/





















































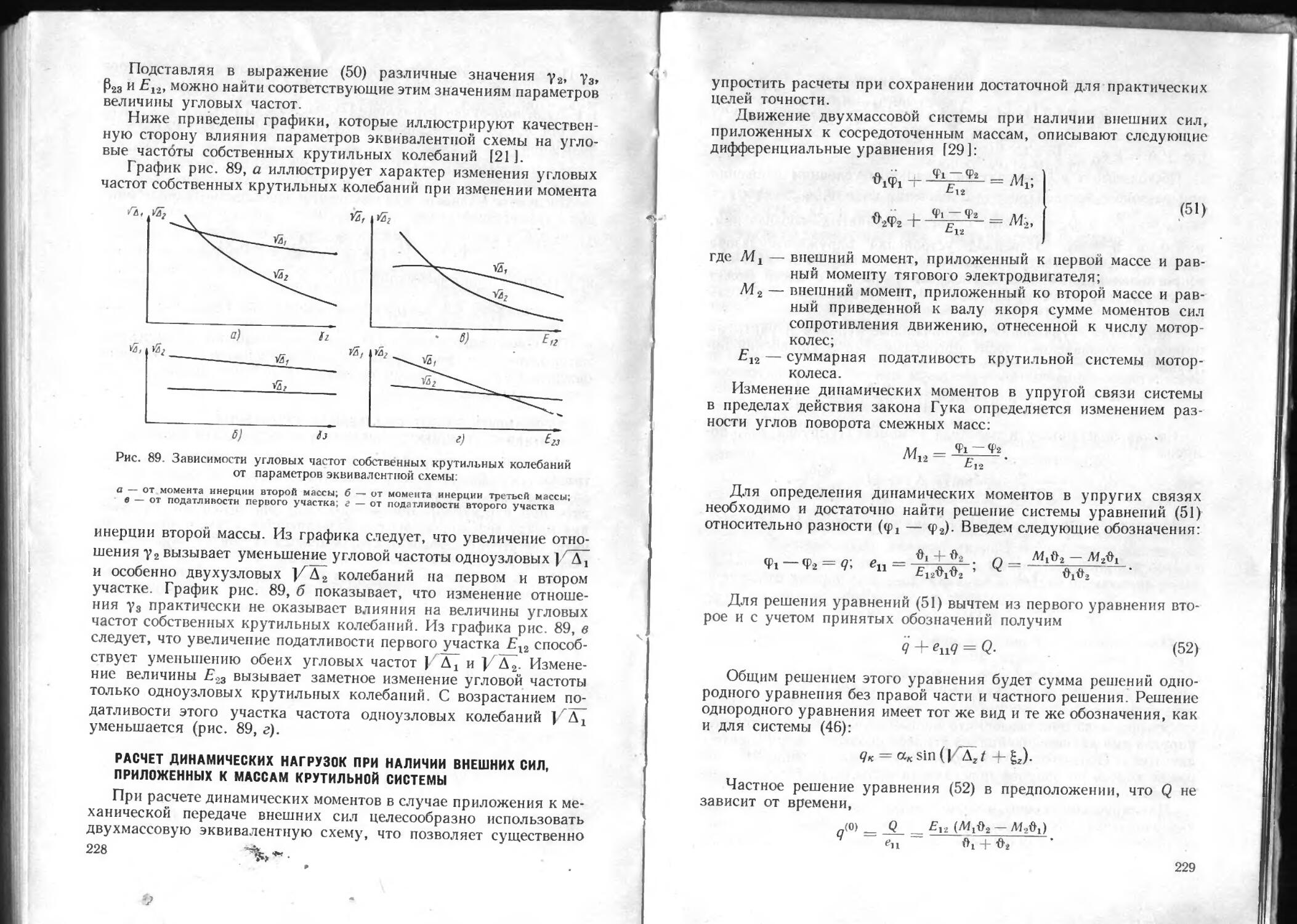


Author: Яковлев А.И.
Tags: техника средств транспорта электротехника конструкции автомобили
Year: 1970




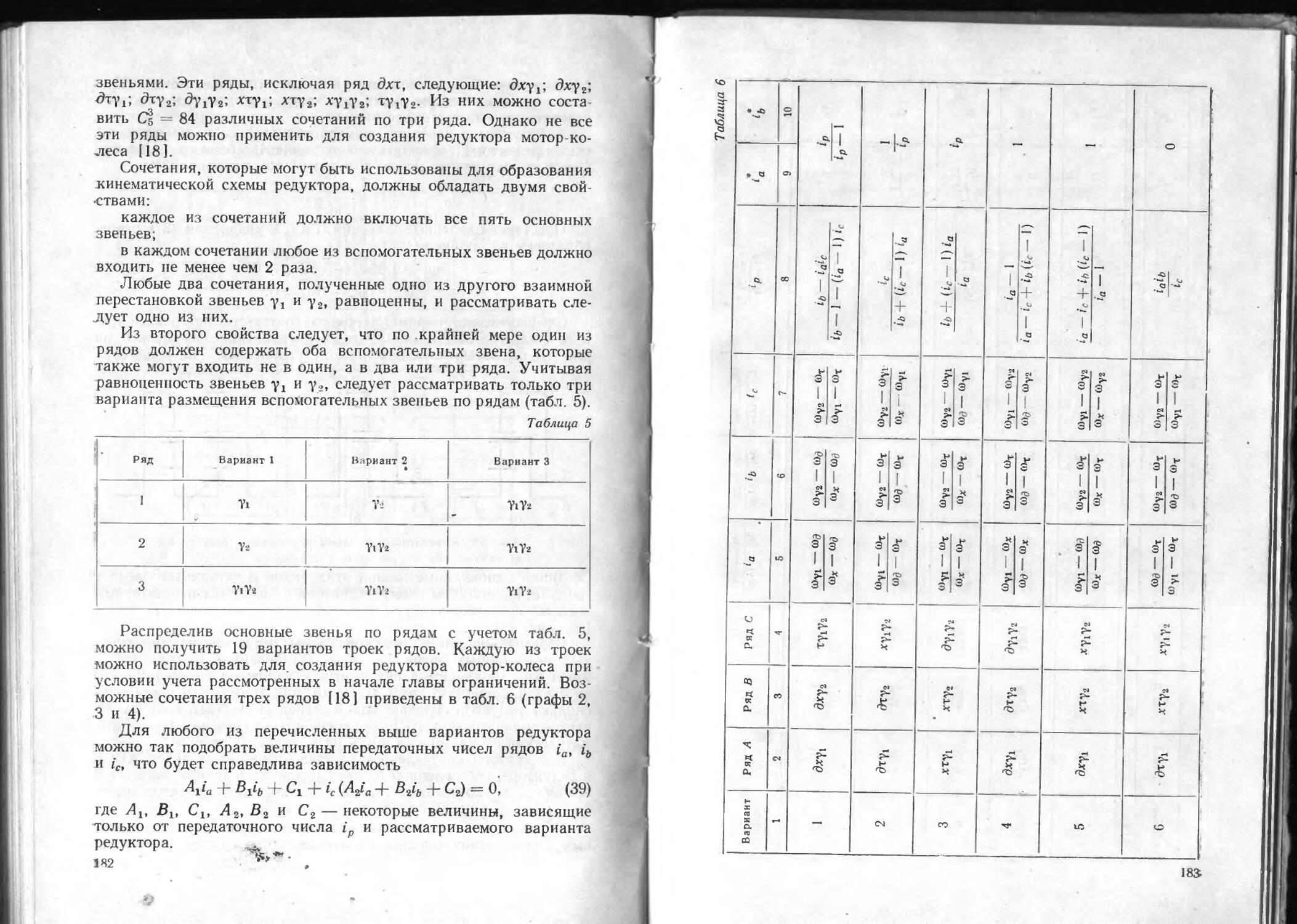
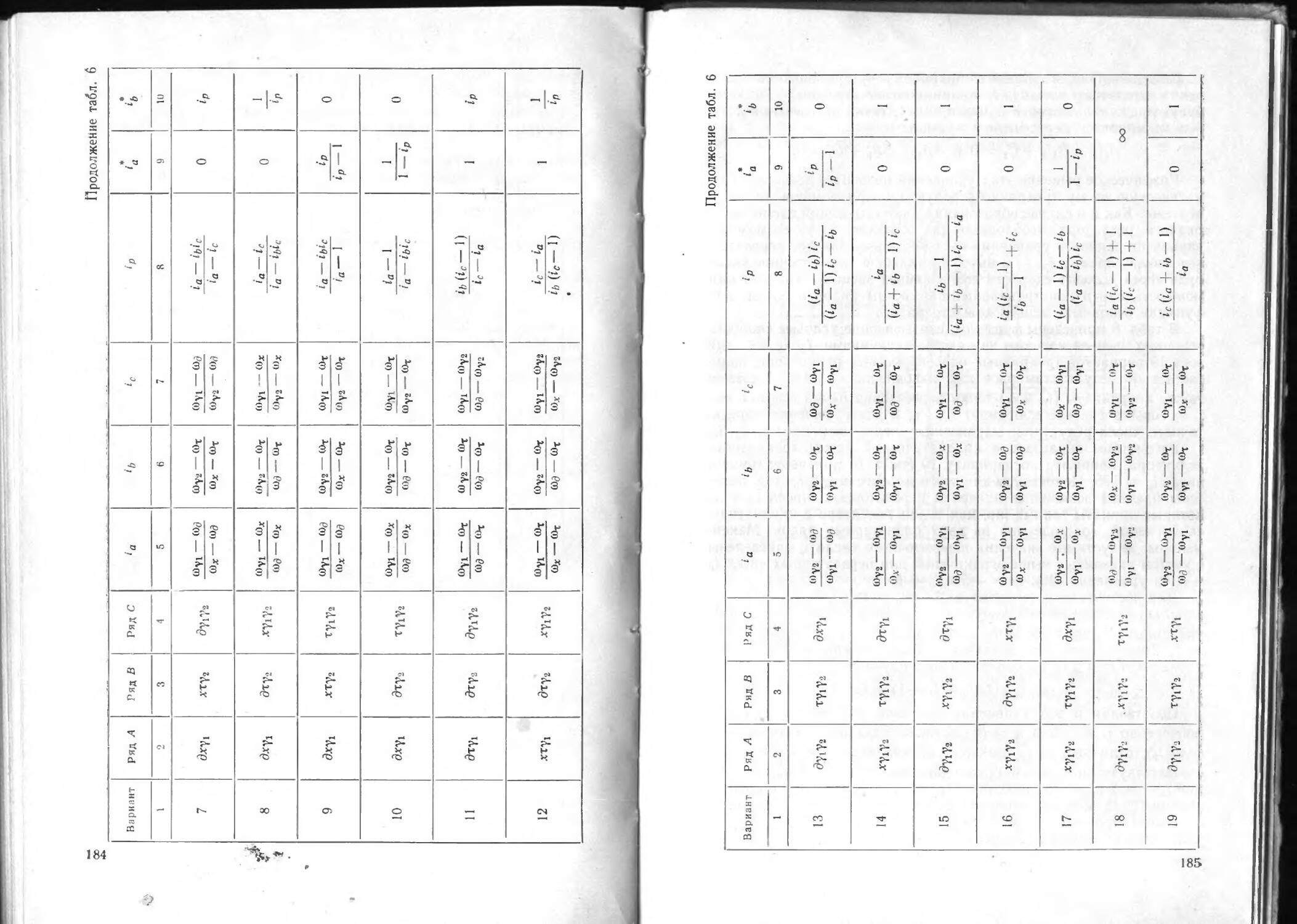
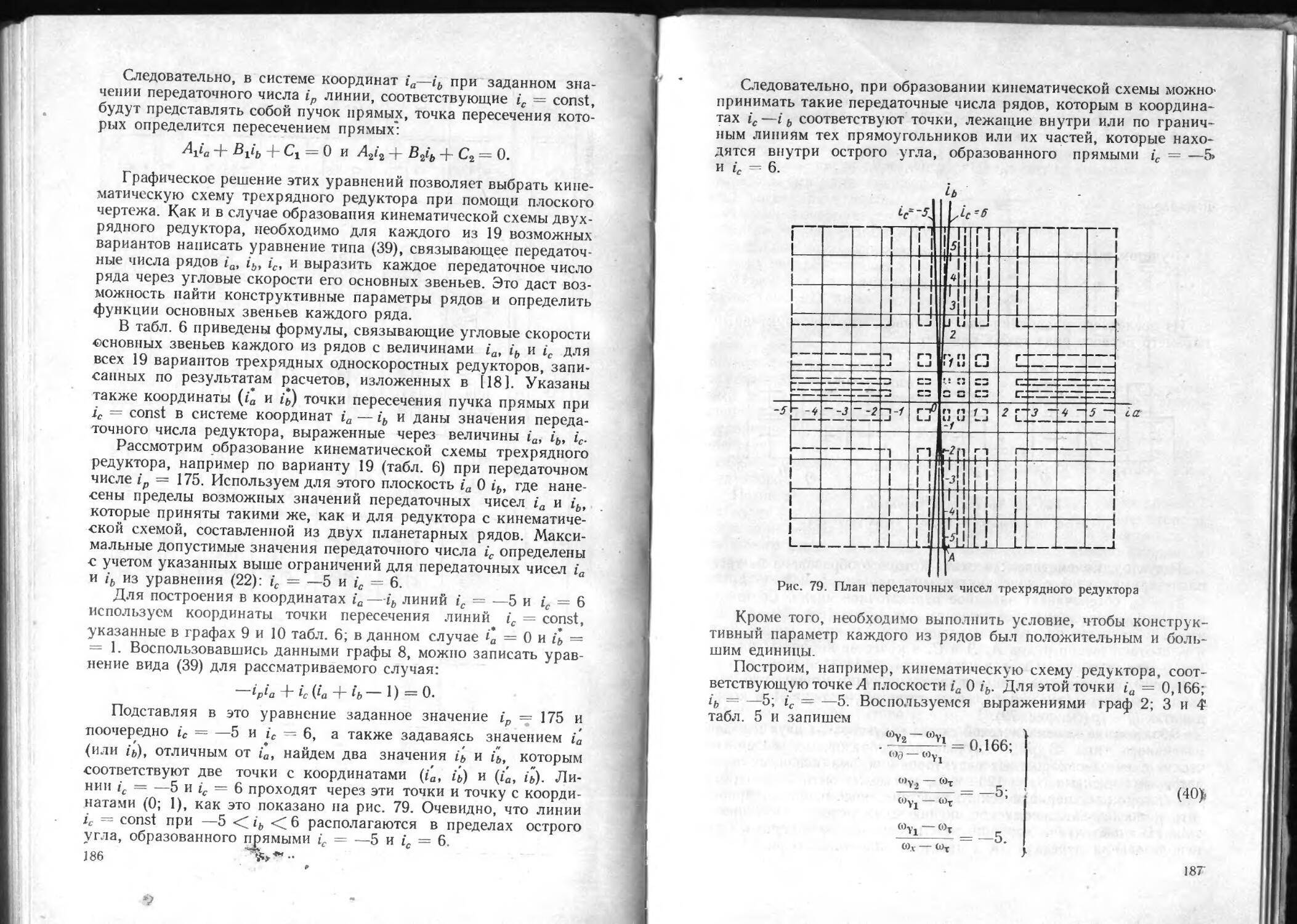
Text
И. Яковлев г г. 1 Л. 11 * г
dfl-i
ЭЛЕКТРОМОТОР КОЛЕС
Конструкция и расчет
JL
А. И. ЯКОВЛЕВ
КОНСТРУКЦИЯ И РАСЧЕТ ЗЛЕКТР0М0Т0Р-К0ЛЕС
Издательство „М ашиностроени Москва 1970
ян
УДК 629.11.012.3 : 621.313.13.001.2
Конструкция и расчет электромотор-колес.
М.» «Машиностроение», 1970., стр 240
В книге сформулированы задачи расчета и основы теории мотор-колеса, рассмотрена компоновка мотор-колес и конструкция их основных узлов и механизмов. Изложена методика тягово-динамического расчета мотор-колеса при заданных электромеханических характеристиках электродвигателя и определения параметров электродвигателя по заданным показателям транспортной машины и мотор-колеса.
Рассмотрены особенности и методика выбора кинематических схем редукторов односкоростных и двухскоростных мотор-колес, дан анализ свойств передач, применяемых в редукторах мотор-колес. Изложены особенности расчета механической передачи мотор-колеса, включая выбор расчетных нагрузок, и рекомендован целесообразный объем аналитических расчетов динамических нагрузок при проектировании мотор-колеса.
Книга рассчитана на инженерно-технических работников, специализирующихся в области электропривода автомобилей и автопоездов. Табл. 7, илл. 89, библ. 45 назв.
Рецензент канд. техн, наук П. Н. Иванченко
385-69
ПРЕДИСЛОВИЕ
Быстрый рост грузоперевозок в ряде районов Советского Союза, еще не имеющих достаточно развитой сети усовершенствованных дорог, необходимость перемещения больших количеств грунта и породы при земляных работах и в карьерах, потребность в маневренном колесном транспорте для перевозки разнообразных грузов вне дорог настоятельно требуют создания колесных транспортных средств большой грузоподъемности и высокой проходимости.
В отечественном и зарубежном автомобилестроении грузоподъемность и проходимость повышают увеличением числа ведущих осей машины и нагрузки на ось, а также созданием двухзвенных и многозвенных машин.
Серьезной технической проблемой, которую приходится решать при создании таких машин, является выбор силового привода ведущих колес. Предпочтение часто отдают электрическому приводу, применение которого решает задачу рационального дробления и передачи мощности от силовой установки к веду щим колесам при любой колесной формуле независимо от числа звеньев транспортной машины. Это свойство электропривода позволяет создать принципиально новые пневмоколесные транспортные машины высокой проходимости и практически любой грузоподъемности, привод которых осуществлен при помощи системы «электромотор-колесо».
Несмотря на то, что электромотор-колеса как система привода известны свыше 50 лет, а их производство как опытное, так и серийное осуществляется около 10—15 лет, технической литературы, посвященной анализу существующих образцов, методам
выбора их параметров и расчета основных элементов, а также основным принципам конструирования, крайне мало.
В данной книге сделана попытка комплексно рассмотреть основы теории, связанной с расчетом и конструкцией электро-мотор-колес. Книга рассчитана на инженерно-технических работников проектпо-конструкторских организаций и автомобильных заводов, осуществляющих разработку и производство транспортных машин с электромотор-колесами.
Рассмотренные вопросы находятся в прямой связи с содержанием ранее изданной работы «Электропривод автомобилей и автопоездов» [40].
I ОБЩАЯ ХАРАКТЕРИСТИКА МОТОР-НОЛЕС |а И ОСНОВЫ ИХ РАСЧЕТА
ОБЛАСТЬ ПРИМЕНЕНИЯ МОТОР-КОЛЕС
Электромотор-колесо (мотор-колесо) является исполнительным механизмом системы тягового электропривода пневмоколес -ной транспортной машины. Мотор-колесо осуществляет преобразование электрической энергии, вырабатываемой двигатель-гене-ратором, в механическую энергию, реализуемую при движении машины.
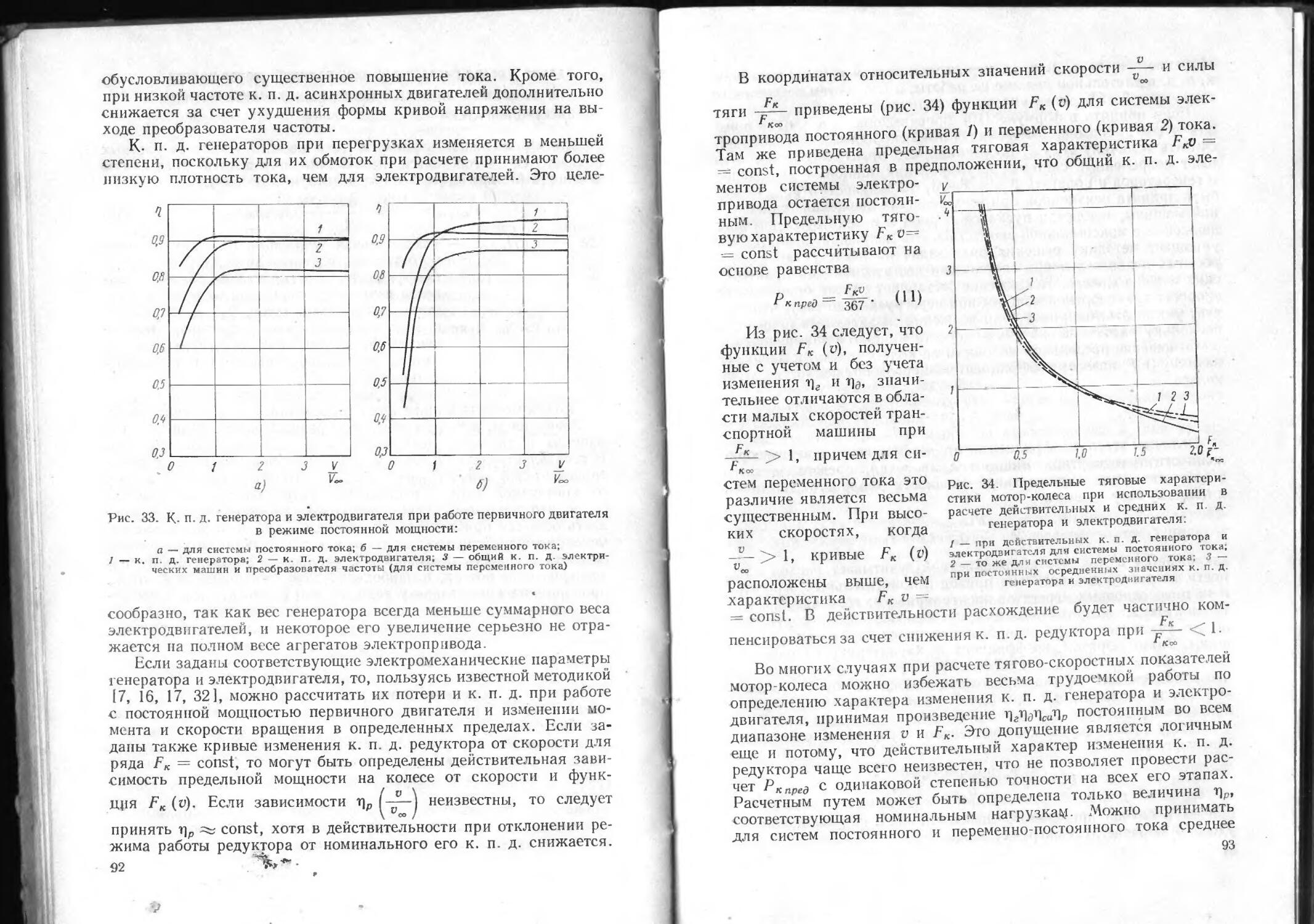
Мотор-колесо представляет собой агрегат, в котором конструктивно объединены все элементы исполнительного механизма:
электродвигатель;
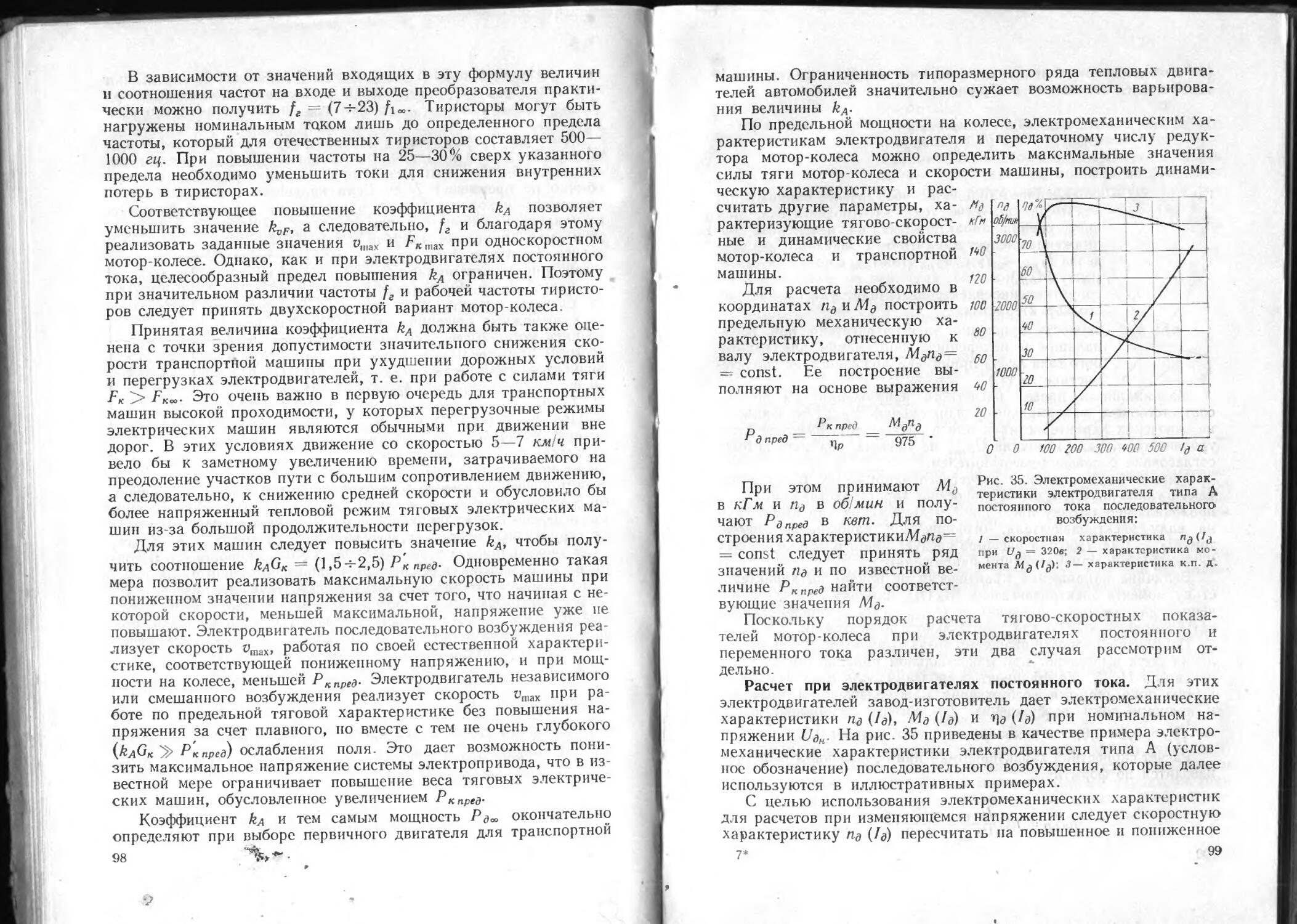
механическая передача, состоящая из редуктора, механизма сочленения вала электродвигателя с ведущим звеном редуктора и (в некоторых образцах) механизма переключения передач или сцепления с приводом;
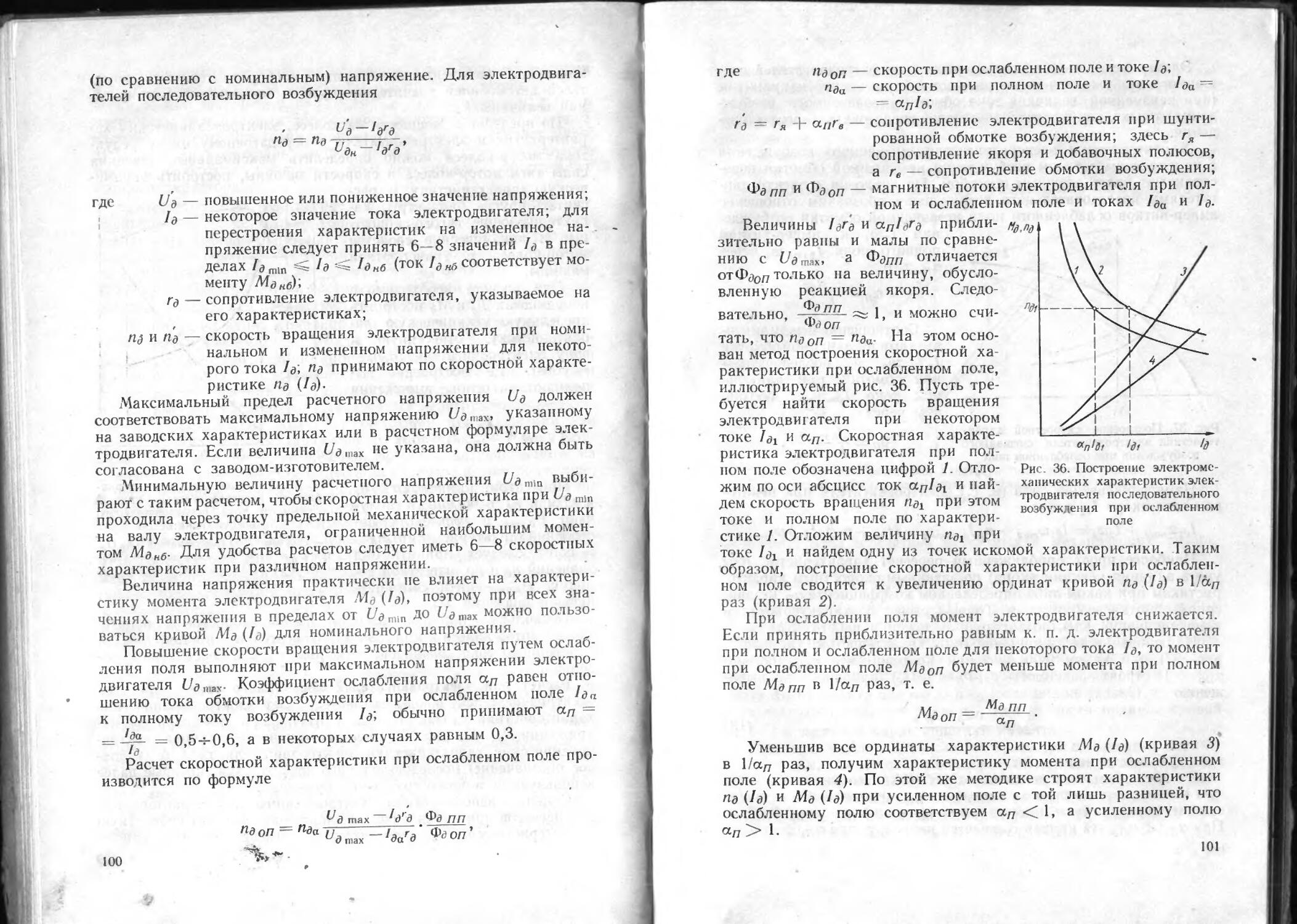
колесо, состоящее из шины (с камерой или без нее) с ободом и ступицей или только с ободом;
тормозной механизм с соответствующим приводом, осуществляющий механическое торможение мотор-колеса;
механизм или элементы подвески мотор-колеса к раме транспортной машины.
Характерной особенностью конструкции мотор-колеса является весьма рациональная компоновка его элементов, в частности, размещение электродвигателя полностью или частично внутри обода колеса, а также сведение к минимуму числа и размеров деталей механической передачи.
В последние годы область применения мотор-колес на транспортных и специализированных машинах различного назначения непрерывно расширяется. Это объясняется тем, что использование мотор-колес открывает новые технические возможности в создании колесных машин принципиально новой конструкции, для которых трансмиссия в виде индивидуального электропривода ведущих колес является единственно возможной или целесообразной.
5
Основными критериями, определяющими целесообразность применения индивидуального электропривода с мотор-колесами на транспортных машинах взамен механического или гидромеханического привода или группового электропривода, являются следующие:
вес агрегатов и узлов привода в сравниваемых вариантах; эксплуатационные свойства (надежность в работе, объем и периодичность технического обслуживания);
к. п. д. системы привода;
срок службы агрегатов;
стоимость агрегатов и узлов привода в сравниваемых вариантах и эксплуатационные расходы за расчетный срок службы.
Соответствующие исследования, проведенные применительно к конкретным типам автомобилей и автопоездов, показывают экономическую целесообразность применения системы электропривода с мотор-колесами па автомобилях и автопоездах грузоподъемностью свыше 50 Т, а также на ряде многоприводных транспортных машин 114]. Это подтверждается практикой создания определенных образцов автомобилей и автопоездов с электроприводом.
В настоящее время как в Советском Союзе, так и за рубежом создан ряд образцов машин с мотор-колесами, имеющих различное назначение и работающих в разных эксплуатационных условиях. Основное применение мотор-колеса находят на транспортных машинах большой и особо большой грузоподъемности: на карьерных автомобилях-самосвалах грузоподъемностью 50—180 Т, двухзвенных автопоездах грузоподъемностью до 200 Т, автопоездах для перевозки особо тяжелых неделимых грузов или сыпучих тел, многозвенных и двухзвенных полноприводных автопоездах, а также на дорожно-строительных и землеройно-транспортных машинах: скреперах, автогрейдерах, грейдер-элеваторах, бульдозерах. Созданы образцы многоприводных автомобилей и автобусы с мотор-колесами. Ведутся работы по применению мотор-колес для активизации полуприцепов двухзвенных автопоездов.
Успехи, достигнутые в последние годы отечественной автомобильной и электротехнической промышленностью, создали благоприятные предпосылки для разработки и внедрения на транспортных машинах мотор-колес разнообразной конструкции.
Основные параметры мотор-колес определяются техническими и эксплуатационными характеристиками транспортной машины. Вместе с тем возможно создание новых транспортных машин на базе существующих мотор-колес с применением двигатель-гене-ратора, обеспечивающего питание электроэнергией определенного числа электродвигателей мотор-колес данной конструкции. В этом проявляется характерное свойство мотор-колеса как самостоятельного агрегата электропривода транспортной машины, который можно применить на ряде машин, помимо той, для которой он был создан.
6
ОСНОВНЫЕ ГРУППЫ МОТОР-КОЛЕС
В зависимости от режима работы системы тягового электропривода с мотор-колесами последние делят на:
мотор-колеса для транспортных машин с электроприводом постоянного действия (мотор-колеса постоянного действия);
мотор-колеса для транспортных машин с электроприводом периодического действия (мотор-колеса периодического действия).
Мотор-колеса постоянного действия делят на:
мотор-колеса с ограниченным диапазоном регулирования, у которых диапазон регулирования крутящего момента и числа оборотов на колесе ограничен характеристиками односкоростного тягового электродвигателя (первая группа);
мотор-колеса с расширенным диапазоном регулирования, у которых расширение диапазона регулирования крутящего момента и числа оборотов на колесе достигнуто за счет специальной конструкции тягового электродвигателя или редуктора (вторая группа).
Мотор-колеса периодического действия составляют третью группу.
Для мотор-колес первой группы характерно постоянное передаточное число между тяговым электродвигателем и колесом. Пределы регулирования крутящего момента и числа оборотов у таких мотор-колес относительно невелики, и их расширение может быть достигнуто лишь увеличением размеров электродвигателя, что не всегда возможно по конструктивным соображениям и целесообразно с точки зрения весовых характеристик агрегата.
Мотор-колеса первой группы в настоящее время нашли сравнительно широкое применение на транспортных’ машинах с автономным питанием. Их используют также на дорожно-строительных машинах и троллейвозах (грузовых безрельсовых транспортных машинах с питанием электродвигателей от контактной сети). Они могут оказаться также перспективными для троллейбусов и автобусов с электроприводом.
Для мотор-колес второй группы характерно переменное передаточное число между тяговым электродвигателем и ведущим колесом или использование двухскоростных асинхронных двигателей. Передаточное число между электродвигателем и колесом можно изменять ступенями при использовании редукторов с двумя передачами, или плавно, в случае введения между электродвигателем или редуктором гидравлической передачи.
Мотор-колеса с гидротрансформатором или объемной гидравлической передачей, встроенной между электродвигателем и редуктором, не получили распространения и поэтому в данной книге нс рассмотрены. Двухскоростные мотор-колеса, имеющие редуктор с двумя передачами, нашли практическое применение на транспортных машинах различных типов.
7
Мотор-колеса второй группы существенно расширяют диапазон регулирования тягово-скоростных показателей и могут быть использованы на транспортных машинах, эксплуатируемых в самых различных условиях. При соответствующем выборе передаточных чисел редуктора на обеих передачах или параметров двухскоростного ансихропного двигателя, а также в случае применения специальных шин мотор-колеса второй группы могут обеспечить проходимость транспортной машины в трудных дорожных условиях и движение с достаточно высокой скоростью по усовершенствованным дорогам.
Особенностью работы мотор-колес третьей группы, используемых па прицепах и полуприцепах двухзвенных автопоездов, является включение электродвигателей лишь на низших передачах тягача во время преодоления труднопроходимых участков дороги.
С переходом на высшие передачи якорь (ротор) электродвигателя и наиболее быстроходные звенья редуктора должны быть механически отключены от колеса механизмом сцепления, так как в случае их вращения вхолостую со скоростью, в несколько раз превышающей расчетное значение, в якоре электродвигателя и деталях редуктора возникнут значительные центробежные силы, которые могут вызвать выход из строя этих деталей. Кроме того, резко возрастут гидравлические потери в редукторе и потери на трение якоря электродвигателя о воздух.
Согласование чисел оборотов колес с механическим или гидравлическим приводом и колес с электрическим приводом в большинстве случаев требует выполнения редуктора мотор-колеса с большим передаточным числом, определяемым передаточным числом трасмиссии тягача на низших передачах и скоростью вращения тягового электродвигателя.
• Конструкция мотор-колеса периодического действия должна допускать движение автопоезда задним ходом с включенным электроприводом, что необходимо для повышения его маневренности и проходимости.
Особенностью мотор-колес третьей группы является также конструкция тормозного механизма, который не должен быть связан с валом тягового электродвигателя, так как последний при переходе па высшие передачи механически отключается от колеса.
СХЕМА РАСЧЕТА МОТОР-КОЛЕСА
Общей задачей расчета и конструирования мотор-колеса является создание агрегата, обеспечивающего реализацию заданных тягово-скоростных показателей транспортной машины и обладающего конструктивными параметрами, допускающими его установку на машине.
8
Расчет мотор-колеса представляет собой сложную задачу, при решении которой необходимо в равной степени учитывать как параметры автономного источника электроэнергии и системы регулирования электропривода, так и технические характеристики транспортной машины и колесного движителя. При этом имеется достаточно широкая возможность поиска наиболее целесообразного варианта сочетания параметров основных элементов мотор-колеса, обеспечивающего при его оптимальных характеристиках реализацию заданных тягово-скоростных показателей машины.
Методы расчета отдельных элементов мотор-колеса, например тягового электродвигателя, многопоточного планетарного или непланетарного редуктора и пр., хорошо известны. Однако сумма методов расчета отдельных элементов мотор-колеса еще не позволяет решить общую задачу расчета мотор-колеса. Необходим комплексный метод, учитывающий как взаимозависимость параметров элементов мотор-колеса, так и их зависимость от параметров остальных элементов электропривода, а также транспортной машины.
Следует особо подчеркнуть, что в задачи расчета мотор-колеса непосредственно не входит выбор шины и рода тока системы электропривода. Тип шины, ее размеры и нагрузка определяются характеристиками, назначением и условиями эксплуатации транспортной машины. Род тока выбирают с учетом совокупности технико-экономических факторов, которые должны быть рассмотрены одновременно с решением вопроса о применении первичного двигателя определенного типа. Поэтому тип и размеры шины, а также род тока электродвигателя при расчете мотор-колеса следует рассматривать в качестве заданных исходных факторов.
При разработке методики выбора передаточного числа редуктора мотор-колеса важно оценить допустимое использование перегрузочной способности электродвигателя при наиболее тяжелых условиях движения транспортной машины.
Для большинства видов электрического транспорта перегрузочную способность но моменту электродвигателей стремятся использовать полностью, что учитывают при выборе передаточного числа редукторов. Для автомобилей и автопоездов с электроприводом подобное решение вопроса допустимо лишь в случае их эксплуатации на усовершенствованных дорогах с ограниченными по величине подъемами при условиях, когда возможны лишь кратковременные перегрузки электродвигателей.
Перегрузочную способность по моменту электродвигателей автомобилей и автопоездов, эксплуатируемых вне дорог при весьма большом общем сопротивлении движению, нельзя использовать в полной мере, поскольку длительность перегрузок может быть относительно большой, тогда как работа электродвигателя
9
с максимальной перегрузкой допустима лишь кратковременно. Поэтому при оценке допустимого использования перегрузочной способности электродвигателя мотор-колеса необходим анализ эксплуатационных характеристик транспортной машины.
Методика выбора передаточного числа редуктора односкоростных мотор-колеса должна учитывать возможность принятия за исходные величины максимального динамического фактора или максимальной скорости машины. Однако для большинства автомобилей и автопоездов, на которых применен электропривод, определяющим параметром является максимальный динамический фактор.
При выборе передаточных чисел двухскоростных мотор-колес принимают во внимание принципиально важный вопрос о допустимости переключения передач во время движения транспортной машины или только па стоянках. При разработке методики выбора передаточного числа мотор-колес периодического действия двухзвенных автопоездов необходимо исходить из особенностей и параметров привода как тягача, так и полуприцепа.
/Методика расчета оптимальных параметров электродвигателей для мотор-колес включает определение группы исходных факторов в соответствии с характеристиками транспортной машины и шины. Исходя из этих факторов могут быть рассчитаны основные параметры электродвигателя для односкоростного или двухскоростпого мотор-колеса. Однако расчет электромагнитных параметров электродвигателя и его конструирование относятся к области проектирования электрических машин и не входят в задачи проектирования мотор-колеса. Поэтому следует путем тяговых расчетов определить необходимые электромеханические параметры электродвигателя в соответствии с заданным родом тока и выбрать электродвигатель из числа существующих, а если нет подходящих образцов серийного производства, то составить техническое задание на проектирование электродвигателя специализированными организациями.
Особенностью методики определения необходимых параметров электродвигателей постоянного тока для мотор-колес является необходимость задания формы механической характеристики в зависимости от типа и назначения автомобиля или автопоезда. Как известно, форма механической характеристики электродвигателя влияет на некоторые свойства электропривода постоянного тока колссных транспортных машин. Разнообразие параметров шин, различие колесных формул и условий эксплуатации автомобилей требует выбора оптимальной формы механической характеристики для каждой группы машин определенного типа и назначения. Этого достигают как выбором параметров электродвигателя, так и соответствующим изменением его магнитного потока, что обеспечивает система регулирования.
10 .
Методика определения параметров электродвигателя постоянного тока включает анализ критериев для выбора оптимальной в данных условиях системы возбуждения. В электрической тяге это вопрос не новый, однако применительно к мотор-колссам автомобилей его надо решать с учетом комплекса факторов, характерных для этого вида транспортных машин.
Методика определения оптимальных параметров тяговых асинхронных двигателей мотор-колес в части исходных факторов аналогична методике, применимой к электродвигателям постоянного тока. При определении необходимых параметров асинхронных двигателей надо учитывать функциональные свойства систем регулирования электропривода. Следует различать случаи, когда обеспечивается регулирование напряжения в зависимости от частоты по определенному закону или осуществляется только ступенчатое регулирование тока возбуждения синхронного генератора, который в определенном диапазоне изменения параметров рабочего режима асинхронного двигателя остается постоянным. Первый случай соответствует системам электропривода с преобразователями частоты. Во втором случае, характерном для электропривода периодического действия, при выборе параметров асинхронного двигателя и оценке режимов его работы необходимо учитывать влияние реакции якоря по продольной оси синхронного генератора на форму механической характеристики электродвигателя.
При отсутствии узлов регулирования для каждого асинхронного двигателя выбирать его параметры необходимо с учетом распределения нагрузки между электродвигателями транспортной машины.
Следует подчеркнуть значение выбора максимальной скорости вращения электродвигателей как постоянного, так и переменного тока. Повышение быстроходности способствует снижению удельного веса электродвигателя, но приводит к усложнению редуктора и увеличению его веса. При достаточно высоких скоростях вращения электродвигателя существует оптимальное решение, при котором суммарный вес этих элементов мотор-колеса будет минимальным.
В случае использования в проектируемом мотор-колесе существующего тягового электродвигателя рассчитывают его электромеханические характеристики при различных значениях напряжения и (для асинхронных двигателей) частоты. Результаты расчета позволяют оценить с учетом величины мощности первичного двигателя, передаваемой на колесо, соответствие характеристик электродвигателя заданным тягово-скоростным показателям машины и дают исходные величины для определения электрических параметров генератора.
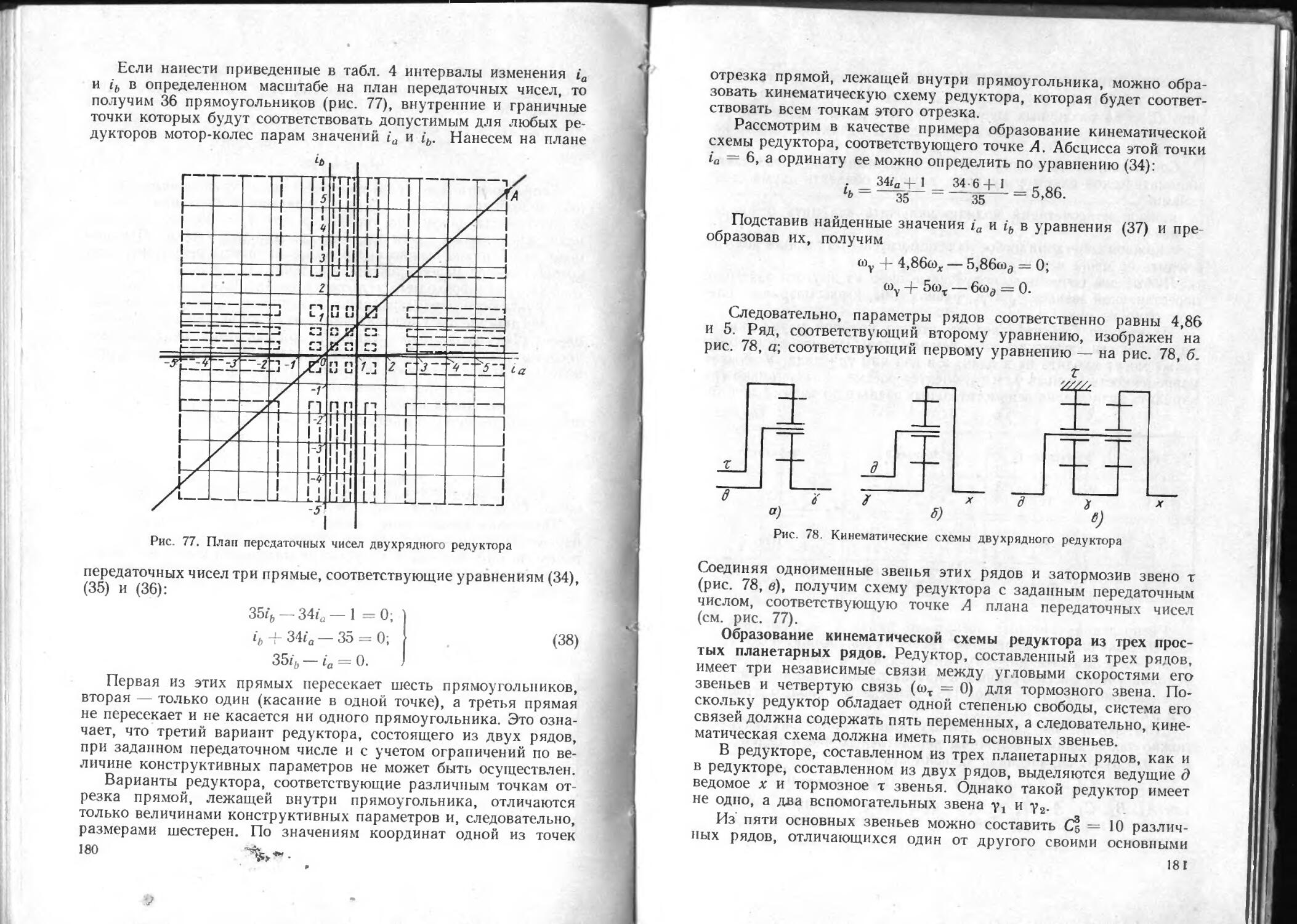
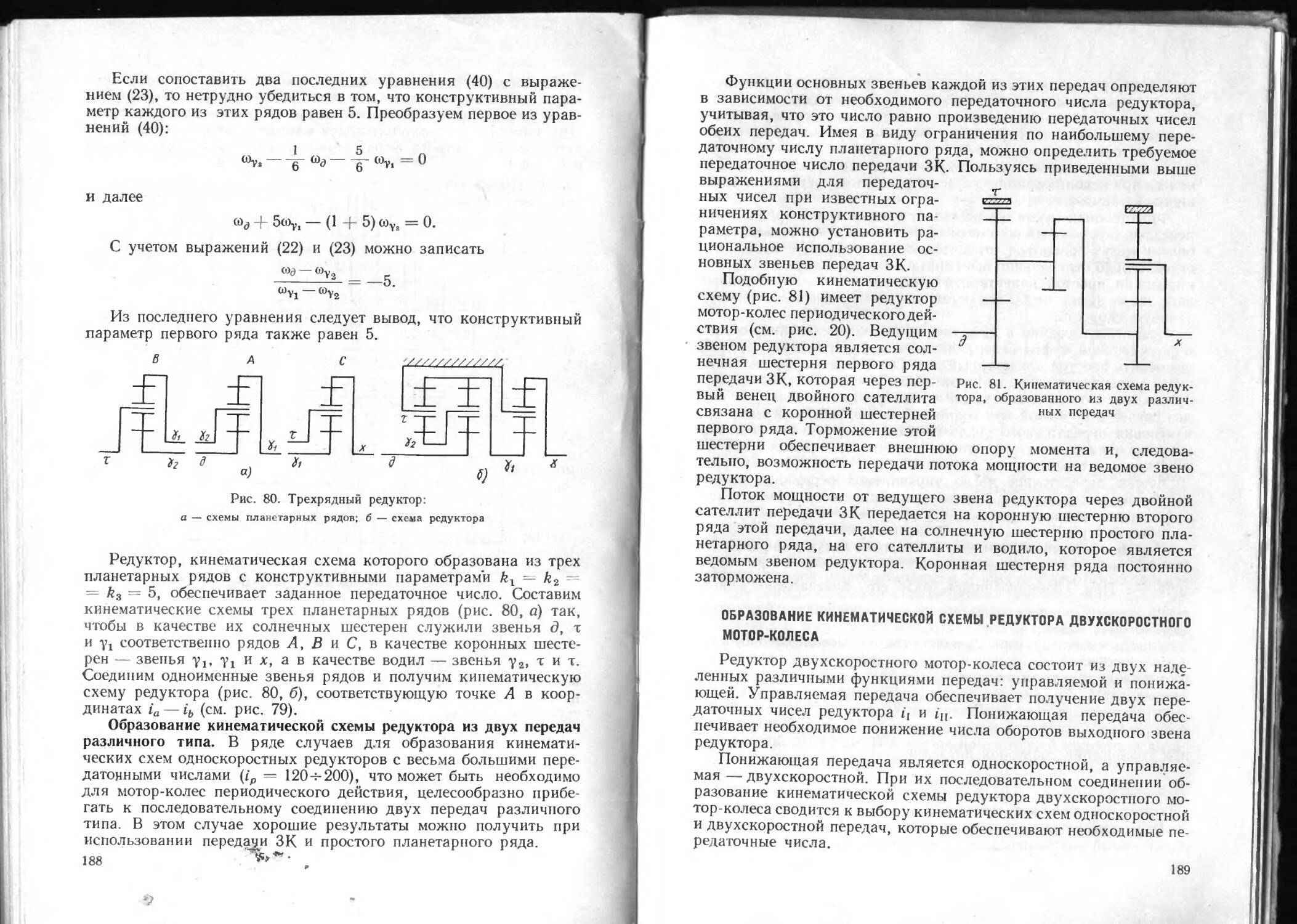
Выбор кинематической схемы редуктора мотор-колеса сравнением ряда вариантов должен обеспечить получение возможно более простой схемы с удовлетворительным значением к. п. д. при задан
ном передаточном числе. При этом следует учитывать те ограничения в образовании кинематичесих схем редукторов, которые обусловлены специфическими особенностями мотор-колес.
Задача заключается в том, чтобы, используя известные методы образования кинематических схем редукторов и учитывая упомянутые ограничения, создать редуктор с наиболее удачным сочетанием конструктивных, весовых и эксплуатационных параметров.
Поиск оптимальной кинематической схемы редуктора требует анализа параметров как планетарных, так и неплапетарных передач, которые нашли применение или могут быть использованы в редукторах мотор-колес.
При необходимости обеспечить весьма широкий диапазон регулирования тягово-скоростных показателей транспортной машины следует решить вопрос о предпочтительности одного из двух возможных решений: увеличения размеров электродвигателя или применения редуктора с переключением передач. Должны быть приняты во внимание соображения как конструктивного (общая масса мотор-колеса, степень сложности конструкции), так и эксплуатационного (надежность работы механизма переключения, дополнительные потери мощности в мотор-колесе, обусловленные наличием механизма переключения) характера. Отношение передаточных чисел на первой и второй передаче существенно влияет на кинематическую схему и другие параметры редуктора.
Механическую передачу мотор-колеса на прочность и выносливость рассчитывают известными в автомобилестроении методами. Особенности заключаются в выборе расчетных нагрузок и учете динамических нагрузок. Определение расчетных нагрузок для механической передачи мотор-колеса требует анализа режимов работы транспортной машины и допустимого использования перегрузочной способности электродвигателя. Методика расчета динамических нагрузок в механической передаче мотор-колеса, основанная на общих методах анализа динамических процессов в крутильной многомассовой системе, должна также учитывать ряд особенностей системы мотор-колеса, отличающих ее от силовых передач обычных автомобилей. Весьма специфичны также некоторые эксплуатационные режимы мотор-колес, создающие предпосылки для возникновения динамических нагрузок определенных видов. При проектировании мотор-колеса особенно важно выявить возможность возникновения устойчивого резонанса свободных и вынужденных колебаний в крутильной системе мотор-колеса в рабочем диапазоне скорости вращения электродвигателя.
Реализация тех задач, которые стоят перед расчетом мотор-колеса, не может быть завершена без выполнения компоновки его основных элементов. Если для различных видов расчета мотор-колеса может быть предложена соответствующая методика, то в отношении компановки можно лишь сформулировать общие
принципы и обобщить те решения, которые нашли применение в существующих образцах и разработках мотор-колес.
Вид компоновки оказывает значительное влияние на конструктивные и технико-эксплуатационные свойства мотор-колеса. При рациональной компоновке можно достигнуть снижения веса и уменьшения осевого размера мотор-колеса, однако не в ущерб его долговечности и условиям доступа к отдельным узлам, от чего зависит удобство их технического обслуживания.
Те или иные конструктивные решения, применяемые при проектировании определенных узлов и механизмов мотор-колес, могут повторяться во многих образцах в различных сочетаниях. Именно это обстоятельство, наряду с несколькими видами компоновки, создает то разнообразие конструкций, которое характерно для мотор-колес.
Ниже использован поэлементный и поузловой анализ конструкции мотор-колес, позволяющий в любом образце отыскать рациональные решения отдельных узлов и механизмов независимо от оценки конструкции мотор-колеса в целом. Систематизация апробированных решений и их использование при проектировании мотор-колес будут способствовать повышению надежности конструкции.
Основные задачи, объем и последовательность расчета и конструирования мотор-колеса можно сформулировать следующим образом:
определение исходных данных для проектирования мотор-колеса па основе технических характеристик транспортной машины, шины и первичного двигателя;
оценка допустимой перегрузки электродвигателя при его использовании на транспортной машине данного типа;
выполнение тяговых расчетов для определения параметров электродвигателя принятого рода тока, выбор электродвигателя из числа существующих или составление технического задания на его проектирование; определение передаточного числа редуктора;
выбор вида компоновки и предварительная компоновка мотор-колеса с использованием проектных размеров тягового электродвигателя и учетом конструктивного исполнения его корпуса и вала;
образование кинематической схемы редуктора, выбор величины расчетного момента и предварительный расчет на прочность деталей механической передачи, конструирование редуктора и других узлов механической передачи;
расчет и конструирование других узлов и механизмов мотор-колеса, уточнение его компоновки;
полный расчет на прочность и долговечность деталей механической передачи, в том числе оценка уровня динамических нагрузок и вероятности возникновения устойчивого резонанса крутильных колебаний в рабочем диапазоне скорости вращения электродв и гател я.
II КОМПОНОВКА И КОНСТРУКЦИЯ |1в МОТОР-КОЛЕС
ВИДЫ КОМПОНОВКИ МОТОР-КОЛЕС
Под компоновкой мотор-колеса понимают способ взаимного расположения его элементов и узлов в монтажном пространстве внутри обода и с его внутренней стороны. Вид компоновки в определенной степени зависит от особенностей конструкции транспортной машины, для которой предназначено мотор-колесо данного типа. В ряде случаев вид компоновки обусловлен типом колесного движителя. Выбранный вид компоновки оказывает существенное влияние на конструкцию отдельных элементов и мотор-колеса в целом, а также определяет его монтажные свойства.
Можно назвать два характерных признака, определяющих вид компоновки:
порядок расположения элементов мотор-колеса (электродвигатель, редуктор и пр.) внутри обода;
выбор опоры внутренних обойм подшипников колеса.
В соответствии с этими признаками способы компоновки мотор-колес можно разделить на семь видов.
Компоновка I вида (рис. 1) характерна тем, что внутри обода с наружной стороны располагают опору подшипников 3 колеса, а затем редуктор 2 и электродвигатель 1. При компоновке этого вида ни корпус редуктора, ни корпус электродвигателя не используются в качестве опоры подшипников колеса. Относительное расположение редуктора и электродвигателя 1 может быть соосным (рис. 1,а) или несоосным (рис. 1,6). Монтажный объем внутри обода используется не полностью, вследствие чего мотор-колесо при компоновке этого вида имеет большой’ осевой размер.
Эта компоновка допускает использование серийных трехэлементных ободьев колес с дисками и опорных подшипников колеса сравнительно небольшого размера, что позволяет применять уплотнения небольшого диаметра. Поэтому становится возможным устанавливать в мотор-колесах подшипники и сальники серийного производства. Поскольку при компоновке этого вида электродвигатель располагают вне обода колеса, к корпусу двигателя не предъявляется каких-либо специальных требований. Несмотря 14
9
на известные преимущества, компоновку I вида па практике почти не используют из-за значительной величины осевого размера мотор-колеса.
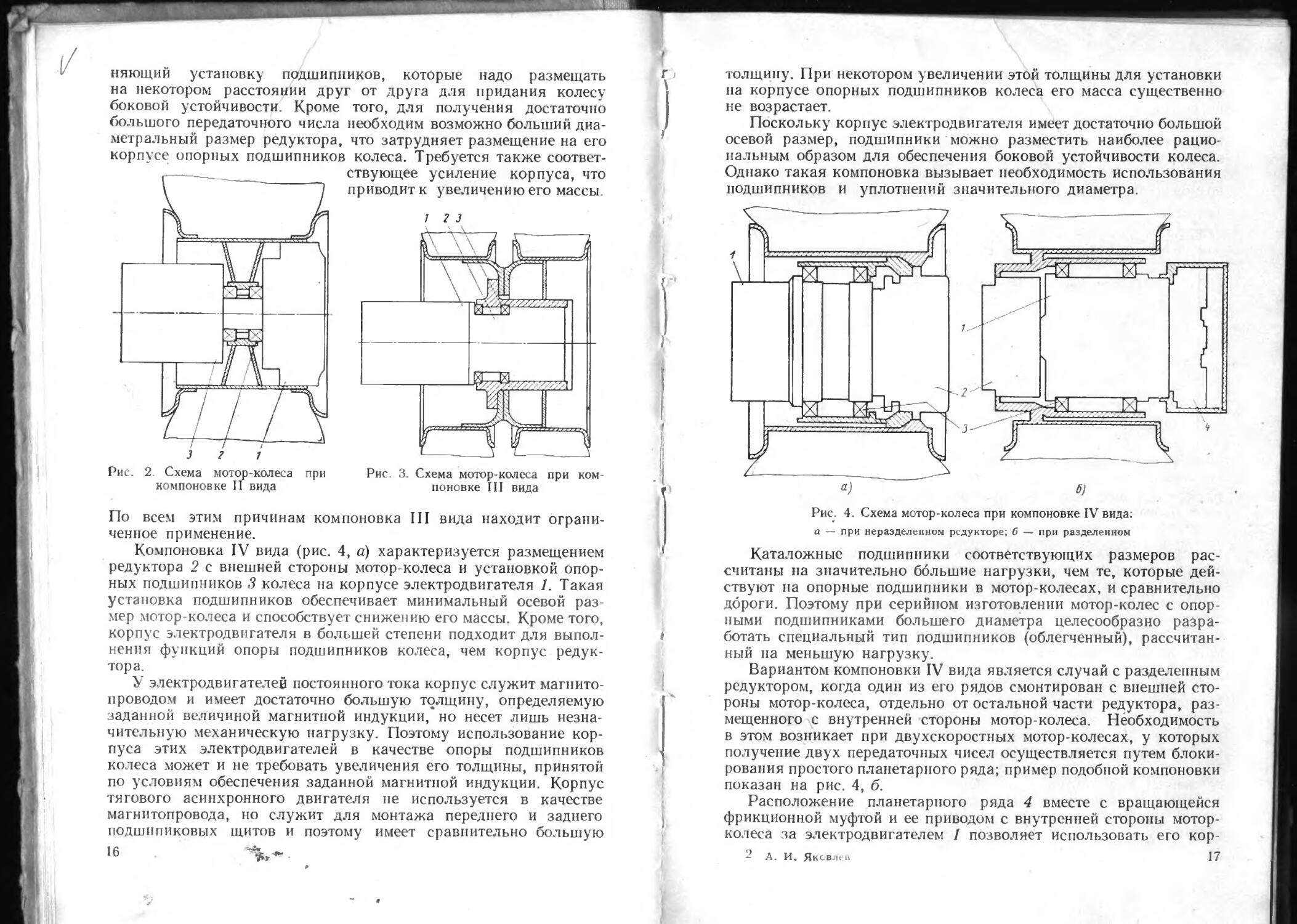
Компоновка II вида отличается тем, что в монтажном объеме внутри обода с наружной стороны мотор-колеса располагают редуктор 1 (рис. 2), а опорные подшипники 2 колеса размещают между редуктором и электродвигателем 5, причем ни корпус редуктора, ни корпус электродвигателя не служат опорой подшипни-
Рис. 1. Схема мотор-колеса при компоновке I вида;
а — при соосном расположении электродвигателя и редуктора; б — при несоосном расположении.
