/



































































Text
"ДО"КПР"ВиП-( SXI-Z СI -Н [ Ц ], К[ Ц], X1 [ I ] ); sy. .г1ХУ1-Е(1“Н[ц],к[ц],хц1]кУ11 iJ):sxibjmc
ОБЪЕКТИВНЫЙ КОНТРОЛЬ точности САМОЛЕТОВОЖДЕНИЯ
..i=axii2;№KLuj-HCu]+i;A“(NxSiixyi-sxixsy' I-SXI кА )/N; ГАт[Ц]»(А BS(A )х 57 ]”ВыЦп*ТРАФ‘,2,Х ,У; "BUBO-“ПРОГ i РАД- ];"ВаВ0""ЗНАЧ"ГА1)МА[В
AxXlL IJ+B; 0Ш-2[ 1]-У 1[ I ];
ЕСЛИ”Б<1
- ХОРОШ)]));
яч-гдлгтдо-нг
УКЛОНЕНИЕ НА ];' HOPMLoj’TO’CKtBO"" Н("ЪСЛИ"Б>НОРМ[3]"Т 10Ри[1]”Т0и("ЕСЛГЗ>
^'[ОЦЕНКА - У zЛ1ЕТВ0РИТЕЛЬН0])"ШЧЕ”(0 eFB)x(-l) ;Н0РМ[7>5,3,2,0 ,-Л]=б,23,31,37;Х1[37>1,2,3,4,5,6,7,8,9,4
0ТР0";"ДДЯ”1=
ВиВО"1УГОД до
от)) ;b-abs(z[ i]); -для-i-,; > ABS(Z[ I ] ) ) ;"B(uBO”"uPQi <ДОВ=ГАА!а[1>ГА.^Л!
3UBO""I1POB",L ~СТР");"Вы^а
i(TNl"BulJ
Г. Ф. МОЛОКАНОВ Профессор, доктор технических наук
ОБЪЕКТИВНЫЙ КОНТРОЛЬ ТОЧНОСТИ САМОЛЕТОВОЖДЕНИЯ
Ордена Трудового Красного Знамени ВОЕННОЕ ИЗДАТЕЛЬСТВО МИНИСТЕРСТВА ОБОРОНЫ СССР МОСКВА 1980
М
ББК 39.57
М75
УДК 358.4(24)
31808—028 „
068(02)—80 87-80-3806000000.
(g) Воениздат, 1980
ВВЕДЕНИЕ
Экипаж любого аппарата, будь то в воздухе, на суше, на воде или под водой, решает самые различные задачи: исследовательские, народнохозяйственные, военные и т. д. Успех выполнения этих задач во многом зависит от четкой организации движения аппарата. Наземный транспорт, как правило, привязан к дорожной сети, для морских и воздушных судов маршруты (трассы) указываются на картах, экипажи с помощью навигационных приборов обеспечивают соблюдение графика и безопасность движения по ним.
Движение будет организованным (а в военных целях — это согласованность боевых действий с различными родами войск, гарантирующая максимальную боевую эффективность их совместных усилий) только в том случае, если экипаж следует по указанному маршруту, а органы управления в любой момент знают местонахождение аппарата и точное время прибытия его к месту назначения.
Наиболее трудно организовать движение в воздушном пространстве, в котором перемещение летательных аппаратов (ЛА) осуществляется в трех измерениях, сочень большими скоростями и часто ночью, в облаках.
В этих условиях особенно важно установить непрерывный контроль за фактическим перемещением ЛА, их взаимным положением, чтобы в нужный момент оказать помощь экипажу, терпящему бедствие, а также анализировать закономерности, характеризующие особенности перемещения ЛА. Для этого с помощью соответствующей бортовой или наземной аппаратуры можно непрерывно записывать фактическую траекторию полета ЛА для ее последующего анализа. Такую аппаратуру называют средством контроля, а сам процесс записи и ее обработай — объективным контролем за полетом ЛА.
Результатом объективного контроля за полетом ЛА являются записанные автоматически или полученные после дополнительной обработки данные о линии фактического пути, высоте, скорости полета и некоторых других параметрах, которые помогают объективно оценить работу экипажа в воздухе.
Методика обработки результатов объективного контроля, анализ полученных данных в интересах повышения точности самолетовождения, а также, что особенно важно при организации социалистического соревнования, рекомендации руководящему звену авиационных подразделений, по долгу службы обязанному организовывать объективный контроль за полетами экипажей, и составляют основное содержание книги.
Глава I посвящена краткой характеристике заданных траекторий
1* Г. Ф. Молоканов
полета, особенностью которых является постоянное возрастание в них доли криволинейных участков. Дано строгое математическое определение способа сравнения траекторий, основанного на известном в математике определении расстояния между двумя кривыми. Раскрыта физическая сущность основных показателей точнбсти и надежности вождения ЛА по заданной траектории и в пределах отведенной поло с ы маршрута (трассы). Этот же способ использован для контроля точности и надежности выхода ЛА на цель в назначенное время, выдерживания заданных высоты и скорости полета.
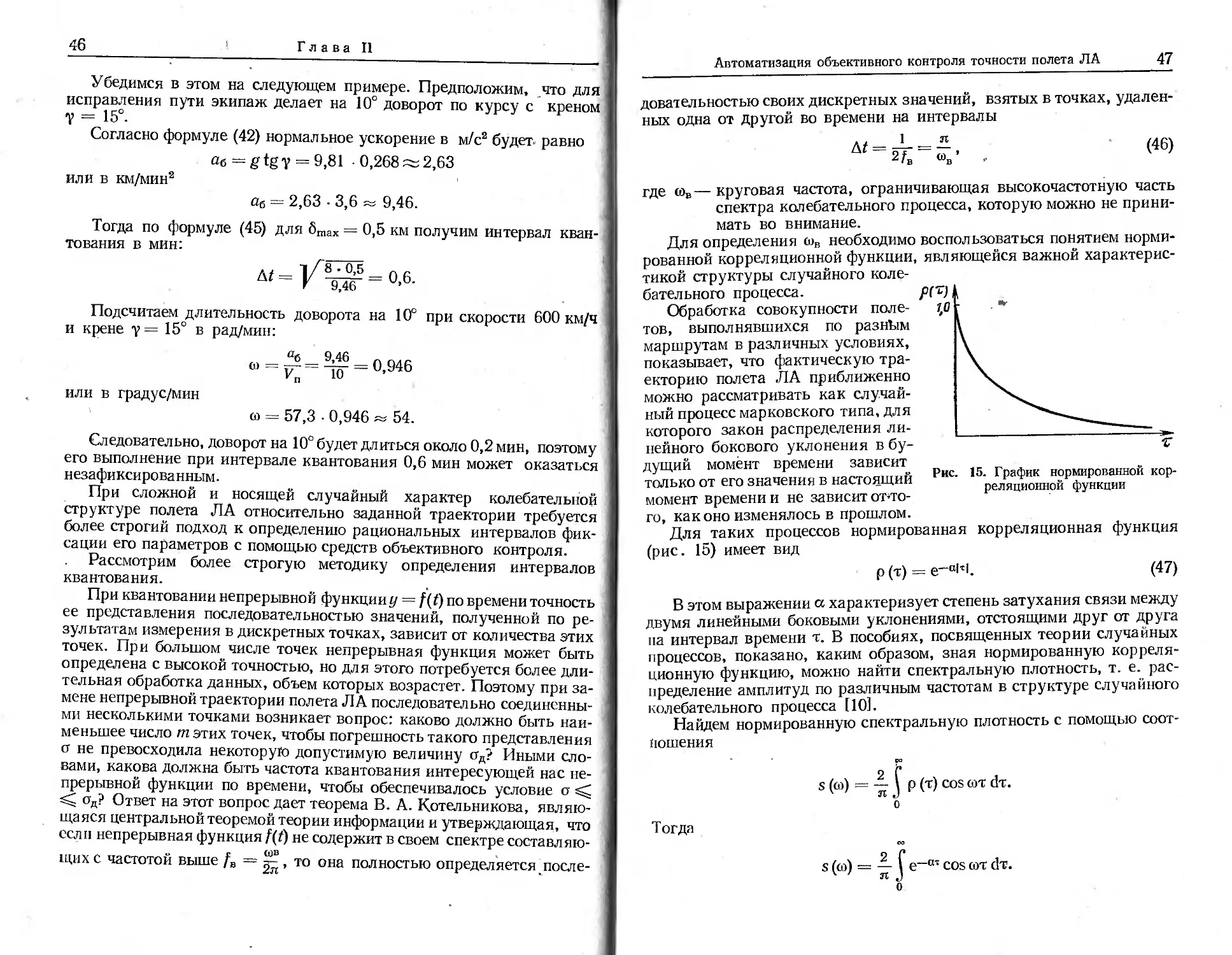
В главе II дано теоретическое обоснование алгоритмов для автоматической обработки результатов объективного контроля по способу наименьших квадратов, а также изложены требования к рациональной частоте фиксации параметров, регистрируемых с помощью технических средств. Анализ базируется на корреляционной теории случайных процессов (нормированная корреляционная функция, ее производные, спектральная плотность и др.), но расчеты доведены до простых конечных формул и раскрыта их физическая сущность.
В главе III приведена методика обработки результатов объективного контроля за полетом ЛА по заданному маршруту, назначение которой заключается в том, чтобы пояснить смысл полного и глубокого анализа выполненного полета и показать возможность автоматической обработки его результатов. Методика основывается на количественной оценке числа выбросов случайного процесса и их длительности. Однако с достаточной для практического применения точностью можно использовать более простой путь обработки результатов объективного контроля, заключающийся в введении среднего интервала времени, через который ЛА, периодически отклоняясь от маршрута, пересекает заданную траекторию полета. Объясняется физическая сущность конечных формульных зависимостей.
В главе IV изложена методика рациональной обработки результатов контроля точности самолетовождения с помощью двух типов наиболее распространенных электронно-вычислительных машин: малой ЭВМ МИР-2 и большой ЭВМ ЕС-1030, выдающих конечные результаты в удобной форме, и дан анализ выполненных расчетов*.
Имея обработанные результаты объективного контроля, можно тщательно проанализировать качество выполненного полета, объективно оценить работу экипажа в воздухе, уровень его подготовки, вскрыть допущенные ошибки и наметить пути их предупреждения. Нужно отчетливо знать характер основных погрешностей вождения ЛА по заданным маршрутам и методику их анализа.
Для сокращения времени на статистическую обработку совокупности полетов следует широко использовать электронно-вычислительную технику. Если для каждого полета указать условия, в которых он выполнялся (тип ЛА, высоту, метеорологическую
* Примеры обработки результатов объективного контроля точности самолетовождения выполнены на ЭВМ МИР-2 и ЕС-1030 в ВВА им. Ю. А. Гагарина.
обстановку, летную классификацию экипажа и т. д.), то сама ЭВМ по заданному признаку может автоматически формировать массивы данных для последующей их обработки. Это поможет найти зависимость точности самолетовождения от условий полета, уровня подготовки экипажа, типа ЛА и т. д.
Детальный разбор качества каждого выполненного полета должен по мере накопления статистических данных дополняться анализом их совокупности, что позволит выявить новые важные закономерности, характеризующие рост мастерства летного состава, его воздушной выучки, вскрыть дополнительные резервы повышения ее качества, эффективности и безопасности полетов. ’
Полное понимание методики обработки результатов объективного контроля необходимо также и для правилыТЬго выбора тех средств, с помощью которых можно получить нужные характеристики точности вождения ЛА, способствующие наиболее качественному анализу предстоящего полета.
Автор считает своим долгом выразить признательность главному штурману ВВС заслужённому военному штурману СССР генерал-лейтенанту авиации В. П. Буланову и профессору В. Г. Тарасову за ценные критические замечания, которые были учтены при доработке рукописи.
ГЛАВА I ОСНОВНЫЕ ТРЕБОВАНИЯ И ПОКАЗАТЕЛИ ТОЧНОСТИ ВОЖДЕНИЯ ЛА
§ 1. Тактические требования
Современный бой представляет собой организованную вооруженную борьбу подразделений, частей и соединений воюющих сторон. Появление ядерного оружия, ракет, оснащение войск большим количеством бронированных боевых машин и танков, средствами противовоздушной обороны и электронной техникой способствовали тому, что современный бой усложнился. Он может вестись на земле, в воздухе и на море с участием различных родов войск.
Основными чертами современного боя являются маневренность, динамичность, быстрые и резкие изменения обстановки, неравномерность развития по фронту и в глубину, разнообразие способов его ведения. Решающую роль в достижении успеха в таком бою играют тесное взаимодействие сил и средств, согласованность по месту и времени действий войск на суше, в воздухе и на море, их высокая орга^ низованность и дисциплина, умелое применение средств поражения и маневрирование ими.
Основой тесного взаимодействия авиации с другими видами вооруженных сил и родами войск является точное нанесение ударов по заданным объектам (целям) в назначенное время. Это требует тщательного расчета и соблюдения каждой группой ЛА времени взлета, построения боевых порядков, следования по заданным траекториям к объектам удара, десантирования или разведки и своевременного возвращения на аэродромы посадки.
По мере развития средств противовоздушной обороны противника повышается степень прикрытия им войск и объектов. Это выражается в повышении точности обстрела воздушных целей, многослой-ности огня и в увеличении дальности пуска ракет. Уменьшаются необстреливаемые зоны и усложняется их конфигурация.
Чтобы проникнуть к объекту, расположенному в тылу противника, экипаж ЛА, используя внезапность и умело маневрируя, должен преодолеть противодействие малокалиберной зенитной артиллерии (МЗА), венитных управляемых ракет (ЗУР), истребительной авиации и т. д. Следовательно, необходимо выбрать наилучшую траекторию полета до объекта и обратно. Выбор такой траектории обусловлен главным образом тактической обстановкой, и в первую очередь расположением средств ПВО на пути к объекту противника.
Кроме того, на выбор траектории влияют условия полета: облачность, азимут и высота Солнца над горизонтом, задымленность и запыленность воздуха, надежность ориентировки, наличие ориентиров коррекции, очагов пожара, радиоактивной облачности и т. д.
Облачность, задымленность атмосферы ухудшают видимость ориентиров и самого объекта, затрудняют экипажу выход на него. Выбирая траекторию полета, рекомендуется выполнять заход на объект со стороны Солнца. При этом практически исключается возможность1 пуска по ЛА зенитных ракет с инфракрасной головкой самонаведения (чувствительный элемент, реагируя на тепловое излучение, вместо воздушной цели может захватить Солнце). По этой же причине усложняется обстрел воздушных целей, пролетающих вблизи очагов пожаров.
Большую роль при выборе траектории полета, способов маневрирования и особенно высоты полета играют уровень тактической и воздушной выучки летного состава, степень освоения им техники пилотирования и самолетовождения. Умение максимально использовать большие возможности прицельно-навигационного комплекса, полное овладение богатейшим арсеналом тактических приемов, а также знание слабых сторон различных средств ПВО противника позволяют выбрать наилучший в данной конкретной обстановке тактический прием.
Однако мало разработать оптимальный тактический прием и выбрать наилучшую траекторию полета. Для успешного выполнения поставленной боевой задачи нужно точно провести ЛА по выбранной траектории.
Расчеты показывают, что запаздывание с началом маневра на несколько секунд, неточное выдерживание элементов маневра (крена, скорости, угла отворота и т. д.), небольшое уклонение от маршрута или невыдерживание намеченного профиля полета существенно увеличивают возможность обнаружения и обстрела ЛА средствами ПВО противника. Кроме того, невыдерживание маршрута, высоты и времени пролета заданных пунктов осложняет оценку воздушной обстановки руководящим составом.
Поэтому экипажи должны уметь выполнять полет точно по выбранной траектории, строго выдерживать все элементы намеченного маневра по месту и времени, а если тактическая обстановка изменилась, вносить коррективы в воздухе. Этому экипажи должны обучаться в каждом полете. Все тренировочные полеты должны насыщаться элементами динамичной тактической обстановки и оцениваться по установленной системе нормативов. Эта система позволяет выделять главный показатель, по которому определяется общая оценка, или производить оценку действий экипажа за отдельные элементы полета. При этом нормативы могут использоваться независимо один от другого и комплексно. Высокую оценку экипажу можно ставить только при условии успешного решения основной задачи, которая определяется главным показателем.
Предположим, что решением старшего начальника в качестве главного показателя для выставления общей оценки за полет назначен норматив, определяющий уровень тактической выучки экипажа, в частности его умение преодолевать систему ПВО противника. В этом случае, если ЛА уклонился от маршрута и «сбит», то при определении
общей оценки за выполненный полет нет оснований руководствоваться нормативами для оценки точности самолетовождения.
Другим примером, когда среди нормативов выделяется главный, является оценка точности полета по маршруту (второстепенный показатель) и выхода на цель (главный показатель). Так, при полете на предельно малой высоте можно перед выходом на цель следовать по маршруту с небольшим уклонением, не превышающим норматив на оценку «хорошо», и проскочить цель, не обеспечив выхода на нее. В этом случае нет оснований выставлять экипажу положительную Оценку по самолетовождению, так как главная задача (выход на цель с ходу) оказалась нерешенной.
Точный выход на цель еще не означает, что она будет поражена. Существует отдельный норматив для оценки боевого применения средств поражения. Нормативы, характеризующие точность выхода на цель и меткость ее поражения, могут рассматриваться как независимые. В этом случае экипажу выставляются две оценки, дающие представление о том, ка к в данном полете решена задача самолетовождения и как решена задача применения средств поражения. Оценка по различным элементам позволяет Выявить слабые стороны в подготовке экипажа, наметить конкретные меры для повышения качества обучения. Такое использование нормативов особенно полезно на начальной стадии обучения. На итоговых полетах для определения уровня тактической подготовки экипажа полезно оценку его полета производить по главному показателю, включающему такие элементы воздушной выучки, как техника пилотирования, точность самолетовождения, точность применения средств поражения и другие.
Помимо выполнения тактических требований точное следование ЛА по заданному маршруту на строго назначенном эшелоне является гарантией безопасности полетов, исключающей случаи столкновения ЛА между собой или с препятствиями на земной поверхности.
При точном следовании по маршруту надежнее ведется визуальная и радиолокационная ориентировка. Ориентиры появляются в строго расчетное время под известным курсовым углом, что практически исключает их поиск и обеспечивает быстрое и уверенное опознавание. Экипаж знает свое местонахождение, на большем расстоянии обнаруживает цель и располагает большим временем для прицеливания и нанесения удара по ней.
Точное вождение ЛА по заданному маршруту с соблюдением расчетного времени прохода назначенных пунктов существенно облегчает поиск экипажей, терпящих бедствие.
Подводя итог сказанному, подчеркнем, что точное вождение ЛА — это непременное и повседневное требование к экипажам, так как оно является необходимым условием взаимодействия авиации с сухопутными войсками и военно-морским флотом, обеспечивает высокое качество и эффективность выполнения любой задачи, безопасность полетов и успешное проведение поисково-спасательных мероприятий по сохранению жизни летного состава и авиационной техники.
§ 2. Краткая характеристика траекторий полета
В общем случае траекторией полета называется пространственная кривая, описываемая центром масс ЛА в процессе его перемещения в воздухе. Для определения траектории используются понятия линии пути и профиля полета.
Полет во всех случаях должен выполняться по оптимальной, т. е. нанвыгоднейшей, траектории.
Проекция заданной траектории полета ЛА на земную поверхность называется линией заданного пути (ЛЗП), которая, начинаясь у исходного пункта маршрута (ИПМ) и заканчиваясь у конечного пункта (КПМ), определяет тем самым весь маршрут полета. Обычно он задается пунктами или точками земной поверхности, через которые должна пройти линия пути. Профиль задается высотой полета ЛА в этих, а при необходимости и в других точках маршрута.
Вид траектории сближения ЛА с целью зависит от условий полета, характера цели и того критерия, по которому выбирается оптимальная траектория полета ЛА.
Критерии оптимизации траектории полета весьма разнообразны. В общем случае они должны определяться с учетом наибольшей эффективности выполнения поставленной задачи, оперативно-тактической обстановки, а также других факторов, от которых зависят точность вождения ЛА по маршруту и безопасность полета.
В качестве критерия оптимальности преодоления ПВО может служить, например, минимальное число пусков ракет или выстрелов МЗА по ЛА. При перехвате воздушной цели критерием оптимальности траектории может служить время сближения ЛА с целью. Это время должно быть минимальным, так как важно не допустить цель к объекту и быстро уничтожить ее.
Виды оптимальных траекторий различны и зависят от критерия, условий полета и характера цели. Если цель неподвижна относительно земнойповерхности и ее местоположение известно, то оптимальная траектория, а также режим полета и время выхода на цель могут быть «аданы экипажу заранее. Если цель подвижна и ее координаты (например, координаты воздушной цели по данным наземной радиолокационной станции) в каждый данный момент известны, то вид оптимальной траектории сближения ЛА с целью и режим полета будут определяться характером движения цели и методом наведения на нее. Если воздушная цель движется по прямой с постоянной скоростью, то траектория полета ЛА, летящего на перехват цели, также может иметь вид прямой линии, когда ЛА подходит к цели методом параллельного сближения. В этом случае он должен лететь с неизменной скоростью в упрежденную точку. Если же в процессе сближения с воздушной целью удерживать ее все время строго впереди по продольной оси ЛА, то траектория его полета будет иметь вид кривой погони. Так как траектория сближения ЛА с подвижной маневрирующей целью имеет сложный вид, то экипажу не могут быть заранее указаны маршрут
и режим полета, потому что они зависят от положения, скорости и ха-рактера маневра цели и должны определяться в процессе сближения с нею.
Сближение ЛА с подвижной воздушной целью имеет ряд особенностей и зависит от того, стремится цель сблизиться с ЛА (например, для построения боевого порядка, дозаправки и т. д.) или, наоборот, уклоняется от него.
Если координаты наземной, морской или воздушной цели неизвестны, то вождение ЛА необходимо выполнять по траектории, обеспечивающей надежный поиск цели.
Совремейный математический аппарат (принцип максимума Понтрягина Л. С., динамическое программирование, дифференциальные игры и некоторые другие методы) позволяет решать задачу нахождения оптимальной траектории (маневра) для сравнительно простых условий, которые пока не охватывают всего многообразия реальных факторов оперативно-тактической обстановки.
Если не накладывать ограничений на скорость полета ЛА и рассматривать его центр масс как движущуюся в горизонтальной плоскости точку, то при расчете оптимальной траектории (обеспечивающей за наименьшее время выход ЛА на неподвижную цель, находящуюся в начале прямоугольной системы координат) движение точки в общем случае должно выполняться все время по кривой, т. е. с ускорениями. Вначале при малой кривизне траектории осуществляется интенсивное торможение движения точки с предельно допустимым значением. По мере уменьшения скорости движения точки возрастает кривизна траектории, а следовательно, и интенсивность разворота. После энергичного выполнения разворота на минимальной скорости дальнейшее сближение с целью происходит с непрерывным разгоном при максимально допустимом ускорении и постепенном уменьшении кривизны траектории (пунктирная кривая на рис. 1). Следовательно, после разворота скорость движения точки непрерывно возрастает, достигая максимального значения в момент выхода на цель (в начале координат).
Для этих же условий при выходе на неподвижную цель в минимальное время с постоянной скоростью оптимальная траектория полета ЛА будет представлять собой сочетание дуги окружности наименьшего радиуса разворота и отрезка прямой линии (сплошная кривая на рис. I.)
Необходимость выполнения полета по криволинейным траекториям, как было показано выше, вызвана и тактическими соображениями, так как для успешного преодоления ПВО противника предусматриваются энергичное маневрирование при полете на средних и больших высотах, использование области радиотеней и полетов на предельно малых высотах.
Факторы, влияющие на выбор траекторий полета, свидетельствуют о том, что в общем случае перемещение ЛА должно осуществляться по криволинейной траектории. Конечно, в практике часто исполь
зуются и прямолинейные участки траектории, сопрягающиеся отрезками окружностей с радиусами, равными радиусам разворотов ЛА. Для постоянной скорости полета такие траектории могут отвечать условиям оптимального сближения с целью. Но так как радиус разворота пропорционален квадрату скорости полета, то это приводит к возрастанию доли криволинейных участков траектории, которая может достигать для современных скоростных ЛА более 30— 40% общей протяженности.
Рис. 1. Общий вид оптимальных траекторий полета, обеспечивающих выход ЛА на цель в минимальное время
Для точного выполнения полета по криволинейной траектории требуется высокое летное мастерство. Важное значение при этом имеет надежное управление с земли, которое в условиях роста скоростей полета ЛА и интенсивности воздушного движения должно обеспечивать регулярность и безопасность полетов, исключать случаи опасного сближения и столкновения ЛА.
Актуальность проблемы предотвращения столкновений ЛА подтверждается фактами, приведенными в американском журнале Naval Aviation News [111, где говорится, что в США в течение года было 38 столкновений ЛА, в 2230 зарегистрированных случаях едва удалось избежать столкновений, а с учетом незарегистрированных случаев, как полагают, имели место до 10 000 опасных сближений ЛА, экипажи которых действовали по правилам визуального полета. После столкновения 6 июня 1971 г. самолета F-4, у которого^ в воздухе вышла изстроя рация, с самолетом ДС-9, имевшим на борту пассажиров, в США были
введены ограничения в правила визуального полета, установлены более строгие правила полетов по приборам, а также усовершенствована система радиолокационного контроля за воздушным движением, посадкой ЛА и соблюдением намеченных планов полета. Однако за 1962— 1976 гг. среди наиболее характерных причин происшествий происшествия по вине летного состава вследствие столкновений ЛА в воздухе составляют 5%, а вследствие столкновений с землей — 11%.
§ 3. Показатели точности полета по заданной траектории
Для определения в некоторый момент времени положения ЛА в пространстве необходимо знать его местонахождение и высоту полета. Под местонахождением ЛА понимается та точка земной поверхности, в которую в данный момент времени проецируется его центр масс (над которой он находится).
Известно, что положение точки на плоскости или на поверхности Земли (на карте) определяется величинами X и У в ортодромической системе координат или величинами <р (широта) и к (долгота) в геодезической (географической) системе координат. Для определения положения ЛА в пространстве необходимо указать еще высоту его полета И. В процессе полета ЛА все три его координаты непрерывно изменяются, центр масс описывает фактическую траекторию. Ее проекция наземную поверхность называется линией фактического пути (ЛФП).
Основная задача экипажа и лиц, управляющих полетами с земли, заключается в том, чтобы обеспечить наиболее точное совпадение фактической траектории с заданной и, кроме того, строгое соблюдение времени пролета назначенных пунктов.
Для полного анализа точности полета ЛА по заданной траектории и характера его движения (рис. 2) необходимо в любой момент времени уметь определить следующие погрешности самолетовожде-ния:
— линейное боковое уклонение I ЛА от заданной траектории в горизонтальной плоскости;
— отклонение АЛ ЛА от заданной траектории по высоте в вертикальной плоскости;
— линейную (или временную) As(AZ) дистанцию, характеризующую отклонение ЛА (точнее, проекцию на заданную траекторию его центра масс) от расчетной точки (РТ), перемещающейся по заданной траектории в соответствии с запланированным временем взлета, прбхода назначенных пунктов, выхода на цель и возвращения на аэродром посадки.
Зная указанные погрешности, можно при планировании полетов по маршрутам определить ту область пространства (рис. 3), которая
должна быть отведена для выполнения полета ЛА с соблюдением мер безопасности. Назовем ее областью безопасности.
Рис. 2. Проекции фактической траектории полета ЛА на горизонтальную н вертикальную плоскости
В центре этой области находится та расчетная точка, которая перемещается строго по заданной траектории в соответствии с расчетным временем взлета ЛА и прохода заданных пунктов маршрута.
Эта расчетная точка, отражающая идеальный характер полета ЛА по заданной программе, не имеет рассеивания, ее положение на
Рис. 3. Область безопасности и положение в ней ЛА
траектории полета может быть определено для любого момента времени с самой высокой точностью.
Положение ЛА в этой области определяется погрешностями I, As'и &Н, которые не должны превышать максимально допустимых значений, определяющих размеры безопасного пространства.
В связи с проблемой безопасности в последние годы уделяется большое внимание статистической обработке максимальных погрешностей,
особые закономерности распределения которых рассматриваются в ряде работ, посвященных статистике экстремальных значений [4]. Обработка опытных данных показывает, что максимальные погрешности наблюдаются чаще, чем это следует из нормального закона распределения, по которому число ошибок, превышающих утроенное значение среднего квадратического отклонения, не должно превосходить 0,3%, т. е. допускается не более трех погрешностей в каждой серии из 1000 наблюдений.
Так как именно максимальные погрешности могут приводить к опаснымпоследствиям, то важно установить закономерности и характер их распределения. Как показывают исследования, распределение максимальных погрешностей подчинено двойному экспоненциальному закону, исходя из которого можно рассчитать размеры области безопасности для любой заданной вероятности нахождения в ней ЛА.
В практической деятельности принято исходить из предельно допустимых норм вертикального, продольного и бокового эшелонирований, которые устанавливаются правилами полетов.
Для принятой системы вертикального эшелонирования предельная погрешность выдерживания заданной высоты полета не должна превышать ± 150 м до высоты 6000 м, ±300 м до высоты 12 000 м и ±500 м от высоты 12 000 м и более.
Продольные размеры области безопасности при установленной минимальной временной дистанции А/ = 10 мин будут зависеть от путевой скорости полета Еп и составят
As = -ivnAf.
Минимальные интервалы продольного эшелонирования зависят от условий полета, скорости ЛА, наличия радиолокационного контроля и могут устанавливаться от нескольких километров (при визуальной видимости) до нескольких десятков километров (при полетах по правилам полетов по приборам).
Ширина области безопасности определяется предельно допустимым линейным боковым уклонением (ЛБУ) ЛА от заданного маршрута, которое не должно превышать установленных норм бокового эшелонирования.
Заметим, что вероятность нахождения ЛА в пределах этой области различна и зависит от закона распределения погрешностей. Она тем больше, чем меньше погрешности Z, АД и As.
В приведенном рассуждении предполагалось, что центр области безопасности совпадает с расчетной точкой, в которой должен находиться ЛА при строгом выдерживании времени взлета, заданных моментов прохода назначенных пунктов и при отсутствии погрешностей вождения ЛА как в горизонтальной, так и в вертикальной плоскости. Если центр области безопасности совместить с ЛА, то все количественные характеристики погрешностей вождения ЛА сохраняют свою ве-
15
личину, но приобретают иное содержание. В этом случае уже сама область безопасности будет занимать случайное положение, но она непременно должна включать расчетную точку, которая должна находиться внутри этой области.
В пределах указанной области безопасности не должен находиться никакой другой ЛА. Во всех случаях выход ЛА за пределы указанной области пространства должен рассматриваться как нарушение безопасности полетов.
Погрешности I, АН и As в процессе полета не остаются постоянными, они непрерывно изменяются, поэтому необходимо установить тенденцию изменения соответствующей погрешности.
V I
д«
PT as Заданная высота
Заданный рт маршрут Г1 а
Рис. 4. Отклонения ЛА от заданной траектории и скорости их изменения:
а — в горизонтальной плоскости; б — в вертикальной плоскости
Например, если зафиксировано уклонение ЛА от заданного маршрута, то важно знать, сближается он с ним или удаляется от него, а также определить скорость данного движения. Это нетрудно сделать, если известен вектор путевой скорости Уп, т. е. скорость и направление полета ЛА относительно земной поверхности. Боковая составляющая Уб этого вектора и будет характеризовать скорость движения ЛА в направлении, перпендикулярном к линии заданного пути. Необходимо знать также скорости изменения величин Д/7 и As. Это позволит оценить, с какой вертикальной скоростью ЛА сближается с заданной высотой полета или удаляется от нее. Скорость изменения As покажет, как изменяется время опоздания или опережения относительно заданных сроков прохода назначенных пунктов или времени прибытия на цель (аэродром посадки).
На рис. 4,а показано, что линейное боковое уклонение I ЛА от маршрута уменьшается со скоростью Уб, а отклонение А77 от заданной высоты (профиля полета) с вертикальной скоростью У„ продолжает возрастать (рис. 4,6).
Увеличивая скорость полета, можно ликвидировать опоздание, равное величине А/ == As/V (рис. 4,а).
Таким образом, для более полной характеристики полета ЛА по заданной траектории кроме I, АН и As необходимо знать:
— вектор путевой скорости ЛА;
— вертикальную скорость набора высоты или снижения;
— продольное и боковое (нормальное) ускорения.
Заметим, что в рассмотренных навигационных условиях оценивается лишь перемещение центра масс ЛА, т. е. самолет или вертолет принимается за точку, при этом не учитываются другие величины, характеризующие положение и процесс движения ЛА с точки зрения пилотирования (угол крена, тангаж). Для оценки степени совпадения фактической траектории полета с заданной недостаточно знать только величины линейных уклонений ЛА в некоторых точках маршрута.
