/










Author: Назаренко А.И.
Tags: математика алгоритмы монография эвм компьютерные технологии
ISBN: 978-5-9710-4636-3
Year: 2018


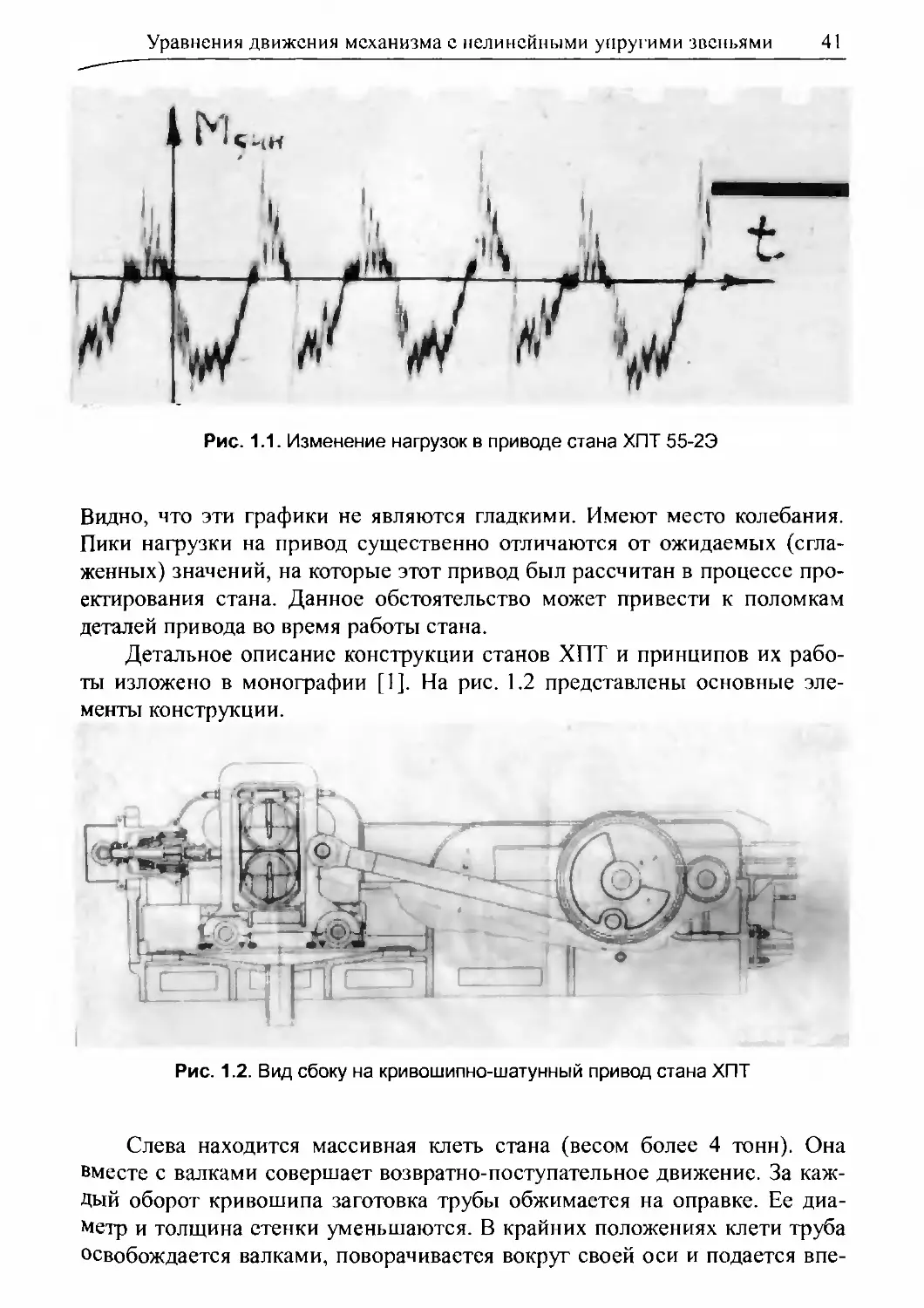
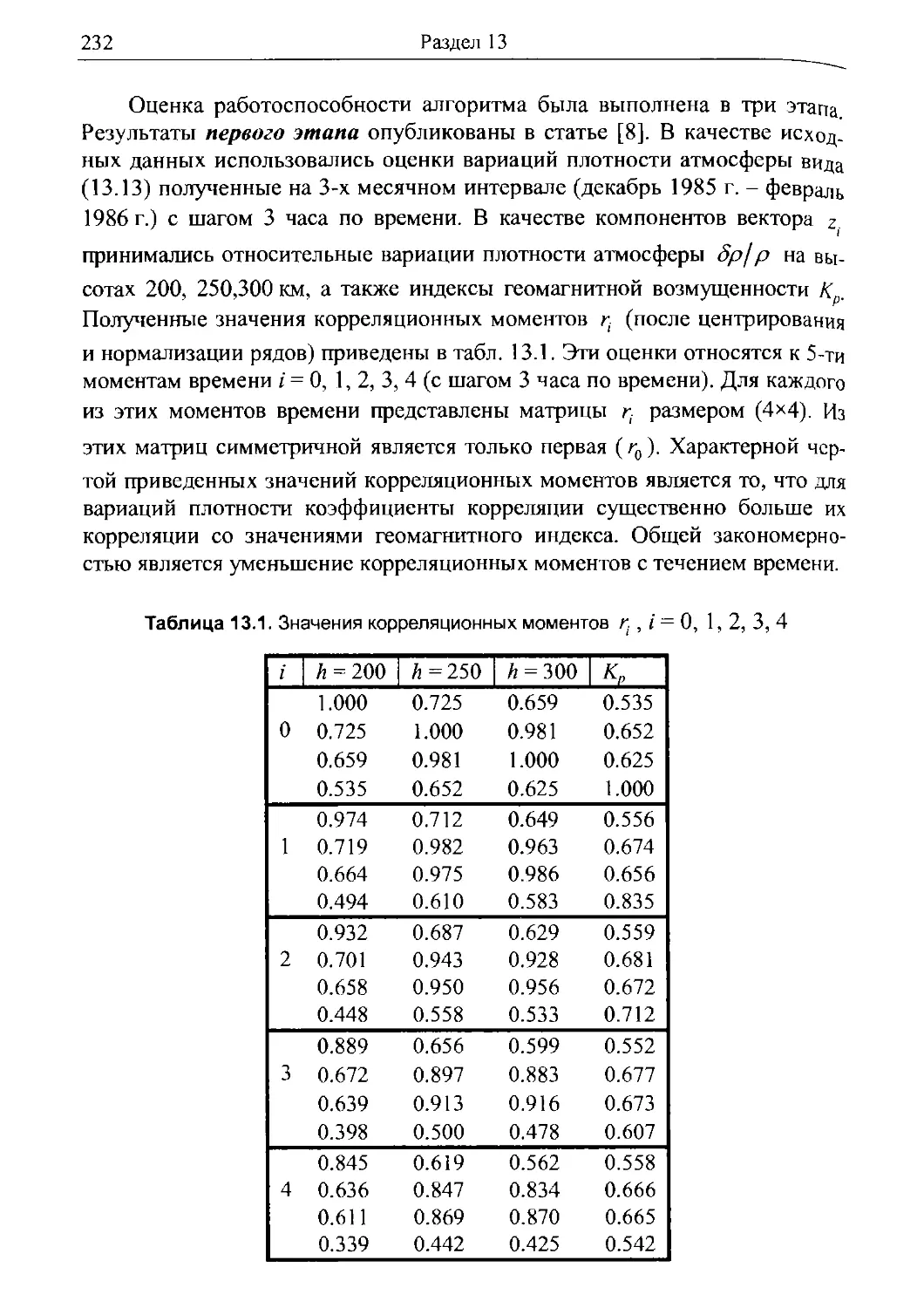
Text
А. И. Назаренко
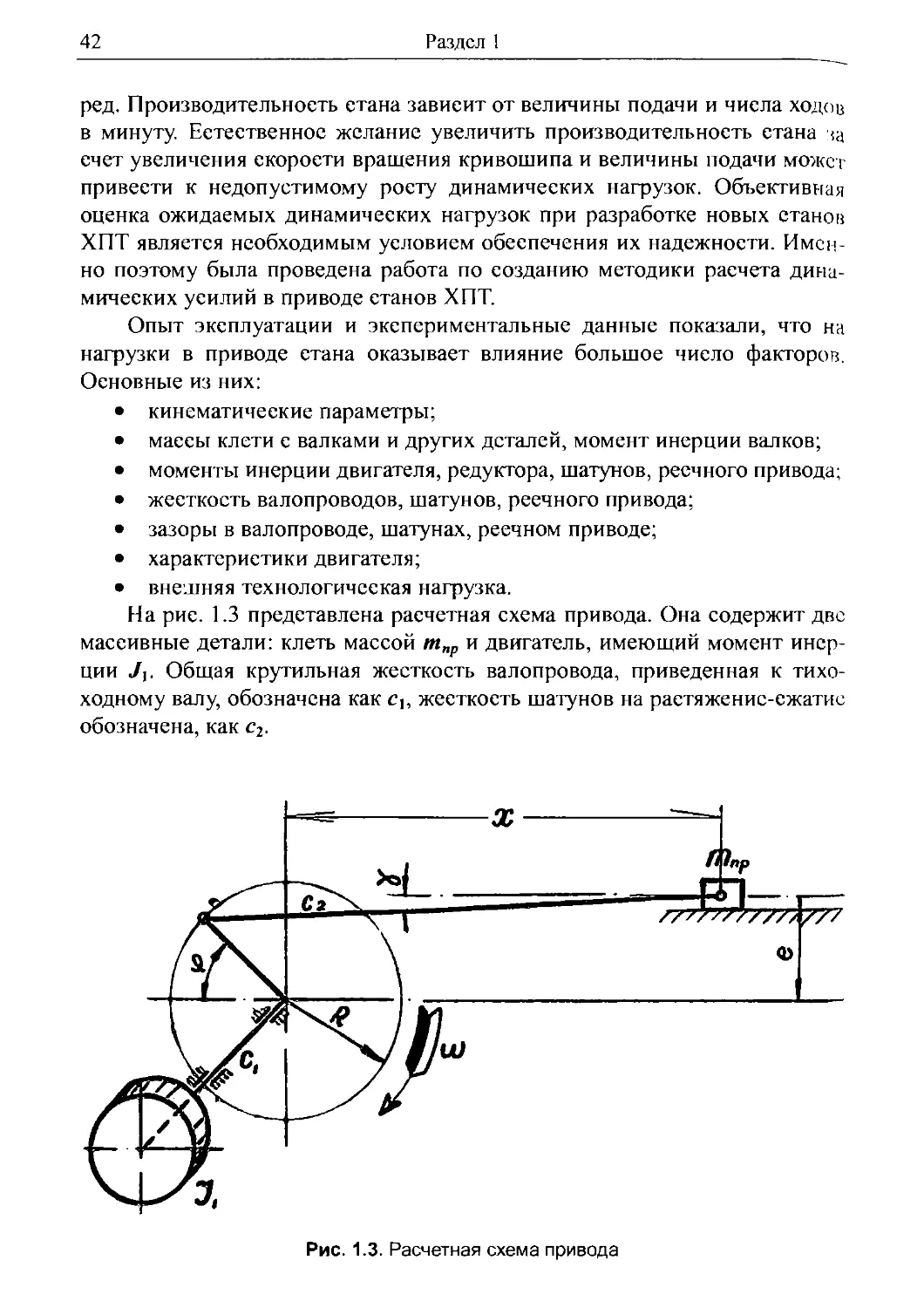
ЗАДАЧИ
СТОХАСТИЧЕСКОЙ
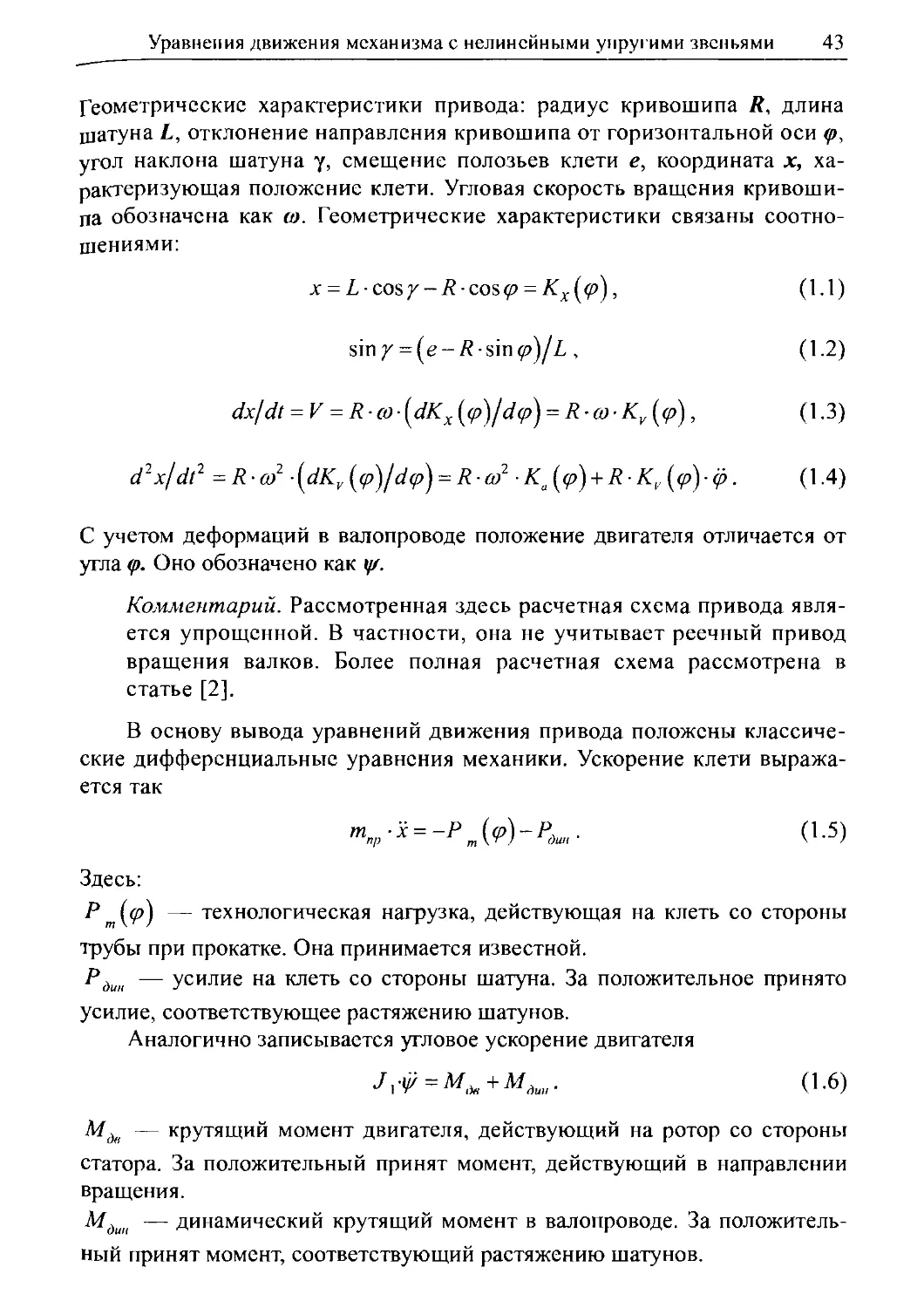
КОСМОДИИАМИКИ
Математические методы
и алгоритмы решения
А. И. Назаренко Мл
ЗАДАЧИ
СТОХАСТИЧЕСКОЙ
КОСМОДИНАМИКИ
Математические методы
и алгоритмы решения
URSS
МОСКВА
ББК 22.19 32.97 39.6
Назаренко Андрей Иванович
Задачи стохастической космодинамики: Математические методы
и алгоритмы решения. — М.: ЛЕНАНД, 2018. — 352 с.
Представленная монография подготовлена автором по материалам нескольких
ранее выполненных им исследований и содержит выводы, которые основываются
на результатах, полученных автором за 55 лет работы (1960-2015) в области при¬
менения математических методов для решения различных технических задач.
За указанный период быстродействие ЭВМ увеличилось в миллионы раз: от тысяч
операций в секунду у ламповых ЭВМ до нескольких ГГц у современных ПК. На
протяжении всех лет работы автор сталкивался с необходимостью преодоления
вычислительных ограничений на основе совершенствования соответствующих
методов (разработка новых алгоритмов и формул). Автор надеется, что этот опыт
будет полезен читателю.
Книга адресуется широкой читательской аудитории: специалистам, аспирантам,
студентам, занимающимся разработкой алгоритмов и компьютерных программ
для решения технических задач.
Рецензент:
заслуженный деятель науки РФ, д-р техн. наук, проф. Л. Н. Лысенко
Формат 60x90/16. Печ. л. 22. Зак. № АО-404.
Отпечатано в ООО «ЛЕНАНД».
117312, Москва, пр-т Шестидесятилетия Октября, 11А, стр. 11.
ISBN 978-5-9710-4636-3 © ЛЕНАНД, 2017
21329 Ю 227332
78597
46363
НАУЧНАЯ И УЧЕБНАЯ ЛИТЕРАТУРА
URSS
E-mail: URSS@URSS.ru
Каталог изданий в Интернете:
http://URSS.ru
Тел./факс (многоканальный):
+ 7 (499) 724 25 45
Все права защищены. Никакая часть настоящей книги не может быть воспроизведена или
передана в какой бы то ни было форме и какими бы то ни было средствами, будь то элек¬
тронные или механические, включая фотокопирование и запись на магнитный носитель,
а также размещение в Интернете, если на то нет письменного разрешения владельца.
Оглавление
Рецензия проф. JT. Н. Лысенко 5
Предисловие автора 8
Краткое содержание 11
Основные сокращения 22
Введение. Прикладная математика 24
Раздел 1. Уравнения движения механизма
с нелинейными упругими звеньями
и переменными маховыми массами 40
Раздел 2. Выбор уточняемых параметров
полиномиальной модели системы 52
Раздел 3. Драконический период и время
пересечения экватора 65
Раздел 4. Усредненные уравнения, характеризующие
эволюцию элементов орбиты спутников Земли 78
Раздел 5. Прогнозирование корреляционной матрицы
погрешностей вектора состояния 87
Раздел 6. Статистические характеристики гравитационных
возмущений спутников Земли 105
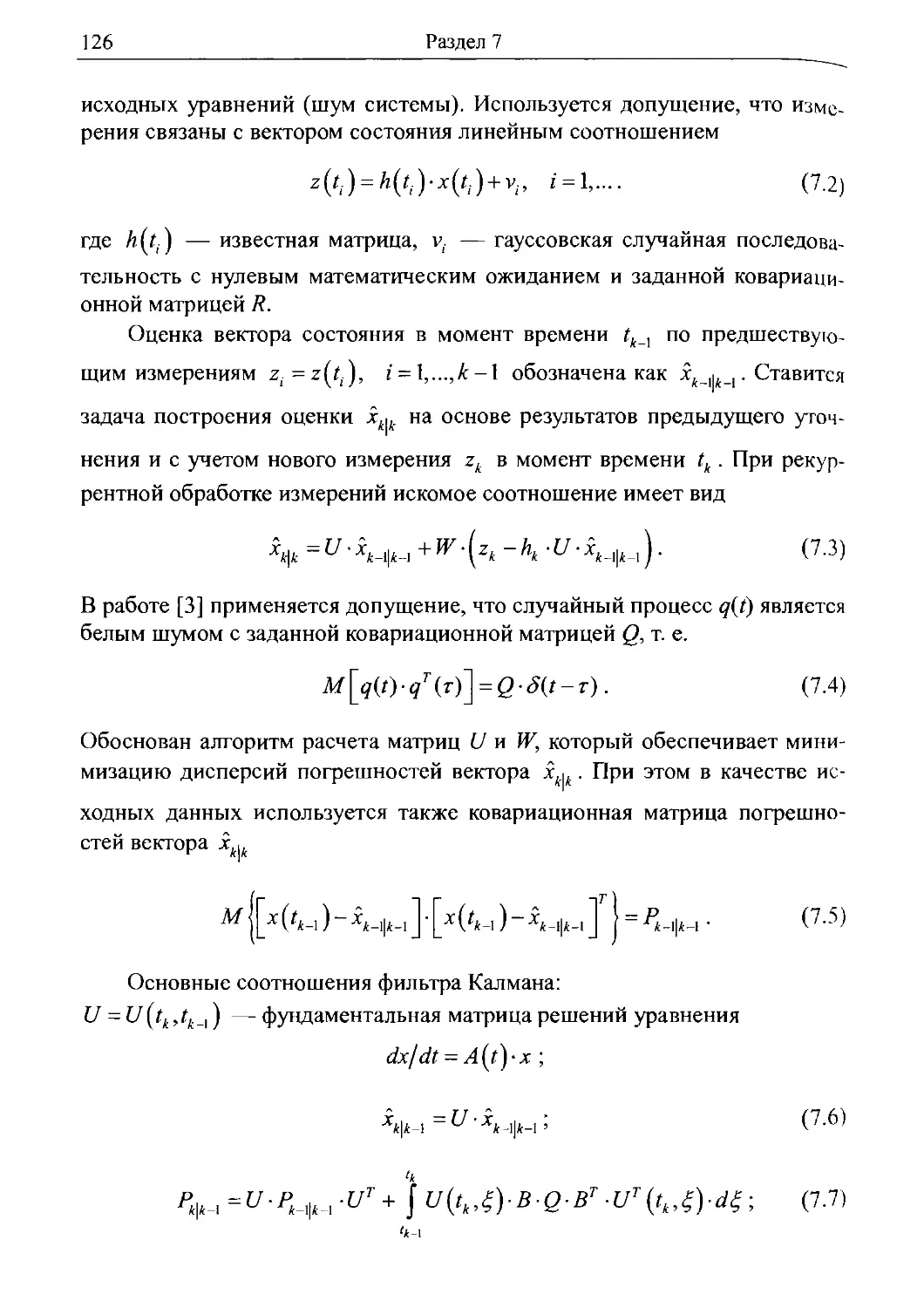
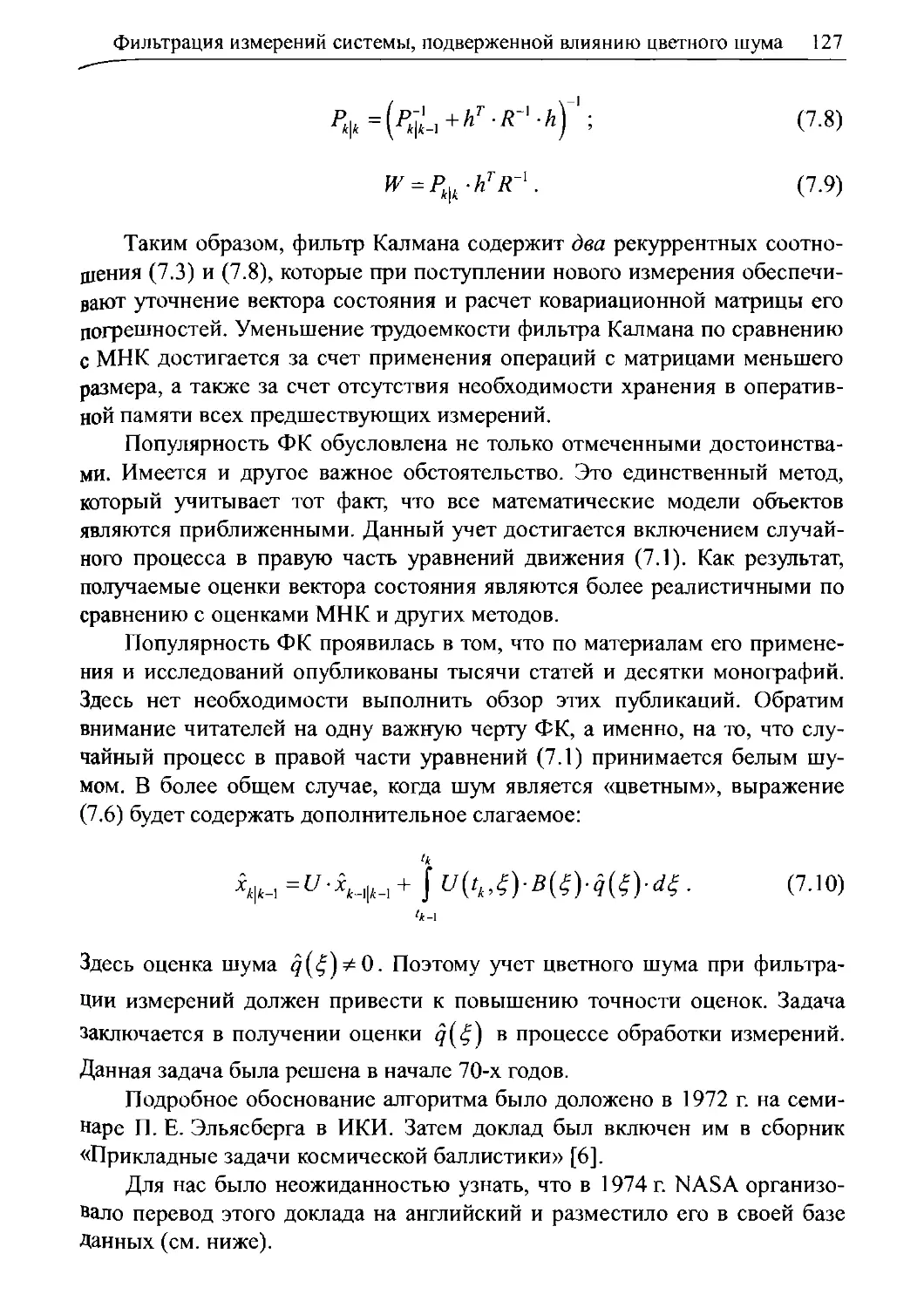
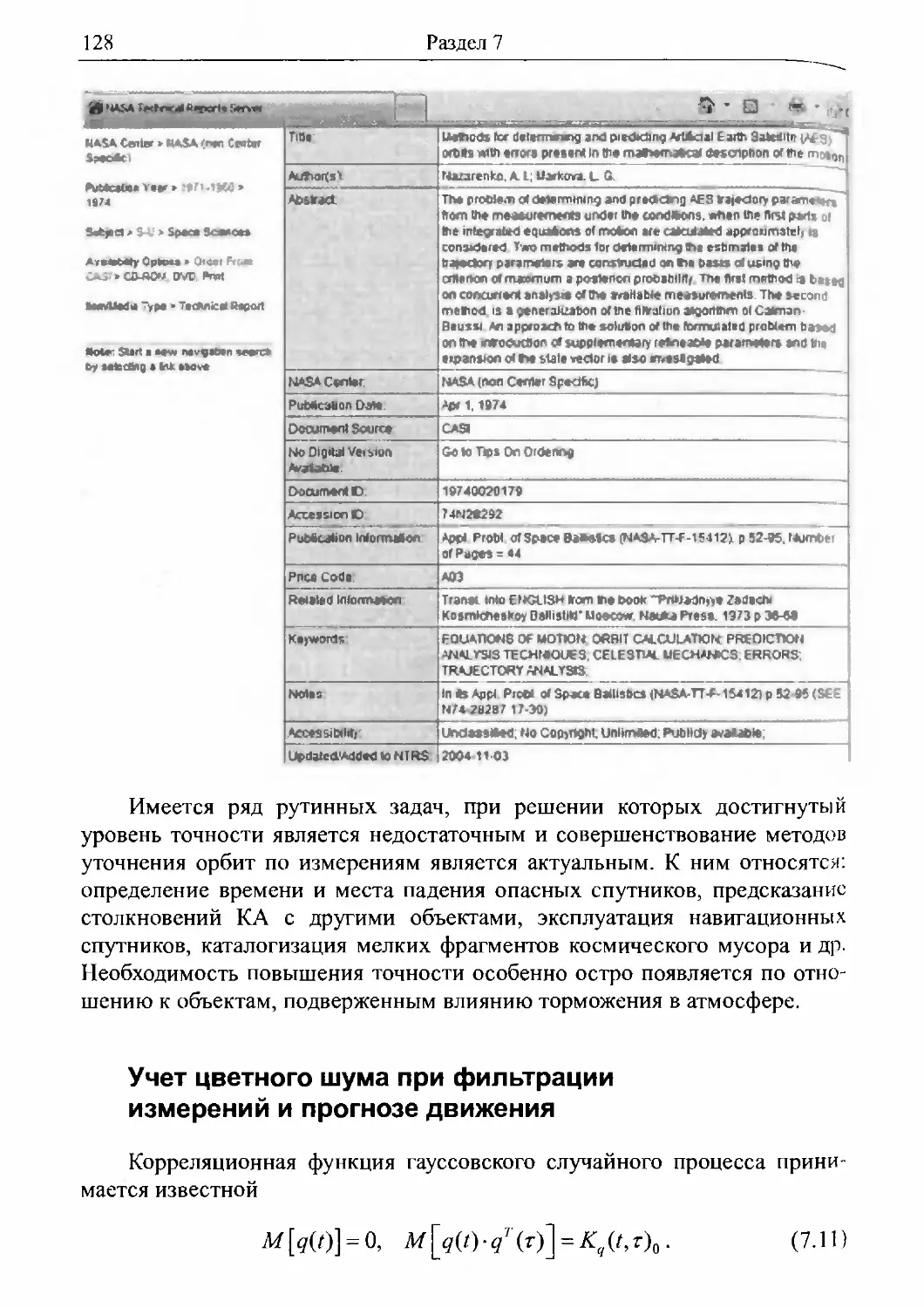
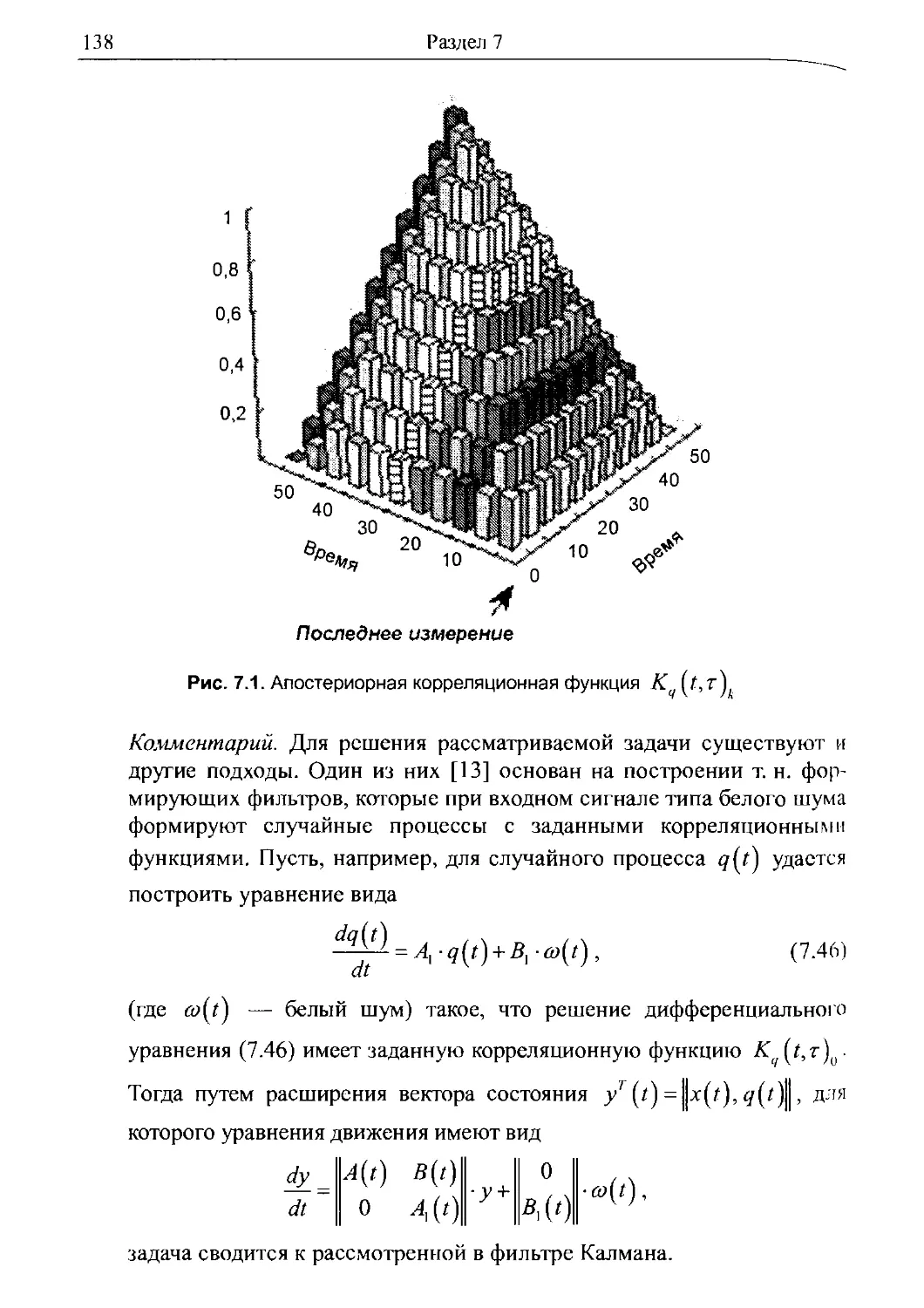
Раздел 7. Рекуррентная фильтрация измерений
динамической системы, подверженной влиянию
возмущений в виде цветного шума 125
Раздел 8. Совместная обработка измерений динамической
системы, подверженной влиянию возмущений
в виде цветного шума 141
Раздел 9. Сравнение точности параметров, полученных
с использованием разных методов
обработки измерений 157
4
Оглавление
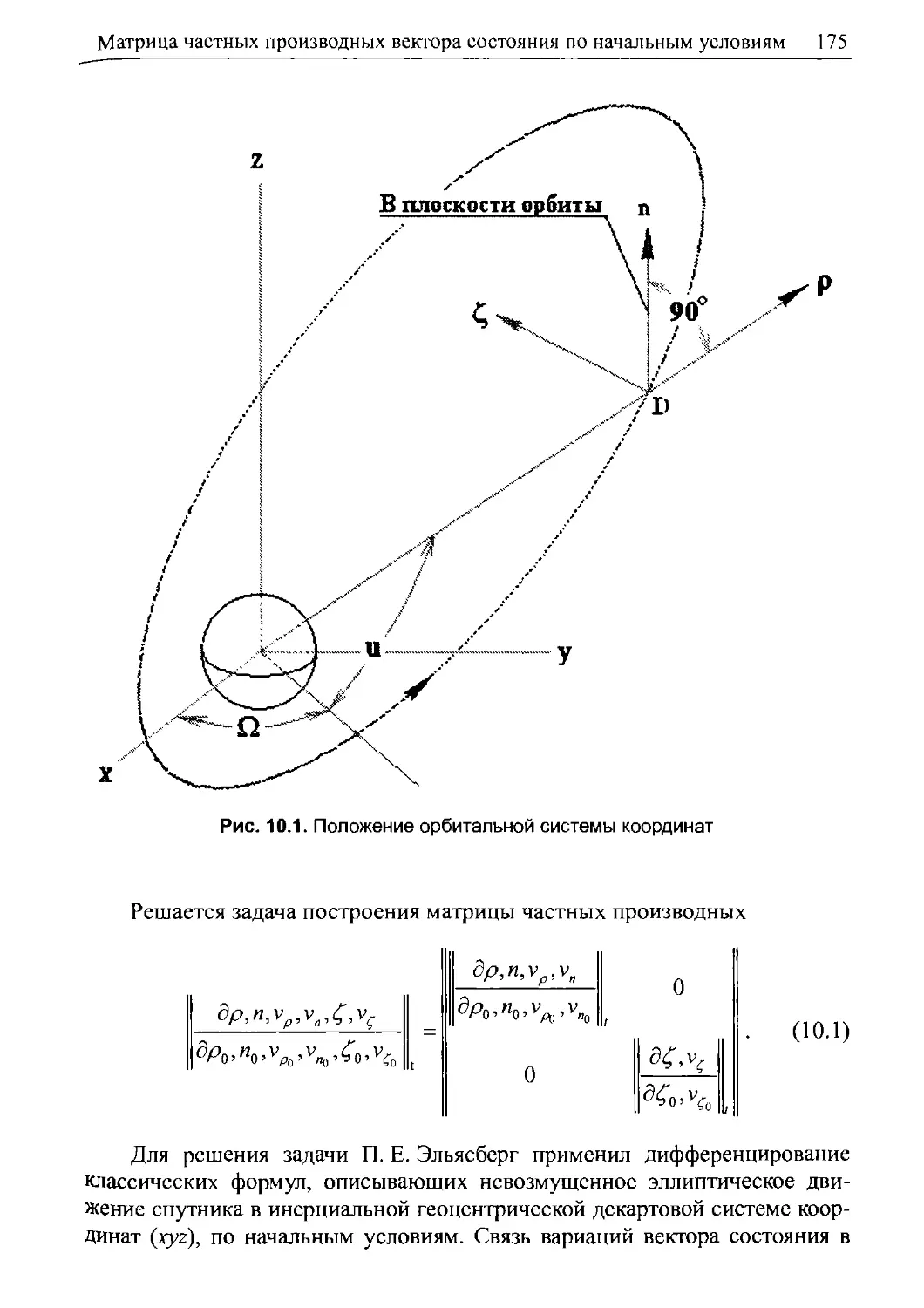
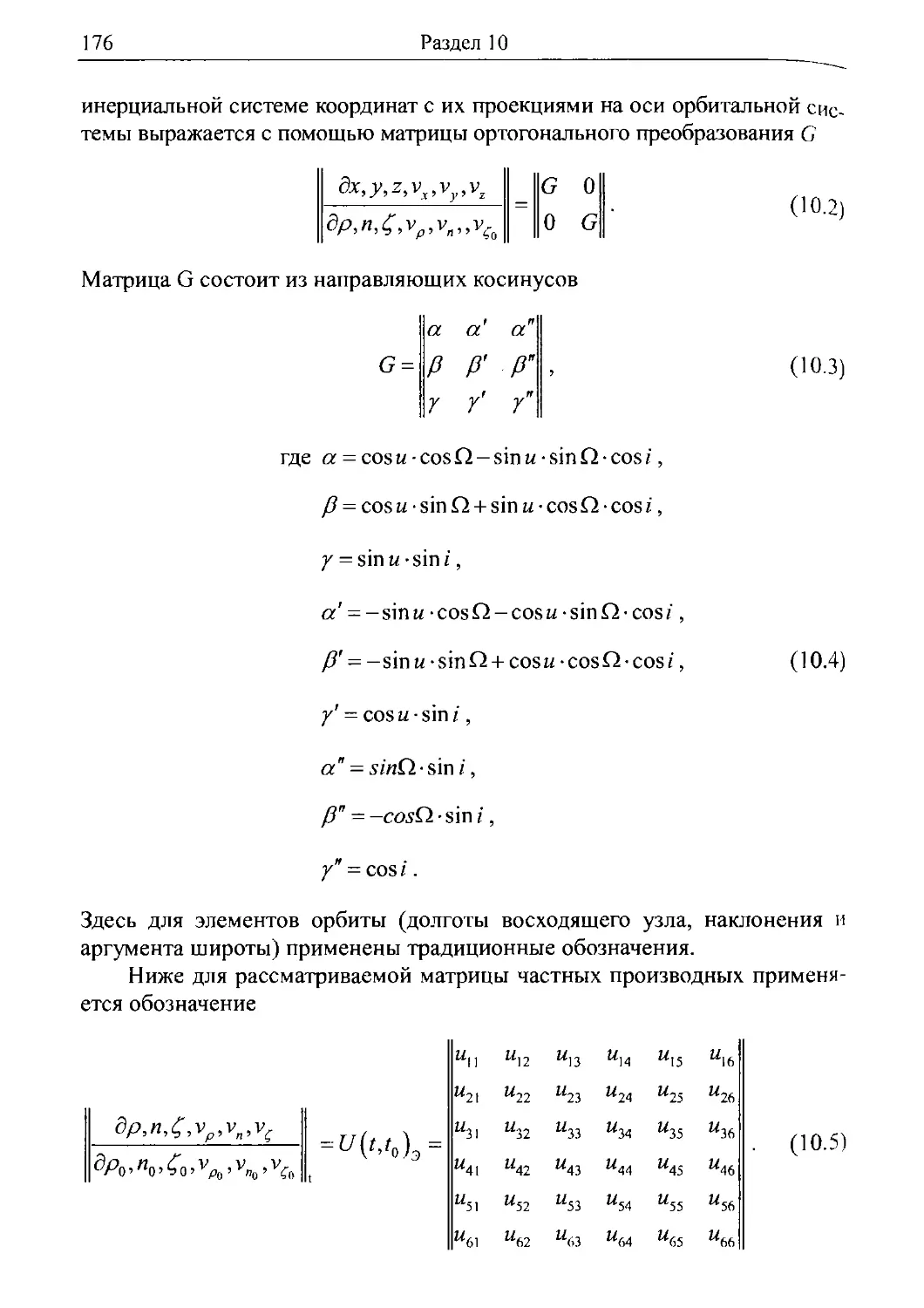
Раздел 10. Матрица частных производных вектора
состояния по начальным условиям 174
Раздел 11. Рекуррентный метод оптимального
прогнозирования гауссового случайного процесса.... 196
Раздел 12. Оптимальная фильтрация измерений гауссового
случайного процесса в непрерывном времени 212
Раздел 13. Рекуррентный метод построения уравнений
авторегрессии для векторных процессов 221
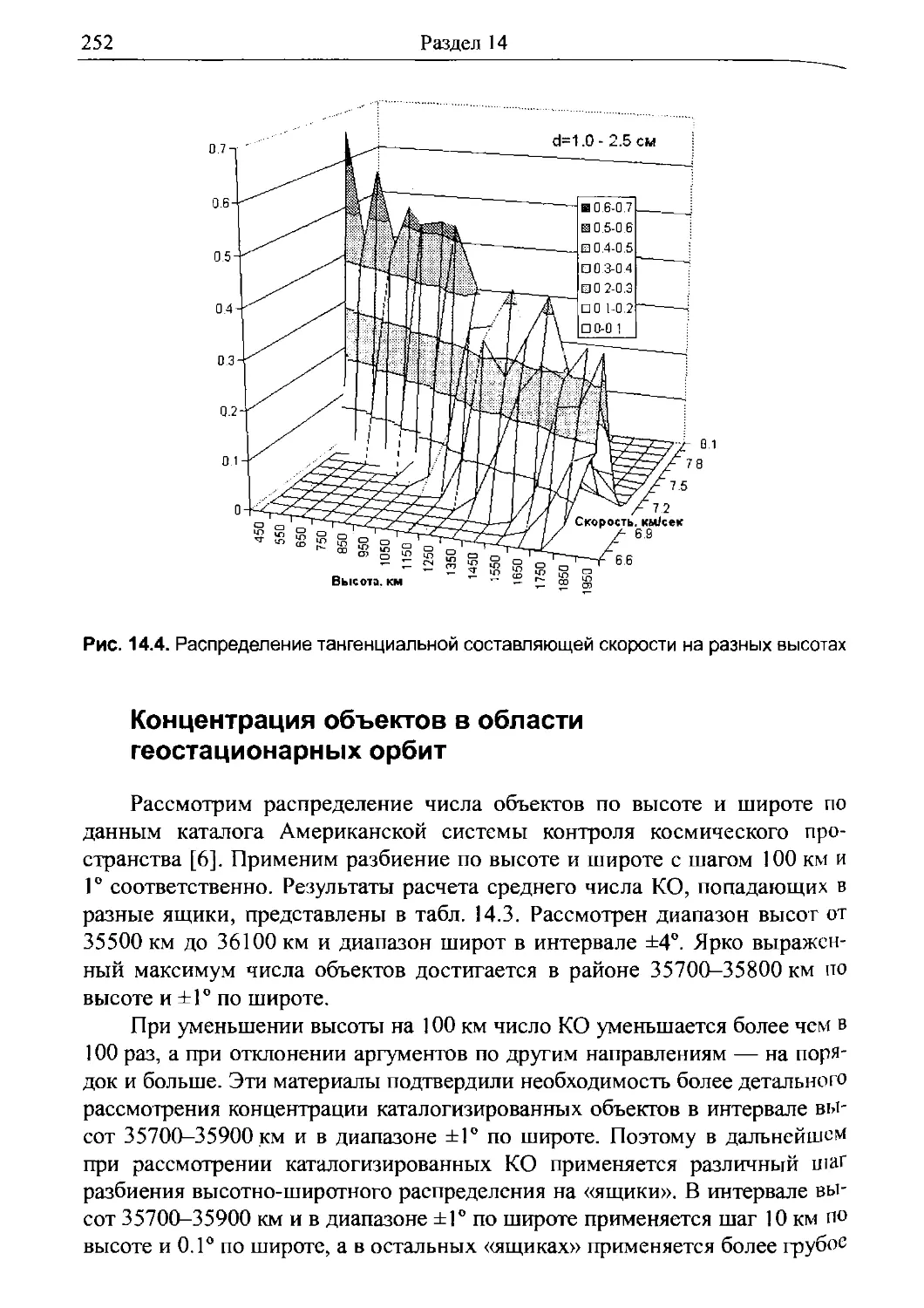
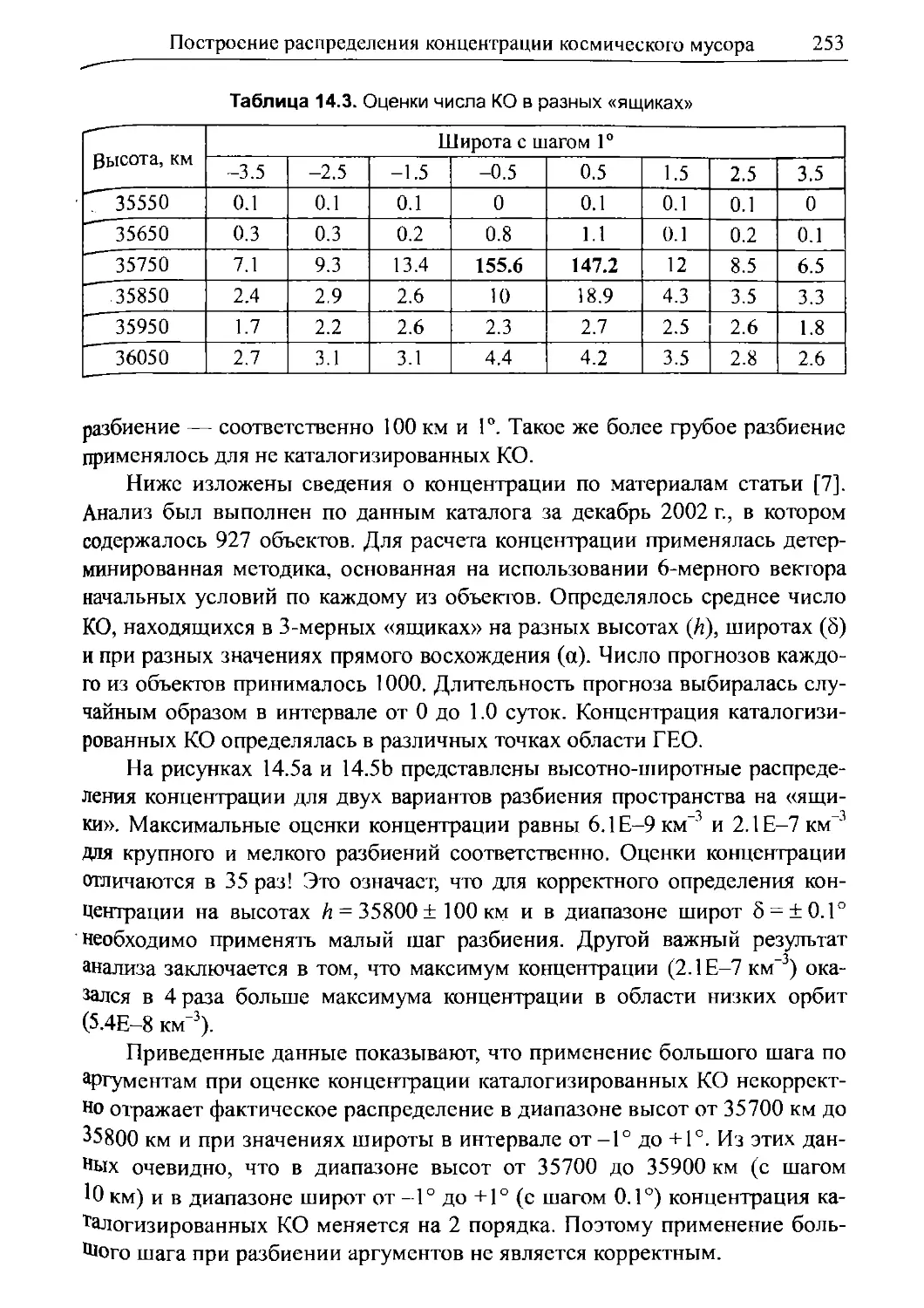
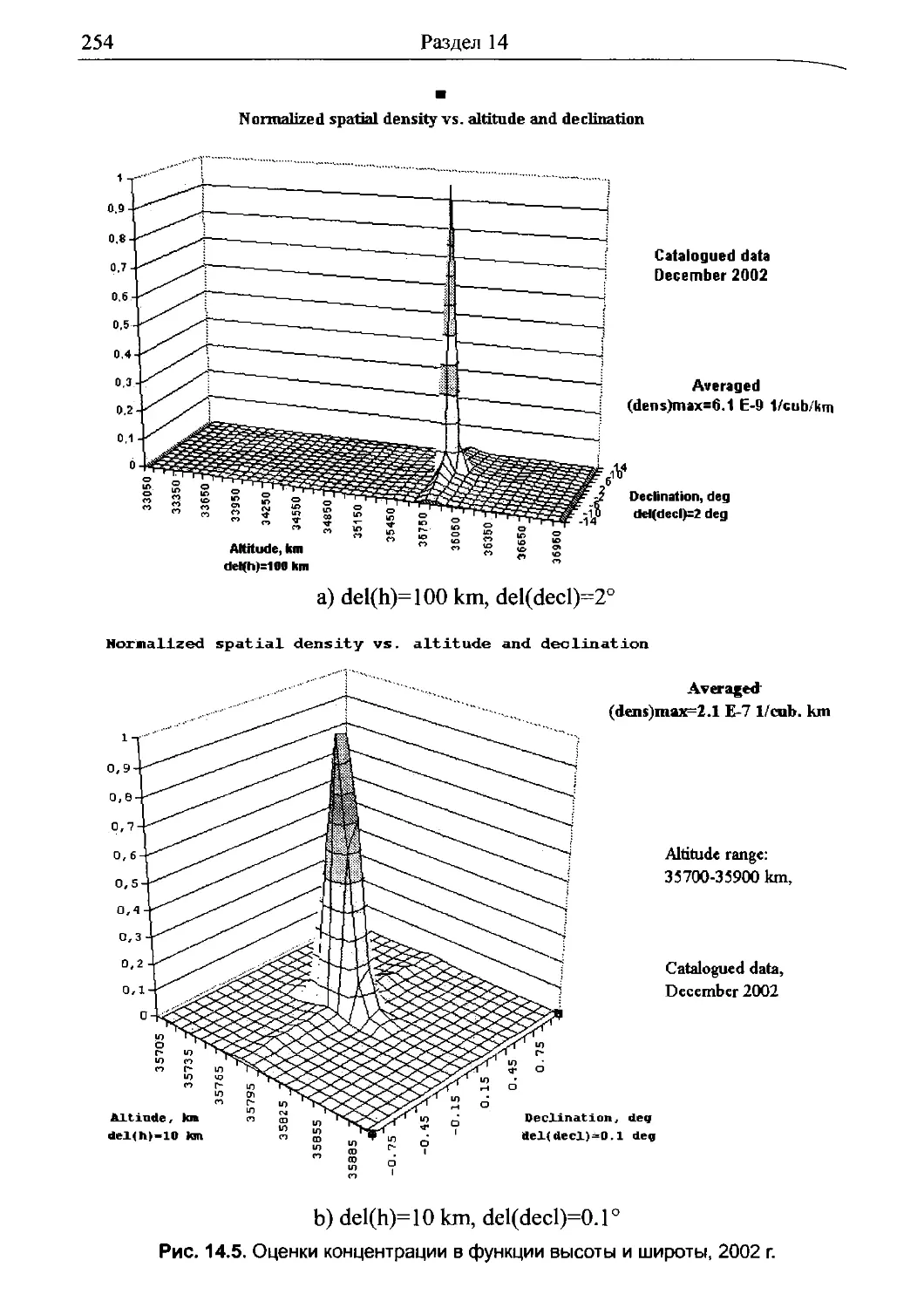
Раздел 14. Построение пространственного распределения
концентрации космического мусора 243
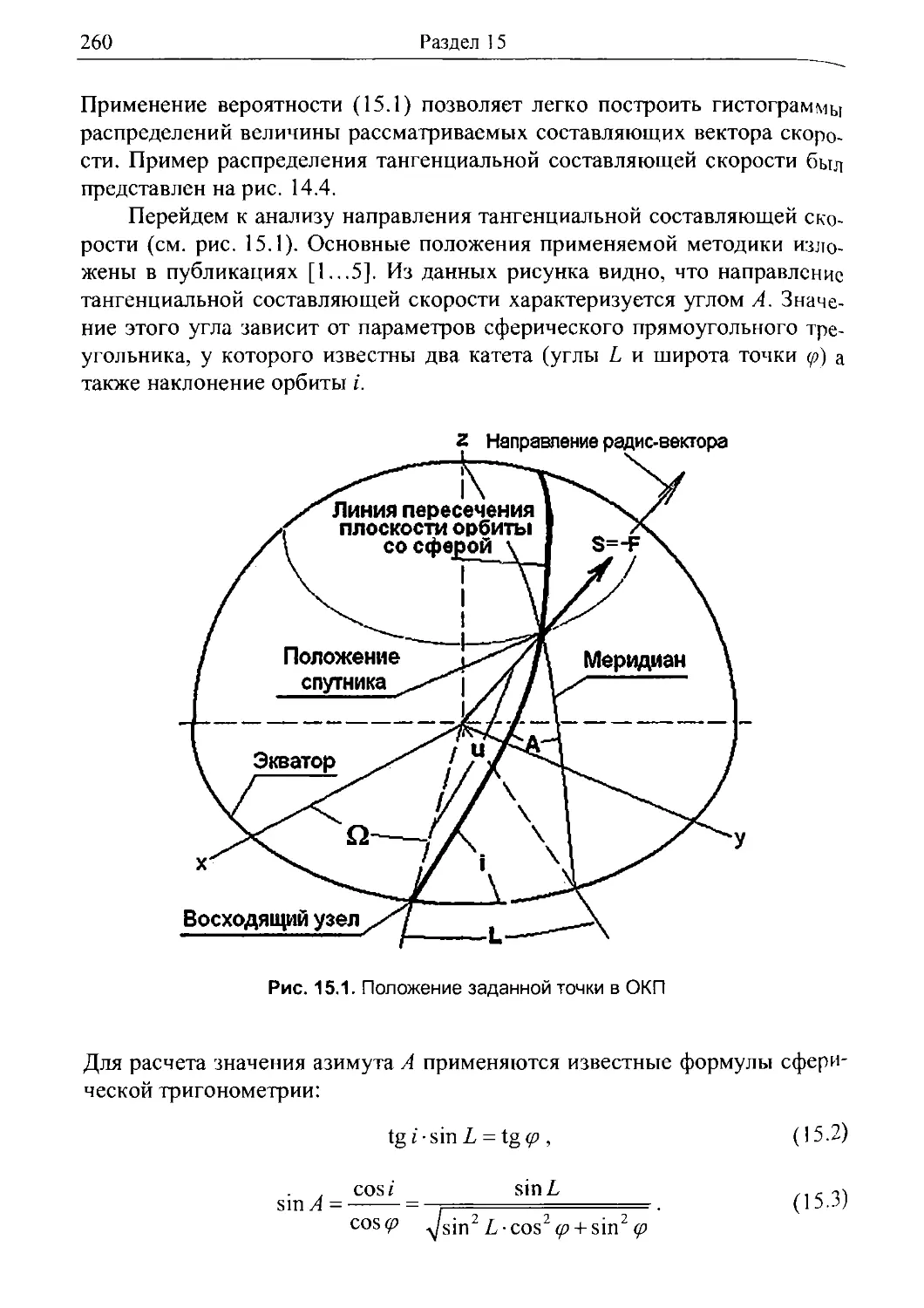
Раздел 15. Статистические распределения величины
и направления скорости космических объектов
в инерциальном пространстве 259
Раздел 16. Оценка характеристик столкновения спутника
Земли с космическим мусором 273
Раздел 17. Расчет вероятности взаимных столкновений
объектов разных размеров 294
Раздел 18. Уравнения для прогнозирования статистического
распределения космического мусора по высоте 309
Раздел 19. Оценка последствий взаимных столкновений 327
Заключение 346
Публикации автора по рассмотренным вопросам 348
Рецензия
на монографию д. т. н. Назаренко А. И.
«Задачи стохастической космодинамики.
Математические методы и алгоритмы решения»
Представленная на рецензирование рукопись монографии ориентиро¬
вочным объемом 16 а. л. под названием «Задачи стохастической космоди¬
намики. Математические методы и алгоритмы решения» ставит своей це¬
лью обобщение более чем 50-летнего опыта автора в области постановки
и решения значительного количества прикладных задач вычислительной
математики в области теории и практики стохастической космодинамики.
Приобретение соответствующего опыта первоначально было достиг¬
нуто в процессе участия автора в создании алгоритмического обеспечения
системы контроля космического пространства (СККП) в одной из органи¬
заций МО СССР.
Особенностью решения соответствующих задач в то время с научно-
технической точки зрения явилось требование высокоточного получения
результата в условиях ограниченных характеристик существующей вы¬
числительной техники.
Свидетельством успешности и эффективности работы автора в этом
направлении может служить Государственная премия СССР, которой он
был удостоен в составе авторского коллектива за цикл соответствующих
исследований, выразившийся в создании новых методов и алгоритмов,
положенных в основу создания СККП.
Последующее развитие вычислительной техники привело в значи¬
тельной степени к снятию соответствующих вычислительных ограниче¬
ний. Однако это не означает, что проблемы постановки и решения многих
сложных вычислительных задач современности потеряли актуальность и
перешли в разряд тривиальных решений, получаемых в результате приме¬
нения современных суперкомпьютеров.
В качестве примера автор справедливо указывает на задачу техно¬
генного засорения околоземного космического пространства, в области
решения которой он является сегодня признанным и наиболее квали¬
фицированным специалистом в России, да и, пожалуй, далеко за её
пределами.
Решение возникающих трудностей постановки подобного типа задач
находится в настоящее время в области разработки и совершенствования
6
Рецензия проф. Л. Н. Лысенко
методов прикладной математики, являющейся согласно утверждению
Е. С. Вентцсль, на которую ссылается автор во введении к рукописи,
«...наукой особого рода, стоящей на грани между точными, гуманитарны¬
ми и опытными науками, смело применяющая приёмы, выработанные в
каждой из этих групп наук, если они оказываются эффективными».
Именно в таком ключе рассматривается автором обсуждаемая область
научных исследований в части её приложений к решению задач, которым
он посвятил практически всю свою жизнь.
Применительно к прикладной математике как науке, не удается, однако,
составить четкую логическую классификацию составляющих её разделов
в силу того, что её методы обычно могут быть применены лишь к специ¬
фическому классу прикладных задач путём составления математической
модели изучаемой системы.
Предлагаемая монография, следуя представленному содержанию и
оглавлению, как раз и посвящена рассмотрению проблем прикладной ма¬
тематики конкретного объекта изучения, а именно стохастической дина¬
мики космических объектов и систем (от искусственных спутников Земли
различного назначения до систем техногенного загрязнения космического
пространства, так называемого «космического мусора»).
С одной стороны, в этом усматривается огромное и неоспоримое дос¬
тоинство работы (она написана профессионалом высочайшего уровня по
проблемам, досконально известным автору), но с другой стороны, указан¬
ное обстоятельство дает основание и для некоторых критических замеча¬
ний, связанных, как представляется с неоправданным расширением «круга
притязаний». Полагая, что достоинства работы очевидны, есть смысл ог¬
раничиться здесь пояснением последнего.
Ссылка автора во введении на ориентацию работы в качестве пособия
для расширения магистерских компетенций направления подготовки 01.04.02
(«Прикладная математика и информатика» и 01.04.03 («Механика и мате¬
матическое моделирование») не являются в этом смысле бесспорными.
Содержание работы все же в большей степени касается проблем кос¬
мической баллистики и космодинамики, нежели, чем профессиональных
проблем математики, пусть даже и «прикладной».
Естественно, глупо было бы спорить по поводу того, что уровень ма¬
тематической подготовки специалистов, а тем более магистров по видам
профессиональной деятельности должен быть сегодня очень высоким, но
это отнюдь не связано с подготовкой исключительно «прикладных мате¬
матиков».
Возьму на себя смелость даже порекомендовать более приемлемый с
моей точки зрения вариант: «Математические методы и алгоритмы реше¬
ния задач стохастической космодинамики». При этом, однако, потребуется
некоторая корректировка и содержания рукописи.
Рецензия проф. Jl. Н. Лысенко
7
Несмотря на сделанные замечания (и, главное, принятие или «непри¬
нятие» их автором) считаю возможным сделать вывод, что рукопись моно¬
графии А. И. Назаренко представляет исключительно полезную и высоко¬
квалифицированную в научном отношении работу, которая без сомнения
будет с интересом встречена широкой читательской аудиторией.
Рекомендую её к изданию.
Рецензент
Заслуженный деятель науки РФ
почетный работник высшего
профессионального образования,
лауреат премии президента РФ
в области образования
д. т. н., профессор
Лысенко Л. Н.
Предисловие автора
Материалы, изложенные в данной монографии, основаны на резуль¬
татах, полученных за 60 лет его работы (1957-2016 гг.) в области приме¬
нения математических методов для решения различных технических за¬
дач. Указанный период характерен тем, что в эти годы произошел ги¬
гантский прорыв в развитии вычислительной техники. Быстродейст¬
вие увеличилось в миллионы раз: от тысяч операций в секунду у лампо¬
вых ЭВМ до нескольких ГГЦ у современных ПК. Естественно, что рост
быстродействия и памяти вычислительных машин оказал очень сильное
влияние на развитие методов решения прикладных задач.
Освоение автором математических методов началось с детального
изучения монографии «Математические методы в инженерном деле»
(Т. Карман и М. Био, ОГИЗ, 1948). Основная задача книги — способство¬
вать развитию умения самостоятельно формулировать математическое
содержание заданной технической задачи. Характерной особенностью
этой монографии является то, что она основана на опыте решения инже¬
нерных задач без применения современных вычислительных машин. Со¬
держание монографии ориентировано на построение аналитических ре¬
шений. Тем не менее, ее изучение оказалось очень полезным. Здесь надо
иметь в виду, что каждый раздел монографии содержит несколько задач.
Их общее число — 142. Автор решил почти все эти задачи. Описание ре¬
шений заняло мелким шрифтом одну толстую тетрадку.
После окончания МВТУ им. Баумана в 1956 г. по специальности ин¬
женер-механик автор работал на заводе тяжелого машиностроения в горо¬
де Электросталь. Там он столкнулся с необходимостью расчета нагрузок в
приводе ряда механизмов. Оказалось, что соответствующие дифференци¬
альные уравнения не имеют аналитического решения. Поэтому потребо¬
валось применить вычислительную технику.
В 1963 г. по приглашению Н. П. Бусленко автор перешел на работу в
один из институтов Министерства обороны и стал заниматься спутниковой
механикой. В это время в институте формировался коллектив, которому бы¬
ло поручено создание службы (системы) контроля космического простран¬
ства. В процессе работы по этой тематике автор столкнулся с целым рядом
задач, для решения которых в условиях ограниченных характеристик вы¬
числительной техники потребовались новые методы и алгоритмы.
С 1992 г. по 2016 автор работал в одной из организаций Роскосмоса,
где занимался изучением космического мусора. Отсутствие детальных
сведений об элементах орбит мелких (не каталогизированных) объектов
Предисловие автора
9
й рх большое количество обусловили необходимость применения стати-
стИчсского подхода. Традиционный подход к изучению движения спутни¬
ке является детерминированным. Поэтому и в этой области автор столк¬
нулся с целым рядом задач, для решения которых потребовались новые
методы и алгоритмы.
Таким образом, на протяжении всех лет работы по тематике приме¬
нения математических методов для решения прикладных задач автор
сталкивался с необходимостью преодоления вычислительных ограниче¬
ний на основе совершенствования соответствующих методов. В материа¬
лах монографии показано, что в ряде случаев традиционные методы при¬
кладной математики не позволяют получить приемлемое решение и что
изложенные в монографии алгоритмы решения задач стохастической
космодинамики могут рассматриваться как определенный вклад в разви¬
тие прикладной математики. Автор надеется, что этот опыт будет полезен
читателю.
При подготовке материалов монографии автор придерживался хроно¬
логического порядка, который позволяет проследить влияние характери¬
стик вычислительной техники на методику решения прикладных задач.
В частности, содержание раздела 1, относящееся к началу применения
ЭВМ, является иллюстрацией того, что получение приемлемого решения с
использованием численного интегрирования оказалось возможным только
на основе модификации исходных дифференциальных уравнений.
На получение изложенных в монографии результатов существенное
влияние оказало сотрудничество автора с его учителями, великими рус¬
скими учеными, — Н. П. Бусленко, М. Д. Кисликом и П. Е. Эльясбергом.
Их умение сочетать теоретические исследования с получением важных
прикладных результатов стало для автора образцом, которому он старался
следовать.
Н. П. Бусленко М. Д. Кислик П. Е. Эльясберг
(1922-1975) (1922-1995) (1914-1975)
10
Предисловие автора
Решение рассматриваемых в монографии задач было бы невозможно
без поддержки, которую оказали автору его непосредственные начальники
И. И. Казакевич, Ю. П. Горохов, А. Д. Курланов, Н. П. Морозов. Большой
вклад во внедрение в практику разработанных методов внесли коллеги
автора: В. Д. Анисимов, А. Г. Клименко, Е. В. Коверга, С. Н. Кравченко,
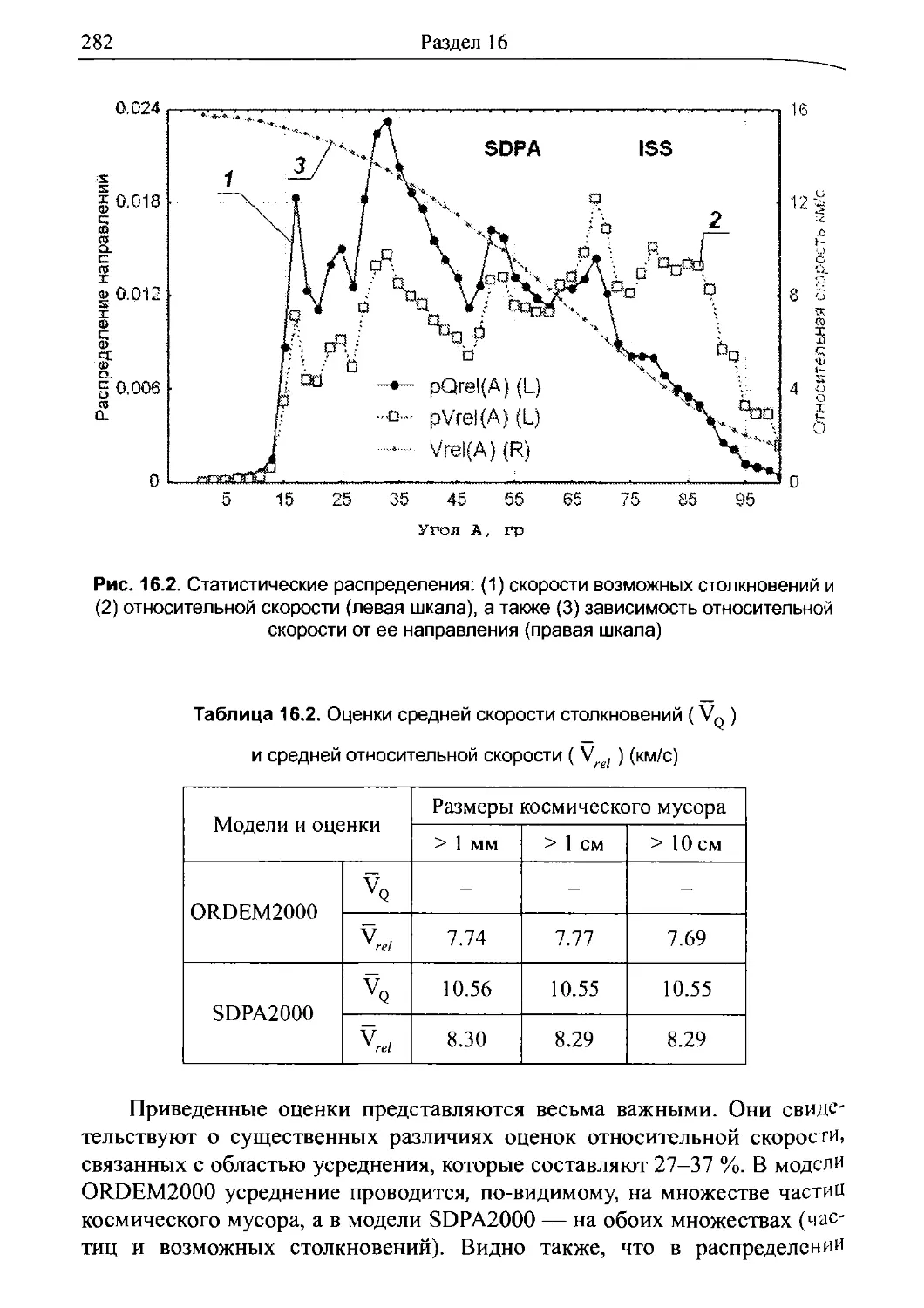
И. М. Кутепов, Л. Г. Маркова, И. Г. Поздняков, Л. М. Харченко, В. С. Юрасов.
Автор выражает им искреннюю признательность.
А. И. Назаренко
Краткое содержание
Введение. Прикладная математика
Изложены основные этапы развития прикладной математики, как ин¬
струмента для применения математических методов и алгоритмов в дру¬
гих областях науки и практики.
Важным этапом развития прикладной математики явилась организа¬
ция в России в 60-х годах Института прикладной математики (ИПМ РАН).
Он был создан для решения расчётных задач, связанных с государствен¬
ными программами атомной и термоядерной энергетики, исследования
космического пространства и ракетной техники.
В дальнейшем в связи развитием вычислительной техники и широ¬
ким применением персональных компьютеров роль прикладной матема¬
тики изменилась. Это связано со следующими обстоятельствами:
- наличие мощных компьютеров и множества пакетов прикладных про¬
грамм создало у многих специалистов иллюзию, что с использовани¬
ем известных математических методов они обеспечивают возмож¬
ность решения любой задачи;
- встречаются сложные вычислительные задачи, для решения которых
необходимо привлекать современные суперкомпьютеры, но и в этом
случае не всегда удается получить решение.
Учебные курсы по прикладной математике основаны большей ча¬
стью на предшествующем опыте, который не учитывает расширение кру¬
га прикладных задач. Эти учебные курсы «не успевают» за последними
достижениями. Поэтому актуальным направлением развития прикладной
математики является разработка методов решения тех задач, которые в
настоящее время не поддаются решению. В монографии рассмотрено ре¬
шение ряда актуальных задач такого рода.
Раздел 1. Уравнения движения механизма
с нелинейным упругими звеньями и переменными
маховыми массами (1961 г.)
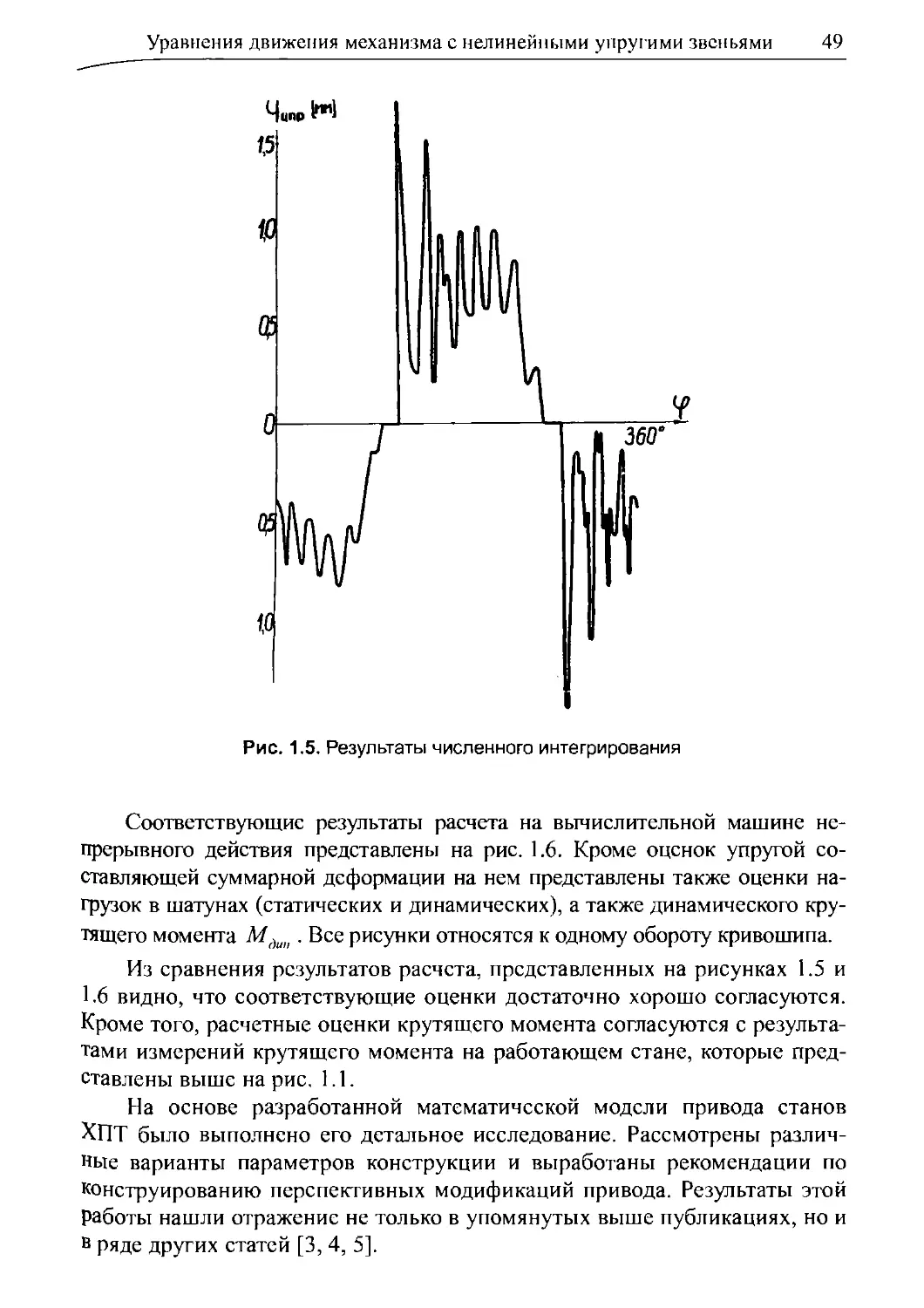
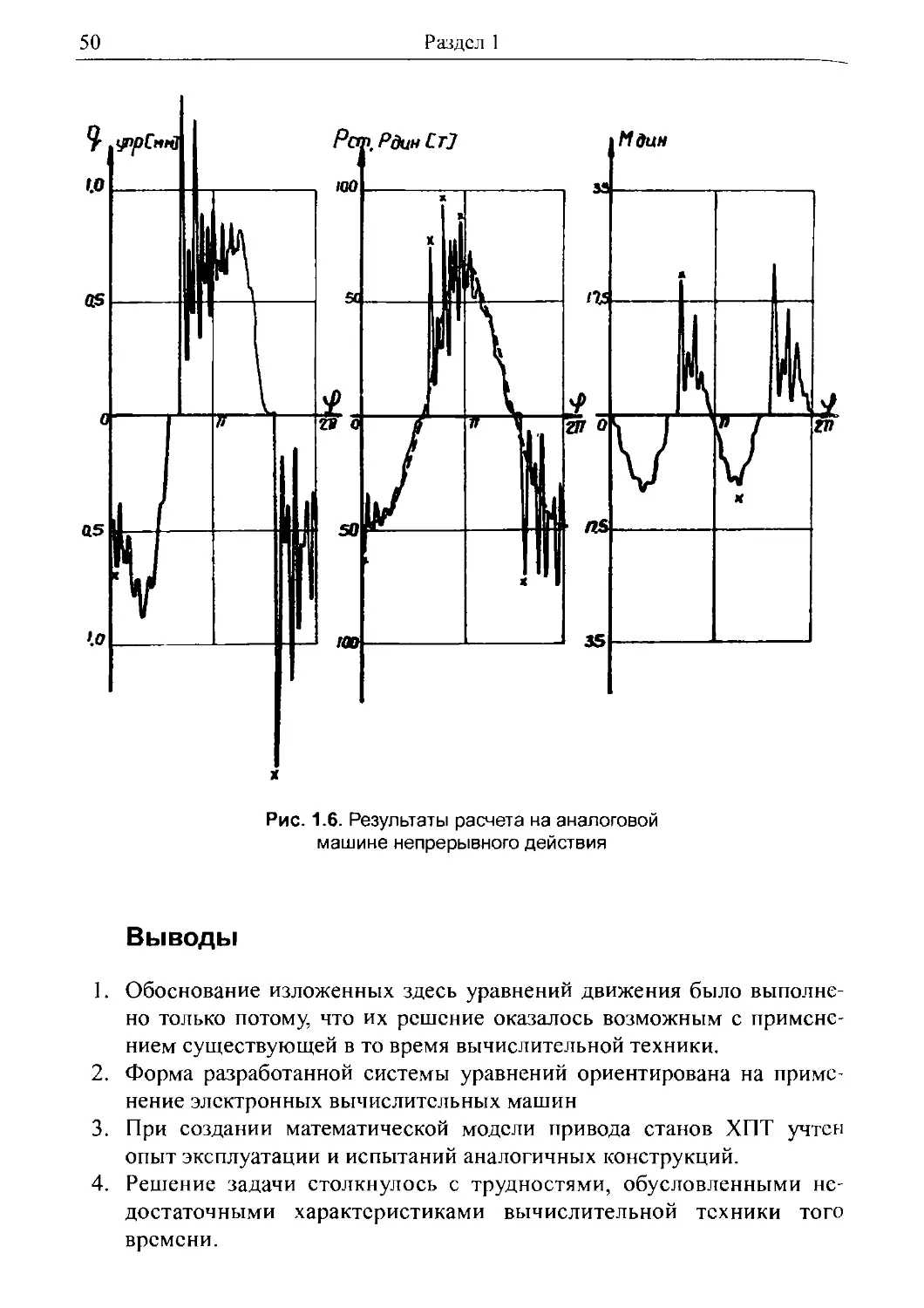
Обоснование изложенных уравнений движения было выполнено
только потому, что их решение оказалось возможным с применением су¬
ществующей в то время вычислительной техники.
Форма разработанной системы уравнений ориентирована на приме¬
нение электронных вычислительных машин.
12
Краткое содержание
При создании математической модели привода станов холодной
прокатки труб учтен опыт эксплуатации и испытаний аналогичных кон¬
струкций.
Решение задачи столкнулось с трудностями, обусловленными недос¬
таточными характеристиками вычислительной техники того времени.
Раздел 2. Выбор уточняемых параметров
полиномиальной модели системы (1968 г.)