ков колеса. По сравнению с компоновкой I вида здесь уменьшены осевые размеры мотор-колеса, поскольку редуктор целиком, а электродвигатель частично расположены внутри обода колеса-Однако ограниченный монтажный объем внутри обода и необходимость выполнения специальной опоры подшипников колеса позволяют использовать редукторы с ограниченным осевым размером, простой кинематической схемой и небольшим передаточным числом. Как и при компоновке I вида, здесь могут быть применены подшипники и уплотнения с небольшим наружным диаметром.
Компоновка III вида (рис. 3) отличается размещением редуктора 2 внутри обода с внешней стороны, а электродвигателя 1 с внутренней стороны мотор-колеса и использованием корпуса редуктора в качестве опоры подшипников 3 колеса. Все это сокращает осевые размеры мотор-колеса.
Однако при использовании корпуса редуктора для монтажа опорных подшипников колеса возникают трудности, так как корпус обычно имеет сравнительно небольшой осевой размер, затруд
15
няющий установку подшипников, которые надо размещать на некотором расстоянии друг от друга для придания колесу боковой устойчивости. Кроме того, для получения достаточно большого передаточного числа необходим возможно больший диаметральный размер редуктора, что затрудняет размещение на его корпусе опорных подшипников колеса. Требуется также соответ-
Рис. 2. Схема мотор-колеса при компоновке II вида
ствующее усиление корпуса, что приводит к увеличению его массы.
Рис. 3. Схема мотор-колеса при компоновке III вида
По всем этим причинам компоновка III вида находит ограниченное применение.
Компоновка IV вида (рис. 4, а) характеризуется размещением редуктора 2 с внешней стороны мотор-колеса и установкой опорных подшипников 3 колеса на корпусе электродвигателя 1. Такая установка подшипников обеспечивает минимальный осевой размер мотор-колеса и способствует снижению его массы. Кроме того, корпус электродвигателя в большей степени подходит для выполнения функций опоры подшипников колеса, чем корпус редуктора.
У электродвигателей постоянного тока корпус служит магнитопроводом и имеет достаточно большую толщину, определяемую заданной величиной магнитной индукции, но несет лишь незначительную механическую нагрузку. Поэтому использование корпуса этих электродвигателей в качестве опоры подшипников колеса может и не требовать увеличения его толщины, принятой по условиям обеспечения заданной магнитной индукции. Корпус тягового асинхронного двигателя не используется в качестве магнитопровода, но служит для монтажа переднего и заднего подшипиковых щитов и поэтому имеет сравнительно большую 16
толщину. При некотором увеличении этой толщины для установки на корпусе опорных подшипников колеса его масса существенно не возрастает.
Поскольку корпус электродвигателя имеет достаточно большой осевой размер, подшипники можно разместить наиболее рациональным образом для обеспечения боковой устойчивости колеса. Однако такая компоновка вызывает необходимость использования подшипников и уплотнений значительного диаметра.
а) б)
Рис. 4. Схема мотор-колеса при компоновке IV вида: а — при неразделенном редукторе; б — при разделенном
Каталожные подшипники соответствующих размеров рассчитаны на значительно большие нагрузки, чем те, которые действуют на опорные подшипники в мотор-колесах, и сравнительно дороги. Поэтому при серийном изготовлении мотор-колес с опорными подшипниками большего диаметра целесообразно разработать специальный тип подшипников (облегченный), рассчитанный на меньшую нагрузку.
Вариантом компоновки IV вида является случай с разделенным редуктором, когда один из его рядов смонтирован с внешней стороны мотор-колеса, отдельно от остальной части редуктора, размещенного с внутренней стороны мотор-колеса. Необходимость в этом возникает при двухскоростных мотор-колесах, у которых получение двух передаточных чисел осуществляется путем блокирования простого планетарного ряда; пример подобной компоновки показан на рис. 4, б.
Расположение планетарного ряда 4 вместе с вращающейся фрикционной муфтой и ее приводом с внутренней стороны мотор-колеса за электродвигателем 1 позволяет использовать его кор-
9
А. И. Яковлев
17
пус в качестве опоры подшипников 3 колеса и разместить часть редуктора 2, имеющие кинематическую связь с планетарным рядом посредством торсионного вала, с внешней стороны мотор-колеса.
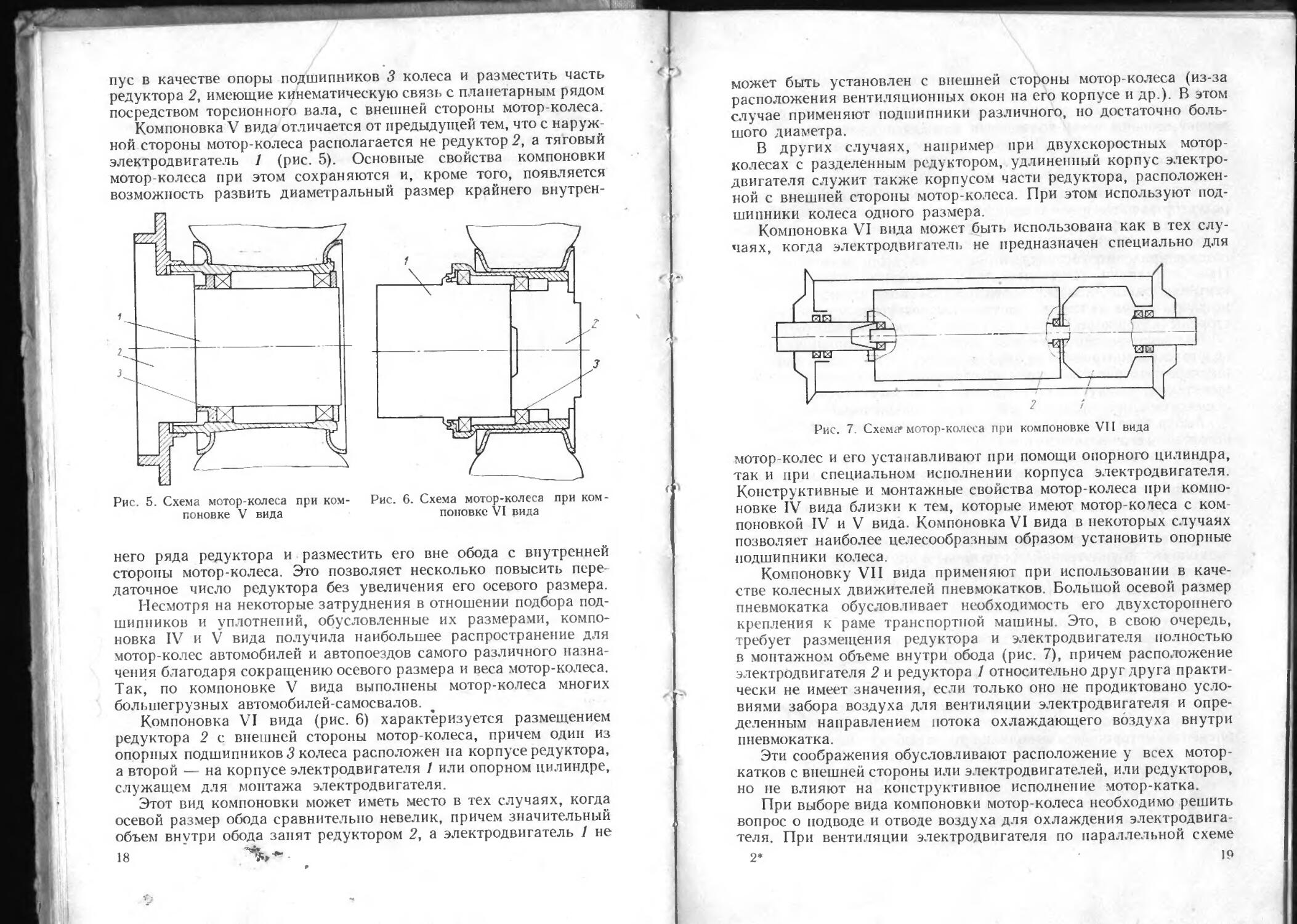
Компоновка V вида отличается от предыдущей тем, что с наружной стороны мотор-колеса располагается не редуктор 2, а тяговый электродвигатель 1 (рис. 5). Основные свойства компоновки мотор-колеса при этом сохраняются и, кроме того, появляется возможность развить диаметральный размер крайнего внутрен
Рис. 5. Схема мотор-колеса при компоновке V вида
Рис. 6. Схема мотор-колеса при компоновке VI вида
него ряда редуктора и разместить его вне обода с внутренней стороны мотор-колеса. Это позволяет несколько повысить передаточное число редуктора без увеличения его осевого размера.
Несмотря на некоторые затруднения в отношении подбора подшипников и уплотнений, обусловленные их размерами, компоновка IV и V вида получила наибольшее распространение для мотор-колес автомобилей и автопоездов самого различного назначения благодаря сокращению осевого размера и веса мотор-колеса. Так, по компоновке V вида выполнены мотор-колеса многих большегрузных автомобилей-самосвалов.
Компоновка VI вида (рис. 6) характеризуется размещением редуктора 2 с внешней стороны мотор-колеса, причем один из опорных подшипников 3 колеса расположен на корпусе редуктора, а второй — на корпусе электродвигателя 1 или опорном цилиндре, служащем для монтажа электродвигателя.
Этот вид компоновки может иметь место в тех случаях, когда осевой размер обода сравнительно невелик, причем значительный объем внутри обода занят редуктором 2, а электродвигатель 1 не 18
может быть установлен с внешней стороны мотор-колеса (из-за расположения вентиляционных окон на его корпусе и др.). В этом случае применяют подшипники различного, но достаточно большого диаметра.
В других случаях, например при двухскоростных мотор-колесах с разделенным редуктором, удлиненный корпус электродвигателя служит также корпусом части редуктора, расположенной с внешней стороны мотор-колеса. При этом используют подшипники колеса одного размера.
Компоновка VI вида может быть использована как в тех случаях, когда электродвигатель не предназначен специально для
Рис. 7. Схема» мотор-колеса при компоновке VII вида
мотор-колес и его устанавливают при помощи опорного цилиндра, так и при специальном исполнении корпуса электродвигателя. Конструктивные и монтажные свойства мотор-колеса при компоновке IV вида близки к тем, которые имеют мотор-ко чеса с компоновкой IV и V вида. Компоновка VI вида в некоторых случаях позволяет наиболее целесообразным образом установить опорные подшипники колеса.
Компоновку VII вида применяют при использовании в качестве колесных движителей пневмокатков. Большой осевой размер пневмокатка обусловливает необходимость его двухстороннего крепления к раме транспортной машины. Это, в свою очередь, требует размещения редуктора и электродвигателя полностью в монтажном объеме внутри обода (рис. 7), причем расположение электродвигателя 2 и редуктора 1 относительно друг друга практически не имеет значения, если только оно не продиктовано условиями забора воздуха для вентиляции электродвигателя и определенным направлением потока охлаждающего воздуха внутри пневмокатка.
Эти соображения обусловливают расположение у всех мотор-катков с внешней стороны или электродвигателей, или редукторов, но не влияют на конструктивное исполнение мотор-катка.
При выборе вида компоновки мотор-колеса необходимо решить вопрос о подводе и отводе воздуха для охлаждения электродвигателя. При вентиляции электродвигателя по параллельной схеме 2* • 19
/
вентиляционные окна для подвода и отвода воздуха располагают с противоположных концов корпуса электродвигателя. Подвод воздуха обычно осуществляют через вентиляционное окно с внутренней стороны мотор-колеса, что не вызывает затруднений конструктивного характера. Большие трудности представляет устройство отводящего канала или полости. В некоторых случаях отвод воздуха удается осуществить с внутренней стороны мотор-колеса. Такое решение чаще приходится принимать в тех случаях, когда редуктор располагают с внешней стороны мотор-колеса и он имеет вращающиеся водила. Однако во многих случаях как при неподвижных, так и вращающихся водилах отвод вентиляционного воздуха приходится осуществлять с внешней стороны мотор-колеса. При вентиляции электродвигателя по последовательной схеме вентиляционные окна для подвода и отвода воздуха располагают на одном и том же конце корпуса электродвигателя с внутренней стороны мотор-колеса, что упрощает компоновку мотор-колеса.
Большинство выполненных мотор-колес имеет компоновку одного из рассмотренных видов. Некоторые мотор-колеса, например с поперечным расположением электродвигателя относительно оси, имеют компоновку, выходящую за рамки рассмотренных видов. Однако они представляют собой немногочисленные исключения.
Выбор вида компоновки мотор-колеса является наиболее важным этапом его проектирования. Принятое решение в значительной степени определяет основные конструктивные и монтажные особенности мотор-колеса. При выборе компоновки мотор-колес необходимо учесть следующие факторы:
конструктивное исполнение тягового электродвигателя;
особенности редуктора и соображения в пользу его размещения с внешней или внутренней стороны мотор-колеса;
количество уплотнений, их размеры и окружные скорости трущихся поверхностей:
схему вентиляции мотор-колеса;
возможность доступа к коллектору при использовании электродвигателей постоянного тока;
способ монтажа колеса (выбор опоры подшипников и др.); принятую конструкцию и размещение механического тормоза; способ крепления мотор-колеса к раме транспортной машины. Согласование возможных решений этих частных задач позволяет выбрать наиболее целесообразный для данного случая вид компоновки мотор-колеса. Конструктивную проработку узлов и элементов мотор-колеса выполняют после выбора вида компоновки.
*
УСТАНОВКА ЭЛЕКТРОДВИГАТЕЛЕЙ И ОПОРНЫХ ПОДШИПНИКОВ КОЛЕСА
Способ установки электродвигателя в мотор-колесе и его крепление, а также выбор опоры подшипников колеса зависят от размеров и конструктивного исполнения электродвигателя и приня
той компоновки мотор-колеса. К числу основных конструктивных параметров электродвигателей мотор-колес относятся наружный диаметр и длина корпуса, исполнение наружной поверхности корпуса, конструкция вала, тип вентиляции и те конструктивные особенности электродвигателя, которые определяются его применением в мотор-колесе данного типа.
Размеры электродвигателя, в первую очередь наружный диаметр, определяют возможность его размещения целиком или частично внутри обода колеса или обусловливают необходимость установки вне обода. В большинстве случаев проще разместить бес-коллекторные электродвигатели переменного тока, имеющие меньшие габаритные размеры при равной мощности, чем электродвигатели постоянного тока.
По конструктивному исполнению тяговые электродвигатели^ применяемые в мотор-колесах, можно разделить на две группы: общего назначения;
предназначенные специально для мотор-колес.
Электродвигатели первой группы не имеют каких-либо особенностей в исполнении основных элементов: корпуса, подшипниковых щитов, вала и узлов системы вентиляции. Исполнение таких электродвигателей практически не связано с конструкцией мотор-колес определенного типа.
Электродвигатели общего назначения используют в мотор-колесах, имеющих компоновку I, II и IV вида. В этих случаях корпус электродвигателя или его передний подшипниковый щит соединяют шпильками, болтами, сваркой или специальными монтажными деталями с опорой подшипников колеса.
Электродвигатели второй группы предназначены для использования в мотор-колесах определенной конструкции, причем отдельные детали электродвигателей выполняют роль конструктивных элементов мотор-колеса. Эти детали могут быть использованы для крепления мотор-колеса к раме транспортной машины, монтажа опорных подшипников колеса, а также выполнять функции деталей корпуса редуктора.
Особенностью конструкции электродвигателей второй группы является специальное исполнение корпуса, подшипниковых щитов и вала, а также устройство вентиляции, выполненное с учетом вида компоновки мотор-колеса. Применение таких электродвигателей обязательно при компоновке IV, V, а иногда VI и VII вида.
В тех случаях, когда корпус электродвигателя используют в качестве опоры подшипников колеса, к нему предъявляют определенные требования в отношении размеров, исполнения наружной поверхности, места расположения вентиляционных отверстий и выводов концов обмоток.
У электродвигателей специального исполнения диаметральной размер корпуса ограничен внутренним диаметром обода или сту-
21
пицы колеса, а также высотой (разностью наружного и внутреннего диаметра) тего опорных‘подшипников.
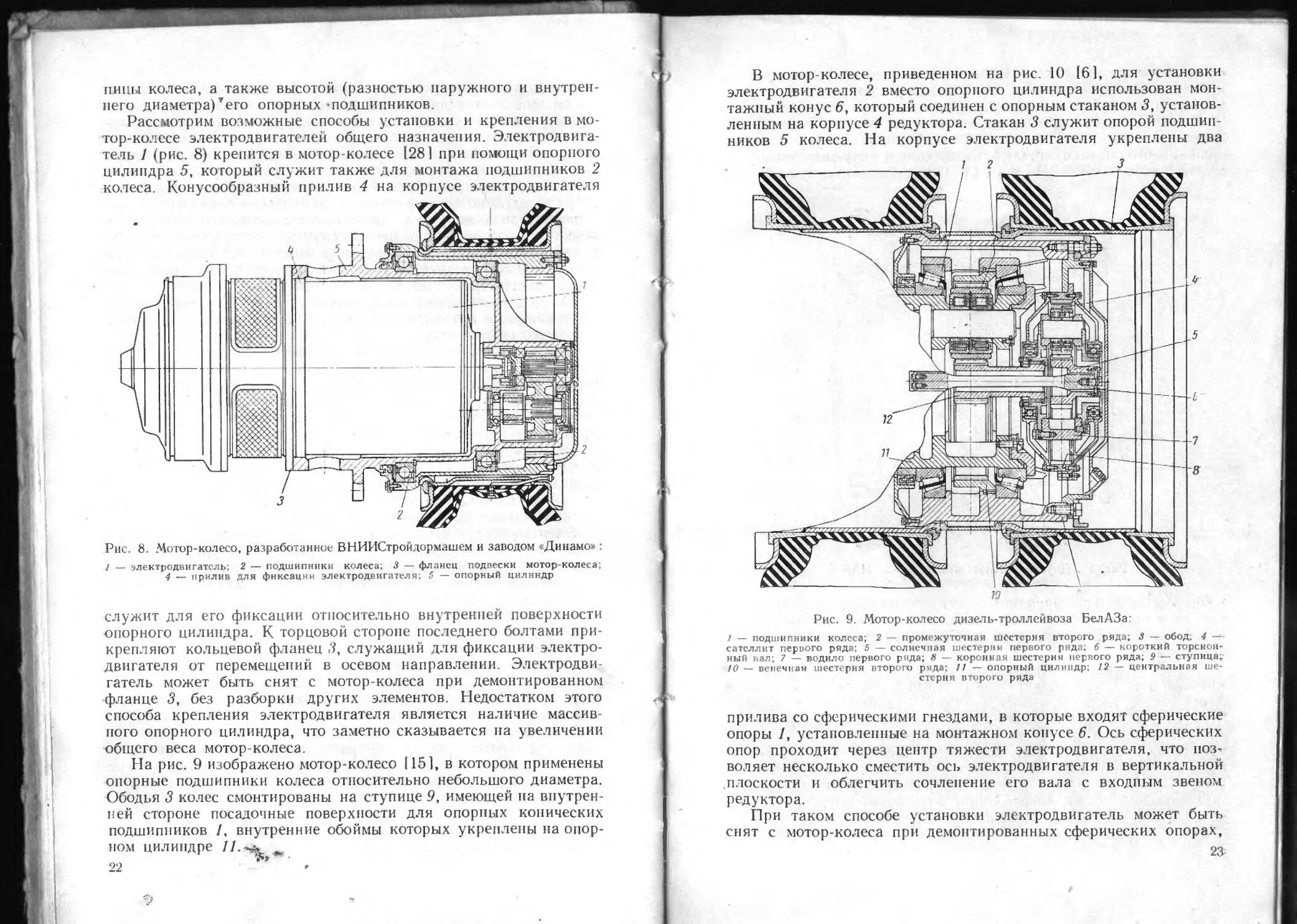
Рассмотрим возможные способы установки и крепления в мо-тор-колесе электродвигателей общего назначения. Электродвигатель 1 (рис. 8) крепится в мотор-колесе [28] при помощи опорного цилиндра 5, который служит также для монтажа подшипников 2 колеса. Конусообразный прилив 4 на корпусе электродвигателя
Рис. 8. Мотор-колесо, разработанное ВНИИСтройдормашем и заводом «Динамо» : у — электродвигатель; 2 — подшипники колеса; 3 — фланец подвески мотор-колеса;
4 — прилив для фиксации электродвигателя; 5 — опорный цилиндр
служит для его фиксации относительно внутренней поверхности опорного цилиндра. К торцовой стороне последнего болтами прикрепляют кольцевой фланец 3, служащий для фиксации электродвигателя от перемещений в осевом направлении. Электродвигатель может быть снят с мотор-колеса при демонтированном фланце 3, без разборки других элементов. Недостатком этого способа крепления электродвигателя является наличие массивного опорного цилиндра, что заметно сказывается на увеличении общего веса мотор-колеса.
На рис. 9 изображено мотор-колесо [15], в котором применены опорные подшипники колеса относительно небольшого диаметра. Ободья 3 колес смонтированы на ступице 9, имеющей па внутренней стороне посадочные поверхности для опорных конических подшипников /, внутренние обоймы которых укреплены на опорном цилиндре 11.
22 * *
В мотор-колесе, приведенном на рис. 10 [6], для установки электродвигателя 2 вместо опорного цилиндра использован монтажный конус 6, который соединен с опорным стаканом 3, установленным на корпусе 4 редуктора. Стакан 3 служит опорой подшипников 5 колеса. На корпусе электродвигателя укреплены два
Рис. 9. Мотор-колесо дизель-троллейвоза БелАЗа:
1 — подшипники колеса; 2 — промежуточная шестерня второго ряда; Л — обод; 4 сателлит первого ряда; 5 — солнечная шестерня первого ряда; 6 — короткий торсионный вал; 7 — водило первого ряда; 8 — коронная шестерня первого ряда; 9 — ступица;* /0 — венечная шестерня второго ряда; // — опорный цилиндр; 12 — центральная шестерня второго ряда
прилива со сферическими гнездами, в которые входят сферические опоры 1, установленные на монтажном конусе 6. Ось сферических опор проходит через центр тяжести электродвигателя, что позволяет несколько сместить ось электродвигателя в вертикальной плоскости и облегчить сочленение его вала с входным звеном редуктора.
При таком способе установки электродвигатель может быть снят с мотор-колеса при демонтированных сферических опорах,
23-
без разборки других узлов. Необходимость в специальных деталях крепления электродвигателя, как и в случае применения опорного цилиндра, приводит к заметному увеличению веса мотор-колеса.
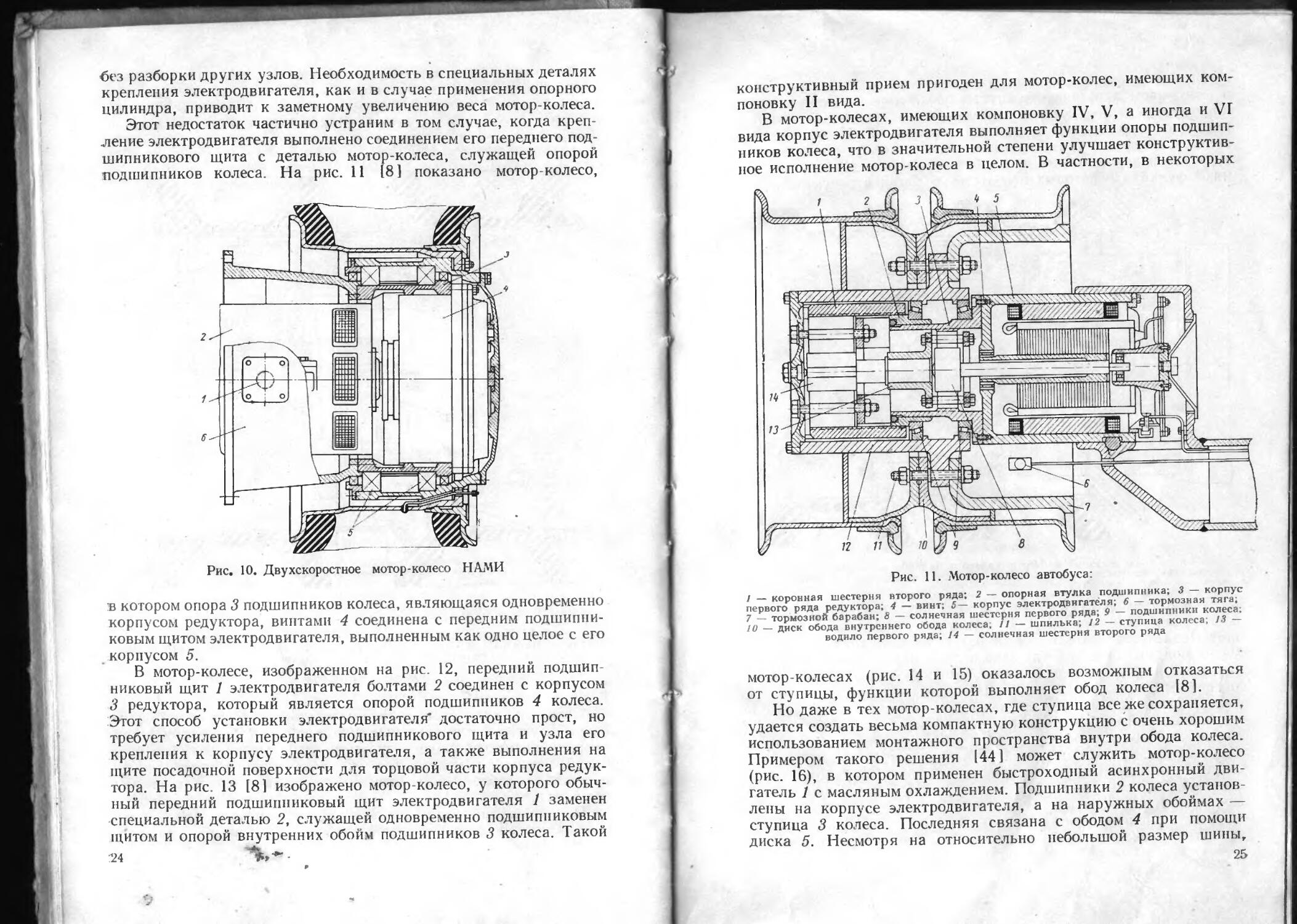
Этот недостаток частично устраним в том случае, когда крепление электродвигателя выполнено соединением его переднего подшипникового щита с деталью мотор-колеса, служащей опорой подшипников колеса. На рис. 11 [8] показано мотор-колесо,
Рис. 10. Двухскоростное мотор-колесо НАМИ
в котором опора 3 подшипников колеса, являющаяся одновременно корпусом редуктора, винтами 4 соединена с передним подшипниковым щитом электродвигателя, выполненным как одно целое с его корпусом 5.
В мотор-колесе, изображенном на рис. 12, передний подшипниковый щит 1 электродвигателя болтами 2 соединен с корпусом 3 редуктора, который является опорой подшипников 4 колеса. Этот способ установки электродвигателя* достаточно прост, но требует усиления переднего подшипникового щита и узла его крепления к корпусу электродвигателя, а также выполнения на щите посадочной поверхности для торцовой части корпуса редуктора. На рис. 13 [81 изображено мотор-колесо, у которого обычный передний подшипниковый щит электродвигателя 1 заменен специальной деталью 2, служащей одновременно подшипниковым щитом и опорой внутренних обойм подшипников 3 колеса. Такой :24 * •
конструктивный прием пригоден для мотор-колес, имеющих компоновку II вида.
В мотор-колесах, имеющих компоновку IV, V, а иногда и VI вида корпус электродвигателя выполняет функции опоры подшипников колеса, что в значительной степени улучшает конструктивное исполнение мотор-колеса в целом. В частности, в некоторых
77777777777
НИШ
Рис. 11. Мотор-колесо автобуса:
/ — коронная шестерня второго ряда; 2 — опорная втулка подшипника; 3 — корпус первого ряда редуктора; 4 — винт; 5— корпус электродвигателя; 6 — тормозная тяга;
7 — тормозной барабан; 8 — солнечная шестерня первого ряда; 9 — подшипники колеса.
10 — диск обода внутреннего обода колеса; 11 — шпилька; 12 — ступица колеса; 13 — водило первого ряда; 14 — солнечная шестерня второго ряда
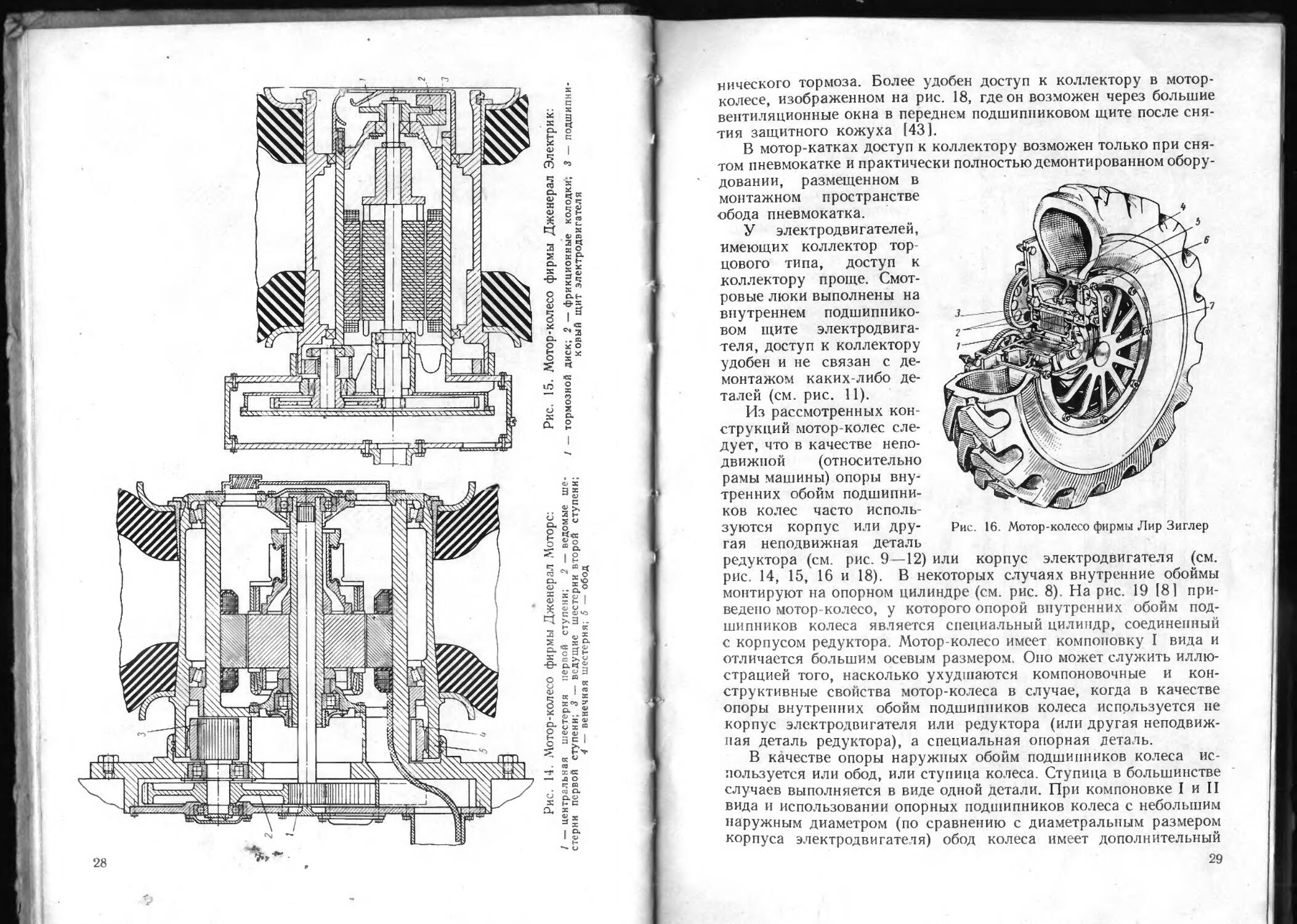
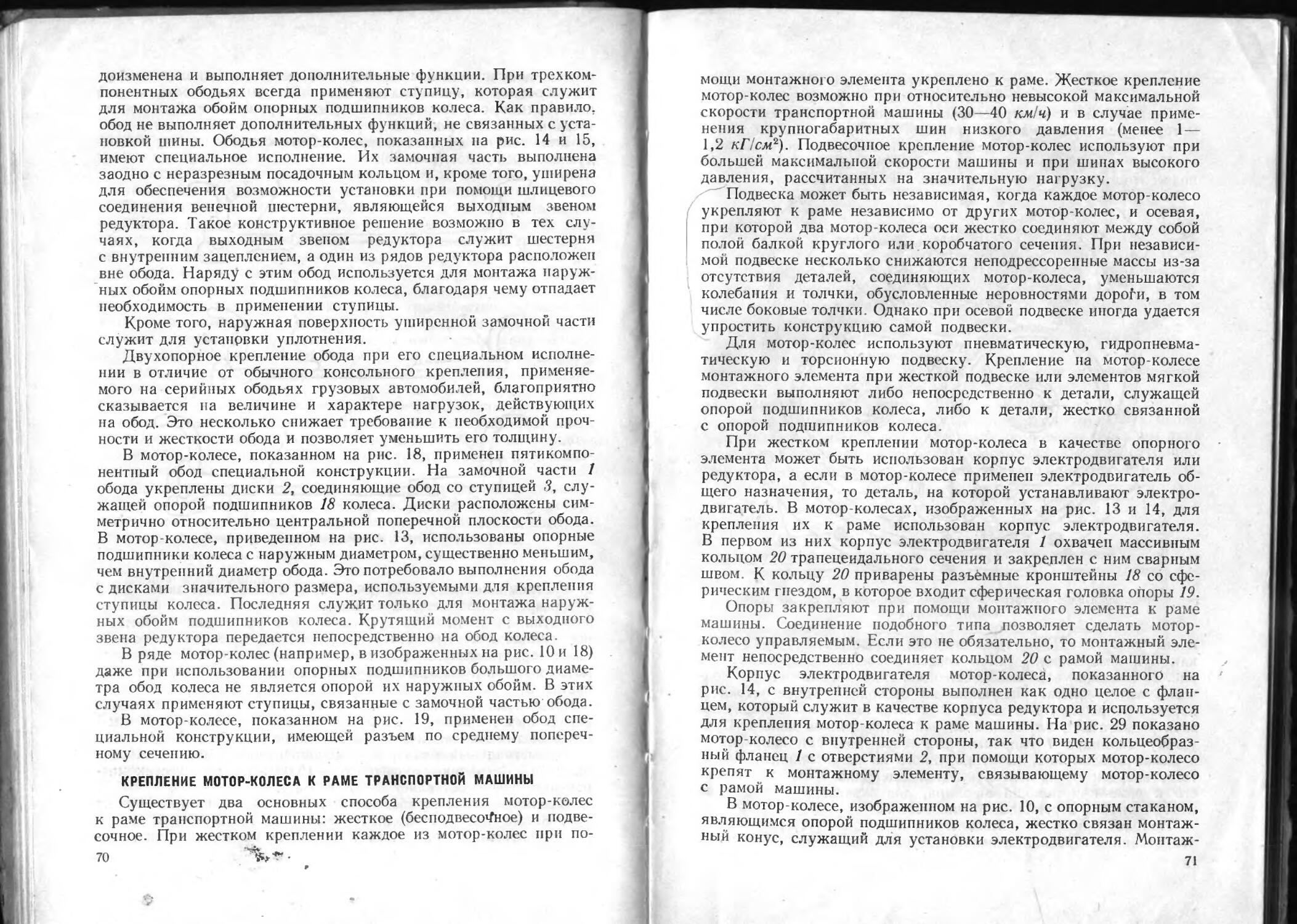
мотор-колесах (рис. 14 и 15) оказалось возможным отказаться от ступицы, функции которой выполняет обод колеса [8].
Но даже в тех мотор-колесах, где ступица все же сохраняется, удается создать весьма компактную конструкцию с очень хорошим использованием монтажного пространства внутри обода колеса. Примером такого решения 144] может служить мотор-колесо (рис. 16), в котором применен быстроходный асинхронный двигатель 1 с масляным охлаждением. Подшипники 2 колеса установлены на корпусе электродвигателя, а на наружных обоймах — ступица 3 колеса. Последняя связана с ободом 4 при помощи диска 5. Несмотря на относительно небольшой размер шины, 25
электродвигатель и редуктор (исключая один ряд) размещены в монтажном пространстве внутри обода колеса. Особенностью конструкции этого мотор-колеса является торсионный вал 7 и многодисковый тормоз 6, связанный с колесом. В некоторых мотор-колесах, имеющих указанную компоновку, корпус электродвигателя или подшипниковый щит, обращенный к редуктору, выполняют функции некоторых неподвижных деталей редуктора.
Рис. 12. Мотор-колесо троллейбуса
. При компоновке VII вида выполняют двухстороннее крепление электродвигателя (рис. 17). С одной стороны подшипниковый щит 3 электродвигателя соединяют с неподвижной деталью 4 редуктора, выполненной как одно целое с коронными шестернями первого и второго ряда редуктора. Деталь 4 соединена также с неподвижным водилом третьего ряда, представляющим собой деталь сложной формы, заканчивающуюся хвостовиком 6. Водило служит опорой подлинников 5 пневмокатка, а хвостовик используется для монтажа мотор-катка к раме транспортной машины. Другой подшипниковый щит 2 электродвигателя соединен с неподвижным хвостовиком, служащим для установки мотор-катка на раме. Этот же хвостовик используется в качестве опоры подшипника 1 пневмокатка [2].
Вид компоновки мотор-колеса и способ установки электродвигателя в значитедышй мере определяют возможность простого
доступа к коллектору и щеткам для осмотра и обслуживания», если в мотор-колесе применен электродвигатель постоянного тока.
При компоновке I, II, III и IV вида обеспечивается хороший доступ к коллектору. Это видно из поперечных разрезов мотор-колес (см. рис. 8, 10 и 13), выполненных по указанным видакт
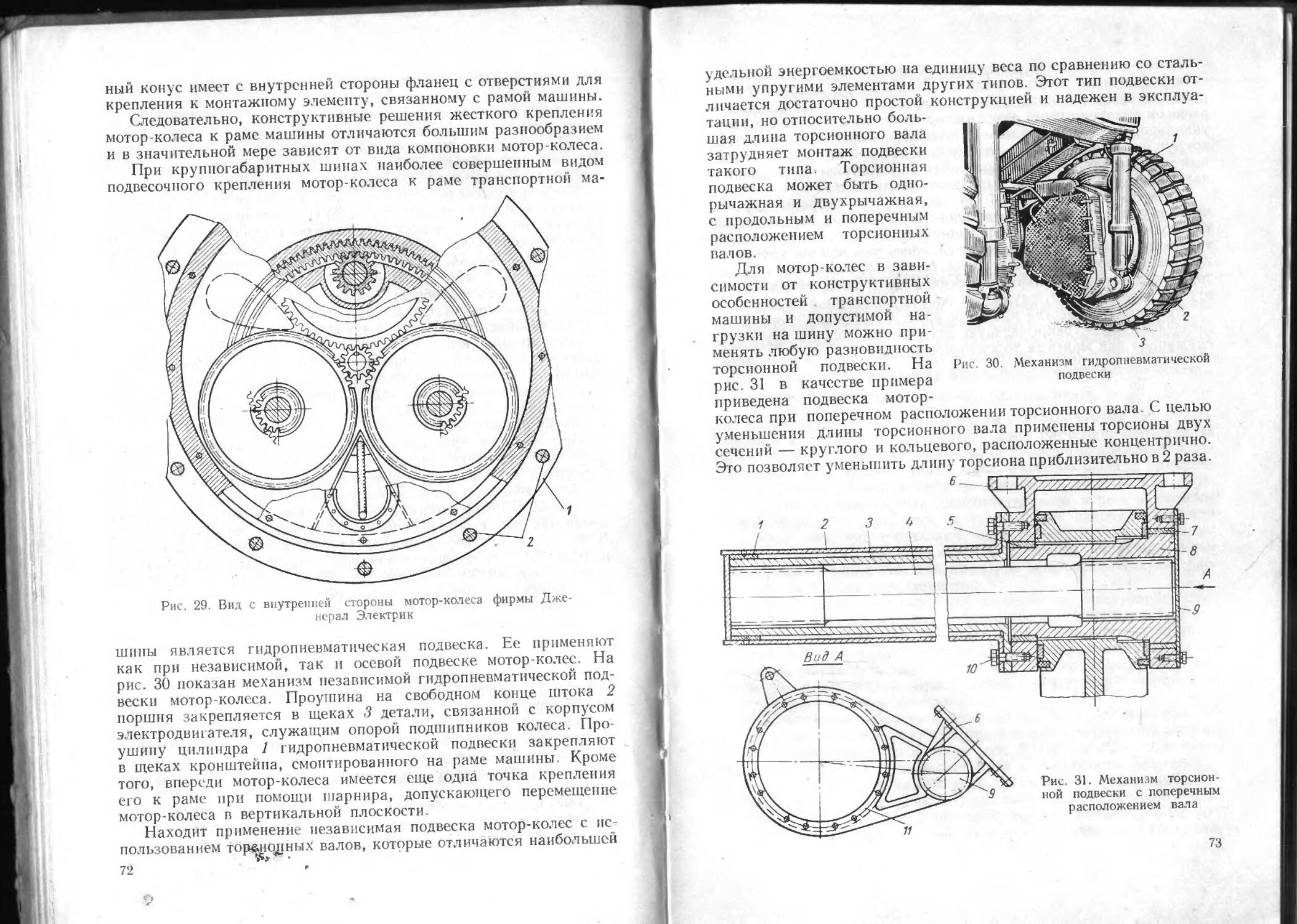
Рис. 13. Мотор-колесо фирмы Ле Турно:
/ — электродвигатель; 2 — опора внутренних обойм подшипников колеса; 3 — П°Д~ шнпники колеса; 4 — ведомая шестерня первой ступени; 5 — ведущая шестерня второй; ступени; 6 — торсионный вал; 7 — венечная шестерня; 8 — монтажное кольцо; 9 — обод; 10 — вал электродвигателя; 11 — подвижные диски тормоза; 12 — неподвижные диски, тормоза; 13, 14 — детали крепления неподвижных дисков к корпусу электродвигателя; /5 — нажимной диск; 16 — пружины: 17 — обмотка электромагнитного привода; 18 — разъемные кронштейны; 19 — сферическая головка опоры; 20 — кольцо
компоновки. Доступ к коллектору прост, так как часть корпуса электродвигателя размещена вне монтажного объема обода с внутренней стороны мотор-колеса, в то время как коллектор обычно расположен со стороны, противоположной выходу вала электродвигателя, т. е. с внутренней стороны мотор-колеса.
Доступ к коллектору осложняется при компоновке мотор-колеса IV и V вида, когда необходим демонтаж некоторых деталей.. Так, например, в мотор-колесе, представленном на рис. 14, возможен осмотр коллектора лишь при снятии наружного защитного1 кожуха через вентиляционные окна, а в мотор-колесе, показанном на рис. 15, возможен осмотр коллектора при демонтаже меха-
нического тормоза. Более удобен доступ к коллектору в мотор-колесе, изображенном на рис. 18, где он возможен через большие вентиляционные окна в переднем подшипниковом щите после снятия защитного кожуха [43].
В мотор-катках доступ к коллектору возможен только при снятом пневмокатке и практически полностью демонтированном обору
довании, размещенном в монтажном пространстве обода пневмокатка.
У электродвигателей, имеющих коллектор торцового типа, доступ к коллектору проще. Смотровые люки выполнены на внутреннем подшипниковом щите электродвигателя, доступ к коллектору удобен и не связан с демонтажом каких-либо деталей (см. рис. 11).
Из рассмотренных конструкций мотор-колес следует, что в качестве неподвижной (относительно рамы машины) опоры внутренних обойм подшипников колес часто исполь
зуются корпус ИЛИ Дру- Рис. 16. Мотор-колесо фирмы Лир Зиглер гая неподвижная деталь
редуктора (см. рис. 9—12) или корпус электродвигателя (см. рис. 14, 15, 16 и 18). В некоторых случаях внутренние обоймы монтируют на опорном цилиндре (см. рис. 8) На рис. 19 [81 приведено мотор-колесо, у которого опорой внутренних обойм подшипников колеса является специальный цилиндр, соединенный с корпусом редуктора. Мотор-колесо имеет компоновку I вида и отличается большим осевым размером. Оно может служить иллюстрацией того, насколько ухудшаются компоновочные и конструктивные свойства мотор-колеса в случае, когда в качестве опоры внутренних обойм подшипников колеса используется не корпус электродвигателя или редуктора (или другая неподвижная деталь редуктора), а специальная опорная деталь.
В качестве опоры наружных обойм подшипников колеса используется или обод, или ступица колеса. Ступица в большинстве случаев выполняется в виде одной детали. При компоновке I и II вида и использовании опорных подшипников колеса с небольшим наружным диаметром (по сравнению с диаметральным размером корпуса электродвигателя) обод колеса имеет дополнительный
29
фланец трапецеидального сечения, на котором монтируют цилиндрическую опору наружных обойм подшипников колеса (см. рис. 13 и 19).
Принятый способ монтажа электродвигателя и опорных подшипников колеса определяет особенности сборки всего мотор-колеса и тем самым возможный способ организации обслуживания, ремонта и замены мотор:ко-лес с учетом условий х эксплуатации транспорт-2 ной машины, а также раз-меров и веса мотор-ко-° леса.
s Существуют два способа сборки мотор-колеса: н поузловой и подетальный. S При поузловом способе * сборки должна быть обес-н печена возможность неза-* висимого монтажа тяго-o’ во го электродвигателя, ре-.2 дуктора и колеса (шины с ободом, иногда только — шины), причем монтиро-вать эти элементы можно при установленных опорных подшипниках колеса.
Компоновка I и II вида практически всегда допускает поузловую сборку мотор-колеса, в большин-, стве случаев она также возможна при компоновке III и VI вида, при условии сборки редуктора по частям. Примером возможности поузловой сборки может служить мотор-колесо (см. рис. 10), имеющее компоновку III вида.
Достоинством поузловой сборки являются относительная доступность каждого узла и возможность ремонта и замены отдельных деталей без съема с машины и разборки всего мотор-колеса. Однако при этом увеличиваются номенклатура деталей мотор-колеса, его осевой размер и вес.
Рис. 18. Двухскоростное мотор-колесо фирмы Берлие:
/ — замочная часть обода; 2 — диск; 3 — ступица; 4 — ведущая шестерня первой сту-пени передачи; 5 — диски тормозных механизмов; 6 — коронная шестерня планетарного ряда; 7 — водило; 8 — фрикционная муфта механизма переключения передач; 9 — солнечная шестерня планетарного ряда; 10 — торсионный вал; 11 — тормоз механизма переключения передач; Г2 — сателлиты планетарного ряда; 13 — вал шестерен; 14 — ведомая шестерня первой ступени; 15 — промежуточная шестерня; 16 — шестерня, соединенная со ступицей колеса; 17 — электродвигатель; 18 — подшипники колеса
При подетальном способе сборки исключается независимый монтаж всех основных узлов мотор-колеса при установленных опорных подшипниках колеса. Этот способ сборки характерен для мотор-колес, имеющих компоновку IV и V вида. В этом случае затрудняются ремонт и замена отдельных деталей мотор-колеса. Например, при монтаже наружных обойм подшипников колеса непосредственно на ободе демонтаж обода или съем электродвига
31
теля практически возможен только в стационарных условиях, так как связан с демонтажом опорных подшипников колеса. Подетальный способ сборки имеют также мотор-колеса, изображенные на рис. 14 и 15.
Однако рациональность конструкции мотор-колес, имеющих компоновку IV и V вида, и существенное уменьшение номенклатуры их деталей компенсируют трудности монтажа. Смягчение
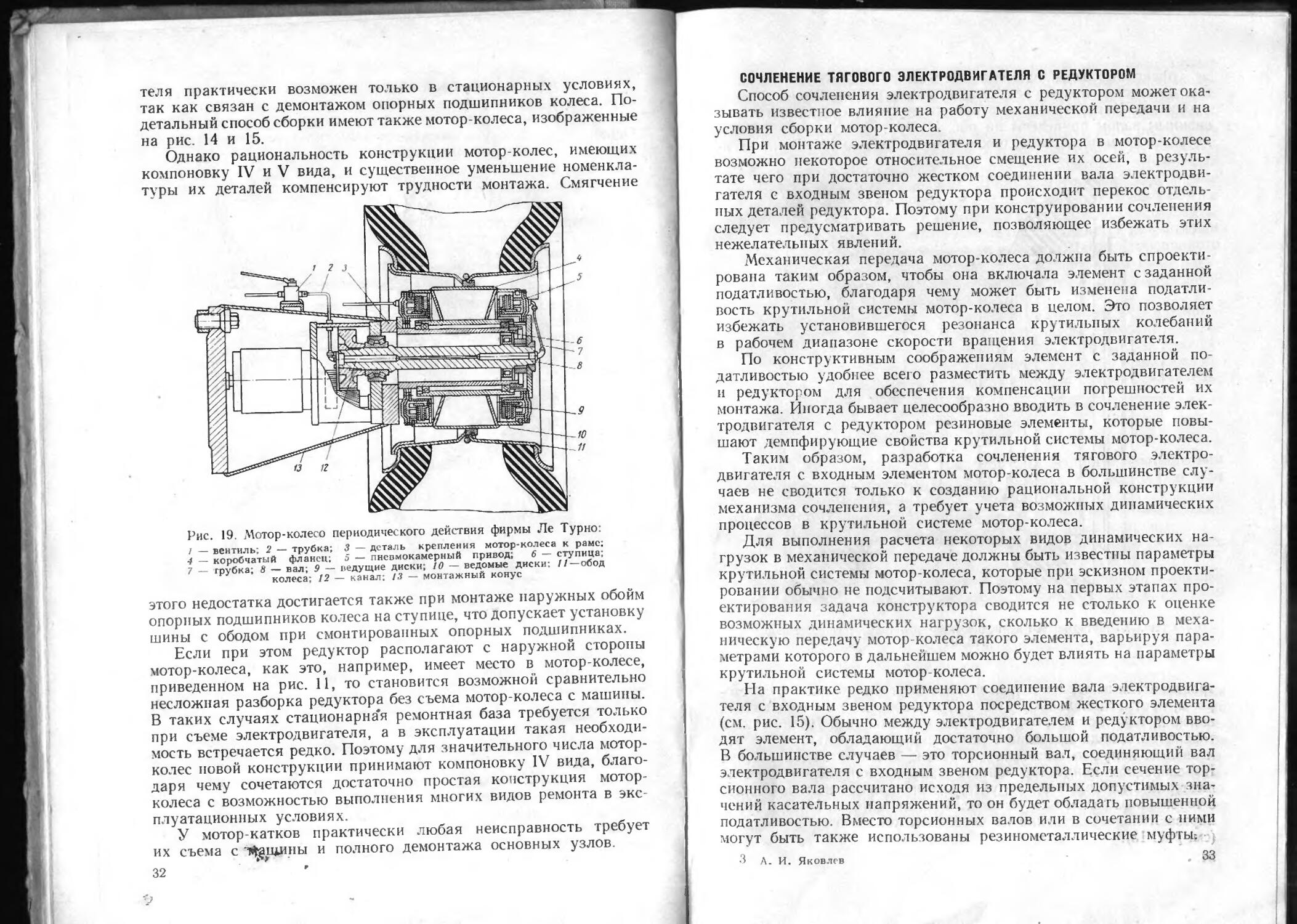
Ряс. 19. Мотор-колесо периодического действия фирмы Ле Турно: j — вентиль; 2 — трубка; 3 — деталь крепления мотор-колеса к рамс;
4 — коробчатый фланец; 5 — пневмокамерный привод; 6 — ступица;
7 — трубка; 8 — вал; 9 — ведущие диски; 10 — ведомые диски: //—обод колеса; 12 — канал; 13 — монтажный конус
этого недостатка достигается также при монтаже наружных обойм опорных подшипников колеса на ступице, что допускает установку шины с ободом при смонтированных опорных подшипниках.
Если при этом редуктор располагают с наружной стороны мотор-колеса, как это, например, имеет место в мотор-колесе, приведенном на рис. 11, то становится возможной сравнительно несложная разборка редуктора без съема мотор-колеса с машины. В таких случаях стационарная ремонтная база требуется только при съеме электродвигателя, а в эксплуатации такая необходимость встречается редко. Поэтому для значительного числа мотор-колес новой конструкции принимают компоновку IV вида, благодаря чему сочетаются достаточно простая конструкция мотор-колеса с возможностью выполнения многих видов ремонта в эксплуатационных условиях.
У мотор-катков практически любая неисправность требует их съема с *^1цины и полного демонтажа основных узлов.
32
СОЧЛЕНЕНИЕ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ С РЕДУКТОРОМ
Способ сочленения электродвигателя с редуктором может ока-зывать известное влияние на работу механической передачи и на условия сборки мотор-колеса.
При монтаже электродвигателя и редуктора в мотор-колесе возможно некоторое относительное смещение их осей, в результате чего при достаточно жестком соединении вала электродвигателя с входным звеном редуктора происходит перекос отдельных деталей редуктора. Поэтому при конструировании сочленения следует предусматривать решение, позволяющее избежать этих нежелательных явлений.
1\\сханическая передача мотор-колеса должна быть спроектирована таким образом, чтобы она включала элемент с заданной податливостью, благодаря чему может быть изменена податливость крутильной системы мотор-колеса в целом. Это позволяет избежать установившегося резонанса крутильных колебаний в рабочем диапазоне скорости вращения электродвигателя.
По конструктивным соображениям элемент с заданной податливостью удобнее всего разместить между электродвигателем и редуктором для обеспечения компенсации погрешностей их монтажа. Иногда бывает целесообразно вводить в сочленение электродвигателя с редуктором резиновые элементы, которые повышают демпфирующие свойства крутильной системы мотор-колеса.
Таким образом, разработка сочленения тягового электродвигателя с входным элементом мотор-колеса в большинстве случаев не сводится только к созданию рациональной конструкции механизма сочленения, а требует учета возможных динамических процессов в крутильной системе мотор-колеса.
Для выполнения расчета некоторых видов динамических нагрузок в механической передаче должны быть известны параметры крутильной системы мотор-колеса, которые при эскизном проектировании обычно не подсчитывают. Поэтому на первых этапах проектирования задача конструктора сводится не столько к оценке возможных динамических нагрузок, сколько к введению в механическую передачу мотор-колеса такого элемента, варьируя параметрами которого в дальнейшем можно будет влиять на параметры крутильной системы мотор-колеса.
На практике редко применяют соединение вала электродвигателя с входным звеном редуктора посредством жесткого элемента (см. рис. 15). Обычно между электродвигателем и редуктором вводят элемент, обладающий достаточно большой податливостью. В большинстве случаев — это торсионный вал, соединяющий вал электродвигателя с входным звеном редуктора. Если сечение торсионного вала рассчитано исходя из предельных допустимых значений касательных напряжений, то он будет обладать повышенной податливостью. Вместо торсионных валов или в сочетании с ними могут быть также использованы резиномсталлические муфтьк •
3 А. И. Яковлев « Bq
Торсионные валы, применяемые в мотор-колесах для соединения электродвигателя с редуктором, можно разделить на короткие и длинные. Характерные конструкции мотор-колес с длинным торсионным валом приведены па рис. 11, 14 и 18. Торсионный вал имеет также мотор-колесо, показанное на рис. 20 [6]. Вал 1 элек-
Рис. 20. Мотор-колесо периодического действия, разработанное НАМИ
тродвигателя выполнен полым и имеет внутренние шлицы со стороны, противоположной редуктору, для соединения с торсионным валом 2, один конец которого также имеет шлицы. Длина такого торсионного вала превышает длину вала электродвигателя, что позволяет получить элемент с достаточно большой податливостью. На свободном конце торсионного вала расположена солнечная шестерня 3 первого ряда редуктора, выполненная как одно целое с торсионным валом или установленная на шлицах. Иногда зубья нарезают непосредственно на свободном конце торсионного вала (см. рис. 13).
34 .
Примером использования короткого торсионного вала может служить мотор-колесо, показанное на рис. 9. В этом случае введение торсионного вала 6, передающего момент от электродвигателя на солнечную шестерню 5 первого ряда редуктора, оказалось возможным, так как первый ряд расположен непосредственно с внешней стороны мотор-колеса и наиболее удален от электродвигателя. Естественно, что податливость коротких торсионных валов существенно меньше, чем длинных, но и такие торсионные валы могут влиять на общую податливость крутильной системы мотор-колеса. Соединение торсионного вала с валом электродвигателя в рассматриваемом мотор-колесе осуществляется при помощи шлицевой муфты, в которую входит шлицевой конец торсионного вала. Применение коротких торсионных валов может быть рекомендовано в тех случаях, когда в мотор-колесе используется электродвигатель, не имеющий полого вала.
Использование в качестве элемента сочленения электродвигателя с редуктором резинометаллических муфт позволяет устранить погрешности монтажа электродвигателя и повысить демпфирующие свойства крутильной системы мотор-колеса. Однако влияние муфт на увеличение податливости системы не столь значительно, как влияние торсионных валов.
КОНСТРУКЦИЯ РЕДУКТОРОВ
Редукторы мотор-колес'транспортных машин в соответствии с назначением и необходимостью размещения полностью или частично внутри обода колеса должны обеспечивать:
необходимое передаточное число в соответствии с заданными тягово-скоростными показателями транспортной машины;
достаточно высокий к. п. д., позволяющий не только уменьшить расход топлива, но и упростить охлаждение редуктора;
минимальный осевой размер и вес, обусловленный размещением редуктора и электродвигателя в ограниченном монтажном объеме внутри обода колеса;
рациональную компоновку с другими элементами мотор-колеса; простоту в изготовлении и ремонте, надежность в эксплуатации. Влияние передаточного числа на конструкцию редуктора сказывается в том, что оно наряду с передаваемой мощностью определяет его размеры, и следовательно, возможность размещения внутри обода колеса. Передаточным числом определяется тип передачи редуктора или целесообразная комбинация типов передачи. От этого зависит возможность выполнения всех рядов редуктора с приблизительно одинаковым диаметральным размером, что позволяет наилучшим образом использовать монтажный объем внутри обода колеса, или возникает необходимость увеличения диаметрального размера одного ряда и размещения его вне обода.
3* 35
По типу используемых передач редукторы мотор-колес могут быть с неподвижными осями валов, планетарными или комбинированными, т. е. состоящими как из планетарных передач, так и из передач с неподвижными осями валов. У подавляющего числа мотор-колес редукторы являются соосными, когда оси входного и выходного звена редуктора совпадают.
Редукторы с неподвижными осями делят на одно-, двух- и трехступепчатые в зависимости от числа ступеней зацепления. Планетарные редукторы в зависимости от числа планетарных рядов могут быть одно-, двух- и трехрядными.
Планетарные редукторы мотор-колес можно выполнять с одной или двумя параллельными кинематическими цепями. Выполнение редуктора с параллельными кинематическими цепями (при условии отсутствия циркулирующей мощности) способствует уменьшению веса и размеров редуктора.
С повышением числа ступеней или рядов редуктора увеличивается его передаточное число и осевой размер, но становится возможным использование быстроходных электродвигателей, обладающих меньшими габаритными размерами и удельным весом.
В зависимости от типа мотор-колеса редуктор должен обеспечивать получение одного или двух передаточных чисел, т. е. он может быть непереключаемым или переключаемым.
Анализ конструкции разработанных и выполненных мотор-колес показывает, что характерной особенностью большинства редукторов является наличие хотя бы одной ступени, выполненной с внутренним зацеплением. Шестерни с внутренним зацеплением имеют большую несущую способность и по своему конструктивному исполнению лучше отвечают условиям рациональной компоновки мотор-колеса, чем шестерни с внешним зацеплением. При одинаковом передаточном числе диаметральный размер передачи с внутренним зацеплением меньше, чем с внешним, но первая имеет несколько больший осевой размер. Выполнение редуктора с оптимальными размерами может быть достигнуто при использовании передач, сочетающих внешнее и внутреннее зацепление.
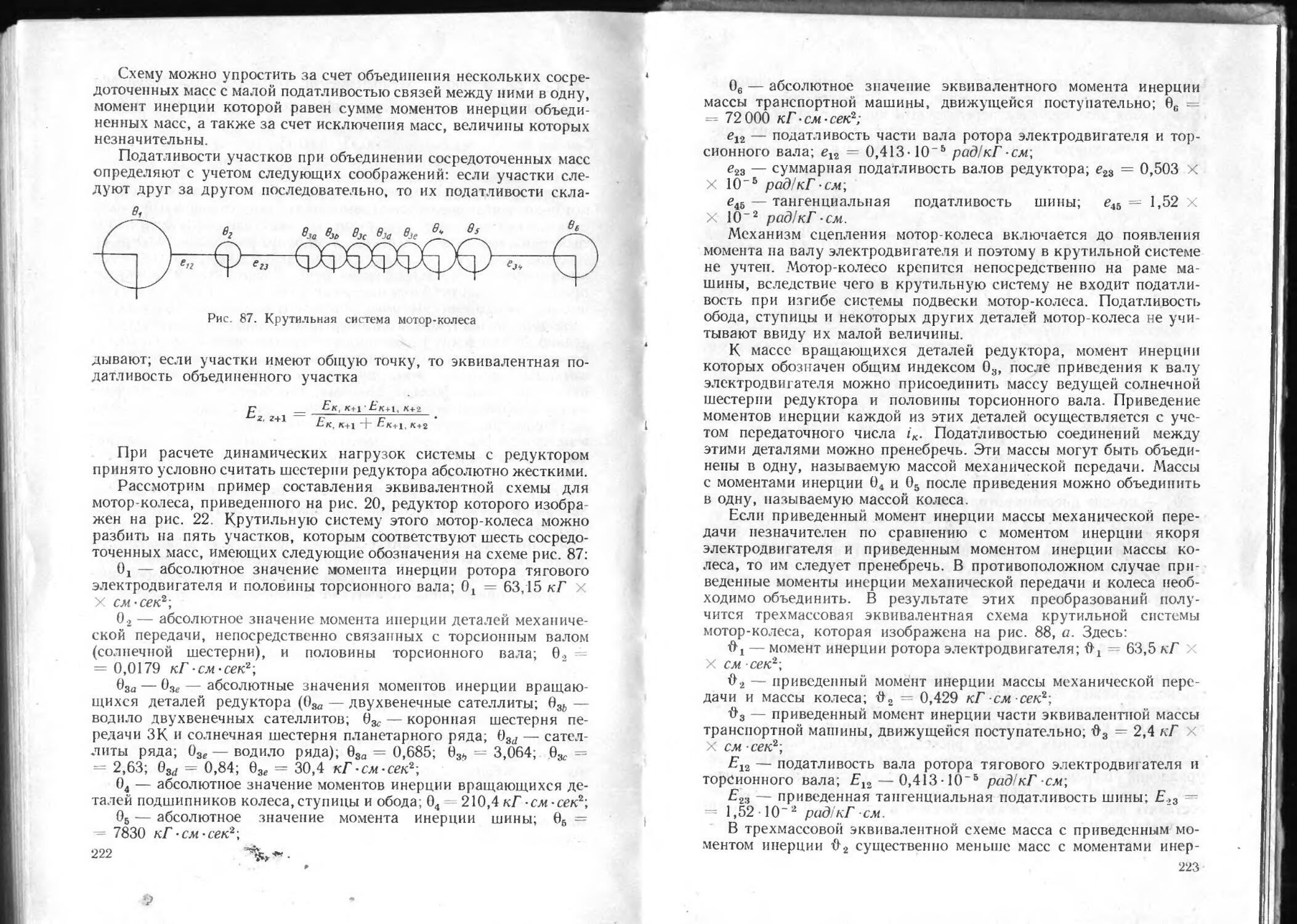
Рассмотрим особенности конструкции редукторов с неподвижными осями валов, которые применены в мотор-колесах, изображенных на рис. 13, 14, 15, 18 и 19. Все эти редукторы двухступенчатые. Их кинематические схемы, так же как и других редукторов, приведены в главе IV.