Предположим, что по данным средств объективного контроля получены линии фактического пути двух экипажей, пролетевших по одному и тому же маршруту. Эти линии для одного прямолинейного этапа маршрута, совпадающего с осью абсцисс, показаны на рис. 5. Из
Рис. 5. Показатели точности полета двух экипажей по маршруту
рисунка видно, что максимальные величины линейных боковых уклонений у обоих экипажей одинаковы и равны /тах (у первого экипажа в точке Alt у второго в точке А2). Но при этом у первого экипажа наибольшая разность между фактическим путевым углом и заданным которую можно непосредственно измерить транспортиром в точке Вг, оказалась несколько меньше, чем аналогичная разность Др2 для второго экипажа (в точке В2). Соответственно различны и боковые составляющие Vci и Уб2 путевых скоростей, с которыми ЛА на этом этапе удалялисьот линии заданного пути, хотя путевая скорость Vn у них была одинаковой. Меньшее значение Vgi у первого экипажа свидетельствует о том, что курс следования этим экипажем выдерживался точнее, чем вторым экипажем. При одной и той же величине максимального линейного бокового уклонения от маршрута первый экипаж на рассматриваемом этапе всего лишь один раз исправил путь (в точке Д1), тогда как второй экипаж сделал это дважды (в точках С и Д2). Следовательно, несмотря на одинаковые максимальные линейные боковые уклонения, качество вождения ЛА на этом этапе маршрута у первого экипажа было выше, чем у второго.
Рассмотренный пример показывает, что для оценки точности полета ЛА по маршруту недостаточно знать одну величину наибольшего линейного бокового уклонения ЛА от заданного маршрута, нужно учесть
и такие величины, как Уб и (рис. 5), т. е. необходимо дать строгое математическое обоснование способа сравнения двух в общем случае криволинейных траекторий.
Сказанное выше справедливо и для оценки точности полета ЛА в вертикальной плоскости.
§ 4. Способ сравнения траекторий полета
Экипаж, выполняя полет по заданной траектории, должен управлять процессом движения ЛА. Если экипаж обнаруживает отклонение ЛА от маршрута, то он выполняет доворот и ликвидирует это отклонение. Аналогично управляется ЛА по высоте и шЛрости. Это управление может осуществляться самим экипажем или с помощью систем автоматического управления, которые устанавливаются на борту ЛА. Управляющие воздействия приводят к тому, что фактическая траектория полета ЛА оказывается довольно сложной. ЛА, продвигаясь по заданному маршруту, совершает колебания относительно него. Поэтому возникает вопрос-: каким образом установить степень совпадения двух в общем случае кривых линий, чтобы оценить точность полета ЛА по маршруту?
Для полной оценки точности управляемого полета ЛА по заданному маршруту, который не обязательно должен быть прямолинейным, воспользуемся известным в математике определением расстояния между двумя кривыми линиями [8].
Согласно этому определению расстоянием n-го порядка кривой у = Д(х) до кривой у = f(x) на интервале от х0 ДО хх называется максимум абсолютного значения разности n-х производных, т. е.
уп = 1Лп)(х) —/(n)(x)|max, x0<xC*i- (1)
Чтобы понять физический смысл этого общего определения, предположим, что заданный маршрут у = f(x) изображается отрезком прямой, совпадающей с осью х (рис. 5).
В этом самом простом, но наиболее важном для практики случае, когда у = /(х) = 0, из соотношения (1) получим
Уп = | f\n\x) Itnax, Хо С X С Xi. (2)
Если брать из данного выражения различные значения производных от нулевой до n-й включительно, то получим расстояния нулевого, первого, второго и n-го порядков.
Расстояние нулевого порядка (и = 0) равно
Уо ~ I fl(x) |max = I у |max, Xg^XS^Xj, (3)
т. е. оно представляет собой абсолютную величину максимального линейного бокового уклонения ЛА от заданного маршрута 1таг (рис. 5).
Расстояние первого порядка (n = 1) согласно формуле (2) будет представлять собой максимум абсолютного значения первой производной на интервале от х0 др хг:
i/l-|A'W|max-|^|max. (4)
Из геометрического смысла первой производной как тангенса угла наклона касательной к кривой следует, что расстояние первого порядка представляет собой абсолютную величину максимального значения
кри-
тангенса разности фактического и заданного путевых углов. При выполнении полета по маршруту экипаж стремится к тому, чтобы фактический путевой угол не отличался от заданного. Возможна разность на небольшое число градусов, связанная с погрешностями выполнения полета. Заменим тангенс малого угла самим аргументом и напишем приближенное равенство
У1 ~ | tg ДР [max | ДР |тах- (5)
Таким образом, для прямолинейного этапа маршрута физическая сущность расстояния первого порядка сводится к максимальному значению разности Др между фактическим и заданным направлениями эта разность (при том же у0), тем точность полета
Рис. 6. К определению визны кривой
полета. Чем меньше
на рассматриваемом этапе маршрута выше (рис. 5). Для выяснения физической сущности расстояния второго порядка воспользуемся известным в математике определением кривизны кривой.
Напомним, что под кривизной кривой понимается предел отношения угла Др поворота касательной при смещении точки касания по дуге к величине Де, если эту величину устремить к нулю (рис. 6):
М 0 As * #
т. е. кривизна кривой в данной точке обратна радиусу кривизны R, она определяется по формуле
(6)
где R — радиус кривизны кривой.
Если в этом соотношении предположить, что — 0, т. е. рассмотреть точки траектории, в которых касательная к ней параллельна оси
абсцисс и, значит, вектор путевой скорости параллелен линии заданного пути (точки Av А2, С на рис. 5), то из формулы (6) получим более простое выражение:
K = "РИ S = °-
(7)
Эта формула характеризует кривизну линии фактического пути в точках ее частных или абсолютного максимумов, т. е. интенсивность доворотов ЛА по курсу в этих точках.
Для расстояния второго порядка из формулы (2) имеем
У2-|/Г(х) |max -
(8>
Сравнивая формулы (7) и (8), приходим к выводу о том, что расстояние второго порядка представляет собой максимальное значение кривизны линии фактического пути (в точках Ai,A2 и С на рис. 5). В соотношениях (2) — (8) аргументом уравнения линии фактического пути, полета является к, т. е. пройденное расстояние. Если в этих же формулах в качестве аргумента будет служить не х, а время полета t па рассматриваемом прямолинейном этапе маршрута, то физическая сущность расстояний первого и второго порядков будет несколько иной.
Действительно, из формулы (2) имеем
Уп — | /["'(О |тах> /0 < * < ^1- (9>
Тогда для п — 1
У1 =
— I /1(0 |шах — I Уб Imax, max
(10)
т. е. в этом случае расстояние первого порядка представляет собой не наибольшую по абсолютной величине разность путевых углов, а максимальную боковую составляющую путевой скорости, характеризующую скорость приближения ЛА к линии заданного пути или удаления от нее (Уб! и Уб2 на рис. 5).
Для расстояния второго порядка получим
У2= |a^|max = l/“(Z)l™x = 'dF |шах= 1Об1П,аХ-
Следовательно, расстояние второго порядка является максимальным значением бокового (нормального) ускорения, о котором можно судить по максимальной величине нормальной перегрузки.
Подводя итог рассмотрению физической сущности частного случая, когда заданный маршрут является прямолинейным, сведем полученные результаты в таблицу (табл. 1).
Все сказанное о расстояниях нулевого, первого и второго порядков относится не только к анализу линии фактического пути, но и к анализу отклонений ЛА от заданного эшелона в вертикальной плоскости.
Таблица 1
Расстояние Аргумент
времй полета, мин пройденное расстояние, км
Нулевого порядка Абсолютная величина максимального линейного бокового уклонения ЛА от маршрута (км)
Первого порядка Максимальное значение боковой составляющей путевой скорости (км/ч, км/мин, м/с) Максимальная . разность фактического и заданного путевых углов (градус)
Второго порядка Максимальное боковое ускорение (км/ч2, км/мин2, м /с2), максимальная нормальная перегрузка Максимальная кривизна линии фактического пути (градус/км)
В этом случае вместо максимального линейного бокового уклонения ЛА от маршрута нужно рассматривать его наибольшее отклонение по высоте от заданного профиля (эшелона), вместо боковой составляющей путевой скорости следует рассматривать вертикальную скорость и вместо бокового ускорения (направленного в борт) — ускорение, направленное по вертикали.
Приведем аналогичную таблицу, сведя в нее значения расстояний нулевого, первого и второго порядков применительно к анализу отклонений ЛА в вертикальной плоскости (табл. 2).
Таблица. 2
Расстояние Аргумент
время полета, мин, с пройденное расстояние, км, м
Нулевого порядка Абсолютное значение наибольшего отклонения ЛА по высоте от заданной траектории (заданного эшелона) (м)
Первого порядка Максимальное значение вертикальной скорости набора высоты или снижения (м/с) Максимальная разность между фактическим и заданным углами набора высоты или снижения (градус)
Второго порядка Максимальное ускорение в вертикальной плоскости (м/с2) Максимальная кривизна траектории полета в вертикальной плоскости (гра-Дус/м)
Таким образом, определение расстояний n-го порядка имеет наиболее простую физическую сущность, когда заданная траектория представляет собой отрезок прямой линии. В принципе их смысл остается без изменений и для общего случая, когда заданная траектория является криволинейной. Только в этом случае следует рассматривать мак
симальную разность фактической и заданной вертикальных скоростей или ускорений движения.
На рис. 7 показано расстояние нулевого порядка, под которым понимается половина наименьшей ширины полосы А^тах. построенной около заданной криволинейной траектории у = f(x), включающей в себя фактическую траекторию у = Д(х). Следует подчеркнуть, что наименьшую ширину полосы определяет именно максимальная величина отклонения At/max фактической траектории от заданной.
Приведенные значения расстояний п-го порядка, вытекающие из формулы (2), практически определяются непосредственным измерением искомых величин на карте, планшете, кальке радиолокационной про-
Рис. 7. К определению расстояния нулевого порядка для криволинейной траектории
водки ЛА или по данным средств объективного контроля (так как аналитическое выражение уравнения линии фактического пути обычно неизвестно).
Для полного анализа результатов выполненного полета необходимо знать отклонения фактической траектории полета ЛА от заданной в любой момент времени, и особенно у назначенных пунктов, но именно наибольшие отклонения чаще всего сравниваются с нормативными и на этом основании определяется оценка точности выполнения полета по заданной траектории. Если в качестве норматива точности полета по маршруту установлена ширина трассы, то оценка будет положительной лишь в том случае, если максимальное по абсолютной величине линейное боковое уклонение ЛА, т. е. расстояние нулевого порядка, не превысит половины ширины трассы. Максимальные отклонения ЛА в вертикальной плоскости также не должны выходить за пределы выделенной для полета нормативной разности высот.
Если в формуле (2) опустить знак максимума, то она будет характеризовать при п = 0 линейное боковое уклонение ЛА от заданного маршрута в любой точке на отрезке при п = 1 — текущую
разность путевых углов (фактического и заданного) или боковой составляющей путевой скорости, а при п — 2 — соответственно текущее значение Об (ускорения).
Знание предельных величин отклонений, и в первую очередь расстояний нулевого порядка, особенно важно для обеспечения безопасности полетов, а знание текущего значения этих величин необходимо для полного анализа фактической траектории полета.
§ 5. Показатели точности и надежности полета
Изложенная методика сравнения траекторий, основанная на определении расстояний n-го порядка, дает важные характеристики ЛФП и ее отклонений от заданного маршрута, а в вертикальной плоскости — фактического профиля полета ЛА от заданного.
Рассмотрим отдельно показатели, характеризующие точность полета ЛА по трассе, выхода на цель по времени, выдерживания воздушной скорости и точность полета ЛА в пределах отведенной разности высот.
ПолетЛА по трассе
Если вместо маршрута полета рассматривать некоторую полосу, осью которой он является, то помимо показателей точности полета ЛА по линии заданного пути необходимо назвать еще ряд важных показателей, характеризующих надежность выполнения полета в пределах отведенной полосы и имеющих прямое отношение к безопасности воздушного движения.
Рис. 8. Погрешности полета ЛА по трассе
В реальных условиях полета по трассе, ширина которой известна, отведенная полоса существенно ограничивает допустимые уклонения ЛА, что предъявляет повышенные требования к частоте контроля и точности исправления (коррекции) пути.
Предположим, что по данным средств объективного контроля на этапе от первого поворотного пункта маршрута (ППМХ) до второго (ППМ2) получена линия фактического пути ЛА. При известной ширине трассы (рис. 8) 2/т, равной, к примеру, 10 км (/т= +5 км), могут представлять интерес следующие погрешности полета ЛА по трассе:
/х— ошибка выхода ЛА на ППМХ, характеризуемая величиной линейного бокового уклонения от него, измеренного по направлению, перпендикулярному заданному маршруту.
Д₽I— ошибка выдерживания заданного путевого угла' при отходе ЛА от ППМр характеризуемая либо величиной угловой ошибки, либо боковой составляющей путевой скорости Убь
4> др2—ошибки выхода ЛА на ППМ2 по месту и направлению (на рис. 8 /2 — 0);
Д/2— ошибки выхода ЛА соответственно на ППМ1 и ППМ2 по времени;
/max — наибольшее линейное боковое уклонение ЛА от заданного маршрута (расстояние нулевого порядка в точке К);
Уб max — наибольшее значение боковой составляющей путевой скорости, с которой ЛА приближался к линии заданного пути или удалялся от нее (на участке ДЕ в точке £);
ДРтах — максимальный угол отклонения* фактического направления полета от заданного (расстояние первого порядка на участке ДЕ в точке L);
Ктах — максимальная величина кривизны (и соответственно ускорения), характеризующая радиус разворота или угол крена при довороте ДА для исправления пути (расстояние второго порядка линии фактического пути ЛА в точке А);
ti — время от момента прохода FIFlMj или исходного пункта маршрута до первого выхода ЛА за пределы трассы (в точке А);
/в— продолжительность выхода ЛА (ZBi, /В2, • • •./Bt), т. е. время, через которое ЛА после выхода за пределы трассы возвращается в отведенную полосу (время полета от точки А до точки В, от точки Е до точки А);
п
/в общ = S /в» — общее время пребывания ЛА за пределами трассы i= 1
(для случая, показанного на рис. 8, ZB. ОбЩ = ZBi + 4г);
tH— интервал времени, через который ЛА вновь оказывается за пределами трассы (независимо от стороны выхода);
tK — интервал времени между двумя коррекциями курса, т. е. исправлениями пути (время полета от точки М до точки N, а также от точки N до точки А);
t0 — интервалы времени, через которое ЛА пересекает линию заданного пути (Zol, toS, t03); значение этой погрешности, практически равной tK, будет рассмотрено в дальнейшем (§ 16).
Показатели полета ЛА по трассе отражают различные стороны процесса управления его движением как экипажем, так и с земли. Эти же показатели характеризуют траекторию ЛА при полностью автоматизированном процессе полета по маршруту с помощью пилотажно-навигационных комплексов, работающих по введенной в них до вылета программе. Чем меньше величины /ь Аръ /тах, Уб max или Afmax, 4» Ар2, А^, А/2 и, наоборот, чем больше t0, Ч> 4 и tK (при прочих равных условиях, т. е. при тех же величинах уклонений), тем выше точность вождения ЛА в пределах отведенной полосы.
Все названные величины могут быть непосредственно измерены на карте, если на ней показать трассу и по данным средств объективного контроля нанести линию фактического пути ЛА.
При обработке большого числа полетов может быть определена такая важная характеристика, как частота невыхода ЛА за пределы трассы Р*, равная отношению числа полетов N6 без нарушения правил бокового эшелонирования (т. е. без выходов за пределы трассы) к общему числу маршрутных полетов по трассе Аобщ:
ЛЬ р*_____
б ~ /у , • общ
Частота Рд является важным для безопасности полетов по к а з а-телем надежности соблюдения Требований бокового эшелонирования, т. е. надежности вождения ЛА по трассе или в пределах другой назначенной полосы (например, нормативной).
Формула (12) позволяет определить частоту получения оценок «отлично»,«хорошо» или «удовлетворительно», если брать отношение числа полетов, когда не было выходов ЛА за пределы соответствующих нормативных полос, к общему числу маршрутных полетов.
Выход на цель
Показатели точности выдерживания некоторой непрерывно записываемой с помощью средств объективного контроля величины в принципе могут быть применимы и при оценке точности соблюдения заданной программы полета во времени от взлета ЛА и до его посадки. Однако погрешности во времени выхода принято фиксировать лишь в моменты прохода назначенных рубежей (одного или нескольких), и особенно при выходе на цель, а иногда и на аэродром посадки. Эти погрешности определяются по разности фактического и заданного времени пролета указанных рубежей или пунктов маршрута:
Д/ = 7ф — Т3. (13)
' Для согласованности действий родов авиации между собой и взаимодействия с различными войсками, а также для безопасности полетов точность выхода на цель по времени регламентируется нормативами.
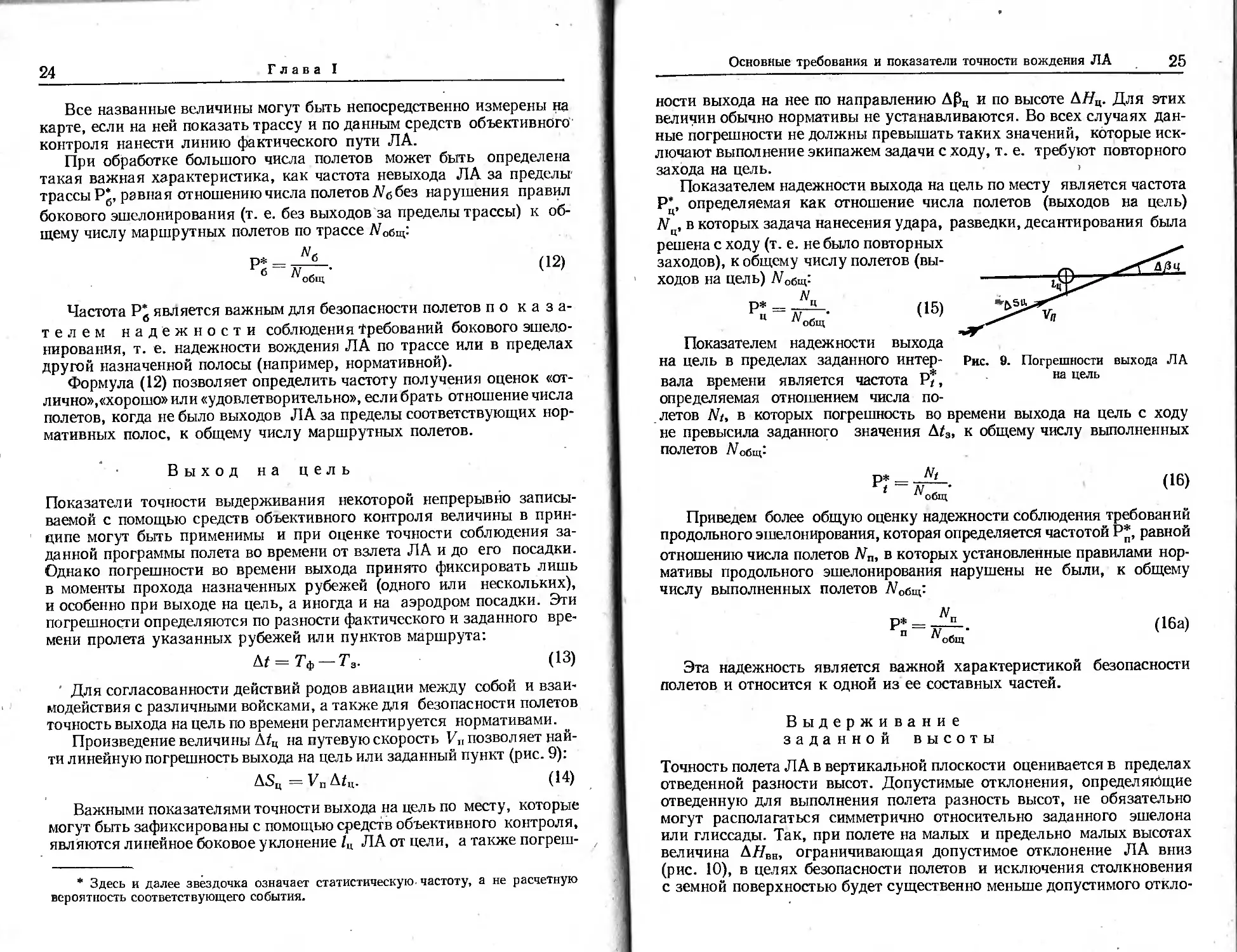
Произведение величины Д/ц на путевую скорость V„ позволяет найти линейную погрешность выхода на цель или заданный пункт (рис. 9):
Д5Ц=УПД/Ц. (14)
Важными показателями точности выхода на цель по месту, которые могут быть зафиксированы с помощью средств объективного контроля, являются линейное боковое уклонение/ц ЛА от цели, а также погреш-
* Здесь и далее звездочка означает статистическую, частоту, а не расчетную вероятность соответствующего события.
ности выхода на нее по направлению Д₽ц и по высоте ДДЦ. Для этих величин обычно нормативы не устанавливаются. Во всех случаях данные погрешности не должны превышать таких значений, которые исключают выполнение экипажем задачи с ходу, т. е. требуют повторного захода на цель. >
Показателем надежности выхода на цель по месту является частота Р*, определяемая как отношение числа полетов (выходов на цель) Nit, в которых задача нанесения удара, разведки, десантирования была решена с ходу (т. е. не было повторных заходов), к общему числу полетов (выходов на цель) Аобщ: АГ р*_____________ и
ц ~ N л ' общ
Показателем надежности выхода
(15)
на цель в пределах заданного Интер- Рис. 9. Погрешности выхода ЛА вала времени является частота Р*, на цель
определяемая отношением числа по-
летов Nt, в которых погрешность во времени выхода на цель с ходу не превысила заданного значения Д/3> к общему числу выполненных полетов 7VO64:
Р* —
{ Л'общ
(16)
Приведем более общую оценку надежности соблюдения требований продольного эшелонирования, которая определяется частотой Р*, равной отношению числа полетов N„, в которых установленные правилами нормативы продольного эшелонирования нарушены не были, к общему числу выполненных полетов АОбщ:
р* _ "н
" ~ *общ
(16а)
Эта надежность является важной характеристикой безопасности полетов и относится к одной из ее составных частей.
Выдерживание заданной высоты
Точность полета ЛА в вертикальной плоскости оценивается в пределах отведенной разности высот. Допустимые отклонения, определяющие отведенную для выполнения полета разность высот, не обязательно могут располагаться симметрично относительно заданного эшелона или глиссады. Так, при полете на малых и предельно малых высотах величина Д7УВН, ограничивающая допустимое отклонение ЛА вниз (рис. 10), в целях безопасности полетов и исключения столкновения с земной поверхностью будет существенно меньше допустимого откло-
иения АЯВВ ЛА вверх. Несимметричность полос возможна и при полете по маршруту вблизи зон с особым режимом, вблизи государственной границы и в других случаях.
Показателями точности полета ЛА на заданной высоте, которые могут быть непосредственно измерены по точной записи фактической высоты полета, как в горизонтальном полете, так и в режиме набора высоты или снижения (рис. 10) являются:
&Нг— погрешность выхода на заданный эшелон;
А/7тах— наибольшее отклонение ЛА от заданной высоты (эшелона, глиссады), являющееся расстоянием нулевого порядка;
VB max или AVB max — максимальная величина вертикальной скорости для режима горизонтального полета или разность между заданной при наборе или снижении ЛА и фактической вертикальными скоростями (расстояние первого порядка на рис. 10 не показано);
Рис. 10. Погрешности выдерживания заданной высоты полета
ti — время первого выхода ЛА за пределы отведенной для полета разности высот от момента занятия заданной высоты;
A>i, /в2> • • •, tbi — продолжительность каждого г-го пребывания ЛА за пределами выделенной для полета разности высот;
п
tB. общ = S tBi — суммарное время пребывания ЛА за пределами 1 =1
назначенной разности высот при п выходах;
tm, tn2, , t„i — интервалы времени, через которые ЛА вновь оказывается за пределами отведенной для полета разности высот;
t01, to2, ..., toi—интервалы времени, через которые ЛА пересекает заданный эшелон (глиссаду);
Р* — частота невыхода ЛА за пределы отведенной разности высот, характеризующая надежность вертикального эшелонирования при выполнении полетов по маршруту или при заходе на посадку; рассчитывается по формуле, аналогичной (16а):
N
Р: = АТТ-. (16б>
общ
где Мв— число полетов, в которых нарушений правил вертикального эшелонирования не было.
Названные величины являются важными показателями точности и надежности выполнения полета в вертикальной плоскости и характеризуют качество управления процессом выдерживания ЛА заданного профиля Полета.
Одним из обобщенных показателей совместной надежности бокового, продольного и вертикального эшелонирования, определяемого правилами полетов, является частота Рэ^, равная произведению частот Р*, Р* и Р*, подсчитываемых с помощью соотношений (12), (16а), (166):
р* _ р* р* р* ЭШ б П В •
Полученная величина является относительным числом полетов, в которых никаких нарушений правил эшелонирования не было.
Выдерживание заданной скорости
Точность выдерживания воздушной скорости ЛА при ее заданном значении может оцениваться в пределах полосы, которая определяется как разность величин нормативного значения допустимых отклонений фактически выдерживаемой скорости полета и заданной.
На рис. 11 показаны полученная с помощью средств объектив -ного контроля запись выдерживавшейся воздушной скорости и ее
Рис. 11. Запись колебаний фактической воздушной скорости полета
заданное значение У3, а также допустимые отклонения на оценки «отлично» (+ АУотл), «хорошо», (+ АУхор) и «удовлетворительно» (+АУуд). Из записи видно, что в течение времени (до момента 7\) воздушная скорость выдерживалась на оценку «хорошо», затем (от Тг до Т2) — на оценку «удовлетворительно», а на последнем отрезке времени — на оценку «отлично».
К анализу этой записи, характеризующей точность выдерживания воздушной скорости, полностью применимы такие показатели, как А Утах, Отах (продольное ускорение), tB, tM, t0. Отметим, что при анализе точности вождения ЛА по маршруту отклонения в выдерживании воздушной скорости от ее заданного значения могут являться следствием
28 Г л а в a I
ошибок не только пилотирования. Переход на большую скорость полета бывает необходим для выхода на цель в назначенное время, для точного выдерживания своего места в рассредоточенном боевом порядке И т. д.
глава II АВТОМАТИЗАЦИЯ
ОБЪЕКТИВНОГО КОНТРОЛЯ ТОЧНОСТИ ПОЛЕТА ЛА ПО МАРШРУТУ
* * *
Понимание характера основных погрешностей вождения ЛА необходимо для объективной оценки работы экипажа. Все причины появления погрешностей при полете ЛА по трассе, выходе на цель во времени, полете ЛА в пределах отведенной разности высот, вскрытые закономерности выдерживания воздушной скорости, ее колебания относительно заданного значения должны быть тщательно проанализированы, правильно объяснены, чтобы принять меры, способствующие повышению точности выполнения и безопасности полетов.
§ 6. Принципы автоматизации
Чтобы правильно контролировать точность полета ЛА по заданному маршруту, необходимо иметь достоверные сведения о фактической траектории его движения. Эти сведения, фиксируемые непрерывно или дискретно во время полета, поступают от контрольно-измерительной аппаратуры, установленной на ЛА и на земле. Как говорилось ранее, данную аппаратуру называют средством контроля, а фиксирование и обработку полученных результатов — объективным контролем точности полета ЛА.
В процессе объективного контроля фиксируется большое количество параметров, характеризующих отклонение ЛА от маршрута, выдерживание высоты, скорости полета, режим работы двигателей и различных бортовых систем, особенности их эксплуатации экипажем в воздухе и т. д.
Полученную информацию необходимо расшифровать, обработать и представить в форме, удобной для анализа полета и объективной оценки его качества. Для выполнения этой трудоемкой работы в минимальные сроки используются автоматизированные системы и электронно-вычислительная техника. Рассмотрим принципы автоматизации на примере контроля за полетами ЛА по маршруту с помощью наземных радиолокационных станций (РЛС) и радиотехнических систем ближней навигации (РСБН).
При выборе РЛС или РСБН необходимо отдавать предпочтение тем, с помощью которых можно проще организовать использование средств объективного контроля и получить необходимые данные к требуемому моменту времени с достаточной точностью.
Большая продолжительность полета осложняет организацию объективного контроля точности полета ЛА по заданным маршрутам, так как местонахождение ЛА нужно точно и многократно определять над обширной территорией. Наблюдение за ЛА требует специальной организации сбора и последующей обработки полученных данных.
В качестве средств объективного контроля за полетами ЛА по заданным маршрутам можно использовать наземные радиолокационные станции, радионавигационные маяки, гиперболические системы ближней и дальней навигации или автономные средства (бортовую РЛС, фотоаппаратуру и др.). Эти средства обеспечивают требуемую точность непрерывного или дискретного определения текущих координат местонахождения ЛА на протяжении всего маршрута или на той его части, которая намечена для контроля.
При большом объеме фактического материала выполнение всего комплекса расчетов вручную затруднительно, поэтому как для записи,
так и для обработки информации широко используются различные автоматические устройства и электронно-вычислительные машины.
Рассмотрим выполнение полета на малой высоте по маршруту, показанному на рис. 12.
Для быстрой и наглядной оценки тех наземных РЛС или маяков РСБН, которые могут быть использованы, необходимо иметь на специальной карте их суммарные радиолокационные и радионавигационные поля для различных высот полета. В этих полях выбирают средства, которые обеспечат надежный контроль за полетами ЛА по всему маршруту или части его. Из рис. 12видно,что на первом участке марш-
Рис. 12. К оценке использования суммарных радиолокационных и радионавигационных полей для контроля за полетами ЛА по маршруту на заданной высоте
рута от точки А до точки В ни РЛС, ни РСБН не обеспечивают контроля за полетом ЛА. Следовательно, нужно использовать другие средства. Ими могут быть бортовые фотоаппараты, позволяющие фотографировать экран бортовой РЛС, счетчики координат системы автоматического счисления пути (погрешности которой на -начальном этапе еще незначительны) и т. д.
Начиная от точки В ЛА входит в зону видимости РЛС, а затем (пос-ле точки С) и в зону действия наземного маяка РСБН. На участке от точки Сдо точки Смогут использоваться и РЛС и РСБН одновременно, что повышает достоверность и точность определения местонахождения ЛА. В последующем, за исключением небольшого участка EF, контроль обеспечивается с помощью РСБН.
Покажем принцип решения задачи полной автоматизации объективного контроля за полетом ЛА по трассе с помощью наземной РЛС.
1. С момента радиолокационного обнаружения ЛА наземная РЛС через равные промежутки времени, зависящие от скорости вращения антенны, определяет азимуты и наклонные дальности до ЛА (Л/, Сш).
2. При известной высоте полета Н наклонные дальности Du автоматически пересчитываются в горизонтальные D:
D = VD2K — H2.
3. Прямоугольные координаты местонахождения РЛС (Хрлс» Урлс)—координаты Гаусса, сетка которых печатается на картах крупного масштаба), а также координаты начальной (Ха, Ya) и конечной (Хм, Yм) точек этапа маршрута вводятся в ЭВМ. Туда же пен ступают текущие полярные координаты местонахождения ЛА (А,-, О,).
Полярные координаты (А,, £)[), однозначно определяющие местонахождение ЛА, например, в точке N, преобразуются в прямоугольные координаты ЛА, характеризующие его положение относительно линии заданного пути AM (находятся пройденное расстояние Si и текущее линейное боковое уклонение ЛА от маршрута /,).
4. Для учета погрешностей при определении местонахождения ЛА (они приводят к разбросу точек относительно фактической траектории полета) каждый раз автоматически выполняется сглаживание ЛФП (§ 13 и 14).
5. При известной ширине трассы 2/т абсолютные значения 4 сравниваются со значениями /т:
если | It | — | li | 0, то ЛА находится в пределах трассы;
если 11Т | — | li | < 0, то ЛА находится за пределами трассы.
В момент равенства | /т | = [ lt | ЛА либо выходит (если до этого было 11Т | — | li | 0) за пределы трассы, либо входит (если было
11Т |—| Ц | < 0) в нее. При фиксировании этих моментов можно найти продолжительность каждого выхода ЛА за пределы трассы, при суммировании их подсчитывается общее время полета ЛА вне ее.
6. Из всех значений lt последовательно выбирается наибольшее по абсолютной величине (расстояние нулевого порядка) линейнсе боковое уклонение ЛА от заданного маршрута, которое сравнивается с введенной в ЭВМ нормативной величиной для автоматического определения оценки экипажу за точность полета на этом этапе маршрута.
7. По совокупности значений автоматически осуществляют также расчет фактического путевого угла, который сравнивают с заданным для определения расстояния первого порядка.
8. В процессе автоматического контроля определяются моменты начала выполнения и продолжительность доворотов по курсу и его величина, что позволяет установить частоту исправления пути.
9. Все окончательные и необходимые промежуточные данные выдаются на экран или печатаются на бумажной ленте для последующего анализа и выводов.
Аналогично могут определяться отклонения ЛА от маршрута на криволинейных участках. Если бортовые средства позволяют фиксировать текущие координаты местонахождения ЛА или другие параметры полета, то их можно записывать на магнитную ленту с последующим вводом ее в ЭВМ для автоматической обработки и получения необходимых для анализа величин.
§ 7. Алгоритмы автоматической обработки результатов
Процесс получения данных о полете ЛА, находящихся в зонах видимости РЛС, называется обработкой радиолокационной информации. Методика ее обработки рассматривается в ряде пособий. Применительно к автоматизированным системам вопросы обработки информации с использованием ЭВМ изложены в различных книгах [7, 10].