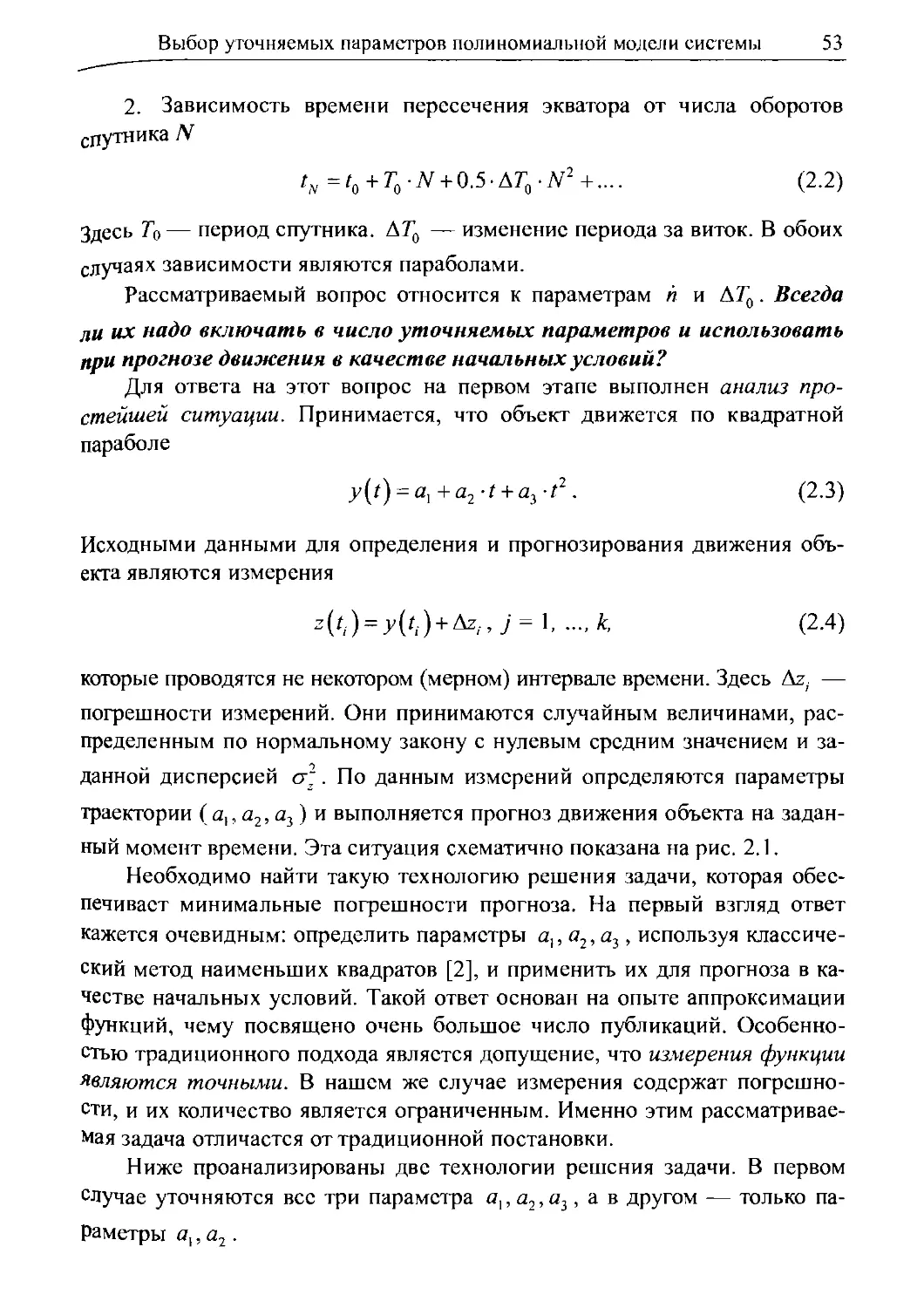
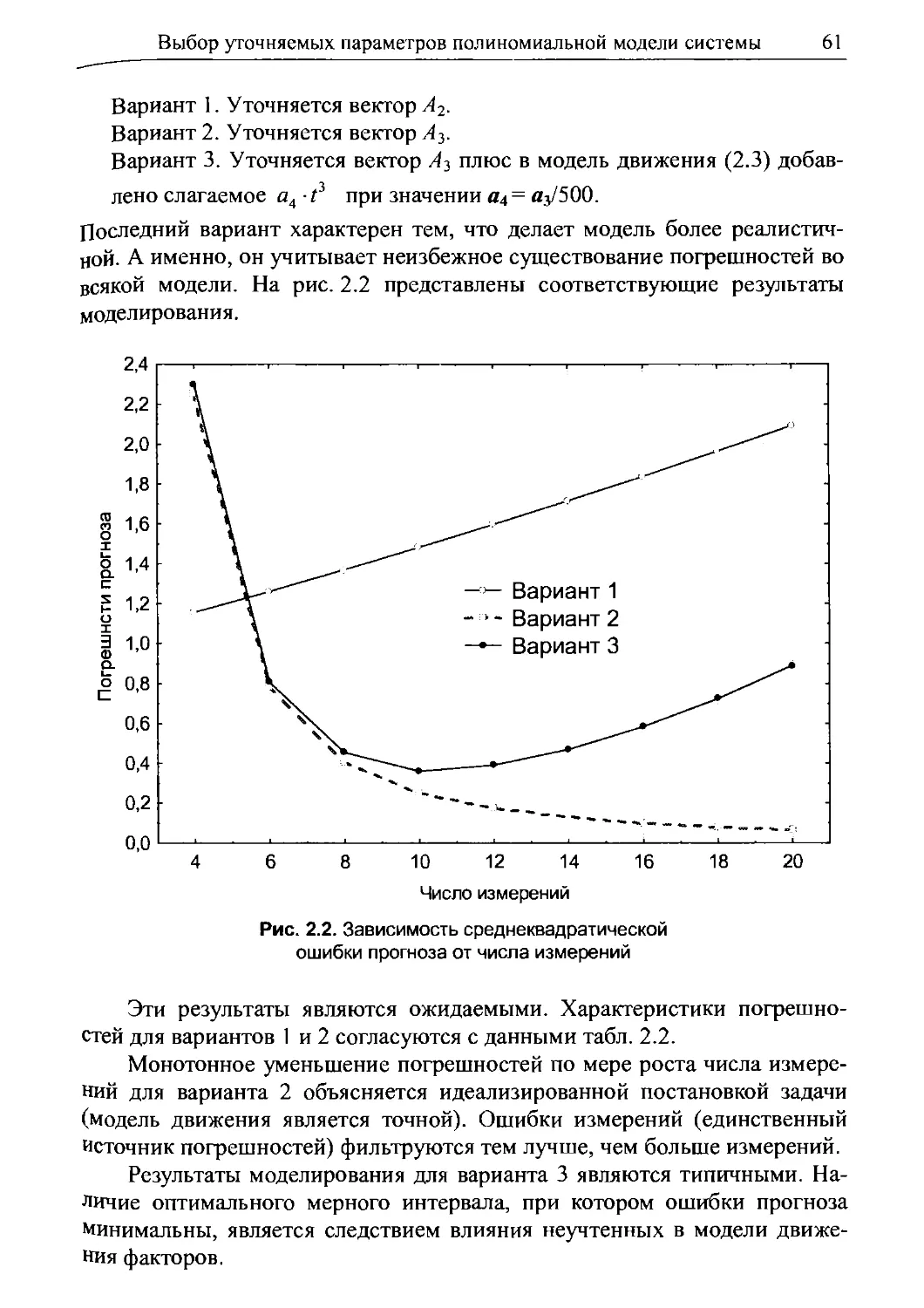
Постановка рассматриваемой задачи отличается от традиционного
подхода к аппроксимации функций учетом погрешностей исходных
данных.
Разработан критерий принятия решения о включении или не вклю¬
чении данного параметра в число начальных условий для прогноза
процесса.
Показано согласие разработанного критерия с результатами модели¬
рования и опытом уточнения начальных условий для прогноза движения
спутников.
Остался открытым вопрос, как уменьшить негативное влияние малых
возмущений на прогноз движения, если они не включены в число уточ¬
няемых параметров.
Раздел 3. Драконический период и время
пересечения экватора (1968 г.)
Рассмотрена методика вывода формул для расчета драконического
периода и времени пересечения экватора, учитывающих возмущения,
пропорциональные параметру с20 разложения гравитационного потенциа¬
ла Земли в ряд по сферическим функциям.
Выведенные формулы являются более общими по сравнению с ана¬
логичными формулам, изложенными в ряде известных публикаций.
Представленные в данном разделе результаты были использованы в
60-х годах в процессе разработки аналитической модели движения спут¬
ников для Российского центра контроля космического пространства.
Раздел 4. Усредненные уравнения, характеризующие
эволюцию элементов орбиты спутников Земли (1969 г.)
В качестве основы создания численно-аналитической модели целесо¬
образно использовать метод усреднения Крылова—Боголюбова. В нем для
короткопериодических возмущений применяются аналитические форму¬
лы, а для усредненных элементов строится система дифференциальных
уравнений. При расчете эволюции элементов орбит метод усреднения по¬
зволяет корректно учесть не только консервативные (гравитационные)
возмущающие силы, но и торможение в атмосфере. Тем самым обеспечи¬
Краткое содержание
13
вается повышение точности прогноза движения по сравнению с аналити¬
ческими моделями движения.
В общем случае, когда усредненные уравнения не поддаются анали¬
тическому решению, необходимо применять численные методы интегри¬
рования. Возможность применения большого шага (порядка 1 суток)
обеспечивает существенное преимущество такого подхода по сравнению с
численным интегрированием исходных уравнений.
В ряде случаев (при упрощенном составе возмущающих факторов),
удается найти аналитическое решение усредненных уравнений. В про¬
граммно-алгоритмической системе ЦККП целесообразно применение
обоих моделей (аналитической и численно-аналитической), разработан¬
ных на основе общей системы усредненных уравнений. Это обеспечивает
их согласованность.
Для исходной системы дифференциальных уравнений с одной «быст¬
рой» переменной разработан простой способ составления усредненных
уравнений, правая часть которых состоит из известных возмущений 1 -го и
2-го порядка за виток. Система уравнений является более точной по срав¬
нению с известной приближенной системой уравнений. Практическое
значение этого результата состоит в том, что на его основе за короткое
время была разработана численно-аналитическая модель движения спут¬
ников. Уже в начале 70-х она была внедрена в практику работы Российско¬
го ЦККП.
Раздел 5. Прогнозирование корреляционной матрицы
погрешностей вектора состояния (1969 г.)
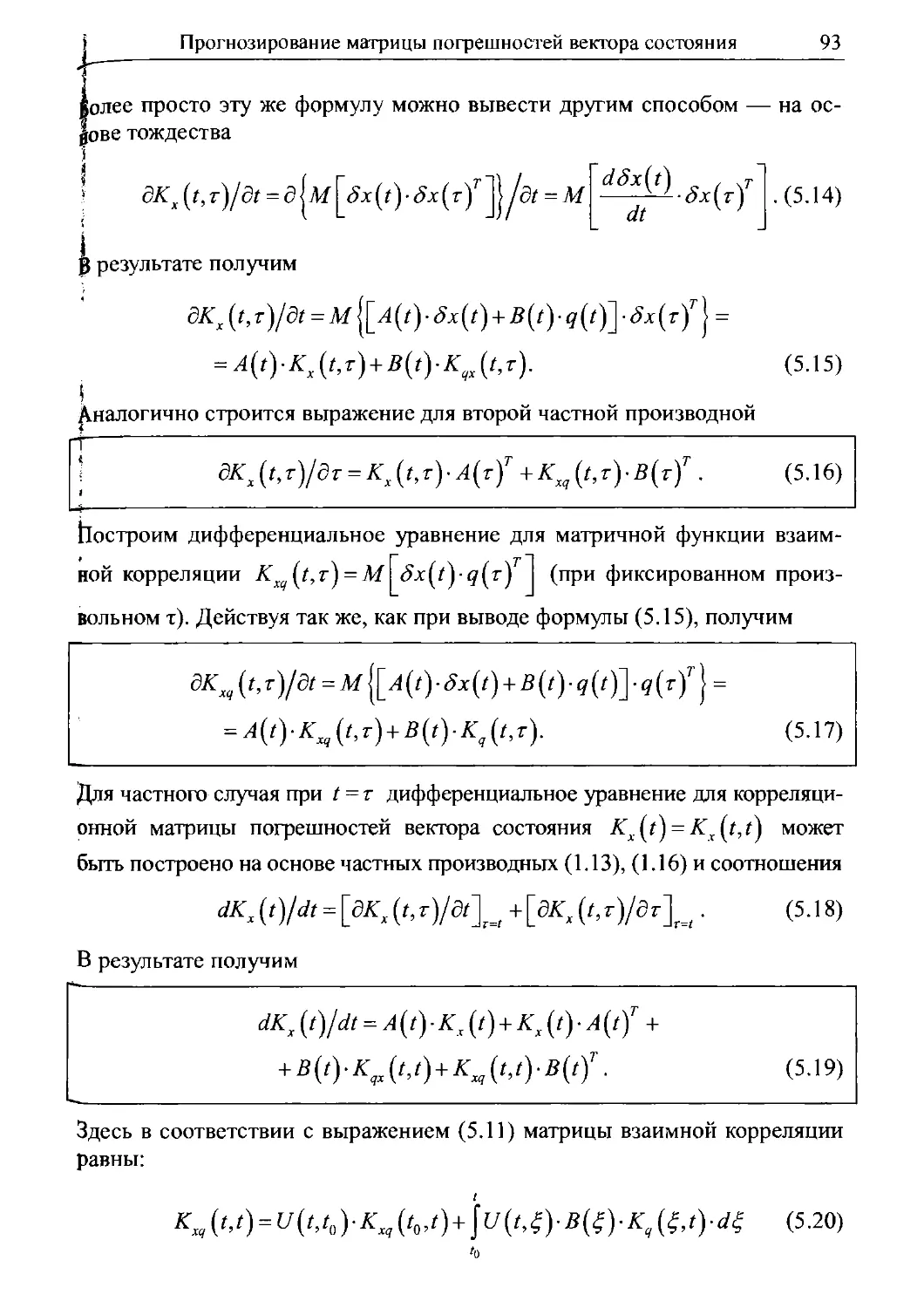
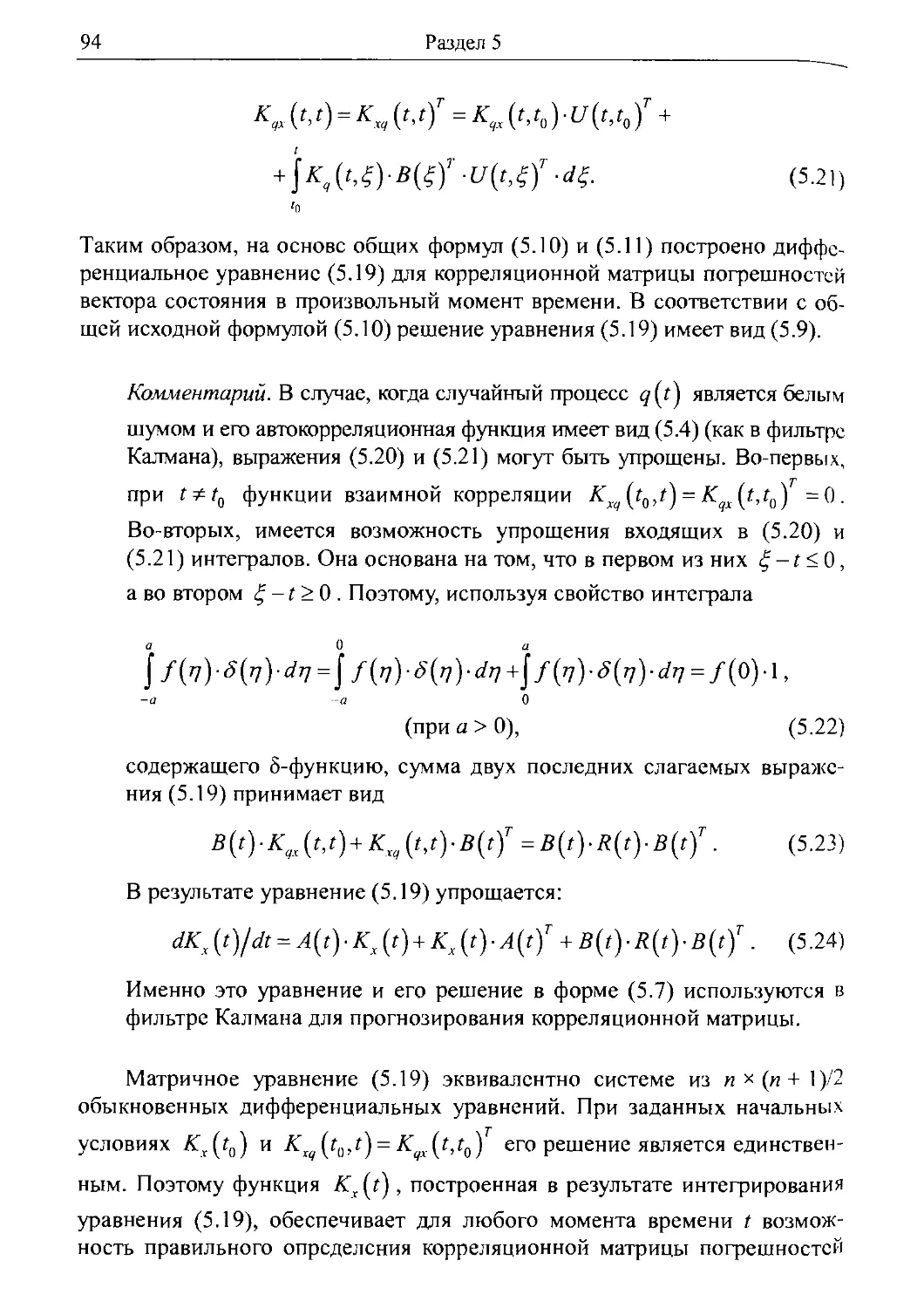
Эволюция погрешностей вектора состояния при прогнозировании
описывается системой неоднородных линейных дифференциальных урав¬
нений, в которых возмущение («цветной» шум системы) принимается га¬
уссовым случайным процессом с известными статистическими характе¬
ристиками. Важным является то, что этот шум существенно отличается от
белого шума, т. е. имеется корреляция значений шума в разные моменты
времени.
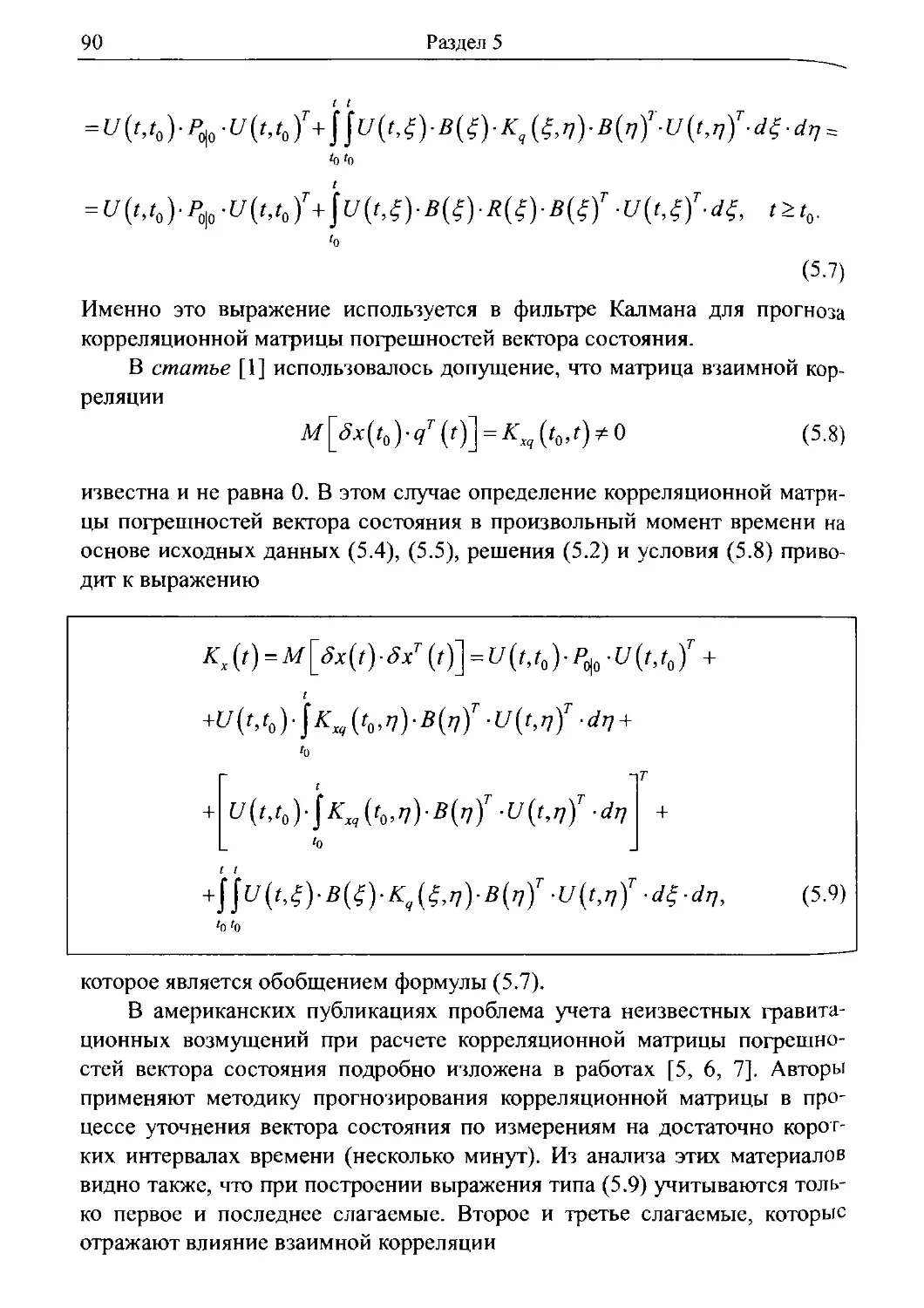
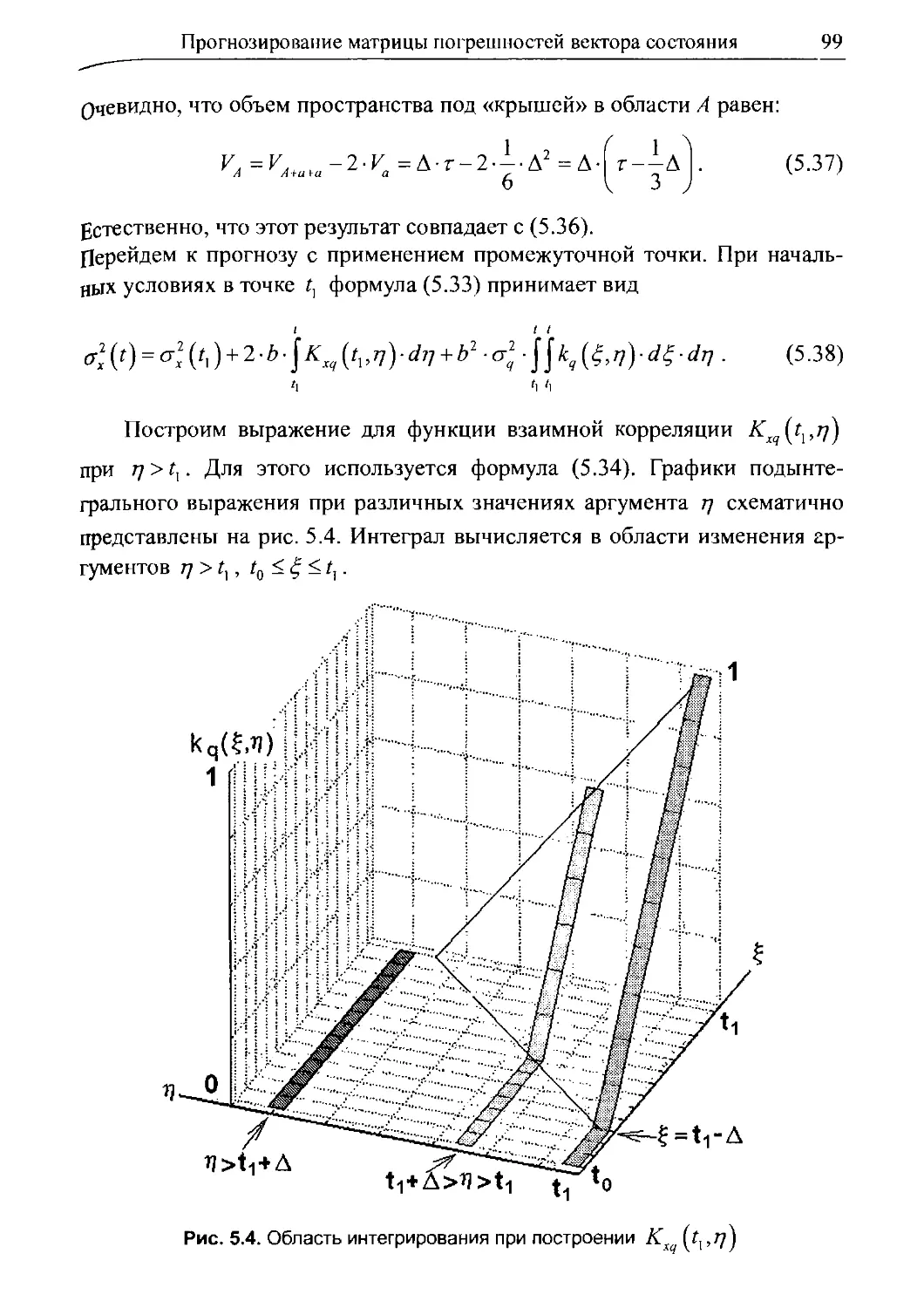
Построена зависимость для определения корреляционной матрицы
погрешностей вектора состояния в произвольный момент времени. Ис¬
ходными данными являются: автокорреляционная функция шума системы,
корреляционная матрица погрешностей вектора состояния в начальный
момент времени и матрица взаимной корреляции погрешностей вектора
состояния в начальный момент времени и шума системы в произвольный
момент времени.
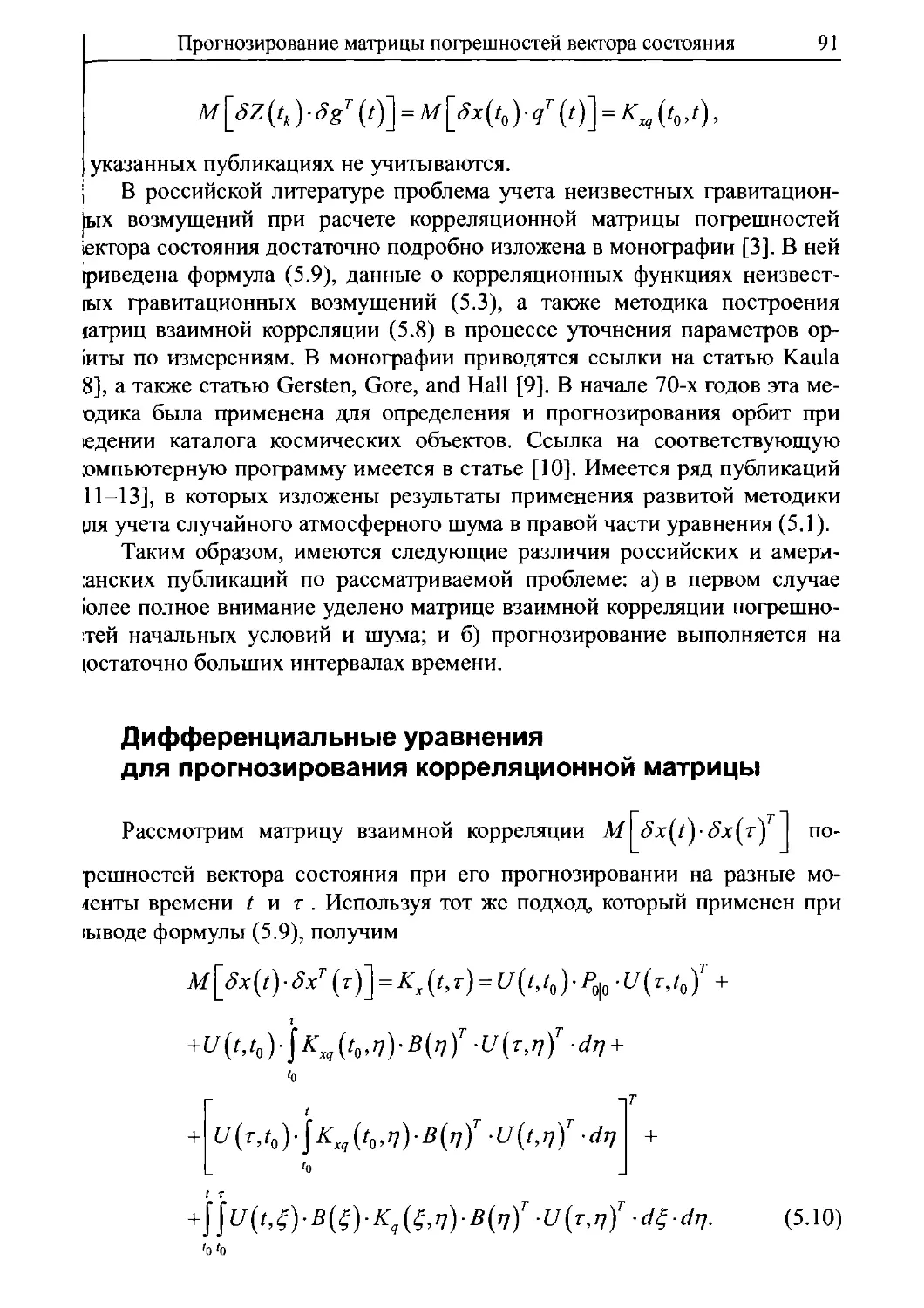
При прогнозировании движения спутника возникает взаимная корре¬
ляция погрешностей вектора состояния и значений шума в разные момен¬
ты времени. Поэтому для обеспечения корректного прогнозирования кор¬
14
Краткое содержание
реляционной матрицы погрешностей вектора состояния необходимо учи¬
тывать полный набор исходных данных. Выполнение прогнозирования
корреляционной матрицы погрешностей без учета матриц взаимной кор¬
реляции погрешностей вектора состояния и шума приводит к неправиль¬
ным результатам.
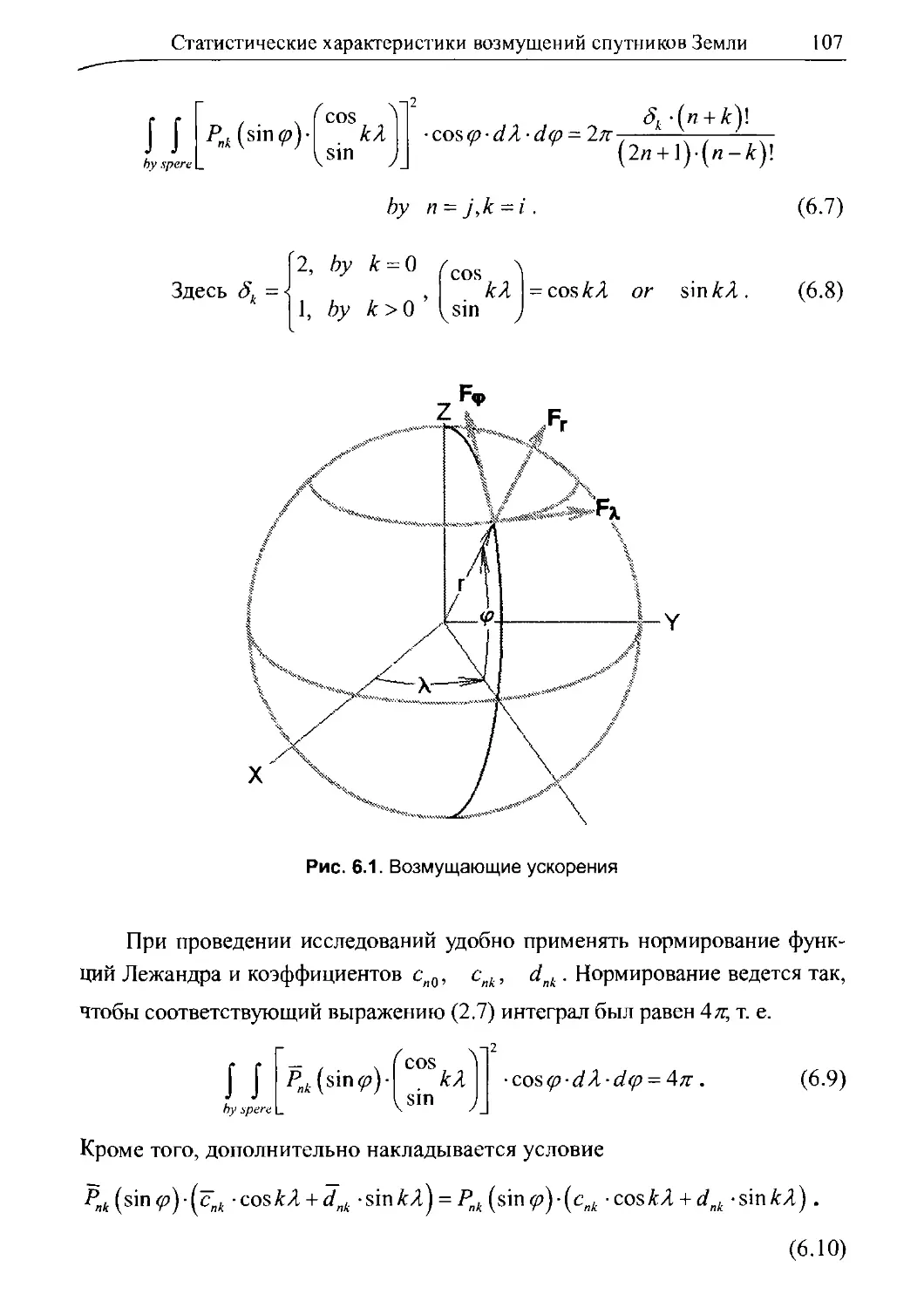
Раздел 6. Статистические характеристики
гравитационных возмущений спутников Земли (1970 г.)
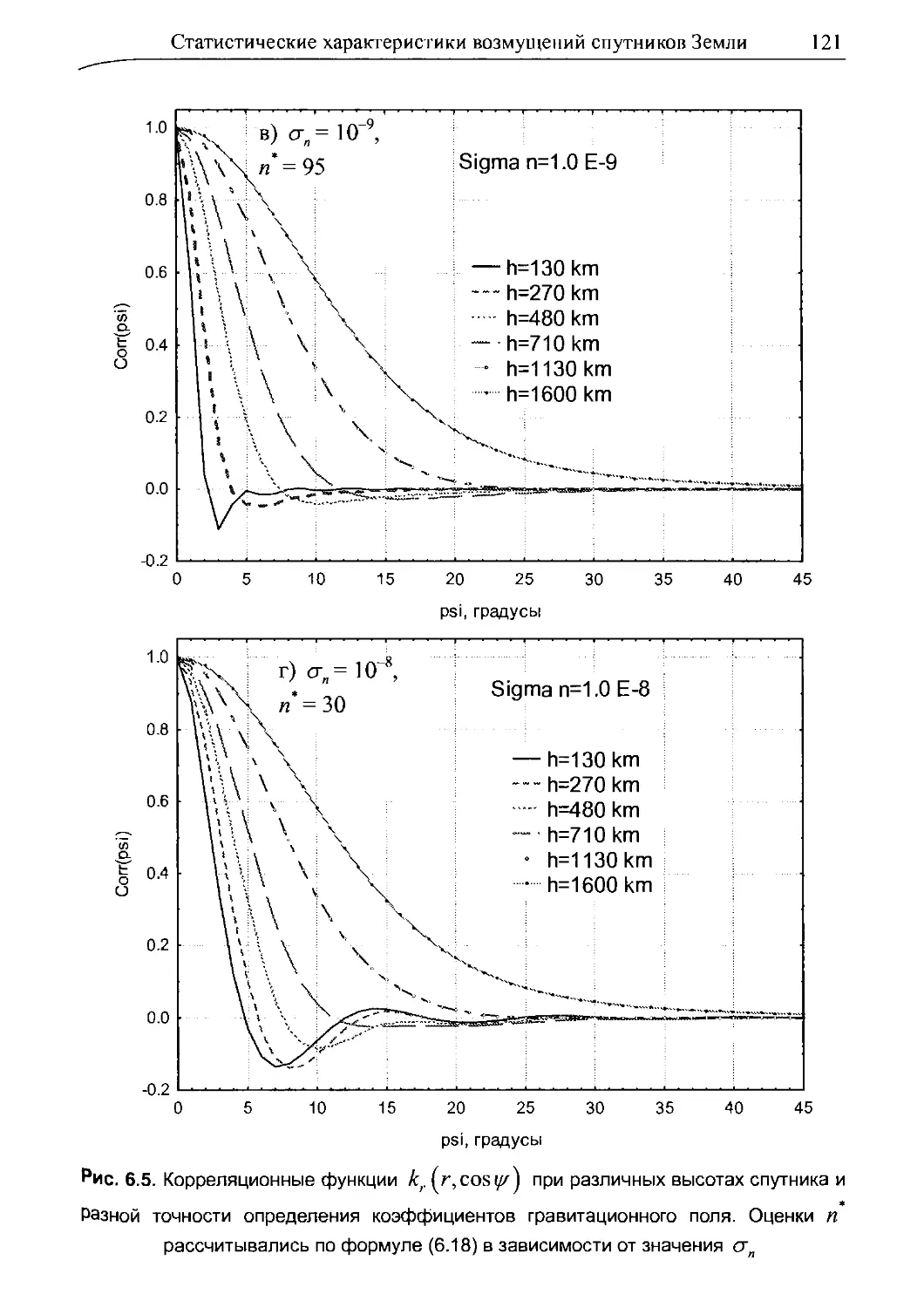
Построены формулы для расчета дисперсии и автокорреляционных
функций трехмерного вектора случайных гравитационных возмущений во
вращающейся, связанной с Землей системе координат. Результаты расчета
зависят от погрешностей определения коэффициентов разложения грави¬
тационного потенциала, учитываемых при прогнозировании движения
спутников, а также от числа учитываемых гармоник. Влияние не учтен¬
ных при прогнозировании гармоник оценивается на основе аппроксима¬
ции их среднеквадратических значений.
Изложенные в разделе оценки дисперсии возмущений и корреляци¬
онные функции этих возмущений являются основой дальнейшей работы
по оценке погрешностей прогнозирования движения спутников, обуслов¬
ленных влиянием не учтенных гравитационных возмущений.
Важной характеристикой автокорреляционных функций является
практическое обнуление корреляции при удалении от заданной точки бо¬
лее чем на 10°-30°. Реальные орбиты спутников относительно Земли ред¬
ко проходят над одними и теми же подспутниковыми точками. Это об¬
стоятельство необходимо учитывать при переходе в инерциальную сис¬
тему координат, в которой обычно интегрируются уравнения движения
спутников.
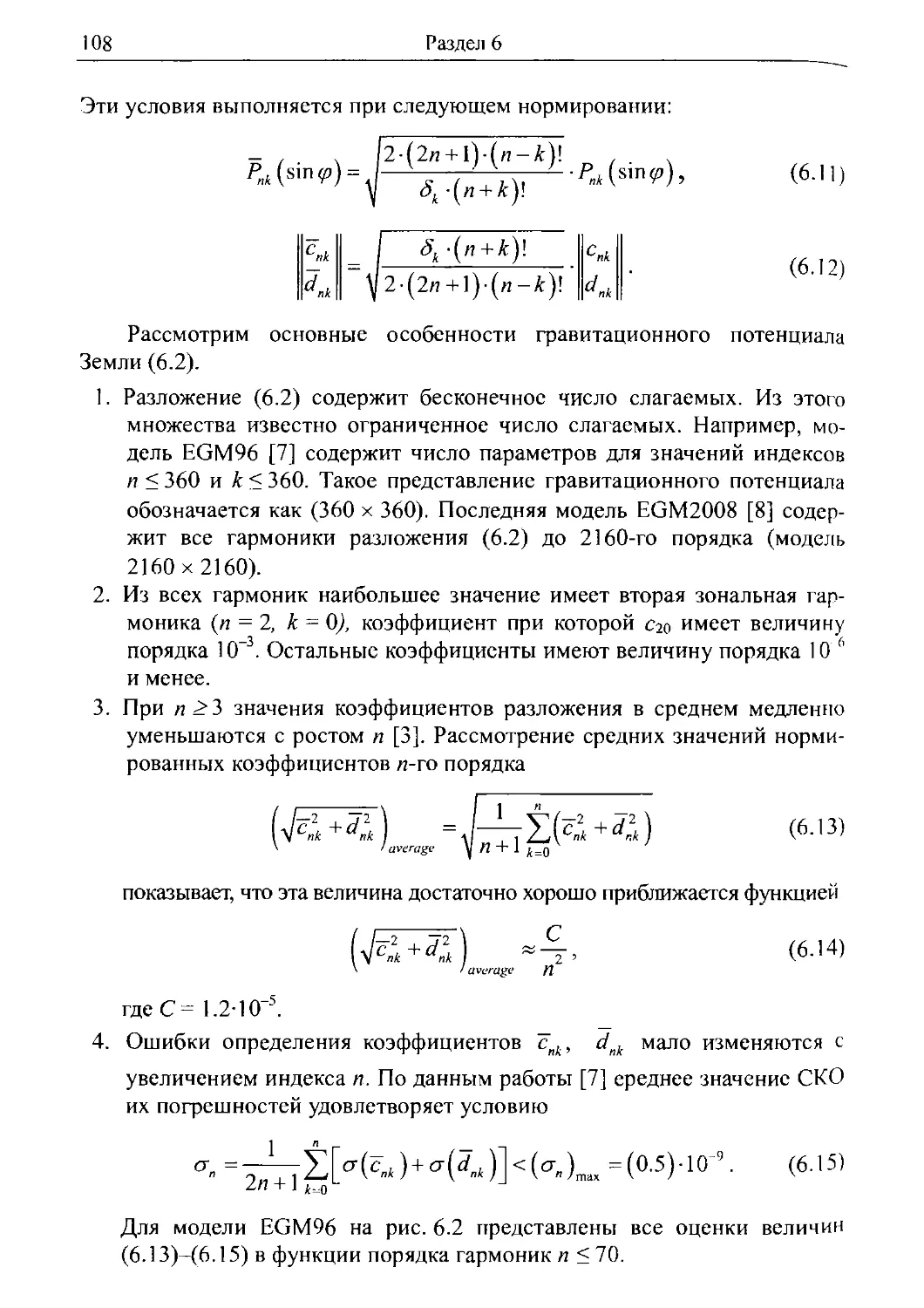
СКО (<7п) погрешностей нормированных коэффициентов разложения
гравитациионного потенциала Земли по сферическим функциям мало из¬
меняются с увеличением индекса п. Поэтому оценку (сг„) рекомендо¬
вано использовать для выбора оптимального порядка учитываемых гар¬
моник.
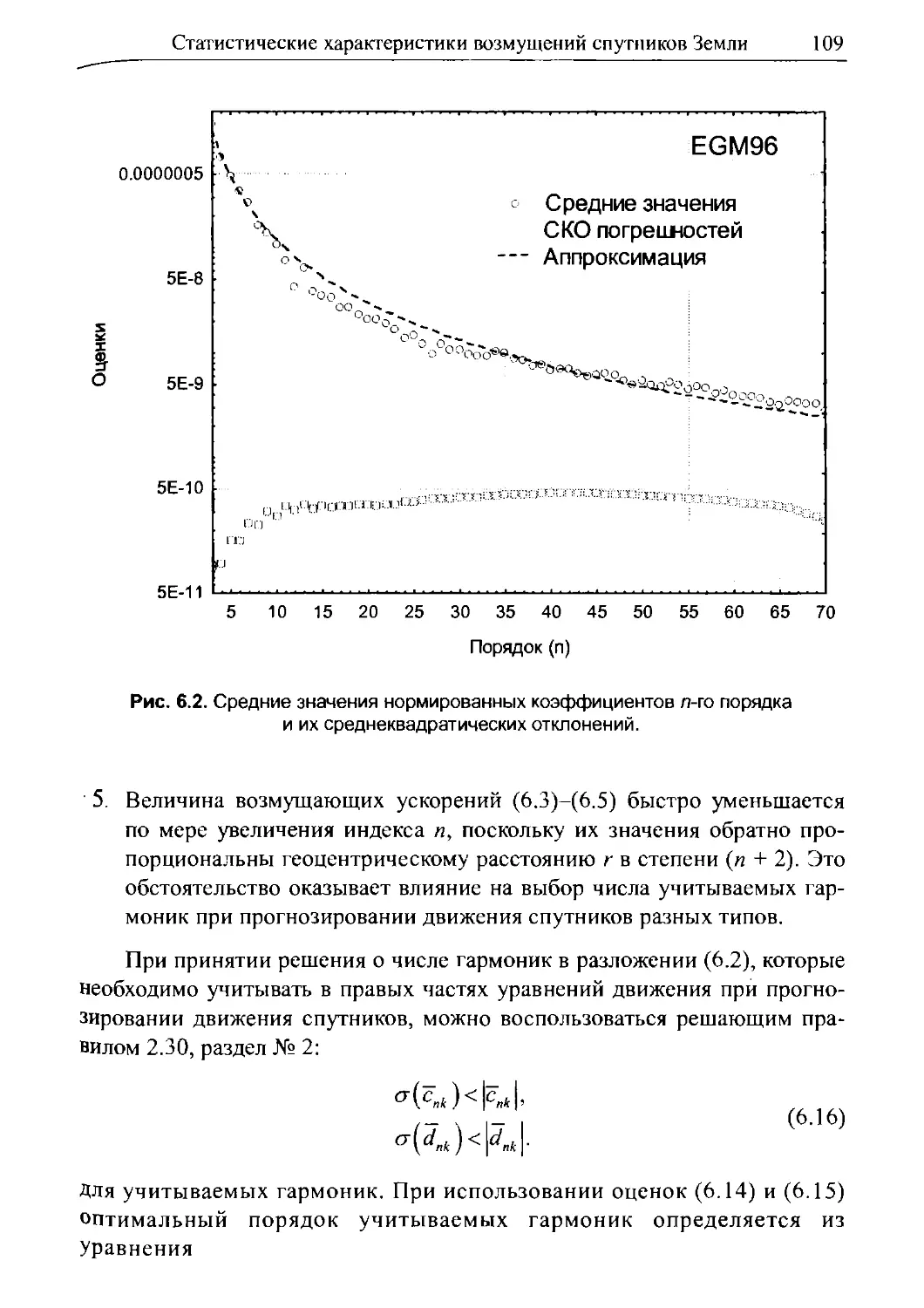
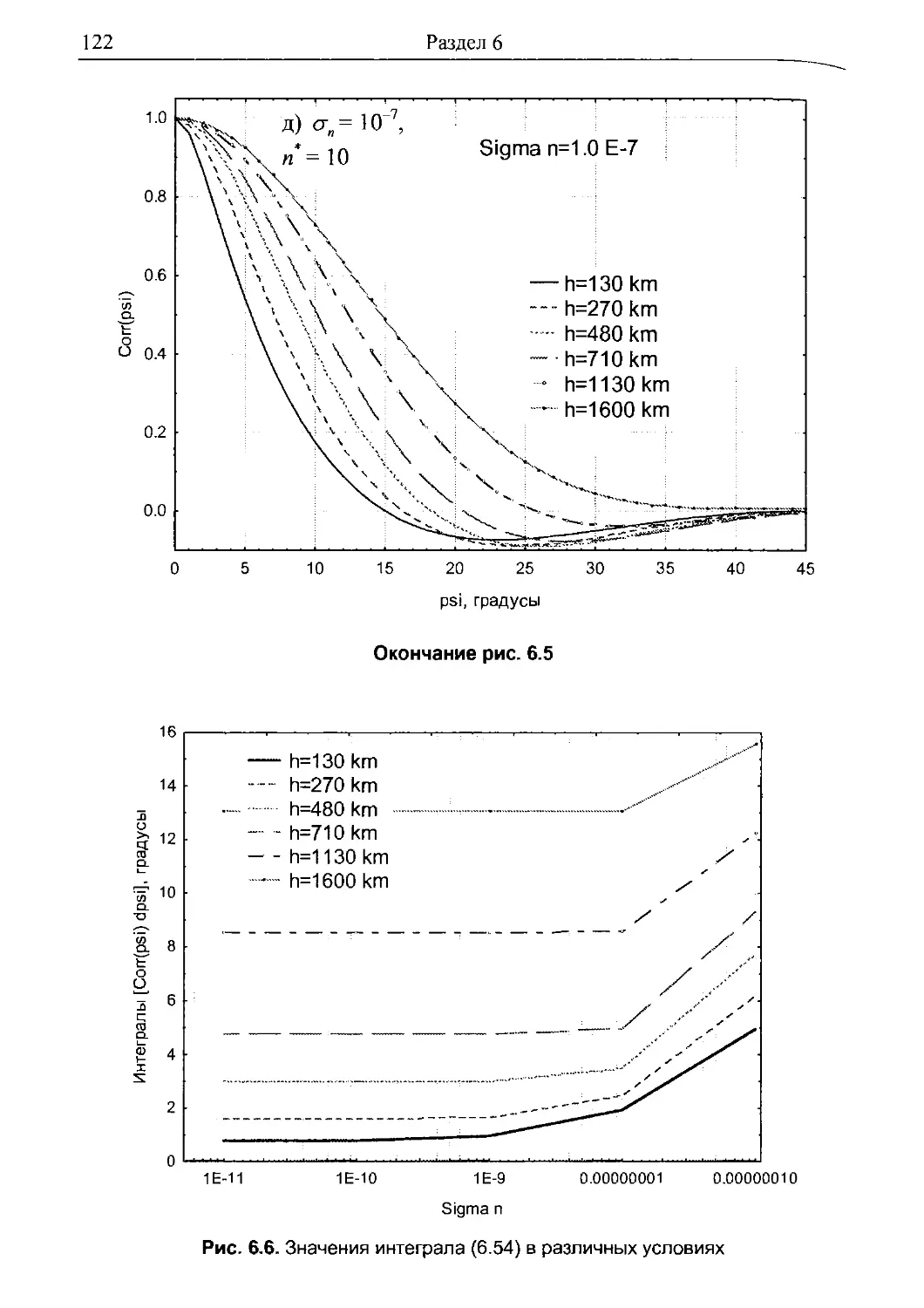
Показано, что данные о точности коэффициентов разложения грави¬
тационного потенциала в ряд, публикуемые авторами моделей, не явля¬
ются достаточно достоверными. У современных моделей поля значение
СКО погрешностей коэффициентов разложения потенциала имеет поря¬
док не лучше =10 9. Этому значению соответствует оптимальный поря¬
док учитываемых гармоник п = 95. На практике в алгоритмах прогноза
движения спутников обычно учитывается меньшее число гармоник.
Этим условиям соответствуют значения СКО погрешностей в интервале
от 10 9 до 10 8.
Краткое содержание
15
Раздел 7. Рекуррентная фильтрация измерений
динамической системы, подверженной влиянию
возмущений в виде цветного шума (1971 г.)
Актуальность создания рекуррентных алгоритмов обработки измере¬
ний была обусловлена низкими техническими характеристиками вычис¬
лительной техники 60-х и 70-х годов. Их применение обеспечивало эко¬
номию машинного времени и памяти.
Построен рекуррентный алгоритм фильтрации измерений динамиче¬
ской системы, подверженных влиянию возмущений в виде цветного шума.
Принципиальное отличие этого алгоритма от фильтра Калмана заключает¬
ся в добавлении трех функциональных рекуррентных соотношений. Их
реализация на ЭВМ связана с необходимостью запоминания соответст¬
вующих функций на некоторой сетке аргументов.
Работоспособность и достоинства алгоритма подтверждены результа¬
тами математического моделирования, а также опытом его применения
для уточнения и прогнозировании орбит по реальной измерительной ин¬
формации.
К концу 20-го века в результате прорывного улучшения характери¬
стик вычислительной техники область применения рекуррентных алго¬
ритмов существенно уменьшилась.
Раздел 8. Совместная обработка измерений
динамической системы, подверженной влиянию
возмущений в виде цветного шума (1973 г.)
Основы методики совместной обработки измерений были опублико¬
ваны автором более 40 лет назад. Однако ограниченные вычислительные
возможности того времени препятствовали практическому применению
этой методики. В последние годы такая возможность появилась. Харак¬
терной особенностью развитой методики является учет статистических
характеристик возмущений на интервале обработки измерений и при про¬
гнозировании движения.
Изложено детальное обоснование алгоритма совместной обработки
измерений, названного методом оптимальной фильтрации измерений
(ОФИ), а именно, обоснованы формулы для оценки вектора состояния и
шума системы.
Задача решается в два этапа. На первом этапе организуется итераци¬
онный процесс уточнения вектора состояния x(tk.) с применением фор¬
мулы (8.26). На втором этапе при прогнозе движения на моменты време¬
ни t . > tk в правую часть исходных нелинейных уравнений добавляются
оценки шума. Эта методика характерна тем, что оценки шума строятся
после обработки измерений на мерном интервале. При этом используются
16
Краткое содержание
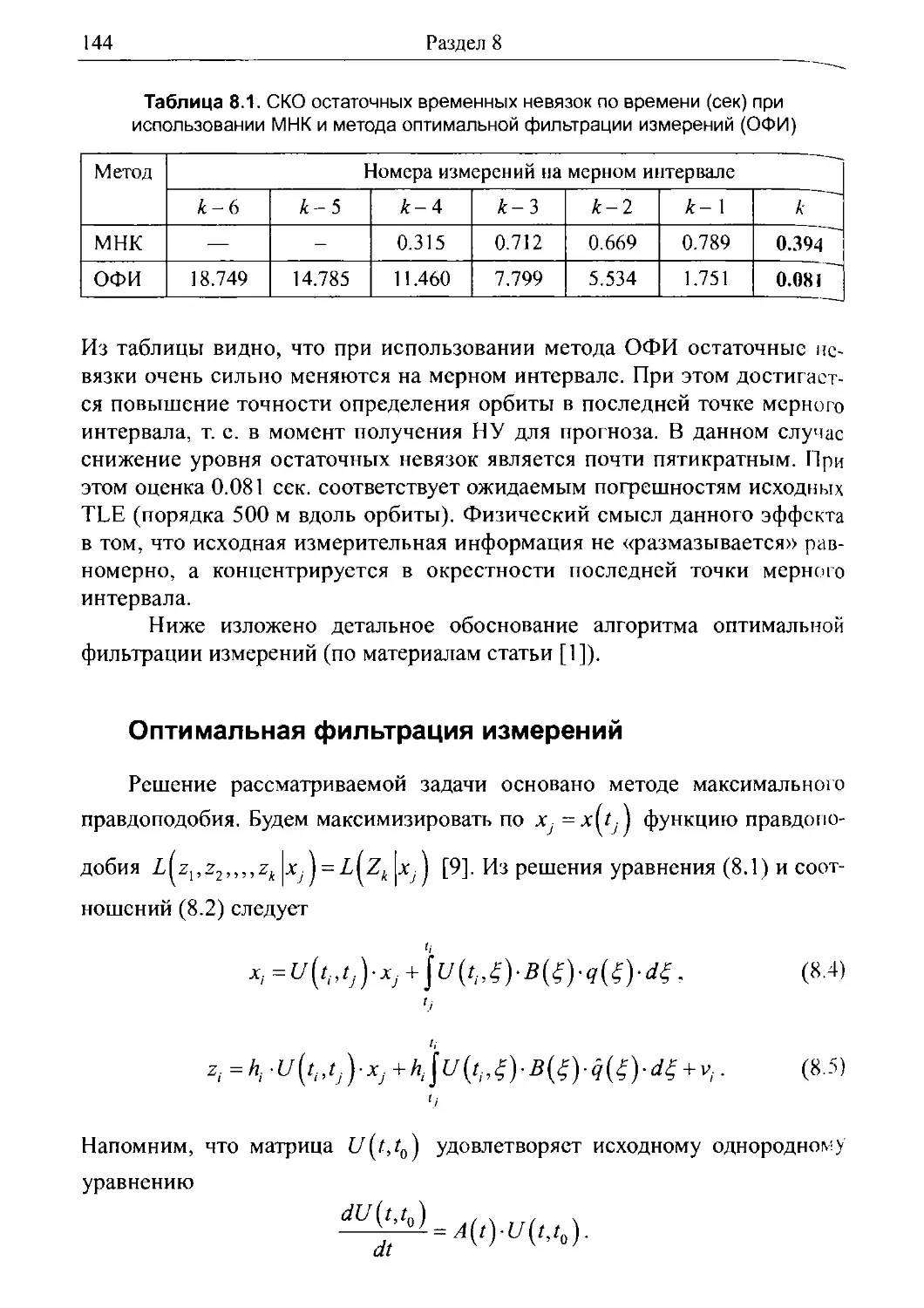
остаточные невязки (Zk —Хк -хк) между измеренными и расчетными зна¬
чениями параметров.
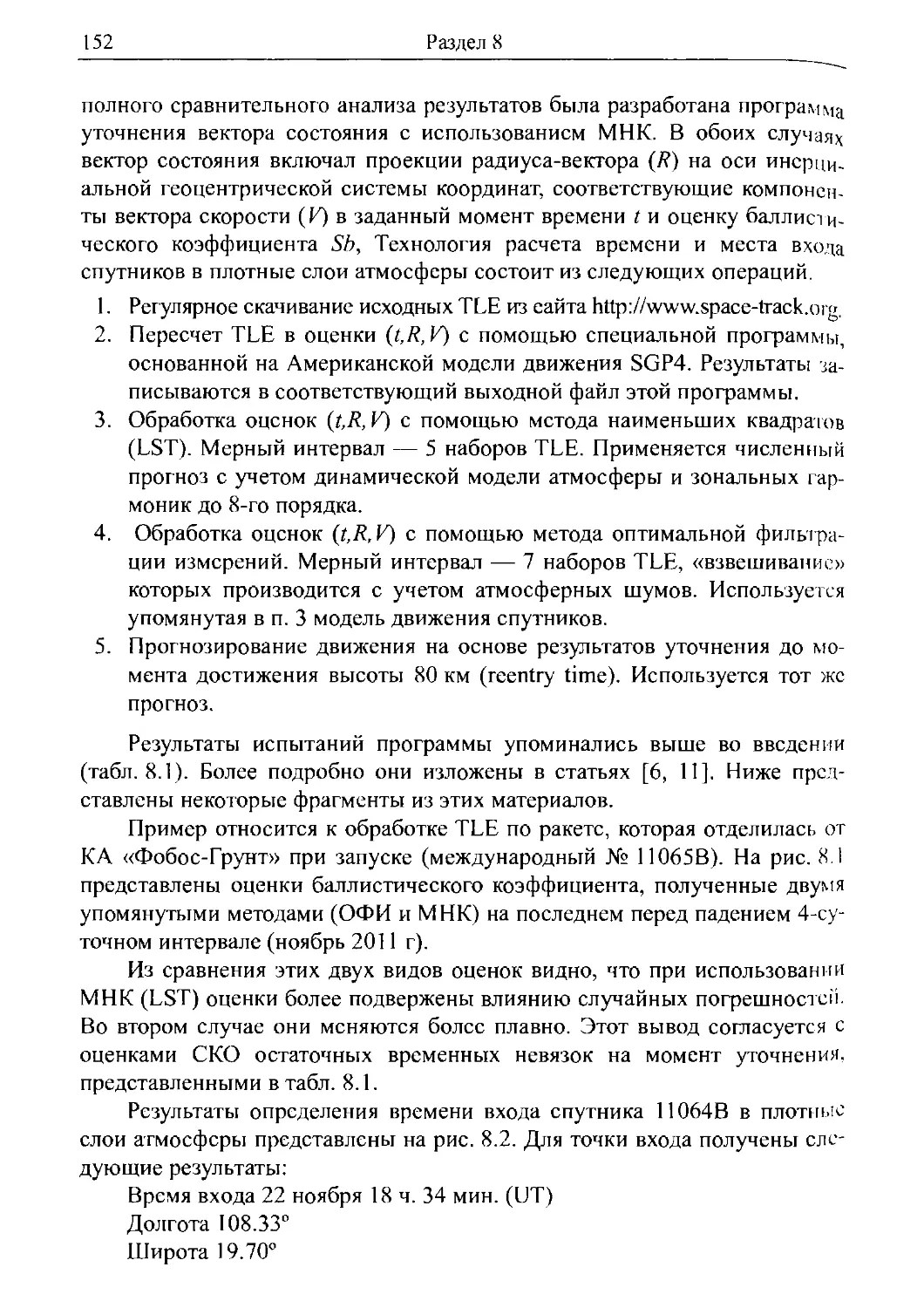
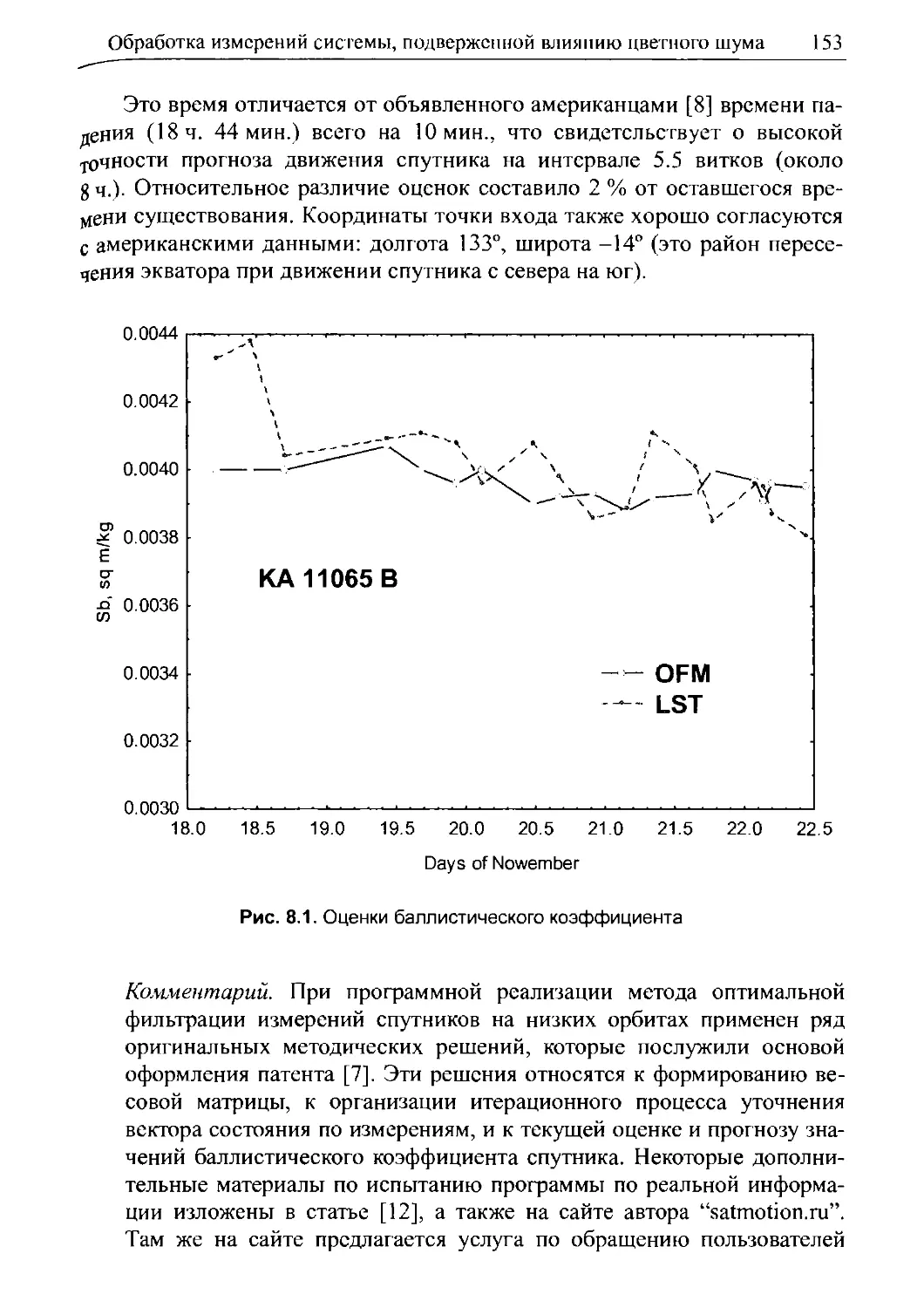
На основе метода ОФИ разработана компьютерная программа для
уточнения параметров орбиты и прогнозирования движения спутников до
точки входа в плотные слои атмосферы. Она учитывает статистические
характеристики атмосферных возмущений. Испытания программы пока¬
зали ее высокую точность: в большинстве случаев погрешности опреде¬
ления времени падения не превышают нескольких процентов от оставше¬
гося времени существования.
Разработанная методика применима не только для низких, но и дру¬
гих типов спутников. В этом случае необходимо учитывать статистиче¬
ские характеристики возмущений другой природы: гравитационные, а
также связанные с погрешностями учета светового давления.
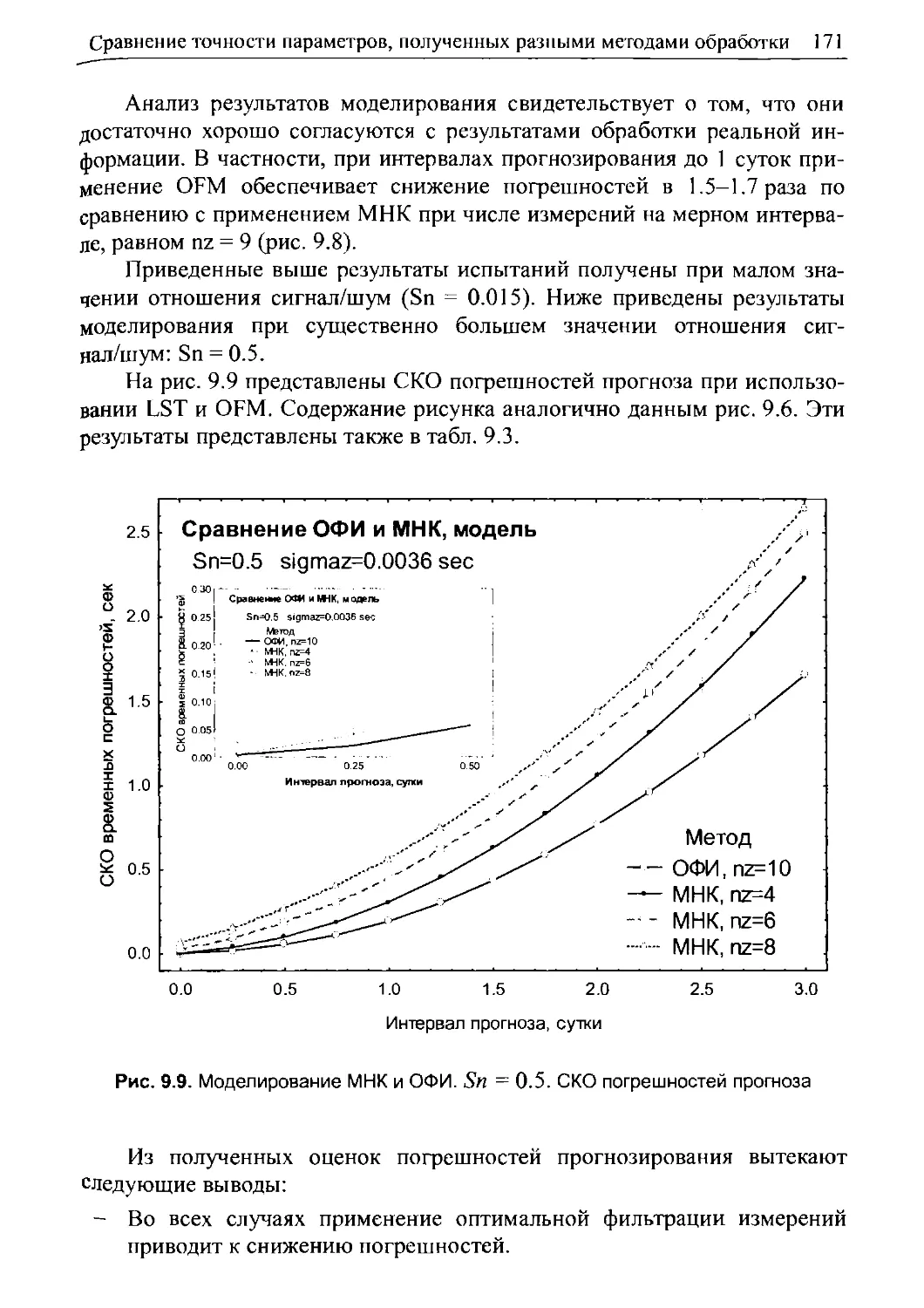
Раздел 9. Сравнение точности параметров,
полученных с использованием разных методов
обработки измерений (2007 г.)
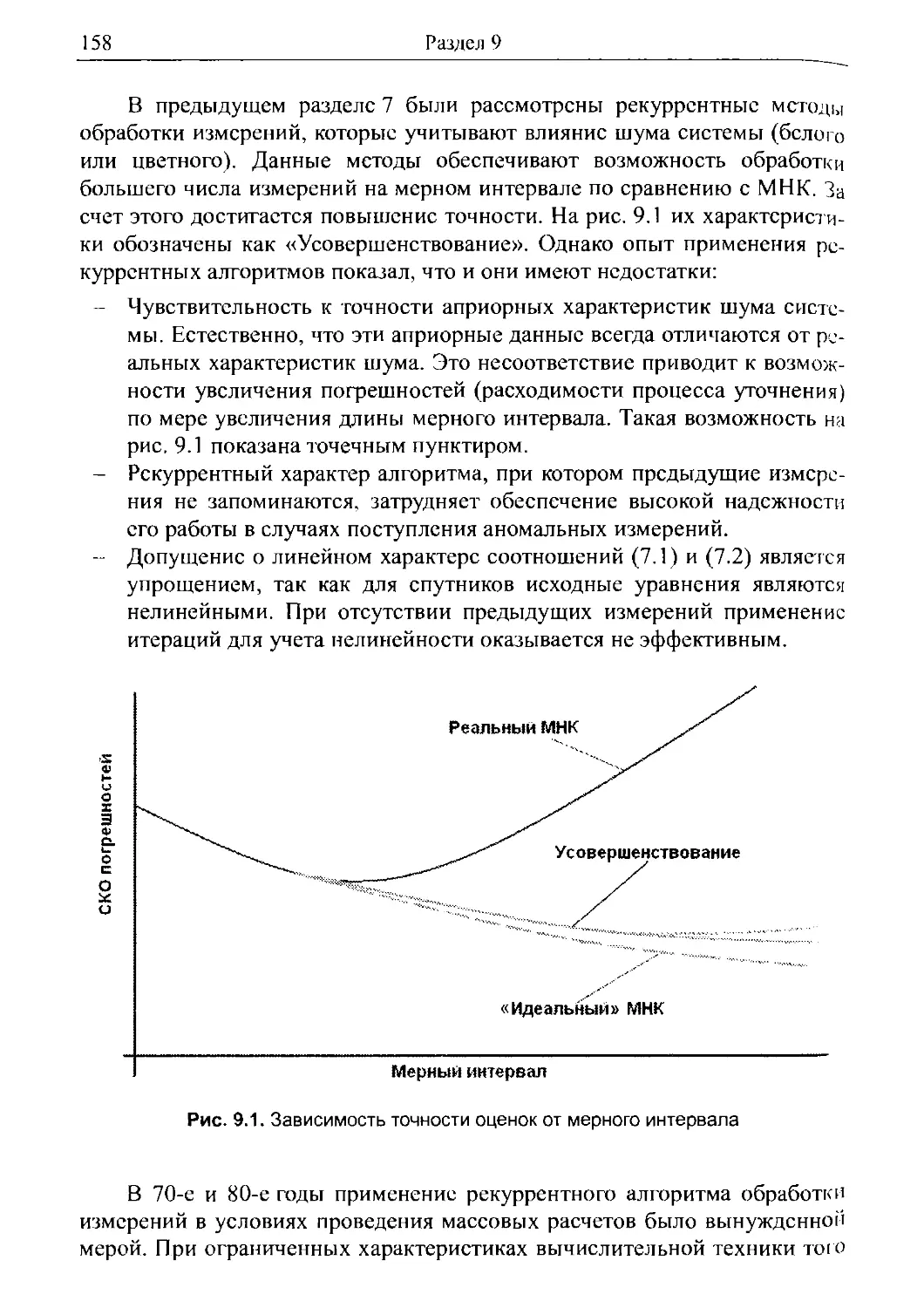
В последние годы, по мере улучшения характеристик вычислитель¬
ной техники, появилась возможность перехода к совместной обработке
измерений при уточнении элементов орбит всех спутников, т. е. к приме¬
нению МНК и его модификаций.
Применение совместной обработки измерений при уточнении орбит
спутников сталкивается с необходимостью корректного учета случайных
возмущений.
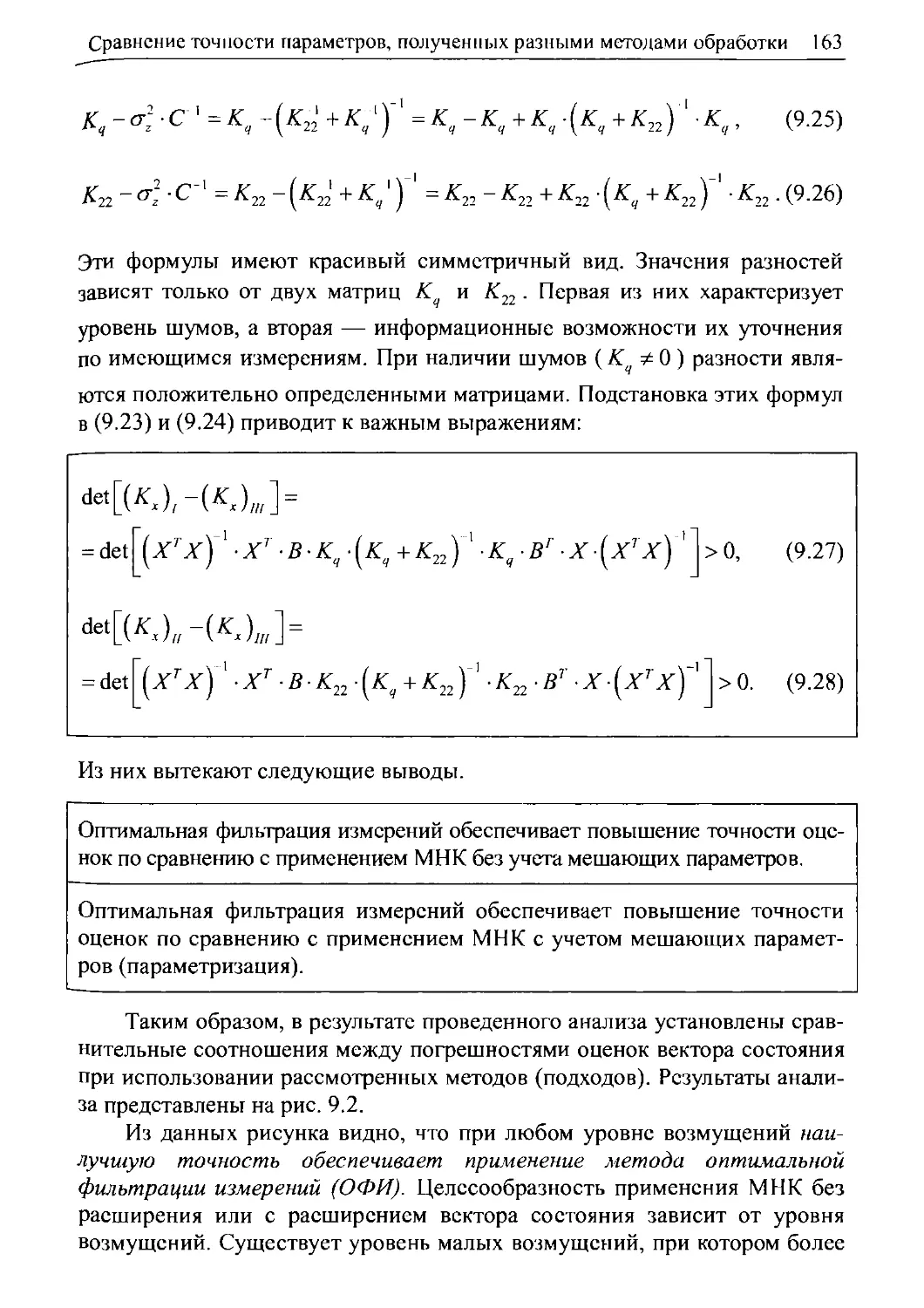
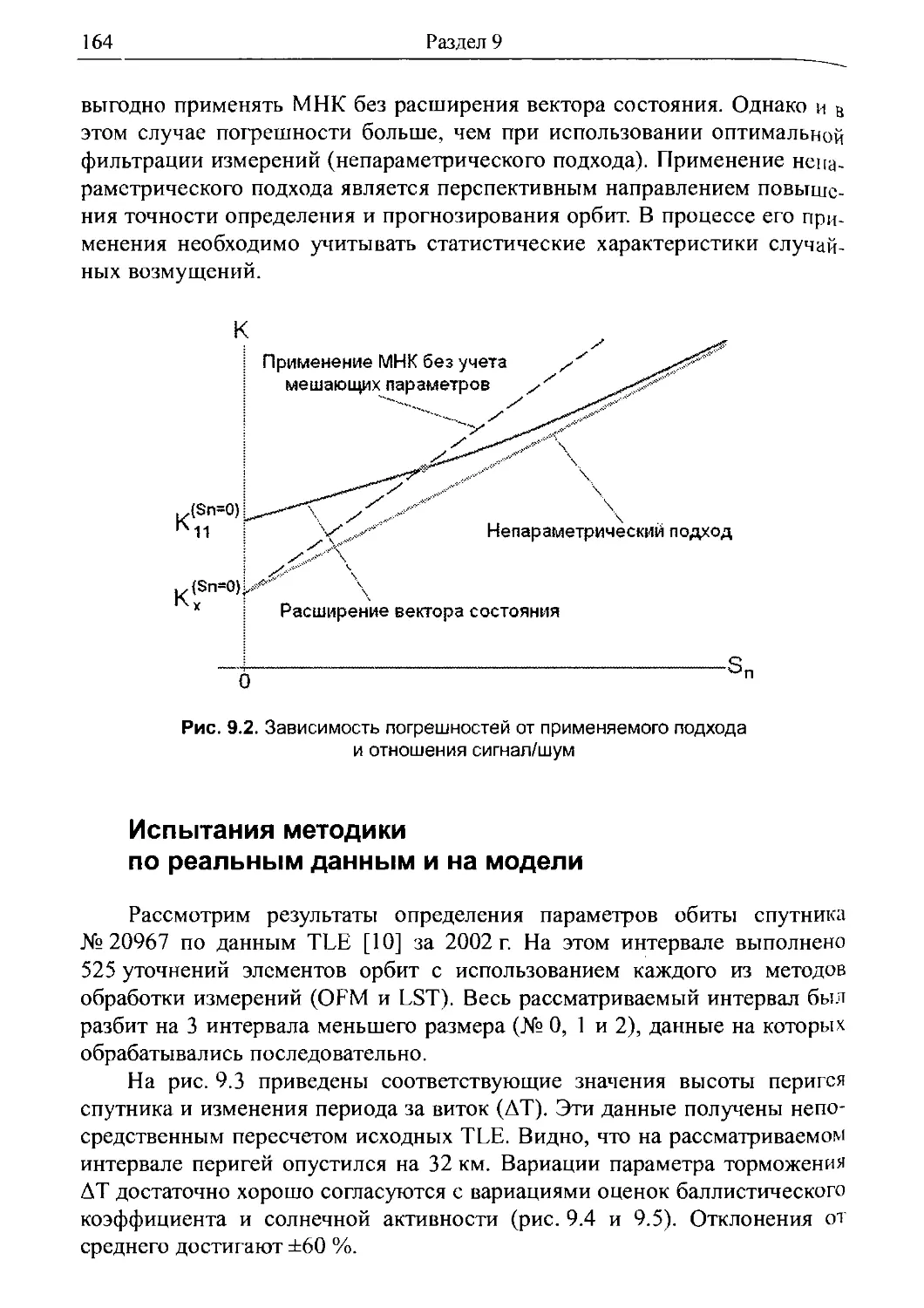
В результате проведенного анализа установлены сравнительные со¬
отношения между погрешностями оценок вектора состояния при исполь¬
зовании трех методов оценки вектора состояния, отличающихся способом
учета случайных возмущений.
