/























Text
0S4>
U-7S
Ю. И. ИОРИШ
ТРУДЫ
КРАСНОЗНАМЕННОЙ
ОРДЕНА ЛЕНИНА
ВОЕННОЙ ВОЗДУШНОЙ
АКАДЕМИИ
им. Жуковского
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
АМОРТИЗАТОРА
С УПРУГИМИ ОГРАНИЧИТЕЛЯМИ
ХОДА
ИЗДАНИЕ АКАДЕМИИ
19 4 6
„1961 г,«
Hi 7=^:-
ТРУДЫ
КРАСНОЗНАМЕННОЙ
ОРДЕНА ЛЕНИНА
ВОЕННОЙ ВОЗДУШНОЙ
АКАДЕМИИ
им. Жуковского
Доктор тонических наук
Ю. И. ИОРИШ
6,-ftr
И 7-зГ
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
АМОРТИЗАТОРА
С УПРУГИМИ ОГРАНИЧИТЕЛЯМИ
ХОДА
Выпуск
168
ИЗДАНИЕ АКАДЕМИИ
1 9 4 *>
.6^
ПРЕДИСЛОВИЕ
Наученье работы амор газаторов вибраций сшаолетного об орудо-
вания, имеющих упругие ограничители хода, представляет собой при-
мер решения задачи о действии внешней периодической силы на нели-
нейную систему. Рассмотрение этой задачи в общем виде и в отдельных
случаях проводилось за последние годы многими авторами. Однако
опытная проверка полученных решений, главным образом приближен-
ных, либо не производилась вовсе #либо была недостаточно полной.
В настоящей работе, возникшей в связи с наблюдаемыми на опыте
большими амплитудами колебаний, опасными для сохранности аморти-
зованного оборудования и характерными для нелинейных систем, полу-
ченные решения проверяются на опыте более тщательно.
В главе II описано явление субгармонического резонанса, когда
амортизованный Объект совершает установившиеся колебания с часто-
той в TV раз меньшей частоты внешней силы
Предложенная теория этого явления дала не только качественное,
но( и количественное совпадение с результатами проведенных опытов.
В заключение приведены рекомендации конструкторам амортизованных
систем с упругими ограничителями хода по уменьшению возможности
возникновения колебаний с большими амппит дами, нарушающими
амортизацию.
Экспериментальная часть.работы проведена в Научно-Исследова-
тельским институте самолетного оборудования (НИСО).
1 ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а0 . О.,. Cla. ь • • » 8 . • • • — коэфициенты разложения
в ряд Фурье.
А0ДД, . . - Bj, Вг .коэфициенты разложения
в ряд Фурье силовой ’ функции при подстановке в нее периодического
решения.
fl — энергия, поступающая в систему Sa период.
С, , Са , Са, . . . — коэфициенты многочлена, апроксимирую-
щего силовую функцию^
h — коэфициент трения.
h*— коэфициент трения при деформациях, не
ггревышающих величины свободного хода.
hn . ii . ,
, ,Г)Я — коэфициенты трения при деформациях, вы-
ходящих за: пределы свободного хода до первого или второго ограни-
чителя соответственно индексу
L — целое число
к — коэфициент упругости.
к'— коэфициент упругости прч деформациях, не
превышающих величины свободного хода.
к"— коэфициент упругости в симметричных си-
стемам при деформациях, выходящих за пределы свободного хода.
k,", kj— коэфициенты упругости в несимметричных
системах при деформациях, выходящих за пределы свободного хода
до первого или второго ограничителя, ci ответственно индексу.
Е — величина свободного хода массы в симмет-
ричных системах из положения равновесия до. ограничителя.
Е(, .— расстояние от положения равновесия массы
в несимметричных системах до первого или второго ограничителя соот-
ветственно индексу.
ГЛ — масса.
П — целое число.
р — частота .внешней силы, Ьтнесевная к С02 .
Р, Р, — силовая функция упругого элемента.
Р2 — функция силы трения.
— частот; внешней силы, отнесенная к .
S(.y)— многочлен, апроксимирующий силовую
функцию упругого элемента.
5
S — целое; числе.
fa — время.
Т — период колебаний.
1лГ— линейное смещение в абсолютных коорди-
натах, 'отнесенное к £ .
V/ — энергия, рассеиваемая в системе за период
ОС — линейное смещение в абсолютных коор-
динатах.
ц — линейное смещение относительно точки
подвеса.
Уо.ь Уг • уп амплИтУДы гармонических составляющих
смешения’ относительно точки подвеса.
2 — смещение относительно точки подвеса, от-
несенное к t
Zc, Z. Z* ... Zn,— амплитуды гармонических составляющих
смещения относительно точки подвеса, отнесенные к Б .
оС — коэфициент затухания.
сС,— коэфициент затухания при деформациях, Не
превышающих величины свободного хода.
о(У1 , оСу2 — коэфициенты затухания в, несимметричных
системах при амплитудах колебаний у , выходящих за пределы свобод-
ного хода до первого или второго ограничителя, соответственно
и щексуу
ft — мера нелинейности.
Ya ,Тч —фазы, соответствующие моментам сопри-
косновения и и’рыва от ограничителей хода, приведенные к! острым
углам.
б" — прйведенный сдвиг фазы.
£, -— декремент затухания.
j — нелинейная функция (см. таблицу на стр. 14).
п — амплитуда колебаний точки подвеса, отне-
I сенная к £ .
50 — амплитуда колебаний точки подвеса.
Ч*2 • •• Уц..— СДВИГИ Фэз гармонических составляющих
смещения.
ц/ — фаза основной гармонической составляю-
щей смещения.
%, % — фазы, соответствующие моментам соприкос-
новения и отрыва от ограничителей.
со — частота внешней силы.
с0(— частота собственных колебаний при дефор-
мациях. не превышающих величины свободного хода.
GJj,— частота собственных колебаний, соответ-
ствующая упругости основного элемента и одного ограничителя.
, GDy? — частоты собственных колебаний в несим-
метричных системах при амплитудах колебаний у , выходящих за пре-
делы свободного хода /о первого или второго ограничителя соответ-
ственно индексу.
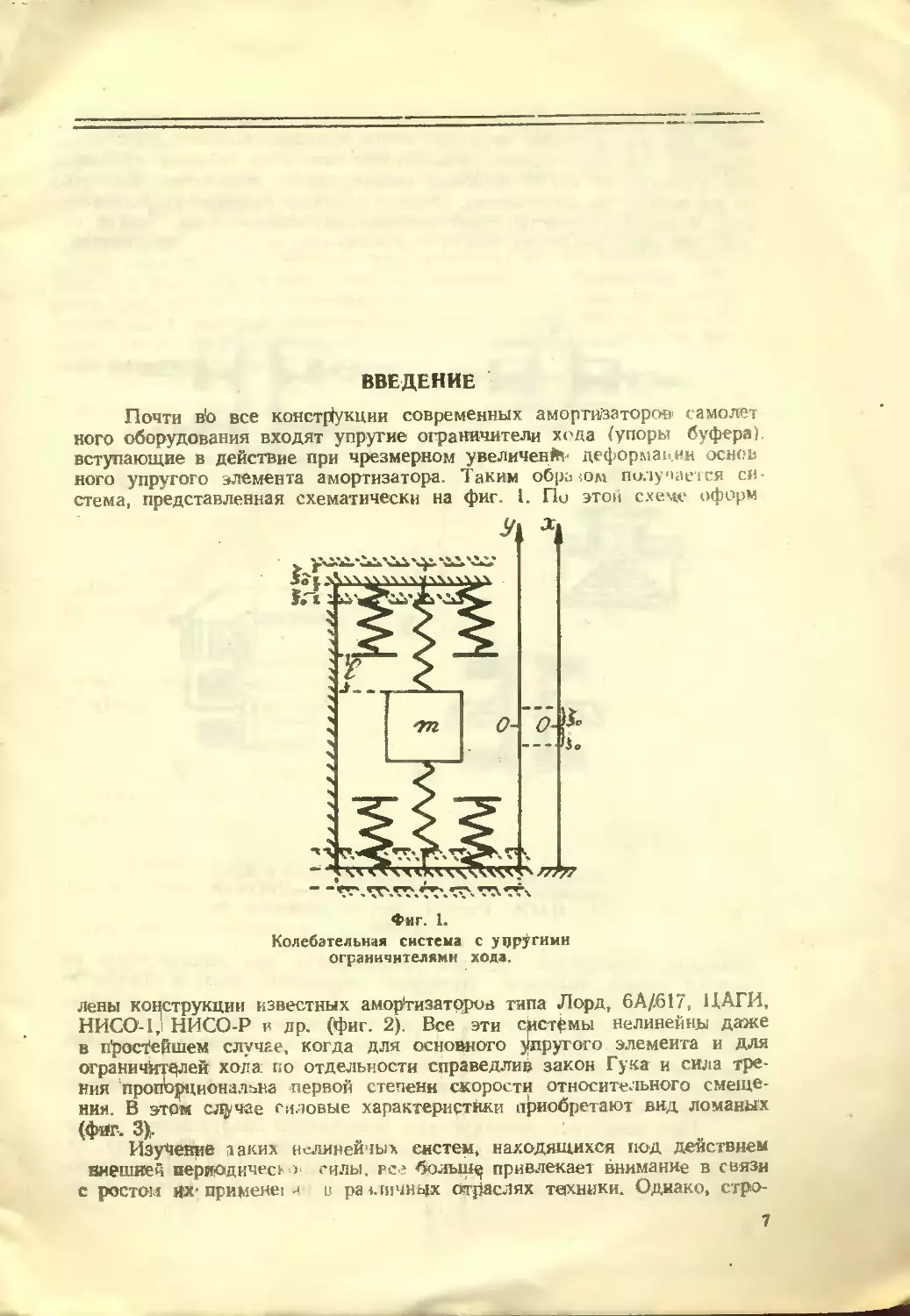
ВВЕДЕНИЕ
Почти в'о все конструкции современных амортизаторов самолет
ного оборудования входят упругие ограничители хода (упоры буфера)
вступающие в действие при чрезмерном увеличен^ деформации основ
ного ynpvroro элемента амортизатора Таким обраюм получается си
стема, представленная схематически на фиг. I. По этой схеме оформ
Фиг. 1.
Колебательная система с упругими
ограничителями хода.
лены конструкции известных амортизаторов типа Лорд, 6А/.617, 11, АГИ,
НИСО-1,1 НИСО-Р в др. (фиг. 2). Все эти системы нелинейны даже
в простейшем случае, когда для основного упругого элемента и для
ограничителей хода, по отдельности справедлив закон Гука и сила тре-
ния пропорциональна первой степени скорости относительного смеще-
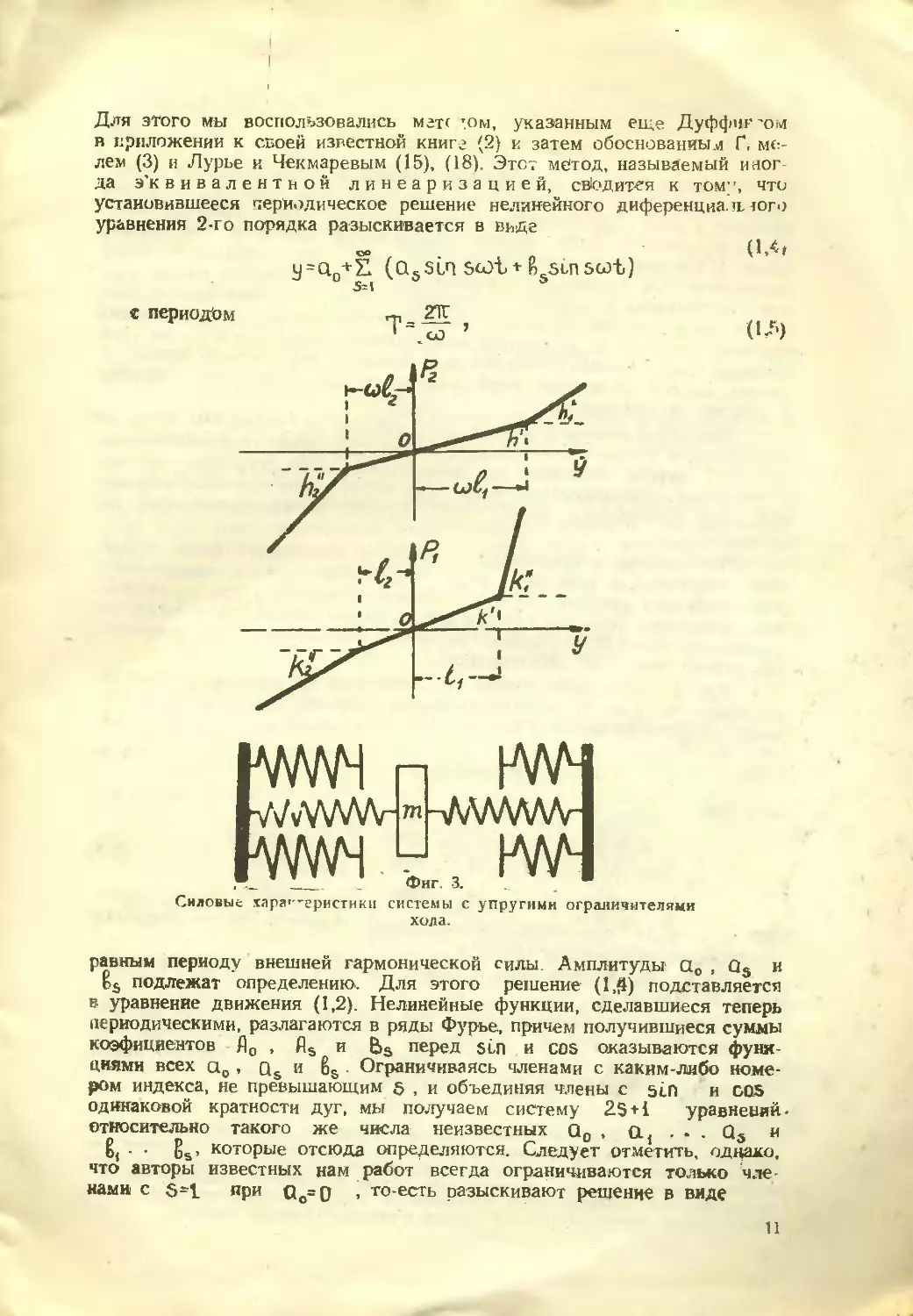
ния. В этом случае силовые характеристики приобретают вид ломаных
(фиг. 3),.
Изучение таких нелинейных систем, находящихся под действием
внешней периодичнол. силы, все больше привлекает внимание в связи
с ростом ИХ’ примене! и в ра <личных отраслях техники. Однако, стро-
7
i ие исследования и решения доведены до конца лишь в частных слу-
чаях, так как в. общем виде задача представляет большие трудности,
особенно при значительной нелинейности или, если заданные нелиней-
ные функции не имеют простого аналитического выражения. Поэтому
за последние три десятилетия, начиная с работы Мартинсена (I), появи-
лось большое количеств© приближенных способов решения. Многие из
этих способов физически Кажутся очевидными, но без строгих матема-
Фиг. 2.
Конструкции амортизаторов самолетного обору-
дования: I, II—Лорд, III—6А/617, IV—НИСО—Р,
V — ЦАГИ. Разрезы упругих элементов за-
чернены.
тических обоснований пределов применимости, они должны,'1 быть во
всяком случае тщательно проверены экспериментально и притом не,
только качественно, но и количественно. Тем не менее такие экспери-
менты почти отсутствуют, а немногочисленные проведенные работы
дают, главным образом, только качественное соответствие полученных
приближенных решений с наблюдаемыми на опыте явлениями (2), (5).
Значительные трудности эксперимента очень усложняют проведение
подобных исследований.
При испытании амортизаторов самолетного оборудования их не-
линейные свойства проявляются чрезвычайно сильно. В частности, на-
равне с малыми амплитудами установившихся колебаний, характеризую-
щих хорошую амортизацию, мы наблюдали при тех же частотах внеш-
8
ней гармонической силы, установление колебаний с очень большими
амплитудами. опасными для сохранности амортйзованного оборудо-
вания. При Зтом, во втором случае частота установившихся колебаний
амортизованной массы могла и не соответствовать частоте внешней
гармонической силы.
Имея в виду рациональный расчет амортизатора самолетного обо-
рудования, мы посвятили эту работу исследованию некоторых из ука-
занных выше вопросов. Вместе с тем, поскольку эти же вопросы встре-
чаются и в других Задачах теории колебаний, то полученные здесь
результаты, 'особенно в отношении субгармонического решения и эксие
риментальной проверки примененного приближенного метода исследо-
вания, могут представить более! общее значение, выходящее за пре-
делы настоящей работы).
ГЛАВА I
УСТАНОВИВШИЕСЯ ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
С ЧАСТОТОЙ ВНЕШНЕЙ ГАРМОНИЧЕСКОЙ СИЛЫ
§ 1. Ограничители хода с линейной силовой характеристикой
В э1ом параграфе мы будем предполагать, что сила упругой де-
формации для ограничителей хода и для основного упругого элемента
амортизатора, по отдельности, пропорциональны величине их дефор-
мации, т. е. силовая характеристика имеет вид ломаной. Если еще поло-
жить силу трения пропорциональной только первой степени скорости
относительного! движения, то при колебаниях точки подвеса рассматри-
ваемой системы (фир. 1 и 3) по закону
получаем уравнение движения в относительных коордиьатах у :
mij+ F>(y) + Рг(у‘= тсО2^оз1п cot * 0,2)
где, как обычно, т — масса, со — угловая частота и — ампли-
туда колебаний точки подвеса.
Сила Р, определяется следующими равенствами:
к'у пр« в2^у^е,
ЯСу^'у-Ч^-к",)^ "Р« (U)
к" у * (V' к" 4 Вг при ,
где к', к", и к £ - коэфициенты упругости, действующие на различ-
ных участках характеристики внутри и вне области свободного хода
Е, . 82 (фиг. 3). Сила трения Р2 определена ниже.
Аналогичная задача для случая симметричной характеристики ре-
шалась различными способами Вихертом (6), Рюденбергом (4), Ден-Гар-
тогом (7), (8), (12) и Лурье и Чекмаревым (15). Однако, неравенство
между собой к," и к2 и |В,| и |В2|? то-есть несимметричность
характеристики вместе с учетом коэфициента трения, который также
может быть неодинаковым на различных участках характеристики и
заданное движение точки подвеса вместо обычно рассматриваемой силы,
действующей на массу, заставило нас провести оешение задачи заново
•) Рассмотрение заданного движения точки подвеса амортизованной системы,
а не силы, яриложе.чной к массе, в нашем случае удобнее, так как обычно задается
характер вибрации, т. е. именно движение точки подвеса.