Покажем сущность алгоритма на примере обработки результатов контроля за полетом ЛА по маршруту с помощью наземной РЛС.
Обработка делится на первичную, вторичную и третичную. При первичной обработке находят дальность и азимут. Дальность до ЛА определяется по временному интервалу. Величина этого интервала равна половине времени прохождения сигнала от момента запуска передатчика РЛС до момента прихода отраженного сигнала от ЛА. Азимут ЛА определяется по угловому положению антенны РЛС в момент прихода отраженного сигнала. Полученные в результате первичной обработки значения азимутов и дальностей содержат случайные ошибки измерений.
Задачей вторичной обработки, которая производится за несколько оборотов (обзоров) антенны, является уменьшение до минимума влияния этих ошибок. Вторичная обработка выполняется с помощью ЭВМ и включает определение:
— осредненных текущих координат местонахождения ЛА и высоты его полета;
— путевой и вертикальной скоростей, путевого угла и их изменений.
Третичной обработкой называется совместная обработка информации о воздушной обстановке, поступающей от всех наземных РЛС и бортовых систем. В ходе третичной обработки данные приводятся к единой системе координат и единому времени. Избыточность данных позволяет повысить точность конечных результатов по сравнению с исходными величинами.
Теоретической основой построения алгоритмов обработки данных является способ наименьших квадратов, с помощью которого определяются наиболее вероятные значения неизвестных величин по результатам измерений, содержащих неизбежные ошибки.
Полученные значения неизвестных величин называют их о ц е н-к а м и.
Этот фундаментальный способ теории ошибок был предложен в конце XVIII в., когда накопилось большое количество астрономических наблюдений за движениями планет и никто, в сущности, не знал, как поступить с этими наблюдениями, чтобы извлечь из них наиболее точные значения элементов эллиптического движения каждой из больших планет.
В 1806 г. А. Лежандр (1752-—1833) дал простое решение этой задачи. Еще ранее, в 1795 г., 18-летний К. Гаусс (1777—1855) предложил
аналогичный метод и после выхода в свет работы Лежандра довел его до алгебраически строгого способа наименьших квадратов.
Гаусс исходил из предположения, что «потеря» от замены точного, по неизвестного значения измеряемой величины х ее приближенным значением х*, именуемым оценкой, вычисленной по результатам наблюдений, пропорциональна квадрату ошибки (х* — х)2. В этих условиях наилучшей оценкой будет такая лишенная систематической ошибки величина х*, для которой среднее значение «потери» оказывается минимальным, что и приводит к требованию минимума суммы квадратов ошибок.
Строгое математическое обоснование способа наименьших квадратов с теоретико-вероятностных концепций и границы его применимости были даны академиком А. А. Марковым (1856—^922) и крупнейшим советским математиком академиком А. Н. Колмогоровым.
Приведем вывод формульных зависимостей, позволяющих обрабатывать результаты измерений способом наименьших квадратов, ограничившись наиболее простым случаем.
Пусть х1г х2,___, xfe — совокупность неизвестных величин, оценки
которых, т. е. наиболее вероятные значения, необходимо определить. Обозначим эти оценки соответственно х*, х*, ..., х%. В общем случае непосредственному измерению подлежат не сами величины хь х2, ..., xk, а другие величины: г/ь у2, ..., уп, являющиеся функциями от Xi, х2, ..., xk.
Для уяснения сущности способа наименьших квадратов рассмотрим случай, когда п > k и измеряемые величины yt (i — I, 2, ..., п) являются линейными функциями от х/ (/=1, 2, k):
ацХ1 + а12х2 +-----F alkxk = уг, |
°2i-4 + и22х2 + • • • + a2kxk = У2’ I ,
сп1%1 ф- а„2х2 4--F ankxk = уп, J
где ац — известные коэффициенты.
Соотношения (17) представляют собой п алгебраических уравнений с k неизвестными. Задача оценки неизвестных величин xlt х2, ..., xk сводится к отысканию решения системы уравнений (17), в которых величины уг, у2, ..., уп известны, но измерены со случайными погрешностями. Влияние погрешностей приводит к тому, что система уравнений (17) оказывается несовместной (не существует такого решения, при котором каждое уравнение обращалось бы в тождество). Поскольку несовместная система точного решения не имеет, то способом наименьших квадратов отыскивается приближенное решение, являющееся наилучшим в том смысле, что сумма квадратов погрешностей будет наименьшей.
Обозначим это решение х*, х*, ..., х%, Подставив его в систему уравнений (17), найдем приближенную систему тождеств. Для 2 Г. Ф. Молоканов
получения из системы несовместных уравнений (17) системы точных тождеств после замены х/ на х* добавим в левые части невязки Ду,-, за счет которых левые части окажутся равны правым. Тогда аих* + п12х* +--------------------h aux*k + Ауг = уъ
а21х* + п22х* +-----h a2kx% 4- Ду2 = у2,
(18)
anix* + ап2х* 4-----1- ankx* + &Уп = Уп-
Эту систему точных тождеств можно записать более компактно, используя знак суммы и соответствующие индексы:
k
S ацх* + Ду,- = yt, 1=1,2,..., п. /=1
Решив каждое соотношение относительно невязок Ду,-, получим
k
^Ui = Уi— S ацх*, i = 1, 2, ..., n.
i=i
Возведем каждое из этих п тождеств в квадрат и просуммируем их:
п п k
Е М = Е (у, — Е ацх*)2, i=l,2............п. (19)
е=1 »=1 /=1
Решение системы (17) будет наилучшим, если стоящая в левой части сумма квадратов невязок Ду,- будет наименьшей. Это условие и определило наименование способа наименьших квадратов.
Из соотношения (19) видно, что Ду? зависит от х*, значения которых можно подбирать различными способами. Теперь задача сводится к тому, чтобы найти такие значения х*. при которых сумма величин Ду? будет минимальной.
Из математики известно, что для нахождения минимума некоторой функции ее необходимо продифференцировать и производную -приравнять к нулю.
Рассматривая выражение (19) как некоторую функцию от х*. найдем ее минимум, для чего необходимо и достаточно, чтобы все ее частные производные были равны нулю. Возьмем частную производную по х^ от правой части выражения (19), помня, что по условию функции yt являются линейными от х,-:
п k п п k
= —2 Е (Vi — Е ацх*]) ац = — 2 Е a{jyL 4-2 1' ati V йцх*.
>=i i=i i=i 1=1 /=1
Приравнивая к нулю каждое из этих выражений поочередно для / = 1, 2, .... k, получим систему из п так называемых нормальных уравнений, в которых содержится п неизвестных. Эта система, для которой можно было бы строго доказать, что ее определитель не равен нулю, имеет единственное решение для переменных х*, х*. ..., х*, обращающих в минимум выражение (19).
Покажем эти преобразования. Из условий минимума было найдено:
п п k
—2 S aiiHi + 2 У ац £ ацх* = 0. i f=i i=i ;=i
w
После сокращения на два и переноса первого слагаемого в правую часть получим
У aU S ацх* = £ ацу{, /= 1, 2, .... А. i=l j=l i=l
Подставим значения индексов / = 1 к коэффициентам ац, развернув найденное выражение:
п п
У ац (ацх* + а^Хъ + • • • 4-О{*х*) = У Oiif/r-
i=l i=l
Полученное выражение является первым нормальным уравнением. Данное выражение можно переписать в виде следующей суммы:
Пн (<7пх* + aJ2x2 +---------1- alkx*) = а^,
а21 (п21х* + п22х* +--------F о^х^) = п21г/2,
ап1 (anlrf + ап2^2 +--------b ank*%) = ап1Уп-
Сопоставляя эту запись с системой исходных уравнений (17), установим общее правило для записи первого нормального уравнения.
Для этого необходимо каждое из уравнений (17) умножить на коэффициент при хх, после чего все уравнения сложить. Иными словами, первое уравнение системы (17) необходимо умножить на коэффициент при хх, т. е. на пц, второе на п21 и n-е на ani, а затем все уравнения сложить, что и приведет к первому нормальному уравнению.
Для получения второго нормального уравнения первое из уравнений системы (17) умножается на й12 (коэффициент при х2), второе на п22 и т. д., а затем все они суммируются.
После выполнения всех преобразований система нормальных уравнений будет иметь вид
п k п
i=\ /=1 ,-=i
n k n •
Sj ^«2 5j aijX j — ^12Уй ь (20)
n k n
S ®in S ЯцХ, ~ СУпУь * i=l /=1 i=l
Таким образом, для получения всех уравнений системы (20) необходимо каждое из уравнений системы (17) предварительно умножить на коэффициент при определяемом неизвестном, т. е. при X/, а затем все их сложить.
Проиллюстрируем это правило на примере решения системы трех уравнений с двумя неизвестными:
2хх -р Зх2 = г/i, хх —2x2 = z/2, 2хх —х2 = у3. .
Значения измеренных величин оказались следующими: уг = 5, у2 — 7, у3 = 8. Найдем значения х* и х* способом наименьших квадратов.
Перепишем исходную систему, заменяя правые части уравнений их значениями:
2xj ф- Зх2 — 5, хх — 2х2 = 7, 2хх —х2 = 8.
Для нахождения нормальных уравнений согласно формуле (20) умножим каждое из приведенных выше уравнений на коэффициент при хх, а затем их сложим.
Первое нормальное уравнение примет вид
4хх + 6х2 = 10, хх — 2х2 = 7, 4хх — 2хх = 16,
9л'1 + 2х2 = 33.
Аналогично найдем второе нормальное уравнение, умножив каждое исходное уравнение на коэффициент при х2 с учетом его знака. В итоге получим
6хх + 9х2 = 15,
—2хх 4х2 = —14,
—2хх + х2 =-~ —8, 2хх + 14х2 = —7.
Решив систему двух уравнений с двумя неизвестными:
9%1 4- 2х2 = 33, I
2х'1 4- 14х2 -= —7, J
получим наилучшие значения величин и х2: х*= 3,9 и 4 = —1,06.
Значения невязок будут равньк
АУ1 = 5 —2 -3,94-3 1,06 = 0,38, ' Ду2 = 7 —3,9 —2 1,06 = 0,98, \Уз = 8 — 2 - 3,9 — 1,06 = —0,86.
Значения х* и х* дают минимум суммы квадратов невязок и поэтому являются наилучшими:
з
S = 0,382 4- 0,982 4- 0,862 = 1,8444 = min. i=l
Далее рассмотрим, как способом наименьших квадратов можно уточнить линию фактического пути ЛА, уменьшив влияние погрешностей определения его местонахождения.
§ 8. Определение линии фактического пути и параметров полета
Для того чтобы найти линию фактического пути ЛА, необходимо непрерывно (периодически) о. помощью бортовых или наземных средств объективного контроля фиксировать координаты его местонахождения. Так как их определение производится с неизбежными погрешностями, то это будет приводить к некоторому разбросу найденной последовательности точек местонахождения ЛА относительно фактической траектории его полета. Задача обработки результатов объективного контроля будет заключаться в том, чтобы способом наименьших квадратов сгладить разброс точек из-за ошибок определения координат местонахождения ЛА и получить его линию фактического пути с наибольшей достоверностью.
Как и ранее, будем предполагать, что ЛА . движется в горизонтальной плоскости, и рассматривать его центр масс как перемещающуюся в прямоугольной системе координат точку. В качестве средства объективного контроля выберем наземную РЛС.
Предположим, что в некоторые моменты времени Тг, Т2, ... , Тп с помощью РЛС определяются текущие координаты ЛА. Полярные координаты ЛА А и D пересчитываются в прямоугольные координаты
хи у. Примем такое условие, когда ЛА движется прямолинейно. Тогда уравнения его движения будут иметь вид
х (0 = хо + У nXt, 1
У (О = Уо + Vnyt- J
Рассмотрим решение задачи только по координате х, так как методика расчета для координаты у будет аналогичной. Для упрощения рассуждений совместим ось у прямоугольной системы координат с линией заданного пути одного из прямолинейных этапов маршрута. При этом условии координата х будет, соответствовать линейному боковому уклонению ЛА — величине I, а значение Упх— боковой составляющей путевой скорости Уб-
Так как по принятому условию ЛА движется прямолинейно, то для моментов времени Тъ Т2, ..., Тп запишем значения его линейных боковых уклонений, введя текущее время t, — Ti — Тх. Получим систему
Zi — Zi + Уб (7\ — Т\) — 1Ъ
^2. — 11 У б ----- Т j) = Il Рб^2>
(21)
4 — li Т" У^1-
Система п уравнений (21) аналогична системе (17), но каждое уравнение имеет не k слагаемых, а всего два, причем все коэффициенты при первых слагаемых (ац) равны единице, а при вторых слагаемых (at2) равны k (i = 1, 2, 3, ..., ri).
Особенностью решения системы уравнений (21) способом наименьших квадратов является то, что все величины It, полученные в результате измерений, содержат только случайные погрешности. Поэтому, примем математические ожидания этих погрешностей равными нулю, для упрощения окончательных формул — дисперсии одинаковыми,_ а сами ошибки — независимыми друг от друга и подчиненными нормальному закону распределения.
В результате решения системы уравнений (21) для оценок и Уб, найденных способом наименьших квадратов, получаются следующие выражения:
Для случая когда текущие координаты, а значит, и линейные боковые уклонения ЛА от маршрута определяются через равные промежутки времени А/, выражение для tt примет вид
ti - (i— 1) М, i = 1, 2, ..., п. (23)
Это условие упрощает формулы (22), так как в них под знаками сумм будут стоять числовые ряды, представляющие собой сумму квадратов натуральных чисел от Одо п — 1, значения которых приведем к виду
i=l
п (п— 1) (2п— 1) 6
(24)
Первое из этих выражений является суммой арифметической прогрессии 1 + 2 + 3 + ... + (п — 1).
С учетом этих соотношений формулы (22) запишутся так:
(25)
Теперь уточненные линейные боковые уклонения ЛА от заданного маршрута могут быть подсчитаны по формуле
/* =/* ~р У* А/(t —- 1), i=l,2.п. (26)
На основании этого соотношения получим выражение для линейного бокового уклонения ЛА в конечной (n-й) точке:
,* — 2” — 2
ln~~ Z- п (п-р 1) г=1
(27)
Выражения (25), (26), (27) и представляют собой алгоритмы, применяемые при автоматической обработке параметров прямолинейного движения ЛА в горизонтальном полете. Для удобства вычислений их целесообразно переписать в ином виде, введя весовые функции, значения которых могут быть подсчитаны заранее для различных чисел п:
2 (0.
1=1
61 — 4 (п -р 1) п (п -р 1) .
(28)
*
1
1
пц (0 = —
Аналогично для боковой составляющей путевой скорости получим
г=1
/ч 1 12/ — 6 (п+1)
?1V6 (0 — д/ • п („2 _ J)
(29)
а для линейного бокового уклонения в п-й точке
I* = hr\in (i),
6t—2(>г+ 1) n (n -f- 1)
(30)
*UnP) =
По математическому ожиданию величины V* находим на этом ж участке среднее значение разности фактического и заданного путевых углов, т. е. бокового уклонения в градусах:
у*
Д₽* = 57,3 р-6, (31)
'п
оно характеризует точность расчета и выдерживания курса следования на данном этапе маршрута, а также угол подхода к нему при исправлении пути.
Средние квадратические отклонения, характеризующие точность определения по п точкам способом наименьших квадратов величин 1п и Vo при одинаковой точности определения единичного линейного бокового уклонения ЛА по каждой отметке его местонахождения crZj могут быть найдены с помощью соотношений, приведенных в книгах, посвященных цифровой обработке радиолокационной информации [71:
„ _ л Г______________12
Vg At г п (п2 — 1)
(32)
(33)
и
ci}/"
а • =
In
2 (2я — 1) п (п + 1)
где п — число точек, в которых фиксировались на данном этапе маршрута координаты местонахождения ЛА и находилась способом наименьших квадратов его фактическая траектория.
Из теории вероятностей известно, что для случайной величины, подчиненной нормальному закону распределения, вероятность того, что ее отклонение не выйдет за пределы + ст, равна 0,68. В 95 случаях из 100 отклонение случайной величины не превысит + 2сг и в трех случаях из тысячи — ±3а.
Учитывая соотношения (31) и (32), запишем выражение для оценки точности определения фактического путевого угла, т. е. бокового уклонения, в градусах на прямолинейном этапе маршрута:
о₽. = 57,3 п (п2 _ ц , (34)
где Уп А/ = As — расстояние в км между двумя соседними отметками местонахождения ЛА.
При числе точек п = 2 формулы (32), (33) и (34) сводятся для независимых и равноточных определений к более простым соотношениям:
<т, г~ „ о, ]/2
<4 = д/ 2« °гп =и =г57’3 ~кг
Напомним, что при известной точности определения местонахождения ЛА, характеризуемой средним квадратическим радиальным отклонением о,, величина среднего квадратического линейного боко
вого уклонения
<Т, 01 = -Г-/2
(35)
Способом наименьших квадратов можно получить алгоритмы и для обработки (сглаживания) криволинейных участков линии фактического пути ЛА, на которых он двигался с ускорением а^. В этом случае уравнение для определения сглаженных, т. е. наиболее точных значений линейных боковых уклонений, имеет вид
*
l*i = < + Vj а/ (i - 1) + У [Az (i - I)]2. (36)
Осредненные значения величин I*, Уб и Об, входящих в это уравнение кривой второго порядка, находятся с помощью соотношений, которые приводятся в упоминавшихся ранее пособиях [8, 11]:
£ = S WO. S W6(0, I
i=n (37)
а* = S 4Паб (0. /* = S ^„(0,
i=l £=1 п )
где значения весовых функций определяются по формулам:
Q
П/, W = п Щ + 1)(п + 2)13 (« + !)(« + 2) — 2i (6п + 7) + Юг2], (38)
^6 & = ~ -ДМ(»2 _61)(п*-4) t(« + О (« + 2) (6« — 7)-—
— 2г(16п2—19)+30i2(n—1)], (39)
(0 = Д7МВ2-1)(П2_4) [(« + 1) (« + 2) - 61 (n + 1) + 6г2],
(40)
Ып(0 = п(в+1)(в + 2) [(« + 1) (п + 2)-21(4и + 3) + Юг2].
(41)
По величине можно найти значение угла крена или угловой скорости разворота ЛА на соответствующем криволинейном участке траектории его полета:
а!
tgT=9jf, (42)
откуда крен в градусах будет равен
Т ~ «б = 5,84йб. (43)
Необходимо учитывать, что при значениях li в км, а А/ в мин ускорение получится в км/мин2, поэтому в формулах (42) и (43) его необходимо привести к размерности м/с2, воспользовавшись соотношением
„ ал км/мин^ fl6M/c=—ад—•
Для практических целей угловую скорость разворота ЛА при полете на криволинейном участке траектории удобно привести к размерности градус/мин. В этом случае она будет равна
со* = 57,3^5,
а радиус кривизны траектории ЛА
V2
г=^. (44)
«б
•t
Методика вычислений и анализа ЛФП с использованием приведенных соотношений будет изложена в гл. III.
§ 9. Рациональная частота фиксации параметров полета
В полете центр масс ЛА описывает траекторию, для определения и последующего анализа которой необходимо установить рациональную частоту фиксации с помощью средств объективного контроля параметров, характеризующих его движение. Частая фиксация приводит
к чрезмерному увеличению объема информации, что усложняет обработку результатов, загромождая вычисления, а слишком редкая фиксация не позволяет учесть все закономерности полета ЛА.
Например, при очень редком определении координат могут оказаться незафиксированными максимальные линейные боковые уклонения ЛА от заданного маршрута, моменты интенсивного изменения курса, высоты или скорости полета.
Частота определений фактического местонахождения ЛА для нахождения его линейных боковых уклонений от маршрута может быть существенно реже частоты фиксаций высоты полета, так как колебания высоты наблюдаются значительно чаще.
Если же оценивать структуру колебаний ЛА относительно заданной траектории на глиссаде снижения, то и точность и частота фиксации отклонений ЛА при заходе на посадку должны быть больше, чем в маршрутном полете. На глиссаде отклонения не превышают десятков метров, поэтому фактическая траектория будет характеризоваться совершенно иными закономерностями, чем в маршрутном полете.
Какова же рациональная частота фиксации показаний средств объективного контроля?
С точки зрения физических свойств она должна быть чаще у процесса, быстро изменяющегося с течением времени, и реже у процесса, медленно протекающего. Поэтому во всех случаях частота фиксации пилотажных параметров должна быть значительно выше, чем частота фиксаций линейного бокового уклонения.
В работах [5], посвященных объективному контролю за выдерживанием высоты и скорости полета ЛА, рекомендуется записывать соответствующие параметры через 1—3 с.
Такая частота фиксации местонахождения ЛА в маршрутном полете, конечно, не нужна, так как отклонение от заданного маршрута изменяется медленно с течением времени и экипаж лишь раз за 5— 15 мин доворачивае? ЛА.
Задача определения шага дискретности при наблюдении Непрерывно изменяющейся во времени величины широко распространена в измерительной технике и имеет название задачи квантования непрерывной величины во времени. Существуют различные методы ее решения, которые рассмотрены в ряде работ, посвященных передаче радиосигналов. В приближенных методах определения шага квантования исходят из геометрических соображений на основе замены дуги кривой спрямляющей ее хордой [61. Более строгие методы основаны па анализе всего спектра частот в структуре рассматриваемого колебательного процесса и отбрасывании тех из них, которые не вносят заметной погрешности в результаты, наблюдения. Для обоснования частоты определений местонахождения ЛА, т. е. квантования во времени его линии фактического пути, воспользуемся вначале геометрическими приемами.
Примем в качестве условия, когда при замене гладкой траектории отрезками прямых в каждой из точек положение ЛА определяется Правильно, а точки ломаной и гладкой траекторий в обоих концах хорд
совпадают. Из рис. 13 видно, что чем больше кривизна траектории, тем дальше хорда отклоняется от стягиваемой дуги. В этом случае максимальное значение погрешности будет равно
Л _ (d2y\ А/2
Отах - ( d/?ymax 8 .
где Д/ — интервал квантования;
У ~ /1(0 — уравнение фактической траектории движения ЛА.
В этом выражении первый сомножитель представляет собой значение второй производной от функции у = в точке, расположенной внутри интервала Д t. Как было показано ранее, максимальная величина второй производной является ничем иным, как расстоянием второго
Рис. 13. К определению интервалов квантования по времени
порядка, что соответствует максимальной величине бокового ускорения. Чем больше эта величина, тем больше искривлена траектория, тем чаще нужно определять положение ЛА. Решив записанное выше соотношение относительно А/, получим
/ОЛ
sp- <45>
F \d/2/max
Найдем рациональную частоту повторных определений местонахож-дения^ЛА, взяв в качестве примера величину бокового ускорения равной <2б = 0,205 км/мин2. Для максимально допустимой погрешности Отах = 0,5 км, представляющей собой максимальное линейное отклонение дуги фактической траектории от стягивающей ее хорды, получим интервал квантования в мин:
1/’8 • 0,5
Г 0,205
4,5.
Убедимся в справедливости полученного результата. Найдем радиус кривизны ЛФП в км для скорости ЛА Vn — 10 км/мин и ускорения «б = 0,205 км/мин2 по формуле (44):
,,2
г ~ = Ж ~ 488-
За 4,5 мин полета по дуге окружности ЛА проходит путь, равный 45 км.
Из рис. 14 видно, что
5тах = Г (1 COS tt). ,
Для нашего примера АВ = 22,5 км, что соответствует углу а в радианной мере:
a = 0,046 или а^2°38'.
* 4оо
Тогда линейная погрешность в км будет равна
6тах = 488 (1 — cos 2° 38') « 488 • 0,0011 « 0,5.
максимальной погрешности.
Эта величина и была задана в качестве
Зависимость рациональной частоты определений параметров движения ЛА от величины Пбтах, т. е. от максимального значения нормальной перегрузки, позволяет в принципе автоматизировать процесс фиксации координат местонахождения ЛА. Например, можно отрегулировать частоту срабатывания затвора фотоаппарата, фотографирующего счетчики координат или экран бортовой РЛС в зависимости от величины ускорения, измеряемого инерциальной системой. Частота съемки, минимальная в пря-
Рис. 14. К определению линейной ошибки при замене дуги кривой стягивающей ее хордой
молинейном полете, должна автома-
тически возрастать с ростом нормальной перегрузки, свидетельствующей о развороте ЛА, и уменьшаться при отсутствии ускорений, когда ЛА летит по прямой. В зависимости от этой частоты фиксации координат определяют характер движения ЛА, а следовательно, и способ
сглаживания его траектории.
Расчеты показывают, что в зависимости от вида предстоящего маршрута полета, наличия и длительности участков разворотов рациональная частота определения местонахождения ЛА колеблется от 1 до 5'—6 мин.
§ 10. Еще один метод расчета интервалов фиксации параметров полета
Изложенная методика определения рациональной частоты интервалов фиксации параметров полета ЛА, и в частности его отклонений от заданной траектории, имеет простую физическую сущность, в основе которой лежит введенное ранее понятие расстояния второго порядка. Недостаток этой упрощенной методики заключается в том, что она учитывает только максимальную величину бокового ускорения или нормальной перегрузки, но не учитывает их длительность.
Убедимся в этом на следующем примере. Предположим, что для исправления пути экипаж делает на 10° доворот по курсу с креном у = 15°.
Согласно формуле (42) нормальное ускорение в м/с2 будет, равно аб = gtgy = 9,81 • 0,268 ss 2,63 или в км/мин2
аб = 2,63 • 3,6 9,46.
Тогда по формуле (45) для бтах = 0,5 км получим интервал квантования в мин:
А'“/э=0'6- I
Подсчитаем длительность доворота на 10° при скорости 600 км/ч и крене у= 15° в рад/мин:
аб 9,46 л оз с
w ~ Уп ю 0,946
или в граду с/мин
со = 57,3 • 0,946 « 54.
Следовательно, доворот на 10° будет длиться около 0,2 мин, поэтому его выполнение при интервале квантования 0,6 мин может оказаться незафиксированным.
При сложной и носящей случайный характер колебательной структуре полета ЛА относительно заданной траектории требуется более строгий подход к определению рациональных интервалов фиксации его параметров с помощью средств объективного контроля.
Рассмотрим более строгую методику определения интервалов квантования.
При квантовании непрерывной функции у = /(/) по времени точность ее представления последовательностью значений, полученной по результатам измерения в дискретных точках, зависит от количества этих точек. При большом числе точек непрерывная функция может быть определена с высокой точностью, но для этого потребуется более длительная обработка данных, объем которых возрастет. Поэтому при замене непрерывной траектории полета ЛА последовательно соединенными несколькими точками возникает вопрос: каково должно быть наименьшее число т этих точек, чтобы погрешность такого представления ст не превосходила некоторую допустимую величину од? Иными словами, какова должна быть частота квантования интересующей нас непрерывной функции по времени, чтобы обеспечивалось условие о
Од? Ответ на этот вопрос дает теорема В. А. Котельникова, являющаяся центральной теоремой теории информации и утверждающая, что если непрерывная функция f(t) не содержит в своем спектре составляю-« г <йв
щих с частотой выше /в = , то она полностью определяется после
довательностью своих дискретных значений, взятых в точках, удаленных одна от другой во времени на интервалы
Д/ =
1 _ п
2 /в — <ов ’
(46)
Рис. 15. График нормированной корреляционной функции
где оэв—круговая частота, ограничивающая высокочастотную часть спектра колебательного процесса, которую можно не принимать во внимание.
Для определения ыв необходимо воспользоваться понятием нормированной корреляционной функции, являющейся важной характеристикой структуры случайного колебательного процесса.
Обработка совокупности полетов, выполнявшихся по разном маршрутам в различных условиях, показывает, что фактическую траекторию полета ЛА приближенно можно рассматривать как случайный процесс марковского типа, для которого закон распределения линейного бокового уклонения в будущий момент времени зависит только от его значения в настоящий момент времени и не зависит оттого, как оно изменялось в прошлом.
Для таких процессов нормированная корреляционная функция (рис. 15) имеет вид
р (т) == е_ “б I. (47)
В этом выражении а характеризует степень затухания связи между двумя линейными боковыми уклонениями, отстоящими друг от друга па интервал времени т. В пособиях, посвященных теории случайных процессов, показано, каким образом, зная нормированную корреляционную функцию, можно найти спектральную плотность, т. е. распределение амплитуд по различным частотам в структуре случайного колебательного процесса [10].
Найдем нормированную спектральную плотность с помощью соотношения
2 (
s (со) == — I р (т) cos сот du о
Тогда
2 Г
s (со) = — I е~ат cos сот du v л J
о
После интегрирования этого выражения получим , . 2а 1
s(“) = л ’а? + <оГ
Ограничивая спектр частот значением сов, можно выражение для нормированной корреляционной функции написать в виде
“в
, . 2а Г cos сот , р (т) = — I -г~.-2 о®.
г ' л J а? + со?
о
Из свойств преобразования Фурье известно, что ограничение верхней части спектра (т. е. отбрасывание частот от ®в до со) сказывается главным образом на точности воспроизведения нормированной корреляционной функции в окрестности т = 0.
Для определения этой погрешности подставим т = 0 в записанное выше соотношение, взяв пределы интегрирования от ®в до со. Получим
со
s г , .. 2а С dw . 2 , ыв
6 (Р (т)1 — — \ “ГЛ—2 =1--arctg — ,
' v л J а?со? л ° а ’
“в
откуда
0,05 = 1--— arctg— .
л ь а
Тогда интересующая нас величина. сов будет равна
®B = atg^n= 12,7а. (48)
Следовательно, с учетом формулы (46) интервал А/, определяющий рациональное квантование некоторой непрерывной величины по времени, окажется равен
= («)
Из этого соотношения видно, что чем больше а, т. е. чем быстрее затухает связь между двумя отклонениями ЛА от заданной траектории, разнесенными друг от друга на интервал времени т, тем в большей степени процессу присущи высокочастотные колебания, что приводит к уменьшению шага его квантования по времени.
Приблизительное значение а находится с помощью формулы (47), если исходя из физических представлений предварительно оценить наименьший интервал времени между двумя отклонениями ЛА от заданной траектории, которые можно считать практически независимыми.
Для независимых величин обычно принимают значение р(<г) = 0,05. Из формулы (47) можно найти величину а:
* 0,05 = е~“14,
откуда
cz= —1п0,05~ — т ’ т
(50)
Подставив это значение в формулу (49), получим
или приближенно
Д/^ 0,1т.
(51)
Пусть в некоторый момент времени отклонение ЛА вправо от заданного маршрута было равно 5 км. Через 1—2 мин полета оно в общем случае мало изменится, а через 10—12 мин может быть практически каким угодно.
Тогда, принимая т = 10 мин, из формулы (51) получим требуемые интервалы определений местонахождения ЛА, равные примерно Д/ — 1 мин. При полете с энергичным маневрированием это время должно быть существенно меньше приведенного интервала квантования, справедливого для обычного маршрутного полета на прямолинейном отрезке пути.
* * *
Применение алгоритмов для автоматизированной обработки результатов объективного контроля по способу наименьших квадратов, а также рациональная частота фиксации параметров, регистрируемых с помощью различных технических средств, позволяют осуществлять контроль и анализ точности вождения ЛА, а также оценивать работу экипажа на достаточно строгой научной основе.
«
глава ill МЕТОДИКА
ОБРАБОТКИ РЕЗУЛЬТАТОВ
ОБЪЕКТИВНОГО КОНТРОЛЯ
§ 11. Использование средств объективного контроля
Результатом объективного контроля за полетом ЛА являются записанные автоматически или полученные после дополнительной обработки данные о линии фактического пути, высоте, скорости полета и некоторых других параметрах. Для сбора этих данных на ЛА устанавливаются различные штатные средства объективного контроля (СОК). К ним относятся системы регистрации параметров полета, самописцы, осциллографы, магнитофоны, фотоаппаратура и т. д., которые позволяют фиксировать на бумажных и магнитных лентах, фотопленке и других носителях информации интересующие нас сведения.
С помощью бортовых СОК можно получить объективные данные о различных характеристиках выполненного полета.
Общая продолжительность полета находится подсчетом числа временных меток, начиная с нулевой, соответствующей началу взлетй, и кончая последней, определяющей момент посадки ЛА. Сравнивая фактическую продолжительность полета с заданной, можно предварительно судить о том, как протекал полет. Конечно, их совпадения или отклонения еще недостаточно для оценки точности полета по маршруту. Время выхода на цель может быть определено по отметке времени нажатия боевой кнопки, сброса подвесок, отклонения стабилизатора при атаке цели с пикирования и последующего выхода из него, начала энергичного маневра после удара по объекту или фотографирования его и т. д.
Если характер маршрута таков, что для перехода на очередной этап требуется выполнить доворот на довольно большой угол, то время полета на этапе может быть определено по моменту начала виража, который распознается по наличию нормальной перегрузки Пу> 1, фиксируемой в течение определенного времени. Так как погрешности выхода на последующий этап маршрута зависят от точности выполнения разворота, то важно оценить, насколько строго выдержаны параметры разворота: время, крен, скорость и радиус.
Значения этих величин находятся с помощью следующих соотношений:
de V ,
77 •---- COS U
d£ g
COS у =------—— ’
%
а I/
sin 0 = -у и VB = ,
(52)
где 0 — угол наклона вектора воздушной скорости; Ув — вертикальная скорость.
