/




































































































































































































Author: Петренко Ю.Н.
Tags: характеристика машин по способу привода физика электроника электричество электропривод
ISBN: 978-985-475-219-8
Year: 2007




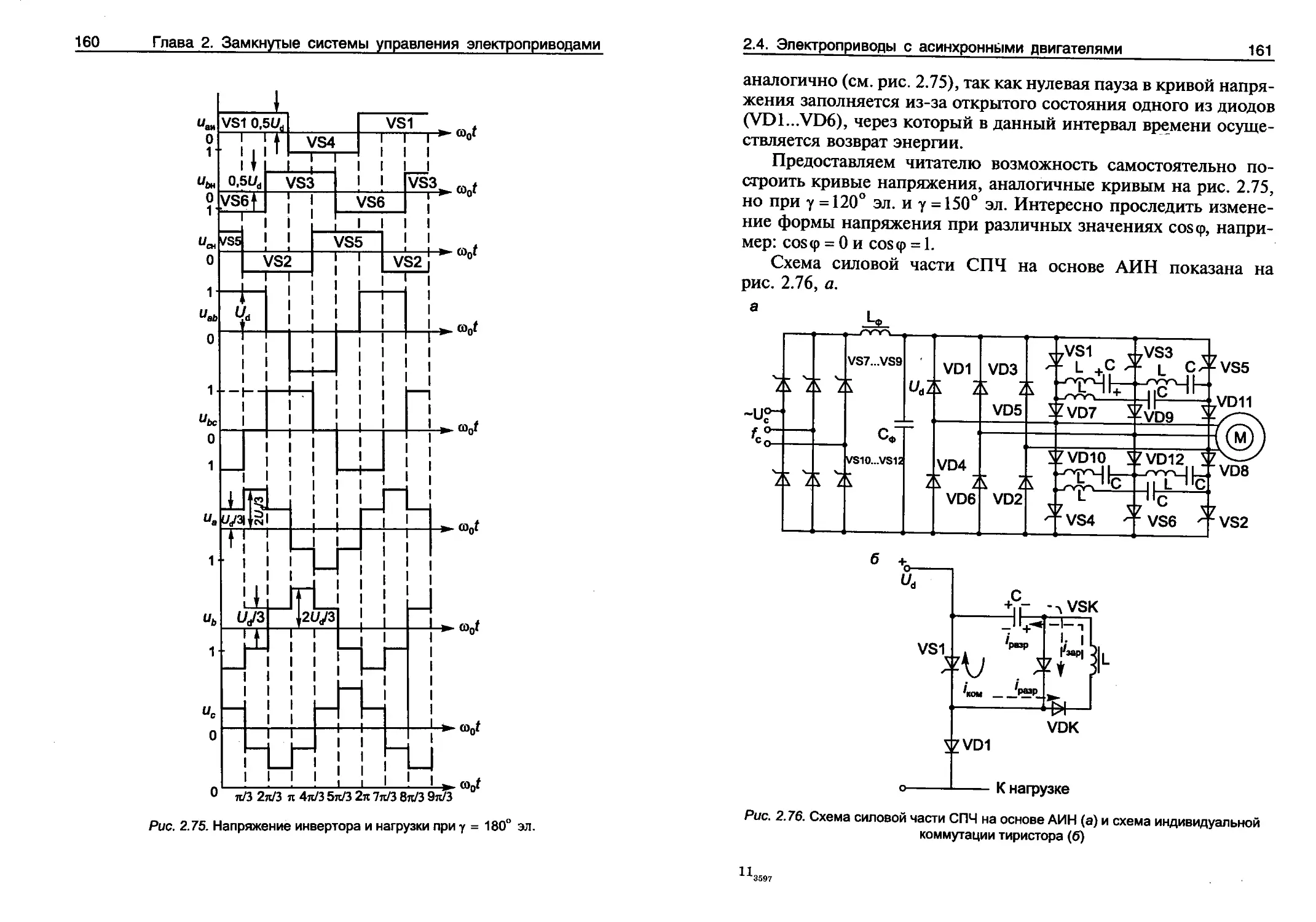
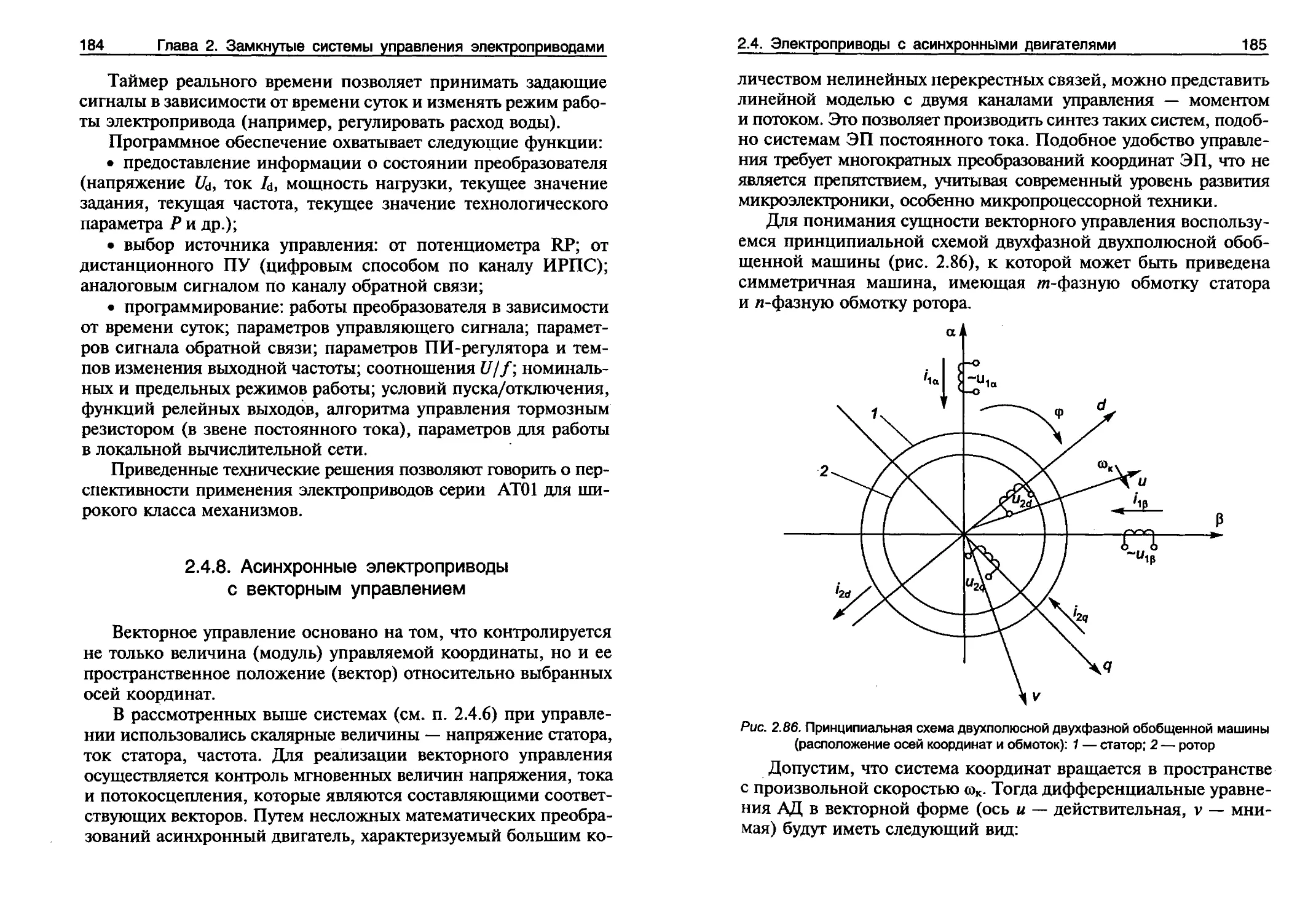
Text
СИСТЕМЫ
АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
Под общей редакцией Ю,Н. Петренко
Допущено Министерством образования Республики Беларусь
в качестве учебного пособия для учащихся специальности
«Электротехника» учреждений, обеспечивающих получение
среднего специального образования
2-е издание, исправленное и дополненное
МИНСК ООО «НОВОЕ ЗНАНИЕ» 2007
УДК 62-83-52(075 32)
ББК ЗК291я723
С40
Авторы:
Г.И. Гульков, Ю.Н. Петренко, Е.П. Раткевич, О.Л. Симоненкова
Рецензенты:
цикловая комиссия
специальности «Элект;
техника» Гомельского
государственного политехнического техникума (преподаватель Г.Г. Новогран)\
зав. кафедрой «Автоматизированный электропривод» Гомельского
государственного технического университета, доктор технических наук,
профессор В.И. Луковников
Системы автоматизированного управления электро-
С40 приводами : учеб, пособие / Г.И. Гульков, Ю.Н. Петренко,
Е.П. Раткевич, О.Л. Симоненкова; под общ. ред. Ю.Н. Пет-
ренко. — 2-е изд., испр. и доп. — Минск : Новое знание,
2007. — 394 с. : ил.
ISBN 978-985-475-219-8.
Изложены теория и практика современных систем автоматизированного
управления электроприводами — от релейно-контакторных (простейшие
функции управления) до сложных (с применением микропроцессоров и
микроЭВМ). Рассмотрены системы управления с различными типами
двигателей: асинхронные, синхронные, постоянного тока, шаговые и вен-
тильные. Качественные иллюстрации значительно облегчают усвоение
материала.
Для учащихся средних специальных учебных заведений, изучающих
электротехнику. Может быть полезно студентам энергетических и маши-
ностроительных специальностей высших учебных заведений.
УДК 62-83-52(075.32)
ББК 31.291я723
ISBN 978-985-475-219-8
© Коллектив авторов, 2004
© Коллектив авторов, 2007, с изменениями
© Оформление. ООО «Новое знание», 2007
Предисловие
Во всех отраслях промышленности производительность технологи-
ческого оборудования в значительной степени определяется уровнем
его автоматизации, основным звеном которой является электропривод.
Прогресс во многих отраслях науки и техники (микроэлектроника,
транспорт, авиация, космическая техника, и т.д.) все более подчеркива-
ет его важнейшую роль. Электропривод обеспечивает работу ходовых
винтов атомных ледоколов и прокатных станов мощностью несколько
мегаватт. В то же время движение стрелок электромеханических часов
также происходит благодаря электроприводу, правда, гораздо меньшей
мощности — всего лишь доли ватта. Большинство людей редко употреб-
ляют слово «электропривод», хотя сталкиваются с этим понятием еже-
дневно и многократно: комфортное движение в электропоезде (включая
метро), лифте (особенно высотного здания), использование многочис-
ленных бытовых приборов (пылесос, миксер, кондиционер, вентилятор,
кухонный комбайн, автоматическая стиральная машина) и т.д. Движе-
ние лунохода и марсохода — это тоже электропривод.
Автоматизированный электропривод чаще всего не рассматривается
как отдельное устройство, а является, существенным звеном иерар-
хической структуры автоматизации. Наиболее ярко сущность автомати-
зированного электропривода проявляется в электросталеплавильных
установках и металлорежущих станках с числовым программным управ-
лением, робототехнических комплексах и автоматических линиях. Пони-
мание устройства и работы электропривода — это прежде всего понима-
ние физических процессов, происходящих в нем, умение сопоставлять
современные технические решения в области микро- и силовой элек-
трон»
1, а также современного программного обеспечения. Это необхо-
димо всем, чья деятельность непосредственно связана с проектировани-
ем, изготовлением и эксплуатацией установок, в которых используется
автоматизированный электропривод.
Цель настоящего пособия — дать необходимый минимум знаний
в области автоматизированного электропривода. Следует подчеркнуть
единство информационной составляющей автоматизированного электро-
привода — устройств микроэлектроники и микропроцессорных средств,
включая программное обеспечение, с силовыми полупроводниковыми пре-
образователями и непосредственно электродвигателями. Использование
технических средств и методов цифрового управления является основной
Предисловие
тенденцией развития электропривода и в ближайшее время станет преобла-
дающим даже в очень простых системах управления.
Пособие рассчитано на учащихся, имеющих подготовку в области
электрических машин, электропривода, электроники и автоматики.
Учебное пособие может использоваться параллельно с учебниками
по автоматизированному электроприводу авторов В.В. Москаленко,
В.М. Васина, Е.М. Зимина и различного рода справочной литературой.
Материал пособия распределен между авторами следующим обра-
зом: предисловие, §14-2.6, гл.З — Ю.Н. Петренко; § 1.1-1.4 —
ОЛ. Симоненкова; § L5 и гл. 4 — Е.П. Раткевич; § 2.1—2.3 — Г.И. Гуль-
ков, § 2.7 — О.Ф. Опейко.
Авторы выражают искреннюю благодарность рецензентам — заве-
дующему кафедрой автоматизированного электропривода доктору тех-
нических наук, профессору учреждения образования «Гомельский Госу-
дарственный технический университет им. П.О. Сухого» В.И. Луковникову
и преподавателю Гомельского политехнического техникума Г. Г. Ново-
грану за внимательное прочтение рукописи и ценные критические заме-
чания.
Авторы признательны своим коллегам — преподавателям технику-
мов, чьи рекомендации были использованы при работе над книгой.
Ю.Н. Петренко
Список принятых сокращении
АД — асинхронный двигатель
АИ — автономный инвертор
АИН — автономный инвертор напряжения
АИТ — автономный инвертор тока
АЛУ — арифметическо-логическое устройство
АР — аналоговый регулятор
АЦП — аналого-цифровой преобразователь
АЭП — автоматизированный электропривод
БИС — большая интегральная схема
БО — блок ограничения
БРг — блок регистров
БЦК — буквенно-цифровой код
ВД — вентильный двигатель
ВЗУ — внешнее запоминающее устройство
ВТ — вращающийся трансформатор
ВФ — выходной формирователь
ГМД — гибкий магнитный диск
ГОН — генератор опорного напряжения
ГПН — генератор пилообразного напряжения
Д — датчик
ДМ — демультиплексор
ДОС — датчик обратной связи
ДПВ — датчик проводимости вентиля
ДПР — датчик положения ротора
Д ПТ — двигатель постоянного тока
ДСТ — д атчик состояния тиристоров
ДТ — датчик тока
ЗУ — запоминающее устройство
ЗЭ — запоминающий элемент
И — интегральный
ИМ — исполнительный механизм
ИП — измерительный преобразователь
ИРПС — интерфейс радиальный последовательный
ИС — интегральная схема
КПД — коэффициент полезного действия
КТ — комплект тиристоров
6 Список принятых сокращений
ЛПУ — логическое переключающее устройство
ЛЦ — логическая цепь
М — мультиплексор
МАВ — модуль аналогового ввода
МАЦП — многоканальный аналого-цифровой преобразователь
МДС — магнитодвижущая сила
МК — микроконтроллер
МП — микропроцессор
МПК —• микропроцессорный комплект
МПС — микропроцессорная система
МПСАУ — микропроцессорная система автоматического управления
МСИД — модуль связи с импульсным датчиком
МЦАП — многоканальный цифроаналоговый преобразователь
НГМД — накопитель гибких магнитных дисков
НЗ — нелинейное звено
НО — нуль-орган
НПЧ — непосредственный преобразователь частоты
НС — намагничивающая сила
ОЗУ — оперативное запоминающее устройство
ОП — основная память
ОУ — операционный усилитель
П — пропорциональный
ПВ — полупроводниковый выпрямитель
ПЗУ — постоянное запоминающее устройство
ПИ — пропорционально-интегральный
ПИД — пропорционально-интегрально-дифференциальный
ПК — программируемый контроллер
ПКДИ — преобразователь «код — длительность импульса»
ПЛМ — программируемые логические матрицы
ПМ — передаточный механизм
ППЗУ — перепрограммируемое запоминающее устройство
ППК — преобразователь «перемещение — код»
Пр — преобразователь мощности
ПТ — программируемый аппаратный таймер
ПУ — программное управление
ПФ — передаточная функция
ПХ — переключатель характеристики
ПЧ — преобразователь частоты
ПШИУ — преобразователь с широтно-импульсным управлением
РВРУ — реверсивный выпрямитель с раздельным управлением
РИ — распределитель импульсов
РКС — релейно-контактная (релейно-контакторная) схема
Список принятых сокращений
7
РМ — рабочий механизм
PH — регулятор напряжения
РНТ — режим непрерывного тока
РО — рабочий орган
РОН — регистратор общего назначения
РП — рабочая программа
РПП — рабочая программа пользователя
РПТ — режим прерывистого тока
PC — регулятор скорости
РТ — регулятор тока
РТВ — регулятор тока возбуждения
РТЯ — регулятор тока якоря
РУС — регистр управляющего слова
РЭ — регулятор электродвижущей силы
С — сумматор
САУ — система автоматического управления
СБИС — сверхбольшая интегральная схема
СИФУ — система импульсно-фазового управления
СОЗУ — сверхоперативное запоминающее устройство
СПЗУ — системное постоянное запоминающее устройство
СПО — системное программное обеспечение
С ПУ — система программного управления
СПЧ — статический преобразователь частоты
СУ — согласующее устройство
СУВ — система управления выпрямителем
СУИ — система управления инвертором
СУТ — система управления тиристорами
СЧПУ — система числового программного управления
СЭ — согласующий элемент
ТВВ — тиристорный выпрямитель возбуждения
ТВЯ — тиристорный выпрямитель якоря
ТК — технологический комплекс
ТП — транзисторный преобразователь
ТПЧ — тиристорный преобразователь частоты
ТРН — тиристорный регулятор напряжения
УВ — управляемый выпрямитель
УВВ — устройство ввода-вывода
УВМ — управляющая электронно-вычислительная машина
УП — управляющая программа
УПЭ — управляемый преобразователь энергии
УС — устройство синхронизации
УСО — устройство связи с объектом
8
Список принятых сокращений
УУ — устройство управления
УЧ ПУ — устройство числового программного управления
ФДИ — формирователь длительности импульсов
ФИД — фотоимпульсный датчик
ФП — функциональный преобразователь
ФСБ — фазосдвигающий блок
ФСУ — фотосчитывающее устройство
ЦДЛ — цифроаналоговый преобразователь
ЦП — центральный процессор
ЦПУ — цикловое программное управление
ЧПУ — числовое программное управление
ЧЭП — частотный электропривод
ША — шина адреса
ТТТД — шина данных, шаговый двигатель
ШИМ — широтно-импульсная модуляция (модулятор)
ШИП — широтно-импульсный преобразователь
ШИР — преобразователь с широтно-импульсным регулированием
ШУ — шина управления
ЭВМ — электронно-вычислительная машина
ЭД — электродвигатель
ЭДС — электродвижущая сила
ЭП —• электропривод
Гпава 1
РАЗОМКНУТЫЕ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
1.1. Назначение и функции систем
автоматизированного управления
электроприводами
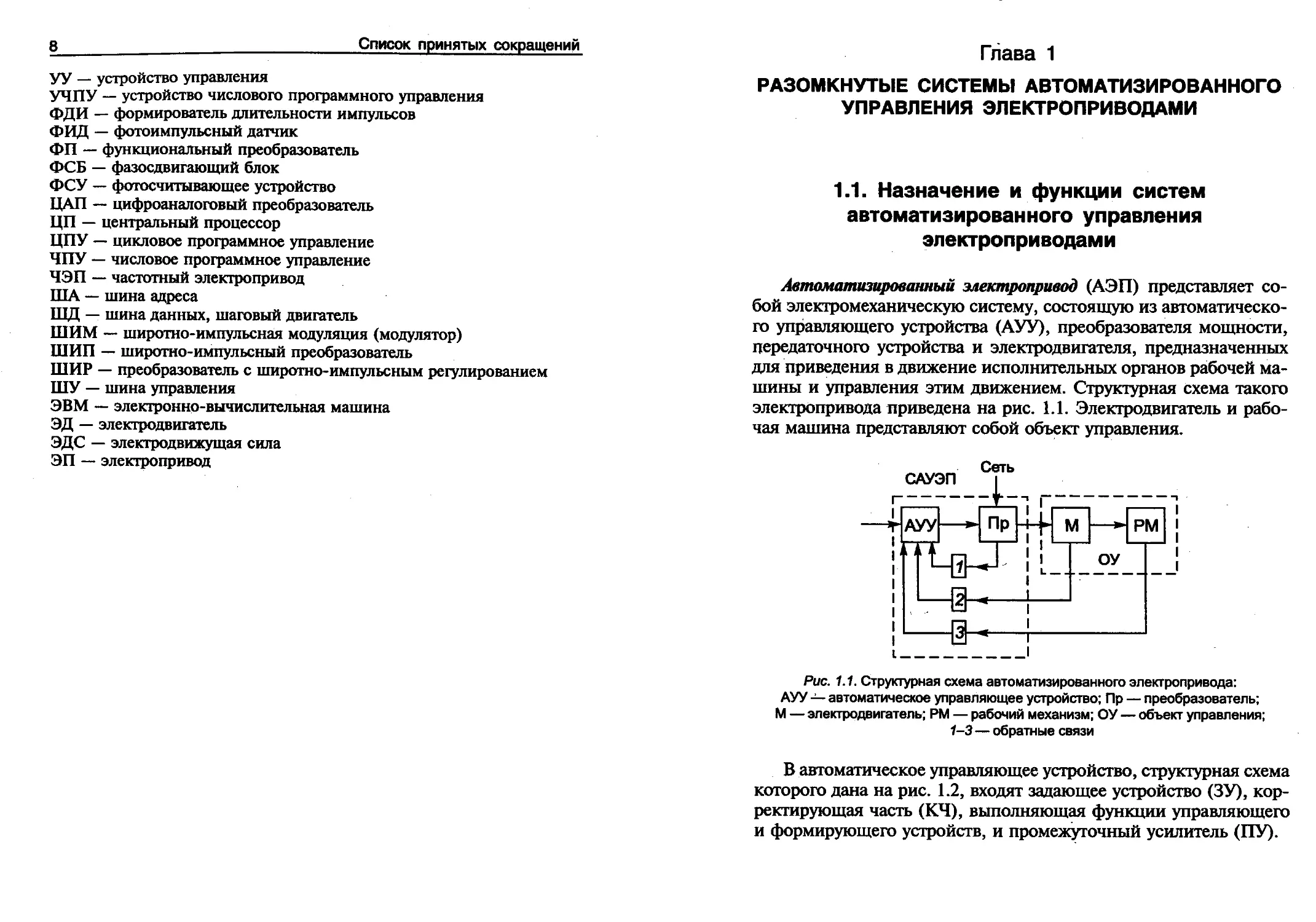
Автоматизированный электропривод (АЭП) представляет со-
бой электромеханическую систему, состоящую из автоматическо-
го управляющего устройства (АУУ), преобразователя мощности,
передаточного устройства и электродвигателя, предназначенных
для приведения в движение исполнительных органов рабочей ма-
шины и управления этим движением. Структурная схема такого
электропривода приведена на рис. 1.1. Электродвигатель и рабо-
чая машина представляют собой объект управления.
Рис. 1.1. Структурная схема автоматизированного электропривода:
АУУ — автоматическое управляющее устройство; Пр — преобразователь;
М — электродвигатель; РМ — рабочий механизм; ОУ — объект управления;
1—3—обратные связи
В автоматическое управляющее устройство, структурная схема
которого дана на рис. 1.2, входят задающее устройство (ЗУ), кор-
ректирующая часть (КЧ), выполняющая функции управляющего
и формирующего устройств, и промежуточный усилитель (ПУ).
10 Глава 1. Разомкнутые системы управления электроприводами
ПУ
Рис. 1.2. Структурная схема автоматического управляющего устройства
Система автоматизированного управления электроприводом
(САУЭП) состоит из автоматического управляющего устройства
и преобразователя, которые воздействуют на объект управления.
Выходными параметрами электропривода являются: скорость,
ускорение, угол поворота, момент, мощность. В процессе управ-
ления эти величины могут регулироваться по определенному за-
кону либо стабилизироваться. Обозначим, например, задающее
воздействие ХО, а выходную величину y(t) (рис. 1.3). Основная
задача САУЭП — обеспечить отработку задающего воздействия,
т.е. выполнение равенства ХО = ХО во все моменты времени ра-
боты электропривода. Но эти функции не равны, так как в систе-
ме существуют возмущающие воздействия. К ним относятся не-
стабильность напряжения, характеристик элементов системы,
изменение нагрузки и др. При формировании функции ХО необ-
ходимо найти оптимальный вариант.
Рис. 1.3. Структурная схема САУЭП по разомю(утому циклу:
УУ — управляющее устройство; Пр — преобразователь; М — электродвигатель;
РМ — рабочий механизм; /п«.../пл — возмущающие воздействия
Основные функции САУЭП сводятся к управлению процесса-
ми пуска, торможения и реверса электродвигателя, стабилизации
координат электропривода, выполнению слежения за изменяю-
щимися параметрами, программному и адаптивному управле-
нию, защите электрических цепей, обеспечению заданной по-
следовательности операций с отдельными элементами и узлами.
САУЭП — это система, получающая и перерабатывающая ин-
формацию. Она может строиться по разомкнутому, замкнутому
и комбинированному циклу.
1.2. Типовые узлы и схемы управления электроприводами 11
В разомкнутых системах имеется только один канал
информации — задающий. Выходная величина не воздействует
на входную. Точность отработки заданного режима невелика.
Структурная схема такой системы приведена на рис. 1.3.
В разомкнутых системах возможно Только последовательное
выполнение работы элементов схемы: пуск, торможение и т.д.
В замкнутых системах используются два канала ин-
формации: задающий и канал обратной связи. Это позволяет
увеличить точность обработки.
В комбинированных системах объединяются замк-
нутая и разомкнутая системы. Эго наиболее совершенные САУЭП
(подробнее они рассмотрены в гл. 2).
Контрольные вопросы
1. Дайте определение автоматизированного электропривода.
2. Какие структурные блоки входят в автоматическое управляющее
устройство?
3. Назовите основные функции САУЭП.
4. Какие каналы информации используются в разомкнутых и замк-
нутых системах?
1.2. Типовые узлы и схемы
управления электроприводами
1.2.1. Общие сведения
Электрическая схема автоматизированного электропривода
содержит множество отдельных элементов, связанных между со-
бой проводами, кабелями и шинами. При составлении и чтении
электрических схем необходимо пользоваться ГОСТами. Не-
смотря на многообразие типов, элементы электрических схем
(обмотки двигателей, катушки, контакты аппаратов и др.) имеют
много общего, поэтому для их изображения на схемах необходи-
12
Глава 1. Разомкнутые системы управления электроприводами
мо относительно небольшое количество условных обозначений.
Контакты аппаратов изображаются на схемах в обесточенном со-
стоянии аппаратов, например контакты электромагнитных реле
и контакторов — при обесточенной катушке, контакты кнопок —
при отсутствии нажатия на кнопку и т.д. Контакты электрических
аппаратов подразделяются на замыкающие и размыкающие. При
включении аппарата, т.е. при прохождении тока по катушке,
контакты меняют свое положение на
тивоположное.
Цепи в электрических схемах подразделяются на силовые
и цепи управления. К силовым относятся цепи статоров, роторов
и якорей электрических машин. На схемах силовые цепи изобра-
жаются утолщенными линиями, а цепи управления, в которые
включаются катушки и контакты контакторов и реле, контакты
путевых выключателей и кнопочных станций, элементы защиты
и сигнализации, — тонкими линиями.
1.2.2. Классификация схем
I
Структурная схема показывает последовательность работы
отдельных узлов устройства без детализации.
Функциональная схема — это схема, разъясняющая опреде-
ленные процессы, протекающие в функциональных блоках уста-
новки или в установке в целом. Она несколько подробнее
и сложнее структурной схемы. Здесь уже видны основные устрой-
ства (щитки сигнализации, станции управления и т.д.), отдельные
элементы (лампы, звонки) показаны в условных обозначениях,
а группы аппаратов, осуществляющих переключения, изображе-
ны прямоугольниками.
Принципиальная схема определяет полный состав элементов
и связей между ними и, как правило, дает детальное представле-
ние о принципах работы установки. Примеры таких схем приве-
дены при рассмотрении схем управления электродвигателями.
Схема соединения (монтажная) показывает соединение со-
ставных частей установки и определяет провода, жгуты, кабели,
которыми осуществляются эти соединения, а также места их при-
соединения и ввода. Монтажные схемы являются рабочим черте-
жом, по которому выполняется монтаж электрических цепей. Ха-
1.2. Типовые узлы и схемы управления электроприводами 13
ракгер и форма исполнения чертежа должны соответствовать виду
производства монтажных работ, а при заводском исполнении па-
нелей управления, защиты и автоматики — требованиям заво-
да-изготовителя. Маркировки цепей на монтажных и принципи-
альных схемах должны полностью соответствовать друг другу.
Схемы внутренних соединений реле, спецификации, эксплика-
ции, текстовые примечания и указания, схемы кабельных связей
совместно с кабельным журналом рассматриваются как необходи-
мые поясняющие элементы монтажной схемы.
Схема подключения — это схема, показывающая внешние
подключения изделий. В ряде организаций ее называют схемой
внешних соединений.
Схема расположения — это схема, определяющая относи-
тельное расположение составных частей изделия (установки),
а при необходимости — проводов, жгутов, кабелей, трубопрово-
дов и т.п.
1.2.3. Общие требования к выполнению
принципиальных электрических схем
Принципиальные электрические схемы служат основанием
для разработки других конструкторских документов, например
монтажных схем и чертежей, схем внешних соединений и т.п. По
форме исполнения различают принципиальные электрические
совмещенные (свернутые) и развернутые схемы. На совмещенных
электрических схемах приборы и аппараты изображают в со-
бранном виде, т.е. обозначение элементов, входящих в комплект
аппарата (катушки, контакты), размещают внутри условного
изображения прибора с маркировкой выходных зажимов соглас-
но заводской инструкции или данным каталога. Совмещенные
электрические принципиальные схемы применяют для изобра-
жения принципа действия сложных регулирующих устройств, ин-
формационных или вычислительных управляющих машин и др.
При составлении принципиальных электрических схем в развер-
нутом виде изображения приборов и аппаратов разъединяют на
составные элементы, которые связывают друг с другом, в резуль-
тате чего образуются отдельные электрические цепи.
14 Глава 1. Разомкнутые системы управления электроприводами
В целом схема состоит из ряда электрических цепей, распо-
ложенных горизонтально или вертикально. Желательно распола-
гать электрические цепи в соответствии с последовательностью
действий отдельных элементов во времени, так как в этих схемах
используют развернутые изображения отдельных элементов ап-
паратов. При вычерчивании принципиальных электрических схем
применяют условные графические изображения в соответствии
с действующими стандартами.
Каждый элемент схемы должен иметь буквенно-цифровое
обозначение. Все элементы одного и того же аппарата в принци-
пиальной схеме обозначаются одинаково. Если таких аппаратов
в схеме несколько, то после буквенного обозначения ставится
цифра. Переключатели, которые не имеют отключенного со-
стояния, изображают на схеме в одном из положений, принятом
за исходное. Для обозначения положения контактов, ключей
и переключателей управления, программных реле и других мно-
гопозиционных аппаратов и устройств используют специальные
диаграммы, характеризующие состояние контактов при различ-
ных положениях аппаратов.
1.2.4. Принципы автоматического управления
пуском и торможением двигателей
Пуск любого двигателя сопровождается определенными пе-
реключениями в силовой цепи и цепи управления. При этом ис-
пользуются релейно-контакторные и бесконтактные аппараты.
Для асинхронных двигателей с короткозамкнутым ротором пуск
чаще всего сводится к прямому включению двигателя на полное
напряжение сети. Мощные асинхронные и синхронные двигате-
ли включаются на пониженное напряжение, а по окончании
пуска статор двигателя включается на полное напряжение сети.
Для асинхронных двигателей с фазным ротором и двигателей по-
стоянного тока в целях ограничения пусковых токов в цепи ро-
торов и якорей двигателей включаются пусковые резисторы, ко-
торые при разгоне двигателей по ступеням выключаются. Когда
пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизи-
1.2. Типовые узлы и схемы управления электроприводами 15
рован. После команды на торможение с помощью релейно-кон-
такторной аппаратуры осуществляются необходимые переклю-
чения в силовых цепях. При подходе к скорости, близкой к нулю,
двигатель отключается от сети. В процессе пуска выключение
ступеней происходит через определенные интервалы времени
либо в зависимости от других параметров; при этом изменяются
ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции
ЭДС (или скорости), тока, времени и пути.
1.2.5. Типовые узлы и схемы автоматического
управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или незави-
симого возбуждения осуществляется с резистором, введенным
в цепь якоря. Резистор необходим для ограничения пускового
тока. По мере разгона двигателя пусковой резистор по ступеням
выводится. Когда пуск закончится, резистор будет полностью за-
шунтирован, и двигатель перейдет работать на естественную ме-
ханическую характеристику (рис. 1.4). При пуске двигатель раз-
гоняется по искусственной характеристике 7, затем 2, а после
шунтирования резистора — по естественной характеристике 3.
рад/с
М, Нм
Рис. 1.4. Механические и электромеханические характеристики двигателя
постоянного тока параллельного возбуждения (ш — угловая скорость вращения;
It, Mt — пиковый ток и момент двигателя; 4> Мг — ток и момент переключения)
16 Глава 1. Разомкнутые системы управления электроприводами
Рассмотрим узел схемы пуска двигателя постоянного тока
(ДПТ) в функции ЭДС (рис. 1.5).
Рис. 1.5. Узел схемы пуска ДПТ параллельного
возбуждения в функции ЭДС
Управление в ф у н к ц и и ЭДС (или скорости) осуществ-
ляется реле, напряжения и контакторами. Реле напряжения на-
строены на срабатывание при различных значениях ЭДС якоря.
При включении контактора КМ 1 напряжение на реле KV в мо-
мент пуска недостаточно для срабатывания. По мере разгона
двигателя (вследствие роста ЭДС двигателя) срабатывает реле
KV1, затем KV2 (напряжения срабатывания реле имеют соответст-
вующие значения); они включают контакторы ускорения КМ2,
КМЗ, и резисторы в цепи якоря шунтируются (цепи включения
контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска ДПТ в функции ЭДС (рис. 1.6). Уг-
ловая скорость двигателя часто фиксируется косвенным путем,
т.е. измерением величин, связанных со скоростью. Для ДПТ та-
кой величиной является ЭДС. Пуск осуществляется следующим
образом. Включается автоматический выключатель QF, обмотка
возбуждения двигателя подключается к источнику питания. Сра-
батывает реле КА и замыкает свой контакт. Остальные аппараты
схемы остаются в исходном положении. Для пуска двигателя не-
обходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1
срабатывает и подключает двигатель к источнику питания. Кон-
тактор КМ1 становится на самоПитание. ДПТ разгоняется с ре-
зистором R цепи якоря двигателя. По мере увеличения скорости
1.2. Типовые узлы и схемы управления электроприводами
17
двигателя растет его ЭДС и напряжение на катушках реле KV1
и KV2. При скорости <oi (см. рис. 1.4) срабатывает реле KV1. Оно
замыкает свой контакт в цепи контактора КМ2, который сраба-
тывает и закорачивает своим контактом первую ступень пуско-
вого резистора. При скорости сог срабатывает реле KV2. Своим
контактом оно замыкает цепь питания контактора КМЗ, кото-
рый, срабатывая, контактом закорачивает вторую пусковую сту-
пень пускового резистора. Двигатель выходит на естественную
механическую характеристику и заканчивает разбег.
Рис. 1.6. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле
напряжения KV1 на срабатывание при ЭДС, соответствующей
скорости <0], и реле KV2 на срабатывание при скорости ®2-
Для остановки двигателя следует нажать кнопку SB2 «Стоп».
Для обесточивания схемы нужно отключить автоматический вы-
ключатель QF.
2
3597
18
Глава 1. Разомкнутые системы управления электроприводами
Управление в функции т о к а осуществляется с помо-
щью реле тока. Рассмотрим узел схемы пуска ДПТ в функции
тока. ।
схеме, приведенной на рис. 1.7, применяются реле мак-
симального тока, которые срабатывают при пусковом токе 71
и отпадают при минимальном токе Л (см. рис. 1.4). Собственное
время срабатывания токовых реле должно быть меньше собст-
венного времени срабатывания контактора.
Рис. 1.7. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью вве-
денном в цепь якоря. По мере разгона двигателя ток уменьшает-
ся, при токе 1г реле КА1 отпадает и своим контактом замыкает
цепь питания контактора КМ2, который своим контактом шун-
тирует первую пусковую ступень резистора. Аналогично осуще-
ствляется закорачивание второй пусковой ступени резистора
(реле КА2, контактор КМЗ). Цепи питания контакторов на схеме
не показаны. По окончании пуска двигателя резистор в цепи
якоря будет зашунтирован.
Рассмотрим схему пуска ДПТ в функции тока (рис. 1.8). Со-
противления ступеней резистора выбираются таким образом,
чтобы в момент включения двигателя и шунтирования ступеней
ток /г в цепи якоря и момент М\ не превосходили допустимого
уровня.
Пуск двигателя осуществляется включением автоматическо-
го выключателя QF и нажатием кнопки SB1 «Пуск». При этом
срабатывает контактор КМ1 и замыкает свои контакты. По сило-
вой цепи двигателя проходит пусковой ток 71, под действием ко-
торого срабатывает реле максимального тока КА1. Его контакт
размыкается, и контактор КМ2 не получает питания.
1.2. Типовые узлы и схемы управления электроприводами
19
Рис. 1.8. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения Д, реле
максимального тока КА1 отпадает и замыкает свой контакт. Сра-
батывает контактор КМ2 и своим главным контактом шунтирует
первую секцию пускового резистора и реле КА1. При переклю-
чении ток возрастает до значения Д. При повторном увеличении
тока до значения Д контактор КМ1 не включается, поскольку его
катушка зашунтирована контактом КМ2. Под действием тока Д
реле КА2 срабатывает и размыкает свой контакт. Когда впроцес-
се ускорения ток вновь уменьшается до значения h, реле КА2 от-
падает и включается контактор КМЗ. Пуск заканчивается, двига-
тель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время сра-
батывания реле КА1 и КА2 было меньше времени срабатывания
контакторов. Чтобы остановить двигатель, необходимо нажать
кнопку SB2 «Стоп» и выключить автоматический выключатель
QF для обесточивания схемы.
20
Глава 1. Разомкнутые системы управления электроприводами
Управление в функции времени осуществляется
с помощью реле времени и соответствующих контакторов, кото-
рые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска ДПТ в функции времени
(рис. 1.9). Реле времени КТ срабатывает сразу при появлении на-
пряжения в схеме управления через размыкающий контакт КМ 1.
После размыкания контакта КМ 1 реле времени КТ теряет пита-
ние и с выдержкой времени замыкает свой контакт. Контактор
КМ2 через промежуток времени, равный выдержке реле време-
ни, получает питание, замыкает свой контакт и шунтирует со-
противление в цепи якоря.
Рис. 1.9. Узел схемы пуска ДПТ параллельного
возбуждения в функции времени
К достоинствам управления в функции времени относятся
простота управления, стабильность процесса разгона и торможе-
ния, отсутствие задержки электропривода на промежуточных
скоростях.
Рассмотрим схему пуска ДПТ параллельного возбуждения
в функции времени. На рис. 1.10 приведена схема нереверсивно-
го пуска ДПТ параллельного возбуждения. Пуск происходит
в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2
«Стоп», контакторы КМ1...КМЗ, электромагнитные реле време-
ни КТ1, КТ2. Включается автоматический выключатель QF. При
1.2. Типовые узлы и схемы управления электроприводами 21
этом катушка реле времени КТ1 получает питание и размыкает
свой контакт в цепи контактора КМ2. Пуск двигателя осуществ-
ляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает
питание и своим главным контактом подключает двигатель к ис-
точнику питания с резистором в цепи якоря.
Реле минимального тока КА служит для защиты двигателя
от обрыва цепи возбуждения. При нормальной работе реле КА
срабатывает и его контакт в цепи контактора КМ1 замыкается,
подготавливая контактор КМ1 к работе. При обрыве цепи воз-
буждения реле КА обесточивается, размыкает свой контакт, за-
тем обесточивается контактор КМ1 и двигатель останавливается.
При срабатывании контактора КМ1 замыкается его блокировоч-
22 Глава 1. Разомкнутые системы управления электроприводами
ный контакт и размыкается контакт КМ1 в цепи реле КТ1, ко-
торое обесточивается и замыкает свой контакт с выдержкой
времени. Через промежуток времени, равный выдержке време-
ни реле КТ1, замыкается цепь питания контактора ускорения
КМ2, который срабатывает и своим главным контактом закора-
чивает одну ступень пускового резистора. Одновременно полу-
чает питание реле времени КТ2. Двигатель разгоняется. Через
промежуток времени, равный выдержке времени реле КТ2,
контакт КТ2 замыкается, контактор ускорения КМЗ срабатыва-
ет и своим главным контактом закорачивает вторую ступень
пускового резистора в цепи якоря. Пуск заканчивается, и дви-
гатель переходит работать на естественную механическую ха-
рактеристику.
1.2.6. Типовые узлы схем управления торможением
двигателей постоянного тока
*
В системах автоматического управления ДПТ применяется
динамическое торможение, торможение противовключением
и рекуперативное торможение.
При динамическом торможении необходимо обмотку
якоря двигателя замкнуть на добавочное сопротивление, а обмот-
ку возбуждения оставить под напряжением. Такое торможение
можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамиче-
ском торможении можно выполнить по схеме, приведенной на
рис. Г.1 1. При отключении контактора КМ1 якорь двигателя от-
ключается от сети, но на его зажимах в момент отключения име-
ется напряжение. Реле напряжения KV срабатывает и замыкает
свой контакт в цепи контактора КМ2, который своим контактом
замыкает якорь двигателя на резистор R. При скорости, близкой
к нулю, реле KV теряет питание. Дальнейшее торможение от ми-
нимальной скорости до полной остановки происходит под дей-
ствием статического момента сопротивления. Для увеличения
эффективности торможения можно применить две или три сту-
пени торможения.
1.2. Типовые узлы и схемы управления электроприводами
23
Рис, 1.11. Узел схемы автоматического управления
динамическим торможением в функции ЭДС:
а — силовая цепь; б — цепь управления
Динамическое торможение ДПТ независимого возбуждения
в функции времени осуществляется по схеме, приведенной на
рис. 1.12.
Рис. 1.12. Узел схемы динамического торможения ДПТ независимого
возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь
контактора торможения КМ2 разомкнута. Для торможения не-
24
Глава 1. Разомкнутые системы управления электроприводами
обходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле
времени КТ теряют питание; срабатывает контактор КМ2, так
как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт
реле времени КТ размыкается с выдержкой времени. На время
выдержки реле времени контактор КМ2 получает питание, за-
мыкает свой контакт и подключает якорь двигателя к добавочно-
му резистору R. Осуществляется динамическое торможение дви-
гателя. В конце его реле КТ после выдержки времени размыкает
свой контакт и отключает контактор КМ2 от сети. Дальнейшее
торможение до полной остановки осуществляется под действием
момента сопротивления Мс.
При торможении противовключен и ем ЭДС двига-
теля и напряжение сети действуют согласно. Для ограничения
тока в силовую цепь вводится резистор.
1.2.7. Управление возбуждением электродвигателей
постоянного тока
Обмотка возбуждения двигателя обладает значительной ин-
дуктивностью, и при быстром отключении двигателя на ней мо-
жет возникнуть большое напряжение, что приведет к пробою
изоляции обмотки. Для предотвращения этого можно использо-
вать узлы схем, приведенные на рис. 1.13. Сопротивление гаше-
ния включается параллельно обмотке возбуждения через диод
(рис. 1.13, б). Следовательно, после отключения ток через сопро-
тивление проходит кратковременно (рис. 1.13, а).
a r б VD r
Рис. 1.13. Узлы схем включения сопротивлений гашения:
а — сопротивление гашения включается параллельно;
б — сопротивление гашения включается через диод
Защита от обрыва цепи возбуждения осуществляется с помо-
щью реле минимального тока по схеме, показанной на рис, 1.14.
1.3. Электроприводы с асинхронными двигателями
25
Рис. 1.14. Защита от обрыва цепи возбуждения:
а — силовая цепь возбуждения; б — цепь управления
При обрыве обмотки возбуждения реле КА теряет питание
и отключает цепь контактора КМ.
Контрольные вопросы
1. Дайте классификацию схем управления электроприводом.
2. Чем отличается структурная схема от функциональной?
3. Каковы требования к выполнению принципиальных электриче-
ских схем?
4. По каким принципам строятся схемы управления пуском ДПТ
независимого возбуждения?
5. По каким принципам строятся схемы управления торможени-
ем ДПТ?
6. Как осуществляется динамическое торможение ДПТ?
7. Как предотвратить пробой изоляции обмотки возбуждения ДПТ?
1.3. Типовые узлы и схемы управления
электроприводами с асинхронными двигателями
1.3.1. Управление асинхронными электродвигателями
с короткозамкнутым ротором
Управление асинхронными двигателями с короткозамкнутым
ротором можно производить с помощью магнитных пускателей
или контакторов. При применении двигателей малой мощности,
не требующих ограничения пусковых токов, пуск осуществляется
включением их на полное напряжение сети. Простейшая схема
управления двигателем представлена на рис. 1.15.
26
Глава 1. Разомкнутые системы управления электроприводами
кк
км\ \ \
Рис. 1.15. Схема управления асинхронным двигателем с короткозамкнутым
ротором с нереверсивным магнитным пускателем
Для пуска включается автоматический выключатель QF и тем
самым подается напряжение на силовую цепь схемы и цепь
управления. При нажатии кнопки SB1 «Пуск» замыкается цепь
питания катушки контактора КМ, вследствие чего его главные
контакты в силовой цепи также замыкаются, присоединяя ста-
тор электродвигателя М к питающей сети. Одновременно в цепи
управления замыкается блокировочный контакт КМ, что создает
цепь питания катушки КМ (независимо от положения контакта
кнопки). Отключение электродвигателя осуществляется нажати-
ем кнопки SB2 «Стоп». При этом разрывается цепь питания кон-
тактора КМ, что приводит к размыканию всех его контактов,
двигатель отключается от сети, после чего необходимо отклю-
чить автоматический выключатель QF.
В схеме предусмотрены следующие виды защит:
• от коротких замыканий — с помощью автоматического вы-
ключателя QF и предохранителей FU;
• от перегрузок электродвигателя — с помощью тепловых
реле КК (размыкающие контакты этих реле при перегрузках раз-
мыкают цепь питания контактора КМ, тем самым отключая дви-
гатель от сети);
1.3. Электроприводы с асинхронными двигателями
27
• нулевая защита — с помощью контактора КМ (при сниже-
нии или исчезновении напряжения контактор КМ теряет пита-
ние, размыкая свои контакты, и двигатель отключается от сети).
Для включения двигателя необходимо вновь нажать кнопку
SB1 «Пуск». Если прямой пуск двигателя невозможен и необхо-
димо ограничить пусковой ток асинхронного короткозамкнутого
двигателя, применяют пуск на пониженное напряжение. Для
этого в цепь статора включают активное сопротивление или ре-
актор либо применяют пуск через автотрансформатор.
На рис. 1.16 приведена схема управления асинхронным двига-
телем с короткозамкнутым ротором с симметричными сопротивле-
ниями в цепи статора. Включается автоматический выключатель
QF, подается напряжение на силовую цепь и цепь управления.
После нажатия на кнопку SB1 срабатывает контактор КМ1, си-
ловые контакты которого замыкаются и подключают двигатель
к сети с активными сопротивлениями в цепи статора. Одновре-
менно получает питание реле времени КТ, поскольку контакт
КМ1 в цепи реле КТ замыкается.
Рис. 1.16. Схема управления асинхронным двигателем с короткозамкнутым
ротором с симметричными сопротивлениями в цепи статора
28 Глава 1. Разомкнутые системы управления электроприводами
По истечении времени, равного выдержке времени реле КТ,
замыкается контакт КТ, вследствие чего контактор КМ2 сраба-
тывает и своими контактами шунтирует сопротивления в цепи
статора. Пуск заканчивается. Для остановки двигателя нажима-
ется кнопка SB2 «Стоп» и отключается автоматический выклю-
чатель QF.
На рис. 1.17 приведена схема управления асинхронным двига-
телем с короткозамкнутым ротором с реверсивным магнитным
пускателем. Схема позволяет осуществлять прямой пуск асин-
хронного короткозамкнутого двигателя, а также изменять направ-
ление вращения двигателя, т.е. производить реверс. Пуск двигате-
ля осуществляется включением автоматического выключателя QF
и нажатием кнопки SB1, вследствие чего контактор КМ1 получает
питание, замыкает свои силовые контакты и статор двигателя
подключается к сети. Для реверса двигателя необходимо нажать
кнопку SB3. Это приведет к отключению контактора КМ1, после
чего нажимается кнопка SB2 и включается контактор КМ2.
ООО
ккГп □ □ ’
Рис. 1.17. Схема управления асинхронным двигателем с короткозамкнутым
ротором с реверсивным магнитным пускателем
1.3. Электроприводы с асинхронными двигателями
29
Таким образом, двигатель подключается к сети с изменением
порядка чередования фаз, что приводит к изменению направле-
ния его вращения. В схеме применена блокировка от возможно-
го ошибочного одновременного включения контакторов КМ2
и^КМ1 с помощью размыкающих контактов КМ2, КМ1. Отклю-
чение двигателя от сети осуществляется кнопкой SB3 и автома-
тическим выключателем QF. В схеме предусмотрены все виды
защит электродвигателя, рассмотренные в схеме управления асин-
хронным двигателем с нереверсивным магнитным пускателем.
1.3.2. Узлы схем управления торможением
асинхронных двигателей
Динамическое торможение осуществляется отключением дви-
гателя от сети трехфазного тока и подсоединением обмотки стато-
ра к сети постоянного тока. Магнитный поток в обмотках статора,
взаимодействуя с током ротора, создает тормозной момент.
На рис. 1.18 приведена схема прямого пуска асинхронного
двигателя с динамическим торможением в функции времени.
Двигатель запускается с помощью контактора КМ1. Одновре-
менно замыкается цепь питания реле времени КТ (при включен-
ном автоматическом выключателе QF), так как блок-контакт
КМ1 в цепи реле времени замыкается. Контакт реле времени
замкнется, но контактор КМ2 не получит питания, поскольку
разомкнется контакт контактора КМ1 в цепи контактора КМ2.
Для остановки двигателя нажимается кнопка SB2 «Стоп».
Контактор КМ1 обесточивается, размыкая свои контакты в сило-
вой цепи двигателя. Одновременно с этим замыкается контакт
КМ1 в цепи контактора КМ2, вследствие чего контактор КМ2
срабатывает и замыкает свои силовые контакты в цепи постоян-
ного тока. Обмотка статора двигателя отключается от трехфазной
сети и подключается к сети постоянного тока. Двигатель перехо-
дит в режим динамического торможения. В схеме применено реле
времени с выдержкой времени при размыкании. При скорости,
близкой к нулю, контакт КТ размыкается, вследствие чего кон-
тактор КМ2 обесточивается и двигатель отключается от сети.
30
Глава 1, Разомкнутые системы управления электроприводами
Рис. 1.18. Схема управления асинхронным двигателем с короткозамкнутым
ротором с динамическим торможением в функции времени
Интенсивность торможения регулируется с помощью рези-
стора R. В схеме применена блокировка с помощью размыкаю-
щих контактов КМ 1 и КМ2 для невозможности включения ста-
тора двигателя одновременно в сеть постоянного и трехфазного
тока. Управлять динамическим торможением можно в функции
скорости с помощью реле контроля скорости SR.
На рис. 1.19 приведена схема управления асинхронным двига-
телем с динамическим торможением в функции скорости. Вклю-
чается автоматический выключатель QF и с помощью контактора
КМ1 двигатель запускается. Для торможения нажимается кнопка
SB2 «Стоп». Контактор КМ1 обесточивается, так как контакт реле
контроля скорости замыкается при пуске двигателя, а размыкаю-
щий контакт замыкается при отключении контактора КМ 1. Кон-
тактор КМ2, срабатывая, замыкает свои контакты. Статор двига-
теля отключается от сети трехфазного тока и подключается к сети
постоянного тока. При скорости, близкой к нулю, контакт SR
размыкается и двигатель отключается от сети.
1.3. Электроприводы с асинхронными двигателями
31
Рис. 1.19. Схема управления асинхронным двигателем с короткозамкнутым
ротором с динамическим торможением в функции скорости
Торможение противовключением асинхронного двигателя
осуществляется путем изменения порядка чередования фаз, но
при скорости, близкой к нулю, необходимо отключить двигатель
от сети. Управление торможением осуществляется в функции
скорости двигателя, причем скорость контролируется с помо-
щью реле контроля скорости.
На рис. 1.20 приведена схема управления асинхронным дви-
гателем с торможением противовключением. Она работает сле-
дующим образом. Подача напряжения на схему осуществляется
включением автоматического выключателя QF. Для пуска элек-
тродвигателя используется кнопка SB1 и контактор КМ1. Одно-
временно замыкается контакт SR реле контроля скорости, но
контактор КМ2 не включен, так как при включении контактора
КМ1 размыкается его контакт в цепи контактора КМ2. Для тор-
можения нажимается кнопка SB2 «Стоп», контактор КМ1 теряет
питание, вследствие чего замыкается контакт КМ1 в цепи кон-
тактора КМ2, который, срабатывая, подключает двигатель к сети
32 Глава 1. Разомкнутые системы управления электроприводами
с изменением порядка чередования фаз. Происходит торможе-
ние двигателя в режиме противовключения. При скорости, близ-
кой к нулю, контакт SR реле контроля скорости размыкается
и отключает контактор КМ2. Двигатель останавливается. Схема
имеет электрическую блокировку, чтобы невозможно было од-
новременно включить контакторы КМ2* и КМ1.
о
О
N
ккГ5 5 Ъ '
- — * - —р — > — I
Рис. 1.20. Схема управления асинхронным двигателем с короткозамкнутым
ротором с торможением противовключением
1.3.3. Типовые схемы управления асинхронными
двигателями с фазным ротором
Пуск двигателя с фазным ротором осуществляется с введен-
ными резисторами в цепи ротора. Резисторы в цепи ротора слу-
жат для ограничения токов не только в процессе пуска, но и при
реверсе, торможении, а также при снижении скорости.
1.3. Электроприводы с асинхронными двигателями 33
По мере разгона двигателя для поддержания ускорения при-
вода резисторы выводятся. Когда пуск закончится, резисторы
полностью шунтируются, и двигатель перейдет работать на есте-
ственную механическую характеристику.
На рис. 1.21 приведена схема асинхронного двигателя с фаз-
ным ротором, где с помощью релейно-контакторной аппаратуры
осуществляется пуск двигателя в две ступени, причем напряже-
ние подается одновременно на силовые цепи и цепи управления
с помощью выключателя QF.
Рис. 1.21. Схема пуска асинхронного двигателя с фазным ротором
Управление двигателем осуществляется в функции времени.
При подаче напряжения в цепь управления реле времени КТ1,
КТ2 срабатывают и размыкают свои контакты. Далее нажимает-
ся кнопка SB1. Это приводит к срабатыванию контактора КМЗ
О
°3597
34
Глава 1. Разомкнутые системы управления электроприводами
и пуску двигателя с резисторами, введенными в цепи ротора, так
как контакторы КМ1 и КМ2 питания не получают. При включе-
нии контактора КМЗ реле КТ1 теряет питание и замыкает свой
контакт в цепи контактора КМ1 через промежуток времени, рав-
ный выдержке времени реле КТ1. По истечении указанного вре-
мени включается контактор КМ 1, шунтирующий первую пуско-
вую ступень резисторов. Одновременно размыкающий контакт
КМ1 в цепи реле КТ2 размыкается, реле КТ2 теряет питание
и с выдержкой времени замыкает свой контакт в цепи контакто-
ра КМ2, который срабатывает через промежуток, равный вы-
держке времени реле КТ2, и шунтирует вторую ступень резисто-
ров в цепи ротора.
Схема управления асинхронным двигателем с фазным рото-
ром в функции тока представлена на рис. 1.22. Для контроля пус-
ка по току применяют токовые реле, которые срабатывают при
пусковом токе и отпадают при минимальном токе переключе-
ния. Схема предусматривает пуск двигателя и его защиту без ре-
версирования и торможения. Пуск двигателя осуществляется
при включении в цепь автоматического выключателя QF и кон-
тактора КМЗ, причем в цепь ротора полностью введены пуско-
вые резисторы. Блокировочные контакты контактора КМЗ шун-
тируют кнопку SB1 и создают цепь питания блокировочного
реле KL. Замыкающий контакт реле KL подает питание на кон-
такторы ускорения КМ1, КМ2. Собственное время срабатыва-
ния реле тока КА1 и КА2 меньше, чем соответствующих контак-
торов КМ1 и КМ2, поэтому реле тока срабатывает раньше, чем
соответствующий контактор ускорения, и пуск двигателя осуще-
ствляется с резисторами, введенными в цепь ротора.
При пусковом токе реле тока КА1 срабатывает и размыкает
свой контакт в цепи контактора КМ1. По мере разгона двигателя
ток ротора уменьшается. При токе переключения реле КА1 отпа-
дает и контакт КА1 в цепи контактора КМ1 замыкается, что при-
водит к срабатыванию контактора КМ1, который своими кон-
тактами шунтирует первую ступень пускового резистора и реле
КА1. Одновременно замыкается блокировочный контакт КМ1,
что ставит катушку контактора КМ1 на самопитание при размы-
кании контакта КА1. При шунтировании первой пусковой сту-
пени резистора ток возрастает до максимального значения, что
1.3. Электроприводы с асинхронными двигателями
35
приводит к срабатыванию реле КА2, препятствуя включению
контактора КМ2. По мере разгона двигателя ток снова уменьша-
ется до минимального значения, реле КА2 отпадает, размыкаю-
щий контакт КА2 замыкается, создавая цепь питания катушки
КМ2. При этом шунтируется вторая ступень пускового резисто-
ра. Остановить двигатель можно нажатием кнопки SB2 «Стоп»,
в результате чего обесточивается контактор КМЗ и двигатель от-
ключается от сети.
Рис. 1.22. Схема управления асинхронным двигателем
с фазным ротором в функции тока
36
Глава 1. Разомкнутые системы управления электроприводами
Схема пуска асинхронного двигателя с фазным ротором
в функции времени и динамическим торможением в функции
скорости показана на рис. 1.23. Схема работает следующим обра-
зом. Включаются автоматические выключатели QF1 и QF2, в ре-
зультате чего реле времени КТ получает питание и размыкает
свой контакт в цепи контактора КМ1. Для запуска двигателя на-
жимается кнопка SB1 «Пуск», что приводит к срабатыванию
контактора КМЗ и запуску двигателя с резисторами в цепи ротора.
Одновременно размыкающий контакт контактора КМЗ отклю-
чает реле времени от сети, но контактор КМ1 не срабатывает,
поскольку размыкающий контакт КТ замыкается с выдержкой
времени. По истечении выдержки времени реле КТ контакт КТ
замыкается, что приводит к срабатыванию контактора КМ1,
а б
Рис. 1.23. Схема пуска асинхронного двигателя с фазным ротором в одну ступень
в функции времени и динамическим торможением в функции скорости:
а — силовая цепь; б — цепь управления
1.3. Электроприводы с асинхронными двигателями 37
контакты которого замыкаются и шунтируют резисторы в цепи
ротора, в результате чего двигатель переходит работать на естест-
венную механическую характеристику. Для перевода асинхрон-
ного двигателя в режим динамического торможения нажимается
кнопка SB2 «Стоп». Контактор КМЗ обесточивается, размыкает
свой контакт в цепи контактора КМ 1 и замыкает контакт в цепи
контактора КМ2. Контактор КМ2 срабатывает, так как контакт
реле контроля скорости SR замкнут. Вследствие этого обмотка
статора отключается от трехфазной сети и подключается к посто-
янному току. Одновременно контактор КМ1 обесточивается,
размыкает свои контакты и в цепь ротора вводится резистор R.
При скорости, близкой к нулю, контакт реле контроля ско-
рости SR размыкается, контактор КМ2 обесточивается и размы-
кает свои контакты. Двигатель отключается от сети постоянного
тока. Схема приходит в исходное положение.
Контрольные вопросы
1. С помощью каких аппаратов выполняется защита в схемах управ-
ления электроприводом?
2. В функции каких величин осуществляется управление асинхрон-
ным двигателем с фазным ротором?
3. Как происходит торможение противовключением асинхронного
двигателя с короткозамкнутым ротором?
4. Как регулируется интенсивность торможения асинхронного дви-
гателя при динамическом торможении?
5. Как осуществляется пуск асинхронного двигателя с фазным ро-
тором?
6. Почему по мере разгона асинхронного двигателя с фазным рото-
ром резисторы ротора выводятся из цепи?
38
Глава 1. Разомкнутые системы управления электроприводами
1.4. Типовые узлы и схемы управления
электроприводами с синхронными двигателями
1.4.1. Управление синхронными двигателями
Синхронные двигатели получили широкое распространение
в промышленности для электроприводов, работающих с посто-
янной скоростью (компрессоров, насосов и т.д.). В последнее
время, вследствие появления преобразовательной полупровод-
никовой техники, разрабатываются регулируемые синхронные
электроприводы.
Синхронный двигатель несколько сложнее, чем асинхрон-
ный, но обладает рядом преимуществ, что позволяет применять
его в ряде случаев вместо асинхронного. К таким преимуществам
относятся:
• возможность работы двигателя с опережающим cos<p, бла-
годаря чему повышается cos<p предприятия в целом и уменьшает-
ся мощность компенсирующих устройств;
• меньшая чувствительность к колебаниям напряжения в сети;
• высокая перегрузочная способность и др.
Возможны следующие способы пуска синхронного двигате-
ля: асинхронный пуск на полное напряжение сети и пуск на по-
ниженное напряжение через реактор или автотрансформатор.
Схема возбуждения синхронного двигателя с глухоподклю-
ченным возбудителем (рис. 1.24, а) довольно проста и может
применяться в том случае, если пусковые токи не вызывают па-
дения напряжения в сети больше допустимого и статистический
момент нагрузки Мс 0,4 MH0M
Асинхронный пуск синхронного двигателя производится
присоединением статора к сети. Двигатель разгоняется как асин-
хронный до скорости вращения, близкой к синхронной. В про-
цессе асинхронного пуска обмотка возбуждения замыкается на
разрядное сопротивление (рис. 1.24, б), чтобы избежать пробоя
обмотки возбуждения при пуске, так как при малой скорости ро-
тора в ней могут возникнуть значительные перенапряжения. При
скорости вращения, близкой к синхронной, срабатывает контак-
1.4. Электроприводы с синхронными двигателями
39
тор КМ (цепь питания контактора на схеме не показана), обмот-
ка возбуждения отключается от разрядного сопротивления и под-
ключается к якорю возбудителя. Пуск заканчивается.
а
М
LM
КМ
К якорю
возбудителя
Рис. 1.24. Типовые узлы схем возбуждения синхронного двигателя
Разработаны также системы тиристорного возбуждения. Если
пуск производится на пониженное напряжение, то при «легком»
пуске возбуждение подается до включения обмотки статора на
полное напряжение, а при «тяжелом» пуске подача возбуждения
происходит при полном напряжении в цепи статора.
Возможно подключение обмотки возбуждения двигателя
к якорю возбудителя последовательно с разрядным сопротивле-
нием (рис. 1.24, в).
Процесс подачи возбуждения синхронному двигателю авто-
матизируется двумя способами: в функции скорости и в функ-
ции тока.
40 Глава 1. Разомкнутые системы управления электроприводами
На схеме, приведенной на рис. 1.25, подача возбуждения
синхронному двигателю осуществляется с помощью электромаг-
нитного реле постоянного тока КТ (реле времени с гильзой). Ка-
тушка реле включается на разрядное сопротивление Rpaap через
диод VD. При подключении обмотки статора к сети в обмотке
возбуждения двигателя наводится ЭДС. По катушке реле КТ
проходит выпрямленный ток, амплитуда и частота импульсов
которого зависят от скольжения.
LM
КМ
КМ
км
К якорю
возбудителя
Рис. 1.25. Подача возбуждения синхронному двигателю в функции скорости
При пуске скольжение 5=1. По мере разгона двигателя оно
уменьшается и интервалы между выпрямленными полуволнами
тока возрастают; магнитный поток постепенно снижается по
кривой Ф(0 (рис. 1.26). При скорости, близкой к синхронной,
магнитный поток реле успевает достигнуть значения потока от-
падания реле Фот в момент, когда через реле КТ ток не прохо-
дит. Реле теряет питание и своим контактом создает цепь пита-
ния контактора КМ (на схеме цепь питания контактора КМ не
показана).
Рассмотрим контроль подачи возбуждения в функции тока
с помощью реле тока. При пусковом токе срабатывает реле тока
КА (рис. 1.27, а) и размыкает свой контакт в цепи контактора
КМ2 (рис. 1.27, б).
1.4. Электроприводы с синхронными двигателями
41
а
Ф|
и
Рис. 1.26. График изменения тока и магнитного
потока в реле времени КТ
К якорю
возбудителя
б
Рис. 1.27. Контроль подачи возбуждения
синхронному двигателю в функции тока
При скорости, близкой к синхронной, реле КА отпадает и за-
мыкает свой контакт в цепи контактора КМ2. Контактор КМ2
срабатывает, замыкает свой контакт в цепи возбуждения маши-
ны и шунтирует резистор КразР-
42 Глава 1. Разомкнутые системы управления электроприводами
1.4.2. Схема прямого пуска синхронного
двигателя напряжением до 1000 В
Асинхронный пуск синхронного двигателя осуществляется
при включении автоматических выключателей QF1, QF2 и сра-
батывании контактора КМЗ (рис. 1.28, а, б). При этом реле фор-
сировки KV срабатывает и замыкает свой контакт, что приводит
к срабатыванию контактора форсировки КМ1. Контакт КМ1
размыкается, и в цепь обмотки возбуждения вводится резистор
Ифр. Включаются красная и зеленая сигнальные лампы, что ука-
зывает на присоединение двигателя к сети, но возбуждение еще
не подано.
а
б
Рис. 1.28. Схема прямого пуска синхронного двигателя напряжением до 10ОО В
1.4. Электроприводы с синхронными двигателями
43
При пусковом токе срабатывает реле максимального тока
КА. Своим замыкающим контактом оно подает питание реле
времени КТ1. Контакт КТ1 замыкается, что приводит к срабаты-
ванию реле времени КТ2, но контактор КМ2 не включен, по-
скольку контакт КТ1 размыкается, а контакт КТ2 замыкается.
"При скорости двигателя, близкой к синхронной, реле КА размы-
кает свой контакт в цепи контактора КТ1; при этом цепь пита-
ния контактора КМ2 окажется замкнутой, так как контакт КТ2
размыкается с выдержкой времени. Контактор КМ2 срабатыва-
ет, шунтирует разрядный резистор Rpa3p в обмотке возбуждения
и закорачивает катушку реле КА. Катушка контактора КМ2 ста-
новится на самопитание. Одновременно отключается зеленая
лампа. Пуск двигателя закончен.
При снижении напряжения для сохранения момента двигате-
ля применяется форсировка возбуждения. При снижении напря-
жения реле форсировки KV отпадает и размыкает свой контакт,
что приводит к отключению контактора форсировки КМ 1. При
этом контакт КМ1 в цепи возбуждения двигателя замыкается
и шунтирует резистор йфР. Это приводит к увеличению тока воз-
буждения двигателя, а следовательно, и к сохранению момента
двигателя. Остановка двигателя осуществляется нажатием на
кнопку SB2 «Стоп» и отключением автоматических выключате-
лей QF1 и QF2.
1.4.3. Защита в схемах управления электроприводом
Защита двигателя от короткого замыкания и перегрузки. Защи-
та в схемах управления электроприводом необходима для быст-
рого отключения цепей при возникновении аварийного режима
работы. Это способствует сохранению работоспособности элек-
трооборудования и повышению надежности работы схем. Защи-
та от короткого замыкания осуществляется с помощью плавких
предохранителей (рис. 1.29, а) или автоматических выключате-
лей с электромагнитными расцепителями (рис. 1.29, б). Силовые
цепи в цепи управления можно защищать одними и теми же ап-
паратами для двигателей малой мощности либо иметь отдельную
защиту (рис. 1.29, в). Реле максимального тока КА защищает си-
44 Глава 1. Разомкнутые системы управления электроприводами
ловые цепи от
коротких замыканий и недопустимо больших
толчков тока.
Рис. 1.29. Схемы защиты электрических целей от короткого замыкания:
а — с помощью плавких предохранителей; б — с помощью автоматических
выключателей; в — с помощью реле максимального тока
Защита двигателя от перегрузки осуществляется тепловым
реле или тепловыми расцепителями автоматических выключате-
1.4. Электроприводы с синхронными двигателями
45
лей (рис. 1.30). Тепловые реле включаются в силовые цепи дви-
гателя, а контакты этих реле — в цепи управления. Аппараты
защиты от перегрузок не реагируют на кратковременное повы-
шение тока из-за тепловой инерции.
Рис. 1.30. Схема защиты двигателя от перегрузки
Защита от работы на двух фазах. В трехфазной силовой цепи
при перегорании одного предохранителя возможна работа на
двух фазах (рис. 1.31), что приводит к перегреванию двигателей.
При нормальной трехфазной работе двигателя напряжение на
реле напряжения KV равно нулю. При обрыве фазы появляется
напряжение на реле KV, которое срабатывает и размыкает свой
контакт в цепи питания контактора КМ, что приводит к отклю-
чению двигателя от сети.
Защита от самозапуска двигателей (нулевая зашита). Такая за-
щита позволяет предотвратить самозапуск двигателя при исчез-
новении или значительном снижении напряжения. Она осу-
ществляется с помощью контактора. При исчезновении или
снижении напряжения сети контактор отпадает, размыкая свои
контакты, и двигатель отключается от сети.
Блокировочные связи в схемах управления электроприводами.
Блокировочные связи обеспечивают надежность работы схемы,
необходимую последовательность работы отдельных элементов
и предотвращают ошибочные действия оператора.
46
Глава 1. Разомкнутые системы управления электроприводами
Рис. 1.31. Схема защиты от работы двигателя на двух фазах
Рис. 1.32. Блокировочная связь в электроприводе
г
В цепь управления
1.4. Электроприводы с синхронными двигателями 47
Схема на рис. 1.32, а предусматривает возможность включе-
ния второго двигателя только после включения первого. Блоки-
ровка осуществляется с помощью замыкающего контакта КМ1
в цепи контактора КМ2.
Схема, приведенная на рис. 1.32, б, предусматривает раздель-
ное включение контакторов. Блокировка осуществляется с по-
мощью размыкающих контактов КМ1 и КМ2.
Схема на рис. 1.32, в позволяет работать двум двигателям од-
новременно. Блокировка осуществляется замыкающим контак-
том КМ1.
Схема, показанная на рис. 1.32, г, позволяет включать крат-
ковременно и длительно контактор при наладочных работах.
При кратковременной работе ключ SA не включен, при длитель-
ной работе включается ключ SA и контактор КМ становится на
самопитание.
