/































Text
ОТДЕЛЕНИЕ НАУЧНО-ТЕХНИЧЕСКОЙ ИНФОРМАЦИИ
ТЕХН ИЧЕСКАЯ
, ИНФОРМАЦИЯ
Исследования техники высокоманевренных истребителей
по программе HiMAT.................................. 1
Истребитель-перехватчик SAAB-Сканиа JA-37 .Вигген" . . 16
Авиационно-космическая промышленность Швеции .... 22
1979
Сканирование и обработка
Deathdoor
№ 22
ТЕХНИЧЕСКАЯ
ИНФОРМАЦИЯ
(ОБЗОРЫ Н РЕФЕРАТЫ
по материалам иностранной печати)
ОТДЕЛЕНИЕ
НАУЧНО-ТЕХНИЧЕСКОЙ
ИНФОРМАЦИИ
№ 22 (1380)
Ноябрь 1979 г.
XL год издания
УДК 629.735.33 : 623.746.3 (72)
ИССЛЕДОВАНИЯ ТЕХНИКИ ВЫСОКОМАНЕВРЕННЫХ ИСТРЕБИТЕЛЕЙ
ПО ПРОГРАММЕ HiMAT
Комплексная оценка новой авиационной техни-
ки требует проведения летных испытаний, связан-
ных с большими затратами на постройку летатель-
ных аппаратов и высокой степенью риска для жиз-
ни летчика. Однако достижения последних лет в
области телепнлотируемых аппаратов обеспечива-
ют возможность реализации подобной программы
при гораздо меньших затратах и без риска для
жизни летчика.
В 1973 г. летно-испытательный центр NASA
нм. Драйдена на базе ВВС Эдвардс и министер-
ство обороны США приступили к совместным ис-
следованиям, связанным с изучением техники пер-
спективных военных высокоманевренных истреби-
телей, по программе HiMAT (Highly .Maneuverable
Aircraft Technology) *. NASA было привлечено
к участию в этих исследованиях как организация,
располагающая обширной экспериментальной ба-
зой и, в частности, пилотажным стендом DMS
(Differential Maneuvering Simulator) в НИЦ
им. Лэнгли, на котором можно моделировать воз-
душный бой с участием летчика для оценки манев-
ренных характеристик разрабатываемого само-
лета.
Целью программы HiMAT является постройка
ь летные испытания беспилотных аппаратов для
оценки комплекса технических усовершенствова-
ний, которые могут найти применение на истреби-
телях будущих поколений. Многие из подлежащих
рассмотрению технических новшеств находятся еще
в стадии лабораторных исследований. Этим про-
грамма HiMAT отличается от программы AFTI •,
которая предусматривает использование полно-
масштабных экспериментальных самолетов для
изучения эффективности менее радикальных усо-
вершенствований. Достижения каждого этапа про-
граммы HiMAT могут быть использованы на по-
следующем этапе программы AFTI.
Испытания беспилотных аппаратов по програм-
ме HiMAT заполнят пробел между информацией,
получаемой при испытаниях моделей в аэродина-
мических трубах и на моделирующих установках,
и информацией, которая будет получена при лет-
ных испытаниях натурного истребителя.
Программа HiMAT предусматривает экспери-
ментальную проверку ряда новых концепций в об-
блнзитедьно на шесть месяцев было вызвано рядом
~ Сканирование и обработка
©ИЗДАТЕЛЬСКИЙ ОТДЕЛ ЦЕНТРАЛЬНОГО -----------------
АЭРО-ГИДРОДИНАМИЧЕСКОГО ИНСТИТУТА
имени проф. Н. Е- Жуковского (ЦАГИ). 197»
* См «ТИ» № 17-18. 1977
Deathdoor
ласти аэродинамики, перспективных конструкций
систем управления полетом, силовой установкой
ч т. д. [1].
Комплексное усовершенствование самолета по-
зволит улучшить его маневренность, управляе-
мость. устойчивость, улучшить точность ведения
огня, повысить тяговооруженность и снизить
относительный вес планера. В цели программы
HiMAT входит определение оптимального набора
потеницальных усовершенствований, приводящих
к наилучшему суммарному результату.
За шесть лет пройдено три этапа программы
HiMAT — от изучения концепции до изготовления
двух аппаратов и начат этап летных испытаний.
На первом этапе проводились аналитические
исследования возможности создания перспектив-
ных самолетов на основе новейших научно-техни-
ческих достижений. На этом этапе определялись и
тщательно изучались области авиационной техни-
ки, развитие которых могло бы улучшить характе-
ристики перспективного истребителя. Предвари-
тельные исследования технической осуществимости
программы проводили девять авиационных „фирм
США в середине 1973 г. в течение трех месяцев.
Стоимость исследований каждой фирмы составила
~ 10 000 долл.
На втором этапе осуществлялась предваритель-
ная разработка компоновок перспективных самоле-
тов. Исследования на этом этапе проводили три
фирмы (Рокуэлл, Грумман и Макдоннелл-Дуглас)
в течение шести месяцев по контрактам стоимостью
по 330000 долл. На первых двух этапах програм-
мы (до выбора фирмы-разработчика) изучались
проекты полномасштабных самолетов в соответст-
вии с определенными требованиями.
Третий этап программы начался в октябре
1975 г., когда NASA объявило победителем кон-
курса фирму Рокуэлл и выдало ей контракт стои-
мостью 11,8 млн, долл, на проектирование и изго-
товление двух экспериментальных аппаратов. Пер-
воначально программа была рассчитана на 30 ме-
сяцев, из которых 18 месяцев отводились на лет-
ные испытания, к которым предполагалось присту-
пить в конце 1978 г. Однако этот график был нару-
шен, и первый полет аппарата HiMAT был перене-
сен на лето 1979 г. Это отставание от графика при-
1
технических проблем и снижением темпа работ ос-
новного контрактанта по экономическим причинам.
Постройка первого аппарата HiMAT была за-
вершена в марте 1978 г., а второго в июне 1978 г.
(фиг. I) [2—4]. Они были переданы летно-испыта-
тельному центру NASA им. Драйдена. На первом
аппарате были проведены комплексные испытания
бортовых систем аппарата. Эти работы вместо за-
планированных 12 педель заняли 26 недель. Отста-
вание от графика частично объяснялось проблема-
ми, связанными с разработкой средств математи-
ческого обеспечения системы управления аппара-
том. Потребовалась также модификация распреде-
лительного блока системы управления полетом, ко-
торый обеспечивает переключение с основного на
резервное управление. Как показали результаты
исследований и начальных наземных испытаний,
для обнаружения бортовыми системами серьезных
неполадок в системе управления полетом и перехо-
да на резервный режим управления (при котором
аппарат выполняет полет по круговой траектории
ври скорости, соответствующей числу М = 0,75 на
высоте 7600 м, до тех пор пока с бортовой станции
управления сопровождающего самолета не посту-
пит команда на посадку) потребуется ~0,065 с.
Чтобы уменьшить опасность аварии, до разработ-
ки нового оборудования в носовой части аппарата
предполагается разместить ~77 кге балласта для
улучшения продольной статической устойчивости
Фиг. I. Первый (вверху) и второй (внизу)
чкспериме11та.ты1Ые аппараты Рокуэлл HiMAT
Фиг. 2. Первый свободный полет аппарата
Рокуэлл HiMAT
и увеличения располагаемого времени для перехода
на аварийный режим управления [5].
При взвешивании полностью укомплектованного
аппарата оказалось, что его вес на 30 кге (~2%)
меньше расчетного. При испытаниях на прочность
имитировались нагрузки, соответствующие девяти-
кратным перегрузкам; измерения при имитирован-
ных восьмикратных перегрузках показали, что де-
формации крыла и переднего оперения составили
~70% расчетных аэроупругих деформаций [6|.
Комплексные испытания бортовых систем перво-
го аппарата HiMAT с опробованием двигателя
GE J85-2I завершились в сентябре 1978 г., после
чего началась новая серия наземных испытаний
с использованием специального наземного ком-
плекса.
В январе 1979 г. начались наземные испытания
аппарата вместе с системами; в программу этого
этапа входило моделирование всех потенциально
опасных режимов полета. Для имитации аэродина-
мических характеристик в ЭВМ использовались ре-
зультаты испытаний модели аппарата в аэродина-
мической трубе НИИ нм. Эймса [5 .
10 июля 1979 г. NASA начало летные испы-
тания первого аппарата HiMAT на авиабазе ВВС
Эдвардс. В первом полете аппарат не сбрасывал-
ся с самолета-носителя В-52. Неполадки в гидрав-
лической системе аппарата привели к преждевре-
менному прекращению полета, после того как про-
грамма полета на 3/4 была выполнена (из-за не-
значительной утечки гидросмеси произошел выпуск
одной из посадочных лыж). Система управления
полетом и ТРД Дженсрал Электрик ,185 работали
удовлетворительно. Испытания систем начались
при скорости полета 330 км/ч и затем повторялись
при постепенном увеличении скорости. Двигатель
работал на режиме малого газа, боевом режиме и
максимальном форсажном режиме. Максимальная
высота полета составляла 9100 м [7].
Первый свободный полет аппарата (фиг. 2)
состоялся 27 июля 1979 г. Аппарат был сброшбн
с самолета-носителя В-52 на высоте 13 720 м и
после полета продолжительностью 22 мин призем-
лился на дно высохшего озера, используя посадоч-
ные лыжи. Управление аппаратом осуществлялось
операторами с наземной станции и самолета
TF-104G. Программой первого свободного полета
предусматривалась проверка методики сброса и по-
садки аппарата. До конца 1979 г. намечается про-
ведение еще четырех полетов с постепенным
усложнением маневров. В декабре 1979 г. намечено
провести испытания аппарата с выполнением уста-
новившихся разворотов с восьмикратными пере-
грузками на высоте 7620 м при скорости, соответ-
2
Hi МЛ T
Фиг. 3 Сравнение маневренности
самолетов F-4E, F-16 и аппарата HiMAT
(М-0,9, Н =9100 м)
ствуютцей числу М = 0,9, и полета в течение 3 мин
со сверхзвуковой скоростью [8].
После завершения первого этапа летных испы-
таний (7 полетов) первого аппарата его аэродина-
мическая схема будет модифицирована, а борто-
вое оборудование усовершенствовано.
Летные испытания второго аппарата начнутся
в 1980 г. Всего программой летных испытаний двух
аппаратов HiMAT предусматривается проведение
37 полетов в течение трех лет [6].
По маневренности аппараты HiMAT будут зна-
чительно превосходить современные истребители
(фиг. 3) [7].
К настоящему времени на программу HiMAT
NASA и ВВС уже затратили 17 млн. долл. [1].
Требования к аппарату HiMAT. Контрактом
NASA, выданным в 1975 г. фирме Рокуэлл, преду-
сматривалась закупка двух опытных аппаратов,
удовлетворяющих следующим требованиям.
Летные характеристики: полет продолжитель-
ностью не менее 3 мин при скорости, соответствую-
щей числу М = 1,4 на высоте 12 200 м, демонстра-
ция возможности обеспечения полномасштабному
истребителю (моделью которого является аппарат
HiMAT) следующих характеристик маневренности:
установившийся разворот с восьмикратной пере-
грузкой на высоте 9100 м при скорости, соответ-
ствующей числу М = 0,9.
Конструкция: максимальные перегрузки в ди-
апазоне от —6 до 4-12 при дозвуковой скорости и
ст —5 до 4-10 при сверхзвуковой скорости полета;
максимальный скоростной напор 7324 кге/м2.
Надежность: единичный отказ не должен приво-
дить к потере аппарата.
Согласование с «внешними» системами: с на-
земной станцией управления, вычислительным
комплексом в летно-испытательиом центре
им. Драйдена, а также с самолетом-носителем
В-52.
Фиг. 4. Окончательная схема аппарата HiMAT
Выбор схемы. Аппарат HiMAT представляет со-
бой выполненную в масштабе 0,44 летающую мо-
дель перспективного истребителя, проект которого
был рассмотрен на втором этапе исследований
(анализ аэродинамических схем, силовых устано-
вок, материалов, методов производства и бортовых
систем).
При выборе расчетных параметров аппарата
HiMAT проектировщики стремились к тому, чтобы
тяговооруженность и удельная нагрузка на крыло
соответствовали аналогичным показателям натур-
ного истребителя в боевых условиях (число М =
= 0,9, высота полета 9100 м) для летной демон-
страции маневренных возможностей перспективных
истребителей. Поскольку было решено использо-
вать ТРДФ Дженерал Электрик J85-21, эти усло-
вия определили масштаб аппарата — 0,44 и стар-
товый вес ~ 1500 кге [9]. На фиг. 4—6 [10, 11] пред-
ставлены окончательная схема аппарата HiMAT и
схема перспективного истребителя, а в табл. 1 да-
ны их основные характеристики.
Концевые кили на крыле. Применение концевых
килей-шайб позволяет одновременно снизить вих-
Фпг. 5. Схема перспективного истребителя
2 .TH- .V? 22
3
Фиг. 6. Сравнение размеров полномасштабного
истребители и аппарата HiMAT
ревое сопротивление и уменьшить размеры основ-
ных килей. Улучшение путевой устойчивости
является важным соображением, поскольку более
эффективным способом снижения индуктивного со-
противления является увеличение размаха крыла.
Таблица I
Характеристики перспективного высокоманевренного
истребителя и экспериментального беспилотного
аппарата Рокуэлл HiMAT
у мести °•° средн
0,002
л I-------1_______I_______I_______I-------1-------1
0,4 0,6 0,8 \0 1,2 1,4 1.6
Число М
I — распределение подъемной силы (М - 0,9, а = 6°)
---------------- крыло ♦- концевые кили;
---------------крыло:
II — поляра (М = 0,9)
О — крыло;
□ — крыло 4- концевые кили;
III — путевая устойчивость (а — 0)
Фиг. 7. Влияние концевых килей-шайб
на аэродинамические характеристики крыла
Истребитель HiMAT
Размеры Длина аппарата, м 13.4 6.85
Высота аппарата, м 2,83 1.31
Размах крыла, м 10,5 4,7
Площадь крыла, м® 27,68
Относительное удлинение 3,85
крыла Стреловидность крыла по 45
передней кромке, град Веса и нагрузки Стартовый вес, кге 77 J0 1530
Вес топлива, кге 1790 285
Боевой вес, кге 6847 1385
Стартовая удельная на- 279,3 283,6
грузка на крыло, кге, м2 Боевая удельная нагруз- 247 257
ка на крыло, кге/м* Стартовая тяговооружен- 1,43 1,48
И ОСТЬ Боевая тяговооружен- 0,828 0,824
ность (// = 9100 м, М=0,9, максимальный бесфорсажный режим) Силовая установка Уменьшенный ТРДФ
(ХО,644)ТРДД GE J85-2I
Бесфорсажная тяга, кге PW 74-20 (т = 0,8) 1590
Форсажная тяга, кге 10 400-11 800 2270
Летные характеристики Радиус действия, км -555
Число М полета — 1,6 1.5
Установившаяся пере- 8 (М = 0,9, 6,76(М =0.9.
