подобную диаграмму мы уже получали
в главе I (стр. 78) для сжатого стержня, снабженного нелинейной
упругой опорой. По аналогии с этой задачей в теории устойчивости
*) Здесь имеются в виду оболочки, у которых центры кривизны всех
нормальных сечений лежат по одну сторону от срединной поверхности
(см. § 135).
$ 134] ОТЛИЧИТЕЛЬНЫЕ ЧЕРТЫ ЗАДАЧ ОБ УСТОЙЧИВОСТИ ОБОЛОЧЕК 467
оболочек применяются понятия верхней и нижней критических
нагрузок*). Под верхней критической нагрузкой Р3 будем по-прежнему
понимать наибольшую нагрузку, до которой начальное равновесное
состояние является устойчивым в малом, т. е. по отношению к
соседним равновесным состояниям. Применительно к модели, которая
описывается диаграммой OABD, верхняя критическая сила
соответствует точке бифуркации равновесных состояний. Под нижней
критической нагрузкой Ра будем подразумевать нагрузку, до которой
начальное состояние является единственным устойчивым состоянием **);
при нагрузках, лежащих ниже Рп, обеспечивается устойчивость
оболочки не только в малом, но и в большом.
Допустим, что исходная форма оболочки — идеальная
(отсутствуют какие-либо начальные прогибы), а нагружение является
статическим и происходит таким образом, что напряженное состояние
является строго безмоментным; тогда прикладываемая к оболочке
нагрузка должна возрасти до верхнего критического значения Рв,
после чего оболочка совершит скачок (хлопок) от равновесного
положения А к положению F, после чего нагрузка вновь начнет
увеличиваться ***), но уже но ветви FD. Обратный процесс состоит
в падении нагрузки но линии DB, «выхлопу» оболочки по линии ВО,
а затем в новом снижении нагрузки от О до О. Следовательно,
скачок при разгрузке происходит на уровне нижней критической
силы Ра. Что касается равновесных состояний, соответствующих
линии АС, то они обычно не реализуются, так как им отвечает более
высокий уровень энергии.
Реальные оболочки всегда имеют, однако, те или иные
начальные неправильности формы. Для таких оболочек исходное
состояние, как правило, уже нельзя считать безмоментным, так что ветвь
равновесных состояний при нарастающей нагрузке уже не будет
совпадать с осью ординат. Во многих случаях диаграмма P(f) по
рис. 12.2 и здесь состоит из устойчивых ветвей О А' и В'1У и
неустойчивой А'В'. Переход от одного устойчивого состояния к
другому также должен происходить скачком — на уровне А'. Нагрузки,
соответствующие точкам А' и В', будем, по аналогии с
предыдущим случаем, называть верхней и нижней критическими нагрузками
Рв и Рн. Мы предполагали, что начальный прогиб направлен в ту
же сторону, что и дополнительный, — преимущественно к центру
; *) Эти понятия были впервые введены Карманом и Цянь Сюэ-сэнем
i|13.35] в 1939 г.; более подробно они разобраны в § 246.
'.' **) Напоминаем, что здесь рассматриваются прогибы, сопоставимые
{« толщиной оболочки: они могут превышать толщину в несколько раз, даже
Щ Ю—20 раз, но все же должны оставаться малыми по сравнению с радиу-
JWmh кривизны. Поэтому, например, случай полного продавливания резино-
,8ого мяча в рамки этой теории не входит.
***) Здесь предполагается, что нагрузка в процессе хлопка поддержи-
Лается постоянной. Другие варианты изменения нагрузки разбираются ниже,
> §§ 146 и 149.
i
¥ зо*
468
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
(ГЛ. XII
кривизны. Ест исходный прогиб направлен от центра кривизны, то
начальная ветвь ОЛ1 будет идти влево от оси ординат. Другие
возможные равновесные формы характеризуются участками NB" и В"П".
Здесь также имеет место (хотя и не во всех случаях) перескок от
ветви ОМ к ветви B"D": уровень энергии для точек второй из этих
ветвей может оказаться значительно ниже, чем для соответствующих
точек первой ветви.
Как видим, начальные неправильности формы и другие
возмущения проявляются в случае оболочки совсем иначе, чем для пластинки;
они приводят к сичыю.чу снижению верхней критической нагрузки.
Поэтому экспериментальные данные, относящиеся к критическим
нагрузкам для оболочек, обычно характеризуются значительным
разбросом*). Само выпучивание оболочек на практике во многих
случаях сопровождается резким хлопком. Отсюда вытекает вывод, что
эксплуатационная нагрузка должна выбираться с известным запасом
по отношению к верхней критической величине; коэффициент запаса
зависит от характера нагрузки, технологии изготовления конструкции
и т. д. Если в рассматриваемом случае нижняя критическая нагрузка
резко отличается от верхней, то это является своего рода знаком
опасности: здесь надо ожидать большой разброс реальных критических
усилий, значительную реакцию конструкции на разного рода
возмущения и т. д. На первый взгляд было бы желательным исходить
в практических расчетах из того, чтобы эксплуатационная нагрузка
не превышала нижней критической величины: последняя сравнительно
слабо зависит от различных случайных факторов и является более
стабильной, чем верхняя критическая нагрузка.
Еще несколько лет назад — в начале 60-х годов — можно было
выдвигать такое требование более определенно: во многих случаях
теоретическое значение нижней критической нагрузки оказывалось
близким к нижней границе экспериментальных данных. Но
уточненные вычисления, выполненные в самое последнее время с помощью
ЭЦВМ, привели к новым значениям нижней критической нагрузки,
лежащим в наиболее характерных задачах — например, при осевом
сжатии цилиндрических оболочек — значительно ниже, чем в
предыдущих решениях: вновь найденные величины оказываются примерно
в десять раз меньше верхних критических значений. Правда,- есть
основания полагать, что эти новые величины нижних критических
нагрузок отвечают таким ветвям равновесных состояний, переход
к которым требует преодоления значительного энергетическо о
барьера и является поэтому маловероятным. Но не надо забывать, что
в отдельных случаях нижняя критическая нагрузка является даже
отрицательной, т. е. имеет обратное направление по сравнению
*) За исключением таких лабораторных испытаний, в которых
обращается особое внимание на технологию изготовления оболочек и условия
нагружения.
$ 135] НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 469
с основным состоянием. Следовательно, общее требование, чтобы
эксплуатационная нагрузка была меньше нижней критической
величины, трудно выполнить, да оно и является излишним. Наиболее
обоснованным всегда будет расчет, непосредственно учитывающий
влияние начальных неправильностей формы и иных возмущающих
факторов. Если речь идет о большом числе одинаковых элементов
конструкций, изготовляемых в идентичных условиях, то самый
естественный подход при этом — статистический (см. главы XXV и XXVI).
Так или иначе практические расчеты на устойчивость
целесообразно вести с учетом поведения оболочек при больших прогибах.
Поэтому в дальнейшем будем, как правило, параллельно рассматривать
одну и ту же задачу, подходя к ней с точки зрения устойчивости
в малом и в большом. В первом случае надо исходить из линейной
теории жестких оболочек, во втором — из нелинейной теории гибких
оболочек.
Обратимся к основным положениям линейной и нелинейной
теорий.
§ 135. Некоторые сведения из теории поверхностей
Если подходить к оболочкам с геометрической точки зрения, то
они характеризуются, прежде всего, формой срединной поверхности.
Поэтому при выводе основных зависимостей, относящихся к
оболочкам, приходится пользоваться
многими понятиями общей теории
поверхностей *).
Рассмотрим участок
поверхности, показанный на рис. 12.5, и
выберем на нем систему (семейство)
линий U таким образом, чтобы
каждая из них соответствовала
определенному значению
некоторого параметра \: с, = |0, 1 = 1г,
| = ?2 и т. д. Далее, выберем НО- Рис. 12.5. Сеть координатных
ВуЮ Систему ЛИНИЙ V, каждая ИЗ верхиости.
которых отвечала бы некоторому
значению второго параметра ц: Л = 1Ъ "П == ^li. Л = 'П2 и т- Д-. и при
этом так, чтобы липни V пересекали все линии U. Выполним
требование, чтобы через любую точку поверхности проходила одна и
только одна линия каждого семейства; выбранная таким образом
сеть линий называется правильной. Если линии систем U и V
пересекаются под прямым углом (т. е. угол между касательными
к этим линиям равен прямому), то сеть называют ортогональной.
линии на ио-
*) См., например, курсы дифференциальной геометрии М. Я.
Выгодского (М., 1949), А. В. Погорелова (Харьков, 1961), П. К. Ращевского
(М., 1956), С. П. Финикова (М„ 1961).
470
ОБЩИЕ СВЕДЕНИЯ OB ОБОЛОЧКАХ
[ГЛ. XII
Конкретный смысл параметров |, ц может быть различным. Для
примера на рис. 12.6 изображены координатные линии на участке
цилиндрической поверхности, причем линии U совпадают с
образующими, а линии V лежат в поперечных сечениях цилиндра.
В качестве параметров £, ц здесь можно избрать непосредственно
длины отрезков, отложенных вдоль линий. На рис. 12.7 показан
участок сферической поверхности.
Здесь удобно пользоваться
географическими координатами и в
качестве параметров |, г| выбирать
угол широты а и угол долготы р.
Заметим, что в этом примере
Рис. 12.6. Координатные линии иа цилин- Рис. 12.7. Географические координаты
дрической поверхности. на сфере.
полюс А является особой точкой, так как для него не выполняется
требование правильности координатной сети.
В случае пологой поверхности М, близкой к плоскости N,
параметрами могут служить декартовы координаты
соответствующих точек плоскости (рис. 12.8) либо
полярные координаты этих точек. /,/ду
Как бы ни были выбраны параметры
£, т), положение каждой точки
поверхности определяется их значениями; они
являются криволинейными координа-
'У
р=х, с,-х2 i,-Zj
Рис. 12.8. Координатные линии,
характеризующие пологую поверхность.
Рис. 12.9. Радиус-вектор точки
поверхности как функция
криволинейных координат.
тами точек поверхности; координата | отсчитывается вдоль линий
Л = Лс Л = Л1> • ■ •. а координата г| — вдоль линий | = |0, \ = £,, ...
Сами линии семейств U и V носят название координатных линий.
§ 135] НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 471
Пш
Если обозначить через г радиус-вектор точки поверхности
относительно произвольного начала О (рис. 12.9), то г будет однозначной
векторной функцией криволинейных координат £ и ц:
r = r(t л). A2.1)
Проведем векторы гиг -f-A/% соответствующие двум соседним
точкам М и М' линии т)= const. Относя приращение функции Лг
к приращению параметра Л£ и считая Л£—>-0, получаем в пределе
частную производную от г по \:
( Аг \ — £L
W/де-И)- Я'
Направление вектора drjd\ совпадает с направлением касательной
к линии £ в данной точке; поэтому он носит название
координатного вектора. Второй координатный вектор дг/дц направлен вдоль
касательной к линии г) (рис. 12.10).
Плоскость L, проведенная через векторы -^ и -£-, является
плоскостью, касательной к поверхности в точке М. Линия,
перпендикулярная к плоскости L,
представляет собой нормаль к
поверхности; направление нормали
определяется векторным произведением
векторов drjd% и дг/дц:
" ~~ dl X dr, •
Единичный вектор нормали равен
П-
dl х dr,
dly~K
dl x dr.
A2.2)
Тле.
12.10. Координатные векторы
в точке М поверхности.
в знаменателе здесь — абсолютная величина N. Вектор я не должен,
конечно, зависеть от выбора параметров £, ц. Если координатные
линии составляют угол а, то, пользуясь определением скалярного
произведения, получим
cosct =
dr dr
dl dr)
«12
dr
dl
dr
Va
ЦЙ22
A2.3)
здесь введены обозначения:
Пользуясь C), находим
а.-,—
%%■ -п-т A2-4»
sin a
/апап
A2.6)
472
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
где
0)-
У а
11а22
12'
Исходя из определения векторного произведения,
к виду
дг
п
dl л дг\
A2.6)
приводим B)
A2.7)
Поставим перед собой цель исследовать поверхность вблизи
некоторой точки М (рис. 12.11). В первом приближении бесконечно
малый участок поверхности можно заменить бесконечно малым
участком касательной плоскости. Воспользуемся этим, чтобы
определить дифференциал ds дуги, проходящей через точку М.
Направление дуги будет фиксировано, если задано отношение
соответствующих дифференциалов криволинейных координат di\ : d.\ (при d\ Ф 0).
Будем под dr понимать дифференциал радиуса-вектора г при
перемещении из точки М по касательной к данной дуге. Квадрат ds
можно вычислить, составив скалярное
произведение
ds2 = dr ■ dr = dr2.
Полный дифференциал dr равен
dr
dr = -
■dl
A2.8)
Рис. 12.11. К исследованию
поверхности вблизи точки М в первом
приближении.
ности, а величины я.
отсюда
ds2 = an dt? 4-2and\ dr\-f- a02drf.
A2.9)
Выражение (9) носит название
первой квадратичной формы поверх-
а22 по D) — коэффициентов первой
квадратичной формы. Эти коэффициенты зависят от криволинейных
координат для точки М, но не зависят от их дифференциалов;
следовательно, для данной точки поверхности величины ап, а12, а.п
определяются однозначно. Зная первую квадратичную форму
поверхности, можно найти угол между любыми линиями, проходящими через
эту точку (т. е. угол между касательными к этим линиям); примером
может служить формула C), позволяющая найти угол между
координатными линиями. Интегрируя выражение для ds вдоль некоторой
кривой, можно вычислить полную длину дуги кривой.
Так как при исследовании выпучивания оболочек важно
определить удлинения и сдвиги в срединной поверхности, т. е. изменения
длин дуг и углов между дугами, то, очевидно, первая квадратичная
форма срединной поверхности оболочки должна играть в таком
исследовании существенную роль. Отметим, кроме того, что с помощью
первой квадратичной формы можно вычислить площади тех или иных
участков поверхности.
§ 135] НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 473
»и =
fl,.,=
а22 —
т+т+т-
дх дх . ду ду . дг дг
r)j r)n ' dj r)n ~*~ dl 7h]
;i"^r) +Ыг) +Ыг)'
Будем в дальнейшем обозначать первую квадратичную форму через /:
/=■«!! dl2 -f-2fl12<?|rfTi -)- а22 rfrl'- A2.9a)
Для ортогональной координатной сети будет по C) а12 = 0, при этом
I = andl2-{-a2.idn2. A2.10)
Если радиус-вектор г выразить через декартовы координаты х,
у, г, то по D) получим:
A2.11)
Далее исследуем поверхность во втором приближении и
выясним, как отклоняется поверхность от касательной плоскости в
окрестности точки касания. Проведем
через М произвольную линию /,
лежащую на поверхности, и
касательную т к этой линии (рис. 12.12).
Представим себе плоскость,
проходящую через касательную к линии I
и некоторую точку N, лежащую на
линии вблизи точки касания М.
Проследим за изменением
положения этой плоскости, устремив длину
дуги MN к нулю; в пределе
получим гак называемую
соприкасающуюся плоскость S. Если бы
кривая / лежала в одной плоскости,
то эта плоскость являлась бы
соприкасающейся для всех точек
кривой. Нормаль к кривой, лежащая
в соприкасающейся плоскости,
называется главной нормалью.
Единичный вектор (орт) главной
нормали обозначим через v; он показан на рис. 12.12. Если г—радиус-
вектор точки М, a s — длина дуги, отмеряемой вдоль линии, то орт
касательной будет drjds. Производная от этого вектора по s,
равная d2r!ds2, определяет кривизну кривой k и называется вектором
кривизны; он направлен вдоль орта главной нормали v, подобно
нормальному ускорению при движении точки по кривой. Таким
образом, приходим к известной формуле Френе:
d2r
Рис. 12.12. К исследованию поверхности
вблизи точки М во втором приближении.
d$'d
= k\.
A2.12)
474
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
Спроектируем вектор кривизны линии / на нормаль к
поверхности, как показано на рис. 12.12; тогда найдем так называемую
нормальную кривизну линии kn. Для определения kn составим
скалярное произведение вектора kx на орт нормали к поверхности п\
тогда найдем:
d2r
kn — kxn, или &п = -т-т». A2.13)
Если обозначить через 8 угол между направлениями v и п, будет
v» = cos8 и, следовательно,
kn = kcosQ. A2.14)
Эта зависимость позволяет определить кривизну k любого
наклонного сечения поверхности по нормальной кривизне kn {теорема
Менье).
Выберем в качестве параметра, определяющего положение точки
на кривой /, длину дуги s; тогда криволинейные координаты точки
будут функциями s, т. е. £ = £(s), ti=ti(s). По (8) получим
«L. = %f+*L^. (,2.15)
ds dl ds ' dr\ ds ч '
Дифференцируя это выражение вновь по s, найдем
ds2 ~~ dl ds2 ~т~ дт\ ds2 ^ dg2 \rfs/ д1дц [ds I \ ds ) ~^drf [ds } '
A2.16)
Выпишем скалярное произведение • A3), учитывая, что каждый
из координатных векторов дг\д\ и дг/дц ортогонален орту нормали п;
тогда будет
*.-*•($?+»»№+*>№■ <12-17>
где
».1=»ЦГ. ».2 = «5|^-. »22 = Я^Г- A2.18)
Выражение A7) можно переписать в виде
ь — П — bnde,2 + 2bndldr\ + b22drf ,
K" I —aud? + 2altdtdr\ + a„drf ^*А">
под II здесь понимается выражение, построенное аналогично (9а) и
носящее название второй квадратичной формы поверхности:
II == bn dl2 4- 2*i2 dl d\] -f b22 drf. A2.20)
Величины bn, b12, b22 носят название коэффициентов второй
квадратичной формы. Судя по формулам A8) — B0), для всех линий
на поверхности, имеющих общую касательную, т. е.
характеризуемых одним и тем же соотношением dx\: d\, нормальная кривизна kn
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 475
будет одна и та же. Следовательно, величина kn дает суммарное
представление о кривизне поверхности по выбранному направлению; ее
можно назвать нормальной кривизной поверхности.
Если в A9) положить й?г| = 0, а затем a\ = Q, то получим
соответственно &и=^||/Я||, &22 — b22laT2- Таким образом, коэффициенты
второй квадратичной формы Ьп и Ь22 характеризуют нормальную
кривизну линий ц = const и \ = const. Что касается коэффициента 612, то
он отвечает параметру кручения поверхности. Внося G) в A8), пред-
, I (д2г дг дг\
ставим скалярно-векторные произведения в виде: £>,, = — -r-г- -^г^— '-
<>> \ д£ дс, дг\,
. 1 l д2г дг дг\ и 1 /д2г дг дг^
0,2 =
) - Ь.п= - ^— — — j . где о) определяется по F).
12 о \д\дт\ д% дц,
Если выразить г через декартовы координаты х, у, z, то для Ьи
можно составить определитель
д2х
dl2
■дх
дг
дх
дц
11 <о
д2у
dl2
ду
dl
ду
дц
д*г
д\2
dz
dl
дг
дг\
A2.21)
Аналогичные определители можно составить для Ьп и Ь22-
Подойдем к определению второй квадратичной формы с иной
точки зрения. Принимая по-прежнему длину дуги кривой s в качестве
параметра, выпишем соотношение —г—п = 0. Дифференцируя это
произведение по s, получим
tf2r
ds2
dr dtt „
ds ds
Сопоставляя эту зависимость с A3) и A9), находим
11 = — dr ■ dn.
Таким образом, вторая квадратичная форма зависит от того, насколько
интенсивно изменяется в окрестности данной точки ориентация орта
нормали п.
Сопоставляя сведения, относящиеся к первой и вто рой
квадратичным формам поверхности, можно сказать, что форма I
характеризует длины дуг, углы между кривыми и площади областей на
поверхности, в то время как форма II позволяет определить нормальные
кривизны поверхности. Можно показать, что формы I и II, взятые
вместе, полностью определяют очертание поверхности с точностью
до ее положения в пространстве.
Перейдем к исследованию различных нормальных сечений
поверхности, проведенных в какой-либо точке М поверхности (рис. 12.13),
т. е. сечений, содержащих нормаль к поверхности п. Если зафиксн-
476
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
ровать направление касательной, через которую проходит некоторое
сечение Р, то кривизна этого сечения будет равна по абсолютной
величине нормальной кривизне поверхности kn в соответствующем
направлении: векторы v и п составляют для нормального сечения
угол 0 или л. Проследим за изменением k„ при повороте сечения
вокруг нормали к поверхности при переходе, например, от плоскости Р
к плоскости R. Такой поворот равносилен изменению отношения
с(ц: d\ при фиксированных ц и £. Для гладкой поверхности это
отношение меняется непрерывно и вместе
с тем периодически; следовательно,
кривизна kn должна принимать при
определенных положениях сечения максимальное
и минимальное значения. Найдем эти
значения; для этого перепишем A9) в вид:
bu d% н- 2bl2dl d4±b22drf — kn (ап </£Ч
-Jr2ai2d£>di]Jra22dr(i) = 0. A2.22)
Примем вначале, что дифференциал di\
постоянен; дифференцируя B2) по d\ и
приравнивая производную нулю, получим
bn d\ -}-bndi\ — kn (аи d% ~f ai2dx\) = 0.
Аналогично, считая постоянным
дифференциал d\, находим
b\-id\ -f- b22 dr]— k„(al2d\-t- a22 d\]) = 0.
Рис. 12.13. Нормальное сечение
поверхности.
Исключим отсюда отношение dy\: d\\ тогда придем к квадратному
уравнению относительно kn:
(аий22 - йп) kl - (fl|,*M + «22^11 ~ 2fl12M kn + (*, А2 ~ *|2) = 0.
A2.23)
Отсюда находим два экстремальных значения k„, которые
называются главными кривизнами поверхности в данной точке;
соответствующие направления, определяемые отношением di\ : d% no B2),
носят название главных направлений. Будем считать, что
кривизна kn<i отвечает линии ц = const, а &„ — линии | = const;
тогда из B2) получим, считая последовательно rfn = 0 и ^ = 0:
a^?k„ % = 0, bt7—a,2k
\2Kn, i) ■
:0.
Принимая kn< i ф kn> находим для главных направлений ftj2 = 0,
а]2 = 0. Отсюда следует, что главные направления взаимно
перпендикулярны. В дальнейшем будем обозначать главчые кривизны
через kl и k2.
Проведем линии на поверхности таким образом, чтобы в каждой
точке касательные к ним шли вдоль главных направлений. Такие
5 135] НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕН 477
кривые называются линиями кривизны; их удобно выбирать в
качестве координатных кривых.
Определим произведение и полусумму главных кривизн, исходя
из уравнения B3):
г . , b\\h22 — h\2 ,,00|,
I — klk2 = я-, A2.241
апа22 — а,2
Х__ kx+-k2 __ 2al2bl2 -anb22—anbn ]22-.
2 2(апа22 —rtf2)
Первая из этих величин называется гауссовой кривизной
поверхности в данной точке, а вторая — средней кривизной.
В качестве примера вычислим коэффициенты первой и второй
квадратичных форм и гауссову кривизну для поверхности, заданной
уравнением z = f(x, у). Примем х, у в качестве криволинейных
координат: х —|, у = ц; тогда по A1) и F)
1 , idz\2 dz дг . . jdz\2
\дх ! ' J- дх ду ' '-- " ' \ ду
ОJ:
'+(£Ь(£)'
} A2.26)
/. l oz , I o-z , i о-г /шли
£„= — -Д-»-. 6,.,— — , , , Й„, = --гт. A2.2I
и, далее, по формулам тина B1)
1 д2г . __ 1 d2z „А_^£
и дх2 ' '-"" и <9л-ду ' 2: ел ду''
Отметим, что для пологой оболочки при (dz:dxJ<^\, (dz'dy)-<^\
можно принять м« 1, тогда коэффициенты Ьц будут выражаться
так же, как кривизны и кручение изогнутой поверхности пластинки,
Гауссова кривизна по B4) будет
р 1 [d2z d2z ( d2z \21
l=^\lx^l)yT-{jxlij) I" <12^
Интересно отметить, что для пологой оболочки при м«1 мы
получаем выражение, которое фигурировало в одном из основных
уравнений теории гибких пластинок. Сравнивая (9.40) и B8), находим
jL(w, w) = T. A2.29)
Таким образом, цепные напряжения, образующиеся при больших
прогибах пластинки, непосредственно связаны с гауссовой кривизной
изогнутой поверхности.
Рассмотрим, далее, поверхность вращения (рис. 12.14),
заданную уравнениями
х= г(z)cosop, у =r r(z)sinop, z — z. A2,30)
Под г понимается радиус параллельного круга в сечении г, пол
ф—угол поворота меридиональной плоскости. В качестве параметров
478
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
примем £ = ф, t]=z. По формулам A1), F) и B1) находим:
а22= I -\~ г' ,
Vl + r'
а
12 = 0,
£,2=0,
0):
rVl+r'2
bu
V\+>
A2.31)
через г и г" обозначены производные от г по z, характеризующие
очертание меридиана. Гауссова кривизна равна по B4)
Г =
A2.32)
нормальных сечений,
Если выпуклость меридиана обращена к оси z, как изображено на
рис. 12.14, то будет г" > 0; такая оболочка имеет отрицательную
гауссову кривизну. На рис. 12.14 показаны центры кривизны С2 и Сх
одно из которых совпадает с плоскостью
меридиана, а второе перпендикулярно к
этой плоскости.
Заметим, что кривизна
параллельного круга 1/г должна быть по
теореме Менье A4) равна (l/p,sin0,),
где pj —главный радиус MCi
кривизны сечения. Отсюда следует, что
центр кривизны С, является точкой
пересечения нормали к поверхности
с осью симметрии; как легко
видеть, соответствующая кривизна равна
*■--!-
1
Рис
12.14. Центры кривизны С, и
в случае поверхности вращения.
С,
Pi r/l+r'2
Вторая главная кривизна равна
1 г"
/Со
Р2 (l-f )
Понятие гауссовой кривизны является в теории поверхностей
фундаментальным. Преобразуя выражение B4) для Г, можно показать,
что гауссова кривизна зависит только от коэффициентов первой
квадратичной формы и их производных. Вместе с другими величинами,
зависящими от коэффициентов формы I, гауссова кривизна относится
к так называемой внутренней геометрии поверхности.
По знаку гауссовой кривизны можно судить о форме поверхности
в окрестности данной точки. Если Г > 0, то, как видно из B4),
кривизны &! и k2 имеют одинаковый знак. Это означает, что центры
кривизны С, и С2 по главным направлениям находятся по одну
сторону от поверхности, как показано на рис. 12.15, а; центры
кривизны всех других нормальных сечений будут лежать на отрезке С,С2.
Точка М поверхности, для которой центры кривизны располагаются
таким образом, называется эллиптической. Напротив, при Г < 0
$ 135] НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 479
центры С\ и С2 лежат, как мы видели, по разные стороны от
поверхности (рис. 12.15, б); центры кривизны остальных нормальных
сечений находятся на внешних областях отрезка Cfi^,
соответствующая точка поверхности носит название гиперболической. Наконец
Г=0
Рис. 12.15. Расположение центров кривизны С^ и С2 для; а) эллиптической,
б) гиперболической и в) параболической точек поверхности.
в случае Г = 0 точка называется параболической. Здесь одна из
главных кривизн обращается в нуль; центры кривизны лежат по одну
сторону от С,, и центр С2 находится на
бесконечности. Это относится, например, к
точке М на рис. 12.15, в, принадлежащей
цилиндрической поверхности.
На рис. 12.16 изображена поверхность
вращения; в точках верхней части будет
Г < 0, как на рис. 12.14, в точках нижней
части Г > 0; эти части разделяются
параболической линией, для точек которой Г = 0.
Примерами поверхностей, во всех точках
которых гауссова кривизна положительна,
могут служить сфера или эллипсоид.
Отрицательную гауссову кривизну, и притом постоянную для всех точек,
имеет так называемая псевдосфера; здесь ft, =— ft2 = const.
Цилиндрическая и коническая поверхности имеют нулевую гауссову кривизну.
Гауссова кривизна играет особую роль в теории изгибания
поверхностей. Под изгибанием понимается преобразование поверхности,
при котором длины любых кривых, проведенных на поверхности,
остаются неизменными; вместе с тем сохраняются и углы между
пересекающимися кривыми. Такое преобразование называют также
изометрическим. Поверхность при изгибании надо представить себе как
абсолютно гибкую нерастяжимую оболочку, которая может изменять
свою форму без складок и разрывов*).
*) Простое перемещение поверхности в пространстве при этом
исключается.
Рис. 12.16. Поверхность
вращения с участками, имеющими
различную гауссову кривизну.
480 ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ [ГЛ. XII
При изометрическом преобразовании первая квадратичная форма,
равная квадрату длины линейного элемента, должна оставаться
неизменной; но тогда и гауссова кривизна будет сохраняться.
Следовательно, изометричиые поверхности имеют в соответствующих точках
одинаковую гауссову кривизну *). Интересно отметить, что при
изгибании поверхности меняются все три
коэффициента формы II, но таким образом, что
дискриминант этой формы, равный bub22 — b\2
и содержащийся в выражении B4), остается
постоянным. Примером изометричпых поверх-
Рис. 12.17. нротелкива- "остей являются поверхности, развертывающиеся
иис выпуклого сегмента, па плоскость; все они имеют нулевую гауссову
кривизну.
Мы до сих пор не ставили условия, чтобы изгибание поверхности
было непрерывным процессом. Поэтому можно сказать, что переход
выпуклого сегмента с закрепленным контуром (рис. 12.17) из
положения / в положение 2, являю-
а) щееся зеркальным отражением
первого, является изгибанием **),
но оно происходит й большом.
Если же речь идет о бесконечно
малом изгибании, то оно мо-
Рис. 12.18. а) «Неизменяемая» и б) «изме
няемая» в малом стержневые системы. жет осуществляться лишь для
ограниченного класса поверхностей.
Такое изгибание оказывается невозможным для любой выпуклой
непрерывной замкнутой поверхности (например, полной сферы). Иными
словами, такая выпуклая поверхность является жесткой в малом***).
С другой стороны, для поверхностей нулевой и отрицательной
гауссовой кривизны бесконечно малое изгибание, вообще говоря,
возможно. Это можно иллюстрировать на простом примере стержневой
системы, показанной на рис. 12.18. Если стержни нерастяжимы, то
бесконечно малые перемещения среднего шарнира в первом случае
(рис. а) исключены, а во втором (рис. б), когда стержни вытянуты
в одну линию, могут осуществиться.
Все эти выводы, содержащиеся в теории поверхностей, как мы
увидим ниже, имеют прямое отношение к задачам устойчивости обо-
*) Эта замечательная теорема была доказана Гауссом в 1816 т. Говоря
об изометрическом преобразовании, Гаусс представлял поверхность именно
как «гибкое, но нерастяжимое тело, одно из измерений которого
принимается исчезающим» («Общие исследования о кривых поверхностях»,
перевод 1887 г., стр. 34).
**) Сравни деформацию арки-полоски по рис. 12.3.
***) Обзор исследований по качественным вопросам теории деформации
поверхностей был опубликован Н. В. Ефимовым (Успехи матем. наук 3,
№ 2 A948), 47—158); ряд относящихся сюда общих теорем получе-i Л. В. По-
горелоным (см.. паи])., его работу «Некоторые результаты но геометрии
в целом», Харьков, 1961).
§ 136] ТРЕХМЕРНАЯ ЛИНЕЙНАЯ ЗАДАЧА В КРИВОЛИНЕЙН. КООРДИНАТАХ 481
лочек в малом и в большом. Если бы оболочка была бесконечно
топкой, то ее деформацию можно было бы охарактеризовать
полностью с помощью теории поверхностей. Однако и реальных
оболочках любое изменение формы, даже если оно сопровождается
изометрическим преобразованием срединной поверхности, вызывает появление
деформаций изгиба, неравномерно распределенных по толщине.
Поэтому мы будем пользоваться приведенными выше зависимостями,
изучая деформации срединной поверхности, но должны вместе с тем
учесть деформации собственно изгиба оболочки. Иными словами, нам
необходимо как бы объединить теорию абсолютно гибких оболочек
с теорией жестких пластинок.
§ 136. Трехмерная линейная задача в криволинейных
координатах
При исследовании малых прогибов оболочки, вызывающих
деформацию смешанного типа, будем исходьт,> из общих линейных
соотношений трехмерной задачи теории упругости. Введем три
криволинейные координаты £, т|, £, которые будут определять положение
произвольной точки пространства так же, как два параметра \ и т)
характеризовали положение любой точки поверхности.
Длины дуг, отсчитываемые вдоль координатных линий, равны
dsl=-Hxd\, ds2 = H2dr\, ^3 = Я3С A2.33)
Величины Я,, Н2, Н3, каждая из которых является некоторой
функцией |, ц, С, называются коэффициентами Ламе; они соответствуют
коэффициентам первой квадратичной формы ап и а22 в теории
поверхностей. Примем с самого качала систему координат ортогональной,
тогда квадрат линейного элемента—-как бы первая квадратичная форма
трехмерного пространства — будет *)
ds2 = H\dt+-H\dr\2 + Hldl2- A2.34)
В дальнейшем координаты \ и ц мы привяжем к срединной
поверхности оболочки, а координату С условимся отсчитывать вдоль
нормали, но здесь будем вести выкладки в общем виде.
На рис. 12.19 изображен элемент поверхности, содержащий дуги
dSj и ds2. Обозначим через С, и С2 центры кривизны этих дуг в
плоскости, нормальной к дуге ds3, а через Rl2 и /?2| ~ соответствующие
радиусы кривизны. При изменении координаты т| на dv\ длина дуги dsl
получает приращение; новая длина будет
Очевидно, должно быть
ds1 rfs,
*) Параметры Ламе должны удовлетворять шести условиям
непрерывности трехмерного пространства, см. [12.3], стр. 193.
31 А. С. Волъмнр
482
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XI!
отсюда находим кривизну дуги ds^.
1 ds, — dSj
1 дНх
ds{ ds2 HJIi
Аналогично кривизна дуги ds2 будет
1 _ 1 дН2
R2l — H.JI, д\ '
дг]
A2.35)
A2.36)
Если теперь рассмотреть элемент поверхности, образованной дугами
di\ и ds3, то таким же образом найдем кривизну дуги ds{ в
плоскости, нормальной к ds2:
1 1 dff, A2.37)
Идя подобным путем, можно определить кривизну дуги ds2 в
плоскости, нормальной к dsv и кривизны дуги ds^ в плоскостях,
нормальных к dst и ds.2.
Допустим, что при деформации упругого тела принадлежащая ему
точка М получает перемещения вдоль координатных линий |, ц, £,
равные соответственно и, v, w. Определим деформации удлинения,
которые получают дуги dslt ds2 и ds:i, а также сдвиги в
плоскостях, образованных
различными дугами.
Деформация удлинения
дуги dsl равна
On , v , w A238)
Et
~/iidt
R\2 R\:
Первая составляющая
соответствует приращению и при переходе
Рис. 12.19. Дуги криволинейных координат в
случае трехмерной задачи.
Рис. 12.20. К определению деф>рма
ции, вызванной перемещениями.
от точки М к смежной точке N (рис. 12.20); если бы а зависело только
от sp то было бы Ei = du/ds1. Если бы все точки дуги dsi = Rl2dQl2
получили перемещения v (рис. 12.20), то радиус кривизны R12
увеличился бы на v. При этом дуга dsl получит длину (Rl2 -f- v) afOi2,
и относительная деформация будет
(Rl2 + v)dOl2 — Rl2dOl2 v
Rl2dQl2 Rl2'
$ 136] ТРЕХМЕРНАЯ ЛИНЕЙНАЯ ЗАДАЧА В КРИВ0ЛШШ КООРДИНАТАХ 483
Это дает вторую составляющую в выражении C8). Аналогичное
рассуждение относится к перемещению w, что дает третью
составляющую. Подставим в C8) выражения C5) и \
C7) для 1/Я12 и 1/Я!3; тогда найдем
1 ди , 1 дНх .
4 ~~ Я, 01
+ '
1 дН,
дц
д£
w. A2.39)
Деформация сдвига в плоскости,
касательной к дугам dsl и ds2, равная
изменению прямого угла между этими
дугами, будет
1 ди . 1 dv и v .
Vtr,
in Н2 дг\ ' Я, д£
I И. Л% D.
Rv.
Рис. \"Л\. д гзределеяию
деформации, ЗИИ..Н* Г.Щ'0П\Ш ЭЛе-
Hi -тоз.
/?21
A2.40)
положительный знак здесь, как обычно,
отвечает уменьшению угла между
дугами. Первые две составляющие соответствую: жогегаи ;jr dsl и
ds2, вызванным перемещениями точек L и N относительно точки М
(рис. 12.21), и имеют такой же вил, как для ни пластинки
(см. стр. 323). Представим себе, далее,
что все точки дуги ds2 получают
смещение v (рис. 12.22); тогда угол между ds{
и ds2 должен увеличиться на v,'R2l; если
же точки дуги ds{ сместятся на а, то угол
увеличится на a!Rl2. Это дает третью и
четвертую составляющие в D0).
Подставим сюда выражения C5) и C6), тогда
будет
_ 1 ди 1 дН2
\п н2 di) НХН2 д\
1 dv 1 дН1
v -\-
+
или
V6r,=
ft,
dZ, НХН2 дц
и, A2.41)
дтц
Рис, ~2.ьхшк«ию допо.
и»:а.-и кегюшй от поаД
ртов. \
Аналогичные выкладки позволяют получить зараиля для лругц
составляющих деформации. Окончательно :6:ща\ удлинен^
получаются такими:
Ч
1
1 ди
1
Н2
1
dv
дг\
dw
1
н2н3
ИМ,
U11 I ,
dHj
<Г?Т|
дН2
dt
01
1 ей.
•ш-
i a
И3Щ Ц '
A2-4^
31»
484
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
Я2 _д_ ijT\ |
//, (К //о j '
Ik
я3
и±
я
//.
Я,
1й
а деформации сдвига —
Чп Я2 dn \ //, )
н, ■
A2.43)
I—
Используем эти выражения для построения теории тонких
оболочек. Напомним, что все выведенные зависимости относятся только
к малым перемещениям; поэтому они могут быть применены лишь
в случае, если прогибы оболочки малы по сравнению с ее толщиной.
§ 137. Оболочка малого прогиба. Зависимость между
деформациями и перемещениями
В основе теории изгиба тонких оболочек лежит гипотеза
прямых нормалей, по которой точки, принадлежавшие нормали к
срединной поверхности до деформации,
остаются и после деформации
лежать на прямой, нормальной к
срединной поверхности. Строго говоря,
в процессе деформации оболочки
прямолинейность нормалей несколько
нарушается: это связано со сдвигами
в сечениях, нормальных к срединной
поверхности. Поэтому гипотеза
прямых нормалей, по существу, сводится
к предположению о том, что сдвиги
в нормальных сечениях малы по
сравнению с углами поворота
нормалей и что поэтому сдвиги можно,
как правило, принимать равными
нулю *).
Отнесем срединную
поверхность к линиям кривизны и будем
откладывать вдоль этих линий
координаты | и г) (рис. 12.23). Такая
сеть линий является ортогональной; коэффициенты первой
квадратичной формы срединной поверхности обозначим следующим образом:
2 2
ан = Ль а22 = Л2, причем а12 = 0. Величины Л1 и Л2 эквивалентны
коэффициентам Ламе: Л1 = #!, А2 = Н2. Линию £ совместим с
нормалью к срединной поверхности и примем //3= 1. Введем, далее,
Рис. 12.23. Элемент оболочки,
образованный линиями кривизны срединной
поверхности.
*) См. В. В. Новожилов, Теория тонких оболочек [12.11].
§ 137]
ОБОЛОЧКА МАЛОГО ПРОГИБА
485
обозначения R{ и /?2 для радиусов кривизны нормальных сечений
срединной поверхности соответственно вдоль линий | и т).
Рассмотрим слой оболочки, отстоящий на расстоянии t, = z от
срединной поверхности; здесь (—/г/2) <С z -^ /г/2, где h — толщина
оболочки. Положительное направление z и w условимся
откладывать к центру кривизны *). Так как длины дуг пропорциональны
расстояниям до центра кривизны, то коэффициенты Л\ и А\ для данного
слоя будут
Л^лф-^-), л! = Л2A--£■). A2.44)
A2.45)
Производные от них но z равны
дА\ А1 дА\ А2
ТГ^^Ж' dz ~~~Ж"
После того, как вычислены производные, мы будем в D4) принимать
z<C^i> 2<^R2 и, следовательно, А\тЛ\, Л\^а Л2;
производные D5) будут одними и теми же для любой точки нормали.
По гипотезе прямых нормалей мы должны принять у — yi£ = 0.
Развертывая выражения D3) для v. и Y-- п0 ТИПУ D1) и полагая
Л3= 1, получим:
^ff. _ j£f_ Ml i _L EEL — о ^
dz Ax dz ■ Ai dc. ' !
z лл i Л * A2.46)
dvz v^ dA2 , 1 dwz „J v '
dz A2 dz A2 dr\ 'J
где uz, vz, wz—перемещения произвольной точки нормали. Для точек
прямого элемента, нормального к срединной поверхности,
производные duzjdz и dvzjdz должны сохранять постоянные значения, равные
duz du uz — u dvz dv vz — v ,.„ ,-r.
dz dz z ' dz dz
Но, с другой стороны, принимая 2 = 0 в D6) и пользуясь D5),
получим:
du и 1_ dw dv_ v 1 dw ri 9 48^
1)г~~~~Щ~А~1~Щ' ~dz~~~~~R~2 A2dr)' U "'
Сравнивая D7) и D8), находим:
.г ( и , 1 dw\ г / v , 1 dw\ /10 . n.
Обозначим деформации удлинения вдоль линий кривизны через е1
и е2, а деформацию сдвига через у; если принять в общих выраже-
*) Это относится к эллиптическим и параболическим точкам срединной
поверхности.
486
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. ХП
ниях D2) и D3) Н1 = А1, Н2 — А2, Я3= 1, iwz = w, то при любом z
будет
1 диг , 1 дА, г , 1 дАх
д% ^ А^А2 дг] ^ =•-
£l А,
z__J_dv^_i 1 дА2
е2~ А2 дц ' А,А2 dt
У — А2 дг\ {AjT At dl \A2
" "Г -Г
Л, dz
1 дА2
w.
A2.50)
Пользуясь D9), можно теперь представить деформации в виде *)
е1 = £1 + 'гХГ S2~ e2~^Zyi2' Y* — Y + 2г1-
A2.51)
Под sp е2, у здесь понимаются деформации в срединной поверхности:
1 ди , 1 6Л, w
tl~~Tl~di~T'~A^r2~d^v~'lTl'
\ dv , 1 г)Л,
£о =
а —
Л2 dri ' AiA2 dl
1 Л f)n UJ^ A dl \A3
/?2
A2.52)
под И], x2—изменения кривизн и под % — «кручение» срединной
поверхности:
1 д I и , 1 dw\ 1 { v , 1 dw\ дА\
1 d /_w_ . 1 dw\ 1
A2 0Г] \/?2 -^2 ^1 / ^1^2
X) =
д7 + ^"^"J-^"'
1
/I, c)
Л <?£
Л2/?2
+
1 da;
+
А. д
A2 дц J A2 дц\ AXR
и
1 dw
A\ d\
A2.53)
Принимая в E3) Л1 = Л2=1 и R1 = R2 — со, придем к прежним
выражениям для кривизны и кручения пластинки:
d2w d2w d2w
dl2
дт?
х = -
ttdi\'
Отметим, что шесть величин — деформации в срединной
поверхности и изменения кривизн — выражаются через три функции
перемещений и, v, w. Очевидно, эти шесть величин не являются незави-
*) Выражения типа E2) и E3) были получены различным путем
многими авторами; подробный их анализ дан в книгах В. 3. Власова [12.3].
А. Л. Гольденвейзера [12.6], В. В. Новожилова [12.11]. Приведенный здесь
рывод принадлежит Э. Рейсснеру [12.21]. Первые пять выражений E2)
и E3) совпадают у всех этих авторов; шестое же выражение — для
кручения— имеет несколько вариантов, незначительно отличающихся друг
от другд.
§ 137]
ОБОЛОЧКА МАЛОГО ПРОГИБА
487
симыми, для них можно выписать три уравнения совместности.
Приведем одно из этих уравнений*):
АХА2 \ д\ Ах L
~т" дг] А2[
де,2
2~Щ
дА,
дг
(Е2 — еО-
2
дА.
дц
V +
Л ^
(М,
<?п
A2.54)
Это уравнение можно проверить непосредственной подстановкой
выражений для деформаций ер е2, У и параметров изменения кривизны
щ, Щ> ПРИ этом "ад0 воспользоваться следующими соотношениями,
известными из теории поверхностей**) (формулы Петерсона — Ко-
дацци и Гаусса):
~dl\R2)~Rl dl • d^XRj- R2 дц * AZ-00)
1 1 Г д I 1 <М2\ . г) / 1 дЛ,У|
Л,Л, — Л,Л2 Ug U, ^/^nlA- *1 AT (lz-00>
Зависимости E5) и E6), выписанные здесь для главных направлений,
выражают, по существу, связь между коэффициентами первой и
второй квадратичных форм срединной поверхности. Формула E6)
свидетельствует о том, что гауссова кривизна, равная \IR}R2, зависит
только от коэффициентов первой квадратичной формы и их
производных; об этом уже было сказано в § 134.
В частном случае, если Л, и Лг постоянны и могут быть
приняты равными Л1 = Л2=1, уравнение совместности E4) переходит
в следующее:
д2е.2 (?2Е| д2у 1 d2w 1 d2w no s,Aa\
dl2 ~*~ дц2 д1дц~ R2 dl2 У?, дг\2 " (ч-°ы)
Как мы увидим ниже, во многих задачах, относящихся к
устойчивости оболочек, можно упростить выражения E3) для параметров
изменения кривизны и кручения, считая перемещения «в массиве»
материала и, v малыми по сравнению с прогибом w; тогда получим:
1 д / 1 dw\ 1 dw dAt
Ui dl)
и, = -
x2:
f
1
d\
д
1 dw
AlA2 дц дц
1 dw дА2
A2 дц \ A2 дц 1 A\A2 д\ д\
j_
2
)
' A2 д /J_ dw\ _,A±_d_ /J_ dwY
Al dl [A22 дц)^ А2~дч~\А2 dl)
A2.57)
Перейдем к исследованию напряженного состояния оболочки
*) См. книгу А. Л. Гольденвейзера [12.6], стр. 58. Два других уравнения
приведены ниже, на стр. 494.
! **) См. П. К. Рашевский, Курс дифференциальной геометрии, 1956.
етр. 350. ' г
488
ОБЩИЕ СВЕДЕНИЯ OB ОБОЛОЧКАХ
(ГЛ. XII
§ 138. Усилия и моменты. Уравнения равновесия
элемента оболочки
Проведем нормальные сечения оболочки вдоль линий кривизны.
Обозначим через ot, а2, x напряжения в срединной поверхности по
этим сечениям, а через ozv а*, хг — напряжения в некотором слое
на расстоянии z от срединной
поверхности.
Нормальные и касательные
усилия, приходящиеся на единицу
длины дуги линии ц, обозначим через
Л^ и Т12 (рис. 12.24); они будут равны
ft 2
ЛГ,=-Дт- I a\A2dr\dz,
А2 dr\
-ft.'2
ft/2
Рнс. 12/24. Положительные направления
усилий в срединной поверхности.
Г12
А2 ёц
xz A\ dr\ dz.
-fi-2
Эти выражения составлены с учетом того, что длина дуги A2dr\
в срединном слое не равна длине дуги [Aldr]) произвольного слоя.
Подставив сюда значение А\ по D4), получим:
ft'2 • ft/2
Nx= \d\{\ — ^dz, 7\2= J*T*(l—-^)rfz. A2.58)
-ft/2
-ft'2
По аналогии находим усилия в сечении по линии |:
ft/2 ft/2
N2 = \<&{\—±.у2, Т21= ^т*{\-±.уг. A2.59)
-А/2 -ft/2
В общем случае, при Rx Ф R2, касательные усилия Т12 и Г21
оказываются различными. Если учесть, однако, что для тонких
оболочек z<^Rt и z<^_R2, можно в выражениях E8) и E9) принять
1 — zlR2»\, 1 — zlR1^U тогда получим Т12—Т21, как это было
в случае пластинки. Выпишем, далее, выражения для изгибающих и
крутящих моментов (рис. 12.25):
ft/2
1= Jof(l-^)zdz, H12= j*Wl-■£)*<**, A2.60)
-ft/2 2 -ft/2 2
ft/2 ft/2
2= J <f2(\—^zdz, H2l= ^xz(\-^zdz. A2.61)
-ft/2
5)ЯВ]
УСИЛИЯ И МОМЕНТЫ
489
И здесь можно приближенно принять #12 —#2!. Поперечные силы
в сечениях вдоль t] и | пусть будут Qt и Q2; приходящуюся на
единицу площади внешнюю нагрузку вдоль линий |, tj, z обозначим
через <?!, q2, qz. Ad ^s^__^_
Составим уравнения равновесия J^0^s.P 1
элемента оболочки, вырезанного
сечениями ВДОЛЬ ЛИНИЙ крИВИЗНЫ *). Д^с,
»7*S^
A2d^
Рис. 12.23. Положительные направления
моментов, поперечных сил и поперечной на
грузки.
Рис. 12.26. К выводу уравнений
равновесия элемента обилочки.
Система координат здесь
отличается от принятой на рис. 12.24.
Длины дуг в срединной поверхности, отложенных вдоль |, tj, равны
Axd\, А2Aц, а длины соседних дуг
Уравнение равновесия в проекциях на касательную к линии | имеет вид
-NlA2d4 + [Nx
dN,
)('
dl\ Л
дА
dl
2 dl\dr\ —
~ТПА1(Ц + (Т2
дТ2Х
дг\
dr\) Л
dr]d^dl — N2-^-dldr] +
+ Т12 *£j- dldn -Q1^Ldld4 + giAtA2 d\ dr\ = 0. A2.62)
Здесь члены, зависящие от N2 и Tl2, появляются вследствие
изменения длин дуг при переменных Лх и А2. Из рис. 12.26, а видно,
что малый «угол поворота» р дуги (Л, ~{-~^-dr\) d\
дц
равен разности
*) Приведенное здесь изложение построено по Ван Цзи-де (см. [27.21].
стр. 366).
490
ОБЩИЕ СВЕДЕНИЯ OB ОБОЛОЧКАХ
[Г.'г. XII
отрезков {а2-\-—~ йцйц и A2dr\, разделенной на длину дуги:
дА2
dc, dx\
А: +
дА,
дц
di\)dt
Угол а получается равным (рис. 12.26,6)
дА,
Умножая усилие
соответственно усилие
а-
No
дц
rfT)rf|
[Л2-
dN2
дц
дА,
[Тх-2 И"
дГ.,
дц
dl)[A2
дА2
dr\\d£, па угол E и
d\
;) dr\ п
а угол а и
■Щ
Рис, 12.27. К определению
результирующей поперечных сил.
отбрасывая малые высшего порядка,
приходим к выражениям, фигурирующим в
F2). Далее, заметим, что сечение, в
котором действует поперечная сила
[Ql+^.dl\[A1 + ^dl)dn, накло-
нено к сечению с силой Q,A2dx\ под углом
dy, равным й?у= Л1 d%!R, (рис. 12.27);
отсюда находим проекцию первой из этих
сил, выписанную в F2). Приходящаяся на
элемент проекция внешней нагрузки равна
QiAyAodl^dr]; этой величине отвечает
последний член уравнения.
Пренебрегая в F2) малыми высшего порядка и представляя члены,
зависящие от N1 и Г12, в виде
(dNj
Л2+ЛГ,
'^А + Т
, дг\ Л1 + У 21
дА?
дЪ
дА,
дц
dldTt]--
d\d\\:
d(A2N,)
д(А,Г2,)
dldr\,
■ d% dt\,
приходим к следующему уравнению:
HA2Nj) д (А,Т2,) _ АТ дА2 дА,
di
дц
дА_
dl ~1" ' 12 • дг]
■^2^- +Л:
дц
Qi т^ + ^Л^^о.
Л|
A2.63)
Таким же образом получаем уравнения равновесия в проекциях
на касательную к линии г)
d(A,N2) , д(А2Т12) Л; дА, . т дА2 п А,А2
дт]
Ъ
Л/ дА> -L.T дЛ*
Q2
R»
q2A,A2 = 0.
A2.64)
§ 138] УСИЛИЯ И МОМЕНТЫ 491
Проектируя, далее, все усилия на направление нормали, находим
Здесь члены, зависящие от vVj и N.,, появляются благодаря тому,
что соответствующие усилия действуют под углами Aldl/R1 и A2dr\!R2
друг по отношению к другу.
Проектируя вектор-моменты, показанные на рис. 12.25, и находя
момент поперечной силы, получаем уравнение моментов относительно
касательной к линии ч\:
-MlA2d4-[Mx+^-di){A.2 + ^± dl)dr\ +
+ HnAld\- (Я21 + ™1L d4) (A, + ^L dn) dl + M, d\^d4-
-Hl2^d4dl + (Q1+^-dl)[A2+^di)d4Aldl = 0.
Члены, зависящие от М2 и Нп, вычислены с учетом углов
поворота аир, аналогично толу, как это было сделано выше для Л^
и Т12; малые высшего порядка отброшены. После простых
преобразований приходим к уравнению
1(^ + А(^0._Ж2^ + //12^--СИИ2 = 0. A2.66)
Уравнение моментов относительно кисательной к | принимает вид
i^ + i^-*.^ + "».^-<b'V48 = 0. A2.67)
Нам осталось составить уравнение моментов относительно оси z,
направленной вдоль нормали в точке (|, ц); оно имеет вид
(г12 + ^^)(л2 + -^^)^л1^
или
- ('А, + ^f d4) (А, + ^ dn) d%A2 d4 -
~ н12 A^i dld4 +. h21 *£. d\ d4 = о
т12-т21-^- + ^- = о. A2'68)
Введем в шестое уравнение равновесия F8) исходные выражения
E8)—F1) для входящих в него величин, тогда окажется, что оно
'удовлетворяется тождественно. Если же принять приближенно Т12 = Т21
и Н12 — Н21, то при ЯгфЯ2 шестое уравнение не будет
удовлетворяться; можно показать, однако, что вносимая при этом
погрешность, как правило, того же порядка, что и погрешность других
соотношений теории оболочек.
492
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. Xtl
Перейдем к соотношениям между усилиями и деформациями,
а также моментами и изменениями кривизн, отвечающим закону Гука.
Примем для некоторого слоя оболочки, отстоящего па z от
срединной поверхности, зависимости того же типа, что и для пластинки:
«\ = т=р®+»*Ъ- ^т^цгФ+^О- A269)
2A+1*) Y
Выражения F9) соответствуют обобщенному плоскому напряженному
состоянию слоя оболочки; иными словами, считается, что
напряжение а2 не влияет на напряжения ffj и а2.
Введем F9) в выражения для усилий E8) и E9) и воспользуемся
соотношениями E1); тогда, считая z<^_R1 м z <^ R2, получим:
Eh f A2-70)
Tu = T2i = T=z 2A+ц) У- I
Аналогично находим выражения для моментов:
Ж, = D(x,+(-ih2), М2==0(и> + цу»,),
A2.71)
Ha = H21 = H = D(l—\i)%.
Мы получили точно такие же соотношения, что и в теории
пластинок; они подкупают своей простотой. Но мы отмечали уже некоторые
противоречия, к которым приводит это упрощение; появляются и
другие затруднения, например, при рассмотрении потенциальной
энергии деформации оболочки. Эти противоречия можно устранить,
принимая условно выражения для Т12 и Т21 следующими*):
т Eh I h2 \ _ Eh I h2 \ /10 _„.
Подставляя G2) в F8), убеждаемся, что шестое уравнение
равновесия теперь удовлетворяется тождественно. Таким образом, в этом
варианте теории оболочек ио-ирежпему будет Я12 = Я21=#, по
касательные усилия Тх2 и Г2, оказываются различными.
В нашем распоряжении теперь имеются 6 зависимостей E2) и E3),
связывающих деформации с перемещениями, 5 уравнений равновесия
и 8 соотношений закона Гука. Неизвестными являются 3
перемещения и, v, w, 4 усилия в срединной поверхности, 4 момента, 2
поперечные силы, 3 деформации в срединной поверхности и 3 параметра
кривизны. Общее число уравнений A9) соответствует числу
неизвестных. Решая уравнения, мы должны удовлетворить граничным
условиям, составленным для конкретной задачи.
*) Эти выражения были предложены Л. И. Балабухом и В. В.
Новожиловым; см. книгу [12.11], стр. 47.
§ 139] УПРОЩЕННЫЙ ВАРИАНТ ОСНОВНЫХ УР-НИЙ ЛИНЕЙНОЙ ТЕОРИИ 493
Пути решения уравнений могут быть выбраны различными в
зависимости от того, какие величины выбраны в качестве основных
неизвестных— перемещения либо усилия и моменты. В дальнейшем мы
будем также часто пользоваться смешанным методом, как в теории
гибких пластинок; основными неизвестными будут прогиб и функция
усилий в срединной поверхности.
§ 139. Упрощенный вариант основных уравнений
линейной теории оболочек
Как мы видели, структура исходных уравнений общей теории
оболочек даже для области малых прогибов сравнительно сложна;
поэтому решение конкретных задач представляет значительные
трудности. К счастью, для многих задач но устойчивости оболочек,
имеющих наибольшее практическое значение, основные уравнения удается
сильно упростить. Это относится к тем случаям, когда выпучивание
оболочек сопровождается появлением сравнительно мелких воли, т. е.
таких воли, размеры которых, хотя бы в одном направлении, малы
по сравнению с радиусами кривизны срединной поверхности пли
габаритными размерами оболочки. При этом в пределах каждой
вмятины оболочку можно рассматривать как пологую. Это позволяет
применить в подобных задачах устойчивости оболочек произвольного
очертания аппарат теории пологих оболочек *).
При построении теории пологих оболочек можно считать, что
внутренняя геометрия срединной поверхности независимо от ее
гауссовой кривизны является па некотором участке такой же, как
и геометрия на плоскости **). Иными словами, первая квадратичная
форма поверхности считается той же, что и для плоскости:
Но тогда зависимость E6) гауссовой кривизны от коэффициентов
первой квадратичной формы нарушается, и надо положить
i(i^)+i(i^H- <12-">
Другой критерий заключается в том, что функции, через которые
выражаются перемещения, деформации и напряжения, изменяются
сравнительно быстро хотя бы вдоль одной координаты, так что при
дифференцировании по данной координате функция значительно
возрастает.
*) Эта теория была разработана для круговых цилиндрических
оболочек Доннелом [12.16]. а для оболочек произвольного очертания — В. 3.
Власовым [12.3], А. Л. Гольденвейзером [12.6], X. М. Муштари [12.9], В. В.
Новожиловым [12.11], [12.12], Ю. Н. Работновым [12.13] и С. Фейнбергом [12.14].
**) Это допущение было впервые сформулировано В. 3. Власовым ([12.3]
стр. 303); см. также статью С. А. Амбарцумяна, Прикл. мат. и мех., 11 A947)-
494
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
Вместе с тем надо принять, что перемещения и, v вдоль линий
кривизны срединной поверхности малы но сравнению с прогибами w.
Это позволяет воспользоваться упрощенными выражениями E7) для
изменений кривизны.
Далее, шестое уравнение равновесия во внимание не принимается;
соотношения упругости получают вид G0) и G1), причем Т12 = Т21 =•- Т
и Нп =■■ #2i== Н- Что касается первых двух уравнений
равновесия F3) и F4), то в них оказывается возможным пренебречь
членами, зависящими от поперечных сил; уравнения эти переходят
в следующие:
d(A2Nt) . d(AJ)
dl " дц
d(A,N2) . д(АгТ)
2 ds дц
дц
dl
1 дц d5
0.
A2.74a)
A2.74b)
Уравнения G4) будут тождественно удовлетворяться, если ввести
функцию усилий в срединной поверхности <р по формулам:
/V,=
д
2 дЦ
1 д<р
/V9= —
А, 01
А2 дц
1 ду
Ах dl
А^А2
дА2 dq>
dl dl
dAi dq>
A^A2 дц дц
T = —
A2 д
Ax dl
1
1 d(f
Аг2 дц
д2у
+
ч
d t 1 ()фУ
4 \ 4 dl J
A-2 dr\
1 dAx dq>
AtA2 {dlch) Ax дц r)|
A,
dA2 d(f>
~д1~~дц~
)•,
A2,75)
Величина ф аналогична функции напряжений в срединной
поверхности Ф, которая фигурирует в теории гибких пластинок. Если
положить Л[ —Л2=1 и ввести координаты х и у, то будет, например,
N1 = hax = h д2Ф/ду2, так что ф = Ф/г.
Отметим, что усилия Nt, N2, T выражаются по G5) через
функцию ф таким же образом (с точностью до знака), как кривизны и2,
щ и X через функцию прогиба w по E7). Очевидно, кривизны должны
удовлетворять соотношениям, аналогичным уравнениям равновесия G4):
д (А2х2) д (Ад)
dl дц
д(Аы) д(АЛ)
dA2
dl
dAi
1
dAt
дц
dl
дц
дц
дА?
dl
X^ =
02.76)
Эти зависимости представляют собой упрошенный вариант двух
дополнительных уравнений совместности, упоминавшихся в § 137
(стр. 487).
§ 139] УПРОЩЕННЫЙ ВАРИАНТ ОСНОВНЫХ УР-НИЙ ЛИНЕЙНОЙ ТЕОРИИ 495
Найдем, далее, поперечные силы Qx и Q2 из уравнений
равновесия F6) и F7):
1 Тд{А2Мх) д(АхН) м дА2 н дА{
1 Г.(Л,М2) . д(А2И) м dAi - _ дА2
Q2
А, А,
1 дт\ ' dl J
A2.77)
Воспользуемся соотношениями упругости G1). Если принять во
внимание соотношения G6), то получим при этом
п _ л ! d(*i+*2) л
^ 1 dfoi-j-Xa)
Л2 <?ч
A2.78)
С другой стороны, по E7) находим
. Г 1 д I 1 dw\ . 1 дА2 dw
Al dl\At dl) A{A2 dl dl
1 dAi dw
или
A2 dr\\A2dT]l ' AXA\ dr\ dr\
x( -j-x2 — — V2'te>;
A2.79)
A2.80)
здесь под V2 понимается оператор Лапласа в криволинейных
координатах:
Оператор V2 в декартовых координатах получим при Л1 = Л2=1.
Окончательно находим следующие выражения для поперечных сил:
^ _._/J ______ , q2___/j____, (I2.82)
подобные же выражения мы получали в теории пластинок.
Введем (82) в оставшееся уравнение равновесия F5) и выразим
усилия /V, и N2 через функцию ф по G5); тогда придем к уравнению
A2.83)
DV-да— Vfo+ q;
здесь введен новый оператор [12.3]:
vj-
1
А,А2
Ш-кЪЯ+ШЪШ- <12-84>
который отличается от V2 коэффициентами \/R2 и l/Rlt
учитывающими кривизны оболочки.
Воспользуемся, далее, уравнением совместности деформаций E4).
Если ввести в пего выражения для деформаций по G0):
l=-£b(Mi-VN2l е.
= ~K(N2-liNl), y = ^±^-T, A2.85)
Ы
496
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XI!
и, далее, выразить Nlt N2, T через функцию усилий по G5), а
изменения кривизн — через w по E7), то придем к следующему уравнению:
J^V4<p = — V2kw. A2.86)
Таким образом, мы получили систему симметрично построенных
линейных уравнений четвертого порядка относительно функции
прогиба w и функции усилий ф; при <7 = 0 эта система принимает вид
В частном
получим:
DVV; = V2kq>, ]
1 „4 „2 1 A2.87)
_V9 = -V^. (
случае Ах — А2=1, если ввести х и у вместо \ п г),
9 гJ гJ О 1 Л2 1 Г>2
v =4т + -7гт< *1==-гг-тт + -в-4т- О2-88)
дх2 ' ду2 R2 дх2 ' R, ду2 v '
Однако в задачах устойчивости первое из уравнений (87) надо
дополнить членами, учитывающими основные усилия в оболочке. Если
основное состояние является безмоментным, то необходимо учесть
докритические усилия в срединной поверхности, в общем случае
надо принять во внимание и усилия изгиба. Рассмотрим случай без-
моментного основного состояния; при этом можно ввести в
уравнение (83) фиктивную поперечную нагрузку q;^=q, равную сумме
дополнительных проекций основных усилий рх, ру, s на направление
нормали к изогнутой поверхности:
q = h(px"A1-^pyy.2-\-2sx) = hU(p, v.). A2.89)
Положительными здесь считаются усилия, способствующие
увеличению параметров кривизны; в применении к рк. и ру положительными
принимаются усилия сжатия. При Л1 = Л2=1 получим
Применим к первому из уравнений (87) оператор V4, а ко вто-
2
рому — оператор V*; тогда систему (87) можно привести к одному
разрешающему уравнению восьмого порядка:
-^ Vsw + Vlvlw = 0 A2.90)
или
12A*-и») ^ + v*v^ = 0- A2.90а)
В задачах устойчивости уравнение (90) надо дополнить членом V4<7;
оно получит по (89а) вид
-щ^™^ Vlvlw — -jrV'riQ?, к) = 0; A2.91)
ST"
§ НО] ОБОЛОЧКА БОЛЬШОГО ПРОГИБА 497
здесь параметры изменения кривизны должны быть выражены через w
по E7). При Л,=Л2=1 будет
^.V8-o;+V*V^+-i- V4IIO, w)=0. A2.91a)
В дальнейшем мы будем пользоваться уравнениями типа (91) при
решении многих частных задач. В случае, когда будет применяться
энергетический метод, нам придется находить потенциальную энергию
деформации оболочки, складывающуюся из энергии деформации в
срединной поверхности и энергии изгиба. Первая из этих составляющих
вычисляется по формуле, аналогичной той, которая была приведена
в главе IX для гибких пластинок (см. стр. 327):
и' = W J" J" [(<Ji + ff2J-2(l +ц)(а,о2 — т2)] AxA2dldx\; A2.92)
интеграл распространяется па срединную поверхность оболочки.
Используя соотношения типа G0), выразим £/с через деформации:
^с^П-и») \ \ [(£, +е2J-2A -ii) (е,е2 --f)] Л,Л2й\йц.
р
A2.93)
Энергия изгиба определяется по-прежнему формулой типа (9.39):
U*=^\\ Ки,+И2J—2A—nHvta — t-~)\AxA2dldr\. A2.94)
F
Для пологой оболочки можно ввести сюда функции напряжений
и прогиба; тогда получим:
t/c=w I I[(V2(I)J"~A+^ L (ф- ф)] dx dy-
F
u»="i" J J [(V2^J—о — ю ^ (да. «oirf* <*y-
A2.95)
Обратимся к основным соотношениям теории гибких оболочек.
§ 140. Оболочка большого прогиба. Деформации
и перемещения
Линейная теория оболочек позволяет исследовать устойчивость
в малом. Но полное решение задачи об устойчивости и закритиче-
ской деформации оболочек может быть дано, как мы видели, лишь
§2 А. С. Вольмир
498 ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ [ГЛ. XFF
с позиций нелинейной теории. Приведем основные соотношения,
относящиеся к оболочкам большого прогиба *).
Условимся относить срединную поверхность к линиям %,, ц,
совпадающим до деформации оболочки с линиями кривизны срединной
поверхности.
Коэффициенты формы I по (9а) для исходной срединной
поверхности примем по-прежнему в виде ац--—Л2, ап = Ь, a<zi = A\,
Обозначим, далее, коэффициенты формы II по B0) через bu = b}, b12 = bf,
b22 = b2. Напомним, что в случае, когда координаты откладываются
вдоль линий кривизны, будет Ь' — 0.
Рассмотрим, далее, деформированную срединную поверхность.
Условимся обозначать коэффициенты формы I для нее через а*п, а*2, а*2.
Квадрат длины элемента вдоль линии | равен вначале аи rf|2, а после
деформации ап й?|2A+Е,Jили, при малых деформациях, ап uf|2(l+2e1).
Следовательно, а*п = Л2П -(- 2ЕЛ; по аналогии а*2 = А\(\ -\-2е,)\
Легко видеть, далее по C), что коэффициент а*2 определяется
деформацией сдвига: а*12= А{А2у.
Коэффициенты формы II для деформированной поверхности пусть
будут b\\—b\, b\i = b , Ья=Ьг. Как выразить эти величины через
исходные значения коэффициентов? Нормальная кривизна координатной
линии | по A9) равна до деформации bnjaw=^b\':A\. Если обозначить
изменение кривизны вдоль | через к{, то нормальная кривизна после
деформации будет Ьц/о-ц —\b\JA\)—xj. Если считать здесь яп^яп.
то b\\ — b\ — А\щ. По аналогии с этим bii = b-i—А?Лъ. Далее, коэф-
фициепт b * связан с кручением поверхности b\2 = b —/h/l2)C-
Окончательно будет •
а*п = А\ A И-- 2Е,), а\2 = А^у, а\2 = Л] A + 2е2), ]
2 * . , С'З-96)
bu=h — AiV.u bn = b —AiAit, ft22 = *-2— A&,2. j
Обратимся к соотношениям между деформациями и перемещениями.
Будем исходить из зависимостей E2) линейной теории, но в каче-
ствекривизп введем в них, основываясь на A9), выражения Ьц/ац = bi'A\
и b-ijAz вместо 1,7?! и 1//?2- Далее, дополним E2) нелинейными
членами так же, как это было сделано для гибких пластинок, но с
использованием криволинейных координат **). В итоге придем к следующим
*) Эти соотношения были выведены Цянь Взй-чаном [12.15], Н. А. Алу-
мяэ [12.1], X. М. Муштари и К. 3. Галимовым [12.10], В. Койтером (Techn.
Univ., Delft, Rep. № 310. 1965, Proc. Kon. Ned. Akad. Wetensch. В -69, № 1,
1966, 1—33) и другими авторами. В дальнейшем изложение построено по
Ланхару и Борези A1. Langhaar, А. В ore si, NASA TN D1510, 1962).
**) Как показал Доннелл (L. Donne 11), при значительных прогибах
могут оказаться существенными и другие нелинейные члены в выражениях
для деформаций, связанные с гр и у.
ОБОЛОЧКА БОЛЬШОГО ПРОГИБА
499
выражениям:
е — _« ,-f
А^А}
Аиц*-
е? =— v
-т-
А,А2
А2Ли
Л2 2Л
1
1 2
-у «и.
и>-
2А
■2 ^.%<
А \А, .тЛ
i2/i»\ . 1
A2.97)
Индексы после запятой здесь и далее обозначают
дифференцирование по соответствующей переменной. Обратимся к уравнению
совместности деформаций. Как было показано в книге [0.3], стр. 237,
в это уравнение входит изменение гауссовой кривизны поверхности,
имеющее место при деформации. Определяя новую кривизну Г* по
формуле типа E6), но с учетом того, что координатные линии уже не
являются линиями кривизны *), и вычитая исходное выражение для
кривизны Г, получим:
А\ Л,
А»
P. f —к- к,.
А1А2(Г*-Г) = уЛц-
«1.6 + —Г" Е2
A{Ait ^ Аи ц
-1. л"
+
^2^1, J
2Л
2.1
1
1
i + ^~ лщУл + ~г А2.1У,Ц +
+ 2(^Дг-«-^5 Л1ДЛ2,Ае1+2^ЛЬтп1--1|Л1,11Л2,Т1\е2 +
+ (^Л,'Е"+1;Д2.Ет1-^ЛьИ1.ч-^>1г.И2,11O. A2-98)
Подставляя сюда выражения (97) и пользуясь формулами Петерсона —
Кодацци и Гаусса типа E5) —E6), получим
АХА2(Г* — Г) = Л2Г %и + Л,Г, „к + 2Л!Л2ГАГ^ +
+ ^5J- (х ЛдЛ2- 6*> ~ Л ь ^2) w- 6 +
+
н-
^1^2
^Ии»2-А
>., тА) W, „
"Н
1
АХА2
А
b2wt u -
Л,А
-&!«>
тп
У^.И^+^^ + гл^)^-
*) Более полная формула приведена, например, в книге
«Дифференциальная геометрия» С. С. Ьюшгенса, М. 1940, стр. 229.
500
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
■ —г A, iw tw « -f- —я— Л, _tw pte» t_ —
A* A
л\лч
A\A2
A, t® sw.
"an
A,A2
J A2, tP, „<», l\ +"
AA
l-
4 iw, ri®. Sti 4- -г К „w. „да. „г, ■+-
Т^^чп-»^' A2.99)
^ AA
Под К здесь понимается средняя кривизна по B5). В результате
таких преобразований находим
/=•(8,, е2. у)=А2ГЛи +-Л2Г т]г» + Ч;(-да). A2.100)
При постоянной кривизне, Г = const, зависимость A00) переходит
в уравнение совместности деформаций вида
f (е,, е2, y) = ^(w). A2.100а)
Отсюда легко получить соотношение (9.55), найденное выше для
плоской пластинки; надо положить при этом At = A2— \ и
ь1 = ь2 = г = к = о. •
Для изменений кривизн и кручения могут быть в первом
приближении приняты те же выражения, что и в линейной задаче. Если
пренебречь влиянием перемещений и, v на параметры изменения
кривизн, придем к формулам E7):
МА
■W г
,1
АХА2
Ah л«\
■"—ШЧГ^Л'"'1,
%~~ 2
ГА I 1 \ . Л, / 1
АХА2
■^ч \ \
A2.101)
ч \ л2 ),\ , ■,- у />T1j
Мы определили, таким образом, деформированное состояние оболочки.
§ 141. Оболочка большого прогиэа. Уравнения равновесия.
Различные подходы к решению задачи
Составим уравнения равновесия. Будем исходить из найденной
выше системы уравпепий F3)—F8). Но для оболочки большого
прогиба надо выполнить требование, чтобы геометрические параметры
соответствовали срединной поверхности оболочки после деформации.
Мы должны, следовательно, ввести вместо коэффициентов формы I
§ 141) ОБОЛОЧКА БОЛЬШОГО ПРОГИБА. УРАВНЕНИЯ РАВНОВЕСИЯ 501
(а,, = А\, а22 = Aty новые значения а*п, а22 и учесть, кроме того,
коэффициент а*2. Далее надо заменить кривизны 17?, и 1 'R2
величинами b\Jc?n и b22jd*i2 и заново ввести параметр кручения,
связанный с Ь*2.
От выполнения первого из этих требований мы здесь откажемся
и примем в уравпепиях равновесия а*п = ап = А\, a^ = A:„ а*2 — 0.
Иными словами, мы выпишем условие равновесия в предположении,
что внутренняя геометрия срединной поверхности остается в процессе
деформации неизменной.
Что же касается второго требования, касающегося формы II, то
оно является существенным; оно связано с учетом поворотов нормали
к срединной поверхности, которыми пренебрегать нельзя (см. ниже
§ 143). Начнем с уравнений F3) — F4) в проекциях на касательные
к линиям |, ту, они приобретают вид
А2
A2.102)
A2.103)
-+ KJv-^b^-b'Q^q^A.^O,
(АЛГ2),п + (Л27\2),|-Л1,Т1Л/1 +
+ Л2, гТ21 - b,yQx - 4- b*2Q2 4- q2A, A2 = 0.
Эти уравнения могут быть сильно упрошены, если пренебречь в них
эффектом поперечных сил; тогда они получат форму
(АМ.Х £ +■ (Л^), „ - Л,, гМ2 + Л,, /12 - 0,
(Л,Л/2), „ ч- (Л2Г12), Е - Аи „W, + Л2. гТ21 = 0.
Если принять систему A03) вместо A02), то, по существу, па этих
уравпепиях равновесия никак пе скажется изменение очертания
срединной поверхности в процессе деформации. Однако это
изменение необходимо учесть при составлении третьего уравнения в
проекциях па нормаль. Исходя из F5), получим:
(ДА),!4 (Л.О^ + ^Л/, ±^-b\N2±
+ (Tn+T2i)b'* + ЛЛ<7, = °- A2.104)
Что касается входящих сюда поперечных сил, то они связаны с
моментами соотношениями G7), вытекающими из уравнений моментов
F6)-F7):
1
<?1 = -щ; №*Mil I + (Л'Я2,), г, ~А% %М2 + Ah ЦН12],
Шестого уравнения равновесия F8) выписывать здесь пе будем.
A2.105)
502
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
Лам остается составить уравнения, связывающие усилия и
деформации. В пределах упругости для изотропных оболочек
будет по G0):
Tl2 = T21 = T = Ghy.
Выражения для моментов по G1) будут:
Ml = D (и, -f \м2), М2 — D (х2 4- n^i),
tfI2 = tf21=tf = D(l-fiKc.
Мы получили полную систему уравнений, связывающую
перемещения, деформации и услилия для гибкой оболочки. Задача сводится
к интегрированию этих уравнений с учетом граничных условий.
При этом могут быть намечены два подхода к задаче. О первом
из них будет сказано в § 142; он состоит во введении функции
усилий ф по формулам G5), в связи с чем автоматически
выполняются уравнения равновесия A03). Тогда в качестве неизвестных
могут быть выбраны функции <р и w, путь решения задачи
аналогичен тому, который был принят в главе для гибких пластинок. Но
этот подход удобен лишь в тех случаях, когда уравнение
совместности деформаций имеет сокращенный вид A00а), т. е. не содержит
перемещений и, v. Таким образом, вариант решения с использованием
функций ср, w приемлем для оболочек постоянной гауссовой
кривизны, например цилиндрических, конических или сферических. Пример
решения задачи с помощью такого подхода и с учетом изменения
коэффициентов Av A2 будет дан в главе XV.
Если же кривизна срединной поверхности является переменной,
удобнее решать задачу, выбирая в качестве основных неизвестных
переметения и, v, w, без использования уравнения совместности
деформаций. При этом целесообразно рассмотреть соотношения
между деформациями и перемещениями, условия равновесия и
зависимости Гука в их естественном виде, не повышая порядка уравнений.
Решение может быть проведено с помощью самых различных
приближенных методов, описанных в главе I, например с помощью метода
конечных разностей.
Выписанные выше уравнения удается значительно упростить, если
в рассматриваемой зоне оболочки, например в зоне вмятины,
образующейся при потере устойчивости, коэффициенты форм I и II
срединной поверхности можно считать постоянными. Дополнительное
условие заключается в том, что в пределах исследуемой зоны
оболочка является пологой. Напомним теперь основные зависимости,
относящееся к такому наиболее простому варианту теории.
A2.106а)
§ 142] УПРОЩЕННЫЕ ЗАВИСИМОСТИ ДЛЯ ОБОЛОЧКИ БОЛЬШОГО ПРОГИБА 503
§ 142. Упрощенные зависимости для оболочки
большого прогиба
Рассматривая пологие оболочки, будем откладывать вдоль линий
кривизны координаты х и у, при этом положим At= А2=\.
Начальные кривизны срединной поверхности будем обозначать через
kl=:bl и /е2 —&2 и примем их для заданного участка оболочки
постоянными.
Выпишем сначала выражения для деформаций в срединной
поверхности E2), используемые в линейной теории:
ди , dv , ди , dv
1 дх i l ду l ' ду ' дх
Дополняя их теми же нелинейными членами, что и в теории гибких
пластинок, будем иметь:
dv , , 1 /dw \2
4 = %--k2w+±[^\\ A2.108)
Y = J^^^La..i^^L. A2.109)
' ду ' дх '■ дх ду ч '
Эти соотношения можно получить и из общих выражений (97) для
оболочки произвольного очертания, полагая в них Л1 = Л2=1.
Уравнение совместности деформаций A00) принимает вид
Y, ху - еь уу — р-2. хх = biwt хх + &i«\ уу -г- «', л-.,™, Уу — ^;л-у,
или
ГJЕ, , дЧ2 д*у 1 , , . 02 „пит
-г-г-Н-г-^ -1—г- = — -к L (W, w) — Уk-w, A2.110)
ду2 ' дх' дхду 2 v ; v '
под L(w, W) здесь понимается прежний оператор (9.40), а под Vft —
оператор вида
7* = *»^- + *,0-. 02.111)
Формулы A01) для изменений кривизны и кручения переходят в
следующие:
*■ = -■&• ».—£• «—^- (»•"«
Таким образом, параметры и и % будут теми же, что и в случае
•Пластинки. Уравнения равновесия A03) в проекциях на касательные
'% линиям х, у приобретают вид
504
ОБЩИЕ СВЕДЕНИЯ ОБ ОБОЛОЧКАХ
[ГЛ. XII
здесь принято ax = Nx!h, оу —/V2//z. Третье уравнение равновесия
в проекциях на нормаль A04) будет
l^ + TT+M+^ + ^^+^O. A2.114)
Принимая во внимание выражения (96) для коэффициентов II
квадратичной формы деформированной поверхности и A12) для изменений
кривизн и кручения, перепишем A14) в следующем виде:
dQi , dQ2 , [ (. , d2w\ , I. . d2w\] . . 0 , d2w . n
A2.115)
причем т= Tjh.
Поперечные силы по A05) и A06а) будут:
Q1==_D^i. Q2=-D^l. A2.116)
Внося эти выражения в A15), приходим к следующему уравнению:
DWw = exh(k1+^)±ayh(k2+^W2Th-£%- + q.{l2A\7)
дх2 } r-y-y-г | ду2 J 1 "--(ixdy
Вводя в уравнение совместности деформаций (ПО) напряжения по
соотношениям упругости типа (85), получим
д2ах д2х д2ву (д2вх д2х д2ау
Ту2 дх ду ^~дх~2 il\lh?~ +" 2 дхду "+" ~дуг
■■ — jL(w, w) — Vlw. A2.118)
Воспользуемся теперь функцией напряжений Ф = ф.'А и выразим
ах, ау, х в A17) и A18) через Ф по известным формулам (9.60);
тогда придем к окончательным уравнениям (при q = 0):
■j- V4w = L (w, Ф)-\-У\ф, ]
i A2.119)
±-^Ф = — -^L{w, да) — V\w. J
Эти уравнения обобщают систему (87) на случай оболочки
большого прогиба. С другой стороны, полагая здесь равными нулю
члены, содержащие оператор Vft, получим уравнения (9.63) и (9.64),
относящиеся к гибким пластинкам. Как мы видели, первое из
уравнений A19) выражает условие равновесия элемента оболочки,
а второе — условие совместности деформаций.
Допустим теперь, что оболочка имеет до нагружения некоторые
отклонения от идеальной формы, или, иными словами, начальные
§ 142] УПРОЩЕННЫЕ ЗАВИСИМОСТИ ДЛЯ ОБОЛОЧКИ БОЛЬШОГО ПРОГИБА 505
ег = -
прогибы w0(x, у). Тогда выражения для деформаций A07) — A09)
получают вид
dv . , . . 1 / dw \2 1 / dw0 \2
w-ky{w-w0) + 1(w) -^(-jj-) ,
dw dw dw0 dw0
du , dv
у = 4_ _—
1 dy ' dx
dx dy dx dy '
A2.120)
под w здесь понимается полный прогиб. Повторяя вывод основных
уравнений, получим вместо A19)
~ V4 (w — w0) = L (w, Ф) 4-- у1Ф,
— v4<P = ~ — \L (w, w) — L (w0, w0)] — Vft {-w — w0).
A2.121)
Перейдем к конкретным задачам об устойчивости в малом и
в большом оболочек различного очертания. Начнем с круговых
цилиндрических оболочек.
ГЛАВА XIII
УСТОЙЧИВОСТЬ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
В ПРЕДЕЛАХ УПРУГОСТИ
§ 143. Основные уравнения для оболочки
кругового очертания
В исследованиях по устойчивости оболочек наибольшее
внимание уделяется круговым цилиндрическим оболочкам. Оболочки такого
очертания отвечают, как правило, требованиям наименьшего веса
конструкции и простоты изготовления; поэтому они широко
применяются в различных областях техники. Цилиндрические оболочки
входят в конструкции летательных аппаратов и двигателей,
подводных лодок, резервуаров, трубопроводов и т. д.
Выпучивание цилиндрических оболочек может произойти в тех
случаях, когда они подвергаются действию осевого сжатия,
поперечного давления, кручения, изгиба,
причем эти нагрузки встречаются
отдельно либо в различных
сочетаниях. В дальнейшем мы рассмотрим
последовательно задачи об
устойчивости оболочек при этих видах на-
р 1Ч, „ гружения.
1'ис. 13.1. Координатные линии при рас- п
смотрении цилиндрической оболочки. Прежде ВССГО Приведем ОСНОВ-
ные соотношения линейной теории
круговых цилиндрических оболочек постоянной толщины h. Обознач-им
радиус кривизны срединной поверхности через R. В качестве
параметров, определяющих положение любой точки срединной
поверхности, выберем координаты х и у, откладываемые соответственно
вдоль образующей и по дуге (рис. 13.1). Перемещения вдоль этих
линий и по нормали по-прежнему обозначаем через и, v и w;
прогибы w считаем положительными, если они направлены к центру
кривизны.
Первая квадратичная форма срединной поверхности будет здесь
/ = fix2 -f df.
A3.1)
( 143]
ОСНОВНЫЕ УР-НИЯ ДЛЯ ОБОЛОЧКИ КРУГОВОГО ОЧЕРТАНИЯ
507
Следовательно, мы должны принять в обозначениях предыдущей
главы а„ = Л1=1, а22—Л2=1, а12 = 0 и, далее, 1 = х, т) = у.
Кроме того, надо положить Rl=oo, R2 = R. Так как
коэффициенты Л] и Л2 здесь постоянны, все соотношения теории оболочек
сильно упрощаются.
Выражения A2.52) для деформаций в срединной поверхности
получают вид
ди dv w ди , dv
е- = -
dv T~ dr. '
дх' у ду R ' ' ду
параметры изменения кривизны по A2.53) будут
d2w в I dv d2w l dv
J ~1Т'д~у
I-
d2w
A3.2)
. A3.3)
дх2 ' у R ду ду2 ' л 2R дх дхду'
Отметим, что для параметра у. в литературе применяется и другое
w d2w
выражение:
V
ду''
A3.4)
его можно получить из B), если принять условие «нерастяжимости»
срединной поверхности в направлении дуги: гу
dv
w
~r'
■■ 0; тогда будет *)
A3.5)
В дальнейшем при рассмотрении изотропных оболочек будем
вводить в основные соотношения не усилия N х, Ny, T, а
непосредственно напряжения в срединной поверхности ox = Nx!h, ay — Ny'h
ax = Tjh. Уравнения равновесия A2.63) — A2.65) в проекциях на
ось х, касательную к линии у, и ось z перепишутся в виде
да.
дх
дх "" ду "+" h qx
^О,
Уравнения моментов A2.66)-
Qx
дМг dl I
^"ду~
дх доу
дх ' ду
dQx
дх
-A2
= 0,
dQy
1 ду
Rh +
, h°y
1 R
68) получают
дП
Тх^~
дМу
dv
1
+■ <7г =
форму
-Qy =
= 0,
-0
0.
дх
Найдем Qx и Qy из G) и подставим в F); тогда получим:
A3.6)
A3.7)
да.
дх
дх
~ду~
+ Т1х=°-
дх
dav
дх
д2Мх
ду
+■2-
1 1дИ
М\~дх~
дМ,
ду
■)+т
д2Н
d2Mv
ha
дх2 ' дх ду ду2
.Шестое уравнение равновесия A2.68) учитывать не будем
/4^ = 0. j
A3.8)
5.
*) В варианте основных соотношений, принятом В. 3. Власовым [12.3],
выражение D) не связано с условием нерастяжимости.
508 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Определим, далее, напряжения в срединной поверхности по
A2.70) и B):
Е Г ди , .. ( dv w
Or =
1 — u2 L дх
-зт-гИ
ду
R
_ Е Г dv w ди'
0у ~ 1-u2 [1у~~~ ~R ~т~A ~дх\ '
t = ;
Е
■2A + ц)
и моменты по A2.71) и C):
' d2w
М.
М,
г)*2
д2да
ди , r)w
г)у ' дх
I 1 гЬ
1 ди ,
A3.9)
Я:
(?У2 "Т
O(l-n)
R ду ' г
2/? дх "т" ддгду
d2w V
d2w
Их2
д2т
*
A3.10)
Введем выражения (9) и A0) в условия равновесия (8); тогда
придем к следующим уравнениям:
д2и
1 — [i д2и , 1_-\- \i d2v
ц dw
1 - u2
дх2
d2v
ду2
+
2 ду2 '
1 — [х d2v
2
/г2
2 дх2 '
1 + И д2"
12Я2
1
г)х ду
d2v
1
г>у2
dw
~л7< г :
R дх '
— u d2v\
2 'дх2')'
Eh
чх-
:0.
/г2
2" <1* d/ R ду ~^ V2R \дх2 ду
d3w
дът \
'1у»~Г
ц2
ЕЛ
■^
= 0,
12 V ™^/?2 Д dx ~
+ •
у? ^7 •
h2 I дЧ>
d3v
ду3
1 - ц»
Е/г
fc = 0.
A3.11)
12/? I/).*2 ду
где V4 = V2V2 — двойной оператор Лапласа по (9.20а).
Мы получили один из вариантов уравнений теории
цилиндрических оболочек в перемещениях *). Перепишем эти уравнения в виде
таблицы операторов по отношению к и, v, w (грузовые члены
опущены), см. табл. 13.1.
Отметим, что недиагональные члены этой таблицы построены
симметрично.
Обратимся теперь к упрошенному варианту линейной теории
оболочек, изложенному в § 139. Новые выражения для изменений
кривизны по A2.57) имеют вид
d2w d2w d2w /ло .п,
К = -7^7йг . О3-12)
дх2
ду2
дхду'
') См. книгу Ван Цзи-де [27.21], стр. 395.
5 143] ОСНОВНЫЕ УР-НИЯ ДЛЯ ОБОЛОЧКИ КРУГОВОГО ОЧЕРТАНИЯ 509
Как легко видеть, окончательные выражения для деформаций B)
и параметров кривизны A2) совпадают с такими же выражениями
в теории пластинок; исключение составляет формула для еу,
включающая здесь дополнительный член (—w'R). Первые два уравнения
равновесия (8) приобретают вид
даг . дх
дх ~ ду
дх до
= 0,
+ -^г =0;
дх ' ду
A3.8а)
они аналогичны соответствующим уравнениям для элемента пластинки.
Это позволяет ввести функцию напряжений Ф по A2.75)
д2Ф п д2Ф д2Ф ,,о ,оч
°у=^Г. ^=--^-5-. A3.13)
х ду2 ' у дх2 ' дхду
Уравнение совместности деформаций A2.54а) получает вид
дЧх дЧу д2у 1 д2т
ду2 ^Ix2 дхду ~ ~R дх2 '
A3.14)
Идя далее по пути, описанному в § 139, приходим к
окончательным уравнениям A2.83) и A2.86). Полагая по A2.84)
„2 1 д2т
k~'R"W'
находим:
Мы получили известную систему уравнений смешанного типа
относительно прогиба w и функции напряжений Ф, лежащую в основе
многих исследований. При решении задач устойчивости оболочек
в уравнение A5) надо подставить вместо qJh величину Що, и)
по A2.89); в полном виде уравнение будет
D _, 1 д2Ф d2w d2w 0 д2т ... , _ .
пг^^т-дЖ-Р'-ш-Ру-ф-^-Шу- A3Л5а)
Далее, уравнения A5а) и A6) можно привести к одному
разрешающему уравнению вида A2.91а). Если напряжения рх, ру, s
не зависят от координат, получим
Л ^ /?г дх* ^Рху \дх2)^РУ \ду2)^
+2sV4(SyH- A3Л7)
510 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХШ
Таблица 13.1
Дифференциальные операторы основных уравнений
д2
дх2
1
, !
1
-|-и
-ц
2
д2
д2
ду2
дх ду
ц д
"R~dx~
\+\i д2
\ду2
2 дх ду
1— ц д2
2 дх-
■Ь х
/? rty
x(!+w)
+
/г2 / д3 . д3 \
12/? U*2<ty +r)y3 )
/? ду ^
^ 12/? W2 r)y + ду3)
12 ^ R2
Упрощенный вариант теории цилиндрических оболочек можно
представить и в виде уравнений в перемещениях. В таблице 13.1
можно при этом отбросить члены со вторыми и третьими
производными, коэффициенты в которых содержат /г2; тогда придем к
следующей таблице*) 13.2.
Таблица 13.2
Дифференциальные операторы упрощенных уравнений
а
д2 1 — и. д2
дх2 ' 2 ду2
1 + ц д2
2 дх ду
и д
~~R"dx
V
1+ц д*
2 дхду
д2 1 — и д2
ду2 ' 2 Лег
1 д
R ду
W
\i д
~"Rdx
1 д
R ду
Ь*Л1 1
12 ^ R2
Эти операторы также обладают полной симметрией. Приведенные
в таблице 13.2 уравнения можно преобразовать. Дифференцируя
второе уравнение по х и у, находим
1 -f- u. d4u , d*v , 1 — ц. d4v 1 d3af
__ д'и
~2" дх2 ду2
d*v
дхду3
2 дх*ду R дхду''
- = 0.
*) Эти уравнения были приведены В. 3. Власовым (см. [12.3], стр. 316)
и Доннелом [13.30]
ОСНОВНЫЕ УР-НИЯ ДЛЯ ОБОЛОЧКИ КРУГОВОГО ОЧЕРТАНИЯ 511
Пользуясь первым уравнением, определяем входящие сюда
производные v; тогда придем к уравнению
*"—"&-«&■• 03.17а)
Аналогичное уравнение для v имеет вид
Эти два соотношения дополняют уравнение A7) для w.
Мы привели вариант упрощенных уравнений, относящийся к
случаю, когда размер выпучин мал по сравнению с размерами оболочки
хотя бы в одном направлении. Например, если оболочка получает
осесимметричные (кольцевые) выпучины, то длина их должна быть
мала по отношению к полной длине оболочки. Если же, напротив,
вмятина занимает всю длину оболочки, то число п волн вдоль
окружности должно удовлетворять условию к2^>1. Практически
упрощенные уравнения можно применять при п ^ 4; это условие
выполняется в различных случаях нагружения оболочки, если
отношение LJR не слишком велико. Вместе с тем, это отношение не
должно быть и чрезмерно малым: в зонах оболочки, прилегающих
к торцам, будут сильно сказываться местные напряжения. Таким
образом, в применении к задачам устойчивости, упрощенные уравнения
по таблице 13.2 справедливы для оболочек средней длины; этот
термин часто встречается в литературе. Более подробный анализ
показывает, что параметры оболочек средней длины должны
удовлетворять условию (по В. М. Даревскому):
1 н<:[-^)\ 03.18)
/12A—u2) R \nRi
Ymi-^-j^^J. A3.18a)
Сделаем попытку установить более определенные границы для
LjR, записав вместо A8) и A8а) следующие неравенства:
-./ я Jh_ _L_ -|/Yl2(l-n») R
У /12A —v.2)RRV я h
/12A -ц2) R
или
A3.18b)
/i<4</4- <13Л8с>
В дальнейшем мы уточним эти соотношения на примере задачи о£
осевом сжатии оболочки.
Рассмотрим другой вариант упрощения основных уравнений,
относящийся к случаю слабо выраженного волнообразования по длине
оболочки. Этот вариант состоит в том, чтобы принять срединную
512 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
поверхность перастяжимой в дуговой направлении (еу = 0) и считать,
кроме того, что сдвиги в срединной поверхности отсутствуют (у=0\
Далее, можно положить равными пулю поперечные силы и
изгибающие моменты в осевом направлении, а также крутящие моменты:
Qx = МХ = Н = 0, и принимать во внимание только усилия Qy и Му.
Такая теория оболочек получила название полубез.иомеятной *).
При этом выполняется условие E), поэтому для иу получаем
выражение D):
ди в / d2w , w Y dv w ди dv
Отсюда вытекает соотношение
д2&х 1 д2т
ду2 ~~ ~~~ ~R 'дЖ'
Сопоставляя его с выражением для иу, приходим к следующему
уравнению совместности деформаций:
д*ех 1 дЧх д2щ
Уравнения (8) приобретают вид
дах дх 1 дх дау 1 дМу 1
~W>rT)y"Jr Tqx==Q' Ix ^"~ду~ ~~Rh~dy~^rTqy~ °'
д2М„ h
■ov-4-q, = 0.
ду2 ' R "У
Объединяя их, получаем уравнение равновесия
d'Mv 1 д2Му д2а!С
R4y^+lR-WL+lt^- = P' A3-2°)
где
P = -%L+^R?g_t A3.20a)
дх ' ду ду2 к '
Соотношения закона Гука выпишем в виде
Р Ph.3
Егх. Му = ю..-_ .. ку = йку. A3.21)
"х 1— и2 х — ""*■ -'у — 12A— ,t2) "у — ""у
Введем переменные a = xjR, p = y//? и воспользуемся оператором
*) Эта теория, применение которой особенно уместно для
подкрепленных (ортотропных) оболочек, была разработана В. 3. Власовым [12.3]. Ему
принадлежат уравнения B3). См. также статьи В. М. Даревского (Инж. ж.
3, № 4, 1963) и И. Г. Кильдибекова и автора (Инж ж. 4, № 2, 1964).
§ 143] ОСНОВНЫЕ УР-НИЯ ДЛЯ ОБОЛОЧКИ КРУГОВОГО ОЧЕРТАНИЯ 513
тогда уравнения A9) и B0) примут вид
127? д2М„ д2ах
Qa* W-lJ-^^ /?A-^-r-QMy = /?*/>•. A3.23)
где
' ~ да ^ dp dp2 * (ld.^4)
Исключая вх и подставляя Му по B1), приходим после
исключения (для задач устойчивости) оператора (д2!д$2 -\- 1) к уравнению
DQQwh EhR^= -R*—-. A3.25)
Этим уравнением следует пользоваться, исследуя устойчивость
оболочек средней и особенно большой длины при том характере
волнообразования, о котором говорилось выше.
Отметим, что уравнение A9) непосредственно связывает
изменение кривизны ку, характеризующее искажение контура поперечного
сечения, с деформацией гх, определяющей искажение сечения в
направлении образующей, т. е. депланацию сечения. Напряжения ах,
возникающие при такой деплаиации, образуют в поперечном сечении
систему усилий, которую мы в главе V называли бимоментом
Таким образом, данный вариант теории оболочек тесно связан
с теорией тонкостенных стержней.
К приведенным выше уравнениям мы будем обращаться в
последующем при решении линейных задач. В нелинейных задачах будем
пользоваться упрощенными уравнениями теории гибких оболочек,
приведенными в § 142, полагая k{=0, k2=i!R- Окончательные
уравнения A2.109) получают вид*)
4^ = Цв,Ф) + {^, A3.26)
Дополненное разрешающее уравнение типа A7) будет
^-V4» + -|-g._V<L(W, Ф) + JL-^L(w, «0 = 0. A3.28)
При исследовании оболочек с начальной погибью надо
воспользоваться уравнениями A2.111); они переходят в следующие (при q = 0):
~V*(w ~wd = L(w, Ф)-г-^-Ц-.
A3.29)
*) Эти уравнения были впервые составлены Карманом и Цянь Сюэ-
сэнем [13.35]. Уравнение B8) было получено Цянь Вэй-чаном [12.15].
33 А. G. Вольмир
514 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Если с помощью уравнений B6) — B9) исследуется закритиче-
ская деформация оболочки, то производные от Ф по формулам A3)
определяют полные напряжения и включают, таким образом,
критические усилия.
Интегрируя приведенные выше линейные (либо нелинейные)
уравнения, мы должны удовлетворить граничным условиям. Выясним,
каковы будут эти условия для торцевых сечений замкнутой
оболочки*). При шарнирном опирании или защемлении оболочки по
краям х=0, x = L должно быть соответственно
да —0, —— = 0 или да = 0, ^— = 0.
дх2 дх
Далее, необходимо формулировать условия, касающиеся
перемещений и, v, а также усилий в срединной поверхности. Если точки
краев свободно смещаются вдоль образующей и по дуге, в этих
точках будет вх — 0, т = 0. В другом предельном случае песмещаю-
щихся кромок надо положить и = 0, i/ = 0. Одно из важных свойств
оболочки как упругой конструкции состоит в том, что эффект
воздействий, сосредоточенных в некоторой зоне, выражающийся в
образовании моментов и поперечных сил в сечениях оболочки, при
удалении сечения от этой зоны существенно затухает**). Это
обстоятельство надо учитывать при исследовании влияния граничных условий
в конкретных задачах.
§ 144. Сжатие замкнутой оболочки вдоль образующей.
Линейная задача
Обратимся прежде всего к задаче об устойчивости замкнутой
круговой цилиндрической оболочки, подвергающейся сжатию вдоль
образующей усилиями р, равномерно распределенными вдоль дуговых
кромок (рис. 13.2). Этот случай иагружеиия представляет большой
практический интерес. Например, корпус летательного аппарата
подвергается на участке разгона действию сжимающих усилий,
передающихся от двигателя. Некоторые другие задачи, в том числе задача
об устойчивости оболочек при изгибе, сводятся, как мы увидим,
к применению результатов, относящихся к случаю центрального
сжатия. Вместе с тем, круговая оболочка, сжатая вдоль образующей,
является своего рода эталоном, служащим для сопоставления
теоретических и экспериментальных данных и для проверки различных
.подходов в теории устойчивости оболочек.
*) О граничных условиях для открытой оболочки (цилиндрической
панели) см. в § 161.
**) Исключение составляет случай, когда воздействия происходят вдоль
асимптотических линий, т. е. линий нулевой нормальной кривизны. См.
книги [12.6], [12.8], [12.2].
wr
144]
СЖАТИЕ ЗАМКНУТОЙ ОБОЛОЧКИ ВДОЛЬ ОБРАЗУЮЩЕЙ
515
Эксперименты и наблюдения над реальными конструкциями
показывают, что характер выпучивания сжатых оболочек на практике
совсем не такой, каким он рисуется, если исходить из линейной
теории. Критические напряжения в опытах получаются здесь в три-
четыре раза меньшими, чем это
вытекает из исследования
устойчивости оболочки в малом. Более
полное решение этой задачи может
быть осуществлено с помощью
нелинейной теории оболочек. Таким
образом, эта классическая задача,
являющаяся па первый взгляд
элементарной, таит в себе неожиданные
затруднения; их до сих пор не
удалось полиостью преодолеть.
Начнем с рассмотрения
устойчивости оболочки в малом *).
Будем считать, что оболочка длиной L
шариирио оперта по торцам. Воспользуемся дифференциальным урав
неиием A7); оно принимает в данном случае вид
Е <Н- ^(Ц^
Рис. 13.2. Оболочка, сжатая вдоль
образующей.
— \sw-
h
R2 дх*
= 0.
A3.30)
Граничные условия для w будут
(JW
lb?
w = 0,
:0
при
:0, L.
Определенных условий, относящихся к перемещениям и, v, ставить
не будем.
В качестве первого варианта решения примем, что изогнутая
поверхность оболочки после выпучивания является осесимметричной,
т. е. что поперечные сечения остаются круговыми. Тогда w будет
зависеть только от х и уравнение C0) переходит в следующее:
D dsw d6w
~h ~dx» "+ P Их* ^
Примем для w выражение
w = /sin-
Е
R!
d*w
■0.
A3.30a)
A3.31)
удовлетворяющее граничным условиям; здесь т — число полуволн
изогнутой поверхности вдоль длины. Очевидно, при таком характере
выпучивания каждая продольная полоска находится в тех же
условиях, что и сжатый стержень на упругом основании (см. главу III);
таким «основанием» здесь служат дуговые волокна.
*) Решение этой задачи, принадлежащее Р. Лоренцу [13.45] и С. П.
Тимошенко [13.23], было дано в 1908—1914 гг.
38»
516 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Подставляя C1) в уравнение C0а), находим
'4J+I' A3-32>
где А,= mnRjL = nRllx. Определим минимальное значение р,
приравнивая пулю производную от р по А.; при этом мы считаем т ~^> 1.
Тогда получим
%=\fn{\~^)Y^ ■ A3.32а)
Обозначим через рв верхнее критическое значение напряжения,
соответствующее точке бифуркации для линейной задачи; предыдущие
соотношения дают
рв= г ' =В — . A3.33)
/3A -ц*) R V ;
При [I — 0,3 будет
/?в=0,605£ А. A3.34)
Формула C3) является фундаментальной в теории устойчивости
оболочек. Она показывает, что отношение верхнего критического
напряжения сжатия к модулю упругости материала — того же порядка,
что и отношение толщины оболочки к радиусу кривизны срединной
поверхности.
Судя по C2а), длина полуволны 1Х равна
1Х= л Л V'Rh. A3.35)
У12 A-м2)
так что величина ее—порядка ]/Rh.
В случае весьма короткой оболочки, если (£//?)'<d 1. надо
положить /и = 1, и дифференцирование выражения C2) по Я. стано--
вится неправомерным. Но тогда А, будет велико, так что вторым
членом в C2) окажется возможным пренебречь по сравнению с
первым; отсюда
Лр = -Щ-- A3.32Ь)
Мы получили формулу Эйлера для полоски, вырезанной из оболочки
в направлении образующей.
Обратимся теперь к более общему варианту решения задачи и
допустим, что изогнутая поверхность не является осесимметрич-
ной; тогда надо исходить из дифференциального уравнения C0).
Примем для w выражение, также удовлетворяющее граничным
условиям:
w = fsm—.— sin -5-. A3.36)
$ 144] СЖАТИЕ ЗАМКНУТОЙ ОБОЛОЧКИ ВДОЛЬ ОБРАЗУЮЩЕЙ 517
где т — число полуволн по образующей, я— число полных волн
вдоль окружности.
Подставляя C6) в уравнение C0), находим
D I т2п2 . л2 И , Е /я'л4 ( т2л2 . п2 \2 т2п2 n ,1QO,4
хНг + 7?0 +~&—1Г- Р[-!Г+1?) ~1Г = 0- A3'37)
Введем безразмерные параметры
Отметим, что величины & и т] можно выразить через длины
полуволн изогнутой поверхности вдоль дуги (/у = л/?/ге) и по
образующей {lx — Ljm):
lv n2Rh
& = —, т| =——• A3.38а)
lx 'у
Таким образом, параметр Ь характеризует очертания вмятины,
а Т] — длину полуволны 1у. Из C7) находим
1 (!+#*)* nj_ __**__ ,„ш
р- 12A- и«) #* ''т A4-#*Jл ' М ^
Считая числа тип достаточно большими, найдем минимум р из
условия
где
Р фг 'I.
это дает
p = Vl2(l— n2).
Верхнее критическое значение параметра р равно
рв = . L^^ 0,605. A3.40)
в /3A—ц2) ч '
Соответствующее напряжение рв определяется формулой, в точности
совпадающей с C3).
В рамках приведенного решения нельзя установить однозначно
форму волнообразования оболочки; величины ц и Ь должны лишь
удовлетворять условию
Ti(» + ij2 = ]/l2(l — ц2)«3,3. A3.41)
Если предположить, что волны являются квадратными @=1),
получим 11 = 0,825; отсюда
я,»0.91|/-£. A3.42)
518 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХШ
Следовательно, потеря устойчивости оболочки в малом с
образованием вмятин, расположенных в шахматном порядке, происходит при
том же критическом напряжении, что и в случае осесимметричного
выпучивания, причем число волн вдоль дуги — порядка ]//?//г. Мы
увидим в дальнейшем, что этот вывод относится только к
изотропным оболочкам.
Аналогичные результаты можно получить, исходя из уравнений
относительно перемещений, по таблице 13.2. При этом надо
положить
. ткх . пу
и — A cos—-.— sm ~
п . ткх пу
v = Bsm —-.— cos—~-,
W-
.-, . ткх . пу
■ L sin—-.— S'n-rr
A3.43)
и ввести в третье уравнение грузовой член
d2w
1 — ц2 d2w
— Р
Е
дх2
:ф-
дх2 '
где ф =
A -»2)Р
Е
-К
ц/.
тогда придем к системе алгебраических линейных уравнений
относительно А, В, С. Приравниваем нулю определитель, составленный из
коэффициентов при этих величинах:
2 I 1~}[ „2 + .4) •
"^ 2 2
2
где по-прежнему л
■Я2
= 0, A3.44)
Ф
' 2
П Е (П2 + >-2J + 1
m^RIL—bn и е = h'2i'l2R2. Находим отсюда ф:
(„2 + A2)S | A -ц»)?,» _
я5
(л2-f-л2J •
это соответствует выражению C9) для р.
Все приведенные выше формулы относятся к случаю /г2^>1, при
более общем решении задачи мы должны исходить из системы
уравнений по таблице 13.1. Если воспользоваться выражениями D3)
для и, v, w, то придем к следующему уравнению *):
1 — ц - 1 + И -
. 2 КП
Я2-
— п2
цХ
1 + ц
цХ
Я/г (l-f-e)/z2
A—|U)A+E)A2
2
/г[1 + е/г(/г2+Я2)]
■Я2ср п[\+еп(п2+Х2)]
= 0.
е(л2+а2J+1—Я2ф
A3.44а)
*) См. книгу Ван Цзи-де [27.2], стр. 396.
СЖАТИЕ ЗАМКНУТОЙ ОБОЛОЧКИ ВДОЛЬ ОБРАЗУЮЩЕЙ
519
Определяя отсюда ф и р в зависимости от относительной длины
оболочки и числа волн, приходим к результатам, изображенным на
рис. 13.3*). Здесь по оси абсцисс отложены (на участках а и б
рис. 13.3) различные величины:
со,
ч
1^12A-^) L fl?
я R V А '
Щ:
1
яУ 12A—ц2)
R V R '
p,2. Очевидно,
а по оси ординат—величина kp, где
рис. а относится к коротким оболочкам, рис. б — к длинным.
Нисходящая линия в левом углу рис. а соответствует уравнению C2b);
р
Об
uj -
П2 -
01
1 6
У
4
asssr
3
\
п
-2
1
/
V
\н
■;
/7=;--'
OfittfiOJi WW IJ) >
a) -»
0,03 0,04 0/50,06008'0,1
OJ 0,3 0,4 0$0fi OB 1.0 1,5
6) ai
Рис. 13.3. Значения верхнего критического напряжения в случае сжатия вдоль
образующей.
каждая полоска оболочки выпучивается, как пластинка. Далее мы
получаем горизонтальную линию на уровне 1/^3 = 0,577, что
отвечает выражению C3). Числа га здесь настолько велики, что изменение
при переходе от п к (п — 1) является незаметным. Однако в правой
части диаграммы, для относительно длинных оболочек, переход от
одного целого числа п к другому становится ощутительным. На
рисунке изображены лишь нижние части кривых для разных п,
лежащие между точками их пересечения. Как видим, при й^-4
значения ра лежат близко к значению C3). Однако при /1 = 3 и,
особенно, при га = 2 минимум рв резко отклоняется вниз. Наконец,
справа кривая га = 2 ограничена линией га=1; эта линия отвечает
*) График рис. 13.3 построен для ц = 7в и Л/А = 100, см. книгу Флюг-
ге [12.18], стр. 248. Участки, лежащие между кривыми п = 2, п= 1 и т. д.,
получены параллельным переносом ветвей, лежащих слева; они отвечают
Другим формам волнообразования.
520 цилиндрический оболочки в пределах упругости [гл. хит
эйлеровой форме потери устойчивости оболочки как стержня; в самом
деле, при га=1 любое сечение трубы перемещается, как жесткое
целое.
Радиус инерции кругового сечения тонкой трубы равен / = Rfy 2 ;
эйлерово напряжение равно аэ = x2ER2j2L2, при этом
- _ я2/?3
р ~ 2L*h "
Таким образом, здесь мы переходим от местной потери
устойчивости к общей. Рассмотрение рис. 13.3 позволяет определить
область значений L'R, для которых можно считать справедливой
формулу C3). Слева она ограничена значением о, »0,8, справа —
значением (о2«*0,1. При этом отношение LjR лежит в пределах
1-38/?<4<0-57/т-
что приблизительно соответствует A8Ь). Например, при /?/А=100
находим 0,14 < LjR < 5,7. Как видим, границы применимости теории
оболочек средней длины сравнительно велики и охватывают
значительную часть диапазона значений L/R, встречающихся на практике.
Рассмотрим теперь более подробно случаи я = 2 и /1=3, когда
оболочка выпучивается с образованием длинных волн. В § 143
подготовлен для этого аппарат полубезмоментной теории оболочек.
Воспользуемся уравнением B5). Здесь надо принять перемещения v и w
сравнимыми между собой и положить в B4) qx = 0, qy = —• ph д2х)[дх2,
qz = — ph d2wjdx2\ тогда
— P* — JL(nh d*v \ _ Л (nh d?w \
df, \pn R2 da2 j dp2- \pn R2 da2 J"
Но из исходных соотношений (стр. 512) следует: dvJdf, = 'W, поэтому-
га, h д2 I d2w\
~Р =PWla>\W—W)-
Полагая w = W (a) sin п$, приводим B5) к виду*)
EhR^^^^n\n2~lfW = ---phR44^+l)-^-.
A3.25а)
Принимая W = / sin mxRa/L, получим
Е ГГ en»(n'-l)»i
г — п2 + 1 [ п2 "i" к2 A - ц2) J '
*) Уравнение типа B5а) выведено для подкрепленной оболочки другим
пугем К. Д. Туркииым [13.24].
522 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
начало отсчета координаты х выбрано здесь посередине длины; а и
Ь— безразмерные величины, являющиеся в общем случае комплексными.
Подставляя (Ь) в (а), приходим к системе уравнений относительно а, Ь:
(с)
а) 2 (Ш* v* + b (к2 — р2J = 0.
Здесь введены безразмерные параметры:
Р = ТГ7Т »• ^ :
* __Рх!}_
D2
2,
(d)
2Д "" " 4/?2Л2
Исходя из (с), получаем следующее характеристическое уравнение
восьмой степени относительно параметра X:
{I? - р2J [(А,2 — р2J — к2рх\ + Х4Ъ4 = 0. (е)
Корни этого уравнения могут быть комплексными, вещественными
или мнимыми; при этом надо различать случаи симметрии и
антисимметрии упругой поверхности относительно линии х — 0.
Например, если корни вещественны и равны ± и;-, где у'=1, 2, 3, 4,
то выражения для Wj и Фу имеют вид:
для случая симметрии
да
Чх
, ^ пу
w = КjBj chco,- — sin -£-
Ф/z
~~D
■ = B
2x
ny
;chco;- — sin_n-
(f)
для случая антисимметрии
w
-L = KrCj&b(Oj t
1x ny
— sin-^
Ф;Л
R
1x ny
■■ Cj sh 0y —j— sin -5-
(g)
здесь y=l, 2, 3, 4; под /<*• понимается выражение
К; =
/ \2
Yr,
R
~D
Выражения (f) или (g) должны быть подчинены граничным
условиям. Будем различать следующие условия.
Варианты
I
II
III
IV
V
ох = 0
и = 0
и = 0
и = 0
ах = 0
Условия при Х=±Ц2
и = 0
Т = 0
и = 0
v = 0
v = 0
да = 0
да = 0
да = 0
да = 0
да = 0
да' = 0
да'=0
vWr = 0
да' = 0
А1, = 0
ВЛИЯНИЕ ГРАНИЧНЫХ УСЛОВИЙ В СЛУЧАЕ ОСЕВОГО СЖАТИЯ 523
По первому, второму и четвертому из этих вариантов края
оболочки являются защемленными; однако резко различаются между
собой граничные условия для перемещений в срединной поверхности:
в первом варианте точки края свободно перемещаются вдоль
образующей, но не могут смещаться вдоль дуги, во втором — условия являются
обратными. Четвертый вариант близок к условиям, в которых обычно
проводятся эксперименты: точки торцов не смещаются ни в одном
из направлений. По третьему и пятому вариантам края оболочки
оперты шарнирно, но в первом случае перемещения в срединной
поверхности для точек края отсутствуют, а во втором осуществляется
свободное смещение их вдоль образующей. Можно показать, что этот
л.
O.i
0,4
0,3
0,2
0,1
hl'paa^mo: За 5
I :-' .? 4 A W УО -а'/ 4С М 'НО ГСП Vp/,
Рис. 13.4. Влияние граничных условий в случае осевого сжатия,
W-trl
последний вариант отвечает «классическому» решению. На рис. 13.4
даны результаты вычислений, относящихся к оболочкам различной
длины. Как видим, начиная с некоторой длины, при всех вариантах
критическое усилие получается одним и тем же и совпадает с
классической формулой C3); эта величина обозначена на рис. 13.4
через ркл. Для более коротких оболочек первый и четвертый
варианты дают близкие между собой значения критического усилия,
лежащие выше, чем по остальным вариантам. С другой стороны, третьему
и пятому вариантам отвечают также совпадающие данные.
Итак, при вариантах граничных условий, приведенных в таблице,
параметр верхнего критического напряжения сравнительно мало
отличается от классического значения 0,605. Но наряду с этими случаями
имеются такие варианты граничных условий, для которых падение
верхнего критического усилия является значительно более резким.
Первый из этих вариантов относится к осесимметричной форме
потери устойчивости при условии, что по торцам w Ф 0. Вместе
с тем полагаем, что в концевых сечениях равны нулю момент Мх и
524 ЦИЛИНДРИЧЕСКИЕ ОВОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХШ
поперечная сила Qx. Таким образом, граничные условия имеют вид
w" = 0, w'"-\- (MjD)w, = 0.
Анализ, проведенный подобно тому как это было сделано в § 23,
показывает, что при таких условиях задача является
самосопряженной *). Решение задачи приводит к выводу, что критические усилия
сильно зависят от относительной длины оболочки. В следующей
таблице дано отношение критического усилия р к классическому
значению р0 = 0,605 для различных отношений LIR:
L/R
Р/Ра
0,12
1,0
0,17
0,60
0,20
0,50
0,25
0,44
0,30
0,43
0,40
0,50
0,50
0,51
0,60
0.50
0,70
0,49
>0,8
0,50
Исследование формы волнообразования показывает, что прогибы
оболочки очень резко меняются вблизи краев; по остальной же длине
образующие остаются почти прямолинейными.
Другой интересный вариант граничных условий относится к не-
осесимметричной форме потери устойчивости, когда края оболочки
закреплены шарнирно и прогиб равен нулю (?# —0, d2w2jdx'2 = 0);
вместе с тем предполагается, что при выпучивании оболочки по
торцам не возникает дополнительных осевых и касательных усилий **)
@^ = 0, т = 0). И здесь выпучивание концентрируется у торцов,
а критическое усилие составляет примерно половину от классического
значения.
Эти выводы, часть из которых получена лишь в самые
последние годы, имеют существенное методическое значение. Однако в
реальных конструкциях условие w ф 0 или т = 0, как правило, не
реализуется. Следовательно, снижение критических усилий для реальных
оболочек но отношению к значению 0,605 объясняется главным
образом влиянием начальных несовершенств; этому вопросу посвящен § 148.
§ 146. Нелинейная задача
Как мы видели, верхнему критическому напряжению C3)
соответствует форма изогнутой поверхности по C1) — при осесимме-
тричном выпучивании и по C6) — при отсутствии симметрии. Эти
два варианта изображены на рис. 13.5, а и б. Однако характер вы-
*) Эта задача была впервые рассмотрена Н. А. Кильчевским (Прикл.
матем. и мех. 6, № 6, 1942, 497—506) и в дальнейшем в статье
Н. А. Кильчевского и С. Н. Никулинской, Прикл. мех. № 11 A965).
**) Эта задача рассматривалась в работах В. И. Кожевникова (Изв.
АН СССР, Мех. и маш., № 3, 1964, 137—141), Хоффа и других авторов
(N. Hoff, Tsai-cjien Soong, Stanford Univ. Rep. № 204, 1964; N. Hoff,
Journ. Appl. Mech. 32, № 3. 1965, 533—541; N. Hoff, L. R e h f 1 e 1 d, там же,
542—546).
нелинейная задача
526
пучивания реальных оболочек средней длины не согласуется ни с одним
из этих вариантов. Вместо вмятин прямоугольного очертания,
расположенных в шахматном порядке и обращенных поочередно к центру
и от центра кривизны (рис. 13.5, б), в действительности образуются
ромбовидные вмятины, похожие на грани кристалла, как показано
на рис. 13.5, 8. Эти вмятины, глубина которых уже в
первоначальный момент сравнима с толщиной оболочки, появляются обычно
а) 6) в)
Рис. 18.Б. Различные формы выпучивания оболочки: а) осесим-
метричиая, б) «шахматная», в) ромбовидная.
в процессе резко выраженного хлопка. В большинстве случаев
вмятины составляют два или три смежных пояса. Однако в отдельных
опытах со тщательно изготовленными образцами удается получить
сетку ромбовидных углублений на всей поверхности оболочки или
на большей ее части. Таким образом, здесь совершенно четко
реализуется потеря устойчивости оболочки в большом. Отсюда вытекает
необходимость решения задачи с позиций нелинейной теории; впервые
оно было дано Карманом и Цянь Сюэ-сэнем [13.27]. Эти авторы
использовали такой же метод, какой обычно применяется в теории гибких
пластинок (см. главу VII). Он состоит в выборе аппроксимирующего
выражения для прогиба w, содержащего несколько варьируемых
параметров, и подстановке этого выражения в правую часть уравнения B7).
Интегрирование этого уравнения определяет функцию напряжений Ф.
Далее вычисляем энергию системы; варьируя энергию по параметрам
прогиба, находим диаграмму равновесных состояний оболочки. Задача
526 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХШ
осложняется тем, что в процессе выпучивания число и размеры
вмятин являются переменными; поэтому диаграмма равновесных форы
представляет собой огибающую некоторой серии кривых, отвечающих
тем или иным числам волн. В работах других авторов,
опубликованных за последние два десятилетия, были предложены уточненные
варианты решения задачи. В некоторых работах вместо метода
Ритца был использован метод Бубнова—Галеркина в применении
к уравнению B6).
Приведем один из наиболее простых вариантов решения задачи
с помощью метода Ритца *). Выберем выражение для w в виде
, . тпх . пу . , . ., тпх . , ,,„ .„ч
w = f1sm—j-- sin ^--l-/2sin2—2— -f/0. A3.46)
Первый из этих членов взят исходя из решения задачи об
устойчивости в малом и совпадает с C6). Второй член отражает
несимметричность прогиба относительно срединной поверхности, с
преимущественным направлением к центру кривизны. Если, суммируя первые
два члена, построить линии равного прогиба, то они дадут
очертания вмятин, напоминающие рис. 13.5, в. Наконец, третий член
в D6) соответствует радиальным перемещениям точек, принадлежащих
торцевым сечениям, при х — 0, L. Этот член не зависит от у:
считается, что при выпучивании оболочки торцевые сечения остаются
круговыми.
Введем обозначение
г = ^=пЪ A3.47)
для отношения длины полуокружности к длине полуволны вдоль
образующей; вместо D6) получим
■a> = /lSin-^-sin -^- + /2sin2-^- + /0. A3.48)
Подставляя D8) в правую часть уравнения B7), находим
Г ?4ф = f\ W (cos -^ + cos -f-) +
, , , г2/г2 / . Згх . пу . гх . пу \ ,
+ fif-2 -щс (sm -д- sin -£ — sin -д- sin -£-} +
. . г2 . rx . пу „, f! Irx ,,„ ...
+ /i-^T sin-g sin ^" —2/2-^r cos -Д-. A3.49)
Интеграл этого уравнения будет
1 ^ ., г2/г2 / 1 2/гу . 1 2гх\ .
Т ф = f\ — lw C0SR + ТЕРТ cos -r) +
.,,,,[ 1 . Ъгх . пу 1 . гх . пу 1 ,
+ f^rn IW^) S1" ~R SI" -R~~ T^) SI" -R SI" ~w\ +
. , r2R . rx . ny , R Irx py2 ,,„ .n .
+ f4r7vsm^~sinR~f2'^cos^ If: A3l49a)
*) Это решение принадлежит П. Г. Бурдииу.
528 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ (ГЛ. X11I
Окончательно
A3.59)
Решая задачу в первом приближении, будем варьировать
энергию по двум параметрам:
ж=°- Ш=°- A3-60)
Введем обозначения в дополнение к C8):
Si=x- ^=4' *=?f: A3-61)
тогда уравнения F0) примут вид
iis'f 1 / -804
£2_ U^n t3(l-|ii) p]fc» .„„ox
Ь| — i 7 sSn— „A2 / 1 T~\ • (М.ОД)
>+TW?W+-i
16fl-J \ sf ; 2 \ sf s2
где
S, = 1 +- #2, s,2 — 1 _|_. 9#2
Подставляя Щ по F3) в F2), приходим к уравнению, связывающему
р и £2> а считая ^2=0. —к прежней формуле C9) для/?,
полученной с помощью линейной теории. Выбирая, далее, определенные
значения # и г), строим кривые р (£-,). На рис. 13.6 и 13.7 показаны
две серии таких кривых для # = 0,5 и # = 0,6; вычисления были
также проведены для 12 других значений #, лежащих в пределах
0,3<^#<^2,4. Пунктирные линии являются огибающими кривых,
соответствующих различным значениям г\. При сопоставлении всех
вариантов оказалось, что наименьшая величина р — нижнее
критическое напряжение — соответствует параметрам # = 0,6, г|=0,19, £,=7,2,
£2=3,04 и равна /?„ = 0,124.
§ 146]
НЕЛИНЕЙНАЯ ЗАДАЧА
&29
Во втором приближении будем варьировать энергию системы
дополнительно но п и составим уравнение
оно получает вид
1*1
+
6A—ц2I»2 16ft2
+ 2гH4
ц-
дЭ
дп
2fl2
= 0;
A3.64)
>
A+*2K Л
1
402
8fl* A — О2)
О+02K
£2 = 0. A3.65)
Комбинируя уравнение F5) с F2) и F3), находим новую
зависимость р(Сг)- Соответствующие кривые для различных г| и й показаны
Рис. 13.6. Равновесные формы оболочки при 0 = -j— = 0,5;
х
к исследований в первом и втором приближениях.
на рис. 13.6 и 13.7 пунктирными линиями. Соединяя вновь полу,
ченные точки пересечения, находим новую огибающую (сплошная
линия). На рис. 13.8 сопоставлены огибающие для различных t>.
Наименьшее значение р имеет место при тЗ- = 0,48, г| = 0,4, ^ = 3,45,
52=1,9 и равно рн = 0,186. Таким образом, во втором приближении
нижнее критическое напряжение оказалось равным
рн = 0,186 £-£,
A3.66)
что составляет приблизительно 30% от верхнего значения C4).
34 А. С. Вольмир
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Рис. 13.7. Равновесные фэрмы оболочки при 0 = -у— = 0,6.
1х
0.5
л
р
0,<>
0,3
0,2
О J
в.
т
#--0fie
ъ?
^
1
^
* ь
Рис. 13.8. Равновесные формы оболочки при 0=-;— = 0,48.
Нижнее критичеокое напряжение соответствует /7=0,186.
НЕЛИНЕЙНАЯ ЗАДАЧА
531
Полученные данные позволяют построить диаграмму зависимости
параметра нагрузки от величины е, характеризующей взаимное
сближение торцов оболочки: e = ARjLh. По формуле E7) находим
a=p-r-^-(C?+-iq)- A3.67)
При С] = £2= 0 получаем прямую е=р, изображенную на рис. 13.9;
она соответствует исходному равновесному состоянию. Точка
бифуркации А отвечает ра = 0,605. Здесь ответвляется кривая ABC
изогнутых форм, разные точки которой отвечают различным т> и т);
0,2 Ц 0,6 0,8 1,0 1,2 л 1,4
Рис. 13.9. Диаграмма «сжимающее усилие —сближение краев».
значения ft указаны на рисунке. Как видим, переход от неустойчивых
форм к устойчивым и дальнейшее развитие закритической
деформации связаны с возрастанием параметра Ф; судя по C8а), это
означает, что вмятины вытягиваются вдоль дуги. Надо полагать, что на
участке АВ параметр $ резко падает, а вблизи точки В начинает
постепенно возрастать.
Итак, зак"ритическая диаграмма р (е) состоит из «падающей» ветви,
соответствующей неустойчивым равновесным состояниям, и
«восходящей» ветви устойчивых состояний. Мы считали, что процесс перехода
от одних равновесных форм к другим является статическим. Но так
как неустойчивые равновесные состояния не осуществляются, то
оболочка должна перейти от начальной формы к изогнутой устойчивой
форме динамически, путем хлопка.
В § 133 мы говорили только о таком случае, когда хлопок
происходит при неизменной внешней нагрузке. Но этот случай
сравнительно редко осуществляется на практике. Если бы оболочка была
расположена вертикально и подвергалась сжатию грузом
определенного веса, то требование р— const могло быть реализовано, однако
такие опыты провести трудно. При сжатии оболочки в испытательной
машине можно также создать фиксированную нагрузку, но для этого
машина должна быть снабжена специальным приспособлением,
включающим газовую «подушку»: во время хлопка оболочки содержащийся
ял*
532 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
в такой «подушке» газ (например, воздух или азот*)) расширяется,
поддерживая давление неизменным. Другой предельный случай состоит
в том, что в процессе хлопка фиксируется общая деформация
оболочки е. Такое требование е = const может быть осуществлено лишь
в условиях весьма жесткой испытательной машины, расстояние между
плитами которой остается при хлопке неизменным. Обычно, однако,
конструкция испытательной машины является упругой, так что при
резко возрастающей деформации оболочки одновременно снижается
приложенная к ней нагрузка. Это можно
иллюстрировать рис. 13.10: сжатая пружина А,
моделирующая упругую часть нагружающего
устройства машины, разгружается при хлопке
оболочки. В реальных конструкциях элементы,
связанные с оболочками, обычно также
являются упругими. Характер хлопка в двух
предельных случаях и при наличии упругой
связи изображен на рис. 13.11. Обратный
e-const^A I
S Ч 1
/ p-const
В
А
в-coast
'/^
Ь-const
—*~/
>^?
Рис. 13.10. Оболочка в
испытательной машине.
Рис. 13.11. Различные варианты хлэпка оболочки.
хлопок должен произойти по пунктирным линиям. Так или иначе,
диаграмма равновесных состояний ограничивается снизу нагрузкой ря,
поэтому, как было уже сказано в § 133, для практических расчетов
она представляет большой интерес.
Обратимся к другим решениям задачи об устойчивости сжатой
цилиндрической оболочки в большом. В книге [0.3] подробно
изложен вариант решения задачи, принадлежащий В. Л. Агамирову,
с выбором аппроксимирующего выражения для w в виде
t« = /1sln
—j— sin — -+- /2 sin2
тпх
sin'
A3.68)
отличающегося от D8) вторым членом. Величина рн оказалась в
первом приближении равной (при варьировании энергии по двум пара-
*) Во избежание взрыва лучше пользоваться азотом.
НЕЛИНЕЙНАЯ ЗАДАЧА
538
метрам) 0,284, а во втором (при четырех варьируемых
параметрах)— 0,334; соответствующее значение # = 0,59. Сравнение с
предыдущим вариантом показывает, как влияет малозначительное,
казалось бы, изменение структуры второго члена вD8) на результаты
решения: значение ра возросло примерно в два раза. Это относится
и к другим нелинейным задачам по устойчивости оболочек. Подобно
тому как реальные оболочки резко реагируют на малые
возмущения, что приводит к большому разбросу критических напряжений
(см. § 149), результаты решения соответствующих задач по методу
Ритца сильно меняются даже при незначительном изменении
аппроксимирующего выражения для прогиба.
В первоначальном решении Кармана и Цянь Сюэ-сэня [13.27]
,,„, , л , I 2тлх . 2пу\
второй член выражения D8) был выбран в виде /2lcos —-. |-cos-^4
и было получено для квадратных волн (#=1) р„ = 0,194. Позднее
Михилсен [13.46] нашел в уточненном решении /?„ = 0,195. Кемп-
B//Z 71Х
/2 cos — 1-
-f-/3cos—^-) и провел варьирование по пяти параметрам (/,, /2,
/3, ft и г)); в результате было получено ря = 0,182 при #==0,36.
Таким образом, до 1963 г. решения по методу Ритца привели
к значениям рн, лежащим в пределах от 0,182 до 0,334. В
последние годы удалось применить к этой задаче электронные цифровые
машины, и это позволило получить ояд новых результатов *).
Наименьшее из найденных к концу 1966 г. решений оказалось равным
ри — 0,0427. Как мы увидим в главе XVI, примерно такая же
величина для рн была получена при исследовании симметричного
выпучивания сферической оболочки.
Сопоставление результатов, полученных некоторыми авторами
за период с 1939 по 1966 г., сделано в следующей таблице.
Число
парам етров
Рн
0,1860
0,1820
0,0949
0,0733
0,0856 **)
0,0706 **)
0,0528 **)
0,0427
•■ Wmax/A
5,4
8,0
23,0
44,0
50,0
90,0
152,0
236,0
*) См. работы Элмроса (В. А 1 m г о t h, AIAA Journ. J, 1963, 630—633),
Соби (A. S о b e у, ARC Rep. and Memo № 3366, 1962), Хоффа и других
IBTopoB (N. Hoff a. o., Stanford Univ., Rep. № 206, 1964 и AIAA Journ. 4,
» I, 1966, 126-133).