(53)
(54)
(55)
что
Для горизонтального полета 0 — 0, поэтому формула для с деления угла крена упрощается и сводится к такому виду:
1 cos у = — .
ПУ
По величине угла крена рассчитывается радиус разворота
V? cos2 6 ~ gny sin Т
или для горизонтального полета с учетом формулы (53) — у2 r~£tgY-
При использовании этих соотношений следует иметь в виду,
точность определения угла крена, а следовательно, и радиуса разворота падает по мере уменьшения у. Например, если точность регистрации нормальной перегрузки равна ±0,25, то при пу= 2 (что соответствует крену 60°) ошибка определения крена не будет превышать + 5°, а по-грешность в определении радиуса разворота — нескольких сот метров.
Для того чтобы убедиться в этом, найдем ошибку в определении угла крена при развороте ЛА в горизонтальной плоскости. Продифференцируем формулу (53), перейдя к конечным приращениям:
siny Ду=-/.
пу
Ошибка в угле крена в градусах будет равна
Для ранее приведенных цифр получим в градусах
Ду = 57(3^5 4,1.
Чтобы найти ошибку в радиусе разворота, продифференцируем формулу (55), подставив в нее значение Ду в градусах и опустив знак минус:
. V2 ДТ V2 дт
1 9,81 ' 57,3 sin2 т " 562,1 ’ sin2 Т '
Подставив сюда значения у = 60° и Ду = 4,1°, для воздушной скорости полета 900 км/ч (250 м/с) получим Дг = 607,8 м.
Если же нормальная перегрузка близка к единице (пу^. 1,5), то ошибки в определении угла крена, а значит, и радиуса разворота будут недопустимо большими даже при более высокой точности регистрации пу. Поэтому фиксировать с помощью ныне имеющихся на ЛА средств объективного контроля моменты доворотов на небольшие углы, выполняемые с малыми кренами, пока практически не удается.
Анализ бароспидограмм после их дешифрирования позволяет судить о качестве выдерживания профиля полета, наличии участков разгона или торможения скорости при маневрировании ЛА для точного выхода на цель во времени.
Большое значение для оценки точности захода на цель и прицеливания имеют анализ пленок фотоконтрольных приборов, фиксация разовых команд о включении автопилота, выполнении коррекции и т. д., а также прослушивание магнитофонной записи. Все это позволяет составить объективное представление главным образом о качественных и частично о количественных показателях точности самолетовождения.
Однако регистрации параметров полета с точностью, необходимой для полного анализа фактической траектории полета как в вертикальной, так и в горизонтальной плоскости, бортовые СОК не обеспечивают. Исключением являются лишь установки, которые позволяют с требуемой дискретностью фотографировать индикаторы бортовых радиолокационных станций, и частично аэрофотоаппараты для фотографирования земной поверхности, с помощью которых могут быть определены линия фактического пути или время и точность прохода цели и контрольных ориентиров. Поэтому для детального анализа этих показателей предпочтение отдается наземным радиотехническим средствам (радиолокационным станциям и радионавигационным системам).
По мере совершенствования бортовых СОК, упрощения и автоматизации процесса дешифрирования носителей информации их возможности существенно возрастают.
В самом деле, если бортовой прицельно-навигационный комплекс обеспечивает с высокой точностью регистрацию фактических координат ЛА, курса, угла крена и доворота, составляющих путевой скорости и других элементов, то использование этих данных, их сопоставление с результатами контроля с помощью наземных средств позволит значительно повысить точность, достоверность, а значит, глубину и качество анализа результатов выполненного полета.
Методика восстановления линии фактического пути по записям параметров функционирования прицельно-навигационного комплекса, имеющего в своем составе бортовую цифровую вычислительную машину (БЦВМ), изложена в статье Е. Мешкова, опубликованной в журнале «Авиация и космонавтика» за 1978 г., № 5.
На фотобумагу бортового осциллографа по точному каналу непрерывно записываются значения азимута А и дальности D от ЛА до наземного радиомаяка. Линия фактического пути определяется на основе дешифрирования записей обоих параметров, которые позволяют однозначно установить местонахождение ЛА в любой момент времени, в том числе и в тех случаях, когда в одном маршрутном полете последовательно использовалось несколько радиомаяков системы РСБН.
В различных областях техники, связанной с автоматизацией управления, а также необходимостью точного измерения различных величин, широкое применение находят так называемые корреляционно-экстре
мальные системы (КЭС). Навигация относится к одной из основных областей применения этих систем, с помощью которых могут с высокой точностью автономно определяться положения движущихся объектов, измеряться параметры их движения — скорость, ускорения, пройденный путь, направления на движущийся объект, расстояния до него и т. д. Принципы устройства и применения КЭС разнообразны и подробно излагаются в литературе [21. .
КЭС работают, например, по принципу автоматического совмещения заранее заготовленной и записанной в бортовом устройстве карты местности предстоящего полета ЛА с фактическим изображением того участка, над которым он находится в данный момент. Изображение местности под ЛА может быть получено с помощью различных источников информации: оптического, радиолокационного, инфракрасного и т. д. В зависимости от источника информации на борту ЛА устанавливается соответствующий датчик, преобразующий, например, записанную топографическую карту местности в видимое изображение для ввода в оптический или радиолокационный коррелятор. Изображение местности под ЛА воспринимается также специальным бортовым датчиком и вводится в оптический (радиолокационный) коррелятор. В системе сравнения изображения (корреляторе) обеспечивается их наилучшее совмещение, после чего автоматически определяются все необходимые величины (линейные боковое и продольное уклонения, скорость полета, курс, путевой угол и т. д.).
Принцип действия других систем основан на точечном зондировании какого-либо геофизического поля, например рельефа местности, над которой в данный момент пролетает ЛА, и сравнении его профиля с местностью, записанной в памяти бортовой ЭВМ.
Как в системах, основанных на сравнении изображения местности, так и в системах, работающих по принципу сравнения геофизического поля, необходимо определить момент наилучшего совпадения наблюдаемого кадра с картой или измеряемого сечения геофизического поля с тем, который был введен в ЭВМ. Этот момент определяется^ по экстремуму так называемой корреляционной функции, которая характеризует степень связи (общности) совмещаемых изображений или сечений. Полное совпадение сечения, например, рельефа местности, полученного по записям в полете, с реальным рельефом, заблаговременно введенным в ЭВМ, будет только в том случае, если точно определена фактическая траектория полета. Задача автоматической обработки, которая выполняется с помощью ЭВМ, в том и заключается, чтобы найти те единственные условия, при которых сечения рельефа или изображения кадра и карты наилучшим образом совпадают. Тем самым устанавливается фактическое местонахождение ЛА, а последовательность полученных точек места ЛА позволяет найти линию фактического пути.
Преимущества данного корреляционно-экстремального метода заключаются в его высокой точности, автономности, возможности использования при полете на малых и предельно малых высотах, когда радиолокационный контроль с земли затруднен или даже невозможен.
Корреляционно-экстремальные системы успешно могут быть использованы для автоматизации объективного контроля, который упрощается в связи с тем, что карту или рельеф местности можно иметь не в бортовом устройстве, а в памяти наземной ЭВМ. В полете достаточно с помощью штатных бортовых средств собрать требуемую информацию (аэрофотоснимки, снимки с экрана бортовой РЛС, запись показаний барометрического и радиовысотомера и др.), чтобы после полета и обработки ее по соответствующим .алгоритмам с помощью наземной ЭВМ с высокой точностью установить линию фактического пути ЛА, необходимую для анализа качества выполненного полета. Так как задача определения фактической траектории полета решается с помощью наземной ЭВМ, то на нее можно возложить полную обработку результатов с выдачей наглядного рисунка и буквенно-цифровой информации, необходимой для тщательного анализа и поучительного разбора выполненного полета с целью вскрытия причин допущенных экипажем недостатков (см. гл. IV).
§ 12. Определение вида линии фактического пути ЛА
Линия фактического пути ЛА может быть установлена периодическим определением его местонахождения теми способами, которые обеспечивают достаточную точность.
При полете над местностью, богатой ориентирами, местонахождение ЛА может определяться обзорно-сравнительным способом, основанным на сличении карты с визуально наблюдаемыми ориентирами или их изображениями на экране бортовой радиолокационной станции. Последовательность таких отметок местонахождения ЛА является дискретным представлением его линии фактического пути.
Местонахождение ЛА, а следовательно, и его ЛФП в любых условиях полета могут определяться с помощью наземных радиотехниче-ких средств.
В качестве основных документов объективного контроля, подтверждающих факт местонахождения ЛА в соответствующей точке, могут служить фотоснимки земной поверхности в момент пролета ориентиров, снимки экрана бортовой или наземной РЛС, проводки ЛА, выполненные на планшете или на кальке, и т. д.
На рис. 16 показана линия фактического пути ЛА, полученная на основании дешифрирования фотоснимков экрана бортевой РЛС, производившихся через каждую минуту полета на малой высоте. Дешифрирование фотоснимков заключалось в привязке каждого снимка к карте. Точки, характеризующие местонахождение ЛА в соответствующие моменты времени, последовательно соединены отрезками прямых.
Измеренные на карте и округленные до целого числа километров линейные боковые уклонения ЛА от заданного маршрута на контролировавшемся этапе полета общей продолжительностью 36 мин приведены в табл. 3.
Таблица 3
/, мин 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
1, км 0 +1 +1 4-1 4-3 +3 4-3 4-1 0 0 4-2 4-2 0 0 -2 -2 -3 —5
t, мин 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
1, км —3 —3 —4 —5 —5 —5 —2 —1 0 0 0 4-1 4-4 +4 4-3 4-2 4-2 0 0
Путевая скорость в данном полете 600 км/ч. Обратим внимание на то, Что наличие ошибок при определении местонахождения ЛА по фотоснимку с экрана бортовой РЛС (неточная привязка снимка к карте) и допускаемых при округлениях, приводит к случайным погрешностям в определении величины линейного бокового уклонения. Возникают вопросы: в какой степени проведенная через полученную последовательность точек ломаная линия соответствует фактической линии пути и действительно ли полученные на 17, 21, 22 и 23-й минутах полета записанные в табл. 3 максимальные уклонения (5 км влево) являются точными?
Для того чтобы обоснованно ответить на подобные вопросы, необходимо при обработке данных точно дешифрировать те снимки, на которых была зафиксирована величина наибольшего уклонения ЛА. Кроме того, погрешности отдельных отсчетов, привязки снимков к карте и т. д. могут быть вычислены в процессе обработки результатов наблюдений способом наименьших квадратов, если известен характер полета ЛА на рассматриваемом участке.
Покажем на примерах порядок обработки и сглаживания погрешностей с целью получения плавной линии пути полета ЛА, т. е. наилучшей замены ломаной линии отрезком прямой или кривой второго' порядка.
До начала обработки необходимо на основе изучения полетной документации, беседы с экипажем, анализа данных, полученных с помощью контрольно-записывающей аппаратуры или других средств объективного контроля, установить общий характер полета ЛА по заданному маршруту. Обратить внимание на время.и место выполнения доворотов, производившихся экипажем для коррекции своего местонахождения и исправления курса следования.
Для этого используют магнитофонную запись, с помощью которой нетрудно установить, когда отдавались команды на выполнение доворотов по курсу и на какой угол. Наличие и продолжительность доворотов могут быть установлены также по осциллограммам точной системы автоматической регистрации параметров полета, на которой
видны участки нормальной перегрузки, превышающей единицу (их продолжительность характеризует длительность доворота ЛА по курсу). Для выявления причин допущенных уклонений ЛА от маршрута важно установить, выполнялся ли полет в режиме автоматизированного самолетовождения и, следовательно, связано ли уклонение с отказом техники или оно объясняется ошибками экипажа, не использовавшего полностью возможности ПНК.
Для правильного анализа выполненного полета, особенно на этапах большой протяженности, необходимо также использовать синоптические карты и карты барической топографии для уровней, соответствующих высоте полета. С помощью этих карт можно установить причины уклонения ЛА от маршрута, например при изменении ветра, оценить качество контроля пути и своевременность его исправления.
На основе указанных материалов нужно объективно восстановить порядок действий экипажа по самолетовождению, правильность эксплуатации в воздухе прицельно-навигационных комплексов и обоснованно принять для последующей математической обработки наилучший вариант расчетов, определяющий общий вид линии фактического пути (прямая; кривая второго порядка, ломаная).
Так, на рис. 16 по расположению точек, в которых по данным фотоснимков находился ЛА, можно сделать следующее предположение о характере его движения относительно заданного маршрута при неавтоматизированном полете на этом этапе. После точного прохода ППМ экипаж, убедившись, что ЛА уклонился вправо, выполнил небольшой доворот по курсу (первое исправление пути), который к 8-й минуте обеспечил возвращение ЛА на заданный маршрут, где экипаж вновь уточнил курс (второе исправление пути). Однако взятое упреждение на снос оказалось малым, поэтому после выхода на заданный маршрут ЛА опять начал уклоняться вправо. Тогда на 11-й минуте полета еще раз был выполнен доворот влево (третье исправление пути), но при этом угол доворота оказался больше требуемого, в результате чего ЛА пересек заданный маршрут, оказавшись слева на максимальном уклонении, равном 5 км (21—23-я минуты).
На 23-й минуте полета вновь курс был исправлен (четвертое исправление пути),' ЛА начал приближаться к заданному маршруту, пересек его и к 30-й минуте оказался в четырех километрах правее заданного маршрута, где вновь был выполнен доворот влево (пятое исправление пути), обеспечивший постепенное уменьшение этого уклонения и возвращение ЛА на заданный маршрут с последующим точным проходом над поворотным пунктом маршрута (36-я минута).
Эти рассуждения основаны на анализе расположения точек местонахождения ЛА и предположении, что в течение 36 мин полета на малой высоте экипаж пять раз исправлял путь, делая небольшие довороты по курсу.
Поэтому целесообразно установить, действительно ли экипаж исправлял путь пять раз. В результате изучения полетной документации, доклада экипажа о своих действиях было установлено,
что курс , на данном этапе исправлялся трижды. Отсюда следует, что разброс точек местонахождения ЛА объясняется погрешностями их определения. В частности, расположение двух точек, характеризующих положение ЛА, якобы уклонившегося на 10-й и 11-й минутах вправо на 2 км, является следствием неточной привязки этих снимков к карте. Фактически ЛА шел по маршруту. Сомнительно также положение точки, относящейся к 17-й минуте. В действительности после исправления пути на 5-й минуте полета (первый доворот в точке В) ЛА медленно начал приближаться к заданному маршруту и на интервале от 8-й до 13-й минуты пересек его, продолжая до 21— 23-й минуты уклоняться влево, затем вновь был исправлен путь (вто- ' рой доворот в точке С).
Последующее уклонение ЛА вправо было ликвидировано на 30-й минуте (третий доворот в точке Д), после чего ЛА точно прошел над следующим ППМ (точка £). Таким образом, экипаж в полете на этом этапе три раза исправлял путь: на 5, 22 и 30-й минутах.
До начала обработки и сглаживания линии фактического пути должны быть использованы все материалы, которые позволили бы с наибольшей объективностью установить картину полета ЛА относительно заданного маршрута.
§ 13. Сглаживание линии фактического пути отрезками прямых
Сглаживать некоторые участки линии фактического пути отрезками прямых можно лишь на основании объективных данных, свидетельствующих о том, что полет ЛА на рассматриваемом этапе маршрута был прямолинейным. Если же никаких материалов о характере полета ЛА нет, то сглаживание производят на основании глазомерной оценки положения точек, характеризующих по данным средств объективного контроля местонахождение ЛА в соответствующие моменты времени. Поясним порядок сглаживания ЛФП, исходя из того, что на контролируемом этапе экипаж трижды исправлял путь.
Если взять за основу изложенный выше характер движения ЛА относительно заданного маршрута, то приведенную на рис. 16 реальную ЛФП можно заменить показанной на рисунке пунктирной линией, состоящей из четырех прямолинейных отрезков (АВ, ВС, СД и ДЕ).
Приведем пример, иллюстрирующий методику расчетов, основанную на способе наименьших квадратов.
Пользуясь данными табл. 3, выполним сглаживание первого уча- . стка ЛФП, включающего шесть отметок (рис. 16), полученных дешифрированием снимков экрана бортовой радиолокационной станции, сделанных с равными интервалами А/ = 1 мин при скорости полета Еп = 600 км/ч и точности определения местонахождения ЛА ог = = 1,5 км.
1. Выпишем из табл. 3.отдельно линейные боковые уклонения ЛА от заданного маршрута в указанных точках:
t, мин 0 1 2 3 4 5
1 1 2 3 4 5 6
1[, км 0 1 1 1 3 3
2. Найдем по формуле (28) для каждой i-й точки значения весовых функций. *-
Для i = 1 при п = 6 получим ... 6-4-7 11
•ХО) 6.7 21 ’
Для i = 2, 3, 4> 5 и 6 найдем соответственно ’ll, (2) — 42 — 21 > ’ll, (3) —21’
Пб (4) = 27 ’ ’ll, (5) = — • ’ll, (6) = — Л
Тогда по формуле (28), умножая значения весовых функций в каждой t-й точке на соответствующее ей линейное боковое уклонение /4 ЛА от заданного маршрута с учетом знака, получим сглаженную начальную точку, более точно характеризующую положение ЛА в момент прохода ППМ:
/* = JL (11-0 + 8- 1 + 5-1 + 21 — 1-3 — 4-3) = 0.
Следовательно, сглаженное начальное уклонение ЛА совпадает с наблюдавшимся. В общем случае не исключено, что эти величины окажутся различными.
3. Аналогичным образом, воспользовавшись формулой (29), подсчитаем значения весовых функций для среднего значения боковой составляющей путевой скорости.
Учитывая, что А/ == 1 мин и поэтому размерность весовых функций равна 1/мин, запишем:
’lv6 (1) = — 35, ПИб (2) = 35 > ’П'б (^) == 35 •
1 ч S
’ЧГб (4) = 35 , ПГб (5) = 35 и T]V6 (6) = 25 .
По формуле (29) найдем боковую составляющую путевой скорости в км/мин:
^ = ^(-5-0-3-1-1 1 + 1 1+3-3 + 5-3)= g = 0,6.
4. По формуле (26) подсчитаем сглаженные значения линейных боковых уклонений ЛА от заданного маршрута. Так как = 0 и А/ = = 1 мин, их уточненные величины равны
/Г = o,6(i— 1).
Подставляя сюда значения i = 1, 2, 3, 4, 5, 6, получим
I* = 0, /* = 0,6 км, /3 = 1,2 км, I* = 1,8 км, I* = 2,4 км, I* = 3,0 км.
Значение последнего уклонения можно проверить по формуле (30). Сглаживающая прямая, аппроксимирующая ЛФП на первом этапе полета (АВ), показана на рис. 16 пунктирной линией.
Сравнивая найденные способом наименьших квадратов сглаженные линейные боковые уклонения ЛА от заданного маршрута с их значениями, приведенными в табл 3, можно оценить невязки, т. е. разности между сглаженными и табличными значениями линейного бокового уклонения в каждой точке, которые будут равны
Д/{ = /!-!<.
Вычислив эти разности, получим соответственно
Д/х = 0, Д/2 =—0,4 км, Д/3 = 0,2 км, Д/4 =—1,2 км, Д/6 = 0,6 км, Д16 = 0.
Отсюда видно, что наибольшая ошибка в определении линейного бокового уклонения ЛА от заданного маршрута допущена в четвертой точке. При необходимости можно вновь вернуться к дешифрированию снимка, с помощью которого было определено с ошибкой местонахождение ЛА в этой точке.
5. Найдем среднее значение бокового уклонения в градусах, ха- I растеризующее точность расчета и выдерживания курса следования на участке отхода от ППМ (от точки А).
По формуле (31) при Уп = 600 км/ч (Уп = 10 км/мин) подсчитаем боковое уклонение в градусах:
ДР* = 57,3 Ofo^3,4.
Полученный результат свидетельствует о том, что при отходе от ППМ курс ЛА выдерживался неточно.
Для исключения подобных ошибок в дальнейшем важно выявить причины их возникновения. Ими могут быть ошибка в измерении путевого угла на карте, ошибка в расчете курса следования, неточность курсовой системы, ошибка пилотирования, допущенная летчиком, И т. д.
6. Подсчитаем погрешности определения уклонения /6 в последней точке и найденной в предыдущем пункте величины Др* = 3,4°.
По формуле (35) получим среднее квадратическое отклонение в км, характеризующее точность определения каждого линейного уклонения (несглаженного):
1,5
ОI = -у= ~ 1
/2 К
По формуле (33) для п = 6 найдем точность сглаженного значения линейного бокового уклонения в км:
G *
0,7.
Точность определения бокового уклонения в градусах подсчитаем по формуле (34):
57,3
Таким образом, точность последнего сглаженного уклонения, которое также оказалось равным наблюденному значению — 3 км (что не обязательно должно иметь место), повысилась с 1 до 0,7|км, т. е. на 30%.
Оценка найденного ранее математического ожидания разности фактического путевого угла и заданного, равного 3,4°, показывает, что с вероятностью 0,68 фактическое значение этой разности отличается от 3,4° на величину не более ±1,4°, т. е. заключено в пределах от 2 до 4,8° и означает недостаточную точность подбора курса следования на первом участке.
7. Подобным образом отрезком прямой ВС сгладим второй участок полета между первым и вторым исправлениями пути от 5-й до 22-й минуты, включающий 18 точек. ч
По формулам (28) и (29) при п = 18 выражения для весовых функций примут вид
... 3/ —38
Л/, (0 — 9 . 19 ’
1 21 —19 ЛКб W — д/ ‘ з . 323 •
Значения линейных боковых уклонений ЛА, числителей весовых функций, а также сглаженные величины уклонений приведены в табл. 4.
Просуммировав числа, стоящие в графе 5 таблицы, и учтя выражение для Tj/j (i), получим сглаженное линейное боковое уклонение для первой точки в км:
495 <4 q
£ = m ~2’8-
t мин i li км Числитель Ч/, (О ’)/,(») • й Числитель 4Иб (') чуб (О - h Числитель 4/° 4Zn (О • It * км
1 2 3 4 5 6 7 8 9 10
5 1 +3 35 105 — 17 —51 — 16 —48 2,8
6 2 +3 32 96 —15 —45 —13 —39 2,3
7 3 +1 29 29 —13 —13 —10 —10 1,9
8 4 0 26 0 —11 0 —7 0 1,4
9 5 0 23 0 —9 0 4 0 0,9
10 6 +2 20 40 —7 —14 —1 —2 0,5
11 7 +2 17 34 —5 —10 2 4 0
12 8 0 14 0 —3 0 5 0 —0,5
13 9 0 11 0 —1 0 ' 8 0 —0,9
14 Ю —2 8 —16 1 —2 11 —22 —1,4
15 11 —2 5 —10 3 б 14 —28 —1,9
16 12 —3 2 —6 5 —15 17 -51 —2,3
17 13 —5 —1 5 7 —35 ' 20 —100 —2,8
18 14 —3 —4 12 9 —27 23 —69 —3,3
19 15 —3 —7 21 11 —33 26 —78 —3,7
20 16 —4 —10 40 13 —42 29 —116 —4,2
21 17 —5 —13 65 15 —75 32 —160 —4,7
22 18 —5 —16 80 17 —85 35 —175 —5,2
Сумма. .. | 495 1 - | —453 1 " I —894 1 ”
Просуммировав числа, стоящие в графе 7, и учтя значение весовой функции для t]iz6 (0» найдем боковую составляющую путевой скорости в км/мин:
^ = -з5з--°’467-
При округлении значения Vg подсчет точке прямолинейного отрезка может дать чины /*, поэтому ее лучше подсчитать по
уклонения в последней неточное значение вели-формулам (30).- Весовая
функция имеет вид
31—19
^ln (0 ~ 9 • 19
Значения числителя для каждой i-й точки приведены в графе 8, а их произведения на соответствующие 1г—в графе 9. Из таблицы находим, что линейное боковое уклонение в километрах для п-й точки равно
1*_ 894 _ г
— m-------
В графе 10 даны подсчитанные по формуле (26) сглаженные линейные боковые уклонения с округлением величины до десятых долей километра. 4
Как видно из таблицы, значения уклонения в последней, 18-й точке (t = 22 мин), подсчитанные по формулам (30) и (26), совпали, что свидетельствует о правильности вычислений.
Сглаженная ЛФП показана пунктиром на рис. 16 (отрезок ВС), из которого следует, что наибольшие ошибки в определении местонахождения ЛА при привязке снимков к карте допущены на 8, 10, 11 и 17-й минутах.
Ранее отмечалось, что обработка результатов объективного контроля способом наименьших квадратов позволяет найти такое положение отрезка ЛФП, при котором сумма квадратов уклонений, характеризующих разброс точек местонахождения ЛА относительно сглаживающей их прямой, является минимальной, т. е.
S А/? = min. i=l
Из табл. 4 видно, что значение уклонения в последней точке превышает 5 км. Подчеркиваем, что чем больше п, тем точность определения линейного бокового уклонения в последней, i-й, точке выше при условии, что ЛА до этой точки все время летел по прямой. При п = 18 из формулы (33) имеем в км
Таким образом, среднее квадратическое отклонение линейного бокового уклонения, полученное путем сглаживания, почти в два раза меньше аналогичной величины в каждой отдельно взятой отметке местонахождения ЛА.
• Осредненная разность фактического и заданного путевых углов в градусах на втором сглаженном прямолинейном участке, подсчитанная по формуле (31), при Рп = 10 км/мин будет равна
др* = —57,3 —2,7.
8. Аналогичным образом сглаживается третий участок линии фактического пути с 22-й по 30-ю минуту (отрезок ДЕ), он включает 9 точек.
Выражения (28), (29) и (30) для весовых функций (i), т]уб (i) и (i) при п — 9 примут вид
’l/i (О — 4§~ » rIVC (0 — д7 ’ ~6О~ ’ — 45~ ‘
Результаты,’вычисленные по той же методике, приведены в табл. 5.
По формуле (28) получим сглаженное линейное боковое уклонение в км для первой точки:
I* —__217 __g
45
t
МИН i 1- км Числитель т, <‘) ’И, <‘) • Ч Числитель W6 <0 Wg (0 - 1{ Числитель % % (£> • ч 1* км
1 2 3 4 5 6 7 8 9 10
22 1 -5 17 -85 —4 20 —7 35 —4,8
23 2 -5 14 —70 —3 15 —4 20 —3,8
24 3 —2 11 —22 —2 4 — 1 2 —2,8
25 4 —1 8 —8 — 1 1 2 —2 —1,8
26 5 0 5 0 0 0 5 0 —0,9
27 6 0 2 0 1 0 8 0 0,1
28 7 0 —1 0 2 0 11 0 1,1
29 8 +1 —4 —4 3 3 14 14 2,0
30 9 4-4 —7 —28 4 16 17 68 3,0
Сумма... | —217 1 - 59 — 137 —
Обратим внимание на уклонение, относящееся к 22-й минуте (оно было последним). При сглаживании 18 точек предыдущего отрезка оно оказалось более 5 км, а то же уклонение, являющееся первым для последующего отрезка прямой, оказалось менее 5 км.
В случае подобных расхождений снимок, с помощью которого определялось местонахождение ЛА к этому моменту времени, должен быть привязан к карте особенно тщательно.
Что касается степени доверия к полученным двум различным цифрам, то предпочтение следует отдать величине 5,2 км, так как точность ее определения при сглаживании, характеризуемая средним квадратическим отклонением, повысилась в два раза по сравнению с точностью единичного определения уклонения ЛА. Однако слишком малое значение (200 м) сглаженной величины, на которую наибольшее уклонение ЛА от маршрута превысило 5 км (при точности определения этой величины 450 м), не дает оснований сделать утверждение о том, • что ЛА вышел за пределы пятикилометровой границы. Окончательное решение должно выноситься по результатам дополнительного тщательного анализа снимка, по которому определялось положение ЛА в этой точке.
Для определения боковой составляющей путевой скорости в км/мин возьмем значение суммы чисел, стоящих в графе 7, и с учетом приведенного выше выражения для весовой функции получим при AZ — = 1 мин
V* = g « 0,98.
И тогда боковое уклонение в градусах
Д₽* = 57,3^ = 5,6.
Соответственно сглаженное линейное боковое уклонение в км для девятой точки будет равно
,* 137 о
1п= 45
Значения текущих линейных боковых уклонений ЛА от маршрута, подсчитанные по формуле (26), приведены в графе 10 табл. 5. Третий отрезок (СД), сглаживающий ЛФП, показан на рис. 16.
9. Для упрощения вычислений последний отрезок возьмем с 31-й по 36-ю минуту. Так как п равно шести точкам, то значения весовых функций будут точно такими же, как и на первом отрезке (см. п. 2).
Тогда сглаженное линейное уклонение в км для первой точки этого участка будет равно *
/* = 1(11 • 4 + 8 • 3 + 5 • 2 + 2 • 2) = || « 3,9, боковая составляющая путевой скорости в км/мин
у* = 1(—5.4 —3-3—1-2+1 - 2) = — § «-0,83, OU OD
линейное уклонение в км для последней, шестой, точки
£ = ^(-4-4-1 -4 +2-2 +5-2) =-^«-0,3.
В процессе сглаживания ЛФП на концах отрезков прямых могут иметь место невязки (например, в точке С на рис. 16). Для их устранения достаточно отрезки продолжить до точки пересечения, которую и считать местом, где выполнен доворот ЛА (точка С'). Заметной погрешности это не даст. Таким образом, линия фактического пути, определяемая 37 точками, полученными с интервалом в одну минуту, сглажена четырьмя отрезками прямых, которые с большой достоверностью показывают траекторию полета ЛА.
Подводя итог рассмотрению методики обработки, на основании полученных результатов сделаем следующее заключение о том, как выполнялся полет на данном этапе.
Расчеты показывают, что экипаж, точно выйдя на ППМ (Z2 = 0), начал уклоняться от маршрута вправо со скоростью 600 м за каждую минуту полета (1+ = 36 км/ч), что свидетельствует о низкой точности в определении курса следования на первом участке (Др*= 3,4°) или невыдерживании его.
На 5-й минуте полета экипаж фактически выполнил доворот на угол 3,4°+ 2,7°= 6,1°, который целесообразно сравнить с рассчитанной экипажем поправкой в курс (она должна быть записана в бортовом журнале). Фактический угол Доворота превышает требуемую величину исправления курса следования, что после выхода на заданный маршрут и явилось причиной последующего наибольшего уклонения ЛА влево, длительное время не исправляемого. На 22-й минуте экипаж вновь 3 Г. Ф. Молоканов
допустил аналогичную ошибку, довернув вправо на величину 2,7°+ + 5,7°= 8,4°, что существенно больше требуемой величины, поэтому ЛА со скоростью около 60 км/ч начал интенсивно приближаться к заданному маршруту, между 10-й и 11-й минутами пересек его и уже на 30-й минуте оказался правее маршрута на 4 км.
Для точного выхода на ППМ необходимо было при втором исправлении выполнить доворот на такой угол, при котором скорость приближения в км/мин к заданному маршруту равна
что в три раза меньше величины (Vc = 0,98 км/мин) от 22-й до 30-й минуты полета.
Это и вынудило экипаж на 30-й минуте в третий раз исправлять курс для точного выхода на ППМ.
§ 14. Сглаживание линии фактического пути на криволинейных участках траектории полета
Если по данным высокоточных средств объективного контроля на некотором участке полета в течение длительного времени фиксировалась небольшая величина бокового ускорения (ас, Ф 0) или нормальной перегрузки, незначительно превышающей единицу, то предположение о прямолинейной траектории полета ЛА должно быть отвергнуто.
К этому же выводу можно прийти на основании глазомерной оценки серии точек местонахождения ЛА, если они явно группируются относительно некоторой кривой, что имеет место главным образом при сглаживании линии пути полета ЛА на участках'выполнения разворотов. Искривление линии фактического пути ЛА наблюдается и при полете с постоянным курсом через барические системы с быстро изменяющимся ветром, а также из-за нескомпенсированных уходов гироскопов курсовых систем при полете по маршруту как в режиме ручного управления, так и с включенным автопилотом.
В процессе сглаживания подобных участков может уточниться величина максимального линейного бокового уклонения ЛА, а следовательно, и оценка точности полета по маршруту.
Криволинейные участки линии фактического пути сглаживаются с помощью уравнения (36).
Рассмотрим в качестве примера, иллюстрирующего методику расчетов, порядок сглаживания линии фактического пути, приведенной на рис. 16.
1. По данным табл. 3 сгладим 14 точек ЛФП на участке от 13-й до 26-й минуты, включающем наибольшую величину линейного бокового уклонения ЛА от заданного маршрута, равную 5 км. Значения линейного бокового уклонения в каждый момент времени показаны в графе 3 табл. 6.