грузка /7 = 9100 м) // = 7600 м)
Расчетная перегрузка 12 6(М = 1.2. /7 = 9100 м) 12
Удельная избыточная 0,61 -107
мощность (Р.) при Ну = 8. М = 0,9, м/с Продолжительность экс- периментального поле- та, мин: при М=0,9, // 12 200 м, (Н = 9100 м) (Н =7600 м)
47
«»= । при М=0,9, //=12 200 м, максимальная бесфор- сажная тяга при М-0,9, /7= 12 200 м. 22
6.5
максимальный форсаж при М=1,4, //=12 200 м, 3.7
максимальный форсаж
4
Дополнительная аэродинамическая нагрузка на
концевые части крыла (фиг. 7,/) используется
также для усиления аэроупругой деформации
с целью получения требуемой крутки крыла при
больших нагрузках. При достаточно больших зна-
чениях снижение вихревого сопротивления компен-
сирует рост сопротивления трения (фиг. 7,//). Кон-
цевые кили положительно влияют на путевую
устойчивость на всех режимах полета (фиг. 7,111).
Эффект близкого расположения переднего опе-
рения и крыла. Схема «утка», отличающаяся ма-
лым расстоянием между горизонтальным оперени-
ем н крылом, способствует увеличению максималь-
ных несущих свойств крыла. Скос потока за перед-
ним оперением (фиг. 8) приводит к перераспреде-
лению нагрузки по размаху крыла. Уменьшение на-
грузки на корневую часть крыла с избытком ком-
пенсируется увеличением нагрузки на концевых
частях при соответствующем выборе конфигурации
системы крыло — переднее оперение, так что при
заданной крутке и кривизне крыла можно задер-
жать срыв потока на его концевых частях. При
умеренном расчетном значении коэффициента
подъемной силы можно спроектировать крыло с
аналогичными аэродинамическими характеристика-
ми без использования эффекта переднего оперения,
но только ценою больших деформаций конструк-
ции. При значениях си, соответствующих условию
срыва потока, может возникнуть подъемная сила,
обусловленная влиянием вихрей, большая чем в
случае слабо взаимодействующих крыла и опере-
ния. Это было подтверждено рядом исследований,
послуживших основой для выбора аэродинамиче-
ской схемы аппарата HiMAT.
На фиг. 9 показана эффективность схемы «ут-
ка» с близкорасположенными крылом и оперением.
В случае применения реактивных закрылков
эффект суперциркуляции на такой схеме может
быть реализован без усложнения проблемы балан-
сировки. Кроме того, при использовании передне-
го оперения с большим поперечным V обеспечи-
вается возможность непосредственного управления
боковой силой.
Плавное сопряжение с фюзеляжем крыла,
имеющего наплывы. Интегральная схема аппарата
удобна для установки наплывов крыла, которые
способствуют увеличению вихревой составляющей
подъемной силы при больших углах атаки и повы-
шению max- Проблему нелинейности моментных
характеристик можно решить путем использования
реактивных закрылков, в противном случае при реа-
лизации уменьшенного запаса статической устойчи-
вости обеспечить требуемые характеристики управ-
ляемости будет весьма сложно.
Реактивные закрылки. Такие закрылки повыша-
ют си благодаря местному циркуляционному
эффекту. Размещение реактивных закрылков на
части размаха увеличивает нагрузку на корневую
часть крыла и задерживает отрыв потока на конце-
вых частях. Исключение условия Кутта—Жуков-
ского на задней кромке ослабляет рекомпрессию
в этой зоне. Таким образом, эффекты сильного
скачка и срыва могут быть ослаблены путем уме-
лого включения в схему реактивных закрылков.
Уменьшенный запас статической устойчивости.
Обеспечение благоприятных условий балансировки
па расчетном режиме (например, при околозвуко-
Фнг. 8. Скос потока на крыле вследствие
влияния переднего оперения
вом маневрировании) может привести к неустойчи-
вости при дозвуковых скоростях полета. Можно до-
стигнуть малого балансировочного сопротивления
при сверхзвуковых числах М и снизить сопротивле-
ние трения путем уменьшения размеров баланси-
ровочных поверхностей. Для этого необходимо обе-
спечить требуемую управляемость на границах об-
ласти летных режимов, в особенности при малых
скоростях и больших углах атаки, когда эффекты
нелинейности характеристик особенно сильны.
Изменение кривизны крыла. Минимальное ин-
дуктивное сопротивление может быть достигнуто в
широком диапазоне су с помощью системы измене-
ния кривизны крыла, которое обеспечивается от-
клонением носка крыла и целенаправленной аэро-
упругой деформацией (фиг. 10). Эффекты аэро-
упругости включают крутку вследствие воздейст-
вия крутящего момента и изгиба стреловидного
крыла. Система изменения кривизны уменьшает
пиковые нагрузки на носке крыла, вызывающие
отрыв потока, и обеспечивает малую кривизну, оп-
тимальную для около- и сверхзвукового крейсер-
ского режима полета.
Доработка аэродинамической схемы аппарата
HiMAT. Первые испытания в аэродинамических
трубах модели аппарата HiMAT показали, что тре-
бования к индуктивному сопротивлению не выпол-
няются и моментные характеристики при больших
углах атаки нелинейны. Это потребовало доработ-
ки аэродинамической схемы аппарата.
□ — крыло + переднее оперение; Q— изолированное крыло
Фиг. 9. Преимущество схемы «утка»
с близкорасположенными крылом и оперением
перед изолированным крылом (М = 0,9)
5
/—эффект отклоняемого носка; 2—крейсерский
режим; 3—деформация крыла; 1—крутка при
маневре
Фиг. Ю. Требования к управлению круткой
крыла
График и запланированный объем работ не по-
зволяли применить реактивные закрылки (или плос-
кие сопла для управления вектором тяги), поэтому
нелинейность моментных характеристик нельзя
было полностью исключить. В качестве полумеры
было решено отказаться от плавного сопряжения
крыла с фюзеляжем и наплывов. Кроме того, для
сохранения вихревой составляющей подъемной си-
лы при больших углах атаки и ослабления нели-
нейности при умеренных си наплывы переднего опе-
рения были устранены и его угол стреловидности
был увеличен до 63°.
Испытания в аэродинамической трубе показа-
ли, что нелинейность зависимости оста-
лась неустраненной, и в результате был выбран
промежуточный угол стреловидности оперения 55°,
обеспечивающий ослабление нелинейности и дости-
жение си шах = 2,0 (фиг. II).
Была модифицирована система крыло—опере-
ние для получения требуемого распределения на-
грузки по размаху крыла и снижения индуктивно-
го сопротивления при выполнении практических
ограничений на крутку. Хорда концевых частей
крыла была увеличена для уменьшения местного
значения си, а нагрузка на переднее оперение уве-
личена. Задняя кромка оперения была сдвинута
вперед с целью исключить неблагоприятную интер-
ференцию от «перехлеста» крыла и оперения. Пред-
--------1_______i_____i_______।_______।
0 8 16 24 32
<Х.) 2рад
Фиг. II. Влияние угла стреловидности переднего
оперения (/п 0) на зависимости су=/(а) и л|,=/(су)
при М = 0,23
полагалось больше разнести по вертикали оперение
и крыло, но этому препятствовала малая высота фю-
зеляжа. Поэтому было решено увеличить попереч-
ное V оперения. Влияние этого параметра на крут-
ку крыла, необходимую для оптимального распре-
деления нагрузки, показана на фиг. 12. Для полу-
чения более плавного распределения крутки кры-
ла проектировщикам пришлось отойти от опти-
мального распределения нагрузки.
Увеличение поперечного V оперения ухудшило
характеристики боковой устойчивости при малых
углах атаки, что потребовало увеличения площади
нижней части концевых килей на крыле. Это при-
вело к увеличению коэффициента //гудии в широ-
ком диапазоне углов атаки до срывных.
ХАРАКТЕРИСТИКИ УСТОЙЧИВОСТИ
Одной из особенностей аппарата HiMAT яв-
ляется искусственное повышение устойчивости.
Применение системы активного управления позво-
ляет проектировщику значительно улучшить харак-
теристики аппарата выбранной конфигурации.
Уменьшенный запас статической устойчивости
упрощает выбор кривизны крыла для минимизации
индуктивного сопротивления. Условия балансиров-
ки выбирались на основе минимума индуктивного
сопротивления. На фиг. 13 показаны целевые зна-
чения аэродинамических коэффициентов при ма-
неврировании: с(/=1,0 и /и, = 0,10. Крутка и кри-
визна крыла в крейсерских условиях представляют
другой набор требований, выполнить которые мож-
но путем управления кривизной или обеспечением
соответствующих аэроупругих характеристик кры-
ла (фиг. 10). Для удешевления программы было
решено в летных испытаниях использовать смен-
ные носки крыла вместо отклоняемых носков, ко-
торыми будет оснащен перспективный истребитель.
На крыле с полуразмахом 2,29 м концевая крутка
9,5° обеспечивается при отклонении конца на
0,15 м. Это приводит к значительным изменениям
характеристик продольной и боковой устойчиво-
сти аппарата.
Поскольку в аэродинамических трубах испыты-
вались неупругне модели в конфигурациях, соот-
ветствующих крейсерскому режиму и маневрирова-
нию с перегрузкой 8, нерасчетные аэродинамичес-
кие характеристики получались интерполяцией
этих результатов на основе принятых показателей
упругости конструкции. Предстоит изучить эффек-
ты аэроупругости на околозвуковых режимах по-
лета, однако эксперименты с моделями, имеющими
упругие крылья, не подтверждают результаты ана-
литических исследований. Точная оценка летных
характеристик аппарата требует более полного мо-
делирования, включая инерционные эффекты, кото-
рые, конечно, не могут быть воспроизведены в
аэродинамической трубе.
Расчетная 10%-ная продольная неустойчивость
аппарата представляется максимально допустимой
по соображениям обеспечения управляемости и бе-
зопасности полета. Однако этот предел должен
быть несколько расширен вследствие снижения
собственной устойчивости из-за аэроупругости при
больших углах атаки и малых числах М. Эта по-
теря устойчивости частично компенсируется малым
6
скоростным напором, однако суммарный результат
состоит в том, что критической по продольной
управляемости оказывается посадочная конфигу-
рация аппарата при задней центровке. Аппарат в
этом случае считается неупругим, однако суммар-
ная неустойчивость составляет ~10%, увеличи-
ваясь до 30% при см>сИпос (фиг. 11). Эти харак-
теристики требуют доработки законов управления.
Наиболее критическим случаем является посад-
ка с неработающим двигателем. Влияние работы
двигателя мало, но при работе системы управления
в аварийном режиме аккумуляторы обеспечивают
электроэнергией только приводы элевонов и рулей
направления. Эффективность управления по танга-
жу уменьшается приблизительно на 60%. Макси-
мальная скорость отклонения сохраняется только
для элевонов, управление по тангажу имеет прио-
ритет перед управлением по крену при насыщении
системы.
В случае неустойчивого аппарата проблема со-
стоит не в получении максимума дополнительной
сбалансированной подъемной силы, а в определе-
нии максимально допустимых отклонений парамет-
ров движения, которые можно компенсировать без
насыщения системы управления. Это в свою оче-
редь зависит от скорости отклонения управляю-
щих поверхностей. Посадка критична по двум при-
чинам: 1—максимальна собственная статическая
неустойчивость аппарата, 2 — скорости порывов
ветра максимальны в пропорции к скорости аппа-
рата и вызывают наибольшие изменения угла ата-
ки. Расчетным для посадки аппарата HiMAT был
резкий вертикальный порыв ветра, имеющий ско-
рость 55,6 км/ч.
Моделирование посадки при минимальной рас-
четной скорости захода на посадку 276 км/ч (на
20% больше скорости сваливания) выявило опре-
деленные трудности управления при таком порыве
ветра. Когда су достигает определенного уровня
(~0,8 см. фиг. 14), изменение производной дт^дсц
становится достаточно большим для располагае-
мой мощности управления. Аппарат устойчив при
а > 25°, но в этой точке продольное управление
теряет свою эффективность.
Вместо доработки конфигурации для улуч-
шения устойчивости были использованы рули пе-
реднего оперения. Благодаря гибкости цифровой
системы управления потребовалось лишь изменить
программу для отклонения рулей оперения про-
порционально углу атаки (фиг. 14). Это обеспечи-
вается только при основном режиме управления и
улучшает устойчивость, как показано на фиг. 15.
Помимо заданной минимальной скорости полета
(296 км/ч при максимальном весе) это гарантиру-
ет аппарату требуемый запас управляемости [9].
КОНСТРУКЦИЯ И СИСТЕМЫ АППАРАТА HiMAT
Конструкцию аппарата HiMAT отличают мо-
дульность, обеспечивающая быструю замену ком-
понентов для целей эксперимента; широкое приме-
нение перспективных металлических и компози-
ционных материалов; использование полезных эф-
фектов аэроупругостн (aeroelastic tailoring), обес-
печивающих требуемую крутку и кривизну несу-
щих поверхностей при больших аэродинамических
нагрузках.
-------- оптимальное изолированное крыло;
---------крыло + оперение (Vп, 0 = 0);
--------крыло + оперение (Vn- 0 = го°)
Фиг. 12. Потребная крутка крыла при различных
значениях поперечного V переднего оперения
(М = 0,7»
/—при маневрировании: 2—точка нейтраль-
ной устойчивости по перегрузке; 3—крейсер-
ский режим; 4— Су Крейс
Фиг. 13. Целевые характеристики про-
дольной устойчивости для аэроупругого
крыла на крейсерском режиме и при
маневрировании (М=0,9, </=1743 кгс/мг)
Фиг. 14. Закон отклонения рулей
переднего оперения (М<0,'7)
3 ЛИ* № 22
7
/—„сходная кривая; 2—эффект рулей оперения;
3--Гу захода на посадку
Фиг. 15. Стабилизирующий эффект отклонения
рулей оперения при малых скоростях
К легкозаменяемым компонентам относятся от-
сек силовой установки (в задней части фюзеляжа),
передняя часть воздухозаборника, консоли крыла,
переднее оперение, кили на концах крыла, носки
крыла и переднего оперения. Это позволяет значи-
тельно расширить возможности аппарата HiMAT
как летающего экспериментального стенда
(фиг. 16) [7].
Приблизительно 30% * веса конструкции
(~500 кге) аппарата изготовлено из композицион-
ных материалов (фиг, 17),
Обшивка фюзеляжа, крыла переднего оперения,
килей, воздухозаборника, а также лонжероны кры-
ла и носового оперения изготовлены из графито-
эпоксидного материала, а носки концевых частей
крыла — из стеклопластика. Титан применен в кон-
струкции выхлопного сопла двигателя и в узлах
крепления балок килей в средней части крыла. Ти-
тановые рамы передней и хвостовой частей фюзе-
• Согласно последним данным, около 25% 71.
ляжа изготовлены методом суперпластнческого
формования, а некоторые рамы хвостовой части —
методом суперпластнческого формования одновре-
менно с диффузионной сваркой.
Основными целями использования композицион-
ных материалов в некоторых компонентах кон-
струкции современных самолетов являются обычно
экономия веса или снижение стоимости. На аппа-
рате HiMAT используется еще одно исключитель-
ное свойство перспективных композиционных мате-
риалов — однонаправленная жесткость.