Зубья ведущего звена первой ступени редуктора мотор-колеса, показанного на рис. 13, нарезаны непосредственно на свободном конце торсионного вала 6. С этим звеном находятся в зацеплении две диаметрально расположенные ведомые шестерни 4 первой ступени. Вторая ступень редуктора образована шестернями 5, имеющими общий вал с шестернями 4, и венечной шестерней 7, закрепленной на ободе 9 колеса монтажным кольцом 8. На разрезе 36 я
мотор-колеса показана только одна из двух аналогичных систем шестерен.
Передача мощности от электродвигателя к ободу колеса двумя параллельными потоками позволяет уменьшить нагрузку на зубья шестерен, компенсировать радиальные силы и выполнить «плавающим» ведущее звено редуктора. Выполнение опор валов шестерен понятно из чертежа. Весь редуктор размещен внутри обода колеса.
Редуктор мотор-колеса, показанного на рис. 14, вынесен за пределы обода. Конструкция редуктора обеспечивает передачу мощности тремя параллельными потоками, для чего предусмотрены три промежуточные пары шестерен, расположенные под углом 120° относительно друг друга. Момент от центральной шестерни 1 первой ступени, посаженной на торсионный вал, передается на ведомые шестерни 2 первой ступени, далее на ведущие шестерни 3 второй ступени, имеющие общий вал с шестернями 2, и па венечную шестерню 4. Обод 5 колеса имеет шлицы для установки «плавающей» венечной шестерни. Размещение редуктора вне обода колеса позволило увеличить диаметральный размер первой ступени и несколько повысить общее передаточное число редуктора.
Конструкция редуктора мотор-колеса, показанного на рис. 15, аналогична рассмотренной. Центральная ведущая шестерня, установленная па шлицах вала электродвигателя, имеет «плавающую» посадку. Редуктор, показанный на рис. 19, несоосный, имеет шестерни только с внешним зацеплением, и передача момента электродвигателя на обод колеса осуществляется через фрикционную муфту без разветвления на параллельные потоки.
В двухскоростном мотор-колесе, приведенном на рис. 18, двухступенчатая передача с двумя внешними зацеплениями использована в качестве понижающей нерегулируемой передачи редуктора. Солнечная шестерня 9 планетарного ряда, соединенная с валом электродвигателя 17 торсионным валом 10, зацепляется с сателлитами 12, которые связаны с коронной шестерней 6. С водила 7 планетарного ряда мощность тремя параллельными потоками передается па двухступенчатую передачу. Мощность поступает через шестерню 4 и промежуточные шестерни 15 к шестерням 14, которые установлены на валу 13. На одном конце вала есть шлицы для установки дисков 5 тормозных механизмов, а на другом нарезаны зубья, входящие в зацепление с шестерней 16, соединенной со ступицей колеса.
Двухступенчатые редукторы с передачей мощности тремя параллельными потоками нашли широкое применение в мотор-колесах, причем для более нагруженной второй ступени часто используется внутреннее зацепление. К числу положительных качеств таких редукторов относится достаточно высокий к п. д., простота изготовления шестерен, имеющих прямой зуб с эволь-вентным зацеплением, и надежность в эксплуатации.
37
Вместе с тем использование равномерно расположенных по окружности двухвенечных промежуточных шестерен требует высокой точности взаимного расположения зубьев на обоих их венцах. Условия сборки в этом случае несколько ограничивают выбор передаточных чисел. Однако основной недостаток двухступенчатых редукторов это то, что целесообразная величина их передаточного числа ip 25. При осуществлении большего передаточного числа диаметральный размер редуктора сильно увеличивается; это делает более приемлемым повышение числа ступеней до трех, что позволяет довести передаточное число до ip
35. Но трехступепчатые редукторы имеют худший к. п. д., чем двухступенчатые, а недостатки двухвенечных промежуточных шестерен в этом случае сказываются особенно заметно.
Трехступенчатый редуктор с передачей мощности тремя параллельными потоками имеет мотор-колесо, изображенное на рис. 8. Здесь центральная шестерня первой ступени соединена с валом электродвигателя посредством зубчатой муфты. От шестерни момент передается на первую промежуточную двухвенечную шестерню, а затем на вторую двухвенечную шестерню (на разрезе не показана). Ведущая шестерня третьей ступени находится в зацеплении с ведомой венечной шестерней третьей ступени, которая запрессована в ступицу колеса.
Недостатки двух- и трехступенчатых редукторов с неподвижными осями валов, затрудняющие компоновку редуктора с относительно большим передаточным числом в ограниченном монтажном объеме внутри обода колеса, приводят к необходимости использования передач с большей нагрузочной способностью, чем рассмотренные. К таким передачам относятся планетарные передачи некоторых типов.
Редуктор мотор-колеса, показанного на рис. 9, состоит из двух рядов, причем первый ряд имеет вращающиеся, а второй — остановленное водило. Момент от электродвигателя передается на солнечную шестерню 5 первого ряда и через сателлиты 4 на коронную шестерню 8. С центральной шестерней 12 второго ряда зацепляются промежуточные шестерни 2, которые, в свою очередь, связаны с венечной шестерней 10. Для установки промежуточных шестерен 2 служат специальные приливы опорного цилиндра И. Центральная шестерня 12 второго ряда соединена с водилом 7 первого ряда, а коронная 8 и венечная 10 шестерни соединены со ступицей 9 колеса.
Особенностью конструкции редуктора этого мотор-колеса является расположение второго ряда шестерен между подшипниками колеса, что позволило применить опорные подшипники относительно небольшого диаметра.
В мотор-колесе, изображенном на рис. 11, редуктор выполнен из двух планетарных рядов, соединенных последовательно. Передаточное число двухрядного редуктора ip «S 36. Редукторы^по
добного типа используют в широком диапазоне мощности при достаточно высоких значениях к. п. д. Они просты в изготовлении и надежны в эксплуатации.
Редуктор мотор-колеса, показанного на рис. 11, интересен также тем, что некоторые его неподвижные детали выполняют ряд дополнительных функций. Так, корпус 3 первого ряда редуктора, неподвижно закрепленный на корпусе 5 электродвигателя, выполняет функции коронной шестерни первого ряда и вместе с тем используется для монтажа опорных подшипников 9 колеса. Втулка 2, установленная на корпусе 5, служит непосредственной опорой наружного подшипника и используется для крепления коронной шестерни 1 второго ряда.
Корпус 12 второго ряда редуктора выполняет функции ступицы колеса и используется для монтажа и фиксации наружных обойм подшипников колеса. Диски сдвоенных колес крепятся к фланцу корпуса 12 редуктора шпильками 11, используемыми для крепления тормозного барабана 7, который опирается на фланец корпуса 12.
Солнечная шестерня 8 первого ряда редуктора устанавливается на шлицах торсионного вала. Водилом 13 первого ряда служит втулка с внутренними шлицами, необходимыми для установки хвостовика солнечной шестерни 14 второго ряда. Функции водила второго ряда выполняет крышка корпуса редуктора, соединенная болтами с корпусом 12. Весьма рациональная конструкция редуктора и его небольшой диаметральный размер обеспечивают простоту монтажа мотор-колеса и допускают размещение колесного колодочного тормоза.
В двухскоростных мотор-колесах применение планетарных передач позволяет поочередным затормаживанием двух выбранных звеньев разных рядов изменять передаточное число редуктора. Так выполнен редуктор мотор-колеса, изображенного на рис. 10. На первой передаче редуктор передает мощность по двум параллельным кинематическим цепям, причем обеспечивается весьма рациональное использование элементов передачи, лучшее, чем у планетарных редукторов, имеющих последовательное соединение рядов. Благодаря разветвлению передаваемой мощности по двум параллельным кинематическим цепям размеры и вес деталей, а следовательно, и редуктора в целом уменьшаются.
Редуктор этого мотор-колеса (рис. 21) состоит из трех планетарных рядов. С внешней стороны мотор-колеса редуктор ограничен крышкой 4, выполняющей функции водила третьего ряда, на которой установлены сателлиты 5 третьего ряда. С внутренней стороны редуктор ограничен задней крышкой 24. Коронная шестерня 3 третьего ряда, монтажный диск 13 и корпус 14 редуктора жестко закреплены на опорном стакане 27 шпильками 2.
Вал 21 электродвигателя соединен с солнечной шестерней 20 первого ряда через роликовую муфту 22. Шестерня 20 через са-
39
Рис. 21, Редуктор двухскоростного мотор-колеса:
/ — водило первого ряда; 2 — шпилька; 5 — коронная шестерня третьего ряда; 4 — крышка-водило третьего ряда; 5 — сателлйты третьего ряда; 6 — промежуточный вал; 7 — солнечная шестерня третьего ряда; 8 — солнечная шестерня второго ряда; 9 — водило второго ряда; 10 — коронная шестерня второго ряда; 11 — тормозной цилиндр второго ряда; 12 — кольцевой поршень первого ряда; 13 — монтажный диск; 14 — корпус редуктора; 15 — тормозные диски второго ряда; 16 — тормозные диски первого ряда; /7 — штуцер цилиндра первого ряда; 18 — тормозной цилиндр первого ряда; 19 — коронная шестерня первого ряда; 20 — солнечная шестерня первого ряда; 21 — вал электродвигателя; 22 — роликовая муфта; 23 — сателлиты первого ряда; 24 — задняя крышка редуктора; 25 — кольцевой поршень второго ряда; 26 — штуцер цилиндра второго ряда; 27 — опорный стакан; 28 — воздушный канал; 29 — пружинные толкатели
40
is
в
15
д
ю
74
12
13
Рис. 22. Редуктор мотор-колеса периодического действи я
теллиты первого ряда 23 связана с коронной шестерней 19 первого ряда, которая соединена с солнечной шестерней 8 второго ряда. Водило первого ряда соединено промежуточным валом 6 со ступицей коронной шестерни 10 второго ряда, а шестерня 10 зацеплена через сателлиты 5 с солнечной шестерней первого ряда. Солнечная шестерня 7 третьего ряда, сцепленная с сателлитами 5 третьего ряда, установлена на шлицах промежуточного вала. Тормозными звеньями редуктора являются коронная шестерня первого ряда, которая тормозными дисками 16 может быть сблокирована с корпусом 14 редуктора, и водило 9 второго ряда, которое затормаживается дисками 15.
Работа на первой передаче осуществляется при заторможенном водиле второго ряда и расторможенной коронной шестерне первого ряда. Для включения второй передачи следует затормозить коронную шестерню и растормозить водило.
В конструкции рассматриваемого мотор-колеса отметим также липдры 18 первого и 1
первого и 25 второго ряда, штуцеры цилиндра 17 первого и 26 второго ряда, воздушный канал 28 и пружинные толкатели 29.
Редуктор мотор-колеса, приведенного на рис. 20, образован из планетарных передач двух типов: передачи ЗК и простого планетарного ряда. Поперечный разрез такого редуктора показан на рис. 22. Внутренняя полость редуктора образована кольцевым цилиндром /, крышкой 12 и частью ступицы 2 колеса. Солнечная шестерня 14 выполнена как одно целое с торсионным валом. Она сцеплена с коронной шестерней 7 двухвенечными сателлитами 8,
следующие элементы: тормозные ци-второго ряда, кольцевые поршни 12
41
установленными на водиле И. Шестерня 7 жестко связана с солнечной шестерней 9 шлицевыми зубьями вала 10. Сателлиты 13 установлены на крышке /2, выполняющей функции водила, которое закреплено на ступице колеса. Коронная шестерня 5 закреплена на корпусе 3 редуктора.
Коронная шестерня 6 первого ряда может быть сблокирована с корпусом редуктора при помощи фрикционного тормоза, состоящего из подвижных 15 и неподвижных 4 дисков, а также кольцевого поршня 16 и тормозного цилиндра 18 со штуцером 17. Для передачи момента от электродвигателя на ступицу шестерня 6 затормаживается. В этом случае момент с солнечной шестерни первого ряда передается через двухвенечные сателлиты на коронную шестерню 7 и далее через солнечную шестерню и сателлит планетарного ряда на крышку-водило, связанную со ступицей колеса. Для отсоединения электродвигателя от колеса коронная шестерня первого ряда растормаживается.
Мотор-колесо, изображенное на рис. 18, имеет комбинированный переключаемый редуктор. Он образован последовательным соединением простого планетарного ряда и двухступенчатого редуктора с внешним зацеплением шестерен. Момент от электродвигателя передается на солнечную шестерню планетарного ряда, а с водила ряда — на центральную шестерню двухступенчатого редуктора, изменяясь или оставаясь прежним по величине в зависимости от того, какой из элементов управления включен: тормоз или фрикционная муфта.
Работоспособность и эксплуатационные свойства редуктора мотор-колеса зависят не только от принятого типа передачи, но и от точности изготовления его деталей, а также способов компенсации погрешностей изготовления и монтажа, предусмотренных в конструкции редуктора и обеспечивающих равномерное распределение нагрузки на его элементы.
Для снижения требований к обработке и упрощения сборки планетарных редукторов мотор-колес, а также для обеспечения равномерного распределения нагрузок между звеньями редукторов одно из основных звеньев (солнечную или коронную шестерню) выполняют «плавающим». При этом шестерню жестко не фиксируют в подшипниках. В многорядных редукторах мотор-колес «плавающими» целесообразно выполнять общие звенья рядов, ограничив их осевые перемещения. В ряду нежелательно иметь более одного «плавающего» звена. Если в качестве такого звена выбрана солнечная или центральная шестерня (рис. 11, 13, 14), то механизм, обеспечивающий ее самоустановку, получается минимальным по весу, поскольку эти шестерни передают меньший крутящий момент, чем другие звенья редуктора.
Механизмом самоустановки может служить торсионный вал, что позволяет избежать увеличения осевого размера редуктора. «Плавающим» получается входное звено редуктора, благодаря
чему улучшаются условия работы сочленения электродвигателя с редуктором.
Если по конструктивным соображениям трудно выполнить «плавающей» солнечную шестерню, то «плавающей» выполняют коронную или венечную шестерню, как это имеет место в редукторах мотор-колес, приведенных на рис. 15 и 18. В качестве «плавающего» звена можно принять и водило, но для этого требуется относительно большой и тяжелый механизм самоустановки, что приводит к увеличению осевого размера мотор-колеса. Однако в таком случае механизм самоустановки будет подвержен незначительным динамическим нагрузкам, поскольку водило имеет малые угловые скорости.
Необходимой подвижности звеньев редуктора мотор-колеса достигают установкой их только, па одном подшипнике, что также несколько сокращает осевой размер звена. Уменьшению осевого размера редуктора отвечает также и расположение подшипников внутри его шестерен, в частности внутри сателлитов.
Следует также отметить, что планетарные передачи можно выполнять с относительно небольшим модулем. Это делает редуктор менее шумным и снижает затраты на его изготовление.
Смазка редукторов мотор-колес происходит разбрызгиванием. Необходимый уровень масла зависит от конструкции редуктора. Чтобы не было избыточного давления в корпусе редуктора, устанавливают сапун, связывающий полость редуктора с атмосферой.
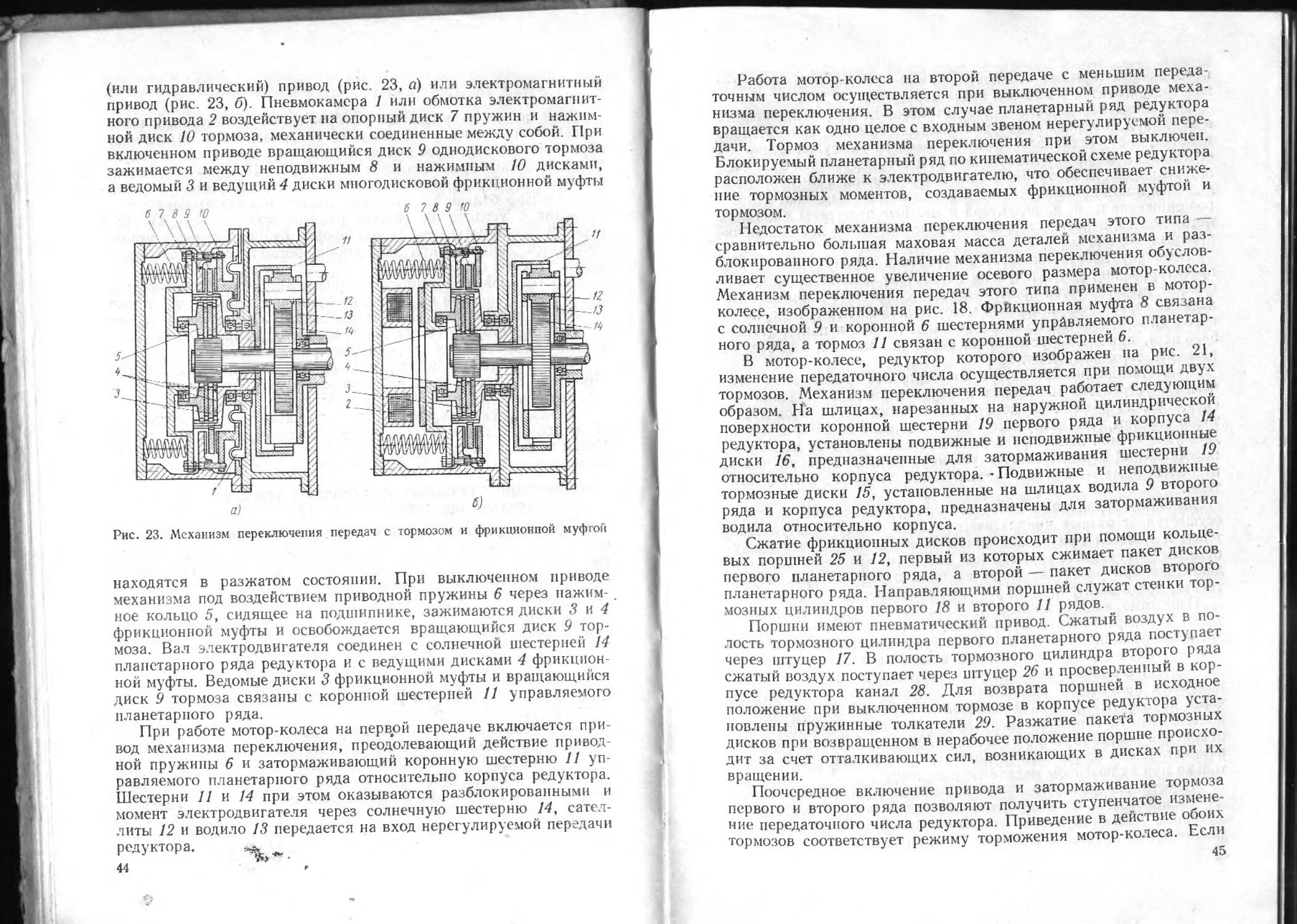
КОНСТРУКЦИЯ МЕХАНИЗМОВ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ
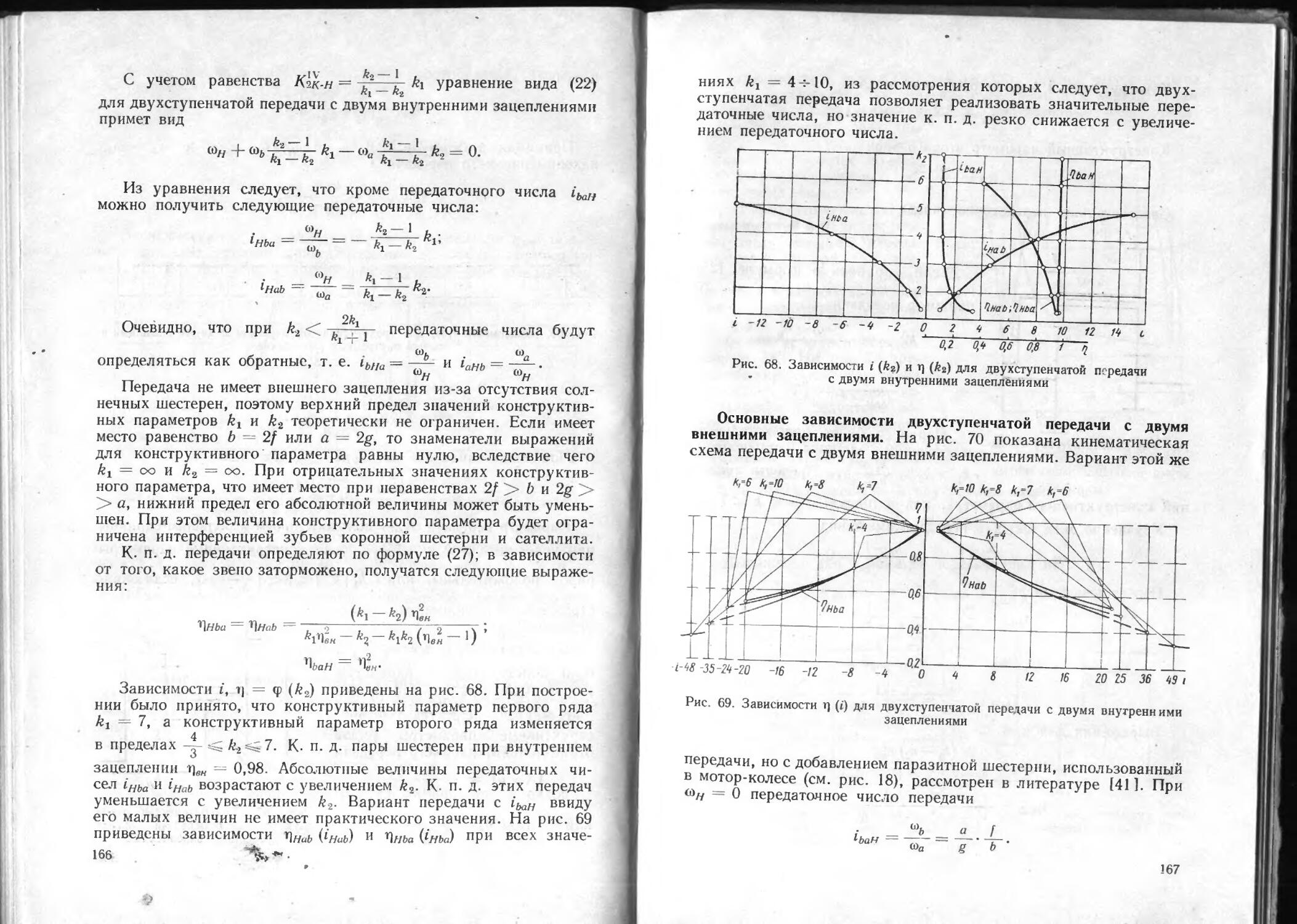
И МЕХАНИЗМОВ СЦЕПЛЕНИЯ МОТОР-КОЛЕС
В двухскоростных мотор-колесах передаточное число изменяется при помощи механизма переключения передач, который разрывает кинематическую цепь редуктора, соответствующую определенной передаче, и затем замыкает эту цепь для работы на другой передаче. Такая задача может быть решена при помощи фрикционного механизма или зубчатой муфты. Первое решение дает более совершенную конструкцию механизма переключения, и оно использовано в большинстве двухскоростпых мотор-колес.
Механизм переключения в зависимости от принятой кинематической схемы редуктора мотор-колеса может состоять из двух тормозов или из тормоза и фрикционной муфты. В зависимости от величины момента на затормаживаемом звене в качестве тормозных устройств можно применять ленточные, однодисковые и многодисковые тормоза. Использование ленточных тормозов целесообразно лишь при ограниченном тормозном моменте на звене, поэтому в механизмах переключения передач в основном применены однодисковые и многодисковые тормоза. Фрикционные муфты выполняют однодисковыми и многодисковыми.
На рис. 23 показан механизм переключения передач с тормозом и фрикционной муфтой [8]. Механизм имеет пневматический
43
(или гидравлический) привод (рис. 23, я) или электромагнитный привод (рис. 23, б). Пневмокамера 1 или обмотка электромагнитного привода 2 воздействует на опорный диск 7 пружин и нажимной диск 10 тормоза, механически соединенные между собой. При включенном приводе вращающийся диск 9 однодискового тормоза зажимается между неподвижным 8 и нажимным 10 дисками, а ведомый 3 и ведущий 4 диски многодисковой фрикционной муфты
Рис. 23. Механизм переключения передач с тормозом и фрикционной муфгой
находятся в разжатом состоянии. При выключенном приводе механизма под воздействием приводной пружины 6 через нажим-. ное кольцо 5, сидящее на подшипнике, зажимаются диски 3 и 4 фрикционной муфты и освобождается вращающийся диск 9 тормоза. Вал электродвигателя соединен с солнечной шестерней 14 планетарного ряда редуктора и с ведущими дисками 4 фрикционной муфты. Ведомые диски 3 фрикционной муфты и вращающийся диск 9 тормоза связаны с коронной шестерней И управляемого планетарного ряда.
При работе мотор-колеса на первой передаче включается привод механизма переключения, преодолевающий действие приводной пружины 6 и затормаживающий коронную шестерню 11 управляемого планетарного ряда относительно корпуса редуктора. Шестерни 11 и 14 при этом оказываются разблокированными и момент электродвигателя через солнечную шестерню 14, сателлиты 12 и водило 13 передается на вход нерегулируемой передачи
редуктора.
44
Работа мотор-колеса на второй передаче с меньшим передаточным числом осуществляется при выключенном приводе механизма переключения. В этом случае планетарный ряд редуктора вращается как одно целое с входным звеном нерегулируемой передачи. Тормоз механизма переключения при этом выключен. Блокируемый планетарный ряд по кинематической схеме редуктора расположен ближе к электродвигателю, что обеспечивает снижение тормозных моментов, создаваемых фрикционной муфтой и тормозом.
Недостаток механизма переключения передач этого типа — сравнительно большая маховая масса деталей механизма и разблокированного ряда. Наличие механизма переключения обусловливает существенное увеличение осевого размера мотор-колеса. Механизм переключения передач этого типа применен в мотор-колесе, изображенном на рис. 18. Фрикционная муфта 8 связана с солнечной 9 и коронной 6 шестернями управляемого планетарного ряда, а тормоз 11 связан с коронной шестерней 6.
В мотор-колесе, редуктор которого изображен на рис. 21, изменение передаточного числа осуществляется при помощи двух тормозов. Механизм переключения передач работает следующим образом. На шлицах, нарезанных на наружной цилиндрической поверхности коронной шестерни 19 первого ряда и корпуса 14 редуктора, установлены подвижные и неподвижные фрикционные диски 16, предназначенные для затормаживания шестерни 19 относительно корпуса редуктора. - Подвижные и неподвижные тормозные диски 15, установленные на шлицах водила 9 второго ряда и корпуса редуктора, предназначены для затормаживания водила относительно корпуса.
Сжатие фрикционных дисков происходит при помощи кольцевых поршней 25 и 12, первый из которых сжимает пакет дисков первого планетарного ряда, а второй — пакет дисков второго планетарного ряда. Направляющими поршней служат стенки тормозных цилиндров первого 18 и второго 11 рядов.
Поршни имеют пневматический привод. Сжатый воздух в полость тормозного цилиндра первого планетарного ряда поступает через штуцер 17. В полость тормозного цилиндра второго ряда сжатый воздух поступает через штуцер 26 и просверленный в корпусе редуктора канал 28. Для возврата поршней в исходное положение при выключенном тормозе в корпусе редуктора установлены пружинные толкатели 29. Разжатие пакета тормозных дисков при возвращенном в нерабочее положение поршне происходит за счет отталкивающих сил, возникающих в дисках при их вращении.
Поочередное включение привода и затормаживание тормоза первого и второго ряда позволяют получить ступенчатое изменение передаточного числа редуктора. Приведение в действие обоих тормозов соответствует режиму торможения мотор-колеса. Если 45
привод обоих тормозов выключен, то кинематическая цепь между электродвигателем и колесом будет нарушена.
Механизм переключения передач мотор-колеса, выполненный в виде двух многодисковых фрикционных тормозов, сравнительно невелик, не увеличивает осевого размера и существенно не осложняет компоновку мотор-колеса. Но его недостатком являются потери мощности на трение в пакете фрикционных дисков, находящемся в выключенном состоянии. Эти потери вызывают некоторое снижение к. п. д. редуктора и местные перегревы в деталях мотор-колеса, непосредственно соприкасающихся с пакетом фрикционных дисков.
Величину потерь на остаточное трение трудно оценить при проектировании, поскольку они зависят от многих причин. Однако не рекомендуется применение многодискового тормоза в механизме переключения передач мотор-колеса в тех случаях, когда необходимо относительно большое число дисков в пакете (свыше 5—6 пар), причем допустимое их число тем меньше, чем больше размеры тормозных дисков.
Существенно снизить потери на остаточное трение можно при помощи устройства механизма принудительного разведения дисков. Однако возможные конструкции таких механизмов достаточно сложны, что затрудняет их применение в мотор-колесах. Для уменьшения пакета фрикционных дисков тормоза механизма переключения передач следует устанавливать на звеньях рядов, расположенных по кинематической схеме ближе к электродвигателю.
Механизм сцепления в мотор-колесах периодического действия осуществляет разрыв кинематической цепи между электродвигателем и колесом при выключенном электроприводе, что предупреждает чрезмерное повышение скорости вращения электродвигателя при работе на более высоких передачах трансмиссии тягача, когда электропривод уже не используется.
Известные конструкции механизма сцепления, допускающие также и реверсирование мотор-колеса, выполнены в виде многодисковых фрикционных тормозов или зубчатых муфт. Многодисковый механизм сцепления применен в мотор-колесе, приведенном на рис. 19. С валом 8 связаны ведущие диски 9 вместе с пневмо-камерным приводом 5 механизма сцепления. Ведомые диски 10 через коробчатый фланец 4 связаны со ступицей 6 и ободом 11 колеса. Воздух в пневцокамеру механизма сцепления поступает от вентиля 1 через трубки 2 и 7 и канал 12 к валу 8. Таким образом, кинематическая связь электродвигателя с колесом имеет место только при включенном механизме сцепления.
Недостатком рассмотренного механизма сцепления является его расположение по кинематической схеме непосредственно на выходном звене редуктора, что вынуждает рассчитывать его на значительные крутящие моменты. Это приводит к существенному
увеличению размеров механизма сцепления и его веса. Вместе с тем такое расположение механизма сцепления обеспечивает отсоединение от колеса всех деталей редуктора.
В мотор-колесе, редуктор которого показан на рис. 22, применен многодисковый механизм сцепления другой конструкции. Здесь для снижения момента на механизме сцепления последний установлен на промежуточном звене редуктора — коронной шестерне, связанной с большой шестерней двухвепечного сателлита. Однако при этом часть деталей редуктора сохраняет постоянное соединение с колесом.
Наружная цилиндрическая поверхность коронной шестерни 6 имеет шлицы для установки подвижных фрикционных дисков 15. Неподвижные фрикционные диски 4 также установлены на шлицах, нарезанных на внутренней поверхности корпуса 3 редуктора. Для сжатия пакета фрикционных дисков, обеспечивающего затормаживание коронной шестерни первого ряда относительно корпуса редуктора и замыкание кинематической цепи от электродвигателя к колесу, служит кольцевой поршень 16, перемещающийся в тормозном цилиндре 18. Сжатый воздух в полость тормозного цилиндра поступает через штуцер 17. При отсутствии избыточного давления в тормозном цилиндре поршень отжимается в исходное положение. При этом коронная шестерня 6 растормаживается и кинематическая цепь между электродвигателем и колесом разрывается.
Недостатком многодисковых механизмов сцепления мотор-колеса являются потери мощности на трение в выключенном состоянии. Этот недостаток устраняется в случае применения зубчатых муфт, в частности, торцовых с пневматическим или гидравлическим приводом на включение и пружинным приводом на отключение» Целесообразность применения в качестве механизма сцепления фрикционного тормоза или зубчатой муфты определяется общей компоновкой и конструктивными особенностями мотор-колеса. При использовании зубчатой муфты существенно затрудняется включение электропривода во время движения автопоезда.
УПЛОТНЕНИЯ МОТОР-КОЛЕС
Одной из основных задач конструирования мотор-колес является обеспечение надежного уплотнения с достаточно большим сроком службы, поскольку выход из строя какого-либо уплотнения может привести к аварии мотор-колеса.
Требования к уплотнениям мотор-колес особенно серьезны, так как они работают в очень неблагоприятных условиях. При движении транспортной машины возможны значительные перегревы уплотнений, а при стоянке они могут подвергаться воздействию весьма низких температур. Кроме того, на уплотнения попадают пыль и влага.
47
Назначение уплотнений мотор-колеса — препятствовать утечке масла из корпуса редуктора в стыке двух вращающихся одна относительно другой поверхностей деталей. Очевидно, что создать абсолютную герметичность вращающихся соединений не представляется возможным. Просачивание масла в небольших количествах всегда будет иметь место. Поэтому конструкция мотор-колеса должна исключать возможность попадания масла из полости, расположенной с внешней стороны уплотнения, в тяговый электродвигатель, так как попадание масла на коллектор (при его наличии) может привести к серьезной аварии.
Для надежной работы мотор-колеса следует по возможности уменьшить число уплотнений и применять такие из них, конструк-
Рис. 24. Поперечные сечения сальников мотор-колеса
тивные и эксплуатационные качества которых соответствуют условиям использования в мотор-колесе данного типа и назначения.
В мотор-колесах в большинстве случаев применяют уплотнения радиального типа, выполненные из резины или резиноподобных материалов. Обычно они имеют металлический каркас (обойму), служащий для увеличения жесткости резиновой манжеты. В отдельных случаях уплотнение на валу электродвигателя может быть выполнено в виде фетрового сальника.
У резиновых сальников металлические каркасы 3 приклеивают вулканизацией к манжете с внутренней (рис. 24, б) или с внешней (рис. 24, а, в) стороны. Расположение металлического каркаса с внутренней стороны манжеты предпочтительнее, если предусмо
трена смена уплотнения, поскольку в этом случае при смене не будет портиться поверхность гнезда корпуса. Для защиты от пыли, которая проникает через уплотнение из внешней среды, манжету 2 снабжают дополнительными уплотнительными элементами, защищающими от пыли (рис. 24, в). Для улучшения контакта манжеты с вращающейся деталью применяют металлические спиральные пружины 1.
Резина, из которой изготовлена манжета сальника, должна
отвечать следующим требованиям:
не иметь затвердеваний и растрескиваний поверхности, особенно в зоне контакта, при действии высоких температур;
48 *
восстанавливать упругие свойства после действия низких температур;
иметь приемлемую величину коэффициента трения в зоне контакта.
Большинство резиновых сальников удовлетворительно работает в диапазоне температуры от —55 до -Ь150 С. При нормальных условиях работы уплотнения этот диапазон вполне удовлетворяет условиям эксплуатации транспортных машин с мотор-колесами. Однако существует ряд причин, связанных с нарушениями работы уплотнений из-за увеличения потерь на трение в зоне контакта, в результате чего температура в этой зоне может существенно повыситься.
В сальниковых уплотнениях контакт уплотнительного кольца с металлической поверхностью происходит по очень небольшой площади, что в сочетании с высокими окружными скоростями и относительно большим контактным давлением приводит к интенсивному нагреву контактирующих поверхностей вала и уплотнения.
Ввиду высокой концентрации тепла на поверхности трения создание надежного вращающегося уплотнения представляет известные трудности, основными из которых являются обеспечение необходимого срока службы сальника и соприкасающейся с ним детали, а\ также поддержание температуры уплотняющего узла в пределах, допускаемых для используемого материала.
Условия работы сальников различных размеров можно сравнить между собой, пользуясь удельной силой трения на поверхности скольжения (в Г!см)'.
Мтр
Ртр=2^’
где Мтр — момент силы трения;
гск — радиус поверхности скольжения.
Из этой формулы следует, что увеличение размера сальникового уплотнения не означает снижения его надежности и срока службы. При определенных условиях сальники большого размера могут быть не менее надежны, чем сальники сравнительно небольших размеров. Однако практика показывает, что изготовление сальников значительных размеров связано с большими технологическими трудностями, и не всегда удается обеспечить должное качество и выдержать проектные размеры сальника.
Величина М.тр и связанный с ней нагрев поверхности сальника и детали в зоне контакта зависят от многих факторов, в том числе от химического состава резины и масла, применяемого для смазки редуктора, качества обработки и твердости детали в зоне контакта, степени натяга уплотнительной кромки и других причин.
Температура поверхности контакта снижается при соответствующем подборе материала сальника и масла, создающего 4 Л. И. Яковлев 49
устойчивую пленку, в зоне контакта. На величину Мтр значительно влияют такие факторы, как эксцентрицитет детали и мельчайшие риски па поверхности контакта. Не меньшее значение имеет сила натяжения пружины: при недостаточном или неравномерном по окружности сальника натяжении ухудшается герметичность уплотнения, при чрезмерном натяжении увеличивается момент сил трения и со временем происходит выработка канавки в зоне контакта, особенно в случае недостаточной твердости поверхности детали.
Весьма важным фактором, связанным с температурой в зоне контакта и влияющим на долговечность сальника, является окружная скорость па поверхности трения. Практика показывает, что величина этой скорости для обеспечения падежной работы резиновых уплотнений не должна превышать 20 м/сек, а в отдельных случаях 25 м/сек. В зависимости от сорта резины уплотнения могут быть также пригодны для работы при температуре 95—150° С, а при использовании силиконовой резины — и до 180° С.
Однако допускать одновременно высокие окружные скорости и температуры не рекомендуется, так как это снижает надежность уплотнения. Поэтому если допускается большая удельная сила трения и, следовательно, температура в зоне контакта, то окружную скорость необходимо понизить. Испытания показывают [3], что для сальников из пербунановых резин при окружной скорости около 8 м/сек удельная сила трения может быть принята равной Ртр = 45^-50 Г/см, а для сальников из силиконового каучука при окружной скорости около 18 м/сек допускается удельная сила трения
Ртр = 27-г-30 Г/см.
С уменьшением радиуса детали на поверхности скольжения окружную скорость также необходимо уменьшить, поскольку ухудшаются условия охлаждения детали и увеличивается частота деформации сальника вследствие биения вала.
Размеры сальников мотор-колес в значительной степени зависят от вида компоновки. В большинстве случаев при компоновках III, IV, V и VI вида применяют сальники большого диаметра. Из известных уплотнений наибольшие размеры имеет сальник мотор-колеса, показанного на рис. 15; его посадочный диаметр составляет 1079,5 льи. При компоновках I, II и VII вида в мотор-колесах применяют сальники серийного изготовления с относительно небольшими размерами. •
Количество уплотнений и место их установки в значительной степени зависят от конструктивного исполнения мотор-колеса. Минимальное возможное количество уплотнений равно двум, причем одно из них устанавливают с наружной стороны перед соответствующим опорным подшипником колеса, а второе на валу «т-г
50
или на детали, связанной с валом электродвигателя, чтобы предупредить попадание жидкой смазки из редуктора в полость корпуса электродвигателя. При большом диаметре опорных подшипников колеса уплотнения часто ставят перед обоими подшипниками. В этом случае полость, ограниченная сальниками, должна иметь связь с атмосферой.
Особое внимание должно быть уделено подаче смазки на трущуюся кромку уплотнений, расположенных у опорных подшипников большого диаметра, так как к ним в большинстве случаев не поступает масло из редуктора. Особенно ухудшаются условия подачи смазки на наружный сальник, если у подшипника установлено два сальника, а консистентная смазка не может быть применена. Поэтому наружный сальник часто заменяют фетровым уплотнением.
Герметизация мотор-колес транспортных машин высокой проходимости осуществляется обычно при помощи двух сальников, установленных рядом, причем наружный может иметь две уплотняющие кромки. Наружная поверхность внешнего сальника должна быть защищена от соприкосновения с твердыми частицами грунта. Возможны и другие способы герметизации мотор-колеса.
КОНСТРУКЦИЯ МЕХАНИЧЕСКИХ ТОРМОЗОВ МОТОР-КОЛЕС
На транспортных машинах с электроприводом и мотор-коле-сами используют две независимые тормозные системы. Электрический тормоз применяют при служебном торможении; он не требует какого-либо изменения в конструкции мотор-колеса. Нагрузки при электрическом торможении учитывают при расчете па выносливость деталей механической передачи.
Механический тормоз мотор-колес используют в качестве стоя
ночного и вспомогательного, осуществляющего дотормаживание транспортной машины при небольшой скорости до полной оста
новки, когда эффективность действия электрического тормоза
резко снижается. Условия безопасности движения требуют, чтобы
механический тормоз мог осуществить функции аварийного в случае выхода из строя электрического тормоза. Значительная нагрузка на шину мотор-колеса обусловливает необходимость применения тормозов, отличающихся большой энергоемкостью, тепло
стойкостью и надежностью при значительных скоростях сколь
жения.
Механический тормоз составляет с остальными элементами мотор-колеса единый агрегат. Его конструкция в значительной степени зависит от того, на какое звено механической передачи мотор-колеса воздействует тормоз. Возможны три принципиальг ных решения:
тормоз связан с валом тягового электродвигателя или с деталями, жестко соединенными с валом;
51
тормоз воздействует на промежуточные детали редуктора; тормоз связан с деталями колеса.
Преимуществом установки тормозного механизма на валу электродвигателя являются получающиеся при этом малые размеры и вес его деталей, что обусловлено небольшим необходимым тормозным моментом. Если тормоз не использовать постоянно в качестве служебного, то он будет обладать большой долговечностью, а если использовать, будет иметь место значительный износ трущихся поверхностей в результате высокой скорости вращения вала электродвигателя. Установка тормозного механизма на валу электродвигателя возможна на всех мотор-колесах постоянного действия с ограниченным диапазоном регулирования.
В двухскоростных мотор-колесах установка тормозного механизма па валу электродвигателя не допускается, если выход из строя привода механизма переключения приводит к разрыву кинематической цепи редуктора. Кроме того, необходимый тормозной момент на валу электродвигателя меняется в зависимости от включения первой или второй передачи.
В мотор-колесах периодического действия установка тормозного механизма на валу электродвигателя исключена во всех случаях.
Поскольку необходимый тормозной момент при установке тормозного механизма на валу электродвигателя относительно невелик (на колесо передается тормозной момент, в ip раз превышающий момент на валу электродвигателя), обычно используют однодпековые, в редких случаях многодисковые фрикционные тормоза с пневматическим, гидравлическим (иногда пневмогидравлическим) или электромагнитным приводом.
Последний вид привода надежен и имеет наименьшее время срабатывания, но механизм отличается сравнительно большими размерами и весом. Наиболее удобен и прост пневматический привод с питанием от бортового компрессора транспортной машины. Пневмогидравлический привод применяют для одподиско-вых тормозов с большой силой давления колодок на диск, причем в системе привода тормоза должно быть давление, значительно превышающее возможное давление в сети бортового компрессора, что требует использования пневмогидравлического усилителя. Применение чисто гидравлического привода может оказаться не- * желательным из-за необходимости установки специального гидронасоса.
Следует учитывать, что механический тормоз мотор-колес обычно используют в качестве стояночного. Поэтому привод должен обеспечивать действие тормоза на стоянке в течение достаточно длительного времени. В этой связи представляет интерес использование тормозов с пружинным приводом, действующим на затормаживание. Второй вид привода (пневматический, электромагнитный) преодолевает действие пружин и осуществляет раз-52 ' ' >
жатие фрикционных элементов во время движения транспортной машины.
* Механический тормоз с электромагнитным приводом на растормаживание применен в мотор-колесе, изображенном на рис. 8. 11а подшипниковом щите электродвигателя со стороны коллектора
(рис. 25) смонтирован механический дисковый тормоз 1. Обмотка 2 тормоза соединена последовательно с обмоткой возбуждения тягового электродвигателя. При отключен
ном возбуждении электродвигателя дисковый тормоз сжат пружиной 3\ в этом случае тормозной момент через вал электродвигателя и редуктор передается на колесо. При включении электродвигателя электромаги ит-наясила, создаваемая обмотками тормоза, преодолевает силу сжатия пружины и колесо растормаживается. Предусмотрена также возможность использования тормоза в аварийных случаях при движении машины.
В мотор-колесе, изображенном на рис. 15, на валу электродвигателя с внешней стороны установлен однодисковый механический тормоз, состоящий из диска 1 и фрикционных колодок 2. Тормоз-
Рис. 25. Механический тормоз с электромагнитным приводом на растормаживание
нои диск с радиальными вырезами смонтирован на валу электродвигателя. Тормозные накладки прижимаются к диску с обеих сторон гидроцилиндрами двухстороннего действия, закрепленными на подшипниковом щите 3 электродвигателя. Тормоз действует плавно, и на его работу не влияет тепловое расширение контактной поверхности. Диск изготовлен из специального сплава, допускающего нагрев до 320 С, а кратковременно — до 540 С [28]. Для использования тормоза в качестве стояночного необходимо поддерживать давление в системе привода.
В мотор-колесе, приведенном на рис. 13, применен многодисковый механический тормоз с электромагнитным приводом. Вал 10 электродвигателя со стороны коллектора связан с подвижными дисками 11 тормоза. Неподвижные диски 12 тормоза закреплены на
53
корпусе электродвигателя 1 при помощи деталей 13 и 14. При обесточенной обмотке 17 электромагнитного привода подвижные диски тормоза блокируются пружинами 16, действующими через нажимной диск 15. При замыкании цепи электродвигателя обмотка 17 получает питание, и электромагнитный привод, преодолевая действие пружин, притягивает нажимной диск 15, освобождая фрикционные диски.
В двухскоростных мотор-колссах тормозной механизм должен быть связан с колесом или промежуточным звеном редуктора, имеющим постоянную кинематическую связь с колесом. Во втором ’случае снижается необходимый тормозной момент, что позволяет уменьшить размеры и массу тормозного механизма, причем в некоторых случаях удается создать достаточно удачную конструкцию.
Одно из возможных конструктивных решений тормозного механизма, связанного с промежуточными звеньями редуктора, применено в мотор-колесе, приведенном на рис. 18. Fla одном из концов каждого из трех валов 13 имеются шлицы для установки тормозных дисков 5, которые сжимаются тормозными колодками, имеющими гидравлический или .пневмогидравлический привод.
Расчленение тормозного механизма на три аналогичных тормоз--пых узла позволяет значительно уменьшить его осевой размер и необходимую величину тормозного момента каждого узла, а также облегчить режимы работы тормозной системы в целом. Однако определенным недостатком в этом случае является увеличение числа деталей тормозного механизма и возможная неравномерность и несинхропность зажатия тормозных дисков, что может вызвать нежелательное перераспределение нагрузок в деталях каждого из трех тормозных узлов, а также в соответствующих деталях редуктора.
В двухскоростных мотор-колесах, у которых изменение передаточного числа осуществляется при помощи поочередного затормаживания двух определенных звеньев редуктора (см. рис. 21), принципиально возможно торможение мотор-колеса одновременным приведением в действие обоих тормозов.
При движении транспортной машины с включенной первой или второй передачей мотор-колеса приведен в действие тормоз второго или первого планетарного ряда. Для торможения мотор-колеса необходимо привести в действие тормоз другого ряда. Аналогичная возможность имеется при использовании в качестве элементов управления механизмом переключения тормоза и фрикционной муфты.
Возможность использования этого вида торможения в качестве служебного зависит от конструкции мотор-колеса и, в частности, от конструкции узлов торможения звеньев первого и второго ряда, а также от эффективности отвода тепла, выделяющегося при торможении.
Следует учитывать, что при сравнительно большой частоте повторяемости тормозных режимов в редукторе будет выделяться значительное количество тепла, что может отразиться на тепловом режиме мотор-колеса в целом и вызвать местные перегревы в определенных зонах редуктора. Кроме того, величины необходимых тормозных моментов на звеньях рядов при торможении транспортной машины могут быть больше, чем в режиме тяги, что может потребовать увеличения числа дисков, а следовательно, и размера пакета, и усиления ряда деталей редуктора.
Однако можно использовать этот способ торможения для до-тормаживания транспортной машины и на стоянках без опасения, за тепловой режим мотор-колеса и прочность деталей редуктора. Для торможения на стоянках должен быть предусмотрен специальный ресивер для поддержания давления в системе привода тормоза. Необходимость в ресивере отпадает, если тормозные механизмы имеют пружинный привод на затормаживание, а пневматический — на растормаживание.
В мотор-колссах периодического действия тормозной механизм должен быть связан с промежуточными звеньями редуктора, имеющими постоянную кинематическую связь с колесом, либо-непосредственно с колесом.
Выполнение механического тормоза, связанного с промежуточными звеньями редуктора, затрудняется из-за относительной сложности редуктора, обычно имеющего значительное передаточное число, и наличия механизма сцепления. Поэтому размещение в монтажном объеме внутри обода мотор-колеса узлов механического тормоза встречает значительные трудности конструктивного характера.
Вследствие этого в существующих разработках мотор-колес предусмотрена связь механического тормоза непосредственно с колесом. Наиболее рациональным решением для мотор-колес периодического действия является использование колодочных тормозов того же типа, который применен па тягаче. Однако компоновка когор-колеса в некоторых случаях исключает возможность применения этих тормозов.
Хорошее конструктивное решение для мотор-колес периодического действия может быть получено при использовании многодисковых тормозов, связанных с колесом. Применению многодисковых тормозов в этом случае препятствуют трудность достижения четкого и полного его выключения при растормаживании и отсутствие гарантированного зазора во фрикционных парах, что обусловливает потери мощности па трение в выключенном состоянии и дополнительный нагрев деталей тормоза, особенно при сухом трении. Это вызвало создание многодисковых тормозов, с масляным охлаждением [24], причем масляная прослойка между поверхностями трения компенсирует отсутствие гарантированного зазора в выключенном состоянии. Однако присутствие масла при-
55
водит к значительному уменьшению коэффициента трения и увеличению размеров тормоза.
^Многодисковые металлокерамические тормоза, связанные с колесом, применены, в частности, на лесотрелевочном автопоезде «Торнапул», мотор-колесо которого показано на рис. 19. На рис. 26 приведена конструкция аналогичного типа. На корпусе электродвигателя 1 смонтирован цилиндр 2, шлицы которого служат для
Рис. 26. Многодисковый тормоз мотор-колеса периодического действия
установки неподвижных тормозных дисков 5. Подвижные тормозные диски 6 установлены па шлицах ступицы 7 тормоза, которая болтами закреплена на ступице 3 колеса. Ступица 7 имеет ребра для охлаждения тормоза. Приведение тормоза в действие осуществляется при помощи нажимного кольца 9, перемещению которого противодействует шток 12 с пружиной. Тормоз имеет пневмо-камерный привод. Диафрагма 10 тормозной камеры прижимается крышкой 11 к цилиндру 2 и внешнему кольцу 8, которое имеет цилиндрическую часть, защищающую внутреннюю полость тормоза от попадания грязи. Кольцо 8 укреплено к крышке 11 болтами, а крышка, в свою очередь, также болтами на цилиндре 2. Крайний неподвижный диск упирается в упругое кольцо 4.
В многодисковых тормозах сухого трения должно предусматриваться удаление абразивной пыли, образующейся в результате износа тормозных дисков.
В мотор-колесе периодического действия, приведенном на рис. 19, для торможения использован связанный с колесом многодисковый фрикционный тормоз с пневмокамерным приводом, аналогичный по конструкции рассмотренному механизму сцепления. Он смонтирован с внутренней стороны коробчатого фланца 4, причем его неподвижные диски через деталь 3 и монтажный корпус 13 крепления мотор-колеса к раме связаны с рамой транспортной машины.
Применение колесных колодочных тормозов в мотор-колесах всех типов без увеличения их осевого размера возможно в том случае, когда диаметр корпуса электродвигателя существенноменьше диаметра ступицы или обода колеса и в пространстве между корпусом электродвигателя и ступицей (или ободом) может быть, размещен колодочный тормоз. Примером выполнения этого условия может служить мотор-колесо со сдвоенными шинами, приведенное на рис. 11. Трехэлементный обод колеса имеет диск. К диску 10 обода внутреннего колеса шпильками И укреплены ступица колеса 12 и тормозной барабан 7. Тормозные колодки (на чертеже они не показаны) управляются механизмом, связанным тягой 6 с пневматическим или гидравлическим цилиндром.
ОХЛАЖДЕНИЕ ОСНОВНЫХ ЭЛЕМЕНТОВ МОТОР-КОЛЕСА
Тепловые режимы основных элементов мотор-колеса определяют работоспособность как отдельных элементов, так и всего-агрегата в целом. В мотор-колесе в сравнительно небольшом монтажном объеме внутри обода объединены три основных источника теплообразования: тяговый электродвигатель, редуктор и механический тормоз. Известную роль в тепловом балансе мотор-колеса играет тепло, выделяющееся в опорных подшипниках колеса,, шине, уплотнениях и выключенных фрикционных механизмах переключения и сцепления.
Вопросы охлаждения основных элементов мотор-колеса и, в первую очередь, электродвигателя и редуктора следует решать на начальной стадии проектирования агрегата. Помимо естественного охлаждения элементов мотор-колеса за счет теплоотдачи в окружающую среду необходимо предусматривать напорную воздушную вентиляцию электродвигателя, в некоторых случаях и корпуса редуктора, реже — механического тормоза. Выбор схемы вентиляции мотор-колеса во многом зависит от вида его компоновки -и схемы вентиляции электродвигателя.
Условия охлаждения тяговых электродвигателей транспортных машин, работающих по бездорожью, хуже, чем эксплуатируемых пр усовершенствованным дорогам. Это объясняется более . трудным (по условиям нагрева электродвигателя) режимом движения по плохим дорогам из-за частых перегрузок и отсутствия режима выбега, а также возможностью быстрого загрязнения
57
поверхностей охлаждения и засорения вентиляционных каналов электродвигателя и других участков воздухопровода, что повышает его аэродинамическое сопротивление и ухудшает теплоотдачу охлаждаемы х поверх ностсй.
К особенно тяжелым результатам приводит засорение вентиляционных каналов электродвигателя, поскольку в нем превращается в тепло 8—12% подводимой электрической энергии, а у тяговых асинхронных двигателей к. п. д. при перегрузках бывает ниже 0,7. Вместе с тем нагревы до температуры, превышающей определяемую классом изоляции величину, вызывают преждевременное старение изоляции и необратимое снижение ее электрической прочности или пробой при значительном кратковременном перегреве.
Для тяговых электродвигателей возможна самовептиляция и независимая вентиляция. У электродвигателей с самовептиля-цией наилучшие условия охлаждения создаются при высоких скоростях вращения. При перегрузках, когда скорость вращения электродвигателя заметно снижается, производительность установленного па валу электродвигателя вентилятора и, следовательно, эффективность самовентиляции резко падает. Поскольку режимы перегрузок для электродвигателей мотор-колес в большинстве случаев являются обычными, самовентиляция не обеспечивает должной надежности работы электропривода. Это обстоятельство особенно неблагоприятно отражается на работе асинхронных двигателей, у которых при снижении скорости вращения в случае работы по предельной механической характеристике возрастают абсолютное скольжение и потери в роторе.
Кроме того, очень часто охлаждающий воздух для электродвигателей пневмоколесных машин приходится забирать через специальные воздухопроводы и воздушные фильтры, что создает дополнительное аэродинамическое сопротивление. Вентиляторы, установленные на валу электродвигателя, не в состоянии компенсировать дополнительной потери напора воздушной струи.
Электродвигатели с самовентиляцией могут найти применение главным образом в мотор-колесах периодического действия, когда их скорость вращения остается относительно стабильной, близкой к скорости вращения при выбранном рабочем режиме [40].
Большинство электродвигателей мотор-колес имеет независимую вентиляцию, которая повышает интенсивность охлаждения за счет увеличения коэффициента теплоотдачи электродвигателя и тем самым позволяет повысить его мощность при заданных габаритных размерах, а также эксплуатационную надежность. С повышением расхода охлаждающего воздуха Q по сравнению с Qh (Q.h — номинальный расход охлаждающего воздуха при самовентиляции) при неизменных тепловых потерях перегрев . вначале резко снижается, но при дальнейшем увеличении Q снижение перегрева уменьшается. При Q = (2,5-ь2,7) QH насту-58
пает «насыщение» машины охлаждающим воздухом, что соответствует установившемуся перегреву, поскольку дальнейшее повышение интенсивности вентиляции практически не дает снижения перегрева.
Применение независимой вентиляции позволяет использовать, при необходимости воздушные фильтры без снижения напора воздушной струи при использовании более мощных вентиляторов, а также осуществить охлаждение электродвигателя на стоянках».
Решать вопросы вентиляции электродвигателя независимо от компоновки мотор-колеса можно только в том случае, когда мотор-колесо имеет компоновку I и II вида или электродвигатель с вентиляцией по последовательной схеме и подводом и отводом, воздуха со стороны внутреннего подшипникового щита. При всех других видах компоновки и при вентиляции электродвигателей по параллельной схеме конструкция мотор-колеса должна обеспечивать отвод от электродвигателя охлаждающего воздуха через-полости, расположенные в монтажном объеме внутри обода ко
леса.
Количество тепла, выделяемого в редукторе, зависит от его-к. п. д., который определяется кинематической схемой редуктора,, числом зубчатых зацеплений, наличием в редукторе фрикционных, тормозных механизмов, их конструкцией и характером работы.. Значительно влияет на к. п. д. редуктора качество выполнения его деталей, система смазки, количество и качество масла. Обычнотепловые потери в редукторе не превышают потерь в электродвигателе, причем местные перегревы не играют столь большой роли, как в электродвигателе (где они ведут к тепловому пробою изоляции), если только местный перегрев в редукторе не вызывает
химического разложения масла.
Улучшения теплового режима редукторов мотор-колес, помимо соответствующих компоновочных решений, обеспечивающих, естественный обдув определенной части поверхности корпуса редуктора, достигают принудительным обдувом корпуса редуктора, воздушной струей, охлаждающей также электродвигатель. Этот способ является особенно желательным в том случае, когда есте-
ственный обдув корпуса редуктора недостаточно э
ективен, од-
нако он требует соответствующего конструктивного исполнения’
мотор-колеса.
Тепловые потери в механическом тормозе могут достигать больших величин только в том случае, когда его используют в качестве служебного. Если же тормоз работает только как аварийный или при дотормаживании колеса на малой скорости машины при снижении эффективности действия электрического-тормоза, то периодически выделяемые в нем тепловые потери не вызовут больших перегревов.
Сравнительно невелики тепловые потери в опорных подшипниках колеса и уплотнениях. Нагрев шины при качении колеса!
59»
в известной степени влияет на тепловой режим оборудования, расположенного внутри обода колеса, ухудшая его теплоотдачу через поверхность обода.
Рассмотрим схемы вентиляции, характерные для ряда мотор-колес различных типов. Вид компоновки мотор-колеса может быть определен по соответствующей схеме.
Схема вентиляции, изображенная на рис. 27, а, характерна принудительным охлаждением корпуса редуктора. Воздух поступает через патрубок, расположенный с внутренней стороны мотор-колеса, омывает поверхность корпуса редуктора и затем поступает к электродвигателю. Последний имеет вентиляцию по параллельной схеме. Воздух проходит двумя параллельными потоками по вентиляционным каналам статора (или междукатушеч-пому пространству) и ротора и, выйдя через окна подшипникового щита электродвигателя, омывает дисковый тормоз и через отверстия во внешней неподвижной крышке мотор-колеса выходит в атмосферу. К достоинству этой схемы относится вентиляция всех трех элементов мотор-колеса, являющихся основными источниками выделения тепла, — электродвигателя, редуктора и /механического тормоза.
В схеме вентиляции, приведенной на рис. 27, б, воздух подается к мотор-колесу через патрубок, расположенный с внутренней стороны мотор-колеса, и охлаждает электродвигатель, имеющий вентиляцию по параллельной схеме. Воздух выбрасывается через окна в подшипниковом щите электродвигателя, проходит через каналы, расположенные у обода колеса, и поступает в кожух, закрывающий тормоза. Здесь он омывает заднюю крышку корпуса редуктора и детали редуктора, а затем выходит в атмосферу через жалюзи в кожухе. Эта схема обеспечивает хорошую вентиляцию электродвигателя, причем охлаждаются также редуктор и тормоза. Однако конфигурация воздухопровода достаточно сложна, что увеличивает аэродинамическое сопротивление воздухопровода.
Схема, показанная на рис. 27, в, отличается тем, что охлаждающий воздух омывает не только внутренние полости электродвигателя, но частично и наружную поверхность его корпуса. Охлаждающий воздух через отверстия в опорном цилиндре поступает в кольцевую щель между цилиндром и корпусом электродвигателя, а затем в полость, образованную подшипниковым щитом электродвигателя и торцовой стенкой опорного цилиндра, являющейся одновременно частью корпуса редуктора. Затем воздух поступает в электродвигатель, имеющий вентиляцию по параллельной схеме, и выходит в атмосферу через вентиляционные окна в корпусе электродвигателя, расположенные у заднего подшипникового щита.
Достоинством этой схемы вентиляции является достаточно эффективное охлаждение электродвигателя. Однако воздухопрс-60
вод обладает значительным аэродинамическим сопротивлением, а обдув корпуса редуктора незначителен.
Схема, изображенная на рис. 27, г, также не обеспечивает достаточного охлаждения корпуса редуктора, по в отличие от предыдущей схемы обладает относительно небольшим аэродинамическим сопротивлением. Охлаждающий воздух поступает с внутренней стороны мотор-колеса через патрубок и проходит в вентиляционные окна внутреннего подшипникового щита электродвигателя. Вентиляция последнего выполнена по параллельной схеме. Воздух, пройдя параллельными потоками через вентиляционные каналы статора (межкатушечное пространство) и ротора, выходит в атмосферу через вентиляционные окна в наружном подшипниковом щите и жалюзи в неподвижной крышке мотор-колеса.