**) Эти величины относятся к деформации tR/h = 3,4.
534 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Здесь же приведены значения стрелы прогиба, отнесенной к тол-
шине оболочки, при нижней критической нагрузке. Надо оговориться,
что помещенные в таблице величины получены различными методами
и потому не всегда сопоставимы между собой. Все же мы должны
сделать тот вывод, что повышение числа варьируемых параметров
приводит к резкому снижению уровня рн и нет основания считать,
что полученные данные являются окончательными. По-видимому,
имеется определенная тенденция к дальнейшему снижению рн до уровня,
близкого к нулю. Правда, эти величины рп относятся к ветвям
равновесных форм, весьма удаленным от основной. Значение
относительной амплитуды прогиба в последнем столбце таблицы достигает 236;
естественно поэтому, что результаты эти надо рассматривать как
условные. Надо предполагать, что хлопок к такой отдаленной
равновесной форме потребует преодоления высокого потенциального барьера
и поэтому практически является неосуществимым. Но, по-видимому,
в рассматриваемом широком диапазоне изменения параметров прогиба
имеется не одна ветвь устойчивых равновесных положений, а
множество таких ветвей и, соответственно, множество нижних критических
нагрузок *). Для перехода к ближним устойчивым ветвям надо
преодолеть менее высокий потенциальный барьер; поэтому для реальных
конструкций такой переход является более вероятным **).
§ 147. Геометрический подход к задаче
Выбирая аппроксимирующее выражение для прогиба, мы
стремились отразить склонность оболочки выпучиваться по ромбической
форме. Подойдем теперь к явлению хлопка оболочки с
геометрической точки зрения и постараемся более подробно изучить характер
волнообразования, проявляющегося в результате хлопка. Если бы
оболочка продолжала после потери устойчивости выпучиваться по той
симметричной форме***) C1) или C6), какую отражает линейная
теория, то это было бы связано с затратой значительной работы на
деформацию срединной поверхности. Как было уже сказано в § 1.34,
оболочка во многих случаях «предпочитает» выпучиваться внутрь,
и именно потому, что при этом срединная поверхность не получает
значительных деформаций растяжения — сжатия. Поэтому
целесообразно рассмотреть такой предельный случай волнообразования
оболочки, при котором дополнительная энергия деформации в сре-
*) Это было показано Н. К. Лебедевой для задачи об устойчивости
сферической оболочки, см. также § 246.
**) На это обстоятельство указывалось Л. И. Балабухом в 1952 г., а в
дальнейшем — автором (Труды 2-го съезда по механике, 1964 и Бакинской
конференции по теории оболочек, 1966); см. также статью Джонса (AIAA J.
4, № 9, 1966).
***) Под симметрией здесь условно понимается равенство стрел прогиба
к центру и от центра кривизны.
r-
5 147] ГЕОМЕТРИЧЕСКИЙ ПОДХОД К ЗАДАЧЕ 535
аинной поверхности вообще отсутствует *). Но как мы знаем из
§ 134, при этом изогнутая поверхность должна быть изометрична
первоначальной поверхности кругового цилиндра. Иными словами,
гауссова кривизна в каждой точке новой поверхности должна остаться
равной нулю.
Такое геометрическое изгибание не является непрерывным и
осуществляется в процессе хлопка оболочки.
Чтобы получить искомую поверхность, изометричную круговому
цилиндру, поступим следующим образом. Пусть дана правильная
призма с четным числом граней,
как изображено на рис. 13.12.
Проведем на одной из боковых
граней а, некоторую гладкую
кривую Yi> однозначно
проектирующуюся на ось призмы; на рисунке
эта кривая изображена для
примера в виде синусоиды, нулевые
точки которой проходят через
среднюю линию грани. Далее
нанесем на соседней грани а2
кривую Y2- являющуюся зеркальным
отображением Yi относительно
плоскости р12, проходящей через ось
призмы и ребро 612. Повторяем
такое же построение для
следующих граней, тогда получим кри- а) 6)
'3' Т4 • А- Рис. 13.12. Построение поверхности, изо
ПОСТРОИМ Теперь ЦИЛИНДрИЧе- метрнчной цилиндру.
скую поверхность ZI2 таким
образом, чтобы она проходила через кривые yit y2 и чтобы ее образующие
были'перпендикулярны к плоскости р,2 (рис. 13.12, б). Этим же
путем проведем поверхности Z23, Z34 и т. д. Трубчатая поверхность,
состоящая из Z12, Z23 и является искомой. Это легко показать.
В самом деле, очевидно, что в точках, не принадлежащих кривым
Yi. Y2' ••■, вновь образованная поверхность имеет нулевую гауссову
кривизну, так что она изометрична исходной. Но и в точках
кривых Yi> Y2- • • • изометрия сохраняется, так как, если отразить
цилиндрическую поверхность Z23 зеркально в плоскости грани а2, то полу-
*
ченная при этом поверхность Z23 будет являться продолжением
поверхности Z12.
В поперечном сечении вновь образованной трубчатой поверхности
мы получим замкнутую линию. Можно показать, что длина этой
v *) Подробные исследования в этой области принадлежат А. В. Погоре-
^;; лову [13.19], [13.20]. Ниже излагается предложенный им метод построения
Sy иаометричиых поверхностей. См. также работы Кирсте [13.38] и Иошимура
■'£■ \1. Yo8hlmura, Rep. of the Inst, of Science and Techn., Univ. of Tokyo 5, 1951)
536 ЦИЛИНДРИЧЕСКИЕ ОВОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
а)
6)
Рнс.
13.13. Изиметричная цилиндру
поверхность с гранями кристалла.
линии окажется во всех сечениях одной и той же независимо от
вида линий Yi> Y2> •••'• она равна периметру правильного
многоугольника (см. рис. 13.12, а), вершины которого совпадают с
серединами сторон в сечении первоначальной призмы. Будем считать
длину этой линии равной 2я/?, где
R — радиус кривизны изометричнои
цилиндрической поверхности.
Отметим также, что длина линии
пересечения трубчатой поверхности с
плоскостью, проходящей через ось
призмы и любое ребро, равна высоте
цилиндра.
Следовательно, полученная
трубчатая поверхность изометрична
круговому цилиндру радиуса R. Так
как этот вывод не зависит от вида
кривой у, то подобное построение
является, по существу,
универсальным.
По мере развития закритиче-
ской деформации оболочки форма
изогнутой поверхности должна
изменяться; это можно отобразить,
увеличивая амплитуду синусоиды по рис. 13.13, а. Если теперь
заменить синусоиду прямолинейными отрезками со сглаженными участками
в местах сопряжений, то в пределе получим поверхность,
изображенную на рис. 13.13, б. Мы пришли к тем характерным «граням
кристалла», о которых говорилось в § 146. Таким образом,
геометрический подход к задаче позволяет исследовать характер
поверхности оболочки после хлопка с качественной стороны. Можно
попытаться использовать полученную изометрическую модель и для
'количественной оценки нижнего критического напряжения. Коль скоро мы
пренебрегаем деформациями в срединной поверхности, связанные
с ними нелинейные члены в основных уравнениях выпадают.
Потенциальная энергия деформации оболочки при выпучивании будет
состоять только из энергии изгиба.
В статье Хоффа и других авторов (см. ссылку на стр. 633) было
проведено дальнейшее изучение модели, показанной на рис. 13.13.
Если представить радиальные перемещения цилиндра при переходе
к изометричнои поверхности с помощью тригонометрического ряда,
относя прогиб к параметру R/n2, то коэффициенты этого ряда будут
обладать замечательной особенностью. Они будут являться
предельными значениями для варьируемых параметров метода Ритца (см. § 146)
при последовательном увеличении числа членов ряда, как показано
в таблице на стр. 538. 8то обстоятельство сближает различные пути
изучения закритических равновесных форм оболочки.
НАЧАЛЬНЫЕ НЕПРАВИЛЬНОСТИ ПРИ ОСЕВОМ СЖАТИИ 537
§ 148. Влияние начальных неправильностей при осевом сжатии
Как известно, наибольшее влияние на разброс экспериментальных
значений критических нагрузок оказывают начальные неправильности
в форме оболочки. Обратимся поэтому к исследованию поведения
оболочек, имеющих начальную погибь. Пути решения этой задачи
могут быть различными. Один из них заключается в составлении
нелинейных уравнений, описывающих равновесные состояния
оболочки при различных параметрах нагрузки.
Допустим, что таким образом построена диаграмма «нагрузка —
характерное дополнительное перемещение». Если подобная диаграмма
имеет предельную точку, то эта точка определяет верхнее
критическое значение нагрузки *). Такой подход к задаче будет подробно
проиллюстрирован ниже (§ 154) для случая, когда замкнутая
оболочка подвергается внешнему давлению.
Другой подход состоит в предположении, что оболочка получает
осесимметричные начальные прогибы, и в определении
образующихся при действии нагрузки напряженных и деформированных
состояний оболочки. Если, далее, выписать линеаризованные уравнения,
описывающие несимметричные дополнительные прогибы, то можно
установить точку бифуркации, в которой от основной кривой
равновесных состояний ответвляется линия несимметричных конфигураций.
Решение линеаризованной задачи дает, таким образом, возможность
определить верхнюю критическую нагрузку для осесимметричных
равновесных форм **). Остановимся более подробно на этом втором
подходе. Допустим, что в начальном состоянии оболочка имеет осе-
симметричный начальный прогиб
«>o = /osm—7—. (а)
где щ—число полуволн вдоль длины.
Определим дополнительные осесимметричные прогибы те»,, которые
появятся после приложения к оболочке сжимающих усилий р.
Воспользуемся уравнением A2.91), которое в данном случае, при tw = tw(x),
принимает вид
= Р cPwj Р dew{ . 1 dkwx Р d6w0
Eh dx* -+" E dxe "+" R2 dxi ~ ~E~~dxe~' ^ '
*) Этот путь, ведущий свое начало от работ Доннелла [13.30], был
' использован автором [0.3] для исследования влияния начального прогиба
; на поведение цилиндрических панелей при осевом сжатии.
**) Такой путь был намечен С. Н. Каном (Теория оболочек и пластин,
Ереван, 1964) и В. Койтером (Nonlinear problems, Madison, 1963, 257—273;
"Ргос. Коп. Nederl. Akad. van Wetensch. B56, № 4, 1963, 265—279). См. также
статьи И. Я. Амнро (Прикл. мех., № 1, 1966), Хачинсона (J. H u t с h i n-
'Son, AIAA J. 3, N° 8, 10, 1965). Приведенное здесь решение задачи
принадлежит Д. Е. Липовскому.
538 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Будем считать торцы оболочки закрепленными шарнирно. Находим
решение уравнения (Ь), отвечающее условиям <w]=w" — О при
jc = 0, L:
f (тл Y2
«. L > ■ т°пх
Л I I j PI I j ^ Я*
Введя обозначение
где XQ— mQnRIL, перепишем (с) в виде
<»i = IP/оИРщ — Р)\ sin (V/Л). (ft)
Сопоставление (d) и A3.32) показывает, что рт представляет собой
критическое напряжение, соответствующее осесимметричной форме
потери устойчивости, при образовании т0 полуволн по длине
оболочки. Пользуясь прежним обозначением р = pRjEh, находим
полный прогиб:
w = wi + w0==-r^-sin^0-i; (f)
под v понимается отношение р/рт ■ Эту зависимость можно
сопоставить с формулой A.182), приведенной выше для сжатого стержня.
В результате образующая цилиндра получает кривизну
1 Л 1 /о>-о . , х
где 70=/о/Я-
Вместе с тем появятся дополнительные окружные напряжения:
Py = Ent = T~sinlo^- (h)
Рассмотрим устойчивость в малом равновесного состояния,
характеризуемого соотношениями (/) — (й), считая при этом число щ
нечетным. Для этого воспользуемся линейными уравнениями (85) — (86).
В рассматриваемом случае их можно записать в виде
1 (д\ 7 а;
х (Гф\
, I d2w Efa . , х d2w\ ГЛ
$ И8]
НАЧАЛЬНЫЕ НЕПРАВИЛЬНОСТИ ПРИ ОСЕВОМ СЖАТИИ
539
Дополнительный прогиб, появляющийся при несимметричной потере
устойчивости, примем, в первом приближении, в виде
■ffit = /sinA,-n-sin ~-,
где Я = mnR/L. Подставляя (I) в (к), находим
(I)
фа=-£АЯ/
>- х
■оПТ8,п?"л"+
гЖ
/о
cos(X0-X)-£ cos(A0 + A)^
(л, *о-л)
(л, Х0 + Х)
! sin
пу
/>У2
R
2£
(т)
здесь по E0) принято
(аг, Ьп) = [(агJ -f- FяJ]2.
Подставив (I) и (гп) в уравнение (i) и применяя метод Бубнова -
Галеркина, после некоторых преобразований находим уравнение для
определения критического напряжения р = рк :
Рт, л Ркр
*0 ^ш„
/о
к
а Уз (I - ц2) (а2 - 4л2) 1/Я I —v } А
(Х„-ХK(*-о + 2Х)
(л, Х0 - А)
X
(л0 + аJ(Ао-2а)-| 4Х,Х»
(Л. Х0 + Х) Г (Л, А) "Г
-f-
1 4 2
А>
8а/3A — ц2) Л2 V 1 — v
1
(л,Х0-Х) (л, Vf-A)
■0.
где
г т, п
/12A-ц»)
rci^JlL
с (А
—I
, и) J
A3.69)
(п)
Под /?т> „ следует понимать параметр критического напряжения для
идеальной оболочки при потере устойчивости с образованием п волн
по окружности ист полуволнами вдоль образующей; кроме того,
принято с = (£)/£7г/?2)'/2. Подчеркнутый в F9) член связан с
окружными докритическими усилиями р • остальные члены, содержащие /0,
Нэтражают начальную кривизну образующей оболочки. Отметим, что
•выражение (п) легко привести к виду C9).
^ Анализ соотношения F9) показывает, что при /0 = 0 находим
&кр — Рт,п' так что критическое напряжение совпадает с верхним
^Критическим значением для идеальной оболочки. Если /0 > 0, то
РУД" ЯР < Рт. п-
I Уравнение (п) можно рассматривать как квадратное относительно /0;
|дегко для каждого сочетания параметров л0, К и п найти соответ-
540 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
ствуютие значения /0. При этом параметр Х0 является исходным, а А,
и п определяются из условия минимума ркр. Наибольшее влияние
начальной погиби имеет место при значении т0, близком к
отмечающему осесимметоичной форме потери устойчивости идеальной
оболочки; тогда к0 = с~11*. Кроме того, влияние осесимметричных
неправильностей возрастает по мере приближения А. к А0/2. Так как
т0—нечетное число, то минимум р^р получается при т~{тй — 1)/2,
что соответствует Х = (Х0— nR'L)'2. Следовательно, при отыскании
минимума ркр достаточно варьировать п.
Вычисления по F9) приводят к следующей зависимости
параметра критического напряжения ркр от стрелы начального прогиба
^ = /о/А=7оЯ'А:
So
Ркр
0
0,605
0,1
0,350
0,2
0,290
0,3 0,4
!
0,230
0,196
0,5
0,180
Как видим, величина ркр сильно зависит от амплитуды начального
прогиба.
Эти результаты с методической стороны представляют интерес;
они прокладывают мост от исследования волнообразования оболочки
при осевом сжатии к изучению случая нормального давления *). Надо,
однако, иметь в виду, что на практике начальное волнообразование
оболочки сводится обычно к появлению одиночных вмятин,
напоминающих описанные выше ромбовидные вмятины **). Правда,
раскладывая функцию начального прогиба в ряд Фурье, можно определить
нулевой член разложения и тем самым отделить осесимметричную
составляющую прогиба; эту составляющую отражают, например,
второй и третий члены в выражении F8). Выбирая путь линеаризации
задачи о выпучивании, мы должны, таким образом, перейти от
несимметричного начального выпучивания к симметричному, а затем
снова рассмотреть несимметричное дополнительное волнообразование.
Казалось бы, естественнее с самого начала исследовать задачу в общем
виде, с нелинейных позиций. Вместе с тем решение элементарной
линеаризованной задачи позволяет выяснить, как влияют на
поведение оболочек те или иные факторы.
Остается обсудить вопрос о том, каким образом осесимметричная
форма начального прогиба, характеризующаяся поочередным сжатием
*) На эту аналогию обратил внимание Хачинсои, AIAA J. 3, № 11
A965), 1968—1970.
**) Практические измерения начальных неправильностей для
цилиндрических оболочек проводились С. Н. Каиом, см. также статью Коппа
(А. Р. Сорра, AIAA J. 4, № 1, 1966, 172—175).
w
} 149] РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ 541
и растяжением поясков оболочки, может привести к столь резкому
падению критического напряжения, характерному для случая
внешнего давления. Не должно ли действие сжимающих усилий в одном
из поясков компенсиг оваться эффектом растягивающих усилий в
соседнем пояске? По-видимому, при несимметричном выпучивании
прогибы в зонах со сжимающими напряжениями оказываются больше, чем в
зонах растягивающих напряжений; общий эффект периодически
изменяющихся усилий приводит к падению устойчивости конструкции *).
§ 149. Результаты экспериментов. Данные
для практических расчетов
Обратимся к экспериментальным данным, относящимся к величине
критического напряжения и характеру волнообразования. Данные эти
являются разноречивыми, так как сильно зависят от начальных
неправильностей в форме оболочки и условий нагружения.
Рассмотрим прежде всего результаты испытаний металлических
оболочек, изготовленных с большой тщательностью, — как правило,
обточкой на токарном станке по *
специальному копиру, с мини- '
мальными отклонениями толщины
стенки и радиуса кривизны от
заданных величин **).
В подобных испытаниях еще
до,хлопка удается наблюдать —
лучше всего по искажению
световых полос на поверхности
образца— образование едва заметных
прямоугольных вмятин того типа,
КаКОЙ Отвечает Выпучиванию В МЭ- Рис. 13.Н. Формы вмятин при различных" ва-
лом по рис. 13.5,6. Такие нредва- риантах хлопка-
рнтельные вмятины оказываются примерно «квадратными»: размеры их
вдоль образующей и по дуге близки между собой. Затем происходит
резкий хлопок, после которого на образце появляются вмятины
ромбического типа по рис. 13.5, в, причем и здесь диагонали
вмятины получаются приблизительно равными. Нагрузка, регистрируемая
данометром машины, при хлопке резко надает. Если же продолжать
фагружение образца, то усилие сжатия слегка повышается, а вмятины
лытягиваются вдоль дуги. К сожалению, при испытаниях стальных
рли дюралюминовых образцов обычно не удается провести опыт
Ш чистом виде, так как в зонах, прилегающих к гребням вмятин,
^Образуются пластические деформации. Если бы равновесные формы
'■»
г *) Такое объяснение приводит В. Койтер (Nonlinear problems, ссылка
|ра стр. 537).
**) Такие испытания были проведены Л. Р. Исправииковым, В. Л. Ага-
рИировым и др. авторами, см. [0.3], стр. 320—325.
542 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
оболочки сменялись статически, по диаграмме р(е) рис. 13.11, то
первоначальные вмятины, отвечающие точке А на рис. 13.14, должны
были бы сильно вытянуться вдоль образующей, как показано для
точки В, и лишь затем постепенно изменить форму, удлиняясь по
дуге. Но в реальном динамическом процессе оболочка, по-видимому,
Рис. 13.15. Последовательные стадии образования ромбовидных вмятин.
«проскакивает» промежуточные равновесные формы, так что на
диаграмме рис. 13.14 мы попадаем непосредственно в точку С с
«квадратными» вмятинами. Параметр напряжения, при котором происходит
хлопок, для таких образцов составляет
ркр ~ 0,23-н-0,35.
Как видим, даже при весьма тщательном проведении опыта
критическое напряжение составляет лишь около половины от верхнего
значения рв.
При испытаниях оболочек, изготовленных более
грубо—например, из свернутого плоского листа, — обычно можно заметить уже
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ
543
при малых нагрузках образование одиночных вмятин в местах, где
имеются те или иные возмущения — начальная погибь пли
концентрация напряжений.
В дальнейшем происходит серия хлопков, ведущих к появлению
новых вмятин.
Такой процесс отражен на фотографиях рис. 13.15, относящихся
к стальным оболочкам (/.//? = 1,4, Rjh = 1870) *). В конечном счете
образуется та же система ромбических вмятин, что и в случае
тщательно изготовленных образцов.
На рис. 13.16 указана область экспериментальных значений /?кр,
взятых из работ различных авторов. Как видим, величина рв = 0,605
действительно является верхней границей для реальных критических
напряжений. Из
теоретического исследования выте- J,B0\ г 1 ~———\Рд
кает, что выпучивание
оболочек должно происходить
при безразмерных
напряжениях, лежащих между ри
и рв. Так как
окончательное значение рп еще не
найдено, трудно судить о том,
насколько это
предположение осуществляется.
Значительная часть опытов
приводит к значениям ркр, лежа-
J.SB
0,k5
U, 39
A,15
йШ
■лУУ77770'
Ш^&
{^777777777
''//////У/// V///7>£*L,_
i
Рн
R/fi
Рнс. 13.16. Область экспериментальных данных для
ЩИМ ВЫШе 0,18. Однако Не- критического напряжения сжатия.
Которые экспериментальные
точки лежат ниже этой величины и в отдельных случаях оказываются
равными 0,06-~0,15. Рис. 13.16 указывает па явную тенденцию
к падению ркр при возрастании**) отношения R/h. Такой результат
не был получен ни в одной из работ, основанных на методе Ритца,
и вытекал лишь из исследования С. А. Алексеева [13.2]; им была
получена формула ра = 2,35(й//?H,а. Надо иметь в виду, что по мере
увеличения R/h вероятность появления начальных прогибов должна
повышаться; это, несомненно, должно приводить к снижению средней
величины реальных критических напряжений (см. главу XXV).
Будем, например, определять нижнюю границу критических
напряжений, исходя из того требования, чтобы вероятность попадания
экспериментальной точки в вышележащую область составляла 90%
*) Эти фотографии получены Канемитцу и Пайима (S. Kanemltsu,
N. М. N о j i m a).
**) Снижение ~ркр при весьма малых Rjh объясняется тем, что в этой
области выпучивание оболочек происходит за пределами упругости (см.
следующую главу).
544
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
или 99%*); тогда получим следующие значения р в зависимости
от Rjh:
R!h
По критерию 90% вероят-
По критерию 99%
вероятно
0,18
0,14
">09
0,16
0,12
ПО
0,14
0,10
3000
0,13
0,08
1500
0,11
0.07
2000
0,09
0,065
2500
0 08
0,06
Как видим, при увеличении Rjh значения р действительно резко
падают.
Какие же данные надо положить в основу практических
расчетов? Так как в случае осевого сжатия разрыв между верхним и
нижним критическими усилиями очень велик, эксплуатационная нагрузка
должна определяться со значительным коэффициентом запаса по
отношению к верхней критической величине р. В настоящее время
нельзя ставить требование, которое было уместным еще несколько
лет назад, — чтобы расчетная нагрузка лежала в пределах нижнего
критического усилия /?„. Напомним, что под рн понимается то
наименьшее значение параметра нагрузки, при котором отклоненные
равновесные состояния системы перестают быть устойчивыми. По
здесь речь идет о равновесных состояниях определенного типа,
переход к которым может быть связан с преодолением высокого
энергетического барьера. Цель расчета сводится к тому, чтобы система
была практически устойчива в большом, т. е. чтобы была
обеспечена устойчивость начальной формы равновесия при заданных
границах для начальных неправильностей и при заданных отклонениях
реального процесса нагружения от принятой схемы.
Сопоставление данных статистической теории устойчивости
оболочек с результатами многочисленных опытов приводит к следующей
таблице значений /?piC, которой рекомендуется пользоваться на
практике для тщательно изготовленных оболочек, в пределах упругости.
R/h <250 500 750 1000 1500
Ярам 0,18 0,14 0,12 0,10 0,09
Если же оболочки изготовляются недостаточно тщательно и
начальные прогибы достигают величины порядка толщины п, расчетные
значения р следует снижать примерно вдвое. Начальные прогибы,
заметно превышающие толщину оболочки, вообще недопустимы, так
как жесткость конструкции при этом резко снижается.
*) Приведенные ниже таблицы составлены Б. М. Броуде на основании
данных, имек>!цихся в статье [13.33] и других работах.
СЛУЧАЙ ВНЕШНЕГО ДАВЛЕНИЯ. ЛИНЕЙНАЯ ЗАДАЧА 545
§ 150. Случай внешнего дагления. Линейная задача
Перейдем к случаю, когда оболочка подвергается действию
равномерно распределенного по боковой поверхности внешнего
давления q (рис. 13.17). Такой вид нагружения характерен для корпусов
подводных лодок и оболочек авиационных двигателей. Резервуары
в химической промышленности также
часто испытывают избыточное
внешнее давление.
Допустим, что по торцам
оболочка шарнирно скреплена со
шпангоутами, точки которых могут
получать некоторые радиальные
перемещения, причем шпангоуты
остаются круговыми.
Рассмотрим задачу об
устойчивости такой оболочки сначала
в линейной постановке *). Если
круговая оболочка подвергается
действию внешнего давления q и изгиб оболочки отсутствует, то из
уравнений F) получим при Q^ = Qy==:0 напряжение вдоль дуги
равным 0у = — qR/h. Таким образом, действие поперечной нагрузки q
эквивалентно действию сжимающих напряжений ру = qRjh. Поэтому
мы можем воспользоваться однородным уравнением A7), учитывая
лишь усилия ру\ тогда получим
Рис. 13.17. Цилиндрическая оболочка,
подвергающаяся внешнему давлению.
ft
Примем для w то же выражение C6), удовлетворяющее граничным
условиям, что и в случае сжатия; тогда вместо C7) получим
h \ L2 "г R2 ) '
Е т*л*
ЗВ.
h
т2п2
п2 \2 п2
-^г) -^- = 0; A3.71)
отсюда
--DR
т2п2
L2n
R2
Eh
Rn2
n2L2
R2m2tf
A3.72)
Очевидно, при определении критического давления надо принять
т=\. Следовательно, в отличие от случая осевого сжатия, при
внешнем давлении оболочка должна выпучиваться вдоль образующей
*) Линейная задача была решена Р. Мизесом [13.47], а в дальнейшем
X. М. Муштари и Л. И. Саченковым [13.16] и другими. Об использовании
полубезмомеитной теории в этой задаче см. статью И. Г. Кильдибекова
и автора (ссылка на стр. 512).
35 А- с. Впльмнр
546 цилиндрические Оболочки в пределах упругости и~л. xtti
всегда по одной полуволне; это заключение подтверждается
экспериментами. Введем обозначение
вместо G2) находим
А п> I я'&у .п«/у 1 3 74^
, "Т" „2/2 ~Г I 4;,„в / тт2Е>2\2 • U°-'4J
R 12A—ji2) V «2i2 z1 ' L4in*
0+ЗД"
Эта формула упрощается, если можно принять
gJ<Ci; A3.75)
тогда будет
- 1 п2п . .ч4/?5
<7_ 12A—ц2) R "+" Z.«/m« '
Минимизируя q по и, получим
" = ^блп7т^р|/"||/*4 A3-76)
или, при A = 0,3,
«~2,7j/4i/"x- A3-76a)
Подставляя G6) в выражение G4), определяем верхнее критическое
значение qB:
*. = ^1ПТ~(-Г A3.77)
Чв 9A—ц»H-75 L U/ .
или,- при [X = 0,3,
9В = 0,92^|/"А. A3.77а)
Соответствующее окружное напряжение равно
ру = 0,92Е^У^. A3.77Ь)
Формулами G7) можно пользоваться, если выполняется
условие G5). В противном случае надо вернуться к полному
выражению G4) и найти значение п, отвечающее минимуму q. На рис. 13.18
представлены значения qB, вычисленные *) по G4) для большого
диапазона отношений R/h и L/R.
Выражение G4) справедливо и здесь при условии 1/я2<^ 1,
относящемся к исходному уравнению G1). Будем по-прежнему
считать, что это условие выполняется при я^>4. Случаи я = 2; 3 надо
*) Расчетный график (рис. 13.18) принадлежит В. А. Нагаеву A3.17].
ад
oji
0,10
0,09
Щ
0,47
0,01
0,ВЬ
0,04
0,03
0,02
0,01
О
-
—
fl"
и
"
\
т
ов
А
ъ-Щ
V
■гоо
«
щ
w
\п-9\
\
\
f
\
\
ЬРп
л/
\
i-вт'Шт-А
Г !
I I
i
-
-
\ ■ \=\
_у™
•
\
I
! I
i '
I I
W
too
v
\
х
\i
Sn-S
\л-!В
-!2\
,V\
п.
/Л
VV/JN
V;'*l
_
N"
Кс*3
■IS
1
К.л-9
1
ЧД-W
«s-^.
Ч/7-=У
\7=/
N
N
...
V
! *
i
s."-
к^"-
^Г
i-ti
в
k~--UJ
.7-
=a
1 ■
i
-
&y^
II
1
—
^J^^^Q
\^\3ш^
'vC'S^'
ft '0.3
1 i
!}•
^
5
Л-7
--"'"IT
I
^>
>——■L.l
—*-—L^*
^-LlLttv
n-IOlr^
H
1
! i
^~ -fegg-
~-i--^
|
=7-
1
i ! < !
1
1
!
'* i
'
-_.
!
i
1
1
n
"—i
-
1
i
—
—
i
_[_
^ ■ i
r y]
■
i:
:l
i
',
5 j
. /7™ / .
4-
1
>
3
m
S
I
>
Я
n
X
3
>
>
ДО /,/? ',5 2,0 2,5 3,0 XS
Рис. 13.18. Расчетные данные для определения верхнего критического давления.
iO
548 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХШ
рассматривать, исходя из уточненного выражения для кривизны
изогнутой поверхности вдоль дуги. Воспользуемся выражением D),
содержащим по сравнению с A2) дополнительный член (— w/R2);
тогда вместо A0) получим
. - п / d2w w . d2w \
Если воспользоваться новыми выражениями для моментов, а нагрузку qz
для задач устойчивости определить по A2.89), то можно прийти
к следующему уравнению*):
Е d*w qR 4 /• d2w , w \
+ "^13^+"-TV \1р" + ж] - A3'78)
Подставляя сюда выражение C6), получим
D ( т2л* . п.2 \* (( т*л2 . я2 \* . 1 Г. 0/ т2.ч2Д2 \"п
, £ т*л* q ( т2л2 . я2 \2 „ -
+^-р—-Rh\-ir-+w) (»2-1) = o.
Отсюда при да= 1
О Я f / л2 . /г2 \* 1 г / Я2Я2 \
£А я^
+ ^^-Т^ ^ • A3.79)
№+*)>-»
Рассмотрим случай весьма длинной оболочки, когда L~^>> R;
выражение G9) переходит в следующее:
(я2 — 1) D ,10 „-.
<7в = б5 * A3.80)
Минимальное значение q находим при п = 2: -■ .
3D 3 - -'■ ■ "'" '" .
Яв = п5г- : , ■;■",'- Х13.81)
*3 •'<:.( г- 1-" 1 '' - £?
Отметим, что формула G2) дает при L~^>R q — n2D/R3; при я —2
будет qB = 4D/R3, что превышает (81) на 33%. Этот пример
иллюстрирует то, что область применения приближенных уравнений
теории оболочек средней длины является ограниченной и что
погрешность результатов вычислений в отдельных случаях может быть
значительной **). Впрочем, с практической точки зрения эти случаи
являются скорее исключениями.
*) Это уравнение было получено С. В. Александровским [13.1] для
общего случая анизотропной оболочки.
**) Пользуясь уравнением типа G9), можно составить график для qB,
охватывающий весь диапазон отношений L/R, как на рис. 13.3; подобный
график приведен в книге Флюгге [12.18].
ВЛИЯНИЕ ГРАНИЧНЫХ УСЛОВИИ
549
§ 151. Влияние граничных условий в случае внешнего давления
Оценим влияние граничных условий на величину верхнего
критического давления q так, как это было сделано для случая осевого
сжатия в § 145. Введя «фиктивную» внешнюю нагрузку q =
= — pyd2wjdx2, получим систему дифференциальных уравнений:
1 д2Ф d2w
R дх2 ~РУ~дуг'
1 г-.^ 1 d2w
h
vo =
R dx2
A3.82)
Общее решение системы найдем так же, как и раньше *). На
рис. 13.19 показаны результаты решения системы для вариантов
г з
w
го зо 4о so too 2oo
ш 'fiw>
Рис. 13.19. Влияние граничных условий при внешнем давлении.
граничных условий, приведенных в § 145**). Из графика видно,
что ограничение продольного смещения и (варианты 3 и 4)
увеличивает приблизительно в 1,5 раза критическое давление для длинных
оболочек и оболочек средней длины. Ограничение же окружного
смещения v (варианты 2 и 4) практически не влияет на величину ^кр.
Отметим, что в случае осевого сжатия наибольшее влияние, как мы
видели, оказывает наличие или отсутствие окружного смещения.
К интересным результатам приводит в рассматриваемом случае
решение упрощенного уравнения B5) при различных вариантах
граничных условий. Введем в B5) член, содержащий параметр нагрузки q,
*) Решение этой задачи дано Тилемаиом и Эсслингером (см. ссылку
на стр. 521), см. также работу Соубла (L. Sobel, AIAA Journ. 2,
№ 8, 1965).
**) Такое исследование уравнений полубезмомеитной оболочки было
проведено Н. А. Алфутовым («Проблемы устойчивости в строительной
механике», М., 1965, 153—158); см. также сборник «Расчеты на прочность»,
вып. 11, 1965, 349—363.
550 ЦИЛИНДРИЧЕСКИЕ ОПОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
и преобразуем уравнение следующим образом:
Eh d*w . D (dsw dew d4w\ . (dew d4w\ n .„ „
nr~d^~j~W\W'+ 'W + ~d^) + q\'W ^"Ж/ ( }
Решение (83) будем искать в виде
w = w0X sin «p, A3.84)
где X зависит только от координаты а. В результате подстановки (84)
в (83) получим:
ig._A,«* = 0; A3.85)
здесь
W = j«-n4n*-l)-Dn'fh-lJ. A3.86)
Отсюда находим выражение для критического давления q:
Eh I
R n<(n2 — 1)
где X,, — наименьшее собственное значение по уравнению (85) для
заданного варианта краевых условий, п — число волн,
соответствующее минимуму q.
Так как уравнение B5) получено на основе полубезмоментной
теории оболочек, то Л1Х = 0, Я = 0, и на каждом краю оболочки
сохраняют смысл только следующие граничные условия:
1) и = 0 или Nx = 0; 2) v = 0 или т=0. (Ь)
Допустив, что
dv w п ди , dv n
■ *y = W-l?^0 и y = W + ^ = 0'
найдем зависимость й и нот функции прогиба w, а затем определим
осевое и касательное усилия:
а г с, Sa w0 Eh d2X . .
N*~Eh-E7 = l?r-W-dtfsxnnb
~ w0 Eh d3X .
7 = ~ -yr- —-=- cos «B.
n3 R da3 K
При a = const граничные условия (b) выражаются через функцию X
таким образом:
.. dX n d2X n n\ v n d3X „ , .
1} __=0 или -^ = 0; 2)^ = 0 или ^г = 0. (с)
Уравнение (85) с условиями (с) совпадают с известным уравнением
и граничными условиями для колеблющейся балки.
Так, если на обоих торцах оболочки отсутствуют окружные
перемещения, но допускаются осевые, то V = 0 и N^ = 6, т. е.
СЛУЧАЙ ВНЕШНЕГО ДАВЛЕНИЯ. НЕЛИНЕЙНАЯ ЗАДАЧА 551
^ = 0и d2X/da2 = 0. Тогда kl = nRjL и д = дкл по формуле G7а).
Если же на обоих торцах отсутствуют осевые и окружные
перемещения, то v = 0, « = 0. Следовательно, X = 0 и dXjda — Q.
В этом случае ^, = 4,73/?/Z. и <7=1.5<7КЛ, что хорошо совпадает
с приведенным выше решением уравнений теории пологих оболочек.
§ 152. Случай внешнего давления. Нелинейная задача
Опыты показывают, что и в случае внешнего давления
выпучивание оболочек происходит, как правило, в виде резко выраженного
хлопка. Поэтому исследуем большие прогибы оболочки *). Сохраним
схему решения, изложенную в § 146. Аппроксимирующее решение
для прогиба выберем в виде
w=/,sin-^sin-^ + /2sin2ibI + /o; A3.87)
оно совпадает с D6), если принять /и= 1. Вместо D7) примем
обозначение
* = ■£• A3-88)
Уравнение типа D9) сохраняется. В выражение D9а) для Ф/Е должна
быть введена величина
(-£f) «™ (-#)• <13-89>
Уравнение периодичности E1) принимает в отличие от E5) вид
Работу нормального давления будем вычислять по приближенной
формуле
12яД
W = q J J wdxdy; A3.91)
о о
находим:
W = qnRLBf0 + f2). A3.92)
Эту величину следует ввести в выражение для энергии E9) вместо
Двух последних членов.
Сохраним обозначения F1); тогда уравнение F2) останется в силе,
но с заменой р на qlb2; в уравнении F3) следует положить р = 0.
*) Эта задача рассматривалась Ф. С. Исанбаевой [13.9], В. Нэшем
{13.48], В. А. Нагаевым [13.17], Н. А. Алфутовым [13.4]. Решение В. А.
Нагаева подробно изложено в книге [0.3]. Здесь приведен вариант решения,
принадлежащий П. Г. Бурдину.
552 цилиндрические оболочки в пределах упругости [гл. хш
Подставляя t\ из F3) в уравнение F2), получим (при rj = п2/г//?)
Ai + W^)}{l + ^^
М"(ГР
1
A-fft2J ' L(l+*2J A+9»2J
+ Ф4 [ (Прр)Г 4- A+9^2J J Ц + A + ^Jri +
Т1A+У)» 1 Г. , 8<И 1- - пз по,
+ 12A-ц») TL1 + A+*»)мь~^ ( }
Это уравнение определяет q как функцию параметра £2. Полагая
С2 — 0, находим
* 12A —|х2) ^ A+*2Jti ' и0-»-*;
что согласуется с решением линейной задачи по G4).
Далее, пользуясь зависимостью (93), можно определить нижнее
критическое давление в первом приближении.
Варьируя энергию Э дополнительно по п, как в § 146, приходим
к уравнению
г!A+*2) С? 2Ф« Г 1
6A— |Х2) "г" ' 16 A + *2K Ч
1 Г 8°4 О
г]с22-
A+*2K ~ A+9й2K.
'Р-]Ь = 1 A3.95)
4 [' A+*2):
Комбинируя это уравнение с (93), получаем решение задачи во
втором приближении.
В дальнейшем желательно дать уточненное решение задачи,
последовательно "повышая число варьируемых параметров, как это было
сделано для случая осевого сжатия (см. § 146).
Для случая внешнего давления могут быть построены изометрич-
ные цилиндру поверхности аналогично тому, как это было сделано
в § 147*).
§ 153. Эксперименты с оболочками, подвергающимися внешнему
давлению. Рекомендации для практических расчетов
Приведем данные исследований выпучивания оболочек,
подвергающихся внешнему давлению. Начнем с тех опытов, в которых
оболочки изготовлялись тщательно из труб на токарном станке с
соблюдением жестких допусков в отношении размеров. Потеря устойчивости
оболочек, как правило, происходит внезапно с образованием глубоких,
регулярно расположенных вмятин, обращенных к центру кривизны,
именно той формы, какая была положена в основу решения
нелинейной задачи.
*) См. работы А. В. Погорелова [13.20].
РЕКОМЕНДАЦИИ ДЛЯ ПРАКТИЧЕСКИХ РАСЧЕТОВ
553
Сводка экспериментальных значений v = #Kp/#B, полученных
различными авторами при разнообразных условиях изготовления и
испытания образцов, представлена на рис. 13.20; под дкр понимается
реальная величина давления при выпучивании. В некоторых сериях
опытов модели были получены из плоских листов и имели
значительные начальные неправильности; при этом разброс
экспериментальных точек оказался более значительным и уровень критического
давления — гораздо ниже, чем в случае тщательно изготовленных
оболочек. Для тонких оболочек (Rjh от 1000 до 1500) критическое
//
^ссг
Винденбдрг и Трилииг
0,2 0,2Ь 0,3 0,35 0,1 0.15 0,5 0,55
9
Рнс. 13,20. Экспериментальные значения критического давления по
данным различных авторов.
давление падает особенно сильно из-за большего влияния начальных
неправильностей. Анализ данных экспериментов показывает также,
что для дюралюминовых образцов значения v лежат в среднем
несколько ниже, чем для стальных. Возможно, это объясняется
большей чувствительностью дюралюминовых оболочек к термическим
эффектам во время обработки, хранения и т. д.
Пунктирная линия на рис. 13.20 отвечает, очевидно, qB;
сплошная же получена по данным второго приближения для qa.
Подавляющее число экспериментальных точек лежит и здесь между этими
линиями. Наименьшее значение v составляет в этих сериях опытов 0,68.
Таким образом, практические расчеты на устойчивость при
внешнем давлении нужно вести по верхнему критическому значению (см.
график рис. 13.18 и формулы G7)), умноженному на коэффициент v;
значение v будем считать зависящим только от отношения Rjh.
Ориентировочно рекомендуем следующие значения v:
R/h
V
250
0,7
500
0,6
1000
0,5
1500
0,4
Эти данные можно использовать и для всестороннего сжатия,
554 ЦИЛИНДРИЧЕСКИЕ ОпОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХЩ
§ 154. Влияние начальных неправильностей
при внешнем давлении
Есть все основания считать, что наибольшее влияние на разброс
экспериментальных значений критических нагрузок оказывают
начальные неправильности формы оболочки. Обратимся поэтому к более
подробному исследованию поведения оболочек, имеющих начальную
погибь. Удобнее всего это сделать по отношению к оболочкам,
подвергающимся внешнему давлению, так как конфигурация вмятин здесь
более определенная, чем в случае осевого сжатия. Рассмотрим задачу
в нелинейной постановке и будем исходить из системы уравнений B9).
Напомним, что под w понимается полный прогиб, под w0 —
начальный прогиб. По-прежнему для w примем выражение
w = /(sin^sin-^ + i|>sin2^+cp). A3.96)
Будем предполагать, что начальные прогибы распределяются по
аналогичному закону:
Wo = /0(siniH.sin-^ + *sln2j« +ф). A3.97)
и что величины гр и ф в (96) и (97) совпадают. Иными словами, мы
считаем, что форма начального волнообразования, характеризуемая
параметрами гр и ф, находится «в резонансе» с волнообразованием
оболочки в процессе деформации и что единственным наперед
заданным параметром является величина /0. Такое допущение несколько
усиливает влияние начальных неправильностей *).
Подставим (96) и (97) в правую часть второго из уравнений B9);
интегрируя уравнение, получим следующее выражение для функции
напряжений:
+ К (l+9ft2J /,Ф sin Зал: sin P)) —
—15 (l+ft2J ffi— (i+ft2J •p5^Jsina*sinPy—Ьгт- A3,98)
Здесь введены обозначения:
a = T- P = -£- /i = /-/o. к=1 + 277^7=л": A3'99)
под fx понимается стрела дополнительного (упругого) прогиба.
*) Это предположение, значительно облегчающее выкладки, принято
также в работе Лу [13.44], Доппела [13.30] и др. Приведенное здесь
решение дано В. Е. Минеевым и автором (см. [13.5], статья 1957 г.).
НАЧАЛЬНЫЕ НЕПРАВИЛЬНОСТИ ПРИ ВНЕШНЕМ ДАВЛЕНИИ 555
Вычислим полную энергию системы E6), пользуясь выражениями
A2.95) и (91), но с заменой w на w—wQ. Если ввести, кроме того,
безразмерные параметры
ё = э1Ш^> С, = £. Е = ^- <13-100>
то получим
3 = J-C,£2(£, + 2Ь,J -f jC2(d Ч-2&,J^2-
-С3(С, + 2Со) С,Е + i C46+ i СД2-^ (С, +2Со) 4- З?2, A3.101)
где
с —1+*!^ Co-±ir_J L.__L_lr,2
'' 64
с-'Гп 8»4 1 п с - 'Г °4 1 с + ^Я
Сз— 16 L "^ A+#2JJ '' 4~ 2 [A+*2J ^ 12A— |х2) J'
Уравнения метода Ритца в применении к параметрам £ и £
выпишем в виде
-$ = 0, -§ = 0; A3.102)
пренебрегая некоторыми несущественными членами, представим эти
уравнения в виде
2С& & + 2£о) (С, + Со) + С2 ft, -f ■ 2Q £2 - 2Са (С, + Со) £ -4- С4С, -
— 2С65(С14-Со) = 0. A3.103)
С2(£, + 2СоJ| - С3£, (£, + 2Q +С5Е = 0. A3.104)
Отметим, что такие же соотношения можно получить, пользуясь
методом Бубнова — Галеркина в применении к первому из
уравнений B9). На рис. 13.21 представлены результаты вычислений по
уравнениям A03) —A04) для случая Rfh= 112,5, £/Я = 2,2. По оси
абсцисс отложен параметр полного прогиба С. по оси ординат —
безразмерная нагрузка q; принято р. = 0,3. Каждая сплошная линия
отвечает определенной величине £q и представляет собой огибающую
Серии кривых, построенных для различных значений параметра
r\=n2h/R; на рисунке показаны пунктиром подобные кривые,
соответствующие оболочке круговой формы (£0 = 0). Кружок на оси
ординат отмечает величину qB для идеальной оболочки. Как видим,
при наличии начальных неправильностей верхняя критическая
нагрузка (наивысшая точка петли) снижается: так, например, для
Со = 0,1 снижение составляет около 12%. Между тем нижнее
давление qa остается почти постоянным.
556 ЦИЛИНДРИЧЕСКИЕ ОГ.ОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Если стрела начального прогиба превышает толщину оболочки,
то нагрузка изменяется монотонно. Отметим, что на известной стадии
Ап'О
с-г
О 2 4 S
Рнс. 13.21. Диаграммы «давление —прогиб» для оболочек с начальной погибью.
'0,001}
щ
0,1
■OS
t,
,5 J
Ыо-о)
Рис. 13.22. Снижение верхнего критического давления для
оболочек с начальной погибью.
нагружения характеристика деформации оболочки д(С) оказывается
тем более крутой, чем выше величина Zo; возрастание жесткости
объясняется тем, что при значительных начальных прогибах оболочка
УСТОЙЧИВОСТЬ ОБОЛОЧКИ ПРИ КРУЧЕНИИ
557
становится как бы гофрированной. На рис. 13.22 показана
зависимость дв от амплитуды начального прогиба £д для разных
отношений R/fi в случае всестороннего сжатия; было принято LjR «2,5.
§ 155. Устойчивость оболочки при кручении
Обратимся теперь к случаю кручения оболочки парами Мк,
приложенными по торцам (рис. 13.23). Здесь основное состояние
определяется касательными напряжениями; для тонкой
оболочки их можно считать равными
2я/?2й *
A3.105)
Выпучивание при действии такой нагрузки может
иметь место при известных условиях для оболочек
летательных аппаратов и двигателей.
Рассмотрим сначала линейную задачу*), считая,
что оболочка средней длины шарнирно оперта по
торцам. Уравнение A7) приобретает вид
£'-+£& + **h&)-o. (-злое,
По аналогии с задачей об устойчивости пластинки
при сдвиге можно предполагать, что выпучивание
оболочки в случае кручения будет сопровождаться образованием
регулярно расположенных по окружности волн, наклоненных под
известным углом к образующей. Поэтому примем для w выражение
Рнс. 13.23.
Оболочка,
подвергающаяся кручению.
w = f cos -j- cos -£■ (у -1- ух),
A3.107)
считая, что начало отсчета х расположено посередине длины
оболочки; под п понимается число полных волн по окружности, под у —
тангенс угла наклона гребней волн к образующей. Выражение A07)
удовлетворяет условию w = 0 при x=±L[2. Находим, далее,
dw
дх
d2w
дх2
1
'х=
L
1
= —
=/
-fJL
2япу
LR
п I , L
cos -д \У ± v-*-
J>
sin-i^iyi).
Как видим, избранное нами выражение для прогиба, строго говоря,
не удовлетворяет ни условию шарнирного опирания, ни условию
. *) Эта задача рассматривалась Доииелом [13.30], X. М. Муштари [12.9],
В. М. Даревским [13.7]. Излагаемое ниже решение дано В. Л. Марьиным
[13.14].
558 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
защемления. Вместе с тем получаем
' dw\ .... Г / д2да
1
2
I
<?jc*
z йГу = 0.
Таким образом, оба эти условия удовлетворяются одновременно
в интегральном смысле. Выражение A07) можно переписать в виде
вд = вд,-)- w2, где
w.
-у/ (cos -к- cos мл;— sin—^-sinmx
R
R
)■
w2 — -k f (cos -jycoslx — sin -^- sinlx),
причем
я
т
A3.108)
A3.109)
A3.110)
Подставляя вд, -f-w2 B уравнение A06), получим
[(»' + £
4 D
+
я2
.^-2^(^ + -5-)>1 +
+ [(' + £L£+П^-2*т(' + £)Ъ = °- (.3.1.1)
Приравнивая нулю коэффициенты при ад, и гг>2, получаем два
уравнения:
2s (m2R2-\-n2J I h\i , m3/?3
£
_2s
£
■(*)*
12A— n2)mRn
(l2R2 + n2J I A\2
г3/?3
A3.112)
1TA — |x2) lRn\R] "Г"-G2^2 + Я2J я • A3.113)
Уравнения A12) и (ИЗ)- должны давать одно и то же значение s.
Задавшись числом волн и отношением R!L, мы можем построить по
этим уравнениям кривые s — s(ny),
как показано на рис. 13.24. Эти
кривые одинаковы по форме (так
как величины т и / в A12) и A13)
взаимозаменяемы), но смещены одна
относительно другой вдоль оси
абсцисс на величину
(m — l)R = ^£.. A3.114)
ay
Рис. 13.24. К вычислению верхнего кр№
тического напряжения при кручении.
Ордината точки К пересечения
кривых дает критическое значение s
при принятых условиях. Задавшись
различными значениями я, ищем минимальную величину s,
определяющую верхнее критическое напряжение sB. Заметим, что достаточно
построить одну из кривых по A12) или A13) и вписать в нее парал-
УСТОЙЧИВОСТЬ ОБОЛОЧКИ ПРИ КРУЧЕНИИ
559
лельно оси абсцисс хорду длиной с = 2aR/L. Если кривая построена
по (П2), то точка К будет находиться на правом конце хорды.
Введем обозначения:
, nR
v = «y4—jf
1
h \2
A3.114а)
v 12A -ц*) \R) •
тогда уравнение A12) примет вид
2s р^ + ^ + Л
£ vw (v2 -(- я2J ■ '
Пренебрегая v2 по сравнению с я2, получим
2 s = /t»p» + v« A3.116)
Учитывая, что значениям v и v-) ?— соответствуют одинаковые
величины s, находим
w8p2 + v4 ^ ' \ ' L
L + m\n»
A3.117)
-r)ni
Отсюда при заданном отношении LJR необходимо определить п.
Решая уравнение A17), находим*)
п^4,2У^^2]/т Vt- A3Л18)
Пользуясь A16), определяем далее верхнее критическое напряжение:
s„ = 0,74-
или, при (х = 0,3,
Rh
A— |х2)'8 R r Z.2
V
зв^0,78Е^]/Г
Введем безразмерные параметры
Rh
Z.2
Eh' nL
Rh
IT
тогда получим
£=0.78^6.
A3.119)
A3.120)
A3.121)
A3.122)
При этом значении s будет
& = ■
4,2 VT=^F
-Уй»0,75уй, у» 1.73уй. A3.123)
*) См. работы Ц. М. Даревского [13.7].
560 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Судя по A18) и A23), число волн, образующихся вдоль дуги, падает
по мере увеличения относительной длины оболочки L/R и менее резко
при увеличении относительной толщины h/R.
Для оболочек большой длины число волн становится равным
я — 2, так что сечение приобретает вид овала. Если исходить при этом
пг 0,4 12 4 10 20 40 W0 200 400 1000 2000
Рис. 13.23. Расчетные данные для определения верхнего критического напряжения
при кручении.
из более общих уравнений типа A1), то придем к следующей
формуле для критического напряжения *):
1 Е /A\i.s
*B = W(i-ii*H-7S Ш : A3л24)
при этом, считая (х = 0,3, получим
Зв = 0,254 |/-|.. A3.125)
Для весьма длинных оболочек sn не зависит от отношения L/R:
граничные условия по торцам здесь становятся несущественными.
На графике рис. 13.25 объединены расчетные данные для
оболочек различной длины**) при разных отношениях Rjh. Здесь по оси
*) Формула такого типа принадлежит Шверину [13.50J.
**) Этот график принадлежит Штурму [13,49].
5 155] УСТОЙЧИВОСТЬ ОБОЛОЧКИ ПРИ КРУЧЕНИИ 561
абсцисс отложено отношение L/R, по оси ординат— параметр s* =
= s/?2/£/z2; применена логарифмическая шкала. Судя по формулам
A20) и A25), в случае оболочки средней длины мы должны получить
на таком графике наклонные прямые, а для весьма длинной
оболочки—горизонтальную линию. Строго говоря, наклонные прямые в левой
части диаграммы являются огибающими кривых, соответствующих
различному числу волн я; эти
числа указаны на графике. Кривые
л=2 при значительном L'R
переходят в горизонтальные линии. Из
графика можно убедиться в том,
чго наибольшее значение
отношения L/R, при котором число волн
составляет п ^> 4, соответствует
приблизительно величине У Rjh; это
согласуется с неравенством A8Ь),
устанавливающим пределы
применимости теории оболочек средней
длины. На рис. 13.25 дана также
величина у, равная тангенсу угла
наклона гребня волн к
образующей.
Исследование влияния
защемления краев на критическое
напряжение*) показало, как и следовало
ожидать, что оно является
существенным лишь для сравнительно
коротких оболочек.
Как показывают опыты,
реальные оболочки выпучиваются при
кручении приблизительно таким же образом, как в случае внешнего
давления, но вмятины расположены под некоторым углом к
образующей**) (рис. 13.26). Появление вмятин у оболочек средней длины,
как правило, сопровождается хлопком. Поэтому и здесь надо
обратиться к решению нелинейной задачи об устойчивости в большом ***).
Аппроксимируем прогиб с помощью выражения
Рис. 13.26. Оболочка после
выпучивания при кручении.
, . ПХ П ,
■yX) + f3Sln*?£:
A3.126)
Лервый член аналогичен выражению A07), относящемуся к линейной
задаче. Второй член выбран в том же виде, как и в случаях осевого
сжатия и внешнего давления. После подстановки A26) во второе
£ *) Оно было выполнено Доннелом [13.30].
\ **) Фотография рис. 13.26 получена О. И. Теребушко.
■У ***) Это решение дано Лу [13.44]; см. также работу Иошимура и Ни«-
36 А. С. Волыни и
562
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
из уравнений B9) и интегрирования находим:
Ф
1
О2
32 LO+Y2J
cos
2л (у — ух)
2\2
A + «?)
COS
R
л (у — ахх)
1 2лх 1
•кг cos
л (у — *,jc)
,2\2
0+*?)
COS-
A+4)
2\2
COS
л (у — аъх)
.242
A+ф
COS
R
л (у — М) '
R
+ 2лТ
L(i+4):
.242
COS
n(y — alX)
cos
"(у—V)
/,/2 +
/г
(i + ^J "" «
/? 2длг
-g^jT/2cos-I- + sx\-, A3.127)
где
а^у + Ъ, b^y — Ъ, a3 = Y+3ft, b3 = y — Зхт. A3.128)
Если положить Y = 0. придем к прежнему выражению D9а) для Ф
с заменой (— />у2/2) на sxy.
Определим полную энергию системы Э по E6). Величины Эс и
Эи вычисляются по формулам A2.95)*). Работа внешних сил равна
W = MKQ = 2xR2hsQ, A3.129)
где 0 — взаимный угол поворота торцов. По формуле A2.109) будет
ди , dv , dw dw 1 1 д2Ф
W
dv . dw dw 1
dx dx dy G G dx ду
A3.130)
Угол 0 равен \L'R, где у—среднее значение той составляющей
деформации сдвига, которая не зависит от w.
Y=-
1
2л RL
J(£+
dx dy-
J(-
1 <Э2Ф
2лRL J J \G dxdy { dx dy
F
*° *L)dxdy. A3.130
Пользуясь выражениями A26) и A27), находим
ft —(_l_l_i£-A.JL я\А-
\G ^ 4 V W Ji) R'
отсюда
Далее составляем уравнения метода Ритца:
d9
dfx
:0,
d9
= 0.
A3.132)
A3.133)
*) Выражения для Эс и Зн приведены в книге [0.3], стр. 348.
w
j [55] УСТОЙЧИВОСТЬ ОБОЛОЧКИ ПРИ КРУЧЕНИИ 563
Примем в первом приближении, что в процессе закритической
деформации вид волнообразования будет тот, который соответствует
решению линейной задачи об устойчивости в малом, по A23). Тогда
можно определить соотношение между параметром s и углом
поворота 0 и найти нижнее критическое напряжение sH. Отношение
\ = sJsB оказывается зависящим от параметра b=Rh!L2. При
6= 1/20; 1/200; 1/2000 получаем соответственно v = 0,94; 0,80; 0,87.
ПО
&
130
120
1/0
100
S0
50 100 150 200 Z50 300
в
Рис. 13.27. Влияние начальной погиби на верхнее
н нижнее критические напряжения при кручении.
Таким образом, наименьшее значение составляет около 80%. Как
видим, эффект нелинейности задачи оказывается здесь несколько более
слабым, чем в случае внешнего давления.
Геометрический подход к задаче (см. § 147) позволяет и в случае
кручения построить поверхность, изометричиую исходному
круговому цилиндру и воспроизводящую форму выпучивания оболочки
в большом*).
Исследование влияния начальных неправильностей формы для
оболочки **) средней длины может быть проведено тем же путем,
что и в § 154. На рис. 13.27 изображена зависимость между
величиной s= (s/G) (Z.//zJ и параметром угла закручивания 0 = 0(Z.//zJ
Для оболочки идеальной формы и для оболочек с начальной погибью
при 6= 1/200. Отношение стрелы начального прогиба к толщине
обозначено через ф0. На графике отмечены точки, отвечающие
верхнему и нижнему критическим напряжениям sB и sH. Общий характер
Этих кривых тот же, что и в случае внешнего давления.
*) См. работы А. В. Погорелова [13.19], ч. 3 и [13.20].
**) Оно было выполнено Нэшем [13.48].
36*
564 цилиндрические оболочки в пределах упругости [гл. хги
Судя по данным опытов, экспериментальные значения критического
напряжения лежат, как правило, в вилке, составляемой верхним и
нижним критическими напряжениями. Поэтому в практических
расчетах для определения sB надо пользоваться графиком рис. 13.25 либо
(для оболочек средней длины) формулой A20). Расчетное значение
spac4 следует принимать при R[h^.250 равным vsB, v = 0,8. При
больших значениях Rlh влияние начальной погиби будет и здесь более
сильным; поэтому v должно быть уменьшено примерно в
соответствии с таблицей v для внешнего давления (стр. 553), причем нижний
предел при R'hm 1500 равен v « 0,5.
§ 156. Устойчивость при изгибе
Вопрос об устойчивости цилиндрических оболочек при изгибе
возникает, например, при расчете длинных трубопроводов:
выпучивание здесь может произойти в тех зонах, где изгибающий момент или
поперечная сила достигают максимума. Эта же задача встречается
при расчете многих авиационных конструкций.
Теория устойчивости оболочек при изгибе развивалась по трем
направлениям. Первое из этих направлений связано с изучением
местной потери устойчивости оболочек средней длины, которое
выражается в появлении вмятин в сжатой зоне. При этом основное
напряженное состояние считается
безмомеитиым, а сечение
принимается круговым вплоть до потери
устойчивости. Здесь, по существу,
сохраняется тот же общий
подход, что и в случае осевого сжатия,
но нормальные напряжения
считаются неравномерно распределенными
Рис. 13.28. Оболочка, подвергающаяся ПО СеЧСНПЮ.
чистому изгибу. g раб0Тах, ОТНОСЯЩИХСЯ КО
второму направлению, учитывается
сплющивание поперечных сечений. При этом определяется
предельная нагрузка для круговой цилиндрической оболочки, изменяющей
свое сопротивление вследствие изменения формы сечения. Наконец,
третий подход заключается в определении момента появления
местных вмятин с учетом докритического процесса сплющивания сечения.
Осветим более подробно первый из этих подходов.
Рассмотрим случай чистого изгиба оболочки средней длины.
Допустим, что оболочка подвергается действию пар с моментами М,
приложенными в диаметральной плоскости (рис. 13.28). Будем
отсчитывать координату у от точки пересечения плоскости пары со
срединной поверхностью, расположенной в растянутой части сечения.
Нормальные напряжения в поперечных сечениях распределяются до
WT
§ 1S6] УСТОЙЧИВОСТЬ ПРИ ИЗГИБЕ 565
выпучивания оболочки по закону
Px = PicosT?=^R2hcosJl- A3.134)
Соответствующие деформации в срединной поверхности равны
ди __ рх dv w \х.рх .
Считая v = 0 и та» = 0 по торцам при х — 0 и х = L, получим
следующие выражения для начальных перемещений:
«о = ^D--*)с°5^. A3.135)
v0 = ^x(L — x)sin^, A3.136)
[л:(£ — х)— 2ц/?2] cos-^. A3.137)
•а»,
_ Pi
2ER 1 к > r v J " R
Как видим, сечения оболочки не остаются круговыми; максимальные
прогибы равны
— .ВЛ(Л о,Л
w0, max — 2£ \ 4R2 ^ I'
Однако мы не будем принимать во внимание этих перемещений,
понимая в дальнейшем под w дополнительный прогиб; легко показать,
что погрешность решения будет незначительна.
При исследовании устойчивости оболочки в малом будем
исходить из уравнения A7); оно принимает вид
£*- + 4£ + Л"(&». i) = 0. «З...Ц
Принимая, что торцевые сечения оболочки оперты шариирио,
выберем решение уравнения A38) в виде ряда
оо
m> = sin; , V/„sin-^-. A3.139)
Подставим это выражение в A38) и приравняем нулю коэффициенты
при однородных членах; тогда придем к трехчленным уравнениям
■ относительно параметров /„ такого вида:
''■ Г_° ( т2п2 . я2 V , Е (тпу-\ , _
L А \ L* ~1~ R2 ) ~^~ Я2 V L I J /л
_^^.(^1 + ^)(/л_1 + /л+1) = 0; A3.140)
здесь принимается во внимание, что
sin
?.M.J_^rtn<t^li + ,l„i-!U].
566 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Если ограничиться некоторым числом параметров /„ и положить
равным нулю определитель системы A40), то можно приближенно
определить верхнее критическое значение р0. Судя по расчетам,
принадлежащим Л. В. Кармишину, 10. Г. Одинокову *) и Флюгге [12.18],
величина рь в отличается на несколько процентов от верхнего
критического напряжения C3) для центрально сжатой оболочки. Можно
показать, что по мере увеличения числа параметров это расхождение
падает. Такой результат легко объяснить, если принять во внимание,
что характер потери устойчивости в обоих случаях один и тот же.
Таким образом, верхнее критическое значение рив определяется поC3):
р. =,1ьЛ= ' - ^0,605. A3.141)
1,в Eh /3A — ц*) '
Эксперименты показывают, что выпучивание оболочек средней
длины при чистом изгибе происходит путем хлопка с образованием
сравнительно мелких вмятин в сжатой зоне. Поэтому полное
исследование поведения таких оболочек при местном выпучивании должно
включать решение нелинейной задачи. Исследования в этом
направлении показали**), что нижнее критическое напряжение для сжатой
зоны при изгибе примерно то же, что и при осевом сжатии; имеется
в виду, конечно, что вычисления ведутся с примерно одинаковым
числом варьируемых параметров.
Исходя из сказанного, в практических расчетах следует
пользоваться приблизительно теми же данными, относящимися к наибольшему
сжимающему напряжению при изгибе, что и при продольном сжатии.
Влияние начальных неправильностей в форме оболочки в случае
изгиба должно быть не так велико, как при осевом сжатии;
начальные вмятины в растянутой зоне не должны сказываться сколько-нибудь
существенно на поведении оболочки. Следовательно, со статистической
точки зрения вероятность прощелкиваиия оболочки в случае изгиба
будет меньшей. С другой стороны, сплющивание поперечного сечения
ведет к повышению максимального напряжения по сравнению с
расчетным значением. Все же здесь расчетные напряжения надо
принимать несколько более высокими, чем при центральном сжатии.
Так, при R\h = 250 следует принимать ри расч = 0,22 вместо
значения 0,18, указанного для случая центрального сжатия.
В общем случае внецентренного сжатия следует вычислить
коэффициент а, равный а = 1 —PilPv r^e Р\— максимальное
напряжение сжатия, р2 — напряжение у противоположного конца диаметра
(с учетом знака). Тогда для расчета можно воспользоваться данными
таблицы для /?расч в случае центрального сжатия (стр. 544) (в зави-
*) См. Труды Казанского авиац. ин-та, 1940.
**) См. Ю. А. Шевляков, Л. И. Маневич. ДАН УССР, № 5 A960),
605 — 608.
§ 156] УСТОЙЧИВОСТЬ ПРИ ИЗГИБЕ 567
симости от отношения R!h) и найти значение наибольшего
сжимающего напряжения по формуле *)
Pi.p.c, = Pp.c,(l+-|). A3.142)
В случае чистого изгиба будет а = 2; отсюда при Rjh -^ 250
приходим к величине р1?расч= 1,25 • 0,18 = 0,225, что соответствует
указанному выше значению 0,22.
Все приведенные выше данные относились к оболочкам средней
длины. Для тонких оболочек со значительным отношением длины
к радиусу можно ожидать иного явления — выпучивания по
длинным полуволнам, подобно случаю равномерного сжатия (стр. 520) **).
Пользуясь тем же аппаратом «полубезмомеитиой» теории оболочек,
л
Pl.B
0,6
0,5
0,1
0,3
0,2
0,1
0 0,1 0,2 0,3 0,4 0,5 0,5 OJ Ofi 0,9 1,0 1,1
Рис. 13.29. Верхнее критическое напряжение при чистом
изгибе.
можно решить в линейной постановке задачу о потере устойчивости
с образованием таких длинных полуволи. Результаты приближенного
решения представлены на рис. 13.29. По оси ординат отложен
параметр pliB, по оси абсцисс — величина | здесь
т — число продольных полуволн. Наименьшее значение />ьв = 0,38
имеет место при 6 = 0,58. Например, при /?//z = 330 этот
минимум получается для оболочки с отношением L/R=10. Как видно
из графика, снижение ри в по сравнению со случаем изгиба по
коротким полуволнам, когда />Ьвг»0,605, происходит, начиная с
1 = 0,35. При расчетах по рис. 13.29 следует вычислить |,
подставляя т=1, 2 и т. д., и выбрать затем меньшее значение ри в.
*) Эта формула предложена Б. М. Броуде.
**) На это обстоятельство было впервые указано Е. Д. Плетниковой
в 1949 г. В дальнейшем данная задача исследовалась в применении к
различным случаям изгиба гладких и подкрепленных оболочек К. Д. Турки-
ным [13.24]. Ему принадлежат график рис. 13.29 и приведенные на нем
экспериментальные данные, а также фотография, воспроизведения на рис. 13,30
^<S»
<\S
о
о
1
гп
^т
568 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. ХПГ
Рис. 13.30. Выпучивание при изгибе по
«длинным волнам».
На рис. 13.30 показана оболочка после выпучивания по длинным
полуволнам. Судя по предварительным вычислениям, учет
геометрической нелинейности задачи здесь не приводит к такому
«катастрофическому» падению расчетного напряжения, как при выпучивании
по коротким полуволнам. Об этом свидетельствуют и показанные
на рис. 13.29 кружочками экспериментальные значения рх; разброс
их сравнительно невелик.
Если вести расчет по значению />,, расч = 0,22, то, по-видимому,
это даст для длинных оболочек некоторый дополнительный запас
^^^5!^,ии,пил|||.1и111пииь1^-^е^, устойчивости. Отметим, что все
иГ^>да;;:':::^^^^ а) представленные на рис. 13.29 экспе-
ч<<е=г = ^^^^^^3? римеитальиые точки лежат выше
уровня р} — 0,22.
Мы разобрали случай чистого
изгиба оболочки. Обратимся теперь
к другому, практически важному
случаю, когда оболочка п
ввергается поперечному изгибу под
действием сосредоточенных сил или
распределенной нагрузки. Здесь возможны два подхода к задаче.
Один из них состоит в исследовании волнообразования в зоне
наибольших нормальных напряжений сжатия, как при чистом изгибе; он
относится к сравнительно длинным оболочкам (L > 4R). Другой
подход заключается в рассмотрении зоны наибольших касательных
напряжений тт;и, расположенной у нейтрального слоя. Отметим, что
в случае оболочки, защемленной одним концом и нагруженной
сосредоточенной силой на другом, свободном конце, величина ттах
составляет p^RjL.
Влияние касательных напряжений будет, естественно, возрастать
с уменьшением длины оболочки. Поэтому расчет на устойчивость
по ттах имеет значение для коротких оболочек при L < 4R; его
можно вести, исходя из данных о верхнем и нижнем критических
напряжениях*) при кручении (см. § 155). В окончательный расчет
вводится наименьшая из критических нагрузок, найденных по /?/
Исходя из формулы A19), приходим к следующим окончательным
выражениям для верхней критической поперечной силы. Для
оболочки, защемленной по одному торцу и подвергающейся действию
*) Такой подход был развит В. М. Даревским [13.7]; ему же
принадлежат формулы A43), A44); см. также книгу [0.3], стр. 351. Судя по вычислениям
В. В. Сердюкова, верхнее критическое значение тв, из для поперечного изгиба
несколько отклоняется от тв, кр в случае кручения, причем расхождение
это зависит от отношения LjR. Этот вопрос желательно исследовать более
подробно.
« 1561
УСТОЙЧИВОСТЬ ПРИ ИЗГИБЕ
569
сосредоточенной нагрузки на свободном конце, будет (при jj, —0,3)
QB = 0J8nEh2yr~^r, A3.143)
в случае же нагрузки Q, распределенной по всей длине оболочки,
(?в=1,12яей2|/"*£-. A3.144)
Как уже было сказано в начале этого параграфа, существуют и
другие направления в теории изгиба цилиндрических оболочек.
Карманом *) была сформулирована задача о сплющивании поперечных
сечений трубы, причем форма выпучивания предполагалась
одинаковой по всей длине. Теория устойчивости прямой круговой трубы
при изгибе вследствие сплющивания сечений была развита Бразье**).
Уточненное решение этой задачи предложил Э. Рейссиер ***),
связавший ее с нелинейной теорией изгиба кривых труб.
Третье направление состоит, как мы видели, в разыскании
критического значения изгибающей нагрузки, при котором труба
получает вмятины; по этой теории учитываются искривление и
сплющивание трубы предшествующей нагрузкой. Для длинной цилиндрической
оболочки критическая нагрузка оказывается примерно вдвое меньшей,
чем при расчете по иедеформироваииому состоянию ****).
Пример 13.1. Внутризаводской газопровод представляет собой
цилиндрическую оболочку, имеющую ряд опор (рис. 13.31) '). Толщина стенки
газопровода h = 6 мм, радиус поперечного сечения /?= 1010 лш; материал —
низколегированная сталь марки 14ХГС с пределом текучести ат = 3500 кг/см2.
Погонный вес трубы rfTp = 246 кг/м, погонный вес изоляции dn3 = 600 кг 1м;
давление в газопроводе во время испытания воздухом составляет 9 = 3,75 кг/см2.
Расстояние между опорами, найденное по нормам прочности 2), равно L=?(:8m.
Провести проверку оболочки на устойчивость, учитывая, что газопровод
имеет так называемые линзовые компенсаторы температурных деформаций,
показанные на рис. 13.31, и что вблизи одной из опор газопровод может
быть снабжен задвижкой.
Оболочка подвергается здесь совместному действию изгиба и осевого
сжатия. Максимальное сжимающее напряжение в сечении над опорой равно
(dry + d^L* t io gR
Pl Ш h ' 2A ~
B,46+6) 6802 , , .3,75-101 ОЛпЛ . оол о0ол , ,
* -ПМ6100 + U~Т^Г = 200° + 38° = 238° KilCM'
где W — момент сопротивления сечения.
*) Th. К arm an, Z. der VD1 55 A911), 1889—1895.
**) L. O. Brazier, Proc. Roy. Soc. 116 A927), 104.
***) E. Reissner, Trans. ASME, E26 A959), 386—392.
****) Этот результат принадлежит Э. Л. Аксельраду (см. «Расчет
простр. констр.» 10, 1965, 101—118; Изв. АН СССР, Мех., № 4, 1965).
') Этот пример предложен М. Н. Ручимским.
2) Указания по определению нагрузок, действующих на опоры ipy6o
проводов, и допускаемых пролетов между их опорами, 1959.
570 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ -[ГЛ. ХШ
Первое слагаемо! учитывает изгибные напряжения, вызываемые весовой
нагрузкой в средних пролетах трубопровода, рассматриваемого как
неразрезная балка. Второй член соответствует продольным усилиям от внутреннего
давления; коэффициент 1,2 введен для учета дополнительного давления на
линзу компенсатора.
Рис. 13.31. К расчету газопровода на устойчивость при изгибе.
Растягивающее напряжение у противоположного конца диаметра равно
рг =— 2000 + 380 = — 1620 кг/см2. Вычисляем коэффициент а:
1620
(=1-
2380
1,7.
При R/h = 1010/6 находим по приведенным выше данным (стр. 566):
Рьрасч = 0,18 (l+i^l =0,216.
Отсюда
Pi, расч = 0,216 • 2,1.10в -М- « 2700 кг/см2.
Принимая коэффициент запаса устойчивости равным 1,5, находим
допускаемое напряжение рияоп= 1800 кг/см2. Сравнение этой величины с
вычисленным напряжением 2380 кг/см2 показывает, что конструкция не является
надежной. Следует уменьшить длину пролета примерно до 50 м.
В дополнение к этому исследуем устойчивость оболочки по длинным
полуволнам (стр. 567). По данным примера L//?=6,7; /?//i= 168; считая /и=1,
получим | = 0,51. По графику рис. 13.29 параметр ри в составляет 0,38; эта
величина лежит выше принятого нами значения рх = 0,216.
§ 157. Замкнутые оболочки при комбинированном нагружении
Во многих конструкциях замкнутые цилиндрические оболочки
подвергаются одновременному действию нагрузок разного типа.
Приведем данные для определения критических напряжений при таком
комбинированном нагружении.
§ 157] ЗАМКНУТЫЕ ОБОЛОЧКИ ПРИ КОМБИНИРОВАННОМ НАГРУЖЕМИИ 571
1. Осевое сжатие или изгиб и внешнее давление. Сочетание
этих нагрузок характерно, например, для высоких башен резервуаров,
используемых в химической промышленности. В нижнем поясе башни
создаются сжимающие напряжения от собственного веса, вместе с тем,
внутри башни может иметь место некоторый вакуум.
Рассмотрим сначала задачу об устойчивости оболочки в малом.
Комбинируя C0) и G0), получаем исходное уравнение для оболочек
средней длины в виде
D R , Е d*w , 4 / d2w \ . qR 4 ,' d2w \ . „„...
R2 dx*
\dx*
Wy2
Подставляя решение C6) и пользуясь безразмерными параметрами C8)
и G3), приходим к следующей зависимости:
P + W =
1
A-f-ft2J
12A-ц2)
#2
11 +
ft2
(l+fl2)r.
A3.146)
Как видим, критические сочетания величии р и q связаны между
собой, при определенных & и т), линейной зависимостью.
График р (q) должен представлять
собой некоторую ломаную линию
АСОВ такого типа, как
показано на рис. 13.32. Ниже (см.
главу XXVII) мы убедимся в том,
что подобные диаграммы
устойчивости при комбинированных
нагрузках всегда обращены
выпуклостью наружу—-от начала
координат: это вытекает из
общих соображений. Отметим, что
точки А и В на рис. 13.32
соответствуют верхним критическим
нагрузкам осевого сжатия р0> в и
внешнего давления q0> B,
приложенным отдельно друг от друга.
Если мы соединим эти точки прямой линией, то
точные значения р и q, отвечающие уравнению
Рис. 13.32. К определению верхних
критических напряжений при совместном действии
осевого сжатия и внешнего давления.
получим промежу-
1
или
Ро. в
р
?0,
■ ==1.
A3.147)
Ро, в ' 9о, в
Как легко видеть, значения р и q по A47) будут всегда
определять верхние критические нагрузки с некоторым запасом
572 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
устойчивости по сравнению с ломаной линией. Поэтому в
практических расчетах в качестве первого приближения можно пользоваться
уравнением A47).
Судя по экспериментальным данным, потеря устойчивости
оболочек s большом при комбинированном нагружении сопровождается
волнообразованием смешанного характера: вмятины оказываются более
вытянутыми вдоль образующей, чем при чистом сжатии *). Решение
нелинейной задачи **) позволяет определить зависимость между
нижними критическими нагрузками. Отметим, что и здесь диаграмма р(д)
должна быть очерчена по отношению к началу координат таким же
образом, как и в предыдущем случае (см. главу XXVII).
Следовательно, при вычислении нижних критических нагрузок можно
пользоваться уравнениями типа A47):
J- У-4— = 1. A3.148)
Ро, н <7о, н
Экспериментальные значения критических нагрузок, полученные
для комбинированного нагружения В. Л. Агамировым (см. [0.3],
стр. 344), заполняют область, лежащую между прямыми A47) и A48).
Разберем, далее, случай всестороннего давления, часто
встречающийся на практике. При этом будет p=:q\2, формула A46)
приобретает вид ***)
а--Л ГA+А2JЛ | А4 1 ПЗ 149)
i_uii Ll2(l-n2) + A-И2Jт1.Г Ua.i*»J
~г 2
Приближенное уравнение A47) дает
В \ 2р0, в Чо, в I
Воспользуемся формулами D0) и G7а) для р0: в и q0> B; тогда получим
* @.83 + 1.1 £/тН-
Если отношение R\h велико, первый член в скобках будет мал по
сравнению со вторым; поэтому, как уже было сказано выше,
критическое давление в случае всестороннего сжатия слабо отличается
от значения, отвечающего чистому поперечному давлению.
2. Внешнее давление и кручение. Такому сочетанию нагрузок
подвергается, например, оболочка корпуса трансмиссии
газотурбинного двигателя. Избыточное давление возникает в расположенной
*) Эти опыты описаны более подробно в книге [0.3], стр. 344.
**) Оно было выполнено В. Л. Агамировым и О. И. Теребушко.
***) Формула такого типа была получена Мизесом [13.47].
IF
«г
§ 167] ЗАМКНУТЫЕ ОБОЛОЧКИ ПРИ КОМБИНИРОВАННОМ НАГРУЖЕНИИ 573
с внешней стороны камере сгорания, а крутящий момент передается
от диска, несущего направляющие лопатки.
Решения задачи об устойчивости оболочки в малом и в
большом *) приводят здесь к приближенным формулам такого же типа,
как и в случае пластинки, подвергающейся одновременному действию
сжатия и сдвига:
Jb_ + /£b_J=1i Jh_ + /.Jl\2=1. A3.150)
Яв, в V S0, в / q0}H \ s0, „ /
Под s здесь понимается параметр A21); случаю самостоятельного
кручения соответствует параметр верхнего или нижнего критического
напряжения sQB или s0ill (см. § 155).
Наконец, при совместном действии осевого сжатия, внешнего
давления и кручения можно пользоваться формулой,
комбинирующей A47) и A50):
X + J-H-fXJ-!; A3.151)
Ра, в Яо, в \ so, в /
аналогичную формулу надо рекомендовать для нижних критических
напряжений.
3. Внешнее давление, кручение и изгиб. В предыдущем пункте
было указано, что корпус трансмиссии газотурбинного двигателя
подвергается действию внешнего давления и кручения. К этим
усилиям надо присоединить напряжения от изгиба, если учесть силы
инерции корпуса двигателя при вращательных перемещениях самолета.
Из § 153 мы знаем, что в случае поперечного изгиба надо
разделять оболочки в зависимости от относительной длины. При
сравнительно большой длине (/- > 4R) основное значение имеет потеря
устойчивости типа сжатия с образованием мелких вмятин в сжатой
зоне. Поэтому здесь уместно вести расчет па комбинированную
нагрузку, исходя из формулы типа A51), подставляя вместо pQ
величину максимального напряжения при изгибе pv В случае же
оболочки малой длины должно произойти выпучивание типа кручения,
с концентрацией вмятин в нейтральной зоне. Тогда необходимо
воспользоваться формулой типа A50), понимая под s сумму
касательных усилий, вызванных кручением, и максимальных касательных
усилий от изгиба.
4. Влияние внутреннего давления. Вопрос об устойчивости
при осевом сжатии или изгибе и внутреннем давлении возникает,
например, в задаче о расчете несущей оболочки топливного бака
летательного аппарата. Как известно, на стартовом участке в корпусе
летательного аппарата возникают сжимающие усилия, связанные с
*) Решение линейной задачи принадлежит В. М. Даревскому [13.7], [13.8],
а нелинейной — О. И. Теребушко [13.22]. Некоторые авторы рекомендуют
показатель степени при sfsa в формуле A50) принимать равным 3.
574 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XHI
силами инерции; на других участках траектории корпус подвергается
изгибу; в то же время внутри бака поддерживается значительное
давление. Так как с целью экономии веса оболочка топливного бака
проектируется возможно более тонкостенной, то эта задача имеет
актуальное значение.
Рассмотрим случай совместного действия осевого сжатия и
внутреннего давления, не принимая во внимание местного
напряженного состояния в зоне сопряжения оболочки с жестким
шпангоутом, т. е. считая начальное напряженное состояние безмоментным *).
Если исследовать устойчивость оболочки, подвергающейся осевому
сжатию, с помощью линейной теории **), то окажется, что
дополнительное внутреннее давление не влияет на величину критического
напряжения, так что значение рв по-прежнему должно определяться
формулой C4). К иному выводу мы приходим с позиций
нелинейной теории. В самом деле, выпучивание оболочки в большом
сопровождается образованием глубоких вмятин, обращенных к центру
кривизны; но при наличии внутреннего давления такое прощелки-
вание оболочки будет затруднено. Отсюда ясно, что характер
волнообразования должен здесь измениться. Это подтверждается
экспериментами. При малом внутреннем давлении мы получаем вмятины
типа сжатия, но вытянутые вдоль дуги (напомним, что при внешнем
давлении они вытягивались вдоль образующей). Это можно видеть
по фотографиям***) на рис. 13.33; здесь сопоставлен образец (а),
испытанный на простое сжатие, и образцы (б) — (г), подвергавшиеся
сжатию в сочетании с внутренним давлением. По мере увеличения
интенсивности давления эффект удлинения вмятин вдоль дуги
усиливается. При значительном внутреннем давлении цепочку мелких вы-
пучип заменяют сплошные кольцевые складки, так что потеря
устойчивости становится осесимметричной (рис. 13.33, б).
Но в этом случае эффект нелинейности уже не будет
существенным, и, как это видно из § 144, мы снова придем к формуле C4)
для критического напряжения.
Эти выводы вытекают также из теоретического
исследования****). Если обобщить решение Кемпнера (см. стр. 533) на
случай, когда осевое сжатие сочетается с внутренним давлением, то
окажется, что нижнее критическое напряжение рн возрастает по мере
увеличения внутреннего давления.
На графике рис. 13.34 вдоль оси ординат отложено отношение
PjPo,B> гДе Ро, в—параметр верхнего критического напряжения для
простого осевого сжатия по D0), а по оси абсцисс — величина
*) Об учете этого эффекта см. ниже, в § 163.
**) См. W. Flflgge, Die Stabllitat der Kreiszyllnderschale, Ing. Archiv
3, № 5 A932).
***) Фотографии рис. 13.49 взяты из статьи [13.33], 1957.
****) Это решение содержится в статье Тилемана [13.51], [13.52], см.
также работы Ло, Крэйт и Шварца [13.43] и Клейна [13.40].
• .«I ЗАМКНУТЫЕ ОООЛОЧК,. ПРИ КОМБИНИРОВАННОМ НДГРУЖННИИ 575
q^{qlE)(Rlh?yr(r^W) Пои а — п п«
отвечает формуле F6) Судя по mi ПОлУ"аем Рн = 0.18. что
метра 0<{Jrn* гРафику, в области изменения
параметра 0<,<0,5 поддерживающее влияние внутреннего давления
Резко возрастает. Когда q приближается к а — 9 „«
тически достигает верхнего предел Л V "Г'3 '» "рак-
также значения А — / //° предела Ро.» На рис. 13.34 отчеченп
ия v — hlLx' характеризующие относитр^.,^»
вмятин при напряжении в • как ВИ1И„ 2 0Т110сительные размеры
личивается по мере роста"'* LT °Тноше,,Ие У* быстро уве-
тальпых точек. Р Р Я' 3деСЬ Же ^каза"а область эксперимен-
576
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XItt
К несколько иным результатам приводит исследование
совместного действия кручения и внутреннего давления. Решение,
основанное на линейной теории *) и относящееся к оболочкам средней
длины, указывает на некото-
■4,0
W
hlh.e
0,6
0,4
0,2
О
;i
-у
t t
?
Корьцебые склвдки
и.
>
VJ>
"~~Рн/Ряв
^^Ь-
j'Ysp-S)
*
-
3,2
2,t>
г,е
Цд
0,5
>,0
W
Рис. 13.34. К определению нижних критических
нагрузок при совместном действии осевого
сжатия и внутреннего давления.
рое возрастание верхнего
критического напряжения
кручения s„, определяемого по A21),
при увеличении параметра
внутреннего давления q по G3). Это
видно из графика рис. 13.35.
Здесь по оси ординат
отложено отношение sB/s0, в. где s<\ в
находится по формуле A22),
а по оси абсцисс — величина
q!q0tB, где q0tB отвечает
критическому значению внешнего
давления для такой же
оболочки, вычисляемому по G7)
или G7а). Расчетной является сплошная линия; пунктирная линия
соответствует приближенной параболической зависимости
-^5_]2 = 0,907 J-,
So, в / Яй, в
относящейся лишь к большим значениям q. Если рассмотреть
встречающиеся обычно на практике значения внутреннего давления, то
влияние его на устойчивость
при кручении в малом
может оказаться слабым. Вместе
с тем, несомненно,
внутреннее давление должно
существенно повысить нижнее
критическое напряжение
кручения. Желательно дать
решение подобной нелинейной
задачи.
В экспериментах
отмечаются два различных типа
А .Л
hlso,b
.
/
о
V
S*"
,--'-
н
f
5*
VHofi
Рис. 13.35. Верхние критические нагрузки при
совместном действии кручения и внутреннего давления.
волнообразования оболочки. При малых значениях внутреннего дав
ления хлопком возникает выпучина, расположенная по винтовой линии
(рис. 13.36). При относительно большом давлении образуются
короткие сплошные волны, развивающиеся в дальнейшем у торцов.
*) Оно было дано В. М. Даревски.м [13.7] и В. А. Марьиным [13.14].
См. также работу Клейна [13.40].
'ТЫЕ ОБОЛОЧКИ ПРИ КОМБИНИРОВАННОМ НАГРУЖЕНИИ 577
На рис. 13.37 показана фотография такого образца, уже
получившего пластические деформации *).
На графике рис. 13.35 показаны экспериментальные точки для
критических напряжений, относящиеся к одному стальному
(зачерненный кружок) и 18 дюралевым образцам**). Большая часть
экспериментальных значений напряжения лежит несколько ниже верхней
критической величины; для некоторых из
них снижение составляет 12—15%.
В итоге можно рекомендовать вести
практические расчеты по графику
Рис. 13.36. Выпучивание
оболочки при o.iHOBpe.wi'H-
ном действии кручения и м i-
лого внутреннего давления.
Рис. 13.37. Случай одновременного
действия кручения и значительного
внутреннего давления.
рис. 13.35, вводя поправочный коэффициент v несколько более
высокий, чем при простом кручении (см. § 155), например v = 0,85
при Я//г<250.
При комбинированном действии внутреннего давления и
изгиба***) надо пользоваться различными данными в зависимости
оттого, являются ли при простом изгибе данной оболочки решающими
нормальные или касательные напряжения. В первом случае можно
определять нижние критические значения максимального напряжения изгиба
ЯО графику рис. 13.34, повышая />н (при q < 0,5) примерно на 25%.
«Щ втором случае надо вести расчет, пользуясь графиком рис. 13.35,
/ПО аналогии с задачей о кручении.
*) Фотографии рис. 13.36 и 13.37 принадлежат В. А. Марьииу.
**) По опытам, выполненным Р. И. Кшнякиным, М. В. Никулиным и
В- В. Сердюковым, см. [13.11]
***) Эта задача рассмотрена В. М. Даревским [13.7].
37 А. С. Вильмйр
578 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
Все приведенные данные относятся к упругой области. В ходе
расчета важно выяснить, не превышает ли максимальное значение
интенсивности напряжений пре-
Р«
дел пропорциональности
материала. Если напряжения,
вызываемые внутренним давлением,
настолько велики, что это
требование нарушается, то
поддерживающее влияние внутреннего
давления будет ослабевать.
Обратимся, например, к случаю
совместного действия внутреннего
давления и сжатия; дополненный
график рис. 13.34 получит
форму, показанную на рис. 13.38
(см. [13.30а]). Падение несущей
способности оболочки имеет место, начиная с точки А,
соответствующей пределу пропорциональности.
Пример 13.2. Корпус (а) топливного бака ракеты (рис. 13.39) *),
представляющий собой цилиндрическую оболочку, передает на стартовом участке
сжимающую силу Я при внутреннем давлении 9 = 2 am.
Длина бака составляет L — 6,5 л, диаметр D = 2,44 м,
толщина стенки h = 2 мм. Материал — дюра люмии, Е = 7 ■ 105 кг/см2,
и = 0,32, 0,Щ = 24ОО кг!см2. Определить критическую
сжимающую нагрузку.
Находим параметр внутреннего давления:
~ q (R\2 2 / 122\2 . ,.
?=l(l) =77ШГ|Д2-) =1'16; .
Рис. 13.38. Несущая способность оболочки
при сов-местно.м действии осевого сжатия и
внутреннего давления падает при развитии
пластических деформаций.
при этом q = VZ{\ — ji2) <т~= 1,91. По графику рис. 13.34
находим: v = 0,92, р„ = 0,56. Практическая нижняя критическая
нагрузка сжатия составляет
Я„ = 2nRhpa = 2nEph2 = 2я • 7 • 10* ■ 0,56 • 0,22 = 98 000 кг.
Растягивающее напряжение в дуговом направлении равно
Оу = qR/h = 1220 кг/см2, сжимающее напряжение от силы Р
составляет ах = — 0,56 Eh/R = — 640 кг/см2. Интенсивность
напряжений ai = у ч\ -f- о1 — ахау = 2380 кг/см2 лежит в
пределах пропорциональности.
В том случае, если внутреннее давление отсутствует,
надо было бы принять рп = 0,18; нижняя критическая
нагрузка при этом Я„ = 98 000 @,18/0,56) = 31 500 кг. Таким
образом, благодаря поддерживающему влиянию внутреннего
давления несущая способность бака повышается примерно
втрое.
Пример 13.3. Рассчитать на устойчивость корпус А трансмиссионного
вала и наружный корпус В камеры сгорания газотурбинного двигателя,
*) Рис. 13.39 взят из журнала «Weltrau«fahrt». .4» 3 A961), стр. 75.
Размеры бака приняты на основе данных, приведенных в журнале «Flight»,
N° 2643 A959), 507-532.
Рис. 13.39.
Корпус ракеты с
несущим
топливным баком.
$ 1Б7] ЗАМКНУТЫЕ ОБОЛОЧКИ ПРИ КОМБИНИРОВАННОМ НАГРУЖЕНИИ 579
имеющего осевой компрессор *). Схема двигателя изображена на рис. 13.40.
Оболочки А, В воспринимают крутящий момент Мк от сил Sa, St,,
передаваемых от лопаток соплового аппарата а, Ь. Оболочка А, кроме того,
подвергается действию внешнего давления д~8 am. Размеры этой оболочки:
L = 560 мм, R = 160 мм, h = 1,6 мм. Учитывая, что оболочка подкреплена
кольцами, примем приведенную толщину равной hup = 2,5 мм. Наружный
корпус В испытывает такое же давление, которое для кего является уж
yJ~fe
4 Ч ~,
Компрессор
- Шин —
Камера сгорания
Ц'ркчя
•+•
Сопло
Рис. 13.40. К расчету на устойчивость оболочек газотурбинного двигателя.
внутренним; размеры оболочки примем: L = 800 мм, /? = 400 мм. h = 2 л*
Определить критическое значение М . и М д для каждой из оболочек.
Материал — сталь, Я = 2,1 • 106 кг/см2, и = 0,3, аПц -^ 5000 лгг/гл2.
Для оболочки А находим по графику рис, 13.18 при £//? = 3,5 и
#/йПр = 64 (см. также формулу G7а))
д0: B = 0,0329.
Примем в качестве расчетной величину ^о, расч = 0,8<7о, в = 0,0263. Далее,
по формуле A22)
А „ *Г~М л 70 */~ 16 • 0,25 л .._,
«о, в = 0,78 у -jj. = 0J8y —ggs—=0.1475.
Принимая и здесь v = 0,8, получим s0, расч = 0,8s0, в = 0,118. Параметр q,
8 • 642
отвечающий д = 8 am, ранен <7расч = 9 , . 1р6 =0,0157. Для
комбинированного нагруженпя по формуле типа A50)
лрасч — ло.
Отсюда по A21) и A05)
/■
9расч
= 0,118
?0,|
/0,0157
1 = 0,075.
0,0263
°расч
-~ = 2460 кг/см2, М А = 2n#2ftspaC4 = 9,88 • IQe кг ■ см.
Для оболочки В при L/R = 2, /?/й = 200 аналогичным образом находим:
9о, в = 0,033, д,
о, расч :
■■ 0,026,
s0, B =0,147,
*о.расч = 0.118. 9,расч = °Д52. ?расч/?о. расч = 5.86.
*) Этот пример предложен И. А. Биргером.
580 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
При совместном действии кручения и внутреннего давления но графику
рис. 13.35, вводя условно расчетные критические напряжения, получим
рэсч
— = 2,0, Spacq ~ 0,27 1
So, расч
и, следовательно, s = 2850 кг/см2, Мк д = 5,72 • 106 кг ■ см.
Таким образом, внешний корпус камеры сгорания может передать
крутящий момент в 6 раз больший, чем внутренний корпус; в этом сказывается
отчасти влияние направления поперечной нагрузки.
§ 158. Подкрепленные оболочки. Общие уравнения
В летательных аппаратах и двигателях, в кораблестроении и
инженерных сооружениях часто применяются круговые
цилиндрические оболочки, имеющие продольные подкрепляющие ребра
(стрингеры) и кольцевые ребра (шпангоуты). Такими подкрепленными
оболочками являются, например, фюзеляж самолета и корпус подводной
лодки. Подобно тому как это было при исследовании
подкрепленных пластинок (см. главу IX), в случае оболочки возможны два
подхода. Если ребра расположены достаточно часто, то конструкцию
можно рассматривать как ортотропную; жесткость ребер
распределяется, или, как иногда выражаются, «размазывается», по длине
соответствующего отсека. Если же ребра находятся на большом
расстоянии друг от друга, то их приходится рассматривать как дискретные
элементы *). Основное внимание ниже будет уделено первому подходу
к задаче. Полученные при этом результаты могут быть с известным
приближением применены к оболочкам, изготовленным из
стеклопластиков **).
Примем, что цилиндрическая оболочка является ортотропной и
что главные направления жесткости совпадают с образующей цилиндра
н дугой поперечного сечения. Выведем основные дифференциальные
уравнения изгиба такой оболочки сначала для случая, когда прогибы
являются малыми. Будем следовать упрощенному варианту
соотношений между изменениями кривизн и перемещениями по A2).
Уравнения равновесия по (8а) и (8) выпишем в усилиях Nх, Ny, T и
моментах Мх, Му, Н, при qz — q:
dNx dT дТ dNv
1_J —о !-■ - = 0
дх ' ду ' дх ' ду '
д2Мх д2Н d2Mv N
у
+ 2Т7яТГ + ^- + -1Г + Ч = О
дх2 т дхду ' ду
A3.152)
*) Устойчивость оболочек, подкрепленных дискретными ребрами и
подвергающихся внешнему давлению, была рассмотрена В. М. Даревским и
Р. И. Кшнякиным [13.8, 1960 г.], см. также статью Н. А. Алфутова (ссылка
на стр. 549).
**) См. ниже пример 13.4.
ПОДКРЕПЛЕННЫЕ ОБОЛОЧКИ. ОБЩИЕ УРАВНЕНИЯ 581
Зависимости закона Гука, относящиеся к деформации в
срединной поверхности, будут иметь такой же вид, как и для ортотропной
пластинки; представим их следующим образом *):
Л A ^ о \/NA
еу h=HV 6-' ° ^у • A3.153)
.V / \0 0 60/\Г /
причем в обозначениях типа § 108 будет
Развернем для примера матрицу A53) для гх; тогда получим:
zx = b,Nx 4 6uNy ^О.Уггг-——-У-г-.
■* ' ■* * у ti\h E2h
Моменты выразим в соответствии с (9.256):
^л\ /£>, Ч 0 WK,\
м> -•= °ц °2 0 xv ; A3.154)
/ \0 0 2D0J\X )
здесь в обозначениях § 108 D = £>bii2= D2[i].
Первые два уравнения равновесия A52) удовлетворяются при
введении функции напряжений по формулам типа A3):
д, __d2cp_ д. _д\_ т_ д2ср
* dy2 ' v ~~ дхг ' ~~ дхду '
Третье уравнение принимает вид
D^^2D*-d^W+D*-dr--Rl&=:A' A3-155)
где D3 = /) 4 2DG; оно переходит в соответствующее уравнение
(9.259) для пластинки при R-+oo. Уравнение совместности A4)
переходит в следующее:
^+2^5f+«. $+№=»• <■»■'«»
Введем операторы:
^ = 6,^ + 263^+6^, 7^^^4-27K^+0.^;
тогда уравнения A55) и A56) можно представить в более
компактной форме:
^■'■«F = ?' ^-b-ffl^^0- A3157)
*) См. работы Тилеманна и других авторов [ 13.51], [13.52].
582 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
Для изотропной оболочки будет
В задачах об устойчивости в малом вместо q следует подставлять
интенсивность фиктивной нагрузки по A2.89); тогда первое из
уравнений A57) примет вид
Обратимся к случаю, когда прогибы являются большими. Поступая
таким же образом, как в § 142, приходим к следующим
уравнениям *) (при q = 0):
Vlw=L(w, Ф) + ^45"' |
1 1 w * A3.158)
Vft(p=-TL(W.«0-T1F-, I
где оператор L выражается по формулам (9.40) и (9.62). Если же
исследуется поведение оболочки с начальными неправильностями, то
по B9) будет
Vd (w — то0) = L (w, ф) -+- -g -^, j
t , a,, s \ A3.159)
V6q>= —y[L(TO, w) -L(w.,„ wQ)\ --g—L__w..
Под w и w0 по-прежнему понимаются функции полного и начального
прогибов.
В заключение приведем выражения для энергии деформации
в срединной поверхности и энергии изгиба по A2.95):
U* = у | \ (biNl 4- 2^NxNy + b2N2y + baT2) dx dy, A3.160)
" F *
и~ 2 J J [иЛдх* j + 2U* dx* dv* + L4 dy2 ) +
p
+4^£jyf]dxdy- A3Лб1)
Перейдем к решению некоторых частных задач.
*) Уравнения такого типа были выведены С. В. Александровским [13.1].
ПОДКРЕПЛЕННЫЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 583
§ 159. Подкрепленные оболочки при осевом сжатии.
Одновременное действие осевого сжатия
и внутреннего давления
Рассмотрим устойчивость ортотропиой оболочки при осевом
сжатии. Будем решать общую задачу об устойчивости в большом *);
линейная задача явится предельным случаем. Примем
аппроксимирующее выражение для прогиба, выбранное Кемппером (см. стр. 533):
:/(cos~cos^-racos^i4 bcos^ + d). A3.162)
\ lX I у lx (у ]
Подставляя, как обычно, это выракениг в правую часть второго из
уравнений A58) и интегрируя его, иах.иим функцию напряжений:
w —
л £ тл -. f г>2 I t — 8а 2л.
X
-г
Жcos77 + Т + г^грй l2*{a ^b)'~l ]cos 77cos if +"
О2 Злл: лу
+ 2a4 + 2 • 9vctt» + 8ЙР cosТГ C0S77 +
, ... \V 2ЯДГ 2лу ,
+ a^1+2Vc02 + lfrco.s —cos-^ -t-
+ 2^T+2^W^COS^C°S ^ }-^^; A3Л63)
здесь введены следующие параметры:
1 „
?л2 , f-q /., 4А2
— уыо,, 1= ;_L_, e = -^ 1/ —.
vc = . ,4 = —9 ^ « ^
Для изотропной оболочки будет vc = 1, а величины ц и f} переходят
в следующие:
л2/?/г /,,
Л = f. * = -r-- A3.164)
i2i/qCi ..2\ /г v '
/у ]/3 A-U2)'
Аналогичные обозначения вводились выше, в § 144; они
характеризуют размеры и форму вмятины.
Определим относительное укорочение оболочки по формуле,
аналогичной E7):
/. l
Д 1 | ди
е~Т—~Т J 7
и о
A3.165)
*) Это исследование проведено О. И. Теребушко [13.22], И. Я. Амиро
(Прикл. мех. 6, № 3, 1960; 7, № 5, 1961; 8, № 4, 1962; 9, № 3, 1963; 1, № 10,
1965), а также В. Тилеманном и другими авторами [13.51], [13.52]. Ниже
приводится решение, содержащееся в этих последних статьях.
584 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [Г.
Вычисляем, далее, полную безразмерную энергию системы Э*\
Э* = |г(£М, -ЪА2 + А, + г,М4-+-ЦА:>) +Э*0; A3.166)
коэффициенты Лр .... А- зависят от а, Ь, \*h vc и от величины
vli=D3/|/01D2. Минимизируя энергию но параметрам £, % а, Ь, Ь,
приходим к системе пяти нелинейных уравнений.
Полагая £-> 0, находим решение линейной задачи, определяющее
точку бифуркации равновесных состояний. При этом будет а = Ь — 0,
так что для прогиба получаем выражение in —- f sin(nx;lv)s\u(x.y!ly);
выпученная поверхность делится па прямоугольные клетки. Огдельно
Рис. 13.41. Диаграмма равновесных ф .рм сжатой ортотроп-
uoi'i оболочки при боль:!Ш\ прогибах.
надо исследовать случай Ф->оо, когда образуются осесимметричные.
кольцевые выпучины; при этом w — fsin(nx!lx). Верхнее критическое
усилие получается в последнем случае равным
Для изотропной оболочки отсюда вытекает классическая формула C3).
Введем обозначения:
N-^TV SI* У~Ж' A3.168)
Величине NB соответствует параметр NB=\/~y; длина полуволны 1Х
4
оказывается при этом равной 1Х = л \Л/^20162 •
Вернемся к уравнениям, описывающим большие прогибы оболочки.
Па следующих графиках представлены результаты их решения,
полученного с помощью электронных цифровых машин. Наиболее
существенной характеристикой ортотроппости оболочки оказывается
параметр у; судя по A68), при относительно сильных стрингерах у
велико, а при сильных шпангоутах — мало. На рис. 13.41 показано,
ПОДКРЕПЛЕННЫЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 585
как зависят величина верхнего критического усилия NB и вид
диаграммы от Y при vc = 4 и v„ == 0,5. За единицу по оси ординат
взято верхнее критическое усилие осесимметричной потери
устойчивости Л/0] в, вычисляемое по A67); по оси абсцисс отложено
отношение e/e0iB, где е0|В—критическая деформация кольцевого
выпучивания. Как видим, для ортотроппых оболочек точки бифуркации
«клеточного» типа /VB и «кольцевого» типа /V0iB не совпадают.
Выпучивание в малом должно, очевидно, сопровождаться образованием
клеток, причем с возрастанием у отношение А/п/^о, в падает. Закри-
тические диаграммы относятся к выпучиванию «по ромбам»; характер
их резко меняется в зависимости от у.
При значительных у, т. е. в случае усиленных стрингеров,
диаграмма имеет за точкой бифуркации обычный падающий участок.
Однако при уменьшении у
наклон этого участка
изменяется, и, начиная с у < 1/9, мы
получаем уже не падающую,
а восходящую характеристику.
Правда, в последующем
напряжение вновь снижается и
оказывается возможным
определить нижнее критическое
напряжение. По-видимому, при
испытаниях реальных
оболочек мы будем наблюдать
переход от одной ветви к другой
путем хлопков.
На рис. 13.42 показано,
как меняется отношение ниж-
6* 4 1 1/4 1/9 1/№ 1/64
У
Рис. 13.42. Изменение нижнего критического
напряжения сжатия в зависимости от характера
подкрепления оболочки.
него критического усилия к верхнему в зависимости от у при тех же
vc и v„. Судя по этим данным, эффект нелинейности оказывается
наибольшим для изотропных оболочек. Он несколько ослабевает в случае
оболочки, усиленной в продольном направлении, и резко падает для
оболочек, имеющих поперечные подкрепления. Различной оказывается
и форма волнообразования: как и естественно ожидать, в случае
сильных стрингеров вмятины вытянуты вдоль образующей, а при сильных
шпангоутах — вдоль дуги.
Для случая, когда подкрепленная оболочка подвергается
одновременному действию осевого сжатия и внутреннего давления,
решение может быть проведено аналогичным образом. Если
воспользоваться для w прежней аппроксимацией A62), то выражение A63)
для ф надо дополнить членом {qRx2j2), где q—интенсивность
внутреннего давления. Введем параметры
586 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРНДНЛАХ УПРУГОСТИ [ГЛ. XIII
в случае изотропной оболочки они равны:
На рис. 13.43 изображена зависимость между сжимающим усилием N
и величиной е+б^/у Ojfto при определенных значениях vc, v„ (они
указаны па рисунке) для оболочки, усиленной в осевом направлении
Рис. 13.4.4. Диаграммы «усилия —приведенная деформация» для оболочки,
испытывающей осевое слитие в сочетании с гн.утренним давлением.
Y = 8,064). Нижняя кривая относится к случаю, когда внутреннее
давление отсутствует (9 = 0), а вышележащие кривые—к
последовательно возрастающим значениям q. График ограничен сверху линией,
отвечающей случаю осесимметричпого выпучивания. Как видим, с
увеличением q здесь возрастает не только нижнее, но и верхнее
критическое усилие; этим ортотроппая оболочка отличается от изотропной.
Вместе с тем, как видно из рисунка, от интенсивности q зависит вид
начального участка закритической диаграммы, при значительном q
и здесь мы получаем восходящие участки, при q=4 начальный
участок получает форму петли.
Мы можем сделать вывод, что при наличии значительного
внутреннего давления более эффективным оказывается усиление оболочки
в продольном направлении: в этом случае величины Л/в и Nu оказьь
ваются относительно выше, чем для оболочек, усиленных в дуговом
направлении.
О. И. Теребушко рассмотрел нелинейную задачу об осевом
сжатии конструктивно анизотропной оболочки, пользуясь методом Ритца
Рис. 13.44. Оболочка «вафельного» типа.
ПОДКРЕПЛЕННЫЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 58?
и принимая аппроксимацию для w в виде F8). Решение проводилось
также с помощью электронных цифровых машин. Исследуя закри-
тическое поведение оболочек для
разных типов подкрепления,
приходим к заключению, что
требованию наименьшего веса
отвечает оболочка вафельного типа
с весьма часто расставленными
продольными и кольцевыми
ребрами (рис. 13.44).
При этом ставилось
требование равиоустойчивостп в большом
для замкнутой оболочки и для
отдельных цилиндрических
панелей, расположенных между подкреплениями (см. § 161). Такой вывод
станет понятным, если учесть, что редко расставленные стрингеры или
шпангоуты не могут заметно
повлиять на образование
местных вмятин. Конструкция должна
быть рассчитана таким образом,
чтобы в пределах каждой
вмятины было расположено несколько
подкрепляющих ребер; лишь
тогда критическое напряжение
может значительно возрасти по
сравнению со случаем пеподкре-
пленпой оболочки. Пример
выпучивания гофрированной
оболочки, удовлетворяющего этому
требованию, показан на рис, 13.45*).
Изображенная па предыдущем
рис. 13.44 вафельная
конструкция является необычной,
возникает вопрос о технологии ее
изготовления. Здесь могут быть
применены штамповка,
фрезерование или другие методы.
Однако преимущество такой
конструкции является очевидным. При
обоснованном выборе размеров
ребер и расстояний между ними
можно спроектировать подкрепленную оболочку, которая будет
в 1,6 раза легче равиоустойчивой с пей изотропной оболочки.
Рис. 13.4о. Выпучивание гофрированной
оболочки, подвергающейся осевому сжатию.
*) Испытания таких обол
точек были проведены Г. Л. Комиссаровой,
588
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
При расчете подкрепленных оболочек на устойчивость надо иметь
в виду, что величина критической нагрузки может существенно
зависеть от того, как расположены подкрепляющие ребра —- снаружи
или внутри оболочки *). Остановимся сначала на примере оболочек
вафельного типа. В этом случае влияние расположения ребер будет
разным в зависимости от вида нагрузки. Если потеря устойчивости
подкрепленной ободочки сопровождается образованием выпучии,
близких к квадратным, то внешнее расположение ребер приводит к более
высоким значениям верхней критической нагрузки, чем внутреннее,
В случае образования вытянутых выпучии большее значение
критической нагрузки соответствует внутреннему расположению ребер.
При осевом сжатии образуются квадратные или близкие к квадратным
по форме выпучипы, при действии внешнего или дополнительного
внутреннего давления — вытянутые в продольном или поперечном
направлениях; поэтому эффект расположения ребер при разных
нагрузках окажется различным.
Случаи, когда оболочка подкреплена сравнительно мощными
ребрами в одном направлении, требуют отдельного рассмотрения.
Отдельные эксперименты показывают, что
для оболочки, подкрепленной стрингерами
и подвергающейся осевому сжатию,
критическая сила при внешнем расположении
ребер более чем в два раза превышает
силу, полученную при внутреннем
расположении. Эта задача ждет дальнейшего
углубленного исследования; ее решение"
даст возможность определить оптимальный
тип подкрепленной конструкции.
Пример 13.4. Определить критическую
нагрузку для сжатой вдоль оси замкнутой
стеклопластиковой оболочки, изготовленной
из стеклоткани типа корд и полиэфирной
смолы. Направление основы совпадает с
образующей цилиндра. Размеры: R = 108 мм,
h = 1,5 мм. Такого типа оболочку можно
приближенно рассматривать как ортотропную.
Заданы следующие значения модулей упругости
и коэффициентов Пуассона: Е\~2- 106 кг/см1
(вдоль оси), Е2 = 1 • 106 кг/см1 (в кольцевом
направлении), щ = 0,1, н2 = 0.05.
Находим верхнее критическое усилие по A67) для осесимметрикной
потери устойчивости:
Рис. 13.46. Оболочка из стекло
пластика после выпучивания.
ачв=4/:
б2
R
VDlEih\
(а)
*) Этот вопрос был подробно рассмотрен О. И. Теребутко (Сб.
«Расчет простр. констр.», т. 12, 1966); см. также статью Хеджепета и Холла
(J. Heiigepeth, D. Hall, AIAA Journal 3, № 12, 1965, 2275—2286).
Оболочки, связанны? с упругим заполнителем 589
отсюда
ИЛИ о. 1П5 . 0 15
а„ ,=-, 7 " /о,5 ill =П20 кг/с.к=.
/3A-0,1-0,05) 10,8
Эта величина лежит в пределах упругости материала. Полная критическая
нагрузка равна
Я0, в = 2лЛАа0, в = 11,4т.
Испытание такой оболочки в лаборатории, проведенное В. В. Ивановым,
показало, что в действительности выпучивание происходит но ромбической
форме, как показано на рис. 13.46. Критическая нагрузка составила 6 т,
т. е. около 53% от верхней критической величины.
Отметим, что стеклопластиковые оболочки, армированные тканью или
жгутами, находят все большее распространение в различных областях
техники. Желательно, чтобы были даны уточненные методы расчета таких
оболочек, основанные на нелинейной теории и учитывающие особенности
структуры того или иного материала
§ 160. Устойчивость оболочек, связанных с упругим
заполнителем
Обратимся теперь к задачам о влиянии упругого заполнителя
на устойчивость оболочек. Эти задачи имеют практическое значение
для расчета некоторых типов летательных аппаратов. Могу г
встретиться случаи сплошного заполнения замкнутой цилиндрической
оболочки и случаи, когда оболочка имеет внутреннюю полость.
Заполнитель рассматривается как вииклеровское упругое основание
с коэффициентом постели К. Влияние заполнителя сводится к тому,
что верхняя критическая нагрузка быстро возрастает с увеличением
жесткости заполнителя; одновременно уменьшаются размеры пмягин.
Оказывается, что в случае осевого сжатия цилиндрической панели *)
увеличение кривизны приводит к уменьшению влияния упругого
основания; с ростом отношения сторон панели a lb (a - размер вдоль
образующей, b— по дуге) верхнее критическое напряжение падает.
П. Г. Бурдиным выполнено исследование для случая осевого
сжатия замкнутой цилиндрической оболочки с заполнителем.
Оказалось, что имеет место резкое увеличение нижней критической
нагрузки при повышении жесткости основания и что оно связано
со значительным изменением формы волнообразования. Если для
изолированной оболочки характерны волны, близкие к квадратным,
*) Эту задачу рассмотрели Б. А. Корбут и Л. Г. Однорал (см.
Изв. вузов, Строит, и арх., № 8 A965), 50—55; там же см. библиографию).
Первому из указанных авторов принадлежит также исследование в линейной
постановке поведения замкнутой цилиндрической оболочки при различных
видах нагружения (Изв. АН Арм. СССР, серия физ.-мат. наук, 18, № 4, 1965)
и решение задачи в случае сферической оболочки (Изв. вузов, Авиац.
техника, № 4, 1965, 97—102).
590
ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. Х1П
то по мере увеличения жесткости основания вмятины вытягиваются
вдоль дуги и, в конечном счете, переходят в кольцевые складки.
Важным является и то обстоятельство, что перепад между верхней
и нижней критическими нагрузками постепенно уменьшается и,
начиная с известного значения
К4
',2
1,0
0,8
0,6
0.4
0,2
О
■
■
с? ♦*
5. *»•
"!'/
1./
'/
г ,
/,
о
а
— О >""
о
У^2
в
- 250
о 300
••333
-375
"
ал P/h
'333
-500
-532
•537
жесткости, верхняя нагрузка
оказывается решающей. Эти
результаты подтверждаются данными
экспериментов для оболочек с
различными отношениями Rjh.
Величины vB = сгв.'о"[(л (кривая /) и
v„= ап/о\.л (кривая 2) для
верхней и нижней критических
нагрузок на рис. 13.47*) даются в
функции от безразмерной
жесткости заполнителя
0,2
0,4 0,6 К' 0,8
Рис. 13.47. Изменение верхнего и нижнего
критических напряжений в зависимости от
жесткости заполнителя.
К'-
Во всех экспериментах коэффициенты Пуассона материала оболочки
и заполнителя были равны соответственно 0,3 и 0,5.
§ 161. Устойчивость цилиндрической панели
при осевом сжатии
При проектировании подкрепленных оболочек необходимо, как
мы видели, рассчитывать па устойчивость отдельные панели, лежащие
между ребрами. Обратимся поэтому к задачам об устойчивости таких
панелей — открытых круговых цилиндрических оболочек — при сжатии
и сдвиге. Условия закрепления панели по кромкам зависят от
размеров подкрепляющих ребер. Обычно ребра имеют достаточную
жесткость па изгиб в плоскости, перпендикулярной к срединной
поверхности, и потому прогиб панели по кромкам можно принимать
равным пулю. В зависимости от крутильной жесткости ребер
различают случаи полного или упругого защемления, либо шарнирного
опирапия. Кроме того, должны быть сформулированы условия,
касающиеся перемещений точек, принадлежащих кромкам панели,
в плоскости, касательной к срединной поверхности. В одних
случаях— при ребрах, слабых па изгиб в этой плоскости, —можно
считать, что точки кромки перемещаются свободно в направлении,
перпендикулярном к кромке. Если же ребра обладают большой
жесткостью, ставится условие равенства пулю этих перемещений.
Далее, должны быть рассмотрены условия, касающиеся перемещений
*) График принадлежит Элмросу и Брашу (В. Aim roth, D. Brush,
AIAA Journ. 1, № 10, 1963).
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ ПРИ ОСЕВОМ СЖАТИИ 591
точек напели вдоль кромок. При наличии сварного шва или
заклепочного соединения следовало бы считать, что перемещения точек
панели по отношению к ребру в этом направлении отсутствуют; это
условие в большой мере относится к «цельным» или «интегральным»
конструкциям, в которых ребра
изготовляются заодно с обшивкой.
Однако для упрощения задачи чаще
всего принимают, что точки панели
свободно скользят вдоль кромок.
Рассмотрим прежде всего случай,
когда круговая цилиндрическая
панель сжата усилиями р, равномерно
распределенными вдоль
криволинейных кромок. Обозначим через а и b
длину и ширину панели, через 0 —
охватываемый ею центральный угол
(рис. 13.48). Рассмотрим случай шарнирного опирапия панели по
всем кромкам. При решении линейной задачи *) будем исходить из
уравнения A7):
sss>
Рис. 13,48. Цилиндрическая панель при
осевом сжатии.
Примем
h
4sw-
R2 дх
\ дх2 )
A3.169)
, . тлх . яяу
w = J sin sin ,
A3.170)
где m и я — числа полуволн вдоль образующей и по дуге.
Подставляя это выражение в A69), получим
D I т2л2
Т \ а2
П2Л2 \4
+ -Й5
Е т*а*
I т2л2 , п2л2 \2 т^л*
откуда
или
К2 я*
D \ а2 *- b ) л
1~
о,
hb2
т2
а?
Ь2Е
R2 (тЧ
и no, Е
B+тУ-
Ь2
где
/ тЧ . п2\ а
Минимизируя р по ф, находим
9=4^12A-^)
VRh
A3.171)
A3.172)
A3.172а)
*) Эта задача была впервые рассмотрена С. П. Тимошенко, см. его
«Курс теории упругости», ч. 2, Петербург, 1916, стр. 395.
592 ЦИЛИНДРИЧЕСКИЕ ОГ.ОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
Верхнее критическое напряжение оказывается равным
рв= г L=- Е — = 0,605£ —. A3.173)
FB /3A -ц2) R R
Мы пришли вновь к хорошо известной нам формуле C3),
полученной выше для замкнутой оболочки. Однако эта формула
справедлива лишь для панели, охватывающей сравнительно большой
центральный угол, когда операция дифференцирования по ф является
допустимой.
Как и для замкнутой оболочки, форма волнообразования здесь
однозначно не определяется, известна лишь величина ф, зависящая
от чисел т и п. В случае весьма пологой панели следует в A72)
принять я=1, /и = а/£; тогда будет ф = 2. Отсюда по A71)
"B^W + lMD2^ A3Л733)
Эта формула справедлива при условии
2л _,
4 |/
V 12 A - И2)
/ h
' R
или
Введем безразмерные параметры, характеризующие сжимающее усилие
и кривизну панели:
тогда из A73) получаем для панели большой кривизны
1
Ив /3A-ц2)
а для пологой панели при й-^12
0,605й, A3.175)
я2 k2 k2
/>в=3A-,х2) +4^~3'6+39Т- °ЗЛ7б)
Решим ту же задачу в нелинейной постановке *). Примем сначала
для простоты, что речь идет о шарнирно опертой квадратной панели
ф = а) и что ненагруженные кромки сближаются свободно, оставаясь
прямолинейными. В первом приближении выберем выражение для w
по-прежнему в виде A70), считая при этом, что в обоих направле-
*) Приведенное ниже решение предложено автором [13.5], причем
условие прямолинейности кромок выполняется лишь приближенно. Исследования
устойчивости панелей в большом принадлежат также В. Койтеру [13.41],
Легге (Legget D., Rep. and Mem., № 1899 A942), № 1972 A943)) и другим.
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ ПРИ ОСЕВОМ СЖАТИИ 593
ниях образуется лишь по одной полуволне (т = п — 1). Подставляя w
в правую часть уравнения B7) и интегрируя, находим
1 ... 1 ,, / 2ах 2лу \ 1 ,
32
а2 . ах . яу руг
—5-sin —sin — ■— .
■х- а а 2Е
Статические граничные условия на кромках: оу = О, т = 0 при
у = 0, Ъ\ ох = — р, т = 0 при х —0; они выполняются для
каждой кромки лишь в среднем.
Воспользуемся методом Бубнова—Галеркина и составим
уравнение
I | V£-V*w — L(w, Ф)-
1 с»2Ф1 . лх . лу , , п
-ft -т—5- sm —• sin —— ах йу = и.
R дх2 } а а '
о о
Подставляя выражения для w и Ф и выполняя интегрирование,
приходим к уравнению
32а'
7 ЕР
-mEf-
16Я2
a2h
D
Е-\-
0.
Считая /—>0, находим
прежнюю формулу A73) для верхнего
критического напряжения рв.
Далее находим
л2
P=P* + -t*Ef2-
8а2
Ef.
И1
\\
\ \
•1?
i I
1 i <7
i /
1 ч/
Г! "Г
-1
II
-А'"
/V
/ 1
" \Г
-'
7;( -
/ / _
!
1
I3
1
/
10
3/?
Полагая £ = //А, получим
^=р:-НтР-^*;. A3.177)
Минимизируя /?* по С, находим
нижнее критическое напряжение
равным "' " ' й J * £ *
п* === п* — ——ft2 A3 178) Рис' 13-49- к определению нижнего
критики 'в 9яб ^ ' ' ческого напряжения сжатия для
цилиндрической панели при различных условиях закреп-
При С,«г0,14й; НаПОМНИМ, ЧТО леиия.
критическое напряжение для
плоской панели равно л2/3A—[i2)«s3,6. В последнее время эта
задача для квадратной панели была решена в конечных
разностях с помощью электронной цифровой машины*). На рис. 13,49
*) Эти результаты принадлежат А. Ю. Биркгану. См. также статью
М. А. Колтунова «Устойчивость гибкой панели цилиндрической оболочки»
8 «Вестнике Мое. гос. ун-та», № 5 A962). Различные варианты условий
закрепления краев панели обсуждаются с тех же позиций нелинейной
теории в работе Поупа (G. Pope, ARC Rep. and Memo. № 3392, 1965).
594 ЦИЛИНДРИЧЕСКИЕ ОВОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
представлена зависимость р*(£), относящаяся к случаю k-= 12;
предполагалось, что кромки панели остаются прямолинейными (кривая 1)
или свободно искривляются (кривая 3). Часть кривой /,
соответствующую неустойчивым равновесным состояниям панели, данным
методом получить не удалось. Штрих-пунктирная линия 2
соответствует уравнению A77), полученному при граничных условиях,
приближающихся к случаю прямолинейных кромок. Как видим, общий
характер изменения р* описывается приближенным решением
удовлетворительно, но величина р„ но A78) лежит ниже уточненного значения.
Влияние начальных неправильностей на поведение панели
обсуждается подробно в книге [0.3].
В более общем решении *) задачи, для панели произвольной
кривизны и а ф Ь, прогиб был задан с помощью выражения типа F8):
, . тлх . плу , , . .? тпх . 9 плу „ __
w = flsm sin—-~- + /2sm2 sin2—~ . A3.179)
Нижнее критическое напряжение оказалось равным (при k > 20)
р* = 0,26£. Надо полагать, что при более точном решении задачи
величина р* должна упасть и приблизиться к значениям, относящимся
к замкнутой цилиндрической оболочке. В то же время для пологой
напели (при & ^ 20) величина р*, как мы видели, мало отличается
от критического напряжения для плоской пластинки. Поэтому можно
рекомендовать вести практические расчеты, принимая в случае
тщательно изготовленных оболочек
р* =3,6 при £<20; р* = 0.18А: при k > 20.
Если же панели получают при изготовлении и сборке конструкции
значительную начальную иогибь, сравнимую с толщиной оболочки,
следует принимать /?* ч = 0,12£ (при k > 30).
§ 162. Устойчивость панели при сдвиге
Цилиндрические панели, входящие в конструкцию крыла
летательного аппарата, передают не только нормальные, но и сдвигающие
усилия. Перейдем к исследованию устойчивости панели при сдвиге.
Допустим, что панель со сторонами а, Ь, шарнирно закрепленная
по краям, подвергается действию касательных усилий s, равномерно
распределенных по всем кромкам (рис. 13.50)**). Исследуя
устойчивость панели в малом, примем за основу уравнения A5а) и A6):
D „. 1 д2Ф п d2w . 1Q ,om
— V4w = -75- -т-j- — 2s , , , A3.180)
h R дх2 дхду х '
*) Оно дано О. Н. Ленько и автором, см. [0.3], стр. 296.
**) Впервые эта задача была рассмотрена Н. В. Зволинским (Труды
ЦАГИ, № 246 A936)). Приведенное здесь решение задачи принадлежит
В. А. Марьину [13.14].
УСТОЙЧИВОСТЬ ПАНЕЛИ ПРИ СДВИГЕ
Примем выражение для w в виде
595
w
V1 V1 t тл* «
nay
Подставляя это выражение в правую часть уравнения A81) и
интегрируя, получим
ф=—— УУ f
т п
Я*\2
Ь2 I
тпх . яяу .
sin sin —jf- -\- sxy.
Воспользуемся методом Бубнова — Галеркина и вместо A80)
возьмем уравнение ^sss3i=3*"
. 0 d2w \ . tax . /яу , , „
+ 2$-г—г- sin sin +-f- dx dy — 0.
1 дх ду I a b
Рис. 13.50. Цилиндрическая панель
при сдвиге.
Подставляя выражения для w и Ф, после интегрирования находим
1 тп.
ab
т*Е
лЮ I тп2
R2a'
I m2 . п2
\~а2"^Ж
h \ а
„1 * hi
п_2\2
Ь2
-lit
,8s
mnij
i J
И0* (й* —/*)(**—./»)
= 0;
здесь должны учитываться лишь те члены, для которых суммы m-\-i
и n-\-J нечетны. Это следует из соотношений (9.151). Вводя в
дополнение к A74) обозначения
„ аЬ . а
S ~STh2' К~~Ь'
A3.182)
приходим к уравнениям типа
U
Amnfmn Р £ jU ft) (m2 ~ P)\n2 — f) —®' A3.183)
где
A — (m2 + n2l2J k2 4m3X2
m"~3(l—|x2) mnX2 "Г-я2 (m2 + n2X2J n
В первом приближении примем числа m, n, i, j равными 1, 2.
Выпишем соответствующую систему уравнений типа A83):
4 1
Ап/и— сгР/22 = 0, A2of22 — -gpfll = 0,
. Р = Ц^. A3.184)
9
1
9
2 2
Aufl2 + "о Р/21 = °. Л21/21 "Г" -О" P/l2 = 0 •
as*
596 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XII!
Условие нетривиального решения этой системы имеет вид
4
Ml
1
О
р О О
^22
О
о о
АП -дР
п 2 л
О "д-р А21
Уравнение A85) распадается на два:
4
Ml
I
■■g-p
Р
О,
М2
2
9-Р
JP Ап
= 0;
A3.185)
первое из них соответствует четной сумме индексов т -f- n, второе —
нечетной. Отсюла находим два корня для р:
Р1 = -5-уГ^1И22 . 92=^-0 VAnA2l<
и значения верхнего касательного напряжения:
9л2 ■-—j-
56 » АпАй-
Ч 2;6 > "ir-22- 256
В случае квадратной панели (Л. = 1) получим
Зл4
^Va~a~
56 ' Л12А21
A3.186)
Si— 327Г
_,./[,. 3^^
1
3A
Ц2)
64 л4
k2\. A3.187)
Во втором приближении учтем все возможные комбинации
индексов, равных 1, 2 и 3, причем система уравнений по-прежнему
распадается на системы, относящиеся к индексам с четной и нечетной
суммами т -f- п. Для случая четных сумм получим уравнение вида
~- IT?
1
0
0
А
22
15
ТбР
о о
1 1
Тр 5-Р
А13 0
0 А
31
0 —^р 0 0
о
_9_
25
О
*зз
= 0.
Отсюда
УСТОЙЧИВОСТЬ ПАНЕЛИ ПРИ СДВИГЕ
59?
где
L, _ AnAl3 ^-g25" ^3i + 75 Аж) ~~^~ ^зИзз ^75 Ап "+" ~8Т А]3) '
Для нечетных сумм т + п будет
s*=mV
Л12Л21Л23Д32
причем
36
2— 625 "^12^2! Н gj- ^23^32 +5 ^1-"^23+ ^2Изг)-
Наконец, в третьем приближении учтены все комбинации
индексов от 1 до 4. Оказалось, что это приближение дает малые
поправки к результатам
второго приближения.
Верхнее критическое
напряжение s*. как правило,
определяется величинами,
относящимися к четным
суммам индексоз. Исключение
составляют удлиненные
панели (к > 3) малой
кривизны (k < 7).
Обратимся к решению
нелинейной задачи. Если
принять выражение для w
в виде
w = /isin —sin -f- +
+ /2sin^sin^y A3.188)
я воспользоваться обычным
Методом, то мы придем к
рафику для нижних
критических напряжений сдвига,
доказанному на рис. 13.51.
^ти данные можно рассма-
|фивать, естественно, лишь
| качестве первого
приближения; желательно в
дальнейшем получить уточнен
Рис. 13.51. Расчетные данные для определения
нижнего критического напряжения сдвига в случае
цилиндрической панели с различным отношением
сторон.
рые результаты. Сравнение данных рис. 13.51 с экспериментальными
^«личинами напряжений показывает, что их можно рекомендовать
"качестве расчетных при проектировании.
598 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ
§ 163. Устойчивость оболочек в зоне приложения
сосредоточенных нагрузок
До сих пор мы рассматривали, как правило, такие задачи по
устойчивости оболочек, в которых основное состояние можно было
считать безмоментным. Однако на практике мы находим случаи,
когда изгибные усилия в исходном состоянии являются
значительными. Мы уже видели это в § 151, когда надо было учесть
влияние защемления торцов оболочки на устойчивость при действии
внешнего давления. Вообще с такого рода задачами мы встречаемся,
если к оболочке приложены нагрузки, сосредоточенные в некоторой
узкой области, например в районе сопряжения оболочки с днищем
или жестким шпангоутом. Допустим, что оболочка подвергается
осевому сжатию и внутреннему давлению или одному внутреннему
давлению; так как днище или шпангоут препятствуют деформации
оболочки, то от них на оболочку передаются сжимающие радиальные
усилия. В зоне краевого эффекта, прилегающей к месту сопряжения,
прогиб резко изменяется; при этом моменты и поперечные силы имеют
большую амплитуду, и, следовательно,
моментное напряженное состояние
оказывается ярко выраженным.
Здесь мы сталкиваемся, с одной
стороны, с задачей о бифуркации
равновесных состояний оболочки для зоны
краевого эффекта и, с другой стороны,
с определением несущей способности
из условия, что напряжения достигают
опасной величины. Остановимся
сначала на бифуркационных задачах.
Допустим, что замкнутая оболочка
длины L подвергается действию
внешнего давления, распределенного равномерно по поясу Ь,
расположенному посередине длины (рис. 13.52). Такая задача может
встретиться при расчете оболочек, снабженных шпангоутами, в
различных конструкциях, в случае, если продольные подкрепляющие
ребра отсутствуют. Примем, что деформации в срединной
поверхности и изменения кривизн для исходного осесимметричного
напряженного состояния оболочки определяются по B) и D) выражениями
Рис. 13.52. Оболочка подвергается
внешнему давлению по поясу
шириной Ь.
ди0
дх
R
w0
R
Y° = 0,
1
d2w0
дх2
/О —
D2 ' А и>
A3.189)
где и0, w0—начальные перемещения; принято о°=0. Будем считать,
что потеря устойчивости оболочки сопровождается
волнообразованием как по образующей, так и вдоль дуги. Решая задачу об устий-
УСТОЙЧИВОСТЬ Б ЗОНЕ ПРИЛОЖ. СОСРЕДОТОЧЕННЫХ НАГРУЗОК 599
чивости в малом с помощью метола Ритца*), представим начальные
и дополнительные прогибы с помощью рядов
w,
— i ii /o' -
. тлх
SH1 = , W-
яг-1,3, 5, .
cosr 1и ^Sin
рях
Р= 1,3,5,
Аналогичные выражения могут быть выписаны для перемещений и, v.