Крыло и переднее оперение аппарата выполне-
ны с учетом использования полезных эффектов
аэроупругости, благодаря чему их деформация при
маневрировании будет отличаться от изгиба и
крутки несущих поверхностей с обычными аэро-
упругими характеристиками. Когда аэродинами-
ческие поверхности испытывают изгиб и крутку,
они, как правило, теряют свою эффективность. По-
лезное использование аэроупругости достигается
посредством такой выкладки слоев композицион-
ного материала в процессе изготовления аэродина-
мических поверхностей, которая обеспечит им оп-
тимальную кривизну и крутку при аэродинамиче-
ских нагрузках. Фирма Рокуэлл заявляет, что кры-
ло и переднее оперение аппарата HiMAT представ-
ляют собой первый случай разработки несущей
системы, выполненной по схеме «утка» с близким
расположением аэродинамических поверхностей
и оптимизированной для эффективного маневриро-
вания на околозвуковом режиме. Ранее переднее
оперение применялось лишь для улучшения взлет-
ных и посадочных характеристик или в качестве
средства балансировки и управления. На аппарате
HiMAT система крыло —переднее оперение обес-
печивает высокую маневренность и эффективную
управляемость па всех режимах полета.
Фирма Рокуэлл провела серию испытаний
с целью изучения влияния ориентации волокон в
слоях композиционных материалов, предназначен-
ных для использования при изготовлении крыла
и переднего оперения. Как показали результаты
испытаний, при изготовлении крыла ленты из ком-
позиционного материала должны укладываться
/— оснонная конструкция модульною типа; 2-с.релоннднос крыло малого удлине-
ния; 3-крыло обратной стреловидности; 4 плоемн- сопло: > крыло г нтченяемым
углом установки
Фиг. 16. Перспективы модификации аппарата HiMAT
под углами 35° и +50° к осевой линии, а на перед-
нем оперении — под углами 15° и +45° [1].
Расчетные требования предусматривали обеспе-
чение крутки —9,5° на концах крыла при восьми-
кратной перегрузке (фиг. 18). Первоначально пред-
полагалось, что стапельная конфигурация крыла
должна обеспечить крутку —2°, а остальные —7,5°
должны создаваться аэроупругой деформацией
конструкции. Однако изучение выкладки слоев
различных композиционных материалов и компо-
новочных схем аппарата показало, что максималь-
ная практически достижимая величина крутки кон-
цевого сечения крыла выбранной схемы составляет
5,5°. Основным ограничением в данном случае яви-
лась модульная схема конструкции (консоль вы-
полнена съемным легкозаменяемым компонентом).
В результате оказалось, что почти вся расчетная
аэроупругая деформация должна обеспечиваться
только консольной частью крыла, в то время как
вклад корневой части крыла был практически ра-
вен нулю.
Окончательная конструкция крыла имеет ис-
ходную стапельную крутку —4°, а остальные —5,5°
создаются аэроупругой деформацией при nv = 8°,
у переднего оперения эти составляющие крутки
равны соответственно 3° и —4°. Подобный ком-
промисс может не потребоваться при разработке
перспективного истребителя.
В отличие от гипотетического истребителя, кото-
рый должен иметь ТРДДФ с плоским соплом,
аппарат HiMAT оснащен одним ТРДФ Дженерал
Электрик J85-21 с обычным осесимметричным соп-
лом, так как проектировщики нс нашли подходя-
щего малогабаритного ТРДД для эксперименталь-
ного аппарата. Поскольку циклы работы силовых
установок аппарата HiMAT и натурного истреби-
теля различны, их системы управления также раз-
ные. В результате летный эксперимент позволит
продемонстрировать лишь отдельные аспекты ком-
плексного управления полетом и силовой установ-
кой натурного истребителя [9].
Управление аппаратом HiMAT осуществляется
по радиокомандам с наземного (основного) или
воздушного (вспомогательного, размещенного на
самолете TF-104G) центров управления.
Аппарат HiMAT имеет цифровую электроди-
станционную систему управления полетом. Борто-
вая система управления полетом обслуживается
основной и резервной гидросистемами: основная
система работает от гидронасоса с приводом от
двигателя, насос резервной гидросистемы работает
от аккумуляторных батарей, имеющих емкость, до-
статочную для обеспечения работы в течение около
20 мин всех необходимых систем, в том числе сис-
темы регистрации обработки данных летных ис-
пытаний.
Система управления полетом аппарата имеет
пять пар поверхностей управления: элероны, элево-
ны, рули высоты на крыле, рули переднего гори-
зонтального оперения и вертикальные хвостовые
кили на выносных балках. Элевоны, рули высоты и
рули переднего оперения применяются для управ-
ления по тангажу и непосредственного управления
подъемной силой; элероны и элевоны — для управ-
ления по крену; хвостовые кили для управления
рысканием; рули переднего оперения и рули на-
I—графитоэпоксидный материал. 26%; 2—стеклопластик, 3%;
1— алюминий. 26%: 4— титан. 18%: 5—сталь. 9%; 6—вольфрам.
1%; прочие материалы. 14%
Фиг. 17. Использование материалов в конструкции
аппарата HiMAT
правления используются для непосредственного
управления боковой силой [9]. Переднее оперение
обеспечивает непосредственное увеличение подъем-
ной силы, соответствующее Antf=l, дифферен-
циальное отклонение рулей переднего оперения
совместно с килями создаст боковую перегрузку
до 0,3 [7].
В случае обнаружения отказов система управ-
ления полетом переключается на резервный ре-
жим; элероны, рули высоты и рули переднего опе-
рения запираются в заданном положении и только
маневрировании: II—крыло; ///—переднее оперение:
/—отклонение средств механизации крыла для
изменения кривизны; 2—крутка вследствие деформа-
ции крыла (—5,5°) и переднего оперения ( 4.<Х*);
3— эффект механизации; 4— стапельная конфигура-
ция; 6—эффект деформации конструкции; в—крутка
при Ну=8
Фиг. 18. Расчетная крутка крыла
и переднего оперенпя
9
элевоны и хвостовые кили используются для управ-
ления при возвращении на базу.
К числу других компонентов цифровой системы
управления полетом относятся две бортовые ЭВМ
и аппаратура линии телеметрической связи с на-
земным или воздушным центрами управления.
Основная бортовая ЭВМ обрабатывает входные и
выходные сигналы основной системы управления
полетом и системы регистрации и обработки дан-
ных летных испытаний. Резервная ЭВМ обслужи-
вает резервную систему управления полетом и
систему управления силовой установкой. На фиг. 19
приведена блок-схема бортовой системы управле-
ния полетом.
ПРОГРАММА ЛЕТНОГО ЭКСПЕРИМЕНТА
Летные испытания по программе HiMAT будут
проводиться в летно-испытательном центре NASA
им. Драйдена на авиабазе ВВС Эдвардс. Граница
испытательной зоны будет проходить на расстоя-
нии 80 км от авиабазы.
Аппарат HiMAT рассчитан на запуск с под-
крыльного пилона модифицированного самолета
В-52 на высоте 12 200—13 700 м при скорости, со-
ответствующей числу М = 0,7. В течение 3 с аппа-
рат должен лететь по заданной траектории с нуле-
вой нормальной перегрузкой под контролем назем-
ной ЭВМ; идентичная программа заложена в памя-
ти бортовой резервной ЭВМ, которая в случае от-
каза обеспечит переход на резервную систему
управления. На случай, если потребуется произво-
дить запуск аппарата с увеличенным запасом про-
дольной статической устойчивости, под воздухоза-
борником предусмотрена установка сбрасываемого
балласта весом 136 кге. После начального пусково-
го этапа движения аппарат автоматически перехо-
дит на обычный режим управления оператором на-
земной станции. Если во время полета возникают
неполадки и происходит переключение на резерв-
ный режим, управление обеспечивает бортовой
автопилот. С помощью резервной системы управ-
ления аппарат выполняет запрограммированный
маневр с переходом на почти горизонтальный полет
с дозвуковой скоростью. По завершении этого ма-
невра аппарат начинает совершать развороты с уг-
лом крена 35° на постоянной высоте с постоянной
скоростью, пока не получит соответствующую
команду от оператора с наземного или с воздуш-
ного центра управления. Если управление аппара-
том осуществляется с помощью резервной системы,
на борт аппарата могут быть переданы команды
на увеличение или уменьшение тяги, на выполне-
ние правого или левого разворота, на пикирование
или набор высоты, на переход на круговую траек-
торию полета или сход с нее, на переход к обычно-
му режиму полета или к посадочному режиму. При
посадочном режиме автопилот регулирует верти-
кальную скорость аппарата и обеспечивает его
выравнивание перед касанием земли.
После стандартного полета аппарат выполняет
обычный заход на посадку и приземляется на дно
Верхняя
кСитеина
Нижняя
антенна.
Перги л юна ret ь
Эи а паза на
частот С
Ди плене ер
ди а пазона
частот С
Управление
перекл ючателем
Радиовысо-
томер
Телевизион-
на я
камера
Датчики, системыуправления
полетом(датчик воздушной,
скорости, и высоты, скоростные
гироскопы, датчики, системы.
управления силовой установкой
аксел^ометр^ датчик темпера-
Приводы органов управления
элеронов (2)
элевонов(2)
рулей переднего оперения(2',
килей. (2~)
реактивных сопл (2)
рулей, высоты(2)
дроссел я (2 элек тропри -
гвода)
Ватники, летного эксперимента
отчики давления,расходомер,
тензодатчики, датчики углов
атаки и скольжения, датчики
дискретных сигналов, датчики
положения органов управление
датчики признаков
Фиг. 19. Блок-схема бортовой системы управления полетом
10
высохшего озера, используя стальные лыжи в ка-
честве посадочного средства.
Оператор наземной станции управления кон-
тролирует посадку аппарата с помощью воспроиз-
водимого на телевизионном экране изображения
Таблица 2
Регистрируемые параметры при летном эксперименте
по программе HiMAT
Измеряемые параметры Число каналов переда- чи ин- форма- ции Частота замеров в 1 с Тип chi нала
Перегрузка в ц. т. (стро- енный датчик) 2 220 Цифровой
Углы тангажа, крена и курса • 3 55 •
Угловые скорости по тан- гажу, крепу н рысканию (строенные датчики) 3 220
Воздушная скорость (сдвоенный датчик в но- совой штанге) 1 55
Барометрическая высота (сдвоенный датчик в но- совой штанге) 1 55
Высота по радиовысото- меру 1 55 *
Температура набегающего потока (сдвоенный датчик) 1 55 •
Температура в отсеке (сдвоенный датчик) 1 55 •
Число оборотов ротора 1 55 »
двигателя
Давление на выходе из компрессора 1 55 •
Температура выхлопных газов (сдвоенный датчик) 1 55 •
Положение дросселя (сдвоенный датчик) 1 55 •
Площадь выхлопного соп- ла (сдвоенный датчик) 1 55 •
Дискретные команды управления полетом 7 55 V
Воздушное давление на поверхности аппарата 85 13 Аналоговый
Эталонное воздушное дав- 1 55
ленне
Нагрузки на конструкцию н шарнирные моменты 30 27 •
Углы отклонения управ- ляющих поверхностей 10 55 •
Расход топлива 2 27 •
Команды управления пе- редачей информации на ап- парат 2 13 *
Углы атаки и скольжения 2 220 •
Продольная перегрузка в 1 220
Ц. т.
Уровень тряски при баф- 6 220
тинге
Итого: 164
/—наземный центр управления; 2—самолет-носитель
В-52; 3— самолет TF-I04G — воздушный резервный
центр управления; <— маневрирование при М — 1,4.
на Н — 12 200 м и течение 3 мин; 5—посадка с ис-
пользованием лыжного шасси на дно высохшего
озера
Фиг. 20. Профиль типового полета
аппарата HiMAT
посадочной полосы, передаваемого бортовой теле-
визионной камерой, установленной в макете фона-
ря кабины экипажа [9].
На фиг. 20 показан профиль типового испыта-
тельного полета аппарата HiMAT [12].
Программой летных испытаний предусмотрены
передача и регистрация большого объема экспе-
риментальных данных. Передача данных будет
осуществляться по 227 телеметрическим каналам.
На поверхности аппарата имеется 128 отверстий
для измерения давления (при 85 датчиках давле-
ния), 48 тензодатчиков для измерения нагрузки на
конструкцию и шарнирных моментов, 6 акселеро-
метров для регистрации бафтинга, 7 датчиков па-
раметров работы силовой установки, 10 датчиков
углов отклонения рулей, 15 датчиков параметров
движения аппарата и воздушных данных. NASA
планирует добавить еще около 40 датчиков давле-
ния для более полного замера аэродинамических
нагрузок. Время между замерами этих параметров
изменяется в пределах от 13 до 220 с. В табл. 2
дается перечень параметров летных испытаний.
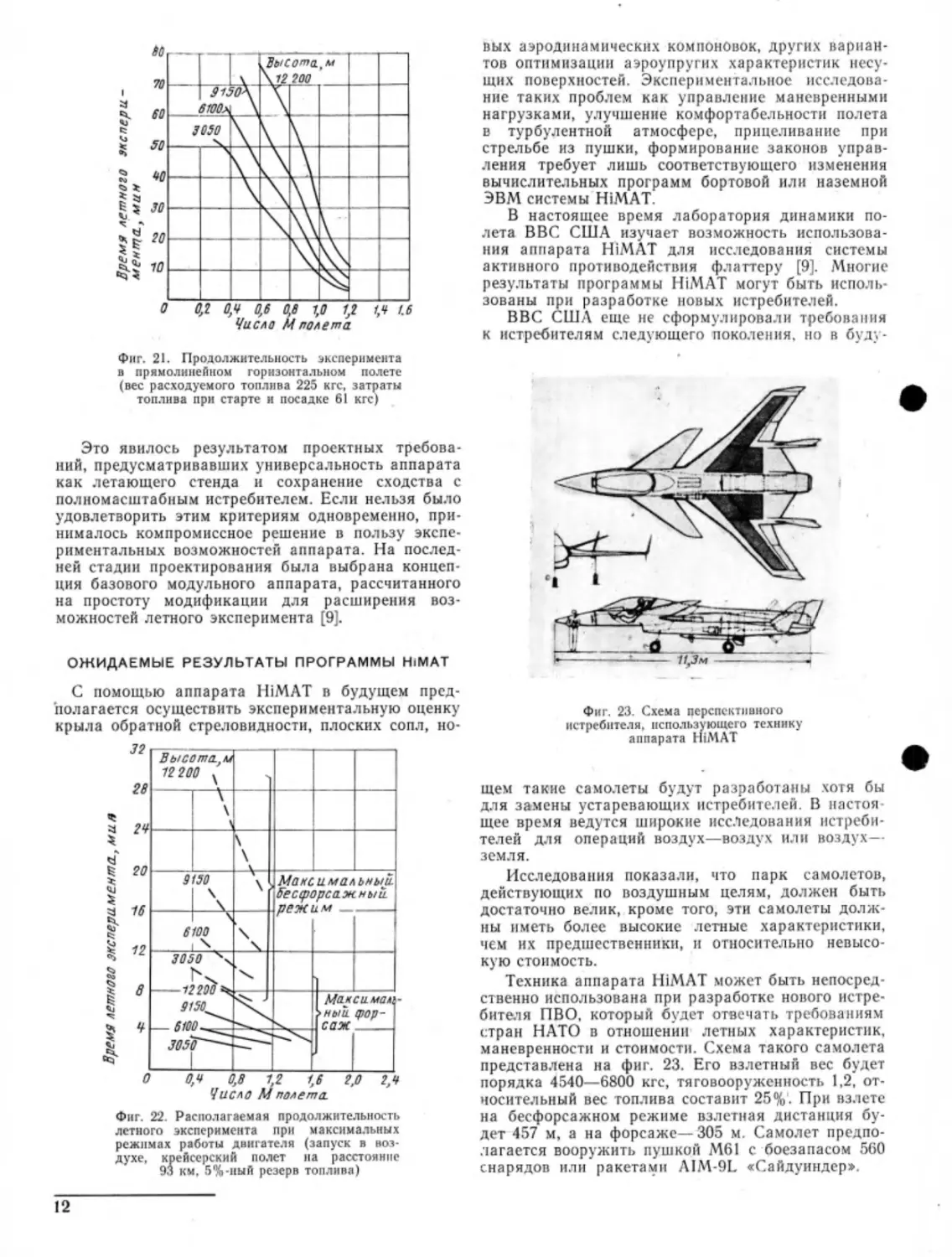
Продолжительность экспериментального полета
аппарата HiMAT может изменяться в диапазоне от
15 мин до 1 ч 20 мин в зависимости от требуемого
уровня тяги для поставленных задач. Средняя про-
должительность полета составит ~30 мин. На
фиг. 21 представлены графики располагаемой про-
должительности испытаний в прямолинейном гори-
зонтальном полете с различными скоростями, а
на фиг. 22—при максимальной тяге. Из графиков
следует, что располагаемая продолжительность
летного эксперимента для расчетных условий поле-
та (при максимальном форсаже, числе М= 1,4 и
высоте полета 12 200 м) составляет 3,7 мин. При
максимальной бесфорсажной тяге, числе М = 0,9 и
высоте 12 200 м располагаемая продолжительность
летного эксперимента равна 22 мин. Если испыта-
ния проводятся в установившемся прямолинейном
полете на большой высоте при дозвуковой скоро-
сти, то располагаемое время эксперимента увели-
чивается до 75 мин.