10
Для этого мы воспользовались мет< ’.ом, указанным еще Дуффиг 'ом
в приложении к своей известной книге (2) и затем обоснованным Г. ме-
лем (3) и Лурье и Чекмаревым (15), (18). Этот метод, называемый и ног
да эквивалентной линеаризацией, сводится к том;что
установившееся периодическое решение нелинейного диференциалыого
уравнения 2-го порядка разыскивается в виде
оо (1Л*
у = а0+Е (QsSin Scot + BsSLHSWt>)
хода.
равным периоду внешней гармонической силы. Амплитуды а0 , Qs и
Г подлежат определению. Для этого решение (1Д) подставляется
в уравнение движения (1,2). Нелинейные функции, сделавшиеся теперь
периодическими, разлагаются в ряды Фурье, причем получившиеся суммы
коэфициентов fl0 , й5 и перед stn и cos оказываются функ-
циями всех а0 , qs и 6S . Ограничиваясь членами с каким-либо номе-
ром индекса, не превышающим 5 , и объединяя члены с ььП и 005
одинаковой кратности дуг, мы получаем систему 2S + 1 уравнений
относительно такого же числа неизвестных Qo , Q. . . . Qs и
. - gs, которые отсюда определяются. Следует отметить, однако,
что авторы известных нам работ всегда ограничиваются только чле-
нами с 3-1 при Qo=0 , то-есть разыскивают решение в виде
11
’ • y=y,stn (wt+tfj'y^tnqi, (1,6)
так как более высокие приближения связаны с очень большими вычис-
лительными трудностями. В этом параграфе мы тоже' будем искать
радение р виде (1,6). Отметим, однако, что при значительной несиммет-
ричности! системы более верное приближение дает учет постоянного
члена. В предыдущей нашей работе (25) приведено исследование одной
несимметричной системы и показано, что в рассмотренном случае учет
или отбрасывание в решении постоянного члена не только количествен-
но, но даже качественно меняет взаимозависимость между параметрами
системы, амплитудой и-частотой вынужденных колебаний и амплитудой
внешней силы, то-есть меняется вид семейств резонансных кривых, а
именно наклон их вершин переходит со стороны возрастания частоты
в сторону ее уменьшения.
Поскольку общего метода определения погрешностей здесь не
разработано, в таких задачах необходимо соблюдать особую осторож-
ность. С другой стороны, для испытанной несимметричной системы
с упругими ограничителями хода (см. ниже) приближенное решение
(1,6), без постоянного члена, дало вполне удовлетворительные ре-
зультаты.
Повидимому отбрасывание в решении постоянного члена, умень-
шая точность, не изменяет вида резонансных кривых, если силовая
характеристика системы как при положительных, так и при отрицатель-
ных смещениях остается в обоих направлениях мягкой или в обоих на-
правлениях жесткой *). Однако, насколько нам известно, это утвержде-
ние строго никем ие доказывалось.
Для функции силы трения Р2 , считая ее на каждом участке ха-
рактеристики (фиг. 3) пропорциональной скорости колебаний у и при-
миная в соответствии с (1,6).
У =cdytcosip, (1.7)
получим:
h'y при
Р,(9)= ч" о.»)
где h . h* и h"z— коэфициенты треНия, действующие на различных
участках характеристики (фиг. 3).
Наша дальнейшая задача будет состоять в определении ампли-
туды колебаний у( j.
Пусть у достигает в первый раз значения Е( в момент времени,
соответствующий фазе ф, и значения Еа —< фазе . Если при этом
считать, что сдвиг фазы <j> не превышает ТГ , то у1 следует прови-
сать как положительные, так и отрицательные значения.
Уу яЖе<?»кями' принято называть системы, в которых абсолютное значение нро-
медоанЬй от силы по деформации возрастает с ее увеличением, а „мягкими*, На-
оборот, называют системы, в которых абсолютное значение производной соотвест-
етвенно уменьшается. Для симметричных систем вершины резонансных кривых в
аауч*с жесткой характеристики наклонены в сторону возрастания частоты, а в
сжу.чхе мягкой характеристики—наклонены и сторону убывания частоты-
12
Тогда для у^о1 ^iSLn% ('1,9)
&г.= У< Sin ф2 (1,101
к*‘U.sLntp при Ofeip&ty
к* у^СтКк'-кЭД п₽и
Р< Су sin у) = к 'у ,stn q> ПРН
к^гпфЧк'-к^при
k'y.siny* ПР“
«
cohy^cos^ ПРИ
coh'yjcoS4>+(H-h"1)wB( ПРИ
Pt (cjyf 005ф) - CD h' 9,005 ф при
CD H'2y, cosy» *(h'-h“)aj£z при
coh'ytG054> при
Для У,<0 получаются такие
(1,11) и (1,12) ва исключением инд
ф ^тг-ф,
«ТГ-ф.бФ^
ч^ч^зи-чъ
31Г-Ч»г5:4^211
О^ф£ф(
Ф^ф^Тг-ф,
тт-Ф1^Ф^Фг (1,12)
Ч'г<-’Р<3'ГС-Ф2
ЗТГ^^Ф 6 2.К
же выражения, (1,10).
ексов г С , которые лекшотС!
местами.
В разложении функций РДу.бёпф) и Р2 (сЗу^овФ) в ряды
Фурье мы тоже ограничимся лишь членами с дугой ф и, таким обра-
зом, разбивая при интегрировании полный период колебаний на пять
промежутков (1,11) и (1,12), получим, учтя (1,9) и (1,10), ДЛя функции
РДу 81Пф) коэфициенты — перед зСпф. :
a.-$Dw й,- v (•&%)] ’
(1,13)
переА cosq» :
в ~о
и аналогично для функции Рг (cDyt СОБФ) коэфициенты перед $tn ф :
Я 12'0
и перед cos ф
где введена' функция
^(]ЬЛ)=^(рч)[голс51п J ’V
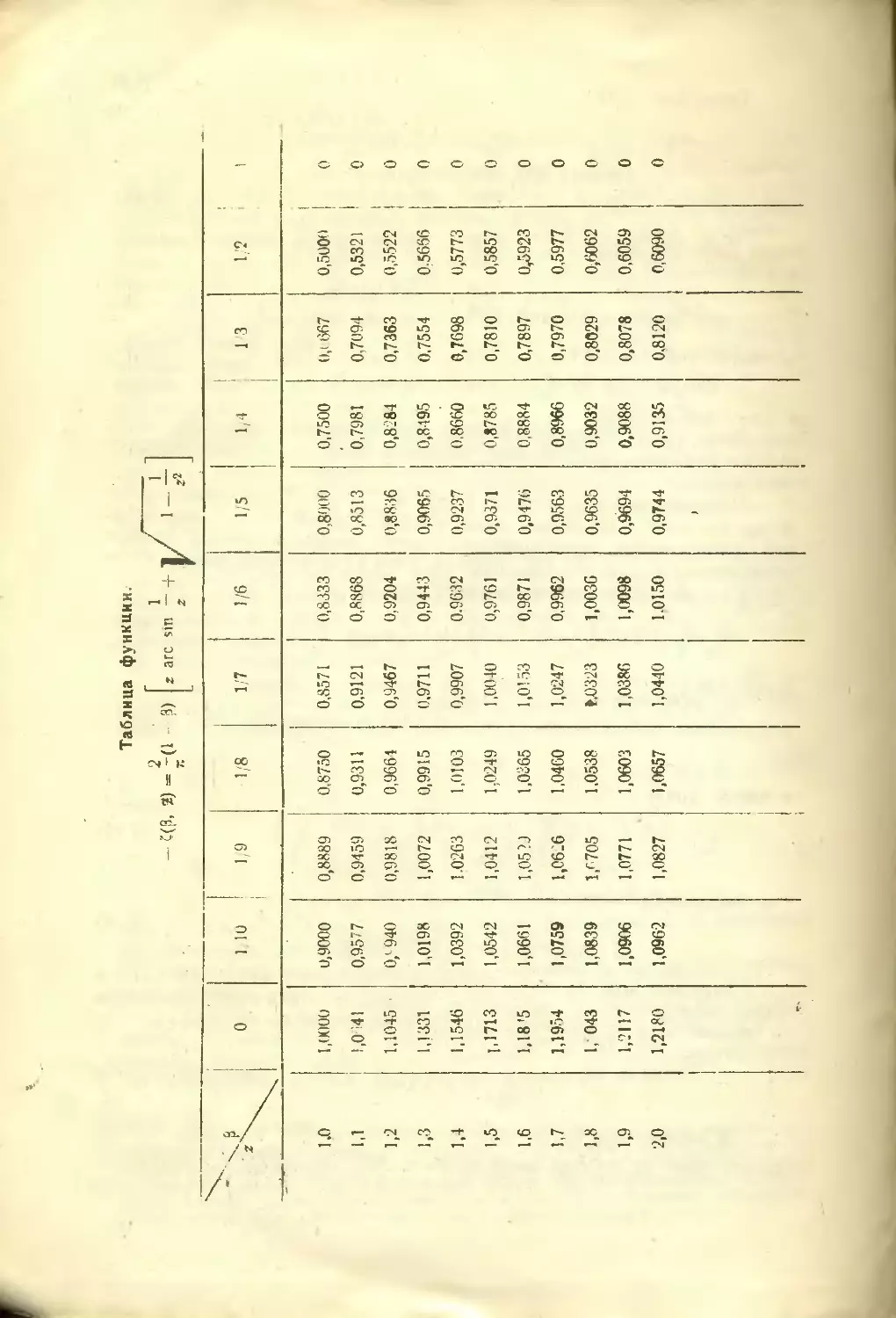
Значения этой функции для разных р> и Z, которые в (1,13) и
(1,14) обозначают соответственно различные отношения, приведены
• таблице. Для Z, превышающих 2, с точностью не менее 0,2%:
«л
В выражениях (1,13) и (1,14) поставлены двойные зяйхя: 4-
рается для «и Sv>0, — Для 1У<1>|В(Д *» Ц-?0.
Таблица функции.
1
z arc sin — 4-
z
2)
0 1 10 1,9 1 1/8 1/7 1/6 1/5 1,4 1 3 1/2 1
1.0 1,1X100 0,9000 0,8889 0,8750 0,8571 0,8333 0,8000 0,7500 O,i 667 0,5000 0
1.1 1,0 41 0,9577 0,9459 0,9311 0,9121 0,8868 0,8513 0,7981 0,7094 0,5321 Q
1,2 1,1045 • 0/ 940 0,9818 0,9661 0,9467 0,9204 0,8836 0,8284 0,7363 0,5522 0
1,3 1,1331 1,0198 1,0072 0,9915 0,9711 0,9443 0,9065 0,8495 0,7554 0,5666 0
1,4 1,1546 1,0392 1.0263 1.0103 0,9907 0.9632 0,9237 0,8660 0,7698 0,5773 0
1,5 1,1713 1,0542 1,0412 1.0249 1,0040 0,9761 0,9371 0,8785 0,7810 0,5857 0
1.6 1,18'5 1,0661 1,05? J 1,0365 1,0153 0,9871 0,9476 0,8884 0,7897 0,5923 0
1,7 1,1954 1,0759 1,0626 1,0460 1,0247 0,9962 0,9563 0,8966 0,7970 0,5977 0
1,8 1,- 043 1,0839 1/705 1,0538 *.0323 1,0036 0,9635 0,9032 0,8029 0/5062 0
1,9 1,2117 1,0906 1,0771 1,0603 1,0386 1,0098 0,9694 0,9088 0,8078 0,6059 0
2,0 1,2180 1,0962 1,0827 1,0657 1,0440 1.0150 0,9744 i 0,913.5 0.8120 0,6090 0
. Таким образом, подставив (1,6) в уравнение (1,2), мы придем
к следующей системе:
B12r mca2sosi.ny>. (1,17)
После возведения в квадрат, сложения и подстановки значений
й„ и из (1,13) и (1,14) получим:
где обозначено:
О)г - к* (1,20)
Н2 ТП Ml
о( =2Ь_ _ ЯЛЕ.* (&,’&) U.21)
н’ Zm У)
о( = -^ u.^s(4. ,*) (1,22)
2 m у.
Если колебания хотя бы в одну сторону не выходят за пределы
свободного хода, то-есть если |у,|4|е<| или |У,ЩЕ2| , TO coni’
ветствующие сОу(, о<у), или с0у2 , <Ху2 вменяются через:
2 СО, = к' (1,23)
1 m
с( “ h’ (1,24
ЧЛ, 2m
При невыходе колебаний за пределы, свободного Хода в обе ст'
роны к задаче полностью приложима обычная линейная теория.
Если ь.-О или 1 82-0 , то соответствующие соу
или CJ <лу2 заменяются через
о)2 ч - Au (1,25)
m
0(2 -А (1,26)
2. 2"1,
15
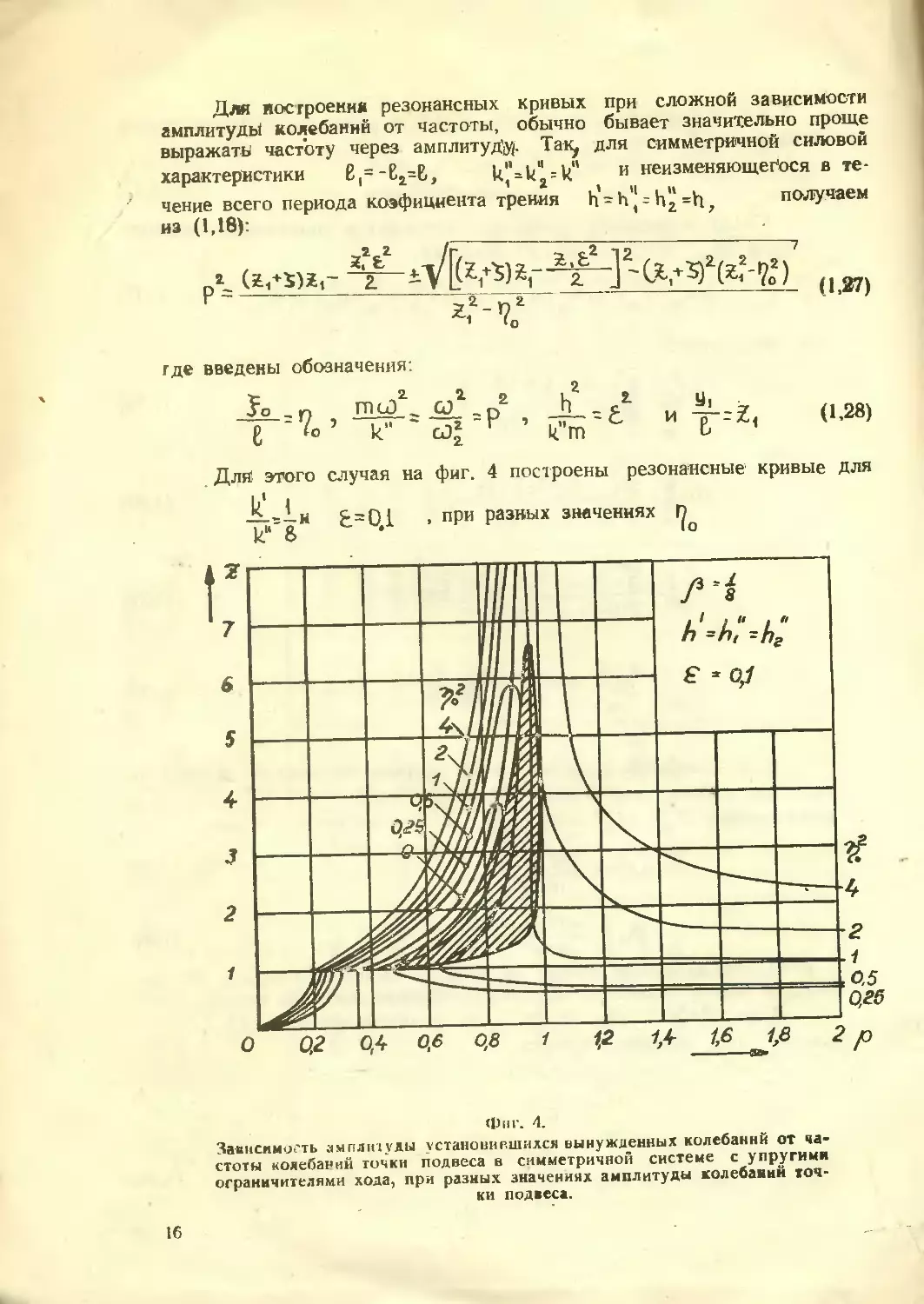
Для нестроения резонансных кривых при сложной зависимости
амплитуды колебаний от частоты, обычно бывает значительно проще
выражать частоту через амплитуд'^. Так* для симметричной силовой
характеристики k"=k” = k'' и неизменяющег'ося в те-
чение всего периода коэфициента трения h = h'1 = h','=h получаем
из (1,18): ‘
Л а,*»*,-
г.2-1?.2
где введены обозначения:
2
w\d2 h м Уд, П2Л
е ‘Vo’ k" --^-Р ’ и ь _21 (1,28)
Для! этого случая на фиг. 4 построены резонансные кривые для
Ь* |
-Д_-Дм £.= Q,1 , при разных значениях
Фиг. 4.
Зависимость амплитуды установившихся вынужденных колебаний от ча-
стоты колебаний точки подвеса в симметричной системе с упругими
ограничителями хода, при разных значениях амплитуды колебаний точ-
ки подвеса.
16
Качественно мы получили хорошо известный результат, что в не-
линейных колебательных системах, под действием приложенной к массе
внешней периодической силы одной и той же частоты (в нашем случае
приложено внешнее колебательное движение к точке подвеса), могут
установиться вынужденные колебания с различными амплитудами.
В рассматриваемой задаче их число может доходить до трех(.
Заштрихованная на чертеже область соответствует неустойчивым
значениям амплитуд. Применяя последовательно метод ван-дер-Поля,
можно показать, как это. например, сделал Кац (17). что область не-
зависимость амплпгтты установиншихсч вы-
нужденных колебании от частоты колебании
точки подвеса к симметричной системе с упру-
гими ограничителями хода при разных зцачф
ниях величины трения, земству тощего только
вне области свободного хота.