Показано, что оптимальная фильтрация измерений (без параметриза¬
ции шумов) обеспечивает повышение точности оценок по сравнению с
применением МНК с учетом или без учета мешающих параметров.
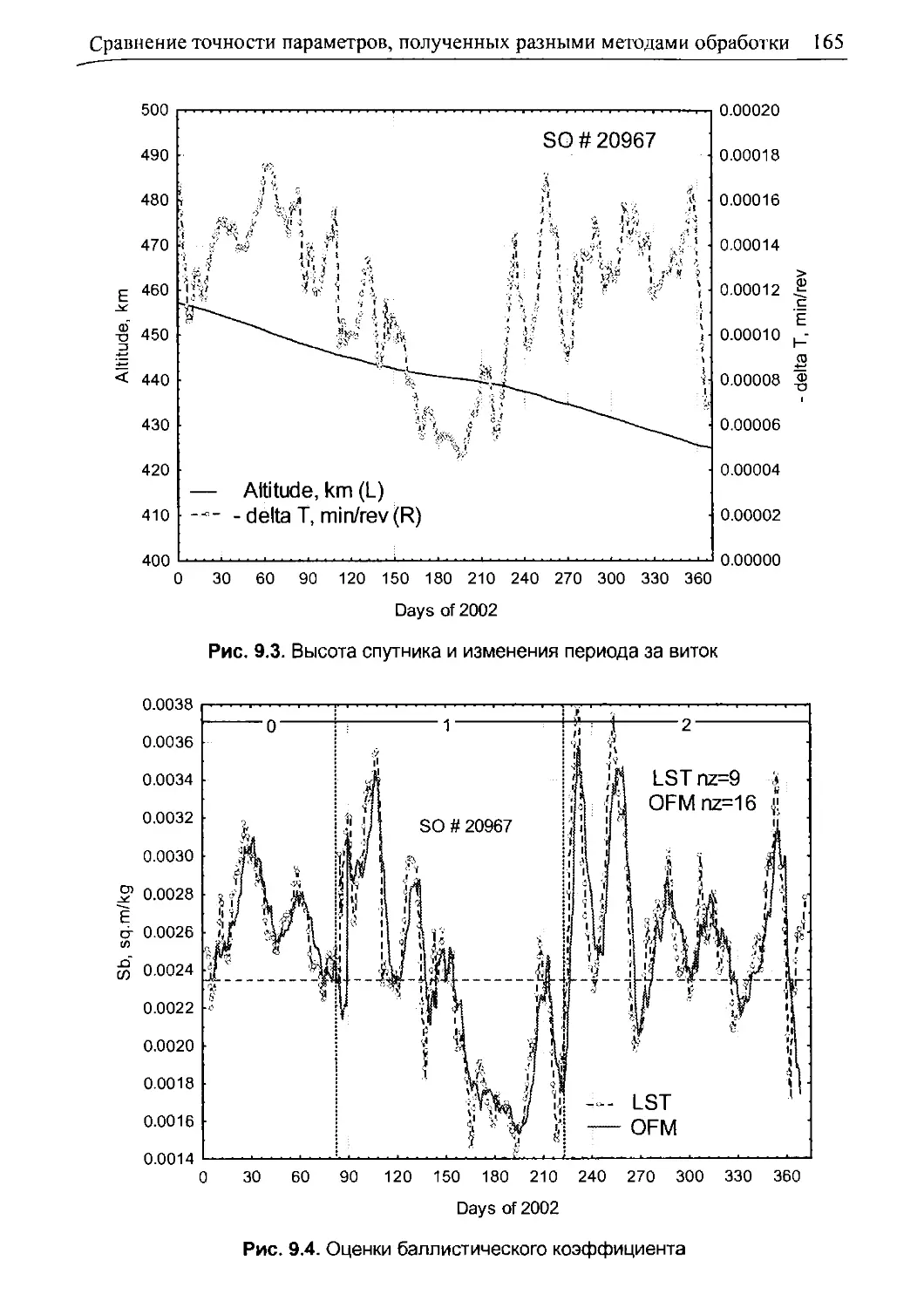
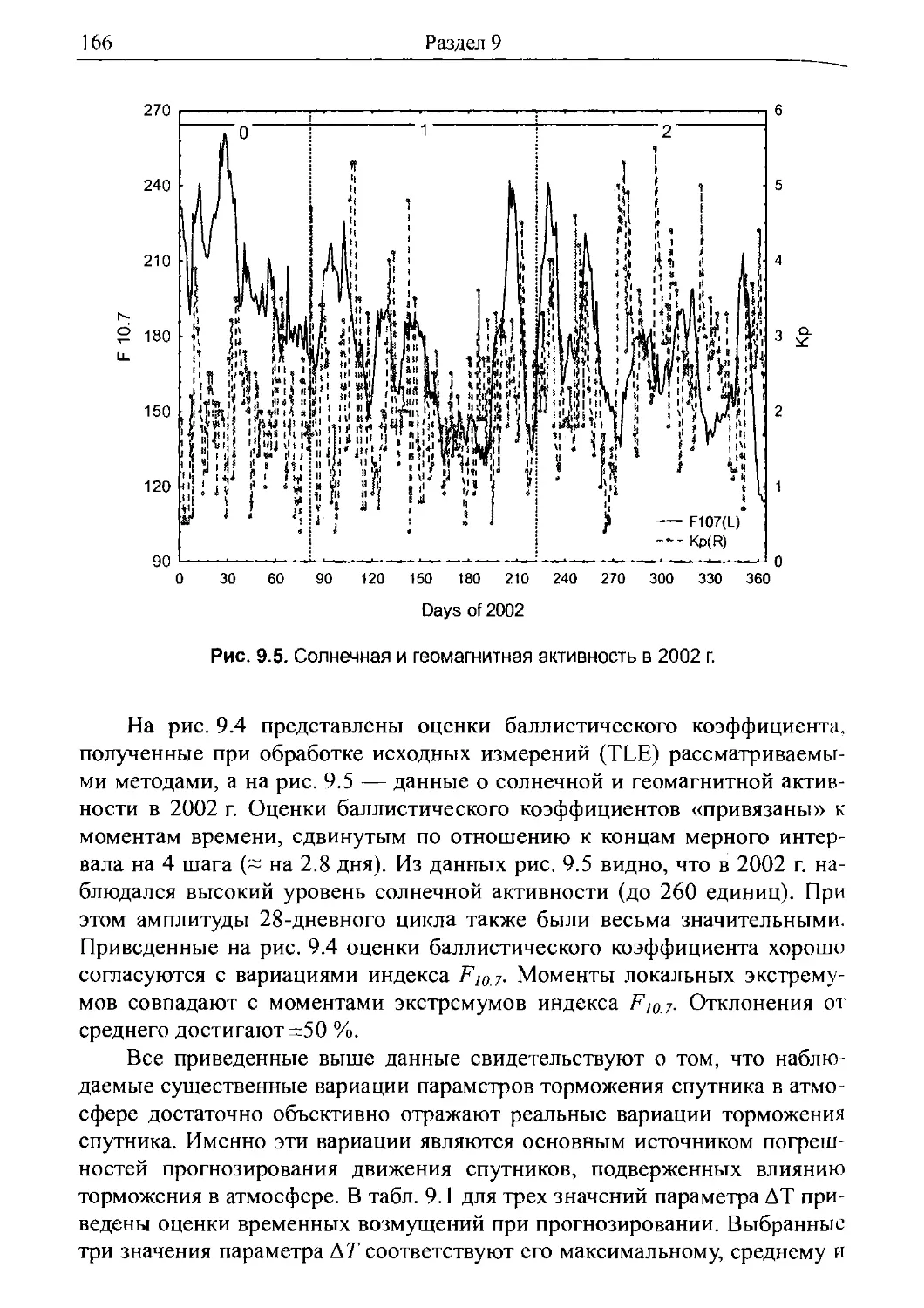
Испытания методики оптимальной фильтрации измерений по реаль¬
ным данным и на модели подтвердили вывод о том, что она обеспечивает
повышение точности определения и прогнозирования орбит ИСЗ.
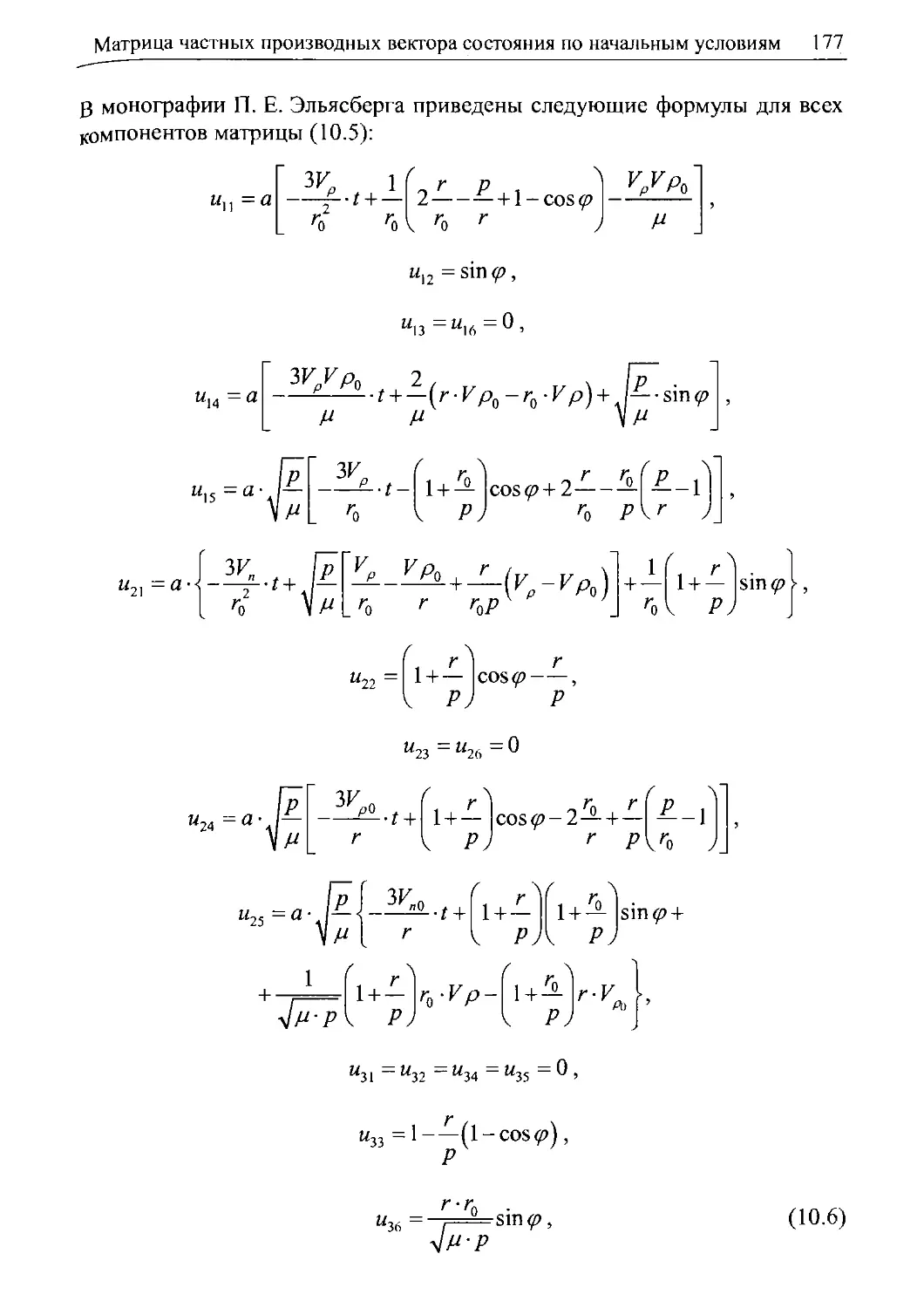
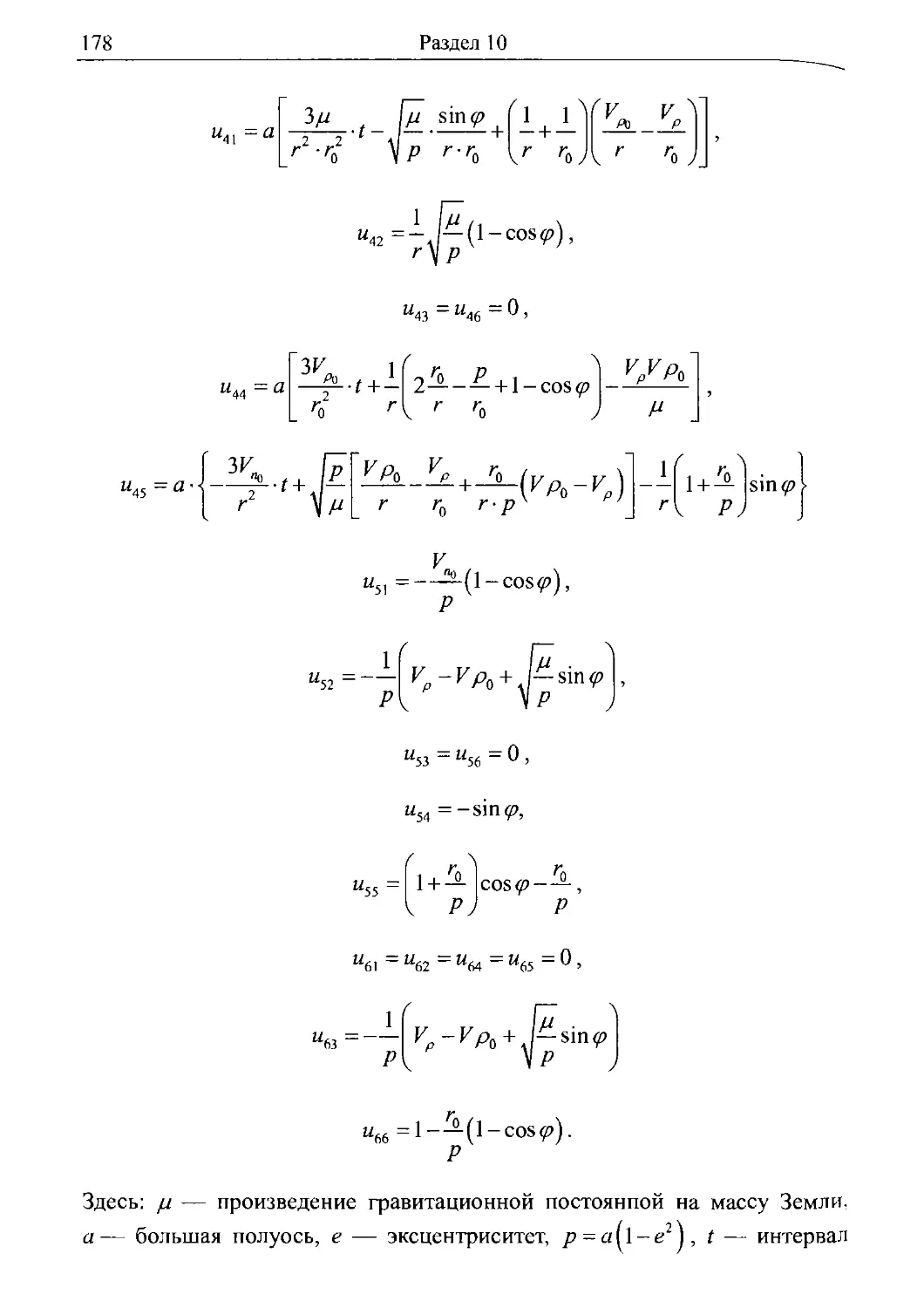
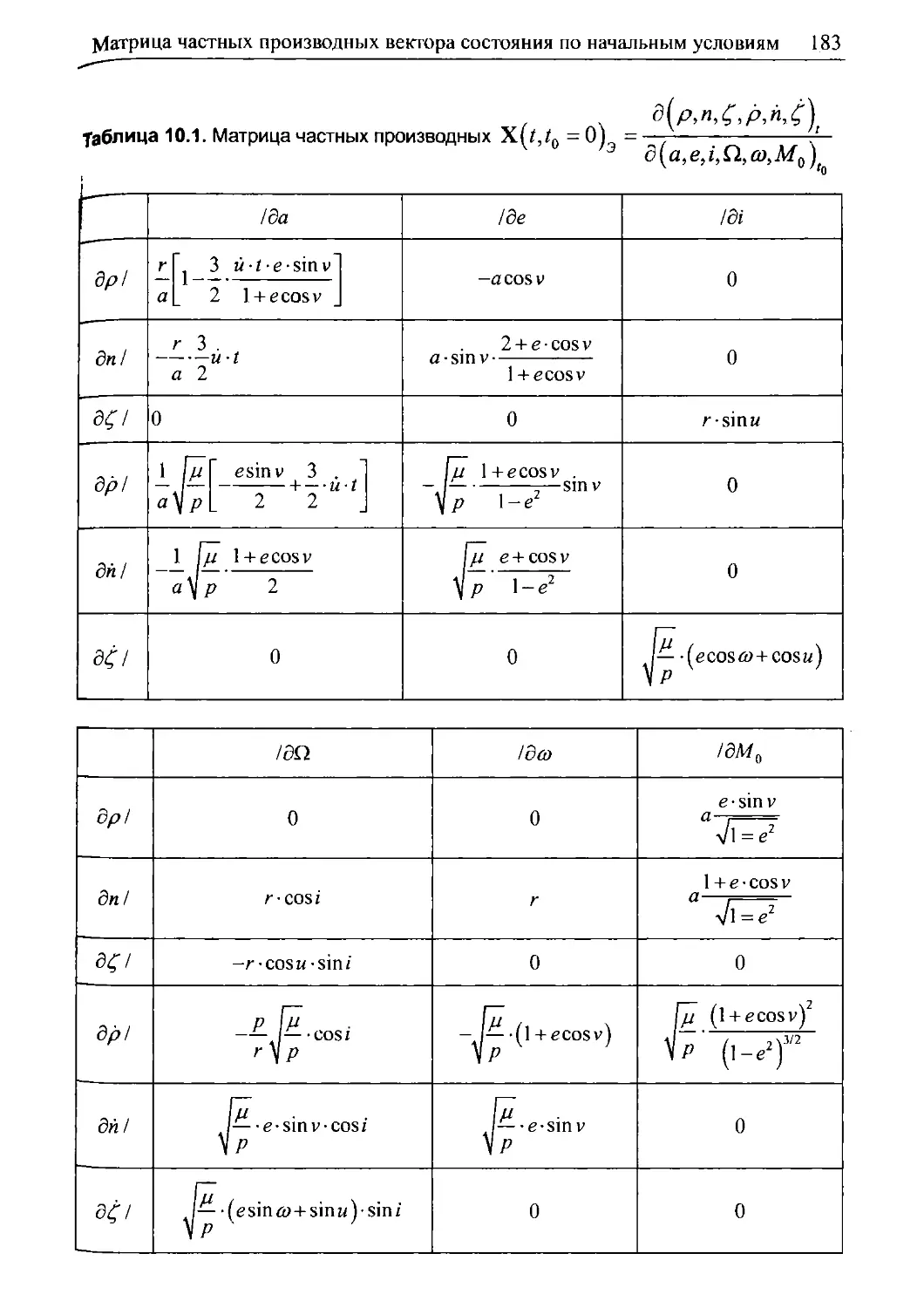
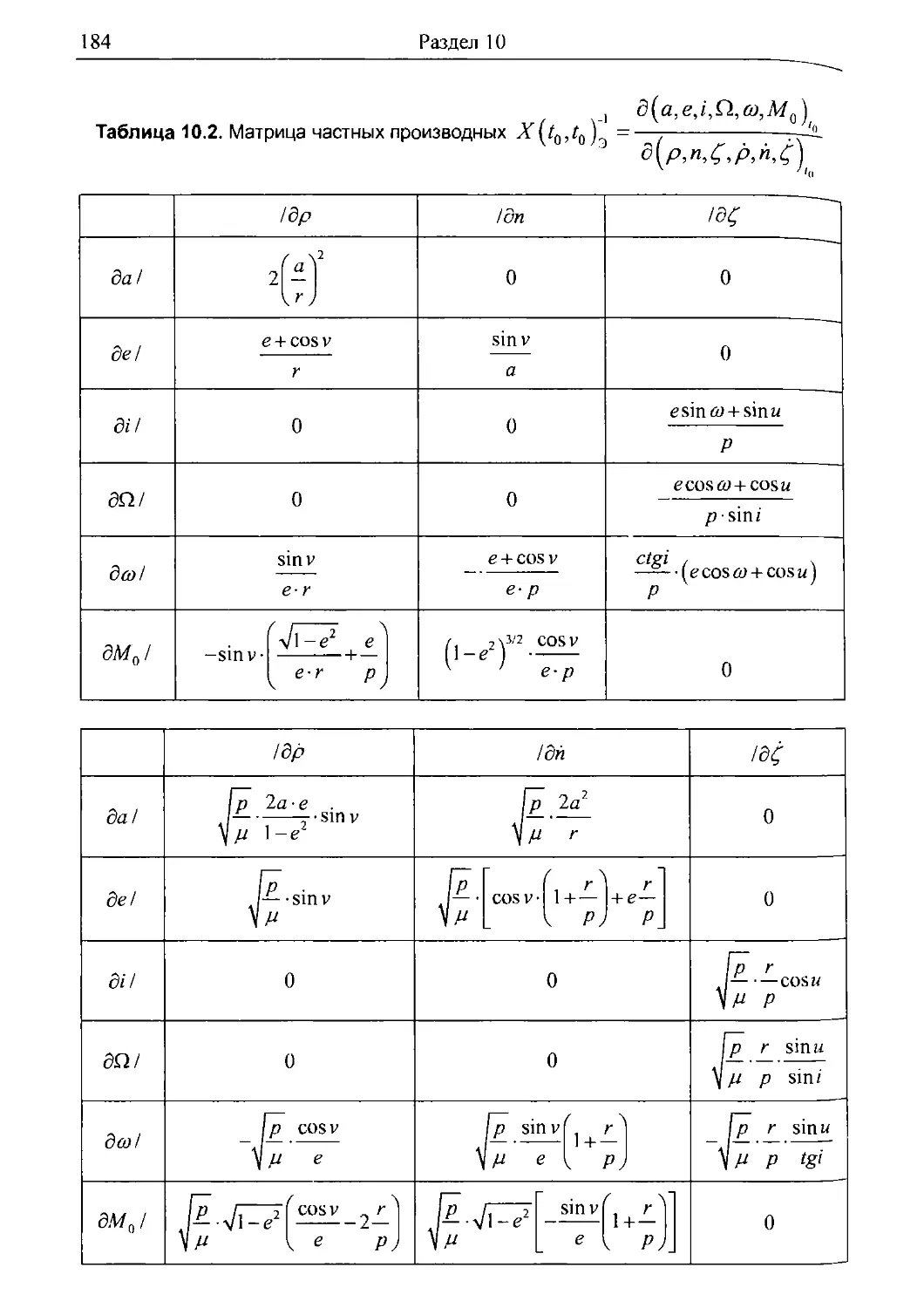
Раздел 10. Матрица частных производных вектора
состояния по начальным условиям (1981 г.)
50 лет назад П. Е. Эльясберг опубликовал формулы для расчета мат¬
рицы частных производных текущего вектора состояния по начальным
условиям в инерциальной системе координат (£/(/,/„ )э). Значение этого
Краткое содержание
17
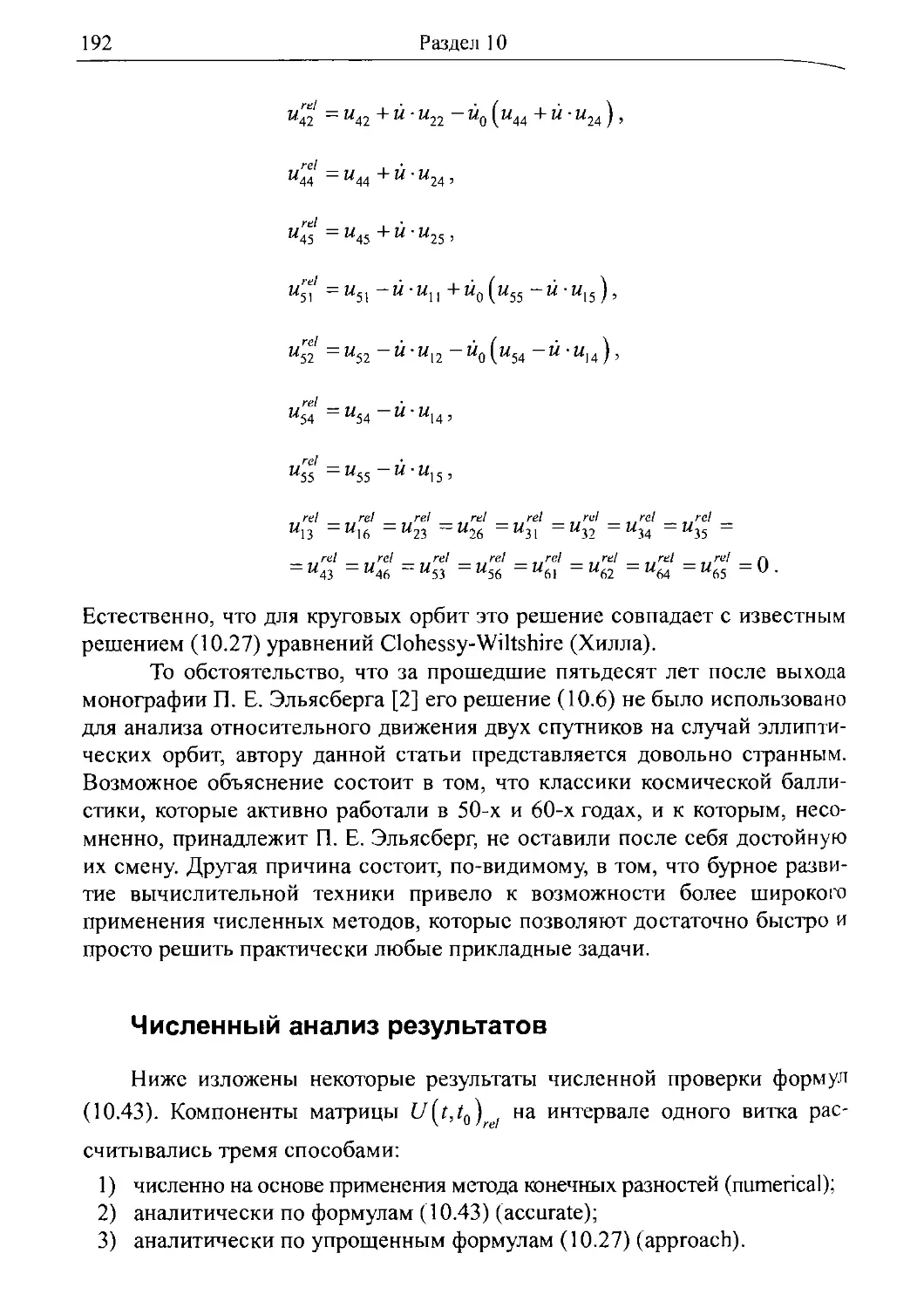
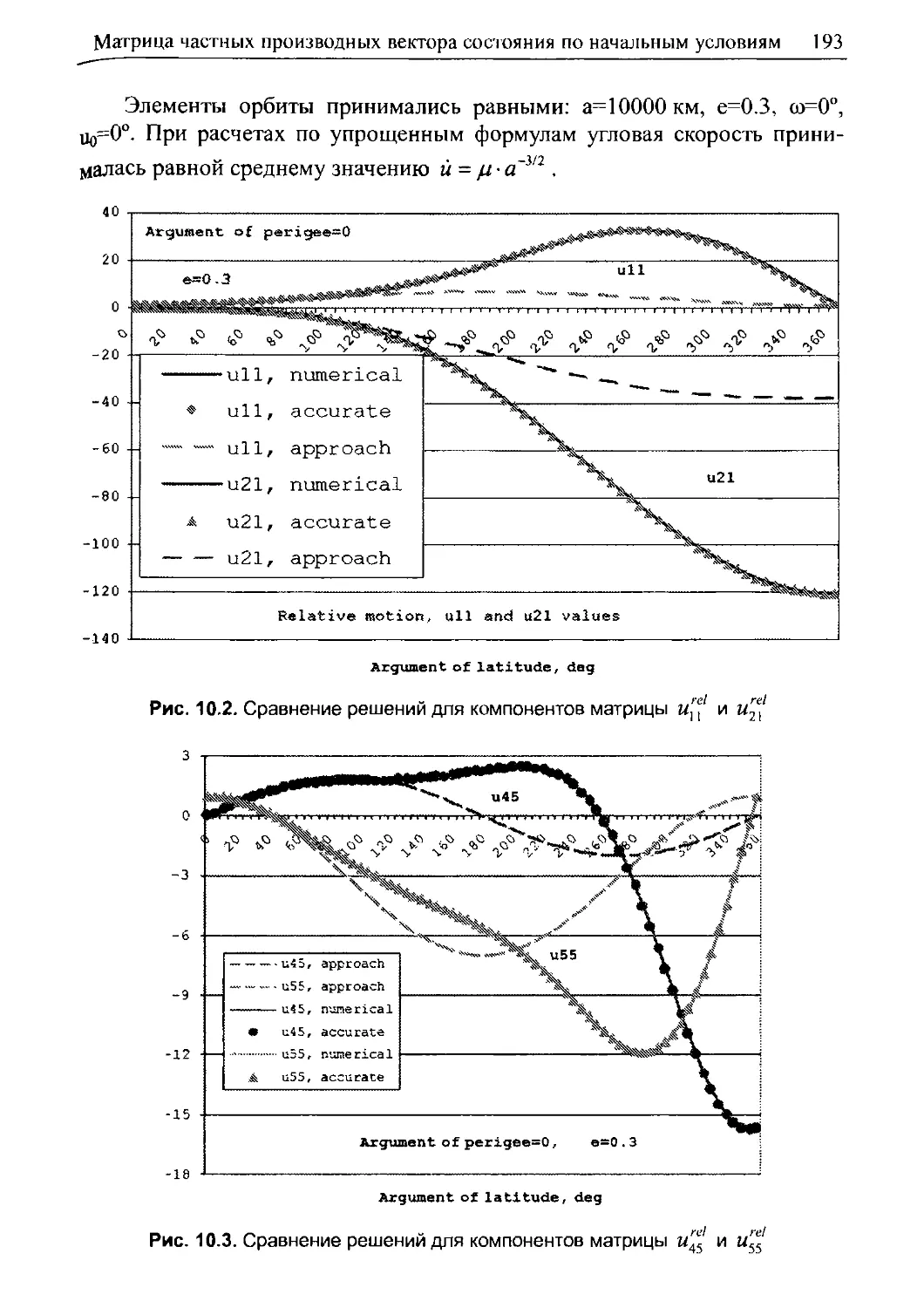
результата состоит не только том, что он позволяет качественно и количе¬
ственно оценить влияние погрешностей выведения спутника на орбиту на
его последующее движение по траектории. Не менее важное прикладное
значение построенных соотношений состоит в том, что они применялись
при уточнении параметров орбит по измерениям.
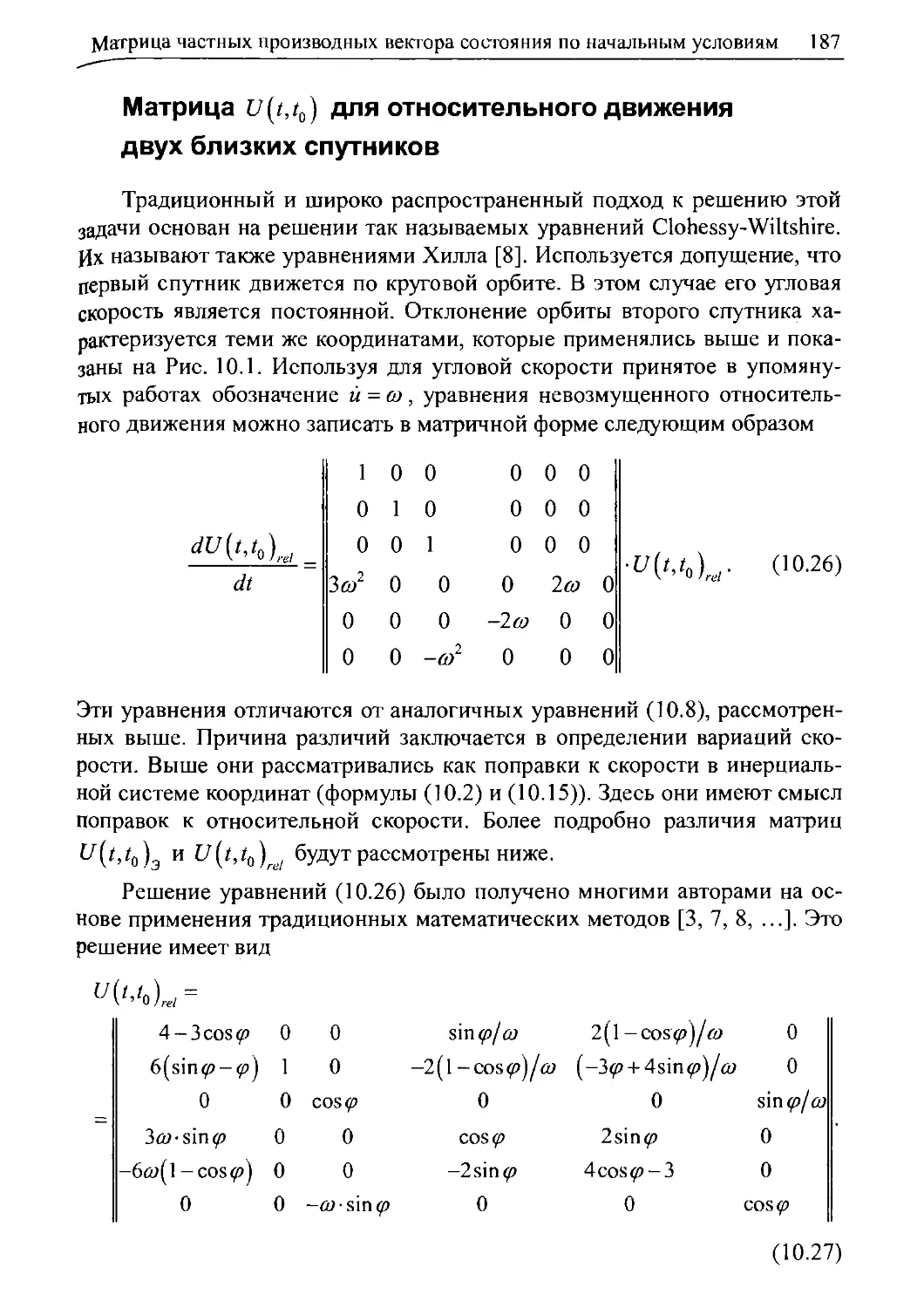
Традиционный подход к изучению относительного движения двух
близких спутников основан на решении так называемых уравнений
Clohessy-Wiltshire. При этом матрица частных производных U(t,t0)rd
строится приближенно — только для круговых орбит. Из многочисленных
современных публикаций по этой проблеме видно, что решение уравне¬
ний Clohessy-Wiltshire для эллиптических орбит получить не удалось.
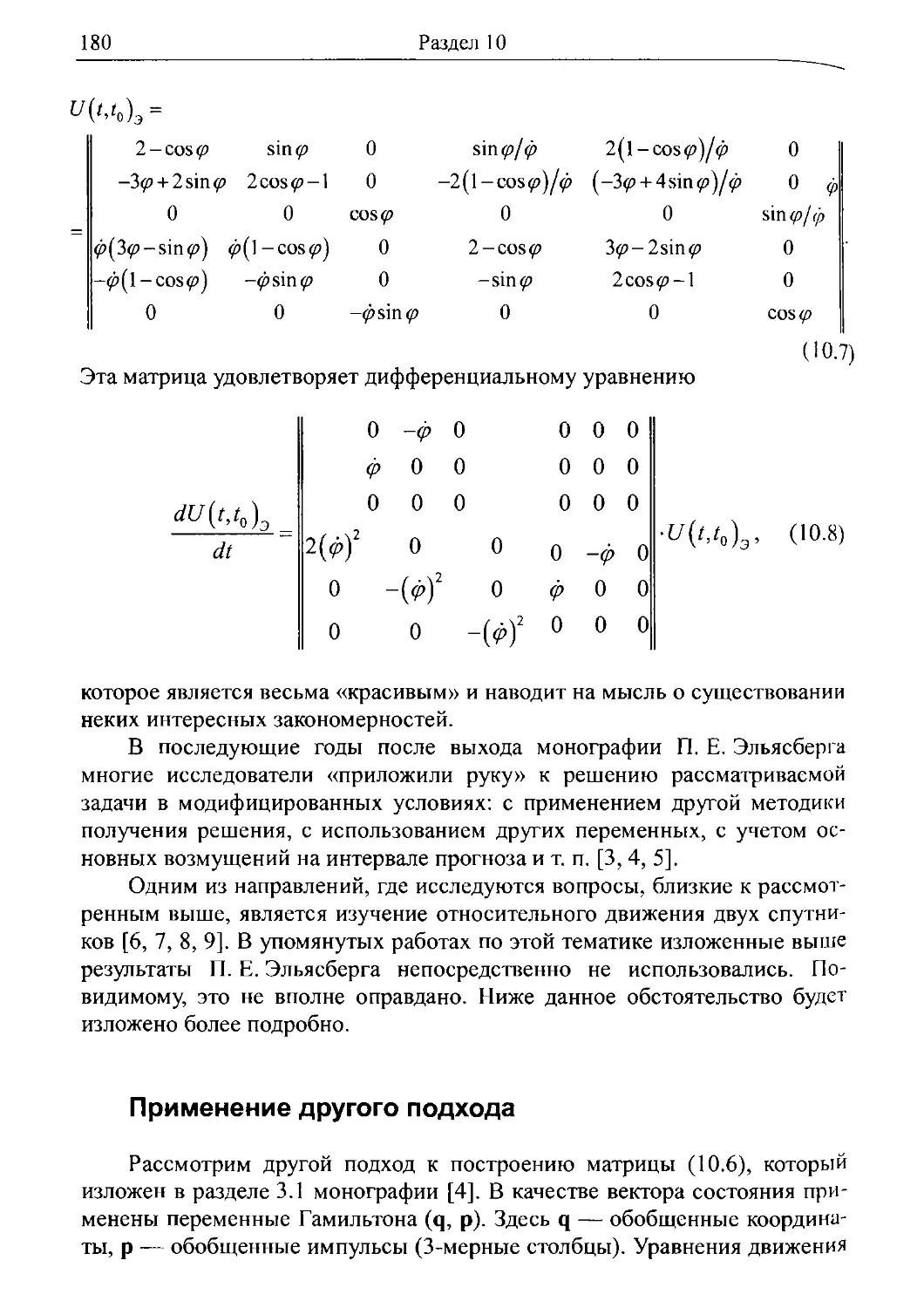
Разработан новый подход к построению матрицы U(t,t0)3, основан¬
ный на применении переменных Гамильтона. Его применение позволяет
выявить ряд полезных закономерностей.
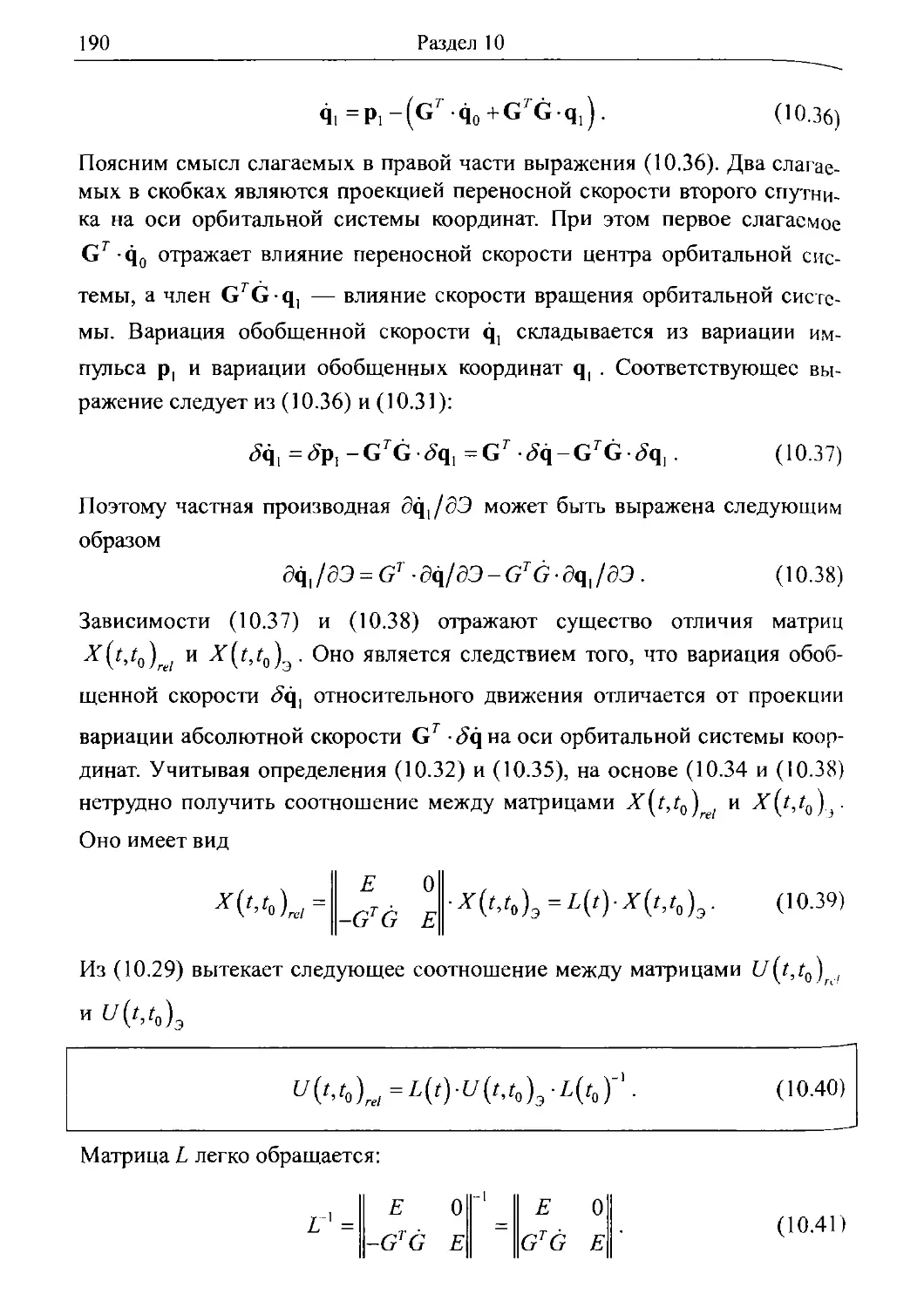
Разработан простой способ пересчета матрицы U(t,t0)3 в матрицу
U(t,t0) e/, пригодную для эллиптических орбит (формула (10.40)).
То обстоятельство, что за прошедшие пятьдесят лет после выхода мо¬
нографии П. Е. Эльясберга его решение не было использовано для иссле¬
дования относительного движения двух спутников, свидетельствует о не¬
достаточном внимании к трудам классиков космической баллистики, к
которым, несомненно, принадлежит Павел Ефимович Эльясберг.
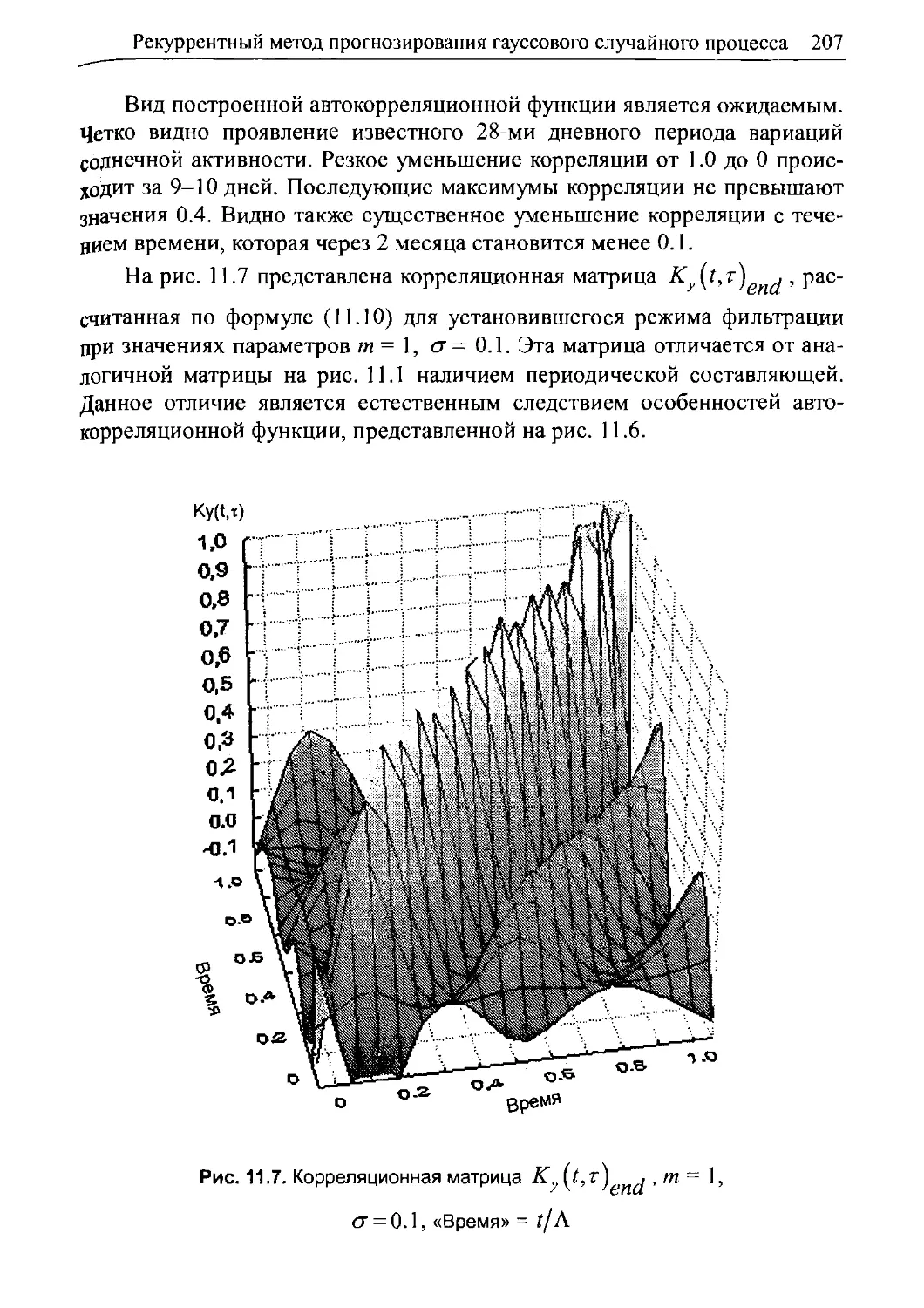
Раздел 11. Рекуррентный метод оптимального
прогнозирования гауссового случайного процесса
по измерениям в дискретном времени (1985 г.)
Обоснована методика оптимального прогнозирования гауссового
случайного процесса по измерениям в дискретном времени. Она отлича¬
ется от известных подходов возможностью задания априорной автокор¬
реляционной функции процесса в произвольной форме. Решение задачи
сводится к последовательному применению двух функциональных соот¬
ношений.
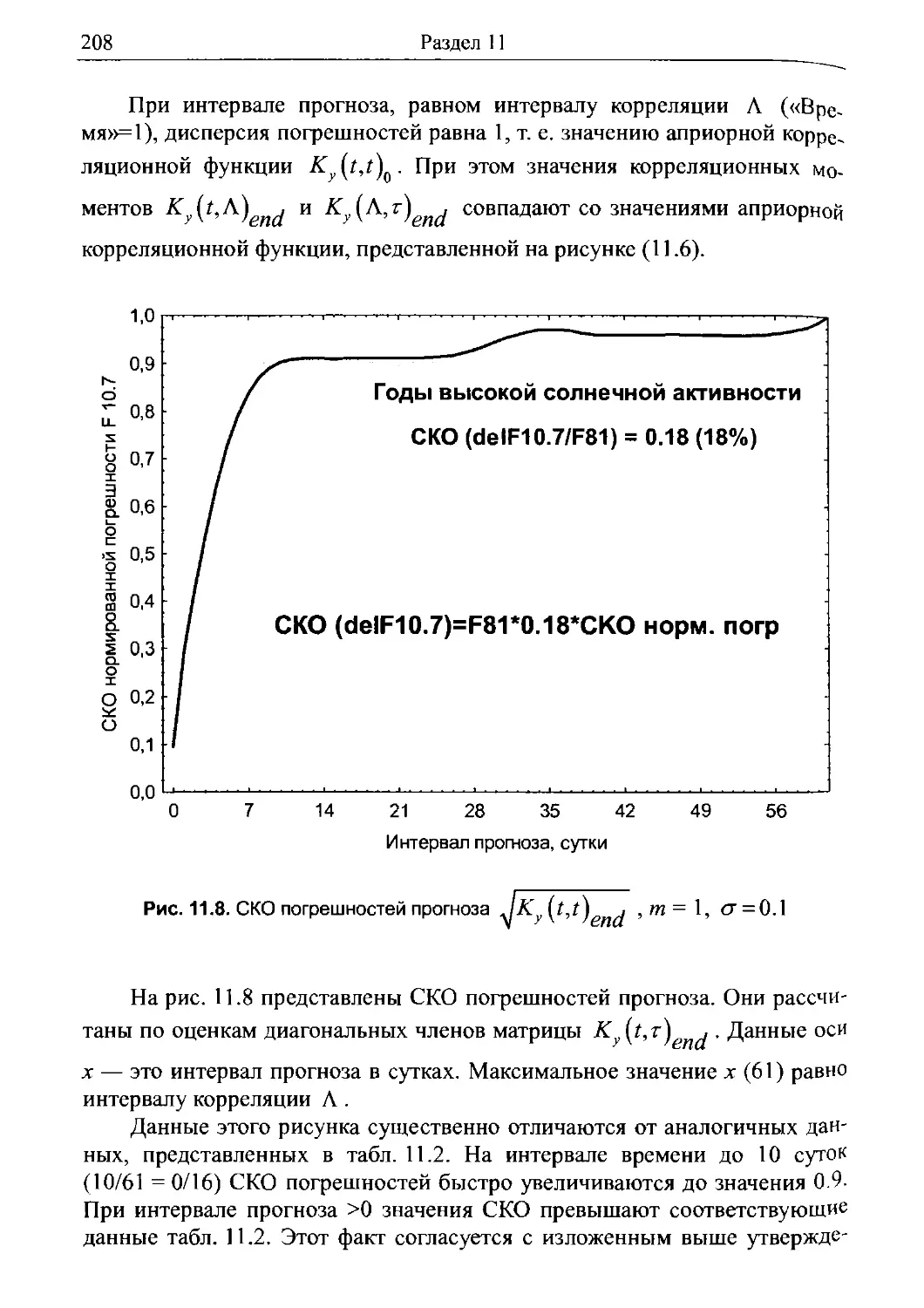
Показано, что наилучшая точность прогнозирования достигается для
процесса с линейной автокорреляционной функцией.
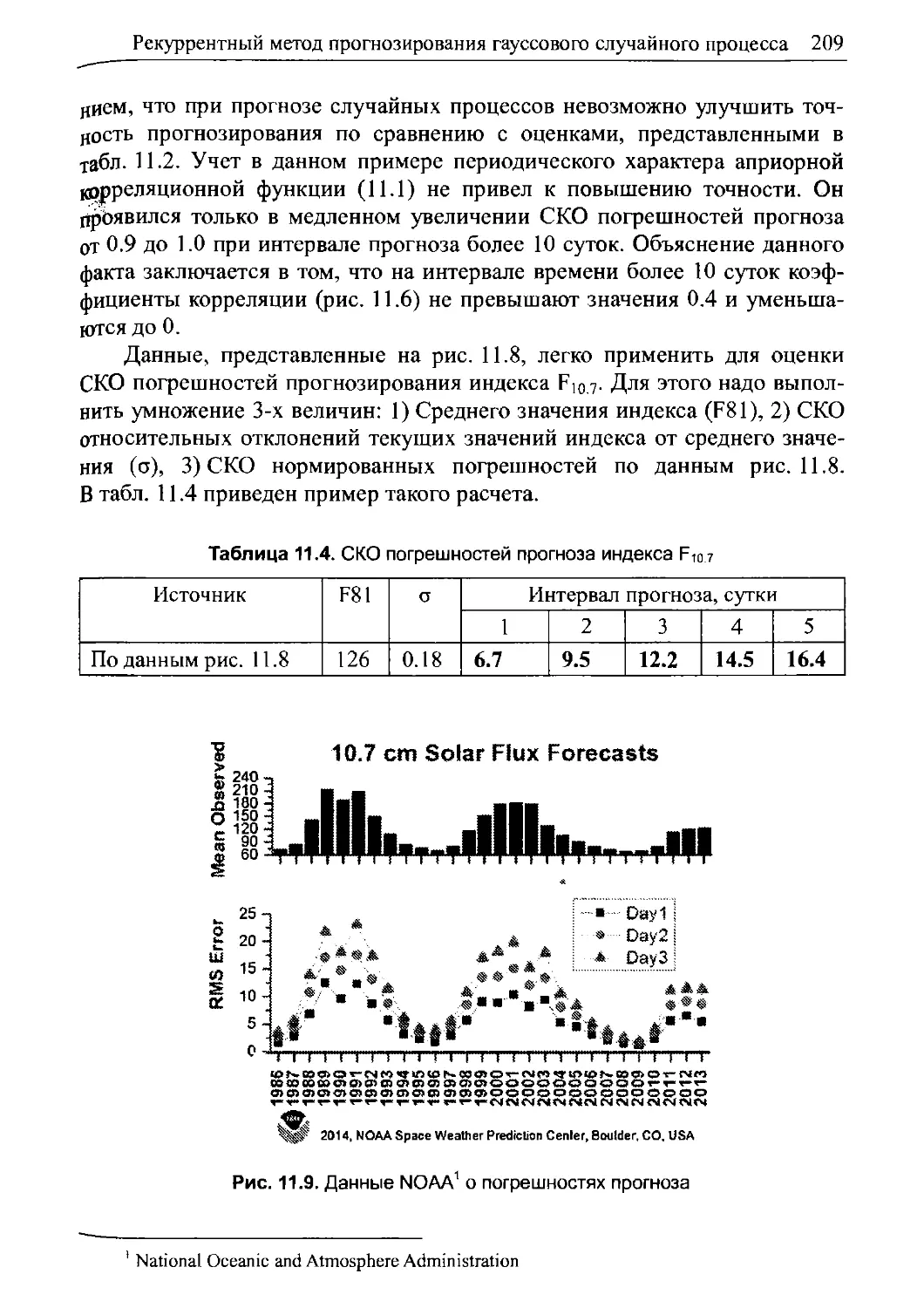
Рассмотрено применение разработанной методики для прогнозиро¬
вания индекса радиоизлучения Солнца F ю.7 в периоды высокого уровня
солнечной активности. Сравнение полученных результатов с соответст¬
вующими данными NOAA показало очень хорошее соответствие оценок
погрешностей прогноза. Это свидетельствует, по-видимому, о невозмож¬
ности дальнейшего повышения точности прогнозирования солнечной
активности при современном уровне знаний ее природы.
18
Краткое содержание
Раздел 12. Оптимальная фильтрация измерений гауссового
случайного процесса в непрерывном времени. (1985 г.)
Продолжено исследование задачи, рассмотренной в предыдущем раз¬
деле №11. Его цель — показать связь современного подхода с тем, кото¬
рый применялся в классической теории регулирования.
Обоснована методика оптимальной фильтрации измерений векторно¬
го нестационарного гауссового случайного процесса в непрерывном вре¬
мени. Эту методику можно рассматривать как применение современного
подхода к решению задачи, которая до 60-х годов исследовалась на основе
классического подхода на «частотном» языке. Современный подход более
приспособлен к решению задач с использованием электронных цифровых
вычислительных машин.
Для решения задачи построена система двух дифференциальных
уравнений в частных производных (12.17) и (12.18).
При стационарном режиме фильтрации система дифференциальных
уравнений (12.17) и (12.18) принимает более простой вид уравнений
(12.22) и (12.23).
На конкретном примере показано, что уравнение (12.22), выведенное
для стационарного режима фильтрации, эквивалентно уравнению Винера—
Хопфа (12.3), которое использовалось в классической теории регулирования.
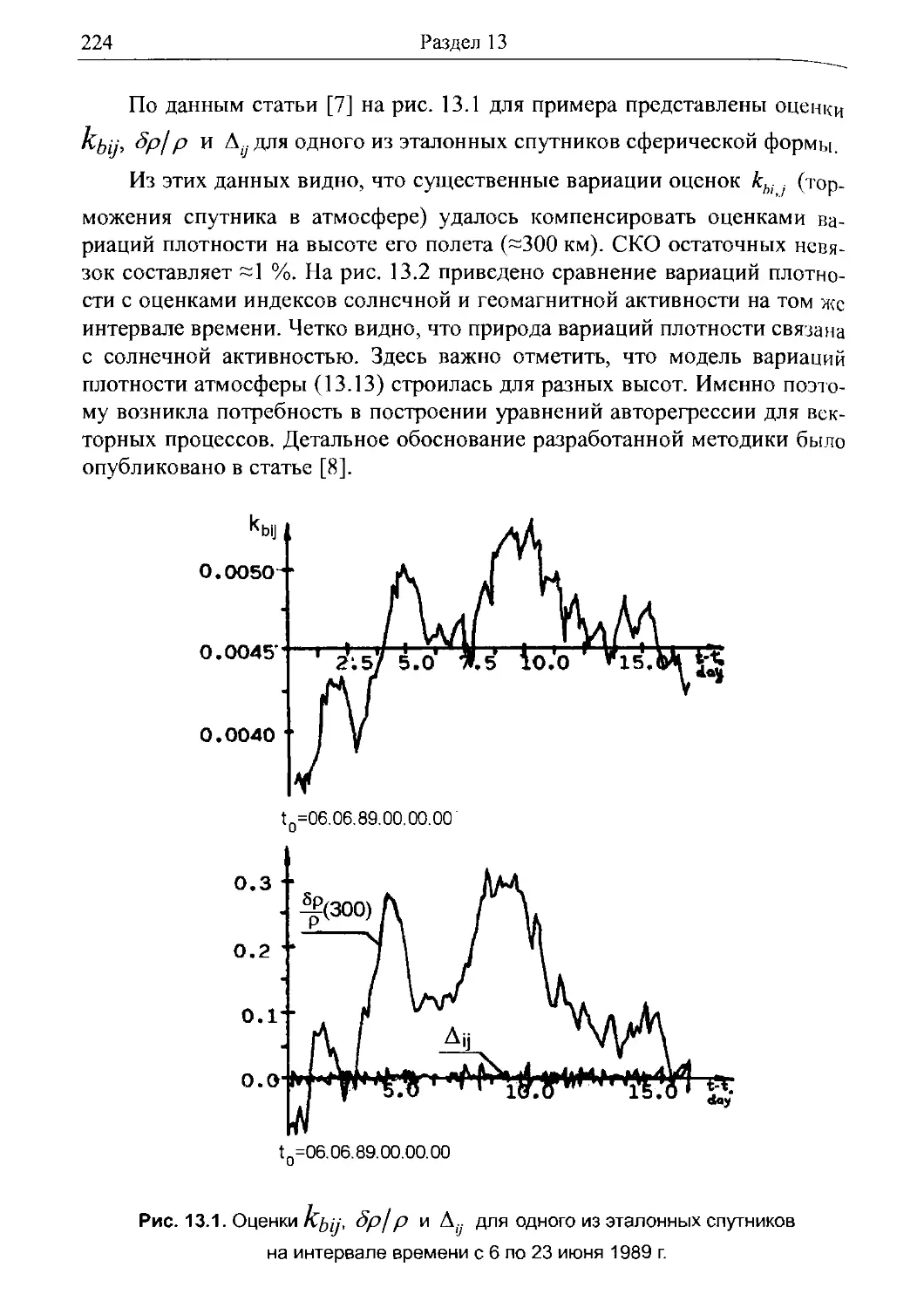
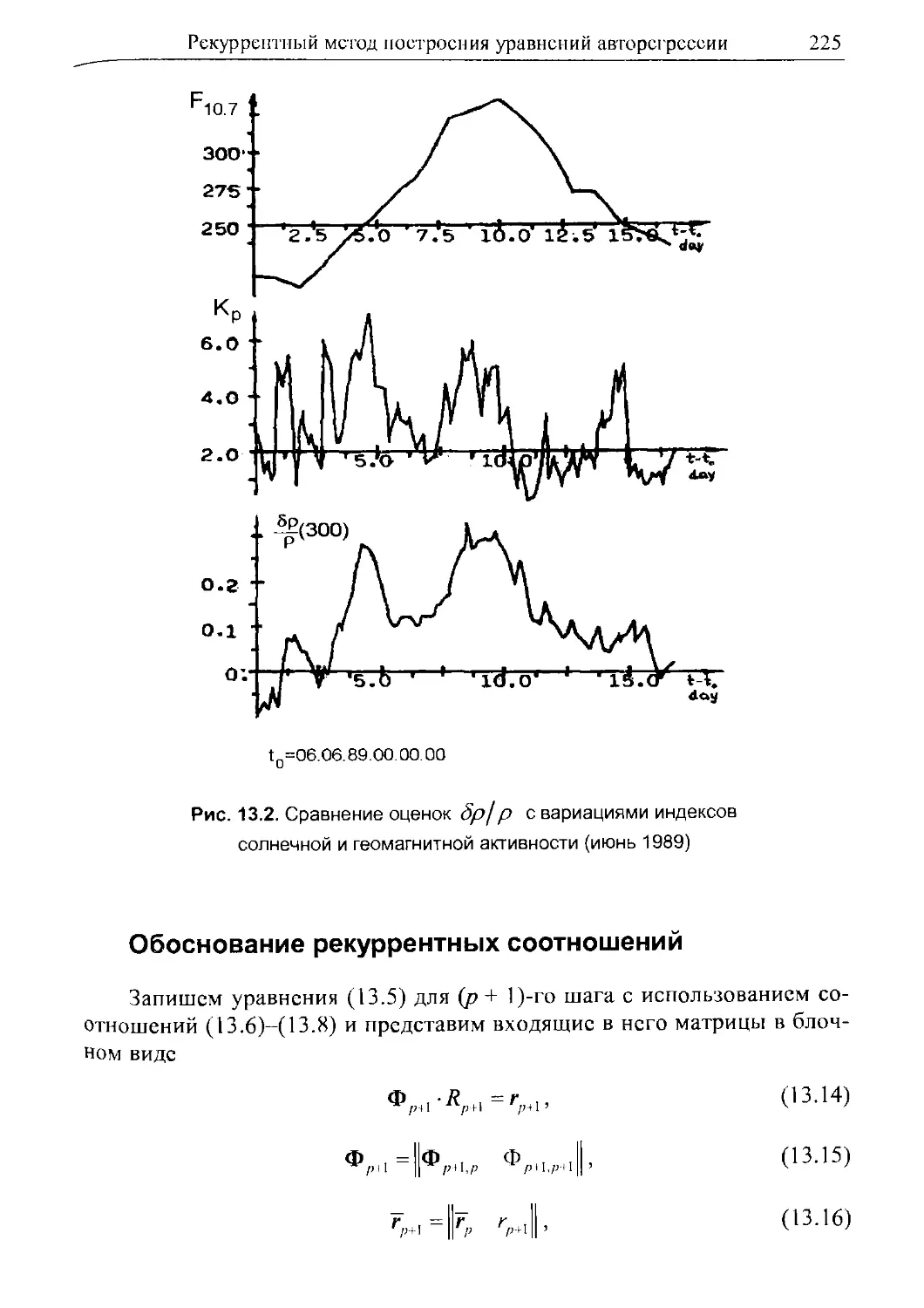
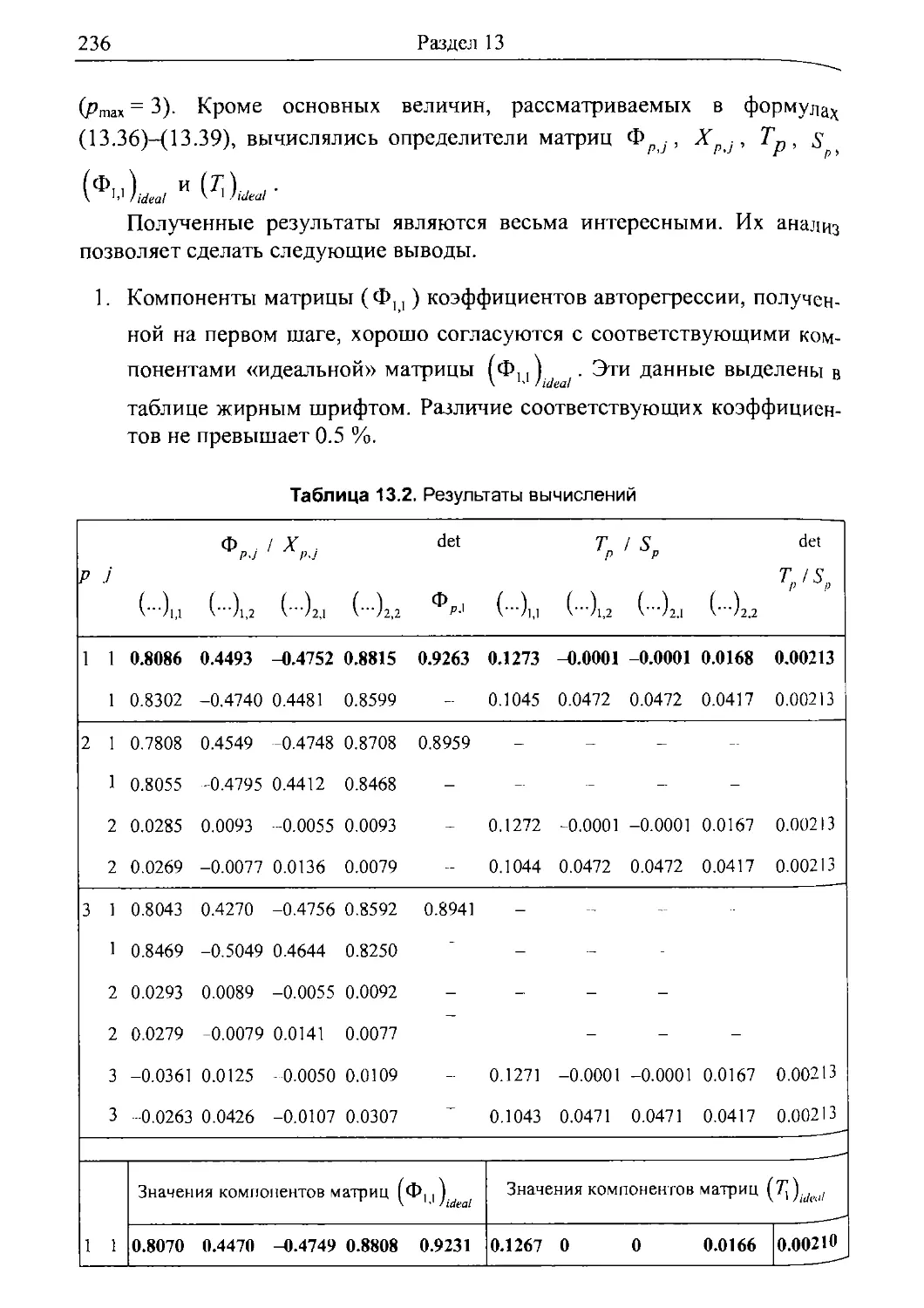
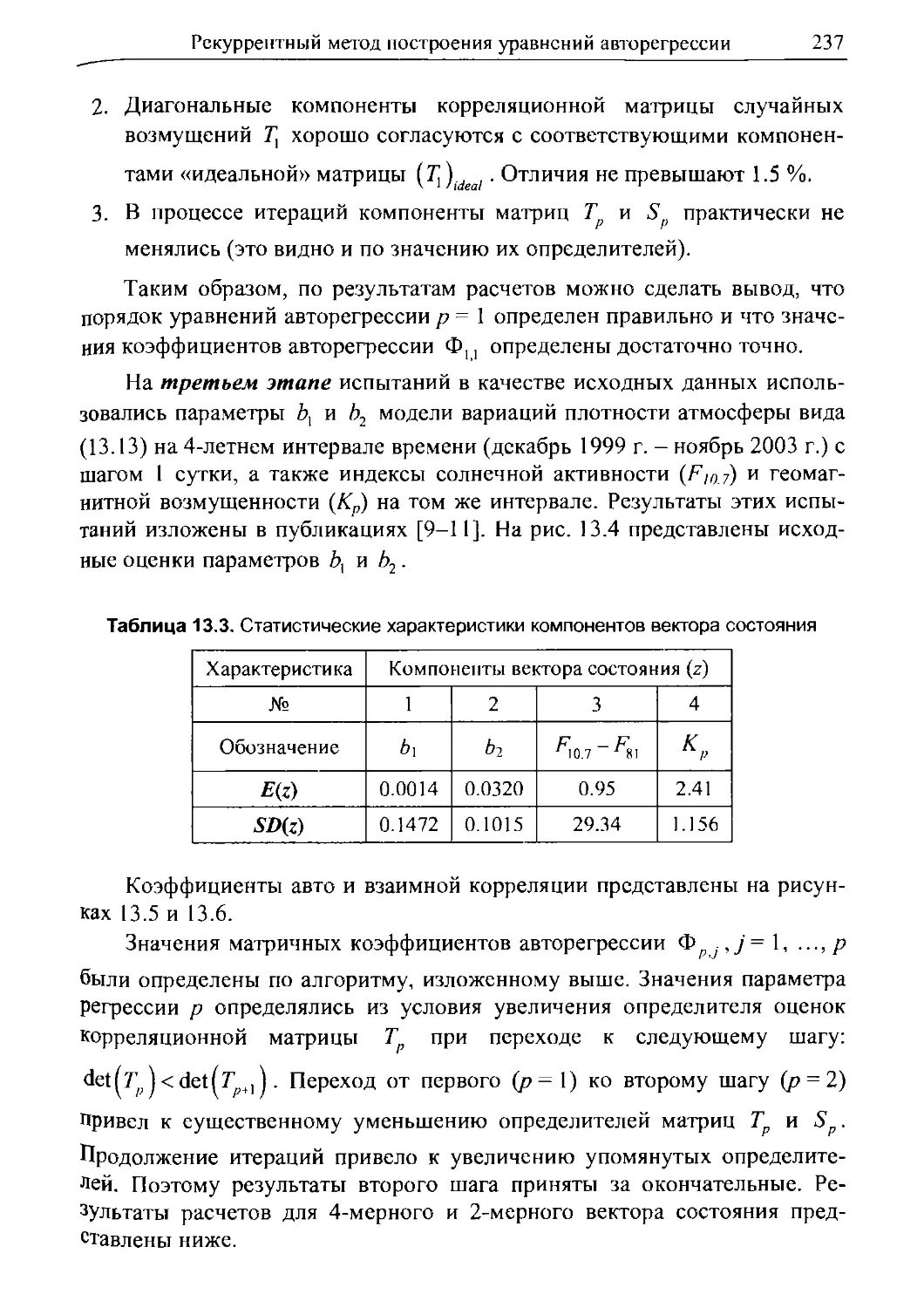
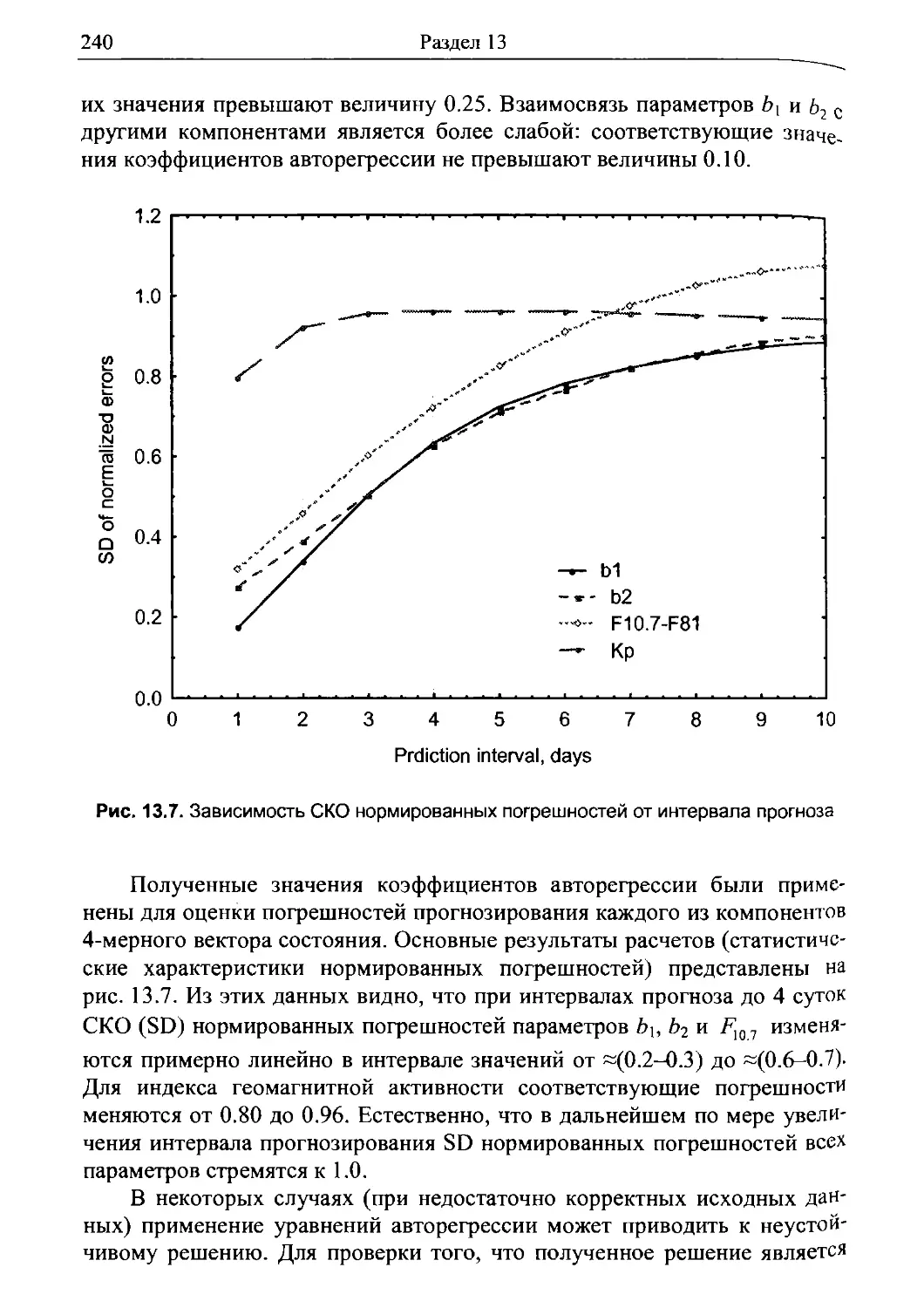
Раздел 13. Рекуррентный метод построения уравнений
авторегрессии для векторных процессов (1985 г.)
Обоснована рекуррентная методика построения уравнений авторег¬
рессии для векторных процессов, которая является обобщением известно¬
го алгоритма Дарбина—Левинсона.
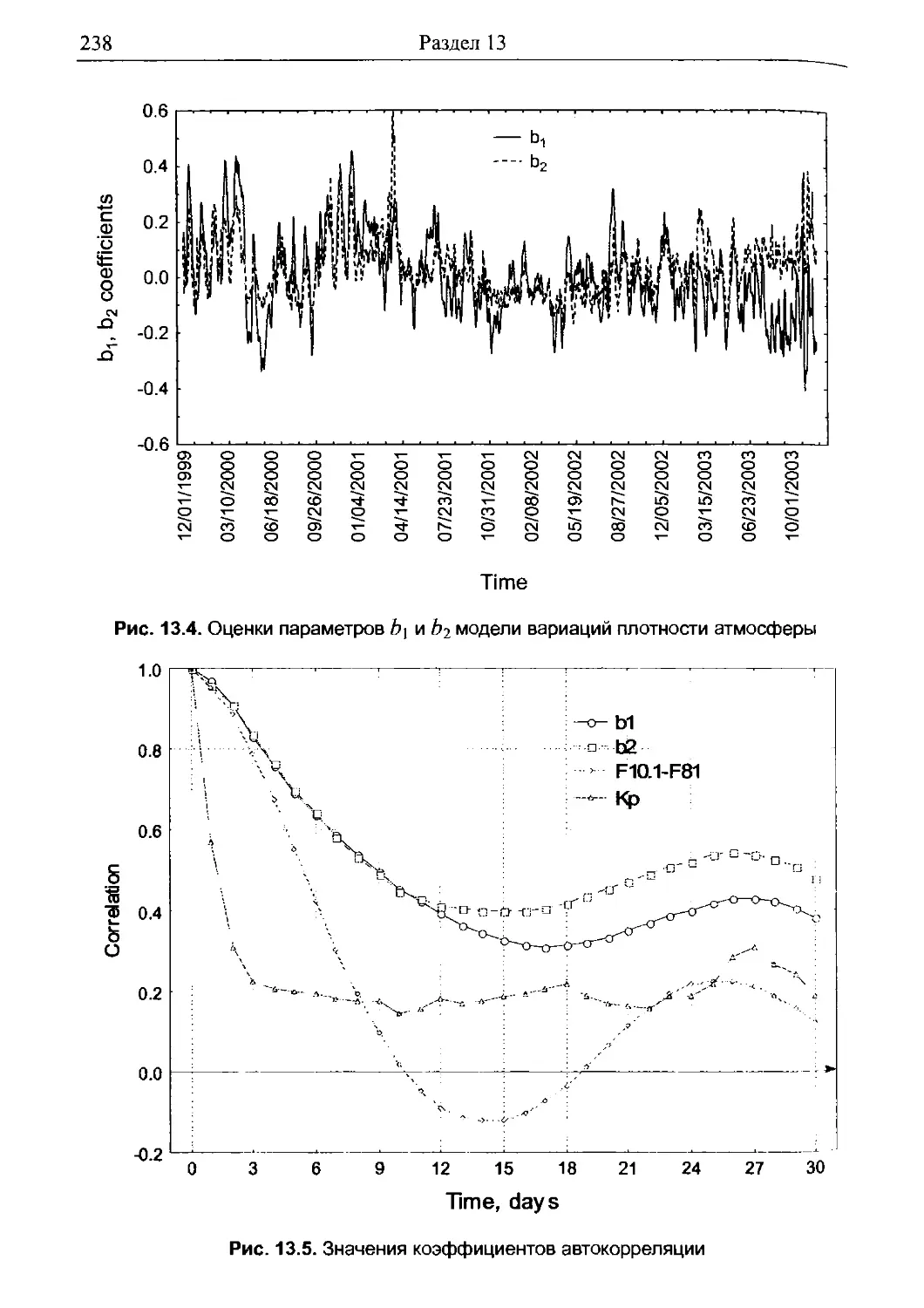
Испытания предложенной рекуррентной методики на статистической
модели и по реальной информации подтвердили ее работоспособность.