Отсутствие достаточного принудительного охлаждения корпуса редуктора в данном случае едва ли может быть отнесено к серьезным недостаткам схемы, поскольку редуктор частично вынесен за пределы ступицы колеса и поэтому имеет хорошее естественное охлаждение.
Схема, приведенная на рис. 27, д, предусматривает принудительное охлаждение только электродвигателя, имеющего параллельную схему вентиляции. Воздух через патрубок с внутренней стороны могор-колеса и вентиляционные окна в подшипниковом щите электродвигателя поступает в его внутреннюю полость, а затем в атмосферу через вентиляционные окна в корпусе электродвигателя у наружного подшипникового щита. Корпус редуктора не имеет принудительного обдува.
Схема, приведенная на рис. 27, е, обеспечивает охлаждение электродвигателя, имеющего параллельную вентиляцию, и предусматривает охлаждение обеих частей разделенного редуктора. Воздух поступает по патрубку с внутренней стороны мотор-колеса, а выходит так же, как по схеме рис. 27, б. Основной недостаток схемы — большое аэродинамическое сопротивление, обусловленное конструкцией отводящей части воздухопровода.
Схема, приведенная на рис. 27, ж, предусматривает принудительное охлаждение только электродвигателя. Его вентиляция осуществлена по последовательной схеме, причем струя воздуха поступает в электродвигатель через вентиляционные окна в подшипниковом щите с внутренней стороны мотор-колеса, проходит далее через вентиляционные каналы ротора, а затем у другого подшипникового щита совершает поворот на 180 , направляясь в вентиляционные каналы статора (или в межкатушечное пространство). Отвод охлаждающего воздуха в атмосферу осуществлен через вентиляционное окно в корпусе электродвигателя у внутреннего подшипникового щита.
Подобная схема вентиляции находит применение в мотор-колесах в тех случаях, когда компоновку редуктора целесообразно выполнить независимо от подвода и отвода охлаждающего воздуха.
61
a)
в)
/к)
Рис. 27. Схемы вентиляции
Вместе с тем для схемы характерны отсутствие принудительного охлаждения редуктора и большое аэродинамическое сопротивление воздухопровода электродвигателя.
Сравнительную оценку различных схем вентиляции проводят по трем показателям:
эффективности охлаждения элементов мотор-колеса, являющихся основными очагами теплообразования;
соответствию намечаемой схемы вентиляции компоновке мотор-колеса и условиям эксплуатации транспортной машины;
мощности, затрачиваемой на вентиляцию.
По эффективности охлаждения элементов мотор-колеса, являющихся основными источниками теплообразования, наиболее рациональны схемы, соответствующие рис. 27, а, в и е. Однако выполнение вентиляции редуктора и механического тормоза связано с определенным усложнением конструкции мотор-колеса и требует устройства в монтажном объеме внутри обода специальных полостей с достаточно большим поперечным сечением, чтобы существенно не увеличивать аэродинамическое сопротивление воздухопровода. Схемы, соответствующие рис. 27, д и ж, предусматривают охлаждение только электродвигателей.
При выборе схемы вентиляции следует исходить из необходимости создания наиболее благоприятных условий охлаждения для электродвигателя, который является наиболее слабым элементом мотор-колеса в отношении теплового режима. Ограниченность экспериментальных данных по тепловым режимам редукторов мотор-колес в эксплуатации не позволяет определенно рекомендовать обязательное принудительное охлаждение редуктора. Целесообразность принудительного обдува корпуса редуктора увеличивается при ухудшении его естественного охлаждения, что и должно быть учтено при компоновке мотор-колеса и выбора схемы вентиляции. Необходимость в принудительном охлаждении механического тормоза определяется главным образом характером его использования. Если тормоз не предназначен для служебного торможения, то принудительного охлаждения не требуется.
При оценке соответствия схемы вентиляции компоновке мотор-колеса и условиям эксплуатации транспортной машины следует в первую очередь учесть те ограничения, которые накладывают условия эксплуатации. Так, для машин высокой проходимости, рассчитанных на движение в заболоченной местности или на преодоление брода, требуется герметизация мотор-колеса в целом и в том числе подводящих и отводящих патрубков системы его вентиляции. Конструктивно эту задачу проще решить в том случае, когда подвод и отвод воздуха осуществляется с внутренней стороны мотор-колеса. При отводе воздуха с наружной стороны мотор-колеса (рис. 27, а и г) требуется устройство выпускных клапанов, 64 ** •
что снижает надежность герметизации и увеличивает аэродинамическое сопротивление воздухопровода.
Предупреждение попадания влаги в полость мотор-колеса требует специальных*конструктивных решений его узлов, а иногда определяет рациональный в этом случае вид компоновки. В этих условиях может оказаться целесообразным использование электродвигателей с вентиляцией по последовательной схеме, что облегчает герметизацию мотор-колеса и, в частности, воздушных патрубков.
Мощность, затрачиваемая на вентиляцию мотор-колеса (или только электродвигателя), зависит от требуемого напора и расхода (т. е. объема воздуха, поступающего в систему вентиляции за единицу времени) охлаждающего воздуха. Расчет этих величин рассмотрен в специальной литературе [7, 16]. Значения напора и расхода воздуха взаимосвязаны, но при прочих равных условиях напор воздушной струи должен быть тем больше, чем больше аэродинамическое сопротивление воздухопровода электродвигателя, а также подводящих и отводящих его участков, определяемое компоновкой и конструкцией мотор-колеса. Расход охлаждающего воздуха прямо пропорционален потерям мощности в электродвигателе и принимаемому в определенных пределах коэффициенту вентилированности, который представляет собой отношение расхода воздуха к величине потерь мощности.
Необходимые величины напора и расхода охлаждающего воздуха для электродвигателя определяют при его расчете. При конструировании мотор-колес следует определить дополнительную составляющую общего папора воздуха, которая обусловлена аэродинамическим сопротивлением подводящих и отводящих участков воздухопровода вне электродвигателя, и рассчитать мощность, необходимую для вентиляции мотор-колеса, исходя из суммы значения напора электродвигателя и дополнительной составляющей напора. Методика расчета напора охлаждающего воздуха для участков воздухопровода та же, что и для электродвигателя.
Затрачиваемая на вентиляцию мощность будет наименьшей в тех случаях, когда охлаждается только электродвигатель, имеющий вентиляцию по параллельной схеме (см. рис. 27, д). Однако, если подвод и отвод воздуха осуществляются с внутренней стороны мотор-колеса, причем имеет место поворот струи воздуха на 180 \ это приводит к значительному увеличению аэродинамического сопротивления (схемы вентиляции на рис. 27, б, в и е). Поэтому в данных схемах следует по возможности увеличивать сечение отводящих полостей, чтобы избежать существенного повышения затрачиваемой на вентиляцию мощности. В схемах с принудительным охлаждением редуктора и тормоза (см. рис. 27, а, в и е) повышение аэродинамического сопротивления воздухопровода также обусловливает возрастание затрачиваемой на вентиляцию мощности.
5 А. И. Яковлев
6S
В электродвигателях с параллельной вентиляцией через вентиляционные каналы статора и ротора проходит лишь часть охлаждающего воздуха, тогда как при последовательной вентиляции через эти каналы проходит весь воздух. Поэтому при последовательной вентиляции уменьшают расход воздуха примерно в 2 раза, но существенно увеличивают напор. Мощность па вентиляцию возрастает по сравнению с вентиляцией по параллельной схеме, но не пропорционально увеличению аэродинамического сопротивления электродвигателя вследствие снижения расхода воздуха.
Таким образом, при выборе схем вентиляции мотор-колеса часто приходится сталкиваться с противоречивыми требованиями, исключающими выбор оптимальной схемы по всем показателям. Поэтому следует выделить основные требования к схеме вентиляции данного мотор-колеса и выбрать схему, отвечающую этим требованиям.
Рассмотренные схемы вентиляции мотор-колес, естественно, не исчерпывают все возможные решения, а лишь иллюстрируют использованные на практике варианты этих схем. Однако они характерны для ряда мотор-колес и могут быть приняты в новых разработках.
ШИНЫ МОТОР-КОЛЕС
Различие в назначении и типах колесных машин с электроприводом обусловливает большое разнообразие применяемых на них шин. Шины, которые могут быть использованы для мотор-колес, по назначению и конструкции могут быть разделены на
четыре типа:
крупногабаритные шины обычной конструкции (отношение высоты профиля к ширине = 0,97-^0,99) для автомобилей особо большой грузоподъемности, строительных, дорожных и подъемнотранспортных машин; к крупногабаритным шинам относят шины с шириной профиля 350 мм (14") и более независимо от посадоч
ного диаметра;
крупногабаритные' низкопрофильные шины для землеройных машин, отличающиеся от шин обычной конструкции относительно
меньшей высотой профиля
= 0,8-7-0,84) и более низким вну-
тренним давлением;
шины специальных конструкций (регулируемого давления, широкопрофильные, арочные, пневмокатки);
шины обычной конструкции для грузовых и других автомобилей массового производства.
Из шин перечисленных типов для применения в мотор-колесах наиболее перспективны шины обычной конструкции для автомобилей особо большой грузоподъемности, поскольку именно на 66 *' •
этих транспортных машинах применение электропривода обеспечивает наибольший технико-экономический эффект.
Значительный диапазон нагрузки этих шин (от 3800 до 20 000 кГ при 50 км!ч) потребует создания типоразмерного ряда электродвигателей с широким диапазоном мощности, значительно большим, чем для щин специальных конструкций, у которых увеличение размера шины сопровождается существенно меньшим возрастанием расчетной нагрузки, чем у шин автомобилей особо большой грузоподъемности. При этом число типоразмеров шин специальных конструкций значительно меньше, чем шин автомобилей особо большой грузоподъемности.
Области применения и производство шин автомобилей особо большой грузоподъемности, строительных, дорожных и подъемно-транспортных машин будут значительно шире, чем шин всех других типов, исключая шины грузовых автомобилей массового производства.
Шины автомобилей особо большой грузоподъемности могут иметь рисунок протектора «повышенной проходимости» и «карьерный». Рисунок протектора «повышенной проходимости» характеризуется наличием массивных грунтозацепов, разделенных широкими выемками. Рисунок может быть направленного и ненаправленного тина. Шины с таким рисунком протектора предназначены для эксплуатации в условиях бездорожья, преимущественно на мягких грунтах. Рисунок протектора типа «карьерный» характерен наличием направленных и ненаправленных массивных грунтозацепов, разделенных узкими канавками. Насыщенность рисунка шин, предназначенных для эксплуатации в карьерах, составляет 60—70 %.
На транспортных машинах высокой проходимости, оборудованных системой электропривода с мотор-колесами, используют широкопрофильные крупногабаритные шины. Они имеют сравнительно небольшую норму слойности и соответствующий рисунок протектора и могут быть выполнены с регулируемым давлением, что улучшает проходимость транспортной машины по грунтам с различной несущей способностью.
На многозвенных автопоездах, рассчитанных исключительно на движение вне дорог, применяют широкопрофильные шины большого диаметра (1860, 2240, 3050 и 3200 мм), часто с регулируемым давлением при очень небольшом нижнем его пределе (до 0,1 — 0,35 кПсм?). Благодаря большому диаметру шин автопоезда могут передвигаться по слою снега толщиной до 1000 мм, имеющему очень малую несущую способность. Шины, разрезая слой снега, дают возможность автопоезду двигаться не создавая снежной подушки перед лидером. Шины многозвенных автопоездов имеют большой посадочный диаметр (800—1000 мм), что облегчает компоновку мотор-колеса и допускает различные варианты размещения тягового оборудования внутри обода.
5* 67
Эксплуатация мотор-колес с шинами большого размера показывает, что существенной проблемой является их замена при аварии в полевых условиях. При бескамерных шинах несколько упрощаются операции их замены, но большая масса шин (800— 1200 кг) требует специальных передвижных подъемных и монтажных механизмов.
Мпогоприводные автомобили высокой проходимости, а также многозвенные автопоезда, рассчитанные на движение не только по бездорожью, но и по шоссейным дорогам, должны иметь шины с меньшим наружным диаметром и ограниченной нагрузкой. Для обеспечения достаточно высокой проходимости на этих транспортных машинах следует применять широкопрофильные шины с регулируемым давлением при наружном диаметре 1200—2000 мм.
В последние годы получили распространение пневмокатки, существенно повышающие проходимость транспортной машины по мягким грунтам. Они отличаются от обычных шин соотношением основных размеров: при относительно небольшом наружном и весьма малом внутреннем диаметре они имеют большую ширину профиля. Форма пневмокатка значительно усложняет выполнение механического привода, и в этом случае электропривод пцзво-ляет значительно упростить конструкцию трансмиссии. Для многоприводных автомобилей высокой проходимости применяют пневмокатки с наружным диаметром и шириной 1200 мм\ их посадочный диаметр составляет 500 мм. Существуют образцы пневмокатков и несколько меньших размеров.
Обычные шины сравнительно небольших размеров с «универсальным» или «дорожным» рисунком протектора для мотор-колес используют редко. В частности, они применены на опытных образцах автобусов и электромобилей с мотор-колесами.
ОБОДЬЯ МОТОР-КОЛЕС
Ободья, применяемые в мотор-колесах, по конструкции могут быть разделены на два типа. К первому относят ободья, имеющие конструкцию, аналогичную ободьям серийных автомобилей. Такие ободья имеют диск, через который передается крутящий момент на колесо и реактивные нагрузки от дороги, воспринимаемые деталями мотор-колеса и подвески. В этом случае обод не выполняет дополнительных функций, связанных с работой мотор-колеса. Такие ободья применяют в мотор-колесах автобусов (см. рис. 11) при использовании серийных шин грузовых автомобилей.
Ободья, относящиеся ко второй группе, характеризуются специальным исполнением, позволяющим использовать их не только для монтажа шины, но и для придания ободу некоторых функций ступицы колеса. Это снижает массу и упрощает конструкцию мотор-колеса. Конструкция обода специального исполнения определяется не только размерами и способом монтажа шипы, но
и теми дополнительными функциями, которые выполняет обод. Такие ободья бывают бездисковыми или с дисками специальной конструкции, служащими для монтажа наружных обойм опорных подшипников мотор-колеса.
Большинство ободьев мотор-колес относится к одному из следующих трех типов (рис. 28):
Рис. 28. Ободья, применяемые в мотор-колесах: а — трехкомпонентный; б — пятикомпонептный; в — шестикомпонентный
трехкомпонентный обод (рис. 28, а) с разрезным замочным 1 и неразрезным бортовым 2 кольцами;
пятикомпонентный обод (рис. 28, б) с разрезным и съемным посадочным 1 и замочным 2 кольцами, неразрезным и посадочным 4 и бортовыми 5 кольцами и замочной частью 3. В некоторых мотор-колесах посадочное кольцо 4 выполняют вместе с замочной частью 3;
шестикомпонентный обод (рис. 28, в) с разрезными съемным посадочным 1 и замочным 2 кольцами, неразрезным посадочным 5 и бортовыми 6 кольцами, замочной частью 3 и обечайкой 4.
Диаметральный размер трехкомпонентного обода не превышает 14,25", пятикомпонентного — 15,00"; размер шестикомпонентного обода составляет 13,00" и более.
Трехкомпонентный обод имеет мотор-колесо, приведенное на рис. 8. По типу пятикомпонентных выполнены ободья мотор-колес, показанных на рис. 14 и 15, однако их замочная часть ви-69
доизменена и выполняет дополнительные функции. При трех компонентных ободьях всегда применяют ступицу, которая служит для монтажа обойм опорных подшипников колеса. Как правило, обод не выполняет дополнительных функций, не связанных с установкой шины. Ободья мотор-колес, показанных на рис. 14 и 15, имеют специальное исполнение. Их замочная часть выполнена заодно с неразрезным посадочным кольцом и, кроме того, уширена для обеспечения возможности установки при помощи шлицевого соединения венечной шестерни, являющейся выходным звеном редуктора. Такое конструктивное решение возможно в тех случаях, когда выходным звеном редуктора служит шестерня с внутренним зацеплением, а один из рядов редуктора расположен вне обода. Наряду с этим обод используется для монтажа наружных обойм опорных подшипников колеса, благодаря чему отпадает необходимость в применении ступицы.
Кроме того, наружная поверхность уширенной замочной части служит для установки уплотнения.
Двухопорное крепление обода при его специальном исполнении в отличие от обычного консольного крепления, применяемого на серийных ободьях грузовых автомобилей, благоприятно сказывается на величине и характере нагрузок, действующих на обод. Это несколько снижает требование к необходимой прочности и жесткости обода и позволяет уменьшить его толщину.
В мотор-колесе, показанном на рис. 18, применен пятикомпо-нентпый обод специальной конструкции. На замочной части 1 обода укреплены диски 2, соединяющие обод со ступицей 5, служащей опорой подшипников 18 колеса. Диски расположены симметрично относительно центральной поперечной плоскости обода. В мотор-колесе, приведенном на рис. 13, использованы опорные подшипники колеса с наружным диаметром, существенно меньшим, чем внутренний диаметр обода. Это потребовало выполнения обода с дисками значительного размера, используемыми для крепления ступицы колеса. Последняя служит только для монтажа наружных обойм подшипников колеса. Крутящий момент с выходного звена редуктора передается непосредственно на обод колеса.
В ряде мотор-колес (например, в изображенных на рис. 10 и 18) даже при использовании опорных подшипников большого диаметра обод колеса не является опорой их наружных обойм. В этих случаях применяют ступицы, связанные с замочной частью обода.
В мотор-колесе, показанном на рис. 19, применен обод специальной конструкции, имеющей разъем по среднему поперечному сечению.
КРЕПЛЕНИЕ МОТОР-КОЛЕСА К РАМЕ ТРАНСПОРТНОЙ МАШИНЫ
Существует два основных способа крепления мотор-колес к раме транспортной машины: жесткое (бесподвесо^ное) и подвесочное. При жестком креплении каждое из мотор-колес при по-70 •
мощи монтажного элемента укреплено к раме. Жесткое крепление мотор-колес возможно при относительно невысокой максимальной скорости транспортной машины (30—40 км!ч) и в случае применения крупногабаритных шин низкого давления (менее 1 — 1,2 кГ см2). Подвесочное крепление мотор-колес используют при большей максимальной скорости машины и при шинах высокого давления, рассчитанных на значительную нагрузку.
Подвеска может быть независимая, когда каждое мотор-колесо укрепляют к раме независимо от других мотор-колес, и осевая, при которой два мотор-колеса оси жестко соединяют между собой полой балкой круглого или коробчатого сечения. При независимой подвеске несколько снижаются неподрессорепные массы из-за отсутствия деталей, соединяющих мотор-колеса, уменьшаются колебания и толчки, обусловленные неровностями дороги, в том числе боковые толчки. Однако при осевой подвеске иногда удается упростить конструкцию самой подвески.
Для мотор-колес используют пневматическую, гидропневма-тическую и торсионную подвеску. Крепление па мотор-колесе монтажного элемента при жесткой подвеске или элементов мягкой подвески выполняют либо непосредственно к детали, служащей опорой подшипников колеса, либо к детали, жестко связанной с опорой подшипников колеса.
При жестком креплении мотор-колеса в качестве опорного -элемента может быть использован корпус электродвигателя или редуктора, а если в мотор-колесе применен электродвигатель общего назначения, то деталь, на которой устанавливают электродвигатель. В мотор-колесах, изображенных на рис. 13 и 14, для крепления их к раме использован корпус электродвигателя. В первом из них корпус электродвигателя 1 охвачен массивным кольцом 20 трапецеидального сечения и закреплен с ним сварным швом. К кольцу 20 приварены разъёмные кронштейны 18 со сферическим гнездом, в которое входит сферическая головка опоры 19.
Опоры закрепляют при помощи монтажного элемента к раме машины. Соединение подобного типа позволяет сделать мотор-колесо управляемым. Если это не обязательно, то монтажный элемент непосредственно соединяет кольцом 20 с рамой машины.
Корпус электродвигателя мотор-колеса, показанного на 1 рис. 14, с внутренней стороны выполнен как одно целое с фланцем, который служит в качестве корпуса редуктора и используется для крепления мотор-колеса к раме машины. На рис. 29 показано мотор-колесо с внутренней стороны, так что виден кольцеобразный фланец 1 с отверстиями 2, при помощи которых мотор-колесо крепят к монтажному элементу, связывающему мотор-колесо с рамой машины.
В мотор-колесе, изображенном на рис. 10, с опорным стаканом, являющимся опорой подшипников колеса, жестко связан монтажный конус, служащий для установки электродвигателя. Монтаж-
71
ный конус имеет с внутренней стороны фланец с отверстиями для крепления к монтажному элементу, связанному с рамой машины.
Следовательно, конструктивные решения жесткого крепления мотор-колеса к раме машины отличаются большим разнообразием и в значительной мере зависят от вида компоновки мотор-колеса.
При крупногабаритных шинах наиболее совершенным видом подвесочного крепления мотор-колеса к раме транспортной ма-
Рис. 29. Вид с внутренней стороны мотор-колеса фирмы Дже-нсрал Электрик
шины является гидропневматическая подвеска. Ее применяют как при независимой, так и осевой подвеске мотор-колес. На рис. 30 показан механизм независимой гпдропневматической подвески мотор-колеса. Проушина на свободном конце штока 2 поршня закрепляется в щеках 3 детали, связанной с корпусом электродвигателя, служащим опорой подшипников колеса. Проушину цилиндра 1 гпдропневматической подвески закрепляют в щеках кронштейна, смонтированного на раме машины. Кроме того, впереди мотор-колеса имеется еще одна точка крепления его к раме при помощи шарнира, допускающего перемещение мотор-колеса в вертикальной плоскости.
Находит применение независимая подвеска мотор-колес с использованием тор&исшных валов, которые отличаются наибольшей 72 ' *
удельной энергоемкостью на единицу веса по сравнению со стальными упругими элементами других типов. Этот тип подвески отличается достаточно простой конструкцией и надежен в эксплуа-
тации, но относительно большая длина торсионного вала затрудняет монтаж подвески такого типа. Торсионная подвеска может быть одпо-рычажная и двухрычажная, с продольным и поперечным расположением торсионных валов.
Для мотор-колес в зависимости от конструктивных особенностей транспортной машины и допустимой нагрузки на шину можно применять любую разновидность торсионной подвески. На рис. 31 в качестве примера
з
Рис. 30. Механизм гидроп невм эти ческой подвески
приведена подвеска мотор-
колеса при поперечном расположении торсионного вала. С целью уменьшения длины торсионного вала применены торсионы двух сечений — круглого и кольцевого, расположенные концентрично. Это позволяет уменьшить длину торсиона приблизительно в 2 раза.
73
Мотор-колесо имеет двойное крепление к раме. С корпусом электродвигателя жестко соединен балансир 11, который своим рычагом связан с кронштейном торсионной подвески. Вторым рычагом балансир через амортизатор соединен с рамой. При вертикальном перемещении колеса балансир может поворачиваться вокруг оси кронштейна на втулке 8, с которой он связан шлицевым соединением. Втулка 8 вращается в кронштейне на подшипниках трения, роль которых выполняют втулки 5 и 7.
Момент, воздействующий на подвеску со стороны дороги, через втулку 8 при помощи шлицевого соединения передается на торсионный стержень 4 и торсионную трубу 3, связанную с ним также шлицами. Противоположный конец торсионной трубы закреплен на кронштейне посредством болтов 10. С внешней стороны торсионная система закрыта кожухом 2, в котором находится втулка скольжения 1, служащая опорой торсионной системы.
Кронштейн 6 жестко крепят к раме. С торцовой стороны он имеет крышку 9, закрывающую внутреннюю полость втулки 8, служащую для монтажа торсионного стержня.
Ш ТЯГОВО-ДИНАМИЧЕСКИЙ РАСЧЕТ * МОТОР-КОЛЕСА
ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКОГО РАСЧЕТА
Для транспортных машин с мотор-колесами тягово-динамический расчет удобно вести применительно к одному мотор-колесу. При этом предполагают, что вес полноприводного автомобиля или автопоезда Ga равномерно распределяется между мотор-колесами, число которых (равное числу электродвигателей) обозначим тд, так что на каждое мотор-колесо приходится вес GK = ~. В случае неполноприводпой машины будем считать, что вес Ок, приходящийся на каждое мотор-колесо, равен расчетной нагрузке на шину. Методика тягово-динамических расчетов для машины в целом и для мотор-колеса аналогична. Удобство расчета применительно к одному мотор-колесу заключается в возможности определить его параметры как самостоятельного агрегата системы электропривода и при этом не суммировать величины момента или силы тяги, как это делают, если расчет ведут для машины в целом, а также не переходить к удельным характеристикам (отнесенным к тонне массы машины), за исключением случая расчета динамических характеристик..
Задачей тягово-динамических расчетов является определение основных тягово-скоростных и динамических показателей транспортной машины и мотор-колеса. Частная задача заключается в определении передаточного числа редуктора мотор-колеса по заданным характеристикам шины и тягового электродвигателя с учетом особенностей эксплуатации транспортной машины и конструктивного типа мотор-колеса.
Расчет тягово-скоростных показателей мотор-колеса при заданных характеристиках электродвигателя требует определения тяговой характеристики мотор-колеса FK (у), где FK — сила тяги, развиваемая одним мотор-колесом, a v — скорость машины.
Динамическую характеристику D (и), где D —динамический фактор, рассчитывают, используя тяговую характеристику мотор-колеса. Динамическая характеристика позволяет определить максимальную скорость при различных условиях движения,
75
допустимую величину подъема или коэффициента общего сопро
тивления движению, а также развиваемое ускорение.
Пользуясь методами, изложенными в работе [32], динамиче-
скую характеристику можно также использовать при выполнении тяговых расчетов для определенной трассы с известным про
филем при заданном
коэффициенте
.uni
сопротивления
движению.
Если электродвигатель мотор-колеса подлежит проектирова-
нию, то тягово-динамический расчет позволяет определить пара-
метры электродвигателя, необходимые для составления техниче-
ского задания па его проектирование.
Расчет тормозных характеристик мотор-колеса при электрическом и механическом торможении также входит в задачи тягово
динамического расчета.
Токовые нагрузки электродвигателя рассчитывают при известных электромеханических характеристиках. Это позволяет определить величины токов при заданном режиме работы мотор-колеса и оценить допустимую длительность этого режима.
МЕТОДИКА ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОГО ЧИСЛА РЕДУКТОРА
Допустимые перегрузки электродвигателей мотор-колес. Величину передаточного числа редуктора мотор-колеса находят в зависимости от:
заданных тягово-скоростных показателей транспортной машины;
электромеханических параметров применяемого электродвигателя;
допустимого использования перегрузочной способности электродвигателя, определяемого типом, назначением и условиями эксплуатации транспортной машины;
параметров трансмиссии тягача для мотор-колес периодического действия.
Если при определении передаточного числа редуктора исходить из максимальных значений динамического фактора Dmax и момента электродвигателя МдП1ах, то не будет учтена возможная по условиям нагрева электродвигателя длительность работы с максимальным динамическим фактором, иначе говоря, не будет оценено допустимое использование перегрузочной способности электродвигателя.
Характерной особенностью выбора передаточного числа редуктора мотор-колеса в отличие от редукторов, используемых в механическом и гидромеханическом приводе автомобиля, является учет не только заданной величины динамического фактора, но и возможной длительности работы с £)тах (или при близких к нему значениях £)), а также повторяемости этих режимов в эксплуатации. Эга особенность обусловливается тепловыми режимами электродвигателя и возможным ухудшением диэлектриче-/6 *
ских свойств его электроизоляционных материалов при нагреве сверх определенной величины. Процесс снижения диэлектрических свойств является необратимым, причем старение изоляции происходит тем интенсивнее, чем чаще электродвигатель подвергается перегревам сверх температуры, допустимой классом изоляции. При значительном перегреве может наступить мгновенный пробой изоляции. Поэтому электродвигатели способны к значительным перегрузкам, но в течение ограниченного времени. Перегрузочная способность электродвигателей постоянного тока, кроме того, ограничена коммутацией.
Величины максимального динамического фактора Dmax для транспортных машин различного типа и назначения имеют достаточно широкие пределы. Для автомобилей и автопоездов данного типа, характеризуемого определенной колесной формулой, назначением, параметрами шин и грузоподъемностью, величина Dmax изменяется сравнительно мало, что нетрудно установить, проанализировав технические характеристики существующих образцов автомобилей и автопоездов.
В соответствии с работой [27] динамический фактор
-- — Gafttm — Fw
т-\
Для полноприводной машины или одиночного мотор-колеса, если рассматривать динамический фактор как параметр мотор-
колеса ,
В этих формулах применены следующие обозначения:
Мк — крутящий момент на колесе;
гк — радиус качения колесного движителя, принимаемый в тяговых расчетах равным 0,95—0,98 величины свободного радиуса;
GK — расчетная нагрузка на шину;
fKm — коэффициент сопротивления качению машины на дорогах с твердым покрытием;
Fw — сила сопротивления воздуха;
FKW — сила сопротивления воздуха, отнесенная к числу мо-р тор-колес машины, т. е. FKw —
Структура динамического фактора в представленном виде учитывает внутренние потери в системе привод—движитель автомобиля, в данном случае потери в мотор-колесе, включая шину. Это позволяет исключить внутренние потери из коэффициента общего сопротивления движению ф.
77
Поскольку на дорогах с твердым покрытием коэффициент сопротивления качению учитывает потери в колесном движителе при пренебрежимо малых необратимых деформациях дороги, он, в свою очередь, является параметром собственно автомобиля (или мотор-колеса) и входит в выражение для динамического фактора. Величина потерь, обусловленная сопротивлением качению от необратимых деформаций нетвердых опорных поверхностей, может быть охарактеризована величиной /гр1 равной разности коэффициентов сопротивления качению транспортной машины на нетвердой и твердой опорной поверхности.
_ у г* к **
Учитывая, что сила тяги мотор-колеса гк = — и при низкой скорости машины FK > FKW, а для колесных движителей GKfKrn < к max» ТНК КЗ К FK шах - Ск(рСц, Э ?кт Фсц (фгц КОЭффи циент сцепления колеса с опорной поверхностью), можно принять
Рк шах
(2)
шах '
где FKma*— максимальная сила тяги одного мотор-колеса, соответствующая заданному динамическому фактору Пп)ах.
Сила тяги и момент электродвигателя связаны известным соотношением
MfiipTlp
(3)
К --
где ip — передаточное число редуктора;
— к. п. д. редуктора.
Условимся характеризовать использование перегрузочной способности электродвигателя коэффициентом его допустимой перегрузки kF, равным отношению наибольшего реализуемого момента электродвигателя Л1днб, который соответствует силе тяги ГКтах и может быть равен или меньше максимального момента Л1?тах, к моменту длительного режима М,^:
Если пренебречь некоторым различием к. п. д. редуктора при изменении момента электродвигателя от Мд^ до Мднб, то отношение можно заменить отношением
Рк max
(5)
так как момент Мдоо соответствует силе тяги FKoo.
Коэффициент kF характеризует не конструкцию и перегрузочные свойства электродвигателя, определяемые коэффициентом перегрузки по моменту — Л^у£1ах-, а целесообразный режим
использования электродвигателя данного типа в зависимости от назначения и условий эксплуатации транспортной машины определенной группы. В общем случае 1 < kF kM, причем для . электродвигателей мотор-колес обычно kM — 2,9 4-3,3.
При исследовании вопроса о допустимом использовании перегрузочной способности электродвигателя необходимо исходить из условий эксплуатации транспортной машины, которые в данном случае будем характеризовать наибольшим коэффициентом общего сопротивления движению Полагаем, что коэффициент фнб соответствует такому достаточно большому общему сопротивлению движению, которое при эксплуатации транспортной машины определенной группы может встречаться сравнительно часто, причем движение в этих условиях вероятно в течение длительного времени (с точки зрения нагрева электродвигателя). Из приведенного определения коэффициента следует, что ему должен соответствовать момент электродвигателя, не превышающий
Допустимая перегрузочная способность электродвигателя при использовании его в мотор-колесе с заданными параметрами в конечном итоге определяется величиной отношения т-гу- 11 вероятной длительностью однократной реализации Dmax. Можно различать пять вариантов сочетания этих факторов (табл. 1), обусловливающих разное соотношение коэффициентов допустимой перегрузки электродвигателей kP и перегрузки по моменту kM.
Если для транспортной машины данного типа отношение —m— < kM, причем коэффициент принят для электродвига-теля, который предполагается применить в мотор-колесе, то коэффициенту должен соответствовать длительный момент электродвигателя Мд^у а максимальному динамическому фактору D наибольший момент электродвигателя Мд нб <Z Мд тах-циент допустимой перегрузки электродвигателя в этом случае равен kP ной реализации D тем больше, чем больше kP отличается от kM нагрев электродвигателя в период, предшествовавший перегрузке (в табл. 1 условно указано до 5 мин), а кратковременно могут быть реализованы значения динамического фактора, заданную величину D„lax.
Когда отношение kM и по условиям
транспортной машины однократная реализация фактора D„,ax небольшой частоте повторяемости этих режимов, коэффициенту фнб должен соответствовать момент электродвигателя М<?оо, а величине £>тах — наибольший момент электродвигателя, рав-79
max Коэффи-
тах Поскольку kF <С kM, длительность однократ-пах может составлять несколько минут, причем и чем меньше был
превышающие
эксплуатации динамического может быть кратковременной (менее 1 мин) при частоте повторяемости этих режимов,
Таблица 1
^ina\
До 1 Л1^ — Л1^ Aid нб — Л1$ шах
^тах
со
Мб нб < Мд шах
До 1 Л'1& Mg нб — Mfi шах
Д<пах Ч'НО
До 5
нб < Мд шах
м
м
пый максимальному (Мдн6- — ^Иатах). В этом случае kr — k^.
Если отношение —^- k^, но по условиям эксплуатации
фнб
транспортной машины длительность однократной реализации динамического фактора £>1Пах может составлять несколько минут (например, до пяти), а частота повторяемости режимов с реализацией О,11ах или близких к нему значений D достаточно велика, то коэффициенту фкб будет соответствовать момент Мд
а величине Dmax — момент Мднб <Л1дтах. В таком случае kP <
При лпзации
> ^и» небольшой длительности однократной реа-Vh6 1
Z)max и ограниченной частоте повторяемости перегрузоч-
ных режимов коэффициенту ф«б должен соответствовать момент Мд а величине Z)max —момент Мднб = Мдтах. В этом
случае kF — kM.
Если > kMf но однократная реализация Dmax может Ч^нб
составлять несколько минут и перегрузки повторяются относило ** •
тел ыю часто, коэффициенту фнб должен соответствовать момент а динамическому фактору D,nax — момент Мднб <
<Г Мл max*
В таком случае kF kM. С точки зрения использования мощности и перегрузочной способности электродвигателя целесообразно, чтобы коэффициенту фнб соответствовал момент Мд* и соблюдалось равенство kF — kM. В действительности условия эксплуатации и заданные тягово-динамические параметры транспортных машин вынуждают в ряде случаев отказаться от этих
Рис. 32. Графики нагрузки транспортных машин: а — при kp ~ 2»91; б —* при kp = 2,66
соотношений, что обусловливает увеличение размеров электродвигателя мотор-колеса.
Определение численных значений коэффициента kF может быть конкретизировано, если известен нагрузочный график, характеризующий длительность работы мотор-колеса с определенными значениями силы тяги в течение соответствующей части времени рабочего цикла Тр транспортной машины. Этот график может быть получен для транспортных машин некоторых типов расчетным путем (например, для карьерных самосвалов).
Допустимо также использование графиков, полученных экспериментальным путем для существующих машин, аналогичных по конструктивному типу и назначению той машине, для которой разрабатывается мотор-колесо.
На рис. 32 приведены примерные графики нагрузки мотор-колес для двух транспортных машин с различным режимом эксплуатации. Чтобы использовать график нагрузки для определения коэффициента kF, введем понятие эквивалентной силы тяги мотор-колеса:
6
Л. И. Яковлев
81
где FK1, Fk2, . . ., FKi — силы тяги мотор-колеса, характеризующие средние значения в их определен
ном диапазоне;
/2, • • • k — периоды времени рабочего цикла, в те-
чение которых сила тяги мотор-колеса
составляет FKlf FK2,
KI
Если эквивалентную силу тяги FK9 выразить не в абсолютных величинах, а в процентах силы тяги FKmax (принимаемой за 100°6) и рабочий цикл принять за 100% времени, то
^\э% — ' 4^20 1 *^30 Н“ ’ ’ ’ Н-
где /10, /20, . . ., /100 — периоды времени в процентах от рабочего цикла, соответствующие на рис. 32 значениям силы тяги мотор-колеса, составляющим 10, 20, ... 100% от FKmax.
Если положить, что Екшах соответствует наибольшему, а Fk9 — длительному моменту электродвигателя, то отношение
Рк max %___100
Ркэ% Екэ%
Так, для графика нагрузки, приведенного на рис. 32, а, коэффициент kF = 2,94, а для графика нагрузки на рис. 32, б коэффициент kF = 2,66. Если графики нагрузки отсутствуют, то значение kF может быть установлено ориентировочно в соответствии с типом, назначением и условиями эксплуатации транспортной машины.
В табл. 2 указаны семь групп транспортных машин, на которых в определенных случаях применяют или можно применять электропривод с мотор-колссами. Рассмотрим характерные для этих групп значения Dmax, 4W и kF, полученные в результате эксплуатационных испытаний машин определенных типов в заданных условиях.
Первая группа включает большегрузные автомобил и-самосвалы грузоподъемностью 100—180 т с колесной формулой 4 X 2 и 4 X 4. Для этих машин применяют шины автомобилей особо большой грузоподъемности. Величина максимального динамического фактора для большегрузных автомобилей, как и для автомобилей других групп, принята в результате анализа технических характеристик отечественных и зарубежных образцов соответствующего типа, причем вид привода колес не учитывался. Для машин первой группы Dmax = 0,35-^0,45, а в табл. 2 указана средняя величина.
Найдем вероятное значение коэффициента Для большегрузных карьерных самосвалов. Подъем на выходе для наиболее тяжелых карьеров ah — 84-9е при протяженности не более 4 км. Для дорог в карьерах применяют усовершенствованное покрытие, 82 ,
в наиболее неблагоприятном случае — щебеночное, для которого величина {гр = 0,05. В таком случае
ф = f.p 4~ 51паЛ = 0,05 -}- 0,15 = 0,2.
Учитывая, что время движения на подъеме из карьера при указанных условиях в среднем не превышает 25—30 мин и, следовательно, режим движения с найденным значением ф не может быть отнесен к числу длительных с точки зрения нагрева электродвигателя, величину фнб можем принять на 20—25% меньше найденного значения ф; положим фнб 0,15.
Тогда отношение
2,67.
шах
^тах Ч’нб
Поскольку отношение
меньше средних значений коэффи-
циента kM, величину коэффициента допустимой перегрузки можно
принять в соответствии с табл. 1 ( kF
или, учи-
тывая приближенность расчета, kF — 2,62,7. При этом дли
тельность реализации динамического фактора по условию нагрева электродвигателя может составить не менее 3—4 мин, чего вполне
достаточно для транспортных машин, эксплуатируемых на доро
гах с твердым покрытием.
Для второй группы машин (автопоездов с колесной формулой 6 X 4 и грузоподъемностью 100—200 Т) могут быть сохранены принятые для первой группы машин значения Dmax, фк/5 и kP, поскольку условия эксплуатации машин обеих групп идентичны.
Для многоприводных автомобилей высокой проходимости с колесной формулой 6 X 6 и более, имеющих шины с регулируемым давлением, принимают высокое значение максимального динамического фактора: Dnsx = 0,70. Это обусловлено их назначением и условиями эксплуатации вне дорог, в том числе, по пересеченной местности. Наиболее тяжелыми опорными поверхностями, на которых вероятно длительное движение многоприводных автомобилей, являются увлажненный грунт или пахота, снежная целина при глубине покрова 20—30 см, сухое торфяное болото, песок и пр. Величина коэффициента сопротивления качению [гр в этих условиях существенно зависит и от параметров шины — размера, конструкции, давления; для этих опорных поверхностей в случае ведущего режима в среднем (гр= 0,15^-0,20. Принимая fsp = 0,17 и считая, что движение осуществляется на небольшом эквивалентном подъеме [32] (например, ah = 2°), найдем величину фнб = 0,17 4- 0,03 = 0,20. Отношение £?”ах — 3,50. Дли-тельность реализации динамического фактора, близкого к максимальному, может составлять 4—5 мин. Поэтому коэффициент до-84 .*’*»*'•
4 Г
пустимой перегрузки электродвигателя не должен превышать
шах
Для образующих четвертую группу неполноприводных автомобилей высокой проходимости с колесной формулой б X 4 и арочными шинами значение максимального динамического фактора принимают меньше, чем для полноприводных машин: D = 0,50. Величина для этих машин может быть принята та
кой же, как и для полноприводных: фнб = 0,20. Отношение £?'пах = 2,50. Поэтому можно принять kF ~ 2,45-^2,55.
Унб
Автопоезда с колесной формулой 10 X 10 и выше, имеющие шины с регулируемым давлением и предназначенные для движения как вне дорог, так и по усовершенствованным дорогам, образуют пятую группу. По условиям эксплуатации они близки к многоприводным автомобилям, но, учитывая наличие сцепных устройств, движение по пересеченной местности для них следует считать менее вероятным, чем для одиночных транспортных машин. Кроме того, в случае прямолинейного движения на уплотняемых грунтах различной влажности и плотности первый, второй и каждый из последующих проходов колеса но колее обусловливает повышение плотности грунта, причем после третьего — четвертого прохода уплотнение прекращается или резко уменьшается. В результате средний коэффициент сопротивления качению для транспортной машины, имеющей от пяти до десяти осей, будет меньше, чем для трехосной или четырехосной, и эта разница тем заметнее, чем больше осей имеет машина. Поэтому максимальный динамический фактор для машин пятой группы может быть принят равным £)шах = 0,45ч-0,50.
В табл. 2 указана большая величина.
По ориентировочной оценке коэффициент фнб ~ 0,15. Отно-
шение ™а¥- — 3,33. Для многоприводных автопоездов вероятна унб
меньшая длительность однократной реализации максимального динамического фактора (2—3 мин), чем для многоприводных автомобилей. Вследствие этого можно принять kF — 2,60-^2,70.
К шестой группе транспортных машин отнесены многозвенные автопоезда, эксплуатируемые исключительно вне дорог и оборудованные крупногабаритными шинами с регулируемым давлением. Наибольшее число мотор-колес у известных автопоездов этого типа составляет 54 (колесная формула 54 X 54). Эти автопоезда эксплуатируются в равнинных пустынных местностях, причем высокая проходимость обеспечена за счет многоприводности и свойств крупногабаритных шип. На уплотняемых опорных поверхностях можно ожидать существенного снижения коэффициента сопротивления качению колес автопоезда. Максимальный динамический фактор для внедорожных многозвенных автопоездов может быть ограничен D
шах — 0,40. Отсутствие надежных данных по пара-
85
. Сопостав-
метрам опорной проходимости позволяет лишь ориентировочно оценить соответствующую величину коэффициента
ление факторов, определяющих проходимость внедорожных многозвенных автопоездов и автопоездов, предназначенных для экс-
плуатации как вне дорог, так и по дорогам с твердым покрытием, показывает, что повышение диаметра и ширины шины при низком рабочем давлении, как и большее число ведущих осей внедорожных автопоездов, обеспечит некоторое снижение величины
Поэтому примем = 0,12 и получим отношение — 3,33. Принимая во внимание состав, большое число ведущих колес и
условия эксплуатации внедорожных многозвенных автопоездов, используемых преимущественно на равнинной местности, длительную реализацию максимального динамического фактора можно считать маловероятной и принять kF — 2,94-3,0.
К седьмой группе отнесены автопоезда, предназначенные для транспортировки крупных неделимых грузов (длинномерные строительные конструкции, трубы большого диаметра) и сыпучих .(строительные материалы, зерно) по дорогам с твердым покрытием, а также автобусы большой вместимости. На этих транспортных машинах с колесной формулой 8 X 4, 8 X 8 или 6x4 применяют обычно шины автомобилей большой грузоподъемности. Учитывая характер грузов и условия эксплуатации, максимальный динамический фактор для этих машин может быть принят равным £)тах = 0,30, а величина фмб найдена из условий движения по дороге с твердым покрытием при подъеме ал = 2%. Тогда
Фнб = 0,05 + 0,03 = 0,08,
а величина отношения
^гпах
= 3,75.
Поскольку при указанных условиях эксплуатации автопоездов и автобусов максимальный динамический фактор можно практически реализовать только в период разгона (преодоление максимальных подъемов на дорогах с твердым покрытием не требует реализации принятого Dmax), то для транспортных машин этой группы можно принять наиболее высокий коэффициент допустимой перегрузки электродвигателя kF = 3,24-3,3.
При оценке рекомендуемой величины kF не делалось различия между электродвигателями постоянного и переменного тока, поскольку перегрузочная способность по моменту для выполненных электродвигателей мотор-колес приблизительно одинакова независимо от рода тока. Для тяговых асинхронных двигателей нет столь явно выраженного ограничения перегрузки по моменту, каким является ограничение по коммутации у электродвигателей постоянного тока. Однако у асинхронных двигателей даже в слу-
чае частотного управления 86 • . ’
при перегрузках по моменту кратность
тока по отношению к номинальному больше, чем у электродвигателей постоянного тока, что обусловлено снижением коэффициента мощности. Это приводит к повышению электрических потерь, которые вызывают существенное уменьшение к. п. д., а при относительно большой длительности перегрузок у внедорожных и в меньшей степени у большегрузных транспортных машин — значительный перегрев асинхронного двигателя. Определенное значение имеет также увеличение потерь из-за ухудшения формы кривой напряжения при снижении частоты в случае перегрузок. Поэтому коэффициент kM у существующих асинхронных двигателей мотор-колес целесообразно принимать приблизительно таким же, как у электродвигателей постоянного тока, хотя при соответствующем регулировании напряжения в зависимости от частоты теоретически его можно повысить.
Нетрудно заметить, что значения ряда величин, и в частности коэффициента kFt содержащиеся в табл. 2, представляют собой числовую интерпретацию общих соотношений, сведенных в табл. 1. Приведенные величины следует рассматривать в качестве ориентировочных, поскольку в настоящее время не накоплено достаточно экспериментальных данных по эксплуатационным режимам нагрузки мотор-колес, применяемых на транспортных машинах разных типов, и по параметрам опорной проходимости для многоприводных машин. По мере накопления таких данных значения DmaK, и kF будут уточняться.
Методика определения передаточного числа редуктора мотор-колес первой группы. Передаточное число редуктора мотор-колес первой группы, имеющих односкоростной редуктор, определяется на основании одного из двух исходных данных: максимального динамического фактора Р,пах или максимальной скорости транспортной машины Утах для груженой или vmax для негруженой машины, если они различаются.
При определении передаточного числа редуктора, исходя из максимального динамического фактора, полагаем, что величине Dwa< соответствует момент электродвигателя Мднб. Тогда, на основе формулы (3) и учитывая соотношения (2) и (4), получим
• _ ^тах 6кгк
В этой формуле динамический фактор Z)’ах задан, момент известен из характеристик электродвигателя, значения GK и гк берут из технических характеристик шины, коэффициент kF рассчитывают указанным выше способом при помощи графика нагрузки или определяют в соответствии с табл. 2, а значение к. п. д. редуктора принимают в зависимости от его кинематической схемы, как это следует из раздела IV.
87
Если передаточное число редуктора односкоростного мотор-колеса определяют по формуле (6), то возможная максимальная скорость транспортной машины будет зависеть от максимальной скорости вращения электродвигателя namax. Скорость вращения электродвигателя мотор-колеса пд и скорость движения транспортной машины связаны соотношением
о = 0,377гк .
'р
В случае необходимости реализации заданной максимальной скорости транспортной машины утах (или t’rnax) передаточное число редуктора определяют из соотношения
ip = 0,37.7 г к
Пд max
Umax
(8)
При определении передаточного числа по этой формуле реализуемая величина максимального динамического фактора может быть найдена из формулы (6).
Методика определения передаточного числа редуктора мотор-колес второй группы. Для двухскоростных мотор-колес, имеющих редуктор с переключением передач, необходимо определить передаточные числа первой и второй передач. Передаточное число первой передачи определяют по величине максимального динамического фактора (как и для редуктора односкоростного мотор-колеса) по формуле (6) или, если задано значение максимальной силы тяги ЕКП1ах> из выражения
F к max Г к нб^р
где Цр — к. п. д. редуктора на первой передаче.
Передаточное число второй передачи 1П определяют по формуле (8) с учетом заданной максимальной скорости транспортной машины итах (или с'тах) и максимальной скорости вращения тяго
вого электродвигателя лдтах.
Соотношение передаточных чисел обеих передач редуктора зависит от величин vmax (цПах), Пщах, и мощности, подведенной
к колесу, а также от назначения и условий эксплуатации транспортной машины.
Если транспортная машина рассчитана на резко отличающиеся условия движения при груженом и негруженом рейсе (например, карьерные самосвалы, лесотрелевочные машины и др.), то передаточные числа редуктора на первой и второй передачах взаимно не связаны и их выбирают в соответствии с условиями движения. При этом переключение передач во время движения не предусматривают. Отношение передаточных чисел у двухскоростного мотор-
колеса в зависимости* от конкретных условий эксплуатации Транс-
88 •
портных машин и заданных значений цпах и Dmax может быть в пределах — 1,5-г-4,5.
В том случае, когда предусматривают переключение передач редуктора двухскоростного мотор-колеса во время движения, помимо указанных выше параметров при выборе соотношений передаточных чисел ij и 1ц необходимо учитывать также и тепловой режим тягового электродвигателя. Чтобы не создавать возможности перегрева электродвигателя при работе на второй передаче, переход с первой передачи на вторую следует осуществлять при такой скорости вращения пд, для которой величина наибольшего тока электродвигателя во время работы на второй передаче значительно не превосходит величины его длительного тока
1д /d4). Исследование параметров двухскоростных мотор-колес показывает [42J, что отношение передаточных чисел при этом находится в пределах = 1,9-ьЗ,4.
Методика определения передаточного числа редуктора мотор-колес третьей группы. Определение передаточного числа мотор-колес периодического действия непосредственно связано с расчетом системы электропривода в целом и зависит от рода тока системы и вида привода колес тягача. В настоящее время практическое применение нашли системы электропривода периодического действия на переменном токе при механическом приводе тягача и на постоянном токе при гидромеханическом приводе тягача. Рассмотрим определение передаточного числа редуктора мотор-колеса в этих случаях.
Электропривод периодического действия па переменном токе отличается тем, что при движении автопоезда по прямой (проскальзыванием колес тягача и полуприцепа пренебрегаем) относительное скольжение асинхронного двигателя мотор-колеса, соответствующее устойчивому режиму его работы, является постоянной величиной, не зависящей от частоты и тока возбуждения генератора. Это скольжение назовем рабочим скольжением.
Такая особенность работы асинхронного двигателя в системе электропривода периодического действия вытекает из наличия двух связей между тепловым и асинхронными двигателями: через синхронный генератор, а также через ведущие колеса тягача и полуприцепа и опорную поверхность. Первая из этих связей задает определенную частоту тока, питающего а,синхронный двигатель, а вторая определяет его устойчивую скорость вращения при данной частоте. При переходных процессах в системе электропривода режим работы асинхронного двигателя будет стремится измениться так, чтобы его скорость вращения при данном значении частоты соответствовала величине рабочего скольжения
Рд. — . L* /Пяг. i Рг ^тяг гк пр
$раб
89
где рг и рд — число пар полюсов синхронного генератора и асинхронного двигателя;
1тяг — передаточное число трансмиссии тягача, на которой используют электропривод;
ip — передаточное число мотор-колеса полуприцепа;
1рг — передаточное число редуктора генератора (с учетом передаточного числа коробки отбора мощности);
гк тяг и гк пр — радиусы качения колес тягача и полуприцепа.
Величину spa6 выбирают из условий распределения нагрузки между электродвигателями. Основные параметры механической передачи электропривода (1рг и ip) рассчитывают при выбранном spa6. Для полного использования мощности генератора передаточное число ip2 следует найти из выражения
• _ РгПтдМ
Р£~ 6О/1Н ’
где птдМ — число оборотов теплового двигателя при максимальном моменте;
flH — номинальная (максимальная) частота системы.
Затем находят передаточное число ip из выражения для spa6.
Передаточное число мотор-колеса с электродвигателем постоянного тока при гидромеханическом приводе тягача
• _ Чпяг е Пдр _ Гк пР
1гт nmdN
где пдр — скорость вращения электродвигателя в том режиме работы, в котором его предполагается использовать в электроприводе периодического действия при максимальной мощности теплового двигателя;
nmdN — число оборотов теплового двигателя при максимальной мощности;
^тяг — передаточное число механической передачи тягача; 1гт — передаточное отношение гидротрансформатора.
Передаточное отношение гидротрансформатора — величина переменная, изменяющаяся от минимального значения при пуске до величины (1—s) при работе в режиме гидромуфты, когда скольжение s — 0,02 4-0,04. При движении автопоезда в тяжелых дорожных условиях работа гидротрансформатора в режиме гидромуфты маловероятна.. Поэтому при расчете передаточного числа редуктора, исходя из параметров гидротрансформатора и возможных условий движения, необходимо выбрать наиболее вероятные значения iem, соответствующие максимальной скорости автопоезда на той передаче тягача, на которой используется электропривод. 90
РАСЧЕТ ТЯГОВО-СКОРОСТНЫХ ПОКАЗАТЕЛЕЙ МОТОР-КОЛЕСА ПРИ ЗАДАННЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИКАХ ЭЛЕКТРОДВИГАТЕЛЯ
Последовательность расчета. Для расчета тягово-скоростных показателей мотор-колеса необходимо определить предельную мощность (в кет) на колесе (подведенную к колесу):
р„ п„ед = ч (10)
где Мтдтах — максимальная мощность па валу первичного теплового двигателя в л. с.\
Pem — коэффициент, учитывающий расход мощности первичного двигателя на привод вспомогательных механизмов; frecn < 1;
Л?» На» 'Чеа, Чр — к. п. д. соответственно генератора, электродвигателя, статических агрегатов (выпрямителя или преобразователя) и редуктора мотор-колеса;
0,736 — коэффициент для перевода л. с. в кет. Потери момента в шине при определении Ркпред не учитывают. Значения т]г и при изменении режима работы транспортной машины и системы электропривода не остаются постоянными. В теплоэлектрическом приводе пределы изменения к. п. д. электродвигателей значительнее, чем при питании электродвигателей от контактной сети с постоянным напряжением. Это связано с тем, что в первом случае реализуемая электродвигателем мощность остается приблизительно постоянной во всем диапазоне изменения тока и напряжения, тогда как при питании от контактной сети эта мощность повышается с увеличением тока. Между тем электрические потери, в наибольшей мере влияющие па к. п. д., пропорциональны квадрату тока. В результате к. п. д. электродвигателя с увеличением тока при питании от контактной сети снижается в меньшей степени, чем при автономном источнике питания.
В качестве примера на рис. 33 приведены зависимости, характеризующие изменение к. п. д. тяговых электрических машин постоянного и переменного тока, а также общего к. п. д. электрических машин (для системы переменного тока с учетом к. п. д. преобразования частоты) при работе системы привода с постоянной мощностью первичного двигателя. Из рис. 33 следует, что к. п. д. электродвигателей с уменьшением скорости машины (на графиках указаны относительные скорости существенно снижается, что объясняется увеличением электрических потерь. У асинхронных двигателей к. п. д. снижается в большей степени вследствие ухудшения коэффициента мощности при перегрузках,
91 •
обусловливающего существенное повышение тока. Кроме того, при низкой частоте к. п. д. асинхронных двигателей дополнительно снижается за счет ухудшения формы кривой напряжения на выходе преобразователя частоты.
К. п. д. генераторов при перегрузках изменяется в меньшей степени, поскольку для их обмоток при расчете принимают более низкую плотность тока, чем для электродвигателей. Это целе-
Рис. 33. К- п. д. генератора и электродвигателя при работе первичного двигателя в режиме постоянной мощности:
а — для системы постоянного тока; б — для системы переменного тока;
/ — к. п. д. генератора; 2 — к. п, д. электродвигателя; 3 — общий к. п. д. электрических машин и преобразователя частоты (для системы переменного тока)
сообразно, так как вес генератора всегда меньше суммарного веса электродвигателей, и некоторое его увеличение серьезно не отражается па полном весе агрегатов электропривода.
Если заданы соответствующие электромеханические параметры генератора и электродвигателя, то, пользуясь известной методикой 17, 16, 17, 321, можно рассчитать их потери и к. п. д. при работе с постоянной мощностью первичного двигателя и изменении момента и скорости вращения в определенных пределах. Если заданы также кривые изменения к. п. д. редуктора от скорости для ряда FK = const, то могут быть определены действительная зависимость предельной мощности на колесе от скорости и функция FK (и). Если зависимости т]р —) неизвестны, то следует \ Vco /
принять т)р const, хотя в действительности при отклонении режима работы редуктора от номинального его к. п. д. снижается. 92
В координатах относительных значений скорости —-— и силы
Uoo
тяги приведены (рис. 34) функции FK (и) для системы элек-* Коо
тропривода постоянного (кривая 1) и переменного (кривая 2) тока. Там же приведена предельная тяговая характеристика = ~ const, построенная в предположении, что общий к. п. д. элементов системы электропривода остается постоянным. Предельную тяговую характеристику FKv~ const рассчитывают на основе равенства
к пред Qg7 * (11)
Из рис. 34 следует, что функции FK (у), полученные с учетом и без учета изменения т)г и значительнее отличаются в области малых спортной
Fк 1
Ц1 1
а । V ' " Ом 1
0,5
скоростей тран-машины при
причем для си-
О
Коо
стем переменного тока это различие является весьма существенным. При высоких скоростях, когда V
2.0 r
Рис. 34. Предельные тяговые характери-стики мотор-колеса при использовании в расчете действительных и средних к. п. д. генератора и электродвигателя:
/ — при действительных к. п. д. генератора и электродвигателя для системы постоянного тока; 2 — то же для системы переменного тока; 3 — при постоянных осредненных значениях к. п. д. генератора и электродвигателя
скоростях
1, кривые FK (г)
расположены выше, чем ^характеристика FK v = = const. В действительности расхождение будет частично ком-пенсироваться за счет снижения к. п. д. редуктора при -=— <Z 1-
ГКоо
Во многих случаях при расчете тягово-скоростных показателей мотор-колеса можно избежать весьма трудоемкой работы по определению характера изменения к. п. д. генератора и электродвигателя, принимая произведение ЛгЛаЛсаЛр постоянным во всем диапазоне изменения v и FK. Это допущение является логичным еще и потому, что действительный характер изменения к. п. д. редуктора чаще всего неизвестен, что не позволяет провести расчет РКПред с одинаковой степенью точности на всех его этапах. Расчетным путем может быть определена только величина tjp, соответствующая номинальным нагрузка^. Можно принимать для систем постоянного и перемен но-постоя иного тока среднее 93
значение общего к. п. д. электрических машин равным значению к. п. д. в длительном режиме их работы, а для систем переменного тока — на 3—5% ниже указанной величины.
Если принять в формуле (10) произведение — const
для всего диапазона изменения тягово-скоростных показателей, считать величину Nmdmax постоянной, что практически обеспечивают современные системы регулирования тепловых двигателей и генераторов и полагать pecrt = const, то мощность РКпред может быть принята неизменной при всех режимах движения транспортной машины, исключая пусковой период и в некоторых случаях движение с максимальной скоростью. Это допущение значительно упрощает методику решения ряда задач по расчету тягово-скоростных показателей при сохранении достаточной для практических целей точности. Исключение составляет случай определения скорости транспортной машины при перегрузках по току, что следует учитывать, например, при движении на затяжных подъемах, поскольку расчетные значения скорости являются завышенными.
Отношение предельной мощности на колесе (в кет) к нагрузке на шину (в Т) назовем коэффициентом энерговооруженности мотор-колеса :
, Рк пред ..
«Д — --7; • И*)
Отличие этого коэффициента от коэффициента энерговоору-
женности транспортной машины ka (в л. с.),, представляющего
собой отношение максимальной мощности теплового двигателя
к полному весу машины
N тд шах
заключается в том, что коэффициент kA учитывает расход мощности теплового двигателя на привод вспомогательных агрегатов и к. и. д. основных агрегатов электропривода: генератора, электродвигателя, выпрямителя или преобразователя и редуктора, но не учитывает неактивизированные колеса транспортной машины. Таким образом, коэффициент ka характеризует определенные свойства машины, а коэффициент kA — свойства мотор-колеса, причем для неполноприводных машин он будет больше, чем для полноприводных при одной и той же мощности первичного двигателя.
Между этими двумя коэффициентами существует следующее соотношение:
причем в случае применения сдвоенных шин под GK понимают удвоенную расчетную нагрузку шины.
94 * •
Для полноприводных машин, у которых Ga = GKtnd, эта формула упрощается:
= ' 0 >736.
Принимая некоторые средние значения входящих в формулу величин, получим
fe4 = ka-^—0,85-0,88-0,86-0,92-0,736 =
= 0,435Аа .
Если при расчете тягово-скоростпых показателей мотор-колес мощность первичного двигателя и колесная формула транспортной машины не заданы или проектируемое мотор-колесо предпо-лагаегся использовать на автомобилях разных типов с отличающимися зйачениями коэффициента kai то величину предельной мощности на колесе можно определять из выражения (12) для kA.
При выборе коэффициента энерговооруженности мотор-колеса необходимо учитывать следующее:
минимальное значение коэффициента kA, необходимое для реализации максимальной скорости итах;
достигнутый уровень величины коэффициента ka для транспортных машин данного типа и назначения;-
возможность одновременного задания двух величин; коэффициента общего сопротивления движению и соответствующей ему скорости
возможность реализации необходимого диапазона регулирования тягово-скоростных показателей, определяемого коэффициентом
£> ^тах F к max , ymln Рк mln *
необходимость повышения скорости транспортной машины в тяжелых условиях движения, сопровождающихся перегрузками электрических машин;
необходимость соблюдения условия kAGA где Рд<» —
Чр
полезная (механическая) мощность на валу электродвигателя в длительном режиме работы.