Модульная конструкция аппарата HiMAT обес-
печивает исключительно широкие возможности
летного эксперимента в интересах программ разра-
ботки перспективных истребителей.
11
Фиг. 21. Продолжительность эксперимента
в прямолинейном горизонтальном полете
(вес расходуемого топлива 225 иге, затраты
топлива при старте и посадке 61 кге)
Это явилось результатом проектных требова-
ний, предусматривавших универсальность аппарата
как летающего стенда и сохранение сходства с
полномасштабным истребителем. Если нельзя было
удовлетворить этим критериям одновременно, при-
нималось компромиссное решение в пользу экспе-
риментальных возможностей аппарата. На послед-
ней стадии проектирования была выбрана концеп-
ция базового модульного аппарата, рассчитанного
на простоту модификации для расширения воз-
можностей летного эксперимента [9].
ОЖИДАЕМЫЕ РЕЗУЛЬТАТЫ ПРОГРАММЫ HiMAT
С помощью аппарата HiMAT в будущем пред-
полагается осуществить экспериментальную оценку
крыла обратной стреловидности, плоских сопл, но-
Фиг. 22. Располагаемая продолжительность
летного эксперимента при максимальных
режимах работы двигателя (запуск в воз-
духе, крейсерский полет па расстояние
93 км, 5%-ный резерв топлива)
вых аэродинамических компоновок, других вариан-
тов оптимизации аэроупругих характеристик несу-
щих поверхностей. Экспериментальное исследова-
ние таких проблем как управление маневренными
нагрузками, улучшение комфортабельности полета
в турбулентной атмосфере, прицеливание при
стрельбе из пушки, формирование законов управ-
ления требует лишь соответствующего изменения
вычислительных программ бортовой или наземной
ЭВМ системы HiMAT.
В настоящее время лаборатория динамики по-
лета ВВС США изучает возможность использова-
ния аппарата HiMAT для исследования системы
активного противодействия флаттеру [9]. Многие
результаты программы HiMAT могут быть исполь-
зованы при разработке новых истребителей.
ВВС США еще не сформулировали требования
к истребителям следующего поколения, но в буду-
Фиг. 23. Схема перспективного
истребителя, использующего технику
аппарата HiMAT
щем такие самолеты будут разработаны хотя бы
для замены устаревающих истребителей. В настоя
щее время ведутся широкие исследования истреби-
телей для операций воздух—воздух или воздух—
земля.
Исследования показали, что парк самолетов,
действующих по воздушным целям, должен быть
достаточно велик, кроме того, эти самолеты долж-
ны иметь более высокие летные характеристики,
чем их предшественники, и относительно невысо-
кую стоимость.
Техника аппарата HiMAT может быть непосред-
ственно использована при разработке нового истре-
бителя ПВО, который будет отвечать требованиям
стран НАТО в отношении летных характеристик,
маневренности и стоимости. Схема такого самолета
представлена на фиг. 23. Его взлетный вес будет
порядка 4540—6800 кге, тяговооружснность 1,2, от-
носительный вес топлива составит 25%. При взлете
на бесфорсажном режиме взлетная дистанция бу-
дет 457 м, а на форсаже—305 м. Самолет предпо-
лагается вооружить пушкой М61 с боезапасом 560
снарядов или ракетами AIM-9L «Сайдуиндер».
12
Как и у аппарата HiMAT, крыло нового само-
лета будет выполнено из композиционных мате-
риалов и рассчитано на использование полезных
эффектов аэроупругости при маневрировании с
большими перегрузками. Отдельные детали плане-
ра будут изготовлены из титана методом супер-
пластического формования. Кабина летчика будет
оснащена креслом с большим углом наклона для
уменьшения воздействия на летчика больших пере-
грузок и боковой ручкой управления.
Планируется применить комплексную цифровую
систему управления полетом и огнем, обеспечиваю-
щую автоматическое терминальное наведение на
цель с использованием непосредственного управ-
ления подъемной и боковой силами.
Как видно из фиг. 24, новый самолет будет по
габаритам значительно меньше современных ис-
требителей, что, однако, не скажется на его ха-
рактеристиках благодаря многочисленным техниче-
ским усовершенствованиям. Поскольку стоимость
пропорциональна весу самолета, перспективный
истребитель будет относительно дешев. Небольшие
размеры нового самолета не являются препятстви-
ем в обеспечении высокой маневренности. Приме-
ром может служить самолет F-86 «Сейбр»— один
из лучших американских истребителей ближнего
возушного боя (фиг. 25).
Технические усовершенствования, которые бу-
дут проведены в процессе осуществления програм-
Фиг. 24. Сравнение размеров перспективного
истребителя и некоторых современных
истребителей США
мы HiMAT, послужат основой для нового усовер-
шенствования самолетов с высокими летными дан-
ными. Одним из шагов в этом направлении может
оказаться использование крыла обратной стрело-
видности.
Аэродинамические преимущества крыла обрат-
ной стреловидности известны уже несколько лет и
подтверждены многочисленными аналитическими и
экспериментальными исследованиями. К этим пре-
имуществам относятся большая располагаемая
подъемная сила, чем у крыла прямой стреловид-
ности (фиг. 26), меньшее сверхзвуковое сопротив-
ление (фиг. 27), улучшенные флаттерные характе-
ристики, возможность выбора формы фюзеляжа,
обеспечивающего лучшее распределение внутренне-
го объема. Основным недостатком, препятствую-
щим практическому применению крыла обратной
стреловидности, была аэродинамическая диверген-
ция, которая требовала повышенной жесткости
конструкции. Утяжеление конструкции оказыва-
лось неприемлемо большим при использовании
Фиг. 25. Габариты перспективного истребителя
и истребителя F-86 «Сейбр»
обычных материалов. За время осуществления про-
граммы HiMAT были найдены пути эффективного
решения этой проблемы.
Композиционные материалы обеспечивают не-
обходимую жесткость и эффективность для ком-
пенсации эффектов дивергенции.
Оптимизация аэроупругих характеристик несу-
щих поверхностей путем соответствующего распре-
деления толщины и направления выкладки слоев
композиционного материала для предотвращения
дивергенции. Недавние исследования показали, что
необходимые свойства несущей поверхности могут
быть обеспечены без утяжеления конструкции.
Техника активного управления позволит умень-
шить изгибающий момент и подавить развитие
флаттера или дивергенции при минимальном изме-
нении условий балансировки.
Оценки показывают, что самолет с крылом об-
ратной стреловидности может иметь на 20% мень-
ший взлетный вес, чем самолет эквивалентного
уровня техники с крылом прямой стреловидности.
Это окажет непосредственное влияние на закупоч-
ную стоимость самолета и затраты на его эксплуа-
тацию.
Проведенные с помощью аппарата HiMAT воз-
можности крыла обратной стреловидности могут
быть реализованы в виде увеличения скорости по-
лета или повышения маневренности, уменьшения
веса самолета, предназначенного для выполнения
определенной операции, и связанным с этим сниже-
нием расходов и т. д.
Стоимость самолета имеет тенденции расти с
улучшением летных характеристик. Поэтому неце-
лесообразно повышать летные характеристики
сверх тех, которые необходимы для выполнения
расчетного задания. Требования маневренности
аппарата HiMAT определились в основном его
Фиг. 26. Сравнение максимальных несущих
способностей крыльев прямой н обратной
стреловидности при малых скоростях
полета
13
Фиг. 27. Волновое сопротивление крыльев
прямой и обратной стреловидности
Фиг. 29. Зависимость стоимости истребителя (без
учета стоимости радиоэлектронного оборудова-
ния) от веса пустого самолета (из расчета
выпуска 500 самолетов)
Фиг. 28. Связь стоимости перспективного
истребителя с расчетной установившейся
перегрузкой
функциями как экспериментального объекта, одна-
ко выбранные расчетные перегрузки отражают ре-
зультаты анализа влияния маневренности на бое-
вую эффекивность самолета и пределов выносливо-
сти экипажа. На фиг. 28 показана зависимость ме-
жду эксплуатационной Перегрузкой перспективного
истребителя (соответствующего технике аппарата
HiMAT) и его стоимостью. Стоимость одного обо-
рудованного самолета определена из расчета про-
изводства 500 истребителей.. Установившаяся пере-
грузка соответствует условию Р4=0 при М —0,9,
// = 9150 м.
Многие из примененных на аппарате HiMAT
технических усовершенствований окажут благо-
приятный эффект на размеры и вес натурного са-
молета и соответственно на его стоимость.
Связь между весом и стоимостью перспектив-
ного истребителя ПВО, соответствующего требова-
ниям НАТО, представлена на фиг. 29.
Таким образом, результаты программы HiMAT
могут быть реализованы в будущих истребителях
в виде улучшения летных характеристик при ма-
лых сверхзвуковых скоростях полета, улучшения
управляемости, повышения околозвукового манев-
рирования, упрощения производства, снижения
стоимости самолета, использования схем с крылом
обратной стреловидности [6].
1. Intersvia Air Letter, 1978, 23/111, N 8971, p. 5—8..
2. Air ct Cosmos, 1978, 1/IV. N 712, p. 13.
3. Aviation Week and Space Technology, 1978, v. 108,
20/111, N 12. p. 17.
4. Aviation Week and Space Technology, 1978, v. 109,
10/VII, N 2, p. 43.
5. Aerospace Daily, 1978, v. 94, 12/XII, N 27, p. 183—184.
6. F a i r G.. Robinson M. R. Enhanced capability of
future fighters as a result of HiMAT.
AIAA Paper N 79-0698.
7. Flight International, 1979, v. 116, 21/VII, N 3670, p. 161
8. Interavia Air Letter, 1979, 6/VIII, N 9310, p. 5.
9. В ro» n L. E., Roe M., W i 1 e r C. D. The HiMAT
RPRV system.
AIAA Paper N 78-1457.
10. Aerospace Daily, 1976, v. 79, 10/V, N 6, p. 42a.
11. Aviation Week and Space Technology, 1975, v. 103.
17/XI, N 20, p. 38.
12. Air et Cosmos, 1978, 29/IV, N 716, p. 21.
Референт A. //. Волкова.
УДК 629.735.33 : 623.746.3 (485) SAAB-Сканна JA-37 kBiiiivu»
ИСТРЕБИТЕЛЬ-ПЕРЕХВАТЧИК
SAAB-CKAHHA JA-37 „ВИГТЕН“
В начале 1980-х годов на вооружение ВВС Шве-
ции поступит истребитель-перехватчик ПВО
SAAB-Сканиа JA-37 «Вигген» (фиг. 1). Истреби-
тель JA-37 является последним представителем се-
мейства самолетов «Виттен» — основного компо-
нента так называемой «системы 37» ВВС Швеции.
Эта «пилотируемая система оружия» кроме само-
летов, их двигателей, бортового оборудования
включает также вооружение, боеприпасы, фотогра-
фическое оборудование, средства наземного обслу-
живания, испытательные и тренировочные уста-
новки. «Система 37» используется совместно с сис-
темой управления средствами ПВО Швеции
STR1L-60.
Разработка проекта самолета «Вигген» нача-
лась в 1963 г. Первый полет опытного самолета
состоялся в феврале 1967 г.
Характерными особенностями аэродинамиче-
ской компоновки самолетов «Вигген» является пе-
реднее горизонтальное оперение и треугольное кры-
ло, обеспечивающие хорошие взлетно-посадочные
характеристики. Модифицированный ТРДД Пратт-
Уитни JT8D с форсажной камерой шведской кон-
струкции позволяет самолету совершать крейсер-
ский полет с малым расходом топлива и выполнять
задачи перехвата, требующие большой скоро-
подъемности и ускорения. Оригинальная аэродина-
мическая компоновка, двигатель с реверсором тя-
ги, система автоматического торможения при по-
садке, индикатор на уровне остекления позволяют
самолету «Вигген» эксплуатироваться с узких ВПП
длиной около 500 м.
На вооружении ВВС Швеции состоят следую-
щие варианты самолета «Вигген»:
AJ-37 (фиг. 2) — одноместный всепогодный
ударный самолет, способный выполнять также пе-
рехват воздушных целей. Разработан для замены
самолета SAAB А-32А «Лансен». Первый полет
серийного самолета AJ-37 состоялся в феврале
1971 г,, поставки начались в нюне 1971 г.;
SF-37 (фиг. 3) — одноместный всепогодный раз-
ведывательный самолет, предназначенный для за-
мены самолетов SAAB S-35E «Дракон». Контракт
на производство выдан в начале 1973 г. Пред-
назначен в основном для ведения разведки над су-
шен. Самолет SF-37 имеет модифицированную но-
совую часть, в которой размещено фотографичес-
кое и другое оборудование. Может вести разведку
в дневное и ночное время, на больших и малых вы-
сотах, на большом удалении от базы. Первый полет
серийного самолета состоялся в мае 1973 г., по-
ставки начались в апреле 1977 г.;
SH-37 (фиг. 4)—одноместный всепогодный
морской разведывательный самолет, предназначен
для замены самолетов SAAB S-32C «Лансен». Кон-
тракт на производство выдан в начале 1973 г. Са-
молет может использоваться также в качестве
ударного самолета. Летные испытания опытного
самолета начались в декабре 1973 г. Первый се-
рийный самолет был поставлен ВВС в нюне 1975 г.
SK-37 (фиг. 5) — двухместный учебно-трениро-
вочный самолет, который может применяться так-
же в качестве ударного. Самолет способен нести
полный комплект вооружения варианта AJ-37.
Имеет модифицированный киль увеличенной пло-
щади. Место для второй кабины обеспечено за счет
одного из центральных топливных баков и части
отсека электронного оборудования. Поставки нача-
лись в 1972 г.
К весне 1978 г. было поставлено 150 самолетов
«Вигген» всех вариантов из заказанных к тому
времени 329 самолетов. ВВС планируют укомплек-
товать самолетами «Вигген» 16 эскадрилий.
По данным ВВС Швеции, с 1969 г. по 1979 г.