1.4.4. Тиристорное управление асинхронным
двигателем с короткозамкнутым ротором
Для управления асинхронным двигателем могут использо-
ваться тиристоры в сочетании с релейно-контакторными аппара-
тами. Тиристоры применяются в качестве силовых элементов
и включаются в статорную цепь, релейно-контакгорные аппараты
включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов,
можно на статор при пуске подавать напряжение от нуля до но-
минального значения, ограничивать токи и моменты двигателя,
осуществлять эффективное торможение либо шаговый режим
работы. Такая схема приведена на рис. 1.33.
Силовая часть схемы состоит из группы тиристоров
VS1...VS4, включенных встречно-параллельно в фазы А и С. Ме-
жду фазами А и В включен короткозамыкающий тиристор VS5.
Схема состоит из силовой цепи (рис. 1.33, а), цепи управления
(рис. 1.33, б) и блока управления тиристорами — БУ (рис. 1.33, в).
Для пуска двигателя включается автоматический выключатель
QF, нажимается кнопка SB1 «Пуск», в результате чего включа-
48
Глава 1. Разомкнутые системы управления электроприводами
ются контакторы КМ1 и КМ2. На управляющие электроды
тиристоров VS1...VS4 подаются импульсы, сдвинутые на 60° от-
носительно питающего напряжения. К статору двигателя при-
кладывается пониженное напряжение, что приводит к сниже-
нию пускового тока и пускового момента.
Рис. 1.33. Тиристорное управление асинхронным двигателем
с короткозамкнутым ротором (окончание см. на с. 49)
1.4. Электроприводы с синхронными двигателями
49
б
Рис. 1.33. Окончание (начало см. на с. 48)
в
Размыкающий контакт КМ1 отключает реле KV1 с выдерж-
кой времени, которая определяется резистором R7 и конденса-
тором С4. Размыкающими контактами реле KV1 шунтируются
соответствующие резисторы в блоке управления, и на статор по-
дается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управ-
ления теряет питание, отключаются тиристоры VS1...VS4. Это при-
водит к тому, что на период торможения включается реле KV2 за
счет энергии, запасенной конденсатором С5, и своими контактами
включает тиристоры VS2 и VS5. Через фазы А и В статора проходит
постоянный ток, который регулируется резисторами R1 и R3.
Обеспечивается эффективное динамическое торможение.
Контрольные вопросы
1. Каковы преимущества синхронных двигателей по сравнению
с асинхронными?
2. Как осуществляется асинхронный пуск синхронного двигателя?
4
3597
50
Глава 1. Разомкнутые системы управления электроприводами
3. Начертите типовые схемы возбуждения синхронных двигателей.
4. Назовите блокировки, применяемые в схемах управления элек-
троприводом. Начертите схемы блокировок.
5. Как осуществляется управление асинхронным двигателем с ко-
роткозамкнутым ротором с помощью тиристоров?
1.5. Логические приемы составления и анализа
релейно-контакторных1 и бесконтактных схем
1.5.1. Синтез систем автоматического управления
на контактных и бесконтактных элементах
Синтез систем автоматического управления на контактных
и бесконтактных элементах состоит в построении на основе при-
нятой элементной базы структурной схемы, реализующей задан-
ный алгоритм функционирования.
Порядок синтеза следующий:
1) кодирование входных и выходных сигналов;
2) переход от словесного задания алгоритма функциониро-
вания к формальному в виде системы булевых функций;
3) минимизация полученных функций;
4) преобразование полученных минимальных выражений
в базис, определяемый принятой элементной базой;
5) составление структурной схемы.
В дальнейшем синтезируемую систему автоматического управ-
ления будем называть логическим устройством.
В общем случае логическое устройство имеет л входов и т
выходов. Входные сигналы обозначим xi, Хг, — ,хп, а выходные —
Я, У1, ,Ут.
Рассмотрим синтез системы на контактных элементах.
1 С точки зрения логического описания и синтеза необходимо подчеркнуть,
что широко распространенные термины «релейно-контакторные» и «релейно-кон-
тактные схемы» являются синонимами; для их
pa РКС.
1.5. Релейно-контакторные и бесконтактные схемы 51
Пример 1.1. Составить схему включения двух сигнальных лампочек
с помощью трех ключей. Чтобы включить лампочку HL1, необходимо
одновременно замкнуть ключи SA1 и SA2 и разомкнуть ключ SA3. Для
включения лампочки HL2 необходимо или замкнуть ключи SA1 и SA3,
или разомкнуть ключ SA2 и одновременно замкнуть ключ SA1. Для
^управления сигнальными лампочками следует использовать электро-
магнитные реле, управляемые ключами.
Первый этап. Выполняется подразделение всех действующих
в схеме сигналов на входные и выходные. Входными сигналами являют-
ся сигналы от кнопок управления, ключей, конечных выключателей,
датчиков, контролирующих процесс, и т.п. Выходные сигналы управля-
ют исполнительными элементами (реле, контакторами, электромагни-
тами и т.д.). Каждому сигналу присваивается буквенное обозначение.
Катушки реле, включаемые ключами, обозначим прописными бук-
вами латинского алфавита Лд Xz, Х$, замыкающие и размыкающие кон-
такты реле — соответствующими строчными буквами: замыкающие
контакты — X], Х2, хз, размыкающие — х, х2, хз- Выходной сигнал схе-
мы, обеспечивающий включение лампочки HL1, обозначим yi, лам-
почки HL2 — соответственно у2.
Второй этап. Согласно словесной формулировке, запишем усло-
вия включения сигнальных лампочек в совершенной дизъюнктивной
нормальной форме:
У1 = xix2x3;
у2 = ад + ад.
(1.1)
Третий этап. Минимизируем выражение (1.1), преобразовав его
в скобочную форму:
У2 = Aj(^ + Х2).
(1.2)
В результате для реализации выражения (1.1) необходимо четыре
контакта, а выражения (1.2) — три контакта (рис. 1.34).
При построении схемы на контактных элементах пропускаем чет-
вертый этап. Схема представлена на рис. 1.34, где последовательная це-
почка контактов реле реализует конъюнкцию, а параллельная — дизъ-
юнкцию.
Иногда уменьшать число контактов целесообразно за счет
введения в схему разделительных вентилей.
Пример 1.2. Построить на контактных элементах схему, реализую-
щую функцию
у = адх4 + адх| + ад*5 + ад^-
(1.3)
52
Глава 1. Разомкнутые системы управления электроприводами
Рис. 1.34. Схема включения сигнальных лампочек
Преобразуем данную функцию в скобочную форму. Возможны два
варианта:
у = ^(х2>4 + ад) + ^(ХРЬ + ад); (1.4)
у = х*(ад + ад) + Х|(ад + ад). (1.5)
Схемы, соответствующие выражениям (1.3)...(1.5), представлены на
рис. 1.35, а...в соответственно.
Преобразуем схемы, приведенные на рис. 1.35, d, в, к виду, показан-
ному на рис. 1.35, г. Составим логические выражения, соответствующие
данной схеме:
у' = адх| + адх» + адх| + адх* + ададх^ +
+ ададл^ + адХ)ДбЛ4 + адхгад. (1-6)
Выражение (1.6) отличается от исходного (1.3) четырьмя последними
конъюнкциями, соответствующими так называемым ложным цепям.
В ложных цепях ток через контакты х2, xs, хв проходит навстречу току
в этих же контактах при правильной работе цепей. Если бы эти контакты
обладали односторонней проводимостью, то ложные цепи прервались
бы. Для придания этим контактам односторонней проводимости в цепях
постоянного тока применяются вентили VD1...VD4 (рис. 1.35, д).
Рассмотренные схемы называются параллельно-последовательными
или схемами класса П. Они содержат параллельные (соответствующие
дизъюнкциям) и последовательные (соответствующие конъюнкциям)
1.5, Релейно-контакторные и бесконтактные схемы
53
д
х« VD4
Х—В+-
Рис. 1.35. Параллельно-последовательные схемы
54
Глава 1. Разомкнутые системы управления электроприводами
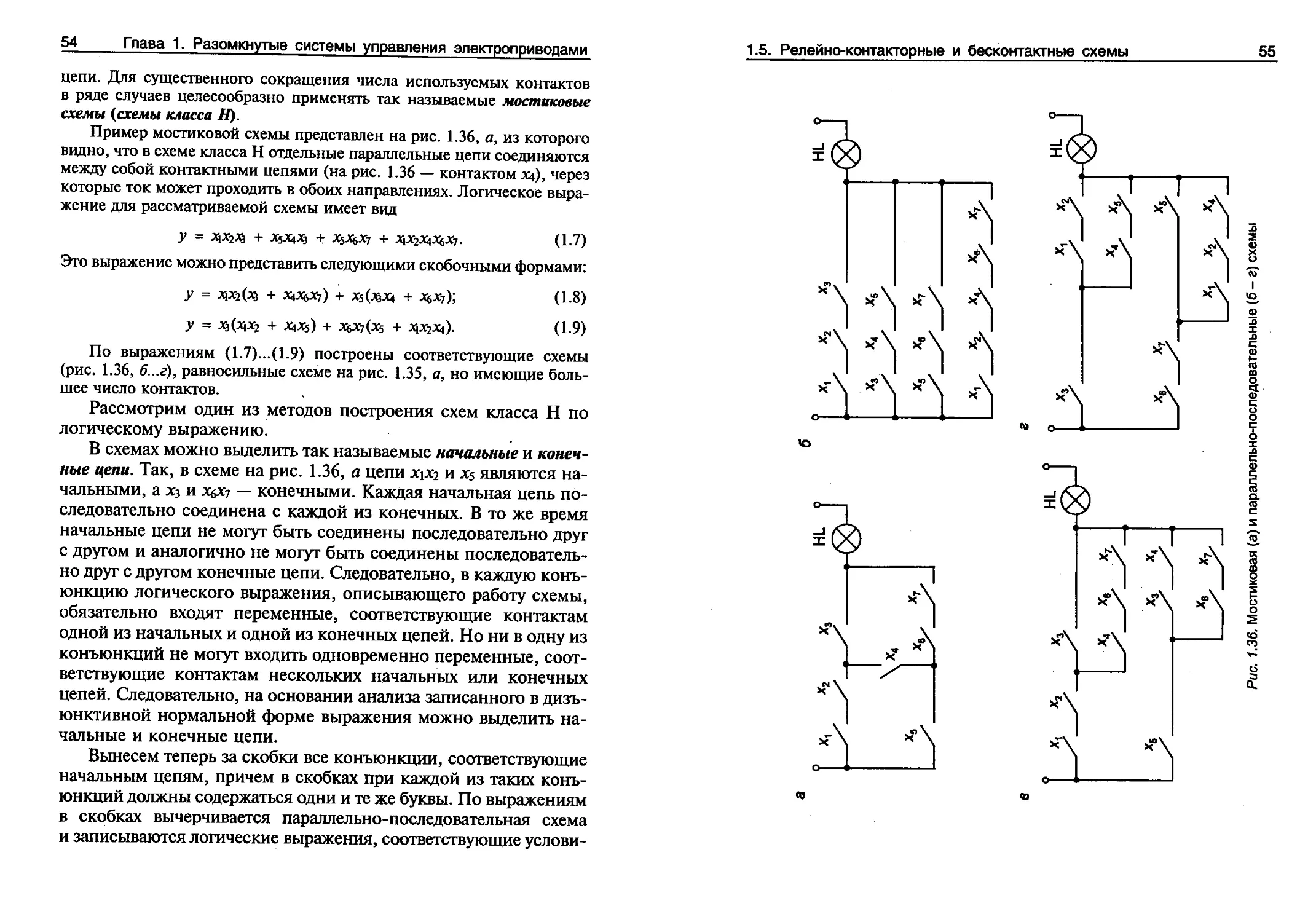
цепи. Для существенного сокращения числа используемых контактов
в ряде случаев целесообразно применять так называемые мостиковые
схемы (схемы класса Н).
Пример мостиковой схемы представлен на рис. 1.36, а, из которого
видно, что в схеме класса Н отдельные параллельные цепи соединяются
между собой контактными цепями (на рис. 1.36 — контактом х0, через
которые ток может проходить в обоих направлениях. Логическое выра-
жение для рассматриваемой схемы имеет вид
у = лрад + храд + х>ад + ададх?- (1-7)
Это выражение можно представить следующими скобочными формами:
У = адОа + адх?) + х5(ад + ад); (1.8)
у = Аз(ад + ад) + ад(х5 + адАд). (1.9)
По выражениям (1.7)...(1.9) построены соответствующие схемы
(рис. 1.36, 6...г), равносильные схеме на рис. 1.35, а, но имеющие боль-
шее число контактов.
Рассмотрим один из методов построения схем класса Н по
логическому выражению.
В схемах можно выделить так называемые начальные и конеч-
ные цепи. Так, в схеме на рис. 1.36, а цепи xja^ и Xs являются на-
чальными, а хз и х&Х7 — конечными. Каждая начальная цепь по-
следовательно соединена с каждой из конечных. В то же время
начальные цепи не могут быть соединены последовательно друг
с другом и аналогично не могут быть соединены последователь-
но друг с другом конечные цепи. Следовательно, в каждую конъ-
юнкцию логического выражения, описывающего работу схемы,
обязательно входят переменные, соответствующие контактам
одной из начальных и одной из конечных цепей. Но ни в одну из
конъюнкций не могут входить одновременно переменные, соот-
ветствующие контактам нескольких начальных или конечных
цепей. Следовательно, на основании анализа записанного в дизъ-
юнктивной нормальной форме выражения можно выделить на-
чальные и конечные цепи.
Вынесем теперь за скобки все конъюнкции, соответствующие
начальным цепям, причем в скобках при каждой из таких конъ-
юнкций должны содержаться одни и те же буквы. По выражениям
в скобках вычерчивается параллельно-последовательная схема
и записываются логические выражения, соответствующие услови-
1.5. Релейно-контакторные и бесконтактные схемы
55
ю
Рис. 1.36. Мостиковая (а) и параллельно-последовательные (б - г) схемы
ф
56 Глава 1. Разомкнутые системы управления электроприводами
ям замыкания цепей между всеми узлами схемы и ее конечной
точкой. При сравнении этих логических выражений с выражения-
ми в скобках при оставшихся начальных цепях находятся узлы,
к которым должны быть подключены начальные цепи.
Пример 1.3. Построить схему класса Н, работа которой описывается
выражением
У = ЛЙгад + + ХЦХг* + адХ5Х7^.
Для нахождения начальных и конечных цепей выпишем все входя-
щие в выражение переменные так, чтобы нижерасположенная строка
начиналась со следующей по порядку буквы:
Л1Х2ЛЗ ад>Хб*7Л8; Х2^Х|Х5ЛбХ7^ J
Л&Х|Х5Х5Х7^; Х1Х5Х5Х7Л&;
xpfcws; X6X7J&; х7л&.
Вычеркнем в каждой строке'те буквы, которые входят хотя бы в од-
ну конъюнкцию с буквой, стоящей в первой строке. Тогда в первой
строке останутся невычеркнугыми xi и хб, во второй — хг ихб, в треть-
ей — хз, х7 и хе, в четвертой — х? и в пятой — Х5, в шестой — хб,
в седьмой — Х7. Можно выделить две группы переменных, не входящих
в общие конъюнкции. Первую группу составят ль х7 и х&, вторую — %,
х», х7 и Пусть первая группа переменных составляет начальные цепи,
а вторая — конечные. Так как переменные xi и Х2 входят вместе в конъ-
юнкции исходного выражения, считаем, что соответствующие им кон-
такты образуют одну начальную цепь, а контакт, обозначенный хб, —
другую. Перепишем исходное выражение, вынося начальные цепи за
скобки:
у = эд(фй + + AfiCwvs + х-гЪ). (1.10)
В обеих скобках содержатся одни и те же переменные.
Примем за исходную схему цепи, проходящие через начальную
цепь xjx?:
у' = + Л5Х7Д6).
Схема, соответствующая этому выражению, представлена на рис.
1.37, а. В ней имеются два внутренних узла (д и Ь). Составим условия за-
мыкания цепи между этими узлами и конечной точкой с. Для узла а
х&х5 + х7э§, для узла b xp^xsx? + Первое из этих выражений совпа-
дает с выражением в скобках при начальной цепи хб в выражении (1.10).
1.5. Релейно-контакторные и бесконтактные схемы 57
Следовательно, начальная цепь должна быть подключена к узлу а, и вся
схема будет иметь вид, представленный на рис. 1.37, б.
Синтез схем на бесконтактных элементах имеет следующие
особенности:
• на бесконтактных элементах могут быть построены только
параллельно-последовательные схемы, так как они являются од-
нонаправленными элементами;
• выбранные бесконтактные элементы, как правило, реали-
зуют определенные логические функции, поэтому логические
выражения необходимо преобразовать с учетом принятой эле-
ментной базы.
Преобразование логических выражений с учетом особенно-
стей бесконтактных элементов осуществляется за счет исключе-
ния тех логических операций, которые не реализуются выбран-
ными элементами. Для этого используются основные законы
и равносильности алгебры логики.
Пример 1.4. По минимизированному логическому выражению
у = (а + b)(c + d) + abc составить схему, используя элементы, реали-
зующие функцию И-НЕ.
Преобразуем исходное выражение:
у = (а + b)(c + d) + abc = ас + be + ad + bd + abc.
58 Глава 1. Разомкнутые системы управления электроприводами
Применим закон двойной инверсии и правило де Моргана:
у = ас + be + ad + bd + abc - ас be ad bd abc. (1.11)
Для получения инверсии переменной воспользуемся соотношением
а = а + а = аа.
ч
На рис. 1.38 представлена структурная схема, соответствующая вы-
ражению (1.11). На основании этой схемы составляется принципиаль-
ная схема, в которой учитываются особенности выбранной элементной
базы.
Рис, 1.38. Структурная схема
1.5. Релейно-контакторные и бесконтактные схемы 59
1.5.2. Проектирование бесконтактных схем управления
на основе релейно-контакторных схем
Замена релейно-контакторных схем на бесконтактные дает
возможность использовать достоинства бесконтактных элемен-
тов в сравнении с релейно-контакторными: выше быстродейст-
вие и надежность, больше срок службы, меньше массогабарит-
ные показатели и потребление электрической энергии.
Недостатком бесконтактных элементов является невозмож-
ность обеспечения полной гальванической развязки коммути-
руемых цепей в отключенном состоянии, так как сопротивление
полностью выключенного полупроводникового прибора имеет
конечное значение; в то же время механические контакты обес-
печивают полный разрыв цепи.
Порядок проектирования бесконтактной схемы на основе
релейно-контакторной следующий:
1) выявляют и обозначают все входные сигналы, к которым
относятся сигналы от кнопок управления, конечных выключате-
лей, датчиков, контролирующих процесс, и т.п., и все выходные
сигналы, управляющие исполнительными элементами (контак-
торами, электромагнитами);
2) составляют алгебраические выражения, соответствующие
цепям выходных переменных релейно-контакторной схемы.
Алгебраические выражения для схем класса П записываются
в нормальной дизъюнктивной или нормальной конъюнктивной
форме либо в скобочной. В схемах класса Н для получения ал-
гебраического выражения сигнала, идущего к определенному
элементу, записываются формулы для всех возможных цепей
включения этого элемента.
Дальнейшее проектирование схемы осуществляется в соот-
ветствии с пп. 3—5 (см. с. 50).
Пример 1.5. Составить структурную схему из бесконтактных логиче-
ских элементов И-НЕ, соответствующую релейно-контакторной схеме,
представленной на рис. 1.39, а, б.
Разделим элементы исходной схемы и соответствующие им сигналы
на входные и выходные и обозначим их.
60
Глава 1. Разомкнутые системы управления электроприводами
Входные сигналы
а — кнопка «Стоп» — SB1
b — кнопка «Вперед» — SB2
с — кнопка «Назад» — SB3
d — конечный выключатель, ограни- — SQ1
чивающий движение «Вперед»
е — конечный выключатель, ограничи- — SQ2
вающий движение «Назад»
Выходные сигналы
X — контактор «Вперед»
Y — контактор «Назад»
Z — линейный контактор
- КМ1
- КМ2
- КМЗ
На рис. 1.39, в представлена релейно-контакторная схема с учетом
принятых обозначений элементов. Составим по данной схеме алгебраи-
ческие выражения, соответствующие цепям выходных переменных:
X = a(b + Y = а(с + у)Ьхё; Z - а(х + у).
Преобразуем эти алгебраические выражения с учетом выбранной
элементной базы:
X = a(b + x)cyd = abcyd + axcyd =
= abcyd + axcyd = abcyd • axcyd’, (112)
Y = a(c + y)bxe = acbxe + aybxe =
= acbxe + aybxe = acbxe • aybxe’, (1.13)
Z = a(x + y) = ax + ay = ax + ay = ax • ay. (1.14)
Структурная схема, соответствующая выражениям (1.12)...(1.14),
представлена на рис. 1.40. Принципиальная схема составляется на ос-
новании этой схемы с учетом условий включения бесконтактных эле-
ментов.
1.5. Релейно-контакторные и бесконтактные схемы
61
Рис. 1.39. Релейно-контакторная схема
62______Глава 1. Разомкнутые системы управления электроприводами
Рис. 1.40. Структурная схема, соответствующая рис. 1.39
Контрольные вопросы
1. Как осуществляется синтез систем автоматического управления
на контактных и бесконтактных элементах?
2. Преобразуйте функцию
у = + Л4Х5ЛЬ + адх5 + х2х5^
в скобочную форму.
3. Составьте алгебраическое выражение для следующей мостиковой
схемы:
1.5. Репейно-контакторные и бесконтактные схемы
63
4. Преобразуйте логическое выражение у = (ab + c)(d + ае) + abd
с учетом применения элементов, реализующих функцию И-НЕ.
5. Поясните принцип действия схемы, представленной на рис. 1.39,
виды защит и блокировок, обеспечиваемых этой схемой.
Глава 2
ЗАМКНУТЫЕ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
2.1, Элементы и устройства замкнутых систем
управления электроприводами
2.1.1. Классификация элементов АЭП
Под термином «элемент» автоматизированного электропри-
вода понимается входящее в него устройство, выполняющее
определенную функцию управления, в соответствии с которой
входное воздействие элемента преобразуется в выходное.
АЭП можно представить в виде совокупности силовых
и управляющих элементов (рис. 2.1). Силовые элементы преобра-
зуют, регулируют и подводят к рабочему органу (РО) механизма
основной поток энергии. Управляющие элементы формируют,
преобразуют и подводят сигналы управления к силовым элемен-
там. К силовым элементам относятся управляемые преобразова-
тели энергии УПЭ, электродвигатели (М), передаточные меха-
низмы (ПМ), рабочие органы машин и механизмов.
Управляющие элементы можно разделить на две группы:
1 ) элементы систем управления вентилями УПЭ, которые
преобразуют сигнал управления с выхода системы автоматиче-
ского управления (САУ) в открывающие импульсы;
2 ) элементы САУ, формирующие задающие и управляющие
воздействия и определяющие статические и динамические свой-
ства АЭП.
По функциональному признаку элементы второй группы де-
лятся на следующие виды:
• регуляторы (Р), которые вычисляют разность сигналов за-
дания и обратной связи (рассогласование) и на ее основе форми-
руют управляющее воздействие, приводящее регулируемую ко-
ординату к заданному значению;
• датчики (Д), преобразующие управляемую координату
в электрический сигнал, используемый как сигнал обратной связи;
2.1. Элементы и устройства...
65
Рис. 2.1. Структурная схема автоматизированного электропривода
• задающие элементы (ЗЭ), которые формируют задающие воз-
действия, определяющие технологическую программу работы АЭП;
• согласующие элементы (СЭ), которые согласуют выходные
и входные координаты соединяемых элементов по роду тока,
виду и уровню сигналов и т.п.
2.1.2. Регуляторы
Регулятор выполняет вычисление рассогласования и его пре-
образование в управляющее воздействие в соответствии с опре-
деленной математической операцией. В САУ используются в ос-
5
о597
66
Глава 2. Замкнутые системы управления электроприводами
новном следующие типы регуляторов: пропорциональный (П),
интегральный (И), пропорционально-интегральный (ПИ), про-
порционально-интегрально-дифференциальный (ПИД). В зави-
симости от вида преобразуемых сигналов различают аналоговые
и цифровые регуляторы. Аналоговые регуляторы (АР) реализуют-
ся на основе операционных усилителей, цифровые — на основе
специализированных вычислительных устройств или микропро-
цессоров. Аналоговые регуляторы преобразуют только аналого-
вые сигналы, являющиеся непрерывными функциями времени.
При прохождении через АР преобразуется каждое мгновенное
значение непрерывного сигнала.
Для реализации АР операционный усилитель (ОУ) включает-
ся по схеме суммирующего усилителя с отрицательной обратной
связью. Тип регулятора и его передаточная функция определя-
ются схемой включения резисторов и конденсаторов в цепях на
входе и в обратной связи ОУ.
При анализе регуляторов воспользуемся двумя основными
допущениями, которые с высокой степенью точности выполня-
ются для ОУ с отрицательной обратной связью в линейном ре-
жиме работы:
• дифференциальное входное напряжение Um ОУ равно нулю;
• инвертирующий и неинвертирующий входы ОУ тока не по-
требляют, т.е. входные токи i„ ~ i„„ » 0 (рис. 2.2). Так как неин-
вертирующий вход подключен к шине «нуль», то, согласно пер-
вому допущению, потенциал <рд инвертирующего входа также
равен нулю. С учетом этого в соответствии с законом Ома
Royh = ~иЬа = WyUl =«з/^з;*2 =Wbc/^OC-
В предположении, что /и = im = 0, запишем для узла «о» пер-
вый закон Кирхгофа:
h ~h =h'>
и3 Ирс ~иу
Лз Roc Roy
При равенстве сопротивлений входных резисторов (R3 = Roc )
последнее уравнение примет вид
-иу “«ос)
Л3
2.1. Элементы и устройства...
67
или
7?ОУ
—Uy — —— 1/рас,
лз
(2.1)
где «рас = и3 - «ос — рассогласование. Знак «-» означает, что
сигналы управления и рассогласования изменяются в противо-
'фазе.
Рис. 2.2. Функциональная схема пропорционального регулятора
Перейдя к приращению переменных в уравнении (2.1) и ис-
пользовав преобразование Лапласа, получим передаточную функ-
цию П-регулятора:
^n(p} = =^~ = ^L = Ka,
Ирас (р) Лз
где Ап — коэффициент пропорционального усиления.
Таким образом, в П-регуляторе осуществляется пропорцио-
нальное усиление (умножение на постоянную Ап) сигнала рассо-
гласования «рас
Коэффициент Ап может быть как больше, так и меньше еди-
ницы. На рис. 2.3 представлена зависимость иу = f(f) П-регуля-
тора при изменении сигнала рассогласования «рас -
Напряжение «рас на входе регулятора не должно превышать
значения С7рас max, определяемого из условия
и
“рас
рас max
вых max
(2.2)
где и„ъа max — максимальное значение выходного напряжения ОУ.
68
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.3. Временные диаграммы работы пропорционального регулятора
Если условие (2.2) не выполняется, то регулятор входит в со-
стояние насыщения и теряет управляющие свойства. При умень-
шении |ирас | до значений, меньших |£/рас шах |, регулятор вновь пе-
реходит в линейный режим работы.
Интегральный регулятор (И-регулятор) реализуется
при включении в цепь обратной связи ОУ конденсатора СОу
(рис. 2.4). Передаточная функция И-регулятора
Wn<J>) =
~Uy(P)
Wpac(p)
тир
где 7и = /?3Соу — постоянная интегрирования, с.
Рис. 2.4. Функциональная схема интегрального регулятора
В И-регуляторе осуществляется интегрирование сигнала рас-
согласования 1/рас.
2.1. Элементы и устройства...
69
Если входной сигнал «рас изменяется скачком, то иу изменя-
ется линейно, достигая за время t = Тц значения входного Uрас
(рис. 2.5). При действии на входе И-регулятора постоянного сиг-
нала Uрас в течение времени
вых max
вых О
17рас
где илЫх о — начальное выходное напряжение при t = 0, регулятор
входит в насыщение и будет находиться в нем, пока рассогласо-
вание ирас не изменит знак.
Рис. 2.5. Временные диаграммы работы И-регулятора
Пропорционально-интегральный регулятор (ПИ-ре-
гулятор) реализуется включением в обратную связь резистора
Roy и конденсатора Соу (рис. 2.6).
Рис. 2.6. Функциональная схема ПИ-регулятора
70 Глава 2. Замкнутые системы управления электроприводами
Передаточная функция ПИ-регулятора
И^пиСр) = = Кп + J- = РГП (Р) + ИЪф
Wpac 1 И Р
является суммой передаточных функций пропорционального
и интегрального регуляторов. Так как ПИ-регулятор обладает
свойствами П- и И-регуляторов, то он осуществляет одновре-
менно пропорциональное усиление и интегрирование сигнала
рассогласования «рас. Если рассогласование ырас изменяется ска-
чком от нуля до -Upac, то вначале осуществляется его пропорцио-
нальное усиление до значения А'п/Урас, а затем интегрирование
во времени с постоянной интегрирования 7и (рис. 2.7). При дей-
ствии на входе ПИ-регулятора постоянного сигнала (7рас в тече-
ние времени
вых шах
^вых О U
рас
t^pac
Ги
регулятор входит в состояние насыщения.
Рис. 2.7. Временные диаграммы работы ПИ-регулятора
Пропорционально-интегрально-дифференциальный
регулятор (ПИД-регулятор) реализуется в простейшем случае
включением в ПИ-регуляторе параллельно резисторам R3 и ROc
конденсаторов С а и Сое (рис. 2.8).
2.1. Элементы и устройства...
71
Рис. 2.8. Функциональная схема ПИД-регулятора
Передаточная функция ПИД-регулятора
И'Ъид (?) = —
Upac
где Кп = ^°уС°у + ^зС3 _ Т] + Т2 _ коэффициент пропорцио-
RiCoy Ти
нального усиления ПИД-регулятора; 7д = ЯоуС3 — постоянная
дифференцирования; 7и = R3Coy — постоянная интегрирова-
ния; 71 = RoyCoy; Т2 = R3C3.
Передаточная функция ПИД-регулятора является суммой
передаточных функций пропорционального, интегрального и диф-
ференциального регуляторов. ПИД-регулятор осуществляет од-
новременно пропорциональное усиление, дифференцирование
и интегрирование сигнала рассогласования «рас.
2.1.3. Датчики координат АЭП
Структурная схема датчика. В АЭП для получения сигналов
обратной связи по управляемым координатам используются дат-
чики. Датчик представляет собой устройство, информирующее
о состоянии управляемой координаты АЭП путем взаимодейст-
вия с ней и преобразования реакции на это взаимодействие
в электрический сигнал.
72 Глава 2, Замкнутые системы управления электроприводами
и
Управляемыми в АЭП являются электрические и механиче-
ские координаты: ток, напряжение, ЭДС, момент, скорость, пе-
ремещение и т.д. Для их измерения используют соответствую-
щие датчики.
Датчик координат АЭП структурно может быть представлен
в виде последовательного соединения измерительного преобра-
зователя (ИП) и согласующего устройства (СУ) (рис. 2.9). Изме-
рительный преобразователь преобразует координату х в электри-
ческий сигнал напряжения и (или тока 0, пропорциональный х.
Согласующее устройство осуществляет преобразование выход-
ного сигнала и ИП в сигнал обратной связи «ос, который по ве-
личине и форме удовлетворяет САУ.
ип
и, i
иос
Рис. 2.9. Структурная схема датчика координат АЭП
f
атчики тока. Датчики тока (ДТ) предназначены для получе-
ния информации о силе и направлении тока двигателя. К ним
предъявляют следующие требования:
• линейность характеристики управления в диапазоне от 0,1 /иом
до 5/иом не менее 0,9;
• наличие гальванической развязки силовой цепи и системы
управления;
• высокое быстродействие.
В качестве измерительных преобразователей в ДТ использу-
ются трансформаторы тока, дополнительные (компенсационные)
обмотки сглаживающих дросселей, элементы Холла, шунты.
ДТ на основе трансформаторов тока в основном используют-
ся в АЭП постоянного тока для измерения тока двигателей при
питании их от симметричных мостовых однофазных и трехфаз-
ных выпрямителей (рис. 2.10).
Для однофазного выпрямителя используется один трансфор-
матор тока (ТА1), а для трехфазного — три трансформатора
(ТА1...ТАЗ), включенных в звезду. Для обеспечения режима
работы трансформаторов тока, близкого к режиму короткого за-
мыкания, их вторичные обмотки нагружаются низкоомными ре-
зисторами Rtt (0,2...1,0 Ом). Преобразование переменного на-
2.1. Элементы и устройства...
73
пряжения вторичных обмоток осуществляется выпрямителем
VD1...VD4 (VD1...VD6).
Рис. 2.10. Функциональные схемы электропривода постоянного тока
с трансформаторными датчиками тока
Структурно датчик тока можно представить последователь-
ным соединением нескольких измерительных преобразователей
(рис. 2.11). Коэффициент передачи датчика тока
74
Глава 2. Замкнутые системы управления электроприводами
где Х'св =<1//я — коэффициент передачи по току силового вы-
прямителя; Rtt — сопротивление нагрузочного резистора;
ЛГ-гт = h/h — коэффициент трансформации трансформатора
тока; Лив — коэффициент передачи измерительного выпря-
мителя.
Так как ii = /я, то Лев = 1- Для однофазной схемы коэффици-
ент передачи измерительного выпрямителя ЛИв = 1, а для трех-
фазной Лив =2. Следовательно, коэффициент передачи одно-
фазного датчика £дт
Рис. 2.11. Структурная схейа трансформаторного датчика тока
Характеристика управления трансформаторного датчика тока
приведена на рис. 2.12. Из нее видно, что трансформаторные
датчики тока якоря не позволяют получать информацию о на-
правлении тока в якоре. Вторым недостатком является невоз-
можность их применения для измерения тока якоря при питании
двигателей от полууправляемых выпрямителей. Достоинство же
таких датчиков заключается в возможности использования сиг-
нала Идг для защиты тиристоров по току.
Рис. 2.12. Характеристика управления трансформаторного датчика тока
2.1. Элементы и устройства...
75
Широкое распространение для измерения тока двигателей
получили датчики тока на основе шунтов. Шунт представляет
собой четырехзажимный резистор с чисто активным сопротив-
лением Rw (безындуктивный шунт), к токовым зажимам кото-
рого подключается силовая цепь, а к потенциальным — измери-
тельная.
По закону Ома падение напряжения на активном сопротив-
лении и = Rmi.
Для ослабления влияния шунта на прохождение тока в цепи
двигателя его сопротивление должно быть минимальным. Номи-
нальное падение напряжения на шунте составляет обычно 75 мВ,
поэтому его необходимо усилить до требуемых значений
(3,0...3,5 В). Так как шунт имеет потенциальную связь с силовой
цепью, датчик тока должен содержать устройство гальваниче-
ской развязки. В качестве таких устройств применяются транс-
форматорные и оптоэлектронные устройства. Структурная схема
датчика тока на основе шунта приведена на рис. 2.13. Коэффи-
циент передачи
ЛД1 — Л г.р Л ус ,
где If г.р, Кус — коэффициенты передачи устройства гальваниче-
ской развязки и усилителя соответственно.
и
идт
ш
Рис. 2.13. Структурная схема датчика тока на основе шунта
В настоящее время все большее распространение получают
датчики тока на основе элементов Холла, которые выполняются
из полупроводникового материала в виде тонкой пластинки или
пленки (рис. 2.14). При прохождении электрического тока /хпо
пластинке, расположенной перпендикулярно к магнитному полю
с индукцией В, в пластинке наводится ЭДС Холла ех:
ёх = KxIxB,
rat Кх — коэффициент, зависящий от свойств материала и раз-
меров пластинки.
76
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.14. Получение ЭДС Холла в элементе Холла
Датчик тока на основе элемента Холла схематично представлен
на рис. 2.15. Он содержит магнитопровод 1, в воздушном зазоре
которого размещен элемент Холла 3, подключенный к усилите-
лю 4. При прохождении тока двигателя /цв по шине 2, располо-
женной в окне магнитопровода, возникает магнитный поток,
пропорциональный i№. Следовательно, при постоянном токе
элемента Холла 1Х ЭДС ех пропорциональна току двигателя iw.
2
Рис. 2.15. Упрощенная схема датчика тока на основе элемента Холла
2.1. Элементы и устройства...
77
Датчики напряжения. В качестве измерительного преобразо-
вателя напряжения в электроприводе используются резистивные
делители напряжения (рис. 2.16).
Рис. 2.16. Функциональная схема датчика напряжения
Выходное напряжение делителя
и =
идв.
Датчик напряжения помимо делителя может содержать также
устройства гальванической развязки и усилитель. В этом случае
коэффициент передачи датчика напряжения
*дн =-^—KTVKy,
Л1 + Д2
а выходное напряжение датчика идн = £Дн .
Датчики ЭДС. При невысоких требованиях к диапазону регу-
лирования скорости (до 50) в качестве главной обратной связи
в электроприводе применяется обратная связь по ЭДС.
Принцип действия датчика ЭДС якоря основан на вычисле-
нии ЭДС по известному уравнению для якорной цепи:
т я
вЯ = ^Я ^Я.Ц .
at
я.ц*я >
(2-3)
где и,, /я — соответственно напряжение и ток якоря; £яи, Ляц
индуктивность и активное сопротивление якорной цепи.
78 Глава 2. Замкнутые системы управления электроприводами
Схемотехническая реализация выражения (2.3) затруднена
из-за необходимости получения сигнала, пропорционального
производной тока якоря /я.
Преобразуем выражение (2.3) по Лапласу:
ея (р) = ия (р) - Яяц/я (р)(Тэр + 1), (2.4)
где Г, = £яц /7?я.ц — электромагнитная постоянная якорной
цепи.
Разделим выражение (2.4) на Тэр +1:
(2-5)
Тэр+1 ГэР+1
Функциональная схема датчика ЭДС, который реализован
в соответствии с выражением (2.5), представлена на рис. 2.17.
Для измерения напряжения используется делитель на резисторах
R2, R3 с выходным напряжением
Ri
«ДН =-=----Б““я =£дн«я,
Л2 + Лз
где Лда = Кз/(^2 + 7?з) — коэффициент передачи датчика напря-
жения.
9+ ц
Рис. 2.17. Функциональная схема датчика ЭДС якоря
Для измерения тока используется дополнительная обмотка
L1.2 сглаживающего дросселя. Напряжение ия через делитель,
ЛС-фильтр и повторитель А1 подается на сумматор А2. На вход
2.1. Элементы и устройства...
79
суммирования А2 подается также сигнал, пропорциональный
падению напряжения Ra ui» Выходное напряжение мдэ усилите-
ля А2 для установившегося режима работы получим на основа-
нии уравнения
«дэ
“ДН
I R<
1ДН________ЛД
R< ’ Яя.ц
Ra.u I я Rs •
(2.6)
При условии Лдн //?4 = kjxr /(Ra.n Ri) выражение (2.6) можно
записать так:
Мдэ =£дэ(«я - R*.ui*) = Лдэвя,
, Л ДМ R5 knrRs , ,
где кдэ - —---= —-------коэффициент передачи датчика ЭДС.
1?4 Ля.ц Ri
Датчики скорости. Для получения электрического сигнала,
пропорционального угловой скорости ротора двигателя, исполь-
зуются тахогенераторы и импульсные датчики скорости. Тахо-
генераторы применяются в аналоговых САУ, импульсные —
в цифровых.
К датчикам скорости предъявляются жесткие требования по
линейности характеристики управления, стабильности выходно-
го напряжения и уровню его пульсаций, так как они определяют
статические и динамические параметры привода в целом.
Широкое распространение в электроприводе получили тахо-
генераторы постоянного тока с постоянными магнитами. Для
уменьшения уровня оборотных пульсаций тахогенераторы встраи-
ваются в электродвигатель. Основной характеристикой тахогене-
ратора является зависимость его ЭДС от скорости:
где ктг =етг/й>п. — коэффициент передачи тахогенератора, или
крутизна характеристики.
В импульсных датчиках скорости в качестве первичного из-
мерительного преобразователя используются импульсные преоб-
разователи перемещения, у которых количество импульсов про-
порционально углу поворота вала. В зависимости от измеряемой
80 Глава 2. Замкнутые системы управления электроприводами
скорости, диапазона регулирования и требуемой динамической
точности используют два варианта цифрового измерения скоро-
сти. Оба способа основаны на цифровой реализации выражения
Аф ДАТ 2л
а> =— =-------,
АГ АГ Z
где Дф — угол поворота вала за время АГ; AN — число импульсов
преобразователя за время АГ; z — число импульсов преобразова-
теля за один оборот вала.
При первом варианте осуществляется подсчет импульсов
преобразователя AN за фиксированный (эталонный) интервал
времени АГ, т. е.
,м z&T ,
AN = —— со = КдС(о,
2л
где Кдс =Z^Tj2n — коэффициент передачи датчика скорости.
Этот вариант применяется при высокой скорости вращения.
При втором варианте осуществляется измерение временного
интервала АГ, за который от преобразователя поступает фиксиро-
ванное (эталонное) число импульсов Not, т.е.
. . 2nNэт < 1
АГ =------= лдс —,
Zv> <»
где Лдс = 2kNot lz — коэффициент передачи датчика скорости.
Такой вариант используется при низкой скорости вращения.
Датчики положения. В настоящее время в электроприводе
для измерения пермещения подвижных частей машин и меха-
низмов применяются индукционные и фотоэлектронные пре-
образователи.
К индукционным относятся вращающиеся трансформаторы,
сельсины и индуктосины. Индуктосины могут быть круговыми
и линейными.
Вращающимися трансформаторами (ВТ) называются электри-
ческие микромашины переменного тока, преобразующие угол
поворота а в синусоидальное напряжение, пропорциональное
этому углу. В системе автоматического регулирования вращаю-
щиеся трансформаторы используются в качестве измерителей
2.1. Элементы и устройства...
81
рассогласования, фиксирующих отклонение системы от некото-
рого заданного положения.
Вращающийся трансформатор имеет на статоре и роторе по
две одинаковые однофазные распределенные обмотки, сдвину-
тые между собой на 90’. Напряжение с обмотки ротора снимает-
ся с помощью контактных колец и щеток или с помощью коль-
цевых трансформаторов.
Принцип действия ВТ в синусном режиме основан на зави-
симости напряжения, наведенного в обмотке ротора пульсирую-
щим магнитным потоком статора, от углового положения осей
обмоток статора и ротора.
Пусть к обмотке А (рис. 2.18) подведено синусоидально изме-
няющееся напряжение ил = Umax sin <of. Проходящий в обмотке ток
создает продольный пульсирующий магнитный поток. Если ось вто-
ричной обмотки В совпадает с осью первичной (а = 0), то во вто-
ричной обмотке Сбудет наведена ЭДС ев = Emax sin (рис. 2.18, а).
При повороте вторичной обмотки В на угол а (рис. 2.18, б) в ней
будет наводиться меньшая ЭДС е в = (£max cos a) sin at. При а = 90’
(поперечное расположение обмотки В на рис. 2.18, в) пульси-
рующий магнитный поток статора не сцепляется с вторичной
обмоткой, и ЭДС в ней не будет наводиться.
Если относительно неподвижной катушки статора поворачи-
ваются две одинаковые катушки — синусная и косинусная, рас-
положенные под прямым углом друг к другу (рис. 2.18, г), то ам-
плитуды наведенных в них ЭДС будут изменяться по закону
соответственно синуса и косинуса:
С sin = (^max sin a) sin СО/, Ceos = (^тах COS(x) Sin (Of.
Вращающийся трансформатор может использоваться также
в фазовращательном режиме. В этом случае на взаимно перпен-
дикулярные обмотки статора подаются напряжения, сдвинутые
во времени на 90° эл. Токи, созданные этими напряжениями,
возбуждают два пульсирующих потока, которые образуют сум-
марное вращающееся магнитное поле. Это поле наводит в об-
мотках ротора синусоидальные ЭДС с постоянными амплитудой
и частотой, равной частоте питающих статор напряжений. Фаза
этих ЭДС будет определяться углом а поворота относительно
статора.
°3597
82
Глава 2. Замкнутые системы управления электроприводами
а б в
Рис. 2.18, Схематическое представление принципа действия
вращающегося трансформатора
Сельсин представляет собой электрическую микромашину
переменного тока, имеющую две обмотки: возбуждения и син-
хронизации. В зависимости от числа фаз обмотки возбуждения
различают одно- и трехфазные сельсины. Обмотка синхрониза-
ции всегда трехфазная. В САУ широкое распространение полу-
чили бесконтактные сельсины с кольцевым трансформатором.
2.1. Элементы и устройства...
83
Обмотка синхронизации бесконтактного сельсина с кольце-
вым трансформатором размещается в пазах статора, обмотка
возбуждения — в пазах или на явно выраженных полюсах ротора
сельсина. Особенность кольцевого трансформатора состоит в том,
что его первичная обмотка располагается на статоре, а вторичная —
на роторе. Обмотки имеют вид колец, размещенных в магнитной
системе, состоящей из кольцевых магнитопроводов статора и ро-
тора, которые на роторе соединяются внутренним магнитопро-
водом, а на статоре — внешним. В САУ сельсины используются
в амплитудном и фазовращательном режимах.
Схема включения обмоток сельсина в амплитудном режиме
представлена на рис. 2.19. Входной координатой сельсина в этом
режиме является угол поворота ротора т. За начало отсчета при-
нята осевая линия обмотки фазы А.
Рис. 2.19. Функциональная схема включения обмоток сельсина
в амплитудном режиме
При подаче на обмотку возбуждения переменного напряже-
ния ыВОзб = С^воэбтах sin со/ (^возбтах — амплитудное значение на-
пряжения возбуждения) возникает пульсирующий магнитный
поток, действующий по осевой линии обмотки возбуждения.
При этом в фазах обмотки синхронизации наводятся ЭДС той же
частоты, амплитуды которых изменяются в зависимости от угла
поворота ротора относительно статора, а фазы выходных напря-
жений неизменны. При отклонении ротора на угол т ЭДС фаз-
ных обмоток соответственно равны:
84 Глава 2. Замкнутые системы управления электроприводами
возбтах COST Sin (1)Z,
с g ~~ ^^Увозбшах cos(t 2tij/3) sin со/,
ec = cos(t - 4л/3) sin at,
где к — коэффициент трансформации между статорной и ротор-
ной обмотками при их соосном положении.
Схема включения обмоток сельсина в фазовращательном ре-
жиме представлена на рис. 2.20. Входной координатой сельсина
в этом режиме является угол поворота т, а выходной — фаза <р
выходной ЭДС еВых по отношению к переменному питающему
напряжению. Обмотка синхронизации получает питание от ис-
точника трехфазного напряжения с неизменной амплитудой.
Образующееся вращающееся магнитное поле наводит в обмотке
ротора, ось которой сдвинута на угол т относительно начала от-
счета, ЭДС
евых = ^£2- cos(co/ - ср),
2к
где Umax — амплитудное значение фазного напряжения обмотки
синхронизации.
Рис. 2.20. Функциональная схема включения обмоток сельсина
в фазовращательном режиме
2.1. Элементы и устройства...
85
Амплитуда и частота ЭДС евых не зависят от угла поворота т
ротора сельсина. Угловое положение ротора влияет только на
временную фазу ip этой ЭДС. Поскольку число пар полюсов ро-
тора и статора сельсинов в большинстве случаев равно единице,
то значение временной фазы <р численно равно угловому переме-
щению т ротора сельсина, выраженному в градусах (рис. 2.21):
ф = т.
иА Чл Чв ис
Рис. 2.21. Осциллограммы ЭДС е^,, наводимой в обмотке
при трех угловых положениях: <pi = 0 (кривая 1), <р2 = 90°эл. (кривая 2),
<рз = 180°эл. (кривая 3), <р4 = - 90°эл. (кривая 4)
Фотоэлектрический преобразователь перемещения состоит из
трех основных частей: механической, оптической и электронной.
Механическая часть служит для точного вращения входного
вала преобразователя, на котором расположен растровый диск.
Механическая часть имеет базовые поверхности для установки
и присоединения фотоэлектрического преобразователя к валу ме-
ханизма. Корпус преобразователя защищает оптическую и элек-
тронную части от пыли, влаги и механического воздействия.
Оптическая часть (рис. 2.22) содержит светодиод 1, линзу 2,
растровую индикаторную пластину 3 и растровый диск 7. Свето-
86
Глава 2. Замкнутые системы управления электроприводами
4
Рис. 2.22. Упрощенный вид оптической части
фотоэлектрического преобразователя
вой поток светодиода 1 проходит через линзу 2, растровый диск
7, растровую индикаторную пластину 3. При вращении растро-
вого диска меняется интенсивность света, который пропускается
через растровое сопряжение, образуемое диском 7и пластиной 3.
В результате меняется фототок через основные фотодиоды 4 и 6.
На индикаторной пластине растры расположены в четырех сек-
торах. Штрихи каждого из секторов смещены относительно друг
друга на 1/4 периода растра. Четыре фотодиода, установленных
против каждого из этих секторов, и сопрягаемые.с ними растры
диска формируют основные первичные сигналы, изменяющиеся
по синусоидальному sin т и косинусоидальному cost законам, где
т — относительное смещение подвижного и неподвижного рас-
тров (рис. 2.23). Фотодиод 5, расположенный ниже фотодиодов 4
и 6, формирует дополнительный сигнал начала отсчета один раз
за оборот преобразователя. Первичные сигналы всех трех кана-
лов поступают на электронную часть, осуществляющую форми-
рование прямоугольных импульсов.
Электронная часть (рис. 2.24) имеет три канала, каждый из
которых содержит предварительный усилитель 1, компаратор 2
и выходные усилители 3 и 4. Предварительный усилитель усили-
вает первичный сигнал до необходимой величины, а компаратор
формирует прямоугольные импульсы. Выходные усилители 3 и 4
служат для получения прямого и инверсного сигналов каждого
2.1. Элементы и устройства...
87
Рис. 2.23. Временные диаграммы работы
фотоэлектрического преобразователя
Рис. 2.24. Структурная схема электронной части
фотоэлектрического преобразователя
канала и усиления их по мощности. В результате на выходах пре-
образователя формируется шесть сигналов. Число импульсов п
на каждом из выходов пропорционально углу поворота <р вала
преобразователя:
88 Глава 2. Замкнутые системы управления электроприводами
, 360°
ф = кпрл =----п,
Z
где ЛПр — коэффициент передачи преобразователя; z — число
импульсов за один оборот вала преобразователя.
_ Наличие четырех выходов преобразователя с сигналами Ui,
U1, U2, U2 обусловлено необходимостью определения направле-
ния вращения и дает возможность при числе импульсов z за один
оборот вала преобразователя формировать в измерительной сис-
теме z, 2z, 4? импульсов.
2.1.4. Задающие элементы
К задающим элементам относятся устройства ввода задания
(задатчики скорости, силы тока и т.д.) и задатчики интенсивно-
сти. По виду сигналов задающие элементы делятся на аналого-
вые и цифровые.
Простейшими задающими элементами являются потенцио-
метрические. Для электропривода с малым диапазоном скорости
используется один потенциометр (рис. 2.25), с большим — два
(рис. 2.26). Потенциометр R1 служит для грубого задания скоро-
сти, R2 — для точного. Для повышения точности задания скоро-
сти задающие элементы питаются стабилизированным напряже-
нием ±Unm- Как правило, iUmn =±10 В.
•’ ^пит
Рис. 2.25. Потенциометрический задатчик скорости
Вместо потенциометров со скользящим контактом в электро-
приводе большой мощности используются бесконтактные задат-
чики скорости. Основой их являются бесконтактные сельсины
и вращающиеся транс
рматоры, выходное напряжение кото-
рых пропорционально углу поворота вала на требуемый угол.
2.1. Элементы и устройства...
89
Рис. 2.26. Потенциометрический задатчик скорости с точным заданием
В качестве цифровых задатчиков используются многопози-
ционные переключатели. Они представляют собой десятипози-
ционные (или более) переключатели сегментного типа с бара-
банным толкателем. На цилиндрической поверхности барабана
нанесены номера сегментных ламелей, с которыми поочередно
замыкается общий круговой вывод переключателя при переводе
барабана из одного механически фиксируемого положения
в другое. Многопозиционные плоские переключатели позволяют
при наборе обычного десятичного числа получать на выходе то
же число, но в двоичном либо двоично-десятичном коде.
В качестве бесконтактного цифрового задатчика использует-
ся фотоэлектрический преобразователь перемещения, число им-
пульсов на выходе которого пропорционально углу поворота
вала на требуемый угол.
Задатчики интенсивности служат для получения линейного
(в большинстве случаев) закона изменения во времени задающего
сигнала, в частности сигнала задания скорости. Функциональная
схема аналогового задатчика интенсивности представлена на
рис. 2.27 и состоит из компаратора А1 и интегратора А2, охвачен-
ных обратной связью. При ступенчатом изменении входного сиг-
нала И] компаратор А1 входит в состояние насыщения с напряже-
нием «2, а интегратор А2 начинает интегрировать напряжение иг
Интегрирование продолжается до момента равенства напряжений
«1 и «з. С этого момента входное напряжение из интегратора А2
устанавливается на уровне и}. Скорость изменения во времени
напряжения Из на выходе задатчика интенсивности
90 Глава 2. Замкнутые системы управления электроприводами
du^/dt ~ U2 max/WCi),
где СА2тах — напряжение насыщения компаратора А1.
С1
R3
Рис. 2.27. Функциональная схема задатчика интенсивности
Контрольные вопросы
1. Дайте определение понятия «элемент» АЭП.
2. Какие элементы АЭП относятся к силовым, а какие — к управ-
ляющим?
3. Каково назначение регуляторов АЭП?
4. Какие требования предъявляются к датчикам тока?
5. Назовите достоинства и недостатки трансформаторных датчи-
ков тока.
6. Для чего в АЭП используются датчики ЭДС?
7. Напишите выражение для передаточных функций П-, ПИ-,
ПИД-регуляторов.
8. Опишите варианты цифрового измерения скорости.
2.2. Системы импульсно-фазового управления
2. 2.1. Принципы управления тиристорами
В выпрямителях в качестве управляемых ключей использу-
ются тиристоры. Для открывания тиристора необходимо выпол-
нение двух условий:
• потенциал анода должен превышать потенциал катода;
• на управляющий электрод необходимо подать открываю-
щий (управляющий) импульс.
2.2. Системы импульсно-фазового управления 91
Момент появления положительного напряжения между ано-
дом и катодом тиристора называется моментом естественного
открывания. Подача открывающего импульса может быть задер-
жана относительно момента естественного открывания на угол
открывания. Вследствие этого задерживается начало прохожде-
ния тока через вступающий в работу тиристор и регулируется на-
пряжение выпрямителя.
Для управления тиристорами выпрямителя используется сис-
тема импульсно-фазового управления (СИФУ), выполняющая
следующие функции:
• определение моментов времени, в которые должны откры-
ваться те или иные конкретные тиристоры; эти моменты време-
ни задаются сигналом управления, который поступает с выхода
САУ на вход СИФУ;
• формирование открывающих импульсов, передаваемых
в нужные моменты времени на управляющие электроды тиристо-
ров и имеющих требуемые амплитуду, мощность и длительность.
По способу получения сдвига открывающих импульсов отно-
сительно точки естественного открывания различают горизон-
тальный, вертикальный и интегрирующий принципы управления.
При горизонтальном управлении (рис. 2.28) управ-
ляющее переменное синусоидальное напряжение иу сдвигается
по фазе (по горизонтали) по отношению к напряжению щ, пи-
тающему выпрямитель. В момент времени wt = а из управляю-
щего напряжения формируются прямоугольные отпирающие
импульсы t/GT. Горизонтальное управление в электроприводах
практически не применяется, что обусловлено ограниченным
диапазоном регулирования угла а (около 120°).
При вертикальном управлении (рис. 2.29) момент по-
дачи открывающихся импульсов определяется при равенстве
управляющего напряжения иу (постоянного по форме) с перемен-
ным опорным напряжением «„ил (по вертикали). В момент равен-
ства напряжений формируются прямоугольные импульсы J7GT.
При интегрирующем управлении (рис. 2.30) момент
подачи открывающих импульсов определяется при равенстве пе-
ременного управляющего напряжения иу с постоянным опор-
ным напряжением UOn • В момент равенства напряжений форми-
руются прямоугольные импульсы Ugt
92 Глава 2. Замкнутые системы управления электроприводами
Рис. 2.29. Вертикальный принцип управления
Рис. 2.30. Интегрирующий принцип управления
2.2. Системы импульсно-фазового управления
93
По способу отсчета угла открывания а СИФУ делят на мно-
гоканальные и одноканальные. В многоканальных СИФУ отсчет
угла а для каждого тиристора выпрямителя производится в соб-
ственном канале, в одноканальных — в одном канале для всех
тиристоров. В промышленном электроприводе преимуществен-
ное применение получили многоканальные СИФУ с вертикаль-
ным принципом управления.
2. 2.2. Основные узлы систем управления
тиристорными преобразователями
Структурная схема вертикальной СИФУ представлена на
рис. 2.31. Она содержит два канала и может быть использована
для управления открывающимися в противофазе тиристорами
однофазной мостовой схемы. СИФУ состоит из устройства син-
хронизации УС, генератора опорного напряжения ГОН, сумма-
тора С, нуль-органа НО, формирователя длительности импуль-
сов ФДИ, двух распределителей импульсов РИ и выходных
формирователей ВФ. Временные диаграммы работы СИФУ пред-
ставлена на рис. 2.32.
Рис. 2.31. Структурная схема вертикальной СИФУ
94
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.32. Временные диаграммы работы вертикальной СИФУ
УС служит для получения из питающего выпрямитель напря-
жения неискаженного синусоидального напряжения синхрониза-
ции с требуемыми амплитудой и начальной фазой, потенциально
разделенного с сетью. Напряжение синхронизации используется
2.2. Системы импульсно-фазового управления
95
для формирования широких прямоугольных импульсов и+ ии~,
разрешающих включение соответствующих тиристоров в поло-
жительные и отрицательные полупериоды напряжения синхрони-
зации. Кроме того, синхронизирующее напряжение необходимо
для формирования последовательности синхронизирующих уз-
ких импульсов «о, строго синхронизированных с моментом есте-
ственного открывания тиристоров, относительно которых осу-
ществляется сдвиг открывающих импульсов.
ГОН осуществляет формирование пилообразного опорного
напряжения «пил - Возврат ГОН в исходное состояние осуществ-
ляется в момент подачи импульса «о замыканием разрядного
ключа К. В качестве опорного в СИФУ может использоваться
также косинусоидальное напряжение.
Сумматор С выполняет операцию алгебраического суммиро-
вания напряжений: пилообразного ипт, управления иу и сме-
щения Uс. Напряжение смещения Uc„ необходимо для зада-
ния начального угла открывания а.Нач, соответствующего му = 0.
В момент равенства суммарного напряжения и нулю НО изменя-
ет выходное напряжение с положительного на отрицательное.
При этом ФДИ формирует в каждый полупериод синхронизи-
рующего напряжения импульс «фд, длительность которого дос-
таточна для надежного открывания тиристоров. Импульсы ИфД
распределяются через распределители РИ на соответствующие
выходные формирователи ВФ, которые осуществляют усиление
открывающих импульсов по мощности и потенциальное разде-
ление СИФУ от силовой цепи.
При увеличении (уменьшении) напряжения иу, действующе-
го встречно напряжению смещения, угол а уменьшается (увели-
чивается). Изменение угла открывания а приводит к изменению
длительности проводящего состояния тиристора и регулирова-
нию значения выпрямленного напряжения.
Контрольные вопросы
1. Назовите принципы управления тиристорами.
2. Нарисуйте структурную схему вертикальной СИФУ.
3. Поясните принцип действия вертикальной СИФУ.
96 Глава 2. Замкнутые системы управления электроприводами
2.3. Построение систем подчиненного
регулирования в электроприводе
постоянного тока
2.3.1. Основные схемы нереверсивных вентильных
электроприводов
Для регулирования напряжения якоря двигателя постоянного
тока используются трехфазные (рис. 2.33) и однофазные (рис. 2.34)
нереверсивные выпрямители. Ток якоря в них не может изме-
нить направление, так как выпрямитель имеет один комплект
тиристоров. В полууправляемых выпрямителях (рис. 2.34, а) дио-
ды, включенные параллельно якорю, создают путь для прохож-
дения тока под действием' ЭДС самоиндукции в цепи якоря.
Поэтому электроприводы с полууправляемыми выпрямителями
не могут работать в инверторном режиме с рекуперативным тор-
можением двигателя. Полностью управляемые выпрямители
(рис. 2.33, 2.34, б) позволяют осуществлять рекуперативное тор-
можение двигателя.
Рис. 2.33. Схемы силовых цепей трехфазных выпрямителей
От выбора типа выпрямителя зависят характеристики элек-
тропривода. Полууправляемые выпрямители имеют более вы-
2.3. Подчиненное регулирование в электроприводе
97
сокий коэффициент мощности и применяются в тех случаях,
когда не требуется осуществлять рекуперативное торможение
двигателя.
Рис. 2.34. Схемы силовых цепей однофазных выпрямителей
2.3.2. Статические характеристики вентильного
электропривода в режиме непрерывного
и прерывистого тока
Электромагнитные процессы в якорной цепи двигателя при пи-
тании от полностью управляемого выпрямителя. Электромагнит-
ные процессы в якорной цепи двигателя при питании от управ-
ляемого выпрямителя рассмотрим на примере электропривода
с однофазным мостовым выпрямителем (рис. 2.35, а). Диаграмма
токов и напряжений представлена на рис. 2.35, б.
Для упрощения анализа примем допущения о непрерывности
тока якоря и отсутствии пульсаций скорости. При допущении
о постоянстве скорости двигателя ЭДС якоря ея = Ея = const
механическая часть электропривода не оказывает влияния на
электрическую часть. Такое допущение позволяет рассматривать
уравнение якорной цепи отдельно, без уравнения движения
электропривода.
7
3597
98
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.35. Схема силовой цепи однофазного мостового выпрямителя (а)
и диаграммы напряжений и тока (б)
Из уравнения якорной цепи
е — Ея — Ля.и^'я
(2.7)
dt ’
где е = U\ щи sin (Qi? на интервале а a>iZ < л + a; t/i тах — ампли-
тудное значение напряжения сети; — круговая частота напря-
жения сети; Ля.ц — активное сопротивление якорной цепи;
Ьял — индуктивность якорной цепи, видно, что ЭДС самоин-
дукции ei = £Я11 -2- равна разности ЭДС е выпрямителя и сум-
ей
мы 7?я.ц 1Я + Ея.
В момент подачи открывающих импульсов, соответствую-
щий углу а, открываются тиристоры VS2, VS3. Двигатель под-
ключен к сети через тиристоры VS2, VS3 в течение фазового ин-
тервала a £<011 < л + а. В период a <coit < л энергия из сети
передается в якорную цепь и преобразуется в кинетическую
энергию механической части электропривода и в тепловую энер-
гию в сопротивлении йяц. Помимо этого, в течение фазового
интервала а < <о/ < 0а, когда ЭДС самоиндукции eL > 0 (так как
е >(Ля.ц»я + £»)), часть энергии запасается в электромагнитном
2.3. Подчиненное регулирование в электроприводе 99
поле индуктивности Ьяа. ЭДС eL действует встречно напряже-
нию сети и препятствует нарастанию тока /я (?нак ЭДС е l указан на
рис. 2.35, а над индуктивностью £я,ц). В момент времени, когда
мгновенное значение ЭДС е станет равным сумме /?я.ц/я + Ея
(точка а на рис. 2.35, 6), ЭДС eL в соответствии с уравнением
"(2.7) станет равной нулю, т.е. Ля.ц —— = 0, а ток /я достигнет
dt
максимального значения. В течение фазового интервала
0а < ан/ < к ЭДС < 0, так как (Ля.цгя + Ея) > е. ЭДС eL дейст-
вует согласно с напряжением сети и препятствует спаданию тока
/я (знак ЭДС eL указан на рис. 2.35, а под индуктивностью £я.ц).
Энергия электромагнитного поля, запасенная в индуктивности
Ея, преобразуется в механическую и тепловую энергию в сопро-
тивлении Ля. При <01/ > л напряжение сети меняет полярность,
однако открытые тиристоры VS2, VS3 не закрываются. Открытое
состояние тиристоров VS2, VS3 и прохождение тока /я на фазо-
вом интервале жо^/^л+а обеспечивается за счет действия
ЭДС самоиндукции eL, которая направлена встречно напряже-
нию сети, превышает сумму е + Ея и за счет этого поддерживает
прямое падение напряжения на тиристорах VS2, VS3. Действие
ЭДС самоиндукции в£ приводит при этом к появлению участков
отрицательной полярности в кривой ЭДС е полупроводникового
выпрямителя (ПВ). На этом интервале энергия индуктивности
£я.ц продолжает преобразовываться в механическую и тепловую
энергию в Ля.ц, а часть ее из якорной цепи передается в сеть. На
это указывают разные знаки ЭДС е и тока i„, определяющие на-
правление потока энергии из якорной цепи к сети.
Процесс передачи энергии из цепи постоянного тока в пи-
тающую сеть переменного тока называется инвертированием,
а устройство, с помощью которого осуществляется этот про-
цесс, — инвертором. В течение фазового интервала a<coi/<7t
ПВ работает в режиме выпрямления, а в течение интервала
л<о>1/<л+а — в режиме инвертирования.
Выпрямленная ЭДС Е определяется как средняя на интерва-
ле проводимости величина в установившемся режиме работы
ПВ. На основании рис. 2.35, б запишем:
Е =-[«/(<»!/) ТяпСо»! />/(<□,/) = 2г/1тах cos а. (2.8)
л J л J л
а а
100 Глава 2. Замкнутые системы управления электроприводами
При а = 0 из равенства (2.8) получим
Е = Ео = 2Ut w /я = 0,9(Л, (2.9)
где СЛmax — амплитудное значение напряжения сети; Ux — дейст-
вующее значение напряжения сети.
С учетом формулы (2.9)
Е = Еа cosa, (2.10)
где Ео = 0,96/1.
Выражение (2.10) представляет собой характеристику управ-
ления вентильного комплекта однофазного мостового выпрями-
теля. Для данной характеристики в технической литературе часто
используется название «регулировочная характеристика выпря-
мителя». Выражение (2.10) описывает характеристику управления
всех управляемых выпрямителей в режиме непрерывного тока
(РНТ). При этом необходимо иметь в виду, что для трехфазного
нулевого выпрямителя Eq = l,17t/2 (t/2 — действующее значение
фазного напряжения вторичной обмотки трансформатора), для
трехфазного мостового Ео = 234171.
При определенных условиях работы системы выпрямитель —
двигатель возникает режим прерывистого тока (РПТ). Как пра-
вило, ток якоря имеет прерывистый характер при больших зна-
чениях угла управления и малых токах якоря. При этих условиях
уменьшается количество энергии, запасаемой в индуктивности
якорной цепи, и наступает момент, когда накопленной энергии
становится недостаточно, чтобы поддерживать ток при условии
е < Ея + Ея,ц/я. Вследствие этого ток в цепи якоря уменьшается
до нуля, т.е. становится прерывистым. Интервал проводимости ти-
ристоров 1 становится меньше л. Поэтому для РПТ характеристика
управления вентильного комплекта описывается выражением
। Х+a г г Х+<х
Е = — [ e(a>i/)d(a)iO = —[ sin(coif)t/((oiZ)-
л J Л J
a a
Электромагнитные процессы в якорной цепи двигателя при
I-
тании от однофазного полууправляемого выпрямителя. Схема си-
ловой цепи изображена на рис. 2.36, а диаграммы тока и напря-
жений — на рис. 2.37.
2.3. Подчиненное регулирование в электроприводе
101
Рис. 2.36. Схема силовой цепи однофазного
полууправляемого выпрямителя
Рис. 2.37. Диаграммы напряжений и тока в однофазном
полууправляемом выпрямителе
В момент подачи управляющего импульса, соответствующий
углу а, открываются симмистор VS1 и диоды VD1, VD4. Процес-
сы в якорной цепи при питании от полууправляемого ПВ проте-
кают так же, как и при питании от полностью управляемого ПВ,
за исключением следующего. При <oit >п Ui меняет полярность.
Прямое падение напряжения на диодах VD1...VD4, создаваемое
за счет действия. ЭДС самоиндукции eL, поддерживает диоды
VD1, VD4 в открытом состоянии и переводит VD2, VD3 в откры-
тое состояние. При этом симмистор VS1 закрывается. Цепь яко-
ря двигателя в интервале 7с<Ю1^л + а шунтирована параллель-
но включенными парами диодов VD2, VD4, VD1 и VD3, поэтому
102 Глава 2. Замкнутые системы управления электроприводами
ЭДС е = 0. Продолжающий проходить по якорной цепи ток ia
создает электромагнитный момент двигателя. В такой схеме режим
инвертирования невозможен. В момент подачи управляющего
импульса, соответствующий углу тс + а, открывается симмистор
VS 1 и ток к двигателю начинает проходить через симмистор VS 1
и диоды VD2, VD3. При этом к диодам VD1, VD4 через откры-
тые диоды VD2, VD3 прикладывается напряжение обратной по-
лярности и закрывает их.
На основании рис. 2.37 запишем:
Е = — [ eJ(<oiO = и*3* [ sin(coit) = (1 + cosa) =
7CJ Л 1 П
a a
ИЛИ
E = ;~(1 + cosa).
2
(2.П)
Выражение (2.11) представляет собой характеристику управ-
ления вентильного комплекта полууправляемого выпрямителя.
Внешние характеристики нереверсивного выпрямителя. Внеш-
ней характеристикой выпрямителя называется зависимость по-
стоянной составляющей ЭДС Е выпрямителя от тока якоря /я
при постоянной величине угла открывания а. Так как при пита-
нии двигателя от выпрямителя возможны режимы непрерывного
и прерывистого тока, то внешние характеристики состоят из двух
частей: для РНТ и РПТ. Для РНТ внешние характеристики пред-
ставляют собой прямые линии, параллельные оси тока якоря 1Я,
так как ЭДС Е не зависит от 1Я, а определяется лишь утлом от-
крывания а, т.е. Е = Ео cosa. Для прерывистого режима работы
внешние характеристики являются функциями не только напря-
жения Uy, но и тока 1Я якоря двигателя. Внешняя характеристи-
ка выпрямителя для прерывистого режима работы описывается
уравнением
Е — Е' о —Лфикт (1Я)1.
(2.12)
2.3. Подчиненное регулирование в электроприводе
103
В выражении (2.12) Е'о — максимальное значение ЭДС ЕПВ
при холостом ходе, равное значению ЭДС Ея, причем
max
max
cos(a - Tt/m)
для a < л/т*;
для a > it/m’;
Ema — амплитудное значение выпрямленной ЭДС, равное ам-
плитудному значению прикладываемого к двигателю напряже-
ния сети; Лфикт — фиктивное эквивалентное сопротивление вы-
прямителя: Лфиет = f(I„).
Значение Е'о соответствует максимальному мгновенному зна-
чению ЭДС на интервале открытого состояния вентиля, так как
ток в цепи может отсутствовать только при условии Ея > е.
Зоны непрерывного и прерывистого тока на внешних харак-
теристиках отделены друг от друга границей, каждой точке кото-
рой соответствует гранично-непрерывный ток. Границу зоны
можно построить следующим образом.
Гранично-непрерывный ток определяется выражением
(2.13)
где nt — число пульсаций выпрямленной ЭДС за период питаю-
щего напряжения.
Из выражения (2.13) при a = л/2 получим максимальное зна-
чение гранично-непрерывного тока
гр max
После деления (2.13) на (2.14) получим
/гр/Ггртах — sinct.
Из уравнения регулировочной характеристики ПВ
cosa = Е/ Eq.