Таблица 6
t МИИ 1 /(КМ Числитель vi, 0) VI, (D- ‘i Числитель W6 (') чуб (О • 1{ Числитель (0 1- км
1 2 3 4 5 6 7 8 9 10
13 1 0 548 0 12636 0 156 0 -г0,1
14 2 —2 396 —792 7572 — 15144 84 -168 — 1,3
15 3 —2 264 —528 3288 —6576 24 —48 —2,3
16 4 —3 152 —456 —216 648 —24 72 —3,1
17 5 —5 60 —300 —2940 14700 —60 300 —3,8
18 6 —3 — 12 36 —4884 14652 —84 252 —4,2
19 7 —3 -64 192 —6048 18144 -96 288 —4,4
20 8 —4 -96 384 —6432 25728 —96 384 —4,5
21 9 -5 — 108 540 —6036 30180 —84 420 —4,3
22 10 —5 — 100 500 —4860 24300 —60 300 —3,9
23 11 —5 —72 360 —2904 14520 —24 120 —3,3
24 12 —2 -24 48 —168 336 24 —48 —2,5
25 13 —) 44 —44 3348 —3348 84 —84 — 1,5
26 14 0 132 0 7604 0 156 0 0,3
Сумма... -60 — 118140 - 1788 1 -
Расположение точек, характеризующих положение ЛА на участке пути, который показан отдельно на рис. 17, свидетельствует о том, что сглаживание данного участка ЛФП необходимо производить по формуле (36).
13 14 15 16 п 18 13 20 21 22 23 24 25 26tMUH
Рис. 17. Линия фактического пути ЛА, полученная по снимкам экрана бортовой РЛС, и сглаживающая ее кривая второго порядка
2. Найдем значения весовой функции (i) в каждой i-й точке
по формуле (38), которая при п = 14 после преобразований примет
вид
= i4~.ll.16 [3 ’ 15 ~ 16-2 * * *‘(6 • 14 + 7 *) + Юг2) =
= ^(720-182i+10i2).
Значения числителя, подсчитанные с помощью выражения, стояще-
го в скобках, приведены в графе 4 табл. 6. По формуле (37) для /* най-
дем сглаженное значение линейного бокового уклонения в км для первой точки:
т. е. начальная сглаженная точка практически совпала с ранее полученной.
3. Выражение для весовой функции цу6 (/) с размерностью 1/мин, полученное с помощью формулы (39) после ее преобразования, имеет вид
<0 = 14 . 195 • 192 115 • 16'77-2l‘(16 • 142 — 19) + 30 13i2J = = — (18480 — 6234i + 390г2).
Значения величины в скобках для каждой i-й точки приведены в графе 6 табл. 6, а их произведения на текущие уклонения — в графе 7. Учитывая значение суммы, получим по формулам (39) и (37) боковую составляющую путевой скорости в км/мин на криволинейном участке траектории:
118140 ,
'/б— 87360 ~
Знак минус означает, что ЛА перемещается относительно заданного маршрута справа налево, т. е. отрицательные уклонения (влево) по абсолютному значению возрастает, а положительные (вправо) уменьшаются.
4. Подставив п = 14 и Д/ = 1 в формулу (40), найдем значение весовой функции с размерностью 1/мин2 для определения математического ожидания ускорения ас, постоянного на этом участке пути. После подсчетов получим
Расчеты по этой формуле дают значения числителя весовой функции, приведенные в графе 8 табл. 6, а их произведения на текущие величины линейных боковых уклонений — в графе 9.
По формуле (37) для а* получим сглаженное постоянное ускорение в км/мин2:
* 1788 п опс
Сб = 8736 ~ °’295‘
Знак плюс соответствует развороту ЛА вправо.
5. По формуле (36) полинома второй степени найдем значения сглаженных линейных боковых уклонений ЛА в каждой i-й точке. Они приведены в графе 10 табл. 6 и представляют ЛФП в виде кривой второго порядка. Сглаженная траектория показана на рис. 17 сплошной линией.
Уменьшенная величина максимального линейного бокового уклонения (4,5 вместо 5 км) может повлиять на оценку точности полета по маршруту. Поэтому окончательное суждение о фактической величине линейного бокового уклонения ЛА от заданного маршрута в точке, соответствующей максимальной величине этого уклонения, должно быть основано на точном определении местонахождения ЛА известными уже способами (по пеленгу и дальности до ориентира, по двум дальностям или пеленгам и т. д.) с точным графическим решением этой задачи на карте.
При необходимости точность привязки снимка к карте может быть повышена неоднократным определением линейного бокового уклонения ЛА в этой точке независимыми способами и незаинтересованными лицами с последующим осреднением полученного результата.
6. Воспользовавшись формулой (43), по величине 0% найдем среднее значение угла крена в градусах:
= 0,205 ~ 0,33.
Угловая скорость изменения фактического путевого угла, выраженная в градус/мин, подсчитывается по формуле (44):
„0,205 . „
со* = 57,3 -|Q- 1,2-
При подсчете этой величины могут быть выявлены погрешности вождения ЛА в автоматическом режиме, возникающие при нескомпен-сированном уходе курсового гироскопа.
Приведенный выше пример свидетельствует о том, что ЛА в течение всего времени разворачивался с очень малым креном (около 0,3°). Заметим, что к сглаживанию по кривой второго порядка участка фактической траектории полета, на котором производилось исправление пути, необходимо подходить осторожно, так как оно может исказить реальную картину.
Часто исправление пути (доворот по курсу на небольшое число градусов) может быть сделано в течение времени, которое приходится на интервал между двумя последовательными снимками с экрана бортовой РЛС. В подобных случаях лучший результат дает раздельное сглаживание участков ЛФП двумя отрезками прямых (отдельно до доворота и после него), если предположить, что на каждом из них ЛА двигался прямолинейно.
Продолжительность разворота можно иногда определить по характеру снимков экрана бортовой РЛС, которые делались при наличии большого крена.
Решение о сглаживании по кривой второго порядка конкретных участков ЛФП можно вынести лишь при наличии на борту ЛА соответствующего высокоточного средства объективного контроля, позволяющего фиксировать длительность разворота ЛА по времени (например, по длительности фиксации очень малого крена, угловой
скорости разворота, нормальной перегрузки или бокового ускорения). Этим средством может быть инерциальная система навигации. Зная время разворота, нетрудно определить, сколько точек следует брать при обработке (сглаживании) участка траектории, на протяжении которого полет выполнялся с ускорением (нормальной перегрузкой, незначительно превышающей единицу).
Так, сглаживание 14 точек в приведенном примере может быть оправдано, если в течение 13 мин полета фиксировалось малое ускорение (порядка 0,06 м/с2), зарегистрированное, например, акселерометрами высокой точности.
Если же этого не было и по данным средств объективного контроля нормальное ускорение фиксировалось лишь в течение нескольких секунд, необходимых для выполнения небольшого доворота, то нет оснований исходить из предположения о криволинейной траектории движения ЛА на протяжении длительного отрезка времени (от 13-й до 26-й минуты), как это было сделано ранее.
Итак, если перегрузка регистрировалась в течение короткого времени, то при сглаживании участка криволинейной траектории должны браться лишь те точки, которые на него приходятся.
Заметим, что нет надобности сглаживать три точки, потому что через них всегда можно провести кривую второго порядка, следовательно, сглаженные уклонения обязательно будут точно равны наблюденным. При п — 3 по формулам (37) — (40) получим соотношения:
С = ь,
°C ~ 01— 2/а +
Сглаживать криволинейной траекторией участок линии пути, включающий три точки, на котором 1Х= 1Ъ= 13 (как это имело место на 21, 22 и 23-й минутах), нет оснований, так как в этом случае получим значения Vc и равными нулю, т. е. отрезок прямой линии.
Для точного анализа выполненного полета с помощью приведенных формул целесообразно воспользоваться простейшей вычислительной техникой.
§ 15. Методика статистической обработки совокупности данных о траекториях полета
Методика обработки данных, полученных в отдельно выполненном полете, позволяет объективно установить фактическую траекторию полета ЛА, необходимую для последующего анализа точности самолетовождения.
Системный подход к статистической обработке данных требует выполнять ее по всей совокупности полетов, в ходе которых фиксирова
лись определенные показатели, и дает обобщенную информацию о точности и надежности вождения ЛА.
Рассмотрим методику такой обработки. Условимся в дальнейшем реальный вид линии фактического пути, полученный с помощью средств объективного контроля, называть ее реализацией.
Имеется десять реализаций, вид которых показан на рис. 18. Значения линейных боковых уклонений ЛА в км для каждого момента времени приведены в табл. 7.
Данные десять полетов выполнялись по одному и тому же маршруту, состоящему из двух этапов. Разворот на второй этап маршрута начинался на 12—15-й минутах полета.
Таблица 7
Номер реализации t МИИ
0 3 6 9 12 15 18 21 24 27
1 2 3 4 5 6 7 8 9 10 11
1 0 —1 —1 —2 —3 0 4-2 +2 +2 0
2 0 +1 +2 +2 0 —4 —2 — 1 +1 0
3 —2 —3 —3 —1 0 — 1 -1-2 +4 +2 —2
4 —2 -5 —6 —4 —3 — 1 0 + 1 + 1 0
5 -5 —4 —8 —6 —1 +7 + Н +8 0 —4
1 =
6 0 — 1 —5 —3 +1 +6 +ю + Н +8 +2
7 + 1 0 0 —3 —2 +7 +8 +7 +5 +1
8 —2 -2 —2 —3 —2 +5 + 1 +3 + 1 —1
9 — 1 —1 0 + 1 +2 —4 —3 — 1 —2 0
10 0 0 0 +2 -1 —8 —4 —6 —4 0
—11 —16 —23 — 17 —9 7 25 28 14 —4
39 58 143 93 33 257 323 302 120 26
П1/ км —1,1 —1,6 —2,3 —1,7 —0,£ 0,7 2,5 2,8 1,6 —0,4
км 1,7 1,9 3,1 2,6 1,6 5,3 5,3 5,0 3,2 1,6
72
Приведенные в табл. 7 результаты контроля десяти полетов могут относиться к одному экипажу, который выполнил их за соответствующий период времени. В этом случае на основании обработки данных об этих полетах будут получены обобщенные показатели точности и надежности вождения ЛА, характеризующие уровень подготовки данного экипажа за этот период времени.
По одной и той же (излагаемой ниже) методике могут быть обработаны данные о полетах различных экипажей одного подразделения, и тогда полученные показатели будут характеризовать точность и надежность вождения ЛА экипажами данного подразделения, объективно отражая уровень их воздушной выучки по анализируемому виду подготовки.
Приведем известные из теории вероятностей соотношения, необходимые для подсчета математического ожидания и среднего квадратического отклонения случайной величины 1{.
При п независимых определениях математическое ожидание mz находится по формуле среднего арифметического:
п
=4-. (56)
Среднее квадратическое отклонение, характеризующее разброс случайной величины относительно ее математического ожидания, находится по формуле
Пользуясь этими соотношениями и значениями линейных боковых уклонений ЛА от заданного маршрута, указанных в табл. 7, подсчитаем для каждого момента времени величины mz и oz.
Просуммировав числа, стоящие в графе 2, и поделив их на число реализаций п = 10, получим для момента времени t = 0 математическое ожидание линейного бокового уклонения в км:
11 1 1
ГП1 = — Ц) =— 1,1.
Эта величина свидетельствует о том, что ЛА проходили левее исходного пункта маршрута в среднем на 1,1 км.
Если сложить суммы квадратов линейных боковых уклонений (их значения также приведены в табл. 7), то получим среднее квадратическое отклонение, характеризующее разброс значений линейных боковых уклонений, т. е. точность выхода ЛА на исходный пункт маршрута, в км:
Аналогично подсчитаем значения математических ожиданий и средних квадратических отклонений по всем графам. Величины этих характеристик точности показаны в двух последних строках табл. 7 для каждого момента времени.
По изменению величины mz на рис. 19 видим, что на первом участке экипажи шли преимущественно левее маршрута (mz со знаком минус), затем после разворота — правее его и к концу вновь оказывались слева на 0.4 км.
График, характеризующий изменение о[ по мере продвижения ЛА по маршруту, показывает, что экипажи на исходный, поворотный
Рис. 19. Изменение математического ожидания и среднего квадратического отклонения линейного бокового уклонения по времени
(/ = 12 мин) и конечный (/ = 27 мин) пункты маршрута выходили с одинаковой точностью (oz = 1,7 1,6 км). При удалении от ППМ величи-
на oz возрастает, свидетельствуя о понижении точности полета по маршруту, на 6-й минуте экипажи выполнили исправление пути, которое привело к уменьшению величины oz к 12-й минуте полета, в результате выход на следующий ППМ осуществлялся более точно (crz = = 1,6 км). Вследствие погрешностей при выполнении разворота на новый курс следования к 15-й минуте величина среднего квадратического отклонения стала равна 5,3 км, т. е. к началу второго этапа она возросла в 3—3,5 раза по сравнению с ее значением на 12-й минуте. По мере приближения ЛА к КПМ среднее квадратическое отклонение вновь уменьшилось до 1,6 км.
Эти цифры показывают, что у экипажей точность выхода на исходный, поворотный и конечный пункты маршрута была в среднем в 2— 3 раза выше, чем точность вождения ЛА при полете между ними. Отметим разницу средних величин о-'/ср = 2,2 км на первой части маршрута и о”ср = 4,1 км на второй части (эти значения на рис. 19 показаны пунктирными линиями). Причиной этой разницы может быть неправильный расчет курса следования, погрешности его выдерживания при отходе от ППМ, но главным образом — неточное выполнение разворота
при выходе на очередной этап маршрута. Именно этот последний элемент иногда бывает причиной, приводящей к грубым ошибкам в самолетовождении и нарушениям требований безопасности полетов.
Для последующих расчетов понадобится осредненная за весь маршрутный полет величина среднего квадратического отклонения, которая находится по формуле
Г п
1/
Чг~- (58>
Б этом выражении под корнем стоит среднее арифметическое значение квадратов средних квадратических отклонений. Для значений ozi, приведенных в табл. 7, при п = 10 oZcp = 3,5 км.
Для расчета надежности вождения ЛА в пределах трассы подсчитаем, через сколько минут в среднем в этих полетах он пересекал заданный маршрут.
В первом полете, как следует из табл. 7, ЛА, находясь вначале точно на заданном маршруте (t = 0), пересек его на 15-й и 27-й минутах (когда /( = 0), следовательно, он возвращался на него через 15 и 12 мин, во втором полете — через 12 и 10 мин, так как вторично ЛА пересек заданный маршрут на 22-й минуте, когда линейное боковое уклонение изменилось с — 1 км на 21 -й минуте до +1 км на 24-й минуте. В третьем полете ЛА был на заданном маршруте на 16-й и 25-й минутах, т. е. вернулся на него через 9 мин.
Таким же образом подсчитываются по табл. 7 все интервалы времени (их число оказалось равным 13), через которые ЛА пересекал заданный маршрут полета, что дает возможность судить о частоте коррекции курса, доворотах при исправлении пути, т. е. о степени колебательности процесса движения ЛА относительно заданной траектории. Округляя найденные величины до целых минут, по формуле (56) найдем среднее значение этого интервала (как величину его математического ожидания) Zo в мин:
. _ 15 + 12 + 12 + 10 + 9 + 9 + 11 + 11 + 7 + 12 + 7 + 14 + 16 ..
Го-------------------------13 ;-----------«11-
Напомним, что время Zo характеризует также среднее значение интервала времени, через который экипаж исправляет путь. Эту величину полезно знать и лицам, управляющим воздушным движением, так как она дает представление о среднем интервале времени, через который экипажу может понадобиться команда на исправление курса следования.
Значения величин о/ср и t0 позволяют вычислять целый ряд важных показателей точности и надежности вождения ЛА в пределах заданной йолосы (трассы).
Приведем необходимые соотношения для подсчета указанных ранее показателей точности и надежности вождения ЛА в пределах
трассы шириной 2/т для заданной продолжительности полета t. Теоретическое обоснование этих соотношений, базирующееся на оценке числа выбросов случайного процесса, можно найти в книге [91.
Среднее значение общего числа выходов ЛА за пределы трассы (в обе стороны) в течение времени полета t при математическом ожидании гпг 0 подсчитывается по формуле
1 Мт у
Nt = ~e (59)
*0
где t — продолжительность полета по трассе;
/0 — среднее значение интервала времени в мин, через который ЛА пересекает заданный маршрут (ось трассы);
1Т — половина общей ширины трассы в км;
<ii Ср — осредненная по всему маршруту величина среднего квадратического отклонения линейного бокового уклонения в км.
В этом выражении время t может означать не только продолжительность полета данного экипажа по трассе, но и общий налет часов, планируемый на определенный период времени, т. е. на полеты, выполняемые различными экипажами и по разным трассам, например, в течение месяца. Но при этом, конечно, величины о>ср и t0 должны относиться ко всем ранее выполненным полетам по трассам в аналогичных условиях различными экипажами. Иными словами, если величины о,ср и t0 найдены на основании статистической обработки данных обо всех полетах в совокупности, выполненных на разных типах ЛА, на различных высотах, по разным маршрутам, в простых и сложных метеорологических условиях, днем и ночью, в различные сезоны года, т. е. отражают статистические характеристики разнообразных полетов, то их следует использовать и при расчетах разнообразных планируемых полетов.
При оценке по этим величинам полетов, выполняемых в конкретных условиях, значения о/ср и t0 (найденные по всей совокупности данных о траекториях полетов) могут оказаться иными, поэтому все приводимые формулы, включающие эти значения, будут давать неточный результат. К примеру, для выборочной оценки полетов на малых высотах величины О/ср и t0 также должны быть определены на основании отдельной статистической обработки маршрутных полетов, выполненных именно на малых высотах. В гл. IV мы еще вернемся к этому вопросу.
Среднюю продолжительность в минутах каждого выхода ЛА за пределы трассы можно найти с помощью соотношения
где Ф — интеграл вероятностей, значения которого приведены в приложении.
Как показано ниже, выражение, стоящее в квадратных скобках, представляет собой относительное время пребывания ЛА за пределами трассы. Поэтому с учетом формулы (59) можем сказать, что средняя продолжительность tB каждого выхода равна общему времени полета вне трассы, поделенному на количество выходов за ее границы. Эта величина показывает, через сколько минут в среднем после выхода ЛА за пределы трассы он вновь возвращается внутрь заданной полосы. Такова физическая сущность формулы (60).
Средняя величина интервала времени между двумя выходами ЛА за пределы трассы в одну и ту же сторону определится по формуле
А — А
(61)
Для выполнения расчетов по данным формулам в приложении приведены таблицы значений величин ех, е~х и Ф(х).
Следует обратить внимание на часто допускаемую ошибку при расчетах по формулам (59), (60) и (61). В первую из них — основание натуральных логарифмов — число е входит с отрицательным показателем степени, тогда как в формулах (60) и (61) показатель степени тот же, но знак у него положительный.
Умножив общее число выходов ЛА за пределы трассы, определяемое по формуле (59), на продолжительность каждого из них, подсчитываемую с помощью соотношения (60), находим общее время, в течение которого ЛА будет находиться за пределами трассы:
общ -- t
(62)
Это время рассматривается как показатель предпосылок, так как оно характеризует продолжительность нарушения экипажем ЛА режима полетов.
Общая продолжительность нахождения ЛА в пределах трассы, т. е. когда нарушения режима полетов не было, подсчитывается по формуле
= <63)
\ I ср/
Для оценки точности расчета и выдерживания курса следования, а также интенсивности исправления пути при полете по трассе полезно использовать еще два соотношения:
2°/сР i0
(64)
где s0 = Уп4.
о₽= 180^, so
(65)
Первое соотношение дает значение среднего квадратического отклонения боковой составляющей путевой скорости в км/мин, а второе— характеристику разброса фактического путевого угла относительно заданного направления полета в градусах.
После вычисления по формуле (59) общего числа выходов /Vz можно подсчитать надежность вождения ЛА по трассе, т. е. надежность бокового эшелонирования Рб, характеризующую вероятность того, что в течение времени полета/за пределы трассы шириной 2/т не будет ни одного выхода:
рб = ф^)е-л\ (66)
где oit — среднее квадратическое отклонение линейного бокового уклонения, характеризующее точности 1г выхода на исходный пункт маршрута, расположенный в начале трассы.
Первый сомножитель учитывает вероятность входа ЛА в заданную полосу в самом начале полета по трассе, а второй — вероятность невыхода ЛА за ее пределы в течение всего времени i — продолжительности полета по трассе.
Рассмотрим методику расчета по этим формулам показателей точности и надежности вождения ЛА по трассе и сравним результаты вычислений с фактическими данными, которые приведены в табл. 7.
Пусть задана ширина трассы 10 км (ZT = =t5 км). Найдем число выходов ЛА за ее пределы для общей продолжительности всех десяти полетов: t = 27 • 10 — 270 мин.
Зная величины фср = 3,5 км и /0= 11 мин, по формуле (59) получим число выходов ЛА за пределы трассы шириной 10 км:
Nt = (А) « 24,5е-1.°2 « 24,5 • 0,361 = 8,8.
Сравним фактическое число выходов ЛА за пределы трассы, когда его линейное боковое уклонение от заданного маршрута оказалось более 5 км, с полученным расчетным значением, обратившись к табл. 7, в которой находим следующие семь случаев (они выделены жирной линией) из десяти полетов: одно уклонение влево в четвертом полете; два (первое влево с 6-й по 9-ю минуту, второе вправо с 15-й по 21-ю минуту) в пятом полете; по одному вправо в шестом и седьмом полетах; два влево в десятом полете.
Учитывая сравнительно небольшой объем статистических данных, следует признать вполне удовлетворительным совпадение расчетного числа выходов ЛА за пределы трассы (округленно девять выходов) с фактическим их числом (семь выходов).
Подсчитаем но формуле (60) среднюю длительность пребывания ЛА за пределами трассы при каждом выходе в мин:
tB = 11 [1— фШ1е1.02= ц [1 _ф(1,43)] е1-02.
Значения величин Ф (1,43) и е1-02 находим в приложении для соответствующих аргументов (х = 1,43 для интеграла вероятности и х =. = 1,02 для показательной функции). Тогда
tB = 11 (1 — 0,847) 2,77 = 4,8.
Пользуясь табл. 7, подсчитаем среднюю продолжительность фактически зафиксированных в полетах семи выходов ЛА. Первый выход ЛА в четвертом полете длился с 3-й по 7,5-й минуту. Эта цифра получена путем интерполирования времени, при котором уклонение стало вновь 5 км, что равно среднему значению — 6 км (6-я минута) и —4 км (9-я минута). Поэтому считаем, что на 7,5-й минуте ЛА вернулся в заданную полосу и округленно время первого выхода равнялось 5 мин.
Рассуждая аналогичным образом, получим длительность каждого последующего выхода ЛА за пределы трассы, соответственно равную (с округлением до целого числа минут) 5, 6,9, 11, 10, 3 и 3 мин.
По формуле (56) найдем среднее арифметическое значение этих величин, т. е. среднюю длительность отдельного выхода, в мин:
, _ 5 + 6 + 94-11+ 10 +3 + 3 _ 47 _
«в — 7 — 7 ~ '•
Фактическая средняя продолжительность каждого выхода (7 мин) оказалась несколько больше расчетной (4,8 мин) потому, что на второй части маршрута среднее квадратическое отклонение ЛА от заданного маршрута было несколько больше (4,1 км) ее средней величины (3,5 км), следовательно, основное число выходов (5 из 7) приходится в каждом полете именно на вторую половину маршрута, точность вождения на которой в среднем была в два раза ниже, чем на первой части маршрута.
Сравним общую продолжительность пребывания ЛА за пределами трассы во всех десяти полетах, сложив длительность каждого из семи выходов. Фактическая ее величина, равная 47 мин, была найдена выше (см. числитель для /в), а расчетная в мин может быть получена перемножением ранее подсчитанного числа выходов Nt — 8,8 на среднюю длительность каждого из них tB = 4,8 мин:
tB. »5щ = 8,8 • 4,8 «« 42.
Эту же величину в мин можно подсчитать по формуле (62):
/в.об,ц = 270(1 — 0,847) = 42.
Тогда в пределах трассы ЛА находился в течение времени, равного разности между общей продолжительностью десяти полетов и фактическим пребыванием за пределами трассы: 270 — 47 = 223 мин, а согласно расчету — 228 мин, что также свидетельствуете практическом совпадении результатов. Подсчитаем показатели точности вождения ЛА, определяемые соотношениями (64) и (65), и учтем, что скорость полета была равна 500 км/ч:
3 5 ау = 3,14 yi = 1 (км/мин) или = 60 км/ч,
а,= 180^-57,3 “«7».
Полученные цифры характеризуют не'столько интенсивность уклонения ЛА от заданного маршрута, сколько скорость сближения и угол подхода к нему при исправлении пути. Причем вероятность того, что фактические значения боковой составляющей скорости и угла пересечения заданного маршрута не превысят этих величин, для нормального закона распределения составляет 0,68. Следовательно, в 1/3 всех остальных случаев фактические значения боковой составляющей скорости были больше найденной величины.
В справедливости этого можно убедиться, обратившись вновь к табл. 7. Так, в пятом полете за три минуты линейное боковое уклонение ЛА уменьшилось с 8 км до 0 (см. 21-ю и 24-ю минуты), т. е. скорость сближения ЛА с заданным маршрутом на этом отрезке времени составила 8 км за 3 мин, или 160 км/ч.
По формуле (61) подсчитаем в мин среднюю продолжительность интервала времени между двумя соседними выходами ЛА за пределы трассы в разные стороны:
/и = | = у (’ + °>847) 2-77 = 28‘
Цифру, полученную расчетным путем, не удается сопоставить с фактическим значением из-за малой продолжительности маршрута (27мин), но ее величина свидетельствует о том, что в данных полетах выходы ЛА за пределы трассы были не таким уж редким явлением.
В заключение подсчитаем по формулам (12) частоту и (66) вероятность, характеризующие фактически имевшую место надежность вождения ЛА по трассе и ее расчетное значение (надежность бокового эшелонирования). Ясно, что эти величины не должны существенно отличаться одна от другой. По табл. 7 общее число полетов, в которых ЛА не вышел за пределы трассы (|5 км), равно 5(1,2,3,8 и 9-й полеты). Тогда частота
рМ = °’5-
Учитывая, что оа = 1,7 км (см. табл. 7 для t — 0), а для продолжительности одного полета Nt = 0,88 (8,8 выходов было получено для общей продолжительности 270 мин), по формуле (66) найдем
Рб = ф^е-0-88 = 0,997-0,415= 0,41.
Таким образом, и здесь результаты оказались близкими.
Мы сопоставляли цифры, полученные путем вычислений, с их фактическими значениями, показывая, что приведенные формулы позволяют вычислить величины, вполне удовлетворительно согласующиеся с их действительными значениями.
Знание таких показателей точности вождения ЛА по маршруту, как о/ср и t0, для каждого экипажа или подразделения в целом позволяет обоснованно решать многие важные задачи бокового эшелонирования, связанные с безопасностью полетов: определять ширину допустимого коридора, продолжительность полета по нему ит. д.
Таким же методом можно получить характеристики, свидетельствующие о точности полета в заданном диапазоне высот, т. е. обоснованно решать задачи вертикального эшелонирования. Имея таблицу нескольких реализаций и обработав их по аналогичной методике, можно получить необходимые величины ан и t0 для выполнения расчетов, связанных с вертикальным эшелонированием и оценкой точности и надежности вождения ЛА на заданном эшелоне.
При этом точность определения отклонений ЛА от заданной высоты полета должна быть такой, чтобы надежно фиксировались погрешности ее выдерживания, равные примерно 10 м на больших и 3 —5 м на малых высотах. На бароспидограмме такие небольшие колебания высоты заметить не удается, для этого нужны более точные средства объективного контроля за точностью выдерживания заданного эшелона.
Обработка реализаций, аналогичных представленным на рис. 10, показывает, что величина среднего квадратического отклонения Оц при ручном пилотировании равна примерно 30 м на средних высотах, а значение t0 составляет около 7 мин. Имея эти характеристики точности, можно подсчитать, например, при каком налете часов общая продолжительность пребывания ЛА за пределами разности высот ±150 м может достичь опасного значения сточки зрения возможных столкновений ЛА.
Из формулы (62) при заданном 4. общ получим в мин j А. общ ' Т7К.
1 _ ф
(67)
Так как отклонения ЛА, идущего на нижнем эшелоне вверх, за пределы 150 м такие же, как и отклонения ЛА, идущего на верхнем эшелоне вниз, то общее число выходов за отведенную разность высот обоих летательных аппаратов будет таким же, как и одного ЛА в обе стороны. При этом предполагается, что каждый ЛА свой эшелон занял правильно, т. е. при расчете эшелона все поправки высотомеров учтены. Найдем, за какой налет часов будет иметь место крайне опасная ситуация, т. е. нижний ЛА окажется выше того ЛА, который должен идти на верхнем эшелоне. Допустим, что это опасное время равно 3 мин, тогда по формуле (67) найдем в мин
3 3 50 • 106,
t =
1 — Ф
1 —0,999999994
что составляет около 830 тысяч часов.
Полученный результат, конечно, является ориентировочным и справедлив для условий, когда экипажи не допускают грубых ошибок. Но эта цифра может существенно сократиться при неточном выходе на свой эшелон, небрежном выдерживании высоты полета.
§ 16. Методика сравнительной оценки точности и надежности вождения ЛА и пути их повышения
Систематически обрабатывая за некоторый период времени результаты объективного контроля, по изложенной выше методике определяют такие показатели точности вождения ЛА, как:
Git — точность выхода на ППМ;
ci ср — осредненная величина среднего квадратического отклонения, характеризующая разброс фактических траекторий относительно заданной по всему маршруту полета;
t0 — среднее время, через которое ЛА пересекают заданную траекторию.
Величины 4, in, и ор зависят от этих показателей и при v б
необходимости могут быть вычислены.
Естественно, что указанные показатели у разных экипажей будут различными. По мере совершенствования воздушной выучки они в общем случае будут изменяться у одного итого же экипажа, если сравнивать эти величины, скажем, за текущий и прошедший годы.
Поэтому важно уметь объективно сопоставлять эти различные показатели, определять тенденции изменения точности и надежности вождения ЛА, четко представлять пути их повышения.
Методика сравнения показателей позволяет объективно оценить реальный уровень подготовки каждого экипажа, выявить передовиков, правильно организовать социалистическое соревнование на основе сравнимости результатов, гласности их и возможности повторения передового опыта.
Ясно, что чем меньше величины о/, и о/ Ср и чем больше величина /0 (при том же значении о/ср), тем точность и надежность самолетовождения выше.
Из формулы (62) видно, что при одинаковой ширине трассы 2/т чем меньше щСр, тем меньше общая продолжительность нахождения ЛА за ее пределами. Величину 07 ср при одинаковой точности расчета и выдерживания курса следования можно уменьшить более частым исправлением пути. Если -экипаж на этапе вместо одного исправления пути сделает это дважды, то величины линейных боковых уклонений также уменьшатся вдвое, а следовательно, во столько же раз сократится величина сцср (рис. 20), что приведет к заметному уменьшению времени /в. общ.
Поэтому, учитывая, что среднее квадратическое отклонение прямо пропорционально частоте коррекции курса, можно допустить, что
t' — t
‘о — fo —, I ср
(68)
где штрихом обозначены новые значения соответствующих величин.
Зависимости (62) и (68) позволяют рассчитать потребную частоту исправления пути, если задать допустимую величину tB. Общ«
Пусть вместо полученной величины /в. общ = 42 мин поставлена задача при той же суммарной продолжительности полетов 270 мин уменьшить общее время нахождения ЛА за пределами трассы в десять
Рис. 20. Зависимость линейного бокового уклонения от час-стоты исправления пути по времени
раз, т. е. сократить его до 4 мин. Найдем, какая при этом потребуется частота коррекции при прежней точности стр.
Из формулы (62) имеем
ф / А | _ | _1в. общ
Wcp/ t ’
откуда
ф(гг;)=1-27б = 0-9862-
По таблице приложения по этому значению интеграла вероятности находим величину его аргумента х:
4- = 2,42.
а1 ср
Учитывая, что /т = + 5 км, получим в км
' 5 о 1
°1 ср “ 2,42 — 2’1-
Как было показано выше, эта величина примерно соответствует точности полета на первом этапе маршрута.
На основании соотношения (68) получим потребную частоту коррекции в мин:
«=п§=бд
Значит, если корректировать путь через 6—7 мин, то при той же ширине трассы и одинаковой точности расчета и выдерживания курса следования общая продолжительность нахождения ЛА за пределами трассы сократится в десять раз.
Нетрудно по формулам (59) и (66) подсчитать, что при тех же значениях = 1,7 км и 07 Ср = 2,1 км общее число выходов ЛА за пределы трассы равно
= = 0,2*5,
1 6,5
т. е. оно сократилось почти в четыре раза (было 0,88). Тогда надежность вождения ЛА по трассе будет равна
Ре = 0,997 • е-°-23 = 0,8, следовательно, она существенно возросла по сравнению с прежним ее значением (Рб = 0,41).
Дальнейшее повышение показателей точности и надежности навигации возможно при более строгом выдерживании курса следования. Если добиться сокращения значения о/ср До 2,1 км при одновременном увеличении величины t0 до 15 мин, то аналогичные подсчеты дадут еще большую надежность бокового эшелонирования:
Р6 = 0,99.
Как видно из формулы (66), надежность вождения ЛА по трассе зависит от величины oZ1. Чемменьшеэта величина, тем л у чшеточность, тем выше надежность. Уменьшения величины oZl можно добиться в том случае, если в начале полосы (трассы) имеется характерный ориентир, обеспечивающий уверенный выход на него ЛА, а тем самым и надежный вход в заданную полосу.