потерян 21 самолет «Вигген». Из первых 28 по-
строенных самолетов на трех произошло разруше-
. ние лонжерона крыла. Это потребовало соответст-
вующей модификации конструкции (6].
В 1968 г. фирма SAAB приступила к разработке
проекта истребителя-псрсхатчика JA-37 (фиг. 6),
который должен заменить устаревший истребитель
SAAB J-35 «Дракон». Серийное производство са-
молета началось в 1976 г. и будет продолжаться
до середины 1980-х годов. Первый полет самолета
серийного образца состоялся 4 ноября 1977 г. Пер-
вая эскадрилья будет полностью укомплектована
в начале 1981 г. Всего предполагается закупить
160—180 самолетов JA-37. Первые 30 самолетов
были заказаны в сентябре 1974 г. [1]. Вторая пар-
тия из 60 самолетов и третья партия из 59 самоле-
тов JA-37 были заказаны в мае 1978 г. Таким
образом, число заказанных самолетов достигло
149 [2].
Истребитель-перехватчик JA-37 отличается от
предшествующих вариантов самолетов «Вигген»
целым рядом усовершенствований в конструкции
планера, силовой установке, оборудовании кабины
летчика, радиоэлектронном и навигационном обо-
рудовании и вооружении.
30 Гх
Фиг. 1. Первый серийный истребитель-перехватчик
SAAB-Скаииа JA-37 в первом полете
Фиг. 2. Ударный самолет AJ-37
Фиг. 3. Разведывательный самолет SF-37
ПЛАНЕР И СИЛОВАЯ УСТАНОВКА
Все самолеты семейства «Внгген» имеют иден-
тичную аэродинамическую схему, практически оди-
наковую конструкцию и системы планера.
Самолет JA-37 выполнен по схеме «утка» и
имеет треугольное крыло с изломом по передней
кромке н треугольное переднее оперение, располо-
женное выше крыла (фиг. 7). Оперение имеет от-
клоняемые хвостовые секции (рули высоты). Кры-
ло оснащено двухсекционными элевонами с гидрав-
лическим приводом. В конструкции управляющих
поверхностей широко используются клееные пане-
ли с сотовым заполнителем.
В связи с увеличением располагаемых перегру-
зок при полете с большими скоростями и расшире-
нием спектра нагрузок на самолете JA-37 повы-
шена жесткость и усилена конструкция крыла.
Кроме того, увеличена мощность привода элевонов.
Цельнометаллический фюзеляж имеет полумо-
нококовую конструкцию, в которой используются
поковки из легких сплавов и теплостойкие клеевые
соединения. Титан применен для противопожарных
перегородок и для некоторых других элементов
конструкции в зонах с повышенной температурой.
Широко применены клеевые конструкции с сото-
вым заполнителем. Имеется четыре воздушных
тормоза (два по бокам фюзеляжа и два под ним).
Длина фюзеляжа самолета JA-37 незначитель-
но увеличена (на ~9 см) по сравнению с исходны
мн вариантами самолета. Конструкция нижней ча-
сти фюзеляжа изменена для размещения встроен-
ной пушки.
Хвостовое оперение состоит из киля, руля на-
правления с бустерным управлением и небольшого
подфюзеляжного киля. Высота киля несколько уве-
личена, его задняя кромка получила характерный
излом.
Основные стойки шасси имеют по два колеса,
расположенные тандемом, и убираются в направ-
лении к фюзеляжу. Носовая стойка имеет два ко-
леса, убирается вперед. Шасси рассчитано на
вертикальную скорость при посадке 5 м/с.
За счет установки пушки Эрлнкон КСА, более
тяжелой РЛС и нового двигателя взлетный вес
истребителя-перехватчика больше веса самолета
AJ-37 примерно на 1000 кге.
Топливо размещается в шести баках: два в
крыле, четыре в фюзеляже (один за кабиной лет
чика, два по бокам и один седловидный бак над
Фиг 4. Морской разведывательный самолет S1I-37
двигателем). Насосы с электроприводом подают
топливо из центрального фюзеляжного бака, кото-
рый все время питается от периферийных баков.
На самолете JA-37 установлен ТРДДФ Волво
Флигмотор RM8B— усовершенствованный вариант
двигателя RM8. Новый двигатель (фиг. 8) соответ-
ствует более строгим требованиям, обусловлен-
ным выполнением задач перехвата. Одним из основ-
ных требований является увеличение запаса по
помпажу всей области режимов полета. ТРДД
RM8B имеет тягу, на 10% большую, чем двигатель
RM8A, применяемый на предыдущих вариантах са-
молета «Внгген».
Двигатель прошел квалификационные испыта-
ния в середине 1977 г., в течение которых он про-
работал 150 ч, из них 20 ч при полном давлении и
высоких температурах на входе. До начала квали-
фикационных испытаний он проработал 5000 ч.
В настоящее время двигатель находится в серий-
ном производстве.
Основным отличием ТРДДФ RM8B от двигате-
ля RM8A (фиг. 9) является вентилятор-компрес-
сор, состоящий из трехступенчатого вентилятора и
трехступенчатого компрессора низкого давления.
Максимальная форсажная тяга двигателя
RM8B составляет 12 750 кге, что примерно на
960 кге больше, чем у ТРДДФ RM8A. Температу-
ра газа перед турбиной возросла на 55°С, что по-
требовало применения новой турбины высокого
давления. Была изменена конструкция форсажной
камеры, время реакции камеры на изменение ре-
жима работы уменьшено в 2 раза. Усовершенство-
ванная камера сгорания позволила значительно
уменьшить уровень дымления двигателя. Боковые
воздухозаборники самолета нерегулируемые.
Фиг. 5. Двухместный учебно-тренировочный
самолет SK-37
16
1 номе радциьлск!ровное оборудование; 2—нопий на
риант двигателя; 3—новая бортовая РЛС: < -пушка
Эрликон КСА; 5—усиленное крыло
Фиг. 6. Основные отличия истребителя JA-37-
от предыдущих вариантов самолета «Вигген»
Заправка самолета JA-37 может производиться
при работающем двигателе, что сокращает время
подготовки самолета к повторному вылету и обес-
печивает высокую степень боеготовности (самолет
может подняться в воздух менее чем за 1 мин).
Двигатель оснащен реверсером тяги для умень-
шения пробега при посадке.
Основные данные ТРДДФ Волво Флигмотор RM8B |3]
Тяга, кге:
максимальный форсаж.................... 12750
максимальный бсефорсажный режим. . . . 7 350
на режиме малого газа на земле.......... 325
Удельный расход топлива, кге/кге-ч:
максимальный форсаж..................... 2.52
максимальный бсефорсажный режим .... 0,64
Общий вес, кге............................. 2350
Общая длина, м............................. 6.23
Диаметр входа, м........................... 1,03
ОБОРУДОВАНИЕ КАБИНЫ ЛЕТЧИКА
И БОРТОВЫЕ СИСТЕМЫ
Самолет JA-37 имеет бортовые радиоэлектрон-
ные системы и приборное оборудование кабины
летчика, отвечающие современным требованиям
к истребителю-перехватчику (фиг. 10).
Фиг. 7. Схема истребителя JA-37
Фиг. 8. ТРДДФ Волво Флигмотор RM8B
Хотя летчики хорошо отзываются о компоновке
и оборудовании кабины самолета AJ-37, для само-
лета JA-37 была разработана практически новая
кабина в связи с особыми условиями работы лет-
чика при перехвате. Особое внимание было уделе-
но уменьшению рабочей загрузки летчика.
Значительное число органов управления и ин-
дикаторов находится на передней панели (фиг. 11).
Панель имеет полный комплект приборов, обычно
используемых для пилотирования, контроля рабо-
ты двигателя и топливной системы, а также при
выполнении аварийных операций.
Другая группа приборов относится к объеди-
ненной радиоэлектронной бортовой системе само-
лета и включает индикатор РЛС, индикатор на
уровне остекления, индикатор тактической обста-
новки и индикаторы состояния систем и вооруже-
ния. Ряд индикаторов выполнен на ЭЛТ.
Сверху индикатора воздушной скорости имеет-
ся кнопка задания и контроля режима посадки с
коротким пробегом. С помощью этой кнопки вклю-
чается автоматическое дросселирование двигателя,
а на индикатор на уровне остекления подается со-
ответствующая информация.
Индикация состояния системы вооружения и
выбор оружия обеспечиваются органами управле-
ния на панели вооружения, расположенной в ниж-
ней части приборной доски слева. Все операции на
панели осуществляются левой рукой. Летчику ука-
зывается также располагаемое время ведения огня
из пушки.
Справа от индикатора РЛС располагаются се-
лектор выбора основных режимов и индикаторы
состояния бортовых систем. В случае необходимос-
ти летчик может управлять этой группой приборов
левой рукой. Эта панель удачно сочетает средства
индикации автоматического или ручного режимов
полета со средствами управления.
Фиг. 9. Схемы ТРДДФ Волво
Флигмотор RM8A и RM8B
17
Пилотажная информация, данные для прнцелн
вания и ведения огня отображаются на индика-
торе на уровне остекления, используемом при поле-
те на малых высотах и в ближнем воздушном бою;
радиолокационном индикаторе, используемом для
всепогодного перехвата; индикаторе тактической
обстановки в виде синтезированной карты мест-
ности.
Индикатор на уровне остекления, разработан-
ный фирмами Смите Индастриз и Свенска Радио,
с помощью ограниченного числа символов выдает
летчику основную пилотажную информацию. Инди-
катор работает также в режиме наведения на цель
в ближнем воздушном бою. Летчик устанавливает
этот режим при помощи переключателя на РУД.
При переходе на этот режим индикатор «очи-
щается» от лишних символов и отображает при-
цельную информацию, а РЛС начинает работать
в режиме поиска н захвата цели.
Экран радиолокационного индикатора на ЭЛТ
(фиг. 12) в два раза больше, чем у обычных радио-
электронных индикаторов, что позволяет представ-
лять летчику всю необходимую информацию, не
отвлекая его внимание на другие приборы. Отобра-
жаются данные о высоте и скорости полета, курсе
и угловой ориентации самолета в пространстве.
Эта информация представляет собой комбинацию
цифровых и аналоговых данных, получаемых как
от наземных станций, так и от бортовой РЛС
после захвата цели.
Неподвижный символ в центре индикатора ха-
рактеризует вектор скорости. Представление век-
тора скорости вместо данных об угловой ориента-
ции самолета имеет несомненное преимущество для
летчика, которому уже не нужно принимать в рас-
чет значительные изменения угла атаки, характер-
ные для самолета с треугольным крылом.
Вертикальный штрих на символе вектора ско-
рости характеризует требуемую скорость во время
перехвата цели. Когда этот штрих располагается
на кольце подобно килю самолета, скорость само-
лета соответствует заданной. Если этот штрих вы-
ступает из кольца снизу, скорость меньше за-
данной.
/— рад и исканная аппаратура 2—централы!ый цифровой и ы числитель; 3—электронные
блоки индикаторов: 4- система посадки по приборам; 3—система опознавания;
?—система управлении оружием; 7—аппаратура пилонов; Л—блок системы РПД:
^-система инерциальной навигации; /0—вычислитель воздушных данных; //—дат*
тики перегрузки и угловых скоростей; 12—радиовысотомер; 13—радионавигацион*
ное оборудование; 14— регистратор; 15—система автоматического управления полетом
Фиг. 10. Радиоэлектронное и приборное оборудование
истребителя JA-37
Для контроля высоты полета в дополнение
к цифровой информации на экране изображаются
два столбика. С их помощью пилот считывает от-
клонения от желаемой высоты полета в случае,
когда нс включен режим автоматической стабили-
зации. При полете на указанном режиме летчик
может контролировать работу автопилота по от-
клонению от заданной высоты. Если самолет нахо-
дится на требуемой высоте, вершины столбиков
касаются горизонтальной линии.
В левой части экрана находится шкала дистан-
ций. В верхней части экрана отображается инфор-
мация о цели, поступающая либо от наземных сис-
тем, либо от бортового радиолокатора. Надпись на
экране, показанном на фиг. 12, означает, что цель
летит со скоростью, соответствующей числу М=1,3
на высоте 11 км, расстояние до цели 140 км, буквы
FRAM означают курс на цель.
На курсовой шкале рядом с указанием собст-
венного курса самолета указывается заданный
курс, переданный с наземной станции наведения.
Справа на экране располагается шкала высо-(
ты, охватывающая весь диапазон высот полета от
0 до 20 км. На экране показано, что высота полета
перехватчика несколько больше 500 м, а цель ле-
тит на высоте 11 км.
Между 2 и 18 км имеется вертикальная линия,
указывающая зону обзора радиолокатора на ди-
станции селекции. Это позволяет задавать зону об-
зора на требуемую высоту возле метки высоты це-
ли достаточно быстро и точно. Только на очень ко-
ротких дистанциях такой режим обзора становится
слишком медленным и ограниченным.
Скорость полета высвечивается в нижнем левом
углу экрана. Символ TYST означает, что радиоло-
катор не работает в режиме передачи. Такая ин-
формация признана необходимой, после того как
использование преобразования допплеровской ин-
формации радиолокатора свело к минимуму уро-
вень ложных сигналов тревоги и летчик нс мог
знать, включен или выключен передатчик РЛС до
того как цель обнаружена.
На самолете AJ-37 применяется система преду-,
преждения о близости земли, которая по данным
барометрического или радиовысотомера включает
вспыхивающую сигнальную лампочку. Для само-
лета JA-37 эта система была признана недостаточ-
ной, и было решено использовать на радиолока-
ционном индикаторе символ земной поверхности.
В случае пикирования на экране будет показы-
ваться время, остающееся до столкновения с по-
верхностью земли. Когда символ зем-
ной поверхности коснется символа
вектора скорости, до столкновения
с землей остается 7 с. Этот же крите-
рий используется в системе преду-
преждения о близости земли со свето-
вой сигнализацией.
Таким образом, летчик имеет воз-
можность выполнять энергичные ма-
невры на малой высоте, непрерывно
контролируя свое положение относи-
тельно земной поверхности. Если все
же он по каким-то причинам теряет
контроль над высотой, в нужный мо-
мент сработает система предупрежде-
ния.
18
Индикаторы на ЭЛТ, установленные на само-
лете JA-37, позволяют благодаря послесвечению
запоминать требуемую информацию в течение до-
статочно длительного времени. Например, если
имеющееся время запоминания составляет 10 с,
летчику достаточно смотреть на экран через ин-
тервалы времени до 10 с. Это очень важный мо-
мент в ситуациях, когда летчику требуются и дру-
гие индикаторы.
На индикаторе тактической обстановки (фиг. 12)
отображается «электронная» синтезированная
карта местности и информация о местоположении
самолета. Карта содержит береговые линии, озера,
реки, территориальные границы, ориентиры, аэро-
дромы, запретные для полетов зоны и т. д.
Как видно из фиг. 12, летчик получает инфор-
мацию не только о положении н направлении поле-
та своего самолета, но и цели, что позволяет рас-
считать траекторию перехвата. Аналогичная ин-
формация обеспечивает навигацию и посадку са-
молета. Индикатор позволяет летчику контролиро-
вать полет самолета в режимах как ручного, так и
автоматического управления.
Автопилот представляет собой цифровую систе-
му. использующую только один процессор. Кроме
обычных режимов работы — демпфирования, ста-
билизации угловой ориентации и высоты полета
автопилот имеет еще режим прицеливания, исполь-
зуемый при перехвате цели.
Для задания и контроля требуемого режима
полета используются переключатели и сигнальные
лампочки, расположенные в верхней, части при-
борной панели.