Учитывая уравнения (2.15) и (2.16), записываем:
(2.14)
(2-15)
(2.16)
104 Глава 2, Замкнутые системы управления электроприводами
Часть соответствующего этому выражению эллипса, очерчи-
вающего границу зоны прерывистого режима, показана на рис. 2.38
штриховой линией. Здесь же приведены внешние характеристи-
ки нереверсивного выпрямителя. В результате того, что ЭДС Е
выпрямителя в РПТ имеет большее значение, чем ЭДС Е, кото-
рая существовала бы при данном угле а и непрерывном токе,
внешние характеристики искажаются и приобретают нелиней-
ный характер.
tp ПИЛ
Рис. 2.38. Внешние характеристики нереверсивного выпрямителя
Механические характеристики двигателя при питании от вы-
прямителя. Механической характеристикой двигателя называется
зависимость среднего значения угловой скорости двигателя от
среднего значения момента: соср = /(Л/Ср). Уравнение якорной
цепи (2.7) для средних значений в режиме непрерывного тока за-
пишется в виде
Е — Ея —Кя.и^яг (2.17)
где 1Я — среднее значение силы тока якоря.
Среднее значение ЭДС выпрямителя
£ = £0cosa. (2.18)
Среднее значение ЭДС вращения
Ея =ЛФ<Оср, (2-19)
где к — конструктивная постоянная двигателя; Ф — магнитный
поток двигателя.
2.3. Подчиненное регулирование в электроприводе
105
Среднее значение тока якоря
/я —
(2.20)
где Afcp — среднее значение момента двигателя.
Из выражений (2.17)...(2.20) получим уравнение механиче-
ской характеристики двигателя постоянного тока в РНТ:
Eq COS ОС 7?я.ц А/ср
ЛФ (£ф)2
(2.21)
Для режима прерывистого тока уравнение якорной цепи
Eq ^фикг
я.ц * я
(2.22)
Из выражения (2.22) с учетом (2.19) и (2.20) получим уравне-
ние механической характеристики двигателя для РПТ :
Eq Ля.ц + ^факт .z /л л.ч
соС/> = ---------5---Мер- (2.23)
(АФ)2
Первые слагаемые выражений (2.21) и (2.23) определяют ско-
рость идеального холостого хода двигателя, а вторые слагаемые —
падание скорости из-за действия момента нагрузки. Механиче-
ские характеристики приведены на рис. 2.39. Участки характери-
стик в первом квадранте соответствуют двигательному режиму,
а в четвертом квадранте — режиму противовключения.
Рис, 2.39, Механические характеристики системы электропривода
«нереверсивный выпрямитель - двигатель постоянного тока:»
106
Глава 2. Замкнутые системы управления электроприводами
2.3.3. Реверсивный вентильный электропривод
с совместным и раздельным управлением
Принципы управления реверсивным выпрямителем. Макси-
мальное быстродействие реверсивного электропривода дости-
гается при использовании реверсивного выпрямителя, обеспе-
чивающего возможность прохождения тока в якоре в обоих
направлениях.
Реверсивный выпрямитель образуется соединением по соот-
ветствующей схеме двух нереверсивных, называемых комплектами
тиристоров. Комплекты в большинстве применений включаются
по перекрестным или встречно-параллельным схемам, питаются
от общей сети (или трансформатора) и имеют общие элементы
системы управления тиристорами (СУТ).
Для управления комплектами тиристоров применяют два
принципа (совместное и раздельное управление), которые оказы-
вают влияние на построение силовой схемы реверсивного выпря-
мителя. В мощных выпрямителях с совместным управлением ис-
пользуют преимущественно перекрестную схему, в выпрямителях
средней и малой мощности с раздельным управлением — в основ-
ном встречно-параллельную схему включения комплектов.
Совместное управление. Функциональная схема электропри-
вода с трехфазным нулевым реверсивным выпрямителем с со-
вместным управлением приведена на рис. 2.40.
При совместном управлении комплектами тиристоров откры-
вающие импульсы подаются одновременно на оба комплекта
(VS1...VS3 и VS4...VS6). При этом в зависимости от направления
вращения двигателя один комплект работает в выпрямительном
режиме, а другой — в инверторном. Ток якоря проходит по ком-
плекту, работающему в выпрямительном режиме. Система управ-
ления тиристорами выпрямителя содержит две СИФУ (СИФУ1
и СИФУ2) и аналоговый инвертор А1,
Так как открывающие импульсы подаются на оба комплекта,
то в схеме через два открытых тиристора (например, VS1 и VS6)
образуется замкнутый контур двух фаз вторичной обмотки транс-
форматора TV1. Схема замещения силовой цепи представлена на
рис. 2.41. Диоды имитируют однонаправленную проводимость.
2.3. Подчиненное регулирование в электроприводе
107
Рис. 2.40. Функциональная схема электропривода с реверсивным
выпрямителем с совместным управлением
Рис. 2.41. Схема замещения силовой цепи электропривода
с реверсивным выпрямителем с совместным управлением
В этом контуре действует сумма ЭДС двух фаз вторичной обмот-
ки, которая носит название уравнительной ЭДС:
^ур + ^2»
где £1, е2 — выпрямленные ЭДС комплектов VS1...VS3 и VS4...
VS6 соответственно.
108
Глава 2. Замкнутые системы управления электроприводами
Уравнительная ЭДС вур создает уравнительный ток !>т>. По от-
ношению к уравнительному току трансформатор находится в ре-
жиме короткого замыкания, и для его ограничения в силовую
цепь включаются уравнительные реакторы L1 и L2. В качест-
ве примера, показывающего наличие уравнительного тока, на
рис. 2.42 представлены выпрямленные ЭДС ег, ЭДС уравни-
тельного реактора еур и уравнительный ток /ур.
Рис. 2.42. Графики ЭДС е,, е2, еур и тока /ур
Помимо включения уравнительных реакторов ограничение
уравнительного тока достигается путем согласованного управле-
ния комплектами, при котором постоянная составляющая урав-
нительной ЭДС Еур равна нулю, т.е.
2.3. Подчиненное регулирование в электроприводе
109
£ур = Е\ + Е2 = £o(cosai + cosa2) = 0, (2.24)
где Ei, Ei — постоянные составляющие ЭДС е\ и е2 соответствен-
но; Ео — постоянная составляющая выпрямленной ЭДС при
a = 0; ai, a2 — углы открывания комплектов VS1...VS3 и VS4...
.VS6.
Условие (2.24) выполняется, если оц + а2 = л. Оно представ-
ляет собой условие согласованного управления комплектами ти-
ристоров.
Совместное управление обладает следующими преимущест-
вами:
• уравнительные токи обеспечивают проводящее состоя-
ние обоих комплектов независимо от силы тока нагрузки дви-
гателя и, как следствие, линейность внешних характеристик
выпрямителя;
• высоким быстродействием благодаря постоянной готовно-
сти к реверсу тока, которая не связана с какими-либо переклю-
чениями в схеме.
Однако при совместном управлении необходима установка
уравнительных реакторов, что увеличивает массу, габариты
и стоимость электропривода. Прохождение уравнительного тока
увеличивает нагрузку элементов силовой цепи и снижает КПД
выпрямителя.
Раздельное управление. В реверсивном выпрямителе с раз-
дельным управлением при работе одного комплекта тиристоров
в выпрямительном или инверторном режиме другой комплект
полностью выведен из работы (сняты открывающие импульсы).
Вследствие этого отсутствует контур прохождения уравнитель-
ного тока, что исключает необходимость в уравнительных реак-
торах. Реверсивные выпрямители с раздельным управлением из-
готавливаются с двухкомплектной и однокомплектной СИФУ.
Последние получили преимущественное распространение.
Функциональная схема электропривода с реверсивным вы-
прямителем с раздельным управлением (РВРУ) приведена на
рис. 2.43. Работу РВРУ обеспечивают дополнительные элементы
системы управления тиристорами: датчик проводимости венти-
лей (ДПВ), логическое переключающее устройство (ЛПУ), пере-
ключатель характеристики (ПХ).
110
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.43. Функциональная схема электропривода с реверсивным
выпрямителем с раздельным управлением
ДПВ предназначен для определения состояния (открыт или
закрыт) тиристоров выпрямителя и формирования сигнала об их
запирании, что равносильно отсутствию тока в комплектах.
ЛПУ выполняет следующие функции:
• выбирает нужный комплект тиристоров «Вперед» или «На-
зад» (КТ «В» или КТ «Н») в зависимости от требуемого направле-
ния тока двигателя, задаваемого сигналом t/3.T;
• запрещает появление открывающих импульсов одновре-
менно в обоих комплектах тиристоров посредством ключей «Впе-
ред» («В») и «Назад» («Н»);
• запрещает подачу открывающих импульсов на вступающий
в работу комплект до тех пор, пока в ранее работавшем комплек-
те проходит ток;
• формирует временную паузу между моментом закрывания
всех тиристоров ранее работавшего комплекта и моментом пода-
чи открывающих импульсов на вступающий в работу комплект.
Переключатель характеристики служит для согласования од-
нополярной регулировочной характеристики СИФУ а = f(uy)
с реверсивным сигналом иу.
Раздельное управление обладает следующими преимуще-
ствами:
• отсутствуют уравнительные реакторы, что значительно сни-
жает габариты, массу и стоимость реверсивного выпрямителя;
2.3. Подчиненное регулирование в электроприводе
111
• отсутствует уравнительный ток, что уменьшает потери
мощности в выпрямителе и повышает его КПД.
Недостатками раздельного уравнения являются:
• наличие режима прерывистого тока, что требует линеариза-
ции характеристик управления выпрямителя;
• более сложная система управления из-за наличия ЛПУ
иДПВ;
• наличие бестоковой паузы при переключении комплектов.
2.3.4. Реверсивный вентильный электропривод
с реверсом по цепи якоря, по цепи возбуждения
Функциональная схема реверсивного электропривода с кон-
тактным реверсором по цепи якоря приведена на рис. 2.44.
Рис. 2.44. Функциональная схема реверсивного электропривода
с контактным реверсором в цепи якоря
При наличии напряжения управления иу определенной по-
лярности соответствующая группа контактов реверсора замкну-
та. Переключение контактов необходимо осуществлять при от-
сутствии тока якоря, что обеспечивается благодаря ДПВ.
При вращении двигателя в прямом направлении контакты
К1 замкнуты и через них, выпрямитель и двигатель проходит ток
якоря. Реверсирование двигателя начинается с изменения знака
112 Глава 2. Замкнутые системы управления электроприводами
напряжения задания скорости, которое вызывает изменение зна-
ка задания тока и3.т и уменьшение напряжения иу. Угол а увели-
чивается, и ток якоря спадает до нуля, так как ЭДС Е выпрями-
теля становится меньше ЭДС £я. Сигнал с ДПВ о закрывании
тиристоров поступает на ЛПУ, которое осуществляет переключе-
ние контактов реверсора. Размыкание контактов К1 и замыкание
контактов К2 происходит за 50... 100 мс. В течение этого времени
двигатель отключен от выпрямителя и вращается по инерции.
При замыкании контактов К2 двигатель опять подключается
к выпрямителю, работающему в инверторном режиме. Ток якоря
начинает проходить в обратном направлении, двигатель перехо-
дит в режим рекуперативного торможения. При скорости двига-
теля, равной нулю, напряжение выпрямителя уравновешивает
падение напряжения в якорной цепи. Дальнейшее уменьшение
угла а приводит к разгону двигателя в обратную сторону до уста-
новившейся скорости.
Для реверсирования двигателя в схемах с реверсом по цепи
возбуждения при неизменном направлении якорного тока меня-
ется полярность напряжения, приложенного к обмотке возбуж-
дения (рис. 2.45) выпрямителем UZ2.
Обмотка возбуждения двигателя обладает значительной элек-
тромагнитной инерцией. Для ускорения процесса изменения по-
тока применяют форсировку, суть которой заключается в подаче
на обмотку возбуждения при изменении тока повышенного на-
пряжения, превышающего обычно в 2...5 раз номинальное на-
пряжение возбуждения. При достижении током требуемого зна-
чения напряжение возбуждения уменьшается до номинального.
Реверсирование двигателя осуществляется следующим об-
разом. При изменении знака напряжения задания скорости на-
пряжение управления иу начинает уменьшаться, что приводит
к уменьшению ЭДС Е выпрямителя. При Е < Ея ток в якорной
цепи спадает до нуля, после чего угол открывания КТ «В» увели-
чивается до значения, обеспечивающего инверторный режим
с выходным напряжением, превышающим номинальное напря-
жение возбуждения, благодаря чему происходит форсировка
спадания тока возбуждения. С уменьшением тока возбуждения
падает ЭДС Ея. При спадании тока возбуждения и ЭДС Ея до
нуля открывающие импульсы снимаются с КТ «В» и до момента
2.3. Подчиненное регулирование в электроприводе 113
подачи открывающих импульсов на КТ «Н» обеспечивается пау-
за 10...20 мс. По истечении этого времени на КТ «Н» подаются
открывающие импульсы и обеспечивается форсированное на-
растание тока возбуждения. ЭДС Ея меняет свой знак, и по цепи
якоря и якорного выпрямителя, работающего в инверторном ре-
жиме, начинает проходить ток. Двигатель тормозится с рекупе-
рацией энергии в сеть.
Рис. 2.45. Функциональная схема реверсивного электропривода с реверсивным
выпрямителем в цепи возбуждения
2.3.5. Системы с двухзонным регулированием скорости
В электроприводе с двухзонным регулированием скорости
часть полного диапазона регулирования от нуля до номинальной
скорости осуществляется путем изменения напряжения на якоре
от нуля до номинального значения при номинальном потоке
Q
°3597
114
Глава 2. Замкнутые системы управления электроприводами
возбуждения, а регулирование при скорости выше номиналь-
ной — путем уменьшения потока возбуждения при постоянном
напряжении на якоре.
При двухзонном регулировании скорости двигатель в каждой
зоне располагает разными допустимыми значениями момента
и мощности (рис. 2.46).
Рис. 2.46. Диаграммы регулирования мощности и момента при двухзонном
регулировании скорости
При независимом охлаждении двигателя во всем диапазоне
регулирования скорости допустимым значением тока якоря яв-
ляется его номинальный ток 7я.ном- Так как магнитный поток
двигателя Ф постоянен при регулировании скорости вниз от но-
минальной, то и допустимое значение момента Млоп постоянно
и равно номинальному ЛГНОМ:
Л/доп — *ФЛ -НОМ — м ном.
(2.25)
Допустимая мощность Рдоп на валу двигателя при этом снижается
линейно.
При регулировании скорости вверх от номинальной допусти-
мый момент, согласно формуле (2.25), уменьшается, так как
уменьшается магнитный поток Ф, а допустимая мощность Рдоп
остается постоянной.
Таким образом, регулирование скорости вниз от номинальной
осуществляется с постоянством допустимого момента, а вверх от
номинальной — с постоянством допустимой мощности.
2.3, Подчиненное регулирование в электроприводе
115
Рассмотрим принцип действия двухзонного электропривода
на примере электропривода ЭПУ1-2Д (рис. 2.47). Двигатель М
питается от тиристорного выпрямителя якоря (ТВЯ), а обмотка
возбуждения — от тиристорного выпрямителя возбуждения (ТВВ).
Система автоматического управления включает две взаимосвя-
занные системы: систему регулирования скорости по цепи якоря
с регуляторами тока якоря (РТЯ) и скорости (PC) и систему регу-
лирования ЭДС по цепи возбуждения с регуляторами тока возбу-
ждения (РТВ) и ЭДС (РЭ).
ДТЯ
СИФУ
ДТВ -*
Рис. 2.47. Функциональная схема электропривода
с двухзонным регулированием скорости
Пока двигатель работает на скорости ниже основной, значе-
ние ЭДС якоря меньше номинального, регулятор ЭДС РЭ выве-
ден из работы блоком ограничения БО. Вследствие этого ток
возбуждения поддерживается на номинальном уровне регулято-
ром РТВ. При увеличении напряжения задания и3,с скорость уве-
личивается. Когда скорость двигателя станет равной номинальной,
ЭДС двигателя достигнет номинального значения, регулятор РЭ
116
Глава 2. Замкнутые системы управления электроприводами
выйдет из ограничения и контур регулирования ЭДС замкнется.
С этого момента система автоматического управления переходит
в режим поддержания постоянства ЭДС. Регулятор РЭ шунтиру-
ет выходной сигнал регулятора РТВ, напряжение управления иул
уменьшается, что приводит к уменьшению тока возбуждения
и ослаблению потока. Дальнейшее увеличение скорости проис-
ходит за счет ослабления потока возбуждения при постоянной
ЭДС якоря Ея = Ея.жм •
2.3.6. Системы «импульсный преобразователь -
двигатель постоянного тока»
Способы регулирования напряжения. В простейшем случае
преобразователь с широтно-импульсным управлением (ПШИУ)
содержит ключ S1 и диод VD1, шунтирующий двигатель М
(рис. 2.48). Преобразователь получает питание от источника по-
стоянного напряжения, в качестве которого может использовать-
ся неуправляемый выпрямитель, аккумуляторная батарея и т.п.
Рис. 2.48. Силовая схема преобразователя
с широтно-импульсным управлением
Регулирование напряжения на якоре осуществляется путем
периодического замыкания и размыкания ключа S1. Когда ключ
S1 замкнут, якорь подключен к напряжению постоянного тока
Un. В разомкнутом состоянии ключа ток двигателя замыкается
через шунтирующий диод VD1. В результате на двигателе фор-
мируются напряжение ия в виде последовательности прямо-
угольных импульсов напряжения с амплитудой Un (рис. 2.49).
Среднее значение ия можно определить по выражению
2.3. Подчиненное регулирование в электроприводе
117
ия
1 г t
— \Uadt =Un^~
КОМ О * ком
где Тком = to + ta — период коммутации импульсов; to — время
открытого состояния ключа S1; t3 — время закрытого состояния
ключа S1.
Рис. 2.49. Г рафики напряжения якоря при широтно-импульсном
и частотно-импульсном управлении
Следовательно, регулирование напряжения на якоре можно
осуществить одним из следующих способов:
118 Глава 2. Замкнутые системы управления электроприводами
1) путем регулирования времени открытого состояния to при
постоянной частоте коммутации /ком = 1/Тком = const (способ на-
зывается широтно-импульсной модуляцией)',
2) путем регулирования периода коммутации при постоян-
ном времени открытого (или закрытого) состояния to = const
(способ называется частотно-импульсной модуляцией).
Преимущественное использование в электроприводе полу-
чил способ широтно-импульсной модуляции.
Нереверсивный электропривод с ПШИУ. В нереверсивном
электроприводе используются две схемы ПШИУ: последова-
тельная и полумостовая. Функциональная схема и временные
диаграммы работы электропривода с последовательным ПШИУ
приведены на рис. 2.50. При напряжении управления му >0
широтно-импульсный модулятор (ШИМ) формирует последова-
тельность двухполярных импульсов Uqj, поступающих на базу
транзистора VT1. В течение действия положительных импульсов
Ugt > 0 VT1 открыт и якорь двигателя подключен к напряжению
Un. Электрическая энергия, потребляемая от источника U„, пре-
образуется в кинетическую и тепловую энергию; часть ее запаса-
ется в электромагнитном поле индуктивности якоря L„. Вследст-
вие наличия индуктивности £я нарастание тока происходит по
экспоненциальному закону. В течение действия отрицательных
импульсов Uqt транзистор VT1 закрыт и ток якоря проходит по
шунтирующему диоду VD1 под действием ЭДС самоиндукции
eL = La Длительность прохождения тока на интервале
dt
t3 = (1 - У)ТКОМ зависит от количества запасенной в индуктивно-
сти энергии, которое определяется моментом нагрузки (силой
тока якоря), временем t0 и частотой коммутации /ком. Если ток
спадает до нуля, то ПШИУ работает в режиме прерывистого
тока, если не спадает — в режиме непрерывного тока. Для РНТ
среднее значение напряжения на якоре без учета падения на
транзисторе и диоде
I *° f
ия =^—]Undt=^Un =yUn,
л КОМ Q л КОМ
где у — скважность импульсов.
2.3. Подчиненное регулирование в электроприводе
119
Рис. 2.50. Функциональная схема и временные диаграммы напряжений и тока
нереверсивного электропривода с одноключевым ПШИУ
Достоинством данной системы электропривода является ма-
лое число полупроводниковых силовых элементов, недостатка-
ми — отсутствие режима генераторного торможения двигателя,
наличие нелинейных участков в механических характеристиках
двигателя из-за возможности режима прерывистого тока.
Функциональная схема и временные диаграммы полумосто-
вого ПШИУ приведены на рис. 2.51. При «у = 0 в схеме открыт
транзистор VT2, который совместно с диодом VD2 закорачивает
цепь якоря, чем обеспечивается динамическое торможения дви-
гателя. При напряжении иу > О ШИМ формирует две противо-
120 Глава 2. Замкнутые системы управления электроприводами
фазные последовательности двухполярных импульсов £7Gti и
Ugt2, поступающих на базы транзисторов VT1 и VT2. В данной
схеме в отличие от предыдущей невозможен РПТ, но в зависи-
мости от момента нагрузки ток может быть однополярным или
двухполярным.
Рис. 2.51. Функциональная схема и временные диаграммы напряжений и тока
нереверсивного электропривода с полумостовым ПШИУ
2.3. Подчиненное регулирование в электроприводе
121
Реверсивный электропривод с ПШИУ. В реверсивном элек-
троприводе используется мостовая схема ПШИУ. Функциональ-
ная схема электропривода приведена на рис. 2.52. В мостовой
схеме ПШИУ применяются три способа управления ключами:
диагональный, симметричный и несимметричный.
Рис. 2.52. Функциональная схема реверсивного электропривода
с мостовым ПШИУ
При диагональном управлении открывающие им-
пульсы подаются на пару транзисторов VT1, VT4 (при иу >0)
либо на VT2, VT3 (при иу < 0). На якоре формируется двухполяр-
ное напряжение ия. Ток якоря может быть непрерывным и пре-
рывистым. В РПТ механические характеристики нелинейные,
поэтому такое управление применяется в электроприводе малой
мощности с невысокими требованиями к статическим и динами-
ческим характеристикам.
При симметричном управлении открывающие им-
пульсы подаются в противофазе на пары транзисторов VT1, VT4
и VT2, VT3. На якоре формируется двухполярное напряжение
ия. При всех режимах работы ток в якоре имеет непрерывный ха-
рактер, поэтому механические характеристики линейны. Сред-
нее значение напряжения на якоре ия = Un (2у -1).
При несимметричном управлении при иу >0тран-
зистор VT4 открыт и открывающие импульсы подаются в проти-
вофазе на транзисторы VT1 и VT3; при иу < 0 открыт транзистор
VT3 и открывающие импульсы в противофазе подаются на VT2
и VT4. На якоре формируется однополярное напряжение ия. Ре-
жим прерывистого тока в схеме отсутствует. Среднее значение
напряжения на якоре Us = U„ у.
122 Глава 2. Замкнутые системы управления электроприводами
Электроприводы с ПШИУ обладают высоким быстродейст-
вием с полосой пропускания до 100 Гц и большим диапазоном
регулирования (до 100 000).
2.3.7. Математическое описание двигателя постоянного
тока независимого возбуждения при управлении
по якорной цепи
Входным воздействием для двигателя постоянного тока при
постоянном магнитном потоке является напряжение якоря ия,
а выходной координатой — угловая скорость со (рис. 2.53).
О- - — . ----- - ,
4*
О-----------------------
*
Рис. 2.53. Силовая цепь двигателя постоянного тока
Для якорной цепи без учета падения напряжения на щетках
можно записать второй закон Кирхгофа:
Ия — Хя —3 = ^я*"я г
at
или
п г dig
“ Ия 1я + ~~z Ь
at
(2.26)
где Кя — сопротивление якоря; Ья — индуктивность якоря; с —
коэффициент пропорциональности между ЭДС е и скоростью со.
Уравнение движения электропривода
М -Мс
dta
dt
или
2.3. Подчиненное регулирование в электроприводе
123
С/я - С/с
Jco
Л’
(2.27)
где /с, — статические ток и момент; J — момент инерции
Привода.
Преобразовав выражения (2.26) и (2.27) по Лапласу, получим:
ия(р) = са(р) + R„i„(p) + ЬяЛя (р);
j
С J
(2.28)
Решив систему уравнений (2.28), получим операторное урав-
нение двигателя
ия (р) = (ТмТэр2 + Тмр +1) ® (р)с + (Тэр + 1)/с Ля,
где Тм = JR2/с1 — электромеханическая постоянная времени дви-
гателя; Т3 = £я / R* — электромагнитная постоянная времени якоря
двигателя.
Структурная схема двигателя независимого возбуждения, соот-
ветствующая системе уравнений (2.28), представлена на рис. 2.54.
«я/с
Рис. 2.54. Структурная схема двигателя независимого возбуждения
Реакция двигателя на изменение напряжения ия характери-
зуется передаточной функцией по заданию
<»(/)> _ 1 / с
ТмТ3р2 +Тир+1
Передаточная функция двигателя по возмущению
ю(р) ___________________Лр+1
/сЛя (ТмГэр2 +Тмр+1)с
124 Глава 2. Замкнутые системы управления электроприводами
2.3.8. Вентильный преобразователь как звено
системы автоматического управления
Передаточная функция выпрямителя. На динамические свой-
ства выпрямителя оказывают влияние следующие факторы:
• дискретный характер управления, выражающийся в том,
что управляющий сигнал на входе СИФУ воздействует на фор-
мирование выпрямленной ЭДС лишь в дискретные моменты
времени, отстоящие друг от друга на время Твыпр = l/(m'/i), где
tri — число пульсов выпрямителя за период питающего напряже-
ния; /1 — частота питающего напряжения;
• неполная управляемость выпрямителя, характеризуемая тем,
что тиристор открывается в момент подачи открывающего им-
пульса, а закрывается лишь при спадании тока до нуля.
Вследствие нелинейности характеристики управления и на-
личия двух режимов тока выпрямитель является сложным нели-
нейным элементом САУ.
В большинстве случаев можно воспользоваться упрощенным
представлением выпрямителя как звена САУ. Комплект тири-
сторов представим звеном чистого запаздывания с передаточной
функцией в виде
w^ = k^e-T^p,
где кк; — коэффициент усиления комплекта тиристоров.
Инерционность элементов СИФУ учитывается в виде апе-
риодического звена
(р)
где кс.у — коэффициент усиления СИФУ; Тс.у — постоянная вре-
мени СИФУ.
Передаточная функция полупроводимого выпрямителя при-
ближенно может быть записана так:
ИЪв (р) = И'кт (р) ,
1 + Ттр
где &пв — общий коэффициент усиления выпрямителя;
Тпв = Ткт + 7с.у — суммарная постоянная времени выпрямителя.
2.3. Подчиненное регулирование в электроприводе
125
Передаточная функция преобразователя с широтно-импульс-
ным управлением. ПШИУ можно рассматривать как звено чисто-
го запаздывания с передаточной функцией
И'пшиуСр) = £пшиу^ Тгш,р,
где Лпшиу — коэффициент усиления преобразователя; Тком —
период коммутации.
Так как частота коммутации ключей в ПШИУ высокая
(3...20 кГц), то период Тком мал. Вследствие этого ПШИУ
можно представить апериодическим звеном И^пшну (р) =
= ^ПШИУ/(1 + ТкомР)-
2.3.9. Структура, принципы построения и функции
замкнутых систем управления электроприводом
В соответствии с уравнениями (2.21), (2.23) в разомкнутой
системе угловая скорость двигателя зависит не только от управ-
ляющего воздействия (угол а), но и от возмущающих воздейст-
вий, основным из которых является ток нагрузки 1Я. Влияние
возмущающих воздействий приводит к отклонению выходной
координаты от заданного значения.
В замкнутой системе сигнал управления иу, действующий на
преобразователь П, изменяется при отклонении действительных
значений выходных координат Ха от заданных Х3. Это обеспе-
чивается введением обратных связей с выхода системы на ее вход
(рис. 2.55). Датчики осуществляют преобразование выходных ко-
ординат в пропорциональные им электрические сигналы. Сум-
матор С осуществляет алгебраическое суммирование заданного
Х3 и действительного Ха значений выходной координаты. В ре-
зультате на выход регулятора поступает сигнал, пропорциональный
отклонению действительного значения от заданного. Такие сис-
темы по принципу построения относятся к системам регулиро-
вания по отклонению.
С целью уменьшения влияния на выходную величину объек-
та какого-либо возмущающего воздействия используются ком-
бинированные САУ (рис. 2.56). В такой системе на регулятор Р
через устройство компенсации дополнительно подается сигнал,
126 Глава 2. Замкнутые системы управления электроприводами
пропорциональный возмущающему воздействию f Добавление
в замкнутую САУ устройства компенсации позволяет упростить
ее и повысить точность управления.
Рис. 2.55. Функциональная схема САУ по отклонению
Рис. 2.56. Функциональная схема комбинированной САУ
В зависимости от выполняемых функций замкнутые САУ
можно разделить на системы стабилизации, системы програм-
много управления и следящие системы. Системы стабилизации
осуществляют поддержание постоянства управляемой координа-
ты, системы программного управления — изменение управляемой
координаты по закону, предписанному заранее определенной
программой, а следящие системы — изменение управляемой ко-
ординаты по заранее не известному закону.
2.3.10. Построение систем подчиненного регулирования
электропривода с управляемым вентильным
преобразователем
В настоящее время в электроприводе постоянного тока ис-
пользуются в основном системы подчиненного регулирования
координат, которые характеризуются простотой расчета и налад-
ки, удобством ограничения промежуточных координат системы.
2.3. Подчиненное регулирование в электроприводе
127
Система подчиненного регулирования представляет собой
многоконтурную систему последовательного действия (рис. 2.57).
Каждый контур в системе содержит отдельный регулятор, пара-
метры которого рассчитываются в соответствии с передаточной
функцией объекта регулирования этого контура. Количество ре-
гуляторов с передаточными функциями FKpl(p), H^p2(p),...9PKPj(p)
в системе регулирования равно числу регулируемых координат
Уь в системах регулирования скорости используются
двухконтурные, а в системах регулирования положения — трех-
контурные системы подчиненного регулирования. На вход каж-
дого регулятора поступают сигналы заданного Х31, Хз29...9Х3/
и действительного X29...9Xi значений регулируемой коорди-
наты. Каждый предыдущий регулятор формирует задающий сиг-
нал для последующего регулятора. Ограничения регулируемой
координаты обеспечиваются ограничением выхода предыдущего
регулятора.
Рис. 2.57. Структурная схема системы подчиненного регулирования
2.3.11. Основные схемы управления и их характеристики
Повышенные требования к САУ предъявляют электроприводы,
работающие в режиме программного задания или стабилизации
скорости. В таких системах регулятор контура скорости выпол-
няется пропорциональным или пропорционально-интегральным,
а регулятор тока (РТ) — пропорционально-интегральным.
Функциональная схема системы подчиненного регулирова-
ния с П-регулятором скорости представлена на рис. 2.58. Систе-
ма содержит внутренний контур регулирования тока с ПИ-регу-
128 Глава 2. Замкнутые системы управления электроприводами
лятором тока РТ и внешний контур регулирования скорости
с П-регулятором скорости PC. Так как РТ содержит интеграль-
ную часть, для установившегося режима работы должно выпол-
няться условие
(2.29)
где U3.r — сигнал задания тока якоря; 1Г0.т — сигнал обратной свя-
зи по току; кол — коэффициент передачи обратной связи по току.
Рис. 2.58. Функциональная схема системы подчиненного
регулирования с П-регулятором скорости
Сигнал задания тока U3.T является выходным сигналом регу-
лятора скорости, и его можно определить следующим образом:
из.т = (Uз.с ~ Uoc )^РС ~ (Uз.с - &ос °>)£рс У (2.30)
где из.с — сигнал задания скорости; [/Ос — сигнал обратной свя-
зи по скорости; кос — коэффициент передачи обратной связи по
скорости; £рс — коэффициент усиления PC.
Решив уравнения (2.29) и (2.30) совместно, получим уравне-
ние электромеханической характеристики системы в режиме
стабилизации скорости:
со—
Цз.С
кос
кос крс
U к
где соо = — скорость холостого хода; Дсо = —— 1Я — паде-
вое кбскрс
ние скорости.
2.3. Подчиненное регулирование в электроприводе
129
Следовательно, жесткость характеристики определяется со-
отношением коэффициентов кот, кос , £₽с •
Функциональная схема системы подчиненного регулирования
с ПИ-регулятором скорости содержит внутренний контур регу-
лирования с ПИ-регулятором тока и внешний контур с ПИ-ре-
гулятором скорости. Так как регулятор скорости содержит инте-
гральную часть, то для установившегося режим работы должно
выполняться условие
Uз.с —Uoc = Uз.с — кос со = 0.
(2.31)
Из выражения (2.31) находим уравнение электромеханиче-
ской характеристики:
со = Uз.с/кос •
Следовательно, электромеханические характеристики систе-
мы с ПИ-регулятором скорости не зависят от тока якоря 1Я и па-
раллельны ОСИ /я •
2.3.12. Расчет и выбор элементов систем
подчиненного регулирования
В системах подчиненного регулирования параметры регуля-
торов рассчитываются методом последовательной оптимизации
отдельных контуров регулирования. Оптимизация контура регу-
лирования сводится к замене разомкнутой цепи с большой по-
стоянной времени замкнутым контуром, описываемым диф-
ференциальным уравнением того же порядка, но с меньшей по-
стоянной.
Расчет параметров начинают с внутреннего контура системы,
которым является контур регулирования тока якоря. При оптими-
зации контура тока обычно пренебрегают внутренней обратной
связью по ЭДС двигателя. Структурная схема замкнутого контура
тока для этого случая представлена на рис. 2.59. Объектом регули-
рования контура тока является выпрямитель и цепь якоря.
На структурной схеме объект регулирования представлен
в виде двух последовательно включенных апериодических звень-
ев с постоянными времени Тпв и Тэ, причем Тэ > Тпв, т.е. объ-
О
°3597
130 Глава 2. Замкнутые системы управления электроприводами
ект содержит большую (Тэ) и малую (ТПв) постоянные времени.
Постоянную Тпв называют нескампенсированной постоянной вре-
мени. Передаточная функция объекта регулирования
IFot (р)
&ПВ V -Пя.ц
1 + ТпвР 1 + Тэр
где Л„.ц — полное активное сопротивление якорной цепи.
^о.т
Рис. 2.59. Структурная схема замкнутого контура тока
В контуре регулирования тока применяется ПИ-регулятор
с передаточной функцией
Игрт(р) = О + 7ртР)/?и.тД
где Трт — постоянная времени обратной связи регулятора тока;
Т’и.т — постоянная времени интегрирования регулятора тока.
Для компенсации большой постоянной Тэ постоянную Трт
принимают равной Т3, т.е. Тут =Т3. При этом передаточная
функция разомкнутой цепи контура тока
... . . ... . .... , . Ло.тЛпВ / R
И'раз.т(р) = (Жт(р) = ”*<-- .
Передаточная функция замкнутого контура тока
где кол — коэффициент обратной связи по току:
(2.32)
и3лпаи — максимальное напряжение задания тока; /я max — мак-
симальный ток якоря.
2.3. Подчиненное регулирование в электроприводе
131
Контур регулирования тока настраивается на технический
оптимум. Условие оптимизации, соответствующее техническому
оптимуму, а2 = 2а2, или
я.ц
о.т л пв
^н.т^ПВ^
ПВ
я.ц
(2.33)
Из условия (2.33) можно определить постоянную Ги т. С уче-
том (2.33) передаточная функция (2.32) запишется в виде
И<т(р)
2Гп2в/ +2Гпв^+1
Настройка на технический оптимум характеризуется неболь-
шим перерегулированием, равным 4,3 %. Время переходного
процесса определяется малой постоянной времени Тпв и состав-
ляет приблизительно 4,7ГПв •
При оптимизации контура скорости пренебрегают членом
второго порядка в передаточной функции контура тока. Тогда
2ТПв/> + 1’
С учетом этого структурная схема замкнутого контура скорости
имеет вид, показанный на рис. 2.60. Объектом регулирования
контура скорости является замкнутый контур тока и механиче-
ская часть электропривода. На структурной схеме объект регу-
лирования представлен в виде двух последовательно включен-
ных апериодического и интегрирующего звеньев. Передаточная
функция объекта регулирования
И'о.С (р)
1 / кОл 7?я ц
2ТПвР + 1 сТир
где с = ЛФ — коэффициент пропорциональности между током
и моментом; к — конструктивная постоянная двигателя; Ф —
магнитный поток.
Для оптимизации контура скорости используется настройка
регулятора как на технический, так и на симметричный опти-
мум. При настройке на технический оптимум применяется П-ре-
гулятор с передаточной функцией W'p.c (р) = Ка.
132 Глава 2. Замкнутые системы управления электроприводами
Рис. 2.60. Структурная схема замкнутого контура скорости
Передаточная функция замкнутого контура скорости с П-ре-
гулятором
И'з.с (р) =
1 / кос
,КОТС1 пв2 м 2
Кя.и коскп
Ля.и кос п
(2.34)
где кос ~ коэффициент обратной связи по скорости:
Лое = - з с-'ном; 1/зх. „ом — напряжение задания скорости, соответ-
(Оном
ствующее номинальной скорости соНОм •
При оптимизации по техническому оптимуму
< ^я.ц &ОС *п
м
откуда
4Тпв Ля.цКос
(2.35)
Подставив выражение (2.35) в (2.34), получим передаточную
функцию замкнутого контура скорости при оптимизации по тех-
ническому оптимуму:
1/^ос
(Р) = , ,
87цвР +4ТпвР+1
При оптимизации по симметричному оптимуму в качестве
регулятора скорости используется ПИ-регулятор с передаточной
функцией
(/>) = Тр + 1/(Ги.ср),
2.3. Подчиненное регулирование в электроприводе
133
где Трс — постоянная времени обратной связи регулятора скоро-
сти; Тк.с — постоянная времени интегрирования регулятора ско-
рости.
Передаточная функция замкнутого контура скорости с ПИ-ре-
гулятором
И^З.С (р) =
(Т рс /м-1) / кос
кос -Кя.ц
кос Ля.и
р+ Грср+1
м
(Трс/н-!)/ кос
а3р +a2p2+aip+l
(2.36)
Условия оптимизации, соответствующие симметричному оп-
2 2
тимуму: Oi = 2о2 , о2 = 2а\ а2. Используя их, можно записать:
= 2ТГС
(2.37)
м
кос Т^я.ц
м
(2.38)
Решая совместно уравнения (2.37) и (2.38), получаем:
Трс
= 87’пв> Т’и.с
32£ос Ra.u Тпв
(2.39)
Подставив выражение (2.39) в (2.36), получим передаточную
функцию замкнутого контура скорости при оптимизации по
симметричному оптимуму:
^(р)
(8Т пв Р*-1) / кос
мт^ърг + згт^вр2 + 8ТпвР+1’
Настройка на симметричный оптимум характеризуется боль-
шим перерегулированием, равным 43,4 %. Для уменьшения пе-
ререгулирования на входе системы устанавливается фильтр пер-
вого порядка с постоянной времени, равной 8Тпв-
134
Глава 2. Замкнутые системы управления электроприводами
Контрольные вопросы
1. Приведите выражение характеристики управляемого выпрями-
теля для режима непрерывного тока.
2. Чем обусловлено возникновение режима прерывистого тока?
3. Нарисуйте внешние характеристики выпрямителя: для режима
непрерывного тока; для режима прерывистого тока.
4. Назовите принципы управления комплектами вентилей ревер-
сивного выпрямителя.
5. Каковы назначение и функции логического переключающего уст-
ройства?
6. Сопоставьте достоинства и недостатки совместного и раздель-
ного управления.
7. Каковы особенности регулирования скорости вниз и вверх от
номинальной?
8. Назовите способы регулирования напряжения в ПШИУ.
9. Опишите способы управления ключами в ПШИУ.
10. Запишите передаточную функцию двигателя по заданию.
11. Запишите передаточную функцию двигателя по возмущению.
12. Запишите передаточные функции ПВ и ПШИУ.
13. Опишите принципы построения замкнутых САУ.
14. Как строится система подчиненного регулирования АЭП?
15. Сформулируйте основное назначение регулятора тока.
2.4. Электроприводы с асинхронными
двигателями
2.4.1. Основные соотношения и способы управления
асинхронным двигателем
Принципиальные вопросы работы АД. Вращающееся магнитное
поле. В предыдущие десятилетия практически вся потребность
в регулируемом электроприводе обеспечивалась за счет электро-
привода постоянного тока. Совершенствование его характери-
стик продолжается и будет продолжаться, что позволит электро-
приводу постоянного тока сохранять свои позиции в будущем.
В настоящее время широко развивается электропривод на базе
2.4. Электроприводы с асинхронными двигателями
135
машин переменного тока — асинхронных короткозамкнутых
двигателей (АД). Это обусловлено несколькими причинами:
во-первых, простотой, невысокой стоимостью и надежностью
АД; во-вторых, созданием устройств силовой электроники и сис-
тем управления, способных управлять АД.
Для образования вращающегося магнитного поля на статоре
двигателя располагаются обмотки фаз, число которых должно
быть не менее двух. Рассмотрим этот процесс на примере трех-
фазного двигателя.
На статоре расположены катушки (витки) обмоток (рис. 2.61, а)
А—X, B—Y, C—Z (буквами А, В, С обозначены начала обмоток).
Если по обмотке, например фазы А, проходит переменный ток
ia = Ittax COSCOc^,
где /щах — амплитудное значение тока; сос = 2л/с; <ос — круговая
частота питающей сети, рад/с; /с — частота сети, Гц, то образу-
ется магнитодвижущая сила (МДС)
Fg = ^пшх COS (Ос ,
пульсирующая перпендикулярно к оси витка. В симметричном
двигателе обмотки фаз В и С располагаются, в статоре с углом
пространственного сдвига
0 = 2п/т = 2л/3,
где т = 3 — число фаз.
При симметричном питании токи Ьи 1С, проходящие по об-
моткам фаз В и С, сдвинуты во времени на тот же фазовый угол,
равные соответственно 2л/3 и 4л/3. Мгновенные значения МДС
фаз Ви С, созданных этими токами (рис. 2.61, б):
Fb = F„ua COS((Oc t -2lt/3); Fc = Fnax cos(toc t - 4л / 3)
пульсируют в направлениях, перпендикулярных к осям соответ-
ствующих обмоток.
Результирующий вектор МДС образуется геометрическим
суммированием МДС отдельных фаз:
F = K(Fa + аГЛ + а2ГД
где К — коэффициент пропорциональности; а — вектор поворо-
та. Для трехфазной обмотки К = 2 / 3, а = exp(J2n / 3). В этом
136 Глава 2. Замкнутые системы управления электроприводами
случае амплитуда вектора МДС равна амплитуде синусоидаль-
ной волны Fm, т.е. |F|= Fm.
Рис. 2.61. Образование вектора МДС трехфазного АД (а)
и мгновенные значения фазных МДС (б)
Пространственное положение МДС фаз Fa, Fb, Fc и резуль-
тирующего вектора F для ®СГ = 0 (рис. 2.61, б) показано на рис.
2.61, а. Нетрудно убедиться, что при изменении <oct результирую-
щий вектор F вращается в пространстве.
В общем случае симметричного 2п-полюсного /я-фазного
двигателя при симметричном питании (т.е. при прохождении то-
ков в обмотках, сдвинутых на 2л/т) уравнение бегущей волны
МДС имеет вид
F = 0,5Fmax sin(oV -юс/ т),
ь
где х — координата точки (т.е. длина дуги от обмотки), в которой
определяется значение F; т — полюсное деление: т = 7tZ>/(2Zn);
D — внутренний диаметр статора; Zn — число пар полюсов.
2.4. Электроприводы с асинхронными двигателями 137
Угловая скорость перемещения волны
фо — 2л/с /Z п •
Частота вращения поля /0 = 60/с /Zn.
Основные соотношения асинхронного двигателя. Момент АД
'возникает при взаимодействии токов ротора и поля статора. Ис-
точником, действующим в роторной цепи, благодаря которому
возникает ток, является ЭДС Ё'2, наводимая в обмотке ротора по
закону электромагнитной индукции. Здесь и далее роторные ве-
личины, приведенные к обмотке статора, обозначаются штри-
хом. Основные соотношения АД удобно рассматривать на основе
Т-образной схемы замещения (рис. 2.62), где Rs, R2 — активные
сопротивления обмоток фаз статора (s) и ротора (2) соответст-
венно; Zsa, Х’2а — индуктивные сопротивления рассеяния фаз
статора и ротора; s — скольжение АД:
S =(<£>о — ф)/ф()
где ф — скорость вращения ротора.
Rjs
Рис. 2.62. Т-образная схема замещения АД
Для нахождения тока ротора воспользуемся выражением, из-
вестным из курса электрических машин:
+ Riis)2 +
(2.40)
где Хк = Xsa + Х2а — индуктивное фазное сопротивление корот-
кого замыкания АД.
138
Глава 2. Замкнутые системы управления электроприводами
В результате взаимодействия тока ротора и поля статора, вра-
щающегося со скоростью <оо, создается электромагнитный мо-
мент М3. При этом электромагнитная мощность выразится отно-
шением
Рэ = МэФо- (2.41)
Без учета механических потерь мощность на валу двигателя
Р2 = Мэоо- (2.42)
Разность между электромагнитной мощностью (2.41) и мощ-
ностью на валу двигателя (2.42) образует потери в роторе АД:
ДР2 = Рэ -Рг= М3Фц - М3<о = M3aos. (2.43)
Соотношение (2.43) показывает, что регулирование скорости
за счет изменения скольжения приводит к пропорциональному
изменению потерь в роторе.
Механические характеристики АД. На основании соотноше-
ния (2.43) можно найти выражение момента (в дальнейшем ин-
декс «э» опускаем). В самом деле, потери — это не что иное, как
aP2=X/92P2,
откуда с учетом (2.43) получим для трех фаз
„ ДР2 3(Р2)2Р'2
Af ==---=------------.
а>0<? ОМ
(2.44)
Тогда, подставив (2.40) в (2.44), получим выражение момента
АД, удобное для дальнейшего анализа:
и
377 2
м =---------------------- R2. (2.45)
aw((Ps + Rijs)2 + X2)
Найдем экстремум функции (2.45) dM/ds = 0 и соответствую-
щие ему значения критического момента Мк и скольжения sK.
После преобразования получим:
м 2Л/К (1 + asK)
(s/sK + sK/s + 2а
(2.46)
2.4. Электроприводы с асинхронными двигателями
139
мк
зи?
2«о Rs ± № + (*«, + Х2а)2
(2.47)
R? + (Хю + 2^О)2
(2.48)
где а = Rs/R'2.
Для практических расчетов часто пренебрегают влиянием ак-
тивного сопротивления статора, полагая Rs = 0. Тогда а - 0. Та-
кое приближение оправданно для двигателей мощностью РНом >
> 10 кВт. Учитывая это в формулах (2.46)...(2.48), получим более
простые формулы, удобные для расчетов:
2Л/К
Мк
(s/sK + SK/i)
3(7?
2(фо*к)’
(2.49)
Sk =RjIX^
(2.50)
Возможности получения искусственных механических ха-
рактеристик, требуемых при регулировании момента и скоро-
сти АД, определяются формулой (2.45). Все способы можно
разделить на две большие группы: при постоянном значении
синхронной скорости (о0 и при переменном (частотные способы
регулирования). Общей характерной чертой способов первой
группы (coo = const) является регулирование путем изменения
скольжения, а следовательно, пропорциональное увеличение
потерь в роторе двигателя согласно формуле (2.43). К таким
способам относятся: включение активных и индуктивных доба-
вочных сопротивлений в цепь статора и ротора; изменение под-
водимого напряжения.
Наиболее экономичным является регулирование путем изме-
нения <во (частотное управление), которое будет подробно рас-
смотрено ниже. Ступенчатое регулирование скорости может
быть обеспечено изменением числа пар полюсов, при котором
частота подводимого напряжения остается неизменной, а часто-
140 Глава 2. Замкнутые системы управления электроприводами
та вращения поля статора изменяется ступенчато. Существуют
и другие способы регулирования координат — каскадные схемы,
которые изучаются в курсе электропривода.
Из существующего многообразия способов воздействия на
характеристики АД практическое применение получили лишь те
из них, которые обладают хорошими показателями. Рассмотрим
некоторых из этих способов более подробно.
Регулирование скорости вращения включением добавочных ре-
зисторов. При включении добавочных резисторов в цепь ротора
скорость идеального холостого хода со0 и момент Мк остаются
неизменными, а критическое скольжение (2.50) увеличивается.
Искусственные характеристики отличаются повышенным зна-
чением пускового момента М„, и в пределе можно достичь
Мп = Мк. Уменьшается также пусковой ток, который может
быть найден по формуле
А = Us
fak + А2 + As)2 + + Х2а)2 ’
где R’a — добавочное сопротивление, вводимое в цепь ротора.
Жесткость характеристик со = f (т) уменьшается по мере роста
Ад. Этот способ обеспечивает лишь ступенчатое изменение ско-
рости (реостат с плавным изменением сопротивления практиче-
ски не реализуется при больших токах; имеется опыт использо-
вания жидкостных реостатов, но их габариты и трудности отвода
теплоты резко ограничивают область промышленного примене-
ния таких реостатов). Для повышения плавности регулирова-
ния требуется большое число ступеней, что усложняет схему
управления. На практике пусковой реостат имеет обычно 3...6
ступеней, что позволяет поддерживать высокое значение пус-
кового момента. Регулирование скорости этим способом осу-
ществляется в небольшом диапазоне или в кратковременном
режиме из-за значительных потерь энергии и снижения КПД.
Такой способ нашел применение в подъемно-транспортных ме-
ханизмах.
2.4. Электроприводы с асинхронными двигателями
141
2.4.2. Регулирование скорости вращения асинхронных
двигателей путем изменения напряжения
Регулирование скорости вращения АД путем изменения на-
пряжения реализуется применением относительно простых тех-
нических средств. С этой целью между сетью переменного тока
со стандартным напряжением Uc = const (рис. 2.63) устанавлива-
ется регулятор напряжения (PH), напряжение на выходе которого
Us = var регулируется путем подачи некоторого сигнала управле-
ния Uy. В качестве PH могут быть использованы различные
устройства — магнитные усилители, автотрансформаторы, тири-
сторные регуляторы напряжения (ТРН). Последние получили
в настоящее время наибольшее распространение из-за массогаба-
ритных показателей и высокого КПД.
! ' U = const
V
PH
$I/, = var
Рис. 2.63. Функциональная схема электропривода
с АД и регулятором напряжения
Существуют симметричные и несимметричные ТРН. При
симметричном ТРН в каждой фазе АД (рис. 2.64, а) устанав-
ливается пара встречно-параллельно включенных тиристоров
(VS1...S6) или один симмистор, управляемые от СИФУ. Здесь
используется такой же принцип управления, который применя-
ется в вентильном приводе постоянного тока, а именно: измене-
ние момента отпирания тиристоров относительно нулевой точ-
ки. При а = 0 (рис. 2.64, б) тиристоры полностью открыты и к АД
прикладывается напряжение сети. При а = оц > 0 к АД прикла-
дывается напряжение t/s, состоящее из участков синусоиды по-
ложительной и отрицательной полярности. Упрощенная форма
такого напряжения приведена на рис. 2.64, б, там же показано
142 Глава 2. Замкнутые системы управления электроприводами
напряжение первой гармоники этого напряжения Ui. Существу-
ют иные схемы ТРН при симметричном управлении и соедине-
нии нагрузки в треугольник (рис. 2.65, а).
Рис. 2.64. Схема тиристорного регулятора напряжения (а) и форма напряжения
на статоре АД при различных значениях угла регулирования (б, в)
При несимметричных ТРН пара тиристоров включается
в одну или две фазы (рис. 2.65, б); вместо одного тиристора пары
может использоваться диод.
Несимметричное управление требует меньшего количества ти-
ристоров, но в большей мере искажает синусоиду. Несинусоидаль-
ное напряжение Us вида, показанного на рис. 2.64, в, создает до-
полнительные трудности (повышенные тепловые и магнитные
потери, а также пульсации момента двигателя, что является следст-
вием токов высших гармоник). Эти факторы, как правило, учиты-
ваются приближенно; все расчеты при пониженном напряжении
проводятся лишь по первой гармонике. Снижение напряжения
с помощью ТРН приводит, согласно (2.49), к уменьшению крити-
ческого момента Мк, который пропорционален его квадрату. Ско-
рость идеального холостого хода <о0 = 2n/c/Zn остается неиз-
менной. Критическое скольжение & (2.48) также не зависит от
2.4, Электроприводы с асинхронными двигателями
143
Рис. 2.65. Схемы тиристорных регуляторов напряжения:
а — при симметричном управлении и соединении обмоток в треугольник;
б — при несимметричном управлении
напряжения. Искусственные механические характеристики, при-
веденные на рис. 2.66, показывают, что при постоянстве момента
нагрузки Mci = const и нормальных значениях = 0,1...0,2, харак-
терных для электродвигателей общепромышленного применения,
диапазон регулирования невелик (отношение скоростей в точках 1
и 2). Следует учитывать другое ограничение — энергетическое, со-
гласно которому растут потери в роторе двигателя. Номинальные
потери
2 ном ~
Рэ ~PiH0M ~ МцОМ (©О
— (Оном) — М
НОМ ОД) S НОМ
Приравняв их к текущим потерям ДРг = ЛГном^о^, можно по-
лучить границу допустимой по нагреву области искусственных
характеристик в продолжительном режиме:
Мс.доп = Мном^ном / S.
Как следует из рис. 2. 66, эта область, ограниченная штриховой
линией Mci, невелика, что сужает применение рассматриваемого
144 Глава 2. Яамкнуть'е системы управления электроприводами
Рис. 2.66. Механические характеристики АД
при регулировании напряжением
способа регулирования на практике при Мci = const. Однако есть
механизмы, которые имеют зависимость Мс2 (s), схожую с грани-
цей области, допустимой по нагреву. К таким механизмам отно-
сятся вентиляторы, для которых целесообразно применение
электропривода с ТРН. Уменьшение потерь в роторе двигателя
(но не в приводе в целом!) может быть получено применением
ТРН, питающего АД с фазным ротором при включенных в цепь
ротора сопротивлениях Ra. Это увеличивает значение sK, и диа-
пазон регулирования увеличивается (точки 3 и 4), особенно для
механизмов с вентиляторной нагрузкой (точки 5 и 6), что пока-
зано на рис. 2.66. Как отмечалось, характеристики при понижен-
ном напряжений (см. рис. 2.66), имеют низкую жесткость. По
этой причине возможные колебания момента нагрузки МС], час-
то имеющие место на практике, приводят к резким изменениям
скорости, что в большинстве случаев недопустимо. Рассмотрим
это на примере механических характеристик (рис. 2.67), полу-
ченных при различных значениях угла регулирования а. При на-
грузке МС1 рабочая точка электропривода отмечена цифрой
1 (угол регулирования аг). Положим, что момент нагрузки увели-
чился до МС2. При неизменном значении а = аг = const функцио-
2.4. Электроприводы с асинхронными двигателями
145
нирование электропривода невозможно и двигатель остановится,
поскольку МС2 > Мк при данном угле регулирования. В то же вре-
мя уменьшение угла до значения cq позволит сохранить электро-
привод в работоспособном состоянии; при этом скорость враще-
ния соответствует а>2 благодаря увеличению момента двигателя.
Мс1 М
Рис. 2.67. Механические характеристики АД
с регулятором напряжения в замкнутой системе
Приведенный пример показывает необходимость регулирова-
ния угла а при изменении момента Мс нагрузки. Такое регулиро-
вание трудно осуществить оператору, наблюдающему за работой
установки. Гораздо эффективнее с этой задачей справится зам-
кнутая по скорости система автоматизированного электропривода,
принципиальная схема которой приведена на рис. 2. 68, а. Управ-
ляющие электроды тиристоров VS1...VS6 ТРН подсоединены
к выходам СИФУ, задачей которой является сдвиг управляющих
импульсов в зависимости от величины управляющих сигналов Uy
и их распределение по тиристорам. Сигнал управления
Ю3597
146
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.68. Функциональная схема замкнутой системы электропривода с АД
и ТРН (а) и включение тиристоров для реверсивного управления (6)
2.4. Электроприводы с асинхронными двигателями 147
и у = (U3 - Кос ®Крс , (2.51)
где U3 — напряжение задания; Кос — коэффициент пропорцио-
нальности в цепи обратной связи по скорости; КРС — коэффици-
ент усиления промежуточного усилителя (регулятора скорости).
Задающее напряжение U3 снимается с потенциометра RP1.
Согласно выражению (2.51), всякое изменение скорости АД, на-
пример при изменении нагрузки, вызывает изменение Uy (при
U3 = const), угол а также изменяется, и АД переходит на работу
на другой характеристике. Совокупность точек на линии 1—2 обра-
зует искусственную механическую характеристику (см. рис. 2.67),
жесткость которой определяется коэффициентом К?с- Искусст-
венные характеристики (см. рис. 2.67) при различных значениях
напряжения задания имеют относительно высокие же-
сткость и перегрузочную способность и позволяют получать дос-
таточно большой диапазон регулирования скорости.
Помимо регулирования скорости АД включение еще двух пар
тиристоров, как показано на рис. 2.68, б, позволяет осуществлять
реверс двигателя. Приведенная схема аналогична контакторному
управлению, когда один контакт заменяется парой встречно-па-
раллельно соединенных тиристоров.
Используя тиристоры ТРН, можно обеспечить динамическое
торможение АД подачей постоянного (импульсного) тока. При-
ведем несколько вариантов схем включения (рис. 2.68, б): отпира-
ются тиристоры VS2, VS3 и VS5 в схеме нереверсивного управления;
тиристоры VS1, VS4, VS8 и VS9 образуют двухполупериодную
схему выпрямления, и обмотки двух фаз соединяются последова-
тельно. Силу выпрямленного тока (среднее значение) можно ре-
гулировать с помощью угла а.
Приведенные схемы ТРН показывают возможность пуска АД
с плавным регулированием напряжения, реверса, торможения,
скорости в диапазоне до десяти достаточно простыми средства-
ми. К достоинствам данного метода управления следует отнести
также его простоту, надежность и удобство управления. Вместе
с тем такая система электропривода имеет и серьезный недоста-
ток, заключающийся в больших потерях энергии при снижении
скорости, что уменьшает КПД электропривода в целом. Этот не-
достаток не является существенным, если работа на пониженной
148
Глава 2. Замкнутые системы управления электроприводами
скорости непродолжительна (например, при останове электро-
привода). Второй серьезный недостаток — искажение напряже-
ния и появление токов высших гармоник в питающей сети, что
может негативно отразиться на других потребителях.
2.4.3. Импульсное регулирование скорости
асинхронного двигателя
Импульсное регулирование скорости АД стало возможным
благодаря совершенствованию характеристик силовых полупро-
водниковых приборов, главным образом тиристоров. Его суть за-
ключается в дискретном (импульсном) изменении параметров
АД или питающей сети, при котором возникают периодические
колебания момента АД. В установившемся режиме среднее зна-
чение момента двигателя равно статическому моменту.
При импульсном регулировании в цепи статора может быть
использована схема с ТРН, приведенная на рис. 2.64. Однако ре-
жим работы тиристоров здесь предполагается иным: они должны
открываться и запираться все одновременно. Это возможно
лишь в том случае, если время включенного (выключенного) со-
стояния Превышает период напряжения питающей сети. Такой
способ отличается крайне низкими энергетическими показате-
лями и тяжелыми условиями работы тиристоров и поэтому не
нашел применения в промышленности.
Чаще всего импульсное регулирование применяется в элек-
троприводах с АД с фазным ротором при регулировании в цепи
ротора. С этой целью может быть использована схема (рис. 2.69),
которая позволяет либо включить Кдоб в цепь ротора, либо замк-
нуть ротор накоротко. В приведенной схеме для этой цели ис-
пользуются симмисторы VS1, VS2. При достаточно большой час-
тоте коммутации симмисторов /ком можно считать, что в цепь
ротора включено некоторое добавочное эквивалентное сопро-
тивление Лэкв, значение которого изменяется от нуля до Кдо6,
при изменении скважности включения симмисторов т - /вкл /То
от 1 до 0. Здесь /вкл — длительность замкнутого состояния сим-
мисторов; То =1//ком — период коммутации. В этом случае
Лэкв “ -^доб(1 ~ т).
2.4. Электроприводы с асинхронными двигателями
149
Рис. 2.69. Схема импульсного регулятора скорости АД
на симмисторах в цепи ротора
Частота коммутации /и>м в приведенной схеме не может пре-
вышать частоту тока в роторе. С учетом низкой частоты тока
в роторе, особенно вблизи номинальных значений параметров,
такое управление приводит к большим пульсациям момента.
Кроме того, включаться симмисторы могут только в момент пе-
рехода напряжения через нуль, т.е. с довольно низкой частотой.
По этим причинам большее применение нашла схема, приведен-
ная на рис. 2.70, а, где резистор Rao6 и дроссель Zd включаются
в цепь выпрямленного тока ротора, полученного с помощью вы-
прямителя на диодах VD1...VD6. Шунтирование резистора осу-
ществляется тиристорным коммутатором ТК, состоящим из
основного тиристора VS 1, коммутирующего тиристора VS2, ком-
мутирующих конденсатора и дросселя L,™, и диода VD7.
Для повышения жесткости механических характеристик
и увеличения диапазона регулирования применяется замкнутая
система, в которой управление тиристорами VS1 и VS2 осущест-
вляется в функции выпрямленного тока ротора »d и скорости
двигателя. Указанные сигналы поступают в суммирующее уст-
ройство СУ; для управления тиристорами служит релейный эле-
мент РЭ. Датчиком тока является шунт RS. При запертых тири-
сторах VS1 и VS2 и включении двигателя в цепь ротора включено
сопротивление RAO6 и выпрямленный ток zd нарастает по экспо-
150 Глава 2. Замкнутые системы управления электроприводами
ненте (из-за влияния индуктивности сглаживающего дросселя
Ld) до значения (рис. 2.70, б). Для нормального функциони-
рования коммутатора предварительно должна быть подготовлена
коммутирующая цепь. С этой целью при включении АД отпира-
ется тиристор VS2 и конденсатор СкОм заряжается от выпрямите-
ля В по цепи В+ - Ld - С ком - VS2 - RS - В ; в конце заряда имеет
место положительный потенциал на верхней обкладке (рис. 2.70, а).
Процесс заряда не оказывает влияния на работу АД из-за его
кратковременности. При отпирании VS1 управляющим импуль-
сом U\ от РЭ ток z’d в роторной цепи ограничивается лишь со-
противлением обмотки ротора, сопротивлением дросселя Ялр
и шунта Яш, что может привести к его нарастанию по экспонен-
те до некоторого значения zdo- Одновременно с отпиранием VS1
происходит разряд коммутирующего конденсатора С ком - VS1 -
-VD7-LKom -Ском- Параметры этой цепи подбираются таким
образом, что разряд имеет колебательный характер, в результате
чего конденсатор С КОм приобретает «+» на нижней обкладке (по-
казано справа на рис. 2.70, а). На этом колебательный процесс
заканчивается благодаря запирающим свойствам диода VD7 при
запертом тиристоре VS2.
При достижении током ротора значения ii2 (рис. 2.70, б), что
контролируется шунтом RS, релейный элемент вырабатывает
импульс на VS2, который открывается, и положительный заряд
конденсатора Су™, прикладывается к катоду тиристора VS 1, ко-
торый запирается. Начинается процесс перезаряда конденсора
Су»м по той же цепи В+ - Ld - СКОм - VS2 - RS - В', в результате
чего на верхней обкладке Ском вновь появляется «+», а тиристор
VS2 запирается. В этом процессе в течение некоторого времени
положительный потенциал прикладывается к катоду VS 1, обес-
печивая тем самым восстановление его запирающих свойств
(20...80 мкс в зависимости от типа тиристора). Запирание тири-
стора VS 1 означает, что в цепь ротора вновь вводится сопротив-
ление Вдов и ток уменьшается по экспоненте до значения id3, при
котором РЭ снова подает импульс щ на VS1. Управляющие им-
пульсы «1 и «2, подаваемые на тиристоры VS1 и VS2 соответст-
венно, показаны на рис. 2.70, б. Далее работа схемы повторяется.
Эквивалентное сопротивление роторной цепи зависит от скваж-
ности т. Регулируя скважность т изменением момента подачи
2.4. Электроприводы с асинхронными двигателями
151
Рис. 2.70. Импульсное регулирование в цепи ротора АД:
а — электрическая схема; б — временные диаграммы работы регулятора;
е — механические характеристики в замкнутой системе
152
Глава 2. Замкнутые системы управления электроприводами
импульса на VS2, можно регулировать среднее значение тока zd ср
ротора, а следовательно, и его момента. Механические характе-
ристики такого электропривода (рис. 2.70, в) располагаются
в зоне, ограниченной значениями т = 1 и т = 0.
Значение эквивалентного добавочного сопротивления Лдоб. экв
находится следующим образом:
R
доб.экв
“ ^доб (1 ~~ т) + ^др + >
где 7?др, 7?ш — активное сопротивление соответственно сглажи-
вающего дросселя Ьй и шунта RS.
Получим выражение для полного приведенного активного
сопротивления ротора:
~ -^тр(^2 + -ЛдобС ~ т) + Ддр + 7?ш),
где А'тр — коэффициент трансформации двигателя; Ri — актив-
ное сопротивление фазы обмотки ротора.
Для получения жестких характеристик 1, 2, 3 (рис. 2.70, в)
применяется обратная связь по скорости. В этом случае сигнал
Uqc суммируется с сигналом по току, вызывая изменение грани-
цы срабатывания РЭ. Например, увеличение скорости вызывает
срабатывание РЭ при меньшем токе в якорной цепи.
При продолжительном включении VS1 конденсатор Ском мо-
жет не сохранить достаточный для коммутации заряд. Решением
является использование дополнительного источника и дио-
да VD8 для поддержания напряжения на Ском на нужном уровне.
Основная область применения рассмотренного электропри-
вода — механизмы подъема, передвижения и поворота крановых
установок.
2.4.4. Частотное регулирование скорости
асинхронного двигателя
Частотное регулирование скорости АД является наиболее эко-
номичным и поэтому рассматривается как основной и наиболее
перспективный способ. Его суть заключается в регулировании
синхронной скорости за счет изменения частоты питания статора
2.4. Электроприводы с асинхронными двигателями
153
АД. Экономичность частотного регулирования скорости объясня-
ется тем, что при регулировании частоты не происходит увеличе-
ния скольжения, как, например, при реостатном регулировании.
Полное использование электрической машины, в том числе
АД, имеет место, если она работает с номинальным магнитным по-
током. В свою очередь номинальный поток определяется геомет-
рическими размерами и физическими свойствами магнитной цепи.
Магнитный поток Ф двигателя создается током намагничивающе-
го контура /0 (см. рис. 2.62), который пропорционален ЭДС Е$:
^-4,440/3^06, (2.52)
где /s — частота напряжения статора; — число витков обмот-
ки; АГоб — обмоточный коэффициент.
Обозначив в формуле (2.52) Ке запишем:
Е$ — Ф/sATe,
откуда вытекает естественное соотношение
Ф ~ Es/fs = const,
(2.53)
которое говорит о том, что для полного использования двигателя
наряду с изменением частоты питания /s необходимо пропорцио-
нально ей изменять Es. ЭДС является внутренним параметром АД,
воздействовать же на двигатель можно лишь напряжением. При
управлении ставится задача сохранения перегрузочной способно-
сти двигателя М*, которая определяется отношением критического
момента Мк к моменту нагрузки Мс. Имея в виду упрошенную мо-
дель (Rs = 0) двигателя, для нахождения Мк воспользуемся форму-
лой (2.49), учитывая,чтоХк = + Х'2а) =<o0(Lsa + Z2o)(где
и L2a — индуктивности рассеяния статора и ротора):
Мк
3US2
2g)qX к
Wo
(2.54)
Отсюда следует, что для любой частоты должно соблюдаться
пропорциональное ей изменение напряжения. Еще раз подчерк-
нем, что соотношение (2.54) получено при пренебрежении со-
противлением статора Rs.
Для пояснения законов частотного регулирования необходи-
мо принять во внимание,'что момент нагрузки Л/с также может
изменяться в зависимости от скорости вращения. При условии
154
Глава 2. Замкнутые системы управления электроприводами
Л/к/Л/с = Af* = const для любых значений coOi и ©02 должно со-
блюдаться соотношение
_ t^SHOM
2 2 2
(О01М cl <002 МС2 ®0ном Л/ном
где МС1, МС2 — моменты нагрузки при синхронных скоростях АД
сом и слог соответственно. Отсюда следует предложенный акаде-
миком М.П. Костенко в 1925 г. основной закон изменения на-
пряжения при частотном способе регулирования скорости АД:
у = а^й, (2.55)
где y = 17s/17Shom — относительное напряжение; а = а>о/®о ном =
= fs/fsт~ относительная частота; ц = Мс/Мти — относитель-
ный момент, показывающий изменение статического момента
при регулировании скорости.
Выражение (2.55) является универсальным, и с его помощью
могут быть получены частные случаи.
При постоянстве момента нагрузки Мс = const по формуле
(2.55) получим
у = а, (2.56)
т.е. напряжение на статоре двигателя должно меняться пропор-
ционально его частоте.
Для вентиляторного момента нагрузки соотношение (2.55)
имеет вид у = а2. Если момент нагрузки изменяется обратно про-
порционально скорости, то имеет место зависимость у = Та.
Механические характеристики АД при регулировании по за-
кону (2.53) и, следовательно, при Л/к = const, которые могут быть
получены при регулировании вниз от номинальной частоты а < 1,
показаны на рис. 2.71. При частотах, близких к номинальной, они
практически совпадают с характеристиками при пропорциональ-
ном управлении у = а. Однако при соблюдении закона (2.56) по
мере снижения частоты при а < 0,2 (для двигателей РНом < 5 кВт
даже при больших значениях а) все более сказывается влияние
активного сопротивления статора, которым пренебрегли при по-
лучении зависимости (2.54). Эго проявляется в уменьшении Мк
и, соответственно, перегрузочной способности двигателя. Соот-
ветствующие характеристики показаны штриховой линией. Ком-
пенсация Л осуществляется в замкнутых системах регулирования.
2.4. Электроприводы с асинхронными двигателями
155
При частотах выше номинальной (а > 1) соблюдение закона
(2.56) нереализуемо, так как напряжение на АД не может превы-
шать номинальное. Поэтому в этой зоне регулирование осущест-
вляется при Us = Us ном = const и критический момент снижается
(рис. 2.71).
Рис. 2.71. Механические характеристики АД при частотном управлении
Укрупненная функциональная схема электропривода с час-
тотным регулированием скорости представлена на рис. 2.72.
Главным элементом этой схемы является преобразователь часто-
ты ПЧ, осуществляющий, как было показано, регулирование
частоты и напряжения по одному из законов. Задачей ПЧ явля-
ется преобразование напряжения сети (Uc, fc), подаваемого на
АД. По информационному каналу на ПЧ подается сигнал управ-
ления Uy. Согласно сложившейся терминологии, такие электро-
приводы называются частотными. Они различаются типами
ПЧ, способами формирования напряжения и видами обратных
связей. Для получения совершенных характеристик частотного
электропривода применяются замкнутые системы.
156
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.72. Укрупненная функциональная схема электропривода
с частотным управлением
2.4.5. Преобразователи частоты для частотного
электропривода
Преобразование частоты возможно по схеме электромашин-
ного преобразователя: приводной двигатель с регулируемой час-
тотой вращения — синхронный генератор. Однако такая схема
в промышленности не применяется из-за громоздкости и низких
энергетических показателей. Практически все ПЧ строятся на
основе полупроводниковых элементов — транзисторов, тиристо-
ров и т.д., которые получили название статических преобразова-
телей частоты (СПЧ). Широкое распространение СПЧ объяс-
няется их высокими технико-экономическими показателями.