устойчивости находится внутри границ, определяемых геометрическим
местом точек, где производная
= (1,29)
В нашем случае это дает из выражения (1,18) уравнение границ
области неустойчивости:
& (1,30)
где u
(1,31)
Таким образом и для рассматриваемых нелинейных систем под-
тверждается известное общее положение, что не: все возможные ам-
плитуды установившихся вынужденных колебаний устойчивы. Из фиг. 4
следует, что устойчивыми будут только два вида колебаний — с са-
мыми малыми амплитудами, мы такое движение в дальнейшем будем
2 Ю. И. Иоркш. ^ь-гитут 17 ф
БИЬЛЫ ГЕКА
I
называть первым устойчивым режимом к с самыми большими ампли-
тудами, такое движение мы будем называть вторым устойчивым
режимом.
Какое именно движение установится в системе, зависит от началь-
ных условий, а также от случайных ударов и толчков, которые могут
сменить вид установившегося движения с первого режима на второй
и обратно.
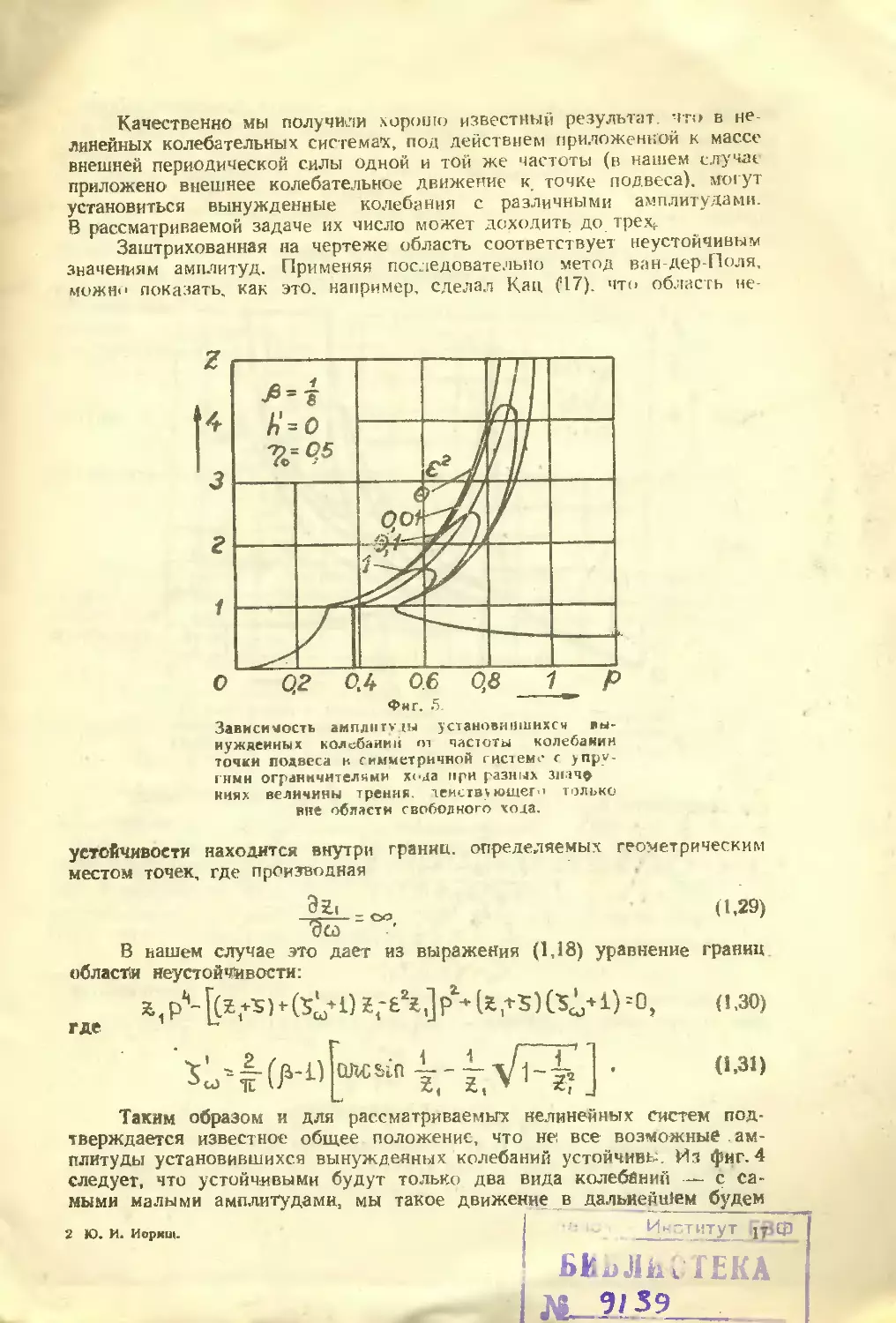
На фиг. 5 представлены резонансные кривые для случая, анало-
гичного рассмотренному, когда треНие, однако, действует лишь вне обла-
лебаний от часто 1Ы колебания точки подвеса * симметрич-
ной системе с упручими ограничителями хода при разных
зна чениях меры нелинейности р.
стн свободного хода, то-есть h =0 , a h'^h^+O . Тогда
р2-2 V 0^ (1,32)
Vo (
где обозначено: Cg
'S^'SCO.Z,).
Резонансные кривые для разных значении
фиг. 6, при этом обозначено:
рк'
р - построены на
о=-^' 0.33)
I cJf
§ 2. Высшие приближения
Получение решения (1,4) с более высоким приближением, учиты-
вающим постоянный член и дуги кратности выше первой, сопряжено со
значительными вычислительными трудностями и, как указывалось, нам
18
неизвестно, чтобы рассматриваемым способом оно когда-нибудь дово
дилось до конца. Однако, для систем с симметричной ломаной характе
рйстикой, при отсутствии трения следующее приближение, учитываю-
щее член с дугой 3cat . то-есть
у = У<ЬсП<л)Ъ + узЬ1ПЗсоЪ> (2,1)
получается сравнительно просто. Можно заранее утверждать» что член
43si.rt Suit будет слабее всего выражен при у лишь немного превы
тающем £ , когда движение определяется главным образом коэфи-
циентом упругости к’ . и пр’й у значительно превышающем В , когда
движение определяется главный образом коэфициентом упругости ки -
Мы рассмотрим этот последний случай. Смена вида функций:
к'у при [y|£f>
Pf(y) = kVU'-W при у>В
к"у- (k'-k*)^ при у<~в
(2,2)
будет происходить в моменты времени, определяемые из уравнении:
6= у,sin cot + y3sin3wij (2.3)
- t= y< sin cot + y3sin Scot (2,4)
Причем, если в соответствии
у,>>у3 , то член y3sinSa?t н
вносит. Подставим (2,1) в (2,2) и для
колебания на 5 участков:
k’y.sinqi+k'yjSinty при
kl,y1sin4>+k"y3sin +E(k' к") при
P^sinqiv^siniw)’ k'y^imp *k'y3siniip при
к."у (sin у) +к"уг5Ш 3>ф-Е(к- к") при
k'y.sinip+k'y sinH при
со сделанным, предположением
каких дополнительных корней не
уз?0 разобьем полный период
ФЛФ^ТГ-Ф,
Ть-ф^фЫёкЦ), <2 5<
ТГ+Ф,^Ф^2ГК-Ф5
2К-ф,&ф -ь 21Г
где попрежнему ф=соЪ и ФЛ есть наименьший корень (2.3) Для
у(<0 получаются аналогичные выражения с ф, , являющимся
наименьшим корнем (2,4) и противоположными знаками перед £
В разложении функции Р, (у,51Пф +У3й£пЗф) , в ряд Фурье
мы тоже удержим только члены с дугами ф и Зф , и таким образом,
после интегрирования выражений
21Г
_ (_
РДу 51Пф + у3а(пЗф)81Пф с!ф
о
21с
Р1{у|Б(Пф + У55(пЗф) COS Ф dip.
(2,6)
о
19
21Г
j P,(^sinip + y^inSip) sin3ip dip.
о
21Г
Ba=4j £«Cy1sintV+y3^i40co$3\pdip
0
(2,6j
при учете (2,5) получим:
(k'-k") [,Ф(- (y-y3)sin 2ip, - 4 y^vn/jip, ±2 Uos Ф^+к'у,
%’iv (к'-’Ю^Ф+т, У Sin 2Ф~^ y,sin к ip~ y3sinG^+~ Uos3<pJ+k:,y3
B3-0
Там, где поставлены двойные знаки, + относится к У«>0. и
— к у,<0 • Подставив (2,1) в уравнение движения (1,2), произ-
ведем указанное разложение силовой функции и, введя ’обозначения
(1,28), получим после группировки членов с одинаковой кратностью
дуг два уравнения:
(jH) ^'rKl^sinZipj-^ z^in/iip^Eecosip^p^ (2,8)
-эр*HisCn sCn ^ip^z^infcip t|G0s5ipl(2,9)
относительно трех неизвестных £.( ,
V C
(2,10)
и у . . Третье уравнение дается (2,3) или (2,4):
+ sin Ф,+ Zasin3<pv f2’11)
Точное решение системы уравнений (2.8), (2,9) и (2.11) представ-
ляется затруднительным, однако способом итераций решение с любой
степенью точности получается сравнительно просто. Пренебрегая сна-
чала в (2,8) и (2,11) Х , имеем
х!
Ф- аде sin
(2.12)
20
и
2.
P “
it [g.QtaSin
(2,13)
Задаваясь значениями iZt> получаем отсюда нулевые прибли-
жения (ip,)0 , (Р+)о и СР~)о • где значки + и — обозначают соот-
ветственно решения для и ^<0 - Подставив эти нулевые
приближения в (2,9), получаем первые приближения и •
Последние подставляются вместе с прежним + 2( в ,(2,11), откуда
численно определяются первые приближения и . Теперь
из (2,8). после подстановки с (23+)1 и (ф,.^ с (Z.3_)1 , нахо-
дятся первые приближения и (р_) и затем из (2,9) (23+')п. и
^-)й И Т. Д.
Пример: Дано £ ~ 25 ’ ?0~ •
Найти р+ и для 2^=<,5.
Произведя выкладки, ..по приведенной выше схеме, получаем сле-
дующие результаты:
Ф1 р *3
0-е приближение 0,7297 0,1532 0
1-е приближение 0,7886 0,1592 — 0,1020
2-е приближение — 0,158э — 0,0915
§ 3. Ограничители хода с нелинейной силовой характеристикой
Конструктивно ограничители хода выполняются обычно* в виде
резиновых прокладок-буферов, прижимающихся к металлическим упо-
рам (см. фиг. 2). Таким образом резина работает на сжатие и поэтому
зависимость упругой силы от деформации значительно отличается от
линейной, даже при небольших смещениях.
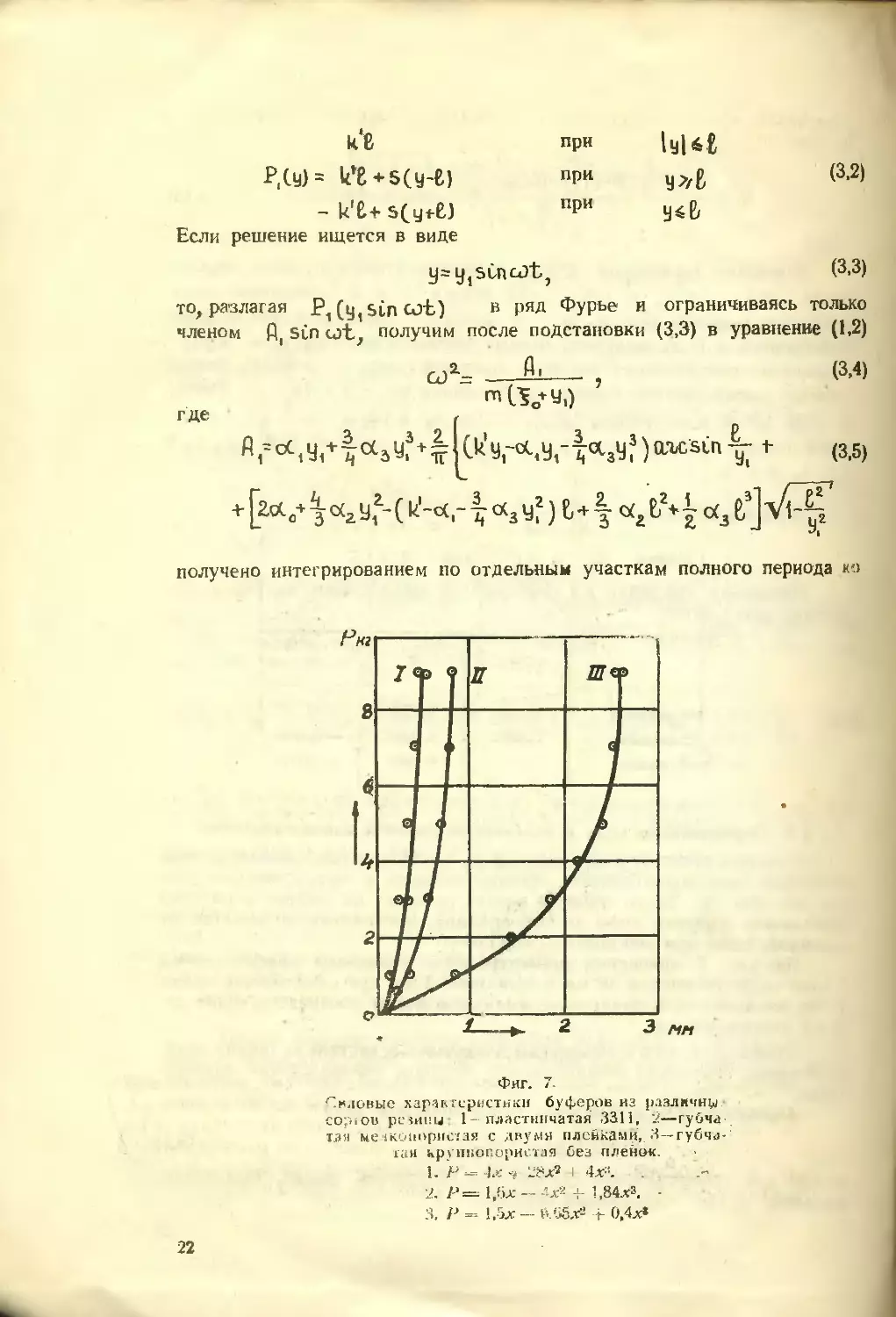
На фиг. 7 приведены характеристики различных сортов резины
в виде шайб диаметром 36 мм и толщиной 4 мм при сдавливании одним
и тем же кольцевым пуансоном, имеющим форму соответствующих де-
талей амортизатороц.
Чтобы определить амплитуды колебаний в системе с такими огра-
ничителями^ мы снова воспользуемся методом эквивалентной линеари-
зации.
Апроксимируя кривые| фиг. 7 многочленом вида
зСу^у + О^С^ (3.1)
можно для симметричного случая, при отсутствии трения, представить
функцию Р, Сч) следующим образом:
21
к'е
рду)= i?e+s(y-ej
- к'Е+ s(y<-£)
Если решение ищется в виде
при
при
при
y=y,ScncJt,
то, разлагая P^yjSinwt) в ряд Фурье и
членом fl(sin получим после подстановки
1чК£
улВ (3,2)
у^Ь
(3.3)
ограничиваясь только
(3,3) в уравнение (1,2)
где
СОг= ___Aj____ , (3Л)
гс(Х>*У1)
flr^iyi+|aay^^Ck'yroC4yf|cc3^)Q^csin^ 1- (3i5)
+ [z<V со, у < (k'-ct.- т; <*3 У?) Ь+1 Ь2+ £ о(3 6 j Vl-^2
получено интегрированием по отдельным участкам полного периода ко
Фиг. 7.
Силовые харакгерметики буферов из различны,
сор.ов речивы 1 пластинчатая 3311, 2—губча
тля мечкопормстая с двумя пленками, 3—губча-
тая крупнопористая без пленок.
1. Р = -).£ т । 4х:!.
2. Р== 1,бл — 3Х2 3- 1,84x3. .
3. Р !,5х — KS5X3 + 0,4х*
22
лебаний, как в предыдущем параграфе. Принятые сокращения обо-
значают:
<*о= Ck’-Ct+CgE-Cj/jB
оС,* C(~2.CzBt зсде2'
Сг'ЗС3£
(3,6)
оС3- с3
На фиг.. 8 изображены резонансные кривые для амортизатора
с резиновыми! буферами, силовые характеристики которых представ-
лены на фиг. 7. Вид этих кривых, естественно, отличается от кривых
'РИГ. в.
Зависимость амплитуды установившихся вынужденных
колебаний от частоты колебаний точки подвеса в сим-
метричной системе с упругими ограничителями хода,
имеющими силовые характеристики, представленные
иа фиг. 7.
Однако основные Заключения, которые можно сделать о параметрах
ограничителей хода, остаются в силе. В частности, мы попрежнему
видим, что уменьшение жесткости упоров поднимает резонансные кри-
вые и уменьшает таким образом область частот, в которой возможно
возникновение больших колебаний второго устойчивого режима.