Погрешности прогнозирования на основе применения уравнений ав¬
торегрессии оказались на 10 %— 12 % больше соответствующих результа¬
тов применения метода оптимального прогнозирования гауссового слу¬
чайного процесса. Этот эффект объясняется, по-видимому, тем, что при
построении уравнений авторегрессии не используются все исходные зна¬
чения корреляционных моментов.
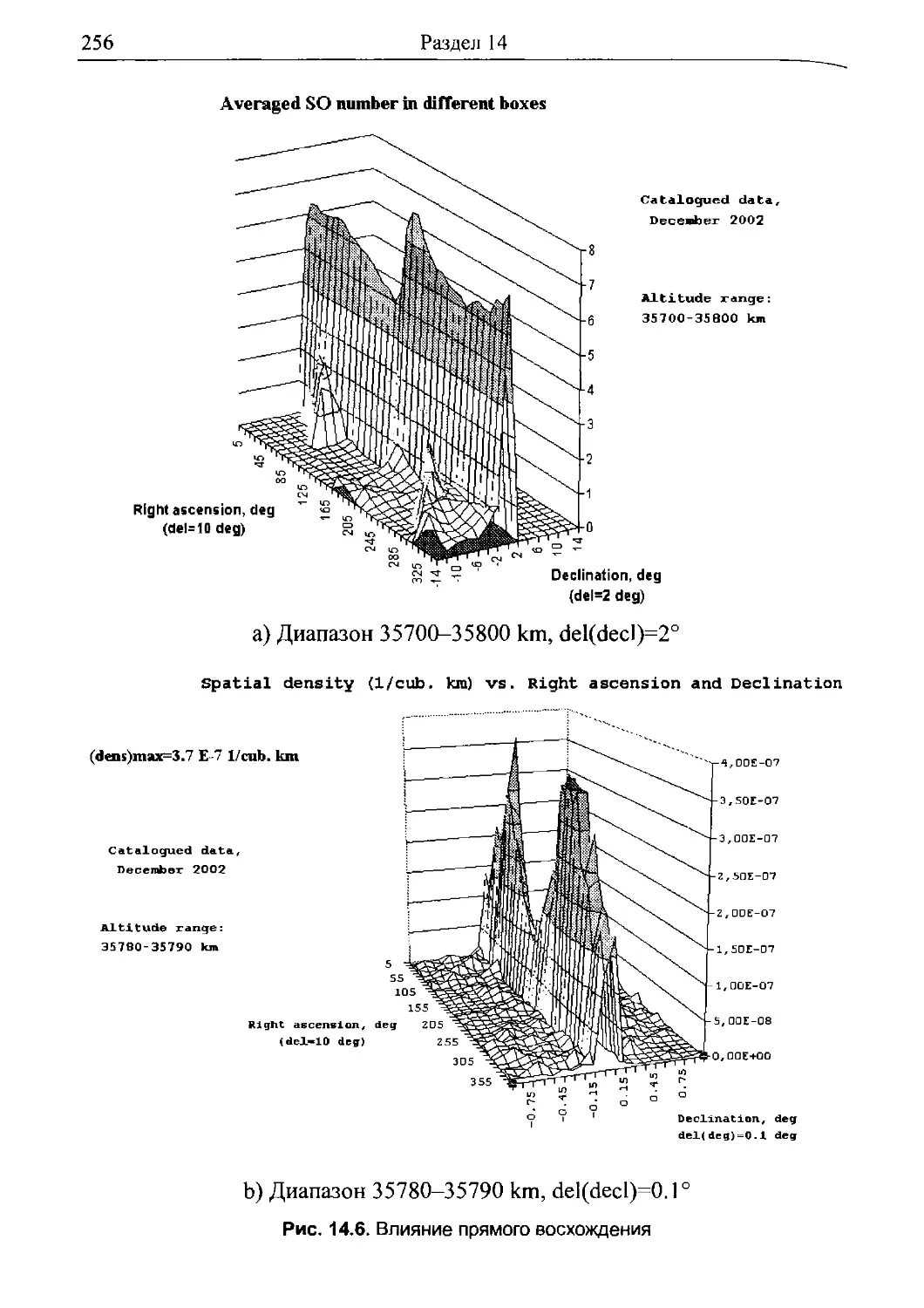
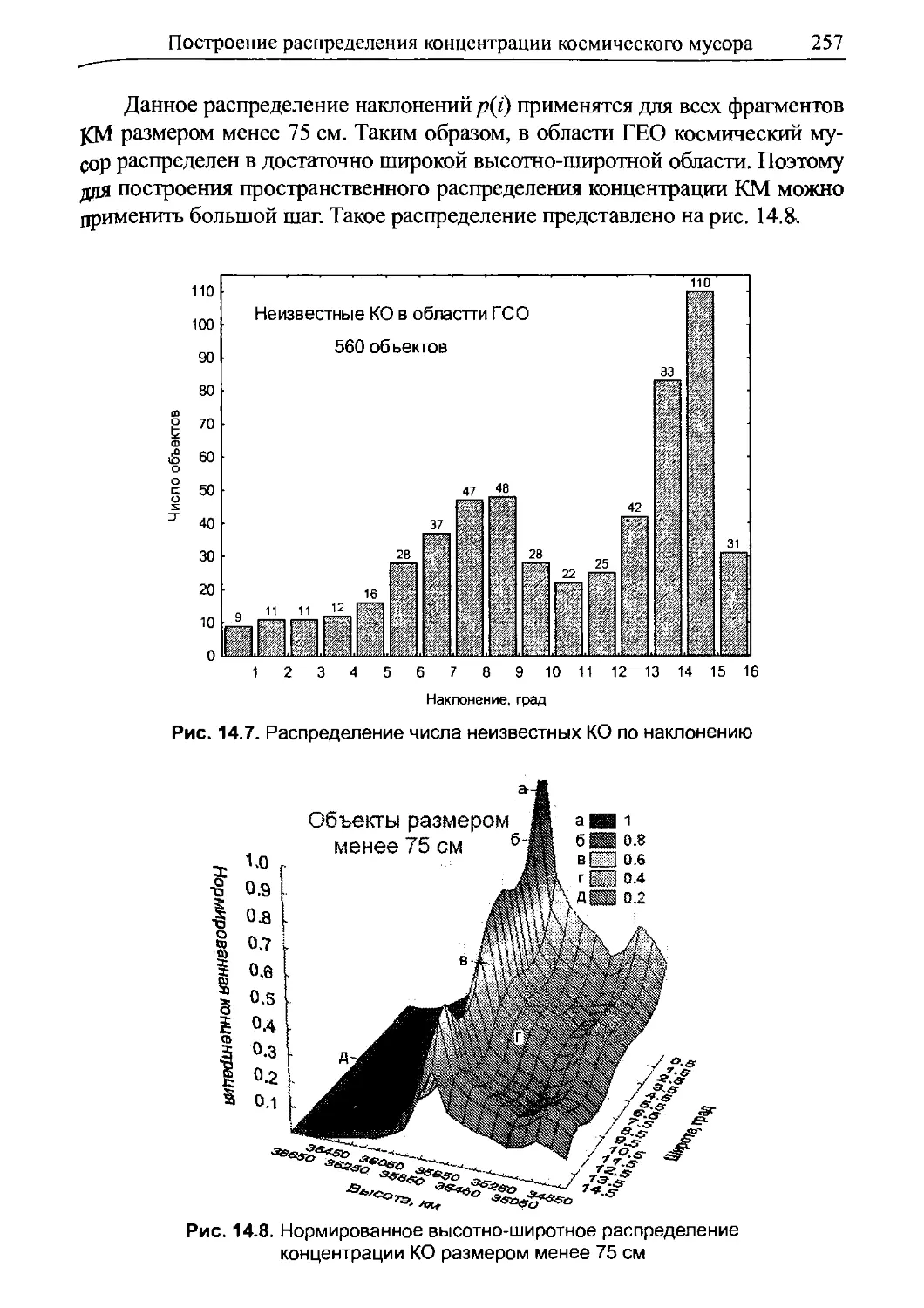
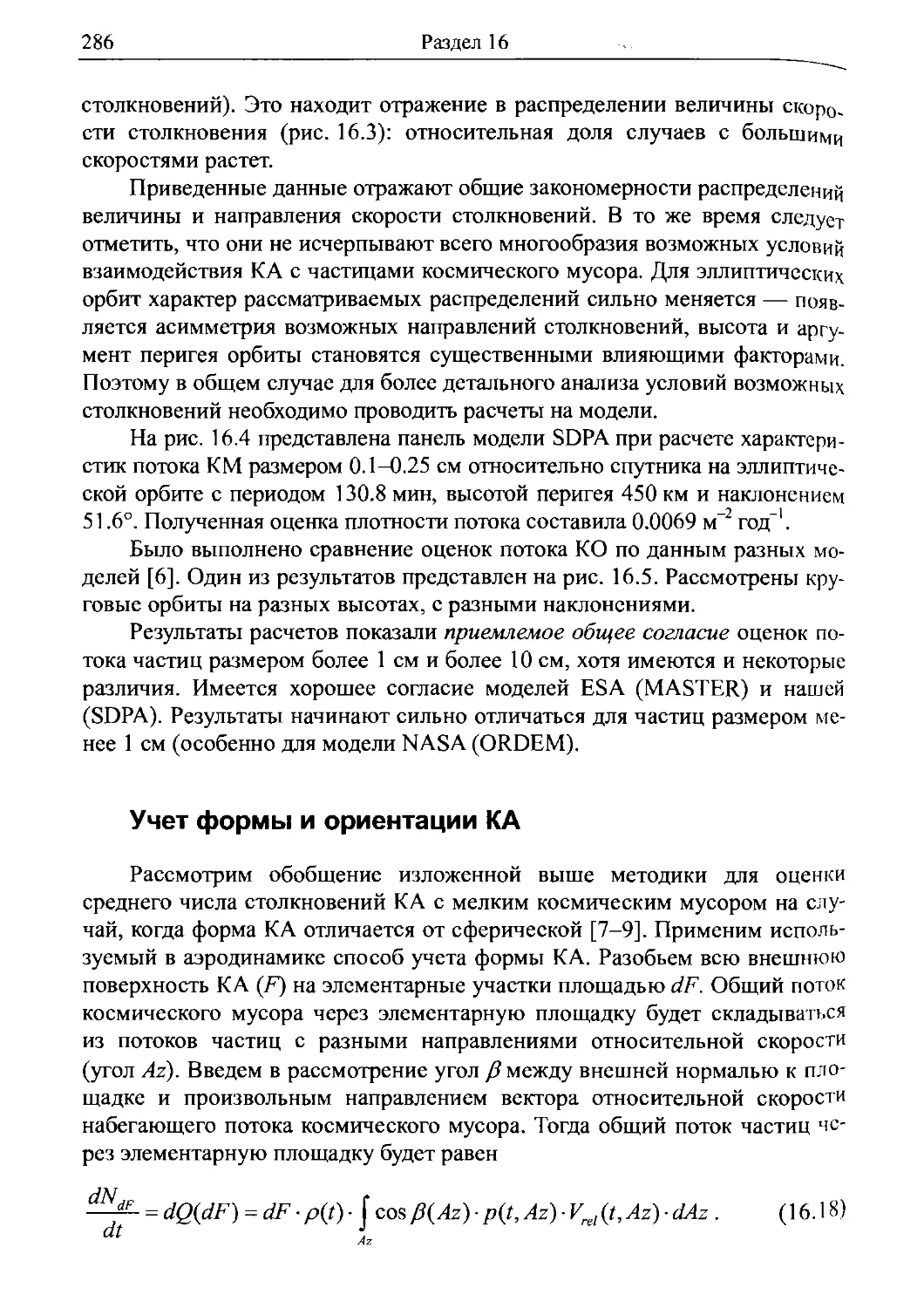
Раздел 14. Построение пространственного распределения
концентрации космического мусора (1993 г.)
Традиционный подход к построению пространственного распределе¬
ния концентрации спутников является детерминированным. Он основан на
интегрировании уравнений движения. При таком подходе для каждого из
объектов (или группы) формируется вектор начальных условий. Прогнози¬
рование выполняется с использованием традиционных моделей движения.
Краткое содержание
19
По сравнению с зарубежными моделями сделан следующий шаг в на¬
правлении уменьшения роли детерминированного подхода: вместо эле¬
ментов орбит каждого из объектов в качестве исходных данных рассмат¬
риваются статистические нормированные распределения трех элементов
орбит: высоты перигея, эксцентриситета и наклонения. Для этих исходных
данных разработана аналитическая методика расчета концентрации, а
именно выведена соответствующая формула.
Работоспособность и достоинства разработанной методики подтвер¬
ждены результатами построения высотно-широтных распределений кон¬
центрации объектов для области низких и геостационарных орбит.
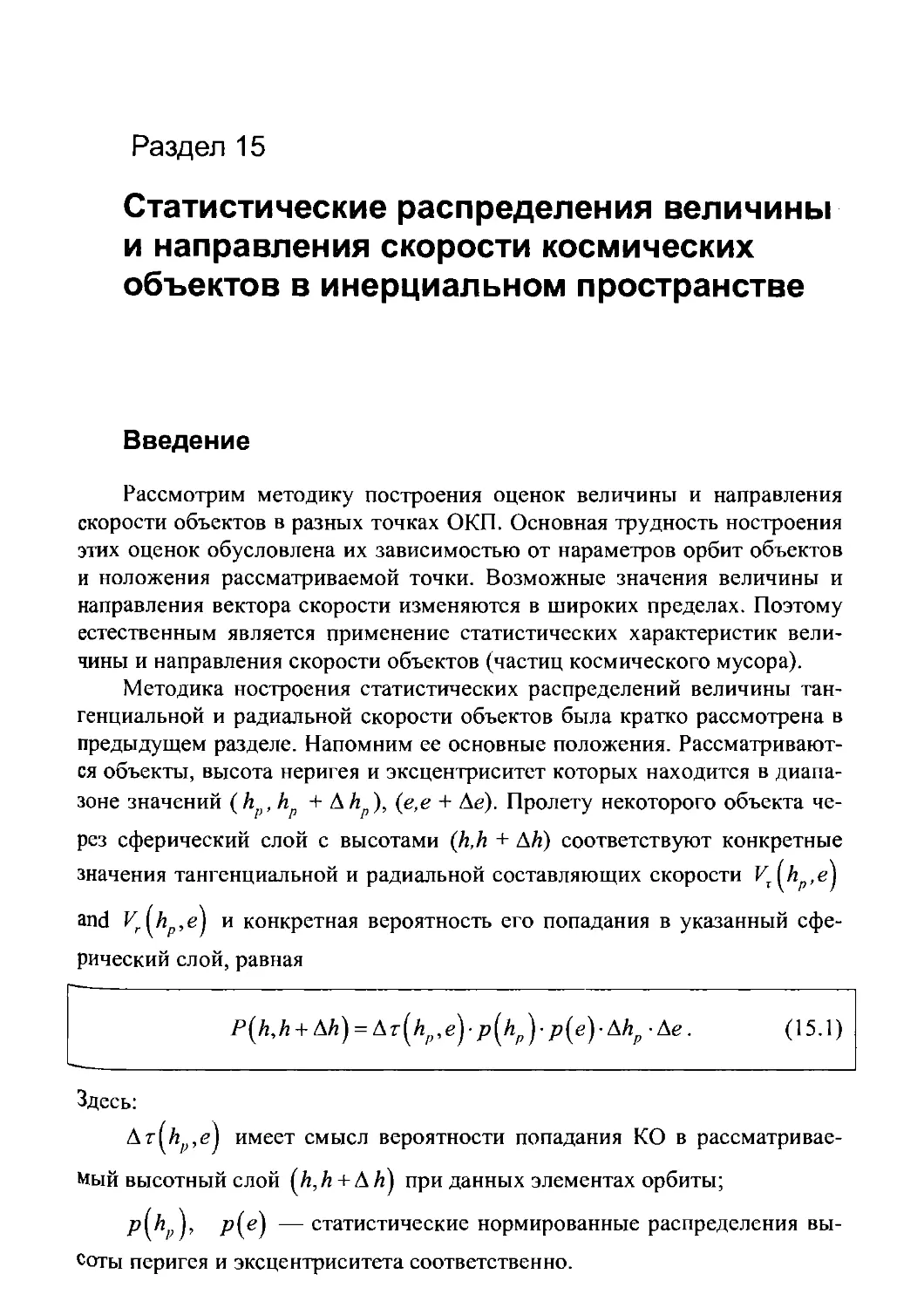
Раздел 15. Статистические распределения
величины и направления скорости космических
объектов в инерциальном пространстве (1997 г.)
Основная трудность построения рассматриваемых распределений
обусловлена их зависимостью от параметров орбит объектов и положения
рассматриваемой точки. Возможные значения величины и направления
вектора скорости изменяются в широких пределах.
Разработана аналитическая методика построения распределений ве¬
личины и направления скорости КО в инерциальном пространстве. Она
основана на выведенных автором формулах (15.1) и (15.12). В качестве
исходных данных применяются статистические нормированные распреде¬
ления трех элементов орбит.
Работоспособность методики подтверждена результатами построения рас¬
сматриваемых распределений для различных точек околоземного пространства.
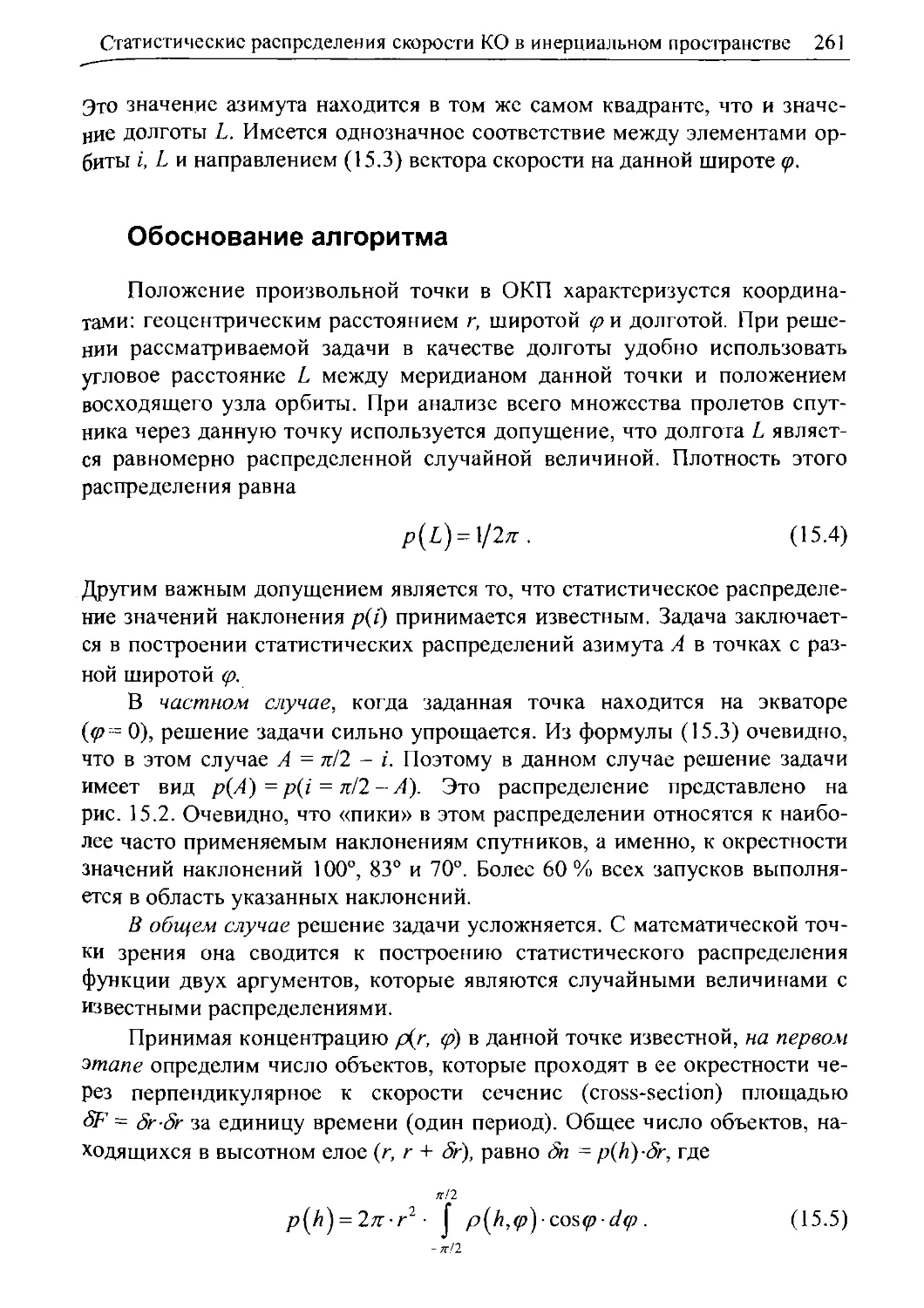
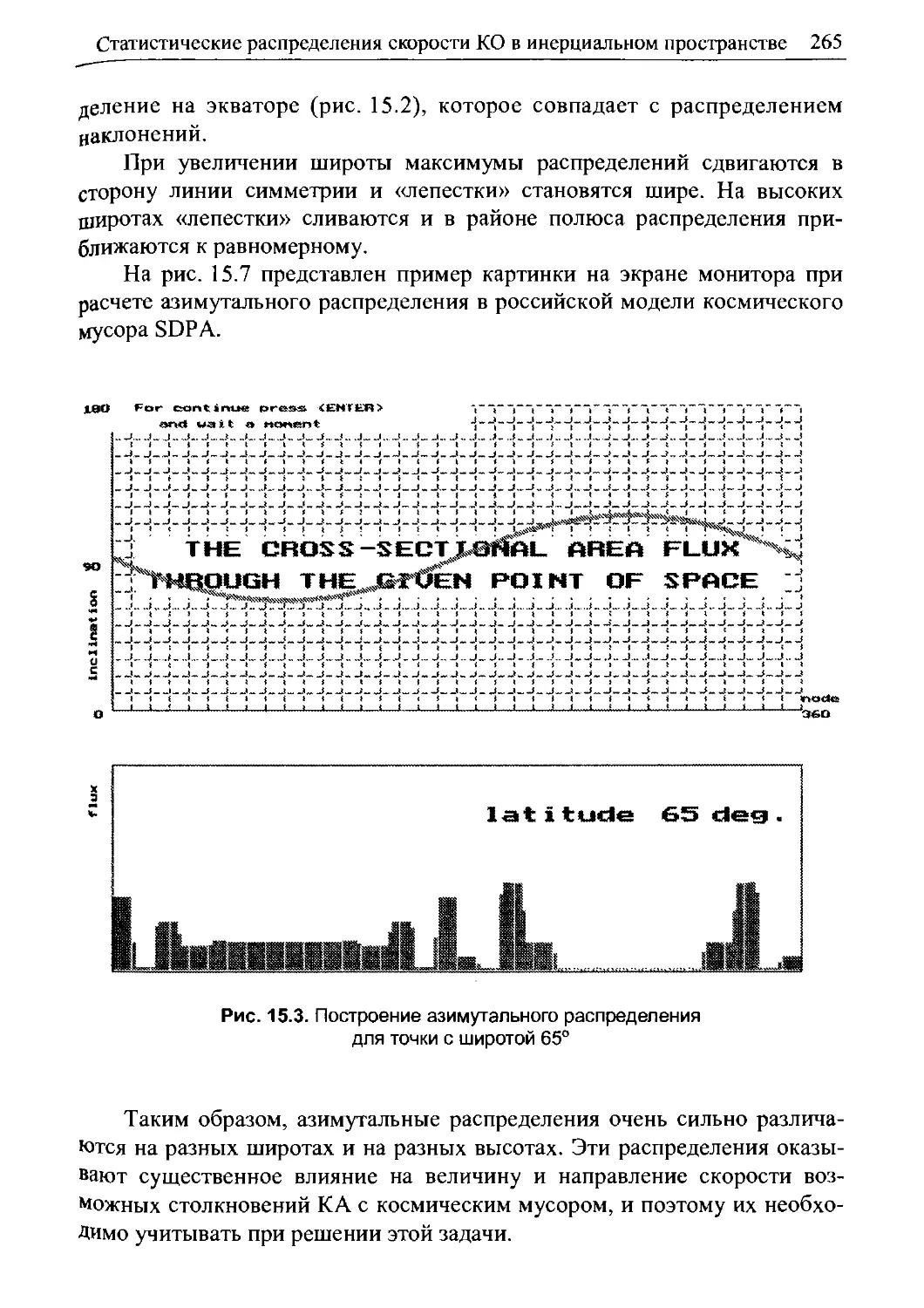
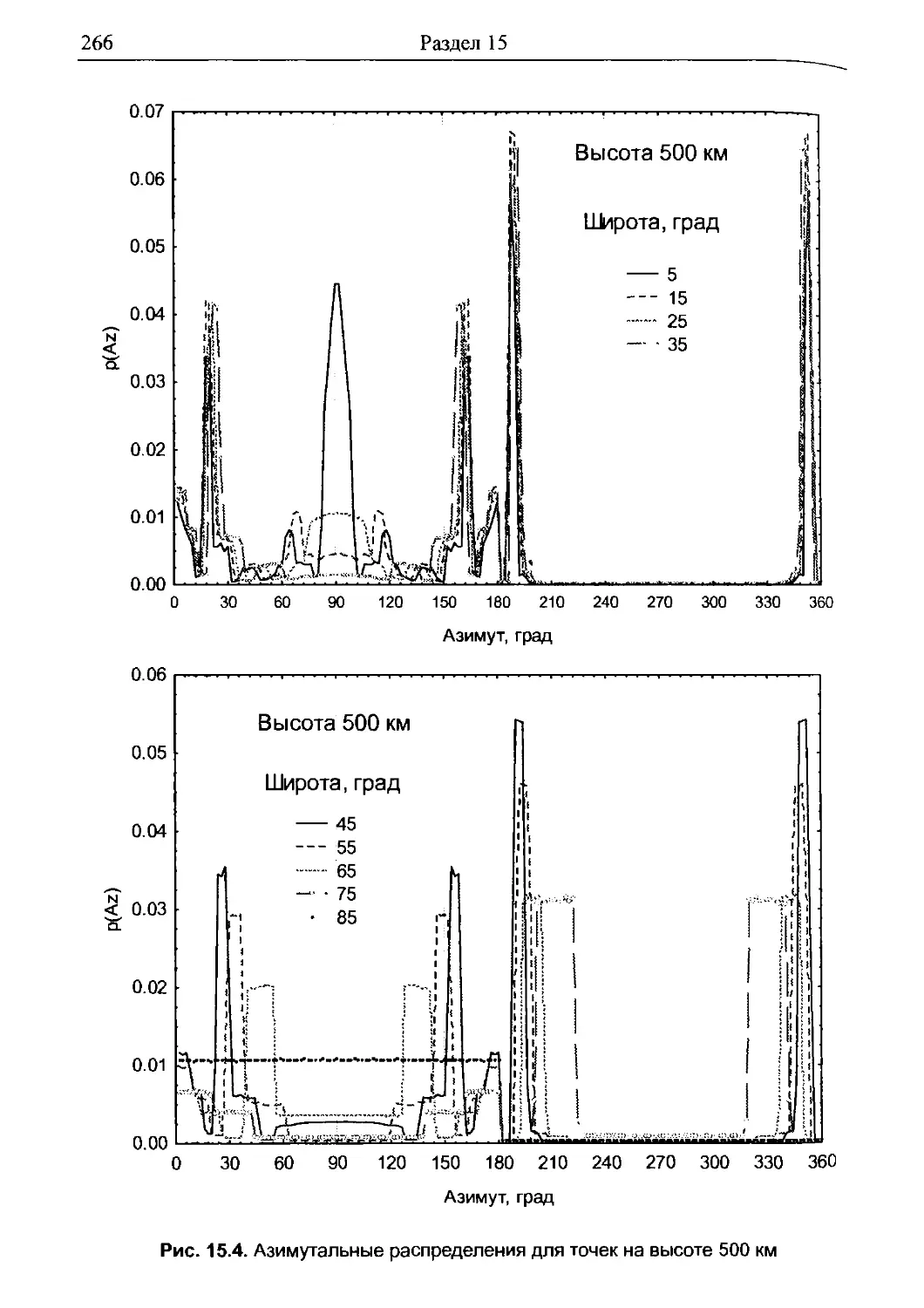
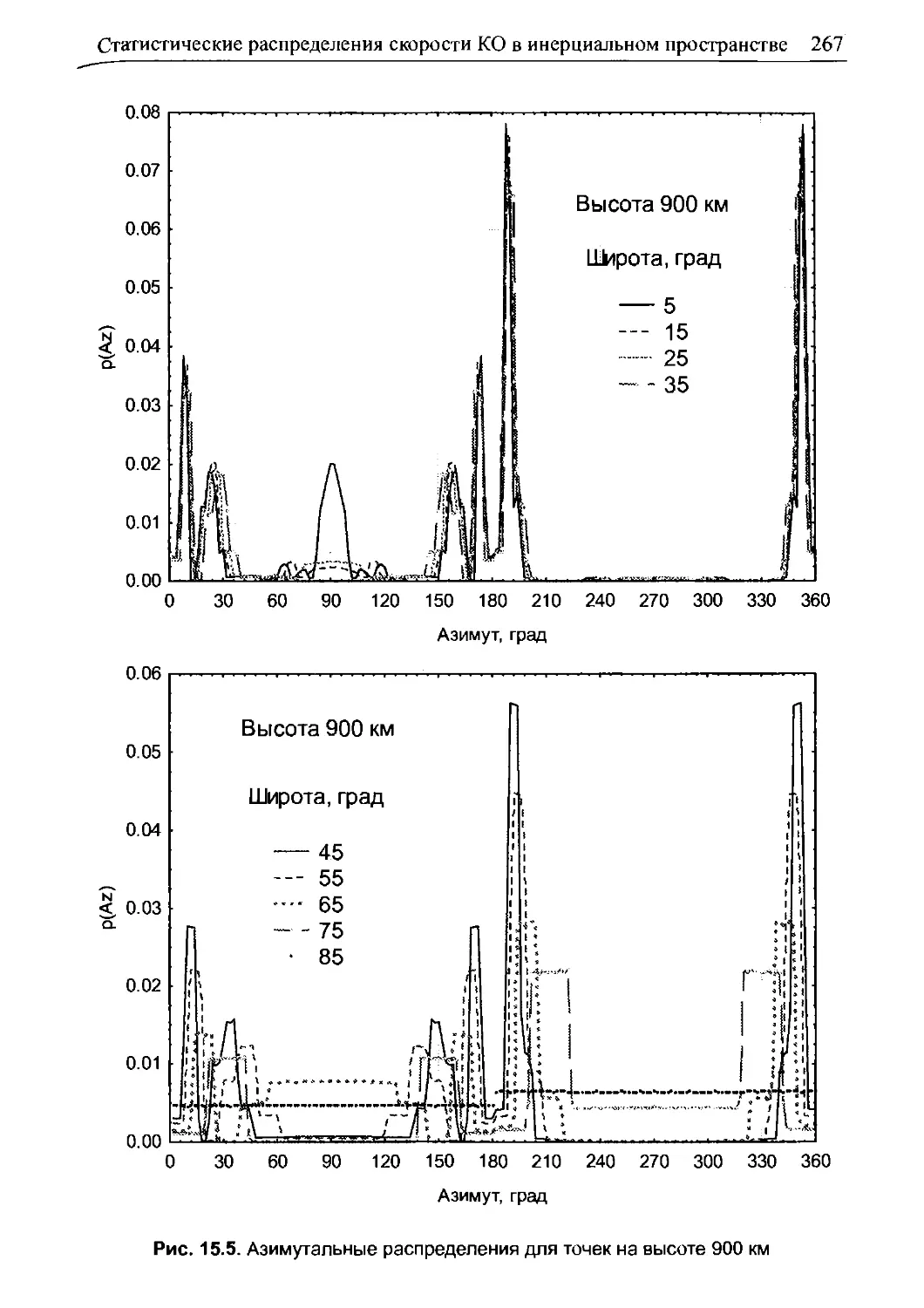
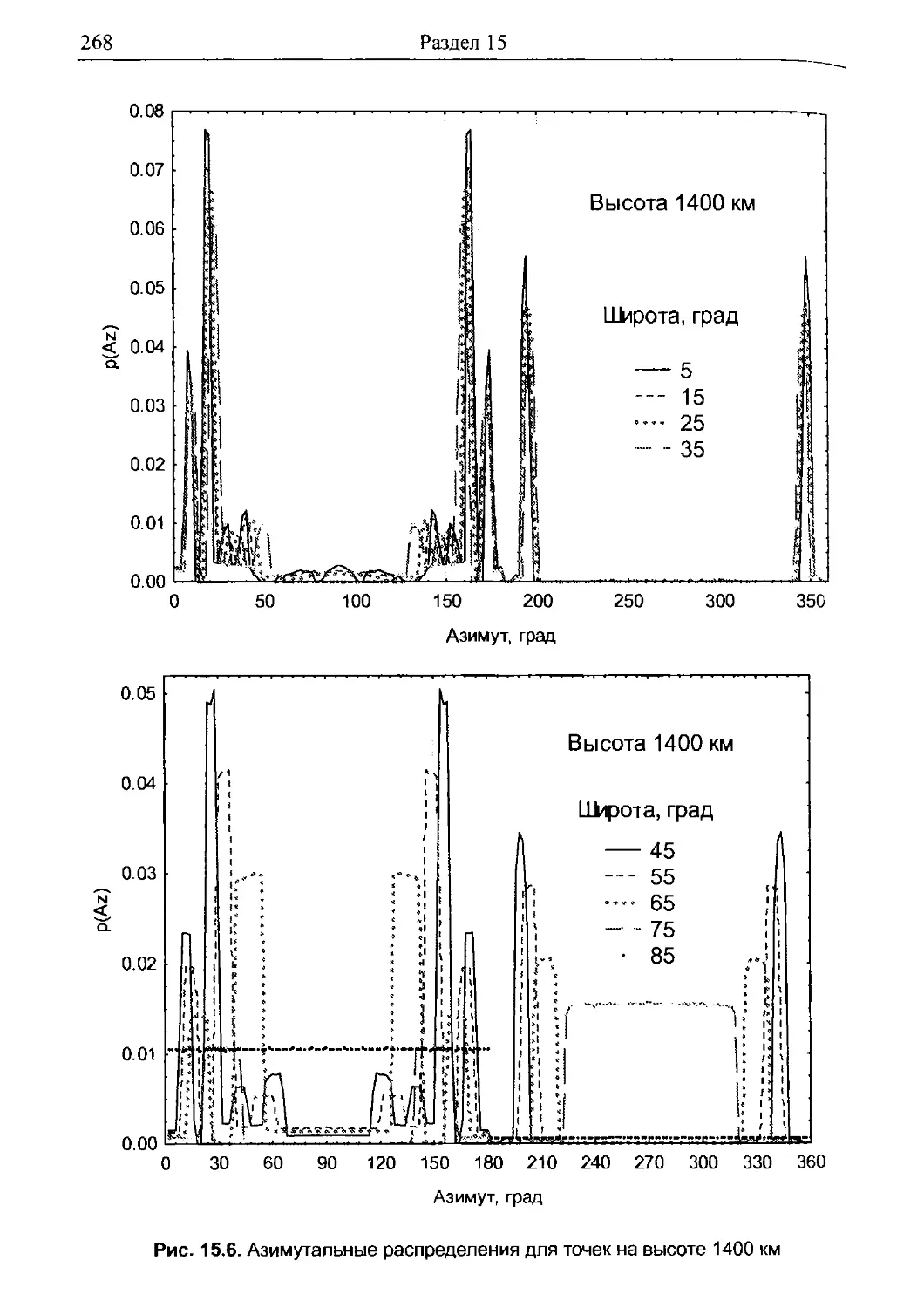
Азимутальные распределения построены с шагом 2°. Они оказались
сильно «изрезанными» и очень различаются на разных широтах и на разных
высотах. Эти распределения оказывают существенное влияние на величину
и направление скорости возможных столкновений КА с космическим мусо¬
ром, и поэтому их необходимо учитывать при решении этой задачи.
Зарубежные модели космического мусора такие распределения (с ма¬
лым шагом по аргументам) строить не умеют.
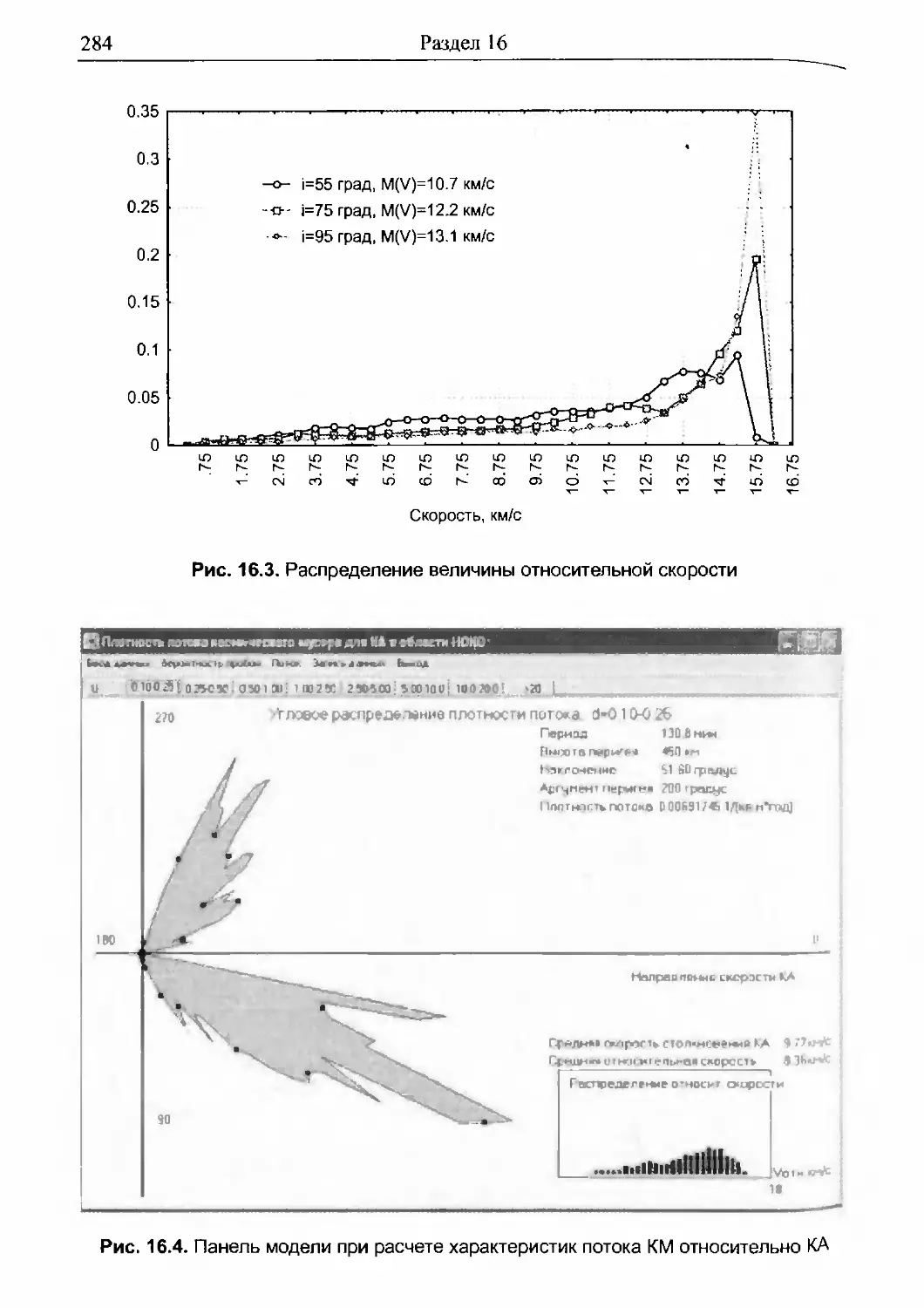
Раздел 16. Оценка характеристик столкновения
спутника Земли с космическим мусором (1997 г.)
Основы изложенной методики для оценки вероятности столкновений
объектов с космическим мусором были разработаны автором в начале 90-х
годов. Для решения задачи построены соотношения (16.10) и (16.12). Прин¬
ципиальное отличие разработанной методики от зарубежных аналогов за¬
ключается в учете детальных статистических распределений величины и
направления скорости КМ при расчете вектора относительной скорости.
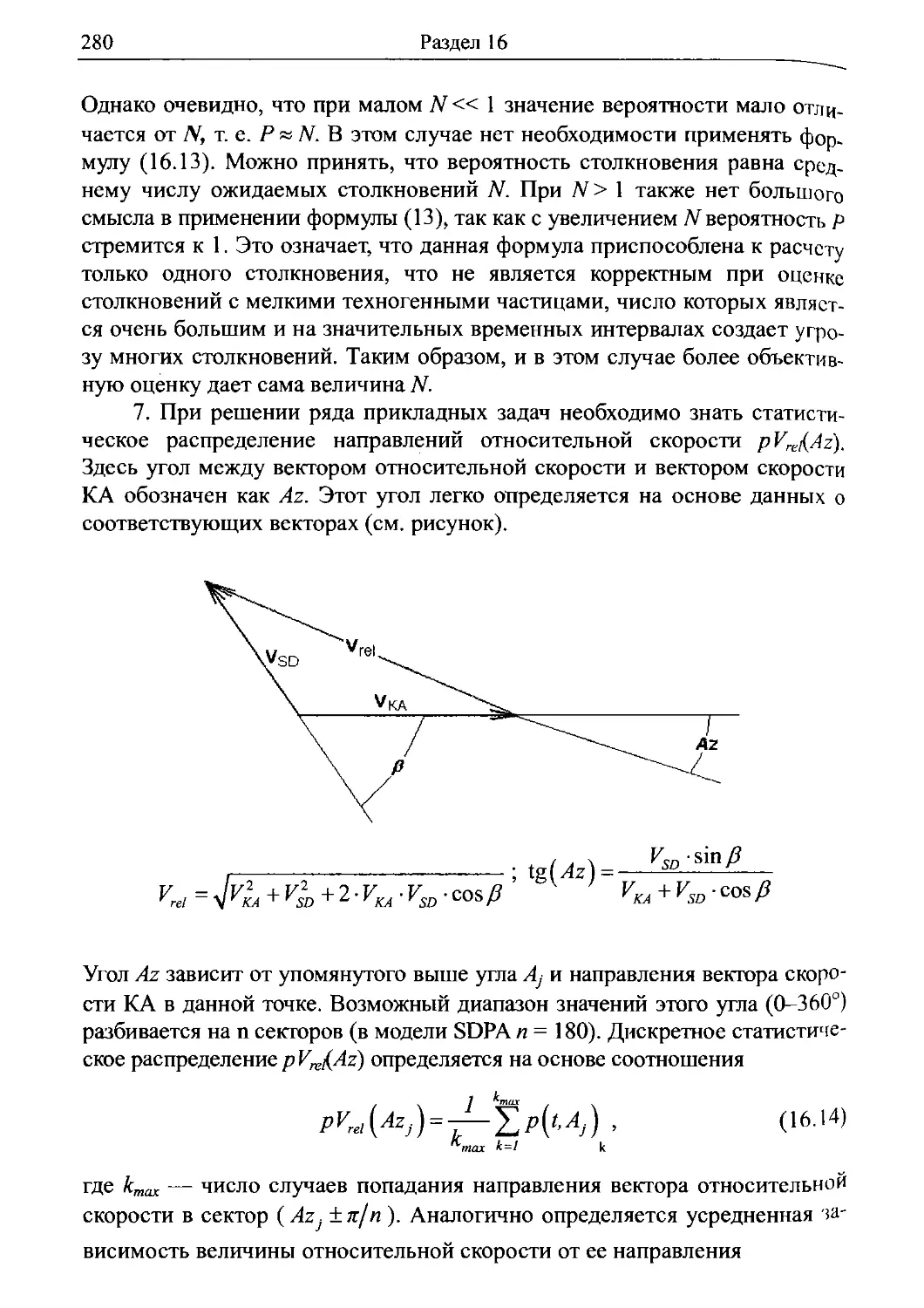
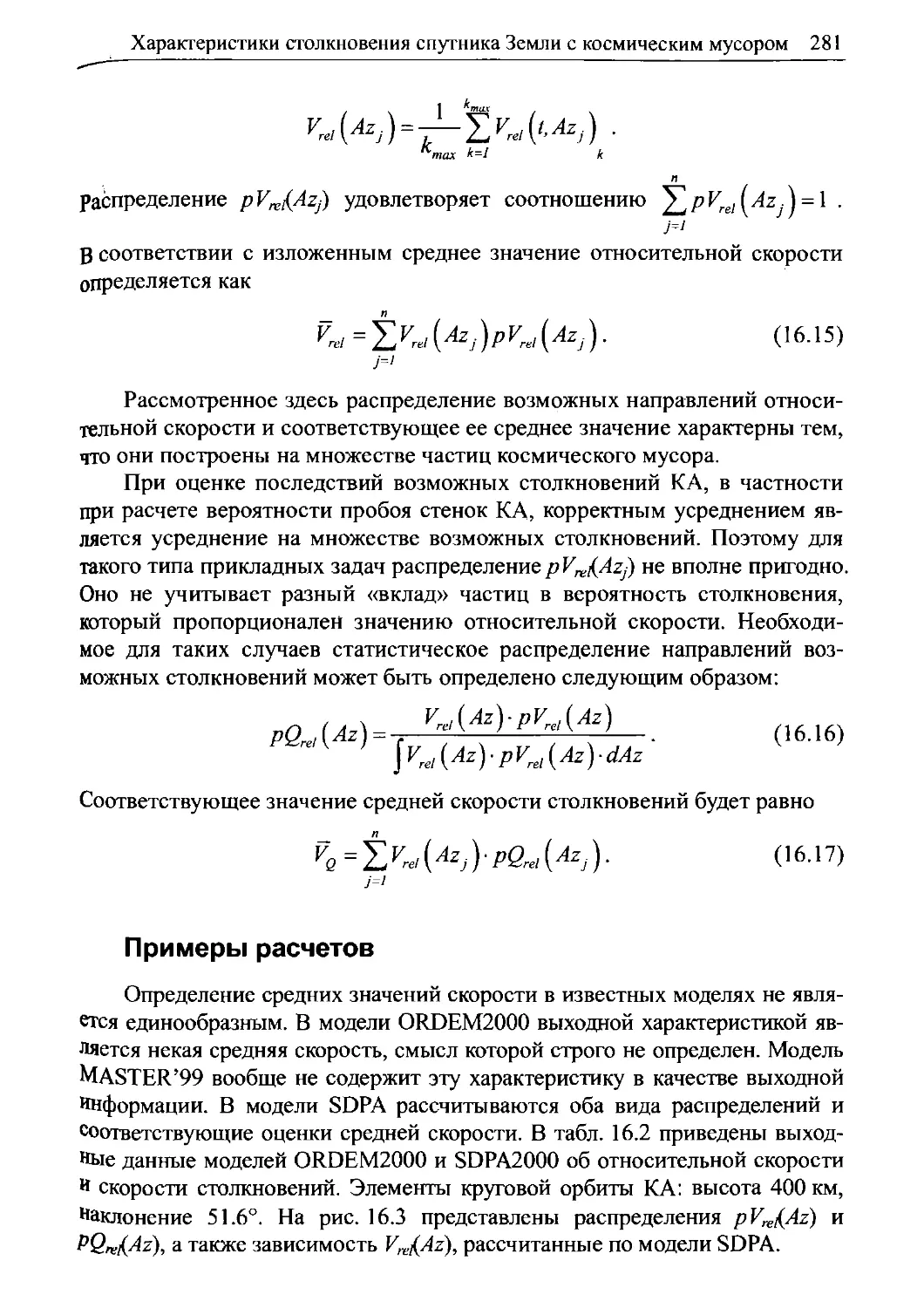
При решении ряда прикладных задач необходимо знать статистиче¬
ское распределение направлений относительной скорости. Рассмотрено
20
Краткое содержание
два возможных подхода к построению такого распределения, отличаю¬
щихся областью усреднения. Показано, что для оценки последствий
столкновений усреднение необходимо проводить по множеству возмож¬
ных направлений потока частиц.
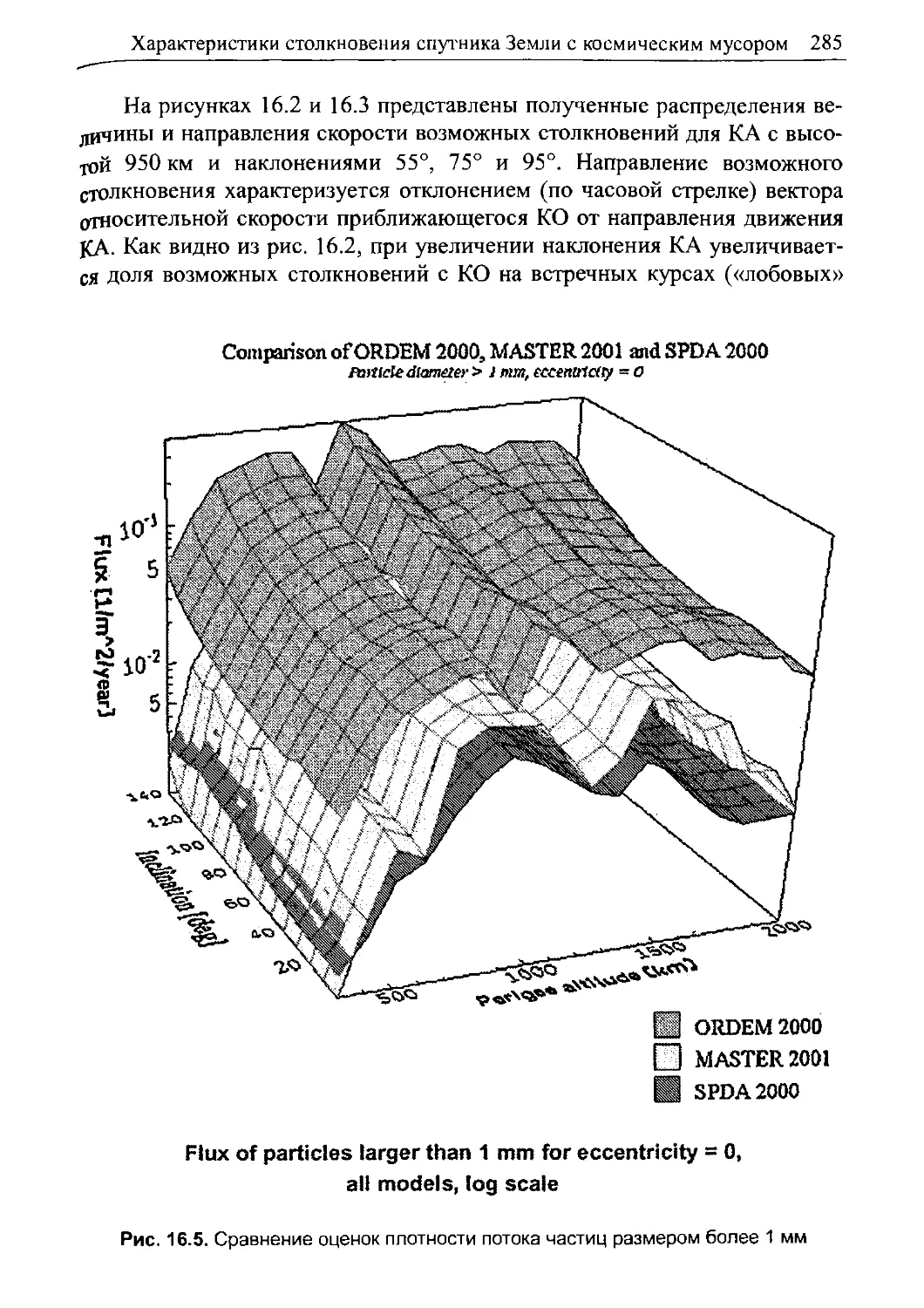
Разработан способ учета формы и ориентации КА при расчете веро¬
ятности столкновений. Введен в рассмотрение некий безразмерный коэф¬
фициент CN , аналогичный коэффициенту Сх в аэродинамике. Для реше¬
ния задачи выведены соотношения (16.20) и (16.21).
На основе разработанной методики выполнено большое число раз¬
личных исследований, подтвердивших ее корректность. Основные резуль¬
таты нашли отражение в ряде публикаций.
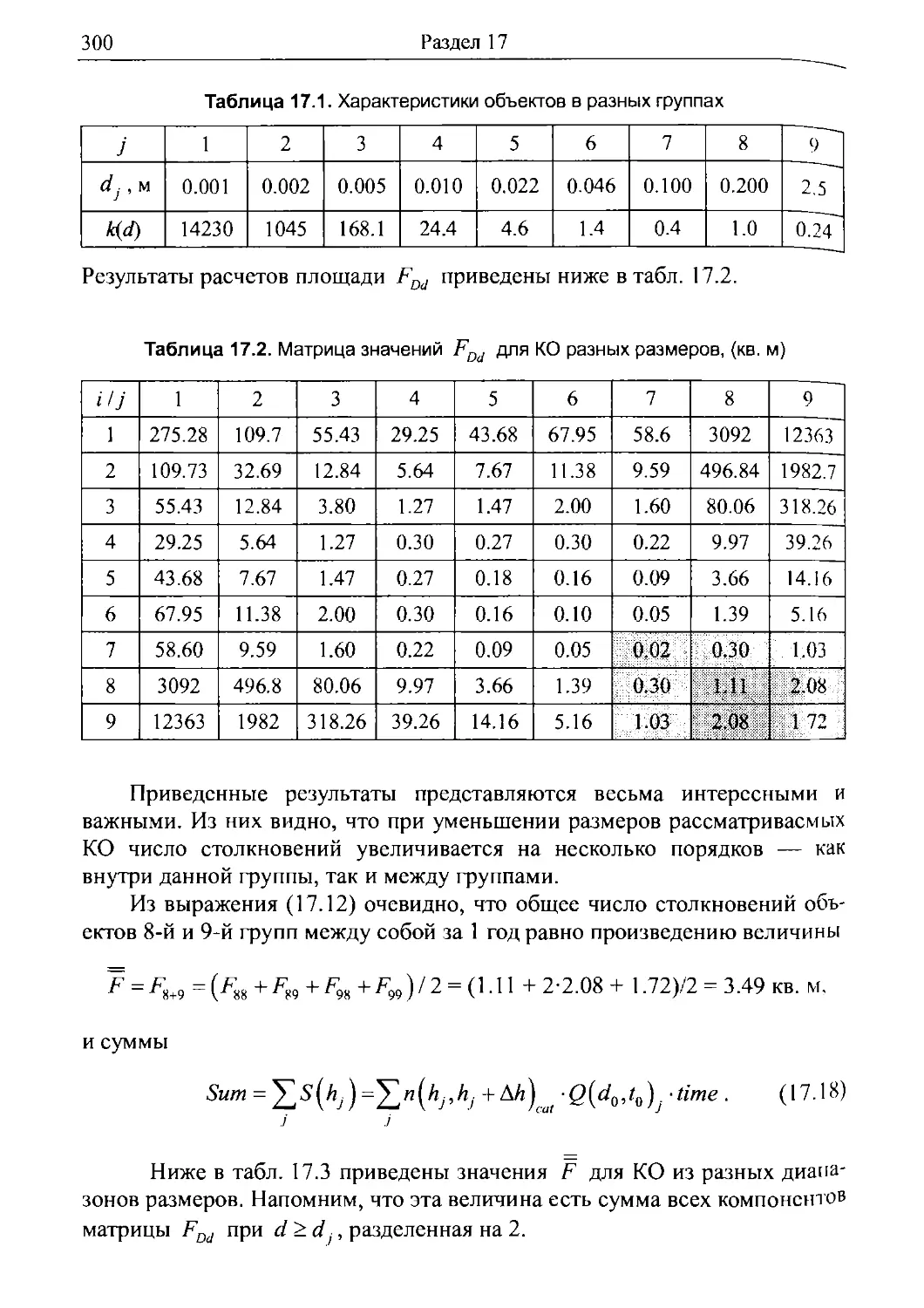
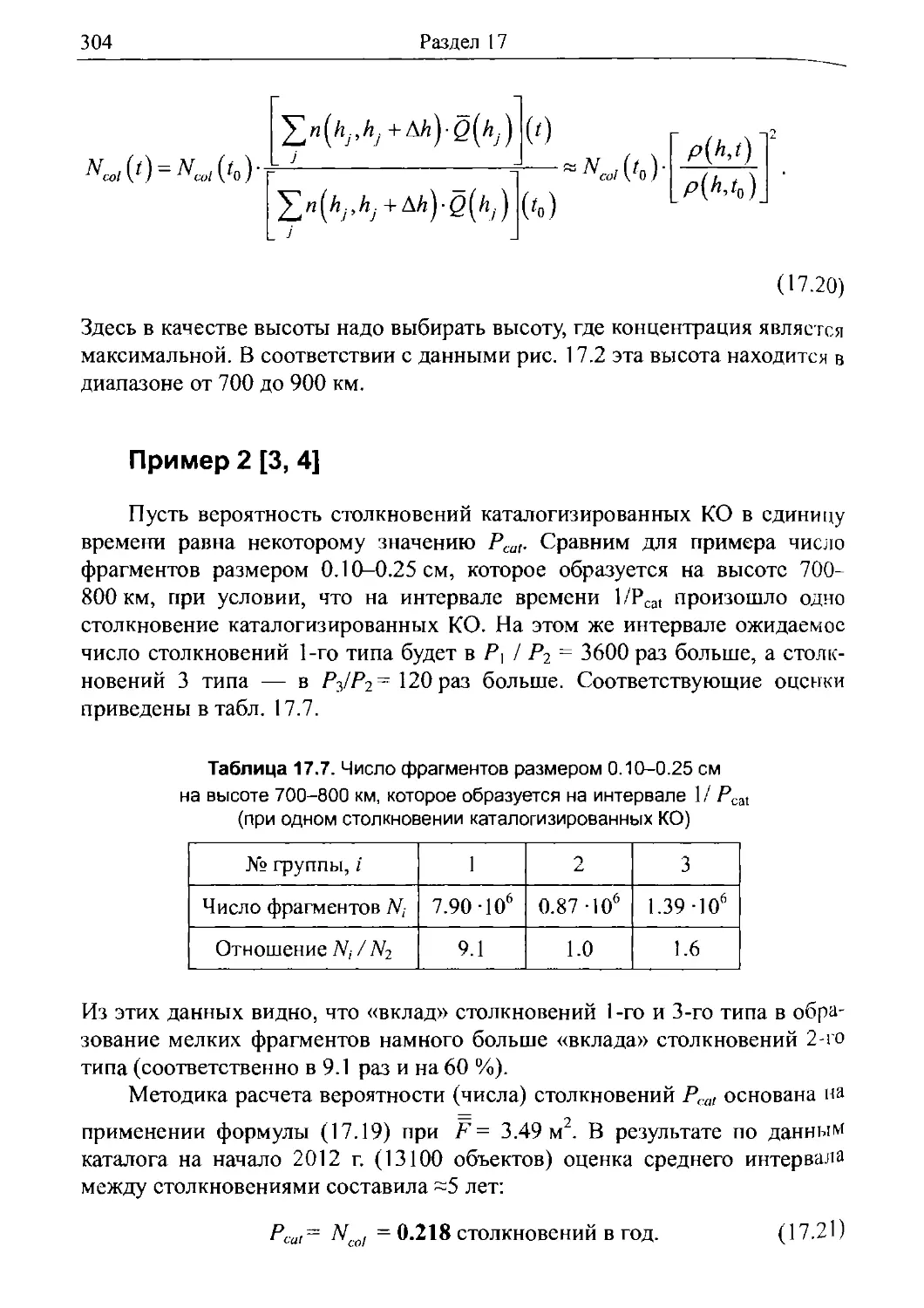
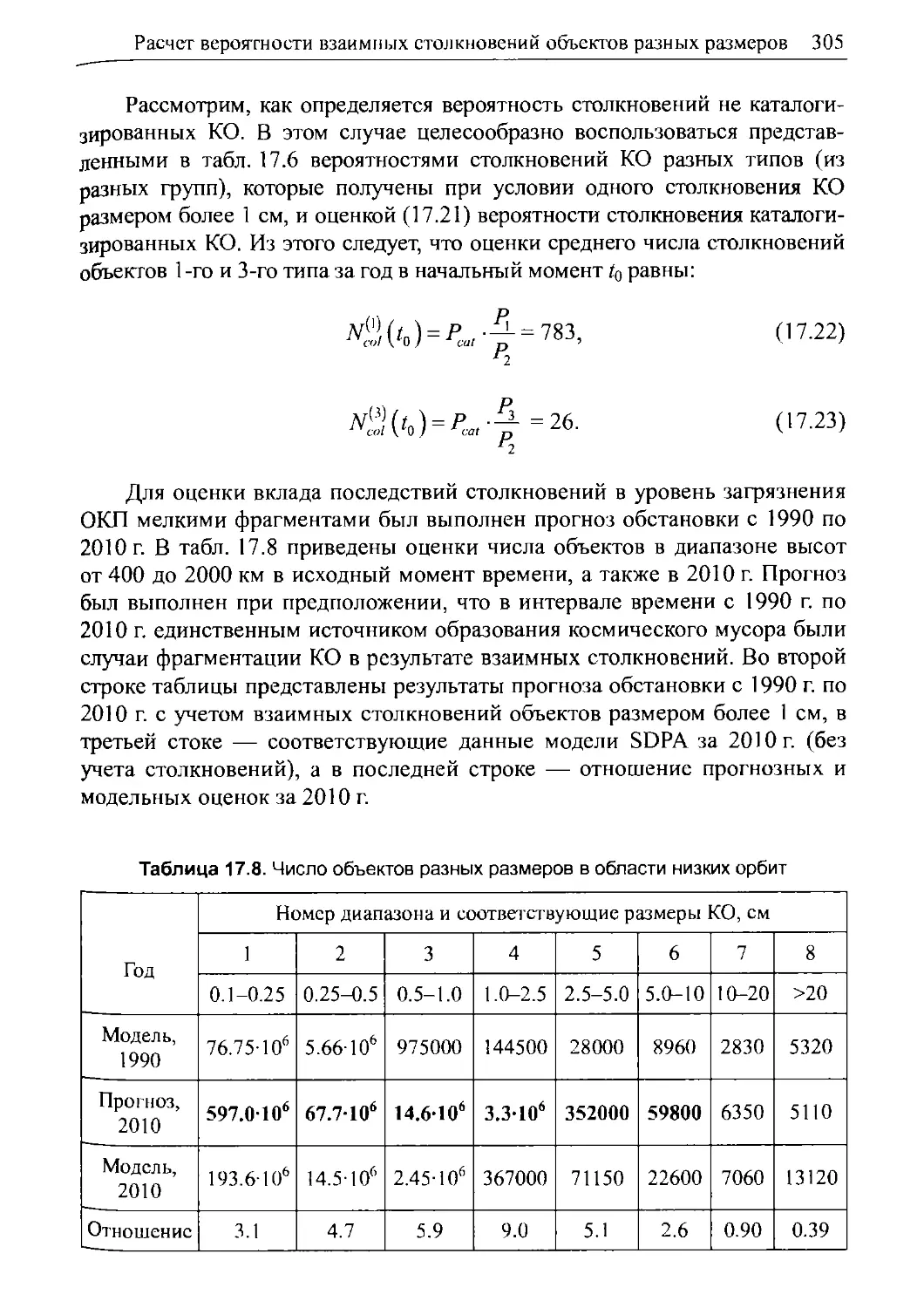
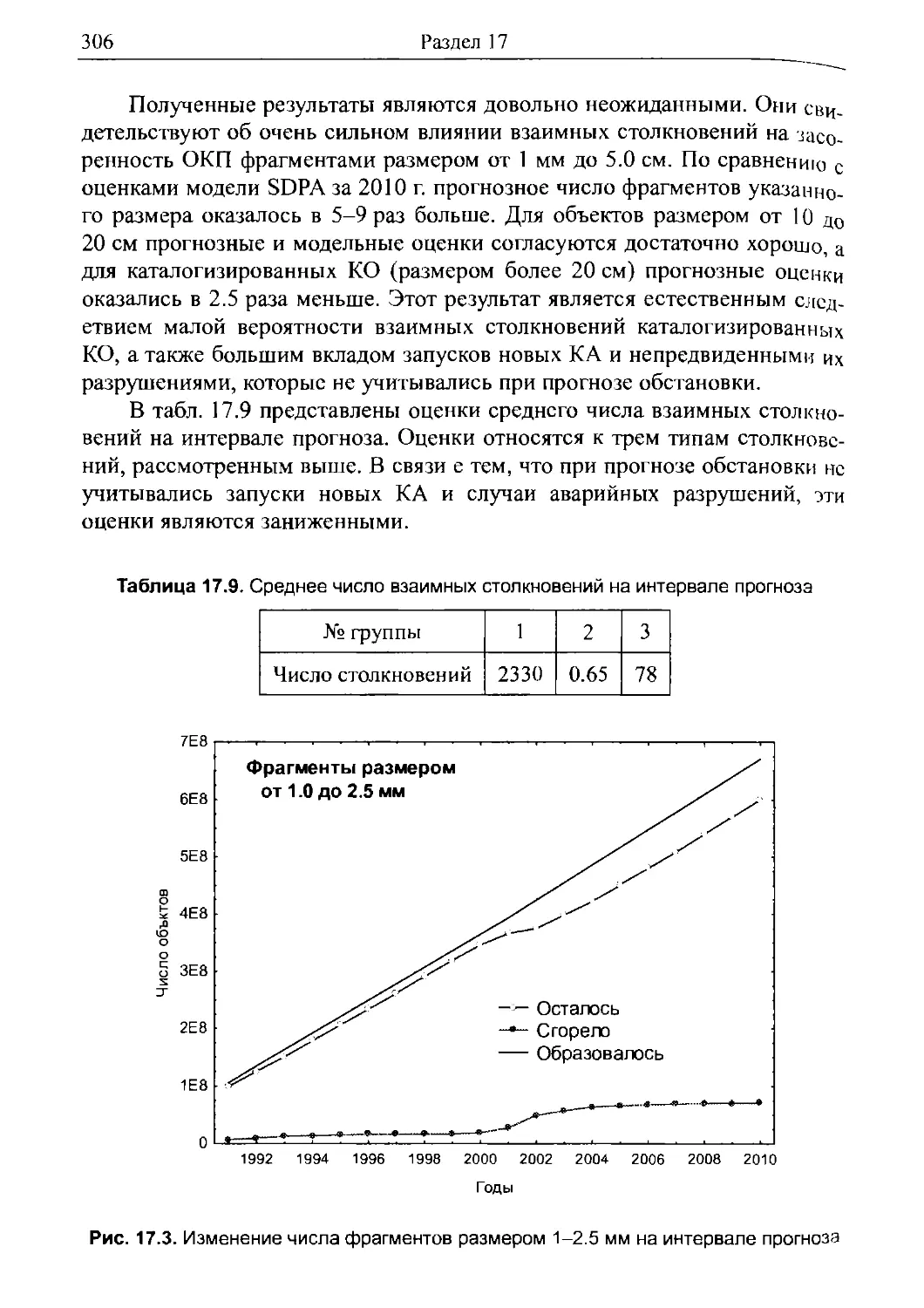
Раздел 17. Расчет вероятности взаимных
столкновений объектов разных размеров (2000 г.)
Проблема достижения критического уровня загрязнения ОКП при¬
влекла внимание мировой общественности. Однако в настоящее время нет
общепризнанного ответа на вопрос, начался ли каскадный процесс само¬
размножения космического мусора. По оценкам автора (в части объектов
размером менее 10 см) этот процесс уже идет.
Разработана методика расчета числа (вероятности) взаимных столк¬
новений объектов разных размеров. Для решения задачи выведены соот¬
ношения (17.12) и (17.13).
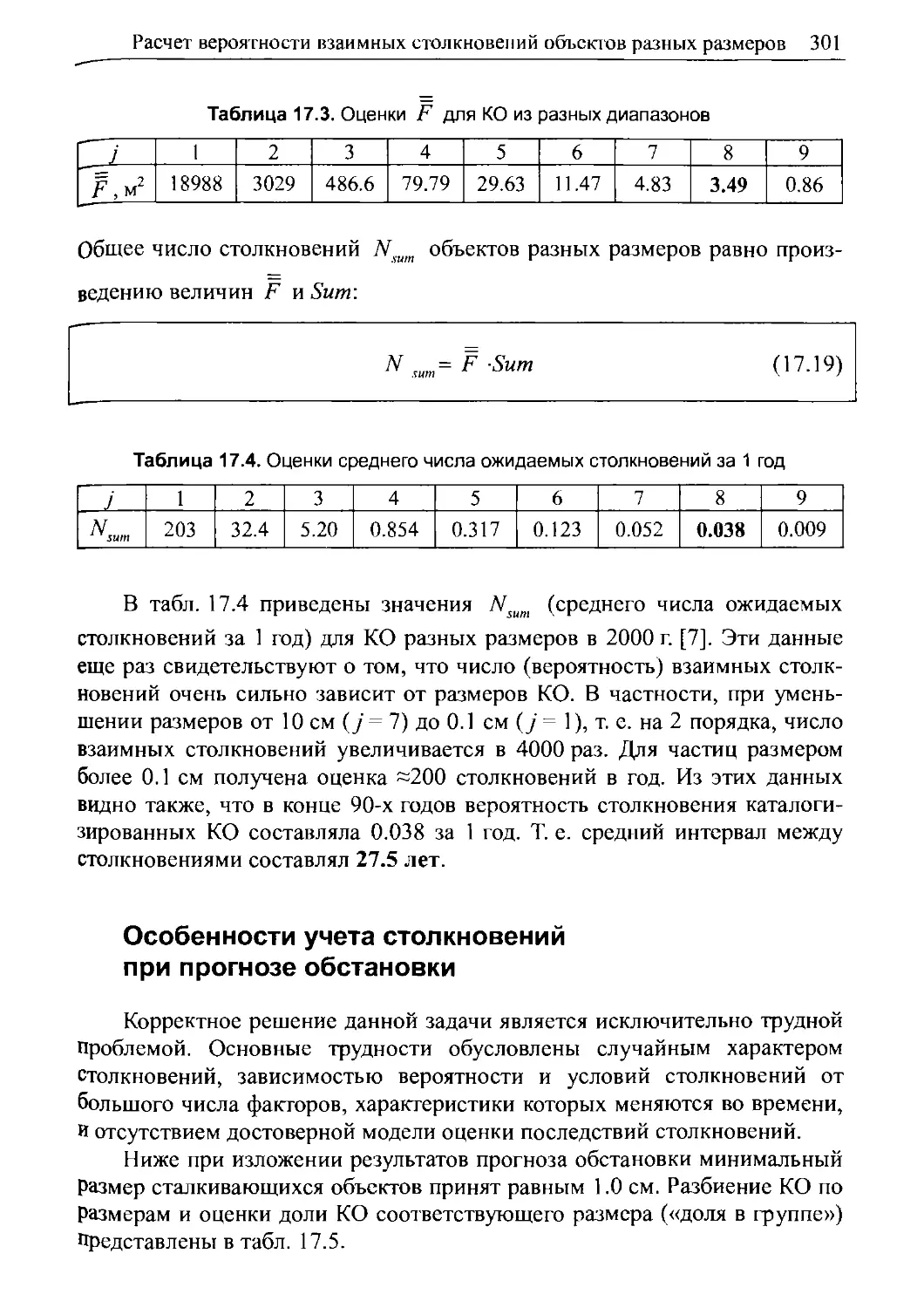
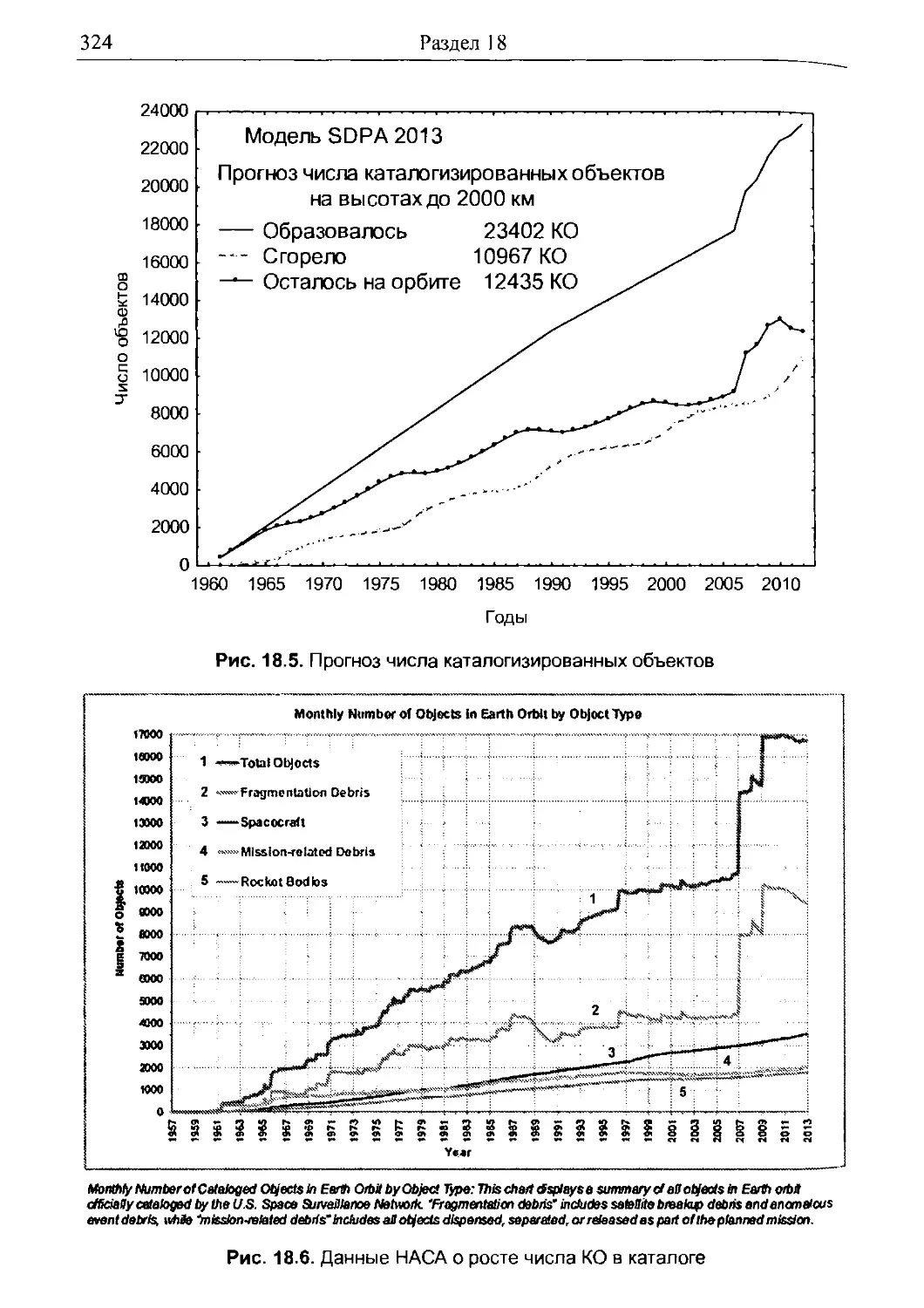
Установлено, что в конце 90-х годов вероятность взаимных столкно¬
вений, каталогизированных КО за 1 год составляла 0.038, т. е. средний
интервал между столкновениями составлял 27.5 лет. На начало 2012 г.
аналогичная оценка оказалась равной = 5 годам.
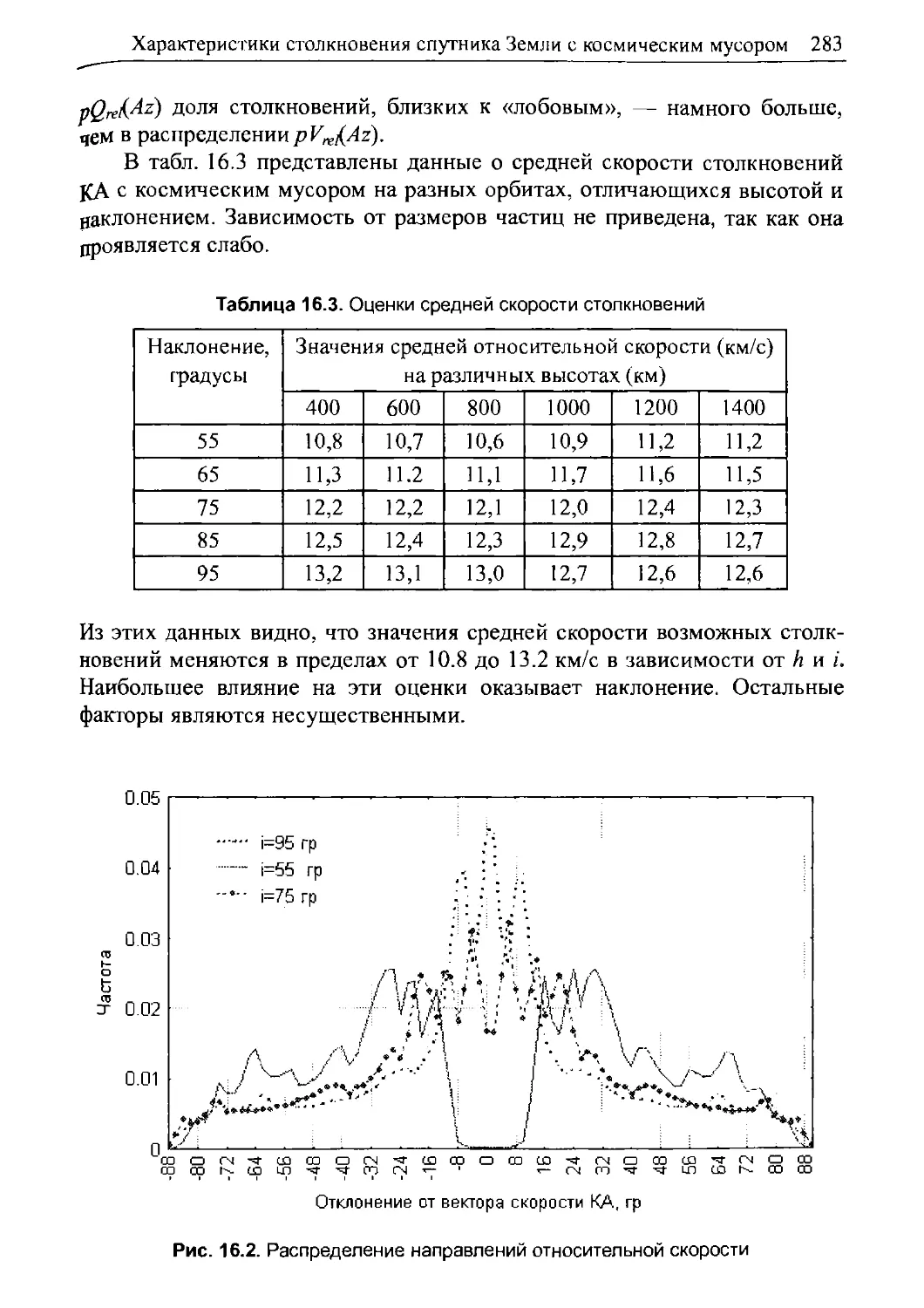
Показано, что число столкновений более мелких (не каталогизиро¬
ванных) объектов размером более 1 см между собой, а также с каталоги¬
зированными КО в =3600 раз больше числа взаимных столкновений, ката¬
логизированных КО.