Помимо регулируемого электропривода СПЧ применяют в ис-
точниках бесперебойного питания, установках для высокочас-
тотного нагрева металла и т.д.
Все СПЧ разделяются на две большие группы:
1) СПЧ с непосредственной связью питающей сети и нагруз-
ки — непосредственные ПЧ (НПЧ); иное их название — цикло-
конверторы',
2) СПЧ с промежуточным звеном постоянного тока.
Принципиальные схемы и особенности применения каждого
вида СПЧ будут рассмотрены ниже.
Статические преобразователи частоты со звеном постоянно-
го тока состоят из следующих основных блоков (рис 2.73, а):
2.4. Электроприводы с асинхронными двигателями
157
управляемого выпрямителя (УВ) 1 со схемой управления 2, авто-
номного инвертора (АИ) 3 со схемой управления 4 и фильтра 5
в звене постоянного тока. Напряжение сети (£4, Тс) в СПЧ преоб-
разуется в напряжение Us регулируемой частоты fs. Амплитуда
этого напряжения регулируется системой управления выпрями-
телем (СУВ), а его частота — системой управления инвертором
(СУИ). В зависимости от схемы фильтра Ф (рис. 2.73, б, в) в звене
постоянного тока АИ делятся на инверторы напряжения (АИН)
и тока (АИТ). АИН являются источниками напряжения, для
чего фильтр кроме индуктивности Ьф содержит конденсатор Сф
относительно большой емкости (порядка (2...5)-103 мкФ). Это
обеспечивает АИН жесткую характеристику (зависимость напря-
жения от нагрузки). Управляющими воздействиями на двигатель
в СПЧ-АИН являются амплитуда и частота напряжения.
а
-U
VC>
Рис. 2.73. Схема статического преобразователя частоты (а)
и схемы фильтров (б, в) в звене постоянного тока
От УВ
UA = var
9
4= var
9
В схеме СПЧ на основе АИТ в звено постоянного тока
включается реактор La с большой индуктивностью (рис. 2.73, в),
что делает такой инвертор источником тока. Поэтому в схеме
СПЧ-АИТ управляющими воздействиями на двигатель являются
158
Глава 2. Замкнутые системы управления электроприводами
частота и ток статора. Эти особенности предопределяют структу-
ры замкнутых систем регулирования, которые будут рассмотре-
ны ниже.
Рассмотрим подробнее процесс формирования напряжения
и схемы СПЧ-АИН. Процесс выпрямления напряжения сети
Uc с помощью УВ не отличается от процесса в электроприводах
постоянного тока.
Рассмотрим работу ДИН на примере трехфазной мостовой
схемы (рис."2.74) с подключением обмоток АД, соединенных
в звезду (соединение обмоток в треугольник не меняет принципа
работы АИН).
Рис. 2.74. Принципиальная схема силовой части автономного инвертора
напряжения (устройства коммутации тиристоров VS1...VS6 не показаны)
Тиристоры VS1...VS6 осуществляют поочередное подключение
источника постоянного напряжения Ua к точкам А, В и С, являю-
щимся выходами инвертора. На схеме не изображены устройства
принудительной коммутации тиристоров; взамен тиристоров мо-
гут применяться также транзисторы. Наиболее простую структуру
системы управления имеют АИН с фиксированным значением
угла проводящего состояния тиристоров у = 120° эл. и у = 180° эл.
Получение формы выходного напряжения при у = 180° эл. мож-
но показать следующим образом. Последовательным включением
двух конденсаторов С1 и С2 равной емкости на входе инвертора
образуем нулевую точку, как показано на рис. 2.74, потенциал
которой равен нулю. Тогда фазные напряжения инвертора иая,
«ьи и «си, равные потенциалам точек А, В и. С относительно
2.4. Электроприводы с асинхронными двигателями 159
нуля, зависят от состояния тиристоров VS1...VS6. Например, для
точки А иап = + О,5СЛ/, когда открыт VS1, и иои = - 0,5^/^ при от-
крытом VS4. При у = 180° эл. всегда открыты три тиристора од-
новременно. Соответствующие построения фазных напряжений
инвертора иая, и«и и иси, линейных напряжений иаь, чьс и иса
и фазных напряжений нагрузки ча, щ и «с при соединении в звез-
ду показаны на рис. 2.75. Там же обозначены тиристоры, находя-
щиеся в проводящем состоянии.
Линейные напряжения равны:
ЧаЬ ~ “аи ~ Щи , Wic ~ Щи ~ Чей , ЧСа — Чей ~~ Чан •
Для нахождения фазных напряжений иа, Щ и чс на нагрузке
при соединении звездой запишем систему уравнений:
Ча Uff,
Чье = Чь - Чс ; >
(2.57)
Чса =ЧС ~Ча.
С учетом того, что в симметричной системе иа + чь + чс = 0,
из (2.57) получим:
2 1
1 2 .
4b — _ Чса _ Чаь,
(2.58)
Чса 4fc
3
Необходимо заметить, что уравнения (2.58) не приемлемы
для нахождения фазных напряжений инвертора, так как для по-
следних не соблюдается условие равенства нулю суммы фазных
напряжений ввиду наличия напряжения третьей гармоники.
Вентили VD1...VD6 обратного тока в схеме, приведенной на
рис. 2.74, служат для возврата реактивной энергии АД в конден-
сатор Сф либо (частично) через открытый тиристор другой фазы
в нагрузку. При угле проводимости тиристоров у = 120° эл. фор-
ма кривой фазного напряжения зависит от cosep нагрузки и в це-
лом имеет более сложный характер. При cosep < 0,558 напряжение
160
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.75. Напряжение инвертора и нагрузки при у = 180° эл.
2.4. Электроприводы с асинхронными двигателями
161
аналогично (см. рис. 2.75), так как нулевая пауза в кривой напря-
жения заполняется из-за открытого состояния одного из диодов
(VD1...VD6), через который в данный интервал времени осуще-
ствляется возврат энергии.
Предоставляем читателю возможность самостоятельно по-
строить кривые напряжения, аналогичные кривым на рис. 2.75,
но при у = 120° эл. и у = 150° эл. Интересно проследить измене-
ние формы напряжения при различных значениях cos<p, напри-
мер: costp = 0 и COS(p = 1.
Схема силовой части СПЧ на основе АИН показана на
рис. 2.76, а.
a
о-----------К нагрузке
Рис. 2.76. Схема силовой части СПЧ на основе АИН (а) и схема индивидуальной
коммутации тиристора (6)
^3397
162
Глава 2. Замкнутые системы управления электроприводами
Амплитуда напряжения на входе инвертора регулируется ти-
ристорами VS7...VS12 УВ; между УВ и АИН включен Ьф—
Сф-фильтр. Для коммутации тиристоров VS1...VS6 инвертора
служат конденсаторы С и реакторы L. Отсекающие диоды VD7...
VD12 предотвращают разряд коммутирующих конденсаторов че-
рез нагрузку. Частота коммутации тиристоров VS1...VS6, которая
однозначно определяет выходную частоту инвертора, задается
системой управления. Характерная особенность схемы заключа-
ется в том, что каждый из тиристоров VS1...VS6 может быть от-
крыт в течение 1/3 периода, т.е. у = 120° эл. Рассмотрим этот во-
прос более подробно. При отпирании очередного тиристора из
группы VS1, VS3, VS5 или VS2, VS4, VS6 предшествующий тири-
стор запирается. Допустим, открыты тиристоры VS 1 и VS2. Ком-
мутирующий конденсатор заряжается по цепи: Uj—VS1—L—С—
—VD9 — нагрузка — VS2—Uj; по окончании процесса заряда на
левой Обкладке конденсатора имеется «+» (цепи заряда других
конденсаторов не рассматриваем). Следующим по порядку рабо-
ты включается тиристор VS3 (VS5 в этом такте включен быть не
может, так как при открытом VS2 это приведет к короткому замы-
канию), после чего на короткое время прохождения обратного
тока образуется цепь С+ — L — VS1 — VS3 — СН“ и тиристор VS1
запирается. В дальнейшем рассматриваемый конденсатор пе-
резаряжается по цепи Ud — VS3 — С — L — VD7 — нагрузка —
VD8 — VS2 — Ua. Некоторое время, определяемое параметрами
коммутирующей цепи, на левой обкладке конденсатора сохраня-
ется знак «+», что необходимо для восстановления запирающих
свойств тиристора VSI.
Следующим будет включен тиристор VS4. Такая коммутация
называется фазовой. Ограничением схем с фазовой коммутацией
является фиксированный угол проводящего состояния тиристо-
ров (120° эл., когда в проводящем состоянии находятся лишь два
тиристора одновременно (рис. 2.76, а), или 180° эл. (схема не
приводится). Этот недостаток устраняется применением схем
с двухступенчатой коммутацией, в которых запирание очередно-
го вентиля происходит в момент включения вспомогательного
тиристора, подключающего источник коммутирующей ЭДС. При
такой коммутации ток нагрузки кратковременно переводится на
2.4. Электроприводы с асинхронными двигателями
163
вспомогательный тиристор. Можно выделить следующие группы
схем инверторов с двухступенчатой коммутацией:
1) с индивидуальной коммутацией тиристоров;
2) с групповой коммутацией;
3) с общим узлом коммутации.
Количество схем коммутации чрезвычайно велико. Приве-
дем одну из них — схему С индивидуальной коммутацией, в ко-
торой каждый из силовых тиристоров инвертора имеет вспо-
могательный (коммутирующий) тиристор. Рассмотрим схему га-
шения лишь одного из силовых тиристоров (например, VS1 на
рис. 2.76, а), которая изображена на рис. 2.76, б. Перед отпира-
нием основного тиристора VS1 предварительно отпирается ком-
мутирующий тиристор VSK и конденсатор С заряжается по цепи
Uj — С — VSK — VD1 — нагрузка и т.д. По окончании процесса
заряда на левой обкладке конденсатора имеется «+» и тиристор
VSK запирается, поскольку зарядный ток через него прекра-
щается. При отпирании основного тиристора VS1 (напоминаем,
что рассматриваются лишь цепи коммутации) конденсатор пере-
заряжается по цепи С—VS1—VDK—L—С~ (ipa3p — ток разряда).
Параметры коммутирующей цепи L—С выбираются таким обра-
зом, чтобы обеспечить колебательный характер процесса, в ре-
зультате которого на правой обкладке конденсатора будет поло-
жительный заряд. Теперь коммутирующая цепь подготовлена
к своей основной функции — запиранию тиристора VS1. Это
произойдет в нужный момент при отпирании коммутирующего
тиристора VSK, когда «+» конденсатора прикладывается к като-
ду VS 1; последний запирается, а процесс перезаряда конденсато-
ра теперь уже с участием источника питания Ua происходит ана-
логично описанному выше. По его окончании на левой обкладке
конденсатора будет положительный заряд и схема готова к сле-
дующему такту работы. Необходимо отметить, что процессы
коммутации и зарядов-разрядов коммутирующих конденсаторов
столь кратковременны, что не могут оказать существенного влия-
ния на работу двигателя. Схема на рис. 2.76, б содержит большое
число вспомогательных элементов, что является ее недостатком.
Этот недостаток устраняется в схемах с групповой коммутацией,
которые здесь не рассматриваются.
164 Глава 2. Замкнутые системы управления электроприводами
В рассмотренных выше схемах СПЧ регулирование амплиту-
ды напряжения на АД, необходимое при регулировании частоты,
осуществляется с помощью УВ, который работает так же, как
и в приводах постоянного тока. Напряжение на фазе двигателя
и ток <ф фазы при этом изменяются, как показано на рис. 2.77, а.
Как видно, форма тока значительно отличается от синусоидаль-
ной. Высшие гармоники тока создают пульсирующие моменты,
которые начинают сказываться на работе привода при частоте
питания ниже 10 Гц. Это ограничивает возможности привода.
Между тем применение принципов двухступенчатой коммута-
ции, которая необходима для надежной работы инвертора (одна
из возможных схем показана на рис. 2.76, б), позволяет регули-
ровать напряжение внутри инвертора за счет изменения времени
проводящего состояния силовых тиристоров. Это дает возмож-
ность вместо управляемого выпрямителя применять неуправляе-
мый, выполненный на шести диодах. Кроме того, что умень-
шается количество тиристоров, такой СПЧ предпочтительнее
с точки зрения вредного влияния на питающую сеть, При регу-
лировании внутри инвертора для уменьшения содержания выс-
ших гармоник в кривой выходного напряжения применяется
принцип широтно-импульсной модуляции (ШИМ),
согласно которому, ширина импульсов изменяется по опреде-
ленному закону (рис. 2.77, б, в) в течение интервала проводимо-
сти инвертора. Необходимо отметить, что на указанном рисунке
дан упрощенный вид кривой, хотя он в достаточной мере иллю-
стрирует принцип регулирования. При прямоугольной модуля-
ции (рис. 2.77, б), которая является частным случаем ШИМ,
кривая напряжения состоит из нескольких импульсов одинако-
вой ширины. Время ti включенного состояния тиристора не из-
меняется в течение интервала О...тс (Тком = const и 0 < fi < Гком).
Регулирование напряжения, первая гармоника щ которого пока-
зана на рисунке, заключается в изменении 6.
Наилучшие показатели имеет синусоидальная ШИМ, при
которой ширина импульса пропорциональна синусу текущего
значения ©оЛ При этом ток в обмотках двигателя имеет форму,
близкую к синусоидальной (рис. 2.77, в). Для получения сину-
соидального ШИМ-напряжения необходима достаточно слож-
2.4, Электроприводы с асинхронными двигателями
165
Рис. 2.77. Напряжение фазы иф и ток фазы/ф при питании от инвертора
с фазовой коммутацией (а) и напряжения и токи при прямоугольной
(б) и синусоидальной (в) ШИМ
166
Глава 2. Замкнутые системы управления электроприводами
ная система управления инвертором; она реализуется на основе
микропроцессорной техники. Реальные СПЧ, построенные по
принципу ШИМ, имеют напряжение, состоящее из 50 и более
импульсов на полупериоде на нижнем пределе частоты питания
fs. При повышении fs до номинального значения количество им-
пульсов уменьшается. Таким образом, инвертор с ШИМ обеспе-
чивает не только регулирование напряжения, но и улучшение его
гармонического состава.
Регулирование напряжения возможно и на входе инвертора.
В такой схеме (рис. 2.78, а) применяется также неуправляемый
выпрямитель В, а между ним и инвертором включается коммута-
тор — широтно-импульсный преобразователь (ШИП).
При этом регулируется среднее значение напряжения на входе
АИН, а следовательно, и напряжение на двигателе. Принципи-
альная схема ШИП приведена на рис. 2.78, б. ШИП состоит из
основного VS1 и вспомогательных VS2, VS3 тиристоров, токо-
ограничивающего реактора L1, конденсатора Ском и реактора
Lkom коммутирующего контура. Импульсы управления тиристо-
рами формируются СИФУ.
Предварительно открывается VS3 и конденсатор СКОм заря-
жается по цепи Ei — VS3 —Ском — — Li~ нагрузка —
(знак «+» на левой обкладке СКОм)- Затем отпираются VS1 и VS2;
к нагрузке прикладывается Полное напряжение Д (пренебрегая
влиянием L1), а конденсатор Скои перезаряжается по цепи
Ском - VS2- Lkom - Ском (параметры Скон -Lkom обеспечива-
ют колебательный характер), в результате чего СКОм приобретает
«+» на правой обкладке. Теперь схема готова к коммутации
VS1, для чего в нужный момент отпирается VS3; к катоду VS1
прикладывается «+» Ском, тиристор запирается, и процесс по-
вторяется.
Частота коммутации ШИП выбирается достаточно высокой
(до 1 кГц), что позволяет уменьшить габариты фильтра. В пред-
ставленной схеме СИФУ не имеет синхронизации с сетью; ее за-
дачей является сдвиг управляющих импульсов VS3 относительно
VS1. Достоинством СПЧ с ШИМ и ШИП является возможность
работы от нерегулируемого источника постоянного тока, в том
числе от аккумуляторных батарей.
2.4. Электроприводы с асинхронными двигателями
167
VD1
VS1
VS2
VD2 2i
U.
ИРШ
— о
Рис. 2.78. Схема статического преобразователя частоты с ШИП
на входе инвертора (а) и принципиальная схема ШИП (б)
СПЧ на основе АИТ в упрощенном виде представлен на
рис. 2.79, в котором основные коммутирующие конденсаторы
С1...С6 включены между рабочими тиристорами фаз VS1...VS6,
а в интервалах между коммутациями отделены от нагрузки дио-
дами VD1...VD6. Обратим внимание лишь на два существенных
отличия данной схемы от схемы, приведенной на рис. 2.76, а:
фильтр в звене постоянного тока выполнен согласно рис. 2.73, в,
и диоды обратного тока отсутствуют. В такой схеме АИТ приме-
няется фазная коммутация тиристоров, т.е. запирание проводя-
щего тиристора происходит при открывании тиристора другой
фазы (например, запирание VS1 при отпирании VS3, запирание
168
Глава 2. Замкнутые системы управления электроприводами
VS6 при отпирании VS2 и т.д.). Функционирование электропри-
вода с АИТ возможно лишь в замкнутой системе регулирования,
что будет пояснено ниже.
к
VS1 VS3 VS5
Рис. 2.79. Схема силовой части СПЧ на основе АИТ
Схемы с непосредственным преобразовате-
лем частоты (НПЧ) формируют напряжение на двигателе не-
посредственно из напряжения сети. Это поясняется весьма рас-
пространенной схемой НПЧ с нулевым проводом, имеющей три
реверсивных выпрямителя, к выходу каждого из которых под-
ключена фаза двигателя (рис. 2.80).
Каждый из трех реверсивных выпрямителей, например U1,
содержит шесть тиристоров VS1...VS6 для фазы А, три из кото-
рых (VS1...VS3) подключены к сети анодами, а три оставшихся
(VS4...VS6) — катодами. В приведенной схеме нулевая точка
трансформатора соединена с общей точкой трехфазной обмотки
статора, поэтому такая схема называется нулевой.
Рассмотрим процесс формирования напряжения в фазе А для
случая активной нагрузку. При подаче управляющих импульсов
на тиристоры VS1...VS3 в моменты времени соответственно ft, ft,
ft (рис. 2.81, а) на фазе двигателя формируется напряжение и2,
2.4. Электроприводы с асинхронными двигателями
169
Рис. 2.80. Схема НПЧ с нулевым проводом
170
Глава 2. Замкнутые системы управления электроприводами
состоящее из трех участков синусоидального напряжения вто-
ричной обмотки трансформатора TV (см. рис. 2.80, 2.81, б). При
этом проводящий тиристор, например VS1, запирается при
включении следующего (VS2), поскольку потенциал на аноде ти-
ристора VS1 ставится меньше, чем потенциал на аноде тиристора
VS2. Происходит естественная коммутация за счет напряжения
сети, что позволяет назвать НПЧ преобразователем частоты
с естественной коммутацией. Количество участков синусоиды,
из которых формируется напряжение на двигателе, может быть
большим, чем это показано на рис. 2.81, б, если в моменты пере-
сечения синусоид продолжать подавать управляющие импульсы
на тиристоры VS1...VS3. Если прекратить подачу управляющих
импульсов на VS1...VS3 и подать импульсы на VS6, VS4 и VS5
в моменты ?5, 4, /7, то на нагрузке будет сформировано напряже-
ние из трех участков синусоиды отрицательной полярности.
Кривая и2 будет периодически повторяться, если продолжать по-
дачу импульсов на VS1...VS3, и т.д. Первая гармоника выходного
напряжения обозначена и1а. Для регулирования напряжения от-
пирание последующего тиристора каждой из групп производят
не в моменты естественной коммутации (Л, (2,1з и т.д.), а со сдви-
гом на некоторый угол а (рис. 2.81, в). Выходное напряжение на
нагрузке определяется соотношением
ТТ JZUiQmi sinfr/mi)
и =------------------cos а,
(2.59)
л
где Е71ф — фазное напряжение вторичной обмотки трансформа-
тора; а — угол регулирования.
Из рис. 2.81 видно, что частота выходного напряжения ниже,
чем частота питающей сетиуё, и что
/И1
л
/И1
где л = 0,1, 2,3,... — количество открываемых тиристоров в груп-
пе за вычетом одного.
Поскольку
/с _ Т2 _ (2л + л»1)
Л Тс лл ’
2.4. Электроприводы с асинхронными двигателями
171
Рис. 2.81. Кривые напряжения сети (а) и на выходе НПЧ при различных
значениях угла регулирования (б - г)
172
Глава 2. Замкнутые системы управления электроприводами
то
2п + 7И1
(2.60)
Из формулы (2.60) видно, что частота f3 зависит от частоты
первичной сети fc, числа полуволн первичного напряжения (л+1)
и числа фаз mj первичной сети. Регулирование частоты fs проис-
ходит дискретно. Для плавного регулирования частоты f3 вво-
дится пауза между включением и выключением анодной и катод-
ной групп тиристоров.
При работе преобразователя на асинхронный двигатель энер-
гия, накопленная в магнитном поле, должна быть возвращена
в питающую сеть. С этой целью тиристоры переводятся в инвер-
торный режим: анодной группы VS1...VS3 — при отрицательном
напряжении, катодной группы VS4...VS6 — при положительном.
Перевод тиристоров из выпрямительного режима в инверторный
и наоборот должен осуществляться при нулевом токе и по исте-
чении выдержки времени, необходимого для восстановления
управляющих свойств тиристора. Контроль тока осуществляется
датчиками ДТЛ, ДТЙ и ДТС. Другим решением является уста-
новка уравнительных реакторов подобно тому, как это делается
в реверсивных выпрямителях.
Получение трехфазного напряжения со сдвигом фазных на-
пряжений на треть периода достигается подачей управляющих
импульсов на тиристоры групп других фаз со сдвигом на треть
периода выходной регулируемой частоты /s.
Как следует из соотношения (2.59), для регулирования ам-
плитуды выходного напряжения изменяют угол а. Амплитуда
первой гармоники выходного напряжения ща на рис. 2.81, в боль-
ше, чем на рис. 2.81, г, поскольку а2 > а|.
Недостатки рассмотренных схем НПЧ — низкий коэффици-
ент мощности вследствие изменения угла регулирования а и не-
синусоидальная форма кривой выходного напряжения. Кривая
выходного напряжения содержит основную гармонику с частотой
/s и пульсирующее напряжение зубчатой формы, уменьшающееся
с увеличением соотношения /с/Л- Для улучшения гармониче-
ского состава выходного напряжения углы регулирования в вы-
прямительном и инверторном режимах изменяют по арккосину-
соидальному закону.
2.4. Электроприводы с асинхронными двигателями 173
Существуют схемы НПЧ с принудительной коммутацией на
основе тиристоров и транзисторов, благодаря которым можно
получить выходную частоту fs, не только меньшую (как в НПЧ
с естественной коммутацией), но и большую частоты /с.
Расчет механических характеристик частотного электропри-
вода с НПЧ выполняют, пренебрегая влиянием высших гармо-
ник в кривой выходного напряжения на момент двигателя. При
этом справедливы соотношения законов частотного регулирова-
ния, рассмотренные ранее.
2.4.6. Замкнутые системы частотного электропривода
Как указывалось (см. п. 2.4.4), для регулирования частоты
вращения АД в системе частотного привода (ЧЭП) необходимо
изменять напряжение и частоту. Асинхронные двигатели в но-
минальном режиме ((Л,/ном) работают с номинальным магнит-
ным потоком, который невозможно увеличивать из-за насыщения
магнитной цепи. Основная задача, возникающая в замкнутой
системе ЧЭП, заключается в стабилизации магнитного потока
при изменении нагрузки. Поскольку непосредственное измере-
ние магнитного потока затруднительно, используются обратные
связи по току (постоянному и переменному), ЭДС, скорости и
абсолютному скольжению.
Для повышения жесткости механических характеристик ис-
пользуется обратная связь по скорости с воздействием на частоту
питания АД. Замкнутые системы ЧЭП различаются видом обрат-
ных связей и зависят от типа преобразователей частоты (АИН,
АИТ). Если в системе применена ОС по скорости, то ее исполь-
зуют и для стабилизации магнитного потока. Такой принцип
реализуется в двухконгурной системе ТПЧ (АИН)-АД (рис. 2.82, о),
где один сигнал управления по частоте Uy,4 используется для за-
дания как частоты, так и напряжения U3M через функциональный
преобразователь (ФП). На рис. 2.82, а обозначены сигналы
управления частотой Uy.4, напряжением Uy.H; обратной связи
в каналах управления напряжением UC.H и частотой Uc.4- Таким
образом, в таком электроприводе есть два контура регулирова-
ния: контур регулирования напряжения выпрямителя, который
174
Глава 2. Замкнутые системы управления электроприводами
б
Рис. 2.82. Функциональная схема двухконтурной системы частотного
электропривода с АД (а) и переходные процессы при пуске АД
в системе частотного электропривода (6)
2.4. Электроприводы с асинхронными двигателями
175
обеспечивает стабилизацию магнитного потока, и контур регу-
лирования частоты питания, стабилизирующий скорость двига-
теля при изменении нагрузки.
Применение обратной связи по скорости вместо непосредст-
венного измерения магнитного потока несколько снижает точ-
-ность его стабилизации, но тем не менее системы вида, показан-
ного на рис. 2.82, а, позволяют обеспечивать высокую жесткость
механических характеристик и достаточный для многих меха-
низмов диапазон регулирования скорости.
Для стабилизации момента двигателя и соблюдения закона на-
растания частоты питания в переходных процессах в структуру,
приведенную на рис. 2.82, а, вводится отрицательная обратная
связь по току статора или положительная обратная связь по скоро-
сти. Эти обратные связи являются нелинейными (или задержанны-
ми) и в установившемся режиме должны быть отключены. Вместо
этих обратных связей, называемых формирующими, применяется
задатчик интенсивности SJ (в схеме на рис. 2.82, а обведен штрихо-
вой линией), который обеспечивает формирование требуемого за-
кона изменения частоты изя. Переходные процессы момента Мэ,
частоты статора /s и скорости сопри пуске АД в такой системе при-
ведены на рис. 2.82, б. Система обеспечивает линейное нарастание
частоты и пуск двигателя с постоянным ускорением.
Задача замкнутой системы регулирования с автономным ин-
вертором тока (рис. 2.83, а) — формирование частоты переклю-
чения тиристоров VS1...VS6 (см. рис. 2.79) и тем самым частоты
тока статора /s, а также регулирование амплитуды тока статора,
для чего воздействие производится на управляемый выпрями-
тель U. В этой системе можно обнаружить два контура: 1) контур
регулирования тока, содержащий регулятор тока (РТ), функцио-
нальный преобразователь (ФП), датчик тока (RS) и СИФУ;
2) контур регулирования скорости вращения АД, состоящий из
регулятора скорости (PC), датчика скорости (BR), регулятора
частоты (РЧ) (генератора импульсов) и распределителя импуль-
сов (РИ). Частота тока формируется инвертором АИТ таким об-
разом, что в любой рабочей точке справедливо соотношение
е>о = Znco+ а>2,
(2.61)
где ®2 — частота тока в роторе
176
Глава 2. Замкнутые системы управления электроприводами
Реализация соотношения (2.61) обеспечивается суммировани-
ем на входе РЧ двух сигналов, один из которых пропорционален
измеренной скорости вращения ротора Uoc, а другой — заданной
частоте тока ротора (частоте скольжения ©2 = ©о - «)• Внеш-
ний контур регулирования скорости необходим для обеспечения
требуемой жесткости механических характеристик. В соответ-
ствии с этим требованием выбирается коэффициент усиления PC.
Выходной сигнал PC U$. используется одновременно в качестве
сигнала задания частоты тока ротора и для формирования сигнала
задания тока статора СД с помощью функционального преобразо-
вателя ФП, поскольку при изменении нагрузки от нуля до номи-
нальной ток статора двигателя изменяется от тока холостого хода
/о = (0,3.. .0^)Дном до номинального, т.е. в 2...3 раза. Поэтому
электропривод с АИТ строится таким образом, что ток статора не
сохраняется постоянным, а увеличивается с ростом нагрузки (час-
тоты тока ротора ©г). Если, например, при регулировании скоро-
сти задаться условием постоянства потока двигателя Ф = const, то
можно рассчитать зависимость Is = /(р), реализующую это ус-
ловие. Зависимость Д = Д(р) является нелинейной функцией
(рис. 2.83, б), которая реализуется с помощью ФП. Величина ₽ —
это абсолютное скольжение электродвигателя в рабочей точке,
равное отношению угловой частоты ЭДС ротора ©2 к номиналь-
ному значению угловой частоты напряжения статора ©о ном > т.е.
„ _ ©о - © _ ©2
а>о НОМ <О0 ном
В ряде случаев замкнутые системы с АИТ оказываются про-
ще, чем с АИН, поскольку в них легче решается задача стабили-
зации момента, который пропорционален току, как в системах
электропривода постоянного тока. Такие системы называются
системами с частотно-токовым управлением.
СПЧ на основе АИТ позволяют создавать электроприводы
с высоким быстродействием, работающие в напряженных пов-
торно-кратковременных режимах. К их достоинствам относятся
сравнительно небольшое число тиристоров, возможность реку-
перации энергии в сеть, для чего УВ переводится в режим ведо-
мого сетью инвертора. Недостатком является необходимость
входного реактора большой индуктивности.
2.4. Электроприводы сасинхронными двигателями
177
-U f
о с’ с
Рис. 2.83. Схема частотного электропривода на основе АИТ (а) и зависимость
тока статора от частоты тока в роторе (6); а>2к» Рк — критические
значения соответствующих величин
2.4.7. Комплектные электроприводы с частотным
управлением
В настоящее время в промышленности используются ком-
плектные частотно-управляемые электроприводы различного на-
значения. Рассмотрим наиболее распространенные из них.
Электроприводы ЭК.Т2 (в более раннем исполнении серия
ТПЧ) предназначены для широкого класса механизмов, требую-
12з597
178 Глава 2. Замкнутые системы управления электроприводами
щих регулирования скорости вращения в небольшом диапазоне
и не предъявляющих высоких требований к динамическим харак-
теристикам. Основные технические характеристики электропри-
водов ЭКТ2 приведены в табл. 2.1. ЭКТ2 имеют следующие моди-
фикации: ЭКТ2Д — с динамическим торможением; ЭКТ2Р —
с рекуперативным торможением.
Электроприводы ЭКТ2 выполнены по схеме управляемый
выпрямитель — автономный инвертор напряжения. Функцио-
нальная схема электропривода ЭКТ2Д приведена на рис. 2.84,
где изображены следующие функциональные узлы. Задающий
генератор (ЗГ) вырабатывает последовательность импульсов, по-
ступающих на кольцевой распределитель (КР) и на формирова-
тель импульсов (ФИ), а затем на управляющие входы тиристоров
АИН. Частота импульсов ЗГ определяется входным сигналом,
пропорциональным ЭДС двигателя, для чего в датчике ЭДС
(ДЭ) осуществляется преобразование е = U - IRS, где U — напря-
U
-380 В
QF
50 Гц
UA2 *
ДТ
УВ
СУВ
AUU
АА
AF РЧ
ЗИ SJ
FA СЗС
UZV
А1 УДР
АЗ УР
щ
Рис. 2.84. Функциональная схема электропривода с преобразователем частоты ЭКТ2Д
2.4. Электроприводы с асинхронными двигателями
179
180
Глава 2. Замкнутые системы управления электроприводами
жение на двигателе, измеренное с помощью датчика напряжения
ДН; I — ток, измеряемый с помощью датчика тока (ДТ) UA2;
Rs — активное сопротивление фазы двигателя. Блоки ФИ, КР
и ЗГ образуют систему управления инвертором (СУИ).
Выходной сигнал ДЭ подается на вход ЗГ, обеспечивая тем
самым выполнение закона частотного управления е// = const,
где f — выходная частота инвертора. При регулировании частоты
сверх номинальной устройство двухзонного регулирования (УДР)
поддерживает напряжение на уровне номинального или факти-
ческого напряжения сети (если оно ниже номинального). Замкну-
тая система регулирования электропривода выполнена по струк-
туре подчиненного регулирования и содержит внутренний кон-
тур регулирования входного тока (ДТ — датчик тока, РТ — ре-
гулятор тока, СУВ — система управления выпрямителем)
и ПИ-регулятор частоты РЧ. Сигнал задания частоты ±(73 посту-
пает на вход устройства реверса УР, которое устанавливает коль-
цевой распределитель КР для счета в прямом или инверсном
направлении. Помимо этого, сигнал +U3 через задатчик интен-
сивности ЗИ подается на регулятор частоты РЧ, куда поступает
также сигнал с выхода ЗГ через датчик частоты ДЧ. Таким обра-
зом, РЧ формирует задание регулятору тока.
В электроприводах ЭКТ2Д применяется динамическое тор-
можение, которое обеспечивает тормозное устройство (ТУ),
управляемое устройством управления торможением (УУТ). ТУ
состоит из последовательно включенных тиристора и резистора.
Система защиты и сигнализации (СЗС) осуществляет защиту от
максимального тока, тока перегрузки, нарушения охлаждения
вентилей, срыва инвертора, снижения напряжения сети более
чем на 15 %, от обрыва фазы двигателя.
Электроприводы ЭКТ2 нашли применение в механизмах,
работающих преимущественно в режиме S1 (в текстильной, ме-
таллургической, химической промышленности) при невысо-
ких, как это следует из табл. 2.1, значениях диапазона регулиро-
вания.
Электропривод транзисторный регулируемый асинхронный
АТ01 (рис. 2.85) предназначен для регулирования частоты вра-
щения насосов, вентиляторов, компрессоров и механизмов, ис-
2.4. Электроприводы с асинхронными двигателями 181
пользующих АД с короткозамкнутым ротором мощностью до 15,
22, 37, 55, 75 кВт. АТ01 обеспечивает плавный пуск и длительную
работу механизма в рабочем диапазоне частот вращения, а также
автоматическое регулирование заданного технологического па-
раметра (давления, расхода, напора и т.д.).
' Основные параметры приводов серии АТ01 приведены
в табл. 2.2.
Таблица 2.2
Технические характеристики частотных
электроприводов серии АТ01
Тип привода
Параметр
Полная мощность, кВ - А
Номинальная мощность
двигателя, кВт
Номинальный ток нагрузки
4tOM> А
Ток перегрузки в течение
120 с (1,2/тм), А
АТ01-15
18
15
30
36
АТ01 -22 АТ01 -37 АТ01 -55 АТ01 -75
28 45 72 100
22 37 55 75
45 75 110 150
54 90 140 180
Электроприводы серии АТ01 характеризуются следующими
параметрами:
Диапазон регулирования скорости...........................1:10
КПД (без учета электродвигателя), не менее................0,95
Коэффициент мощности, не менее ...........................0,97
Параметры питающей сети:
число фаз............................................... 3
напряжение, В................................ 380, ±10 -15 %
частота, Гц......................................... 50
Параметры выходного напряжения (питание электродвигателя):
число фаз ............................................. 3
номинальное напряжение, В.......................... 380 ±2 %
номинальная частота, Гц............................50±0,1 %
предел регулирования напряжения, В..................0...380
предел регулирования частоты, Гц................ 1,0...50 (100)
частота дискретизации, Гц......................... 3906,25
182
Глава 2. Замкнутые системы управления электроприводами
От описанного ранее электропривода ЭКТ2 электроприводы
серии АТ01 отличаются применением силовых транзисторных
ключей на IGBT-модулях и микропроцессорной системы управ-
ления. В электроприводе реализовано частотное управление по
закону u/f= const с возможностью настройки параметров с кла-
виатуры пульта управления. Выпрямленное с помощью диодного
выпрямителя напряжение сети преобразуется в АИН с ШИМ
в напряжение переменных частоты и амплитуды.
К основным задачам микропроцессорной системы автомати-
ческого управления (МПСАУ) относятся расчет и поддержание
требуемых значений выходных параметров — частоты ,и напря-
жения, а также диагностика и индикация текущего состояния
преобразователя и выполнение защитных функций. Благодаря
встроенному программному обеспечению МПСАУ пользователю
предоставляется значительная гибкость в управлении, диагно-
стике, адаптации работы электропривода к конкретному техно-
логическому процессу путем программирования режимов работы
и формирования дискретных и аналоговых выходов.
В состав МПСАУ входят следующие функциональные узлы
(см. рис. 2.85): микроконтроллер (МК); ЗУ; блок ШИМ; таймер
(часы) реального времени (Т); УВВ дискретных сигналов; блок
аналоговых адаптеров (БАА), содержащих встроенные АЦП
и активные фильтры на каналах измерения выпрямленного на-
пряжения Щ и тока Id, схема защиты (СЗ); интерфейс радиаль-
ный последовательный (ИРПС); контроллер клавиатуры и ин-
дикации (ККИ); пульт управления, содержащий клавиатуру
и индикацию; формирователи (драйверы БДР) сигналов U\...Uf>
управления силовыми ключами; блоки питания (на схеме не
показаны).
Микроконтроллер выполнен на основе БИС N8XC5IGB
и представляет собой набор функциональных блоков, связь между
которыми осуществляется через ШАД. Запоминающее устройст-
во содержит ПЗУ для хранения программ и ППЗУ для хранения
программируемых параметров (с сохранением информации после
снятия напряжения).
Блок ШИМ служит для формирования сигналов, поступаю-
щих на БДР.
2.4. Электроприводы с асинхронными двигателями
183
Рис. 2.85. Функциональная схема управления электроприводом серии АТО 1
184
Глава 2. Замкнутые системы управления электроприводами
Таймер реального времени позволяет принимать задающие
сигналы в зависимости от времени суток и изменять режим рабо-
ты электропривода (например, регулировать расход воды).
Программное обеспечение охватывает следующие функции:
• предоставление информации о состоянии преобразователя
(напряжение U<i, ток /<1, мощность нагрузки, текущее значение
задания, текущая частота, текущее значение технологического
параметра Р и др.);
• выбор источника управления: от потенциометра RP; от
дистанционного ПУ (цифровым способом по каналу ИРПС);
аналоговым сигналом по каналу обратной связи;
• программирование: работы преобразователя в зависимости
от времени суток; параметров управляющего сигнала; парамет-
ров сигнала обратной связи; параметров ПИ-регулятора и тем-
пов изменения выходной частоты; соотношения U/f; номиналь-
ных и предельных режимов работы; условий пуска/отключения,
функций релейных выходов, алгоритма управления тормозным
резистором (в звене постоянного тока), параметров для работы
в локальной вычислительной сети.
Приведенные технические решения позволяют говорить о пер-
спективности применения электроприводов серии АТ01 для ши-
рокого класса механизмов.
2.4.8. Асинхронные электроприводы
с векторным управлением
Векторное управление основано на том, что контролируется
не только величина (модуль) управляемой координаты, но и ее
пространственное положение (вектор) относительно выбранных
осей координат.
В рассмотренных выше системах (см. п. 2.4.6) при управле-
нии использовались скалярные величины — напряжение статора,
ток статора, частота. Для реализации векторного управления
осуществляется контроль мгновенных величин напряжения, тока
и потокосцепления, которые являются составляющими соответ-
ствующих векторов. Путем несложных математических преобра-
зований асинхронный двигатель, характеризуемый большим ко-
2.4. Электроприводы с асинхронными двигателями
185
личеством нелинейных перекрестных связей, можно представить
линейной моделью с двумя каналами управления — моментом
и потоком. Это позволяет производить синтез таких систем, подоб-
но системам ЭП постоянного тока. Подобное удобство управле-
ния требует многократных преобразований координат ЭП, что не
является препятствием, учитывая современный уровень развития
микроэлектроники, особенно микропроцессорной техники.
Для понимания сущности векторного управления воспользу-
емся принципиальной схемой двухфазной двухполюсной обоб-
щенной машины (рис. 2.86), к которой может быть приведена
симметричная машина, имеющая ш-фазную обмотку статора
и л-фазную обмотку ротора.
а А
'1° J-U1a
Рис. 2.86. Принципиальная схема двухполюсной двухфазной обобщенной машины
(расположение осей координат и обмоток): 1 — статор; 2 — ротор
Допустим, что система координат вращается в пространстве
с произвольной скоростью ©к. Тогда дифференциальные уравне-
ния АД в векторной форме (ось и — действительная, v — мни-
мая) будут иметь следующий вид:
186
Глава 2. Замкнутые системы управления электроприводами
us =isRs +
dys
dt
+ JcOkV,,
Ui =iiRi + У2 + j(«>k — ®)Y2>
dt
(2.62)
Мэ = (3 / 2)Zn Lm Im(is h), (2.63)
где us, Hi, i3, /2» Ys, Y2 — соответственно векторы напряжений,
токов и потокосцеплений статора 1 и ротора 2',j — обозначение
мнимой оси; Zn — число пар полюсов; Lm — взаимная индуктив-
ность между обмотками статора и ротора; f2 — комплексно-со-
пряженный вектор i2', 1т — мнимая часть комплексной перемен-
ной; сок — угловая скорость ротора.
Потокосцепления вычисляются по следующим формулам:
Y1 = Lsis + Lmilt
Y2 = Lih. + Lmis, (2.64)
где Ls(Lsg + Lm)vt L2(L2v + Lm) — индуктивности фазных обмо-
ток соответственно статора и ротора.
Уравнения (2.62) можно записать, используя проекции обоб-
щенных векторов на оси координат и, у, т.е. в скалярной форме:
” D Vsu
Usu — Isu^-s + —“ COkVsv?
at
d у sv
dt
U2u -iluRi + “3~~(®K
at
(2.65)
+ (BkVjuj
«2v = Gv Rl + -J1V- + (<0K - co)Y su •
dt
В зависимости от используемых переменных состояния АД
уравнения момента могут иметь различную форму. Кроме приве-
денного уравнения (2.63) применяют следующие выражения элек-
тромагнитного момента:
2.4. Электроприводы с асинхронными двигателями
187
Л/Э “ (3/2)2^п (v SU^SV tysvisu\
Мз = (3/2)Zn (W2v>2u ~ 'Иги'гу), (2.66)
Л/э = [(3/2)Zn£m / (LsLm — £m)]('|/jv*2u ~
Уравнения обобщенной машины для системы координат uv
(2.62) могут быть записаны в любой системе координат. Выбор ко-
ординатных осей зависит от типа машины (синхронная, асинхрон-
ная) и целей исследования. В практике ЭП нашли применение
следующие системы координат: неподвижная система координат
ар (®к = 0); синхронная система координат XY (<ок = ®о) и система
координат dq, вращающаяся вместе с ротором (<ок = и). Взаимное
расположение векторов переменного АД приведено на рис. 2.87.
Переход от уравнений обобщенной машины (2.62), (2.63)
к уравнениям реальной трехфазной асинхронной машины осу-
ществляется с помощью уравнений координатных преобразова-
Рис. 2.37. Векторная диаграмма: 0¥ = 02 + 0г—угол потока;
0« = 0м + Ф — угол вектора напряжения (XY); 0/s = 0М + 0V — угол вектора тока (ар)
(0м — угол момента, <р — угол между векторами тока и напряжения)
188
Глава 2. Замкнутые системы управления электроприводами
ний и замены переменных обобщенной машины реальными
фазными значениями переменных АД. Формулы координатных
преобразований получены при условии постоянства мощности
обеих машин. Они могут быть получены для любых переменных,
записанных в любых осях. При этом преобразования реальной
машины к обобщенной называются прямыми, а преобразования
обобщенной машины к реальной — обратными. Например, фор-
мулы прямого преобразования фазных напряжений статора usa,
Щь, Use к уравнениям ит, и# в осях сф имеют вид:
(2.67)
(2.68)
ит =usa,us(t={i / v-
Формулы обратного преобразования
Usa = Usa ,
Wife =( Usa + ^ЗИф) / 2,
Use =(.-Usa -л/ЗЫф)/ 2.
Для рассмотрения векторного управления выбирается система
координат XY, вращающаяся в пространстве со скоростью поля,
т.е. (ок = <оо, за последнюю принимается скорость вектора потоко-
сцепления ротора v 2- Здесь необходимо отметить, что скорости
вращения векторов напряжения, тока и потокосцепления одина-
ковы лишь в установившихся режимах, а в переходных процессах
они различны. Принцип векторного управления, как уже отмеча-
лось, заключается в том, что вектор переменной (тока, напряже-
ния и т.д.) располагают в пространстве определенным образом.
Наиболее эффективно с точки зрения простоты синтеза системы
расположить вектор потокосцепления у 2 вдоль вещественной оси
X синхронной системы координат, вращающейся со скоростью
поля. В этом случае v2 = |v21 = V2x = V2 и \р2у =0- При этом урав-
нения АД с короткозамкнутым ротором имеют вид:
aRs +K2^.+ K1(^-isy^),
dt dt
гу + A1^- • 4
at
dt
(2.69)
2.4. Электроприводы с асинхронными двигателями
189
0 = -\р2со2 + R2K2IS»,
где К\ = Ls — К2 Lm; К2 = Lm/L2, <о2 = too — со — частота скольжения
или частота тока ротора.
Анализируя уравнения (2.69), можно заметить их некоторое
сходство с уравнениями двигателя постоянного тока: момент
в (2.69) пропорционален потокосцеплению ротора и составляю-
щей вектора тока статора isy, а потокосцепление пропорциональ-
но составляющей ia. Это дает возможность, подобно двигателям
постоянного тока, раздельно управлять потоком и моментом, т.е.
принцип векторного управления приближает асинхронный дви-
гатель с его синусоидальными переменными к двигателю посто-
янного тока. Кроме того, векторное управление позволяет ис-
пользовать при синтезе методы подчиненного регулирования,
широко распространенные в электроприводах постоянного тока.
Различие (не в пользу векторного управления) состоит в том, что
независимое управление потоком, моментом и скоростью осу-
ществляется не реальными переменными двигателя, а преобра-
зованными к иной системе координат.
На рис. 2.88 изображена функциональная схема векторного
управления АД. В обозначениях сигналов управления и обрат-
ных связей использованы следующие индексы: з — задание; У —
управление; ОС — обратная связь по скорости; с — скорость; i —
ток; х, у — принадлежность переменных к синхронной системе
координат; а, 0 — принадлежность переменных к неподвижной
системе координат; ф — потокосцепление; а,Ь,с — индексы фаз.
Схема выполнена на основе принципа подчиненного регули-
рования и содержит три контура:
1) скорости (внешний); содержит датчик скорости BR и регу-
лятор скорости вращения (момента) AR;
2) потокосцепления (магнитного потока) с регулятором потока
Ау и каналом обратной связи, имеющим выходную величину iq,;
3) активной и реактивной составляющей вектора тока
статора с регуляторами АА2 и АА1.
Сигнал обратной связи по току статора осуществляется датчиком
тока UA, который измеряет фазные токи двигателя в двух фазах,
например А и В, и вырабатывает сигналы и,а и и*. Для преобразо-
вания этих сигналов к неподвижной системе координат а0 служит
190
Глава 2. Замкнутые системы управления электроприводами
с
Рис. 2.88. Функциональная схема векторного управления АД
2.4. Электроприводы с асинхронными двигателями
191
функциональный преобразователь U1, работающий в соответст-
вии с формулами (2.67) прямых координатных преобразований:
l/дх — Uia,
«Ф = 1 / л/3(и(в + uib).
(2.70)
Измерение потокосцепления может производиться с помо-
щью различных устройств, например измерительной обмоткой,
укладываемой в те же пазы, что и силовая обмотка. Наибольшее
распространение получили датчики Холла, помещаемые в воз-
душный зазор двигателя. Сигналы датчика Uy преобразуются
в функциональном преобразователе U2 по формулам (2.67) в сиг-
налы «фа и «фр неподвижной системы координат. Полученные ве-
личины необходимо преобразовать к системе координат XY, вра-
щающейся в пространстве со скоростью поля двигателя. С этой
целью в преобразователе D' выделяется модуль потокосцепления
ротора у2 - Jy L + у 2р в виде соответствующего сигнала иф,
«Ф = J ифа + «фР. Здесь же определяются сигналы sin у = «фр/ыф
и cos <р = «фо/мф, которые в преобразователе А2 позволяют перей-
ти от неподвижных координат оф к координатам XY по следую-
щим формулам:
utx = Un. cosy + «ф sin у;
uty = u$ cosy - Uia sin y. (2.71)
Напомним, что сигналы напряжения «фа, «фр, «&, uiy пропор-
циональны соответствующим физическим величинам.
На вход регулятора потокосцепления Ау подается разность
сигналов задания потокосцепления ы3.ф и обратной связи «ф, т.е.
«у.Ф = «з.ф — «ф, а на выходе Ау формируется сигнал задания тока
статора по оси X, т.е. u3ix. Разность сигналов изк — и^, проходя че-
рез регулятор тока АА1, превращается в сигнал Аналогич-
ные преобразования имеют место в канале управления по оси Y,
за исключением того, что здесь установлен регулятор скорости
(момента) AR, выходной сигнал которого делится на сигнал мо-
дуля потокосцепления «ф для получения сигнала задания тока и^
по оси Y. На выходе регулятора АА2 составляющей тока статора
по оси Y вырабатывается сигнал и£, который вместе с сигналом
иьс подается на входы блока А1, функционирующего в соответст-
вии с первыми двумя уравнениями (2.69). На выходе блока А1
192
Глава 2. Замкнутые системы управления электроприводами
получаем преобразованные сигналы их и иу, в которых отсутству-
ет взаимное влияние контуров регулирования составляющих то-
ков по осям X и К Управляющие сигналы их и иу, записанные во
вращающейся системе координат ХУ, в координатном преобра-
зователе АЗ превращаются в сигналы управления ПЧ в непод-
вижной системе координат ар по уравнениям
Муо = «X COS<P - иу sin <р ;
«у₽ = «х sin ф + иу соБф. (2.72)
Для управления силовыми ключами ПЧ в трехфазной системе
координат необходимо с помощью АЧ получить сигналы иуа, иуь,
иусъ соответствии с формулами обратного преобразования (2.68):
ИуЛ ~ Цуа,
Ыуь = (-Иуа + ч/зиур ) / 2; (2.73)
Иус = (—Иуа ~~ ^Зйур ) / 2.
Таким образом, благодаря координатным преобразованиям
в системе векторного управления ЧЭП выделяют два независи-
мых канала регулирования: потокосцепления (магнитного пото-
ка) и скорости вращения (момента). В этом смысле система век-
торного управления аналогична электроприводу постоянного
тока с двухзонным регулированием скорости.
Для многократного преобразования координат электропри-
вода в соответствии с приведенными выше формулами служат
специализированные микропроцессорные контроллеры класса
DSP, работающие в режиме реального времени. Это позволяет
получить глубокорегулируемые ЭП с высоким быстродействием,
используя асинхронный короткозамкнутый двигатель.
Существует множество структурных решений векторного
управления. Рассмотренная на рис. 2.88 функциональная схема
векторного управления АД относится к классу прямого вектор-
ного управления, при котором непосредственно измеряется по-
токосцепление (магнитный поток). При косвенном векторном
управлении измеряют положение ротора АД и электрические па-
раметры (ток, напряжение). Такие системы получили большое
распространение по двум причинам:
1) измерение потока трудоемко;
2) датчик положения необходим во многих промышленных
ЭП (например, позиционный ЭП станков с ЧПУ и автоматиче-
ских манипуляторов).
2.4. Электроприводы с асинхронными двигателями 193
Если нет необходимости измерять положение ротора, приме-
няют так называемое «бездатчиковое» векторное управление
(датчик положения ротора отсутствует). Однако последнее тре-
бует более сложных вычислительных процедур.
Источник питания (3 фазы)
U
W
Перемычка
380...430В ± 10 %
(50,60Гц-5%)
Обратное
вращение
Прямое
вращение
Программи-
руемые ВХОДЫ
Частотный
электропривод
Перемычка
11С
12А
12С
SN
RP
02
RB
N
Съемная клеммная
колодка
Программируемые
выходы
м-
Н
Н
Программируемое реле
Выходные контакты
сигнализации
SN > RS485
R0
ТО
AL0
AL1
DC24B
Выход ДЛЯ
аналогового
измерительного Л=п-----------
прибора Цг Термистор
осо = 10 ± 10 В(12 бит)-
DC0 = 10В (12 бит)
ОСО = 10В
О
1
1
Аналоговый
выходАМ
DC4 = 20mA (12 бит)
Аналоговый
выход АМ1
DC10B
01
AM
O...1OBJ(8 6ht)
4...20mA (8 бит)
t
I
АМ1
А
I
G
Рис. 2.89. Схема подключения комплектного электропривода
(описание клемм силовых и клемм управления см. на с. 194)
М
RS485
1 ^3597
194 Глава 2. Замкнутые системы управления электроприводами
Электропривод с векторным управлением обеспечивает ши-
рокий диапазон регулирования скорости (до 10 000) и во многих
случаях заменяет широкорегулируемый ЭП с коллекторными
двигателями постоянного тока.
Комплектный ЭП изготавливают многие предприятия. Схе-
ма подключения комплектного ЭП приведена на рис. 2.89.
Клеммы силовые: R, S, Т (LI, L2, L3) — клеммы питания;
U, V, W (Tl, Т2, ТЗ) — выход преобразователя частоты; PD, Р —
подключение дросселя в промежуточном звене постоянного тока;
Р, RB — внешний тормозной резистор; Р, N —• внешний модуль
торможения; G — защитное заземление.
Клеммы управления: L — клемма «общий» для аналоговых
входов и выходов; Н — питание потенциометра задания частоты;
О — клемма установки выходной частоты напряжением; 01, 02 —
дополнительная клемма установки выходной частоты соответст-
венно током и напряжением; AM — импульсный выход (напря-
жение); АМ1 — аналоговый выход (ток); Р24 — клемма питания;
СМ1, ПС, 12С, ALO — клемма «общий»; PLC — общая клемма
для внешнего источника питания; FW — прямое вращение; 1, 2,
3, 4, 5 — программируемые дискретные входы; НА — клемма
программируемого выхода 11; 12А — клемма программируемого
выхода 12; AL1, AL2 — реле сигнализации; TH — вход термистора.
Контрольные вопросы
1. Покажите вращающееся магнитное поле при симметричном пи-
тании при числе фаз, отличном от трех, например при т = 2, т — 6.
2. Каковы негативные последствия регулирования скорости напря-
жением в цепи статора при длительном режиме работы?
3. Для каких механизмов предпочтительно регулирование скорости
изменением напряжения?
4. По какой причине частотное регулирование скорости АД являет-
ся наиболее экономичным?
5. Должно ли регулироваться напряжение при регулировании час-
тоты и почему?
6. Какие ограничения имеются при регулировании частоты АД
сверх номинального значения?
7. Какие типы преобразователей частоты для питания АД вы знае-
те? Приведите формы напряжения на двигателе.
2.5. Дискретные электроприводы с шаговыми двигателями 195
8. Какие способы коммутации тиристоров вы знаете?
9. Какими способами осуществляется регулирование напряжения
статических преобразователей?
10. В чем существенное различие инверторов тока и напряжения?
11. Возможно ли рекуперативное торможение в системе частотного
электропривода? Что для этого нужно в системе АИН-АД и системе
НПЧ-АД?
12. Возможно ли получение частоты питания АД выше частоты сети
в системе НПЧ-АД?
13. Какие комплектные частотные электроприводы вы знаете?
14. Каково назначение конденсатора в звене постоянного тока
в преобразователе частоты на основе автономного инвертора напряже-
ния при работе на АД?
15. Сравните значение коэффициента мощности для частотного
электропривода с АД при питании от автономного инвертора напряже-
ния и для АД при питании от сети (при одинаковых значениях частоты
и нагрузки).
16. Поясните назначение диода VDK в схеме, приведенной на
рис. 2.76, б.
17. Каково назначение диодов VD1...VD6 в схеме, приведенной на
рис. 2.76, а? Покажите форму тока, проходящего через один из них.
18. Какие системы координат применяются при векторном управлении?
19. Для чего при векторном управлении необходимо преобразование
переменных из одной системы координат в другую?
20. Возможно ли векторное управление без датчиков магнитного по-
тока АД?
2.5. Дискретные электроприводы
с шаговыми двигателями
2.5.1. Принцип работы и способы
коммутации шаговых двигателей
По принципу работы шаговый двигатель (ШД) является син-
хронным двигателем. Отличие от последнего заключается в том,
что магнитное поле ШД перемещается в воздушном зазоре дис-
кретно (шагами). Вследствие этого движение ротора состоит из
последовательных элементарных шагов. Для получения такого
196
Глава 2. Замкнутые системы управления электроприводами
движения обмотки ТТТД подключаются в определенном порядке
к источнику питания.
От синхронных двигателей ШД отличаются многообразием
конструктивных решений и способов управления. Они широко
применяются в качестве исполнительных элементов рабочих ор-
ганов механизмов, которые должны совершать строго дозирог
ванные перемещения. Для иллюстрации этого приведем лишь
несколько примеров: электропривод стрелки часов, нажимные
устройства прокатных станов, установки для выращивания кри-
сталлов, рабочие органы управления ядерных реакторов, приво-
ды запорной и регулирующей аппаратуры и др. Но наиболее ши-
рокое применение ШД имеют в оборудовании с числовым
программным управлением (ЧПУ) — металлорежущих станках,
промышленных роботах, механизмах гибкого автоматизирован-
ного производства. Новый импульс применению ШД придало
широкое распространение ЭВМ и информационных технологий,
где ШД используются в перфораторах и считывателях ленты, для
управления головкой дисковода, графопостроителем, перемеще-
ния кареток печатающих устройств и т.д.
По принципу действия ШД делятся на три типа:
1) двигатели с ротором, представляющим собой постоянный
магнит (магнитоэлектрические);
2) синхронные реактивные двигатели с переменным магнит-
ным сопротивлением (индукторные);
3) гибридные (или синхронные реактивные) двигатели, кото-
рые обладают свойствами двигателей первых двух типов.
По числу фаз — обмоток управления — ШД разделяются
на однофазные, двухфазные и многофазные; по числу паке-
тов стали магнитопровода — на однопакетные, двухпа-
кетные и многопакетные; по способу фиксации ротора
при обесточенных обмотках управления — на двигатели с внут-
ренней и внешней фиксацией.
Рассмотрение всех конструкций ШД, применяемых в настоя-
щее время, затруднительно из-за их многочисленности, поэтому
далее рассматриваются лишь наиболее распространенные из них.
В отличие от обычных синхронных двигателей роторы ШД
не имеют пусковой короткозамкнутой обмотки; их пуск произ-
водится не асинхронным, а частотным способом.
2.5. Дискретные электроприводы с шаговыми двигателями
197
Упрощенная схема восьмифазного ШД приведена на рис. 2.90.
Полагаем, что ротор имеет два полюса. Питание обмоток может
быть однополярным, когда напряжение изменяется от нуля до
+U„, и двухполярным (от +ип до -Un ).
Каждому импульсу унитарного кода на входе системы управ-
ления соответствует операция переключения фаз ШД, смещаю-
щая на определенный угол или расстояние (в линейных ШД)
вектор магнитного поля в зазоре машины. Это приводит к одно-
временному смещению в пространстве положения устойчивого
равновесия подвижного элемента (ротора), что вызывает пере-
мещение последнего на один шаг.
Электронные коммутаторы могут обеспечивать питание об-
моток статора ШД либо порознь, либо группами в различных со-
четаниях. Каждому такту коммутации включенных обмоток,
число которых зависит от способов включения,—Соответствуют
определенные величина и направление вектора F результирую-
щей намагничивающей силы (НС), а следовательно, и вполне
определенное положение ротора в пространстве. Например, если
обмотки ШД в схеме, приведенной на рис. 2.90, а, подключать
к источнику питания поочередно (7—2-3— ...—8— 1—...), то ротор
двигателя будет иметь число устойчивых положений, равное чис-
лу фаз, т.е. восемь (т = 8), которые совпадают с осями обмоток.
Последовательный перебор комбинаций включенных фаз мо-
жет соответствовать симметричной коммутации, при которой в каж-
дом такте число фаз одинаково (четное или нечетное). Рассмот-
ренный выше вариант является симметричной коммутацией.
Другой вид симметричной коммутации — последовательный пе-
ребор из двух одновременно включенных фаз (7^— (23) — (34) —...
(рис. 2.90, б), при котором суммарный вектор F12 = F\ + А- При
несимметричной коммутации число включенных фаз изменяет-
ся от такта к такту. Например, чередование «одна фаза» — «две
фазы», т.е. (7) — (12) — (2) — (23), является несимметричной ком-
мутацией. Другой вид несимметричной коммутации — чередова-
ние «две фазы» — «три фазы», т.е. (12) — (123) — (23) — (234) —...
(рис. 2.90, в).
На практике с целью увеличения результирующей НС двига-
теля, а следовательно, магнитного потока и синхронизирующего
момента, обычно одновременно подключают две, три и большее
198 Глава 2. Замкнутые системы управления электроприводами
Рис. 2.90. Схемы питания обмоток восьмифазного ШД и положения ротора
при включении: а — фазы 1; б— фаз 1 и 2; е — фаз 1,2,3
2.5. Дискретные электроприводы с шаговыми двигателями 199
число обмоток. При этом ротор ШД при холостом ходе занимает
положения, в которых ось ротора совпадает с результирующим
вектором НС. При подключении четного числа обмоток положе-
ние результирующего вектора Fn совпадает с линией, проходя-
щей между двумя соседними обмотками (рис. 2.90, б). Если же
включено нечетное число обмоток, устойчивое положение рото-
ра совпадает с осью средней обмотки (рис. 2.90, в). Таким обра-
зом, в обоих случаях симметричной коммутации (при четном
и нечетном числе подключенных обмоток) ротор двигателя будет
иметь т устойчивых положений. При несимметричной коммута-
ции число устойчивых положений ротора двигателя равно 2m.
Указанные соотношения справедливы для двигателей, имеющих
число пар полюсов Zn =1- На практике широко используются
многополюсные двигатели. Если Zn > 1, то m-фазный ШД может
иметь либо mZ„ устойчивых положений (при симметричной
коммутации), либо 2mZn положений (при несимметричной ком-
мутации). Виды коммутаций фаз ПТД характеризуются числом
тактов коммутации п, равным числу комбинаций включенных
фаз при их последовательном переборе до повторения исходной
комбинации, т.е. за цикл коммутации.
Величина шага (в электрических радианах) определяется так:
а = 2п/п.
Механический шаг
aM=2n/(Znn). (2.74)
Скорость вращения ротора ШД находится по соотношению
со= 2л/у/(Zn л) = ам/у, (2.75)
где /у — частота импульсов, подаваемых на обмотки ШД, Гц.
Получение различных устойчивых состояний поясняется
векторной диаграммой, которая показывает неравномерность
распределения магнитного поля. В самом деле, амплитуда сум-
марного вектора НС для т = 8 равна:
при одной включенной фазе (суммарный вектор неизменен
и равен вектору НС с одной фазы F)
Fi = Fz =. ..= Fi,
где индекс «1» означает количество включенных фаз;
200
Глава 2. Замкнутые системы управления электроприводами
при двух фазах
/12 = 2F cos(rc/m) = 2(л/8) »1,84 ,
где Fi — вектор НС одной фазы;
при трех фазах
F123 = Fi + 2Fi с os (2*/) = Fi + 2Fi cos(2%) = Fi V2 ® 2,41 F1.
a
Таким образом, при m=8 и коммутации (7)—(72)—(723)—...
или (7)—(72)—(2)... имеет место существенная неравномерность
амплитуды вектора НС, что создает дополнительные трудности
при работе двигателя. С этой точки зрения интересный результат
можно получить для двигателей с числом фаз т = 5 и коммутации
(72)—(723)—(23)—... В самом деле,
Fi2 = 2Fi cos(n/m) =1,62^; Fi2j = Ft + 2Ft cos(n/zn) =l,627:i.
Векторные диаграммы для этих случаев приведены на рис. 2.91.
Так как при т = 6 и т = 8 имеет место неравномерность амплиту-
ды НС, то ШД мощностью более 100 Вт выполняются в основ-
ном пятифазными.
Рис. 2.91. Векторные диаграммы для пятифазного ШД
2.5. Дискретные электроприводы с шаговыми двигателями
201
2.5.2. Особенности конструкций шаговых двигателей
В шаговых двигателях с постоянными магнитами
(ШД-ПМ) в качестве роторов используются постоянные магниты.
Особенность ШД-ПМ состоит в том, что ротор в конце такта
движения приходит в фиксированное положение даже при сня-
тии питания с обмотки статора. Такое положение ротора называ-
ют положением фиксации.
Из рассмотренного в п. 2.5.1 принципа действия ШД следует,
что чем меньше шаг, тем точнее можно отработать угол. Как вид-
но из формулы (2.74), уменьшение шага требует увеличения чис-
ла полюсов, что при неизменном диаметре ротора ограничено
технологическими возможностями и увеличением потока рассея-
ния между полюсами. Поэтому обычно принимают Zn = 4.. .6, что
ограничивает шаг а м несколькими десятками градусов.
Вторая проблема связана с постоянными магнитами: они
либо дороги, либо не обеспечивают нужного магнитного потока
(например, ферритовые).
Реактивные двигатели (ШД-Р) являются основным
типом ШД, применяемых в настоящее время. Для пояснения
конструкции реактивного ШД рассмотрим поперечное сечение
трехфазного двигателя (рис. 2.92, а), статор которого имеет
шесть зубцов. Каждые два зубца статора, расположенных на 180°
друг от друга, принадлежат одной фазе. Катушки фаз могут под-
соединяться параллельно или последовательно; на рис. 2.92, б
они соединены последовательно. Ротор имеет четыре зубца. Ста-
тор и ротор обычно изготавливаются из шихтованного магнито-
мягкого материала, обладающего высокой магнитной проницае-
мостью, хотя ротор может быть и массивным. При соединении
обмоток, которое показано на схеме, зубцы I, II, III при наличии
питания образуют северный магнитный полюс, а зубцы Г, 1Г,
ПГ — южный.
При подключении катушки фазы (рис. 2.92, а) образуется маг-
нитный поток и ротор устанавливается в такое положение, что
зубцы статора / и Г и какие-либо два зубца ротора располагаются
по одной линии. В этой позиции магнитное сопротивление мини-
мально, что обеспечивает устойчивое положение равновесия.
202
Глава 2. Замкнутые системы управления электроприводами
Фаза 1
Рис. 2.92. Поперечное сечение трехфазного реактивного ШД (а) и схема
соединения обмоток (б): 1 — обмотка; 2 — статор; 3 — ротор
2.5. Дискретные электроприводы с шаговыми двигателями
203
а б
Рис. 2.93. Процесс поворота ротора на один шаг при отключении фазы
1 и включении фазы 2
Процесс поворота ротора при отключении фазы 1 и включе-
нии фазы 2 показан на рис. 2.93 (а — возбуждена фаза Г, б —
фаза 1 отключена, фаза 2 подключена (начало такта); в — поло-
жение ротора в конце шага, фаза 2 возбуждена). В дальнейшем
фаза 2 отключается, а фаза 3 включается и т.д. Каждая коммута-
ция приводит к повороту ротора на 30° в положительном направ-
лении. После трех коммутаций ротор повернется лишь на 90°.
Число фаз т, зубцов ротора Nr, а также количество шагов S за
один полный оборот ротора связаны соотношением
S = mNr. (2.76)
Для уменьшения шага увеличивают число зубцов. На рис.
2.94, а показано поперечное сечение трехфазного ШД-Р с чис-
204
Глава 2. Замкнутые системы управления электроприводами
лом зубцов статора =12 и ротора N, =8, что вдвое больше,
чем у конструкции, приведенной на рис. 2.92. Это дает S = 3 х
х 8 = 24 и угол шага а = 2л/24 = 15°. Четырехфазный ШД-Р, имею-
щий 7VS = 8
5 = 4-6 = 24
М=16иУг
и NT - 6, показан на рис. 2.94, б, для которого
и а =15°. Для четырехфазного ШД-Р, имеющего
10 360 360 «-о
= 12, угол шага а =--=-----= 75 .
mNT 4-12
а
4=12,4 = 8
б
4 = 8,4 = 6
Рис. 2.94. Трехфазный ШД-Р при числе зубцов статора Ns = 12,
ротора Wr = 8 (а) и = 8, Wr = 6 (б)
ч
Таким образом, для уменьшения шага двигателя требуется
увеличение числа зубцов ротора и статора, хотя последнее не
входит непосредственно в формулу (2.76). Из рассмотренных ри-
сунков следует, что увеличение Ns и Nt встречает технологиче-
ские трудности. Стремление уменьшить угол шага привело
к конструкции реактивного редукторного ШД (РШД) (рис. 2.95),
где обмотка располагается вокруг больших выступающих частей,
называемых полюсами. Полюс статора имеет два или более зуб-
цов, которые намагничиваются в одном направлении. Каждая
обмотка управления (фаза) располагается на диаметрально про-
тивоположных полюсах статора (1—1', 2—2', 3—3', 4—4'). Ротор
РШД имеет также зубцовую структуру. Зубцовые деления стато-
ра и ротора равны. Шаг и число зубцов на роторе и полюсах ста-
тора выбираются так, чтобы между зубцами ротора и зубцами
2.5. Дискретные электроприводы с шаговыми двигателями 205
полюса, который в данный момент не возбужден, имел место
сдвиг на 1/т зубцового шага, т.е. на 1/4 для рис. 2.95. Тогда для
двух оставшихся полюсов сдвиг будет составлять соответственно
2/4 и 3/4 зубцового шага тг (xz — часть окружности, занимаемая
зубцом и пазом). Процесс поворота ротора при переключении
'тока с обмотки 1 на обмотку 2 показан на рис. 2.96.
Полюс
Обмотка
Рис. 2.95. Конструкция реактивного редукторного ШД
При возбужденной обмотке 1 на первом такте коммутации
зубцы статора и ротора располагаются на одной оси (рис. 2.96, а).
Момент М равен нулю, ротор неподвижен. При возбуждении об-
мотки 2 (рис. 2.96, б) вектор магнитного потока Ф поворачивает-
ся на 45°, магнитные силовые линии деформируются и появляет-
ся момент М, под действием которого ротор поворачивается на
угол, равный 1/4 зубцового деления. В конце этого процесса ро-
тор займет положение, при котором зубцы располагаются на од-
ной линии (рис. 2.96, в). Затем возбуждается фаза 3 и т.д.
Таким образом, дискретность утла поворота вектора НС со-
ставляет а нс = 2n/(Znffj). Шаг угла поворота ротора вычисляется
по формуле а = 2n/(mNr). За полный цикл коммутации ротор по-
ворачивается на одно зубцовое деление lit/Nx, а отношение элек-
трического шага к механическому составит а* = NTIZn.
Некоторые примеры конструктивных параметров РШД: т-3,
Nt = 14;m=3, Nt =44; т = 4, Nt =50.
206
Глава 2. Замкнутые системы управления электроприводами
а б
в
Рис. 2.96. Пояснение принципа действия реактивного редукторного ШД:
а — фаза 1 включена; б — фаза 1 отключена, фаза 2 включена (начало такта);
в — фаза 2 включена (конец такта)
Рассмотренные ШД имеют однопакетную конструкцию.
Дальнейшее уменьшение шага поворота ротора возможно в много-
пакетной (каскадной) конструкции ШД, в которых секции статоров
развернуты относительно друг друга на часть зубцового деления.
Чередование коммутации по фазам и секциям дает возможность
уменьшить дискретность в г раз (г —число самостоятельных сек-
ций — пакетов).
Индукторные ШД (ШД-И) отличаются от реактивных
тем, что в них применяется подмагничивание ротора (электро-
магнитное или постоянными магнитами). Постоянный поток
подмагничивания возбуждается со стороны статора или ротора.