§ 4. Экспериментальные исследования
Явление установления колебаний с большими амплитудами вто-
рого устойчивого режима мы наблюдали решительно во всех конструк-
циях амортизаторов самолетного оборудования, имеющих упругие огра-
ничители хода. Однако для количественной проверки на опыте выведен-
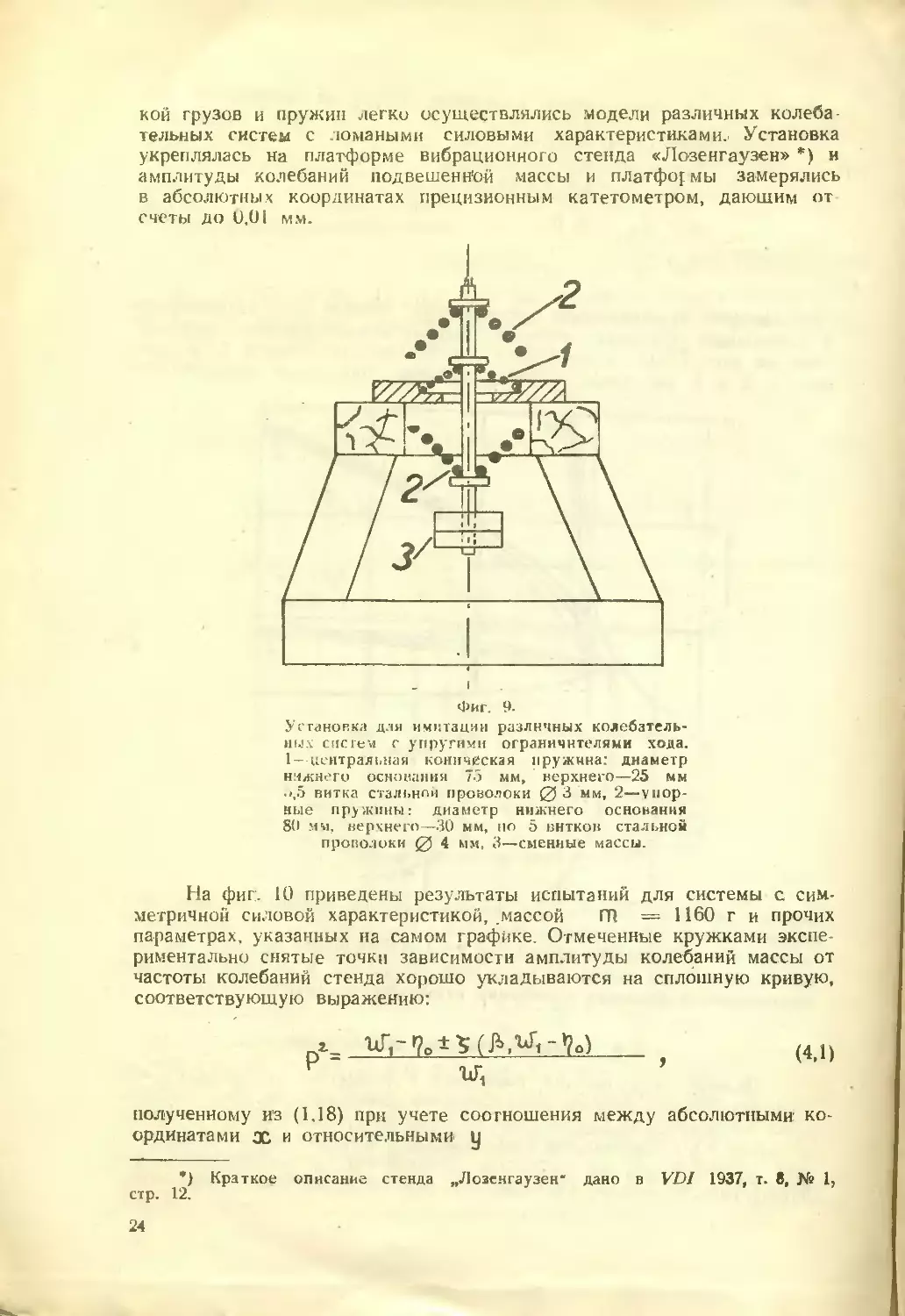
ных зависимостей, мы построили специгСчьиую установку-макет, изо-
браженную на фиф 9. Регулировкой червячных передач и перестанов-
23
кой грузов и пружин легко осуществлялись модели различных колеба-
тельных систем с ломаными силовыми характеристиками. Установка
укреплялась на платформе вибрационного стенда «Лозенгаузен» *) и
амплитуды колебаний подвешенной массы и платфо[мы замерялись
в абсолютных координатах прецизионным катетометром, дающим от
счеты до 0,01 мм.
Установка дчя имитации различных колебатель-
ных систем с упругими ограничителями хода.
1 — центральная коническая пружина: диаметр
нижнего основания 75 мм, верхнего—25 мм
о,5 витка стальной проволоки 0 3 мм, 2—упор-
ные пружины: диаметр нижнего оснонанчг
80 ми, верхнего—30 мм, по 5 витков стальной
проволоки 04 мм 3—сменные массы.
На фиг.. 10 приведены результаты испытаний для системы с сим-
метричной силовой характеристикой,.массой ГП — 1160 г и прочих
параметрах, указанных на самом графике. Отмеченные кружками экспе-
риментально снятые точки зависимости амплитуды колебаний массы от
частоты колебаний стенда хорошо укладываются на сплошную кривую,
соответствующую выражению:
и,и,-у.) (41)
w>
полученному из (1.18) при учете соотношения между абсолютными ко-
ординатами х и относительными у
*} Краткое описание стенда „Лозенгаузен" дано в VDI 1937, т. 8, № 1,
стр. 12.
24
у+5 = ^.,
(4,2)
пренебрегая трением и введя обозначение:
(4,3)
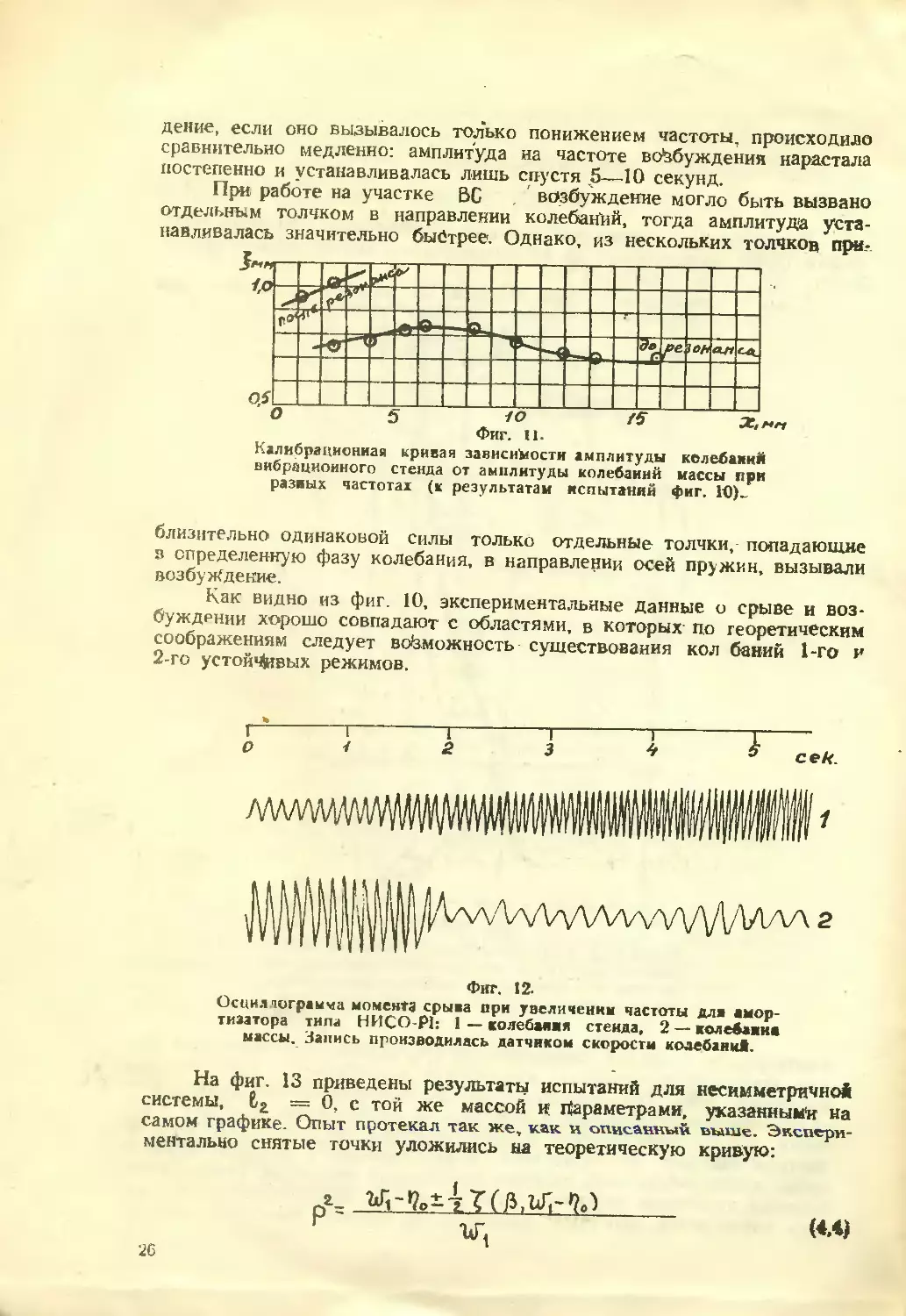
Величины 1?0 , пропорциональные амплитудам колебаний плат-
формы (1,28), определялись из экспериментальНо-снятой кривой зависи-
мости от (фиг. Н)-
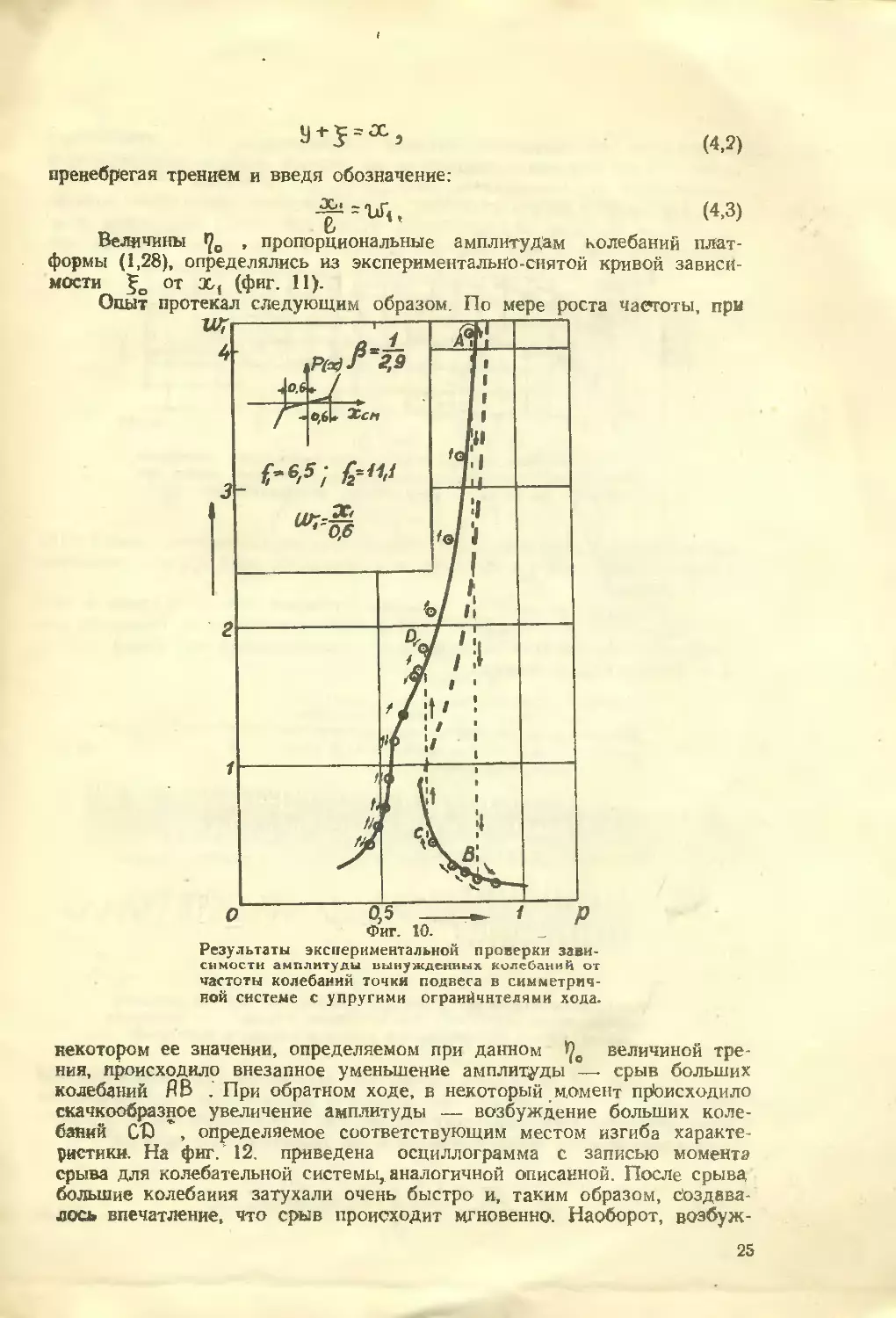
Опыт протекал следующим образом. По мере роста частоты, при
Результаты экспериментальной проверки зави-
симости амплитуды вынужденных колебаний от
частоты колебаний точки подвеса в симметрич-
ной системе с упругими ограийчнтечями хода.
некотором ее значении, определяемом при данном величиной тре-
ния, происходило внезапное уменьшение амплитуды — срыв больших
колебаний АВ . При обратном ходе, в некоторый м,омент происходило
скачкообразное увеличение амплитуды — возбуждение больших коле-
баний CD , определяемое соответствующим местом изгиба характе-
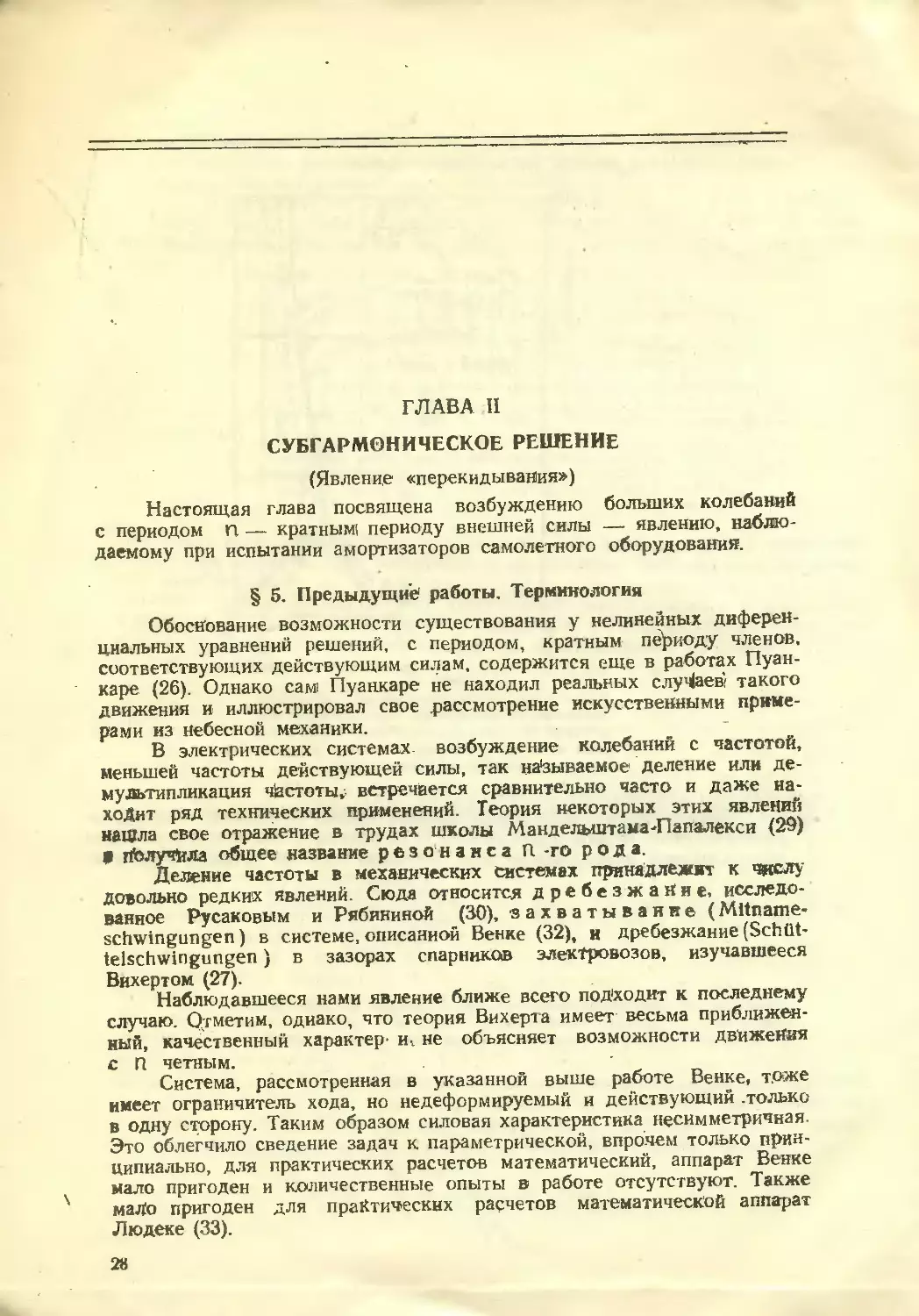
ристики. На фиг. 12. приведена осциллограмма с записью момента
срыва для колебательной системы, аналогичной описанной. После сры«а
большие колебания затухали очень быстро и, таким образом, создава-
лось впечатление, что срыв происходит мгновенно. Наооорог, воэбуж-
25
дение, если оно вызывалось только понижением частоты, происходило
сравнительно медленно: амплитуда на частоте возбуждения нарастала
постепенно и устанавливалась лишь спустя 5—10 секунд.
При работе на участке ВС возбуждение могло быть вызвано
отдельным толчком в направлении колебаний, тогда амплитуда уста-
навливалась значительно быстрее. Однако, из нескольких толчков при
Калибрационная кривая зависимости амплитуды колебаний
вибрационного стенда от амплитуды колебаний массы при
разных частотах (к результатам испытаний фиг. ГО)_
близнтельно одинаковой силы только отдельные толчки, попадающие
в определенную фазу колебания, в направлении осей пружин, вызывали
возбуждение.
Как видно из фиг. 10, экспериментальные данные о срыве и воз-
буждении хорошо совпадают с областями, в которых по теоретическим
соображениям следует возможность существования кол баний 1-го и
2-го устойчивых режимов.
I—--------I--------1---------1 1 т—
О 1 2 3 э сек.
1
Фиг. 12.
Осцил чограмма момента срыва при увеличении частоты дли амор-
тизатора типа НИСО-PI: 1 — колебания стенда, 2 — колебание
массы. Запись производилась датчиком скорости колебаний.
На фиг. 13 приведены результаты испытаний для несимметричной
системы, = 0, с той же массой и1 параметрами, указанными иа
самом графике. Опыт протекал так. же, как и описакный выше. Экспери-
ментально снятые точки уложились на теоретическую кривую:
Р v (4.4)
2С
несколько хуже, чем в предыдущем случае, однако и здесь совпадение
следует считать вполне удовлетворительным.
Фиг. 13.
Результаты экспериментальной проверки
зависимости амплитуды вынужденных ко-
лебаний от частоты колебаний точки под-
веса в несимметричной системе с упруги-
ми ограничителями хода.
Таким образом, для рассмотренных систем с ломаной силовой ха-
рактеристикой первое приближение (1,6) решения, полученного методом
эквивалентной линеаризации, дает результаты, согласующиеся с опытом.
ГЛАВА И
СУБГАРМОНИЧЕСКОЕ РЕШЕНИЕ
(Явление «перекидывания»)
Настоящая глава посвящена возбуждению больших колебаний
с периодом п — кратным! периоду внешней силы — явлению, наблю-
даемому при испытании амортизаторов самолетного оборудования.