Если одновременно заданы величины ф«б и то коэффициент
1, __ 1ЛЗ
Ra " 367 ’ 1 ‘
Минимальное значение коэффициента kA для данного мотор-колеса соответствует минимальному значению предельной мощности на колесе РКПред- Должно соблюдаться условие kAGK —
95
— Рк пред > Q', чем больше эта разность, тем больше подъем, преодолеваемый машиной без снижения скорости цпах*
Мощность Рк Пред определяют из выражения баланса мощности транспортной машины при максимальной скорости итах. Полагая, что при скорости vmax движение осуществляется по горизонтальному участку без ускорения, получим значение мощности
/сип
где Рк[ — мощность, расходуемая на преодоление сопротивления качению всех колес и отнесенная к числу мотор-колес ;
— мощность, расходуемая на преодоление сопротивления воздуха и отнесенная к числу мотор-колес.
При скорости циах мощность
р Ggf«Стах
367’
причем средний для всех колес коэффициент сопротивления качению fK должен соответствовать скорости Цпах.
При той же скорости мощность
367.3,6s/n
где kS — фактор обтекаемости.
При этом площадь лобового сопротивления машины 5 принимают в л12, а цпах— в км. ч. Значения коэффициента обтекаемости для различных машин могут быть найдены в литературе 111].
Если при проектировании мотор-колес не заданы мощность первичного двигателя и колесная формула транспортной машины, то коэффициент kA предварительно следует принять в соответствии со значениями коэффициентов энерговооруженности ka, сложившимися в мировой практике для автомобилей определенного типа и назначения и с учетом тенденций к повышению коэффициента ka.
В табл. 3 для семи групп транспортных машин с электроприводом, краткая техническая характеристика которых дана в табл. 2, приведены значения коэффициента kai полученные путем анализа характеристик отечественных и зарубежных образцов автомобилей и автопоездов, и соответствующие им значения коэффициента 7гл. Последние рассчитаны для случая полноприводной машины (т. е. при Ga — GKtnd, для II и IV групп — колесная формула 6x4). Коэффициент kA может быть найден и для транспортной машины с любой колесной формулой.
Предварительное значение коэффициента kA должно быть оценено с точки зрения возможности реализации необходимого диапазона регулирования тягово-скоростных показателей мотор-т** --
96 . ,
колеса. Из выражения (12) для принятой величины kA определяют мощность Рк пред и из формулы (11) находят значение umln Летах =£>max <Лс ИЛИ FK min При Vn!ilX И ОПредеЛЯЮТ КОЭ циент
Диапазон регулирования (характеризуемый величиной ^7.) электродвигателей постоянного тока используемых в мотор-коле-сах автомобилей и автопоездов при теплоэлектрическом приводе обычно не превышает 7—9. Если найденное значение коэффициента kvF находится в этих пределах, то заданный диапазон регулирования скорости и силы тяги при принятом коэффициенте kA может быть реализован при односкоростном мо-тор-колесе. Если то следует принять одно из двух возможных решений: выполнить мотор-колесо двухскоростным или увеличить коэффициент kA [40 ] с целью уменьшения kvF jvq значений kvF
при
и-г
за»
Таблица 3
Группа транспортных машин с электроприводом
Коэффициент энерговооруженности автомобиля kn в л. cjm
Коэффициент энерговооруженности мотор-колеса Ц в квт/т
III
IV
9,0—14,5
При /^>(124-14) единственным выходом практически является двухскоростной вариант мотор-колеса, поскольку значительное повышение требует соответствующего повышения мощности теплового двигателя и тяговых электрических машин, что нецелесообразно по экономическим соображениям и вызывает конструктивные трудности, особенно при создании мотор-колес.
В электроприводе переменного тока с односкоростными мотор-колесами возможность реализации заданных значений ц11ах и FKm^ при выбранном коэффициенте kA и соответствующем значении Лг зависит от необходимого соотношения между частотой на входе преобразователя, равной частоте генератора /\, и частотой длительного режима асинхронного двигателя /ico, поскольку значе-
8,0—10,0
тельного режима асинхронного двигателя f\ ние частоты fs ограничивается параметрами тиристоров.
Так как kvF — kvkF, а при асинхронных двигателях /<
kyF kF
Соотношение частот па входе и выходе
частота f
у современных тиристорных преобразователей составляет нс ме-
нее
5-^5,0. Следовательно, соотношение между /г и f\ определится выражением
kvF kF
7 А. И. Яковлев
97
В зависимости от значений входящих в эту формулу величин и соотношения частот на входе и выходе преобразователя практически МОЖНО получить f9 = (7-5-23) fioo- Тиристоры могут быть нагружены номинальным током лишь до определенного предела частоты, который для отечественных тиристоров составляет 500— 1000 гц. При повышении частоты на 25—30% сверх указанного предела необходимо уменьшить токи для снижения внутренних потерь в тиристорах.
Соответствующее повышение коэффициента kA позволяет
уменьшить значение а следовательно, [г и благодаря этому реализовать заданные значения ц1|ах и FKmax при односкоростном мотор-колесе. Однако, как и при электродвигателях постоянного тока, целесообразный предел повышения kA ограничен. Поэтому при значительном различии частоты }г и рабочей частоты тиристоров следует принять двухскоростной вариант мотор-колеса.
Принятая величина коэффициента kA должна быть также оценена с точки зрения допустимости значительного снижения скорости транспортной машины при ухудшении дорожных условий и перегрузках электродвигателей, т. е. при работе с силами тяги FK 2> FKoi. Это очень важно в первую очередь для транспортных машин высокой проходимости, у которых перегрузочные режимы электрических машин являются обычными при движении вне дорог. В этих условиях движение со скоростью 5—7 км/ч привело бы к заметному увеличению времени, затрачиваемого на преодоление участков пути с большим сопротивлением движению, а следовательно, к снижению средней скорости и обусловило бы более напряженный тепловой режим тяговых электрических машин из-за большой продолжительности перегрузок.
Для этих машин следует повысить значение kA, чтобы получить соотношение клСк — (1,5-т-2,5) Рк преэ. Одновременно такая мера позволит реализовать максимальную скорость машины при пониженном значении напряжения за счет того, что начиная с некоторой скорости, меньшей максимальной, напряжение уже не повышают. Электродвигатель последовательного возбуждения реализует скорость утах, работая по своей естественной характеристике, соответствующей пониженному напряжению, и при мощности на колесе, меньшей Ркпред- Электродвигатель независимого или смешанного возбуждения реализует скорость vmax при работе по предельной тяговой характеристике без повышения напряжения за счет плавного, но вместе с тем не очень глубокого (kAGK РКпред) ослабления поля. Это даст возможность понизить максимальное напряжение системы электропривода, что в известной мере ограничивает повышение веса тяговых электрических машин, обусловленное увеличением РКПред-
Коэффициент кл и тем самым мощность окончательно определяют при выборе первичного двигателя для транспортной 98 •
машины. Ограниченность типоразмерного ряда тепловых двигателей автомобилей значительно сужает возможность варьирования величины kA.
По предельной мощности на колесе, электромеханическим характеристикам электродвигателя и передаточному числу редуктора мотор-колеса можно определить максимальные значения силы тяги мотор-колеса и скорости машины, построить динами
ческую характеристику и рассчитать другие параметры, характеризующие тягово-скоростные и динамические свойства мотор-колеса и транспортной машины.
Для расчета необходимо в координатах пд и Мд построить предельную механическую характеристику, отнесенную к валу электродвигателя, Мдпд= = const. Ее построение выполняют на основе выражения
Рк пред ^дПд
~ = ~975~ ’
При этом принимают М;, в кГм и пд в об’мин и получают Р д пред в ДЛЯ ПО-
СТрОеНИЯ характеристикиЛ4аПа= = const следует принять ряд значений п& и по известной величине Рк пред найти соответст-
Рис. 35. Электромеханические характеристики электродвигателя типа А постоянного тока последовательного возбуждения:
1 —скоростная характеристика
при Uq = 320в; 2 — характеристика момента 3 — характеристика к.п. д.
вующие значения М$.
Поскольку порядок расчета тягово-скоростных показателей мотор-колеса при электродвигателях постоянного и переменного тока различен, эти два случая рассмотрим отдельно.
Расчет при электродвигателях постоянного тока. Для этих электродвигателей завод-изготовитель дает электромеханические характеристики fid (Jd), Mq (h) и (/а) при номинальном напряжении Ud,,- На рис. 35 приведены в качестве примера электромеханические характеристики электродвигателя типа А (условное обозначение) последовательного возбуждения, которые далее используются в иллюстративных примерах.
С целью использования электромеханических характеристик для расчетов при изменяющемся напряжении следует скоростную характеристику п$ (/а) пересчитать па повышенное и пониженное 7* 99
(по сравнению с номинальным) напряжение. Для электродвигателей последовательного возбуждения
пд = пд
hrd
где Uq — повышенное или пониженное значение напряжения; - /а — некоторое значение тока электродвигателя; для
перестроения характеристик на измененное на-. пряжение следует принять 6—8 значений Id в пределах /ат1п < Id < Id нб (ток h нб соответствует моменту Мдн6)\
Гд — сопротивление электродвигателя, указываемое на его характеристиках;
п$ и п'д — скорость вращения электродвигателя при номинальном и измененном напряжении для некоторого тока Iq, nd принимают по скоростной характеристике nd (Id)-
Максимальный предел расчетного напряжения Ud должен соответствовать максимальному напряжению Ud max, указанному на заводских характеристиках или в расчетном формуляре электродвигателя. Если величина i/^max пе указана, она должна быть согласована с заводом-изготовителем.
Минимальную величину расчетного напряжения выбирают с таким расчетом, чтобы скоростная характеристика при Ud mJn проходила через точку предельной механической характеристики на валу электродвигателя, ограниченной наибольшим моментом MdH6- Для удобства расчетов следует иметь 6—8 скоростных характеристик при различном напряжении.
Величина напряжения практически не влияет на характеристику момента электродвигателя M# (Id), поэтому при всех значениях напряжения в пределах от Uamin до Ud max можно пользоваться кривой Md (Id) для номинального напряжения.
Повышение скорости вращения электродвигателя путем ослабления поля выполняют при максимальном напряжении электродвигателя Udmay- Коэффициент ослабления поля ап равен отношению тока обмотки возбуждения при ослабленном поле Ida к полному току возбуждения Id', обычно принимают ац — = -~— = 0,5-г-0,6, а в некоторых случаях равным 0,3.
*д
Расчет скоростной характеристики при ослабленном поле производится по формуле
Пд оп — nd
Ud max д* д Ud max даг д
ПП
ФдОП*
100
где Пдоп — скорость при ослабленном поле и токе Iq\
Пда — скорость при ПОЛНОМ поле И токе Ida ~ — сс/у/а;
гд = гя -|- алгв — сопротивление электродвигателя при шунтированной обмотке возбуждения; здесь гя — сопротивление якоря и добавочных полюсов, а гв — сопротивление обмотки возбуждения;
Фд пп и ®доп — магнитные потоки электродвигателя при полном и ослабленном поле и токах Ida и I#.
Величины 1д?д и прибли-
зительно равны и малы по сравнению с Udm^y а ^дпп отличается отФа0/7 только на величину, обусловленную реакцией якоря. Следовательно, 77 — 1, и можно счи-
оп тать, что Пооп = Пди. На этом основан метод построения скоростной характеристики при ослабленном поле, иллюстрируемый рис. 36. Пусть требуется найти скорость вращения электродвигателя при некотором токе Id! и ап. Скоростная характеристика электродвигателя при полном поле обозначена цифрой 1. Отложим по оси абсцисс ток ап1дг и найдем скорость вращения при этом токе и полном поле по характеристике I. Отложим величину при
токе Idi и найдем одну из точек искомой характеристики. Таким образом, построение скоростной характеристики при ослабленном поле сводится к увеличению ординат кривой nd (Id) в 1/&п раз (кривая 2).
При ослаблении поля момент электродвигателя снижается. Если принять приблизительно равным к. п. д. электродвигателя при полном и ослабленном поле для некоторого тока Id, то момент при ослабленном поле MdOn будет меньше момента при полном поле Mdnn в Van раз, т. е.
Мд он —
Мд пл ап
Уменьшив все ординаты характеристики Мд (Id) (кривая 3) в l/ct/7 раз, получим характеристику момента при ослабленном поле (кривая 4). По этой же методике строят характеристики nd (Id) и Md (h) при усиленном поле с той лишь разницей, что ослабленному полю соответствуем ап <2 1, а усиленному полю «и > 1.
101
Электромеханические характеристики электродвигателей смешанного возбуждения перестраивают па измененное напряжение (при неизменной величине тока обмотки независимого возбуждения) так же, как и электродвигателей последовательного возбуж
дения.
Характеристики электродвигателя смешанного возбуждения с изменяющимся током возбуждения независимой обмотки перестраивают более сложным способом. По аналогии с электродвигателями последовательного возбуждения обозначим отношение ампер-витков ослабленного поля независимой обмотки возбужде-
Рис. 37. Построение скоростной характеристики электродвигателя смешанного возбуждения при ослабленном поле
ния I 2w2 к ампер-виткам ПОЛНОГО ПОЛЯ /2 max ^2 через
Соотношение между ампервитками независимой обмотки /2 гаах w2 и последовательной обмотки при длительном токе обозна-
чим через
Рл —
*‘2 max да^ПОСЛ
Намагничивающая сила (н. с.) электродвигателя при некотором токе якоря 1д\ равна
I дуу^посл Н- ^2^'2 == Idl^nocA Д- ®*Л^2 max ^'2 = (^#1 Л- ^лРл^дое) ^посл*
Наиболее прост приближенный пересчет характеристик (без. учета влияния реакции якоря) по заданным скоростным характеристикам при каком-либо определенном коэффициенте ап независимой обмотки возбуждения. Точный расчет по характеристикам намагничивания электродвигателя изложен в работе [321.
На основании заданной скоростной характеристики (кривая /, рис. 37) при каком-либо значении коэффициента апо (обычно аПо ~ 0 строят зависимость = ф (Id) (кривая 2) по выражению
~1дГд сЕд^д = —------
(13)
где сЕе — постоянная электродвигателя.
С изменением тока независимой обмотки возбуждения, т. е. при изменении величины ап с апо Д° аЛ1» кривая сЕ/&д = ф (Id) смещается вдоль оси абсцисс на величину тока (апо — ani) Рл1^°°-При аЛ1 <^аПо эта кщщдя смещается вправо, а при аПх > «по — 102 *
влево. Полученная новая зависимость сЕэФд = <Р (/а) представлена кривой 3, по которой можно приближенно построить скоростную характеристику Пд (Id) при ап = аП1 (кривая 4) с использованием формулы (13), понимая под Uq измененное значение напряжения.
Характеристику момента Md(Id) строят исходя из следующих соображений. Как известно, момент на валу электродвигателя постоянного тока Мд отличается от электромагнитного момента Мд
Рис. 38. Построение характеристики момента электродвигателя смешанного возбуждения при ослабленном поле
величиной АЛ1<9 вследствие магнитных и механических потерь, т. е.
Мд = Мд — ДМа. (14)
Для расчета величины АЛ4а можно принять, что при любых коэффициентах ап она будет одной и той же при одинаковых скоростях вращения Пд и, следовательно, приблизительно равных магнитных потоках независимо от тока якоря Id. Поэтому следует предварительно построить зависимость электромагнитного момента М'з от тока Id при ап = апо (если она не задана) и определить величины ЬМд при ап — аП1 как разности ординат кривой Мд (id) и заданной характеристики момента.
При этом значение следует брать при одинаковых магнитных потоках, как это показано на рис. 38 для точки, которой соответствует величина АЛ4а, выраженная отрезком ab = cd. Кривые 1 и 2 соответствуют зависимости сЕ$>д — ф (Id) при аПо и ал1, кривые 3 и 4 — зависимости Md (id) при апо и «ль а кривые 5 и 6 — зависимости Md (Id) при аПо и аП1.
103
Электромагнитный момент (в кГм) при аП1 рассчитывают по формуле
Мд = Смд®д!д (15)
с использованием зависимости сЕ$>э = <р (Id) при аП1.
Постоянные электродвигателя
__ p^V-10-8, _ рдЛМ0-« _ сЕд
с^д~ 60а ’ смд~ 2л. 9,810 “ 1,03»
где рд — число пар полюсов электродвигателя;
а — число пар параллельных цепей обмотки якоря электродвигателя;
N — число проводников обмотки якоря.
После построения электромеханических характеристик электродвигателя при различных значениях напряжения в диапазоне от Д° и измененном поле, если применено ослабление или усиление поля, следует построить механические характеристики электродвигателя М& (rid), число которых будет равно числу скоростных характеристик.
Для построения механической характеристики необходимо принять ряд значений тока Id (6—8 точек), определить для них скорости вращения rid по характеристике nd (Id) при некотором напряжении Ud и для тех же значений тока найти величины Мд по характеристике Мд (h)- При измененном поле следует пользоваться характеристиками nd (Id) и M# (Id), соответствующими оп ределен пому значению коэффициента аП1.
Величины nd и Мд для ряда значений тока Id откладывают в координатах Пд — Мд и строят по полученным точкам механические характеристики электродвигателя при выбранных значениях напряжения Ud и коэффициентах ослабления поля. На рис. 39 приведены механические характеристики электродвигателя типа А с одной ступенью ослабления поля = 0,75. Затем по формулам (3) и (7) рассчитывают тяговые характеристики мотор-колеса с учетом величин радиуса качения колеса для заданной шины гк, передаточного числа редуктора мотор-колеса 1Р и к. п. д. редуктора т}г, принятого в соответствии с кинематической схемой редуктора.
Тяговые характеристики мотор-колеса при выбранных значениях Ud строят в координатах v—FK, в которых построена и предельная тяговая характеристика FKv = const. Далее следует найти ограничения по скорости и силе тяги, а также определить токовые нагрузки электродвигателя и соответствующие им значения напряжения при работе по предельной тяговой характеристике.
На рис. 40 приведены тяговые характеристики электродвигателя, полученные пересчетом механических характеристик электродвигателя типа Аудтри ip — 20,0; гк — 0,84 м и т]р = 0,92. 104 *
Точка 1 образована пересечением предельной тяговой характеристики (Ркпред = 50 кет) с тяговой характеристикой электродвигателя, соответствующей напряжению Ud max при полном поле или, если применено ослабление поля, при ослабленном поле (точка Г).
Если осуществляется ступенчатое ослабление поля шунтированием последовательной обмотки возбуждения, то в случае пере
хода с характеристики Fe (у) при Ud max и полном поле на характеристику при ослаб
Рис. 40. Тяговые характеристики электродвигателя постоянного тока
0 20 4/7 60 80 100 120 МдкГм
Рис. 39. Механические характеристики электродвигателя типа А при различных значениях напряжения и одной ступени ослабления поля
ленном поле имеет место скачкообразное увеличение силы тяги, поскольку скорость v при переходе не изменяется. Чтобы после перехода на характеристику ослабленного поля реализуемая электродвигателем мощность не превысила предельную РКПред, переход происходит при несколько уменьшенной мощности первичного двигателя, причем ослабление поля осуществляется при скорости, соответствующей точке Г. При нескольких ступенях ослабления поля точка Г принадлежит характеристике с минимальным коэффициентом .
Положение точки 1 (или /') устанавливает ограничение скорости при работе по предельной характеристике. Если скорость у,, определяемая точкой /, соответствует скорости вращения электродвигателя П$г <C«<?max, т0 скорость flmax ПрИ НЗПрЯЖеНИИ Ud max и полном поле может быть достигнута только при пониженной мощности первичного двигателя. Возможность реализации скорости (и тем более а111ах) зависит от силы тяги FK1 при этой скорости. Если FK1 Ркг 4- FKw, где FKf — сила сопротивления
105
качению колеса при скорости иг на горизонтальном участке, а сила сопротивления воздуха соответствует той же скорости, то скорость не может быть достигнута. Повышение скорости может быть осуществлено лишь увеличением мощности первичного двигателя, и следовательно, предельной мощности на колесе.
Наоборот, если FK1 > FKf + FKa?, то возможна реализация скорости vH6 > Vi при напряжении Ud <t7amax- В этом случае возможно на высоких скоростях работать не по предельной характе-
Рис. 41. Возможность реализации максимальной скорости без повышения напряжения
ристике FKv = const, а по тяговой характеристике Fd (и) при напряжении Ud = const, причем U а < max (рис.41). При наибольшей реализуемой скорости vh6 должно соблюдаться условие FK — ~F Kf F K(JJ.
Чтобы найти ограничение предельной тяговой характеристики по силе тяги, рассчитывают величину максимальной силы тяги по формуле (3), принимая Мд = = MdH6- При этом величину наибольшего момента выби-
рают для электродвигателя данного типа в соответствии с рекомендуемым коэффициентом его допустимой перегрузки kF (см. табл. 2).
по силе
(см. рис. 40)
Ограничение предельной тяговой характеристики тяги находят по пересечению линии FK = FKmax с характеристикой FKv = const (точка 2).
Для определения токовых нагрузок электродвигателя в случае работы по предельной тяговой характеристике определяют значения FK в точках пересечения характеристик Fd (v) при различных значениях Ud с характеристикой FKv = const. Далее, пользуясь формулой (3), находят соответствующие моменты Md и по заводской характеристике момента Мд (Id) определяют токи электродвигателя. В случае работы с измененным полем пользуются соответствующими характеристиками момента электродвигателя. После этого строят кривые зависимости FK (Id) и, с учетом выражения (1), D (Jd)- Длительные значения силы тяги FKOO и динамического фактора D№ находят по длительному ТОКу /доо.
Значения силы тяги, превышающие FKoa> можно реализовывать в течение ограниченного времени, которое тем меньше, чем 106
больше FK, Возможная длительность работы Д/аоп с некоторыми значениями FK Fk°° зависит от квадрата отношения -Д- и доо
температуры меди обмоток перед перегрузкой. При больших кратковременных нагрузках на величину А/доп практически не влияют интенсивность вентиляции и теплоемкость* машины,
поскольку тепловые потери выделяются непосредственно в меди обмоток, а относительно плохая теплопроводность изоляции проводов затрудняет быстрый отвод тепла от меди.При соответствующем выборе величины коэффициента допустимой перегрузки kF
электродвигателя мотор-колеса в эксплуатационных условиях можно не опасаться чрезмерных перегревов изоляции как по
величине, так и по длительности.
При использовании электродвигателя в двухскоростном мо-тор-колесе следует учитывать назначение и условия эксплуатации транспортной машины. Если переключение передач во время движения не предусматривается, то передаточные числа на первой и второй in передачах выбирают по формулам (6) и (8). После этого по электромеханическим характеристикам электродвигателя, используя изложенную методику, рассчитывают тягово-скоростные показатели мотор-колеса.
Если предусматривается переключение передач во время движения транспортной машины, то необходимо согласовать выбор передаточных чисел i\ и in, чтобы при длительном движении на второй передаче со скоростями, близкими к —предупредить
возможность перегрева электродвигателя.
Работа на второй передаче в диапазоне скорости — ^minii (и соответствующем ему диапазоне силы тяги FK<*>n — EKmaxii, рис. 42) ограничивается по времени нагревом электродвигателя, так как в этом диапазоне ток Id 1д«>. Поэтому переход с первой передачи на вторую осуществляется при скорости цпах1, которая должна незначительно отличаться от скорости п, соответствующей длительному режиму работы электродвигателя при включенной второй передаче редуктора. По условиям нагрева электродвигателя при движении на второй передаче можно считать допустимой работу с токами, не превышающими часового, т. е. Id 1дч- В координатах v—FK (см. рис. 42) часовому току соответствуют значения скорости и силы тяги FK4n, взятые по характеристике FKv = const.
Таким образом, переключение передач редуктора двухскоростного мотор-колеса во время движения следует выполнять с учетом условия
^оо 11 ^inax I I
или
(16)
к min
кч! I»
107
Поэтому в зависимости от задания по величине v мулы (8) определяют передаточное число tn или чине FKmax из формулы (9) чае из условия (16) определяют скорость гтах передаточное число 6. При этом принимают п$ — Пдтак.
Vfnax
О
V maxi
Рис. 42. Определение оптимальных условий переключения передач редуктора двухскоростного мотор-колеса:
характеристика F Kv =
характеристика электро-| Uд 3 — тяговая dll (V1I}
//
min.
/ — предельная тяговая =const; 2 — тяговая двигателя F^j характеристика
= Пд^, по
и
д max’ электродвигателя при ^max
пах из фор-/п или по вели-передаточное число ij. В первом слу-. ь а по формуле (8) — Во втором случае из условия (16) выбирают значение скорости Vooii и, полагая пэ формуле (8) находят 1ц. Найденные таким образом fj условию (16). После определения значений ii и in рассчитывают тяговые характеристики для обеих передач.
Расчет при электродвигателях переменного тока. Для тяговых асинхронных двигателей завод-изготовитель дает механические Мд (rid) и скоростные Пд(Id) характеристики при нескольких значениях частоты. На рис. 43 приведены характеристики тягового асинхронного двигателя типа Б (условное обозначение), а также нанесена предельная механическая характеристика МдПд — —const, соответствующая Рд пред = 39,2 кет.
Однако при расчете тягово-скоростных показателей мотор-колеса возникает необходимость в расчете характеристик асинхронного двигателя при значениях пряжения, тех, которым
Следует отметить, что для двигателя требуется
удовлетворяют
частоты и на-отличных от соответ-
ствуют заводские характеристики.
пересчета характеристик асинхронного
значительное число его электромагнитных параметров, определяемых при проектировании и сведенных в расчетный формуляр.
При частотном управлении характеристики асинхронного двигателя, необходимые для определения тягово-скоростных показателей мотор-колеса, рассчитывают по следующим формулам [5].
108 • .
Ток статора асинхронного двигателя
2
2
об/мн
5000
4000
3000
1000
1000
I______________I_______________1------------------------------u-------------
О 200 400 ООО ООО ig а
Рис. 43. Электромеханические характеристики тягового асинхронного двига теля типа Б
Электромагнитный момент асинхронного двигателя
109
Максимальный электромагнитный момент Mdmax имеет место при р = рк, причем
d“ + е2а. j
'
Тогда значение момента
Мд max —
тф^дн Л 2
9,81<o1K Vt/
(62 + с2<х|) (d2 + е2**2) + riaf
При неподвижном роторе его частота равна частоте статора, что соответствует равенству р = а/. Заменив в выражении для Мд величину р на а/, получим следующую зависимость для пускового электромагнитного момента:
Электромагнитный момент асинхронного двигателя Мд отличается от полезного механического момента на валу электродвигателя Мд на величину тормозного момента при холостом ходе:
MdQ --
мех ~|~ доб 2лп&
Момент Мдо существенно меньше момента на валу Мд, особенно при независимой вентиляции асинхронного двигателя, когда потери на вентиляцию компенсируют за счет электродвигателя вентилятора. Поэтому при тяговых расчетах допустимо пренебречь величиной Мм и приближенно принять Мд Мд-
В приведенные формулы входят следующие величины:
Ud — фазовое напряжение асинхронного двигателя;
UdH — номинальное фазовое напряжение, соответствующее номинальной (наибольшей) частоте f1H и номинальному значению магнитного потока асинхронного дви-
га тел я;
Id — фазовый ток статора асинхронного двигателя;
т<р — число фаз обмотки статора;
<о1н — угловая частота поля статора, соответствующая частоте f1H;
гх — активное сопротивление обмотки статора;
го — приведенное активное сопротивление обмотки ротора;
г0 — активное^сопротивление намагничивающей цепи;
а io
Xj — индуктивное сопротивление обмотки статора при номинальной частоте;
xz — приведенное индуктивное сопротивление обмотки ротора при номинальной частоте;
х0 — индуктивное сопротивление намагничивающей цепи при номинальной частоте;
Рмех — механические и вентиляционные потери;
Рдоб — добавочные потери.
Значение UdH и величины активного и индуктивного сопротивления берут из расчетного формуляра асинхронного двигателя. Остальные величины, входящие в формулы, рассчитывают по этим параметрам.
Относительная частота тока статора
af =
Относительная частота тока ротора или относительный параметр абсолютного скольжения
(,)1« flH
<oQ;
wi
Здесь со — угловая частота поля статора, соответствующая некоторой частоте /г;
со2 — угловая частота ротора, связанная с угловой частотой со1н соотношением со2 = colw (а^ •— Р).
Отметим, что относительное скольжение ротора s при частот-р ном управлении s = --- •
~ ид
Относительное напряжение Уи== -гг~ •
Удн
Величину U&H берут из расчетного формуляра асинхронного двигателя, а порядок определения величины Ud рассмотрен ниже.
Коэффициенты рассеяния статора и ротора т2 рассчитывают
xo
по формулам т
Общий коэффициент рассеяния т = тх Н- т2 т/Ч.
Параметры асинхронного двигателя b,c, d и е, если пренебречь сопротивлением г0» равны:
Величины напряжения Ud при расчете характеристик асинхронного двигателя мотор-колеса необходимо принимать в соответствии с выбранным законом регулирования напряжения в зависимости от частоты, определяющим величину магнитного по
тока.
В системах тягового электропривода с автономным источником электроэнергии ограниченной мощности нет необходимости сохранять номинальное (расчетное) значение магнитного потока асинхронного двигателя во всем диапазоне частоты от flmin до f1H. При частотах /10С магнитный поток должен иметь номинальное значение, так как асинхронный двигатель при работе по предельной механической характеристике Мдпд = const с указанными значениями частоты должен развивать значительные моменты. При пуске асинхронных двигателей в тяжелых дорожных условиях целесообразно даже несколько повысить магнитный поток
по сравнению с номинальным значением для получения возможно больших пусковых моментов.
При частотах floa нет необходимости, сохранять номинальное значение магнитного потока [1, 40]. Достаточно поддерживать его значение, а следовательно, и напряжение Ud на таком уровне, чтобы при работе асинхронного двигателя ~по предельной механической характеристике (рис. 44) для некоторой частоты /1>- flco его максимальный момент Мд тах*превосходил значение момента Мд по характеристике Мдпд = const при значении пд, соответствующем той же частоте fx. С уменьшением магнитного
потока при повышении частоты несколько увеличиваются токи
статора, снижается коэффициент мощности и к. п. д. электродви
гателя. Однако достигаемое при этом существенное понижение
напряжения при номинальной частоте flti позволяет применить генератор, рассчитанный на более низкое напряжение и имеющий, следовательно, меньший вес.
Закон регулирования- напряжения в зависимости от частоты для асинхронного двигателя мотор-колеса в общем случае может быть выражен следующей зависимостью:
Ud
(17)
Постоянную величину Сф находят из условия Ud = Udoo и = f1O0 при номинальном значении магнитного потока (q = 1). При частотах /д > floo принимают показатель степени q = 0,35ч-0,5, а при частотах floa показатель степени q = 1. При пуске можно принимать q = 1,04ч-1,07.
Наряду с законом регулирования, предусматривающим изме-
1н, выше которой напряжение
нение напряжения во всем диапазоне частоты, можно осуществлять регулирование по закону = Сф вплоть до некоторой граничной частоты 112
соответствующее flsp, уже не изменяется. Определяющими факторами при выборе закона регулирования Ug (/\) в конечном итоге
являются к. п. д. асинхронного двигателя, величина напряжения
UdH и степень сложности системы регулирования. На рис. 44
приведены механические характеристики асинхронного двига теля как при регулировании по закону —j— — Сф во всем диа-
па
Рис. 44. Механические характеристики тягового асинхронного двигателя при различных зависимостях напряжения от частоты
пазоне частоты, так и при регулировании по закону 37-------Сф
при частотах > floo.
Закон регулирования, выражаемый формулой (17), практически может быть осуществлен при автоматических системах регулирования электропривода, в частности, при системах со статическим преобразователем частоты. Если система регулирования обеспечивает изменение тока возбуждения генератора в зависимости от частоты по некоторому закону iei (f х), как это обычно имеет место в электроприводе периодического действия, то при расчете величины Ug необходимо учитывать э. д. с. реакции якоря по продольной оси генератора. Поэтому для расчета характеристик асинхронного двигателя по приведенным выше формулам предва-
8 А. И. Яковлев
рительно следует рассчитать зависимость напряжения от скольжения U (s) при = const и ie3 — const.
При расчете зависимости Ud (s) необходимо использовать видоизмененную векторную диаграмму э. д. с. явнополюсного синхронного генератора, рекомендуемую в работе М. П. Костенко и Л. М. Пиотровского [17] для определения падения напряжения, вследствие размагничивающего действия продольной реакции якоря и падения напряжения на индуктивном сопротивлении от потока рассеивания статора.
После построения механических характеристик тягового асинхронного двигателя следует рассчитать по формулам (3) и (7) тяговые характеристики Fd (и) для ряда значений частоты h и построить их в координатах v—F. В тех же координатах необходимо строить рассчитанную по формуле (11) предельную тяговую характеристику FKv = const. Точка пересечения тяговой характеристики при частоте f1H с характеристикой FKv = const ограничивает максимальную скорость цтах.
Определение точки на характеристике FKv = const, соответствующей ограничению по максимальной силе тяги FK тах, зависит от работы системы частотного управления асинхронными двигателями при пуске. Если система обеспечивает глубокое регулирование частоты [5], то при плавном нарастании частоты сила тяги FK также плавно возрастает. Колесо остается неподвижным до тех пор, пока сила тяги FK при некотором значении не достигнет и не превысит значения силы сопротивления качению при трогании Ffm для данного колеса (точка /, рис. 45). Колесо приходит во вращение, причем реализуемая на колесе мощность, даже если пе учитывать проскальзывания, будет меньше предельной Ркпред.
С дальнейшим повышением частоты точка рабочего режима, характеризуемая текущими значениями v и FK, переходя с одной характеристики Fd (v) при == const на другую, опишет в плоскости v — F некоторую траекторию. Когда частота достигнет некоторого значения К, при котором тяговая характеристика пересекается с предельной, папример в точке 3, пуск закончится, причем траектория точки рабочего режима при пуске выражается линией 1—3. При дальнейшем повышении частоты точка рабочего режима будет перемещаться по предельной тяговой характеристике.
Положение точки 3 на характеристике FKv = const зависит от скорости нарастания частоты при пуске, определяемой величиной производной . При малых значениях весь процесс пуска происходит при скольжениях меньше критического (траектория 1—2'), т. е. точка рабочего режима переходит при повышении частоты с одной характеристики па другую, оставаясь всегда на устойчив^й^яасти характеристики. Этот режим пуска 114
n dfi
называется «мягким». При больших значениях весь процесс частотного пуска происходит при скольжении больше критического (траектория 1—2"), т. е. по неустойчивой части тяговых характеристик при различной частоте. Этот режим пуска называют «жестким».
Режим пуска, рри котором точка рабочего режима при нарастании частоты переходит с одной тяговой характеристики на дру-
Рис. 45. Зависимость v (FK) при пуске асинхронного двигателя с частотным управлением
гую в точках максимального момента и критического скольжения, описывая траекторию /—2", называют граничным. При граничном режиме пуска асинхронный двигатель работает с максимальными моментами при всех частотах.
При «жестком» режиме пуска увеличиваются потери в асинхронном двигателе и, что особенно нежелательно в условиях автономного электропривода с ограниченной мощностью двига-тель-генератора, резко возрастают пусковые токи. Производная dh
имеет оптимальную величину в «мягком» режиме пуска, близком к граничному пуску. При этом реализуются ускорения, близкие к максимально возможным, причем к. п. д. асинхронного двигателя заметно выше, чем при «жестком» пуске.
8*
115
Отметим, что если при пуске частота будет увеличена скачком до значения f[ и останется постоянной до выхода на предельную тяговую характеристику, то пуск будет осуществляться по характеристике Fd (v), соответствующей данной частоте, которую называют минимальной, т. е. — Д min. Величина силы тяги при пуске определяется положением точки 2\
Таким образом, для ограничения предельной тяговой характеристики по силе тяги необходимо, пользуясь характеристиками
Рис. 46. Тяговые характеристики электродвигателя переменного тока
асинхронного двигателя при номинальном потоке, выбрать желательную траекторию точек рабочего режима в координатах пд — — Мд и рассчитать токовые нагрузки асинхронного двигателя для выбора параметров генератора. Затем траекторию точек наносят в координатах v—F, а соответствующую величину —-опре-at
деляют при проектировании системы регулирования электропривода.
Положительной особенностью режима работы асинхронного двигателя при частотном управлении является то, что неустойчивая часть его механических характеристик практически не используется, за исключением возможного случая пуска по неустойчивой части механической характеристики при fA min. Это снижает потребляемые электродвигателем при разгоне токи вследствие увеличения коэффициента мощности и повышает его к. п. д.
Тяговые характеристики асинхронного двигателя, приведенные на рис. 46, получены пересчетом механических характеристик электродвигателя 4сипа Б при ip = 31,6, гк = 0,84 м и = 0,92
116
для случая, когда показатель степени в формуле (17) q — 1 при и <7 = 0,37 при > /1оо. В тех же координатах нанесена характеристика FKv = const, соответствующая Ркпред = — 36 кет.
Точка, соответствующая максимальной скорости vraax при работе по предельной тяговой характеристике, образована пересечением этой характеристики с тяговой FK (v) при частоте flH и напряжении UdH. Скорость транспортной машины, соответствующая синхронной скорости вращения электродвигателя, незначительно превышает скорость отах. Возможность реализации максимальной скорости при работе по предельной характеристике ограничена тем же условием, что и в случае электродвигателей постоянного тока.
Токовые нагрузки тягового асинхронного двигателя при работе по предельной тяговой характеристике определяют по той же методике, которая изложена для электродвигателей постоянного тока. Ток Iд возрастает по мере увеличения силы тяги и снижения частоты, а следовательно, и напряжения. По мере снижения частоты та же величина мощности Ркпред реализуется при меньшем напряжении, а также и при пониженном коэффициенте мощности вследствие увеличения абсолютного скольжения, что и обусловливает увеличение тока Iд.
При использовании асинхронного двигателя в двухскоростпом мотор-колесе тяговые характеристики рассчитывают с учетом выполнения условия (16) так же, как и характеристики электродвигателей постоянного тока.
РАСЧЕТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Динамические свойства транспортной машины определяются следующими параметрами: максимальной скоростью при различных условиях движения, преодолеваемыми подъемами или участками пути с особо трудными условиями движения, характеризуемыми коэффициентами общего сопротивления движению, и развиваемыми ускорениями. Динамические свойства могут быть определены расчетным путем по известной предельной тяговой характеристике на колесе, заданным величинам сопротивления движению, моментам инерции маховых масс и передаточному числу мотор-колеса.
Силовой баланс для мотор-колеса может быть записан в следующем виде:
Рк == РKf РKh Р РKw ~ Р Kj >
где FKf — сила сопротивления качению колеса;
FKh — сила сопротивления от подъема;
FKj — сила сопротивления при разгоне;
FKw — сила сопротивления воздуха, отнесенная к числу мотор-колес.
117
При определении динамических свойств транспортной машины удобнее пользоваться удельными значениями сил сопротивления ’качению колеса, от подъема и при разгоне.
Удельное значение силы FKf равно
GK Gk
Следовательно, удельная сила сопротивления качению выражается коэффициентом сопротивления качению fK — fKm -f- fep.
Удельное значение силы FKh равно
где аЛ — угол подъема трассы.
Сумма удельных сопротивлений качению fsp и от подъема sin осЛ определяет значение коэффициента общего сопротивления движению
Ф f гр Ч
Ф I гр t Sin (Z/j.
Удельное значение силы FK]- равно Fк/ Gк!^вр /рвр
тде / — ускорение машины;
— коэффициент инерции вращающихся масс;
g — ускорение силы тяжести.
В формулу (1), определяющую динамический фактор, входит сила сопротивления воздуха
_ kSv2
Kw~
где ke — приведенный коэффициент сопротивления воздуха; для большегрузных автомобилей ke = 0,065<-0,075;
S — лобовая площадь автомобиля; S = ВН (В — ширина колеи в м, Н —.наибольшая высота автомобиля в л);
v — скорость машины в км!ч.
Если нагрузка машины меньше расчетной, то значение динамического фактора D‘ возрастает пропорционально отношению расчетной нагрузки на шину к общему весу, приходящемуся на .колесо при уменьшенной нагрузке GK, т. е.' D' = D -%-. Наи-
GK
большее значение динамического фактора имеет пегруженая машина, когда в формуле (1) под GK понимают собственный вес машины, отнесенный к числу мотор-колес.
Для графического изображения зависимости динамического •фактора от скорости транспортной машины необходимо рассчитать предельную тяговую характеристику FKv = const с ограничениями по г?П1ах FK max, величину GafKm, а также зависимость
FK:if (v). Затем по формуле (1) определяют ряд значений динамического фактора при различной скорости. По найденным значениям D и соответствующим величинам v строят кривую зависимости динамического фактора от скорости машины D (и), называемую динамической характеристикой. На рис. 47 изображена
для примера динамическая характеристика односкоростного мотор-колеса. Двухскоростные мо
тор-колеса имеют две динамические характеристики, построенные по характеристикам FKv = = const для первой и второй передачи.
Для оценки динамических свойств транспортной машины необходимо определить ряд величин: максимальное значение динамического фактора Dmax; максимальную скорость Цф при заданном коэффициенте общего сопротивления движению ф, характерном для условий движения данной транспортной машины; величину максимального преодолеваемого подъема при некотором коэффициенте сопротивления качению fep, среднее ускорение транспортной машины при определенных условиях эксплуатации. Кроме того, необходимо знать значение динамического фактора /?«>,
соответствующее длительному режиму
Рис. 47. Динамическая характеристика, соответствующая предельной тяговой характеристике
работы электродвигателя.
Выражение для динамического фактора через удельные значения сил сопротивления, называемое безразмерным тяговым балансом, имеет вид [271
D = fep + sin ah +
/Р«р
/Pep
Рассмотрим методику определения динамических свойств транспортной машины при помощи динамической характеристики.
Если в координатах D — v отложить ряд значений коэффициента общего сопротивления движению ф, характеризующегося линиями, параллельными оси v, то абсциссы точек пересечения
этих линий с динамической характеристикой дадут величины максимальной скорости при данном значении ф (рис. 48).
Для определения максимального преодолеваемого подъема в координатах D—v параллельно оси v следует провести линию,
119*
соответствующую определенной величине fep (рис. 49). Точка пересечения этой линии с динамической характеристикой определяет максимальную скорость при заданном сопротивлении качению [гр и отсутствии подъемов. Ординаты, заключенные между кривой D (v) и прямой fep = const, определяют возможные подъемы ah, преодолеваемые транспортной машиной при ускорении j = О
Рис. 48. К определению максималь- Рис. 49. К определению наибольших ной возможной скорости преодолеваемых подъемов
(движение машины с установившейся скоростью v — const). Величина максимального преодолеваемого подъема ahmax соответствует отрезку (а6)тах при скорости uniin. В общем случае величину максимального подъема ah mln определяют по выражению
Sill CCfj max — *Anax Tгр*
в котором значение fep зависит от условий движения транспортной машины.
Необходимо также определить, для каких подъемов существует ограничение по их протяженности. Для этого на динамической характеристике мотор-колеса следует нанести точку, соответствующую длительному значению динамического фактора D«, (рис. 49). При динамических факторах D <ZD
ограничения по времени при движении на подъеме. Подъем аЛоо, для которого sin а/гто характеризуется отрезком Dood, является наибольшим подымем неограниченной протяженности по усло-120 **
не существует
виям нагрева электродвигателей мотор-колес. Работа транспортной машины на подъемах ah >> аЛоо ограничена по времени.
Практически проверку возможной длительности движения транспортной машины на подъеме следует выполнять для очень больших, близких к aftn)ax или затяжных подъемов. Для этого по данным стендовых испытаний электродвигателя определенного
типа оценивают допустимую длительность Д/^оп работы электродвигателя с током, соответствующим динамическому фактору, необходимому для преодоления подъема, рассчитывают скорость движения на подъеме va и находят ограничение подлине подъема
L == доп
с учетом допустимого нагрева тяговых электродвигателей.
Ускорение транспортной машины определяют из выражения безразмерного тягового баланса
Pep
Для его решения в координатах D — v проводят линию, для которой ф1= const. Возможное ускорение машины при некоторой скорости Vj ординаты ab (рис. 50)
Рис. 50. К определению возможного ускорения
величины
определяют, умножая g на отношение . р»р
В общем виде коэффициент инерции вращающихся масс мотор-
колеса
где V — сумма моментов инерции вращающихся элементов мотор-колеса, приведенных к оси колеса.
Для приведения моментов инерции элементов мотор-колеса к оси колеса используют соотношение
- =
121
где 0К — абсолютное значение момента инерции элемента мотор-колеса;
iK — передаточное число, равное отношению (пэ и пк — соответственно числа оборотов данного элемента и колёса).
Обозначим момент инерции якоря электродвигателя и деталей редуктора, непосредственно связанных с его валом, через 0v Приведенное значение момента инерции 0Г определяют из выражения
1«ол —
Момент инерции деталей механической передачи мотор-колеса, которые непосредственно не связаны с валом электродвигателя или осью колеса, обозначим 02 и найдем его приведенное значение: а ______________________________д (i'\2
и2«ол — v2 \ Р/ >
где [ — передаточное число ступени редуктора, связывающей детали с моментом инерции 02 и колесо.
Если кинематическая схема и конструкция редуктора таковы, что момент инерции деталей механической передачи 02 разбивается на несколько слагаемых с различными величинами t то под'О’гедд следует понимать сумму приведенных моментов инерции, соответствующих определенным величинам 02 и ip-
Момент инерции колеса и непосредственно связанных с ним деталей обозначим 03, причем приведенное значение = 03. Тогда сумма моментов инерции вращающихся элементов мотор-колеса, приведенных к оси колеса,
^кол = 4“ @2 (ip) + @3’
а коэффициент
Следовательно, на величину коэффициента рвр значительно влияет передаточное число редуктора ip. В случае двухскоростных мотор-колес при значительной величине отношения передаточных чисел первой и второй передачи -4- коэффициент рвр для первой передачи существенно больше, чем для второй, поскольку первый (I \
-г-1 раз.
*п /
Поэтому ускорение при пуске, обратно пропорциональное величине рвр, на первой и второй передаче будет отличаться значи-122
тельно меньше, чем в -Д- раз. При больших величинах последит
него отношения ускорение на первой передаче может быть меньше,, чем на второй.
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ ТРАНСПОРТНОЙ МАШИНЫ И МОТОР-КОЛЕСА
Исходные данные для расчета. При разработке мотор-колес возможиы случаи, когда ни один из существующих тяговых электродвигателей не может быть использован в мотор-колесе данного типа и назначения из-за несоответствия его электромеханических, тепловых или конструктивных параметров заданным тяговоскоростным показателям и конструктивным ограничениям мотор-
колеса.
В этом случае необходимо разработать новый тяговый электродвигатель с параметрами, найденными при тягово-динамическом расчете, выполненном с учетом характеристик транспортной машины и шины.
Исходные данные для определения основных параметров элек
тродвигателя следующие:
расчетная нагрузка на шину GK в кГ\
максимальная скорость в км1ч груженой машины ц|1ах или негруженой ^ах;
максимальный динамический фактор Z)maA;
коэффициент допустимой перегрузки электродвигателя kF„ коэффициент энерговооруженности мотор-колеса kA.
Величины максимального динамического фактора Dmax и коэффициента допустимой перегрузки электродвигателя kF для основ
ных типов транспортных машин с электроприводом и мотор-колесами приведены в табл. 2.
Значение GK принимают в соответствии с характеристиками шины. Значение цП1ах определяют по соответствующим ГОСТам, (или другим регламентирующим документам) на шины данного типа при расчетной нагрузке на шину GK. Хотя на практике в отдельных случаях имеет место использование шин при более высокой скорости без снижения нагрузки, такая мера является исключением. Наиболее высокая скорость при расчетной нагрузке на шину, допускаемая для шин автомобилей особо большой грузоподъемности, составляет 50 км!ч, для шин с регулируемым давлением 60—90 км!ч, для арочных шин 60 км!ч.
Введение второго значения максимальной скорости v'max при
движении без груза обусловливается экономической целесообразностью повышения технической скорости автомобиля, что увеличит его производительность и обеспечит снижение себестоимости перевозок. Однако при наличии постоянной кинематической связи
123>
между электродвигателем и колесом скорости должна соответствовать максимальная скорость вращения электродвигателя лэ max- Это приводит к недоиспользованию скоростных свойств электродвигателя при движении транспортной машины с грузом и в итоге к увеличению всех основных размеров электродвигателя. В зависимости от типа и назначения транспортной машины следует принимать
^max = (1 -т- 1,25) t^niax*
При электродвигателях постоянного тока реализация скорости утах может осуществляться не повышением напряжения электродвигателей Ud сверх величины (7а max, соответствующей скорости Цпах, а ослаблением поля или, при последовательном возбуждении, просто использованием естественной механической характеристики электродвигателя при напряжении Ud шах- Это возможно по той причине, что динамический фактор для негружепой машины существенно возрастает.
Задача выбора расчетной величины коэффициента энерговооруженности мотор-колеса возникает в том случае, когда не задана мощность первичного двигателя или проектируемое мотор-колесо предполагается использовать на автомобилях различных типов с разными значениями коэффициента ka. Принятая величина коэффициента kA определяет предельную мощность на колесе, от которой зависят техническая скорость и другие характеристики транспортной машины и системы электропривода, в частности, мощность электродвигателя и диапазон регулирования электропривода при реализации мощности Ркпред.
На первом этапе проектирования при выборе коэффициента kA можно исходить из тех же соображений, которые были изложены при рассмотрении методики расчета тягово-скоростных показателей мотор-колеса при заданных характеристиках электродвигателя.
Методика определения параметров электродвигателей постоянного тока. Длительная мощность электродвигателя численно равна предельной мощности на колесе с учетом к. п. д. редуктора, т. е.
Рк пред
Пр
поскольку именно эта величина мощности может длительно передаваться на электродвигатель от двигатель-генератора.
Мощности Pdv, соответствуют длительные значения тока /а», момента электродвигателя Md^ и силы тяги на колесе Гкоо. Напряжению
124
соответствуют длительные значения скорости вращения электродвигателя Пда, и скорости машины причем — к. п. д. электродвигателя при длительном режиме работы.
Наибольший момент электродвигателя и максимальная сила тяги на колесе FKmax реализуются за счет перегрузки электродвигателя по току с учетом принятого коэффициента kF. Чтобы реализовать максимальную скорость машины итах при соответствующем значении силы тяги /*'« min, определяемом сопротивлением движению при утах, необходимо повысить напряжение на зажимах электродвигателя до некоторого максимального значения Udma*' В большинстве случаев напряжение повышают до значения Udmax, отвечающего наибольшему значению скорости vli6 < umax, причем диапазон скорости от vh6 до t'rnax при работе по предельной тяговой характеристике реализуется за счет ослабления поля электродвигателя.
При составлении технического задания на проектирование электродвигателя обычно указывают величину длительной мощности и отношение максимального напряжения к длительному
|||ЗХ = k . Очевидно, что необходимость реализации больших значений коэффициента k.v = г"1ах = 4~-6, характерных для пне-вмоколесных транспортных машин, и максимальной силы тяги на колесе FK тях при определенных значениях коэффициентов kF и /?4 обусловливает изменение конструкции, увеличение размеров электродвигателя мотор-колеса по сравнению с вариантом, соответствующим параметрам длительного режима.
Электродвигатель мотор-колеса рассчитан на длительное напряжение Ud«>. Однако при токах h он должен допускать повышение напряжения, соответствующее выбранному значению коэффициента kv. Величину kv ограничивает среднее межсегментное напряжение на коллекторе. Реализация скорости машины vmax или повышением напряжения от значения Ud^
До ^Этах при >2 обычно требует увеличения диаметра якоря и размеров электродвигателя. Но если ки'^2, то при больших kv повышение скорости от vhF} до и1Пах осуществляется за счет глубокого ослабления поля электродвигателя, который должен иметь увеличенный воздушный зазор и размеры.
Для описания свойств электродвигателя целесообразно ввести обобщенный параметр, являющийся функцией исходных показателей, задаваемых при разработке мотор-колеса: GK1 kA, Е)шах, утах и формы механической характеристики. В качестве обобщенного параметра электродвигателя мотор-колеса предлагается величина, названная установленной мощностью Рдуст-
Поэтому разница в электромагнитных и конструктивных параметрах вариантов электродвигателей при несовпадающих величинах
125
мощности для определенного значения GK обусловлена тем, ЧТО электродвигатель С МОЩНОСТЬЮ PdycmZ> Рдуст должен быть рассчитан на работу с большим Z)max или при более высоких значениях скорости, хотя другие параметры обоих вариантов электродвигателей идентичны.
Параметр Рдуст используется при сопоставлении односкоростного и двухскоростного вариантов мотор-колес, а также вариантов, отличающихся каким-либо показателем (ymax, Dmax, kA и т. д.), для приближенной оценки веса электродвигателя.
Для пневмоколесных транспортных машин, особенно для машин высокой проходимости, характерны отклонения радиусов качения отдельных колес от среднего для всех колес значения гкср, и постоянно изменяющийся коэффициент сцепления ведущих колес с опорной поверхностью, причем условия сцепления для колес машины могут быть различными. Вследствие этого создаются предпосылки для неравномерной нагрузки электродвигателей и для развития процесса буксования мотор-колес. Количественная сторона этих процессов зависит от системы регулирования возбуждения электродвигателя, а при последовательном и смешанном возбуждении — от формы механической характеристики Мд (Пд).
В системах электропривода постоянного тока с параллельно соединенными электродвигателями независимого возбуждения ток возбуждения автоматически изменяется, например, в функции тока якоря электродвигателя данного мотор-колеса, причем вид функции не зависит от напряжения на зажимах электродвигателя. В системах переменно-постоянного тока с тиристорными выпрямителями возможно также регулирование тока возбуждения в функции тока нагрузки генератора и напряжения на зажимах каждого электродвигателя по отклонению его тока от среднего тока электродвигателей. В любом случае выравнивание нагрузки электродвигателей или предупреждение развития буксования мотор-колес производится путем дополнительного автоматического регулирования тока возбуждения или напряжения на зажимах электродвигателя, у которого величины Пд и Id имеют отклонения от средних значений для всех электродвигателей транспортной машины.
На величину отношения —^|?"4 и Рдуст при заданных тяговоскоростных показателях транспортной машины также влияет форма механической характеристики электродвигателя Мд (пд) при любой системе его возбуждения, если ток независимой обмотки возбуждения является однозначной функцией тока якоря.
В процессе определения параметров электродвигателя должна быть установлена оптимальная при данных условиях форма его-механической характеристики, соответствующей напряжению дли-12-3 ,
тельного режима. Параметром формы механической характеристики является коэффициент относительной жесткости х» равный _ пд . dMb
Мд drtd
Механическая характеристика тягового электродвигателя [321 МдПд — const,
если принять, что коэффициент х — постоянная величина.
В действительности коэффициент х для данной механической характеристики — величина переменная. Однако для каждой из
двух частей механической характеристики (в диапазоне от максимального до длительного момента и от длительного до минимального момента) можно указать некоторые средние значения коэффициентов Xi и 7.2> определяющих форму данной части характеристики.
При определении коэффициента хДля некоторого участка механической характеристики возьмем на кривой Мд (пд) (рис. 51) две точки по границам участка и напишем два уравнения
М-д^Лд! б 1 И == ^>2’
Эти уравнения можно переписать следующим образом:
lg№i + xlgnc)i= 1g
и
Ig^ds + %lgnd2 = lgC2.
Рис. 51. К определению коэффициентов относительной жесткости Xi и %2 для механической характеристики электродвигателей постоянного тока
Если принять, что х — const и Сг = С2, то можно записать lg Af— lg Ма3 = (1g пдг — 1g ndl) х,
откуда получим
—- lgMa2
1g — 1g
Условимся определять коэффициент Xi по двум точкам механической характеристики при Ud = для которых Мд = = 2Mdoo (точка J) и Мд — Мд™ (точка 2); при определении коэффициента Х2 будем понимать под точкой 2 точку с Мд — Мд™ и под точкой 1 ту, которая соответствует скорости вращения Пд = = 2nd™. Значения момента Мд™ и скорости вращения п.д™ соответствуют длительному режиму работы электродвигателя.
127
Проведенное исследование влияния формы механической характеристики на распределение нагрузки между электродвигателями, процесс буксования и величину установленной мощности позволяет рекомендовать значения коэффициентов Xi и Ха для семи групп транспортных машин, перечисленных в табл. 2. Рекомендуемые значения Xi следующие:
Группа транспортных машин с электроприводом
I II III IV \,т *
VI
VII
Коэффициент
3,0-3,6
2,8—3,6
3,0—4,0
3,0—3,6
3,0—4,0
2,8—4,0
3,0—3,6
Чем мягче механическая характеристика (чем меньше коэффициент Xi), тем меньшую разницу по току и моменту имеют электродвигатели (при параллельном соединении) различных мотор-колес, но тем интенсивнее развивается процесс буксования в случае нарушения сцепления между колесом и опорной поверхностью.
Для уменьшения установленной мощности электродвигателя следует по возможности уменьшить значение коэффициента Хг> желательно до величины х-а — 2,7ч-2,9. При этом необходимо учитывать, что те конструктивные меры, которые обеспечивают снижение коэффициента х-з механической характеристики электродвигателя, одновременно снижают величину коэффициента Xi, т. е. значения этих коэффициентов взаимосвязаны.
Рассмотрим методику определения установленной мощности электродвигателя последовательного или смешанного возбуждения, включающую также расчет необходимой величины отношения Jniax . В дальнейшем для простоты будем полагать, что при
работе по предельной тяговой характеристике реализация скорости утах осуществляется повышением напряжения до значения Од шах» так что при работе машины с расчетной нагрузкой = umax, а при негруженой машине диапазон скорости от итах до v реализуется за счет ослабления поля электродвигателя, которое допу-
стимо по максимальному межсегментному напряжению при нормальной величине воздушного зазора.
По заданным величинам коэффициента kA и нагрузки на шипу GK из выражения (12) или (10), если заданы мощность первичного двигателя и предельную 128
колесная формула транспортной машины, находят мощность на колесе Ркпред и строят предельную
ограничен-mavGK. Из соотношения (15) соответствую-
тяговую характеристику мотор-колеса FK v — const, ную значениями umax и FKmail можно также найти силу тяги мо!ор-колеса FKmln, щую максимальной скорости vmax.
Для определения установленной мощности электродвигателя следует воспользоваться процентной механической характеристикой Мд% (пд%), которую можно получить из механической характеристики тягового электродвигателя при напряжении длительного режима t/doo, если за 100% Мд и по принять длительные значения момента Мд™ и скорости вращения Пд™.
Чтобы выбрать процентную характеристику Мд% (пд%) с необходимыми значениями коэффициентов и х2> следует рассчитать значения %, и %2 для механических характеристик существующих электродвигателей мотор-колес и использовать для расчета процентной характеристики ту механическую характеристику, которая имеет требуемые в данном случае значения и %2-
В общем случае по процентной механической характеристике в координатах v — FK (рис. 52) должна быть построена тяговая характеристика электродвигателя Fd(v) при некотором напряжении Ud=Udmx, которая отвечала бы двум условиям: обеспечивала получение максимальной силы тяги FKmax при выбранной величине коэффициента kF и некоторой минимальной скорости umln при пониженном напряжении;
обеспечивала реализацию заданной максимальной скорости транспортной машины в груженом состоянии при работе по предельной характеристике FKv = const.
Рассмотрим построение характеристики Fd (v) при Udmdx-Отметим, что точка, лежащая на пересечении прямой FKOO = const и предельной характеристики FKv = const, принадлежит также тяговой характеристике электродвигателя при напряжении Ud™> При этом
Рис. 52. К определению основных параметров для проектирования тягового электродвигателя постоянного тока:
/ — предельная тяговая характеристика FKv — const;2 — тяговая характеристика электродвигателя F& (о) при Uлгаах; 3 — тяговая характеристика электродвигателя Fj (о) при
max
9 А. И. Яковлев
129
где v' — скорость, определяемая пересечением прямой FKOO = const с характеристикой (ц) при Udm^
— скорость, соответствующая длительному режиму работы эл ектродв и гател я.
По принятой величине^ и значению FKmax, соответствующему максимальному динамическому фактору, может быть определена
Рис. 53. Процентная
механическая характеристика электродвигателя мотор-колеса
центиой характеристике (рис. соответствует точке предельной динатами цпах и FKmln:
min %
/a*,. Отношение = -г — = kv позволяет найти по Пророс г к min
53) величину которая
тяговой характеристики с коор-
== 100% kv
Далее, откладывая ординату Afamm% — const в координатах Пд% —Мд%, найдем n^max % — ^Пднб%, где пэнг> % определяется точкой пересечения ординаты с процентной характеристикой. Найденная величина л^тах % соответствует максимальной скорости груженой машины иП1ах. Абсолютную величину и'атах %
определяют из соотношения
__ fmax
max — / Г1-д max’
umax
Для построения характеристики Fd (v) при Ud та* определяют величины скорости V при значениях СИЛЫ ТЯГИ FKea И FK max- Для этого находят масштаб скорости в ~K^J4 по формуле
70
130
а затем и скорость
-v = nd%mv.
По процентной характеристике определяют значение Пд min% при Л4дкб%, которое соответствует скорости v" при силе тяги F^max- По трем точкам (или любому большему числу точек) с координатами (цшах; FKmln), (v'; FKO>) и (ц"; Fxmax), где v' — соответствует Ндоо% строят Fd(v) при Udmax (см. Рис. 52).
По этой характеристике можно найти установленную мощность электродвигателя, необходимого для создания мотор-колеса с шиной определенного типа и заданными тягово-скоростными показателями:
_ К*»
уст ~ ЖГЦр
где — среднее значение к. п. д. редуктора, принимаемое с учетом его передаточного числа.
Передаточное число редуктора ip в данном случае определяется по формуле (8), однако, если > t>max, вместо n<jmax следует подставить величину n^max. Тогда длительный момент электродвигателя Мдоо находится из соотношения (9), по ранее определенному значению FKOO, причем к. п. д. редуктора принимается приближенно в зависимости от величины ip.
Установленную мощность электродвигателя двухскоростного мотор-колеса принципиально определяют по той же методике, что и для односкоростного мотор-колеса. Если переключения передач во время движения не происходит, то следует определить величину Рдуст. при работе на первой и второй передаче и принять большее значение Рдуст- Если переключение передач во время движения предусмотрено, то при выборе установленной мощности следует учитывать условия, выражаемые неравенством (16). При этом величина отношения -~ч- (а следовательно, и от-doo
v F \
ношений - °° ; и | может быть принята равной аналогичному Ч11 fKOo|l /
значению для существующих электродвигателей мотор-колес с той же системой вентиляции, или приближенно = 1,15-ь doo
4-1,20.
Для определения Рдуст выбирают некоторую точку на предельной тяговой характеристике FKv — const (см. рис. 41), для которой координаты полагают равными v = Оооц и FK = Fxoon> а затем определяют величину Fxmaxn = kFFKOOu. Используя значения итах =- цпахП, Fx«n и рассмотренным ранее
методом строят тяговую характеристику электродвигателя на 9* • 131
второй передаче Fan (^п) при Udmax и находят значение скорости Тогда величина установленной мощности
Рдуст.