Таким образом, основным источником образования мелких фрагмен¬
тов являются взаимные столкновения не каталогизированных объектов.
То, что данный факт не удалось подтвердить зарубежным специалистам,
является следствием методических трудностей моделирования столкнове¬
ний мелких объектов, которые они не сумели преодолеть.
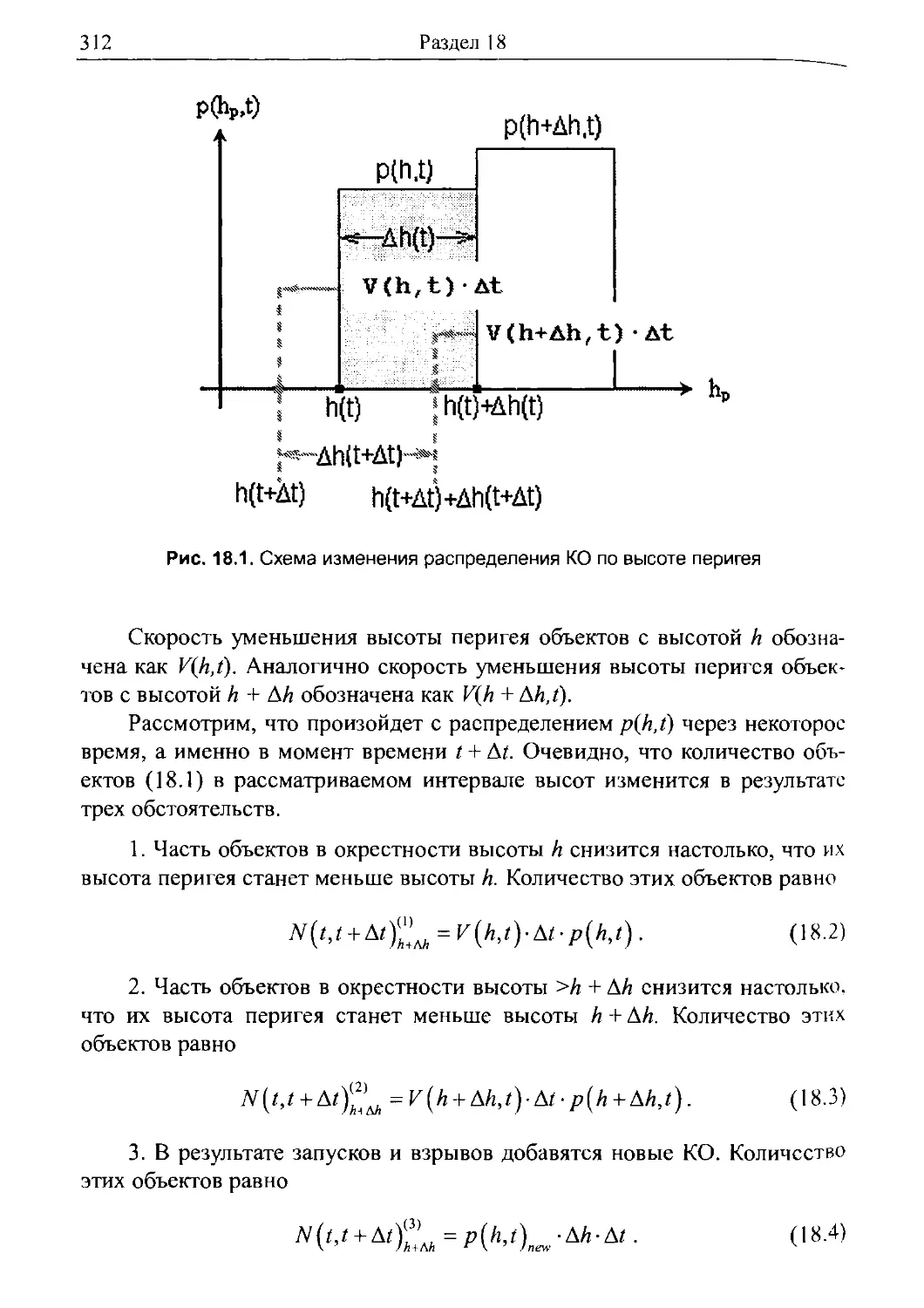
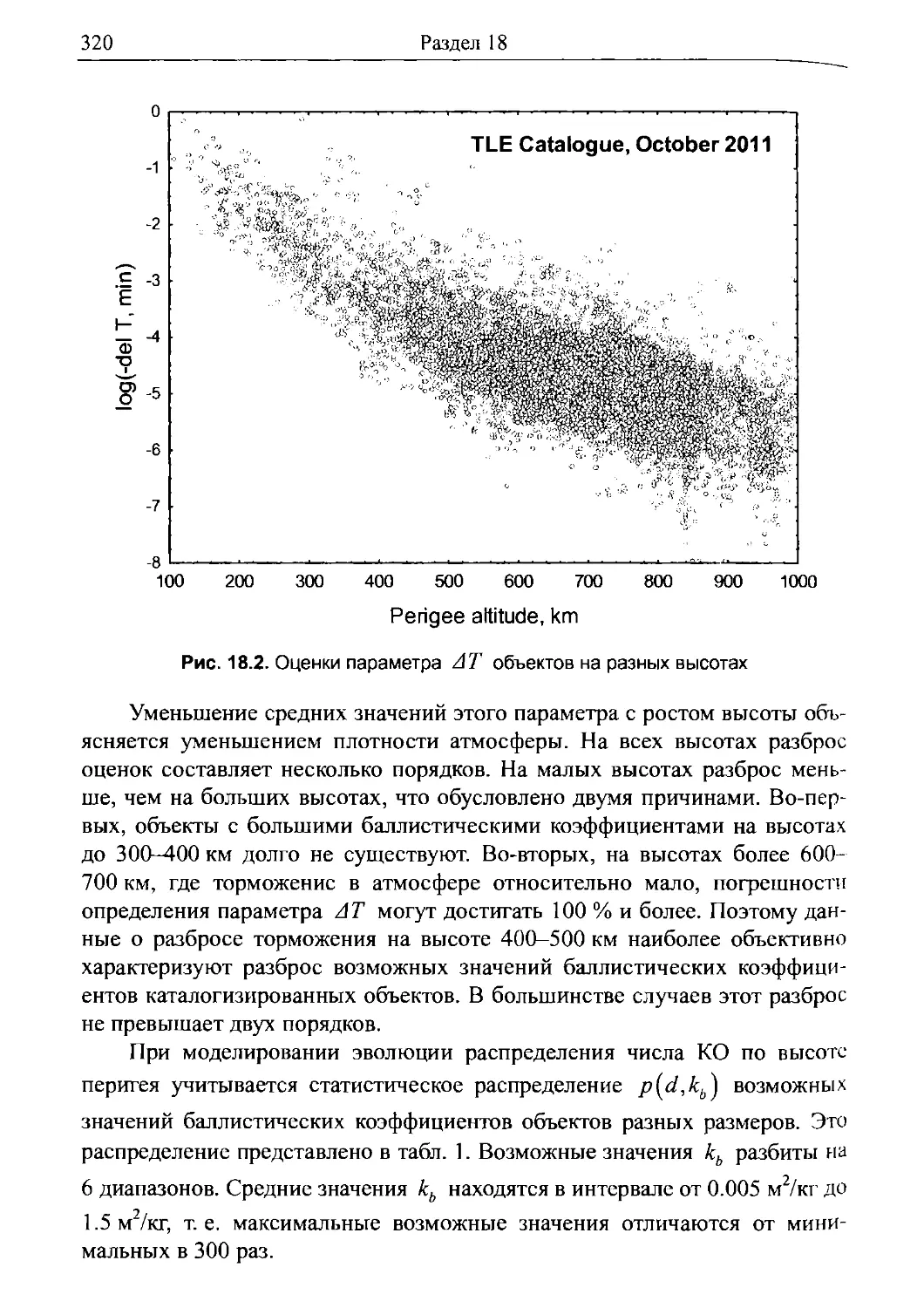
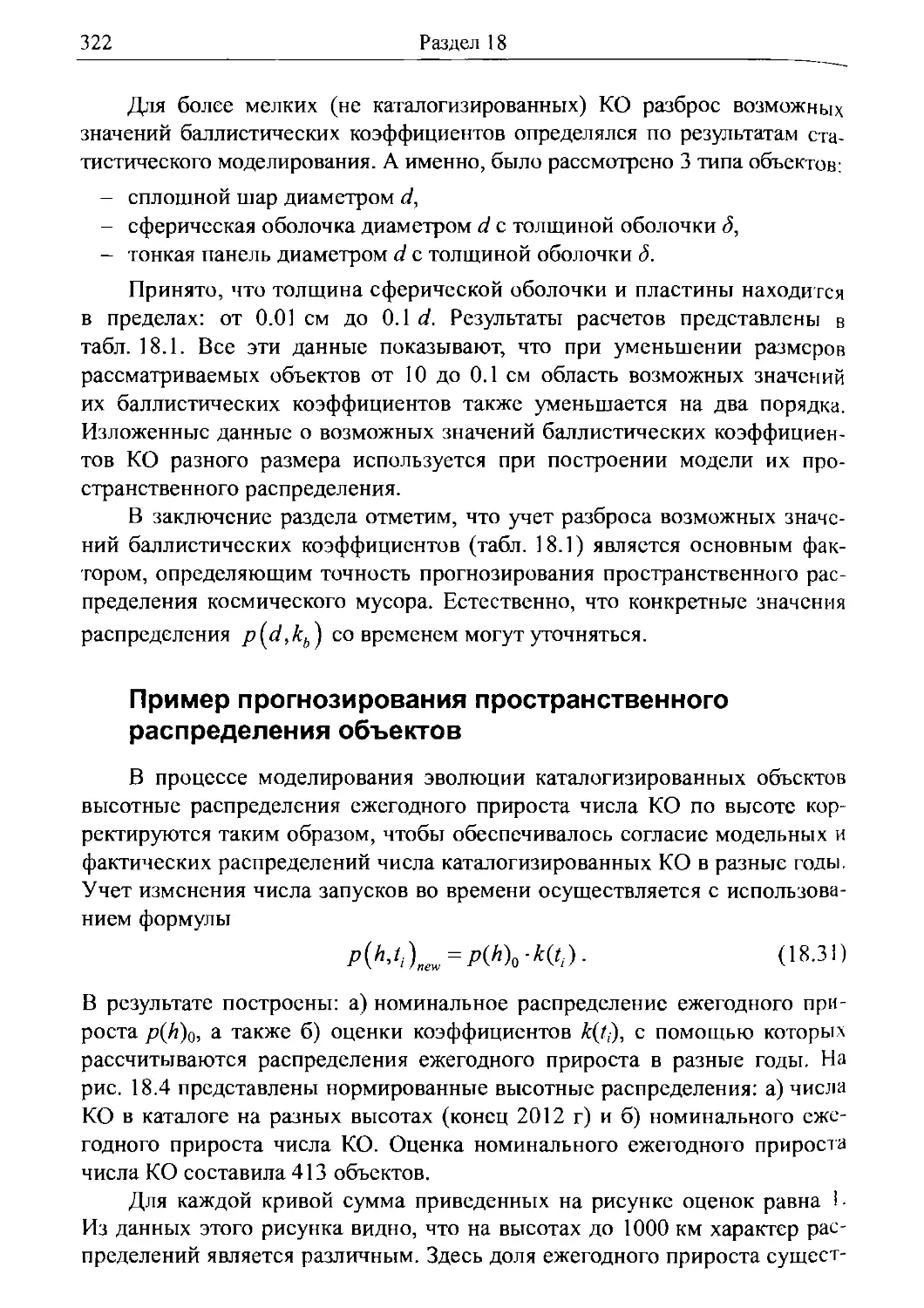
Раздел 18. Уравнения для прогнозирования
статистического распределения космического
мусора по высоте (2000 г.)
При использовании традиционного подхода выполнение долгосроч¬
ных прогнозов характеристик космического мусора оказывается весьма
трудоемкой вычислительной задачей. Даже применение современных су¬
перкомпьютеров не позволяет в достаточной степени учесть существенные
Краткое содержание
21
влияющие факторы, например, последствия взаимных столкновений объ¬
ектов разных размеров.
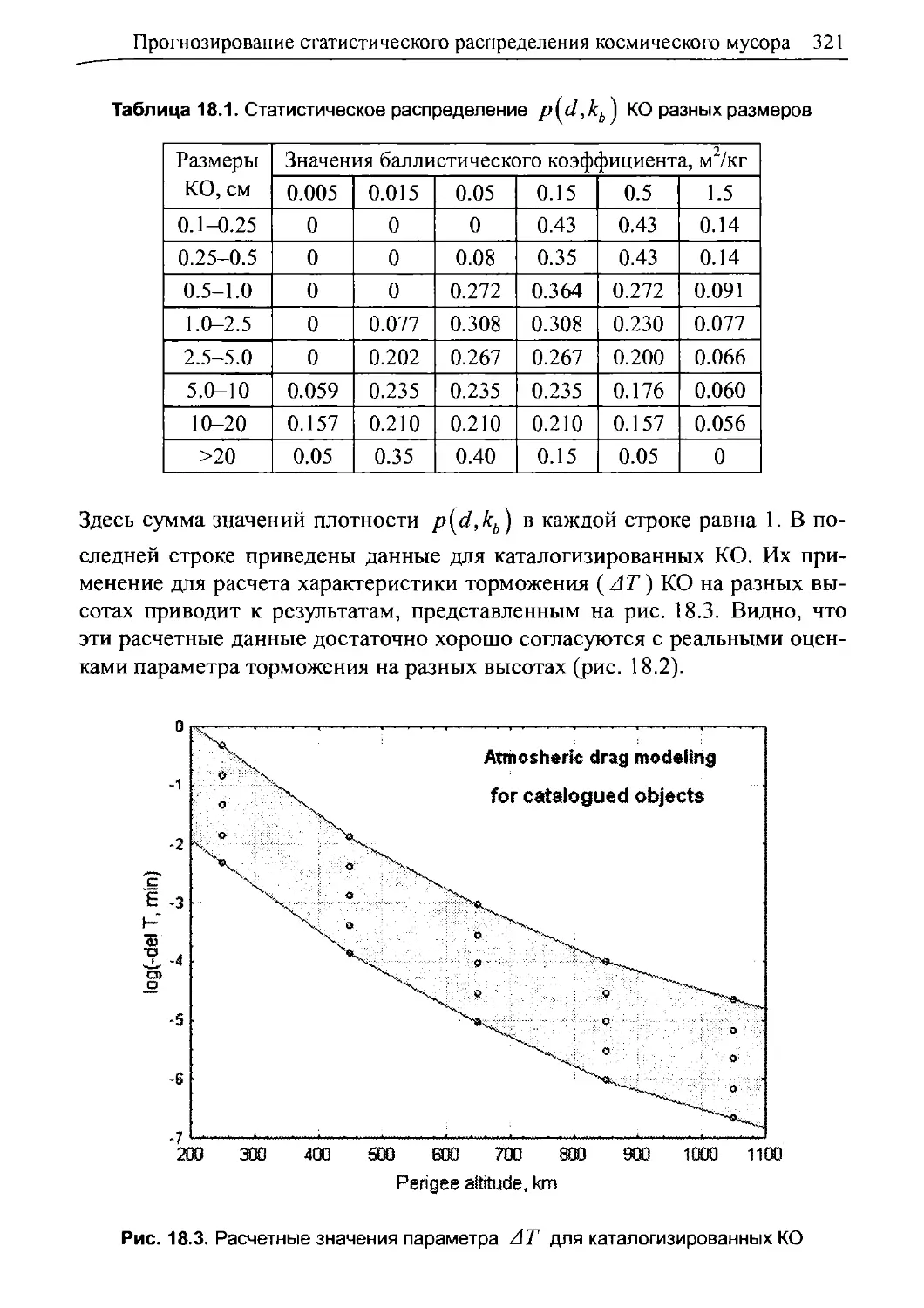
Разработана численно-аналитическая методика долгосрочного про¬
гнозирования пространственного распределения космического мусора,
основанная на составлении и решении новых эволюционных уравнений
(18.5) и (18.11). Эти уравнения представлены в двух формах — разностной
и дифференциальной. В последнем случае задача сводится к интегрирова¬
нию системы двух обыкновенных дифференциальных уравнений.
Применение построенных эволюционных уравнений позволяет учи¬
тывать при прогнозе обстановки основные влияющие факторы и на не¬
сколько порядков снизить затраты машинного времени.
Раздел 19. Оценка последствий
взаимных столкновений (2012 г.)
Для корректной оценки последствий взаимных столкновений целесо¬
образно учесть результаты, изложенные в предыдущих разделах. Кроме
того, необходимо уточнить модель фрагментации объектов при столкно¬
вениях, а также методику учета последствий столкновений при прогнозе
обстановки.
На основе традиционной модели фрагментации выведена формула
для расчета массы максимального по размеру фрагмента.
Применяемая в зарубежных моделях формула для определения выде¬
лившейся при столкновении энергии справедлива только для частного
случая при условии тх « т,. Для более общего случая выведена формула
(19.12), применимая для различных условий столкновения
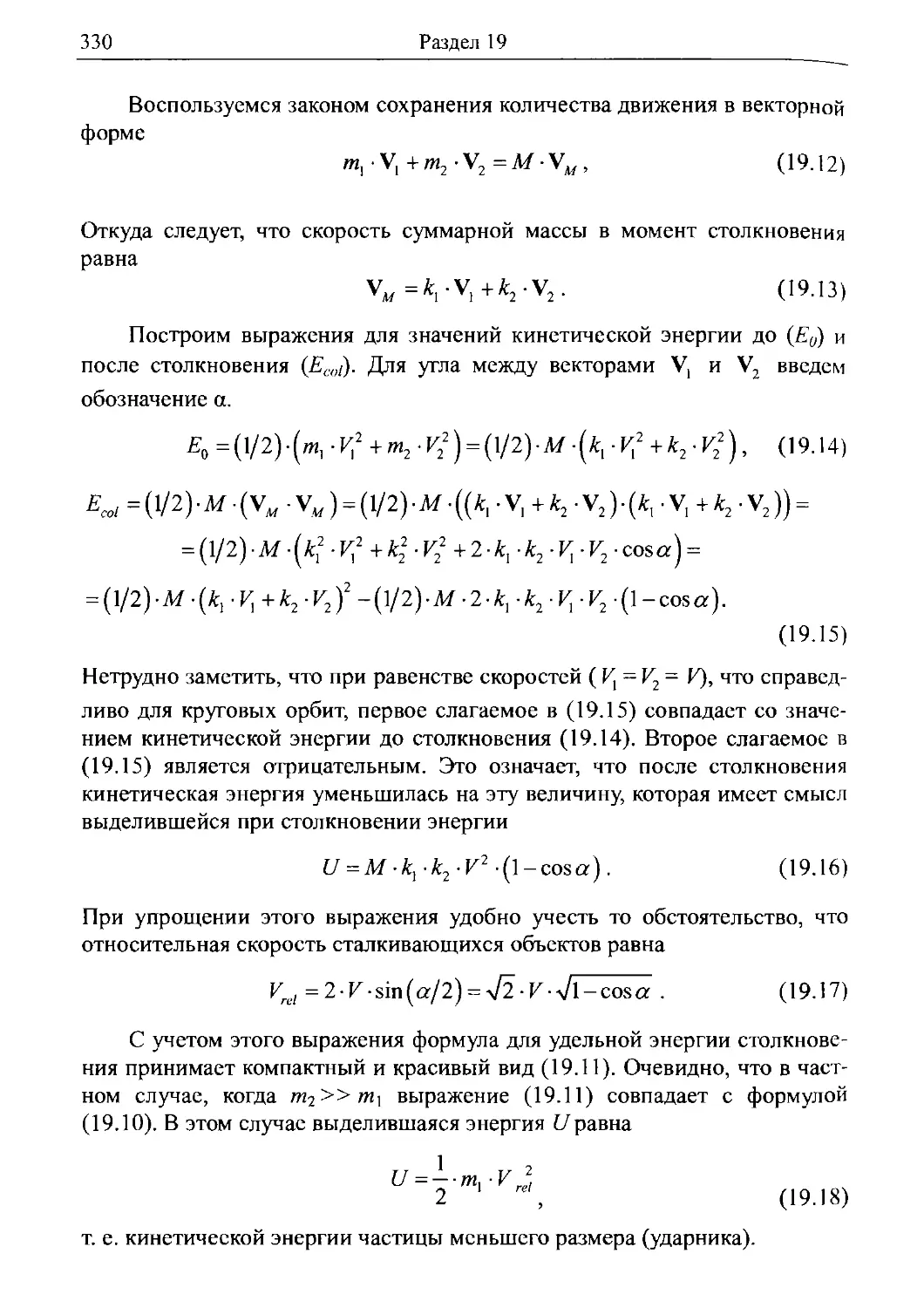
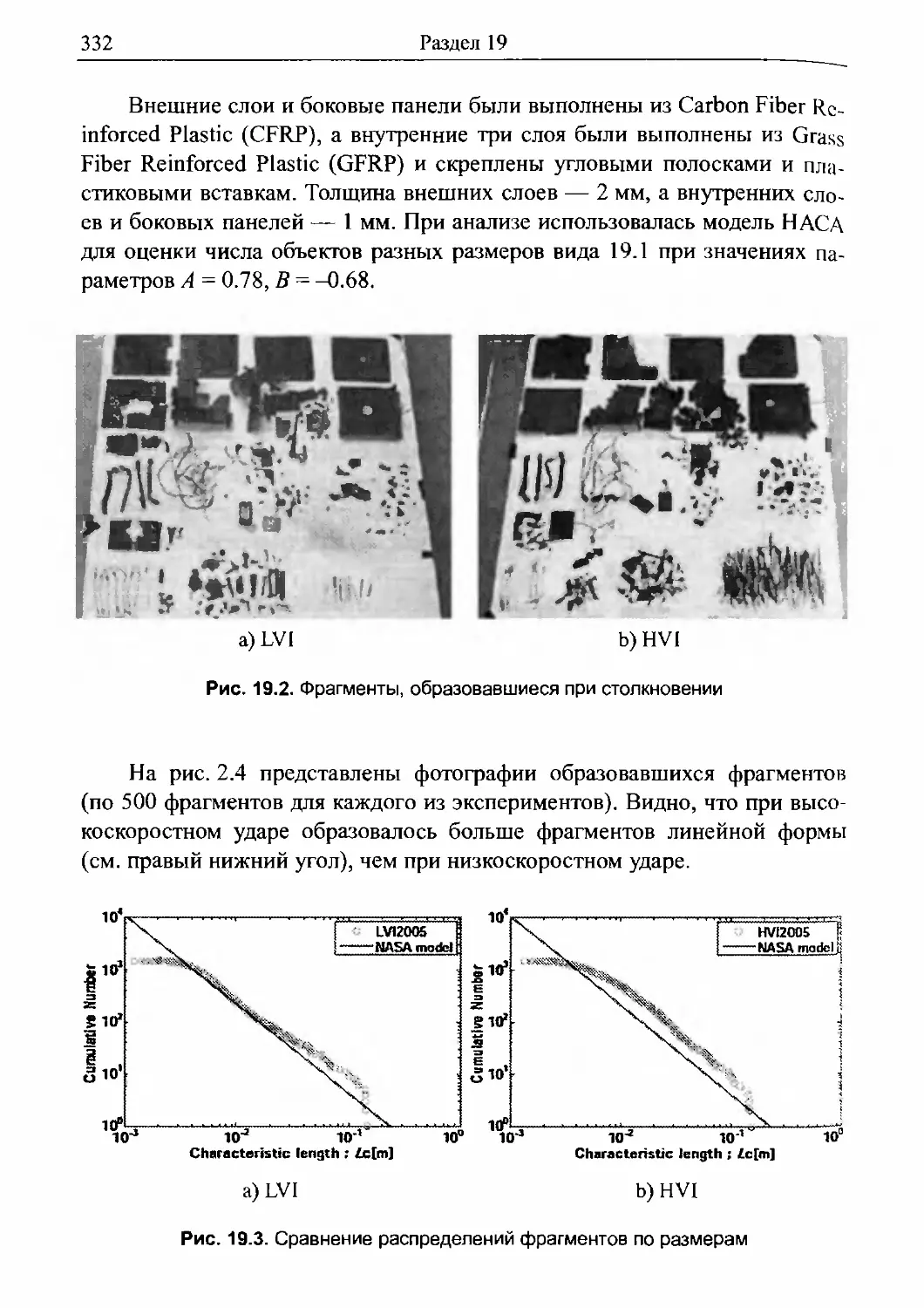
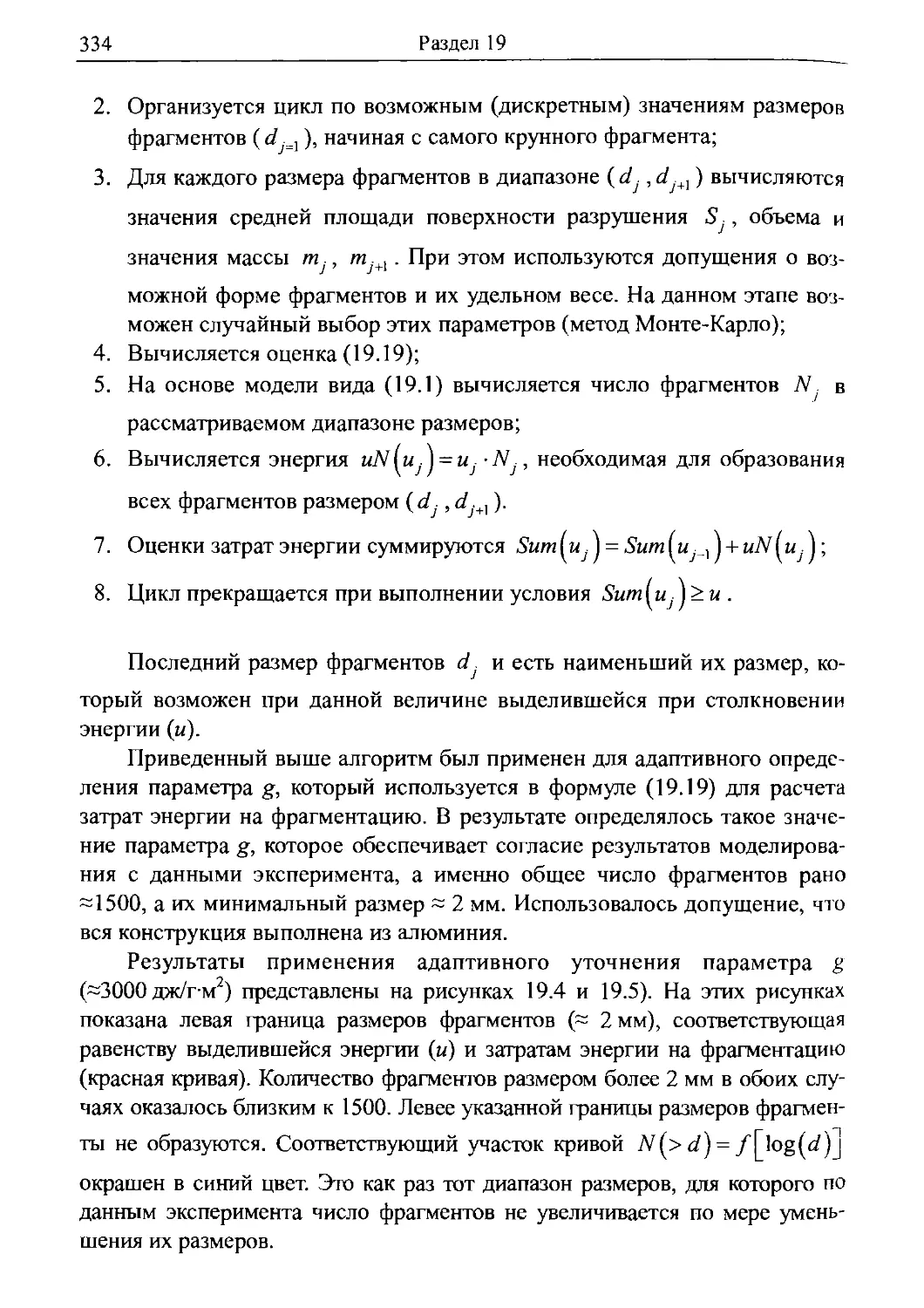
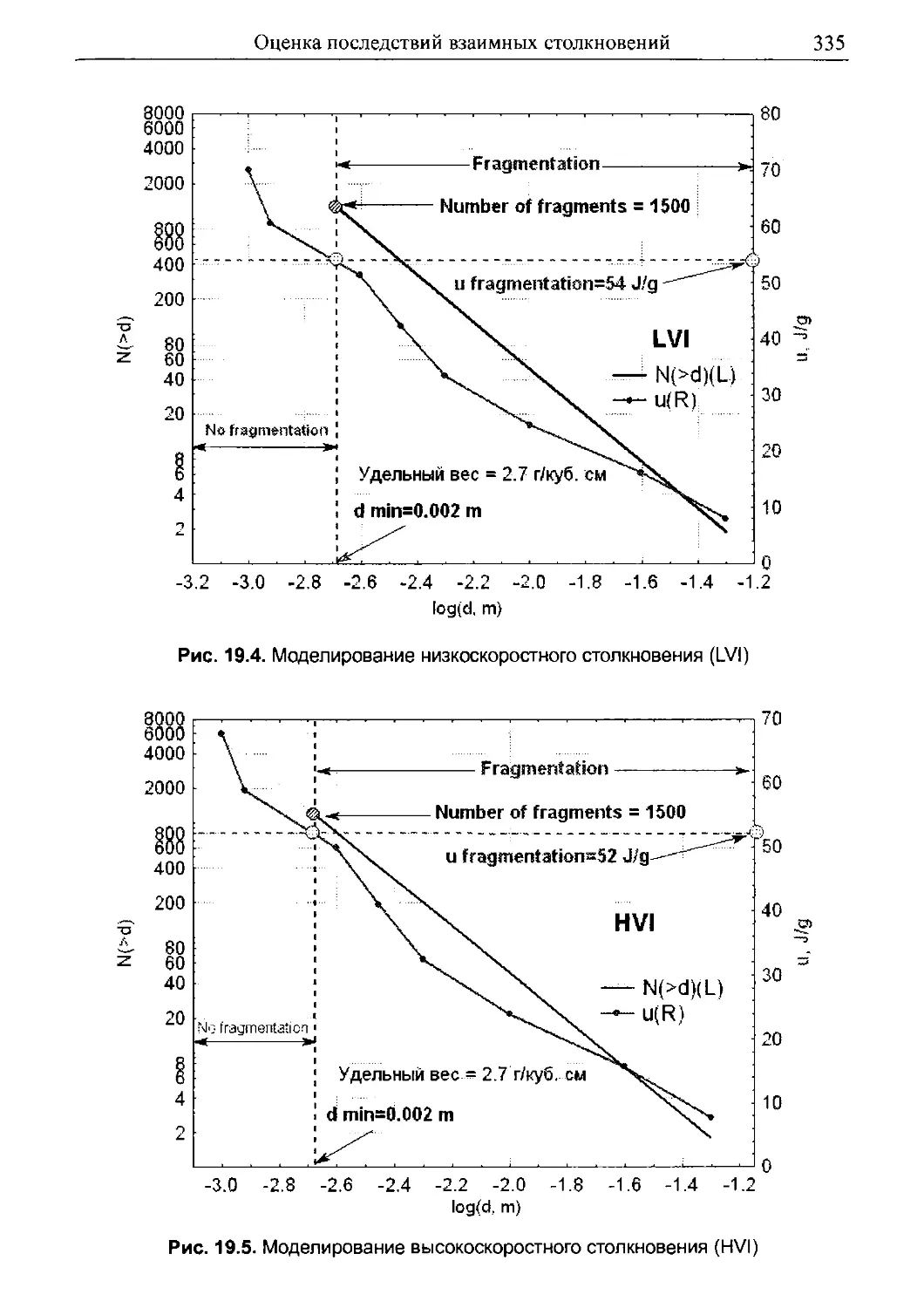
На основе использования оценки выделившейся при столкновении
энергии разработана методика определения минимальной массы фрагмен¬
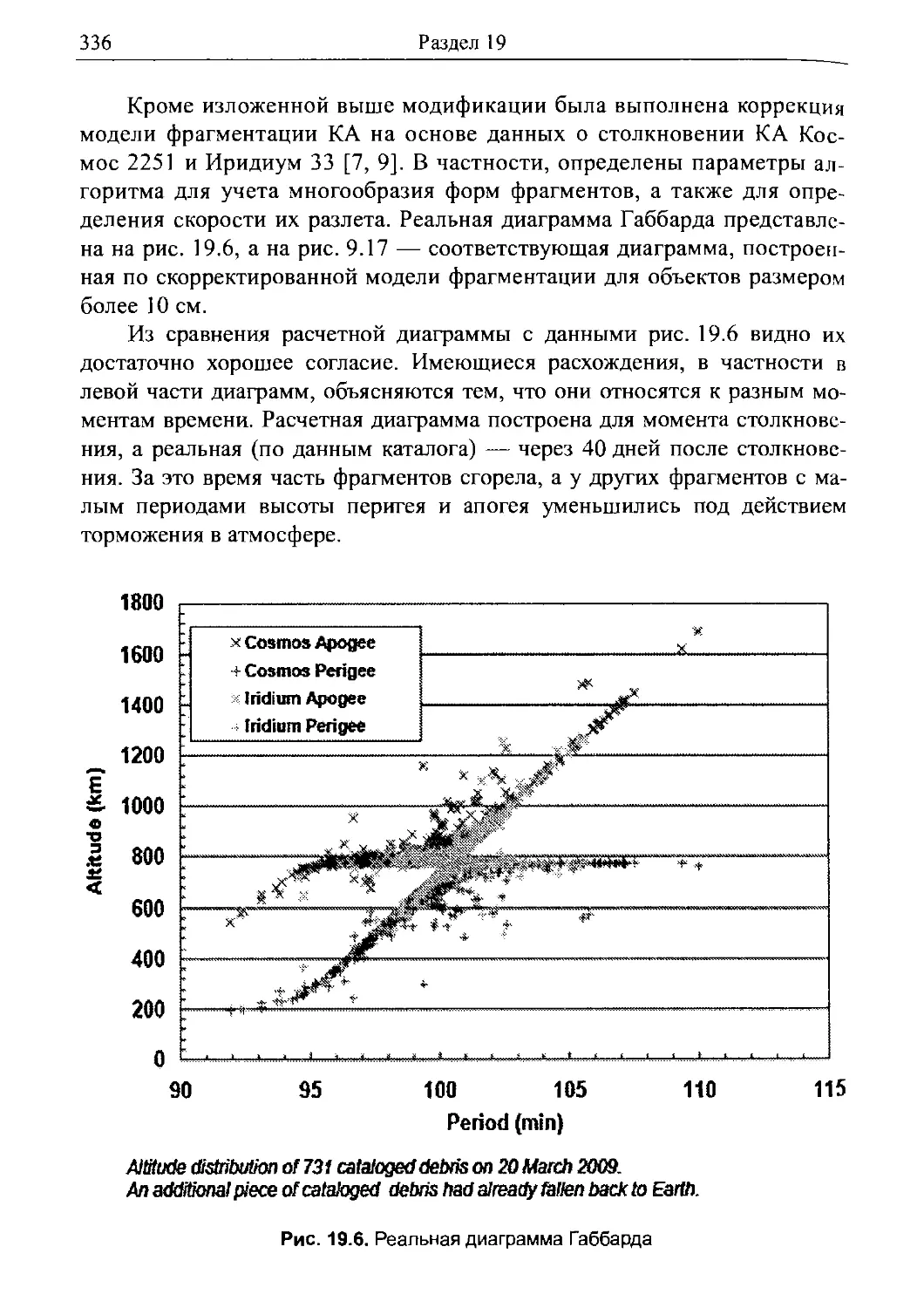
тов. Параметры алгоритма уточнены по данным наземного эксперимента
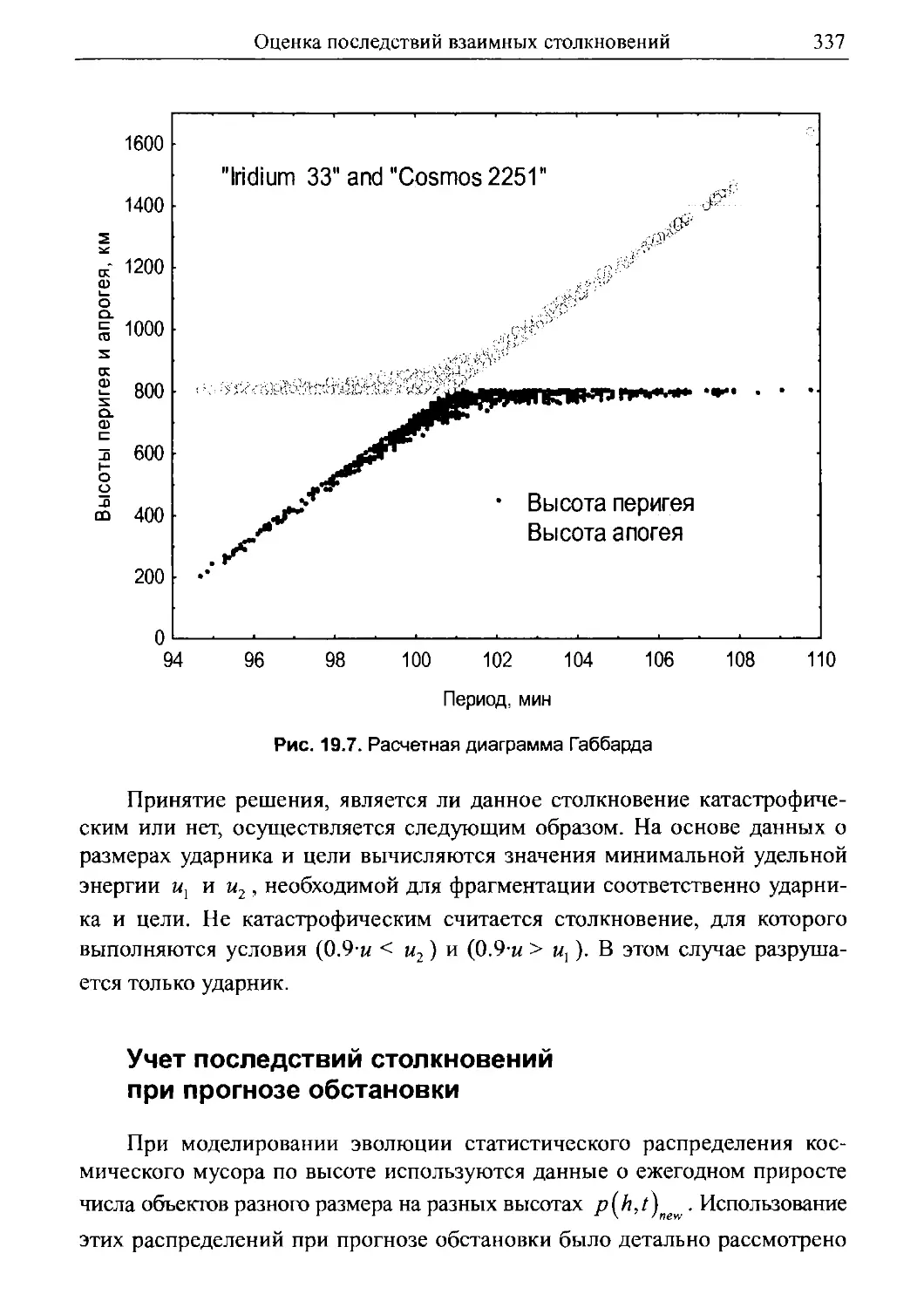
и данных о столкновении спутников Космос 2251 и Иридиум 33.
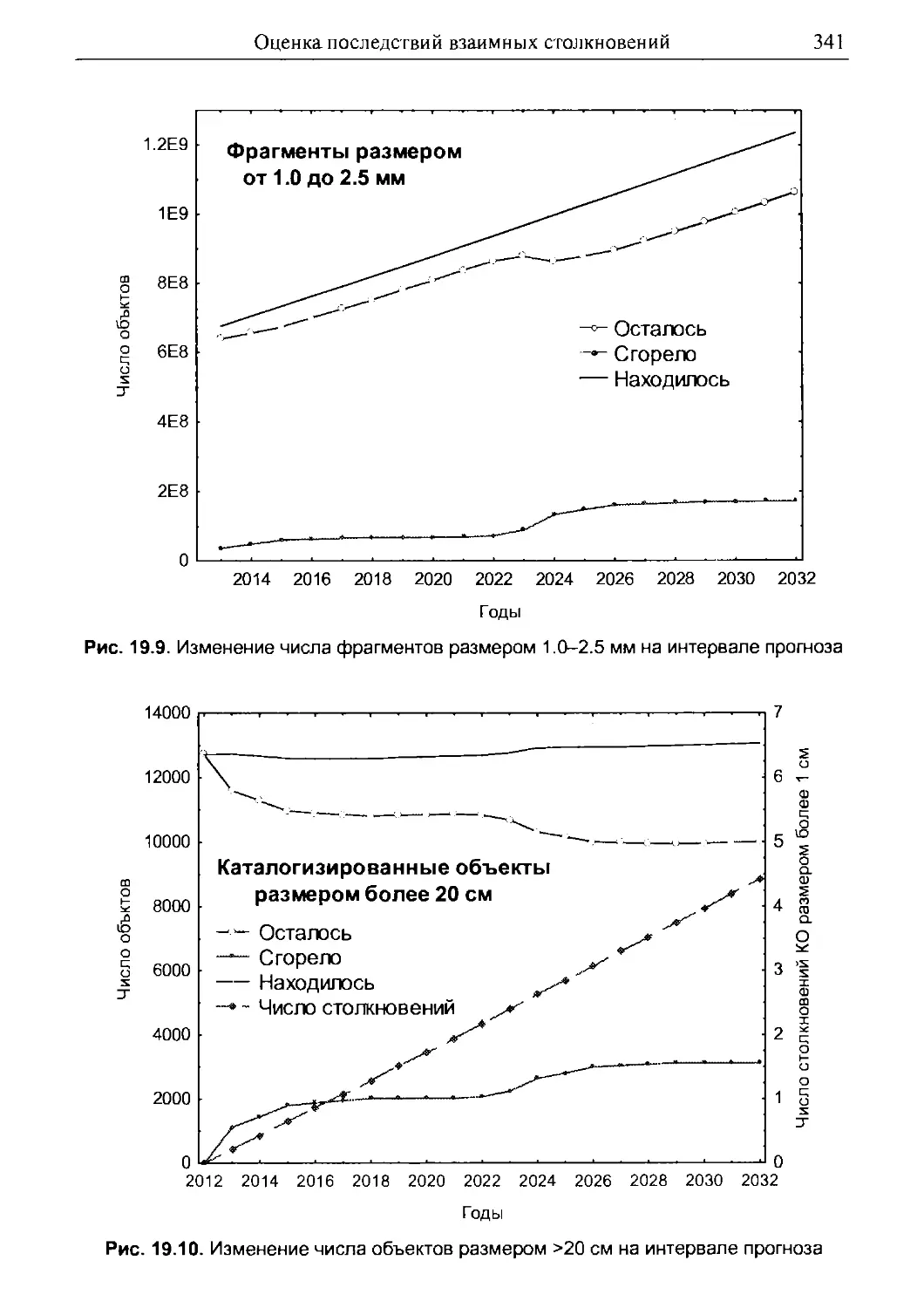
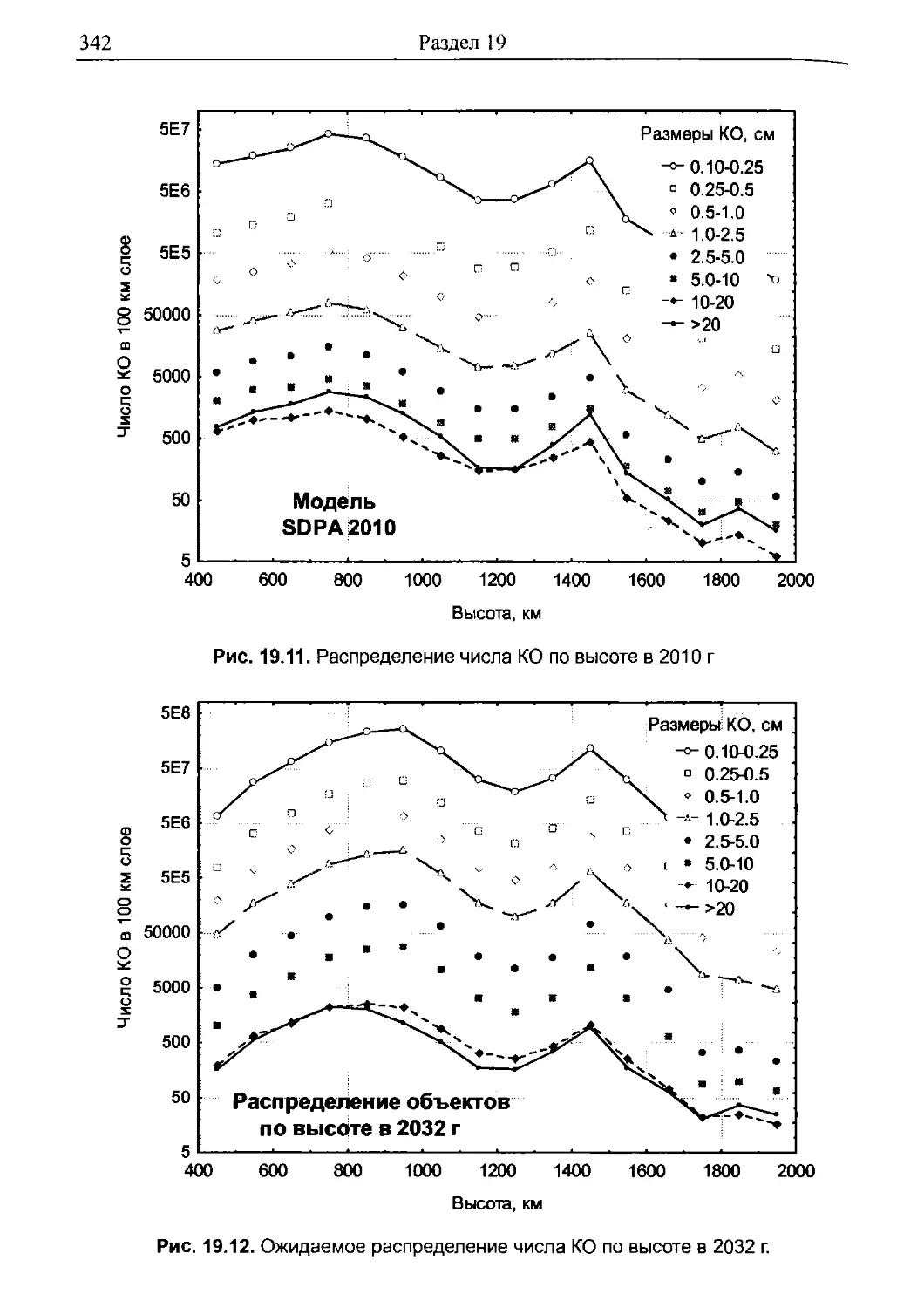
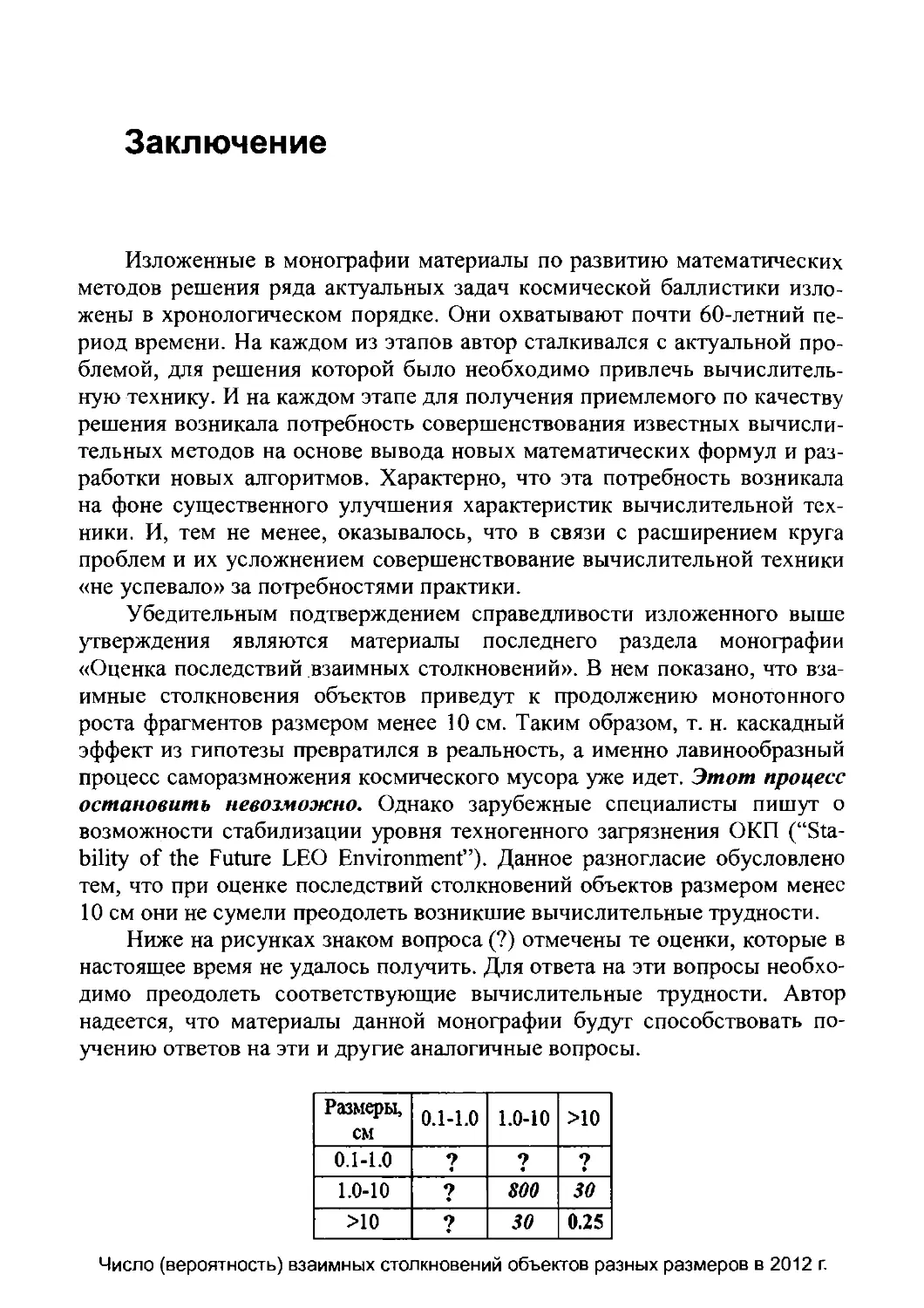
Выполнен прогноз обстановки на интервале времени до 2032 г. При
этом учитывались последствия взаимных столкновений объектов разме¬
ром более 1 см и допущение, что никаких новых запусков и аварийных
случаев фрагментации (взрывов) на интервале прогноза не будет. Уста¬
новлено, что взаимные столкновения объектов приведут к продолжению
монотонного роста фрагментов размером менее 10 см. По сравнению с
данными за 2012 г. их количество увеличится через 20 лет на 50-70 %.
Таким образом, основным источником образования мелких фрагмен¬
тов являются взаимные столкновения не каталогизированных объектов.
Вклад этого источника в образование космического мусора размером от
1 мм до 10 мм на порядок больше вклада взаимных столкновений, катало¬
гизированных КО.
Основные сокращения
1 1 и
— Единица измерения частоты (109 Ец)
ГИСК
— Геоцентрическая Инерциальная Система Координат
ики
— Институт Космических Исследований
исз
— Искусственный Спутник Земли
КА
— Космический Аппарат
КМ
— Космический Мусор
КО
— Космический Объект
ммп
— Метод Максимального Правдоподобия
мнк
— Метод Наименьших Квадратов
НПО
— Научно-Производственное Объединение
окп
— Околоземное Космическое Пространство
ОФИ
— Оптимальная Фильтрация Измерений
ПК
— Персональный Компьютер
СККП
— Система Контроля Космического Пространства
ско
— Среднеквадратическое Отклонение
ФГУП
— Федеральное Еосударственное Унитарное Предприятие
ФК
— Фильтр Калмана
цккп
— Центр Контроля Космического Пространства
ЭВМ
— Электронная Вычислительная Машина
ЭЦВМ
— Электронная Цифровая Вычислительная Машина
F 10.7
— Индекс радиоизлучения Солнца
GEO
— Geo Earth Orbit
IADC
— Inter-Agency space Debris coordination Committee
INN
— International Space Station
LEO
— Low Earth Orbit
Основные сокращения
23
LST
— Least Square Technique
RASTER
NASA
NOAA
— Название европейской модели космического мусора
— National Aeronautics and Space Administration (НАСА)
— National Oceanic and Atmospheric Administration
OFM
— Optimal Filtration of Measurements
ORDEM
— Название американской модели космического мусора
SGP
— Simplified General Perturbations (название американской
модели движения спутников)
SDPA
— Space Debris Prediction and Analysis model (название
российской модели космического мусора)
SSS
— Space Surveillance System
TLE
— Two-Line Element set
UT
— Union Time
Введение
Прикладная математика
Прикладная математика — область математики, рассматривающая
применение математических методов, алгоритмов в других областях науки
и практики. Примерами такого применения являются: численные методы,
математическая физика, линейное программирование, оптимизация и ис¬
следование операций, механика сплошных сред...
В вопросе о том, что является прикладной математикой, нельзя соста¬
вить чёткую логическую классификацию. Математические методы обыч¬
но применяются к специфическому классу прикладных задач путём со¬
ставления математической модели системы. (Википедия)
Возможность применения математики для решения прикладных задач
является ее сущностью. Ведь само возникновение математики (алгебра,
геометрия) несколько тысяч лет назад было обусловлено хозяйственным
потребностями того времени. Например, по мнению историков, соотноше¬
ние между сторонами прямоугольного треугольника было известно еще в
Междуречье примерно за 1800 лет до нашей эры. Все последующее время
развитие математики было тесно связано с решением технических проблем.
Существенный прогресс в развитии математики начался в эпоху Воз¬
рождения (XVII век и последующие годы) [1]. Работы математиков этого
периода охватывали много областей — новых и старых. Они обогатили
оригинальными результатами классические разделы, пролили новый свет
на прежние области и создавали даже совершенно новые области матема¬
тических исследований. Примером первого рода могут служить труды
Ферма. Новым творением была математическая теория вероятностей.
Движущей силой в этом расцвете творческой науки, не имевшем себе рав¬
ного со времен величия Греции, было не только то, что новой техникой
можно было легко пользоваться. Многие крупные мыслители искали
большего — «общего метода», который иной раз понимали в ограничен¬
ном смысле, как метод математики, иной раз понимали шире — как метод
познания природы и создания новых изобретений. Это было причиной
того, что в рассматриваемую эпоху все выдающиеся философы были ма¬
тематиками и все выдающиеся математики были философами. В поисках
новых изобретений иногда непосредственно приходили к математическим
открытиям. Трудно перечислить всех выдающихся математиков того вре-
Прикладная математика
25
тени. Некоторые их них: Галилей, Декарт, Кеплер, Паскаль, Гюйгенс,
Ньютон, Лейбниц, Братья Бернулли, Эйлер, Лагранж, Лаплас, Гаусс.
Последующие успехи естествознания в конце 19 - начале 20 веков
сыграли решающую роль в подготовке научно научно-технической рево¬
люции 20 века (40-е годы). Революционный сдвиг произошёл в технике, в
первую очередь под влиянием применения электричества в промышлен¬
ности и на транспорте. Было изобретено радио, родилась авиация. Откры¬
тие электрона, радия, превращения химических элементов, создание тео¬
рии относительности и квантовой теории ознаменовали прорыв науки в
область микромира и больших скоростей. Человечество убедилось в ко¬
лоссальных преобразующих возможностях науки и её практического при¬
менения. В начале 20 века появились специальные курсы высшей матема¬
тики для инженеров. Именно в эти годы началось формирование вычис¬
лительной и прикладной математики в качестве самостоятельных разделов
математики.
В начале XX в. (в 1906 г.), выдающийся русский математик, механик
и инженер-кораблестроитель академик Л. Н. Крылов, озабоченный тем, что
в современных курсах математического анализа доказывается существо¬
вание решения какой-либо проблемы и теоретическая возможность полу¬
чения его с любой степенью точности, но при этом не уделяется внимания
получению такого решения с точностью, необходимой для практических
целей, решил исправить это положение. Им был составлен курс о прибли¬
женных вычислениях, приемах и способах: вычисление корней численных
уравнений, и определенных интегралов, пользование тригонометрически¬
ми рядами и приближенное решение дифференциальных уравнений.
Книга А. Н. Крылова «Лекции о приближенных вычислениях» была
первым в мировой литературе курсом такого направления и послужила
образцом для последующих, вышедших после нее курсов других авторов.
Этот классический курс выдержал пять изданий (три из них при жизни
автора). В главе IV описывается также общая теория и конструкция меха¬
нических приборов для вычисления определенных интегралов. Это меха¬
нические приборы, в которых исходные данные и результаты представля¬
ются не в цифровой форме, а в виде линейных или угловых перемещений
частей этих приборов.
Ниже приведены выдержки из доклада А. Н. Крылова «Прикладная
математика и техника», который был сделан им на чрезвычайной сессии
АН СССР 21 июня 1931 г. (тогда же выпущен отдельной брошюрой Гос.
Научно-техническим изд-вом под названием «Прикладная математика и ее
значение для техники»).
«Инженер должен владеть общими математическими методами,
приложенными к решению множества задач, тогда только он сможет
решать действительно новые вопросы по своей специальности...
26
Введение
В настоящее время математика настолько проникла в технику всех
отраслей строительного дела, всех отраслей машиностроения, корабле¬
строения, построения летательных аппаратов, артиллерийского дела,
электротехники, оптики и пр., что нельзя себе и вообразить ни одного
сооружения, которое не было бы предварительно рассчитано...
Во всяком техническом деле важен не тот логический процесс, ко¬
торый привел к какому-либо заключению или результату, а важно самое
заключение или самый результат и притом выраженный “числом и ме¬
рою ”. Поэтому все, что математика дает в смысле составления уравне¬
ний, их решения, и притом доведенного до конца, упрощения вычислений,
применения приближенных методов решения математических вопросов, —
все это техника рано или поздно использует и применит часто в вопросе,
казалось бы, ничего общего не имеющем с тем, для решения которого
тот или иной метод был первоначально развит...
Главная задача Академии наук и состоит не только в использовании
сокровищ, уже имеющихся, но и в накоплении новых; не только в исполь¬
зовании процентов, но и в капитальных вложениях»
Другим примером, подтверждающим полезность освоения инжене¬
рами математики, является публикация в 1940 г. монографии «Математи¬
ческие методы в инженерном деле», Т. Карман и М. Био (Титульный лист
русского издания и первая страница оглавления приведены ниже). Основ¬
ная задача книги — способствовать развитию умения самостоятельно
формулировать математическое содержание заданной физической или
технической задачи.
Перечень разделов:
I. Введение в теорию обыкновенных дифференциальных уравнений
II. Основные сведения о бесселевых функциях
III. Основные положения динамики
IV. Элементарные задачи динамики
V. Малые колебания консервативных систем
VI. Малые колебания неконсервативных систем
VII. Дифференциальные уравнения теории упругих тел
VIII. Ряды Фурье и их приложения к теории упругих тел
IX. Комплексное представление периодических явлений
X. Переходные явления. Операторное исчисление
XI. Уравнения в конечных разностях и их приложения к техническим
проблемам.
Характерной особенностью этой монографии является то, что она ос¬
нована на опыте решения инженерных задач без применения современных
вычислительных машин — ориентирована на построение аналитических
решений.
ФИЗИКО-МАТЕМАТИЧЕСКАЯ БИБЛИОТЕКА ИНЖЕНЕРА I ПреВНСЛОВНе
Прикладная математика
27
а)
X
X
01
ч
?
«=!
и
О
й
о
в
8.
I
SL
о
«е-
- ■£ s
«» 9 И
3
g г |
s о
3 о. 3
§• с 3
s « S.
- 8 i 2
3 § 1 8
5 о. g q
sti
-5е
sill
ill!
U , S •- п
* д 3.
Г в 3
г § &
ri
S sis
Ж = “ "
я «
«с Я
asss
р. к я о
осччб
•• с4 vi ^ i/S <
III
И Ж о
0 9 U
sis-
& t s
с \э „
«° I
г d 2
3- о Я
а §|
я tc 41
а. а. а
►> о.
э !
1 i I
_за
&is
«5с
«> 3
5 И
3s&
П4
1Г
Ё ' 3
§ * #
Э § I
2 5 3
Ш
в я Y
1 аз
2 Б v
■ t I !
* | а
' I 8.?
:м!
. :ц!
: 3&н
1*1
Ав М«
Ъ 3 В 4»
|£П
ill!
^ —
1
S |Й |
g * я g
з о "
I»*
sits-
S Я п о
* s § °
* 2 « я
Ш|
504 S
^ сЧ
т
и
и
CS
§
ж
к
и
2
2
2 3.
■ I
i!
= 5
^ S ®
L 3 1й
3 о
§ I
" -2
О Я
2 й
И
И
•и 1
2 3
ч С*
1 а
2 о
:l I
Г2
I з
!*я
е" "
5
а я
1э*
•о _
» г ? 3
11 = |
■" з| I
а я * “■
= 5 = 8
3
■2
и 2
*J а
* (
-i сЧ с< «
III
О
S
Е
£
а
<
к
о
н
U
Ш Ш
£ к
U
S
a
о
5
о
Е
О.
Ш U
£ Г
S
н
<
Ш
н
<
5
ш
*
Е
S
g §
3 I
a I
- §
* j!
28
Введение
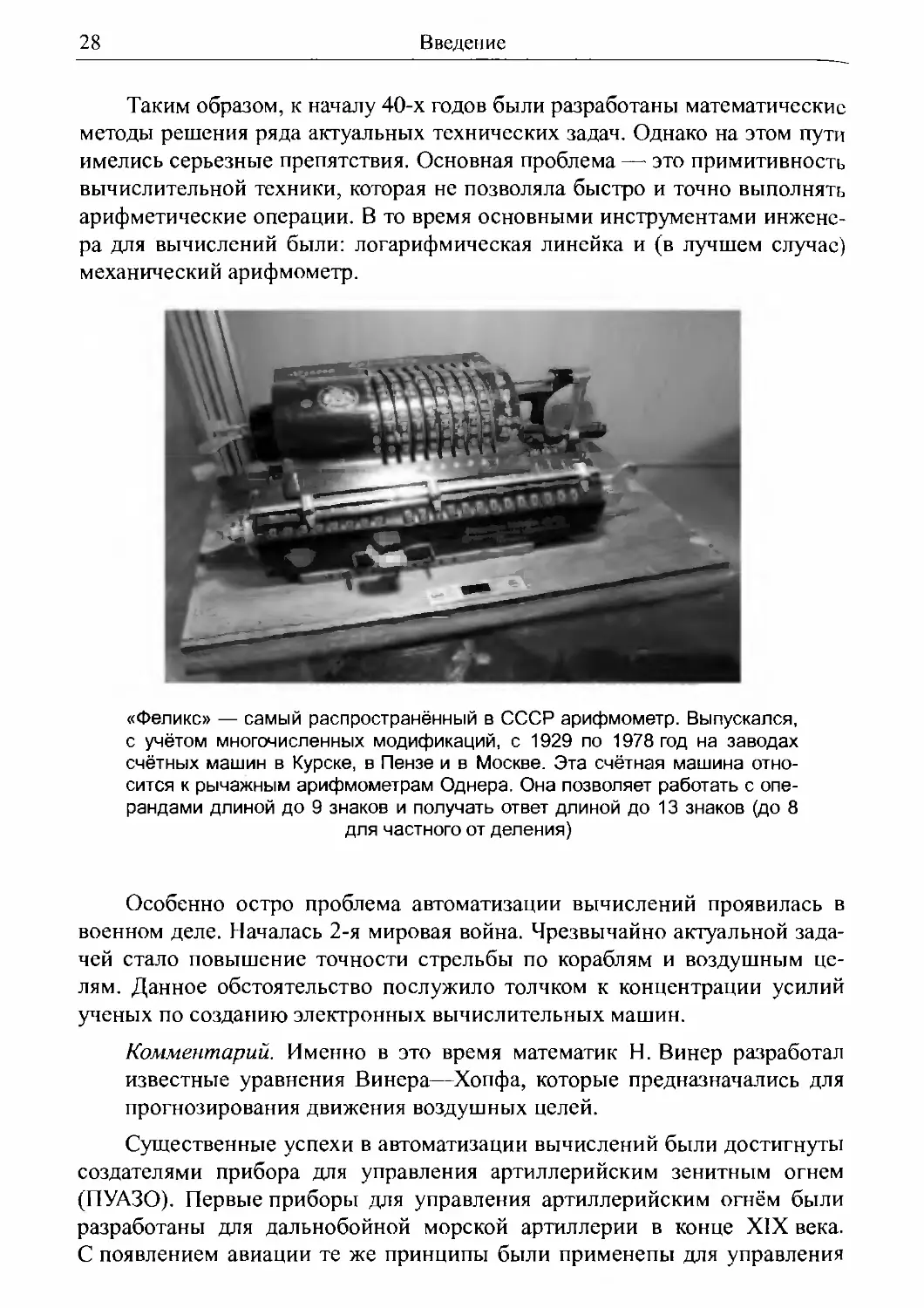
Таким образом, к началу 40-х годов были разработаны математические
методы решения ряда актуальных технических задач. Однако на этом пути
имелись серьезные препятствия. Основная проблема — это примитивность
вычислительной техники, которая не позволяла быстро и точно выполнять
арифметические операции. В то время основными инструментами инжене¬
ра для вычислений были: логарифмическая линейка и (в лучшем случае)
механический арифмометр.
«Феликс» — самый распространённый в СССР арифмометр. Выпускался,
с учётом многочисленных модификаций, с 1929 по 1978 год на заводах
счётных машин в Курске, в Пензе и в Москве. Эта счётная машина отно¬
сится к рычажным арифмометрам Однера. Она позволяет работать с опе¬
рандами длиной до 9 знаков и получать ответ длиной до 13 знаков (до 8
для частного от деления)
Особенно остро проблема автоматизации вычислений проявилась в
военном деле. Началась 2-я мировая война. Чрезвычайно актуальной зада¬
чей стало повышение точности стрельбы по кораблям и воздушным це¬
лям. Данное обстоятельство послужило толчком к концентрации усилий
ученых по созданию электронных вычислительных машин.
Комментарий. Именно в это время математик Н. Винер разработал
известные уравнения Винера—Хопфа, которые предназначались для
прогнозирования движения воздушных целей.
Существенные успехи в автоматизации вычислений были достигнуты
создателями прибора для управления артиллерийским зенитным огнем
(ПУАЗО). Первые приборы для управления артиллерийским огнём были
разработаны для дальнобойной морской артиллерии в конце XIX века.
С появлением авиации те же принципы были применены для управления
Прикладная математика
29
зенитным огнём по высоколетящим целям. Приборы такого типа были
разработаны в конце 1930-х годов компаниями Vickers-Armstrongs (Вели¬
кобритания), Sperry (США), Siemens (Германия) и другими.
Дальнейшее развитие управления зенитным огнём связано с использо¬
ванием радара. Первый радарный ПУАЗО, — Director Т-10, — был разрабо¬
тан компанией Bell Labs. Он получал входные данные цели от радара и, кро¬
ме сигналов управления по ушам наведения орудия, выдавал время полёта
снаряда до расчётной точки встречи. Последний параметр позволял перейти
от контактных взрывателей к дистанционным, что значительно повысило
вероятность поражения целей. Дальнейшее повышение эффективности зе¬
нитного огня было связано с применением неконтактных радио-взрывателей.
Радарный ПУАЗО был впервые применён в 1944 году во время вы¬
садки союзников в Италии. Применялся также при отражении налётов
люфтваффе на район высадки в Нормандии. Первый же опыт применения
новой системы показал её высокую эффективность: все попытки люф¬
тваффе помешать десантам были успешно отражены, при этом зенитным
огнём было сбито большое число самолётов.
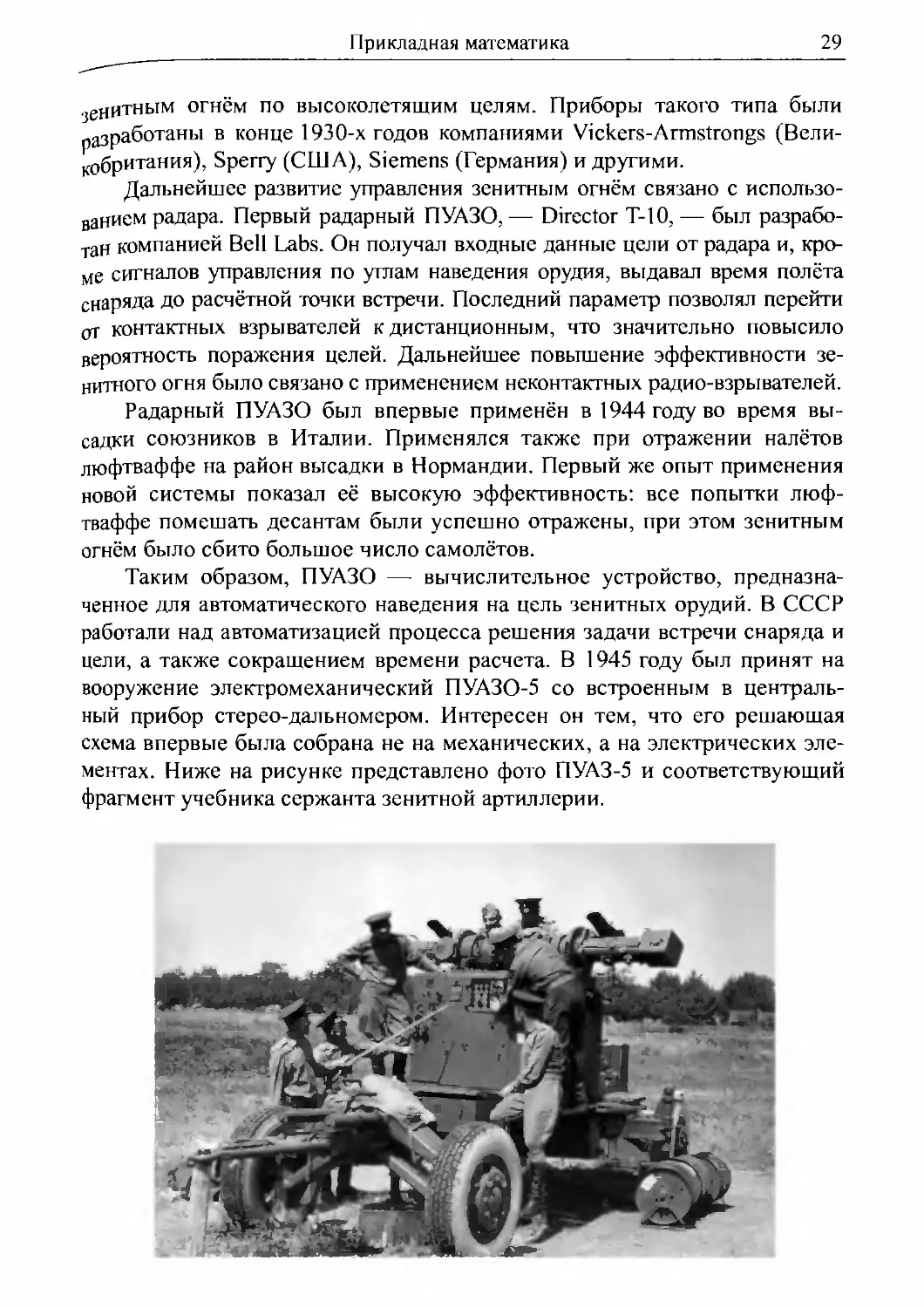
Таким образом, ПУАЗО — вычислительное устройство, предназна¬
ченное для автоматического наведения на цель зенитных орудий. В СССР
работали над автоматизацией процесса решения задачи встречи снаряда и
цели, а также сокращением времени расчета. В 1945 году был принят на
вооружение электромеханический ПУАЗО-5 со встроенным в централь¬
ный прибор стерео-дальномером. Интересен он тем, что его решающая
схема впервые была собрана не на механических, а на электрических эле¬
ментах. Ниже на рисунке представлено фото ПУАЗ-5 и соответствующий
фрагмент учебника сержанта зенитной артиллерии.
30
Введение
ГЛАВА 10
ПРИБОРЫ УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ
ЗЕНИТНЫМ ОГНЕМ
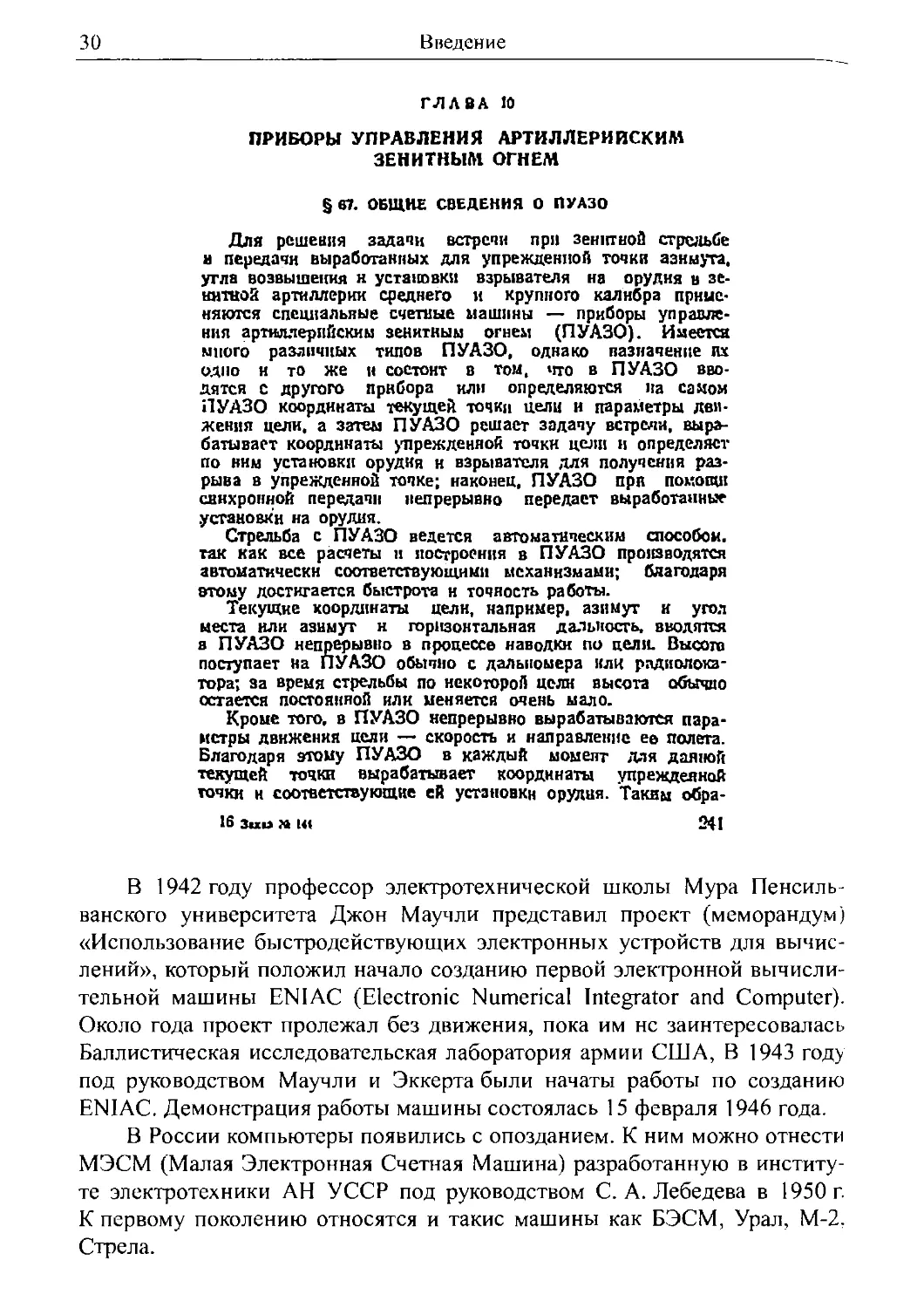
§ 67. ОБЩИЕ СВЕДЕНИЯ О ПУАЗО
Для решения задачи встречи при зенитной стрельбе
и передачи выработанных для упрежденной точки азимута,
угла возвышения и установки взрывателя на орудия в зе¬
нитной артиллерии среднего и крупного калибра приме¬
няются специальные счетные машины — приборы управле¬
ния артиллерийским зенитным огнем (ПУАЗО). Имеется
много различных типов ПУАЗО, однако пазиаченпе их
одно и то же и состоит в том, что в ПУАЗО вво¬
дятся с другого прибора или определяются на самом
ПУАЗО координаты текущей точки цели и параметры дви¬
жения цели, а затем ПУАЗО решает задачу встречи, выра¬
батывает координаты упрежденной точки цели и определяет
по ним установки орудия и взрывателя для получения раз¬
рыва в упрежденной точке; наконец, ПУАЗО прп помощи
синхронной передачи непрерывно передаст выработанные
.установки на орудия.
Стрельба с ПУАЗО ведется автоматическим способом,
так как все расчеты и построения в ПУАЗО производятся
автоматически соответствующими механизмами; благодаря
этому достигается быстрота и точность работы.
Текущие координаты цели, например, азимут и угол
места или азимут н горизонтальная дальность, вводятся
а ПУАЗО непрерывно в процессе наводки по цели. Высота
поступает на ПУАЗО обычно с дальномера или радиолока¬
тора; за время стрельбы по некоторой цели высота обычно
остается постоянной или меняется очень мало.
Кроме того, в ПУАЗО непрерывно вырабатываются пара¬
метры движения цели — скорость и направление ее полета.
Благодаря этому ПУАЗО в каждый момент для данной
текущей точки вырабатывает координаты упрежденной
точки и соответствующие ей установки орудия. Такам обра-
16 зшо м mi 241
В 1942 году профессор электротехнической школы Мура Пенсиль¬
ванского университета Джон Маучли представил проект (меморандум)
«Использование быстродействующих электронных устройств для вычис¬
лений», который положил начало созданию первой электронной вычисли¬
тельной машины EN1AC (Electronic Numerical Integrator and Computer).
Около года проект пролежал без движения, пока им не заинтересовалась
Баллистическая исследовательская лаборатория армии США, В 1943 году
под руководством Маучли и Эккерта были начаты работы по созданию
ENIAC. Демонстрация работы машины состоялась 15 февраля 1946 года.
В России компьютеры появились с опозданием. К ним можно отнести
МЭСМ (Малая Электронная Счетная Машина) разработанную в институ¬
те электротехники АН УССР под руководством С. А. Лебедева в 1950 г.
К первому поколению относятся и такие машины как БЭСМ, Урал, М-2,
Стрела.