Такие двигатели называют также гибридными, поскольку в них
используются принципы как реактивного двигателя, так и двига-
теля с постоянными магнитами. По сравнению с ШД-Р индук-
торные ШД при одинаковом шаге обеспечивают большее значе-
2.5. Дискретные электроприводы с шаговыми двигателями 207
ние синхронизирующего момента, в результате чего улучшаются
энергетические и динамические характеристики. Существуют
также гибридные двигатели с постоянными магнитами на стато-
ре, принцип работы которых не отличается от рассмотренных.
2.5.3. Линейные шаговые двигатели
Шаговые двигатели, рассмотренные выше, являются вра-
щающимися машинами с обеспечением вращения как по ходу,
так и против хода часовой стрелки. Однако большое число меха-
низмов требует линейного перемещения рабочих органов (коор-
динатные перемещения механизмов подач станков с ЧПУ, гра-
фопостроителей ЭВМ, механизмов печатающих устройств ЭВМ,
промышленных роботов и т.д.). В этих случаях преобразование
вращательного движения в поступательное осуществляется с по-
мощью различных кинематических механизмов. Последние яв-
ляются источниками потерь мощности и, что особенно важно
для прецизионных механизмов, вносят погрешность при отра-
ботке координатных перемещений. Применение линейных
шаговых двигателей (ЛШД) позволяет упростить кинема-
тическую схему, устранив элементы, преобразующие вращатель-
ное движение в поступательное. ЛШД обеспечивают линейное
перемещение рабочих органов. Видов линейных двигателей так
же много, как и вращающихся; существуют линейные двигатели
постоянного тока, асинхронные, синхронные и вентильные. ЛШД
обладают известными преимуществами обычных вращающихся
ШД и подобно им могут быть реактивными (ЛШД-Р), с посто-
янными магнитами (индукторными, гибридными) — ЛШД-И.
Не различаются они также по принципу действия.
ЛШД можно представить как развернутый на плоскости ШД
вращательного типа. В качестве примера рассмотрим ЛШД-И
с двумя обмотками управления, изображенный на рис. 2.97. Под-
вижная часть ЛШД, называемая ротором, выполнена из электро-
технической стали в виде двух П-образных магнитопроводов 2,
на каждом из которых размещено по одной обмотке управления 1.
Статор 4 представляет собой плиту из магнитомягкого материа-
ла; полюсы ротора и поверхность плиты, обращенная к нему,
имеют зубчатую структуру. Подмагничивание магнитопроводов
208 Глава 2. Замкнутые системы управления электроприводами
осуществляет постоянный магнит 3. Зубцовые деления статора
и ротора равны. Зубцы полюсов ротора одного и того же магни-
топровода сдвинуты относительно зубцов статора на тг/2 (для
полюсов / и II) и на тг/4 (для полюсов III и IV). В результате та-
кой конструкции зубцы всех полюсов ротора имеют различное
расположение •относительно зубцов статора, но магнитное со-
противление потоку подмагничивания не зависит от перемеще-
ния ротора. Принцип работы ЛШД не отличается от ШД-И,
с тем лишь исключением, что вместо вращающего момента соз-
дается сила F, направленная в плоскости статора. В зависимости
от наличия возбуждения обмоток ось магнитного потока переме-
щается от полюса к полюсу, например по схеме I— III— II— IV,
в результате чего ротор перемещается на величину зубцового де-
ления тг. В каждом такте коммутации линейный шаг
ДХ — Тг/Кг,
где кт — число тактов коммутации.
. Рис. 2.97. Конструкция индукторного ЛШД-И:
1 — обмотки; 2 — магнитопроводы ротора; 3 — постоянный магнит;
4 — статор; I - IV — полюсы ротора
На основании рассмотренного ЛШД можно построить мо-
дуль, обеспечивающий перемещение одновременно по несколь-
ким координатам. При этом отдельный ЛШД предназначен для
перемещения лишь по одной координате.
2.5. Дискретные электроприводы с шаговыми двигателями 209
Пример двухкоординатного модуля ЛШД приведен на
рис. 2.98. Он состоит из магнитопровода подвижного ротора 1
и статора 2, представляющего собой плиту из магнитомягкого
материала. На рабочей поверхности плиты выполнены две систе-
мы взаимно перпендикулярных зубцов. На роторе 1 расположены
две системы электромагнитных модулей 3 и 4, предназначенных
для перемещения по двум координатам (х и у). Соответственно
каждый модуль состоит из постоянных магнитов 5 и обмоток
возбуждения 6. Модули, предназначенные для перемещения
вдоль оси X, имеют зубцы, направленные вдоль этой оси. Это же
касается оси Y. Принцип управления обмотками модулей по ка-
ждой из координат такой же, как и в однокоординатном модуле
(см. рис. 2.97). Для уменьшения сил трения в модулях на основе
ЛШД применяют магнитно-воздушную подвеску. Ротор притя-
гивается к статору магнитным притяжением полюсов ротора. Че-
рез специальные форсунки под ротор нагнетается сжатый воз-
дух, который приподнимает его над статором. Между статором
и ротором образуется воздушная подушка, в результате чего ро-
тор подвешивается над статором с некоторым минимальным
воздушным зазором. При этом и сопротивление движению ротора
близко к нулю. Высокая точность позиционирования обеспечи-
вается максимально мелкой нарезкой зубцовых делений. Приве-
дем некоторые параметры модулей ЛШД: шаг 0,16; 0,32; 0,50 мм;
максимальное усилие 84; 70; 20 Н. Воздушный зазор между ста-
тором и ротором составляет 15 мкм.
2.5.4. Режимы работы и характеристики
шаговых двигателей
Режимы работы и характеристики ШД рассмотрим на приме-
ре двигателей вращательного типа, хотя основные соотношения
справедливы также и для ЛШД (имея в виду эквивалентность
момента и силы, а также угла поворота и линейного перемеще-
ния). Особенностью дискретного электропривода с ШД является
возможность д лительной работы при частоте входных импульсов
управления /у = 0. Такой режим работы, получивший название
статического, предусматривает прохождение постоянного тока
14
3597
210
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.98. Конструкция двухкоординатного линейного модуля (а)
и расположение его составных частей (6): 1 — ротор; 2 — статор;
3, 4 — электромагнитные модули; 5 — постоянные магниты;
6 — обмотки возбуходения
2.5. Дискретные электроприводы с шаговыми двигателями
211
по обмоткам возбуждения, создающим неподвижное магнитное
поле. Двигатель и система питания должны быть рассчитаны
с учетом этого режима.
Стартстопный режим (режим отработки единичных шагов)
имеет место при такой частоте управляющих сигналов, при кото-
рой переходный процесс, вызванный управляющим импульсом,
заканчивается к моменту поступления следующего импульса.
Это означает, что ротор двигателя перемещается на один угловой
шаг а и успевает затормозиться. Процесс сопровождается элек-
тромагнитными переходными процессами в обмотках ШД вслед-
ствие их подключения к источнику постоянного напряжения
и электромеханическим переходным процессом вследствие воз-
действия электромагнитного момента на ротор двигателя. Движе-
ние ротора в конце шага характеризуется свободными колебания-
ми относительно положения устойчивого равновесия (подобно
колебанию маятника). Колебания затухают, когда вся кинетиче-
ская энергия ротора будет израсходована на электрические, маг-
нитные и механические потери. Очевидно, что такие колебания
являются нежелательными, поэтому разработаны различные
приемы их гашения. Этот процесс отображен на рис. 2.99; как
правило, имеет место перерегулирование на величину Да. Пере-
ходный процесс заканчивается за время .
е а
Рис. 2.99. Отработка шагов ШД
212
Глава 2. Замкнутые системы управления электроприводами
Установившийся режим вращения имеет место при постоянной
частоте управляющих импульсов /у, причем время такта Тком комму-
тации превышает время переходного процесса ti (ti < TKOtl = 1/fy).
Скорость вращения ротора при этом определяется выражением
(2.75). Характеристики шагового электропривода (ШЭП) определя-
ются системой нелинейных дифференциальных уравнений электри-
ческого равновесия по числу обмоток ШД и уравнением моментов
(без учета демпфирования)
R . ••• > *fc»0) _ /• • • \.
+----------Т------------Uk\l\,l2,...,lk),
at
7W 2 А
^ + МН(О) = МЭ(<1,/2,...Л,0),
dt2
(2.77)
где ц — ток в к-й обмотке шаговых двигателей; Л* — активное
сопротивление Л-й обмотки; уНй, 12, ..., 4,0) — потокосцепле-
ние; *2>• ••,ik) — напряжение на к-й обмотке, зависящее
в общем случае от тока; J — приведенный момент инерции элек-
тропривода; AfH(0) — момент нагрузки, зависящий в общем слу-
чае от угла поворота 6; i-i, ..-,ik, 6) — электромагнитный
момент, зависящий от тока в обмотках и угла поворота ротора.
В результате исследования системы (2.77), характеризующе-
гося большой трудоемкостью, определены условия, при которых
обеспечивается устойчивая работа шагового электропривода
(ШЭП). К ним относятся: введение внешнего демпфера; исклю-
чение режима холостого хода, являющегося самым тяжелым
с точки зрения устойчивости; увеличение числа тактов коммута-
ции. Дискретный электропривод устойчив, если
Мп/М„ шах — ОД; Ра>о/Л/н шах — ОД,
где р — коэффициент вязкого трения; соо — круговая частота соб-
ственных колебаний: со0 =(Мп тдл Zn/J^2.
Переходные режимы (пуск, торможение, реверс, переход с од-
ной частоты на другую) полностью описываются системой (2.77).
Статический режим работы определяется угловой статиче-
ской характеристикой (рис. 2.100), представляющей собой зави-
симость статического синхронизирующего момента Мс от угла
рассогласования 0 между полем статора и ротором. В дальней-
2.5. Дискретные электроприводы с шаговыми двигателями
213
шем угловые характеристики будем рассматривать для двухпо-
люсного ШД (Zn = 1). В общем случае кривая статического син-
хронизирующего момента Мс (0) несинусоидальна.
_“-н
Рис. 2.100. Статическая угловая характеристика ШД:
1 — исходное положение; 2 — положение после одного такта коммутации
При анализе ШЭП учитывается, как правило, лишь первая
гармоническая составляющая:
Мс — Метах Sin(a — 0),
где a — угол поворота поля статора при коммутации фаз. Значе-
ние Мс „их зависит от геометрии магнитной системы и типа ШД,
числа пар полюсов ротора и числа возбужденных фаз.
При возбуждении одной или нескольких фаз ШД, согласно
принятому способу коммутации обмоток, установившиеся в них
токи определяют положение поля статора и ротора, при котором
электромагнитный момент, возникающий в результате взаимо-
действия полей ротора и статора, уравновешивает моменты внеш-
214 Глава 2. Замкнутые системы управления электроприводами
них сил (момент нагрузки М„). Такому положению ротора ШД
при Мн = 0 и состоянию поля статора, характеризующемуся кри-
вой 7 на рис. 2.100, соответствует точка 0. Отключение одной
фазы ШД и включение другой в результате такта коммутации из-
меняет состояние электромагнитного поля статора, которое при
этом (электромагнитными процессами в обмотках ШД при ком-
мутации пренебрегаем) изображается кривой 2, сдвинутой отно-
сительно характеристики 7 на один шаг а = 2 л/л. Угловые харак-
теристики 7 и 2 позволяют определять значения моментов,
действующих на ротор и вызывающих его переход из одного ус-
тойчивого состояния в другое. Так, при М„ = 0 переход ротора из
точки 0 в точку А описывается известным уравнением движения
»z • / пч Jd2B
Мс max sin(a — 0)------,
dt2
Если же на ротор действуют моменты внешних сил Мп, то
его устойчивое положение характеризуется углом нагрузки 0Н
(см. рис. 2.100). Положение ротора при этом определяется урав-
нением
-Л/с max Sin 0н — Мн >
л Л/„
Он =arcsm-------
Листах
Это угол отставания ротора от поля статора в результате действия
нагрузки Мн.
Нагрузочные свойства ШД при единичных переключениях
фаз определяются моментом Мн щах > который имеет место в точ-
ке пересечения угловых характеристик 7 и 2, соответствующих
смежным комбинациям включенных фаз. Из рис. 2.100 очевид-
но, что при очередной коммутации двигатель отработает шаг при
выполнении условия Мн < Ми max • Последний можно определить
из выражения
., ,, • (л - 2)я
-Ля н max — Ля с max SIR
2п
2.5. Дискретные электроприводы с шаговыми двигателями 215
Величина Мн max быстро приближается к Мс max при увеличе-
нии числа тактов коммутации п. Так, при л = 16 (несимметричная
коммутация (7)—(72)—(2)—... ШД с числом фаз т =8) обеспечи-
вается Митах = 0,98Л/сщах, что является практически предель-
ным значением. Дальнейшее увеличение числа п не приводит
к повышению нагрузочной способности ШД.
Для обеспечения перегрузки и устойчивого движения при ко-
лебаниях момента нагрузки Мн необходимо выполнение условия
Л/н <0^Л/нтах — (0,3.. .0,4)Л/с тах (2.78)
Механические характеристики со (Л/) шагового электроприво-
да при частотном регулировании скорости являются абсолютно
жесткими (штриховые линии на рис. 2.101). Скорость ШД не за-
висит от момента на валу при выполнении условия нормального
нагружения (2.78) и определяется согласно (2.75).
Рис. 2.101. Механические (штриховые линии) и нагрузочные
характеристики шагового электропривода:
1 — форсированное управление; 2 — управление при постоянном
напряжении фазы; 3 — момент при прерывистом характере движения
Предельная нагрузочная характеристика — зависимость мак-
симального нагружающего момента Мп max от частоты управляю-
216 Глава 2. Замкнутые системы управления электроприводами
щих импульсов /у — зависит от способа регулирования (форси-
ровки, что будет пояснено ниже) напряжения в функции /у
и фактически определяет диапазон рабочих частот и нагрузоч-
ную способность ШЭП.
При работе с неизменным значением фазного напряжения
(без форсировки) по мере увеличения частоты управления /у ток
в обмотках ШД не достигает установившегося значения, что при-
водит к снижению момента. Для сохранения работоспособности
ШЭП в таком режиме необходимо снижать момент нагрузки Ми.
Допустимый момент нагрузки в зависимости от частот управляю-
щих импульсов определяется по предельной нагрузочной характе-
ристике, примерный вид которой показан на рис. 2.101 (кривая 2).
Максимальная допустимая статическая нагрузка Мн опреде-
ляется пусковым моментом МЩСк при fy - 0.
Регулирование напряжения в ШЭП имеет свои особенности
и осуществляется путем импульсного форсирования (в отличие
от непрерывного изменения напряжения для электроприводов
постоянного тока и частотных электроприводов с АД), т.е. крат-
ковременной подачи на фазу ШД импульса повышенного напря-
жения с ограничением длительности импульса форсирования
в функции времени либо тока. Другой путь — включение в фазы
форсировочных резисторов — в настоящее время из-за низкого
КПД все чаще заменяется импульсным форсированием. Все спо-
собы форсирования обеспечивают близкий к линейному закон
изменения фазного напряжения
иф = Uo + А/у, (2.79)
где Uo — начальное значение напряжения при /у = 0; к — коэф-
фициент, зависящий от параметров схемы замещения ШД и от
напряжения форсировки.
Учитывая предельную нагрузочную характеристику, можно
выделить две зоны регулирования (см. рис. 2.101): 1) зона низ-
ких скоростей <о < со *, соответствующая регулированию с по-
стоянным моментом М = const; 2) зона высоких скоростей
со > со *, соответствующая регулированию с постоянной мощно-
стью Р = Mat = const. Граничное значение скорости со * разделяет
2.5. Дискретные электроприводы с шаговыми двигателями
217
переход от регулирования напряжения в функции частоты к ре-
жиму работы с постоянным напряжением.
При соблюдении закона (2.79) предельный момент нагрузки
ШД Мн тях изменяется незначительно. Поэтому при проектиро-
вании ШЭП область 0 < со < со * может быть аппроксимирована
прямой 1 (М = Мн max )• Спад предельной нагрузочной характери-
стики в области низких частот, имеющий место из-за прерыви-
стого характера движения (кривая 3 на рис. 2.101), может быть
преодолен путем электрического дробления шага. С повышени-
ем частоты /у (при со > ю *) необходимая длительность импульса
форсирования превышает интервал включенного состояния фа-
зы, поэтому схема управления обеспечивает по существу пере-
ключение ШД с низкого напряжения на повышенное, которое
является предельным для данной схемы. Другими словами, при
со > со * имеет место частотное регулирование при Цф = const.
Таким образом, основными параметрами в аппроксимирую-
щей характеристике являются значения момента Ми max, которые
определяются по выражению (2.78), и граничные значения ско-
рости со*, зависящие от параметров схемы управления, основ-
ным из которых является напряжение форсировки.
Изменение частоты управляющих импульсов /у при про-
граммном управлении ею может производиться по экспоненци-
альному или линейному закону в соответствии с рис. 2.102, где
А1 • • • /у4 — максимальные частоты /у; tpi,..., tp4 — время нарас-
тания соответствующего значения частоты; /Т1.../т4 — время
начала торможения. На рис. 2.102, а ШД работает в режиме
«больших» перемещений, когда имеет место установившееся
значение /у. Такому режиму соответствует лишь одна из характе-
ристик на рис. 2.102, Остальные характеристики представ-
ляют режим отработки «малых» перемещений, при котором уста-
новившееся значение /у отсутствует, а время окончания разгона
и время начала торможения совпадают. Разгон может произво-
диться с некоторого начального значения частоты /0 (рис. 2.102, б),
не превышающего частоты приемистости.
С точки зрения программной реализации управления средст-
вами микропроцессорной техники предпочтение следует отдать
управлению по линейному закону (рис. 2.102, б).
218
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.102. Характеристики программного разгона и торможения ШД:
а — при экспоненциальном законе изменения частоты управляющих импульсов;
б — при линейном законе
2.5.5. Функциональная схема шагового электропривода
Шаговый электропривод (ШЭП), называемый также дис-
кретным, можно отнести к классу частотно-регулируемых элек-
троприводов, регулирование скорости которых в общем случае
требует изменения двух параметров — частоты и фазных напря-
жений. ШЭП приближается по своим свойствам к непрерывным
2.5. Дискретные электроприводы с шаговыми двигателями 219
электроприводам постоянного и переменного тока, отличаясь от
них возможностью отработки заданной координаты (угла пово-
рота) без датчика обратной связи по этому параметру, что очень
важно. Системы управления ШЭП выполняются с большим чис-
лом дискретных компонентов, а в некоторых случаях — полно-
стью на дискретных компонентах, что делает чрезвычайно удоб-
ным прямое цифровое управление такими электроприводами от
ЭВМ. Это обусловило их широкое применение в металлообраба-
тывающем оборудовании с ЧПУ, робототехнических комплексах
и непосредственно в ЭВМ. Для управления ШД применяются
статические преобразователи частоты, принцип функциониро-
вания которых отличается от тех, которые применяются в час-
тотно-управляемом асинхронном электроприводе. ШЭП управ-
ляется частотно-модулированной последовательностью импульсов,
в которой частота следования импульсов управления пропор-
циональна средней скорости, а их число — углу поворота вала
ротора. Как было отмечено в п. 2.5.4, частота следования им-
пульсов может меняться по произвольному закону (с учетом из-
ложенных ограничений) в широком диапазоне, включающем
и режим фиксации (/у =0), когда ШД развивает статический
синхронизирующий момент, сохраняя заданное угловое или ли-
нейное положение.
Основные функциональные узлы разомкнутого ШЭП приве-
дены на рис. 2.103. Последовательность управляющих импульсов
вырабатывается генератором импульсов (ГИ) с регулируемой
частотой путем подачи управляющего сигнала Uy. Указанная по-
следовательность импульсов может поступать также непосредст-
венно от ЭВМ либо иного цифрового задающего устройства через
преобразователь «код — частота». При необходимости сигналы
с выхода ГИ калибруются по длительности и амплитуде в фор-
мирователе импульсов ФИ и через ключ управления КУ посту-
пают на распределитель импульсов РИ.
Задачей распределителя импульсов является формирование
m-фазной последовательности прямоугольных напряжений, не
всегда совпадающей с требуемым законом коммутации фаз ШД,
которое обеспечивается дешифратором DC. В некоторых схемах
функции распределителя и дешифратора могут быть объединены
в одном устройстве, которое называется коммутатором (К). Ре-
220
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.103. Функциональная схема разомкнутого шагового электропривода
2.5. Дискретные электроприводы с шаговыми двигателями
221
гулятор напряжения, который имеется не во всех схемах, осуще-
ствляет импульсное регулирование напряжения на обмотках ШД
при изменении частоты /у.
Распределитель импульсов может быть выполнен на различ-
ной элементной базе и иметь разнообразные схемные решения.
В настоящее время для реализации РИ чаще всего применяются
триггеры, сдвигающие регистры и счетчики с дешифраторами.
Свойства ШЭП не зависят от того, на какой элементной базе
выполнен РИ. Одним из главных требований, предъявляемых
к РИ, является высокая помехоустойчивость, поскольку всякий
сбой в системе управления непременно сказывается на отработ-
ке заданного перемещения.
Схемы ШЭП различаются способами формирования тока
в обмотках двигателя.
ШЭП с потенциальным управлением. В этом случае
обмотки ШД подключаются к источнику питания неизменного
напряжения. В таких схемах для уменьшения электромагнит-
ной постоянной времени и расширения частотного диапазона
скорости последовательно с обмоткой включается форсирую-
щее сопротивление ЯфР (рис. 2.103). Недостатки такого решения
очевидны: необходимость повышения напряжения источника пи-
тания и увеличение потерь, возникающих в R<j)p. В итоге включе-
ние ИфР получило распространение в ШЭП небольшой мощности
с невысокими требованиями к динамическим характеристикам.
ШЭП с форсированным управлением. При враще-
нии ротора индукторно-реактивных ГИД в результате изменения
взаимной индуктивности между статором и ротором в обмотках
фаз возникает генераторная ЭДС, увеличивающаяся по мере
роста частоты вращения, что приводит к снижению тока и мо-
мента двигателя. Для сохранения же момента среднее значение
силы тока статора необходимо поддерживать постоянным. С це-
лью уменьшения влияния ЭДС вращения на характеристики
ШЭП применяются различные способы форсировки нарастания
и спада тока в обмотках фазы. Одно из возможных решений за-
ключается в том, что для формирования тока фазы используют
два источника: форсированного напряжения (/фр и номинального
напряжения (7Н0М (рис. 2.104). При поступлении управляющего
импульса /у открываются транзисторы VT1 и VT2 и источник
222
Глава 2. Замкнутые системы управления электроприводами
UфР подключается к фазе двигателя. Напряжение £/фР в несколь-
ко раз превышает напряжение 17ном, чем обеспечивается быстрое
нарастание тока. При достижении током фазы номинального
значения по сигналу с измерительного сопротивления RS фор-
мирователем импульсов ФИ транзистор VT1 запирается и ток
поддерживается на уровне номинального источником (7Ном • По-
сле снятия импульса /у форсированный спад тока достигается
благодаря встречному включению обмотки фазы на напряжение
t/фр, т.е. по цепи /ф ~ VD2 — С/фр — /7фр — Uном ~ Uном ~ VD1.
Рис. 2.104. Схема форсировки тока с двумя источниками напряжения
(С/фр, (Уном — соответственно форсированное и номинальное напряжение)
Стабилизация тока фазы возможна также путем применения
широтно-импульсного регулятора.
Контрольные вопросы
1. Какой ШД лучше: с меньшим или большим числом фаз?
2. Чем ограничивается число фаз ШД?
3. Поясните преимущества и недостатки несимметричной коммута-
ции. Постройте векторные диаграммы и определите степень неравно-
мерности поля для двигателей с числом фаз т = 4, т = 5 при коммута-
ции (7)-(72)-(2)-.. .
2.6, Электроприводы с вентильными двигателями 223
4. Какими конструктивными решениями можно уменьшить вели-
чину шага ШД с постоянными магнитами?
5. Какой ШД предпочтительнее с точки зрения точности отработки
задаваемого перемещения: с постоянными магнитами или индукторный?
6. Чем ограничивается верхний предел частоты управляющих им-
пульсов ШД?
7. Перечислите методы форсировки тока в фазах двигателя. Опи-
шите их достоинства и недостатки.
8. В каких установках предпочтительно использование модулей ШД?
9. Отличается ли принцип действия линейного ШД от ШД враща-
тельного типа?
2.6. Электроприводы с вентильными двигателями
2.6.1. Устройство и принцип действия
вентильных двигателей
Двигатели постоянного тока, в том числе с постоянными
магнитами, позволяют создавать высокоэффективные электро-
приводы разнообразного применения для различных областей
техники. Однако они имеют весьма существенный недостаток —
наличие щеточно-коллекторного узла. Между тем сфера приме-
нения автоматизированного электропривода непрерывно рас-
ширяется (бытовая и медицинская техника, электрический
транспорт, космические аппараты и т.д.), повышаются требова-
ния к их надежности в самых разнообразных условиях (вакуум,
резкие перепады температуры, тряска, вибрация, агрессивная
среда и т.п.). В этих условиях эксплуатации механический ком-
мутатор двигателей постоянного тока (щетка — коллектор) явля-
ется серьезным недостатком и не обеспечивает достаточного
уровня надежности. Решением является применение вентильных
двигателей, у которых механический коммутатор заменен элек-
тронным (полупроводниковым).
Вентильный двигатель (ВД) представляет собой синхронный
двигатель, регулируемый путем изменения частоты с самосин-
хронизацией. Частотное регулирование с самосинхронизацией
224 Глава 2. Замкнутые системы управления электроприводами
заключается в том, что управление преобразователем частоты
осуществляется в функции углового положения ротора двигате-
ля, для чего на последнем расположена система датчиков; при
этом напряжение подается на каждую фазу двигателя при углах
нагрузки 0 < 90° эл. В технической литературе существует не-
сколько терминов, обозначающих один и тот же двигатель: ВД,
БДПТ (бесконтактный двигатель постоянного тока), БМПТ
(бесконтактная машина постоянного тока), БЭМ (бесконтактная
электрическая машина). Работа ВД основана на принципе, ука-
занном выше, который поясняется функциональной схемой,
приведенной на рис. 2.105. Как следует из рисунка, ВД состоит
из трех основных элементов: собственно двигателя с zn-фазной
обмоткой и индуктором; датчика положения ротора (ДПР), вы-
полненного в одном корпусе с двигателем и вырабатывающего
сигналы управления, которые определяют последовательность
подключения обмоток фаз к источнику питания; бесконтактного
(полупроводникового) коммутатора, который по сигналам дат-
чика положения осуществляет подключение (коммутацию) об-
моток двигателя.
Коммутатор
НН Двигатель
ДПР
Рис. 2.105. Функциональная схема вентильного двигателя
Как правило, ВД имеет обращенную конструкцию по отно-
шению к обычным двигателям постоянного тока, т.е. обмотка
якоря находится в пазах статора, а на роторе располагается ин-
дуктор (щетки, контактные кольца и обмотка возбуждения). Но
чаще всего, особенно в двигателях малой мощности, на роторе
располагается постоянный магнит с одной или более парами по-
люсов. В последнем случае используется термин «вентильный
2.6. Электроприводы с вентильными двигателями
225
двигатель с постоянным магнитом» (ВДПМ). В зарубежной ли-
тературе часто используется термин PMSM (Permanent Magnet
Synchronous Motor — синхронный двигатель с постоянными маг-
нитами).
В схеме на рис. 2.106, поясняющей принцип действия
ВДПМ, два полукольца коллекторного узла заменены транзи-
сторными ключами VT1...VT4 коммутатора 1. Ротор двигателя 2 с
постоянными магнитами N—S и датчиком положения 3 образует
вращающуюся часть машины. Обмотка статора 4 для упрощения
рисунка представлена лишь двумя проводниками. Коммутатор
подключен к источнику питания t/пит постоянного тока. Для
прохождения тока i в обмотке статора по указанному на рис. 2.106
направлению сигналами с датчика положения ротора (ДПР)
открываются ключи VT1 и VT4. Током i создается магнитный
поток £я. В результате взаимодействия потока Фо постоянных
магнитов и Fg создается вращающий момент Мэ. Поскольку
в рассматриваемом двигателе обмотка якоря расположена на
статоре, т.е. якорь неподвижен, то благодаря действию момента
Рис. 2.106. Пояснение принципа действия ВДПМ
3597
226
Глава 2. Замкнутые системы управления электроприводами
Мэ вращается постоянный магнит (ротор) (поз. I). После пово-
рота ротора на угол п/2 потоки Ёя и Фо совпадают (поз. II), и при
дальнейшем повороте ротора развиваемый момент будет препят-
ствовать движению, поэтому в поз. III происходит переключение
обмотки статора (якоря) к источнику Unm противоположной по-
лярности, для чего ключи VT1 и VT4 выключаются, а ключи VT2
и VT3 включаются. Ток / меняет свое направление, и поток Тя
занимает положение, указанное в поз. III. Поскольку ротор про-
должает движение (по инерции), направление движения сохра-
няется. Направление тока i не изменяется до поз. IV, в которой
под действием сигналов с ДПР происходит коммутация ключей:
VT2 и VT3 выключаются, a VT1 и VT4 включаются. Таким обра-
зом, коммутация ключей, благодаря которой ток i меняет свое
направление, происходит по сигналам с ДПР каждые 180°, чем
обеспечивается постоянное направление вращающего момента
Мэ двигателя при любой скорости его вращения.
В приведенном примере_отсутствует вращающий момент при
расположении потоков F„ и Фо вдоль оси (поз. II и V). Поэтому при
малом числе обмоток (секций) статора ВД возникают большие
пульсации вращающего момента и пульсации тока. Кроме того,
имеет место размагничивание НС якоря. Сопоставляя ВД с кол-
лекторным двигателем постоянного тока, нетрудно заметить, что
в последнем имеется большое количество секций якоря, комму-
тируемых с помощью коллекторно-щеточного узла. Поэтому пуль-
сации момента и тока якоря минимальны. В ВД чрезмерное уве-
личение числа секций нереально, поскольку для подключения ка-
ждой из них к источнику питания требуются свой чувствительный
элемент ДПР, устройства для усиления сигнала и полупроводни-
ковый ключ. Все это увеличивает габариты, усложняет схему
и увеличивает ее стоимость. Поэтому при проектировании ВД
стремятся к минимально возможному числу секций (фаз) статора,
что позволяет обойтись меньшим числом чувствительных элемен-
тов ДПР и полупроводниковых ключей. По этой причине совре-
менные ВД имеют не более четырех секций (фаз), варианты
включения которых приведены на рис. 2.107.
По способу питания фаз обмоток различают двигатели с ре-
версивным (двухполупериодным) питанием, при котором ток
в каждой фазе в процессе коммутации изменяет свое направле-
2.6. Электроприводы с вентильными двигателями
227
Обмотка
Питание
1-секционная
2-секционная
3-секционная
реверсивное
нереверсивное
4-секционная
Рис. 2.107. Типовые схемы питания обмоток ВД
ние, и двигатели с нереверсивным (однополупериодным) пита-
нием, при котором ток в каждой фазе проходит только в одном
направлении. Выбор той или иной схемы питания зависит от та-
ких требований, как быстродействие, минимальные пульсации
228
Глава 2. Замкнутые системы управления электроприводами
электромагнитного момента в зависимости от угла поворота ро-
тора, наилучшие энергетические показатели и др.
Рассмотрим работу ВД,. содержащего трехфазную обмотку,
соединенную в звезду с нейтралью (рис. 2.108). Ротор двигателя
выполнен в виде постоянного магнита 2. В статоре 1, изготов-
ленном из шихтованной электротехнической стали, располага-
ются три обмотки (А, Ви Q, сдвинутые в пространстве на 120°
и соединенные в звезду. В одном корпусе с двигателем находится
датчик 3 положения ротора. Ротор 4 ДПР выполнен в виде сег-
мента и расположен на одном валу с двигателем. Сегмент являет-
ся сигнальным элементом СЭ ДПР, который воздействует на чув-
ствительные элементы (ЧЭ) 5, расположенные на статоре ДПР.
Число ЧЭ соответствует числу обмоток двигателя, а положение
ЧЭ — расположению обмотки. Чувствительными элементами мо-
гут быть различные устройства, например датчики Холла, магни-
тодиоды и др. Задачей ЧЭ является выработка под воздействием
СЭ сигналов, поступающих на ключи коммутатора 6.
Коммутатор в представленной схеме состоит из трех ключей:
VT1, VT2 и VT3 (тиристорных или транзисторных), работающих
в режиме «открыт — закрыт». При наличии сигнала с ЧЭ ключ
открывается и соответствующая обмотка подключается к источ-
нику питания. В исходном положении, показанном на рис. 2.108,
сигнальный элемент находится около ЧЭ фазы А; следовательно,
VT1 открыт и по фазе А проходит ток /я • В фазах ВиС тока нет.
Угол поворота ротора а = 0; угол между НС статора и ротора
0 = 90° (рис. 2.109, а). Поскольку СЭ не воздействует на ЧЭ фаз В
и С, то ключи VT2 и VT3 закрыты. Благодаря взаимодействию
НС Fa фазы А статора и потока Фо постоянного магнита ротора
создается электромагнитный момент Мэ, поворачивающий ро-
тор по ходу часовой стрелки. Вместе с ротором поворачивается
и сигнальный элемент ДПР. При повороте последнего на угол
а <30° (рис. 2.109, б) угол 0 несколько больше 60°. При дальней-
шем движении угол а несколько превышает 30° (а > 30°), СЭ бу-
дет воздействовать сразу на два чувствительных элемента — фаз
А и В. Результирующая НС фаз А и В статора Fab = Fa + Fb займет
положение, показанное на рис. 2.109. Другими словами, вектор
НС Fat повернется скачкообразно на угол 60°, образуя суммар-
2.6. Электроприводы с вентильными двигателями
229
Рис. 2.108. Схема трехфазного ВД с нулевым проводом
ный угол между Фо и Fab, равный 120°. При дальнейшем враще-
нии ротора (при а > 60°) фаза А отключается (VT1 закрыт) и угол
0 = 90°. При повороте ротора на угол а < 90° взаимное располо-
жение векторов показано на рис. 2.109, г. Далее, после выключе-
ния фазы А (рис. .2.109, д), в работе остается лишь фаза В и век-
тор НС статора (теперь это /*) скачком поворачивается до угла
0 = 120°. В дальнейшем взаимное расположение потоков ротора
и НС статора чередуется в такой же последовательности.
При вращении ротора в обмотке якоря благодаря действию
магнитного потока постоянного магнита наводится ЭДС, кото-
рая совместно с падением напряжения на сопротивлении обмот-
ки уравновешивает приложенное к двигателю напряжение, как
230
Глава 2. Замкнутые системы управления электроприводами
СО у
Рис. 2.109. Электромагнитные процессы в трехфазном ВД с нулевым проводом
при повороте ротора в пределах 0° < а < 90°
2.6. Электроприводы с вентильными двигателями 231
в машине постоянного тока. Пульсации электромагнитного мо-
мента возникают вследствие неравномерного (скачкообразного)
перемещения вектора НС статора в пространстве, что приводит
к скачкообразному изменению угла 0. Из рис. 2.109 видно, что
при повороте ротора всего на 60° из положения а = 0 в положе-
ние а = 60° угол 0 между НС статора и осью потока ротора изме-
няется в достаточно больших пределах (90°—60°—120°—90°).
Без учета реактивного момента, которым вследствие малой
магнитной проницаемости постоянного магнита можно пренеб-
речь, электромагнитный момент ВД равен произведению потока
постоянного магнита Фо, НС статора Fa и синуса угла 0 между
ними, т.е.
ЛУэ — СмФо-Гя sin0,
(2.80)
где См — постоянный коэффициент.
Зависимость М3 = /(а) для рассмотренного двигателя
(см. рис. 2.108) представлена на рис. 2.110. Нетрудно убедиться,
что в соответствии с формулой (2.80) и указанными пределами
изменения угла 0 момент М3 уменьшается до 0,86 своего макси-
мального значения.
1,0
0,86
0 30 60 90 120 150 а, град
Рис. 2.110. Форма кривой электромагнитного момента ВД
232 Глава 2. Замкнутые системы управления электроприводами
2.6.2. Характеристики вентильных двигателей
При обеспечении постоянной частоты питания систему
ВД — регулятор мощности можно рассматривать как соединение
преобразователя и синхронного двигателя без получения каких
либо новых свойств. В этом случае система приобретает незави-
симость угловой скорости вращения от нагрузки. При сохране-
нии неизменным потока возбуждения значение Мэ определяется
только утлом нагрузки 9, предельное значение которого соответ-
ствует максимальному значению Мэ‘, превышение этого значе-
ния приводит к выпадению двигателя из синхронизма.
Особенность ВД как элемента системы автоматизированного
электропривода проявляется тогда, когда частота питающего
тока от регулятора мощности ставится в зависимость от положе-
ния ротора. Вращение ротора приводит к наведению в обмотках
ЭДС вращения, которая, как известно, пропорциональна скоро-
сти вращения ротора <о и потоку Фо. Форму кривой ЭДС враще-
ния в первом приближении можно считать синусоидальной.
ЭДС вращения ВД, как и ЭДС коллекторных и синхронных дви-
гателей, стремится скомпенсировать подведенное к якорю на-
пряжение. Очевидно, что при увеличении напряжения увеличи-
вается компенсирующая его ЭДС, следовательно, возрастает
скорость вращения ротора. Отсюда вытекает первый способ регу-
лирования скорости вращения — изменением питающего напря-
жения. Второй способ регулирования со основан на уменьшении
значения Фо (например, с помощью тока обмотки возбуждения,
если таковая имеется). При этом для поддержания значения
ЭДС ротор двигателя вынужден увеличить скорость вращения.
Существуют и иные способы регулирования скорости вращения
в электроприводах с ВД, которые рассматриваются в специаль-
ной литературе.
Далее сосредоточим внимание на анализе характеристик ВД
малой мощности, для которых реакция якоря и коммутация су-
щественной роли не играют, что значительно упрощает анализ.
Поскольку для таких двигателей недопустимо пренебрежение
активным сопротивлением обмотки статора Rs, воспользуемся
уравнением напряжения в комплексной форме для синхронных
двигателей:
2.6. Электроприводы с вентильными двигателями
233
i7c — ~Р() + jXdld JXqlq jX&a! + PsA (2.81)
где Uc — напряжение питания; — ЭДС; xd, xq — полное про-
дольное (d) и поперечное (q) синхронное индуктивное сопротив-
ление; id, Ig — токи соответственно по продольной и поперечной
осям; х<за — индуктивное сопротивление рассеяния; I = + Iq.
В ВД малой мощности, как правило, используются постоян-
ные магниты, что позволяет принять xd « xq = ха. Тогда уравне-
ние (2.81) будет иметь вид
£/С ^0 + jXa(^ d + Ау ) "Ь jx<3a I + .
Векторная диаграмма маломощного ВД приведена на рис. 2.111.
Рис. 2.111. Векторная диаграмма маломощного ВД
Электромагнитная мощность фазы
Рэ= Po/cosv,
что с учетом рис. 2.111 позволяет записать:
Рэ = ( рс (Ps cos 0 + X sin 0) - £0 Ps], (2.82)
Цх2 + PS2)J
где х = ха + хсто.
234 Глава 2. Замкнутые системы управления электроприводами
Электромагнитный момент двигателя
М3 = тР3/ъ\ (2.83)
где со — скорость вращения ротора.
ПротивоЭДС Ео выразим через поток возбуждения Фо:
Ео = лл/2ДомФо = ceZa <вФ0, (2.84)
где к0 — обмоточный коэффициент, учитывающий распределение
и укорочение обмотки; се = ко w/V2; Zn — число пар полюсов.
Тогда, согласно формулам (2.82)...(2.84),
Мэ = СеФ° UC(RS cose + х sin 6) - Се2сйФ0Е5. (2.85)
x2 + R2
Значение пускового момента Л/Э.п получим из. выражения
(2.85) при со = 0 и х = 0:
Л/э.П
mZnCe^oUc cos9
R*
Для максимального использования двигателя с помощью
ДПР устанавливают 0 = 0, и тогда выражение (2.85) будет иметь
вид
Мэ = Uc - ceZn®Ф0. (2.86)
х2 + Rl
Из формулы (2.86) получим выражение механической харак-
теристики:
СО = - х-+, s Мэ, (2.87)
mk\Rs
где кх = се7пФ0.
Семейство характеристик при Uc = const образуется различ-
ными значениями х. Поскольку х = 2nfL = Z„ toL, то характери-
стики, построенные по выражению (2.87), носят нелинейный ха-
рактер, имея две общие точки: холостого хода (при М3 =0)
и пускового момента (х = 0, со = 0). Механические характеристи-
ки а(М) при различных значениях индуктивности якоря приве-
дены на рис. 2.112, а.
2.6. Электроприводы с вентильными двигателями
235
Рис. 2.112. Механические характеристики ВД при различных значениях
индуктивности (а) и напряжения питания (б) якоря
При снижении скорости вращения, а также для ВД малой
мощности можно положить х « R, и тогда выражение (2.87)
примет вид
Uс Rs tj
со =-------- М3.
тк\
Полученная зависимость со (М), как и для коллекторных дви-
гателей постоянного тока с независимым возбуждением, являет-
ся линейной.
Для регулирования скорости ВД прибегают к широтно-им-
пульсной модуляции (ШИМ) напряжения питания на основе
транзисторных инверторов. При этом напряжение на каждой
фазе представляет собой последовательность прямоугольных им-
пульсов переменной скважности с постоянной частотой /ком-
В этом случае корректно говорить о среднем напряжении Ucp
взамен Uc. Современные транзисторы могут обеспечить доста-
точно высокое значение /ком (до 15...20 кГц) и тем самым свести
к минимуму пульсации тока. Кроме того, обеспечивается быст-
родействующая электронная защита на каждом периоде комму-
тации 7"ком = 1//ком.
Семейство характеристик при изменении напряжения пита-
ния иср приведено на рис. 2.112, б.
236
Глава 2. Замкнутые системы управления электроприводами
Для получения передаточной функции (ПФ) вентильного дви-
гателя воспользуемся выражением момента (2.86) при х « Rs:
— ^1^2(^ср ”^1(о)5
где к2 = m/Rs, и уравнением движения
da*
dt
стат •
Перейдя к операторным изображениям по Лапласу, получим
ПФ по управляющему воздействию:
^(р) = 7ГТч = тЦ’ (2.88)
иср(р) Тр + \
где Т =//(£2£3);£д =1/Ль
Приведенное выражение (2.88) для ПФ можно использовать
при анализе и синтезе электропривода с ВД.
2.6.3. Датчики положения ротора
Датчик положения ротора (ДПР) — неотъемлемый элемент
электропривода с ВД. Задачей ДПР является определение отно-
сительного положения магнитной оси ротора и эквивалентной
оси статора и выдача соответствующих сигналов для управления
коммутатором.
В настоящее время имеется четыре разновидности ДПР:
• индуктивные (дроссели или трансформаторы насыщения),
выполненные на малогабаритных ферритовых сердечниках;
• фотоэлектрические;
• гальванометрические датчики Холла, магнитодиоды, маг-
нитотранзисторы и магниторезисторы;.
• датчики синусоидальных напряжений (вращающиеся транс-
форматоры и т.п.).
В зависимости от характера выходного сигнала ДПР делятся
на две большие группы: дискретные и аналоговые. Информаци-
онными признаками сигналов ДПР являются амплитуда напря-
жения или тока, полярность (знак) или относительная длитель-
ность импульсов.
2.6. Электроприводы с вентильными двигателями
237
При разработке дискретных ДПР стремятся получить на вы-
ходе сигнал, максимально приближающийся к прямоугольному,
что идеально соответствует ключевому режиму работы силовых
элементов.
В случае применения аналоговых ДПР желательно обеспе-
чить синусоидальную функциональную зависимость амплитуды
выходных сигналов от текущего углового положения ротора.
В этом случае сигнал ДПР подвергается преобразованию в ши-
ротно-импульсный модулированный сигнал, относительная дли-
тельность импульсов которого пропорциональна амплитуде сиг-
нала на выходе чувствительного элемента. Такие датчики имеют
более сложное устройство, поэтому их применение оправданно
лишь в электроприводах с повышенными требованиями к вели-
чине пульсаций электромагнитного момента.
Индуктивные ДПР используют дроссельные или трансфор-
маторные чувствительные элементы (ЧЭ).
Для изменения индуктивности обмоток дросселей насыщения
и трансформаторов таких датчиков применяется подмагничива-
ние их магнитопроводов магнитным полем постоянного магнита
сигнального элемента (СЭ). Под действием СЭ магнитная прони-
цаемость магнитопровода и его индуктивность изменяются пе-
риодически с частотой вращения ротора ВД, с которым связан СЭ
(рис. 2.113, а). При подаче напряжения С/д питания ДПР, как по-
казано на рис. 2.113, а, уменьшение индуктивного сопротивления
ЧЭ приводит к тому, что на выходной обмотке согласующего
трансформатора TV появляется напряжение «чэ > модулированное
частотой вращения ДПР (рис. 2.113, б). В этом случае выпрямлен-
ный сигнал ДПР Мвых (рис. 2.113, в) используется для управления
силовыми ключами. Напряжение Ua питания ДПР выбирается
достаточно высокой частоты (10...100 кГц), что уменьшает габари-
ты его элементов. ДПР с датчиком ЭДС Холла имеет такие же
элементы, которые приведены в п. 2.1.2.
Параметры выходных сигналов рассмотренных датчиков (ам-
плитуда, крутизна фронта, мощность), как правило, недостаточ-
ны для непосредственного управления полупроводниковыми
ключами. Поэтому выходные сигналы предварительно поступа-
ют на усилители-формирователи, после чего приобретают необ-
ходимые амплитуду, крутизну и мощность.
238
Глава 2. Замкнутые системы управления электроприводами
а
б
Рис. 2.113. Датчик положения ротора трансформаторного типа (а)
и кривые его напряжений (б, в)
Кроме того, датчики Холла имеют температурную зависи-
мость. Несмотря на это, они получили наиболее широкое рас-
пространение в ЭП-ВД. Существует большое разнообразие кон-
струкций ДПР с датчиками Холла.
В качестве магниточувствительных элементов используются
микросхемы типа К1116КП (рис. 2.114), которые содержат эле-
менты Холла, малошумный операционный усилитель выходного
2.6. Электроприводы с вентильными двигателями
239
напряжения, триггер Шмитта с гистерезисной характеристикой,
формирующий сигнал усилителя, и выходной каскад усиления
на транзисторе с открытым коллектором.
К1116КПЗ
____о+15 В
15 кОм
---о
Выход
Рис. 2.114. Схема подключения микросхемы КП1116КПЗ с датчиком Холла
В зависимости от типа микросхемы имеют униполярную пря-
мую, униполярную инверсную и биполярную переключательную
характеристики. Серия содержит 14 типов микросхем, различаю-
щихся видом переключательной характеристики, напряжением
питания, потребляемым током, параметрами выходного сигнала
высокого и низкого уровня, индукцией срабатывания и отпуска-
ния, быстродействием, пределами рабочей температуры окру-
жающей среды, габаритами и типом корпуса.
2.6.4. Электропривод с вентильным двигателем
и тиристорным коммутатором
Преобразование постоянного тока источника в переменный
ток в фазах ВД (инвертирование тока) осуществляется с помо-
щью инверторов (преобразователей мощности), особенность ко-
торых определяется типом применяемых полупроводниковых
элементов.
Для ЭП-ВД большой мощности в качестве ключевых элемен-
тов применяются тиристоры, для отключения которых использу-
ются схемы либо с искусственной, либо с естественной (назы-
ваемой также машинной) коммутацией. Суть естественной
коммутации заключается в использовании ЭДС вращения, наво-
димой в обмотках статора, для создания паузы прохождения
тока, в течение которой тиристор запирается.
240
Глава 2. Замкнутые системы управления электроприводами
Схема трехфазного тиристорного мостового инвертора с ма-
шинной коммутацией приведена на рис. 2.115, а. Электромаг-
нитные процессы в ВД носят циклический характер; период ка-
ждого цикла определяется угловым расстоянием между двумя
соседними чувствительными элементами или промежутками
времени между двумя следующими друг за другом коммутациями
фаз. При числе фаз, равном трем, этот угловой период равен л/3.
Поэтому для анализа квазиустановившегося режима достаточно
рассмотреть процессы внутри только одного какого-либо перио-
да. При этом можно выделить два участка: коммутационный
и внекоммутационный. На коммутационном участке фаза А вы-
ходит из работы, для чего тиристор VS1 должен выключиться,
фаза В включается в работу за счет отпирания тиристора VS3.
4 '
Рис. 2.115. Схема тиристорного инвертора с машинной коммутацией (а)
и схема узла искусственной коммутации (б)
2.6. Электроприводы с вентильными двигателями
241
Длительность коммутационного процесса определяется углом
коммутации у = <о/ком, гае со — скорость вращения ротора, а /ком —
время коммутации, в течение которого ток отключаемой фазы
уменьшается до нуля, а ток включаемой фазы возрастает до зна-
чения, равного значению входного тока инвертора.
Для обеспечения коммутации с фазы А на фазу В тиристор
VS3 необходимо включить левее точки пересечения фазных ЭДС
еа и еь, т.е. в момент времени, когда еа > еь; угловой сдвиг влево
относительно точки пересечения фазных ЭДС коммутируемых
фаз называется текущим углом опережения 0. В контуре коммута-
ции, состоящем из фаз А, В и тиристоров VS1 и VS3, проходит
коммутационный ток гКОм и VS1 запирается. Процесс коммута-
ции заканчивается при ia ~ 0, после чего необходимо создание
паузы t0 для восстановления запирающих свойств тиристора
(обычно t0 = 10...15 мкс).
Использование машинной коммутации значительно упроща-
ет схему преобразователя, но проблемы возникают при пуске
ВД, когда ЭДС в обмотках отсутствуют. Для обеспечения пуска
применяются специальные меры, например асинхронный пуск,
временный перевод инвертора в режим искусственной коммута-
ции и др., что в целом усложняет схему электропривода.
Для обеспечения искусственной коммутации в схему инвер-
тора (рис. 2.115, а) подключается узел искусственной коммута-
ции (рис. 2.115, б), состоящий из коммутирующих конденсато-
ров Cl, СЗ и С5 и тиристоров VS7 и VS8. В межкоммутационные
интервалы конденсаторы заряжаются так, что их фазные зажимы
приобретают потенциалы соответствующих фазных обмоток.
Например, при работающей фазе А открыт основной тиристор
VS1 и открывается коммутирующий тиристор VS8. Конденсатор
С1 заряжается по цепи U а - VS1 - Cl - VS8 - Uj, приобретая «+»
на правой обкладке. Для гашения VS 1 тиристор VS7 отпирается
и положительный заряд С1 прикладывается к катоду VS1. По об-
разующейся цепи С1+ - VS1 - VS7 -С1~ кратковременно прохо-
дит ток через тиристор VS1 в обратном направлении, и VS1 вы-
ключается. В целом работа узла коммутации не отличается от
работы подобных схем, применяемых для частотного электро-
привода.
242
Глава 2. Замкнутые системы управления электроприводами
При синусоидальных токах и напряжениях и пренебрежении
активным сопротивлением обмотки статора можно получить
следующее уравнение относительно скорости ротора:
“ = —-----------------------т ’ (2.89)
(Фо +(Ц1)2 -20oZ,/sinp)/2
где Z] — индуктивность фазы статора: L} = х/а>; I — ток двигате-
ля; р — угол опережения коммутации.
Из уравнения (2.89) следуют три способа регулирования ско-
рости в рассматриваемом электроприводе с ВД: 1) изменением
напряжения; 2) изменением потока возбуждения (для ВД с элек-
тромагнитным возбуждением; существуют также схемы, позво-
ляющие регулировать скорость изменением потока для ВД с по-
стоянными магнитами; они основаны на векторном управлении
ВД и здесь не рассматриваются); 3) изменением угла опережения
Р при коммутации тиристоров инвертора.
Влияние угла опереженйя сказывается на линейности меха-
нических характеристик, КПД и коэффициенте использования
ВД по мощности.
Для получения зависимости со = ис/Ф0 в уравнении (2.89) не-
обходимо выполнение условия
(ЦГ)2 -2O0Zi/sinp = 0,
откуда р = arcsin
L\I(n
Таким образом, при регулировании скорости вверх от номи-
нальной за счет ослабления потока (при Uc = const) необходимо
увеличивать угол р пропорционально увеличению скорости и на-
грузки. Следует отметить, что приведенные соотношения явля-
ются приближенными и носят качественный характер.
2.6.5. Дешифратор для вентильного двигателя
В состав ЭП-ВД входит функциональный преобразователь,
содержащий информационно-логическую часть — дешифратор
(DC), который по сигналам с ДПР и цепей управления выраба-
2.6. Электроприводы с вентильными двигателями 243
тывает сигналы на соответствующие силовые транзисторы,
и входное устройство (при необходимости согласования сигна-
лов ДПР и DC). Для упрощения конструкции двигателя, особен-
но при малых диаметрах ротора, стремятся уменьшить число
чувствительных элементов ДПР. Достоверная информация о шес-
ти положениях ротора, необходимая при трехфазной обмотке,
может быть получена при трех чувствительных элементах. При
амплитудном управлении в нереверсивном исполнении работа
дешифратора описывается следующим образом:
А = ху; В =yz , С = zx; D = ху; Е =yz', F = zx,
где А, В, С, D, Е, F — выходные сигналы дешифратора; х, у, z —
сигналы ДПР.
На каждый из ключей коммутатора должны поступать сигна-
лы длительностью 120° со сдвигом на 60° относительно друг друга.
Для реализации такого управления необходимы три сигнала ДПР
длительностью 180° каждый (меандр), сдвинутые относительно
друг друга на 120° (рис. 2.116). Схема дешифратора наиболее про-
сто реализуется с помощью элементов ИЛИ-HE (рис. 2.117).
В большинстве случаев к электроприводу предъявляется тре-
бование реверса. При наличии сигналов ДПР вида, показанного
на рис. 2.116 (сигналы х, у, z), реверсирование весьма просто, так
как сдвиг меандра по фазе на 180’ соответствует его логическому
инвертированию, т.е. необходимо наличие трех инверторов,
управляемых сигналом реверса.
Для организации импульсного сигнала управления скоро-
стью вращения надо на входах или выходах схемы, приведенной
на рис. 2.117, включить двухвходовые элементы ИЛИ-HE, объе-
динив по одному из входов в общую точку и подключив ее к цепи
импульсного управления.
Дешифратор должен также обеспечить динамическое тормо-
жение. Такой режим наиболее просто реализуется путем отпира-
ния ключей одной из групп и запирания ключей противополож-
ной группы. В этом случае ЭДС двигателя замыкается через
открытые транзисторы и шунтирующие их диоды. Такое тормо-
жение называют симметричным динамическим. Для его реализа-
ции дешифратор описывается системой логических (булевых)
уравнений:
244______Глава 2. Замкнутые системы управления электроприводами
A = (xyR + xyR)S;
В = (yzR + yzR)S;
С = (zxR + zxR)S-,
D = (xyR + xyR) + 5;
(2.90)
где R — сигнал реверса; S — сигнал управления скоростью.
Режим разгона осуществляется заданием в формулах (2.90)
5 = 0; при 5 = 1 — торможение; при R = 1 — вращение вперед; при
R = 0 — реверс. Для случая вращения вперед получение сигналов
а
2.6. Электроприводы с вентильными двигателями
245
Рис. 2.117. Схема дешифратора на элементах ИЛИ-НЕ
2.6.6. Электропривод с вентильным двигателем
и транзисторным коммутатором
Коммутаторы для ЭП-ВД в диапазоне малых и средних мощ-
ностей выполняются практически исключительно на основе
транзисторов. Широкое применение в таких схемах находят по-
левые транзисторы (MOSFET) и транзисторы с изолированным
затвором (IGBT). Схемы коммутаторов могут быть выполнены
также на униполярных силовых транзисторах и модулях. Схема
такого коммутатора, который нашел применение в электропри-
воде воздуховсасывающего агрегата, приведена на рис. 2.118. Об-
мотки А, В, С трехфазного ВД с датчиком положения ДПР полу-
чают питание от источника питания (ИП) через коммутатор,
содержащий полумостовые силовые транзисторные ключи СТК А,
СТК В, СТК С. Каждый из них имеет два силовых транзистора
УГ1, VT2, возвратные диоды VD1,VD2 (с целью упрощения на
рис. 2.118 приведена схема лишь одного полумоста). Управление
силовыми транзисторами осуществляется с помощью усилитель-
24$______Глава 2. Замкнутые системы управления электроприводами
2.6. Электроприводы с вентильными двигателями
247
ных каскадов базовых цепей А1 и А2, где предусматривается по-
тенциальная развязка силовых цепей и управления. На входы
усилительных каскадов базовых цепей подаются сигналы от де-
шифратора DC, на вход которого поступают сигналы от ДПР,
и сигнал задания скорости U3, формируемый в усилителе АЗ.
В схеме предусмотрено токбограничение на уровне 10гр, для чего
в силовую цепь включен шунт R5. Сила тока 101р устанавливается
потенциометром RP. Регулирование напряжения осуществляет-
ся посредством ШИМ напряжения, для чего в схеме предусмот-
рен генератор пилообразного напряжения (ГПН). Включение
коммутатора в работу производится кнопкой SA. Коммутатор
может работать от однофазной сети переменного тока, и тогда
в ИП предусматривается выпрямитель. Источником питания
может служить также аккумуляторная батарея.
2.6.7. Комплектные электроприводы
с вентильными двигателями
Промышленностью выпускаются комплектные электропри-
воды, основанные на применении синхронного двигателя с воз-
буждением от постоянных магнитов, расположенных на роторе.
Основное преимущество таких электроприводов по сравнению
с тиристорными приводами постоянного тока — облегчение об-
служивания из-за отсутствия щеточно-коллекторного узла и по-
вышения быстродействия благодаря применению полностью
управляемого коммутатора. Помимо этого, отсутствие коллекто-
ра позволяет питать двигатель от источника энергии с высоким
напряжением (напряжение на выходе неуправляемого выпрями-
теля равно 520 В постоянного тока при питании его от сети 380 В
переменного тока), т.е. осуществлять безтрансформаторное пи-
тание. В результате исключается понижающий трансформатор,
имеющийся в большинстве электроприводов с высокомомент-
ными двигателями постоянного тока.
Серия таких электроприводов разработана во ВНИИР (г. Че-
боксары); электроприводы ЭПБ1 серийно выпускаются с 1985 г.;
позже освоен выпуск электроприводов ЭПБ2.
248
Глава 2. Замкнутые системы управления электроприводами
Электроприводы ЭПБ1 имеют типоисполнения двигателей
с высотами оси вращения 90 и 100 мм, длительно допустимым мо-
ментом при минимальной скорости А/доп, равным 13,21 и 35 Н-м.
Технические характеристики электроприводов ЭПБ1 приве-
дены в табл. 2.3, а зависимости длительно допустимых (режим
S1, кривые 1—3) и кратковременных (режим S2, кривые 4...6) мо-
ментов от частоты вращения — на рис. 2.119. ЭПБ1 обеспечивает
диапазон регулирования частоты вращения 104 и полосу пропус-
Рис. 2.119. Зависимости длительно допустимых, и кратковременных
моментов от частоты вращения для электроприводов ЭПБ1
На рис. 2.120 представлена функциональная схема электро-
привода ЭПБ1. Он содержит блок питания (БП) БС9801, имею-
щий три типа исполнения по току: 6,3; 12,5; 25 А. К каждому из
этих блоков питания можно подключить от одного до трех бло-
ков регулирования (БР) БС4101, которые имеют два типоиспол-
нения по номинальному току: 6,3 и 16 А. Рассмотрим кратко со-
ставляющие ЭПБ1.
2.6. Электроприводы с вентильными двигателями
249
со
cxi
250
Глава 2. Замкнутые системы управления электроприводами
Рис. 2.120. Функциональная схема электропривода ЭПБ1
2.6. Электроприводы с вентильными двигателями 251
Блок питания подключается к сети 380...400 В непосредст-
венно через автоматический выключатель QF. Сопротивление
RF служит для ограничения зарядного тока конденсатора С1,
опасного для диодов выпрямителя UM. После заряда конденса-
тора С1 ограничивающее сопротивление RF шунтируется кон-
тактами пускателя КМ. Если напряжение питающей сети не со-
ответствует указанному, подключение БП производится через
согласующий трансформатор. БП формирует постоянное напря-
жение 520 В для питания силового преобразователя и напряже-
ния ±24 В и ±15 В для питания цепей управления БР и ДПР дви-
гателя. Конденсатор С1 служит для сглаживания напряжения
диодного выпрямительного моста U и приема энергии при реку-
перативном торможении двигателя. Поскольку при этом напря-
жение на С1 может возрасти значительно, предусмотрен узел га-
шения энергии, состоящий из резистора R1 и тиристора VS7,
который работает в импульсном режиме.
Блок регулирования содержит тиристорно-транзисторный
коммутатор (на рис. 2.121 — тиристоры VS1...VS6 и транзисторы
VT1, VT2), который обеспечивает широтно-импульсное регули-
рование подводимого к двигателю напряжения (VT1, VT2) и пе-
реключение фаз (VS1...VS6) обмоток двигателя М по сигналам
ДПР через распределитель импульсов РИ.
Транзисторные ключи VT1 и VT2 предназначены для комму-
тации силовых тиристоров VS1...VS6 и для поддержания задан-
ной силы тока двигателя. Для коммутации тиристора транзи-
сторные ключи VT1 и VT2 закрываются, и ток через тиристоры
прекращается; тиристоры восстанавливают свои запирающие
свойства, а ток двух фазных обмоток двигателя через диоды мос-
та VD1...VD6 замыкается на источник питания, подзаряжая его.
Коммутация происходит по каждому фронту сигналов ДПР, т.е.
шесть раз за период.
Регулирование тока двигателя в межкоммутационном интер-
вале осуществляется ключами VT1 и VT2, работающими в режи-
ме ШИМ по сигналу релейного регулятора тока (РРТ) DA1
(см. рис. 2.120). При этом заданная сила тока формируется сиг-
налом на выходе регулятора скорости (PC) DA2, а сигнал обрат-
ной связи поступает от блока датчиков тока (БДТ) UA. БДТ со-
вместно с тороидальными трансформаторами тока ТА, в которых
252
Глава 2. Замкнутые системы управления электроприводами
^пит
VD1 ... VD6
VT2
VT1
VS4
vse—Я
VS2
ЕМ
«VS1
VS3
М
VS5
Я
Я
Рис. 2.121. Схема силовой части тиристорно-транзисторного коммутатора
суммируются токи тиристорного моста UZ и моста обратных
диодов UZ1, образует нереверсивный безынерционный датчик
постоянного тока с выходным сигналом U,, пропорциональным
суммарному току всех фаз двигателя, который с помощью элек-
тронных ключей коммутатора, управляемого нуль-органом (НО)
DA3, преобразуется в реверсивный сигнал Ui, поступающий на
вход РРТ.
Регулятор скорости ПИ-типа выполнен на ОУ типа
КМ551УД1А. PC сравнивает сигналы от источника, задающего
напряжение U3, и обратной связи (тахогенератора) Urr и выраба-
тывает сигнал рассогласования t/pc, который является задающим
для регулятора тока. Из условия равенства напряжения на входе
PC в установившемся режиме можно записать:
U3!R3 = К-хцх^ Ra,
откуда
со = U3 Ra/(R3 Хтг )>
2,6. Электроприводы с вентильными двигателями 253
где <о— угловая скорость двигателя; Ra, R3 — входное сопротив-
ление регулятора скорости со стороны соответственно тахогене-
ратора и задающего напряжения; ЛГтг — выходное напряжение
тахогенератора: А'тг = Ujt /<% Utt — выходное напряжение тахо-
генератора.
Электроприводы ЭПБ1 имеют блок защиты (БЗ) DF, в кото-
рый входят: максимально-токовая защита (с выходом на транзи-
сторы VT1 и VT2 и два красных светодиода), тепловая защита
с помощью терморезисторов ВТ1 и ВТ2 в охладителях ключей
и в двигателе соответственно, защита от кратковременных пере-
грузок и защита от обрыва в цепи тахогенератора. Все защиты,
кроме первой, вызывают снятие сигналов «Готовность к работе 1»
и «Готовность к работе 2» и свечение светодиода VD1. Электро-
привод имеет два входа U3i и U32 для подключения сигналов за-
дания скорости, два входа подключения сигналов разрешения
работы KU2 и KU3, вход «Сброс защит» KU4, вход «Ограниче-
ние тока» (замыкание KU1), по которому снижается уставка тока
путем уменьшения максимального значения выходного сигнала
Uрс • Срабатывание максимально-токовой защиты вызывает экс-
тренную блокировку РС и запрет выдачи управляющих импуль-
сов на тиристоры VS1...VS6 и транзисторные ключи VT1, VT2.
В этом случае торможение электропривода осуществляется за-
мыканием силовых контактов К3.2 и КЗ.З (динамическое тормо-
жение) или наложением механического тормоза.
Двигатель М имеет встроенный датчик обратной связи (ДОС),
состоящий из тахогенератора постоянного тока ТП80-20-0,2
и импульсного ДПР типа ДФЗА или ДФЗ. Последний кроме сиг-
налов, необходимых для управления коммутатором, формирует
импульсные сигналы (250 импульсов на один оборот) для орга-
низации ОС по скорости (две последовательности прямоуголь-
ных импульсов напряжения, сдвинутых друг относительно друга
по фазе на 90°, и нулевую метку).
Серия электроприводов ЭПБ2 (разработана в 1986 г.) харак-
теризуется большим диапазоном моментов двигателя (от 0,05 до
70 Н м) и скоростей (от 1000 до 6000 об/мин), применением
транзисторных (взамен тиристорных) преобразователей и новы-
ми типами вентильных двигателей на основе ферритовых (серия
254
Глава 2. Замкнутые системы управления электроприводами
ДВУ) и редкоземельных (2ДВУ) магнитов. Двигатели имеют
встроенный комплексный датчик обратных связей типа ПДФ8
или ПДФ9, состоящий из тахогенератора, фотоимпульсного дат-
чика положения ротора и фотоимпульсного датчика пути с чис-
лом импульсов до 2500 на один оборот вала. Электроприводы
ЭПБ2, обладая такими же, как и ЭПБ1, основными технически-
ми параметрами (диапазон регулирования и быстродействие),
имеют большие точность поддержания скорости и равномер-
ность вращения, более благоприятные нагрузочные характери-
стики (рис. 2.122). Они обеспечивают полосу пропускания
частот замкнутой системы регулирования скорости не менее
628 рад/с (100 Гц), диапазон регулирования не менее 10 000
(под полосой пропускания частот понимается диапазон частот
гармонического сигнала, в котором сдвиг по фазе первых
гармоник сигналов тахогенератора и задатчика скорости не
превышает 90° эл. или ослабление сигнала тахогенератора не
превышает 3 дБ).
0 12 3 4
Рис. 2.122. Нагрузочные характеристики электропривода ЭПБ2
Преобразователи электроприводов ЭПБ2 имеют два конст-
руктивных исполнения: кассетное (от одной до пяти координат
в одном конструктиве) и блочное, в котором блок питания и бло-
ки регулирования выполнены в виде отдельных блоков с воз-
можностью подключения до трех блоков регулирования от одно-
го блока питания. Технические данные электроприводов ЭПБ2
приведены в табл. 2.4.
2.6. Электроприводы с вентильными двигателями
255
256
Глава 2. Замкнутые системы управления электроприводами
Контрольные вопросы
1. Возможно ли регулирование скорости ВД изменением числа пар
полюсов?
2. Какое устройство необходимо для подключения фаз ВД к источ-
нику питания?
3. Перечислите типы ДПР.
4. Каково назначение дешифратора в схеме управления ВД?
5. Чем ограничивается число фаз ВД?
6. Что является причиной пульсаций электромагнитного момента ВД?
7. Сравните пульсации электромагнитного момента ВД и коллек-
торного двигателя постоянного тока.
8. Каким типовым динамическим звеном описывается ВД с учетом
ряда упрощений?
9. Каковы недостатки тиристорного коммутатора?
10. Возможно ли использование сельсинов и вращающихся транс-
форматоров в качестве ДПР?
11. На каких логических элементах можно реализовать дешифратор?
12. Каким образом осуществляется реверс ВД?
13. Каково различие силовых частей электроприводов ЭПБ1 и ЭПБ2?
14. Что предпочтительней и почему: ВД с возбуждением от постоян-
ных магнитов или с обмоткой возбуждения? Зависит ли от этого тип ДПР?
15. Каково назначение регуляторов тока и скорости в электропри-
воде ЭПБ1?
16. Какие виды защит применяются в электроприводе ЭПБ1?
2.7. Электроприводы систем управления
положением
2.7.1. Типы систем управления положением
В технике находят применение системы и устройства, в кото-
рых необходимо управлять пространственным положением ра-
бочего органа. Простейшие из них требуют управления положе-
нием при линейном перемещении в одном направлении или при
повороте вокруг одной оси. Сюда относятся механизмы пози-
ционирования инструмента относительно обрабатываемой по-
верхности в металлорежущих станках (рис. 2.123, а).
2.7. Электроприводы систем управления положением
257
Рис. 2.123. Примеры систем управления положением
17
’ 3597
258
Глава 2. Замкнутые системы управления электроприводами
Шпиндель с инструментом должен переместиться в заданное
положение х3 из положения х, чтобы обрабатывать отверстие.
Рассогласование по положению равно Ах. На рис. 2.123, б пока-
зан механизм нажимного устройства прокатного стана, устанав-
ливающий верхний валок в заданное положение у3, соответст-
вующее требуемому обжатию. Механизм рулевого управления
автомобиля выполняет поворот передних колес вокруг верти-
кальной оси на заданный угол. Здесь так же, как и в предыдущем
случае, выходной регулируемой величиной является положение
рабочего органа (колеса), но угловое.
Подъемно-транспортные машины (подъемные краны, экска-
ваторы, лифты, конвейеры, электрокары) выполняют задачу пе-
ремещения груза в заданную область пространства. По существу,
здесь необходимо управление положением, однако, как правило,
не требующее высокой точности. Перемещение является про-
странственным, т.е. трехмерным. На рис 2.123, в показано пере-
мещение груза из положения А в положение Aq. Положение А ха-
рактеризуется вектором координат г = (х; у; z), а заданная точка
Aq — вектором r3 =(x3;y3;z3). Рассогласование по положению
Аг = (х3 - х,у3 - y,Zs - z). Движение вдоль оси х осуществляется
мостом крана, вдоль оси у — тележкой, вдоль оси z — механиз-
мом подъема.
Характерным примером системы управления положением
являются манипуляторы и промышленные роботы, задача управ-
ления которыми заключается в обеспечении заданного положе-
ния схвата с манипулируемым предметом и его ориентации
(рис. 2.123, г).
В зависимости от назначения системы управления положе-
нием подразделяются на позиционные и контурные.
Позиционными называются системы, предназначенные для
отработки заданных перемещений (позиционирования рабо-
чего органа в заданную точку) с заданной точностью. Приме-
рами позиционных систем являются системы, показанные на
рис. 2.123, а...в.
Манипуляционный робот (рис. 2.123, г) может выполнять
как позиционирование, так и перемещение схвата по заданной
траектории, в зависимости от выполняемых функций. Так, для
обслуживания станков, прессов и литейных машин манипуляци-
2.7. Электроприводы систем управления положением
259
онный робот выполняет перемещение в зону обработки, снятие
готового изделия, транспортировку в отведенное место, т.е. зада-
чу позиционирования.