Определяя полную энергию системы и минимизируя ее по параметрам /
Г'р ==г=п «Г'е—~1 1 НГг=
/да
ш
w
300
SCO W *
800
woo
0,10 , 1,00
w
0,01 0,10 Ш
t)b/L
V4 \ ' ifflH '
^\Vv>
: ^
: l/r-я
1 1 IUU,
2R
1
, 1 Mill:
В..
h
WO
0,01 0,10 , 1,00
.1 blL
Рис. 13.53. Данные для вычисления верхнего критического давления при
местном приложении'нагрузки.
определяем верхнее критическое давление qa. На рис. 13.53
даны значения параметра qB = qBR/Eh для различных b/L при
отношении Z./7? = л/4, л/2 и л. Эксперименты
показали, что оболочки теряю г устойчивость
хлопком, причем вмятины располагаются в
зоне пояса b (рис. 13.54). Желательно, чтобы
в дальнейшем эта задача была исследована
с помощью нелинейной теории.
Предельный случай, когда отношение L/R
весьма велико, а ширина пояса b
стремится к нулю, так что давление
оказывается приложенным по линии, может быть
рассмотрен с помощью преобразований
Фурье **).
Обратимся к задаче об определении несущей способности
оболочки в зоне краевого эффекта. Допустим, что оболочка конечной
Рис. 13.34. Характер
выпучивания оболочки.
D. О. Brush,
этими авторами
*) См. статью Элмроса и Браша (В. О. А 1 m r о t h,
Journ. Aerospace Sciences 28, № 7 A961), 573—578, 592);
получены данные, приведенные на рис. 13.53 и 13.54.
**) Это решение задачи было дано Л. И. Балабухом и В. М. Марченко,
а в дальнейшем — А. И. Тюленевым.
600 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ В ПРЕДЕЛАХ УПРУГОСТИ [ГЛ. XIII
длины, скрепленная по торцам со шпангоутами, подвергается
совместному действию внутреннего давления и осевого сжатия.
Исследуем напряженное состояние вблизи шпангоута*). Если ограничиться
линейной постановкой этой осесимметричной задачи, то придем
к уравнению типа
„ dkw . ,, d2w , Eh
D-d^ + N*-d^+^W:=(l-
При интегрировании этого уравнения надо учесть условия сопряжения
оболочки со шпангоутом. Определяем максимальные напряжения,
складывающиеся из напряжений в срединной поверхности и
напряжений изгиба. Пользуясь той или иной теорией пластичности,
находим сочетание усилий Л^ и q, при котором напряжения достигают
опасной величины. Полученные таким образом расчетные графики
для Nx и q приведены в статье [13.12].
*) Эта задача была рассмотрена О. Н. Ленько [13.12]. Им было
показано, что учет нелинейных членов в выражениях типа A89) в данном случае
мало влияет на результат решения.
ГЛАВА XIV
УСТОЙЧИВОСТЬ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
ЗА ПРЕДЕЛАМИ УПРУГОСТИ
§ 164. Задача об устойчивости в малом
Выведенные в главе XIII зависимости справедливы лишь в пределах
упругости. Так, например, формулой A3.33) для верхнего
критического напряжения при осевом сжатии круговой цилиндрической
оболочки можно пользоваться при условии рв^ат; отсюда
h ' Кз A - и2) апц "
Для дюралюмина при \х = 0,3, оШ1 = 2 . 103 кг,'см2, Е ~- 7 • 105 кг/см2
должно быть R/h^ 210. Формула A3.66) для нижнего критического
напряжения применима, если R/h ,.> 70. Однако во многих случаях
выпучивание оболочек происходит в пластической области. Это
относится, прежде всего, к инженерным сооружениям, например
к трубопроводам. В главе X говорилось уже, что панели
современных тяжелых самолетов также выпучиваются при напряжениях,
превышающих предел пропорциональности. Поэтому исследование
устойчивости оболочек за пределами упругости, слабо еще
представленное в литературе, имеет существенное практическое значение.
Как показывают экспериментальные данные (см. § 165), при слабо
развитых пластических деформациях необходимо так же, как и
в пределах упругости, отличать устойчивость оболочек в малом и
в большом.
Подойдем сначала к задаче с точки зрения устойчивости в
маслом. Естественно распространить на решение этой задачи те методы,
.Которыми мы пользовались при исследовании устойчивости пластинок
5(глава X), и применить теорию деформаций, либо теорию течения.
^. Обратимся вначале к теории деформаций*). Так как по
сравнению со случаем пластинки задача здесь усложняется, выберем
наиболее простой вариант решения и не будем учитывать эффект
е-—
| . *) Надо помнить, что все ограничения, касающиеся применения
деформационной теории в задачах такого типа (см. § 114), остаются здесь в силе.
Г
602 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗЛ ПРЕДЕЛАМИ УПРУЮСТИ
разгрузки *). Иными словами, будем считать, что срединный слой
является нейтральным в том смысле, что напряжения и деформации
собственно изгиба в точках этого слоя равны нулю. Но для оболочки надо
учесть приращения напряжений в срединной поверхности Ьах, Ьау, Ьх
и соответствующие деформации Ьех, 6еу, by, координаты х, у будем
отсчитывать ио-ирежнему вдоль образующей и по дуге. Пользуясь
обозначениями A0.33), перепишем выражения A0.123 -5) в виде
bsx = EebEx-{Ei:- fj-^ffez.
bsy =r. £ ftey - (Et. - EJ -^ fie,,
бт == T Ec by - (Ec — EK) ± be,.
i 14.2)
где sx = ax— 0,5oy)
■0,5ax, а e, и о; — интенсивность
деформаций и интенсивность напряжений в срединной поверхности **).
Умножим левые и правые части уравнений B) соответственно на
ах, av, Зт и сложим; принимая во внимание соотношение
получим
Отсюда
где
be,- -
ах bsx + ау bsy -f Зт бт = £ка,- бе,.
ах &sx + ау bsy -\- Зт бт П (rr, bs)
<цЕк
A4.3)
A4.4)
A4.5)
П (a, 6s) = II E, 6а) — sx bax -4- sy 6ay -j- Зт 6т.
Пользуясь B), находим:
6г _ 1
'х Е
6еу=~
Е
bs 4- s-; Е<: £к и (a, bs)}
Е«
bsv +--£- — -П(а, 6s)
Г36т4-^- £с~/:'^П(о, bs)
A4.6)
*) Другой подход к задаче, основанный на использовании
идеализированной модели с пластическими шарнирами, содержится в работе Баттер-
мана (S. Batter man, A1AA Journ. 3, К» 2, 1965). Этот подход связан
с обсуждавшимся в § 54.
**) В главе X мы пользовались обозначением s (без индекса!) для
другой величины — интенсивности усилий сдвига; мы сохраним это обозначение
и здесь.
ЗАДАЧА ОБ УСТОЙЧИВОСТИ В МАЛОМ
603
Выпишем уравнения равновесия элемента оболочки в проекциях на
направления образующей и касательной к дуге:
д (баг)
дх
<?(бт)
дх
д Fау)
ду
0.
A4.7)
Эти уравнения будут удовлетворены,
полнительных напряжений по формулам:
6а,.—
д2Ф
ду2
6а„
д2Ф
Тогда
дх2
д2Ф
6т
если ввести функцию до
$2Ф
дхду
П(ст, bs) = U(s, Ф)=^-^-
<?2Ф
У дх2
Зт
д2Ф
A4.8)
A4.9)
Выражения F) принимают вид:
бе,
6е„ =
J_
д2Ф
6Y-
Е.
dy2
гJФ
— 3
2 дх'2
1 <Э2Ф
^. £с ^ПE> ф)
2 <Эу
гJФ
а
fl
о
(г,
Ек
сс — Ек
К,
U(s, Ф)
( A4.10)
дх ду
Зт Ес
Е,
^IT(s, Ф)
Проектируя силы, действующие на элемент оболочки, на
направление нормали к срединной поверхности, мы получили ранее
следующее уравнение равновесия (стр. 507):
д2Мх
дх2
д2Н
дх ду
д2Му
"ly2""
d2w
Ix2'
d2iv d2w bev \
+ °vlF+2TaI^-+-jf * = °- A4Л1)
Основные напряжения, соответствующие моменту потери
устойчивости, обозначим по-прежнему через р r, py, s; величины рх, ру
считаются положительными при сжатии. Соответствующая
интенсивность напряжений равна
pt=Vpl+p\-pxpy + w-
A4.12)
Моменты Мх, Му и Н будем и здесь определять с помощью
выражений A0.137) — A0.139). Пользуясь, кроме того, соотношениями (8),
604 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ |ГЛ. XIV
представим уравнение A1) в виде
1
1--^- К4
%/ p'i
д w
~д?
+-2
1-1A
4\
Ч>А PxPy + 2s
д w
+
1 И——
4 V %/ р
2 1 /)<U
2 I л„4
Фк 1 />Т. I д4ю
|<?у4
3 1
Фк
s / д да
фс / />, \
дх2 ду-
dAw
-ч-
дл-3 <?у
+
, й / d2w n d2w
+ Ру
ду>
Hv дхду3,
7ri?h0i A4ЛЗ)
уравнение A0.140), составленное ранее для пластинки, дополнено
здесь членом, содержащим Ф.
Возьмем уравнение совместности деформаций, в случае малых
прогибов оно имеет форму A3.14):
д2 Ьгх дг бе
дПу
d2w
A4.14)
ду2 дх2 дхду R дх2
Подставляя выражения A0), приходим к следующему уравнению*):
%Р1
i \ dm (р,ф) . i i \ dm (р, Ф)
\р*-\р')
дхду |
2 * л1 дх'
<рсЕ d2w
~R~~5W
A4.15)
В уравнениях A3) и A5) приняты прежние обозначения A0.68) и
A0.120) для Фс, Фк и D'c.
Воспользуемся теорией течения. Как мы видели выше (§ 123),
соотношения типа F) сохраняются в этом случае, если положить
ЕС = Е. Поэтому мы придем к тем же дифференциальным
уравнениям A3) и A5), считая <р = 1, D'c~D.
§ 165. Выпучивание замкнутой оболочки при осевом сжатии
Обратимся к случаю шарнирио опертой по торцам оболочки,
сжатой вдоль образующей усилиями р. Уравнение A3) принимает
вид (при px=zр{ = р, py = s = 0):
-Зут] + Р-ТГл =-вал- 04.16)
Р'фс [Hi 1^^.1-9 Л*
h 1 \ 4 "^ 4 Фс ) дх* "f" дх2 д
ду2
Выражение (9) оказывается равным
дх2
R дх2
П(в, Ф)=р(
д*Ф
1 д2Ф'
ду2
2 дх2
*) Уравнения A3) и A5) содержатся в работах Э. И. Григолюка [14.4].
ВЫПУЧИВАНИЕ ЗАМКНУТОЙ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 605
Уравнение A5) переходит в следующее;
/3 . 1 фс\<?4Ф . (о фс\ <?4Ф | Фс <?4Ф _ Фс^ 02W /,4 17л
|Т+4фк)^'гГ фк / дх> ду* ""•" Фк <?у4 "~ R дх>' A*,и)
Примем для w выражение
, , тпх
, . тпх пу „. ...
w — f$in—-—cos-jr A4.18)
и подставим его в правую часть уравнения A7); тогда получим
/3 ■ 1 фс\ <?4Ф I /о Фс\ <?4Ф , Фс <?<Ф _
14 "■ 4 фк I дх< "f \ Фк ' дх* ду2 "т" ф,< ду4
= ^./(^Js,n^cos^-. (H.19)
Будем искать частный интеграл уравнения A9) в виде
O^^sin^Lcos^; A4.20)
находим
Л — pf ^ •
отсюда
д2Ф _ _Ff_ Фс v
дх* /? C 1 Фс \ / Фс W Ln \г Фс / In \* А
141фк11"Г Фк М '«я/? ' "*" ф!; I тел/? )
. , . тлх пу ., . а 1Ч
Xsm——cos-rr- A4.21)
Подставляя выражения A8) и B1) в A6) и полагая D' — Е№'%,
приходим к следующему выоажению для р:
'-^{-?[(т+т^(")'+»№'+№Л +
введем безразмерные параметры
j: р=-ёг- 4 = -^. 0 = -^. Л = ^. A4.23)
; ^ Eh ' R nL фс
рее эти величины, кроме Я, встречались в главе XIII. Выражение B2)
ролучает вид
? Р — Фс1 -ol—Z— ^ T^ + Afh г ! л- ЗА. ГТГ
? I v 7 4 4^*2+(зя-1)+^11
f A4.24)
606 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗЛ ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. XIV
Если осуществляется осесимметричная форма потери устойчивости,
то я = 0 и из B2) получим
Р— сФс 9 \4 + 4 <рс ) { L ) + / 3 , 1 ус W тпЯ\а
U + 4 <рк ) [ L }
Минимизируя полученное выражение по mnjL, находим параметр,
соответствующий критическому напряжению *):
Рв = |УфЖ; A4-25)
при этом
Рв = |УГ^с-^- A4.26)
В упругой области, при <рк = <рс=1, будет
Рв = |^-|. A4-27)
Это выражение вытекает из A3.33), если принять [1 = 0,5.
Если воспользоваться теорией секущего модуля [14.10], о которой
говорилось в главе X (стр. 420) *), мы получили бы
/>в = §£<:-!• A4.28)
Сравнение B6) и B8) показывает, что решение задачи по теории
деформаций без учета эффекта разгрузки приводит к более низкому
значению для рв. Основываясь на теории течения и идя тем же
путем, придем к формулам:
Рв = !У^. рв = |уЁ^-|. A4.29)
Если условно принять Ес« \^EWE, то эти формулы совпадут с B8).
Рассмотрим теперь более общий случай несимметричной формы
потери устойчивости оболочки. Критическое напряжение но B4)
представляет собой функцию параметров ц и Ф2. Минимизируя
функцию B4) по т], находим
„_ зуТ
V
Ч^*2+2+^Н1^й2+зя-1+^
A4.30)
Подставляя это значение в B4), получим
Рв = 4 d\ УфкФо A4.31)
где
di — y I -f- A . зм#«4-4(ЗЛ-1)Фг+7- A4'32)
*)ц Формула B5) получена а работах [10.9], [14.3], [14.10] и обобщена на
случай сжимаемого материала Э. И. Григолюком [14.4].
§ 1651 ВЫПУЧИВАНИЕ ЗАМКНУТОЙ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 607
Если теперь исследовать выражение C2), то окажется, что оно
получает «локальный» минимум при
02=-^ . A4.33)
/l+ЗА. '
Так как ft характеризует отношение длин полуволн в окружном и
продольном направлениях, то из C3) следует, что при переходе из
упругой области в пластическую полны должны вытягиваться вдоль
дуги; как мы увидим ниже, это подтверждается экспериментами.
Окончательно формула для критического напряжения при
несимметричном выпучивании оболочки будет
2 с 1/7 -1 / 2-f-^l-f-3/. h ,,,„.
pB = — Ewcy X Л/ !—-—Т ■ ■ —. A4.34)
3 Т У V ЗЛ-1+/1+ЗЛ R '
Для точек площадки текучести (>„ = 0) формула C1) получает
2 '• I.5
вид Рв = Фс("о') • Отсюда можно определить критическую
деформацию
/ О \ 1,5 h
'.р=D) -R- A4-35)
Сопоставление формул B5) и C1) показывает, что при ?»Ф 1
будет с?, > 1 и, следовательно, выпучивание оболочек в малом при
наличии пластических деформаций должно происходить по осесимме-
тричиой форме, поэтому для практических расчетов надо
пользоваться формулой B6). Ее следует представить в виде:
£jl__L^ = 1]L. (Н.26а)
£ Уфсфк 3 R
Зная зависимость фс и <рк от а (см. § 126), находим отсюда
критические значения рв для различных отношений R'h. Такой же путь
применяется при расчетах по формуле B9).
Приведем данные серии экспериментов по устойчивости дюралю-
миновых оболочек в упруго-пластической области *). Отношение
длины к радиусу составляло L'R = 2; величина R]h менялась в
пределах от 130 до 20. Образцы изготовлялись из труб на токарном
станке, так что начальные неправильности формы были
незначительными.
В тех случаях, когда потеря устойчивости происходила при слабо
развитых пластических деформациях, она всегда сопровождалась
хлопком. Появляющиеся при этом вмятины имели ромбовидное
очертание, как в упругой области. По мере уменьшения отношения R\h
число волн по окружности падало. На рис. 14.1, а, б, в приведены
фотографии испытанных образцов при отношении R!h, соответственно
*) Эти опыты были проведены А. Н. Божииским [11.1].
608 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. XIV
равном 50, 30 и 25. В случае, если пластическая деформация до
потери устойчивости была значительной, эффект хлопка исчезал и
образовывалась сплошная
кольцевая вынучина (рис. 14.1, в),
как п упругой области при
наличии внутреннего давления.
Таким образом, судя но этим
опытам, чисто пластическое
выпучивание оболочки
действительно является осесиммет-
ричным *).
На рис. 14.2 знаком Д
отмечены значения параметра ркр,
полученные в опытах, в
зависимости от отношения R/h.
Сплошная и штрих-пунктирная
линии построены по формулам
B6) и B9), первая из которых
вторая — теории течения. Интересно
построенные по двум эгим теориям,
мало отличаются друг от
друга, в то время как в
случае плоской пластинки
диаграммы pK9(b!h) резко
отличались одна от
другой. Пунктирная линия на
рис. 14.2 относится к
упругой области, причем принято
(.1 = 0,5. При выпучивании
в пределах упругости
реальное критическое напряжение
оказалось равным ркр«0,27,
что составляет около 40%
от ра = 0,667 (при ц = 0,5)
и 45% от р3 = 0,606 (при
ц = 0,3). Таким образом,
300 здесь налицо резкое
расхождение между реальными
критическими напряжениями
Рис. МЛ. Сжатие вдоль оси оболочки после
выпучивания при илист .чс-екпх доф.)рм„цмих;
для образца б) пластические деф >рм.иши
являются наибольшими.
отвечает теории деформаций, а
отмстить, что графики pa{R'.h),
R/h
Рис. 14.2. Зависимость верхнего критического иа-
пряжения сжатия от отношения R/h по различным
теориям пластичности в сопоставлении с экспери- и Верхним Значением Ркп-
ментальными данными. *
Однако, как это видно из
графика, при возрастающей пластической деформации это
расхождение сглаживается. Несколько лучшие результаты были получены
*) Аналогичные результаты были получены В. Г. Зубчаниновым [14.2].
§ 166]
ЗАМКНУТАЯ ЦИЛИНДРИЧЕСКАЯ ОБОЛОЧКА
609
0,2
/s;;// // j / s/;; ; ;y-/-f r
по теории локальных деформаций (см. § 125); соответствующая
кривая, полученная без учета разгрузки, дана на рис. 14.2*).
На рис. 14.3 результаты экспериментов представлены в иной
форме. По оси абсцисс по-прежнему отложено отношение Rjfi,
а по оси ординат—коэффициент
v=PkP/Pb. пРичем рв вычислено ,д . По теории dapopmuui
по теории деформаций. Здесь же у
отмечен характер
волнообразования в различных случаях. Ofi
Из графиков рис. 14.2 и 14.3
можно сделать вывод, что при
сравнительно малых значениях R/h '
(длядюралюминовых оболочек при
R/h < 25), когда пластические ^
деформации значительны, можно
вести практические расчеты лишь
на устойчивость в малом. Однако
при слабо развитых пластических
деформациях эффект
геометрической нелинейности продолжает
сказываться; здесь расчетные
разрушающие напряжения должны
составлять известную долю от рв.
Поэтому задача об устойчивости
в большом сохраняет значение и для упруго-пластической области.
Попытка решения такой задачи будет сделана ниже (§ 170) в
применении к цилиндрическим панелям.
50
100
150
200.
R/h
Рис. 14.3. Зависимость между безразмерным
параметром сжимающего усилия и
отношением R/h.
§ 166. Замкнутая цилиндрическая оболочка при совместном
действии осевого сжатия и внутреннего давления
Исследуем случай одновременного действия на круговую
цилиндрическую оболочку осевой сжимающей нагрузки и внутреннего
давления. Ранее, в § 159, при анализе упругой задачи было показано,
что внутреннее давление оказывает подкрепляющее действие; было
также отмечено, что это влияние ослабевает с переходом в
пластическую область. Здесь мы приведем решение данной задачи в
линейной постановке, основываясь на уравнениях деформационной
теории**). Если считать докритическое состояние безмоментным и форму
выпучивания осесимметричной, то критическое сжимающее напряжение
*) Эти данные принадлежат И. В. Кнетсу, канд. дисс, Рига, 1965.
Различие между результатами, полученными по теориям деформаций и
локальных деформаций, объясняется, в основном, характером аппроксимации
кривой а (е).
**) Это решение впервые получено Э. И. Григолюком [14.4]; оно
содержится также в работе Ли [14.12].
ЗУ А. С. Вольмир
610 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
в пластической области при одновременном действии па оболочку
осевого сжатия и внутреннего давления будет
4<РЛ
1 — 2ц \2
-2|А
+-(l-2|i)
/ ' 2Фс ■
B — а) Bа— 1)
4A—а-fa2)
i)
R
(a)
отношение
где [I — упругий коэффициент Пуассона; а = ру!рл
окружного напряжения к осевому.
Нетрудно видеть, что при [i = '/2 (а) переходит в B6), иными
словами, в случае несжимаемого материала критическое напряжение
в пластической области, основанное на решении геометрически
линейной задачи, как и в
упругой области, не зависит от
внутреннего давления.
Кривые по уравнению (а),
соответствующие различным
отношениям R!h, построены на
рис. 14.4 в координатах р по
A3.38) и q по A3.73); при
вычислениях использовалась
диаграмма для дюралюмина
Д16Т. Видно, что с
переходом в пластическую область
критическое сжимающее
напряжение падает.
Обратимся далее к
результатам экспериментов по
выпучиванию дюралюминовых
оболочек в пределах и за
пределами упругости при совместном
действии осевого сжатия и
внутреннего давления *).
Геометрические параметры образцов были следующими: DR — 2;
/?//z=180. Опыты на выпучивание оболочек в пластической области
осуществлялись по трем заданным путям нагружения, различающимся
порядком приложения внутреннего давления и осевой сжимающей
нагрузки. Путь I: доведение внутреннего давления до заданного
значения, а затем — нагружение осевым сжатием до выпучивания при
0,8
Л
Р
Dfi
V
\ \
V \
\ W\
VA \
J4o\ \
\\\
\ \?А
л\
0,5
1.0
1,5
Рис. 14.4. Критическое напряжение для
дюралюминовых оболочек в зависимости от
внутреннего давления и отношения Rlh по
деформационной теории.
*) Эти эксперименты проведены А. Н. Божинским и А.' Т. Пономаревым
[Прикладная механика, № 10, 1965); подобные опыты для более узкого
диапазона параметров нагрузок и путей нагружения выполнены Ли [14.12].
Результаты экспериментов с образцами из стали и магниевых сплавов даны
в работе В. И. Королева (Вопросы механики, К° 193, изд. МГУ, 1961).
ЗАМКНУТАЯ ЦИЛИНДРИЧЕСКАЯ ОБОЛОЧКА 6Ц
постоянном внутреннем давлении. Путь II: одновременное действие
внутреннего давления и осевой сжимающей нагрузки; при этом
величина осевой нагрузки определялась из условия компенсации осевых
напряжений, вызванных внутренним давлением. По достижении
внутренним давлением заданного значения осуществлялось осевое сжатие
до выпучивания. Путь III: одновременное нагружение до
выпучивания осевым сжатием и внутренним давлением, которые увеличивались
малыми ступенями (случай, соответствующий простому иагружению).
Результаты экспериментов совместно с теоретическим решением
для пластической области по уравнению (а) — ниспадающая кривая
0 0,5 1,0 1,5
Ч
Рис. 14.5. Различные пути нагружеиия.
и для упругой области по нелинейной теории *) изображены на
рис. 14.5. Знаками Д отмечен путь I, О—путь II, □ — путь III.
Экспериментальные точки на рис. 14.5 дают наглядное представление
о кривой разрушения для цилиндрической оболочки. Кривая имеет вид
параболы; ее форма и расположение зависят как от свойств материала,
так и от отношения Rjh. Вершина экспериментальной кривой
разрушения смещена вправо от оси # = 0, что означает возрастание величины
критического напряжения с увеличением параметра давления д. Однако
При #;>0,17 критическое напряжение постепенно начинает падать. С
переходом в пластическую область при <7>-0,60 скорость падения
*) См. работу Элмроса и Браша (В. Almroth, Brush, AIAA
Journ. 1. № ю, 1963).
612 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
критического напряжения возрастает. Характерные формы выпучивания
оболочек представлены на рис. 14.6; ромбовидная форма (рис. а, б)
соответствует 0^^^0,17. При q > 0,17 наблюдается осесимметрич-
ная форма (рис. в—<?). Данные опытов обнаруживают весьма слабое
влияние пути нагружеиия па величину критического напряжения; этот
Ф
.-- т >тт
«ue- -т %"- *
S) в)
***№•'
^V
*;
0
Рис. 14.6. Разные формы выпучивания при наличии внутреннего давления.
вывод является важным в связи с использованием в задачах
устойчивости деформационной теории пластичности.
С точки зрения приложений наибольший интерес представляет
определение максимальной осевой нагрузки, которую может
воспринимать цилиндрическая оболочка, подверженная действию внутреннего
давления. Судя по результатам описанных выше экспериментов, при
q'^0,40 увеличение осевой нагрузки вследствие повышения
внутреннего давления практически не достигается.
§ 167. Замкнутая оболочка при внешнем давлении
Перейдем к случаю, когда оболочка средней длины подвергается
действию равномерно распределенного внешнего давления*) q.
Рассматривая устойчивость в малом, будем исходить из уравнений A3)
и A5) деформационной теории. Примем px = s = 0, py = qR/h, тогда
получим:
d4w , 9
дх* I г
d*w
дх2 ду2
-(т+т*)
d*w
1 д*Ф
X дх*
+ (^
д*Ф
дх2 ду2
h I £w_ 1_ <№_\ _ „
ду* "г" фсО' \рУ ду2 R ду2 ) ~ '
A4.36)
фс£ d7w
/3 , 1 \ д*Ф
\4 ■" 4A.J ду* ''
R дх2
A4.37)
*) Это решение принадлежит Джерару [14.10].
ЗАМКНУТАЯ ОБОЛОЧКА ПРИ ВНЕШНЕМ ДАВЛЕНИИ 613
Примем для w выражение
a;==/sin-^sin-^-. A4.38)
Из уравнения совместности C7) находим функцию напряжений в виде
(P^/l.sin^sin^, A4.39)
где
л =pL $£
1 R фс / гая \2 , / фс W п \2 13 1 Фс \ / Ln2 \г '
Подставляя C8) и C9) в уравнение C6), получим
;>|[о.+»+({+{*)]+
** 3 , 1 фЛ1 ■ <14-4»)
^'+C^)»*+(т+т£)]
здесь по-прежнему обозначено
PyR q I RV
величины & и ri определяются по B3). Как мы видели из
рассмотрения упругой задачи, для оболочек средней длины можно принять
ю=1, &2<^1; тогда получим
Ф, 9 \4 ' 4
Фк\ ■ А4
или
i_=B<E£ + 32s.J^.+ 4фк * (»*\\ A4.42)
Фс Збфс Л ' Зфк + фс и й V «W
Находя минимум по и2, имеем
п* — з',5(,фк>10,5 4фс д2/?3
кр WJ Фс + Зфк AL2 '
Подставляя это выражение в формулу D2), находим верхнее
критическое давление:
д± = _4_ /фс + Зфк\'Л / ф.уА я#_ / А_\'А
Фс 3^ \ 4фс / Uc/ L \Rl V
Если принять фк = фс=1, то найдем отсюда
- _ 4 лЯ / ft VA
мы приходим к прежней формуле A3.77) при [i = 0,5. И здесь
614 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
при слабо развитых пластических деформациях может происходить
выпучивание оболочки в большом. Поэтому в практических расчетах
следует пользоваться формулой D3), вводя затем поправочный
коэффициент v «* 0,7.
§ 168. Кручение замкнутой оболочки
Рассмотрим теперь случай нагружения замкнутой оболочки по
торцам скручивающими парами *) с моментом
MK = 2nR°-hs. A4.44)
Уравнения A3) и A5) принимают вид
4[
д w д w лаш
' A+Ь) '
d2w 1 д~Ф
дх4 I v* -г "/ дх2ду2 ' ду*
д*Ф ,C _Л д*Ф , д*Ф __ Ec£w_ ,u4fi>
~W~r\k' J^2^y2_r ду* '- ' R dxf ' l • y
По аналогии с упругой задачей примем для w выражение
w = fsin^-sin-^(y-{-yx), A4.47)
где у — тангенс угла наклона волны к образующей цилиндра.
Частный интеграл уравнения D6) можно искать в виде
tt = 5icos-£[y+(Y + &)*] + 52cos-£[y + (Y —&)*]; A4-48)
здесь b = n,R/nL. Подставим выражение D8) в D6), находим;
EcR(y+Wf
Я,=
2n2[(Y + *L+(|-1)(Y + *J + I] '
£C#(Y-*J/
2«2[(Y-*L + (|-l)(Y-*J + l]'
Далее подставляем w и Ф по D7) и D8) в уравнение D5) и
приравниваем нулю коэффициенты при cos(n/R)[y-}-(у4-Ь)х\ и
cos (n/R) [у -f- (у — &)х]; тогда получим два соотношения между
сдвигающим напряжением s и параметрами оболочки:
2s _ n\(h\2 (v + ft)* + (I+A)(Y + ftJ+l ,
£с ~ 9 \R) Y + * "^
+ <V±J£ A4.49)
и2 [(Y + *L + ^^f- (Y + ftJ + 1J
2s __ и2 (h\2 (Y-ftL + q + ;i)(v-ftJ + i
£c 9 ItfJ Y —* "^
+ ^= fe? T- <"-50)
„2^_ФL+3_А(у_#J + 1'|
*) Эта задача впервые исследовалась Джераром [14.10].
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ. УСТОЙЧИВОСТЬ В МАЛОМ 615
Введем обозначения:
V+» = 4№+-f)'4».=:?- * = *»,* = £. A4.51)
и придадим уравнению D9) форму
,_„уШ±^еГ±1+ Br]
-Щ — П pi 2L . Г / v, \4 . 3
п
Для оболочек средней длины можно пренебречь v^ по сравнению
с п2, тогда получим:
Сравнение этого результата с A3.116) показывает, что правая часть
уравнения получается той же, что и при решении упругой задачи.
Но в § 155 мы пришли к выражениям A3.118) и A3.119),
определяющим число волн вдоль дуги и верхнее критическое напряжение.
Полагая в этих выражениях ц = 0,5 и вводя Ес вместо Е, получим
для нашего случая
л = 4.2@,75),/'(-£),/'D)\ (Н.53)
SB = 0,74@,75)-%cD)Va(|f4. A4.54)
Таким образом, в задаче о кручении мы приходим
непосредственно к расчету по секущему модулю, как это было в некоторых
задачах по устойчивости пластинок. Учитывая возможность
выпучивания оболочки в большом, рекомендуется в практических расчетах
вводить поправочный коэффициент к величине sB, равный v «* 0,75.
Аналогичное решение задачи может быть дано для оболочек-
большой длины [14.10], тогда придем к уравнению, аналогичному A3.124):
sB=0,272.0,75~X(^)V2. A4.55)
и здесь расчет может быть проведен по секущему модулю.
§ 169. Цилиндрическая панель при осевом сжатии.
Устойчивость в малом
Исследуем случай круговой цилиндрической панели, шарнирно
закрепленной по краям и сжатой вдоль образующей. Рассмотрим
сначала устойчивость панели в малом с применением теории
деформаций, тогда надо воспользоваться уравнениями A6) и A7). Примем
следующее выражение для w.
, . mux . ияу ,. л г/,,
«; = /sm -sin—jf-. A4.56)
616 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
Подставляя F6) в A7), находим
Ф = А0 sin sin —г-
1 a b
A4.57)
где
отсюда
д2Ф
'к(ытгяз-т'+ы^)
е4-
фс
дх* ~ R C 1 фс \ / фс \ / an \г фс / па у
{ 4 "Т" 4 Фк J "f Г фк М ftm I "•" <рк \ mft j
Пользуясь уравнением A6) и вводя обозначения:
— = /
/и х'
■к, ^=к
фс
где /„, L—длины полуволн вдоль сторон панели, находим
A4.58)
/> = £Фс|( —
яйу/1+ЗЯ. 2 4
■^г" +-^- + -^14-
+
(яЯJ
1 + зя 1 /-;
-J—Нзя-1OГ + ^
IIг 'у 'у
A4.59)
Исследование этого выражения значительно упрощается, если принять
во втором члене 37. — 1 я* 2; как легко видеть, это ведет к несколько
преуменьшенному значению р. Делая такую замену, находим
'=**(^+-гк-)- A4-60)
где
1+ЗЯ
Vi;
2 . it
ui
И
Г
у у
Считая, что для панели большой кривизны волнообразование
осуществляется свободно, запишем условие минимума р по vt; тогда
для vt получим выражение
3 -./~~Т~
верхнее критическое напряжение будет равно
A4.61)
Эта формула совпадает с выражением B6), относящимся к
замкнутой оболочке.
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ. УСТОЙЧИВОСТЬ В БОЛЬШОМ 617
В случае панели малой кривизны надо принять п = \; тогда
получим выражение E9) с заменой 1у на Ь. Если панель является
удлиненной, то надо определить минимальное значение рв, варьируя
число полуволн т = а/1х. Для квадратной панели, условно считая
т—п= 1, будем иметь:
„ / /г\2 Г , 13 + ЗА . 1 / Ь2 \2 4Я. 1 ... йо.
При R->oo придем к прежней формуле A0.147), относящейся
к пластинке.
§ 170. Цилиндрическая панель при осевом сжатии.
Устойчивость в большом
Мы видели, что в случае слабо развитых пластических
деформаций следует подойти ко всем задачам данной главы с точки зрения
устойчивости в большом. Необходимость учесть в таких задачах
одновременно физическую и геометрическую нелинейность делает
решение исключительно трудным, и, прежде всего, с принципиальной
стороны. Если говорить о теории деформаций, то здесь, когда
должны исследоваться большие прогибы оболочки, возможность
использования гипотезы о простом нагружении становится особенно
сомнительной. Вместе с гем, применение других теорий пластичности
ведет к сильному усложнению задачи. Поэтому примем условно, что
теория деформаций может быть использована, по крайней мере, на
первых ступенях закритического выпучивания оболочки. Но и тогда
мы сталкиваемся с трудностями, поскольку интенсивность напряжений
меняется от точки к точке, как вдоль определенной нормали к
срединной поверхности, так и для различных нормалей. Можно подойти
к исследованию такого поля напряжений двояким образом. Один
подход состоит в решении задачи «в лоб», т. е. в определении
закона изменения интенсивности напряжений от точки к точке;
при решении задачи по методу конечных разностей *) рассматривают
определенное число точек по нормали и вдоль координат х, у.
Другой путь, значительно упрощающий решение задачи, основан
на предположении, что пластические свойства материала
проявляются лишь в отношении основного напряжения в срединной
поверхности **). Попытаемся использовать этот второй путь для
решения задачи об устойчивости в большом пологой цилиндрической
панели, сжатой вдоль образующей. Будем при этом считать, что
*) Такой метод был предложен П. А. Лукашем и В. М. Проскуриной
для пластинок; по-видимому, он может быть реализован при условии
применения цифровых электронных машин.
**) Этот путь указан в первой работе Ли и Адеса [14.11]. См. также
[14.12]. Приведенное здесь решение принадлежит А. Н. Божинскому
(Прикладная механика, Киев, 9, № 1, 1963).
618 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ [ГЛ. XIV
физические характеристики материала--секущий и касательный
модули— являются функцией лишь средней интенсивности напряжений
в срединной поверхности. Очевидно, при исследовании закритического
поведения оболочки мы должны исходить из соотношений,
соответствующих теории оболочек большого прогиба. Поэтому введем в
уравнения A6) и A7), описывающие малые прогибы оболочки (сжагой
вдоль образующей), нелинейные члены из уравнений A3.26), A3.27).
Тогда придем к следующим основным уравнениям:
0'фс/1+ЗЯ d*w . . d*w . d*w\ ,, fT,. . 1 д2Ф ,.,.,,
h l~4 ^ + 2a^-+^HL(w' Ф)+1Т1Ж' A4-63)
\ 4 ""*" 4Я j dx4 "i" Г Я J дх* ду2 "+" Я dy4 —
= -ЕФс[1/.(«. t») + -^U]. A4.64)
Допустим для простоты, что панель является квадратной (а = Ъ).
Поставим перед собой цель определить равновесные состояния панели
при р Ф рв. Считая, что пологая панель будет выпучиваться в обоих
направлениях по одной полуволне, примем аппроксимирующее
выражение для прогиба в виде
w=fsin-£- sin ~-. A4.65)
Подставляя это выражение в F4) и интегрируя, получим
+т!ФЧ'"т«-?-|£. си.*»
где
С1 = Т^зя' с2 = х> Сз = т+Ж- A4-67)
Применяя, далее, метод Бубнова—Галеркина для интегрирования
уравнения F3), находим соотношения между нагрузкой и стрелой
прогиба:
«Ц^Р-^+^с,)*-,-
Ц+зс, 9 с w р* _
36 П +Сз 4^~^~ °' A4-Ь8)
здесь введены обычные параметры:
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ. УСТОЙЧИВОСТЬ В БОЛЬШОМ 619
При £->() находим верхнее критическое напряжение по F2).
Поэтому F8) можно переписать в виде
p*=pi+%[—^^?-M2C^^-)kZ\- A4-69)
Считая С1=1 A=1, 2, 3) и <рс=1, придем к уравнению A1.177),
относящемуся к упругой задаче.
Результаты вычислений по F9) в применении к дюралюмину Д16Т
приведены на рис. 14.7; принято &=12. Кривые /—3 построены
для различных отношений bjh. При Ъ\Н"^-ЪЬ выпучивание происходит
Рис. 14.7. Диаграмма «усилие сжатия —прогиб» для
цилиндрической паиели в зависимости от развития пластических
деформаций.
в упругой области, этому случаю соответствует кривая /; напомним,
что здесь принято [i = 0,5. Следующие кривые построены для более
толстых оболочек при bjh = 40,1 и 27,4 и относятся к упругопла-
стической области. Судя по кривым /—3, во всех случаях может
быть найдено нижнее критическое напряжение /?*. Отношение P^/pl
составляет в упругой области 59%, а для кривых 2 и 3 —
соответственно 74 и 80%. Этот результат является очень интересным, так
как свидетельствует о постепенном сглаживании явления хлопка
оболочки по мере развития пластических деформаций. Такой вывод
согласуется с экспериментальными данными для замкнутых оболочек,
описанными в § 165.
620 ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ЗА ПРЕДЕЛАМИ УПРУГОСТИ
/5
Р'
Заслуживает внимания предельный случай плоской пластинки
(/г —0). На рис. 14.8 построены по F9) кривые /?*(£).
характеризующие закритическое поведение пластинок различной толщины.
Кривая / соответствует случаю, когда критическое напряжение лежит
в пределах пропорциональности и закритическая деформация
относится целиком к упругой области. Кривые 3 - 5 отражают
деформацию пластинки полностью
в пластической стадии при
&//z = 37,5; 29,5; 25,2.
Кривая 2 (для bjh — 50)
ответвляется от линии 1 в точке А,
соответствующей пределу
пропорциональности, так
что начальная стадия
деформации пластинки является
упругой, а последующая —
чисто пластической. Как
видим, п случае упругой
деформации по кривой 1
среднее напряжение уже при
£ = 3 более чем в два
раза превышает критическое.
В пластической же
области возрастание напряжения
сверх критического
значения оказывается значительно
меньшим, так что несущая
способность пластинки
приближается к критической
нагрузке. Таким образом,
при развитых пластических
деформациях цепные напряжения, появляющиеся при больших
прогибах, не оказывают существенного влияния на поведение пластинки.
Если по этим данным определить редукционные коэффициенты,
то в пластической области они окажутся более высокими, чем в
упругой. Это и естественно, так как при развитых пластических
деформациях неравномерность напряжений сглаживается.
Аналогичный путь может быть принят для исследования влияния
начальных неправильностей на поведение оболочки или пластинки.
Исходные уравнения F3)- F4) при этом получают вид:
C_ , М О®, i /ч_ 1\ д<Ф 1_ д4Ф
U "+" 4А.) дх* + [ А.) дх2 ду2 ~^~ X ду4 ~~
,с
' .//'■■'je'
уг •"'•'-•'' У?'
/уг у -..- , ^%
/SSS
А
Т~
i
Г
i^
3
.4
^^
Г
Рис. 14.8. Несущая способность подкрепленной
пластинки за пределами пропорциональности.
(Н.71)
ЦИЛИНДРИЧЕСКАЯ ПАНЕЛЬ. УСТОЙЧИВОСТЬ В БОЛЬШОМ 621
под w и wQ здесь подразумеваются, как обычно, полный и начальный
прогибы. Вычисления показывают, что начальные неправильности
оказывают в пластической области значительно меньшее влияние на
поведение оболочки, чем в упругой.
Мы применили здесь приближенный прием, отказавшись от
детального исследования пластических свойств материала в различных точках
и сосредоточив внимание на изменении пластических свойств в
зависимости от основного сжимающего напряжения. По-видимому, этот
путь позволяет прийти к практически ценным качественным выводам.
В уточненных исследованиях следует исходить из более общих
уравнений, описывающих большие прогибы оболочки при пластических
деформациях *). Интегрирование этих уравнений можно провести по
методу конечных разностей, о чем говорилось выше (стр. 367), либо
с помощью метода последовательных приближений, исходя из
решения упругой задачи**).
*) Такие уравнения для пластинок были составлены Ю. Р. Лепи-
ком [14.7].
**) Подобное исследование закритической деформации сжатой пластинки
было выполнено Н. Ф. Ершовым (См. сборник «Теория пластин и оболочек»,
Киев, 1962, 344—346).
ГЛАВА XV
КОНИЧЕСКИЕ ОБОЛОЧКИ
§ 171. Исходные соотношения линейной теории
Круговые конические оболочки входят в конструкции реактивных
двигателей, летательных аппаратов, резервуаров и т. д. Решение
задачи об устойчивости конических оболочек значительно труднее,
чем в случае цилиндрических оболочек, гак как структура исходных
уравнений является более
сложной.
Приведем основные
уравнения линейной теории
конических оболочек.
Определим вначале коэффициенты
первой квадратичной формы
иедеформированной
срединной поверхности оболочки.
Расположим оси
координат так, как показано ' на
рис. 15.1, а. Начало
координат пусть совпадает с
вершиной конуса. Будем
определять положение точки К
срединной поверхности
радиусом-вектором г,
проведенным из вершины
конуса О, и углом 6 между
осевой плоскостью, проходящей через рассматриваемую точку, и
некоторой неподвижной осевой плоскостью.
Длину вектора г обозначим через s, а угол наклона образующей
к основанию — через а. Проекции г на оси координат равны
x — ssina, y = scosacos6, z — s cosasinB. A5.1)
Вектор г можно разложить по ортам /, j, k:
r = s(i sin a -f- j cos a cos 0 -(- k cos a sin 0).
Рис. 15.1. Система координат при рассмотрении
конических оболочек.
A5.2)
ИСХОДНЫЕ СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
623
Величины s и 6 будем рассматривать как криволинейные координаты
на срединной поверхности | = s, r] = 0.
Коэффициенты первой квадратичной формы ац — А\ и а<п = Ао
определятся по формулам A2.4):
Отсюда
Ax = l, A:, = scosa.
A5.3)
A5.4)
Далее вычислим деформации срединной поверхности и параметры
изменения кривизн, учитывая, что радиусы кривизны срединной
поверхности /?! и R2 равны (см. рис. 15.1, б)
S
Rl — co, R2
A5.5)
Удлинения и сдвиг в срединной поверхности по формулам A2.52)
с учетом D) и E) оказываются равными
е2
ди
~~ ds '
1
s cos a
1
s cos а
dv t и
ди dv
o9 ■+" ds
w tgot
s
V
s
A5.6)
Здесь и, v и w — смещения точек срединной поверхности
соответственно в направлении образующей, вдоль параллельного круга (по
окружности, получающейся при пересечении срединной поверхности
с плоскостью, перпендикулярной к оси оболочки) и по внутренней
нормали к поверхности.
Изменения кривизн и кручение определяем по формулам A2.53):
■ч--
d2w
~dsT
1
2 s2cos2ot о92
л 2 \ s ds
tgo dv
s2 cos a dd
2tga . 4
1 dw
7~ds~'
d2w
s cos a ds dd
2 dw\
s2 cos a dd i '
A5.7)
В упрощенном варианте решения будем пренебрегать в
выражениях для к2 и х членами, зависящими от перемещения v; тогда
получим приближенно
1 d2w 1 dw )
%1 ~ s2cos2ot ~Ж2 7 ~ЗТ * !
1 d2w 1 dw \
s cos a os о9
s2cosot o9 ' I
624
КОНИЧЕСКИЕ ОБОЛОЧКИ
В § 139 было показано, что уравнения равновесия элемента
оболочки и уравнение совместности деформаций при безмоментном
основном состоянии (основным называется состояние оболочки до потери
устойчивости) можно свести
к системе следующих упро-
\,/Г V/ »" л-г- fr—Л щепных уравнений A2.83) и
М\ / \/А / «2f* 2
DTw -Vftf—9 = 0,1
vV4-£AVl«»-0.jA5-9)
Под q подразумевается
фиктивная поперечная нагрузка,
равная по A2.89)
— q = Л/jKj -f ^«2 + Ti2l>
A5.10)
погонные нормальные (положительные при
Рис. 15.2. Усилия, действующие на элемент оболочки.
И
здесь Nv N2
растяжении) и касательные усилия в основном состоянии (см. рис.
15.2), ф —функция усилий. Подставляя в A0) выражения G) и (8)
для %1 и у,2, при Tl2 = 0 получим:
■".&
■Л/,
1 d2w , 1 dw \
2 Vs2 cos2 а d92
+
s ds I'
A5.10a)
2 2
Операторы V и Vk находим по формулам A2.81) и A2.84):
V2 =
1
п2_ fg«
Vft — ——
s cos a I. ds
д2
s cos а
ds
) "+" d9 \ s cos а d9 )\ '
отсюда
V2w
ds2 '
d2w
ds2
1 dw
s ds
+
1
d2w
s2cos2ot d92
Далее находим:
„2 tea d2«i
A5.11)
A5.12)
44w.
\ ds2
1
+
1 dw
s ds
1
d2w
s2 cos2 a d92
■)-
a { ds
scosa
' d2w 1 da; .
"г "Т~л7 г
1
d2a;
■)] +
^ d9 L
ds \ ds2 ~ s ds ~ s2 cos2 a d92
1 d I d2w , 1 da; , 1 d2w
или
V4w-
d*w
2 d3a;
s cos a дд \ ds2
1 d2w , 1 da;
s ds
s2cos2ot d92
■)]}■
ds4
s ds3
s2 ds2
d*w
ds
+
daw
s2cos2ot ds2d92 s3cos2ot ds dO2
4 d2a; , 1
+
d*w
s4cos2ot dO2 ' s4cos4ot d94
A5.13)
ОСЕВОЕ СЖАТИЕ КОНИЧЕСКОЙ ОБОЛОЧКИ
625
Подставляя выражения A2) и A3) в уравнения (9), приходим
к следующим окончательным уравнениям линейной теории:
п i d'w 2 d*w 1 dAw
~~' \ ds4 ""•" s2cos2ot ds2 d92 "f" s4cos4a "dlL
2 d3w . 4 d2a/ .
s3cos2a ds f)92 s'cos2a d92 '
, 2 d% 1 d2a> . 1 dw\ tga д2ц> .
^7~дГ3 J2 ds2 ~^ 1*~дГ) ~1~~1& "г
, ., d2a; , ,, / 1 d2a> i 1 dw\ „ ,, c , ,.
д4Ф , 2 d4<p 1 d4tp 2 d\
ds4 "^ s2 cos2ex ds2 dO2 "i" s4 cos4 a' W ~ s3 cos2 a ds dO2 ~^
i 4 а2ф 2 азф Li!!L i _L^£_LPAiifL^!HL_n n^i^
~rs4cos2a dO2 ~T" s ds3 s2 ds2 ^ s3 ds ^ s ds2 ' ^tJ-ltJ-'
Воспользуемся этими уравнениями для решения частных задач.
§ 172. Осевое сжатие конической оболочки
Рассмотрим прежде всего задачу об устойчивости в малом
круговой конической усеченной оболочки, сжатой вдоль оси. По
аналогии с решением задачи для цилиндрической оболочки примем
сначала, что выпучивание оболочки является осесимметричным. Тогда
будет w = w(s), <p = <p(s), и уравнения A4) и A5) приведутся к виду
„ I d*w . 2 d3w l d2w . 1 dw \ .
1 ~77i I Г rid 7i TTi I ^з ~Й7~ i~
\ ds* ' s dss s2 ds2 ~ s3 ds
ds* ' s ds3 s2 ds2 ' s3 ds ' s ds2 ч '
или, в более компактной форме,
Будем считать, что при потере устойчивости образуется большое
число волн; длина каждой волны будет невелика, и потому
величину s в пределах одной волны можно считать постоянной *).
Рассмотрим волну, примыкающую к большому основанию конуса.
Положив s = /j, где /j — расстояние по образующей от вершины до
большего основания, и A/i =—N\, где !щ — сжимающее усилие на
*) Такое предположение было сделано И. Я. Штаерманом [16.13]; ему
принадлежит формула B5).
626 КОНИЧЕСКИЕ ОБОЛОЧКИ
окружности большего основания, согласно A8) и A9) получим:
ds4
duw tgct d\ ___ „
rls2 "r /, ds2 ~~ '
rf4 | рл tga rf2^ _ft
rfs4 "г" f, rfs2 ~~u-
Будем искать решение уравнений B0) в форме
w = Л sin— (s— /J,
т
ф= В sin 4- (s — /j),
где X. — длина волны. Подставляя B1) в B0), получим
A5.20)
A5.21)
A5.22)
Приравнивая нулю определитель системы B2) и вводя обозначение
я/А, = р, находим:
Минимизируя Л/i по р , определяем величину р :
R2 =
/Eh tg2a
D l\
A5.23)
A5.24)
Подставляя это значение в B3), приходим к следующему значению
верхнего критического усилия:
_ Eh2 tg a
Nl.B =
л/за-ц»)
При ц=0,3, получим:
РА2 РА2
Л/, в = 0,605 — tg a =0,605 Д£-
l\ Ко
A5.25)
A5.26)
R0 — радиус кривизны срединной поверхности у большего основания.
Исследуя, далее, случай, когда выпучивание оболочки не является
осесимметричным, примем:
w = <wx cos «6, 9 = 9jCOsre6, A5.27)
где wx = wx (s), ф1 = ф1E), п—число волн по параллельному кругу.
ОСЕВОЕ СЖАТИЕ КОНИЧЕСКОЙ ОБОЛОЧКИ
627
Подставляя B7) в A4) и A5) и вводя обозначение re = rejC0s<x,
получим:
Л„„ о Л„, l+2n'f A, l+2«i rfo»j
n\diwl 2 rf3^!
[ rfs4 ' T dss
ds2 r s3 rfs
—V-^>
d4<Pj 2 rf3(pj 1+2л? rf2(pj
d2w, tga rf2<p,
rfs4 ^ s As3 s2 ds2 r
1+2л? rfcp, и?D— л?) tga rf2w,
Легко убедиться, что эти уравнения можно переписать в виде
^^+^^ = 0,A5.30)
+ *А^^ = 0. A5.31)
Заменяя в C0) и C1), как и в предыдущем выводе, s на lt и
М на — Л/?, придем к прежнему выражению B6) для верхнего
критического усилия. Оно получается таким же, как в случае осевого
сжатия цилиндрической оболочки радиуса R0.
Как показывают эксперименты, реальные конические оболочки,
сжатые вдоль оси, выпучиваются хлопком по ромбической форме
с образованием двух или нескольких поясов выпучин у большего
основания. Поэтому здесь должен быть принят тот же подход к
задаче, что и в случае цилиндрической оболочки, с рассмотрением
устойчивости в большом. Полное решение нелинейной задачи для
сжатой конической оболочки в литературе еще отсутствует. Примем
поэтому с достаточно большой уверенностью, что нижнее критическое
давление может быть определено по аналогии с принятым для
цилиндрической оболочки *) по формуле
N, B = 0,\SE~. A5.32)
Формулы B6) и C2) пригодны для практических расчетов;
при этом надо принять во внимание указания, сделанные в § 149
по отношению к цилиндрическим оболочкам. Значения полной осевой
*) В пользу законности такой аналогии говоряi также и теоретические
соображения (см. [16.11]).
40»
628
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
сжимающей силы получаются при этом равными:
PD = 0,605£— я^ sin 2а,
° } A5.33)
Р„ = 0,18£ ~ я/, sin 2а = 0,18£/г2я tg а sin 2а;
здесь принято во внимание соотношение R0 = l1jtga.
Формула B6) справедлива при условии, что число волн вдоль
образующей достаточно велико. Следуя И. Я. Штаерману [15.11],
будем считать, что это условие выполняется, если оболочка является
достаточно подъемистой (угол а ^-30°)*).
Желательно, чтобы задача об устойчивости конической оболочки
при осевом сжатии была разработана более подробно, с учетом
влияния угла подъема а на характер волнообразования. Кроме того,
интересно распространить на коническую оболочку геометрический
подход к задаче, освещенный в § 126.
Р-г,Ьт
- R-ПОмм
Полно/Ног
s: крепление
«4
болтоОое
крепление
Рас. 15.3. Диафрагма воздушно-реактивного двигателя.
Пример 15.1. Коническая диафрагма средней опоры (днище) воздушно-
реактивного двигателя, выполненная из стали, нагружена осевой силой
/' = 2500 кг (рис. 15.3). Провести проверку диафрагмы на устойчивость.
Находим tga = —^—=0,533 и а и 28°. Длина образующей равна
543 мм, радиус кривизны у большего основания /?0=
_ 480
h ~ cos 28'
543
"Щ3з
= 980 мм.
*) Экспериментальные данные Лекмона и Пенциена (L. L а с k m о п,
J. P e n г i e n, Journ. Appl. Mech. 27, № 3, I960,458—460) показывают, что
формула для Ра дает значения критического усилия, лежащие ниже опытных,
если R0fh < 1000. Фактически коэффициент в формуле для Ркр зависит от
отношения RJh, подобно тому как это имеет место для цилиндрических
оболочек.
j
СЛУЧАИ ВНЕШНЕГО ДАВЛЕНИЯ
629
По формуле C2) значение нижнего критического сжимающего усилия
будет
N, „ = 0,18£~ = 0Л8-2.106-^- = 586 кг/см.
Полная осевая критическая сила согласно C3) равна
Ри = 0,18£/12я tg a sin 2а = 0,18 • 2 ■ 106 • 0,42 • я 0,533 • 0,829 = 8 -10* кг.
Критическое напряжение у верхнего основания
°«- » = a.3480,400sin28° = 400° «^
Критическое напряжение не превосходит предела пропорциональности.
Величина Ри оказалась во много раз большей величины заданной осеиой
силы Р.
§ 173. Случай внешнего давления
В конструкциях реактивных двигателей, резервуаров и т. д.
конические оболочки подвергаются внешнему давлению. Обратимся к
рассмотрению этого случая, причем сначала рассмотрим оболочку,
замкнутую в вершине. Предварительно упростим исходные уравнения,
следуя Н. Л. Ллумяэ [15.1]. Представим функции w и <р в виде
w = ф (s) tg ос cos raG
ф == Xi (s) &Ehlx tg2 a cos «0.
Здесь га—число волн, образующихся по параллельной окружности
при потере устойчивости; под е понимается величина
*™.0 I О5-34)
-V-
Г ctg.g А, Aб.35)
]Л2A-ц2) I,
где /j — длина образующей от вершины до большего основания.
Такая подстановка позволяет выделить в разрешающих
уравнениях малые члены, которыми можно пренебречь. Усилия докрити-
ческого напряженного состояния при равномерном внешнем
давлении q выражаются следующим образом:
— _ 9
^, = — ——5, Л/2 = —-Ts^-s. A5.36)
1 2 tg a J tf о v '
Введем безразмерные параметры
ql
V = ——
и безразмерную координату
v = lfect^a' P=^ <15'37)
* = -£-. A5.38)
м
Тогда выражения C6) примут вид:
N1 = — yve3£Atg2a, Л/2 = — x\e3Eh tg2a. A5.39)
630
КОНИЧЕСКИЕ ОБОЛОЧКИ
[гл. xv
Если принять во внимание равенства C4) и C7) — C9), то
уравнениям A4) и A5) можно придать такую форму:
dx2
л7^ + 2^^-Trf^ + ^rfJJ-0, A5-40)
tf*2 "т" jf3 Л1 ь л: \ Лс2 л: rf* "г х" ) '
+"ИЗи-»4&—гЗи-7-£-)-<>- о5"»
Величина е мала по сравнению с единицей, если только угол а
не близок к нулю, величина же р становится большей по
сравнению с единицей, если угол а близок к л/2. В случае, если угол а
не близок ни к нулю, ни к л/2, в уравнениях D0) и D1) можно
пренебречь членами, содержащими е и е2. Сделав это, получим:
^--^-Ф+Р^ = 0. A5.42)
£+£х.-0. 05-43)
Исключив из этих уравнений функцию %lt придем к следующему
разрешающему уравнению:
dx2
*3^г) + ('5--Н*==0- A5l44)
Примем это упрощенное уравнение в качестве исходного. При
решении задачи воспользуемся сначала методом Бубнова — Галеркина.
Для случая шарнирно опертой оболочки зададимся функцией ф
в таком виде:
ф = Ахъ{\ -\-ax)sinnx, A5.45)
где
№г- <15-46)
8 + |»
При \1= 0,3 будет а = — 0,759. Функция D5) удовлетворяет условиям
шарнирного опирания фA)=0 и (Мг)л=1 = 0 (момент Мг показан
на рис. 15.2, б).
Уравнение метода Бубнова — Галеркина, соответствующее
уравнению D4), запишем в виде
i 1 1
1 -& (х3 Щ Ч> dx + р* J £ dx - ph J* ф2 dx = 0. A5.47)
СЛУЧАИ ВНЕШНЕГО ДАВЛЕНИЯ
Пользуясь формулой интегрирования по частям, находим:
631
J iu?[x ^rdx=z^v i^r,-) -^(х"^Ыах==
dx2 dx
>i
с>1\\
х°[~ш) dx; A5-48)
тогда из D7) получим:
J_
d2ty dty
dx2 dx
:+.И£г*+'1£*
A5.49)
J>
*dx
Если оболочка жестко защемлена по краю, то граничное условие
имеет вид (dtyfdx)x=1 = 0 и мы придем к формуле*)
i *№«+,!
dx
A5.50)
J*
i' dx
Подставляя выражение D5) в D9) и определяя величину р из
условия минимума v, найдем vmin = 20,4. Используя формулы C5),
C6) и C9), получим следующее значение верхнего критического
давления:
*--'*Ш**"/Б^
:3,15£ (А)"-«,„)'<
1
A5.51)
(i-n2f
Решим эту же задачу методом конечных разностей **). Перепишем
уравнение D4) в виде
d2ty
^4^4-6*6^
dx*
dx3
6х4-
dx2
.(p* — pb,x*)$ = Q. A5.52)
Для оболочки, замкнутой в вершине, будет 0^х-^1. Разделим
этот интервал на п частей. Примем следующие граничные условия.
В вершине, при х = 0, положим ф = 0, dtyjdx=Q. Для точек
*) Эта формула была получена Н. А. Алумяэ.
•*) Это решение проведено И. И. Трапезииым [15.12]. Ему же
принадлежат формулы E1), E7), A03), A04).
632 КОНИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. XV
основания, при х=1, примем условия шарнирного опирания
Выражая в E2) и в граничных условиях производные через
конечные разности по известным формулам *), составим систему
алгебраических уравнений относительно значений ф в узлах. Положив
я = 4, придем к следующим уравнениям:
7ф3-16ф2 + A3 + 16р4--^)ф1 = 0,
4
- 53,48ф3 + C1,36 +| />4 - -^ рву) ф2 4- 6.1*1 = О,
B7.83 4-Ц-Р4 -^у)ф3-12,4ф2-0,6ф1 = 0.
A5.53)
Приравнивая определитель этой системы нулю, получим
уравнение, из которого может быть определена величина v. Минимизируя v
по р, находим значение v= 17,8. При более мелком шаге (га=5)
будет vmln= 18,2; формула для критического давления примет
тогда вид
9в=2,8Е(±)"'-М^!Г. A5.54)
\lj A-u2)'1
Мы получили формулу той же структуры, что и раньше (см.
выражение E1)), но численный коэффициент оказался здесь равным 2,8
вместо 3,15. Формулу E4) и следует рекомендовать для
практических расчетов при определении верхнего критического давления.
Судя по экспериментальным данным (см. ниже), значения реальных
критических давлений для тщательно изготовленных оболочек лежат
несколько выше величин, получающихся по формуле E4). Поэтому
расчет по формуле E4) будет, как правило, идти в запас
устойчивости. Для оболочек, имеющих начальную погибь, следует вести
расчет с учетом нижнего критического давления. Соответствующая
нелинейная задача еще не решена, поэтому здесь целесообразно
пользоваться теми же поправочными коэффициентами, которые
рекомендовались в § 153 для цилиндрических оболочек.
Обратимся к случаю усеченной оболочки (рис. 15.4), чаще
встречающемуся в реальных конструкциях. Докритические усилия
определяются здесь формулами:
N,=-J—[^ — s), /V2 = — J-a, A5.55)
1 2tga \ s ) 2 tga v >
*) См., например, указанную на стр. 66 книгу Э. Камке. Целесообразно
для точек х = 1/я и х = 1 воспользоваться выражениями для производных,
дающими приближения первого порядка, а для всех остальных точек —
приближениями второго порядка.
§ 173]
СЛУЧАИ ВНЕШНЕГО ДАВЛЕНИЯ
633
где /0—расстояние по образующей от вершины до меньшего
основания. Введя безразмерную координату x = s/71, представим эти
выражения в виде
,2
Л/г = — уе3£/г tg2
/ 'о
Л/,
xve3£/ztg2<x. A5.56)
Величины е и v определяются по-прежнему по C5) и C7).
Поступая так же, как и в случае замкнутой оболочки, после упрощений
придем к уравнению D4). Но если в случае оболочки, замкнутой
Рис. 15.4. Усеченная оболочка под действием внешнего давления.
в вершине, величина х изменялась в пределах 0-^x^1, то теперь
она лежит в пределах /0//j-^ х-^ 1.
Решая задачу об устойчивости усеченной оболочки методом
конечных разностей, получим для случая, когда оболочка по меньшему
основанию защемлена, а по большему шарнирно оперта, следующую
формулу:
Коэффициент С1 определяется по кривой рис. 15.5.
Полученные формулы применимы, как уже говорилось, при угле аи
не близком ни к нулю, ни к я/2. Эксперименты показывают, что этими
формулами можно пользоваться при угле, лежащем в пределах
20°-^ а -С 80°; при а > 80° можно коническую оболочку при
вычислении qv заменить цилиндрической с радиусом, равным среднему
радиусу конической оболочки.
634
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
Приведем данные испытаний тщательно изготовленных замкнутых
и усеченных конических оболочек *), подвергшихся внешнему
гидростатическому давлению. Края оболочек были жестко защемлены.
Давление измерялось с помощью манометров и датчика; показания
датчика записывались на ленте осциллографа. Момент потери
устойчивости отмечался скачкообразным уменьшением ординаты кривой
Рис. 16.5. Грлфик для расчета усеченной обо- Рис. 15.7. Вид на образец с
лочки с меньшим защемленным и большим торца,
шарнирно опертым торцами.
давления. На рис. 15.6 показана оболочка, замкнутая в вершине,
после выпучивания. На рис. 15.7 изображена усеченная коническая
оболбчка после испытания; фотография сделана со стороны
большего основания.
Углы а замкнутых в вершине оболочек менялись в пределах
от 30 до 75°, а усеченных — от 81 до 86°. Отношение hjL изме-
— 2 —2
нялось от 0,235 • 10 до 0,57 • 10 . Потеря устойчивости сопро-
*) Эти испытания были проведены И. И. Трапезшшм [15.12].
СЛУЧАИ ВНЕШНЕГО ДАВЛЕНИЯ
63.5
вождалась хлопком, хотя и не резким. Хлопок был более сильным,
если давление на оболочку осуществлялось не жидкостью, а воздухом.
Для всех тщательно изготовленных оболочек экспериментальное
значение критического давления оказалось несколько выше
теоретического, определенного по формуле E4) (для замкнутых в вершине
оболочек) и по E7) (для усеченных оболочек), и ниже давления,
найденного по E1). В среднем экспериментальная величина критического
давления была приблизительно на 5% выше значения по E4) и
примерно настолько же ниже величины, определенной по E1).
В практических расчетах можно использовать формулы E4)
и E7) для верхнего критического давления; при этом следует вводить
коэффициент v, аналогично тому как это рекомендовалось для
цилиндрических оболочек (см. § 150).
Пример 15.2. Проверить на устойчивость коническую часть
внутренней стенки диффузора, толщиной h = 2,5 мм. расположенную между
соседними ребрами жесткости (рис. 15.8) и находящуюся под действием
Ф700
-Ф860
Рис. 15.8. Внутренняя стенка диффузора газотурбинного двигателя.
внешнего давления q = 6.3 кг/см2. Размеры даны на рисунке; пользуясь
ими, находим:
2-120
tg а = ~—^к?г = 1,5, а = 56° 20',
/| =
860 — 700
430
cos 56° 20
А- 2'5
U
у = 777 мм, 1а =
350
cos 56° 20
г = 632 мм.
ш-3,22.10-» Ь--™ =0,815.
|асчет ведем по формуле E7). Значения С, на рис. 15.5 даны для значе-
|иЯ /0//„ изменяющихся от нуля до 0,8; в нашем случае 10ЦХ =0,81.
Экстраполяцией находим С, = 6,2. Далее по формуле E7) находим
qB = 6,2 • 2,1 • 106 • C,22 • КГ3)'" A'5K/2 „ = 15,1
A — 0,32) и
кг
>, Формула (о7) получена в предположении, что оболочка защемлена по
меньшему основанию и свободно оперта по большему. В нашем случае оба
Основания упруго защемлены, но ребра, на которые опирается оболочка,
^являются настолько мощными, что закрепление можно считать
приближающимся к жесткому. Расчетное критическое Давление оказывается в 2,4 раза
больше избыточного внешнего давления.
636
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
§ 174. Случай кручения
Рассмотрим задачу об устойчивости усеченной, свободно опертой
конической оболочки, нагруженной равномерно распределенными по
торцевым сечениям сдвигающими усилиями *).
Погонное усилие в плоскости меньшего основания (s — l0)
обозначим через 7*/0, а в плоскости большего основания (s = /j) через 7^.
Эти усилия равны
т,.=
мк
2я (/„ cos aJ
Т,=
мк
2я (/i cos аJ
A5.58)
где Мк — крутящий момент.
Для добавочных смещений, возникающих при выпучивании
оболочки, примем следующие выражения, соответствующие
винтообразным волнам, образующимся при потере устойчивости:
а = С,ег {sin^z-f- иО)— sin(A,2z-j- иО)},
v — С2ег {sin (k^z ~\- габ) — sin (X2z -f- «0)},
w = — 1С3ег sin (kz -f- ) sin mxz,
A5.59)
причем
z
1 s
lnT,
я Xi —
m1=j = 2"
Ao
C = 1n 1 +
■iv
1 ^1 -H^-2
Под l понимается длина оболочки по образующей, через Ср С2, С3
обозначены неопределенные постоянные.
Формулы E9) удовлетворяют кинематическим граничным
условиям на торцах оболочки: при z = Q и z = £, u = v = w — Q.
Используя для решения задачи метод Ритца, приходим к
следующей приближенной формуле для критического сдвигающего усилия:
_ __ ЕА(р» —1)!
'• 4(я*-К')
-e%C0tg»a;
A5.60)
здесь введены обозначения:
p=l+-f-.
la
ЯЙ
Я2+С2
L б (р2 — о
A5.61)
A5.62)
С0 = 2,61 (*)"" [l + 0,33 ( ±)* A + Vl)] . Vl = ^
Условия применимости приведенных формул состоят в следующем:
е<0,1, 0,25<(х<0,33.
*) Приведенное здесь решение принадлежит X. М. Муштари [15.7].
§ I75J ПОДКРЕПЛЕННЫЕ КОНИЧЕСКИЕ ОБОЛОЧКИ
Приводим таблицу для величины С0 (при jo, = 0,3):
е
Со
0,12
3,75
0,10
3,87
0,07
3,95
0,05
4,08
0,03
4,31
637
Необходимо отметить, что при решении этой задачи значительную
роль должны играть нелинейные члены; было бы желательно
исследовать устойчивость конической оболочки при кручении в большом.
§ 176. Подкрепленные конические оболочки
под действием внешнего давления
В летательных аппаратах и двигателях, кораблестроении и
инженерных сооружениях, наряду с подкрепленными ребрами
цилиндрическими оболочками (см. § 158), применяются и подкрепленные
конические оболочки. Кроме того, возможны случаи, когда материал,
из которого выполнена коническая оболочка, является анизотропным.
Рассмотрим сначала задачу об устойчивости конической оболочки,
выполненной из анизотропного материала, ограничиваясь случаем
ортотропии. Примем, что главные направления жесткости совпадают
с образующей конуса и дугой поперечного сечения.
Зависимости закона Гука, относящиеся к деформации срединной
поверхности, предстапим аналогично тому, как это было сделано
в § 158 (см. формулы A3.153)):
Здесь
A5.63)
I
U2
1
Gh '
ЕЛ
£,А '
Т:
'■ Т\1 ^21.
через £\, Е2, (^ и (х2 обозначены модули упругости и коэффициенты
Пуассона в направлении образующей и в направлении параллельной
окружности.
Развернув для примера матрицу F3) для еь получим
ei = W,-|-<yV2-fO-r
_ *.
£,А
V-2 \J
638 КОНИЧЕСКИЕ ОБОЛОЧКИ II Л. XV
Моменты выразим по аналогии с A3.154):
A5.64)
Величины X], х., и х определяются равенствами G):
D - £'*' D - Егк3 D -0-51
_ 12A-ц.ц,)' ^2-12A-ц,ц2)' иа-и 6 '
D|1 = D1|i, = D2nI. A5.65)
Рассмотрим теперь уравнения равновесия по A2.63) — A2.68).
Они могут быть написаны как для основной формы равновесия, так
и для формы нейтрального равновесия, отличной от основной.
Назовем первые уравнения, относящиеся к основной форме
равновесия, уравнениями (а), а вторые—-уравнениями (б).
Положив в уравнениях (б) £ —s, 11 — 0, Al=^\, Л2 —scosa
и приняв во внимание уравнения (а), мы приведем эти уравнения
к такому виду:
-jp- scosa -j-/V,cosa -j—-^r /V2cosa —0, A5.66)
__1 _|_ j—lijcosa +- rr?cosa -j- Го, cos a — Q2sina, A5.67)
-^-Lscosa-rQ,cosa + -g§1 +-A/10-^-s cos a-f
+ ЛГ28.па + ЛЦ^|*+£со8а) = 0. A5.68)
-^-scosa -f- Л1, cosa +--^p — /W2cosa — QjScosa^O, A5.69).
12 scosa-j—~ -l #,,cosa ■+ W21cosa — Q2scosa = 0. A5.70)
В этих уравнениях /Vl0 и /V20—нормальные усилия, возникающие
в оболочке перед потерей устойчивости; все остальные усилия и
моменты являются дополнительными, т. е. возникающими при переходе
оболочки от основной осесимметричной формы к новой форме
равновесия (усилия и моменты показаны на рис. 15.2, а и 15.2, б).
Члены, содержащие Л/10 и Л/20, связаны с изменениями кривизн
( -Xj) и (—х2) [см. G) и (8)]. Последнее из шести уравнений
равновесия мы не написали, так как оно, как это было показано в гл. XII,
тождественно удовлетворяется.
ПОДКРЕПЛЕННЫЕ КОНИЧЕСКИЕ ОБОЛОЧКИ 639
Если в уравнении F7) пренебречь поперечной силой, то
уравнениям F6) и F7) можно удонлетворить, положив
Л, = __!_.§+ _!*£, A5.71)
1 s2 cos2 а д№ ' s ds v '
^2=0. A5.72)
Г12 = 7*2, = — s cos a -gj^- -h 52 CQS a- ж, A5.73)
где ф — функция усилий. Исключив из остальных трех уравнений Qx
и Q2, получим
■scosa-f-2 , cosa-f- , , ' -+- -^—4г ~ cos a-4-
ds2 ° ""''"' i ds ' dsdB ' ds<59 ds
. 1 dtf,2 1 dtf21 , 1 d2M2 ....
1 s дд ' s d9 ' scosa й! ' l '
+ V1„^««+i»,GjL_'*+^cM.)-0. A5.74)
Обратимся к уравнению совместности деформаций A2.54); в данном
случае при \ = s, г) —0. ^t=l, /l,-= scosa оно примет такой вид:
щ 1 д2у 1 ду д2е2
/?s scosa ds 69 s2cosa дВ ' ds2 '
[ 1 d2e, I 2 de2 J_ ае, n ,1r-7r-,
~Ts2cos2u o92 "T" s ds s~dT"~U- A0-/0)
Выражая Мх, М2 и Hn — H2l — H с помощью соотношения F4)
и учитывая равенства G), (8) и G2), придадим уравнению
равновесия G4) форму
п d*w ~ / 2 d*w 2 d3w . 2 д2а>) \
1 ds4 t» \s2 cos2 a ds2d92 s3 cos2 a IsW "i s4 cos2 a dO2 J
1 s ds3 2\s4cos4a <594 s2 ds2 "^ s3 ds "+" s* cos2 a Wj —
_ n / 2 d2tm 2 а4да 2__ d3a> \ _tg_a_ д2ф
0 \ s4 cos2 a <592 "+" s2 cos2 a ds2 dQ2 s3 cos2 a ds дв2 ) ' s Is3" +
Используя, далее, равенство F3), с учетом G) и (8) приведем
уравнение совместности G5) к такому виду:
■"» "air
ъ(?
cos4 a <594 "т" s4cos2a <592 s2 ds2 ~+~ s3 ds J "т-
.2 й4ф
WS+!I?M.(
s2cos2a ds2d92
д3ф 2 сJф1
s3cos2a ds<592 ' s4cos2a <592
)+
1 d4(f 1 д3ф , 1 д2ц>
s4 cos2 a 1¥
"ruO\s2cos2a ds2d92 s3 cos2 a ds <592 "'"
~г s3cos2a OsdQ s'cos2a o9 / ' s ' ds2 ~ ' (io.il)
640
КОНИЧЕСКИЕ ОБОЛОЧКИ
Уравнения G6) и G7) являются исходными при решении задачи
об устойчивости ортотропной оболочки в малом.
Рассмотрим случай, когда оболочка подкреплена круговыми и
продольными ребрами, симметрично расположенными относительно
срединной поверхности (рис. 15.9, а и 15.9, б). Ребра считаются
расположенными достаточно часто, так что жесткость ребра можно
равномерно распределить («размазать») по длине шага.
t'; „
!> Г/4
V 1
h
1
-*—
//У/
. ь
и ,
а) 6)
Рис. 15.9. Сечения подкрепляющих ребер.
Будем считать, что ребра обладают жесткостью только в их
плоскости. При этом условии ребра не будут оказывать влияния на
сдвиг и кручение оболочки. Учитывая это, примем для Т12 = Т2х = Т,
Hl2 — H2i—H те же выражения, что и для гладкой оболочки.
Остальные усилия и моменты должны быть рассмотрены отдельно.
Для волокна, параллельного образующей и расположенного на
расстоянии z от срединной поверхности, получим такое выражение
для деформации удлинения:
Для волокна, перпендикулярного к образующей, будет
ег, = е2 — %.2z.
A5.78)
A5.79)
Для напряжения а, получим
р . I h\ h
== ■! 2 lei + M-62 —*fri 4- \x%2)\ при \— 2J<2<-2 A5.80)
и, далее,
при
о* — £ef = E(г, ~ znt)
A5.81)
ПОДКРЕПЛЕННЫЕ КОНИЧЕСКИЕ ОБОЛОЧКИ R41
Аналогично находим:
=■= t л 2 tR2 "г !iRi — г Ы2 + \Щ)} при - y < г < -^ , A5.82)
аг2 = Ее* = Е (е., — гх2)
при
А
-if +«)<,<_4] ., [|<z<
D+«)]-
A5.83)
Усилие /V, равно
Л/, = т^-г (е, +- Ц82) +- 2Е -£- й? е, =
T^Wd1 ^2^-6f(l —/x2)]e, -r-jae2}. A5.84)
Таким же образом Получим
Л/,
£А
.!
1-р* |
62бР
1+27^FA~|a2)Je2+laei}- (l5-85>
Момент УИ, оказывается равным
£АЭ
Мх
i2(i-VLz' ^Кг) +2£7Г/Гн1'
или
Л*,
i1 = w^{[1+2t^/^1+-^}- A5-86)
Для момента /И2 получаем такое же выражение:
В равенствах (86) и (87) под 1\ и 1\ понимаются моменты
инерции половины сечения ребра относительно осей, лежащих в срединной
поверхности:
41 А. С. Вольмир
642
Вводя обозначения:
26,6?
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
1+-7^A-^ = 01.
24A-^) ;п
2Ь^.(\ -ц2) = со,, A5.88)
t,h3
\ = ч.
t2h
24A -ц2) /Р .
представим равенства (84)—(87) в форме
N
Eh
Eh3
(co,ei t-(-ie2).
N,
Eh
уИ,=
(г,и, + цх2), Л12 =
1 — ,u2
Eh3
A5.89)
(еле,-Hie,), A5.90)
м- 12A-ц!) ^"'Tf",№ '"' — 12A — Ц2)
Выражая е, и е2, исходя из равенств (90), получим:
-(g^V,—|iW2),
E2 = ры * „ач (°^2 — l^l) •
(г,х2 -f- ii"^). A5.91)
1—ц2
£A (@,@2 —Ц2)
1—H2
A5.92)
EA (@,@2 —Ц2)
Сравнивая выражения для е, и e2 по (92) с формулами F3),
получим следующие значения Ьь 62, 6^:
(о2A-ц2) . = (о,A-^2) . _ — цA— ^2)
°'- ~~ ЕЛ (ш,(о2 — р.2) ' 2 £Л((о,(о2 — ц2) ' °« £А((о,ю2 —ц2) '
A5.93)
Сопоставляя, далее, равенства (91) с выражениями для моментов,
1
т
-* >■
т
Рис. 15.10. Одностороннее расположение ребер.
даваемыми равенством F4), найдем:
D,-
Eh3l,
12A-ц2)
, D2
EhHn
12(l-(i2)
Д.=
ц£Лэ
t1 12A—ц2)
^0 = 0-6--
A5.94)
Подставляя (93) и (94) в уравнения G6) и G7), получим, что
в случае конических оболочек, подкрепленных продольными и
ПОДКРЕПЛЕННЫЕ КОНИЧЕСКИЕ ОБОЛОЧКИ
643
поперечными ребрами, задача сводится к решению следующих
уравнений:
Eh3 Г. dAw , 2 d*w 2 d3w i2 d4w ,
12A — ii2) Г' ds4 "T s2 cos2 a ds2 d(J s3 cos2 a ds <№2 + s<cos4a W "~
i 2 A -f- /2) d2®* 2г i d3zei /2 d2w Ь dzei
s4cos2a dO2 ' s ds3 s2 ds2 ~* s3 ds
tga д2ц> д, д2да Л7 / 1 d2w
■]-
■^■2- '40 ds2 -/V20\-s2cos2a йу2 ^IITJ — ^' ([!Э^°>
(l-,Ll2)Ml d<<f Q Л 1-U2 \ 1 (?«ф
(о,(о2 —|i2 ds4 "^ M r ь ш,(о2 —|i.2 ^j s2cos2a ds2<502 r"
(l-ii2)m2 1 d^i [ l-[t' 2 _2(|-l „VI _L_ _^L 4-
"^ (о,(о2 —Ц2 s4cos4u<594 ^Чм,ш2 —u.2 ^ u ^ ' ' \ s3 cos2 a ds d№ ^~
+ Ж ЫЙ? «ъ- v.) + (i 4- ii)] S- +
2A-Ц») И, д3ф 1-Ц2 1 д2ф
' cojffls — ii2 s ds3 2 (о,(о2 — ii2 s2 ds2
co2(l-,u2) 1 *£, +igfL^gL£A==0. A5.96)
1 ш^з—n2 s3 ds ' s as2 v '
В случае оболочки, снабженной односторонними ребрами
(рис. 15.10), изменяются выражения для ix, сох и 12, со2. В этом
случае *)
. 12A -и2) р . 12 A-u2) p )
'i—И ^з Л. '2— Н ^э 'г. |
66р 66р I A5-97)
a,= l-f-^f О-И2). со2=1 +-1±A_цг). I
Здесь /j°—момент инерции сечения продольного ребра относительно
центральной оси профиля кругового сечения оболочки, /§—момент
инерции сечения кругового ребра относительно центральной оси
профиля осевого сечения оболочки. При отсутствии продольных
ребер будет 1Х=\.
Рассмотрим задачу об устойчивости конической оболочки,
подкрепленной ребрами, при действии равномерного поперечного
внешнего давления. Уравнения (95) и (96) можно упростить так же, как
это было сделано выше по отношению к соотношениям A4) и A5)
(см. § 173); тогда получим уравнение
1Их3^Н'р41-рЛ=0: A5-98)
*) Более подробное исследование случая односторонних ребер в
применении к цилиндрическим оболочкам было дано В. В. Новожиловым,
В. И. Королевым, а также О. И. Теребушко [13.22], см. работу 1962 г.
644
КОНИЧЕСКИЕ ОБОЛОЧКИ
здесь
Р.
A— j.l2)@2
__ A—цг)м2
Р2 С0]0J — |Л2
A5.99)
A5.100)
Функция ф связана с функцией ге> равенством C4), а величины v
и р даются формулами C7). Решая уравнение (98) методом
Бубнова — Галеркина, мы вместо равенства D9) получим
1 1
1
d2^ d$
dx2 dx
~dl?
dx + p%
V
dx
A5.101)
P2 | ^2dx
Задаваясь, как и в случае гладкой оболочки, выражением D5)
для функции ф, из условия (Л1,)х=1 = 0 найдем
6/i-j-n
\ + V-
A5.102)
Таким образом, при наличии не только круговых, но и
продольных ребер величина а зависит от г,; изменение а оказывается
незначительным: при г, = 1 будет а = — 0,759, а при ^=5,
■0,75.
Это дает возможность принять при |i = 0,3 для а значение,
соответствующее /[—-1.
В результате, найдя р из условия минимума v, приходим к такой
формуле для критического давления:
<7в;
3,15 *пъ
Р2
VS*(f
(tga)
Чг
A-H2)
2\3/<
A5.103)
Напомним здесь, что уравнение (98), а следовательно, и
равенство (ЮЗ) получены в предположении, что угол а не близок ни к нулю,
ни к л/2. Как показывают вычисления, круговые ребра существенно
повышают критическое давление; продольные же ребра
оказываются значительно менее эффективными. Решая ту же задачу с
помощью метода конечных разностей, получим формулу (ЮЗ) с
коэффициентом 2,8 вместо 3,15.
В случае усеченной оболочки будет
■№*{$
(tga)"
,'/*
A-иТ
A5.104)
Величины коэффициентов Сх можно определить по кривой рис. 15.5,
при тех же граничных условиях.
КОНИЧЕСКИЕ ОБОЛОЧКИ БОЛЬШОГО ПРОГИБА
645
§ 176. Конические оболочки большого прогиба
При решении некоторых задач устойчивости конических оболочек
значительную роль, как указывалось выше, должны играть
нелинейные члены. Уравнение совместности, написанное с учетом нелинейных
членов, дается в общем виде равенством A2.99) § 140.
Коэффициенты П-ой квадратичной формы для конической
оболочки равны
bn = b1 — Q, ftl2 = 6'i=0, b2? = b2 = scosasma. A5.105)
Гауссова и средняя кривизны для конической оболочки равны
соответственно
Г = 0. * = ^- A5.106)
Левая часть уравнения совместности Л,Л2(Г*—Г) дается равенством
A2.98) § 140. Для конической оболочки получим
AXA2{Y —1)= , ' tk?—s-^-fcosa-ir-
1 l ч ' dsdQ s cos a d92 ds2 '
-+- -г- cos a — 2 -^- cos a H ^r.
1 ds ds ' s dfl
С учетом A05) и A06) получаем нелинейное уравнение совместности
деформаций для конической оболочки в таком виде:
д2у 1 д2е, дЧ2 , de,
, L за? s -гт- cos a -f- -т± cos a —
ds d0 s cos a d92 ds2 ' ds
r, de2 . 1 dy d2w . 1 / dw \2 ,
— 2^-cosa-H ~r —--r-j-sina = Нзтг 4-
ds ' s ra ds2 s3 cos a \ d9 / '
dw d2w 2 dw d2w .
"T_lF"di2"C0Sa+ s2cosa Ж~дТдТ~*~
1 fd2w d2w ( d'w \2-i ., |f)
"^s cos a Us2 dQ2 \dsdQ) ]' l^.iu/j
Выразив 8j, e2 и у с помощью формул F3), G1), G2), G3) через
функцию усилий ф, получим нелинейное уравнение совместности
в таком виде:
*2 ?4ф_ stzad2w ,1 ( ' d2w \ dw\d2w_
Ek v Ф sxga д$2 -\-\ \v 5з C0S2 a dQ2 -Г s ds J ds2 >
1 Г д 11 dw W)
t^(ttt)]V- <15-108>
' cos-
Здесь У4ф дается формулой A3), если в этой формуле заменить w
на ф.
Рассмотрим теперь уравнения равновесия A2.103) — A2.105).
Уравнения A2.103) удовлетворяются с помошью функции усилий ф.
Коэффициенты b\, bi и Ь\.ч связаны с Ьъ Ьч формулами A2.96) § 140. По
646
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
этим формулам, учтя равенства A05), получим:
b\\ = bi = - и,, bi2= — scosa-%,
bii=^bi — s cos a sin a — s2 cos2ax2. A5.109)
Исключив при помощи равенств A2.105) Qx и Q2 из уравнения A2.104)
* * *
и используя выражения A09) для Ь\, Ь& и Ь2< получим
% ~ "* - N^ - <?» + ^ X + 7^ № + Т) +
, d2M, , 1 (d2Hi2 , d2W2
г) +
' ds2 ' s cos a V ds dQ ' ds dB
1 д2М2 , 2 (Щ, 1 <Ш2 _л .....
+ s2cos2a ~т~~г~т~дГ~t~w~p —u- A&-n°J
Здесь /? — внутреннее давление, действующее на оболочку. Это
уравнение отличается от уравнения G4) наличием члена, учитывающего
влияние кручения /; кроме того, в этом уравнении не выделены
усилия, относящиеся к докритическому напряженному состоянию; Ыг
и N2— полные нормальные усилия. Принимаем, подобно
предыдущему, Я21=Я12 = Я, Тг2=^Т21 = Т. После замены усилий их
выражениями через функцию ф, моментов — через перемещения и их
производные с помощью соотношений упругости, кривизн и
кручения— соотношениями G) и (8), получим
ду^-.^ д2ф р2ф /1 dw 1 d2w\
s ds2^Las2\s ds ^ s2cos2a dQ2 j
— 2 — { l ^-\ — (—1— 0lL\ -4-
ds \ s cos a C9 / ds \ s cos a d9 ) ~*~
+ (I^ + __i_g.)^L_p = 0. A5.111)
' \s ds ' s2 cos2 a dO2 J ds2 ^ v '
§ 177. Коническая оболочка, находящаяся под действием
внутреннего давления и сжатия вдоль образующей
Определим несущую способность конической оболочки, сжатой
вдоль образующей, при наличии внутреннего давления *). Будем
исходить из уравнений A09) и A11).
С помощью подстановок
Ф — plx — w р
Р==~Ш' Р = ~Ж¥' W===T' Х = Т" 0i = 0c°sa A5.112)
*) Этот вывод принадлежит Лу (S. L о о); он содержался в докладе
В. Нэша (W. Nash) на съезде по механике в Москве A964 г.).
СОВМЕСТНОЕ ДЕЙСТВИЕ ВНУТРЕННЕГО ДАВЛЕНИЯ И СЖАТИЯ 647
эти уравнения приведем к виду
V4/7:
lx tga d2w l d2w д2ъ
h x дхг
х2 дв2
дх'
■+■
1 ( dw
~х1\дв~1
+
+ -
d2w
~дх ав,
1 dw d2w
х дх дх2
2 d2w dw
~х* дхдв. Ж"
A5.113)
12 (
1—ц2) Л * д*2 дл-2 \х дх х2 дв2 )
2А
1 dF
дх \ х дв
J)_
дх
1 dw
х дв,
1 д/7 1 d2F
.. :,.. I ..2 _-,п2
д: йд:
d9f
d2w
дх
2 -Р = 0;
A5.114)
здесь V4 = Z4V4. Пусть сжимающее напряжение при х=1 равно ох,
тогда в точках х0 = lQjlx -< х -^ 1 оно будет lxaxjs = axjx. Функция F
может быть разбита на две части и представлена в виде
F = FQ+Flt A5.115)
где F0— функция напряжений, соответствующая первоначальной осе-
симметричной форме равновесия. Она должна удовлетворять
соотношениям:
d2Fn
xh —
■P.
1 d2F,
о
1 dFn
дх* /jtga ' ' x2 дв2
Из равенств A16) вытекает, что
pxh
V2^
х дх
1 axl\
1 <Vf
х Eh2
A5.116)
Mga
V4F0=-_i—
и jc Л tga
х Eh2 '
1 oxl\
A5.117)
здесь
V2 =
dx2
+
д дх
x3 Eh2 '
+ x2 dQ2 '
Приняв во внимание равенства A17) и уравнения A13), получим:
V4^ +
lx tga d2w . 1 d2w д2ъ
1 /dwV
+ ■
1 (Эк> d^w
dx2
2
У d6f dx1
d w
x
1>
дв.
x дх дх2 ""л-3 dxdQi <Э0, Tx /,tgo дэ £Л2
1 / d2w \2 ,
л2 \ й* дв[ J
A5.118)
1 a,/2
= 0.
Задача сводится к определению функций Fx и w из уравнений
A14) и A18). Решается она методом Бубнова—Галеркина. Для этих
648
КОНИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XV
функций задаются следующие выражения:
w = bx -\-x2(b2cosk1x cosX2Q1-\-b3cos2Xlx -\-b3cos2X2Ql), A5.119)
Fx = х2 (ап cos ^x cos Х20, + а22 cos 2Хгх cos 2X2QX -f-
-f- ao2cos2A,20I -\- a20 cos 2Xxx); A5.120)
здесь Ьг, b2, b3, an, a22, a02, «20—неопределенные постоянные;
величины ^A—х0)/2л и X, cos а
представляют собою числа волн в
продольном и окружном
направлениях. При проведении вычислений
было принято, что A/Я(-)<^1.
Результаты вычислений представлены
на рис. 15.11; по осям координат
отложены безразмерные величины
pR2/Eh2sin2а и a^R/Ehsina, где
р — внутреннее давление, а R —
радиус большего основания
оболочки, а, — напряжение сжатия на
большем основании конуса.
Пунктирная линия (х0= 1) относится
к цилиндру, сплошная — к
усеченному конусу, для которого
отношение х0 = /0//х = 0,7, а
пунктирная с точкой — к конусу с
отношением х0= 0,5.
При /7=0 для нижнего критического усилия в случае цилиндра
получим значение по C2), а для конусов — близкое к C2).
0,6
0.5
0.4
ЦЗ
0,2
0.1
хв-1(Цилиндр)
vv
—— х„-0,5
и иг Ц4 о.б 0.8 /.о аг^ь
Рис. 15.11. К расчету конической
оболочки при сжатии и внутреннем давлении.
ГЛАВА XVI
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
§ 178. Устойчивость в малом сферической оболочки
при внешнем давлении
Оболочки вращения, имеющие сферическое очертание или форму,
близкую к сферической, применяются во многих областях техники.
Примерами могут служить обтекатели радиолокационных антенн
в летательных аппаратах, переборки подводных лодок, днища
резервуаров и т. д. Наиболее важная задача устойчивости таких
оболочек относится к случаю, когда оболочка нагружена равномерно
распределенным внешним
давлением. В реальных
конструкциях чаще всего встречаются
сферические сегменты,
закрепленные по краю. Мы будем
различать сегменты с
большим углом охвата, стрела
подъема Н которых сравнима
с радиусом кривизны
срединной поверхности R (рис. 16.1),
и пологие панели, для
которых H<^R. В данной главе
рассматриваются только
сегменты большого подъема *).
Так как выпучивание такого сегмента сопровождается образованием
сравнительно мелких вмятин, то критические напряжения для него
будут теми же, что и для полной сферической оболочки (рис. 16.2).
Обратимся поэтому к определению критической нагрузки для
полной сферической оболочки, подвергающейся внешнему
равномерному давлению. На первый взгляд, ввиду предельной простоты
формы оболочки и симметрии нагрузки, эта задача не должна быть
сложной. И действительно, она не представляет особых трудностей,
Рис. 16.1. Сферический купол, нагруженный
внешним давлением.
*\ Пологим сферическим панелям посвящен § 190 следующей главы
650
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
если решать ее в линейной постановке. Однако реальные
сферические оболочки оказываются такими же чувствительными к
малейшим начальным несовершенствам, как и сжатые вдоль оси
цилиндрические оболочки. Выпучивание сферических оболочек, как правило,
сопровождается хлопком, и истинные значения критических усилий
лежат обычно гораздо ниже значений, найденных по линейной
теории. Поэтому задача об
устойчивости сферической оболочки
должна ставиться как нелинейная.
Экспериментальные исследования
устойчивости полной сферической
оболочки или подъемистых
сегментов являются более сложными,
чем для цилиндрических
оболочек. Особенность процесса
выпучивания реальной сферической
оболочки состоит в том, что в
одних случаях он сопровождается
появлением одной быстро
развивающейся вмятины, а в
других— серии волн,
расположенных по окружности. Поэтому
построение приближенных
решений, связанных с аппроксимацией изогнутой поверхности, требует
здесь особой тщательности. Таким образом, практически важная
классическая задача о выпучивании сферической оболочки является
одной из наиболее тонких и сложных задач этого круга как в
теоретическом, так и в экспериментальном отношении.
Начнем с решения линейной задачи *). Будем полагать, что в
пределах зоны первичной вмятины оболочка является пологой, и
воспользуемся уравнениями A2.83) и A2.86). В нашем случае по A2.88)
будет V| = A //?) V2, где R — радиус срединной поверхности;
следовательно, приходим к следующей системе уравнений:
Рис. 16.2. Полная сферическая оболочка под
действием внешнего давления.
1
Eh
V4q) = -
?2Ф + <7,.
■V2w.
A6.1)
Исключая отсюда ф, получим окончательно уравнение шестого
порядка относительно w:
Eh
Dv6ro+9v2® = ^.
R2
A6.2)
*) Эта задача рассматривалась впервые Цолли [16.14] и Л. С. Лейбен-
зоном [16.2) в 1915 — 1917 гг,
§ 1?8] УСТОЙЧИВОСТЬ В МАЛОМ 651
где V6 = V2V2V2. При действии внешнего равномерного давления
начальные усилия во всех нормальных сечениях оболочки будут по A2.65)
Если считать сжимающие усилия N и напряжения о положительными,
найдем:
N = f' * = £■ 06.3)
Определим радиальное перемещение wg всех точек срединной
поверхности, соответствующее начальным напряжениям а. Деформация
укорочения вдоль дуги любого нормального сечения равна £ = w0IR;
с другой стороны, е = аA — \i)/E = qRA — ц)/2Ек, отсюда
дао = "|§-A-И)- A6.4)
В дальнейшем через w будем обозначать дополнительный прогиб,
имеющий место при выпучивании оболочки; сама нагрузка q
непосредственно в уравнение B) входить не будет. Фиктивную же
нагрузку qz, отвечающую напряжениям о, найдем по A2.89а);
qz — — haV2w. Таким образом, уравнение B) получает вид
— V6w-f-aV% 4--J5- V%» = 0. A6.5)
Следуя В. 3. Власову [12.3], примем, что решение уравнения E)
должно удовлетворять соотношению
V2w = — А2то, A6.6)
где А— неопределенный параметр. Тогда из E) получим (при А Ф 0)
£л4-<ТА2 + 1§- = 0
и, далее,
a=x*2+w- <16-7>
Минимизируя о по А2, находим
^тЛзт^ж^1^1-'^- A6-8)
По G) определяем верхнее критическое напряжение:
1
°в~ /3(l-|i»)
Соответствующее давление равно
1 D h -«0,605£—. A6.9)
R у
65*2
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
Таким образом, величина верхнего критического напряжения для
сферической оболочки по (9) получается в точности такой же, как
для цилиндрической оболочки радиуса R, сжатой вдоль оси.
§ 179. Случай осесимметричного выпучивания.
Линейная задача
До сих пор мы интересовались только значением критического
давления и не определяли формы выпучивания оболочки. Выясним
теперь, какой является форма изогнутой поверхности в случае, если
выпучивание является осесимметричным.
Будем сначала исходить из уравнения F), соответствующего
теории пологих оболочек. Введем полярные координаты г, ф и примем
Rlh-50
Рис. 16.3. Форма выпучивания, описываемая бесселевыми функциями.
что прогиб является функцией только расстояния г данной точки от
полюса: w = w (r). Определяя V2w по формуле A1.16), приходим
к уравнению
d2w , 1 dw , ., п ,....,
/Ае» = 0. A6.11)
rfr2
г dr
4-
Уравнение такого типа уже встречалось выше, при рассмотрении
устойчивости радиально сжатой пластинки. В самом деле,
соотношению (П.9) можно при ог = Оу — — р придать вид
D
или, при k2= phjD,
Y V4w + pV2w = 0
V2(V2a>4-ft2w) = 0;
отсюда вытекает уравнение A1). Как мы видели, подобное
уравнение интегрируется в бесселевых функциях. Считая, что в полюсе
«!==/, получим
да = /У0(Я.г). A6.12)
где ^о(Яг) — бесселева функция первого рода с индексом 0. График
этой функции показан на рис. 16.3. Как видим, осесимметричное
выпучивание оболочки должно сопровождаться появлением
сравнительно глубокой вмятины у полюса и ряда кольцевых складок,
размельчающихся по мере удаления от полюса.
СЛУЧАЯ ОСЁСИММЕТРИЧНОГО ВЫПУЧИВАНИЯ
653
Если теперь воспользоваться теорией непологих оболочек, то
естественно перейти к географическим координатам (рис. 16.4).
В общем случае несимметричной задачи первая квадратичная форма
будет
/ = R2 da2 -f- г2 df = R2 (da2 ■+- sin2 a d$2), A6.13)
где а и р — углы широты и долготы. Коэффициенты формы / равны
Сц = М = R , «22 =
A2.81) получает вид
аи = Л2 = /?2, а22 — ^2 = /?2sin а, а12 = 0. Оператор Лапласа по
1
R2
д2
да2
ct aJ_j 1
да ' sin2 а д$2
Возвращаясь к симметричной задаче, найдем:
•)•
R2 I
d2
da2
ctg.a
da '
A6.14)
A6.15)
Введем безразмерный оператор V2 = R2V2; тогда, исходя из общих
соотношений главы X, можно прийти, (см. [12.3]) к следующему
уточненному соотношению,
заменяющему F):
(V2+ 2)те> =
-SW, A6.16)
где s—новый неопределенный
параметр.
Подставляя значение V2,
приходим к уравнению
d*w , dw . . п п
Примем s-\-2 = п (п-f- 1), где
и= 1, 2, 3, .... тогда вместо A6)
получим:
d2w . dw ,
rfo2- + ^TctSa+ D 1Я4 „
Рис. 16.4. Координатные линии при рассмо-
-|— П (п -)- 1) W = 0. A6.17) треиии сферических оболочек.
Уравнение такого типа относится к классу так называемых гипер-
Геометрических уравнений. Ему удовлетворяют гармонические
сферические функции Лежандра первого рода (полиномы Лежандра
первого рода). Каждому индексу п отвечает функция определенного
вида. Попытаемся связать величину s с геометрическими параметрами
оболочки. Сравнивая уравнения F) и A6), приближенно примем
st&R2k2 или, по (8), s = /?/l2(l — |х2)//г « 3,3/?//г.
На рис. 16.5 приведен график функции то (а), которая, исходя из
Этих приближенных зависимостей, соответствует отношению R\h = 50.
Как видим, изогнутая поверхность здесь имеет тот же характер, что
654
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
и по рис. 16.3. Отметим, что число волн, помещающихся на данном
отрезке меридиана, увеличивается по мере возрастания отношения Rjh;
следовательно, чем тоньше оболочка, тем волны будут короче. Если
амплитуду основной вмятины принять за 1, то амплитуда соседней
складки окажется равной лишь 0,4; в дальнейшем амплитуды
постепенно уменьшаются при возрастании а. При выпучивании реальных
Рис. 16.0. Форма выпучивания, описываемая сферическими функциями.
оболочек положение полюса центра основной вмятины является
случайным. В экспериментах, как мы увидим ниже, могут одновременно
возникнуть несколько очагов выпучивания, расположенных в
различных местах оболочки. Нужно считать, что на достаточном удалении
от полюса эффект данного очага не будет ощущаться. Если же
расстояние между полюсами меньше, чем радиус действия этого эффекта,
то волны, принадлежащие различным очагам, должны накладываться
друг на друга.
§ 180. Устойчивость в большом
Обратимся к исследованию устойчивости сферической оболочки
в большом. Как уже было сказано, в опытах наблюдается либо про-
щелкивание и развитие одной вмятины, завершающиеся
«опрокидыванием» оболочки, либо образование группы волн, соединяющихся затем
обычно в одну глубокую вмятину. В соответствии с этим возможны
два подхода к задаче: а) рассмотрение процесса развития одиночной
вмятины, заключающееся в решении осесимметричной задачи; б)
исследование несимметричного выпучивания. В настоящей главе мы
рассмотрим первый из этих подходов; второй путь будет освещен ниже,
в главе XVII. Здесь будем считать, что на первой стадии развития
вмятины, вплоть до достижения нагрузкой нижнего критического
значения, поведение упругой сферы может быть описано теорией
пологих оболочек. Основные нелинейные уравнения A2.119) имеют вид
(с учетом поперечной нагрузки q)
^-^w = L(w, Ф) + V*0 4-jL,
-L yi<D = ~ 1L (w, w) — Tkw.
A6.18)
§ 1801
УСТОЙЧИВОСТЬ В БОЛЬШОМ
655
2 2
Считая по-прежнему V* = A//?)V, получим:
D
^V4w = L(w, ф) + -^Ф + -i-,
2- V*HD = — 1 i (W, да) - -L V2te>.
A6.19)
Воспользуемся полярными координатами г, ф, совмещая начало
радиуса-вектора с центром вмятины. Считая, что функции w и Ф
не зависят от ф, найдем по A1.16) и A1.29):
, , (Tt. I (d2w d<3>
rfr2 ^ r dr
dw d20 ^ 1 rf / rfw rf<D v.
dr dr2 j r dr \ dr dr j
■ A6.20)
r dr \ dr)'
Уравнения A9) можно представить следующим образом (после
сокращения на г):
■г-£['£<Н-7£('4г)+!
1№<™]—в[],М'%)
d<$> dw\ qr
dr \ IF IF) +" T"
rf2ai rftei 1
dr2 dr
A6.21)
Проинтегрируем эти уравнения по г; тогда получим (после
деления на г):
Л Л- k ; ~~ R dr ^ r dr dr ^ h '
под W подразумевается функция нагрузки:
A6.22)
A6.23)
Напряжения в срединной поверхности равны (в общем случае)
1 дФ , 1 д2Ф
г дг
<5ф!
— i!5L = —(— дФ )
'' °Ч> ~ дг2 ' Х~~ дг[гду)
В осесимметричных задачах будет
\ dO rf2<D d , ч
о.
A6.24)
656
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
В дальнейшем нам понадобятся выражения для радиального
перемещения и точек срединной поверхности. Найдем сначала
деформацию удлинения в кольцевом направлении:
гч— Е \rtr* r dr )-
С другой стороны, величина еф равна еф = и/г, отсюда
Приложим эти соотношения к решению конкретной задачи.
Поставим перед собой цель проследить за изменением стрелы
прогиба одиночной вмятины, образующейся в полной сферической
оболочке, в зависимости от давления; это должно привести к
определению нижней критической нагрузки. Все имеющиеся в литературе
решения этой задачи можно разделить на две группы. Значительная
часть работ основана на использовании вариационных методов
Ритца и Бубнова — Галеркина *), в последних работах проводилось
численное интегрирование дифференциальных уравнений с помощью
цифровых электронных машин. Остановимся сначала на
применении вариационных методов. Трудность задачи состоит здесь в
установлении граничных условий на контуре вмятины, поскольку
остальная часть оболочки также подвергается деформации. Вообще говоря,
участок вмятины надо считать упруго защемленным, однако
аппроксимировать изогнутую поверхность вмятины с учетом деформации
«гладкой» зоны нелегко. Кроме того, возник ряд методических
вопросов. В одном из первых вариантов решения [16.10] по методу
Ритца изогнутая поверхность аппроксимировалась с помощью
нескольких параметров и далее производилась минимизация по одним
параметрам полной энергии системы, а по другим — величины
давления. X. М. Муштари и Р. Г. Суркин показали [16.4], что
правильнее минимизировать по всем параметрам непосредственно полную
энергию**). Далее, в работе [16.9] были допущены погрешности
в формулировке граничных условий для усилий в срединной
поверхности. Что касается применения метода Бубнова — Галеркина, то
здесь оказалось существенным, учитывается ли изменение радиуса
вмятины в процессе выпучивания и соответствует ли основное
уравнение метода принципу возможных перемещений (см. [16.7], [16.3]).
Приведем один из простейших вариантов решения задачи с помощью
метода Ритца***). Примем (в качестве первого приближения), что на
*) Первая работа в этой области принадлежит Карману и Цянь
Сюэ-сэню [16.10]; дальнейшие исследования были проведены Фридрих-
сом [16.9], X. М. Муштари и Р. Г. Суркиным [16.4], [16.6], В. И. Феодосье-
вым [16.7], Мацуя и Иошимура [16.12] и другими авторами.
**) Такой путь был избран выше, в гл. XIII, при рассмотрении
устойчивости цилиндрической оболочки при осевом сжатии и внешнем давлении.
***) Этот вариант был предложен автором [0.31, стр. 364 в развитие
работы [16.12]. •
УСТОЙЧИВОСТЬ В БОЛЬШОМ
657
контуре вмятины (рис. 16.6) выполняется условие полного
защемления:
(il3)
■w = 0, -^г = ° "Ри r = c; A6.26)
здесь под с подразумевается радиус вмятины. Положим, далее, что
по краю вмятины отсутствуют радиальные перемещения:
и = 0 при г = с; A6.27)
по B5) получим
rf2<D и rf<D .
—r-n —-г- ~0 при г^=с.
dr2 г dr r
A6.28)
В полюсе, при г—>0, радиальные напряжения ап очевидно, должны
Рис. 16.6. Форма вмятины при осесимметричном
выпучивании сферической оболочки.
быть ограничены по величине. Отсюда по B4) вытекает четвертое
граничное условие:
IT
= 0 при г = 0.
A6.29)
Аппроксимирующее выражение для прогиба, удовлетворяющее
условиям B6), примем в виде
*» = /(i-4J; A6.30)
Г
это соответствует форме изогнутой поверхности круглой пластинки,
защемленной по контуру и подвергающейся действию равномерной
поперечной нагрузки.
Подставляя C0) в правую часть второго из уравнений B2), получим
_£ 16/2 (г г3\2 ( Е 4j^(r_ гг
1г с2 [с с3
ir(V2<I>)
~т~ R с [с с3 )'
**. Интегрируя это выражение, находим
У dr )~ с2 {2с2 2с4 + 6св)"+"
+4Ш-^)+с" A6-31)
^2Ф = _1 d (_dto_\_ SE/2 i п
r dr
I Новое интегрирование дает
dd> 2Е/2 ' гЪ
Г dr с \2сэ Зс5
4B А. С. Вольмир
/Г8 ГЬ г? \ Е/с /3гЭ Г*\ г Г с 1
\2^~3^+w; + ~ж\~? -&) +'Ci 2 +ч7"
658 СФЕРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. XVI
Постоянная С2 равна нулю в силу условия B9). Определяя, далее,
С, из условия B8), находим
dO __ Е/2 /5 — 3ц. г г ll_\ a£L_1L)_
dr "~~ 6с \ 1 — ц с с3 ' с5 с7 )
Е/с Г2B-ц) г „ г» , гз 1 у/?
6/? L 1—М- с с3 ^ С5 | 2Л г- *-,и-°^
Последний член соответствует основным напряжениям pr —p =
= qR\2h.
Определим энергию системы. Потенциальная энергия деформации
срединной поверхности равна по A2.95)
с
*/с=-2М[(?2ФJ-2A+Ю7-^^]2яг'/г- A6'33)
о
Величину У2Ф находим, пользуясь C1), по выражению C2):
у2Ф =
£/2 E-Зц 10 г2 , 10г« , г
Зс2 \ 1 — ц
г2 г4 г° \
12-^4-12-V — 4^- ■
с2 ' с4 с6 /
£/ Г2B-|х) г И ^_ о /-41 ?Л nfi о4.
Выражение для £/с по C3) получает вид
B3 — 9ц) п р h .4 C —ц)я ЕА ,3 ^
Uc— 126A—ц) с2 7 9A—ц) RJ '
. G — 2ц) я Ehc2 ,<, я п,, , я , , . 1 — ц. „ R2 с2 ,, - Q К\
Н- 45A—|г) /?» /2-Т^/2 + Т?с2/Н 4--V-^x. A6.35)
Потенциальная энергия изгиба равна по A2.95)
с
U" = -T J[(VW-2(l-ti)!^^]2.-Trrfr. A6.36)
о
Величина V2to равна по B0) и C0)
V% = -l£(l-2.£). A6.37)
Окончательно
t/„ = f-nDDJ. A6.38)
Определим работу внешних сил, равную приближенно
с
W= J q{w-\-w0Jnrdr, A6.39)
о
под Щ здесь подразумевается радиальное смещение, соответствующее
основным напряжениям. Подставляя в (89) выражения C0) и D) для
УСТОЙЧИВОСТЬ В БОЛЬШОМ
659
чо и iM0, находим
Полная энергия равна
nqtR2
W = %qfc*+^f-(\-\L)±.
9 = UC + Utt-W.
A6.40)
A6.41)
Введем безразмерные параметры
/?Р2
" — Rh~ h '
тогда получим
а 23 —9|л »
^~ 84A—и) А
ОРЬ2 > Ь и • "^ О „J7J.4 ,-7' (iO.tZ)
Eh
3— ц
6A-|i)
2£Л2
С3
2 nEh4
3A—и2)*
•С2 +
Будем считать варьируемыми параметры £ и А: первый из них
характеризует стрелу прогиба вмятины, а второй — ее радиус.
Уравнения метода Ритца получают вид
^ = 0.
аэ
= 0.
6k— <16-44>
Выполняя дифференцирование, приходим при £ ^ 0 к уравнениям:
23 —9ц
С2-
■и
7 —2ц
21A—ц) ft* 2A— ц) * г 3A— ц2)^ ~ 15A— ц)
7 —2ц
84
А> —-20 = 0,
23 — 9^ „ Г 4_
1A — ц)£2 ^ "^ L3 (I —!Л
2)fc2
30
A6.45)
Эта система уравнений связывает величины а, С, ft- Исключим отсюда
к и найдем зависимость а (С); тогда получим график, изображенный
на рис. 16.7. Наинизшая точка
кривой о соответствует значению *) ojS
он= 0,155 или ан = 0,155£-|- egi
A6.46)
при стреле прогиба £ = 9,16.
Формула D6) определяет
нижнее критическое напряжение; ему
соответствует давление
(и >2 Рис. 16.7. Диаграмма «напряжение —прогиб»
—• I • A6 471 ПРИ потеРе устойчивости в большом.
Полученное нами значение аи почти в четыре раза меньше верхнего
критического напряжения ав. Если сравнить формулы D6) и A3.66)
*) Более подробно выкладки приведены в книге [0.3], стр. 367.
4**
о.г
о
660
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
для сферической и цилиндрической оболочек, то окажется, что
коэффициенты в них близки между собой, подобно тому как это было
в линейной задаче.
X. М. Мушгари и Р- Г. Суркин [16.4], [16.6] дали уточненное
решение задачи. Они составили несколько различных
аппроксимирующих выражений для w и, кроме того, для меридионального
перемещения а. В одном из вариантов было принято
—/(.-■£)*(.+■££)• I
" = "»('-?-)A_т-?)- I
Далее использовался метод Ритца, и энергия системы
минимизировалась по параметрам /, с и и0. Нижнее критическое напряжение
оказалось равным он = 0,193/]/" 1—и2 я» 0,203.
Как было уже сказано, принятые при выводе формулы D6)
граничные условия не вполне соответствуют истинному характеру
сопряжения зоны вмятины с остальной частью оболочки: защемление
по контуру вмятины надо считать не жестким, а упругим. Такое
предположение было сделано в работе В. И. Феодосьева [16.7]; им
принималось следующее аппроксимирующее выражение для угла
поворота нормали 8:
6 = ЛрA—р2)е-*Р, (Ь)
где 8 = -т—, р = —. Отметим, что в предыдущем решении, исходя
из формулы C0), мы получили бы 9 = 2/рA — р2).
Таким образом, новым в (Ь) является множитель е-*Р,
учитывающий затухание прогибов по мере удаления от вмятины. Если
воспользоваться методом Бубнова—Галеркина и в первом
приближении варьировать только параметр /, то нижнее критическое давление
оказывается отрицательным: он = — 0,13; это соответствует
давлению, направленному от центра кривизны. Если же в дополнение
к этому варьировать и радиус вмятины г (как это сделано в статье
X. М. Муштари [16.3]), то получим для ап положительное значение
5H = 0,l/]/l — ц2« О.И •
Если ' сопоставить между собой различные варианты решения
задачи, то окажется, что найденная в них величина ан колеблется
в очень широких пределах. Здесь сказывается та резкая
чувствительность результатов применения вариационных методов к выбору
аппроксимирующих функций, которую мы отмечали выше. Очевидно,
дальнейшее уточнение решения возможно либо путем повышения
числа варьируемых параметров при использовании методов Ритца
или Бубнова—Галеркина, либо путем применения иных методов
интегрирования основных дифференциальных уравнений. И в том и
УСТОЙЧИВОСТЬ В БОЛЬШОМ
661
в другом случае, по-видимому, нельзя обойтись без применения
цифровых электронных машин. В связи с этим обратимся к результатам
вычислений, выполненных с помощью ЭЦВМ в работе [16.1] (см.
также статью [16.13]).
А. Г. Габрильянц и В. И. Феодосьев [16.1] преобразовали
уравнение B2), введя новые переменные; при этом было показано, что
полученная в результате решения величина ап не должна зависеть
от отношения R\h. Этот важный вывод относится, конечно, лишь
к исходным уравнениям теории пологих оболочек. Далее, было
принято, что нелинейные зависимости распространяются на некоторую
область со сравнительно большими прогибами, размеры которой
можно было менять в достаточно широком диапазоне. Что касается
остальной зоны оболочки, то для нее основные уравнения были
линеаризованы. Как мы видели в § 179, решение таких линейных
уравнений выражается в бесселевых функциях и может считаться
известным.
Граничные условия были приняты следующими. Для центра
вмятины, при г = 0, считалось 0= — dwldr = 0, а также dCD/dr —0
j i i i i i i i i I ' i '
it 8 12 16 20 24 28 32
С
Рис. 16.8. Диаграммы равновесных состояний, полученные с помощью
численного метода.
по B9). Кроме того, были выписаны четыре условия непрерывности
функций 6 и ar = {\lr)(d(Djdr) по линии сопряжения линейной и
нелинейной областей; эти условия выражают равенство по этой линии
углов поворота нормали, изгибающих моментов, а также
меридиональных усилий и перемещений. Машинный счет применялся для
численного интегрирования шаг за шагом уравнений типа B2) в
пределах нелинейного участка, от центра к границе. Интегрирование
проводилось пробами, с тем, чтобы удовлетворить приведенным выше
условиям сопряжения. Результаты вычислений приведены на рис. 16.8.
По оси абсцисс отложен безразмерный прогиб в центре £ = //й,
по оси ординат — величина а. Сплошная линия соответствует
основным формам равновесия, а пунктирные — высшим формам; эти формы
662
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
показаны на рисунке. Наинизшая точка основной кривой,
отвечающая стреле прогиба /»22,5/г, дает величину 0Н = 0,067. Таким
образом, судя по этому решению осесимметричной задачи, величина он
лежит значительно ниже, чем это вытекает из решений по методу
Ритца, и вместе с тем выше того значения (—0,13), которое было
получено при неварьируемом радиусе вмятины с помощью метода
Бубнова —• Галеркина. Все же надо полагать, что коэффициент о = 0,067
не является еще окончательным. Прежде всего, описанное решение
построено на основе теории пологих оболочек и результаты могут
быть иными, если использовать уточненные уравнения. Кроме того,
задача считалась осесимметричной. Между тем, во многих опытах
скачкообразное выпучивание оболочки выражается в развитии ряда
вмятин, заполняющих некоторую область оболочки, и сопровождается
взаимным влиянием (интерференцией) вмятин, подобно тому, как это
происходит в случае цилиндрической оболочки. Но тогда задача
должна рассматриваться как несимметричная. Поэтому теоретическое
исследование этой важной задачи необходимо продолжить.
Влияние начальных неправильностей формы на величину
верхней критической нагрузки изучалось рядом авторов *). В. А.
Савельев воспользовался методом Ритца в предположении, что размеры
начальной вмятины совпадают с размерами области выпучивания.
Аппроксимирующее выражение для упругого прогиба было подобрано
таким образом, чтобы кривая «нагрузка-прогиб» при отсутствии
начальных отклонений наилучшим образом соответствовала точной
кривой а (С) по рис. 16.8. Выло принято, что начальная вмятина имеет
форму, подобную форме упругого прогиба.
Оказалось, что при стреле /0 начальной погиби, равной примерно
одной трети от толщины оболочки, верхнее критическое давление' ов
снижается наполовину по сравнению с ов для оболочки идеальной
формы, а при /0 = /г значение ов оказывается на 70% ниже, чем
для неискривленной оболочки.
Геометрический подход к задаче, предложенный А. В. Пого-
реловым [16.5], основан на том, что выпучивание сферической
оболочки (или выпуклой оболочки иной формы) в большом должно
соответствовать изометрическому преобразованию срединной
поверхности. Но тогда, как мы видели в § 134, форма вмятины будет
отвечать зеркальному отражению сегмента оболочки в отсекающей
его плоскости (см. рис. 12.17). Рассмотрим энергию деформации,
образующуюся при таком выпучивании, как это было сделано для
цилиндрических оболочек: ее можно составить из энергии изгиба
*) См. работы Р. Г. Суркина [16.6], С. X. Танева (Инж. журнал I.
№ 4 A961), 95—106), Н. К. Лебедевой (канд. днсс, 1965), В. А.
Савельева (Инж. журнал 5, № 5 A965), 907—915).
РЕКОМЕНДАЦИИ ДЛЯ ПРАКТИЧЕСКИХ РАСЧЕТОВ 663
в зоне вмятины и энергии деформации пояска, лежащего между
вмятиной и гладкой зоной. Определяя эту энергию через параметры
вмятины, можно приближенно определить нижнее критическое давление.
§ 181. Данные опытов и рекомендации
для практических расчетов
Как уже отмечалось выше, проведение экспериментов с полными
сферическими оболочками затруднительно. В статье [16.10] приведены
данные испытания сферического сегмента с углом раствора в 180°
при R/h = 900. Потеря устойчивости заключалась в скачкообразном
продавливании вмятины,
охватывавшей центральный угол в 16°, со
стрелой прогиба /=12,5/z.
Критическое напряжение оказалось равным
0 = 0,154. Многочисленные опыты
со сферическими сегментами были
также проведены Р. Г. Суркиным *).
Образцы изготовлялись из
листового материала (стали, латуни,
меди, алюминия) вытяжкой под
давлением Масла. Характер ВЫПуЧИ- Рис- 16-9- Серповидная вмятина.
вания оболочки зависел от вида
нагружения. В тех случаях, когда во внутренней области создавался
вакуум, потеря устойчивости происходила в процессе резкого хлопка.
При нагружении жидкостью (маслом) эффект хлопка был значительно
меньшим. Оболочки первоначально теряли устойчивость, как правило,
по несимметричной форме. Для высокоподъемистых оболочек при
Н\с = 0,6 -5-0,75 (см. рис. 16.1, стр.649) наблюдались различныекар-
тины выпучивания. У некоторых образцов появлялась серповидная
вмятина, прилегающая к контуру; при последующем нагружении эта вмятина
последовательно расширялась, охватывая всю периферийную часть
сегмента (рис. 16.9). Другой пример показан на рис. 16.10,
выполненном по результатам скоростной киносъемки. Первоначально вблизи
контура здесь образовывалась одна вмятина, быстро углублявшаяся;
затем возникали соседние вмятины. Сопоставление отдельных кадров
показывает, что границы вмятин меняли свои очертания в процессе
выпучивания. Случай ярко выраженной несимметричной потери
устойчивости, происходившей в виде очень сильного хлопка и
сопровождавшейся образованием нескольких волн по окружности, отражен
на рис. 16.11. Наконец, в отдельных случаях имело место продавли-
вание центральной зоны оболочки (рис. 16.12).
*) Р. Г. Суркин, С. Г. Степанов, статья в сборнике «Теория пластин
ц оболочек», Киев, 1962, 311—313.
666
СФЕРИЧЕСКИЕ иБиЛОЧКИ
[ГЛ. XVI
Хотя теоретически нижнее критическое давление не связано
с отношением Rjh, при больших значениях R'h надо ожидать
значительных начальных неправильностей в форме оболочки, а это ведет
к снижению 0кр. Выпучивание
относительно толстостенных оболочек
за пределом упругости приводит
/гм
к уменьшению значений окр при
R'h < 100.
Впредь до накопления новых
теоретических и экспериментальных
данных в практических расчетах
следует исходить из различных
значений орасч в зависимости от отношения Rjh. Ориентировочно
можно предложить следующую таблицу для орасч и критического
давления ^расч:
Рис. 16.13. Область экспериментальных
данных для критических давлений.
Rlh
^расч
"расч
<250
0,15
0,30£Л2/#2
500
0,12
0,24£Л2/#2
750
0,10
0,20ЕЛ2/#2
1000
0,08
0,16£Д2//?2
1500
0,075
0,15£Л2/#2
При начальных прогибах, достигающих величины порядка толщины
оболочки, эти величины следует снизить приблизительно в полтора раза.
Приведем также экспериментальную формулу, рекомендуемую в
работе [16.11] для оболочек с отношением Rjh, лежащим в пределах
от 400 до 2000, и углом охвата 8 от 40 до 120°:
?расч = 0,3«:(А]2; A6.48)
здесь коэффициент k определяется по формуле
0°—40°
£ = A—0.175-
40°
1 — 0,07
ЮЛ/-
400/г
Пример 16.1. Сферический газгольдер, предназначенный для
взрывоопасных газов, имеет диаметр D = 12 м. Материал оболочки
легированная сталь с пределом текучести ат = 3300 кг/см2. В
эксплуатации возникает необходимость создания в газгольдере
Требуется определить толщину оболочки из условия устойчивости.
Внешнее давление в рассматриваемом случае составляет q з*
Примем ориентировочно в соответствии с приведенной выше
q = 0,24£/г2/#2. Отсюда
хранения
— низко-
процессе
вакуума.
1 кг/см2.
таблицей
w
i 182]
ЭЛЛИПСОИДАЛЬНЫЕ ОБОЛОЧКИ
667
Учитывая, что при изготовлении элементов газгольдера и их монтаже
возможно появление значительных начальных прогибов, следует увеличить
толщину оболочки на 20—25%. Получим h = 1,1 см. Сжимающее напряжение
при такой толщине составит
qR _ 1-600
1h ~ 2-1,1
а = -^гт- =
ss 275 кг/см2,
что значительно ниже предела текучести материала.
Для реальных конструкций необходимо дополнительно увеличить
полученное значение h с учетом допусков на воздюжное отклонение толщины
от номинального размера.
§ 182. Эллипсоидальные оболочки
Приведем, далее, данные для расчета на устойчивость
эллипсоидальных оболочек вращения, встречающихся в авиастроении,
химической промышленности, приборостроении. Следует различать
вытянутые эллипсоиды, образованные вращением вокруг оси АВ эллипса
с полуосями а, Ь, причем а<Ь (рис. 16.14), и сплющенные
(сжатые) эллипсоиды, при а~>Ь (рис. 16.15). Допустим, что
эллипсоидальная оболочка подвергается действию внешнего равномерно
±_* /?
\ I I
Рис. 16.14. Вытянутая эллипсоидальная обо- Рис. 16.15. Сплющенная (сжатая) эллипсои-
лочка. дальная оболочка.
распределенного давления q. Задача об устойчивости такой
оболочки *) родственна аналогичной задаче, относящейся к сферической
оболочке, так как в обоих случаях речь идет об образовании
местных вмятин. Для вытянутой эллипсоидальной оболочки следует
ожидать появления таких вмятин в зоне экватора, так как главные
радиусы кривизны срединной поверхности здесь являются
наибольшими. Верхнее критическое давление равно
<7в =
2£
/3A —ц2) 262 —а2
,2Ш-
Д2
262 — а2
A6.49)
*) Эта задача была рассмотрена в линейной постановке X. М. Муш-
тари [12.9], а в нелинейной — Р. Г. Суркиным [16.6], см. также книгу [0.6].
668
СФЕРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. XVI
В случае сплющенной оболочки, напротив, первые вмятины должны
образоваться в зоне полюсов А, В. Главные кривизны в полюсах
равны R{ = R2--a2lb; здесь оказывается применимой известная
формула A0) для сферической оболочки с заменой R на a2jb:
<7в:
IE
h2b*
K3A-|X2) a*
1.21E
/i2u2
A6.50)
Интересен случай
ствию внутреннего
показывает, что при
к
когда сплющенная оболочка подвергается дей-
давления *). Более подробное исследование
а > b |/2 кольцевые напряжения в оболочке
будут сжимающими. Это
можно пояснить на
разобранном в главе X примере
круглой пластинки со свободно
смещающимся в плане
контуром: при значительных
прогибах в зоне пластинки,
прилегающей к контуру,
также появлялись
сжимающие напряжения. Для
эллипсоида, испытывающего
внутреннее давление,
сжимающие напряжения будут
наибольшими у экватора; здесь
и образуются начальные
вмятины. Пример такой
потери устойчивости показан**) на рис. 16.16. Критическое
давление определяется в этом случае формулой ***)
9F h2 А2
qB= r l = 2—-»1,2Ш - . A6.51)
"К3A— ц2) а2 —2б2 а2 —262
совпадающей по структуре с D9).
Что касается нижнего критического давления qn, то оно
составляет для эллипсоидальных оболочек приблизительно такую же долю
от qB, как и для сферических оболочек; практические расчеты надо
вести по величине qn.
Рис. 16.16. Выпучивание сплющенной
эллипсоидальной оболочки в зоне экватора.
*) Этот случай был впервые исследован И. В. Геккелером (Статика
упругого тела, 1934, стр. 281).
**) По данным Н. И. Спиридоновой (Расчет на прочность топких
эллипсоидальных оболочек, канд. дисс, 1961).
***) Эта формула получена X. М. Муштари [12.9].
ГЛАВА XVII
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
Рис. 17.1. Тороидальная оболочка.
§ 183. Исходные соотношения
Под тороидальными мы будем понимы", оболочки, срединная
поверхность которых образована вращением некоторой замкнутой
плоской кривой относительно оси, лежащей
в ее плоскости и ее не пересекающей
(рис. 17.1). В зависимости от вида
поперечного сечения различают круговые
тороидальные оболочки, эллиптические и др.
Тороидальные оболочки находят
широкое применение в турбиностроении,
химическом машиностроении, приборостроении;
они встречаются также в конструкциях
летательных аппаратов. Отметим, что
в технических применениях фигурируют как полные тороидальные
оболочки, так и оболочки, охватывающие часть дуги круга в плане.
Рассмотрим круговые полные
тороидальные оболочки. На рис. 17.2 показано
поперечное сечение срединной поверхности.
Обозначим через а радиус сечения и через
R — расстояние от оси симметрии до центра
сечения. Очевидно, линии кривизны в
произвольной точке срединной поверхности будут
Совпадать с меридианами и параллелями.
Введем криволинейные координаты 8 и ср; под
'ф подразумевается полярный угол в
плоскости меридиана, под <р—угол в плоскости
ТОраллельного круга. Один из главных
радиусов кривизны, соответствующий мери-
риану, совпадает с радиусом сечения и равен
?2 — а.\ второй, отвечающий параллельному
№угу, по теореме Менье A2.14) равен
^t = r/sin 6, где г—расстояние от оси симметрии до некоторой
Эчки срединной поверхности: г — R-\~ a sin 0 = а A -f-&sin6)/&,
Рис.
ии «
17.2. Поперечное сече-
круговой тороидальной
оболочки.
670
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
[ГЛ. XVII
где к = a/R. Один из центров кривизны (С,) лежит на оси
симметрии, другой (С2)— в центре сечения (рис. 17.2).
Полюсами О и О' сечение делится на две части: для точек
внешней части гауссова кривизна Г > 0, для точек внутренней части
Г < 0; в полюсах кривизна обращается в нуль. Таким образом,
тороидальная поверхность содержит эллиптические, гиперболические и
параболические точки. Отметим, что в одноименных полюсах всех
поперечных сечений тороидальная поверхность имеет одну и ту же
касательную плоскость.
Квадратичная форма I срединной поверхности A2.9а) оказывается
равной
/ = г2 dq>2 + a2 d№,
следовательно,
fl11 = r2=(/?+-flsineJ = (|-,JA4-^sineJ, e,2 = 0. а22 = а2.
Зная главные радиусы кривизны, мы можем, далее, по A2.19) найти
коэффициенты квадратичной формы II:
Ьп = г sin 8 = (R -f- a sin 0) sin 0 = -г- A ~\~ k sin 8) sin 0,
#12 = 0, #22 = fl.
Допустим, что для отрезка кругового тора будет R—>со и к—>0;
тогда в пределе мы получим отрезок круговой цилиндрической
поверхности радиуса а.
Перейдем к основным соотношениям, характеризующим
деформированное и напряженное состояние оболочки малого прогиба. В
общих уравнениях главы XII надо положить:
Л1 = /а1
;г = -г A -j- AsinG), А
22 '
У*
22
я. = -
я,
a(l + fesinO)
1 sin 0 fe sin 0 ' "^
Отсюда
^1=/?1sin8, A2 = R2.
Отметим, что по второй из формул Петерсона — Кодацци A2.55) будет
dQ
(*)
R2 dQ "
Обозначая деформацию в направлении параллели через г,
меридиана через е2, получим по A2.52)
ft ди ! ft cos 0 й sin G
е! ~~ а A + ft sin 0) ~д<р "'
а A +ft sin 0)
а A+ft sin 0)
w,
_ 1_ dv
62 — a dQ
_]_du_
Y"~ a dQ
1
■w,
a вдоль
A7.1)
ft cosO
dv
a A 4- ft sin 0)
a A -|- ft sin 0) dtp
5 183] ИСХОДНЫЕ СООТНОШЕНИЯ 671
В частном случае цилиндрической оболочки выражения A7.1)
перейдут в A3.2), если учесть, что элементу дуги центрального
круга тора Rd(f = (ajk)d(p будет соответствовать элемент образующей
цилиндра dx, а дуге a dQ — элемент dy.
Выпишем далее выражения для изменений кривизн и кручения,
пользуясь упрощенными соотношениями A2.57):
й2 d2w k cos 0 dw \
и, =
а2 A + ^ sin ВJ бф2 a2(l+£sinO) дд '
1 d^w
к d2w , k2 cos 9 dw
x = -
a2(l-|-& sin 0) d<pdQ T a2(l + £sin0J dtp '
отсюда вытекают выражения A3.12) для цилиндра. По A2.80)
находим
и, + х2 = — V%>, A7.3)
причем оператор Лапласа A2.81) в нашем случае будет
у»- ! К I *Z d2 I *cos9 «Ч П7 4}
"~ a2 М2 ' A-f-^sinOJ Лр2 ^ 1 + fcsinO <Ю]- ^'-^
Перейдем к уравнениям равновесия в проекциях на касательные
к линиям ф, 0; выпишем их с учетом поперечных сил в виде A2.63),
A2.64), при ql = q2 = 0:
j^+^--~,^ + 7'^-Q^ = o. <ir.5b,
60 ' Лр • 60 ~ дц> ^ R,
Уравнение равновесия в проекциях на нормаль A2.65) будет
Поперечные силы по A2.77) оказываются равными:
п _ 1 Г6(Л2уИ,) , d{AtH) МдА2 ндАп
^i —"л7л7 L *р ' 5о м*-д$~ + м-до-\'
п __ 1 Г^(Л,уМг) , <ЦЛ2Я) m^i iw^2l
у2—-лй7[ 50 I—d^ м*ж+"-д$~\-
A7.7)
Воспользуемся, наконец, соотношениями закона Гука A2.70) и
A2.71). По аналогии с A2.82) найдем:
о — . п 1 д(У2а>) 0_ D 1 6 (У2а>) _.