^Соо IIVII 367П₽П ’
где т]рп — средний к. п. д. редуктора при работе на второй передаче.
По формуле (8) находят передаточное число второй передачи, причем v — vmax, а величину ng — ng max определяют из соотношения ng max = ng щах • По найденному ранее значению ^тах
^xmaxii, величине к. п. д. т)рп и передаточному числу 1П рассчитывают наибольший момент электродвигателя
7И *"'ахП «
n’lpii
(18)
и его длительный момент
Далее, по заданному значению FK maxJ = FKmax, найденной величине MgH6 и принятому значению tjpi по формуле (8) находят передаточное число первой передачи ц.
По известному значению n^max по формуле (8) определяют величину цпахь которую сравнивают с величинами и учц. Если flmaxi < Ц<п» т0 скорость Voon завышена, а мощность Рдуст. занижена. Если omax i > *>«п, то скорость Уооц принята заниженной, а мощность Рдуст завышена. Если ^maxi^* и«п> то
выбранное значение dtoIi и найденная величина Рдуст могут быть сохранены.
Другим важным параметром электродвигателя, который должен быть оговорен в техническом задании на проектирование, является максимальная скорость вращения namax. Повышение tig шах позволяет уменьшить размеры и вес не только электродвигателя, но и осевой размер и вес мотор-колеса [42], несмотря на увеличение передаточного числа редуктора при заданном Dmax и соответственно его размеров и веса. Предел повышения скорости вращения электродвигателя ограничен допустимой окружной скоростью якоря, коммутацией и конструкцией подшипниковых щитов.
Верхний предел скорости вращения должен уменьшаться по мере повышения мощности электродвигателя как из-за увеличения его диаметрального размера, так и вследствие необходимости применения подшипников больших размеров, которые при высокой скорости вращения^ не обладают требуемой долговечностью.
Большинство современных отечественных электродвигателей мощностью 18—210 кет, предназначенных для мотор-колес, имеет максимальную скорость вращения около 4000 об!мин. При этом зависимости максимальной скорости вращения от мощности в соответствии с отмеченной выше закономерностью не наблюдается. Это объясняется тем, что возможности повышения скорости вращения для электродвигателей относительно небольшой мощности (до 80—100 кет) еще не исчерпаны. Вместе с тем известны образцы электродвигателей мотор-колес, имеющих максимальную скорость вращения 7000—10 000 об!мин при мощности до 30—40 кет.
При назначении максимальной скорости вращения следует учитывать мощность электродвигателя, необходимый срок службы, возможность применения высококачественных электротехнических материалов и подшипников. Повыбранной величине н^тах и известному отношению -g?-a-- может быть определена скорость вращения электродвигателя в длительном режиме:
Voo == Пдтах ~Т, • vmax
Длительный момент электродвигателя ЛЬ*, может быть определен с учетом соотношения (3) по известному значению FKOO (для двухскоростного мотор-колеса — по FKOOn) и передаточному числу редуктора ip (во втором случае — /’и). Для односкоростного мотор-колеса передаточное число находят по формуле (8) с учетом величин ц11ах (или итах) и Пд1Пах.
Величины напряжения и тока длительного режима выбирают при расчете электромагнитных параметров электродвигателя исходя из условий возможно более высокого к. п. д. и наиболее рациональной конструкции электродвигателя (в частности, с учетом возможности выполнения коллектора в заданных габаритах). Ограничения по величинам Z7doo и Ud max вводят в том случае,
когда предусматривают использование существующего генератора.
При выборе величины напряжения при заданном отношении
U д max
следует учитывать условия коммутации электродвига-
теля при работе с напряжением Udmax ПРИ скорости, равной или близкой к г/тах. Этот режим для электродвигателя является наиболее тяжелым по коммутации при работе системы с постоянной
мощностью первичного двигателя.
Выбор системы возбуждения электродвигателей мотор-колес непосредственно связан с принятой системой регулирования электропривода. Реализация заданных тягово-скоростных показателей мотор-колеса может быть осуществлена при различных системах возбуждения электродвигателя. Однако эксплуатационные режимы мотор-колеса как агрегата электропривода в определенной мере зависят от системы возбуждения и способа его регулирования
133
главным образом в отношении процессов буксования мотор-колеса и распределения нагрузки между электродвигателями.
Когда транспортную машину создают на базе существующих образцов мотор-колес, система возбуждения их электродвигателей предопределяет методы регулирования электропривода в режиме тяги и электрического торможения и тем самым в определенной части принципы построения электрической схемы.
В мотор-колесах используют электродвигатели последовательного, согласного смешанного (с независимой обмоткой) и независимого возбуждения, причем выбор системы возбуждения зависит от назначения и условий эксплуатации пневмоколесной машины, принятой схемы соединения электродвигателей или необходимости их перегруппировки. Рассмотрим вопросы, связанные с выбором системы возбуждения электродвигателей, предполагая, что принято их постоянное параллельное соединение, характерное для выполненных отечественных образцов автомобилей и автопоездов с электроприводом.
Электропривод транспортных машин с электродвигателями последовательного возбуждения отличается простотой и надежностью, поскольку не требует специальной системы регулирования возбуждения электродвигателей, а изменение тока непосредственно влечет за собой изменение магнитного потока, обусловливая их надежную работу при переходных процессах. При независимом возбуждении электродвигателей эта связь осуществляется через систему автоматического регулирования. Электродвигатели последовательного возбуждения имеют несколько меньшие размеры, чем электродвигатели смешанного или независимого возбуждения с аналогичными электромеханическими параметрами. Это объясняется тем, что последовательную обмотку выполняют однослойной из шины большого сечения, вследствие чего коэффициент заполнения обмоточного пространства и теплоотдача улучшаются благодаря небольшой доле сечения обмотки, занимаемой изоляцией. Форма механической характеристики электродвигателя последовательного возбуждения имеет определенное сходство с предельной механической характеристикой. Это позволяет ограничить величину отношения п и уменьшить мощность генератора.
Возможность использования в мотор-колесах электродвигателей последовательного возбуждения ранее представлялась сомнительной даже при их постоянном параллельном соединении из-за вероятности разносного буксования мотор-колес. Однако опыт показал, что скорость вращения электродвигателя, связанного с колесом, нарастает во много раз медленнее, чем у одиночного электродвигателя, а установившуюся скорость вращения ограничивают потери холостого хода в механической передаче мотор-колеса/
134
Положительные качества электродвигателей последовательного возбуждения обусловили их преимущественные применение в электрической тяге. Однако полностью удовлетворить всем требованиям, предъявляемым к электроприводу пневмоколесных транспортных машин, только за счет свойств саморегулирования электродвигателей последовательного возбуждения не представляется возможным. Это касается распределения нагрузки между электродвигателями, развития процесса буксования, способов ослабления поля, реверсирования электродвигателей и перехода в тормозной режим.
Распределение нагрузки и характер протекания процесса буксования при электродвигателях последовательного возбуждения могут быть признаны удовлетворительными лишь в первом приближении. Такие операции как ослабление поля, реверсирование и переход в режим электрического торможения требуют значительного количества силовой коммутационной аппаратуры.
Устранение этих недостатков, обусловленных свойствами электродвигателей последовательного возбуждения, возможно при функциональном управлении возбуждением электродвигателей, что требует применения независимых обмоток, получающих питание от специального источника электроэнергии.
Выравнивание нагрузок электродвигателей возможно при их смешанном возбуждении в случае регулирования тока независимой обмотки при помощи соответствующей автоматической системы. Еще более совершенным в функциональном отношении является независимое возбуждение электродвигателей, которое позволяет осуществить плавное ослабление поля в широком диапазоне и этим уменьшить установленную мощность электродвигателей и генератора, повысить к. п. д. системы электропривода, устранить опасность развития процесса буксования и существенно ограничить количество коммутационных аппаратов в силовых цепях.
При независимом возбуждении есть возможность осуществить последовательно-параллельное соединение электродвигателей, если это целесообразно по параметрам генератора, или применить их перегруппировку, что позволяет использовать генератор меньшей мощности. При последовательном соединении двух или более электродвигателей последовательного или смешанного возбуждения несовпадение их механических характеристик и отклонение радиусов качения колес приводит к перераспределению напряжения генератора и моментов между электродвигателями. При буксовании одного из мотор-колес основная доля напряжения генератора придется на электродвигатель буксующего колеса, что при достаточно мягких характеристиках электродвигателей может привести к остановке транспортной машины. При независимом возбуждении можно регулировать магнитный поток электродвигателя по отклонению числа оборотов связанного с ним колеса от
135
среднего числа оборотов всех колес и тем самым предупредить развитие буксования.
Однако применение электродвигателей независимого возбуждения связано с рядом серьезных проблем, главной из которых является обеспечение высокой надежности системы регулирования. Выравнивание токов и моментов электродвигателей, защита от буксования и выбор оптимального режима работы электрических машин по к. п. д. требуют применения замкнутых систем авто
Мфн ^доо
Рис. 54. К определению основных параметров для проектирования тягового электродвигателя переменного тока
матического регулирования. Усложнение систем регулирования увеличивает вероятность отказов в эксплуатации и выдвигает повышенные требования к обслуживанию и оборудованию ремонтной базы.
В настоящее время в теплоэлектрическом приводе транспортных машин наметилась тенденция к специализации функций отдельных элементов систем регулирования. Поддержание наиболее экономичного режима работы двигатель-гене-ратора при различных уровнях мощности, измерение контролируемых величин, формирование и усиление управляющих сигналов возлагаются на
соответствующие узлы системы регулирования. В связи с этим, в частности, возникает вопрос о замене последовательного возбуждения электродвигателей не
зависимым.
Механическая характеристика электродвигателя последовательного возбуждения позволяет использовать его на транспортных машинах при самом простом регулировании. Однако оптимизация параметров системы электропривода возможна лишь при электродвигателях независимого возбуждения и совершенной системе автоматического управления. Поэтому выбор системы возбуждения электродвигателей мотор-колес представляет собой серьезную технико-экономическую задачу, при решении которой следует учитывать тип и назначение транспортной машины, преимущества, достигаемые при оптимизации параметров электропривода, а также дополнительные первоначальные затраты и эксплуатационные расходы, обусловленные усложнением системы регулирования электропривода.
Методика определения параметров электродвигателей переменного тока. НОрйС: 54 изображена предельная механическая
136
характеристика асинхронного двигателя MgHg = const, соответствующая предельной мощности
kAGK _ МдПд Пр 975 ’
Точка L характеристики соответствует длительному режиму работы асинхронного двигателя, параметрами которого являются мощность Р^оо, напряжение 1/^, ток момент Мд«> и частота /100.
В техническом задании на проектирование асинхронного двигателя мотор-колеса должны быть указаны величины Рд^ и соотношение номинального и длительного значений частоты
и значение f1K, отношение напряжения при номинальной частоте UdH к длительному напряжению максимальная синхронная скорость вращения п&., относительное скольжение $«> при длительном режиме работы асинхронного двигателя, момент М$н при /1к, соответствующий предельной мощности Рдпред-
Мощность Ра» численно равна предельной мощности Рдпред-Частоте f10O соответствует скорость для реализации скорости итах частоту следует повысить до значения /1Н. Соотношение между частотами пропорционально отношению соответству-ющих синхронных скоростей вращения:
F1H ^дг max
' 1ОО (JC °°
Максимальная и длительная скорости вращения электродвигателя патах и л3оо, соответствующие частотам f1H и /100 при работе по характеристике Мдпа == const, меньше синхронных скоростей на величину абсолютного скольжения. Если пренебречь разницей в абсолютном скольжении при значениях скорости вращения па тах и па»» то можно приближенно принять
flH ^тах
I 100 оо
Величина отах задана, а значение может быть определено по найденной предельной мощности на колесе Ркпред из выраже-
Fk ния (13), если принять FK — причем FKOO — —
Быстроходные асинхронные двигатели мотор-колес рассчитывают на повышенную частоту (200—400 гц), что позволяет получить электродвигатели с оптимальными весовыми и габаритными показателями. Если используется частотное управление асинхронных двигателей с тиристорным преобразованием частоты, то при выборе величины f1H следует учитывать возможное отношение номи-
137
нальных ^частот генератора и асинхронного двигателя - —-
Л _ /1Н
— 2,о 4-0, т. е. генератор и тиристоры должны быть рассчитаны на более высокую частоту, чем асинхронные двигатели. Отметим,
что значение частоты f1H непосредственно влияет на число пар полюсов и тем самым на конструкцию асинхронного двигателя.
Отношение для принятых значений А и показателя '-'даа
степени q может быть найдено из выражения (17). Закон регулирования напряжения в зависимости от частоты при не
оказывает влияния на размеры элементов магнитной цепи асинхронного двигателя, поскольку номинальную величину магнитного потока и размеры элементов магнитной цепи рассчитывают исходя из значений и Ug^ при q = 1. Однако, как указыва-Un
лось ранее, отношение / влияет на параметры генератора. доо
Величины напряжения тока и коэффициента мощности cos (pa,» определяют при проектировании асинхронного двигателя, причем от значений Ug^ и Ig^ зависят конструкция электродвигателя и его к. п. д. Важной задачей расчета является повышение cos <ра, которое позволяет понизить уровень токовых нагрузок асинхронного двигателя.
Максимальная синхронная скорость вращения асинхронных двигателей связана с частотой f1H отношением
„ - 6°А»
дс щах — рд
где pg — число пар полюсов асинхронного двигателя.
Величины /1н, и^тах и Рд Должны быть взаимно согласованы. При составлении технического задания определяют величину f1H и указывают значение zzatnax, соответствующее определенному числу пар полюсов. Следует избегать значения pg — 1, так как при нем ухудшаются конструктивные, весовые и габаритные показатели электродвигателя. Асинхронные двигатели при относительно большом числе пар полюсов (рд — 4; 6) имеют несколько • меньший вес, чем при рд = 2 или pg - 3, но у них хуже cos <ра и выше уровень токовых нагрузок.
Обычно рекомендуют принимать для тяговых асинхронных двигателей повышенной частоты n^max ~ 60004-8000 об! мин. Однако известны опытные образцы асинхронных двигателей, предназначенные для использования в мотор-колесах, максимальная скорость вращения которых 24 000—30 000 об!мин [44, 45].
Длительный момент асинхронных двигателей мотор-колес определяют так же, как и электродвигателей постоянного тока, по значениям FKmsait kF и найденному передаточному числу редуктора.
138 Sfc.
Форма механической характеристики может быть задана величиной относительного скольжения длительного режима асинхронного двигателя при частоте /1ОО. Выбор величины s« зависит от системы регулирования электропривода. При использовании тиристорного преобразователя частоты с отдельными блоками для каждого мотор-колеса величина должна быть минимально возможной при данной конструкции асинхронного двигателя, так как это позволяет повысить его к. п. д. Равномерное распределение нагрузки между электродвигателями в этом случае обеспечивают системы управления преобразователем частоты.
Если все тяговые синхронные двигатели получают питание от общего преобразователя частоты или применена система электропривода без преобразователя частоты, то для выравнивания нагрузки асинхронных двигателей мотор-колес требуется существенное снижение жесткости их механических характеристик путем увеличения активного сопротивления ротора с повышением скольжения до 6—10% или применение особого устройства, называемого «тиристорным контактором».
Значительное повышение активного сопротивления обмотки ротора связано с конструктивными трудностями в выполнении обмотки и приводит к существенному снижению к. п. д. электродвигателя, что практически делает этот вариант неприемлемым. Вариант с «тиристорным контактором» применительно к автомобилям и автопоездам по функциональным свойствам системы регулирования уступает варианту с преобразованием частоты, имеющим отдельные блоки для каждого мотор-колеса.
При выборе параметров асинхронного двигателя для двухскоростного мотор-колеса следует учитывать те же основные условия, что и для электродвигателей постоянного тока, в частности, условие, выражаемое неравенствами (16). Однако здесь задача сводится не к определению величины отношения - при по-мощи соответствующей процентной механической характеристики, а к нахождению отношения частоты
/ JOO
Для этого на предельной тяговой характеристике FKv = const (см. рис. 41) выбирают точку с координатами v = Уооп и FK — = а по значениям скорости итах и и«>п находят отношение f
частот . Принимают значение ndmax и по формуле'(8) опреде-/ 100
ляют передаточное число in и далее Mqh6 из соотношения (18). Затем по заданному значению ЕКП1ах1 = ЕКП1ах и моменту Мднб находят по формуле (9) передаточное число первой передачи и максимальную скорость на первой передаче итах Р Если 1>тах г < <С Ц/П> то значит скорость принята завышенной, а получения
ное отношение — занижено; если £maxi 3> Uoon, то скорость Doon
• 1 0Q
139
завышено. При Uooii цчп принятое значение и найденное отношение
принята заниженном, а отношение
Цпах 1 f могут быть сохранены. 1100
Другие параметры асинхронного двигателя двухскоростного мотор-колеса могут быть определены так же, как и для односкоростного мотор-колеса.
Определение основных конструктивных параметров электродвигателей мотор-колес. Для определения особенностей конструкции электродвигателя необходима эскизная проработка мотор-колеса, которая позволит выбрать рациональную компоновку агрегата, установить конструктивные функции корпуса электродвигателя и его основные размеры, конструкцию вала и тормозных механизмов.
При эскизной проработке мотор-колеса размеры тягового электродвигателя принимают ориентировочно по аналогии с существующими тяговыми электродвигателями равной мощности. Если
корпус электродвигателя используют в качестве опоры подшипников колеса, то эскизная проработка должна определить тип опорных подшипников колеса, обработку наружной поверхности корпуса, а также и максимально возможный наружный диаметр, который в дальнейшем уже не подлежит изменению.
Расчет электромагнитных параметров тягового электродвигателя и конструктивная проработка его корпуса по данным технического задания на проектирование позволяют решить вопрос о возможности создания электродвигателя с необходимой мощностью при заданных габаритных размерах и уточняют размеры электродвигателя (при ограниченном наружном диаметре — его длину). По результатам электромагнитного расчета уточняют эскизный проект мотор-колеса и окончательный выбор основных конструктивных параметров электродвигателя.
С учетом компоновки мотор-колеса следует решить вопрос о целесообразности параллельной или последовательной схемы вентиляции электродвигателя. При любом способе подвода и отвода охлаждающего воздуха должно быть проработано расположение вентиляционных окон на корпусе электродвигателя, определены их размеры и способ крепления подводящих и отводящих патрубков.
ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ
Предварительные замечания. Тормозные средства транспортных машин с мотор-колесами представляют собой один из элементов
мотор-колеса как в функциональном, так и в конструктивном отношении. В большинстве случаев мотор-колеса имеют механиче-
ский и элект 140
ричесд^ри тормоза.
, Механический тормоз может быть связан с валом электродвигателя, промежуточной ступенью редуктора или колесом. Расчет тормозных характеристик мотор-колеса в этом случае аналогичен расчету тормозных характеристик автомобиля.
При электрическом торможении транспортных машин может тормозиться каждое мотор-колесо и, следовательно, сцепной вес будет таким же, как в режиме тяги.
На транспортных машинах с автономным источником электроэнергии практически применяется электрическое торможение двух видов: элсктрокомпрессионное торможение с поглощением рекуперируемой электроэнергии в первичном двигателе [401 и реостатное торможение, при котором электроэнергия поглощается в специальных тормозных сопротивлениях. В отличие от подвижного состава рельсового транспорта на пневмоколесных машинах не следует исключить возможности применения торможения противовключением.
Электрическое торможение при электродвигателях постоянного тока. При электрокомпрессиопном торможении в системах электропривода на постоянном токе силовая электрическая цепь между генератором и электродвигателями сохраняется замкнутой. Силу торможения можно регулировать изменением тока возбуждения электродвигателей или генератора. При этом используют существующие обмотки возбуждения электродвигателей и генератора, но закон регулирования возбуждения будет иным, чем в режиме тяги.
Электродвигатели, работающие в генераторном режиме, питают обмотку якоря генератора, который работает в режиме электродвигателя. Генератор осуществляет привод первичного двигателя. Рекуперируемая электроэнергия расходуется в первичном двигателе на компенсацию потерь трения и на сжатие воздуха, который затем выбрасывается в атмосферу.
Для перехода в режим электрокомпрессионного торможения необходимо, чтобы э. д. с. электродвигателя мотор-колеса Ед = = сЕд^д^о превосходила напряжение генератора Ue. Возбуждение генератора устанавливается на таком уровне, чтобы развиваемая им электрическая мощность при максимальном тормозном токе не превышала ту тормозную мощность, которую может поглотить первичный двигатель.
Ток электродвигателя при электрокомпрессиопном торможении
1дт —
cjj№dnd —
Гд
откуда скорость вращения электродвигателя
г (I) cEdWd
(19)
141
Электромагнитный тормозной момент электродвигателя находят по формуле, аналогичной выражению (15):
Л4дт == ('Мд^д^дт'
При переходе на тормозной режим меняется знак электромагнитного момента, так как направление магнитного потока сохраняется прежним, а направление тока якоря меняется па противоположное. Механические и магнитные потери, вызывающие в режиме тяги уменьшение момента на валу электродвигателя на величину (14), при электрическом торможении складываются с электромагнитным моментом. Однако чтобы упростить расчеты, потери мощности в электродвигателе при определении тормозной силы учитывают величиной среднего к. п. д. электродвигателя.
Используя формулу (19), можно построить механическую тормозную характеристику электродвигателя Мдт (пд) и по формулам (3) и (7), обозначая силу торможения мотор-колеса Вк, рассчитать тормозную характеристику мотор-колеса:
& _ Q’377 С_Мд^дт (^2 "1~
Выбор системы возбуждения тяговых электродвигателей, работающих при электрокомпрессионном торможении в генераторном режиме, и генератора, работающего в режиме двигателя, должен отвечать требованию электрической устойчивости. Условие электрической устойчивости в общем виде выражается неравенством
(20)
Здесь под величиной Ех понимают приложенную э. д. с., в данном случае э. д. с. электродвигателя, а под Е2 — уравновешивающую э. д. с., т. е. э. д. с. генератора. В системе автономного электропривода при электрокомпрессионном торможении э. д. с. Е2 возникает при вращающемся генераторе и наличии необходимого в тормозном режиме возбуждения.
Неравенство (20) может быть записано в виде
& Ч~ 7дтГd)
didm
ИЛИ
d (Wtyd — Wd) (Юг
di dm dldm
причем для простоты рассматриваем тормозной контур, включающий один двигатель и один генератор.
Характер изменения возбуждения электродвигателей мотор-колес и генератора при электрокомпрессионном торможении должен обеспечивать выполнение этого неравенства. 142
При реостатном торможении электродвигатели должны быть отсоединены от генератора и их якоря замкнуты на тормозное сопротивление. Механическая энергия движущейся транспортной машины превращается в электрическую энергию, а затем выделяется в виде тепла в основном в тормозном сопротивлении.
Регулирование силы торможения может осуществляться изменением величины тормозного сопротивления или изменением тока возбуждения электродвигателей. Последний способ предпочтительнее, но требует питания обмотки возбуждения электродвигателя от независимого источника. Существуют схемы реостатного торможения, которые предусматривают последовательное соединение всех обмоток возбуждения и питание их от главного генератора, работающего с пониженным напряжением. Регулирование силы торможения может осуществляться изменением тока возбуждения генератора. Возможно также питание обмоток возбуждения электродвигателя от вспомогательного генератора.
Характеристики реостатного торможения зависят от системы возбуждения тяговых электродвигателей в генераторном режиме. Электродвигатели последовательного возбуждения работают при реостатном торможении как генераторы с последовательным самовозбуждением или могут получить независимое возбуждение. В первом случае торможение недостаточно эффективно вследствие замедленного самовозбуждения электрической машины и резкого уменьшения тормозной силы с падением скорости. Электродвигатели смешанного возбуждения могут работать как генераторы встречного смешанного или согласного смешанного возбуждения.
Скоростная характеристика электродвигателя при реостатном торможении определяется уравнением л
„ __ Idm (гд + Rm)
Пд- —’ <21>
где Rrn — тормозное сопротивление.
Тормозной момент электродвигателя при реостатном торможении определяют по тем же формулам, что и при электрокомпрессионном торможении.
Если при реостатном торможении из общего числа mg электродвигателей мотор-колес составлено гпдпар параллельных цепей, в каждую из которых входит тдп0СЛ последовательно включенных электродвигателей, то уравнение скоростной характеристики примет вид
пд =
I dm iff) Ъп) СЕд®д
Здесь Rm = Rm—. Тормозной момент всех мотор-колес тд поел
транспортной машины в mg раз превосходйт тормозной момент одного мотор-колеса.
143
Тормозная характеристика мотор-колеса, рассчитанная с использованием формулы (21) аналогично характеристике электро-компрессионного торможения, определяется следующим выражением:
Вк =0,377
сМд сЕд'№р
V
л
' дт-
Тормозные характеристики мотор-колеса при реостатном торможении приведены в координатах v—Вк на рис. 55. Каждому зна
Рис. 55. Тормозные характеристики транспортной машины при электрическом торможении с электродвигателями постоянного тока
чению тока возбуждения, а следовательно, магнитного потока электродвигателя и величине тормозного сопротивления соответствует определенная тормозная характеристика. При постоянном значении магнитного потока электродвигателя и величины тормозного сопротивления сила торможения пропорциональна скорости, и зависимость этой силы от скорости изображается линией, проходящей через начало координат. Угол наклона линии зависит от величины магнитного потока электродвигателя, или тормозного
сопротивления.
Для максимального возбуждения электродвигателей Фдтах и Rm = const или минимального тормозного сопротивления mln и Фа = const тормозная характеристика соответствует линии ОЛ. При минимальном возбуждении Ф^пцп и Rm = const или при максимальном сопротивлении RmmK и Ф<? = const тормозная характеристика соответствует линии ОС. Изменением возбуждения
электродвигателя или тормозного сопротивления можно регулировать силу торможения в пределах, ограниченных линиями ОЛ и ОС.
При постоянном токе якоря электродвигателя сила торможения обратно пропорциональна скорости v и, следовательно, ограничение по максимальному тормозному току якоря электродвигателя изображает гипербола AF. Ограничению по коммутации соответствует линия DF, ограничению по максимальной скорости соответствует линия GD, а ограничению по сцеплению — линия ЕН.
Мощность тормозного сопротивления выбирают так, чтобы соответствующая линия ограничения располагалась вне тормозной зоны, ограниченной перечисленными линиями. Ограничение по мощности, которую может поглотить первичный двигатель при электр окомпрессионном торможении, определяет зависимость 144 в _
тормозной. мощности теплового двигателя от числа оборотов Nгпд т
Режим электрического торможения для тяговых электродвигателей является более напряженным, чем режим тяги, поскольку большие токи реализуются при высоком напряжении, что неизбежно при получении больших сил торможения при высокой скорости начала торможения. В результате этого тормозная мощность превысит мощность, реализуемую в режиме тяги, что может привести к нарушению коммутации электродвигателя. Это следует учитывать при определении основных параметров электродвигателя или ограничивать замедление при электрическом торможении.
При расчете тормозных характеристик мотор-колеса к силе торможения, развиваемой электродвигателем, следует добавить силу сопротивления движению транспортной машины, отнесенную к числу мотор-колес.
Двухскоростные мотор-колеса при реостатном торможении имеют две группы тормозных характеристик, соответствующих двум передаточным числам редуктора, причем величина силы торможения в обоих случаях существенно различается. Это обстоятельство следует учитывать при выборе эксплуатационных режимов реостатного торможения.
Электрическое торможение при электродвигателях переменного тока. Тяговые асинхронные двигатели автоматически переходят в режим электрического торможения, если их скорость вращения становится выше синхронной. Это положение, естественно, возникает при движении транспортной машины на спуске, причем асинхронный двигатель работает по механической характеристике, соответствующей определенной частоте.
При частотном управлении асинхронными двигателями при помощи статических преобразователей частоты переход в режим электрического торможения происходит не только автоматически при превышении асинхронными двигателями синхронной скорости вращения в случае движения на спусках, но и по воле водителя. Для этой цели необходимо плавно понижать частоту на выходе преобразователя частоты. Некоторому значению пониженной частоты fi <Zfi (где fr — частота в момент начала торможения) соответствует меньшая синхронная скорость вращения электродвигателя п' чем частоте Д. Поэтому при достаточном понижении частоты будет выполняться условие псд < пд, где пд — действительная скорость вращения электродвигателя при частоте fr. Асинхронный двигатель перейдет в режим электрокомпрессион-ного торможения, которое при плавном понижении частоты может осуществляться почти до полной остановки транспортной машины.
Возбуждение асинхронных двигателей в этом режиме производится от синхронного генератора, который передает асинхронным Ю Л. И. Яковлев 145
двигателям реактивную мощность. Потери в синхронном генераторе и первичном двигателе компенсируются за счет активной мощности асинхронных машин. Частота тока асинхронной машины равна частоте тока возбуждения, т. е. частоте на выходе преобразователя частоты.
При электрокомпрессиопном торможении скольжение асинхронной машины отрицательно, а ее скорость вращения
/2^ — Р-дс f /2S —
б(^
Рд
P'S’
где ns — абсолютное скольжение.
Асинхронная машина при торможении должна работать со скольжениями, меныпими критических значений, что следует учитывать при выборе закона регулирования напряжения в зависимости от частоты.
В системах электропривода на переменном токе без преобразования частоты электрокомпрессионное торможение осуществляется плавным снижением числа оборотов первичного двигателя путем уменьшения подачи топлива, что приводит к понижению частоты генератора до значения f'2 <Zfv В основном процесс аналогичен тому, который имеет место в системах электропривода с преобразователем частоты. Частота тока асинхронной машины равна частоте генератора.
Возможный режим работы асинхронного двигателя в генераторном режиме при электрокомпрессионном торможении иллюстрирует рис. 56, на котором нанесены механические характеристики асинхронного двигателя в двигательном и генераторном режиме при различной частоте.
Если перед началом торможения режим работы мотор-колеса характеризовался частотой flH и силой тяги FKH, а затем началось dft понижение частоты, причем скорость понижения частоты достаточно велика, то асинхронный двигатель перейдет в генераторный режим с рекуперацией энергии. Сила торможения Вк будет меняться по кривой 1—2—0. Увеличение скорости понижения частоты приведет к изменению формы зависимости Вк (v), которая будет описываться [5 ] кривой 1—2'—0.
Величина тормозного момента асинхронного двигателя определяется не только скоростью понижения частоты, но и величиной напряжения при данной частоте, причем закон регулирования может совпадать или отличаться от аналогичной зависимости в режиме тяги.
Следует различать два режима торможения: подтормаживание на спусках и торможение до остановки транспортной машины. В первом случае требуется снизить скорость машины до определенной величины, отвечающей условиям безопасности движения на данном участке, и в дальнейшем поддерживать ее на этом уровне. 146 ’ ,
При этом скорость понижения частоты невелика, а общее снижение частоты не должно быть глубоким. Во втором случае понижение частоты должно осуществляться достаточно интенсивно, причем частоту следует довести до минимального значения, практически близкого к пулю.
Эффективное электрокомпрессионное торможение возможно только в том случае, когда первичный двигатель может поглотить
Рис. 56. Характеристики тягового асинхронного двигателя при электрокомпрессиопном торможении
передаваемую через генератор рекуперируемую асинхронными двигателями энергию. Возможные технические решения рассмотрены в работе [40]. Чтобы избежать поглощения в первичном двигателе значительной тормозной мощности, следует прибегнуть к реостатному торможению по разработанной в последние годы схеме [4, 30]. Для поглощения тормозной мощности параллельно статорным обмоткам каждого из асинхронных двигателей подключают тормозные сопротивления. Как и в случае электрокомпрес-
сионного торможения, при реостатном торможении асинхронные двигатели работают как асинхронные генераторы, получая реак-
тивную мощность для возбуждения от синхронного генератора. Величину тормозного момента можно регулировать изменением
скорости понижения частоты
или величины напряжения на
зажимах асинхронного двигателя при данной частоте.
10*
Рис. 57. Тормозные характеристики при электрическом торможении с асинхронными двигателями
Отличие этого вида реостатного торможения от электроком-прессионного заключается в том, что основная часть электрической мощности, вырабатываемой асинхронным генератором, поглощается в тормозном сопротивлении, хотя известная часть тормозной мощности может передаваться на первичный двигатель, который работает с минимальной подачей топлива.
Характеристика тормозного момента асинхронного двигателя при реостатном торможении Мат (ng) может быть определена следующим образом [4]. Активная мощность, вырабатываемая асинхронным двигателем,
Рда = Рг+ Рщ>
где Р? — мощность, передаваемая синхронному генератору;
Рт — мощность, поглощаемая в тормозном сопротивлении;
р зс/а>.
m Итф ’
Удф — фазное напряжение;
Р пФ — тормозное сопротивление одной фазы.
Мощность Рт может быть выражена через момент синхронного генератора Л1', приведенный к валу асинхронного двигателя:
Рд
где рг — число пар полюсов генератора. Тогда мощность
Мепд
975 ’
Тормозной момент на валу асинхронного двигателя (с учетом его потерь)
—
975Рда
При помощи найденного выражения нетрудно построить тормозную характеристику мотор-колеса Вк (v).
При анализе тормозных характеристик мотор-колеса с асинхронным двигателем следует учитывать ряд ограничений, которые 148 «к .
указаны на рис. 57. Линия АС в координатах v—Вк соответствует ограничению по максимальной частоте преобразователя частоты, а линия DE — ограничению по минимальной частоте преобразователя, которая определяется параметрами его задающего устройства. Линия CF характеризует ограничение по величинам макси
мального момента асинхронного двигателя в тормозном режиме
при регулировании по закону
—— = Сф, причем в данном случае
линия CF приблизительно соответствует случаю q — 0,5. Линия CG представляет собой ограничение по максимальному току
тиристоров при регулировании напряжения от частоты по указанному закону, а линия EG — ограничение по максимальному току тиристоров при частотах /х когда регулирование
осуществляется по закону = Сф. Линия НК соответствует /г
ограничению по сцеплению.
Ilf ОБРАЗОВАНИЕ КИНЕМАТИЧЕСКИХ СХЕМ I V РЕДУКТОРОВ МОТОР-КОЛЕС
АНАЛИЗ ОГРАНИЧЕНИЙ ПРИ ИСПОЛЬЗОВАНИИ ПРОСТЫХ ПЕРЕДАЧ В РЕДУКТОРАХ МОТОР-КОЛЕС
Образование кинематической схемы редуктора является одной из основных задач, которая должна быть решена при проектирова-.нии мотор-колес. Основным исходным параметром при образовании кинематической схемы является передаточное число редуктора или передаточные числа первой и второй передачи редуктора при двухскоростном мотор-колесе.
Если исходить только из заданной величины передаточного числа, то задача выбора кинематической схемы редуктора мотор-колеса будет допускать весьма большое число решений. Поэтому уже па начальной стадии поиска наиболее рациональной кинематической схемы следует установить ограничения в использовании простых передач тех или иных типов, обусловленные спецификой конструкции и назначения мотор-колеса как агрегата тягового электропривода. Удовлетворение этих ограничений обеспечивает получение схемы, наиболее полно соответствующей назначению редуктора. При этом некоторые из ограничений характерны вообще для мотор-колес, другие присущи только мотор-колесу данного типа и назначения.
Ограничения в использовании различных простых передач, которые приходится учитывать при образовании кинематической схемы редуктора мотор-колеса, можно разделить па пять основных групп:
обусловленные необходимостью обеспечить удовлетворительный к. п. д. редуктора при реализации заданного передаточного числа;
габаритные;
накладываемые особенностями компоновки и конструкции мотор-колеса данного типа;
вызванные необходимостью ступенчатого изменения передаточного числа в двухскоростных мотор-колесах.
обусловленные передачей редуктором заданной мощности при определенном числе оборотов ведущего звена.
.153 %*.
Учет этих ограничений помогает решать вопрос о целесообразности использования тех или иных простых передач или сочетаний простых передач для образования кинематической схемы редуктора с оптимальными параметрами. Рассмотрим ограничение каждой из перечисленных групп и установим те основные практические выводы, которые следуют из их учета.
Ограничения, обусловленные необходимостью получения удовлетворительного к. п. д. редуктора при реализации заданной величины передаточного числа, являются наиболее существенными. Суть этих ограничений заключается в том, что хотя заданное передаточное число редуктора мотор-колеса всегда может быть обеспечено путем соответствующего соединения двух или нескольких простых передач одного или различных типов, не всякая комбинация простых передач и способов их соединения при допустимых значениях конструктивного параметра позволяет получить удовлетворительный к. п. д.
Поэтому при образовании кинематической схемы редуктора мотор-колеса не следует использовать те простые передачи, которые хотя и удовлетворяют условию получения заданного передаточного числа, но имеют невысокие значения к. п. д.
Габаритные ограничения при образовании кинематической схемы редуктора мотор-колеса обусловлены тем обстоятельством, что редуктор полностью или частично располагается в ограниченном монтажном пространстве внутри обода колеса. Обычно перед выбором кинематической схемы редуктора выполняют предварительную компоновку мотор-колеса, в результате которой оценивают наибольший допустимый диаметральный и осевой размер редуктора.
Следовательно, для образования кинематической схемы редуктора целесообразно использовать такие простые передачи, которые при заданном передаточном числе позволят создать наиболее простую схему из всех возможных. Это будет способствовать выполнению редуктора с минимальными габаритными размерами.
Ограничения, накладываемые особенностями компоновки и конструкции мотор-колеса данного типа, также приводят к исключению при образовании кинематической схемы редуктора простых передач определенных типов. Так, при несоосном расположении электродвигателя и колеса могут быть использованы передачи только некоторых типов, если не введена дополнительная ступень зацепления между электродвигателем и ведущим звеном редуктора. Выполнение одного ряда редуктора с большим диаметральным размером, чем остальные, или установка тормозного механизма на промежуточных звеньях редуктора также влияет на выбор типа передачи. При поперечном расположении электродвигателя относительно оси колеса возникает необходимость применения конической пары и т. д. В некоторых случаях выбранная система
151
вентиляции требует применения передачи с остановленным водилом.
Ограничения, вызванные необходимостью ступенчатого изменения передаточного числа в двухскоростиых мотор-колесах, требуют использования такого сочетания простых передач при образовании кинематической схемы, которое обеспечивает получение заданного передаточного числа как на первой, так и на второй передаче. Должны быть исключены такие сочетания передач, которые обеспечивают одно из заданных передаточных чисел, но не позволяет реализовать второе.
Вместе с тем передаточные числа двухскоростного мотор-колеса не должны различаться знаками, так как это повлечет за собой необходимость реверсирования электродвигателя при переходе с одной передачи на другую. Число элементов управления редуктора, осуществляющих изменения передаточного числа, должно быть минимальным, чтобы не усложнять конструкцию редуктора и систему привода элементов управления. В число этих элементов не должен входить фрикционный механизм, располагаемый на выходном звене редуктора, поскольку его размеры неприемлемы для редуктора мотор-колеса.
Ограничения, обусловленные передачей редуктором заданной мощности при определенном числе оборотов ведущего звена, заключаются в следующем. Ограничение по величине передаваемой редуктором мощности требует исключения при образовании кинематической схемы редуктора простых передач тех типов, у которых с увеличением передаваемой мощности резко ухудшается к. п. д.
У планетарных передач существует определенная зависимость между числами оборотов ведущего звена, соединенного с валом электродвигателя, и сателлитов. По соображениям надежности редуктора не следует применять на входе редуктора те простые передачи, у которых число оборотов сателлитов при выбранном передаточном числе существенно выше числа оборотов ведущего звена. Иначе могут создаться тяжелые условия работы подшипников сателлитов. При этом целесообразно тем больше ограничивать число оборотов сателлитов первого ряда, чем больше мощность, передаваемая редуктором.
Некоторые из рассмотренных ограничений можно учитывать непосредственно перед выбором простых передач для образования кинематической схемы редуктора, другие — использовать для отбраковки при сравнении различных вариантов кинематической схемы. Учет габаритных ограничений возможен лишь после образования кинематической схемы, на первом этапе расчета на прочность — при определении размеров шестерен. Учет ограничений, обусловленных спецификой мотор-колеса, является основной особенностью образования кинематической схемы редуктора.
При образовании кинематической схемы мотор-колеса возможны два способа решения задачи:
152
использование в проектируемом мотор-колесе кинематической схемы, уже примененной для редукторов существующих мотор-колес ;
выбор рациональной схемы с использованием известных методов образования планетарных передач по заданным исходным параметрам и учетом рассмотренных ограничений.
Первый способ может иметь ограниченное применение, поскольку среди ранее разработанных кинематических схем редукторов может не оказаться подходящей по своим параметрам (передаточному числу, габаритам) для проектируемого мотор-колеса. Вместе с тем использование для редукторов вновь создаваемых мотор-колес кинематических схем, уже опробованных в аналогичных конструкциях, обеспечивает известные преимущества в отношении надежности в эксплуатации, удовлетворительного к. п. д. и облегчения конструирования.
При невозможности использовать в проектируемом мотор-колесе кинематические схемы редукторов существующих мотор-колес следует составить ряд возможных вариантов схем, предварительно выбрав простую передачу определенного типа или сочетание простых передач двух типов, которое позволит получить необходимое передаточное число, а затем провести их анализ и отбраковку.
ОСНОВНЫЕ ЗАВИСИМОСТИ И СВОЙСТВА ПРОСТЫХ ПЕРЕДАЧ,
ПРИМЕНЯЕМЫХ В РЕДУКТОРАХ МОТОР-КОЛЕС
Предварительные замечания. При выборе простых передач для образования кинематической схемы редуктора мотор-колеса необходимо знать их свойства, т. е. величины передаточных чисел при различных вариантах использования основных звеньев передачи в качестве ведущего, ведомого и тормозного (остановленного) звена, соответствующие значения к. п. д., величину момента на ведомом звене и скорость вращения сателлитов. Рассмотрение ряда вариантов позволит выбрать наиболее подходящие в данном случае простые передачи и правильно установить функции их основных звеньев.
Общие методы оценки свойств планетарных передач известны из литературы [18, 19, 20, 35]. На основе этих методов получены соотношения, характеризующие простые передачи, которые наиболее пригодны для редукторов мотор-колес и нашли применение в ряде выполненных образцов.
Методы анализа основных свойств могут быть общими как для планетарных, так и непланетарных передач, причем последние в таком случае рассматривают как планетарные передачи с остановленным водилом. Принят следующий порядок индексов при величинах передаточного числа и к. п. д.: первый индекс относится к ведущему, второй — к ведомому и третий — к тормозному
153
звену. Буквенные обозначения шестерен сохранены также для числа их зубьев и радиусов начальных окружностей.
Передаточное число передачи. В качестве исходной зависимости для определения передаточных чисел может быть использовано уравнение, которое устанавливает связь между угловыми скоростями звеньев планетарной передачи [31]:
(Ojl /С(02
(1 + Л) (03 = о,
(22)
где (оь ю2, со3 — угловые скорости трех основных звеньев;
К — параметр передачи, равный отношению угловых скоростей двух основных звеньев в относительном движении;
COj — (D»j
<О2----GJ3
(23)
Величина и знак параметра определяются тем, какое из основных звеньев планетарной передачи понимают под звеньями 1, 2 и 3. Для передач, используемых в мотор-колесах, следует принять параметр положительным и большим единицы, что обеспечивает подстановка в формулу (23) в качестве со3 угловой скорости того звена, при торможении которого угловые скорости 04 и со2 двух остальных звеньев различаются по знаку, причем угловая скорость сог по абсолютной величине должна быть больше угловой скорости со2.
Выражения передаточного числа при поочередном затормаживании одного из звеньев в соответствии с формулой (22) могут быть записаны в следующем виде:
(24)
*231
Пользуясь этими выражениями, можно определить передаточные числа любой планетарной передачи.
К. п. д. передачи. Распространенным способом теоретического определения к. п. д. планетарной передачи является разложение сложного движения звеньев передачи на два простых. Этот метод называют методом обращенного механизма.
В планетарной передаче возникают потери как в результате переносного, так и относительного движения. При переносном движении, под которым понимают вращение деталей передачи относительно центральной оси, возникают гидравлические потери на размешивание и разбрызгивание масла, а также потери, обусловленные сопротивлением воздуха. При относительном движении, 154 .
когда водило неподвижно и передача работает как непланетарная,, возникают потери в зацеплении шестерен и в подшипниках.
Ввиду небольшой величины потерь, связанных с переносным движением (по сравнению с потерями в относительном движении при номинальной мощности), в первом приближении ими можно пренебречь и учитывать при расчете к. п. д. примененной в мотор-колесе передачи только потери, связанные с относительным движением. Па этом допущении основан метод «приведенного механизма» [18, 19] для определения к. п. д. планетарных передач.
Однако следует иметь в виду, что определенный таким образом к. п. д. представляет собой параметр, характеризующий кинематическую схему передачи редуктора в целом, но не учитывающий ряд факторов эксплуатационного порядка. К ним относятся действительная передаваемая мощность и величина гидравлических потерь, которые могут заметно влиять на к. п. д. редуктора в определенных режимах его работы.
В расчетах к. п. д. элементарного зубчатого механизма внутреннего зацепления принимают несколько выше, чем к. п. д.. зубчатого механизма внешнего зацепления т%р, за счет пониженных потерь в зацеплении. При определении к. п. д. передачи вводят понятие силового передаточного числа:
*0 Vlo
(25)
где г 0 — силовое передаточное число группы (составленной из нескольких элементарных зубчатых механизмов), равное произведению силовых передаточных чисел всех механизмов;
Iо — кинематическое передаточное число этой же группы; ц*—к. п. д. группы из нескольких зубчатых механизмов с общим передаточным числом;
х — показатель степени, учитывающий направление потока энергии в передаче и принимающий только два значения, а именно: (+1) и (—1).
Знак показателя степени х определяют из выражения
X = sgn •
(26)
где i — кинематическое передаточное число передачи. , Общее выражение для к. п. д. передачи имеет вид
Л =
<г («01;
(27).
причем tn — число групп зубчатых механизмов, составляющих
передачу;
i — силовое передаточное число передачи.
Следовательно, для определения к. п. д. передачи необходимо найти выражение i — <р (i01; <ог--лот) кинематического передаточного числа передачи через передаточные числа групп зубчатых механизмов (или элементарных зубчатых механизмов), определить по формуле (26) показатели степени х для каждого значения t0, по формуле (25) вычислить силовые передаточные числа групп, определить силовое передаточное число передачи из выражения г = Ф (loi‘> Io2---lom) и п0 формуле (27) рассчитать к. п. д. передачи.
Крутящие моменты основных звеньев передачи. На любую планетарную передачу с неподвижным звеном в неблокированном состоянии действуют три внешних крутящих момента: ведущего звена 714 ь ведомого звена 714 2 и тормозного звена Л43. Направление действия крутящего момента ведущего звена совпадает с направлением угловой скорости звена, а направление действия крутящего момента ведомого звена противоположно направлению угловой скорости звена.
Величина крутящего момента тормозного звена равна алгебраической сумме моментов ведущего и ведомого звеньев. В понижающей передаче момент на неподвижном звене направлен в сторону действия момента ведущего звена.
Если пренебречь инерционными моментами и моментами трения в опорах ведущего и ведомого звеньев, то из условия равновесия при установившемся движении можно записать
Л41 4-Л42 + М3 = 0. (28)
Это выражение справедливо как с учетом, так и без учета потерь на трение в зацеплении шестерен. Если не учитывать потери на трение, то алгебраическая сумма мощностей, подводимых к передаче и отводимых от нее, равна нулю, т. е.
44j(0i 7И2(О2 + -MgCOg = 0,
(29)
где coj, со 2, со3 — угловые скорости звеньев, взятые относительно какого-либо звена.
Если за последнее принято одно из основных звеньев, например звено 3, то
7I41CO1 -f- ТИ2со2 = 0,
откуда
Мл 1
— -тг = ’ пРичем 423 =
/И 2 *123
Следовательно, отношение с обратным знаком моментов, действующих па основные звенья, равно обратной величине отношения угловых скоростей этих звеньев относительно третьего основного звена. По аналогии
м2 ц
з <231
156
Угловая скорость сателлита. В простых передачах угловая скорость сателлита относительно своей оси может быть найдена по формуле
“г = К — ®и) ~ ,
где ыа и сон — угловые скорости соответственно солнечной шестерни и водила;
д и с — числа зубьев соответственно ведущего звена и
сателлита.
В передачах, составленных из нескольких простых планетар-
ных рядов, угловые скорости сателлитов определяют при помощи значений wa и сон, найденных из плана пере- даточных чисел [25].
В известных образцах мотор-колес используют передачи 2К-Н, ЗК и в редких случаях передачи K-H-V. Рассмотрим основ- —I—
ные зависимости, характеризующие наибо- —г-
лее употребительные в мотор-колесах простые передачи [41].
Основные зависимости простого плане-тарного ряда. В передачах 2К-Н основными
звеньями являются две центральные шестерни а и Ь, а также водило Н. Одной из передач, наиболее часто применяемых в редукторах мотор-колес, является простой планетарный ряд, кинематическая схема которого приведена на рис. 58.
а Н
Рис. 58. Кинематическая схема простого планетарного ряда
Если угловые скорости солнечной и коронной шестерни взяты относительно водила, то передаточное число от солнечной шестерни к коронной в относительном движении
О) -
• __ а Н
СО — со ь н
Величина передаточного числа не зависит от того, щается ли водило с (£>н — const или cow = 0. Поэтому
_ СОд __________Ь_
1аЬН ю а
и
(30)
вра-
(31)
В соответствии с выражением (23) параметр ряда .
Кък-н —
причем верхний индекс при Л обозначает разновидность передачи данного типа.
Сравнивая выражения (23) и (31), находим rxl Ь
1\ЪК-Н = — •
157
В трехзвенных механизмах отношение числа зубьев (или радиуса начальной окружности) коронной шестерни к числу зубьев солнечной шестерни называют конструктивным параметром и обозначают k. Для планетарного ряда имеет место равенство
Кгк-н = k = ~. (32)
причем численное значение конструктивного параметра для редукторов транспортных машин рекомендуется принимать в пределах 1,6^ 6^5 [31, 351.
Верхний предел значений конструктивного параметра ограничен минимальными размерами валов и допустимой нагрузкой солнечной шестерни. Нижний предел значений k ограничен возможностью выполнения достаточно работоспособных осей и подшипников сателлитов.
Из уравнения планетарного ряда вида (22) с учетом равенства (32) получим
ма 4- Mbk — (ан (1 -}-&) — 0.
В соответствии будут равны:
с формулами (24) передаточные числа рядов
1“ЪН ~ (о,
: __
1аНЬ ,л
(33)
G)
= 'cl
При передаточном числе iabH, т. е. при заторможенном водиле, к.-п. д. ряда равен к. п. д. непланетарной передачи 1]0. При подсчете к. п. д. по формуле (27) при передаточных числах 1аНЬ и ibHa следует учитывать ранее сделанное допущение о пренебрежении потерями переносного движения. В выражениях (33) доля энергии, передаваемая относительным движением, связана с величиной конструктивного параметра, поэтому при определении силового передаточного числа по формуле (25) па величину к. п. д. умножают лишь значение k. Таким образом,
В соответствии с выражением (26)
3(1 + *) dk
158
и, следовательно,
Лань —
Аналогично получим
- __ Ло +
Пм/а — 1 k •
Зависимости i, т) = (р (k) даны на рис. 59, а на рис. 60 — зависимость (г) для простого планетарного ряда при условии, что
Рис. 59. Зависимости i (k) и т] (k) для простого планетарного ряда
т]0 = 0,95. При наиболее целесообразном использовании звеньев ряда максимальное передаточное число iaHb = 6 и соответствующее значение к. п. д. ч\аНЬ = 0,9.
Для получения необходимого передаточного числа редуктора (всегда ip > 6) его кинематическая схема должна быть образована из двух или трех соответствующим образом соединенных рядов.
Основные зависимости двухступенчатой передачи с внешним и внутренним зацеплением. Для получения более высокого передаточного числа при использовании трехзвениого механизма следует прибегнуть к двухступенчатой передаче с двойным сателлитом. Кинематическая схема двухступенчатой передачи с внешним и внутренним зацеплением шестерен, примененная в рассмотренных выше мотор-колесах (см. рис. 13—15), приведена на рис. 61.
Передаточное число
. _ ыа _
- X" ~ ь
где iHp и 1вн — передаточные с внешним и
числа шестерен соответственно внутренним зацеплением.
159
Выразим число зубьев g сателлита первой ступени через число зубьев а солнечной шестерни и число зубьев фиктивной коронной шестерни Ь':
Аналогично число зубьев f сателлита второй ступени выразим через число зубьев коронной и фиктивной солнечной шестерни:
Рис. 60. Зависимость т] (i) для простого планетарного ряда
Рис. 61. Кинематическая схема двухступенчатой передачи с внешним и внутренним зацеплением
Таким образом, для этой разновидности передачи типа 2К-Н конструктивные параметры первого и второго рядов будут равны: k — = + .
1 а а *
_ 6 _ b 2" а' - 6 — 2/ ’
Выразим передаточное число iabH через конструктивные параметры рядов:
Для определения передаточных чисел передачи в случае, когда заторможено не водило, а одна из шестерен (а или Ь), найдем ее параметр с учетом формулы (30):
iv-i 1 1 <
Л2Д-Я = -г---Г «2*
Для двухступенчатой передачи с учетом полученного выражения уравнение (22) можно записать в виде
160
г
* 1 г
Пользуясь этим уравнением, по формулам (24) найдем передаточные числа iaHb и ibHa'.
__ <°а __ k\k-z — 1
аНЬ ~ “ /?2—1 ;
/7 Л
i — —
“ <о„ ~ 11
^1^2--- 1
Пределы значений конструктивного параметра для передачи 2К-Н с внутренним и внешним зацеплениями применительно к редукторам транспортных машин [18, 35] следующие:
k^7.
При определении к. п. д. передачи необходимо учитывать, что в данном случае передаточные числа элементарных зубчатых механизмов равны:
kY — 1
iH..=-----------для внешнего зацепления;
2k2
— для внутреннего зацепления шестерен.
К. п. д. передачи при = О
ИаЬН ~ ЛнрПсн == По*
При торможении коронной или солнечной шестерни к. п. д. определяют по формуле (27). С учетом полученного равенства
(&2—1)-I-Mfei —1) По ---------:
_ kxk2 — k2 + (k2 — 1) 1]0 klk. — 1
Зависимости /, rj — <р (k2) при условии, что kr — 7, а конструктивный параметр второго ряда изменяется в указанных выше для данной передачи пределах, приведены па рис. 62. Для передачи характерно снижение абсолютных величин передаточных чисел iaHb и при увеличении k2, которые при малых значениях k2 достаточно высоки (соответственно 25 и 24). Передаточное число ibHa не превышает 1,335, вследствие чего этот вариант передачи для мотор-колес не имеет практического значения. К. п. д. передачи достаточно высок (т) = 0,924-0,95), причем \\аЬН не зависит, а г[аНЬ мало зависит от k2.
Зависимости q (i) для передачи, у которой величина конструктивного параметра первого ряда принята постоянной и равной последовательно kY = 3; 4; 5; 6; 7, а величина k2 изменяющейся 11 А. И. Яковлев 161
в указанных пределах, но так, чтобы k2 klt приведены на рис. 63. Зависимости т] (г) выражаются линиями, параллельными
Рис. 62. Зависимости i (k) и i] (Аг) для двухступенчатой передачи с внешним и внутренним зацеплением
большему и наименьшему значению передаточного числа i при данном значении k±.
Основные зависимости трехступенчатой передачи с двумя внешними и одним внутренним зацеплением. На рис. 64 приведена
Рис. 63, Зависимости т) (tj для двухступенчатой передачи с внешним и внутренним зацеплением
кинематическая схема трехступенчатой передачи с двумя внешними и одним внутренним зацеплением шестерни, примененная в мотор-колесе, рассмотренном ранее (см. рис. 8). Для этой пере-162
дачи при соя — 0 передаточное число от солнечной шестерни к коронной
Од
• ЖДЛД • *
labil == = ^plf'g'leH =
b
Соотношения между числами звубьев шестерен, полученные для двухступенчатой передачи, справедливы для первой и третьей ступеней трехступенчатой передачи. Поэтому i . __ 2fc2
1вн ‘ Т2 — 1
. Следовательно, с
1цЬН ~
нр /г2—1 ’
При определении параметра трехступенчатой передачи по формуле (23) для нахождения передаточных чисел iaJib и iHba необходимо за звено 1 принять солнечную шестерню а, а за звено 3 — коронную шестерню Ь, поскольку только в этом случае параметр будет положительным и большим ницы. Тогда
еди-
нр — 2— И
Рис. 64. Кинематическая схема трехступенчатой передачи с двумя внешними и одним внутренним зацеплением
= 0, находим
— 1 = labH — 1*
I I I - О),
11 а о
1\2К-Н " — - - •
“// %
Полагая в этом выражении гЛ 11 «а
О
Подставив в последнюю формулу значение для получим выражение параметра трехступенчатой передачи:
К&'-Н = (*1 - 1) (-/„») (А4 - 1 •
Уравнение вида (22) для трехступенчатой передачи примет вид
со., — со
(^1^2 —
f^ = 0.
Тогда можно записать выражения для передаточных чисел iaHb и ^ньа трехступенчатой передачи:
«а _ (М2 ~ ^2) h'g' —’ (^2 ~ О
1°нь~ w 1 ;
О)
нЬа юь (fcjfej k2j if,gt (А?2 1)
(&1А’2 — ^2) *
11*
163
Значения к. п. д. определяют с учетом соотношений, приведенных выше для двухступенчатой передачи:
ЛаМ/ — ЛоЛнр»
_ (*2 ~ 9 + k2 (*i ~ 9 to (*2-9+ *2 (*1-9‘nr ’
— (fe2 ~ 9 ~ (^1 ~ 9 *fg'fe2 (*2 - 9 Мр - (k! - 9 4'^2 ‘
Зависимости /,*] = <£ (&2) при = 7 и изменении k.2 в заданных пределах (причем полагалось, что т]но = 0,97) приведены
0.25 Д5 0.75 t~ij
Рис. 65. Зависимости i (kj>) и 4 (k%) для трехступенчатой передачи с двумя внешними и одним внутренним зацеплением
сел = 72,6 и iaHb = 72 имеют место при минимальных значениях /е2. Передаточное число iHba не превышает 1,05. К. п. д. передачи не зависит от &2.
Из зависимостей т] (г), показанных на рис. 66, следует, что при соответствующем выборе величин kx и k2 (с указанными ранее ограничениями) трехступенчатая передача позволяет реализовать необходимые передаточные числа в весьма широком диапазоне при достаточно высоком значении к. п. д.
Основные зависимости двухступенчатой передачи с двумя внутренними зацеплениями. На рис. 67 приведена кинематическая схема двухступенчатой передачи 2К-Н с двумя внутренними зацеплениями. При = 0 передаточное число
, -2L- « ._L ЬаН «а g ь '
Используя выражения конструктивных параметров рядов
_ Ь А _ а
— b^2f и — а —2^ 9
164
получим
.
lbaH =
k*>-----
Принимая в формуле (23) со1 = Ш/у, находим параметр передачи
со2 = и
rHV н
1\2к-н = — ~
а
Рис. 66. Зависимости
1] (i) для трехступенчатой передачи с двумя внешними и одним внутренним зацеплением
При О)/у — О
1/1 V ‘
Л2К-// — ------
lbaH
Подставив найденное значение W, получим
Л2К-Я = 1
Параметр передачи будет положительным и большим единицы при условии k г' 1
2
параметры
, если конструктивные
2Aii
также
если кон-
если кон-
параметры рядов
67. Кинематическая схема
Рис. двухступенчатой передачи с двумя внутренними зацеплениями
рядов положительны, или 1 kr
структивные параметры рядов отрицательны.
В случае kx > /е.2 < если конструктивные параметры рядов положительны
структивные
отрицательны, параметр передачи
(i)L — (О
или
2К н
165
С учетом равенства Кчк-н — ~tr—т fa уравнение вида (22) «1 -------------------------------- «2
для двухступенчатой передачи с двумя внутренними зацеплениями примет вид
I ^2 1 1 t л
+ «ь k k kl ~ 0>а ki — k2 = °’
Из уравнения следует, что кроме передаточного числа можно получить следующие передаточные числа:
; _ _ -fa—L ь •
fa — k2 ъ
I Hub ~
— 1
*— k2
Очевидно, что при
передаточные числа будут
определяться как обратные, т. е. ibfla ——— и 1аць = —~ • н
Передача не имеет внешнего зацепления из-за отсутствия солнечных шестерен, поэтому верхний предел значений конструктивных параметров fa и fa теоретически не ограничен. Если имеет место равенство 6 = 2/ или а = 2g, то знаменатели выражений для конструктивного параметра равны нулю, вследствие чего
= оо и fa = оо. При отрицательных значениях конструктивного параметра, что имеет место при неравенствах 2/ > 6 и 2g > 2> а, нижний предел его абсолютной величины может быть уменьшен. При этом величина конструктивного параметра будет ограничена интерференцией зубьев коронной шестерни и сателлита.
К. п. д. передачи определяют по формуле (27); в зависимости
от того, какое звено заторможено, получатся следующие выражения:
(^1 ^2) Лен
П/йа = = —-------\-----~~~
ki^BH fafa (П
'VaH =
Зависимости i, 4 = Ф (62) приведены на рис. 68. При построении было принято, что конструктивный параметр первого ряда = 7, а конструктивный параметр второго ряда изменяется в пределах ^7. К. п. д. пары шестерен при внутреннем
зацеплении г)вн = 0,98. Абсолютные величины передаточных чисел iHba и iHab возрастают с увеличением fa. К. п. д. этих передач уменьшается с увеличением fa. Вариант передачи с ввиду его малых величин не имеет практического значения. На рис. 69 приведены зависимости x\Hub (iHab) и г)ИЬа (iffba) при всех значе-166
ниях kj = 4^-10, из рассмотрения которых следует, что двухступенчатая передача позволяет реализовать значительные передаточные числа, но значение к. п. д. резко снижается с увеличением передаточного числа.