Прикладная математика
31
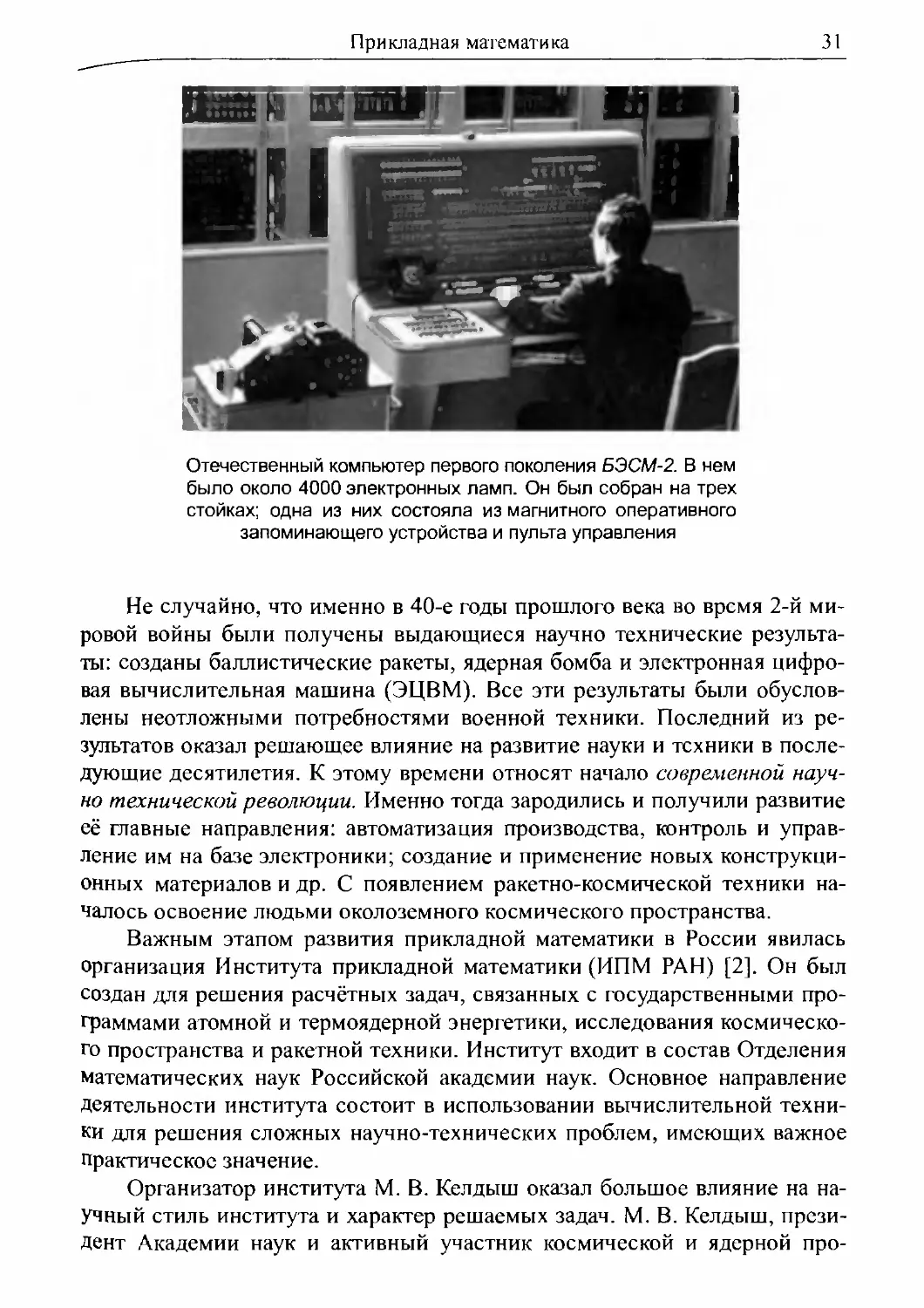
Отечественный компьютер первого поколения БЭСМ-2. В нем
было около 4000 электронных ламп. Он был собран на трех
стойках; одна из них состояла из магнитного оперативного
запоминающего устройства и пульта управления
Не случайно, что именно в 40-е годы прошлого века во время 2-й ми¬
ровой войны были получены выдающиеся научно технические результа¬
ты: созданы баллистические ракеты, ядерная бомба и электронная цифро¬
вая вычислительная машина (ЭЦВМ). Все эти результаты были обуслов¬
лены неотложными потребностями военной техники. Последний из ре¬
зультатов оказал решающее влияние на развитие науки и техники в после¬
дующие десятилетия. К этому времени относят начало современной науч¬
но технической революции. Именно тогда зародились и получили развитие
её главные направления: автоматизация производства, контроль и управ¬
ление им на базе электроники; создание и применение новых конструкци¬
онных материалов и др. С появлением ракетно-космической техники на¬
чалось освоение людьми околоземного космического пространства.
Важным этапом развития прикладной математики в России явилась
организация Института прикладной математики (ИПМ РАН) [2]. Он был
создан для решения расчётных задач, связанных с государственными про¬
граммами атомной и термоядерной энергетики, исследования космическо¬
го пространства и ракетной техники. Институт входит в состав Отделения
математических наук Российской академии наук. Основное направление
Деятельности института состоит в использовании вычислительной техни¬
ки для решения сложных научно-технических проблем, имеющих важное
практическое значение.
Организатор института М. В. Келдыш оказал большое влияние на на¬
учный стиль института и характер решаемых задач. М. В. Келдыш, прези¬
дент Академии наук и активный участник космической и ядерной про¬
32
Введение
грамм, вовлекал свой институт в работы по важнейшим практическим
проблемам, в которых научная новизна сочеталась с необходимостью
сложных расчётов. Так как подобные задачи часто оказывались на стыке
научных дисциплин, коллектив института включал математиков, физиков,
механиков, а также специалистов по вычислительной технике. Институт
был награждён Орденом Ленина.
После смерти М. В. Келдыша в 1978 году ИПМ РАН стал носить его имя.
М. В. Келдыш
История ИПМ РАН началась во второй половине 1940-х годов, когда в
Математическом институте им. В. А. Стеклова АН СССР возникла группа
математиков-вычислителей под руководством М. В. Келдыша. В 1953 году
было организовано Отделение прикладной математики (секретное), фор¬
мально являвшееся подразделением Математического института. В 1966 году
институт получил современное название Институт прикладной математики.
Много сведений о работе института можно найти в сборнике «Буду¬
щее прикладной математики: Лекции для молодых исследователей. Поис¬
ки и открытия» под редакцией Г. Г. Малинецкого (2009. 640 с. ISBN 978-
5-397-00638-5). Ниже приведены некоторые выдержки из этого сборника.
«В нашем Институте за его полувековую историю работало много
талантливых людей, воплотивших дерзновенные мечты в реальность.
У Института славное прошлое. В нем были решены задачи, которые
не только вошли в монографии и учебники, стали классическим. В Инсти¬
Прикладная математика
33
туте решались задачи стратегического масштаба. От их решения, без пре¬
увеличения, зависела история второй половины XX века. В прошлом Ин¬
ститута — работы по совершенствованию атомной и водородной бомб,
потребовавшие сложнейших компьютерных расчетов. В нем — работы
по расчетам и баллистическому сопровождению космических аппаратов,
проложивших человечеству путь в космос. В его стенах закладывались
основы прикладной математики компьютерной эры и системного програм¬
мирования...
У Института большие успехи в настоящем. Это — актуальные задачи,
связанные с космической навигацией и межпланетными полетами, с физи¬
кой плазмы и новыми поколениями вычислительных и коммуникационных
систем, с управлением рисками и энергетикой, с дистанционным зондиро¬
ванием и математической геофизикой, с компьютерной графикой и мате¬
матической медициной. Многие работы, выполненные в нем, получили ми¬
ровое признание».
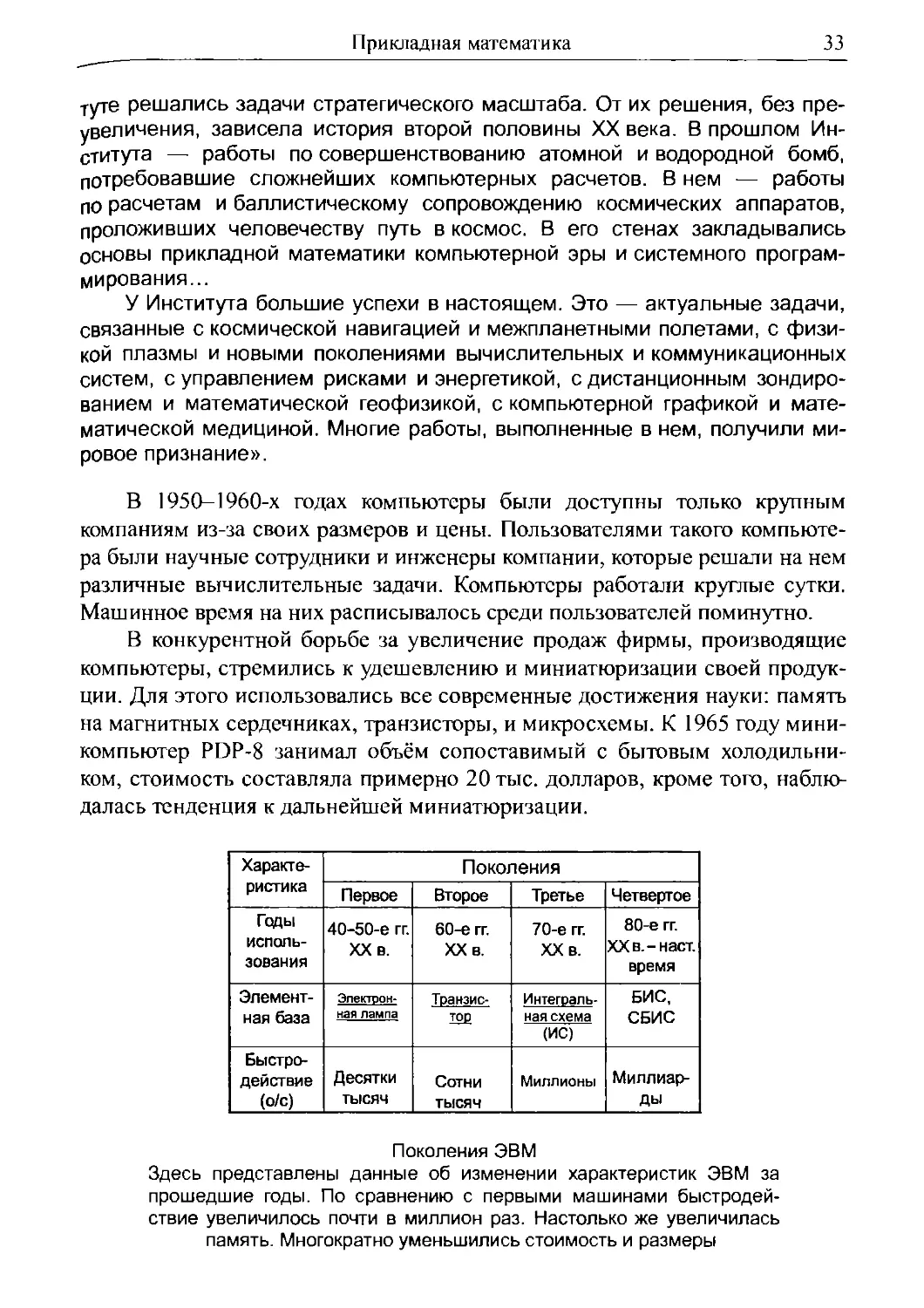
В 1950-1960-х годах компьютеры были доступны только крупным
компаниям из-за своих размеров и цены. Пользователями такого компьюте¬
ра были научные сотрудники и инженеры компании, которые решали на нем
различные вычислительные задачи. Компьютеры работали круглые сутки.
Машинное время на них расписывалось среди пользователей поминутно.
В конкурентной борьбе за увеличение продаж фирмы, производящие
компьютеры, стремились к удешевлению и миниатюризации своей продук¬
ции. Для этого использовались все современные достижения науки: память
на магнитных сердечниках, транзисторы, и микросхемы. К 1965 году мини¬
компьютер PDP-8 занимал объём сопоставимый с бытовым холодильни¬
ком, стоимость составляла примерно 20 тыс. долларов, кроме того, наблю¬
далась тенденция к дальнейшей миниатюризации.
Характе¬
ристика
Поколения
Первое
Второе
Третье
Четвертое
Годы
исполь¬
зования
40-50-е гг.
XX в.
60-е гг.
XX в.
70-е гг.
XX в.
80-е гг.
XX в.-наст,
время
Элемент¬
ная база
Электоон-
ная лампа
Транзис¬
тор
Интеграль¬
ная схема
(ИС)
БИС,
СБИС
Быстро¬
действие
(о/с)
Десятки
тысяч
Сотни
тысяч
Миллионы
Миллиар¬
ды
Поколения ЭВМ
Здесь представлены данные об изменении характеристик ЭВМ за
прошедшие годы. По сравнению с первыми машинами быстродей¬
ствие увеличилось почти в миллион раз. Настолько же увеличилась
память. Многократно уменьшились стоимость и размеры
34
Введение
Существенный прорыв в миниатюризации был совершен в 1976
1977 годах, когда несколькими фирмами были выпущены первые персональ¬
ные компьютеры (ПК). В августе 1981 года IBM выпустила компьютерную
систему IBM PC (фирменный номер модели IBM 5150). Полугодичный план
его продаж был выполнен за месяц. Его популярность была обусловлена от¬
крытой архитектурой, что позволяло сторонним фирмам осуществлять его
ремонт, обслуживание, а также производство периферийных устройств.
К 1988 году было произведено 25 миллионов IBM-совместимых ПК. В янва¬
ре 1983 года журнал Time назвал персональный компьютер «Машиной года».
По прогнозам журнала, к концу XX века во всём мире должно было быт:,
80 миллионов ПК. Но, как оказалось, авторы прогноза ошиблись почти
вдвое: к 2000 году в мире было 140 миллионов персональных компьютеров.
В России в настоящее время находится ~ 20 миллионов ПК.
Изначально компьютер был создан как вычислительная машина, но
ПК также используется в других целях — как средство доступа в инфор¬
мационные сети и как платформа для мультимедиа и компьютерных игр.
Применение в ПК многочисленных текстовых и графических редакторов
не только вытеснило печатные машинки, но изменило и всю технологию
выпуска печатной продукции.
Очевидно, что в связи с широким применением ПК роль прикладной
математики изменилась. Это связано со следующими обстоятельствами:
- большую часть пользователей, которые применяют ПК для других
целей, вычислительные задачи не интересуют;
- развитые языки программирования и доступные стандартные вычис¬
лительные процедуры превратили создание многих компьютерных
программ в рутинную работу;
- на основе известных методов разработано множество пакетов при¬
кладных программ различного назначения, которые удовлетворяют
большинство пользователей;
- увеличение быстродействия и памяти компьютеров сделало возмож¬
ным решение тех вычислительных задач, которые ранее не подвались
решению, расширился круг решаемых задач.
- наличие мощных компьютеров создало у многих специалистов иллю¬
зию, что с использованием известных математических методов они
обеспечивают возможность решения любой задачи;
- встречаются сложные вычислительные задачи, для решения которых
необходимо привлекать современные суперкомпьютеры, но и в этом
случае не всегда удается получить решение.
Пример вычислительных трудностей. Внимание многих специалистов
привлекает проблема космического мусора. Уровень техногенного засоре¬
ния ОКП стал опасным. Число объектов размером более 1 см приближается
к миллиону. Зафиксировано несколько случаев столкновений спутников.
Прикладная математика
35
Возникает вопрос — что будет через 100-200 лет? Общественность интересу¬
ет решение этой задачи. В статье [3] изложены результаты прогноза обста¬
новки на 200 лет с учетом взаимных столкновений объектов при нескольких
вариантах исходных данных. Рассмотрены объекты размером более 10 см.
Задача решалась на современном суперкомпьютере со следующими харак¬
теристиками: число ядер — 360, объем памяти — 24 Go, суммарное быст¬
родействие — 4 Tflops/second. Для решения задачи потребовалось более
24 часов машинного времени. В связи с увеличением количества объектов
по мере уменьшения их размеров решение задачи с учетом столкновений
более мелких объектов в настоящее время получить не удалось.
Таким образом, актуальным направлением развития прикладной ма¬
тематики является разработка методов решения тех задач, которые в на¬
стоящее время не поддаются решению.
В связи с увеличением числа компьютеров и расширением круга ре¬
шаемых задач возникла потребность в существенном увеличении числа
специалистов, владеющих прикладной математикой. Более чем в 100 рос¬
сийских вузах организованы кафедры по специальности «Прикладная ма¬
тематика» (№01.04.04). Кроме того, имеется много кафедр по родствен¬
ным специальностям:
«Прикладная математика и информатика» (01.04.02)
«Механика и математическое моделирование» (01.04.03).
Рассмотрим кратко требования к студентам, которые оканчивают ма¬
гистратуру по специальности «Прикладная математика». Эти требования
изложены в приведенном ниже документе Министерства образования и
науки РФ.
Выдержки из документа:
4.4. Выпускник, освоивший программу магистратуры, в соответствии с видом
(видами) профессиональной деятельности, на который (которые) ориентирована
программа магистратуры, готов решать следующие профессиональные задачи: ....
научно-исследовательская деятельность:
• анализ и синтез технических систем управления;
• проведение научно-технических экспериментов и исследований, сбор и анализ
экспериментальных данных; построение математической модели объекта;
• поиск и обоснование оптимальных решений с учетом различных требований;
• разработка и применение математических методов и наукоемкого про-
грамного обеспечения для анализа, синтеза, оптимизации и прогнозиро¬
вания.
Здесь выделены те направления, которые связаны с развитием при¬
кладной математики. Из них видно, что эти необходимые компетенции маги¬
стра занимают видное место. Все они связаны не только со знанием предме¬
та, но, в большей степени, — с умением применять полученные знания.
36
Введение
Приказ Минобрнауки России от 30.10.2014 N 1400 Документ гоадоетаелеи КоискльтангПл^
•Об утверждении федерального государственного Документ градост^е^он^льтентПл^
образовательного стандарта...
Зарегистрировано в Минюсте России 26 ноября 2014 г. N 34925
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ПРИКАЗ
от 30 октября 2014 г. N1400
ОБ УТВЕРЖДЕНИИ
ФЕДЕРАЛЬНОГО ГОСУДАРСТВЕННОГО ОБРАЗОВАТЕЛЬНОГО СТАНДАРТА
ВЫСШЕГО ОБРАЗОВАНИЯ ПО НАПРАВЛЕНИЮ ПОДГОТОВКИ 01.М.04
ПРОХЛАДНАЯ МАТЕМАТИКА (УРОВЕНЬ МАГИСТРАТУРЬЦ
В соответствии с подпунктом 5.2.41 Положения о Министерстве образования и науш Российской
Федерации, утвержденного постановлением Правительства Российской Федерации от 3 июня 2013 г. N
466 (Собранно законодательства Российской Федерации, 2013, N 23, ст. 2923; N 33, ст. 4386; N 37, ст.
4702; 2014, N2, ст, 126; N6, ст. 582; N 27, ст. 3776), и пунктом 17 Прапил разработки, утверждения
федеральных государственных образовательных стандартов и внесения в них изменений, утвержденных
постановлением Правительства Российской Федерации от 5 августа 2013 г. N €61 (Собрание
законодательства Российской Федерации, 2013. N 33, ст. 4377; 2014, N 38. ст. 6069), приказываю:
1. Утвердить прилагаемый федеральный государственный образовательный стандарт высшего
образования по направлению подготовки 01.04.04 Прикладная математика (уровень магистратуры).
2. Признать утратившими ату:
приказ Министерства образоважя и науки Российской Федерации от 25 января 2010 г. N 76 'Об
утворжпонии и введении в действие федерального государственного образовательного стандарта
высшего профессионального образования по направлеюио подготовки 231300 Прикладная математика
(квалификация (степень) ’магистр')' (зарегистрирован Министерством юстиции Российской Федерации 4
марта 2010 г., регистрационный N16570);
пункт 57 изменений, которыо вносятся в федеральные государственные образовательные
стандарты высшего профессионального образования по направлениям подготовь, подтверждаемого
присвоением лицам квалификации (степени) ■магистр", утвержденных приказом Министерства
образования и наук» Российской Федерации от 18 ыая 2011 г. N 1657 (зарешетрироаан Министерством
юстиции Российской Федерации 1 июня 2011 г., регистрационный N 20902);
пункт 146 изменений, которыо вносятся в федеральные государственные образовательные
стандарты высшего профессионального образования по направлениям подготовки, подтверждаемого
присвоением лицем квалификации (степени) ’магистр', утвержденных приказом Министерстве
образования и науки Российской Федерации от 31 мая 2011 г. N 1975 (заретстрироевн Министерством
юстиции Российской Федерации 26 июня 2011 г., регистрационный N 21200).
Министр
Д.В.ЛИВАНОВ
Приложение
Утосржпон
приказом Министерства образования
и науки Российской Федерации
от 30 октября 2014 г. N 1400
ФЕДЕРАЛЬНЫЙ ГОСУДАРСТВЕННЫЙ ОБРАЗОВАТЕЛЬНЫЙ СТАНДАРТ
ВЫСШЕГО ОБРАЗОВАНИЯ
УРОВЕНЬ ВЫСШЕГО ОБРАЗОВАНИЯ
МАГИСТРАТУРА
НАПРАВЛЕНИЕ ПОДГОТОВКИ
01.04.04 ПРИКЛАДНАЯ МАТЕМАТИКА
Прикладная математика
37
Именно о ключевой роли «Умения» говорил академик А. Н. Крылов
в докладе на сессии АН СССР в 1931 г. (см. выше): «Во всяком техниче¬
ском деле важен не тот логический процесс, который привел к какому-
либо заключению или результату, а важно самое заключение или самый
результат и притом выраженный “числом и мерою”». В связи с развити¬
ем и широким применением компьютеров положение о необходимости
воспитания «умения» стало еще более актуальным. Действительно, те
учебные курсы, которые изучают студенты, основаны большей частью на
предшествующем опыте, который не учитывает колоссальный рост про¬
изводительности современных компьютеров. Эти учебные курсы «не ус¬
певают» за последними достижениями.
Анализу особенностей применения математических методов для ре¬
шения прикладных задач посвящена статья «Методологические особенно¬
сти прикладной математики на современном этапе» известного математика
автора знаменитого учебника по теории вероятностей писательницы Елены
Сергеевны Вентцель [4]. Ниже приведены выдержки из этой статьи.
«Дело в том, что техника и технология сейчас меняются настолько бы¬
стро, что не успевают сформироваться опытные люди, умеющие разумно
управлять этой техникой, приводить её в действие ...
Приступая к решению конкретных задач практики, специалист-мате¬
матик, воспитанный в «классической» традиции, должен волей-неволей
перестраивать свои приёмы, методологические подходы, способы рассуж¬
дений и умозаключений ...
То и дело раздаются голоса, утверждающие, будто главная задача
обучения математике в школе и вузе — это научить людей логически мыс¬
лить. Отсюда чрезмерная формализация математических дисциплин, из¬
ложение их в отрыве от задач практики. Слов нет, привычка к логическому
мышлению — хорошее дело, но у математики есть и другие задачи: ак¬
тивного вмешательства в практику, разумной организации производствен¬
ных и иных процессов. Жизнь непрерывно требует от математика ответа
на вопрос, как поступать в том, или другом случае, при тех или других
сложившихся обстоятельствах. И дело его чести — не уходить от этих
требований в пучину абстракций, а по мере сил удовлетворять их....
Многие задачи просто «не решаются» на уровне должной строгости, а
решать их нужно — жизнь не ждёт. Волей-неволей приходится пользовать¬
ся всеми доступными на сегодняшний день средствами, в том числе и та¬
кими, от которых наши предки-математики, как говорится, перевернулись
бы в гробах...
Прикладная математика, вступая в новые для себя области, должна
соответственно перестроиться, выработать новую, более гибкую тактику,
сформировать новую идеологию. И это уже происходит на наших глазах,
только не всегда и не везде и не для всех очевидно. Наряду с образцами
Подлинной творческой деятельности в области прикладной математики не¬
редко приходится встречаться с «псевдоприкладными» работами, где тра¬
диционный, иной раз весьма замысловатый и тонкий математический аппарат
38
Введение
работает вхолостую. В таких работах прикладная задача служит только по¬
водом для затейливого математизирования...
Современный прикладной математик (или группа таковых), занятый ре¬
шением практической проблемы, непременно должен участвовать не только
в решении, но и в постановке задач. Не только в построении модели, но и в
выборе целевой функции, в организации расчётов, осмыслении результатов,
выдаче рекомендаций. Словом, прикладная математика не должна быть
«белоручкой», в таком качестве она попросту никому не нужна...
Вообще, злоупотребление формальной стороной теории вероятностей
в ущерб здравому смыслу — беда многих прикладных работ, где математи¬
ческий аппарат — не средство, а цель. На теорию вероятностей нередко
смотрят как на своего рода волшебную палочку, позволяющую получать
информацию из полного незнания. Нельзя забывать, что это невозможно —
теория вероятностей только средство преобразования одной информации
в другую...
При нынешней моде на математику в условиях густого потока инфор¬
мации, записанной на языке формул, очень трудно отличить подлинное от
кажущегося, настоящую науку — от наукообразия. Слишком часто приме¬
нение математических методов понимают как чистое и абсолютное благо;
считается, что любая математизация — шаг вперёд, а если он сопровож¬
дается автоматизацией — тем паче...
Надо прямо смотреть в глаза фактам и признать, что применение ма¬
тематических методов не полезно, а вредно до тех пор, пока явление не
освоено на доматематическом, гуманитарном уровне. Вредно тем, что от¬
влекает внимание от главного к второстепенному, что создаёт почву для
очковтирательства. Жадное внимание, уделяемое первой букве в блоке
«АСУ», — плод неразумия и поспешности; ведь само по себе «А» никому
не нужно; если оно нужно, то только для «У». А многие думают, что главное
в проблеме управления — сбор и обработка информации. А так как ин¬
формации много, то копить и обрабатывать её должна машина. Часто эта
подсобная, в сущности, процедура выдвигается на первый план, абсолюти¬
зируется. За бортом остаётся главный вопрос: какую именно информацию
следует собирать и обрабатывать? Какая нужна, а какая нет? И на каком
уровне нужна? Заранее исходят из допущения, что всякая информация —
благо, и возможность в любой момент вывести её из машины и предста¬
вить на обозрение и есть главная задача АСУ. Исключения редки...
Современная прикладная математика — наука особого рода, стоящая
на грани между точными, гуманитарными и опытными науками, смело при¬
меняющая приёмы, выработанные в каждой из этих групп наук, если они
оказываются эффективными. Только такой она и может быть, если её за¬
дача — не созерцание отвлеченностей, а активное вмешательство в
жизнь».
К этим словам мудрого человека трудно что-то добавить. Автор на
своем многолетнем опыте неоднократно убеждался в справедливости по¬
ложения о необходимости участия математика не только в решении, но и в
постановке задачи. Это позволяет во многих случаях увидеть задачу по-
Прикладная математика
39
новому и предложить решение, которое оказывается более эффективным
по сравнению с традиционным подходом.
В предлагаемой монографии изложены примеры того, как автор пре¬
одолевал вычислительные трудности решения ряда прикладных задач.
Они относятся к 60-летнему периоду времени. Во всех случаях он сталки¬
вался с дефицитом вычислительной мощности компьютеров. Трудности
преодолевались на основе модификации постановки задачи и обоснования
новых формул, облегчающих ее решение.
Литература
1. История развития математики. Сайт http://imcs.dvfu.ru/lib/eastprog/math_
history.html
2. К. И. Бабенко. О работах М. В. Келдыша по механике, 1981. Сайт келдыш.рф/
babenko.htm
3. J. С. Dolado-Perez, R. Di-Costanzo, В. Revelin. Introducing MEDEE — A New
orbital debris evolutionary model, Proceedings of the Sixth European Conference
on Space Debris, Darmstadt, Germany, 22-25 April, 2013, European Space Agen¬
cy Publication SP-7237, 2013.
4. E. С. Вснтцель. Методологические особенности прикладной математики на
современном этапе // Математики о математике: сборник статей / сост.
Н. Я. Виленкин. М.: Знание, 1984. С. 37-55.
Раздел 1
Уравнения движения механизма
с нелинейными упругими звеньями
и переменными маховыми массами
После окончания в 1956 г. Московского высшего технического учи¬
лища им. Баумана автор работал инженером на Электростальском заводе
тяжелого машиностроения (ЭЗТМ). Этот завод занимался проектировани¬
ем, изготовлением, монтажом и пуском в эксплуатацию различного обору¬
дования для металлургических заводов. Это оборудование было очень
востребованным. Достаточно сказать, что около четверти всех изготовлен¬
ных в мире труб сделаны на прокатных станах ЭЗТМ.
В производственной линейке завода есть особенная номенклатура —
станы для холодной прокатки труб (ХПТ). В те годы бурное развитие по¬
лучила атомная энергетика, авиационная, космическая, нефтехимическая
промышленность. Эти и другие отрасли требовали большого количества
точных холоднодеформированных труб из черных и цветных металлов,
различных марок сталей и сплавов — надо было в сжатые сроки осна¬
стить трубопрокатные предприятия страны необходимым для этого обо¬
рудованием. Постановлением Минтяжмаша в 1957 году заводу было по¬
ручено взяться за решение этой важной промышленной задачи. Так на
предприятии появилось бюро холодной прокатки труб. Руководил ими
Марк Израилевич Гриншпун — один из тех, кого сегодня можно назвать
человеком-легендой завода тяжелого машиностроения. За годы работы
специалистами бюро было разработано более 50 модификаций станов
ХПТ для производства труб диаметром от 6 до 450 мм. Заводом выпуще¬
но почти 400 единиц этой номенклатуры, более 80 станов ХПТ поставле¬
но на экспорт.
В июне 1958 года закончилось изготовление первого головного об¬
разца серийных станов ХПТ 55-2Э, где «Э» означало ЭЗТМ. На заводе
были проведены стендовые испытания стана с прокаткой готовых труб.
Тем самым положено начало выпуску станов ХПТ с маркой «ЭЗТМ».
Автор участвовал в этих испытаниях — занимался измерением нагру¬
зок в приводе, а также и других параметров различных агрегатов. На
рис. 1.1 представлена осциллограмма изменения крутящего момента в
приводе стана в процессе его работы, снятая во время этих испытаний.
Уравнения движения механизма с нелинейными упругими звеньями
41
4
Рис. 1.1. Изменение нагрузок в приводе стана ХПТ 55-2Э
Видно, что эти графики не являются гладкими. Имеют место колебания.
Пики нагрузки на привод существенно отличаются от ожидаемых (сгла¬
женных) значений, на которые этот привод был рассчитан в процессе про¬
ектирования стана. Данное обстоятельство может привести к поломкам
деталей привода во время работы стана.
Детальное описание конструкции станов ХПТ и принципов их рабо¬
ты изложено в монографии [I]. На рис. 1.2 представлены основные эле¬
менты конструкции.
Рис. 1.2. Вид сбоку на кривошипно-шатунный привод стана ХПТ
Слева находится массивная клеть стана (весом более 4 тонн). Она
вместе с валками совершает возвратно-поступательное движение. За каж¬
дый оборот кривошипа заготовка трубы обжимается на оправке. Ее диа¬
метр и толщина стенки уменьшаются. В крайних положениях клети труба
освобождается валками, поворачивается вокруг своей оси и подается впе¬
42
Раздел 1
ред. Производительность стана зависит от величины подачи и числа ходов
в минуту. Естественное желание увеличить производительность стана за
счет увеличения скорости вращения кривошипа и величины подачи может
привести к недопустимому росту динамических нагрузок. Объективная
оценка ожидаемых динамических нагрузок при разработке новых станов
ХПТ является необходимым условием обеспечения их надежности. Имен¬
но поэтому была проведена работа по созданию методики расчета дина¬
мических усилий в приводе станов ХПТ.
Опыт эксплуатации и экспериментальные данные показали, что на
нагрузки в приводе стана оказывает влияние большое число факторов.
Основные из них:
• кинематические параметры;
• массы клети с валками и других деталей, момент инерции валков;
• моменты инерции двигателя, редуктора, шатунов, реечного привода;
• жесткость валопроводов, шатунов, реечного привода;
• зазоры в валопроводе, шатунах, реечном приводе;
• характеристики двигателя;
• внешняя технологическая нагрузка.
На рис. 1.3 представлена расчетная схема привода. Она содержит две
массивные детали: клеть массой т„р и двигатель, имеющий момент инер¬
ции У). Общая крутильная жесткость валопровода, приведенная к тихо¬
ходному валу, обозначена как сь жесткость шатунов на растяженис-сжатие
обозначена, как с2.
Рис. 1.3. Расчетная схема привода
Уравнения движения механизма с нелинейными упругими звеньями 43
Геометрические характеристики привода: радиус кривошипа R, длина
шатуна L, отклонение направления кривошипа от горизонтальной оси f,
угол наклона шатуна у, смещение полозьев клети е, координата х, ха¬
рактеризующая положение клети. Угловая скорость вращения кривоши¬
па обозначена как со. Геометрические характеристики связаны соотно¬
шениями:
х = L-cosy - R-cos<p = Кх(ср), (1-1)
чту = (е-R-4m<p)j L , (1-2)
dx/dt = V = R-co(dKx () = R-co-Kr{<p), (1.3)
d2x/dt2 = R-со2 ■ (dKv {(p)/d(p) = R ■ a2 ■ Ka (cp) + R ■ Kv (q>) ■ ф. (1.4)
С учетом деформаций в валопроводе положение двигателя отличается от
угла ср. Оно обозначено как у/.
Комментарий. Рассмотренная здесь расчетная схема привода явля¬
ется упрощенной. В частности, она не учитывает реечный привод
вращения валков. Более полная расчетная схема рассмотрена в
статье [2].
В основу вывода уравнений движения привода положены классиче¬
ские дифференциальные уравнения механики. Ускорение клети выража¬
ется так
m*P-'i = -p О-5)
Здесь:
Р (<р) — технологическая нагрузка, действующая на клеть со стороны
трубы при прокатке. Она принимается известной.
Рдин — усилие на клеть со стороны шатуна. За положительное принято
усилие, соответствующее растяжению шатунов.
Аналогично записывается угловое ускорение двигателя
J^=M^+Mdull. (1.6)
Мде — крутящий момент двигателя, действующий на ротор со стороны
статора. За положительный принят момент, действующий в направлении
вращения.
Мдш, — динамический крутящий момент в валопроводе. За положитель¬
ный принят момент, соответствующий растяжению шатунов.
44
Раздел 1
Динамические нагрузки выражаются через соответствующие дефор¬
мации следующим образом.
м*ш=с\"*> (1-7)
(1.8)
Здесь w — угол скручивания валопровода под действием момента Ма .
sx— проекция удлинения шатуна под действием усилия Рдт на ось л:.
Между усилием в шатуне и моментом в валопроводс существует соотно¬
шение, которое выводится из условия равновесия кривошипа:
Mdu„=Pau„-R-Kv{<P)- (1-9)
Для корректного учета зазоров в приводном механизме необходимо
определить, на какое расстояние при данном положении якоря двигателя
может перемещаться клеть без появлений упругих усилий в приводе. Этот'
суммарный зазор складывается из зазора в валопроводе (АД и зазора в
системе шатун-клеть (Д2). Необходимое выражение для суммарного зазора
выводится из соотношения (1.1). Приращениям угла <р и длины шатуна /.
присваиваются значения соответствующих зазоров. При этом учитывает¬
ся, что зазор всегда является положительной величиной. В результате по¬
лучаем следующее выражение для суммарного зазора
Д(<р) = Д,-Л-|/Д,И| + Д2. (1.10)
Связь между координатами <р и у/ упоминалась выше
(р = у/ + W . (1.11)
Поэтому выражение (1.1) с учетом упругих деформаций и зазоров прини¬
мает вид
х = Кх (у/ + vr) + 5x + Д(<р)/2 . (1.12)
Для завершения вывода системы уравнений, описывающей движение
привода с учетом упругих деформаций и зазоров, необходимо определить
момент двигателя, который входит в правую часть уравнения (1.6). Для
этого используется допущение о линейной зависимости момента от скоро¬
сти двигателя:
мд„ =к\со0-цг), (1.13)
где параметры к и являются известными.
Уравнения движения механизма с нелинейными упругими звеньями
45
Таким образом, построена система из 8-ми соотношений (1.5)—(1.9),
(1.11)—(1.13), которая достаточна для определения всех 8-ми неизвестных
величин ц/, <р, х, Р/)ии, Мат , и>, sx и М0в. По своему содержанию это сис¬
тема двух дифференциальных уравнений второго порядка (1.5) и (1.6),
правые части которых содержат 6 величин, определяемых из 6-ти соотно¬
шений (1.7)—(1.9), (1.11)—(1.13). Эта система уравнений не имеет аналити¬
ческого решения. Для ее интегрирования могут быть применены стан¬
дартные численные процедуры.
Важно отметить, что применение численного интегрирования систе¬
мы уравнений (1.5) и (1.6) является практически нереализуемым. Дело в
том, что при вычислении правых частей этих уравнений используются
соотношения (1.11)—(1.13), в которых для определения упругих деформа¬
ций и изменения скорости двигателя приходится вычислять разность
больших чисел. Такая операция требует представления чисел с большой
разрядностью и приводит к существенному негативному влиянию ошибок
округления. Эта трудность была непреодолимой в начале 60-х годов, когда
выполнялась данная работа и когда характеристики вычислительной тех¬
ники были намного хуже современных.
Отмеченный выше недостаток исходной системы уравнений может
быть преодолен на основе замены переменных. Для этого введено понятие
суммарной деформации системы
q = x-Kx(a)0-t). (1.14)
Это отличие фактического положения клети от того положения, где она
находилась бы при отсутствии деформаций и зазоров. Связь суммарной
деформации с ее упругой составляющей учитывает наличие зазоров и вы¬
ражается следующим образом
q-A(i//)/2, npuq>A(y/)/2,
0, при - Д((//)/2 <q < = A[ip)/2, (1-15)
q + k(y/)/2, при q < = -А(ц/)/2.
Ч y„p=f(<j) =
Измерения динамических нагрузок в прокатных станах показали, что
Колебания имеют затухающий характер. Это объясняется диссипацией
энергии. При учете затухания обычно принимается, что оно пропорцио¬
нально скорости упругих отклонений ( q ). Применяемый в данной работе
Коэффициент пропорциональности ач определен по результатам экспери¬
ментов на ряде прокатных станов.
Опуская вес преобразования по замене переменных, приведем окон¬
чательный результат.
46
Раздел 1
q = -Fx{y/)-f{q) {--Pm(y)-R-Ka(y)-y2-?-^-Kv(y)-((O0-y)-a4cU
тпп ■Л
к
W = F2{y\ f{q) + -\a<s-y).
J \
(1.17)
Здесь применены обозначения:
(1.18)
(1.19)
Форма уравнений (1.16) и (1.17) имеет ожидаемый вид. Первое из них
описывает эволюцию деформации привода. В нем правая часть состоит из
5-ти слагаемых, которые последовательно учитывают влияние: упругих
деформаций, технологической нагрузки, сил инерции, приводного момен¬
та от мотора и интенсивности затухания колебаний. Коэффициент в по¬
следнем слагаемом рассчитывается по формуле
Второе уравнение намного проще. Его правая часть учитывает влия¬
ние на мотор только упругих деформаций и сам приводной момент.
Рассмотрим частные случаи уравнений (1.16) и (1.17).
а) Маховой момент двигателя очень большой, т. е. J^>> т -R~.
В этом случае у » 0 и уравнение (1.16) принимает вид
Это уравнение вынужденных колебаний нелинейной упругой системы с
затуханием. Частота колебаний (множитель в первом слагаемом) является
переменной. Она зависит от массы клети и соотношения жесткости упру¬
гих элементов.
(1.20)
(1.21)
Уравнения движения механизма с нелинейными упругими звеньями 47
б) То же, как в п. а), плюс отсутствие зазоров и затухания колебаний.
Уравнение (1.21) принимает вид
Это уравнения вынужденных колебаний квазиупругой системы без зату¬
хания. Частота колебаний является переменной.
в) Идеальный привод. Зазоры и деформации отсутствуют (Д(^) =
w = sx= 0). В этом случае решение исходной системы уравнений (1.5)-
(1.9), (1.11)—(1.13) относительно неизвестных величин упрощается. Фор¬
мулы для ускорения у/ и нагрузок в приводе принимают вид:
Эти формулы можно применить для расчета нагрузок в статическом
режиме работы привода. Для этого надо использовать условие у/ = 0.
Приведенные формулы применялись в инженерных расчетах того време¬
ни. Типичные графики нагрузок в приводе для этого режима представлены
на рисунке (1.4).
Выше отмечалось, что уравнения (1.16) и (1.17) не имеют аналитиче¬
ского решения. Единственно возможным способом исследования привода
станов ХПТ с использованием этих уравнений является их интегрирова¬
ние с помощью вычислительной техники. Здесь надо отметить, что в то
время (1959 г) электронные вычислительные машины были редкостью.
Для решения задачи был привечен вычислительный центр Московского
энергетического института. Он был оснащен цифровой машиной (Урал 1)
и несколькими вычислительными машинами непрерывного действия.
Хотя последние обладают меньшей точностью по сравнению с циф¬
ровыми ЭВМ, они оказались более удобными для исследования привода
при большом количестве комбинаций влияющих факторов. В этом случае,
Для одного варианта начальных условий задача решалась за несколько
Минут. Решение одного варианта на цифровой машине занимало около
суток. Поэтому она привлекалась только для проведения контрольных
расчетов. Результаты расчета упругой составляющей суммарной деформа¬
ции (1.15) на цифровой машине представлены на рис. 1.5.
{m„p-R2-K2v{¥) + J,\y} =
= -R-Kr{y,)-Pa-mv-R2-K р(у,)К + *'Ц>-*)>
po„„ = ~p ■ R ■ К a (у/) • y>2 ~ mv ■ R ■ К y (у/) ■ у/ ,
Mdm=R-Kv(y,)-Pdwl.
(1.23)
(1.24)
(1.25)
48
Раздел 1
PmCil
Рис. 1.4. Расчетные нагрузки в статическом режиме работы привода,
а) Силы инерции, б) Технологические усилия в шатуне и на валу привода
Уравнения движения механизма с нелинейными упругими звеньями 49
Соответствующие результаты расчета на вычислительной машине не¬
прерывного действия представлены на рис. 1.6. Кроме оценок упругой со¬
ставляющей суммарной деформации на нем представлены также оценки на¬
грузок в шатунах (статических и динамических), а также динамического кру¬
тящего момента МАш . Все рисунки относятся к одному обороту кривошипа.
Из сравнения результатов расчета, представленных на рисунках 1.5 и
1.6 видно, что соответствующие оценки достаточно хорошо согласуются.
Кроме того, расчетные оценки крутящего момента согласуются с результа¬
тами измерений крутящего момента на работающем стане, которые пред¬
ставлены выше на рис. 1.1.
На основе разработанной математической модели привода станов
ХПТ было выполнено его детальное исследование. Рассмотрены различ¬
ные варианты параметров конструкции и выработаны рекомендации по
Конструированию перспективных модификаций привода. Результаты этой
работы нашли отражение не только в упомянутых выше публикациях, но и
в ряде других статей [3, 4, 5].
50
Раздел 1
*
Рис. 1.6. Результаты расчета на аналоговой
машине непрерывного действия
Выводы
1. Обоснование изложенных здесь уравнений движения было выполне¬
но только потому, что их решение оказалось возможным с примене¬
нием существующей в то время вычислительной техники.
2. Форма разработанной системы уравнений ориентирована на приме¬
нение электронных вычислительных машин
3. При создании математической модели привода станов ХПТ учтен
опыт эксплуатации и испытаний аналогичных конструкций.
4. Решение задачи столкнулось с трудностями, обусловленными не¬
достаточными характеристиками вычислительной техники того
времени.
Уравнения движения механизма с нелинейными упругими звеньями 51
Комментарий. Работы по математическому моделированию оборудо¬
вания и технологических процессов в интересах ЭЗТМ были поддер¬
жаны не только руководством завода (Ф. Д. Хижняк, А. Б. Верник,
И. И. Казакевич), но Московским областным совнархозом, который
выделил средства на приобретение ЭВМ. В дальнейшем совнархоз
неоднократно заслушивал наши отчеты о проделанной работе по этой
тематике. Эти обсуждения были очень полезными. В них участвовали
известные специалисты в области математики и вычислительной тех¬
ники: Н. П. Бусленко, Е. С. Вентцель, Б. В. Гнеденко, Ф. М. Длин,
Н. А. Криницкий, Л. А. Люстерник, А. Н. Тихонов и др. Под руково¬
дством Н. П. Бусленко была выполнена работа по математическому
моделированию производственного процесса автоматизированного
стана печной сварки труб [6].
Литература
1. М. И. Гриншпун, В. И. Соколовский. Станы холодной прокатки труб. Теория,
расчет и конструирование. М. «Машиностроение» 1967.
2. А. И. Назаренко. Математическое моделирование и исследование динамики
кривошипно-шатунного привода станов холодной прокатки труб. Труды
ВНИИМЕТМАШ № 3, 1961.
3. И. М. Тетельбаум, Н. И. Челноков, Э. И. Шехвиц, Р. М. Шлыков, Ю. Р. Шнейдер,
А. И. Назаренко. Исследование динамики механизмов сложных приводов
машин с помощью электронных моделей. Доклад на научно-технической
конференции МЭИ по итогам научно-исследовательских работ за 1960 г.
4. И. М. Тетельбаум, А. И. Назаренко, Н. И. Челноков. Электрическое модели¬
рование в машиностроении, Экономическая газета, № 18, 4/Х11-1961 г.
5. А. И. Назаренко. Инженерный метод расчёта динамических усилий в главном
приводе станов холодной прокатки труб //Труды ВНИИМЕТМАШ. 1963. № 7.
6. Н. П. Бусленко, А. И. Назаренко, Г. П. Климов, Г. А. Алиев. Математическое
моделирование технологического процесса автоматизированного стана печ¬
ной сварки груб. Сб. Проблемы кибернетики. № 9, 1963 г.
Раздел 2
Выбор уточняемых параметров
полиномиальной модели системы
В 1963 г. по приглашению Н. П. Бусленко автор перешел на работу в
один из институтов Министерства обороны и стал заниматься спутнико¬
вой механикой. Дело в том, что в это время в институте формировался
коллектив, которому было поручено создание службы (системы) контроля
космического пространства. Соответствующее решение было принято
руководством страны в конце 1962 г.
В мире только две страны имеют такие системы: США и Россия. Эти
системы являются уникальными. В них вложен гигантский труд большого
количества людей. Основная задача систем — это максимально полное и
максимально точное ведение каталога КО. По известным причинам ин¬
формация о Российской и Американской системах является весьма огра¬
ниченной. Тем не менее, о Российской системе был опубликован ряд ра¬
бот. Одна из первых — это статьи Ю. В. Вотинцева [1], вышедшие в свет в
1993 г. С начала создания головного объекта Российской системы — Цен¬
тра контроля космического пространства (ЦККП) — прошло более 50 лет.
Он успешно работает до сих пор.
В данном разделе рассмотрена одна из многих новых задач, которые
пришлось решать в процессе создания центра. Речь идет о выборе уточ¬
няемых параметров, которые используются в качестве начальных условий
для прогноза движения спутников. В первом приближении ответ кажется
очевидным: это координаты и компоненты вектора скорости в 3-мерном
пространстве или 6 классических Кеплеровых элементов орбиты. Важным
дополнительным параметром является характеристика торможения спут¬
ника в атмосфере, которое приводит к монотонному снижению высоты
спутника и, в конечном счете, к его падению на Землю. История рассмат¬
риваемой задачи началось именно с анализа влияния этого параметра на
угловое перемещение спутника по траектории. Для количественного опи¬
сания этого движения используются соотношения двух типов:
1. Зависимость углового перемещения (например, т. н. средней ано¬
малии) от времени
М (/-/„) = М (/„) + «■(/—/„) + 0.5 ■«•(/—/0)2 +(1/6) ■«■(/ —/0)3. (2.1)
В небесной механике величина и называется средним движением.
Выбор уточняемых параметров полиномиальной модели системы 53
2. Зависимость времени пересечения экватора от числа оборотов
спутника /V
tN =to+To-N + O.5-AT0-N2 +.... (2.2)
Здесь Го — период спутника. ЛТ0 — изменение периода за виток. В обоих
случаях зависимости являются параболами.
Рассматриваемый вопрос относится к параметрам п и А'/0. Всегда
пи их надо включать в число уточняемых параметров и использовать
при прогнозе движения в качестве начальных условий?
Для ответа на этот вопрос на первом этапе выполнен анализ про¬
стейшей ситуации. Принимается, что объект движется по квадратной
параболе
y(t) = a]+a2-t + ai-t1. (2.3)
Исходными данными для определения и прогнозирования движения объ¬
екта являются измерения
z(tl) = y(tl) + bzl,j=\, (2.4)
которые проводятся не некотором (мерном) интервале времени. Здесь /Ц —
погрешности измерений. Они принимаются случайным величинами, рас¬
пределенным по нормальному закону с нулевым средним значением и за¬
данной дисперсией сг. По данным измерений определяются параметры
траектории ( а,, а2, а3) и выполняется прогноз движения объекта на задан¬
ный момент времени. Эта ситуация схематично показана на рис. 2.1.
Необходимо найти такую технологию решения задачи, которая обес¬
печивает минимальные погрешности прогноза. На первый взгляд ответ
кажется очевидным: определить параметры а,, а2, аг, используя классиче¬
ский метод наименьших квадратов [2], и применить их для прогноза в ка¬
честве начальных условий. Такой ответ основан на опыте аппроксимации
функций, чему посвящено очень большое число публикаций. Особенно¬
стью традиционного подхода является допущение, что измерения функции
являются точными. В нашем же случае измерения содержат погрешно¬
сти, и их количество является ограниченным. Именно этим рассматривае¬
мая задача отличается от традиционной постановки.
Ниже проанализированы две технологии решения задачи. В первом
случае уточняются все три параметра at,a2,a}, а в другом — только па¬
раметры а,, а2.
54
Раздел 2
Рис. 2.1. Траектория объекта и прогноз его движения
В обоих случаях для уточнения параметров (вектора состояния) при¬
меняется метод наименьших квадратов [2]. Результаты анализа впервые
были опубликованы в статье [3]. Их изложение удобно выполнить с при¬
менением матричных обозначений.
Л =
й\
Й1
А,
’ А1 ~
а2
=
а2
аз
йз
р(о=|11 * *2Н=/(0зЧ,
Я'Н1 Ф4+'2 ■ai=f{t)2-A2+‘2
zi
ЛОз
Аz,
Z =
z/
=
/(Оз
■ “Ь
Az;.
zk
А'А
Дг*
• А2 + А 7 ,
(2.5)
(2.6)
(2.7)
(2.8)
Выбор уточняемых параметров полиномиальной модели системы
55
/(02
*2 =
/(02
, А2Г =
if
/(02
tl
>*3=||*2 Д*||>
(2.9)
С использованием обозначений (2.5) и (2.9) выражение (2.8) принимает вид
Л
а,
Z = [X2 АХ]
+ AZ — 2 '-^2 ^ 3 AZ *
(2.10)
Оценка А2 с помощью МНК:
Л=(*2Г -*2)"' -*2Г -Z . (2.11)
Подставим в это выражение значение Z из (2.10). Получим:
А2 =А2+(Х2-Х2У>-Х$-АХ-а} + (х'2-Х2) ' -Х2 - AZ . (2.12)
Из этого выражения определяются погрешности оценки А2. С использова¬
нием дополнительных обозначений
получим
В = [ХТ2 ■ X2] ', G = Xt2 AX
SA 2=А2 ~А2 - ~B-G a2-B-X2 AZ .
(2.13)
(2.14)
Здесь первое слагаемое в правой части выражает систематическую по¬
грешность, а втрое — случайную составляющую суммарной погрешно¬
сти. Произведение 8А2-8А2 характеризует суммарное влияние этих со¬
ставляющих.
С учетом статистических характеристик погрешностей измерений
m{jXZ- AZT] = а\-Е (2.15)
из соотношения (2.14) легко определяется среднее значение произведения
м{дА2-8А[) = а] ■ В ■ G-G1 ■ В + a2z ■ В .
(2.16)
56
Раздел 2
Данная формула отражает влияние параметра а}, который не учитывается
в модели движения при вычислении оценки (2.12), на погрешность этой
оценки. В частном случае, когда а3 = 0, формула (2.16) принимает вид
классического выражения для корреляционной матрицы погрешностей
оценок (2.12).
Перейдем к анализу погрешностей оценки вектора А3, которая опре¬
деляется по формуле
Аг=(х1-Хг)'-Xl-Z.
Корреляционная матрица погрешностей этой оценки равна
м(5Аг-54)=<т1\х1-Хг)-'.
(2.17)
(2.18)
Для проведения сравнительного анализа точности оценок (2.11) и
(2.18) матрицу в правой части последнего выражения необходимо выра¬
зить через те величины, которые используются в формуле (2.16). Учитывая
обозначения (2.9), (2.13) и D = AXT -АХ, представим матрицу из (2.18) в
блочном виде
*3 -*з =
\АХ
1*2 Д*|| =
*2 '*2
х72-ах
5’1
G
АХТ -Х2
АХТ-АХ
GT
D
Обратную матрицу также можно представить в блочном виде [4]
(*зГ-*з )"' =
В 1
G
=i
К
L
GT
D
Л
Р
где
K = ±G.G'.B_ +
D-G-B-G
Р = -
1
D-G1 -BG
Из формулы (2.18) очевидно, что дисперсия оценки параметра аг равна
(2.19)
(2.20)
(2.21)
(2.22)
а1=аг-Р = -
D-GT • B-G '
Это соотношение удобно использовать в формуле (2.21):
(2.23)
Выбор уточняемых параметров полиномиальной модели системы
57
сг2 ■К=м(ЗА2-8Ат2) =cr2ai-B-G-GT-В + сг] В. (2.24)
В соответствии с выражениями (2.18) и (2.20) данная величина имеет
смысл корреляционной матрицы погрешностей параметров А 2, опреде¬
ленных в составе 3-мерного вектора состояния по формуле (2.17). Это
аналог формулы (2.16). Разность оценок (2.24) и (2.16) характеризует эф¬
фект перехода от уточнения двумерного вектора состояния А2 к уточне¬
нию трехмерного вектора состояния А 3.
м(8А2-8А2) -М(ЗА2-8А2^ = (o2al-a\)-B-G-GT-В. (2.25)
Если разность (а2} меньше нуля, переход к уточнению трехмерного
вектора состояния Аъ приведет к улучшению точности оценок, в против¬
ном случае — к ухудшению.
Таким образом, критерием целесообразности перехода к уточнению
трехмерного вектора состояния является условие
ааЪ < |а3 | ■ (2-26)
В противном случае лучшую точность будет обеспечивать технология,
основанная на применении двумерного вектора состояния.
Комментарий.
Физический смысл условия (2.26) можно объяснить следующим об¬
разом. Эффект увеличения числа уточняемых параметров имеет по¬
ложительную и отрицательную сторону. Положительная сторона за¬
ключается в учете параметра аъ ф 0, который реально влияет на дви¬
жение объекта. Отрицательная составляющая заключается в том, что
исходная измерительная информация расходуется на утонение боль¬
шего числа параметров, а именно ухудшается точность определения
параметров А2 (в части фильтрации случайных погрешностей изме¬
рений). Условие (2.26) как раз и учитывает эти две противоречивые
стороны. Смысл его в том, что при малом числе измерений выгодно
не тратить имеющуюся информацию на уточнение несущественных
факторов. В случае, когда измерения являются точными, условие
(2.26) всегда выполняется. В этом случае целесообразно уточнять и
применять трехмерный вектор состояния Т3. Такая ситуация харак¬
терна для классического подхода к решению задачи аппроксимации.
Рассмотрим более сложную постановку задачи [4]. А именно при¬
мем, что движение объекта описывается полиномом, состоящим из п сла¬
гаемых:
58
Раздел 2
И'ЫЛ’/ДО. (2.27)
i-\
где fj (t) — некоторые заданные функции. Предполагается, что при уве¬
личении j влияние слагаемых уменьшается. Ставится вопрос о целесооб¬
разности уточнения и применения последнего слагаемого ап ■ /п (/).
Анализ проведен по той же методике, что изложена выше. Для оценки
вектора А„ применяется МНК:
(2.28)
Используется представление блочной матрицы Хп, аналогичное обозна¬
чению (2.9)
ХЯ=\Х'Л Д*||- (2-29)
Дальнейший анализ полностью совпадает с изложенным выше. В резуль¬
тате получаем аналогичное условие целесообразности перехода к уточне¬
нию n-мерного вектора состояния
< а
(2.30)
Комментарий.
Изложенный выше анализ не является достаточно строгим с точки зре¬
ния математика. В частности, в условии (2.25) не рассмотрены особен¬
ности матричного произведения B-G-G7 ■ В , которые могут оказать
влияние на выполнение условия. Не рассмотрена проблема выбора ба¬
зисных функций, которые используются в полиноме (2.27). Можно
найти и другие некорректности. Эта ситуация характерна для «инже¬
нерного» подхода к решению прикладных задач. Она отмечалась в ста¬
тье Е. С. Вентцель (см. Введение): «Многие задачи просто “не реша¬
ются ” на уровне должной строгости, а решать их нужно — жизнь не
ждёт. Волей-неволей приходится пользоваться всеми доступными на
сегодняшний день средствами, в том числе и такими, от которых на¬
ши предки-математики, как говорится, перевернулись бы в гробах...».
Корректность условий (2.30) была подтверждена в 60-е годы опытом
определения и прогнозирования орбит разных спутников. В то же время
автор неоднократно сталкивался с ситуаций, когда специалисты придер¬
живались традиционного подхода, полагая, что чем больше число уточ¬
няемых параметров — тем лучше. Для подтверждения корректности усло¬
вий (2.30) автор выполнил статистическое моделирование процесса опре¬
деления и прогнозирования орбит в различных условиях. Ниже кратко
Выбор уточняемых параметров полиномиальной модели системы
59
лзложены эти результаты, полученные в 2015 г. Применялась модель дви¬
жения (2.3).
Используемые значения параметров:
al= t0 =0, а2= Г0 = 96, аЗ = 0.5-ДГ0 = -0.00010;
Интервал между измерениями 5 витков;
Число измерений на мерном интервале к = 6, 8,10, 12,14, 16, 18, 20;
Интервал прогноза 100 витков;
СКО погрешностей измерений сг ,: = 0.01,0.02,0.04,0.08, 0.16, 0.32;
Число реализаций метода Монте-Карло при моделировании из¬
мерений — 1000.
В качестве показателей точности прогноза вычислялись:
sigN2 — корень из дисперсии ошибки при использовании
оценок А2,
sigN3 — корень из дисперсии ошибки при использовании
оценок Л3,
Ъ, = sigN3/sigN2 — отношение среднеквадратических погреш¬
ностей,
ег^ — расчетное СКО, определенное по формуле (2.23).
Ниже в таблице представлены эти оценки для мерного интервала из
12 измерений и при разной их точности (а 2).
Таблица 2.1. Результаты моделирования при 12 измерениях. а3 =10 1
sigN2
sigN3
sigN3/sigN2
оою
1.596
0 176
-
0.0000 ll
0.020
1.596
№
:
0.000022
0.040
1.595
0.688
bI|,; ;P43
0.000044
0.080
1.601
1.405
0.88
0.000088
0.160
1.643
2.733
l.66
0.000175
0.320
1.732
5.741
3.31
0.000350
Из этих результатов четко видно, что условие (2.26) работает правиль¬
но. При ега3 < 0.0001 лучшую точность обеспечивает применение 3-мер-
Ного вектора состояния. Эти результаты окрашены серым цветом. Такая
ситуация имеет место при ег г < 0.080. В случае, когда измерения являются
Менее точными, оаЪ > 0.0001 и применение двумерного вектора состояния
обеспечивает более высокую точность по сравнению с применением 3- мер¬
ного вектора состояния.
60
Раздел 2
В табл. 2.2 представлены отношения среднеквадратических погреш¬
ностей ^ при различной точности измерений (а_) и различном числе из¬
мерений к на мерном интервале. Серым цветом окрашена область, где
лучшую точность обеспечивает применение 3-мерного вектора состояния.
При повышении количества и точности измерений эта область расширяет¬
ся. По мере ухудшения точности и уменьшения количества измерений
более выгодным становится применение двумерного вектора состояния
(оценки Л2). Граница этих двух областей обозначена в таблице звездочка¬
ми и пунктирной линией.
Таблица 2.2. Значения коэффициента эффективности ?,
СГг
Число измерений к
6
8
10
12
14
16
18
20
1 °
о
! о
*0.65
0.32
0.17
0 11
0.07
0.06
0.04
0.03
0.020
1 ,з1«ь.
0.63
0.37
0.22
0.15
0 II
0.08
0.06
0.040
2.59
1.2$*
^(1.68
0.43
0.30
0.21
0.15
0.12
0.080
4.90
2.44
1.3&S
W
0.58
0.43
0.33
0.24
0.160
8.50
4.66
2.66
1.66
гТзс
-Л,*?,
0.62
0.50
0.320
11.93
7.71
4.85
3.31
2.27
1.74
\ 29С
>0.94
Здесь данные, отмеченные звездочками, рассчитаны по приближен¬
ной аналитической формуле для СКО оценки коэффициента аз:
‘'•'“‘'•■жё'ё- <231)
Эта формула выведена на основе общей формулы (2.18) путем аналитиче¬
ского представления соответствующих сумм. В результате подстановки в
эту формулу значения а3 вместо <та3 получаем уравнение для определения
числа измерений к, при котором выполняется условие <то3 = |а3|. Решения
именно этого уравнения использованы для обозначения границы между
областями в табл. 2.2.
Изложенные выше результаты применения статистической модели
полезны также для оценки влияния величины мерного интервала на точ¬
ность определения и прогнозирования движения объекта. Ниже приведен
конкретный пример такого рода оценок. Рассмотрено 3 варианта расчетов.
Использовались те же исходные данные, что приведены выше (при
<j z =0.01).
Выбор уточняемых параметров полиномиальной модели системы
61
Вариант 1. Уточняется вектор А2.
Вариант 2. Уточняется вектор А3.
Вариант 3. Уточняется вектор А3 плюс в модель движения (2.3) добав¬
лено слагаемое а4 -/3 при значении я4= а3/500.
Последний вариант характерен тем, что делает модель более реалистич¬
ной. А именно, он учитывает неизбежное существование погрешностей во
всякой модели. На рис. 2.2 представлены соответствующие результаты
моделирования.
Рис. 2.2. Зависимость среднеквадратической
ошибки прогноза от числа измерений
Эти результаты являются ожидаемыми. Характеристики погрешно¬
стей для вариантов 1 и 2 согласуются с данными табл. 2.2.
Монотонное уменьшение погрешностей по мере роста числа измере¬
ний для варианта 2 объясняется идеализированной постановкой задачи
(модель движения является точной). Ошибки измерений (единственный
источник погрешностей) фильтруются тем лучше, чем больше измерений.
Результаты моделирования для варианта 3 являются типичными. На¬
личие оптимального мерного интервала, при котором ошибки прогноза
Минимальны, является следствием влияния неучтенных в модели движе¬
ния факторов.
62
Раздел 2
В заключение раздела рассмотрим вопрос, как согласуется изложен¬
ный здесь способ выбора уточняемых параметров с опытом определения
параметров торможения спутников (я и Л70) в Американской системе
контроля космического пространства (Space Surveillance System, SSS). Для
всех объектов полный каталог текущих орбитальных данных этой системы
публикуется на сайте [5]. Детальное описание этих данных, представлен¬
ных в форме так называемых двухрядных элементов (TLE), можно найти в
работах [6] и [7]. Каждый набор элементов орбит содержит два параметра
торможения: оценки я (8 разрядов после запятой) и баллистического ко¬
эффициента Bstar (в форме с плавающей запятой). Последний параметр
пропорционален плотности атмосферы. Если Bstar = 0, то торможение в
атмосфере не учитывается. В первом приближении параметры я и Bstar
пропорциональны. Однако параметр я отражает влияние не только тормо¬
жения, но и других возмущающих факторов второго порядка малости.
По данным каталога за 2015 г. построена гистограмма оценок пара¬
метра Bstar для всех объектов, летающих на высотах до 2000 км. Она
представлена в табл. 2.4.
Таблица 2.4. Распределение числа объектов
по значениям баллистического коэффициента
Диапазон значений Bstar
<0
0
>0 и
<10 5
<10
>10" и
<10"
>10" и
<10"
>10" и
<10"
>10" и
<10"
>10" и
<1
>1
0
34
167
1826
5262
3911
108
3
0
Характерными особенностями этого распределения являются:
- отсутствие объектов со значениями Bstar < 0;
- наличие объектов (34), у которых Bstar = 0;
- большая часть объектов имеет баллистические коэффициенты в диа¬
пазоне от 1 (Г5 до 10-2.
Таким образом, у 34-х объектов параметр торможения Bstar не уточ¬
нялся. Анализ орбитальных данных этих объектов показал, что все они
летают на высоте более 800 км и имеют значение параметра я не более
10-6. Этому уровню торможения соответствует значение АТ0 < -0.2-10-6 мин
(справедливо соотношение я « -я3-(ДГ0/1440), где ДТ0 — в минутах).
Такой уровень торможения на 2 порядка меньше уровня, рассмотрен¬
ного выше при статистическом моделировании процесса определения и
прогнозирования орбит. Ниже в табл. 2.5 приведены результаты модели¬
рования при измененных исходных данных. А именно, при характеристике
Выбор уточняемых параметров полиномиальной модели системы
63
торможения а3 = 10 й и числе измерений к = 24. Форма представления ре¬
зультатов — такая же, как у табл. 2.1.
Таблица 2.5. Результаты моделирования при 24 измерениях и а3 = 1СГ6
<У _
sigN2
sigN3
sigN3/sigN2
0 005
0.024
0.023
0.98
0.00000096
0.010
0.025
0.045
1.80
0.00000191
0.020
0.030
0.096
3.17
0.00000382
0.040
0.045
0.189
4.18
0.00000764
0.080
0.081
0.362
4.48
0.00001528
0.160
0.156
0.730
4.68
0.00003056
Из этих результатов четко видно, что при а3 = 10-6 лучшую
точность обеспечивает применение 3-мерного вектора состояния. Эти ре¬
зультаты окрашены серым цветом. Такая ситуация имеет место при
az < 0.005. В случае, когда измерения являются менее точными, оаЪ > 10
и применение двумерного вектора состояния обеспечивает более высокую
точность по сравнению с применением 3-мерного вектора состояния. Та¬
ким образом, результаты моделирования при a z > 0.01 согласуются с при¬
веденными выше данными объектов каталога, у которых не уточнялась
характеристика торможения.
Комментарий.
Согласие изложенного в данном разделе критерия для выбора уточ¬
няемых параметров модели движения с опытом определения пара¬
метров торможения спутников в Американской SSS объясняется кор¬
ректностью этого критерия, который объективно отражает имеющие¬
ся закономерности.
Особенностью упомянутого выше представления каталога SSS в
формате TLE является то, что эта форма была разработана более 50 лет
назад. В то время в уравнении (2.1) использовалась оценка п . В дальней¬
шем эта оценка в качестве начальных условий перестала применяться,
хотя и сохранилась в формате TLE. Ниже для одного из КО приведен при¬
мер орбитальных данных каталога США в форме TLE.
1 39502U 14003А 14012.38384580 .00013119 00000-0 23449-3 0 153
2 39502 051.6492 151.8272 0005825 020.4381 090.1720 15.50350525 417
В первой строке выделены 3 оценки:
.00013119 — это значение п ;
23449-3 — это значение Bstar\
00000-0 — это значение п .
64
Раздел 2
В настоящее время для всех объектов каталога И = 0. Это, по-видимому,
объясняется тем, что специалисты США на опыте убедились в нецелесо¬
образности уточнения данного параметра в процессе обработки измере¬
ний. Этот факт еще раз подтверждает справедливость рассматриваемого в
данном разделе положения, что не все параметры модели движения целе¬
сообразно уточнять и включать в состав начальных условий.
Выводы
1. Постановка рассматриваемой задачи отличается от традиционного
подхода к аппроксимации функций учетом погрешностей исходных
данных.
2. Разработан критерий принятия решения о включении или не включе¬
нии данного параметра в число начальных условий для прогноза про¬
цесса.
3. Показано согласие разработанного критерия с результатами модели¬
рования и опытом уточнения начальных условий для прогноза дви¬
жения спутников.
4. Остался открытым вопрос, как уменьшить негативное влияние малых
возмущений на прогноз движения, если они не включены в число
уточняемых параметров.
Литература
1. Ю. В. Вотинцев. Неизвестные войска исчезнувшей сверхдержавы. Военно¬
исторический журнал, 1993, № 8,9,10,11.
2. Ю. В. Линник. Метод наименьших квадратов и основы математико-статисти¬
ческой теории обработки наблюдений. ФИЗМАТГИЗ, 1958.
3. А. И. Назаренко. О целесообразности учета новых уточняющих факторов в
математическом описании некоторых систем, Сб. Анализ и синтез систем ав¬
томатического управления, Изд-во НАУКА, 1968.
4. А. И. Назаренко. Некоторые вопросы оптимизации обработки орбитальных
измерений искусственных спутников Земли. Космические Исследования.
1968, т. 6, с.с. 674—683.
5. http:Wwww.space-track.org.
6. Hoots, F. R. and R. L. Roehrich. Models for Propagation of NORAD Element Sets.
Spacetrack Report № 3, Aerospace Defense Command, United States Air Force,
December 1980.
7. D. Vallado. Fundamentals of Astrodynamics and Application. Space Technology
Library. Microcosm Press, Kluwer Academic Publishers. 2004.
8. Felix R. Hoots, Paul W. Schumacher Jr., and Robert A. Glover. History of Analyti¬
cal Orbit Modeling in the U. S. Space Surveillance System, Journal of Guidance,
Control, and Dynamics, vol. 27, No. 2 (2004), pp. 174—185.
Раздел 3
Драконический период
и время пересечения экватора
В данном разделе рассмотрены две задачи, которые пришлось решать
50 лет назад на начальном этапе создания Центра контроля космического
пространства (ЦККП). При рассмотрении этих материалов надо иметь в
виду, что это было время начала развития космической баллистики. Пуб¬
ликаций по данной тематике было мало [1, ..., 5]. Ниже приведены неко¬
торые полезные сведения по космической механике.
Первое аналитическое решение
И0 = /[И*о)>*“*о] С3-1)
уравнений движения спутников в простейшем центральном гравитацион¬
ном поле U = fj/r, (где г — геоцентрическое расстояние, t — время, у —
вектор состояния, / — некоторая аналитическая функция), было найде¬
но И. Ньютоном. Оно имеет вид т. н. Кеплеровой орбиты. Ее детальное
описание можно найти в бесчисленном числе публикаций по небесной
механике.
Классические постоянные интегрирования (элементы орбиты Кеплера):
а — большая полуось,
е — эксцентриситет,
со— аргумент перигея,
М0 = /(v0,e) — характеризует положение спутника на орбите
в начальный момент, здесь v — истинная аномалия,
П — долгота восходящего узла,
< — наклонение орбиты.
и = со + v — аргумент широты. (3-2)
Основные характеристики Кеплеровой орбиты представлены на ри¬
сунках 3.1 и 3.2.
66
Раздел 3
Драконический период и время пересечения экватора
67
Дополнительные полезные формулы:
г = р / [1 + е ■ cos(m - *»)], р = а ■ (1 - е1),
du! dt = dv/dt = yjp-р / г2 = ■ (1 + е■ cos v)2. (3.3)
Р
(fifv / dt)-г2 = const один из законов Кеплера.
\ 2 U М
— V = — кинетическая энергия.
2 г 2а
— кинетическая энергия.
Решение дифференциального уравнения dv/dt =
v
(
1 + е Е
7
Af(?) = M0 +n-(t-10) = Е — е-sinЕ, уравнение Кеплера. (3.4)
п = 2п / Т = у[р / ат.
Здесь: Е — эксцентрическая аномалия, М — средняя аномалия, п — сред¬
нее движение спутника, Т — период обращения спутника.
В реальных условиях наряду с Ньютоновой силой притяжения на
спутник действуют и другие (возмущающие) силы, которые приводят к
существенному отличию реальной орбиты от эллипса. Для их учета при¬
меняется разложение гравитационного потенциала Земли в ряд по сфери¬
ческим функциям
— полином Лежандра 2-го порядка, (р — широта точки, с20 * КГ3 — без¬
размерный коэффициент. Остальные слагаемые в фигурных скобках име¬
ют порядок * КГ6 (на данном этапе мы их рассматривать не будем).
Общие закономерности изменения возмущений элементов орбит во
времени представлены на рис. 3.3.
Вековые возмущения — пропорциональны времени.
Долгопериодические возмущения имеют период порядка нескольких
Месяцев.
(3.5)
Здесь R — средний экваториальный радиус Земли,
3 1
P2o(sM=2Sin2^2
68
Раздел 3
Короткопериодические возмущения имеют период, равный времени
одного оборота КО вокруг Земли.
В упомянутых выше публикациях были представлены формулы воз¬
мущений элементов орбиты, вызванных влиянием второго члена разло¬
жения геопотенциала (3.5). В большинстве случаев формулы разных авто¬
ров совпадали. В случае их расхождения1 автор продублировал вывод
формул. Ниже приведены вековые возмущения за виток:
Sa = Se = Si = О,
Важным свойством приведенных оценок является то, что вековые
возмущения возникают только у трех элементов орбиты: долготе восхо¬
дящего узла, аргументе перигея и средней аномалии. Эти аналитические
1 Несовпадения формул имели место для возмущения SMQ - Эти различия в даль-
нейшем не были обнаружены, по-видимому, потому, что данное возмущение является
частью среднего движения л, которое уточняется в составе начальных условий при обра-
ботке измерений.
Драконический период и время пересечения экватора
69
формулы для расчета возмущений за виток использовались в 60-е годы (и
в России, и в США) для прогнозирования движения спутников. Зависи¬
мость времени пересечения экватора от числа оборотов спутника может
быть представлена в дискретной форме.
Здесь N— номер витка, 6v — время пересечения экватора, TN— дракони¬
ческий период. Слагаемое ДТ отражает влияние гравитационных воз¬
мущений на изменение периода за виток. Слагаемое ДТат отражает влия¬
ние торможения в атмосфере. Как показано в разделе 2, его значение
уточняется в процессе определения начальных условий по измерениям.
Характерная особенность алгоритма (3.7) заключается том, что он, явля¬
ясь экономным по затратам машинного времени, корректно учитывает
вековые и долгопериодические возмущения параметров орбиты (без ко¬
роткопериодических составляющих). Эта особенность была особенно
ценной в первые годы освоения космического пространства, когда вычис¬
лительная техника только начала развиваться.
Исходными данными являются значения элементов орбиты а, е, i, со в
момент времени tN , т. е. в начале (N + 1 )-го витка. При выводе формулы
учитываются: выражения (3.2), (3.3), (3.4) для аргумента широты, угловой
скорости и среднего движения, а также вековые возмущения (3.6). Снача¬
ла определим влияние возмущений на значение аргумента широты в мо¬
мент времени tN+]. На это значение оказывают влияние два возмущения, а
именно 5со и 8М0. Влияние этих возмущений очевидно из формулы
(3.2) для аргумента широты
Входящая в это выражение частная производная строится на основе соот¬
ношения (3.3).
Она выражается следующим образом
(3.7)
Задача 1. Построение формулы для расчета
драконического периода
дМ
(3.8)
70
Раздел 3
Таким образом, суммарное возмущение аргумента широты равно
_ (1 + е • cos со) ^
OU = ^2—+ осо ,
(ЗЛО)
Если величина Susum положительна, то спутник прилетит «на эква¬
тор» в конце витка несколько раньше. Соответствующее уменьшение пе¬
риода составит ST = Susllln / и . Здесь м определяется по формуле (3.3).
С учетом (3.4) в результате получаем
Т
дТ = —£-
2 71
ёМ0 +
('-4
(1 + ecos со)
■ёсо
(3.11)
Здесь через Тк обозначено значение периода невозмущенного движения
по орбите, большая полуось которой равна а. С учетом поправки (3.11)
значение драконического периода на (N + 1 )-м витке составит (без учета
торможения в атмосфере):
Ты«=Та=Тк+8Т = Тк-
1-
_1_
2 л
дМй +
С-1)1
(1 + е ■ cos со)
-дсо
(3.12)
Подстановка возмущений (3.6) в это выражение приводит к следующей
формуле
т =Т ■
■*п 1 к
, 3
1 Н С-,
2 2
'R'1
(1 + е ■ cos со)
1-е2
О-1)’
(1 + е • cos со)
Э 5 ' 2-
2—sin i
(3.13)
Данная формула была выведена автором в середине 60-х годов. Она ис¬
пользовалась при разработке алгоритмов прогнозирования движения
спутников Земли. Впервые формула была опубликована в монографии [6]
(раздел 2.1). В монографии П. Е. Эльясберга [5] в разделе 3.7 приведен
вывод формулы для драконического периода спутников с малым эксцен¬
триситетом. При сохранении наших обозначений эта формула имеет вид
Т =Т ■
■*п 1 к
1 + -
3 —— sin2 i - e-cos <w-(l -5sin2 ij
(3.14)
Драконический период и время пересечения экватора
71
Нетрудно показать, что если формулу (3.13) разложить по степеням экс¬
центриситета и отбросить все слагаемые со степенями боле е, то получа¬
ется формула (3.14).
В монографии D. Vallado [7] в разделе 11.4.2 также приведен вы¬
вод формулы для драконического периода (nodal period). Эта формула
имеет вид
Видно, что эта формула существенно отличается от приведенной
выше формулы (3.13). Для проверки корректности изложенных выше ре¬
зультатов был выполнен контрольный расчет драконического периода.
Применялось численное интегрирование уравнений движения в пределах
одного витка. Использовались исходные данные по КА «Прогресс-М-
27М», а именно: аргумент широты и = 0, большая полуось а = 6608.4648,
наклонение /= 51.669°, эксцентриситет е = 0.00652, аргумент перигея
ю = 77.51596°. Прогнозирование движения выполнено для трех вариантов
исходных данных, отличающихся учитываемыми параметрами гравита¬
ционного поля Земли и интервалом прогноза, который принимался рав¬
ным расчетному значению периода. В качестве результата фиксировалось
значение координаты z (отклонение от плоскости экватора). Исходные
данные и результаты представлены в табл. 3.1.
Таблица 3.1. Результаты прогноза движения на один виток
№
вар
Параметры поля
Интервал прогноза,
мин
Результат
Z, км
1
Ньютоновский потенциал
Тк = 89.10680
0.000041
2
С20
(3.13) Тп = 88.90937
0.044134
3
Сго> Сзо> С4о, С50, С(;о, С70,
(3.13) Тп = 88.90937
0.061676
Эти результаты являются ожидаемыми. Они свидетельствуют о кор¬
ректности формулы (3.13). А именно:
- Значение невозмущенного периода хорошо согласуется с результата¬
ми прогноза Кеплеровой орбиты на один виток.
- Отличие драконического периода Тп от Тк равно 0.1974, что состав¬
ляет 2.2-10 от значения периода, т. е. имеет тот же порядок что и па¬
раметр с20.
72
Раздел 3
- Для варианта № 2 отношение отклонения от экватора z = 0.044 к раз¬
меру орбиты (г,а) равно 6.7-КГ6, т. е. имеет порядок с20.