672
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
[ГЛ. XVII
По F) получим
D I д ГА2
А{А2 \ скр [~А^
или
d(V2w)-\
d<f \
DV2V2
~Г"
w
д
=
[А2
д (Vhv)
Ri ' Ri "r
]}-£+$ *«.
?*•
A7.9)
§ 184. Устойчивость оболочки в малом.
Случай внешнего давления
Рассмотрим устойчивость замкнутой тороидальной оболочки,
подвергающейся действию равномерно распределенного по всей
поверхности внешнего давления *).
Начнем с исследования потери устойчивости в малом по осесим-
метричной форме, когда выпучины образуют кольцевые складки
в направлении координаты ср. Прежде всего изучим начальное
напряженное состояние. Исходя из A) и B), будем иметь:
е, =
аA + &sinO)
Я, = —
(v cos 0 — да sin 0),
■ cos 0
и, далее,
dw
a2(r+ftsin) "Ж
a2 LtfO*
— 1 *!L
Е2 ~ a d0 ~
_ 1 d2w
■ii>.
k cos
14 k
s_e rfj
sin 0 rfOT
Вместо второго из уравнений E) будет (при Q2 = 0)
Отсюда
4(Л,ЛГ2)
rfO
1 -j- fe sin 0 ^Л^2
k dO
N
dAi
0.
1 rfO
•(Л/2 —A/,HosO = 0.
A7.10)
A7.4a)
A7.11)
A7.11a)
Предположим, что начальное напряженное состояние оболочки
является бе з м о м е н тн ым; ему соответствует уравнение (9) в виде
(при qz = q)
или
Ri
A^sinO
N,
A7.12)
Используем уравнение A2) и (Па) для определения Л/, и Л/2>
считая q = const. Исключая Nx из этих уравнений, получим
d
rfO
(rN2 sin 6) = — qar cos 8.
A7.13)
*) Эта задача исследовалась Ю. А. Федосовым и Махнигом [17.4], см.
также статью [17.0]. Приведенное ниже решение принадлежит Т. И. Коше-
левой (Прикл. механика 3, № 1, 1967, 55—62).
§ 1841
УСТОЙЧИВОСТЬ ОБОЛОЧКИ В МАЛОМ
673
Будем отсчитывать угол 6 от одного из полюсов (точки О на
рис. 17.1). Интегрируя уравнение A3) при r = R -f- a sin 8 в
пределах от 0 до 6, будем иметь
i-f-4sin°
., qa RA-r '2 /1-7 1 лч
^=—1 7- = - 1 + fesinO Ча. A7.14)
Далее, по A2)
N^-Ц-. A7.15)
2
Как видим, усилия Nx и /V2 во всех точках поперечного сечения
являются сжимающими. Усилие N.2 зависит от угла 8: в полюсах
оно равно да, на внешнем экваторе qa(\ \- й/2)/A -f- k).
Наибольшим усилие N2 оказывается у внутреннего экватора (при
ajR < 1), зтесь его величина будет qa(\—&/2)/A — k).
Определив, таким образом, основное напряженное состояние,
исследуем его устойчивость. Воспользуемся для этого уравнениями
E) и (9). Для 'осесимметричной задачи уравнение Eа) удовлетворяется
тождественно. Уравнение EЬ) приобретает вид
d(A,N2) ., dAi Q A,A2
Далее, в уравнении (9) надо принять
7!ш = _11(А^ у2у2^^,АГА^у2а,>1 A7 17)
V W Л, A, dO \A2 rfO )' ^W AtA2dO[A2 dQ Г V л ' >
Пользуясь выражением (8) для Q2, соотношениями упругости A2.70)
и геометрическими зависимостями A0), запишем основные уравнения
в перемещениях:
1 -I- fe sin 9 d2v . А dv k cos2 0 . n
—■ Z Т77ТГ -Ь cos " -JK 1 i и ■ n v — № Sln 9
14-ftsinQ do> . n die cos 0 ,
—u тп UsinO -yx 1 1 ■ . n no 4~
k dQ ^ dQ 1 -j- к sin 0 '
Л2 / 1 + A sin 0 rf3w , Q d2w sin 0-4-ft rfw \ _ ,..,..
+ wHni W + cose^—l + ^nO-rfFj^0' <17Л8>
1 4-6 sin 0 rfu . a dv . Q . ft sin 6 cos 0
—!—г :nr + М-sin 0 -угг-\- u.i)cos0-t- , 1 , , „ v -
ft dQ ^ dO ' ^ ' 14^sin0
ft sin2 0 ~ . n T -4- A sin 0
— 1 1 и ■ n w — 2utwsin9 1—r «; —
1 -\-k sin 0 ^ &
2 r 14-ft sin 0 rf% . n a rf3a»
—J- l. 2 cos 9
Eh
12a2 [ * dQ* -г-1-" rfOr
_ 2sinQ4-ftsin204ft rf2a> _ A — ft2) cos 0 dw ] _
1 + * sin 0 rfO2 I + ft sin 0 rfO J
^2) gfl f'fn-.Q^ 1 ' + (fe/2> sln ° <pw \ - О П7 19)
43 А. С. Вольмир
674 ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ [ГЛ. XVlt
Здесь в качестве фиктивной нагрузки, в соответствии с A2.89) и
A0), A4), A5), принимается
qa A — ц2) (\ „„„ n dw , 1 + (ft/2) sin 8 d*w\
ft rfO2 j "
<1ф--
Eh
rfO
Положительными считаются сжимающие усилия.
Для замкнутой в обоих направлениях круговой тороидальной
оболочки решение должно быть периодической функцией угла 8.
Примем его в виде
v = BsinnQ, w = CcosnQ. A7.20)
Проинтегрируем полученную систему A8) — A9) с помощью метода
Бубнова — Галеркина, принимая во внимание, что элемент площади
тора равен AxA2dQd(f = [a2(\ ~~ksinQ)Jk]dQd(p. В результате
получим следующую систему алгебраических уравнений относительно
В и С:
[£('+t)jLHi
2
В +
h* [я2
U2
ft2
+£[£('+4)+i]K=°.
')•
-{p-+o+rt+ia.»f[-F(»+4)+4]-
-Ф-
i+t) c = °-
A7.21)
Здесь введеко обозначение ф = A—\i2)qa/Eh. Раскрывая
характеристический определитель, получим формулу для критического
значения параметра ф:
Л2
ft2 [n2 + ±-Ji- n*ft2 + A + VY & + A + |i)]
12а2
(-
,[,A+*)+1^,]
-н
n2ft2
2
ft2^
)[я.(,+4-)+**]
n2(l +
+
1+и
ft2
A7.22)
из фор-
В частном случае цилиндрической оболочки, при й->0
мулы B2) следует
?=i27r^D)V-i).
что совпадает с формулой A3.80) для критического давления,
относящейся к бесконечно длинному цилиндру.
♦ -ш**»8-1)
или
I 184) УСТОЙЧИВОСТЬ ОБОЛОЧКИ В МАЛОМ 675
На рис. 17.3 и 17.4 нанесены вычисленные по B2) значения
параметра критического давления для широкого диапазона величины к
Рис. 17.3. Верхнее критическое давление для тороидальной оболочки.
при некоторых отношениях ajh. Как видим, критические значения
полученные для случая осесимметричной деформации, резко возрастают
при увеличении параметра k *).
*) Эти результаты хорошо согласуются с данными, полученными в
работе Махнига [17.4] методом малого параметра.
43*
676
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
[ГЛ. XVII
Формулу B2) можно значительно упростить, если пренебречь
в ней некоторыми второстепенными членами. Тогда
' +
k2
■(.+
i=^*
In-
0+т)
а2 2 Л I k2\
12а2
2 ,'
A7.23)
Минимизируя функцию ф по и, найдем
4
«=/ф
ak
+\)
¥■
6 1
1-ц»
*■)•
A7.24)
Подставляя это выражение в B3), получим следующую приближенную
формулу для критического значения параметра ф:
ч>=
*й /[2+(l-|x2)fe2]/12
а 1 -f &2/4
A7.25)
Формула B5) уже не включает частный случай цилиндрической
оболочки (k = 0).
Рис. 17.4. Изменение верхнего критического давления в
зависимости от геометрических параметров.
Мы рассматривали случай регулярного волнообразования вдоль
дуги поперечного сечения оболочки. Исследование нерегулярного
выпучивания, более характерного для оболочки переменной кривизны,
может привести к более низким значениям для ф (см. W. Fliigge,
L. H. Sobel, Stability of shells of revolution, 1965).
§ 185] ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ 677
§ 185. Экспериментальные данные
Приведем результаты экспериментов, проведенных над
незамкнутыми по координате 8 тороидальными оболочками из нержавеющей
стали, охватывающими половину окружности *). Края образцов были,
жестко закреплены. Оболочки подвергались действию внешнего
давления в установке, изображенной на рис. 17.5. На рис. 17.6 и 17.7
Рис. 17.5. Установка для экспериментов над тороидальными оболочками.
показаны фотографии оболочек после испытания; первый из них
относится к случаю А = 0,4 при а/А = 62,5 (рис. 17.6, а) и а/А = 33
(рис. 17.6,E); второй—к случаю А = 0,2, а/А = 62,5. Как видим,
Рис. 17.6. Тороидальная оболочка после испытания при ft — a/# = 0,4.
потеря устойчивости сопровождается образованием нескольких вмятин
вдоль параллели у полюса. Оболочка большей толщины выпучивается
с резко выраженным хлопком. Величины критического давления
оказались следующими. Для оболочки с параметрами А = 0,4 и
а/А = 62,5 было ф = 0,32 • 10~3; при А = 0,4 и а/А = 33
ф = 0,53 • 10~3; при А = 0,2 и а/А = 62,5 ф = 0,3 • 10~3. Если
сопоставить эти данные со значениями, полученными по формуле B2),
*) Эти эксперименты были проведены Р. И. Кшиякиным.
678
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
[ГЛ. XVII
то они будут значительно ниже теоретических. Надо иметь в виду,
что эти опыты не вполне соответствуют теоретической схеме,
относящейся к замкнутым оболочкам. Поэтому желательно проведение
Рис. 17.7. Характер выпучивания оболочки при А = а/Я = 0,2.
серии экспериментов над полными тороидальными оболочками.
Целесообразно также в дальнейшем рассмотреть задачу об устойчивости
тороидальной оболочки в нелинейной постановке.
§ 186. Торосферическая оболочка при внутреннем давлении
Отрезок тороидальной оболочки может служить соединительным
элементом между пологой сферой и цилиндром в сосудах,
воспринимающих внутреннее давление. Очевидно, в меридиональном
направлении тороидальная вставка испытывает растягивающие усилия,
передаваемые ей сферическим днищем, с одной стороны, и
цилиндрической оболочкой, с другой. Но тогда вдоль параллелей в срединной
поверхности тора будут иметь место сжимающие напряжения; при
достаточно высоком уровне этих напряжений оболочка может
потерять устойчивость с образованием ряда меридиональных складок *)
(рис. 17.8).
Для определения критического значения внутреннего давления
должно быть прежде всего исследовано докритическое напряженное
состояние тороидальной оболочки. Этой задаче посвящены работы
Кларка [17.3] и других. В статье Кларка было получено численным
методом асимптотическое решение неоднородного уравнения,
описывающего основное напряженное состояние. В качестве примера был
взят случай, когда угол 90 в месте контакта тороидальной и сфери-
*) Фотография рис. 17.8 взята из статьи Мэсколла [17.5].
|4eej ТОРОСФЕРИЧЕСКАЯ ОБОЛОЧКА ПРИ ВНУТРЕННЕМ ДАВЛЕНИИ 679
ческой оболочек равен 35°. Оказалось, что сжимающие напряжения
в срединной поверхности, направленные вдоль параллели, резко
Г-*"
Рис. 17.8. Выпучивание торосферической оболочки при внутреннем давлении.
«>%/£
28
24
го
W
12
8
4
О
Экспериментальные
значения-.
« 00-35'
0,002
0,004 0,006
h/a
0,010
Рис. 17.9. Данные для расчета торосферической оболочки.
возрастают при 8 = 45°, а затем постепенно снижаются и меняют знак
вблизи линии контакта с цилиндрической оболочкой. Далее, при
решении задачи об устойчивости оболочки может быть использован
680
ТОРОИДАЛЬНЫЕ ОБОЛОЧКИ
[ГЛ. XVII
вариационный метод с заданием аппроксимирующих функций для
дополнительных перемещений, например, в виде
и = Ar2 cos к (9 — 80) cos иср, |
v = Br2sin Хф — 90)sinwp, | A7.26)
w = Cr2 sin A, @ — 90)cos«(p, )
где п — число волн в направлении параллели. На рис. 17.9 показаны
результаты вычислений [17.5], относящихся к тороидальным
оболочкам, ограниченным углами в 35° и 15°. Здесь же показаны данные
экспериментов над пластмассовыми оболочками при R/h от 100 до 500.
Аналогичная задача может быть поставлена для тороконической
оболочки, являющейся соединительным элементом между конусом и
цилиндром. В предельном случае соединительным элементом может
являться шпангоут. Он также должен быть проверен на устойчивость *).
*) Эта задача рассматривалась Л. И. Балабухом и Л. А. Шаповаловым
Изв. АН СССР, ОТН, №4, 1952).
ГЛАВА XVIII
УСТОЙЧИВОСТЬ ПОЛОГИХ ОБОЛОЧЕК
ПРИ ДЕЙСТВИИ ПОПЕРЕЧНОЙ НАГРУЗКИ
§ 187. Исходные зависимости
Мы рассматривали до сих пор оболочки различного очертания,
считая, что начальные кривизны срединной поверхности могут быть
значительными. Выделим теперь особо пологие оболочки, имеющие
малые кривизны. На рис. 18.1 показаны примеры пологих оболочек,
Рис. 18.1. Пологие оболочки: а) прямоугольная в плане, б) круговая
в плане.
одна из которых является прямоугольной в плане, а другая —
круговой в плане. Условимся считать оболочку пологой, если стрела
подъема И не превышает '/5 от наименьшего размера в плане*).
Примем, далее, что оболочка подвергается действию нагрузки,
направленной нормально к срединной поверхности (давление rasa или
жидкости), либо нагрузки, направленной перпендикулярно к основной
плоскости (собственный вес оболочки, вес снега для покрытий и т. д.).
Пологие оболочки применяются в настоящее время все шире в
*) Такое ограничение было указано В. 3. Власовым (см. [12.3], стр. 303).
Э. Рейсснер при рассмотрении оболочек вращения принял, что для пологой
оболочки максимальный угол наклона касательной не должен превышать '/з
(Е. Reissner, Journ. Math, and Mech. 7, № 2 A958), стр, 128).
682 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
строительных конструкциях; они входят также в конструкции
летательных аппаратов, подводных лодок и т. д.
При исследовании пологих оболочек, находящихся под действием
поперечных сил, приходится, как правило, считать напряженное
состояние моментным уже па первых ступенях иагружения. Если
ограничиться определением напряженного состояния оболочки при
малых прогибах, то его можно вести в рамках линейной теории.
Различие между пологой оболочкой и плоской пластинкой скажется
тогда лишь в том, что для оболочки надо учитывать дополнительные
напряжения в срединной поверхности. Однако для расчета на
устойчивость пологой оболочки важным является исследование больших
прогибов с позиций нелинейной теории.
Рассмотрим различные варианты диаграммы «нагрузка — стрела
прогиба», которые являются характерными для пологих оболочек
ч..
а) б) в) г)
Рис. 18.2. Различные варианты диаграммы «нагрузка —стрела прогиба».
различной кривизны. В случае весьма пологой оболочки параметр
нагрузки q монотонно возрастает с увеличением стрелы прогиба /
(рис. 18.2, а); диаграмма имеет при этом точку перегиба С, причем.на
первом участке ОС жесткость оболочки падает, а на втором
возрастает. В случае, если начальная стрела подъема оболочки сравнима
с толщиной, диаграмма получает предельную точку А (рис. 18.2, (У);
здесь при известных условиях — когда нагрузка является «мертвой» —
становится возможной потеря устойчивости, выражающаяся в про-
щелкивании оболочки к новому устойчивому равновесному
состоянию. Далее, на рис. 18.2, в изображена диаграмма q(f),
соответствующая оболочкам большой кривизны; падающая ветвь АВ
неустойчивых состояний лежит вблизи начальной ветви ОА. Такого типа
кривые анализировались нами в главе XIII; прощелкиваиие становится
возможным здесь при любом поведении нагрузки. Наконец,
встречаются примеры, когда прогиб в центре оболочки на некотором этапе
иагружения уменьшается и диаграмма q(f) становится петлеобразной
(рис. 18.2, г); это связано с изменением формы волнообразования*).
*) Такой тип диаграммы был получен А. Ю. Биркганом для
цилиндрических панелей; см. также работу Будянского [18.12].
ИСХОДНЫЕ ЗАВИСИМОСТИ
683
В некоторых случаях прощелкиваиие пологих оболочек является
необходимым их свойством (хлопающие мембраны в приборах).
С другой стороны, для оболочек,
служащих покрытиями в строительных
конструкциях, и во многих других
примерах явление прощелкивания недопустимо.
Так или иначе для расчета пологих
оболочек на устойчивость должны быть
известны характерные точки диаграммы «па-
грузка — прогиб».
При выводе основных зависимостей
нелинейной теории пологих оболочек
возможны два подхода.
Первый из них состоит в
непосредственном использовании уравнений главы X.
Будем исходить из уравнений A2.121)
для оболочки, имеющей начальные
отклонения от идеальной формы, и введем в
них вместо полного прогиба
дополнительный прогиб Wj = да — да0; в развернутом виде уравнения примут вид
Рис. 18.3. Пологая оболочка,
рассматриваемая как пластинка с
начальной погибью.
h Wl дх2 \
— 2
d2Wt
d2w,
?k
д2Ф I d2w
ду2 1 ду2 J ' ду2 \ дх2
д2Ф I д2и), . d2w0\ , L д2Ф
d2w0
дх ду \дхду ' дх ду j
) + К
дх2
)-
д2Ф
£ v ^ \дхду)
d2n>i d2n>i
x ду2 ' у дх2
d2Wi d2w0
h *
дх2
d2Wi d2w0
ду2
d2i»i
d2w0
дхду дх ду
, d2w.
дх2 ду2
ду2 дх2
ду2
*У дх2
A8.1)
A8.2)
Уравнения A) и B) получены в предположении, что перемещения и,
V, да точки срединной поверхности отсчитываются вдоль касательных
к линиям кривизны х, у и по нормали к поверхности; все размеры
оболочки также естественно измерять вдоль линий кривизны. Под kx, ку
подразумеваются начальные кривизны линий х, у.
Другой подход заключается в рассмотрении оболочки как
пластинки с начальной погибью. Допустим, что контур оболочки
в плане является прямоугольным. Тогда удобно ввести декартовы
координаты х, у, откладывая их в основной плоскости /—4 вдоль
сторон контура (рис. 18.3). Пусть, далее, координата z определяет
начальное положение точек срединной поверхности *). Прогиб w1
теперь надо отсчитывать от исходной срединной поверхности
параллельно оси z. В такой трактовке надо в уравнениях A), B) положить
*) При расположении системы координат на рис. 18.3 значения г будут
отрицательными.
684 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVltl
kx = ky = О и ввести Z вместо w0; тогда будет *)
R.V* — д2ф { d2wi | д2г\ д2Ф Г d2w{ д2г\
h 1~ дх2 \ ду2 ~т- ду2]" ду2 \ дх2 +" их2 J
1 г-j/ts / й2и,1 \2 d2w, (Уш, . n d2»! д2.г
£ \ дх ду} дх2 ду2 ' дх ду дх ду
d2Wi d2z d2w{ d2z
дх2 ду2 ду2 дх2
или, в компактной записи,
A8.4)
х | A8.5)
Если используется этот подход, то размеры оболочки целесообразно
представлять как размеры в плоскости ху.
Системы уравнений A) — B) и C) — D) являются
эквивалентными**) при условии, если центральный угол 2ф, охватываемый
наибольшим размером оболочки, достаточно мал, так что можно
принять coscps^ I, sincp«cp. Перейдем к отдельным задачам,
относящимся к оболочкам различной формы.
§ 188. Панель, прямоугольная в плане
Начнем со случая, когда панель с главными кривизнами kx, ky
имеет очертание, прямоугольное в плане (рис. 18.1, а); величины kx
и ky принимаются постоянными. Размеры сторон опорного контура
обозначим через а, Ь. Предположим, что по краям оболочка шар-
пирпо скреплена с ребрами, абсолютно жесткими па изгиб в
направлении нормали и в то же время имеющими малую жесткость на
изгиб в плоскостях, касательных к срединной поверхности. Кроме
того, будем считать, что точки, принадлежащие концевым сечениям
оболочки, свободно скользят вдоль ребер. Этим допущениям
соответствуют следующие граничные условия для краев х = 0, х = а:
да = 0. 45" = 0; °* = 0' Т = 0- О8-6)
*) Эти уравнения были даны Маргерром (К. М argue гге. Ргос. of
5th Internet. Congress of Appl. Mech., 1938).
**) Этот вопрос рассматривается в книге X. М. Муштари и К. 3. Гали-
мова [0.6], стр. 181.
§ 188]
ПАНЕЛЬ, ПРЯМОУГОЛЬНАЯ В ПЛАНЕ
685'
и аналогичные условия для краев у — 0, у — Ь. Примем, что нагрузка
интенсивности q равномерно распределена по всей поверхности и
действует со стороны выпуклости *).
Используем уравнения A) — B); принимая w0~0, представим их
в виде
v D _4 , /гТ. . , д2Ф , д2Ф q
у дх2
О, A8.7)
1
Г==?4Ф+ _/,(«,„ «;,) + *,
d2wt
ду2
еУ дх2
0. A8.8)
При заданных выше граничных условиях можно воспользоваться для
интегрирования системы G) — (8) методом Бубнова — Галеркина,
применяя его одновременно к двум уравнениям системы**).
Аппроксимируем функции w и Ф в нервом приближении с помощью
выражений
«^/^inijsin-^. Ф = Л, sin-H sin if. A8.9)
Как легко видеть, первые три граничных условия типа F)
удовлетворяются на всех кромках; четвертое же условие выполняется лишь
«в среднем»; так, для кромок х = 0, х = а будет — xdy = 0.
о
Выпишем уравнения Бубнова — Галеркина:
a b а Ь
\ X ъхп ~ %\w-^-dx dy — §, К sin — sin — dxdy — 0.
оо оо
A8.10)
Подставляя сюда G) — (9) и интегрируя, получим:
D , я6 / 1 1 \2 2 я4
я4 lkK ky\ q
+ Л1 "Ж \~W + IF J ~ T = 0<
E
ЗяМ-
16 2 lkX ky\ 1 1 __
lb , a\2 fi~~\b2~+~tf)l? ( 1 , 1 \2 /i = °-
U + Tj l^+ftTJ
етры
kvb2 ^ a
A8.11)
Введем безразмерные параметры
, *• = *;+*;. х = т,
^ A ' 7 ~ E \ h2 J '
A8.12)
*) Это относится к оболочкам положительной и нулевой гауссовой
кривизны.
**) Такой путь был уже принят в § 106, см. стр. 372.
686
ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ
[Гл. XVIII
тогда по A1) придем к следующей зависимости между нагрузкой
и прогибом *):
32я2
1 £3 _ h* ГС2
■с2+
+
16й
/ 1 \ 2
"(т+*)'
192A—(Л2)
С A8.13)
Если панель является квадратной (а~Ь), то при (J. == 0,3 будет
<7* = 8,77С3—2,46ГС2 + @,154А*2 + 22)С. A8.14)
В случае, когда оболочка имеет цилиндрическую форму и
координата у отсчитывается вдоль дуги, надо принять kx = 0, ky=\jR;
тогда будет k* = b2/Rfi. Для сферической оболочки получим: kx —
= ky= l/R; при a = b найдем k* = 2b2'Rh. Интересно рассмотреть
случай оболочки отрицательной гауссовой кривизны. В § 135
приводился пример псевдосферы, для которой kx = — ky; если считать
а = Ь, то при этом будет k* = 0. Уравнение A4) получает вид
9* = 8,77£3 + 22£.
Если судить по этим данным, панель псевдосферы будет вести себя,
как плоская пластинка; потери устойчивости по форме,
отвечающей (9), здесь произойти не может.
На графике рис. 18.4 пунктирными линиями изображены
диаграммы <7*(С) по A3) для различных значений k* при Х=1. Как
видим, при малых k* величина q* непрерывно возрастает, подобно
случаю плоской пластинки; при больших k* диаграмма имеет
нисходящий участок. Для того чтобы найти значение k*, при котором
становится возможным прощелкивание, надо исследовать
производную dq*ld£. Приравнивая ее нулю, находим значения £,
соответствующие верхней и нижней критическим нагрузкам:
t — —- k*
t_" 32 R
32
Г 6R 2A—u^
2A-ц2)
A8.15)
Граница области прощелкивапия соответствует тому случаю, когда
диаграмма q* (£) имеет точку перегиба с горизонтальной касательной **);
*) Эта зависимость была получена М. А. Колтуновым [18.4]; ему же
принадлежит приводимое ниже уточненное решение, выполненное с помощью
цифровых электронных машин.
**) При этом мы переходим от диаграммы по рис. 18.2, а к диаграмме
такого типа, какой изображен на рис. 18.2, б.
ПАНЕЛЬ, ПРЯМОУГОЛЬНАЯ В ПЛАНЕ
687
при этом подкоренное выражение в A5) должно обратиться в пуль.
Таким образом, предельное значение k* будет
/ I \2
k* = -— при £ —-зо&*.
/CA-ц2) 32
На первый взгляд, в ходе проектирования желательно назначать
такие значения кривизн, при которых прощелкивание оболочек будет
Рис. 18.4. График «нагрузка —прогиб» для квадратной в плане паиеди.
исключено. Легко видеть, однако, что при этом начальный участок
диаграммы будет иметь малый угол с осью абсцисс, так что
жесткость оболочки окажется незначительной. Поэтому с практической
точки зрения важно возможно точнее определить q* и q* для
оболочек относительно большой кривизны. Представим для этого
функции w и Ф в виде рядов:
^ = £/^п-^п^, Ф=1Ли^~^^. A8.16)
I, I i, )
Решение будет тем ближе к точному, чем большее число членов
ряда принимается во внимание при вычислениях. Приводим
результаты такого решения, выполненного с помощью цифровой электронной
688 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
машины. Если удержать в рядах A6) члены с индексами A; 1) и B; 2),
а затем присоединять к ним члены C; 3) и D; 4), то получим
сплошные кривые рис. 18.4, обозначенные соответственно через 2; 3; 4;
на рисунке они сливаются между собой. Однако отличие от данных
первого приближения оказывается очень ощутительным, начиная
с /г* «36. Уточненные диаграммы дают несколько меньшие верхние
критические нагрузки, причем пик кривой перемещается в сторону
меньших прогибов. Но особенно меняется, и при этом в сторону
возрастания, нижняя критическая нагрузка; в некоторых случаях она
меняет знак и становится положительной. Вблизи qa кривая становится
более крутой, а вблизи qH — более пологой*). Отсюда видно, что
при k* < 60 второе приближение дает практически точные результаты;
правда, прежде чем делать окончательные выводы, следует провести
дополнительно счет для сочетаний индексов A; 3); C; 1) и т. д.,
а также рассмотреть антисимметричные формы выпучивания. На
графике рис. 18.5 даны значения верхней и нижней критических
нагрузок в зависимости от k* для пластинок с различным
отношением сторон по данным четвертого приближения (Х,= 1,
A,= l/]/, X, = 0,5); принято (J. = 0,3. Прощелкивапие имеет место
при k* > 18 для Х=1, при k* > 20,4 для Я,= l/]^2 и при k* > 30
для К = 0,5. Очевидно, с увеличением X жесткость оболочки
понижается.
Отметим, что четвертое граничное условие F) может быть
удовлетворено во всех точках края, если выбрать аппроксимирующее
выражение для Ф в виде Ф = U (x)V(y), где U и V — «балочные»
функции, удовлетворяющие условию защемления балки по краям **).
Если рассмотреть квадратную панель, то при этом в уравнении A4)
существенно изменяется только коэффициент при £3; он получает
значение 7,48 вместо 8,77.
Обратимся к другим случаям закрепления краев панели.
Предположим, например, что ребра, окаймляющие панель, остаются
прямолинейными, но вместе с тем свободно сближаются между собой.
Идя аналогичным путем, приходим для квадратной панели в первом
приближении к уравнению (при ji —0,3)
<7* = 7,5£3 —2,06А*£2 -f@,154A*2-f 22)£. A8.17)
Существенное влияние на характер диаграммы оказывает коэффициент
при С2; нижние критические нагрузки по сравнению с предыдущим
случаем сильно повышаются. Прощелкивапие оказывается возможным
*) К аналогичным выводам пришел В. И. Феодосьев, исследовавший
с помощью цифровой машины прощелкивание пологих сферических
сегментов (см. § 190, стр. 698).
**) Это решение дано М. М. Козаровым, канд. дисс, МИСИ, 1955.
КОНИЧЕСКАЯ ПАНЕЛЬ
689
при k* > 25,3. Если же ребра являются несмещающимися,
зависимость A7) получает вид:
?« = 28.9£3— 6,lAit2-f @,5Ai24- 22) С. A8.18)
Желательно, чтобы для этих случаев, важных с точки зрения
практических приложений, были даны уточненные решения.
600
Г
500
too
300
,1-05
200
100
0
-wo
-гоо
/.?
■
гн
jtfX
^Jr"
%JS
\ • С
\60 '
Я-0,5
\л=///Г
^л-;
Рис. 18.5. Значения верхней и нижней критических нагрузок
для пологих панелей.
Отметим, что для удлиненной цилиндрической панели (а^§>Ь)
может быть получено точное решение задачи *); при этом исследуется
поведение арки-полоски с соответствующими условиями закрепления.
§ 189. Коническая панель
Обратимся к случаю, когда очертание панели в плане является
не прямоугольным, а круговым. Рассмотрим сначала коническую,
*) Это решение было дано И. Г. Бубновым [0.2] и М. С. Корнишиным
и X. М. Муштари [18.5].
44 А. С. Вол
льмир
690 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
а затем сферическую панель. Допустим, что пологая оболочка, с углом
подъема а < 1/5, подвергается действию равномерного давления
(рис. 18.6). Будем считать,
что панель защемлена по
контуру и что вместе с тем
точки края свободно
перемещаются в плане
(скользящая заделка) *). Особенности
задачи, связанные с
наличием вершины конуса,
учитывать не будем.
Воспользуемся вторым
из подходов к задаче но
§ 187, представляя
оболочку как искривленную
пластинку. По рис. 18.7
находим z = Hrjc =ar, где
a«stga = #/c; под с
понимается радиус основания,
под Н — начальная стрела
подъема. Возьмем за основу
уравнения E) и F) и
выразим операторы в полярных координатах г, ср, как в главе XI
(стр. 446). Вводя относительную координату р = г/с, п'олучим:
Рис. 18.6. Коническая паполь под действие-.1
поперечной нагрузки.
Рис. 18.7. Система координат при рассмотрении
конической панели.
D
V*w--
}__д_(дФ_ dw_\ | 1 (д2Ф
p dp \ dp dp } ' p*
2 / дЩ dw ,
d2w
i\f dp2
дФ d2w
H
p3 \dp дкр d<f
?4(P
_ J_ / d2w \2
~~P2 [dpdy)
d2cp d2w
dp2 dif2
2 д2Ф d2w
dp dip ) (i2 dp дц> dp дц>
2 дФ dw , ca d2w ,
p4 дц> дц> ' ph dp2 '
2 dw d2w
1
p3 дц> dp d(p
dw \2
*V )
1 d2w d2w
p2 dp2 d(p2
1
1 h
dw d2w
c\ A:8.19)
p dp dp2
ca d2w
P dp
A8.20)
оператор Лапласа имеет вид
dp2 ' p dp
^ p2 d<f2
Граничные условия будут
w = 0, -^- = 0, or = 0, x = 0 при р=1. A8.21)
*) Подобная задача была рассмотрена Э. И. Григолюком [18.3].
Приведенное ниже решение принадлежит И. И. Трапезину [18.8].
КОНИЧЕСКАЯ ПАНЕЛЬ
691
Выберем аппроксимирующее выражение для прогиба,
удовлетворяющее первым двум условиям B1), в виде*)
w = fl(\— р8J Н-/af*4 A — p^cosmp. A8.22)
Первый член B2) соответствует, как уже указывалось в главе XI,
решению осесимметричной линейной задачи для защемленной
пластинки, а второй отображает изгиб по п волнам вдоль дуги с равными
амплитудами к центру и от центра кривизны. Во взаимном сочетании
эти два члена характеризуют образование ряда вмятин,
преимущественно направленных к центру кривизны.
Подставляя B2) в правую часть уравнения B0), находим
-L V<t(p ^=R0-irRn cos wp ■-)- R2n cos 2иср, A8.23)
где R0, Rn—некоторые функции р, содержащие параметры /,, /2.
Интегрируя B3), с учетом того, что в центре панели, при р = 0,
величина ог должна быть ограниченной, получим
-i(p = (P0-f-0/Icosre(p-r-(I,2ncos2re(p, A8.24)
где Ф0, Ф„, Ф2я —новые функции р, /г, /2. Проинтегрируем далее
уравнение A9) по методу Бубнова—Галеркина; тогда придем к
следующим двум зависимостям:
<Г=-С1& + С£ + С& + С£' + С!&, A8.25)
в& + в21 + вд, + в& + в£ + т2 = 0; 0 8.26)
здесь введены параметры
' = Ш' С = 4. * = £■ 08.27)
Коэффициенты Сх, .... С5 и Вх, .... В6 зависят от числа волн я.
Отметим, что безразмерная величина £ характеризует по B7) прогиб
центра панели. Исключая I из системы B5) — B6), находим
зависимость <7*(£), причем случай я = 0 соответствует осесимметричной
форме прогиба.
На рис. 18.8 приведена диаграмма q*(£,) для с/Л == 100 при
а = 0,1 и я = 0 (сплошная линия). Если построить кривые для пфО,
Что до значения £=7,5 они будут идти выше кривой,
соответствующей осесимметричной форме равновесия, а при О 7,5 — ниже этой
кривой. Для примера па рис. 18.8 приведена пунктирная линия,
относящаяся к и=10. Следовательно, несимметричная форма
выпучивания должна проявиться при прогибе в центре, равном 7,5
толщинам оболочки. Огибающая семейства кривых, соответствующих
различным п, при £ > 7,5 мало отличается от кривой, соответствующей
*) Это выражение было ранее использовано В. И. Феодосьевым при
рассмотрении гибких круглых пластинок [18.10].
44*
692 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
осесимметричной форме*). Нижнее критическое давление
оказывается близким к нулю.
Если рассмотреть аналогичным образом случай жесткой заделки
панели, когда точки кромки не смещаются, то нижнее критическое
давление при с/А = 100 окажется отрицательным.
2,5 5 7,5 W 12,5 15 17,5
С
Рис. 18.8. Диаграмма равновесных форм для конической паиеди.
Допустим, далее, что коническая панель со скользящей заделкой
по контуру подвергается действию сосредоточенной силы Р в центре,
направленной вдоль оси. Исследование осесимметричного выпучивания
панели приводит к следующей зависимости между нагрузкой Р и
стрелой прогиба /:
/* = 0,294£8-0,332^Р + [0.1б(^J-Ь 1.47]С
где P* = Pc2IEh2, C = //A.
§ 190. Сферическая панель
Перейдем к задаче об устойчивости пологого сферического
сегмента (рис. 18.9), нагруженного равномерно распределенным
внешним давлением. Эта задача послужила предметом многочисленных
исследований **); она оказалась достаточно трудной, и результаты
*) Этот вывод относится лишь к данному примеру. При других
параметрах оболочки результат может быть иным, так что исследование
несимметричного выпучивания окажется необходимым.
**) Первая работа в этом направлении относилась к расчету хлопающих
мембран и принадлежала В. И. Феодосьеву [18.9], [18.10].
ff 1901
СФЕРИЧЕСКАЯ ПАНЕЛЬ
693
40j
пабот различных авторов часто оказывались противоречивыми.
Изучение поведения пологой панели тесно связано с исследованиями,
относящимися к полной сферической оболочке или подъемистому
сегменту, так как панель
служит как бы моделью вмя- ' '
тины, развивающейся при
выпучивании таких
оболочек. Вместе с тем расчет
пологих панелей, форма
которых приближается к
сферической, имеет сам по себе
большое практическое
значение.
Обозначим через Н
стрелу подъема оболочки, через
с — радиус в плане, через
# — радиус кривизны
срединной поверхности, через р —половину угла, охватываемого
панелью. Как легко видеть, эти величины связаны соотношениями *)
R' h
Рис. 18.9. Сферическая пологая панель.
с2«2ЯЯ, р
»£■
A8.28)
До настоящего времени рассматривалась, как правило, осесим-
метричная форма выпучивания пологой сферической оболочки. Будем
исходить из уравнений типа A) и B), считая, что начальная погибь
отсутствует (а»0==0). Вводя полярные координаты и считая w = w(r),
ф=Ф(г), мы можем найти первый интеграл этих уравнений, как
в главе XVI. При q = const по A6.22) получим:
D
\ d dw I dw r \ d(b qr2 /1S9q^
A8.30)
d_
lirdr
1 d_ \__d_ dO_
~Er drT dr r dr
1 dw . r
2 dr
R
dw
dr
Введем безразмерные параметры **)
1 dw
P' = -
1 P2/?
/?P2 dd
0, Y =
dO
dr
Eh$Vm
1 /R\2 _ 1
yWq(hj ' m~~ 12A—и
Y~m h ' ~ IE
тогда уравнения B9) и C0) перейдут в следующие:
Z/(a) = p'(aY + .P02).
Z/(Y)=4p'@2-a2),
A8.31)
A8.32)
A8.33)
A8.34)
I *) Если исходить из указания Э. Рейсснера, приведенного на стр. 669,
to по B8) сферическую оболочку надо считать пологой при "/Л<7б-
**) Такие параметры введены Рейссом, Гринбергом и Келлером [18.16].
694 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
где под L' понимается линейный оператор
Параметры р' и Р связаны с введенными нами в главе XVI
величинами k и о соотношениями
p' = -l=rk, P = -£=. A8.36)
У т У т
Будем считать, что панель защемлена но контуру и что
радиальные смещения точек контура отсутствуют, как показано на рис. 18.9.
Тогда граничные условия получают вид
а = 0, Y = 0 при 0 = 0, A8.37)
а=1. -|| HY = 0 при 0=1. A8.38)
Один из вариантов решения задачи состоит в следующем [18.16].
Представим величины а и Y в виде рядов по степеням 0:
а=2а/-', Y=2Y„02"-1. A8.39)
п. п
Первое из выражений C9) представляет собой обобщение
аппроксимирующей формулы, которой мы пользовались в § 129 *) главы XI.
В самом деле, по A1.51) находим:
£—4/(£-£)—if-w-оч.
Увеличивая число удерживаемых членов в C9) по сравнению с A1.52),
мы повышаем точность решения.
Выражения C9) удовлетворяют граничным условиям C7). По C8)
получаем:
Е ап — 1 = О,
Ц[2л —A -|-ii)]Y» = 0.
л
Подставляя C9) в уравнения C3) и C4), имеем:
A8.40)
02=- 9- , Y2= / ,ч Для я = 2 A8.41)
8(аЛ + /?)' 8A -а\)
и, далее,
я-1
tt"=4/iU-l)Sa'V"-'- Y"=s-4>i(«-l)Sa*a"-' ДЛЯ П>2'
A8.42)
*) См. также первый член выражения B2), относящегося к конической
панели.
1190]
СФЕРИЧЕСКАЯ ПАНЕЛЬ
695
is- Эти формулы позволяют выразить все коэффициенты <х„ и уп
через cij и Yi- Уравнения D0) принимают тогда вид
F(a1, Yi) = 0. 0{щ, Yi) = 0. A8.43)
где F, О — нелинейные функции щ и Yi- В работе [18.16]
определение корней уравнений D3) было проведено с помощью цифровых
на диаграмме
электронных машин; находились точки /, 2, 3,
«нагрузка Р — стрела прогиба £»,
как показано на рис. 18.10.
Наиболее благоприятным был случай, когда
линия ОАВ, соединяющая эти точки,
имела нисходящую ветвь АВ: это
давало возможность с известной
уверенностью найти верхнюю
критическую нагрузку. Однако процесс
вычислений не всегда приводил к
нужным результатам. Так, например,
в отдельных случаях зависимость
P(Q получала вид, изображенный
иа рис. 18.10 пунктирной линией;
в некоторой точке С процесс
вычислений начинал расходиться. Такие
случаи вообще нередко встречаются
при решении систем нелинейных
уравнений в задачах устойчивости; они требуют дополнительного
исследования, так как могут быть вызваны особенностями принятой
программы вычислений. Во всяком случае, рискованно принимать точку С
для определения верхней критической нагрузки. Приводим
сравнительно надежные результаты, относящиеся к определению верхней
'Критической нагрузки. На рис. 18.11 приведена зависимость
верхнего критического давления qB от геометрических'параметров оболочки
при различных условиях закрепления: жесткого защемления по кон-
ТУРУ (кривая 1), шарнирного закрепления с несмещающимися в плане
.^точками контура (кривая 2) и шарнирного опирания со свободно
Умещающимся в плане контуром (кривая 3). По оси абсцисс отло-
|жена величина
р = Ур' = У2A — ц2) -^- = /12A — H2)k. A8.44)
Пользуясь соотношениями B8), выразим также параметр р через
^ношение H\h:
Рис. 18.10. Диаграммы «нагрузка
—прогиб» но данным вычислений иа
цифровых машинах.
н
р = 2 Y12 A — Ц2) -т- или, при (J, = 0,3, р я
По оси ординат откладываются значения параметра
6,6
Н
A8.45)
696 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
Судя по выражению A6.10), в D6) фигурирует величина
верхнего критического давления для полной сферы; обозначим ее через q0i B.
Следовательно, величина vB характеризует верхнюю критическую
нагрузку для пологой панели, отнесенную к q0i B; vB = qjgo, „• При
р > 40 (&>12) процесс вычислений сходился настолько медленно,
что результаты нельзя считать окончательными; соответствующие
участки кривых показаны на рис. 18.11 пунктиром. Обратимся прежде
всего к случаю защемленной по контуру панели. ЗначенИ! vB лежат
•£ н ♦ '
v
1,0
0,8
0,6
0,4
полной ыреры
jT^,
20
60
90
'W
120
Рис. 18.11. Верхняя критическая нагрузка для пологой сферической панели при
различных условиях закрепления.
при р < 25 значительно ниже 1; в то же время при 35 < р < 75
они превышают 1 и, наконец, при р > 75 снова лежат ниже 1. Такой,
на первый взгляд, неправдоподобный вид кривой vB(p) объясняется
тем, что в зависимости от значения р характер волнообразования
оболочки оказывается различным. Это обстоятельство подтверждается
экспериментами *), проведенными над оболочками, изготовленными
из магниевого сплава и жестко защемленными по контуру. При
малых р прогиб являлся максимальным в центре и монотонно
уменьшался по направлению к краю (рис. 18.12, а). При больших
значениях р средняя часть вмятины становилась более пологой, при р> 20
максимальный прогиб всегда имел место не в центре (рис. 18.12, (У).
В случае развитой вмятины максимум прогиба будет уже на рас-
*) Ряд опытов с пологими сферическими сегментами был проведен
Г. А. Генневым и Н. С. Чаусовым («Исследования по вопросам строительной
механики, М., 1956), а также Р. Г. Суркиным (см. § 181). Здесь приводятся
данные, полученные Капланом и Фыном [18.14].
i 190]
СФЕРИЧЕСКАЯ ПАНЕЛЬ
697
стоянии половины радиуса от центра. При р>55 появлялся новый
пик в центре (рис. 18.12,8).
Вернемся к графику рис. 18.11. Сравнение кривой 2 с кривой 1
показывает, что в определенной области, при 15 < р< 30, величина <7В
для случая шарнирного закрепления лежит выше, чем при защемлении
панели по контуру. Это объясняется, возможно, различным влиянием
изгибных напряжений, образующихся у края. В остальной области
а) 6) В)
Рис. 18.12. Формы волнообразования сферических панелей различной кривизны.
изменения р для шарнирно закрепленной оболочки мы получаем
значения vB меньшие, чем для защемленной. Особенно резко падает vB
при свободно смещающемся в плане контуре.
Отметим, что постановка задачи здесь отличается от принятой
в § 180. Там мы условно предполагали, что основное состояние
является безмоментным, и вводили первоначальный прогиб w0. Если
все же, пользуясь уравнениями A5.45), попытаться найти верхнее
критическое давление при £->0, то получим:
3A—ц2) ft ^ 15A — м.) R-
Если, далее, построить по этому уравнению кривую a№(k), то она
будет напоминать начальный участок кривой 1 рис. 18,11.
Все эти данные относятся к верхнему критическому давлению.
Судя по результатам экспериментов (см. ниже рис. 18.15),
выпучивание реальных оболочек1 происходит при нагрузке, лежащей, как
правило, значительно ниже qB. Очевидно, здесь проявляются те же
особенности задачи, что и в случае полной сферы. Поэтому
надежные основания для расчета можно получить лишь после исследования
характера других участков кривой q(t,) и определения нижнего
критического давления. Такие данные были получены с помощью
электронных цифровых машин *). Приведем окончательные
результаты вычислений. На рис. 18.13**) показана зависимость между
параметром нагрузки q* = qc^jEh4 и безразмерной стрелой прогиба
в центре £ —■aw/A для панелей, имеющих различную начальную
.Кривизну и жестко защемленных по контуру. При Hjh = 0 получаем
■ *) Эти исследования выполнены почти одновременно В. И. Феодосьевым
:н Тёрстоном [18.18]; отметим, что результаты этих работ, полученные раз-
Выми методами, оказались очень близкими между собой. Аналогичные дан-
i|?*e c помощью оригинального метода получили также И. И. Ворович и
Щ- Ф. Зипалова (Прикл. мат. и мех. 29, № 5 A965), 894—901).
% **) Графики рис. 18.13 и 18.16 принадлежат В. И. феодосьеву.
698 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVlIt
случай плоской пластинки. Далее, для весьма пологой панели
(Я/А < 1,5 или р < 11) нагрузка возрастает с увеличением £
монотонно, что соответствует рис. 18.2, а. Для панелей большей
кривизны график <7'(С) получает вид, показанный на рис. 18.2, б. На
графике отмечены значения верхнего и нижнего критических
давлений, причем максимальное значение H'h здесь составляет 4; это
отвечает р « 26.
50
3D
20
w-
—+-(-—
1/-*&
jzi9 4
1-0 М
III
i 15 2
/ /
Jjl
A-^ll
/SPl2.<.
10
J
и
7* у
2,Ь
II
3 15 $-♦
к
1 AS
S%0
У
/
/
\ \AUlt i
^-"Т Ч—■—й
1
.и I ? 3 1 5 6 7 8
Рис. 18.13. Верхние и нижние критические нагрузки для сферических панелей.
В случае р > 26 процесс вычислений значительно осложняется:
это объясняется изменением характера волнообразования в процессе
выпучивания оболочки. Как мы видели из рис. 18.12, максимальный
прогиб будет при р > 26 иметь место, как правило, не в центре
панели; на некоторых участках нагружения прогиб в центре w°
будет уменьшаться (см. рис. 18.2, г). Будем все же определять
параметр £ как прогиб в центре, отнесенный к толщине: £ = г0°/А.
На рис. 18.14*) изображены результаты вычисленый, относящиеся
к панелям несколько большего подъема, при 36<р<81. Для
значений р = 49 и р=64 было получено несколько различных ветвей
равновесных состояний оболочки, не связанных между собой. Одни
из этих ветвей соответствуют, по-видимому, устойчивым, а другие —
*) Графики рис. 18.14 и 18.15 получены Тёрстоном [18.18].
iieo]
СФЕРИЧЕСКАЯ ПАНЕЛЬ
699
неустойчивым формам равновесия. Отложенный здесь по оси ординат
параметр у равен
Y = 6(l— Ц2) 1^3A — \i2)q* или, при ц = 0,3, у~9<7*- A8.47)
Исследование кривых рис. 18.13 и 18.14 позволило определить
верхние и нижние значения критического -давления qB и qH при
О < р < 80. Эти окончатель-
гл ППиоапаии НО
5000
6000
Лр-36
0/>-49
о р-В
ар-д!
4000
3000
2000
1000 -
8 10 12 14 16 18 20
С
Рис. 18.14. Ветвн равновесных состояний
пологих оболочек различной кривизны.
ные данные приведены на
рис. 18.15; по оси ординат
отложены по-прежнему
параметры vB и v„,
характеризующие отношения qB и qK к
величине q0t в для полной сферы.
Кривая 2 для vB почти
совпадает с той, которая была
получена другими методами (см.
кривую / рис. 18.11); линия 3,
относящаяся к v„, является для
нас новой.
В практических
расчетах следует пользоваться
графиком рис. 18.15,
определяя для тщательно
изготовленных оболочек vH
непосредственно по кривой 3 графика,
а при относительно большой
начальной погиби — с уменьшением vH приблизительно на 40%.
В случае шарнирного закрепления оболочки можно получить
ориентировочные расчетные данные, сравнивая графики рис. 18.11 и 18.15.
Приведем данные, позволяющие судить о том, в каком соотношении
потенциальная энергия деформации оболочки делится на две части —
Энергию деформации срединной поверхности £/с и энергию изгиба U„.
На рис. 18.16 повторена кривая #*(£). относящаяся к защемленной
Ло контуру панели, при Я/А = 4. Здесь же показано, как меняется
Л процессе выпучивания отношение UJUc-\-U„, выраженное в %.
|Сак видим, при малых прогибах (£, < 1) основную долю — около 90%
фбщей энергии — занимает энергия деформации срединной поверхности;
рта пропорция сохраняется при q = qB. Затем удельный вес £/с быстро
$адает, но все же при нижнем критическом давлении £/с составляет
■йримерно 23% от общей энергии. При последующем выпучивании
:ДОля Uc снижается уже до 6%; вычисления для значений О 8 еще
проводились. Эти данные проясняют вопрос о возможности
енебрежения величинами £/с или £/в при исследовании различных
ов процесса выпучивания оболочки; надо, впрочем, иметь в виду,
fro они относятся только к отдельному примеру.
700 ПОЛОГИЕ ОБОЛОЧКИ ПРИ ПОПЕРЕЧНОЙ НАГРУЗКЕ [ГЛ. XVIII
Мы рассматривали выше лишь осесимметричную задачу. Однако
по аналогии со случаем конической панели естественно
предположить, что при некотором значении прогиба должно произойти
?,2
>,0
08
0,6
0,4
0,2
'
■
■
1 S/t^.2
1 lis \
Х--/-
К>
>
/—"—" '
<J0° > '.." о
л °7\
,■',!
k ^°*--5>^. ■■ - „ ■■■„
, . . ,
-—.з °
1
•
•
V
t'-M->-Y-
25
100
225
400 р 625
Рис. 18.15. Теоретические и экспериментальные значения критических нагрузок.
4 Ik* Uи
50 г Ш
Л
Рис. 18.16. Изменение удельного веса энергии деформации срединной
поверхности при выпучивании оболочки в большом.
образование волн по окружности, причем число волн будет зависеть
от интенсивности нагрузки.
Рассмотрение такой задачи было начато Э. И. Григолюком [18.3],
принявшим аппроксимирующее выражение в форме, аналогичной B2).
Использование метода Бубнова — Галеркина привело к системе двух
нелинейных алгебраических уравнений.
31
СФЕРИЧЕСКАЯ ПАНЕЛЬ
701
Джелзвик и Боднер *), а также Пармертер и Фын**) исследовали
эту задачу энергетическим методом (кривые 4 и 6 на рис. 18.15).
Из-за приближенного характера принятых форм прогиба полученные
ими результаты следует рассматривать, по-видимому, лишь с
качественной стороны. Решения, которые получили Вейничке [18.19]
и Хуан ***), основаны на предположении, что в начале нагружения
форма прогиба является осесимметричной, а при достижении
некоторого уровня нагрузки происходит волнообразование по иному
закону. В соответствии с таким предположением функция прогиба и
функция напряжений представлялись в виде суммы двух выражений,
одно из которых соответствует симметричной, а другое —
несимметричной формам. При изменении характера выпучивания прогибы
несимметричной формы являются малыми. Поэтому для определения
уровня нагрузки, соответствующего этому моменту, использовались
линеаризованные уравнения: в них были отброшены нелинейные
члены, связанные с несимметричной формой волнообразования.
Использование различных вычислительных схем привело Вейничке и Хуана
к разным результатам, представленным на рис. 18.15 (кривые 5 и 7).
Закритическое поведение сферических сегментов было
исследовано Фэмили и Арчером****) при конечных несимметричных
прогибах. Это дало возможность определить важные с практической точки
зрения значения нижней критической нагрузки (см. пунктирную линию
на рис. 18.15). Приведенные выше теоретические данные сопоставлены
на рис. 18.15 с экспериментальными значениями критического
давления (светлые кружки), полученными различными авторами.
Обратимся к случаю, когда сферическая панель подвергается
действию сосредоточенной силы в вершине *****). Для очень пологих
панелей (р < 16) в этом случае характерно плавное увеличение
прогиба. Явление прощелкивания наблюдается лишь у более
подъемистых сегментов (р > 25). При закритической деформации сегментов
с р> 104 область вмятины асимметрична и имеет вид треугольника
со скругленными вершинами.
Отметим своеобразный путь решения нелинейных задач теории
оболочек, предложенный Н. А. Кильчевским (Докл. АН УССР, № 7,
1962; Основы аналитической механики оболочек, часть 1, Киев, 1963),
■Заключающийся в использовании эквивалентной линейной модели
£с переменными упругими характеристиками.
;, *) A. Ojielsvik, S. R. Bod пег, Proc. of SCE, Journ. Eng.
•; Mech. Div. 88, № 5.
ik **) R. R. Parmerter, Y. С Fung, NASA TN D-1510, 1962, 491.
***) N. С Huang, Trans. ASME E31, 447—457 A964).
****) J. Famili, R. R. Archer, AIAA Journ. 3, 506-510 A965).
* *****^ £M) например, теоретические исследования А. В. Погорелова
1116.5], а также экспериментальные работы Эшвелла (Proc. JUT AM Symposium
|«n the theory of thin elastic shells, Amsterdam (I960), 43—46), Лу Та-Шеиь
ЩЧ Иван-Ивановского (J. Engng. Mech. Div. Proc. Amer. Soc. Civil Engrs,
§w. № 3 A964), PI, 255-270).
ГЛАВА XIX
УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК
§ 191. Основные уравнения линейной теории
трехслойных пластинок и оболочек
Трехслойная пластинка или оболочка состоит из двух тонких
внешних слоев, изготовленных из прочного материала (несущие слои),
между которыми размещается
относительно легкий и
малопрочный средний слой (заполнитель),
обеспечивающий совместную
работу внешних слоев. Несущие
слои обычно выполняются из
таких жестких материалов, как
металл, фанера, пластмасса. В
качестве заполнителя может
использоваться пенопласт, бальзовое
дерево, пористая резина, металл
в виде гофрированного листа или
сотовых ячеек (рис. 19.1).
Трехслойные конструкции находят все
более широкое применение в
самолетостроении, судостроении,
промышленном строительстве и
в других областях техники.
Конструкции, средний слой которых
выполнен из металлического
гофрированного листа или сот,
начинают применяться при
повышенных температурах.
Расчет трехслойных
конструкций наустойчивость должен вестись
с учетом различных видов выпучивания конструкции в целом и ее
отдельных элементов. Пусть трехслойная пластинка или пологая
оболочка со сплошным заполнителем нагружена симметрично
относительно срединной поверхности. Прежде всего, надо различать две
Рис. 19.1. Трехслойные панели с
заполнителями из а) сплошного пенопласта,
б) гофра, е) сот.
#191]
ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
703
формы потери устойчивости: общую, обусловленную, в основном,
искривлением срединной поверхности конструкции (рис. 19.2, а), и
местную, выражающуюся, главным образом, в искривлении
{сморщивании) внешних слоев (рис. 19.2, <?) и происходящую без
искривления пластинки или оболочки в целом. При местной потере
устойчивости внешнего слоя он может быть представлен как пластинка
или оболочка на упругом основании. В случае, если средний слой
выполнен в виде листа гофра или в виде ячеек сот, возможна, кроме
того, местная потеря
устойчивости стенок гофра или
пластинок сот.
Исследования
трехслойных конструкций на
устойчивость общего и местного
типа представляют собой
две самостоятельные
области, в каждой из которых
применяются свои
допущения. Такое разделение
оказывается возможным в связи
с тем, что для трехслойных
пластинок отсутствует
взаимное влияние этих форм
[19.5], а для трехслойных оболочек взаимным влиянием можно
пренебречь, если оболочка пологая [19.9].
В настоящей главе мы будем рассматривать лишь вопросы общей
устойчивости трехслойных пластинок и оболочек *).
Тонкие несущие слои трехслойных пластинок и оболочек
естественно представлять как обычные пластинки и оболочки, используя
при составлении уравнений для них гипотезу прямых нормалей.
Заполнитель трехслойной конструкции необходимо, вообще говоря,
рассматривать как тело трех измерений. В такой точной постановке
.был выполнен ряд исследований устойчивости трехслойных
пластинок **) Эти исследования сыграли роль в обосновании эффективных
Приближенных методов расчета трехслойных пластинок и оболочек, ис-
Яользующих некоторые допущения о работе заполнителя. Приближенная
Рис. 19.2. Кососимметричпая и симметричная формы
потери устойчивости.
*) Местная устойчивость внешних слоев в случае сплошного заполни-
Вля рассмотрена в работах А. П. Вороновича [19.5], В. И. Королева [19.8],
Л. Рабиновича [19.13], Кокса [19.15], Марча [19.24], Юсуффа [19.37];
*естная устойчивость в случае заполнителя типа гофра рассмотрена в ра-
№Ьте [19.3], а также А. Я. Александровым и Г. С. Шпаком (Расчеты
элементов авиационных конструкций 4, Машиностроение, 1965, 42 — 58). Неко-
Пфые работы по устойчивости трехслойных пластинок и оболочек отмечены
\ обзоре Хэбипа (L. H a b i p, Applied Mech. Reviews 18, № 2, 1965, 93—98).
**) В этом направлении были выполнены работы А. П. Воронови-
ем[19.5], Коксом [19.15], Рудьиром и Нео [19.18], Хантер-Тодом [19.21],
1ейбером [19.26], Легге и Хопкиисом [19.22] и другими авторами.
704 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
теория устойчивости трехслойных пластинок и оболочек в пределах
упругости и будет предметом настоящей главы *).
Сделаем некоторые допущения, касающиеся деформации
заполнителя при общей потере устойчивости пластинок и оболочек. Прежде
всего, будем пренебрегать поперечной сжимаемостью заполнителя, и
прогибы внешних слоев будем считать одинаковыми. Это допущение,
как показано в ряде работ [19.11], [19.27], оказывается приемлемым
для практических расчетов в весьма широком диапазоне.
Если заполнитель имеет жесткость того же порядка, что и
несущие слои, или отношение размеров пластинки к ее толщине велико,
то при расчете можно считать справедливой гипотезу прямых
нормалей для всего трехслойного пакета. Расчет в этом случае не будет
отличаться от расчета обычных однослойных пластинок и оболочек,
с той лишь разницей, что в нем будут использоваться жесткости
составных сечений. Однако, в большинстве случаев, из соображений
экономии веса трехслойная конструкция выполняется таким образом,
что заполнитель оказывается недостаточно жестким, и расчет
приходится вести с учетом деформаций поперечного сдвига заполнителя.
Собственно в учете влияния сдвига среднего слоя на работу
внешних слоев и состоит главное отличие расчета
трехслойных конструкций от расчета обычных
однослойных пластинок и оболочек.
Для учета деформаций поперечного сдвига
заполнителя введем следующее допущение. Будем
считать, что в заполнителе прямая линия, перпендику-
Рис. 19.3. Харак- ' I
тер распределения лярная к его срединной поверхности до деформации,
то1Ршин^трехслш°- остается прямой и в процессе деформации, но за
иой оболочки. счет сдвига перпендикулярность нарушается; иными
словами, по толщине заполнителя задается линейный
закон смешений. К тонким внешним слоям будем применять гипотезу
прямых нормалей. Таким образом, нормаль, проведенная через все
три слоя, в процессе деформации становится ломаной (рис. 19.3).
Такая расчетная схема для трехслойных пластинок и оболочек
является весьма общей и позволяет учесть как деформации сдвига
заполнителя, так и работу его на продольные силы и моменты. Но
учет воспринимаемых заполнителем продольных сил и моментов далеко
не всегда является необходимым. В случае, если отношение модуля
упругости несущего слоя Е к модулю упругости заполнителя Е3
в плоскости, параллельной несущим слоям, велико, а отношение
толщины несущего слоя t к толщине заполнителя 2Л не очень мало
(E3hjEt <0,1), то продольные силы воспринимаются почти целиком
*) Эта теория получила свое развитие в работах Нейта [19.25],
А. Л.Рабиновича [19.13], Рейсснера [19.27], А. П. Прусакова [19.11]. [19.12],
Хемпа [19.19], Лайбева и Батдорфа [19.23], Штейна и Менерса [19.31],
Хоффа [19.20], Э. И. Рриголюка [19.6], В. Ф. Караванона [19.7], Л. М. Кур-
шина [19.9J. [19.10] и других авторов.,
|§ 191) ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ 705
внешними слоями. Такие заполнители по установившейся
терминологии принято называть легкими. Таким образом, при расчете
трехслойных пластинок и оболочек с легким заполнителем можно
пренебрегать в среднем слое нормальными и касательными
напряжениями, лежащими в плоскости, параллельной несущим слоям. В
случае, если заполнитель воспринимает заметную часть продольных
усилий, его принято называть жестким заполнителем.
Гипотеза ломаной линии для смещений позволяет получить
уравнения трехслойных оболочек как с легким, так и с жестким
заполнителем. Мы дадим здесь
вывод уравнений для случая
легких заполнителей,
представляющих наибольший интерес для
практики. Попутно кратко
остановимся и на уравнениях
для жестких заполнителей.
Рассмотрим трехслойную
пологую оболочку с
одинаковыми внешними слоями и
легким заполнителем. Обозначим
через R1 и R2 главные
радиусы кривизн ее срединной
поверхности (рис. 19.4).
Криволинейные координаты х, у на срединной поверхности оболочки пусть
совпадают с линиями главных кривизн.
Для перемещений точек верхнего слоя при потере устойчивости
в соответствии с гипотезой прямых нормалей и с учетом пологости
оболочки находим (при (—h—f)^2-^(—A))*):
Рис. 19.4. Элемент трехслойной оболочки.
wB = wx, ив = и1 — Ьг + А+-^
t \ dw{
дх
va = v,
Z-+-/1-
:wn — w2,
■Un~-\Z
A —-
dw2
dx
t \ dwi .
J dy '
A9.1)
вдесь ux, vlt wl— смещения точек срединной поверхности верхнего
несущего слоя.
Аналогично для смещений точек нижнего слоя (при /i^.z-^fi-^1)
I , t\ dw2
A9.2)
Причем u2, v2, Щ — смещения точек срединной поверхности нижнего
^Несущего слоя. При исследовании деформаций общей потери
устойчивости трехслойной конструкции можно, как было указано выше,
■принять
?_ w^ — w^^w. A9.3)
? *) Индексы «в» и «н» здесь относятся к верхнему и нижнему слою,
в то время как в других разделах они соответствуют верхней и нижней
критической нагрузке.
i 45 А. с. Вольнир
S
706 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Смещения среднего слоя, в соответствии с гипотезой прямых линий
в заполнителе, равны (при — /г ^ г ^Щ
•Wr — W,
1 / I ч г
= (и,+и2) —
2/г
и2-
dw
1 , , . г I , dw
vc = 1(v1 + v.2)--^(vl-v2-t~^
Для деформаций слоев используем выражения
ди w dv w
A9.4)
е* -~ дх Ri' £У — ду R2
Y*y =
ди
dv
yz"
dv . dw
ди
dw
A9.5)
дг ~^~~дх
I
Последние два соотношения необходимы только для среднего слоя,
где имеют место деформации сдвига.
Будем рассматривать трехслойную оболочку с внутренними и
внешними слоями из изотропных материалов. Обозначим модуль сдвига
материала заполнителя через 03. Для напряжений во внешних слоях
имеем выражения
°Х = 1_A2 (е'Х + (*еу). °у = Y-
(еу-\-цех), т
ху— 2(l+|.i) **г
A9.6)
Касательные напряжения xxz, tyz во внешних слоях, как обычно
при использовании гипотезы о прямых нормалях, определяются из
уравнений равновесия элемента внешнего слоя. Для касательных
напряжений в заполнителе имеем:
■■03Ухг. tyt — Oab*-
A9.7)
Определим усилия во внешнем слое. Для этого проинтегрируем
напряжения F) по толщине внешнего слоя и учтем выражения для
деформаций E) и смещений A). Для усилий в верхнем несущем
слое получим:
г, I ди, . dv, w w \
вil>xL+»w-ж~llж)•
т а (dvi i ди, w w \
fy^ = B(-dy-^^~dT—R7-^l^)
т 1 — Ц о ( dvi . dui \.
Ti=—2-B[-dF + W}'
A9.8)
здесь B = Etj(\—ц2) — жесткость внешнего слоя.
Аналогичным образом для усилий в нижнем несущем слое NXt 2.
Л/УJ> ^2 получим те же выражения (8) с заменой в них и{, vx
соответственно через и2, г»2.
191]
ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
707
Для изгибающих (Мх, Му) и крутящих (Я) моментов во
внешних слоях относительно соответствующих срединных поверхностей
получим, вычисляя интегралы вида
-h
f
ax\z — h
-(л i-О
известные выражения:
2 J dz = Мх< J,
' d2w
Жу,, = Жу,2 = _я(-р-
Н1==Н2 = -A-11H
-Г-Н-
d2w
d2w
If)'
d2w'
дх2 '
Г
A9.9)
дх ду '
здесь D—цилиндрическая жесткость внешнего слоя: D = EfiJ\2{\ —\х2)
пт, di ах
'yf-
Рис. 19.5. Моменты и поперечные силы, действующие на элемент
внешнего слоя.
Определим касательные напряжения в заполнителе. Из G), E), D)
имеем:
^.-°.(£+£)--ЭД<.,-'Ма+4)£].
ъ.-°.(£+£)=-£&(».-Н»+4)£]-
Поперечные силы в заполнителе:
45*
A9.10)
A9.11)
708
УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Выделим из верхнего внешнего слоя элемент dx, dy. Рассмотрим
условия равновесия моментов (рис. 19.5) и продольных сил (рис. 19.6),
действующих на элемент. Обозначим через xXZil, т^л касательные
*~х
Рис. 19.6. Усилия, действующие иа элемент внешнего Рис. 19.7. Касательные напряжения,
слоя. обусловленные взаимодействием
внешних слоев с заполнителем.
напряжения, действующие в месте сопряжения внешнего слоя с
заполнителем. Из условия равновесия моментов найдем:
<?,.! =
дМ
X, 1
<5Я,
дх
Qv
дМ
у, 1
ду
дН{
t
-2Xxz,\>
СУ> 1 — ду
Условия равновесия сил дают
dN,.
дх
дТ,
дх
dN
ду
ду
~>~~ дх
lxz, 1
lyz, l
2 ТУ*'!'
= 0,
= 0.
A9.12)
A9.13)
Исключая из A2) напряжения ххгЛ, xyzA, с помощью A3) получим
выражения для поперечных сил во внешнем слое:
dMx,i , дНу t (dNx,i , дТ,
Q
x,l~
дх
Qy.i=-
дМ
у, 1
ду
дН,
W
дх
t /dN
у, 1
А
ду)'
дтл
дх
A9.14)
ду s дх 2 V ду
Аналогичным образом для нижнего слоя, учитывая направление
напряжений xxz, xyz (рис. 19.7), из уравнений равновесия элемента
будем иметь:
п _ дМх, 2 , дН2 , t (dNx, 2 , дТ2 \
Чх,2 Лг -г- л„ -г-2\ дх ~г~~ду~)'
дх
Qy, 2
дМ
У, 2
ду
ду
дН2
~дх~
ц
dN
у, 2
ду
ду
дТг
~дх
)•
A9.15)
1911
ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
709
Суммируя поперечные силы в заполнителе и внешних слоях,
получим для поперечных сил в трехслойной оболочке выражения
iti^-^+lr^-^].
л = Qy>3 + -£-(My, , + Му,2)+ -£-(//,+ Я2)-
ду
■i[ly(»y.i-N,.*+-Zc<r>-T*]-
A9.16)
Введем обозначения:
Ba = -2(«i + «2). "а = -2 («iH"«2).
"в = Т (*i — «г)- ^b^-o-^i —^г)-
A9.17)
Выразим суммарные усилия и моменты в трехслойной оболочке
через смещения точек срединных поверхностей внешних слоев. По (8)
и A7) получим:
Изгибающие и крутящие моменты в трехслойной оболочке
относительно ее срединной поверхности будут
му = мУ:, + мУ12 - (а + {) (лг„,! - л/У; 2),
я = я, + я2 - (а + {) (Г, - т2).
Используя (8), (9) и A7), получим:
pi, = -2Z)(.
<52до
~ду*
//==-2D(l_,a)-
d*w
дхду
A9.19)
710
УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Для поперечных сил в трехслойной оболочке A6) с учетом (8),
(9), A1) и A7) получим выражения через перемещения:
<?,=-
203[«р
h
Q*
20,
Bt
Bt
д2и
P
1 — 11 d2Ua
l+|.i d2v.
dx:
2 dy2 ' 2 u*dy
C»2fR
1 — |li d2v^ 1 -f- ji <52ыр
йу2
<5jc2
cbrdy
■)■
A9.20)
Обратимся к уравнениям равновесия элемента пологой
трехслойной оболочки в целом. Из условий равновесия сил в направлениях х
-мх+
Рис. 19.8. Усилия, действующие на эле- Рис. 19.9. Моменты, действующие на элемент
меит трехслойной оболочки. трехслойной оболочки.
и у получим (рис. 19.8):
<W, дТ
= 0,
dNv
дТ
• = 0.
дх ' ду ' ду ' cbt
Уравнения равновесия моментов (рис. 19.9) дают
ОМ,
+
<5#
-Q*
дМ,
A9.21)
A9.22)
дх т ду х' ду
Уравнение проекций сил на направление нормали с учетом
составляющих, обусловленных поворотом элемента, дает
N,
Nv
dQx
Ri
Я2
дх
д
^1 , ±
ду ' дх
*£)+
+4t(N°vh-UT°w)+-k(r,i!rh(>- <19-23)
Здесь Nx, Ny, ~T — усилия п оболочке до потери устойчивости,
§ 19П
ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
Учитывая, что усилия Nx, Л/у, Т удовлетворяют
равновесия, запишем уравнение B3) в виде
711
уравнениям
Nx
Я.
0QX
dQv
дх
ду
Лт0 <52да
■ N
о <52да
ду2
■27°
d2w
дх ду
= 0. A9.24)
Выразим в уравнениях B1), B2), B4) усилия и моменты через
перемещения точек срединных поверхностей внешних слоев с
помощью формул A8), A9), B0).
Кроме того, преобразуем уравнение B4), прибавив к нему
уравнения B2); продифференцировав их по х и у и умножив на 203,
получим систему уравнений устойчивости пологой трехслойной
оболочки в перемещениях:
д2иа , 1 — и- д2и„ , 1 4- (I d2vn д
+
'дх2 s 2 ду2
d2va , 1—ц d2va
ду2 ~i~~
Bh /д2и
1
2 дхду
1 -j- U. д2иа
дх
д
Р
дх2 ~ 2
1 — |Л <52ия
dx <5у <5у
1 4- (I d2v.
да , да \ _
дл:2
<5у2
Bh I
-vH*+t)£=°-
f \ <5да
<5у2
1 — (.i <52i/3
1 + 1.1
■2В
(*+1
V2
+
дх2
дх
дхду
(*+-т)-ЗГ
= о.
A9.25а)
+
ду
■2DV%4-
2В
<5у
ду
дип
да
"лГ
да
■Nx
о <52да
их Л2
то d2w
дх2
+n;
ду2
-ц
-27"
+
да
,о <52да
дх ду
0. A9.25Ь)
Систему уравнений B5) можно привести к одному разрешающему
Уравнению. Введем функцию усилий ф, полагая
Л/ =-^5-
■*■ <5у2 '
У дх2
д2<р
дхду
A9.26)
ь Исключив из трех соотношений A8) с учетом B6) функции иа
М va, получим уравнение
712 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Обозначив
дифференцируя третье уравнение системы B5) по х, а четвертое —
по у и складывая, получим:
£AV2F=G3[> — (л + 4) V2,ny] * A9l29)
Последнее уравнение системы B5) с учетом соотношений B6)
и B8) запишется в виде
+ <-& + «;|? + 27^=0. A9.30)
Из уравнений B9), C0) можно исключить функцию F. Получим
уравнение
Таким образом, для функции усилий ф и прогиба w мы получили
систему из двух уравнений B7), C1); их можно привести к одному
уравнению относительно прогиба:
25 [h ■+-1J 4«w + A — Щ- V2) [2DV% +
+ 2A_^__+__) w-
-^^ + ^ + 2^)Н- A9-82)
Заметим, что решение задач устойчивости с помощью одного
уравнения оказывается возможным в тех случаях, когда граничные
условия удается выразить через w. В противном случае приходится
обращаться к системе уравнений B5), позволяющей удовлетворить
граничным условиям, сформулированным относительно «„, г»е, иа, va.
В случае трехслойной пластинки (Rl = oo, R2 = oo) система
уравнений B5) распадается на две независимые системы: два
уравнения относительно функций иа, va, имеющих тривиальное решение,
и три уравнения для функций и„, v„, w. Эти три последних
уравнения и будут уравнениями устойчивости трехслойной пластинки с
Шт
ОСНОВНЫЕ УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
713
легким заполнителем, они имеют вид
Bh I
7 V
а2ир 1—ц д2ир 1-f-u d2v{
Bh
~Ql
дхг
ду2
ду2
•)-
дхду,
1—ц <?21>р l-f-ц д2ир
й*2
I
_2S(*+4)V'(.
ди«
dt/.
д2да
■2Г°
diw
= 0,
= 0.
A9.33)
дх2 ~"У ду2 ' дхду
Систему C3) можно привести к одному разрешающему уравнению
относительно прогиба:
d2w
dx2
X
d2w
-2Г
d2w
■ 0. A9.34)
dy2 dx dy)
Отметим, что в предельном случае, когда модуль сдвига 03
стремится к бесконечности, уравнения трехслойных пластинок и оболочек
приводятся к уравнениям однородных пластинок и пологих оболочек
с изгибной жесткостью 2 [D -\- В {h -{-t{2J\, т. е. с жесткостью
составного сечения из двух слоев, разнесенных на высоту заполнителя.
В другом предельном случае, когда О3—>0, получаются уравнения
для изолированных внешних слоев.
Итак, исходя из допущения о линейном распределении
перемещений по толщине заполнителя, мы получили уравнения устойчивости
пологой трехслойной оболочки с легким заполнителем, т. е. без учета
нормальных и касательных напряжений в заполнителе, параллельных
внешним слоям.
В практике расчета трехслойных пластинок и оболочек, как уже
было сказано, могут встретиться случаи и более жестких
заполнителей, когда в трехслойной конструкции заполнителем воспринимается
заметная часть продольных сил и моментов. В этом случае
необходимо учитывать напряжения в заполнителе, направленные параллельно
внешним слоям.
При решении задач устойчивости трехслойных пластинок и
оболочек со средним слоем типа гофра, сот или армированного пенопласта
можно введением приведенных жесткостных параметров заменить такие
заполнители некоторым эквивалентным однородным заполнителем *).
*) Для определения приведенных модулей упругости гофра и сот можно
воспользоваться работой [19.2]. Уравнения устойчивости пологих оболочек
с жестким ортотропным заполнителем можно иайти в работе [19.6].
714 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Выше были приведены основные уравнения линейной теории
трехслойных оболочек. Закритическое поведение трехслойных оболочек
описывается с помощью нелинейных уравнений *), обобщающих
соответствующие зависимости главы XII.
§ 192. Граничные условия
В отличие от однородных оболочек, где на контуре можно задать
четыре условия, для трехслойных оболочек должно быть задано
шесть условий.
Обратимся к краю оболочки х = const и выпишем для него
основные граничные условия.
1. Два граничных условия связаны с прогибами и поворотами
на контуре или, при статических граничных условиях, с поперечной
силой и моментами. В случае шарнирного опирания внешнего слоя
или свободной кромки граничное условие будет
пГ. ( d2w . d2w \ .
При защемлении внешних слоев будем иметь dw/dx = 0. Если
прогибы на контуре произвольны (край свободен от опор), имеем:
При наличии опор вместо этого имеем геометрическое условие w == 0.
2. Два граничных условия, связанных с перемещениями иа и va
или соответственно с усилиями Nх, Т, определяются характером
закрепления края оболочки в целом относительно смещений в
направлении, перпендикулярном к краю (иа), и в направлении,
касательном к краю (va).
В случае, если опоры препятствуют таким перемещениям, имеем:
Если смещения иа, va ничем не стеснены, вместо этих условий имеем:
диа , .. dva w w _ dva диа _ .
3. Последние два граничных условия связаны с перемещениями и„,
v„ или соответствующими усилиями и определяются характером
закрепления края оболочки в целом относительно поворотов в
направлении, перпендикулярном к опоре (и ), и относительно взаимных
*) Обзор работ в этой области дан Э. И. Григолюком и П. П. Чулковым,
Расчеты элементов авиационных конструкций 4, Машиностроение, 1965
100—133.
716 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК (ГЛ. XIX
устойчивости, так что
*р-
•■и&(х).
Jr
= 0, W = W(x), №X'
N, М°у = Г9 = 0.
Уравнения C3) запишутся в виде
d2Ua I t\ Jl d.W
d4a
dAw
ы
d&
d-V
d*w
'OF
A9.35)
Здесь ф — параметр критической нагрузки, связанный с N
соотношением
2я2В|
-Ы)'
введены безразмерные величины
пх
а ' О, а
£ = ■
,__Bh v? __
к — 75 ~ > г —
12
t у
»+4 Г
A9.36)
A9.37)
Найдем решение системы C5), полагая r==0 (D = 0).
Характеристическое уравнение системы в этом случае будет
а2[а2A— &ф) — ф] = 0. A9.38)
A9.39)
Решение запишется в виде
w =* A j sin аЕ, -f- Л2 cos <x| -f- Аз1 + Ар
ир = — -J (h + -j) [1+afa2 (Л2 sinal — Л, cos a|) — Л3] .
Значение a определяется условиями закрепления кромок пластинки.
Обратимся к граничным условиям. В связи с тем, что в
рассматриваемом случае условия, связанные с г>„, выпадают, должны быть
поставлены (с учетом допущения D = 0) два граничных условия на
каждой из кромок пластинки: относительно w и и„ или
соответствующих усилий. При шарнирном опирании граничные условия
будут в безразмерном виде
du.
w-
UUa
-jJ- = 0 при | = 0, l = n.
A9.40)
Подчиняя решение C9) граничным условиям D0), получим:
Л2 + Л4 = 0, А, sin ал ~\- Л2 cos ал -(- Л3л -J- Л4 = 0,
Л2 = 0, Л2а cos ал-f-^i« sin ал = 0.
Нетривиальное решение имеет место при равенстве нулю
определителя однородной системы, что дает уравнение sin ал = 0. Наи-
§1941 ПРЯМОУГОЛЬНАЯ СВОБОДНО ОПЕРТАЯ Г{ ЧАСТНИКА 717
меньшему значению критической нагрузки соответствует а= 1. Таким
образом, параметр критической нагрузки ф в формуле C6)
оказывается равным
Ф = ТТ*" A9.41)
В случае, если кромки пластинки защемлены, граничные
условия будут
«; = Ир=0 при |=0, | = я. A9.42)
Определитель системы, полученной в результате подчинения
решения C9) условиям D2), сводится к уравнению
. an Г . ал an а.чП .
Sln_^2sm— -T-j-^rcos-Tj = 0,
"из которого наименьшее а будет а = 2. Тогда
§ 194. Прямоугольная свободно опертая пластинка
при продольном сжатии
Перейдем к случаю прямоугольной пластинки шириной Ь,
равномерно сжатой усилиями *) Nx = — N. Вводя безразмерные величины
2 A9.44)
и коэффициент ф, равный
Kb2 ,,„,,.,
запишем уравнения C3) в виде
A9.46)
*) Эта задача исследовалась А. П. Вороновичем [19.5], Бижляром [19.14],
Хоффом [19.20] и др. авторами. В работах Бижляра [19.14], Сейде и Стоу-
влла [19.30] и А. П. Прусакова [19.11] дано решение задачи с учетом
работы внешних слоев пластинки за пределом упругости; см. также статью
Л. М. Курщина, Р. Е. Лампера, Ю. В. Липовцева (Расчеты элементов
авиационных конструкций 3, Машиностроение, 1965, 170—188).
718
УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
Получим сначала решение, полагая г = О (D = 0). На каждом из краев
пластинки должны быть поставлены три граничных условия.
При свободном опирании пластинки имеем условия:
дУа
при х = 0, х = а w=~-+a~-==0,
ах ' ду
при у —0, у = Ъ w ==—--{-ц —
ду
0.
A9.47)
Третье условие можно сформулировать различно. Если внешние
слои на опорах соединены диафрагмами, то должно быть:
при х~0, х = а г>р = 0; при у = 0, у = Ь ир=0. A9.48)
Если диафрагмы отсутствуют, то при х = 0, х = а, у = 0,
у = b будет
dfR дня
^F + ^f=°- A9-49)
Найдем решение задачи, полагая, что на контуре имеются диафрагмы
5
IS ,L 3,0
Рис. 19.10. График для параметра ф в случае свободно опертой
пластинки.
С учетом обозначений D4) граничные условия запишутся в виде:
OUa
при | = 0, | = я W-
при Y] = 0, г) = л w-
д%
■vo = 0,
dVi
В
A9.50)
д\\ 3 j
§ 195] ДРУГИЕ УСЛОВИЯ ЗАКРЕПЛЕНИЯ КРАЕВ 719
Граничным условиям и уравнениям D6) можно удовлетворить,
разыскивая решение в виде
<w = A sinm|sin«r), u„ = Bcosm^sinnt], v„ = Csmml,cosny\, A9.51)
где т и п — целые числа. Уравнения D6) дают однородную систему,
равенство нулю определителя которой приводит к уравнению для
параметра критической нагрузки Ф = тгХг fl"+"^ ("а + m2Xi)] ■
Очевидно, наименьшему значению ф соответствует д=1.
Обозначив т'к — mbja — ф, получим:
Целое число т в формуле E2) выбирается таким образом, чтобы
значение ф было наименьшим. Критическая нагрузка определяется
по формуле
I t \2
лг = ф у^-
На графике рис. 19.10 даны значения ф в зависимости от
отношения а\Ь для ряда значений параметра k.
§ 195. Другие условия закрепления краев.
Метод разделения жесткостей
При решении задач устойчивости прямоугольных пластинок, две
противоположные кромки которых свободно оперты, а на двух
других заданы различные условия, можно использовать метод Леви,
известный в теории однородных пластинок. Рассмотрим случай
прямоугольной пластинки, сжатой равномерно усилиями Nx = — N, не-
нагруженные кромки которой защемлены, а нагруженные
свободно оперты *). Полагая, что на кромках пластинки имеются
диафрагмы, запишем граничные условия с учетом обозначений D4)в виде
див
й6 Р } A9.53)
Т1 = 0, ц — п, w — v=u=0.
*) Решение этой задачи было получено в работах Сейде [19.29], Иена,
Салерно и Хоффа [19.36], А. П. Прусакова [19.11]. Другие граничные
условия рассмотрены Тёрстоном [19.32], А. В. Ивановым (Расчеты элементов
авиационных конструкций 4, Машиностроение, 1965, 134-149), А. П. Пруса-
ковым [19.11]. Задача об устойчивости длинной свободно опертой пластинки
при сдвиге рассматривалась Сейде [19.29], прямоугольной свободно опертой
пластинки при сдвиге — А. П. Вороновичем [19.5], при сдвиге совместно
со сжатием — А. П. Прусаковым [19.11], при сжатии в двух направлениях —
Рейсснером [19.27]. Устойчивость трехслойных пластинок с заполнителем
типа гофра рассматривалась Сейде [19.29].
720 устойчивость трехслойных пластинок и оболочек [гл. хгх
Решение уравнений D6) при г = 0 будем разыскивать в виде
w = /iOl)sinm|, ир =/2(ri) cos m|, ■y(j = /3(ri)sinm£, A9.54)
где /и—целое число. Граничные условия на кромках | = 0, | = л,
очевидно, выполняются. Вводя выражения E4) в уравнения D6),
получим систему обыкновенных дифференциальных уравнений для
функций / (г|):
1+|Х
-^72+V^2
kf'i
1 —I*
*Ф2/з
2 ■Аф/з-Л-ь(А-ь4)тфА = о.
A9.55)
где
- Ф72 4- Ф/2' 4- Ф2Л - Л' 4- ф (* 4-}) Т Ф7. = о,
Ф
_— = Я,«, ф== , ~
2я*в(й + |)
Характеристическое уравнение системы будет
[l — -Цр^2 — Ф2)] {(Y2 — Ф2J — ФФ2[1—ft(Y2— Ф2)Ц=0. A9.56)
Обозначив
Yb9 = */l_£±/*!£+£. 7з = ]/>
A9.57)
запишем решение системы E5) в виде
з
/2=2 (Л- ch YfT] -f- Ct sh y,ti),
2
fz = S ~| (C' ch W + Л'sh Y^) 4- ^ (C3ch y3m + Ля sh Y3r|),
/«.i
/.=
(А + у)яф/
S \k G2~Ф2)- 1] (^,— ch YjThK, sh ^л).
A9.58)
Подчиняя решение граничным условиям, получим систему
однородных уравнений относительно произвольных постоянных At, С{.
Приравнивая определитель этой системы нулю, получим уравяение,
которое распадается на два уравнения. Первое из них имеет вид
yJMyI-^-ij
th
Y,fi
■Y2[*(Y]-*2)-l]
,2\_ 1ИЬ_М1_|_
th
^MzAth^^o. A9.59)
Y» 2
ДРУГИЕ УСЛОВИЯ ЗАКРЕПЛЕНИЯ КРАЕВ
721
latopoe уравнение получается из уравнения E9) заменой всюду
функции М на с*'1- Расчеты показывают, что наименьшее значение ф дает
уравнение E9). При расчетах число полуволн т должно выбираться
из условия минимума ф. На графике рис. 19.11 даны значения ф для
ряда значений k в функции от отношения сторон а\Ъ.
2,5 3,0
а/б
Рис. 19.11. Значения параметра ф для пластинки с защемленными
продольными кромками.
i Особо рассмотрим случай сжатой длинной пластинки с
защемленными продольными кромками. Обратимся для решения этой
Задачи к приближенному методу разделения жесткостей *), за-
|шочаю1цемуся в следующем. В уравнении устойчивости трехслойной
Ьластинки C4) полагаем Nx = — Nnx, 1\у = — Nny, T° = — NnXt у;
рдесь N—искомый критический параметр при заданном характере
■вгружения пластинки усилиями пх, пу, пх>у. Уравнение примет вид
2в(/г + jJV4w + fl — ~^)[2ОТ*т-\-ЫР(т)]=0. A9.60)
lae
P(w)-.
n
d*w
x dx*
АгП
d2w . „
d2w
Далее рассмотрим три задачи устойчивости.
Допустим, прежде всего, что жесткость сдвига среднего слоя
^конечно велика @3—>оо), а изгибная жесткость внешних слоев
*) Этот метод был предложен Бижляром [19.14], решившим с его по-
№ю большое число различных задач.
46 А. С. Вольмир
722 устойчивость трехслойных пластинок и оболочек [гл. xix
равна нулю. Уравнение F0) примет вид
2B(h-\-jf\2V*w + NP(w) = 0. A9.61)
Далее, примем, что пластинка в основном работает на сдвиг
(Ос-->0), и, кроме того, как и в первом случае, примем D = 0.
Уравнение этой задачи будет
2B(h+j\2 V4w — ~NV2P(w) = 0. A9.62)
Наконец, будем считать равной нулю жесткость на растяжение
внешнего слоя (В = 0), тогда уравнение F0) перейдет в следующее:
2DV%>-f NP(w) = Q. A9.63)
Предположим, что во всех случаях формы потери устойчивости w
одинаковы. Если обозначить через Nx, N2, NQ критические нагрузки
соответственно для каждой из трех задач, то получим:
2В (h -+-1? V% = — NtP (w), ^- V2P (w) = — ^-P (w),
2DV% = — 4^P{w).
Вводя эти выражения в основное уравнение F0), находим
- N{P («О + (l + ^i.) (N - N0)P(w) = 0,
отсюда
N = N0 + i * , ■ A9.64)
N, ^ N2
Эта формула и является основной в методе разделения жестко-
стей. Длина полуволны выпучивания для N0, Nlt N2 принимается
одной и той же, она определяется из условия минимума N.
Находя Л/j, мы, по существу, рассматриваем случай однородной
пластинки. Полагая
. пх 1, 2яу\
W = sin -7—11 — cos—-~\
и интегрируя по методу Бубнова — Галеркина уравнение типа F1):
получим:
Н,-*"^ *+«+*» . „_£: (.9.65)
здесь L — половина длины волны при выпучивании.
1951
ДРУГИЕ УСЛОВИЯ ЗАКРЕПЛЕНИЯ КРАЕВ
723
Для определения М2 представим уравнение F2) в виде
t\2
к
V2w — /V, -3-5- = 0.
- ах2
Полагая w = F (у) sin (ях/L), получим уравнение
h+
t_\2
+ /V2-g-F = 0.
Интеграл этого уравнения будет
F (у) = Cl sin ку -f- C2 cos иу,
где
L2
iV,
20с(л + 1J
— 1
-
-
—
1J "
■ A
= ■
0/ Й4 0.6 0.3 L '.0
к
Рис. 19.12. Значения параметра ср для
бесконечно длинной пластинки с защемленными
кромками.
Используем граничные условия F@)= F ф) = 0; тогда найдем by. — я,
отсюда
N.
= 20CV h1} A-Й2)-
A9.66)
Обращаясь к формуле F4) и пренебрегая в ней изгибной
жесткостью внешних слоев (Л/0 = 0), получим окончательно
N
™вЫJ Р+0+
~" Ь> ЗР2
4р2J
1
.п25/г [2 + A+4П2]
"+~ Осй2 ЗР2A + Р2)
П. j. at 2я2В (й-И/2J .
Параметр ф в формуле Л/ = ф ^rj-1—L-i- будет равен
ф:
[2 + A+4р2J]A+р2)
ЗР20+Р2)+*[2 + 0+4Р2J]
Где k = n2Bh[G3b2. Параметр р определяется здесь из условия
минимума ф. Зависимость ф от параметра k представлена на рис. 19.12.
В заключение отметим, что метод разделения жесткостей дает для
реальных трехслойных пластинок вполне приемлемые результаты.
46*
724 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
§ 196. Устойчивость цилиндрической трехслойной панели
при сжатии
Перейдем к задачам, относящимся к трехслойным оболочкам.
Рассмотрим устойчивость в малом свободно опертой
цилиндрической панели, сжатой продольными равномерно распределенными
усилиями Nx= — N *). Уравнения устойчивости B5) при
допущении D = 0 запишутся в виде
дЧа 1
дх2
д2Уа
ду!
И. д2ца , 1+t* J2?a
2 ду2
1 —|х d2va
2 ~дх2~
2 дх ду
1+|х дгиа
\i dw
R дх
■■О,
дхду
1 dw „
R ду — '
A9.67а)
Bh
Bh
"о!
/ д2Ир 1 — ц д2ие | 1 + Ц й2ке \ I t\ dw \
Vdx1"! T~~df~~\ Т~ ~дх~ду)~ "р+Г + г/'дЗГ^0, j
(
ду2
•ц <Э2ив
1+ц <Э2и,
-2fl(A + 4)v»(.
2 дх2
дил .
d^c d>'
dvp
A9.67b)
дх
IB
ду
+
2B I
+ ТГ-
dfv
■ц
<Э«а
(be
<Э2и>
■N-^ = 0. A9.67с)
Полагая, что на кромках пластинки имеются диафрагмы,
граничные условия для случая свободного опирания запишем в форме
(см. § 196)
дия ди„
при
при
х = 0, х = а w = --f = г\,==г>„ = -т+! ==0,
у = 0, y = b W-
дх
dv„
ду
"а=="р:
дх
ди$
ду
= 0.
A9.68)
Разыскиваем решение уравнений F7) в виде
w = A1 sin m| sin nr\,
ua = A2 cos m£ sin ni\, u„ = Л3 cos m| sin rer),
г»а = Д, sin m£ cos nr|, v„ = Л5 sin m| cos rer);
здесь /re и n—целые числа, £==ях/а, т] = яу/#.
A9.69)
*) Решение задачи об устойчивости цилиндрической свободно опертой
панели с легким заполнителем получено в работе Штейна и Мейерса [19.31]
н в работе [19.9]. Другие граничные условия рассмотрены В. Ф. Каравано-
вым [19.7]. Ряд задач решен в работе [19.9] Л. М. Куршиным; им
исследована также задача об устойчивости при сдвиге и об устойчивости при
сжатии за пределами упругости.
УСТОЙЧИВОСТЬ ЦИЛИНДРИЧЕСКОЙ ТРЕХСЛОЙНОЙ ПАНЕЛИ ?25
Вводя перемещения F9) в уравнения F7), из условия равенства
яулю определителя системы найдем для параметра критической нагрузки
аыражение
Ф =
(п2 + тЧ1)*
тЧ* [1 -г- k (тЧ2 -f- n2)]
+ а2
тЧ2
здесь
9 =
Nbs
2л2В
Ы)
t\2 '
n2Bh
(тЧ2 -f л2J
*40-|х2)
A9.70)
Огб2 '
«*#(* + £)
П2 '
Значения целых чисел /те и га в формуле G0) определяются таким
образом, чтобы получить наименьшее значение ф. На рис. 19.13 даны
12
10
8
6
4
2
0 0,2 0,4 0,6
Рис. 19.13. Значения параметра q> для цилиндрической панели при а2 = 5,
к-
0,1
0,2
о,у
к-0А_
,
\
\
\[
«2-5
^
V
1,0 1,2 1,4 1,6 1,8 10
а/6
минимальные величины ф для некоторых значений k при а2 = 5.
Полученные результаты применимы, как показано в работе [19.10],
ври а2<A — k)jk2. В случае а2>A — k)[k2 надо учитывать
жесткость внешних слоев (см. [19.10]). Результаты без учета D дают
В этом случае несколько заниженное значение критической нагрузки.
• Некоторые исследования устойчивости трехслойных панелей
I большом [19.10] приводят к предварительному заключению, что
|ффект нелинейности задачи сказывается здесь не столь значительно,
|ак в случае однородной оболочки. Рассмотрение этого вопроса жела-
1№льно продолжить.
726 УСТОЙЧИВОСТЬ ТРЕХСЛОЙНЫХ ПЛАСТИНОК И ОБОЛОЧЕК [ГЛ. XIX
§ 197. Устойчивость трехслойного цилиндра
при продольном сжатии и внешнем давлении
Рассмотрим длинный трехслойный цилиндр с легким
заполнителем, нагруженный равномерной сжимающей продольной нагрузкой *)
Nx~—N. Будем и здесь исходить из линейных уравнений.
Уравнение устойчивости C2) относительно прогиба при условии
D = 0 запишется в виде
2В (,, + ±)>. + (, - - V*) Pl9^ + V'(«^)] = „.
A9.71)
Если потеря устойчивости является осесимметричной,
уравнение G1) примет вид
A9.72)
Полагая w = As\n(rix/L), где L — длина полуволны в продольном
направлении, из G2) найдем:
^f+nV' A9J3)
где
NR2 ______ _
______ __ Bh ft2_tf2(l-H2) „_яЛ
Ф — —-J—-jw Ai? — 7_Ж' P ~"
2_(,.+4f "*-<>_-• н-(й+4J
Из условия минимума G3) получим:
при Адр < 1 Y2 = 7_r^-p-; при/гйр>1 у2==с>0-
Таким образом, в первом случае
Ф = РB-/.др) A9-74)
и во втором
Ф = -г- A9.75)
KR
*) Линейные задачи об устойчивости трехслойных цилиндрических
оболочек с легким заполнителем при сжатии рассматривались в работах Легге
н Хонкипса [19.22], Штейна и Мейерса [19.31], Джерара [19.17]; см. также
работу Геллатли (R. Gellatly, AIAA Journ. 2, 1964, 398—400). Случай
заполнителя типа гофра рассмотрен в работах [19.31] и [19.9]. Устойчивость
трехслойного цилиндра при сжатии за пределом упругости рассмотрел Э. И. Гри-
голюк [19.6]. Задача об устойчивости длинного трехслойного цилиндра с легким
заполнителем при кручении решалась в работах Джерара [19.17], Л. М. Кур-
шина и Л. П. Денисовой ([19.7]; Расчеты элементов авиационных
конструкций 4, Машиностроение, 1965, 144—156). Устойчивость оболочек при
комбинированных нагрузках исследовалась Л. М. Куршяным (там же, 3, 158—169).
f"
;.| 197] ТРЕХСЛОЙНЫЙ ЦИЛИНДР 727
Исследование, проведенное для общего случая потери
устойчивости [19.9], показывает, что для трехслойных цилиндров при
R /(h -\- -к-) > 100 наименьшее значение критической нагрузки дает
симметричная форма. Отметим, что формула G5), полученная без
учета изгибпой жесткости внешних слоев, дает заниженное значение
нагрузки.
Желательно рассмотреть задачу об устойчивости цилиндрической
трехслойной оболочки с позиций нелинейной теории и провести
экспериментальные исследования, которые позволили бы оценить
практическое значение приведенных выше формул *).
В заключение приведем без вывода формулу для расчета на
устойчивость в малом длинного трехслойного цилиндра с легким
заполнителем, нагруженного равномерно распределенным наружным
давлением. Критическое давление определяется по формуле
/ t \2
6Д й + -
Я= Ri(L+uRy A9-76)
Потеря устойчивости здесь, как и в случае длинного однослойного
цилиндра, происходит с образованием двух волн в окружном
направлении.
*) См. статью Э. И. Григолюка и П. П. Чулкова (ссылка на стр. 714).
ГЛАВА XX
ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ
§ 198. Общие уравнения
В настоящей главе мы вернемся к вопросу о влиянии высоких
температур на устойчивость упругих систем, который отчасти
разбирался в главе VI. Как уже говорилось в § 65, относящиеся сюда
задачи являются актуальными для авиационных конструкций: расчет
обшивки летательных аппаратов, имеющих сверхзвуковую скорость
полета, ведется с учетом аэродинамического нагрева. Вопрос о
влиянии высоких температур важен также для расчета оболочек в
конструкциях двигателей. Но выпучивание оболочек под влиянием
температурных воздействий может произойти и в конструкциях,
относящихся к другим областям техники, например в оболочках башен
или резервуаров, испытывающих неравномерный нагрев в разных
направлениях.
Дополним основные уравнения теории гибких пологих оболочек
(приведенные в главе XII) в предположении, что температура
изменяется как в срединной поверхности, так и по толщине оболочки.
Запишем выражение для деформации гх вдоль линии кривизны х на
расстоянии z от срединной поверхности:
e* = 7F@*-^0yHa'O'*; (а)
под ozx и о* здесь понимаются напряжения в этом же слое оболочки,
под t 'z — температура в градусах С в данном слое, под Ег и р/—
модуль упругости и коэффициент Пуассона, зависящие, вообще
говоря, от температуры, и под a — коэффициент линейного
расширения материала. В дальнейшем будем считать величины Ег = Е и
р/ — р, постоянными по толщине и отвечающими температуре
срединного слоя.
Величина ггх, с другой стороны, равна
е2==е _г_^ (Ь)
I 198]
ОБЩИЕ УРАВНЕНИЯ
729
где под гх понимается деформация в срединной поверхности. Таким
образом, находим:
и аналогично
B0.2)
d2w 1 , , ,ч , ,п _
Умножим все члены выражений A) и B) на z и проинтегрируем по
толщине пластинки, тогда получим:
ft3 d2w
1
12 дх2
ft3 d2w
(Мх — \iMy) — -g-ов.
(М-цЛу _|Ue;
B0.3)
12 dy2 — E к У ^ x> 12
здесь /Их, /Иу— изгибающие моменты, а в — приведенная величина
«температурного момента»:
Л/2
®=-Щ [ e-zzdZ.
-Л/2
Найдем моменты по C):
«,=-D№
<52да \ ,
м.
—°(
д2да
<Эу2
И
д2да
йд 1
12 1—ц
+ С 12 1 —|х
ав,
ав.
B0.4)
B0.5)
Подставляя эти выражения в уравнение равновесия элемента
оболочки A2.115), придем к следующему окончательному уравнению*),
заменяющему A2.117):
-£?Ч» = 1(«,,Ф)Н-Л,.р.
а2Ф , q Eha
У дх2 ~ГТ~ 12A—ц)
у>е. Bо.б)
Далее, выпишем по A) и B) выражения для деформаций:
ъх— р-(ах — M-oy)-f- aT, £у = -р(Оу — цох)-\-аТ; B0.7)
8десь под Т понимается величина
Л/2
'=1 J '"
-Л/2
dz,
B0.8)
*) Уравнения F) и (9) содержатся в книге X. М. Муштари и К. 3. Га-
лимова [0.6]; см. также Л. М. Куршин, Изв. вузов, Авиац. техника, № 1,
1963, 151—156. Общие линейные уравнения приведены в книгах: В. Новац-
кого «Вопросы термоупругости», 1962; Б. Боли и Д. Уэйнера, «Теория
температурных напряжений», 1964.
730 Пластинки и оболочки при высоких температурах [гл. хх
ал, ау — напряжения в срединной поверхности. Подставляя G) в
уравнение совместности деформаций A2.110), получим взамен A2.119)
такое уравнение:
^.V«D = -i£(«, w)-kx^-ky^-aW. B0.9)
Рассмотрение уравнений F) и (9) показывает, что температурный
эффект сказывается в них только через лапласианы У2Г и V26.
Следовательно, если величины Т и в остаются вдоль линий х, у
постоянными или меняются по линейному закону, основные
дифференциальные уравнения будут такими же, как и для «холодной»
конструкции. Однако влияние температуры может все же сказаться через
граничные условия. Такой случай характерен для подкрепленных
конструкций. Если обшивка нагревается быстрее, чем подкрепляющие
ребра, то температурная деформация обшивки будет стеснена и
в обшивке могут возникнуть значительные сжимающие напряжения,
вызывающие выпучивание.
Если исследуются малые прогибы оболочки с учетом заданных
усилий в срединной поверхности, то уравнения F) и (9) перейдут
в следующие:
4-™=-*^-*, ■&-■**
под рг, ру по-прежнему понимаются заданные нормальные усилия
(положительные при сжатии), под s — касательные усилия.
Исключая отсюда Ф, получим следующее разрешающее уравнение
относительно w (при постоянных kx и ky):
D „8 , ,2 dAw . 0, , dAw . ,2 d*w .
^ E V \P* dx* I ^ E Г дхду j ^ E V [РУ dy2 /
- ж V4<H~ W^i) v6e + °** if V2T+ak>~w V2r=0- /20-l»)
Для круговой цилиндрической оболочки будет
•+Т2^^+|^г^ = »- B0-12)
199]
ПЛОСКАЯ ПОДКРЕПЛЕННАЯ ПАНЕЛЬ
731
Для тонких оболочек можно считать, что температура t 'z меняется
вдоль толщины по линейному закону. При таком допущении найдем:
Т = Г , в=-АГ. B0.13)
сред' \
Здесь АГ характеризует перепад температур tmQm и ^в„утр между
внешней (z = — А/2) и внутренней (z = А/2) поверхностями, a t° —
среднюю температуру:
д^о внеш гвнутр ,° внеш ~Т~ гвнутр ,ni\ i л\
2 ' сРеД 2 ' \ ■ >
Если считать ?е>=0, то по (9) получим известное уравнение
плоской задачи термоупругости *):
-1у4Ф = — aV27\ B0.15)
Если же принять Ф = 0, то придем к исходному уравнению задачи
об изгибе пластинок при неравномерном температурном поле:
DV*to = — 10/f*a ч у2°- B0.16)
12A—ц) ч '
При исследовании устойчивости оболочек в малом следует выписать
уравнения «в вариациях», которые можно получить из A0) — A2),
если под w и Ф понимать прогиб и функцию напряжений,
связанные с выпучиванием, и положить q=Q; температурные члены при
этом выпадают.
§ 199. Плоская подкрепленная панель
Рассмотрим случай, когда плоская прямоугольная панель обшивки
шарнирно скреплена по краям с жесткими на изгиб ребрами, так что-
точки всех краев панели не смещаются ни в плоскости пластинки,
ни в поперечном направлении. Примем, что температура изменяется
вдоль осей х, у (рис. 20.1) по параболическому закону
а по толщине является постоянной. Определим критические значения
параметров Т0 и 7^, при которых произойдет выпучивание
пластинки **).
*) Здесь рассматривается случай плоского напряженного состояния.
**) Эта задача была рассмотрена Клоснером и Форреем [20.15].
732 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
Напряжения основного состояния определяются из уравнения A5).
Интеграл этого уравнения выпишем в виде
ф=£а
cos
2тлх
■^вп
cos
2плу
+ЪЪс
£тлх
, cos-
COS
In яу
РхУ
Рч*
(а)
где рх, ру— средние сжимающие напряжения вдоль л: и у. Входящие
сюда постоянные определяются из граничных условий, отвечающих
У
Рис. 20.1. Подкрепленная пластинка при неравномерном нагреве.
неподвижным кромкам. Далее применяем метод Ритца. Выбираем
аппроксимирующее выражение для прогиба в виде
•ш
=SS'«
. тях . п%у
, SIH SHI—■—-
(Ь)
Минимизируя полную энергию системы по fmn, приходим к
системе линейных уравнений относительно fmn. Приравнивая, как
обычно, нулю определитель этой системы, находим критическое
напряжение. Результаты расчетов по [20.15], проведенных с
удержанием четырех членов ряда (Ь), приведены сплошными линиями на
рис. 20.2 (принято ц —0,32). По оси абсцисс отложено
отношение а/b, по оси ординат — значение коэффициента kT, определяющего
критический перепад температур Th кр по формуле
т - kr L(±Y
11. ч> — 1 — ^2 « U / '
^99] ПЛОСКАЯ ПОДКРЕПЛЕННАЯ ПАНЕЛЬ 733
(Кривые построены для различных отношений T0[Tj,
характеризующих температурное ноле. Пунктирными линиями даны результаты
'приближенного решения, в котором температура принимается
равномерной и соответствующей некоторому среднему значению между Т0
и Ту При Tq/T^ ,> 2 результаты уточненного и приближенного
решений можно считать
совпадающими, между тем как
в случае TujTx < 2 эффект
неравномерности
температурного поля оказывается
существенным.
Если рассмотреть
случай, когда подкрепляющие
ребра являются упругими и
деформация пластинки менее
стесненной, то
неравномерность распределения
температуры скажется еще
сильнее.
Вопрос о закритиче-
ской деформации нласти-
*яок при наличии
равномерного или неравномерного
^распределения температур
Йюляется важным, прежде
"£сего, для расчета обшив-
Йси летательных аппаратов.
ЁКак уже говорилось в главе IX, от амплитуд местных выпучим
Цависят аэродинамические характеристики конструкции. С одной
стороны, волнообразование обшивки ведет к увеличению лобового
сопротивления, а с другой — к усилению турбулентности потока, что,
свою очередь, связано с появлением опасных колебаний и разви-
ием усталостных трещин *). Наконец, необходимо определить влия-
Ве высоких температур на редукционные коэффициенты. Задачи
Кзакритическом термическом выпучивании пластинок должны решаться
■помощью уравнений F) и (9). Некоторые результаты в этой обла-
были получены Ван-дер-Нойтом [20.18], а также В. В.
Болотном и Ю. Н. Новичковым [20.5].
| Случай цилиндрической панели при неравномерном распределении
«пературы по толщине был рассмотрен с помощью уравнений F)
;(9) М. С. Танеевой [20.3]. Задачи, относящиеся к устойчивости
фуговых пластинок при неравномерном распределении температур
|оль радиуса, исследовались С. Г. Винокуровым [20.1] и Э. И. Гри-
jteoKOM [20,4].
о,ь
0,5
0,4
о,з
0,2
0J
0
i
\
\
\
i \
\ \
\ \
\ \
д
\ ч
ч^ч..
i
.<тг-^У
т^
ч.
ч.
'^__
,2
~Т~
~~~~?
—d—
3
0,5-
4
--
a/b
Рис. 20.2. К определению критических температур
в случае подкрепленной пластинки.
*) На это указывается, в частности, в статье Ван-дер-Нойта [20.18].
734 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
§ 200. Подкрепленная цилиндрическая оболочка
Обратимся к задачам об устойчивости оболочек при
повышенных температурах. Эти задачи представляют особый интерес для
расчета тонкостенных конструкций: термическое выпучивание оболочки,
часто сопровождающееся хлопками, ведет к появлению остаточных
деформаций и снижению жесткости конструкции; такое явление, как
правило, является недопустимым. Кроме
того, температурные напряжения, даже
если они являются сами по себе
незначительными, могут служить тем
возмущающим фактором, который в соединении
с основными усилиями вызывает потерю
устойчивости оболочки в большом.
Рассмотрим сначала случай
равномерно нагретой круговой цилиндрической
оболочки, скрепленной по торцам с
«холодными» шпангоутами (рис. 20.3), при
условии, что торцы свободно
смещаются в осевом направлении друг
относительно друга. Примем, что разность
температур оболочки и шпангоутов
составляет Т. «Холодный» шпангоут
препятствует температурному удлинению
оболочки в окружном направлении; поэтому в оболочке возникают
кольцевые сжимающие напряжения. Величина их падает по мере
удаления рассматриваемой точки от шпангоута; мы получаем здесь
паиряженпое состояние типа краевого эффекта. В тот момент, когда
сжимающие напряжения достигают критического уровня, вблизи
шпангоута возникают выпучины; осевая симметрия изгиба оболочки
нарушается. Определим критическую температуру, при которой
происходит такое выпучивание оболочки в малом *). Эта задача очень
близка к тем задачам об устойчивости оболочек в зоне краевого
эффекта, которые рассматривались в § 163.
Будем считать, что в осевом направлении оболочка деформируется
свободно и что но торцам имеет место защемление. Для того, чтобы
найти напряжения в докритическом состоянии, воспользуемся первым
из уравнений A0). Для осесимметричной задачи при равномерном
распределении температур будет
Рис. 20.3. Оболочка в случае
неравномерного распределения
температур вдоль образующей.
ИЛИ
D dAw
D d*w
~ R — R Еу
B0.17)
h dx*
E I .j, w
Т\аТ~Т
*) Подобная задача рассматривалась Цуком [20.22], Джонсом [20.11],
Хоффом [20.14], Л. М. Куршиным.
ПОДКРЕПЛЕННАЯ ЦИЛИНДРИЧЕСКАЯ ОБОЛОЧКА 735
Отсюда вытекает следующее уравнение:
Rh2 d4w . w
12A—ц2) rfA-4
= аГ;
B0.18)
ПрИ Т = 0 оно переходит в уравнение A3.192). Интегрируя A8)
с учетом граничных условий
w = 0, -т—= 0 при л;:=0, x = L,
находим:
w = aRT[ 1 — е~2& (Л, cos 2рх + Л2sin 2р*) —
— e-2i5(i-^,cos2p(l — i)-f- A2sm2$(l— х)), B0.19)
где
Х = Т' Р=4УзA-и2))/-
Rh "
10
Ear
075
Через Л,, Л2 обозначены некоторые функции величины р,
характеризующей относительную
длину оболочки. Пользуясь
A7), определяем по A9)
кольцевые напряжения ау.
На рис. 20.4 сплошными
линиями показана
зависимость величины OyjEaT от
х при различных
значениях р. Пунктирной линией
изображена функция
-~- = zos2nx. B0.20)
0,5
0,25
0
ч
\ч
V»
\ а
\
л
J
-=£>
ь
\ч
_/-/'/7
. -.
t "
SR
—"Д ♦
J5=l,03
ч ^
\
Ч
ч.
0.1
0,2
0,3
0,4
0,5
Как видно из графика, она
приблизительно отвечает
параметру E = 2.
Возьмем для примера
зависимость B0) в качестве
, исходной *) и определим критический перепад температур. Будем
^исходить из уравнения A2); в нашем случае оно принимает вид
Рис. 20.4. К расчету на устойчивость оболочки при
неравномерном распределении температур.
к
D
Eh
V8«M
1 d4w
>(•,&)-*
I Здесь под w понимается дополнительный прогиб. Аппроксимируя w
t € помощью выражения
t г ■ о ПХ . Пу
| w = /sir-j- sm~p~
*) Такое предположение было сделано Цуком [20.22].
736 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
и пользуясь методом Бубнова—Галеркина, приходим к следующему
выражению для критической температуры *):
1
1 +
A+4Ф2L
4- 128
ф6K2
B0.21)
кр /3A—|х2) Ra { 40V
где ф = nR/nL. Фигурирующее здесь число воли п должно быть
определено из условия минимума Т
Приведем полученные другим путем расчетные формулы,
относящиеся к длинным оболочкам, при р > 5. При защемлении по торцу
критическая температура равна
Ткр= г 6-41==А, B0.22)
кр /3A— ц2) aR к '
B0.23)
а при шарнирном оиирании по торцу
Т — 12,21 h
кр ~~ /3A-ц2) aR '
Соответствующее кольцевое напряжение вблизи шпангоутов равно
в первом случае aKp = 3,88£7z/#, а во втором акр = 7,4£Уг/#. To
обстоятельство, что величина Гкр получается для шарнирно опертой
оболочки выше, чем для
защемленной, объясняется
большей податливостью шарнирно
опертой оболочки при нагреве.
Судя по приведенным
выражениям для акр) термическое
выпучивание защемленных по
торцам дюралюминовых
оболочек при Rjh < 1500 будет
происходить уже за
пределами упругости.
В случае, если торцы
оболочки не могут смещаться
друг относительно друга, при возрастании температуры в оболочке
возникнут осевые сжимающие напряжения. При этом следует ожидать
выпучивания по рис. 20.5, а в пределах упругости и по рис. 20.5, б— в
упруго-пластической области.
Значительный интерес представляют также задачи о выпучивании
цилиндрических оболочек при температуре, изменяющейся вдоль
окружности. Примером может служить оболочка, частично
наполненная жидкостью **) (рис. 20.6, а). Допустим, что зона оболочки,
°)
6)
Рис. 20.5. Термическое выпучивание
оболочки: а) с образованием ромбовидных
вмятин, б) осесимметричное.
*) Это выражение получено Л. М. Куршиным; ему же принадлежат
формулы B2) и B3).
**) Эта задача была рассмотрена В. И. Ускжиным, им же проведены
описанные здесь эксперименты.
|?ЯI] ВЫПУЧИВАНИЕ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ ПОЛЗУЧЕСТИ 737
;оприкасающаяся с жидкостью, имеет температуру более низкую, чем
)стальная зона, и разность температур составляет Т (рис. 20.6, б).
Тогда в области повышенных температур возникнут участки со
;жимающими напряжениями (рис. 20.6., а), и здесь может произойти
выпучивание. Такой вывод подтверждается экспериментами. Вмятины
1меют форму ромба и располагаются в средней части оболочки по
длине (рис. 20.7); появление вмятин
обычно сопровождается хлопком.
Путь решения подобной
задачи состоит в следующем.
Рис. 20.7. Выпучивание оболочки при
неравномерном распределении
температур вдоль окружности.
Определяется эпюра распределения начальных напряжений; решающее
значение здесь имеют осевые напряжения ах. Эпюра имеет различный
вид в зависимости от соотношения между размерами нагретой и
холодной зон. Далее, для решения задачи об устойчивости в
малом используется уравнение A2). Подробное исследование
показывает, что практические расчеты можно производить, как в случае
выпучивания оболочки при изгибе, по наибольшему напряжению сжатия,
сравнивая его с величиной 0,6QbEhjR. Желательно рассмотреть такую
задачу в нелинейной постановке.
§ 201. Выпучивание пластинок и оболочек
при ползучести
Перейдем к задачам о выпучивании пластинок и оболочек при
ползучести. Они являются более сложными, чем аналогичные задачи,
относящиеся к стержням (см. главу VI), так как здесь в каждом
слое пластинки или оболочки образуется не одноосное, а двухосное
напряженное состояние. Между тем законы ползучести при сложном
напряженном состоянии сами по себе еще не являются выясненными.
Кроме того, особенность явления выпучивания пластинок и оболочек
при ползучести состоит в том, что при прогибах, сравнимых с их
толщиной, проявляется эффект цепных напряжений. Как мы
увидим, для пластинок это влияние сводится к тому, что процесс
Выпучивания пластинки «тормозится» и нарастание прогибов затухает.
о) б)
Рис. 20.6. Оболочка в случае
температуры, изменяющейся вдоль окружности.
47 А. С. Вольмир
738 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
В то же время для оболочек, подвергающихся ползучести,
характерным является выпучивание в процессе хлопка. Поэтому
исследование этого явления будет достаточно полным лишь в том случае,
если оно проводится с позиций устойчивости в большом. На рис. 20.8
сопоставляются характерные диаграммы «стрела прогиба £ — время t»
для стержней, пластинок и оболочек. Здесь рассматриваются
элементы конструкций, приближающиеся к реальным и имеющие ту или
I #- С ^-. С ^
а) ' б) ' В) '
Рис. 20.8. Характерные диаграммы «прогиб — время» для стержня, пластинки и оболочки
при ползучести.
иную начальную погибь. В случае стержня прогибы монотонно
нарастают во времени (рис. 20.8, а). Прогибы пластинки сначала
увеличиваются ускоренно, затем скорость возрастания прогибов
постепенно падает (ркс. 20.8, б). Наконец, в случае оболочки монотонное
увеличение прогибов завершается хлопком (рис. 20.8, в). Эти
диаграммы намеренно упрощены; в отдельных опытах может проявиться
влияние таких факторов, как несоответствие формы начального
прогиба и формы выпучивания, соотношение между неустановившейся
и установившейся ползучестью и т. д. Какой же вид будет иметь
диаграмма «прогиб — время» для идеального элемента конструкции,
не имеющего начальных несовершенств? Можно ли получить такую
зависимость как предельную по диаграммам типа рис. 20.8, устремляя
начальные прогибы к нулю? По-видимому, на этот вопрос в
настоящее время еще нельзя дать окончательного ответа. Все же в ряде
работ предложены критерии выпучивания идеальных конструкций,
изложенные в § 70. Для пластинок и оболочек часто применяют
критерий критической деформации *). Например, для сжатой
в одном направлении удлиненной пластинки ширины b критическая
деформация в упругой области равна
екр«3,62(А]2. («)
«
*) См. работу Джерара и Гильберта [20.10]. Несколько иной подход
предложен в другой статье Джерара (J. Aerospace Scl. 2A, Ха 9, 1962).
ВЫПУЧИВАНИЕ ПЛАСТИНКИ. ИМЕЮЩЕЙ НАЧАЛЬНУЮ ПОГИБЬ 739
Принимают, что выпучивание при ползучести наступит, когда
сближение нагруженных кромок достигнет этой неличины. Для сжатой
круговой цилиндрической оболочки аналогичный подход приводит
к формуле
h
екр,в = 0.605 —
R
(Ь)
если за основу брать верхнюю критическую нагрузку. Но, как мы
увидим ниже, расчет по (Ь) дает резко завышенные значения
критического времени; лучше согласуется с опытами расчет по нижней
критической деформации:
ега „«0.184. (с)
'кр, и
R
Динамический критерий устойчивости пластинок при
ползучести был развит Ю. И. Работповым и С. А. Шестериковым [6.6].
В. М. Панферов предложил метод определения критического времени
при неустановившейся ползучести на основе серии экспериментов
по растяжению образцов при заданных скоростях изменения
деформации.
В дальнейшем мы подробно остановимся на критерии начальных
несовершенств; будем при этом считать, что начальные и
дополнительные прогибы сравнимы с толщиной пластинки или оболочки.
§ 202. Выпучивание пластинки, имеющей начальную погибь
Исследуем случай прямоугольной пластинки со сторонами а, Ь,
опертой по краям и сжатой вдоль кромок а (рис. 20.9); примем,
что кромки пластинки остаются прямолинейными и что ненагружен-
ные края свободно сближаются *).
Основные уравнения выпишем по A2.121):
D_
h
■ V4 (w — w0) = L (w, Ф),
_ У4Ф = j[L («i0. wQ) - L (w. w)},
B0.24)
где w и w0—полный и начальный прогибы.
Решая задачу в первом приближении, примем для прогибов
аппроксимирующие выражения
71Х
w—fsm— sin ,
J a b
, . ях . яу
w0 = f0sm—s\n-f-
B0.25)
Подставляя B5) в правую часть второго из уравнений B4),
Находим:
: *-&/>-i>[w«-¥-+W'«!p-]-q-- «>•*>
*) В таком виде задача была рассмотрена автором в 1959 г.
47*
740
ПЛАСТИНКИ И ОВОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
под р понимается интенсивность усилий сжатия. Напряжения в
срединной поверхности будут
ах = ■
д2Ф
д2Ф
д2Ф
ду2 ' У дх2 ' 1~~ дхду '
Напряжения изгиба, наибольшие по толщине пластинки, равны
B0.27)
+ 2A
Eh Г
1—м-2> L
д2 (w — w0)
дх2
д2 (w — wa)
ду2
_ Eh д2 (w — w0)
т"~+ 2(l+u)
— - Eh Г
°у.и— + 2A—u2) L
+ И
+ И
]■
дг (w — w о)
ду2
д2 (w —w0)l
дх2
дх ду
B0.28)
Знак минус относится к точкам пластинки (рис. 20.9, б),
лежащим у нижней поверхности (z = /z/2), знак плюс—к точкам у
гп
I)
Рис. 20.9. Квадратная плоская панель, сжатая вдоль
одной из сторон.
верхней поверхности (z — — Л/2). Определим полные напряжения
для центра пластинки (х = а;2, у = Л/2):
ох. п - -^(/2 ~ Л) ± 2A _ ^ (/ - /о)(*Г + -рг)-Р.
a — J*L(fi-fb + л2Е,г (f—fn)(±-L.JL\ 1 B0.29)
тп = 0.
Интенсивность напряжений в каждой из точек с координатами
г = ± Л/2 равна
'202] ВЫПУЧИВАНИЕ ПЛАСТИНКИ, ИМЕЮЩЕЙ НАЧАЛЬНУЮ ПОГИБЬ 741
этой величине соответствует интенсивность деформаций f, = at/E;
во всех случаях под Е понимается модуль упругости материала при
соответствующей температуре; принимается, что в течение всего
процесса деформации пластинки напряжения лежат в пределах
пропорциональности.
Перейдем к безразмерным параметрам
4bi aib2 . о*, п lb\2 . tfy, п /а\2
°;
G*
1
~ t2^-
= Y«T +
-О
ft
+
<
2A
' —-
-и2) ^
и °А-
'=4- ^Х' ^Т' ^Щ'' B0.31)
Условимся в дальнейшем сжимающие напряжения считать
положительными. Тогда получим:
< = - -&№-Q + ffj^l (C-Q 4 р*. B0.32)
Со), B0.33)
B0.34)
Допустим, что н начальный момент времени пластинка
испытывает сжатие усилиями р. В дополнение к начальным прогибам она
сразу же получает упругие прогибы. Для определения
дополнительной стрелы прогиба надо обратиться к первому из уравнений B4).
Если подставить в это уравнение выражения для w, w0 и Ф и
воспользоваться методом Бубнова — Галеркина, то придем к следующей
зависимости (см. книгу [0.3], стр. 286):
р* = К + ж Чг~&2 + &>>] ^ • B0-35)
Здесь под р* понимается параметр критического сжимающего
напряжения:
При заданном параметре сжимающего усилия р* из C5) можно
найти стрелу полного прогиба £. Зная £, можем определить
интенсивность деформаций в любой точке пластинки. Будем для
упрощения ограничиваться определением интенсивности деформаций в двух
точках нормали г = ± /г/2 для центра пластинки при х — а/2, у = Ь/2.
Для характеристики процесса ползучести при сложном
напряженном состоянии будем пользоваться зависимостями теории упруго-
пластических деформаций. Введем понятие интенсивности
деформаций ползучести:
742 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
8^ = ^ L> Ь^-Чг. -■ B0-39)
Воспользуемся теорией старения и примем для примера, что
при установившейся ползучести неличина Е; является функцией
интенсивности напряжений О; и времени t:
tt = Aa?t. B0.38)
Предполагается, что этот закон имеет место, в частности, при
одноосном растяжении и сжатии с неизменными для данного
материала параметрами А и т. Для определения составляющих
деформации ползучести будем пользоваться соотношениями
~ч (g*--r) - = 8~Ту~т)
Введем обозначения:
~щЬ2 - 1ХЬ* _ 1,а2 т/й\2т~2
<=-ь-- е;=-^-- e;=v- А*=АЕт[т) • B°-4°)
тогда соотношения C8) и C9) примут вид
z] = A'(a*)mt, B0.41)
-(• а1\ —(• ЯЧ\
е'= V . 7 , <= V . 2 '-. B0.42)
Примем следующий порядок расчета. Допустим, что пластинка
подвергается действию постоянных по величине усилий р. Рассмотрим
некоторый промежуток времени Af, считая от начала процесса
ползучести. Вычислим интенсивность напряжений в точках z = ± /г/2 для
центра пластинки. Далее по выражению D1) установим
интенсивность деформаций ползучести и по D2) — составляющие е* и е*.
*-» х у
Следующий шаг должен состоять в определении дополнительных
прогибов Ата пластинки, вызванных ползучестью. Для этого восполь-
вуемся соотношением, относящимся к точке z — h/2:
Ъ*. 1*2=-?%£-• B0-43)
Принимая
Aw=:A/sin-^sm^-, At, = ^f, B0.44)
для центра пластинки получим:
(£U/2 = fД^ B0-45>
При z = — А/2 будет
Й] ВЫПУЧИВАНИЕ ПЛАСТИНКИ, ИМЕЮЩЕЙ НАЧАЛЬНУЮ ПОГИБЬ
Запишем выражение для Д£ в виде
1
743
A^7[(Clr«»)-J
B0.47)
От деформаций изгиба можно перейти к полным деформациям
так как деформации в срединной поверхности будут при вычитание
исключаться. Получим:
A?=i[(eU/2-(s;,n)_j- Bo-48>
Прибавляя приращение стрелы прогиба Д£ к начальной стреле £о,
найдем новую стрелу прогиба £0:
Со = С04Д£. B0.49)
Величину £i рассматриваем как начальную стрелу прогиба для
следующего промежутка времени АЛ Повторяя эту процедуру, можно
проследить за развитием пластических и упругих деформаций
пластинки.
Пример 20.1. Рассмотрим случай квадратной дюралюминовой
пластинки, для которой отношение а/А составляет 60. Усилия сжатия примем
равными 80% от критической величины:
р = Qfip = 0,8 • 3,6 = 2,88.
(а)
Составим соотношение C5). Вводя
обозначение А — £/(;„, получим:
f = 3,6 (l-j)+ 1.23 (А2-
В данном примере будет
■D&
г2.
*0"
5 —А
1,7* (А2-1)
(Ь)
(с)
0
0
г
1
п
Пользуясь выражением (Ь), составляем ^
таблицу или график для зависимости £0 (А). Рис. 20.10. Зависимость между
Подобный График изображен на рис. 20.10. полной и начальной стрелами про-
Пусть температура окружающей среды гиба для пластинки.
составляет 300° С. Модуль упругости дюралю-
мина при этой температуре примем равным £ = 4-105 кг/см2. Закон
ползучести зададим в виде
i,=9.10-I2a?*, (d)
аричем 0; выражается в кг/см2, t — в часах. При т — 3 по выражению D0)
А* = 9 • 10" '2 D • 105K -^L- = 0,0445,
В, далее,
ij = 0,0445(a*K/.
(е)
(f)
jf Примем начальную стрелу прогиба равной /о = 0,1А илн £„ = 0,1.
Пользуясь графиком рис. 20.10, находим соответствующее значение А = 4;
безразмерная стрела полного прогиба составляет £ = 0,4.
744
ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ {ГЛ. XX
По выражениям C2) — C3) при ц — 0,3 находим:
а* = - 1,23 • 0,15 + 7,05 • 0,3 + 2,88 = — 0,19—2,12+2,88 = 4,81 при z = — А/2,
а* =—0,19 —2,12 + 2,88 = 0,57
а* = -0,19+2,12 =1,93 .
а* =- — 0,19 — 2,12 = — 2,31
при г = А/2,
при г = — Л/2
при г — Л/2.
' Интенсивность напряжений по C4) равна
а\ = УЧ812 + 1,932 - 4,81 ■ 1,93 = 4,17 при *- —л/2,
о* = /0,572 + 2,312 + 0,57 . 2,31 = 2,64 при z = Л/2.
Выберем интервал времени / = 0,5 часа. По выражению D1) определяем
интенсивность деформаций ползучести:
I] = 0,0445 • 0,5 • 4,173= 1,62 при ,?=—Л/2,
Гг = 0,0445 • 0,5 • 2,643 = 0,42 при г = Л/2.
Составляющие деформации вдоль
оси по выражению D2) будут
- __ 1,62D,81 - 0,5 • 1,93) . .
^ 4Л7 = 1>5
при z = — Л/2,
0,42 @,57 + 0,5 • 2,31)
2,64
при z =. Л/2.
.0,27
3 4
t (часы)
Рис. 20.11. Нарастание стрелы прогиба
пластинки во времени.
Приращение стрелы прогиба
составляет
1,5-0,27
Д£ =
: 0,13.
Мы получили бы несколько иной
результат, если бы вели расчет по
деформациям в* Более последовательно было бы исправить полученные
значения в* и bv с тем, чтобы величина Д£ оказалась одной и той же. Будем,
-*
однако, продолжать выкладки, пользуясь значениями tx.
Рассматривая интервал времени от 30 до 60 мин, мы должны считать
начальную стрелу прогиба равной
So = £о +- Д£ = 0,23.
Пользуясь рис. 20.10, находим ЫЗи £' = 3 • 0,23 = 0,69. Далее
повторяем выкладки но той же схеме. Ниже приведены результаты вычислений,
относящихся к первым девяти интервалам времени (но 30 мин); здесь даны
безразмерная стрела полного прогиба Z, в начале интервала и приращение
стрелы прогиба Д£, имеющее место на протяжении данного интервала
вследствие ползучести.
( 203] ВЫПУЧИВАНИЕ В БОЛЬШОМ ЦИЛИНДРИЧЕСКОЙ ПАНЕЛИ 745
Номер
шага
А?
1
0,4
0,13
2
0,69
0,17
3
0,92
0,20
4
1,14
0,21
5
1,38
0,20
б
1,51
0,17
7
1,67
0,14
8
1,79
0,11
9
1,92
0,05
График зависимости t,(t) приведен на рис. 20.11 (сплошная линия).
Как видим, скорость нарастания прогибов, связанных с ползучестью
сначала увеличивается, а затем начинает падать; штрих-пунктирная линия
на рис. 20.11 отвечает приращениям Д£. По-видимому, в случае
подкрепленной пластинки вообще нельзя определить критический период времени, по
истечении которого скорость нарастания прогибов становится бесконечно
большой. Как уже говорилось, в этом проявляется эффект ценных
напряжений, возникающих при прогибах пластинки, сравнимых с толщиной.
Решение задачи было дано здесь лишь в первом приближении. Однако
полученные результаты интересны с качественной стороны: они
свидетельствуют о своеобразии в поведении пластинки, выражающемся в повышении
ее несущей способности по сравнению со случаем сжатого стержня.