Логика режимов проста, и в качестве иллюстра-
ции может служить режим стабилизации высоты
полета. Для изменения высоты не требуется отклю-
чение автопилота. При определенном усилии на
ручке управления осуществляется переключение
на режим демпфирования, и когда усилие с ручки
снимается, автоматически включается режим ста-
билизации высоты и самолет выравнивается. Точ-
ность стабилизации высоты высокая (4^20 м, даже
при резком крене). С точки зрения условий безо-
пасности полета эта точность не является абсолют-
но необходимой. Однако для обеспечения эффек-
тивной связи «человек—машина» такая точность
полезна, поскольку она способствует снижению
рабочей загрузки летчика.
Одним из основных усовершенствований само-
лета JA-37, отличающих его от более ранних ва-
риантов, является применение инерциальной нави-
гационной системы фирмы Зингер Кирфотт, обла-
дающей высокой точностью. Система хорошо интег-
рируется с другими бортовыми системами и для
ее нормальной работы не требуется участия летчи-
ка. Выставка системы во время включения дви-
гателя осуществляется нажатием единственной
кнопки.
Фирма Зингер Кирфотт также разработала и
центральный цифровой вычислитель, который про-
изводится по лицензии в Швеции под обозначением
SAAB-Сканиа CD-107. Он имеет емкость в пять раз
большую, чем вычислитель самолета AJ-37, и свя-
зан с системой индикации, которая ограничивает
объем представляемой летчику информации до
уровня, необходимого для выполнения определен-
Фнг. II. Приборная панель самолета JA-37
ной задачи, уменьшая тем самым рабочую загруз-
ку летчика. Вычислитель включает в себя ряд эле-
ментов, разработанных фирмой Зингер Кирфотт
для стратегического бомбардировщика Рокуэлл
В-1.
Самолет JA-37 оснащен многорежимным им-
пульсно-допплеровским радиолокатором PS 46/А,
работающим в диапазоне частот X со средней
частотой повторения импульсов (фиг. 13). Радио-
локатор разработан фирмой Эриксон с использова-
нием технологии фирмы Хьюз Эркрафт в соответ-
ствии с требованиями, основными из которых были
всепогодность применения, эффективность в усло-
виях радиопротиводействия, высокая эксплуата-
ционная надежность и простота обслуживания.
Обеспечена способность захватывать и сопровож-
дать цели на фоне земли. Радиолокатор имеет ко-
герентный передатчик на лампе бегущей волны,
антенну Кассегрена с малой интенсивностью боко-
вых лепестков диаграммы направленности, усовер-
шенствованную систему обработки данных. Преду-
смотрена встроенная система самопроверки.
Положение антенны регулируется по сигналам
инерциальной платформы самолета. РЛС включает
Фиг. 12. Экраны индикатора РЛС (слева)
и индикатора тактической обстановки (справа)
19
в себя систему опознавания, антенна системы яв-
ляется частью антенн радиолокатора.
Радиолокатор имеет следующие режимы рабо-
ты: поиск, обнаружение (либо автоматическое с по-
мощью индикатора на уровне остекления, либо по-
луавтоматическое с помощью индикатора РЛС),
сопровождение (при обзоре или без обзора про-
странства) и облучение цели, а также определение
дальности до наземной цели.
Расчетное среднее время между отказами ра-
диолокатора PS 46/А равно 100 ч. Предполагается,
что это время будет увеличено ко времени поступ-
ления самолета на вооружение.
Разработка радиолокатора обошлась в 43 млн.
долл., его выпуск будет продолжаться до середины
1980-х годов.
Самолет JA-37 «Вигген», как и его предшест-
венник J-35 «Дракон», будет действовать в системе
ПВО Швеции STPIL, имеющей наземные РЛС и
центры управления. Кроме обычной голосовой ра-
диосвязи самолет оборудован аппаратурой телеме-
трического канала связи, позволяющей наземной
станции наведения выбирать воздушную цель и
осуществлять наведение на нее самолета JA-37 без
использования голосовых команд. Центральный вы-
числитель будет выбирать наилучшую радиочасто-
ту для канала передачи данных [2].
БОЕВЫЕ ВОЗМОЖНОСТИ САМОЛЕТА JA-37
Одним из основных требований к самолету
JA-37 была высокая эффективность в ближнем воз-
душном бою. Для этого необходимо сочетание вы-
сокой маневренности и хорошей управляемости
самолета с мощным вооруженном.
Индикатор иа уровне остекления обеспечивает
летчика всей необходимой в воздушном бою ин-
формацией. не отвлекая его от обзора внекабин-
ного пространства. Указатель числа М и прибор-
ной скорости установлены рядом с индикаторами
перегрузки и угла атаки в верхней части прибор-
ной панели, что также удобно для летчика.
Для самолета JA-37 разработана специальная
система предупреждения сваливания. Указание об
уровне перегрузок и углов атаки обеспечивается
звуковой сигнализацией, а предупреждение
тряской ручки управления.
Фиг. 13. Радиолокатор Эриксон PS 46/А
Фиг. 14. Самолет JA-37 с ракетами «Скай Флэш»
Когда приближаются предельные по свалива-
нию значения перегрузки и угла атаки, летчик пре-
дупреждается тряской ручки управления и слышит
громкий звуковой сигнал в наушниках.
Предупреждение первого уровня соответствует
7.5% значения критического по сваливанию угла
атаки и 85% предела по перегрузке.
При этом летчик слышит прерывистый звуко-
вой сигнал с низкой частотой повторения импуль-
сов. Частота импульсов повышается по мерс при-
ближения к опасному пределу. Имеется пять час-
тот для угла атаки и три для перегрузки.
Для того чтобы летчик различал звуковые сиг-
налы по углу атаки и сигналы по перегрузке, ис-
пользуются разные частоты— 400 и 2000 Гц.
Упрощение операций по управлению самолетом
а его системами является одной из наиболее труд-
ных проблем при разработке одноместного истре-
бителя. Одним из примеров решения такой пробле-
мы на самолете JA-37 является введение специаль-
ной программы, которая независимо от состояния
систем самолета обеспечивает их быстрое переклю-
чение на режим ведения воздушного боя. Переклю-
чение осуществляется нажатием специальной кноп-
ки, установленной на РУД. в результате чего инди-
катор на уровне остекления переходит на режим
воздушного боя, осуществляется выбор оружия, вы-
бирается режим прицеливания для выбранного
оружия и специальный режим работы автопилота,
включается радиолокатор, обеспечивающий поиск
цели по специальной программе и ее автоматичес-
кий захват.
Каждому типу оружия соответствует своя про-
грамма поиска цели. Путем уменьшения глубины
зоны обзора можно уменьшить влияние помех и
время поиска и захвата цели t{3].
На самолете JA-37 установлена пушка Эриксон
КСА калибром 30 мм, расположенная под цен-
тральной частью фюзеляжа. В отличие от пушки
«Аден» самолета J-35 «Дракон», пушка Эрликон
имеет на 50% более тяжелую выстреливаемую
часть снаряда (0,36 кге), большую в пять раз эф-
фективную дальность стрельбы на малой высоте,
в восемь раз большую кинетическую энергию при
попадании в цель. Скорострельность пушки
1350 выстрелов в минуту, начальная скорость
снаряда 1075 м/с.
В стандартном варианте самолет имеет семь
узлов наружной подвески общей грузоподъемностью
6 тс — четыре под консолями крыльев и три под
фюзеляжем. На наружных узлах могут быть раз-
мещены снаряды с радиолокационной системой на-
ведения Бритиш Аэроспейс (ВАе) «Скай Флэш» и
20
усовершенствованные снаряды «Сайдуиндер» с ПК
головкой самонаведения [3, 4].
На фиг. 14 показан самолет JA-37, вооружен-
ный ракетами класса воздух—воздух «Скай
Флэш». Швеция подписала контракт с фирмой ВАе
на поставку ракет этого типа. Этому предшество-
вала двухлетняя программа работ по совмещению
ракеты с самолетом, включавшая испытательные
пуски. Поставки ракет начнутся в середине 1980 г.
Фирма SAAB-Сканна получила заказ на произ-
водство некоторых компонентов ракеты «Скай
Флэш» в качестве субподрядчика фирм ВАе и Мар-
кони (последняя будет выпускать мононмпульсную
головку самонаведения) (5].
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ
Техническое обслуживание в шведских ВВС
подразделяется на три категории:
А — обслуживание в составе эскадрильи,
В — обслуживание в мастерских на авиацион-
ной базе,
С — обслуживание в специализированных авиа-
ремонтных мастерских.
Обслуживание по категориям А и В включает
в себя текущее техническое обслуживание, и ре-
монт производится силами ВВС. Обслуживание по
категории С осуществляется ремонтным отделени-
ем государственной фирмы FFV и включает в себя
капитальный ремонт и модификацию самолета, а
также капитальный и профилактический ремонт
оборудования. Фирма-изготовитель отвечает в ос-
новном за производство запасных частей, модифи-
кацию или восстановление самолетов.
Проверка бортовых систем самолета JA-37 на
летном поле осуществляется специальным стендом,
разработанным фирмой FFV. Эта система обеспе-
чивает проверку работы 3300 блоков оборудования
с помощью 21 программы. Широкое применение
встроенных систем самопроверки позволяет значи-
тельно уменьшить потребность в испытательном
оборудовании и сократить время контроля. Так.
для самолета JA-37 требуется всего три различных
автоматических испытательных стенда, в то время
как для самолета J-35 «Дракон» требуется 10 стен-
дов. Время, необходимое для контроля систем са-
молета JA-37, составляет всего 30% времени, не-
обходимого для самолета J-35.
Фиг. 15. Программа летных испытаний всех вариантов
самолета «Внгген» (5000 ч в течение 14 лет, из них
1500 ч приходится на самолет JA-37)
ПЕРСПЕКТИВЫ РАЗВИТИЯ СЕМЕЙСТВА
САМОЛЕТОВ .ВИГГЕН-
В случае выделения необходимых ассигнований
для ВВС Швеции может быть разработан новый
вариант самолета «Внгген» — штурмовика А-20 на
основе истребителя-перехватчика JA-37. Для повы-
шения эффективности действия по наземным це-
лям самолет А-20 будет оснащен модифицирован-
ной РЛС, рядом новых систем (контейнерной ИК
системой переднего обзора и т. д.) и новым оружи-
ем (ракетами класса воздух—поверхность). Если
такой самолет будет разработан (принятие реше-
ния по этому вопросу ожидается нс ранее 1980 г.),
то он поступит на вооружение после 1985 г.
До настоящего времени ни один самолет «Виг-
ген» не был продан за границу. В 1974—1975 гг.
Швеция предлагала экспортный вариант самоле-
та «Вигген» SAAB 37Е «Еврофайтер» четырем
странам НАТО — Бельгии, Дании, Голландии и
Норвегии для замены устаревших истребителей
Локхид F-104 «Старфайтер». Однако, как известно,
эти страны выбрали американский истребитель
Дженерал Дайнэмикс F-16. Самолеты AJ-37 наме-
ревалась закупить Индия, но продажа самолетов
была запрещена правительством США на том ос-
новании, что ряд систем самолета разработан аме-
риканскими фирмами, а двигатель RM8A является
модификацией двигателя Пратт-Уитни JT8D-22[3],
ПРОГРАММА ЛЕТНЫХ ИСПЫТАНИЙ
При разработке в испытаниях самолета JA-37
фирма использует опыт, накопленный ею в ходе
разработки самолета AJ-37. В связи с этим лет-
ные испытания ограничиваются лишь испытанием
отдельных систем с последующей их интеграцией.
Для летных испытаний были переоборудованы 5
из 7 опытных образцов самолетов AJ-37. Был по-
строен один предссрийный образец для испытаний
всего комплекса бортовых систем. Доводочные ис-
пытания с использованием первого серийного само-
лета будут продолжаться до 1981 г., когда самоле-
тами JA-37 «Вигген» будет укомплектована первая
эскадрилья. Общин налет составит к этому време-
ни 1500 ч. К середине 1978 г. летные испытания
были выполнены на 70%, причем была полностью
исследована вся область летных режимов.
Характеристики истребителя SAAB-Сканиа JA-37
.Вигген* |1, 3]
Размеры
Размах крыла........................ 10,6 м
Площадь крыла (с подфюзеляжной
частью)....................... 46,0 м’
Площадь консолей переднего оперения 6.2 .
Длина самолета (с нгх-овой штангой) , 16,4 м
Длина фюзеляжа................. 15,58 .
Высота самолета.................. 5.9 ,
Высота самолета со сложенным килем 4.0 .
Нормальный взлетный вес................. 17000 кге
Двигатель............................... ТРДДФ Волво
Флнгмотор RM8B
Статическая форсажная тяга................ 12 750 кге
Летные данные
Максимальное число М
на большой высоте...................... >2
на высоте 100 м................... > 1,1
21
Время набора высоты 10 000 м (с мо-
мента отпускания тормозов)..........менее 100 с
Тактический радиус действия с под-
весными грузами:
профиль большая—малая—большая
. высота ......................... 10<М) км
профиль малая—малая—малая вы-
сота ........................ 500 км
Длина разбега....................... 400 м
Длина пробега ...................... 500 .
Потребная длина посадочной полосы:
при обычном приземлении..........1000 .
при приземлении без выравнивания 500 .
Скорость захода на посадку..........2.0 км ч
I. Jane's All the Worlds Aircraft. 1978—1979, р. 159—160.
2. Interavia Air Letter. 1978, 1/V!, N 9016, p. 4.
3. The JA37 Viggen: air defence capability for the 1980s.
Interavia World Review of AAA, 1978, v, 33, VII, N 7,
p. 621-624.
4. Frieberg LL Progress report on the Viggen with
emphasis on man-machine design.
The Society of Experimental Test Pilots Technical Review,
1976, v. 13, N 2, p. 79—92
5. Flight International, 1978, v. 114. 16/XII, N 3639, p. 2160.
6. Interavia Air Letter, 1979, 20/VIH, N 9320, p. 5.
Референты Ю. Д. Вишневский, С. Н. Супруненко.
УДК 658 : 629.7(485)
АВИАЦИОННО-КОСМИЧЕСКАЯ ПРОМЫШЛЕННОСТЬ ШВЕЦИИ
Относительно небольшая западноевропейская
страна Швеция с населением около 8 млн. чело-
век обладает высокоразвитой авиационно-космиче-
ской промышленностью (АКП), в которой работа-
ют более 11 000 человек.
Швеция постоянно расходует значительную
часть совокупного национального продукта на
военные нужды, и в настоящее время промышлен-
ность страны на 75—80% обеспечивает вооружен-
ные силы оружием и военной техникой, а АКП
полностью удовлетворяет потребности страны в
военных самолетах.
Хотя АКП Швеции отличает высокий уровень
развития и использование новейших достижений
науки и техники, однако она, естественно, не мо-
жет конкурировать с АКП более крупных стран
Западной Европы и США в области гражданского
авиастроения. Это привело к одностороннему раз-
витию авиационной промышленности Швеции, ко-
торая специализировалась, главным образом, на
выпуске военных самолетов.
Будущее АКП Швеции в значительной степени
определено пятилетней программой развития во-
оруженных сил, предусматривающей ассигнование
57,66 млрд, крон в 1977 1982 гг. В 1978 -1979 б. г.