- Для варианта № 3 отношение отклонения от экватора z = 0.061 к раз¬
меру орбиты имеет тот же порядок е20 .
Таким образом, формула (2.13) позволяет рассчитать значение драко-
нического периода с относительными погрешностями порядка 10 6. Тако¬
го рода погрешность свойственна возмущениям первого порядка, пропор¬
циональным параметру гравитационного поля с20.
Задача 2. Прогнозирование времени пересечения экватора
Выше упоминалось, что при движении спутника в гравитационном
поле Земли вековые возмущения большой полуоси а (и периода) не воз¬
никают. Однако при долгосрочном прогнозировании временных парамет¬
ров орбиты существенный вклад в результаты прогноза могут внести дол¬
гопериодические возмущения большой полуоси. Поэтому этот вопрос
рассмотрен ниже более подробно.
Учитываются только гравитационные возмущения порядка с20. Пре¬
небрегая возмущениями второго порядка, запишем разностное уравнение
(3.7) для времени в дифференциальной форме
^ = Ta(N) = TK(Ny
1-1—с,,
■a(N)
(3.16)
где
а(77) =
(l + e-cos<y^)3
1-е2
М)
(l + e-cos<y^)
Э 5 • 2.1
2 sin i .
(3.17)
В правой части уравнения (3.16) переменными являются две величины:
<Уд, и Тк (N). Первая из них изменяется вековым образом в соответствии
с упомянутым выше возмущением 5со за виток. Изменение оскулирую-
щего периода
tAn)=(2k/4»}“3/4n)
(3.18)
имеет долгопериодический характер, связанный с изменением полуоси.
Представим текущее значение полуоси в виде суммы начального значения
и приращения a(N) = a = a0+Sa. Тогда ткущее значение периода (3.18)
может быть выражено через его начальное значение следующим образом
Драконический период и время пересечения экватора
73
(3.19)
Это выражение имеет погрешности второго порядка.
Соответствующую закономерность для да/а0 можно построить на
основе интеграла энергии, который утверждает, что в рассматриваемых
условиях сумма кинетической и потенциальной энергии (-U) со време¬
нем не меняется [4-7]. Выражение для гравитационного потенциала U
приведено выше (3.5). При положении спутника на экваторе {(р = 0)
значение полинома Лежандра второго порядка равно -1/2. Поэтому для
этих положений сумма кинетической и потенциальной энергии может
быть записана так
Приравнивание значений (3.20) в двух точках — начальной и произволь¬
ной — приводит к уравнению
Это уравнение нетрудно решить относительно возмущения да , если пре¬
небречь возмущениями второго порядка, т. е. считать элементы р и е по¬
стоянными величинами. Получим
Здесь выражение в квадратных скобках обозначено как fi(N). Оно являет¬
ся функцией coN.
С учетом возмущения (3.22) подстановка текущего значение оскули-
рующего периода (3.19) в дифференциальное уравнение (3.16) приводит к
следующему результату
г 2 а
'^2o(sin Ф)
(3.20)
а0 + да р6
•(l + e-cos6>w)3 =—L+ с2о R -(l + e0 -cos6>0)3. (3.21)
ао Ро
е' cos о)0
)3 (l + e-cosft)w)3
(3.22)
74
Раздел 3
— = Tk(N о)
dN кК 0J
■P{N)
f) MN)
= 7'Л".)-|,+|<!2.-[|] [“М+Ал')]+°(4)
(3.23)
Здесь переменными являются функции a(N) и fi(N) в квадратных скобках.
Обозначения этих функций приведены выше. Рассмотрим их сумму
a(N) + /3(N)-
(2
1-е J
1-е
(l + e-cos60w)
(l + e-cosft>0)3 (l + e-cosfti^)3
1-е
1-е2
(3.24)
Замечательным свойством этой суммы является то, первое и последнее
слагаемые — одинаковые по величине, но имеют разные знаки. Они вза¬
имно уничтожаются. С учетом этого обстоятельства уравнение (3.23)
принимает достаточно простой вид
— = TJN „)■
dN КУ 0/
3 ( R
~2С™\р
(1 + е • cos coN)
5 . , Л (1 + е ■ cos щ )3
2—siiTj + - ——
(3.25)
Правая часть этого уравнения характеризует текущее значение дракони-
ческого периода в виде известной функции времени. А именно, единст¬
венной переменной величиной является аргумент перигея, который вхо¬
дит в первое слагаемое в квадратных скобках
coN =С0О +Sa>-(N-N0).
(3.26)
Поэтому построение зависимости времени пересечения экватора от числа
витков сводится к вычислению интеграла
rdt'
dN
■dN.
(3.27)
Здесь производная в правой части задается выражением (3.25), в котором
единственный переменный компонент — это знаменатель первого слагае¬
Драконичсский период и время пересечения акватора
75
мого в квадратных скобках. Рассмотрим интеграл, соответствующий это¬
му слагаемому
Любопытно, что по форме интеграл (3.28) совпадает с тем, который ис¬
пользовался классиками небесной механики при обосновании уравнения
Кеплера (3.4)
Поэтому при вычислении интеграла (3.28) выполняется замена перемен¬
ных (dN на dev) и для аргумента перигея вводятся аналоги средней и экс¬
центрической аномалии:
С учетом этих обстоятельств решение уравнения (3.25) принимает сле¬
дующий вид
Как и ожидалось, зависимость (3.31) имеет вековую и периодическую
составляющую. Последняя имеет период 2л/8(о и зависит от значений
новой переменной Мт. Из выражений (3.31), (3.28) и (3.6) очевидно, что
периодическая составляющая момента пересечения экватора имеет ам¬
плитуду
(3.28)
(3.29)
(3.30)
АГ = £ - e-sin £ .
СО (О (О
X
(3.31)
да
(3.32)
76
Раздел 3
Изложенные в данном разделе формулы (3.25) и (3.31) впервые были
опубликованы в монографии [6]. Они являются обобщением упрощенных
формул, представленных в разделе 13.9 монографии [5] П. Е. Эльясберга,
и приспособленных для орбит с малым эксцентриситетами. Формулы
(3.25) и (3.31) пригодны для орбит с любыми эксцентриситетами.
В заключение раздела рассмотрим пример расчета по формулам (3.25) и
(3.31). Используются начальные условия: а = 7500 км, е = 0.1, / = 90°, ш = О'1.
Период Тк = 107.73 мин. Результаты прогноза представлены на рис. 3.4.
- Кривая «Изменение драконического периода» показывает разность
правых частей уравнения (3.25) в текущей и исходной точках орбиты.
В исходной точке (со = 0°) драконический период минимален. Поэто¬
му все изменения являются положительными.
- Кривая «Соответствующая поправка во времени пересечения эквато¬
ра» является интегралом от предыдущей функции. Это та часть фор¬
мулы (3.31), которая включает разность .
(X
S
X
ш
X
ф
о
ф
о.
ф
с
IX
5
ф
о.
m
ф
О
о
со
CD
cd"
о.
ш
о
CD
ь-
о.
CD
с
со
о
с
*
о
сх
CD
в
я
>.
со
н
о
н
ф
со
f—
о
о
Интервал прогноза, витки
Рис. 3.4. Результаты прогноза на 2500 витков
Драконичсский период и время пересечения экватора
77
{4а этом рисунке четко видны долгопериодические изменения рассматри¬
ваемых временных параметров — драконического периода и времени пе¬
ресечения экватора. Их средние значения показаны пунктиром. Период
отклонений от среднего равен 2ж/бсо = 1670 витков. В соответствии с
формулой (3.32) ожидаемая амплитуда отклонений от среднего для вре¬
мени пересечения экватора равна 107.73-60 0.1 /3.14 = 206 сек. Эта оценка
совпадает с данными рисунка.
Выводы
1. Рассмотрена методика вывода формул для расчета драконического
периода и времени пересечения экватора, учитывающих возмущения,
пропорциональные параметру с20 разложения гравитационного по¬
тенциала Земли в ряд по сферическим функциям.
2. Выведенные формулы (3.13), (3.25) и (3.31) являются более общими
по сравнению с аналогичными формулам, изложенными в ряде из¬
вестных публикаций.
3. Представленные в данном разделе результаты были использованы в
60-х годах в процессе разработки аналитической модели движения
спутников для Российского центра контроля космического про¬
странства.
Литература
1. Y. Kozai. The motion of a close Earth satellite. Astronomical Journal, November
1959.
2. И. Д. Жонголович. Возмущения искусственного спутника в гравитационном
поле Земли. Бюллетень института теоретической астрономии. 1960, т. VII, 10,93.
3. М. Д. Кислик. Движение искусственного спутника в нормальном гравитаци¬
онном поле Земли. Искусственные спутники Земли, 1960, вып. 4.
4. D. Brower and G. М. Clemence. Methods of Celestial Mechanics. New York: Ac¬
ademic Press, Inc., 1961. (Русское издание вышло в 1964 г)
5. П. Е. Эльясберг. Введение в теорию полета искусственных спутников Земли.
М.: Изд-во «НАУКА» 1965.
6. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. М.: Машиносроение, 1981.
7. D. Vallado, Fundamentals of Astrodynamics and Applications. Third Edition. Mi¬
crocosm, Hawthorne, CA. 2007.
Раздел 4
Усредненные уравнения,
характеризующие эволюцию элементов
орбиты спутников Земли
История
Рассмотренные в разделе 3 аналитические формулы для расчета воз¬
мущений за виток использовались в 60-е годы для прогнозирования дви¬
жения спутников на основе численного решения разностных уравнений
3(N + \) = 3(N) + S3(3(N)),
г / м (4Л)
*ЛМ -lN+TN+1 [3(^)]‘
Здесь N— номер витка, t — время пересечения экватора, Т — дракони-
ческий период. Возмущения 5Э рассчитывались по аналитическим
формулам.
Алгоритм (4.1) называют методом повиткового суммирования воз¬
мущений. Характерная особенность этого числено-аналитического метода
заключаются том, что он позволяет рассчитать эволюцию медленно изме¬
няющихся элементов в восходящем узле орбиты («на экваторе»), оставляя
на первом этапе без внимания короткопериодические возмущения. Учет
последних осуществлялся после выполнения прогноза элементов «на эк¬
ваторе» путем добавления к ним возмущений внутри витка
Э(/) = Э(ЛГ) + £Э[Э(ЛГ),/-/„]. (4.2)
Такая методика была особенно ценной на начальном этапе освоения
космического пространства, когда вычислительная техника была ешс
очень слабой. Заманчивым направлением совершенствования алгоритма
(4.1) был переход к интегрированию уравнений вида
d3(N)/dN = S3(3(N)). (4.3)
В ряде случаев эти уравнения удается проинтегрировать аналитически,
обеспечивая тем самым возможность экономии машинного времени.
уравнения, характеризующие эволюцию элементов орбиты спутников Земли 79
Идея разделения возмущений на вековые, долгопериодические и ко¬
ротко-периодические составляющие не является новой. Она применялась
специалистами по небесной механике более 100 лет назад. Применитель¬
но к анализу движения спутников фундаментальным является вклад
Д. Брауэра [1]. На основе метода канонических переменных он разработал
теорию движения спутников в гравитационном поле Земли. В результате
построены формулы для вековых (Э), долгопериодических (S3) и ко¬
роткопериодических (S3 ) возмущений элементов орбит. В 60-х годах эта
теория была положена в основу построения аналитической модели дви¬
жения спутников, примененной в Американской системе контроля косми¬
ческого пространства [2]. Схема последовательного применения этих
формул для учета указанных возмущений имеет вид
В результате определяются текущие значения т. н. оскулирующих эле¬
ментов орбит Э(?).
Примененный Д. Брауэром метод интегрирования уравнений движе¬
ния основан на допущении, что все возмущающие силы являются консер¬
вативными — порождаются некой силовой функцией. Тем самым не пре¬
дусмотрена возможность учета неконсервативных сил, например тормо¬
жения спутника в атмосфере. В этом состоит основной недостаток реше¬
ния Д. Брауэра.
Существует альтернативный способ решения рассматриваемой зада¬
чи, не связанный с допущением о консервативном характере возмущаю¬
щих сил. Он называется методом усреднения Крылова—Боголюбова [3, 4].
Это один из мощнейших методов теории возмущений. Суть его заключает¬
ся в замене правых частей дифференциальных уравнений, содержащих
«быстрые» переменные, усредненными функциями, не содержащими вре¬
мя явно. Применительно к рассматриваемым условиям ставится задача
составления дифференциального уравнения для средних элементов 3 ,
в качестве которых принимаются элементы в восходящем узле («на эква¬
торе»), Здесь £. — малые параметры, соответствующие конкретным воз-
э(о = э(г0)+э-(/-/0),
3(t) = 3(t) + S3(t-t0),
3(t) = 3(t) + S3(t-t0).
(4.4)
(4.5)
Мущениям, /г(Э,Л^ — функции, которые надо построить. Правая часть
80
Раздел 4
этих уравнений может учитывать возмущения любой природы, в том чис¬
ле и торможение спутника в атмосфере. После интегрирования уравнения
(4.5) оскулирующие элементы в некоторой точке внутри витка определя¬
ются с учетом короткопериодических возмущений по формуле (4.2).
По своему содержанию дифференциальное уравнение (4.5) эквива¬
лентно разностному уравнению (4.1). Поэтому при учете одних и тех же
возмущений решение уравнения (4.5) совпадает с решением разностных
уравнений (4.1) и (4.4). Целесообразность перехода от применения урав¬
нений (4.1) к модели движения на основе уравнения (4.5) была обусловле¬
на следующими обстоятельствами.
1. В ряде случаев, а именно при некотором составе возмущающих фак¬
торов уравнения (4.5) могут быть проинтегрированы аналитически.
Такая возможность очевидна для условий, при которых было по¬
строено решение Д. Брауэра. Она имеется и при более полном соста¬
ве возмущающих факторов.
2. Расширение состава возмущающих факторов и применение более
точных формул для их учета стало возможным в середине 60-х годов
в результате исследований, выполненных разными авторами [5, 6|.
В частности, в статье И. Жонголовича были опубликованы вековые и
долгопериодическис возмущения элементов орбиты за виток 1-го и 2-ю
порядка малости, пропорциональные параметрам гравитационного
поля Земли с20, c30, с40, с50, с60, с20. Это результат очень большой и
кропотливой работы автора. Формулы И. Жонголовича были исполь¬
зованы в конце 60-х годов при разработке аналитической модели
движения [7].
3. Учет атмосферных (и других неконсервативных) возмущений в пра¬
вой части уравнений (4.5) приводит к системе, которая не имеет ана¬
литического решения. В этом случае необходимо применение чис¬
ленного интегрирования уравнений. Тем не менее, возможность
применения при интегрировании большого шага (порядка суток)
обеспечивает экономию машинного времени по сравнению с реше¬
нием разностных уравнений (4.1). Такой подход приводит к созда¬
нию численно-аналитической модели движения спутников, которая
по затратам машинного времени является более трудоемкой по
сравнению с аналитическими моделями движения, но существенно
менее трудоемкой по сравнению с численным интегрированием ис¬
ходных уравнений движения.
4. В конце 60-х - начале 70-х годов развитие вычислительной техники
обеспечило возможность применения численно-аналитической моде¬
ли движения при выполнении расчетов по большому числу спутни¬
ков, что характерно для условий работы ЦККП.
I Уравнения, характеризующие эволюцию элементов орбиты спутников Земли 81
5. Применение уравнения (4.5) в качестве основы при разработке ана¬
литической и численно-аналитической моделей движения обеспечи¬
вает согласованность моделей. Это особенно важно, когда обе модели
работают в одной программно-алгоритмической системе и имеют со¬
гласованную входную и выходную информацию.
Г
Составление усредненных уравнений
Для вектора элементов орбиты Э исходная система дифференциальных
уравнений с одной быстрой переменной может быть представлена в сле¬
дующем виде
d3/du =Ъ. (Э,и)+ £ £ •*,- -ХУ (Э,и). (4.6)
М /=1 1=1
Здесь и — аргумент широты, е1 — малые параметры, соответствующие
конкретным возмущениям, Х^Э,и), ЛС(Э,ц) — известные функции.
Сущность применения метода усреднения для решения уравнений (4.6)
заключается в такой замене переменных
к к к
э = э + • v,. (э,и)+ХЕс' £j' УДЭ>“)+- • (4-7)
/=| /=| 1=1
чтобы исходная система приняла более простой вид (без быстрой пере¬
менной и)
d3/du = Ъг 4 (Э)+££*,• • 4 (э)+- (4.8)
М Ы 1=1
В работах [1,2] изложен алгоритм построения функций и
доказывается, что решение системы (4.8) имеет погрешность порядка
■u'j на интервале времени 1/^,где с" —наименьший порядок
слагаемых, удерживаемых в правой части системы (4.8), а е — один их
параметров е,. Функции строятся следующим образом
A,(3) = ^-jxi(3,u)-du> (4.9)
о
V. (Э,н) = J[x, (э,ц) - Д (э)] ■ du + vl0 (э), (4.10)
82
Раздел 4
/-\ 1 2f /- \ 1 2г дХ,(Э,и) . 5у,о(э)
з-■■’■Л3'")-*—з—^л3)-
(4.11)
Здесь v;0 (Э) —произвольная функция.
Выясним связь между строго обоснованной системой уравнений второго
(и = 2) приближения (4.8) и упрощенной системой вида (4.3) и (4.5)
йЭ/dN « S 3(lj + Щ2), (4.12)
которая с использованием значений возмущений первого и второго по¬
рядка за виток описывает эволюцию оскулирующих элементов в восхо¬
дящем узле орбиты (и = 2л■ N ). Возмущения в правой части уравнений
(4.12) упоминались выше в п. 2 раздела История. Они построены с помо¬
щью метода последовательных приближений по формулам
^Э(.)=£^(Эо>2^М(Эо>0)]> (4-]3)
"(О
к к
II
1=1 j=\
дЭ(2) =ХЕ{^{фЛэ0,2^)-ф,(э„,о)] + ^/[/;.(Эо,2^-^(э0,о)]}.
(4.14)
Здесь применены обозначения
F,(30,«) = _[*,(Э0>и)-<й<, (4.15)
^.(Э0,и) = рГ*(Э0,«)■</«, (4.16)
, ч г дХ (Эп,и) . .
O,(30,h) = J 'У’ ^Э(1).(Э0>1/)-^, (4.17)
S3(i)J (э0,и) = £j{Fj (30,u)-Fj (Э0,О)] . (4.18)
С учетом обозначения (4.15) формулы (4.9) и (4.10) принимают вид
4 (5) = ^[f , (э, 2») - F, (Э, 0)] = ■ Щ1Г (4.19)
V,. (э,и) = |>, (э,и) - F, (Э,0)] - [>, (Э, 2л) - F, (Э, О)] • (и / 2л) + v,0 (э).
(4.20)
уравнения, характеризующие эволюцию элементов орбиты спутников Земли 83
функция у,0(э) выбирается таким образом, чтобы удовлетворялись на¬
чальные условия Э(и = 0) = Э0. Это условие выполняется при vi0 (Э) - 0.
С использованием формулы (4.18) выражение (4.20) принимает вид
является характерной особенностью метода усреднения. В частности,
эту функцию можно выбрать таким образом, чтобы средние элемен¬
ты в уравнении (4.8) совпадали со средними элементами, применен¬
ными в теории Д. Брауэра.
Построим соответствующее выражение для функции (4.11). После ряда
довольно громоздких преобразований получим
С использованием формулы (4.22) правая часть уравнений (4.6) принима¬
ет вид
Использование формул (4.13) и (4.14) и замена в (4.23) переменной
u = 2k-N приводит к результату
(4.21)
Комментарий. Возможность произвольного выбора функции
4 (э)=^{|Ч (э’2;г) - Fu (э> °)]+~, • [ф«? (э> 2я0 - ф</ (3’°)]}
(4.22)
(4.23)
— = 8Э,Л+8Э
du (,)
(4.24)
84
Раздел 4
Таким образом, поставленная задача разработки уравнений вида
(4.5) решена. Предложен простой способ составления усредненных
уравнений, правая часть которых состоит из известных возмущений 1 -г0
и 2-го порядка за виток. Система уравнений (4.24) является более точной
по сравнению с приближенной системой уравнений (4.12). Изложенный
здесь способ составления усредненных уравнений впервые был опубли¬
кован в 60-х годах в работе [8]. Практическое значение этого результата
состоит в том, что на его основе за короткое время была разработана
численно-аналитическая модель движения спутников. Уже в начале 70-х
она была внедрена в практику работы Российского ЦККП. Это обеспечи¬
ло повышение точности определения и прогнозирования движения низ¬
ких спутников, подверженных существенному влиянию торможения в
атмосфере.
Б. В. Кугаенко (ученик П. Е. Эльясберга) применил уравнение (4.24)
для построения аналитической модели движения почтикруговых орбит
ИСЗ под влиянием зональных гармоник (Космич. исслед. 1968. Т. 6.). Для
этих условий им построено точное решение.
В монографии Д. Валладо [9] упоминается, что в США также были
разработаны алгоритмы и программы, основанные на применении метода
усреднения. В списке литературных источников приведены соответст¬
вующие публикации по этому вопросу [10, 11, 12]. Цитата из моно¬
графии: “Paul Cefola and his colleagues at the Charles Srark Draper Labor¬
atory developed his theory in the mid-1970s and early 1980s”. Из этих мате¬
риалов очевидно, что в России соответствующие алгоритмы и программы
были разработаны и внедрены в практику массовых расчетов намного
раньше.
Естественно, что рассмотренный способ составления усредненных
уравнений не исключает необходимости дальнейшего развития численно¬
аналитического похода к созданию моделей движения спутников. В 80-е
годы такая необходимость была обусловлена продолжением интенсивного
освоения ОКП и повышением требований к точности решения соответст¬
вующих баллистических задач. В частности, для учета влияния тессераль-
ных гармоник гравитационного потенциала потребовалось ввести в ис¬
ходные дифференциальные уравнения вторую быструю переменную —
звездное время (угол, характеризующий положение Земли в инерциальной
системе координат). Потребовались и другие доработки, связанные с рас¬
ширением области применения моделей движения спутников. Таким об¬
разом, методы прогнозирования движения, связанные с применением ме¬
тода усреднения, продолжали развиваться. В качестве подтверждения это¬
го положения сошлемся на работы В. С. Юрасова [13, 14], В. Ф. Бойкова
[15] и Ю. А. Гребенникова [16].
уравнения, характеризующие эволюцию элементов орбиты спутников Земли 85
В заключение приведем данные о затратах машинного времени на вы¬
полнение прогноза движения при быстродействии компьютера -200 ООО
операций в секунду:
- аналитический метод — 0.007 сек,
- численно-аналитический метод — 0.05 сек/шаг,
- численный метод — 3.4 сек/сутки.
Выводы
1. На первом этапе развития космической баллистики (60-е годы) для
прогнозирования движения спутников широко применялись доста¬
точно простые аналитические модели. Однако их точность во многих
случаях не удовлетворяла пользователей. В начале 70-х годов в связи
с развитием вычислительной техники появилась возможность приме¬
нения в массовых баллистических расчетах более точной, но более
трудоемкой (по затратам машинного времени) численно-аналитиче¬
ской модели движения спутников.
2. В качестве основы создания численно-аналитической модели целесо¬
образно использовать метод усреднения Крылова—Боглюбова. В нем
для коротко-периодических возмущений применяются аналитические
формулы, а для усредненных элементов строится система дифферен¬
циальных уравнений. При расчете эволюции элементов орбит метод
позволяет корректно учесть не только консервативные (гравитацион¬
ные) возмущающие силы, но и торможение в атмосфере. Тем самым
обеспечивается повышение точности прогноза движения по сравне¬
нию с аналитическими моделями движения.
3. В общем случае, когда усредненные уравнения не поддаются аналити¬
ческому решению, необходимо применять численные методы интегри¬
рования. Возможность применения большого шага (порядка 1 суток)
обеспечивает существенное преимущество такого подхода по сравне¬
нию с численным интегрированием исходных уравнений.
4. В ряде случаев (при упрощенном составе возмущающих факторов),
удается найти аналитическое решение усредненных уравнений.
В программно-алгоритмической системе ЦККП целесообразно при¬
менение обоих моделей (аналитической и численно-аналитической),
разработанных на основе общей системы усредненных уравнений.
Это обеспечивает их согласованность.
5. Для исходной системы дифференциальных уравнений с одной «быст¬
рой» переменной разработан простой способ составления усредненных
уравнений, правая часть которых состоит из известных возмущений 1-го
и 2-го порядка за виток. Система уравнений (4.24) является более точ¬
ной по сравнению с приближенной системой уравнений (4.12). Прак¬
86
Раздел 4
тическое значение этого результата состоит в том, что на его основе за
короткое время была разработана численно-аналитическая модель
движения спутников. Уже в начале 70-х она была внедрена в практику
работы Российского ЦККП.
Литература
1. D. Brower and G. М. Clemence. Methods of Celestial Mechanics. New York: Ac¬
ademic Press, Inc., 1961. (Русское издание вышло в 1964 г).
2. Hoots F. R. and R. L. Roehrich. Models for Propagation of NORAD Element Sets.
Spacetrack Report № 3, Aerospace Defense Command, United States Air Force,
December 1980.
3. H. H. Боголюбов, Ю. А. Митропольский. Асимптотические методы в теории
нелинейных колебаний. Физматгиз, 1958.
4. В. М. Волосов. Усреднение в системах обыкновенных дифференциальных
уравнений. Успехи математических наук, 1962, 13(6), 3-126.
5. И. Д. Жонголович. Возмущения искусственного спутника в фавитационном поле
Земли. Бюллетень института теоретической астрономии. 1960, т. VII, 10,93.
6. П. Е. Эльясберг. Введение в теорию полета искусственных спутников Земли.
М.: Наука, 1965.
7. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. М.: Машиностроение, 1981.
8. А. И. Назаренко. О составлении усредненных уравнений движения искусст¬
венных спутников Земли. Доклад на конференции по общим вопросам небес¬
ной механики и астродинамики, Москва, 1967. Сб. Современные проблемы
небесной механики и астродинамики. М.: Наука, 1973, с.с. 148-154.
9. Vallado D. A., Fundamentals of Astrodynamics and Applications, Springer, New
York (2007).
10. P. Cefola. Technical Comments on the Semianalytic Satellite theory and Compari¬
son to Present Applied Methods. Memorandum to W. G. Denhard. MEMO NO.
PL-008-78-PJC. The Charles Stark Draper Laboratory. 1978.
11. P. Cefola R&D GTDS Semianalytic Satellite Theory Input Processor. Draper
Intralab Memorandum to Rick Metzinger. ESD-92-582. SGI GTDS-92-001. Rev. 1.
February 8, 1993.
12. W. D. McClain. Semianalytic Artificial Satellite Theory. Vol. I. Charles Stark
Draper Laboratory. 1992.
13. В. С. Юрасов. Применение численно-аналитического метода для прогнози¬
рования движения ИСЗ в атмосфере. Наблюдения искусственных небесных
тел. М.: АС АН СССР, № 82, 1987.
14. V. S. Yurasov. Universal semi-analytic satellite motion propagation method. Se¬
cond US/Russian Space Surveillance Workshop, Poznan, 1996.
15. В. Ф. Бойков и др. Быстродействующие алгоритмы прогнозирования движе¬
ния для оперативного уточнения параметров и определения времени сущест¬
вования космических объектов. Наблюдения искусственных небесных тел.
М.: АС АН СССР, № 84, 1988.
16. Е. А. Гребенников. Метод усреднения в прикладных задачах. Наука, 1986.
Раздел 5
Прогнозирование корреляционной
матрицы погрешностей вектора
состояния
Введение
Традиционный подход к прогнозированию небесных тел, развитый в
классических трудах по небесной механике, основан на составлении и
решении уравнений движения. Этот подход характерен применением до¬
пущения, что все действующие на космический объект силы известны и
могут быть учтены в правых частях дифференциальных уравнений дви¬
жения, и что основным источником ошибок прогноза являются погрешно¬
сти начальных условий. Последние возникают при определении парамет¬
ров траектории (начальных условий) по результатам измерений, содержа¬
щих погрешности.
Традиционный подход широко используется при прогнозировании
движения ИСЗ. Однако оказывается, что для ИСЗ не все действующие на
спутник силы можно считать известными и что во многих случаях не все
известные силы могут быть учтены в правых частях дифференциальных
уравнений при их интегрировании. Возникающие в связи с этим погреш¬
ности модели движения могут отрицательно сказаться на результатах оп¬
ределения и прогнозирования орбит ИСЗ. Например, одним из отрица¬
тельных проявлений этих погрешностей является ограничение временного
интервала, на котором используются измерения при уточнении начальных
условий.
При изучении погрешностей прогнозирования удобно воспользоваться
аппаратом теории вероятностей. В частности, не учтенные при прогнози¬
ровании возмущающие силы можно считать гауссовым случайным про¬
цессом. Для обоснования такого подхода могут быть приведены следую¬
щие доводы [1].
• Теория вероятностей применяется не только в тех случаях, когда име¬
ется множество повторяемых событий, но и тогда, когда речь идет о
неопределенности выводов. В рассматриваемом случае, такая неоп¬
ределенность имеется, например, относительно коэффициентов раз¬
88
Раздел 5
ложения гравитационного потенциала Земли, а также параметров мо¬
дели атмосферы и баллистического коэффициента спутника.
• Число не учтенных при прогнозировании возмущающих факторов
обычно велико, и условия их совместного действия чрезвычайно мно¬
гообразны, так как могут отличаться расположением данной орбиты
относительно поверхности Земли, относительно Луны и Солнца. Так,
например, действие тсссеральных и секториальных гармоник разло¬
жения гравитационного потенциала Земли зависит от взаимного по¬
ложения восходящего узла орбиты и Гринвича (L = Q - St,, где S,,
звездное время Гринвича). Последняя величина быстро меняется,
принимает самые разнообразные значения и поэтому у большинства
спутников может считаться случайной величиной, равномерно рас¬
пределенной в интервале (0, 2л). Здесь также следует иметь в виду,
что не учтенные при прогнозировании возмущения имеют обычно
одинаковый порядок, т. е. соизмеримы между собой, так как основ¬
ные возмущающие факторы известны и учитываются. Это обстоя¬
тельство позволяет использовать центральную предельную теорему
и принять, что значение возмущений в некоторый момент времени
является случайной величиной, распределенной по нормальному
закону.
• Известные значения учтенных при прогнозировании возмущающих
факторов, например, параметров гравитационного поля, представля¬
ют собой случайные величины, так как определены по большому
числу измерений, содержащих случайные ошибки.
• Торможение в атмосфере, служащее одним из главных возмущающих
факторов для низких спутников, существенно зависит от уровня сол¬
нечной и геомагнитной активности, которые при прогнозировании
можно считать случайными процессами [2].
Расчет корреляционной матрицы
погрешностей при прогнозировании
В результате применения опорной орбиты и линеаризации исходных
дифференциальных уравнений движения спутника могут быть построены
дифференциальные уравнения для отклонений от опорного вектора со¬
стояния (погрешностей)1
= A(t) ■ 8х + В It) ■ q It), (5.1)
dt
1 Здесь используются обозначения, которые применялись в статье [1] и монографии [3]
Прогнозирование матрицы погрешностей вектора состояния 89
розмущающие ускорения q{t), которые не учитываются при интегрирова-
ЛИИ исходных уравнений, будем называть шумом системы. Важным явля¬
ется то, что этот шум существенно отличается от белого шума, т. е. имеет¬
ся корреляция значений шума в разные моменты времени. Общее решение
системы уравнений (5.1) имеет вид:
Матрица U(t,tQ) называется фундаментальной матрицей решений урав¬
нений (5.1), а также переходной матрицей. Статистические характеристи¬
ки случайного процесса q(t) принимаются известными:
В широко известном фильтре Калмана [4] рассматривается частный слу¬
чай условий (5.3), а именно, случайный процесс q(t) принимается белым
шумом. В этом случае его автокорреляционная функция имеет вид
Корреляционная матрица погрешностей в начальный момент времени
принимается известной:
В фильтре Калмана определение соответствующей корреляционной мат¬
рицы погрешностей вектора состояния для произвольного момента време¬
ни основано на исходных данных (5.4), (5.5), решении (5.2) и еще одного
условия
которое свойственно для белого шума. В результате получается следую¬
щее выражение
Sx(t) = l/(t,t0)-fix(t0) + Jl/(t,4)-B(4)-q(4)-d4. (5.2)
(5.3)
(5.4)
(5.5)
(5.6)
M[Sx{t)-5xT{t)\ = M\ l/(t,t0)-Sx(t0) + Jl/(t,e)-B(e)-q(f)-d€ x
b
-1T
t
x U(t,t0)-Sx(t0) + ju(t,rj)-B(rj)-q(rj)-drj > =
90
Раздел 5
t t
= U(t,t0yP^U(t,t0)T+llu(t,£).B(£).K4(t,T,)-B(T,)r.U(t,Tj)T-d£-dr,s
*0 *0
= u{t,t0)-p^^t,t0)T+\u(t,4yB(4yR(4)-B(4)T-u(t,4)T.d4, t>t0.
'o
(5.7)
Именно это выражение используется в фильтре Калмана для прогноза
корреляционной матрицы погрешностей вектора состояния.
В статье [1] использовалось допущение, что матрица взаимной кор¬
реляции
М [8x(t0) • qT (t)] = Kxq (t0,t) * 0 (5.8)
известна и не равна 0. В этом случае определение корреляционной матри¬
цы погрешностей вектора состояния в произвольный момент времени на
основе исходных данных (5.4), (5.5), решения (5.2) и условия (5.8) приво¬
дит к выражению
Kx{t)^M[Sx{tySxT{t)\ = U{ut0yp^U{ut0)T
I
+U(t,t0) ■ jX* (t0,T?) ■ В(т])Т ■ U(t,T)f ■ drj +
h
t
U(t,t0)-\Kxq{t0,T])-b(t])T ■U(t,7])T -dr)
(5.9)
'o f0
которое является обобщением формулы (5.7).
В американских публикациях проблема учета неизвестных гравита¬
ционных возмущений при расчете корреляционной матрицы погрешно¬
стей вектора состояния подробно изложена в работах [5, 6, 7]. Авторы
применяют методику прогнозирования корреляционной матрицы в про¬
цессе уточнения вектора состояния по измерениям на достаточно корот¬
ких интервалах времени (несколько минут). Из анализа этих материалов
видно также, что при построении выражения типа (5.9) учитываются толь¬
ко первое и последнее слагаемые. Второе и третье слагаемые, которые
отражают влияние взаимной корреляции
Прогнозирование матрицы погрешностей вектора состояния
91
М \SZ (tk ) - SgT (/)] = М [Sx (/„ ) • q‘r (0] = Kxq (t0, t),
указанных публикациях не учитываются.
j В российской литературе проблема учета неизвестных гравитацион¬
ных возмущений при расчете корреляционной матрицы погрешностей
(ектора состояния достаточно подробно изложена в монографии [3]. В ней
гриведена формула (5.9), данные о корреляционных функциях неизвест-
[ых гравитационных возмущений (5.3), а также методика построения
итриц взаимной корреляции (5.8) в процессе уточнения параметров ор-
!иты по измерениям. В монографии приводятся ссылки на статью Kaula
8], а также статью Gersten, Gore, and Hall [9]. В начале 70-х годов эта ме-
одика была применена для определения и прогнозирования орбит при
едении каталога космических объектов. Ссылка на соответствующую
:омпьютерную программу имеется в статье [10]. Имеется ряд публикаций
11-13], в которых изложены результаты применения развитой методики
[ля учета случайного атмосферного шума в правой части уравнения (5.1).
Таким образом, имеются следующие различия российских и амери-
:анских публикаций по рассматриваемой проблеме: а) в первом случае
юлее полное внимание уделено матрице взаимной корреляции погрешно-
:тей начальных условий и шума; и б) прогнозирование выполняется на
[остаточно больших интервалах времени.
Дифференциальные уравнения
для прогнозирования корреляционной матрицы
решностей вектора состояния при его прогнозировании на разные мо-
юнты времени Гиг. Используя тот же подход, который применен при
1ыводе формулы (5.9), получим
Рассмотрим матрицу взаимной корреляции
М[**(/)• SxT (г)] = Кх (Г,г) = U{t,t0) • Р0|0 • U(r,t0 f +
т
+ U(t,t0)-jKxq(t0,rj)-B(rj)T-и(т,т])Т-dr) +
t
+ U(T,t0)-$Kxg(t0,Tj)-B(T])T-U{t,t])T-dr] +
+\)и(^ув^укд(^г1ув(г1)т-dZ-drj. (5.10)
*0 ?0
92
Раздел 5
Естественно, что при t = т это выражение совпадает с формулой (5.9).
Рассмотрим также матрицу взаимной корреляции M\j5x{t)-ц(т)1
погрешностей вектора состояния в момент времени t и случайного про¬
цесса (](г) в произвольный момент времени т. Применяя тот же подход,
получим:
M\Sx{t)-q{T)T =Kxq(t,r)
= М<
■я(т)т =
U(t,t0)-Sx(t0) + ju(t,Z)-B(Z)-q(Z)-dZ
I - ?0
I
= U{t,tb)-K^,T) + \u{t,$)-B{$yK4{$,T)-db (5.11)
(0
Построим дифференциальные уравнения
dKx{t,T^/dt = ... и дКх^,т)/дт =....
Применяя непосредственное дифференцирование выражения (1.10), получим:
dKx(t,T)/dt = A(t)-U(t,t0)-P0]0-U(T,t0)T +
г
+А (t) ■ и (t, f0) • | Kxq (f0,77) • В (77 f • и (г, Г] У ■ drj +
'о
+[^(Мо)-^Л'о,'Н(')г]г +
(
+A{t)- и{т,1й)-\Кх11{1й,т])-В{г])Т ■U(t,j7)T drj
Г
+В(1)• 'В(ч)Т 'и(т’Ч)Г • dli +
'о
+A{t)])u{t^)-B^)-K4^,T})-B{r,)T-и{т,г})т(5.12)
'о'о
Сгруппируем в этом выражении слагаемые с общими множителями A(t)
B(t). Учитывая выражения (5.10) и (5.11), получим
dKx(t,r)/dt = A(t)-Kx(t,r) + B(t)-Kqx(t,r).
(5.13)
Прогнозирование матрицы погрешностей вектора состояния 93
|олее просто эту же формулу можно вывести другим способом —
|ове тождества
(
- на oc-
t
\ dKx(t,r)/dt = 5|м'\^Sx(t)-Sx(<rfj| dt-М
(r)rl
dt v ’
.(5.14)
g результате получим
8Кх (t,r)/dt =М + 5(У)-<7 (/)]■£* (г)Г| =
= A(t)-Kx{t,T) + B(t)-Kqx{t,T).
i
(5.15)
)
Аналогично строится выражение для второй частной производной
т
| дкЛ(’т)/дт=кЛ(’т)-А(т)т +кЛ1’т)-в(т)т ■
(5.16)
Достроим дифференциальное уравнение для матричной функции взаим¬
ной корреляции Кщ (/,г) = М^Sx(t)-q(z)r j (при фиксированном произ¬
вольном т). Действуя так же, как при выводе формулы (5.15), получим
dKxq{t’T)/dt=M {[л(/М*(/)+s(0^(0]-^(7')r) =
=А({) ■ т)+в(0 ■ кч (*•■т)-
(5.17)
Для частного случая при t = т дифференциальное уравнение для корреляци¬
онной матрицы погрешностей вектора состояния Kx(t) = Kx(t,t) может
быть построено на основе частных производных (1.13), (1.16) и соотношения
dKx{t)ldt = [dKx(t,T)ldt\_t +[dKx{t,T)/dT\_t. (5.18)
В результате получим
dKx (,t)/dt = A(t)-Kx(t) + Kx (/) • A{t)T +
+ Щ-кчх{^)+кщ(^)-в(1)т.
(5.19)
Здесь в соответствии с выражением (5.11) матрицы взаимной корреляции
равны:
I
Kx,{t,t) = U(t,t0)-Kxq(t0,t) + \u(t^)-B^)-Kq(^t)-d^ (5.20)
94
Раздел 5
Kv ('> ■0 = кхд(,Г,.?)г = Kljx (t,.(0) ■.С/ (/, /0 )г +
I
+ \Kq{t^)-B^)r-U{t^)T-d^. (5.21)
'о
Таким образом, на основе общих формул (5.10) и (5.11) построено диффе¬
ренциальное уравнение (5.19) для корреляционной матрицы погрешностей
вектора состояния в произвольный момент времени. В соответствии с об¬
щей исходной формулой (5.10) решение уравнения (5.19) имеет вид (5.9).
Комментарий. В случае, когда случайный процесс q(t) является белым
шумом и его автокорреляционная функция имеет вид (5.4) (как в фильтре
Калмана), выражения (5.20) и (5.21) могут быть упрощены. Во-первых,
при t*t0 функции взаимной корреляции Кщ (t0,t) = К (t,t0)T = 0 .
Во-вторых, имеется возможность упрощения входящих в (5.20) и
(5.21) интегралов. Она основана на том, что в первом из них £ -t < 0,
а во втором £, -1> 0 . Поэтому, используя свойство интеграла
а 0 а
j f(v)-<5(ri)-d77=l f(rj)■ §{?])■ dp f {г]) -S{ij)-dij = /(0)• 1,
-a -a 0
(при a > 0), (5.22)
содержащего 5-функцию, сумма двух последних слагаемых выраже¬
ния (5.19) принимает вид
B{t)-Kjt,t) + K4(t,t)-B(t)T =B(t)-R(t)-B(t)T. (5.23)
В результате уравнение (5.19) упрощается:
dKx (t)/dt = A(t) ■ Кх (t) + Кх (t) ■ A(t)T + B(t) ■ R(t) ■ B(t)T . (5.24)
Именно это уравнение и его решение в форме (5.7) используются в
фильтре Калмана для прогнозирования корреляционной матрицы.
Матричное уравнение (5.19) эквивалентно системе из п х (п + 1)/2
обыкновенных дифференциальных уравнений. При заданных начальных
условиях Kx(t0) и К (t0,t) = К (1,10)Г его решение является единствен¬
ным. Поэтому функция Kr(t), построенная в результате интегрирования
уравнения (5.19), обеспечивает для любого момента времени t возмож¬
ность правильного определения корреляционной матрицы погрешностей
Прогнозирование матрицы погрешностей вектора состояния
95
вектора состояния. Последнее утверждение может показаться тривиаль¬
ным. Однако, это не совсем так.
Покажем на конкретном примере, что применение решения (5.9) без
учета матриц взаимной корреляции погрешностей вектора состояния
(Кхд (t0,t) = Кqti (t,t0)? ) может приводить к неправильным результатам.
В этом случае решение (5.9) принимает вид
Kx(t) = U(t,t0)-P0 {0-U(t,t0)T +
I t
+ \\u{t^)-B(^)-Kq(^r1).B{r1)T-U(t,Tj)T .d$-dTj. (5.25)
Применим это решение для прогнозирования корреляционной матрицы на
момент времени t и обратно в точку t0. При прогнозе из точки t в исход¬
ную точку t0 значение корреляционной матрицы будет равно
К,
(t0) = u(t0,ty[u(t,t0yp^-u(t,t0)T +
t t
+
U) to
fo 'о
]]U(t0,Z)-B(Z)-K4(4,4yB(n)T-U(t0,n)T -dt-dn. (5.26)
+
1 I
Используя известные свойства переходной матрицы
= (5.27)
U = Е (5.28)
и возможность замены в последнем слагаемом порядка интегрирования на
обратный, выражение (5.26) можно упростить. Оно принимает вид
K{h) = P^+2]\u{t^)-B^)-Kq(^r1yB(T1)T-Uy^)7-d^-d^. (5.29)
(0 *0
Очевидно, что это значение отличается от исходного значения % ■ Таким
образом, решение (5.25) не является достаточно корректным. Оно не позво¬
ляет получить достоверную оценку корреляционной матрицы при различ¬
ных режимах прогнозирования. Этот недостаток является следствием пре¬
небрежения матрицами взаимной корреляции Кщ (;0, ^). Напомним, что
Именно решение вида (5.25) используется в упомянутой выше статье [5].
96
Раздел 5
Комментарий. Изложенный выше анализ упрощенной формулы
(5.25) справедлив и для случая, когда случайный процесс q[t) явля¬
ется белым шумом и его автокорреляционная функция имеет вид (5.4)
(как в фильтре Калмана). Все дело в том, что двойной интеграл в вы¬
ражении (5.25) всегда является положительно определенным. Поэто¬
му и при прогнозе вперед, и при прогнозе назад диагональные компо¬
ненты корреляционной матрицы всегда увеличиваются.
Простейший пример учета цветного шума
Рассмотрим простой пример, который является иллюстрацией изло¬
женной выше теории. Вместо матричного уравнения (5.1) рассмотрим
скалярное уравнение, которое следует из (1.1) при A(t) = 0 и B{t) =b:
Для этого дифференциального уравнения фундаментальная матрица ре¬
шений £/(/,/„) имеет простейший вид: U(t,t0}= 1. Примем, что корреля¬
ционная функция случайного процесса (1.3) имеет вид
(5.30)
(5.31)
где
(3.32)
0, | £-фД.
Эта корреляционная функция представлена на рисунках 5.1 и 5.2.
1 /
/\
\
\
\
\
\.
-Л
о
д
Рис. 5.1. Вид корреляционной функции
Прогнозирование матрицы погрешностей вектора состояния
97
С учетом изложенных допущений приведенные выше формулы (5.9)
и (5.11) для прогнозирования корреляционной матрицы погрешностей
Kx{t) и функции взаимной корреляции Kxq (t,Tj) принимают вид
кх (0 = (0 = о? (О + 2 }КЩ ,ч)-dT] + b2-a2q-\\kq (£,?]) d£-dr],
'О *010
(5.33)
Kxq (t,v) = Kxq (t0,n) + b • a2 ■ Jkq (In)• d£ . (5.34)
98
Раздел 5
Выполним прогноз дисперсии погрешностей (5.33) из точки t0 в точку г
двумя способами: непосредственно в точку ( ис применением промежу¬
точной точки в момент времени ?„</,<?. В обоих случаях используются
следующие начальные условия:
-Л2(г0) = 0, Kxv(t0,Jj) = O.
(5.35)
Для первого случая (при непосредственном прогнозе из точки t0 в точку
t) получим следующее значение дисперсии погрешностей на момент про¬
гноза:
'\t) = b2 ■a2q'\\kq(^,T])-d^-di1 = b2
1о ‘о
[ {о
з-д
A- t-L —А
t - (д > А.
(5.36)
Вычисление интеграла (5.36) при r = t-t0>& сводится к вычислению
объема пространства под поверхностью, представленной на рис. 5.2 и
имеющей форму двускатной крыши.
Область изменения аргументов при вычислении интеграла представ¬
лена также на рис. 5.3. Она обозначена как область А.
Рис. 5.3. Область значений аргументов при вычислении интеграла
Прогнозирование матрицы погрешностей вектора состояния
99
Очевидно, что объем пространства под «крышей» в области А равен:
УА=УА+аЫ1-2-Уа=А-т-2.^А2 = А^г-и^. (5.37)
Естественно, что этот результат совпадает с (5.36).
Перейдем к прогнозу с применением промежуточной точки. При началь¬
ных условиях в точке формула (5.33) принимает вид
e2At) = crl{t\) + 2-b'\Kx4{t^rl)-dil + b2-crl-Wk^^-dZ-dri . (5.38)
'i 'i 'i
Построим выражение для функции взаимной корреляции Kxq(t\,r])
при т] > . Для этого используется формула (5.34). Графики подынте¬
грального выражения при различных значениях аргумента г] схематично
представлены на рис. 5.4. Интеграл вычисляется в области изменения ар¬
гументов Т}> , t0 < £ < tx.
100
Раздел 5
В результате вычисления интеграла получим:
КЛ1^Г<) = Ь'С
0.5-
(/, +А-?])2
А ’ t^<T]<t^+A, (5.39)
0, т] > t] + А.
Максимальное значение этой функции достигается в точке г/ = /, и равно
М'1-0 = ^.°.5-А. (5.40)
Рассмотрим теперь все три слагаемых выражения (5.38). Первое из них
вычисляется по выражению (5.36):
a2x(t\) = b2 •ег;-А-^1 -/0--Uj, А. (5.41)
Вычисление второго слагаемого (при / > /, + А ) приводит к результату
2-b'\Kxq(ti,i1ydr1=b1-(J14A--A1. (5.42)
Обратим внимание на то, что эта величина тем больше, чем больше ин¬
тервал корреляции (А2), т. е., чем больше цветной шум отличается от бе¬
лого шума.
Наконец вычисление третьего слагаемого по формуле (1.76) при
/0 = /, приводит к результату
1)2■\\k4(Z’Tl)-d£-dri = b2 ■°2Ч-Ь \ t~t,--А |.
'1 <1
1
(5.43)
Суммирование значение упомянутых трех слагаемых приводит к значе¬
нию дисперсии погрешностей прогноза при использовании промежуточ¬
ной точки. Оно равно:
а
х(0 =1)2
= b2 -aj-А-I t-tn~ — А I.
Д-| -^-Aj + ^-A2 + A-I t-t,-^A
1
(5.44)
Прогнозирование матрицы погрешностей вектора состояния 101
{(ак и следовало ожидать, этот результат совпадет с результатами прогно¬
зирования дисперсии по формуле (5.36) при t > t0 + Д , т. е. без применения
промежуточной точки.
Комментарий. Сравним результат прогноза (1.84) с соответствующим
результатом для случая, когда шум q(t) является белым и имеет кор¬
реляционную функцию Kq[r = 4-Tj)while (г). Следует иметь в
виду, что для белого шума площадь подынтегральной функции
со
Sq=\Kq(r)-dr (5.45)
—ос
равна а1. Для этих условий результат прогноза дисперсии погрешно¬
стей имеет вид
°2AtL,le=b2-Sq.(t-t0). (5.46)
Для рассматриваемого цветного шума площадь (5.45) рана ег^-Д.
Подставим это значение в выражение (5.44) вместо множителя перед
скобкой. Получим
<7Х2(0 = &2Л^-*0“Л)- (5’47)
Из сравнения оценок (5.46) и (5.47) очевидно, что при малых значе¬
ниях интервала корреляции, т. е. при t-t0>> Д эти оценки практиче¬
ски совпадают. И наоборот, различия оценок (5.46) и (5.47) тем боль¬
ше, чем больше интервал корреляции. Корректность решения (5.47)
при использовании промежуточной точки достигается на основе уче¬
та матрицы взаимной корреляции К , влияние которой тем
больше, тем больше интервал корреляции Д .
Итак, мы показали, что учет матричных функций взаимной корреля¬
ции Kxq(t0,t) = Kqx(t,t0)T при прогнозировании корреляционной матрицы
погрешностей вектора состояния обеспечивает корректное выполнение
прогнозов с использованием промежуточной точки. Этот результат схема¬
тично представлен на рис. 5.5.
102 Раздел 5
Рис. 5.5. Прогнозы с применением промежуточной точки
3. Эпизод из истории (начало 70-х)
Руководитель проекта: «Наши сотрудники И. И. Иванов, П. П. Петров
и С. С. Сидоров разработали алгоритм и программу для оценки погреш¬
ностей прогнозирования движения спутников. Ес название — Стандарт¬
ный Блок ОШибок (СБОШ). Алгоритм и программа отлажены, испытаны
и успешно работают в автоматизированной системе обработки информа¬
ции. Результаты работы алгоритма и программы удовлетворяют необхо¬
димым требованиям, а именно, достигнуто соответствие реальных и рас¬
четных статистических характеристик погрешностей прогнозирования
движения».
Руководитель института: «Очень хорошо. Подготовьте предложения
по поощрению сотрудников. Но хочу заметить, что название программы
является не совсем удачным. Предлагаю более подходящее название: Уни¬
версальный Единый Блок ОШибок».
Выводы
1. Эволюция погрешностей вектора состояния при прогнозировании
описывается системой неоднородных линейных дифференциальных
уравнений, в которых возмущение («цветной» шум системы) прини¬
мается гауссовым случайным процессом с известными статистиче¬
скими характеристиками. Важным является то, что этот шум сущест¬
венно отличается от белого шума, т. с. имеется корреляция значений
шума в разные моменты времени.
Прогнозирование матрицы погрешностей вектора состояния 103
2. Построена зависимость для определения корреляционной матрицы
погрешностей вектора состояния в произвольный момент времени.
Исходными данными являются: автокорреляционная функция шума
системы, корреляционная матрица погрешностей вектора состояния в
начальный момент времени и матрица взаимной корреляции погреш¬
ностей вектора состояния в начальный момент времени и шума сис¬
темы в произвольный момент времени.
3. При прогнозировании движения спутника возникает взаимная корре¬
ляция погрешностей вектора состояния и значений шума в разные
моменты времени. Поэтому для обеспечения корректного прогнози¬
рования корреляционной матрицы погрешностей вектора состояния
необходимо учитывать полный набор исходных данных, перечислен¬
ный в п. 2. Выполнение прогнозирования корреляционной матрицы
погрешностей без учета матриц взаимной корреляции погрешностей
вектора состояния и шума приводит к неправильным результатам.
Литература
1. А. И. Назаренко, JI. Г. Маркова. Методы определения и прогнозирования ор¬
бит ИСЗ при наличии погрешностей в математическом описании движения.
Сб. Прикладные задачи космической баллистики. М.: Наука, 1973, с.с. 36-67.
2. В. Д. Анисимов и др. Прогнозирование и определение орбит искусственных
спутников Земли с учетом вариаций атмосферного торможения. Сб. Опреде¬
ление движения космических аппаратов. М.: Наука, 1975.
3. А. И. Назаренко и Б. С. Скребушсвский. Эволюция и устойчивость спутнико¬
вых систем. М.: Машиностроение, 1981.
4. R. Е. Kalman. New Methods in Wiener Filtering Theory, Proceedings of the
First Symposium on Engineering Applications of Random Function Theory and
Probability, edited by J. L. Bogdanoff and F. Kozin, John Wiley & Sons, New
York, 1963.
5. J. R. Wright. Sequential Orbit Determination with Auto-Correlated Gravity Model¬
ing Errors, AIAA, Journal of Guidance and Control, Vol 4, № 2, May-June 1981,
page 304.
6. J. R. Wright et al. Orbit gravity error covariance, AAS 08-157.
7. J. R. Wright et al. Orbit covariance inner integrals with polynomials, AAS 08-161
8. W. M. Kaula. Statistical and Harmonic Analysis of Gravity, Journal of Geophysi¬
cal Research, vol. 64, Dec. 1959, pp. 2411, 2412, 2418.
9. R. H. Gersten, R. C. Gore, N. S. Hall. Statistical Properties of Orbit Perturbations
Induced by the Earth’s Anomalous Gravity, Journal of Spacecraft, vol. 4., Sep.,
1967, p. 1150.
10. A. 1. Nazarenko. Determination and Prediction of Satellite Motion at the End ofthe
Lifetime. International Workshop on Salyut-7/Kosmos-l686 Reentry, ESOC,
Darmstadt (G), 9 April 1991.
104
Раздел 5
11. A.I. Nazarenko. Determination and Prediction of Orbits with Due Account of Djs.
turbances as a “Color” Noise. AAS/AIAA Space Flight Mechanics Meeting. Monte¬
rey, CA, February 1998. AAS 98-191.
12. A. I. Nazarenko, V. S. Yurasov, К. T. Alfiicnd, P. J. Cefola. Optimal Measurement
Filtering and Motion Prediction Taking Into Account the Atmospheric Perturba¬
tions, AAS/AIAA Conference, Mackinac, Aug. 2007, Paper AAS 07-363.
13. A. 1. Nazarenko. Accuracy of Determination and Prediction Orbits in LEO. Esti¬
mation Errors Depending on Accuracy and Amount of Measurements, Seventh
US/Russian Space Surveillance Workshop, Monterey, October-November 2007.
Раздел 6
Статистические характеристики
гравитационных возмущений
спутников Земли
Введение
Среди возмущающих факторов, оказывающих влияние на движение
спутников Земли, существенное место занимает отклонение гравитацион¬
ного поля Земли от центрального. Это отклонение характеризуется воз¬
мущающей функцией
R^=U(r,<p,X)-U0, (6.1)
где и(г,ср,Л) — гравитационный потенциал Земли, U0 =^/г — Ньюто¬
новский потенциал, /л —гравитационная постоянная, r,q>,/1 —сфериче¬
ские координаты точки, соответственно радиус-вектор, широта и долгота.
Широко используется разложение гравитационного потенциала Земли по
сферическим функциям (полиномам Лежандра) вида
и(г,<р,Л) = ^\\ + ^Н^\ \спк-coskA. + dnk-sin^)-^ (sin^)i. (6.2)
г у л-2 к= О V Г ) J
Здесь R@ — средний экваториальный радиус Земли, спк, dnk — безраз¬
мерные коэффициенты, характеризующие фигуру Земли, ,Рп0 (sin<p) —
полиномы Лежандра п-то порядка, Рпк (sin^) — присоединенные функ¬
ции Лежандра. Заметим, что функции вида
п ( R 'V
X — г (с"к'cosкЯ+d"k ■sin кЯ) ■ Р"к (sin ^
к= 0\ Г J
Называются общими сферическими функциями п-го порядка. При к = О
слагаемые потенциала (6.2) называются зональными гармониками, при
106
Раздел 6
к ^ 0 — тессеральными гармониками, а при к = п — секториальными тур.
мониками.
Подробное описание представления гравитационного потенциалу
Земли в форме (6.2) и результаты исследования его свойств изложены в
большом числе публикаций, включая множество монографий. Здесь нет
необходимости приводить обзор этих публикаций. В разделе Литературу
приведены ссылки только на некоторые из первых публикаций, наиболее
известные в России и США [1-3].
Важно отметить, что за 50 лет проведения спутниковых исследова¬
ний параметры гравитационного поля Земли, которые используются в
(6.2), многократно уточнялись. Если на первых порах достоверные оцен¬
ки были получены для параметров сп0, спк, dnk с малыми значениями
индекса п (п < 6), то в настоящее время известны миллионы параметров
[4-8]. Здесь приведены ссылки на Американские публикации. В России
работы по уточнению параметров гравитационного поля также проводи¬
лись в достаточно большом объеме, однако эти результаты подробно не
публиковались. Краткую информацию об этих исследованиях можно най¬
ти в статье [9].
Из (6.1) и (6.2) легко определяются составляющие возмущающего ус¬
корения по различным направлениям, в частности, по радиусу-вектору
( Fr), параллели ( Fx ) и меридиану ( F ) (рис. 6.1):
Для сферических функций справедливы соотношения ортогональности:
(6.3)
(6.4)
I,.......
by пф j or к Ф i,
(6.6)
Статистические характеристики возмущений спутников Земли 107
И
by spere .
/ \
' COS '
кЛ
■cos(p-dX-d(p = 2n
sk -{n + k)\
(2и + 1)-(и-Л)!
Здесь St = •
by n = j,к — i
12. by k = 0 ^cos л
1, by k> 0
кЛ
(6.7)
= cos£A or sin£A. (6.8)
-Y
Рис. 6.1. Возмущающие ускорения
При проведении исследований удобно применять нормирование функ¬
ций Лежандра и коэффициентов сп0, спк, dnk. Нормирование ведется так,
чтобы соответствующий выражению (2.7) интеграл был равен 4л; т. е.
Кроме того, дополнительно накладывается условие
^t(sin(p)-(c„* -cosкЛ + 1пк -sinW) = P„* (sin^)-(c„t -cosкЛ + d^ -sinЛЯ).
(6.10)
108
Раздел 6
Эти условия выполняется при следующем нормировании:
(6.11)
2\2п+\)\п-к)\' dnk ‘
sk jn + k)\
(6.12)
Рассмотрим основные особенности гравитационного потенциала
Земли (6.2).
1. Разложение (6.2) содержит бесконечное число слагаемых. Из этого
множества известно ограниченное число слагаемых. Например, мо¬
дель EGM96 [7] содержит число параметров для значений индексов
п <360 и к <360. Такое представление гравитационного потенциала
обозначается как (360 х 360). Последняя модель EGM2008 [8] содер¬
жит все гармоники разложения (6.2) до 2160-го порядка (модель
2160 х 2160).
2. Из всех гармоник наибольшее значение имеет вторая зональная гар¬
моника (л = 2, к = 0), коэффициент при которой о имеет величину
порядка 10“3. Остальные коэффициенты имеют величину порядка 10 6
и менее.
3. При п >3 значения коэффициентов разложения в среднем медленно
уменьшаются с ростом п [3]. Рассмотрение средних значений норми¬
рованных коэффициентов п-го порядка
показывает, что эта величина достаточно хорошо приближается функцией
где С = 1.2-10-5.
4. Ошибки определения коэффициентов ~спк, dnk мало изменяются с
увеличением индекса п. По данным работы [7] среднее значение СКО
их погрешностей удовлетворяет условию
(6.13)
(6.14)
=i^7T^[CT(C'-*) + C7(^*)]<(c7'-Lx =(0.5)-КГ9. (6.15)
Для модели EGM96 на рис. 6.2 представлены все оценки величин
(6.13)-(6.15) в функции порядка гармоник п <70.
Статистические характеристики возмущений спутников Земли 109
EGM96
0.0000005 \
О
\
о Средние значения
СКО погрешностей
-- Аппроксимация
5Е-8
•оо '
со
о
5Е-9
'eeQ©eaop
5Е-10
5Е-1 "I ——
5 10 15 20 25 30 35 40 45 50 55 60 65 70
Порядок (п)
Рис. 6.2. Средние значения нормированных коэффициентов п-го порядка
и их среднеквадратических отклонений.
5. Величина возмущающих ускорений (6.3)-(6.5) быстро уменьшается
по мере увеличения индекса п, поскольку их значения обратно про¬
порциональны геоцентрическому расстоянию г в степени (п + 2). Это
обстоятельство оказывает влияние на выбор числа учитываемых гар¬
моник при прогнозировании движения спутников разных типов.
При принятии решения о числе гармоник в разложении (6.2), которые
необходимо учитывать в правых частях уравнений движения при прогно¬
зировании движения спутников, можно воспользоваться решающим пра¬
вилом 2.30, раздел № 2:
Для учитываемых гармоник. При использовании оценок (6.14) и (6.15)
оптимальный порядок учитываемых гармоник определяется из
Уравнения
(6.16)
110
Раздел 6
С =V2-<T(CJmax. (6.17)
2
^max
Отсюда следует:
п.
.0.003/
шах
)тах
(6.18)
График этой функции представлен на рис. 6.3. При использовании за¬
висимости (6.18) надо иметь в виду, что данные о точности коэффициен¬
тов разложения гравитационного потенциала в ряд, публикуемые автора¬
ми моделей, не являются достаточно достоверными.
CKO(Cnk и Dnk)max
Рис. 6.3. Оптимальный порядок учитываемых гармоник
Рассмотрим данные о точности определения коэффициентов разло¬
жения гравитационного потенциала на конкретном примере. Ниже в
табл. 6.1 представлены данные об оценках коэффициента с20.
Статистические характеристики возмущений спутников Земли
111
Таблица 6.1. Данные об оценках коэффициента с2 0 по EGM96 и EGM08.
(С2,0 )EGM9(l
(С2,° )£GW08
(C2,°)eGM0S (C2-°)eGM96
СГ(С2,° )eGM9(,
-0.4841653717Е-3
-0.4841651438Е-3
2.27Е-10
0.35Е-10
Из приведенных оценок видно, что по данным модели EGM2008 по¬
правка к значению коэффициента (с20 в 6.5 раз превысила объяв¬
ленное значение СКО погрешностей определения коэффициента с2 0 . Это
свидетельствует о том, что к приведенным на рис. 2.2 оценкам СКО по¬
грешностей надо относиться критически. Дополнительно было проведено
сравнение оценок коэффициентов ~спк, dnk по моделям 1996 и 2008 гг.
Для всех значений п и к при п< 80 вычислялись разности dcnk, ddnk со¬
ответствующих коэффициентов и их среднеквадратические значения при
различных п:
ско-~-- <б,9)
На рис. 6.4 представлены СКО разностей (6.19), а также СКО по¬
грешностей коэффициентов <тп по данным модели EGM96. Из этих дан¬
ных видно, что для всех п > 10 среднеквадратические значения поправок
(6.19) в 2.0-2.5 раза превышают соответствующие заявленные значения
СКО погрешностей модели EGM96. В случае реалистических оценок СКО
погрешностей коэффициентов они должны быть больше среднеквадрати¬
ческих значений поправок (6.19).
На практике, при прогнозировании движения КО учитывается мень¬
шее число гармоник по сравнению с рекомендациями, представленными
на рис. 6.3. Это объясняется не только отмеченными выше недостатками
оценок СКО погрешностей коэффициентов crk, dnk . Другими причинами
являются:
• Увеличение затрат машинного времени на выполнение прогнозов, ко¬
торые пропорциональны п2тах.
• Относительно малое влияние гармоник с большими значениями сте¬
пени п, особенно на движение высоких спутников.
• Влияние погрешностей других учитываемых факторов, например
торможения в атмосфере.
112
Раздел 6
о.оооооооою
0.0000000008
0.0000000006
0.0000000004
0.0000000002
0.0000000000
• Разности EGM2008;-EGM96
• • • *
•••
• •
• •
• • • • • •
• •
• •• ..
• •
• CKO разностей
] CKO EGM96 погрешностей
5 10 15 20 25 30 35 40 45 50 55 60 65 70
Порядок (п)
Рис. 6.4. Сравнение поправок к модели EGM96 с оценками СКО
Основные формулы
для сферических функций
Данные о сферических функциях изложены в большом числе публи¬
каций. Здесь мы ссылаемся на монографии Российских авторов [2, 11]. а
также на монографию [12]. Для вычисления функций Лежандра исполь¬
зуются соотношения:
/>(*)=_! —(х2-1 V,
"oV ’ 2"•«! dx"X 1
р„Лх) = ('11-х2) "^ГР'о(хУ
(6.20)
Эти формулы удобно применять при малых значениях п. Для вычис¬
лений при больших п целесообразно применять рекуррентные соот¬
ношения:
Статистические характеристики возмущений спутников Земли
113
^,0 М=■х■ р„о (4^-1,0 (4
Рп+и{х) = х-рЛх) + {п + к)^1~х1 -р»аЛх)’ (6-21)
Последняя формула является обобщением первой.
Для производных функций Лежандра справедливы следующие
формулы:
dp»Ax) _ п
j 1 2 п -i,u \ / 1
dx 1-х 1-х
^и4)-4"т4о(4
(6.22)
dpAx) (я + 4* / л («-* + !) , v
dx 1-х2 ' 1-х2 "+и' ''
В процессе дальнейшего анализа используется также т. н. теорема сложе¬
ния сферических гармоник. Это тождество имеет вид
4 (cos V) = Z I [" k,\, ■ pn,k (sin ft) • pn,k (sin <Рг) • cos к (4 - A,). (6.23)
*=(A ■(« + £)!
Здесь косинус угла между направлениями на две точки со сферическими
координатами <р^, А, и ^ задается соотношением
cos
ц/ = sinsin^x, + cos^>, -cos^2 -cos(A, -A,) (6.24)
Дисперсия гравитационных возмущений
Используя выражения (6.3)-(6.5) и обозначения
AW=7"(^y. (О-25)
fnk (4= 4* 'Coskl + Sdnk • sin А:Л., (6.26)
gnk (А) = -Scnk - sin kl + Sdnfi - cos к A , (6.27)
Cn^dnk- ЬУ n>n
114
Раздел 6
где c„k,dnk — применяемые оценки коэффициентов, запишем выражения
для погрешностей расчета соответствующих возмущающих ускорений:
Погрешности расчета возмущений (6.29)—(6.31) являются функциями
сферических координат г,<р,Л точки. Они зависят от погрешностей учи-
ционного потенциала, использующих оценки спк, dnk .
Непрерывная последовательность возмущений (6.29)—(6.31) образует
3-мерную векторную возмущающую функцию SF(t), которая является
источником погрешностей прогнозирования движения КО. Конкретная
реализация этой функции при полете КО над конкретными районами Зем¬
ли не является случайной. Однако если нас интересуют оценки возможно¬
го отклонения траектории полета от расчетной при полете над разными
районами Земли, то функцию 5F(t) можно считать случайной функцией.
Необходимое для усреднения множество элементарных событий возника¬
ет в связи с наличием области земной поверхности при ср е (-/,+/), над
которой может пролетать КО.
Примем, что среднее значение (математическое ожидание) погрешно¬
стей (6.29)—(6.31) равно 0. Тогда дисперсия этих погрешностей может
быть определена по следующим формулам:
(6.29)
(6.30)
(6.31)
тываемых параметров поля (и < и ) и от самих значений не учитываемых
параметров (п > п ). Последнее обстоятельство отражено в формулах
(6.28), где п — максимальный порядок учитываемых гармоник гравита-
а2 (г)--м (SFr f = М \Pj-pA" + l)U + 0 • Hfji • ■ Pj, -pj-
i-0 *-0
(6.32)
aj(r)=M(SFAf =M Y^Pj-p^Yi.i^-Sjrgnk' р„ ' Pnk
j-2 n--2
i-0 *-0
(6.33)
Статистические характеристики возмущений спутников Земли 115
7-2 л=2 /=0 к=0 а(Р а(Р
(6.34)
Здесь для краткости опущены аргументы при функциях p{j), /(^)>
g(2) и P(sin^). При вычислении дисперсий (6.32)-(6.34) принимается,
что плотность распределений возможных положений точки на сфере явля¬
ется равномерной (р((р,Л)~ const). Обозначим поверхность сферы еди¬
ничного радиуса как S. Очевидно, что телесный угол сферы равен 4л. По¬
этому р(ср,Л) = \/4k , и математическое ожидание функции сферических
координат можно представить следующими образом:
| | л/2 2л
М =^— |ф(г,^с>,I | Ф(г,ср,Лус1Л |-cos<p-d<p.
4 n
~л)2
(6.35)
Определим интеграл произведения функций /(Я) и g(2.) по долготе Л.
2л л 2л
J fnk W' /„ {Л)-с1Л= —(дспк ■ 8с..) J [cos(к-1)Л + cos(к + ()Л\-<1Л +
О ^ О
j 2 л
+—{^8dnk -8(1^ J [cos(A-/)A-cos(A + /)A[|-fi?A-i-
^ о
1 2,1
+—[8спк ■8dji +8dnk ■8с^) J [sin(£ -i)X + sm(k + i)X^-dX.
^ о
(6.36)
Здесь при к i все интегралы равны 0. При к = i отличающимся от 0 яв¬
ляется лишь интеграл функции cos(£-;)/l. При к = i = 0 надо учитывать,
что коэффициенты Sdk0 и 8di0 не существуют. В результате получим:
2л
\ /л ;-)•/, (/-w;-
-U0
2 к
ГГ
0, by к * i,
2л ■ 8с„0 ■ 8с/0, by k = i = 0,
(Sc*'Scji+Sd*-Sdji)> ЬУ k = i* °-
(6.37)
Этот результат можно записать более компактно, если ввести специаль¬
ную функцию, такую, что
116
Раздел 6
Sk =
(6.38)
Тогда
J лЛл)-/Ал)^л-
2, by к = О,
1, by к* О.
О, by к* i
2 ^■^(ScnkScji+SdrkSdji), by k = i. (6'39)
Такой же результат справедлив для функций g(A.):
О, by к Ф i
J gAA)-sAA),dA =
Осталось провести усреднение по широте. На основе свойства ортого¬
нальности полиномов Лежандра справедливо равенство
j
J рпк (sin <р) • Pji (sin <р) ■ d (sin <р) =
О, by пф j
2-(n + A:)!
(2n + l)(n-A:)!’
by n = j
(6.41)
Для функций широты, входящих в выражения (2.33) и (2.34), справедливы
аналогичные соотношения:
j
j (sin^)-/*, (sin 49)
d(sin<p)
cos (p
0, by пф j,
2-{n + &)!
k-(n-k)!
, by n = j.
(6.42)
J
dPnk (sin <p) dP^'mcp)
dcp
d(p
0, by пФ j,
d(sm<p) = <
Ап + к)\
(п-к)\
2п(п + \) 7
2и +1
, by п
(6.43)
Учитывая общее выражение (6.35), подставим интегралы (6.39) и (6.40) в
(6.32). Получим:
Статистические характеристики возмущений спутников Земли
117
для дальнейших упрощений целесообразно перейти к нормированным
коэффициентам, используя формулу (6.12). Результат замены:
^И = (4] ■£(—] -(« + 1)21(^+<Ч*)- (6.45)
\Г J n=2V r J к= о
На основе приведенных выше интегралов аналогично упрощаются фор¬
мулы (6.33), (6.34)) для дисперсии возмущений по долготе и широте:
= •£(—1 -(2« + l)t,k\5clk+5dlk). (6.46)
L VГ J л=2 V Г ) k= 0
2n(n + \)
2n + \
(<*£+&»£)> (6-47)
Зависимости (6.45)-(6.47) позволяют рассчитать дисперсии компо¬
нентов вектора случайных возмущений как функцию геоцентрического
расстояния г. При этом величины 5с пк и 5dnk выбираются по-разному, с
учетом используемых параметров поля в алгоритме прогнозирования.
Здесь возможны два основных варианта.
1. В алгоритме прогнозирования учитываются гармоники относительно
невысокого порядка п< п . Тогда при п < п в качестве величин 5спк
и 5dnk применяются СКО соответствующих коэффициентов, а при
п > п — сами значения коэффициентов ~спк и dnk . При суммировании
достаточно учесть не очень большое число слагаемых (итах «30-40).
2. В алгоритме прогнозирования учитываются гармоники высокого по¬
рядка п < п . Тогда может оказаться, что при п > п число достоверно
известных слагаемых невелико, и для получения приемлемых по точ¬
ности оценок необходимо учесть члены более высокого порядка, чем
лтах «30-40. В этом случае можно воспользоваться известной ап¬
проксимацией (6.14) коэффициентов разложения гравитационного
потенциала и принять:
(‘•W-l (6-48)
118
Раздел 6
При определении 3-мерной квадратной корреляционной матрицы К
возникает необходимость определения недиагональных компонентов ->той
матрицы. На основе применения изложенной выше методики можно по¬
казать, что все нсдиагональные компоненты матрицы Кд равны 0. Таким
образом
0
0
0
Чг)
0
0
0
а1{г)
Изложенные в данном разделе результаты были опубликованы в
1981 г. в книге [13].
Автокорреляционные функции
в связанной с Землей системе координат
Рассмотрим две точки со сферическими координатами (rv<px,/1,) и
(г2,<р2,Я,). Угловое расстояние между точками удовлетворяет соотноше¬
нию (6.24). Будем определять среднее значение произведения
KM>A) = M{8Fr(rx,q>x,\)-8Fr(r2,q>2,kl)) =
= M\^iPj-Pn\n+\)\j + \)^^fjr(\)fnk(X])-prXsm(p^Pnk^m(pA.
{j-2 п-2 Ы0 *=0 J
(6.50)
Подробный вывод результата усреднения приведен в монографии [14].
Получено
Kr{>1>''2)=-M'1>''2-C0S^) =
V i \ I \ + 0 '(2и + 1)
= 2.рЛп)-рЛг2)--—Ч
■{Sc1nk+5d'-k)-PM(cosy/). (6.51)
Для круговых орбит формула (5.51) принимает вид:
Kr (r,cos^) = + ^ ^2П + --(Чк +^t)-Pn0(cosV/)-
(6.52)
Статистические характеристики возмущений спутников Земли
119
Безразмерная корреляционная функция радиальных возмущений легко
рассчитывается на основе формул (6.52) и (6.45):
При выводе и анализе выражений (6.46) и (6.47) отмечалось, что диспер¬
сии возмущений по долготе и широте мало отличаются друг от друга, и
я в два раза меньше дисперсии по радиусу. Аналогичная ситуация имеет
место и для корреляционных функций К (г,cosy/) и Кл (г, cos у/), кото¬
рые мало отличаются друг от друга, и ~ в два раза меньше корреляцион¬
ной функции по радиусу. Поэтому нормированные корреляционные функ¬
ции вида (6.53) можно принять одинаковыми для всех составляющих воз¬
мущений.
Расчеты корреляционной функции (5.53) были проведены в следую¬
щих условиях. А именно: выбрано 6 вариантов высоты круговой орбиты
(130, 270, 480, 710, 1130, 1600 км) и 5 вариантов значений СКО погрешно¬
стей коэффициентов cnk, dnk (а„= 10 ", 1010, 10 9, 10 8, 10 7). Эти оценки
использовались для выбора максимального порядка учитываемых гармо¬
ник п , значения которого представлены на рис. 6.3. При суммировании
по индексу п рассчитывалось 1000 слагаемых.
На рис. 6.5 представлены корреляционные функции (6.53) для ука¬
занных выше условий. Из этих данных видно следующее:
- во всех случаях на рассмотренном интервале корреляция довольно
быстро приближается к 0;
- с ростом высоты спутника интервал корреляции увеличивается от
единиц до десятков градусов;
- с ростом оценок ап интервал корреляции сначала практически не ме¬
няется, а затем растет.
В предыдущем разделе отмечалось, что при оценке погрешностей
прогноза существенную роль играет площадь подынтегральной функции
вида (5.45). В связи с этим для всех рассмотренных вариантов были вы¬
числены интегралы
Для максимального значения угла у/ использовалась оценка у/тт =45°.
Результаты расчетов представлены на рис. 6.6.
(6.53)
(6.54)
Corr(psi) Corr(psi)
120
Раздел 6
а) <Jn= 10 ",
иЛ \ п =950
1, V \
Sigma n=1.0 Е-11
' \ \ \ \
1 \' \ \
,Ц\ \ \
I \ \ \ \
— h—130 км
--- h=270 км
И \ \ \
\ \ \ \
h-480 км
h=710 км
h=1130 км
1 1 ^
h=1600 км
' \ \ \
- “
0 5 10 15 20 25 30 35 40 45
psi, градусы
psi, градусы
Corr(psi) Corr(psi)
Статистические характеристики возмущений спутников Земли 121
psi, градусы
psi, градусы
Рис. 6.5. Корреляционные функции kt. (r,cos^) при различных высотах спутника и
*
Разной точности определения коэффициентов гравитационного поля. Оценки п
рассчитывались по формуле (6.18) в зависимости от значения оп
Интегралы [Corr(psi) dpsi], градусы
122
Раздел 6
psi, градусы
Окончание рис. 6.5
Sigma п
Рис. 6.6. Значения интеграла (6.54) в различных условиях
Статистические характеристики возмущений спутников Земли 123
По представленным результатам расчетов можно сделать следующие
выводы:
• Значения интеграла (6.54) меняются в пределах от =1 ° до 16°.
. Наиболее сильное влияние на интеграл оказывает высота спутника: с
ее ростом величина интеграла увеличивается.
• На интервале значений СКО погрешностей коэффициентов (стл) от
10"11 до 10”9 величина интеграла практически не меняется. Затем при
росте значений ап он также растет. Это происходит при уменьшении
числа учитываемых членов разложения потенциала (п ) от 95 до 30 и
менее.
• При сгп = 10“ (п =95) значения интеграла находятся в диапазоне от 1°
до 13°.
Выводы
1. Построены формулы для расчета дисперсии и автокорреляционных
функций трехмерного вектора случайных гравитационных возмуще¬
ний во вращающейся, связанной с Землей системе координат. Резуль¬
таты расчета зависят от погрешностей определения коэффициентов
разложения гравитационного потенциала, учитываемых при прогно¬
зировании движения спутников, а также от числа учитываемых гар¬
моник. Влияние не учтенных при прогнозировании гармоник оцени¬
вается на основе аппроксимации их среднеквадратических значений.
2. Изложенные в разделе оценки дисперсии возмущений и корреляци¬
онные функции этих возмущений являются основой дальнейшей ра¬
боты по оценке погрешностей прогнозирования движения спутников,
обусловленных влиянием не учтенных гравитационных возмущений.