0,2 0,4 0,6 0,8 1 Ц
Рис. 68. Зависимости i (k2) и t] (k2) для двухступенчатой передачи - с двумя внутренними зацеплениями
Основные зависимости двухступенчатой передачи с двумя внешними зацеплениями. На рис. 70 показана кинематическая схема передачи с двумя внешними зацеплениями. Вариант этой же
Рис. 69. Зависимости т) (0 для двухступенчатой передачи с двумя внугренн ими зацеплениями
передачи, но с добавлением паразитной шестерни, использованный в мотор-колесе (см. рис. 18), рассмотрен в литературе [41 ]. При = 0 передаточное число передачи
— ь
1ЬаН —
G)a
g
b '
167
Конструктивный параметр первого ряда
Конструктивный параметр второго ряда
Следовательно, передаточное число kx — J lbaH — Л ! •
Если принять в формуле (23) (О j — (1)9 —' И 1*^3 ТО
параметр передачи
Рис. 70. Кинематическая схема двухступенчатой передачи с двумя внешними зацеплениями
Параметр будет положительным и большим единицы при условии k 1 1
^1 > ^2 Х> - Пределы значе-/vo 1 1 L 1 w
4
пий конструктивного параметра, как и прежде, k 7.
о
Уравнение вида (22) для передачи имеет вид
Передаточные числа
_ мн __ * 2 — 1
tHba — ~ kx — k., ’
_ _ ^-1
ч,аЬ " Ыа ” kt - k2 ’
_ _ fet-1
lbali (0o — k2 — 1
Выражения для к. п. д.
168
Зависимости i, т] — (k2) для рассматриваемой передачи даны
на рис. 71. Практическое значение имеет вариант с передаточным числом ibafl. В остальных вариантах передаточные числа малы.
Соответствующие величины к. п. д. сохраняют достаточ-
но высокое значение во всем диапазоне реализуемых передаточных чисел.
Из приведенных на рис. 72 зависимостей (i) видны реализуемые величины передаточного числа при определенном значении и изменении k2 в заданном диапазоне (при соблюдении условия ^2 ^1)-
Основные зависимости передачи ЗК. На рис. 73 приведена кинематическая схема передачи ЗК, которая использована в редукторе мотор-колеса, рассмотренного ранее (см. рис. 20). Конструктивные параметры имеют те же пределы, что и у пе-
Рис. 71. Зависимости i (£2) и i] (Лг) для двухступенчатой передачи с двумя внешними зацеплениями
редачи 2К-Н с внешним и внутренним зацеплением:
Выражение для параметра передачи при kr >> k2
Рис. 72. Зависимости (i) для двухступенчатой передачи с двумя внешними зацеплениями
Рис. 73. Кинематическая схема передачи типа ЗК
169
Уравнение передачи вида (22)
л, — k
(°е fe, _ k
= 0.
Передаточные числа
«а (dt
— Л2
1аеЬ~~ 0>г ~ /Ji— k
(О
А’?/’., — А, 2
Расчетные формулы для к. п. д. передачи ЗК различаются между собой в зависимости от соотношения между величинами конструктивного параметра первого ряда kY и параметра передачи /<зк. Вывод формул для к. п. д. приведен в работе [41], ниже даны окончательные выражения для к. п. д.
При
k
УКзк
'Ue ” - k
о
k2 (kl — Чо) — kl (k2 — 1) ЧвН
Чо
,2 2
Чо
kt — k<
Чаеб ,2
/-i4<jh — ^гЧо “Ь /2j/?2 — ^1^2Чвн Чо
лх — k
При
_ k\ - Чо
ЧЬеа — ,9
klk2 — Л^2Т)0 4- МгЧоЧвн + *1ЧоЧен
Лабе
*1Мо - *1ЧоЧвм — М2Ч0 0 —
kikn — k
•1 — k>'
_ *(Чо -1
ЧаеЬ — <>
— Л2
вн
_ ^1Чо -1
4bea — ,2 1
kykcy — k
^1^2Чо ^1^2Чо 0 Чек) ^1ЧоЧвн
— ^2 Н“ ^Plo1!
170
Приведенные выражения для к. п. д. дают удовлетворительные результаты при i >> 20.
Применение передачи ЗК целесообразно в тех случаях, когда
Рис. 74. Зависимости i (£2) и i) (kz) для передачи типа ЗК
поэтому, несмотря на указанное ограничение, приведенные формулы для определения к. п. д. передачи ЗК сохраняют практическое значение.
Зависимости Z, т] — <р (k2) приведены на рис. 74. Вариант передачи с передаточным числом ibea не рассмотрен, поскольку это
- С 41_______________I______________________L.
-I -250 -200 -150 -100 -50 0 50 100 150 200 250
Рис. 75. Зависимость 4 (0 для передачи типа ЗК
передаточное число незначительно превышает единицу в возможном диапазоне изменения k2. Особенностью передачи ЗК является повышение абсолютного значения передаточных чисел и iabe по мере увеличения конструктивного параметра k2 и одновременно уменьшение соответствующих значений к. п. д. На рис. 75 приведены зависимости (iae6) и т)аЬе (iabe)- При изменении передаточных чисел в весьма широком диапазоне к. п. д. в целом сохраняет достаточно высокие значения.
171
СРАВНИТЕЛЬНАЯ ОЦЕНКА ПРОСТЫХ ПЕРЕДАЧ, ПРИМЕНЯЕМЫХ В РЕДУКТОРАХ МОТОР-КОЛЕС
Полученные зависимости к. п. д. от передаточного числа для простых передач (применяемых в мотор-колесах), найденные при допустимых значениях конструктивных параметров рядов и средних значениях к. п. д. пар шестерен при внешнем и внутреннем зацеплении, позволяют провести сравнительную оценку простых
Рис. 76. Зависимости i] (i) для простых передач редукторов мотор-колес:
1,2 — соответственно ti и, ит) . „ для простого планетарного ряда; 3 и 4 — соответствен. апо abn
но т] & и Ч Для двухступенчатой передачи с внешним и внутренним зацеплением;
5 и 6 — соответственно п ... и п , „ для трехступенчатой передачи с двумя внешними arib abn
и одним внутренним зацеплением; 7 и 8 — соответственно и ц , Для двухступенчатой передачи с двумя внутренними зацеплениями; 9 — ^ЬаН ^ля двУхстУпсичато^ пере-дачи с двумя внешними зацеплениями; 10 и 11 — соответственно Ч и Ча^е Для передачи типа ЗК
передач и выявить целесообразность применения их в мотор-колесах различных групп.
Зависимости т] (Z) приведены на рис. 76 без учета знака передаточного числа всех вариантов рассматриваемых простых передач, которые могут быть использованы в редукторах мотор-колес. Эти варианты простых передач отличаются тем, что обеспечивают достаточно высокие передаточные числа при приемлемом значении к. п. д.
Наибольшие значения к. п. д. (т) = 0,954-0,97) имеет простой планетарный ряд и двухступенчатая передача с внешним и внутренним зацеплением при передаточном числе iaHh (кривые 1 и 3). При этом высокое значение к. п. д. сохраняется у этих передач во всех диапазоне ^адизуемых передаточных чисел (для планетар-172
него ряда i = 2,5 ч-6,0; для двухступенчатой передачи i = 8,04-4-25,0).
Достаточно высокое значение к. п. д. (т) 0,92) имеет трех-
ступенчатая передача с двумя внешними и одним внутренним зацеплением при передаточных числах iaHb и iabH (кривые 5 и 6), причем это значение сохраняется постоянным в широком диапазоне передаточного числа (iallb = 20,04-72,5 и iabf1 — 214-73).
Двухступенчатая передача с двумя внутренними зацеплениями имеет сравнительно высокий к. п. д. при передаточных числах iHba и iHab лишь в случае их небольших абсолютных значений. С увеличением передаточного числа к. п. д. резко снижается. Двухступенчатая передача с двумя внешними зацеплениями при передаточном числе ibaf7 (кривая 9) имеет сравнительно высокий и постоянный к. п. д. т) = 0,94 в диапазоне передаточного числа i = 14-18.
У передачи ЗК с передаточными числами iaeb и iabe (кривые 10 и 11) к. п. д. имеет сравнительно высокие значения в весьма большом диапазоне передаточного числа, хотя и снижается с увеличением I. Так, i]aeb = 0,9 при iaeb = 47,0 и v\abe = 0,9 при ^аеЬ , 0.
Таким образом, среди простых передач наиболее высоким к. п. д. обладает простой планетарный ряд при iaHb и двухступенчатая передача с внешним и внутренним зацеплением. Именно эти простые передачи в первую очередь применяют ₽ редукторах мотор-колес. Редукторы с использованием двухступенчатой кинематической схемы, имеющие внешнее и внутреннее зацепление, часто применяют в мотор-колесах, поскольку шестерни с внутренним зацеплением по своему конструктивному исполнению более соответствуют условиям компоновки мотор-колеса, а сочетание внешнего и внутреннего зацепления в одной передаче позволяет получить более высокий к. п. д. редуктора.
Двухступенчатая передача с двумя внешними зацеплениями обладает сравнительно высоким к. п. д. в достаточно широком диапазоне передаточных чисел, но уступает в этом отношении двухступенчатой передаче с внешним и внутренним зацеплением. Существенным недостатком двухступенчатой передачи с двумя внутренними зацеплениями является резкое снижение к. п. д. с увеличением передаточного числа, что исключает ее применение в редукторах мотор-колес.
Целесообразная величина передаточного числа редуктора с двухступенчатой схемой не превышает ip 25. Такие редукторы имеют достаточно высокий к. п. д., сравнительно просты в изготовлении и надежны в эксплуатации. При большом передаточном числе диаметральные размеры редуктора резко возрастают, что вынуждает располагать его полностью или частично вне обода колеса. При необходимости реализовать большое передаточное число редуктора (ip > 25,0) можно рекомендовать трехступен-173
чатую передачу с двумя внешними и одним внутренним зацеплением при передаточном числе iaHb.
Редукторы, выполненные по трехступенчатой кинематической схеме, позволяют реализовать значительное передаточное число, но они не нашли широкого применения из-за пониженного к. п. д. и особенно вследствие ухудшения конструктивных свойств, из-за необходимости использовать значительное число двухвенечных промежуточных шестерен. Последние требуют высокой точности изготовления и обусловливают известные трудности при удовлетворении условиям сборки и выборе передаточных чисел отдельных ступеней. Этот недостаток, присущий и двухступенчатым редукторам, особенно ощутим при использовании трехступенчатых редукторов. Трехступенчатый редуктор применен в мотор-колесо, рассмотренном ранее (см. рис. 8).
В отечественных конструкциях мотор-колес при образовании кинематических схем редукторов часто используют простой планетарный ряд. Он может быть применен в комбинированных редукторах [6], которые имеют непланетарную ступень, причем ряд размещается на входе или выходе пепланетарного редуктора.
Кинематические схемы, образованные из двух или трех планетарных рядов, применены, в частности, в редукторах мотор-колес, рассмотренных ранее (см. рис. 11 и 17). Весьма рациональное использование элементов передачи, особенно в случае передачи мощности параллельными потоками (без существенной ее циркуляции), высокий к. п. д. редуктора, простота в изготовлении элементов редуктора и надежность его в эксплуатации делают двухрядные редукторы весьма перспективными, если только реализуемое в этом случае передаточное число удовлетворяет параметрам мотор-колеса.
Кинематические схемы редукторов, образованные из трех планетарных рядов, позволяют осуществлять значительные передаточные числа. Трехрядные редукторы весьма целесообразны при использовании в мотор-колесах быстроходных электродвигателей, а также для мотор-колес периодического действия.
Передачу ЗК можно рекомендовать при осуществлении весьма большого передаточного числа редуктора (например, в мотор-колесах периодического действия), когда к. п. д. этой передачи оказывается выше к. п. д. нескольких простых передач, соединенных последовательно.
ПРОВЕРКА ПЛАНЕТАРНОЙ ПЕРЕДАЧИ ПО УСЛОВИЯМ СБОРКИ
После выбора кинематической схемы планетарной передачи для редуктора мотор-колеса, которая обеспечивает получение заданного передаточного числа при удовлетворительном к. п. д., следует проверить соответствие передачи условиям сборки. Для этого должно быть известно число зубьев всех шестерен.
174 ’
9
Поскольку в каждой планетарной передаче имеется несколько сателлитов, находящихся одновременно в зацеплении с солнечной и коронной шестернями, выбор параметров этих шестерен связан с определенными ограничениями, обусловленными:
условием соосности передачи;
условием соседства сателлитов;
возможностью сборки передачи.
Условие соосности относится только к планетарным передачам с цилиндрическими шестернями. Соосность передачи можно обеспечить соответствующим выбором числа зубьев шестерен или их размеров, обеспечивающих совпадение осей ведущего и ведомого валов.
Для удовлетворения второго условия число сателлитов и их размеры следует принять такими, чтобы между зубьями соседних сателлитов были достаточные зазоры.
Третье условие требует, чтобы число зубьев шестерен, число сателлитов и их взаимное расположение обеспечивали возможность сборки шестерен передачи с внешним и внутренним зацеплением.
Первое условие при равномерном расположении сателлитов выполняется в том случае, когда число зубьев шестерен планетарной передачи удовлетворяет определенным соотношениям [25]. Это соотношение для простого планетарного ряда (см. рис. 58) имеет вид
b — а + 2с, где с — число зубьев сателлита.
Для передач с внешним зацеплением шестерен (см. рис. 70)
(а + g) = т2 (/ + 6),
где т1 и т2 — модули зацепления шестерен первой и второй ступени.
Если тг = т2, предыдущие выражения принимают более простой вид, т. е.
о + g = f + b.
Для передач с внутренним зацеплением шестерен (см. рис. 67)
(о — g) = т2 (b — f)
и (при = /п2)
а — g = b — f.
Для передач с внутренним и внешним зацеплением шестерен при двойном сателлите (см. рис. 61)
mi (а + g) = m2(b — f)
и (при тг = т2)
Приведенные равенства справедливы для шестерен с нормальным, т. е. некоррегированным зубом.
Для удовлетворения условия соседства сателлитов необходимо обеспечить между ними некоторый зазор (не менее 0,5 мм). Для этого необходимо соблюдать неравенство [20]
De<Z 2А sin —,
где De — диаметр окружности по наружной кромке зубьев сателлита;
А — расстояние между центральной осью редуктора и осью сателлита;
— число сателлитов.
Для выполнения условий возможности сборки планетарной передачи с равномерным расположением сателлитов по окружности количество сателлитов и числа зубьев солнечной и коронной шестерни должны находиться в определенном соотношении [25]. Для простого планетарного ряда это соотношение имеет вид
где W — целое число.
Формула сборки для планетарной передачи с двойным сателлитом при внешнем и внутреннем зацеплении шестерен:
(а + g) (g + /)
= W или gf> = W
где at b, g и f — числа зубьев соответственно солнечной и ко-
ронной шестерен, большого и малого сателлита (см. рис. 61).
Формула сборки для планетарной передачи с двойным сателлитом при двух внешних зацеплениях (см. рис. 70) следующая: (6 + /) (/ — g) TV7 fa — bg TV7
--- ±_LL"-= Ц7 или _i---------s_ _ yp.
Формула сборки для планетарной передачи с двойным сателлитом при двух внутренних зацеплениях шестерен (см. рис. 67) следующая:
(b-f) (f + g)
= W или —f— = W.
Если числа зубьев шестерен внешнего и внутреннего зацепления передачи удовлетворяют условиям сборки, то при наличии наибольшего общего делителя для чисел зубьев сателлитов сборка зацепления возможна после каждого поворота сателлитов на угол
. Если же числа зубьев сателлитов не имеют общего делителя, 176 •
то сборка зацепления возможна только в одном положении сателлитов при повороте на угол 2л.
Когда проверка по приведенным выше формулам показывает, что при выбранных числах зубьев шестерен и числе сателлитов сборка невозможна, следует изменить число зубьев отдельных шестерен или число сателлитов. Методом последовательных проб можно найти такие условия, при которых сборка передачи будет возможна. Однако это повлечет за собой некоторое отклонение от заданного передаточного числа.
ОБРАЗОВАНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ РЕДУКТОРА
ОДНОСКОРОСТНОГО МОТОР-КОЛЕСА
Предварительные замечания. При образовании кинематической схемы редуктора односкоростиого мотор-колеса могут быть использованы уже рассмотренные простые передачи. При этом двухступенчатые и трехступенчатые передачи с двойными сателлитами, а также передача ЗК могут обеспечивать требуемое передаточное число без необходимости прибегать к последовательному соединению передач одного или двух различных типов.
Иначе обстоит дело с использованием в редукторах мотор-колес простого планетарного ряда. Относительно небольшое передаточное число ряда при известных ограничениях конструктивного параметра приводит к необходимости соединить тем или иным способом два или три планетарных ряда, чтобы получить заданное передаточное число. При этом задача заключается в образовании такой кинематической схемы, которая при минимальных размерах редуктора обеспечивала бы получение удовлетворительного значения к. п. д.
Образование кинематической схемы редуктора из двух простых планетарных рядов. Основной задачей образования кинематической схемы редуктора из двух или трех планетарных рядов является выявление всех возможных кинематических схем редуктора, обеспечивающих заданное передаточное число, и отбор тех кинематических схем, которые соответствуют рядам с допустимыми значениями конструктивных параметров и обладают удовлетворительными к. п. д.
Каждый планетарный ряд имеет одну независимую связь между угловыми скоростями составляющих его звеньев. Поскольку редуктор состоит из двух рядов, он имеет две независимые связи между угловыми скоростями его звеньев. Третья связь выражена уравнением для тормозного звена wT — 0. Поэтому двухрядный редуктор, состоящий из четырех основных звеньев (ведущего д, ведомого х, тормозного т и вспомогательного у), имеет одну ступень свободы, что соответствует одному определенному значению передаточного числа.
12 А. И. Яковлев 177
Из этих четырех звеньев можно составить С4 — 4 различных ряда, отличающихся друг от друга своими основными звеньями: дхт, дху, дту, лту. Первый из этих рядов образует однорядный редуктор. Из трех последующих рядов можно составить Сз сочетаний, которые образуют редукторы трех типов:
дху, дху, дху, хту; дту, хту.
Для каждого редуктора может быть записано два выражения вида (22), связывающих угловые скорости как первого, так и второго ряда. Эти выражения вместе с равенством <от = 0 после исключения соу позволяют записать удобное для дальнейшего построения соотношение между передаточным числом редуктора и угловыми скоростями ведущего и ведомого звеньев [18].
Уравнения, устанавливающие связь между угловыми скоростями основных звеньев первого и второго рядов для редукторов всех трех типов, следующие.
Для редуктора первого типа
Здесь и далее ia и ib — некоторые рациональные числа, отличные от нуля и единицы, которые можно рассматривать как передаточные числа соответствующего ряда. Полагая = 0 и исключая соу, получим
1
ib — ia
или
i'pib 0 ^а 1
Для редуктора второго типа
(Ду (Др (Ду (Д-^
--------= i и -----------= L
(Од- — соа ° (£>х — С0т 1
передаточное число
• ___ (Ос* _ 1Ь 1 а
Р~ их~ 1 - 1а
(34)
или
~Ь {ip 1) ia ip
(35)
Для редуктора третьего типа
178
передаточное число
___ ia
Ч)
ИЛИ
ipib ia — О-
(36)
Если нанести три прямые, описываемые уравнениями (34)— (36), в координатах ia—ib для определенного значения передаточного числа редуктора, например для ip = 35, то получим план передаточных чисел рассматриваемых редукторов. При помощи этого плана можно выявить все варианты редуктора, при которых обеспечивается заданная величина ip.
Для этого необходимо установить соотношения, связывающие конструктивные параметры рядов и величины ia и ib. Планетарный ряд помимо трех передаточных чисел, определяемых уравнениями (24), обеспечивает также и три обратных передаточных числа, которые могут быть найдены, если показатель степени при конструктивном параметре k принять а = —1.
Если понимать под величиной im любое из шести возможных передаточных чисел каждого ряда и поочередно полагать каждое звено ряда ведущим, ведомым и тормозным, то можно записать
7 — i — 1 — №
(37)
где а = 1 при прямом и а — —1 при обратном передаточном числе. Отметим, что обратное передаточное число im < 1.
Подставив приведенные выше ограничения конструктивного параметра планетарного ряда в уравнения (37), получим ряд неравенств, определяющих допустимые интервалы изменений величин передаточных чисел ia и ib. Результаты расчетов [6] сведены в табл. 4.
Таблица 4
Расчетные формулы lCX Чп —к • iftt = “ 1 Интервалы значений ia н
при а = -|-1 1,6 5s ia 6 ia Ub) 2,6 при a = — 1 —0,2 ia (ib) —0,625 1,625 ia (ib) 1,2
1 f . 0,384 ia iib) > 0,166 0,832 ia (ib) 0,625
ka-l-1
12*
179
Если нанести приведенные в табл. 4 интервалы изменения ia и ib в определенном масштабе на план передаточных чисел, то получим 36 прямоугольников (рис. 77), внутренние и граничные точки которых будут соответствовать допустимым для любых редукторов мотор-колес парам значений ia и ib. Нанесем на плане
1ь
Рис. 77. План передаточных чисел двухрядного редуктора
передаточных чисел три прямые, соответствующие уравнениям (34), (35) и (36):
35f& —34/й—1 =0; '
ib + 34го — 35 = 0; - (38)
35/&—1а = 0. J
Первая из этих прямых пересекает шесть прямоугольников, вторая — только один (касание в одной точке), а третья прямая не пересекает и не касается ни одного прямоугольника. Это означает, что третий вариант редуктора, состоящего из двух рядов, при заданном передаточном числе и с учетом ограничений по величине конструктивных параметров не может быть осуществлен.
Варианты редуктора, соответствующие различным точкам отрезка прямой, лежащей внутри прямоугольника, отличаются только величинами конструктивных параметров и, следовательно, размерами шестерен. По значениям координат одной из точек 180 **.
отрезка прямой, лежащей внутри прямоугольника, можно образовать кинематическую схему редуктора, которая будет соответствовать всем точкам этого отрезка.
Рассмотрим в качестве примера образование кинематической схемы редуктора, соответствующего точке А. Абсцисса этой точки ia — 6, а ординату ее можно определить по уравнению (34):
Подставив найденные значения ia и ib в уравнения (37) и преобразовав их, получим
4- 4,86сох — 5,86сод = 0;
cov 4- 5(от — бсол — 0.
Следовательно, параметры рядов соответственно равны 4,86 и 5. Ряд, соответствующий второму уравнению, изображен на рис. 78, а\ соответствующий первому уравнению — на рис. 78, б.
Рис. 78. Кинематические схемы двухрядного редуктора
Соединяя одноименные звенья этих рядов и затормозив звено т (рис. 78, в), получим схему редуктора с заданным передаточным числом, соответствующую точке А плана передаточных чисел (см. рис. 77).
Образование кинематической схемы редуктора из трех простых планетарных рядов. Редуктор, составленный из трех рядов, имеет три независимые связи между угловыми скоростями его звеньев и четвертую связь (сот = 0) для тормозного звена. Поскольку редуктор обладает одной степенью свободы, система его связей должна содержать пять переменных, а следовательно, кинематическая схема должна иметь пять основных звеньев.
В редукторе, составленном из трех планетарных рядов, как и в редукторе, составленном из двух рядов, выделяются ведущие д ведомое х и тормозное т звенья. Однако такой редуктор имеет не одно, а два вспомогательных звена yj и у2.
Из пяти основных звеньев можно составить — 10 различных рядов, отличающихся один от другого своими основными
181
звеньями. Эти ряды, исключая ряд дхт, следующие: дху3; дху2; дту2; духТа”» *т?2; л'ТГУа*» т¥1?2- Из них можно составить = 84 различных сочетаний по три ряда. Однако не все эти ряды можно применить для создания редуктора мотор-колеса [18].
Сочетания, которые могут быть использованы для образования кинематической схемы редуктора, должны обладать двумя свойствами:
каждое из сочетаний должно включать все пять основных звеньев;
в каждом сочетании любое из вспомогательных звеньев должно входить не менее чем 2 раза.
Любые два сочетания, полученные одно из другого взаимной перестановкой звеньев -у3 и у2, равноценны, и рассматривать следует одно из них.
Из второго свойства следует, что по .крайней мере один из рядов должен содержать оба вспомогательных звена, которые также могут входить не в один, а в два или три ряда. Учитывая равноценность звеньев у3 и у,, следует рассматривать только три варианта размещения вспомогательных звеньев по рядам (табл. 5).
Таблица 5
!' Ряд Вариант 1 Вариант 2 • Вариант 3
1 1 Vi Т-2
2 ?2 Т1Т« Tl?2
3 TiVi • Т1Т4 Т1?2
Распределив основные звенья по рядам с учетом табл. 5, можно получить 19 вариантов троек рядов. Каждую из троек можно использовать для создания редуктора мотор-колеса при условии учета рассмотренных в начале главы ограничений. Возможные сочетания трех рядов [18] приведены в табл. 6 (графы 2, 3 и 4).
Для любого из перечисленных выше вариантов редуктора можно так подобрать величины передаточных чисел рядов iat ib и ic, что будет справедлива зависимость
(39)
где Alt Blt Clt Л 2, В2 и С2 — некоторые величины, зависящие
только от передаточного числа
ip и рассматриваемого
варианта
редуктора.
182
9
)
Таблица 6
183,
Продолжение табл. 6
Вариант Ряд Л Ряд В Ряд С ‘а 4) J7? ip * la • • b
1 0 4а* 3 4 5 6 7 8 9 10
7 Л'Ту2 d?i?2 (Oyi — (Оу 0)Х — (05 (Oyg — 0)x — (Oyi — (O5 (Oyo fg tbic la — ic 0 ip
8 dxyi дх у2 ХУ1У2 (Oyi — (Ох (05 — (Ох 6)y2 (Oyi — (Ox ia — ic ( 1 1
(05 — 0Jt (Oyo — (Ox ia — Ib^c ip
9 а*У1 хту2 ТУ1У2 (Oyi — (Ox""" (Оу (Oyo — (0^ (Ox — (Oyi — (0 Y2 — (Ox la — tb^c ip 0
ia 1 ip — ।
10 dxyi Эху» ТУ1У2 (Oyi — (Ox (05 — (Ox (Оу2 — (Of (05 — (0T (Oyi — (0T Cl)y2 ““ (0^ ia - । I 0
ia — ib^c 1 — ip
11 ату3 дТ1У2 <0?! — (^T ®5 — (Dt (Oyg — (Oy (O5 — (Ot (Oyi (Oyg (Оу (Oyo ib (ic — ic ia 1) i I ip
12 XTyi дтуз хуху2 (Oyi — (0T (Ox — Gh (Oyo — (05 — (0T (Oyi — (Oyg (Ox (0y2 • • ic ’ la 1 I 1 ip
4) (ic— • I)
Продолжение табл. 6
Вариант Ряд A Ряд В Ряд С ‘а 1 гс lp la ♦ lb
1 2 3 4 а» э 6 7 8 9 10
13 ayty2 ТУ1У2 дху! (Оу2 — (Оу (0y2 — Q)T (05 - — (Oyi (ia - ib) ic ip 0
(0^1 “ coy (Oyj (0^ (Ox- ” (Oyi (ia 1) ic — ib ip — 1
14 Ху!у2 ТУ!У2 Jrvi (Оу о — (Oyi (0Y2 — (0T (0Y1 — 0)T ia 0 1
v 1 1 (Ох- - (Oyi (Oyi €0^ (05- - (0T (la -) ib 0 ic
15 a Vi у-». хугу2 ату! (Oy2J ~ O)V1 (Оуз — (Ox (0Y1 (Ox ib 1 0 I
1 X lw (05- - (0Yl (Oyi — (Ox (05 — (Ox (ia , ib — 1) ic — ia
16 ху1уа XTyt (Оу 2 — O)V1 (Oy2 — (O5 (0Yl (Oy <а(<г-1) , .. 0 1
1 1 г * (Ох- (Oyi (Oyi — (Oy (Ox — (Or <6-1 1
17 *ViYe ТУ1У2 аху! (Оу& — (Ox (Oy2 — (Ox tox- - (0Y1 (ia'— 1) ic — ib 1 0
(Оу| — (Ox (Oyi — (oT (05- -(Oyi (ia — ib) ic 1 — ip
18 aYiy> ; *Т1Т‘2 TTiY* (05- 0)yt • — <0Y3 (Oy •> (Ox — (Oya (Oyi (Oy>o O)V1 (Oy»j — 0)r — (Or ia(ic~\)+ 1 ib (lc — I) + । 00
19 <>№ •- - - хту( (1)у2 — (0Y1 (0y2 (0^ (Oyi — (Of ic (la 4“ ib — 1) 0 1
ТТ1?2 (05 " “ OJyi (Oyj — (Ox (Ox — (Of ia 1
Следовательно, в системе координат ia—ib при заданном значении передаточного числа ip линии, соответствующие ic = const, будут представлять собой пучок прямых, точка пересечения которых определится пересечением прямых’:
^l^a “Г = О И /^2^2 “F “Г ^2 == t)*
Графическое решение этих уравнений позволяет выбрать кинематическую схему трехрядного редуктора при помощи плоского чертежа. Как и в случае образования кинематической схемы двухрядного редуктора, необходимо для каждого из 19 возможных вариантов написать уравнение типа (39), связывающее передаточные числа рядов ia, ib, ic, и выразить каждое передаточное число ряда через угловые скорости его основных звеньев. Это даст возможность найти конструктивные параметры рядов и определить функции основных звеньев каждого ряда.
В табл. 6 приведены формулы, связывающие угловые скорости основных звеньев каждого из рядов с величинами /а, ib и ic для всех 19 вариантов трехрядных односкоростных редукторов, записанных по результатам расчетов, изложенных в [18]. Указаны также координаты (ia и ib) точки пересечения пучка прямых при ic = const в системе координат ia — ib и даны значения передаточного числа редуктора, выраженные через величины ia, ib, ic.
Рассмотрим образование кинематической схемы трехрядного редуктора, например по варианту 19 (табл. 6) при передаточном числе ip — 175. Используем для этого плоскость ia 0 ib, где нанесены пределы возможных значений передаточных чисел ia и ib, которые приняты такими же, как и для редуктора с кинематической схемой, составленной из двух планетарных рядов. Максимальные допустимые значения передаточного числа ic определены с учетом указанных выше ограничений для передаточных чисел ia и ib из уравнения (22): ic = —5 и ic — 6.
Для построения в координатах iQ — ib линий ic — —5 и ic = 6 используем координаты точки пересечения линий ic = const, указанные в графах 9 и 10 табл. 6; в данном случае = 0 и ib = = 1. Воспользовавшись данными графы 8, можно записать уравнение вида (39) для рассматриваемого случая:
Lpl-a “F 4? (4i т*
Подставляя в это уравнение заданное значение ip = 175 и поочередно ic — —5 и ic — 6, а также задаваясь значением i'a (или ib), отличным от ia, найдем два значения ib и ibt которым соответствуют две точки с координатами (ia, ib) и (ia, ib). Линии ic = —5 и ic = 6 проходят через эти точки и точку с координатами (0; 1), как это показано на рис. 79. Очевидно, что линии ic = const при —5 <Z ib < 6 располагаются в пределах острого угла, образованного прямыми ic = —5 и ic = 6. 186 /ж.
Следовательно, при образовании кинематической схемы можно* принимать такие передаточные числа рядов, которым в координатах ic—ib соответствуют точки, лежащие внутри или по граничным линиям тех прямоугольников или их частей, которые находятся внутри острого угла, образованного прямыми ic = —5> и L — 6. С*
1ь
Рис. 79. План передаточных чисел трехрядного редуктора
Кроме того, необходимо выполнить условие, чтобы конструктивный параметр каждого из рядов был положительным и боль
шим единицы.
Построим, например, кинематическую схему редуктора, соответствующую точке Л плоскости ia 0 ib. Для этой точки ia = 0,166; ib — —5; ic = —5. Воспользуемся выражениями граф 2; 3 и I табл. 5 и запишем
* = 0,166;
(0у9 — со
— ок
(401
СО.г — СОТ
187“
Если сопоставить два последних уравнения (40) с выражением (23), то нетрудно убедиться в том, что конструктивный параметр каждого из этих рядов равен 5. Преобразуем первое из уравнений (40):
1 5 л
g <+ g ®Vi — 0
и далее
+ 5cov, — (1 + 5) coYa = 0.
С учетом выражений (22) и (23) можно записать
(0^ —
WV1 — (0у2
Из последнего уравнения следует вывод, что конструктивный параметр первого ряда также равен 5.
Рис. 80. Трехрядный редуктор:
а — схемы планетарных рядов; б — схема редуктора
Редуктор, кинематическая схема которого образована из трех планетарных рядов с конструктивными параметрами kx — =
= = 5, обеспечивает заданное передаточное число. Составим
кинематические схемы трех планетарных рядов (рис. 80, а) так, чтобы в качестве их солнечных шестерен служили звенья д, т и соответственно рядов Л, В и С, в качестве коронных шестерен — звенья у, и х, а в качестве водил — звенья у2, т и т. Соединим одноименные звенья рядов и получим кинематическую схему редуктора (рис. 80, б), соответствующую точке А в координатах ia — ib (см. рис. 79).
Образование кинематической схемы редуктора из двух передач различного типа. В ряде случаев для образования кинематических схем односкоростных редукторов с весьма большими передаточными числами (ip = 120^-200), что может быть необходимо для мотор-колес периодического действия, целесообразно прибегать к последовательному соединению двух передач различного типа. В этом случае хорошие результаты можно получить при использовании передачи ЗК и простого планетарного ряда. 188 . ***• .
Функции основных звеньев каждой из этих передач определяют в зависимости от необходимого передаточного числа редуктора, учитывая, что это число равно произведению передаточных чисел обеих передач. Имея в виду ограничения по наибольшему передаточному числу планетарного ряда, можно определить требуемое передаточное число передачи ЗК. Пользуясь приведенными выше
выражениями для передаточных чисел при известных ограничениях конструктивного параметра, можно установить рациональное использование основных звеньев передач ЗК.
Подобную кинематическую схему (рис. 81) имеет редуктор мотор-колес периодического действия (см. рис. 20). Ведущим звеном редуктора является солнечная шестерня первого ряда передачи ЗК, которая через первый венец двойного сателлита связана с коронной шестерней первого ряда. Торможение этой
Рис. 81. Кинематическая схема редуктора, образованного из двух различных передач
шестерни обеспечивает внешнюю опору момента и, следовательно, возможность передачи потока мощности на ведомое звено
редуктора.
Поток мощности от ведущего звена редуктора через двойной сателлит передачи ЗК передается на коронную шестерню второго ряда этой передачи, далее на солнечную шестерню простого планетарного ряда, на его сателлиты и водило, которое является ведомым звеном редуктора. Коронная шестерня ряда постоянно заторможена.
ОБРАЗОВАНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ РЕДУКТОРА ДВУХСКОРОСТНОГО МОТОР-КОЛЕСА
Редуктор двухскоростного мотор-колеса состоит из двух наделенных различными функциями передач: управляемой и понижающей. Управляемая передача обеспечивает получение двух передаточных чисел редуктора ц и in. Понижающая передача обеспечивает необходимое понижение числа оборотов выходного звена редуктора.
Понижающая передача является односкоростной, а управляемая — двухскоростной. При их последовательном соединении образование кинематической схемы редуктора двухскоростного мотор-колеса сводится к выбору кинематических схем односкоростной и двухскоростной передач, которые обеспечивают необходимые передаточные числа.
189
Выбору кинематической схемы двухскоростной передачи предшествует выбор элементов управления редуктором двухскоростного мотор-колеса. Большинство выполненных образцов имеет в качестве элементов управления тормоз и фрикционную муфту или два тормоза.
Рассмотрим особенности редуктора двухскоростного мотор-колеса при использовании в качестве элементов управления фрикциона и тормоза.
Фрикционная муфта осуществляет блокирование управляемой передачи, под которым понимают такое состояние ее звеньев, когда они не могут вращаться относительно друг друга, а вращаются относительно центральной оси передачи как одно целое. Для блокирования простой планетарной передачи достаточно сблокировать два ее звена, чтобы все остальные звенья имели одинаковую угловую скорость.
При использовании в качестве элементов управления тормоза и фрикционной муфты целесробразно как управляемую передачу применять простой планетарный ряд. Одно из двух передаточных чисел управляемой передачи, отличное от единицы, реализуется при включенном тормозе и выключенной фрикционной муфте. Тормоз связан с коронной или солнечной шестерней, поскольку при изменении передаточного числа направление вращения ведомого звена не должно меняться, чтобы не прибегать к реверсированию тягового электродвигателя.
Второе передаточное число управляемой передачи, соответствующее выключенному тормозу и включенной фрикционной муфте, равно единице, поскольку управляемая передача (простой планетарный ряд) оказывается сблокированной.
Передаточное число понижающей ступени редуктора равняется отношению заданных передаточных чисел первой и второй передачи —у. При сблокированном ряде его передаточное число равно единице, поэтому передаточное число понижающей передачи должно быть равно /и.
Значение конструктивного параметра при использовании в качестве понижающей передачи простого планетарного ряда при торможении коронной шестерни
при торможении солнечной шестерни
Если в качестве понижающей передачи принимают не простой
планетарный ряд, а. передачу
190 .
другого типа, то приведенные фор-
мулы можно использовать для определения параметра передачи К с целью выбора кинематической схемы управляемой
передачи.
Одной из важных задач при создании редукторов двухскоростных мотор-колес с фрикционной муфтой и тормозом в качестве управляющих элементов является выбор места расположения по кинематической схеме фрикционной муфты, что определяет величину тормозного момента и, следовательно, размеры и надежность
механизма.
В табл. 7 поданным работы [25] указаны различные случаи расположения фрикционной муфты в управляемой передаче, в качестве которой использован простой планетарный ряд. Там же содержатся соответствующие расчетные формулы для определения момента на фрикционной муфте через момент на ведущем звене, причем, как и ранее, под а, Ь, с понимают числа зубьев солнечной и коронной шестерен, а также сателлита. Приведены численные значения момента на фрикционной муфте для
Ь о частного случая— = 3.
Рис. 82. Кинематическая схема двухскоростпого редуктора с тормозом и фрикционной муфтой в ка-Таким образом, определение чесгве элементов управления нагрузок и расчет размеров дета-
лей фрикционной муфты зависят от ее расположения. Наиболее рациональным является такое расположение, при котором момент на фрикционной муфте минимален и вместе с тем относительная величина числа оборотов к линейной скорости подвижных и неподвижных дисков при выключенной фрикционной муфте будет находиться в допустимых пределах. Относительное число оборо
тов дисков определяют при включении тормоза, связанного с солнечной или коронной шестерней.
Пример кинематической схемы редуктора для двухскоростного мотор-колеса (см. рис. 18) приведен на рис. 82. Управляемая передача выполнена в виде планетарного ряда с расположением фрикционной муфты по варианту 4 (табл. 7) и установкой тормоза на коронной шестерне. В качестве понижающей применена двухступенчатая непланетарная передача с двумя внешними зацеп
лениями.
Если в качестве элементов управления управляемой передачи редуктора двухскоростного мотор-колеса выбраны два тормоза, то кинематическая схема такого редуктора должна быть образована не менее, чем из двух простых передач одного или различных
191
Вариант
Схема блокирования
Момент на фрикционной муфте Ь Л при----------- = 3
а
Таблица 7
Ма — Мф = Мд
а
(Мф -- 0,2оМд)
I
Ма Мф = Мд
(Мф - О.ЗЗЛ'Ь)
Мф — Мд
Мь — Мф — Мд
ь
(Мф - 0,75Ма)
Мь = Мф — Мд—
(Мф — ЗМд)
Мф = Мд
192
типов. Однако практически всегда необходима еще и третья (понижающая) передача.
Для определения передаточных чисел управляемой передачи необходимо заданные передаточные числа редуктора на первой о и второй in передачах разделить на передаточное число понижающей передачи inH, т. е.
Рис. 83. Кинематическая схема двухскоростного редуктора с двумя тормозами в качестве элементов управления
(первая передача) заторможено
При использовании двух тормозов как элементов управления в качестве управляемой передачи обычно применяют двухрядную планетарную передачу. В качестве понижающей передачи можно применить любую, однако по конструктивным соображениям для этой цели целесообразно использовать также простой планетарный ряд.
Кинематическая схема редуктора двухскоростного мотор-колеса (см. рис. 10) с двумя тормозами в качестве элементов управления приведена на рис.83. Схема образована из трех планетарных рядов. При реализации большего передаточного числа
водило второго ряда, а коронная шестерня первого ряда расторможена. В этом режиме поток мощности, поступающий к ведущему звену передачи — солнечной шестерне первого ряда — разделяется па две составляющие.
Одна из составляющих потока мощности через сателлиты и коронную шестерню первого ряда передается на солнечную шестерню второго ряда, а затем на вал солнечной шестерни третьего ряда. Вторая составляющая потока мощности через сателлиты и водило первого ряда передается па вал солнечной шестерни третьего ряда. Таким образом, на валу солнечной шестерни третьего ряда происходит суммирование потоков мощности. С солнечной шестерни третьего ряда суммарный поток мощности передается через сателлиты на водило третьего ряда, которое является ведомым звеном редуктора. Коронная шестерня ряда постоянно заторможена.
При реализации меньшего передаточного числа (вторая передача) коронная шестерня первого ряда затормаживается, а водило второго ряда растормаживается. Поток мощности с ведущего звена через сателлиты и водило первого ряда передается на вал солнечной шестерни третьего ряда и далее, как и в первом случае, на ведомое звено редуктора. В этом редукторе первые два ряда яв-
13 А. И. Яковлев *93
ляются управляемой передачей, третий ряд — понижающей передачей.
Если как управляемая использована двухрядная передача с двумя тормозами в качестве элементов управления, то выбор ее кинематической схемы по заданным величинам передаточных чисел fi и fu можно выполнить при помощи плана угловых скоростей [18, 191.
Угловые скорости тормозных звеньев обоих рядов обозначают соответственно соТ1 и юТ2. При работе на первой передаче редуктора wT1 - 0 и =/= 0, па второй передаче wT1 =f= 0 и coTs = 0. Условия <оТ1 — 0 и сот> = 0 соответствуют торможению мотор-колеса.
При построении плана угловых скоростей удобно пользоваться относительными угловыми скоростями. Для этого угловые скорости всех звеньев делят на угловую скорость ведущего звена редуктора cod, которая равна угловой скорости тягового электродвигателя. При построении плана, следовательно, принимают соа = 1.
В осях координат соа — (о\, как и прежде, — угловая ско-
рость ведомого звена редуктора) строят лучи угловых скоростей основных звеньев управляемой передачи редуктора. Полагая оба тормозных звена управляемой передачи расторможенными и учитывая, что управляемая передача является механизмом без постоянной внешней опоры момента, можно записать, что мд — = ii)x = (от, т. е. управляемая передача в этом случае вращается как одно целое.
Но поскольку принято, что cod = 1, справедливо равенство
(0^ Cdjj. (0^. 1,
т. е. лучи каждой из трех угловых скоростей должны проходить через точку с координатами (1; 1). Эту точку наносят в осях координат cod—(рис. 84) в произвольном масштабе на биссектрисе первого координатного угла.
Прямая, параллельная оси coA, проходящая через точку (1; 1), характеризует угловую скорость ведущего звена, поскольку любая точка этой прямой имеет ординату, равную о>д = 1. Прямая to = сол, делящая координатный угол первой четверти на две равные части, характеризует угловую скорость, ведомого звена. Прямая, отсекающая па оси абсцисс отрезок
(0л. =
характеризует угловую скорость одного из тормозных звеньев, поскольку в данном случае осуществляется требуемое передаточное число управляемой передачи
194
По плану угловых скоростей можно определить параметр управляемой передачи, а также угловые скорости и моменты ее звеньев. Направленный отрезок АВ равен разности — юТ1, направленный отрезок ВС — разности wT1 — соТ1. Отношение 4^, которое является постоянной величиной при любом положе-ВС г
нии точки (1; 1) на биссектрисе первого координатного угла, можно записать как
w — С1)т< = с О)- — (О-
и привести к виду
— CtOjj -J- (0 Н- 1) (Оп — 0.
Это уравнение, устанавливающее связь между угловыми скоростями звеньев планетарной передачи, аналогично уравнению (22), а постоянная величина С, взятая со знаком минус, представляет собой параметр передачи К.
Таким образом, параметр планетарной передачи можно определить как отношение двух
направленных отрезков оси ординат. При этом началом каждого из этих отрезков будет точка пересечения оси ординат честве неподвижного, а концами
Рис. 84. План угловых скоростей основных звеньев двухскоростного рс-
дуктора
: лучом звена, выбранного в ка-— точки пересечения этой оси с
лучами двух остальных звеньев.
Знак параметра передачи зависит от того, какое звено принято за неподвижное. Если неподвижно среднее звено, то параметр будет иметь отрицательный знак. При выборе в качестве неподвижного одного из крайних звеньев знак параметра будет положительным.
Угловые скорости звеньев управляемой передачи зависят от того, какая из двух передач редуктора включена. Если неподвижно первое тормозное звено редуктора, то следует провести вертикальную прямую через точку D, образованную пересечением луча заторможенного звена с осью абсцисс. Угловые скорости сох и oTs двух других звеньев будут характеризоваться направленными отрезками вертикальной линии. При этом началом отрезков является точка D, а концами G и Н — точки пересечения соответствующих лучей с вертикальной линией.
13*
195
Из плана скоростей также следует, что второе тормозное звено вращается в сторону, противоположную скорости вращения тягового электродвигателя. При торможении второго тормозного звена методика определения угловых скоростей звеньев сохраняется. В этом случае угловая скорость первого тормозного звена совпадает по знаку с угловой скоростью электродвигателя.
Для определения момента на тормозном звене управляемой передачи запишем уравнения (28) и (29) в виде
4“ Мх 4" — О’
(41)
4“ Мх(дх -р Л1хсот = 0.
Подставим значение момента на ведомом звене, найденное из первого уравнения
Мх = - (Мд + Мх),
во второе уравнение и после преобразования получим Мх ____________________— От ____ <&д
Мд й)х — <0х й)х
(42)
И
Момент на ведомом звене
Мх = ^д^дхх- (43)
Подставляя в уравнение (41) значения Мх и Мх из (42) и (43) и сокращая все члены уравнения на Мд, имеем
^дтх — 1 ^дхт* (44)
Заменив в уравнении (42) величину id%x ее значением из выражения (44), получим
Следовательно, момент на тормозном звене зависит только от передаточных чисел управляемой передачи и может быть определен по плану угловых скоростей. При этом момент на ведущем звене, характеризуемый направленным отрезком ОА, принимают равным единице, а моменты на остальных звеньях характеризуют направленными отрезками, отсекаемыми соответствующими лучами на вертикальной линии, аналогично величинам угловых скоростей.
Образуем кинематическую схему управляемой передачи редуктора мотор-колеса, пользуясь изложенной методикой, полагая передаточные числа управляемой передачи редуктора соответственно равными == 17,4 и Z'j = 4,4. Построим планы угловых 196 "*&** •
скоростей как для положительного, так и для отрицательного передаточного числа (рис. 85, а, б). Обозначения приняты те же. что и на рис. 84.
Число возможных трехзвенпых механизмов в каждом случае будет равно числу сочетаний из четырех основных звеньев редуктора по три, т. е. С4 = 4. Возможные сочетания звеньев в редукторе следующие: дхх^, дхх2, дх^', х2хгх или дхгх', дх2х\ дх2х±’, т2тгх.
Рис. 85. Планы угловых скоростей управляемой передачи редуктора: а — при положительном передаточном числе; 6 — при отрицательном
Пользуясь планом угловых скоростей, определим конструктивные параметры рядов. Их значения при положительном передаточном числе равны 16,40; 3,40; 4,56; 3,82 и при отрицательном передаточном числе 17,40; 4,40; 6,24; 2,39. Величины конструктивных параметров рядов дхт1э а также дтгх и дх2х1 выходят за пределы принятых ограничений, поэтому эти ряды из дальнейшего рассмотрения исключаем.
Ряды между собой могут сочетаться следующим образом: а) дхх2, dxyX2’j б) дхх2, т2т^х; в) ^т^т2, т2т^х, г) ^TjX, t2TjX.
Каждому сочетанию ряда соответствует определенная кинематическая схема редуктора (рис. 86).
Запишем уравнения вида (22) для каждой из четырех кинематических схем редуктора:
для схемы а
соа + — (1 -h^i) в 0;
для схемы б
«а + k2toXt — (1 4- k2) ых = 0;
«т2 4- &i<Ox — (1 4- kJ (дХ1 = 0; для схемы в
а>д 4- k2tox> — (14- ^2) (°т1 = 0;
4- — (14- k2) coTg = 0;
Рис. 86. Варианты кинематической схемы управляемой передачи при различном сочетании рядов
для схемы г
ыд 4- k2ux — (1 4- £2) = 0;
соТа 4- k&x — (1 4-^i) = 0.
Выразим осуществляемые передаточные числа через конструктивные параметры рядов, полагая в каждой системе уравнения соответственно юТ1 = 0и coTj = 0. Получим [181 для схемы а
iu = 1 + kt и i, = А,;
для схемы б
in = 1 4- и <1 = 4- k2 4- 1;
198
для схемы в
in = (1 +А) и ‘1 =
для схемы г
Для определения к. п. д. запишем силовое передаточное число:
для схемы а
~ и ~ 1 +k ' По , X
in = 1 + Мо и q = ———- ^1По — Мо
для схемы б
Ч-&2ПО и
ii = &1П0&2П0 + + 1;
для схемы в
iu =------z~~ic—^1По и = ^По^гНо»
1 4- *^5
для схемы г
ill = —^2^0 И
Il = —(^iHo^Ho + &1По + &2Ло)-
Здесь х и у — показатели степени, соответствующие первому и второму ряду. По формуле (26) определим знак показателя степени хну. Затем по формуле (27) находим к. п. д. редуктора. Ниже приведены значения к. п. д. для обоих передаточных чисел:
для схемы а
Ли =
1 ^гЛо
__ (1 4~ ^аЛо) (^1 ^г) .
(1 4" &>) (^1 М По
для схемы б
1 + /гчп0 ^1^2Ло 4" ^гИо 1 *
ип = —12~ и = ;
для схемы в
Пн =
Но и Hi == Ио’»
1 4-*2
для схемы г
тщ = Но и Hi = -“
По-
Подставляя в формулы для определения к. п. д. управляемой передачи при работе с передаточными числами ц и tn соответ-
199
ствующие значения конструктивного параметра и принимая i]0 = = 0,95, получим:
для схемы а
Лп = 0,963 и tjj = 0,84;
для схемы б
Ли = 0,963 и Th = 0,921;
для схемы в
Лп = 0,950 и th = 0,900;
для схемы г
Ли = 0,950 и tji = 0,920.
Следовательно, все кинематические схемы при передаточном числе in обеспечивают достаточно высокий к. п. д. При работе с передаточным числом о первые две кинематические схемы имеют низкий к. п. д., что дает основание предполагать наличие циркулирующей мощности.
Помимо рассмотренных передач в качестве управляемой передачи редуктора двухскоростного мотор-колеса в некоторых случаях могут быть использованы трехзвенные механизмы с общим двойным сателлитом [41 ].
ПРОВЕРКА НАЛИЧИЯ ЦИРКУЛИРУЮЩЕЙ МОЩНОСТИ
В РЕДУКТОРЕ МОТОР-КОЛЕСА
Передача мощности в планетарных передачах может осуществляться последовательным потоком или с разделением потока. Во втором случае кинематическая схема передачи имеет замкнутый контур, в котором вероятно возникновение циркулирующей мощности. Эта мощность может в несколько раз превышать мощность, подведенную к ведущему звену передачи от тягового электродвигателя. Циркулирующая мощность дополнительно нагружает элементы передачи, образующие замкнутый контур, вызывает их усиленный износ, а иногда и поломки, снижает к. п. д. редуктора.
Однако отказываться от кинематической схемы передачи только потому, что она имеет разделение потока мощности, не следует. Передача мощности с разделением потока обеспечивает известные преимущества, заключающиеся в лучшем использовании всех элементов редуктора и увеличении доли мощности, передаваемой переносным движением, которое сопровождается меньшими потерями, чем относительное движение. Однако, если кинематическая схема содержит замкнутый контур, то окончательная ее оценка должна содержать проверку наличия и величины циркулирующей мощности.
200
Известны методы качественного анализа кинематических схем двухрядных планетарных передач 125] с целью выяснения наличия циркулирующей мощности. Однако более целесообразно воспользоваться общим способом оценки любой планетарной передачи, а именно определением ее к. п. д. Наличие циркулирующей мощности неизбежно отразится на к. п. д. передачи, а этот параметр является одним из важнейших при решении вопроса о применении передачи данного типа.
Рассмотрим передачу с наличием циркулирующей мощности. Ее кинематическая схема (рис. 86, а) была проанализирована и забракована вследствие низкого к. п. д., что и позволяет предположить наличие циркулирующей мощности. Эта двухрядная передача обеспечивает два передаточных числа, первое из которых осуществляется торможением звена тп а второе — торможением звена т2. При реализации второго передаточного числа первый ряд не передает момента и замкнутый контур отсутствует. При реализации первого передаточного числа имеется замкнутый контур, в котором возникает циркулирующая мощность.
Момент на ведомом звене передачи [19]
Мх = мт = Мей = Me /г,-
Момент на солнечной шестерне второго ряда, найденный из условия равновесия ряда,
Момент на коронной шестерне второго ряда
= Т+К
В редукторах мотор-колес передаточные числа всегда больше
z'i > 0 и
единицы, поэтому
Следовательно, на солнечную шестерню второго ряда дей
ствует момент превышающий момент тягового электродвигателя. Но обе солнечные шестерни вращаются с угловой ско
ростью тягового электродвигателя, и знГачит солнечная шестерня второго ряда передает мощность, превышающую мощность элек
тродвигателя.
К солнечной шестерне второго ряда помимо момента электродвигателя приложен момент солнечной шестерни первого ряда Ма1. Его величина может быть найдена из условия равновесия ряда с учетом выражения
Mt = Мл - Me = /И„ = Ме(й - 1) = Me
--^2
201
Следовательно,
Момент на коронной шестерни первого ряда
Направление момента Ма1г действующего на солнечную шестерню первого ряда со стороны сателлитов, совпадает с направ--лением ее вращения. Это означает, что мощность в первом ряду передается от коронной к солнечной шестерне.
Циркулирующая мощность в замкнутом контуре, образованном двумя рядами,
M01co01 — М^од J — Рд л _\2
При значениях конструктивных параметров рядов, указанных ранее при образовании кинематической схемы по рис. 86, а, циркулирующая мощность
Рц 4Рд.
If ОСОБЕННОСТИ РАСЧЕТА МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ ’ МОТОР-КОЛЕСА
ОСОБЕННОСТИ НАГРУЗОЧНЫХ РЕЖИМОВ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
Нагрузочные режимы механических передач мотор-колес ха* рактерны наличием нагрузок двух видов. Это моменты, передаваемые от электродвигателя к ведущему колесу, определяемые сопротивлением движению и величиной ускорения машины и имеющие сравнительно плавный характер изменения, а также возникающие при переходных процессах динамические моменты, которые зависят от параметров крутильной системы мотор-колеса.
При расчете на прочность деталей механической передачи нагрузки по характеру действия делят на две категории: единичные пиковые, действующие подряд не более 5—10 раз и в общей сложности не более 2 • 104—6-105 раз за расчетный срок службы детали, и длительные, имеющие циклический характер и действующие более 10 раз подряд, а в общей сложности более 2-104—6-105 раз. Первые могут вызвать поломку отдельных деталей, вторые влияют на их усталостную прочность [391.
В механической передаче мотор-колес к первой категории нагрузок относят динамические ударные моменты и динамические моменты, возникающие при резонансе собственных и вынужденных крутильных колебаний. Их учитывают при расчете деталей передачи на прочность по динамическим нагрузкам.
К длительным относят нагрузки, обусловленные электромагнитным моментом электродвигателя. Однако следует учитывать, что па момент, передаваемый от электродвигателя, накладываются колебательные составляющие, вызванные крутильными, колебаниями системы. Амплитуды колебательных составляющих в большинстве случаев меньше момента, передаваемого от электродвигателя, за исключением случая установившегося резонанса и автоколебаний при буксовании. Длительные нагрузки учитывают при расчете на выносливость.
Колебательные процессы могут быть общими для всего мотор-колеса или местными, присущими отдельным деталям или узлам. Общие колебательные процессы обусловлены наличием в мотор-203
колесе значительных сосредоточенных маховых масс, связанных между собой элементами с определенной податливостью. Местные колебательные процессы вызываются ограниченной точностью изготовления деталей, в частности шестерен, особенностями кинематики механизмов, наличием разветвлений потоков мощности и другими причинами.
Ударные нагрузки в мотор-колесе практически всегда связаны с процессом перехода кинетической энергии, накопленной якорем электродвигателя, в потенциальную энергию упругого закручивания элементов передачи, обладающих определенной податливостью. ,
При проектировании механической передачи мотор-колеса выполняют расчет валов, шестерен и подшипников. Валы рассчитывают по внутренним напряжениям. При расчете па выносливость многократно возникающие напряжения должны соответствовать пределу выносливости стали определенной марки, из которой изготовлен вал. При расчете на прочность максимальные напряжения, действующие ограниченное число раз, не должны превышать ограниченного предела выносливости.
Проектирование зубчатых передач редуктора мотор-колеса включает расчеты па прочность и долговечность, геометрический расчет шестерен и разработку технологии изготовления. Размеры шестерен определяют на основании следующих основных расчетов: на выносливость по изгибу; на выносливость по контактным напряжениям; на прочность по динамическим нагрузкам; на смятие при динамических нагрузках.
Размер подшипников устанавливают по расчетам на долговечность с использованием коэффициентов работоспособности. В результате этого расчета выбирают подшипник, обладающий достаточной выносливостью от выкрашивания рабочих поверхностей тел качения и обойм. Кроме того, подшипники сателлитов рассчитывают по сопротивляемости появлению остаточных деформаций. Для этого определяют максимальную динамическую нагрузку, действующую на подшипник, интенсивность ее приложения, повторяемость данной нагрузки и рассчитывают остаточные деформации.
Для расчета на прочность и выносливость передачи мотор-колеса используют методику, принятую для расчета аналогичных деталей в автомобилестроении [13, 37, 38]. Для расчета шестерен редукторов мотор-колес наиболее удобно пользоваться [38] методикой расчета прямозубых передач с внешним и внутренним зацеплением, которые преимущественно используются в редукторах мотор-колес; там же имеются примеры расчета планетарных передач колесных редукторов и планетарных коробок передач некоторых автомобилей отечественного производства. В работе И. С. Ци-товича [37] приведена методика расчета валов и подшипников.
204
Такие специфические особенности расчета зацеплений планетарных передач, как выбор числа зубьев шестерен передачи, угловая коррекция планетарных передач с прямозубыми цилиндрическими шестернями, распределение нагрузки между сателлитами и пр. рассмотрены в специальной литературе 120, 35 и др. ].
При расчетах механической передачи мотор-колеса на выносливость необходимо выбрать расчетный режим, определяемый характером работы мотор-колеса в целом, а также его отдельных узлов и деталей. Методика выбора расчетных нагрузок мотор-колес существенно отличается от методики, применяемой при расчете передач автомобилей.
ВЫБОР РАСЧЕТНЫХ НАГРУЗОК ДЛЯ РАСЧЕТА МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ НА ВЫНОСЛИВОСТЬ
Для расчета на выносливость деталей механической передачи мотор-колеса необходимо определить тот наибольший момент, который нагружает передачу в течение времени, составляющего значительную долю от расчетного срока службы мотор-колеса. Этот момент, отнесенный к валу электродвигателя, принимают за расчетный. В зависимости от назначения и условий эксплуатации транспортной машины расчетный момент, за отдельными исключениями, может находиться в пределах Мд<» -С Мра£Ц < Мдн$.
Расчетный момент выбирают на основе анализа условий эксплуатации транспортной машины. При этом следует учитывать, что определение коэффициента допустимой перегрузки электродвигателя основано на положении, что наибольшему коэффициенту общего сопротивления движению фнб, характеризующему такое достаточно большое общее сопротивление движению транспортной машины, которое в условиях эксплуатации может встречаться сравнительно часто и в течение длительного времени, соответствует момент электродвигателя Мд Мд*.
Таким образом, длительный момент электродвигателя в любом случае соответствует условиям эксплуатации, которые должны быть расценены как относительно тяжелые. Поэтому усталостные явления в механической передаче односкоростного мотор-колеса в целом будут определяться моментами, значительно более близкими к длительному моменту Мд™, чем к наибольшему моменту Мднб- При этом предполагается, что параметры электродвигателя выбраны в соответствии с изложенной выше методикой и момент Мд а» не завышен относительно расчетного значения.
Для тех групп транспортных машин, у которых момент, соответствующий фнб, принимают меньше, чем момент практически во всех случаях можно рекомендовать Мрае« = Мд со.
Если для данной группы транспортных машин коэффициенту соответствует момент то следует учитывать вероятность повторения в эксплуатации режимов с реализацией 205
динамических факторов, близких к £>|Пах. В зависимости от этого следует «принимать = (1,1ч-1,3) Мд™.
Для двухскоростных мотор-колес величина расчетного момента зависит от того, как происходит переключение передач редуктора — во время движения машины или только на стоянках. В первом случае для деталей редуктора, передающих нагрузку только при работе на второй передаче, следует принять Мрасч (0,8ч-0,9) /Идо», поскольку в этом случае не реализуются моменты, превышающие длительный или часовой момент, что следует из неравенства (16). Для остальных элементов редуктора, используемых при работе на обеих передачах, уровень нагрузок также ниже, чем для односкоростных мотор-колес, поскольку меньше диапазон скорости, в котором моменты электродвигателя превышают длительное значение. Поэтому можно принять Мрасч =
Для двухскоростных мотор-колес, у которых переключение передач происходит только па стоянках, следует учитывать время использования каждой передачи за расчетный срок службы мотор-колеса. Если протяженность трассы для груженого и негруженого рейса транспортной машины с двухскоростными мотор-колесами одинакова (например, для карьерного самосвала), то время работы и число циклов нагружения на первой передаче будут больше, поскольку ей соответствуют более низкие скорости движения и большее передаточное число. Поэтому при расчете элементов редуктора, работающих только на второй передаче, можно принять Л1тч = (0,84-0,9) Л1дто, а при выборе Мрасч для остальных элементов редуктора исходить из тех же соображений, которые справедливы для односкоростных мотор-колес.
При определении расчетных моментов для всех деталей механической передачи мотор-колеса по расчетному моменту, отнесенному к валу тягового электродвигателя, следует учитывать кинематическую схему редуктора и значения к. п. д. отдельных его ступеней. При анализе нагрузочных режимов механической передачи мотор-колеса и выборе расчетного момента необходимо также учитывать нагрузки, возникающие при торможении, которые могут оказывать существенное влияние на выносливость деталей передачи.
Число циклов нагружения передачи за расчетный срок службы . при электрическом торможении зависит от характеристик и назначения транспортной машины. Например, для машин, предназначенных для эксплуатации в условиях города или для карьерных самосвалов, числом циклов нагружения передачи при электрическом торможении нельзя пренебречь по сравнению с числом циклов в режиме тяги.