В заключение приведем сравнение точности и надежности вождения ЛА двух экипажей по трассе шириной ±10 км, основные показатели которых, полученные на основании обработки ранее выполненных полетов, оказались следующими:
у первого экипажа: о/, = 1 км, о/ср = 3 км, t'o = 12 мин;
у второго экипажа: о", = 0,7 км, <Л'ср = 2 км, t"0 = 10 мин.
Подсчитаем также расчетный средний балл каждого экипажа, которому предстоит выполнить маршрутные полеты часовой продолжительности при известной ширине нормативных полос (она должна быть, к примеру, на оценку «отлично» ±3 км, «хорошо» 10 км и «удовлетворительно» ±10 км).
Выполним расчет для первого экипажа, основными показателями уровня подготовки которого по самолетовождению являются:
— надежность полета по трассе;
— общее время пребывания за ее пределами;
— средний балл.
Надежность полета по трассе шириной 10 км подсчитаем по формулам (59) и (66).
Так как а/, и о/' в три раза меньше самой узкой полосы ( + 3 км), то при всех подсчетах по формуле (66) первый сомножитель можно принять равным единице (см. приложение):
7V; = §e-^(T) « 5 - 0,249 « 1,25 и
Рб = е-i.25 ~ 0,29.
Полученный результат нужно понимать так: примерно в трех полетах из десяти (каждый полет по трассе длится один час) экипаж не будет ни разу выходить за пределы трассы 10 км.
Среднее время общего пребывания ЛА за пределами трассы в часовом полете найдем по формуле (62) в мин:
(в.общ = 6о[1 —ф(4)] = 5,2.
Подсчитаем средний балл, воспользовавшись выражением (66) для определения вероятности того, что ЛА ни разу не выйдет за пределы полосы ±3 , =t 5 и ± 10 км соответственно:
Nt = 5е 2 V з ) = з оз и Р5' = е-з.°з = 0,05.
Для норматива «хорошо» Р\ = 0,29.
Для ширины полосы +10 км
ш)2
N} = 5е 2 ( 3 } = 0>02 и Р3’ = е-0-02 = 0,98.
Для определения расчетного среднего балла необходимо вероятности получения оценок умножать на соответствующие им баллы:
N6 == 5РВ 4- 4 (Р4 - Р6) + 3 (Р3 - Р4) + 2 (1 - Р3),
где Р5, Р4 и Р3— вероятности того, что ЛА ни разу не выйдет за пределы нормативной полосы на оценку «отлично», «хорошо» и «удовлетворительно», а
РБ+(Р4-РБ)+(Р8-Р4) + (1-Рз)= I-
В приведенных выше выражениях слагаемые имеют следующий физический смысл:
Р4—РБ— вероятность того, что уклонение ЛА превысит норматив на оценку «отлично» (в нашем примере ±3 км), но будет не более норматива на оценку «хорошо», т. е. 3 км < | | =gC 5 км;
Р3— Р4— вероятность невыхода ЛА за пределы норматива на оценку «удовлетворительно» при условии, что ЛА выйдет за пределы норматива «хорошо», т. е. 5 км < |/,1 10 км;
1 — Р3— вероятность выхода за пределы полосы на оценку «удовлетворительно», т. е. вероятность получения экипажем «двойки».
Выражение для расчетного среднего балла можно переписать в ином виде, если раскрыть скобки и привести подобные члены:
Аб = 2 + Р6 + Р4 + Р8. (69)
По этой формуле получим: для первого экипажа
Аб = 2 4- 0,05 + 0,29 + 0,98 » 3,32;
W
для второго экипажа
а; = “ е~г (т) ~ 0,264 и Рб' = е-°-264 « 0,77.
Следовательно, надежность вождения ЛА по трассе у второго экипажа значительно выше, так как он из десяти полетов в среднем в 7— 8 полетах не допускает линейных боковых уклонений ЛА, превышающих 5 км. Найдем общее время пребывания ЛА за пределами трассы в каждом маршрутном полете часовой продолжительности в мин:
/в.общ = 6о[1-ф(|)]~ 0,7.
Эта величина более чем в семь раз меньше, чем у первого экипажа. Ясно, что такое значительное сокращение времени пребывания ЛА за пределами трассы способствует повышению безопасности полетов.
Подсчитаем вероятности невыхода за пределы полосы ±3 и 10 км:
--(-Г
А/ = 6е » Ь) «1,95 и Р;' = е-1-95^ 0,14, соответственно
(_10\2
А; = 6е 2 Ь/ « о и Рз»1.
Тогда расчетный средний балл по формуле (69) для второго экипажа
Ае = 2 + 0,14 + 0,77+ 1 « 3,91.
Первому экипажу, имеющему удовлетворительные результаты, необходимо при той же точности выдерживания курса увеличить частоту коррекции, сократив тем самым t'o, что и обеспечит уменьшение величины а/Ср. Однако повышение точности в расчете и выдерживании курса следования дает лучшие результаты, когда при увеличении /0 уменьшается значение величины о/ср.
* * *
Понимание сущности полного и глубокого анализа выполненного полета на основе обработки результатов объективного контроля позволяет ’оценивать степень воздушной выучки экипажей, правильность эксплуатации в воздухе оборудования, умение точно рассчитывать, программировать и пилотировать ЛА. По накопленным статистическим данным можно анализировать зависимость точности самолетовождения от различных факторов, следить за тем, как она изменяется с ростом мастерства летного состава, при освоении новой техники.
глава IV ПРИМЕНЕНИЕ
ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ ДЛЯ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ РЕЗУЛЬТАТОВ ОБЪЕКТИВНОГО КОНТРОЛЯ
§ 17. Обработка данных с помощью электронно-вычислительной машины МИР-2
Изложенная в предыдущих главах методика расчетов для сглаживания линейных боковых уклонений и определения способом наименьших квадратов линии фактического пути ЛА, а ^Йкже обработки совокупности данных о траекториях полета требует значительных затрат времени.
Рассмотрим обработку результатов контроля точности самолетовождения с помощью двух типов наиболее распространенных электронно-вычислительных машин: малой ЭВМ типа МИР-2 и большой ЭВМ единой серии типа ЕС-1030.
Машина для инженерных расчетов (сокращенно МИР) является малой электронно-вычислительной машиной, позволяющей результаты расчетов выдавать на печатающее устройство, а графическую информацию отображать на телевизионном экране специального устройства, именуемого дисплеем.
Для выполнения расчетов на ЭВМ составляется программа, которая предназначена для автоматизации вычислений по ранее приведенным формулам. Машина производит расчет после ввода в нее исходных данных в виде таблицы линейных боковых уклонений ЛА от заданного маршрута и выдает готовые результаты на бумажную ленту и на экран дисплея.
Ниже приведены программы обработки значений линейных боковых уклонений ЛА от заданного маршрута способом наименьших квадратов для случаев сглаживания исходных точек отрезками прямых и кривой второго порядка. Программы составлены для машины МИР-2 с выдачей исходных точек и сглаживающей их линии на экран дисплея*.
Помимо программы даются выполненные на ЭВМ МИР-2 готовые результаты расчетов для тех же примеров, которые были подробно рассмотрены в § 13 и 14.
Программа 1 предназначена для сглаживания линейных боковых уклонений ЛА от линии заданного пути отрезками прямых. В начале программы приведены исходные данные для сглаживания первых шести точек, линейные боковые уклонения в которых взяты из табл. 3.
Исходные данные:
N — количество сглаживаемых точек (N = 6);
V — скорость полета (V = 600 км/ч);
Программы составлены В. П. Савенко (ВВА им. Ю. А. Гагарина).
НАЧ|
Ш ? параметры цикла для вывода н а экран сглаживающей пря-KOHJ мой (начиная с первой точки и кончая шестой с шагом 0,1 км);
XI [6] порядковые номера точек, в которых производилась оценка линейных боковых уклонений (указаны в последней строке программы);
VI [6] значения линейных боковых уклонений в каждой из шести точек.
”РАЗР'’3.”ФОРМ"2;’'МАСШ’’0.10.-6. 6; ’ВЫВО’ "ЗАГОЛ" ТАБЛ" 1, ВРЕМЯ.ЛБУ, Л БУ.СГЛ, РАЗНОСТЬ; SXI=E(l-t.N.X1[I)).Syi=Z(I=t.N.yi[I]);Snxyi=£(l= 1,N.X1[I ]ХУ1[1 ]);SXIBK=£(I=1,N,X1[I ]12);KBSXI=SXIt2;A"(NxSnxyi-S Х1к5У1)/(Мх5Х1ВК-КВ5Х1);В=(5У1-5Х1хАУМ; ”ДЛЯ"Х=ГШАГ".5’Д0”К0Н”В ЫП" ТРАФ”2. X. 0; ”ВЫВО" "ПРОБ" 2; ГАММА=(АВ5(А)Х57.3х 60)/V; "ДЛЯ’ЬГ’Ш АГI "ДО"Н”ВЫП"(2=АКХ1[I ]+В;0Ш=2-У1[ I ];ВР=Х1[1 Н;"ВЫВО"”ТАБЛ" 1. В Р,УГ[1),2.0Ш);’ВЫВ’”‘ЗРАЧ”’СТР”2, [ БОКОВОЕ УКЛОНЕНИЕ В ГРАД = ],ГА ММА:”ДЛЯ"Ы”ШАГ'1 ЖМ”ВЫП0”ТРАФ~1,Х1[ I ].-У f[ 1 ] ;’ДЛЯ”Х=МЧ"ШАГ 'ЦГД0”К01ГВЫП'”ТРДФ"2, X. У” ГДЕ"Ы=б; V=600; 0=0; НАЧ=1. Ш=. 1; КОП =6; У=( АхХ+В)х(-1);ХЦб]=1,2,3,4.5,б;У1[б]=0,1 J,1,3.3’K0N”
РЕЗУЛЬТАТЫ РАСЧЕТА
Первый отрезок ЛФП
ВРЕМЯ ЛБУ ЛБУ СГЛ. РАЗНОСТЬ 0
0 0 0 0
1 1 ,6ООО1оО —,4000ю0
2 1 -12001о1 .200О1о0
3 1 -18О01о1 -8ООО1оО
4 3 -24ОО1о1 —.6000w0
5 3 .ЗОООщ! 0
Боковое уклонение в градусах = -3438iOl О
Второй отрезок ЛФП
ВРЕМЯ ЛБУ ЛБУ СГЛ. РАЗНОСТЬ о
0 3 .28951О1 —.Ю501о0
1 3 .2417i01 —,5830100
2 1 Л9391О1 .939О10О
3 0 ,14611О1 .1461101
4 0 .98301о0 .9830100
5 2 .5060)о0 --1494Х01
6 2 .28ОО1о—1 —.1972ю1
7 0 —.45001о0 —.45ОО1оО
8 0 —.9280ю0 —.9280100
9 —2 —.1406101 .5940100
10 —2 —.1884101 •НбОюО
11 —3 - .23611О1 .639О1оО
Применение вычислительной техники 89
12 13 —5 —3 —.28401о1 —.3317101 .2160ю1 —.3170ю0
14 —3 —.37951о1 —,7950ю0
15 —4 —.4272101 —.272О1оО
16 —5 -.47511С1 ,2490ю0
17 —5 —.52281с1 —.228О1оО
Боковое уклонение в градусах = .2738ю1 0
Третий отрезок ЛФП
ВРЕМЯ ЛБУ ЛБУ СГЛ. РАЗНОСТЬ 0
0 —5 —.4820101 ,1800100
1 —5 —.3837ю1 .1163101
2 —2 —,2854101 —.8540ю0
3 -1 —,1871ю1 w —.8710ю0
4 0 —,8880100 —,8880ю0
5 0 .950010—1 .950010—1
6 0 .1078ю1 ,10781„1
7 1 .2О611о1 .1061,,,1
8 4 -3044101 —.95601о0
Боковое уклонение в градусах = .5631И1 О
Четвертый отрезок ЛФП
ВРЕМЯ ЛБУ ЛБУ СГЛ. РАЗНОСТЬ©
0 4 .4392ю1 ,3920i„0
1 4 .3642ю1 —.3580100
2 3 .2892101 —,1080ю0
3 2 .2142ю1 .142О10О
4 2 ,1392ю1 —.6080ю0
5 0 ,6420ю0 ,6420ю0
6 0 —,1080ю0 —,1080ю0
Боковое уклонение в градусах = .42981010
Примечание. Единица, стоящая правее значений сглаженных линейных боковых уклонений в км и бокового уклонения в градусах, означает, что запятую необходимо перенести вправо на один знак, т. е. сглаженные боковые уклонения будут равны 1,2 км, 1,8 км и т. д., а боковое уклонение — 3,4° (округленно)
На рис. 21 и 22 приведены фото с экрана дисплея*, на котором видны исходные линейные боковые уклонения и сглаживающие их отрезки прямых для первого и второго участков ЛФП.
Программа 2 предназначена для сглаживания способом наименьших квадратов линейных боковых уклонений ЛА от заданного маршрута, когда линия фактического пути аппроксимируется кривой второго порядка. Показаны результаты расчетов с выдачей на печать исходных и сглаженных линейных боковых уклонений, разностей между ними,
* На рис. 21—24 отметки мест ЛА для наглядности последовательно соединены прямыми.
Рис. 21. Фото экрана дисплея с изображением первого участка линии фактического пути и сглаживающая ее прямая
Рис. 22. Фото экрана дисплея с изображением второго участка линии фактического пути и сглаживающая ее пря\ ая
а также значений боковых составляющих путевой скорости и ускорения, с которыми ЛА перемещался на этом криволинейном участке траектории полета.
' РАЖ 3. ”Ф0РМ”2;СЧ=1; "МАСШ’0,20. -10,10; "ВЫВО" "ЗАГОА" "ТАБЛ” 1, ВРЕМ Я.Л5У, АБУ СГЛ,PA3M0CTb;UM[2,3]=E(I=1,N,XIII 3>E(I=I.N.X1 [I]t2);UM[l,2]=£(l=1,N.X1 [I]t3);UM[|,1]=E(I=1.N,X1[I]t4);llM[3,4] =Z(I=f,N,yiII ]);UM[2,4b£(l = l,N,X1 [1]*У1 II1; UMU,4]=£(I=I. N.XlI I]t2xyi[I]);UM[2.1]=UM(1,2];UM[2,2]=UM[|.3];UM[3.1l=UM(1,3];UMl3
‘,2] =UM[2,3];UM 13,Я =N; "ДЛЯ" 1=ГШАГ I ”ДО"Э"ВЫГГ("ДЛЯ\1=1 ”ШАГ1 "ДО ”3"ВЫП”(РМ[1, J ] =UM 11, J ])); W ГШАГ1 "Д0"3”ВЫЛ"(”ДЛЯ"1=ГШАГ" fA0’’3”Bbin”(UMII.J]=UM[I,4]);LAIlC4]=UM[i.1]x(UM[2,2]*UMB,3]-M M[3,2]xUM[2>3])-UM[1,2]x(UM[2,|]xUM[3,3]-UM[3,"f]xUM[2.31)+UMI1,3 HUMI2.1 ]xUMl3,2]-UM[3,1 )x UMI2.21); "ДЛЯ”К=ГШАГ1 "ДО’ТВЫПТДЛ Я”Т=1 "ШАП "Д0"3"ВЫП”(иМ[ К,Т]=РМ[К,Т])); СЧ=СЧ 1; ”ECAU”C4=4”T0” (° HA”L)”UHA"i”HA"W);W.);A=A1[1]/A1[4J;B=Ai(2]/Al[4];C=AH3]/A1[4]; ’ДЛЯ"Х=ГШАГ”. 5"ДО”КОР”ВЫП”ТРАФ''2,Х.О;’'ДЛЯ'Т=ТШАГ"Г’ДО'’М”ВЫЛ”( 2=АхХ1[П12+ВхХ|[1]+С;0Ш=2-У1[1];ВР=Х1 [ЦН; "ВЫВО’"ТАБЛ" 1, ВР.УИ I ] I,ОШ); "ВЫВ" ’ЗМАЦ- СТР”2ДУСКОРЕНИЕ = ], -А,"ПРОБ"4,1СКОРОСТЬ =
] ,-В; "ДЛЯ Т=ГШАП "AO’N'W ТРАФ"1,Х« (11.-У 111 ] "ДЛЯ’Х=ИАЧ"ША Г”Ш"ДО"КОН"ВЫП’ТРАФ"2,Х,У’ГДЕ"М=|4;0=0;МАЧ=1;Ш=.1;К0Ы4;У=(АхХ |2+ВхХ<С)*(-1);ХШ41=1,2.3,4,5,6,7,3,9,10, И, 12.13,14;У1П4]=0, -2,-2,-3.-5, -3,-3,-4.-5.-5.-5,-2,-1,0; ИМ 13.4]; РМ13.3]; Al 14ГК01Г
Исходные данные:
N — количество сглаживаемых точек (задано 14);
НАЧ1
Ш I — параметры цикла для вывода на экран сглаживающей кри-KOHJ вой второго порядка;
Х1[14]—порядковые номера точек, в которых производилась оценка линейных боковых уклонений (с первой по четырнадцатую включительно);
VI[14] — значения линейных боковых уклонений (по данным табл. 3).
В приводимых ниже результатах расчетов нуль шкалы времени совмещен с первой сглаживаемой точкой криволинейного участка, которая приходится на 13-ю минуту полета (см. табл. 3).
РЕЗУЛЬТАТЫ РАСЧЕТА
ВРЕМЯ ЛБУ ЛБУ СГЛ.
0 0 —.540010—1
1 —2 -,13О41о1
2 —2 —.2350,01
3 —3 -.3191ю1
4 -5 —.3827101
5 —3 —4259101
6 —3 —.4480ю1
7 —4 —.4510ю1
РАЗНОСТЬо
—.54001о—1 .69601о0
—.35ОО1оО
—-19101о0
1173„1
—.1259ю1 — 1480ю1
—.5100ю0
8 —5 —,43301о1 ,6700и0
9 —5 —,39391О1 ,1О611о1
10 —5 —3349101 ,1651101
11 —2 —,2549101 —,54901о0
12 —1 —.15701о1 —,570О1о0
13 0 —-33901о0 —.339О1оО
Ускорение = —.10231о0 Скорость = .1557JO1 О
Фотография дисплея со сглаживающей кривой приведена на рис. 23.
Если общая длина маршрута или отдельного этапа, на котором осуществляется объективный контроль, невелика, то удобно вывести на экран дисплея все сглаживающие прямые (см. рис. 24), а в программу ввести значения нормативных уклонений для автоматического определения оценки за точность самолетовождения. Тогда итоговый результат обработки и оценку за точность выполнения полета по маршруту можно получить в готовом виде с выдачей углов доворота ЛА, имевших место при исправлении пути, времени, при котором линейное боковое уклонение было наибольшим, а также общей оценки за данный полет.
Программа 3 более полная, в нее в качестве иллюстрации введены нормативы ±2, =±=3 и ±5 км для оценок «отлично», «хорошо» и «удовлетворительно».
”РАЗР”3.”ФОРМ”2-.”МАСЦГО,40, HO JO; ”ВЬ1В0””ЗАГ0Л"'ТАБЛ” 1, ВРЕМЯ.АБУ ,ЛБУ.СГЛ,РАЗНОСТЬ;"ДЛЯ"1=ГШАГ’Г'ДО”7''ВЬ1П”(’’ДЛЯ’’Х=ГШАГ'5'ДО"Н1’’ ВЬ1П”(’ ГРАФ”2. X, НОРМ [I ])); ”ДЛЯ”1=1”ШАГ"1 "ДО'Н ГВЫП' ТРАФ"1, XI [ I] -УНИ: ”ЛАЯ”Ц~ГШАÔÒДО”КПР”ВЫП”(5Х1=£(1=Ц[Ц],К[Ц],Х|[Ц);5У1=Е (1=Ц[Ц1,К[Ц],У1[ I ]);5ПХУК(1=Ц[Ц],К[Ц],Х1[1]хУ1[1] );SXIBK=£(I=H [Ц], К ГЦ L XI [I]12);KBSXl=SXIf2; N=KtU]-M [Ц]+(; АЧА1*5ПХУ1~5Х1*5У1)/ (Nx5XIBK-KBSXI);B=(Syi-SXlxA)/N;rAMMA[UKABS(A)x57.3><60)/V; "ДЛЯ ”Х=Н[ЦГШАГ.5"Д0”К[ЦГ’ВЫП"ТРАФ”2,Х,У; "ВЫВО""ПРОБ”б [
БОКОВОЕ УКЛОНЕНИЕ В ГРАД= ]; ”ВЫВ0""ЗНАЧТАММА[Ц];"ДЛЯ’1=Н[Ц]"ША Г”1”ДО”К[Ц]”ВЫП’(2[1]=АхХ1[1]+В;ОШ=2[1]-У1[1];ЬР=Х1[1]-1;”БЬ1ВО'” ТАБЛ" 1, ВР, У f [ 11, Zl I ] ,0Ш)); 6=ABS(Z[ 1 ]); "ДЛЯ”1=2”ШАГ” 1 ”ДО”Н 1” ВЫП"" ECAU”ABS(Z[I])>B”TO”(6=ABS(Z[I] )):"ВЫВ0””ПР0Б”2,”СТРО”;”ДЛЯ”1=Г ШАГ"1 ”ДО"(КПР-1 )’’ВЬ1П’’(Д0В=ГАММА[1]+ГАММAII+1 ];"ВЫВОТУГОЛ ДОБОР ОТА ];"ВЫВ0"”ЗНАЧ”1;"ВЫВ0””ПР0Б”, [=];"ВЫВО”"ЗНАЧ"ДОВ.[ МА ),(Н [1*1 ]-!),[ МИНУТЕ.],"СТР”);"ВЫВ0””СТР"2:"ДЛЯ’1=ГШАГТ'Д0"1И "ВЫ П"(”ЕСЛИ"АВ5(2[11)=Б”ТО"(” ВЫВО” [НАИБОЛЬШЕЕ УКЛОНЕНИЕ НА ];”ВЫ ВО” "ЗНАЧ"(1 -1);" ВЫВО [ МИНУТЕ])); ”ЕСЛИ”Б<Н0РМ[ЗГ Т0”(” ВЫВО” "СТР "2,[ОЦЕНКА - ОТЛИЧНО!]);"ECAU”6«H0PM[2]”T0”("ECAU"6>H0PM[3 ГТ0”( ”ВЫВ0”’СТР”2.[ОЦЕНКА - ХОРОШО]));”ЕСЛи”Б<НОРМП]"ТО”(”ЕСЛИ"Б’НО РМ[2]”Т0”(” ВЫВО””СТР”2, [ОЦЕНКА - УДОВЛЕТВОРИТЕЛЬНО])”ИНАЧЕ"(ОЦЕН КА=2))’ТДЕ”КПР=4;У=б00;М1=37;У=(АхХ+В)х(-1 );Н0РМГ?]=5,3,2,0 -2 -3,-5;Н[4]=1,6,23,31; К[4]=б,23,31,37;Х1[37]=1,2.3.4.5.6,7,8,9,10, II, 12,13,14,15,16,17,1В, 19,20,21.22,23,24,25,26,27.28,29,30,31,3 2,33,34,35.36,37,•УП37]=0,1,1,1,3.3,3,1,0.0.2,2,0.0,-2 -2 -3 -5 -3.-3,-4-5.-5.-5-2.-1,0,0,0,1,4.4,3,2.2,0,0;2[371;0Ш[371;ГАММА [4] "КОН"
Рис. 23. Фото экрана дисплея с изображением линии фактического пути и сглаживающая ее кривая второго порядка
Рис. 24. Фото экрана дисплея с изображением линии фактического пути и сглаживающими ее четырьмя прямыми
Исходные данные:
КПР — количество прямых, сглаживающих линейные боковые уклонения по маршруту;
V — скорость полета (км/ч);
НОРМ [7] — нормативы оценки точности самолетовождения;
Н[4]1— массивы точек начальных и конечных участков сглажи-
К|4][ вания;
XI [37] — порядковые номера точек, в которых производилась оценка линейных боковых уклонений;
VI [37] — значения линейных боковых уклонений.
РЕЗУЛЬТАТЫ РАСЧЕТА
ВРЕМЯ ЛБУ ЛБУ СГЛ. РАЗНОСТЬф
Боковое уклонение в градусах = .3438101
0 0 0 0
1 1 .60001Оо —ЛОООщО
2 1 .1200101 .20001о0
3 1 .18001О1 .8ООО1оО
4 3 .24001о1 —.60001о0
5 3 ,ЗООО1о1 Оо
Боковое уклонение в градусах = ,2738101
5 3 .2895101 —.1050ю0
6 3 -2417101 —.5830ю0
7 1 .19391О1 9390ю0
8 0 -1461101 .1461101
9 0 .9830w0 .9830ю0
10 2 •5050iO0 —Л495ю1
11 2 .280010-1 —.1972101
12 0 —.4510ю0 —.4510ю0
13 0 —.9280ю0 —.9280ю0
14 - —2 —.140бю1 •5940ю0
15 —2 —.1883101 .1170ю0
16 —3 —.23621„1 .6380ю0
17 -5 —.2839101 -2161ю1
18 —3 - .33181О1 —-3180100
19 —3 —-37951о1 —,7950ю0
20 —4 —,428О1о1 —.2800ю0
21 —5 —.4750ю[ ,2500ю0
22 —5 —,52301о1 —.2300ю0
Боковое уклонение в градусах = .5631ю1
22 5 —.48201о1 .18ОО1оО
23 —5 —.384О1о1" .116О1о1
24 —2 —.28501о1 —,85ОО1оО
25 —1 —.18801О1 —,88001о0
26 0 —.8800ю0 —-8800ю0
27 0 .900010-1 .900010—1
28 0 ,1080ю1 .1О8О1о1
29 1 .2060ю1 .lOCOiol
30 4 •3050101 —.9500ю0
Боковое уклонение в градусах = 4298101
30 4 .439О1о1 .39001о0
31 4 .364О1о1 —,36ОО1оО
32 3 .2890JO] —.11ОО1оО
33 2 .214О1о1 .14001о0
34 2 • 13901о1 —.61001о0
35 0 . .64001с0 .64001о0
36 0 —.11ОО1оО —.11001о0
Угол доворота 1 = .61761о1 на 5-й минуте Угол доворота 2 = .8369101 иа 22-й минуте Угол доворота 3 = ,9929101 на ЗО-й минуте
Наибольшее уклонение на 22-й минуте О Оценка — «удовлетворительно» О
Приведенные программы и выполненные по ним расчеты, занимающие считанные минуты, позволяют исключить трудоемкие вычисления и сосредоточить основное внимание на анализе результатов объективного контроля, вскрытии допущенных экипажем ошибок и устранении их в последующих полетах.
Следует еще раз подчеркнуть, что для объективного контроля результатов полета основное внимание должно быть уделено точному определению линейных боковых уклонений ЛА от заданного маршрута, которые с равномерным шагом должны быть записаны в исходной таблице, вводимой в последующем в ЭВМ МИР-2.
§ 18. Обработка данных с помощью электронно-вычислительной машины ЕС-1030
С помощью ЭВМ ЕС-1030 можно в короткие сроки обрабатывать данные о совокупности большего по сравнению с машиной МИР-2 числа траекторий и полученных в ходе полетов за более длительный период времени. В этом случаетакже исходной информацией является таблица линейных боковых уклонений ЛА от заданного маршрута полета. Рассмотрим методику прдготовки исходных данных для обработки с помощью ЭВМ ЕС-1030 совокупности линий фактического пути ЛА, представленных в виде таблиц, аналогичных табл. 8.
Еще раз напомним, что точность исходных таблиц дблжпа быть как можно выше и что тщательности подготовки исходных данных должно быть уделено особое внимание, так как обработка грубо снятых значений линейных боковых уклонений может лишь затруднить анализ.
В зависимости от цели предстоящего анализа точности самолетовождения необходимо выполненные маршрутные полеты предварительно сгруппировать по однородным признакам. Ими могут быть признаки, характеризующие, например, полеты, выполненные на ЛА одного типа, но в различных условиях. В этом случае в одну группу должны быть сведены маршрутные полеты, выполненные на малых высотах,
S к Длина
С.5
с 5 0 20 40 60 80 100 120 140 160 180 200 220 240
X с.
СРЕДНИЕ
1 1,о 1,5 3,0 4,6 —2,0 —0,7 0,6 1,5 2,3 2,2 3,0 3,0 3,2
2 0,8 1,5 2,8 1,5 — 1,3 — 1,5 —1,3 — 1,2 -1,2 — 1,2 — 1,2 —1,8 -2.0
3 1,0 1,0 0,5 0 — 1,5 — 1,8 — 1,8 —2,0 —2,1 —23 —3,2 —2,1 -1,1
4 0 0,2 0,4 —0,2 — 1,4 2,0 0 — 1,4 —1,3 — 1,2 — 1,0 3,1 3,5
5 0 0 0 0 —0,5 — 1,4 —2,0 —2,5 —з,о —4.0 —2,5 4,0 4,5
6 0 0 0 0,5 —0,5 —2,0 — 1,7 -0,8 0 0 1,6 2,0 3.4
7 —0,5 —0,5 -0,5 -0,5 —0,8 — 1,0 — 1,7 — 1,7 —2,0 —2,4 0 4,5 4,1
8 —1,0 —0,7 —0,4 0 0 0 0,5 0,7 1,0 0,8 0,6 0 -0,5
9 0,5 0,5 0.4 0 0,7 1,6 2,1 1,9 1,6 1,0 0,5 0,3 —0,6
10 0 —0,7 —1,0 -0,5 0 0,4 0,7 1,3 1.8 2,1 1,5 — 1,8 -2,4
0,18 0,65 0,28 0,83 0,52 1,34 0,54 1,54 —0,73 0,83 —0,44 1,4 —0,46 1,42 —0,42 1,61 0 29 -0,5 2,06 —0,07 1,92 1,12 2,52 1,21 2,75
а1 1,88
МАЛЫЕ
1 0 0,2 0,2 0 0 0,8 1,0 0,6 0,4 0,3 0 —0,3 -0,5
2 0,2 0,4 0,5 0,1 —0,3 —0,5 —0,6 — 1,2 — 1,0 —0,4 0,1 0,7 1,4
3 —0,3 —0,5 —0,7 -0,1 —0,4 —0,7 -1,1 —1,4 -2,3 —1,8 0,2 0,4 0,5
4 0 0 0 —0,5 —0,9 — 1,1 — 1,7 —1,9 —2,4 —3,4 —4,0 -2,7 —1,5
5 0 0,9 0,8 1,4 0,6 0,2 —0,2 —0,6 —1,1 — 1,8 —0,5 0 0,6
6 0,3 0,3 0,5 0 —0,2 —0,5 —0,7 —0,9 —1,0 —1,0 0 0 0,9
7 0 —0,4 -0,7 —1,2 — 1,4 0,9 0,7 0,4 0 —0,5 — 1,4 —0,8 -0,5
8 1,2 0,8 0 0,5 0,5 0,7 0,7 0,6 0,5 0,5 0,4 0,6 0,7
9 —0,7 — 1,0 —0,5 0 0,6 1,3 1,8 0,7 1,8 2,4 1,9 1,3 0.8
10 0 0 0,3 0.2 0,2 0,3 0,5 0,5 0,8 1,5 2,0 2,0 1,9
0,07 0,07 0,04 0,04 —0,13 0,14 0,04 —0,32 —0,43 —0,42 —0,13 0,12 0,43
°z 0,48 0,59 0,53 0,66 0,66 0,8 1,08 0,99 1,36 1,7 1,7 1,27 1,0
а во вторую — на средних высотах. Раздельная обработка этих двух групп позволит проанализировать влияние высоты полета на точность вождения ЛА по заданному маршруту.
Аналогичным образом маршрутные полеты могут группироваться по такому признаку, как степень использования средств автоматизации. В этом случаете полеты, которые выполнялись в режиме автоматизированного самолетовождения, составят одну группу, а ручного управления — другую. Это позволит установить, как изменяется точность полета по маршруту при переходе от автоматизированного к ручному режиму управления.