Контурными называют системы, предназначенные для пере-
движения рабочего органа по заданной пространственной траек-
тории с заданной точностью. Для окраски, сварки, резки листо-
вого материала и обработки сложных поверхностей в схвате
манипулятора закрепляется инструмент, который должен дви-
гаться по заданной траектории. В этом случае функционирует
контурная система управления положением.
Каждое звено манипуляционного робота (рис. 2.123, г) при
движении из точки А в заданную точку Aq поворачивается на
определенный угол. Этот поворот осуществляется электроприво-
дом, имеющим редуктор. Двигатель и редуктор встроены в кине-
матическую пару.
Чтобы обеспечить контурное управление, каждый привод
должен выполнять поворот так, чтобы угол поворота был задан-
ной функцией времени. Результирующее движение схвата будет
происходить по заданной пространственной кривой. Отсюда
следует, что в зависимости от требуемых движений задающие
воздействия на каждый электропривод программируются в виде
различных функций времени и3 (t).
Следящей системой называется система управления положе-
нием, выходная величина которой воспроизводит с заданной
точностью задающее воздействие, являющееся функцией време-
ни. Системы контурного управления — это следящие системы.
Другая разновидность следящих систем имеет задающий сигнал
в виде случайной или непредвиденной функции времени. При-
мерами таких систем являются электроприводы радиолокаторов,
следящих за движущейся целью.
2.7.2. Структуры и режимы работы систем
управления положением
Структурные схемы систем управления положением приве-
дены на рис. 2.124. На рис. 2.124, а показана разомкнутая по по-
ложению система. Она применяется, если требуемая точность
260
Глава 2. Замкнутые системы управления электроприводами
невысокая, как в подъемно-транспортных устройствах. При под-
ходе к заданному положению задающий сигнал становится нуле-
вым или формирует переход на пониженную скорость (для улуч-
шения точности), а затем отключается. На рис. 2.124 приняты
следующие обозначения: УУ — устройство управления, ОУ —
объект управления, и — сигнал управления, х — выходная вели-
чина (положение), х — скорость, W(p) — передаточная функция
контура скорости, К(р) — передаточная функция регулятора,
ко.п — коэффициент обратной связи по положению, б — ошибка
регулирования.
Рис. 2.124. Структурные схемы систем управления положением
2.7. Электроприводы систем управления положением 261
На рис. 2.124, б показана система с управлением по возмуще-
нию. Основным возмущающим воздействием систем контурного
управления и следящих систем является скачок скорости задающе-
го сигнала, т.е. величина du3jdy = й3. В самом деле, скачок вели-
чины и3 требует изменения скорости, т.е. разгона или торможе-
ния электропривода. Поскольку ускорение привода ограничено,
для изменения скорости требуется некоторое время, в течение
которого и накапливается рассогласование. Для компенсации
влияния возмущения в структуру добавляется параллельный
канал с коэффициентом усиления X. Он способствует скорей-
шему изменению скорости привода в том же направлении, что
и задание.
Преимуществом управления по возмущению является воз-
можность получения заданной точности без использования дат-
чика положения, а недостаток — неучет других возмущений, ко-
торые могут увеличить ошибку по положению.
На рис. 2.124, в показана структура с управлением по откло-
нению, имеющая обратную связь коп по положению. Эта струк-
тура является основной, наиболее часто применяемой. Принцип
действия данной системы заключается в следующем. Если на
вход системы подается задающее воздействие, то сигнал управ-
ления и, а значит, и скорость х возрастают, увеличивается выход-
ная величина х, уменьшается ошибка 8, определяемая выражением
8 = и3 - ко.„ х. Она пропорциональна рассогласованию по поло-
жению Ах = х3 - х, где х3 = и3/к0.п — заданное положение.
В режиме позиционирования величина и3 определяет требуе-
мое конечное состояние рабочего органа. При наличии статиче-
ского момента Мс на валу двигателя установившийся режим до-
стигается при и3 = const, и = const, х = 0. Сигнал управления
пропорционален 1ИС, поскольку он необходим для создания
электромагнитного момента двигателя, уравновешивающего Л/с.
Если применяется пропорциональный регулятор положения, то
и = 8АГ(0), а значит, ошибка позиционирования будет прямо про-
порциональна статическому моменту. Для устранения ошибки
в таких системах применяются астатические (обычно пропор-
ционально-интегрирующие) регуляторы.
В режиме контурного управления основным задающим воз-
действием, для которого выполняется расчет системы, является
262
Глава 2. Замкнутые системы управления электроприводами
скачок скорости. Основным установившимся режимом служит
режим постоянства скорости. На рис. 2.125, а приведены ступен-
чатый график заданной скорости х3 и кривая фактической ско-
рости х с учетом ограничения на ускорение. Здесь показан пре-
дельный случай, когда в течение всего процесса ускорение
максимально. На интервале разгона Го график перемещения x(t)
имеет форму параболы (интеграл линейной функции х(/)). В ре-
зультате отставания выходной скорости от заданной на интерва-
ле tQ накапливается рассогласование по положению, определяе-
мое площадью треугольника:
/о
Ах = j(x3 - x)dt = х3Л)/2.
о
а
Рис. 2.125. Предельные диаграммы при разгоне
Чем больше скачок скорости задающего воздействия, тем
больше рассогласование. Из последнего выражения также следу-
ет, что для повышения точности следящей системы необходимо,
чтобы время разгона /0 было как можно меньше или ускорение
Xmax - x3/to было как можно больше.
2.7. Электроприводы систем управления положением
263
Добротностью по скорости следящей системы называется ве-
личина отношения скачка скорости к возникающему при этом
рассогласованию по положению:
Da = х3 /Дх.
Величина D& определяется для установившегося режима, ко-
гда х3 = х. Если обозначить скорость поступательного движения
у, вращательного со, а рассогласование А(р, то добротность может
быть выражена как через угловую скорость двигателя, так и через
линейную скорость рабочего органа:
Da
СО __ V
Дф Дх
Из структурной схемы, приведенной на рис. 2.124, в, следует,
что добротность по скорости численно равна коэффициенту уси-
ления разомкнутого контура. В самом деле, в установившемся
режиме при р = 0 получим
Поскольку в системах управления положением наиболее же-
лательным является монотонный переходный процесс, без пере-
регулирования, то, как видно из рис. 2.125, а, рассогласование
Дх, а значит, и добротность однозначно определяются быстро-
действием, т.е. величиной to'.
п - Хз _ _ 2
Дх Х/о to
Для повышения точности следящих систем с учетом ограни-
чения на ускорение во многих случаях применяется астатиче-
ский регулятор К(р), обычно пропорционально-интегрирующий.
Тогда график разгона в предельном случае максимального уско-
рения примет вид, показанный на рис. 2.125, б. Кривая измене-
ния скорости х(0 в этом случае имеет перерегулирование
— \лтах лз // •Л'З ?
благодаря чему ошибка, накопленная за время to и равная
Дхтах = tox3 /2, уменьшается до нуля к моменту Л окончания пе-
264
Глава 2. Замкнутые системы управления электроприводами
реходного процесса в соответствии с предельной диаграммой.
В реальных процессах Дх -> О при t —> оо в силу принципа действия
астатической системы: равновесие в замкнутом контуре наступа-
ет, если на входах интеграторов сигналы равны нулю. В частно-
сти, установившийся режим постоянства скорости в системе, по-
казанной на рис. 2.124, в, наступает при х = const, и = const,
а значит, в случае интегрирующего регулятора должно быть 8 = 0.
Введение в регулятор интегрирующего звена может отрица-
тельно повлиять на быстродействие и запас устойчивости. По-
этому в следящих системах часто предпочтительным оказывается
применение комбинированного управления, т.е. управления по от-
клонению и по возмущению (см. рис. 2.124, г).
Коэффициент усиления X канала компенсации возмущения
рассчитывают по условию полной компенсации или исходя из
требуемой добротности. При полной компенсации процессы
имеют такой же вид, как на рис. 2.125, б. В случае недокомпенса-
ции имеется установившееся рассогласование Дх, меньшее ДХщах,
но оно должно соответствовать требуемой добротности. Опера-
торное изображение рассогласования имеет вид
и X
в случае воздействия в виде скачка скорости и3 = — = -——, по-
Р ко.пр
k0,n K^(p)0. + Хр)
р+ kanK(p)W(p)
1 - Xfc0.n K(p)W(p)
3 р + Ло.п K(pW(p)
Для определения установившегося значения рассогласования
принимается р = 0, тогда х = х3 и
х(1 - ХЛо.п Д0)1Г(0))
(Ло.п KW)
Отсюда, учитывая, что Da = х/Дх, получаем выражение, связы-
вающее коэффициент X и добротность:
(2.91)
Ло.п
Здесь р = А'(0)ВЛ(0) — коэффициент усиления прямого канала.
2.7. Электроприводы систем управления положением
265
Условие полной компенсации, обеспечивающее в установив-
шемся режиме Дх = О, получается, если в выражении (2.91) поло-
жить £>ш =- оо, 1/1)ш = 0. Тогда X = 1/(Аг0.п
Компенсирующее воздействие может быть приложено на
входе контура скорости. Тогда его можно рассматривать как со-
ставляющую сигнала управления, задающую скорость.
Передаточная функция канала компенсации на рис. 2.124, г
представлена идеальным дифференцирующим звеном для упро-
щения. Для обеспечения реального дифференцирования сигнала
применяют аналоговый или цифровой дифференциатор.
2.7.3. Ограничения переменных в системах
управления положением
Переменные, характеризующие процессы в электроприводе,
не должны превышать допустимых для них значений. Положе-
ние, скорость, ускорение и момент должны быть ограничены
по модулю. Наибольшее перемещение обычно зависит от раз-
меров рабочей зоны, наибольшая скорость ограничена воз-
можностями двигателя, а ускорение — требованием плавности
движения. Момент привода может быть ограничен по условиям
прочности механической части, а также возможностями электро-
привода.
При наличии ограничений обычно различают большие пере-
мещения, когда все переменные достигают предельных для них
значений в процессе движения (рис. 2.126, а, б), средние переме-
щения, когда лишь некоторые переменные достигают предель-
ных значений (рис. 2.126, в), и малые перемещения, когда огра-
ничения не достигаются (рис. 2.126, г).
Для ограничения переменных в системах управления приме-
няется несколько способов.
Первый способ заключается в формировании задающего
воздействия с учетом ограничений. На рис. 2.126, а показано задаю-
щее воздействие, обеспечивающее ограничение скорости значе-
нием «з = «з тю /ty, а также процесс отработки этого воздействия
системой (кривые со, ср). На рис. 2.126, б (нижний график) пока-
зано задающее воздействие u3(t), обеспечивающее ограничение
Рис. 2.126. Процессы с учетом ограничений
2.7. Электроприводы систем управления положением
267
ускорения по модулю при разгоне и торможении, а также огра-
ничение скорости. Кривая являющаяся заданием для ско-
рости, показана на рис. 2.126, б (верхний график, имеющий вид
трапеции). Там же показан график й3, являющийся заданием для
ускорения. Процесс отработки задающего воздействия представ-
лен кривыми (р, со, со.
Второй способ нашел применение в многоконтурных сис-
темах. Он предусматривает ограничение переменных на задаю-
щих входах. Структура такой системы показана на рис. 2.127.
Здесь объект управления представлен передаточными функция-
ми IFi(p), W2(p) и интегрирующим звеном —, учитывающим
hP
преобразование скорости со двигателя в угол поворота рабочего
органа ср. Устройство управления содержит регуляторы тока, ско-
рости и положения: Кр^(р), К?с (/?), А^п (р), синтезируемые мето-
дом подчиненного регулирования (последовательной оптимизации
контуров). Регуляторы положения и скорости предусматривают
ограничения выходных величин по модулю. Выходная величина
регулятора положения представляет собой сигнал задания скоро-
сти и3.с, а выходная величина регулятора скорости есть сигнал
задания тока мз т. Требуемые уровни ограничений скорости и то-
ка достигаются настройкой коэффициентов обратных связей по
скорости и току в соответствии с выражениями
_ ^з.сшах о _ W3.T max
^о.с-------j Kq.t----;---,
Ютах I max
где местах, Мз.ттах — максимальные значения задающих сигналов;
сотах, /тах — максимальные значения переменных.
Третий способ заключается в применении нелинейной об-
ратной связи по ограничиваемой переменной. На рис. 2.128 по-
казана структура системы ^ограничением тока с помощью от-
сечки по току. Для ограничения тока применяется нелинейное
звено (НЗ) с зоной нечувствительности в обратной связи по току.
Ширина зоны нечувствительности равна zmax. Если ток находит-
ся в допустимых пределах, на выходе НЗ сигнал равен нулю.
Если i > /тах, появляется выходной сигнал и$, который способст-
268______Глава 2. Замкнутые системы управления электроприводами
Рис. 2.127. Структура многоконтурной системы
2.7. Электроприводы систем управления положением
269
Рис. 2.128. Структура системы с ограничением тока
вует резкому уменьшению сигнала управления, что и ограничи-
вает ток. Наклон характеристики НЗ должен удовлетворять усло-
виям устойчивости контура тока и системы в целом.
2.7.4. Функциональные схемы систем
управления положением
На рис. 2.129, а показана функциональная схема системы
управления положением на основании сельсинной пары. Одно-
фазные статорные обмотки сельсинов S1 и S2 подключены к ис-
точнику синусоидального напряжения. Магнитный поток вызы-
вает в трехфазной обмотке ротора ЭДС, амплитудные значения
которых зависят от угла поворота осей фазных обмоток относи-
тельно направления магнитного потока статора.
Если углы поворота роторов сельсинов S1 и S2 одинаковы, то
равные и встречно направленные ЭДС соединенных между со-
бой фазных обмоток уравновешиваются и токи в обмотках отсут-
ствуют (»а =ib = ic =0). Если углы поворота сельсинов S1 и S2
совпадают, то в фазных обмотках возникает ток. Взаимодействуя
с магнитным потоком статора, он создает момент, поворачиваю-
щий ротор сельсина S2 в положение, совпадающее с положением
ротора сельсина S1.
Сельсин S1 расположен на задающей оси, a S2 — на исполни-
тельной. Поворачивая задающую ось на угол <р3, можно обеспе-
чить поворот исполнительной оси на угол <р = <р3. Таким образом,
270
Глава 2. Замкнутые системы управления электроприводами
а
Рис, 2.129. Функциональные схемы системы управления положением
2.7. Электроприводы систем управления положением
271
исполнительная ось отслеживает положение задающей, благода-
ря чему осуществляется дистанционная передача угла поворота.
Недостаток подобных систем заключается в их малой мощ-
ности (сотни ватт) и невысокой точности. Повышение точности
и мощности исполнительного двигателя требует использования
в системе современного высокоточного датчика положения, пи-
тания двигателя от управляемого преобразователя и применения
управляющего устройства.
На рис. 2.129, б показана функциональная схема системы
управления положением на базе регулируемого электропривода
с силовым полупроводниковым преобразователем. Здесь R1 —
задающий потенциометр; А — суммирующий усилитель, на вы-
ходе которого формируется сигнал управления и = р(и3 - wo n),
где р — коэффициент усиления усилителя, и0.п — сигнал обрат-
ной связи, пропорциональный перемещению рабочего органа
и снимаемый с потенциометра R2, VT — силовой полупроводни-
ковый управляемый преобразователь, М — двигатель. В подоб-
ных системах находят применение электроприводы постоянного
и переменного тока, допускающие широкий диапазон регулиро-
вания скорости благодаря управляемому преобразователю (пре-
образователь обязательно должен быть реверсивным). Коэффи-
циент усиления р выбирается из условий обеспечения заданной
точности: чем меньше допустимое рассогласование, тем выше
должен быть коэффициент усиления, что может привести к ухуд-
шению динамических показателей и снижению запаса устойчи-
вости. Для улучшения динамических свойств в системах управ-
ления положением применяются дополнительные обратные
связи по скорости, ускорению или току двигателя. Функцио-
нальная схема такой системы с широтно-импульсным транзи-
сторным преобразователем показана на рис. 2.129, в. Открытое
состояние транзисторов VT1...VT3 соответствует направлению
вращения «вперед», VT2...VT4 — «назад», VD1...VD4 — возврат-
ные диоды, необходимые для обеспечения прохождения тока
при запертом состоянии ключей, БУП — блок управления пре-
образователем, УУ — устройство управления, формирующее сиг-
нал управления и в зависимости от задающего сигнала и обрат-
ных связей по положению и0.п, скорости ы0.с> току ио т. Вместо
обратной связи по току в ряде случаев применяется обратная
272
Глава 2. Замкнутые системы управления электроприводами
связь по ускорению. В данной системе имеются датчики угла по-
ворота BQ и скорости BR. Возможно определение скорости и ус-
корения по результатам измерения угла поворота, если датчик
угла поворота обеспечивает достаточные точность и устойчи-
вость к помехам.
Контрольные вопросы
1. Каковы области применения систем управления положением?
2. В чем различие позиционных, контурных и следящих систем?
3. Как обеспечить заданную точность в системах управления положе-
нием?
4. Что такое добротность по скорости?
5. Как влияет компенсирующая связь на точность контурной систе-
мы управления?
6. Как рассчитать коэффициент усиления канала компенсации,
обеспечивающий заданную добротность по скорости?
7. Как обеспечить ограничение переменных системы управления
положением?
8. Назовите функционально необходимые элементы системы управ-
ления положением.
9. Составьте функциональную схему системы управления поло-
жением.
Глава 3
КОМПЛЕКСНЫЕ АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
3.1. Устройства ЭВМ для управления
электроприводами
3. 1.1. Основные термины
Системы управления современными технологическими объ-
ектами (металлорежущими станками, лифтами, складскими ком-
плексами, прокатными станами и т.д.), основу которых составля-
ет автоматизированный электропривод, осуществляют обработку
большого объема информации с целью выработки управляющих
воздействий (логических, цифровых или аналоговых), поступаю-
щих на электроприводы. Такие системы управления выполняют-
ся на основе цифровых устройств — ЭВМ. Все цифровые вычис-
лительные устройства — от супербольших рабочих станций до
встроенной в автоматизированный электропривод микропроцес-
сорной системы управления — имеют аналогичную архитектуру
и в значительной мере общие характерные свойства.
Укрупненные структуры ЭВМ и микроЭВМ совпадают и мо-
гут быть представлены в виде схемы, приведенной на рис. 3.1.
Эта схема предполагает программный принцип управления
для решения широкого круга задач на основе составленной опе-
ратором программы, т.е. набора инструкций, автоматически об-
рабатываемых ЭВМ.
Прежде всего уточним, что микропроцессорные управляю-
щие вычислительные машины (УВМ), или для краткости просто
микроЭВМ, являются одной из разновидностей микропроцес-
сорных средств вычислительной техники. Они реализуются на
основе функционально законченных изделий, построенных на
базе БИС. В отличие от ЭВМ общего назначения, которые пред-
назначены для разнообразных вычислительных операций в тем-
пе времени, определяемом самой машиной, микропроцессорные
1 ®з»эт
274 Глава 3. Комплексные системы управления электроприводами
УВМ можно определить как программно-управляемые ЭВМ для
специализированных применений в реальном времени, таких,
как управление технологическими комплексами и другими объ-
ектами, работа в различных измерительных комплексах и прибо-
рах, где темп вычислений диктуется технологическим процессом
(например, управление работой ядерных реакторов, процессом
варки стали и чугуна, пуском ракет, автоматической посадкой
летательных аппаратов и др.).
ШУ
Рис. 3.1. Укрупненная структура ЭВМ
УВМ функционируют как системы с обратной связью, полу-
чая в определенные такты времени информацию от датчиков
объекта управления, производя необходимые вычисления в со-
ответствии с заранее записанной программой и формируя ре-
зультаты обработки для направления их в исполнительные уст-
ройства (в том числе электроприводы).
Принцип программного управления процессом обработки
данных делает микроЭВМ универсальным устройством, так как
позволяет реализовать требуемый для конкретного применения
алгоритм взаимодействия с объектом. При этом особенности
конкретного алгоритма учитываются путем разработки приклад-
ного или специального программного обеспечения и выбора не-
обходимых функциональных модулей системы.
3.1. Устройства ЭВМ для управления электроприводами 275
Проектируя микропроцессорную систему управления для
какого-либо конкретного устройства, специалист сталкивается
прежде всего с необходимостью выбора микроЭВМ для реализа-
ции этой системы. В основе выбора лежит анализ основных ха-
рактеристик и архитектуры микроЭВМ.
Архитектура микроЭВМ или микропроцессора (МП) — это
совокупность аппаратных, микропрограммных и программных
средств, создающих организованную вычислительную среду,
необходимую для обработки данных в соответствии с назначе-
нием микроЭВМ. С точки зрения пользователя архитектура
находит отражение в языке машины, форматах команд, функ-
циональной схеме микропроцессора, структуре и способе ор-
ганизации памяти, средствах управления периферийными уст-
ройствами и т.д.
Вычисления, задаваемые программой, осуществляются цен-
тральным процессором (ЦП). Его функция заключается в выбор-
ке команд из памяти и выполнении заданных ими операций. По-
мимо этого, ЦП осуществляет управление всеми процессами
преобразования и передачи информации как внутри ЦП, так
и во всей вычислительной системе.
Основная память (ОП) служит для хранения команд про-
граммы, в соответствии с которой обрабатывается информация,
а также числовых констант, исходных, промежуточных данных
и результатов вычислений.
С точки зрения функционального устройства ОП имеет две
разновидности: постоянное запоминающее устройство (ПЗУ), ко-
торое предназначено для хранения команд программы и часто
применяемых числовых констант, и оперативное запоминающее
устройство (ОЗУ), служащее для хранения промежуточных дан-
ных и результатов вычислений. Конструктивно ОП состоит из
ячеек памяти, каждая из которых имеет адрес в виде двоичного
числа и содержит некоторое количество запоминающих элемен-
тов. Количество элементов в ячейке памяти обычно равно числу
разрядов двоичных чисел, с которыми оперирует процессор.
Число, хранимое в ячейке памяти, называют словом.
Основная память выполняется в виде модулей емкостью по
1...16К слов, а общее число модулей определяется спецификой
применения микроЭВМ. Максимальное число ячеек (слов) в со-
276 Глава 3. Комплексные системы управления электроприводами
ставе ОП определяется разрядностью двоичного числа, которым
кодируется адрес ячейки. В большинстве микроЭВМ это 16-раз-
рядное число, которое можно представить так: 216 = 65 536 адре-
сов. Для упрощения записи обычно обозначают 2 0 = 1024 в виде
двоичной тысячи и записывают: 210 = IK. С учетом этого ем-
кость ОП в приведенном примере равна 216 = 2-210 = 64К слов.
Для удобства записи значения адресов ячеек обычно пред-
ставляют в восьмеричной и шестнадцатеричной формах записи.
Для представления двоичного числа в восьмеричной системе
счисления оно представляется группами по 3 бита, поэтому для
16-разрядного двоичного числа цифра старшего разряда прини-
мает значение 1 или 0.
Например, двоичное число 1110011101111100(2) имеет вид 163574(8).
Для представления двоичного числа в шестнадцатеричной системе счис-
ления оно записывается группами по 4 бита, а затем кодируется цифра-
ми 0,1,2,...,9 и буквами А, В, С, D, Е, F, каждая из которых изображает
числа от 10 до 15 соответственно. Таким образом, уже упоминавшееся
двоичное число 1110011101111100(2) при шестнадцатеричной форме за-
писи примет вид Е77С(16).
Рассмотренный пример показывает, что восьмеричная и ше-
стнадцатеричная системы счисления являются лишь формами
записи двоичных чисел (высокий уровень — низкий уровень),
служащих для удобства чтения и более лаконичной записи.
Устройства ввода осуществляют прием информации от раз-
личных носителей (перфокарт, клавиатур, датчиков технологи-
ческих величин и т.д.) и преобразование ее (в случае необходи-
мости) в двоичный код.
Устройства вывода преобразуют электрические сигналы, по-
ступающие из памяти, которые несут в себе информацию о ре-
зультатах обработки данных в форму, удобную для дальнейшего
использования (перфолента, магнитный диск, печатный текст,
изображение на экране видеотерминала и др.). В отдельных слу-
чаях цифровые сигналы преобразуются в аналоговую форму.
Иногда ввод и вывод реализуются одним физическим устройст-
вом, которое в этом случае называется устройством ввода-вывода
(УВВ). В состав устройств ввода-вывода иногда входят и устрой-
ства связи с объектом (УСО), средства связи с другими перифе-
рийными устройствами, включая долговременную память.
3.1. Устройства ЭВМ для управления электроприводами 277
Большинство мини- и микроЭВМ устроены таким образом,
что все функциональные блоки (см. рис.3.1) подключены па-
раллельно к единому каналу связи, который называется маги-
стралью.
В процессе обмена информацией по каналу связи участвуют
два типа устройств: активное (инициатор обмена) и пассивное.
В качестве активного устройства обычно выступает центральный
процессор. При параллельном подключении пассивных устройств
обмена к магистрали необходимо знать, с каким именно устрой-
ством должен произойти обмен. Для этого каждое из устройств
снабжается адресом, а в составе магистрали предусматриваются
специальные линии, по которым сообщается информация в дво-
ичной форме в параллельном формате об адресе пассивного уст-
ройства. Совокупность этих линий в магистрали образует шину
адреса (ША). Передача самой информации в параллельном фор-
мате производится также по линиям, которые образуют шину
данных (ШД). В составе магистрали существует еще один набор
линий, по которым передаются различные управляющие сигна-
лы и которые образуют шину управления (ШУ).
3. 1.2. Основные определения
микропроцессорных средств
К настоящему времени в области микропроцессорной техни-
ки сложилась определенная терминология.
Микропроцессор (МП) — это программно-управляемое уст-
ройство, предназначенное для обработки цифровой информа-
ции и управления процессом этой обработки, реализованное на
основе одной или нескольких БИС. В отличие от обычных БИС
микропроцессор как программно-управляемое устройство со-
держит в своем составе элементы, позволяющие настроить его на
выполнение любых функций, т.е. реализовать любую зависи-
мость между входными и выходными последовательностями сиг-
налов. Микропроцессор является универсальным средством ав-
томатики в смысле реализации заданных функций.
278
Глава 3. Комплексные системы управления электроприводами
Для решения определенной задачи МП должен быть запро-
граммирован соответствующим образом, ему должен быть обес-
печен обмен информацией с другими устройствами, к числу ко-
торых относятся в первую очередь запоминающие устройства
и устройства ввода-вывода.
Микропроцессорная система (МПС) — это совокупность
взаимосвязанных устройств, состоящая из одного или несколь-
ких МП, памяти (ЗУ), УВВ и ряда других устройств, предназна-
ченных для выполнения четко определенных функций. Таким
образом, МП наряду с другими БИС является основой построе-
ния МПС.
МикроЭВМ — это конструктивно оформленная МПС, имею-
щая в своем составе панель управления, устройства связи с внеш-
ними объектами, источник питания и снабженная программным
обеспечением.
Микроконтроллер (МК) — это устройство, выполняющее
функции логического анализа и управления. Например, МК
управляют работой внешних устройств микроЭВМ: накопителей
на ГМД, печатающих устройств, графопостроителей, и т.д. МК
имеет меньшую аппаратную сложность за счет сокращения функ-
ций по выполнению арифметических операций; в то же время он
имеет более развитые функции логического управления. Микро-
процессорный комплект (МПК) интегральных схем (ИС) — это
совокупность микропроцессорных БИС и других ИС, однотип-
ных по конструктивно-технологическому исполнению, для ко-
торых обеспечена функциональная, структурная, информацион-
ная и энергетическая совместимость для использования в МПС.
МПК ИС является по существу элементной базой МПС и мик-
роЭВМ.
Микропроцессорная система автоматического управления
(МПСАУ) — это система со встроенными в нее средствами мик-
ропроцессорной техники (МПТ). Взаимосвязь основных средств
МПТ в составе МПСАУ показана на рис. 3.2, а, где подчеркнута
модульность и магистральность.
МП является составной частью МПС и соответственно мик-
роЭВМ и МПСАУ и содержит в своем составе АЛУ, УУ и блок
регистров (БРг), в который входят: аккумулятор, регистры адре-
са, общего назначения, состояния, флажковые, стековые, про-
граммный счетчики и т.д.
3.1. Устройства ЭВМ для управления электроприводами
279
а
б
1
МПСАУ
МП
Объект управления
Связи:
— электрические многоканальные
— электрические одноканальные
— механические
Рис. 3.2. Взаимосвязь основных средств микропроцессорной
техники (а) и МПСАУ (6)
280 Глава 3. Комплексные системы управления электроприводами
Кроме МП (одного или нескольких) МПС содержит ЗУ (ОЗУ
и ПЗУ), УВВ и ряд других устройств и является одной из состав-
ных частей МПСАУ (рис. 3.2, б). Взаимодействие составляющих
частей МПСАУ осуществляется посредством шин ША, 1ПД,
ШУ, а также шин измерения, контроля и управления. Связь
с объектом (или процессом) осуществляется через УСО, который
содержит: мультиплексор М, демультиплексор ДМ, датчик Д,
исполнительный механизм ИМ (например, электромагнит зо-
лотника гидро- или пневмосистемы), электропривод ЭП, много-
канальные ЦАП и АЦП (МЦАП и МАЦП), включающие функции
одноканальных ЦАП и АЦП соответственно, а также мульти-
плексоров М и демультиплексоров ДМ.
3. 1.3. Память микропроцессорных систем
Основные термины. Память определяется как функциональ-
ная часть МПС, предназначенная для записи, хранения и вос-
произведения (выдачи) информации. В целом весь комплекс
технических средств, реализующий функцию памяти, называет-
ся запоминающим устройством (ЗУ), а отдельные элементы
ЗУ — запоминающими элементами (ЗЭ).
Основные операции с памятью: запись — занесение инфор-
мации в память и считывание — выборка информации из памя-
ти. Обе эти операции называются обращением к памяти.
К основным характеристикам систем памяти и отдельных
ИС памяти относятся: информационная емкость памяти (ем-
кость памяти), определяемая максимально возможным количе-
ством битов хранимой информации; ширина выборки (разрядность),
определяемая количеством разрядов информации, записывае-
мой в ЗУ или извлекаемой из него за одно обращение.
Время обращения (быстродействие) характеризуется обоб-
щенным параметром — временем цикла обращения к ЗУ, т.е. цик-
ла считывания (записи), которое определяется от момента посту-
пления кода адреса до завершения всех процессов в микросхеме
при считывании (записи) информации.
При работе с памятью говорят также о времени доступа к па-
мяти, т.е. времени, необходимом для вывода информации из па-
3.1. Устройства ЭВМ для управления электроприводами 281
мяти на ШД после*адресации нужной области памяти. Время дос-
тупа обусловливается организацией памяти и скоростью работы
схем, на которых выполнена память. Например, память на ИС
может иметь время доступа 200 нс. Это означает, что время от ад-
ресации любой области памяти до поступления данных на выход-
ную шину памяти составляет 200 нс. Если информация хранится
на магнитной ленте, то время доступа может быть довольно зна-
чительным и зависит от времени доступа к расположению нужной
информации. Поэтому говорят о среднем времени доступа.
Потребляемая мощность указывается исходя из расчета на
один бит и может быть различной для режимов хранения и обра-
щения.
Важной характеристикой ЗУ является его способность сохра-
нять информацию при отключении питания. Здесь различают
энергонезависимые и энергозависимые ЗУ,
По способу хранения информации различают
статические и динамические ЗУ.
По способу доступа (обращения) к памяти раз-
личают два класса ЗУ: с произвольным доступом (адресные)
и с последовательным доступом.
Возможно несколько вариантов физической реализации ЗУ:
встроенные в кристалл МП; реализованные в виде отдельной
БИС, содержащие группу БИС и схемы управления.
По функциональному назначению большинство
типов ЗУ разделяется на следующие группы: сверхоперативные
ЗУ (СОЗУ); оперативные ЗУ (ОЗУ); постоянные ЗУ (ПЗУ); полу-
постоянные у или перепрограммируемые, ЗУ (ППЗУ); буферные ЗУ
(БЗУ), служащие для согласования различных типов ЗУ между
собой и с ВЗУ; стековые ЗУ; внешние ЗУ (ВЗУ), предназначен-
ные для хранения больших объемов информации (магнитные
диски, магнитные ленты, барабаны). Специальным видом ПЗУ
являются программируемые логические матрицы (ПЛМ).
Организация основной памяти. Как уже указывалось, память
представляет собой упорядоченную структуру, состоящую из
большого количества запоминающих элементов (например, триг-
геров), объединенных в ячейки памяти. Ячейка памяти пред-
ставляет собой совокупность ЗЭ и обладает присвоенным ей ад-
ресом. В ячейке хранится двоичное слово информации. При
282 Глава Э. Комплексные системы управления электроприводами
наличии на линиях ША двоичного числа (соответствующего ад-
ресу данной ячейки) и управляющих сигналов информация мо-
жет быть записана в ячейку памяти или считана из нее. При бай-
товой организации памяти с 8-разрядным МП в ячейке хранится
байт информации (8-разрядное слово), что соответствует полно-
му слову МП. Если используется 16-разрядный МП, то для хра-
нения его полного слова требуется две ячейки памяти, причем
старший и младший байты слова располагаются в ячейках с со-
седними адресами.
Адреса ячеек принято нумеровать целыми положительными
числами 0, 1, 2,..., Л“1, где N— общее число ячеек памяти, свя-
занное с разрядностью п ША формулой N = 2п. Совокупность
возможных разных адресов образует адресное пространство.
В конкретной МПС не обязательно, чтобы все адресное про-
странство было заполнено физически подключенной памятью.
Так, например, на рис. 3.3, а показан случай, когда физическая
память занимает четверть адресного пространства. Как следует из
рисунка, физическая память микросхемы может быть расположе-
на в разных четвертях адресного пространства; адреса памяти при
этом различны, а объем одинаков и составляет 16 Кбайт. При раз-
биении адресного пространства на 4, 8, 16 частей говорят о разде-
лении памяти на банки, каждый из которых имеет свой номер.
Для его дешифрации в адресном пространстве, разделенном на
четыре части, два старших разряда А15 и А14 адресной шины по-
даются на входы дешифратора DC (рис. 3.3, б). Перемычками
SO...S3 задается номер банка, т. е. положение физической памяти
16 Кбайт в адресном пространстве 64К. Для схемы, приведенной
на рис. 3.3, б, ЗУ объемом 16 Кбайт включено во 2-й банк, следо-
вательно, ему присвоены адреса с 8000 (16) по BFFF (16) включи-
тельно. Распределение адресов этого пространства решается при
организации МПС. Например, если адресное пространство едино
для основной памяти и внешних устройств, производится распре-
деление областей адресного пространства между ними. Далее
в пределах каждой из областей адреса распределяются между кон-
кретными устройствами и ячейками памяти. При раздельной ад-
ресации основной памяти и внешних устройств производится
распределение адресного пространства основной памяти между ее
модулями, блоками и банками.
3.1. Устройства ЭВМ для управления электроприводами
283
а
0000 3FFF 0-й банк
4000 7FFF 1 -й банк
8000 BFFF 2-й банк
сооо FFFF 3-й банк
Рис. 3.3. Распределение памяти в адресном пространстве
В МПС используются следующие типы ЗУ: СОЗУ, ОЗУ, ПЗУ,
ППЗУ.
Сверхоперативное запоминающее устройство (СОЗУ) имеет са-
мое низкое время доступа (для БИС ТТЛ 50...100 нс) и представля-
ет собой набор регистров, содержимое которых используется непо-
средственно при обработке информации в МП, обычно в течение
выполнения одной или нескольких операций. Такими регистрами
являются РОН; их разрядность соответствует разрядности МП.
СОЗУ широко используется для расширения функциональных
возможностей и повышения производительности МП.
Оперативное запоминающее устройство (ОЗУ) предназначе-
но для хранения оперативной информации, требующейся в про-
цессе обработки: операнды, числа, программы, промежуточные
результаты и т.д. В ходе выполнения программы старая инфор-
мация может быть заменена новой. ОЗУ называют также памя-
тью с произвольным доступом (от англ. Random Access Memory —
RAM). Существуют ОЗУ со статическими и динамическими эле-
ментами памяти.
Статические элементы памяти сохраняют информацию (один
бит) сколь угодно долго, пока имеется электропитание. Таким
элементом может служить статический триггер.
284 Глава 3, Комплексные системы управления электроприводами
Динамические элементы памяти могут хранить бит информа-
ции только непродолжительное время (единицы миллисекунд
или микросекунд), поэтому информацию через некоторое время
нужно периодически обновлять, т.е. регенерировать. В динами-
ческих ОЗУ основным элементом памяти является конденсатор
с соответствующими схемами управления и регенерации, поэто-
му их схема управления достаточно сложная.
Оба вида памяти — СОЗУ и ОЗУ — являются энергозависи-
мыми, т.е. информация в них теряется при выключении напря-
жения питания. Решение проблемы — применение резервных
источников питания, например аккумуляторов.
Рассмотрим структуру основной памяти на примере МП
КР58ОВМ8О, имеющего раздельную адресацию к основной па-
мяти и внешним устройствам. Адрес ячеек основной памяти ко-
дируется 16-разрядным двоичным словом, что позволяет иметь
65 536 ячеек памяти. Это соответствует емкости 64 Кбайт при
байтовой организации памяти. Такую память реализуют из неко-
торого количества микросхем, так как емкость полупроводнико-
вых БИС значительно меньше. Микросхемы объединяют в виде
блоков или модулей памяти определенной емкости (1, 2 или
4 Кбайт). Один модуль памяти емкостью 4 Кбайт, имеющий мас-
сив из 4096 ячеек и дешифратор, изображен на рис. 3.4. В соот-
ветствии с принципом байтовой организации каждая ячейка
массива состоит из восьми ЗЭ. Модуль подключается к линиям
АП... АО шины адреса (12 линий), что позволяет получать в ре-
зультате дешифрации 2П = 4096 значений адресов внутри моду-
ля. Выводы модуля D7... D0 подключаются к линиям ШД. Для
работы модуля на него подаются управляющие сигналы ВЫБОР
МОДУЛЯ - ЧТЕНИЕ (MEMR) или ВЫБОР МОДУЛЯ - ЗА-
ПИСЬ (MEMW). Активному состоянию управляющих и инфор-
мационных сигналов может соответствовать как уровень логиче-
ской единицы, так и уровень логического нуля (в зависимости от
типа применяемых микросхем).
На рис. 3.5 приведена схема дешифратора модулей памяти,
выполненная на микросхеме К155ИДЗ. В этой схеме сигналу
ВЫБОР МОДУЛЯ N соответствует логический нуль (N — номер
выхода микросхемы). Адрес ячейки конкретного модуля опреде-
ляется ее адресом внутри модуля (12 младших разрядов) и выхо-
3.1. Устройства ЭВМ для управления электроприводами
285
дом дешифратора, с которого на модуль поступает сигнал
ВЫБОР МОДУЛЯ (4 старших разряда). Например, если сигнал
на модуль поступает с выхода 5, то физические адреса ячеек мо-
дуля находятся в адресном пространстве 5000(16)...5FFF(16).
АО
А1
Выбор
модуля
Запись
Чтение
ОШО
QQQ1
0002
АЗ
А4
А5
КША< А6
I А7
А8
А9
А10
А11
Управление режимами
4024
402£
Адреса ячеек памяти (0000...4095)
D7 D6 D5 D4 D3 D2 D1 D0
Рис. 3.4. Структура модуля основной памяти
Если основная память содержит менее 16 модулей, т.е. в ад-
ресном пространстве существуют нерабочие области, это должно
учитываться при программировании.
Постоянные запоминающие устройства. Помимо оперативной
памяти МПС обычно снабжаются и постоянной памятью для
хранения не изменяемой в процессе эксплуатации информации
(системных программ, тестов, трансляторов прикладных про-
грамм и т.д.). Отсюда вытекает и название такой памяти — ПЗУ
(ROM — от англ. Read Only Memory — память только для чте-
ния). ПЗУ размещается в части адресного пространства МПС,
286 Глава 3. Комплексные системы управления электроприводами
свободной от ОЗУ. Пересечение ОЗУ и ПЗУ недопустимо. Мо-
дульное построение ОЗУ и ПЗУ позволяет гибко перестраивать
структуру адресного пространства памяти МПС, распределяя его
между ОЗУ и ПЗУ в зависимости от требований пользователя
и конкретной области применения системы.
ВА12 13
ВА13 14
ВА14 15
ВА15 16
DD1 К155ИДЗ
Рис. 3.5. Принципиальная схема дешифратора модулей памяти
При использовании ПЗУ не возникает проблема энергозави-
симости, поскольку при потере питания информация в нем сохра-
няется сколь угодно долго. В практике МПС нашли применение
четыре типа полупроводниковых ПЗУ различного назначения
(устройства на основе магнитных сердечников в настоящее вре-
мя применяются редко).
Самым простым видом является диодное ПЗУ, элемент па-
мяти которого приведен на рис. 3.6, а. Выбор требуемого слова
производится подачей сигнала на соответствующую шину адре-
са. При этом диод, соединяющий шину адреса и шину данных
в точке их пересечения, находится в проводящем состоянии,
устанавливая сигнал высокого уровня на шине адреса. Таким об-
разом, наличие диода соответствует записи в элементе памяти
«1», а отсутствие — «О». Широкое распространение получили
ПЗУ с транзисторными элементами памяти: биполярными и на
3.1. Устройства ЭВМ для управления электроприводами 287
МОП-транзисторах (рис. 3.6, б). Они обладают большим быстро-
действием и имеют высокую плотность компонентов. При выборе
слова подключенные к адресной линии транзисторы переводятся
во включенное состояние. Если сток транзистора подключен
к земле, то на разрядной шине, связанной со стоком данного
транзистора, появляется низкий уровень. Когда сток транзисто-
ра изолирован от земли, то на соответствующей разрядной ли-
нии высокий уровень не изменяется. Эти два уровня использу-
ются для кодирования «1». Запись информации осуществляется
подключением МОП-транзистора к адресной линии путем ме-
таллизации стока транзистора.
Адресная
VT
шина
Разрядная шина Адресная шина
Разрядная шина
Рис. 3.6. Виды ПЗУ:
а — диодный элемент памяти; б — транзисторный элемент
При применении диодов запись производится путем метал-
лизации промежутков, позволяющих соединять соответствующие
линии строк и столбцов (рис. 3.6, а). Она реализуется с помощью
маскирующих фотошаблонов, задающих участки металлизации,
которые требуются для кодирования той или иной информации.
Отсюда и название таких устройств — ПЗУ с масочным програм-
мированием. Эта операция выполняется на заводе-изготовителе
с помощью фотошаблона и экономически целесообразна лишь
при массовом производстве микросхем. Изготовленное таким
288 Глава 3. Комплексные системы управления электроприводами
способом ПЗУ является металлизированным модулем, служа-
щим для преобразования двоичного кода в коды символов (букв
русского и латинского алфавита, цифр и т.п.), ПЗУ микропро-
грамм, программ, управляющих работой микроЭВМ, и т.д.
Программируемые постоянные запоминающие устройства —
ППЗУ (PROM) отличаются от масочных ПЗУ тем, что при их из-
готовлении все диоды соединяются с соответствующими столб-
цами с помощью плавких перемычек, т.е. по всем адресам ППЗУ
с байтовой организацией записываются при изготовлении коды
1111 1111(2) = FF(16). Программирование такого ППЗУ заклю-
чается в том, что на него последовательно подаются адреса слов
и импульсами тока разрушаются перемычки в тех местах, где они
не нужны. Ошибка, допущенная при программировании, не мо-
жет быть исправлена; такая микросхема не пригодна к использо-
ванию.
Стираемые программируемые постоянные запоминающие
устройства — СППЗУ (EPROM) позволяют производить запись
и стирание информации. Структура их отличается от структуры
ППЗУ тем, что между линиями строк и столбцов установлены не
диоды с плавкими перемычками, а специальные МОП-тран-
зисторы (с изолированным затвором). После изготовления все
МОП-транзисторы закрыты. Подачей импульса большой ампли-
туды МОП-транзистор переводится в проводящее состояние, ко-
торое он может сохранять длительное время. Для возвращения
транзисторов в исходное (закрытое) состояние их подвергают
воздействию (с помощью специальной установки) ультрафиоле-
товых лучей в течение 10...30 мин через кварцевое окно в корпусе
БИС. После этого БИС СППЗУ переводится в исходное состоя-
ние и ее можно снова программировать.
Электрически изменяемые постоянные запоминающие устрой-
ства — ЭППЗУ (EAPROM) отличаются от СППЗУ тем, что
в них после программирования можно вернуть в исходное со-
стояние (стереть) любой отдельно взятый МОП-транзистор. Это
осуществляется путем подачи определенных электрических сиг-
налов в течение нужного времени. Обычно длительность сигна-
лов записи составляет несколько миллисекунд, в результате чего
процесс записи проходит значительно медленнее процесса чте-
ния информации. ЭППЗУ не обеспечивают столь долговремен-
3.1. Устройства ЭВМ для управления электроприводами
289
ного хранения информации, как СППЗУ. Однако они, так же
как и СППЗУ, относятся к классу энергонезависимых устройств.
Разработка БИС ЗУ осуществляется в соответствии с их стан-
дартизацией. В настоящее время широко применяются БИС,
имеющие емкость 256, 1024 и 4096 бит. Наиболее распростра-
ненными являются БИС ЗУ К565РУ1, К565РУЗ, КР568РЕ2,
КР568РЕЗ, К573РР1 и некоторые другие. В практике встречают-
ся случаи, когда в ПЗУ или ППЗУ используются не все входные
адреса, в соответствии с которыми в памяти расположены дан-
ные. В таких случаях целесообразно использовать для програм-
мирования программируемую логическую матрицу. Отличие
БИС ПЛМ от БИС ЗУ заключается в том, что она служит не для
хранения информации, а для формирования адресов обращения
к различным устройствам МПС, в том числе и к ЗУ.
ПЛМ может быть выполнена на отдельной микросхеме, но
может и входить в состав интегральной схемы ЗУ. В этом случае
ПЛМ выполняет функции селектора (указателя передачи адре-
сов) по всем участкам данной микросхемы. Использование ПЛМ
особенно эффективно в тех случаях, когда нет необходимости
выделять ячейки памяти для адресов, которые не рассматрива-
ются при конкретных наборах входных данных.
3. 1.4. Функциональные схемы электроприводов
с микропроцессорным управлением
Микропроцессорное управление электроприводами широ-
ко используется в станках с ЧПУ, промышленных и транс-
портных роботах, автоматических линиях, оборудовании метал-
лургической, химической промышленности и т.д. В настоящее
время однокристальные МП и микроЭВМ используются прак-
тически везде, где применяется силовая преобразовательная
техника. Основные достоинства МПС в управлении электро-
приводами:
• гибкость системы, обеспечиваемая возможностью реали-
зации различных способов управления программными средст-
вами;
lesser
290 Глава 3. Комплексные системы управления электроприводами
• обеспечение заданной точности регулирования;
• возможность изменения параметров регуляторов, работаю-
щих в реальном времени;
• возможность линеаризации характеристик управления и реа-
лизации нелинейных функций;
• унификация аппаратуры.
При этом управление электроприводами — лишь часть функ-
ций МПС, которая используется: для решения траекторных задач
(в станках с ЧПУ и промышленных роботах); управления элек-
троавтоматикой; обработки сигналов датчиков, характеризующих
состояние объекта управления; диагностики оборудования, вклю-
чая собственно электропривод и преобразователь мощности.
Широкое применение микропроцессорных средств управ-
ления электроприводом не означает полного отказа от элемен-
тов аналоговой техники. Уровень использования дискретных
и аналоговых устройств определяется технико-экономически-
ми показателями системы (стоимость, габариты, надежность
и т.п.). Анализ многочисленных электроприводов позволяет
сделать вывод, что в настоящее время предпочтение отдается
аналогов©-цифровой структуре, в которой границей, разделяю-
щей аналоговую и цифровую части системы, является контур
регулирования тока. В то же время известны и полностью циф-
ровые системы.
Для снижения требований к быстродействию МПС широко
используется аппаратно-программная реализация алгоритмов
управления. Пример электропривода постоянного тока с тири-
сторным преобразователем приведен на рис. 3.7. Его основны-
ми функциональными узлами являются микроЭВМ, СИФУ
с устройством синхронизации (УС), реверсивный тиристорный
преобразователь (ТП) с датчиками состояния тиристоров (ДСТ)
и измерительный преобразователь ИП перемещений.
Алгоритмы, требующие большого объема вычислений, реа-
лизованы аппаратно. К ним относятся: формирование кода ско-
рости, фазосмещение импульсов управления тиристорами, логика
раздельного управления ТП. Программным путем реализуются
следующие функции управления: прием и обработка дискретной
информации измерительного преобразователя «перемещение —
3.1. Устройства ЭВМ для управления электроприводами
291
Рис. 3.7. Электропривод с микроЭВМ
цифровой код» (ППК), расчет кода Ny управляющего воздейст-
вия в соответствии с применяемыми законами управления. Про-
граммным путем реализованы регуляторы стандартной настройки
(П, ПИ, ПИД) в контурах положения и скорости. Для управле-
ния двигателем М применяется реверсивный ТП с раздельным
управлением, обеспечивающим лучшие массогабаритные пока-
затели. ТП имеет лучшие динамические показатели при мосто-
вой схеме соединения вентилей. Одновременная работа групп
вентилей при встречно-параллельной схеме ТП исключается ло-
292
Глава 3. Комплексные системы управления электроприводами
гическим переключающим устройством (ЛПУ), получающим
сигналы от ДСТ. Фазосмещение импульсов управления ТП осу-
ществляется единой для всех каналов СИФУ с устройством син-
хронизации УС. Одноканальная СИФУ обусловливает аппарат-
ные затраты на наладку и обслуживание. УС формирует код
цифровой развертки, поступающий в фазосдвигающий блок ФСБ.
Код жестко синхронизирован с началом и концом интервала на-
пряжения сети. Распределитель импульсов РИ формирует отпи-
рающие импульсы по тиристорам ТП с учетом фазы напряжения
питания. ЛПУ осуществляет выбор группы тиристоров по знако-
вому разряду кода управления Ку при отсутствии тока в ТП, что
фиксирует ДСТ. В качестве ИП применяется фотоэлектриче-
ский датчик BE-178. Обработка сигналов датчика с целью полу-
чения кода скорости Nc производится в ППК, режим работы ко-
торого зависит от абсолютного значения частоты вращения вала
двигателя. Переключение режимов осуществляется сигналом от
микроЭВМ. Рассмотренная схема электропривода может быть
реализована на основе микроЭВМ «Электроника-60», «Электро-
ника НЦ-80» и их модификаций. Время реализации программы
для микроЭВМ «Элекгроника-60» составляет примерно 1,5 мс.
Электропривод снабжен системой диагностики отказов отдель-
ных блоков, которая формирует сигналы прерывания программы
МП. Программными средствами производится идентификация
модуля, вызвавшего прерывания, вырабатывается реакция сис-
темы и соответствующая информация выводится на дисплей.
Представленный привод обеспечивает диапазон регулирования
не менее 104 и полосу пропускания от 20 до 35 Гц.
3. 1.5. Цифровая СИФУ
СИФУ должна обеспечивать запаздывание на расчетное вре-
мя импульса управления тиристором относительно момента пе-
рехода через нуль напряжения питания (момента его естествен-
ного отпирания).
Реализация задержки возможна программным путем или
с помощью внешнего устройства, называемого таймером, кото-
3.1. Устройства ЭВМ для управления электроприводами
293
рый фактически выполняет функцию реле времени. Програм-
мный способ реализации временных задержек имеет несколько
недостатков. Во-первых, когда выполняется программа отсчета
времени, МП не может выполнять какую-либо программу. Он
начнет работать по другим программам лишь при выполнении
программы задержки. Во-вторых, если требуется большое время
задержки, то необходимо использовать при программировании
несколько регистров. Первый способ в современном электро-
приводе с МПС практически не применяется из-за недостаточ-
ного быстродействия МП.
Рассматриваемая задача легко решается с помощью програм-
мируемого аппаратного таймера (ПТ). Таймер представляет со-
бой счетчик на вычитание, начальное состояние которого уста-
навливается программным путем. Таймер имеет специальный
вход, на который подаются тактовые импульсы от генератора
тактовых импульсов либо от другого источника. Когда содержи-
мое счетчика становится равным нулю, счетчик вырабатывает
импульсный сигнал на выходе.
Возможны два варианта схем формирования управляющих
импульсов. В первой схеме (рис. 3.8, а) сигналом ШУ в таймер
ПТ записывается код, соответствующий рассчитанной ЭВМ вре-
менной задержке импульса от начала отсчета. Отсчитав задан-
ную задержку времени, таймер посылает сигнал программе
управления прерыванием, и микроЭВМ прерывает процесс вы-
числений и выдает в дешифратор код, соответствующий нужно-
му номеру тиристора, включаемого в данный момент. Здесь код
расшифровывается и выдается импульс на управляющий элек-
трод тиристора.
Во второй смехе (рис. 3.8, б) микроЭВМ одновременно с вы-
дачей в таймер (ПТ) временной задержки на дешифратор сооб-
щает код, соответствующий номеру управляемого тиристора.
При переполнении таймера вырабатывается импульс, который
поступает на схему управления, состоящую из схем И (по коли-
честву тиристоров преобразователя), где производится также
усиление сигналов. В обеих схемах заполнение таймеров произ-
водится сигналами генератора G.
294
Глава 3. Комплексные системы управления электроприводами
Для реализации временной задержки в МПС серии К580
имеется БИС программируемых счетчиков — таймеров
КР580ВИ53.
Рис. 3.8. Схемы формирования управляющих
импульсов цифровых СИФУ
3.1. Устройства ЭВМ для управления электроприводами
295
3. 1.6. Модуль управления электроприводом на базе
одноплатной микроЭВМ «Электроника МС 1201.01»
Особенностью цифровых систем управления роботов и мани-
пуляторов является включение микроЭВМ в основной замкнутый
контур регулирования. При этом на микроЭВМ возлагаются функ-
ции задающего, цифрового сравнивающего и корректирующего
устройств, устройства обработки сигналов датчиков обратных свя-
зей, регуляторов со сложными алгоритмами управления, диагно-
стического устройства и др. Структура варианта такой системы
управления одним звеном манипулятора приведена на рис. 3.9.
ЭВМ верхнего
уровня
НГМД
АЦПУ
ПЗУ
системное
4Кх16
Последний Интерфейс Параллельный
интерфейс
НЩД
ЦП
ОЗУ
28Кх16
Общая магистраль
интерфейс
МСИД
МАВ
(АЦП)
пкди
шип
ПЗУ
пользовательская
4Кх16
Г?2 I
—s—Ы {
рад
ФИД
RP
+10 В -10 В
Рис. 3.9. Схема управления электроприводом на базе
одноплатной микроЭВМ «Электроника МС 1201.01»
Система выполнена на основе одноплатной микроЭВМ
«Электроника МС 1201.01» и является следящей по положению.
Электродвигатель М степени подвижности манипулятора пита-
ется от транзисторного реверсивного ШИП (рис. 3.10, а). Управ-
296
Глава 3. Комплексные системы управления электроприводами
ление ШИП производится через интерфейсный модуль «Код —
длительность импульсов» (ПКДИ, рис. 3.9). Угловое перемеще-
ние вала двигателя измеряется фотоимпульсным датчиком об-
ратной связи (Ф ИД), число импульсов которого пропорциональ-
но углу поворота. Промышленностью выпускаются датчики,
3.1. Устройства ЭВМ для управления электроприводами 297
вырабатывающие следующее число импульсов на один оборот:
1000, 1024, 2000, 2048 и более. Для сопряжения такого датчика
с микроЭВМ служит интерфейсный модуль связи МСИД, с по-
мощью которого число импульсов датчика заносится в опреде-
ленную ячейку памяти микроЭВМ. Каждый импульс датчика
суммируется с содержимым выбранной ячейки памяти, что обес-
печивает формирование текущего значения координаты, которое
доступно для процессора в любое время. Такой датчик измеряет
относительное угловое положение вала двигателя. Специфика
работы манипулятора такова, что иногда требуется определить
абсолютное значение требуемой координаты в рабочем про-
странстве технологического комплекса. Для этой цели служит
аналоговый датчик на основе потенциометра RP, ось которого
соединена с валом рабочего органа манипулятора. Преобразова-
ние аналогового сигнала потенциометра в цифровой код осуще-
ствляется модулем аналогового ввода (МАВ), основой которого
является АЦП, подключенный к общей магистрали микроЭВМ.
Сигнал на отработку перемещения электроприводом звена по-
ступает от ЭВМ верхнего уровня, которая осуществляет плани-
рование траектории и выработку управляющих воздействий для
всех звеньев манипулятора (как правило, 5...6). Для связи с ЭВМ
верхнего уровня служит последовательный интерфейс. Вся сис-
тема работает в реальном времени.
Одноплатная микроЭВМ «Электроника МС 1201.01», входя-
щая в состав системы управления, выполнена на основе БИС се-
рии К1801, реализующей магистрально-модульный принцип ор-
ганизации. В этот комплект входит 16-разрядный центральный
процессор, обеспечивающий управление системным интерфей-
сом, со следующими функциональными интерфейсными бло-
ками, подключенными к общей магистрали: ОЗУ емкостью
28Кх16; СПЗУ — системное ПЗУ емкостью 4Кх16; последова-
тельный интерфейс; устройство байтового параллельного интер-
фейса; устройство интерфейса накопителя на гибком магнитном
диске (НГМД); устройство для установки ПЗУ пользователя ем-
костью 4Кх16, предназначенное для хранения исполнительных
программ. В основу организации рассматриваемой микроЭВМ
положен принцип общей магистрали, как и для микроЭВМ
«Элекгроника-60». Такая же унификация имеет место в конст-
298
Глава 3. Комплексные системы управления электроприводами
рукгивном исполнении, системе команд, организации и интер-
фейсе магистрали.
Усилитель мощности (ШИП) (рис. 3.10, а), выполненный на
транзисторах VT1....VT4 и диодах VD1...VD4, может работать
в двух режимах. При симметричном режиме транзисторные ключи
в течение периода коммутации включаются попарно. В интерва-
ле Л (рис. 3.10, 6) ток проводят ключи VT1 и VT2, а в интервале
t2 — соответственно VT3 и VT4. При этом на якоре двигателя М
возникают разнополярные импульсы напряжения. Среднее зна-
чение напряжения на якоре
С4р = J4(2g-1),
где Ui — напряжение источника постоянного тока; g = 6/(6+(г) =
= Л/TLom; Тком — период коммутации.
Очевидно, что среднее значение напряжения Ucp меняет свой
знак при g < 0,5 и равно нулю при g = 0,5. При симметричном
управлении нулевые паузы в двигателе отсутствуют и механиче-
ские характеристики привода линейны при всех нагрузках. Вме-
сте с тем симметричный режим отличается повышенным уровнем
пульсации тока якоря. При несимметричном режиме коммути-
руются транзисторные ключи VT1 и VT2; вторая пара транзисто-
ров (VT3 и VT4) используется для изменения направления вра-
щения. Например, в интервале h включены транзисторы VT1
и VT2 (рис. 3.10, б). В интервале 6 транзистор VT2 выключается,
а ток якоря замыкается по цепи VT1 — якорь — VD3, обеспечи-
вая нулевое значение напряжения на нагрузке. Характер измене-
ния напряжения ия и тока /я показан на рис. 3.10, в, где /ср —
средний ток якоря двигателя.
Модуль аналогового ввода (см. рис. 3.9) служит для преобра-
зования напряжения постоянного тока потенциометрического
датчика в цифровой двоичный код и ввода его в микроЭВМ.
Входное напряжение 10 В преобразуется в 11-разрядный двоич-
ный код (с учетом знакового разряда) с помощью АЦП пораз-
рядного уравновешивания за время не более 100 мкс. АЦП со-
держит 16-канальный мультиплексор аналоговых сигналов,
усилитель и собственно 10-разрядный АЦП. Сопряжение АЦП
с общей магистралью осуществляется с помощью трех адресуе-
мых регистров: номера канала, буферного регистра данных и со-
3.2. Цикловое программное управление электроприводами 299
стояния. Программный доступ к этим регистрам организуется
с помощью дешифратора. Для приема и обработки импульсной
последовательности сигналов фотоимпульсного датчика (ФИД)
скорости служит модуль связи МСИД, задачей которого явля-
ется выделение знака направления вращения вала двигателя
и в соответствии с этим изменение в режиме прямого доступа
к памяти содержимого ячеек памяти (инкрементирование или
декрементирование), отведенной для хранения текущего поло-
жения управляемой координаты. На вход МСИД с выхода ФИД
поступают две последовательности сигналов, сдвинутых на 1/4
периода их следования. Это обеспечивает чувствительность схе-
мы к направлению вращения. Максимальная частота обмена
с ячейкой памяти зависит от частоты вращения двигателя и па-
раметров ФИД.
Контрольные вопросы
1. В чем различие УВМ и ЭВМ?
2. Что понимается под архитектурой ЭВМ?
3. Из каких основных узлов состоит МПСАУ?
4. Какими параметрами характеризуются ЗУ?
5. Каково функциональное назначение СИФУ?
6. Назовите основные функциональные узлы электропривода
с микроЭВМ.
3.2. Цикловое программное управление
электроприводами
3.2.1. Функциональный состав цикловых систем
программного управления
Значительная доля оборудования промышленных предпри-
ятий выполняет обработку однотипной продукции с редкой
сменой циклов движений. Циклом называется совокупность эле-
300
Глава 3. Комплексные системы управления электроприводами
ментарных операций, осуществляемых в определенной последо-
вательности и обеспечивающих выполнение оборудованием ра-
бочих функций. Работа такого оборудования автоматизируется
с помощью цикловых систем программного управления (ЦПУ).
Удачно выбранная система ЦПУ оборудованием обеспечивает
гибкость его автоматизации, т.е. возможность перехода на вы-
пуск нового изделия в пределах определенной номенклатуры,
и решает противоречия между сроками и стоимостью изготовле-
ния специального оборудования и сроками обновления изделия,
выпускаемого с его помощью.
Элементарные операции называются этапами цикла или
тактами работы системы и разделяются на рабочие и вспомо-
гательные. В течение этапа цикла в системе не происходит изме-
нений в состоянии управляющих воздействий. Этапы цикла
характеризуются следующими параметрами: скоростью и на-
правлением перемещения рабочего органа, наличием смазки
и охлаждения, видом режущего инструмента и т.д. Применитель-
но к металлообработке параметры рабочих этапов цикла опреде-
ляют режимы обработки. В системах ЦПУ программа содержит
в числовом виде только информацию о цикле и режимах обра-
ботки, а величину перемещения рабочих органов задают на-
стройкой (обычно вручную) датчиков перемещений (кулачков,
упоров и др.).
Кроме управления в функции пути в оборудовании с ЦПУ
широко применяется управление в функции времени или других
параметров (давления, температуры, силы зажатия и т.д.).
В обобщенном виде система ЦПУ представлена на рис. 3.11.
Программа работы оборудования в виде этапов цикла формиру-
ется в блоке задания и запоминания программы.
С помощью блока поэтапного ввода команды программы
вводятся в исполнительный механизм через блок связи с объек-
том. Режим работы системы, т.е. переход от выполненного этапа
цикла к следующему, зависит от положения рабочего органа, ко-
торое контролируется д а т ч и к а м и обратных связей. Вка-
честве последних широко применяются различные путевые
переключатели, в том числе бесконтактные, микропере-
ключатели, по команде которых блок поэтапного ввода програм-
мы приступает к опросу программы очередного этапа цикла.
3.2. Цикловое программное управление электроприводами
301
Рис. 3.11. Функциональная схема системы циклового программного управления
Как отдельные устройства системы ЦПУ, так и вся система
могут строиться не только на электрических компонентах, но и на
пневматических, гидравлических, хотя электрические компо-
ненты наиболее распространены. Блок задания и запоминания
программы может быть выполнен в виде штекерной панели, па-
нели кнопок или переключателей.
Блок поэтапного ввода программы реализуется обычно в ви-
де счетно-распределительной схемы, построенной на шаговых
искателях, электромагнитных реле или логических элементах.
Имеются также примеры выполнения этого блока в виде бара-
банных командоаппаратов, в которых имеются барабаны с фик-
сированными в гнездах кулачками, воздействующими на пере-
ключатели по мере его вращения.
Согласование б л о к а ввода программы с исполни-
тельными элементами оборудования и датчика-
ми обратных связей выполняет блок связи с объектом.
Здесь же происходит усиление (ослабление) и потенциальная
развязка сигналов. Исполнительный механизм находится непо-
средственно на технологическом оборудовании и осуществляет
отработку заданных программой этапов цикла. Под исполни-
тельным механизмом (ИМ) понимают электрический, гидравли-
ческий, пневматический, или иной привод рабочих органов обо-
рудования, муфты (электромагнитные, гидравлические и др.),
электромагниты, гидрозолотники и т.п.
302
Глава 3. Комплексные системы управления электроприводами
Датчики обратных связей, осуществляющие контроль окон-
чания отработки этапов цикла, обычно монтируются непо-
средственно на технологическом оборудовании. Рабочие органы
(РО) — это различные механизмы технологического оборудова-
ния, участвующие в реализации управления (суппорты станков,
поворотные столы, насосы, механизмы роботов и манипулято-
ров и Т.Д.).
Как указывалось, контроль отработки программы наибо-
лее часто осуществляется с помощью путевых переключателей.
Контроль в функции в р е м е н и с помощью реле времени
используется в тех случаях, когда применение других способов
затруднительно и когда время отработки этапа программы ко-
леблется мало. Примером может служить включение привода пе-
риодической подачи круга плоскошлифовального станка. Кон-
троль в функции давления удобно использовать для
механизмов перемещения рабочих органов, приводимых в дви-
жение гидроцилиндрами. Контроль в функции тока
можно применять в электромеханических зажимных устройствах
с приводом от электродвигателей. Для ряда механизмов приме-
няется также контрол ь в функции числа операций.
Цикловые системы являются простейшим видом программ-
ного управления и характерны тем, что информация о величинах
перемещений рабочих органов задается посредством относи-
тельно трудоемкой настройки кулачков-упоров, воздействующих
на путевые переключатели. В отличие от них в системах ЧПУ
размерная информация о перемещениях задается на программо-
носителе с помощью одного из видов цифровых кодов. Таким
образом, система ЧПУ является более гибкой и универсальной.
Следует также заметить, что в системах ЧПУ применяются эле-
менты циклового управления, в основном для задания движения
вспомогательных механизмов. Например, в гибких производст-
венных модулях цикловое управление используется для задания
цикла работы механизма смены инструмента, ориентации при-
способлений-спутников, поворотных столов и т.д. При этом
программа цикла вводится в систему ЧПУ, а ее отработка опре-
деляется настройкой конечных (путевых) переключателей. В та-
ких системах перенастройка переключателей производится крайне
редко или вообще не производится. Гибкость цикла определяет-
3.2. Цикловое программное управление электроприводами 303
ся возможностями ЧПУ. Вместо путевых выключателей приме-
няются также кодовые метки, индуктивные и оптические датчи-
ки перемещений.
*
3.2.2. Способы формализации работы электроприводов
технологического оборудования
Алгоритм управления. Функционирование объекта управле-
ния (технологического комплекса) — это взаимодействие его ра-
бочих органов в соответствии с его структурой и алгоритмом
управления.
Под алгоритмом управления понимается совокупность пра-
вил выработки управляющих воздействий на исполнительные
элементы объекта управления, обеспечивающих его функциони-
рование с целью решения поставленной перед ним задачи. Вы-
работку указанных воздействий осуществляет устройство управ-
ления на основе программы, введенной в том или ином виде
оператором либо поступившей от ЭВМ верхнего уровня по кана-
лам локальной вычислительной сети, и сигналов датчиков, по-
ступающих от объекта управления.
Структура и содержание алгоритма управления зависят от
особенностей того объекта, которым предстоит управлять. Мно-
гообразие объектов управления не позволяет сформировать еди-
ный подход к построению алгоритмов управления ими.
Предполагая, что все технологические последовательности
объекта управления в конечном счете представляют собой повто-
ряющиеся циклы, выделяют два существенно различных вида мо-
делей: комбинационные и последовательные. В первом случае по-
следующее функционирование объекта определяется только его
состоянием при выполнении предшествующих операций, во вто-
ром — последовательностью смены предшествующих операций.
Общий подход при формализации технологического цикла
предполагает следующие этапы:
1) составление содержательного описания, в котором в про-
извольной форме описывается технологический цикл при нор-
мальном его протекании и в аварийных ситуациях. Способы
описания и его детализация зависят прежде всего от целей опи-
304 Глава 3. Комплексные системы управления электроприводами
сания. Само описание также различается по степени формализа-
ции — от использования естественного языка до построения
формализованной математической модели;
2) разбиение цикла на этапы (такты), характеризуемые неиз-
менным состоянием исполнительных приводов и контролируе-
мых параметров;
3) анализ переходов от одного такта к другому при нормаль-
ных и аварийных ситуациях для выявления причин переходов,
т.е. выявление изменения состояния командных и исполнитель-
ных органов, являющихся причиной перехода;
4) установление причинно-следственных и логических ситуа-
ционных связей между входами и выходами объекта управления,
обусловленных требованиями технологии;
5) составление формализованного графического представле-
ния алгоритма функционирования в виде схемы, таблицы, цик-
лограммы и т.п.
Таблицы истинности. Для формального описания комбинаци-
онных моделей, в которых дальнейший ход цикла определяется со-
стоянием входов и выходов объекта управления только в данном
такте, часто используют таблицы истинности, отражающие одно-
значное соответствие дискретных состояний входов и выходов.
Активное (включенное) или пассивное (отключенное) со-
стояние исполнительного элемента либо уровень контролируе-
мого сигнала (высокий, низкий) может обозначаться любыми
символами. Обычно для этих целей используются дискретные
сигналы «1» и «0». При числе п входных сигналов возможны
^=2И сочетаний комбинаций их единичного и нулевого уровней.
Поскольку последовательность смены комбинаций в данном
случае роли не играет, в таблице истинности их удобно распола-
гать в виде кодов натурального ряда двоичных чисел. Следует
•также отметить, что все комбинации состояний входов и датчи-
ков могут реально иметь место.
Таблица состояний. Число строк таблицы соответствует числу
состояний, число столбцов — числу возможных комбинаций пере-
менных; крайний столбец слева фиксирует номера исходных со-
стояний. Над таблицей приводится мнемограмма. В клетках табли-
цы проставляются номера состояний, обусловленных исходным
состоянием и возникшей комбинацией управляющих переменных.
3.2. Цикловое программное управление электроприводами 305
Графические способы формализации работы оборудования. Су-
ществует несколько графических способов формализации. Вы-
бор способа зависит от конкретных условий, в том числе и от
субъективных причин. В любом случае способ должен быть про-
стым и надежным, при необходимости учитывать временные
задержки, влияние фронтов включения и отключения, быть
удобным для анализа и последующей реализации системы управ-
ления.
Рассмотрим работу силовой головки, в цикле которой можно
выделить следующие этапы: разрешение включения (кнопка
SB) — быстрый ход вперед — рабочая подача — быстрый ход
назад — отключение. Смена этапов цикла происходит при сраба-
тывании переключателей SQ1, SQ2 и SQ3 соответственно. Рас-
смотренный цикл может быть изображен в виде, показанном на
рис. 3.12, а. Такой способ оказывается неудобным при большом
количестве тактов и датчиков.
Наглядным графическим способом изображения последова-
тельности работы оборудования во времени являются циклограм-
мы. Они появились в результате совершенствования временных
диаграмм, или, как их иногда называют, диаграмм включения. На
таких диаграммах показывают состояние органов управления
в функции времени. Циклограммы отличаются от них тем, что
их вычерчивают без соблюдения масштаба времени.