§ 5. Предыдущие1 работы. Терминология
Обоснование возможности существования у нелинейных диферен-
циальных уравнений решений, с периодом, кратным периоду членов,
соответствующих действующим силам, содержится еще в работах Пуан-
каре (26). Однако сам: Пуанкаре не находил реальных случ|аей такого
движения и иллюстрировал свое рассмотрение искусственными приме-
рами из небесной механики.
В электрических системах возбуждение колебаний с частотой,
меньшей частоты действующей силы, так называемое деление или де-
мультипликация частоты, встречается сравнительно часто и даже на-
ходит ряд технических применений. Теория некоторых этих явлений
нашла свое отражение в трудах школы Мандельштама-Папалекси (29)
9 пЬлучйла общее название резонанса П. -го рода.
Деление частоты в механических системах принадлежим к числу
довольно редких явлений. Сюда относится дребезжание, исследо-
ванное Русаковым и Рябининой (30), захватывание (Mitname-
schwingungen) в системе, описанной Венке (32), и дребезжание (Schfit*
telschwingungen) в зазорах спарников электровозов, изучавшееся
Вихертом (27).
Наблюдавшееся нами явление ближе всего под'ходит к последнему
случаю. Отметим, однако, что теория Вихерта имеет весьма приближен-
ный, качественный характер' щ не объясняет возможности движения
с П четным.
Система, рассмотренная в указанной выше работе Венке, т.оже
имеет ограничитель хода, но недеформируемый и действующий .только
в одну сторону. Таким образом силовая характеристика несимметричная.
Это облегчило сведение задач к параметрической, впрочем только прин-
ципиально, для практических расчетов математический, аппарат Венке
мало пригоден и количественные опыты в работе отсутствуют. Также
мало пригоден для практических расчетов математической аппарат
Людеке (33).
28
Кроме уже перечисленных терминов для рассмотренных явлений,
деление, и демультипликация частоты, резонанс п -го рода, захватыва-
ние и дребезжание, в других работах встречаются еще: принудитель-
ная синхронизация на унтертонах «субгармонический резо-
нанс. Нам кажется, что последний термин, применяемый, в частности,
Ден-Гартогом (31), лучше всего передает существо явления, когда оно
имеет то общее с обычным резонансом, что при каждой частоте и
амплитуде; внешней силы устанавливаются колебания определенной
амплитуды, но, в отличие от обычного резонанса с частотой, в целое
число раз меньшей частоты внешней силы.
В своем рассмотрении мы будем еще применять название пере
кидывание. смысл которого уясняется из дальнейшею.
§ 6. Описание явления
Во время испытания амортизаторов с упругими ограничителями
хода (упорами), установленными на вибрационном стенде, как показано
на фиг. 1, мы обнаружили следующее явление.
По мере увеличения частоты вибраций стенда, наступа.. 2 ой
устойчивый режим с. большими амплитудами колебаний, которые, как
=#то! было описано в предыдущей главе, при дальнейшем увеличении
частоты возрастали и в некоторый момент срывались, то-есть ампли-
туда вынужденных колебаний резко уменьшалась. 'Затем, иногда на ча
стоте срыва, иногда на более высокой частоте, самопроизвольно или,
большей частью, от толчка в направлении вибраций, вновь возникали
большие колебания, амплитуда которых все возрастала с увеличением
частоты и, наконец, колебанияs срывались с. тем, чтобы возникнуть
таким же образом опять при еще более высокой частоте вибраций
стенда и т. д
Осциллографирование «их колебании показало, что все возбуж
дения после 2-го устойчивого режима происходят с частотой, точно
в целое число раз меньшей частоты колебаний точки подвеса, то-есть
стенда, причем это число,' начиная с 2, возрастает на I для каждого
следующего возбуждения, наблюдаемого при увеличении частоты.
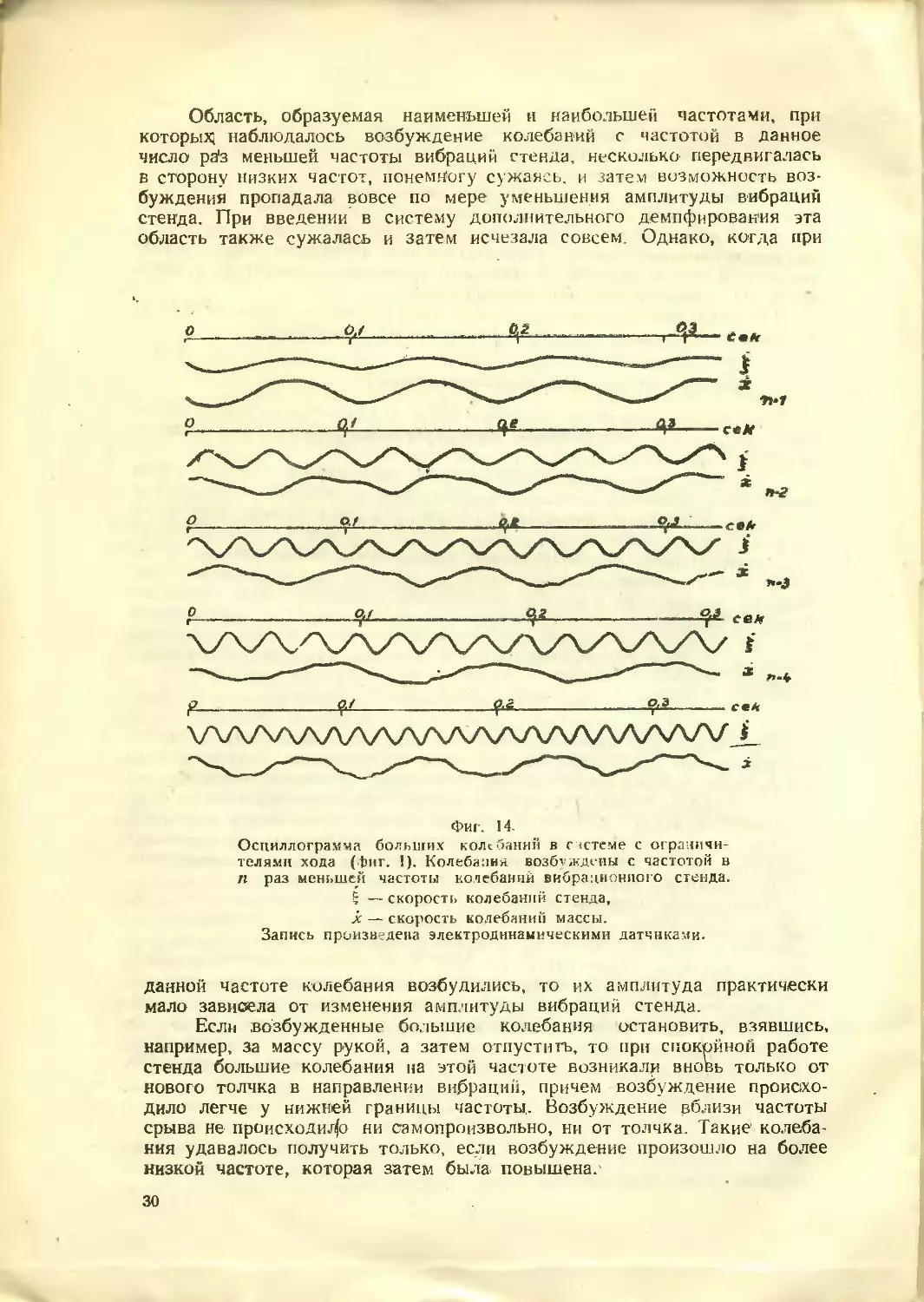
На осциллограммах фиг. 14 записаны большие колебания, возбуж-
денные с частотами в 2, 3, 4 и 5 раз меньшими частоты колебаний
стенда. Как видно Из этих осциллограмм, возбужденные колебания
очень близки к синусоидальным, хотя гармоника с частотой колебаний
стенда обнаруживается также довольно отчетливо.
Описанное явление наблюдалось в реальных амортизованных си-
стемах с резиновыми упорами, имеющими значительно выраженную не-
линейность деформации (глава 1, § 3) и в системах с пружинными упо-
рами, например, приведенной на фиг. 9, с силовой характеристикой,
состоящей Из отрезков прямых. В последнем случае срыв больших
колебаний всегда происходил при частотах немного меньших} или рав-
ных (в пределах точности эксперимента) целому кратному от макси-
мальной частоты собственных колебаний со2 . соответствующей обще-
му коэфициенту упругости средней пружины и одного упора (1,25):
29
Область, образуемая наименьшей и наибольшей частотами, при
которых; наблюдалось возбуждение колебаний с частотой в данное
число р^з меньшей частоты вибраций стенда, несколько передвигалась
в сторону низких часто’, понемногу сужаясь, и затем возможность воз-
буждения пропадала вовсе по мере уменьшения амплитуды вибраций
стенда. При введении в систему дополнительного демпфирования эта
область также сужалась и затем исчезала совсем. Однако, когда при
Фиг. 14.
Осциллограмма больших колебаний в системе с ограничи-
телями хода (Ьиг. 1). Колебания возбуждены с частотой в
п раз меньшей частоты колебаний вибрационного стенда
$ — скорость колебаний стенда,
х — скорость колебаний массы.
Запись произведена электродинамическими датчиками.
данной частоте колебания возбудились, то их амплитуда практически
мало зависела от изменения амплитуды вибраций стенда.
Если возбужденные большие колебания остановить, взявшись,
например, за массу рукой, а затем отпустить, то при спокойной работе
стенда большие колебания на этой частоте возникали вновь только от
нового толчка в направлении вибрации, причем возбуждение происхо-
дило легче у нижней границы частоты,. Возбуждение вблизи частоты
срыва не происходило ни самопроизвольно, ни от толчка. Такие колеба-
ния удавалось получить только, ести возбуждение произошло на более
низкой частоте, которая затем была повышена.
30
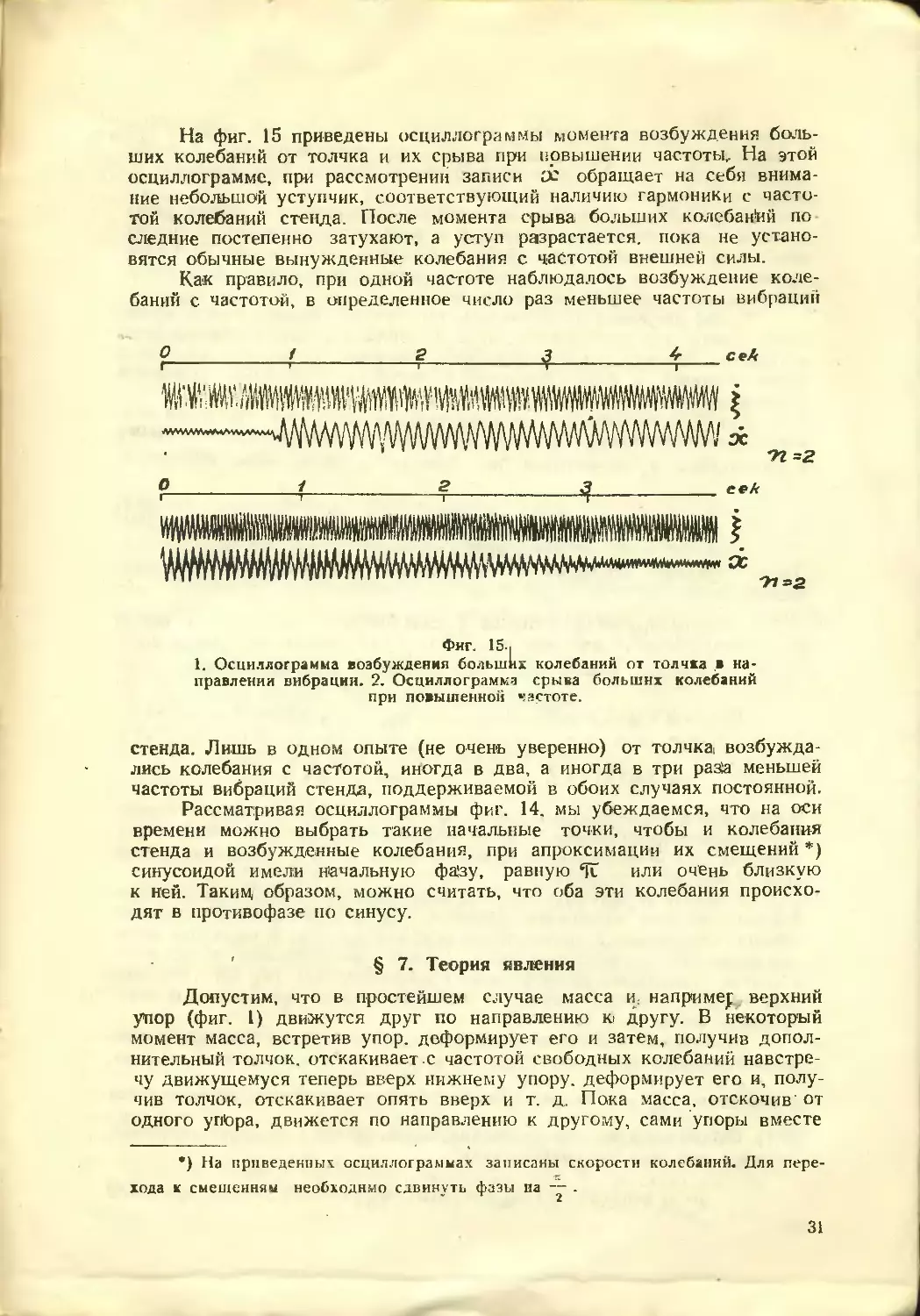
На фиг. 15 приведены осциллограммы момента возбуждения боль-
ших колебаний от толчка и их срыва при повышении частоты. На этой
осциллограмме, при рассмотрении записи X обращает на себя внима
ние небольшой уступчик, соответствующий наличию гармоники с часто
той колебаний стенда. После момента срыва больших колебан'ий по
следние постепенно затухают, а уступ разрастается, пока не устано-
вятся обычные вынужденные колебания с частотой внешней силы.
Как правило, при одной частоте наблюдалось возбуждение коле-
баний с частотой, в определенное число раз меньшее частоты вибраций
?-------------!----------?------------I-----------4—
г-------------f-------------?--------------?------------ "*
Фиг. 15.|
1. Осциллограмма возбуждения больших колебаний от толчка в на-
правлении вибрации. 2. Осциллограмма срыва больших колебаний
при повышенной частоте.
стенда. Лишь в одном опыте (не очень уверенно) от толчка, возбужда-
лись колебания с частотой, иногда в два, а иногда в три раз!а меньшей
частоты вибраций стенда, поддерживаемой в обоих случаях постоянной.
Рассматривая осциллограммы фиг. 14. мы убеждаемся, что на оси
времени можно выбрать такие начальные точки, чтобы и колебания
стенда и возбужденные колебания, при апроксимации их смещений *)
синусоидой имели начальную фазу, равную или очень близкую
к ней. Таким образом, можно считать, что оба эти колебания происхо-
дят в противофазе по синусу
§ 7. Теория явления
Допустим, что в простейшем случае масса и: например верхний
упор (фиг. 1) движутся друг по направлению к> другу. В некоторый
момент масса, встретив упор, деформирует его и затем, получив допол-
нительный толчок, отскакивает с частотой свободных колебаний навстре-
чу движущемуся теперь вверх нижнему упору, деформирует его и, полу-
чив толчок, отскакивает опять вверх и т. д. Пока масса, отскочив' от
одного yrtopa, движется по направлению к другому, сами упоры вместе
•) На приведенных осциллограммах записаны скорости колебаний. Для пере-
хода к смешениям необходимо сдвинуть фазы на — .
31
с точкой подвеса совершают несколько колебаний, не соприкасаясь
с массой, действуя на нее только через центральную пружину с коэфи-
циентом упругости к,, что соответствует обычным вынужденным ко-
лебаниям с частотой внешней силы.
Таким образом явление напоминает перекидывание двумя тенни-
систами мяча: цюка мяч; Находится в возду.хе и подлетает к игроку,
последний может совершать любые движения, лишь бы .мяч был свое-
временно встречен ракеткой. Отсюда и идет предложенное нами назва-
ние явления — перекидывание-
Чтобы движение установились, его полный период, то-есть время,
необходимое для прохождения пути от упора к упору, их деформацию
и обратно, должно равняться целому кратному от периода колебаний
точек подвеса и быть близким к периоду свободных колебаний
в системе.
Для количественного описания явления, допустим, что точка под-
веса совершает вместе с упорами движение ио синусоидальному закону
с амплитудой Jo и частотой По) , где п — целое число, большее 1:
^ = ^osinnu)t> (7,1)
П = 2.3Л.5.....
Тогда уравнение движения в относительных координатах (фиг. 1) запц
шется так:
mij + hy тпгсо2505ьп neat, (72)
пде (
к у «фи
ptyj-k’xy-tpk'e |1|П1 у*в
(7,3)
к (у+£)-к'С при
Здесь, как и в предыдущей главе, обозначено: к'— коэфициент упру-
гости основной пружины, к"— коэфициент упругости общего дей-
ствия основной пружины и одной упорной и — величина зазора
между массой и упорами.
В задаче о действии внешней периодической силы на нелинейную
систему дз всех возможных решений, для установившихся колебаний,
обычно отыскивается только периодическое решение с периодом внеш-
ней силы, что соответствует опыту. Именно так поступают авторы боль-
шинства известных работ в этой области (1), (2), (4), (5), (15). (16).
(23) и др. В этом же состоит, в частности., метод эквивалентной лине-
аризации (глава 1, § 1).
Л1ы также, для установившихся колебаний, будем искать периоди-
ческое решение уравнения (7,2), но, в соответствии с нашими опытами,
CJ к
с периодом - , в R раз большим периода колебаний точки подвеса
(7,1). Отбрасывая все гармонические члены, кроме 1-ой и П-ой гармоник,
получим для первого приближения:
у = у sin (cotз-i^sin (ncoV<fn) - (7,4)
32
Существенно отметить, что здесь происхождение членов, входя*
щи* в решение, различно. Если ynsLn(ncj-b + ‘fn) отвечает обыч-
ному первому приближению для вынужденных колебаний, установив-
шихся под действием внешней силы того же периода, то член
yjSinCut+'lf ), в соответствии с предложенной выше схемой, возникно-
вения перекидывания, близок к собственным колебаниям системы.
Таким образом оба эти члена в известной мере независимы и на число
П никаких требований, в отношении его четности или нечетности, не
накладывается Поэтому суммарное движение (7,4) может не отвечать
второму из условий
yCb)=-y (-g-t)
(7,5)
обычно выставляемым при отыскании решений для установивши кеч
колебаний в системе с симметричной силовой характеристикой, находя
щейся под действием внешней периодической силы (см., например.
Дурье (18).