Нагрузки в механической передаче мотор-колеса при электрическом торможении имеют обратный знак по сравнению с нагрузками в режиме тяги. Циклы нагружения как в режиме тяги, так
и при электрическом торможении являются асимметричными знакопостоянными с изменяющейся амплитудой. Изменение знака* нагружения при электрическом торможении и указанном характере нагружения в целом ухудшает условия работы механической передачи и снижает долговечность ее деталей.
Для выбора расчетного момента с учетом нагрузок, обусловленных электрическим торможением, имеет значение соотношение абсолютных величин нагрузок, действующих в механической передаче мотор-колеса в период тяги и при электрическом торможении. Если электродвигатель допускает при электрическом торможении реализацию тормозных моментов, превышающих моменты в режиме тяги, то не только ухудшаются условия работы деталей передачи, но и повышается общий уровень нагрузок.
Отсутствие экспериментальных данных по нагрузочным режимам механической передачи мотор-колеса не позволяет в настоящее время рекомендовать достаточно обоснованные значения расчетного момента для механических передач мотор-колес транспортных машин, имеющих служебное электрическое торможение. Для ориентировочных расчетов можно принимать Mpaf4 = (1,3^-4-1,8)ЛЪсо, ноне более Мрасч (0,6-г-0,7) МдНб> причем большие величины должны соответствовать тем случаям, когда по условиям работы мотор-колеса в режиме тяги следует принять Мрагч > Мдоо, а назначение машины обусловливает большую* частоту использования электрического торможения.
Характер нагрузок в передаче при торможении механическим тормозом зависит от выбора тормозного звена. Если тормозным звеном служит ступица колеса, то нагрузки при торможении носят динамический характер и при расчете на выносливость не учитываются. При выборе в качестве тормозного звена одного из промежуточных звеньев редуктора тормозными моментами обратного знака нагружаются детали, расположенные между тормозным звеном и колесом. При установке тормоза на валу электродвигателя или торсионном валу тормозными моментами нагружается вся передача.
Влияние тормозных моментов на выносливость деталей передачи следует учитывать в зависимости от характера работы механического тормоза. Если тормоз является стояночным или экстренным, то возникающие в передаче нагрузки нс следует учитывать при расчете на выносливость. Если механический тормоз, связанный с деталями механической передачи, используется в качестве служебного, то возникающие нагрузки надо учитывать в отношении элементов передачи, расположенных между тормозным звеном и колесом. Тормозные моменты в этом случае, как и при электрическом торможении, имеют отрицательный знак. При выборе расчетного момента с учетом тормозных моментов следует исходить из соображений, изложенных применительно к случаю использования электрического торможения.
207
Для расчета шестерен, подшипников и валов на выносливость необходимо знать общее время работы узла или детали механической передачи мотор-колеса. Для этого в соответствии с назначением транспортной машины следует установить ее расчетный пробег Lp, а также среднюю эксплуатационную скорость v9. Обозначив отношение времени работы на заднем ходе Тзх к времени работы па переднем ходе через tt получим выражение для общего времени работы механической передачи мотор-колеса
(45)
Для двухскоростных мотор-колес эксплуатационная скорость на второй передаче может быть принята приблизительно равной
^max II “Ь b'min II
где цтах п и ит1п п — соответственно максимальная и минимальная скорости па второй передаче.
Эксплуатационная скорость на первой передаче может быть найдена из соотношения
Уэ! _ Д£
^э11 Ч
Общее время работы на первой и второй передаче Т0] и ТоП может быть найдено по формуле (45). Соотношение расчетного пробега па первой и второй передаче зависит от характеристик транспортной машины и условий ее эксплуатации.
Для мотор-колес периодического действия общее время работы механической передачи под нагрузкой Тоэ равно расчетному времени работы электропривода периодического действия, которое определяют при его проектировании. Получив общее время работы, необходимо найти число циклов нагружения для каждого узла или детали. В первом приближении действительный режим работы с переменным числом оборотов можно заменить расчетным режимом с постоянным расчетным числом оборотов.
Пользуясь предельной механической характеристикой, определяют числа оборотов вала электродвигателя, соответствующие средней эксплуатационной скорости и расчетному моменту. Если обе величины отличаются незначительно, то за расчетное число оборотов следует принять то, которое соответствует средней эксплуатационной скорости, округлив его в сторону приближения к числу оборотов, соответствующему расчетному моменту. В противоположном случае за расчетное число оборотов следует при-208 ** •
нять среднее из двух найденных величин. По расчетному числу оборотов вала электродвигателя, используя кинематическую схему редуктора мотор-колеса, можно определить расчетное число оборотов всех деталей механической передачи мотор-колеса.
Число циклов нагружения детали определяют исходя из общего времени и условий ее работы, а также расчетного числа оборотов. В некоторых случаях для валов число циклов нагружения определяется частотой собственных или вынужденных крутильных колебаний системы мотор-колеса.
Итак, при расчете деталей механической передачи мотор-колеса на выносливость для упрощения расчетов переменные моменты, нагружающие передачу, заменяют эквивалентным моментом постоянной величины, действующим определенное время и вызывающим те же усталостные явления, что и действительные переменные моменты.
В качестве эквивалентного момента можно принять расчетный момент. Время работы с расчетным моментом, при котором усталостные явления одинаковы с действительными при нагружении передачи переменными моментами, называют эквивалентным временем.
Основная зависимость между моментом М и числом циклов Nti его приложения для шестерен имеет вид
NUMX = const; Ч *
здесь х — 6 при расчетах по выносливости изгибу, х = 3 при расчетах по контактной выносливости и х = 3,33 при расчете подшипников шестерен.
Следовательно, различные нагрузки оказывают разное влияние на отдельные виды износов. Кроме того, вследствие различного значения степени х при расчетах по выносливости изгибу и контактной выносливости эквивалентное число циклов действия расчетного момента для этих случаев не совпадает. Поэтому и эквивалентное время при расчете зубьев по выносливости изгибу отличается от эквивалентного времени при расчете по контактной выносливости.
Если в рассматриваемом выражении принять М = MpaC4t а под N4 понимать число циклов соответствующее эквивалентному времени, то величину ЫцЭКв для шестерен можно определить, пользуясь разработанной НАМИ методикой расчета цилиндрических шестерен автомобильных ведущих мостов и раздаточных коробок, учитывая при этом особенности нагрузочных режимов механической передачи мотор-колеса.
При расчете по выносливости изгибу принимают для ведущей шестерни = 107-о6, а для ведомой шестерни Л^экв — __ . ррИ расчете по контактной выносливости принимают для
1о
14 д, и. Яковлев 209
ведущей шестерни N49Ke — 5- 107-а3. Степень использования максимального динамического фактора
РэКв * фсц ^тах ^тах
Коэффициент сцепления ведущих колес с грунтом <pLt{ принимают равным 0,8, а величину эквивалентного динамического фактора D3Ke — равной 0,15 при расчете по выносливости изгибу и 0,1 при расчете по контактной выносливости. Величина максимального динамического фактора
С/оо Р *Р г kGk
По кривым допускаемых напряжений при изгибе и допускаемых удельных давлений для стали определенной марки, пользуясь найденными значениями МцЭке, определяют допускаемые напряжения при изгибе и удельное давление в зацеплении. Эти величины сравнивают с расчетными, полученными с использованием момента Мрасч и принятых размеров шестерни.
Существуют и другие способы перехода от действительного режима к эквивалентному 138].
Расчет валов автомобильных передач на выносливость существенно зависит от соотношения между постоянной и переменной слагающими передаваемого момента. Для упрощения расчетов можно считать, что у общетрапспортных грузовых автомобилей валы, расположенные за коробкой передач, работают по знакопеременному симметричному циклу [371, причем величины амплитуд зависят от характера нагрузочного режима на первой передаче, а число циклов равно числу оборотов вала при работе с расчетным моментом на первой передаче.
Используя эти предпосылки для расчета валов мотор-колеса на выносливость, можно рекомендовать выполнять его по расчетному моменту, принимая за расчетное число оборотов то, которое по предельной механической характеристике электродвигателя соответствует расчетному моменту.
Для расчета автомобильных валов существуют формулы 1391, которые можно использовать при расчете валов мотор-колес. Целесообразно вести расчет по формулам для тех типов автомобильных валов, условия работы которых близки к условиям работы валов мотор-колес. Например, при расчете торсионного вала мотор-колеса можно использовать формулы для расчета полуосей, а при расчете валов редуктора — формулы для расчета валов колесных редукторов.
ХАРАКТЕР ДИНАМИЧЕСКИХ ПРОЦЕССОВ В МЕХАНИЧЕСКОЙ ПЕРЕДАЧЕ ПРИ РАЗЛИЧНЫХ РЕЖИМАХ ДВИЖЕНИЯ
/
Механическая передача мотор-колеса отличается от силовой передачи автомобиля весьма малой крутильной податливостью ее элементов. По величине этого параметра только торсионный вал мотор-колеса, связывающий электродвигатель с редуктором (если применен этот способ соединения), может быть сопоставлен с такими деталями передачи автомобиля, как полуоси, трубчатая часть карданного вала и сцепление.
Наряду с этим мотор-колеса имеют элемент с большим моментом инерции — якорь (ротор) электродвигателя, который жестко соединен с редуктором. Механизмы переключения двухскоростных мотор-колес и механизмы сцепления мотор-колес периодического действия, имеющие фрикционные элементы, функционально отличаются от механизма сцепления автомобиля, поскольку они осуществляют кинематическую связь электродвигателя с колесом до появления электромагнитного момента на валу электродвигателя. Вместе с тем механическая передача мотор-колеса свободна от динамических нагрузок, которые присущи автомобильным передачам и обусловлены циклическим характером работы двигателя внутреннего сгорания . Поэтому условия протекания динамических процессов в механической передаче мотор-колеса и силовой передаче автомобиля имеют существенные отличия.
Рассмотрим характер динамических процессов в механической передаче мотор-колеса при основных режимах движения транспортной машины: пуске, разгоне, движении в режиме тяги, электрическом и механическом торможении.
Под начальным периодом пуска понимают период времени с момента подачи напряжения па электродвигатель до трогания машины с места. При замыкании цепи якоря (ротора) электродвигатель развивает момент, величина которого зависит от его параметров и способа регулирования электропривода при пуске.
В сочленениях механической передачи мотор-колеса имеются окружные зазоры, сумма которых составляет окружной зазор передачи. Величина окружного зазора передачи зависит от принятой кинематической схемы редуктора и износа его деталей. При сложных редукторах и большом износе шестерен зазор может достигнуть нескольких десятков градусов (по замерам со стороны электродвигателя).
Из-за зазора передачи вращение колеса начинается не в тот момент, когда на электродвигатель подается напряжение, а по-истечении некоторого времени, необходимого для устранения этого зазора. За это время якорь (ротор) электродвигателя, вращаясь при незначительном сопротивлении, обусловленном потерями на трение и моментами инерции деталей передачи, приобретает определенный запас кинетической энергии. . । < г:
14* 211
Транспортная машина обладает большой массой и не может сразу приобрести скорость движения, соответствующую скорости вращения якоря (ротора) к моменту устранения окружного зазора. Поэтому после устранения зазора скорость якоря резко снижается, а его освободившаяся кинетическая энергия переходит в потенциальную энергию упругих деформаций деталей передачи, • что сопровождается затухающим колебательным процессом с большой первой амплитудой. Соответствующий этой амплитуде динамический момент получил название ударного.
Возможность возникновения динамических нагрузок ударного характера при электрическом торможении зависит от условий, при которых было начато торможение. Если нарастание тормозного момента электродвигателя происходит быстро и перед началом электрического торможения не устранен зазор передачи, то она нагружается, кроме тормозного момента, развиваемого электродвигателем, и динамическим моментом.
Наличие зазора передачи приводит к тому, что торможение транспортной машины начинается не сразу после переключения электродвигателей в тормозной режим. Сначала якорь притормаживается, причем вследствие наличия зазора он как бы отстает от передачи. Последняя, продолжая вращаться под действием ведущих колес, сохраняет в течение некоторого времени практически постоянное число оборотов. За время устранения зазора скорость вращения якоря снижается относительно скорости вращения передачи и соответственно уменьшается кинетическая энергия якоря.
После устранения зазора скорость вращения якоря и его кинетическая энергия возрастают за весьма короткое время, а в механической передаче возникает динамический удар. Его амплитуда зависит от разности значений кинетической энергии якоря до и после удара, а следовательно, от величины зазора передачи. В целом уровень динамических ударных нагрузок при электрическом торможении заметно ниже, чем при пуске.
Процесс динамического нагружения передачи мотор-колеса при торможении механическим тормозом зависит от выбора тормозного звена. Наибольшие динамические моменты ударного характера возникают в том случае, когда тормозным звеном служит ступица колеса (если только при торможении не осуществляется механическое отсоединение электродвигателя от колеса). Динамический процесс при этом качественно аналогичен тому, который имеет место при пуске. Величина динамического момента зависит от углового замедления колеса и достигает наибольших значений при блокировании колеса.
При выборе в качестве тормозного звена одного из промежуточных звеньев редуктора от динамических нагрузок будут свободны детали передачи, расположенные между тормозным звеном и колесом. Если тормозное звено связано с валом электродвига-212 .
теля, то детали механической передачи нс нагружаются динамическими ударными моментами.
Динамические ударные моменты возникают также в случае переключения передач редуктора двухскоростного мотор-колеса во время движения. При переходе с первой передачи на вторую якорь (ротор) тормозится, а при переходе со второй передачи на первую разгоняется. Изменение кинетической энергии якоря обусловливает не только упругое закручивание деталей передачи, но и нагрев фрикционных элементов. При быстром срабатывании привода механизма переключения динамические моменты могут достигать значительной величины.
Режим пуска длится до выхода на предельную механическую характеристику или на механическую характеристику, соответствующую меньшей мощности на колесе Рк <^Ркпред- Затем начинается разгон, под которым понимают период движения с момента выхода на механическую характеристику при Рк const до достижения машиной скорости, соответствующей среднему сопротивлению движению при данных условиях. Дальнейшее протекание режима тяги при неизменной мощности, реализуемой мотор-колесом, определяется изменением сопротивления движению транспортной машины.
Нагрузки механической передачи мотор-колеса при пуске, разгоне и. последующем режиме тяги определяются величинами момента, развиваемого тяговым электродвигателем, и динамическими процессами, возникающими при резонансе свободных и вынужденных крутильных колебаний системы.
Причинами возникновения вынужденных крутильных колебаний в механической передаче мотор-колеса являются переход от двухпарного к однопарному зацеплению зубьев шестерен и кинематические погрешности шестерен, возникающие при их изготовлении [26]. Эти причины при вращении деталей передачи обусловливают появление гармонических возмущающих моментов, приложенных к массам крутильной системы механической передачи. Под действием возмущающих моментов в крутильной системе передачи возникают вынужденные колебания, которые при установившемся процессе будут в линейной динамической системе также гармоническими, с частотой, равной частоте возмущающих моментов. С изменением скорости вращения, электродвигателя частота возмущающих моментов и вынужденных колебаний также меняется.
Наибольшего развития вынужденные колебания достигают при резонансе, когда частота возмущающих моментов совпадает с какой-либо частотой главных свободных колебаний системы. С удалением частоты возмущающих моментов от данной частоты свободных колебаний величина амплитуд быстро убывает, достигая некоторой малой постоянной величины. При последующем приближении частоты возмущающих моментов к соседним частотам 213
главных свободных колебаний явление резонанса повторяется. Частота резонансных колебаний практически совпадает с частотой свободных колебаний [36].
При электрическом торможении величина и характер изменения нагрузок механической передачи мотор-колеса зависят от тормозных характеристик. При этом режиме также возможно возникновение резонанса свободных и вынужденных колебаний. Однако вследствие кратковременности тормозных режимов длительная работа в резонансной зоне практически исключается, тогда как в режиме тяги принципиально возможна достаточно длительная работа при скорости вращения электродвигателя, соответствующей резонансной зоне. ’
Чтобы избежать этого, определяют тс диапазоны скорости вращения электродвигателя, при которых возможен резонанс свободных и вынужденных колебаний в крутильной системе механической передачи мотор-колеса, и принимают меры к удалению резонансных зон со значительными динамическими моментами за пределы рабочих значений скорости вращения электродвигателя.
Безусловно должно быть исключено явление установившегося резонанса при относительно больших скоростях вращения электродвигателя, соответствующих таким скоростям транспортной машины, движение с которыми может осуществляться достаточно длительное время. Проход через резонанс при меныпих скоростях вращения электродвигателя представляет меньшую опасность по той причине, что длительное нагружение механической передачи значительными динамическими моментами становится менее вероятным.
Удаление резонансных зон применительно к механической передаче мотор-колеса может осуществляться варьированием элементов крутильной системы, а именно изменением моментов инерции масс и податливости связей. Известно, что увеличение момента инерции масс и податливости связей снижает частоту свободных колебаний, а их уменьшение повышает эту частоту. Соответствующим выбором элементов крутильной системы можно сместить резонансную зону в область весьма малых скоростей вращения электродвигателя, работа с которыми маловероятна, или в сторону больших скоростей вращения, работа с которыми в эксплуатации практически исключена.
Однако следует учитывать, что при большом передаточном числе редуктора податливость системы в целом определяет в основном податливость шины. В этом случае существенно изменить податливость системы за счет изменения параметров деталей механизма сочленения электродвигателя с редуктором или редуктора практически невозможно.
Выбор параметров крутильной системы мотор-колеса должен исключить установившийся резонанс при достаточно высоких скоростях транспортц^й машины. Однако при пуске, разгоне и 214 • ,
электрическом торможении механическая подача может проходить через резонансные зоны вследствие изменения частоты возмущающих моментов в зависимости от скорости вращения электродвигателя. Проход через резонанс сопровождается динамическими процессами, отличающимися от процессов при установившемся резонансе.
Наибольшие амплитуды момента при проходе через резонанс имеют место не при совпадении частот свободных и вынужденных колебаний, а несколько позже. Если скорость вращения электродвигателя растет, то максимум амплитуд смещается в сторону больших частот, а если убывает, то в сторону меньших частот. Наибольшие амплитуды при этом меньше, чем в случае установившегося резонанса. Смещение и снижение амплитуд проявляется тем сильнее, чем быстрее изменяется частота вынужденных колебаний.
Экспериментальные исследования нагрузочных режимов автомобильных трансмиссий 19, 33], а также механических передач колесных машин, имеющих привод колес от электродвигателя, показывают, что при буксовании ведущих колес на деформируемом грунте динамические моменты в механической передаче могут достигать значительных величин.
Динамические процессы в механической передаче мотор-колеса, возникающие при движении машины с пробуксовкой или при буксовании без поступательного движения, носят характер автоколебаний. Их основной причиной является изменение момента сцепления Мсц (в месте контакта колеса с грунтом) в зависимости от скорости буксования. Непостоянство величины Мсц объясняется тем, что коэффициент сцепления <ргч колес с- грунтом зависит от окружной скорости буксующего колеса. Кроме того, буксование колеса, не имеющего поступательного движения, приводит к изменению характеристик грунта в месте контакта с колесом, что также сказывается на величине коэффициента ср6£{.
Автоколебания представляют собой установившийся процесс с постоянными амплитудами и частотой. Для осуществления такого процесса в крутильной системе необходимо наличие следующих факторов: колебательного контура; источника энергии; обратной связи.
Источник энергии (двигатель-генератор в системе электропривода колес) компенсирует имеющиеся в крутильной системе потери на трение. Функции обратной связи заключаются в обеспечении необходимого взаимодействия источника энергии с колебательным контуром. В период развития процесса обратная связь обусловливает увеличение амплитуды, а после установления колебаний удерживает ее значение на постоянном уровне.
Роль обратной связи, обеспечивающей подвод энергии в систему в количествах, необходимых для компенсации потерь, которые обусловлены действующими сопротивлениями, играет
215
переменный момент сцепления Мсц в контакте колеса с поверхностью качения. Нелинейность функции М,ц (пк) является существенной, т. е. она не может быть заменена линейной функцией [9, 11] без принципиального искажения результатов анализа автоколебательного процесса в механической передаче транспортной’ машины.
Особенность автоколебательного процесса состоит в многократном действии динамических нагрузок сравнительно высокого уровня. Интенсивное накопление усталостных явлений, сопровождающее автоколебания, обусловливает необходимость учета этих нагрузок при расчетах на выносливость.
Экспериментальные исследования, проведенные применительно к трансмиссиям автомобилей, показывают, что значение амплитуд динамических моментов при автоколебаниях составляет (0,3— 0,6) Мец, а в отдельных случаях превышает Л4 ч 19, 231. Это зависит от соотношений момента приводного двигателя и момента Мсц при движении по поверхности с низкой несущей способностью. Частота автоколебаний близка к одной из частот собственных колебаний системы. Колебания нагрузки распространяются на все упругие связи крутильной системы трансмиссии автомобиля.
Есть основания считать, что эти закономерности сохраняются и для динамических процессов в механической передаче мотор-колес при автоколебаниях.
ЦЕЛЕСООБРАЗНЫЙ ОБЪЕМ РАСЧЕТОВ ДИНАМИЧЕСКИХ НАГРУЗОК
ПРИ ПРОЕКТИРОВАНИИ МОТОР-КОЛЕСА
Аналитическое определение динамических нагрузок в передачах колесных машин связано, как правило, с применением приближенных методов, которые, однако, требуют большого объема вычислений. В последние годы при расчетах динамических нагрузок характерно стремление к уменьшению допущений, что становится возможным в случае применения электронных вычислительных, в частности аналоговых, машин. Это позволяет исследовать многомассовые крутильные системы с учетом реально действующих закономерностей. Например, можно избежать упрощений, касающихся линеаризации нелинейных зависимостей и сокращения числа сосредоточенных масс и связей исследуемых систем.
Вместе с тем для единичных расчетов, связанных с проектированием механических передач мотор-колес, аналитические методы определения динамических нагрузок сохраняют практическое значение с целью оценки уровня и опасности динамических нагрузок для мотор-колеса данного типа.
Наибольшего уровня динамические нагрузки могут достигать при установившемся резонансе свободных и вынужденных колебаний. Выше указывалось, что выбор параметров крутильной си-♦* •
216
стемы мотор-колеса должен исключать установившимся резонанс при относительно высоких скоростях транспортной машины. Для выполнения этого требования необходимо рассчитать частоты собственных крутильных колебаний системы и убедиться, что они не соответствуют рабочему диапазону скорости вращения электродвигателя; в противоположном случае необходимо изменить соответствующие параметры крутильной системы.
Амплитуды динамических нагрузок в механической передаче при проходе через резонанс меньше, чем при установившемся резонансе. Аналитическое определение этих амплитуд возможно в том случае, когда известна величина работы трения в системе за одно колебание при установившемся резонансе с некоторой частотой. Теоретическое определение этой величины, особенно для шины, связано с весьма большими трудностями, поэтому для проектируемых мотор-колес расчет динамических нагрузок при проходе через резонанс не выполняют. После изготовления образца эти нагрузки могут быть определены опытным путем.
При значительном износе деталей механической передачи мотор-колеса наибольших величин среди динамических нагрузок всех видов могут достигать динамические ударные нагрузки, которые можно определить аналитически. Должны быть определены также динамические нагрузки в передаче, соответствующие наибольшему моменту электродвигателя.
При автоколебательном процессе, возникающем при буксовании мотор-колеса, зависимость Мсц (пк) имеет принципиально нелинейный характер, поэтому и уравнения, описывающие движение в системах с такой обратной связью, будут нелинейными. Аналитический расчет нагрузок при этом режиме 123, 33] отличается большой трудоемкостью. Кроме того, амплитуды этих нагрузок лишь в отдельных случаях превосходят момент по сцеплению. Поэтому расчет динамических нагрузок для этого режима на первом этапе проектирования мотор-колеса можно не выполнять.
Необходимость расчета инерционных нагрузок в передаче при торможении механическим тормозом должна быть оценена в зависимости от расположения в кинематической схеме передачи детали, связанной с тормозным механизмом, и от возможности быстрого блокирования колеса.
Найденное аналитическим путем максимальное значение динамического момента принимают в качестве расчетного при выполнении расчета шестерен по сопротивляемости зубьев поломкам и смятию рабочих поверхностей и валов на прочность. В процессе расчета напряжения, возникающие при действии расчетного динамического момента, сравнивают с предельными, полученными из зависимости предельных напряжений от числа циклов нагружения для стали определенной марки 137]. В таком случае предельные значения напряжений при изгибе и контактных напряжений
217
берут для ограниченного числа циклов нагружения 2 • 104ч-6 • 105).
При расчете валов напряжения от действия расчетного момента
сравнивают с напряжениями, допустимыми по ограниченному пределу выносливости. При расчете подшипников по максималь
ному динамическому моменту определяют остаточные деформации.
ЭКВИВАЛЕНТНАЯ СХЕМА МОТОР-КОЛЕСА
Для расчета динамических нагрузок механической передачи полную крутильную систему мотор-колеса заменяют эквивалентной схемой, которую получают уменьшением числа сосредоточенных масс и упругих связей полной системы, а также рядом других упрощений, в частности, линеаризацией податливостей. Эквивалентная схема не может быть единой для всех случаев. Она изменяется в зависимости от целей и средств исследования. При составлении эквивалентной схемы учитывают моменты инерции и податливости элементов мотор-колеса, а также внешние по отношению к крутильной системе мотор-колеса факторы, влияющие на характер и величину динамических нагрузок механической передачи.
К таким факторам принадлежит масса транспортной машины и податливость системы подвески мотор-колеса. Масса машины наряду с моментами инерции элементов мотор-колеса определяет инерционные свойства крутильной системы и влияет на величину приложенного к колесу момента сопротивления. В некоторых случаях необходимо также учитывать упруго-пластические свойства опорной поверхности.
Массу транспортной машины (отнесенную к числу мотор-колес), движущуюся поступательно, заменяют имеющей вращательное движение эквивалентной массой, которую вводят в эквивалентную схему мотор-колеса.
Нагрузка, приходящаяся на одно колесо, при известных значениях коэффициента общего сопротивления движению ф и коэффициента сцепления позволяет определить момент сопротивления на колесе и момент сцепления колеса с опорной поверхностью.
Податливость системы подвески учитывают введением в эквивалентную схему связи с соответствующей величиной податливости. Аналогично при необходимости учитывают упруго-пластические свойства опорной поверхности.
Параметры двигатель-генератора и системы регулирования электропривода наряду с электромеханическими характеристиками электродвигателя определяют момент последнего при различных режимах работы мотор-колеса. Момент электродвигателя является одной из действующих сил, приложенных к крутильной системе мотор-колеса.
218
* Для составления эквивалентной схемы мотор-колеса необхо-
димо определить моменты инерции его элементов, входящих в эквивалентную схему в качестве сосредоточенных масс, а также податливости всех валов и соединений механической передачи, по
которым рассчитывают соответствующие параметры эквивалентной схемы. Крутильную систему мотор-колеса полагают линейной.
При аналитическом определении динамических нагрузок механической передачи мотор-колес следует использовать двухмассовую или трехмассовую эквивалентную схему. Для составления эквивалентной схемы необходимо привести моменты инерции сосредоточенных масс и податливостей связей к основной части эквивалентной схемы. За основную часть целесообразно принять якорь электродвигателя и участок, включающий его вал.
Для приведения необходимо определить передаточные числа
для различных связей (входящих в эквивалентную
схему), равные отношению скорости вращения электродвигателя Пд к числу оборотов приводимого элемента пэ, расположенного после ступени зацепления. При выборе за основную часть эквивалентной схемы элемента с наибольшей угловой скоростью
приведение выполняют по формулам
п г? ;2
~уГ И Ек_ к-|*1 — Ск, к-f-l ,
где (I и EKf к+1 — соответственно приведенные значения момента инерции сосредоточенной массы элемента и податливости связи между элементами.
Таким образом, эквивалентная схема с приведенными моментами инерции включает только элементы, вращающиеся со скоростью вала электродвигателя. При этом полученная система обладает таким же запасом кинетической энергии, как и исходная система.
Выбор двухмассовой или трехмассовой эквивалентной схемы в значительной степени зависит от величины передаточного числа редуктора мотор-колеса. Из формул приведения следует, что с увеличением передаточного числа все большее значение в эквивалентной схеме приобретают момент инерции якоря (ротора) электродвигателя и податливость связей, расположенных за редуктором (тангенциальная податливость шипы и податливость • при изгибе системы подвески мотор-колеса), и все меньшую роль играют параметры всех остальных элементов крутильной системы мотор-колеса, которые на несколько порядков меньше значений двух указанных параметров. При выборе эквивалентной схемы следует рассмотреть двухмассовый и трехмассовый вариант и в зависимости от соотношений между величинами приведенных моментов инерции и податливости связей решить вопрос об исполь
219
зовании того или другого варианта эквивалентной схемы при расчетах.
Моменты инерции сосредоточенных масс могут быть определены аналитическим или экспериментальным способом. НВ случае несложных поперечных сечений деталей, допускающих их разделение на геометрически простые тела с известными моментами инерции, применяют аналитический способ. При сложной конфигурации детали этот способ применим в том случае, когда не требуется большая точность в определении моментов инерции и возможна приближенная замена объема данной детали геометрически простыми элементами. В обоих случаях подсчитывают моменты инерции каждого из элементов, на которые разделена деталь. Суммой этих моментов и определяется момент .инерции сосредоточенной массы.
Моменты инерции валов вычисляют в пределах участков с сосредоточенными массами. Подсчет выполняют по упрощенному контуру вала. Момент инерции вала разносится поровну на сосредоточенные массы, расположенные по концам участка.
Точный расчет моментов инерции деталей, имеющих сложную форму поперечного сечения, весьма трудоемок. В то же время экспериментальный метод определения моментов инерции позволяет получить эти величины сравнительно быстро и с достаточной точностью. Поэтому, если есть изготовленная деталь, то следует предпочесть экспериментальный способ определения момента инерции. Два наиболее простых способа, получивших широкое распространение на практике (равноускоренного раскручивания и бифилярного подвеса), описаны в литературе (32] и [36].
Поступательно движущуюся массу т транспортной машины необходимо заменить эквивалентной, имеющей только вращательное движение. Такую замену и приведение эквивалентной массы к валу электродвигателя выполняют на основе равенства кинетической энергии исходной и приведенной системы. Баланс кинетической энергии в этом случае можно записать
2 а, 2
—и— = -к- или mKv = vflcoa,
где тк — масса машины, отнесенная к числу мотор-колес, движущаяся поступательно, в кГ-сек2,/см;
v — скорость поступательного движения в м сек;
— эквивалентный приведенный момент инерции части массы автомобиля в кГ -см сек?;
— угловая скорость вала электродвигателя в рад сек.
Используя формулы
___ 2лг«л^ t__60 ip
и
"бб"
220
где гк в см, а также соотношение тк = , где GK — нагрузка
в кГ, приходящаяся на.одно мотор-колесо, a g = 981 см!сек\ получим
Л G кг и г
__ л Л л л = ^2 ~ пт -2 ’
£‘р 98н;
Для численного определения параметров эквивалентной схемы мотор-колеса целесообразно вычертить его упрощенный эскиз с указанием всех основных размеров, наметить вдоль осей валов те сечения, где в эквивалентной схеме будут расположены сосредоточенные массы, причем намеченные сечения обозначить порядковыми номерами соответствующих масс. Массы деталей редуктора принято обозначать общим номером с добавлением буквы. Контуры валов и сосредоточенных масс упрощают, причем каждый участок вала или элемент массы определенного диаметра нумеруют отдельно. Такой эскиз удобен при расчете моментов инерции сосредоточенных масс и податливости участка вала между этими массами. Расчет моментов инерции следует выполнять с использованием справочных формул. Наиболее подробная сводка этих формул с графиками и номограммами приведена в литературе [36].
Параметры эквивалентной схемы целесообразно рассчитывать в табличной форме, где указывать присвоенные номера и геометрические размеры элементов, абсолютные величины моментов инерции сосредоточенных масс и податливости валов, передаточные числа 1К для каждого участка относительно основного участка и квадрат величины /«. Затем вычисляют параметры приведенной системы, которая служит основой всего дальнейшего расчета.
После расчета динамических нагрузок для эквивалентной схемы их следует пересчитать применительно к исходной крутильной системе мотор-колеса. Для этого расчетные динамические нагрузки, приведенные к валу электродвигателя, умножают на передаточные числа iK = причем величину пэ берут для того элемента системы, для которого определяют динамический момент. Найденные величины моментов используют при расчете детали по динамическим нагрузкам.
В системах, состоящих из р сосредоточенных масс, возможно р — 1 собственных колебаний, отличающихся друг от друга угловой частотой и связанной с ней формой колебаний [12]. Экспериментальные исследования систем привода колес транспортных машин с тяговыми электродвигателями, по структуре аналогичных мотор-колесу, показали, чтб подобные системы имеют лишь две частоты собственных крутильных колебаний с достаточно большими амплитудами [21 ]. Это подтверждает возможность использования трехмассовой, а в ряде случаев и двухмассовой эквивалентной схемы.
221
Схему можно упростить за счет объединения нескольких сосредоточенных масс с малой податливостью связей между ними в одну, момент инерции которой равен сумме моментов инерции объединенных масс, а также за счет исключения масс, величины которых незначительны.
Податливости участков при объединении сосредоточенных масс определяют с учетом следующих соображении: если участки следуют друг за другом последовательно, то их податливости скла-
дывают; если участки имеют общую точку, то эквивалентная податливость объединенного участка
При расчете динамических нагрузок системы с редуктором принято условно считать шестерни редуктора абсолютно жесткими.
Рассмотрим пример составления эквивалентной схемы для мотор-колеса, приведенного на рис. 20, редуктор которого изображен на рис. 22. Крутильную систему этого мотор-колеса можно разбить на пять участков, которым соответствуют шесть сосредоточенных масс, имеющих следующие обозначения на схеме рис. 87:
— абсолютное значение момента инерции ротора тягового электродвигателя и половины торсионного вала; 0х = 63,15 кГ X X см-сек2;
02 — абсолютное значение момента инерции деталей механической передачи, непосредственно связанных с торсионным валом (солнечной шестерни), и половины торсионного вала; 02 == = 0,0179 кГ-см-сек2;
03а — 03е — абсолютные значения моментов инерции вращающихся деталей редуктора (03а — двухвенечные сателлиты; 03fc — водило двухвенечных сателлитов; 0^ — коронная шестерня передачи ЗК и солнечная шестерня планетарного ряда; 03J — сателлиты ряда; 03е— водило ряда); 03а = 0,685; 0ЗЪ = 3,064; 03с = = 2,63; 03</ = 0,84; 0зе = 30,4 кГ•см • сек2;
04 — абсолютное значение моментов инерции вращающихся деталей подшипников колеса, ступицы и обода; 04 = 210,4 кГ • см • сек2;
05 — абсолютное значение момента инерции шины; 0б = = 7830 кГ - см' сек2;
222 *^’*х*? •
06 — абсолютное значение эквивалентного момента инерции массы транспортной машины, движущейся поступательно; 0е = = 72 000 кГ‘См- сек2;
е12 — податливость части вала ротора электродвигателя и торсионного вала; е12 = 0,413-10~5 рад!кГ-см;
е23 — суммарная податливость валов редуктора; е23 = 0,503 X X 10"5 рад!кГ-см;
е4б— тангенциальная податливость шины; е45 — 1,52 X X 10"2 рад!кГ'См.
Механизм сцепления мотор-колеса включается до появления момента па валу электродвигателя и поэтому в крутильной системе не учтен. Мотор-колесо крепится непосредственно на раме машины, вследствие чего в крутильную систему не входит податливость при изгибе системы подвески мотор-колеса. Податливость обода, ступицы и некоторых других деталей мотор-колеса не учитывают ввиду их малой величины.
К массе вращающихся деталей редуктора, момент инерции которых обозначен общим индексом 03, после приведения к валу электродвигателя можно присоединить массу ведущей солнечной шестерни редуктора и половины торсионного вала. Приведение моментов инерции каждой из этих деталей осуществляется с учетом передаточного числа iK. Податливостью соединений между этими деталями можно пренебречь. Эти массы могут быть объединены в одну, называемую массой механической передачи. Массы с моментами инерции 04 и 05 после приведения можно объединить в одну, называемую массой колеса.
Если приведенный момент инерции массы механической передачи незначителен по сравнению с моментом инерции якоря электродвигателя и приведенным моментом инерции массы колеса, то им следует пренебречь. В противоположном случае приведенные моменты инерции механической передачи и колеса необходимо объединить. В результате этих преобразований получится трехмассовая эквивалентная схема крутильной системы мотор-колеса, которая изображена на рис. 88, а. Здесь:
Од — момент инерции ротора электродвигателя; Од = 63,5 кГ х X см сек2;
О2 — приведенный момент инерции массы механической передачи и массы колеса; О2 — 0,429 кГ-см-сек2;
О3 — приведенный момент инерции части эквивалентной массы транспортной машины, движущейся поступательно; 03 = 2,4 кГ X X см - сек2;
Е12 — податливость вала ротора тягового электродвигателя и торсионного вала; Е12 — 0,413• 10“5 рад!кГ-см;
£23 — приведенная тангенциальная податливость шины; Е.,3 — = 1,52 • 10" 2 рад!кГ -см.
В трехмассовой эквивалентной схеме масса с приведенным моментом инерции Од существенно меньше масс с моментами инер
ции Оj и Од, а податливость первого участка £12 на два порядка ниже податливости второго участка £23. Подобное соотношение объясняется значительным передаточным числом редуктора i = = 175,6. Поэтому для данного мотор-колеса целесообразно принять двухмассовую эквивалентную схему, изображенную на рис. 88. Здесь:
Рис. 88. Эквивалентные схемы крутильной системы мотор-колеса:
а — трехмассовая; 6 — двухмассовая
— момент инерции ротора электродвигателя и приведенные моменты инерции механической передачи и колеса; = 63,58 кГх X см -сек2;
— приведенный момент инерции части эквивалентной массы транспортной машины; 02 = 2,4 кГ см сек2;
£19 — приведенная тангенциальная податливость шины; £г, = = 1,52 10-2 рад!кГ см.
РАСЧЕТ ЧАСТОТЫ СОБСТВЕННЫХ КРУТИЛЬНЫХ КОЛЕБАНИЙ
При расчете собственных колебаний крутильной системы мотор-колеса может быть сделано допущение, что система обладает абсолютной упругостью, т. е. не учитываются силы трения, возникающие в соединениях при колебательных процессах.
Распространенным методом расчета собственных крутильных колебаний в системе с наложенными связями является применение уравнений Лагранжа. Для получения дифференциальных уравнений движения при помощи уравнений Лагранжа необходимо составить выражения для кинетической и потенциальной энергии системы в функции выбранных координат, используя трехмассовую эквивалентную 4$ему.
224 • * ‘ <.
Кинетическая энергия трехмассовой системы
к= д_ °2^2 д_
Л 2 ‘ 2 2 *
Потенциальная энергия этой системы
п = (<Р1 — Ф;)3 __ (Ф-г — Фз)2 2£12 2£23
Уравнения собственных крутильных колебаний системы получают путем применения уравнений Лагранжа, записанных для данного случая в виде [10]
d дК . дП = п
dt ’ дцк "Г дук ~~ ’
причем индекс к может принимать значения 1; 2 и 3.
После определения производных от функций кинетической и потенциальной энергии и алгебраических преобразований ди([ ренциальные уравнения движения сосредоточенных масс иметь вид
оудут
(46)
Полагая, что движение трехмассовой системы, выведенной из состояния покоя, является колебательным, найдем решение системы уравнений (46) в виде
<Pi = sin (]/Д2 ^+|2);
Ф'з = <х2 sin (КД2 i + £г);
Фз = а3 sin (КД2 t +U,
где г — индекс свободного колебания (г = 1; 2);
Ф — угловое отклонение массы от среднего положения в рпЭ;
а — амплитуда колебаний массы в рад',
— угловая- частота собственного колебания в рад!сект, |2 — начальная фаза z-ro собственного колебания в рад\ t —- время в сек.
Угловая частота собственных колебаний ]/ Д2 пропорциональна частоте /ог (в гц) и связана с ней соотношением
_ /Д2
Ог ~ 2л *
15 А. И. Яковлев
(47)
225
Форма собственного колебания дает вполне определенные для каждой угловой частоты ) Дг соотношения между амплитудами колебаний масс системы аь а2 и сс3.
Характерным различием между формами собственных колебаний является число узловых точек в системе, т. е. таких сечений валов, которые при данной угловой частоте находятся в покое; для них амплитуда собственных крутильных колебаний равна нулю. Форму колебания, имеющую одну узловую точку, называют одноузловой, две узловые точки — двухузловой и т. д. Угловая частота одноузловых колебаний обозначена } Дь двухузловых колебаний — Д2.
Подставляя в систему дифференциальных уравнений (46) значения <5р!, <р2 и <р3 и их вторых производных, получим после сокращения на общий множитель sin (] Дг t |- £г) следующую систему уравнений относительно амплитуд колебаний:
Составив определитель D (Д2) из коэффициентов при значениях а, раскрыв его по неизвестному Д2 и приравняв нулю, после необходимых преобразований получим частотное уравнение
2 г
flt -г А* f'lafli'fl*
(48)
Это уравнение может быть представлено в виде
Дг-рЛг 4-7 = 0.
Уравнение данного вида имеет два положительных действи-
тельных корня, если q
0, и равных Aj 2 =
— q . После подстановки значений р и q получаем выра-
жение для определения частот собственных крутильных колебаний трехмассовой системы
226
Подставив в это уравнение численные значения параметров эквивалентной схемы, можем определить угловые частоты J ЛА и У До и, пользуясь формулой (47), частоты /01 и /0.2-
Для двухмассовой системы частота собственных крутильных колебаний
Численное значение угловой частоты собственных колебаний для двухмассовой схемы (рис. 88, б)
’ V 1,52-10"2 63,58 -2,4 ’
и, в соответствии с формулой (47), f0 = =0,85 1/сек или = 51 \/мин.
i V
Поскольку максимальная скорость вращения электродвигателя мотор-колеса (см. рис. 20) составляет 3900 об! мин, нет оснований опасаться установившегося резонанса в рабочем диапазоне скоростей вращения.
ЗАВИСИМОСТЬ ЧАСТОТ СОБСТВЕННЫХ КРУТИЛЬНЫХ
КОЛЕБАНИЙ ОТ МОМЕНТОВ ИНЕРЦИИ И ПОДАТЛИВОСТЕЙ СИСТЕМЫ
Исследование влияния на значение частот собственных крутильных колебаний величин масс и податливостей системы представляет практический интерес, поскольку оно позволяет наметить при проектировании мотор-колеса определенные соотношения между величинами масс и податливостей с тем, чтобы обеспечить достаточную удаленность резонансных зон от характерных режимов работы механической передачи.
Исследуем влияние изменения масс и податливостей трехмассовой системы на частоты собственных крутильных колебаний, пользуясь уравнением (48). Введем следующие обозначения:
ft., Е>-> а
О, - Т’; ~ т»; — в®’
Преобразуем уравнение (48) с учетом принятых обозначений:
Это квадратное уравнение имеет следующее решение:
15*
227
Подставляя в выражение (50) различные значения у2, у3, Р23 и £12, можно найти соответствующие этим значениям параметров величины угловых частот.
Ниже приведены графики, которые иллюстрируют качественную сторону влияния параметров эквивалентной схемы на угловые частоты собственных крутильных колебаний [211.
График рис. 89, а иллюстрирует характер изменения угловых частот собственных крутильных колебаний при изменении момента
Рис. 89. Зависимости угловых частот собственных крутильных колебаний от параметров эквивалентной схемы:
а — от момента инерции второй массы; б — от момента инерции третьей массы; в — от податливости первого участка; г — от податливости второго участка
инерции второй массы. Из графика следует, что увеличение отношения у 2 вызывает уменьшение угловой частоты одноузловых |/ A j и особенно двухузловых Д2 колебаний на первом и втором участке. График рис. 89, б показывает, что изменение отношения у3 практически не оказывает влияния на величины угловых частот собственных крутильных колебаний. Из графика рис. 89, в следует, что увеличение податливости первого участка Е12 способствует уменьшению обеих угловых частот | Aj и р Д2. Изменение величины £23 вызывает заметное изменение угловой частоты только одноузловых крутильных колебаний. С возрастанием податливости этого участка частота одноузловых колебаний ] Дг уменьшается (рис. 89, г).
РАСЧЕТ ДИНАМИЧЕСКИХ НАГРУЗОК ПРИ НАЛИЧИИ ВНЕШНИХ СИЛ, ПРИЛОЖЕННЫХ К МАССАМ КРУТИЛЬНОЙ СИСТЕМЫ
При расчете динамических моментов в случае приложения к механической передаче внешних сил целесообразно использовать двухмассовую эквивалентную схему, что позволяет существенно 228 мн.
упростить расчеты при сохранении достаточной для практических целей точности.
Движение двухмассовой системы при наличии внешних сил, приложенных к сосредоточенным массам, описывают следующие дифференциальные уравнения [29]:
♦л + = М1;
^12
а * . <₽1- <₽2 Л Л
О2ф2 4- 41 = М>,
^12
<
где М± — внешний момент, приложенный к первой массе и равный моменту тягового электродвигателя;
М.2 — внешний момент, приложенный ко второй массе и равный приведенной к валу якоря сумме моментов сил сопротивления движению, отнесенной к числу мотор-колес;
Е12 — суммарная податливость крутильной системы мотор-колеса.
Изменение динамических моментов в упругой связи системы в пределах действия закона Гука определяется изменением разности углов поворота смежных масс:
Для определения динамических моментов в упругих связях необходимо и достаточно найти решение системы уравнений (51) относительно разности (<рг — <р2). Введем следующие обозначения:
Для решения уравнений (51) вычтем из первого уравнения второе и с учетом принятых обозначений получим
Ч + СцЧ = Q-
(52)
Общим решением этого уравнения будет сумма решений однородного уравнения без правой части и частного решения. Решение однородного уравнения имеет тот же вид и те же обозначения, как и для системы (46):
qK = sin (| \г t + |г).
Частное решение уравнения (52) в предположении, что Q не зависит от времени,
(°) _ Q Eri (Мх#2 — МА)
4 ^1 - +
229
Общее решение уравнения (52) будет иметь вид
q = a sin (] A i 4- £) 4-
(53)
где V А = = у
Постоянные а и £ при разгоне с места.
01 4 02
^i20102 '
находят по начальным условиям движения
При t — 0 значения — 0, <р2 = 0, 44 =
ппд
— ““зо- и Ф2 — 0 или, с учетом принятых обозначений,
«
<7 = 0 и q — В период устранения окружного зазора
Л41 = Mq, т. е. моменту тягового электродвигателя. Момент сил
сопротивления движению для случая трогания с места может быть принят равным нулю, т. е. М2 — 0, поскольку скорость <р2 — 0.
Подставляя в уравнения (53) начальные условия и учитывая принятые обозначения, после преобразований и упрощений получим
| Д cos £
Сделав подстановку и лучим
£ = arctg
I Д ^18
переходя к моменту упругих сил, по-
М
МдЪ
Д cos £
Момент Л112 имеет максимальное значение при sin (|, А/ £) — л
2
= 1, т. е. при I -=—:
уд
, ЛШ2
(54)
llklA
________С|Л7______
Ег2 ) Д cos £
После исключения cos | получим
Эта формула показывает, что максимальное значение момента упругих сил является функцией угловой скорости якоря электродвигателя. Пользоваться формулой можно при условии, что движение колеса но опорной поверхности происходит без проскальзывания.
/Динамический момент в механической передаче мотор-колеса, эквивалентная схема которого дана на рис. 88, б, при максимальном моменте и номинальной частоте асинхронного двигателя, 230 Мх-
т. е. при условиях, наиболее благоприятных для развития динамических процессов, составляет
3440-2,4
66,0
318,32 j / 3440-2,4 \2
28,4• 1,522 10’4 \ 66,0 )
— 4060 кГ-см. = 40,6кГ-м,
т. е. существенно превышает момент, передаваемый от электродвигателя (34,4 кГ -м при Пд = 3032 об!мин).
РАСЧЕТ УДАРНЫХ НАГРУЗОК В МЕХАНИЧЕСКОЙ ПЕРЕДАЧЕ
Предпосылкой возникновения динамического удара в механической передаче мотор-колеса является наличие окружного зазора передачи. За время выборки зазора при пуске или электрическом торможении под воздействием электромагнитного момента происходит изменение скорости вращения якоря относительно скорости вращения деталей механической передачи. Последующее выравнивание этих скоростей после устранения окружного зазора сопровождается изменением за весьма короткое время кинетической энергии якоря Кя, что вызывает упругое закручивание соединений передачи, обусловливающее затухающий колебательный процесс с большой первой амплитудой.
Ударный момент Му, соответствующий первой амплитуде, можно рассматривать как сумму двух моментов [22]:
Л4у ^ду I Мк max» (Зо)
где ЛЦ,— момент электродвигателя, нагружающий механическую передачу мотор-колеса при ударе;
^кшах — момент в передаче, возникающий при изменении кинетической энергии якоря (максимальное значение).
Изменение кинетической энергии якоря за время устранения окружного зазора as и закручивания передачи на максимальный угол ^тах можно подсчитать по формуле
MdcpO-s “Ь
где Мдср и Мдср — средние моменты электродвигателя соответственно за время устранения зазора и закручивания передачи на угол (?тах.
Если принять, что в момент окончания устранения окружного зазора угловые скорости якоря и механической передачи выравниваются, и пренебречь механическими потерями в передаче, то найденное значение /Ся будет численно равно работе, затраченной на создание упругих деформаций в деталях передачи, т. е.
/ИЛра, + M’dcpq^ = , (56)
гДе Як — угол закручивания передачи, обусловленный изменением кинетической энергии якоря; при Мк тах Мд , угол <7тах.
231
Найдем формулу для расчета моментов Мк в механической передаче при пуске, заменяя крутильную систему мотор-колеса двухмассовой эквивалентной схемой. Если принять, что внутреннее трение (характеризуемое коэффициентом трения fт) в элементах крутильной системы мотор-колеса, обладающих демпфирующей способностью, подчиняется линейному закону и зависит лишь от скорости деформаций, то уравнения движения двухмассовой системы будут иметь следующий вид [291:
(57)
причем Мк — текущее значение момента, закручивания q.
Учтем, что <р] — <р2 = </, и обозначим fmp (^1 + ^2) „ . + ^2 __ *
соответствующее углу
М
Подставив эти обозначения в систему (57) и вычитая из первого уравнения второе, получим
Решение дифференциального уравнения (57) состоит из суммы двух слагаемых, причем первое слагаемое представляет собой решение однородного уравнения без правой части, а второе — частное решение уравнения (58).
Однородному уравнению
q -f- 2cq 4- А<? = О
удовлетворяют два вида решений — апериодическое и периодическое с затуханием. Первое решение (апериодическое) получается при с 1 А , второе — при с <Z I А . Практический интерес представляет только второй случай, поскольку он соответствует периодическому процессу со значительными амплитудами.
Если положить, что = р, причем р < 1, так как с < ] А, V А
то уравнение (58) преобразуется следующим образом:
? + 2₽J<A?+A9 = Q.
Решение этого уравнения имеет вид [291
ае & 1 д f
sin
(59)
(60)
Д ’
J
где а и с
232
произвольные постоянные интегрирования.
Тогда значение q из выражения (60)
? = а ]Л\ (1 — ₽2) ,a'coslKA(l—₽2)«+1
— аР)/Д е~е 1 А( Б1п[Кд(1 — Р‘Ь + £
(61)
Произвольные постоянные определяют исходя из начальных условий. Положим i = 0; q = 0; q = 0; после подстановки этих значений в выражение (61) получим
— р2 cos g — р sin g = 0.
Полагая р = cos g, получим g = arccos p. Из равенства (60) после подстановки начальных условий получим
Тогда решение уравнения (59) может быть выражено формулой
sin А (1
Поскольку cos g = р;
угол за-
кручивания вала
4- •Ог
sin (КАО
(62)
Максимальный угол закручивания вала, с учетом qK qmaK,
(63)
Если пренебречь демпфирующей способностью системы, то Р = 0 и g = и максимальное значение дтах можно определить
из выражения
(64)
Исключив из выражений (56) и (64) qK и приравняв их, получим формулу
тах^2^12 2Л4к
~~ cp^s г= 6,
233
из которой можно определить значение момента Л1ктах при пуске без учета демпфирующей способности системы.
Для мотор-колеса, эквивалентная схема которого изображена на рис. 88, б, ударный момент при as = 0,4 составляет М'д р — — 19,5 кГм и Мд ср = 18 кГм (отрицательное решение не рассматривается):
irLK max —
1S 2.4-1.52-10~21,52-10-а)а + 2,47Г52.10~2-0.4-19 5-66
2,4 1,52• КГ2
= 138 кГм.
Ударный момент находят но формуле (55).
ЛИТЕРАТУРА
1. Андерс В. И. Параметры электрических машин электропередачи газотурбовозов на переменном токе. «Электротехника», 1965, № 1.
2. Б а р а н о в Е. Н. и др. Конструкция мотор-колеса с электроприводом для автомобильного пневмокатка. «Автомобильная промышленность», 1966, № 12.
3. Б а ш т а Т. М. Расчеты и конструкции самолетных гидравлических устройств. М., Оборонгиз, 1961.
4. Болдов Н. А., С т е п а н о в Л. Д. Теплоэлсктрический подвижной состав. М., «Транспорт», 1968.
5. Б у л г а к о в А. А. Частотное управление асинхронными электродвигателями. М., «Наука», 1966.
6, Б у р а л е в Ю. В., Выборнов В. Г., Г у щ о - М а л к о в Б. П., Яковлев А. И. Новые конструкции электромотор-колес. М., НИИНАвто-пром, 1967. (серия «Автомобилестроение»).
7. Виноградов Н. А., Г о р я и н.о в Ф. А., Сергеев П. С. Проектирование электрических машин. М.—Л., Госэнергоиздат, 1956.
8. Выборнов В. Г., Г у щ о - М а л к о в Б. П., Ку рз ель И. А., Яковлев А. И. Электромотор-колеса транспортных машин. НИИНЛвто-сельхозмаш, 1965.
9. Гатов Д. М. Исследование автоколебаний и трансмиссии автомобиля. «Машиностроение и металлообработка». Сб. статей, № 2, Минск, 1966.
10. Голубева О. В. Теоретическая механика. М., Физматгиз, 1961.
11. Гольд Б. В.,Фалькевич Б. С. Теория, конструирование и расчет автомобиля. Машгиз, М., 1957.
12. Д е н - Г а р т о г Дж. П. Механические колебания. М., Физматгиз, 1960.
13. Д ы м ш и ц И. И. Коробки передач. Машгиз, М. 1960.
14. Е ф р с м о в И. С., Яковлев А. И., Г ущо -Малков Б. ГТ. Электрический привод с автономным питанием на колесном безрельсовом транспорте. «Электричество», 1967, № 7.
15. Зотов А. В., Паращенко Р. Н., Каган С. И. Заявитель БелАЗ. Двухрядный дифференциальный колесный редуктор. «Изобретения. Промышленные образцы. Товарные знаки». Авторское свидетельство № 185216/815544 27. П от 24 января 1963 г. Класс В 62, 63С, 28, 1966, № 16.
16. Иоффе А. Б. Тяговые электрические машины. М.—Л., «Энергия», 1965.
235
17. Костенко М.П.,П иотровс км й Л. М. Электрические машины, ч. II, Изд. 2-е, М.—Л., «Энергия», 1965.
18. К р е й н е с М. А., Р о з о в с к и й М. С. Зубчатые механизмы. Изд-во МГУ, 1965.
19. К р ю к о в А. Д., X а р ч е и к о А. П. Выбор трансмиссий гусеничных и колесных машин. Машгиз, 1963.
20. Кудрявцев В. Н. Планетарные передачи. «Машиностроение», М.—Л., 1966.
21. Максимов А. Н. Результаты экспериментального определения нагрузок в деталях тяговой передачи с эластичными элементами вагона РВЗ-6. Сборник научных работ, вып. 41, ОНТИ, АКХ, 1966.
22. М а р к о в н и к о в В. Л. Автомобильные передачи на электрическом транспорте. М., Машгиз, 1949.
23. М о с к а л е в В. Н. Анализ максимальных динамических нагрузок в трансмиссии автомобиля. В сб. Труды НАМИ, вып. 45, 1962.
24. О р ж е в с к и й И. С. Автомобильные дисковые тормозы. НИИНАвтопром, М., 1966, (серия «Автомобилестроение»).
25. П е т р о в А. В. Планетарные и гидромеханические передачи колесных и гусеничных машин. М., «Машиностроение», 1966.
26. Петр усев и ч А. И. и др. Динамические нагрузки в зубчатых передачах с прямозубыми колесами. Изд-во АН СССР, М., 1965.
27. П е т р у ш о в В. А. Современные решения задач прикладной теории качения автомобильного движителя, сформулированных акад. Е. А. Чудаковым. В сб. Труды НАМИ, вып. 103, М„ ОНТИ НАхМИ, 1968.
28. П о г а р с к и й II. А. Универсальные трансмиссии пневмоколесных машин. М., «Машиностроение», 1965.
29. Поляков В. С., Барбаш И. Д. Муфты. М.—Л., Машгиз, 1960.
30. Прокопович А. В. Электрическое торможение газотурбовоза с электропередачей на переменном токе. В сб. МЭИ «Доклады научно-технической конференции». Секция электрификации и автоматизации промышленности и транспорта. М., 1967.
31. Прокофьев В. Н. Гидравлические передачи колесных и гусеничных машин. Воениздат, 1960.
32. Розенфельд В. Е., Чеботарев Е. В , Сидоров Н. Н., Болдов II. А. Основы электрической тяги. М., Госэнергоиздат, 1957.
33. Семенов В. J4., Армадеров Р. Г. Работа грузовых автомобилей в тяжелых дорожных условиях. М., «Автотранспорт», 1962.
34. Степанов А. Д. Теплоэлектрический привод транспортных машин. М., Машгиз, 1953.
35. Т к а ч е н к о В. П. Проектирование многосателлитных планетарных передач. Изд-во ХГУ, 1961.
36. Терских В. П. Расчеты крутильных колебаний силовых установок т. I, Л., Машгиз, 1953, 1954.
37. Ц и т о в и ч И. С. Расчеты по предельным состояниям валов, шестерен и подшипников автомобиля. Издание БПИ. Минск, I960.
38. Цитович И. С., В а в у л о В. А., X в а л ь Б. Н. и др Методика
проектирования и расчета зубчатых колес автомобилей и тракторов. Издание
БПИ, Минск, 1966.
236
39. Цитовмч И. С., Островер х ов И.Л. Расчет динамических нагрузок в трансмиссиях автомобилей. В сб. «Материалы II Всесоюзного совещания». Том I, М., ОНТИ НАМИ,. 1966.
40. Яковлев А. И. Электропривод автомобилей и автопоездов. М., «Машиностроение», 1966.
41. Яковлев А. И., Гущо-Малков Б. П., Выборнов В. Г. Вопросы кинематики и к. п. д. редукторов мотор-колес. В сб. Труды НАМИ, вып. 101. М., ОНТИ НАМИ, 1968.
42. Я к о в л е в А. И., Б у р а л е в Ю. В. Исследование некоторых параметров односкоростных и двухскоростных мотор-колес. В сб. Труды НАМИ, вып. 103, М.» ОНТИ НАМИ, 1968.
43. Schenk F., Renold R., Z urn st eg V. Die Kraftubertragung fur die dieselelektrische Grossbaufahrung Berliet tx — 40. Brown Boveri Mittei-lungen, 1965, Sept. (Okt).
44. S 1 a b i a k W., L о w s о n L. G., Borland R. P., P u c h у C. G. Electric transmission with individual wheel drive proves practical for military truckes. SAE Journal, October, 1966.
45. H о p k i n s R. E., К i r t 1 a n d J. A. Turbineelectric vehicle drive system. Diesel and gas turbine progress, 33, 1967, March.
СОДЕРЖАНИЕ
Предисловие.................................................... 3
1. Общая характеристика мотор-колес и основы их расчета ... 5
Область применения мотор-колес .................................. 5
Основные группы мотор-колес.............................. 7
Схема расчета мотор-колеса ... 8
II. Компоновка и конструкция мотор-колес .............. 14
Виды компоновки мотор-колес .................... .... 14
Установка электродвигателей и опорных подшипников колеса 20
Сочленение тягового электродвигателя с редуктором...... 33
Конструкция редукторов .................................... 35
Конструкция механизмов переключения передач и механизмов сцепления мотор-колес . . 43
Уплотнения мотор-колес 47
^Конструкция механических тормозов мотор-колес 51
Охлаждение основных элементов мотор-колеса 57
Шины мотор-колес........................... . . 66
Ободья мотор-колес ... 68
Крепление мотор-колеса к раме транспортной машины............ 70
III. Тягово-динамический расчет мотор-колеса 75
Задачи тягово-динамического расчета............................. 75
Методика определения передаточного числа редуктора ... 76
Расчет тягово-скоростных показателей мотор-колеса при заданных электромеханических характеристиках электродвигателя.......... 91
Расчет динамических характеристик................................ 117
Определение параметров электродвигателя по заданным показателям транспортной машины и мотор-колеса .......................... 123
Тормозные характеристики . . ... 140
IV. Образование кинематических схем редукторов мотор-колес . 150
Анализ ограничений при использовании простых передач в редукторах мотор-колес............................................ 150
Основные зависимости и свойства простых передач, применяемых в редукторах мотор-колес..................................... 153
Сравнительная оценка простых передач, применяемых в редукторах мотор-колес ................................................... 172
Проверка планетарной передачи по условиям сборки . . 174
238
Ж
9
Образование кинематической схемы редуктора односкоростного мотор-колеса.......................................... - 177
Образование кинематической схемы редуктора двухскоростного мотор-колеса................................................ 189
Проверка наличия циркулирующей мощности в редукторе мотор-колеса ..................................................... 200
V. Особенности расчета механической передачи мотор-колеса .... 203
Особенности нагрузочных режимов механической передачи . . - 203
Выбор расчетных нагрузок для расчета механической передачи на выносливость................................................ 205
Характер динамических процессов в механической передаче при различных режимах движения ................................. 211
Целесообразный объем расчетов динамических нагрузок при проектировании мотор-колеса..................................... 216
Эквивалентная схема мотор-колеса ........................... 218
Расчет частоты собственных крутильных колебаний ............ 224
Зависимость частот собственных крутильных колебаний от моментов инерции и податливостей системы............................. 227
Расчет динамических нагрузок при наличии внешних сил, приложенных к массам крутильной системы.......................... 228
Расчет ударных нагрузок в механической передаче..............231
Литература ........................................................235