Циклограмма представляет собой ряд горизонтальных строк
(рис. 3.12, б), равных числу командных (кнопок, тумблеров
и т.д.), исполнительных (электродвигателей, муфт, электромаг-
нитов и т.п.) и контролирующих (датчиков давления, температу-
ры, выключателей, переключателей и т.д.) элементов. Строки
условно (т.е. без соблюдения масштаба времени) разбиты на от-
резки, число которых равно числу этапов цикла. При необходимо-
сти в циклограмму вводятся временные сигналы. По оси ординат
циклограммы изображают сигналы, поступающие от указанных
элементов, в порядке их появления при работе механизма с на-
чала цикла, по оси абсцисс — время в безразмерном масштабе.
На циклограмме изображается наличие сигнала в логическом
смысле (высокий уровень с произвольной амплитудой) или его
отсутствие (нулевой уровень).
20,
<5017 <
306
Глава 3. Комплексные системы управления электроприводами
SQ3
SB
т SQ2
? SQ1
— быстрый ход
— рабочая подача
б
Кнопка
SB
Быстро
вперед
SQ1
Рабочая
подача
SQ2
Быстро
назад
SQ3
Рис. 3.12. Цикл (а) и циклограмма (б) работы силовой головки
Воздействие сигналов друг на друга изображается стрелкой,
направленной от переднего или заднего фронта управляющего
сигнала к управляемому. Время выполнения каждой операции
(включения и отключения), а также временные задержки пока-
зывают горизонтальной линией произвольной длины, начинаю-
щейся от командного сигнала, с переходом в стрелку в конце
операции. Эта стрелка указывает элемент, состояние которого
3.2. Цикловое программное управление электроприводами 307
изменяется в результате воздействия. Наклон фронтов может
быть произвольным, однако для наглядности циклограммы ре-
комендуется наклон 60°.
Если циклограмма всего механизма получается громоздкой
и сложной для анализа, то рекомендуется вычерчивать ее часть,
описывающую работу какого-либо локального узла. При этом вы-
деляется логический сигнал, учитывающий различного рода бло-
кировки и являющийся по сути разрешением начала цикла. По-
скольку циклограмма является основой для составления схемы
управления или описания ее уравнениями алгебры логики, для
упрощения синтеза электроавтоматики входным, промежуточным
и выходным сигналам присваивают легко запоминающиеся обо-
значения. Циклограмма работы локального узла должна заканчи-
ваться сигналом, определяющим окончание работы данного цик-
ла и служащим блокировкой для другого узла.
Пример 3.1. Начертить циклограмму работы кантователя, который
работает в составе автоматической линии и предназначен для кантова-
ния (поворота на 180°) заготовок в процессе многопозиционной меха-
нической обработки. Цикл работы кантователя следующий: исходное
положение каретки кантователя — подвод — захват заготовки — подъ-
ем — поворот (кантование) — опускание — отвод в исходное положе-
ние. Управление кантователем в автоматическом режиме осуществляется
от узла центрального управления автоматической линией (накопитель
задания цикла У-НЗЦ), а в полуавтоматическом режиме — нажатием
кнопки на наладочном пульте кантователя К2-КУ1 (К2 — индекс канто-
вателя). Привод кантователя гидравлический. Управление золотниками
гидросистемы производится с помощью электромагнитов.
Циклограмма работы кантователя изображена на рис. 3.13, где ис-
пользованы следующие обозначения: ЭКВ, ЭКН, ЭЗВ, ЭЗН, ЭЗЛ,
ЭЗП — электромагниты (Э) каретки (К) при движении вперед (В), назад
(Н), захвата (3) при движении вверх (В), вниз (Н), поворота при движе-
нии влево (Л), вправо (П); ККП, ККИ — выключатели каретки в конеч-
ном и исходном положении.
Граф-схемы алгоритмов. При представлении цикла в виде
граф-схемы в вершинах (кружках) записываются номера (коды)
состояний. Между собой вершины соединяются дугами со стрел-
ками, отражающими переходы из одного состояния в другое.
Над стрелками записываются комбинации переменных, обу-
словливающих эти переходы.
308
Глава 3. Комплексные системы управления электроприводами
Рис, 3.13. Циклограмма работы кантователя
3.2. Цикловое программное управление электроприводами
309
Приведем граф-схему алгоритма процесса шлифования
(рис. 3.14), содержащего следующие этапы цикла: 0 — исходное
положение механизма станка; 1 — ускоренное позиционирова-
ние шлифовального круга в заданную координату; 2 — форсиро-
ванный подвод шлифовального круга (ШК) до касания с дета-
лью; 3 — черновая обработка ШК; 4 — черновая правка; 5 —
черновое выхаживание; 6 — чистовая обработка; 7 — чистовая
правка; 8 — чистовое выхаживание.
Рис. 3.14, Граф-схема алгоритма процесса шлифования
310
Глава 3. Комплексные системы управления электроприводами
Вершины графа соответствуют отдельным этапам, а дуги —
условиям перехода от одного этапа к другому. Переход qOi из ис-
ходного состояния (0) в состояние i (в данном случае i может
принимать значения 1, 2, 3) производится по команде «Пуск
цикла» с учетом информации от устройства ЧПУ. Переход qn из
состояния 1 «Ускоренный подвод» в состояние 2 «Форсирован-
ный подвод» осуществляется по достижении задаваемой коорди-
наты, определяемой полем допуска припуска на обработку. Ус-
ловием перехода qn из состояния 2 в состояние 3 «Черновая
обработка» является достижение задаваемой в пространстве ко-
ординаты заготовки либо команда устройства контроля момента
касания круга с деталью.
Блок-схемы алгоритмов. Широкое распространение получили
блок-схемы алгоритмов, благодаря которым удается графически
представить достаточно сложные процессы. С помощью блок-
схемы изображается последовательность элементарных действий
(этапов цикла), на которые можно разбить выполнение алгорит-
ма. На рис. 3.15 приведена блок-схема алгоритма работы сило-
вой головки.
3.2.3. Основные свойства и состав
программируемых контроллеров
Реализация циклового микропрограммного управления обо-
рудованием возможна аппаратным, микропрограммным и про-
граммным способами. При аппаратной реализации формирова-
ние циклов осуществляется с помощью схем, построенных на
релейно-контактной или бесконтактной аппаратуре. Здесь широ-
ко используются интегральные микросхемы серий К155 и К511;
последние обладают повышенной помехоустойчивостью, но от-
личаются более высоким энергопотреблением.
Наиболее перспективным направлением совершенствования
систем ЦПУ является применение гибко программируемых
электронных управляющих систем, основанных на использова-
нии УВМ. Характерная черта УВМ — способность к работе в ре-
альном масштабе времени, т.е. в темпе, диктуемом потребностями
объекта управления. Обычная вычислительная машина (ЭВМ),
3.2. Цикловое программное управление электроприводами
311
Быстрый ход
назад
8 Да
Отключение
шпинделя
6
Рис. 3.15. Блок-схема алгоритма работы силовой головки
312
Глава 3. Комплексные системы управления электроприводами
выполняющая вычислительные операции, не имеет таких жест-
ких рамок реализации алгоритма вычислительного процесса во
времени. Специализированные УВМ, предназначенные для управ-
ления сложными станками, литейными комплексами, машина-
ми для обработки металлов давлением, автоматическими линия-
ми, получили название программируемых контроллеров (ПК).
В связи с повышенной стоимостью такой аппаратуры ее приме-
нение оправданно при числе релейно-контактных аппаратов эк-
вивалентной схемы более 60...80 и при напряженных циклах ра-
боты.
Термин «программируемый» отражает возможность ПК вос-
принимать программу на языке высокого уровня, а «контрол-
лер» — возможность выполнять функции управления сложными
технологическими процессами. Встречающиеся в настоящее вре-
мя термины «программируемый контроллер» — ПК (РС) и «про-
граммируемый логический контроллер» — ПЛК (PLC) рав-
нозначны.
Несмотря на значительную общность ПК и УВМ, ПК имеют
ряд характерных с точки зрения пользователя свойств:
• как правило, ПК предназначены для решения логических
задач с элементами арифметических операций;
• упрощенное программирование, основанное на символах
и мнемокодах, которое легко усваивается персоналом, не имею-
щим специальной подготовки;
• ббльшая помехозащищенность, потенциальная развязка от
внешних цепей с помощью оптронов, ферритовых устройств
и др., расширенный диапазон допустимых условий эксплуата-
ции, что в конечном счете дает возможность применять ПК в це-
ховых условиях;
• модульность конструкции (входы, выходы и объем памяти
наращиваются с определенным шагом);
• наличие вспомогательных устройств для выполнения до-
полнительных функций (таймеры для выдержки времени, счет-
чики импульсов и др.).
Имеется тенденция к расширению функциональных возмож-
ностей ПК за счет введения арифметических операций и реа-
лизации функций регуляторов со стандартными настройками
(П, ПИ, ПИД).
3.2. Цикловое программное управление электроприводами 313
ПК обеспечивают изменение логической программы функцио-
нирования с помощью встраиваемого или автономного устройства
программирования, что равносильно изменению принципиальной
электрической схемы с жесткими связями. При этом отпадает не-
обходимость в отключении объекта управления для переналадки,
исключаются трудоемкие процессы, связанные с проектированием
новой схемы и обеспечением комплектующими.
Проектирование схемы управления на основе жесткой логи-
ки производится индивидуально для каждой конкретной уста-
новки: выбираются электрические элементы и узлы, разрабаты-
вается конструкторская документация на систему управления,
производится ее монтаж, отладка и корректировка. Изготовле-
ние схемы требует наличия определенной номенклатуры ком-
плектующих изделий. Весь описанный процесс требует значи-
тельных затрат времени квалифицированного персонала, что
особенно ощутимо при мелкосерийном или индивидуальном ха-
рактере производства. Стоимость ручного труда в последнее вре-
мя имеет тенденции к росту, в то время как затраты на оборудо-
вание непрерывно снижаются.
Кроме функций логического управления некоторые модели
ПК выполняют также функции регулирования, причем измене-
ние уставок регуляторов может осуществляться как вручную, так
и программным путем.
Особенности решения логических задач определяют и функ-
циональный состав ПК (рис. 3.16.). Программируемый контрол-
лер состоит из центрального процессора, модуля памяти (ПЗУ),
модулей входов-выходов (входного и выходного регистров), обес-
печивающих сопряжение с входными датчиками и исполнитель-
ными устройствами объекта управления, и сканирующего устрой-
ства, которое производит поочередный опрос входов и выходов.
К контроллеру подключается пульт программирования (программ-
ная панель), через который производится набор программы.
В некоторых типах контроллеров в период настройки цикла
вместо ПЗУ подключается ОЗУ, которое может осуществлять как
считывание, так и запись (и перезапись) информации. После
окончательной отладки цикла и внесения всех изменений про-
грамма перезаписывается с ОЗУ на ПЗУ. Часто в контроллерах
используются ПЗУ с возможностью перезаписи информации,
314
Глава 3. Комплексные системы управления электроприводами
т.е. перепрограммируемые (полупостоянные) запоминающие
устройства (ППЗУ). Помимо ручного ввода программы боль-
шинство ПК предусматривает возможность связи с другим ПК
или ЭВМ. Возможно также подключение дисплея, печатающего
устройства и модуля вспомогательной памяти.
" > — постоянные связи; —►- — временные; —► — возможные
Рис. 3.16. Функциональный состав программируемого контроллера
Содержание вычислительного_процесса заключается в реше-
нии логических уравнений типа У = F(X), с помощью которых
описывается алгоритм управления объектом. Набор выходных
функций У г (J, к) состоит из выходных функций У л к, поступаю-
щих на объект для_осуществления функций управления, и внут-
ренних функций У г. j, не имеющих реального выхода и ограни-
чивающих область своего действия самой программой; их можно
назвать промежуточными выходами. Сюда же относятся сигна-
лы таймеров, счетчиков. Набор входных функций включает
сигналы датчиков, а также внутренних устройств ПК (таймеров,
счетчиков).
3.2. Цикловое программное управление электроприводами 315
Таким образом, в течение цикла своей работы ПК обменива-
ется информацией с внешней средой и осуществляет обработку
этой информации в соответствии с записанной в нем програм-
мой. Чем короче цикл работы ПК, тем выше его вычислительная
мощность, которая обычно оценивается по времени обработки
~1К логических слов. Время, необходимое для осуществления од-
ного цикла опроса (время сканирования), зависит от объема
программы и элементной базы и для современных ПК составля-
ет обычно 2...3 мс на 1К слов памяти.
Разнообразие требований потребителей ПК предопределило
модульность их конструкции, предусматривающей широкую
номенклатуру взаимозаменяемых модулей, устанавливаемых
в одном каркасе. Особенно это касается модулей входов-выхо-
дов. Обычно ПК имеют фиксированную общую сумму вхо-
дов-выходов (например, 16,64,128,256, 512,1024) с возможностью
перераспределения в пределах общей суммы. Перераспреде-
ление заключается в изъятии и установке соответствующих
модулей.
3.2.4. Система команд ПК
Система команд ПК представляет собой набор инструкций
(команд), обеспечивающих оперативный ввод, контроль и ре-
дактирование рабочей программы управления объектом.
По назначению инструкции ввода можно разделить на про-
граммные, функциональные и оперативные.
Для программирования к контроллеру (блоку центрального
процессора) через периферийные адаптеры подключается внеш-
нее программирующее устройство (программатор). После ввода
и отладки программы надобность в нем отпадает. В качестве
программаторов применяют как стационарные приборы, позво-
ляющие производить ввод и отладку программ, одновременно
наблюдая на дисплее релейно-контактные или функциональные
алгоритмы и распечатки рабочей программы, так и переносные
приборы с газоразрядной или матричной индикацией.
Запись программы в ОЗУ можно осуществить как в програм-
маторе, так и в самом ПК. Последовательность процесса про-
316
Глава 3. Комплексные системы управления электроприводами
граммирования зависит от типа памяти ПК. Для контроллеров,
имеющих память типа RAM, этот процесс наиболее прост. Необ-
ходимо подключить программатор через соответствующий ин-
терфейс к ПК и по листингу программы выполнить операции
программирования в соответствии с инструкцией. После этого
производится отладка и редактирование программы. При нали-
чии энергозависимого питания модуля памяти ввод и отладку
программы можно осуществлять на лабораторном стенде, ими-
тирующем работу механизма, с последующей перестановкой мо-
дуля памяти со стенда в контроллер.
Для ПК, имеющих память типа EPROM, этот процесс слож-
нее. В таком случае контроллеры снабжаются специальными мо-
дулями памяти типа RAM, располагаемыми в программаторе или
непосредственно в ПК. С их помощью производится первона-
чальный ввод, отладка и редактирование РП. По окончании про-
цесса отладки программа переписывается в микросхемы памяти
типа EPROM с ультрафиолетовым стиранием или типа EAROM
с электрическим стиранием. Микросхемы с записанной про-
граммой устанавливаются в модули памяти ПК. Для внесения
изменений необходимо стереть записанную информацию и про-
извести новую запись.
Помимо ручного ввода программы с помощью клавишного
программатора большинство моделей ПК имеет возможность
ввода и вывода программ с помощью периферийных внешних
устройств, магнитных кассет, а также использования микроЭВМ.
Программные инструкции, записанные в рабочую программу
ПК, определяют, «что» и «с чем» надо сделать, и состоят из кода
операции («что») и адреса операнда («с чем»). Некоторые про-
граммные инструкции являются безадресными, т.е. состоят
только из кода операции, и выполняются в последовательности,
определенной записью программы. Объем рабочей памяти, за-
нимаемый одной программной инструкцией, зависит от структу-
ры ПК.
Функциональные инструкции служат для пуска и выбора ре-
жима программирующего устройства и ввода, редактирования
и контроля рабочей программы. В большинстве ПК эти инст-
рукции решаются аппаратно и не занимают рабочей памяти
программы.
3.2. Цикловое программное управление электроприводами 317
Оперативные инструкции имеют своей целью активное вме-
шательство в работу процессора, возбуждение реальных входов
и выходов и некоторые другие. Оперативные инструкции имеют-
ся не во всех модулях ПК.
По сравнению с другими средствами автоматизации ПК от-
личаются обилием языков программирования. Причина этого —
разнообразие технологических задач, а также традиции и вкусы
пользователей. Некоторые варианты программирования для про-
стейшего примера приведены на рис. 3.17.
Исторически первым и все еще достаточно популярным язы-
ком программирования является язык релейно-контактных сим-
волов (РКС) (рис. 3.17, а). Он основан на широко применяемой
методике проектирования схем электроавтоматики с аппаратной
реализацией на основе реле, контакторов, бесконтактных логи-
ческих элементов. В данном случае исходными документами яв-
ляются принципиальные электрические схемы, хорошо известные
и привычные для электриков — конструкторов и ремонтников.
Исходными документами могут служить также словесное описа-
ние, таблицы, циклограммы и т.д.
Релейные схемы состоят из пяти компонентов: переменная
и ее дополнение, начало и конец ветвления параллельной цепи,
символ присвоения результата. Последний именуют «обмотка
реле» по аналогии с обычной РКС, хотя в ПК подобное устрой-
ство отсутствует. Логические функции И, ИЛИ, НЕ, реализуемые
в РКС соответствующим включением контактов реле, пускате-
лей и других аппаратов, в ПК создаются стыковкой компонентов
и соответствуют понятию «команда». Однако для того чтобы ре-
лейный язык был более совершенным, его сторонники создают
ПК таким образом, чтобы имелась возможность программиро-
вать более полное логическое уравнение.
Логическая цепь (ЛЦ) — это соединение элементов релейных
схем, в том числе хотя бы одного символа присваивания, пред-
ставляющее собой последовательность команд, выполняемых
ПК. Таким образом, ЛЦ — это элемент программирования ре-
лейных языков, который распространяется и на булевы языки.
Конструкция цепи отвечает жестким требованиям, поскольку
она должна быть переведена с помощью устройства программи-
318
Глава 3. Комплексные системы управления электроприводами
И
И
ИЛИ НЕ
г
А1.0 = Е5.1*Е 5.2 +—зЕ5.3
д
ЕСЛИ Е 5.1
И Е5.2
ИЛИ НЕ Е 5.3
ТОГДА ВКЛЮЧИТЬ А1.0
ИНАЧЕ СБРОСИТЬ А 1.0
е
ЕСЛИ Е 5.1 • Е 5.2+
ИНАЧЕ А1.0 = 0
—. Е5.3 ТО А 1.0 = 1
Рис. 3.17. Способы программирования ПК
рования в последовательность выполняемых команд. Формат
цепи может быть фиксированным или переменным. При фикси-
рованном формате ЛЦ должна состоять из определенного числа
компонентов. Символ присваивания позволяет идентифициро-
3.2. Цикловое программное управление электроприводами
319
вать строку программы и назначать промежуточную переменную
либо соответствующий выход. Логические компоненты прида-
ются входам или промежуточным переменным (выходам).
При использовании языка РКС программа вычерчивает
в определенном масштабе легко читаемые схемы. Каждая ЛЦ от-
рабатывается слева направо. Это позволяет разработчику делать
какие-либо сигналы приоритетными по сравнению с другими
в целях обеспечения безопасности (например, сигнал на отклю-
чение питания, двигателя и др.).
Помимо языка РКС используются следующие языки:
• язык ассемблерного типа (рис. 3.17, б);
• графические языки логических схем (рис. 3.17, в);
• языки мнемонического символьного кодирования в виде набо-
ра строк-уравнений сложных булевых структур, сохраняющие
методику проектирования программ на языке РКС (рис. 3.17, г).
Булев язык позволяет непосредственно написать уравнение, по-
элементно соединяя операторы и операнды. В данном случае мы
имеем дело с цепью, состоящей из булевых операторов. Символ
присваивания эквивалентен знаку равенства;
• языки мнемонического задания многоситуационных процессов
управления с естественным логическим описанием управления
(ЕСЛИ ТО ИНАЧЕ), не имеющие РКС-эквивалентов (рис. 3.17, д).
В мнемонических языках используются формальные соответ-
ствия, свойственные языку ассемблера (мнемоническая форма
«машинных языков»). Эти языки просты для пользователей, вла-
деющих логикой или языком ассемблера, однако уступают язы-
кам более высокого уровня;
• оригинальные проблемно-ориентированные мнемонические язы-
ки высокого уровня (рис. 3.17, е);
• процедурные языки высокого уровня общего назначения (Бей-
сик, Паскаль), адаптированные для программирования электро-
автоматики;
• языки графического отображения текущего состояния
и взаимодействия процессов программ управления (например,
GRAFCET).
320
Глава 3. Комплексные системы управления электроприводами
3.2.5. Язык релейно-контактных символов
Рассмотрим примеры использования языка РКС для про-
граммирования контроллеров. Основной единицей языка явля-
ется команда-оператор (инструкция). Команды делятся на груп-
пы: логическая группа, группа функциональных команд, группа
арифметических команд, группа функциональных тестовых ко-
манд. Формат релейно-контактной команды состоит из ее сим-
вола и номера. Форматы других команд включают перечень
параметров, определяемых для каждой команды. Переменные
в языке РКС относятся к одному из двух типов: булевы и число-
вые (целые арифметические). И первые, и вторые могут быть
входными, если они соответствуют выходным сигналам, т.е. ре-
шениям о включении или выключении тех или иных исполни-
тельных органов. В некоторых случаях имеется необходимость
в промежуточных переменных, получаемых на определенных
стадиях вычислительного процесса.
Обобщение особенностей отдельных моделей ПК позволило
составить табл. 3.1, где представлены лишь логические и функ-
циональные инструкции. Остальные группы инструкций отлича-
ются большим разнообразием и рассматриваются для отдельных
моделей ПК.
Команда является самостоятельной наименьшей единицей
рабочей программы пользователя (РПП) и представляет собой
указание для процессора. Любая команда состоит из двух частей:
кода операции (КОП) и адресной части. Некоторые команды
имеют несколько модификаций (в зависимости от признака).
В табл. 3.1 представлен набор команд контроллера КА1. Для хра-
нения команд память контроллера КА1 распределяется в соот-
ветствии с инструкцией ПК. Значения входных величин зано-
сятся в таблицу состояний (ТС) входов. Для занесения состояния
одного ввода используется одно слово ТС. Например, для записи
состояния входов блока с номером 00(8), содержащего модуль
с номером 0(8), используется слово в ТС с адресом 000(8), а для за-
писи состояния входов блока 17(8), содержащего модуль 7(8), —
слово в ТС с адресом 177(8)_.
1 Здесь и далее в скобках указано основание системы счисления.
3.2. Цикловое программное управление электроприводами
321
2I3597
322
Глава 3. Комплексные системы управления электроприводами
со
3.2. Цикловое программное управление электроприводами 323
В контроллере КА1 для адресной информации используется
восьмеричная система счисления. Слово ТС 16-разрядное. Стар-
шие разряды используются для внутренних функций контроллера.
Младшие восемь разрядов характеризуют состояние соответст-
вующего входа данного модуля. Например, в блоке 15(8), содер-
жащем модуль 2(8), замкнуты 1-й и 6-й входы. Следовательно,
в 1-м и 6-м разрядах слова ТС 152(8) будут записаны единицы:
Разряд 15 ... 7 6 5 4 3 2 1 О
Слово памяти 01000010
Таблица состояний входов занимает с 0(8)-го по 177(8)-е сло-
во памяти. Аналогично строится ТС выходов, которая занимает
с 200(8)-й по 377(8)-ю ячейки памяти.
3.2.6. Составление рабочей программы пользователя
Исходной информацией для составления РПП является
РКС управления объектом. В качестве примера рассмотрим
схему, приведенную на рис. 3.18. Каждому входному контакту
и каждому выходному реле присваивается адрес в соответствии
со схемой подключения к модулям и блокам контроллера. Вы-
берем блок 15(8) ввода-вывода, модуль ввода Вв1, модуль выво-
да Выв2. Входные и выходные сигналы подключим согласно
Рис. 3.18. Релейно-контактная схема управления
324____Глава 3. Комплексные системы управления электроприводами
б
Модуль Вв1
Рис. 3.19. Схемы подключения входных (а) и выходных (б) сигналов
3.2. Цикловое программное управление электроприводами
325
рис. 3.19. Следовательно, элементы схемы будут иметь следую-
щие адреса:
Входные
SB1 1510
SB2 1511
КЗ 1512
К4 1513
К5 1514
Выходные
К1 1520
К2 1521
Релейно-контактная схема, составленная в символах ПК КА1,
для рассмотренного примера приведена на рис. 3.20.
Перед началом адреса ставится цифра 0, если контакт под-
ключается к модулю ввода. Если же перед адресом стоит цифра
1 (но она может быть и опущена), это означает, что данный кон-
такт принадлежит элементу, подключенному к модулю вывода.
Любой элемент, кроме вывода, может употребляться в схеме не-
ограниченное число раз.
Рис. 3.20. Релейно-контактная схема в символах ПК
Для занесения программы в память контроллера исполь-
зуется пульт программирования, вид которого зависит от
типа ПК.
326 Глава 3. Комплексные системы управления электроприводами
3.2.7. Программируемый контроллер КА1
Программируемый контроллер КА1 предназначен для управле-
ния различным технологическим оборудованием (автоматическими
линиями, роботизированными комплексами, автоматами и т.д.).
Эксплуатация контроллера должна осуществляться в закры-
том (цеховом) помещении с соответствующими инструкции кли-
матическими условиями.
Ниже приводятся технические характеристики контроллера
КА1:
Максимальное число входов-выходов
Максимальное число промежуточных реле
Максимальный объем памяти програм-
мы, слов
Максимальное число счетчиков/тайме-
ров
Максимальный интервал времени, от-
рабатываемый одним таймером,
с (дискретность 0,1 с)
Максимальное число импульсов, отсчи-
тываемых одним счетчиком
Арифметические операции
Язык программирования
Питание устройства
Напряжение, В
Частота, Гц
Наработки на отказ, ч
Среднее время восстановления, ч
Потребляемая мощность, кВ А, не более:
блока управления
одного блока ввода-вывода
пульта программирования
1024
1024
15 360
64/64
999,9
9999
Сложение, вычитание,
умножение, деление,
сравнение
Символы релейных схем,
арифметические операции
Однофазная сеть перемен-
ного тока
220 +10% (-15%)
50+1
1000
Не более 2
0,075
0,05
0,05
3.2. Цикловое программное управление электроприводами 327
Параметры входных сигналов приведены в табл. 3.2, а выход-
ных — в табл. 3.3.
Таблица 3.2
Параметры входных сигналов
Тип модуля
Входное
напряже-
ние, В
Модуль ввода 1
Модуль ввода 2
Модуль ввода 3
(общ. -)
Модуль ввода 4
Модуль ввода 5
(общ. +)
-110
= 110
= 24
= 5
= 24
Уровень
логиче-
ского
нуля, В
0...30
0...30
0...4.5
0...2.4
0...4.5
Уровень
логической
единицы, В
90...160
90...160
15...35
4...7
15...35
Макси-
мальное
входное
напряже-
ние, В
-170
= 170
= 40
= 9
= 40
Номинальный
входной ток,
мА
25
25
30
25
30
Таблица 3.3
Параметры выходных сигналов
Тип модуля
Модуль вывода 1
Модуль вывода 2
Модуль вывода 3
Модуль вывода 4
Модуль вывода 5
Номинальное
выходное
напряжение, В
Диапазон
питания
нагрузки, В
Ток нагрузки на выход, А
максималь-
ный
минималь-
ный
-220
-110
= 110
= 24
= 5
-170...250
-90...150
70...150
15...35
2,8...7
2
2
0,5
2
0,1
0,15
0,15
Конструктивно программируемый контроллер КА1 выполнен
в виде блоков, встраиваемых в унифицированный шкаф, а пульт
программирования и диагностики — в виде переносного пульта.
В шкаф может быть установлено четыре блока ввода-вывода
(БВВ) и общий источник питания для них. В один из шкафов
устанавливается также блок управления (БУ). В каждом БВВ
расположены стабилизатор напряжения, восемь модулей вво-
да-вывода и модуль адаптера 2 (МА2). К одному БУ можно под-
ключить 16 блоков ввода-вывода. В БУ расположены модуль
процессора, модуль оперативного запоминающего устройства
(МОЗУ), модуль пульта управления (МПУ), модуль адаптера 1
328 Глава 3. Комплексные системы управления электроприводами
(МА1), блок питания. При необходимости в БУ устанавливается
второй модуль МОЗУ.
Пульт программирования и диагностики выполнен в виде пе-
реносного настольного устройства. В своем составе он имеет сен-
сорную клавиатуру, генератор изображения, блок индикации с эле-
ктронно-лучевой трубкой (ЭЛТ) и блок питания. Функциональная
схема программируемого контроллера изображена на рис. 3.21.
Рис. 3.21. Функциональная схема контроллера КАТ
3.2. Цикловое программное управление электроприводами
329
Контроллер обеспечивает следующие режимы работы:
• автоматический, при котором производится отработка ра-
бочей программы, записанной в ОЗУ контроллера, а также (при
необходимости) индикация рабочей программы с помощью пуль-
та программирования и диагностики;
• программирования, при котором обеспечивается ввод про-
граммы с помощью ППД в ОЗУ контроллера, а также контроль,
редактирование программы.
Цикл работы контроллера определяется рабочей програм-
мой, записанной в ОЗУ. Общий объем ОЗУ составляет 16К
16-разрядных слов.
Под рабочую программу отводится 15К слов. Остальной
объем памяти используется для хранения таблиц состояния
330 Глава 3. Комплексные системы управления электроприводами
входов-выходов, счетчиков-таймеров и их уставок, а также
арифметических данных.
Для стыковки контроллера с управляемым объектом конст-
руктору необходимо разработать схему подключения внешних
устройств (датчиков, исполнительных устройств). Кроме того,
определяются необходимые задержки, технологические выдерж-
ки времени и счетчики. Исходя из этого определяется необходи-
мое число модулей по типам. Модули в блоки ввода-вывода уста-
навливаются в те позиции, номера которых обозначены на
электрической схеме.
Схема внешних соединений ПК приведена на рис. 3.22.
3.2.8. Программируемый контроллер «МикроДАТ»
«МикроДАТ» — микропроцессорные программируемые кон-
троллеры диспетчеризации, автоматики, телемеханики. Они пред-
назначены для управления оборудованием массового производства
(металлорежущие станки, кузнечно-прессовые машины, литей-
ные комплексы и т.д.), автоматическими линиями и манипуля-
торами, а также технологическими процессами в различных от-
раслях промышленности (станкостроительной, автомобильной,
приборостроительной, деревообрабатывающей, угольной, неф-
техимической, легкой и т.д.).
ПК выполняют следующие функции:
• управление работой технологического оборудования в со-
ответствии с заданной программой, реализующей технологиче-
ский алгоритм;
• диагностирование управляемого технологического обору-
дования в соответствии с программой, разработанной пользова-
телем на входном языке ПК;
• осуществление связи по каналу последовательного ради-
ального интерфейса с сервисным оборудованием, обеспечиваю-
щим ввод, вывод и редактирование программы пользователя;
• осуществление связи с другими аналогичными ПК, с кор-
ректирующим микропроцессорным контроллером или ЭВМ верх-
него уровня;
3.2. Цикловое программное управление электроприводами 331
• диагностирование состояния ПК с локализацией и сигна-
лизацией отказов.
Вышеперечисленные функции позволяют применять ПК
в гибких автоматизированных производствах в качестве систем
децентрализованного управления.
Вся гамма контроллеров компонуется на основе трех типов
компоновочных каркасов: на 4, 8 или 16 модулей ввода-вывода.
Контроллеры с количеством входов-выходов до 152, 184 и 248
(соответственно МБ57.01, МБ57.02, МБ57.03) компонуются
в виде одного блока управления с компоновочным каркасом на
16 модулей ввода-вывода и блока ввода-вывода на основе одного
из трех компоновочных каркасов: на 4, 8 или 16 модулей вво-
да-вывода. Соединение двух блоков между собой в МБ57.04,
МБ57.05, МБ57.06 осуществляется с помощью расширителя ин-
терфейса (МС99.03), который состоит из двух плат и жгута связи
этих плат. Длина жгута выбирается производителем.
В блоке размещаются микропроцессорный контроллер, мо-
дули ввода-вывода и модуль электропитания. Функциональная
схема контроллера приведена на рис. 3.23. Все эти средства уста-
навливаются в соответствующие гнезда компоновочного карка-
са. Модули ввода-вывода устанавливаются в одни и те же гнезда;
адрес модуля определяется гнездом, в котором он устанавливает-
ся. Замена модулей ввода-вывода производится без отсоедине-
ния проводов от клеммника.
Микропроцессорный контроллер выполнен в виде двух суб-
блоков. На лицевой панели контроллера размещены: пере-
ключатель «Под ключ» для выбора режимов работы, разъем для
подключения сервисного оборудования, а также средства инди-
кации режимов работы и диагностики неисправностей.
Микропроцессорный контроллер содержит память пользова-
теля, в которой пользователь посредством сервисного оборудо-
вания размещает таблицу данных (ТД), программы пользователя
(ПРП), буквенно-цифровые сообщения (БЦС).
Объем области памяти пользователя, отводимой для ТД,
ПРП и БЦС, распределяется пользователем произвольно в режи-
ме программирования и не должен превышать 4 Кбайт.
Принцип работы контроллера — циклическое выполнение
ПРП. При этом контроллер обеспечивает возможность побайт-
332
Глава 3. Комплексные системы управления электроприводами
ного считывания состояния входных модулей, которое перепи-
сывается в ТД, обновляемую циклически, и побайтной записи
информации в выходные модули.
ИРПС
МБ96.03
Рис. 3.23. Функциональная схема программируемого контроллера «МикроДАТ»
Время обновления ТД для 128 дискретных входов-выходов —
не более 2 мс. Среднее время выполнения 1000 логических опе-
раций — не более 6 мс.
В контроллере возможна программная организация таймеров
и счетчиков. Информационное слово, соответствующее таймеру
и счетчику, распределяется следующим образом: 12 бит — содер-
жимое, 1 бит — мгновенный контакт для таймеров или значение
счетного сигнала для счетчика, 1 бит — признак превышения
уставки, 1 бит — признак переполнения разрядной сетки. Преду-
смотрено программное обращение к уставкам и текущим значе-
ниям таймеров и счетчиков. Уставка должна задаваться прямым
десятичным числом.
3.2. Цикловое программное управление электроприводами 333
Таймеры отсчитывают время от 0,1 до 99,9 с с точностью 0,1 с
и от 1 до 999 с с точностью 1 с.
ПК имеют три режима работы: «Программирование», «Тес-
тирование», «Работа».
Электрическое питание контроллеров осуществляется одно-
фазным переменным током с напряжением 110 или 220 В от раз-
делительного трансформатора при допускаемом отклонении на-
пряжения от —15 до + 10 % с частотой (50±2) Гц. Потребляемая
мощность контроллера, Вт, не более: МБ57.01 — 65, МБ57.02 —
80, МБ57.03 — 100. Максимальное количество дискретных вхо-
дов и выходов — до 248.
Контроллер позволяет подключать входные сигналы посто-
янного и переменного тока различных уровней и формирует на
выходе дискретные сигналы постоянного и переменного тока.
Система команд контроллера обеспечивает выполнение сле-
дующих функциональных операций: логических, операций счета
времени и числа импульсов, операций с данными, арифметиче-
ских, операций игнорирования зоны программы, экстренного об-
ращения к вводу-выводу, условного и безусловного переходов и др.
Объем памяти пользователя, выделяемый для ТД, ПРП,
БЦС, составляет 2000 слов (16 разрядов). Объемы области памя-
ти пользователя, в которых размещаются ТД, ПРП, БЦС, зада-
ются пользователем в режиме программирования. Область памя-
ти пользователя, отводимая под ПРП, может быть (по выбору
пользователя) оперативной энергонезависимой с подпиткой от
резервного источника питания или перепрограммируемой со
стиранием путем ультрафиолетового облучения.
Время сохранения информации в энергозависимой памяти
с подпиткой при отключении модуля электропитания составляет
не менее года.
Время выполнения операций, мкс: опрос входа — 7; возбуж-
дение выхода — 9,5; счет времени и числа импульсов — 250;
арифметические операции — 200.
Программирование контроллеров осуществляется на языке
символьного кодирования или посредством языка, описанного
с помощью алгебры логики; в обоих случаях исходное описание
алгоритма работы системы управления рекомендуется выпол-
нять по релейно-контактной схеме.
334 Глава 3. Комплексные системы управления электроприводами
Программа состоит из шага программы, инструкции, операн-
да и комментария. Шаг задается четырехзначным десятичным
числом в интервале 0000...1984. Инструкция задается в виде ре-
лейных символов или эквивалентных им булевых знаков для ба-
зовых логических команд:
( — начало ветвления или открыть скобку;
. — опрос прямого значения адресуемого операнда или ло-
гическое умножение на адресуемый операнд;
./ — то же инверсного значения;
+ — перенос маркера в начало ветвления или логическое
сложение с операндом в следующем шаге;
) — конец ветвления или закрыть скобку;
= — возбудить адресуемый выход;
S= — возбудить адресуемый выход и зафиксировать;
R= — выключить адресуемый выход и зафиксировать.
С помощью мнемокода- описываются также работа таймеров,
счетчиков, инструкции сравнения, арифметические инструкции,
операции с файлами, экстренное обращение. Операнд задается
в виде пятизначного восьмеричного кода для битов и в виде трех-
значного кода для слов в соответствии с системой адресации ПК.
Программа часто снабжается комментарием, который в структу-
ру программы не входит и предназначен для личных пометок
проектанта в листинге программы.
Рабочая программа представляет собой укороченную после-
довательность инструкций (рис. 3.24). Цикловая программа
подразделяется на восемь сегментов (00...07); каждый сегмент
может состоять из 64 блоков (00...77). Число сегментов в про-
грамме и количество блоков в сегменте, а также порядок их сле-
дования могут быть произвольными. В простейшем случае вся
программа может быть одним сегментом, а весь сегмент — од-
ним блоком.
Каждая программа вне зависимости от ее структуры должна
начинаться инструкциями HCT00 (начало сегмента) и НБЛ00
(начало блока) и заканчиваться инструкциями НСТ77 (конец
цикловой программы) и НПП77 (конец массива подпрограммы).
Массив подпрограмм состоит из восьми входимостей (00...07).
Вызов подпрограмм выполняет инструкция ВПП.
3.2. Цикловое программное управление электроприводами
335
Цикловая
подпрограмма
Массив
подпрограмм
Рис. 3.24. Структура рабочей программы
Приведем примеры программирования простейших разветв-
ленных цепей на символьном языке и непосредственно по урав-
нениям булевой алгебры. (Рекомендуется выполнение построч-
ной маркировки релейно-контактного алгоритма и указание
номера строки в комментарии к безадресной инструкции пере-
вода строки — маркера.)
Пример 3.2. Для схем, приведенных на рис. 3.25, составим програм-
му в символах РКС.
336 Глава 3. Комплексные системы управления электроприводами
Для схемы на рис. 3.25, а:
Рис. 3.25. Схема последовательной, параллельной
и разветвленных электрических цепей
3.2. Цикловое программное управление электроприводами
337
0001
0002
0003
0004
0005
0006
0007
0008
нет
НБЛ
нет
нпп
00 Сегмент 00
00 Блок 00
XI Xl->R0
Х2 X1X2-»RO
ХЗ X1X2X3->RO
Y Y = X1 Х2ХЗ
77 Конец программы
77 Конец массива подпро-
граммы
Для схемы рис. 3.25, б:
0001
0002
0003
0004
0005
0006
0007
0008
0009
0010
ООП
0012
0013
нет
НБЛ
нет
нпп
00 Сегмент 00
00 Блок 00
Начало ветвления
XI XI—>R0
Перенос маркера
Х2 (Xl+X2)->R0
Перенос маркера
ХЗ (Xl+X2+X3)->R0
Конец ветвления
Х4 (XI + Х2 + ХЗ) Х4-> R0
Y Y -> Вывод
77 Конец цикловой
программы
77 Конец массива подпро-
граммы
2^3597
338 Глава 3. Комплексные системы управления электроприводами
Для схемы на рис. 3.25, в (комментарии опускаем):
0001
0002
0003
0004
0005
0006
0007
0008
0009
0010
ООН
0012
0013
0014
0015
0016
0017
0018
нет
НПП
00
00
XI
Х4
Х5
Х6
Х7
77
77
Для схем, приведенных на рис. 3.25, г, д, составим программу, ис-
пользуя логические уравнения и булевы знаки.
Логическое уравнение для цепи, представленной на рис. 3.25, г,
имеет вид
Y=(Xl+X2X3+X4X54-X6)(X7(X9+Xl6)+X8).
3.2. Цикловое программное управление электроприводами
339
Текст программы:
0001
0002
0003
0004
0005
0006
0007
0008
0009
0010
ООП
0012
0013
нет
НБЛ
.XI
./Х2
.ХЗ
•Х4
•Х6
0014
0015
0016
0017
0018
0019
0020
0021
0022
0023
0024
0025
0026
,Х7
.Х9
./XI о
.Х8
НСТ77
НПП77
Для схемы на рис. 3.25, д приведем программу с реальными значе-
ниями адресов операндов, указанных на рисунке. (Для ПК «МикроДАТ»
признаком входной переменной является цифра 1, а выходной — 0.)
Составим логические уравнения:
Y1=(XIX2+X3)X4; Y2=(X1X2+X3)X5.
Текст программы:
0001 НСТ 00
0002 НБЛ 00
0003 (
0004 ./ 10000
0005 . 10001
0006 +
0007 . 10002
0008 )
0009 = 12000
XI-> R0
Х1Х2-» R0
(Х1Х2+ХЗ)-> R0
(XI • Х2 + ХЗ)-» ОЗУ
слово 120 бит 00
340 Глава 3. Комплексные системы управления электроприводами
0010
ООН
0012
0013
0014
0015
0016
нет
НПП
10003
00100
12000
10004
00101
77
77
(XI • Х2 + ХЗ) • Х4-» R0
Y1 -> Выход
(XI • Х2 + ХЗ)-> R0
(XI • Х2 + ХЗ) • Х5 -> R0
Y2 -» Выход
Контрольные вопросы
1. Назовите основные функциональные узлы цикловых систем управ-
ления.
2. Какие вы знаете языки программирования ПК?
3. Каково назначение модулей ввода/вывода ПК?
4. Назовите основные компоненты языка РКС.
5. Как можно составить программу для ПК типа «МикроДАТ»?
6. Каков порядок составления рабочей программы пользователя
для ПК?
7. Как вы оцениваете быстродействие ПК по сравнению с обычной
релейно-контактной схемой?
3.3. Системы числового программного
управления
3.3.1. Понятие о программном управлении
Под программным управлением (ПУ) понимается управление
перемещением рабочих органов технологического комплекса
(ТК) по заранее заданной программе. Оно широко используется
во многих ТК различного назначения, но наибольшее распро-
странение получило в металлорежущих станках, промышленных
роботах и гибких производственных модулях и системах. Основ-
3.3. Системы чистового программного управления 341
ные виды и определения ПУ приведены в табл. 3.4. Примени-
тельно к металлорежущим станкам принята следующая система
обозначений (в дополнение к группе букв и цифр, характеризую-
щих непосредственно станок): Ф1 — станки с цифровой индика-
цией и преднабором координат; Ф2 — с позиционными система-
ми ЧПУ; ФЗ — с контурными системами ЧПУ; Ф4 — много-
операционные станки с автоматической' сменой инструмента.
Например, в обозначении станка 6Р13ФЗ указано: станок фре-
зерный (6) с револьверной головкой (Р), вертикально-консоль-
ный (1), со столом третьего габарита (3), с контурной системой
ЧПУ (ФЗ).
Таблица 3.4
Определения программного управления
Обозначение
отечественное международное
Определение
_ - _ ----------------
ПУ
Программное управление. Управление ТК по
детерминированной программе
ЦПУ
ЧПУ
ЧПУ-ЭВМ
ПЦУ, НЦУ
NC
HNC
SNC
CNC
DNC
Цикловое программное управление. Управле-
ние циклами перемещений или режимами об-
работки с заданием величин параметров на пу-
тевых переключателях или других измеритель-
ных преобразователях перемещений
Числовое программное управление (Numerical
Control). Управление по программе, заданной
в алфавитно-цифровом коде
Разновидность устройства ЧПУ (Hand NC)
с ручным заданием программы с пульта управ-
ления с помощью различных переключателей
Разновидность устройства ЧПУ (Speicher NC,
Memory NC), имеющая память для хранения
управляющей программы
Автономная система ЧПУ (Computer NC), содер-
жащая в своем составе ЭВМ или микропроцес-
сор для выполнения функций управления
Система прямого (непосредственного) цифро-
вого управления от групповой ЭВМ (Direct NC).
Функции ЭВМ в такой системе заключаются в
хранении программ и распределении их по за-
просам устройств управления станками
342
Глава 3. Комплексные системы управления электроприводами
Обозначение
отечественное
международное
Окончание табл. 3.4
Определение
VNC
TNC
Система программного управления, ввод про-
граммы в которую осуществляется непосред-
ственно голосом оператора (Voice NC)
Система ЧПУ, работающая в диалоговом режи-
ме с оператором (Total NC)
Многообразие систем ЧПУ (СЧПУ), разработанных к на-
стоящему времени, принято подразделять на поколения. Под
СЧПУ понимается собственно устройство ЧПУ (УЧПУ) и при-
водные устройства (электропривод, гидропривод и др.) станка
(комплекса). СЧПУ первого и второго поколений здесь не рас-
сматриваются. Приведем типы отечественных СЧПУ для стан-
ков основных групп (табл. 3.5). Необходимо отметить, что УЧПУ
третьего поколения являются устаревшими, но многие из них
все еще находятся в эксплуатации.
. Таблица 3.5
Типы СЧПУ для станков основных групп
Группа
станков
Третье
поколение
Третье поколе-
ние с расширен-
ными функциями
Четвертое (мик-
ропроцессор-
ное) поколение
Пятое и шестое поко-
ления (микропроцес-
сорные, многоцеле-
вые)
Токарная
Фрезерная
Сверлильно-
расточная
Шлифоваль-
ная
Электрофи-
зическая
Многоцеле-
вая
Н22-1
НЗЗ-1
2П32-8;
2П32-ЗМ;
П62-3
ПШ-13
1Н22; Н22-1М
«Луч-2Т»
НЗЗ-1;
1НЗЗ;НЗЗ-Н;
«Курс 332»,
Н55-1;Н55-2;
УЗЗ-1;УЗЗ-2
2П52;
2П62-ЗИ;
«Размер-2М»
1Р22; «Элек-
троника
НЦ-31», 2У32;
2У22; 2Р22
2Р32; 2С42;
2С42-61;
2У32-61
То же
У55-2;
«Размер-4»
2М-32; 2М-43;
2М43-22
2С85
«Электроника НЦ
ВО-31»; 2Р32М;
2У32-61; ОЧС-Т(Ф)
ИЦО-П; ИЦО-ПБ;
ИЦО-ПЮ-Ю;
«Размер-5»;
2С85-62; 2С85-63;
2С42-65; ЗС150-16
То же
»
3.3. Системы числового программного управления 343
В настоящее время программное управление распространи-
лось на все виды металлорежущих станков, многие другие про-
мышленные установки. Устройства ЧПУ для каждого из видов
оборудования имеют свои особенности, определяемые конструк-
цией, видом технологического процесса и возможностью связи с
системой верхнего уровня.
Под системой ЧПУ понимается совокупность специализиро-
ванных устройств, методов и средств, необходимых для осущест-
вления управления оборудованием.
Собственно устройство ЧПУ (которое называют также пуль-
том, стойкой) составляет часть этой системы и конструктивно
выполняется в виде отдельного шкафа. В последнее время в свя-
зи с совершенствованием микропроцессорной техники устрой-
ства ЧПУ на ее основе иногда встраиваются непосредственно
в станок.
На ранних этапах развития системы ЧПУ разрабатывались
для каждого конкретного случая применения. Этот фактор
и обилие фирм-изготовителей привели к тому, что на одном
предприятии сосредоточивались разнообразные системы ЧПУ.
При этом возникали естественные трудности их обслуживания
и ремонта. Поэтому акцент был сделан на развитие унифициро-
ванных систем ЧПУ, пригодных для различных технологических
объектов. Системы ЧПУ, обеспечивающие управление широким
классом машин, называются многоцелевыми. Унификация мно-
гоцелевых систем ЧПУ основана на применении ЭВМ и систем
класса CNC. Системы CNC имеют ряд разновидностей, разли-
чающихся способами хранения и обработки управляющей ин-
формации. Одно из преимуществ многоцелевых систем ЧПУ
заключается в организации ввода управляющей информации.
В обычных системах программа первоначально составляется'
в кодированном виде оператором (вручную или с помощью уни-
версальной ЭВМ) и записывается на перфоленте. Затем с по-
мощью интерполятора (специализированной ЭВМ) программа
декодируется и записывается на магнитную ленту или использу-
ется для управления рабочими органами станка непосредствен-
но. При такой организации требуется несколько стадий отладки
программы: исправление ошибок, допущенных при написании;
344 Глава 3. Комплексные системы управления электроприводами
коррекция перфоленты. Кроме того, в самом процессе ввода
перфоленты, если даже ошибки на ней отсутствуют, они неиз-
бежно возникают. На этап работы с перфолентой приходится до
70% сбоев в системе ЧПУ. Применение ЭВМ позволяет исклю-
чить перфоленту и процесс фотоввода и объединить в общей
системе подготовку управляющих программ и обработку изде-
лий. Многоцелевые системы ЧПУ снабжаются комплексом алго-
ритмов и программ, который составляет системное программное
обеспечение (СПО). Многоцелевые CNC-системы объединяются
с ЭВМ верхнего уровня, образуя систему DNC.
В зависимости от способа задания перемещения РО оборудо-
вания СПУ подразделяются согласно классификации, представ-
ленной на рис. 3.26. Временные системы ПУ не получили развития
из-за низкой точности. Большую группу составляют цикловые
системы ПУ, которые разделяются на два класса: с постоянным
циклом и с настраиваемым. Системы с постоянным циклом ха-
рактерны для «жесткой» автоматизации, и их настройка на дру-
гой цикл работы невозможна.
Системы ЧПУ подразделяются на позиционные (координат-
ные) и контурные (непрерывные).
Позиционные системы обеспечивают перемещение (пози-
ционирование) РО в заданные координаты; при этом траектория
движения не оговаривается. Типичным примером таких систем
является система ЧПУ сверлильного станка, когда стол переме-
щается в точки с координатами Xi, Yi; Xi, Yi и т.д., где и происхо-
дит сверление отверстий (рис. 3.27, а). Позиционные системы
ЧПУ применяются также при прямоугольном формообразова-
нии детали вдоль одной из осей координат (рис. 3.27, 6).
Контурные системы обеспечивают перемещение рабочих
органов из одной точки в другую по заданной траектории (пря-
мой, окружности, кривой более высокого порядка и т.д.). Как
частный случай, контурная система обеспечивает обработку
вдоль одной из осей координат (рис. 3.27, б). Виды контурной
обработки при криволинейном формообразовании представле-
ны на рис. 3.27, в, г. По структуре контурные системы ЧПУ
сложнее координатных и могут работать в режиме последних.
3.3. Системы числового программного управления
345
Рис. 3.26. Классификация СПУ
346
Глава 3. Комплексные системы управления электроприводами
«3
Рис. 3.27. Примеры позиционных (а, б) и контурных (в, г) СЧПУ
3.3.2. Кодирование информации и цифровые коды
Решение вопросов кодирования информации в СНУ является
одним из наиболее важных этапов в процессе проектирования сис-
темы управления. Выбор кода для представления программы и ор-
ганизация кадра в значительной мере определяют структуру СПУ.
Кодом называется система знаков; однозначно определяю-
щая кодируемую информацию. В качестве кодовых знаков могут
использоваться цифры выбранной системы счисления.
Приведем основные способы кодирования информации.
Ручное задание программы (ручное кодирование) с помощью
3.3. Системы числового программного управления
347
различных переключателей применяется для цикловых СПУ,
в некоторых случаях —. для позиционных систем. Наибольшее
распространение получили буквенно-цифровые коды (БЦК). В по-
следнее время развивается кодирование с помощью различных
мнемокодов. Общение системы ПУ с оператором в значительной
мере упрощается при речевом способе кодирования информа-
ции, когда распоряжения системе подаются голосом с использо-
ванием определенного словарного запаса. Вся информация
в СПУ представляется набором нулей и единиц независимо от
того, как она интерпретируется.
Системой счисления называется совокупность наименований,
правил и знаков для записи любого числа. Знаки системы счис-
ления называются цифрами. Системы счисления бывают позици-
онными и непозиционными. В технике получили распространение
позиционные системы счисления, в которых число цифр огра-
ничено и значение числа, выражаемого каждой цифрой, по оп-
ределенному закону зависит от места (позиции), которое эта
цифра занимает в записи всего числа. Позиция, занимаемая
цифрой в записи числа, называется разрядом. Нумерация разря-
дов производится с младшего разряда целой части числа, стоя-
щего непосредственно перед запятой (или точкой, общеприня-
той вместо запятой в вычислительной технике и системах ЧПУ),
номер которого принимается за нуль.
Цифры могут быть значащими или нулем. Наибольшим по
абсолютной величине номером разряда, содержащего значащую
цифру, определяется порядок числа (дробной части). Порядок
целой части числа считается положительным, а дробной — отри-
цательным.
Число, выражаемое одной из цифр в позиционной системе
счисления, определяется по формуле
М=х,а', (3.1)
где i — номер разряда; х,- — цифра, стоящая в z-м разряде; а — ос-
нование системы счисления.
Полное число, для записи которого используется несколько
цифр (3.1), расположенных в определенном порядке, записыва-
ется так:
348 Глава 3. Комплексные системы управления электроприводами
i=p i=p
N = = fra' = xpap + Xp_iap”1+...+xoa°+
»=-? »=-9
+ X-jfl'1 + x_2a2+...+x.qa~4, (3.2)
где p — порядок числа; q — наибольший по абсолютному значе-
нию порядок дробной части числа.
Позиционные системы счисления отличаются друг от друга
величиной основания а, в качестве которого может быть выбра-
но любое целое число, кроме единицы. Применяются системы
счисления с основанием 16,10, 8,4, 3,2 (шестнадцатеричная, де-
сятичная, восьмеричная, четверичная, троичная, двоичная). Ко-
личество цифр в позиционной системе счисления равно ее осно-
ванию. Кроме того, основание системы равно наименьшему
возможному в ней числу первого порядка.
Запись некоторых целых чисел в различных системах счисле-
ния приведена в табл. 3.6.
Двоичная система счисления имеет основание а = 2 и только две
цифры: 0 и 1. С ее помощью представление чисел осуществляется
наиболее просто. Действительно, применяя для записи числа всего
лишь два символа, любые числа можно представлять с помощью
дискретных элементов (с двумя устойчивыми состояниями). Для
цифры 1 можно поставить в соответствие, например, замкнутое со-
стояние контакта, высокий уровень напряжения логического эле-
мента, наличие отверстия (пробивки) на перфоленте или перфо-
карте и т.д., а для цифры 0 — противоположные состояния.
Рассмотрим двоичное число 11101.11(2) (в дальнейшем осно-
вание системы счисления будем указывать десятичным индек-
сом), для которогор = 4, q = 2. По формуле (3.2) найдем выраже-
ние этого числа в десятичной системе счисления:
N =1 • 24 +1 • 23 +1 • 22 + 0 • 21 +1 • 2° +1 - 2 1 +1 - 2'2 = 29,75(10).
Восьмеричная и шестнадцатеричная системы счисления полу-
чили широкое распространение в автоматике и вычислительной
технике. Их удобно применять, например, при записи программы
и констант в машинном коде ЭВМ. В восьмеричной системе счис-
ления (а — 8) используются цифры 0, 1, 2, 3, 4, 5, 6, 7.
Представим в десятичной системе счисления число 1562.73(g),
используя формулу (3.2):
3.3. Системы числового программного управления
349
1562.73(8) = 1 • 83 + 5 • 82 + 6 • 81 +
+ 2-8° + 7-8-1 + 3-8’2 =882921875(10)
Запись целых чисел
Таблица 3.6
Система счисления
десятичная
двоичная
восьмеричная
шестнадцатеричная
О
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
64
128
0
1
10
11
100
101
110
111
1000
1001
1010
1011
1100
1101
1110
1111
10000
10001
10010
10011
10100
10101
10110
10111
11000
11001
11010
11011
11100
11101
11110
11111
100000
1000000
10000000
0
1
2
3
4
5
6
7
10
11
12
13
14
15
16
17
20
21
22
23
24
25
26
27
30
31
32
33
34
35
36
37
40
100
200
0
1
2
3
4
5
6
7
8
9
А
В
С
D
Е
F
10
11
12
13
14
15
16
17
18
19
1А
1В
1С
1D
1Е
1F
20
40
80
При переводе дробной части числа из одной системы счисле-
ния в другую часто имеет место бесконечная последовательность
цифр. Поэтому в получаемом числе заранее оговаривают количе-
ство разрядов дробной части числа (в примере q = —6).
350 Глава 3. Комплексные системы управления электроприводами
В шестнадцатеричной системе счисления для обозначения
цифр используются шестнадцать различных символов. Для обо-
значения первых десяти применяют символы десятичной систе-
мы счисления, для обозначения остальных шести — заглавные
буквы латинского алфавита А, В, С, D, Е, F (см. табл. 3.6).
В дальнейшем для сокращения будем применять запись «п-рич-
ное число», где а — основание системы счисления (например,
шестнадцатеричное число, восьмеричное и т.д.).
Запишем шеснадцатеричное число и его эквивалент в деся-
тичной системе счисления:
F5D.4(i6) = F 462 + 5 • 161 + D • 16° + 4 • 16’1 =
=15-162 +5 161 +13 16° + 4-16"1 =3933,25(ю).
Основными требованиями, которым должны удовлетворять
системы счисления, являются экономичность, надежность и на-
глядность. Поэтому на практике широкое распространение по-
лучила система счисления с основанием а = 2.
При переводе чисел из одной системы счисления в другую
ограничимся рассмотрением правил перевода восьмеричных и ше-
стнадцатеричных чисел в двоичные, и наоборот. Для взаимного
преобразования двоичной системы счисления, с одной стороны,
и системы, где основанием является степень двойки, с другой,
существуют простые методы. Заметим, что 8 = 23 и 16 — 24.
Рассмотрим двоичное число
N(2)—...d%d]d6d5^d3did\<^d-id-id-'i,...,
десятичный эквивалент которого
^10)=...<7828+^727+<426+^25+<424+4/з23+£/222+£/121+
+йЬ20+йГ-12_1+^_22"2+б/-з2_3+... . (3.3)
Сгруппировав члены в (3.3), получим
^1о)=...(^22+</721+4/б2о)26+(^22+^421+е/з2о)23+
+ (</222+</i21+<4)20)20+(dL122+d-221+d-320)2_3...+...
+ (</822+4/72,+<420)82+(</522+г/421+(/з20)81+(</222+
+ . (3.4)
3.3. Системы числового программного управления
351
Выражение (3.4) содержит степени числа 8 и совпадает с изо-
бражением восьмеричного числа. Внутри скобок содержатся
двоичные изображения десятичных цифр от 0 до 7. Перевод
из двоичной системы в восьмеричную будет завер-
шен, если выражение, заключенное в каждой скобке, записать
в виде восьмеричной цифры, которая в названном диапазоне
совпадает с эквивалентной десятичной цифрой.
Таким образом, правило перевода двоичного числа в восьмерич-
ную форму формулируется так: двоичные цифры объединяем
в группы по 3 бита (разряда) — триады, направляя их влево
и вправо от разделительной точки. Если количество цифр не
кратно трем, добавляются нули. Затем каждая триада заменяется
эквивалентной восьмеричной цифрой. Результат будет восьме-
ричным изображением двоичного числа. Например, возьмем
двоичное число Nyy = 10101110.10001, биты которого группиру-
ются следующим образом: 010 101 НО. 100 010. Замена каждой
триады восьмеричной цифрой дает = 256.42.
Подобным же образом формулируется правило перевода дво-
ичного числа в шестнадцатеричное’, при этом исходное двоичное
число группируется по 4 бита. Например,
N(2) = 1010111011011.10101 =
= 0001 0101 1101 1011. 1010 1000;
#(1б) = 15DB.A8.
Обратная процедура заключается в записи восьмеричной
(или шестнадцатеричной) цифры двоичным изображением из
трех и четырех разрядов соответственно.
Таким образом, восьмеричное представление двоичного чис-
ла позволяет существенно сократить длину записи числа. Диапа-
зон значений восьмиразрядных двоичных чисел, широко исполь-
зуемых в микропроцессорах и в системах ЧПУ на базе ЭВМ,
находится в пределах 00000000(2>...11111111(2) или 000(8>...377(8).
Дальнейшее сокращение формы записи можно получить, приме-
нив шестнадцатеричную систему.
Следует отметить, что шестнадцатеричные и восьмеричные
числа — это только способ представления двоичных чисел, кото-
рыми фактически оперируют микропроцессоры и ЭВМ. При
352 Глава 3. Комплексные системы управления электроприводами
этом шестнадцатеричная запись числа предпочтительнее восьме-
ричной, поскольку ЭВМ и микропроцессоры, применяемые в си-
стемах ЧПУ, оперируют словами длиной 4, 8,16 или 32 бита, т.е.
словами, длина которых кратна четырем. Для применения
восьмеричной формы записи необходимо было бы добавлять
незначащие нули. Например, восьмибитовое число можно пред-
ставить в виде двух четырехбитовых, каждое из которых записы-
вается одним шестнадцатеричным символом; шестнадцатибито-
вое число представляется четырьмя четырехбитовыми и т.д.
На основе рассмотренных систем счисления строятся цифро-
вые коды, нашедшие применение в системах ПУ.
Единичный (унитарный) код заключается в том, что програм-
мируемое число записывается в виде серии единичных импуль-
сов, количество которых равно количеству единиц в данном чис-
ле. Например, первые десять цифр будут выражаться следующим
образом:
1) 1; 5) 11111; 8) 11111111;
2) 11; 6) 111111; 9) 111111111;
3) 111; 7) ШИН; 10) 1111111111.
4) 1111;
Единичный код не может применяться для выражения дроб-
ных чисел. Поэтому выбор масштаба должен производиться
с учетом требуемой точности отработки задания. Например, при
точности перемещения 0,005 мм/имп. «цена» единичного им-
пульса должна составлять не более 0,005 мм. Тогда при задании
перемещения на 1 м требуемое количество импульсов будет 2-105.
Программа, составленная в унитарном коде, записывается на
магнитную ленту. При принятой плотности записи 10 имп./мм
для записи данной команды потребуется 20 м магнитной ленты.
Таким образом, недостатком кода является громоздкость записи,
а достоинство состоит в упрощении структуры системы ЧПУ,
что особенно заметно при применении шаговых двигателей
в качестве приводных устройств. Унитарный код использовался
в выпускавшихся до недавнего времени системах ЧПУ типа
«Контур 4МИ».
При единично-десятичном коде число разбивается на десятич-
ные разряды, в каждом из которых десятичная цифра изобража-
3.3. Системы числового программного управления
353
ется в унитарном коде, т.е. заменяется соответствующим количе-
ством единиц (импульсов). Для примера ниже изображено число
6835 в единично-десятичном коде:
Разряд Множитель Единичные знаки
0 1 11111
1 10 111
2 100 11111111
3 1000 111111
Нормальный двоичный код заключается в представлении чисел
в двоичной системе счисления. Рассмотрим число 1101010011.
Чтобы перевести его в десятичную систему счисления, восполь-
зуемся формулой (3.2). В результате получим число 851. Как вид-
но, недостатком данного кода является его малая наглядность,
трудность визуального контроля. Поэтому двоичное кодирова-
ние, несмотря на экономичность, не нашло практического при-
менения.
При двоично-десятинном взвешенном кодировании число разби-
вается на десятичные разряды, в каждом из которых десятичная
цифра представляется кодовой комбинацией. Задача построения
кода заключается в выборе веса разрядов четырехзначного двоич-
ного кода ck > di > d2 di с тем, чтобы можно было выразить любую
цифру в интервале 0...9. Согласно условию,
</i + d2 + d3 + d4 > 9. (3.5)
Нулевой разряд должен иметь вес di = 1, иначе невозможно
представить цифру 1. Для представления цифры 2 первый разряд
должен иметь вес d2 = 1 либо d2 = 2.
Учитывая соотношение (3.5), можно составить 17 различных
двоично-десятичных кодов.
Особое место занимает код 8421 (BCD — Binary-Coded
Decimal). Кодовые изображения десятичных чисел от 0 до 9
в этом коде совпадают с их изображениями в двоичном коде. Это
облегчает преобразование данного кода в двоичный. Многораз-
рядные десятичные числа в коде 8421 представляются путем
объединения групп, кодирующих отдельные десятичные циф-
ры. Например, число 628 в коде BCD выглядит так: 628<ю) =
= OIIOOOIOIOOObcd.
354 Глава 3. Комплексные системы управления электроприводами
ч
Число битов в коде должно быть фиксированным и кратным 4.
Недостающие слева знаки при изображении цифр от 0 до 7 запол-
няются нулями. Из шестнадцати возможных комбинаций кода
используется только десять, остальные шесть являются нерабочи-
ми. Эта избыточность кода позволяет с помощью простой логиче-
ской схемы контролировать правильность записанной информа-
ции путем выявления неиспользуемых комбинаций. Легкость
чтения и контроля записи в коде BCD обусловила его широкое
распространение в системах ЧПУ.
Существуют также коды с постоянным весом. Их особен-
ность — постоянство количества единиц в кодовых комбинаци-
ях. Благодаря этому упрощается контроль правильности считы-
вания информации с перфоленты.
Определим арифметические и комбинаторные коды. Код,
обладающий арифметическими свойствами, называется арифме-
тическим. Над комбинациями кода можно производить арифмети-
ческие операции. Коды на основе позиционных систем счисле-
ния и код 8421 являются арифметическими. Код, не обладающий
арифметическими свойствами, называется комбинаторным (по
названию раздела математики — комбинаторики, изучающей со-
четания, размещения, перестановки).
Важным классом комбинаторных кодов являются однопере-
менные коды. Однопеременным называется код, у которого кодо-
вое расстояние равно единице, т.е. при переходе от одной кодо-
вой комбинации к соседней знак изменяется лишь в одном
разряде, например ОНО, 0111, 0101 и т.д. Построить однопере-
менный код можно с помощью диаграммы Карнауга (рис. 3.28),
которая имеет 4 строки и 4 столбца. На их пересечении образует-
ся 16 ячеек. Каждая строка и каждый столбец нумеруется. Адрес
каждой ячейки образуется, таким образом, из номера строки
и номера столбца. Для получения однопеременного кода задается
направление обхода ячеек диаграммы и последовательно выписы-
ваются их адреса. Для направления, указанного на рис. 3.28, а, за-
пишем 16 кодовых комбинаций (табл. 3.7). Такой код называется
кодом Грея.
Для построения двоично-десятичного однопеременного кода
можно ограничиться десятью кодовыми комбинациями (рис. 3.28, бу,
можно выбрать для обхода другие вершины (рис. 3.28, в, табл. 3.7).
3.3. Системы числового программного управления
355
а
00 01 11 10
ооо—0*0—р
010—0*0—о
110—0*0—о
10 О—0*0—о
б
00 01 11 10
00 0*0—о—р
01 о о о р
о о о о
10 о—о—о—о
в
00 01 11 10
Рис. 3.28. Примеры получения кода Грея с помощью диаграммы Карнауга
Сформулируем общие правила для получения однопеременного
кода на основе диаграммы Карнауга:
• направление обхода выбирается произвольно;
• одну и ту же вершину нельзя обходить дважды;
• запрещается движение по диагонали.
Таблица 3.7
Запись десятичных чисел в кодах Грея
Десятичное число
Двоичный код
Код Г рея
Двоично-десятичный одно
переменный код
Вариант 1
Вариант 2
О
1
2
3
4
5
6
8
9
10
11
12
13
14
15
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
0000
0001
0011
0010
0110
0111
0101
0100
1100
1101
1111
1110
1010
1011
1001
1000
0000
0001
0011
0010
0110
1110
1010
1011
1001
1000
0000
0001
0011
0010
0110
1110
1111
1101
1100
1000
Применение кода Грея повышает надежность кодирования,
что объясняется следующим образом. При использовании ариф-
356 Глава 3. Комплексные системы управления электроприводами
метических кодов часто возникает ситуация, когда изменение
кодируемой величины на единицу одновременно изменяет знаки
во всех разрядах кода. Примером может служить ситуация 0111 +
+ 1 = 1000. В таких случаях возможны значительные ошибки.
Например, при считывании информации с кодового датчика по-
ложения цифра старшего разряда может появиться прежде всех
остальных, и в течение некоторого времени будет зафиксировано
число 1111. Коды Грея свободны от этого недостатка; в то же
время они не обладают наглядностью, что затрудняет визуаль-
ный контроль информации.
В реальных условиях эксплуатации системы ЧПУ кодовая
комбинация может искажаться под воздействием индустриальных
помех, сбоев в электронной аппаратуре. Помехоустойчивым назы-
вают такое кодирование, при котором ошибку можно обнаружить
или обнаружить и исправить. Кратностью ошибки называют чис-
ло искаженных символов. Имеются коды, обнаруживающие и ис-
правляющие одиночные ошибки, двойные ошибки и т.д.
Простейшим способом повышения надежности кодовых пере-
дач является контроль кода на четность (или нечетность). В этом
случае наряду с информационными позициями кода имеется одна
контрольная, которая заполняется так, чтобы закодированное сло-
во содержало четное (нечетное) число единиц. При приеме инфор-
мации специальная схема контролирует четность (нечетность) кода,
и в случае ее нарушения формируется сигнал о наличии ошибки.
Подобный контроль реализован в коде ISO-7 bit. Недостаток тако-
го способа Контроля состоит в том, что при двойной ошибке чет-
ность кода не нарушается и наличие искажения кода не обнаружи-
вается. Кроме того, рассматриваемый способ контроля не дает
возможности исправить обнаруженную ошибку.
3.3.3. Международный двоично-десятичный код ISO-7 bit
Код ISO-7 bit является адресным и предусматривает примене-
ние восьмидорожечной перфоленты. В коде применяется двоич-
но-десятичная система счисления. Для обозначения адресов ис-
пользуются прописные буквы латинского алфавита. Для кодиро-
вания знаков и прописных букв латинского алфавита, а также
3.3. Системы числового программного управления 357
для кодирования признаков всех составляющих частей кода при-
менены семь двоичных разрядов (7 bit). Правильность информа-
ции, записанной на каждой строке перфоленты, контролируется
по модулю 2, т.е. на четность числа пробивок. Для контроля чет-
ности применяется восьмая дорожка перфоленты. Аналогичная
система кодирования применена в коде по ГОСТ 13052—74.
Для того чтобы различать знаки, цифры и буквы (например,
на первых четырех дорожках одинаково кодируются %, 5, Е, U),
используются последующие три дорожки — пятая, шестая, седь-
мая (рис. 3.29, гдк с/д — синхродорожка).
Контроль на четность
Вес разряда
0
1
2
3
4
5
6
7
8
9
Символ
Рис. 3.29. Код ISO-7 bit
358
Глава 3. Комплексные системы управления электроприводами
Первое слово кадра имеет в начале буквенный символ, за ко-
торым следуют цифры (N021, F356, Х098123, Т17 и т.д.). Буквы
адресов и кодируемая ими информация приведены в табл. 3.8.