§ 203. Выпучивание в большом цилиндрической панели
Выясним теперь особенности поведения оболочек при ползучести
на примере пологой круговой цилиндрической панели, сжатой вдоль
образующей (рис. 20.12)*). Основные уравнения получают такой вид
по A2.121):
£-V*(*>- «о) = L (w, Ф) + ^ -gr • B0-50)
■1^0=4(^0, w0)-L(w, «01—-^("-"«Л. B0.51)
Принимая прежние выражения для прогиба B5) и подставляя их
в уравнение E1), найдем вместо B6)
•-i^-/9[(fl'».¥+Db^]+
Напряжения в срединной поверхности определяются по-прежнему
по B7), а напряжения изгиба — по B8). Пользуясь безразмерными
*) Эта задача рассмотрена П. Г. Зыкиным; им же проведены
эксперименты, описанные в § 204. Дальнейшие исследования этой задачи с
использованием различных теорий ползучести принадлежат Л. М. Куршину и
Ю. В. Липовцеву («Тепловые напряжения в элементах конструкций, т. 4,
Киев, 1964); см. также статью Л. М. Куршина, ДАН СССР 163, № 1, 1965.
746 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
параметрами C0) и C1), найдем полные напряжения для центра
пластинки (считая их положительными при сжатии):
B0.53)
B0.54)
где k=b2IRh. Интегрируя уравнение E0) по методу Бубнова — Га-
леркина, получим вместо C5)
B0.55)
где р*д — параметр верхнего критического напряжения. Будем считать,
что параметр кривизны панели к лежит в пределах к < 24 и что
выпучивание панели происходит по одной полуволне вдоль сторон а, Ъ.
Рис. 20.12. а) Цилиндрическая панель, сжатая адоль образующей;
б) сечение панели.
Попытаем'ся ввести здесь вместо C8) более общий закон
ползучести с тем, чтобы описать не только установившуюся, но и
неустановившуюся фазу. Примем
I^aW, B0.56)
где К, В, у — постоянные для данного материала при определенной
температуре. Воспользуемся прежними соотношениями D0) и введем
обозначения:
■*• = *(£)'• Б* = ВЕ(тJ> * = *(*)'• <20-57)
тогда будет
г] = К*еВ V. B0.58)
ВЫПУЧИВАНИЕ В БОЛЬШОМ ЦИЛИНДРИЧЕСКОЙ ПАНЕЛИ
747
Ц Сохраним тот же порядок вычислений, что и в § 202.
Выражения D5) — D9) .остаются без изменений.
; Пример 20.2. Проведем вычисления для дюралюмииовой панели при
следующих данных: Я = 1, а = b = 200 мм, Я = 615 мм, h = 1,9 мм, £0 = 0,3.
П
р'
30
15
1,0
0,5
0,25
0,1
0.05
1025
10
\
рА\
Ш0'1
1
/
№\Л
^0,5
(
sl,0
''Ч"
1,5
^
^
s
-1
-■
-1
Е Рис. 20.13. Завнсимость «нагрузка —прогиб» для цилиндрической панели
К с начальной погибью.
|
«Параметры, входящие в формулу E6), примем для материала Д16АТВ при
Цемпературе 250° С равными: К = 4,51 • 10~5, В = 327 • 10~5, у = 0,63; а выра-
шается в кг/см2, t—в часах. Будем считать, кроме того, Е = 5,38 • 105 кг/см2,
Ш = 0,42.
| По формулам E7) имеем:
|: АГ* = 0,503, В* = 0,159.
Если построить по E5) зависимость ff (£) для различных значений Г0,
гр получим график рис. 20.13. Параметры верхнего и нижнего критических
748 пллстинки и Оболочки при высоких температурах [гл. хх
напряжений при g0 = 0 равны рв = 33,6, ра — 6,6. Пользуясь кривыми
рис. 20.13, можно перейти к зависимости £ (£0) при заданных усилиях
сжатия р , определяемых в зависимости от параметра рв но отношению
а = р 1рв. График £(£0) изображен на рис. 20.14. При значениях а > 2 имеет
место скачок от одного устойчивого равновесного состояния к другому.
№
'5
0,5
Л С ft)
0,6
&5 \
0,4 \
о,зу^^-
0,2
-0,1
с/
'—'АС
%
А
/ '1
/1
i
0,5
W
Со
Рис. 20.14. Соотношение между полной и начальной Рис. 20.15. Нарастание прогибов па-
стрелами прогиба для цилиндрической панели. цели во времени, заканчивающееся
хлопком.
Примем для примера а = 0,35, что соответствует среднему сжимающему
напряжению р = 570 кг/см2. В качестве первого шага вычислений находим
по E3) — E4):
а* = 15,36, а* = 3,61 при г = — /г/2;
и, далее,
ах = 11,53, 0у = — 0,22 при г = /г/2
о* = 14,6 при г = — /г/2, <s\ = 11,63 при г = /г/2.
Интервал времени примем равным 0,2 часа. По E8) интенсивность
деформаций ползучести равна
в* = 1,86 при г = — /г/2, ё* = 1,16 при г = /г/2.
Отсюда
ё* = 1,72 при г = — /г/2, ё* = 1,16 при г = /г/2.
Приращение прогиба составляет
Д£= 1,72-1,16 =0>057>
§ 204] ДАННЫЕ ЭКСПЕРИМЕНТОВ 749
Для следующего интервала, от 0,2 до 0,4 часа, начальная стрела прогиба
равна £д = E0-f- Д£ = 0,357. Пользуясь графиком рис. 20.14, находим £ = 0,634.
Продолжая вычисления, составляем следующую таблицу:
Номер шага
Интервал времени в часах
Д£
1
0,2
0,5l'5
0,057
2
0,2
0,634
0,039
3
0,2
0,710
0,031
4
0,2
0,785
0,034
5
0,2
0,880
0,039
б
0,2
1,050
0,058
7
0,1
1,430
0,054
На рис. 20.15 изображены графики t,(t) и Д£@- Уменьшение
приращения прогиба на первых ступенях объясняется падением скорости ползучести
в первой фазе. По мере увеличения прогибов деформации ползучести
накапливаются все быстрее; это приводит, в спою очередь, к ускоренному
росту упругих прогибов. В конце 7-го интервала времени прогиб достигает
такой величины, что должен произойти хлопок с резким возрастанием
прогиба. Как мы увидим ниже, подобные хлопки наблюдаются и в
экспериментах.
Хлопок оболочки сопровождается, как правило, появлением значительных
пластических деформаций. Поэтому мы снова вернемся к понятию
критического времени, понимая иод этим период накопления прогибов,
заканчивающийся хлопком. Если обратиться к графику р* (t.) по рис. 20.13, то для
заданного значения усилий сжатия р = 0,35/>в мы постепенно переходим от
одной кривой к другой; после того как достигнут «горб» кривой g0 = 0,5,
имеет место скачок.
§ 204. Данные экспериментов и рекомендации
для практических расчетов
Приведем данные серии опытов по устойчивости плоских и
цилиндрических панелей в условиях ползучести. Образцы были
изготовлены из дюралюмина Д16АТВ. Панели нагружались с помощью
специального приспособления, позволявшего осуществить различные
условия закрепления кромок. Прогибы измерялись индикаторами
часового типа. Напряженное состояние исследовалось с помощью
электрических термостойких датчиков сопротивления.
Предварительные испытания на устойчивость при нормальной
температуре дали возможность установить порядок погрешности при
определении критических напряжений; для плоских панелей она
составляла не более 5% по отношению к теоретическим значениям. Далее
были проведены кратковременные испытания на устойчивость
пластинок при повышенных температурах (до 250° С); они показали, что
в этом случае применимы обычные расчетные формулы с измененным
модулем Е. Для цилиндрических панелей реальные критические
напряжения (при хлопке) составляли @,65-5-0,7) от верхних теоретических
значений; экспериментальные значения ркр можно было
аппроксимировать формулой ркр да 0,4 ША//?.
750 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
Испытания на ползучесть были проведены при температуре 250' С;
сжимающие усилия р составляли от критических такие доли:
а =-^- = 0,65; 0,8; 0,94.
Лкр
Сводный график зависимости стрелы прогиба от времени
(пунктирные линии) для трех плоских панелей дан на рис. 20.16; под а
понимается отношение сжимающего напряжения к статическому
критическому значению. Как видим,
здесь имеет место монотонное
изменение прогибов с уменьшающейся
скоростью. Ползучесть не приводит,
таким образом, к бурному росту
прогибов; это подтверждают
результаты, полученные выше, в § 202;
теоретические кривые показаны
сплошными линиями. Для контроля
был проведен опыт с пластинкой,
продольные края которой
перемещались свободно, иными словами,
был исследован случай
балки-полоски. Полученная при этом
кривая С@ изображена на рис. 20.16
штрих-пунктирной линией; она
соответствует обычным диаграммам,
относящимся к стержням, и позволяет
определить критическое время tK0.
Рис. 20.16. Диаграммы «прогиб — время» ' v
для плоских панелей. Данные ИСПЫТАНИЙ ДеСЯТИ ЦИЛИН-
дрических панелей приведены на
рис. 20.17 и 20.18. Сплошные кривые и здесь изображают
зависимость t,(t), полученную в опытах; пунктирные—построены по данным
приближенного решения, изложенного в § 203; через £о обозначен
параметр начального прогиба, через а — отношение сжимающего
напряжения к верхней критической величине. В случае, если среднее
напряжение равнялось нижнему критическому значению (а—рц,
а = 0,3), оболочка вела себя подобно плоской панели. Если же
напряжение лежало в пределах рп < а < рв, выпучивание оболочки
во всех случаях заканчивалось хлопком.
С помощью графиков рис. 20.17 и 20.18 устанавливалось
критическое время tKp, по истечении которого происходило выпучивание
в большом. Эти данные изображены на рис, 20.19.
Если условно принять величину начального прогиба для всех
испытанных образцов примерно одинаковой, то можно, пользуясь
экспериментальными данными (треугольники), построить график
зависимости критического времени tK от среднего напряжения сжатия
(пунктир на рис. 20.19). Как видим, критическое время резко падает
ДАННЫЕ ЭКСПЕРИМЕНТОВ
751
при увеличении сжимающего напряжения. При нагрузках,
составлявших 90 -г- 95% от рв, критическое время в ряде случаев
исчислялось секундами.
Таким образом, данные расчета по критерию начальных несовер-
щенств достаточно хорошо согласуются с экспериментами.
3,0
>J
W
0.5
/si
/у.
Л
'7^~
L-0.16;cc-H'i57/
Л 1
\ t
\ 1
\ t
\ /
\ 1
/
/
/
/
/
/
/
UZ-CJ57/
17
1 1
1 1
1 1
/
У
^^"'
1
[0-У15,х-
L-—""
0,1
. — ~~~~
3
t, час
t, час
Рис. 20.17. Диграммы «прогиб —время» для цилин- Рис. 20.18. Диаграммы «прогиб—вре-
дрических панелей первой серии в сравнении с дай- мя» для цилиндрических панелей вто-
ными экспериментов. рой серии,
На рис. 20.19 сплошными линиями нанесены также значения ^кр,
полученные по критерию критической деформации екр, если
считать ее равной 0,605/г//? или 0,4\hjR. Как видим, результаты расчета
по этим формулам сильно отклоняются от экспериментальных данных.
Как уже говорилось, правильнее в основу расчета брать нижнюю
критическую деформацию, которую практически можно принимать
равной 0.18А/Я.
В итоге можно рекомендовать для прикидочных расчетов на
выпучивание пластинок и оболочек при ползучести пользоваться критерием
критической деформации. Для пластинок при этом будет определен,
по-видимому, тот отрезок времени, по истечении которого скорость
нарастания прогибов является наибольшей. Что касается оболочек,
то здесь, таким образом, будет найден момент времени,
соответствующий явлению хлопка. При этом в качестве исходной надо принимать
752 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ [ГЛ. XX
б
к/см2
деформацию, соответствующую нижнему критическому напряжению,
найденному для упругой области (см. глапы XIII - XVIII). Это
относится не только к случаю сжатия, но и к другим нагрузкам.
Более достоверные данные о поведении пластинок и оболочек
при ползучести можно получить, используя критерий начальных
несовершенств, как это было
описано в §§ 202 и 203.
Но здесь надо располагать
сведениями о примерных
значениях начальных
прогибов для конструкций того
или иного типа. И в этом
случае наиболее
обоснованным является статистический
подход к задаче.
Мы не касались здесь
ва-кного вопроса об
уменьшении крутильной
жесткости и о возможной потере
устойчивости тонкостенной
конструкции типа крыла
самолета, связанными с
температурными напряжениями;
этот вопрос освещен в
статьях Будянского и Мейерса
(В. Budiansky, J. Mayers, J.
Aeron. Sci., 23, M> 12, 1956), Ван-дер-Нойта [20.18] и других
авторов, см. книгу А. А. Умаиского [5.12] 1961 г.
500
1 \
7.Ч,
и
k.'Nv
^
n
г'
\
i
\
<jp-fl4
^^v
4^'' р
-----.
/^
о
1
2 3 I) 5
tK? тс
Рис. 20.19. Критическое время для цилиндрических
панелей при различных уровнях сжимаюшего
напряжения.
ГЛАВА XXI
УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК
ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ
§ 205. Постановка задачи
В главе VII мы познакомились с некоторыми задачами,
относящимися к устойчивости стержней при динамическом нагружении.
Обратимся теперь к аналогичным вопросам устойчивости пластинок и
оболочек. Если рассматривать те и другие задачи в линейной
постановке, то между ними не будет принципиального различия. Однако,
если исследовать прогибы, сравнимые с толщиной пластинок или
оболочек, то задача окажется нелинейной и приобретет ряд
особенностей. Напомним случай нагружепия стержня быстро возрастающей
Рис. 21.1. Нарастание статических и динамических прогибов в случае:
а) пластинки, б) оболочки.
во времени сжимающей силой при условии, что стержень имеет
начальную погибь и рассматривается как система с одной степенью
свободы. Диаграмма «стрела прогиба — нагрузка» имеет вид,
показанный на рис. 21.1, а сплошной линией, в отличие от статической
диаграммы, изображенной пунктиром *).
*) В случае, когда задан закон взаимного смещения концов стержня
во времени, задача также становится нелинейной (см. гл. VII).
48 A- G. Вольмир
754 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ |ГЛ. XXI
Обратимся к такой же задаче для оболочки с начальной погибью,
подвергающейся выпучиванию под действием некоторой нагрузки.
Будем и здесь условно считать оболочку системой с одной степенью
свободы. Допустим, что, исследуя равновесные формы при
статическом иагружении, мы получаем на диаграмме «нагрузка — стрела
прогиба» линию с верхней и нижней критическими точками Рв и Ра
(рис. 21.1,6). Если нагрузка быстро возрастает во времени, то
параметр внешних сил может «пробежать» уровни как нижней, так
и верхней критических нагрузок (участок сплошной линии ОК на
рис. 21.1,6), причем на начальном участке (при Р < Рв) будут
происходить колебания вокруг равновесных положений,
характеризующихся «малыми» прогибами.
В некоторый момент, наступление которого определяется
программой нагружепия и различными возмущающими факторами,
происходит скачкообразное перемещение оболочки к равновесным
положениям с большими прогибами (линия KN на рис. 21.1, б); после
этого начнутся колебания вокруг новых равновесных форм, имеющие
ярко выраженный нелинейный характер. В дальнейшем этот процесс
хлопка оболочки при быстро
возрастающей нагрузке мы будем условно
называть динамическим
выпучиванием или динамической потерей
устойчивости. Введем также понятие
динамической критической
нагрузки Рд, отвечающей моменту хлопка.
Мы будем находить ее условно по
диаграмме типа 21.1, б, определяя
абсциссу точки М перегиба кривой P(f),
т. е. точки, отвечающей наибольшей
«скорости выпучивания» оболочки.
Можно также условиться определять
Рд с помощью других величин,
характеризующих участок хлопка KN.
До сих пор мы полагали, что
приложенная к оболочке нагрузка
возрастает во времени и что прощелкивание оболочки происходит на
этой восходящей ветви нагружепия. Допустим теперь, что нагрузка
возрастает лишь до некоторой величины Р' < Р (рис. 21.2) (причем
прощелкивание оболочки не осуществляется) и что затем нагрузка
начинает уменьшаться во времени по заданному закону. Если падение
нагрузки будет совершаться достаточно интенсивно, то оболочка
получит колебания вокруг начального положения равновесия и после
затухания колебаний вернется к этому положению. В том же случае,
если нагрузка будет падать сравнительно медленно, прощелкивание
оболочки все же может иметь место на нисходящей ветви нагружепия.
Примерная кривая, характеризующая изменение / при падении Р,
Рис. 21.2. Динамические прогибы на
нисходящей ветви нагружепия.
!|йN] УСТОЙЧИВОСТЬ ПРИ ДЕЙСТВИИ СЖИМАЮЩЕЙ НАГРУЗКИ 755
показана на рис. 21.2 жирной линией. Мы будем условно считать,
что прошелкивание оболочки совершилось, если наибольший
прогиб /д достигает значения /ст; под /ст понимается статический прогиб,
соответствующий нагрузке Рд. Такое сопоставление необходимо для
того, чтобы выяснить, возникнут ли при динамическом нагружении,
совершающемся по сложной программе, заметные остаточные
деформации.
Описанные здесь задачи являются важными для авиастроения и
других областей техники. Например, корпус летательного аппарата
подвергается динамическому нагружению на стартовом участке.
Быстрое изменение нагрузки во времени испытывают также некоторые
оболочки двигателей.
Выпишем основные динамические уравнения нелинейной теории
пологих оболочек с учетом начальных неправильностей формы
оболочки. Будем исходить из уравнений A2.121) и дополним их
инерционным членом, соответствующим нормальному перемещению
(прогибу оболочки) w. Инерционные нагрузки, отвечающие перемещениям и
и v в срединной поверхности, учитывать не будем. Таким образом,
мы отказываемся здесь от исследования процесса распространения
упругих волн в срединной поверхности; ограничения в отношении
характера приложения нагрузки, приведенные в главе VII для
стержней, остаются в силе *). Окончательно получим уравнения в виде
£- V4 (w -
h
— V4<D =
Е
-wJ = L(w, Ф)+кх1$~
: -g [L (w0, w0) — L (w, w)\ -
1 t d4t> I q
1 '"У dx* ' h
h d*(w— w0)
RX dy2
Y d2w B1 П
h d2 (w — wa) .
аУ дх2
B1.2)
под Y понимается удельный вес материала оболочки.
§ 206. Устойчивость пластинок и цилиндрических панелей
при действии сжимающей нагрузки
Рассмотрим пологую цилиндрическую панель, шарнирно
закрепленную по краям (см. рис. 13.48). Допустим, что панель подвергается
динамическому сжатию вдоль образующей; исследуем ее поведение
во времени при условии, что оболочка имеет начальные прогибы.
Уравнения A) и B) принимают вид
Х— XV4(w-w0)—L(w, Ф) --^--5- — ^- + —-S5- = 0, B1.3)
^.W = -^\L(w, w)-L(w0, w0)}-~ d4wd~Wa) ■ B1.4)
*) Более общие задачи рассматривались Н. А. Алумяэ [21.2J и В. Л. Ага-
мировым.
48*
756 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
Разберем сначала случай, когда усилие сжатия р возрастает
во времени по закону p — st. Примем для полного и начального
прогибов выражения
. . пх . пу . . пх . яу ._., ...
•a> = /sin —sin -f-, Wo = fQSm — sm-f-. B1.5)
Подставляя эти выражения в уравнение D), находим, как обычно,
функцию Ф (см. стр. 745):
i л /f г \ 1 . пх . пу ру2 ,п. „N
U2 + Ь2)
где р — интенсивность среднего сжимающего усилия, зависящая от
времени, £ = ///г, Co = /o/^- Далее, воспользуемся методом Бубнова —
Галеркина в применении к уравнению A). Выполняя интегрирование,
приходим для квадратной панели (а = Ь) к следующей зависимости:
— [зA —И-2) + 4^4 Й-5о>— n2Egh2 ~dF = 0; BIJ)
здесь введены прежние безразмерные параметры р* = pa2jEh2,
k=-a2\Rh. Опуская в G) инерционный член, получим решение
статической задачи об устойчивости в большом. Считая £о —О и £->0,
найдем параметр верхнего критического напряжения для панели, не
имеющей начальной погиби:
рва2 л2 k2
Р.
Eh2 ~ 3A — ц2) ^ 4л2 '
С другой стороны, отбрасывая нелинейные члены и полагая
/»* = 0, Со = 0, придем к уравнению малых колебаний незагруженной
панели без начальной погиби:
at I Yfl4 d% П
р^~т~ n2Egh2 dt2 —U#
Квадрат основной частоты колебаний оказывается равным
уа4 И*
Разделим каждый из членов уравнения G) на рв и введем
обозначение t* для параметра времени:
;; = ^- = 4; B1.8)
Рв Рв
§ 206] УСТОЙЧИВОСТЬ ПРИ ДЕЙСТВИИ СЖИМАЮЩЕЙ НАГРУЗКИ 757
тогда получим обыкновенное дифференциальное уравнение для стрелы
прогиба:
S, Л,
т.!
4—~ F-®
8л
£-+-
+ Д;(бр-4й»-С3)-E-5о)} = 0. B1-9)
Под 5, понимается величина S, = рв I ^—) , где с — скорость
звука в материале оболочки. Сравнивая выражения для со2 и Slt
находим: у 5] = (о—. В отличие от уравнения G.31), составленного
выше для сжатого стержня, уравнение (9) является нелинейным;
интегрируя его, находим зависимость £(Q.
Перейдем к другому случаю, когда задан закон взаимного
смещения криволинейных кромок панели *). Деформация в срединной
поверхности вдоль образующей равна
д2Ф дгФ
С другой стороны,
е* ~~' Е [ ду2 ^ дх*
6jr ~" cJjc + 2 LI Од: j { дх ) }'
где и— перемещение точки срединной поверхности вдоль
образующей. Укорочение некоторого волокна, параллельного образующей,
а
равно ех = — -х—dx. Обозначим через е среднее значение ех по
ех dy; тогда получим:
о
ь
дуговой кромке: е=-г
а Ь
о о
Примем e = st. В случае квадратной панели в прежних
обозначениях получим:
^=;,+-£(£2-ф+-^р^«-ео).
или
4=/;—g-(£a-£g) —^^"^ (£-&. B1.9а)
*) Эта задача была рассмотрена автором [21.11].
758
ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖХПИИ [ГЛ. XXI
Здесь введен новый параметр времени
,* sta
B1.10)
Подставим р* по (9а) в уравнение G) и выразим t по A0); тогда
придем к зависимости
d% о Г Г\* л2 /го f)\ k A — ц)
dt0
Ц 4^
2 *
11 Рв
■в —?о)
£-Ь
+ ^rEp-4ao-^-(£-t))}=0; B1-и)
под 52 здесь понимается новая величина:
S2 = p*
з / яс/z3 \2
saJ
Уравнение A1) было проинтегрировано численным методом, а
также с помощью моделирующей машины для различных значений
Со и S2. Были приняты начальные условия
£ = £о> —V = 0 при £ = 0.
dt2
Результаты интегрирования для случая & = 0 (плоская панель) при
Со=0,001 и <S2=1000 представлены на рис. 21.3, а. По оси абсцисс
0 0,25 Ц5 0,75 1.0IJ51,51,75 2JH 2252.5
«)
U
0 0J5 0J5 0,75 Щ 1,25 IJ5 1.75^2252,5
6)
t*
Рис. 21.3. Диаграммы «нагрузка —время» для: а) пластинки и б) оболочки при статическом
и динамическом пагружении.
откладывается параметр h, по оси ординат — величина с, и
отношение сжимающего усилия к критическому р*\р* . Статическим
зависимостям соответствуют: для стрелы прогиба—участки ОВ и BLF,
а для нагрузки — участки О А и АС. При динамическом пагружении
происходит затягивание начального участка до точки М (или К);
затем прогибы резко нарастают, и возникают установившиеся
нелинейные колебания. Эти результаты очень близки к тем, которые
§ 2071 ПРИМЕНЕНИЕ ЦИФРОВЫХ МАШИН 759
были получены в главе VII для стержней; но закритическая диаграмма
для нагрузки АС здесь является восходящей. На рис. 21.3,6'
изображены аналогичные графики для квадратной в плане
цилиндрической панели при k— 12; значения £э и 52 оставлены прежними.
Статической задаче отвечают кривые ODLF и О АС, динамической —
линии ОВМ и OAK, При динамическом приложении нагрузка
достигает, как и для пластинки, примерно 165% от верхней статической
величины. Затем происходит резкое падение р*, причем величина р*
становится отрицательной, что соответствует растяжению панели.
§ 207. Применение цифровых машин
В предыдущем мы приводили пластинку или оболочку к системе
с одной степенью свободы и определяли зависимость стрелы прогиба
от времени. При этом не удавалось проследить за изменением
характера изогнутой поверхности пластинки или оболочки в процессе
нагружения. Более точное решение задачи можно дать, если
аппроксимировать изогнутую поверхность с помощью нескольких параметров
либо представить исходные уравнения в конечных разностях. Как
в одном, так н в другом случаях вычисления сильно осложняются
и для их выполнения должны быть привлечены электронные
цифровые машины.
Ниже изложено решение задачи с помощью метода конечных
разностей *). Рассмотрим общий случай пологой панели со
сторонами в плане а, Ь, имеющей некоторые начальные прогибы.
Воспользуемся безразмерными параметрами
a J b ab h Eh2 ч '
тогда исходные уравнения A) и B) можно представить в виде
d2w __ fw_ (д2Ф - \ , d2w I д2Ф
~ Рх)
dt2 дх2 \ ду2 1 ду2 {дх2
Ру) —
0 d2w д2Ф 1 =..- - , ,
— 2 _ _ V4(te> — wQ) -+-
дхду дхду 12A— и?)
~kv / д2Ф \ - п/д2Ф _ \ _
+^Ы-р^к^Ы-р'Г41 B1ЛЗ)
d2w d2w I d2w0 \2
~~\дхду) дх2 ду2 \дх
м +
:ду
d2wQ d2w0 kv д2 (w — w0) - ^n d2(w — w0)
дх2 ду2 X2 дх2 ду
kxW -=-^-. B1.14)
*) Это решение дано А. Ю. Биркганом и автором [21.6].
760 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
Здесь введены соотношения
Оператор V4 имеет вид
- 1 а4 /и л*
V4 = — -4-4- 2 _ _ О2-^-- B1.16)
A.2 dx4 c)jc2c)y2 ду4
Заметим, что при выборе безразмерных параметров по A2) и A5)
прямоугольная в плане панель преобразуется в квадратную со
стороной, равной единице.
Рис. 21.4. Трехмерная сеточная область.
Граничные условия, заданные в виде линейных однородных
зависимостей, будем считать неизменными по времени. Начальные
условия могут, например, иметь вид w = w0, dwfdt—0 при t = 0.
В дальнейшем черточки над обозначениями w, х, у, t и т. д. будем
опускать.
В пространстве переменных х, у, t, ограниченном плоскостью
/ = 0 и плоскостями х = 0, х=1, у = 0, у=1, построим систему
плоскостей £ = 0, t — kt, t = 2kt t = tnkt покрытых
сеткой прямых х = 0, х = s, x = 2s х= 1, у = 0, у = s,
. . ., у=1. Здесь Д^—шаг по времени, s — шаг по
пространственным координатам х и у (рис. 21.4). В узлах построенной таким
образом трехмерной сеточной области должны выполняться
уравнения в конечных разностях, аппроксимирующие систему
дифференциальных уравнений. Кроме того, для выражения граничных условий
§ 207] ПРИМЕНЕНИЕ ЦИФРОВЫХ МАШИН 761
с помощью симметричных конечных разностей введем необходимое
количество внеконтурных узлов, расположенных на плоскостях
х = — 2s, x = — s, x=l-fs. x=l-\-2s,
у = — 2s, y = — s, у = 1 -+- 5, y=14-2s.
Производные по пространственным координатам заменим
разностными операторами по формулам типа (9.238) и (9.239),
d2w Wi—2w0 -\- тъ
___ _ ,
d2w wb — w6-\-w7 — ws
дхду ~~ 4«2 •
d4w w9 —iWi-\-bw0 — iWi-^-Wn
d'w __ 4w0 — 2 (a>, -\- w2 4- w3 -\- wt) -f- w5 -\- we -\- w7 4- ws
дх2 ду2 ~ s4
с погрешностью, имеющей порядок квадрата шага. Нумерация узлов
счетной ячейки дана на рис. 21.4. Производную по времени заменим
соотношением
d2w »* + 11-2<| + »'Г')
dt2 (ДО2
Подставив эти выражения в уравнения A3) и A4) и опустив члены
порядка квадрата шага, получим в текущей (нулевой) точке слоя tm
по два уравнения в конечных разностях. Переход от m-го к (т -j- 1)-му
слою по времени производится по формуле, в правой части которой
находятся уже известные значения функций (такая разностная схема
называется явной):
wkm+\) _ 2w[m) — wg1- !> -j- ^- \(w[m) — 2w<-0mi 4 %m)) X
X (ФBт) - 2<P<m> + #»> - р? 's2) + «> - 2<> 4 <0 X
X (ФAт) - 2Ф<т) 4- Ф[т) - p[m)s) -
_ *_ Ц™> _ «£»> Ч ww _ «£»>)(ф<т> _ ф'»> 4- Ф<т) -Ф'т) 4 rs2)] 4-
+-г [it («Г - 2Ч + <С - /'Г ^2) +-
4- kxl2(Ф^ - го™4- ФDга) - />Г*2)] -
-^[(^+M6F)<*>-4(i Т~)«ЧЧга1)-
_ 4 A 4- Я,2) (ге>!,т> 4- ^) 4- 2 (•а£"> 4- ^т) 4" T»7m) + wsn)) +
4- ^ «"> 4- 40 + ^Ко] + да"')] + (Л°2(^ + ?о";)- B1-17)
762 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИН [ГЛ. XXI
Для определения функции напряжений в момент времени t(m'1J
нужно решить совместно систему разностных уравнений такого типа:
ф0т + 1>=_ 1 J ^^т + \) _^m^\)^_w{m+l) __ ^т + 1)у_.
(W\m + 1J — 2wj.m-|-I)-4. w(nz-H)VW"l + 1> — 2wl.mJ-11 -f WniI>V+-
+ 4 A 4 _L'j (<Df» +1) _|_ ф("» + '>) 4 4A 4- ^)((Df+ '> + Ф<Г+'>) —
_ _1_ (ф^'> + ф^')) _ ^ (ф<» + '> ^ ф<™ + '>) _
._ 2 (ф!"г + " -J фFт + " 4- фGш + '> -f. ф</" + ") —
— 52 J — (та' +') — 2?^m +') 4■ wj, +')) +
4- /гдД2Aг1<2т + 1>— 2«»()'n+I)H-«;f4"l + I))l ~f W/1}. B1.18)
Здесь L0 и Wo— функции, зависящие от начального прогиба, d~
= 1/12A -fi2).
Процесс вычислений начинается с того, что последовательным
Эбходом узлов сетки определяется прогиб wi2)(x, у, 2&t) по
формуле A7). Далее находится функция напряжений Ф( \х, у, 2Af)
путем решения методом последовательных приближений системы
разностных уравнений по формуле A8). По существу, на данном этапе
решается линейная задача, так как входящие в правую часть
уравнения A8) значения прогиба •да(т + 1) уже вычислены в предыдущем
пункте. В качестве начального приближения функции напряжений
могут быть взяты ее значения на предыдущем шаге по времени, если
они не равны нулю, или значения функции Hs4. Итерации
заканчиваются после того, как достигнута требуемая степень точности.
Шаг по времени завершается пересчетом внеконтурных
значений w и Ф в соответствии с принятыми граничными условиями.
Далее вычисления повторяются: находятся значения ге1C) (х, у, 3At)
и ФC) (х, у, ЗД^), определяются функции во внеконтурных узлах
и т. д. После каждого шага по времени, либо через определенные
промежутки можно определять значения напряжений.
Конкретные вычисления были проведены на вычислительной машине
для квадратной плоской пластинки с шагом s= 1/8. Шаг по
времени выбирался таким образом, чтобы была обеспечена устойчивость
разностных уравнений. Предварительно были определены статические
равновесные формы пластинки при закритической деформации,
соответствующие различным «порождающим» изогнутым формам.
Последние отвечали собственным значениям линейной задачи при числе
полуволн т = 1 и т = 3 в направлении х и одной полуволне вдоль у.
На рис. 21.5 пунктирными линиями представлена статическая заии-
§ 207] ПРИМЕНЕНИЕ ЦИФРОВЫХ МЛШИН 763
симость прогиба в центре пластинки w* от параметра t* = р[р при
начальной стреле прогиба «»J== 0,001; под /?кр = л2/3A - jj,2)
понимается параметр статического критического напряжения. Прогибы
3
Рис. 21.5. Изменение стрелы прогиба при динамическом нагру-
жении с различными скоростями (по данным вычислений на
цифровой машине).
направленные в сторону начальной погиби, отложены вверх. Далее
сплошными линиями показаны результаты решения динамической
о)
")
с)
е)
О
9)
»)
о
Рис. 21.6. Изогнутые формы пластинки в различные моменты времени.
задачи при нагрузке, возрастающей пропорционально времени. В
случае, когда скорость нагружения относительно мала (р/(= 2,15),
бурное нарастание прогибов имеет место при нагрузке р я* 1,&ркр;
затем происходят нелинейные колебания относительно положений
статического равновесия. При большей скорости нагружения (р = Ы)
764 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
прогиб резко возрастает, когда р да 2,6/7кр; после этого на
протяжении каждого периода колебаний пластинка перескакивает от одной
равновесной формы к другой, так что прогиб меняет знак. При резком
нарастании прогибов и последующих колебаниях форма изогнутой
поверхности сильно меняется. Это можно видеть из рис. 21.6; здесь
представлены изогнутые формы пластинки в среднем сечении,
параллельном х. Каждая из этих форм соответствует точкам кривой
рис. 21.5, обозначенным той же буквой {а, Ь, с и т. д.).
Отметим, что для решения динамической задачи описанным
методом необходимо выполнить около 50 миллионов операций.
§ 208. Выпучивание замкнутых цилиндрических оболочек
при всестороннем давлении
Перейдем к случаю замкнутой круговой цилиндрической оболочки,
подвергающейся динамическому приложению всестороннего давления.
Примем, что по торцам оболочка скреплена со шпангоутами
(см. рис. 13.17), остающимися при деформации оболочки круговыми.
Для полного и начального прогибов по аналогии с решением
статической задачи (§ 154) выберем следующие аппроксимирующие
выражения (см. работу [21.1]):
w = /(sinaxsinpy-f- \|)sin2ax -f-ф). \
ic0= /0(sinax sinpy -f-ф sin2ax -j- ф), J
где а = л'/., р = и//?.
Подставим в правую часть уравнения B) выражения A9). Тогда
интеграл этого уравнения может быть представлен в виде
Ф = Е (Kl cos 2ах -f K2 cos 2ру -)- АГ3 sin ax sin ру +
+ /C4sin3axsinp>i)-4§-x2-4f-y2. B1.20)
Ah
Здесь
^=w[-
(/-/0JР2
-к/-
к,=
/о)/оР2"
а2Р2
2(/-/0)Ф
R
]■
(Z2-/2). ^р%(/2-/э*
к*=
32ps
а2(/-/0) а¥(/2-/;0
(а' + Р2-J
Л(а2 + Р2J
ф.
B1.21)
Последние два члена в выражении B0) отвечают напряжениям
в срединной поверхности, определяемым но безмоментпой теории.
Сравнивая выражения для еу через прогиб и функцию
напряжений, подобно тому как это было сделано в § 146, находим:
dv 1 (д2Ф дЧЬ\ 1 /da/\2 1 (dw0\2, w w0 _ _9
208]
ВЫПУЧИВАНИЕ ЗАМКНУТЫХ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
765
Выпишем условие замкнутости, которым мы уже пользовались при
решении статической задачи (стр. 527):
dv
ду
dy = 0.
ср =
Подставляя B2), с учетом предыдущих соотношений находим:
AC/-/.) E([-~l)-i + T(f + fo^- B1-23)
Таким образом, величина ф оказывается выраженной через т|) и /.
Остается составить уравнения для определения этих параметров.
Воспользуемся методом Бубнова — Галеркипа и запишем уравнения
J Г A'sinaxsinpy dx dy = 0,
о о
L 2яД
| | X s\v?axdx dy = 0;
о о
B1.24)
здесь X определяется по C). Подставим под знак интеграла
выписанные выше выражения для w, w0 и Ф. Выполняя интегрирование,
придем к следующему уравнению, связывающему параметры прогиба
с изменяющейся во времени нагрузкой:
ff = c0(i—Ь-)ч-с,(р —cg)+c2(C»—С?)Ф»—C5(i—-Ь.)^ф—
-Caff-WM-C^-g-. B1-25)
где
со — J rt
1 + \ s' L
Iе
С,=
s2
л2
2A+|2J б
LBIa
16
('+**)
12A
С2 =
Ь
1
i + ^pLO + W
c2 =
c4=
(i+i2J(i + ys2) '
yR2
ся = -
i
i'+h')
[•+
(l+6!
- (i+9S2JJ6.
JJ*
(l + ys2)^!
В выписанных выше уравнениях были введены безразмерные пара-
Метры
*-~ nL
a <> h , Rh
B1.26)
766 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ |ГЛ. XXI
Второе уравнение системы B4) здесь развертывать не будем и, чтобы
упростить выкладки, примем для параметра ф то выражение,
которое вытекает из решения статической задачи:
ф =
ZiN&' + N,)'
B1.25а)
где
N,
6A-!*2)
б2Ч I, Ы, = СЛ
1 + Y^2
С3г\
Это означает, что при заданном значении £ форма волнообразования
считается в случае быстрого нагружения такой же, как и при
медленном.
Ограничиваясь в B5) первым членом и считая ^ = 0, найдем
параметр верхнего критического давления для данного значения г)
равным qB=zC0 или
V , 0+J2J
<7„ =
1 +
т}
A+£*)Ч + 12A
?г4
B1.27)
Это выражение соответствует формулам A3.74) и A3.93) с учетом
£—й. Чтобы получить расчетное верхнее критическое значение qR,
следует найти такую величину ц (или такое число волн и), при
которой выражение для qB будет минимальным.
Примем, что интенсивность давления возрастает по закону q = st,
и введем параметр времени
StR2 __ д _ д ,
t=-
Eh2gB qs
тогда уравнению B5) можно придать вид
B1.28)
■s\{i-Lr1)^Bs2'-^~
— В,
(С2-ф£3
А-В
3 N2L2 + AT,
+ В.
(Е-Со)ССо
4 A^-fW,
здесь
S,=£i
•n
2 6?в
В, = С г,
bNi
В,=
аж
вА =
0; B1.29)
Wb '
Уравнение B9) для безразмерной стрелы прогиба t, было
проинтегрировано численным методом, а также с помощью моделирующих
и цифровых машин при следующих начальных данных:
£ = £о. -§"=0 при £=0.
at
§208] ВЫПУЧИВАНИЕ ЗАМКНУТЫХ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК 767
При вычислениях было принято в применении к дюралюминовым
оболочкам с —5- 105 cujceic, jx = 0,3, £ = 7,75- 105 kzjcm2. Кроме
того, принималось #/£ = 0,45, /?//г = 112, 6=1,8. 10~3.
На рис. 21.7 представлен график t,{t), отражающий зависимость
между стрелой полного прогиба и временем нагружения (или
нагрузкой) для случая Со = 0,001. Первая кривая слева отвечает решению
статической задачи при s—.>0; это решение можно получить по
методу, указанному в § 154. На графике изображена огибающая
различных кривых, отвечающих тому или иному числу волн п. Верхнее
Рис. 21.7. Диаграммы «прогиб —нагрузка»; здесь и m рис. 21.8—21.19
указаны значения параметра 5 в amlceK.
критическое давление имеет место при п = 6, нижнее — при п = 5.
На том же рис. 21.7 нанесены кривые, найденные для случая
динамического нагружения при скоростях 5 = 0,2- 104, s = 1 . 104, 5 =
= 2-104 am/сек. Все кривые перестроены таким образом, что
в качестве базы взято наименьшее верхнее критическое давление qB.
На рисунке приведены кривые для тех чисел волн и, при которьх
бурное возрастание прогибов соответствует наименьшему параметру /.
Как видим, динамический эффект и здесь проявляется в
последовательном возрастании числа волн и значительном увеличении
критического давления.
График рис. 21.8 содержит такие же кривые для случая большей
^начальной погиби B^ = 0,1). Как и следовало ожидать, при
сравнимых значениях скорости 5 здесь проявляются менее высокие формы
потери устойчивости по отношению к случаю ^ = 0,001; меньшими
(примерно в 1,5 раза) оказываются и критические значения давления.
Общий вид кривых также несколько иной: нарастание прогибов
получается менее резким, чем при £,, = 0,001.
768
ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
Приведенная схема решения задачи была использована В. Л. Ага-
мировым *) для определения критического параметра t при самых
различных значениях R,'L, Rjh и $. В качестве примера
продемонстрируем результаты
своеобразного исследования, выполненного
с помощью цифровой машины.
IQ | | |/| I | | | I | На рис. 21.9 изображена
зависимость между коэффициентом
динамической перегрузка йд,
7,5\- §f~\ -§•/—VJ—|—\р]—|—-f\—| равным отношению условной
динамической критической нагрузки
к верхнему статическому
значению, и стрелой начального
прогиба для £/# = 2 и/?/А =100.
2,5\—|—\У/\—-|—\y/i—Уу]—j—j Здесь намеренно были выбраны
исчезающе малые безразмерные
стрелы начального прогиба от
О
-1[
4
i
1
"Г
V
\
\
Дин.
1
У
Г
Г
1
4'
i
/
.._
<■*
/
t
10 4 до 10 20. Величина йд моно-
Рис. 21.8. Случай, когда начальная стрела
прогиба составляет 0,1 толщины оболочки.
4 4 t \ 4
5
тонно возрастала от 4,21 до 8,56.
Возникает естественный вопрос,
можно ли найти конечное
значение Ад для предельного случая идеальной оболочки (при £q —> 0).
Этот вопрос важен с теоретической стороны, и его желательно
рассмотреть подробнее. Однако
можно считать, что случай
исчезающе малых величин Со
(порядка 10" ) может быть
практически исследован.
Рассмотрим более
сложную программу нагружения
оболочки. Допустим, что
оболочка подвергается давлению,
нарастающему со скоростью
5 = 2000 amjcetc и
достигающему значения, равного 80%
от динамической критической нагрузки. Как мы видели, при этом
в процессе нагружения оболочка не получает заметных прогибов.
Предположим, что в дальнейшем нагрузка меняется по различным
законам, как показано на рис. 21.10,E'. Вариант / совпадает с тем,
который был разобран ранее; здесь нагрузка продолжает нарастать
с прежней скоростью. В варианте 2 нагрузка на втором этапе
остается постоянной. В остальных вариантах C—9) нагрузка падает
Рис. 21.9. Динамические критические нагрузки
в зависимости от начальной стрелы прогиба.
*) Другое решение задачи было дано Ю. И. Кадашевичем и А. К. Пер-
цепым [21.15J, учитывавшими инерционность осесимметричного .обжатия"
оболочки.
ВЫПУЧИВАНИЕ ЗАМКНУТЫХ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
769
по линейному закону; скорость падения нагрузки обозначена через s2
и меняется от 2 • 103 до 2- 104 amjceic. На рис. 21.10, а показаны
7; , = 2400 от/'сек
2, q= canst
S, ,=2A00 ат/csn
*im/ \'i;JB00
5; ШО
6; 5033
?, 8033
д; ШВОВ
3,20330 am/сек
Рис. 21.10. Нарастание прогибов оболочки при более
сложной программе нагружения.
графики изменения стрелы прогиба во времени. Несмотря на то, что
в вариантах 3—9 нагрузка падает, стрела прогиба нарастает до
49 А. С. Вольмир
770 ПЛЛСТИЬКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXt
известного предела, после чего начинает уменьшаться. Поведение
оболочки на волне разгрузки характеризуется величиной
максимального прогиба. В § 205 мы условились считать, что оболочка
выпучивается в период разгрузки, если максимальная стрела прогиба
превышает статическую стрелу прогиба, отвечающую наибольшему
значению давления; статическая кривая приведена на рис. 21.10, а
слева. Если согласиться с этим допущением, то опасными скоростями
разгрузки будут все скорости s2, меньшие чем 3000 ат/сек.
0,5 1,0 1,5 £ 20
Рис. 21.11. Диаграмма «прогиб —нагрузка» при быстрой разгрузке.
На рис. 21.11 эти же кривые представлены в иных
координатах. По оси абсцисс отложена величина нагрузки, а по оси
ординат— стрела прогиба.
Можно принять и иные критерии потери устойчивости или
исчерпания несущей способности оболочки в период разгрузки. Например,
есть основания принять в качестве предельного параметра стрелу
прогиба, отнесенную к толщине оболочки. Наиболее важно здесь
установить, при какой стреле прогиба оболочка не получает
заметных остаточных деформаций.
§ 209. Решение с помощью аналоговых машин
Наряду с цифровыми машинами для исследования динамической
устойчивости могут быть применены также аналоговые машины *),
основные элементы которых были кратко описаны в § 28.
Рассматриваемая задача предварительно должна быть сведена к
интегрированию системы обыкновенных дифференциальных уравнений.
Приведем схему решения на машине МН-7 задачи, разобранной
в § 208, для случая, когда нагрузка возрастает пропорционально
*) Аналоговые машины для решения подобных задач применялись
В. В. Болотиным, Г. А. Бойченко и другими авторами [21.9], [21.10]; см.
также Изв. вузов, Машиностроение, № 6, 1965. Приведенное здесь решение
задачи принадлежит Ю. И. Кадашевичу и А. К. Перцеву.
§ 209] РЕШЕНИЕ С ПОМОЩЬЮ АНАЛОГОВЫХ МАШИН 771
времени. Перепишем уравнение типа B9) в форме
Е= Л£ + Я#Н- C+D1? + Щ?-\~Р1?
или в виде системы уравнений
Xi = x2(A-\-Bt + Dx2-\-Ex\ + Fx§ + C, х2 = хг, B1.30)
.где x2 = L x2 = dt,ldt. Рассмотрим оболочку с прежними параметрами,
принимая h = 0,8 мм, R = 90 mm, L = 200 мм, £0 = 0,001, я = 6,
^в = 0,0402, с = 6000 ат\сек.
В этом случае система C0) примет вид
x]==x2(t— 1—0,508- 10_3лг2 4-0,02x2—0,234. 10~V2N,9 +
+ 6,9. Ю; x\ = xv B1.31)
Выберем максимальное значение функций дг, = 100, дг2:=:20.
Для того чтобы процесс в схеме не шел очень быстро, что
неудобно для снятия показаний приборов и наблюдения за
функциями на лучевом индикаторе, увеличим машинное время в 10 раз.
Тогда будет
т— in? ~ — 10° ~ — 20
/ — lUf, Хх— jqq Хх, Х2— |QQ Х2.
Теперь систему C1) можно записать в машинном виде:
*1==х2@,138- 100+ 1,387 + 1.1*2— 5,3?2) +6,9- Ю-4,
x2 = 0,5xI. ■ B1.32)
Здесь учтено, что при перемножении двух функций блок
произведений делит произведение на 100.
Для набора задачи на машине составляется блок-схема. В
данном случае нагрузка линейно зависит от времени, и на блоке
нелинейности была набрана функция F(T)=T. Так как блок
нелинейности позволяет набрать функцию любого вида, то на машине легко
можно исследовать и более сложные случаи пагружения. Блок-схема
для системы C2) показана на рис. 21.12.
Заметим, что машина практически работает хорошо при
увеличении начальных значений функции в 30—50 раз. Специфическим
условием задач исследования вопросов потери устойчивости оболочек
является требование получить увеличение функции в несколько тысяч
раз. Поэтому такие задачи приходится решать, либо вычисляя
начальный участок кривой численно (что облегчается тем, что при
малых прогибах уравнения линеаризируются), либо решая задачу на
машине поэтапно, перестраивая на каждом этапе блок-схему.
Данный пример был решен на машине МН-7, начиная со
времени ?= 3,3. Значения функции £ и ее производной в этот момент
получено численным интегрированием. Система уравнений C2)
49*
772 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НЛГРУЖЕНИИ [ГЛ. XXI
преобразована к новому машинному времени: Г,—Г—33. Решение
задачи записано на искрописце и показано на рис. 21.13 (сплошная
Рис. 21.12. Блок-схема набора з.иачи на моделируются машине.
Рис. 21.13. Диаграммы «прогиб— нагрузка», полученные на
моделирующей машине (сплошная линия) и с помощью
ручного счета (пунктир).
кривая). Здесь же пунктиром нанесен участок кривой, полученный
численным интегрированием. Как видно из графика, точность
решения на машине оказалась достаточно высокой.
§ 210. Экспериментальные исследования выпучивания
оболочек при всестороннем давлении
Приведем результаты экспериментального исследования,
проведенного над серией тщательно изготовленных (точеных) дюралюмиио-
вых образцов*), при R/h = 220 и L/R = 2,2. Специально спроекти-
*) Опыты были проведены В. Е. Минеевым при участии В. С.
Смирнова. Частично данные этих опытов были приведены в статье [21.12].
Рис. 21.15.
Осциллограмма динамического
нагружения оболочки.
774 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
Как видим, с увеличением скорости нагружения изменяется форма
волнообразования, как это вытекает из теоретического решения.
Вместе с тем резко повы-
~\\ I шается несущая способность
\ I оболочки в стадии
нагружения.
На графике рис. 21.17
экспериментальные данные
сопоставлены с
результатами, полученными в § 208,
для оболочек с теми же
размерами. По оси абсцисс
отложена скорость s в ат\сек,
по оси
ординат—коэффициент динамической
перегрузки kA. Сплошной линией
соединены точки,
полученные из графиков рис. 21.7
для Со = 0,001.
Треугольниками помечены
экспериментальные данные для
первоначально «гладких»
оболочек, кружками — для
оболочек с начальной погибью,
причем стрела начального
прогиба составляла 2/г. Судя
по графику, эксперименты
подтвердили теоретические выводы, по крайней мере, с
качественной стороны. Некоторое отклонение опытных значений критического
Рис. 21.16. Оболочки после выпучивания: а) при
статическом нагружешш; б) при иагружеиии со
скоростью 4700 am/сек; в) для скорости 500 ат/сек.
К,
'д
у%
.
•
, *
•
^k
*А
к
-а—
•
0 12 3 4 5 6 7-103ат[сех
Рис. 21.17. Сравнение теоретических данных для случая
to = 0,001 (сплошная линия) с экспериментальными.
давления для оболочек «идеальной формы» вверх от теоретической
кривой можно объяснить тем, что в экспериментах края оболочек
были защемлены и что к силам инерции массы оболочки
присоединялись силы инерции прилегающего слоя жидкости. Кроме того,
~w
$ 411] ЗАМКНУТЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 775
?.гР
Ходлоршия
теоретическое решение нельзя считать окончательным; желательно,
в частности, выяснить подробнее характер изменения параметра i|\
Другая серия опытов была
проведена над стальными оболочками *),
параметры которых составляли: R',h —
= 200, £,7? = 2,9. Оболочки,
снабжённые вставными днищами,
помещались в резервуар, заполненный
жидкостью. По свободной поверхности
жидкости производился удар
падающим грузом. Изменение высоты
падения груза позволяло варьировать
скорость нарастания всестороннего
давления, передававшегося на оболочку.
При статическом пагружении оболочка
получала шесть вмятин по
окружности, при динамическом нагружении
с различными скоростями — восемь и
девять вмятин.
На рис. 21.18 показана еще одна
установка для испытания оболочек
всесторонним динамическим
давлением**). Принцип ее работы ясен из
рисунка. При испытании
дюралюминиевых цилиндрических оболочек на этой
установке время нарастания нагрузки
составляло около 0,03 сек. Испытывались образцы с параметрами:
Rjh = 75, £//<;= 1,38. Если при статическом пагружении оболочка
теряла устойчивость с образованием шести продольных вмятин, то
при динамическом — число вмятин увеличилось до семи.
Рис. 21.18. Установка длл испмт :;;vt
оболочек при ударном воздепсинш
всестороннего давления.
§211. Замкнутые цилиндрические оболочки при осевом сжатии
Перейдем к случаю, когда круговая цилиндрическая оболочка
подвергается динамическому воздействию осевого сжатия (см. рис. 13.2) ***).
Полный и начальный прогиб аппроксимируем по аналогии с A9)
следующим образом:
w = / (sin<x,„x sin py + i|i sin2атх -f- ф)>
w0 = f0{sinamxsin$y -j- i|)sin2amx-f- <p).
*) Это исследование было выполнено В. В. Сорокиным.
**) Установка создана X. С. Блейхом, В. П. Корниенко и А. И. Сре-
бовским.
***) Здесь излагается решение задачи, полученное С. Н. Кирюшипой.
Другие работы но этому вопросу принадлежат В. Л. Агамирову и автору [21.1],
О. И. Теребушко [21.19]. Подробное исследование линейной осеснмметрнчпой
задачи проведено А. И. Блохипой [21.7]. См. также статью Роса и Клос-
нера [22.10].
776 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
В эти выражения входит новый коэффициент ат, равный ат = /ил/Л,
где т—число полуволн по длине оболочки, в то время как в § 208
соответствующий коэффициент принимался в виде а —я/L.
Напомним, что при осевом сжатии, в отличие от случая всестороннего
давления, потеря устойчивости оболочки в большом выражается в
появлении ромбовидных вмятин, расположенных в шахматном порядке
и образующих несколько поясов по длине L. Подставляя w и w0
в уравнение F) и интегрируя, находим:
ф = Е (К[ cos 2amx -f- K'2 cos 2|3y -f
-\- K'us\namxsm$y -f- AT^sin 3amxsinf5y)— ~-.
Коэффициенты K'v .... K'% определяются прежними выражениями B1)
с заменой а па am; под р понимается средняя интенсивность
сжимающих усилий, приложенных к торцам оболочки.
Применяя метод Бубнова — Галеркина, воспользуемся
уравнением C). После интегрирования придем к следующему соотношению:
p = ^(i-f)+c;(C2-^-fq(C2-^)^2-q(C-^+
1 d2L £2 — tl
B1.33)
где
2 \2
(i + &):
С' =
с
A+^)^12 (I-,,2) \1
1 1+Лл. С=йГ '
ц,
16
l(i+UY ' A + С)
2 \2
4&
О+ЙЛ
с.=
yR2 1
^1 &
В дополнение к B6) здесь введены безразмерные параметры
р R
mnR
~пГ~
Р
Если из уравнения C3) исключить инерционный член и
положить £0 = 0, то придем к решению статической задачи для оболочки
идеальной формы. Верхнее критическое напряжение для некоторой
заданной формы выпучивания будет равно
1 A + &I
Р =С':
12 A-Н2) t
■Ч +
im
0 + №
что соответствует формуле A3.39). Минимизируя р, находим
известное значение /?„ = 0,605. Что касается нижнего критического напря-
F
$ 211] ЗАМКНУТЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 777
жения, то данный вариант решения приводит к параметру*) рн=*
-= 0,\5рв = 0,09; он отвечает значению |ш = 0,6.
Вернемся к динамической задаче. Примем, что внешние усилия
возрастают по закону р == st, и введем безразмерный параметр
тогда уравнение C3) примет вид (индексы т опущены):
S dt
*2
■{(^--^)с-
+ ■
1-Ь
4|4
Ч*Рв L 0+VV
ФЙ-СоК-
A+12)г л
(Е'-Й)*Но
B1.34)
Уравнение C4) было проинтегрировано численным методом,
с помощью цифровой машины. При этом была принята форма вмятин,
-2-10 .кг/см1 сек
Рис. 21.19. Кривые «прогиб —нагрузка» при динамическом сжатии вдоль образующей.
которая отвечает наименьшему верхнему критическому напряжению.
Параметр ф принимался тем же, что и в соответствующей статической
задаче для оболочки идеальной формы (см. § 146). Кроме того, было
принято /?/А=180, LJR = 2,2. Результаты вычислений представлены
на рис. 21.19. По оси абсцисс отложены значения
Г:
Рв
Рв
*) Выше (см. § 146) в этом приближении была получена несколько иная
величина @,124). В § 144 величина |т обозначена в- (стр. 517).
778 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖКНИИ [ГЛ. XXI
здесь в знаменатель входит наименьшее верхнее критическое
напряжение. По оси ординат на рис. 21.19 откладываются значения стрелы
прогиба £. Различные серии кривых относятся к динамическому на-
гружению со скоростями s=\ ■ 106; 2 • 106; 5 ■ Ю6 kzjcm2 сек. Каждая
кривая отвечает известному числу волн п, указанному на графике.
Как видим, бурный рост прогибов имеет место в первом случае при
л =11, во втором —при «=12, в третьем---при «=13.
В другом варианте решения задачи (см. [21.1] и [21.19]) прогиб
аппроксимировался выражением
*!„■ тпх ■ пУ i , ■ о тлх . с, пу \
w = flsm -у—sin-^- -fijrsin2 —j--sin2-^- .
В выкладках, проведенных тем же путем, было принято, что волны
являются квадратными: |m = mxRjnL = 1. Интегрирование уравнения
типа C4) было осуществлено с помощью цифровой машины «Урал-2».
Результаты вычислений приведены в работе О. И. Теребушко [21.19].
Теоретические выводы можно сопоставить с данными серии
опытов над дюралюминовыми оболочками*), проведенных с помощью
hM—I—I—1—I—I—I I f I—i
1.4
1.2
\,D\^~J 1 1 1 1 1 1 1 1 1
0 0,4 0,8 1,2 1,6-10s ие/снг-се«
Рис. 21.20. Сопоставление теоретической кривой с данными
опытов (треугольники).
той же установки, какая была описана в § 210. На рис. 21.20
указаны экспериментальные значения коэффициента динамической
перегрузки; он был получен делением величины нагрузки, при которой
происходило динамическое выпучивание, на статическое критическое
значение нагрузки, также найденное из опытов. Сплошная линия
проведена через точки, полученные интегрированием уравнения C4).
Отметим, что экспериментальные точки имеют здесь больший
разброс, чем в случае всестороннего сжатия (см. рис. 21.17). Эффект
динамичности в случае осевого сжатия оказывается меньшим.
*) Эти опыты принадлежат С. Н. Кирюшиной.
§ 211] ЗАМКНУТЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ ПРИ ОСЕВОМ СЖАТИИ 779
В случае сжатия выпучивание выражается в образовании мелких
вмятин, занимающих обычно лишь часть поверхности оболочки;
поэтому силы инерции здесь не оказывают такого влияния, как при
поперечной нагрузке, когда в движение приходит, как правило, вся
масса оболочки.
Рис. 21.21. Фотографии образцов (с торна) после выпучивания.
На рис. 21.21 изображены фотографии (с торца) оболочек
толщиной 0,5 мм, одна из которых была испытана статически (рис. 21.21, а),
а вторая—при динамическом нагружении
со скоростью 5 = 0,65 • 106 кг/см2 сек (рис.
21.21,5).
Ряд интересных опытов по
динамическому выпучиванию оболочек при осевом
сжатии был проведен также Шмиттом [21.23]
и Коппа [21.22]*). Правда, эксперименты
этих авторов относились скорее к чисто
ударному нагружению оболочки, чем к тому
случаю умеренной скорости возрастания
нагрузки, который рассматривался выше. Тем
не менее качественные результаты опытов
соответствуют полученным нами
теоретическим выводам. Оказалось, что при
динамическом нагружении размеры вмятин меньше и число вмятин в
поперечном сечении больше, чем при статическом приложении силы. В
работе [21.22] особое внимание было уделено форме выпучивания
оболочки при ударе. Оказалось, что здесь может быть применен тот
же геометрический подход к задаче, какой был предложен для
Рис. 21.22. Выпучивание
оболочки при резком ударе.
*) См. также статью Витмера и других (Е. A. W i t m e г а. о., А1АА
Journ. 1, № 8, 1963, 1848-1857).
780 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
статических задач (см. § 147), На рис. 21.22 показана форма
волнообразования реальной оболочки, приближающаяся к изометрической.
а) 5)
Рис. 21.23. Оболочка выпучивается при ударе (рис. 6) по форме, весьма близкой
к изометрической (рис. а).
На следующем рисунке полученная построением изометрическая форма
(рис. 21.23, а) сравнивается с фактической конфигурацией вмятин
(рис. 21.23, б).
§ 212. Сферическая оболочка при внешнем давлении
Рассмотрим теперь сферическую оболочку, подвергающуюся
динамическому действию равномерно распределенного внешнего давления.
Речь идет как о замкнутой сферической оболочке, так и о
сферическом сегменте, охватывающем достаточно большой центральный угол
(см. рис. 16.1 и 16.2). До потери устойчивости оболочки сжимающие
напряжения в стенке равны e — qR.j2h.
Ограничимся решением задачи о динамической устойчивости
оболочки в линейной постановке*). Полагая в A) и B) kx — ky= \jR
и отбрасывая нелинейные члены, придем к уравнениям
>(„-„„) =4 vxe-gvv-A^
■1у4Ф==-^У2ею —
g № •
__ V2 (w — щ).
B1.35)
B1.36)
*) В работе Хамфрейса и Боднера (J. Humphreys, S. В о d n e r),
(J. Engng. Mech. Div. Proc. Amer. Soc. Civil Engrs. 88, № 1 A932), 17—36J
была рассмотрена подобная нелинейная задача.
§ 212] СФЕРИЧЕСКАЯ ОБОЛОЧКА ПРИ ВНЕШНЕМ ДАВЛЕНИИ 781
Объединяя эти два уравнения, получаем следующее разрешающее
уравнение для прогиба:
В- ^(w - wQ) + -§- V2 (w - w0) -f --g V% -f- ± ^r {T-w)=Q. B1.37)
Идя тем же путем, что и в § 178, не будем выписывать для
функций w и wQ конкретных выражений, а примем следующую
зависимость, вытекающую из периодического характера этих функций:
Y2w = — k2w, V2w0 = — №w0;
тогда уравнение C7) примет вид
^.X*(-a>-w0)i-§r(w-w0)-^-J^w-\-^^- = 0. B1.38)
Введем обозначения:
— — I X^Rh — п2 1*1 — а — — о-
тогда после простых преобразований получим:
Ь(Г^Г+ 1](£-У-|^+^ = 0. B1.39)
Если в этом уравнении опустить инерционный член, то при £д—>0
найдем статическое критическое давление, отвечающее данному
параметру ц:
qn==2 [l2(l— ц2) ^^J'
Минимизируя эту величину по т|, находим известное значение
верхнего критического давления qB=l,2\. Соответствующее
безразмерное мембранное напряжение равно aD = 0,605.
Динамическое уравнение C9) можно теперь переписать в виде
71? Л* + 2 (; w 2 & —U
ИЛИ
Y^ ig.-|-l(£ —So) —-4—£ = 0. B1.40)
^£Л2?т1, в Л2 2 2^,,,
Примем, что давление меняется по закону q = st, и введем
безразмерный параметр времени
t*—st~ stR2
Тогда уравнение D0) перейдет в следующее:
у $=('■-ОН Со. B1-41^
782 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ ИАГРУЖЕИИИ [ГЛ. XX!
где
2 ^п
с£А2 \2
sR*
)V
B1.42)
Интегоируя уравнение D1), найдем зависимость t(t*) при задан-
5. Затем следует перейти к «единому» времени
/* _ JL — t' —
и сравнить кривые С (О- отвечающие различным значениям i\. Находя
И-5 2.5 15
10
S-5; tf-iV'
I
-г
V
" ! 2 3 i 5.6
Рис. 21.24. Диаграмма «прогиб —нагрузка» для
сферической оболочки.
кривую, которой
соответствует наиболее бурный рост
прогибов, определяем
динамическое критическое
давление.
На рис. 21.24
изображены кривые £(/i),
полученные с помощью
электронной цифровой машины
«Урал-1». Они относятся к
значениям 5 = 5, ^,= 10"
и различным ту2. Как видим,
бурное возрастание
прогибов имеет место прежде всего в случае т]2 = 5. На следующем
рисунке 21.25 сопоставлены кривые £(j?i), относящиеся к параметру
1 £„-»-',
- ч W / -
S-5 J
Ю'А ID'3]
:x^i
_,
г4
/
t;
Рис. 21.25. Графики динамического
выпучивания сферической оболочки при различной
начальной погиби.
Рис. 21.26. Форма выпучивания сферического
сегмента по данным скоростной киносъемки.
5 = 5 и различным t^; здесь выбраны лишь кривые, лежащие ближе
всего к оси ординат.
Поведение сферических сегментов при динамическом нагружении
внешним давлением исследовалось экспериментально па специально
I
I 213] УСТОЙЧИВОСТЬ И НЕЛИНЕЙНЫЕ АКУСТИЧЕСКИЕ КОЛЕБАНИЯ 783
спроектированном гидравлическом копре*). И в этом случае с ростом
скорости нагружения обнаруживаются более высокие формы потери
устойчивости.
На рис. 21.26 показан один из кадров скоростной киносъемки,
хорошо иллюстрирующей несимметричную высшую форму
выпучивания сегмента.
§ 213. Устойчивость и нелинейные акустические колебания
цилиндрической оболочки
Обратимся к задаче о колебаниях и прощелкивании
цилиндрических оболочек, находящихся в поле акустического давления. За
последние 10—12 лет этой задаче уделяется все большее внимание;
она является важной для современной авиационной и ракетной
техники**). Росту мощностей реактивных силовых установок
сопутствует возрастание уровней акустических давлений, создающихся
вблизи работающих двигателей. В связи с этим приобрела
актуальность проблема акустической усталости элементов обшивки
летательных аппаратов, подверженных действию акустического излучения
реактивных двигателей.
Основным источником шума, возбуждаемого реактивным
двигателем, является реактивная струя, звуковая мощность которой может
достигать заметной доли номинальной мощности двигателя.
Акустические давления значительной величины имеют непрерывный спектр
в диапазоне частот 10—10 000 гц.
Высокочастотные колебания конструкции могут привести к
быстрому ее разрушению; при широком диапазоне частот
возмущающей акустической нагрузки не всегда можно добиться
значительного снижения уровня вибраций путем смещения собственных
частот элементов конструкции по отношению к частотам акустических
давлений.
Пульсации давления в поле акустического излучения
реактивных двигателей представляют собой случайную функцию времени и
пространственных координат. Наибольшее значение имеют для ее
*) Опыты были проведены Р. Г. Суркииым, Б. М. Зуевым, С. Г.
Степановым (Казанский физ.-тех. инст., Тезисы докл. юбил. науч. конференции,
секция мех.-мат. наук, Казань, 1966). Другие экспериментальные данные
по воздействию взрыва и ударной нагрузки на сферическую оболочку см.
в-работе Витмера и других авторов. (Е. Wit тег а. о., NASA TN D-1510,
1962, 607—622.)
**) Изучению общих особенностей нелинейных колебаний оболочек
посвящены работы Э. И. Григолюка [21.14], О. Д. Ониашвили [21.18],
С. А. Амбарцумяна и В. Ц. Гнуии [21.3], Г. В. Мишенкова [21.17] и
других авторов. Обзор исследований, посвященных проблеме колебаний
оболочек в поле акустического давления, дается в статьях Гудмэна и Раттайи
[26.15], Кларксона [26.12]; этой области посвящен ряд работ В. В.
Болотина [25.1], [26.2] и Кренделла [26.13].
784 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
описания данные, относящиеся к акустическим давлениям в
непосредственной близости от реактивной струи, т. е. в ближнем акустическом
поле. Однако имеющиеся попытки теоретического исследования,
а также экспериментальные данные относятся главным образом к
дальнему звуковому полю.
Дальнейшее изучение акустических полей реактивных
двигателей остается важной составной частью проблемы акустической
усталости конструкций, подверженных действию аэродинамического
шума.
Исследования поведения конструкций при действии акустических
нагрузок ведутся как в линейной, так и в нелинейной трактовке.
При этом рассматриваются и такие задачи, в которых акустическая
нагрузка представляется в виде детерминированного воздействия,
изменяющегося по гармоническому закону. Большое число
теоретических и экспериментальных работ посвящено изучению реакции
упругих систем при воздействии случайных акустических давлений,
т. е. рассмотрению задачи в статистической постановке.
Применительно к задаче о колебаниях цилиндрической оболочки,
находящейся в поле акустического давления, важно исследовать
задачу с нелинейных позиций, так как при этом возможно
описание колебательных движений, сопровождающихся хлопками (про-
щелкиваниями) оболочки и представляющими особую опасность
в отношении развития усталостных трещин. В случае, если эта задача
рассматривается с учетом случайного характера акустической нагрузки,
исследование нелинейных задач в статистической постановке позволяет
получить вероятностные характеристики движения системы, склонной
к прощслкиванию; при этом особый интерес представляет
определение вероятностного уровня циклов колебаний, сопровождающихся
преодолением системой энергетического барьера, и среднего в единицу
времени числа хлопков *). К исследованию этой задачи в
статистической постановке мы обратимся в главе XXVI. Здесь мы будем
принимать акустическое силовое воздействие в виде гармонической во
времени поперечной нагрузки.
Исследуем случай нелинейных акустических колебаний
цилиндрической пологой панели длиной а и шириной Ъ\ примем, что точки
краев панели свободно смещаются в плане **), Будем учитывать
начальные неправильности формы оболочки. Пусть к криволинейным
краям панели приложены равномерно распределенные по ширине
сжимающие усилия р, постоянные во времени, и оболочка совершает
колебания под воздействием акустического равномерного нормального
*) Исследованию нелинейных колебаний панелей, закрепленных по
контуру и находящихся в акустическом поле, посвящены работы Кирхмана и
Гринспона [26 18], Лэсситера, Гесса и Хаббарда [26.19], Лина [26.20] и
других авторов. В работах В. В. Болотина [25.1], [26.2]. М. Ф. Диментберга [26.6]
этот вопрос исследуется в статистической постановке.
**) Эга задача рассматривалась И. Г. Кильдибековым и автором [26.3].
$ 213] УСТОЙЧИВОСТЬ И НЕЛИНЕЙНЫЕ АКУСТИЧЕСКИЕ КОЛЕБАНИЯ 785
давления q(t) = qacosat. Здесь qa— амплитудное значение
акустического давления. Исходя из соотношения N = 20I»- {qe!qQ), где
Д/ — уровень шума в децибелах, q0 —условно выбранный порог
давления q0 = 2 • 10~''н/л2, qe — эффективная величина звукового
давления, находим амплитуду акустического давления
^в = 1^2 ^в = 21'5 - 105 (о-01^-^ н/Л2^2'-5. 105@'°"v-2' кг\см\
Обозначим через w1 it w0 соответственно дополнительный и
начальный прогибы панели. Система основных уравнений A2.121) при
kx = 0, ky=\jR принимает вид
^-V^^i^ + % Ф) + -^ + ^7Г^. B1-43)
_LV2V2(p = _i.AK + 2Woi Wi)_^^l. B1.44)
Оператор L в применении к функциям (wt -{-wQ), Ф будет
L(w1-lrwQ, Ф) =
_ d2(wl-}-w0) д2Ф , d2(w[ + w0) д2Ф d2(wl -f »0) д2Ф
их2 ду2 ' ду2 дх2 дх ду дх ду '
Псд q(x, у, t) понимается интенсивность нормальной нагрузки,
вычисленная с учетом динамических составляющих:
q(x, у, t) = — ph~~ — 2р/ге -^± + qa cos u>t, B1.4o)
где е—коэффициент затухания.
Для случая шарнирного опирания краев панели аппроксимируем
прогибы wl и w0 выражениями
, ,,. . пх . яу
«'i=/i@sin —sm-^-
, . лх . яу
•ra0 = /osin —sin-^.
B1.46)
Подставим D6) в уравнение совместности деформаций D4) и
определим функцию Ф. В рассматриваемом случае функция напряжений
определяется по B0.52); с учетом принятых здесь обозначений
приведем это выражение к виду
®=-#/i(/i + 2/o)(a.2cos^+-i.cos^) +
Е а2 , . пх . пу 1 , ,п. ._
7KS пл. 1Л2 /i s,n IT sin IT — Т ^ B1-47)
^ У?я2 A-f Я2J •" а 6 2
где А, = a/ft.
50 А. С. Вольмир
786 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
Интегрируя далее уравнение D3) с учетом D5) по методу
Бубнова — Галеркина, получаем следующее обыкновенное
дифференциальное уравнение, описывающее в первом приближении нелинейные
акустические колебания панели:
d\ 2e di (о„ / р*\ еЯ р*
7-гН г + 4'-Я (at-(£2+r,£3)=£o -±-r + q (x). B1.48)
dx со dx ay pD J or рв
Здесь S = /i (О/*. Со =/о/*, x^Grf, р* = pP/Ek2, p\ = pJPjEh*.
Параметр р*в верхнего критического напряжения равен
я-__^A + яу , т? _ B149)
12Л.2 A — [I2) ~т~я*A-\-Х?)*'
параметр кривизны k =b2\Rh, Квадрат основной частоты
собственных колебаний идеальной панели при малых прогибах без учета
сжимающих усилий будет
«S^Xw-1 BL50'
с — скорость распространения продольных волн в материале
оболочки, вычисляемая по G.1). Под а в D8) понимается
а=1+ф{4A+?/)^_^*[1+тг8р?]5о}; B1.51
величины р и rj будут
Т1 = 0,75т|зA+Я4), B1.53)
где
4> = г тйЛ-,..vw ^Т- BL54i
1-ц*
r(i+>^+12X4ft2A-^Vi-
-5)
В рассматриваемом случае находим
или
16 [С\2
Приняв в выражениях D8), E1), E2) £0 —0, приходим к случаю
вынужденных колебаний идеальных панелей. Положив <7 = 0,
получаем уравнение, описывающее собственные колебания панели *).
*) Эти случаи исследовались Г. В. Мишенковым; см. сноску на
стр. 783.
4 213] УСТОЙЧИВОСТЬ И НЕЛИНЕЙНЫЕ АКУСТИЧЕСКИЕ КОЛЕБАНИЯ 787
Обратимся сначала к квазистатической задаче. Опуская
динамические члены в уравнении D8), приходим к выражению
a£-p£24-ri£3:
где параметр qa равен
16
п2о>1Е { к
р*
С \2
I ~*
+ ?*•
РВ
-1
Я и-
B1.57)
B1.58)
Возможные равновесные положения панели в случае Ча~^
и 1^ = о определяются корнями соответствующего однородного
уравнения. При р < 2 ]Лт) оболочка имеет единственное
положение равновесия, около которого происходят колебания; при
р > 2 ]Лт) получается три положения равновесия. Для оболочки,
нагруженной статическим
давлением <7*, возможные положе- НО'
ния равновесия определяются
исходя из выражения
+ r£3 k
С- B1-59)
//
/*=0
/ >/
jfgf^Ta
'"^Ч ^
,
V
/к-12
b
3
4
У
/к-24
У
£7$
Д*
/г
Рнс. 21.27. Равновесные формы панелей с
различными параметрами кривизны.
Зависимости E9) построены
для квадратных идеальных
(^ = 0) панелей с
параметрами кривизны k = 0
(плоская панель), &=12, £ = 24
(рис. 21.27); во всех случаях
принято q* =0,3. Случаю
панели, нагруженной
одновременно поперечным давлением и продольной сжимающей силой,
соответствует линия 4; эта линия пересекает ось £ в трех точках, что
соответствует трем возможным положениям равновесия системы.
При получении амплитудно-частотных характеристик будем
пользоваться методом, предложенным Э. И. Григолюком [21.14]. Примем
приближенное решение уравнения D8) в виде
C = acosx.
B1.60)
Подставим F0) в D8); тогда получим уравнение типа А(т) = 0.
Выполняя далее условие ортогональности результата подстановки
50*
788 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ [ГЛ. XXI
к функции cost по четверти периода
Я/2
| Lcosxdx = 0,
получим
4 е
v4
*°Vr-i
v-«-f-|rP«—Ь«2
, 4 Со
па pD
B1.61)
■ = 0; B1.62)
здесь через v обозначено
При е = 0 амплитудно-частотная характеристика имеет вид
4 к qa
\\а~ s .
4 па _Рв__1 а
8 3
:а f>a-]—т|я2 —
Зя л
B1.63)
B1.62а)
Приняв q* = 0, получим уравнение «скелетной линии», отвечающее
собственным колебаниям
панели.
В\- •^i^JS^tiriPs'U,a j Амплитудно-частотные
характеристики по F2а) для
квадратных идеальных панелей
представлены на рис. 21.28;
здесь по-прежнему принято
<7* =0,3. Проследим за
изменением амплитуды в
зависимости от частоты на примере
плоской панели (k = 0).
Вначале с увеличением частоты
амплитуда монотонно
возрастает вдоль участка АВ. За
точкой В становятся
возможными колебания различного
типа. В некоторой точке С,
положение которой в каждом конкретном случае определяется особо,
происходит «срыв» колебаний: амплитуда падает скачкообразно до
значения, соответствующего точке D нижней ветви характеристики.
Дальнейшее увеличение частоты сопровождается падением амплитуды
2 *
0
.
гг=^
=
"--о'
-<%—
С А
К'24 У^*'
-^-^^K-^iP'/p's-D.S
^47 К'12 л?
^£?/' Л?
-*^-^/' ^^
<?^ // у**
/' /Г
/' уГ
/ 1 у"
1 I У*
У? «^0^
1 \ X / \>^
\ VV с^
-л/м Bjzrt
jS^tff '
=:=^Р-^=^4:^^?Д====^-
w
0,3
12
1,6
2,0
Рис. 21.28. Амплитудно-частотные характеристики
при различных значениях параметра кривизны
панели.
$214]
ПРАКТИЧЕСКИЕ ВЫВОДЫ
789
вдоль участка DF. При уменьшении частоты скачкообразное
возрастание амплитуды происходит в точке Е. К и р х м а н и Гринспон
[26.18] наблюдали явление «срыва» колебаний при экспериментальном
изучении реакции плоских панелей на воздействие шумовой нагрузки
при уровне звукового давления в 150 ЛТ.
Как видим из рис. 21.28, в случае оболочки с параметром
кривизны й= 12 эффект нелинейности возрастает. При значении k = 24
амплитудно-частотная характеристика панели получает две области
неустойчивости.
На рис. 21.28 приводятся кривые и для случая, когда панель
испытывает дополнительное действие продольных усилий,
интенсивность которых составляет 1[2 верхней критической величины. Для
такой оболочки становятся возможными три вида колебательных
движений: а) колебания около основного устойчивого положения
равновесия; б) колебания около прощелкнутого устойчивого
положения; в) колебания, охватывающие оба эти положения. Ветвь cmd
соответствует колебаниям около основного положения равновесия,
верхние ветви кривой отвечают третьему типу колебаний.
Приведенные здесь результаты для идеальных панелей достаточно
хорошо согласуются с данными, полученными Г. В. Мишенковым
по методу «гармонического баланса», если проводить сравнение
максимальных значений прогибов панелей относительно
невозмущенного состояния.
В первой из статей [26.3] исследуется с помощью приведенных
выше зависимостей влияние на поведение оболочки начальных
неправильностей формы.
§ 214. Практические выводы. Другие динамические
задачи
В настоящей главе мы подробно рассмотрели различные подходы
к решению динамической задачи, которая с практической точки
зрения является наиболее актуальной,— о поведении пластинок и
оболочек различной формы при быстром монотонном возрастании нагрузки.
Были намечены также пути исследования более сложных программ
нагружения. Общий вывод состоит в том, что характер выпучивания
пластинок и оболочек при динамическом нагружении является иным,
чем при статическом, и что в первом случае проявляются высшие
формы потери устойчивости. Это позволяет проектировать
облегченные тонкостенные конструкции, заранее предусматривая их
перегрузку в короткий период приложения сил.
Приведенные данные интересны и с теоретической стороны, так как
открывают новую область в проблеме устойчивости пластинок и
оболочек. Они указывают, в частности, на важность изучения не только
первой формы потери устойчивости, но и высших форм. Кроме того,
некоторые свойства оболочек, как, например, переход к почти
790 ПЛАСТИНКИ И ОБОЛОЧКИ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЁНИИ [ГЛ. ХХГ
изометричной поверхности при выпучивании, проявляются в
динамическом процессе более отчетливо.
Мы рассматривали поведение оболочек, как правило, с позиций
нелинейной теории. Отметим, однако, что интегрирование линейных
уравнений (см. § 212) также позволяет, хотя и с некоторой
погрешностью, судить о начальной стадии бурного возрастания прогибов.
Нами учитывались только силы инерции, соответствующие
нормальному перемещению. Более полные уравнения включают
инерционные члены для перемещений и и v. Этот вопрос обсуждается
в следующей главе.
Исследуем еще одну динамическую задачу, рассмотренную
в главе VII в применении к стержням. Большое внимание в
литературе было уделено задаче о параметрических колебаниях пластинок
и оболочек *). И здесь полная картина поведения пластинок и
оболочек может быть получена лишь при использовании нелинейной
теории. Это имеет особенно большое значение для оболочек, так как
процесс колебаний может сопровождаться их прощелкиванием.
Рассмотрим для примера случай замкнутой цилиндрической оболочки,
находящейся под действием пульсирующего нормального давления.
Воспользуемся схемой решения задачи, принятой в § 208, в
применении к идеальной оболочке, т. е. считая £q = 0. Уравнениям B5)
и B5а) можно придать вид
С4 -g- -+- [С0 - q {t)\ С - С-М2 +■ (С, + С2Щ £3 = 0,
B1.64)
д.- N&
Примем q(t) = q°cosQt и положим приближенно ф = (N^jIN^£; тогда
первое из уравнений примет вид
-J!- + cd2A — 2ц cos О/) С — аС3 f-pP = 0, B1,65)
где
C3N3 С, C2N\
Р
2C,%NX С4 ' 4С4ЛГ? '
Если исключить из F5) нелинейные члены, то придем к известному
уравнению Матье G.118). Результаты исследования такого линейного
уравнения совпадают с теми, которые были изложены в § 86. Между
тем, решение нелинейной задачи имеет существенные особенности.
Если учитывать линейное демпфирование, то для nRjnL < 2,66 мы
*) Эти задачи были впервые рассмотрены В. В. Болотиным [21.8], а
в дальнейшем С. А. Амбарцумяном, Ж. Е. Багдасаряном и другими [21.3]—
[21.5], [21.13]. Ниже приведены данные, полученные В. Ц. Гиунн.
§ 214] ПРАКТИЧЕСКИЕ Г!ЫГЮДЫ 791
получим зависимость между квадратом амплитуды установившихся
колебаний С2 и квадратом частоты возмущающей силы О2 в области
главного (первого)
параметрического резонанса,
изображенную на рис. 21.29. Как видим,
кривые С2 (О2) имеют
характерную петлеобразную форму; это
указывает на возможность
осуществления хлопков оболочки
от одних устойчивых
установившихся положений к
другим *).
В заключение отметим, что
приведенные выше
исследования являются лишь первым
шагом в разработке теории
устойчивости оболочек и
пластинок при динамическом нагружении, включающей описание
явления прошелкивания оболочки. „Уязвимым" местом решений по
методам Ритца и Бубнова — Галеркина, особенно в применении к
замкнутым цилиндрическим оболочкам, являются допущения, касающиеся
характера волнообразования оболочки в процессе выпучивания.
Желательно продолжить уточнение решений различных задач с
применением цифровых электронных машин (см. § 207), а также
провести новые серии экспериментов. Другие направления возможных
исследований в этой области намечены в § 249.
Рис. 21.29. Амплитуда колебаний оболочки в
зоне параметрического резонанса.
*) На это обстоятельство было обращено внимание В. В. Болотиным
в работе 1958 г. [21.8].
ГЛАВА XXII
УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ
§ 215. Постановка задачи. Основные уравнения
В предыдущей главе был рассмотрен ряд задач, относящихся
к устойчивости оболочек и пластинок при динамическом нагружении.
В круг этих задач не входил случай весьма быстрого — ударного —
приложения нагрузки, так как его исследование должно вестись
с учетом волнового характера распространения напряжений в
оболочке или пластинке. Обратимся теперь к этому случаю ударного
нагружения пластинок и оболочек, подобно тому как это было
сделано в главе VIII для сжатых стержней.
Отметим, что теория ударной устойчивости оболочек и пластинок
может найти применение в расчетах тонкостенных конструкций на
действие взрывных и сейсмических нагрузок.
Составим новые исходные уравнения, предполагая, что прогибы
при выпучивании оболочки могут быть сравнимыми с ее толщиной;
кроме того, примем во внимание начальные отклонения формы
срединной поверхности от идеальной. Отнесем координатные линии
к главным направлениям и обозначим главные кривизны срединной
поверхности через kx и ky.
Выражения для деформаций в срединной поверхности имеют по
A2.120) вид (для деформации сдвига здесь введено обозначение у,
так как под у далее понимается удельный вес материала):
ди , , . . 1 (dw\2 1 (dway
dv . . . . 1 idwy 1 I dw0y
du , dv A dw dw dw9 dwa
B2.1)
ду dx ' dx ду дх ду
Уравнение совместности деформаций по аналогии с A2.110) выпишем
в виде
д2е й2е д2\> 1
~W + ~w ~ Тк~ду~= ~ 7[L {W' w)" L ^' Wo)] — v* (^ — дао);
B2.2)
«2151
ПОСТАНОВКА ЗАДАЧИ. ОСНОВНЫЕ УРАВНЕНИЯ
793
9
под L (w, w) и \i;W понимаются выражения (см. стр. 321 и *496):
, , ч „Г d2w d2w I d2w \2i
fox
dx
dx
дх
- +
+ ■
дх
до»
*
ду
.1
g
У
g
У дх г х ду* '
Выпишем далее уравнения движения элемента оболочки с
присоединением сил инерции, соответствующих перемещениям и, v вдоль
координатных линий. Уравнения движения в проекциях на
касательные к линиям х, у будут:
B2.3)
d2v v
~dlr==zQ' J
а уравнение в проекциях па нормаль к срединной поверхности
_ V» (да — да0) = Gxkx + oyky +
, д I dw , dw\ . d I dw , dw \ у d2w q or) ..
+ W К -Ш + x W)+17 lT-ЬТ- + °y W! ~T ~dW+ h ■ B2-4)
Мы не включили в эти уравнения члены, отражающие инерцию
вращения элементов оболочки, и прогибы от сдвигов, исходя из
результатов, полученных в главе VIII: проведенные для стержней
вычисления *) показали, что в задачах такого типа этими членами можно
пренебречь.
Соотношения между деформациями и напряжениями будут:
аж = Т^(е* + Деу), оу = г§^(гу + це^), т=2A + [Х) у. B2.5)
Девять уравнений A), C) — E), отвечающие девяти неизвестным —
перемещениям, деформациям и напряжениям — с присоединением
граничных и начальных условий, позволяют, вообще говоря, решить
задачу. Однако в некоторых случаях, например для замкнутых
цилиндрических или конических оболочек, эта схема оказывается слишком
сложной; желательно искать пути ее упрощения.
Один из вариантов такого упрощения состоит в следующем.
Введем выражения E) и A) в первое из уравнений C); тогда получим
у д2и Е ( д ( ди , . , . 1 / dw \2
J^ = T=^{-dT\-dx--k^W~W^^-2\-dx-) ~
-IU
i Г dv . , , , 1 I dw \2 1 /<Эда0\2Ц ,
,!/• . d Y du . dv , dw dw dw0 dw0~\\ /QO _
+ -2-A~'l) 'oj['dy-+'o4'r "dx~Ty W~dT\)' { ■'
*) Более полныэ уравнения приведены Нахди и Купером (Р. М-
Naghdl, R. M Cooper, J. Acoust. Soc. Ашег. 28, j\° "l A956), 56-63).
794 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ (ГЛ. XXII
Здесь'одна из составляющих силы инерции в срединной поверхности
выражена через производные от перемещений и, v, с одной стороны,
и от прогиба w—с другой; аналогичное выражение можно записать
для второй составляющей силы инерции (y/g)d2v/dt2. Примем теперь
во внимание, чго процесс выпучивания оболочки при ударе можно
условно разделить на две стадии: первая состоит главным образом
в накоплении напряжений в срединной поверхности, вторая — в резком
выпучивании оболочки и развитии значительных прогибов. При
рассмотрении первой стадии можно, по-видимому, пренебречь влиянием
прогиба па силы инерции в срединной поверхности. Что касается
второй стадии, то з.тесь «вклад» прогибов оболочки в общую
величину тангенциальных сил инерции может быть заметным; по при этом
влияние самих сил инерции в срединной поверхности па поведение
оболочки не должно быгь значительным. Исходя из этого, условимся
пренебрегать эффектом прогиба при определении сил инерции в
срединной поверхности и для всего процесса выпучивания оболочки.
Напомним, что такая же процедура была применена в главе VIII,
относящейся к ударному выпучиванию стержней, —в уравнении (8.38а)
были отброшены члены, зависящие от прогиба.
Итак, примем вместо выражений типа F) следующие соотношения:
Y
g
Y
g
д2и
d2v
dt2
Е
1 —И2
Е
1-и2
ff'u . d2v 1. ^(д2и | d2v \\
~Ш "*" ! ~Шу + Т( ~!) I If + дхду)\ '
ду2 ~*~ |l дх ду "Г" 2 ( W [дх2 "т" дх ду )\ '
B2.7)
Уравнения G) в совокупности с начальными и граничными
условиями позволяют определить перемещения и, v. Эти уравнения
используются при исследовании процесса распространения упругих воли
в срединной поверхности оболочки. Зная функции и, v, находим
напряжения в срединной поверхности. Далее можно перейти к
уравнению D), с помощью которого отыскивается функция прогиба w.
Другой путь состоит во введении динамической функции
напряжений в срединной поверхности. Дифференцируя первое и второе
уравнения C) соответственно по х и у, получим:
B2.8)
g dydt2
Определим далее входящие в (8) производные от и и г; из
соотношения A); опуская по принятому выше условию члены, зависящие
от прогиба w, найдем:
д3и д2гх d3v д2е.у
дх dt2 Of2 ' ду dt'2 dt2
B2.9)
ПОСТАНОВКА ЗАДАЧИ. ОСНОВНЫЕ УРАВНЕНИЯ 795
Используя (8) и E), будем иметь с учетом (9):
д2ах д2х у / д2°х д2°у \
дхду~т~ ду2 Eg [ dt2 !l dt2 )~°-
Выразим ox и oy через функцию напряжений Ф по формулам,
обобщающим известные формулы A3.13) на динамический случай:
_д2Ф у ,, ,.л й*Ф 1
Каждое из уравнений A0) приведет тогда к следующему уравнению,
связывающему касательное напряжение т с функцией Ф:
^=-w+*£w-(*)'<,-'">4£- <22-'2>
Подставляя A1) в уравнение движения D), приведем его к виду
—^(l+^^ + Ay + V^)^--^"^- + -f, B2.13)
где
л /л-. \ й2Ф д2да . д2Ф d2w
L(d>,w) = 1^w- + w-s-r.
Обратимся к уравнению совместности деформаций B). Учитывая E),
перепишем его в виде
д2ах дЧ д2оу 1д2ах д2х д2ау\
If 2 ~дхду ~*<~ ~дх2 ~~ ^Хдх2' "+ 2 ~дхду ~^~ ly2/ =
= E{—j[L(w, w) — L{w0, wq)] — Vi(w— w0)}. B2.14)
Пользуясь (8) и (9), получим
мр-¥<1-«а[',-1"+4]ф=
i ■>
= —у[£.(да, да) — L(w0, wQ)] — V£(w — wQ). B2.15)
* Система уравнений A3), A5), A2) относительно функций Ф, w
и т. является окончательной; она должна быть дополнена граничными
и начальными условиями*). В частном случае статической задачи A3)
*) Эти уравнения были выписаны в работе [22.5]; по характеру
основных допущений они соответствуют системе II работы Нахди (Р. N а g h d i,
Proc. of the IUTAM Symp. on the theory of thin elastic shells, Delft, 1959).
796 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ. XXII
и A5) переходят в обычную систему уравнений нелинейной теории
оболочек.
Отбрасывая в A3) и A5) нелинейные члены и считая w0 = 0,
придем к следующим основным уравнениям динамической линейной
теории:
D и
— V w-.
h
:»!ф-^-A
\i)(kx-\-ky)
<Э2Ф
дР
Y д2и . q
W-k^-^vW-%v+*w]* = -^-
B2.16)
В некоторых задачах можно приближенно положить т = 0; тогда
система A3) —A5) сведется к двум более простым уравнениям.
Решение системы A3) — A5) может быть проведено с помощью цифро-
пых машин; при этом может быть использован метод конечных разностей.
§ 216. Пластинка и цилиндрическая панель
при продольном ударе
Исследуем поведение пластинки или цилиндрической круговой
панели, воспринимающих удар жесткой массы в направлении одной из
сторон пластинки или вдоль
образующей оболочки. Будем
считать, что усилия, передаваемые
ударяющей массой, равномерно
распределяются вдоль одной из
поперечных кромок и что вторая
поперечная кромка является
неподвижной (рис. 22.1). Эта
задача представляет собой
продолжение рассмотренной нами в главе
VIII задачи об устойчивости
стержня при осевом ударе *).
Воспользуемся соотношениями
между деформациями и
перемещениями A), уравнениями
равновесия C), D) и соотношениями
закона Гука E). Тогда мы получим
девять уравнений относительно перемещений, деформаций и
напряжений как функций пространственных координат х, у и времени t. Для
того чтобы понизить порядок уравнения D), целесообразно ввести
новую функцию o) = V2(w — wQ), тогда в D) будет фигурировать
функция V2co.
Рис. 22.1. Цилиндрическая панель под
действием осевого удара.
*) Редвуд (R. Redwood, J. RAS 68, 1964) применил к задаче о
поведении пластинки при ударе один из простейших критериев, изложенных
в главе VIII.
§ 216] ПЛАСТИНКА ПРИ ПРОДОЛЬНОМ УДАРЕ 797
Выберем следующие начальные условия: w — w0, u = v=^0,
d<o;idt = dujdt = dvldt = 0 при £ = 0. В качестве граничных условий
примем w = 0, d2w/dn2 — 0, т —Одля всех точек контура (d2wldn2 —
производная вдоль нормали к контуру), (Ql;g)d2ujdt2 = hbax при
х = 0, где Q, — вес ударяющего тела; «==0 при x~Q, г/ = 0 при
у = 0 и у = Ь. Выражение для начального прогиба выберем в виде
щ — /о sin (лх/а) sin (яу/b).
Перечисленные выше уравнения, а также начальные и граничные
условия были приведены к безразмерному виду и выражены в
конечных разностях. Решение конечноразностных уравнений было выполнено
0 0,5 х-1
Рис. 22.2. Изменение сжимающих напряжений в среднем
сечении пластинки во времени.
па машине БЭСМ-2М с шагом по пространственным координатам,
составлявшим 1/12 и 1/16 от стороны Ь. Шаг по времени выбирался из
условия устойчивости разностной схемы *). На рис. 22.2 представлено
Рис. 22.3. Распределение прогибов в различных
сечениях пластинки при ударе.
изменение во времени параметра сжимающих напряжений ax=arb2!Eh2
вдоль линии y=zbj2 для случая квадратной пластинки (слева — торец,
подвергающийся удару). Через t* обозначено отношение t/T, где
Т — время прохождения продольных упругих волн вдоль стороны а.
Ударяющая масса считается здесь бесконечно большой; стрела
начальной погиби составляет 0,001 от толщины h пластинки.
*) Это решение принадлежит А. Ю. Биркгану.
798 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ XXII
Далее, па рис. 22.3 для того же примера даны значения
дополнительного безразмерного прогиба w\h вдоль линии у = Ь\2
(сплошные кривые) и линии x = aj2 (пунктир) в последовательные моменты
времени; изогнутая поверхность симметрична относительно у — Ь/2.
Как видим, при выбранной скорости удара по обоим направлениям
образуется одна полуволна своеобразного очертания, которая в
дальнейшем трансформируется в двугорбую кривую.
Рис. 22.4. Распределение прогибов в случае цилиндрической панели при ударе.
Рис. 22.4 относится к цилиндрической панели с параметром
h2IRh = 48; па рисунке изображена изогнутая поверхность панели
после нескольких отражений волны сжатия от торцов. Вдоль контура
панели образуется складка по направлению от центра кривизны,
а в средней части — глубокая вмятина, обращенная к центру.
Очевидно, в момент времени, к которому относится рисунок, завершается
процесс предварительного волнообразования, после чего должно
произойти прощелкивание панели.
§ 217. Различные подходы к приближенному решению задачи.
Выделение узкой зоны оболочки
Интегрирование приведенных выше уравнений представляет собой
трудную задачу, даже при условии применения наиболее мощных из
современных цифровых машин. Поэтому желательно найти некоторые
другие пути исследования, позволяющие использовать уже
разработанные методы теории динамической устойчивости оболочек *). Можно,
например, для каждого момента времени осреднить найденные из
уравнений G) «инерционные напряжения» в срединной поверхности, либо
*) Описанные ниже приемы были намечены В. Л. Агамировым и авто™
ром в статье [22.1]; см. также работы [22.4].
t
'•§ 217) РАЗЛИЧНЫЕ ПОДХОДЫ К ПРИБЛИЖЕННОМУ РЕШЕНИЮ ЗАДАЧИ 799
по всей длине оболочки, либо по некоторой узкой зоне,
охватывающей часть длины.
Рассмотрим здесь второй из этих приемов, уже применявшийся
в главе VIII. Выделим некоторые поперечные сечения оболочки и
определим закон изменения сжимающих инерционных напряжений с учетом
последовательных отражений упругой волны от торцов. При осесим-
метричпом ударе надо принять в G) г/=0 и тогда вместо A5)
получим хорошо известное «стержневое» уравнение (8.2) с заменой Е
на £/A — ц.2). Интегрируя это уравнение с помощью, например,
метода характеристик, либо пользуясь уравнением (8.18а) в конечных
разностях, определяем закон изменения инерционных сжимающих
напряжений р по времени для различных поперечных сечений оболочки.
Далее принимаем, что найденный закон изменения сжимающих
напряжений распространяется па узкую зону вблизи сечения. Составляем
динамические уравнения типа A3) и A5), считая, что инерционные
составляющие уже определены па предыдущем этапе вычислений. Тогда
вместо A5) получим обычное уравнение
± У2Ф = — j [L (w, w) — L (w0, w0)] — V| (w - O. B2.17)
Предполагая, что возникающие при выпучивании оболочки вмятины
имеют ромбовидный характер, принимаем выражения для полного и
начального прогиба, как обычно, в виде A3.68) или A3.46):
w = f (sin ax sin Eу -4- ф sin2 ах sin2 ру),
Wq — /0 (sin ах sin py -f- ф sin2 ах sin2 fiy),
либо
•a; = /(sinaxsinpy -j- i|)sin2ax), )
•a/0 = /0(sinaxsinpy -f ф sin2 ax), j
где a = мя/i, p = «/^. Подставляя A8) или A9) в A7), находим
функцию Ф; в выражение для Ф вводим член (— ру2/2Е), причем
р = р (t) определяется для выбранной зоны оболочки, как сказано
выше. Выбирая выражения типа A8) или A9) для прогиба и находя
интеграл уравнения A7), мы получим для краев рассматриваемой зоны
не вполне определенные граничные условия. Именно такие граничные
условия обычно принимают по отношению к торцам оболочки при
рассмотрении статической нелинейной задачи в случае осевого сжатия.
Эти условия в линеаризированной задаче отвечают случаю
шарнирного закрепления оболочки с поступательно смещающимися плоскими
торцами. Некоторым оправданием предлагаемой процедуры служит то
предположение, что выбранная зона длины оболочки, хотя и является
узкой, но охватывает все же несколько поясов вмятин; тогда
граничные условия не должны сильно отразиться на результатах вычислений.
Итак, мы считаем установленным закон изменения во времени
функции Ф. Дальнейшие вычисления сводятся к использованию метода
B2.18)
800 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ. XXIt
Бубнова — Галеркнна по отношению к уравнению типа A3); эга
процедура подробно изложена в главе XXI. В процессе решения задачи
должны быть выбраны параметры ф, £=а/р и п. Первый из них,
определяющий зависимость между симметричной и несимметричной
частями прогиба, может быть выбран таким же, как и в статической
задаче; специальные вычисления *), проведенные по более сложной
схеме, показали, что такое предположение является приемлемым. Что
Рис. 22.3. Зависимость стрелы прогиба от времени при
различном числе волн.
касается параметра |, то он определяет форму вмятины и равен
отношению размера вмятины вдоль дуги sy к размеру по образующей sx.
Под п понимается число вмятин вдоль поперечного сечения. Эти
величины резко меняются в зависимости от обстоятельств динамического
нагружения.
Для примера па рис. 22.5 показаны полученные с помощью
цифровой машины зависимости между параметром стрелы прогиба £ и
параметром времени t* для случая, когда оболочка с отношением ра-
*) Эти вычисления проведены В. Л. Агамировым; ему же принадлежат
описанные ниже (§ 218) эксперименты [22.2]. Другие экспериментальные
данные см. в работах: Мацумото и др. (Н. М а ( s u in о t о а. о., Trans.
JSME 29, № 197 A963), 49-57), Копна (P. Coppa, NASA TN D-1510
A962), 361-399).
§ 21?] РАЗЛИЧНЫЕ ПОДХОДЫ К ПРИБЛИЖЕННОМУ РЕШЕНИЮ ЗАДАЧИ 801
диуса к толщине /?//?= 180 подвергается удару бесконечно большой
массой (QilQ2->co) со скоростью V0 = 0,Q0\c. Диаграммы относятся
к зоне оболочки, примыкающей к торцу, по которому производится
удар. Принято, что амплитуда начального прогиба Со —/о/^
составляет 0,001 от толщины оболочки. Все кривые имеют три участка:
первый, характеризующий начальную стадию выпучивания и почти
сливающийся с осью абсцисс (па рисунке он не показан), второй,
описывающий переходную стадию бурного роста прогиба, т. е. процесс
собственно прощелкивания оболочки, и третий участок,
характеризующий нелинейные колебания оболочки после прощелкивания. Кривые
рис. 22.5 построены для случая £ = 2. Как видим, фронт бурного
роста прогибов возникает раньше всего для той диаграммы, которая
соответствует числу воли «=11; переходные участки кривых «=10
и «=12 лежат правее. Мы делаем отсюда вывод, что наиболее
вероятным в этом примере является выпучивание оболочки с числом волн
«=11.
Результаты, аналогичные показанным па рис. 22.5, были получены
и для других сечений оболочки. Как и следовало ожидать,
значения критического времени во всех сечениях почти совпадают.
Однако этот результат
относится лишь к оболочкам при- *
нятых размеров, когда процесс #■
выпучивания охватывает
значительное число отражений
упругой волны от обоих
торцов оболочки.
Расчеты показали, что
увеличение скорости удара V0
приводит к возрастанию числа
вмятин «, т. е. к появлению
более высоких форм потери
устойчивости. Вместе с тем
повышается и критическое
значение параметра нагрузки.
Сопоставление диаграмм
«прогиб—время» позволяет
определить эффект удара. Из
сравнения динамической и статической диаграмм можно судить о том,
приведет ли удар к прощелкиванию оболочки, что и является
основной целью исследования.
Интересными оказываются результаты вычислений, относящиеся
к изменению формы вмятины в зависимости от параметров удара. При
бесконечно большой ударяющей массе (Q2/Qi ""*" 0) вмятины оказываются
сильно вытянутыми вдоль дуги, так что величина | = sylsx составляет
около 4 (рис. 22.6). Если же отношение массы груза к массе оболочки
составляет 5, то вмятины оказываются почти квадратными (£, я* 1).
Рис. 22.6. Характер вмятин при ударе в
зависимости от соотношения между массами груза и
оболочки.
51 А. С. Вольмир
802 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ. XXII
§ 218. Экспериментальные данные
на рис. 22.7.
К лебедке
Обратимся теперь к результатам серии экспериментов, в которых
определялось поведение дюралюминовых цилиндрических оболочек
при осевом ударе. Схема экспериментальной установки показана
Образец подвергался удару груза, падавшего с
заданной высоты; центральность удара
обеспечивалась тем, что груз перемещался вдоль
троса, которому придавалось известное
натяжение.
Изучение процесса изменения во
времени деформаций и напряжений в
различных сечениях оболочки проводилось с
помощью проволочных тензодатчиков,
сигналы от которых фиксировались двух-
лучевым катодным осциллографом.
Показания, зафиксированные на экране
осциллографа, фотографировались. При
испытании некоторых образцов для измерения
деформаций был применен восьмишлейфо-
вый осциллограф.
Проволочные датчики наклеивались
в разных сечениях с внешней и
внутренней сторон оболочки; это позволило
выделить напряжения в срединной
поверхности и напряжения собственно изгиба.
На рис. 22.8 показана для примера
осциллограмма осевых деформаций в двух
различных точках — посередине длины и у
неподвижного торца. Весь процесс удара,
судя по отметкам времени, занял около
1100 микросекунд. После пересчета
оказалось, что максимальные
напряжения в сечении х = L составили около
3000 kzjcm2 (через 740 мксек), а в се-
1900 кг/см2 (через 700 мксек). На
Рис. 22.7. Установка для
испытаний оболочек на продольный
удар.
:Щ-
■около
чении х =
рис. 22.9 приведены такие же данные, полученные с помощью
шлейфового осциллографа; сигналы были получены от четырех
датчиков, расположенных с внутренних и внешних сторон, в сечениях
х = 0 и х — LJ2. Максимальные напряжения сжатия составили
1600—1800 kzjcm2.
В проведенных опытах вмятины располагались, как правило,
у торца оболочки, испытывающей удар, и у неподвижного торца,
образуя в каждой из этих зон один или два пояса. На рис. 22.10
показаны ромбовидные вмятины, расположенные у торца,
подвергающегося удару. В некоторых случаях удар сопровождается появлением
$218) ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ 803
сплошной кольцевой складки (рис. 22.11); это, вероятно, объясняется
переходом деформации в упруго-пластическую область.
Рис. 22.8. Характеристика напряженного состояния при ударе, полученная
с помощью катодного осциллографа.
QjdfiB; Уд=5и/сек
-2-10~Jcen
1Л Л Л Л Л Л Л Л h А Л
Рис. 22.9. Характеристика напряженного состояния при ударе, полученная
с помощью шлейфового осциллографа.
На рис. 22.12 приведено сопоставление экспериментальных данных
критических напряжений с теоретическими результатами. Кривая
на рисунке отображает зависимость параметра динамического крити-
51*
804 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ. XXI
Рис. 22.10. Ромбовидные вмятины,
полученные в результате удара.
Рис. 22.11. Кольцевая складка,
образовавшаяся при ударе.
Рис. 22.1^. Теоретические критические напряжения (сплошная линия)
в сравнении с данными опытов (по оси абсцисс отложены значения QJQ2).
5 2181
ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ
805
ческого напряжения (отнесенного к параметру верхнего статического
напряжения р*\ от отношения массы оболочки к массе груза. Эта
диаграмма отвечает результатам вычислений по описанной ранее
процедуре. Кружками здесь отмечены экспериментальные величины
напряжений, определенные из опытов при Rjh= 180. Параметр скорости
удара был равен 1/0/с=10~ , где V0 — начальная скорость удара,
с — скорость распространения продольных упругих волн в материале
оболочки. Из рис. 22.12 видно, что все экспериментальные точки
располагаются достаточно близко к теоретической кривой и при этом
сверху от нее.
Зависимость параметра критической нагрузки от формы вмятины,
полученная из решения нелинейной задачи, показана на рис. 22.13
0,75
0,50
0,25
0
Рис
Динамические
испытания
У/0г-5;1>/Ы0-\
А
• >£ • • /• L/R'2,22
/ ~~ R/h-180
Статические
испытания
0,5
W
22.13. Зависимость параметра критической
нагрузки от формы вмятины.
сплошной кривой. Диаграмма относится к случаю Q,/Q2 —5
и V0/c=10- . Треугольниками нанесены опытные данные при
параметрах Q]IQ2= 3,8-н5 и К0/с = @,8ч-1) Ю- . Здесь же пунктиром
нанесена кривая, полученная из решения соответствующей статической
нелинейной задачи. Кружками нанесены опытные данные, относящиеся
к статическим испытаниям цилиндрических оболочек на осевое сжатие.
Как видим, динамичность нагружения сказывается в увеличении
значений параметра критической нагрузки. В данном случае
экспериментальные величины критических напряжений почти вдвое превосходят
соответствующие статические значения.
. Ряд образцов в эксперименте подвергался удару по ступеням
с постепенным увеличением скорости удара. Это дало возможность
определить минимальные критические скорости удара. На рис. 22.14
показаны результаты испытаний. По оси ординат отложено
отношение массы груза к массе оболочки, по оси абсцисс — параметр
начальной скорости удара. Треугольниками отмечены опытные данные,
806 УСТОЙЧИВОСТЬ ПЛАСТИНОК И ОБОЛОЧЕК ПРИ УДАРЕ [ГЛ. XXII
относящиеся к оболочке с параметром /?//г=120, кружками—к оболочке
с /?/А—180. Кривые на рис. 22.14 построены по экспериментальным
данным. Полученные здесь величины сжимающих усилий в срединной
поверхности оболочки до выпучивания удовлетворительно согласуются
с данными, вытекающими из решения волнового уравнения.
Интересные результаты были получены при скоростной киносъемке
процесса выпучивания оболочки F000 кадров в секунду). Оказалось,
что образование специфических ромбовидных вмятин, объясняющееся
нелинейным эффектом, происходит уже с самого начала выпучивания
в продолжение отрезка времени, не превышающего 180 мксек.
Дальнейший процесс выпучивания сводится к развитию этих вмятин, причем
сложившаяся с самого начала форма вмятины сохраняется в
дальнейшем.
Таким образом, в результате проведенной серии опытов над
дюралюминовыми образцами установлено, что нелинейная постановка
задачи о выпучивании обо-
т, , , , , .
24
20
16
12
Я/Л-120
R/h-Щ
X
-V
■\
1 L/R'2,22
\
лочки при ударных
нагрузках оправдывается. Опытные
значения параметров
критической нагрузки
согласуются с данными,
полученными в теоретическом
решении. Впредь до более
точного решения (с
применением полной системы
уравнений)предлагаемую
постановку задачи можно
использовать для практических
расчетов оболочек.
Приведем далее
данные *) испытаний стекло-
пластиковых
цилиндрических оболочек. Образцы
изготовлялись путем намотки
поперечных и продольных
слоев стеклоленты,
пропитанной фенолыюй смолой.
Размеры оболочки были
следующие: радиус—142 мм,
длина рабочей части —
370 мм, толщина стенки
2 мм. При статическом нагружении оболочки выпучивались с
образованием шести вмятин по дуге окружности, затем разрушались
в зоне волнообразования.
\
-\
V
\
\
\
\
-х
Ч
0,2 0,4 0,6 0,8
W
1,2
V0/clO
1,4
Рис. 22.14. Скорость удара, вызывающая выпучива
ние оболочки.
*) Эти данные получены Л. Н. Сметаниной [22,2].
г
6)
в)
*)
9)
в)
ш)
9)
Рис. 22.15. Процесс выпучивания оболочки из стеклопластика по данным
скоростной киносъемки.
")
н)
м)
ч)
о)
п)
Рис. 22.15. Процесс выпучивания оболочки из стеклопластика по данным
скоростной киносъемки.
I'
j 218] ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ 809
Продольному удару стеклопластиковые оболочки подвергались
на той же установке, что и дюралюминовые. Форма волнообразования
при ударе падающим грузом по одному из торцов оболочки, второй
конец которой был неподвижно закреплен, была примерно такая же,
как и при статическом нагружепии. Выпучивание происходило обычно
вблизи торца, по которому производился удар. Эффект динамичности
сказывался в возрастании числа вмятин вдоль окружности (до 12-+- 14)
примерно вдвое по сравнению со статическим случаем. Оболочка
разрушалась по границам вмятин вдоль периметра сечения.
Процесс выпучивания стеклопластиковой оболочки исследовался
с применением киносъемки D000 кадров в секунду). На рис. 22.15
приведены 15 кадров {а — га) после начала выпучивания. Как видим,
образование ромбовидных вмятин имеет место с самого начала
выпучивания. Так как пластическая деформация здесь отсутствует,
то после снятия нагрузки оболочка возвращается к исходной форме
(кадры м — га).
ГЛАВА XXIII
НЕКОТОРЫЕ ЗАДАЧИ ГИДР0УПРУГОСТИ
§ 219. Взаимодействие упругих конструкций с жидкостью
Во многих практических задачах поведение упругих систем
приходится рассматривать, учитывая условия контакта системы с
окружающей средой — жидкостью или газом. Силы взаимодействия между
упругой конструкцией и жидкостью или газом часто существенно
зависят от деформации самой конструкции; тогда определение
нагрузок, передаваемых системе со стороны окружающей среды, должно
вестись одновременно с исследованием деформации системы. Такие
задачи относятся к областям, связывающим гидродинамику или
аэродинамику и теорию упругости; этн области можно назвать,
соответственно, гидроупругостью и аэроупругостью.
Некоторым вопросам гидроупругости посвящена настоящая
глава; задачи, относящиеся к аэроупругости, приведены в следующей
главе.
Рассмотрим вначале поведение оболочек, погруженных в жидкость,
под действием акустической ударной волны *). Решение этой задачи
не может быть проведено без учета изменения поля давлений,
вызванного волной при деформации конструкции.
Допустим, например, что находящаяся в жидкости круговая
цилиндрическая оболочка подвергается действию плоской ударной волны,
фронт которой параллелен оси оболочки (рис. 23.1). При этом
в жидкости возникает волна отражения, а оболочка получает
некоторые прогибы и вместе с тем деформации в срединной
поверхности.
Деформация оболочки происходит сначала лишь в зоне, находящейся
позади фронта падающей волны (на рисунке — слева от фронта).
Но эффект взаимодействия оболочки с жидкостью выражается не
только в пассивном отражении волны; приходя в движение,
конструкция, в свою очередь, порождает волну излучения в жидкости.
*) Термин «акустическая волна» обсуждается ниже. Обзор некоторых
работ, посвященных этой области, дан в работе Блейха [23.6].
J 219] ВЗАИМОДЕЙСТВИЕ УПРУГИХ КОНСТРУКЦИЙ С ЖИДКОСТЬЮ 811
Обычно скорость распространения деформаций в стенке оболочки
значительно выше, чем скорость перемещения волны в жидкости.
Поэтому упругие волны при движении вдоль окружности опережают
фронт давления в жидкой среде, и кольцевые напряжения пронизывают
всю оболочку до того, как она окажется полностью охваченной
волной. Надо ожидать, следовательно, что волны излучения,
вызванные пришедшей в движение оболочкой, окажутся в тех местах, куда
еще не успеют дойти
падают/гада?
Фронт Волны падающей
отражения оолны
Фронт волны
/ излучения_
щая волна и сопутствующая
ей волна отражения; это
показано на рис. 23.1.
Через некоторое время
после начала соударения может
наступить процесс выпучивания
оболочки, связанный с резким
возрастанием прогибов. Число
и расположение образующихся
при этом вмятин зависят от
интенсивности давления в
падающей волне, а также от
конструкции оболочки.
Большой интерес
представляет также другой раздел
гидроупругости — теория
гидравлического удара в упругом
трубопроводе: движение жидкости здесь не может рассматриваться
изолированно от деформации трубы. Гидравлический удар,
выражающийся в быстром повышении давления, вызывается резким
уменьшением скорости течения жидкости в трубе. Рис. 23.2 относится к
случаю, когда жидкость, скорость
Рис. 23.1
Волны в жидкости при
взаимодействии с оболочкой.
Жести, труба
Упруг, труба
которой при установившемся
течении в трубе была V0,
полностью теряет эту скорость в
некотором сечении вследствие
перекрытия трубопровода. Величина
создающегося перед этим сечением
дополнительного давления связана
со скоростью распространения
возмущений в потоке жидкости.
Упругий трубопровод при
возрастании внутреннего давления получает деформацию удлинения вдоль
окружности; освобождающееся при деформации оболочки пространство
заполняется жидкостью. Вследствие этого скорость распространения
продольных возмущений уменьшается по сравнению со случаем
абсолютно жесткой трубы; соответственно снижается и эффект
гидравлического удара.
ваяна давления у=д
Рис. 23.2. Гидравлический удар в трубах.
812
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
[ГЛ. ХХШ
Описанный процесс является примером неустановившихся движений
жидкости в упругом трубопроводе. Связанные с этим проблемы имеют
важное практическое применение не только в технике, но и в
биофизике: сюда относится описание динамических процессов в
кровеносных сосудах.
§ 220. Уравнения движения жидкости
Приведем некоторые сведения из гидродинамики, которыми мы
будем пользоваться в дальнейшем изложении.
Как известно, гидродинамика занимается изучением законов
механического движения жидкости и ее взаимодействия с омываемыми
твердыми телами. Под жидкостью в широком смысле слова понимают
сплошную среду, обладающую легкой подвижностью: сопротивление
жидкости деформациям сдвига практически отсутствует при малых
скоростях этих деформаций. В отличие от сравнительно легко
сжимаемых газов капельные жидкости можно считать мало сжимаемыми.
Простейшей, но достаточной для описания многих явлений моделью
является несжимаемая жидкость.
Предполагая, что внутреннее трение и теплопроводность
отсутствуют, приходим к модели идеальной жидкости (сжимаемой или
несжимаемой). Пренебрежение теплопроводностью приводит к
рассмотрению процессов, протекающих в идеальной жидкости, как
изэнтропических.
Чтобы объяснить происхождение сопротивления движению жидкости
при обтекании тел или в трубопроводах, должно быть введено более
сложное понятие вязкой жидкости. Вязкая жидкость, для которой
тензор напряжений является линейной функцией тензора скоростей
деформаций, носит название ньютоновской вязкой жидкости. В
реологии рассматриваются также более сложные модели неньютоновских
жидкостей.
При описании движения жидкости можно воспользоваться двумя
способами. Один из них, развитый Лагранжем, заключается в
исследовании движения каждой из частиц жидкости по ее траектории.
Получивший большее применение прием задания движения среды был
предложен Эйлером; он заключается в том, что скорости движения
частиц рассматриваются как функции времени t и координат х, у, z
точек пространства, по отношению к которому происходит движение
жидкости. В дальнейшем мы будем пользоваться методом Эйлера.
Изучение скоростного поля движущейся жидкости приводит к
заключению, что движение элементарного жидкого объема может быть
разложено на поступательную, вращательную и деформационную
составляющие. Такое разложение дает основание выделить два класса
движений жидкости. К одному из них относят вихревые движения.
Вихрь скорости представляет собой мгновенную угловую скорость
малой частицы. Другой класс — безвихревые или потенциальные дви-
§220)
УРАВНЕНИЯ ДВИЖЕНИЯ ЖИДКОСТИ
813
жения, характеризующиеся равенством нулю вихря скорости в каждой
точке жидкости. При установившемся движении во всем пространстве,
занятом жидкостью, поля скоростей, вихрей, давлений, массовых сил
с течением времени ие меняются.
В опытах с подкрашиванием жидкости, текущей в стеклянных
трубках, можно наблюдать за движением отдельных объемов. В
случаях, когда достаточно малые объемы жидкости перемещаются слоями,
подкрашенные струйки сохраняют отчетливую форму на большом
протяжении. Такое движение называется ламинарным.
В отличие от ламинарного турбулентным называется нерегулярное
движение с хаотически переплетенными и быстро изменяющими свою
форму траекториями. Подкрашенные струйки в описанном опыте при
таком движении сразу же размываются, окрашивая соседние объемы.
Обратимся к общим уравнениям динамики жидкости. Выделим
в пространстве, заполненном жидкостью, элементарный
параллелепипед dxdydz. Обозначим составляющие скорости частиц жидкости,
втекающей в этот объем, через vx, vy, vz. Эти величины являются
функциями координат и времени.
Найдем разность между массами жидкости, протекающими за время dt
через две противоположные грани параллелепипеда площадью dy dz:
{ [РЛ + -gj (РЛ)dx] — РЛ } аУ d z dt = aj (РЛ) dxdydz dt,
где pm = pm(*. y, z, t) — плотность жидкости. Аналогичные
выражения можно составить для разностей масс, протекающих через две
другие пары граней. Таким образом, полная масса, вытекающая из
выделенного объема, равна
[ж (РЛ) +17(pmt,y) "*" ~3F(РЛ)] dx dy dz dL
С другой стороны, уменьшение массы жидкости в объеме за время dt
можно определить через изменение плотности:
dt
dx dy dz dt.
Приравняв эти выражения, получим уравнение неразрывности
(сплошности):
^W + -t (РЛ> + 1у~ (Р^у) + W <РЛ) = 0. B3.1)
Составим, далее, уравнение движения элемента жидкости в
проекциях на ось х. Рассматривая идеальную жидкость, считаем, что силы,
приложенные к граням параллелепипеда dxdydz, имеют только
нормальные составляющие. Разность усилий, действующих по граням dydz,
равна
[-жах)ауаг-
814
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
где р = р(х, у, z, t) — давление. Сила инерции в направлении х
будет
— рт dx dy dz -^-.
Вводя проекцию массовой силы Xpmdx dy dz и выражая dvx\dt через
частные производные, приходим к уравнению
„ I dp _ dvx , <>vx dvx , dvx _„
Аналогичные уравнения записываются в проекциях на оси у и z.
Эти три уравнения составляют систему уравнений Эйлера динамики
идеальной жидкости.
Как уравнения Эйлера, так и уравнение неразрывности A) являются
нелинейными. В случае, если возмущения, создаваемые в жидкости,
достаточно малы, соотношения, относящиеся к идеальной жидкости,
могут быть упрощены.
Допустим, что плотность рга незначительно меняется по сравнению
с начальной величиной. Тогда в A) рт можно вывести из-под знака
дифференцирования. Считая, кроме того, малыми и скорости,
отбросим в уравнениях Эйлера квадратичные члены. Тогда (при условии,
что массовыми силами можно пренебречь) уравнения типа B)
примут вид
dvx dp dvv dp dvz dp
P«-*- + l£ = 0- Р'«-Ж- + 1ъГ = 0- ^-ir + lF^0- B3-3>
а вместо уравнения A) будем иметь:
дРт , ldvx , dvy dvz
Такая система уравнений является линеаризированной по сравнению
с исходной.
Введем обозначение ст = ydpjd$m; можно показать, что эта
величина представляет собой скорость звука в жидкости. Уравнение
неразрывности перепишем в виде
1 dp I dvx , dvv , dv, \
m?+p"t + 17 + ir)=0- с»-»)
Рассматривая безвихревое движение, введем понятие потенциала
скоростей ф с помощью зависимостей
d(f d(f <Эф
Vx~~~dx' V?~~dJ' V*~~d~z'
Подставляя эти соотношения в уравнения Эйлера C), получим
/» = -Ря-§- B3.6)
УРАВНЕНИЯ ДВИЖЕНИЯ ЖИДКОСТИ
815
Из E) и F) найдем
lJ—W = 0. B3.7)
где V2 — трехмерный оператор Лапласа
дх2 <* ду2 <* дг2 '
Уравнение G) является волновым; его можно сопоставить с
уравнением (8.2), описывающим распространение волн напряжений
в стержнях.
Положим, что движение жидкости происходит только вдоль
направления х и является однородным в плоскости yz; такая волна
называется плоской. Уравнение G) для плоской волны принимает вид
£—.£=•• <23-8>
Решением этого уравнения являются, как мы видели (стр. 294),
функции вида / (х ± cmt). В бегущей плоской волне скорость vx связана
с давлением р и плотностью рт простыми соотношениями. Полагая
ф = / (х — cmt), имеем vx = д(р,'дх = df/d (х — cmt) и по F) р =
= — Pm дЧ>!д* = 9тст dfld О — Cmt). Отсюда
/» = PmCin»*- B3-9)
К числу наиболее широко наблюдаемых явлений распространения
малых возмущений в жидкостях и газах относятся звуковые
(акустические) колебания. Поэтому задачу о волновом движении жидкости
в линейной постановке называют задачей акустического прибли-
Реальные жидкости являются вязкими и отличаются от идеальных
прежде всего наличием внутреннего трения. Элементарные
поверхностные силы в вязкой жидкости имеют, кроме нормальных, еще и
касательные составляющие. Если речь идет о ньютоновской вязкой
жидкости, то касательное усилие трения между двумя слоями
прямолинейно движущегося потока будет пропорционально отнесенному
к единице длины изменению скорости вдоль нормали к направлению
движения. Так, например, в случае плоского движения,
параллельного ху, со скоростями, параллельными оси х, касательное усилие
трения будет равно
dvx
Динамический коэффициент вязкости ц определяется физическими
свойствами жидкости и ее температурой. Часто используют также
кинематический коэффициент вязкости \ = ц/рт.
Чтобы получить уравнения, описывающие движение вязкой
жидкости, необходимо в уравнения Эйлера, относящиеся к идеальной
816 НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ [ГЛ. XXIII
жидкости, ввести дополнительные члены, учитывающие внутреннее
трение. Тогда получим известные уравнения Навье — Стокса.
Уравнение в проекциях на ось х имеет следующий вид (V—вектор
скорости с компонентами vx, vy, vz):
В левой части уравнения, как мы видим, появились два новых
члена по сравнению с уравнением Эйлера. В первом из этих членов
дивергенция вектора скорости
dvx dvy dv2
дх ' ду ■" дг
представляет собой кубическое расширение жидкости, отнесенное
к единице времени. Если жидкость можно считать несжимаемой, то
divtf —0, и в уравнении A0) остается только второй «вязкостный»
член, в котором V2 — трехмерный оператор Лапласа.
§ 221. Цилиндрическая оболочка
под действием акустической волны давления
В главе XXI мы рассматривали цилиндрическую круговую
оболочку, находящуюся под действием внезапно приложенного внешнего
давления. Обратимся теперь к более конкретной и вместе с тем более
сложной задаче о поведении подобной оболочки, погруженной
в жидкость, в предположении, что на оболочку набегает плоская волна
давления *).
Эта задача имеет также много общего с теорией устойчивости
стержня и оболочки при ударе по ним жесткой массой (главы VIII
и XXII). В дальнейшем оболочку будем считать бесконечно длинной;
в этом случае достаточно исследовать поведение кольцевой полоски,
вырезанной из оболочки. Выпишем основные динамические
уравнения, относящиеся к оболочке — кольцу (см. главу VII, стр. 286),
введя в них инерционный член, соответствующий дуговому
перемещению v; будем учитывать также инерцию вращения элемента
оболочки, подобно тому как это было сделано в главе VIII для стержня.
*) Впервые эта задача в линейной постановке рассматривалась Миндли-
ным и Блейхом [23.8]. В дальнейшем различные аспекты этой задачи
изучались В. В. Новожиловым, А. К. Перцевым и Ю. И. Кадашевичем [2.35],
Э. И. Григолюком и В. Л. Присекиным [23.3], Пэйтоном [23.9], Перальта
и Рэйнором [23.10], Херманом и Клоснером (Н. Herman, J. M. Klosner,
Trans. ASME E32, № 3 A965)). Обрисованная ниже нелинейная постановка
этой задачи принадлежит М. С. Герштейну и автору [23.1].
§ 221) ОБОЛОЧКА ПОД ДЕЙСТВИЕМ АКУСТИЧЕСКОЙ ВОЛНЫ ДАВЛЕНИЯ 817
Тогда придем к следующим уравнениям
dbw
R ду ду R P dyW
. d*v
Р/гЖ:
д2М
N
dw
+ -R+!y-(NJy-)-p-pf
d*w
H-pA
= 0,
d2w
df2
■0,
B3.11)
ду2 ' R ' ду \ ду I y * дугдB
где R— радиус кривизны срединной поверхности, h — толщина
стенки, / = /г3/12, р—плотность материала оболочки. Усилие N
здесь считается зависящим от у: N'= N(у), причем у отсчитывается
вдоль дуги.
Примем, что оболочка погружена в идеальную сжимаемую
жидкость; условимся считать обтекание изэнтропическим, безвихревым,
а возмущения— малыми. Распространение возмущений будет тогда
описываться уравнениями акустического приближения. Будем различать
потенциал скоростей <р падающей
волны и потенциал скоростей ф
отраженной и излученной волн.
Потенциал ф, который будем считать
заданным, подчиняется волновому
уравнению (8) и связан с давлением
соотношением типа F). Потенциал
скоростей ф описывает
расходящуюся волну и также должен
удовлетворять волновому уравнению
типа G):
-gf-C2mV^ = 0; B3.12)
Рис. 23.3. Воздействие ступенчатой
акустической волны на круговую
цилиндрическую оболочку.
под V2 здесь надо понимать двумер
ный оператор Лапласа.
Давление излученной и отраженной волн связано с потенциалом
скоростей зависимостью, аналогичной F):
— _ ii
Ротр 9т Qf
Примем для ф начальные условия:
B3.6а)
♦~2-о
при ^ = 0.
B3.13)
Время t отсчитывается от момента соприкосновения падающей волны
с оболочкой. В дальнейшем при описании движения жидкости будем
пользоваться полярной системой координат с началом в центре кольца
(рис. 23.3); радиус-вектор произвольной точки обозначим через г,
а полярный угол — через Q = yjR.
Параметр р внешней нагрузки, входящий в уравнения A1),
представляет собой полное давление жидкости на оболочку, которое
складывается из давления от падающей волны и давления от отраженной
62 А. С. Вольмир
818
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
и излученной волн. Выражая давление через потенциалы скоростей
для r — R по F) и Fа), запишем:
/—*.(*+$)„„■ <»•")
Предполагая, что кавитация (образование пустот в жидкости)
отсутствует, выпишем условие совместности движения оболочки и
примыкающих к ней частиц жидкости, выражающееся в равенстве
радиальных скоростей:
Будем предполагать, что до удара волны оболочка была идеально
цилиндрической и являлась неподвижной. Тогда начальные условия
для оболочки:
v = w--=:^=^~ = 0 при f = 0. B3.16)
Задача о взаимодействии оболочки с акустической волной
в жидкости сводится, таким образом, к совместному решению
уравнений движения оболочки A1) и волнового уравнения A2) при
условиях A3), A5) и A6). Эта задача очень сложна, и мы наметим
некоторые пути ее упрощения. Одним из таких путей является
введение дополнительных гипотез о поведении жидкости, например так
называемой гипотезы плоского отражения. Согласно этой гипотезе
в начальные моменты соударения малый участок цилиндрической
оболочки рассматривается как плоский.
Обратимся к процессу отражения акустической волны от плоской
преграды, движущейся в направлении падения волны со скоростью
dwjdt; плоскость волнового фронта параллельна плоскости преграды.
Скорость частицы жидкости в падающей волне обозначим через vn,
в отраженной волне — через г/отр. Очевидно, отраженная волна также
является плоской. Условие непрерывности скорости на поверхности
раздела требует равенства v„ — v0Tp = dwjdt. Таким образом,
скорость отраженной волны будет vorp^=v„ — dwjdt. Результирующее
давление на преграду складывается из давлений в падающей и
отраженной плоских волнах; по (9) получим:
Р = РтСт К + г'отр) = РтСт fan ~ ~ж)'
Но давление в падающей волне равно P„ = pmcmv„. Следовательно,
результирующее давление при плоском отражении будет
Р = 2ра-рясм^-. B3.17)
Если используется гипотеза плоского отражения, то в задаче
р взаимодействии акустической волны с оболочкой может быть
ОБОЛОЧКА ПОД ДЕЙСТВИЕМ АКУСТИЧЕСКОЙ ВОЛНЫ ДАВЛЕНИЯ 819
принято следующее соотношение для потенциала ф (см. [23.8]):
£=-ст£ при r = R. B3.18)
В самом деле, с учетом равенства Fа) зависимости A8) можно
придать вид
что совпадает с выражением (9) для плоской волны. Таким образом,
из соотношения A8) вытекает, что от каждого движущегося
элемента оболочки в жидкости распространяется плоская волна.
Подставляя A8) в условие A5), а затем — в выражение для
давления A4), получим
р~~ Pm\dt ^Ст дг ^6m dt ),._
что для начального момента времени равносильно соотношению A7).
Для уточнения зависимости A8) можно использовать
асимптотическое решение, хорошо описывающее явление для некоторого,
относительно малого промежутка времени после начала соударения *).
Волновое уравнение A2) в цилиндрических координатах записывается
следующим образом:
д2^ . \_ &ф_ , _1_ д2$ __ J_ d4f
дг2 г ~дг г2 ~д&~ с2 dt
2 + г Л, "Г" -2 л02 — Л л,2 • (а)
Исследуя движение жидкости лишь в тонком слое у поверхности
цилиндра (г rs R), будем предполагать, что изменение ф вдоль
координаты 9 невелико по сравнению с изменением вдоль нормали к
оболочке (отсутствует перетекание по поверхности). Тогда уравнение (а)
можно упростить:
дг2 + R дг~ с2т dt2 ' W
В качестве граничного условия примем, в отличие от A5),
*L = V при г = Я, (с)
где V — нормальные скорости элементов поверхности.
Начальные условия заключаются в следующем:
f=-§r=° при '=0- (d>
*) Подобные пути использованы Э. И. Григолюком и В. Л. Присеки-
ным [23.3], Пэйтоном [23.9], Перальта и Рэйнором [23.10]. Приводимое здесь
решение дано Э. И. Грнголюком, Л. М. Куршнным н В. Л. Присекиным
(ДАН СССР 155, № 1 A964), 65 — 66) для более общего случая повврхносгн
двоякой кривизны.