Чтобы отыскать амплитуды у^ и подставим решение (7j4)
в уравнение (7,2) и выделим из функции Р Lyisin(cpt+4’1) + ynsinfnc<)t+4’n'
гармоники с частотами и По) для чего определим соответствую-
щие коэфициенты ряда Фурье —
и fln и Вп перед sinnOt
ZR>4>,
Р [ysin<P+ynstn
R, и В, перед
и cosnuJt:
(mp+8)] sin <р dip
sin cat
и COS
1 1Г
2К Г Н>,
II ₽ y,SinqMynSin (niM)J cos^dip
f,
( г
яп=й] P Lyisin4J^nsin<n^+^)] sin
4, e.
I 2"+<лг
Bn= f ] Р1у?[п^Уп*1-ГЦПФ + 8)] QOS пф dip
где обозначено:
cat+^'ip
(7,6)
(7.7)
Ч’п'ПЧ)1 = & (7.8)
Соединив члены с одинаковой кратностью ду| в синусах и косинусах,
получим систему уравнений
33
- rnca^-t- flj= О
в.= о
2. 2. <x I л _ q « (7,9)
-mn Ф yncoso-hncoynsino-* fln= mn ca
-mnWijn s»in8+hncoyn cos&+ BrrO,
где . fln и Bn зависят от .' y^ <?f и фп< Таким обра-
зом. хотя член, соответствующий внешней силе, входит только в третье
уравнение (7,9), все величины у , уп , ф и у>п. будучи связанными
системой (7,9), оказываются зависящими от внешнего воздействия.
Здесь уместно отметить, что если бы мы искали решение, прене-
брегая членом с уп , то система (7.,9) состояла' бы только из первых
двух уравнений. Очевидно такая апроксимация слишком груба, так как
из нее следует, что внешняя сила не совершает работы и поэтому в ре-
альных условиях, при наличии диссипативных сил, колебания не могли
бы установиться.
Чтобы произвести интегрирования (7,6), необходимо разбить в соот-
ветствии с (7,3) промежуток 0,2 7Г на участки, разграничиваемые зна-
чениями фаз, при которых имеет место смена вида функции
Р ^и,51Пфтуп5(п Спф+8з] • определяемые моментами времени
соприкосновения и отрыва массы ГЛ от упоров, то-есть корнями урав-
нений: + ynsin (nipt-ft) прн У >0 (7,10)
и - В = y^sCnqj + ynsin (nip л-8) при у<0 (7,11)
Если у настолько превосходит у^ , что lyJ-hnbE, f7J21 то количество корней этих уравнений за период - определяется
только первым членом правых частей уравнений (7,11) и (7,12) и, при
любом П., равно четырем: мы их обозначим . %. • % в V
Ограничиваясь рассмотрением только этого практически наиболее
важного случая, получим из (7,3):
к'[у1$(Пф+Уп51п(Лфт8')] при Ф
к" при Ф^Ф
= к'[ч151Пф+упЬ(п(пф + ^)] при Фа-Ф^ (7,13)
* 9п51п(пф+8)]-(к,-к”)Епри
sin(nq’tB)'’ п₽и 34
Теперь интегрирования (7.6) лают:
ЯгкУ4(к'-П (sin 24?svn^- scn 2Q/J -
""яйю 5in(ПМ)Ч>г^1П(п+1)фГ31пСп+П^+^^£ jst'n(n-l)%-
- 5in(n-<)% + StnCn-O^'Sinfn-l)^]- ^“y [cOSCn+^lpfOOS (n+l)4’2+COS(n+/)1^-
-cosCn+O^Jt [cos(n-<)qjrCOS(n-Oi^TC0S(n-<)4>5-
-COS(n-<)4\] ± Цс05ф|-С0&ФЛ-С0$^+С05Ц\)| (7,14)
Bi4Ckl-kl,)H(co5^iprCos^q>i+cos2ip3-cosZqj4)+ ЬпМ<рг
-Mn(n-n)q^ s in(n+C4>3-sin(n+4)4iJ 4 К^1^5Сп(п-ПФг
-sin(n-<)^+s£n(n-4)ips-sin(n-i)<pj - [oos(n+n<PA-
-COS(n+l)M>z+COs(n+1)<Vs-COS(ntl)q>4J - [созСп-Оф,-
-cos(n-i)ipz+cos(n4)^rcos(n-()v.]^ e(sin^sio»p2-siniv3+ . 3
+ sin^W5J
Йп= к yncosft Ck'-k")
yncos$
я
l4W%-4^ -
4ncos^
'in
(sia Znq><-
-StnZnq»^ sLnZnq»3-si'n2.nqQ- \С05^пФ,-со£2пф2лсоз2п1р3--
'C0sZn%^^y[sin(n+i)iprsin(n+i)iv2+sinln+t)4>3-sin(h+i)q'4]-t
У, Г
+ 2(лй) 51'п(п-1)Ф3'8;п n-1)%J t
± £ (county-COS n^jDS Г ф^ + uosnil^ )1 *7 ,F!
3* 1 V,
Bn--k'^nsin^4 (sin£n<v
- St n Zn 1рг + sin 2.nq>3- sin In % ) - (co s 2 n - cos 2nфг+ cos 2 nip3-
- COS 2n % ) - 2(^- £oos(n+04»^ COS(n+O^+COS (n+i COS -b
1 Wh) S3S(n-l)4>J+ (?ii7J
л -- (sin n Ц\ - Sinn 4>2-sinn<p5+ sin
Вычисление из общих выражений (7,14) — (7,17) и уравнений
(7,9) — (7,11) величин щ. у и представляется, однако, за
труднительным. Поэтому мы постараемся упростить полученные выра
жения и ограничимся более частными случаями. С этой целью рассмо-
трим прежде всего энергетические соотношения.
Энергия, рассеиваемая в системе за период
ЛМ-j h^teM^n^), Р.'«
может покрываться лишь за счет притока энергии извне под действием
внешней силы (7.2):
F:mn2’co'V sin neat. (7.19)
J о
Тогда энергия, втекае^гая в систему за период будет
СО-
R~j Fdy=-mnV^cyn5in<fn (7.20)
О
Эта энергия положительна, если только упи Sin S?n разных знаков
В противном случае энергия отрицательна, то-есть она выкачивается из
системы и перекидывание затухнет Если движение установилось, то
R--V и
sinsv-
hpWn)
тпаУсуп
(7.21)
Как будет показано ниже. (7,39) и (7.40), ^<-0 • поэтому Sin^M)
и при h->0 УгГ*0-
Для дальнейшего исследования введем острые углы , у
У и / такие, что
ЧД К,
(7,22)
%= 21i-^
36
Подставив это в (7,15) и (7,10), нетрудно показать, что при отсутствии
трения, то-есть при g>n=Q , второе уравнение (7,9) выполняется, если
Lie
УгТ (7,23)
1 = 0,1,2,3 . - •
как при П четном, так и нечетном. Причем в последнем случае
V = , (7,24)
а в первом случае ' 4 ° 7
и (7,25)
В обоих случаях есть первый корень (7,10) или (7,11), а Г при
IX четном определяется
t = VtnV%Stnnfc 1“’" 'J>0 (7.26)
у<о
(7.27)
Из всех значений (7,23) достаточно рассмотреть — 0
при п — четном и = 0 и = 1V при п— нечетном, там как
другие значения сдвига фа^ы не вносят разнообразия в форму ре
тения. Таким образом, при отсутствии трения решение (7,|4} упро,
вдается и сводится к
у*у scnort/*- ynstp neat , (7 28)
где U ц у является алгебраическими величинами.
Теперь из (7,14) и (7,16), учтя (7,22), (7,24) и (7,25), получим для
П нечетного:
й>=|<!1,4 0!'-|г) W.4 stn2ifi'M stn(n+<)yc ^sin(Hr,t2tad[7'29>
>
и для fl четного:
Г fr'-k" ) [4 (тг (stn SCn )+
(7,31)
~-(sCn^,t5io2.&p Bin(nti)^-
-scnln^J-^^sCnMiffSiiKn-ilvJt^(wsnvcosruji)], (7,32'
причем знак + выбирается, если УрО, и знак —, если У <0
Таким образом система уравнений <’1
~тсо2уч+=0 (7,зз)
- mnVyn+ Ап= <Т1п2сог^в (7,34)
вместе с (7,10), (7,11), (7,26) и (7,27) дает связь между частотой и
амплитудой колебаний стенда и амплитудами гармонических составляю-
щих колебаний массы, то есть семейства своего рода резонансных кри-
вых для ра'зных значений П.
Так, введя обозначения:
-Р» 'Г) -7 U Zn (7»35)
P-nuv k.-?-?>—V L г- u ь п-
получим, например, для частного случая П, — 3 из (7,33), (7,34), (7,10),
(7,11), (7,29) и 7,30):
-(s)2zr|(jJ-,)t^4(irz3)5':n:lK.4zJsi:,li‘^iUosiS'>]+^r0.
-P%+i(j1-’)[iJvlz,sinzlS',4i1stniis4z3SCntrr <7,36)
' - JM!,5M+i3'P'J.
Если задаться какими-либо двумя йз величин р , £ , £п, и
Y, , например, если из опыта известны Z=Z<tZ.b и Чъ-’ то
остальные величины могут быть определены методом итерации. Поло-
жив в нулевом приближении известную величину Z-CZOo и прене-
брегая в (7,36l)n (7,36in)z3,найдем нулевые приближения (^,)о и (р)о.
Подставив эти значения вместе с (ZJc в (7,361цнайдем первое прибли-
жение (Z3)t- Теперь находится £Zi)i=Z-(Zj)i и из (7,36Йуи (7,361)
(Лк и (Рк и 3,атем и3 (z’36l)(73)jj. и т. д.
Как будет показано ниже на примере, процесс сходится настолько
быстро.что уже нулевое приближение / Р)о дает вполне удовлетвори-
тельные результаты. Физически это означает, что возбужденные боль-
шие колебания действительно очень близки к собственным и описы-
ваются уравнением (7,33). При учете (7,10) и (7,11) это дает:
р=(р|- п (jb-i) (oJLCSin • <7-37)
На фиг. 16 построена зависимость (7,37) для ра|зных значений R .
Для получения более простых соотношений, легче поддающихся
исследованию, мы выведем асимптотическое выражение для п . Если
у велико, то р
<7>38)
I» тогда из (7.34) для п нечетного
у Р мг _ -t (7,39)
5п р'<- |
Р оо
и для П четл. го:
b ,-----Р_Ъ-------------------_ С (7,40)
Уп pi_ У°
р —о»
Таким образом для больших амплитуд и высоких частот! можно
положить Уп = -?о - Такое приближение соответствует, между про-
чим, тому, что, описывая движение; ' в^ Абсолютных координатах
Фш L.
Заикимость амплитуды перекидывания от частоты колес
ииг готки подвеса npi различных значениях rt. Приближен-
ное решение, соответствующее (7, 7у.
X (фиг. 1), мы переписали бы основное уравнение (7,2). воспользовав
шись соотношением (4,2), в виде
тх-»р(х-^ = ь (7.41)
и искали бы его решение в чисто гармонической форме
Х= XjSin wt(7,42)
Действительно, переходя обратно к относительным координатам, полу
чим отсю. а и из (4.2)
y-x-^ta^sincat ^csin neat- . (7,43)
Сравнивая это выражение с (7,4) и положив ХрУ^ мы придем
‘К L 't
-» П 5 о
3»
Переходя к обозначениям (7,35), получим Zn-~D0 и тогда из
(7,33) и (7,29) для П. нечетного:
Р= п [11 (М [Гг i sin 2,^ -ь sin (n+i) -
stn V <7-43)
и|нз (7,31) для Ц четного:
Р= п [u (jl-t) [| (vrj- i (sin vsin Ki)+ 2k_ (sinfot
+0ri-scn(ntl){i)-J2iyj(sw(n4U,-svnMXi)s|i(cosi(;+cosj;j]]I<7.H>
В соответствии с этим; из (7,10), (7,11), (7,26) и (7,27) фазовые
углы ГнГ определяются из:
* <£-»
(7,45)
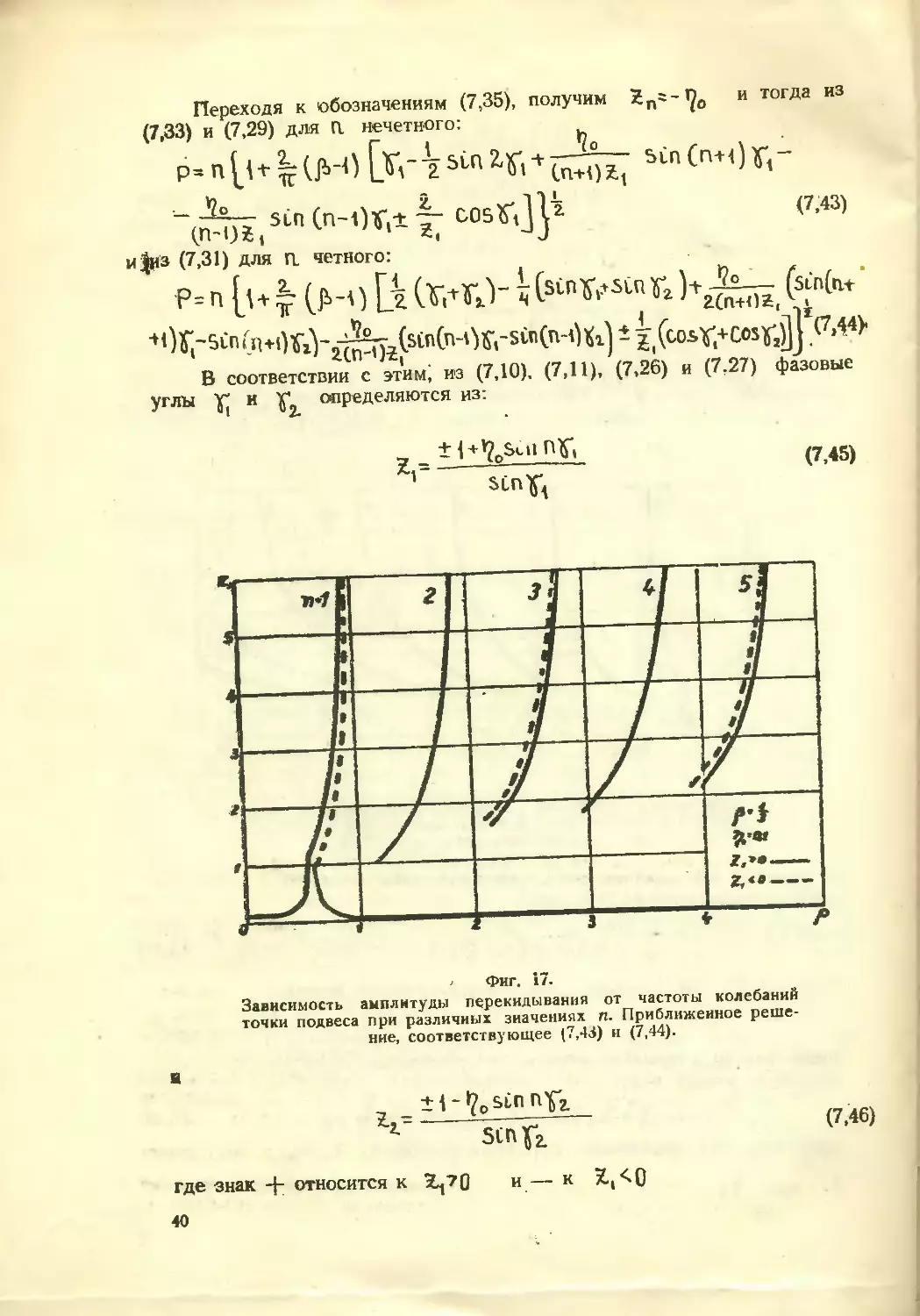
• Фиг. 17.
Зависимость амплитуды перекидывания от частоты колебаний
точки подвеса при различных значениях п. Приближенное реше-
ние, соответствующее (7,43) и (7,44).
а _ tl-^sinnfo
4 Wk (7*46)
где знак 4- относится к и — к Zt<0
40
Для больших значений U , а с ними и %. , получаем из (7,43) я
(7,44) 1 ’
р —* П при Z, —00
' (7,47)
Для случая И. = 1 приходим к задаче, рассмотренной в предыду-
щей главе.