Таблица 3.8
Адреса кода и ISO-7 bit
Символ адреса Кодируемая информация
А Поворот вокруг оси X
В То же, Y
С То же, Z
D Поворот вокруг специальной оси или третья функция подачи
Е То же, вторая
F Подача
G Подготовительные функции (100 команд)
I, J, К Начальные координаты (соответственно по осямХ, У, Z)
дуги окружности относительно ее центра
L Коррекция
М Вспомогательные функции (100 команд)
N Номер блока информации, фразы кадра (1000 команд)
Р, Q, R Дополнительное указание по перемещению (третичному)
параллельно осям X, У, Z (соответственно) или произвольно
S I Частота вращения привода главного движения (100 скоро-
стей)
Т Код инструмента (100 команд)
U, V, W Дополнительное указание по перемещению (вторичному)
параллельно осям X, У, Z или произвольно
X Перемещение вдоль оси X
Y То же, У
Z То же, Z
+, - I Направление перемещения
Признак восстановления информации
ГТ Горизонтальная табуляция
LF (ПС) Конец фразы (кадра)
% Начало программы
( Отключение управления (информация на ленте
не воспринимается СЧПУ)
3.3. Системы числового программного управления
359
Окончание табл. 3.8
Символ адреса
Кодируемая информация
)
DEL (ЗБ)
JAB
BS
CR
Отключение управления
Забой (строчка не читается)
Табуляция
Возврат каретки на шаг
Возврат каретки
Рассмотрим состав кадра протраммы. Первой информацией
на перфоленте является слово, обозначающее начало
программы (%), которому предшествует примерно 1 м «пус-
той» ленты. На ленте можно записать название программы.
Дальнейшая информация начинается со слова, обозна-
чающего порядковый номер и состоящего из буквы N
с последующими тремя цифрами (по порядку номеров кадров
программы). Порядковый номер кадра обычно индицируется на
пульте управления, что позволяет оператору визуально контро-
лировать ход обработки. В конце кадра обязательно ставится
символ LF (или ПС) — конец кадра, за которым следует номер
очередного кадра.
При кодировании информации соблюдаются следующие об-
щие правила:
• в одном кадре может быть только одна команда для одного
адреса;
• если некоторые адреса не соответствуют данному конкрет-
ному станку, они могут быть полностью опущены;
• каждый кадр должен содержать следующие слова: порядко-
вый номер, подготовительная функция, размерные слова, пода-
ча, скорость шпинделя, номер инструмента и вспомогательные
команды (в порядке N, G, X, Y, Z, U, V, W, Р, Q, R, I, J, К, А, В,
С, D, Е, F, S, Т, М);
• табуляционный знак ставится перед каждым словом; перед
порядковым номером кадра и в конце кадра этот знак не ставится;
• за последним словом кадра идет слово, обозначающее ко-
нец кадра (LF).
Некоторые из символов кадра нуждаются в пояснении. При-
знак восстановления информации «:» записывается перед ка-
360 Глава 3. Комплексные системы управления электроприводами
дром, в котором кодируется вся информация для начала или по-
вторного начала обработки. В этом случае данный символ
применяется вместо символа «N» в качестве адреса номера кадра.
Символ «:» можно также использовать в качестве признака для
остановки в нужном месте программы при обратной перемотке
ленты.
Символ начала программы «%» должен предшествовать пер-
вому символу «Конец кадра». Он используется для остановки,
в начале программы при обратной перемотке ленты.
Информация, записанная между символами «(», «)», не вос-
принимается системой ЧПУ. Эти символы удобно применять,
когда возможна обработка заготовок с разными припусками. До-
полнительные проходы, рассчитанные с учетом максимального
припуска, заключаются в скобки. В зависимости от реальных
размеров заготовки эти операции выполняются по команде опе-
ратора. Запись внутри скобок не должна содержать символов «:»
и «%». При появлении символа DEL (ЗБ) («Забой») соответст-
вующая строка пропускается, т.е. не воспринимается системой
управления.
Слово подготовительной функции (команды)
состоит из буквы адреса G, за которой следуют две цифры кодо-
вого номера. Слово G располагается за порядковым номером
кадра. В коде предусмотрено 100 возможных подготовительных
функций. За каждой функцией G закреплено определенное зна-
чение. Наиболее распространенные из них приведены в табл. 3.9.
В конкретных УЧПУ значение тех или иных функций G может
отличаться от стандартных, и это оговаривается инструкцией по
программированию.
Подготовительные функции разделяются на группы ортого-
нальных (взаимоисключающих); в табл. 3.9 они отмечены фигур-
ными скобками. Наличие более одной функции G из одной груп-
пы не допускается в кадре. Действие подготовительной функции,
как правило, выходит за пределы одного кадра. Действует функ-
ция G до ее отмены или замены другой из группы ортогональных.
Функция G00 используется для задания перемещения с мак-
симальной скоростью подачи; при этом траектория движения не
оговаривается. Величина перемещения со знаком указывается
размерными словами.
3.3. Системы числового программного управления
361
Функции G (подготовительные)
Таблица 3.9
Код команды
<G00
/ G01
| G02
\G03
{G17
G18
G19
{G90
G91
{G94
G95
(G96
Ig97
Назначение функции
Позиционирование
Линейная интерполяция
(норма льный размер)
Круговая интерполяция
по ходу часовой стрелки
Круговая интерполяция
против хода часовой
стрелки
Выбор плоскости обра-
ботки XY
То же, XZ
То же, YZ
Абсолютный размер
Размер в приращениях
Размерность подачи
То же
Способ задания частоты
вращения шпинделя
То же
Примечание
Перемещение в запрограммирован-
ную точку с максимальной скоро-
стью
Перемещение по прямой линии
Перемещение по дуге окружности
Используется для выбора плоскости
обработки
Отсчет перемещений производится
относительно выбранной нулевой
точки
Отсчет перемещений производится
относительно предыдущей точки
Цифры, стоящие вслед за адресом
F, указывают значение подачи в
мм/мин
То же, в мм/об
Скорость резания постоянна, при
этом частота вращения шпинделя
регулируется автоматически
Частота вращения шпинделя посто-
янна
Функция G01 означает, что рабочий орган будет перемещать-
ся по прямой линии до координаты, указанной размерными сло-
вами. Это обеспечивается согласованной работой двух электро-
приводов по соответствующим координатным осям. Скорость
движения определяется функцией подачи F.
Функции G02 и G03 служат для задания режима круговой ин-
терполяции, т.е. движения рабочего органа по дуге окружности.
362 Глава 3. Комплексные системы управления электроприводами
При этом обязательно задаются параметры круговой интерполя-
ции I,J,K (в зависимости от плоскости обработки, см. ниже). Зна-
чение отдельных подготовительных функций G указано в табл. 3.9.
Сложным словом «Размерные перемещения»
задают геометрическую информацию. При этом используются
адреса X, Y, Z, U, V, W, Р, Q, R, I, J, К, А, В, С, D, Е. В состав
сложного слова входит столько простых, сколько необходимо ад-
ресов для задания перемещения. Вслед за адресом указывается
знак «+» или «—»(в некоторых УЧ ПУ знак «+» можно опустить).
После этого записывается группа цифр, указывающая на величи-
ну перемещения. При этом в зависимости от внутренней органи-
зации переработки информации в УЧПУ применяют два способа.
1. Число цифр фиксировано, положение десятичной запятой
подразумевается. В целях сокращения количества информации
допускается опускать нули, стоящие перед первой значащей
цифрой. Например, размер перемещения по оси X, равный
637,20 мм, при дискретности системы Д =0,01 мм/имп. может
быть записан так: Х063720 или Х63720 (опущен нуль слева); здесь
распределение размера ведется от младших разрядов.
2. Положение десятичной точки указывается явно; при такой
записи нули слева и справа могут быть опущены, т.е. Х637.2. За-
пись Х.06 означает размер 0,06 мм по оси X, а запись Х320 — раз-
мер 320 мм.
Подача (F) искорость шпинделя (S ) в различных
УЧПУ указываются по-разному. В некоторых из них используют-
ся кодовые таблицы, в которых двузначными цифрами закодиро-
ваны подача и скорость шпинделя. В большинстве современных
УЧПУ эти величины задаются в явном виде, т.е. действительны-
ми числовыми значениями в мм/мин, мм/об и об/мин.
Скорость подачи может также задаваться словом, состоящим
из адреса F и следующих за ним четырех цифр:
1) первая цифра 0 (автоматическое определение необходимо-
сти разгона и торможения; применяется при обходе плавных
участков траектории) или 4 (торможение в конце кадра до фик-
сированного значения скорости 240 мм/мин; применяется при
обходе участков траектории, имеющих резкие изломы) и разгон
в следующем кадре до прежней скорости в случае отсутствия
в нем кода подачи;
3.3. Системы числового программного управления
363
2) вторая цифра — показатель степени числа 10, который на
3 больше, чем количество разрядов в целой части значения ско-
рости подачи;
3) третья и четвертая цифры — мантисса этой величины.
< Покажем, как задается скорость подачи: vn:
• при F0310 vn = 0,10-Ю3-3 = 0,1 мм/мин;
• при F0465 vn = 0,65-104-3 = 6,5 мм/мин;
• при F0525 vn = 0,25-Ю5-3 = 25 мм/мин;
• при F0640 vn = 0,40-106"3 = 400 мм/мин.
Адрес Т с двузначным ч и с л о м определяет код инст-
румента в многоинструментальных станках. В ряде устройств за-
дание команды на инструмент предшествует команде на его за-
мену (М06).
Вспомогательные функции М (двузначное число)
достаточно многочисленны; наиболее распространенные из них
приведены в табл. 3.10.
Таблица 3.10
Примеры вспомогательных функций М
Функция
Название
' Значение
М00
М01
М02
М03(04)
М06
М08
М09
М10(11)
Программируемый останов
Останов с подтверждением
Конец программы
Вращение шпинделя по ходу
(против хода) часовой
стрелки
Смена инструмента
Включение охлаждения
Отключение охлаждения
Зажим (разжим)
Останов без потери информации по
окончании отработки кадра (отклю-
чение шпинделя, системы охлажде-
ния, подачи)
Аналогично М00, но выключение
предварительно подтверждается
с пульта
Завершение отработки программы
детали и останов шпинделя, подачи,
охлаждения. УЧПУ приводится в ис-
ходное состояние
Включение шпинделя в направле-
нии, при котором винт с правой
резьбой ввинчивается в заготовку
(вывинчивается из заготовки)
Вызов цикла смены инструмента
Команда на зажим (разжим)
364
Глава 3. Комплексные системы управления электроприводами
Окончание табл. 3.10
Функция
Название
Значение
М19
М60
МЗО
Останов шпинделя в задан-
ной позиции
Смена заготовки
Останов шпинделя в заданной угло-
вой Позиции
Конец ленты
Завершение программы обработки
детали и останов шпинделя, выклю-
чение охлаждения, установка в ис-
ходное положение
Размерные слова должны появляться в следующем по-
рядке: X, У, Z, V, W, Р, Q, R, I, J, К, А, В, С, D, Е.
Символы D и Е могут быть поочередно использованы вместе с F
как слова функции подачи. Наименования осей, к которым отно-
сятся размерные слова на конкретном станке, приведены в табл. 3.8.
Для конкретного станка размерные слова выражаются либо
в абсолютных значениях координат, либо в приращениях отно-
сительно предыдущего значения. Эти числа имеют в начале циф-
ру старшего разряда. Напомним, что недостающие разряды до-
полняются нулями.
Системы управления, работающие с приращениями, нужда-
ются в кодировании положительных и отрицательных чисел.
Слово «Подача» F (100 команд) может использоваться
при движении только по одной оси. В этом случае оно должно
следовать непосредственно за размерным словом: Если слово
«Подача» используется для двух или более осей движения, то оно
записывается за последним размерным словом. Допустим, для
движения по осям Xи /требуется подача fi, а по оси Z — подача
Fi. В этом случае информацию следует расположить в разных
кадрах и движение по оси Z будет происходить после движений
по осям X и Y.
Если позволяет система управления, в одном кадре можно
задавать различные значения подачи, используя символы D и Е.
Каждое слово «Подача» состоит из адресного символа F
(Е или D) и цифр, которые определяют величину подачи.
Код «Скорость шпинделя» S (1
команд) следует
после всех размерных слов и слова «Подача». Вслед за адресом
S записывается число, определяющее значение скорости.
3.3. Системы числового программного управления
365
Код «Выбор инструмента» Т (100 команд) следует за
словом S. За словом Т записывается кодовый номер, который
в соответствии с техническими данными станков, где зашифро-
ваны номера применяемых инструментов, определяет его вид.
Например, для сверлильного станка, имеющего одну шестипози-
Ционную сверлильную головку, код «Выбор инструмента» запи-
сывается так: Т1, Т2,...,Т6. По коду инструмент выбирается авто-
матически или дается указание оператору.
Код «Вспомогательная функция» М (100 команд)
следует за словом Т. Вслед за адресной буквой М записывают
двузначное кодовое число. Слово М управляет такими действия-
ми станка, как вращение шпинделя, включение-выключение ох-
лаждения, зажим-отжим приспособлений и др. (см. табл. 3.10).
Международная организация по стандартизации ISO реко-
мендует также направление осей координат и пово-
рот о в вокруг них (рис. 3.30). Соответствующие движения инст-
румента на станке обозначают буквами X, Y, Z, А, В, С. Если на
Рис. 3.30. Расположение осей координат
366 Глава 3. Комплексные системы управления электроприводами
станке перемещается обрабатываемая деталь, то направление ме-
няют на противоположное и обозначают буквами X', Y', Z', А
В', С. Ось X располагается всегда горизонтально, а ось Zвсегда
совмещается с осью инструмента (для токарного станка — с осью
шпинделя).
Направление вращения вокруг осей координат опре-
деляется по правилу правой руки: большой палец располагается
вдоль положительного направления оси. Тогда изогнутые паль-
цы руки указывают положительное направление вращения.
3.3.4. Контроль информации в коде ISO-7 bit
При кодировании, считывании и передаче информации воз-
можны помехи, искажающие кодовую комбинацию. Коды,
обеспечивающие помехоустойчивое кодирование, называют по-
мехоустойчивыми. Для контроля передачи информации наи-
большее распространение получили методы информационной
избыточности, использующие коды с обнаружением и коррек-
цией ошибок.
Двоичным кодом можно представить максимум 2" различных
слов, где п — число разрядов. Если все разряды слова служат для
представления информации, код называется простым {не избы-
точным). Коды, у которых для представления информации ис-
пользуются лишь части слов, называются избыточными. Напри-
мер, при общей длине кодовой комбинации п для передачи
' сообщений используется лишь к разрядов, называемых информа-
ционными. Остальные п - к разрядов, называемых контрольными,
служат для обнаружения или исправления ошибки.
Принцип обнаружения ошибки заключается в проверке ко-
довой комбинации. Если при контроле обнаруживается запре-
щенная комбинация, это говорит о наличии ошибки. Для кон-
троля применяются различные операции. В УЧПУ чаще всего
осуществляют контроль по модулю 2 (контроль четности, нечет-
ности). При таком контроле к «-разрядному коду двоичного сло-
ва (Х1, Хг,х„) добавляется один контрольный разряд х„+]. В нем
размещается код, соответствующий четному или нечетному чис-
3.3. Системы числового программного управления 367
лу единиц, содержащихся в «-разрядном слове. Код разряда xn+i
выбирается так, чтобы сумма
Xf mod 2 — X) ® Х2®—®Х„ ® Хп + 1
была четной (равной нулю) или нечетной (равной единице). При
этом соблюдаются следующие эквивалентности:
для кода четности
для кода нечетности
Хд + 1 — / , х,- m(xj 2 •
1-1
Такой контроль позволяет обнаружить одиночную ошибку.
Пусть правильная комбинация в коде ISO-7 bit имеет вид
0110101. Количество единиц четное, поэтому в восьмом разряде
при контроле на четность единица не фиксируется. Кодовые
комбинации с одиночной ошибкой 0110100, 0110001, 0010101,
1110101 будут обнаружены системой контроля, поскольку содержат
нечетное число единиц. Ошибочные комбинации вида 0101101,
0110110 и подобные системой не устанавливаются, поскольку
содержат разрешенное, т.е. четное, число единиц. Такие ошибки
называются двойными. Практика показывает, что подавляющее
число ошибок — одиночные, поэтому контроль по модулю 2 яв-
ляется достаточно надежным.
Схемы, обеспечивающие получение кода х„+ь называются
схемами сверток по модулю 2 или схемами контроля четности
(нечетности). Наиболее просто такие схемы реализуются с по-
мощью элемента «Исключающее ИЛИ» (неэквивалентность)
(рис. 3.31). На рис. 3.32, а дана пирамидальная схема, обеспечи-
вающая получение кода четности (нечетности). Элементы «Ис-
ключающее ИЛИ» выпускаются в составе серийных интеграль-
ных микросхем: в сериях К155 и КМ155 — восьмиразрядная
схема контроля четности и нечетности (К155ИП2 и КМ155ИП2)
(рис. 3.32, 6); в серии К500 — схема контроля четности на 12 вхо-
дов (К500ИЕ160). На рис. 3.32, в показаны восемь информаци-
368 Глава 3. Комплексные системы управления электроприводами
в
Рис. 3.31. Элемент «Исключающее ИЛИ»:
а — обозначение; б — таблица истинности; в — релейный эквивалент
а
Рис. 3.32. Пирамидальная схема контроля четности (а),
микросхема КМ155ИП2 (б) и ее условное изображение (в)
v
v
3.3. Системы числового программного управления
369
онных входов Xi, Х2,..., xs, два управляющих входа п И V и выходы
Si (соответствует четному числу единиц) и 5г (нечетному).
Пирамидальная часть схемы (рис. 3.32, б) описывается урав-
нением ___________________________________________
К = Х1 Ф Х2 Ф Хз Ф Х4 Ф Х5 Ф Х6 Ф Х7 Ф х8,
что эквивалентно уравнению
8
К = Х{ ф Х2 ® Хз Ф Х4 Ф Х5 Ф Х6 Ф Х7 Ф Х8 = £ X,- bmod 2-
' = 1
Во второй части схе^ы (см. рис. 3.32, б) осуществляются пре-
образования 51 = К Ф v, S2 = К Ф V. Входы v и v служат основой
для построения схем контроля четности и нечетности при боль-
шем числе информационных входов. Как известно, многие циф-
ровые устройства ЧПУ (микропроцессоры и микроЭВМ) часто
оперируют с 16- и 32-разрядными словами. На рис. 3.33 приведе-
на 32-разрядная схема, в которой код vv, подаваемый на первую
микросхему, управляет полярностью сигналов 51 и & на выходе.
Изменение кода vv =01 на код vv =10 приводит к инвертирова-
нию кода на выходах 51 и 5г при неизменных сигналах информа-
ционных входов.
Рис. 3.33. Тридцатидвухразрядная схема контроля четности (нечетности)
на микросхеме КП155ИП2
3.3.5. Ручная подготовка управляющих программ
Исходная информация для подготовки управляющей про-
граммы содержится в чертеже детали, выполненном инжене-
ром-конструктором. Задачи перевода информации, заключенной
24
^3597
370 Глава 3. Комплексные системы управления электроприводами
в чертеже, на язык, воспринимаемый системой ЧПУ, решаются
технологом-программистом. Преобразованная таким образом ин-
формация и есть управляющая программа.
Под управляющей программой (УП) будем понимать объем
информации, которая зафиксирована на одном из видов про-
граммоносителей, достаточный для выполнения требуемой тех-
нологической операции по обработке изделия. УП представляет-
ся в виде буквенно-цифрового кода и может быть подготовлена
ручным или автоматизированным (автоматическим) методом.
При ручном программировании, применяемом в основном
при малом количестве станков с ЧПУ, на основании чертежа де-
тали составляют таблицу с программой, в которой зафиксированы
все рабочие движения станка во временной последовательности.
Расчеты выполняются вручную с использованием простейших
вычислительных средств.
Обработка информации чертежа производится в такой после-
довательности:
1) выбирается система координат (в соответствии с рекомен-
дациями ISO), и ее начало совмещается с исходной точкой, в ко-
торую удобно «выставить» инструмент или деталь перед началом
обработки;
2) проставляются размеры детали относительно координат-
ных осей; выбираются опорные точки и назначается последова-
тельность их обхода; на этой основе готовится рабочий чертеж;
3) аппроксимируются типовыми кривыми траектории движе-
ния между опорными точками с учетом возможностей системы
ЧПУ (отрезками прямых, дугами окружностей, участками пара-
болы и т.д.); аппроксимация криволинейных участков отрезками
прямых требует назначения дополнительных опорных точек
и расчета погрешности аппроксимации;
4) обрабатывается технологическая информация (назначают-
ся режимы резания, инструменты и т.д.) и составляется техноло-
гическая карта;
5) определяются приращения координат опорных точек
в единицах длины и переводятся в число дискрет в соответствии
с разрешающей способностью системы ЧПУ; приращения коор-
динат сопровождаются знаками «+» и «—»; для дуг окружностей
дополнительно указывается направление обхода;
3.3. Системы числового программного управления
371
6) производится запись программы в текстовой форме; полу-
ченная управляющая программа наносится на перфоленту.
При интерполяции воспроизводится движение рабочего ор-
гана по заданной траектории. Участок интерполяции может быть
записан в одном или более кадрах программы. Характер интер-
полируемой линии (прямая или окружность) задается G-функ-
цией. Начальная точка каждого участка интерполяции совпадает
с конечной точкой предыдущего участка. Геометрическая ин-
формация о величине и направлении перемещения задается
в приращениях или в абсолютной системе отсчета. При линей-
ной интерполяции кадр программы включает: подготовительную
функцию G01, если она не была указана в предыдущем кадре;
параметры перемещения по координатам х, у, z-
Рассмотрим программирование участка линейной интерпо-
ляции (рис. 3.34). Координаты опорных точек (мм): xi = — 41,12,
Л = + 29,75; Х2 = 30,68, уг = — 19,68; Хз = — 49,56, у3 = — 61,35.
Для перемещения из точки А\ в точку Аз требуются два кадра.
Вычислим приращения для первого кадра: Axi = хг — xj = 71,8 мм;
АИ = У1 ~ У1 = — 49,43 мм. Для второго кадра Дх2 = хз - хз = 80,24 мм,
Дуг — Уз ~~ У2 = ~ 41,67 мм.
У, мм л
40
Рис. 3.34. Участок линейной интерполяции
372 Глава 3. Комплексные системы управления электроприводами
Количество строк в кадрах равно семи. Первая строка, сле-
дующая после признака адреса, отводится для кодирования на-
правления перемещения, а следующие шесть строк — для коди-
рования величины перемещения.
Если дискретность системы ЧПУ 8 = 0,01 мм (паспортное
значение, например, для систем ЧПУ типа НЗЗ), то параметры
перемещений в первом кадре X = + 007180, Y = - 004943, во вто-
ром X = - 008024, Y = — 004167,
При программировании круговой интерполяции все-
гда указывается плоскость обработки, а центр координат поме-
щается в центре дуги. Осями координат плоскость обработки де-
лится на квадранты I—IV.
В одном кадре может быть запрограммирована только дуга,
целиком находящаяся в каком-либо одном квадранте. Если дуга
окружности расположена в нескольких (например, в двух) квад-
рантах, то при программировании она разбивается на участки,
лежащие только в одном квадранте. Для каждого участка отво-
дится отдельный кадр программы. Плоскость обработки указы-
вается, командами G17, G18, G19 и сохраняется до тех пор, пока
не будет названа другая. Любые иные команды G не влияют на
заданную плоскость обработки. Если круговая интерполяция
осуществляется только в одной плоскости, она может быть зада-
на в начале программы.
Участок круговой интерполяции задается кадром, который
включает: 1) соответствующую G-функцию (G02 или G03), если
она не была запрограммирована перед этим; 2) параметры пере-
мещения по координатам X, Y, Z; 3) параметры круговой интер-
поляции I, J, К, которые тождественны абсолютным значениям
координат начальных точек дуг относительно центра окружности.
Скорость подачи задается словом, состоящим из адреса
F и следующих за ним четырех цифр.
Рассмотрим технологические команды: S10 (включение
шпинделя) и S20 (отключение шпинделя). При технологической
команде должно указываться значение подачи. Если технологи-
ческая команда стоит между кадрами, где программируются гео-
метрические перемещения с указанием значения подачи, то при
технологической команде должно быть задано значение подачи,
равное или меньшее записанного в следующем кадре. Например,
3.3. Системы числового программного управления
373
необходимо задать команду «Включение шпинделя». Это осуще-
ствляется следующим образом: S10F0000, т.е. здесь задана нуле-
вая подача. Конец программы программируется кодом М02.
3.3.6. УЧПУ на основе микроЭВМ
Применение микропроцессорной техники в УЧПУ позволи-
ло резко сократить число модификаций устройств, уменьшить
время их проектирования и затраты на эксплуатацию. Семейство
УЧПУ, созданных на базе микроЭВМ «Электроника 60», состоит
из нескольких модификаций: 2С42, 2Р22, 2Р32, 2С85, 2М43 и др.
Конструктивно УЧПУ этого класса выполняются в виде авто-
номной стойки (рис. 3.35) и в блочно-модульном исполнении
с выносным дисплейным блоком (рис. 3.36).
Рис. 3.35. Конструкция УЧПУ в виде автономной стойки:
1 — клавиатура; 2 — ФСУ; 3 — кассеты с перфолентой; 4 — дисплей
Модификации устройств различаются составом программного
и математического обеспечения, учитывающим особенности тех-
нологического процесса на станках различных групп, и количест-
вом управляемых координат. УЧПУ 2С85-62 предусматривает
применение следящего, а 2С85-63 — шагового электропривода.
374 Глава 3. Комплексные системы управления электроприводами
Рис. 3.36. Блочно-модульная конструкция УЧПУ:
1 — дисплей; 2 — клавиатура; 3 — корпус
УЧПУ «Электроника НЦ-31» и «Электроника НЦ80-31», вы-
полненные на основе микропроцессорной системы, имеют мо-
дульную структуру и позволяют увеличивать число управляемых
координат наращиванием модулей.
УЧПУ «Электроника НЦ-31», функциональный состав кото-
рого изображен на рис. 3.37t служит для управления станками
токарной группы со следящими приводами подач и импульсны-
ми датчиками обратной связи. Технологическое программное
обеспечение хранится в маскируемом ПЗУ на этапе изготовле-
ния. УЧПУ обеспечивает линейную и линейно-круговую интер-
поляцию.
Ввод программы выполняется с клавиатуры пульта оператора
и записью на кассету электронной памяти. В составе УЧПУ име-
ются следующие основные устройства: процессоры Пр1 и Пр2,
ОЗУ внешней памяти и АМТ образуют вычислительную часть.
Блоки КЭ, КИП, КП предназначены для связи со станком. Кро-
ме того, в составе УЧПУ имеются блок питания стабилизирован-
ный и блок кассеты внешней памяти.
Взаимодействие функциональных блоков обеспечивается ма-
гистралью МНЦ («Общая шина»). Обмен информацией осуще-
ствляется 16-разрядными словами. Такую же разрядность имеет
адрес хранения слова. Объем адресного пространства, в котором
происходит обмен по МНЦ, составляет 64К слов. Управление
процессами обмена с модулями КЭ, КИП, КП и ПО осуществ-
ляется модулем АМТ (адаптер магистрали — таймер), кото-
рый использует радиальный принцип управления. АМТ реализу-
ет преобразование магистрали МНЦ в дополнительный канал
3.3. Системы числового программного управления
375
Рис. 3.37. Функциональный состав УЧПУ «Электроника НЦ-31»
376 Глава 3. Комплексные системы управления электроприводами
и обработку временных интервалов, заданных программно на
МНЦ. В состав АМТ входят: узел интерфейса, адаптер магистра-
ли, программируемый таймер и схема управления. Адаптер маги-
страли обеспечивает радиальное управление модулями КЭ, КИП,
КП и ПО, в составе которых имеются регистры. Каждый из этих
регистров имеет фиксированный физический адрес в адресном
пространстве МНЦ и программно доступен либо по чтению,
либо по записи, либо по чтению и записи.
Модуль ОЗУ ВП предназначен для ввода-вывода и хра-
нения программы обработки деталей и поставляется как отдельное
изделие. В состав ОЗУ ВП входит кассета внешней памяти (КВП),
представляющая собой накопитель информации с автономным
источником питания (время хранения информации 100 ч).
Для приема информации от узла электроавтоматики станка
и выдачи управляющих сигналов к нему служит модуль кон-
троллера эл ектроавто,матики (КЭ), который подключа-
ется к каналу связи с процессором через АМТ.
Для передачи информации в узел электроавтоматики станка
и обратно в КЭ предусмотрены 16- разрядные регистры (входной
и выходной). Потенциальную развязку осуществляют оптронные
элементы АОТ-ПО.
Модуль контроллера измерительных преобра-
зователей (КИП) предназначен для приема информации от
измерительных преобразователей (ИП), хранения ее и считыва-
ния в процессор. КИП подключается к процессору через модуль
АМТ и обслуживает 4 ИП: по осям Хи Z, маховичка и шпинделя
станка. Тип ИП — фотоэлектрические импульсные преобразова-
тели, имеющие три выходных сигнала: основной (прямой и ин-
версный) дополнительный (сдвинут на 90°, прямой и инверсный)
и нуль-метку. Сигналы имеют форму прямоугольных импульсов
(U «0» = 0 В; U «1» = 15 В ± 10%). КИП осуществляет преобразо-
вание унитарного кода в двоичный 16-разрядный код посредст-
вом двоичных счетчиков, которые доступны процессорам Пр1
и Пр2 по чтению. По окончании чтения счетчики обнуляются.
Таким образом определяются относительные линейные переме-
щения рабочих органов станка по осям Хи Z, частота вращения
шпинделя и относительное линейное перемещение резца (по оси
Xили Z), задаваемое оператором вручную вращением маховичка.
3.3. Системы числового программного управления 377
Модуль контроллера электроприводов (КП)
предназначен для приема и хранения информации в виде 12-раз-
рядного (включая знаковый разряд) параллельного двоичного
дополнительного кода скорости подачи и преобразования его
в пропорциональный аналоговый сигнал постоянного тока от
—10 В до +10 В (дискрета 5 мВ). Время установления выходного
напряжения — не более 20 мкс. Код скорости проходит через оп-
троны и поступает в ЦАП, выходное аналоговое напряжение ко-
торого подается на электропривод подачи соответствующей ко-
ординаты.
Контрольные вопросы
1. Что понимается под программным управлением?
2. Как обозначаются СЧПУ, применяемые в металлорежущих стан-
ках?
3. Какие системы счисления и цифровые коды применяются
в СЧПУ?
4. В чем заключаются особенности двоично-десятичного кода?
5. Запишите число в двоичном коде (например, год своего рожде-
ния). Запишите это же число в восьмеричной и шеснадцатеричной си-
стемах счисления.
6. Каков состав кадра программы в коде ISO-7 bit?
7. Что определяют подготовительные функции?
8. Как программируются размерные перемещения?
9. Какой принцип используется для контроля информации в коде
ISO-7 bit?
10. Какие модули осуществляют связь УЧПУ со станком?
Глава 4
НАДЕЖНОСТЬ СИСТЕМ АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
4.1. Основные понятия и показатели надежности
Важнейшим свойством систем управления электроприво-
дами является надежность. Надежностью называется свойство
устройства выполнять необходимые функции, сохраняя в тече-
ние заданного промежутка времени значения эксплуатационных
показателей в требуемых пределах. Если все параметры устрой-
ства соответствуют требованиям документации, такое состояние
называют работоспособным, а событие, состоящее в нарушении
работоспособности, — отказам.
Отказ может наступить не только при механических или
электрических повреждениях (обрывы, короткие замыкания), но
и при нарушении регулировки, из-за «ухода» параметров элемен-
тов за допустимые пределы и т.п. Отказы отдельных элементов,
а также изменения параметров элементов могут привести к нару-
шению устойчивости САУ и ухудшению показателей качества
переходного процесса (времени установления переходного про-
цесса, установившегося значения регулируемого параметра, пе-
ререгулирования, установившейся ошибки), что также является
отказом системы.
Различают внезапные и постепенные отказы. Внезапные от-
казы возникают в результате скачкообразного изменения экс-
плуатационных параметров элемента или устройства. Они явля-
ются результатом скрытых недостатков технологии производства
или скрытых изменений параметров, накапливающихся в про-
цессе эксплуатации при ударах, вибрациях и т.д. Примеры вне-
запных отказов — обрыв провода, короткое замыкание, пробой
полупроводникового прибора. Постепенные отказы характери-
зуются постепенными, плавными изменениями во времени па-
раметров элементов или устройств, вызванными необратимыми
процессами старения, износа, а также нарушением условий регу-
лировки.
4.1. Основные понятия и показатели надежности
379
Надежность проявляется через безотказность, долговечность,
ремонтопригодность и сохраняемость.
Безотказность — свойство системы (элемента) непрерывно
сохранять работоспособность в течение некоторого времени.
Долговечность — свойство системы (элемента) сохранять ра-
ботоспособность до наступления предельного состояния с пере-
рывами для технического обслуживания и ремонтов. Предельное
состояние может устанавливаться по изменениям параметров,
условиям безопасности, экономическим показателям, необходи-
мости капитального ремонта и т.д.
Ремонтопригодность — свойство системы (элемента), заклю-
чающееся в приспособлении ее к предупреждению, обнаруже-
нию и устранению отказов путем проведения технического об-
служивания и ремонта.
Сохраняемость — свойство системы (элемента) непрерывно
сохранять исправное, работоспособное состояние в течение все-
го времени хранения.
Надежность системы управления зависит от условий экс-
плуатации, схемного и конструктивного исполнения, количества
и качества формирующих ее элементов. Надежность элементов
зависит от качества материалов, технологии изготовления и т.п.
Поскольку отказы являются случайными событиями, то для
исследования надежности применяют теорию вероятностей и ма-
тематическую статистику.
Количественные характеристики надежности — вероятность
безотказной работы, интенсивность отказов, средняя наработка
до отказа (среднее время безотказной работы) и др.
Вероятность безотказной работы P(t) — вероятность того,
что в заданном интервале времени t не возникает отказ. При ис-
пытании или эксплуатации изделий вероятность безотказной ра-
боты определяется следующей статистической оценкой:
No - »(0
No ’
где No — число изделий в начале испытаний; л(/) — число изде-
лий, вышедших из строя за время Г, t — время, для которого
определяется вероятность безотказной работы.
380 Глава 4. Надежность систем автоматизированного управления
При увеличении числа изделий No статистическая оценка ве-
роятности Р (Г) практически не меняется, т.е. P(t) = P\t).
Интенсивностью отказов называется отношение числа изде-
лий, отказавших в единицу времени, к среднему числу изделий,
продолжающих исправно работать:
W) =
л(ДГ)
NM’
где л(Д/) — число изделий, отказавших в интервале времени от
t - Ntlljuo t + АГ/2; N = (N, + NM)/2 — среднее число изделий, ис-
правно работающих в интервале Д/; Nt, Ni+l — число исправно ра-
ботающих изделий соответственно в начале и конце интервала Д/.
Типичная кривая изменения интенсивности отказов во вре-
мени представлена на рис. 4.1. На участке 0 - (участок прира-
ботки) из-за скрытых дефектов интенсивность отказов высока,
но с течением времени уменьшается. Для систем управления
длительность участка составляет десятки, а иногда сотни часов.
Уменьшить его можно за счет предварительной отбраковки и об-
катки элементов и блоков.
Рис. 4.1. Типичная зависимость интенсивности
отказов аппаратуры во времени
Участок Л — tj, (участок нормальной эксплуатации) характе-
ризуется примерным постоянством интенсивности отказов. Дли-
тельность участка — тысячи и десятки тысяч часов.
На участке t > ti в результате износа и старения интенсив-
ность отказов начинает возрастать. При достижении времени /г
дальнейшая эксплуатация системы нецелесообразна.
При постоянной интенсивности отказов = А вероятность
безотказной работы P(t) = е~и.
4.2. Методы расчета на надежность
381
Средняя наработка до отказа (среднее время безотказной ра-
боты) при постоянной интенсивности отказов Тер =1/Х.
Количественные показатели надежности используются при
формулировании требований к надежности проектируемых изде-
лий, сравнении изделий по уровню надежности, определении
"объема запасных частей, расчете сроков службы изделий и т.д.
Контрольные вопросы
1. Что такое надежность, работоспособность, безотказность, долго-
вечность, отказ?
2. Какие бывают отказы?
3. Поясните количественные характеристики надежности.
4. Как на практике определяются вероятность безотказной работы
и интенсивность отказов?
5. Как интенсивность отказов зависит от времени?
4.2. Методы расчета на надежность
4.2.1. Общие сведения
Расчет надежности предназначен для определения количест-
венных показателей надежности. Обычно определяют вероят-
ность безотказной работы устройства.
Рассмотрим методы расчета надежности, применяемые на
стадии проектирования устройств, при внезапных отказах, от-
сутствии резервирования, предположении равнонадежности всех
однотипных элементов и постоянстве интенсивностей отказов
элементов.
Надежная работа систем управления зависит от электриче-
ских режимов работы элементов, механических нагрузок и окру-
жающей среды.
Перегрузка элементов током или напряжением приводит со-
ответственно к перегреву или пробою электрической изоляции.
382 Глава 4, Надежность систем автоматизированного управления
Повышенные механические нагрузки (вибрации, удары и т.п.)
вызывают повреждения элементов, ослабление монтажных со-
единений, обрывы, нарушения регулировок и т.д.
Повышенная влажность способствует снижению сопротив-
ления изоляции, что может вызвать пробои и замыкания цепей.
Влага вызывает коррозию рабочих поверхностей контактов
и ухудшает их работу. При отрицательных температурах меняют-
ся свойства многих изоляционных материалов, происходят тре-
щины и разрывы. Действие повышенной температуры окружаю-
щей среды эквивалентно увеличению электрической нагрузки.
Влияние электрических нагрузок и температуры окружаю-
щей среды на интенсивность отказов элементов оценивается
с помощью соответствующих графиков (рис. 4.2, 4.3). Под коэф-
фициентом нагрузки Кн понимают отношение рабочего значения
нагрузки к номинальному значению. Для конденсаторов опреде-
ляющим параметром нагрузки является рабочее напряжение, для
резисторов — мощность рассеяния, для электрических двигате-
лей — рабочая мощность. Учет влияния окружающей среды на
Рис. 4.2. Зависимость интенсивности отказов конденсаторов от температуры
окружающей среды и коэффициента нагрузки
4.2. Методы расчета на надежность
383
интенсивность отказов осуществляется с помощью коэффици-
ента к = Х'/Хтабл, где Хта6л — табличное значение интенсивности
отказов. Для лабораторных условий к = 1, для производственных
помещений к = 2,5, для открытых площадок к = 10.
10
-1
10 Ч
1.0
А
0,1
0,01
0 40 80 120 °C 160
Рис. 4.3. Зависимость интенсивности отказов углеродистых резисторов
от температуры окружающей среды и коэффициента нагрузки
Исходные данные для проведения расчетов надежности по-
лучают из принципиальной электрической схемы устройства,
с помощью которой определяют типы применяемых элементов
и количество элементов каждого типа.
4.2.2. Метод расчета по среднегрупповым значениям
интенсивностей отказов
Надежность рассчитывается следующим образом:
1) по принципиальной схеме системы управления (устройст-
ва) определяют тип применяемых элементов (резисторы, кон-
денсаторы, реле, двигатели, транзисторы, диоды и т.д.), а также
виды соединений (пайки, штепсельные разъемы и т.п.);
384 Глава 4, Надежность систем автоматизированного управления
2) определяют количество элементов каждого типа и количе-
ство соединений;
3) по справочникам устанавливают интенсивность отказов эле-
ментов и соединений (как правило, в справочниках указаны макси-
мальные и минимальные значения интенсивностей отказов);
4) учитывают влияние электрических нагрузок и окружаю-
щей среды;
5) определяют вероятность P(t) и среднее время Тср безотказ-
ной работы.
Пример. Определить вероятность P(t) и среднее время Гср безотказ-
ной работы устройства, применяемого в производственном помещении,
без учета влияния электрических нагрузок и температуры окружающей
среды.
По принципиальной схеме определяем типы применяемых элемен-
тов (г — число типов элементов) и количество элементов каждого типа
(М). Исходные данные и результаты расчета целесообразно оформить
в виде табл. 4.1.
Таблица 4.1
Расчет надежности
Элемент Nr b, IO"5 «г1 Nib, КГ5 Ч-’
Xf min ^4 max А/ min MX/ max
Транзистор 10 0,4 0,5 4 5
Резистор 40 0,02 0,04 0,8 1,6
Конденсатор 40 0,02 0,04 0,8 1.6
Интегральная схема 10 0,1 1 1 10
Пайка 300 0,001 0,3
Для производственных помещений к = 2, 5.
Интенсивность отказов с учетом категорий помещений:
Xm.n =Я5 ф -1(Г5 = 17,25 -10Г5 ч'1;
Г=1
A-max =^ZMA/max = 25 - 18Д-1(Г5 = 4^25- 1(Г5 ч
Г=1
Среднее время безотказной работы:
’cpmax = 1/A-min = 1 /17,25-10’5 = 5800ч;
4.2. Методы расчета на надежность
385
Тер min = 1 /Хтах = 1 /4^25- 10’5 = 2160 Ч.
Вероятность безотказной работы рассчитывается по следующим
формулам:
п//\ _________ -17,25-10
rV/max — * “ е у
р/А ____ “krnax* _ -46,25-10 3f
* V/min — & — " j
где t — необходимое время эксплуатации устройства.
4.2.3. Коэффициентный метод расчета надежности
При коэффициентном методе расчета надежности использу-
ются не абсолютные значения X,- интенсивностей отказов эле-
ментов, а их коэффициенты надежности К,, определяемые по
соотношению
Ki = ’kij'ks,
где Хе — интенсивность отказов базового элемента. За базовый
принимается элемент, количественные характеристики надеж-
ности которого известны достоверно. Обычно в качестве базово-
го элемента выбираются резисторы, конденсаторы.
Так как предполагается, что интенсивности отказов элемен-
тов всех типов меняются при изменении условий эксплуатации
в одинаковой степени, то значение коэффициента надежности
практически одно и то же в различных эксплуатационных ус-
ловиях. Режимы работы и условия окружающей среды учиты-
ваются поправочными коэффициентами, как и в предыдущем
методе.
Показатели надежности рассчитываются следующим образом:
-Хб
Р(0 = е м
В табл. 4.2 приведены значения коэффициентов надежности
отдельных элементов.
2^3597
386 Глава 4. Надежность систем автоматизированного управления
Таблица 4.2
Значения коэффициентов надежности
Элемент
Полупроводниковый триод
Полупроводниковый диод
Реле
Электродвигатель
Разъем
К/ min
2,5
1
3,3
17
10,7
Ki max
4,0
2,5
5,5
22
15,3
Коэффициентный метод расчета надежности прост и не тре-
бует знания значений интенсивностей отказов элементов, входя-
щих в систему. Достаточно иметь сведения о коэффициентах на-
дежности элементов и знать значение интенсивности отказов
только одного базового элемента. Рассмотрим случаи, когда это
обстоятельство является определяющим.
Как правило, в каждом литературном источнике представле-
ны интенсивности отказов не всех элементов, входящих в слож-
ную систему. Поэтому приходится использовать различные ис-
точники. Анализ показывает, что интенсивности отказов одних
и тех же элементов в разных источниках могут различаться на
один-два порядка. Это объясняется тем, что авторы приводят
значения интенсивностей отказов элементов для различных ре-
жимов и условий эксплуатации, которые существенно влияют на
к,. Применение коэффициентов надежности устраняет данный
недостаток. Проверка показала, что значения коэффициентов
надежности элементов, приведенные в различных источниках,
практически одни и те же, если в качестве Хб в каждом случае ис-
пользовать интенсивность отказов базового элемента, указанную
в том же источнике.
Наиболее целесообразно применение этого метода при сравне-
нии надежности различных систем. Сравнение производится
чаще по среднему времени безотказной работы:
п
где индексы «1» и «2» обозначают номера сравниваемых систем.
4,3. Введение внутриэлементной и структурной избыточности 387
Из последнего выражения видно, что для сравнения систем
по надежности необходимо знать элементный состав систем
и коэффициенты надежности элементов. При этом не нужны ко-
личественные характеристики надежности элементов, в том чис-
ле базового,
ч.
Контрольные вопросы
1. Как влияют на надежность электрические режимы работы эле-
ментов и окружающая среда? Как это влияние учитывается при расчете
надежности?
2. Каковы особенности метода расчета надежности по среднегруп-
повым значениям интенсивностей отказов и коэффициентного метода
расчетов?
4.3. Обеспечение надежности введением
внутриэлементной и структурной избыточности
Повысить надежность системы можно применением внутри-
элементной и структурной избыточности. Используются следующие
способы введения внутриэлементной избыточности', снижение
коэффициентов электрических нагрузок; применение элементов
с более высокими показателями надежности; облегчение усло-
вий работы элементов.
Снижение коэффициента электрической нагрузки может быть
достигнуто заменой данного элемента функционально подоб-
ным, но с большим значением номинальных рабочих парамет-
ров (например, применение резистора с большей номинальной
мощностью).
Облегчение условий работы элементов в местах их установки
достигается за счет лучшей компоновки элементов в блоках, соз-'
Дания лучших условий для отвода теплоты с помощью вентиля-
ционных отверстий, принудительного охлаждения и т.д.
Структурная избыточность — это резервирование с приме-
нением дополнительных элементов структуры системы. Резерви-
рование позволяет создавать надежные системы (устройства) из
388
Литература
недостаточно надежных элементов. Но при этом усложняется
схема, увеличиваются масса, габариты, стоимость устройства,
время отыскания повреждения, затрудняется эксплуатационное
обслуживание. Поэтому к резервированию прибегают, когда не
удается обеспечить требуемую надежность другими методами.
Контрольные вопросы
1. Перечислите методы повышения надежности систем.
2. Каковы достоинства и недостатки резервирования?
Литература
Рекомендуемая
Васин В.М, Электрический привод / В.М. Васин. М.: Высш, шк., 1984.
Зимин Е.Н, Автоматическое управление электроприводами / Е.Н. Зимин,
В.И. Яковлев. М.гБысш. шк., 1979.
Москаленко В.В. Электрический привад / В.В. Москаленко. М.: Высш, шк. , 1991.
Использованная
Армейский Е.В. Автоматизированный электропривод / Е.В. Армейский,
П.А. Прокофьев, Г.Б. Фалк. М.: Высш, шк., 1987.
Башарин А.В. Управление электроприводами / А.В. Башарин, В.А. Новиков,
Г.Г. Соколовский. Л.: Энергоатомиздат, 1982.
Бут А.А. Бесконтактные электрические машины / А.А. Бут. М.: Высш, шк.,
1990.
Гжиров Р.И. Программирование обработки на станках с ЧПУ: Справочник /
Р.И. Гжиров, П.П. Серебрицкий. Л.: Машиностроение, Ленингр. отд-ние, 1990.
ГОСТ 2.709-89 (СТ СЭВ 3754-82, СТ СЭВ 6308-88).
ГОСТ 2.755-87 (СТ СЭВ 5720-86).
Гусев И.Т. Устройства числового программного управления / И.Т. Гусев,
В.Г. Елисеев, А.А. Маслов. М.: Высш, шк., 1986.
Зимин Е.Н, Электроприводы постоянного тока с вентильными преобразова-
телями/ Е.Н. Зимин, В.Л. Канцевич, С.К. Козырев. М.: Энергоатомиздат, 1981.
Ильинский Н. Ф. Общий курс электропрг
да / Н.Ф. Ильинский, В.Ф. Коза-
ченко. М.: Энергоатомиздат, 1992.
Коровин Б. Г, Системы программного управления промышленными установка-
ми и робототехническими комплексами / Б.Г. Коровин, Г.И. Прокофьев, Л.Н. Рас-
судов. Л.: Энергоатомиздат, 1990.
Литература
389
Микропроцессорные автоматические системы регулирования: Основы тео-
рии и элементы / В.В. Солодовников, В.Г. Коньков, В.А Суханов, О.В. Шевя-
ков; Под ред. В.В. Солодовникова. М.: Высш, шк., 1991.
МикроЭВМ: В 8 кн. Кн. 4. Управляющие системы «Электроника НЦ* /
Под ред. Л.Н. Преснухина. М.: Высш, шк., 1988.
Михалев Л. С. Следящие системы с бесконтактными двигателями постоянно-
го тока / АС. Михалев, В.П. Миловзоров. М.: Энергия, 1979.
Петренко Ю.Н. Системы программного управления технологическими ком-
плексами. Мн.; ПИОН, 2002.
Программное управление станками и промышленными роботами / ВЛ. Ко-
лосове кий, Ю.Г. Козырев, А.Н. Ковшов и др. М.: Высш, шк., 1989.
Робототехника и гибкие автоматизированные производства: В 9 кн. Кн. 2. При-
воды робототехнических систем / Под ред. И.М. Макарова. М.: Высш, шк., 1986.
Розман JI.Б. Устройство, наладка и эксплуатация электроприводов металло-
режущих станков / Л.Б. Розман, Б.З. Брейтер. М.: Машиностроение, 1985.
Рутковски Дж. Интегральные операционные усилители. Справочное руко-
водство: Персонал /Дж. Рутковски. М.: Мир, 1978.
Сабинин ЮЛ. Автономные дискретные электроприводы с силовыми шаговыми
двигателями / ЮА. Сабинин, В.И. Кулешов, М.М. Шмырева. Л.: Энергия, 1988.
Сен П. Тиристорные электроприводы постоянного тока / П. Сен. М.: Энер-
гоатомиздат, 1985.
Сергиевский Л.В. Пособие наладчика станков с ЧПУ / Л.В. Сергиевский,
В.В. Русланов. М.: Машиностроение, 1991.
Смирнов А.Н. Надежность устройств автоматики и телемеханики / АН. Смир-
нов. Мн.: Выш. шк., 1973.
Соколов М.М. Дискретный электропривод механизмов электротермических
установок / М.М. Соколов, В.П. Рубцов. М.: Энергоатомиздат, 1986.
Сосонкин ВЛ. Программное управление технологическим оборудованием /
В.Л. Сосонкин. М.: Машиностроение, 1991.
Терехов В.М. Элементы автоматизированного электропривода / В.М. Тере-
хов. М.: Энергоатомиздат, 1987.
Управляющие и вычислительные устройства роботизированных комплексов
на базе микроЭВМ / В.С. Медведев, Г.А. Орлов, Ю.И. Рассадкин и др.; Под ред.
В.С. Медведева. М.: Высш, шк., 1990.
Усатенко С.Т. Выполнение электрических схем по ЕСКД: Справочник /
С.Т. Усатенко, Т.К. Каченюк, М.В. Терехова. М.: Изд-во стандартов, 1989.
Фрер Ф. Введение в электронную технику регулирования / Ф. Фрер, Р. Ор-
тенбургер. М.: Энергия, 1973.
Хализев Г.П. Электрический привод / Т.П. Хализев. М.: Высш, шк., 1977.
Чернов ВЛ. Комплектные электроприводы станков с ЧПУ: Справ, пособие /
ВА. Чернов, В.П. Кузьмин. Горький: Волго-Вят. кн. изд-во, 1989.
Чиликин М.Г. Общий курс электропривода / М.Г. Чиликин, А.С. Сандлер.
М.: Энергоиздат, 1981.
Электронные промышленные устройства / В.И. Васильев, Ю.М, Гусев,
В.Н. Миронов и др. М.: Высш, шк., 1988.
Оглавление
Предисловие ..............................................3
Список принятых сокращений.............................. 5
Глава 1. Разомкнутые системы автоматизированного
управления электроприводами...................
1.1. Назначение и функции систем автоматизированного
управления электроприводами.................................9
1.2. Типовые узлы и схемы управления электроприводами.......11
1.2.1. Общие сведения.......................................
1.2.2. Классификация схем ..................................
1.2.3. Общие требования к выполнению принципиальных
электрических схем..........................................
1.2.4. Принципы автоматического управления пуском и торможением
двигателей..................................................
1.2.5. Типовые узлы и схемы автоматического управления
пуском двигателей постоянного тока..........................
1.2.6. Типовые узлы схем управления торможением двигателей
постоянного тока............................................
1.2.7. Управление возбуждением электродвигателей постоянного тока . . 24
12
13
14
15
22
25
Типовые узлы и схемы управления электроприводами
с асинхронными двигателями........................
1.3.1. Управление асинхронными электродвигателями
с короткозамкнутым ротором.................................25
1.3.2. Узлы схем управления торможением асинхронных двигателей .... 29'
1.3.3. Типовые схемы управления асинхронными двигателями
с фазным ротором...........................................32
1.4. Типовые узлы и схемы управления электроприводами
с синхронными двигателями................................ 38
1.4.1. Управление синхронными двигателями....................
1.4.2. Схема прямого пуска синхронного двигателя
напряжением до 1000 В..................................
1.4.3. Защита в схемах управления электроприводом............
1.4.4. Тиристорное управление асинхронным
двигателем с короткозамкнутым ротором
38
42
43
47
Оглавление
391
1.5. Логические приемы составления и анализа
релейно-контакторных и бесконтактных схем........................50
1.5.1. Синтез систем автоматического управления на
контактных и бесконтактных элементах........................50
1.5.2. Проектирование бесконтактных схем управления
на основе релейно-контакторных схем.........................59
Глава 2. Замкнутые системы управления электроприводами..64
2.1. Элементы и устройства замкнутых систем управления
электроприводами.......................................64
2.1.1. Классификация элементов АЭП...........................64
2.1.2. Регуляторы......................................... 65
2.1.3. Датчики координат АЭП.................................71
2.1.4. Задающие элементы.....................................88
Системы импульсно-фазового управления
90
2.2.1. Принципы управлениятиристорами..........................90
2.2.2. Основные узлы систем управления тиристорными
преобразователями..............................................93
2.3. Построение систем подчиненного регулирования
в электроприводе постоянного тока............................96
2.3.1. Основные схемы нереверсивных вентильных электроприводов ... 96
2.3.2. Статические характеристики вентильного электропривода
в режиме непрерывного и прерывистого тока.......................
2.3.3. Реверсивный вентильный электропривод
с совместным и раздельным управлением...........................
2.3.4. Реверсивный вентильный электропривод с реверсом
по цепи якоря, по цепи возбуждения..............................
2с3.5. Системы с двухзонным регулированием скорости.............
2.3.6. Системы «импульсный преобразователь — двигатель
4 постоянного тока».............................................
2.3.7. Математическое описание двигателя постоянного тока
независимого возбуждения при управлении по якорной цепи....
2.3.8. Вентильный преобразователь как звено системы
автоматического управления......................................
2.3.9. Структура, принципы построения и функции замкнутых
систем управления электроприводом...............................
Построение систем подчиненного регулирования
электропривода с управляемым вентильным преобразователем . . .
Основные схемы управления и их характеристики............
Расчет и выбор элементов систем подчиненного
регулирования............................................
2.3.10.
97
106
111
113
116
122
124
125
126
127
129
392
Оглавление
2.4. Электроприводы с асинхронными двигателями..........134
2.4.1. Основные соотношения и способы управления асинхронным
двигателем.................;..................................
2.4.2. Регулирование скорости вращения асинхронных двигателей
путем изменения напряжения.............................. .
2.4.3. Импульсное регулирование скорости асинхронного двигателя . . .
2.4.4. Частотное регулирование скорости асинхронного двигателя.
2.4.5. Преобразователи частоты для частотного электропривода...
2.4.6. Замкнутые системы частотного электропривода.............
2.4.7. Комплектные электроприводы с частотным управлением......
2.4.8. Асинхронные электроприводы с векторным управлением......
134
141
148
152
156
173
177
184
2.5. Дискретные электроприводы с шаговыми двигателями......195
2.5.1. Принцип работы и способы коммутации шаговых двигателей. ... 195
2.5.2. Особенности конструкций шаговых двигателей.............201
2.5.3. Линейные шаговые двигатели.......... ..................207
2.5.4. Режимы работы и характеристики шаговых двигателей......209
2.5.5. Функциональная схема шагового электропривода...........218
2.6. Электроприводы с вентильными двигателями...........223
2.6.1. Устройство и принцип действия вентильных двигателей...
2.6.2. Характеристики вентильных двигателей.........-........
2.6.3. Датчики положения ротора..............................
2.6.4. Электропривод с вентильным двигателем и тиристорным
коммутатором.............................................
2.6.5. Дешифратор для вентильного двигателя...................
2.6.6. Электропривод с вентильным двигателем и транзисторным
коммутатором......................................
2.6.7. Комплектные электроприводы с вентильными двигателями
223
232
236
*
239
242
245
247
2.7. Электроприводы систем управления положением. . ...256
2.7.1. Типы систем управления положением...................256
2.7.2. Структуры и режимы работы систем управления положением. . . . 259
2.7.3. Ограничения переменных в системах управления положением. . . 265
2.7.4. Функциональные схемы систем управления положением....269
Глава 3. Комплексные автоматизированные системы
управления электроприводами......................... 273
3.1. Устройства ЭВМ для управления электроприводами.......273
3.1.1. Основные термины...................................
3.1.2. Основные определения микропроцессорных средств.....
3.1.3. Память микропроцессорных систем....................
3.1.4. Функциональные схемы электроприводов с микропроцессорным
управлением...............................................
273
277
280
289
Оглавление
393
3.1.5. Цифг
вая СИФУ..........................
3.1.6. Модуль управления электроприводом на базе одноплатной
микроЭВМ «Электроника МС 1201.01».......................
292
295
3.2. Цикловое программное управление электроприводами.....299
3.2.1. Функциональный состав цикловых систем
программного управления....................................299
3.2.2. Способы формализации работы электроприводов
технологического оборудования..............................303
3.2.3. Основные свойства и состав программируемых контроллеров. ... 310
3.2.4. Система команд ПК....................................315
3.2.5. Язык релейно-контактных символов.....................320
3.2.6. Составление рабочей программы пользователя...........323
3.2.7. Программируемый контроллер КА1.......................326
3.2.8. Программируемый контроллер «МикроДАТ»................330
3.3. Системы числового программного управления...........340
3.3.1. Понятие о программном управлении....................
3.3.2. Кодирование информации и цифровые коды..............
3.3.3. Международный двоично-десятичный код ISO-7 bit......
3.3.4. Контроль информации в коде ISO-7 bit................
грамм ..................
3.3.6. УЧПУ на основе микроЭВМ....................
340
346
356
366
369
373
Глава 4. Надежность систем автоматизированного
управления электроприводами.................................378
4.1. Основные понятия и показатели надежности...............378
4.2. Методы расчета на надежность...........................381
4.2.1. Общие сведения...................................381
4.2.2. Метод расчета по среднегрупповым значениям
интенсивностей отказов................................ 383
4.2.3. Коэффициентный метод расчета надежности..........385
4.3. Обеспечение надежности введением внутриэлементной
и структурной избыточности..................................387
Литература..................................................388
Учебное издание
Гульков Геннадий Игнатьевич
Петренко Юрий Николаевич
Раткевич Евгений Петрович
Симоненкова Оксана Львовна
Системы автоматизированного
управления электроприводами
Учебное пособие
Ведущий редактор Л.А. Крупич
Редактор Е.В. Морозова
Художник обложки С.В. Ковалевский
Компьютерная верстка Д.М. Вербалович
Корректор Л. К. Мисуно
Подписано в печать с готовых диапозитивов 10.11.2006.
Формат 60x84 1/|6. Бумага газетная. Гарнитура Ньютон.
Печать офсетная. Усл. печ. л. 23,25. Уч.-изд. л. 20,52.
Тираж 2010 экз. Заказ №3597.
Общество с ограниченной ответственностью «Новое знание».
ЛИ № 02330/0133439 от 30.04.2004. Минск, пр. Пушкина, д. 15, ком. 16.
Почтовый адрес: 220050, Минск, а/я 79.
Телефон/факс: (10-375-17) 211-50-38. E-mail: nk@wnk.biz
В Москве:
Москва, Колодезный пер., д. 2а.
Телефон (495) 234-58-53. E-mail: ru@wnk.biz
http://wnk.biz
ГУП РК «Республиканская типография им. П.Ф. Анохина».
185005, г. Петрозаводск, ул. Правды, 4.
“НОВОЕ ЗНАНИЕ
ИЗДАТЕЛЬСТВО
-- --_ .._- . -С_< •_L. . . . . ___
Серия "Техническое образование
Основана в 2005 году
* Безопасность производственных
Процессов на предприятиях
машиностроения
Под ред. Г.А. Харламова
Учебник
• Гидротехнические сооружения
М.В. Нестеров
Учебное пособие
• Механика.
Пособие к решению задач
В.П. Соколовская
Учебное пособие
• Обработка деталей на станках
с ЧПУ
Е.Э. Фельдштейн, М.А. Корниевич
Учебное пособие
* Организация и оперативное
управление машиностроительным
производством
Н.С. Сачко
Учебник
• Прикладная механика
В.М. Сурин
Учебное пособие
• Проектирование жилых
41 общественных зданий
В.М. Прасол
Учебное пособие
• Проектирование нестандартного
оборудования
А.Г. Схиртладзе, С.Г. Ярушин
Учебник
• Проектирование технологических
процессов сборки машин
Под обш. ред. А.А. Жолобова
Учебник
• Радиоприемные устройства
А.Г. Онишук, И.И. Забеньков,
А.М. Амелин
Учебное пособие
* Строительные материалы
Ю.И. Киреева
Учебное пособие
• Теория резания
П.И. Яшерииын, Е.Э. Фельдштейн,
М.А. Корниевич
Учебник
• Технология изготовления песчано-
смоляных стержней и форм
Под обш. ред. Д.А. Кудина
Научное издание
* Технология конструкционных
материалов
Под обш. ред. О.С. Комарова
Учебник
* Технология сельскохозяйственного
машиностроения
Под обш. ред. А.М. Кожуро
Учебное пособие
* Технология строительного
производства.
Лабораторный практикум
С.Н. Леонович, И.Н. Громов,
И.В. Коваль, А.М. Парфенова
Учебное пособие
* Формообразующие инструменты
в машиностроении
А.Г. Схиртладзе, А.А. Чупина,
А.И. Пульбере, В.А. Гречишников
Учебное пособие
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211 -50-38, e-mail: nk@wnk.biz
ИЗДАТЕЛЬСТВО
“НОВОЕ ЗНАНИЕ”
1
Радиоприемные
устройства
Г. Онищук, И.И. Забеньков, А.М. Амелин
Учебное пособие
Серия ‘Техническое образование"
240 с., с ил.
ISBN 985-475-175-9
Изложены основы теории радиоприемных устройств. Рассмотрены
задачи, принципы, методы и критерии качества радиоприема. Приведены
типовые структурные схемы приемников и принципиальные электрические
схемы их основных элементов (усилителей радиосигналов,' преобра-
зователей частоты, корреляторов, детекторов, согласующих устройств,
устройств автоматической регулировки усиления и подстройки частоты).
Обобщен опыт исследования отечественных и зарубежных авторов в области
теории и техники радиоприема.
Для студентов, аспирантов и магистрантов радиотехнических и теле-
коммуникационных специальностей высших учебных заведений, а также
инженеров — разработчиков радиотехнических систем и устройств. Может
быть полезно студентам колледжей и учащимся средних специальных
учебных заведений.
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211 -50-38, e-mail: nk@wnk.biz
httn://wnk.biz
ИЗДАТЕЛЬСТВО
^^чТоВО^НАНИГ*
Прикладная механика
2-е издание
В.М. Сурин
Учебное пособие
Серия "Техническое образование"
388 с., с ил.
ISBN 985-475-192-9
Изложены основы теории, методы расчета и проектирования механизмов
автоматических систем, приборов, вычислительных средств и роботов. Рассмотрены
общие вопросы структуры, кинематики и динамики механизмов, а также их типовые
соединения, детали и узлы. Даны основы расчетов деталей и механических систем на
точность, а также деталей на прочность и жесткость. Подробно описаны геометри-
ческий, точностный и прочностный расчеты передаточных механизмов.
Качественные иллюстрации значительно облегчают усвоение материала.
Для студентов немашиностроительных специальностей высших учебных заведе-
ний. Может быть полезно для учащихся средних специальных учебных заведений.
Механика. Пособие к решению задач
В.П. Соколовская
Учебное пособие. Серия Техническое образование". 320 с., с ил.
ISBN 985-475-176-7
Даны задания по основным разделам курса «Механика». Реализован
комплексный подход к изучению таких взаимосвязанных дисциплин, как "Теоре-
тическая механика", "Сопротивление материалов" и "Детали машин". Представлена вся
последовательность инженерных расчетов, устанавливается связь между основными
понятиями механики и конкретными инженерными решениями. Каждая глава вклю-
чает основные теоретические сведения, задачи с решениями и ответами, вопросы для
самоконтроля, образцы выполнения и оформления заданий.
Для студентов высших технических учебных заведений. Может быть полезно для
учащихся машиностроительных и технологических специальностей средних специ-
альных учебных заведений.
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211-50-38, e-mail: nk@wnk.biz
http://wnk.biz
ИЗДАТЕЛЬСТВО
ЗНАНИЕ ”
Высшая математика
для инженеров.
Экспресс-курс. I семестр
И.В. Белько, К.К. Кузьмич, Р.М. Жевняк
Учебное пособие. 164 с.
ISBN 5-94735-086-6
экспресс-курс
ВЫСШАЯ
МАТЕМАТИКА
для инженеров
I
семестр
ФЖЛ**<1**Х’3**3*
.....
Экспресс-курс разбит на две части соответственно семестрам и содержит
необходимый минимум для сдачи экзамена. Наглядность в организации материала,
удачно подобранные примеры позволяют эффективно и в сжатые сроки
самостоятельно усвоить и повторить программу курса. Первая часть курса включает
разделы “Линейная алгебра*, "Аналитическая геометрия", "Дифференциальное
исчисление", "Функции многих переменных*.
Для студентов инженерно-технических специальностей вузов.
Высшая математика
для инженеров.
Экспресс-курс. II семестр
И.В. Белько, К.К. Кузьмич, Р.М. Жевняк
Учебное пособие. 164 с.
ISBN 5-94735-086-6
экспресс-курс
ш ВЫСШАЯ
МАТЕМАТИКА
инженеров
ц
семестр
JfkJ -OV**
ДЧИчг.-Л’Л J >.>’.>, _v. |-ъ.Л Йа х? Г -•; >
Вторая часть курса включает разделы "Интегральное исчисление", "Дифферен-
циальные уравнения", "Ряды", "Функции комплексной переменной" и "Операционное
исчисление".
Для студентов инженерно-технических специальностей вузов.
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211 -50-38, e-mail: nk@wnk.biz
И
И
://wnk.biz
ИЗДАТЕЛЬСТВО
'НОВОЕ ЗНАНИЕ”
_• ш- -• V - —• •
http://wnk.biz
— сайт издательства "Новое знание"
Для получения полной информации о наших
изданиях предлагаем вам посетить
сайт издательства.
Книжное ель£1 но ''Минче ^нан^е,т. - Microsoft Internet Explorer
j Файл Of>*ra Вид И5бранное С8₽«»к £правка
httpV/wr^biz/
£ НОВОЕ ЗНАНИЕ
Г гютнау к Книги |
-................м”’ ...... v.^y.лУ/чЗ?1
О нас
Авторам
.♦.•WAM.’Af
Естественны* науки (17)
Медицина (14)
Компьютерная
литература (39)
Общественные и --
гуманитарные науки (31)
Туризм(6)
Экономике н(жзнвс(64) ;
Юриспруденция (6)
Языкознание (14)
Литература для школьников \
и абитуриентов (53)
Техническая ./
I литература (1^)
Сельское хозяйство (2)
03.06.2006 Вышли в свит новые книги
РФ)
О.А. Кдермцд, 2006. 491 стр.
Допущено Минюста pert ом обрахоеянмя и
науки Российском Федерации в качает*!
учебного пособия для студенте*
экономических специальностей
учреждений/ обеспачияеющих получение
внеш его обрезывания.
Допущено мимисте рАвем о брея ее дни я
Республики Беларусь * качестве учебного
пособия для студенте» акономнческик
специальностей учреждений*. обеспемйяемщнх получение
высшего рбраэОьанмя-
Купить в Беларуси
Купить п СНГ
Наши к у ординаты
Отправить сообщение
Оставить отзыв
-------- FJJ "у ' I IJ I । II IJ 11 ’ *ч' F 4 I Т V» ••
Ш!И«?ЛЙИ.в«
А.П. Дурович. Истое
энание, 2005.“ 632 с
^хши^^аамияес.кимлн.вйий
Г<А. Шмарло*ске*« 2006. 340 стр.
Наложены жономич+скне мгл<ды, учения,
идеи .от , античности до наши х дней.
ИВйЙйЙМйУЕ
На сайте представлены аннотации изданий,
содержание, цена
и сроки выхода.
hitp:/7itfiik«biz
Вы можете оставить отзыв
по интересующим вас книгам,
отправить сообщение редакции.
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211 -50-38, e-mail: nk@wnk.biz
ИЗДАТЕЛЬСТВО |~Ч НОВОЕ ЗНАНИЕ
Владивосток
Волгоград
Воронеж
Екатеринбург
Киев
Киев
Киев
Москва
Москва
Москва
Москва
Москва
Москва
Москва
Новосибирск
Пермь
Салехард
Санкт-Петербург
Санкт-Петербург
Санкт-Петербург
Уфа
Якутск
Наши партнеры
Книжный червь
Учебная и деловая книга
Книжный мир семьи
Дом книги
Абзац
Библион
МАУП
Вагант-П
КноРус
Омега-Л
ЦКБ "Бибком*
ЦУПЛ
Юристъ-Гардарика
Юрайт-книга
Топ-книга
ИП Сергеев А.В.
Ямал книга
Буквоед
Лань-Трейд
ТехИнформ
Азия
Книжный маркет
(4232) 36-08-74,35-15-73
(8442) 76-06-06,73-48-37
(4732) 21-60-54,470-081
(343) 358-12-00,358-18-98
(+380-44) 238-82-65
(+380-44) 490-95-17
(+380-44) 490-95-17,490-95-18
(495) 221-05-39
(495) 680-02-07, 680-12-78
(495) 258-08-38
(495) 995-95-77
(495) 788-50-30, 504-14-44
(495) 363-06-34, 363-06-35
(495) 744-00-12,165-46-62
(3833)36-10-26,36-10-27
(3422) 428-116,423-565
(34922) 4-62-17, 4-60-29
(812) 346-53-27 (+208)
(812) 567-85-82,567-85-91
(812)567-70-26, 567-70-25
(3472) 50-39-00, 51-85-44
(4112) 42-89-60, 42-66-29
Книжные магазины в Москве
Библио-Глобус
Библиосфера
Букбери
Дом мед. книги
Дом техн, книги
Медведково
МДК
Молодая гвардия
Москва
Партнер Ай Ди
Пресбург
Школьник
ул. Мясницкая, 6/3, стр.5
ул. Марксистская, 9
Химки, 8-й мкр-н, ТРЦ "Мега’
Комсомольский пр., 25
Ленинский пр.,40
Заревый пр-д.12
ул. Новый Арбат, 8
ул. Большая Полянка, 28, стр.1
ул. Тверская, 8, стр. 1
Старопетровский пр.,7А
ул. Ладожская, 8, стр. 1
Б.Каменщики,6,стр.1а
(495) 925-24-57, 781-19-00
(495) 270-54-20, 270-54-21
(495) 789-65-02,221-31-42
(495) 245-39-33
(495) 137-60-38
(495) 478-48-97,473-00-23
(495) 291-78-32
(495) 238-50-92,238-00-32
(495) 629-73-55,797-87-18
(495) 733-97-80,733-91 -68
(495) 261-07-02, 221-80-33
(495) 912-12-04,912-45-76
Интернет-магазины
www.setbook.ru
www.ozon.ruwww.books.ruwww.colibri.ruwww.mvbook.ru
Наши координаты:
в Москве: (495) 234-58-53, e-mail: ru@wnk.biz
в Минске: (+375-17) 211-50-38, e-mail: nk@wnk.biz