52»
820
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
Применив к уравнению (Ь) преобразование Лапласа по времени t*),
получим с учетом начальных условий (d) уравнение в изображениях
d*L (ф)
2А^Ж_4-^(ф) = 0.
dr dr
Здесь /.(ф)—изображение по Лапласу потенциала скорости ф:
1D;)= J $(t)e-stdt,
(е)
Ф
5 — переменная преобразования Лапласа. Кроме того, введено
обозначение средней кривизны цилиндрической поверхности k =1/2/?.
Решение уравнения (е) имеет вид
L($) — Ae^r-\-Be-br,
is)
где £, = — А + У"*Н s2lc2m и |2=A:-f-V&2-f-s2/c^. Так как
потенциал ф описывает расходящиеся волны (т. е. должно выполняться
условие ф->0 при г->оо), следует принять Л = 0. Постоянная В
находится из граничного условия (с). Окончательно получим (индекс
при |2 опущен):
£(ф) = —le-fi'LOO. (h)
Для давления на поверхность имеем соотношение
dt ПрИ r==R'
или в изображениях с использованием (h):
__ д$
Ризл — " 9т
L(p) = Pm^L(V).
0)
Будем искать решение для начальных моментов движения, имея
в виду, что большим \s\ соответствуют малые значения t.
Асимптотическое представление функции sj\ в окрестности |s|—>oo будет
Jm k+Vk2 + s*/cl
c.(l--^+...).
(j)
Подставляя это выражение в зависимость (i) и переходя от
изображений к оригиналам, получим
t
V — kcmjVdt
о
Ризл — 9тсп
*) См., например, книгу М. А. Лаврентьева и Б. В. Шабата, Метоцы
теории функции комплексного переменного, 3-е изд., М., 1965, стр. 489.
ОБОЛОЧКА ПОД ДЕЙСТВИЕМ АКУСТИЧЕСКОЙ ВОЛНЫ ДАВЛЕНИЯ 821
Выразим теперь давление через потенциал скорости и с
использованием граничного условия (с) найдем
«.(&-&/£*) "P. r-R. B3..9,
Йф
dt
о
По сравнению с выражением A8) здесь добавился интегральный
член, которым учитывается кривизна поверхности. Используя
зависимость A9), исключим величину dtyjdt из формулы A4) для полного
давления на оболочку. При этом обратимся к условию
совместности A5). Отсюда
<Эф I dw . (Эф \
W ~~ \ dt ~*~ dr I
и
(Эф
dt
_ ЕЕ. _ J?3L _L i™. Г (dw i d(f\ Ht
dt dr ~^ 2R J I dt ~*~ dr !
о
Наконец, получаем выражение для давления
/dw ст \ /дф dip <4 (* (ЭФ \
\ о /
B3.20)
Рассматривая взаимодействие оболочки с акустической волной,
будем в дальнейшем определять давление на поверхность с помощью
зависимости B0).
Вернемся к динамическим уравнениям A1) для оболочки. Выразим
усилия в сечениях оболочки через изменение кривизны и дуговую
деформацию в срединной поверхности:
М = - ,o,f ...1*; N-. Eh -
12A— Ц2) "■' ~ 1—Ц2°У
Для величин и и еу принимаем выражения A3.3) и A3.52):
1_ dv_ d2w , dv w . 1 ldw\2
%~ R dy dy2 ' ey — ^dy~~R^\dy~) '
Подставим эти значения в соотношения A1) и введем безразмерные
параметры:
— w— V— у.Нвс
h , "— А • У~ д > »— Л» Н~ с
ш
^. „ _ р . Г— рA
-и2) /#\2.
l.Tj '
t==ir; а = -; ^
под с понимается скорость звука в материале оболочки, под р —
плотность материала.
822
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ [ГЛ. XXIII
Тогда получим следующие уравнения движения оболочки в
безразмерном виде (черточки над обозначениями опущены):
б2 dzw
(■+£)£+
б2 d3v
12 ду3
dv
12 ду*
+ 6
б2 d*w
ду ^
dw d2w
б2 d3w
ду ду2 12Р2 дудх2
1 d2v
Р2 дх2
ду
12 ду4
Jl(<!e.\2
' 2 [ду )
+
dw I d2v
~dj
(d2v
[ду2
. d2w \ dv .6 (dw\2-\ б2
dw . . dw d2w
~ду"~^° ду ~df
1
d*w
ду2дх2 '1~J2"dlr
= 0, B3.21)
■)-
d2w
:0.
B3.22)
Представим уравнения B1) и B2) в конечных разностях,
пользуясь симметричными разностными операторами типа (9.238) и (9.239).
Рис. 23.4. Воздействие волны давления Рц = \ на оболочку
с отношением Д/Л = 100.
Приводим результаты вычислений, которые были проведены по
полученным разностным уравнениям с помощью электронной цифровой
машины. Были приняты значения безразмерных параметров а =10,
р2 = 20. Выражение для потенциала скоростей падающей волны было
выписано в виде
<Р = - МЙ {с J - R -r- r cos 9) п {с J - R + г cos 0),
§ 221] ОБОЛОЧКА ПОД ДЕЙСТВИЕМ АКУСТИЧЕСКОЙ ВОЛНЫ ДАВЛЕНИЯ 823
что соответствует волне с постоянным давлением р0 за фронтом.
Здесь *](...)—функция Хевисайда, равная нулю при отрицательных
значениях аргумента, заключенного в скобку, и единице при
значениях, ббльших нуля или равных нулю. Отметим, что величина
(R—rcosG) представляет собой расстояние от точки с
координатами г, 8 до фронта волны, измеренное в начальный момент соударения.
На рис. 23.4—23.6 изображены графики прогибов оболочек
и эпюры безразмерных кольцевых напряжений о = аA — \i2)R2/Eh2
в последовательные моменты времени т.
Положение фронта падающей волны для каждого т показано на
графиках вертикальной чертой со штриховкой. Безразмерное время
введено таким образом, что т=1, когда фронт падающей волны
проходит от начала соприкосновения с оболочкой расстояние, равное R.
Начнем с рассмотрения случая, когда резкого выпучивания
оболочки за время взаимодействия с ней волны не происходит. На
рис. 23.4 показано
поведение оболочки с отношением
R/h= IQQ под действием
волны с давлением р0 = 1.
В начальный момент
соударения заметные кольцевые
напряжения возникают
только за фронтом падающей
волны; затем они достигают
значительной величины
также на участках
оболочки, расположенных впереди
фронта, и охватывают
оболочку до того, как она
полностью погрузится в волну.
Заметим, что, начиная с
некоторого момента (т=0,8),
кольцевое напряжение ска- _
ЗЫВЭеТСЯ МаКСИМалЬНЫМ В Рис- 23-5- Воздействие волны давления яв = 50 на
оболочку с отношением /?/Л = 100.
области, еще не
соприкоснувшейся непосредственно с ударной волной в жидкости.
Рассмотренный пример относится к случаю малых давлений, когда
допустима линейная постановка задачи.
Перейдем теперь к случаям, когда в процессе взаимодействия
с фронтом волны оболочка получает большие прогибы (рис. 23.5,
23.6). Число и расположение образующихся при этом вмятин
оказались зависящими от интенсивности давления в волне и от толщины
оболочки. Рис. 23.5 относится к оболочке с тем же отношением
/?/Л == 100. Давление в падающей волне здесь значительно выше:
/>q = 50. Вначале образуется одна небольшая вмятина. Затем, при
824
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
[ГЛ. XXIII
т = 0,25 происходит резкое возрастание прогибов с образованием
двух вмятин. Из рассмотрения рис. 23.5 видно, что напряжения
в оболочке к этому моменту оказываются заметными на участках,
расположенных впереди фронта волны давления.
На рис. 23.6 показано поведение более тонкой оболочки (/?/й=500).
При воздействии на такую оболочку волны с давлением р() = 50
выпучивание происходит с образованием двух, а затем четырех вмятин.
Рис. 23.6. Воздействие волны давления ^ = 50 на
оболочку с отношением /?/А = 50(),
Здесь кольцевые напряжения успевают охватить к моменту
выпучивания всю оболочку.
Рассмотренная задача представляет собой пример динамического
выпучивания оболочки при наличии параллельно протекающих
процессов распространения деформаций в оболочке и акустической волны
в окружающей среде. Напомним, что в этом примере речь шла
об идеальной по форме оболочке. И здесь оболочка выпучивается
по некоторым высшим формам потери устойчивости в зависимости
от интенсивности давления в падающей волне и от геометрических
параметров оболочки. Если при статическом нагружении внешним
давлением бесконечно длинной оболочки число образующихся после
потери устойчивости волн га = 2, так что длина одной полуволны
равна я/?/2, то в примере по рис. 23.6 длина полуволны составляет
приблизительно л/?/6.
В заключение отметим, что приведенные здесь выкладки могут
быть распространены на цилиндрическую оболочку конечной длины
при взаимодействии ее с акустической ударной волной.
§222]
НЕУСТАНОВИВШЕЕСЯ ТЕЧЕНИЕ ЖИДКОСТИ
825
§ 222. Неустановившееся течение жидкости
в упругом трубопроводе
Обратимся к другой задаче — о неустановившемся течении жидкости
в упругом трубопроводе. Как уже говорилось, эта известная проблема
связана с исследованием поведения оболочки — трубы при гидравлическом ударе
и, таким образом, близка по постановке к изучавшимся в предыдущих
главах задачам о кратковременных и ударных воздействиях'").
Уравнения осесимметричного движения оболочки выпишем в
следующем виде:
д2Мг
дх2
дх
("-
Их}'
-Л\,
(*+
dNr
/?2) >
+ р + pi
д2М
d*w
дх1 dt2
d2w
= 0;
дх
дх2 дх2
-Рх
— oh
dt2
= 0.
B3.23)
Здесь координата х направлена вдоль оси трубы, у — но дуге; через Nx
и jVy обозначены нормальные усилия в сечениях оболочки, через
Мх—изгибающий момент. Давление р в трубе и продольное усилие рх,
действующее на стенки со стороны жидкости, определяются из решения
гидродинамических уравнений.
Исследуя движение вязкой жидкости в трубопроводе, надо отличать
турбулентный и ламинарный режимы течения, о которых шла речь в § 220.
Условия, создающие тот или иной режим течения, зависят главным образом
от трех факторов: средней скорости течения V, коэффициента вязкости
жидкости v и радиуса трубы R. Безразмерный комплекс величин,
характеризующий эти факторы, носит название числа Рейнольдса: Re = VR/v.
Ламинарное течение осуществляется в трубах, если число Re меньше некоторого
критического значения ReKp; при Re > ReKp течение становится турбулентным.
Рассмотрим ламинарное течение сжимаемой ньютоновской жидкости
в трубе кругового сечения. Деформацию оболочки и движение жидкости
будем считать осесимметричными. Выпишем уравнение Навье — Стокса
типа A0), совмещая линию х с осью трубы. Перейдем к цилиндрическим
координатам. Тогда уравнение движения в направлении оси трубы примет вид
Хоп
•&+"[■
4 d2v„
d2vr
1
3 дх1
дг2
dvx
~дТ
+
д
дх
dvr , v, \]
\dvr . dvx , dvxl
B3.24)
Уравнение неразрывности A) в цилиндрических координатах перепишем
в виде
дрп
dt
■ + Рп
dvr
1 Vr I
dvr
дх
др„
дх
■■ 0. B3.25)
*) Одна из первых работ в этой области — статья И. С. Громека
«О скорости распространения волнообразного движения жидкости в упругих
трубках» A883 г.) — была написана в связи с изучением пульсовой волны
в артериях. Явление гидравлического удара было впервые всесторонне
исследовано И. Е. Жуковским в статье «О гидравлическом ударе в
водопроводных трубах» A899 г.). См. также статью Н. А. Кильчевского, И. Т. Селезова,
С. Н. Никулинской, Л. С. Палько в ДАН УССР 24, 165—171 A962).
826
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
Что касается уравнения движения в радиальном направлении, то его мы
здесь опустим, считая, что радиальная скорость жидкости значительно меньше
осевой. Далее можно показать *), что существенными «вязкостными членами»
в уравнении B4) являются только dsvx/dr2 и (l/r) dvx/dr. Другими членами,
стоящими в квадратных скобках в левой части этого уравнения, можно
пренебречь. Возможна также линеаризация уравнения B4) за счет отбрасывания
членов, содержащих переносные ускорения. В уравнении неразрывности B5),
как и прежде, отбросим малые члены, содержащие производные от плотности
по координатам.
Отметим, что жидкость при сжатии подчиняется закону Гука; объемный
моцуль упругости К = рт (др/дрт). Следовательно,
1 (дРт\_1 др. Bа26)
рт \ dt } К dt
С учетом этой зависимости и принимая во внимание перечисленные выше
допущения, приходим к следующим уравнениям:
Выпишем граничные условия. В силу симметрии радиальная скорость
в точках оси трубы отсутствует: v, = 0 при г = 0. Условие совместности
движения упругой стенки трубы с примыкающими к ней частицами жидкости
имеет вид
dw . ди ,„,„„.
V,=~W' Vx = ~dt прИ Г==Л- ( >
Средняя скорость V в сечении трубы определяется зависимостью
R
aR2V= f 2arvxdr. B3.30)
о
Умножая обе части уравнения B8) на 2яг и интегрируя по г, получим:
R R R
о оо
После интегрирования по частям с учетом B6) н C0) окончательно найдем:
Преобразуя аналогичным образом уравнение движения, обозначим через 2aV
член, характеризующий сопротивление трения. Тогда будем иметь:
X —-^- — Д£- + 2аК = 0. B3.32)
рт дх dt ' ч '
Примем, что при неустановившемся движении вязкой ньютоновской
жидкости сохраняются характеристики сопротивления, установленные для
*) См. работу Д'Суза и Олденбургера (A. F. D'Souza, R. Oldenbur-
ger, Trans. ASME D86, № 3 A964)).
НЕУСТАНОВИВШЕЕСЯ ТЕЧЕНИЕ ЖИДКОСТИ
827
стационарного движения. Найдем эти характеристики для ламинарного
течения в предположении, что жидкость несжимаема, а массовые силы
отсутствуют. Тогда вместо B7) получим:
„ (' д2Чг | 1 dvx\_ dp
^\дг* "Т" г дг ) ~ дх '
В данном случае vx зависит от одной координаты, и уравнение может быть
переписано так:
I-L (г i£t\ = 1 .д.Р
г ctr \ dr } И
дх
Интегрируя, получим:
и, далее,
<*х _ 1 dp „
or 2|x дх '
v* = ^^r* + Alnr + B.
Из условия ограниченности скоростей во всей рассматриваемой области
находим, что постоянная интегрирования А = 0. Постоянную В находим
из граничного условия на стенке: vx = 0 при г — R. Тогда окончательно
найдем:
„, = _ 1 !£-(**-,-*).
Распределение скорости подчиняется, как видим, параболическому
закону. Расход жидкости, т. е. объем, протекающий в единицу времени через
поперечное сечение трубы, равен
R
Q- J 2.W, *--**£. B3.33)
о
Разделив это выражение на я/?2, найдем среднюю скорость течения:
Сила трения, действующая на стенки трубы, будет
dvx I dp R 4ц V /отчкч
Падение давления по длине трубы находится из выражений C3) и C4):
^/? 8[гУ
дх ~ R2 '
Это соотношение выражает закон Гагена — Пуазейля. В соответствии с
принятой нами гипотезой квазистационарности распространим этот закон и на
неустановившееся течение. Коэффициент 1а в уравнении C2) будет равен
в этом случае 2а = Sv/R2. Мы полагаем прн этом, что скорость du/dt
значительно меньше средней скорости V течения жидкости, а прогибы оболочки
малы в сравнении с радиусом R.
Исследование нестационарных процессов в упругом трубопроводе
сводится к совместному решению гидродинамических уравнений C1) и C2) и
уравнений осесимметричного движения оболочки B3).
Дальнейший путь решения задачи о неустановившемся течении в
упругом трубопроводе может, например, состоять в следующем. Выразим
828
НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ
усилия Мх, Nx и Ny через перемещения и заменим уравнения B3), C1) и C2)
конечно-разностными соотношениями. Выписав затем начальные условия,
граничные условия на концах трубопровода и условия сопряжения
различных участков трубопровода, мы сможем решить систему конечно-разностных
уравнений.
Отметим, что уточнение рассмотренного решения можно получить, если
принять в расчет радиальную составляющую скорости жидкости. Подобные
решения были получены с использованием модели трехмерного движения
идеальной сжимаемой жидкости в трубах из линейно-упругого материала *).
§ 223. Приложения в биофизике
В качестве одного из приложений задачи о неустановившемся движении
жидкости в упругом трубопроводе рассмотрим поведение кровеносных
артерий при быстропротекающих гемодинамических процессах; под
гемодинамикой подразумевается течение крови в сосудах. Эта важная проблема,
позволяющая исследовать реакции сосудов — а в какой-то мере и всего орга-
б-Ю'6,дим/см1
3
О
^»
III
--
/
/
/
/
/
/
/
'
иг
0.4
0,6
1,0
низма — по отношению к самым
различным возмущениям,
относится к математической
биофизике **).
Будем предполагать, что кровь
является однородной
ньютоновской жидкостью ***). Строение
стенки кровеносного сосуда весьма
сложно: она состоит из ряда слоев,
имеющих разные физические
свойства. Но все же для стенки
сосуда в целом можно принять
модель нелинейно-упругого орто-
тропного материала.
Нелинейность в этом случае является
«жесткой»: с увеличением
деформации касательный модуль
возрастает. Механические свойства
стенки сосудов зависят также от возраста человека и патологических
явлений. На рис. 23.7 в качестве примера показаны диаграммы для материала
стенки сосуда при одноосном растяжении ****). Кривая / относится к сосуду
молодого человека, кривая // — к сосуду лица пожилого возраста.
Подобные зависимости можно аппроксимировать выражением вида
а = £еA -f- at -\- be2).
Заметим, что стенки артерий получают большие радиальные перемещения.
На трудность одновременного учета физической и геометрической
нелинейности указывалось уже в § 170. Там же предложены некоторые подходы
к решению этой задачи.
Рис. 23.7. Диаграммы «деформация — напряже
ние» для стенок кровеносных сосудов.
*) Эти решения принадлежат Е. Н. Мпеву [23.4], Скалаку [23.11] и
другим.
**) Подобная задача была исследована И. С. Громека (см. ссылку
на стр. 825). Изложенная здесь постановка задачи принадлежит М. С. Гер-
штейну и автору [23.1].
***) В действительности кровь является суспензией и ее эффективная
вязкость зависит от размеров сосуда и скорости течения.
****) По данным, приведенным в книге Н. Н. Савицкого
«Биофизические основы кровообращения и клинические методы изучения
гемодинамики», Л., 1963.
ПРИЛОЖЕНИЯ В БИОФИЗИКЕ
829
В рассматриваемом случае пойдем по пути решительного упрощения
исходных уравнений B3) для оболочки-сосуда. Это тем более целесообразно,
что в настоящее время отсутствуют достаточно достоверные данные о
поведении материала стенки сосуда при сложном напряженном состоянии.
Считая, что перемещения w стеикн сосуда в радиальном направлении
значительно превосходят по величине осевые перемещения и, приведем
уравнения B3), C1) и C2) к следующей системе:
Ehw
II W I L
w2 \ , a'w
К
dp dV
dt + dx
■ + -
^ R
dt2
dw
Ж
X — -
др dV 8v
dx dt + R*
= 0;
0.
B3.36)
При определении окружных напряжений здесь использованы зависимость
е = w/R и приведенное выше аппроксимирующее выражение а (е).
Численное интегрирование системы
уравнений C6) было выполнено
для ряда конкретных случаев
с помощью цифровой
электронной машины. Вычисления
были произведены для участка
сосуда радиуса R = 2 мм.
Параметры, характеризующие
исходные геометрические
размеры сосуда, принимались
равными: h/R = 0,2; L/R = 10
(L—длина рассматриваемого
участка сосуда). Начальные
условия соответствовали
установившемуся течению крови.
Исходная безразмерная
скорость была принята равной
/,/
1,05
1.0
0.95
—
! <*
j
т/
уё\
-.200
т-150
УШ-.
Тзг
т-0
0.25
0.5
0.75
Ю
Рис. 23.8. Изменение давления в упругом сосуде
при его закупоривании.
V = VR2icmh2 = 2 • 10"
безразмерное давление в исходном сечении сосуда р0 = p0R2/Kh2 = 1 • 10 ;
коэффициент вязкости v = vL/cmR2 = 2 • Ю-0; отношение а = р/рш = 1.
В качестве первого примера рассмотрим поведение сосуда при его
внезапной закупорке в сечении x=L. Результаты интегрирования при
соответствующих граничных условиях представлены на рис. 23.8 и 23.9 в виде
кривых распределения безразмерного давления по длине артерии в
последовательные моменты времени т = cmt/L. Кривые рис. 23.8 относятся к легко
растяжимому сосуду. Диаграмма а (е) показана на рис. 23.7 под цифрой I.
На рис. 23.9 приведены кривые давления для более жесткого (ригидного)
сосуда, которому отвечает на рис. 23.7 диаграмма II.
Сравнение рис. 23.8 и 23.9 позволяет оценить влияние жесткости
сосудистой стенки на повышение давления при закупорке артерии. Давление на
отдельных участках сосуда оказывается, как и следовало ожидать, более
высоким при большей жесткости материала стенки сосуда. Графики
подтверждают, кроме того, известные данные о возрастании скорости
распространения возмущений в артериях (в частности, пульсовой волны) по мере
увеличения жесткости сосудистой стенки *).
*) Влияние нелинейности упругой характеристики материала стенки
сосуда на форму пульсовой волны изучалось Гесснером [23.7J, а в
постановке, близкой к принятой здесь, — Е. А. Вольмир.
830 НЕКОТОРЫЕ ЗАДАЧИ ГИДРОУПРУГОСТИ [ГЛ. ХХШ
В качестве второго примера рассмотрим поведение растяжимого сосуда
(кривая / на рис. 23.7) в начальный момент воздействия на организм
перегрузки (повышенной гравитации), направленной в сторону, противоположную
i,i
1,05
p-10i
1,0
Ц95
/
/t-30L
■^
/Ч^
00
/Т\ i
А /
/х-150 / '
-100
''.-50
--0
0,25
0.5
0,75
W
Рис. 23.9. Изменение давления в «ригидном» сосуде при его
закупоривании.
течению крови в рассматриваемой артерии. Безразмерная величина,
характеризующая ускорение при перегрузке, принималась равной т = XLR2/Kh2 —
= 0,2-Ю-4. Было принято также, что в начальном сечении х = 0 рассмат-
4 риваемого участка сосуда одновре-
Р'Ю | | 1 | 1 | | | | менно с воздействием перегрузки
за время т = 100 происходит
повышение давления в два раза. Такое
изменение давления, не будучи
непосредственно связано с
повышенной гравитацией, может явиться
следствием, например, сосудодви-
гательной рефлекторной реакции
в артерии, расположенной перед
рассматриваемым участком.
Кривые давления,
соответствующие описанному сочетанию
воздействий на поток крови в
сосуде, приведены на рис. 23.10. Из
рассмотрения этих кривых видно,
что в момент х = 250 в сечении
x/L = 0,3 приращение давления
составляет /?ж_о з/.== 1,31/7лг=о-
В заключение отметим, что во
всех рассмотренных в этом
параграфе примерах, если и можно
было говорить об устойчивости,
то в применении к растянутой
оболочке; исследование этих примеров в рамках данной книги вызывалось
общностью подхода к задачам и приемов решения. Возможен, однако, н
такой случай, когда давление в некоторой зоне сосуда резко падает и так
называемый ригидный, склерозироваиный сосуд получает повреждения в
результате потери устойчивости при избыточном внешнем давлении.
г,5
2,0
1,5
',0
0,5
\
Ч|
V
'=250
\т*200
t-1
[££-—'
Г^£
£Я!_
t°0
о
Рис. 23.10.
025
0,5
0,75
1,0
Изменение давления в сосуде при
действии перегрузки.
ГЛАВА XXIV
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
§ 224. Дивергенция и флаттер панели в потоке газа
Обратимся к задачам устойчивости пластинок и оболочек,
относящимся к области аэроупругости, когда поведение пластинки или
оболочки тесно связано с воздействием обтекающего их газового
потока. Рассмотрение этих задач является важным, поскольку вопрос
об упругой устойчивости неизбежно возникает при расчете
конструкции любого летательного аппарата. Не менее интересны эти
исследования и с теоретической точки зрения, так как они
позволяют выявить различные виды потери устойчивости. Один из них
состоит в монотонном выпучивании; например, при наступлении
определенных условий становится устойчивой не плоская форма
панели, а изогнутая. В авиационной литературе такой процесс
статической потери устойчивости обычно называют дивергенцией. Другой,
колебательный вид наступления неустойчивости выражается в
возникновении незатухающих вибраций конструкции. С этим вторым
типом неустойчивости мы уже сталкивались при изучении
параметрических колебаний. Особенность того колебательного движения, с
которым мы познакомимся в настоящей главе, состоит в том, что оно
поддерживается за счет энер- *
гии, доставляемой газовым Кя J/Л
потоком, причем скорость и А о^^ ^^>а
направление потока могут ^ /""j^T-—, т-""С\
оставаться постоянными. Та- U ' ^ г * ' * \
КОГО рода Вибрации НазЫВЭ- Рис. 24.1. Панель под воздействием потока газа.
ются автоколебаниями или
колебаниями типа флаттера. Мы будем здесь касаться только
статического выпучивания и автоколебаний подкрепленных пластинок либо
оболочек, являющихся элементами обшивки крыла, фюзеляжа или ©ие-
рения летательного аппарата; такие колебания получили название
панельного флаттера.
Допустим, что удлиненная панель, закрепленная по краям,
обтекается потоком газа вдоль лилии АВ (рис. 24.1), причем скорость
потока равна U. Если панель отклоняется от плоскости АВ, то она
832
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
будет подвергаться поперечному давлению, зависящему в каждой
данной точке от утла между нормалью к срединной поверхности и
направлением потока. В том случае, когда изогнутое очертание
панели симметрично по отношению к среднему сечению, нормальное
давление оказывается в первом приближении антисимметричным, как
показано на рис. 24.1. Панель получает своеобразную
деформированную конфигурацию, сочетающую симметричные и
антисимметричные прогибы. Поведение панели при этом зависит от характера
закрепления краев и от того, имеются ли начальные усилия в
срединной поверхности. Если пластинка в исходном положении является
плоской и подвергается действию сжимающих усилий, то при
известной скорости потока эта начальная форма может стать неустойчивой,
между тем как устойчивыми будут изогнутые формы; в этом случае
наступает статическое выпучивание панели (дивергенция). С другой
стороны, при известном сочетании сжимающих усилий и скорости
потока могут возникнуть колебания типа панельного флаттера. Так
как колебания вызывают ускоренное развитие усталостных трещин
в обшивке *), то они являются нежелательными, хотя бы их
амплитуда и была ограниченной.
Для летательных аппаратов, имеющих сверхзвуковую или гипер-
знуковую скорость, начальные усилия в обшивке могут быть вызваны
повышением температуры, связанным с воздействием того же
газового потока. Поэтому основные уравнения, описывающие поведение
пластинок и оболочек в потоке газа, должны учитывать влияние
температурного поля, и их надо отнести к области аэротермоупругости.
Определение аэродинамического давления при больших
сверхзвуковых скоростях облегчается благодаря возможности применения так
называемой поршневой теории. Нам придется в дальнейшем
пользоваться основными соотношениями этой теории, поэтому приведем их
краткий вывод.
§ 225. Определение нормального давления
по поршневой теории
Рассмотрим одномерную задачу о неустановившемся изэнтропи-
ческом движении идеального газа, заключенного в цилиндрическую
трубу и находящегося справа от поршня А (рис. 24.2). Поршень
перемещается вправо со скоростью а, малой по сравнению со
скоростью звука в невозмущенной газовой среде; очевидно, этой же
скоростью обладают прилегающие к поршню частицы газа. Скорость
распространения малых возмущений (скорость звука) в газовой среде
обозначим через с, давление—через р, плотность — через р. Все
эти величины изменяются по мере удаления от поршня. На достаточно
*) В литературе имеются сведения, что воздействие газового потока
вызвало в свое время разрушение некоторых панелей обшивки немецкой
ракеты V-2.
ОПРЕДЕЛЕНИЕ ДАВЛЕНИЯ ПО ПОРШНЕВОЙ ТЕОРИИ 833
большом расстоянии от поршня точки газа находятся в покое, так
что скорость и = 0; остальные характерные величины соответственно
равны с0, р0, Pq.
Выберем на некотором удалении от поршня два бесконечно
близких сечения т и т' таким образом, что малое возмущение
передается от т к т' со
скоростью звука с за время dt; А
расстояние между сечениями у4'.''.'
будет dx = c dt. Пусть в
сечении т давление
равно /7, а в сечении т' равно
р -dp.
Составим уравнение
импульсов для элементарной
массы газа pdx,
заключенной между сечениями с
единичной площадью, считая,
что под влиянием возмущения эта масса за время dt приобретает
дополнительную скорость du:
р dx du — р dt — (р — dp) dt.
Отсюда
du = -^dp. B4.1)
Полагая, что за время dt внутрь элемента через сечение втекает
масса газа pdudt, определяем новое значение плотности в том же
объеме:
Рис. 24.2. К выводу уравнения движения газа при
перемещении поршня.
, , р dx 4- о du dt
p+rfp=—YX—
следовательно,
da--
■dp.
B4.2)
Другой вывод полученных зависимостей состоит в следующем.
Запишем известные в аэродинамике уравнения движения
элементарной массы газа и неразрывности:
/ ди
Р[~дГ
_ф_
dt
+ и
ди
~дх
Ф
V дх
■0,
+ 7-* р|г = 0-
B4.3)
J
Считая, что величины скорости и и приращений мир малы, будем
пренебрегать их произведениями; тогда уравнения C) примут вид
B4.4)
ди
ф
др 1
дх '
ди
"Pi?'
53 А. С. Вольмир
§34 НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ [ГЛ. XXIV
Для возмущения, передающегося через газ справа от поршня, все
характерные величины будут зависеть от одной переменной *)
х' = х—ct. Для некоторой функции / имеем:
dfjX^_df_ df(x') __ df
дх ~ dx> • dl ~ C dx' ■ (Zq-°>
Заменяя частные производные в D) через полные производные по х',
приходим к соотношениям A) и B).
Сопоставляя A) и B), получаем известную формулу для скорости
звука:
'-/*• «"■«)
dp
С другой стороны, для изэнтропического процесса имеет место
зависимость
где С—постоянная величина, у.— отношение теплоемкости газа при
неизменном давлении к теплоемкости при постоянном объеме.
Находим, считая у. — const,
^eCK^-'=xf B4.7)
Равенства A) и (8) дают
с = ук£. B4.8)
du==-kdP- B4-9>
Пользуясь G) и (8), выразим скорость звука с в произвольном
сечении через скорость звука с0 на бесконечности:
J_ = T/m=(Xp". B4.10)
Соотношение (9) приобретает вид
""=тШ¥т- <24-">
Интегрируя A1), будем иметь:
и — и
о
PlPo х-1 t
С0 / р \ 2х
I
*) Это положение неявно фигурировало и в предыдущем выводе, когда
принималось dx = с dt.
»:
§ 225] ОПРЕДЕЛЕНИЕ ДАВЛЕНИЯ ПО ПОРШНЕВОЙ ТЕОРИИ 835
Отсюда при и0— О
Г х-1 1
B4.12)
Далее получаем:
2с0
х — 1
Р = (' +
х — 1 w
2 с0
1
2и
B4.13)
здесь и надо брать со знаком плюс при выталкивании газа поршнем
(рис. 24.2) и минус при всасывании в трубу. Для воздуха при
Р _/i 1 о о м
и= 1,4 будет — = A —|— 0,2—). Считая и <С с0, разложим выра-
жение A3) в ряд по формуле бинома Ньютона:
Р | 1„» | Х(Х-И) ( U \2 | Х(Х+1) / U \3
Отсюда
+ *+1ff-*>fcV+-]- <2<-15>
Пользуясь (8), находим: Р0 = с1р0Ы, следовательно, множитель перед
скобками в A5) можно записать в виде (с^рЛ-
Для малых возмущении в первом приближении будем иметь:
р-Р0 = £^-и = р0с0и. B4.16)
Мы получили линейные соотношения, связывающие приращение
давления со скоростью потока. Заметим, что A6) также
непосредственно вытекает из B). Удерживая в выражении A5) два или три
члена ряда, получаем соответственно нелинейные зависимости
второго или третьего приближения.
Рассмотрим случай, когда удлиненная слабо искривленная панель
подвергается действию сверхзвукового или гиперзвукового потока
(см. рис. 24.1). Обозначим скорость невозмущенного потока через U,
скорость звука в невозмущенном потоке — через с0, а
соответствующее число Маха—через М = £//с0. Будем считать, что число
это лежит выше значения М = 2.
Если длина панели Ъ значительно больше ширины а, то для
исследования деформации панели достаточно рассмотреть полоску
шириной, равной 1 (рис. 24.3), и считать все искомые величины
функциями координаты х и времени t. Обозначим через Q(x, t) полный
угол наклона нормали к срединной поверхности по отношению к
плоскости, перпендикулярной к вектору U; величину 0, выраженную
в радианах, будем полагать малой: 02<^1.
53*
836
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Допустим, что слева от панели (рис. 24.4) имеется жесткая
преграда, так что панель обтекается потоком только снизу. Примем
сначала, что панель изогнута выпуклостью вверх (рис. 24.4, а).
Тогда непосредственно за точкой А будет лежать зона разрежения
потока. В этой зоне течение является изэнтропическим; отметим, что
если бы оно было одномерным, то оно описывалось бы точно теми
Рис. 24.3. Случай удлиненной панели; задача становится одномерной.
же уравнениями B) и D), как и для дозвукового потока; надо
считать, что поршень, изображенный на рис. 24.2, движется рлево.
Однако рассматриваемая задача гораздо более сложна, так как является
двухмерной. Предположим теперь, что панель искривлена
выпуклостью вниз (рис. 24.4, б). Тогда в ближайшей к точке А зоне будет
Рис. 24.4. Различные случаи искривления панели: а) выпуклостью вверх,
б) выпуклостью вниз.
иметь место сжатие газа; от А берет свое начало фронт скачка
уплотнения. Возможное очертание этого скачка изображено на
рисунке. Возмущенная зона потока (заштрихована на рис. 24.4, б)
находится в пределах между поверхностью пластинки и фронтом
скачка. Здесь уже и одномерная задача должна быть поставлена по-
новому, так как между прилегающим к поршню слоем газа и
остальной областью расположена ударная волна; в пределах возмущенной
зоны энтропия газа меняется.
Таким образом, по сравнению с описанной выше одномерной
задачей о дозвуковом движении поршня мы сталкиваемся здесь с двумя
ОПРЕДЕЛЕНИЕ ДАВЛЕНИЯ ПО ПОРШНЕВОЙ ТЕОРИИ 837
Рис. 24.5. К формулировке
гипотезы плоских сечеиий.
основными затруднениями: (а) задача оказывается двумерной, и (б)
имеются скачки уплотнения в сжатой зоне, причем энтропию газа
нельзя считать постоянной.
Первое из этих затруднений может быть преодолено введением
так называемой гипотезы плоских сечений. Как показывают более
подробные исследования, при достаточно больших числах М фронт
скачка уплотнения лежит сравнительно близко к поверхности
пластинки. При прохождении через скачок скорость частицы газа
меняется незначительно; после соприкосновения с пластинкой частица
газа продолжает перемещаться с почти неизменной касательной
скоростью. Эту касательную скорость £/, можно при малых углах О
считать равной скорости невозмущенного
потока U. Возмущение потока,
вызванное контактом с пластинкой, состоит,
главным образом, в поперечных
перемещениях частиц газа. Картина течения
получается такой, как если бы частицы газа
продолжали перемещаться с неизменной
скоростью U, отклоняясь по направлению
нормали к поверхности пластинки.
Обратим движение, т. е. примем, что пластинка движется со скоростью U
в покоящейся газовой среде (рис. 24.5). Тогда получится, что
пластинка «разрезает» среду, придавая частицам поперечные смещения,
Выделим слой частиц газа двумя плоскостями тп и тхпх,
нормальными к вектору U. Можно
считать, что при больших
сверхзвуковых скоростях перемещения
пластинки частицы слоя получают
смещения лишь в пределах
данного слоя; плоскости тп и тхпх
оказываются как бы
«непроницаемыми стенками» *). В этом и
состоит гипотеза плоских сечений.
Если вернуться к
первоначальной картине обтекания панели
и принять, что панель неподвижна, то поперечная составляющая
скорости (рис. 24.6) будет равна U0; для пластинки, совершающей
колебания, необходимо учесть также переносную скорость dz/dt,
которой обладает точка срединной поверхности с координатой z.
Иначе говоря, задача об определении давления на пластинку
сводится к рассмотрению неустановившегося движения частиц газа при
Рис. 24.6. Поперечная составляющая
скорости потока и переносная скорость.
*) Такая формулировка гипотезы плоских сечений дана в работе
А. А. Ильюшина [24.61. Исследования в этой области принадлежат, кроме
того, Хэйсу [24.19], Лаитхиллу [24.25J, Эшли и Зартарьяну [24.14] и другим
авторам.
838
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
[ГЛ. XXIV
наличии жесткой стенки, перемещающейся со скоростью
и = (/0 + -^-. B4.16а)
Если бы это возмущенное движение газа было изэнтропическим,
то мы могли бы для решения задачи воспользоваться результатами,
полученными при рассмотрении одномерного распространения
возмущений в газе, вытесняемом поршнем; скорость поршня надо,
очевидно, определять по формуле A6а). Для зоны разрежения мы можем
сделать это без всяких новых допущений. Однако для зоны сжатия
газа необходимы дополнительные гипотезы.
Можно показать, что при использовании нелинейного
выражения A5), в котором удержана кубическая степень (и/с0), мы
получаем значения давления, весьма близкие к «точным», даже если эти
последние найдены с учетом наиболее сильного присоединенного
скачка уплотнения. Таким образом, и здесь процесс распространения
возмущений в газе можно приближенно принимать изэнтропическим.
Поршневая теория дает удовлетворительные результаты, если
число М потока удовлетворяет требованию М2^>1; практически она
может быть применена уже при М > 2. Отметим, далее, что при
выводе соотношений, относящихся к одномерной задаче о движении
поршня, мы считали, что скорость поршня мала по сравнению со
скоростью звука с0. Следовательно, должно быть и < с0 или
Допустим, что исследуемый процесс является колебательным и что
величина z меняется по закону z = Asinb)t, где А и со—амплитуда
и частота колебаний; тогда (dz/dt)may. = Лы. При этом условие (а)
перепишется в виде
с.
где 0тах — наибольшее значение 0, или
м(етзх4-4г)<1. (Ь)
Отнесем амплитуду А к ширине панели Ь, тогда вместо (Ь) найдем:
м(етах+4-7г)<1- W
Дополнительные исследования показали, что формулы поршневой
теории применимы и в случае, когда основной поток является
нестационарным, т. е. при U = U(t); при этом должны быть выдержаны
определенные условия в отношении характера изменения U.
§ 226] ПОЛОГАЯ ОБОЛОЧКА, ОБТЕКАЕМАЯ СВЕРХЗВУКОВЫМ ПОТОКОМ 839
Во многих случаях второй составляющей в выражении A6а)
можно пренебречь по сравнению с первой и положить
u=UQ = Mc0Q. B4.16b)
Такая постановка задачи носит название квазистатической: мы условно
считаем, что в каждый данный момент времени давление по
поверхности колеблющейся пластинки распределяется так же, как и для
неподвижной пластинки той же конфигурации.
В курсах аэродинамики приводится известное выражение для
избыточного давления:
Р — А) = . 6,
ИМ2-1
где qA — динамическое давление, равное qA = p0U2/2. Принимая
и = ЬАс0, находим:
2 М2 Q
При М2!^£> 1 можно считать ]^М2— 1 ~ М. Тогда придем к
линейной зависимости *)
P—P0 = ?oclMQ'
она совпадает с формулой A6), выведенной с помощью поршневой
теории, если определять и по A6Ь).
Перейдем к случаю, когда стороны а, Ь панели сравнимы между
собой. При этом прогибы пластинки зависят как от координаты х,
так и от у. Гипотеза плоских сечений остается в силе; поперечное
перемещение частицы газа надо и здесь считать происходящим вдоль
нормали к деформированной поверхности пластинки. Если
направление скорости потока совпадает с направлением х, то под углом Э
мы должны понимать поворот нормали в плоскости xz:
все остальные соотношения остаются в силе. Рассуждая таким
образом, мы пренебрегаем эффектом отклонения вектора скорости
потока от плоскости xz.
§ 226. Исходные уравнения для пологой оболочки,
обтекаемой сверхзвуковым потоком
Будем в дальнейшем рассматривать пологую оболочку как
слабо искривленную пластинку, считая начальные и дополнительные
*) Вводя вместо М множитель М2/|^М2— 1 , можно отодвинуть нижнюю
границу применимости поршневой теории приблизительно до М = У, см.
книгу В. В. Болотина [0.1] 1961 г.
840
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
прогибы сравнимыми с толщиной. В качестве исходных зависимостей
примем динамические нелинейные уравнения, данные в главе XXI
(стр. 755):
D
V4 {w — w0) = L (Ф, w)
Y d2w
J~dF~
+*■
V40 =
[L(w, w) — L(w0, w0)\;
B4.17)
здесь по-прежнему w и w0 — полный и начальный прогибы.
Интенсивность поперечной нагрузки q определим, пользуясь A3):
■■—(Р —Ро) = Ро
1
■(' +
X — 1 U
B4.18)
Знак минус перед (р — р0) объясняется тем, что при
положительном значении 0 нагрузка оказывается направленной вверх, т. е.
в сторону, обратную оси z; при отрицательном же 0 нагрузка будет
действовать вниз (см. рис. 24.1). Считая по A6Ь)
и ., dw
Т0 = М-д7'
введем A8) в уравнения A7) и дополним их температурными
членами по B0.6) и B0.9). Кроме того, примем во внимание линейное
демпфирование, как это обычно делается в теории колебаний. Тогда
получим следующие динамические уравнения аэротермоупругости
для пологой оболочки большого прогиба *), обтекаемой
сверхзвуковым потоком газа в направлении х:
D
^ V4 (ад — wQ) = L (Ф, w) ■
Н-ТГА)
[l-(l +■
у. — 1 , , dw
-2-M^J
у d2w
dw
~~дТ
Eha
-г-
12A — ц)
V26,
1 у4Ф = —^ [L(w, w) ~L(wQ, w0)\ - aV27\
B4.19)
Если представить q по формулам третьего приближения A5)
в виде
dw >c -4— 1
17
q = — P4*
[м-
■«*(&)'
12 IVI { dx
J3], B4.19а)
то первое из уравнений A9) примет форму
j- V4(w — wQ) — L(Ф, w)
Y d2w dw
1 ., dw
[l+^M
dx
(' +
>m
Eha
12A
, V20.
B4.20)
*) Уравнения такого типа были составлены В. В. Болотпным (сб.
«Расчеты на прочность» 6, I960).
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ
841
Уравнения A9) и B0) являются нелинейными с двух точек зрения:
с одной стороны, они учитывают геометрическую нелинейность
в соответствии с основными допущениями теории гибких пластинок
и, с другой, — аэродинамическую нелинейность зависимости
нормального давления от скорости потока. Если принять аэродинамические
соотношения линейными, получим уравнение B0) в виде
.ОУС—Й-МФ..)-.!**-.*-
Перейдем к частному случаю удлиненной пластинки,
испытывающей цилиндрический изгиб. Прогиб w будет здесь зависеть только
от х и /, т. е. w = w {x, t). Из напряжений в срединной
поверхности надо учесть только ох=о0, причем эту величину следует
считать постоянной по ширине пластинки. Второе из уравнений A9)
отпадает, а первое получает по B0) форму
D д* (w — w0) d2w у d2w dw
~h dT* — °° ~dF"— ~J ~df* Z~Si
1 >< dw ["i i x+1 ., dw I. . 1 ,. dw\~\ Eha d2B
-Т^М-^[1 + -f-M-^l 4-3- M -g^j- 12(i^)¥.
B4.21)
Вместо уравнения B0а) будем иметь (сжимающие напряжения
считаем здесь положительными):
D д* (w — w0)
X дх* ~~
— ad*w V d*w cdw l пущ dw Eha дЩ Г2421аЧ
Если длинные края пластинки не смещаются, то величина о связана
с начальным и полным прогибом по (9.44) и (9.207) соотношением
о
Перейдем к решению некоторых конкретных задач.
§ 227. Равновесные формы пластинки со смещающимися краями
Рассмотрим сначала удлиненную пластинку, обтекаемую с одной
стороны газовым потоком при условии, что длинные края оперты
шарнирно и могут свободно сближаться в плоскости пластинки.
Допустим, что пластинка в начальном состоянии является плоской и что
она подвергается действию постоянных сжимающих усилий а0 вдоль
оси х (рис. 24.7).
842
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Сжимающие усилия могут быть вызваны общим изгибом
конструкции и, кроме того, температурной деформацией обшивки.
Правда, температурные напряжения определяются теми или иными
условиями сочленения обшивки с подкрепляющими элементами,
между тем как мы считаем края панели свободно переметающимися.
Однако исследование случая постоянных сжимающих усилий
позволяет выяснить основные особенности задачи.
Ш »--. _-
Рис. 24.7. Начальный и полны!! прогибы пластинки.
Примем, далее, что прогибы малы по сравнению с толщиной
пластинки, и будем решать задачу как линейную и геометрически,
и аэродинамически. Перепишем уравнение B1а) в виде (а = о0):
„ D dAw . d2w , I ,, Л _ ,„. „_
здесь принято е = 0 и 9 = const. Мы отмечали уже, что своеобразие
задачи заключается в сочетании симметричных и антисимметричных
форм изгиба пластинки. Поэтому выражение, аппроксимирующее
прогиб, выберем следующим образом:
, . пх , , . 2пх
w — /, sin —- -f- /, sin
B4.24)
Применяя метод Бубнова — Галеркина, выпишем уравнения
и
X sin —— dx ■■
а
а
I
X%\n~dx = Q. B4.25)
Подставляя сюда B4) и интегрируя, получим:
-T-&^-°o-W^—W P^M/2 = О,
D 8я4 , 2Я2 . . 4 ..,
Введем безразмерные параметры
/. у _ /2
^~1Г' ** — -А
о <г,
кЮ
<г =
рауМа%,
B4.26)
B4.27)
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ
843
под оэ понимается эйлерово критическое напряжение: аэ = л2£)/а2/г.
Уравнения B6) принимают вид
f ^,+A6-40^ = 0.
B4.28)
Считая параметры прогиба £i и £2 отличными от нуля,
приравниваем нулю определитель этой системы, тогда найдем:
Это решение имеет, очевидно, смысл при 1^0*^4, так что
величина Оц лежит между критическими значениями, отвечающими
выпучиванию пластинки по одной и двум полуволнам. Интересно
отметить, что в некоторой зоне значений М критическое напряжение
Рис. 24.8. Зависимость между давлением и сжимающими усилиями для
удлиненной пластинки по точному решению (сплошная линия) н
приближенному решению (пунктир).
сжатия для пластинки, обтекаемой газовым потоком, оказывается
ббльшим, чем в отсутствие потока. Таким образом, здесь газовый
поток оказывает стабилизирующее действие, «выпрямляя» пластинку.
Конечно, исследование закритической деформации пластинки, когда
прогибы становятся сравнимыми с ее толщиной, должно проводиться
с помощью общих нелинейных уравнений.
На графике рис. 24.8 пунктиром изображена зависимость <7*(oJ)
по B9); кривая имеет вид петли. Каждому значению q* соответствуют
две равновесные формы *) с различным соотношением £i и £2. При
*) По-видимому, устойчивой является лишь форма, относящаяся к левой
части петли.
844
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
некоторой предельной величине q* эти формы сливаются; очевидно,
для больших значений q* вообще не существует никаких
равновесных форм, комбинирующих одну и две полуволны синусоиды.
Минимизируя q* по о*, находим значения о* и q* для предельной
точки: з* = 5/2, (ji*=9/8. Если выбрать форму прогиба в виде
комбинации трех и четырех полуволн, то получим на графике <?* @о) СЛе_
дующую петлю, заключенную между значениями о* ==9 и а* =16.
Соответствующий максимум q* лежит гораздо выше первого, поэтому
здесь с практической точки зрения достаточно рассмотреть первую
петлю.
Перейдем к случаю шарнирно опертой по краям пластинки со
сторонами а, Ъ, сравнимыми между собой, и предположим, что
направление потока параллельно стороне а. Допустим, что пластинка
сжата в том же направлении усилиями о0. Решая задачу в той же
постановке, что и в предыдущем случае, запишем уравнение B0а)
в виде
v D Г74 d2W i Ра кл д& rv
Ks-V^ + Oo-gp-t-f-HM-^^O.
Аппроксимируем прогиб с помощью выражения
, . пх . лу , , . 2лх . ity ... пп.
™ = /iSin—sin-^--f/2sm —sinY". B4.30)
вводя, дополнительно к форме изгиба по одной полуволне вдоль обеих
сторон, антисимметричную форму вдоль направления потока.
Выпишем обычные уравнения метода Бубнова — Галеркина; после
интегрирования находим:
D л4
h
D л4 / 4 , 1 \2 л2 , , 2 ... .
B4.31)
Если принять в первом уравнении /?0 —0, найдем величину
критического напряжения:
а*=-1Га {-&+-¥) • B4.31а)
Это выражение справедливо при условии, что размеры пластинки
мало отличаются друг от друга: а<^Ьу2. Введем в дополнение
к B7) безразмерные параметры о0 = а0/аэ, a = ajb; тогда
уравнения C1) примут вид
(l-;G)ti-^3(t|»v^ = °- I
'ж^+Ш^ь-ч B4'32)
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ
845
Приравнивая нулю определитель системы, находим:
3A+а2J -,/ ,~ пГD + а2J
8
]/ (Ро- О[тттЙ7 ~ 4Ч- B4-33)
~ D-1-а2J
Величина q* обращается в нуль при о0=1, о0 = — ^ Т_ '- .Второе
значение о0 соответствует высшей критической силе для второй из
принятых нами форм выпучивания (две полуволны в направлении х
и-одна — вдоль у). В случае квадратной пластинки получим:
?* = | ]/(Оо-1)(х-45о)- B4.34)
Предельное значение q* будет иметь место при о0 — 41/32 и равно
q* = 27/32.
Мы познакомились с решением задач, относящихся к удлиненной
пластинке, а также к пластинке конечных размеров, в первом
приближении. Однако для этих задач можно получить и точное
решение. Вернемся к исходному уравнению B3) для удлиненной пластинки
и перепишем его в виде
d4w a0h d2w . р0яМ dw n ,„. ,-v
Введем обозначения:
J-i, Б0 = ^=п\, q = £^.=^q'; B4.36)
вместо C5) получим:
w™ -Ь a0w" + qw' = 0; B4.37)
штрихами обозначены производные по х. Соответствующее
характеристическое уравнение будет
г*+айг2+^г=0. B4.38)
Один из корней его равен гх = 0, остальные находим из
кубического уравнения
r3-f-0or+^=O. B4.39)
Дискриминант этого уравнения положителен, следовательно, один из
корней является вещественным, два других — комплексные.
Обозначим их г2 = а, г3,4 = y + ib. Корни уравнения связаны с его
коэффициентами следующими зависимостями:
rirzri = — q, r2-+ ГзН- r4 = 0, r2rz + r1ri-\~rlr3 = a0.
Отсюда находим:
<х = — 2у, 6=VA3y2 + o0, 9 = 2уDу2+-аа). B4.40)
846
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Корням Г] г4 соответствует решение уравнения C7):
w = Л-\- Веах + C,^<v' "»х _)_ D,e'Y-''*>*,
или
щ» = ^-|-5^-2Y^-|-CeV^cos6x-|-D^^sin6x. B4.41)
Граничные условия выпишем в виде
w — 0, -j-r = 0 при х = 0; 1.
Подставляя сюда D1), получаем четыре уравнения, связывающие
постоянные Л, ..., D. Первое из них имеет вид А-\-В -\-С = 0.
Выражая отсюда А через В и С, приравниваем нулю определитель
оставшихся трех уравнений:
1— £-2y 1 — eVCos6 —*vSin6
4у2 Y2 — 62 2y6 =
4Y2^~2y^y (y2 cos 6—2y6 sin6—62 cos 6) e"? (y2 sin6+2yo cos6—62 sin6)
= 0.
Развертывая этот определитель, приходим к уравнению*)
[(Y2 -)- б2J + 4y2 (б2 — Y2)l sin 6 0?y — g-Y) _
— 8y3 6 cos 6 (*y _|_ e- v) -4- 8y3 6 (^2y -4- e~2Y) = 0
или
[(Y2-^62J + 4y2F2—Y2)] shYsin6 = 8Y36(chYcos6—ch2Y). B4.42)
Пользуясь D0) и D2), можно найти зависимость между о0 и q,
или, иначе говоря, между о* и q*. В случае q — 0 получим по D2)
Y = 0; при этом будет sin6 = 0, Ь = л, 2л, . . . или о0 = л2, 4л2
что соответствует значениям о*=1, 4, .. . При Y=£0 и 1 < а* < 4
получаем сплошную кривую <7*(о"о) на рис. 24.8; она слегка
отклоняется от пунктирной кривой первого приближения. Предельное
значение <7* по точному решению оказывается равным 1,17, что очень
близко к приближенному значению 9/8=1,12.
Аналогичное решение можно получить для пластинки с конечным
отношением сторон [24.3], если исходить из уравнения B0а) и
представить w в виде w = X (х) sin(^yjb). Перейдем к изучению второго
типа потери устойчивости — колебательного.
§ 228. Динамическая задача для пластинки
со смещающимися краями
Будем исходить из уравнений B1) и B1а), описывающих процесс
движения удлиненной пластинки во времени. Снова рассмотрим слу-
*) Подобное уравнение для более общей динамической задачи было
получено А. А. Мовчаном, а также Хеджепетом, см. ссылку на стр. 850.
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ
847
чай, когда пластинка не имеет начальной погиби и края смещаются
свободно; прогибы будем считать малыми по сравнению с толщиной.
Принимая линейное выражение для давления и не учитывая
демпфирования и влияния неравномерности температуры, получим следующее
исходное уравнение по B1а), при а — а0:
D d*w d2w v d2w 1 ,, dw ,_.. ,„N
T^-^-^tf-jl^r-I^M^. B4.43)
Допустим, что в результате некоторых возмущений панель начала
совершать малые гармонические колебания частоты со около
положения равновесия. Тогда прогиб w можно представить в виде
w = w(x)s\n {at -\- a).
Подставляя это выражение в D3), придем к уравнению
v , . D dkw . d2w ,1 ,. A Y ,— _ ._. . ..
^W=X^F + °o^?- + 7r^M dJ-J^^0- B4-44)
Примем для w по-прежнему аппроксимирующее выражение B4) и
выпишем уравнения Бубнова — Галеркина типа B5). После
интегрирования получим уравнения, аналогичные B6), но в первое из них
войдет дополнительный член (—a\l2g)(n2fi, а во второе (—a\j2g) co2/2.
Если принять в этих уравнениях о = О и р0 — (), то придем к
известным значениям первых двух частот собственных колебаний
удлиненной пластинки:
Введем дополнительно к B7) параметр со* = "J/co/coj; тогда система
уравнений типа B8) примет вид
A — aS — со*') Ci —о- q%2 = О,
B4.45)
3
-§?*C,+(l6-4oS-(O& = 0.
Приравнивая нулю определитель системы, находим:
q' = | У(с? _|_о5— 1)A6 — 4оЗ - со*')- B4.46)
Мы получили зависимость между приведенной скоростью потока q*
и частотой установившихся колебаний пластинки со*, если считать
заданной величину начального сжимающего усилия ojj. Примем сначала
с* = 0; тогда будет
<t = ~ /(со*4-1) A6-со*4).
Эта зависимость изображена на графике рис. 24.9 пунктиром; по оси
ординат отложены значения со*'. И здесь кривая q* (со*4) имеет вил
848 НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
петли. Для каждого значения q* мы получаем в пределах этой петли
два различных типа колебаний, с частотами со* и со*. При колебаниях
с частотой о*, очевидно, преобладает симметричная форма прогиба,
а при частоте со^—антисимметричная. При некотором предельном
значении <7* = q* эти частоты сливаются, и в случае q* > q
установившиеся колебания пластинки становятся невозможными. Очевидно,
в этом случае должно возникнуть неустановившееся движение типа
Рис. 24.9. Зависимость между скоростью и частотой колебаний
пластинки при отсутствии сжимающих усилий.
флаттера, сопровождающееся (при отсутствии демпфирования)
возрастанием амплитуд. Величина <7* является безразмерной критической
скоростью потока. Для определения этой величины запишем условие
dq*jd(>f' = О, откуда со*4 =17/2. Соответствующее значение q* будет
45/16 г« 2,81. Мы пользовались методом Бубнова — Галеркина,
причем аппроксимирующее выражение для прогиба содержало два
параметра. Если принять во внимание три параметра, отвечающие трем
первым собсгвенным формам колебаний, то найдем <7*=3,68.
Обратимся теперь к общему случаю о*ф0. На рис. 24.10 дан
пространственный график *), изображающий зависимость q* от а*
и о*' по D6). Здесь показана поверхность, заключающая петли <7*(со*)
*) Графики рис. 24.10 и 24.12 построены Э. Д. Скурлатовым. График,
аналогичный изображенному на рис. 24.11, был предложен В В. Болотиным,
см. книгу [0.1, 1961 г.], стр. 268.
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ 849
при различных о*, а также петля <7*(а0), отвечающая статическому
выпучиванию.
На рис. 24.11 показан окончательный график <?*(°о) по данным
первого приближения. Наклонная прямая, определяющая границу
Рис. 24.10. Петля статической и колебательной неустойчивости
удлиненной панели.
флаттера, касается петли статического выпучивания в точке <7* = 0,9,
0^=3,4. Анализ этого графика приводит к интересным выводам,
касающимся поведения панели при возрастании скорости потока.
Допустим, что сжимающие усилия малы и лежат ниже аа. При
возрастании #* и Oq = const мы будем двигаться на графике на уровне
некоторой линии тп. Пластинка будет оставаться плоской вплоть
54 А. С. Больмир
850
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
[ГЛ. XXIV
до момента, соответствующего точке п\ здесь должен возникнуть
флаттер. Предположим теперь, что величина q* остается постоянной
и в обшивке возникают сжимающие усилия. Тогда, идя по линии 1р,
мы подходим к точке р, соответствующей дивергенции панели.
Следовательно, перемещаясь на графике из области плоских
равновесных форм, мы можем в одном случае пересечь границу монотонной,
а в другом — границу
колебательной неустойчивости.
Точное решение линейной
задачи можно дать подобно тому,
как это было сделано в § 227.
Пользуясь обозначениями
aaa2h
х -
а °
D
Dg
перепишем уравнение D4) в виде
w]v -4- a0w" -4- qw' — kw = 0.
Вместо характеристического
уравнения C9) мы получаем здесь
уравнение
/•4-r-o0r2 + q~r — k = 0. B4.47)
Исследование его корней *)
приводит к графику, показанному
на рис. 24.9 сплошной линией,
причем величина q* оказывается
равной 3,54, т. е. лежащей на 26% выше q". первого приближения
и на 4% ниже q* второго приближения. Отметим, однако, что при
исследовании равновесных форм панели в закритической области и,
особенно, в зоне, лежащей на графике рис. 24.11 над точкой касания А,
следует пользоваться нелинейными зависимостями (см. § 229).
Обратимся к случаю пластинки с конечным отношением сторон.
Решая задачу в той же постановке, что и выше, примем, что
пластинка сжата вдоль оси х усилиями 0О. Уравнение B0а) принимает вид
Рис. 24.11. График критических скоростей
потока для удлиненной панели.
П
d2w
d2w
J°~№
р0хМ
g dt*
dw
~дх
~- B4-48)
Полагая w = ws\n(at-\-а), приходим к уравнению относительно
*) Оно было проведено А. А. Мовчаном [24.9] и Хеджепетом [24.22]; нм
принадлежит также исследование случая пластинки с конечным отношением
сторон. Здесь изложение построено по [24.22].
, 228]
ПЛАСТИНКА СО СМЕЩАЮЩИМИСЯ КРАЯМИ
851
функции w=--w(x, у):
^==lfV% + 0o
d2w р0хМ dw
дх* г ft fa
— aJw = 0.
g
B4.49)
Пользуясь по-прежнему аппроксимирующим выражением для прогиба
типа C0), выпишем уравнения Бубнова — Галеркина; тогда придем
к уравнениям
т2 ,.,.,2 1 2
TD я4 / 1 . 1 \2 я2 ум2! г 2 ..,
... . Г Л л' / 4 , 1 \2 я2 y»21 ,
2
За/г
B4.50)
Полагая в первом уравнении со = рй = 0, снова находим
статическое значение критического напряжения C1а). С другой стороны,
считая в обо+ix уравнениях о0 = /70 = 0, получим две частоты
собственных колебаний:
они соответствуют формам прогиба, фигурирующим в C0).
Последующие выкладки проведем для квадратной пластинки (а=Ь);
тогда будет
4it2D 2я2 ^ /7O" 5it2 .. /"ПТ
ЬЧг
Введем безразмерные параметры
^^IH2^-^^' а=У 1^' «='
уравнения E0) примут вид
Оо-
Ол4
A — о0 — ш4) Cj — yfe
!*.+(■
25
"ЗУ*»! ~Г\ ^°0~м4К2:
-4ол
:0,
:0.
B4.52)
B4.53)
Приравнивая нулю определитель этой системы, найдем:
? = f j/"E« + S0-l)(^_4S0-5*). B4-54)
~- "- " 29 5 "
Из условия дд/д(л = 0 находим: со4^=— — о0. Максимальное
значение q, которое мы считаем критическим, равно
?ф = т(т~5°)- <24-55)
При отсутствии сжимающего усилия будет <7ф = 63/13. На рис. 24.12
64*
8
to
x
m
?!
О
н
О
41
S
m
ш
>
>
S
>
CO
•o
О
«S
Я
чэ
«<
-1
О
Г)
в
S
Рис 24.12. Петля статической и колебательной неустойчивости квадратной
панели.
Рис. 24.13. График критических скоростей потока
для квадратной панели.
ПЛАСТИНКА С ЗАКРЕПЛЕННЫМИ КРАЯМИ
853
изображен график изменения q в зависимости от сг0 и со4,
аналогичен графику рис. 24.10. На рис. 24.13 показана петля статических
равновесных форм и прямая E5); точка касания соответствует
значениям ^ = 0,675 и сг0==1,45.
§ 229. Пластинка с закрепленными краями
Во всех предыдущих примерах мы предполагали, что сжимающее
усилие сг0 является заданным и что края пластинки свободно
смещаются. В реальных конструкциях, однако, панель обшивки связана
с подкрепляющими ребрами. Поэтому для практических расчетов
важно определить поведение панели во взаимодействии с другими
элементами конструкции. Примем, например, что вдоль линий х = 0,
х = а удлиненная пластинка шарнирно скреплена с настолько
жесткими ребрами, что эти края надо считать неподвижными.
Исследуем равновесные положения пластинки, принимая, что в
начальном состоянии пластинка искривлена по полуволне синусоиды
w0 = /0sin(:u:/a) и что начальная стрела прогиба /0 сравнима с
толщиной пластинки *). Таким образом, здесь мы рассматриваем задачу
с позиций геометрически нелинейной теории. В то же время
аэродинамику будем считать в первом варианте линейной. Следовательно,
мы должны исходить из уравнения B1а):
X _ £_ d*Aw — wo)
dx*
d2w .1 ., dw n
■ О -7^5- -f T A>*M -t- = 0.
dx2
dx
Величина а здесь не является заданной, а связана с прогибом
соотношением B2).
Принимая для w аппроксимирующее выражение B4), находим:
сг =
п2Е
(fl-fl-Щт
1
B4.56)
4д2 v и ' 1 ' -v 1 — р*
Выпишем уравнения Бубнова—Галеркина B5). После
интегрирования придем к следующим уравнениям:
h Ча? KJl Jo)
D 8it4
h a3 h
la
o~A-
jb Po«M/2 = 0,
2я2 4
\
B4.57)
Введем дополнительно к B7) обозначение £о = /о/й и подставим
выражение о по E6); тогда уравнения E7) примут вид
8
3(q+ 4^-^0+^-g—g-^=0,
3DC|-f-^-^) + 4C2 + |^1 = 0.
B4.58)
*) Подобная задача была решена Фыном [24.16] с учетом начальных
усилий в срединной поверхности.
854 НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСтЙ [ГЛ. XXtV
Пользуясь этой системой кубических уравнений относительно
параметров прогиба t,v £2. мы можем при заданных значениях q* и ^
определить равновесные формы панели.
Более точное решение (с учетом аэродинамической нелинейности)
ведет к весьма сложным выкладкам, поэтому оно было осуществлено
с помощью цифровых электронных машин *). Введем безразмерные
параметры
х -— w г _ /о - . 12а2
"^ 9- J П
а' h ' *° h ' Е№
12A—ц2)хМа3 ., Л
Я = Ро Ш ■ Ч = М-.
B4.59)
Если считать х—1,4, то основное уравнение B1), содержащее три
члена ряда в выражении для д, примет вид (черточки над
безразмерными величинами опущены)
d* (w — w0) . d2w . dw Г. . 3 dw [. , 1 dw\~] n ,_., _n.
Выражение B2) приводится к следующей форме:
о
коэффициент A—Ц2) здесь опущен. Как видно из F0), параметр г\
позволяет здесь учесть высшие члены разложения аэродинамической
нагрузки в ряд по A5). Представим F0) и F1) в конечных
разностях, пользуясь симметричными операторами второго порядка
точности по (9.238) и (9.239). В t'-м узле уравнение имеет вид
wt_2 — Awt_x -f- Bwl — Awl+l -f- wl+2 = C;, B4.62)
где ^ = 4-f-as2, В = 6-f-2as2. Под s понимается шаг
интегрирования, Ci зависит от аэродинамической нагрузки и начального прогиба.
Величина а определяется численным интегрированием, например, по
формуле Симпсона. Таким образом, мы приходим к системе
нелинейных алгебраических уравнений, которая решается последовательными
приближениями.
На рис. 24.14 показана зависимость между величиной q и
прогибом в центре панели L,x—fx\h при £о = 5 и т| = 0. Кривая 1
соответствует результатам машинного счета, кривая 2 получена методом
Бубнова — Галеркииа по E8). Как мы видели, величина г) учитывает
здесь аэродинамическую нелинейность; случай г) = 0 отвечает линей-
*) Это решение для удлиненной пластинки и панели с конечным
отношением сторон (см. ниже) принадлежит А. Ю. Биркгаиу.
§ 229] ПЛАСТИНКА С ЗАКРЕПЛЕННЫМИ КРАЯМИ 855
150
50
ной аэродинамике. Точки правого участка ветви определить с
помощью машинного счета не удалось; видимо, для этого должны быть
найдены специальные приемы (см.
сноску на стр. 843).
На рис. 24.15 показана
зависимость q (а) при различных
значениях т). Напомним, что
сжимающее напряжение о здесь является
результатом изгиба панели. Как
видим, учет аэродинамической
нелинейности ведет здесь к
снижению предельной точки *). Формы
изогнутых поверхностей,
соответствующие различным значениям q
при г| = 0,2, представлены на
рис. 24.16.
Перейдем к случаю панели
конечных размеров. Рассмотрим
квадратную в плане шарнирно
опертую панель со стороной а,
имеющую начальный прогиб w0 = /0sin(:u:/a)sin(.-ty/a) и обтекаемую
со стороны выпуклости потоком с параметрами М, р0- Примем, что
7
150 ■
1
"м~
V
24.14.
Равновесные формы панели
крепленными краями.
100
50
С0-5
rj-0
ч
ч
>
ч
\
\
\
■ \
~~
\
\
\
" 5 10 15 20 25 30
б
Рис. 24.15. Определение равновесных форм панели с учетом
аэродинамической нелинейности.
края панели могут смещаться, оставаясь прямолинейными. Будем
решать эту задачу, учитывая одновременно геометрическую и аэро-
*) На это обстоятельство было указано В. В. Болотииым (Научн. докл.
высш. щк., Маш. и приб., № 3, 1958).
856
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
динамическую нелинейность, без разложения величины (р — р0) в ряд;
тогда будет (при и =1,4)
^^-(l-I^O].
где по-прежнему *) г) = МА/я. Принимая безразмерные параметры
х - у
— ■ У ~~
а ' h ' ^°
h '
ф=«
Ф
р0аА
B4.63)
£Л2 • у Eh* ' 12A— ц2) '
приводим систему уравнений A9) к виду (черточки над w, Ф и т. д.
опущены)
cV% = L (<да. Ф) -f- p [l - (l - i ii ~O] + ф. B4.64)
У4Ф = —
g- Z. (ге/, да) — ф;
B4.65)
здесь \|\ ср — функции, зависящие от начального прогиба. Уравнения
F4) и F5) могут быть представлены в конечных разностях и
вычисления проведены с помощью цифровых
машин, как в § 105.
Решение динамической задачи для
удлиненной панели и панели с конечным
У а\ отношением сторон также может быть
выполнено с помощью цифровых машин.
Для этого используется путь, описанный
в главе XXI (§ 207). Если обратиться для
б) примера к уравнению F0), то оно
преобразуется к виду
д* (w — w0)
дх*
d2w
дх4
Рис. 24.16. Формы изогнутой
поверхности панели при
различных q.
В) , dw Г. . 3 dw I. . 1 dw\~\ .
B4.66)
. d2w , dw n
Здесь в дополнение к выражениям E9) введены параметры
7 t h л/ Eg
l~ a* V 12 A — (х2) Y '
B4.67)
*) Здесь параметр \\ является единственной величиной, отвечающей
скорости потока.
ДИВЕРГЕНЦИЯ ЗАМКНУТОЙ ЦИЛИНДРИЧЕСКОЙ ОБОЛОЧКИ 857
величина е учитывает демпфирование колебаний*). Сеточная область
строится в общем случае в пространстве х, у, t. Шаг по времени
выбирается из условия устойчивости решения разностных уравнений.
В результате вычислений были получены следующие результаты.
Допустим, что панель с начальной погибыо пометена в поток с
параметрами т), р. Поведение панели в значительной мере зависит от
значений т), р и коэффициента демпфирования. При относительно
малых т), р колебания быстро гасятся. Когда параметры т), р
достигают некоторой критической величины, максимальные значения
прогибов и напряжений имеют тенденцию к возрастанию или, по крайней
мере, не убывают, несмотря на наличие демпфирования; это
соответствует явлению флаттера. Особенно интересной получается картина
при сжимающих усилиях, значительно превышающих критическую
величину. На протяжении каждого периода колебаний прогиб меняет
знак, так что панель должна совершать один хлопок за другим.
Подобный процесс колебаний с большими амплитудами можно
охарактеризовать как бурный флаттер **). Если проследить за какой-либо
узловой точкой панели, то окажется, что она перемещается во
времени вдоль пролета. Таким образом, здесь отчетливо наблюдается
явление так называемых бегущих волн. Желательно в дальнейшем
провести более полное решение динамической задачи для панелей
различного очертания и при разных условиях закрепления, а также
осуществить дополнительные экспериментальные исследования.
§ 230. Дивергенция замкнутой цилиндрической оболочки
Понятия дивергенции и панельного флаттера распространяются
также на случаи монотонного выпучивания и автоколебаний
замкнутых цилиндрических оболочек при ..
условии, что деформация оболочки *^7 'Z^&f^s'
сопровождается образованием
местных вмятин. Рассмотрим
замкнутую круговую цилиндрическую
оболочку, обтекаемую с внешней
стороны сверхзвуковым потоком
газа, невозмущенная скорость U
которого направлена по
образующей. Предположим, что оболочка,
кроме того, испытывает
статическое действие равномерных
сжимающих усилий о0 вдоль длины
(рис. 24.17). Эта задача представляет естественный интерес для опи
сания поведения корпуса гиперзвукового летательного аппарата.
Рис. 24.17. Цилиндрическая оболочка под
воздействием потока газа и осевых усилий.
*) В уравнении F6) черточки над t и е опущены.
**) Он наблюдался в экспериментах, описанных Фыном [24.16], а также
в опытах В. Л. Агамирова.
858
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Сначала рассмотрим линейную задачу о дивергенции оболочки.
Воспользуемся уравнениями A3.15) — A3.16), принимая q по A9а)
равным q=—кр0М dwjdx; тогда будет
D
?4да:
R дх* СТо дх* '
/г ах
У"Ф:
d2w
B4.68)
Е ' " Я дх* -
Решение ищем в виде
w(x, у, 0 = /m, „(^) sinax sinpy-f- fm..hn(t)smyxsm$y, B4.69)
где a=m.t/L, \ = (m-\- 1).t/L, E =ztijR, m — число полуволн вдоль
образующей, п — число волн в окружном направлении.
Подставляя F9) во второе уравнение F8), найдем выражение для
функции усилий в срединной поверхности
Ф(х, у, t) = llsmaxs\n$y-{-InSlnyxslnfiy, B4.70)
a2£ j. , у2£
где
U
/?(«2 + P2J
' Jm, n> '2
R{t-V P2J
/,„,,,„. B4.71)
Используя F9) и G0) в первом уравнение системы F8) и
применяя метод Бубнова — Галеркина, придем к системе двух
алгебраических уравнений относительно fm< „ и /т+1, „, которая после
введения безразмерных обозначений
J m, n
'|»т1, Л
/п
мл
h ' "и-1' " h L '
__ т(т + \) 4&KPaL* A-Ц2) „ _ 12A -j.2) _^ „
Д ' 1+2т £ft< л* 'л1— Л2 /?А
__ 12A-и8) I2 , , па S-M.
«2 —^ Ж(ОТ^ }' СТ°~ Eh '
, Га,/ Ш\212 \2{\-u.2)m4U
/?2А2л4 | т2
.' я£ \2-|2
т i-1
..= [!■ + »+№
Й7?) J
12 (m-f 1L^A — ц2)
/?AW[(l„ + l). + (^)8]8
■ B4.72)
примет вид*)
СО'
coi
B4.73)
*) Уравнения G3), включающие усилия сжатия, были получены
Э. Д. Скурлатовым. Им же были решены приведенные ниже нелинейные
задачи.
ДИВЕРГЕНЦИЯ ЗАМКНУТОЙ ЦИЛИНДРИЧЕСКОЙ ОБОЛОЧКИ 859
Приравнивая нулю определитель системы уравнений G3), найдем
верхнее критическое усилие сжатия как минимальный корень
следующего уравнения:
Если поток отсутствует (а = 0), получим:
1 (e2-i)
'■Кх
i2(i—ц2) е2
■ц
(i+e2)^ '
это выражение для сг0 совпадает с A3.39).
Исходя из формулы G4), получаем различные петли равновесных
состояний, аналогичные изображенным на рис. 24.8, причем каждая
такая петля соответствует переходу от т к т-\- 1 полуволн вдоль
образующей. Как видим, и здесь
мы сталкиваемся со
стабилизирующим влиянием газового потока.
Рассмотрим ту же задачу в
нелинейной постановке, для чего
воспользуемся уравнениями A3.29).
Так как прогибы и их
производные входят сюда в степени не
выше третьей, то
аэродинамические силы будем определять по
формуле третьего приближения
A5). Выражение для прогиба
зададим в виде ряда
w(x, у, ^) = /i (/)sinaj:sinpy-f-
+ /2 @ sin у лг sin py-f-
+/з@sin2ax. B4.75)
Рис. 24.18. Равновесные формы оболочки
с учетом и без учета потока.
Дальнейшие вычисления аналогичны проведенным для линейной
задачи, но являются весьма громоздкими. _ Минуя промежуточные
выкладки, выпишем уравнение в окончательном безразмерном виде:
+ Я030^ + a2I0^2 + «012^3 = °'
^210^1^2 ~Т~ ^12(А
-f" *012*2*3
^1^3 "+" С200Ч "Г" С02(Р2 "Т" СШ2'3 ~^ С201*1*3 "+' С021'2>3 I
"f clllSlS2^3
= 0.
B4.76)
860
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Коэффициенты aijk, bljk, ciJk зависят от L, R, h, m, n, а0, К, а.
Исходя из уравнений G6), можно определить равновесные формы
оболочки при различных значениях параметра осевой нагрузки а0 и
разных скоростях потока. На рис. 24.18 для стальной оболочки,
имеющей размеры L//?=6, R/h — 500, представлены огибающие петель
равновесных форм в неподвижном воздухе (а = 0) и при обтекании
потоком со скоростью, равной половине той критической величины а*,
которая определяется из решения линейной задачи (а = 0,5а*), под £3
понимается параметр прогиба £3 = /3//г. Здесь, как и для
цилиндрической панели [24.12], оказывается, что критическое напряжение
сжатия для оболочки, обтекаемой потоком, выше, чем в неподвижном
воздухе*). Меняется и форма волнообразования: числа тип для сжатой
оболочки в потоке газа выше, чем для такой же оболочки в
неподвижном воздухе.
§ 231. Динамическая задача
для замкнутой цилиндрической оболочки
Перейдем к динамической задаче для за.мкнутой круговой
цилиндрической оболочки. Будем считать, что оболочка по-прежнему
обтекается газом с внешней стороны. Кроме того, примем здесь, что
оболочка целиком заполнена несжимаемой жидкостью плотности pj.
Решая задачу в линейной постановке, воспользуемся уравнениями
типа A9), с исключением нелинейных членов. Влияние жидкости
условимся учитывать с помощью коэффициента присоединенной массы т1.
Инерционный член типа p0hd2w/dt2 заменим величиной**) Ро^т, „ X
X d2w/dt2, где
fC it т1 1 I Pl# АтУ-т) .
р0Л р0Л кт1п(Хт)
здесь hm = mnR/L, l„ — модифицированная функция Бесселя с
индексом п, /„— ее производная, p0 = y/g.
В первом приближении примем аппроксимирующую функцию для
прогиба в виде F9). Идя тем же путем, что и в § 230, получим
следующие уравнения:
С п + Sm, Лт. п + 7Г~ [A ~~ ^тЧ) £»■ " _ ^« + 1. «1 = °'
Аш, л I
I 4-Р- I A- \ B4.77)
*) Это явление описано в статье Э. И. Грнголюка, Р. Е. Лампера,
Л. Г. Шандарова, Теория оболочек и пластин, Ереван, 1964. 407—411.
**) В таком определении коэффициента присоединенной массы мы
следуем работе Линдхольма и других (U. S. L 1 n d h о 1 m, D. D. Капа,
H. N. A b r a m s о п, J. Aerospace Sci. 29, № 9, 1962).
ДИНАМИЧЕСКАЯ ЗАДАЧА ДЛЯ ЗАМКНУТОЙ ОБОЛОЧКИ 861
где
48хр0М L3 I—ц2 «(т-(-1)
Е«?тп h3 я4 \-\-2m '
а,п,п
12A—ц2) I V
«2 '«т.» **
(точками обозначены производные по времени). Под gmt „ и gm+u „
понимаются коэффициенты затухания, соответствующие различным
формам колебаний. В последующем примем gm< n=gm+ii „=g-
Представляя решение G7) в виде
>п, п — 'т. пе * > Wn+1, п — 'т+1, пе " • B4.78)
получим систему однородных линейных алгебраических уравнений
относительно Fmn и Fm+lt„. Приравнивая нулю определитель системы,
найдем характеристическое уравнение
+ ЬХЬ2 — W>3 - ft А -Ь b3b, + b5 = Q; B4.79)
здесь
<v
Km, n
o0(m+ lJa
K,
m + l, n
h
°5 —
7?
Km+t, n
Q2
и к ..
5ьт2а
h = -p •
^m, n
(l + mJm2
(\ 4-9m^
Невозмущенная форма равновесия оболочки будет устойчивой,
если все действительные части характеристических показателей
отрицательны, и станет неустойчивой, если среди характеристических
показателей окажется хотя бы один, обладающий положительной
вещественной частью. Применяя критерий Рауса—Гурвица*), определим
параметр а*, соответствующий критической скорости флаттера**):
о*_ 1+2w V Km,nKm+i, „ л/ТТЛ 75 V-LQo-^fi2 ! i о2 )
2w(l + m) S— \Ут + 1, (i-Offl, п) ~Х *g [Pm + l, n-f-Om, n),
B4.80)
где
<-,_ 48xp0
■р-О-Л е-.« =
fl2 _ «rn + l.n— <т + 1J^_
"т-И, л —
к,
т+1. я
*) См., например, И. М. Бабаков, Теория колебаний, 2-е изд., 1964.
**) Эта формула без учета присоединенной массы жидкости была
получена Р. Е. Лампером н Л. Г. Шандаровым (Изв. АН СССР, Мех. и маш.,
№ 3, 1963, 58—64), а с учетом присоединенной массы — Э. Д Скурлатовым.
Ю. Ю. Швейко исследовал эффект волновых движений на свободной
поверхности жидкости (Изв.. АН СССР, Мех. и маш., № 5, 1964, 112—116).
S62
НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
Далее минимизируем величину а* но числу полуволн в окружном
направлении п, считая п достаточно большим. Результаты выкладок
приведены па рис. 24.19. Здесь даны критические числа а* при
различных значениях сжимающих (а0 > 0) и растягивающих (а0 < 0)
Рис. 24.19. График критических скоростей потока для цилиндрической
оболочки с y4CTO.Vf демпфирования и присоединенной массы жидкости.
усилий, а также с учетом и без учета эффектов присоединенной
массы жидкости и демпфирования колебаний; принято L//? = 6,
/?//z=100. Этот график можно сравнить с аналогичным графиком
для пластинки, изображенным на
рис. 24.11 и 24.13. Как видно
из рис. 24.19, демпфирование в
данном случае стабилизирует
оболочку. При наличии осевых
сжимающих усилий критическая
скорость флаттера резко снижается,
а при растяжении, напротив,
возрастает. Учет присоединенной массы
жидкости приводит здесь к
некоторому повышению критической
скорости; отметим, что форма
колебаний при этом также меняется.
Обратимся к решению
динамической задачи о флаттере в
нелинейной постановке. Дополняя уравнение G6) членами,
соответствующими инерционным силам и демпфированию, получим систему
трех нелинейных дифференциальных уравнений, связывающих
параметры прогиба £2, £2, £3 со временем. Интегрирование этой системы,
выполненное с помощью ЭЦВМ, приводит к интересным результатам.
Рис. 24.20. График амплитуд установившихся
колебаний.
ДИНАМИЧЕСКАЯ ЗАДАЧА ДЛЯ ЗАМКНУТОЙ ОБОЛОЧКИ 863
Они отражены на рис. 24.20 для оболочки с параметрами L/R = 6,
/?/А = 100, я—7, g- =^ 0,005. Здесь дана зависимость
относительного прогиба Ci от параметра скорости потока a = MA/L,
отнесенного к критическому значению, получаемому при решении линейной
задачи. Из точки a/a* = 1 расходятся две ветви, определяющие
амплитуды колебаний для различных устойчивых предельных циклов
(пунктир — неустойчивый предельный цикл). Судя по этим данным,
для замкнутой оболочки оказывается возможным жесткое
возбуждение флаттера при больших возмущениях, т. е. появление колебаний
с конечными амплитудами при скоростях потока меньших, чем
критические скорости, получаемые по линейной теории (стрелка на
рис. 24.20). Аналогичная задача для ортотропиой цилиндрической
пологой панели с учетом поперечных сдвигов решалась с помощью
метода гармонического баланса Ж. Е. Багдасаряпом [24.2].
В заключение отметим, что имеющиеся результаты
экспериментальных исследований*) флаттера плоских и искривленных пластинок,
а также замкнутых оболочек трудно сравнивать с теоретическими
данными, поскольку принятые в теоретических выкладках
конструктивные схемы отличаются от осуществляемых на практике. Прежде
всего при испытаниях реальных конструкций в аэродинамических
трубах должно сказываться влияние пограничного слоя на поведение
пластинок и оболочек. Судя по имеющимся данным, учет влияния
пограничного слоя приводит к увеличению критической скорости
флаттера [24.26]. Особенно велик эффект пограничного слоя для
оболочек, колеблющихся по коротким волнам в окружном
направлении. Что касается демпфирования, то оно оказывает стабилизирующее
влияние прежде всего при осесимметричных колебаниях.
В дальнейшем желательно провести более широкие
экспериментальные исследования, в особенности по флаттеру замкнутых
цилиндрических оболочек. Интересно также рассмотреть поведение
оболочек, мало отличающихся по форме от цилиндрических. Необходимо
продолжить изучение одновременного воздействия на поведение
пластинок и оболочек пограничного слоя, демпфирующих факторов,
уточненных аэродинамических зависимостей и т. д. Важное значение
имеет также учет влияния высоких температур на упругие
характеристики материала; этот вопрос обсуждается в работе С. А. Амбар-
цумяна и Ж. Е. Багдасаряна [24.1].
В настоящей главе мы определяли аэродинамическую нагрузку,
исходя из поршневой теории.
Надо отметить, что в применении к оболочкам соотношения § 231
могут быть уточнены путем введения поправки на кривизну
поверхности, как это было сделано в § 221 (стр. 820), см. также статью
Крумхаара (Н. Krumhaar, AIAA J. I, № 6, 1963).
*) См. работы Г. Н. Микишева [24.8] и Фына (Y. С. F u tig, AIAA Journ.
1, № 4, 1963, 898-909).
864 НЕКОТОРЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ [ГЛ. XXIV
В некоторых случаях использование поршневой теории приводит
к заметной погрешности, например, при больших числах волн
в окружном направлении для цилиндрической оболочки. В литературе
используется также другой путь определения аэродинамической
нагрузки— с помощью трехмерной линеаризированной теории
потенциального потока*).
В нестационарных задачах о взаимодействии потока и упругой
конструкции при различных углах атаки может оказаться полезным
метод, связанный с нахождением так называемых коэффициентов
вращательных производных (см. С. М. Б е л о цер к овск и й. Изв.
АН СССР, ОТН, N° 7, 1956). Случай дозвукового потока
рассмотрен в книге С. М. Б е л оце р к о век ог о «Тонкая несущая
поверхность в дозвуковом потоке», М., 1965.
*) См., например, работы Ю. Н. Новичкова (Изв. АН СССР, Мех. и ма-ш.,
№ 3. 1963, 138-141) и Зейделя (Е. F. Zelydel, IAS Paper № 91, 1962),
относящиеся к пластинкам, и работы Дауэлла и Виднелла (Е. Dowel],
S. Widnall, A1AA J. 4, № 4, 1966) и Броуна и Холта (R. A. Brown,
М. Holt, Calculation of aerodynamic forces on cylindrical shells in unsteady
supersonic flow, 1963), посещенные колеблющимся цилиндрическим
оболочкам.
г
ГЛАВА XXV
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
§ 232. Основные понятия
В предыдущих разделах книги мы рассматривали, по существу,
некоторые модели конкретных конструкций, отражающие с тем или
иным приближением физические свойства материала, геометрические
характеристики элементов, условия нагружения. В некоторых
случаях мы пытались приблизить выбранную нами модель к реальным
конструкциям, учитывая переход упругих деформаций материала
к упруго-пластическим, начальные неправильности формы элемента
или характер изменения нагрузки в процессе выпучивания, изучая
устойчивость в большом и т. д. Тем не менее, и здесь мы оставались
в рамках определенных схем. С индивидуальными конструкциями
мы сталкивались лишь тогда, когда приводили окончательные данные
отдельных экспериментов, хотя некоторые характеристики опытов
оставались для нас неизвестными либо не были отмечены.
Все это вполне естественно: характеристики материала данного
элемента конструкции, начальные несовершенства, прикладываемые
нагрузки носят случайный характер. Располагая известными
теоретическими результатами или данными серии экспериментов, мы можем
судить о поведении какой-либо новой для нас конструкции лишь
с известной вероятностью. В некоторых случаях мы можем считать
наши суждения практически достоверными, в других — нет. Поэтому
очень важно воспользоваться статистическими методами и
попытаться установить вероятность реализации того или иного
полученного нами вывода для конкретных конструкций. В настоящей
главе исследуются задачи, связанные с влиянием первой группы
факторов, представляющих собой обычно случайные величины.
Статистический эффект нагрузок, изменяющихся во времени
случайным образом, обсуждается в следующей главе.
Приведем некоторые положения и формулы теории вероятностей,
которые понадобятся нам в дальнейшем *). Событие, наступление
*) См. Е. С. Вентцель, Теория вероятностей, 3-е изд., «Наука», М..
1964; Б. Р. Левин, Теоретические основы статистической радиотехники 1.
«Советское радио», М., 1966; В. С. Пугачев, Теория случайных функций.
3-е изд., Физматгнз, М., 1962 и др.
55 А. С. Вольмир
866
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ [ГЛ. XXV
или ненаступление которого нельзя определенно предсказать,
называется случайным. Таким случайным событием мы можем считать
результат отдельного эксперимента. Допустим, что после п
экспериментов, проведенных при определенных условиях, появилось т раз
случайное событие Л. Отношение
называется относительной частотой появления события Л.
Установлено, что эта частота при достаточно большом числе опытов
стабилизируется около некоторой величины, которая называется
вероятностью события при данных условиях. Будем обозначать
вероятность через Ф. Очевидно, частота события и его вероятность
должны удовлетворять неравенствам
0<v<l. 0<Ф<1. B5.2)
Вероятность достоверного события равна единице, невозможного —
нулю. Случайные события называются несовместимыми, если не
могут произойти одновременно, и независимыми, если вероятность
одного из них не зависит от того, произошло второе или нет.
Если события Ах, А2 А„ являются несовместимыми, то
вероятность появления одного из них равна сумме вероятностей
каждого события в отдельности:
Ф(Л,, или А2 или Л„) = Ф(Л1)Н-Ф(Л2)-(- • • • +Ф(Л„). B5.3)
Если события Вх, В2, .... Вп являются совместимыми, но
независимыми, то вероятность одновременного их наступления равна
произведению вероятностей каждого события:
ФE„ и В2 и В,)=Ф(В1)ХФ№)Х ••• ХФ(ЯЯ). B5.4)
Результат отдельного эксперимента представляют также с помощью
некоторой случайной величины |; таким образом, вместо
качественной характеристики опыта вводится его количественная оценка.
В некоторых случаях возможные значения случайной величины можно
заранее перенумеровать с помощью натурального ряда чисел; такая
величина является дискретной. В других случаях случайная величина
может принимать любое значение на некотором интервале; тогда
вероятность того, что величина примет заданное значение, равна
нулю. Можно, однако, определить вероятность того, что такая
случайная величина будет находиться в некотором интервале возможных
значений.
Допустим, что случайная величина | может принимать любые
действительные значения от —сю до -p-co- Тогда важно бывает
установить вероятность того, что | не превосходит некоторого
заданного уровня х, т. е. установить вероятность выполнения
неравенства | < х. Эта вероятность носит название интегральной функ*
§232]
ОСНОВНЫЕ ПОНЯТИЯ
867
ции распределения случайной величины | и зависит от значения х.
Обозначим функцию распределения через ^(л:):
F(x) = (D(i<x). B5.5)
Вероятность того, что величина | будет находиться в .интервале
между значениями хх и х2, равна
<*>(x1<l<xt) = F(x3) — F(x1); B5.6)
всегда должно быть F(x2)^ F(x{) при х2~> хг.
Предположим, что случайная величина изменяется непрерывно
и что интегральная функция распределения также непрерывна и
дифференцируема. Тогда можно ввести новую важную характеристику
Рис. 25.1. Графики: а) плотности вероятности и б) интегральной функции
распределения.
случайной величины, называемую плотностью вероятности или
дифференциальной функцией распределения, равную
/w = -^r1; B5.7)
так как функция F(x) является неубывающей с возрастанием х, то
всегда будет /(л:)^-0. Из предыдущих соотношений вытекает:
X
ФA<х) = Р(х)= \f{x)dx, B5.8)
—оо
Хг
Ф{х,<1<х2)=^ f(x)dx. B5.9)
г,
На рис. 25.1 изображен вид дифференциальной и интегральной
функций распределения / (х) и F(x). Вероятность того, что | лежит
между значениями хх и х2 (по (9)), будет отвечать
заштрихованной площади на рисунке 25.1, а, расположенной в этих пределах.
Так как вероятность того, что величина | примет любое значение
от —оо до -f-oo, равна единице, то полная площадь под кривой
55*
868 ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ [ГЛ. XXV
плотности вероятности равна
]f(x)dx-.
B5.10)
Соответственно интегральная кривая на рис. 25.1, б расположена
между осью абсцисс и прямой F--
Т(х)
Значение | = лг, при котором
плотность вероятности
максимальна, называется модой.
На практике часто
встречаются случайные величины,
имеющие так называемый
нормальный закон
распределения:
f{x) = ce-(x~a?l2s\ B5.11-)
Коэффициент с находится из
условия A0); он оказывается
равным
c = ~7J=^. B5.12)
Мода нормального закона
распределения равна а; на рис. 25.2
отложены значения f (х) в
зависимости от (х — a)js. Как
легко видеть, вторая производная d2f (x)/dx2 обращается в нуль при
x=a + s; следовательно, при этих значениях х кривая /(х) имеет
точки перегиба. Максимальное значение f (х) равно
/ («) =/max =77==^- B5-13)
Рис. 25.2. Нормальный закон распределения.
]/л
На рис. 25.2 показано, какой процент общей площади под
кривой распределения занимает площадь полосы между линиями а ± s,
а + 2s, a ± 35. Судя по этим данным, можно практически считать,
что любая случайная величина, распределенная по нормальному закону,
лежит в пределах а + 3s. Вероятность такого события равна 0,997,
и его поэтому можно принимать практически достоверным. Чем
больше параметр s, тем более пологими оказываются кривые f (х)
и тем значительнее разброс случайной величины. На рис. 25.3
изображены кривые f (х) и F(x) для различных параметров s.
Одной из характеристик распределения случайной величины
является так называемое математическое ожидание или среднее
значение, равное
т
(£) = J xf(x)dx.
B5.14)
§ 232] ОСНОВНЫЕ ПОНЯТИЯ 869
Величина т (|) численно равна статическому моменту плошади,
лежащей между линией f (х) и осью абсцисс, относительно оси ординат.
Но так как сама площадь равна единице, то выражение A4)
одновременно определяет абсциссу центра тяжести плошади. Огкло-
Рис. 25.3. Плотность вероятности (а) и интегральная функция (б) для норм ,.ib , .го
закона при различных параметрах.
нение случайной величины от математического ожидания равно
[| —та)].
Выражение
со
D(l)= \(x-m{l)ffi.x)dx B5.15)
-со
представляет собой математическое ожидание или среднее значение
квадрата отклонения и носит название дисперсии ветчины с,.
Вычисляя квадратный корень из дисперсии, т. е. \'1Н%), находим
среднеквадратичное отклонение или так называемый стандарт
закона распределения.
Для нормального закона распределения после простых
вычислений находим:
т = а, D = s2. B5.16)
Следовательно, под а надо понимать математическое ожидание
(и вместе с тем моду), а под s — среднеквадратичное отклонение
или стандарт нормального закона распределения. Для распределения,
симметричного относительно оси ординат, математическое ожидание
равно нулю.
В дальнейшем нам придется определять плотность вероятности
ф(у) случайной величины т), если известна зависимость г] = £/(|) от
другой случайной величины | и задана плотность вероятности f (х)
этой второй величины (рис. 25.4). Допустим, что имеется
однозначное соответствие между | и т). Если | лежит в пределах х < | <
<.x-\-dx, то отсюда вытекает неравенство у<г)<Ут~^У ПРИ
870
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
y = U(x). Вероятности выполнения этих неравенств равны между
собой. Но так как эти вероятности соответствуют заштрихованным
площадям f(x)dx и <p(y)dy па рис. 25.4, а и б, то можно записать
равенство
/(.*)rf* = <p(y)dy. B5.17)
Отсюда находим простейшую формулу преобразования
вероятностей:
/(■*)
Ф(У) = -
dy_
dx
B5.18)
Напоминаем, что здесь предполагается наличие однозначной
обратной функции x=V(y). Так как всегда ф(у)!>0 и /(лг)^-О,
то в A8) надо подставлять абсолютные значения dyjdx.
Рис. 25.4. Плотности вероятности / и ф для величии £
и Tl = Tl(s).
Допустим, что величина | распределена по нормальному
закону A1):
(х-а)'
B5.19)
/(*) = ■
1
2^з
Если вторая случайная величина т) линейно зависит от первой:
x\ = k\, y^kx, B5.20)
(y-fta)
то по A8) получаем:
Ф (У):
1
]Л2л {skf
е 2(ksf
B5.21)
Таким образом, математическое ожидание, стандарт и дисперсия для
новой величины т) равны
at = ka, Si = ks, Dl — k2D.
B5.22)
ОСНОВНЫЕ ПОНЯТИЯ
871
Преобразование сводится к изменению масштабов вдоль
координатных осей в k раз.
Перейдем к рассмотрению двумерной задачи, когда определяется
вероятность одновременного выполнения неравенств | < х, ц < у
для двух зависимых, в общем случае, случайных величин .| и т].
Обозначим интегральную функцию через
Двумерную плотность вероятности можно геометрически изобразить
в виде поверхности, расположенной над плоскостью х, у.
Вероятность F(x, у) по B3) равна
х у
F(x, у) = j" jf(.x, y)dxdy. B5.25)
— 00 — СО
Считая верхние пределы х~>оо и у—>оо, приходим к формуле
со со
J J / (х, у) dx dy—\. B5.26)
— ОО —СХ)
Следовательно, объем под поверхностью распределения равен
единице. Допустим, далее, что в B5) второй из пределов у->оо; тогда
двумерная плотность переходит в одномерную, относящуюся к
величине |:
X со
F(x, -\-оо) = Г \ f(x, y)dxdy = F\{x). B5.27)
— со -со
Производная от этой величины равна плотности вероятности /г (х):
00
/i(*) = J/(*. y)dy- B5.28)
— ОО
72 ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
Если случайные величины с, и т] независимы, то по правилу
умножении вероятностей получим:
F (х. у) =- Ф (s < х, ii< у) = F, (х) F2(y), B5.29)
где F,(x), F-J.y) - интегральные функции распределения дли каждой
из величин ; и п. Такое лее сооти миеиие имеет место для плотностей
ве.олшостп:
/(л-, у) = /,(*)/2(у). B5.30)
Допустим, что известны математические ожидания a, b двух
случайных величин с,, 1]:
ос ос
а-- Г xfl(x)dx, b= [ yf2(y)dy. B5.31)
— СО - СО
Найдем математическое ожидание для суммы этих величии 'i = с, -\- г\'.
СО СО
с= J J (х-|-у)/(х, y)dxdy. B5.32)
— CO — DO
Сопоставляя B8) и C1), имеем:
ос со со со
а= [ J х/(х, y)dxdy, b^ [ [ у/(х, y)tfxtfy. B5.33)
- Сс - О, - СХ) - СО
Следовательно, величина с раина сумме математических ожиданий:
с = а-\Ь. B5.34)
Пусть, далее, заданы дисперсии Dlt D., независимых случайных
величии |, 1]:
со со
/?i =- J (-v - аJ fx (х) rfx, D2 = J (у - bf f, {y)dy. B5.35)
— CO —CO
Определим дисперсию суммы £ = £-j-ti как математическое ожидание
величины (£— сJ или (c,-j-r] — а — ЬJ. По C4) имеем:
D(£) = m[(S —а) + (т! —й)]8. B5.36)
или
D (£) = от (S, — аJ И- от (Ti — бJ Н-2т(£, — а) (л — *). B5.37)
Для независимых величин последнее слагаемое обращается в нуль,
так как для каждого из множителей (|—-а) и (г] — Ь)
соответствующий интеграл равен нулю, например:
ос ос со
J J (x — a)f(x, y)dxdy = j" (x — a)fx{x) dx = 0. B5.38)
ОСНОВНЫЕ ПОНЯТИЯ
87j
Окончательно находим, что величина D равна сумме дисперсий:
DQ=D(l) г-0(ц). ('25.ЗП"
Предположим, что величины с, и ц независимы и что как тая из
них распределена по нормальному закону:
t / n ] -U-aJ/2.s? , , . 1 -(у -*Г;'-:.С, " ,., ,.Л
/l(*)=T7=5e • /2(У) = Т7=Те "! B5-4i,)
У 2rtsf У 2ns|
тогда двумерная плотность вероятности по C0) равна
1_ Г {х-а? д (у- »J
/(X, У):
1
ги-<
4
B5.41)
2.4S|S2
соответствующая /(х, у) поверхность с сечениями, параллельными
координатным плоскостям, показана на рис. 25.6.
Ф.у)
Рис. 25.6. Сечение поверхности, соответствующе/! двумерному
нормальному закону распределения.
Плотность вероятности для суммы величин x-\-y = z по C9)
и C4) будет равна *)
1 (Z-C?
B5.42)
2rts2
f(z) = ^e* *
где
c = a-\-b, s2 = s\-\-s\.
B5.43)
*) Непосредственный вывод формулы D2) из D1) см. в книге С. Н. Берн-
штейна «Теория вероятностей», М, 1946, стр. 270.
874
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
Пусть требуется по двумерной функции распределения f (хх, х2)
случайных величин ^ и |2 определить двумерную функцию
распределения ф(у,, у2) случайных величин цг и щ, являющихся функциями
первых: t\i = U1(Ii1, |2)> "Па = ^2(si» I2)! есл" функции | и т] взаимно
однозначны, будем иметь:
Ф(У1. Уг) = /(*!. *2)Щ B5-44)
под V понимается определитель, составленный из производных:
дхх' дхх
dyi Hyl _ д(хих2)
дх2 дх2 ~~ д(уи у2) '
дУ\ ду2
V--
B5.45)
Если преобразуются п случайных величин, то будет
Ф (У1. Уг Ун) = / (*i. х2 ха) | V |; B5.46)
определитель V составляется по аналогии с D5):
v= д(хих2 хп) _ 5
д(Уи у2 Уп) У '
Обратимся к приложению статистических методов для определения
несущей способности реальных стержней, пластинок и оболочек.
§ 233. Несущая способность сжатых стержней
Как мы видели, несущая способность сжатых стержней сильно
зависит от начальных неправильностей в форме стержня, от
эксцентриситета в приложении нагрузки, условий закрепления и т. д. Эти
факторы являются случайными, и для них могут быть установлены
некоторые законы распределения. Для функции этих величин —
несущей способности — можно также найти известный закон
распределения и, таким образом, установить вероятность исчерпания несущей
способности в тех или иных условиях.
В работе А. Р. Ржаницына [25.5] был предложен следующий
подход к этой задаче. Предположим, что ось шарнирно опертого стержня
имеет начальную погибь, изменяющуюся по закону w0 = f0s\n(nxll).
Составляя дифференциальное уравнение изогнутой линии
г,. / d2w d2w0\ n
где w и w0 — полный и начальный прогибы (рис. 25.7), и полагая
w = fsin(nxll), приходим к известной формуле A.182):
/ = Ц^- B5.48)
1 "" ПЯЛ
НЕСУЩАЯ СПОСОБНОСТЬ СЖАТЫХ СТЕРЖНЕЙ 875
Определим напряжение ог в краевом волокне для среднего сечения:
B5.49)
°i — р т- w >
где F и W — площадь сечения и момент сопротивления сечения.
Вводя обозначение для среднего напряжения a0 = P/F и для радиуса
ядра сечения p=W/F, находим:
1
B5.50)
л2Е
Рис. 25.7.
Стержень с
начальной погибью, под
вергающийся
эксцентричному
сжатию.
где от = /о/р. В случае, если сила приложена с
эксцентриситетом е0, усиливающим начальную кривизну,
можно положить т = (/0 -f- е0)/р.
Анализ экспериментальных данных показывает,
что величина от тем выше, чем больше гибкость
стержня. Воспользуемся формулой *)
m = a + p(|J B5.51)
и предположим, что значения / и р, а также
нагрузка заданы, а величины аир являются случайными
и что они распределяются по нормальному закону
с центром (модой) в начале координат. Тогда
величина Oj будет также случайной. Будем считать,
что материал подчиняется закону Гука вплоть до
площадки текучести. Тогда несущую способность стержня можно
определить по напряжению а0, при котором в крайних волокнах
достигается предел текучести **).
Определим разность между «абсолютной» несущей способностью
стержня, соответствующей пределу текучести ат, и фактической
несущей способностью:
R^-Oo-Oo) п,ЕЦ^ ■ B5.52)
Величина R характеризует как бы неиспользованную часть
абсолютной несущей способности стержня.
Поставим перед собой цель определить закон распределения R.
Он будет нормальным в том случае, если R выражается через аир
*) Такая зависимость была предложена А. Р. Ржаницыным [25.5];
близкая к этому формула рекомендуется также Доннелом и Ваном [13.30а].
**) В уточненном решении задачи следует также принять во внимание,
что нагрузка Р и предел текучести материала ат являются случайными
величинами, и, кроме того, учесть возможные изменения в- способе
закрепления концов стержня [25.5].
876
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
линейно. Поэтому приближенно примем R в виде
Я = ат —(То + Ла + Яр B5.53)
и определим Л и В как частные производные от R по а и f>:
A = ~^hr. B=U?A. B5.54)
J0r,- \ p
Центр распределения R будет
ал = (Тт~0о> B5.55)
а стандарт по B2) и D3) равен
Я2^0 п/02 . /М4-2
где 5„ и 5 —стандарты распределений величин а и р.
Введем обозначения:
ф = -0-, y = — = - -, *2 = , £=-. B5-57)
Под ф понимается коэффициент снижения несущей способности стержня
по сравнению с пределом текучести, или, иными словами,
коэффициент снижения допускаемого напряжения. Величина у определяет
разброс отклонений предельных напряжений от предела текучести по
отношению к среднему отклонению; чем выше у, тем этот разброс
меньше. А. Р. Ржаницын рекомендует принять ориентировочное
значение у лля стержней несимметричного сечения равным 3, а для
стержней симметричного сечения равным 3,2. Это означает, что точки
перегиба кривой распределения будут лежать в случае
несимметричного сечения на расстояниях от точки R — 0, равных 2/3(сгт—сг0) и
4/3(ат — а()). При симметричном сечении вероятность достижения
предела текучести в крайних волокнах получается большей; этим
объясняется повышение у. Под Х,т понимается гибкость идеального
стержня, соответствующая критическому напряжению, равному
пределу текучести ат. Наконец, параметр | равен отношению радиуса
инерции к радиусу ядра сечения; для прямоугольного сечения будет
|—]/3, для двутаврового сечения при изгибе в плоскости стенки
£« 1. Пользуясь E7), приводим выражение E6) к виду
^=^4,yD"+-(^Lzv B5-58)
где D=s'2, Г)в — si — дисперсии распределений а, р.
Задаваясь значениями Da, D„, X1 и у, определяем из E8)
зависимость между коэффициентом ф и гибкостью стержня X при у=3.
НЕСУЩАЯ СПОСОБНОСТЬ СЖАТЫХ СТЕРЖНЕЙ 877
Ъ = У~3, А,т«90. На рис. 25.8 и 25.9 приведены кривые*) ф(>.)
для стали Ст. 3 при различных значениях Da; принято D =0 и
D„ = 25 • 10" . При Da = D„ = О по уравнению E8) получаем ф — 1.
Однако по графику 25.8 при Da= D =0 находим ф = 0,7. Это
f
0,7
0,6*
0,5
0,4
0,3
0,2-
0,1
О
' ?а-0
. 0,1 0,15 0,2 0,3 Ва
1
-№
г-3
ър-о
\. По Зйлеру
■ i
1 а-
50
100
150
200
250
Рис. 25.8. Коэффициент снижения несущей способности ф для
стержней различной гибкости К при дисперсии D„ = 0.
Р
объясняется тем, что при построении кривых рисунков 25.8 и 25.9
учтен также возможный разброс значений предела текучести стали
по нормальному закону. Было принято, что отношение дисперсии
Рнс. 25.9. Коэффициент ф при дисперсии £>„ = 25 • 10'
-12
распределения ат к среднему значению равно 0,1. Если принять
Da=Dp = 0, то найдем A — ф)/у= 0,1; при у — 3 будет \|> = 0,7.
Приняв определенное значение у, мы фиксируем тем самым закон
распределения величины R. Теперь мы можем определить
вероятность Ф исчерпания несущей способности стержня из условия, что
величина R обращается в нуль. На рис. 25.10 показана примерная
кривая распределения величины
п'Ео,, D .(сГт_аоI B5.59)
jc = m
я*Е — а0Л2
■ R
*) Эти графики взяты из работы [25.5].
878
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
Если эта величина делается равной [—(ат—а0)], то несущую
способность стержня надо считать исчерпанной. Соответствующая
вероятность равна площади, заштрихованной косыми линиями на рис. 25.10,
или, иными словами, разности между полуплощадью под всей кривой
распределения, равной 7г. и
площадью, заштрихованной
вертикальными линиями. Находим:
о
ф=1
2
или
2
1
Vtnsl
/
-(ffx-ffo)
2 dx,
B5.60)
У'ы
V
I
dy =
Рнс. 25.10. К определению вероятности
исчерпания несущей способности стержня.
^-ф(у).
B5.61)
где y = xjsR. Определяя интеграл Ф(у) по таблицам, находим, что
значению у='д соответствует вероятность Ф = 0,135%, 3 7 = 3,2 —
вероятность 0,067%. Как видим, значение у = 3,2 получено с учетом
того, что при симметричном сечении вероятность появления текучести
должна быть вдвое больше, чем это
вытекало из предыдущих выводов.
Мы исходили в приведенном
выводе из того, что несущая
способность стержня исчерпывается
при достижении наибольшим
напряжением предела текучести. Более
обоснованно было бы исходить из
данных главы II, относящихся к
эксцентричному сжатию стержней в
упруго-пластической стадии. Как
мы видели, каждому значению
эксцентриситета (а следовательно, и
каждой величине начальной
стрелы прогиба Со) на диаграмме сг0(£о) соответствует некоторая
предельная точка, определяющая истинную несущую способность
(рис. 25.11). Допустим, что для данного материала определена
зависимость максимального среднего напряжения а0> гаах от возмущающих
факторов: эксцентриситета и начальных неправильностей формы
стержня. Тогда, пользуясь тем или иным законом распределения для
возмущающих факторов, можно установить закон распределения
величины истинной несущей способности и сравнить ее, например,
с несушей способностью, соответствующей пределу текучести ат.
Правда, закон распределения несущей способности уже не будет
Рис. 25.11. Предельная точка для
эксцентрично сжатого стержня в
упруго-пластической стадии.
ВЛИЯНИЕ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
879
нормальным, так как зависимость a0i max от эксцентриситета и
начальной погиби нельзя принять линейной. Задача становится при
этом более сложной и может быть решена тем путем, какой указан
ниже в применении к оболочкам. Желательно, чтобы именно такой
подход к задаче был принят в дальнейших исследованиях.
§ 234. Влияние начальных неправильностей
на поведение оболочек. Цилиндрическая панель
Применение статистических методов является особенно важным
при рассмотрении устойчивости упругих систем в большом. Как мы
видели на примерах оболочек, подвергающихся различного рода
нагрузкам, влияние возмущающих факторов на их поведение и несущую
способность очень велико. Оболочки, а также некоторые другие
системы, склонные к прощелкиванию, чувствительны к самым
незначительным неправильностям в форме срединной поверхности,
эксцентриситетам в приложении нагрузки, погрешностям в технологии
изготовления и т. д. Этим объясняется сильный разброс в критических
нагрузках для реальных конструкций и при экспериментах.
Обоснованный анализ таких экспериментальных данных и попытки
предсказать поведение элементов реальных конструкций, по-видимому,
невозможны без вероятностного подхода.
Будем в дальнейшем условно считать, что опасным событием для
оболочки является выпучивание в большом*). Очевидно, вероятность
этого события при нагрузке, меньшей нижней критической величины,
равна нулю, а при нагрузке, достигшей верхней критической величины,
равна единице. Допустим, что верхняя и нижняя нагрузки определены
для оболочки идеальной формы и для оболочек, имеющих
различные начальные несовершенства, и вместе с тем при разных
граничных условиях. Тогда статистический подход может заключаться в том,
чтобы по заданным вероятностным характеристикам начальных
неправильностей и условий закрепления оболочек определить
вероятностные характеристики критических нагрузок. Задача сводится, таким
образом, к преобразованию вероятностей. Очень важно при этом
условиться о том, как ведет себя оболочка при изменении нагрузки.
Один из подходов к решению задачи состоит в следующем. Будем
здесь считать, что нагрузка меняется сравнительно медленно и что
деформация оболочки непрерывно следит за нагрузкой. Очевидно,
такая система является безынерционной, и поведение оболочки
полностью определяется нелинейной диаграммой равновесных
состояний p(f) такого типа, какая изображена на рис. 25.12, а. Подобный
*) Это соответствует приведенным выше теоретическим и
экспериментальным данным. Более общая постановка задачи заключается в том, чтобы
учесть возможность наступления других опасных состояний, например
перехода из упругой области в пластическую и т. д.
880
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
подход к задаче можно охарактеризовать как статический *).
Необходимо, далее, установить, какая из ветвей диаграммы рис. 25.12, а
используется при решении задачи, с тем чтобы зависимость p(f)
была однозначной. Будем принимать, что при возрастании нагрузки
от р < рн равновесные состояния оболочки соответствуют ветви ОЛ;
при достижении нагрузкой значения рв происходит хлопок. Если же
/
А
О1 у в1 ■ ' ]Г
о) 6)
Рис. 25.12. Диаграммы равновесных состояний оболочки.
нагрузка падает от значения р > рв, то надо пользоваться ветвью СВ;
при р = рн осуществляется обратный хлопок. Неустойчивые
состояния, отвечающие ветви ЛВ, вообще не реализуются. Таким образом,
строго говоря, состояние оболочки зависит от истории нагружения.
В дальнейшем будем для простоты считать, что нагрузка всегда
является возрастающей и что, следовательно, состояния оболочки
однозначно определяются диаграммой по рис. 25.12, б.
Применим такой подход к решению задачи прежде всего к
случаю квадратной цилиндрической панели, шарнирно опертой по краям
и сжатой вдоль образующей усилиями р (см. рис. 13.61). Примем,
что все важнейшие возмущающие факторы сведены к эквивалентным
начальным неправильностям в форме срединной поверхности. Будем
считать панель системой с одной степенью свободы, при этом
формулы преобразования вероятностей значительно упрощаются. Если
аппроксимировать полный и начальный прогибы с помощью
выражений B0.25) и ввести безразмерные параметры по B0.31), то
зависимость между сжимающим усилием р* = pb2jEh2 и стрелой прогиба £
примет вид A7.55). Для квадратной пластинки (^=1) получим:
*) Или, лучше сказать, как квазистатический; с его помощью могут
быть решены и некоторые динамические задачи. Этот подход принадлежит
В. В. Болотину [25.1].
ВЛИЯНИЕ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
881
где k = b2/Rh; под р"д нд понимается верхнее критическое усилие для
оболочки идеальной формы, под Со— стрела начального прогиба.
Примем k=\2. Кривые />*(С), построенные по F2) для различных
значений Со ПРИ такой величине k, приведены в книге [0.3], стр. 288;
они имеют такой же характер, что и кривые рис. 20.13. Определим
с помощью этого графика
значения верхних критических
усилий р*в нач для оболочек с
различными начальными
прогибами Со- На рис. 25.13 изображен
график Сэ (/>*); величины р*в цач
лежат в пределах между
нагрузкой р" =3,3, отвечаю-
г-' г в, нач
щей Со = 0,25, и верхней
критической нагрузкой р* = 7,2
для идеальной оболочки. При
Со > 0,25 прощелкивания
оболочки не происходит. На
рис. 25.13 даны также
абсолютные значения производной
fioldp*.
Таким образом, нами
установлена зависимость между
верхними критическими
усилиями и начальным прогибом
для той области, где имеет
место нрощелкивание оболочки. Задача ставится теперь таким
образом: по заданным вероятностным характеристикам для Со
установить вероятностные характеристики для р*. Наиболее трудная часть
решения задачи состоит в определении вероятностных параметров для
начального прогиба. В настоящее время имеется еще мало данных для
выбора этих параметров. Примем в качестве первого приближения,
что величина Со распределена по нормальному закону с центром
в начале координат:
V
0,25
0,20
0,15
0,10
0,05
, 1 dCe I
1<И
-
-
-
1 I I
V
\dp"\
L ! 1 ^"-^
■=1
■а!
^н.
г
Рис. 25.13. Данные для преобразования функции
распределения в случае сжатой цилиндрической
панели.
/(Q =
1
Уь-в?
<h
v
B5.63)
Воспользуемся, далее, формулой A8) преобразования вероятностей.
Но следует принять во внимание, что, по нашему предположению,
Со принимает любое значение от —сю до -f-сю- в то время как
явление хлопка имеет место лишь при 0<!Со<^Со. где Со = 0,25.
Поэтому при преобразовании вероятностей следует ввести
нормирующий множитель (см. [25.1]). Определим вероятность того, что Со лежит
56 А. С. Вольмир
882 ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ [ГЛ. XXV
в указанных пределах:
j/&>)<*&>•
B5.64)
На эту величину, меньшую единицы, надо разделить плотность F3);
тогда мы от кривой / рис. 25.14 перейдем к кривой 2, причем
площадь под этой кривой останется равной единице. Окончательно
плотность вероятности /(р*) оказывается равной
/(/>*) =
■/(Со)
dU
dp*
B5.65)
На рис. 25.15 изображена кривая /(/?*), полученная в работе [25.1]
для случая sj0 = 0,l. В результате преобразования плотность особенно
№„)
1Р
0,3
0,2
0J
i
■
•
оъ
«**■
I
/ \
/ \
1 1 1 1
• о"
■а.
1 Т_
Рис. 25.14. «Нормирование» кривой
распределения начальных прогибов.
Рис. 25.15. Функция распределения
критической нагрузки для сжатой панели.
повышается для тех значений р*, где велики абсолютные значения
производной dZ^/dp*, т. е. для зоны, ближайшей к нижней
критической нагрузке. Математическое ожидание т (р*) и дисперсия D (р*)
нового закона распределения определяются по формулам A4) и A5)
с учетом множителя IfF:
i(p*)=j? J />'«o)/Q^. B5-66)
т(
D {p*) = ± J [p* (Q - m Q?*)]2 / Q dt». B5.67)
§234]
ВЛИЯНИЕ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
883
По данным работы В. В. Болотина [25.1, 1958 г.], в случае
s (Со) = 0,1 математическое ожидание равно 4,84, или 67% от р*
и 146% от/?*ид; при s(£o) = 0,25 оно равно 4,5, или
соответственно 62% и 136%. Как
видим, величина т(р*) при f(C0)"
принятом законе
распределения мало зависит от
разброса начальных прогибов.
Надо, однако, учесть,
что начальные
неправильности в форме оболочки
возникают в результате
технологической обработки,
различного рода ударов при -Bfi
транспортировке и монтаже
КОНСТРУКЦИЙ' СЛеаУеТ ПОЛа- ^ис' 25.16. Плотность вероятности начальных проги-
rv "• • ЛУ бов, преимущественно направленных к центру кри-
гать, что реакция оболочки визны.
на эти возмущения имеет
такой же характер, как и при действии рабочей нагрузки:
предпочтительнее будут возникать начальные вмятины, направленные
к центру кривизны. Поэтому центр распределения начальных прогибов
f(p')
1,11
ал5
0.5
0,25
П
о. ^-~
i I
—г— !а .
3 i 5 6 7 „, в
а) Р
Рис. 25.17. Функции распределения для панели при начальных прогибах по
рис. 25.16.
уместно выбирать в точке, расположенной на некотором удалении от
начала координат — в сторону положительных прогибов, обращенных
к центру кривизны. На рис. 25.16 изображен такой закон
распределения плотности вероятности с центром, равным ^0 = 0,1, и
стандартом S£0 = 0,1. На рис. 25.17, а показано соответствующее
распределение вероятности f(p*), вычисленное по F5). Математическое
ожидание оказалось равным 4,14, или 57% от р*д и 107% от р*
На рис. 25.17, б изображен соответствующий интегральный закон
распределения. Отметим, что математическое ожидание р* для
оболочек с начальными неправильностями здесь почти совпадает с нижней
критической нагрузкой р*а для гладкой оболочки. Этот вывод имеет
884
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
существенное практическое значение, так как показывает, что в
расчетах реальных панелей надо исходить прежде всего из величины р*в.
Аналогичным образом могут быть приняты во внимание
вероятностные характеристики условий закрепления оболочки по краям.
§ 235. Влияние начальных неправильностей на поведение
замкнутых цилиндрических оболочек
Обратимся к случаю замкнутой цилиндрической оболочки *), шар-
нирно опертой по краям и подвергающейся внешнему равномерно
распределенному давлению (рис. 13.17). На рис. 13.30 изображена
Рис. 25.18. Функция распределения для критической нагрузки в случае
замкнутой оболочки, подвергающейся внешнему давлению.
зависимость параметра нагрузки q = qR2jEh2 от прогиба при
различных значениях безразмерной стрелы начальной погиби £о< Оставляя
для So закон распределения плотности вероятности но рис. 25.16 при
S£0 = 0,I и используя формулу F5), находим распределение плотности
вероятности критической нагрузки, показанное на рис. 25,18.
Математическое ожидание по F6) оказывается равным 0,035 и
составляет 85% от qBi ид. Как мы видели, такой результат сравнительно
хорошо отражает экспериментальные данные (см. § 153).
*) Ряд задач, относящихся к замкнутым оболочкам, рассмотрен более
подробно в первой из работ Б. П. Макарова [25.4].
ВЛИЯНИИ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
885
Рассмотрим аналогичную задачу для замкнутой оболочки,
находящейся иод действием осевого сжатия. Параметр внешней нагрузки
выберем по-прежнему в виде "р — pR\Eh. Зависимость £„(/?), найденная
поданным работы [13.30а] при Rlh = 1000, изображена на рис. 25.19.
Сохраняя прежний закон
распределения (рис. 25.16), при- г-л
ходим к распределению
плотности вероятности нагрузки
(рис. 25.20, а) и к
интегральной функции распределения
(рис. 25.20, б).
Математическое ожидание р равно 0,369,
или 61% от верхнего
критического напряжения pBi ид.
До сих пор мы считали
заданным закон распределения
безотносительно к размерам
оболочки. В действительности,
однако, амплитуда и форма
начальной ногиби зависят от геометрических параметров оболочки.
Для стержней выше принималось, что безразмерная стрела
начального прогиба пропорциональна квадрату отношения длины стержня
Рис. 25.19. Зависимость «начальный прогиб —
верхняя критическая нагрузка» для случая
осевого сжатия.
Рис.
25.20. Функции распределения для критической нагрузки в случае
замкнутой оболочки при осевом сжатии.
или, лучше сказать, длины полуволны изогнутой линии к
характерному поперечному размеру. Для оболочек можно ввести аналогичное
допущение, но здесь амплитуда вмятины должна зависеть от размеров
вмятины не в одном, а по крайней мере в двух направлениях. В
случае цилиндрической оболочки естественно связать стрелу возможного
начального прогиба с длинами полуволн изогнутой поверхности в
двух направлениях (рис. 25.21, а)—вдоль образующей AХ) и по
дуге (/у).В работах [13.30], [13.30а] была предложена формула для
886
ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ [ГЛ. XXV
безразмерной стрелы начального прогиба (отношения стрелы прогиба к
толщине) такой структуры:
С I ijv 1 \s
^ = ^{т^тк)' <25-68>
где С, б — эмпирические коэффициенты.
Судя по некоторым эмпирическим данным, параметр б колеблется
от 1,5 до 3. По аналогии со случаем стержня можно выбрать
среднее значение 6 = 2.
а) 6) 6)
Рис. 25.21. Возможные очертания начальных
неправильностей.
Доннел и Ван [13.30а] считают, что при 6=2 коэффициент С
будет равен: для оболочек, изготовленных из труб, С= 1,5-нЗ, для
цилиндров, тщательно изготовленных из специально обработанных
плоских листов, С = З-т-5, и, наконец, для оболочек, полученных
из листа без особых требований к технологии, С = 5-=- 10. В одной
из статей Нэша [13.48] величина С была принята значительно
большей: С = 30. Таким образом, каких-либо определенных данных
относительно коэффициента С в настоящее время нет; очевидно, он будет
резко меняться в зависимости от технологии изготовления оболочек
и условий их хранения, транспортировки, испытаний и т. д.
Было обращено также внимание [13.30а] на то, что при
изготовлении оболочек вмятины, вытянутые вдоль образующей (рис. 25.21, б),
возникают чаще, чем вдоль дуги (рис. 25.21, в). Поэтому была
предложена формула типа
$> = -&■ ооолJ * B5,69)
где Я, < 1. Принимая X = 0,5, получим:
(> /1,5,0,5
§235]
ВЛИЯНИЕ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
887
Значение Сх, судя по структуре формулы, должно быть примерно
в 4 раза меньше С.
Если принять 1Х — Цт и ly = nRjn, где от— число полуволн
вдоль образующей оболочки и п — число волн вдоль поперечного
сечения, то получим:
^ = HF ("ШВД (шш) ' ' B5.71)
Вводя прежний параметр A3.38)
nL '
приведем G1) к виду
г-С 1 I R У
Величины С и С, зависят, главным образом, от технологии
изготовления образцов. Если условно принять, что С и С1 не зависят от Rjh,
то по G3) окажется, что стрела прогиба начальных вмятин
пропорциональна (RlhJ. Можно наметить следующий путь определения
зависимости математического ожидания р от Rjh. Принимая для С,
некоторый закон распределения и пользуясь формулами преобразования
вероятностей, находим математическое ожидание р для различных
отношений Rjh. В результате мы должны будем прийти к тому
выводу, что среднее критическое напряжение для реальных оболочек
должно снижаться с увеличением Rjh. Между тем но классической
линейной теории верхнее безразмерное критическое напряжение
/>„iIU = 0,606 не зависит от Rjh. Аналогичный вывод вытекает из
нелинейных решений по методу Ритца в отношении нижнего
критического напряжения, равного /?„ ид = 0,18. Следовательно, со
статистической точки зрения мы должны получить последовательное снижение
математического ожидания рв от уровня рв> ид к уровню рн> нд,
а возможно, и далее, к уровню нижнего критического напряжения
для заданного начального прогиба /?Н|Нач, как показано на рис. 25.22.
Такой вывод, как мы видели в главе XIII, согласуется с
экспериментальными данными; он положен в основу рекомендаций § 149 для
практических расчетов *).
Мы принимали в примерах для простоты, что начальные прогибы
распределяются по нормальному закону. Однако это предположение
не является вполне обоснованным. В самом деле, при изготовлении
элементов реальных конструкций обычно исходят из определенных
технических условий. Если эти условия регламентируют наибольшие
отклонения от заданной формы оболочки, то изделия, не отвечающие
*) Это касается лишь того случая, когда напряжения в оболочке лежат
в пределах упругости.
B5.72)
B5.73)
888 ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ
им, идут в брак и исключаются из серии. Поэтому закон
распределения начальных прогибов необходимо подбирать особо для каждой
исследуемой серии образцов. Можно ожидать, что для
ограниченной серии образцов плотность вероятности начального прогиба £0
//////////////////////////////////////////.*.
\ч&
Рн.ь.
Рис. 23.22. Снижение уровня верхнего критического
напряжения прн возрастании Hlh.
будет более или менее равномерно распределена на ограниченном
участке ^ < £ < £2.
Далее, при рассмотрении влияния тех или иных возмущающих
факторов далеко не всегда окажется удобным сводить их к эквива-
лентным начальным
прогибам. Тогда следует перейти
к решению более сложной
задачи, преобразуя
вероятности по формулам D4)
или D6).
Так как законы
распределения начальных
несовершенств еще мало изучены,
интересно поставить
обратную задачу: по
окончательным данным результатов
опытов над реальными
оболочками определить
вероятностные характеристики
начальных прогибов.
Рассмотрим тот же случай
осевого сжатия *) и воспользуемся экспериментальными данными
статьи [13.33]. На рис. 25.23 приведены значения
безразмерного критического напряжения р для различных отношений Rjh. По
Рис.
25.23. Критические напряжения
экспериментальным данным.
*) Этот случай был исследован Б. П. Макаровым во второй работе
[25.4]; ему принадлежат приведенные ниже данные.
ВЛИЯНИЕ НАЧАЛЬНЫХ НЕПРАВИЛЬНОСТЕЙ
889
этим данным можно для различных R'h построить гистограммы
величины v = plpB, 11Д, т. е. диаграммы, состоящие из прямоугольников
и указывающие, какое число опытов соответствует данному
промежутку изменения отношения v реального критического напряжения
к величине plh ид=0,605. Такие гистограммы изображены на рис. 25.24.
!
'■У^-л
77\
НПО
V
т?
1
л
'/
Щг
щ
ш
h=i000+2
100
0.2 0-i 0,6
6)
03 Ш
V
0
fM
't
РЗ
w
Щ—
щ
EBk,
1 1
Rjh- 2000-WOO
0 0,2 Ofi 0,6 0,8 1,0 ° 02 0.4 0.6 0,8
I) V г)
1,0
Рис. 25.24. Гистограммы значений реальных критических напряжений.
Отметим, что по мере возрастания отношения Rjh спектр реальных
значений р сужается и перемещается в зону меньших v. Кроме того,
интересно указать на то, что две
первые гистограммы имеют два
максимума плотностей вероятности,
так что закон распределения
оказывается «двугорбым» *). Если,
далее, провести преобразование
вероятностей по графику рис. 25.19 и
использовать формулы типа G3), то
можно найти гистограмму для
параметра и, соответствующего С1.
Такая окончательная диаграмма
показана на рис. 25.25. Сплошная
линия соответствует нормальному
закону распределения и с центром и—0,1 и стандартом 5=0,06. Мы
находим здесь подтверждение сделанному выше предположению, что
Рис. 25.25. Определение закона
распределения начальных прогибов по данным
о реальных критических напряжениях.
*) Аналогичный двугорбый закон распределения получил В. М. Гоича-
ренко в другой задаче, см. вторую из работ [25.3]. Является ли такой
результат закономерным, остается пока неясным.
890 ПРИМЕНЕНИЕ СТАТИСТИЧЕСКИХ МЕТОДОВ [ГЛ. XXV
центр закона распределения начальных прогибов должен быть
смещен в сторону положительных £0.
Описанные выше методы определения вероятностных
характеристик поведения упругих систем с присоединением статистической
информации о свойствах материала, начальных несовершенствах
реальных конструкций и характере прикладываемых нагрузок (об этом
см. в следующей главе) представляют ключ к подлинному
обоснованию практических расчетов. Поэтому развитие статистических
методов и надлежащая обработка экспериментальных данных являются
важной составной частью теории устойчивости и надежности
конструкций.
ГЛАВА XXVI
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
§ 236. Общие сведения о случайных процессах
В предыдущей главе мы уделяли основное внимание влиянию на
поведение упругих систем статистических характеристик, относящихся
к начальным несовершенствам конструкции, условиям закрепления и
т. д. Задача состояла в том, чтобы по заданным вероятностным
характеристикам случайных величин, описывающих упругую систему
и условия закрепления, определить вероятностные характеристики
опасной (критической) нагрузки. При этом параметры, определяющие
свойства системы и критические нагрузки, рассматривались как
случайные величины.
В настоящей главе мы перейдем к рассмотрению поведения
системы во времени, когда нагрузки, действующие на систему,
изменяются во времени случайным образом. Иными словами, прилагаемые
к системе нагрузки или некоторая их часть будут представляться
нами в виде случайных процессов. В § 213 мы ознакомились уже
с таким видом случайной нагрузки, как акустическое давление на
панели обшивки летательных аппаратов, расположенные вблизи
реактивных двигателей; другой пример — воздействие на конструкции
летательных аппаратов турбулентности атмосферы.
Таким образом, мы переходим к некоторым задачам
статистической динамики деформируемых систем. Прежде всего напомним
необходимые сведения из теории случайных функций *). Случайной
функцией называется функция, значение которой при каждом данном
значении аргумента (или нескольких аргументов) является случайной
величиной. Случайная функция одного непрерывного
параметра—времени— называется случайным процессом. Случайный процесс можно
рассматривать как бесконечную совокупность случайных величин,
зависящую от времени. Проводя опыт, относящийся к некоторому
случайному процессу, мы получаем конкретную функцию — реализацию
процесса.
*) Теория случайных функций изложена в книгах Е. С Вентцель,
Б. Р. Левина, В. С. Пугачева (см. ссылки на стр. 865).
892
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
Пусть КО— случайный процесс; на рис. 26.1 изображены его
реализации |, (t), b,2(t), |3@ |„ (t). При некотором
фиксированном значении аргумента t мы получаем случайную величину. На
рис. 26.1 проведено «сечение» семейства реализаций при данном tx,
которому соответствует п значений, принимаемых случайной
величиной | (£,) в п опытах.