(с 1 июня 1978 г. по 30 июня 1979 г.) правительство
Швеции предложило выделить на военные цели
11,51 млрд, крон, из них 6,366 млрд, крон предна-
значено для ВВС, в том числе 2,33 млрд, крон на
закупку нового оборудования.
Долгое время Швеция считалась образцом то-
го, как сравнительно небольшая, но развитая в
промышленном отношении страна может сохра-
нять высокоэффективную оборонную промышлен-
ность.
Однако в настоящее время АКП Швеции стоит
перед лицом серьезных проблем. Доля оборонных
расходов в общем бюджете страны упала с 18%
в 1961—1962 гг. до ~10% в настоящее время. На
программы АКП сильно влияет инфляция и быст-
рый рост стоимости военной продукции. АКП Шве-
ции постоянно сталкивается с проблемой сбыта,
поскольку ее производственные возможности зна-
чительно превосходят потребности ВВС. Экспорт-
ные заказы АКП невелики, и продажа военной
продукции другим странам не обеспечивает возме-
щение расходов, как, например, в США, Англии,
Франции и Италии. Трудности сбыта военной про-
дукции АКП Швеции определяются также ис-
пользованием технологии зарубежных фирм. Так,
например, правительство США в 1978 г. запретило
продажу шведских самолетов AJ-37 в Индию, мо-
тивируя это тем, что некоторые компоненты бор-
товых систем этого самолета изготовлены в США,
а ТРДД Волво Флигмотор является модифициро-
ванным вариантом ТРДД Пратт-Уитни JT8D-22.
Кроме того, Швеция не является членом НАТО и
Европейского экономического сообщества и поэто-
му в меньшей степени пользуется привилегиями
при сбыте своей продукции на международных
рынках [1, 2, 3, 4].
Большие надежды АКП Швеции возлагала на
продажу Бельгии. Дании, Голландии и Норвегии
истребителя JA-37 «Вигген» для замены устарев-
ших истребителей Локхид F-104 «Старфайтер».
Однако в 1975 г. эти страны выбрали американ-
ский истребитель Дженерал Дайнэмнкс F-16 [1].
АКП Швеции практически полностью обес-
печивает шведские ВВС авиационной техникой.
В 1978 г. боевые силы ВВС составляли 23 эскад-
рильи: шесть эскадрилий истребителей-бомбарди-
ровщиков AJ-37 «Вигген», три разведывательные
эскадрильи самолетов SF-37 и SH-37, 14 эскадри-
лий ПВО из самолетов J-35 «Дракон» Кроме того,
на вооружении состоят легкие учебно-боевые са-
молеты SAAB 105. Вместе с резервами число бое-
вых самолетов достигает 500.
К середине 1980-х годов число состоящих на
вооружении самолетов будет сокращено приблизи-
тельно до 350 в связи с ббльшимн боевыми воз-
можностями новых самолетов. Только за послед-
ние два-три года было ликвидировано пять эскад-
рилий боевых самолетов.
Следующий основной этап переоснащения ВВС
начнется с 1980 г., когда самолеты J-35 «Дракон»
станут заменяться истребителями-перехватчиками
JA-37 «Вигген».
22
В настоящее время состав ВВС н середине
1980-х годов пока точно не определен, но они бу-
дут включать восемь или девять эскадрилий само-
летов JA-37, пять эскадрилий самолетов М-37 и
три разведывательные эскадрильи.
Около 39% бюджета ВВС 1977—1978 б. г.,
составляющего 3,666 млрд, крон (790 млн. долл.),
предназначено для закупок новой техники; 42%
пойдет на содержание персонала, 15%—на иссле-
дования и разработки и 4%—на строительство
аэродромов и других объектов.
После нескольких попыток начать разработку
новых боевых и учебных самолетов министерство
обороны Швеции в настоящее время пересматри-
вает возможности АКП и перспективы закупок но-
вой авиационной техники [1 ].
В 1979 г. шведское правительство объявило
о планах создания фонда в 300 млн. крон для сти-
мулирования разработки самолетов и активизации
деятельности смежных отраслей промышленности и
(намерении увеличить вклад Швеции в международ-
ные космические программы (в том числе в про-
грамму разработки западноевропейской ракеты-но-
сителя «Арнан») [5].
Швеция участвует в нескольких международ-
ных космических программах. В западноевропей-
ском консорциуме .MESH она представлена фир-
мой SAAB-Сканиа, которая участвовала в созда-
нии спутника для исследования солнца TD-1A.
В 1973 г. западноевропейские космические органи-
зации ESRO и ESA поручили консорциуму MESH
разработать экспериментальный спутник связи
OTS, а позднее ИСЗ «Мареке» (прежнее назва-
ние «Маротс») для международной системы мор-
ской связи. По этим программам фирма SAAB-
Сканиа разработала телеметрические системы и
системы управления. Кроме того, эта фирма поста-
вила бортовую ЭВМ для западноевропейской раке-
ты-носителя «Ариан» [1, 2, 6].
На 1979 1980 б. г. на шведские космические
программы запрошено 115,6 млн. крон. Из этой
суммы 81,6 млн. крон составляет вклад Швеции в
бюджет организации ESA (2,8%). Участие в про-
грамме спутника SPOT обойдется в 6,2 млн. крон,
на исследования по национальным программам за-
требовано 27,8 млн. крон (исследовательские раке-
ты, исследования с помощью спутников). Для ИСЗ
SPOT фирма SAAB-Сканна поставит ЭВМ системы
управления и обработки данных. Этот спутник для
наблюдения за поверхностью Земли разрабаты-
вается под контролем французского космического
агентства CNES н будет запущен на орбиту раке-
той-носителем «Ариан» в начале 1984 г. [7].
Крупнейшим производителем авиационно-ра-
кетной продукции является фирма SAAB-Сканиа
с оборотом 6,5 млрд, крон (данные 1976 г.) и чис-
лом работающих более 41000 человек. Фирма
имеет пять отделений и помимо самолетостроения
занимается разработкой и производством радио-
электронного оборудования ракет, грузовых и лег-
ковых автомобилей, вычислителей и т. д. [2, 6, 8].
С 1949 г. фирма SAAB-Сканна продала более
2000 боевых реактивных самолетов ВВС четырех
стран и поставила на мировой рынок более 1500
военных и гражданских самолетов с ПД. С 1962 г.
фирма занимается продажей вертолетов американ-
ской фирмы Хьюз в Скандинавии.
Авиационно-космическое отделение фирмы
SAAB-Сканиа, на предприятиях которого работают
более 5000 чел., занимается в настоящее время
разработкой и производством различных вариан-
тов боевого самолета SAAB-Сканиа «Вигген»
(фиг. 1, 2), с 1965 г. по 1971 г. построило свыше
600 истребителей J-35 «Дракон» в нескольких ва-
риантах (фиг. 3), продолжает выпуск многоцелево-
го учебно-боевого самолета SAAS 105 (фиг. 4) и
легкого многоцелевого гражданского (боевого са-
молета с ПД «Сафари») «Саппортср» (построено
около 200 самолетов) (фиг. 5). В 1968 г. фирма по-
лучила заказы от ВВС Данни и Финляндии на по-
ставку 51 и 12 самолетов J-35 «Дракон» соответ-
ственно, от ВВС Австрии на поставку 40 самоле-
тов SAAB 105 и от ВВС Данни и Пакистана на
поставку 77 самолетов «Саппортер» [6].
Отделение Дсйта-SAAB работает в области ра-
диоэлектроники и выпускает вычислительное обо-
рудование, в том числе авиационные бортовые вы-
числители, прицелы, системы управления огнем,
автопилоты, оборудование для УР, а также ЭВМ
для космических аппаратов [6. 8].
В середине 1976 г. это отделение получило кон-
тракт стоимостью 150 млн. крон на поставку вы-
числителей серии 107 и системы автоматического
управления полетом серин 07 для истребителя
JA-37 «Вигген» [6, 8 .
На вооружении шведских ВВС состоят противо-
корабельные ракеты Rb.04E и Rb.05A авнационно
космического отделения фирмы SAAB-Сканиа
(к настоящему времени их выпуск прекращен).
Этими ракетами вооружены истребители «Вигген»
и ударные самолеты SAAB 105. Отделение до
1978 г. занималось созданием новой ракеты клас-
са воздух—воздух с ПК системой наведения, одна-
ко разработка ракеты была прекращена в связи
с увеличением стоимости [9].
В настоящее время самой крупной программой
АКП Швеции является программа семейства само-
летов «Вигген», и на середину 1978 г. заказано 329
самолетов «Вигген» всех вариантов. Согласно су-
ществующим планам, производство самолетов
Фиг. I. Истребитель-бомбардировщик
SAAB-Сканиа AJ-37 «Вигген», его вооружение
н другие подвесные грузы
23
Фиг. 2. Истребпель-перехватчик
SAAB-Сканиа JA-37 «Вигген»
«Вигген» и запасных частей к ним будет продол-
жаться приблизительно до 1985 г., а в случае раз-
работки самолета А-20 (см. ниже) и в 1990-х го-
дах.
Начато производство нового варианта семей-
ства самолетов «Внгген» —истребителя-перехват-
чика JA-37 (см. статью в настоящем номере «ТИ»).
В 1980-х годах ВВС. Швеции потребуется новый
самолет для замены истребителя-бомбардировщи-
ка AJ-37 и легкого ударного самолета SAAB 105.
Кроме того, выдвигались планы создания модифи-
цированного самолета «Внгген» для нанесения уда-
ров по морским целям, выполнения разведыватель-
ных операций и применения, в случае необходимо-
сти, в системе ПВО. Учитывая будущие потребно-
сти ВВС, фирма SAAB-Сканиа в 1975 г. предложи-
ла проект самолета B3LA (фиг. 6) для замены са-
молетов AJ-37 и SAAB 105 и проект самолета А-20
в качестве модифицированного самолета «Вигген».
Задуманный первоначально как самолет для за-
мены истребителя-бомбардировщика AJ-37, само-
лет А-20 в настоящее время предлагается разрабо-
тать на основе истребителя-перехватчика JA-37 и
оснастить его радиолокатором и другим радиоэлек-
тронным оборудованием и вооружением, оптимизи-
рованными для операций воздух—поверхность.
В случае необходимости намечалось небольшое
увеличение тяги двигателя.
Сравнительно дешевый двухместный самолет
B3LA, предназначенный для эффективных действий
по намеченным целям, должен был обладать высо-
кими маневренностью и живучестью и эксплуати-
роваться в основном с рассредоточенных аэродро-
мов. В конструкции самолета предполагалось ис-
пользовать композиционные материалы, силовая
установка должна была состоять из одного ТРДД
без форсажной камеры.
В начале 1978 г. на программу самолетов
B3LA и А-20 до июля 1979 г. было ассигновано
310 млн. крон [4]. Однако финансовые проблемы
самостоятельной разработки нового самолета за-
ставили Швецию вести переговоры с Италией о со-
здании нового легкого учебно-боевого самолета на
основе проекта, объединяющего проекты шведского
самолета B3LA и итальянского АМХ. Предполага-
лось, что двигатели для этого самолета также бу-
дут изготовляться в Швеции [10].
В конце 1979 г. шведское правительство объя-
вило об отказе от планов разработки легкого удар-
ного самолета B3LA. Вместо него возможно созда-
Фиг. 3. Многоцелевой истребитель SAAB J-35
«Дракон»
ние более дешевого ударного самолета А-38 и его
тренировочного варианта SK-38 [11]. Однако уде-
шевление будущей программы не решило всех про-
блем, и в феврале 1979 г. шведское правительство
объявило о своем решении по финансовым сообра’
жениям не приступать к созданию учебно-боевого
самолета SK-38/A'-38. Командованию вооруженных
сил Швеции было предложено рассмотреть сле-
дующие альтернативы:
сформировать несколько эскадрилий («менее
шести») из незначительно модифицированных са-
молетов JA-37 для повышения боевых возможно-
стей при ударных операциях;
сформировать дополнительные эскадрильи
истребителей JA-37 (сверх восьми намеченных)
вместо соединений специализированных самолетов;
комбинация двух первых предложении;
создание легкого вооруженного тренировочного
самолета.
Решение правительства означает, что разработ-
ка самолета А-20, ударного варианта истребителя
«Вигген», будет продолжаться по крайней мере
еще год.
Правительство выразило также заинтересован-
ность в дальнейшем изучении нового тренировоч-
ного самолета на основе самолета SAAB 105, как’
было предложено в 1978 г. [5].
В 1979 г. правительство Швеции предложило
ВВС и управлению материально-технического обес-
печения рассмотреть следующие варианты дальней-
шего развития военной авиации:
формирование 8—12 эскадрилий самолетов
JA-37 (по 8 12 самолетов в каждой эскадрилье)
Фиг. 4. Многоцелевой учебно-боевой
самолет SAAB 105
24
Фиг. 5. Легкий самолет SAAB
«Сафа|ш*/»Саппортер»
и 4 -5 эскадрилий тренировочных самолетов, раз-
работанных на основе самолета SAAB 105;
формирование 8 эскадрилий самолетов JA-37,
2 4 эскадрилий самолетов JA-37, модифицирован-
ных для выполнения ударных операций, и закупку
некоторого числа зарубежных тренировочных само-
летов;
формирование 8 эскадрилий самолетов JA-37 и
5 эскадрилий самолетов SAAB-Сканиа 105:15
(упрощенный вариант самолета B3LA);
формирование 8 эскадрилий самолетов JA-37,
4 5 эскадрилий модернизированных самолетов
J-35 «Дракон» и закупку приблизительно 100 тре-
нировочных самолетов за рубежом.
Если последнее предложение будет принято, по-
требуется модернизировать приблизительно 100
истребителей J-35F, выпущенных в период 1965—
1977 гг.
Новый вариант самолета «Дракон» предпола-
гается оснастить новой РДС и вооружить противо-
корабельными ракетами. Модернизация обеспечит
увеличение срока службы самолетов не менее чем
на 6 лет.
На основе результатов оценки предложений
шведское правительство весной 1980 г. примет ре-
шение о создании новых боевых самолетов.
Будущее шведской АКП будет изучаться спе-
циальным комитетом, который к сентябрю 1980 г.
должен представить доклад о реорганизации про-
мышленности в связи с планами создания новых
военных самолетов. К этому времени должно быть
принято решение по новому ударному самолету
для ВВС.
Комитет рассмотрит и оценит различные проек-
ты многоцелевых истребителей, рисунок одного из
которых представлен на фиг. 7. Этот самолет дол-
жен использоваться в качестве перехватчика, удар-
ного и разведывательного самолета [12. 13. 14 и 15].
Поскольку экспорт военных самолетов не пер-
спективен, а объем работ по техническому обслужи-
ванию и ремонту самолетов также весьма ограни-
чен (этим занимается государственная фирма
FFV), фирма SAAB-Сканиа активно пытается рас-
Рис. 6. Рисунок легкого ударною
самолета B3LA
ширить программы гражданских самолетов. В по-
следние годы фирма выпускала легкий пассажир-
ский самолет «Сафари» — гражданский вариант
легкого ударного самолета «Саппортер», однако
возможность его сбыта была весьма ограничена
из-за почти абсолютной американской монополии
в этой области. Значительным успехом фирмы счи-
тается получение субконтракта от американской
фирмы Макдоннелл-Дуглас на производство внут-
ренних закрылков и направляющих для самолета
DC-9 «Супер-80», стоимость заказа ~20 млн. долл,
при выпуске 300 комплектов [1]. Фирма SAAB-Ска-
ниа будет участвовать в программе разработки и
производства английского самолета для авиалиний
малой протяженности ВАе146. Начальным кон-
трактом стоимостью 6 млн. долл, предусматривает-
ся изготовление 20 комплектов хвостового опере-
ния, элеронов и интерцепторов [161.