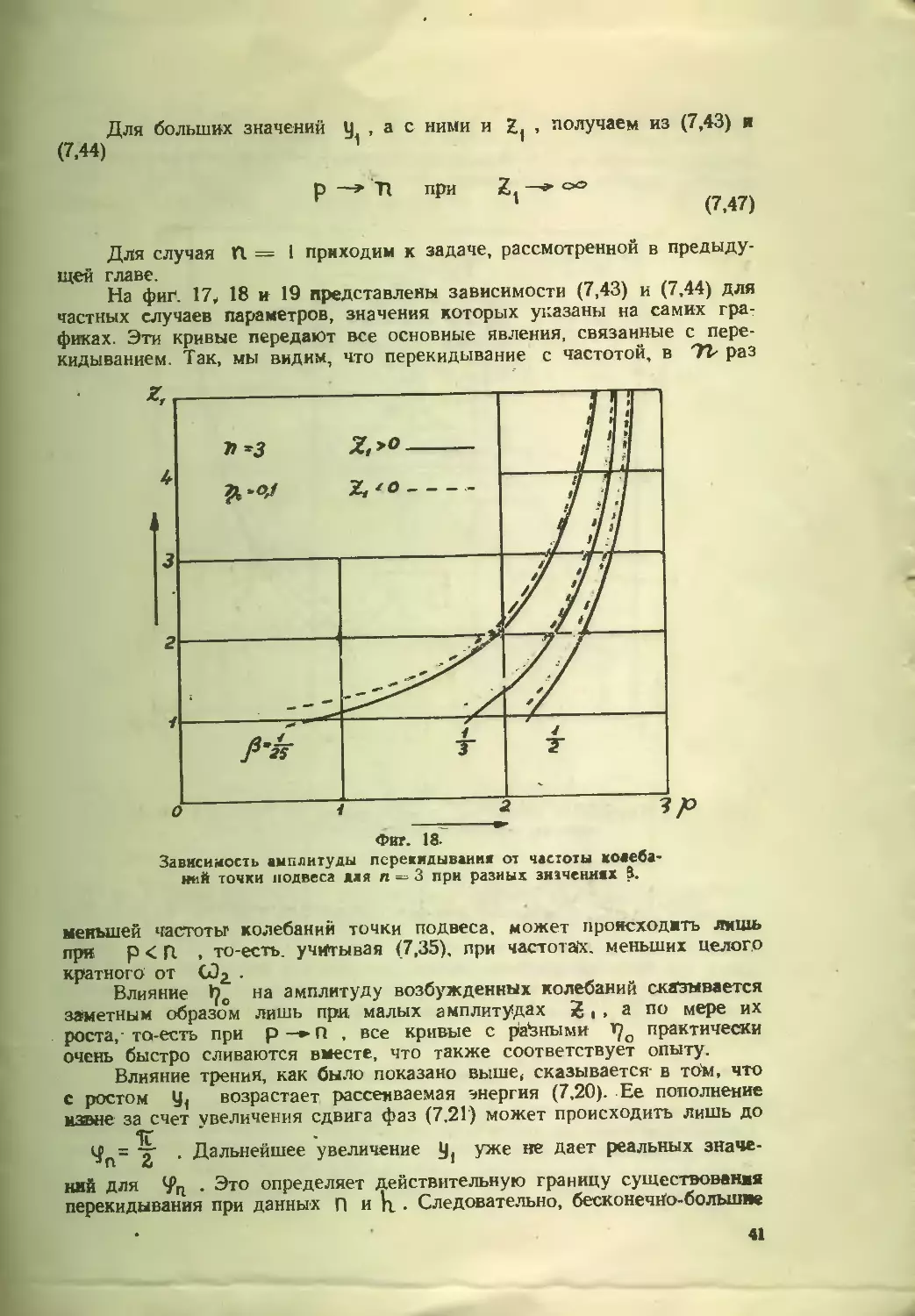
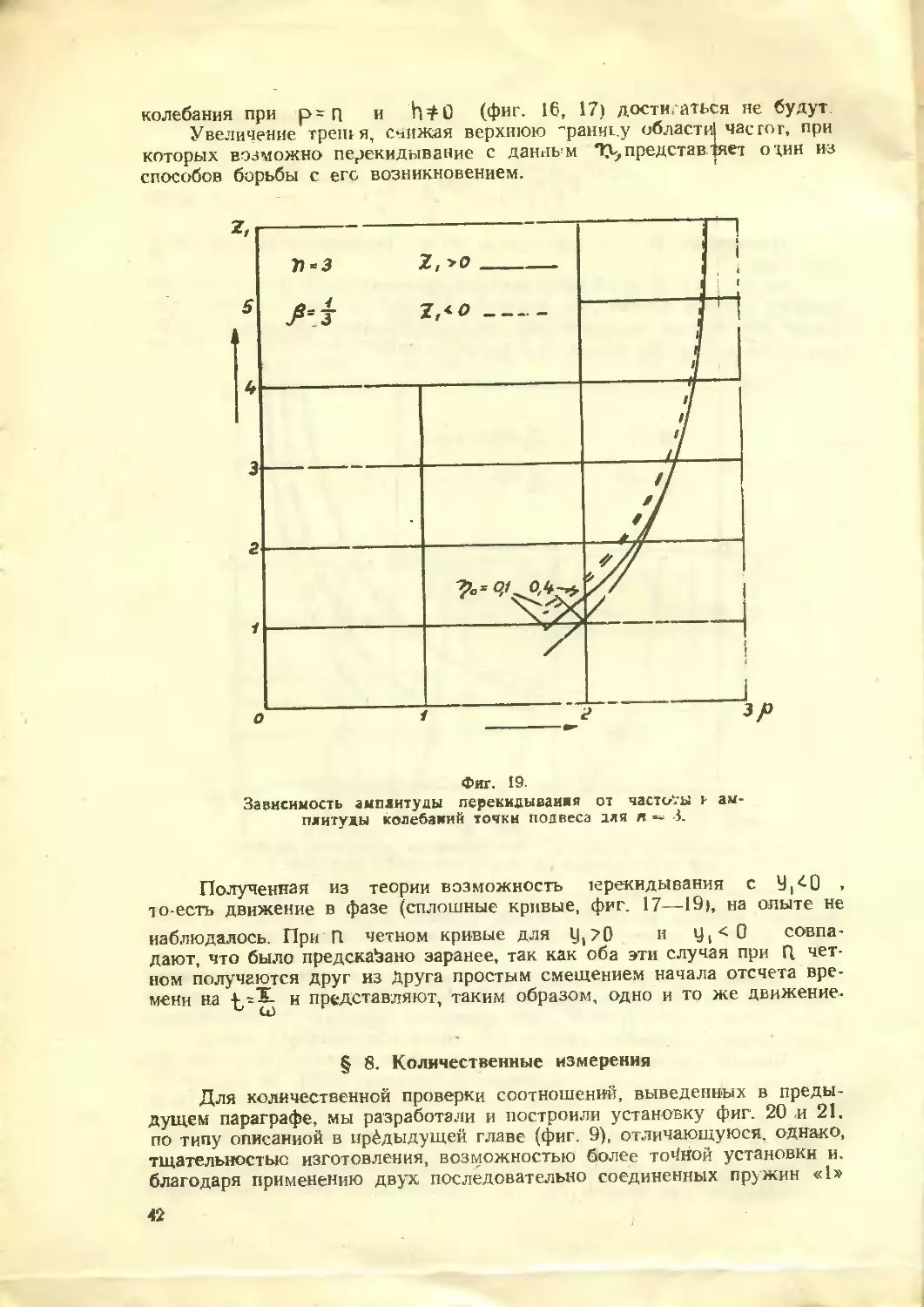
На фиг. 17, 18 и 19 представлены зависимости (7,43) и (7,44) для
частных случаев параметров, значения которых указаны на самих гра-
фиках. Эти кривые передают все основные явления, связанные с пере-
кидыванием. Так, мы видим, что перекидывание с частотой, в 92- раз
Зависимость амплитуды перекидывании от частоты колеба-
ний точки подвеса для п — 3 при разных значении 8.
меньшей частоты колебаний точки подвеса, может происходить лишь
при р < R , то-есть. учитывая (7,35), при частота^-. меньших целого
кратного от С02. •
Влияние 1?о на амплитуду возбужденных колебаний сказывается
заметным образом лишь при малых амплитудах 5g , , а по мере их
роста, то-есть при р—»-п , все кривые с равными Х) практически
очень быстро сливаются вместе, что также соответствует опыту.
Влияние трения, как было показано выше, сказывается в том, что
с ростом У1 возрастает рассеиваемая энергия (7,20). Ее пополнение
извне за счет увеличения сдвига фаз (7.2Г) может происходить лишь до
Ч’п= Y • Дальнейшее увеличение уже не дает реальных значе-
ний для Уц . Это определяет действительную границу существования
перекидывания при данных П и h . Следовательно, бесконечно-большие
41
колебания при р=П и h^O (фиг. 16, 17) достигаться не будут.
Увеличение трети, снижая верхнюю •’раниг.у области частот, при
которых возможно перекидывание с данным представ' яет о тин из
способов борьбы с его возникновением.
Фиг. 19.
Зависимость амплитуды перекидывания от частоты г ам-
плитуды колебаний точки подвеса для я — 3.
Полученная из теории возможность юрекидывания с У(<0 ,
ю-есть движение в фазе (сплошные кривые, фиг. 17—19», на опыте не
наблюдалось. При П четном кривые для yt70 и yt<0 совпа-
дают, что было предсказано заранее, так как оба эти случая при Q чет-
ном получаются друг из Друга простым смещением начала отсчета вре-
мени на н представляют, такшм образом, одно и то же движение-
§ 8. Количественные измерения
Для количественной проверки соотношений, выведенных в преды-
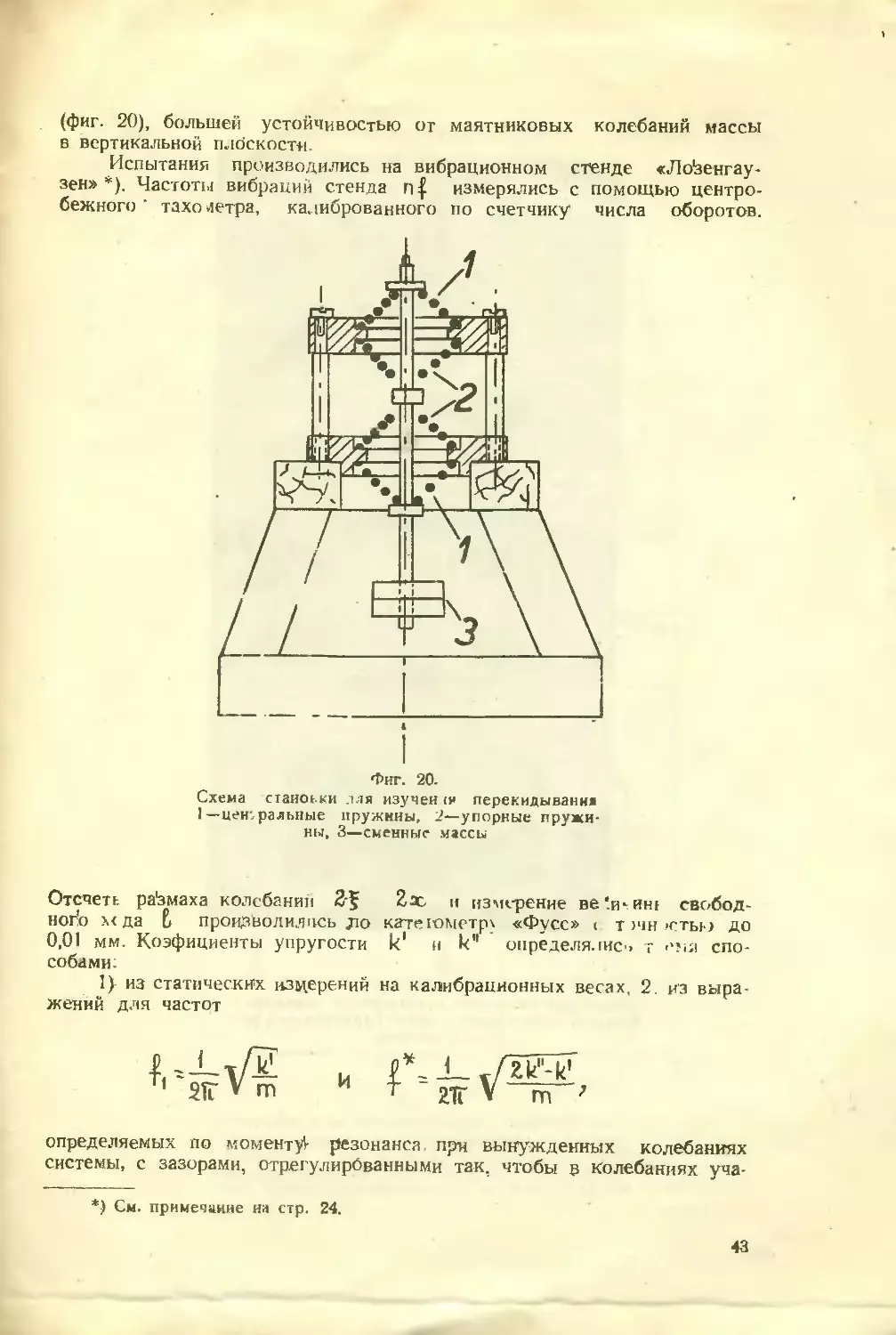
дущем параграфе, мы разработали и построили установку фиг. 20 ,и 21.
по типу описанной в предыдущей главе (фиг. 9), отличающуюся, однако,
тщательностью изготовления, возможностью более тонной установки и.
благодаря применению двух последовательно соединенных пружин «1»
42
(фиг. 20), большей устойчивостью от маятниковых колебаний массы
в вертикальной плоскости.
Испытания производились на вибрационном стенде «ЛоЬенгау-
зен» *), Частоты вибраций стенда п| измерялись с помощью центро-
бежного ’ тахолетра, калиброванного по счетчику числа оборотов.
Фиг. 20.
Схема стаиоьки .тля изучен перекидывания
1—цен, ральные пружины, 2—упорные пружи-
ны, 3—сменные массы
Отсчеть ра'змаха колебании 2§ 2х и измерение ве'лвию свобод-
ного х< да 6 производились jio катетометр} «Фусе» < тннсть» до
0,01 мм. Коэфициенты упругости к1 и к" определялись т спо-
собами:
1) из статических измерений на калибрационных весах, 2. из выра-
жений для частот
±_ v/2k"-k'
t 21Г V m ’
И
определяемых по моменту- резонанса при вынужденных колебаниях
системы, с зазорами, отрегулированными так, чтобы в колебаниях уча-
*) См. примечание иа стр. 24.
43
< Фиг. 21.
Общий вид установки для изучения перекиды-
вания. К центральному штоку прикреплена ка-
тушка датчика.
44
ствовали только центральные пружины «1» или центральные и упорные
«2» вместе и 3) из осииллографирования свободных колебаний систем,
отрегулированных таким же образом
Все три способа лают результаты, очень близкие друг к другу.
Так, например, мы получили:
Из статических измерений Из резонанса Из свободных колебаний
k' • 10-“ k” 10-“ 9.38 24,3 24,9 9,43 24,9 CGS
По условиям опытов мы отдали предпочтение величинам, полу-
ченным из свободных колебаний.
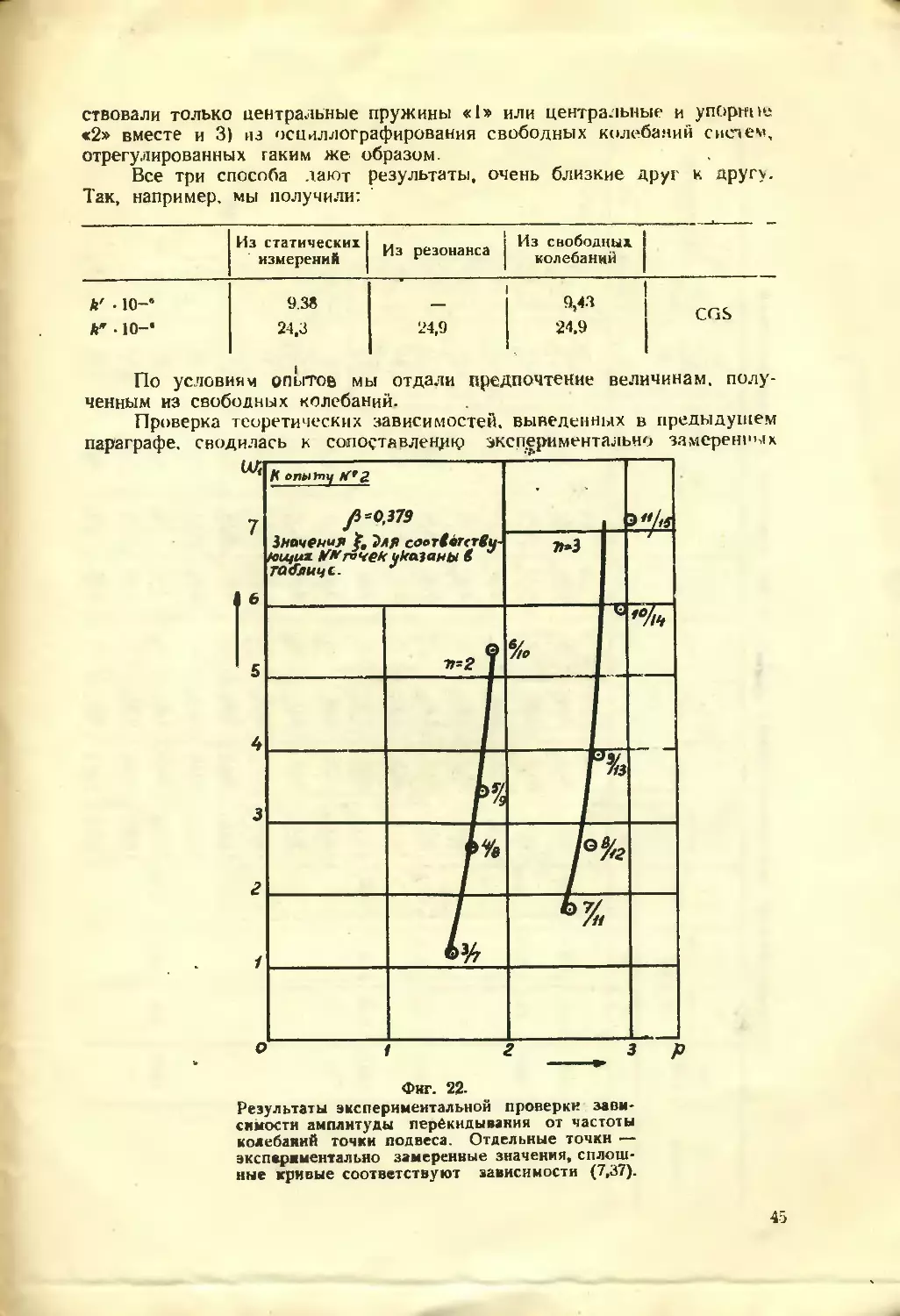
Проверка теоретических зависимостей, выведенных в предыдущем
параграфе, сводилась к сопоставлен^^) экспериментально замеренных
Фиг. 22.
Результаты экспериментальной проверки зави-
симости амплитуды перёкидывания от частоты
колебаний точки подвеса. Отдельные точки —
экспериментально замеренные значения, сплош-
ные кривые соответствуют зависимости (7,37).