Обобщая понятия, введенные в § 232 по отношению к
случайным величинам, рассмотрим вероятность Ф того, что при t = t{
случайная функция |@ не превосходит некоторого заданного уровня хх.
Эта вероятность определяется одномерной интегральной функцией
распределения случайного процесса
/>,(*,. *,) = Ф (&(*,)<*,}• B6.1)
зависящей от фиксированного момента времени t] и от уровня хг
Далее, одномерная плотность вероятности (одномерная
дифференциальная функция
распределения) случайного процесса
будет определяться производной
дх |
= /,(*,. *i); B6-2)
Рис. 26.1. Реализации случайного процесса.
предполагаем, что функция F{
имеет эту производную.
Функции ^i(*i. t\) и
/,(х,, /[) дают представление о
процессе лишь в отдельные,
фиксированные моменты
времени, т. е. описывают
случайный процесс как бы статически;
динамика развития процесса
ими ие характеризуется. Для суждения о связи между случайными
величинами |(^i) и 1@) п Д|-а произвольных момента времени/, и t2
необходимо знание двумерной функции распределения. Вероятность
того, что случайная функция |@ ПРИ t = t{ находится ниже уровня х{
и вместе с тем при t = t2 ниже уровня х2, определяется двумерной
интегральной функцией распределения случайного процесса,
являющейся функцией четырех переменных х{, х2, tx, t2:
F2(xv х2, t{, *2) = Ф {£(*,)<■*!. l(t2)<x2}.
Если функция F2 имеет вторую смешанную производную
d2F (лг|, Хц, t], t2)
дх, дх,
■ f2{xv х2, t{, t2).
B6.3)
B6.4)
то она называется двумерной плотностью вероятности случайного
процесса. Аналогично определяются я-мерные характеристики
случайных процессоз. Случайная функция считается заданной, если для
ОБЩИЕ СВЕДЕНИЯ О СЛУЧАЙНЫХ ПРОЦЕССАХ
893
любого значения п
fn(X\' XZ Хп> М>
известен «-мерный закон распределения
'„)■
Перейдем к определению основных характеристик случайного
процесса. Прежде всего по аналогии с § 232 обратимся к понятию
математического ожидания. Математическое ожидание случайного
процесса представляет собой такую функцию M^(t), значение которой
при каждом t равно-
математическому ожиданию соответ- Ь,£@
ствующего значения
случайной функции; Мг (t) = МЦ (t)].
Очевидно, математическое
ожидание представляет среднюю
функцию, относительно
которой колеблются все
возможные реализации случайного
процесса. На рис. 26.2
тонкими линиями изображены, для
примера, реализации
случайного процесса, жирной
линией— его математическое ожидание. Математическое ожидание
выражается через одномерную плотность вероятности по формуле,
обобщающей B5.14):
Рис. 26.2. К определению математического
ожидания случайного процесса.
M|(f,)= f *,/,(*,. tx)dxx
B6.5)
Дисперсией случайного процесса называется такая функция Di(t),
значение которой при. каждом t равно дисперсии соответствующего
значения случайной функции; D\(t) = D[%{t)\. Дисперсия
характеризует разброс возможных реализаций случайного процесса
относительно математического ожидания и выражается через одномерную
плотность вероятности следующим образом (см. формулу B5.15)):
оо
Dl(t,)=M {[| (*,)-Ms (f,)]'} = J l^-M^,)]2/, (*,. U)dxv B6.6)
■Иззлекзя квадратный корень из дисперсии, получим функцию оч(/) —
•среднеквадратичное отклонение случайного процесса: Oi(t) — VDi(t).
Теперь введем иозое понятие, не встречавшееся в главе XXV, —
•Корреляционную функцию случайного процесса. Корреляционная
функция характеризует взаимную зависимость между значениями
случайного процесса при различных значениях аргумента. Пусть £ (^) и
*К'г) — Два значения случайного процесса, соотзетстзующие двум
^Произвольным моментам времени tx и t2. Функция дзух переменных
/fi и t2, равная математическому ожиданию произведения отклонений
894 ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
от среднего значения процесса для любых двух моментов времени
t\ и t2,
Kb{tv ^) = М{[1(^)-МЪ({,)]Ц^2)-М^Щ B6.7)
называется корреляционной функцией случайного процесса £(£). Эта
функция выражается через двумерную плотность вероятности с
помощью формулы
со оо
—со —со
~MlD)\f2(xv х2, tu t2)dxxdx2. B6.8)
Сразиивая формулы F) и (8), видим, что при tx = t2 корреляционная
функция обращается в дисперсию. Отметим, что, судя по G),
корреляционная функция симметрична:
*£(*!• *2) = *б('2. ',)• B6.9)
При изучении случайных процессов обычно принимают те или
иные допущения, благодаря которым удается ограничить объем
информации, необходимой для описания процесса. В соответствии
с этими допущениями выделяют некоторые виды случайных процессов.
Важный класс случайных процессов составляют так называемые
стационарные случайные процессы — такие, для которых закон
распределения fn(xx, х2 х„, tx, t2, .... t„) произвольного
порядка п не меняется при любом сдвиге всей группы точек tx, t2, .. ., tn
вдоль оси времени:
J п\Х\> Х2> •••> хп< М" *2' ••'• *л)'==/я (■*"!> х2> •••• хп>
*i + т, h -т- т К-+ т).
Очевидно, характеристики стационарных случайных процессов не
будут зависеть от того, к каким конкретным моментам времени они
относятся. Одномерная плотность вероятности здесь вообще не зазисит
от зремеии:
/i(*i. 'i) = /i(*i)-
Двумерный закон распределения сзязаи лишь с промежутками
зремеии между t2 и tx. При t2 — tx = x будет
/2(Х{, Х2, Г], t2) = f2(Xl, Х2, t).
Следовательно, математическое ожидание и дисперсия
стационарного случайного процесса оказываются не связанными со зремеием,
а корреляционная функция будет зависеть только от промежутка т:
K%(tx, t2) = ki(T). Из свойства (9) зытекает, что ki(x) = k^(—т).
Значение корреляционной функции стационарного процесса в начале
координат, очевидно, равно дисперсии процесса: /г@) = £>|. Можно
показать, что значение корреляционной функции в рассматриваемом
i 236] ОБЩИЕ СВЕДЕНИЯ О СЛУЧАЙНЫХ ПРОЦЕССАХ 895
случае при любом т не презосходит по модулю ее значения з
начале координат. Эти свойства корреляционной функции
иллюстрируются графиком рис. 26.3.
При изучении стационарных случайных процессов часто
применяется так называемый спектральный метод. Случайную функцию
представляют в виде разложения на гармонические колебания
различных частот; амплитуды и фазы этих колебаний являются случайными.
При этом дисперсия стационарной случайной функции оказывается
равной сумме дисперсий всех гармоник. Напомним, что график, опи-
сызающий распределение амплитуд по частотам колебаний, называют
Рнс. 26.3. График, демонстрирующий свойства Рис. 26.4. График спектральной
корреляционной функции стационарного про- плотности,
цесса.
обычно спектром амплитуд колебательного процесса. Поэтому в
применении к случайным процессам можно говорить, например, о спектре
дисперсий того или иного процесса. Так как дисперсия, вообще говоря,
меняется з зазисимости от частоты, можно ввести понятие средней
плотности дисперсии, понимая под этим дисперсию, приходящуюся
на единицу длины данного интервала частот.
Считая спектр частот непрерывным, введем далее понятие
«мгновенной плотности», характеризующей плотность дисперсии для любой
заданной частоты. Эта новая функция 5 частоты со носит название
спектральной плотности дисперсии. Обозначим ее через «S(co). На
графике <S(co) по рис. 26.4 полная площадь под кривой 5 будет,
очевидно, равняться дисперсии случайного процесса:
оо
Dt= J 5((o)rf@. B6.10)
о
Разложение случайной функции по различным гармоникам
позволяет прийти к некоторым важным соотношениям типа преобразования
Фурье. Зная, например, спектральную плотность S(co) процесса,
можно определить корреляционную функцию k\ (т) с помощью
косинус-преобразования Фурье:
оо
h(x)= [ S (й) cos ит da. B6.11)
о
896 ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
Может быть выписано также обратное соотношение между этими
функциями. Выражение A1) можно представить иначе, з комплексной
форме:
h (T) :
4Ь
(co)etot tfco.
B6.12)
Здесь в качестве спектральной плотности выбрана функция S0 (со),
отличающаяся от функции S(co) масштабом по оси ординат и тем,
что она определена и для отрицательных частот:
^о(«) = ^5(«)-
B6.13)
По аналогии с понятием интегральной функции B5.8) для
случайных величии можно здесь ввести понятие спектральной функции,
или интегрального спектра:
5j (со) = Г S0 (со) da).
Если спектр случайного процесса сосредоточен з основном в
относительно узкой полосе частот около некоторой фиксированной
частоты со, при которой спектральная плотность достигает
максимума (рис. 26.5, а), то такой процесс называют узкополосным;
Рис. 26.5. Спектральная плотность (а) и пример реализации (б) узкополосного случайного
процесса.
реализации его напоминают синусоиду фиксированной частоты
(рис. 26.5, б). Такой процесс можно представить в виде синусоиды,
амплитуда и фаза которой являются медленно меняющимися
случайными функциями времени. Напротиз, в том случае, если спектр
случайного процесса охватывает широкий диапазон частот, его называют
широкополосным (рис. 26.6, а). На рис. 26.6, б показан пример
реализации такого процесса. Типичный широкополосный процесс —
пульсации дазлеиия в акустическом поле вблизи работающих
реактивных двигателей (см. § 213).
§ 236] ОБЩИЕ СВЕДЕНИЯ О СЛУЧАЙНЫХ ПРОЦЕССАХ 897
Обратимся к тому случаю, когда спектральная плотность имеет
почти постоянное значение в широком диапазоне частот. Моделью
такого случая, удобной в практических приложениях, является спектр
Sfo),
кщ
Рис. 26.G. Спектральная плотность (а) и пример реализации (б) лирокополосного
случайного процесса.
S(co) = 250 = const, равномерный на
чайный процесс, имеющий такой
белым шумом. Этот термин введен
сзета, имеющего примерно
однородный спектральный состав.
Корреляционная функция белого шума
равна по A2)
оо
£(т)= Г 50е''шт^ = 2я506(т),
— СО
B6.14)
где 6(т) — дельта-функция з начале
щаяся неограниченной в начале коор,
точках (рис. 26.8), при этом
всех частотах (рис. 26.7). Слу-
равиомериый спектр, называют
по аналогии с понятием белого
3(Щ
S-2Sn
со
Рис. 26.7. График спектральной
плотности «идеального» белого шума.
координат, т. е. функция, язляю-
дииат и равная нулю з остальных
6(T)dt=l при любом е > 0.
B6.15)
57 А. С. Вольмир
898
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
Белый шум представляет собой некоторый идеальный процесс, так
как достаточно близкие значения случайной функции в
действительности всегда зависят друг от друга. Для т = 0 мы при этом должны
были бы получить по A4) бесконечную дисперсию, что
неосуществимо для реальных процессов.
В приложениях рассматривают случайный процесс,
аппроксимируемый белым шумом з ограниченном диапазоне частот (рис. 26.9);
при этом под белым шумом понимают
случайный процесс, у которого спек-
Ф)
тральная плотность остается
практически постоянной в диапазоне частот,
могущих оказать влияние на данную
динамическую систему.
S(co)
А
Рис. 26.8. Корреляционная функция
белого шума.
Рис. 26.9. График спектральной плотности
случайного процесса, представленного в виде
белого шума в ограниченном диапазоне частот.
Мы рассмотрели статистические характеристики стационарных
случайных процессов. Напомним, что для стационарного процесса вид
функции распределения вероятности не зависит от смещения начала
отсчета вдоль оси времени.
Если классифицировать случайные процессы по виду функций
распределения, то надо прежде всего выделить нормальные
(гауссовы) процессы, когда функция распределения будет нормальной (для
одномерного закона распределения типа B5.19)).
§ 237. Марковские процессы.
Уравнение Фоккера — Планка — Колмогорова
Другим существенным признаком, который лежит в основе
классификации случайных функций, является зависимость поведения
случайной функции от ее значений в предшествующий промежуток
времени. Легче поддаются изучению процессы, характеризующиеся
тем, что вероятностные свойства процесса в последующий промежуток
времени определяются значением функции з заданный момент зремеии и
не зависят от ее значений в предыдущие моменты. Такие процессы
называются процессами без последействия или марковскими процессами.
Процесс, протекающий в физической системе, назызается процессом
I 237] МАРКОВСКИЕ ПРОЦЕССЫ 899
М а р к о з а (процессом без последействия), если в случае, когда известно
состояние системы в момент t0, распределение вероятностей
состояний системы для любых t > t0 не зависит от любых сведений о ходе
изменения системы до момента t0 (по Л. Н. Колмогорову)*). Таким
образом, отличительной особенностью' марковского процесса является
то, что вероятностное суждение о состоянии системы в конце каждого
интервала времени зависит только от характеристики ее состояния
в начале этого интервала и не зависит от предыстории процесса.
Иными словами, при этом может быть сделан вероятностный прогноз
относительно будущего системы, если известно настоящее и, вместе
с тем, «забыто» прошлое.
Непрерывный процесс без последействия характеризуется функцией
перехода F(x, t\y, т), выражающей вероятность Ф того, что в
момент t значение случайной функции будет ниже уровня х, если
з момент т, предшествующий моменту t, случайная функция имела
значение у:
Ф [I, < х\1Х = у] = F«х. 11 у, т). B6.16)
Выражение для плотности вероятности перехода получает вид по
аналогии с B5.7)
f(x. t\y, x)^(VJy'T)- B6.17)
Функция / должна удовлетворять условию типа B5.10):
сю
J f{x, t\y, x)dx=\. B6.18)
— ОС
Обратимся к вызоду некоторых важных соотношений,
относящихся к маркозским процессам. Прежде всего представим себе, что
случайная функция переходит от значения у к значению х не
непосредственно, а принимая некоторое промежуточное значение z в
момент зремени s, лежащий в интервале между т и t: т < s < t.
Плотность зероятности перехода от у к г, а затем и к х выражается
по аналогии с B5.30) в виде произведения плотностей для каждого
перехода, т. е. fix, t\z, s)f(z, s\y, т). Результат интегрирования
этого выражения по всем z определяет плотность вероятности
перехода от значения у к значению х:
оэ
fix, х\у, т)= f f(x, t\z, s)f(z, s\y, x)dz. B6.19)
— oo
Соотношение A9) известно, как уравнение Чепмеиа — Колмогорова.
Примем далее, что конечный момент времени t -4- At отделен от
промежуточного момента t малым отрезком At; тогда A9) можно
*) См. сноску на стр. 902.
67»
900 ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
переписать в виде
со
f{x, t-\-M\y, т)= j f(x, t-\~At\z, ()f{z, t\y, x)dz. B6.20)
* —CO
Далее рассмотрим некоторую произвольную функцию R (х),
достаточно быстро стремящуюся к нулю при х —>■ ± оо. Рассмотрим
интеграл
со оо
/ж/(х' *\У- *)R{x)dx = -^ J/(x, t\y, x)R(x)dx =
— CO —CO
CO
= I'm — Г [f(x, t + M\y, t) — f(x, t\y, x)]R(x)dx. B6.21)
Л/->оо L4 J
-co
Заменяя здесь функцию /(x, /-+ Д£|з>, т) правой частью зыраже-
ния B3), получим:
со
\ Wf(x> *\У' VR(x)dx =
— со
( со со
= lim 4jI R{x)dx I /(x, М-Д/|г( *)/(*. *|y. i)dzdx -
l —со -co
со |
— I /(x, /|y, x)R(x)dx\. B6.22)
Воспользуемся разложением /?(х) по степеням (x—z):
#(x)==#B)+(x_z)/?'(z) + i-(x — zfR"(z)-t .
B6.23)
где штрихами обозначены производные по z. В дальнейшем
ограничимся рассмотрением лишь выписанных здесь членов ряда B3).
Подставляя B3) в перзый из членов празой части уразнеиия B2),
находим, что член, содержащий R(z), и последний член
выражения B2) взаимно уничтожаются, если принять во знимание A8). Что
касается остальных членов, то прежде всего сделаем предположение
о существовании пределов
со
A(z, t)= lim 4т (x~z)f(x, t-\-M\zt t)dx%
Л*->0 ^ J
—со
со
B{z,t)^= lim — f (x—zff(x, t + bt\z. t)dx.
Д/->0
B6.24)
S 237)
МАРКОВСКИЕ ПРОЦГ.ССЫ
901
Таким образом, среднее смещение точки за промежуток At будет
разно A (z, t)At, а средняя дисперсия смещения определится з виде
B(z, t)At. Представим B4) следующим образом:
А (г. *) = Mm *W. B(z. t) =»m ^Щ£>1; B6.24a)
здесь под М понимается среднее значение.
С учетом обозначений по B4) представим B2) в виде
оо
J ~f(x, t\y, x)R(x)dx^
— ос
со
= I /(•г- 11 у, т) [л (г. t)R'(г) ■+ 1й(г, 0 Я" (*)]</*. B6.25)
-со
Интегрируя по частям, заменяя z на х и учитывая, что
функция R(x) стремится к нулю при л;—> ± со, получим из
выражения B5):
оо оо
| jtfix. t\y, x)R(x)dx= J { — ±[A(x. t)f(x. t\y, т)] +
— CO —CO
+ ±JL[B(x, t)f(x. t\y, x)]\R(x)dx. B6.26)
Поскольку функция R (x) произвольна, приравниваем
подынтегральные выражения; тогда приходим к следующему дифференциальному
уравнению в частных производных для плотности вероятности
перехода /:
Ц—ъМ^-шМ- B6/27)
Это соотношение носит название уравнения Фоккера — Планка —
Колмогорова (уравнения ФПК).
До сих пор мы рассматривали одномерный случайный процесс.
Он описывает изменение состояний некоторой системы,
характеризуемой одной случайной функцией времени. Если состояние
системы определяется не одной, а двумя или несколькими
случайными функциями, то мы получим двумерный или многомерный
случайный процесс. Например, динамическая система в простейшем
случае может быть описана координатой Z, и скоростью t, = dt,'dt\
тогда изменение состояния системы является двумерным процессом.
Если же изучается динамическая система, состоящая из п
материальных точек, исследуется 2я-мерный процесс. Можно говорить о
множестве различных возможных состояний системы как о некотором
фазовом пространстве 4f, и эволюция состояний системы соответствует
902
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
[ГЛ. XXVI
перемещению точки в этом пространстве. В случае описанного
выше двумерного процесса пространство W представляет собой
фазовую плоскость (£, £).
Обобщим уравнение ФПК B7) на случай «-мерного процесса
с параметрами xlt х2, ..-, хп. Если совокупность этих параметров
обозначить через х, то плотность вероятности / для такого
процесса будет представлять собой функцию перехода /(х, t\y, т).
Уравнение ФПК для этой функции принимает вид *)
дХ: дХ:
1-Х
Ы\ j-\
Здесь коэффициенты Ah Вц будут функциями ЛДх, t), Bt]-{\, t);
они определяются соотношениями типа B4):
Л;(г, t)= lim
Bu(Z. t):
ы J •••
— сю
(xt— zt)f(x, t-\-kt\z, t)dxY dx2 • • • dxn,
oo
1 Г
л/->
... \ (Xi — zj)(Xj — zj) f (x, t-\--M\z, ()dxx dx2 . . ■ dxn.
— oo
Выражения типа B4а) запишутся следующим образом:
B6.29)
Л,(г, f)= lim
М [Л*,]
At
BtJ(z, t)= lim
Л<->0
M [Лг, Аг,]
~"Л?
B6.29a)
В случае стационарного марковского процесса уравнение B7)
примет вид
—Ц-[А(х)/(х)] +.1^-[В(х)/(*)] = 0. B6.27а)
Для я-мерного стационарного процесса вместо B8) будет
i = n
S^(x)/(x)]+i£
l~n j=n
V
/-1
jLl дХ; дХ/
1-1 /-1
[B„(x)/(x)] = 0. B6.28а)
*) Уравнение типа B8) было составлено Фоккером и Планком для
описания броуновского движения и, независимо от них, А. Н. Колмогоровым
(Успехи математических наук, № 5, 1938, 5—41).
$ 238] 8ЫВР0СЫ СЛУЧАЙНЫХ ПРОЦЕССОВ. ФОРМУЛА РАИСА 903
§ 238. Выбросы случайных процессов. Формула Раиса
Мы рассмотрели основные определения теории случайных
процессов, некоторые их характеристики и остановились на
особенностях стационарных случайных процессов и марковских процессов.
В приложениях теории случайных процессов, которые будут
приведены в настоящей главе, встретятся задачи, исследование
которых связано с применением сведений из теории выбросов случайных
функций. Приведем здесь вывод формулы для среднего в единицу
времени числа пересечений процес- ^(()
сом заданного уровня. Рассмотрим
непрерывный случайный процесс \ (t), £.j-
предполагая, что первая
производная | (t) также непрерывна и
что известна совместная плотность
вероятности /(|, |). Исследуем
выбросы случайного Процесса За Не- Р„С.26Л0. К определению среднего в ели-
который уровень |, понимая под пнцу врсмс,,"огч0%аои™сбаросов случай'
этим пересечения уровня | снизу
вверх. Выберем некоторый интервал времени t-\-ht, как показано
на рис. 26.10. Заменим функцию |(£) внутри интервала /-<т <;/ -\- А/
участком прямой |(т) = \{t) -j- |(()(т — t). Это означает, что на
достаточно малом At может быть не больше одного пересечения
уровня |. Поэтому на интервале At будет один выброс, либо вообще
не будет выбросов; вероятностью более чем одного выброса
пренебрегаем. Под Ф, будем понимать вероятность того, что будет
один выброс, под Ф0—вероятность того, что не будет ни одного
выброса. Пусть \+ — среднее число пересечений уровня | с
положительным наклоном на интервале Af; эта величина равна
v+ = l •Ф1+0-Ф0 = Ф1. B6.30)
Таким образом, число \+ равно вероятности Ф( пересечения уровня |
снизу вверх в интервале [t, t-\-ht\.
Определим, далее, значение Ф[. Найдем прежде всего вероятность
того, что функция | (f) пересекает вертикальный отрезок В А — А|
с производной, заключенной в интервале от \{t) до |@+А|- Эта
вероятность равна
ЛФ = ЯШ. 4@1А£Д£- B6.31)
Рассмотрим теперь вероятность пересечения горизонтального отрезка
АС = At при фиксированном значении производной | (t). Такое
пересечение, очевидно, эквивалентно пересечению под заданным углом,
определяемым |, вертикального отрезка Л| = |(£)А/. Тогда
вероятность пересечения отрезка АС = А/ с произзодиой, лежащей в
904 ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
пределах от l(t) до \(t) -f- A.g, равна по C0)
АФ = /1|, |)|Д|Д<- B6-32)
Исследуемые выбросы (пересечения заданного уровня | снизу вверх)
будут происходить при всех положительных значениях производной,
т. е. при 0 < | < оо; поэтому полная вероятность Ф, пересечения
уровня | на интервале [t, t-{-kt\ будет
ос
Ф,=А* J/(s. 4I4- B6.33)
о
По C0) эта вероятность равна среднему числу превышений,
приходящихся на интервал [t, t + Ы\:
ОО
y{=^j /а.Ы4- B6.34)
о
Среднее в единицу времени число vJ" превышений заданного уровня |
внутри рассматриваемого интервала времени определится как
результат деления обеих частей равенства C4) на А^:
оо
v.-=jf(l.i)idi B6.35)
о
Для стационарного процесса число v5+ не зависит от времени.
Формула C5) была получена Райсом [26.8] *).
§ 239. Некоторые нелинейные задачи
статистической динамики упругих систем
Перейдем к приложениям теории случайных процессов в задачах
устойчивости и нелинейных колебаний упругих систем. Наиболее
важные вероятностные характеристики поведения динамической
системы могут быть получены на основе законов распределения
выходных обобщенных координат системы — параметров, непосредственно
описывающих поведение системы **). Здесь мы рассмотрим
случаи, когда исследование поведения системы при наличии случайных
*) Вывод формулы Раиса был дан здесь по статье В. И. Тихонова
(Успехи физических наук 77, № 3 A962)).
**) Задачи, связанные с определением законов распределения координат
динамической системы, ставились еще М. Смолуховским и А. Эйнштейном
в связи с исследованиями броуновского движения. Изучение поведения
динамических систем при наличии случайных воздействий было впервые
проведено (с использованием аппарата теории марковских процессов) в статье
А. А. Андронова, Л. С. Понтрягина и А. А. Витта [26.1].
§ 2391
НЕЛИНЕЙНЫЕ ЗАДАЧИ
905
возмущений может вестись с использованием теории марковских
процессов н уравнений типа ФПК. Этот путь позволяет вычислять
плотности вероятностей для динамических систем, исходя лишь из общего
вида соответствующего уравнения движения системы. Отметим, что
методы теории марковских процессов позволяют дать точные решения
для нелинейных систем.
Преимущество данного метода заключается в том, что он
позволяет получить наиболее полную вероятностную информацию о
поведении нелинейной системы. При этом возможно описание пересечений
системой энергетического барьера, связанных, например, с прямыми
и обратными хлопками оболочки, имеющей два устойчивых
положения равновесия.
Решение уравнения ФПК в общем случае представляет трудную
задачу. Для систем рассматриваемого здесь типа известны лишь
стационарные решения этого уравнения. Дополнительные трудности
возникают, если случайные возмущения, действующие на систему, не
являются дельта-коррелированными. В этом случае возмущающий
процесс при помощи дополнительной системы уравнений приводится
к эквивалентному воздействию, обладающему дельта-корреляцией,
что приводит к повышению порядка уравнений и значительному
усложнению задачи*).
Обратимся к задачам, в которых теория марковских процессов
применяется для исследования поведения оболочек. Нас прежде всего
интересует вероятностное описание деформированного состояния
оболочек, подверженных действию случайных сил, когда нагружения
таковы, что становится возможным явление хлопка оболочки от
одного положения устойчивого равновесия к другому **). Отметим, что
впервые теория марковских процессов теории оболочек была
применена И. И. Воровичем [26.4]; в дальнейшем исследования задач,
основанные на применениях уравнений типа ФПК, были выполнены
В. М. Гончаренко [26.5] и М. Ф. Диментбергом [26.6].
Если оболочка подвержена действию случайных силовых
возмущений, имеющих приблизительно равномерный спектр в широкой
полосе частот, то процесс ее деформации можно трактовать как
марковский процесс, при котором вероятностное суждение о состоянии
системы в конце каждого интервала времени зависит только от
характеристик ее состояния в начале этого интервала. Задача состоит
в определении вероятностных характеристик пребывания системы в том
или ином состоянии или перехода системы из одного возможного
*) Исследованию нелинейных колебаний в предположении, что
возмущающий процесс является дельта-коррелированным во времени (белым
шумом), посвящен ряд работ. Отметим здесь статьи Лайона (R. H. Lyon,
J. Acoust. Soc. Amer. 32, № 6 A960); 33, N° 10 A961)), а также работы Ариа-
ратнама [26.9], Кренделла [26.7].
**) Обзоры работ, выполненных в этом направлении, были даны В. В. Б о-
лотиным [25.1], [26.2] и И. И. Воровичем [26.4].
906 ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
состояния в другое на протяжении известного промежутка времени.
Решение задачи сводится при этом к интегрированию уравнения ФПК.
Наибольший интерес, естественно, представляют вероятностные
характеристики прощелкивания оболочки от одного устойчивого
положения к другому.
Этим путем могут быть рассмотрены некоторые задачи,
относящиеся к оболочкам, которые формулируются следующим образом:
определить вероятность Ф, того, что в момент времени t оболочка
будет находиться в окрестности прощелкнутого состояния, и
вероятность Ф2 того, что в течение некоторого промежутка времени
оболочка по крайней мере один раз окажется в прощелкнутом
состоянии *). Для достаточно больших t вероятность Ф, находится из
стационарного распределения, являющегося решением уравнения ФПК.
При этом является возможным получение характеристик случайной
величины t — времени достижения окрестности прощелкнутого
состояния оболочки в случае, когда нагрузка заключена между верхним
и нижним критическими значениями и оболочка совершает колебания
под действием случайных возмущений.
Другая группа задач связана с исследованиями статистических
характеристик нелинейных колебаний оболочки с использованием теории
марковских процессов **). На основе приближенного стационарного
решения уравнения ФПК определяются плотность вероятности
координаты (прогиба в центре панели), плотность вероятности
экстремумов координаты и среднее в единицу времени число хлопков
оболочки.
§ 240. Применение уравнения Фоккера — Планка — Колмогорова
для описания случайных нелинейных колебаний
оболочки
Обратимся к исследованию задачи о нелинейных колебаниях и
прощелкивании оболочек при действии случайных нагрузок. В
качестве примера рассмотрим поведение панелей обшивки летательных
аппаратов, подверженных акустическому давлению вблизи реактивных
и особенно ракетных двигателей. Как указывалось в § 213, панели
обшивки испытывают вибрацию, ускоряющую их усталостное
разрушение. Наиболее опасными в отношении развития усталостных
трещин являются циклы колебаний, сопровождающиеся хлопками (про-
щелкиваниями) оболочки, представляющими собой резкие переходы
системы от одного равновесного состояния к другому.
В ряде исследований установлено, что акустическое излучение
двигателей характеризуется почти постоянной спектральной
плотностью в широком диапазоне частот [26.10], [26.17], [26.22]. Эта
*) Эти задачи рассмотрены В. М. Гончаренко [26.5].
**) См. работы М. Ф. Диментберга [26.6].
§240] ПРИМЕНЕНИЕ УР-НИЯ ФОККЕРА - ПЛАНКА - КОЛМОГОРОВА 907
особенность позволяет аппроксимировать подобного типа акустическое
давление белым шумом и использовать аппарат теории марковских
процессов для исследования статистических закономерностей
акустических колебаний оболочек. Аппроксимация акустического давления
белым шумом позволяет получить точное решение уравнения Фок-
кера—Планка—Колмогорова и на этой основе получить важные
вероятностные характеристики поведения оболочки. Представление
акустического давления белым шумом использовалось в ряде работ
[26.14], [26.16], [26.21].
Исследуем поведение пологой цилиндрической круговой панели
со сторонами а, Ь, шарнирпо закрепленной по краям, при условии,
что точки краев панели свободно смещаются в плане*). Считается,
что оболочка имеет заданные начальные неправильности в форме
срединной поверхности. Примем, что к криволинейным краям панели
приложены равномерно распределенные по ширине сжимающие
усилия р, постоянные во времени, и что оболочка совершает
нелинейные колебания под действием случайного акустического давления g(t).
Уравнение B1.48), описывающее движение .панели, представленной
в первом приближении в виде системы с одной степенью свободы,
запишем следующим образом:
-з- ■+ 2е -1 t со2( 1 - 4) (а?- р? + *£3) - ^ 4 = <?* (*)• B6.36)
dtl dt \ pBJ ^ Рв
Здесь, в отличие от уравнения B1.48), под q*(t) понимается
случайный процесс. В случае, если акустические колебания панели
совершаются под действием равномерно распределенного нормального
давления q((), правая часть уравнения C6) определяется по аналогии
с формулой B1.55) выражением
Остальные величины, фигурирующие в C6), определяются
формулами B1.49)—B1.54).
Рассмотрим стационарные колебания оболочки при возмущающем
процессе q*{t), представляющем собой белый шум с нулевым средним
значением и спектральной плотностью, равной S0. Тогда будет
Mq* — 0. Далее по A4) находим
k (*, — h) = M [q* (/,) q* (t2) ] = 2я50б (f, - t2). B6.38)
В качестве первой задачи поставим перед собой целью определить
законы распределения координаты (прогиба в центре панели) и
скорости £ = rf£/rf£. Для этого составим уравнение ФПК типа B8а).
*) Эта задача исследовалась И. Г. Кильдибековым и автором [26.3].
908
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
[ГЛ. XXVI
Эволюция состояний оболочки представляется здесь в виде
двумерного марковского процесса. Таким образом, в уравнении B8а) будет
xl = t, x2 = C- Найдем коэффициенты Аь Btj этого уравнения.
Пользуясь определением по B9а), получим для рассматриваемого
двумерного случайного процесса, с учетом C6),
Л,=£, А2=--2е£-
Р*
1 —*V (aC-p^-f Cf)+ty0 ^ -
2 P"
B\i = B\2 — &2[ = °> #:
B6.39)
22"
:2я50.
Вычисляя значения C9), мы принимаем во внимание, что Mq* = 0 и
что корреляционная функция белого шума находится по C8)*).
Теперь запишем уравнение ФПК для совместной плотности
вероятности координаты £ и скорости £:
~(А/)-
4-(л2л+-
д2
д2
(В1ХЛ+
vlT(BiJ)-h~f;(822f)
= 0. B6.40)
Подставляя сюда значения коэффициентов по C9), получим
-£&>- f {[—2е£ —<Dg(l—4) (aS-pS2+riC3)+C044] /} +
+ nS04f = 0. B6.41)
Это уравнение представим в следующей форме:
о1A-Ку«1~№ + чЩ-^
р
'о ~~*
Рв
f . nS0 df] .
+{-i+2-k)(t/+Jti)=°- B6-4,а)
Потребуем, чтобы совместная плотность вероятности /(£, £)
удовлетворяла двум уравнениям, получающимся в результате приравнивания
пулю соответствующих частей D1а):
л5„ df
Отсюда получаем **)
/ +
2е rf£
f«, £) = /£)/(£).
:0, B6.42)
B6.43)
B6.44)
*) См. статью Кофи [26.11].
**) Это решение можно проверить путем непосредственной подстановки
D4) — D6) в уравнение D1).
240]
ПРИМЕНЕНИЕ УР-НИЯ ФОККЕРА - ПЛАНКА — КОЛМОГОРОВА
909
где плотность вероятности координаты будет
1
/(С) = -£-ехр
1
а закон распределения скорости
/<0 = -ir«
Iti4^)+i7,v
* 9
Vo
В D5) и D6) через S* обозначена величина
B6.45)
B6.46)
B6.47)
Можно показать, что безразмерная величина S0 равна удвоенному
значению среднего квадрата безразмерной стрелы прогиба линейной
идеальной системы при отсутствии сжимающих усилий. При задан-
ных е и (Од параметр S0 характеризует уровень возмущающей
случайной нагрузки. Постоянные С и С определяются из условия
нормировки по B5.10). Значение С
будет
ОО
ч
S*
—Т 1
+—•—»■ ьоС
S0 Ръ .
dl.
Величина С равна
по £г
Г с* 2
С'= J e оС°° 4 =
— СО
B6.48)
со0 У л5*.
B6.49)
У
W
р
Ш
/ 4?
#/
p-/pl=0.278
S'-0,603
h-"]"-
4 £♦
Рис. 26.11. Плотность вероятности
динамического прогиба в центре панели при
сжимающем усилии, близком к нижнему
критическому значению.
Проведем анализ полученного закона распределения координаты £
для примера идеальной цилиндрической (^==0, а=1)
квадратной (А,= 1) панели с параметром кривизны & = 24 (рис. 26.11—26.14).
Верхняя критическая нагрузка для такой оболочки равна по
формуле B1.49) /?* =18. Зависимости построены для случаев, когда
значения параметра сжимающего усилия р* равны 5, б, 9 и 15 при
различных значениях величины 50 (таблица 26.1). Сжимающая
нагрузка р* = 5 выбрана вблизи нижнего критического значения,
которое определяется по формуле A3.178) и составляет для данной
910
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
панели />* = 4,6. Параметры р и г\ были вычислены по данным § 213.
Постоянная С определялась численным интегрированием по
формуле D8).
Как видим, распределение вероятности координаты в случае
оболочки, имеющей два устойчивых равновесных положения, обладает
f(S)
р,з
7 0,2
'",1
piH-o.333
s;*o,667
т
u\
...
2 С,г 3
Рис. 26.12, Закон распределения прогиба £ при несколько
измененном уровне сжимающих усилий вблизи нижнего
критического значения.
двумя максимумами, т. е. является двумодальным (см. стр. 868).
*Чаксимумы функции / (£) соответствуют значениям прогиба, при
которых равновесное положение системы устойчиво, минимум—•
значению прогиба, отвечающего
неустойчивому состоянию. При
р* = 5 — 0,278/?* наибольшая доля
f(C)
0,2
0,1
Р*/Р!-о,5
$2
LS
т
0,3
0,2
0,1
\PlPZ-
0,832
•4,2
0<г г
Рис. 26.13. Плотность вероятности прогиба Z,
при сжимающих усилиях, составляющих
половину верхнего критического значения.
Рис. 26.14. Закон распределения прогиба для
оболочки, сжатой усилиями, близкими к
верхнему критическому значению.
вероятности приходится на область значений прогиба в окрестности
основного устойчивого положения (рис. 26.11).
При незначительном изменении нагрузки вблизи нижнего
критического значения (р* — 6 = 0,333/7В) существенно меняется характер
кривой распределения (рис. 26.12); при этом увеличивается доля
вероятности интервала значений прогиба, соответствующих
окрестности прощелкнутого состояния оболочки. С увеличением сжимающей
5 241]
КОЛЕБАНИЯ СИСТЕМЫ С ПРОЩЕЛКИВАНИЕМ
911
нагрузки до значения, равного половине верхнего критического
(рис. 26.13), резко возрастает доля вероятности для той области
значений прогиба, которая соответствует окрестности второго
устойчивого положения равновесия. Наконец, при р* — 15 = 0,832/?*
(рис. 26.11) вероятность интервала значений прогиба в окрестности
основного равновесного состояния оболочки пренебрежимо мала.
Таблица 26.1
*
р
5
6
9
15
* *
• "/Рв
0,278
0,333
0,5
0,832
К
0,603
0,667
3,8
4,2
с-'
0,485
0,345
0.083
0,0145
м №\
2,37
5,63
16,9
31,7
ф1
0,867
0,6
0,029
0,0005
ф2
0,005
0,186
0,622
0,962
фз
0,128
0,214
0,349
0,0371
N/ao
27 • 10
42-Ю
85-10 3
17-Ю-3
В таблице 26.1 приведены также для каждого из рассматриваемых
случаев значения среднего квадрата прогиба в центре панели,
определяемые по формуле типа B5.14):
оо
М[&\= J С2/(£)<£■ B6.50)
— со
Значения этой величины определены численным интегрированием.
§ 241. Исследование вероятностных характеристик
колебаний системы с прощелкиванием. Приложение
формулы Раиса
Перейдем к исследованию другой характеристики динамической
прочности оболочки — закона распределения экстремумов прогиба.
При этом можно воспользоваться различными приемами. Один из них
требует знания совместной плотности вероятности для координаты,
скорости и ускорения [26.8] *). Другой возможный путь основан на
предположении, что исследуемый случайный колебательный процесс,
происходящий в результате воздействия белого шума на нелинейную
систему, является узкополосным **).
Рассмотрим первоначально узкополосный процесс колебаний
системы, имеющей единственное положение равновесия. Найдем
прежде всего выражение для плотности вероятности максимумов
координаты. Будем при этом пользоваться формулой Раиса C5).
*) Такой подход был использован в работах [26.6].
**) Этот путь к системе с единственным положением равновесия был
применен Лайоном (см. сноску на стр. 905), а к системе с
прощелкиванием — И. Г. Кильдибековым и автором [26.3J.
912
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
Определим, с одной стороны, среднее в единицу времени число
максимумов, лежащих выше заданного уровня £, которое равно среднему
в единицу времени числу v;' превышений этого уровня (пересечений
этого уровня снизу вверх) и может быть найдено по C5):
оо
v;+ = J/(C. i)Ul B6.51)
о
С другой стороны, найдем среднее число v* всевозможных
максимумов, равное числу v+ превышений процессом исходного уровня £j.
Исходя снова из C5), имеем:
V» = VC, = //«!■ bUt B6.52)
о
Отношение этих величин дает представление о том, какова
относительная частота п превышений процессом заданного уровня £:
V +
п = -~. B6.53)
Очевидно, п определяет вероятность Ф(£тах>!;) того, что максимум
координаты превысит уровень £:
Ф(Ь„,х>0 = я. B6.54)
Теперь мы можем найти вероятность Ф(£тах<£) того, что максимум
координаты будет ниже £. Но эта величина по определению B5.5)
представляет собой интегральную функцию распределения
максимумов /7(Стах)- Следовательно,
^(£max)=<I>(U*<D=l-4" B6-55)
V?
ы
Выражение для плотности вероятности максимумов примет вид
/(Cmax)=^f^=-^^. B6.56)
dt, v£ dZ,
Аналогичным путем получаем формулу для плотности вероятности
минимумов:
Таким образом, выражение для плотности вероятности экстремумов
в случае системы с единственным положением равновесия принимает вид
1 dvi 1 dvi ,„„,.„
V mlnj v,„ dc, v£ d£,
§ 241]
КОЛЕБАНИЯ СИСТЕМЫ С ПРОЩЕЛКИВЛНИЕМ
913
Обратимся теперь к исследованию узкополосного колебательного
процесса в случае, когда система — оболочка, склонная к прощелки-
ванию, — имеет три положения равновесия *) £1( £2, £з> причем
d < £г < Сз> так чт0 становятся возможными три вида колебаний:
около основного устойчивого
положения равновесия, определяемого
уровнем £j, около прощелкнутого
положения, имеющего уровень £2,
и с охватом обоих этих
положений. Очевидно, последний из этих
типов колебаний связан с хлопками
оболочки. Тогда среднее число v^
всевозможных максимумов будет
равно
v» = vc+.+vc+,-v£- <26-59>
Здесь величина v+ взята с минусом,
так как в циклах третьего типа
(с хлопками) один максимум связан
с пересечением обоих уровней
устойчивых положений (рис. 26.15), между
тем число прямых хлопков (прощел-
киваний панели з сторону центра
кривизны) равно v + . Возвращаясь
к формуле E8) и заменяя в ней v*m его значением по E9), находим
плотность вероятности экстремумов для системы с прощелкиванием:
Рис. 26.15. К определению среднего в
единицу времени числа экстремумов
динамического прогиба для системы с про.
щелкиванием.
/ ( Wnax
V tnln
1
+
dv+
*t+<-
di
B6.60)
Вычисляя /(£max)« мы должны учитывать лишь области £2 < £ < £2
и £>Сз. а при определении /($mi„) — области £ < ^ и £2 < £ < £3;
очевидно, в остальных областях соответствующие плотности / будут
равны нулю.
Приведем формулу F0) к другому виду. Заменяя числа v их
значениями по формуле Раиса, учитывая соотношение D3), после
простых преобразований получаем выражение для плотности вероятности
экстремумов через плотность вероятности координаты и ее значения
для уровней £i. £2 и £з:
/ fe) ~ + / (SO + / (Сз) - / (Ь)
df(Si
d£
B6.61)
*) Здесь понятие узкополосного процесса обобщается на систему,
имеющую два устойчивых положения равновесия.
58 А. С. Вольмир
914
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ [ГЛ. XXVI
Сюда надо ввести выражение для /(£) по D5), полученное нами
с помощью уравнения ФПК; тогда получим следующую
окончательную формулу *):
/ ( «max ]
V mill У
Ръ) Р„
B6.62)
Наконец, рассмотрим еще одну существенную характеристику
поведения оболочки — среднее число N прямых и обратных хлопков
в единицу времени **); как уже было сказано, оно соответствует
числу пересечений уровня £_>■ По формуле C5) получаем
N = 2v,i = 2 J /(£,. t)idl B6.63)
о
Представляя здесь функцию / в виде произведения по D3) и проводя
интегрирование, приходим к следующему выражению:
-=|/^/0;2). B6.64)
Для примера вновь обратимся к случаю идеальной цилиндрической
квадратной панели при k = 24. Результаты вычислений плотностей
вероятности экстремумов координаты по F2) для значений р*.
равных 5, 6, 9 и 15, представлены на диаграммах рис. 26.16—26.19;
сплошные линии относятся к максимумам, пунктирные — к минимумам.
Эти диаграммы дают наглядное вероятностное представление о
распределении колебательного процесса по циклам. Общая площадь,
заключенная под кривой распределения экстремумов, состоит из
четырех участков.- Площадь d^ характеризует вероятностный уровень
колебательных движений вокруг основного равновесного положения,
а Ф2 — вокруг прищелкнутого состояния. Под Ф3 понимается
вероятность экстремумов, соответствующих колебаниям с охватом двух
положений устойчивого равновесия, когда имеет место прощелкива-
ние. Очевидно, должно быть Ф, -|- Ф2-j— Ф3 = ^- В таблице 26.1
приведены значения Ф^ Ф2 и Ф3 для каждого из рассматриваемых
случаев.
Как видно из таблицы и рис. 26.16, при /7* = 0,278/?*
значительную вероятность Ф1 — 0,867 имеют экстремумы колебаний вокруг
основного положения равновесия. С увеличением продольной нагрузки
*) Формула типа F2) для идеальной системы была получена в [26.6]
с помощью первого из изложенных выше методов.
**) Эта величина впервые получена М. Ф. Диментбергом [26.6].
2/Q
s;t/(Ci)+/(C3)-/(^)i
«ми
КОЛЕБАНИЯ СИСТЕМЫ С ПРОЩЕЛК.ИВЛ1ШЕМ
915
до значения р* = 0,333/?* происходят существенные изменения в
поведении оболочки: заметно падает значение Ф[, а вероятность циклов
'max, win
Рис. 26.16. Плотности вероятности максимумов и минимумов
динамического прогиба в цеитре панели при уровне сжимающих
усилий, близком к нижнему критическому.
^тах, mik
Рис. 26.17. Законы распределения максимумов и минимумов
динамического прогиба при несколько измененном уровне сжимающих усилий
вблизи нижнего критического значения.
второго и третьего типа колебательных движений растет (рис. 26.17).
При р* = 0,5/?* вероятность Ф2 возрастает до 0,622, значительную
вероятность Ф3 = 0,349 составляют циклы третьего типа (табл. 26.1
58*
916
ПРИЛОЖЕНИЕ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
[ГЛ. XXVI
и рис. 26.18). При значении /?* = 0,832/7* имеет место почти
нулевая вероятность экстремумов колебаний вокруг исходного положения
'таг, miп
Рис. 26.18. Закон'распределения экстремумов прогиба при
сжимающих усилиях, составляющих половину верхнего
критического значения.
равновесия и весьма малая вероятность циклов с охватом двух
устойчивых положений равновесия (рис. 26.19); на долю колебаний вокруг
ПС
Т
'max, mln'
0,8
Юш)
«4
0,2
Ч
! V.
-г осг г и с,3 в ю
'max, mi'a
Рис. 26.19. Плотности вероятности максимумов и минимумов
динамического прогиба при сжимающих усилиях, близких к
верхней критической нагрузке.
прощелкнутого положения приходится средняя относительная частота
Ф2 = 0,962.
Определим среднее число хлопков по F4). По данным
вычислений, приведенным в таблице 26.1, возрастанию сжимающей нагрузки
§ 241] КОЛЕБАНИЯ СИСТЕМЫ С ПРОЩЕЛКИВАНИЕМ 917
до /?* = 0,5/?* соответствует увеличение частоты хлопков до
значения 7V/cu0 = 85 • 10-?; при /?* —0,832/?* среднее число хлопков в
единицу времени падает; как мы уже видели, при нагрузке, близкой
к верхней критической, в колебательном процессе значительную долю
составляют движения вокруг прощелкнутого положения.
В приведенном здесь решении моделью оболочки служил
осциллятор с одной степенью свободы, и колебания представлялись в виде
узкополосного процесса. В дальнейшем желательно рассмотреть задачу
в более общем виде. Важно получить статистические характеристики
для напряженного состояния в оболочке с последующим анализом
усталостной прочности конструкции.
ГЛАВА XXVII
ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
§ 242. Динамический критерий устойчивости
В предыдущих разделах книги был разобран ряд задач,
относящихся к выпучиванию стержней, пластинок и оболочек. Мы
познакомились с различными методами решения задач, в основе которых
лежали статический, энергетический или динамический критерии
устойчивости. В настоящей главе мы рассмотрим эти критерии
с более общей точки зрения, связывая их с теми подходами к
понятию устойчивости, которые приняты в аналитической механике и
нелинейной теории упругости.
Еще в § 1, вводя понятие устойчивости сжатого стержня, мы
как бы интуитивно воспользовались простой динамической моделью.
И здесь мы начнем с динамического критерия, применяя его прежде
всего к устойчивости в малом. При этом естественно обратиться
к тем понятиям устойчивости и неустойчивости механических систем
с конечным числом степеней свободы, которые были в свое время
введены Лагранжем *). Он говорил об устойчивом равновесии
«в том смысле, что если сначала система находилась в состоянии
равновесия, а затем была немного из него выведена, то она сама
собою стремится вернуться к этому состоянию, совершая около него
бесконечно малые колебания». Далее, при неустойчивом равновесии
«система, будучи однажды выведена из этого состояния, может
совершать колебания, которые не будут уже очень малыми и которые
могут все более и более отклонять систему от ее первоначального
состояния».
Строгое определение устойчивости равновесия, как частного случая
движения, было впервые дано А. М. Ляпуновым**). Допустим, что
положение системы определяется п обобщенными координатами qt
(/=1, 2 п), причем в равновесном состоянии будет д{ — 0
при тех же /.
*) Ж. Лагранж, Аналитическая механика, т. 1, Гостехиздат, 1950, стр. 97.
**) А. М. Ляпунов, Общая задача об устойчивости движения,
Гостехиздат, 1950, стр. 17—21. См. также Н. Г. Четаев, Устойчивость движения,
Гостехиздат, 1955.
§ 242] ДИНАМИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ 919
Примем, что в начальный момент £ = 0 абсолютные значения
координат и скоростей лежат в пределах
и; к л. \я°,\<ь
и что в любой последующий момент времени t > 0 мы сопоставляем
координаты qL(t) и скорости qt(t) с некоторой величиной е.
Устойчивое равновесное состояние характеризуется тем, что для любого
е>0 можно подобрать соответствующую величину 6(е)>0 такую,
при которой в течение всего периода времени £>0 величины \qt\
и |<7;| будут находиться в пределах
\4i К е. I ki I < е.
Иными словами, в случае устойчивого равновесия системы всегда
можно подобрать такие начальные условия, что обобщенные
координаты и скорости не будут выходить за некоторые наперед заданные
границы, лежащие в окрестности основного состояния. Если подойти
к этому определению с геометрической точки зрения, то нужно
представить себе некоторую трубку в Bга-f-1)-мерном пространстве.
Пусть величины qt и qt откладываются в воображаемом сечении
такой трубки, имеющем 2п измерений, а время t — вдоль ее оси.
Устойчивое равновесие характеризуется тем, что если подобрать
должным образом начальные значения q] и <?!, то величины q{ и qi
будут при любом t лежать внутри трубки с заданным сечением.
Л. М. Ляпуновым было введено также понятие
асимптотической устойчивости: этот вид устойчивости относится к случаю,
когда система при неограниченном возрастании t возвращается
к основному состоянию, т. е. qi(i), qi(t)->0, если ^->оо.
Предположим, далее, что механическая система при заданных
параметрах имеет не одно, а несколько устойчивых равновесных
состояний: ряд подобных примеров мы встречали выше. Тогда
приведенное здесь определение устойчивости в малом должно быть
отнесено к окрестности каждого из этих равновесных состояний.
Приведенные выше критерии устойчивости и неустойчивости можно
обобщить на деформируемую конструкцию, являющуюся системой
с бесконечно большим числом степеней свободы. Круг величин,
характеризующих поведение такой системы во времени, расширяется:
здесь могут быть введены, наряду с перемещениями точек системы
и скоростями, такие величины, как компоненты дополнительных
деформаций и напряжений/ Выходя из рамок собственно механики,
мы можем рассматривать также изменение температуры в различных
точках системы и т. д.
Величины, которые выбираются в той или иной задаче для
описания поведения конструкции, будем в дальнейшем (для краткости) -
называть характеристиками.
920 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ (ГЛ. XXVII
§ 243. Статический критерий устойчивости.
Исследование смежных равновесных форм
для трехмерной задачи
Перейдем к статическому критерию, которым мы
неоднократно пользовались при исследовании устойчивости в малом.
Допустим, что нагрузка, воспринимаемая конструкцией, пропорциональна
некоторому параметру и что малым значениям параметра
соответствует единственное в рассматриваемом диапазоне характеристик
устойчивое состояние системы. Будем увеличивать параметр
нагрузки, исследуя при этом состояния конструкции, близкие
к основному. То значение параметра, при котором хотя бы одно
из смежных состояний конструкции впервые становится
равновесным, мы называем критическим значением. При нагрузке,
превышающей критическую величину, основное состояние, как
правило, перестает быть устойчивым *).
Мы занимались исследованием окрестности основного равновесного
состояния во многих частных задачах, когда оно являлось
одноосным (стержень) или двухосным (пластинка, оболочка); в
практических приложениях именно эти задачи являются существенными,
Но для того, чтобы установить общие черты в постановке различных
задач, рассмотрим случай трехосного напряженного состояния **).
Отнесем деформированное и напряженное состояние упругого
тела к декартовой системе координат. Обозначим, как и прежде,
через и, v, w перемещения точек тела вдоль осей х, у, z, через гх, yxv
и т. д.—деформации удлинения и сдвига, через ах, хху и т. д.—
нормальные и касательные напряжения. В дальнейшем
составляющие деформаций и напряжений, соответствующие основному
состоянию, будем обозначать е°, у° , а", х° и т. д. При возрастании пара-
JC ^У ^ •'"У
метра нагрузки величины е°, а°х, ... изменяются в каждой точке
тела монотонно. Постановка и решение задач значительно облегчаются
в случае простого нагружения, когда главные деформации и
напряжения в любой точке сохраняют свое направление, или, иными
словами, когда все составляющие деформаций и напряжений изменяются
пропорционально одному и тому же параметру нагрузки. Это
требование выполняется, например, для оболочек, если основное
состояние является безмоментным. Однако нам встречались и случаи
сложного нагружения ***), когда направление главных деформаций и
напряжений для тех или иных точек в процессе нагружения меняется
(моментное основное состояние для оболочек).
*) Для некоторых механических систем возможны и исключения, см.
А. Ю. Ишлинский, С. И. Малашенко, М. Е. Темченко, Изв. АН СССР,
ОТН, № 8 A958), 53—61.
**) В дальнейшем изложении мы следуем В. В. Новожилову [27.8].
***) Термины «простое нагружение» и «сложное нагружение» часто
применяются в литературе по теории пластичности.
922 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVtt
где /, т, п— косинусы углов, составляемых нормалью к данной
площадке поверхности с осями х, у, z.
Из известной теоремы Кирхгофа следует, что при заданных
граничных условиях решение линейных статических уравнений
теории упругости является единственным *). Следовательно,
возможность определения соседнего равновесного состояния с помощью
обычных линейных уравнений исключена. Если обратиться к примеру
пластинки, испытывающей усилия в своей плоскости, то в этом случае
невозможно исследовать устойчивость пластинки, используя линейные
уравнения плоской задачи и
соответствующие граничные условия.
Особенность задач устойчивости в
малом состоит в том, что при
исследовании соседнего равновесного состояния
необходимо принять во внимание
изменение ориентации граней элемента тела,
в то время как при составлении обычных
уравнений классической теории упругости
типа B) это изменение не учитывается.
Иными словами, в задачах устойчивости
должны быть введены в рассмотрение пово-
Рис. 27.1. к определению по- роты элемента вокруг координатных осей,
ворота элемента вокруг оси г. Рассмотрим переход от основного
состояния тела к соседнему. Обозначим
дополнительные перемещения любой точки тела, возникающие при таком
переходе, через и', г/, w' и соответственно дополнительные дефор-
т. д. Для деформаций выпишем
мации и напряжения через е ,
выражения типа A):
, ди' i dv'
х дх ' у ду~'
, ди' dv' ,
'ху dy ' дх ' 'У ~
г' —
г
dv'
~~dz
ог и
dw'
dz '
dw'
0\'
r dw' . ди'
'•"■ (jX "l- (jz
!
B7.6)
Поставим перед собой цель охарактеризовать повороты элемента
вокруг координатных осей. На рис. 27.1 представлена грань
элемента тела, перпендикулярная к оси z. Поворот орта оси х в
плоскости ху равен dv'/dx, а поворот орта оси у в той же плоскости
равен ди'/ду, причем он будет положительным, если происходит
в сторону положительных и', т. е. в направлении, обратном первому
повороту. Под поворотом о/ грани ху вокруг оси z будем понимать
полусумму величин dv'/dx и —du'jdy, определяющую как бы «среднее»
значение поворотов вокруг z различных прямых, проходящих через
точку О и лежащих на грани ху. Аналогичные рассуждения приводят
*) См, например, А. Ляв, Математическая теории упругости, ОНТИ,
1935, стр. 181.
§ 243]
. СТАТИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ
923
к следующим формулам для поворотов элемента вокруг осей х, у, г:
, 1 Idw' dv"
&
(I\'^T
2 \ ду
1 ( ди'
дг
dw'
G>'
dz
dv'
dx
dx
du'
dy
И
B7.7)
Будем считать, что деформации удлинения и сдвига по F),
происходящие в плоскости каждой грани, малы по сравнению со «средними»
поворотами грани с/, о/, о/ и, в свою очередь, эти последние
величины малы по отношению к 1. Но тогда при определении нового
положения ортов координатных осей следует рассматривать, например,
грань элемента ху как жесткий диск, поворачивающийся вокруг
оси z на угол, равный а'г. Это дает возможность выписать таблицу
приближенных значений косинусов углов, которые составят
повернутые орты /', j', k' осей х, у, z с их
первоначальными направлениями (рис. 27.2).
X
У
г
V
1
i
-»;
/
1
Г
k'
»;
~wx
1
Рис. 27.2. Повороты ортов
координатных осей.
Выпишем теперь уравнения равновесия элемента тела в соседнем
состоянии, учитывая основные напряжения после поворота,
дополнительные напряжения и массовые силы. Считая дополнительные
напряжения малыми по сравнению с основными, поворота их
учитывать не будем.
Уравнение типа A) в проекциях на ось х будет иметь вид*)
Здесь приращения усилий в площадках с нормалями /', /', k'
последовательно проектируются на ось х с учетом первой строчки таблицы
*) Уравнения такого типа были составлены в работе Бицено и Геики
[27.9].
924 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVII
косинусов. Вычитая B) из (8), получим окончательно:
+^(^-ЗДн-°>У)=о. <27-9)
По аналогии выпишем два других уравнения
_д_
ду
■kVo +-°Х-^о+£ft+*>;- \Л)+
+-|-к-'г>;+<уЧ)=о. B7.П)
Эти уравнения можно представить в несколько ином виде. Так
как мы условились пренебрегать деформациями по сравнению с
поворотами, то при вычислении &'х, и', со^ положим
, да' . dv' ^ „ , dv' . да;' „ , day7 . <Эи' ~
Угу— йу "^ их ~ ' УУ~ дг ^ ду ' Y^— дх "Г-'йГ^"-
B7.12)
Далее, по G) находим:
, ^ dw' dv' , ^ да' dw' , dv' да'
ах ~ ~ду " ~дг~' ау ~ ~дг " дх ' 0)-* ~ ~дх~ d~f'
B7.13)
Если обратиться для примера к уравнению A1), то, пользуясь A3).
ему можно придать вид
д I , , о dw' , о dw' \ )_д_( г _|_ • dw' . о dw' \ .
Йлг1^-г°дг ox "]~Х*)> ду )' ду IV +V <9х ~|_ау)Г;'+"
+ djl<+T«-aF + ^-^r) = 0- B7Л4>
В уравнениях типа (9) или A4) напряжения можно по-прежнему
выразить через деформации по формулам
< = Tf^+T^r0'V ^=2oW-HT-*-- B7Л5)
где 0' = е',-f-e' 4-е' а затем деформации и повороты — через пере-
мещения по F) и G). Тогда получим три однородных уравнения
относительно и', v', w'.
Обратимся к граничным условиям для соседнего состояния тела.
Допустим здесь, что при переходе от основного состояния к
смежному внешняя нагрузка остается неизменной по величине и
направлению. Тогда для нового положения будет
(°; - Vе* + T>i + ахI + «у - аК-+-т>у+ту-) т+
+(*«-v<+°>;+ o=/v B7л6>
§ 243]
статический критерии устойчивости
925
Вычитая первое равенство E) из A6), получим:
« ~ Vе* ■+ r>>)l +0** - аК+v°D т +
+(*«-v»;+°>;)»=0- B7.17)
Другие два условия можно записать по аналогии.
Таким образом, задача сводится к исследованию системы
однородных уравнений, содержащих перемещения и', v', w' (либо
уравнений, эквивалентных им), причем основные напряжения а°, т° , ...
в A7) считаются заданными функциями координат. Если основные
напряжения пропорциональны некоторому параметру л, то, находя
величины л, при которых эти уравнения имеют нетривиальное
решение, получим так называемые собственные значения задачи об
устойчивости в малом; они соответствуют точкам разветвления
(бифуркации) равновесных форм (при рассмотрении задачи в
линейной постановке). Как правило, в упругих системах каждому
собственному значению задачи соответствует одна собственная форма, т. е.
одна определенная форма потери устойчивости. Можно, однако,
представить себе, что в некоторых случаях (например, для пластинок
или оболочек) тому или иному собственному значению будут
отвечать две, три и т. д. формы потери устойчивости (различные
выпученные состояния); тогда мы получим собственные значения второй,
третьей и т. д. кратности. Если сопоставить последовательные
собственные значения задачи об устойчивости системы, то окажется, что
наименьшее из них имеет непосредственный практический смысл, так
как соответствует потере устойчивости основного состояния; это
значение и определяет первую эйлерову критическую нагрузку или, по
принятой нами терминологии, верхнюю критическую нагрузку. Что
касается следующих точек бифуркации, то к ним сходятся лишь
неустойчивые ветви, и отвечающие всем этим ветвям равновесные
состояния не реализуются.
Сопоставим полученные нами уравнения с теми, которыми мы
пользовались для пластинок. Возьмем, например, уравнение A4).
Считая а°, о° и т° не зависящими от координат и, кроме того,
принимая т°^ = т° =0 и о^ = 0, получим
Кг К* • *»' • dV • dV _
~дх~ + ~dy 1~ ах ~д^~ + 2хх» -дУду + ау -оуГ = °-
После интегрирования по толщине пластинки легко получить те
уравнения, которые лежали в основе решения линейных задач
устойчивости. Для того чтобы получить аналогичные зависимости теории
устойчивости оболочек, следует выразить основные зависимости
в криволинейных координатах [см. § 136].
Сравним между собой уравнения равновесия типа B),
относящиеся к основному состоянию, и уравнения A4), соответствующие
926 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
переходу от основного состояния к смежному. И те и другие
уравнения являются линейными, но они имеют различный смысл.
Уравнения второго типа надо рассматривать как уравнения, полученные
линеаризацией некоторых нелинейных зависимостей, описывающих
большие перемещения системы (см. § 246), так как эти уравнения
второго типа выведены с учетом поворота элемента тела. Поэтому
можно сказать, что в конечном счете каждая задача устойчивости
является нелинейной. Возникает вопрос: являются ли точки
бифуркации, найденные с помощью линеаризованных уравнений, теми же,
как если бы они были получены исходя из нелинейных зависимостей?
Этот вопрос был рассмотрен с помощью методов функционального
анализа *). Оказалось, что для практически важных случаев, когда
критическим значениям параметра X отвечает лишь одна определенная
форма выпучивания (или, вообще говоря, нечетное число таких форм,
т. е. когда собственные значения имеют нечетную кратность), все
собственные значения линеаризованных уравнений являются точками
бифуркации нелинейной задачи. Между тем, если собственные
значения имеют четную кратность, такое совпадение может не иметь места.
§ 244. Энергетический критерий устойчивости.
Теорема Лагранжа — Дирихле
Обратимся к энергетическому критерию устойчивости в малом.
Этот критерий в применении к консервативной системе с конечным
числом степеней свободы основывается на известной теореме
Лагранжа— Дирихле**), которая формулируется следующим образом:
Если в некотором (основном) состоянии консервативной
системы потенциальная энергия минимальна по отношению к
значениям энергии для всех смежных (отклоненных) состояний
системы, то основное положение является положением
устойчивого равновесия. Для доказательства примем, что в основном
положении обобщенные координаты qx, q2 qn равны нулю;
потенциальную энергию Э для этого положения также примем равной нулю.
Для смежных положений системы при | qt | < е и |<7/|<е и условии
Э@, О 0) = min = 0 будет Э>0. Но тогда суммарная
энергия Е, состоящая из кинетической Т и потенциальной Э, будет для
этих положений Е = Т -\-Э > 0, так как всегда Т > 0. Отметим
значения Е для различных состояний на границе области г и
установим наименьшее из этих значений Е*. Примем, что величина Е ме-
"■) См. М. А. Красносельский, Топологические методы в теории
нелинейных интегральных уравнений, Гостехиздат, 1956; И. И. Ворович, ДАН СССР,
122, № 1 A958).
**) Эта теорема была формулирована впервые Ж. Лагранжем (см. его
«Аналитическую механику», т. 1, 1950, стр. 97); доказательство принадлежит
П. Г. Лежен-Дирихле (см. ту же книгу Лагранжа, стр. 537). Здесь мы
следуем Ф. Р. Гантмахеру, см. его «Лекции по аналитической механике», 1960.
ЭНЕРГЕТИЧЕСКИЙ КРИТЕРИИ УСТОЙЧИВОСТИ
927
няется внутри области е непрерывно; при этом можно найти такую
более узкую область 6 внутри е, для которой будет | qt | < 6, | qt | < 6,
а энергия окажется Е < Е*. Выберем координаты qt и скорости qlt
удовлетворяющие этому условию, в качестве начальных, тогда и
начальная энергия Е° (при £ — 0) будет £°<£*. Но так как для
консервативной системы полная энергия остается постоянной, то и во
все последующее время энергия системы будет £ = £0 < £*. При
этом система окажется устойчивой, так как при любом t > 0
координаты и скорости не будут выходить за пределы е.
Судя по приведенному доказательству, теорема Лагранжа —
Дирихле может быть распространена на системы, па которые действуют,
в дополнение к потенциальным силам, также диссипативные силы:
для таких систем Е < Е° < Е*. т. е. движение будет сопровождаться
рассеянием энергии.
А. М. Ляпунов дал для двух важных случаев обращение
теоремы Лагранжа — Дирихле. В одном случае рассматривается
некоторое (основное) равновесное положение системы, в котором
потенциальная энергия является максимальной по отношению к энергии
смежных положений, причем этот максимум отвечает членам
наинизшего порядка (не обязательно второго) в разложении потенциальной
энергии по координатам qt; в этом случае основное положение
является неустойчивым. В другой теореме речь идет о случае, когда
известно лишь, что энергия в основном равновесном положении не
является минимальной; такое положение будет неустойчиво, если
отсутствие минимума определяется членами второго порядка в
разложении потенциальной энергии.
Все приведенные теоремы относились к системам с конечным
числом степеней свободы. Обобщение их на случай системы с
бесконечно большим числом степеней свободы было предметом ряда
исследований *) и не является еще завершенным. Но, как было уже
сказано, при решении многих задач упругая конструкция
рассматривается как система с конечным числом степеней свободы, и тогда
основные теоремы могут быть непосредственно приложены.
Одно из возникших здесь затруднений — возможность
концентрации энергии в некоторых малых объемах упругого тела **).
Тогда, по-видимому, мы не должны требовать, чтобы критерий
устойчивости по Ляпунову был выдержан в каждой малой области тела;
но все же его можно применить по отношению к некоторым средним
значениям перемещений и скоростей. При этом уместно
воспользоваться терминами функционального анализа. Обозначим через и вектор
перемещения точки тела по отношению к некоторому равновесному
*) См., например, А. А. Мовчан, Прикл. мат. и мех. 24A960), 988—1001.
**) Например, при распространении «смыкающейся» волны деформации
в двух- или трехмерном упругом теле; см. статью Шилда и Грина (R. Shield,
A. Green, Arch. Rat. Mech. Anal. 12, 1963, 354-360).
928 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVII
положению, а через v—вектор скорости. Введен понятия норм
поля перемещений и скоростей для некоторого объема V:
\uf—\u-udV, [v)=(v-v
dV.
Аналогичным образом можно определить нормы ||и01| и \ч)й\ для
начальных перемещений и скоростей. Критерий Ляпунова «6 — е»
может быть тогда сформулирован по отношению к нормам
перемещений и скоростей *).
Теоремы Лагранжа — Дирихле и Ляпунова указывают путь для
отыскания критической нагрузки. Рассматривая малые отклонения
системы от основного состояния, представим приращение полной
потенциальной энергии в виде
ДЭ = 6Э т-^о2Э;
в линейных задачах следующие члены разложения будут
отсутствовать, так как энергия является квадратичной формой обобщенных
координат. Для любого равновесного состояния ЬЭ — 0; поэтому
о характере равновесия надо судить по знаку второй вариации.
Равновесие будет устойчивым при 62Э > 0 и неустойчивым при 62Э < 0.
Но первая верхняя критическая нагрузка соответствует переходу от
устойчивых равновесных положений к неустойчивым, следовательно,
для этого значения нагрузки должно быть 62Э = 0. Если система
имеет п степеней свободы и отклонения от основного состояния
определяются с помощью обобщенных координат <7,, q2, .... q,„ то
вторую вариацию можно представить в виде
62Э = ™bq>-\-*£.t>q\ -Н . . . -Ь 2 -J^i-bqfa + ...
dq\ dqz2 - dqx0q2
Условие 623 = 0 эквивалентно здесь следующему уравнению, содер-
■•кащему коэффициенты приведенного ряда **):
д2Э <Э2.9
dq\ dq] dq2
д2Э д2Э
dq.,dql dqf2
= 0.
B7.18)
Корни этого уравнения определяют все критические нагрузки и, в том
числе, наименьшую из них.
*) См. статьи В. Койтера (W. Koiter, Ргос. Коп. Ned. Akad. We-
tensch. 66, № 4, 1963, [73—177; 68, № 4, 1965, 178—202).
**) См. Н. Г. Четаев, Устойчивость движения, Гостехн^ат, [955, стр. 52
§ 245]
УСЛОВИЯ ПРОЩЕЛКИВЛНИЯ СИСТЕМЫ
929
Мы не различали здесь «классических» задач устойчивости, в
которых докритпческое пагружепие является простым, а верхняя
критическая нагрузка—точкой бифуркации, и задач со сложным
нагруженном, когда критическая нагрузка представляет собой предельную
точку. В обоих случаях ветвь устойчивых решений сопрягается в
первой критической точке с ветвью неустойчивых решений. Вопрос о том,
к какой ветви относится сама критическая точка, остается при этом
неясным; он может быть рассмотрен лишь при решении нелинейной
задачи с учетом высших членов разложения ЛЭ (см. § 247).
Ряд примеров применения энергетического критерия был приведен
в разделах, относящихся к стержням и пластинкам.
§ 245. Условия прощелкивания системы.
Графики на фазовой плоскости
Обратимся теперь к общей характеристике условий
прощелкивания системы к новым положениям равновесия. Динамический пед-
ход к подобной задаче состоит в исследовании нелинейных
колебаний системы вокруг ее возможных равновесных состояний.
Особый интерес представляет здесь случай, когда конструкция
может быть приведена к консервативной системе с одной степенью
Рис. 27.3. Графики на фазовой плоскости.
свободы. Тогда характер равновесия определяется с помощью
графиков на так называемой фазовой плоскости *). Эти графики
выражают зависимость между обобщенной координатой £ и обобщенной
скоростью £, вытекающую из закона сохранения энергии Е = Т -\-
-\-Э = const, при условии неизменности уровня нагрузки. Под £ здесь
понимается полный запас энергии, полученный системой в начальный
момент времени. На рис. 27.3, а показан график £(£) для случая,
когда нагрузка не достигает нижнего критического значения. Система
имеет здесь единственное устойчивое равновесное положение,
отвечающее точке А. Эта особая точка носит название центра; она
окружена замкнутыми непересекающимися линиями (фазовыми
траекториями), каждая из которых соответствует определенному запасу
*) См., например, И. М. Бабакои, Теория колебаний, 2-е изд., «Наука»,
стр. 410 и ел.
930 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVII
энергии Е. Вверху на том же рисунке изображена зависимость 3(£).
Как видим, центру А соответствует минимальное значение Э.
Следующий график, рис. 27.3, б, содержит фазовые траектории
для случая, когда нагрузка превышает нижнее критическое значение.
Здесь имеются два центра А и С, между. которыми лежит другая
особая точка В, называемая седлом; оно отвечает неустойчивому
равновесному состоянию. В зависимости от того, какие начальные
значения £о и to приданы системе, мы получим колебания вокруг
одного из устойчивых положений либо колебания, охватывающие оба
эти положения. Как видно из верхнего графика, седлу соответствует
максимальное значение Э.
Наконец, график рис. 27.3, в, отвечает случаю, когда нагрузка
в точности равна нижней критической величине. В точке D один из
центров совмещается с седлом. На графике энергии положению D
соответствует точка перегиба с горизонтальной касательной.
Примеры фазовых траекторий для оболочек, рассматриваемых
как системы с одной степенью свободы, были даны Э. И. Григолю-
ком *) и автором [0.3, стр. 294]. Выше, в главе XXI, был приведен
также пример, относящийся к цилиндрической панели-, когда
колебания охватывали различные устойчивые равновесные состояния; при
этом панель была представлена как система с несколькими степенями
свободы.
§ 246. Трехмерная нелинейная задача
В предыдущих главах были приведены нелинейные уравнения,
описывающие равновесные состояния пластинок и оболочек при
больших перемещениях. Познакомимся теперь со структурой таких
уравнений для общего случая трехмерной задачи**). Мы не будем
приводить здесь общих соотношений нелинейной теории упругости,
а сразу же введем те допущения, которые уместны при исследовании
устойчивости гибкой конструкции. Они заключаются в том, что
составляющими деформаций можно пренебрегать, если они входят в
уравнения наряду с поворотами, и что как деформации, так и повороты
являются малыми по сравнению с 1.
В дальнейшем откажемся от раздельного рассмотрения
деформации тела в основном состоянии и при переходе к новому состоянию,
как это было принято в § 243, и будем считать недеформированпое
положение тела исходным.
Обозначим через и, v, w перемещения точек тела вдоль осей
декартовой системы координат х, у, г. Деформации удлинения
*) См. Изв. АН ССРР, ОТН, № 3 A955), 35—68.
**) Этот вопрос исследовался В. В. Новожиловым [27.8], В. В. Болоти-
ным [27.1] и другими. Обзор литературы по общим соотношениям
нелинейной теории упругости дан К. 3. Галимовым [27.4]. Дальнейшее изложение
построено в основном по книге В. В. Новожилова [27.8].
pitf) ТРЕХМЕРНАЯ НЕЛИНЕЙНАЯ ЗАДАЧА
Оказываются равными *)
931
ди
e* = 7uT +
1 [7<Эи\2
dx ~т 2 |Д дх ) + [ дх
ow
~Ъ~г~
+т[(£)'+(£№Л-
dv 1 Г/йи \2 . /й«\2 . /йа»\21 .
B7.19)
деформации сдвига равны
ди dv ди ди
ду ' дх ' дх ду
ии . uv . сш ии , с/с i/i/ . uw сге/
'-«'У r")v "Т" А у ~Т~ ,-)„ ^ г" л, "ЛТГ "Г "^Г л,, '
dv dv
дх ду
dw dw
дх ду
iyz
dv , dw . ди du . dv dv , dw dw
dz ~r~ dy ' dy ~~dz~ ' ~dy~ dz ' dy dz
dw , du . d« d« . du (jf . day day
"** dx "•"" <9г ' dz дх ~*~ dz dx ' d2 dx
B7.20)
Если считать перемещения и, v малыми по сравнению стой
пренебречь в A9) и B0) нелинейными членами, содержащими и и г»,
то получим формулы для е^., гу, \ху> которые были выведены
в главе IX для гибких пластинок.
Воспользуемся приближенными зависимостями типа A3):
du dw dv du
dw
dv
IF
:co„
dz
dx
'■(Uv
dx
dy
co„ B7.21)
и обозначим линейные составляющие е^, уху и т. д. через гх л,
Yjry,д' • • •• пренебрегая квадратами этих величин по сравнению с
квадратами поворотов, получим:
е* = е*,л+2-К + С0'> Y,y = Y,y,,
-оуоу,
еУ=\ л+т К+«£)■ V = v л - ил
ег = Чл+2-К+соу)' ?« = ?*
и/°*-
B7.22)
Уравнения равновесия элемента тела составим, пользуясь
прежними допущениями об относительной величине деформаций и пово-
этов. Тогда косинусы углов, составляемых ортами повернутых осей
юрдинат с неподвижными осями х, у, z, определяются той же
аблицей, что и на стр. 923, но с заменой со^. на юА и т. д.
Рассуждая так же, как в § 243, получим уравнения равновесия в виде
*) См. указанную в § 243 книгу П. Ф. Папковича, стр. 69.
59»
932 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
(массовые силы по-прежнему не учитываем)
-г- (Ох — X_гу1йг + Т«<л>у) -4- _ (ivх - 0у(л)г -у Ту/0у) -+-
•^7 (Тху +- Ox«Z - Txzwx) -
rtv
■<о.
— тгуох, + огму) — О,
огмх) = О,
-^ (Луг т "С.гг0)г
— (Т,г
- av(ov -+- Tx),mv) + -г- (х.,г - тул-му т ovo>J-f
+ 77^ (°г - тг..(|)у + TZyw.v) = 0.
B7.23)
Рассмотрим вновь в качестве примера гибкую пластинку. Примем
повороти в плоскости пластинки пренебрежимо малыми (к»г = 0) и
не будем учитывать в первых двух уравнениях члены, зависящие от
касательных напряжений тхг, туг. Если, кроме того, принять
соотношения B1), то система B3) получит вид
От,
(hyz
дох
~дх~
- а..-
dxv
dv
0,
0rxv
да.,
дх
д2-л<
+ 2хх
d2w
ду
d2w
■=0,
= 0;
эти уравнения и лежат в основе нелинейной теории пластинок (см.
главу IX).
Граничные условия в общем случае сохраняют ту же форму, что
и в § 243; первое из условий составляется по A6):
(ох - ххуаг ■+ т„оу) I -+- (тух — ауаг + тугюу)m ■+
-+ (Ьх — тгу»г 4 ог0у) п = рх, B7.24)
где рх— составляющая внешней нагрузки; принимаем, что внешние
силы не меняют своей величины и направления.
Выпишем соотношения между напряжениями и деформациями по
типу A5):
+ !
+ ц) 1ху
Если подставить в B3) значения ох, т ... по B5) и
воспользоваться зависимостями A9)—B0), то придем к уравнениям
относительно перемещений и, v, w. В отличие от уравнений, составленных
в § 243, они будут уже нелинейными, и это объясняется
структурой формул A9) — B0) или B2) для составляющих деформаций. Таким
образом, нелинейность здесь имеет геометрический смысл и вызвана
ТРЕХМЕРНАЯ НЕЛИНЕЙНАЯ ЗАДАЧА
933
-тем, что перемещения считаются не малыми, а конечными. Если
необходимо учесть еще и физическую нелинейность, то
соотношения B5) надо заменить на соответствующие зависимости, относящиеся
к рассматриваемой системе. Во всех предыдущих выкладках мы
считали деформации и повороты малыми по сравнению с 1; в
противном случае нам пришлось бы учесть не только изменение ориентации
граней элемента, по и изменение площади граней; кроме того,
таблица косинусов, приведенная на стр. 923, получила бы иной вид
(см. [27.8]).
Система уравнений относительно и, v, w может быть заменена
эквивалентной системой, содержащей, например, одно из
перемещений и, кроме того, функцию напряжений, как это было сделано при
рассмотрении гибкой пластинки; но тогда должны быть выписаны
зависимости, вытекающие из A9) и B0) и выражающие условие
совместности деформаций.
Решение окончательной системы уравнений определяет
зависимость между параметром нагрузки к и величинами, характеризующими
деформированное состояние тела. В ряде задач мы стремились
установить значение нижней критической нагрузки. Попытаемся дать
теперь более строгое определение этого понятия. Напомним сначала
тот ход рассуждения, который привел нас к понятию верхней
критической нагрузки. Мы рассматривали основное устойчивое
напряженное состояние. Далее, мы увеличивали параметр к и
определяли точку разветвления решений, считая, что в этой точке при
к = кв основное состояние перестает бить устойчивым.
Теперь подойдем к задаче с другой стороны. Примем, что при
достаточно большом значении к в заданной области характеристик
имеют место устойчивые вторичные равновесные состояния,
отличающиеся от основного (например, моментные состояния для оболочки,
в то время как основное состояние является безмоментным). Будем
уменьшать параметр к и следить за характером решений,
определяющих вторичные состояния. То значение параметра к,
при .котором вторичные состояния тела перестают быть
устойчивыми, назовем нижним критическим значением кп. Мы
допускаем вместе с тем, что при значениях к, меньших, чем кю могут
иметь место вторичные состояния (например, моментные состояния
для оболочки), по уже неустойчивые *). Если конструкция является
идеальной, т. е. полностью соответствует принятой модели, то при
нагрузке, отвечающей кп, и может произойти скачкообразный переход
конструкции от вторичного состояния к основному.
Из приведенных определений вытекает, что «первая» нижняя
критическая нагрузка не должна лежать выше «первой» верхней. В самом
деле, при к — кв в окрестности основного состояния появляются
*) Такие состояния найлены, например, для удлиненной цилиндрической
панели, подвергающейся поперечной нагрузке (см. [0.3], стр. 244).
§0 А. С. Вольмир
934 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
некоторые вторичные состояния, которые мы считаем устойчивыми.
Следовательно, должно иметь место соотношение*) ХН-^.ХВ.
В предыдущих главах мы понимали под нижней критической
нагрузкой такую нагрузку, при которой основная форма равновесия
перестает быть единственной. Для системы с одной степенью
свободы оба подхода приводят к одному и тому же результату. Но
в случае системы с двумя и более степенями свободы вместе с
возрастанием числа точек бифуркации (собственных значений
линеаризованной задачи) увеличивается и число нижних точек ветвей
диаграммы «нагрузка — характеристика деформации»**).
Из этих нижних точек практическое значение имеет лишь та,
которая соответствует потере устойчивости вторичных форм
равновесия. Следующая точка отвечает переходу от одного вида
неустойчивости к другому. Следовательно, при определении нижнего
критического параметра нагрузки надо исследовать именно те решения исходных
уравнений, которые соответствуют устойчивым вторичным положениям.
Это обстоятельство надо иметь в виду при использовании различных
приближенных методов интегрирования исходных уравнений. Метод
Ритца дает возможность непосредственно исследовать энергию
системы и отобрать решения, отвечающие устойчивым состояниям.
Метод Бубнова — Галеркина, примененный к уравнениям формально,
может привести к неустойчивым решениям ***). Если используется
метод конечных разностей и вычисления проводятся с помощью
цифровых электронных машин, то и здесь надо относиться к результатам
с осторожностью. Впрочем, опыт показывает, что неустойчивые
решения можно получить в процессе машинного счета лишь в виде
исключения.
§ 247. Равновесные формы вблизи точек бифуркации
Как мы видели, при отыскании практически ценных ветвей
решений нелинейной задачи важно определить характер соответствующих
форм равновесия; существенную роль при этом играет энергетический
Критерий. Пользуясь им, мы можем, прежде всего, уточнить наши
представления о равновесных формах консервативной системы вблизи
точки бифуркации, т. е. при нагрузках, мало отличающихся от
верхнего критического значения.
*) Можно, правда, представить себе, что интервал основных
устойчивых состояний обрывается в некоторой точке k=XB,s вторичные
устойчивые состояния возникают лишь при более высоком значении К, но такой
случай является гипотетическим.
**) В указанном выше примере с цилиндрической панелью, приведенной
к системе с двумя степенями свободы, были найдены две верхние и две
нижние точки диаграммы.
***) Под этим здесь понимаются решения, соответствующие
неустойчивым формам равновесия.
РАВНОВЕСНЫЕ ФОРМЫ ВБЛИЗИ ТОЧЕК БИФУРКАЦИИ 935
Рассмотрим случай системы с одной степенью свободы *).
Обозначим параметр нагрузки через р и параметр характерного
перемещения (например, стрелы прогиба оболочки) — через £. В отличие
от линейной задачи (§ 244), мы можем теперь представить энергию
с учетом высших степеней £■ Допустим, что в выражении для
безразмерной полной энергии Э* удержаны степени £ до четвертой
включительно и это выражение имеет вид
3* = С, (рв - р) £2 - С£> -+ ср, B7.26)
где рв — параметр верхней критической нагрузки, Ct — некоторые
постоянные. Примеры выражений такого типа для энергии
встречались нам в задачах, относящихся к гибким пластинкам и оболочкам.
Рассмотрим прежде всего критическое состояние и положим
р = рв. Допустим сначала, что С3 Ф 0; тогда член, содержащий С4,
можно отбросить, так что будет Э* = — С3£3. При С3 > 0 и t, > 0
или С3 < 0 и £ < 0 переход к
смежному состоянию будет-
сопровождаться падением полной энергии,
поэтому здесь равновесное
состояние, отвечающее ря, окажется
неустойчивым; это заключение
вытекает также из первой теоремы
Ляпунова (стр. 927). Вели же С, = 0,
то надо исследовать выражение
Э* = С4ь4. При С4 > 0 отклонение
системы от основного состояния
будет связано с повышением уровня
энергии, и критическое состояние
окажется устойчивым. Напротив, при
С4 < 0 оно будет неустойчивым.
Обратимся теперь к
равновесным формам для уровней нагрузки,
лежащих несколько выше или ниже критического. Если учитывать
только члены второго порядка, получим: Э* = С2(ря— Р)ъ2- Считая
основное состояние устойчивым при р < рв, получим: С2 > 0.
В случае С3 Ф 0 отбросим снова член с £4. Учитывая, что смежное
состояние является равновесным, выпишем равенство дЭ*1д£, = 0 при
£ ф 0; тогда получим:
Рис. 27.4. Диаграмма «нагрузка —прогиб»;
при С3 > 0 точка разветвления
принадлежит к неустойчивой ветвн.
E = y(/v
р">
д2Э*
дй2
= 2(р-рп)С2.
Если С3>0, то при нагрузке, превышающей рв, т. е. при р > рк,
будет £, < 0, д2Э*!д£,2 > 0, так что отклоненные состояния будут
устойчивыми; при р < р„ получим: t, > 0, <Э23*/<Э£2 < 0, что
указывает на неустойчивость. На рис. 27.4 изображена диаграмма р (£)
*) Исследование этого случая принадлежит В. Койтеру [27.14].
60*
936 общие критерии устойчивости упругих систем [гл. xxvil
при С3 > О н С4 = 0, относящаяся к £q —О (отсутствие начальных
отклонений); ветви устойчивых состояний изображены сплошными
линиями, неустойчивых — пунктиром. В верхней критической точке Л
происходит обмен устойчивостью между ветвями*), причем сама
критическая точка принадлежит, как мы видели, к неустойчивой
ветви (зачерненный кружок).
Разберем, далее, случаи С3 = 0 и С, Ф 0. При С4 > 0 будет
Отсюда заключаем, что при р > ра смежные равновесные состояния
будут устойчивыми, как показано на рис. -7.5, причем точку А для
Рис. 27.5. Диаграмма «нагрузка — прогиб» Рис. 27.6. Диаграмма «нагрузка
—пропри Сз = 0, С4 > 0; точка разветвления гиб» при С3 = 0, С, < 0.
принадлежит к устойчивой ветви.
Напротив, при С4 < 0 график р(£,) будет обращен выпуклостью вверх
(рис. 27.6), и точка А будет относиться к ветви неустойчивости.
Рассмотрим, далее, влияние, начальных возмущений (например,
начальной погиби в случае оболочки) на поведение системы.
Выпишем дополненное выражение для энергии в виде
Э* = С2 (Рв> ид - р) ™ _ С3« 4- С& - CQpZ&, B7.27)
где £о—параметр начального возмущения, рв ид—верхняя
критическая нагрузка для идеальной системы. Анализ выражений для дЭ*/д£,
и д2Э*[д1? приводит к следующим выводам. В случае С3 > 0, £>0
или С3=0, С4 < 0 диаграммы р (£) имеют предельные точки, как
показано на рис. 27.4 и 27.6, причем эти точки относятся к не-
*) Свойства подобных диаграмм, содержащих точки бифуркации,
впервые исследовались Пуанкаре (Acta mathematica 7 A885), 259-380) в связи
с изучением фигур равновесия небесных тел; в задачах упругой
устойчивости эти диаграммы исследовались Г. Ю. Джанелидзе [27.5], "В. В. Болоти-
ным [27.1J н другими авторами.
$ 248] КРИТЕРИЙ УСТОЙЧИВОСТИ ПРИ КОМБИНИРОВАННОЙ НАГРУЗКЕ 937
устойчивым ветвям. При С3—О, С4 > О все равновесные формы
оказываются устойчивыми (рис. 27.5).
В качестве примера, отвечающего рис. 27.4, может служить
цилиндрическая панель, сжатая вдоль образующей (§ 161), а для
рис. 27.5 — сжатая подкрепленная пластинка (§ 102). Пример
конструкции, соответствующей диаграмме рис. 27.6, приведен в статье
Б. Л. Николаи [27.7]".
Аналогичным образом могут быть исследованы равновесные
состояния, смежные с нижней критической точкой рп. Эта точка, как
мы видели, разделяет области неустойчивости и устойчивости.
Следовательно, при р — рн вторая вариация от полной энергии должна
обращаться в нуль: 62Э*—0.
Наконец, энергетический критерий может в известной мере
служить для определения нагрузки, при которой надо ожидать про-
щелкивания реальных конструкций. Некоторые авторы предлагают
принимать за основу при расчете на устойчивость в большом не
нижнюю критическую нагрузку, а такую нагрузку рэ, при которой
энергия основного состояния равна энергии прошелкнутого состояния.
При этом важно различать «дальние» отклоненные равновесные
формы, определяющие во многих из разобранных задач наименьшую
нижнюю критическую нагрузку, и «ближние» формы, для которых
нижняя критическая нагрузка оказывается большей, но переход к
которым связан с преодолением менее высокого энергетического барьера.
Как было уже сказано (см. стр. 468 и 534), с практической точки
зрения существенным является исследование, прежде всего,
«ближних» отклоненных форм.
Мы обсуждали выше только критерии устойчивости равновесия
деформируемых тел в применении к консервативным и отчасти к дис-
сипативным системам; эти критерии лежат в основе всех знакомых
нам методов решения частных задач для таких систем. Критерии
устойчивости систем, имеющих приток энергии извне, должны быть
рассмотрены особо (см., например, § 22).
Обратимся теперь к случаю, когда консервативная система
подвергается комбинированному нагружепию.
§ 248. Критерий устойчивости при комбинированной нагрузке
Допустим, что потеря устойчивости упругой системы может
произойти при действии нагрузок различного вида. Например, для
подкрепленной прямоугольной пластинки такими нагрузками могут
являться сжимающие усилия в одном и другом направлениях либо
усилия сдвига. Предположим, что найдены критические значения
нагрузок при их раздельном применении, и рассмотрим случай, когда
они действуют совместно в том или ином сочетании *).
*) В общем виде задача об устойчивости при комбинированном нагру-
жепии была впервые решена П. Ф. Папковичем [0.7].
938 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVII
Примем, что система, имеющая одну степень свободы,
подвергается действию двух нагрузок разного типа и что исследуется
устойчивость системы в малом.
На рис. 27.7 по осям откладываются параметры нагрузок Р, Q;
критические значения их при раздельном приложении обозначим
через Р4 и Qt, а при совместном действии — через Рв и QB.
Отмеченная на рис. 27.7 точка А имеет координаты Р0, Q0, лежащие
в пределах 0 < Р0 < Рв, 0 < Q0 < Q„. Очевидно, точка А находится
в области устойчивости, относящейся к основному состоянию.
Полную энергию, соответствующую точке А, представим в виде
Э0=-к-(а — рР0 — yQn)q-
■2
1
%Q2
B7.28)
где q — обобщенная
основного состояния
ъу
координата, изменяющаяся при переходе от
к смежному. Производная дЭ0'дд обращается
в нуль лишь при q = 0; исходя из .
критерия устойчивости основного
состояния, находим:
д2Э
dq2
■%>0.
Будем изменять нагрузки,
приложенные к системе, полагая:
P^PQ + Xk, Q = Q0 + XL
На рис. 27.7 величина X
откладывается вдоль луча An;
параметры к п / представляют собой
направляющие косинусы луча: k =
—cos(л;, п), l = cos(y, n). Так как
работа внешних нагрузок вычитается из полной энергии системы,
то для нового состояния будет
Рх Р;х
Рис. 27.7. Переход из области
устойчивости в область неустойчивости при
комбинированной, нагрузке.
3 = 1(а-
рР - YQ) q* = 1 [00 - X (pft -f yl)] q\ B7.29)
Обозначая фк -j- yl) через 0-, получим:
3 = ±@0 — &X)q*.
B7.30)
Если параметры k, I положительны, то всегда О1 > 0; при
отрицательных k, I имеем ■& < 0. В случае же, если один из
параметров k, l положителен, а другой отрицателен (луч А'п' на рис. 27.7),
может быть & > 0 либо Ф < 0. В зависимости от знака ■& система
будет вести себя при увеличении X различно,
§ 248] КРИТЕРИЙ УСТОЙЧИВОСТИ ПРИ КОМБИНИРОВАННОЙ НАГРУЗКЕ 939
Предположим, что Ф > 0; при некотором значении X мы получим:
д2Э
дд
2 = е0-^с = о,
B7.31)
что соответствует критерию потери устойчивости; следовательно, мы
найдем первую пару критических нагрузок Рв, QB. При дальнейшем
возрастании X всегда будет
п ЪХ<0, B7.32)
дд2
■ = Вп
Рис. 27.8. Граничные липни,
отделяющие устойчивую область от
неустойчивой.
так что равновесие будет неустойчивым-
Допустим, что на рис. 27.7 равенство
C1) выполняется для точек В и В'; эти
точки будут лежать на граничной линии,
отделяющей устойчивую область от
неустойчивой. Если мы движемся вдоль
луча An от точки А, то после того, как
пройдена точка В, мы уже не можем
вернуться в область устойчивости; это же
относится к переходу от А' к В' вдоль
А'п'. В случае, когда # < О, величина
<Э23/<Э<72 не может обратиться в нуль, и
следовательно, мы всегда будем находиться в области устойчивости.
Таким образом, проводя луч из любой точки области устойчивости
в произвольном направлении, можно либо пересечь граничную линию,
и при этом только один раз, либо вовсе не
пересечь ее. Легко видеть, что граничная
линия, удовлетворяющая таким требованиям,
не может быть обращена выпуклостью
к области устойчивости. Это означает,
что граничная линия должна состоять из
участков прямых или из участков кривых,
обращенных выпуклостью к области
неустойчивости (рис. 27.8). При этом угол наклона
прямых участков, касательных к
криволинейным участкам, должен изменяться
монотонно.
Этот вывод дает возможность установить
приближенные значения критических усилий
при комбинированной нагрузке. В самом деле, соединим точки,Pt и
Q4 прямой (рис. 27.9); очевидно, ее точки дают критические
сочетания усилий Р, Q либо точно, либо приближенно, но во втором
случае всегда с известным запасом устойчивости.
Допустим, что нам известно положение касательных к граничным
линиям в точках Р = Р„ и Q = Q, (рис. 27.9); тогда искомые
граничные кривые должны лежать между прямой PfQt и этими
Рис. 27.9. Приближенное
определение граничной линии для
зоны устойчивости.
940 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
касательными. Уравнение «безопасной» прямой имеет вид
-^ + -^=1. B7.33)
Эти результаты нетрудно распространить на случай, когда
система подвергается действию трех нагрузок различного типа: Р, Q, R;
вместо плоской картины мы получим пространственную, вместо
граничной линии — поверхность, вместо прямых участков — плоскости.
При числе нагрузок больше трех необходимо перейти к
многомерному пространству. Аналогичные выводы можно получить также
в более сложном случае, когда система имеет п степеней свободы [0.7].
§ 249. Некоторые задачи для дальнейших исследований
В заключение перечислим некоторые актуальные задачи теории
устойчивости деформируемых систем, о которых отчасти уже
говорилось выше. Наиболее важными с практической точки зрения —
особенно для авиационной техники — продолжают оставаться задачи,
относящиеся к устойчивости оболочек. Как было показано
в главах XIII и XVI, интенсивные исследования, проводившиеся в этой
области на протяжении последних 25 лет, не привели еще к
окончательным результатам. Необходимо, пользуясь наиболее мощными из
современных цифровых машин, получить уточненные решения задач
в нелинейной постановке и установить зависимости «нагрузка —
характерные перемещения» для оболочек различного очертания. Далее
нужно перебросить мост от этих зависимостей к практическим
методам расчета путем накопления сведений о свойствах и видах нагру-
жения реальных оболочек в конструкциях разного типа с использо-
панием статистического подхода.
По-прежнему центральными являются задачи об устойчивости
круговых цилиндрических оболочек при осевом сжатии и сферических
оболочек при внешнем давлении. Для первой из этих задач
необходимо уточнить значения верхних критических нагрузок и исследовать
закритическое поведение оболочек с начальными несовершенствами
и при разных условиях закрепления. Во второй задаче подобное
исследование должно быть проведено главным образом для
несимметричного выпучивания. Желательно осуществить такое же тщательное
изучение поведения цилиндрических оболочек при других видах на-
гружеиия — внешнем давлении, кручении, изгибе и при
комбинированном нагружении, особенно при осевом сжатии с внутренним
давлением. Необходимо дальнейшее исследование устойчивости тороидальных
оболочек, а также пологих оболочек разной конфигурации при
действии поперечной нагрузки.
Должно быть продолжено решение задач об устойчивости
оболочек для того случая, когда основное напряженное состояние
является моментным. Это относится к коротким цилиндрическим
НЕКОТОРЫЕ ЗАДАЧИ ДЛЯ ДАЛЬНЕЙШИХ ИССЛЕДОВАНИЙ 941
оболочкам, подвергающимся внешнему давлению или совместному
действию осевого сжатия и внутреннего давления и т. д. Здесь
целесообразно более подробно рассмотреть бифуркационные задачи, когда
исходная форма оболочки сменяется последовательно формами
различного типа.
Ряд работ в последнее время был посвящен уточненному
исследованию влияния граничных условий на верхние критические усилия для
оболочек. Должно быть проведено дальнейшее решение таких задач для
замкнутых цилиндрических и конических оболочек, для пологих
оболочек различного очертания и т. д. Надо выяснить, как связаны
данные этих исследований с результатами экспериментов.
Все большее распространение в технике получают композиционные
конструкции и материалы с «направленными» упругими
характеристиками. Сюда прежде всего относятся оболочка, подкрепленные
ребрами. Необходимо вновь рассмотреть различные модели таких
конструкций — анизотропную оболочку, с одной стороны, и оболочку
с дискретными ребрами, с другой, и установить границы
применения таких моделей в тех или иных условиях нагружешш. При этом
важно учесть, является расположение ребер внешним или
внутренним по отношению к оболочке. Большой интерес представляет
изучение вафельных оболочек. Должны быть найдены методы
рационального проектирования оболочек наименьшего веса.
Второй широкий класс конструкций с направленными
характеристиками — композиции, состоящие из высокопрочных тонких волокон
и менее прочного связующего. К таким конструкциям принадлежат
стеклопластики, механические свойства которых изучены уже
достаточно полно. Но до сих пор не разработана еще общая теория
многослойных стеклопластиковых оболочек с учетом структуры каждого
слоя и при разных сочетаниях слоев. Конкретные задачи об
устойчивости стеклопластиковых оболочек уже решались как в линейной,
так и в нелинейной постановке, но не всегда в достаточно высоком
приближении. Методы исследования, разработанные для
стеклопластиков, должны быть распространены на случай, когда волокна и
связующее выполнены из . других, более прочных материалов,
обладающих пластическими свойствами. Необходимо учесть различие
в характеристиках композиционных материалов при действии
растяжения и сжатия.
Число работ, посвященных трехслойным пластинкам и оболочкам,
достаточно велико, но в настоящее время еще нет полных данных
для расчета на устойчивость трехслойных оболочек, подвергающихся
действию нагрузок различного типа. Эти задачи должны быть решены
не только в линейной, но и в нелинейной постановке.
Экспериментальных данных для трехслойных конструкций накоплено мало, и
опыты в этой области необходимо расширить.
Теория устойчивости оболочек за пределами упругости требует
значительного внимания. Практические расчеты оболочек в неупругои
942 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
области до сих пор часто основываются на приближенных
зависимостях, относящихся к сжатым стержням. Классические теории
пластичности— теория деформаций и теория течения — должны быть
приложены к задачам об оболочках, имеющих начальные несовершенства;
необходимо более тщательно выяснить пределы применимости теории
деформаций при сложном нагружении. Желательно также, чтобы
к задачам устойчивости были более широко приложены новые теории
пластичности, учитывающие локальные деформации. Интересным
направлением является здесь использование модели
жестко-пластического тела.
Вопрос о температурном выпучивании оболочек и пластинок
ждет дальнейшей разработки. Важно рассмотреть подкрепленные,
вафельные, трехслойные и многослойные конструкции при различных
законах распределения температуры вдоль толщины и по поверхности
и определить критические температуры. В задаче о тепловом ударе
необходимо проанализировать исходные уравнения и установить,
в какой мере они могут быть упрощены при решении практических
задач.
Проблема устойчивости оболочек, пластинок и стержней при
ползучести привлекла к себе большое внимание, но остается не
вполне выясненной. Необходимо вновь сопоставить имеющиеся
критерии выпучивания при ползучести, сопоставив их с
экспериментальными данными для различных материалов. Выпучивание замкнутых
цилиндрических оболочек при ползучести должно быть исследовано
более полно.
Критерии устойчивости в температурных задачах должны быть
обобщены, исходя из термодинамических соотношений для обратимых
и необратимых процессов.
Все большую актуальность приобретают задачи, относящиеся
к устойчивости оболочек, пластинок и стержней при динамическом
нагружении. В настоящее время в основу исследований по
динамической устойчивости берутся две различные модели: одна,
соответствующая конструкции с начальными несовершенствами, и другая,
отвечающая идеальной конструкции. Поведение первой из этих
моделей определяется, как правило, численными методами, шаг за шагом
во времени; для второй модели устойчивость исследуется исходя из
качественного анализа исходных уравнений. В дальнейшем надо
попытаться сблизить эти два направления и выяснить, в каких задачах
уместно применение той или иной модели. Надо при этом учесть,
что для оболочек динамическое выпучивание сопровождается, как
правило, прощелкиванием к ветви новых равновесных состояний и
должно рассматриваться с позиций нелинейной теории.
Желательно расширить исследования устойчивости конструкций
при ударном нагружении с учетом процесса распространения волн
в срединной поверхности. Значительный интерес представляют задачи
динамической устойчивости, относящиеся к взрывным и сейсмическим
НЕКОТОРЫЕ ЗАДАЧИ ДЛЯ ДАЛЬНЕЙШИХ ИССЛЕДОВАНИЙ 943
нагрузкам, при различных направлениях и характеристиках
воздействия, и с учетом пластических деформаций конструкции.
Необходимо выяснить, как ведут себя при ударе оболочки, подкрепленные
ребрами. С практической точки зрения важно установить параметры
оптимальной конструкции, воспринимающей ударную нагрузку.
Те же проблемы для оболочек, содержащих жидкость или
погруженных в нее, должны ставиться как задачи гидроупругости.
Интересным является исследование удара оболочки о свободную
поверхность жидкости. Устойчивость конструкция в этих задачах следует
рассматривать с учетом волновых процессов в жидкости и в оболочке.
При этом важно рассмотреть задачи, в которых для описания
ударных волн акустическое приближение является недостаточным. В
случае слабых ударных волн необходимо определить уточненные значения
давления излучения для сравнительно больших отрезков времени.
При решении задачи аэроупругости необходимо учитывать
факторы, влияющие на поведение реальной конструкции: начальные
неправильности формы, характер температурногополя, дополнительные
ударные нагрузки и т. д. Необходимы тщательные экспериментальные
исследования панельного флаттера для оболочек разного очертания
при различных условиях закрепления.
Серьезное внимание должны привлечь задачи о поведении
оболочек в потоке проводящего газа при наличии магнитного поля.
Надо продолжить исследования по применению статистических
методов для расчета конструкций на устойчивость. Необходимо
изучить законы распределения начальных несовершенств для реальных
оболочек при различной технологиии изготовления и вероятностные
характеристики нагрузок, испытываемых элементами разных
конструкций. Использование статистических зависимостей должно
объяснить экспериментальные данные о разбросе критических нагрузок.
Современные методы теории случайных процессов желательно шире
применять к исследованию влияния случайных динамических
возмущений на поведение оболочек. Таким образом будет подведена более
надежная база для проектирования реальных конструкций.
Разнообразные пути решения частных задач должны быть
пересмотрены, исходя из возможностей электронной цифровой
вычислительной техники, с учетом существенного повышения
быстродействия машин. До сих пор, например, не удавалось решить задачи,
. относящиеся к замкнутым цилиндрическим оболочкам, по методу
конечных разностей с привлечением двумерной или трехмерной сетки
для статических и динамических задач; в ближайшем будущем
подобные программы вычислений смогут быть реализованы. Желательно
использовать цифровые машины для всех этапов решения задач с
помощью различных приближенных методов, например метода Ритца.
Надо научиться отделять устойчивые ветви решений от неустойчивых
при использовании метода конечных разностей или метода колло-
кации. Целесообразно разработать специальную программу для
944 ОБЩИЕ КРИТЕРИИ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ [ГЛ. XXVII
определения нижних критических нагрузок без исследования всей
области выпучивания оболочек.
Для многих конструкций расчет на устойчивость является
решающим. До сих пор при определении размеров проектируемых
конструкций исходят обычно из сопоставления с аналогичными уже
осуществленными сооружениями, либо из интуитивных соображений,
а затем проводят поверку устойчивости. Между тем, применение
электронных вычислительных машин позволяет сопоставить большое
число вариантов конструкции и найти наивыгоднейший нз них. Это
относится, например, к конструкциям из стеклопластиков, для
которых может быть установлено наиболее выгодное сочетание различных
слоев с различным направлением волокон. Таким образом, можно
определить не только размеры, но и желательную технологию
изготовления конструкции.
Необходимо вернуться к исходным уравнениям нелинейной теории
оболочек в статической и динамической задачах, выяснить границы
применения различных вариантов уравнений. Ждут своего дальнейшего
развития методы функционального анализа для качественного
исследования нелинейных уравнений теории оболочек, и в особенности для
выяснения свойств решений вблизи нижних критических точек.
ЛИТЕРАТУРА
Ко всей книге
0. 1. В. В. Болотин, Динамическая устойчивость упругих систем,
Гостехиздат, М., 1956; Пеконсервативные задачи теории упругой устойчивости,
Флз.матгиз, М., 1961.
0. 2. И. Г. Бубнов, Строительная механика корабля, часть 1,1912; часть II,
1914.
0. 3. А. С. В о л ь м и р, Гибкие пластинки и оболочки, Гостехиздат, М., 1956.
0. 4. А. 11. Д и и н и к, Устойчивость упругих систем, ОНТИ, 1935;
Продольный изгиб, ОНТИ, М„ 1936.
0. 5. Н. В. Корноухое, Прочность и устойчивость стержневых систем,
Стройиздат, М„ 1949.
0. 6. X. М. М у ш т а р и, К. 3. Г а л и м о в, Нелинейная теория упругих
оболочек, Таткншоиздат, Казань, 1957.
0. 7. П. Ф, П а п к о 1! и ч. Строительная механика корабля, часть И, Судпром-
гиз, Л., 1939.
0. 8. С. Д. П о н о маре в, В. Л. Б и д о р м а н, К. К. Л и х а р е в, В. М. М а-
кушин, Н. Н. М а л и н и н, В. И. Феодосьев, Расчеты на
прочность в машиностроении, изд. 1-е, -т. II, Машгиз, М., 1952, изд. 2-е,
т. III, 1959.
0. 9. А, Р. Ржаницып, Некоторые вопросы механики систем,
деформирующихся во времени, Гостехиздат, М., 1949.
0.10, А. Р. Ржаницып, Устойчивость равновесия упругих систем,
Гостехиздат, М., 1955.
0.11. А. Ф. Смирнов, Статическая и динамическая устойчивость
сооружений, 1947; Устойчивость и колебания сооружений, 1958.
0.12. В. Г. Чудно вс кий, Методы расчета колебаний и устойчивости
упругих систем, изд. АН УССР, Киев, 1952.
0.13. И. Я- Штаерман и А. А. Пиковский, Основы теории
устойчивости строительных конструкций, Госстройиздат, М., 1939.
0.14. С. В. В i e z e п о, R. Gramme), Technische Dynamik, Berlin, 1939
(в переводе: К- Б. Бицено, Р. Граммель, Техническая динамика, часть I,
Гостехиздат, Л., 1950).
0.15. F. Bleich, Buckling strength of metal structures, NY, 1952 (в
переводе: Ф. Блейх, Устойчивость металлических конструкций, Физматгиз,
М., 1959).
0.16. G. В u r g or m ei s t e r, H. S t e u p, Stabilitatstheorie, Ak. Vertag,
Berlin, Teil I, 1957, Teil II, 1963.
0.17. G. Gerard, Weight analysis of compression structures, NY, Un-ty
Press, 1956; Introduction to structural stability, 1962.
0.18. F. Hartmann, Knickung, Kippung, Beulung (в переводе: Ф. Гартман,
Устойчивость инженерных сооружений, Госстройиздат, М., 1939).
0.19. С. F. Kollbrunner, M. M e i s t e r, Knicken, Springer-V., Berlin,
1955; Ausbeulen, 1958.
0.20. R. Mayer, Die Knickfestigkeit, Springer-V., Berlin, 1921,
946
ЛИТЕРАТУРА
0.21. A. Pfluger, Stabilitatsprobleme der Elastostatik, Springer-V., Berlin,
1950; 2-te Auflage, 1964.
0.22. F. R. Shanley, Weight-strength analysis oi aircraft structures, NY,
1952 (в переводе: Шенли, Анализ веса и прочности самолетных
конструкций, Оборонгиз, М., 1957).
0.23. S. Tirnoshenko, Theory of elastic stability, NY, 1936 (в переводе:
С. П. Тимошенко, Устойчивость упругих систем, Гостехиздат, М., изд.
1-е, 1946, изд. 2-е, 1955); S. Tirnoshenko, J. Gere, Theory of elastic
stability, NY, 1961.
К главе I
1. 1. Б. Г. Галсркин, Теория продольного изгиба и опыт применения
теории продольного изгиба к многоэтажным стержням, стойкам с
жесткими соединениями и системам стоек. Изв. С-Пет. полит, ин-та 12, N° 1
A909), 167—241, № 2 A909), 383—451; Собр. соч., т. 1, изд. АН СССР,
М., 1952, 24—124.
1. 2. К. С. Д ей не ко, М. Я. Леонов, Динамический метод исследования
устойчивости сжатого стержня, Прикл. мат. и мех. 19 A955), 738—744.
1.3. Г. Ю. Джанелидзе, Об устойчивости стержня иод действием
следящей силы, Труды Ленингр". политехи, ин-та, Л° 192 A958).
1. 4. Ю. Д. Копейки н, М. Я. Леонов, Об одном особом случае потери
устойчивости равновесия сжатого стержня, Прикл. мат. ' и мех. 19
A955), 736—737.
1. 5. А. Н. Крылов, О формах равновесия вертикально нагруженных
элементов, Изв. АН СССР A931), 963.
1. 6. Е. П. Попов, Нелинейные задачи статики тонких стержней,
Гостехиздат, М., 1948.
1. 7. Ф. С. Ясинский, О сопротивлении продольному изгибу, 1894;
Избранные работы по устойчивости сжатых стержней, Гостехиздат, 1952.
1. 8 М. Beck, Die Knicklast des einseitig eingespannten, tangential gedruck-
ten Stabes, Zeitschr. angew. Math, und Phys. 3, Хя 3 A952), 225—228.
1.9. L. E u 1 e r, Methodus niveniendinens curvas..., Lausanne et Geneve,
1744; Additamentum 1: De curvis elasticis, p. 267 (Л. Эйлер, Метод
нахождения кривых линий, обладающих свойствами максимума либо
минимума, М., Гостехиздат, 1934; Приложение 1: Об упругих'кривых).
1.10. L. Euler, Sur la force des colonnes, Mem. de I'Acad., "Berlin, 13, A757),
251-282.
1.11. F. Kngesscr, Ueber die Rcrechnung auf Knickfestigkeit beanspruchten
Stabe aus Schweifi- und Gufieisen, Z. osterr. Ing. Arch. Ver., № 45
A893), 506-508.
1.12. J. L. Lagrange, Sur la figure des collonnes, Oeuvres, 2, Paris A868),
125—170, Sur la force des ressorts plies, Oeuvres 3 A869), 77—110.
1.13. J. Ratzersdorfer, Die Knickfestigkeit von Staben und Stabwerken,
Wien, 1936.
1.14. R. H. S с a n 1 a n, Resistance network solution of some structurul
problems in deflection and stability, Proc. Soc. Exp. Stress Anal. 16, X° 1
A958), 117-128.
1.15. H. S. T s i e n, Lower buckling load in the nonlinear buckling theory for
thin shells, Quart. Appl. Math. 5, K° 2 A947), 236-237.
1.16. L. V i a n e 11 o, Graphische Untersuchiing der Knickfestigkeit gerader
Stabe, Z. Vez. deutsch. Ing. 42 A898), 1436—1443.
К главе II
2. 1. Б М. Броуде, Предельные состояния стальных балок, Госстройиздат,
М.—Л., 1953.
2. 2. А. С. Воль м и р, К вопросу о продольном изгибе за пределом
упругости, Научн. зап. Харьковск. мех.-маш. ин-та A935), 137—145.
ЛИТЕРАТУРА
947
2. 3. А. В. Г е м м е р л и н г, О несущей способности сжатых стальных
конструкций, Труды ЦНИПС, № 7, М, A952).
2. 4. С. Д. Л ей те с. Устойчивость сжатых стальных стержней, Госстройиз-
дат, М., 1954; Теория и расчет сжатых стержней в металлических
конструкциях, докт. дне, М., 1965.
2.4а. Б. П. М а к а р о в, Большие прогибы внецентренно-сжатых стержней в
упруго-пластической стадии, Строит, мех. и расчет coop., № 4, 1965.
2. 5. С. Н. Никифоров, Устойчивость сжатых стержней сварных ферм,
ГИЗ, М.—Л., 1938.
2. 6. Я. Г. П а н о в к о, О критической силе сжатого стержня в неупругой
области, Инж. сб. 20 A954); О продольном упруго-пластическом изгибе
стержней в статически неопределимых системах, Изв. АН СССР,
Механика и мат., № 2 A962), 160—165.
2. 7. В. В. П и н а д ж я н, Некоторые вопросы предельного состояния сжатых
элементов стальных конструкций, Изд. АН АрмССР, Ереван, 1956.
2. 8. Ю. Н. Р а б о т н о в, О равновесии сжатых стержней за пределом
пропорциональности, Инж. сб. 11 A952).
2. 9. Н. С. Стрелецкий, Материалы к курсу стальных конструкций.
Работа сжатых стоек, Госстройиздат, Москва, 1959.
2.10. Е. С h w а 11 a, Theorie der aufiermittig gedriickten Stabes. aus Baustahl,
Stahlbau, Kb 21—23 A934).
2.11. F. Engesser, Ueber Knickfestigkeit gerader Stabe, Z. Arch. u. Ing.
Ver. zu Hannover 35 A889), 455; Die Knickfestigkeit gerader Stabe,
Zentralblatt der Bauverwaltung 11 A891), 483; Ueber Knickfragen,
Schweiz. Bauzeitung 26 A895), 24.
2.12. J. F r i t s с h e, Naherungsverfahren zur Bcrechnung der Tragfiihigkeit
aufiermittig gedriickter Stabe aus Baustahl, Stahlbau, Л° 18 A935).
2.13. К- Jezek, Die Festigkeit von Druckstaben aus Stahl, Wien, 1937.
2.14. F. J a s i n s k i, Zu den Knickfragen, Schweiz. Bauzeitung 26 A895), 24
(см. Ясинский Ф. С, Избранные труды, Гостехиздат, М., 1952).
2.15. Th. Karman, Untersuchungen uber Knickfestigkeit, Physik. Z. A908),
138; Mitteilungen uber Forschungsarb. auf dem Gebiet d. Ing. Wesens,
Kq 81, Berlin A910); J. Aeron. Sciences 14 A947b 267.
2.16. L. N a v i e r, Resume de lecons, Paris', 1826.
2.17. A. Pfliiger, Zur plastischen Knickung gerader Stabe, Ing. Archiv 20,
Ко 5 A952), 291—301.
2.18. M. R о s, Le stability de barres comprimees par des forces excentrees,
Paris, 1932.
2.19. F. R. S h a n 1 e v. Inelastic column theory, J. Aeron. Sci, 13, № 12
A946), 678; 14, № 5 A947); Pro'c. Am. Soc. Civ. Fng. 75 A949), 759.
2.20. F. Schleicher, Ueber die Grundlagen der Plastizitatstheorie und des
plastischen Knickens, Stahlbau, № 10 A951), 118.
2.21. L. T e t rn a j e r, Die Gesetze der Knickungs- und zusammengesetzten
Festigkeit der technisch wichtigsten Baustoffe, Leipzig, 1907.
К главе III
3. 1. A. H. Дин ник, О продольном изгибе стержней переменного сечения,
Изв. Донск. полит, ин-та 1 A913), 390—404; Приложение функций
Бесселя к задачам теории упругости, Избранные труды, т. 2, Изд. АН
УССР, 1952, 73—78; О расчете сжатых стоек переменного сечения,
Вести, инж., № 1, 2 A929); Устойчивость арок, М., 1946; Продольный
изгиб; Кручение, М., 1955.
3. 2. Б. Г. Коренев, Некоторые задачи теории упругости и
теплопроводности, М., 1960.
3. 3. Я. И. К о р о т к и и, А. 3. Л о к ш и н, Н. Л. Сивере, Изгиб и
устойчивость стержней и стержневых систем, Машгиз, 1953.
948
ЛИТЕРАТУРА
3. 4. К. Л. И и к о л а и, Об устойчивости прямолинейной формы равновесия
сжатого и скрученного стержня, Труды по механике, Гостехиздат, 1955.
3. 5. Я. Л. Пудельмап, Методы определения собственных частот и
критических сил для стержневых систем, Гостехиздат, М., 1949.
3. 6. Л. М. Пень к о в, Устойчивость стержневых наборов, Труды Киевского
техиол. ин-та пищ. пром-стн, As 6 A947).
3. 7. Л. Л. П и к о в с к и й, Статика стержневых систем со сжатыми
элементами, Фнзматгиз, М., 1961.
3. 8. Л. Р. Ржа н и ц ы и, Теория составных стержней строительных
конструкций, Стройиздат, 1948.
3.9. Н. К- С и и т к о, Устойчивость стержневых систем, Госстройиздат, М.,
1952; Устойчивость сжатых и ежато-изогнутых стержневых систем, 1956.
3.10. П. Г. Чепцов, Стойки наименьшего веса, Труды ЦАГИ, Л° 265 A936).
3.11. A. G г е е п h i 1 1, On height consistent with stability, Proc. Camb. Phil.
Soc. 4 A881), 65—75.
К главе IV
4. 1. А. А. Гвоздев, Общий метод расчета статически неопределимых
систем, 1927.
4. 2. В. А. Киселев, Специальный курс строительной механики,
Госстройиздат, Л1, 1964.
4. 3. Р. Р. М а т е в о с я н, Устойчивость сложных стержневых систем,
Госстройиздат, 1961.
4. 4. И. М. Р а б и н о в и ч. Об устойчивости стержней в статически
неопределимых системах, Госстройиздат, 1932.
4. 5. С. А. Р о г и ц к и й, Новый метод расчета на прочность и устойчивость,
Свердловск, 1961.
4. 6. И. К. С н и т к о. Практические методы расчета статически
неопределимых систем, Госстройиздат, М., 1960.
4. 7. М. R. Horne, The stability of elastic-plastic structures, Progress in
Solid Mechanics 2, 1961, 227—322 (перевод в сб. «Механика», Л» 1, 1965).
К главе V
5. 1. С. А. А м б а р ц у м я и, К вопросу расчета устойчивости тонкостенных
стержней, ДАН АрмССР 17, Х° 1 A953).
5. 2. В. В. Болотин, Интегральные уравнения стесненного кручения и
устойчивости тонкостенных стержней, Прикл. мат. и мех. 17, № 2 A953);
О пространственных деформациях балок после потери устойчивости,
Расчет пространств, констр. 4 A959), 3—18; Конечные деформации
гибких трубопроводов, Труды Моск. энергет. ин-та 19 A956); Об
устойчивости балок, соединенных упругими связями, Расчеты на прочность 1
A954), 223—230.
5. 3. Б. М. Броуде, Об устойчивости и колебаниях упруго защемленного
стержня, «Сб. по теории сооружений» 5 A954); Об устойчивости слегка
искривленных и внецентренно нагруженных двутавровых балок, Расчет
пространств, констр. 4 A958), 5—36; Уточнение' решения задачи Пранд-
тля — Тимошенко, там же, 5 A959); Об устойчивости стержней,
сжатых с двухосным эксцентриситетом, там же, 31—50; О линеаризации
уравнений устойчивости равновесия внецентренно сжатого стержня,
Исследования по теории сооруж. 8 A959), 205—221.
5. 4. В. 3. Власов, Тонкостенные упругие стержни, изд. 1-е, 1940, изд. 2-е,
Физматгиз, М., 1959.
5. 5. В. 3. Власов, Кручение н устойчивость тонкостенных открытых
профилей, Строит, пром., М° 6—7 A938); Кручение, устойчивость н
колебания тонкостенного стержня, Прнкл. мат. и мех. 3, К° 1 A939),
ЛИТИРЛТУРА
949
5. 6. А. В. Геммерлнвг, К расчету впецептренно сжатых тонкостенных
стержней, Труды лабор. строит, мех. ЦНИПС, Стройиздат A949).
5. 7. И. И. Гольденблат, Современные проблемы колебаний и
устойчивости инженерных сооружений, Стройиздат, 1947.
5. 8. Л. М. Качано в, Устойчивость тонкостенных стержней при упруго-
пластических деформациях, ДАН СССР 107, Кя б A956), 803—806.
5. 9. И. Ф. Образцов, К расчету тонкостенных стержней на устойчивость
при изгибе, Труды МАИ, Л° 26, Оборонгиз A953).
5.10 А. Р. Р ж а н и ц ы н, Устойчивость тонкостенных стержней за пределом
упругости, Труды лабор. строит, мех. ЦНИПС, Стройиздат A949).
5.11. А. И. С т р е л ь б и ц к а я, Несущая способность тонкостенных стержней
при сложном сопротивлении, Прикладная механика, изд. АН УССР 2,
Х° 3 A956).
5.12. А. А. Ум а некий, Кручение и изгиб тонкостенных авиаконструкций,
М., 1939; Строительная механика самолета, М.. 1961.
5.13. Хуа X а й - ч а н, Цзе Б о - и и н ь, Общая теория равновесия и
устойчивости упругих тонкостенных стержней (на китайском языке), Acta
Phys. Sinica, Л° 4 A955).
5.14. J. G о о d i e r. Torsional und flexural buckling of bars of thin-walled
open section under compressive and bending loads, J. of the Aeron. Sci.
A942), 103—107.
5.15. R. К a p p u s, Drehknicken zentrisch gedriickten Stabe rnit offenem Pro-
fil in elastisch Bereich, Luftfahrtforschung 14, № 9 A937).
5.16. H. L. Langhaar, On torsional-flexural buckling of columns. The
Journal of the Franklin Institute, № 2 A953), 101—112.
5.17. H. Nylander, Torsion, bending and lateral buckling of I-beams, Kgl.
tekn. hogskolans handl., Кя 102 A956), 140.
5.18. L. P r a n d 11, Kipperscheinungen, Nurenberg, 1899.
5.19. S. Tirnoshenko, Theory of bending, torsion and buckling of thin
walled members of open cross section, The Journ. of the Franklin
Institute, K° 3, 201—219; № 4, 249—268; K° 5, 343—361 A945).
5.20. H. Wagner, Verdrehung und Knickung von offenen Profilen, Festschrift
25-Jahre Т. Н. Danzig, 1929.
К главе VI
6. I. Л. Б. Б у н а т л и, Устойчивость тонкостепных стержней с учетом
ползучести материала, Изв. АН АрмССР, серия физ.-мат., ест. и техи.
наук 6, Л"» 2 A953), 43—53.
6.1а. В. Л, Б л а г о н а д о ж и н, О поведении неоднородных сжатых
стержней при ползучести, Изв. вузов, Машиностроение, № 8, 1964.
6. 2. В, Ф. Воробьев, Устойчивость стержней в состоянии ползучести,
Журн. прикл. мех. и техн. физ., № 6 A961), 135—144.
6. 3. Л. М. К а ч а н о в, Некоторые вопросы теории ползучести, Гостехиздат,
1948; Теория ползучести, Фпзматгиз, 1960.
6. 4. А. П. Кузнецов, Устойчивость сжатых стержней из дуралюмина
в условиях ползучести, Журн. прикл. мех. и техн. физ., № 6 A961),
160—162.
6. 5, Л. М. К у р ш и и, Устойчивость стержней в условиях ползучести, Журн.
прикл. мех. и техн. физ., № 6 A961), 128—134; К> 2 A962).
6.6.10. Н. Работнов, С. А. Шестериков, Устойчивость стержней
и пластинок в состоянии ползучести, Прикл. мат. и мех. 21, Кя 3 A957).
406—412; Journ. Mech. and Phys. Solids 6 A957), 27.
6. 7. A. P. Ржаницын, Процессы деформирования конструкций из упруго-
вязких элементов, ДАН СССР 52, Кя 1 A946), 25—28.
6. 8. В. И. Розен б л юм, Устойчивость сжатого стержня в состоянии пол
зучести, Инж. сб. 18 A954), 99—104.
950
ЛИТЕРАТУРА
6. 9. М. Р. Фельдман, Продольный изгиб стержня с учетом пластического
последействия, Изв. АН АрмССР, серия физ.-мат., ест. и техн. наук 9,
К> 1 A956), 75—86.
6.10. Л. А. Шаповалов, Влияние неравномерного нагрева на
устойчивость сжатого стержня, Прикл. мат. и мех. 22, К» 1 A958), 119—123;
Уравнения термоупругости и устойчивости при действии внешних сил и
температурных напряжений, канд. дисс, М., 1960.
6.11. С. А. Шестериков, К вопросу устойчивости при ползучести, канд.
дисс, Моск. госуд. ун-т, 1957; О критерии устойчивости стержня при
ползучести, Прикл. мат. и мех., К° 3 A959).
6.12. R. L. Carlson, Time-dependent tangent modulus applied to column
creep buckling, J. Appl. Mech. 23, K° 3 A956), 390.
6.13. G. Gerard, Note on creep buckling of columns, J. Aeron. Sci. 19, №10
A954), 714; A creep buckling hypothesis, J. Aeron. Sci. 23, K° 9 A956),
879—882, 887; J. Aerospace Sci., 29 K> 6 A962).
6.14. N. J. Hoff, Creep buckling, Aeron. Quarterly 7, K° 1 A956), 1—20 (см.
сб. переводов «Механика», ИЛ, Ко 6, 1956); Buckling at high
temperature, J. of the Royal Aer. Soc. 61, K° 563 A957), 756—774 (см. сб.
переводов «Механика», ИЛ, Ко 5, 1958, 65—100); A survey of the theories of
creep buckling, Stanford Un-ty Division of Aeronaut. Eng. Research,
K° 80, 1958 Геб. «Механика», ИЛ, № 1, 1960, 63—96).
6.15. L. W. H u, N. H. T r i n e r. Bending creep and its applications to beam
columns, J. Appl. Mech. 23, K° 1 A956), 35—42.
6.IS. J. A. Hult, Critical time in creep buckling, J. Appl. Mech., 22, X° 3
A955), 432.
6.17. J. К e m p n e r, Creep bending and buckling of non-linearly visco-elastic
columns, NACA Techn. Note 3137, 1954.
6.18. J. Kemp nor, V. P о h 1, On the non-existence of a finite critical time
for linear visco-elastic columns, J. Aeron. Sci. 20 A953).
6.19. С Libove, Creep buckling of columns, J. Aeron. Sci. 19, K° 7 A952),
459—467; Creep buckling analysis of rectangular section columns, NACA
Techn. Note X° 2956, 1953.
6.20. Т. Н. Lin, Creep stresses and deflections of columns, J. Appl. Mech. 23,
№ 2 A956), 214—218; Creep deflections and stresses of beam-columns,
J. Appl. Mech. 25, № 1 A958), 75.
6.21. J. Marin, Creep buckling in columns, J. Appl. Physics 18, K° 1 A947),
103—109.
6.22. F. K. Odquist, Influence of primary buckling on column buckling, J.
Appl. Mech. 21, № 3 A954), 295; Trans. Roy. Inst. Techn., № 66,
Stockholm A953).
6.23. S. A. Patel, J. Kemp пег, Effect of higher-harmonic deflection
components on the creep buckling of columns, Aeronaut. Quarterly 8,
K° 3 A957), 215—225.
6.24. D. Rosenthal, H. W. В а е r, An elementary theory of creep buckling
of columns, Proc. of the 1st U. S. Congr. of Appl. Mech., 1951.
6.25. F. B. V e u b e k e, Creep buckling, «High temperature effects in aircraft
structures», 1958.
К главе VII
7. 1. H. M. Беляев, Устойчивость призматических стержней под действием
переменных продольных сил, сб. «Инженерные сооружения и
строительная механика», Изд. «Путь», 1924.
7. 2. В. В. Болотин, О поперечных колебаниях стержней, вызываемых
периодическими силами, «Поперечные колебания и критические
скорости», 1, изд. АН СССР A951), 46—77; О параметрически возбуждаемых
колебаниях упругих арок, ДАН СССР 83, К° 4 A952), 537-539;
Определение амплитуд поперечных колебаний, «Поперечные колебания и кри-
ЛИТЕРАТУРА
951
тические скорости», изд. АН СССР 2 A953), 45—64; О
параметрическом возбуждении поперечных колебаний, там же, 5—44; Динамическая
устойчивость плоской формы изгиба, Ииж. сб. 14 A953), 109—122;
О взаимодействии вынужденных и параметрически возбужденных
колебаний, Изв. АН СССР, ОТН, № 4 A954); Некоторые задачи
динамической устойчивости упругих колец при внезапном нагружеиии, Изв.
вузов, Машиностроение, М» 6, 1965 (совместно с Б. П. Макаровым,
Г. В. Мишенковым, Л. Н. Нагорным, Л. П. Помази).
7.2а А. С. Вольмир, Устойчивость сжатых стержней при динамическом
нагружении, Строит, механика и расчет сооруж., № 1 (I960), 6—9.
7. 3. И. И. Гольденблат, Современные проблемы колебаний и
устойчивости инженерных сооружений, Стройиздат, М., 1947; Динамическая
устойчивость сооружений, Стройиздат, М., 1948.
7. 4. М. А. Лаврентьев, А. 10. И ш л и и с к и й, Динамические формы
потери устойчивости упругих систем, ДАН СССР, 65, № 6 A949).
7. 5. М. Е. К а г а и, Н. Д. Гоня, Экспериментальные исследования работы
деревянных стержней на продольный удар, Изв. вузов, Строительство
и архит.. № 3 A961), 33—38.
7. 6. В. М. М а куш и н, Труды МВТУ им. Баумана, кафедра сопротивления
материалов, разд. 3 A947).
7. 7. В. Н. Чело мой, Динамическая устойчивость элементов авиационных
конструкций, Изд. Аэрофлота, 1938.
7. 8. J. Р. С h a w 1 a, Numerical analysis of the process of buckling of
elastic and inelastic columns, Proc. of the 1st U. S. Congr. of Applied Mech.,
1952, 435—440.
7. 9. J. F. Davidson, Impact buckling of deep beams in pure bending,
Quarterly Journ. of Mech. and Appl. Math. 8, K« 1 A955), 81—87 (см.
сб. «Механика», ИЛ, К° 2 C6), 1956, 133—139).
7.10. Den-Hartog, Theory of vibrations, 1940 (в переводе: Дж. Деи-
Гартог, Теория колебаний, Гостехиздат, 1942).
7.11 N. J. H о f f, The process of the buckling of elastic columns, Rep. K° 163.
Polit. Inst, of Brookline, 1949; Dynamic criteria of buckling, Research
Eng. Struct. Supplement, Butterworths Publ., 1949; The dynamics of the
buckling of elastic columns, J. Appl. Mech., K« 1 A951), 68—74 (см. сб.
«Механика», ИЛ, № 3, 1952).
7.12. N. J. Hoff, Buckling and stability, J. of the Royal Aeron. Soc. 58, № l
A954) (перевод: Н. X о ф ф, Продольный изгиб и устойчивость, ИЛ, 1955).