Весьма важной для шведской АКП является
программа легкого транспортного самолета КВП
«Транспортер» (фиг. 8), проектные исследования
которого фирма SAAB-Сканиа начала в 1975 г.
Сначала предполагалось, что самолет будет пере-
возить 15—19 пассажиров или до 2270 кге груза.
В настоящее время рассматривается проект само-
лета, обеспечивающего перевозку 30 пассажиров
и оснащенного двумя ТРДД. Самолет предназна-
чен для использования на местных авиалиниях ма-
лой протяженности в основном для перевозки гру-
зов. Стоимость разработки самолета оценивается в
250 млн. крон [1].
Видное место в АКП Швеции занимает двнга-
тслсстроительная фирма Волво Флигмотор, осно-
ванная в 1930 г. Фирма выпускает по лицензии
ТРД Роллс-Ройс «Эвон», ведет исследования и
25
Фиг. Н. Чпдсль легкого транспортного самолета KBI1
«Транспортер»
разработку турбореактивных двигателей, прямо-
точных воздушно-реактивных и ракетных двигате-
лей и является поставщиком камер сгорания для
двигателей первой и второй ступеней европейской
ракеты-носителя «Ариан».
Основной программой фирмы в настоящее вре-
мя является производство ТРДДФ RM8A и RM8B
для самолетов AJ-37 и JA-37 «Вигген» соответ-
ственно.
ТРДДФ RB8A является усовершенствованным
военным вариантом гражданского ТРДД Пратт-
Уитни JT8D-22. Программа разработки двигателя
RM8A началась с 1962 г. с участием фирмы Пратт-
Уитни. Двигатель сохранил аэродинамическую схе-
му и геометрию газового тракта американского
двигателя, а форсажная камера и трехстворчатый
реверсер тяги были спроектированы шведской
фирмой. Первый серийный двигатель RM8A по-
ставлен в октябре 1970 г. Всего для самолетов
AJ-37 планируется выпустить 195 двигателей
RM8A.
С 1970 г. фирма начала разработку более мощ-
ного ТРДД RM8B с тягой ~ 12 750 кгс/7350 кге
(с форсажом/без форсажа) для истребителя-пере-
хватчика JA-37 «Вигген». Длина двигателя 6.23 м,
максимальный диаметр ~1,4 м. вес двигателя
2350 кге. Конструкция форсажной камеры сущест-
венно изменена для повышения приемистости и
улучшения характеристик двигателя на больших
высотах полета.
Стендовые испытания ТРДДФ RM8B начались
в 1972 г., доводка газогенераторной части велась
фирмой Пратт-Уитни, а системы управления и фор-
сажной камеры — фирмой Волво Флигмотор. Лет-
ные испытания двигателя на истребителе JA-37
«Вигген» начались в сентябре 1974 г. [6].
Недавно фирма Волво Флигмотор заключила
соглашение с американской фирмой Гаррет Эри-
серч о совместной разработке ТРДД TFE 731-1042
для военных самолетов, который может быть ис-
Фпг 9. Управляемая ракета класса
поверхность воздух Бофоре RBS.70
пользован на тренировочных и легких ударных
самолетах следующего поколения. Фирма Волво
Флигмотор будет разрабатывать форсажную ка-
меру [1, 17].
Одной из самых крупных шведских фирм яв-
ляется фирма Бофоре (~13000 чел.), занимающая-
ся выплавкой стали, производством оружия (в том
числе управляемых ракет), взрывчатых веществ,
металлорежущих станков, турбин, локомотивов, ди-
зелей, электронного оборудования и т. д. В 1976 г.
оборот фирмы составил -—1.5 млрд, шведских крои,
половина оборота относится к военной продукции.
Приблизительно 30—40% военной продукции экс-
портируется.
Основной программой фирмы в области управ-
ляемых ракет продолжает оставаться производство
по заказу армии Швеции системы зенитной ракеты
Бофоре RBS.70 (фиг. 9), обеспечивающей исключи-
тельную мобильность и быстроту развертывания
при очень малом времени подготовки ракет к пус-
ку для действий против самолетов, летящих с боль-
шими скоростями на очень малой высоте. |
Обнаружение цели осуществляется оператором
или импульсно-допплеровской РЛС Эриксон RS/70R
(фиг. 10), которая устанавливается на грузовике
и обслуживается командой из пяти человек. Эта
РЛС работает в диапазоне С и имеет дальность
действия 40 км. Антенна РЛС устанавливается па
раздвижной мачте высотой до 12 м [2].
Исследования ракетной системы RBS.70 нача
лись в 1967 г., разработка — в 1969 г., первые
пуски ракет — в 1971 г. Программа частично фи-
нансировалась Швейцарией, которая является по-
тенциальным заказчиком этой системы. Ракета
RBS.70 считается первой в мире ракетой с паве
дением по лазерному лучу. По мнению фирмы,
конкуренцию новой ракете составят ракеты Шорт
«Блоупайп» и портативный зенитный снаряд Дже-
нерал Дайнэмикс «Стингер» с полуактввной лазер
ной системой наведения, если он будет запущен
в производство.
Зона действия ракеты RBS.70 5 км по дально-
сти и 3 км по высоте; время приведения в боевую’
готовность 15—30 с, время между моментом обна
руження цели и началом стрельбы 5 с. Длина сна-
ряда 1,35 м, диаметр корпуса 0,11 м. Скорость сна-
ряда сверхзвуковая, и он имеет осколочную боевую
часть с дистанционным и ударным взрывателями.
Пуски осуществляются одним человеком, а второй
нужен в том случае, если необходима быстрая пе-
резарядка системы. Кроме Швеции эту ракетную
систему заказала Норвегия.
Фирма Бофоре работает над усовершенствова-
нием системы RBS.70, в частности оснащением се
прицелом для ведения огня ночью. Фирма нс пла-
нирует создание портативного варианта этой раке-
ты, поскольку считает переносную опору необходи-
мой для максимального уменьшения времени реак-
ции на появление цели.
По частной инциатнве фирмы разрабатывается
мобильный вариант системы RBS.70, размещаемый
на бронетранспортере (американском Ml 13 или
шведском IKV90), где оператор будет иметь броне-
защиту.
Разрабатывается также проект системы RBS.77
с ракетой, обладающей увеличенной дальностью
26
действия. Другим новым проектом является про-
тивотанковая ракета для шведской армии. Ракету
предполагается оснастить автономной системой
наведения. Аналогичная ракета с ИК системой на-
ведения изучается фирмой SAAB-Сканиа [2, 18].
В 1978 г. фирмы SAAB-Сканиа и фирма Бофоре
организовали новую фирму SA А в Бофоре Мис-
сайл Корпорейтн (SBMC) для разработки и про-
изводства ракет. В апреле 1979 г. министерство
обороны Швеции выдало этой фирме контракт
стоимостью 1,3 млн. крон (~295 млн. долл.), пре-
дусматривающий создание новой противокорабель-
ной ракеты класса поверхность — поверхность
Rb.15 (RBS.15), ранее изучавшейся под обозначе-
нием Rb.04 «Турбо». Этой ракетой планируется в
1985 г. вооружить 12 патрульных катеров. Решение
о созании варианта воздух—поверхность для ВВС
Швеции может быть принято в 1981 г.
Ракета Rb.15 является вариантом ракеты
Rb.04E класса воздух—поверхность, которой во-
оружаются самолеты «Вигген». Длина ракеты
Rb.15 4,35 м, диаметр 0,5 м и размах крыла 0,85м.
Вес ракеты без стартовых РДТТ 560 кге. Даль-
ность действия ~ 100 км. Силовая установка раке-
1Ы состоит из двух стартовых РДТТ, установлен-
ных по сторонам корпуса, и маршевого ТРД с воз-
духозаборником под корпусом ракеты. Наведение
ракеты обеспечивается комбинированной системой,
сочетающей инерциальное наведение на среднем
участке траектории и самонаведение на конечном
участке полета на предельно малых высотах
(19. 29].
Фирма JJ. М. Эриксон в основном занимается
производством телефонных станций, на долю кото-
рого приходится 64% общего оборота фирмы
(~6 млрд, шведских крон в 1976 г.). Приблизи-
тельно 3% оборота относится к выпуску радио-
электронного оборудования военного назначения,
причем около 15% этого оборудования экспорти-
руется. Основным видом военной продукции фирмы
в ближайшие годы будет многорежимный борто-
вой радиолокатор PS-46A, работающий в диапазо-
не частот X (3 см), который фирма разработала
для перехватчика JA-37 «Внгген». Поставки радио-
локаторов начались в 1977 г.
Для самолета JA-.37 фирма разработала систе-
му обработки информации о цели для передачи
в систему оружия. Система идентификации цели
также разработана фирмой Л. М. Эриксон (инди-
каторы будут поставляться фирмой Свенска Ра-
дио). В будущем фирма будет выпускать оборудо-
вание для предлагаемого истребителя А-20, если
он будет разрабатываться, и в связи с этим зани-
мается исследованиями радиолокатора, ИК систе-
мы переднего обзора и лазерного дальномера.
Фирма Эриксон с 1963 г. занимается лазерным
оборудованием для наземных систем, в основном
для ПВО, и продала ~700 таких систем, в том чис-
ле на экспорт.
Продолжается производство радиолокатора
PS-70/R для ЗРК Бофоре RBS.70. Кроме того, фир-
ма выпускает индикаторы движущихся целей для
модификации радиолокаторов зенитных систем
управления огнем, а также для обзорных РЛС,
применяемых во флоте и в армии.
Для ЗРК Бофоре RBS.70 разработаны два
опытных радиолокатора, работающие в диапазоне
частот С (от 5,85 до 8,2 Гц), и в конце 1975 г. был
получен заказ стоимостью 188 млн. шведских крон
на их производство. Выпуск этих обзорных радио-
локаторов под обозначением PS-70/R «Жираф»
продолжается.
Фирма Эриксон поставила также аппаратуру
для станций системы дальней радиосвязи баз ВВС
Швеции, аппаратуру опознавания для системы
ПВО STR1L60 и оборудование для радиоразвед-
ки и радиопротиводействия и средства контррадио-
противодействия.
Отделение AGA Электронике (~ 2000 чело-
век) — одно из шести отделений объединения
AGA — состоит из нескольких независимых фирм,
занимающихся разработкой и производством элек-
тронного оборудования.
В 1977 г. от объединения AGA отделилась фир-
ма Бофоре Аэротроникс, которая является основ-
ным производителем бортового радиооборудования
и гироплатформ. Фирма разработала и выпускает
новую ВЧ/УВЧ радиостанцию для самолетов
«Дракон* и JA-37. Фирма участвует вместе с фир-
мой SAAB-Сканиа в разработке системы навига-
ции и управления огнем для будущих легкого удар-
ного и тренировочного самолетов. Система будет
иметь бесплатформенный блок гироскопов и инди-
катор с движущейся картой, разработанные фир-
мой Бофоре Аэротроникс [2, 18].
Фирма Свенска Радио АВ (SRA), основанная
в 1919 г., имеет персонал ~2200 человек. Акции
фирмы принадлежат фирмам Л. М. Эриксон (71%)
Фиг. 10. Обзорный допплеровский радиолокатор RS-70R,
разработанный фирмой Эриксон для системы
снаряда Бофоре RBS.70
27
и GEC-Маркони Электронике (29%). Около трети
объема работ фирмы связано с военными зака-
зами.
Фирма Свенска Радио является основным по-
ставщиком гражданского и военного связного обо-
рудования, в том числе наземных мобильных уста-
новок, аппаратуры радиорелейных линий и радио-
станций.
Фирма участвовала в разработке радиолока-
ционного оборудования для системы ПВО Швеции
STRIL 60 и продолжает осуществлять техническое
обслуживание этой системы.
Фирма совместно с английской фирмой Марко-
ни-Эллиот выпускает запросчики-ответчики, элек-
тронное оборудование для управляемых ракет, ин-
дикаторы на уровне остекления. Фирма разработа-
ла и выпускала индикаторы для самолетов «Лан-
сен» и «Дракон». Последняя модель индикатора на
уровне остекления ЕР-12 для истребителя JA-37
«Вигген» имеет значительно лучшие характеристи-
ки, чем у индикатора ЕР-08, применяемого на са-
молете AJ-37 «Вигген». При разработке индикатора
ЕР-12 фирма использовала оптическую систему и
электронно-лучевую трубку, выпускаемые фирмами
Маркони-Эллиот и Смит. В новом индикаторе обес-
печена почти полностью цифровая обработка сиг-
налов.
Выпускается также оборудование РПД и систе-
мы предупреждения летчика об облучении самоле-
та радиолокаторами противника.
Из прочих фирм АКП Швеции следует упомя-
нуть фирму STAN SAAB, акции которой принадле-
жат фирме SAAB-Сканиа и государству. Эта фир-
ма выпускает автоматические системы управления
воздушным движением военного и гражданского
назначения и имеет значительные экспортные за-
казы [2].
1. Brindley J. F. Sweden's aerospace industry at the
crossroads.
Interavia World Review of AAA, 1978, v. 34, VII. N 7,
p. 619-626.
2. Boyle D. Swedish industry looks ahead.
Interavia World Review of AAA, 1976, v. 31. II. N 2,
p. 131—134.
3. Interavia Air Letter, 1978, 19/1, N 8926, p. I
4. Interavia Air Letter, 1978, 3/VIII, N 9060, p. 8.
5. Interavia Air Letter, 1979, 26'11. N 9201, p. 4
6, Jane's All the World Aircraft, 1977—78, p. 166.
7. Interavia Air Letter, 1979. 9/1, N 9167, p. 7.
8. ABC Interavia, 1977. p. 612—615.
9. World missile directory.
Flight International, 1979, v. 115, 2/VI. N 3663, p. 1820—
1866
10. Flight International, 1978, v. 114, 29/VII. N 3619, p. 336.
II. Air International, 1979, v. 16, I, N I, p. 3.
12. Interavia Air Letter, 1979, 19/IV, N 9237, p l I
13. Interavia Air Letter, 1979, 26/VI, N 9282, p. 8.
14. Flight International, 1979, v. 116. I4'VII. N 3669, p. 71.
15. Flight International, 1979, v. 116, 1 IX. N 3676, p. 641.
16. Interavia Air Letter, 1978, 11/XII. N 9151, p. 3.
17. Hanover air show renamed but not reborn.
Interavia World Review of AAA, 1978, v. 33. VI, N 6, p. 494.
18. Flight International, 1978, v. 114, 30/IX, N 3628, p. 1245.
19. Air et Cosmos, 1979. 9/VI, N 769, p. 148.
20. Flight International. 1979, v. 115, 9/VI, N 3664, p 1980.
Референты Г В. Крутикова. Е. II. Новикова.
.TH", ОНТИ НАГИ, 1979, № 22, 1—28.
И. о. ответственного редактора Ю. Я. Шилов
Технический редактор Т. Ф. Рыкуи Корректор Л. Д. Курдюкова
Сдано и набор 25.09.79. Подписано в печать 1S.1I.79. Формат бумаги ДОх90‘ ». Типографская № 1. Литературная гарнитура.
Высокая печать. Бум. л. 1,75. Уел. печ. л. ЗД Уч.-изд. л. 4.34. Тираж 2870 экз. Цена 5S коп.
Типография ЦЛГИ. Зак. 993.
Индекс 6183