Подобное деление общего числа обрабатываемых маршрутных полетов на группы может производиться по условиям ориентировки
маршрута, км
Таблица 8
:>60 280 300 320 340 360 380 400 420 440 460 480 500
высоты 0 0 0,2 2,8
3,8 2,8 1,6 2,4 1,о 0,8 0,2 0 0
-2,6 —3,0 —8,0 —5,0 —2,5 —0,8 0 1,3 1,8 2,0 0,9 1,2 1,5
0,2 0,6 1,5 — 1,0 — 1,4 —2,0 —2,3 —2,2 —3,8 -5,0 —4,5 —3,6 —2,8
1,8 1,3 0,8 0,4 0 —0,3 0,6 — 1,1 — 1,6 —2,0 —2,0 — 1,2 —0,4
3,9 3,1 2,7 —2,0 — 1,7 — 1,2 0,2 1,6 1,5 0 1,2 0 0
4,6 2,5 0,3 0 —0,5 — 1,3 — 1,2 —2,8 —4,0 «-5,0 —5,8 —6,2 —5,0
2,8 1,6 0,5 0 1,0 1,0 1,4 1,5 0,9 0 0 0 1,0
-0,5 —0,5 —0,5 —0,2 0 0,7 1,0 1,1 1,0 0,4 0,9 2,0 0,7
1,0 — 1,5 —0,9 —0,3 0 0 0,1 0,3 0 0 0 0 0,4
3,0 —2,0 —1,5 — 1,5 -1,5 — 1,5 —2,0 —2,0 -0,5 0 1,1 1,5 2,9
0,96 0,49 —0,35 —0,72 —0,56 —0,48 —0,2 —0,23 —0,47 —0,96 —0,82 —0,61 о,н
2,78 2,15 2,97 1,92 1,18 1,04 1,24 1,67 2,06 2,33 2,48 2,51 2,43
ВЫСОТЫ
0,7 —0,2 —0,2 0,4 0,7 0,9 1,1 0,3 0 0,7 1,0 1,5 1.7
2,1 1,0 —0,1 —0,5 —0,9 — 1,1 — 1,5 — 1,5 —0,9 —о,з 0 —2,0 —2,5
0,7 1,3 0,5 0 —0,7 — 1,8 —2,0 —2,0 — 1,0 — 1,4 -0,8 —0,3 0,1
-0,4 0,1 0,4 0,5 0,5 0,8 0,9 0,5 0 —0,7 —0,3 — 1,0 — 1,2
0,9 1,8 2,3 1,6 0,5 0 0,8 1,1 1.1 1,0 1,0 1,5 1,5
0,9 1,1 0,5 0 —0,4 —0,7 —0,5 —0,1 0,8 1,4 0,8 0,3 1,0
0 —0,2 —0,2 0,3 0,9 1,8 0 0 —0,8 —о,? 0 0,3 0
0.9 1,0 1,1 —0,8 0,5 —2,5 — 1,8 —0,8 —0,9 —2,8 —4,0 —4,0 —4,0
0,5 0 -0,6 — 1,0 — 1,5 —0,9 —2,0 —2,5 —2,2 —2,0 —2,8 —3,1 —2,7
-0,1 —4,0 —4,0 —5,0 —4,8 —4,1 —3,2 —1,8 —2,8 —2,0 —0,8 0,5 —0,5
0,48 0,19 0,04 —0,55 —0,52 —0,76 —0,82 —0,68 —0,67 —0,64 —0,59 —0,63 —0,66
0,81 1,63 1,74 1,81 1,7 1,76 1,49 1,22 1,22 1,41 1,65 1,88 1,92
(полеты над местностью, богатой ориентирами, и над безориентирной местностью), степени использования радионавигационных систем, наличию радиопомех бортовым и наземным средствам, по периодам учебного года (летний, зимний), летной классификации (экипажи 1, 2 или 3-го класса), степени освоения новых типов ЛА (экипажи 1-го, 2-го и последующих годов после переучивания), хвостовым номерам ЛА (для оценки качества юстировки прицельно-навигационных комплексов), подразделениям (для подведения итогов социалистического соревнования) и т. д.
В табл. 8 представлены линейные боковые уклонения, полученные с помощью наземных средств объективного контроля за полетами на средних и малых высотах.
4 Г. Ф. Молоканов
Машинная обработка исходных таблиц производится по двум вариантам*.
Первый вариант предусматривает полную обработку данных о каждом маршрутном полете, на основании которой можно детально проанализировать действия экипажей в воздухе, оценить качество самолетовождения по существующим нормативам, обнаружить случаи нарушения режима полетов, обоснованно определить по соответствующим количественным показателям лучший экипаж.
При такой обработке данных точно определяется место, занятое каждым экипажем в данной серии маршрутных полетов. В результате машинной обработки с течением времени накапливаются обобщенные статистические показатели. Их анализ позволяет непрерывно следить за процессом совершенствования воздушной выучки экипажей.
Рассмотрим методику первого варианта машинной обработки и анализа результатов десяти полетов на средних высотах по табл. 8.
Для полной обработки этих результатов необходимо в исходных данных, вводимых в ЭВМ, указать:
— условия выполнения полета (скорость, высоту, погоду, тип самолета, подразделение и т. д.).
— нормативы, по которым должна производиться оценка точности полета по маршруту (для тех условий, в которых выполнялись эти полеты); например, нормативы, характеризуемые величиной допустимого максимального линейного бокового уклонения: на «отлично» г±гЗ км; на «хорошо» =*=5 км, на «удовлетворительно» ±7 км;
— масштабы рисунка вдоль маршрута и поперек его (по линейным боковым уклонениям); примем первую величину 20 км в 1- см, а вторую — 2 км в 1 см, исходя из условий, чтобы рисунок уместился на бумажной ленте и масштаб был целым числом;
— предельно допустимые уклонения ЛА от маршрута влево и вправо; эти уклонения должны учитывать расположение зон с особым режимом полета, требования безопасности от столкновений с другими ЛА или наземными препятствиями (особенно при полете на предельно малых высотах) или соответствовать величинам грубых ошибок самолетовождения, требующих особого анализа, и т. д. Примем в качестве иллюстрации предельно допустимые уклонения ±10 км, полагая, что выход ЛА за пределы этой полосы будет квалифицироваться как грубая ошибка или предпосылка к нарушению режима полета.
После ввода в ЭВМ указанных величин, а также таблицы линейных боковых уклонений результаты обработки в требуемом количестве экземпляров выдаются машиной с помощью алфавитно-цифрового печатающего устройства (а при необходимости и на экран дисплея). Получаем следующие данные: исходную таблицу линейных боковых уклонений, т. е. ЭВМ печатает дубликат табл. 8 (эта таблица нужна для проверки правильности введенных в машину линейных боковых
* Программа обработки результатов объективного контроля с помощью ЭВМ ЕС-1030 составлена В. Б. Поповым (ВВА им. Ю. А. Гагарина).
уклонений и должна быть сверена с контрольным экземпляром) и таблицу результатов обработки, которая включает ряд итоговых показателей, характеризующих точность каждого выполненного маршрутного полета.
Результаты обработки данных для средних высот полета приведены в табл. 9.
Таблица 9
Номер по пор. Максимальное ЛБУ, км Оценка точности самолетовождения Размах уклонений, км Максимальные значения БУ, градус Математическое ожидание ЛБУ, км Среднее квадратическое отклонение ЛБУ, км Место, занятое экипажем
влево вправо
1 2 3 4 5 6 1 8 9
1 2,0 4,6 4 6,6 18,91 +1.49 1,53 7
2 8,0 2,8 2 10,8 14.32 —0,74 2,34 10
3 5,0 1,5 4 6,5 7,16 — 1,62 1,67 8
4 2,0 3,5 4 5,6 11,75 —0,04 1,44 4
5 4,0 4,5 4 8,5 18,62 +0,07 2,21 6
6 6,2 4,6 3 10,8 6,30 —0,84 2,66 9
7 2,4 4,5 4 6,9 12,89 +0,33 1,65 5
8 1,0 2,0 5 3,0 3,72 +0,27 0,70 1
9 1,5 2.1 5 3,6 2,58 +0,29 0,84 2
10 3,0 2,9 5 5,9 9,45 —0,33 1,55 3
Средний балл 4 <
Сравнение максимальных линейных боковых уклонений ЛА от заданного маршрута с их предельно допустимыми значениями, введенными в ЭВМ, позволяет зафиксировать имевшие место случаи нарушения режима полетов или грубых ошибок самолетовождения, ведущих к нарушению безопасности полетов. Если не было нарушений режима полета, то ЭВМ после выдачи таблицы печатает фразу: «Случаев нарушения режима полетов (грубых ошибок) не было». Если такие случаи имели место, то она печатает фразу: «Нарушения режима полетов (грубые ошибки) имели место (к примеру) в 3, 7 и 9-м полетах». Кроме того, факт нарушения режима полета фиксируется и в дальнейшем при выдаче рисунка линии фактического пути для каждого полета.
Сумма значений максимальных линейных боковых уклонений определяет размах уклонений, т. е. наибольшую ширину той полосы, в пределах которой пролетел ЛА в данном маршрутном полете. Эти величины печатаются в графе 5 табл. 9.
Примечание. Если на всем протяжении полета ЛА шел с одной стороны от заданного маршрута, то размах уклонений будет равен не сумме, а разности наибольшего и наименьшего линейных боковых уклонении.
' Чем уже полоса, в которой пролетел ЛА, т. е. чем меньше размах уклонений, тем в общем случае качество самолетовождения выше.
Анализ размахов представляет интерес с точки зрения безопасности полетов и может учитываться при их планировании в аналогичных условиях.
В графе 6 табл. 9 приведены расстояния первого порядка, т. е. наибольшие значения разности фактического и заданного путевых углов. При равномерном шаге (через 20 км) эта величина будет максимальной там, где более всего изменилось значение линейного бокового уклонения. Например, в первом полете (см. табл. 8) на участке от 60-го до 80-го километра величина линейного бокового уклонения изменилась с +4,6 на —2 км, т. е. на 6,6 км.
Поэтому максимальное боковое уклонение в градусах будет равно АРтах = 57,3 || = 18,91.
В девятом полете эта величина оказалась почти в семь раз меньше и составила всего 2,58°, хотя уклонение имело место дважды (на 80— 100-м и 220—240-м километрах линейное боковое уклонение изменилось на 0,9 км). Следует учесть, что полученные значения Дртах по двум соседним точкам могут иметь существенную погрешность.
В графах 7 и 8 табл. 9 приведены значения подсчитанных по каждой строке математического ожидания (машина печатает сокращенно МО) и среднего квадратического отклонения (СКО), найденных по формулам (56) и (57). Первая величина показывает, как в среднем линия фактического пути расположена относительно заданного маршрута (в первом полете она на 1,49 км смещена правее, в третьем на 1,62 км левее его, тогда как в четвертом и пятом полетах такого смещения практически нет). Эта величина позволяет выявить наличие систематической (постоянной) ошибки, приводящей к тому, что ЛА идет преимущественно с какой-то одной стороны относительно заданного маршрута полета. Причину этой погрешности необходимо устранить.
Среднее квадратическое отклонение (графа 8 табл. 9) характеризует степень разбросанности значений линейных боковых уклонений в каждом полете относительно его средней величины (математического ожидания). Чем больше эта величина, тем в общем случае чаще и большие уклонения ЛА от маршрута имели место в полете, тем, следовательно, ниже качество самолетовождения
Так, наименьшее значение этой величины зафиксировано в восьмом полете (0,70 км), а наибольшие — во втором (2,34 км) и шестом (2,66 км), в которых и размах уклонений также был наибольшим (10,8 км).
Автоматическая «ранжировка» полетов по количественным показателям качества самолетовождения решается в ЭВМ следующим образом.
Вначале анализируется подгруппа отлично выполненных полетов (8, 9 и 10-й). Среди них лучшим считается тот полет, в котором максимальное значение линейных боковых уклонений было меньше, чем в двух других полетах (восьмой полет). Если линейные боковые укло
нения оказались одинаковыми, то далее сравниваются последовательно размахи уклонений, максимальные разности путевых углов, затем средние квадратические отклонения линейного бокового уклонения и в последнюю очередь — их математические ожидания. По этим показателям и определяются те места, которые впечатываются в графе 9 табл. 9, если каждый полет выполнялся различными экипажами.
Аналогичным образом «ранжируются» и все последующие подгруппы полетов, выполненные на «хорошо», «удовлетворительно» и «неудовлетворительно».
Примечание. Вместо порядковых номеров полета в исходных таблицах может записываться индекс экипажа, тогда ЭВМ будет выдавать результаты с указанием фамилий командиров или штурманов экипажей. Для этого в ЭВМ должны быть заблаговременно введены списки экипажей и индексы их командиров.
По приведенным в табл. 9 итоговым результатам обработки не представляется возможным проанализировать, какой ценой экипаж, выполнявший, к примеру, восьмой полет, получил отличную оценку. По величине Артах судят о том, как наиболее интенсивно ЛА уклонялся от заданного маршрута или как исправлялся курс. Более полную картину получим, если увидим характер самой линии фактического пути. Ее вид и дополнительная обработка позволяют судить о том, сколько раз, где и на какое число градусов экипаж исправлял путь на протяжении данного маршрутного полета. Ведь в принципе можно обеспечить точное следование ЛА по заданному маршруту серией частых доворотов, а можно таких доворотов сделать всего один или два. Чем меньше было выполнено доворотов при тех же значениях максимальных линейных боковых уклонений, тем качество самолетовождения выше. С этой целью, а также для наглядного представления и анализа точности полета по маршруту в соответствии с методикой, изложенной в § 12, предусмотрена выдача рисунка линии фактического пути в масштабе, указанном в исходных данных или рассчитанном самой ЭВМ.
Вид линии фактического пути выдается на бумажной ленте АЦПУ (рис. 25) или экране дисплея последовательно для каждого выполненного полета в том порядке, в каком они записаны в исходной таблице линейных уклонений. На рис. 25 линиями показаны нормативные полосы, а! звездочками — значения линейного бокового уклонения, в верхней части напечатана легенда (масштаб указан без учета уменьшения рисунка).
На рис 26 приведена линия фактического пути первого полета, выполненного на средних высотах. Для наглядности точки, соответствующие значениям линейного бокового уклонения, соединены отрезками. Знак уклонения от заданного маршрута выдается по правилу: плюс — вправо (на графике — вниз), минус — влево (на графике — вверх). Помимо серии точек (звездочек) каждый рисунок сопровождается краткой легендой, в текстуальной части которой дублируются данные, указанные в табл. 9. К ним относятся:
— номер полета (или фамилия командира экипажа);
— оценка точности полета по маршруту;
— место, занятое экипажем, совершившим данный полет;
ПОЛЕТ НОМЕР ОЦЕНКА МЕСТО
ЛБУ МАКС ВЛЕВО
ЛБУ МАКС ВПРАВО
РАЗМАХ УКЛОНЕНИЙ БУ МАКС МАТ. ОЖИДАНИЕ
1
4
7
2.00 км
4.60 км
6. 00 км
1В. 91 грлцусА
1.43км
масштаб:
ось X 7см=;.7.857км
ОСЬ У 1СМ = D.787KM
— наличие или отсутствие случаев нарушения режима полетов (грубые ошибки), т. е. уклонений, превышающих их заданные предельно допустимые значения (в нашем примере ±10 км);
5 Полет №1. Оценка - хорошо, место-шестое, нарушений нет
§ Масштаба! 20км, 2км,ЛВУ макс-4,бкм,-2,0км,размах 6,6км
| -4 |. БУ макс‘18,91гро6уса М0=‘1,43км,СК0-1,53КМ
Рис. 26. Вид линии фактического пути, полученной в первом полете
Заданный ^маршрут,
— масштабы рисунка по осям;
— максимальные линейные боковые уклонения ЛА от заданного маршрута вправо и влево в км;
— размах уклонений в км;
— максимальное значение разности заданного и фактического пу тевых углов в градусах (расстояние первого порядка);
— математическое ожидание линейных боковых уклонений в км;
— среднее квадратическое отклонение линейных боковых уклонений в км.
Показанная на рис. 26 линия фактического пути дает наглядное представление о том, как экипаж следовал по заданному маршруту, в каких точках имел наибольшие уклонения, где выполнял коррекцию или исправлял путь, насколько энергично это сделал и т. д. Неизбежная при выдаче наглядного рисунка разномасштабность по осям не дает возможности оценить угловые величины доворотов, скорости сближения ЛА с заданным маршрутом или удаления от него и некоторые другие величины. Кроме того, представление о линии фактического пути несколько искажается из-за неизбежных ошибок определения местонахождения ЛА в каждом сечении при измерении линейного бокового уклонения (табл. 8).
Более детальный анализ выполненного полета предусматривает второй этап его обработки, в ходе которого по методике, изложенной в § 13, осуществляется сглаживание линии фактического пути и выдаются по этапам уточненные значения боковых уклонений в градусах, боковых составляющих путевых скоростей, углов доворота и т. д.
Для ввода в ЭВМ задания на эти расчеты необходимо на основе глазомерной оценки и анализа линии фактического пути все множество точек, выданных на рисунок (или все множество линейных боковых уклонений), разбить на подмножества и выделить соответствующие отрезки на линии фактического пути, указав для каждого из них способ сглаживания.
Так, для первого полета (рис. 26) целесообразно это выполнить, как показано в табл. 10.
Таблица 10
Номер сглаженного отрезка ЛФП Номера сглаживаемых точек (ЛБУ) Количество точек Способ сглаживания
1 1—4 4 Прямая
2 4—5 2 Прямая
3 5—14 10 Прямая
4 14—25 12 Прямая
5 25—26 2 Прямая
На основании данных о способе сглаживания линии фактического пути по ранее изложенной методике произведем дальнейшую обработку выполненного полета, результаты которой ЭВМ ЕС-1030 выдаются в следующем виде.
ПОЛЕТ НОМЕР 1 (СРЕДНИЕ ВЫСОТЫ)
1-й отрезок ЛФП, сглаживаемый прямой с 1-й по 4-ю точку
Боковое уклонение в градусах 3.31'10"
Боковая составляющая скорости 49.1999 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
0.0 1.0000 0.6800 —0.3200
20.0000 1.5000 1.9100 0.4100
40.0000 3.0000 3.1400 0.1400
60.0000 4.6000 4.3700 —0.2300
2-й отрезок ЛФП,
сглаживаемый прямой с 4-й по 5-ю точку
Боковое уклонение в градусах —18.15'51"
Боковая составляющая скорости —264.0002 (км/ч)
1 Дальность ЛБУ ЛБУ сгл. Разность
60.0000 4.6000 80.0000 ‘ —2.0000 4.6000 —2.0000 —0.0000 —0.0000
3-й отрезок ЛФП, сглаживаемый прямой с 5-й по 14-ю точку
Боковое уклонение в градусах 1.39' 52"
Боковая составляющая скорости 23.2485 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
80.0000 —2.0000 100.0000 —0.7000 120.0000 0.6000 140.0000 1.5000 160.0000 2.3000 180.0000 2.2000 200.0000 3.0000 220.0000 3.0000 240.0000 3.2000 260.0000 3.8000 —0.9255 1.0745 —0.3442 0.3558 . 0.2370 —0.3630 0.8182 —0.6818 1.3994 —0.9006 1.9806 —0.2194 2.5618 —0.4382 3.1430 0.1430 3.7242 0.5242 4.3055 0.5055
4-й отрезок ЛФП, сглаживаемый прямой с 14-й по 25-ю точку
Боковое уклонение в градусах —0.55' 03"
Боковая составляющая скорости —12.8112 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
260.0000 3.8000 2.8282 —0.9718
280.0000 2.8000 2.5079 —0.2921
300.0000 1.6000 2.1876 0.5876
320.0000 2.4000 1.8674 —0.5326
340.0000 1.0000 1.5471 0.5471
360.0000 0.8000 1.2268 0.4268
380.0000 0.2000 0.9065 0.7065
400.0000 0.0 0.5862 0.5862
420.0000 0.0 0.2660 0.2660
440.0000 0.0 —0.0543 —0.0543
460.0000 0.0 —0.3746 —0.3746
480.0000 0.2000 —0.6949 —0.8949
5-й отрезок ЛФП, сглаживаемый прямой с 25-й по 26-ю точку
Боковое уклонение в градусах 7.24' 20”
Боковая составляющая скорости 103.9990 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
480.0000 0.2000 0.2000 0.0000
500.0000 2.8000 2.8000 —0.0000
Угол доворота 1 =21.7838 на 60.0000-м километре
Угол доворота 2 = 19.9290 на 80.0000-м километре
Угол доворота 3 = 2.5822 на 260.0000-м километре
Угол доворота 4 = 8.3249 на 480.0000-м километре
Наибольшее уклонение на 60.0000-м километре
Оценка — «хорошо»
Для сравнения приведены результаты обработки этих же данных на ЭВМ МИР-2.
ДАЛЬНОСТЬ ЛБУ ЛБУ СГЛ.
Боковое уклонение в градусах = .3523)01 Боковая составляющая скорости (км/ч) .492О1о2
РАЗНОСТЬ о
0 1 ,6800м0 —.32ОО1оО
20 ,1500101 , .19101с1 .4100,„0
40 3 .31401(11 ,14ОО1оО
60 .460О1о1 .437О1о1 —.2300и0
ДАЛЬНОСТЬ ЛБУ ЛБУ СГЛ. РАЗНОСТЬ <
Боковое уклонение в градусах = - ,1828и2
Боковая составляющая скорости (км/ч) —.2640п,3
60 .4600101 ,4600101 0
80 —2 —-2ООО1(!1 00
Боковое уклонение в градусах = : .1665ic 1
Боковая составляющая скорости (км/ч) ,2324i02
80 —2 —.926О1оО ,10741о1
100 —.70001С0 —.344О1оО •ЗббОщО
120 ,6ООО1оО ,23701О0 —.ЗбЗОщО
140 Л50О1о1 .8180100 —,6820ю0
160 ,2300101 .1399101 —.ЭОЮщО
180 ,220О1о1 .1980101 —.22001,,0
200 3 ,25621(|1 —.43801О0
220 3 .3143101 ,1430ю0
240 .3200,01 .3724ю1 ,5240ю0
260 .38ОО1о1 .4305101 .5050100 0
Боковое уклонение в градусах = = —-9170ю0
Боковая составляющая скорости (км/ч) —.12801О2
260 .38ОО1о1 .2828101 —,9720i00
280 .28ОО1о1 2508ю1 —,2920ю0
300 .16ОО1о1 .2187101 ,5870ю0
320 .24ОО1о1 .1867101 —.5330ю0
340 1 .1547101 ,5470ю0
360 .80001о0 .1227101 ,4270ю0 '
380 .2000100 ,90701О0 ,70701О0
400 0 .5860ю0 5860ю0
420 0 •2660ю0 ,2660ю0
440 0 -.540010-1 —.540010—1
460 0 —,3740ю0 —,3740ю0
480 ,2000100 —,6940ю0 —,8940ю0
Боковое уклонение в градусах = -7409101
Боковая составляющая скорости (км/ч) . 1040юЗ
480 .2000и0 .2000 ю0 0
500 .280О1о1 .2800101 0
Угол доворота 1 = .2180i02 на 60-м километре
Угол доворота 2 = ,19951в2 на 80-м километре
Угол доворота 3 = .2582101 на 260-м километре
Угол доворота 4 = ,8326101 на 480-м километре
Наибольшее уклонение на 60-м километре О
Оценка — «хорошо»
Полученные результаты обработки показывают, что при отходе от исходного пункта маршрута экипаж неточно определил или выдержал курс, так как ЛА сразу начал перемещаться с боковым уклонением около +3,5° вправо от заданного маршрута со скоростью 49,2 км/ч (боковая составляющая).
Приведенные на первом отрезке табличные (второй столбец) и сглаженные значения линейного бокового уклонения (третий столбец), а также разности между ними (четвертый столбец) хорошо совпадают —
величины, стоящие в этом столбце, не превышают 500 м (0,32; 0,41; 0,14 и 0,23 км).
На 60-м километре пути, когда уклонение стало более 4 км, был выполнен энергичный доворот, после которого БУ в градусах, т. е. разница между фактическим и заданным путевыми углами, оказалось равным —18,3°. По табл. 9 эта величина была получена как расстояние первого порядка. Расхождение в долях градуса объясняется тем, что значение БУ подсчитано более точно по тангенсу угла. Следовательно, на 60-м километре был выполнен доворот влево на угол 3,5 + + 18,3 — 21,8°. Это значение угла доворота приведено в нижней части результатов обработки.
Вследствие такого резкого доворота ЛА со скоростью 264 км/ч начал быстро сближаться с заданным маршрутом и всего через 20 км оказался на 2 км левее маршрута, что вынудило экипаж вновь исправлять путь, доворачивая теперь вправо на 20°.
Такие резкие довороты на небольшом (двадцатикилометровом) отрезке маршрута могут существенно повлиять на оценку точности полета по маршруту.
На втором отрезке сглаживание выполняется лишь по двум точкам, поэтому сглаженные и исходные линейные боковые уклонения совпадают. Целесообразность подобных сглаживаний обусловлена лишь общностью алгоритма. Сглаживание производится для того, чтобы получить боковые составляющие скорости, боковые уклонения в градусах и углы доворота на всех отрезках линии фактического пути.
После резкого доворота вправо, выполненного на 80-м километре, ЛА начал вновь сближаться с заданным маршрутом, но теперь скорость оказалась равной всего 23,2 км/ч, а разность между фактическим и заданным путевыми углами составила 1°40', или около -J-l,7°, что позволило экипажу не исправлять путь до 260-го километра.
На третьем отрезке, где сглаживались отрезком прямой 10 точек, расхождения между исходными линейными боковыми уклонениями и найденными способом наименьших квадратов оказались более существенными, особенно в первой точке (80-й километр), где разница составила 1,1 км. В подобных случаях исходные значения линейных боковых уклонений следует еще раз уточнить по первоначальным документам (снимки, радиолокационная проводка и т. Д-), которые использовались при составлении табл. 8.
На четвертом отрезке, пройдя 260-й километр и обнаружив уклонение вправо, которое оказалось около 4 км, экипаж довернул ЛА влево на 2,6° и со скоростью 23 км/ч стал медленно сближаться с заданным маршрутом, на 400-м километре вышел на него, а затем в самом конце маршрута почему-то резко довернул вправо на 8,3°.
На предыдущем отрезке, где сглаживались 12 точек, также имеют место некоторые расхождения между значениями линейных боковых уклонений, однако разность между их табличными и сглаженными величинами не выходит за пределы 1 км. На рис. 26 сглаженная линия фактического пути показана пунктирной линией.
На пятом отрезке сглаживание выполняется по двум точкам, т. е. сглаженные и исходные линейные боковые уклонения совпадают.
Таким образом, анализ линии фактического пути ЛА на рисунке и результатов ее дополнительной обработки позволяет выявить, например, для первого полета:
— неточный отход ЛА от ИПМ, когда было допущено линейное боковое уклонение, равное 1 км, и боковое уклонение более трех градусов, что привело к необходимости вскоре же исправлять курс;
— неоправданно резкие довороты на 60, 80 и 480-м километрах пути.
Конечно, необходимость резкого доворота может быть вызвана внезапно изменившейся обстановкой в полете, например потребностью
Рис. 27. Вид линии фактического пути, полученной во втором полете
предотвратить столкновение. Однако сам этот факт чреват серьезными последствиями в виде предпосылок к летным происшествиям или нарушений правил выполнения полета, нарушения требований безопасности его и должен тщательно анализироваться с целью вскрытия причин подобных действий.
Из рис. 26 видно, что в начальных и конечных точках сглаживаемого участка ЛФП имеет место заметное расхождение между значениями линейных боковых уклонений смежных прямолинейных отрезков. Этот вопрос был рассмотрен ранее. Различие в принципе может быть устранено по мере совершенствования машинного алгоритма сглаживания траекторий и учета образующихся на стыках невязок.
В алгоритммогут быть заложены ограничения не только по предельно допустимым линейным уклонениям, но и по допустимым углам доворотов, превышение которых будет автоматически фиксироваться в ходе машинной обработки.
На рис. 27 показана линия фактического пути.ЛА, зафиксированная с помощью средств объективного контроля во втором полете, а также даны характеристики точности самолетовождения по заданному маршруту.
Во втором полете повторились ошибки, имевшие место в первом полете, а именно: неточный отход от ИПМ, быстрое уклонение вправо, затем резкий доворот влево. В дальнейшем во втором полете первого доворота вправо, выполненного на 80-м километре пути, было недо
статочно, ЛА приблизительно на 200-м километре оставался слева и шел почти параллельно линии заданного пути. Затем, возможно из-за ошибочно выполненной коррекции, ЛА, вместо того чтобы довернуться вправо, начал со скоростью 200 км/ч резко уклоняться влево (боковое уклонение —14°), величина линейного бокового уклонения на 300-м километре пути быстро достигла — 8 км, после чего был выполнен доворот вправо. Далее ЛА двигался по криволинейной траектории, что подтверждает расположение точек на рис. 27. В этом случае сглаживание линии фактического пути целесообразнее производить по кривой второго порядка (параболе). На основании такого описания качественной картины полета составляется таблица (табл. 11) группирования точек по отрезкам линии фактического пути и даются способы их сглаживания.
Таблица 11
Номер сглаженного отрезка ЛФП Номера сглаживаемых точек (ЛБУ) Количество точек Способ сглаживания
1 1-3 3 Прямая
2 3-5 3 Прямая
3 5—15 11 Прямая
4 15—16 2 Прямая
5 16—26 11 Кривая
Результаты обработки данных второго полета на ЭВМ ЕС-1030 представлены в следующем виде:
ПОЛЕТ НОМЕР 2 (СРЕДНИЕ ВЫСОТЫ)
1-й отрезок ЛФП, сглаживаемый прямой с 1-й по 3-ю точку
Боковое уклонение в градусах 2.51' 45"
Боковая составляющая скорости 40.0000 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
0.0' 20.0000 40.0000 СП Боковое уклонени Боковая составляв 0.8000 1.5000 2.8000 2-й отрезо таживаемый прямой е в градусах —5.51 эщая скорости —82 0.7000 1.7000 2.7000 к ЛФП, с 3-й по 5-ю точку 10" .0000 (км/ч) —0.1000 0.2000 —0.1000
Дальность ЛБУ ЛБУ сгл. Разность
40.0000
60.0000
80.0000
2.8000
1.5000
— 1.3000
3.0500
1.0000
—1.0500
0.2500
—0.5000
0.2500
3-й отрезок ЛФП, сглаживаемый прямой с 5-й по 15-ю точку
Боковое уклонение в градусах —0.25'18"
Боковая составляющая скорости —5.8909 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
80.0000 —1.3000 —0.9273 0.3727
100.0000 — 1.5000 —1.0745 0.4255
120.0000 —1.3000 — 1.2218 0.0782
140.0000 — 1.2000 —1.3691 —0.1691
160.0000 -1.2000 — 1.5164 —0.3164
180.0000 — 1.2000 — 1.6636 —0.4636
200.0000 -1.2000 — 1.8109 —0.6109
220.0000 — 1.8000 — 1.9582 —0.1582
240.0000 —2.0000 —2.1055 —0.1055
260.0000 —2.6000 —2.2527 0.3473
280.0000 —3.0000 —2.4000 0.6000
4-й отрезок ЛФП, сглаживаемый прямой с 15-й по 16-ю точку
Боковое уклонение в градусах —14.02'14"
Боковая составляющая скорости —200.0000 (км/ч)
Дальность ЛБУ ЛБУ сгл. Разность
280.0000 —3.0000 —3.0000 0.0
300.0000 —8.0000 —8.0000 0.0
5-й отрезок ЛФП, сглаживаемый параболой с 16-й по 26-ю точку
Боковая составляющая скорости 104.9992 (км/ч)
Боковая составляющая ускорения —289.2314 (км/ч2)
Угловая скорость —20.42'58" (градус/ч)
Дальность БУ БУ сгл. Разность
300.0000 —8.0000 —7.4889 0.5111
320.0000 —5.0000 —5.0447 —0.0447
340.0000 —2.5000 —2.9620 —0.4620
360.0000 —0.8000 —1.2409 —0.4409
380.0000 0.0 0.1187 0.1187
400.0000 1.3000 1.1168 —0.1832
420.0000 1.8000 1.7533 —0.0467
440.0000 2.0000 2.0282 0.0282
460.0000 0.9000 1.9417 1.0417
480 0000 1.2000 1.4936 0.2936
500.0000 1.5000 0.6839 —0.8161
Угол доворота 1 = 8.7154 на 40.0000-м километре.
Угол доворота 2 = 6.2747 на 80.0000-м километре.
Угол доворота 3 — 14.4592 на 280.0000-м километре.
Наибольшее уклонение на 300.0000-м километре
Оценка — «неудовлетворительно».
Для сравнения приведены результаты обработки этих данных на ЭВМ МИР-2.
ДАЛЬНОСТЬ ЛБУ ЛБУ СГЛ. » РАЗПОСТЬО
Боковое уклонение в градусах = .2864^1
Боковая составляющая скорости (км/ч) .4OOOlo2
0 ,8ООО1оО 70О01о0 20 .15ОО1о1 17ОО1о1 40 ,2800iel 27ОО1о1 —.1ОО()П|О .2000100 —.1000,(,0
Боковое уклонение в градусах = —.5851101
Боковая составляющая скорости (км/ч) —.8200i02
40 ,280О1о1 ,3050й1 60 .15OOiol ,1000101 80 — .13001с1 —.1050и1 .25001()0 —,50001и0 .2500] „00
Боковое уклонение в градусах = —,4215i00
Боковая составляющая скорости (км/ч) —5884i0l
80 —13ОО1о1 —.92841оО 100 —.15ОО1о1 — 1075то1 120 — 1300м1 — 12221б1 140 — .1200*1 — 1369101 160 —.1200*1 —,1516101 180 — 12ОО1о1 —.1663*1 200 —.1200*1 —.1811*1 220 — .1800*1 —.1958*1 240 —.2000*1 —.2105101 260 —.2600ю1 -.2252101 280 —3 —.23991о1 .3720*0 .4250*0 .780010—1 —.1690*0 —.3160*0 —.4630i„0 —.61 ю*о —.1580*0 —.1050*0 .3480*0 .6010*0
Боковое уклонение в градусах = —.1404i02 Боковая составляющая скорости (км/ч) —,2000i03 •
280 —3 —.3000*1 300 —8 —.8000*1 0 00
ДАЛЬНОСТЬ
БУ
БУ СГЛ.