7.13. N. J. Hoff, S. N а г d о, В. Е г i с k s о n, The maximum load supported
by an elastic column in a rapid compression test, Proc. of the 1st U. S.
Nat. Congress of Appl. Mech., 1952, 419—423; An experimental
investigation of the process of buckling of columns, Proc. of the Soc. for Exper.
Stress analysis 9, № 1 A951), 201—208.
7.14. S. К a 1 i s к i, Statecznosc udarowa preta, Biuletyn Wojckowei Akademy
technicznej, Warszawa, 1955.
7^5. C. Koning, J. Taub, Stossartige Knickbeanspruchung schlanker Stabe
in elastischen Bereich, Luftfahrtforschung 10, № 2 A933), 55—64.
7.16. S. L u b к i n, J. J. Stoker, Stability of columns and springs under
periodically varying forces, Quart, of Appl. Math. 1, № 3 A943).
7.17. Rayleigh, The theory of sound, v. 1, London, 1926 (в переводе: Рэ-
лей, Теория звука, т. 1, Гостехиздат, 1940, стр. 311—313).
7.18. J. S. Rinehart, J. Pearson, Behaviour of metal under impulsive
loads, 1953 (в переводе: Дж. Райнхарт, Дж. Пирсен, Поведение
металлов при импульсивных нагрузках, ИЛ, 1958).
7.19. V. L. Salerno, F. Bauer, I. S h e n g, The behaviour of a simply
supported column under constant or varying end load, Proc. of the 1st
U. S. Nat. Congr. of Appl. Mech., 1952, 425—434.
7.20. J. Taub, Stossartige Knickbeanspruchung schlanker Stabe im elastischen
Bereich, Luftfahrtforschungr 10, № 2 A933), 65—85.
952
ЛИТЕРАТУРА
К главе VIII
8. 1. Д. Г. Б о л о н и н, Формы потери динамической устойчивости я
продольный изгиб стержней, находящихся под действием взрывных
нагрузок, канд. дисс, Ленинград, 1960.
8. 2. Л. С. В о л ь м и р, И. Г. К и л ь д и б е к о в, Исследование процесса вы--
пучнвания стержней при ударе, ДАН СССР 167, Л"° 4, 1966.
8. 3. Л. Н. Воробьев, К вопросу о продольном изгибе при ударном
нагрузке, Труды Новочеркасского политехи, ин-та 21 C5), 1949, 143—146.
8. 4. О. И. К а ц и т а д з е, Теоретическое и экспериментальное исследование
ударного продольного изгиба, Труды Кутаисского с.-х. ин-та 1, 1956,
151 —168; 2, 1957, Труды Груз, ип-та субтроп, х-ва 5—6, 1961; 9 — 10,
1965 (совместно с В. Д. Г о г о б е р и д з е).
8 5. Я. Ф. К а ю к, Динамическая устойчивость стержня при продольном
ударе, Прикладная механика 1, ЛЬ 9 A965), 98—106.
8. 6. Г. Н. Размадзе, Инженерные вопросы теории удара, Тбилиси, 1959;
Устойчивость простой балки при синусоидальном распределении
ударного изгибающего момента, Труды Груз, ин-та субтроп, х-ва 5—6,
1961; 7—8, 1963; Сообщ. АН Груз. ССР 11, Л1» 3, 1965.
8. 7. Г. Н. Размадзе, О. И. Кацнтадзе, О проблеме ударной
продольной устойчивости, Труды Кутаисского с.-х. ин-та 2 A957), 38!—386.,
8. 8. J. F. Fleming, E. H. Liebold, Dynamic response of highway
bridges, Proc. ASCE, J. Str. Div. 87, ST 7 A961), 33—61; Dynamic
response of columns. J. Frankl. In-te 275, № 6 A963), 463—472.
8. 9. G. Gerard, H. Becker, Column behaviour under conditions of
impact, J. Aeron. Sci. 19, ЛЬ 1 A952), 58—62, 65.
8.10. G. W. H о u s n e r, W. K- T s o. Dynamic behaviour of supercriticaily
loaded struts, Proc. ASCE, J. Eng. Mech. Div. 88 A962), 41—65.
8.11. N. Huffington. Response of elastic columns to axial pulse loading,
AIAA Journ. 1, Л» 9 A963), 2099—2104.
8.12. H. E. Li nd berg. Impact buckling of a thin bar, J. Appl. Mech. 32,
ЛЬ 2 A965), 315—322.
8.13. A. P e t r e, Flambage de barres droites par chex axial, Etudes et rech.
de mech. appliquee, 7, Л» 1 A956), 173—178; Bull. Inst, polit. Bukuresti
20, Л° 3 A958), 189—198.
8.14. E. Sevin, On the axial bending of columns due to dynamic axial forces
including effects of axial inertia, J. Appl. Mech. 27, № 1, A960), 125—131.
К главе IX
9. 1. С. А. Алексеев, Послекритическая работа гибких упругих пластинок.
Прикл. мат. и мех. 20, Х° 6 A956), 673—679.
9. 2. В. П. Белкин, Работа элементов палубных перекрытий после потери
устойчивости, Судпромгиз, Л., 1956.
9. 3. Б. М. Б р о у д е. Устойчивость пластинок в элементах стальных
конструкции, Машстройнздат, М., 1949.
9. 4. А. С. К а л м а н о к, Строительная механика пластинок, Машстройнздат,
1950.
9. 5. А. В. К а р м и in и и, Устойчивость свободно опертых прямоугольных
пластинок, подкрепленных ребрами жесткости, под действием
равномерной нагрузки, Инж. сб. АН СССР 24 A956).
9. 6. М. А. Колтунов, Поведение пластинки после потери устойчивости,
Вест. Моск. гос. ун-та, Л» 10 A953); № 6 A962), 43—50.
9. 7. А. С. Л о к ш и н. К расчету пластин, подкрепленных жесткими ребрами,
Прикл. мат. и мех. 2, ЛЬ 2 A935).
9. 8. С. Н. Никифоров, Сжатая прямоугольная пластинка со свободно
искривляющимися в ее плоскости продольными краями, Уч. зап. Моск.
гос. ун-та 117, Механика, Л° 1 A946).
ЛИТЕРАТУРА 953
9. 9. П. М. О г и б а л о в, Изгиб, устойчивость и колебания пластинок, изд.
МГУ, 1958.
9.10. П. Ф. Папковпч, К вопросу о выпучивании плоских пластин,
сжимаемых усилиями, превосходящими их эйлерову нагрузку, Морск. сб.,
Л° 8—9 A920).
9.11. Г. Г. Ростовцев, Продольно-поперечный изгиб гибкой
прямоугольной пластины, Ипж. сб. 8 A950), 83-104.
9.12. II. А. Соколов, О напряжениях в сжатой пластинке после потери
устойчивости, Труды НИСС, Л° 7 A932).
9.13. С. П. Тимошенко, Об устойчивости пластинок., подкрепленных
упругими ребрами, изд. Ин-та инж. путей сообщ., 1915.
9.14. G. H. Bryan, On the stability of a plane plate under thrusts in its own
plane, Proc. of the London Math. Soc. 22 A891).
9.15. 11. L. Cox, Buckling of thin plates in compression, Rep. and Memor.,
№K° 1553, 1554 A933).
9.16. Th. К a r m A n, E. E. S e с h I e r, L. II. D о n n e 1 1, The strength of thin
plates in compression, Trans. ASME 54 A932), 53—57.
9.17. S. L e v v, Bending of rectangular plates with large deflections, NACA
Rep. Л» 737 A942).
9.18. K. M a r g u e r r e, Die mittragende Breite des gedriickten Plattenstreifens,
Luftfahrtforschung 14, Л° 3 A937) (перевод п сб. переводов под ред.
А. Л. Уманского, Оборонгиз, Москва, 1938).
9.19. Е. S е у d е 1, Uebcr das Ausbeulen von rechteckigcn isotropen Oder
orthogonal anisotropen Platten bei Schubbeanspruchung, Ing. Archiv 4
A933), 169.
9.20. R. V. Southwell, S. W. S k a n, On the stability under shearing forces
of a flat elastic strip, Proc. of Royal Society, Л105 A924), 582.
9.21. F.. T r e f f t z, Die Bcstirnniung der Knicklast gedruckter rcchteckiger
Platten, Z. fiir angew. .Math. n. Phys. 15 A935).
9.22. H. Wagner, Ebene Bleclnvandlragcr mit sehr diinner Stegbiech,
Zeitschr. f. Flugtechnik and Moiorluftscliiffahrt 20, Л» 8—12 A922), 200
(перевод в сборнике под ред. Л. Л. Уманского и П. М. Знаменского,
изд. ЦАГИ, 1937, 58—117).
9.23. N. Y a m a k i, Postbuckling behaviour of rectangular plates with small
initial curvature loaded in edge compression, J. Appi. Mech. 26 A959),
407—414: 2o A960), 335—342; Experiments on the postbuckling
behaviour of s<;uare plates loaded in edge compression, J. Appl. Mech. 29
A961), 238-244.
К главе Х
10. !. А. А. Ильюшин, Устойчивость пластинок и оболочек за пределами
упругости, Прикл. мат. и мех. 8, Л» 5, 337—360.
10. 2. Л. А Ильюшин, Пластичность, Гостехиздат, 1948.
10. 3. Л. М. К а ч а н о в, Основы теории пластичности, Гостехиздат, 1956,
165—173.
10. 4. В. Д. К л ю ш и и к о в, Устойчивость пластин за пределами упругости,
Изв. АН СССР. ОТН, Л° 7 A957), 41—56.
10. 5. Ю. Р. Л е п и к. Одна возможность решения задачи об устойчивости
упруго-пластических пластинок в точной постановке, Изв. АН СССР,
ОТН, N° 8 A957), 13—19; Об устойчивости упруго-пластической
пластинки, сжатой в одном направлении, Прикл. матем. и мех. 21, № 5
A957), 722—724; Устойчивость прямоугольной упруго-пластической
пластинки, неравномерно сжатой в одном направлении, Инж. сб. 18,
A954), 161—164; Некоторые вопросы равновесия упруго-пластических
пластинок и стержней, докт. дпес, МГУ, 1957.
10. 6. С. М. Попов, Устойчивость свободно опертых пластинок за
пределами упругости, Инж. сб. 9 A951); О распространении метода смягчения
61 А. С. Вольмир
954
ЛИТЕРАТУРА
граничных условий на устойчивость за пределами упругости
прямоугольных пластинок, Прикл. мат. и мех. 15, N° 1 A951); Устойчивость
за пределом упругости пластинок при вцецентреином растяжении или
сжатии, Инж. сб. 18 A954), 165—173.
10. 7. А. П. Прусаков, Устойчивость н свободные колебания
трехслойных пластин с легким заполнителем, докт. дисс, Днепропетровск,
1955.
10. 8. Л. А. То л о к о н н и к о в, О влиянии сжимаемости материала на упру-
гопластическую устойчивость пластин и оболочек, Вестник ЛАГУ, N° 6
A949), 35—44; К вопросу об устойчивости круглых пластин, сжатых
равномерно распределенным давлением по контуру Уч. зап. Рост,
ун-та 18, №. 3 A953).
10. 9. Р. В i j 1 а а г d, Theory of plastic stability, Proc. Коп. Ned. Akad. d.
Wet. 41, № 5 A948) (перевод в сб. «Теория пластичности», ИЛ, 1948,
392—404); Theory and tests on the plastic stability of plates and shells,
J. Aeron. Sci. 16, №. 9 A949), 529-541.
10.10. G. Gerard, Secant modulus method for determining plate instability
above the proportional limit, J. Aeron. Sci. 13, N° 1 A946), 38—41, 48;
Critical shear stress of plates above the proportional limit; J. Appl.
Mech., №. 3 A948), 7—11; Effective width of elastically supported flat
plates, J. Aeron. Sci. 13, №. 10 A946), 518—524.
10.11. G. J. Heimerl, Determination of plate compression strength, NACA
Techn. Note № 1480, 1947.
10.12. G. H. Han del man, W. P r a g e r, Plastic buckling of a rectangular
plate under edge thrusts, NACA 'iechn. Note N° 1530, 1948.
10.13. H. G. Hopk ins, The plastic instability of plates, Quart, of Appl. Math.
11, № 2 A953).
10.14. С. Е. Pearson, Bifurcation criterion and plastic buckling of plates
and shells, J. Aeron. Sci. 17, №. 7 A950), 417—424, 455 (см. сб.
«.Механика», ИЛ, №. 5, 1951).
10.15. R. A. Preide, G. J. Heimerl, Plastic buckling of simply supported
compression plates, NACA Techn. Note N° 1817, 1949.
10.16. E. Z. S t о w e 1 I, A unified theory of plastic buckling of columns and
plates, NACA Techn. Note N° 1556, 1948.
10.17. E. H. S h u e 11 e, Buckling of curved sheet in compression and its
relation to the secant modulus, J. Aeron. Sci. 15, .No ) A948), 18—22.
К главе XI
11. 1. И. И. В о р о в II ч, О поведении круглой плиты после потери
устойчивости, Уч. зап. Рост. гос. ун-та 32, № 4 A955), 55—60.
11. 2. Б. Г. Г а з и з о в, К вопросу об устойчивости кольцевой пластины, Изв.
Казан, ф-ла АН СССР 12 A958), 155—164.
11. 3. Э. И. Г р и г о л ю к, К вопросу о поведении круглых пластинок после
потери устойчивости, Вест. инж. и техн., N° 3 A949).
11. 4. А. Н. Д и ни и к, Об устойчивости сжатой круглой пластинки, Изв.
Киев, полит, нн-та A911); Приложение функций Бесселя к задачам
теории упругости, 1913; Избранные труды, т. 2, изд. АН УССР, Киев,
1955, 62—72.
И. 5. В. М. М а к у ш и н. Критические значения интенсивности радиальных
сжимающих сил для круглых тонких пластин, «Расчеты на прочность»
4 A959), 270—298; 5 A960), 236—248; 6 A960), 171—181.
11. 6. Ю. И. Р е м н с в, Об устойчивости круглой пластины при облучении,
Научн. докл. высшей школы, физ.-мат. науки, N° 3 A959), 145—147.
11. 7. В. Н о в а ц к и й, 3. О л е с я к, Колебания, устойчивость и изгиб
круговой пластинки на части окружности защемленной полностью и
частично опертой, Бюллетень Польской АН, отд. 4, 4 N° 4 A956).
ЛИТГ.РАТУРА
955
11. 8. Д. Ю. Панов, В. И. Ф е о д о с ь е в, О равновесии и потере
устойчивости пологих оболочек при больших прогибах, Прикл. мат. и мех. 12,
№ 4 A948), 384—406; 13, Кя 1 AЭ49), 116.
11. 9. S. R. В о d п е г, The postbuckling behaviour of a clamped circular plate,
Quart. Appl. Math. 12, .N° 4 A955), 397—401.
11.10. К. Friedrichs, J. Stoker, The non-linear boundary value problem
of the buckled plate; Proc. of the Nat. Acad, of Sci. 25 A939), 535—
540; Arner. J. Math. 63 A941), 839—888; Buckling of the circular plate
beyond the cricital thrust, J. Af.pl. Mech. 9, .Nfe 1 A942), 7—14.
11.11. E. H. Mansfield, On the buckling of an annular plate, Quart. Journ.
of Mech. and Appl. Math. 13, .Vs i (i960), 16—23.
11.12. E. M e i s s п е r, Ucber das Knicken kreisformiger Scheiben, Schweiz.
Bauzeitung 101 A933), 87—89.
11.13. A. N a d a i, Ueber das Ausbeulen von kreisformigen Platten, Zeitschr.
VDJ, Л"» 9 A915), 10.
11.14. N. Y a m a k i. Buckling of a thin annular plate under uniform
compression, J. Appl. Mech. 25 A958), 267-273.
К главе XII
12. 1. H. А. А л у м я э, Равновесие тонкостенных упругих оболочек в после-
критической стадии, Тарту, 1948; Прикл. мат. и мех. 13, № 1 A949);
О представлении основных соотношений нелинейной теории оболочек,
Прикл. мат. и мех. 20, Л"» 1 A956), 136-139.
12. 2. С. А. Амбарцумян, Теория анизотропных оболочек, Физматгиз,
М., 1961.
12. 3. В. 3. Власов, Основные дифференциальные уравнения общей
теории упругих обслочек, Прикл. мат. и мех. 8, Л"° 2 A944).
12. 4. В. 3. Власов, Общая теория оболочек и ее приложение в технике,
Гостехиздат, М., 1949.
12. 5. А. Л. Гольденвейзер, Дополнения и поправки к теории тонких
оболочек Лява, сб. «Пластинки и оболочки», Госстройиздат, 1939;
Уравнения теории оболочек в перемещениях и функциях напряжений,
Прикл. мат. и мех. 21, Л° 6 A957); 801-814; Асимптотические свойства
собственных значений в задачах теории упругих тонких оболочек.
Прикл. мат. н мех. 25, Л» 4 A961), 729—741.
12. 6. А. Л. Гольденвейзер, Теория упругих тонких оболочек,
Гостехиздат. М., 1953.
12. 7. Н. А Кильчевский. Обобщение современной теории оболочек,
Прикл. мат. и мех. 2, „\° 4 A939).
12. 8. А. И. Лурье, Статика тонкостенных упругих оболочек, Гостехиздат,
1947.
12. 9. X. М. М у ш т а р и, Некоторые обобщения теории тонких оболочек
с приложением к задаче устойчивости упругого равновесия, Изв. физ.-
мат. о-ва при Каз. гос. ун-те A938), 71—97, Прикл. мат. и мех. 2,
Кг 4 A939); Об упругом равновесии тонкой оболочки с начальными
неправильностями в форме срединной поверхности, там же, 15, №6 A951)
12.10.Х. М. Муштари, К. 3. Г а л и м о в, Нелинейная теория упругих
оболочек, Таткнигоиздат, Казань, 1957.
12.11. В. В. Новожилов, Теория тонких оболочек, Оборонгиз,' 1941; Суд-
промгиз, 1951.
12.12. В. В. Новожилов, Общая теория устойчивости тонких оболочек,
ДАН СССР 32, Л"» 5 A941).
12.13 10. Н. Работ нов, Основные уравнения теории оболочек, ДАН СССР
47, № 2 A945); Уравнения пограничной зоны в теории оболочек, тач
же, 47, Л"° 5 A945); Локальная устойчивость оболочек, там же, 52,
№2 A946).
61*
956
ЛИТЕРАТУРА
12.14. С. Ф е й п б е р г, К вопросу о построении приближенном теории
тонкостенных оболочек произвольного очертания, сб. «Исслед. по теории
сооружений», Госстройиздат, 1939.
12.15. We i - Z а п g С h i e n, The intrinsic theory of thin shells and plates,
Quart, of Appl. Math, i, Л» 4 A944), 297-327; 2, X° 1, 43—59, № 2,
120—135 A945).
12.16. L. D о п n e 1 I, A discussion of thin shell theory, Proc. 5th congr. for
Appl. Mech., 1939.
12.17. Y. С Fung, E. П. S e с h I e r. Instability of thin elastic shells,
«Structural Mechanics», Perganion-Press A960), 115—168.
12.18. W. Fliigge, Statik und Dynamik der Schalen, 2. Auflage, Springer-
Verlag, 1957 (перевод: В. Флюгге, Статика и динамика оболочек,
Госстройиздат, М., 1961).
12.19. A. I.ove, Mathematical theory of elasticity, 1927 (А. Ляв,
.Математическая теория упругости, ОНТИ, М., 1935).
12.20. К. Marguerre, Zur theorie der gerkrumrnten Platte grosser Forman-
derung, Jahrbuch 1939 der deutschen Luftfahrtforschung, 413—418.
12.21. E. Reissner, A new derivation of the equations for the deformation
of elastic shells, Am. Journ. of Math. 63, X° 1 A941), 177-184; On
some problems in shell theory, «Structural Mechanics», Pergamon-
Press A960), 74—114.
12.22. J. L. Svnge. W. Z. С h i e n, The intrinsic theory of elastic shells and
plates, fh. Karman Ann. Volume A941), 103—120.
К главе XIII
13. 1. С. В. Александровский, Об устойчивости цилиндрической
оболочки при больших прогибах, «Расчет пространств, конструкций» 3,
Стройиздат A955), 453- 492.
13 2. С. А. Алексеев, Гибкие пластинки и оболочки в закритической
области, докт. дисс, М., 1956.
13. 3. Н. А. А л у м я э, Критическая нагрузка длинной цилиндрической
круговой оболочки при кручении, Прикл. мат. и мех. 18, ЛЬ 1 A954),
27—34.
13. 4. Н. А. Л л ф у т о в, Устойчивость цилиндрических и конических
подкрепленных оболочек, нагруженных внешним давлением, канд. дисс,
Моск. высш. техн. уч-ще, 1956; К расчету оболочек на устойчивость
энергетическим методом. Ииж. сб. 22 A955).
13.4а. Н. А. Л л ф у т о в, В. Ф. Соколов, Определение нижнего
критического давления упругой цилиндрической оболочки и поведение
оболочки после потери устойчивости, Расчеты на прочность в
машиностроении. Труды МВТУ", Л° и9 A959;.
13. 5. А. С. Вольмир, Теория устойчивости и больших деформаций
цилиндрической оболочки при сжатии и сдвиге, «Расчет пространств,
конструкций» 1, Машгиз A950), 285—316; О влиянии начальных
неправильностей на устойчивость цилиндрических оболочек при внешнем
давлении, ДАН СССР 113, ЛЬ 2 A957), 291 -293.
13. 6. Е. Д. Голицинская, Устойчивость тонких замкнутых
цилиндрических оболочек, Труды Белорусской сельскохоз. академии 31 A959),
75—82.
13. 7. В. М. Даревский, Устойчивость цилиндрической оболочки при
одновременном действии крутящего момента и нормального давления. Изв.
АН СССР, ОТН, Л° 11 A957), 137—147; Устойчивость консольной
цилиндрической оболочки при изгибе поперечной силон с кручением и
внутренним давлением, «Прочность цилиндрических оболочек», Обо-
ронгиз, 1959, 72—94; «Расчет пространств, конструкций» 5 A959),
431--449.
ЛИТЕРАТУРА
957
13. 8. В. М. Да ре вс к и и, Р. И. Кшнякин, Устойчивость консольной
цилиндрической оболочки с подкрепленным краем при действии
внешнего давления, ДАН СССР 131, Хя 6 (I960), 1294-1297; Устойчивость
подкрепленном кольцами цилиндрической оболочки при действии
внешнего давления, ДАН СССР 134, Хя 3 A960), 548 551.
13.9. Ф. С. Исаи баев а. Определение нижней критической нагрузки
цилиндрической оболочки при всестороннем сжатии, Изв. Казан, ф-ла
АН СССР 7 A955), 51—59; К теории устойчивости защемленной
цилиндрической оболочки при гидростатическом давлении, там же, 12
A958), 149—154.
13.10. Н. И. Кривошеее, Об устойчивости цилиндрической оболочки под
действием сдвига, Изв. Казан, ф-ла АН СССР 12 A958), 133—142; Об
устойчивости цилиндрической оболочки при совместном действии
кручения и равномерного поперечного давления, там же, 143—148.
13.11. Р. И. Кшнякин, Влияние осевой растягивающей силы на
устойчивость цилиндрических оболочек при кручении и при внешнем
нормальном давлении, «Прочность цилиндрических оболочек», Оборонгиз, 1959,
55-71.
13.12. О. Н. Л е н ь к о, Устойчивость круговой цилиндрической ортотропном
оболочки, сб. «Расчет пространств, конструкций» 4 A956), 499—524;
Влияние краевого эффекта на прочность цилиндрической оболочки,
нагруженной внутренним давлением и осевым сжатием, Строит,
механика и расчет сооружений, Хя 1 A960), 1—6.
13.13. Н. Н. Леонтьев, К вопросу устойчивости замкнутой
цилиндрической оболочки, Научн. докл. высшей школы, Строительство, №1 A958),
26—34.
13.13а. П. А. Лука ш, Об устойчивости ортотроппых цилиндрических
оболочек. Научн. докл. высшей школы, Строительство, Хя 2 A958),
5—13.
13.14. В. А. Марьин, Устойчивость цилиндрической оболочки при круяении
и внутреннем давлении, «Расчет пространств, конструкций» 5 A959),
475—484; Устойчивость цилиндрической панели при сдвиге, там же,
485—501.
13.15. X. М. Муштари, Об упругом равновесии цилиндрической оболочки
под действием продольного сжатия в закритической области; Труды
Каз. авиац. ин-та 17 A946); Приближенное определение
редукционного коэффициента обшивки при осевом сжатии. Изв. Казан, ф-ла АН
СССР 7 A955), 23—35.
13.16. X. М. Муштари, А. В. Сачен ков. Об устойчивости
цилиндрических и конических оболочек кругового сечения при совместном
действии осевого сжатия и внешнего нормального давления, Прикл. мат.
и мех. 18, Хя 6 A954), 667—674.
13.17. В. А. Нагаев, Определение нижней критической нагрузки
цилиндрической оболочки при внешнем поперечном давлении, Изв. Высш. уч.
зав., серия машиностр., № 6 A959), 46—52.
13.18. О. М. Палий, Устойчивость круговой цилиндрической оболочки,
защемленной на криволинейных кромках, Изв. АН СССР, ОТН, Хя 1
A958), 126—128.
13.19. А. В. Погорелов, Цилиндрические оболочки при закритических
деформациях, части 1—4, изд. Харьк. ун-та, 1962; Геометрическая теория
устойчивости оболочек, «Наука», М.. 1966.
13.20. А. В. Погорелов, О закритических деформациях сжатых
цилиндрических оболочек, ДАН СССР 134, № 1 (I960), 62—63; Закритические
деформации цилиндрических оболочек под внешним давлением, ДАН
СССР 138, Хя 6 A961), 1325—1327; Закритическая деформация
цилиндрических оболочек при кручении, ДАН СССР 16, № 2 A962).
■13.21. 10. Н. Работнов, Локальная устойчивость оболочек, ДАН СССР
52, Хя 2 A946).
958
ЛИТЕРАТУРА
13.22. О. И. Теребушко, Расчет несущей способности круговой
цилиндрической панели, подкрепленной ребрами, «Расчет пространств,
конструкций» 4 A958), 531—554; Устойчивость цилиндрической оболочки при
кручении, внешнем давлении и сжатии, там же, 5 A959), 502—522;
К расчету на устойчивость и проектирование цилиндрических
подкрепленных оболочек, там же, 7 A962), 119—133.
13.23. С. П. Тимошенко, Известия Электротехнического ин-та 11 A914).
13.24. К. Д. Туркин, Устойчивость подкрепленной цилиндрической
оболочки при сжатии и чистом изгибе, «Расчет пространств, конструкций»
4 A958), 477—498; Общая устойчивость подкрепленной
цилиндрической оболочки при поперечном изгибе, там же, 5 A959), 450—
474.
13.24а. В. М. Ч е б а н о в, Некоторые вопросы исследования устойчивости
оболочек, Вестн. Ленингр. гос. ун-та, Мех. и матем., № 1 A959),
79—93.
13.25. Л. А. Шаповалов, Прикл. мат. и мех. 20, ЛЬ 5 A956), 669—671.
13.26. М. К о з а р о в, Исследования устойчивости тонких упругих ортотроп-
ных цилиндрических оболочек по нелинейной теории В. 3. Власова,
Ежегодник Инжен.-строит, ин-та, София, 1957 (на болгарском языке),
93—136.
13.27. Цянь Сюэ-сэнь (Н. S. Tsien), A theory for the buckling of thin
shells 9 A942), 373—384.
13.28. H. Becker, G. Gerard, Torsional buckling of moderate length
cylinders, J. Appl. Mech. 23, № 4 A956), 647—648.
13.29. P. P. Bijiaard, Buckling stress of thin cylindrical clamped shells
subject to hydrostatic pressure, J. Aeron. Sci. 21, X° 12 A954).
13.30. L. H. Donne II, Stability of thin walled tubes under torsion, NACA
Rep. № 479 A933) (перевод в сб. переводов под ред. А. А. Уманского
и П. М. Знаменского, изд. ЦАГИ, М, 1937, 29—57); Effect of
imperfections on the buckling of thin cylinders under external pressure, J.
Appl. Mech. 23, № 4 A956), 569—575.
13.30a. L. H. D о п n e 11, С. С Wan, Effect of imperfections on the buckling
of thin cylinders and columns under axial compression, J. Appl. Mech.
17, № 1 A950), 73—83.
13.31. G. D. Galletly, R. Bart, Effects of boundary conditions and initial
out of roundness on the strength of thin-walled cylinders subject to
external hydrostatic pressure, Paper Am. Soc. Mech. Eng., NAPM-9, 1956.
13.32. G. Gerard, An evaluation of structural sheet materials in missile
application, Jet Propulsion 28, Mb 8 A958), 511—520.
13.33. L. A. Harris, H. S. S u e r, W. T. Skene, R. J. Bend jaraine,
The stability of thin-walled unstiffened circular cylinders under axial
compression including the effects of interml pressure, J. Aeron. Sci. 24,
№ 8 A957), 587—596; The bending stability of thin walled unstiffened
circular cylinders uncluding the effects of internal pressure, J. Aeron.
Sci. 25, № 5 A958), 281—287.
13.34. H. G. Hopkins, E. H. Brown, The effect of internal pressure on the
initial buckling of thin-walled cylinders under torsion, Aer. Res. Com.
Rep. and Memo, № 2423 A951).
13.35. Th. К arm an, H. S. Tsien, The buckling of thin cylindrical shells
under axial compression, J. Aeron. Sci. 8, .Nb 8 A941), 303—312.
13.36. J. К e m p n e r, Postbuckling behaviour of axially compressed circular
cylindrical shells, J. Aeron. Sci. 21, № 5 A954), 329—335, 342 (перевод
в сб. «Механика», ИЛ, т. 2, 1955, 105—116).
13.37. J. Kempner, К. Pandalai, S. Patel, J. Crouze-Pascal,
Postbuckling behaviour of circular cylindrical shells under hydrostatic
pressure, J. Aeron. Sci. 24, № 4 A957), 253—264.
13.38. L. К irste, Abwickelbare Verformung dunnwandiger Kreiszylinder, Oes-
terr. Ing. Archiv 8, № 2—3 A954), 149-151,
ЛИТЕРАТУРА
959
13.39. А. К i r s t e i п, Е. Wenk, Observations of shap-through action of thin
cylindrical shells under external pressure, Proc. Soc. Exper. Stress
Analysis 14, j\» 1 A956), 205—214.
13.40. B. Klein, Interaction equation for the buckling of unstiffened cylinders
under combined bending, torsion and internal pressure, J. Aeron. Sci.
22, № 8 A955), 583; Buckling of unstiffened thin-walled circular
cylindrical shells subjected to various loading conditions with and without
internal pressure, Am. Rocket Society, 1958.
13.41. W. Т. Ко iter, Buckling and postbuckling behaviour of a cylindrical
panel under axial compression, Nat. Luchtvaart laborat, Rep. № 476,
Amsterdam, 1956.
13.42. D. L e g g e t, R. Jones, The buckling of a cylindrical shell under axial
compression when the buckling load has been exceeded, Rep. and Memo.,
№ 2190 A942); Pubis. Inst. math. Acad. Serbe Sci. 7 A954).
13.43. H. Lo, H. Crate, E. Schwartz, Buckling of thin walled cylinders
under axial compression and internal pressure, NACA Rep. № 1027,
1951.
13.44 Tsu-Tao Loo, Effects of large deflections and imperfections on the
elastic buckling of cylinders under torsion and axial compression, Proc.
of the 2nd US Nat. Cor.gr. of Appl. Mech., NY, 1954, 345—357.
13.45. R. Lorentz, Zeitschr. el. Ver. deutsche Ing. 52 A908), 1706; Physik.
Zeitschr. 12 A911), 241.
13.46. H. F. Michielsen, The behaviour of thin cylindrical shells after
buckling under axial compression, J. Aeron. Sci., № 12 A948),-738—744.
13.47. R. Mises, Der kritische Aufiendruck fur allseits belastete cylindrischer
Rohre, «Festschr. zum. 70 Geburtstag von prof. A. Stodola», Zurich,
1929, 418—432.
13.48. W. Nash, Effect of large deflections and initial imperfections on the
buckling of cylindrical shells, J. Aeron. Sci. 22, № 4 A955), 294—269;
An experimental analysis of the bucking of thin initially imperfect
cylindrical shells subject to torsion, Paper of the Soc. Experim. Stress
Anal., №. 476 A957); Buckling of initially imperfect cylindrical shells
subjected to torsion, J. Appl. Mech. 24, № i A957), 125—130.
13.49. R. G. Sturm, Slability of thin cylindrical shells in torsion, Proc. Am.
Soc. Civil. Eng. 73, № 4 A947), 471—495.
13.50. E. Schwerin, Die Torsionsstabilitat des dunnwandigen Rohres,
Zeitschr. angew. Math, und Mech. 5, № 3 A925), 235—243.
13.51. W. F. Thielemann, New developments in the nonlinear theories of
the buckling of thin cylindrical shells, «Aeronautics and Astronautics»,
Pergamon-Press, 1960, 76—121.
13.52. W. Thielemann, W. Schnell, G. Fischer, Beul- und Nachbeul-
verhalten orthotroper Kreiszylinderschalen unter Axial und Innendruck,
Zeitschr. fur Flugwissenschaften 8, № 10/11 A960), 284—293.
13.53. E. Wenk, R. S. S с a n I a n d, W. A. Nash, Experimental analysis of
the buckling of cylindrical shells subjected to external hydrostatic
pressure, Proc. of the Soc. Exper. Stress. Anal. 12, № 1 A954).
13.54. D. F. Windenburg, C. Trilling, Collapse by instability of thin
cylindrical shells under external pressure, Trans. ASME 56 A934),
819—825.
13.55. Y. Yoshimura, J. Niisawa, Lower buckling stress of circular
cylindrical shells subjected to torsion, J. Aeron. Sci. 24, № 3 A957),
211—216.
К главе XIV
14. I. A. H. Б о ж и н с к и й, А. С. Во ль мир, Экспериментальное
исследование устойчивости цилиндрических оболочек за пределами упругости,
ДАН СССР 142, № 2 A962).
960
ЛИТЕРАТУРА
14. 2. В. Г. Зубчанпнов, Осесимметричная форма потерн устойчивости
круговой цилиндрической оболочки за пределами упругости, Изв AM
СССР, Мех. и мат. Л° 5 A961), 131 — 132.
14. 3. Н. С. Г а н и е в, Определение критической нагрузки цилиндрической
оболочки за пределом упругости при осевом сжатии и внешнем
нормальном давлении, Изв. Казан, ф-ла АН СССР, серия фнз.-мат. п техн.
наук, 7 A955).
14. 4. Э. И. Г р и г о л ю к, О выпучивании тонких оболочек за пределами
упругости, Изв. АН СССР, ОТН, Л° 10 A957), 3—11; Чистопластиче-
ская потеря устойчивости топких оболочек, Прикл. мат. и мех. 21, Лв 7
A957); Об учете сжимаемости материала при определении нижних
критических нагрузок, Изв. АН СССР, ОТН, Л° 5 A958); Касательно-
модульная нагрузка круговых цилиндрических оболочек при
комбинированной нагрузке, Вестник Моск. гос. ун-та, Ке 1 A958).
14. 5. Л. М. К а ч а и о в, К вопросу устойчивости упруго-пластического
равновесия, Вестник ЛГУ 19, серия мат., мех. и астр., ЛЬ 4 A956).
14. 6. В. Д. К л ю ш н и к о в, Устойчивость пластин за пределом упругости,
Изв. АН СССР, ОТН, № 7 A957).
14. 7. Ю. Р. Л е п и к, Одна возможность решения задачи об устойчивости
упруго-пластических пластинок в точной постановке. Изв. АН СССР,
ОТН, Х° 8 A957); Равновесие упруго-пластических пластинок при
больших прогибах, Инж. сб. 24 A956), 37—62.
14. 8. А. В. С а ч е н к о в, Об устойчивости оболочек за пределом упругости,
Изв. Каз. ф-ла АН СССР 10 A956), 81 — 100.
14. 9. Л. А. Т о л о к о и н и к о в, О влиянии сжимаемости материала на
упруго-пластическую устойчивость пластин и оболочек, Вестник Моск.
Гос ун-та, Л° 6 A949), 35—44.
14.10. G. Gerard, Plastic stability theory of thin shells. J. Aeron. Sci. 24,
Лв 4 A957), 264-279; J. Aerospace Sci. 29, Xe 10 A962).
14.11. L. Lee, C. A d e s. Plastic torsional buckling strength of cylinders
including the effects of imperfections. J. Aeron. Sci. 24, Л° 4 A957).
14.12. L. Lee, Inelastic buckling of initially imperfect cylindrical shells subject
to axial compression, J. Aerospace Sci. 29, Лэ 1 A962), 87—96.
14.13. S. Radhakrishnan, Plastic buckling of circular cylinders, J. Aeron.
Sci. 23, Л» 9 A956), 822—894.
К главе XV
15. 1. 11. А. А л у м я э, Об определении состояния равновесия круговой
оболочки при осесимметричной нагрузке. Прикл. мат и мех. 17, ЛЬ 5
A958); К определению критической нагрузки замкнутой в вершине
конической оболочки вращения, находящейся под действием внешнего
давления, Труды Таллинского политехи, ин-та 66 A955);
Асимптотическое интегрирование уравнений статической устойчивости конической
оболочки вращения. Прикл. мат. и мех. 21, Л» 1 A957).
15. 2. Н. А. А л ф у т о в, К расчету оболочек на устойчивость энергетическим
методом, Инж. сб. 2! A955).
15. 3. Л. М. Бунич, О. М. Палий, И. А. Пи сков и тин а, Устойчивость
усеченной конической оболочки, находящейся под действием равномер-
. ного диетного давления, Инж. сб. 23 A956).
15. 4. Г. X. Гениев и' Н. С. Ч а у с о в, Некоторые вопросы нелинейной
теории устойчивости пологих металлических оболочек, Гос. издат. по строит,
и архит., 1954.
15. 5. Э. И. Г р и г о л ю к, Об устойчивости замкнутой двухслойной
конической оболочки под действием равномерного нормального давления,
Инж. сб. 19 A954); Нелинейные колебания и устойчивость пологих
ЛИТЕРАТУРА
961
стержней и оболочек; Изв. АН СССР, ОТН, № 3 A955); К потере
устойчивости при больших прогибах замкнутой слоистой конической
оболочки под действием равномерного нормального давления, Инж. сб.
Ин-та механики АН СССР 22 A955); Упругая устойчивость ортотроп-
ных и слоистых конических и цилиндрических оболочек, сб. статей
«Расчет пространств, конструкций» 3 A955).
6. Т. Д. К а р и м б а е в. Об устойчивости конических и цилиндрических
оболочек при совместном действии осевого сжатия и внешнего
переменного давления. Инженерный журнал 4, JV° 3 A964).
7. X. М. М у ш т а р и, Некоторые обобщения теории тонких оболочек
с приложением к задаче устойчивости упругого равновесия. Изв. Физ.
мат. научно-исслед. ин-та матем. и мех. при Казанском ун-те, сер. 3,
11 A933); Приближенное решение некоторых задач устойчивости
тонкостенной конической оболочки кругового сечения. Прикл. мат. и мех.
7, Mb 3 A943).
8. X. М. М у ш т а р и, А. В. С а ч е н к о в. Об устойчивости
цилиндрических и конических оболочек кругового сечения при совместном
действии сжатия и внешнего нормального давления, Прикл. мат. и мех.
23, Ке 6 A954).
9. П. В. М ю р с е п п, К определению критической нагрузки конической
оболочки вращения за пределом упругости, Труды Ии-та физ. и аст-
рон. АН Эст. ССР, Хо 16, 1961.
10. Р. К. Р я я м е т, Критическая нагрузка конической оболочки,
находящейся под действием равномерно распределенного внешнего давления,
Труды Таллинского политехи, ин-та 66 A951); Равновесие упругих
конических оболочек в послекритической стадии, Труды Таллинского
политехи, ин-та, серия А, Л"» 82 A956); Равновесие тонкостенных
упругих конических оболочек в послекритической стадии, Труды
Таллинского политехи, ин-та. серия А, Л» 82 A956).
11. А. В. С а ч е и к о в, Приближенное определение нижней границы
критической нагрузки при продольном сжатии тонкой конической
оболочки. Изд. Казан, ф-ла АН СССР, серия физ.-мат. и техн. паук, 7
A955); Об устойчивости оболочек за пределом упругости, Изв. Казан,
ф-ла АН СССР, серия физ.-мат. и техн. наук, 10 A956); Об
устойчивости конических оболочек кругового сечения под действием
равномерного внешнего давления, Изв. Казан, ф-ла АН СССР, серия физ.-мат.
и техн. наук, Х° 12 A953).
12. И. И. Трапезин, Об устойчивости тонкостенной конической
оболочки кругового сечения при нагрузках, осесимметоичных относительно
ее оси, Труды Моск. авиационного ин-та, Л° 17 A952); Устойчивость
конструктивно ортотропной тонкостенной конической оболочки,
нагруженной равномерным внешним давлением, Труды А5АИ, вып. 69, Обо-
ронгиз, 1956; Об устойчивости конической оболочки, находящейся под
гидростатическим давлением, сб. «Расчеты па прочность, жесткость,
устойчивость и колебания», Машгиз, 1956; Устойчивость тонкостенной
конической оболочки, замкнутой в вершине, нагруженной боковым
гидростатическим давлением, сб. «Расчеты на прочность», т. 5,
Машгиз, 1960; Экспериментальное определение величин критического
давления для конических оболочек, там же.
13. И. Я. Ш т а е р м а н. Устойчивость оболочек, Труды Киевского авиац.
ин-та, Ко I A936).
14. Е. Н. Dill, General theory of large deflections of thin shells with
special applications to conical shells, NASA TN D-826, March, 1961.
15. J. Fa milf, Asymmetric buckling of finitely deformed conical shells,
AIAA Journal 3, № 8, 1965.
16. J. Fritiof, N. Niordson, Buckling of conical shells subjected to
uniform external lateral pressure, Acta Polytechnica Transactions of the
Royal Institute of Technology, Stocholm, № 10, 1947.
962
ЛИТЕРАТУРА
15.15. N. J. Hoff and J. Singer, Buckling of circular conical shells under
external pressure. Proceedings of the IbTA.W Symposium on the Theory
of Thin Elastic Shells, Delft, 1959.
15.16. J. К e m p п е r, Stability equations for conical shells, Journal of the
Aeronautical Scienc. 25, № 2, February 1958.
15.17. L. Lackman and J. P e n z i e n, Buckling of circular cones under
axial compression, Trans. ASME E27, j\° 3, 1960.
15.18. E. V. P i 11 n e r, F. G. Morton, Stress and stability analysis of
cylindrical and conical shells, Final Report, Lockheed Aircraft Corp,
Report № LMSD-894808, May 1961.
15.19. P. P. Radkowski and D. K- Johnson, Buckling of single- and
multi-layer conical and cylindrical shells subjected to axial loads and
lateral pressure, AVCO Corp., Technical Report RAD-TR-61-36, Dec.
1961.
15.20. P. S e i d e, Axisymmetric buckling of circular cones under axial
compression, Journ. App. Mech., vol. 23, Л° 4, Doc. 1956; A Donnel type
theory for asymmetrical bending and buckling of thin conical shells,
Trans. ASME E24, Л"° 4, 1957, On the buckling of truncated conical
shells under uniform hydrostatic pressure, Proc. IUTAM Symposium on
the theory of thin elastic shells, Delft, 1959; On the buckling of
truncated conical shells in torsion, Trans. ASME E29, Л"° 2, 1962;
Calculations for stability of thin conical frustums subjected to external uniform
hydrostatic pressure and axial loads, Journ. Aerospace Sci. 29, Ss 8,
Aug. 1962; A survey of buckling theory and experiment for circular
conical shells of constant thickness, NASA TN D-1510, 1962.
15.21. J. Singer and E. Abraham, Experimental investigations of the
instability of conical shells under external pressure, The Bulletin of the
Research Council of Israel 11C, N° 1, April 1962.
15.22. K- Shifener, Ober das elastische stabilatets Verhalten dtinnwandiger
orthotroper Kegelschalen unter Axiallasl und Innerdrtick, Jahrb. Wiss.
Ges. Luft- und Raumfahrt, 1962, Braunschweig, 1963.
15.23. С. Е. Taylor, Elastic stability of conical shells loaded by uniform
exernal pressure, Proceedings of the Third Midwestern Conference on
Solid Mechanics, University of Michigan, 1958.
К главе XVI
16. 1. А. Г. Габрильянц, В. И. Ф е о д о с ь с и. Об осесимметричиых
формах равновесия упругой сферической оболочки, находящейся под
действием равномерно • распределенного давления, Прикл. мат. и мех. 25,
Ss 6 A961), 1091—1101.
16. 2. Л. С. Лейб ей зо и, О применении гармоническчх функций к вопросу
об устойчивости сферической и цилиндрической оболочек. Уч. зап.
Юрьевского ун-та, № 1 A917); Собр. трудов, т. 1, изд. АН СССР,
50—85.
16. 3. X. М. Муштари, К теории устойчивости сферической оболочки под
действием внешнего давления, Прикл. мат. и мех. 19, „\° 2 A955).
16. 4. X. М. Муштари, Р. Г. С у р к и и.. О нелинейной теории устойчивости
упругого равновесия сферической оболочки при действии равномерно
распределенного внешнего давления, Прикл. мат. и мех. 14, № 6
A950), 573.
16. 5. А. В. По го ре лов, К теории выпуклых упругих оболочек в закри-
тической области, Харьков, 1960, ДАН СССР 170, № 6, 1966.
16. 6. Р. Г. С у р к и н, К теории устойчивости и прочности сферических и
эллипсоидных оболочек, днищ и мембран, канд. дисс, Казан, филиал
АН СССР, 1952; К вопросу о потере устойчивости сферической
оболочки, Изв. Казан, ф-ла АН СССР 10 A956).
ЛИТЕРАТУРА
963
16. 7. В. И. Феодосьеп, Об устойчивости сферической оболочки,
находящейся под действием цнсшпего равномерно распределенного давления,
Прикл. мат. и мех. 18, Л'° 1 A954), 35—42.
16. 8. Цянь В эй-чаи, Хуа Хай-чан (W. Z. Chien, H. С. Ни), On the
snapping of a thin spherical cap, 9th Congress Int. Mech. Appl., Univ.
Bruxelles 6 A956), 309-320.
16. 9. K. 0. F r i e d r i с h s, On the minimum load for spherical shells,
Th. Karman ann. volume, 1941, 258—272.
16.10. Th. Karman, H. S. T s i e n, The buckling of spherical shells on
external pressure, J. Aeron. Sci. 7 A939), 43.
16.11. К. К 1 б p p e 1, 0. J и n g b 1 и t h, Beitrag zum Durchschlagsproblem
diinnwandiger Kugelschalen, Stahlbau 22, X° 6 A953), 121 — 130.
16.12. U. Masuja, Y. Yoshimura, The buckling of spherical shells by
external pressure, Proc. 2nd Japan Nat. Congress Appl. Mech., 1953,
145-148.
16.13. !■'. J. Murray, F. W. Wright, The buckling of thin spherical shells,
J. Aerospace Sciences 28, № 3 A961).
16.14. R. Zoelly, Ueber ein Knickungsproblem an der Kugelschale, Zurich,
1915.
К главе XVII
17. 1. П. А. За губ и жен ко, И. Н. Спиридонов, Устойчивость торооб-
разной оболочки при изгибе, Научи, записки Днепропетр. ун-та 73,
St 10 A959), 19—24.
17. 2. J. A d а с h i, М. В е n i с е k, Buckling of torispherical shells under
internal pressure, Exper. mech. 4, № 8 A964), 217—222.
17. 3. R. A. Clark, On the theory of thin elastic toroidal shells, Journ. of
Math, and Phys. 29 A950), 146—178.
17. 4. О. М а с h n i g, Ober die Stabilitat von torusformingen Schalen, Techn.
Milt. Krupp. Forsch.-Ber. 21, № 4 A963), 105—112.
17. 5. J. M esc a 11, Stability of thin torispherical shells under uniform
internal pressure, NASA Techn. Note D-1510, A962), 671—692.
17. 6. M. Stein, J. M с Е 1 m a n, Stability of segments of toroidal shells,
А1АЛ J. 3, .Vs 9 A965).
К главе XVIII
18. 1. E. Ф. Бурмистров, Расчет пологих ортотропных оболочек с
учетом конечных деформаций, Ииж. сб. 22 A955), 83—97.
18. 2. Г. А. Гениев, Н. С. Ч а у с о в, Некоторые вопросы нелинейной
теории устойчивости пологих металлических оболочек, Стройиздат, М.,
1954.
18. 3. Э. И. Григолюк, Нелинейные колебания и устойчивость пологих
стержней и оболочек, Изв. АН СССР, ОТН, № 3 A955), 35—68;
Прикл. матем. и мех. 19, № 3 A955); 376—382; О несимметричном
выпучивании оболочек вращения, Изв. АН СССР, ОТН, Мех. и маши-
ностр. (I960); Proc. IUTAM Symposium on the theory of thin elastic
shells, Amsterdam A960), 112-121.
18. 4. M. А. Колтунов, Учет конечных перемещений в задаче об изгибе
и устойчивости пластинок и пологих оболочек, Вестник Моск. ун-та,
№ 5 A952); Уточненное решение задачи об устойчивости
прямоугольных панелей гибких пологих оболочек, там же, № 3 A961), 37—45.
18. 5. М. С. Корнишии, X. М. М у ш т а р и, Устойчивость бесконечно
длинной пологой цилиндрической панели под действием нормального
равномерного давления, Изв. Казан, фла АН СССР, серия физ.-мат. и техн.
наук 7 A955).
964
ЛИТЕРАТУРА
18. 6. X. М. Муштарл. И. В. С в и р с к и й, Опролелеиие больших
прогибов цилиндрической панели, опертой на гибкие перастяжимые ребра,
под действием внешнего нормального давления, Прикл. мат. и мех. 17,
К° 6 A953), 755—760.
18. 7. А. А. Н а з а р о и, О больших прогибах пологих оболочек, Уч. зап.
Сарат. гос. ун-та A956); О больших прогибах и устойчивости пологой
оболочки двоякой кривизны с жестко закрепленными краями, ДАН
УССР, Л» 3 A956).
18. 8. И. И. Т р а п е з и и, Конечные деформации конической оболочки с
малым углом подъема, нагруженной равномерным гидростатическим
давлением, «Расчеты на прочность» 3 A958), Машгиз, 151 —159.
18. 9. В. И. Ф е о д о с ь е в, К расчету хлопающей мембраны, Прикл. мат. и
мех. 10, № 2 A946), 295—300; Расчет хлопающей мембраны, Труды
каф. строит, мех. МВТУ, Машгиз, М. A947).
18.10. В. И. Ф е о д о с ь е в, Упругие элементы точного приборостроения,
Обороигиз, М., 1949, 206—337.
18.11. R. R. Archer, Stability limits for a clamped spherical shell segment
under uniform pressure, Quart. Appl. Math. 15 A958), 355.
18.12. B. Budianskv, Buckling of clamped shallow spherical shells, Proc.
1UTAM Symposium (см. [18.3]), 1960, 64-94.
18.13. В. Budiansky, H. J. W e i n i t s с h k e, On axisymmetrical buckling
of clamped shallow spherical shells, J. Aerospace Sci. 27 A960), 545.
18.14. A. Kaplan, Y. С Fung, A nonlinear theory of bending and buckling
of thin elastic shallow spherical shells, NACA T\T 3212, 1954.
18.15. H. B. Keller, E. L. R e i s s, Spherical cap snapping, J. Aerospace Sci.
26 A959), 643.
18.16. E. L. Reiss, H. J. Green berg, H. B. Keller, Nonlinear
deflections of shallow spherical shells, J.. Aeron. Sci. 24 A957), 533.
18.17. E. R e i s s n e r, Symmetrical bending of shallow shells of revolution, J.
Math, and Mech. 7 A958), 121.
18.18. G. A. Thurston, A numerical solution of the nonlinear equations for
axisymmetrical bending of shallow spherical shells, J. Appl. Mech. 28,
№ 4 A961), 557—562.
18.19. H. Weinitschke, On the stability problem for shallow spherical
shells, J. Math, and Phys. 38 A960), 209; On the nonlinear theory of
shallow spherical shells, J. Soc. Ind. and Appl. Math. 6 A958), 209.
18.20. G. R. W i 11 i с h, The elastic stability of thin spherical shells, Proc. Am.
Soc. Civ. Eng. 185, Л» 1 A959).
К главе XIX
19. 1. А. Я. Александров, Л. Э. Брюккер, Л. М. К у р ш и н,
А. П. Прусаков, Расчет трехслойных панелей, Обороигиз, 1960.
19. 2. А. Я. Александров, Упругие параметры ребристых заполнителей
трехслойных панелей, «Вопросы расчета элементов авиационных
конструкций», Обороигиз, 1 A959); Определение приведенных упругих
параметров сотовых заполнителей трехслойных панелей (совместно с
Э. П. Трофимовой), там же, 2.
19. 3. А. Я- Александров, Г. С. Саввина, Г. М. Таланова,
Местная устойчивость трехслойных панелей с ребристым заполнителем при
сжатии, «Вопросы расчета элементов авиационных конструкций», сб.
статей 2, Обороигиз A959).
19. 4. Л. Э. Брюккер, Л. М. Кур шин, О выводе статическим путем
уравнений изгиба трехслойной пластины с жестким заполнителем, Изв.
АН СССР, ОТН, Мех. и машиностр., Л° 3 A959).
19. 5. А. П. В о рои о вич, Устойчивость обшивки с заполнителем мри
сжатии и сдвиге, канд. дисс, 1948.
ЛИТЕРАТУРА 965
19. 6. Э. И. Г р и г о л ю к, Уравнения трехслойных оболочек с легким
заполнителем, Изв. ЛН СССР, ОТМ, Л* 1 A957); Конечны;.' прогибы
трехслойных оболочек с жестким заполнителем. Изв. АН СССР, ОТН, Л» 1
A958); Об устойчивости трехслойных оболочек л пластин за пределом
упругости, там же, № 6 A958).
19. 7. В. Ф. К а р а в а и о в, Уравнения пологих трехслойных оболочек с
легким заполнителем при конечных смещениях. Изв. вузов «Авиационная
техника», К° 1 A958); Осееимметричиые трехслойные оболочки с
легким заполнителем, Изв. вузов, «Машиностроение», Л"» 6 A958);
Устойчивость трехслойной пологой цилиндрической панели с легким
заполнителем с защемленными продольным» кромками при осевом сжатии,
Изв. вузов «Авиационная техника», Лз 2 A960); Уравнения осесимме-
трнческих трехслойных оболочек с легким заполнителем, «Прочность
авиационных конструкций», Труды МАИ, Л° 130 A960), 110—132.
19. 8. В. И. Королев, Симметричная форма потери устойчивости
трехслойных пластин и оболочек, Вестник МГУ, серия физ.-мат. наук, Л"° 5
A956).
19. 9. Л, М. К у р ш и и, Некоторые вопросы изгиба и устойчивости
трехслойных цилиндрических оболочек, днес, Ии-т механики АН СССР, 1958.
19.10. Л. М. Куршин, Уравнения трехслойных цилиндрических оболочек,
Изв. АН СССР, ОТН, К° 3 A958); Об устойчивости трехслойной
пологой цилиндрической оболочки при сжатии, там же, Л° 8 A958); Об
учете изгибной жесткости трехслойной криволинейной панели,
работающей на продольное сжатие, «Вопросы расчета элементов
авиационных конструкций», сб. статей 1, Оборопгиз A959); Устойчивость при
сжатии трехслойной криволинейной цилиндрической панели, продольные
кромки которой свободно оперты, а поперечные защемлены, там же;
Устойчивость при сжатии трехслойной цилиндрической свободно
опертой панели и цилиндра с заполнителем из гофра, там же; Устойчивость
трехслойной цилиндрической оболочки за пределом упругости, там же,
2, Оборопгиз A959); Об устойчивости трехслойной пластины при
изгибе, Изв. вузов, серия «Строит, и архит.», № 9 A959).
1911. А. П. Прусаков, Устойчивость и свободные колебания трехслойных
пластин с легким заполнителем, докт. дисс, Ин-т механики АН УССР,
1958.
19.12. А. П. Прусаков, Основные уравнения изгиба и устойчивости
трехслойных пластин с легким заполнителем, Прикл. мат. и мех. 15, .Nb 1
A951); Устойчивость и свободные колебания трехслойных пластин
с легким заполнителем, Сборник трудов Днепропетровского инж.-
строит. ии-та, № 4 A958).
19.13. А. Л. Рабинович, Устойчивость обшивки с заполнителем при
сжатии, Оборопгиз, 1946.
19.И. P. P. Bijlaard, Stability of sandwich plates, J, Aeron. Sci. 16, N° 9
A949); Stability of sandwich plates in combined shear and compression,
там же, 17, Л° 1 A950); Analysis of the elastic and plastic stability of
sandwich plates by the method of split rigities, J, Aeron Sci. 18, № 5,
№ 12 A951); 19, № 7 A952); Buckling of sandwich cylinders under
combined compression, torsion and bending loads, J. Appl. Mech. 23,
№ 1 A956).
19.15. H. L. Cox, J. R. Riddel, Sandwich construction and core materials,
part 3, Instability of sandwich struts and beams, ARC Rep. and Memo.,
Л° 2125, 1945.
19.16. A. C. Erin gen, Bending and buckling of rectangular sandwich plates,
Proc. of the 1st US Nat. Congr. of Appl. Mech., 1952.
19.17. G. Gerard, Buckling of a sandwich cylinder under uniform axial
compressive load, J. Appl. Mech. 18, № 4 A951); Compressive and torsional
instability of sandwich cylinders, Symp. of Struct. Sandwich Constr.,
ASTM, Spec. Techn. Publ., 118, 1951; Torsional instability of a long
966
ЛИТЕРАТУРА
sandwich cylinder, Proc. of the 1st U. S. Nat. Congr. of Appl. Mech.,
NY, 1952.
19.18. J. N. Goodier, J. M. N e о u, The evaluation of theoretical critical
compression in sandwich plates, J. Aeron. Sci. 18, Л° 10 A951).
19.19. W. S. Hemp, On a theory of sandwich construction, ARC Rep. and
Memo., ЛЬ 2672, 1952; Proc. 7th Intern. Congr. Appl. Mech. 1, 1948.
19.20. N. J. H о f f, Bending and buckling of rectangular sandwich plates,
NACA TN Хя 2225, 1950.
19.21. J. H. Hunter-Tod, The elastic stability of sandwich plates, ARC
Rep. and Memo, Хя 2778, 1953.
19.22. D. Leg get, H. Hopkins, Sandwich panels and cylinders under
compressive end loads, ARC Rep. and Memo, ЛЬ 2262, 1942.
19.23. С. I. ibove, S. В a t d о г f, A general small deflection theory for flat
sandwich plates, NACA Rep. Хя 899, 1948; NACA TN N° 1526, 1948.
19.24. H. W. Marc h, Sandwich construction in the elastic range, Symp.
Struct. Sand. Constr., ASTM, Spec. Tech. Publ. Хя 118, 1952; Elastic
stability of the facings of sandwich columns, Proc. Symp. Appl. Math. 3 A950).
19.25. A. Neut, Die Stabilitat geschichteter Streifen, Netterlands Nat. Lucht-
vaartlabor., Amsterdam, Bericht Хя 284 A943).
19.26. H. Neuber, Theorie der Druckstabilitat der Sandwich Platte, Teil 1,
Zeit. fur ang. Math, und Mech., Хя 11/12 A952); Teil 2, Хя 1/2 A953).
19.27. E. Reissner, Finite deflections of sandwich plates, J. Aeron. Sci. 15,
№ 7 A948); 17, Хя 2 A950); Small bending and stretching of sandwich-
type shells, NACA TN Хя 1832, 1949; NACA Rep. Хя 975, 1950.
19.28. J. R. Robinson, The buckling and bending of orthotopic sandwich
panels with all edges simply-supported, The Aeron. Quart. 6, Хя 2 A955).
19.29. P. S e i d e, The stability under longitudinal compression of flat
symmetric corrugated-core sandwich plates with simply-supported loaded
edges and simply supported or clamped unloaded edges, NACA TN
Хя 2679, 1952; Compressive buckling of flat rectangular metalite type
sandwich plates with simply supported loaded edges and clamped
unloaded edges, NACA TN № 1886, 1949; Хя 2637, 1952; Shear buckling of
infinitely long simply supported metalite type sandwich plates, NACA
TN ЛЬ 1910, 1949; On the torsion of rectangular sandwich plates, J. Appl.
Mech. 23, ЛЬ 2 A956), 191 — 194.
19.30. P. S e i d e, E. S t о w e 11, Elastic and plastic buckling of simply
supported metalite tipe sandwich plates in compression, NACA TN Хя 1822,
1949; NACA Rep. Хя 967, 1950.
19.31. M. Stein, J. Mayers, A small deflection theory for curved sandwich
plates, NACA TN Хя 2017, 1950; NACA Rep. Хя 1008, 1951; Compressive
buckling of simply supported curved plates and cylinders of sandwich
construction, NACA TN Хя 2601, 1952.
19.32. G. A. Thurston, Bending and buckling of clamped sandwich plates.,
J. Aeron. Sci. 24, Хя 6 A957), 407—412.
19.33 С. Т. Wang, Principle and applications of complementary energy
method for thin homogeneous and sandwich plates and shells with finite
deflections, NACA TN № 2620, 1952.
19.34. С. Т. Wang, G. V. Rao, A study of an analogues model giving the
nonlinear characterictics in the buckling theory of sandwich cylinder,
J. Aeron. Sci. 19, № 2 A952).
19.35. С. Т. Wang, R. J. V а с с a r o, D. F. de Santo, Buckling of sandwich
cylinders under combined compression, torsion and bending loads, J.
Appl. Mech. 22, № 3 A955).
19.36. K. T. Yen, V. G. Salerno, N. J. H о f f, Buckling of rectangular
sandwich plates subjected to edgewise compression with loaded edges
simply supported and unloaded edges clamped, NACA TN Л° 2556, 1952.
19.37. S. Yussuff, Theory of wrinkling in sandwich construction, J. Roy,
Aeron. Soc. 59, № 529 A955).
ЛИТЕРАТУРА
967
К главе XX
20. 1. С. Г. В и и о к у р о в, Температурные напряжения в пластинках и
оболочках, Изв. Казан, ф-ла АН СССР, серия физ мат. и техи. наук,
№ 3 A953).
20. 2. А. С. Вольмир, П. Г. Зыкин, Устойчивость в большом
цилиндрических оболочек прн ползучести, Сб. «Тепловые напряжения в
элементах турбомашии», Киев, 1962.
20. 3. М. С. Танеева, Устойчивость прямоугольной цилиндрической
панели, жестко заделанной по краям и находящейся в неравномерном
температурном поле. Уч. зап. Казан, ун-та 116, № 1 A956), 41—44.
20. 4. Э. И. Г р и г о л ю к, Некоторые задачи устойчивости круглых пластин
при неравномерном нагреве, Инж. сб. 6 A950).
20. 5. Л. М. К у р ш и и, Устойчивость панелей крыла при .нагреве, Доклады
АН СССР 136, Л1» 2 A960).
20. 6. Л. А. Ш а п о в а л о в, Термическая устойчивость пластин и оболочек,
«Прочность и деформации в неравномерных температурных полях»,
М. A961), 241—255.
20. 7. С. А. Шестериков, Устойчивость прямоугольных пластинок при
ползучести, Журнал прикл. мех. и техи. физ., № 3 A961), 93—100;
Устойчивость пластинок при ползучести по теории течения, там же,
№ 5 A961), 100—108.
20. 8. Р. Р. В i j 1 а а г d, Differential equations for cylindrical shells with
arbitrary temperature distribution, J. Aeron. Sei. 25, Л"°9 A958), 594—595.
20. 9. С. С. Chang, J. К. Ebcioglu, Thermoelastic behaviour of a simply
supported sandwich panel under large temperature gradient and edge
compression, J. Aerospace Sci. 28, № 6 A961), 480—492.
20.10. G. Gerard, A. Gilbert, A critical strain approach to creep buckling
of plates and shells, J. Aerospace Sci. 25, Л° 7 A958), 429—438; 458
(перевод в сб. «Механика», ИЛ, № 2, 1959).
20.11. D. J. Johns, Comments on «Thermal buckling of clamped cylindrical
shells», J. Aeron Sci. 26, Л» 1 A959), 59.
20.12. L. A. Harris, Axial compression buckling of a pressurized cylinder
with a thermally induced ring compression, J. Aeron. Sci. 23, № 12
A956), 1120—1121.
20 13. W. S. Hemp, Fundamental principles and theorems of thermoelasticity,
Aeron. Quarterly 7, Л1» 3 A956), 184—192.
20.14. N. J. H о f f, Thermal buckling of supersonic wing panels, J. Aeron. Sei.
23, № 11 A956), 1019—1028; Buckling of thin cylindrical shell under
hoop stresses varying in axial direction, J. Appl. Mech. 24, № 3 A957),
405—412; Buckling at high temperature, J. Roy. Aeron. Soc. 61, № 563
A957), 756—774 (перевод в сб. «Механика», ИЛ, Л"» 5, 1958).
20.15. J. К 1 о s n e r, M. F о г г а у, Buckling of simply supported plates under
arbitrary symmetrical temperature distributions, J. Aeron. Sci. 25, № 3
A958), 181 — 184.
20 16. Т. Н. Lin, Creep deflection of wiscoelastic plate under uniform edge
compression, J. Aeron. Sci. 23, Л1» 9 A956), 883—887.
20.17. K. M i u r a, Thermal buckling of rectangular plates, J. Aerospace Sci.
28, № 4 A961), 341—343.
20.18. A. van der N e u t, Buckling caused by thermal stresses, «High
temperature effects in aircraft structures» A958), 215—247 (перевод в книге
«Проблемы высоких температур в авиационных конструкциях», М.,
1961).
20.19. J. S. P r z e m i e n i e ck i, Transient temperature distributions and
thermal stresses in fuselage shells with bulkheads of frames, J. Roy. Aeron.
Soc. 60, № 552 A956), 799—804.
20.20. J. Singer, Thermal buckling of solid wings of arbitrary aspect ratio,
J. Aeron. Sci. 25, № 9 A958), 573-580.
968
ЛИТЕРАТУРА
20.21. Т. Wan, R. К. Gregory, Creep collapse of long cylindrical shells
under high temperature and exiernal pressure, J. Aerospace Sei. 28, Л1> 3
A961), 177—188, 208.
20.22. W. Z u k, Thermal buckling of clamped cylindrical shells, J. Aeron. Sci.
24, ЛЬ 5 A957), 389.
К главе XXI
21. 1. В. Л. А г а м и р о и, А. С. В о л ь м и р, Поведение цилиндрических
оболочек при динамическом приложении всестороннего давления и осевого
сжатия, Изв. All СССР, ОТМ, Мех. и машнностр., Л° 3 A959), 78—83.
21. 2. 11. А. А л у м я э, О применения метода расчленения напряженного
состояния при решении осесимметричиой задачи динамики замкнутой
цилиндрической оболочки, Или. АН ЭстССР 10, Хя 3 A961).
21. 3. С. А. А М б а р ц у м я и, В. Ц. Г и у и и, О динамической устойчивости
нелинейно упругих трехслойных пластинок, Прнкл. мат. и мех. 25, ЛЬ 4
A961); О вынужденных колебаниях п динамической устойчивости
трехслойных ортотропных пластинок, Изв. АН СССР, ОТН, Мех. и мат.
Л° 3 A961).
21. 4. С. А. А м б а р ц у м я и, А. Л. X а ч а т р я ц. Об устойчивости и
колебаниях анизотропных пластинок, Изв. АН СССР, ОТН, Мех. н маши-
иостр., Xs 1 A960); Об устойчивости и колебаниях пологой ортотрои-
ной цилиндрической панели, ДАН АрмССР 30, Хя 1 A960).
21. 5. Ж. Li. Багдасаряи, В. Ц. Г и у н и, К теории динамической
устойчивости слоистых анизотропных оболочек вращения, Изв. АН АрмССР,
серия физ.-мат. наук, 13, Л1> 5 (I960).
21. 6. Л. Ю. Б и р к г а и, А. С. Воль м и р, Применение электронных
цифровых машин к задаче о динамической устойчивости оболочек, ДАН
СССР 135, Хя 5 A960).
21. 7. А. И. Б л о х и II а, Динамическая устойчивость цилиндрической
оболочки с начальным изгибом при заданно!! скорости сближения торцов,
Инж. сб. 31 A961).
21. 8. В. В. Болотин, Некоторые нелинейные задачи динамической
устойчивости пластинок, Изв. АН СССР, ОТН. Хя 10 A954), 48—59;
Динамическая устойчивость пластинок, Труды МЭИ, Госэиергонздат, Л°. 7
A955); 22—46; Устойчивость тонкостенной сферической оболочки под
действием периодических сил, сб. «Расчеты на прочность», Машгиз.
2 A958), 284—299.
21. 9. В. В. Болотин, Г. А. Б о й ч е и к о, Исследование прощелкивапня
тонких упругих оболочек под действием динамических нагрузок, сб.
«Расчеты на прочностью, Машгиз, 5 A960), 259—282.
21.10. В. В. Болотин, Г. А. Б о й ч е и к о, Б. П. Макаров, Н. И.
Судаков а, Ю- Ю. Швей к о, О потере устойчивости тонких упругих
оболочек под действием импульсивной нагрузки, «Строительная механика
и расчет сооружений» Л1> 2 A959).
21.11. А. С. В о л ь м и р, Об устойчивости цилиндрических оболочек при
динамическом пагружеиин, ДАН СССР 123, Хя 5 A958), 806—808.
21.12. А. С. В о л ь м и р, В. Е. М инее в, Экспериментальное исследование
процесса выпучивания оболочки при динамическом нагружении, ДАН
СССР 125, Хя 5 A959).
21.13. В. Ц. Гну и и, К теории динамической устойчивости оболочек, Изв.
АрмССР, серия физ.-мат. наук, 13, Л° 1 A960); Изв. АН СССР,
Н, Мех. и машнностр., ЛЬ 1 A961), 181—182; О границах дииамиче-
й неустойчивости оболочек, Труды по теории оболочек, Казань, 1960;
параметрически возбуждаемых колебаниях слоистых анизотропных
лочек, Изв. АН АрмССР, серия физ.-мат. наук, 15, № 3 A962).
И. Г р и г о л ю к, О колебаниях пологой круговой цилиндрической
ели, испытывающей конечные прогибы, Прикл. мат. н мех. 19, Л» 3
55).
ЛИТЕРАТУРА
969
21.15. Ю. И. К а д а ш е в и ч, А. К. Перцев, О потере устойчивости
цилиндрической оболочки, Изв. ЛИ СССР, ОТН, Мех. и машипостр., Л° 3 A960).
21.16. /1. А. Мои с и с я и, Об одной динамической задаче для
цилиндрической оболочки, ДЛИ АрмССР 32, Хя 5 A961).
21.17. Г. В. М и ш е н к о в, О вынужденных нелинейных колебаниях упругих
панелей, Изп. АН СССР, ОТН, Мех. и машниостр., ЛЬ 4 A961), 97—103.
21.18. О. Д. О и и а ш в и л и. Некоторые динамические задачи теории
оболочек, изд. АН СССР, 1951.
21.19.0. И. Т е р с б у ш к о, Устойчивость цилиндрической оболочки при
быстром иагружении осевой силы, «Строительная механика и расчет
сооружений», ЛЬ 1 A960).
21.19а. У. Р. У п м а н и с, Обзор исследований по динамическому
продольному изгибу, Уч. зап. Рижского политехи, ии-та, 1 A959), 171 —186.
21.20. Л. А. X а ч а т р я и, Об устойчивости и колебаниях круглых траисвер-
салыю-изотроппых пластинок, Изв. ЛИ ЛрмССР, серия физ.-мат. наук,
13, Хя 1 (I960); Об устойчивости и колебаниях траисверсальио-изо-
тропиой сферической оболочки, там же, 13, Хя 4 A960).
21.21. В. Н. Чел ом ей, О возможности повышения устойчивости упругих
систем при помощи вибраций, ДАН СССР ПО, Хя 3 A956).
21.22. А. Р. Сорра, On the mechanism of buckling of a circular cylindrical
shell under longitudinal impact, Space Sciences Laboratory, General
Clectric, 1960.
21.23. A. F. S с h m it t, Dynamic buckling tests of aluminium shells, Aeronaut,
ling. Review, Sept. 1956, 54—58.
К главе XXII
22. 1. В. Л. А г а м и р о в, А. С. В о л ь м и р, Об устойчивости
цилиндрическом оболочки при продольном ударе, ДАН СССР 157, Хя 2, 1964;
Исследование устойчивости цилиндрических оболочек при продольном
удаое, Проблемы устойчивости в строительной механике,
Госстройиздат! М„ 1965.
22. 2. В. Л. А г а м и р ов, Л. Н. Смета ни и а, Экспериментальные
исследования устойчивости цилиндрических оболочек при продольном ударе,
Тезисы докладов 5-й Всесоюзной конференции по теории пластин и
оболочек, М., 1965.
22. 3. В. И. Б о р и с е и к о, Об устойчивости цилиндрической оболочки
при продольном ударе, Прикл. мех. 10, Хя 6, 1964; 1, № 5, 1965, 100—
104; 1, Хя 8, 1965, 57—62; «Проблемы устойчивости в строительной
механике», Госстройиздат, М., 1965.
22. 4. А. С. В о л ь м и р, Устойчивость при ударе, Аииотации докладов
5-й Всесоюзной конференции по теории пластин и оболочек, М., 1965;
Сборник статей, посвященных И. М. Рабиновичу, Госстройиздат, 1966.
22. 5. А. С. Вольмир, И. Г. К и л ь д и б е к о в, К исследованию поведения
оболочек и пластин при ударе, Изв. вузов, Машиностроение, Л"° 7, 1964.
22. 6. Л. А. Мовспсяи, О потере устойчивости оболочек при продольном
ударе; Изв. АН АрмССР, сер. физ.-мат. наук, 17, Хя 5, 1964, 43—46;
17, Хя 6, 1964, 57—64; Линот. докладов 1.1-го Всесоюзного съезда по
теоретической и прикладной механике, АН СССР, 1964.
22. 7. О. П. Проценко, Динамическая устойчивость цилиндрической
оболочки с начальной погибыо при совместном действии осевого сжатия
и внешнего давления, канд. дисс, Киев, 1965.
22. 8. III. X. Я игу разов, Динамическая устойчивость шарнирно опертой
цилиндрической оболочки при продольном ударе, Сб. иаучио-исслед.
работ Ташкентского текст, ин-та 14, 1962.
22. 9. В. Budiansky, R S. Roth, Axisymmetrical dynamic buckling of
clamped shallow spherical shells, NASA TN D-1510, 1962, 597—606.
62 А. С. Вольмир
972
ЛИТЕРАТУРА
24.17. М. G о 1 a n d, Y. L. Luke, Лп exact solution for two-dimensional linear
panel flutter at supersonic speeds, J. Легои. Sci., M° 4 A954). 275—276.
24.18. L. E. Qoodman, .1. V. R a 11 а у a, Review of panel flutter, Applied
Mech. Reviews 13, X« 1 A960), 2—7 (перевод: «Механика», ИЛ, Л» 5, 1960).
24.19. W. H. Hayes, Quart. Appl. Math. 5, Л» 1 A947), 105—106.
24.20. D. J. Johns, Some panel-flutter studies using piston theory, J. Aeron.
Sci. 25, As 11 A958), 679—684.
24.21. P. F. Jordan, The physical nature of panel flutter, Лего-Digest, Xs 2
A956), 34—38.
24.22. J. M. Hedgepeth, On the flutter of panels at high Mach numbers,
J. Aeron. Sci. 23, № 6 A956), 609-610; Flutter of rectangular simply
supported panels at high supersonic speeds, там же, 24, Л» 8, 1957,
563-573 (перевод: «Механика», ИЛ, Х° 2, 1958, 103 — 126).
24.23. J. M. Hedgepeth, В. В u d i a n s k у, R. W. Leonard, Analysis of
flutter in compressible flow of a panel on many supports, J. Aeron. Sci.
21, № 7 A954), 475—486.
24.24. F. D. H a i n s, Flutter of a thin membrane in hypersonic flow, J. Aeron.
Sci. 25, X° 9 A958).
24.25. M. J. L i g h t h i 11, Oscillating airfoils at high Mach number, J. Aeron.
Sci. 20, X°. 6 A953), 402—406.
24.26. J. W. Miles, On panel flutter in the presence of a boundary layer,
J. Aerospace Sci. 26, Л° 2 A959), 81—93 (см. сб. «Механика», ИЛ,
Л° 4, 1959, 97—122); On the aerodynamic stability of thin panels, J.
Aeron. Sci. 23, Л° 8 A956); 24, Л> 2 A957), 25, Л° 5 A958).
24.27. J. W. Miles, W. P. Rodden, On the supersonic flutter of
two-dimensional infinite panels, J. Aerospace Sci. 26, X> 3 A959).
24.28. S. F. Shen, Remarks on «An exact solution for two-dimensional linear
flutter», J. Aeron. Sci., Л° 9 A955), 656—657; An approximate analysis
of nonlinear flutter problems, J. Aerospace Sci. 26, N° 1 A959)
(перевод; «Механика», ИЛ, Л"» 4, 1959, 79—96).
К главе XXV
25. 1. В. В. Болотин, Статистические методы в нелинейной теории
упругих оболочек, Изв. АН СССР, ОТН, Л° 3 A958); Статистические
методы в строительной механике, изд. 2-ое, Госстройиздат, М., 1964.
25. 2. И. И. В о р о в и ч, Статистический метод теории устойчивости тонких
упругих оболочек, Прикл. мат. и мех. 23, Л° 5 A959), 885—892.
25. 3. В. М. Гончаре и к о, Исследование устойчивости оболочек методами
теории вероятностей, канд. дисс, Киев, 1961; К определению
вероятности потери устойчивости оболочкой, Изв. АН СССР, ОТН, Мех. и
машииостр., ЛЬ 1 A962), 159—160.
25. 4. Б. П. М а к а р о в, Применение статистического метода для анализа
нелинейных задач устойчивости оболочек, Труды Львовской
конференции по теории оболочек, Киев, 1962; Применение статистического
метода для анализа экспериментальных данных по устойчивости
оболочек, Изв. АН СССР, ОТН, Мех. и машииостр., Л° 1 A962), 157—158.
25. 5. А. Р. Ржаиицыи, Статистический метод определения допускаемых
напряжений при продольном изгибе, Госстройиздат, М., 1951.
К главе XXVI
26. 1. А. А. Андронов, Л. С. Понтрягин, А. А. В и т т, О
статистическом рассмотрении динамических систем, Журнал эксперим. и теорет..
физики 3, ЛЬ 3 A933), 165—180.
26. 2. В. В. Болотин, Применение методов теории вероятностей в теории
пластин и оболочек, Теория оболочек и пластин, Изд. АН ЛрмССР,
ЛИТЕРАТУРА
973
1964, 15-63; Обзор исследований по статистической динамике упругих
систем, Сб. «Расчеты на прочность», Изд-во «Машиностроение» 10
A964), 211—260.
26. 3. А. С. В о л ь м и р, И. Г. К и л ь д н б е к о в, Нелинейные акустические
колебания цилиндрической оболочки Изв. АН АрмССР 17, № 3
A964), 65—70; Вероятностные характеристики поведения
цилиндрической оболочки при действии акустической нагрузки, Прикладная
механика 1, № 3 A965), 1-9.
26. 4. И. И. Ворович, Прикл. мат. и мех., 23, Л° 5 A959), 885—892;
Теория оболочек и пластин, Ереван, 1964, 64—94.
26. 5. В. М. Гон чар ей ко, Применение марковских процессов в
статистической теории устойчивости оболочек, Украинский математический
журнал 24, Л° 2 A962), 198—202; Исследование вероятности хлопка
удлиненной цилиндрической панели под действием случайного
давления, Прикл. матем. п мех. 26, Л° 4 A962), 740—743; Прощелкиваиие
панелей при наличии случайных силовых воздействий, Теория
оболочек я пластин, Изд-во АН АрмССР, 1964, 383-390.
26. 6. М. Ф. Л и м е и т б е р г, Нелинейные колебания упругих панелей при
случайных нагрузках, Изв. АН СССР, ОТН, Мех. и маш., Хя 5 A962),
102—ПО; О нелинейных колебаниях упругих оболочек при случайных
нагрузках, Теория оболочек и пластин, Изд. АН АрмССР, 1964, 437—
444.
26. 7. С. Крен дел л, Случайные колебания систем с нелинейными
восстанавливающими силами, Симпозиум по нелинейным колебаниям, Киев,
1961.
26. 8. С. О. Райе, Теория флуктуациониых шумов. Сб. «Теория передачи
электрических сигналов при наличии помех», ИЛ, 1953.
26. 9. S. Т. Ariaratnam, Random vibrations of nonlinear suspensions,
J. Mech. ling. Sci. 2 A960), 195—201.
26.10. E. E. Callaghan, W. L. Howes, W. D. Coles, Near noise field
of a jet engine exhaust. 1 — Cross correlation of sound pressures, NACA
TN 3764, 1956; Applied Mech. Rev. 10 A957), Rev. 919.
26.11. Т. К. Caughey, Derivation and application of the Fokker-Planck
equation to discrete nonlinear dynamic systems subjected to while
random excitation, J. Acoust. Soc. Amer. 35, № 11 A963), 1683—1692.
26.12. B. L. CI ark son, The design of structures to resist jet noise fatigue,
Journ. Roy. Aeronaut. Soc. 66, > 622 A962), 603—616 (перевод:
«Механика», ИЛ, Л° 5 A962)).
26.13. S. Н. С г a n d a 11, Random vibration, Massachusetts Inst, of Technol.,
Cambridge, 1958; Random vibration, vol. 2, .Massachusetts Inst, of
Technol., Cambridge, 1963; Random vibration in mechanical system, New
York — London, Acad. Press, 1963.
26.14. R. W. Hess, R. W. F r a 1 i с h, H. H. Hubbard, Studies of
structural failure due to acoustic loading, NACA TN 4050, July 1957.
26.15. L. E. Goodman, J. V. Rattayya, Review of panel flutter and
effects of aerodynamic noise p. 11, Applied Mech. Rev. 13, Л° 2 (I960),
81—87 (перевод: «Механика», ИЛ, Л° 5 A960), 135—152).
26.16. И. Н. Hubbard, R. W. Hess, Some comparisons of the response of
simple panels to random and discrete noise, J. Acoust. Soc. Amer. 29,
Л° 1 A957), 176.
26.17. D. С Kennard, Sonic vibration as exemplified by the RB-66B
airplane, J. Acoust. Soc. Amer., № 5 A958).
26.18. E. J. Kirchman and J. E. G r e e n s p о n, Nonlinear response of
aircraft panels to acoustic noise, J. Acoust. Soc. Amer. 29, ЛЬ 7 A957),
854 -857.
26.19. L W. Lass iter, R. W. Hess and H. H. Hubbard, An
experimental study of the response of simple panels to intense acoustic loading,
J. Aeronaut. Sci. 24, Л°. 1 A957), 19-- 4.
974
ЛИТЕРАТУРА
26.20. Y. К. Lin, Response of a nonlinear flat panel to periodic and
randomly-varying loadings, J. Aerospace Sci. 29, № 9 A962), 1029—1033.
26.21. J. W. Miles, An approach to the buffeting of aircraft structures by
jets, Douglas Aircraft Co. Rept. SM-14795, June, 1953;'AMR 7 A954),
Rev. 1227; On structural fatigue under random loading, J. Aeronaut.
Sci. 21, .M> 11 A954); J. Acoust. Soc. Ainer. 29, № 1 A957).
26.22. M. Wolfe, The structural aspects of jet noise, J. Roy. Aeron. Soc. 61,
№ 554 A957), 103—106.
К главе XXVII
27. 1. В. В. Болотин, Вопросы общей теории упругой устойчивости, Прнкл.
мат. и мех. 20, № 5 A956), 561—577; Нелинейная теория упругой
устойчивости в большом, «Расчеты на прочность» 3 A958), 310—354;
Современные направления в области динамики пластин и оболочек,
«Теория пластин и оболочек», Киев, 1962, 16—32.
27. 2. А. С. В о л ь м и р, Современные проблемы теории устойчивости
оболочек, Доклад на Львовской конференции по теории пластин и оболочек,
1961; Stability and postbuckling behavior of shells under dynamic loads,
Proc. X-th Int. Congr. Appl. Mech., Amsterdam 1962, 276; О критериях
устойчивости оболочек, Расчет простран. конструкций, 9, A964), 117—
129; Актуальные задачи теории устойчивости оболочек, Механика
твердого тела, М., Наука A966), 95—115; Труды VI-ой (Бакинской)
конференции по теории оболочек и пластин, М., Наука A966).
27. 3. И. И. В о р о в и ч, О существовании решений в нелинейной теории
оболочек, Изв. АП СССР, серия мат. 19 A955); О некоторых
приближенных методах в нелинейной теории пологих оболочек, ДАН СССР 105,
№ 1 A955); Прикл. мат. и мех. 20, Mb 4 A956); О существовании
решений в нелинейной теории оболочек, ДАН СССР 117, № 2 A957);
Некоторые математические вопросы нелинейной теории оболочек, докт.
дисс, 1958.
27. 4. К- 3. Г а л и м о в, Уравнения равновесия теории упругости при
конечных перемещениях и их приложение к теории оболочек. Изв. Казан,
ф-ла АН СССР, серия физ.-мат. и техн. наук, № 1 A948), 25—45.
27. 5. Г. Ю. Джанелидзе, Устойчивость равновесия нелинейно
деформируемых систем, Труды Ленингр. политехи, ин-та 178 A955).
27.5а. Г. В. Иванов, Об устойчивости равновесия при неупругих
деформациях, Жури, прикл. мех. и техн. физики, № 1 A961), 47—55; N° 3
A961), 74—84.
27. 6. А. Ю. И ш л и н с к и й, Рассмотрение вопросов об устойчивости
равновесия упругих тел с точки зрения математической теории упругости,
Укр. матем. журнал 6, № 2 A954), 140—146.
27. 7. Б. Л. Николаи, О критерии устойчивости упругих систем, Труды
Одесского ин-та пнж. гражд. и комм, стр-ва, I A939), 191—208.-
- 27. 8. В. В. Новожилов, Основы нелинейной теории упругости, Гостех-
издат, 1948.
27 8а А В П о г о р е л о в. Общее критическое напряженное состояние строго
выпуклой оболочки, ДАН СССР, 171, № 1 A966), 59—60.
27 86 Ю. II. Р а б о т и о в. Теория ползучести и ее приложения, в сборнике
«Plasticity», Pergamon-Press, 1960, 338—346.
27 9 С В Biezeno, H. Hen с к у, On the general theory of elastic
stability Proc. Roy. Neth. Acad. Sci., Amsterdam 31 A928), 569-592; 32
A929), 444.
27 10 G II. Bryan, On the stability of elastic systems, Proc. of the
Cambridge Phil. Soc. 6 A888), 199.
27.10a. B. Budiansky, J. W. Hutchinson, Dynamic buckling of
imperfect — sensitive structures, Appl. Mech., Spring. V, A966), 636—657,
ЛИТЕРАТУРА
975
27.11. D. С. D r ticker, E. Т. О п-а t, On the concept of stability of inelastic
systems, J. Aeron. Sci. 21, № 8 A954).
27.12. R. Mill, On uniqueness and stability in the theury of finite elastic
strain, J. Mech. Phys. Solids 5, № 4 A957), 229—241; Stability of rigid-
plastic solids, 6, № 1 A957), 1—8.
27.12a. R. Hill, M. S e w e 11, A general theory of inelastic columm failure,
J. Mech. Phys. 8, № 2 (I960), 105—118.
27.126. J. W. Hutchinson, В. В u d i a n s к у. Dynamic buckling estimates,
A1AA Symp. on Struct. Dynamics and Aeroelast, NY, 1965.
27.13. R. К a p p u s, Zur Elasttzitatstheorie endlischer Verschiebungen, Zeitschr.
angew. Math, und Mech. 19, Л» 5 A939), 271—285; № 6, 344—361.
27.14. W. Т. К о i t e r, Over de stabiliteit van het elastisch evenwicht,
Amsterdam, 1945; Elastic stability and postbuckling behaviour, 1960 (В. Койтер,
Устойчивость и закрптическое поведение упругих систем, «Механика».
ИЛ, № 5, 1960).
27.15. F. Murnaghan, Finite deformation of an elastic solid, NY, 1951.
27.16. С. Е. Pearson, General theory of elastic stability, Quart. Appl. Math.
14 A956), 133.
27.17. W. P r a g e r, The general variational principle of the theory of
structural stability, Quart. Appl. Math. 4 A957), 378.
27.18. R. V. Southwell, On the general theory of elastic stability, Phil.
Trans. Roy. Soc. London A213 A913), 187.
27.19. M. S k a 1 о u d, Pokriticka pevnost sten ocelovych nosniku, Praha, 1962.
27.20. E. T r e f f t z, Ueber die Ableitung des Stabilitatskriterien des elastischen
Gleichgewichts, Verhandl. Ill Intern. Kongr. techn. Mech. 3 A930),
44—50.
27.21. Chi-Teh Wang, Applied elasticity, NY, 1953 (перевод Ван Цзи-де,
Прикладная теория упругости, М., 1959).
27.22. О. Zanaboni, Premesse alio studio della stabilita del d'equilibrio
elastico, G. Genio civile 99, № 6 A961), 457—473.
27.23. H. Ziegler, Die Stabilitatskriterien der Elastoniechanik, lng. Arch.
20, № 1 A952); Advances in applied mechanics 4 A956) (перевод в сб.
«Проблемы механики» 2, ИЛ, 1959, 116—160).
ИМЕННОЙ УКАЗАТЕЛЬ
Абрамсон (Abramson Н. К.) Ь60
Абрахам (Abraham E.) 962
Агамиров В. Л. 532, 541, 572, 755, 775, 798,
800, 857
Адаши (Adachi J.) 963
Адес (Ados С.) 617
Аксельрад Э. Л. 569
Александров Л. В. 167
Александров Л. Я. 703, 961
Александровский С. В. 548. 582, 956
Алексеев С. Л. 366, 371. 543, 952, 956
Ллумяэ Н. Л. 498, 629, 631, 755, 955, 956,
960, 968
Алфутов Н. А. 549. 551, 580, 956, 950
Амбарцумнн В. А. 66
Амбарцумян С. А. 493, 783, 790, 863, 918,
955, 963, 970
Лмиро И. Я. 537, 583
Андропов А. Л. 901, 972
Ариаратнэм (Ariaratnam S Т.) 905, 973
Лрутюнян II. X. 257
Лрчер (A'/cher R. R.) 701, 964
Афанасьев II. Л. 434
Багдасарян Ж. Е. 790, 863, 96В. 970. 971
Балабух Л. И. 226, 492, 534, 599. 680
Еалмер (Balmer H.) 970
Барбре (Barbie R ) 377
Барт (Bart R.) 958
Ватдорф (Batdorf S. В.) 433, 701
Ваттерман (Batiennan S.) 602
Бауэр (Bauer F.) 951
Бек (Beck M.) 73, 946
Беккер (Becker II.) 300, 952, 958
Белкин В. П. 952
Беллман (Bellman R.) 66, 85
Белоцерковский С. М. 864
Беляев Н. М. 284, 950
Бенджемайн (Bendjamine R. J.) 958
Беничек (Benicek M.) 963
Бид'ерман В. Л. 915
Вижляр (Bijlaard P. Р.) 423, 715, 721, 954,
958, 965, 967
Био (Biot M.) 224
Биргер И. А. 579
Биркган А. Ю. 367, 392, 593, 682, 759, 797,
854, 968
Бицено (Biezeno С. В.) 923, 945, 974
Благонадежии В. Л. 949
Блейх Г. (Bleich H. Н.) 810. 816, 970
Блейх Ф. (Bleich F.) 47, 154, 395, 945
Блейх X. С. 775
Блохина А. И. 775. 963
Боднер (Bodner S. R.) 456, 460, 701, 780,
955
Боженов А. Ш. 34»
Божинский А. Н. 311, 436. 607. 610. 617,
959
Бойченко Г. Л, 770, 968
Болонин Д. Г. 303, 952
Болотин В. В. 73, 285, 733, 770, 783. 781
790, 791, 839 810, 848, 855, 830, 883, 905,
930, 936, 945—950. 968—974
Борези (Boresi Л.) 498
Борнсенко В. И. 969
Бразье (Brazier L. G.) 569
Бранен (Brvan G. Н.) 324. 328, 354. 450,
454, 953, 974
Браш (Brush D. О.) 590. 599. 611
Броуде Б. М. 414, 567. 946, 948, 952
Броун P. (Brown R. А.) 864
Броун Э. (Brown E. Н.) 958
Брюккер Л. Э. 964
Бубнов И. Г. 47, 148, 352. 461, 689, 915
Будянскии (Budiansky В.) 433, 682, 752.
964. 969. 972, 971
Бунатян Л. Б. 949
Бунин Л. М. 960
Бурдин П. Г. 526, 551, 589
Б;рмистров Н. Ф. 963
Бурнашез И. А. 264
Буштырков Л. Л. 47
Бэр (Ваег II. W.) 950
Бюргермейстер (Biirgermelsier G.) 123, 915
Вагнер (Wagner H.) 361, 389, 949, 953
Ван К. (Wan С. С.) 875. 886
Ван Т. (Wan Т.) 968
Ван Цзи-де (Wang Chi-teh) 489, 508, 518,
975
Baii-дер-Нойт (Van der Neut A.) 733, 752,
967
Вебек (Veubeke F. B.) 950
Вейннчке (Weinitschke H. J.) 701, 964
Венк (Wenk E.) 959
Венцель Н. A. 149
Вианелло (Vianello L.) 54, 946
Виднелл (Widnell S. E.) 864
Виллих (Wllllch G. R.) 964
Винденбург (Windenburg D. F.) 959
Винклер (Winkler) 387
Винокуров С. Г. 733, 967
Витмер (Wltmer E A.) 779. 782, 970
Витт А. А. 904, 972
Власов В. 3. 185, 372, 486, 493. 507, 651,
681, 918, 955
Войт Е. В. 149
Вольмир А. С. 945, 946, 951, 952, 959, 967.
968, 969. 970, 973. 974
Вольмир Е. А. 829
Вольфе (Wolfe M.) 974
Воробьев В. Ф. 949
Воробьев Л. Н. 952
ИМЕННОЙ
УКАЗАТЕЛЬ
977
Ворович И. И. 460. 697. 905, 954, 972, 973,
974
Воронович А. П. 703, 715, 717. 719, 964
Вуд (Wood R.) 177
Габрильяиц Л. Г. 661, 962
Гаврилов Ю. В. 971
Газизов Б. Г. 954
1'алеркин Б. Г. 47, 916
Галимов К. 3. 493, G84, 729. 930. 915, 955,
974
Танеева М. С. 733, 967
1'аниев Н. С. 960
Гантм.ахер Ф. Р. 926
Гартман (Hartmann F.) 319, 945
Гаусс (Gauss К.) 480
Гвоздев Л. Л. 948
Геллатли (Gellatly R.) 726
Геллет.-га (Galletly G. D.) 958
Геккелер (Geckeler J.) 395, 663
Геммерлинт Л. В. 117. 123, 947, 919
Гениев Г. Л. 696, 960, 963
Генки (Hencky N.) 50 923, 974
Геня Н. Д. 951
Герштейн М. С. 816, 823, 970
Гесс (Hess R. \V.) 784, 973
Гесснер (Gessner U.) 829, 970
Гильберт (Gilbert Л.) 738, 907
Гиуни Б. Ц. 783, 790, 968
Гогоберидзе В. Д. 952
Голанд (Goland M.) 972
Голицинская Е. Д. 956
Гольденблат И. И. 919, 951
Гольденвейзер Л. Л. 486. 487, 493. 955
Гончаренко В. М. 889, 005, 972, 973
Гопак К. Н. 75
I орбунов Б. II. 54
Горяннов Ю. В. 970
Граммель (Grammel R.) 945
Грегори (Gregory R. К.) 968
Григолюк Э. И. 460, 606, 609. 690. 704, 7J4.
726, 727, 733, 783, 787, 816, 819, 860. 954,
960. 963, 965, 967, 968, 970
Григорьев Ю. П. 337
Григорян Г. С. 257
Грин (Green Л.) 927
Гринберг (Greenberg II. J.) 693, 96»
Гринспон (Greenspon J. F.) 784, 789. 973
Гринхилл (GreenhiU Л.) 133, 948
Громека И. С. 825. 828
Губанова И. И. 46
Губер (Huber M. Т.) 374
Гудмэн (Goodman L. Е.) 783, 972, 973
Гудьир (Goodler J.) 703, 949
Даревский В. М. 512. 557, 559, 568. 573,
576, 577, 580, 956, 957
Дауэлл (Dauell E. Н.) 864
Дейнеко К. С. 73, 946
Деи-Гартог (Den-Hartog P.) 278, 951
Денисова Л. П. 726
Джанелидзе Г. Ю. 185. 946, 974
Джелзвик (Gjielsvik Л.) 701
Джерар (Gerard G.) 232, 233, 300, 423. 444,
612, 614, 726, 738, 945. 950, 952, 951. 958,
960, 965, 967
Джонс Д. (Johns D. J.) 967, 972
Джонс P. M. (Jones R. М.) 734
Джонс Р. П. (Jones R. Р.) 959
Джонсон Д. (Johnson £>. К.) 962
Джонсон Дж. (Johnson J. В.) 94
Джордан (Jordan P. F.) 972
Дилл (Dill E. Н.) 961
Диментберг М. Ф. 784, 905, 906, 914, 973
Дин (Dean W. R.) 457
Дннник Л. II. 126. 129, 165, 453, 915, 947,
951
Доннелл (Donnell L. II.) 362, 493. 498. 310,
537, 554, 557, 561. 875, 886, 953. 956, 958
Дрейфус (Drevfus S.) 86
Друккер (Drucker D. С.) 974
Д'Суза (D'Souza Л. F.) 826
Дун Мин-дэ 971
Дэвидсон (Davidson J. F.) 290, 951
Дюбек (Djubek J.) 328
Г.жек (Jezek K-l 117, 947
Ершов II. Ф. 621
Ефимов Н. Б. 430
Жуковский II. Е. 825
Загубиженко П. Л. 676, 463
Зартарьяи (Tartarian G.) 837, 971
Зволинский II. В. 594
Зейдель (Seydel E.) 349. 953
Зейдель (Zeiidd E. Г.) 863
Зехлер (Sechler Е. Е.) 362. 953, 956
Зингер II. (Singer J.) 962, 967
Зипалова В. Ф. 697
Зоммерфельд (Sommerleld A ) 342
Зубчанинов В. Г. 113, 114, 608, 960
Зуев Б. М. 782
Зуэр (Suer H. S.) 958
Зыкин П. Г. 745, 967
Иван-Ивановский (Evan-lvanowski R. М.)
701
Пваний Б. И. 388
Иванов Л. В. 719
Иванов Г. В. 238. 974
Иен (Yen К. Т.) 719
Ильюшин Л. Л. ИЗ, 396, 405, 409, 933, 97J
Иошимура (Yoshimura Y.) 535, 561, 656,
959, 963
Исанбаева Ф. С. 551. 957
Исправников Л. Р. 541
Ишлинский Л. Ю. 262. 287, 306, 920, 951,
974
Каган М. F. 951
Кадашевич Ю. И. 768, 770. 816. 969, 970
Калиский (Kaliski S.) 300, 951
Каллаган (Callaglian E. Е.) 973
Калманок А. С. 952
Кан С. Н. 56, 537, 540
Каиа (Капа D. D.) 860
Канемитцу (Kanemitsu S.) 543
Канторович Л. В. 60
Каплан (Kaplan Л.) 696, 961
Каппус (Kappus R.) 919, 974
Караванов В. Ф. 701. 724. 965
Каримбаев Т. Д. 961
Карлсон (Carlson R. L.) 950
Карман (Кйгшйп Th.) 97, 362, 467. 513,
525, 533, 569, 656, 947, 953. 938, 963
Кармишин Л. В. 381. 566, 952
Кацитадзе О. И. 273, 291, 300. 952
Качанов Л. М. 230. 399. 428. 949, 953. 930
Каюк Я. Ф. 952
Келлер (Keller Н. В.) 693. 961
Кемпнер (Kempner J.) 533. 950. 958. 962
Кеннард (Kennard D. С.) 973
Кероиян К. К. 92
Кильднбеков И. Г. 304. 512, 545. 784. 907,
952. 969. 973
978
ИЛШШОЙ
УКАЗАТЕЛЬ
Кильчевский II. А. 524, 701. 825, 955
Кимм (Kimm) 380
Кирнан (Kiernan Т. J.) 665
Кнрсте (Kirsle L.) 535, 958
Кирхман (Kirchman E. J.) 784, 739, 973
Кнрштейн (Kirstein Л.) 959
Кирюшииа С. II. 778
Киселев В. Л. 167, 948
Кларк (Clark R, Л.) 678. 913
Кларксон (Clarkson В. L ) 733, 973
Клебш (Clebsch A.) 293
Клейн (Klein В.) 574, 576, 959
Клёппель (Kloppel К.) 963
Клоснер (Klosner J. M.) 731, 775, 816, 967,
970
Клюшников В. Д. 953, 950
Кнетс И. В. 436, 609
Коднар (Kodnar R.) 328
Кожевников В. И. 524
Коэаров М. М. ass, 958
Койтер (Koiter W. Т.) 537, 511, 592, У23,
935, 959, 975
Кокс (Сох Н. L.) 703, 953, 965
Коллатц (Collatz L.) 21
Коллбруннер (Kollbrunner С. F.) 123, 328,
395, 945
Колмогоров А. Н. 899, 902
Колтунов М. А. 372, 373, 593, 686. 952, 963
Кольский (Kolsky J.) 293
Комиссарова Г. Л. 587
Кондриков Д. В. 665
Кониш- (Koning С.) 951
КопеПкин Ю. Д. 916
Коппа А. П. (Сорра А. Р.) 540, 779, 809,
969
Корбу, Б. А. 589
Коренев Б. Г. 917
Корниенко В. П. 775
Кориишин М. С. 689, 963
Кориоухов II. В. 73, 915
Королев В. И. 610. 613, 703, 965
Короткий Я. И. 917
Коулс (Coles W. О.) 973
Кофи (Caughev Т. К.) 908, 973
Кошелева Т. И. 672
Крегерс А. Ф. 436
Кренделл (Crandall S. Н.) 783, 905, 973
Кренцке (Krenzke M. А.) 665
Кривошеее II. И. 957
Крумхаар (Kruinhaar II.) 863
Крылов А. Н. 916
Крылов В. И. 60
Крылов И. А. 86
Крэйт (Crate II.) 574, 959
Кузнецов А. П. 256. 949
Купер (Cooper R. М.) 793
Курдюмов А. Л. 148
Куршин Л. М. 701, 717, 724. 726, 728, 734,
736 745, 949, 964, 965. 967
Кшнякин Р. И. 577, 580, 677, 957
Лаврентьев М. А. 262, 287. 306, 951
Лагранж Ж. (Lagrange J. L.) 27, 126, 130,
918, 946
Ладе (Lahde R.) 361
Ладыженская О. А. 298
Лайбев (Libove С.) 704, 950
Лайон (Lyon R. II.) 905, 911
Лайтхилл (Lighthill M. J.) 837, 972
Лампер Р. Е. 717, 860, 861
Лангхаар (Langhaar H. L.) 498, 919
Ландквист (Lundquisi E.) 336
Лебедева Н. К. 534. 662
Леви (Levy S.) 366. 953
Легге (Lcgget D.) 343, 592, 703, 726 959
Лежен-Дирихле П. Г. (Dirichlet P. О.
Lejenne) 926
Лейбензои Л. С. 650
Лейпгольц (Leipholz H.) 34
Лейтес С. Д. 947
Лекман (Lackman L.) 628, 962
Ленько О. Н. 594, 600. 957
Леонард (Leonard R. W.) 972
Леонов М. Я. 73, 946
Леонтьев Н. II. 957
Лепик Ю. Р. 103. 405, 414, 621, 953
Лехницкий С. Г. 374
Лн (Lee L.) 609. 617, 960
Либолд (Liebold E. II.) 952
Лин (Lin Т. II.) 239, 433, 950 967
Лин (Lin Y. К.) 784, 974
Линдберг (Lindberg II. Е.) 952
Линдхолм (Llndholm U. S.) 860
Липовский Д. Е. 537
Липовцев Ю. В. 717, 745
Лихарев К. К. 945
Ло (La II.) 574, 959
Локощенко А. М. 232
Локшин А. С. 457, 947, 952
Лоренц (Loreniz R.) 515, 959
Лу (Loo S.) 646
Лу (Loo Tsu-Tao) 554, 561, 959
Лу Та-шень (Loo Ta-Cheng) 701
Лукаш П. А. 617, 957
Лурье А. И. 130, 296, 343, 955
Льюк (Luke Y. L.) 972
Лыков А. В. 308
Лзсситер (Lassiter L. W.) 784. 973
Любкин (Lubkin S.) 951
Лив (Love A. E.) 293, 922, 956
Ляпунов А. М. 918, 919, 927
Мазитов III. С. 264
Майер (Mayer R.) 945
Майлс (Miles J. W.) 972. 974
Макаров Б. П. 884. 888. 947, 968, 971, 972
Макушин В. М. 280, 454, 457, 945, 951,954
Мак-Элмен (McElman J.) 963
Малашенко С. И. 920
Малинин II. Н. 945
Малмейстер А. К. 434
Малютин И. С. 103
Маневич Л. И. 566
Маргерр (Marguerre К) 365. 366, 684, 953,
956
Марч (March H. W.) 703
Марченко В. М. 599
Марьин В. А. 576, 577, 594
Матевосяи Р. Р. 167, 948
Махниг (Machnig О.) 672, 963
Мацумото (Matsumoto II.) 800
Мацуя (Masuja U.) 656, 963
Мейерс (Mayers J.) 704, 724. 752
Мейсспер (Meissner E.) 955
Мейстер (Meister M.) 123, 328, 915
Мельников А. М. 665
Мемель (Melimel A.) 665
Мерчент (Merchant W.) 177
Мнзес (Mises R.) 545, 573, 959
Микишев Г. Н. 863, 971
Миндлин (Mindlin R. D.) 816, 970
Мииеев В. Е. 554, 772, 968
Миронов И. Л. 970
Митинский А. Н. 97
Миура (Miura К.) 967
Михнлсен (Michielsen H. F.) 533, 959
Михлин С. Г. 21, 59, 60, 85
Мишенков Г. В. 783, 786. 789, 969
Мнев Е. Н. 828, 970
Мовсисян Л. А. 969
Мовчан А. А. 846, 850, 927, 971
ИМЕННОЙ УКАЗАТЕЛЬ
979
MonteeB H. H. 86
Мортон (Morton F. G.) 962
Мошенский Н. Л. 264
Муштари X. М. 493, 498, 545, 557, 636. 656,
660. 667, 668, 684, 689, 729, 945, 957, 961,
963. 964
Мэнсфильд (Mansfield E. Н.) 955
Мэрии (Marin J.) 950
Мэрнаган (Murnaghan F.) 975
Мэррсй (Murray F. J.) 963
Мэсколл (Mescall J.) 678, 963
Мюрсепп П. В. 961
Навье (Navier L.) 328. 947
Нагаев В. Л. 546, 55], 957
Надаи (Nadai A.) 454. 955
Назаров Л. А. 964
Найима (Najlma N. М.) 543
Наймарк М. А. 78
Нардо (Nardo S.) 951
Нахди (Naghdl P. M.) 793. 795
Нейбер (Neuber II.) 703
Нейт (Neut A.) 704
Нео (Neol J.-M.) 703
Нефф (Не» }.) 349
Ниизава (Nilsawa J.) 561. 959
Никифоров С. Н. 947, 952
Николаи Б. Л. 937, 974
Николаи Е. Л. 130, 948
Никулин М. В. 577
Никулинская С. Н. 524, 825
Нилаидер (Nvlander H.) 949
Новацкий (Nowacki W.) 451, 729. 954
Новичков Ю. Н. 733, 863, 971
Новожилов В. В. 484, 485, 492, 493, 643,
816, 930. 955, 974
Нудельман Я. Л. 948
Ньордсен (Niordson N.) 961
Нэш (Nash W. Л.) 561, 563, 646, 959
Образцов И. Ф. 949
Огибалов П. М. 953, 971
Одинокое 10. Г. 566
Одквнст (Odquist F. К.) 950
Однорал Л. Г. 589
Олесяк (Ojesiak S.) 454. 951
Олисов Б. А. 271
Ольденбургер (Oldenburger R.) 826
Онат (Onat E. Т.) 974
Ониашвили О. Д. 783, 969
Оселедько А. И. 264
Палий О. М. 957, 960
Палько Л. С. 825
Панов Д. Ю. 456, 955
Паиовко Я Г. 46. 113, 185. 917
Панферов В. М. 739
Папкович П. Ф. 148, 165. 327, 364, 381, 921.
931, 937, 945. 953
Пармертер (Parmerter R) 665, 701
Патель (Pafel S. А.) 950
Пейтои (Payton R. G.) 816. 819, 970
Пеициеи (Penzien J.) 628, 962
Пеньков Л. М. 148. 948
Перальта (Peralta L. А.) 816, 819, 970
Перцев Д. К. 768. 770, 816, 969. 970
Петре (Petre Л.) 952
Петропавловский Л. Л. 167
Пиаи (Pian Т.) 970
Пиковский А. А. 123, 945. 918
Пииаджян В. В. 117, 123. 947
Пирсон Дж. (Pearson J.) 951
Пирсон К. (Pearson С. Е.) 428. 954, 975
Писковитина И. А. 960
Питтнер (Pittner E. V.) 962
Плетникова Е. Д. 567
Погорелов Л. В. 480, 535, 552, 563, 662, 957,
962. 974
Полубаринова-Кочииа П. Я. 372, 373, 462
Поль (Poh! V.) 950
Пономарев Л. Т. 311. 610
Пономарев С. Д. 915
Понтрягии Л. С. 904. 972
Попов Е. П. 946
Попов С. М. 414, 953
Поуп (Pope G.) 593
Похгаммер (Pochhammer J.) 293
Прагер (Prager W.) 428. 954, 975
Прайд (Pride R. Л.) 441, 954
Прандтль (Prandtl L.) 154, 949
Пржеминецкий (Przemienieeki J. S.) 967
Присекин В. Л. 816. 819, 970
Проскурина В. М. 617
Проценко О. П. 969
Прусаков Л. П. 423. 704, 715, 717, 719, 954,
964, 965
Пуанкаре (Poincare II.) 936
Пухов Г. Е. 92
Пфлюгер (Pfliiger Л.) 103, 165, 228, 916.
947
Рабинович Л. Л. 703, 704, 715, 965
Рабинович И. М. 167. 171, 261, 948
Работнов Ю. Н. 103, 232, 233, 238, 493, 739.
917, 919, 955, 974
Радковский (Radkowski P. Р.) 962
Радхакришнан (Radhakrishnan S.) 960
Размадзе Г. II. 300. 952
Райихарт (Rainhart J. S.) 951
Райе 973
Райт (Wright F. W.) 963
Раттаиа (Rattaya J. V.) 783, 972, 973
Ратцерсдорфер (Ratzersdorfer J.) 946
Редвуд (Redwood M. R.) 293, 796
Резницкий Л. Я. 149
Рейсе (Reiss E. L.) 693, 964
Рейссиер (Reissner E.) 324, 486, 569. 681,
693, 704, 719. 956. 964
Ремиев ГО. И. 954
Ренкин (Rankine) 91
Ржаницын Л. Р. 154, 232. 257, 874, 875. 876,
945. 918. 949, 972
Риддел (Riddel J. R.) 965
Ритц (Rilz W.) 42
Рогицкий С. Л. 170. 948
Роддеи (Rodden W. Р.) 972
Розенблюм В. И. 232. 919
Розеиталь (Rosenthal D.) 950
Рос М. (Ros M.) 117, 947
Рос P. (Roth R. S.) 775. 969. 970
Ростозцев Г. Г. 363, 953
Рэйнор (Raynor S.) 816, 819, 970
Рэлей — см. Стретт Дж. В.
Рэфильд (Rehfield L.) 524
Ряямет Р. К. 961
Саввина Г. С. 964
Сазельев В. Л. 178. 662
Савицкий Н. II. 828
Салерно (Salerno V. L.) 719. 951
Саусвелл (Southwell R. V.) 57, 67. 345. 953.
975
Сачеиков А. В. 545. 957, 960, 961
Севии (Sevln E.) 304, 952
Сейде (Seide P.) 719, 962
Селезов И. Т. 825
Сен-Веиап (Saint-Venant В.) 293
Сердюков В. В. 568, 577
Сивере Н. Л. 917
9S0
ИМЕННОЙ
УКАЗАТЕЛЬ
Синг (Synge J. L.) 956
Скалак (Scalak R.) 823, 970
Скалоуя (Skaloud M.) 975
Сканлаи (Scanlan R. H ) 92, 916
Сканленд (Scanland R. S.) 959
Скеи (Skene W. T.) 958
Скурлатов Э. Д. 86, 88. 90, 818. 858. 861
Сюн Сильвия (Skan S. W.) 345 953
Сметаиина Л. Н. 806. 9G9
Смирнов Л. Ф. 130, 165, 167, 170. 915
Смирнов В. С. 772
Смолуховский 904
Снеддон (Sneddon I. \.) 308
Снитко И. К. 170, 948
Снитко Н. К. 948
Соби (Sobey Л.) 533
Соколов В. Ф. 956
Соколов П. Л. 364. 953
Сорокин В. В. 775
Соубл (Sobel I..) 549
Спиридонова II. И. 668. 676. 963
Сребовский Л. И. 775
Степанов Р. Д. 971
Степанов С. Г. баз. 782
Стокер (Stoker J. J.) 460, 951, 955
Стоуэлл (Slowell E. г.) 336, 416, 954
Стрелецкий II. С. 947
Стрельбицкая Л. И. 949
Стретт Дж. В. (Strutt J. W., I.ocd Ray-
leigh) 283, 951
Судакова II. И. 968
Суркии Р. Г. 656, 660, 662. баз, 667 696,
782 962
Сюэл (Sewell M.) 974
Танец С. X. 662
Тауб (Taub J.) 951
Темченко М. Е. 920
Теребушко О. И. 561, 572, 573, 583 586,
588, 643, 775. 778. 958, 969
Тетере Г. Л. 436
Тетмайер (Tetmajer L.) 94. 947
Тёрстон (Thurston G. Л.) 697, 60S. 719.
964
Тилеман (Thielemann W.) 521, 549 574,
581, 583, 959
Тимошенко С. П. 47, 56, 154, 165 303 324,
343. 352. 377. 381. 395, 515, 591, 916, 919
953, 958
Толоконников Л. Л. 423, 954, 960
Торшенов II. Г. 232
Трайнер (Triner N. Н.) 950
Трапезин И. И. 631, аз4, 61H, 961, 96»
Треффц (Trefftz Р..) 953, 975
Триллинг (Trilling С.) 959
Трофимова Э. П. 964
Туркнн К. Д. 520. 567, 958
Тэйлор (Teylor С. F.) 962
Тюлеиев А. И. 599
У Тай-те 433
Уманский А. Л. 185. 381, 388, 752, 919
Упманнс У. Р. 264, 969
Усюкин В. И. 225, 736
Уфлянд Я. С. 303
Федосов Ю. Л. 672
Феннберг С. 493, 956
Фельдман М. Р. 950
Феодосьев В. И. 75, 84, 456, 656, 660, 661,
688. 691, 692, 697, 945, 955. 962, 964
Филиппов А. П. 345
Фишер (Fischer Q.) 959
Флеминг (Fleming J. F.) 952
Флюгте (Fli'itfse W ) 519 548, 574. 956
Форрей (Forray M.) 731. 967
Фрейлич (Fralich R. W.) 973
Фридрихе (Friedrichs К.) 460. 656, 955. 9f,i
Фритьоф (Fritiof J.) 961
Фрича (Fritsche J ) 117. 917
Фуллер (Fuler L.) 184, 946
Фьш (Fung Y. C.) 696, 701, 853, 857, 863
956, 964, 971
Фэмили (Famili J.) 701, 961
Хаббард (Hubbard II. H.) 784, 973
Хай.мерль (Heimerl G. I.) 441. 954
Хайнс (Hains F. D.) 972
Халт (Hult J. A.) 950
Хамфрейс (Humphreys J. S.) 780, 970
Хандельман (Ilandelman G. H.) 428, 954
Ханджн В. 136
Хантер-Тод (Hunter-Tod J. H.) 703
Харрис (Harris L. A.) 958. 967
Хаффингтон (Huffington N.) 303, 304, 308,
952
Хачатрян A. A. 968, 969
Хачннсоп (Hutchinson J.) 537. 540, 974
Хвалла (Chwalla E.) 117, 947
Хеджнет (Hedgepeih J. M.) 588, 846, 850,
972
Хемп (Hemp W. S.) 701. 967
Хермаи (Herman H.) 816
Хертель (Ilertel H.) 381, 387
Хилл (Hill R.) 974
Холл (Hall D.) 5S8
Холт (Holt M.) 864
Хопкннс (Hopkins II. G.) 703. 726. 954, 958
Хорн (Home M. R.) 175, 918
Хоузиер (Housner G. W.) 952
Хоуэс (Howes W. L.) 973
Хофф (Hoff N. J.) 232. 233, 249, 271, 273,
524, 533, 536, 70», 719. 734, 950. 951, 9b2,
967
Xy (Hu L. W.) 950
Хуа Хай-чан (Ни II. C.) 949, 963
Хуан (Huang N. C.) 701
Худобец Б. И. 167
Хзбнп (Habip L.) 703
Хэйс (Haves W. H.) 837. 972
Цанабони (Zanaboni O.) 975
Целли (Zoelly R.) a50, 963
Цзе F>o-MHHb 949
Циглер (Ziegler H.) 975
Цо (Tso W. K.) 952
Цук (Zuk W.) 731. 735, 968
Цянь Вэй-чан (Chien W. X.) 493, 513. 956.
963
Цянь Сюэ-сэнь (Tslen H. S.) 81, 467, 513.
525, 546. 656. 958, 963
Чавла (Chawla J. P.) 951, 971
Чан (Chang С. С.) 967
Чаусов Н. С. 696. 960. 963
Чебанов В. М. 958
Челомей В. П. 951, 969
Чеицов П. Г. 130. 948
Черноусько Ф. Л. 86
Четаев П. Г. 918, 928
Чикала (Cicala P.) 433
Чудновский В. Г. 167, 945
Чулков П. П. 714, 727
Шандаров Л. Г. 860, 861
Шаповалов Л. А. 224, 226, 228. 680, 950,
958, 907
Шварц (Schwartz E.) 574, 959
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ 981
Швейко Ю. Ю. 861, 968, 971
Шверин (Schwerin Г..) 560, 959
Шевляков Ю. Л. 566
Шеи (Shen S. F.) 972
Шенг (Sheng I.) 951
Шенли (Shanley F. R.) 103, 233. 946, 947
Шестериков С. Л. 967
Шёмакер (Shoemaker Е. М.) 66
Шилд (Shield R.) 927
Шифенер (Shifener К) 962
Шлейхер (Schleicher F.) 947
Шмитт (Schmitt A. F.) 779, 969
Шнелл (Schnell W.) 959
Шпак Г. С. 703
Штаерман И. Я. 625. 628, 961
Штейн Г. (Stein П.) 349
Штейн М. (Stein M.) 704, 724, 726, 9G3
Штойп (Steup H.) 123, 945
Штупм (Sturm R. G.) 560, 959
Шют'те (Shuette Е. Н.) 954
Автоколебания 831
Арка круговая 164
Аэротермоупрутость 832
Лэроупрутость 810, 831, 913
Барьер потенциальный (энергетический)
35. 534
Бимомент 189. 513
Бифуркация равновесных форм 17
Величина случайная 865
Вероятность 866
Волна бегущая 857
— термоупруган 308
— Ударная акустическая 810
— упругая 292
Время критическое 223, 258
Выпучивание вторичное 463
— динамическое 75 5
— местное 381
— монотонное 831
— при ползучести 233
— температурное 942
— упругой системы в большом 78
Гемодинамика 828
Гибкость критическая 300
— стержня 26
предельная 27
Гидроупругость 810, 943
— плоских сечений при исследовании
сверхзвукового потока 83?
Гипотеза плоского отражения 818
— прямых нормалей в теории оболочек 484
Депланация сечения 186, 513
Деформация критическая 233
Дивергенция (потеря устойчивости) 831,
857
Дисперсия 869
Длина стержня приведенная 20
Жесткость приведенная 375
Жидкость вязкая 812
ньютоновская 812
Эбциоглу (Ebcioglu J. К.) 967
Эйлер (Euler L.) 20, 133. 946
Эйнштейн (Einstein Л.) 904
Элмрот (Almroth В.) 533. 590, 599, 611
Энгессер (F.ngesser F.) 54, 97, 103, 154, 519,
946, У47
Эрикеон (Erlckson В.) 951
Эринген (Hringen Л. С.) 965
Эсслингер (Esslir.ger D.) 521
Эшвелл (Ashwell) 701
Эшли (Ashley И.) ЮТ. 971
Юнгблут (Jungbluth О.) 963
Юоуфф (Yussuff S.) 703
Ямаки (Jamakl N.) 343. 344, 457, 953, 955
Янгуразов III. X. 969
Ясинский Ф. С. 26, 94, 97, 946, 947
Жидкость идеальная 812
-- несжимаемая 812
Задача бифуркационная для упругой
конструкции 168
— краевая самосопряженная 77
— о собственных значениях 21
Закон распределения нормальный 868
Заполнитель жесткий в трехслойных
конструкциях 705
-- легкий 705
Значения собственные 925
Изгиб продольный 17
за пределами упругости 93
при ползучести 229
Изгибание поверхности 479
Интенсивность деформаций 397
напряжений 397
Искажение поперечного сечения 186
Колебания акустические цилиндрической
оболочки 783
— параметрические 259, 277, 282
Кольцо круговое 162, 163
при динамическом нагружении 235
Координаты криволинейные 470
Коэффициент вязкости динамический 815
кинематический 815
— динамической перегрузки 768
— диффузии 310
-- приведения длины 26
— присоединенной массы жидкости 860
— редукционный 361
— температуропроводности 309
— теплопроводности 228
Коэффициенты второй квадратичной
формы 474
— Ламе 481
— первой квадратичной формы 472
Кривизна кривой 473
— нормальная 474, 475
— поверхности гауссова 477
• - средняя 477
Кривизны главные 476
Критерий касательного модуля при
ползучести 256
— критической деформации 738
при ползучести 256
— начальных несовершенств 34, 64, 234, 739
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
982 ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Критерий касательного модуля при
ползучести 257
— оптимальности 87
— устойчивости динамический 33, 61, 234.
237, 739, 918
, его выбор 115
при комбинированной нагрузке 937
при ползучести 229. 256
статический 33, 920
стержней при ударе 299
энергетический 33. 39, 229, 926
Круг устойчивости 207
Кручение стесненное 186
Купол геодезический 183, 184
— сетчатый 177
Линии координатные 470
— кривизны 477
Линии параболическая 479
Мера эксцентриситета 120
Метод Бубнова -Галеркина 36, 47
— возмущении 462
— динамического программирования 86
— инвариантного вложения 66
— коллокации 52
— конечных разностей 49
— множителей Лагранжа 16
— Монте-Карло 84
— наискорейшего спуска 89
— оптимального программирования 37
— организованного поиска 86
— последовательных приближений 36, 53
— проб 36, 57
— прямой 53
— разделения жесткости 721
— релаксационный 170
— Ритца 36. 42, 45
— случайного поиска 81
— спектральный 895
— статистический 64. 865. 913
— степенных рядов 134, 462
— Тимошенко 45
— характеристик 296
— энергетический 324
Модуль касательный 96, 235. 397
— приведенный 97
— разгрузки 96
— результирующий 97
— секущий 235. 397
— упругости, его зависимость от
температуры 224
Момент инерции секториальный 188
центробежный 194
— температурный 729
Набор стержневой 148
Пагружение динамическое 942
— простое 920
— сложное 920
— ударное 942
Нагрузка критическая 16, 116
верхняя для оболочки 467
динамическая 754
, се зависимость от поперечной силы
152
нижняя для оболочки 467. 933
, приближённые методы определения
36
— Поперечная, ее влияние 71
— приведо.ная 134
— следящая 75
Направления глазные для поверхности 476
Напряжения температурные 223
Несовершенства начальные упругой
системы 34
Неустойчивость в большом 35
— колебательная 831
— монотонная 831
— упругой системы 16
Обмен устойчивостью 17, 936
Оболочка большого прогиба 497, 500 503
645
— в газовом потоке 857
— вафельного типа 587
— гофрированная 587
— коническая 622 и далее
— малого прогиба 48?
— подкрепленная 580. 583. 637, 734. 941
— пологая 681 н далее
— при высокой температуре 728 н далее
— при динамическом нагружении 753 и
далее
— при ударе 792 и далее
— сферическая 649 и далее
— тороидальная 669 и далее
— торосферическая 678
— трехслойная 702 и далее
— цилиндрическая в пределах упругости
506 и далее
за пределами упругости 601 и далее
— эллипсоидальная 667
Ожидание математическое 868
Отклонение среднеквадратичное 869
Панель плоская, подкрепленная при
высокой температуре 731
— пологая коническая 689
прямоугольная в плане 684
— — сферическая 692
— цилиндрическая 590. 594. 615, 617, 879
при высокой температуре 745
при динамическом нагружении 755
-- — при продольном ударе 796
— — трехслойная 724
Перескок упругой системы из одного
положения в другое 81
Пластинка анизотропная 374
— гибкая 325. 363
— жесткая 314
— кольцевая 457
— круглая 445 и далее
—.обтекаемая газовым потоком 841, 846, 853
— ортотропная 371
— подкрепленная 377
— при высокой температуре 728 и далее
— при динамическом нагружении 753 и
далее
— при ударе 792 и далее
— прямоугольная в пределах упругости
313 и далее
-за пределами упругости 394 и далее
— трехслойная 7С2 и далее
Плоскость соприкасающаяся 47?
Плотность вероятности 867, 892
двумерная 871
Площадь секториальная 186
Погибь начальная 64
Ползучесть 223, 229, 942
— установившаяся 230
Полоса при динамическом приложении
момента 288
— при изгибе 212, 215, 217. 218. 219
Полуволна критическая 306
Потеря устойчивости в большом 78
в малом 80
— — динамическая 754
местная 381
плоской формы изгиба 202
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
983
Преобразование вероятностей 870
-- поверхности изометрическое 479
Примеры расчета: бак топливный ракеты
578
: башня телевизионная 13G
: винт ходовой токарно-винторезного
станка 145
: время критическое для нагретого
стержня 253, 255
: газгольдер сферический 063
: газопровод внутризаводской 569
: газохранилище 158
: гибкость предельная стержня 27
: диафрагма коническая
воздушно-реактивного двигателя 628
: диффузор газотурбинного двигателя
635
— —: звено тягн управления самолета 21
: камера сгорания газотурбинного
двигателя 578
— —: колоииа испытательного пресса 26
: критическая нагрузка для стержня
43, 45. 47, 49, 51, 52, 53, 61, 90, 126
— —: — — для тонкостенного стержня 197,
208
— —: — сила для упругой системы 169
: крыша цельнометаллического вагона
22
: оболочка стеклопластиковая 588
: —цилиндрическая подкрепленная 351
— —: палуба корабля 95
— —: панель обшивки крыла самолета 337
: — подкрепленная 383. 384
— —: — при ползучести 747
-— —: пластинка при ползучести 743
— —: рама эстакадного типа 170
: раскос сжатый в конструкции
газохранилища 158
: стержень нагретый 241
: стрела портального крана 129
: стрингер фюзеляжа самолета 151
Принцип возможных перемещений 37
Процесс без последействия 898
— случайный 891
марковский 898
стационарный 894
Прощелкивание рамы 168
Равновесие безразличное 15
— неустойчивое 15, 918
— устойчивое 15. 918
Разветвление равновесных форм 17
Рама 166
— в упруго-пластической области 174
Рекомендации для практических расчетов
373, 441, 541, 552, 663, 749
Седло (особая точка) 930
Сжатие стержня внецентрениое 117, 120
Сжимаемость материала, ее влияние 431
Сила критическая 20
верхняя 80
высшая 60
касателыю-модульная 107
— — нижняя 80
первая 30, 60
приведенно-модульная 107
— поперечная, ее влияние на критическую
нагрузку 152
— следящая 73
Система неконсервативная 73
— стержневая 166
События случайные независимые 866
несовместимые 866
Спектр колебательного процесса 895
Стеклопластики 374, 394, 941
Стержень в пределах упругости 15 и
далее
— за пределами упругости 93 и далее''
—, лежащий на нескольких опорах 141
— на упругом основании 119
— наименьшего веса 126
— переменного сечения 121
— переменной жесткости 124
— под действием возрастающей нагрузки
103. 108
крутящего момента 159, 161
— осевой силы и концевых пар 140
силы, приложенной в пролете 131
— следящей силы 73
— — — собственного веса 133
и сосредоточенной силы 137,
— - — уменьшающейся нагрузки 113
эксцентрично приложенных сил 67,
68
—. подвергающийся удару 293
— при быстром нагружении 258
— при внезапном приложении нагрузки
262
— при заданном законе сближения концов
273
— при импульсивной нагрузке 276
—' при нагрузке, быстро возрастающей во
времени 264
, меняющейся по гармоническому
закону 282
— при неравномерном нагреве 226
— при продольно-поперечном изгибе 71
— при пульсирующей нагрузке 277
— при равномерном нагреве 224
— при тепловом ударе 308
— рамного типа 156
— с защемленными концами 24
— с начальной погибью 65. 875
при динамическом нагружении
260
при ударе массой 301
— с одним защемленным концом 22—25
— с упругой опорой 146
— составной 124, 154, 156
— тонкостенный 185
при внецентрешюм сжатии 205
при поперечном изгибе 220
при чистом изгибе 201
с двумя осями симметрии 189
с несимметричным сечением 200
с одной осью симметрии 193
-- — сжатый 38В
центрально сжатый 189, 193, 200
--. шарнирно опертый по концам 17
Температура, ее влияние на устойчивость
223, 728
Теорема Кирхгофа 818
— Лагранжа—Дирихле 926
— Менье 474
Теоремы Ляпунова 927
Теория деформаций 396, 397, 423
— касательно-модульиая 233
— локальных деформаций 434
— малых упруго-пластических деформаций
395
— наследственности 257
— оболочек полубезмоментная 512
— пологих оболочек 493
— поршневая 832
— скольжения 433
— старения 231, 235
-- течения 396, 428
— упрочнения 232
984
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Теплопроводность, ее влияние на
устойчивость 228
Точка бифуркации ИЗ, 116, 925
— коллокацин 52
— поверхности гиперболическая 479
параболическая 479
эллиптическая 478
— разветвления разновесных состояний
925
Удар гидравлический 811, 825
— тепловой 308
Уравнение Бесселя 451
— волновое 815
— интегральное Гильберта—Шмидта 60
— Матье 1*82
— трех моментов 141
— Фоккера—Планка —Колмогорова 901, 906
— Фредгольма однородное второго рода 59
— Чспмена—Колмогорова 899
Уравнения Навье—Стокса 816
Усталость акустическая 783
Устойчивость 15
— асимптотическая 919
— в большом 35
— в малом 35, 116
-- динамическая 259, 754
— за пределами упругости 85, 353. 566
-- неконсервативной системы 7,), 839
— плоской формы изгиба 158
-- при высокой температуре 198
— при ползучести 737
— Упругой системы 16
Ферма 166
Флаттер 831
— бурный 857
— панельный 831
Форма квадратичная вторая 474
первая 472
Формула Гаусса 487
— Джонсона 9-1
— Кармана 97
— Раиса 901
— Реггкипа 94
— суммирования опасностей 95
— Тотмайера 94
— Эйлера 20, 26, 27
— Ясшн-кого 9-1
Формулы Петерсона—Кодаццн 487
Функции собственные 21, П.)
— фундаментальные 60
— характеристические 60
Функция напряжений динамическая 791
— распределения дифференциальная 867
интегральная 866, 892
— случайная 891
Хлопок оболочки 467, 468
— шарнирной системы 178
Центр изгиба 207, 209
— (особая точка) 929
Цепь шарнирная упругая 50
Числа фундаментальные 60
— характеристические 60, 861
Число хлопков в единицу времени 906,
914
Шарнир пластический 175
— упругий 51
Ширина приведенная 361
Шпангоут 1п2
Шум белый 897
Эксцентриситет в приложении нагрузки 67
Эффект цепных напряжений 737