45
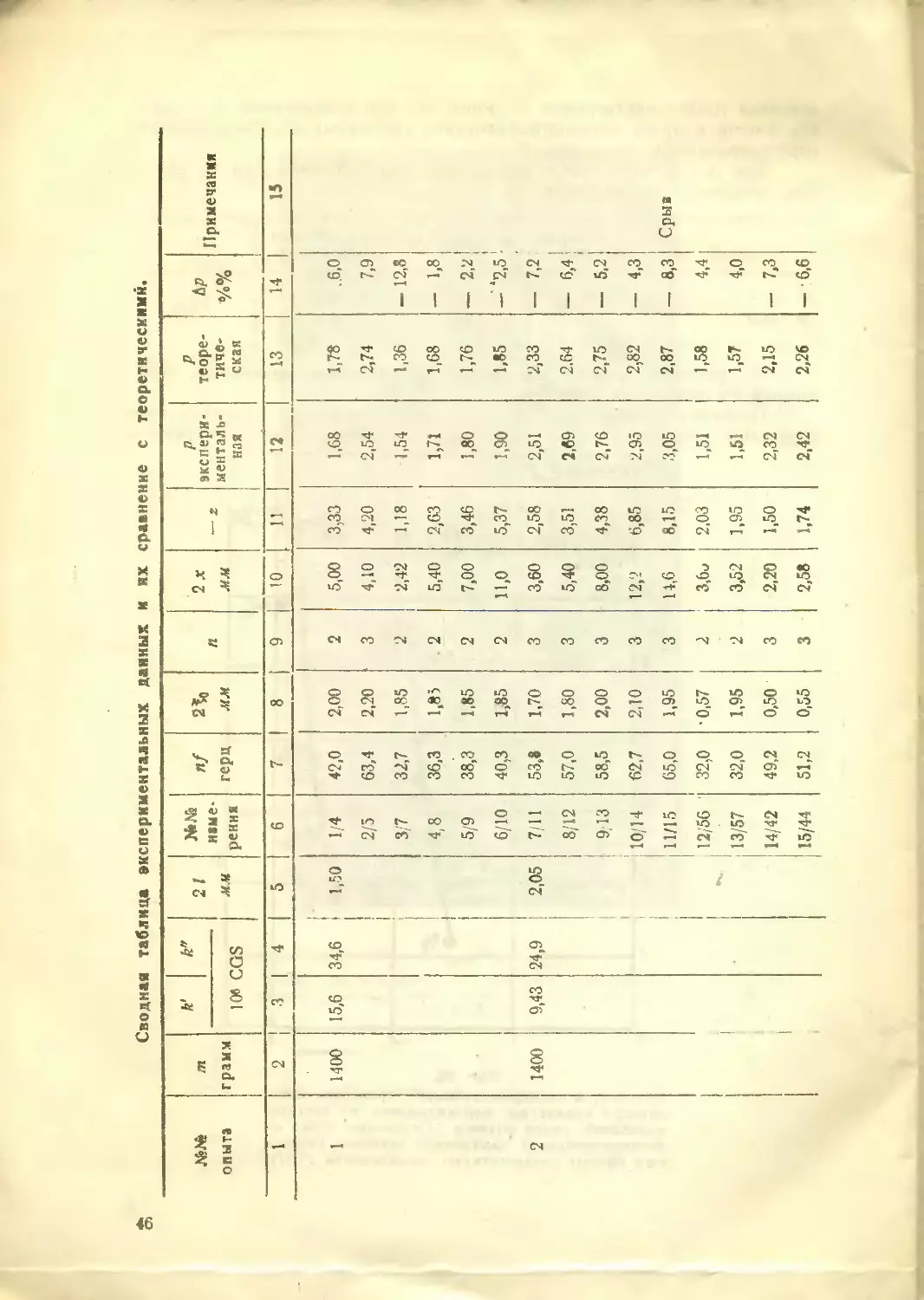
Сводная таблица экспериментальных данных и их сравнение с теоретическими.
№№ т k' k" 21 №№ ивме- nf 2* п 2 х — Z р экспери- р теоре- Ар Примечания
опыта грамм 10в CGS ММ рения герц мм ММ менталь- ная тиче- ская %%
( . 2 3 . 4 5 6 7 8 9 10 11 12 13 14 1 15
1 1400 15,6 34,6 1,50 1/4 42,0 2,00 2 5,00 3,33 1,68 1,78 „6,0
2/5 63,4 2,20 3 4,10 4,20 2,54 2,74 7,9
3/7 32,7 1,85 2 •2,42 1,18 1,54 1,36 - 12,8
4,8 36,3 1,85 2 5,40 2,63 1,71 1,68 - 1,8
5/9 38,3 1,85 2 7,00 ’ 3,46 1,80 1,76 — 2,2
6/10 40,3 1,85 2 11,0 5,37 1,90 1,85 - *2,5
2 1400 9,43 24,9 2,05 7/11 53,8 1,70 3 3,60 2,58 2,51 2,33 — 7,2
8/12 57,0 1,80 3 5,40 3,51 2,89 2.64 — 6,4
9; 13 58,5 2,00 3 8,00 4,38 2,76 2,75 - 5,2
10/14 62 7 2,10 3 12,2 6,85 2,95 2,82 - 4,3
11/15 65,0 1,95 3 14,6 8,15 3,05 2,87 - 8,3 Срыв
12/56 ' 32,0 •0,57 2 3,6и 2,03 1,51 1,58 4,4
13/57 32,0 1,95 2 3,52 1,95 1,51 1,57 4,0
14/42 49,2 0,50 3 2,20 1,50 2,32 2,15 - 7,3
15/44 51,2 0,55 3 2,58 1,74 2,42 2,26 - 6,6
16/46 53,2 055 3 3,05 2,00 2,51 2,37 - 5,81
• 17/47 53,2 1,95 3 В щ е н е возбуждав Т С Я
3 цво 9,43 24,9 1,80 18/4» 55,2 0,55 3 3,40 2,20 2,60 2,45 - 5,8
19/49 55,2 2,00 3 3,40 3,00 2,60 2,58 ' — 0,8
20'50 57,5 0,57 3 4,15 2,63 2/1 2,52 - 7,0
21/51 57,5 2,00 3 4,10 3,39 2,71 2,63 — 3,0
22-52 59,5 0,57 3 5,30 3,27 2,81 2,62 - 6,8
23/53 59,5 2,00 3 5,35 4,08 2,81 2.69 ' - 4,3
24/39 62,7 0,57 з 5 f ж е н е в о з б у ж д а е 1 с я
25/39 62.7 2,00 3 10,5 2.83 — 4.4
4 3430 4,72 20,3 1,80 26/22 39,0 1,95 . 4 5,30 2,94 3.17 3,38 6,6
27/16 26,0 1,50 2 5,80 3,23 1,92 1,72 - 6,2
28'17 37,5 1,85 3 5,20 3,95 2,78 2 69 - 5,6
5 3430 9,43 24,9 1,80 29/19 65,0 1,72 5 6,10 4,21 4.78 4,90 - 2.4
30/20 66,5 1,85 5 6,90 4,87 4.89 4,92 - 4,5
31,-21 68,3 1,80 5 12,8 8,12 5,03 .93 - 7,! гоыв
32/58 66,0 2,10 5 3,45 3,09 4,00 4,25 6,3
33/59 59,5 2,00 3 6,40 4.67 4,25 4,50 5,9
6 3430 11,2 26,5 1,80 <060 62,0 2.00 5 10,1 6,73 4 44 4,66 5,0
35 61 64,7 2,00 5 — — 4,62 — — Срыв
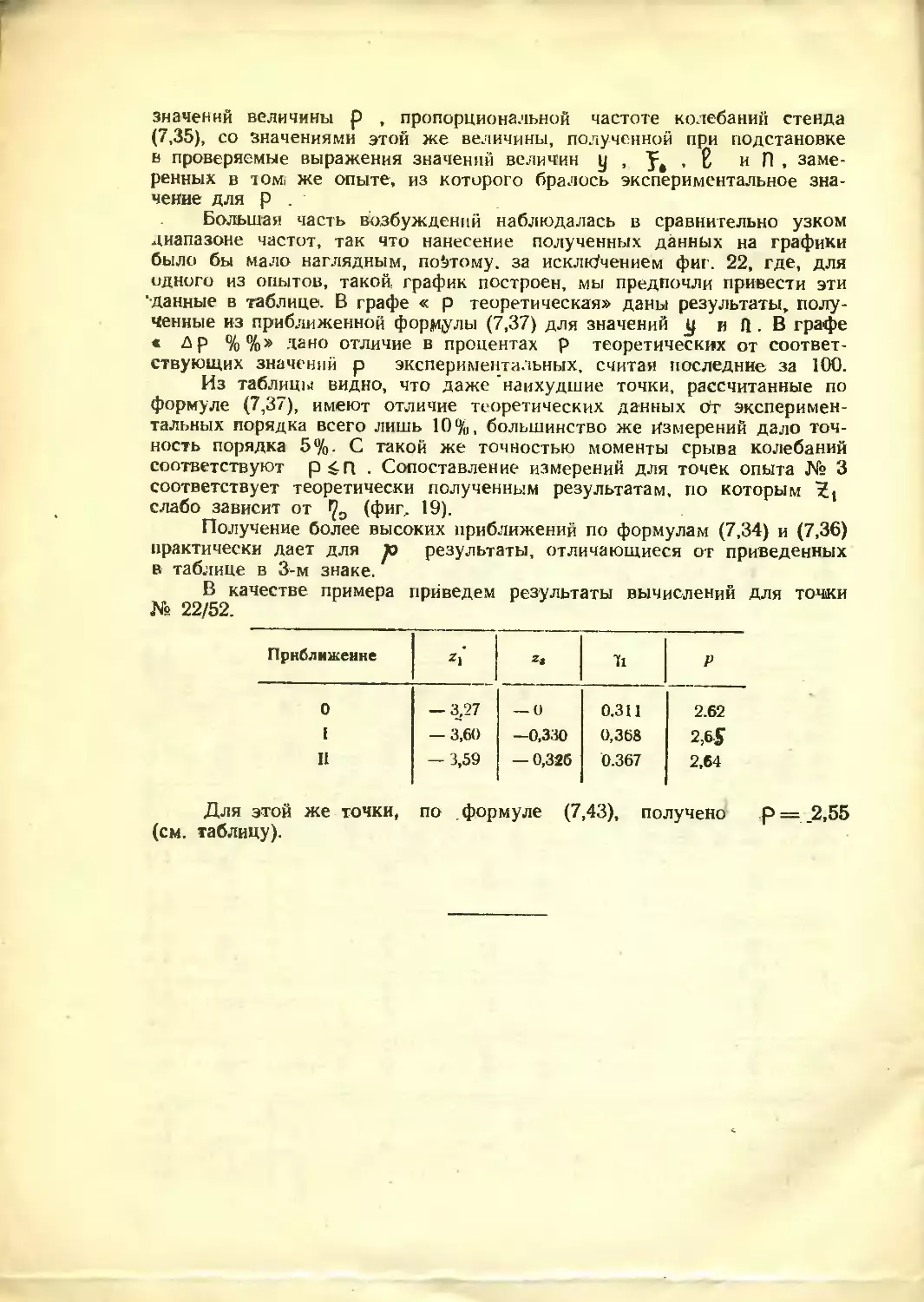
значений величины р , пропорциональной частоте колебаний стенда
(7,35), со значениями этой же величины, полученной при подстановке
в проверяемые выражения значений величин у , У, , 8 и П , заме-
ренных в том, же опыте, из которого бралось экспериментальное зна-
чение для р .
Большая часть возбуждений наблюдалась в сравнительно узком
диапазоне частот, так что нанесение полученных данных на графики
было бы мало наглядным, поэтому, за исклк/чением фиг. 22, где, для
одного из опытов, такой график построен, мы предпочли привести эти
‘•данные в таблице. В графе « р теоретическая» даны результаты, полу-
ченные из приближенной формулы (7,37) для значений у и Я . В графе
« др %%» дано отличие в процентах р теоретических от соответ-
ствующих значений р экспериментальных, считая последние за 100.
Из таблицы видно, что даже наихудшие точки, рассчитанные по
формуле (7,37), имеют отличие теоретических данных dr эксперимен-
тальных порядка всего лишь 10%, большинство же Измерений дало точ-
ность порядка 5%. С такой же точностью моменты срыва колебаний
соответствуют р^П . Сопоставление измерений для точек опыта № 3
соответствует теоретически полученным результатам, по которым
слабо зависит от (фиг, 19).
Получение более высоких приближений по формулам (7,34) и (7,36)
практически дает для jo результаты, отличающиеся от приведенных
в таблице в 3-м знаке.
В качестве примера приведем результаты вычислений для точки
№ 22/52.
Приближение г» 71 Р
0 — 3,27 — 0 0.311 2.62
1 — 3,60 —0,330 0,368 2,6$
П — 3,59 — 0,326 0.367 2,64
Для этой же точки, по формуле (7,43), получено р = .2,55
(см. таблицу).
выводы
1. Явление установления больших колебаний 2-го устойчивого
режима и перекидывания, то-есть больших колебаний с частотой, в 7г
раз меньшей частоты внешней гармонической силы, наблюдаются во
всех конструкциях амортизаторов самолетного оборудования, имеющих
упругие ограничители хода.
2. Предложенная теория этих явлений приводит к результатам, со-
гласующимся с опытами. Учитывая погрешности наблюдений, происхо-
дящие главным образом из-за неспокойной работы вибрационного стен-
да, что затрудняет отсчеты по тахометру и катетометру, следует при-
знать количественное совпадение теоретических и экспериментальных
данных вполне удовлетворительным .
Основной недостаток приведенных теоретических исследований —
отсутствие оценки влияния гармоник, отброшенных в решениях (2,6) и
(7,4), свойственен вообще решениям Типа ван-дер-полевских. которые
тем не менее с успехом применяются во многих задачах теории колеба-
ний. Поскольку в наших опытах присутствие этих гармоник не обнару-
живается, их влияние вряд ли может быть значительным. Лучше всего
в этом убеждает хорошее совпадение теоретических данных с экспери-
ментальными.
Отметим, что проведенное исследование перекидывания, прини-
мающее его за явление субгармонического резонанса, тесно связано
с трактовкой этой же задачи, как параметрической с периодическим из-
менением коэфициента упругости, в чем нетрудно убедиться, подставив
в основное уравнение (7.41) выражения (1,1) и (1,3).
3. Для сужения области частот, в которой могут возникнуть устой-
чивые колебания 2-го режима и перекидывания, необходимо полностью
использовать возможности по увеличению свободного хода, увеличению
трения и уменьшению жесткости ограничителей *). В необходимости вы-
полнения этих требований можно наглядно убедиться из рассмотрения
семейств резонансных кривых фиг. 4, 5, 6. 17, 18, 19 и выражения (7,21).
4. Большие колебания перекидывания, так же как и 2-го устойчи-
вого режима, могут вызвать разрушение амортизованиого оборудования,
что мы неоднократно наблюдали при испытаниях на вибрационном стен-
•) Мы говорим о необходимости „использования возможностей", так как вы-
полнение указанных требований может противоречить другим условиям, которые
также следует учитывать при расчете амортизаторов. Например, увеличение сво-
бодного хода вызывает дополнительную перегрузку при посадке, увеличение тре-
ния вредно отражается на виброизвляции, мягкие упоры противоречат самому
смыслу их введения и т, д.
49
де. Однако, опасность возникновения перекидывания в реальны* усло-
виях эксплоатации не следует и переоценивать. Так же как и в случае
колебаний 2-го устойчивого режима, для возбуждения перекидывания
нужен толчок в направлении оси амортизаторов, попадающий в опре-
деленную фазу колебаний, причем следующие толчки не должны еры
вать уже возбужденных колебаний.
Кроме того, все. да имеющие место небольшие перекосы амортиза
торов при монтаже й наличие подводок (шланги, трубопроводы, элек-
тропроводы), вносящие добавочное демпфирование, значительно умень-
шают возможность возникновения перекидывания.
ЛИ ТЕР А ТУРА
Вынужденные колебания
1. Martienssen О. Physikalische Z. 1910. т 11, стр. 449.
2. Duffing G .Erzwungene Schwingungen" 1918. Braunschweig.
3. Hamel G. Math. Ann. 1922. t. 86, стр. 1.
4. R u d e n b e г g R. Z. f, augew. Math. u. Meeh. 1923, t. 3, стр. '’54.
5. A p p 1 e t о n E. Philos. Magaz. 1924, t. 47, стр. 609.
6. Wichert A. Forschungsarbeiten. 1924. № 266.
7. Den Gartog J., Mikina S. Trans. A. S. M. E. 1932. АРМ 54—15.
8. Den Gartog J. Journ. Frankl. Inst. 1933, t. 216, стр. 459.
9. P о 1 В. Proc. I. R. E. 1934, t. 22, № 9.
10. КI о 11 e r K- Ingen. Archiv. 1936. № 2, стр. 87.
11. Iglisch R. Math. Ann. 1936, t. 112, стр, 221.
12. Den Gartog J., Heiles R., Journ. Appl. Meeh. 1936, t. 3, crp. 127.
13. Г о п п Ю. А. Труды Укр. Авиадизельн. Инет. 1937, вып.‘ X.
14. К1 о 11 е г К- „Einfiirung in die Tecbn. Schwingungslehre' 1938.
15. Л у p ь e А. И., Чек м арев А. И. Прикл. Матем. н Мех. 1938, т. I.
стр. 3)7.
16. Rausch er М. Journ. Appi. Meeh. 1938, т. 5, стр. 169.
I7. Кац А. М" Труды Ленингр. ниц. инет. 1939, № 3, стр. 102.
18. Лурье А. И. Ученые записки лен. гос. универе 1939, № 8, стр 28.
19. Wat.nabe Y; Proc, fifth. Congr. Appl Meeh. 1939.
20. Ден Гартог Дж. «Теорий колебаний". ОГИЗ. 1942.
21. Нат анзои В. А. Труды ЦИАМ. 1943, № 40.
22. Lewinson N. Journ. Math. a. Phys. 1943, т. 7, стр. 31.
23. Булгаков Б. В. Прикл. матем. н мех. 1943, т. 7, стр. 31.
24. Теодорчик К. Ф. Автоколебательные системы. ОГИЗ. 1944.
25 И о р и ш Ю. И. Труды НИСО W» 7. 1945 г.
Субгармонический резонанс.
26. Р о i п с а г ё Н. .Les Methodes nouveiles de laMecanlque Ctleste' 1892. Paris.
27. Сы. t.
28. Pol B., Mark J. Nature. 1927, t. 120, стр. 363.
29. Мандельштам Л. И., Па па леке н Н. Д. Z. f. Phys. 1931, т. 73,
стр. 223. ЖТФ 1932. т. 2. № 7-8. ЖТФ 1934. т. 4. № 1.
30, Русаков И. Г., Рябинина Н. Н. ЖТФ 19 5, т. 5, стр. 670.
31. См. 20.
32. W е п k е W. Hochfr. u. Electroakustik. 1940. т. 5, стр. 94, 109.
33. Ludeke С. Journ. Appl. Physics.*1942, т. 13, стр. 418.
51
ОГЛАВЛЕНИЕ
Предисловие •.........'...................•....................* . 3
Основные обозначения............................................. 5
Введение..................•...........• •..........................7
Глава I. Установившиеся вынужденные колебания с частотой
внешней гармонической силы
§ I. Ограничители хода с линейной силовой характеристикой......... 10
§ 2. Высшие приближения...............• . ...................... 18
§ 3. Ограничители хода с нелинейной силовой характеристикой ...... 21
§ 4. Экспериментальные исследования............................... 23
Глава II. Субгармоническое решение
§ 5. Предыдущие работы. Терминология.............................. 28
§ 6. Описание явления............................. •............. 29
§ 7. Теория явления............................................... 31
§ 8. Количественные измерения..................................... 42
Выводы........................................................... • 49
Литература........................................................... 51
Разрешено к печати2^—1946-г. З1/* п. л. Авт, л. 2,78 ,________________
Г-51105 Типо-лнтография ВВА. Заказ 131