РАЗНОСТЬ о
Боковая составляющая скорости (км/ч) ,1О441оЗ
Боковая составляющая ускорения (км/ч2) —,287О1оЗ
Угловая скорость (градус/ч)* —.2О561о2
300 — 8 —,7520101 ,4800ю0
320 — 5 —,5087м1 —.870010—1
340 —,25OOio 1 — 3013101 —,5130ю0
360 —,8000100 —.1298101 —.4980ю0
380 0 .500010—1 .500010—1
400 ,1300101 .Ю60101 —.2400м0
420 ,18ОО1о1 •1700ю1 —.IOOOioO
440 2 ,1970ю1 —.ЗОООю—1
460 ,9000100 .1890ю1 .9900ю0
480 Л20О1о1 .1450ю1 2500ю0
500 ,1500101 .ббООщО . —,84001О0О
* Угловая скорость выдается только в размерности градус/ч.
На основании данных о способах сглаживания линии фактичес кого пути (табл. 11) дальнейшая обработка результатов показывает, что ст ИПМ экипаж отошел с погрешностью, характеризуемой боковым уклонением, равным 2,9° (в таблице ЕС-1030 2°5Г). Так как на первом отрезке л инейное боковое уклонение в начальный момент было ±0,8 км, то из-за удаления от заданного маршрута со скоростью 40 км/ч уже к 40-му километру пути ЛА имел уклонение около 3 км.
На втором отрезке экипаж, решив исправить курс следования, выполнил доворот влево на 8,7°.
На третьем отрезке (80-м километре) был вновь исправлен курс на 6,3°, и ЛА с разницей между фактическим и заданным путевыми углами всего в —0,4° начал двигаться почти параллельно заданному маршруту, но все-таки медленно удаляясь от него со скоростью около 6 км/ч. Затем на четвертом отрезке (280-м километре) в результате внезапного доворота влево на 14° ЛА со скоростью 200 км/ч начал быстро удаляться от маршрута, вышел за пределы нормативной полосы на сценку «удовлетворительно», после чего исправил курс.
Дальнейшее сглаживание по кривой второго порядка позволило установить, что на пятом отрезке полет выполнялся с боковой составляющей ускорения около 290 км/ч2, которая свидетельствует о наличии постоянной угловой скорости разворота, равной примерно 20° в час. Такая большая угловая скорость может быть следствием отказа курсового гироскопа или большой его ошибки.
Сглаженная кривая, показанная на рис. 27 пунктиром, хорошо согласуется с исходными значениями линейного бокового уклонения, их разница нигде не превышает 1 км.
При отсутствии каких-либо дополнительных данных объективного контроля нельзя исключать второй вариант сглаживания последнего, 200-километрового, участка данного полета. Если его аппроксимировать двумя отрезками прямых (на рис. 27 они показаны сплошными линиями), то, как показывают расчеты, выполненные на ЭВМ МИР-2 и приве-
денные ниже, на 300-м километре был выполнен четвертый доворот вправо на 19,2°, а на 400-м километре — пятый влево на 5,3°.
ДАЛЬНОСТЬ
ЛБУ
ЛБУ СГЛ.
РАЗНОСТЬО
Боковое уклонение в градусах = .5161,01
Боковая составляющая скорости (км/ч) .7218,02
300 — 8 —.7000ю 1 .1000,о1
320 — 5 —.5190,01 —.1900,00
340 —.2500,01 —.3390,01 —.8900,00
3G0 —,8ООО1оО —.158О,о 1 —,7800100
380 0 .2200,в0 .2200, с0
400 .13ОО,о1 2030,01 .73ОО,оО
Боковое уклонение в градусах = —.1636,оО Боковая составляющая скорости (км/ч) —.2285,01
400 420 440 4G0 480 500 .13ОО,о1 .18ОО,о1 2 .9000, „0 .1200,01 .1500,01 .1593,01 .1536,01 .1478,01 Л421,01 .1364,01 .1 ЗО7,о 1 .293О,оО —.2640,„0 —.522О,оО .521О,оО .164О,оО —.193О,оО
Угол доворота 1 = .8715,01 на 40-м километре
Угол доворота 2 = .6273,о1 на 80-м километре
Угол доворота 3 = .1447,о2 на 280-м километре
Угол доворота 4 = .1920,02 на 300-м километре
Угол доворота 5 = .5325,01 на 400-м километре
Наибольшее уклонение на 300-м километре
Оценка — «неудовлетворительно» О
Какой из двух вариантов соответствует действительности, можно установить только на основании беседы с экипажем, анализа документов и записей средств объективного контроля.
Пот Г-в. Оценка-отлично, место-первое, нарушении нет
Рис. 28. Вид линии фактического пути, полученной в восьмом полете
Показательным является отлично выполненный на средних высотах восьмой полет (см. табл. 9), линия фактического пути которого и основные количественные характеристики представлены на рис. 28.
Выполним сглаживание линейных боковых уклонений по варианту, приведенному в табл. 12.
Таблица 12
Номер сглаженного отрезка ЛФП Номера сглаживаемых точек (ЛБУ) Количество точек Способ сглаживания
1 1—9 9 Прямая
2 9—15 7 Прямая
3 15—26 12 Прямая
Результаты вторичной обработки этого полета на ЭВМ МИР-2 оказались следующими:
ДАЛЬНОСТЬ ЛБУ ЛБУ СГЛ. РАЗНОСТЬО
Боковое уклонение в градусах — .66821оО
Боковая составляющая скорости (км/ч) .93281(|1
0 — 1 —,9216100 ,7900lo—1
20 —.7000100 —.68841оО .11601О—1
40 —,4ООО1оО —,4552100 —.55201о— 1
60 0 —,222О1оО —.222О1оО
80 0 .1120м— 1 .112О1о—1
100 0 .2450и0 .245О1оО
120 .5ООО1оО .47801о0 —.22ОО1о— 1
140 ,7000100 ,7110м0 ,11ОО1о—1
160 1 .944О1оО —.56ОО1о—1
Боковое уклонение в градусах = —.8389100
Боковая составляющая скорости (км/ч) —.1171io2
160 1 .1006101 ,600010—2
180 .8000100 .7130и0 —.87ОО1о—1
200 .6ООО1оО .42ОО1оО —.18ОО1оО
220 0 .12801о0 .128О1оО
240 —.5ОСО1оО —.1650J00 .335О1оО
260 —.5000100 —,458О1о0 .42ОО1о—1
280 —,5000100 —,75101в0 - .25101с0О
Боковое уклонение в градусах = .4649ioO
Боковая составляющая скорости (км/ч) ,649Ij0l
280 —,5000100 —.343О1оО .1570100
300 —.50001с0 —.18ОО1оО ,32ОО1оО
320 —,2ООО1оО —.18001о—1 .1820100
340 0 .144OioO .144О1оО
360 ,7000100 ,ЗО7О1оО —.393О1оО
380 1 .4690fo0 —,531О1оО
400 .ПООщ! .631О1оО —.469О1оО
420 1 ,7930iC0 —,2О7О1оО
440 .4ООО1оО ,9560i00 ,55601о0
460 .9000^0 ,1118101 ,218О1оО
480 2 .1280101 —.7200100
500 .7000Ln0 .1443101 .743О1оО
Угол доворота 1 = ,1507i0l на 160-м километре Угол доворота 2 = .13О41о1 на 280-м километре
О Наибольшее уклонение на 500-м километре
Оценка — «отлично!» О
В этом примере указано наибольшее линейное боковое уклонение из числа их сглаженных значений, которое на 500-м километре оказалось равным 1,4 км, тогда как максимальное табличное линейное боко-* вое уклонение, равное 2 км, зафиксировано на 480-м километре.
Из полученных данных следует, что на первом отрезке экипаж прошел в 1 км левее ИПМ, но имел погрешность по боковому уклонению +0,7°, что позволило ЛА со скоростью 9,3 км/ч приближаться к заданному маршруту и не исправлять путь до 160-го километра. В этой точке при линейном боковом уклонении +1 км экипаж выполнил доворот влево на 1,5°, на втором отрезке ЛА с боковой составляющей скорости 11,7 км/ч начал приближаться к заданному маршруту полета. На третьем отрезке (280-м километре пути), после того как ЛА пересек заданный маршрут и оказался слева от него, .был вновь выполнен небольшой доворот вправо, и боковая составляющая скорости изменилась так, что ЛА начал приближаться к заданному маршруту (боковая составляющая 6,5 км/ч).
Эта картина полета свидетельствует о высокой точности юстировки прицельно-навигационного комплекса, если полет выполнялся в режиме автоматического самолетовождения, и об отличной выучке экипажа.
Рассмотрим приведенные по данным табл. 8 итоговые результаты обработки с помощью ЭВМ ЕС-1030 полетов, выполненных на малых высотах (табл. 13). Оценка точности самолетовождения производилась по более жестким нормативам, в результате линейное боковое уклонение имело следующие значения: «отлично» — не более 2 км; «хорошо»— не более 3 км; «удовлетворительно» — не более 5 км. Эти нормативы привели к некоторому снижению среднего балла, хотя точность самолетовождения на малых высотах выше, чем на средних.
Таблица 13
Максимальные ЛБУ, км Оценка точности Размах уклонений, км Максимальное Математическое Среднее квадрати- 2 .<и м О О «
S с о с X к влево вправо самолетовождения значение БУ, градус ожидание ЛБУ, км клоиение ЛБУ, км о К с к к да ~
1 2 3 4 5 6 . 7 8 9
1 0.70 1.70 5 2.40 2.29 0.38 0.58 2
2 2.50 2.10 4 4.60 5.73 —0.34 1.01 6
3 2.30 1.30 4 3.60 5.73 —0.60 0.92 4
4 4.00 0.90 3 4.90 3.72 —0.77 1.27 8
5 1.80 2.30 4 4.10 3.72 0.59 0.92 5
6 1.00 1.40 5 2.40 2.86 0.11 0.68 1
7 1.40 1.80 5 3.20 6.59 —0.09 0.72 3
8 4.00 1.20 3 5.20 8.59 —0.40 1.66 9
9 3.10 2.40 3 5.50 3.15 —0.40 1.60 7
10 5.00 2.00 3 7.00 11.17 —0.86 2.14 10
Средний балл 3.90
Приведенные примеры показывают, какие дополнительные возможности открывает электронно-вычислительная техника для наглядного представления и глубокого анализа результатов объективного контроля каждого выполненного полета.
По мере накопления результатов обработки каждого выполненного полета, что предусмотрено первым вариантом машинного счета, следует выявить общие статистические закономерности, характерные для
Рис. 29. Статистические характеристики точности полета по маршруту на средних высотах
множества полетов, выполненных экипажами на однотипных ЛА в одинаковых условиях. Знание таких закономерностей, присущих какому-либо подразделению, тому или иному типу ЛА, специфическим условиям полета и т. д., позволяет определить влияние соответствующих факторов на точность самолетовождения, с тем чтобы учитывать их при планировании полетов и искать пути повышения качества вождения ЛА.
Рис. 30. Статистические характеристики точности полета по маршруту на малых высотах
Поэтому второй вариант машинной обработки всей совокупности данных о полетах заключается в автоматическом вычислении математических ожиданий и средних квадратических отклонений линейных боковых уклонений по табл. 8. Их значения выдаются отдельно для средних и малых высот и приведены в двух последних строках таблицы, а на рис. 29 и 30 даны графики, показывающие, как эти величины изменяются в зависимости от пройденного пути. Кроме того, на рисунках даны осредненные .по всей совокупности данных о траекториях полетов значения математического ожидания и среднего квадратического отклонения.
Анализ изменения математического ожидания и среднего квадратического отклонения линейных боковых уклонений позволяет выявить
причины роста или, наоборот, уменьшения погрешностей самолетовождения в зависимости от пройденного пути. Особенно это заметно, если все полеты, вошедшие в обработку по второму варианту, выполнялись по одному маршруту. Результаты анализа показывают, что обычно резкое увеличение среднего квадратического отклонения линейных боковых уклонений связано с погрешностями разворотов. Из рис. 29 и 30 видно, что и для средних и для малых высот наименьшие значения средних квадратических отклонений линейных боковых уклонений наблюдаются при отходе от ИПМ (0,65 и 0,48 км -— см. табл. 8), затем к 250, 300 и 470-му километрам пути на средних и к 200, 300 и 500-му километрам на малых высотах эти величины увеличиваются примерно в 3—5 раз.
Заметный рост значения ог зафиксирована 280—300-м километрах (средние высоты) и на 260—280-м километрах пути (малые высоты). Это увеличение погрешностей связано с неточным выполнением разворотов, на что должно быть обращено особое внимание экипажей. Нужно тщательно проанализировать другие данные средств объективного контроля (выдерживание скорости, крена, своевременность начала и окончания разворота ит.д.) и наметить пути уменьшения влияния названных погрешностей.
При выполнении полетов по различным маршрутам их совместная обработка не всегда позволяет выявить заметные максимумы и минимумы значений средних квадратических отклонений линейного бокового уклонения, так как развороты приходятся на различные участки и осреднения погрешностей, распределенных по всей длине маршрутов, что не дает указанной выше характерной картины.
На рис. 29 и 30 прямыми линиями показаны осредненные значения математических ожиданий и средних квадратических отклонений линейных боковых уклонений.
Средние значения этих величин следующие:
средняя высота ш/Ср =—0,11 км, о/Ср = 1,94 км;
малая высота пи ср = —0,24 км, 07 Ср = 1,35 км.
Машинная обработка предусматривает выдачу таких статистических характеристик, как t0, о^, Ор, средний налет часов, приходящихся на один выход за пределы заданной полосы (трассы), средняя продолжительность одного выхода и ширина безопасной полосы для заданной гарантийной вероятности невыхода за нее в течение требуемого налета часов (рассчитанной по величине (Т/ср).
Вариант формы выдачи ЭВМ данных представлен в виде табл. 14, в ней указаны обобщенные статистические характеристики, полученные в результате обработки точности самолетовождения па средних и малых высотах (по данным табл. 8).
Приведенные в таблице данные показывают, насколько точность и надежность самолетовождения в десяти полетах, выполненных на мал ых высотах, выше точности самолетовождения, полученной на средних высотах. Так, за счет уменьшения величины Ср с 1,94 до 1,35 км
Таблица 14
Высоты полета
Математическое ожидание ЛБУ, км
Сред-нее квадратическое отклонение ЛБУ, км
Средний интервал времени пересечения заданного маршрута, мин
Средний налет часов на один выход ЛА за пределы трассы ±5 км, мин
Средняя длительность одного выхода за ±5 км, мнн
Относительное время пребывания за пределами ±5 км, %
Среднее квадратическое отклонение
Средние Малые
—0,11 1,94 8,6
—0,24 1,35 11,6
1,0 42 4,0
0,02 ' 22 2,1
(в 1,4 раза) и увеличения t0 с 8,6 до 11,6 мин (в 1,3 раза) средний налет на один выход за пределы полосы —5 км увеличился с 4 до 184 ч, т. е. в 46 раз.
В справедливости этих цифр, их совпадении с фактическими результатами полетов убедимся, обратившись к табл. 8. Если при средней скорости полета около 800—900 км/ч принять приближенно общий налет за десять маршрутных полетов равным 6 ч, то на средних высотах должны быть зафиксированы 1—2 выхода за пределы полосы ±5 км (так как налет на один выход составляет всего 4 ч), а на малых высотах — ни одного выхода. Действительно, на средних высотах линейные боковые уклонения, превышающие 5 км, были зафиксированы во втором (на 300-м километре) и шестом (на участке 460—480-го километров) полетах, тогда как на малых высотах все линейные боковые уклонения оказались не более этой величины (в десятом полете на 320-м километре одно уклонение равно 5 км).
Значения средних квадратических отклонений боковой составляющей скорости и разности фактического и заданного путевых углов при полете на малых высотах оказались примерно в два раза меньше.
Приведенная зависимость статистических характеристик точности самолетовождения от высоты полета способствует более глубокому анализу уровня навигационной подготовки экипажей.
Полученные обобщенные характеристики точности позволяют выполнять расчеты по обеспечению безопасности полетов. Для этого предусмотрена дополнительная форма выдачи ЭВМ данных для заданных вероятностей невыхода ЛА за пределы полосы (надежности бокового эшелонирования) при указанном налете часов. Вариант формы представлен в виде табл. 15, в ней показана соответствующая ширина безопасной полосы для двух заданных вероятностей и различного налета часов (1, 100 и 10 000 ч).
Из табл. 15 видно, что полоса, обеспечивающая невыход за ее пределы при соответствующем налете часов, для малых высот в среднем в 1,5 раза $же, чем для средних.
Данный пример анализа не дает полной гарантии безопасности, так как он основан на обработке нормального процесса самолетовождения, в ходе которого не были зафиксированы аномальные случаи
Таблица 15
Высоты полета Безопасная ширина полосы, км
Вероятность 0,99 Вероятность 0,999
1 я 100 ч 10 000 ч 1 ч \ 100 ч 16 000 ч
Средние .... Малые ±7,0 ±4,8 ±9,2 ±6,3 ±10,9 ±7,5 ±8,2 ±5,6 ±10,1 ±6,9 ±11,7 ±8.0
нарушения безопасности полетов (отказы техники, грубые ошибки летного состава и т. д.). Кроме того, приведенный анализ основан на осреднении величины о/ ср, тогда как на отдельных этапах эта величина возрастает в несколько раз, что также чревато дополнительными погрешностями.
* * * *
Приведенные в данной главе расчеты свидетельствуют, что автоматизированная обработка статистического материала облегчает оценку и анализ качества выполнения полетов. Применение вычислительной техники сокращает время обработки результатов объективного контроля, практически исключает расчеты и позволяет получить итоговые данные в готовом виде с наглядным отображением сглаживаемых точек и линии фактического пути ЛА на телевизионном экране или па бумажной ленте.
ЗАКЛЮЧЕНИЕ
Нормальное течение любого процесса или функционирование какой-либо системы, будь то комплекс только технических средств или эргономическая система типа человек — машина — среда, невозможно без контроля за их работой. Контроль является важнейшей составной частью управления. Он позволяет наблюдать, как протекает тот или иной процесс, как работает система, объективно фиксировать их важнейшие показатели, сравнивать достигнутые результаты с намеченными целями или поставленными задачами, выявлять слабые места, своевременно принимать меры для их устранения, учитывать и обобщать накопленный опыт, постоянно совершенствуя качество самого процесса и эффективность управления им.
Теоретические и организационные предпосылки правильной организации контроля, охватывающего деятельность людей, и его значение изложены в целом ряде работ В. И. Ленина.
«Проверять людей и проверять фактическое исполнение дела — в этом, еще раз в этом, только в этом теперь гвоздь всей работы, всей политики» *.
Разумеется, необходимость контроля и проверки фактического положения дела не означает недоверия к людям. Доверять людям, ценить их опыт и знания, но вместе с тем и проверять их, то есть спрашивать с них, напоминать об ответственности за порученное дело — один из важнейших ленинских принципов. Контроль — это то средство, которое не дает людям самоуспокаиваться, зазнаваться и предпринимать ошибочные действия. Поэтому важно вскрыть фактическое положение дел, показать человеку его ошибки, уберечь от неправильных действий, пусть даже неумышленных.
В. И. Ленин придавал большое значение технике контроля, принимал деятельное участие в разработке контрольной карточки и требовал заполнять ее «сстрожайшей аккуратностью, до педантизма строго»**.
Одним из главных условий эффективности контроля является привлечение к нему необходимого числа людей. Критическое осмысление опыта, участие их в обнаружении и устранении недостатков дают возможность изо дня в день совершенствовать работу, воспитывая на анализе объективных данных непримиримость к недостаткам. При этом главная задача контроля состоит не только и не столько в том, чтобы эпизодически выявлять те или иные недостатки, но и в том, чтобы изучать причины их появления и искать способы как устранения, так и предупреждения.
* Ленин В. И. Поли. собр. соч., т. 45, с. 16.
** Ленин В. И. Поли. собр. соч., т. 54, с. 259.
Это требует вдумчивой, кропотливой и систематической работы от принятия решения по контролю до полного ее выполнения. Проверка реального выполнения — самая важная и самая необходимая задача.
Постоянно растущий уровень выучки летного и инженерно-технического состава, непрерывное совершенствование авиационной техники, качественно новое оборудование летательных аппаратов, их резко возросшие боевые возможности, усложнение условий боевого применения требуют настойчиво внедрять ленинский стиль работы, повышать качество подготовки к полету, формы и методы контроля за его выполнением.
Планирование и проведение учебно-боевой подготовки на ЛА должны быть нацелены на повышение качества и эффективности полетов, на определение узловых проблем, для решения которых требуется максимальная концентрация совместных усилий руководящего и летного состава.
Важным инструментом планирования и управления ходом этой подготовки является статистика, ее данные являются объективным показателем качества выполнения полетов, способствующим вскрытию резервов повышения эффективности летной учебы.
В современных условиях быстрого развития авиационной техники и большого разнообразия способов ее боевого применения, когда значительно усложняются связи между различными видами наземной и летной подготовки, существенно возрастает значение задач, связанных с улучшением системы учета и отчетности, более полной обработкой статистической информации. Повышаются требования к сбору и анализу статистического материала, характеризующего важные стороны и закономерности протекающих процессов, к качеству и эффективности самих статистических работ, совершенствованию нормативных показателей, которые должны наиболее полно отражать уровень боевой подготовки, динамику ее роста, степень повышения мастерства летного состава. Статистические показатели, представляющие собой количественное выражение этих явлений и процессов, определяющие их качество, являются основным средством для научно обоснованной, объективной оценки состояния учебно-боевой подготовки, способствуют действенности социалистического соревнования.
По мере появления новых задач, процессов и явлений, возрастания взаимосвязей должны изменяться средства объективного контроля и система статистических показателей. Это ставит перед методикой объективного контроля точности и надежности выполнения полетов новые сложные и ответственные задачи дальнейшей разработки ее научных основ, системы статистических показателей, методики их обработки и анализа для повышения эффективности каждой минуты учебы на земле и в воздухе.
Тщательный анализ зафиксированных параметров каждого полета, характера отдельной траектории и их совокупности, установление присущих им закономерностей позволяют глубже понять, как функционировала система человек — машина — среда, каково взаимное влия
ние этих составляющих, в каких условиях эта система фукционирует наиболее успешно, как человек управляет ею.
При оценке точности самолетовождения основное внимание должно быть уделено анализу деятельности человека — основному звену повышения эффективности эргономической системы; необходимо шире использовать средства объективного контроля, не считать потерянным время, которое затрачено на анализ результатов полета. Каждый экипаж должен уметь выполнить обработку данных и проанализировать качество вождения ЛА, а это, в свою очередь, позволит выявить еще неиспользованные резервы дальнейшего совершенствования методики вождения ЛА.
Нет сомнения в том, что средства объективного контроля будут все шире применяться для более глубокого и всестороннего изучения выполняемых полетов, их особенностей, позволят понять причины допускаемых погрешностей, найти пути их устранения и предупреждения в целях дальнейшего повышения качества воздушной выучки экипажей, эффективности выполнения полетных заданий и строгого соблюдения требований безопасности полетов.
ПРИЛОЖЕНИЕ
Значения показательной функции и интеграла вероятности
Л ех е~х Ф(Л) к ел е % Ф(Л) X ея е~х Ф(Х)
0,00 1,000 1,000 0,000 0,65 1,915 0,522 0,484 1,30 3,669 0,272 0 806
01 010 0,990 008 66 935 517 491 31 706 270 810
02 020 980 016 67 954 512 497 32 743 267 813
03 030 970 024 68 974 507 503 33 781 264 816
04 041 961 032 69 994 502 510 34 819 26‘> 89 0
0,05 06 07 08 1,051 062 072 083 0,951 942 932 923 0,040 048 056 064 0,70 71 72 2,032 034 054 0,497 492 487 0,516 522 528 1,35 36 37 3,857 896 935 0,259 257 254 0,823 826 829
09 094 914 072 73 74 075 096 482 477 535 541 39 4,015 249 835
0,10 1,105 0,905 0,080 0,75 2,117 0,472 0.547 1,40 4,055 0,247 0.838
11 116 896 088 76 138 468 553 * 41 096 244 841
12 127 887 095 77 160 463 559 42 137 242 844
13 139 878 103 78 181 458 565 43 179 239 847
14 150 869 111 79 203 454 570 44 221 237 850
0,15 16 1,162 173 0,861 852 0,119 127 0,80 2,225 0,449 0.576 1,45 46 4,263 306 0,235 0.853
17 185 844 135 81 248 445 582 47
18 197 835 143 82 270 440 588 48 393 861
19 209 827 151 83 84 293 316 436 432 593 599 49 437 225 861
0,20 1,221 0,819 0,158 0,85 2,340 0,427 0,605 1,50 4,482 0.223 0,866
21 234 811 166 86 363 423 610 51 527 221 869
22 246 802 174 87 387 419 616 52 572 219 871
23 259 795 182 88 411 415 621 53 618 216 874
24 271 789 190 89 435 411 626 54 665 214 876
0,25 26 1,284 297 0,779 771 0,197 205 0,90 2,460 0,407 0,632 1,55 56 4,712 759 0,212 0,879 881
27 310 763 213 91 484 402 637 57 807 881
28 323 756 221 92 509 398 642 58 886
29 0,30 336 1,350 748 0,741 228 0,236 93 94 0,95 534 560 2,586 395 391 0,387 648 653 0,658 59 1,60 904 4,953 204 0,202 888 0,890
31 363 733 243 96 611 383 663 1,61 5,003 0,200 0,893
377 726 251 97 638 379 668 62 053 198 895
391 719 259 98 664 375 673 63 104 196 897
405 712 266 99 691 372 678 64 155 194 899
36 1,419 433 0,705 698 0,274 281 1,00 2,718 0,368 0,683 1,65 66 5,207 0,192 190 0.901 903
37 448 691 289 01 741 364 687 67 31 2 188 905
38 462 684 296 02 773 361 692 68 366 186 907*
39 477 677 303 03 04 801 829 357 353 697 702 69 420 185 909
1.492 0,670 0,311 1,05 2,858 0,350 0,706 1,70 5.474 0,183 0,911
507 664 318 06 886 346 711 71 529 181 913
522 657 325 07 915 343 715 72 585 179 915
537 651 333 08 945 340 720 73 641 177 916
0,45 46 553 1,568 584 644 0,638 631 340 0,347 354 09 1,Ю 974 3,004 336 0,333 724 0,729 74 1>75 76 697 5,755 819 176 0,174 918 0,920
47 600 625 362 11 034 330 733 77 871 170 923
48 616 619 369 12 065 327 737 78 930
49 632 617 376 13 14 096 127 323 320 741 746 79 990 167 926
0.50 1,649 0,606 0,383 1.15 3.158 0,317 0,750 1,80 6,050 0,165 0,928
51 665 600 390 16 190 313 754 81 по 164 930
52 6В.2 594 397 17 222 310 758 82 172 162 931
53 699 589 404 18 254 307 762 83 234 160 933
54 716 583 411 19 287 304 766 84 297 159 934
0,55 1,733 0,577 0,418 3,320 3,301 0,770 1,85 6 360 0 1 57 0.936
56 751 571 424 1,20 86 424 1 56 937
57 768 566 431 21 353 298 774 87 488 151 9 ЗЯ
58 786 560 438 22 387 295 777 88 554 153 940
59 804 554 445 23 24 411 456 292 289 781 785 89 619 151 941
0,60 1,822 0,549 0,451 1,25 3,4 90 0,286 0,789 1,90 6,686 0,149 0.943
61 840 543 4 58 26 525 284 792 91 753 148 944
62 859 538 465 27 561 281 796 92 821 147 945
63 878 532 471 28 597 278 799 93 890 145 946
64 896 527 479 29 633 275 803 94 959 144 948
Продолжение
X ех е х Ф U) X е* е~х ф W X ех е~х Ф(Х)
1,95 7,029 0,142 0,949 2,50 12,18 0,082 0,988 3,00 20,09 0,050 0,9973
96 099 141 950 55 12,81 0,078 989 10 22,20 0,045 9980
97 171 140 951 60 13,46 0,074 991 20 24,53 0,041 9986
98 243 138 952 65 14,15 0,071 992 30 27,11 0,037 9990
99 316 137 953 70 14,88 0,067 993 40 29,96 0,033 9993
2,00 7,389 0,135 0,954 2,75 15,64 0,064 0,994 3,50 33,12 0,030 0,9995
05 7,768 0,129 960 80 16,45 0,061 995 60 33,60 0,027 0,99968
10 8,166 0,123 964 85 17,29 0,058 9956 70 40,45 0,025 99978
15 8,585 0,117 968 90 18.17 0,055 99бЗ 80 44,70 0,022 99986
20 2,25 30 35 40 45 9,025 9,488 9,974 10,49 11,02 11,59 0,111 0,105 0,100 0,095 0,091 0,086 972 0,976 979 981 984 986 95 19,11 0,052 9968 90 4,00 49,40 54,60 0,020 Q.018 99990 99994
ЛИТЕРАТУРА
1. Ленин В. 11. Поли. собр. соч., т. 45, 54.
2. Белоглазов JI. Н., Тарасенко В. П. Корреляционно-экстремальные системы. М., Советское радио, 1974.
3. Бронштейн 11 Н., Семендяев К. А. Справочник по математике М., Наука, 1967.
4. Г у м б с л I. Э. Статистика экстремальных значений. М., Мир, 1965.
5. Д о б р о л е и с к и й Ю. П. и др. Методы инженерно-психологических исследований в авиации. М., Машиностроение, 1975*
6. Дроздов Е. А., Пятибратов А. П. Автоматическое преобразование и кодирование информации. М., Советское радло, 1964.
7. Кузьмин С. 3. Цифровая обработка радиолокационной информации. М„ Советское радио, 1967.
8. Лаврентьев М. А., Люстерник Л. А. Курс вариационного исчисления. Изд. второе. М., Гостехиздат, 1950.
9. М о л о к а и о в Г. Ф. Точность и Надежность навигации летательных аппаратов. М., Машиностроение, 1967.
10. Т а р а с о в В. Г. Обработка информации в автоматизированных системах управления. Изд. ВВНА им. проф. Н. Е. Жуковского, 1974.
11. Naval Aviation News, 1972, IV, р. 14—17; Abercrombie IT «Positive Aircraft Control».
ОГЛАВЛЕНИЕ
।
Стр.
Введение................................................................. 3
Глава I. Основные требования и показатели точности вождения ЛА . . 6
§ 1. Тактические требования..................... ................ ....
§ 2. Краткая характеристика траекторий полета...................... 9
§ 3. Показатели точности полета по заданной траектории............ 12
§ 4. Способ сравнения траекторий полета........................... 17
§ 5. Показатели точности и надежности полета ..................... 22
Глава II. Автоматизация объективного контроля точности полета ЛА по маршруту . 29
§ 6. Принципы автоматизации..................................... —
§ 7. Алгоритмы автоматической обработки результатов............ 32
§ 8. Определение линии фактического пути и параметров полета . 37
§ 9. Рациональная частота фиксации параметров полета.............. 42
§ 10. Еще один метод расчета интервалов фиксации параметров полета 45 Глава III. Методика обработки результатов объективного контроля ... 50
§ 11. Использование средств объективного контроля . . .... —
§ 12. Определение вида линии фактического пути ЛА........... . 54
§ 13. Сглаживание линии фактического пути отрезками прямых ... 58
§ 14. Сглаживание линии фактического пути на криволинейных участках
траектории полета.............................................66
§ 15. Методика статистической обработки совокупности данных о траекториях полета ..................... ............................ . 70
§ 16. Методика сравнительной оценки точности и надежности вождения ЛА и пути их повышения............................................. 81
Глава IV. Применение вычислительной техники для автоматизированной обработки результатов объективного контроля............................. 87
§ 17. Обработка данных с помощью ЭВМ МИР-2...............• . . . . —
§ 18. Обработка данных с помощью ЭВМ ЕС-1030 .............. 95
Заключение...............................................................120
Приложение...............................................................123
Литература...............................................................125
Молоканов Г. Ф.
М75 Объективный контроль точности самолетово>кд1-11Н»1 М
Воениздат, 1980.— 126 с., ил.
В пер.: СО к
Автор, крупный ученый в области аэронавигации, в своей книге iitiinieei фи «и ческую сущность основных ошибок вождения ЛА, показа гелей «чн ih’iiihi hi и надежности, даст математ ическое обоснование объективному к <ш < । и hi in и iipi д лагает методику обработки получаемых результатов.
Книга будет полезна руководящему н летиому составу, курениiим Hnirunii'iHii.i^ училищ, слушателям академий, а также всем, кто занимается yiipiin.uriiii M нп>д\1н ным движением, моделированием Движения объектов и автомптилпциЙ MfiMhiMii ного контроля за точностью их перемещения.
|.|>k .!<> п/ III ! I
Георгий
Федосеевич
Молоканов
ОБЪЕКТИВНЫЙ КОНТРОЛЬ ТОЧНОСТИ САМОЛЕТОВОЖДЕНИЯ
Редактор Г. Д. Черезов
Художник Л. Н. Наумов
Художественный редактор Н. Б. Попова Технический редактор Ю. Н. Чистякова Корректор И. Ф. Отмахова
ИБ 380
Сдано в набор 27.12.78.
Подписано в печать 28.09.79. Г-22900 Формат, 60x90/16
Бумага тип. № 3. Высокая печать
Печ. л. 8. Усл. печ. л. 8. Уч.-изд. л. 8,148
Тираж 9500 экз. Изд. № 7/2563
Зак. 9-67. Цена 60 к.
Воениздат
103160, Москва, К-160
Книжная фабрика им. М. В. Фрунзе Республиканского производственного объединения «Полиграфкнига» Госкомиздата УССР, Харьков, Донец-Захаржевская, 6/8.