3. Важной характеристикой автокорреляционных функций является
практическое обнуление корреляции при удалении от заданной точки
более чем на 10°-30°. Реальные орбиты спутников относительно Зем¬
ли редко проходят над одними и теми же подспутниковыми точками.
Это обстоятельство необходимо учитывать при переходе в инерци-
альную систему координат, в которой обычно интегрируются уравне¬
ния движения спутников.
4. СКО (ст„) погрешностей нормированных коэффициентов разложения
гравитации-онного потенциала Земли по сферическим функциям ма¬
ло изменяются с увеличением индекса п. Поэтому оценку (&„) ре¬
комендовано использовать для выбора оптимального порядка учиты¬
ваемых гармоник.
124
Раздел 6
5. Показано, что данные о точности коэффициентов разложения грави¬
тационного потенциала в ряд, публикуемые авторами моделей, не яв¬
ляются достаточно достоверными. У современных моделей поля зна¬
чение СКО погрешностей коэффициентов разложения потенциала
(Ю ) имеет порядок не лучше ~10 9. Этому значению соответст¬
вует оптимальный порядок учитываемых гармоник п = 95. На прак¬
тике в алгоритмах прогноза движения спутников обычно учитывается
меньшее число гармоник. Этим условиям соответствуют значения
СКО погрешностей в интервале от КГ9 до 10 8.
Литература
1. И. Д. Жонголович. Внешнее гравитационное поле Земли и связанные с ним
фундаментальные постоянные. Труды Института теоретической астроно¬
мии. Вып. Ill, 1952.
2. Г. Н. Дубошин. Небесная механика. Основные задачи и методы. М.: Наука,
1968.
3. W. М. Kaula. Theory of Satellite Geodesy, Blaisdell Pub, Mass., 1966.
4. Smittsonian Standard Earth III. Ed. By E. M. Gaposhkin, Cambridge SAO, 1973.
5. J. G. Marsh ct al., The GEM-T2 gravitational model, J. Geophys. Res., 95, В13,
1990.
6. Tapley et al., The JGM-3 Gravity Model, Annales Geophys., 12, Suppl., С192, 1994.
7. F. G Lemoinc et al., The Development of the Joint NASA GSFC and NIMA
Geopotential Model EGM96, NASA Goddard Space Flight Center, NASA/TP-
1998-206861, July 1998.
8. N. K. Pavlis, S. A. Holmes, S. C. Kenyon, and J. K. Factor. An Earth Gravitational
Model to Degree 2160: EGM2008, EGU General Assembly 2008, Vienna, Austria,
April 13-18, 2008.
9. В. П. Рогозин, A. H. Зуева. Совершенствование геодезического обеспечения
космической навигационной системы «ГЛОНАСС». Российская научно-
техническая конференция «Спутниковые навигационные системы и их роль к
жизни современного человека», НПО ПМ Железногорск, Октябрь 2007.
10. А. И. Назаренко. О целесообразности учета новых уточняющих факторов в
математическом описании некоторых систем. Сб. Анализ и синтез систем
автоматического управления. М.: Наука, 1968, с.с. 334-337.
11. В. Г. Демин. Движение искусственного спутника в нецентральном поле тяго¬
тения. М.: Наука, 1968.
12. Э. Маделунг. Математический аппарат физики. М. Физматгиз, 1960.
13. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. М.: Машиностроение, 1981. 285 стр.
14. А. И. Назаренко. Погрешности прогнозирования движения спутников в гра¬
витационном поле Земли. ИКИ РАН, НТД «КОСМОНИТ». Москва, 2010
225 стр.
Раздел 7
Рекуррентная фильтрация
измерений динамической системы,
подверженной влиянию возмущений
в виде цветного шума
Введение
Число известных методов определения параметров орбит по измере¬
ниям можно пересчитать по пальцам. Основные: метод наименьших квад¬
ратов (МНК) [1], метод максимального правдоподобия (ММП) [2], фильтр
Калмана (ФК) [3] и метод наименьших модулей (МНМ) [4]. Каждый из
этих методов имеет свои достоинства и недостатки.
На первом этапе космических исследований для уточнения парамет¬
ров орбит по измерениям применялся классический метод наименьших
квадратов, разработанный 200 лет назад. При характеристиках вычис¬
лительной техники того времени на одно уточнение тратилось до 1 часа
машинного времени. Это было приемлемым при малом количестве спут¬
ников, однако уже в 60-х гг. стало существенным сдерживающим обстоя¬
тельством.
По мере расширения космических исследований возникла потребность
создания менее трудоемких алгоритмов обработки измерений. Достаточно
очевидное направление совершенствования — это отказ от совместной об¬
работки измерений, характерной для МНК, и переход к последовательной
(рекуррентной) их обработке. Эта технология позволяет сэкономить не
только машинное время, но и оперативную память. Как обычно бывает,
потребности практики обусловили создание новой технологии, а именно,
фильтра Калмана [3, 5].
Рассматривается динамическая система, движение которой описыва¬
ется системой уравнений
^ = A(t)-x + B(t)-q(t), (7.1)
Здесь х — л-мерный вектор состояния, А, В — известные матрицы, q(t) —
случайное возмущение, которое не учитывается при интегрировании
126
Раздел 7
исходных уравнений (шум системы). Используется допущение, что изме¬
рения связаны с вектором состояния линейным соотношением
где /? (() — известная матрица, v(. — гауссовская случайная последова¬
тельность с нулевым математическим ожиданием и заданной ковариаци¬
онной матрицей R.
Оценка вектора состояния в момент времени по предшествую¬
щим измерениям zi=z(ti), i = -1 обозначена как хк ^ . Ставится
задача построения оценки хк^к на основе результатов предыдущего уточ¬
нения и с учетом нового измерения zk в момент времени th. При рекур¬
рентной обработке измерений искомое соотношение имеет вид
В работе [3] применяется допущение, что случайный процесс q(t) является
белым шумом с заданной ковариационной матрицей Q, т. е.
Обоснован алгоритм расчета матриц U и W, который обеспечивает мини¬
мизацию дисперсий погрешностей вектора х^к. При этом в качестве ис¬
ходных данных используется также ковариационная матрица погрешно¬
стей вектора х^к
(7.2)
**|* = U' Vi|*-i +w\zk-hk-U- ) •
(7.3)
(7.4)
Основные соотношения фильтра Калмана:
U = U{tk,tk_i) — фундаментальная матрица решений уравнения
dx/dt = A(t}-x ;
(7.6)
%-^U-Pk_¥VUT +)u{tk^)-B-Q-BT-UT{tk^)-d^- (7.7)
Фильтрация измерений системы, подверженной влиянию цветного шума 127
Pk\k=(P^+hT-R~'-h]'- (7.8)
W = P^-hTR~l. (7.9)
Таким образом, фильтр Калмана содержит два рекуррентных соотно¬
шения (7.3) и (7.8), которые при поступлении нового измерения обеспечи¬
вают уточнение вектора состояния и расчет ковариационной матрицы его
погрешностей. Уменьшение трудоемкости фильтра Калмана по сравнению
с МНК достигается за счет применения операций с матрицами меньшего
размера, а также за счет отсутствия необходимости хранения в оператив¬
ной памяти всех предшествующих измерений.
Популярность ФК обусловлена не только отмеченными достоинства¬
ми. Имеется и другое важное обстоятельство. Это единственный метод,
который учитывает тот факт, что все математические модели объектов
являются приближенными. Данный учет достигается включением случай¬
ного процесса в правую часть уравнений движения (7.1). Как результат,
получаемые оценки вектора состояния являются более реалистичными по
сравнению с оценками МНК и других методов.
Популярность ФК проявилась в том, что по материалам его примене¬
ния и исследований опубликованы тысячи статей и десятки монографий.
Здесь нет необходимости выполнить обзор этих публикаций. Обратим
внимание читателей на одну важную черту ФК, а именно, на то, что слу¬
чайный процесс в правой части уравнений (7.1) принимается белым шу¬
мом. В более общем случае, когда шум является «цветным», выражение
(7.6) будет содержать дополнительное слагаемое:
Vi=£/-iH*-.+ | £/МН(£И(£Н£. (7.Ю)
**-1
Здесь оценка шума ^0. Поэтому учет цветного шума при фильтра¬
ции измерений должен привести к повышению точности оценок. Задача
заключается в получении оценки q(^) в процессе обработки измерений.
Данная задача была решена в начале 70-х годов.
Подробное обоснование алгоритма было доложено в 1972 г. на семи¬
наре П. Е. Эльясберга в ИКИ. Затем доклад был включен им в сборник
«Прикладные задачи космической баллистики» [6].
Для нас было неожиданностью узнать, что в 1974 г. NASA организо¬
вало перевод этого доклада на английский и разместило его в своей базе
Данных (см. ниже).
128
Раздел 7
^ ' □ -
£ NASA Rnpcrt*
NASA Cwler > NASA <n*r Center
SpecAc!
Title:
Ucfwds fee detemwimg and predicting VtAaal Earth Safedrto lAf 3)|
огоне with errors present In the mathematical description or me motion
AuT>or(s)
Nazarenko, A. L Maikova, L G.
1974
Safcjtci * S-t' > Speca Sc** се»
AvefeMty Opto» * ftui
CASi* CD-ROM DVD, Pmt
SMtfltodii Type ь Теcfлn* Retort
Roter Start a *ew navgabon wac»
by selecting a ink above
Abstract
The problem or determining end predictng aes raiedory parameter^"
from the measurements under me oondHons, when me first parts ui
me integrated equalons of mobon are «AaAated appronimatel, r-
consaJered Two methods lor determining the estimates of me
trajectory parameters are construdad cn via basts of using the
criterion of rrvaomum a postenco probability. The first method is bas-eg
on concurrent analysis of the available measurements. The second
mernod Is a generaiuabon of me flhrabon algorithm of Caiman
Beussl An approach to me solution of me formulated problem Ьзод
on the introduction cf supplementary refoeabte parameters and me
expansion of the state vector is also irrresf gated
NASA center
NASA {non Center Spedhcj
Publication Dane
Apr 1,1974
Document Source
CASt
t4o Digital Version
AvalaMc
Go to Tips On Ordering
Document D
19740020179
Accession tD
74142*292
Publication informaion
Appl Probl. of Space Ba»s1cs (NASA-TT-F-15412X P 52-95. Number I
of Pages = 44
Pnce coda:
A03
Related tnforrnaiw
Trans*, into ENGLISH from me book "PrtMadnyye Zadadu
Kosmlcneskoy OallistM* Moscow. NacAa Press. 1973 p »*68
Keywords
еОЦАПОМЭ OF MOTION ORBIT CALCULATION PREDICTION
ANALYSIS TECHNIQUES; CELESTM*. UECH*N»CS; ERRORS.
TRAJECTORY ANALYSE
Notes
In *s Appl Prcei of Space Ballistics <NASA-TT-f-1S412)p 52 95 (SEE
N74-28287 17-30)
Accessibility
Undasstied; No Copyright Unlimited; PubHdy avaiabie;
Updalcd'Added to NTRS
2004-1103
Имеется ряд рутинных задач, при решении которых достигнутый
уровень точности является недостаточным и совершенствование методов
уточнения орбит по измерениям является актуальным. К ним относятся:
определение времени и места падения опасных спутников, предсказание
столкновений КА с другими объектами, эксплуатация навигационных
спутников, каталогизация мелких фрагментов космического мусора и др-
Необходимость повышения точности особенно остро появляется по отно¬
шению к объектам, подверженным влиянию торможения в атмосфере.
Учет цветного шума при фильтрации
измерений и прогнозе движения
Корреляционная функция гауссовского случайного процесса прини¬
мается известной
M[q(t)] = 0, M[q(t)-qr(T)] = Kq(t,T\. (7.11)
Фильтрация измерений системы, подверженной влиянию цветного шума 129
Используется допущение, что при t - т>А корреляция становится несуще¬
ственной, т. е. Kg(t,r) = 0 . Задача формулируется следующим образом. Для
системы, описываемой уравнением (7.1), по измерениям (7.2) и априори
известным статистическим характеристикам погрешностей измерений
найти оптимальное значение вектора состояния x(t) в произвольный мо¬
мент времени t > tk.
Оптимальным будем считать значение, доставляющее максимум апо¬
стериорному распределению /?(x(z,,...,zt). Следует отметить, что воз¬
можность и уместность постановки такой задачи связаны именно с тем
обстоятельством, что шум q(t) существует и не является белым. В против¬
ном случае прогноз шума невозможен (q(t) = 0). Тогда оптимальное зна¬
чение вектора состояния в произвольный момент времени x(t) будет од¬
нозначно определяться его оптимальным значением x(t0) в некоторый
фиксированный момент времени: x(t) = U(t,tQ)x(tl}). Для оценки x(t0)
здесь можно применить известные методы.
Для решения поставленной задачи применен подход, основанный на
последовательной обработке измерений, — аналогичный тому, что реали¬
зован в фильтре Калмана. Используется допущение, что в результате ре¬
шения задачи на (к - 1 )-м шаге (по (к - 1 )-му измерению) получены сле¬
дующие оценки
Здесь символом Zk_x обозначено множество предшествующих изме¬
рений. Далее применен Байесовский подход: находится такое х], которое
обеспечивает максимум апостериорной плотности вероятности
(7.12)
130
Раздел 7
/ I \ ( 1-7 \ P{Xj’Zk\^k-1) ,
p{xj]zl,z2,...,zk_l,zk) = p{Xj\zk) = -—^—^-y-. (7.14)
Так как знаменатель выражения (7.14) не зависит от х ., то можно офани-
читься рассмотрением только числителя. Построим плотность p(^xJ,zk \Zk .j
Для этого надо определить математическое ожидание вектора (Xj,zk) и
его ковариационную матрицу. Учтем при этом известное решение урав¬
нения (7.1), на основе которого с учетом (7.2) можно записать
Ч
xJ=u{tj>tk-i)‘**-i+ J u(tj>Z)-B{Z)-q{Z)-d%, (7.15)
'*-1
zk =hk-U(tk,tk^)-xk_x +hk J U(tk,£,)-B(£,)-q(£,)-d£ + vk. (7.16)
Напомним, что матрица U(t,tQ) удовлетворяет исходному однородному
уравнению
Для краткости будем использовать следующие обозначения
<7Л7)
д-i
Тогда выражения (7.15) и (7.16) можно записать более компактно
xj = ф, • хк-\ + Wj,k-1 ’ zk= К-ф к' xk-i + К ■ wM_, + vk. (7.18)
Из (7.18) с учетом начальных условий (7.13) и априорных статистических
погрешностей измерений (7.12) следует
Vi =m{xj lz*-i)=ф,- ■ *м*-1+ ^ * (7-19)
Фильтрация измерений системы, подверженной влиянию цветного шума 131
=Af(z*lz*-i )=VV'-
Далее, составляя разности
Zk Zk\k-
=v(**-v,)+v*’
найдем при тех же условиях, что и (7.19) и (7.20),
V. =М
= Ф -Р, Ф +
+фj \ KB'(tl_l,z)t_i.BT(zyuT(tJ,zydZ +
lk~ 1
Jk-1
j J u^sYB^yK^yB'bytf^YdS-dr,,
• фг+
**-! lk~\
M
[Zk Zk\k-\ ) ' (2к Zk\k-i )
■ ^k\k-\ 'К +Rk’
M
= M
(*/ ~*j\k-l)'(zk ~Zk\k-l)T
(xj-Vi)'(x*_V1) -hk =Kx{tj’tk)-hI =
Фу • V> • Ф[ + Фу J (V,,5)*., • *r(4)• t/r(h,4)• ^ +
\u(tJ,eyB(e)-KxqT(tt_l,e)l^de-<i>Tt+
k~)
) J и(^).в(4)-кч(4лувт(tj)-ut(t^-ds-dr,
ck-1 **-]
■hi
(7.20)
(7.21)
(7.22)
(7.23)
132
Раздел 7
На основе данных (7.19)—(7.23) рассматриваемая плотность p(xj,zk \Zk j
может быть выражена следующим образом
Axnzk\Zk ,) = С■ ехр
1
т
1
т
К L
7
<Н
1
ь->
т
<N*
1
£ м
Zk ^k\k-\
, (7.24)
где
К
L
-i
Pj\k-\
£
М
К■*/(',л)
Л7-
(7.25)
Максимизация плотности (7.24) достигается при минимизации критерия
7М=(xj - V<f 'к\х>-■V.)+b “■Vi)r 'L\z* -■v>)+
+ (Zk~ Z*|*-l ) • LT ■ (xj - Xj\k-\ ) + (Zk - ) • M ■ (zt - Z4N ).
Условие минимума критерия (7.26) имеет вид
(7.26)
dx,
= 2(x.-i.N) ^ + 2(z4-z4N) ■£ = 0. (7.27)
7=jrj|*
Из (7.27) следует выражение для искомой оценки
= -Si*-! -
(7.28)
Используя методику обращения блочных матриц [7], выразим
связь компонентов матрицы (7.25):
=-K '.L.(M-Lr-K-'.L)-',
(к • v. Лг + ^ ) = (л/ - f 1 ‘i)"1 • (7-29)
С учетом этих соотношений формула (7.28) может быть записана так
Фильтрация измерений системы, подверженной влиянию цветного шума 133
где обозначено
Pk\k=(p^+K-R?-h]' ■
(7.31)
Это выражение можно использовать и для решения задачи фильтрации
= tk), и для интерполяции (сглаживания) и для экстраполяции (прогно¬
зирования). Нетрудно заметить, что в частном случае, когда tj = tk, матри¬
ца взаимной корреляции Кх (tntk i совпадает с матрицей Pk^kl и выра¬
жение (7.30) упрощается
*к\к *к\к-\ + ^к\к ‘ К '(Zi Zi|*-l)’ (7.32)
приобретая вид известного уравнения (7.8) дискретного фильтра Калмана.
Отличительной особенностью применения выражений (7.30) и
(7.32) для решения задачи фильтрации в данном случае является то, что
для прогнозирования корреляционной матрицы вектора состояния в точ¬
ку ^используется выражение более общего вида (7.21), чем в фильтре
Калмана. Оно учитывает наличие корреляции между оценкой вектора
состояния и шумом (матрицу Kxq (tk,t)k]). Заметим, что уравнения (7.20)
и (7.31) не исчерпывают решение задачи фильтрации и прогноза. Оста¬
лось еще построить апостериорные оценки функций q{t)k, Kxlj(tk,t)k и
■
Составим дифференциальное уравнение для оценки х^к. Для этого
продифференцируем слагаемые правой части выражения (7.30) по tj.
В соответствии с (7.17) и (7.19) производная первого слагаемого равна
_ d<bj dwj,k-i\k-i _ / Ч ,
dtj dtj *-1|M dtj 'H'J ф; *м*-*+
+A(*j) • Vin + b(*j ) L = A(h) ’ V> +B(fi) ' ^ L • (733)
Чтобы найти производную второго слагаемого, продифференцируем сна¬
чала все слагаемые, входящие в выражение (7.23) матричной функции
Mv**)*-rHMeeM:
134
Раздел 7
d<f> , ,
-‘-У*”
J lk~\
1к-1
J J и(^4)-в{4Укя{4,л\_гвт{л).ит{^у44^ =
J 1к-\1к-А
4 lk
= 4*4 J J u{tJ,t\B($)-Kq($,r1)k i.BT(1yUT(tk,T1).d$-dT1 +
‘k-A lk-1
+В4У J КЛtj,v)k_x-BT{v)-uT{tk,V)-dV. (7.34)
Используя (7.34) и (7.23), получим
dKxbidk)k-\ i \ i \
л, ‘Л^)М‘Л),-,*
'*-1
Теперь на основе (7.35), (7.33), (7.30) и с учетом обозначения
КЛ*\-Г 1 U(t^)-B{v)-Kq{r1dj)^dr1 (7.36)
lk~l
можем определить производную оценки (7.30). Окончательно получим
dx
(7.35)
—— = A(t \-х ,k +
dt, yjJ /|;
+виЛАШЛ +1Ф,.-Klt„_,jA,._,+K H.) fx
xflj.V'VA7 •*''•(**-%-,)) =
= A{tj)-xj\k+B{tJ)-q{tj)k. (7.37)
Фильтрация измерений системы, подверженной влиянию цветного шума 135
Очевидно, что здесь выражение в фигурных скобках есть апостериорная
оценка шума, которая учитывает вклад последнего измерения в оценку
Шума q(t)k .
Прежде, чем перейти к непосредственному построению апостери¬
орных значений функций q(t)k, Kxq(tk,t)k и Kq (?, г) , приведем некото¬
рые вспомогательные формулы, которые следуют из приведенных выше
соотношений.
Наконец, с учетом формул (7.38), а также приведенных выше соотноше¬
ний (7.21) и (7.22) мы может построить выражения для апостериорных
функций q(t)k, Kxq(tk,t)k и Kq(t,r)k . После ряда не очень сложных вы¬
кладок получим:
Таким образом, поставленная задача решена. Разработано пять ре¬
куррентных соотношений (7.30), (7.31), (7.39), (7.40) и (7.41), которые по¬
зволяют на основе исходных данных (7.13) обработать последнее измере¬
ние и подготовить необходимые исходные данные для выполнения сле¬
дующего шага по обработке измерений. При этом обеспечивается макси¬
мально возможная точность полученных оценок.
хк “**|* =(**-Vi)-P*I* '(Z* “ V>)’
= фг +М0*-,,
м (7-38)
(7.41)
136
Раздел 7
Анализ разработанного алгоритма
Рекуррентные соотношения (7.30) и (7.31) имеют традиционную
форму фильтра Калмана. Три соотношения (7.39)—(7.41) являются новы¬
ми. Их характерная и принципиальная особенность состоит в том, что
это — функциональные соотношения. Именно это обстоятельство
обеспечивает возможность рекуррентной фильтрации измерений дина¬
мической системы, подверженной влиянию возмущений в виде цветно¬
го шума.
На каждом шаге три апостериорные функции q(t)k , Кщ (tk ,/)4 и
К (t,r}k запоминаются на дискретной сетке в интервале значений аргу¬
ментов {tk,tk +Л). Нет необходимости запоминать эти функции на интер¬
вале времени t>tk+A, поскольку в этом случае q(t) = 0 и Kxti[tk,t)k = 0,
а третья функция совпадает с ее заданным априорным видом Кц (/,г)о .
Подробный анализ этого метода обработки измерений изложен в
упомянутой выше статье [6]. В ней исследуется точность полученной
оценки (7.30).
Оценка (7.30) выражает связь векторов (х^к -х^к 1) и (z4 - f4|4 ,). С уче¬
том этой связи, а также тождества М = yhk ■ Рк^к , • /г4 + Rk j + il ■ К 1 • L
выражение для функционала (7.26) упрощается:
С учетом связи функционала (7.42) с распределениями (7.14) и (7.23), вы¬
ражение (7.14) принимает вид
Таким образом, оценка (3.30) является апостериорным математическим
ожиданием вектора х ., т. е.
I (Xj) = (xj - X#) -K-(xj- xj]k) + (zk - z1|JM )7 X
(7.42)
P(xi lZ*) = C ’ exp{-{(x; - xj]k J ' K{xi ~ xj\к)} ' (7'43)
(7.44)
Фильтрация измерений системы, подверженной влиянию цветного шума 137
а К 1 — его корреляционной матрицей. При = х^к значение функцио¬
нала (7.42) достигает минимума
Очевидно, что всякая оценка вектора состояния, отличающаяся от (7.30),
будет иметь большую дисперсию. Действительно, при х’ Ф х^к из соот-
следует, что диагональные члены этой матрицы строго больше соответст¬
вующих диагональных членов матрицы К 1. Это свидетельствует о том,
что оценка (7.30) минимизирует также дисперсию погрешностей вектора
состояния при прогнозе движения динамической системы.
Изложенный выше алгоритм рекуррентной фильтрации измерений
был реализован в Российском центре контроля космического пространства
в начале 70-х годов. Он применялся для ведения каталога спутников, под¬
верженных влиянию торможения в атмосфере. Вид принятой априорной
корреляционной функции атмосферного шума Кц (/, г)() приведен в разде¬
ле 5 на рис. 5.2. Некоторые данные о применения этого алгоритма для оп¬
ределения времени падения орбитального комплекса Салют-7/Космос-
1786 в феврале 1991 г. опубликованы в статье [9]. В этой статье показано,
что применение рассмотренного метода позволило более корректно по
сравнению с другими алгоритмами отследить вариации баллистического
коэффициента спутника в результате изменения его ориентации в течение
последних суток перед падением.
Некоторые результаты исследования алгоритма на модели опублико¬
ваны в статьях [10-12]. Приведем модельные данные об изменении корре¬
ляционной функции атмосферного шума в результате фильтрации измере¬
ний. На рис. 7.1 представлено для примера трехмерное изображение апо¬
стериорной корреляционной функции Kq{t,z^k . В соответствие с уравне¬
нием (7.40) эта функция в процессе фильтрации деформируется по срав¬
нению с априорной функцией Kq (t,z)g. Ее значения при малых интерва¬
лах прогноза уменьшаются, а при интервалах более А = 50 — сохраняют¬
ся. В момент уточнения (в установившемся режиме фильтрации) значение
функции составило Kq (0,0)^ = 0.20.
I
) (7'45)
ношения
(Г) 1 =М (Xj-Xj)• (xj -Xjf =к 1 + (iм -х])■ (х,к -х) J
138
Раздел 7
Последнее измерение
Рис. 7.1. Апостериорная корреляционная функция К (/,г)
Комментарий. Для решения рассматриваемой задачи существуют и
другие подходы. Один из них [13] основан на построении т. и. фор¬
мирующих фильтров, которые при входном сигнале типа белого шума
формируют случайные процессы с заданными корреляционными
функциями. Пусть, например, для случайного процесса q(t) удастся
построить уравнение вида
МО
dt
- = Arq(t) + Brco(t),
(7.46)
(где co(t) — белый шум) такое, что решение дифференциального
уравнения (7.46) имеет заданную корреляционную функцию К (f,r)0 •
Тогда путем расширения вектора состояния уТ (/) = ||.х(/), #(*)|, Д;,я
которого уравнения движения имеют вид
dy
dt
A(t) B(t)
0
о 4(f)
■у +
40
со
(0.
задача сводится к рассмотренной в фильтре Калмана.
фильтрация измерений системы, подверженной влиянию цветного шума 139
Недостатки применения формирующего фильтра связаны не
только с усложнением алгоритма за счет расширения вектора состоя¬
ния, но и с трудностью построения формирующих фильтров для не¬
стационарных случайных процессов. Эти недостатки усугубляются в
том случае, когда исходные статистические характеристики процесса
q{t) априори плохо известны и их приходится уточнять в процессе
обработки реальной информации. Адаптивное уточнение корреляци¬
онной функции приводит к необходимости замены одного форми¬
рующего фильтра на другой, т. е. к перестройке всего алгоритма
фильтрации. Рассмотренный выше рекуррентный алгоритм фильтра¬
ции не имеет этого недостатка. В нем уточненная корреляционная
функция просто вводится в память на место старой. Примером имен¬
но такой ситуации является история изучения статистических харак¬
теристик атмосферных возмущений [14].
Выводы
1. Актуальность создания рекуррентных алгоритмов обработки измере¬
ний была обусловлена низкими техническими характеристиками вы¬
числительной техники 60-х и 70-х годов. Их применение обеспечива¬
ло экономию машинного времени и памяти.
2. Построен рекуррентный алгоритм фильтрации измерений динамиче¬
ской системы, подверженных влиянию возмущений в виде цветного
шума. Принципиальное отличие этого алгоритма от фильтра Калмана
заключается в добавлении трех функциональных рекуррентных соот¬
ношений. Их реализация на ЭВМ связана с необходимостью запоми¬
нания соответствующих функций на некоторой сетке аргументов.
3. Работоспособность и достоинства алгоритма подтверждены результа¬
тами математического моделирования, а также опытом его примене¬
ния для уточнения и прогнозировании орбит по реальной измери¬
тельной информации.
4. К концу 20-го века в результате прорывного улучшения характери¬
стик вычислительной техники область применения рекуррентных ал¬
горитмов существенно уменьшилась.
Литература
1. Ю. В. Линник. Метод наименьших квадратов и основы математико-стати¬
стической теории обработки наблюдений. М. Физматгиз, 1962. 300 с.
2. R. A. Fisher, Theory of statistical estimation. Proc. Cambridge Philos. Soc. 22,
1925, p.p. 700-725.
140
Раздел 7
3. R. Е. Kalman. New Approach to Linear Filtering and Prediction Problems. Trans
ASME, J. Basic Engineering, March 1960.
4. В. И. Мудров, В. Jl. Кушко. Методы обработки измерений. М. Советское ра.
дио, 1976, 192 с.
5. Р. Ли. Оптимальные оценки, определение характеристик и управление. VI
Мир, 1966, 176 с.
6. А. И. Назаренко, Л. Г. Маркова. Методы определения и прогнозирования ор¬
бит ИСЗ при наличии погрешностей в математическом описании движения //
Прикладные задачи космической баллистики: сборник. М.: Наука, 1973
С. 36-67.
7. А. И. Назаренко, Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. М.: Машиностроение, 1981. 284 с.
8. Ф. Р. Гантмахер. Теория матриц. М.: Наука, 1967.
9. A. I. Nazarenko. Determination and prediction of the satellite motion at the end of
the lifetime. Proc. International Workshop on Salyut-7/Kosmos-1686 reentry,
ESOC, Darmstadt, 9 April 1991, p.p. 35^-3.
10. В. Д. Анисимов и др. Прогнозирование и определение орбит ИСЗ с учетом
флуктуаций атмосферного сопротивления. В книге «Определение движения
космических аппаратов». М. Наука, 1976.
11. А. И. Назаренко. Априорная и апостериорная оценка ошибок прогнозирова¬
ния движения низковысотных ИСЗ. Космические исследования, вып. 4, 1991.
12. Nazarenko, G М. Chemiavskiy. Evaluation of the accuracy of forecast Satellite
motion in the Atmosphere. U. S.-Russian second space surveillance workshop, 4 -6
July 1996, Poznan, Poland, p.p. 6-17.
13. Э. Сейдж, Дж. Меле. Теория оценивания и ес применение в связи управле¬
нии. М. Связь. 1976. 495 с.
14. V. S. Yurasov, A. I. Nazarenko, P. J. Cefola, К. Т. А1 friend. Results and Issues of
Atmospheric Density Correction. 14th AAS/AIAA Space Flight Mechanics Confer¬
ence, Maui, Hawaii, Feb. 2004, AAS 04-305.
Раздел 8
Совместная обработка
измерений динамической системы,
подверженной влиянию
возмущений в виде цветного шума
Введение
Рассматривается та же задача, что и в разделе 7. Проблема формули¬
руется следующим образом. Для системы, движение которой происходит в
соответствии с уравнением
dx
- = A(t)-x + B(t)-q(t), (8.1)
на основе измерений
zi = hj ■x(ti) + v;, / = 1, ... к (8.2)
и априори известных статистических характеристик
м[>(0]„=о,
M[q{t)-qT{T)\=Kq{t,z\, (8.3)
m[v,.]„=o, m[v,.-v;]o=^,
M\_vi-4{t)T\ =0’
необходимо определить оптимальные по точности оценки вектора состоя¬
ния x(t) в произвольный момент времени t > 4. Отличие материалов дан¬
ного раздела в том, что здесь рассматривается не рекуррентная, а совмест¬
ная обработка измерений (как в МНК).
В 70-е и 80-е годы применение рекуррентного алгоритма обработки
Измерений в условиях проведения массовых расчетов было вынужденной
142
Раздел 8
мерой. При ограниченных характеристиках вычислительной техники того
времени это позволило существенно уменьшить интервал времени между
последовательными уточнениями элементов орбит каждого из спутников
и тем самым повысить их точность в текущий момент времени. В после¬
дующие годы, по мере улучшения характеристик вычислительной техни¬
ки, появилась возможность перехода к совместной обработке измерений
при уточнении элементов орбит всех спутников, т. е. к применению MI1K
и его модификаций. Проблема заключалась в необходимости корректного
учета случайных возмущений, которыми пренебрегают в методе наи¬
меньших квадратов.
В разделе 9 изложены сравнительные оценки точности трех методов
совместной обработки измерений, отличающихся способом учета случай¬
ных возмущений. Показано, что при любом уровне возмущений наилуч¬
шую точность обеспечивает применение непараметрического подхода,
названного методом оптимальной фильтрации измерений (ОФИ). При¬
менение данного подхода является перспективным направлением повы¬
шения точности определения и прогнозирования орбит. В процессе его
применения необходимо учитывать статистические характеристики слу¬
чайных возмущений.
Основы усовершенствованной методики совместной обработки изме¬
рений были опубликованы автором более 40 лет назад [1]. Однако ограни¬
ченные вычислительные возможности того времени препятствовали прак¬
тическому применению этой методики. За последние 30 лет точность про¬
гнозирования движения низких спутников повысить не удалось. В лучшем
случае погрешности находятся на уровне примерно 10 % от величины
атмосферных возмущений на интервале прогнозирования.
В последние годы такая возможность появилась. При этом методика
была усовершенствована [2-7]. Характерной особенностью развитой мето¬
дики является учет статистических характеристик атмосферных возмуще¬
ний на интервале обработки измерений и при прогнозировании движения.
Рассматриваемый метод был испытан по модельным и реальным из¬
мерениям низких спутников. Основной эффект повышения точности дос¬
тигается на момент времени последнего измерения, а также при прогнозе
движения на 1-2 суток, что особенно важно при решении оперативных
задач. Этот эффект проявляется в существенно ином (по сравнению с
МНК) поведении остаточных невязок между измеренными и уточненными
параметрами орбиты на мерном интервале (табл. 8.1). Пример относится к
обработке TLE по ракете, которая отделилась от КА «Фобос-Грунт» при
запуске (международный № 11065В). Более подробно эти данные изложе¬
ны в статье [6].
йЗйййшйвкшййййш v м м а й к а к я с а =:• а- *• а я я я я * и n- % а «85
Обработка измерений системы, подверженной влиянию цветного шума 143
Ш ОШПЙ‘- Glil ФЩШОДЩШ#
85
К5
ta
85
<--тз -jarir. агеюзг .*
1x1-1 XT С-2 <EECt j 1
НА ИЗОБРЕТЕНИЕ
№ 2463223
СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ
ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ
ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ
ТОРМОЖЕНИЯ В АТМОСФЕРЕ
П.1ТСитоо6лалатсль(ли) Открытое акционерное общество
"Российской корпорация ракетно-космического
приборостроении и информационных систем” (040
"Российские космические системы") (RV)
Лвтор<ы)- см. на обороте
Затока л- 2011112179
Приоритет К1№рСТОШ 30 март» 2011 г.
Злрегнгтрцрсмым» в Государственном реестре
итобргтгннй Российской Федерации 10 октябри 2012 /.
Срок действии патента истекает 30 марта 2031 г.
(Нвдграмншй службы
пн тято-ыеюкршшпоО собстветюапы
6 .11. Симонов
;-ИГЭГё.-'Зт‘?Г*« мТГэт » 5 ЯП* ЯГВЖ1ЖШПГ1ЖЖЖЖЖШ
585 85 85 85 Я
яавяй
144
Раздел 8
Таблица 8.1. CKO остаточных временных невязок по времени (сек) при
использовании МНК и метода оптимальной фильтрации измерений (ОФИ)
Метод
Номера измерений на мерном интервале
к-6
к-5
к-4
к-3
к-2
к- 1^
к
МНК
—
-
0.315
0.712
0.669
0.789
0.394
ОФИ
18.749
14.785
11.460
7.799
5.534
1.751
0.081
Из таблицы видно, что при использовании метода ОФИ остаточные не¬
вязки очень сильно меняются на мерном интервале. При этом достигает¬
ся повышение точности определения орбиты в последней точке мерного
интервала, т. е. в момент получения НУ для прогноза. В данном случае
снижение уровня остаточных невязок является почти пятикратным. При
этом оценка 0.081 сек. соответствует ожидаемым погрешностям исходных
TLE (порядка 500 м вдоль орбиты). Физический смысл данного эффекта
в том, что исходная измерительная информация не «размазывается» рав¬
номерно, а концентрируется в окрестности последней точки мерного
интервала.
Ниже изложено детальное обоснование алгоритма оптимальной
фильтрации измерений (по материалам статьи [1]).
Оптимальная фильтрация измерений
Решение рассматриваемой задачи основано методе максимального
правдоподобия. Будем максимизировать по Xj = х(Г ) функцию правдопо¬
добия L^zl,z2,,,,zk |x^j = L{zk |xj; j [9]. Из решения уравнения (8.1) и соот¬
ношений (8.2) следует
lj
х, = U(t„tj )-Xj+\u -q(f)-df, (8.4)
4
li
z, = ht .U(tt,tj)-xJ+ h, j£/(f„£)-B{4)-q(4)-d4 + v,. (8.5)
'/
Напомним, что матрица U(t,t0^ удовлетворяет исходному однородному
уравнению
Обработка измерений системы, подверженной влиянию цветного шума 145
Да основе выражения (8.5) и априорных статистических характеристиках
домех (8.3) легко построить функцию правдоподобия. При этом введем
обозначения:
Z1
К
0
0
Zt =
Z2
, # =
0
К
0
0
0
К
К
Rl2
*■*
R2]
R22
R2 k
Rk,
Rk2
Rkk
ii
с"
('/.
4{Z)
UJ =
, H-Uj=Xj,
(8.6)
u{tk,tj)
ф = \\u(tt,$).B(Z)-Kq(Z,r,\.Br {v)-uT (t'^ydTj-dt,
Теперь можем построить выражения для условных математического ожи¬
дания и ковариационной матрицы вектора измерений Zk. Получим
М
,tj)
■Xj=H-U j-Xj =Xj-Xj,
(8.7)
146
Раздел 8
C°v(z, \Xj) = M {[zt -M(zk \Xj)] • [Z, - M (Zk \Xj)]'} = (Я • Kwj ■Ht+R.l ),
(8.8)
L(Z*\xj) =
= C-exp|-I[z4 -M(zk |xy)]7 .R,) ' (z* -M(z, |x.)]J.
(8.9)
Максимум функции правдоподобия доставляет оценка
J*>
II
(8.10)
где обозначено
Pj=(H-Kwj-HT+R,y'. (8.11)
Нетрудно показать, что
Решение (8.10) не отличается по форме от традиционной оценки
«взвешенного» МНК. Различие заключается в формировании матрицы
(8.11), которая учитывает влияние не только погрешностей измерений
(матрица Rz ), но и шумов системы (матрица Kwj). В частном случае
при отсутствии шума q(t), т. е. при АТД/,г) = 0, слагаемое Н -Kwj -Н1
исчезает и решение (8.10) совпадает с известным. Входящие в решение
(8.10) матрицы Xj и Pj являются функциями времени tj. Поэтому
данное решение может использоваться для оценки вектора состояния в
любой момент времени, т. е. и для прогнозирования движения системы.
Как показано в разделе 8, в неявном виде оно учитывает оценку шума
системы на интервале прогнозирования. В этом заключается еще одно
существенное отличие полученного решения от традиционного реше¬
ния МНК.
Здесь важно отметить, что непосредственное применение решения (8.Ю)
для прогнозирования движения не всегда уместно по ряду обстоятельств.
Во первых, исходная система уравнений движения спутников является
нелинейной. Уравнения вида (8.1) применяются для вычисления поправок
Обработка измерений системы, подверженной влиянию цветного шума
147
К вектору состояния на каждом шаге итерационного процесса уточнения
параметров орбиты по измерениям. В этом случае в качестве измерений
используются разности z(.-A(.-jc^. между самим измерением и его про¬
гнозным значением по результатам уточнения вектора i. на предыдущем
шаге итерационного процесса. При этом прогнозирование движения на
момент времени Г выполняется на основе интегрирования исходных не¬
линейных уравнений движения.
Во вторых, при необходимости прогнозировать вектор состояния на
различные моменты времени приходится многократно выполнять опера¬
ции обращения матриц (8.11) и (8.12), что связано с существенными за¬
тратами машинного времени.
Таким образом, значительный интерес представляет установление
связи решения (8.10) с применяемым обычно для прогнозирования интег¬
рированием уравнений движения вида (8.1). Ниже показано, как на основе
решения (8.10) можно найти оценку шума системы, т. е. построить диф¬
ференциальное уравнение
и, таким образом, разработать алгоритм, эквивалентный решению (8.10).
Приступая к решению этой задачи, продифференцируем выражение для
оценки (8.10). Введем обозначение
(8.13)
(8.14)
Получим
dtj dtj
(8.15)
Построим выражения ряда производных, которые будут необходимы при
Дальнейшем изложении. Продифференцируем соответствующие выраже¬
ния из (8.6), (8.11) и (8.13):
148
Раздел 8
иЫ)-ЩУкЛ^\-вТ ^УиТ
и■■
■*г('уКМ-
)•*(*,)■
\кч{1]^) 0'вТ (пУиТ (ti,nYdT}
=-*(ь)'вТ(*№-игв(*№тМ'
где
dP
Ж..
^ - Р. Р. = -Р.. ■ Я—TLrL.ЯГР =
dtj 1 dtj 1 1
dtj - '
= PiH-w{tj).BT{tj).x].pj + Pi.xj.B{tJ).wT{t])-Hi.p
dC
dc;
J- = -C ■ —C =
dtj 1 dtj 1
rT
= -C,
аУР T dP T dX.
—^-P-x,. + уй —J-X,+X]-P,. J-
dt 1 1 J dt 1 1 J dt
■Cj =
= CJ-Ar{tj) + A(tj).Cj-Cj-X].Pj.H.w(tj)BT(tj)-
-B^-W'^.tf-Pj-Xj.Cj,
(8.16)
(8.17)
), (8.18)
(8.19)
Обработка измерений системы, подверженной влиянию цветного шума
149
d(crX].Pj)_
dtj
,[CJ-AT(t]) + A(tj)-Cj-Cj.X].P,H..w(tj)-BT(tj)-
B{tj)-WT{tj)-HT-Pj-Xj.CJ]-XTrPj-
CJ-AT{tj)-X]-Pj+Cj.XJx
y[pj-H-w{tjyBT{tjyx]-Pi + pj-xj-B{tjywT{,jyHT-p]
= A{tJ).Cj.X]-Pj+B{tJ)-WT{tJ).HT-Pj.{E-Xj.Cj-X]-Pj)
(8.20)
Окончательно с учетом (8.20), (8.10) и (8.15) получим
dx
(8.21)
Таким образом, поставленная задача решена. Построено дифференциаль¬
ное уравнение для оценки максимального правдоподобия. Из сопоставле¬
ния формул (8.1) и (8.21) очевидно, что функция
яМ = ^ТМ-Нт^{гк^^)
(8.22)
является оценкой шума системы в момент времени tj.
Анализ полученного решения
Интегрирование уравнения (8.21) с использованием начальных усло¬
вий (8.10) для некоторого момента времени tj=t0 позволяет получить
оценки вектора состояния в произвольный момент времени, т. е. обеспе¬
чивает решение задачи прогнозирования движения. Из уравнения (8.21)
очевидно, что применяемое обычно при прогнозировании интегрирование
однородного уравнения dxj/dtj = х]. или эквивалентное ему реше¬
ние Xj =U(tj,t0)'х0. не обеспечивают получение эффективных оценок,
так как не учитывают возможность определения и использования оценок
(8.22) шума системы.
150
Раздел 8
Рассмотрим алгоритм прогнозирования, основанный на решении
1 /
'о
уравнений (8.13), (8.21). Для этого выведем некоторые вспомогательные
тождества и сделаем ряд упрощений. Подставим (8.10) в выражение (8.22)
для оценки шума системы. Получим
q {t,) = WT (*,) • Н‘ ■ (PJ - Pj • Xj ■ Cj -Xj-Pj)-^. (8.23)
Матрицу в круглых скобках обозначим как
(,,-В РГХ1-С!-Х1:-Р1. (8.24)
Она обладает следующими свойствами, которые будут использованы ниже
при упрощении выражения (8.23):
х;С/=0, G]=G., GrXj={x]G$= 0, dGj/dtj = 0.
Действительно, с учетом (8.14), (8.18) и (8.20) получаем:
x‘rGJ=x]-pj-(x]-PrxJ).cj.x]-pj = x]-pj-c-'.cj.x].pj=o^
= Pj.H-W(tJ)-BT(tJ).X]-PJ.(E-XJ-Cj-XTJ-Pj) +
+PJ.Xj-B(tj)-WT(tJ).Hr-Pj\E-XJ-CJ-Xrj.Pj) +
+Pj.Xj.A(tj).CJ-Xj.pJ-Pj.XJ.A(tj)-Cj-Xj-PJ-
B XrB{,,)-WT{,)-H‘ P (E Л.-Г Л;-/>)-
= PrH-W(tj).BT(tj).X’j-Pj-Pj-H-W{tJ).BT(tj).XTrPj=Q
Из последнего свойства следует, в частности, что Gk = G .. Тогда для на¬
чального момента времени, совпадающего с временем последнего измере¬
ния tk, формула (8.22) принимает вид
q(tj) = w(tj) • Нт • Gk • Z, = w(tj У Hr ■ Pk .(Zk - Xk -xk), (8.23)
где оценка вектора состояния хк определяется по формуле
Обработка измерений системы, подверженной влиянию цветного шума 151
ik={x'k-Pk-Xk)' -XTk-Pk-Zk, (8.26)
а при прогнозе нас интересуют значения времени t. > tk. Интегрирование
дифференциального уравнения (8.13) при исходных данных (8.26) и (8.25),
позволяет определять максимально правдоподобные оценки вектора со¬
стояния x[t) в произвольные моменты времени, т. е. обеспечивает реше¬
ние задачи прогнозирования.
Таким образом, задача решается в два этапа.
На первом этапе организуется итерационный процесс уточнения век¬
тора состояния x(tk) с применением формулы (8.26). При этом прогнози¬
рование движения на мерном интервале выполняется на основе интегри¬
рования исходной системы нелинейных уравнений с учетом априори из¬
вестных возмущающих факторов. «Взвешивание» измерений производит¬
ся с учетом статистических характеристик шума системы.
На втором этапе при прогнозе движения на моменты времени tj > tk
в правую часть исходных нелинейных уравнений добавляются оценки
шума (8.25).
Эта методика характерна тем, что оценки шума строятся после обра¬
ботки измерений на мерном интервале. При этом используются остаточные
невязки (Zk —Хк -хк) между измеренными и расчетными значениями па¬
раметров. Тем самым реализуется рассмотренный в разделе 8 непарамет¬
рический подход к решению задачи (оптимальная фильтрация измерений).
В заключение раздела приведем формулы для двух апостериорных
функций: функции взаимной корреляции погрешностей оценок (8.25) и
(8.26), а также автокорреляционной функции шума системы.
Кщ {tk ,Т\=М {(** - xt) -[д{т) - <?(r)]7'} = -Ск • Х[ ■ Рк ■ Н -W(r), (8.27)
КАг>т\ =м{[?(0-?(0]-[?(гЫ(г)Т } =
= K4(t,T\-WT(t)-HT-Gk-H-W(T). (8.28)
Программная реализация
На основе метода ОФИ была разработана компьютерная программа
Для определения НУ по исходным TLE [8] и прогнозирования движения
спутников до точки входа в плотные слои атмосферы. Кроме того, для более
152
Раздел 8
полного сравнительного анализа результатов была разработана программа
уточнения вектора состояния с использованием МНК. В обоих случаях
вектор состояния включал проекции радиуса-вектора (/?) на оси инерци-
альной геоцентрической системы координат, соответствующие компонен¬
ты вектора скорости (У) в заданный момент времени t и оценку баллисти¬
ческого коэффициента Sb, Технология расчета времени и места входа
спутников в плотные слои атмосферы состоит из следующих операций.
1. Регулярное скачивание исходных TLE из сайта http://www.space-track.org.
2. Пересчет TLE в оценки (t,R,V) с помощью специальной программы,
основанной на Американской модели движения SGP4. Результаты за¬
писываются в соответствующий выходной файл этой программы.
3. Обработка оценок (t,R,V) с помощью метода наименьших квадратов
(LST). Мерный интервал — 5 наборов TLE. Применяется численный
прогноз с учетом динамической модели атмосферы и зональных гар¬
моник до 8-го порядка.
4. Обработка оценок (t,R, V) с помощью метода оптимальной филырн-
ции измерений. Мерный интервал — 7 наборов TLE, «взвешивание»
которых производится с учетом атмосферных шумов. Используется
упомянутая в п. 3 модель движения спутников.
5. Прогнозирование движения на основе результатов уточнения до мо¬
мента достижения высоты 80 км (reentry time). Используется тот же
прогноз.
Результаты испытаний программы упоминались выше во введении
(табл. 8.1). Более подробно они изложены в статьях [6, II]. Ниже пред¬
ставлены некоторые фрагменты из этих материалов.
Пример относится к обработке TLE по ракете, которая отделилась от
КА «Фобос-Грунт» при запуске (международный № 11065В). На рис. 8.1
представлены оценки баллистического коэффициента, полученные двумя
упомянутыми методами (ОФИ и МНК) на последнем перед падением 4-су-
точном интервале (ноябрь 2011 г).
Из сравнения этих двух видов оценок видно, что при использовании
МНК (LST) оценки более подвержены влиянию случайных погрешностей.
Во втором случае они меняются болсс плавно. Этот вывод согласуется с
оценками СКО остаточных временных невязок на момент уточнения,
представленными в табл. 8.1.
Результаты определения времени входа спутника 11064В в плотные
слои атмосферы представлены на рис. 8.2. Для точки входа получены сле¬
дующие результаты:
Время входа 22 ноября 18 ч. 34 мин. (UT)
Долгота 108.33°
Широта 19.70°
Обработка измерений системы, подверженной влиянию цветного шума 153
Это время отличается от объявленного американцами [8] времени па¬
дения (18 ч. 44 мин.) всего на 10 мин., что свидетельствует о высокой
точности прогноза движения спутника на интервале 5.5 витков (около
g ч.). Относительное различие оценок составило 2 % от оставшегося вре¬
мени существования. Координаты точки входа также хорошо согласуются
с американскими данными: долгота 133°, широта -14° (это район пересе¬
чения экватора при движении спутника с севера на юг).
Days of Nowember
Рис. 8.1. Оценки баллистического коэффициента
Комментарий. При программной реализации метода оптимальной
фильтрации измерений спутников на низких орбитах применен ряд
оригинальных методических решений, которые послужили основой
оформления патента [7]. Эти решения относятся к формированию ве¬
совой матрицы, к организации итерационного процесса уточнения
вектора состояния по измерениям, и к текущей оценке и прогнозу зна¬
чений баллистического коэффициента спутника. Некоторые дополни¬
тельные материалы по испытанию программы по реальной информа¬
ции изложены в статье [12], а также на сайте автора “satmotion.ru”.
Там же на сайте предлагается услуга по обращению пользователей
Reentry time, day of November
154
Раздел 8
сайта к компьютерной программе определения времени и места спут¬
ников, основанной на излагаемом в данном разделе методе совместной
обработки измерений.
Initial time, day of No\ember
Рис. 8.2. Оценки времени падения и входа в плотные слои атмосферы
Выводы
1. Основы методики совместной обработки измерений были опублико¬
ваны автором более 40 лет назад [1]. Однако ограниченные вычисли¬
тельные возможности того времени препятствовали практическому
применению этой методики. В последние годы такая возможность
появилась. Характерной особенностью развитой методики является
учет статистических характеристик возмущений на интервале обра¬
ботки измерений и при прогнозировании движения.
2. Изложено детальное обоснование алгоритма совместной обработки
измерений, названного методом оптимальной фильтрации измерений
(ОФИ), а именно, обоснованы формулы (8.25) и (8.26) для оценки
вектора состояния и шума системы.
Обработка измерений системы, подверженной влиянию цветного шума
155
3. Задача решается в два этапа. На первом этапе организуется итераци¬
онный процесс уточнения вектора состояния ■*(/*) с применением
формулы (8.26). На втором этапе при прогнозе движения на моменты
времени >tk в правую часть исходных нелинейных уравнений до¬
бавляются оценки шума (8.25). Эта методика характерна тем, что
оценки шума строятся после обработки измерений на мерном интер¬
вале. При этом используются остаточные невязки [Zk - Xt ■ хк) меж¬
ду измеренными и расчетными значениями параметров.
4. На основе метода ОФИ разработана компьютерная программа для
уточнения параметров орбиты и прогнозирования движения спутни¬
ков до точки входа в плотные слои атмосферы. Она учитывает стати¬
стические характеристики атмосферных возмущений. Испытания
программы показали ее высокую точность: в большинстве случаев
погрешности определения времени падения не превышают несколь¬
ких процентов от оставшегося времени существования.
5. Разработанная методика применима не только для низких, но и дру¬
гих типов спутников. В этом случае необходимо учитывать статисти¬
ческие характеристики возмущений другой природы: гравитацион¬
ные, а также связанные с погрешностями учета светового давления.
Литература
1. А. И. Назаренко, J1. Г. Маркова. Методы определения и прогнозирования ор¬
бит ИСЗ при наличии погрешностей в математическом описании движения //
Прикладные задачи космической баллистики: сборник. М.: Наука, 1973.
С. 36-67.
2. A. I. Nazarenko. Determination and Prediction of Orbits with Due Account of Dis¬
turbances as a «Color» Noise // AAS/A1AA Space Flight Mechanics Meeting.
Monterey, CA, February 1998. AAS 98-191.
3. A. I. Nazarenko. Accuracy of Determination and Prediction Orbits in LEO // Esti¬
mation Errors Depending on Accuracy and Amount of Measurements, Seventh
US/Russian Space Surveillance Workshop, Monterey, October-November 2007.
4. A. I. Nazarenko. Increasing the accuracy of orbit forecasting on the basis of im¬
provement of statistical methods for processing measurements // Fifth European
Conference on Space Debris, ESA SP-672, 2009.
5. А. И. Назаренко. Погрешности прогнозирования движения спутников в гравита¬
ционном поле Земли, Москва, Институт космических исследований РАН, 2010.
6. А. И. Назаренко. Применение метода оптимальной фильтрации измерений
для уточнения и прогнозирования орбит космических аппаратов. Вестник,
научно-технический журнал ФГУП НПО им. С. А. Лавочкина. № 2, 2012.
7. А. И. Назаренко, А. Г. Клименко. Патент на изобретение 2463223, Российская
Федерация. Способ определения и прогнозирования движения космического
156
Раздел 8
аппарата на низких орбитах, подверженного влиянию торможения в атмоефс-
ре. ОАО «Российские космические системы». Заявка № 2011112179, приори¬
тет изобретения 30.03.2011;
8. Сай г http://www.space-track.org.
9. R. A. Fisher, Theory of statistical estimation. Proc. Cambridge Philos. Soc. 22
1925, p.p. 700-725.
10. Ю. В. Линник. Метод наименьших квадратов и основы математико-статисти¬
ческой теории обработки наблюдений. М. Физматгиз, 1962. 300 с.
11. A. I. Nazarenko. How can we increase the accuracy of determination of space¬
craft’s lifetime? Acta Astronautica, 115 (2015), p.p. 229-236.
12. А. И. Назаренко. Определение и прогнозирование орбит низких спутников.
Доклад па семинаре ИКИ РАН, посвященном 100-летию со дня рождения
П. Е. Эльясберга. Таруса, июнь 2014.
Раздел 9
Сравнение точности параметров,
полученных с использованием
разных методов обработки измерений
Введение
Для определения (уточнения) параметров орбит по измерениям тра¬
диционно используется метод наименьших квадратов — МНК (Least
Square Technique) [1]. Этот метод разработан 200 лет назад, когда искусст¬
венных спутников еще не было. Характерной особенностью движения
околоземных ИСЗ является существенное влияние возмущающих факто¬
ров, которые не поддаются математическому описанию с необходимой
точностью. Типичный пример такого рода возмущений — торможение в
атмосфере, величина которого пропорциональна произведению реального
баллистического коэффициента на плотность атмосферы. Основная труд¬
ность учета этих факторов при прогнозе заключается в их непредсказуе¬
мом изменении во времени. При использовании МНК влияние возму¬
щающих факторов проявляется в необходимости выбора оптимального,
т. и. мерного интервала, т. е. времени, на котором расположены исполь¬
зуемые измерения. Зависимость погрешностей оценок с использованием
МНК от величины мерного интервала схематично представлена на
рис. 9.1. Исследования показали, что значение оптимума зависит не только
от величины торможения, но и от точности измерений и их количества. На
практике этот интервал обычно определяется из опыта и задается посто¬
янным для конкретных типов спутников. Пунктирная линия относится к
случаю отсутствия возмущений (идеальный МНК). Жирной линией пока¬
зана зависимость, к которой надо стремиться в результате усовершенство¬
вания методов обработки информации в условиях существования случай¬
ных возмущений.
Таким образом, при использовании метода наименьших квадратов
Имеющийся уровень погрешностей определения и прогнозирования орбит
обусловлен влиянием непредсказуемых возмущений на интервале обра¬
ботки измерений и при прогнозе, а также невозможностью корректного
Учета этих возмущений.
158
Раздел 9
В предыдущем разделе 7 были рассмотрены рекуррентные методы
обработки измерений, которые учитывают влияние шума системы (белого
или цветного). Данные методы обеспечивают возможность обработки
большего числа измерений на мерном интервале по сравнению с МНК. За
счет этого достигается повышение точности. На рис. 9.1 их характеристи¬
ки обозначены как «Усовершенствование». Однако опыт применения ре¬
куррентных алгоритмов показал, что и они имеют недостатки:
- Чувствительность к точности априорных характеристик шума систе¬
мы. Естественно, что эти априорные данные всегда отличаются от ре¬
альных характеристик шума. Это несоответствие приводит к возмож¬
ности увеличения погрешностей (расходимости процесса уточнения)
по мерс увеличения длины мерного интервала. Такая возможность на
рис. 9.1 показана точечным пунктиром.
- Рекуррентный характер алгоритма, при котором предыдущие измере¬
ния не запоминаются, затрудняет обеспечение высокой надежности
его работы в случаях поступления аномальных измерений.
- Допущение о линейном характере соотношений (7.1) и (7.2) является
упрощением, так как для спутников исходные уравнения являются
нелинейными. При отсутствии предыдущих измерений применение
итераций для учета нелинейности оказывается не эффективным.
В 70-е и 80-е годы применение рекуррентного алгоритма обработки
измерений в условиях проведения массовых расчетов было вынужденной
мерой. При ограниченных характеристиках вычислительной техники тою
Сравнение точности параметров, полученных разными методами обработки 159
времени это позволило существенно уменьшить интервал времени между
последовательными уточнениями элементов орбит каждого из спутников
И тем самым повысить их точность в текущий момент времени. В после¬
дующие годы, по мере улучшения характеристик вычислительной техни¬
ки, появилась возможность перехода к совместной обработке измерений
При уточнении элементов орбит всех спутников, т. е. к применению МНК
И его модификаций.
Применение совместной обработки измерений при уточнении орбит
спутников сталкивается с необходимостью корректного учета случайных
возмущений. Если их не учитывать (как в классическом МНК), то прихо¬
дится ограничивать мерный интервал (см. рис. 9.1). В этом случае не ис¬
пользуются имеющиеся резервы повышения точности, которые были про¬
демонстрированы рекуррентными алгоритмами (кривая «Усовершен¬
ствование» на рис. 9.1). Таким образом, полезным является сравнение
точности различных методов совместной обработки измерений и выра¬
ботка рекомендаций. Одна из частных задач, относящихся к такому срав¬
нению, была рассмотрена в разделе 2.
Сравнительный анализ погрешностей
Рассмотрим задачу оценки вектора состояния х (и х 1) по измерени¬
ям Z (А: х 1) в классической постановке. Учтем возможность существова¬
ния неких мешающих параметров q (m х 1). В этом случае основное ис¬
ходное соотношение имеет вид:
Z = X-x + B-q + V . (9.1)
Здесь X (кх п) и В (Ах т) — известные матрицы, V (к х 1) — вектор
ошибок измерений, которые принимаются равноточными и статистически
независимыми, т. е
Л/(К-К7') = о-;-£. (9.2)
Корреляционная матрица мешающих параметров M(q-qT^ =Kq=u2q -kq
принимается известной. Рассмотрим три подхода к оценке вектора со¬
стояния, отличающихся способом учета мешающих параметров:
1. Без учета мешающих параметров. В процессе оценки вектора со¬
стояния влияние мешающих параметров не учитывается. В этом случае для
оценки применяется классический метод наименьших квадратов (МНК):
х = [хТ-X) '-Хт-Z .
(9.3)
160
Раздел 9
Нетрудно показать, что корреляционная матрица погрешностей вектора *
выражается следующим образом
[Кх)/ =а] \ХТ-Х)~' +{ХТ-Ху' •Хт ■B-Kq-Вт-Х-[ХТ-Xj'.
(9.4)
II. Параметризация. Вектор мешающих параметров вводится в со¬
став расширенного вектора состояния уГ = ||х и затем применяется
МНК. В этом случае искомая оценка и ее корреляционная матрица выра¬
жаются следующим образом
У = \
V1
■\\х в\\
Z,
(9.5)
К,=
ки кп
кТ к
12 Л22
X
в‘
■\\х в\\
= сг„
р" -36 X1 в
\вт-х вт в
(9.6)
111. Без параметризации (оптимальная фильтрация измерений). Ап¬
риорная корреляционная матрица мешающих параметров используется
для «взвешивания» измерений без расширения вектора состояния. Влия¬
ние мешающих параметров учитывается путем их объединения с ошибка¬
ми измерений (V^ = В ■ q + V ) и затем применяется метод максимального
правдоподобия (ММП) [3]. В этом случае искомая оценка и ее корреляци¬
онная матрица выражаются следующим образом
/
Р =
х=(хТ-р-ху'-Хт PZ,
= (sl-B-kq-BT+E)
Укх)ш=*]\хт.р.х)-\
(9.7)
(9.8)
(9.9)
Здесь параметр Sn можно трактовать как отношение сигнал/шум.
Выполним сравнение оценок (9.4), (9.6) и (9.9) между собой. Вос¬
пользуемся методикой обращения блочных матриц [4] и, в частности,
формулой Фробениуса. Тогда правая часть формулы (9.6) может быть вы¬
ражена так:
Сравнение точности параметров, полученных разными методами обработки 161
УГ -X X' В
IВТХ Вт В
л-1
*22-(хтх)~'+(хтх)~
' -хТ-в-к22-вт-х-[хтх)
к22
Здесь корреляционная матрица погрешностей оценок шума равна
^■22 — az
вт ■в-вт ■х-(хтх)~'-хт-в
(9.10)
(9.11)
С учетом формулы (9.6) из (9.10) следует, что корреляционная матрица
погрешностей оценок вектора состояния х в данном случае (при расшире¬
нии вектора стояния) равна
[Кх)п =KU =a2z-(xTx)' +(ХТХ)1 -Хт-В-К22-Вт-Х-(ХТХ)[. (9.12)
Форма этого выражения удобна для сравнения с формулой (9.4) для
корреляционной матрицы погрешностей при непосредственном примене¬
нии МНК без расширения вектора состояния. Выразим разность оценок
(9.4) и (9.12). Получим
(КЛ ~(КХ =К*Г-Хт-В-(Кд-К22).ВТ •Х-(ХТХ)~1. (9.13)
Из этого выражения очевидно, что если разность -К22} является по¬
ложительно определенной матрицей, т. е. если выполняется условие
(9.14)
то переход к технологии II («Параметризация») приводит к повышению
точности оценок по сравнению с применением МНК без расширения век¬
тора состояния. В противном случае применение МНК без расширения
вектора состояния будет обеспечивать более высокую точность. Очевидно,
что условие (9.14) является обобщением более простого условия (2.26),
которое было обосновано в разделе 2 при выборе числа уточняемых пара¬
метров.
Перейдем к преобразованию выражения (9.9) к виду, удобному для
сравнения с оценками (9.4) и (9.12). В этом случае удобно воспользоваться
известной леммой об обращении матриц [5]:
[А' + Нг ■ Я'1 ■ Н)' = А-А-Нт \Н ■ А-Нт + R)X ■ Н ■ А, (9.15)
162
Раздел 9
(/Г1 - Нт ■ R 1 •#) ' =А-А-Н‘ -[НА-Н' -Я)'-Н-А. (9.16)
Используем формулу (9.15) для преобразования выражения весовой мат¬
рицы (9.8) к более удобному для сравнения виду. Получим
Р =
±.В.К вт+Е
<7,
■ Е-В-{ВТ-B + a^K^j'-Вт . (9.17)
Обозначим в правой части выражение в скобках как R
R = [BT-В + а]-К-'). (9.18)
Тогда подстановка (9.17) в (9.9) приводит к следующему выражению:
[х1 -р-х) = хт-Х-Хт-В-R-' -Вт ■ X . (9.19)
Выполним обращение этой матрицы с помощью формулы (9.16).
[х1 - P-х) ' =(хт -х) ' +(хт-х) '-Хт-Вх
R-Br-X-[хг-х) ' -Хт-В -в’ -х-{хт -х)'1. (9.20)
В (9.20) выражение в квадратных скобках обозначим как С и учтем (9.18).
Получим
С = Вт ■ В - Вт ■ X -[X1 ■ X) '-Хт-B + al-K^' =сг1-[К21+Кч'). (9.21)
Наконец, формула (9.9) может быть записана так
[Кх)ш =сг1-(хт-X)' +(ХТ-Х)~'-Хт-B-crl-r'-Вт-Х-(ХТ-X) '.(9.22)
Сравним эту оценку с аналогичными оценкам (9.4) и (9.12) для первого и
второго подходов к оценке вектора состояния. Учитывая формулу (9.22).
простроим выражения для соответствующих разностей:
(Кх), -{Кх )ш = (хтх)~' -Хт -В\кч-о]-С~'\вт -X\хтху , (9.23)
(кХ-{кХ=(хТх)'-Хт-B-^-al-Cy-B7-Х\ХТХ)Л . (9.24)
Соотношение этих разностей зависит от соотношения разностей в круг¬
лых скобках. Для их дальнейшего анализа используем формулы (9.21) и
(9.15). Получим
Сравнение точности параметров, полученных разными методами обработки 163
К„ -<т? ■ С 1 = Кч -(к2' +КЧ[У =Кч-Кч+Кч\Кч+ К22) Х.КЧ, (9.25)
к22-■ с-' = к22-(к2\ + кч')~' =к22-к22 + к22■ {кч + к22)"' ■ к22.(9.26)
Эти формулы имеют красивый симметричный вид. Значения разностей
зависят только от двух матриц К и К22. Первая из них характеризует
уровень шумов, а вторая — информационные возможности их уточнения
по имеющимся измерениям. При наличии шумов (Кч ^ 0 ) разности явля¬
ются положительно определенными матрицами. Подстановка этих формул
в (9.23) и (9.24) приводит к важным выражениям:
= det
(х'х)~'-Х’-В-К'\К' + Къ)'' -к, ■в’- х-(х'х)
= det
[хтхУ ■ Хт ■ В ■ К22 ■ [кч + К22)"' • К22 ■ Вт ■ X ■ [хтх)~
>0, (9.27)
>0. (9.28)
Из них вытекают следующие выводы.
Оптимальная фильтрация измерений обеспечивает повышение точности оце¬
нок по сравнению с применением МНК без учета мешающих параметров.
Оптимальная фильтрация измерений обеспечивает повышение точности
оценок по сравнению с применением МНК с учетом мешающих парамет¬
ров (параметризация).
Таким образом, в результате проведенного анализа установлены срав¬
нительные соотношения между погрешностями оценок вектора состояния
при использовании рассмотренных методов (подходов). Результаты анали¬
за представлены на рис. 9.2.
Из данных рисунка видно, что при любом уровне возмущений наи¬
лучшую точность обеспечивает применение метода оптимальной
фильтрации измерений (ОФИ). Целесообразность применения МНК без
расширения или с расширением вектора состояния зависит от уровня
возмущений. Существует уровень малых возмущений, при котором более
164
Раздел 9
выгодно применять МНК без расширения вектора состояния. Однако и в
этом случае погрешности больше, чем при использовании оптимальной
фильтрации измерений (непараметрического подхода). Применение непа¬
раметрического подхода является перспективным направлением повыше¬
ния точности определения и прогнозирования орбит. В процессе его при¬
менения необходимо учитывать статистические характеристики случай¬
ных возмущений.
Рис. 9.2. Зависимость погрешностей от применяемого подхода
и отношения сигнал/шум
Испытания методики
по реальным данным и на модели
Рассмотрим результаты определения параметров обиты спутника
№20967 по данным TLE [10] за 2002 г. На этом интервале выполнено
525 уточнений элементов орбит с использованием каждого из методов
обработки измерений (OFM и LST). Весь рассматриваемый интервал был
разбит на 3 интервала меньшего размера (№ 0, 1 и 2), данные на которых
обрабатывались последовательно.
На рис. 9.3 приведены соответствующие значения высоты перигея
спутника и изменения периода за виток (АТ). Эти данные получены непо¬
средственным пересчетом исходных TLE. Видно, что на рассматриваемом
интервале перигей опустился на 32 км. Вариации параметра торможения
ДТ достаточно хорошо согласуются с вариациями оценок баллистического
коэффициента и солнечной активности (рис. 9.4 и 9.5). Отклонения от
среднего достигают ±60 %.
Sb, sq.m/kg Altitude, km
Сравнение точности параметров, полученных разными методами обработки 165
Days of 2002
Рис. 9.3. Высота спутника и изменения периода за виток
Days of 2002
Рис. 9.4. Оценки баллистического коэффициента
166
Раздел 9
Days of 2002
Рис. 9.5. Солнечная и геомагнитная активность в 2002 г.
На рис. 9.4 представлены оценки баллистического коэффициента,
полученные при обработке исходных измерений (TLE) рассматриваемы¬
ми методами, а на рис. 9.5 — данные о солнечной и геомагнитной актив¬
ности в 2002 г. Оценки баллистического коэффициентов «привязаны» к
моментам времени, сдвинутым по отношению к концам мерного интер¬
вала на 4 шага (~ на 2.8 дня). Из данных рис. 9.5 видно, что в 2002 г. на¬
блюдался высокий уровень солнечной активности (до 260 единиц). При
этом амплитуды 28-дневного цикла также были весьма значительными.
Приведенные на рис. 9.4 оценки баллистического коэффициента хорошо
согласуются с вариациями индекса FIU7. Моменты локальных экстрему¬
мов совпадают с моментами экстремумов индекса FW7. Отклонения от
среднего достигают ±50 %.
Все приведенные выше данные свидетельствуют о том, что наблю¬
даемые существенные вариации параметров торможения спутника в атмо¬
сфере достаточно объективно отражают реальные вариации торможения
спутника. Именно эти вариации являются основным источником погреш¬
ностей прогнозирования движения спутников, подверженных влиянию
торможения в атмосфере. В табл. 9.1 для трех значений параметра ДТ при¬
ведены оценки временных возмущений при прогнозировании. Выбранные
три значения параметра АТ соответствуют его максимальному, среднему и
Сравнение точности параметров, полученных разными методами обработки 167
минимальному значениям в 2002 г. Данные таблицы характеризуют вели¬
чину погрешностей, которые возникнут при пренебрежении влиянием
торможения в атмосфере при прогнозировании.
Таблица 9.1. Возмущения во времени при прогнозировании, сек
Интервал прогнозирования, сутки
— ДТ, мин/виток
0.5
1.0
1.5
2.0
2.5
3.0
0.00016
0.307
1.228
2.76
4.91
7.68
11.06
0.00011
0.211
0.844
1.90
3.38
5.28
7.60
0.00005
0.115
0.460
1.04
1.84
2.88
4.15
В рассматриваемых алгоритмах параметр торможения (баллистический
коэффициент) уточняется в процессе обработки измерений. В этом случае
реальные погрешности прогноза оказываются меньше значений, приве¬
денных в таблице.
Таблица 9.2. Характеристики интервалов обработки TLE
Характеристика
Интервал 0
Интервал 1
Интервал 2
Начало и конец, дни
1-82
83-222
222-360
Число TLE па интервале
118
200
200
Отношение сигнал/шум
0.011-0.015
0.008-0.010
0.008-0.013
Число реализаций при
прогнозах
40-130
100-200
100-200
В табл. 9.2 приведены характеристики режимов обработки исходных из¬
мерений, которые использовались при применении методов OFM и LST на
каждом из трех рассматриваемых интервалов времени.
Во всех случаях число измерений на мерном интервале составляло:
nz = 16 для OFM;
nz = 9 для LST
Средний интервал времени между последовательными TLE — 0.7 суток.
Для каждого из трех рассмотренных интервалов на рис. 9.6 представ¬
лены оценки СКО временных погрешностей прогнозирования движения
КО. Эти оценки получены на основе применения двух методов обработки
Измерений: OFM и LST.
RMS of time errors, sec RMS of time errors, sec
168
Раздел 9
Prediction time, days
а) Интервал 0
Prediction time, days
б) Интервал 1
Рис. 9.6. CKO погрешностей прогнозирования на трех рассмотренных интервалах
Сравнение точности параметров, полученных разными методами обработки 169
Prediction time, days
в) Интервал 2
Окончание рис. 9.6
Комментарии
1. По сравнению с величиной атмосферных возмущений (табл. 9.1) по¬
грешности прогнозирования существенно уменьшены — в 3-6 раз.
2. В подавляющем большинстве случаев применение метода OFM
обеспечивает уменьшение погрешностей по сравнению с МНК.
Наиболее существенный эффект достигается при интервалах про¬
гнозирования до 1 суток. На момент уточнения начальных усло¬
вий погрешности уменьшаются в 2.4-3.4 раза, а при прогнозе на
1 сутки — на 20 % — 30 %.
3. Случаи увеличения погрешностей при использования методики
OFM (рис. 9.6а) объясняются малым числом реализаций на этом
интервале, что не позволяет получить достаточно объективные
статистические характеристики погрешностей.
Сравним реальные погрешности прогнозирования с результатами мо¬
делирования процесса уточнения и прогнозирования параметров орбиты
При аналогичных значениях параметров. При моделировании использова¬
лись следующие значения параметров алгоритма:
170
Раздел 9
СКО погрешностей измерений sig z = 0.06 сек;
Отношение сигнал/шум Sn = 0.015;
Интервал корреляции цветного шума nq = Д = 50 витков;
Интервал между измерениями dN = 10 витков.
Соответствующие результаты моделирования представлены на ри¬
сунках 9.7 и 9.8.
Common initial data
(К) vafan dN vnlw uqq E-l mitutao tiqi Г » mnulvi ^x)Ml/Nuiau dN picdid |N praditil
|5 il [!• (is ^ |i» ij | e.Dtso |P il r~~3
Initial data for LST
nr mn nt iw Ntw Filu (dnf)
-JJ pgr
RUN, LST | Г Drtuj estimate*
Old on^>«« lilo* of 1ST
ШГ5Г Г
dw
2МЬ? г Ы
ЗПЬПд*
япя~4аы
РЛЮЛЫ
^tumtiinn
•I fiMV d tat rrnn
Iks щ.ч’гч
U»n>tlncun>l>n
Initial lint» for OFM
•l_OfU Nm« Flin |Ь11
fit ^ |2NS7^«t
RUN^OFM J r Nore*aJi?*d «,ni
QM oatp.it Met Ol nr M
МММ M
гюгм
zim/iw
?Mi7-4w
там
RM5(Npred) and RMS<N0| of normalized error» vs
Comparison RMS of prediction errors, sec
Рис. 9.7. Панель исходных данных и результатов моделирования
RMS of normalized prediction errors
Prediction interval, revolutions
Рис. 9.8. Нормированные погрешности прогнозирования
Сравнение точности параметров, полученных разными методами обработки 171
Анализ результатов моделирования свидетельствует о том, что они
достаточно хорошо согласуются с результатами обработки реальной ин¬
формации. В частности, при интервалах прогнозирования до 1 суток при¬
менение OFM обеспечивает снижение погрешностей в 1.5-1.7 раза по
сравнению с применением МНК при числе измерений на мерном интерва¬
ле, равном nz = 9 (рис. 9.8).
Приведенные выше результаты испытаний получены при малом зна¬
чении отношения сигнал/шум (Sn = 0.015). Ниже приведены результаты
моделирования при существенно большем значении отношения сиг¬
нал/шум: Sn = 0.5.
На рис. 9.9 представлены СКО погрешностей прогноза при использо¬
вании LST и OFM. Содержание рисунка аналогично данным рис. 9.6. Эти
результаты представлены также в табл. 9.3.
2.5
2.0
1.5
х 1.0
0)
г
03
О
ъ05
0.0
Сравнение ОФИ и МНК, модель
Sn=0.5 sigmaz=0.0036 sec
£ 0 25 j
8. 0.20 ^
С ра вне кие СХШ и МНК, модель
Sn=0 5 sigmaz=0.0036 sec
fife год
— ОЧИ, nz=10
•- МНК, nz=4
• МНК. nz=6
- МНК. nz=8
Метод
ОФИ, nz=10
— МНК, nz=4
-- МНК, nz=6
... .... мнк, nz=8
0.0 0.5 1.0 1.5 2.0
Интервал прогноза, сутки
2.5
3.0
Рис. 9.9. Моделирование МНК и ОФИ. Sn = 0.5. СКО погрешностей прогноза
Из полученных оценок погрешностей прогнозирования вытекают
следующие выводы:
- Во всех случаях применение оптимальной фильтрации измерений
приводит к снижению погрешностей.
172
Раздел 9
- По мере увеличения интервала прогноза разница в результатах прц_
менения разных способов уменьшается. При прогнозе на 1 сутки дос¬
тигается снижение погрешностей в 2-3 раза, а при прогнозе на 3 су¬
ток — до 1.5 раз.
- Эффект применения ОФИ является следствием повышения точности
в исходной точке, которая по сравнению с вариантом «МНК, nz = 8»
улучшается в 18 раз (!). По мере увеличения интервала прогнозиро¬
вания растет вклад случайных вариаций атмосферного торможения.
Поэтому разница в точности прогноза с использованием разных спо¬
собов уменьшается.
Таблица 9.3. СКО погрешностей прогноза (сек) с использованием разных способов
Способ
Интервал прогноза, сутки
0
0.25
0.5
0.75
1
3
ОФИ,
nz=10
0.00359
0.02019
0.05626
0.1133
0.19488
1.6623
МНК,
nz=4
0.00489
0.03965
0.101
0.19029
0.30855
2.22723
МНК,
nz=6
0.02544
0.09082
0.18364
0.30343
0.44985
2.49628
МНК,
nz=8
0.06544
0.15411
0.26855
0.40752
0.57021
2.64658
Выводы
1. В последние годы, по мере улучшения характеристик вычислитель¬
ной техники, появилась возможность перехода к совместной обработ¬
ке измерений при уточнении элементов орбит всех спутников, т. е. к
применению МНК и его модификаций.
2. Применение совместной обработки измерений при уточнении орбит
спутников сталкивается с необходимостью корректного учета слу¬
чайных возмущений.
3. В результате проведенного анализа установлены сравнительные со¬
отношения между погрешностями оценок вектора состояния при ис¬
пользовании трех методов оценки вектора состояния, отличающихся
способом учета случайных возмущений.
4. Показано, что оптимальная фильтрация измерений (без параметриза¬
ции шумов) обеспечивает повышение точности оценок по сравнению
с применением МНК с учетом или без учета мешающих параметров.
Сравнение точности параметров, полученных разными методами обработки 173
5. Испытания методики оптимальная фильтрация измерений по реальным
данным и на модели подтвердили вывод о том, что она обеспечивает
повышение точности определения и прогнозирования орбит ИСЗ.
Литература
1. Ю. В. Линник. Метод наименьших квадратов и основы математико-статисти¬
ческой теории обработки наблюдений. М.: Физматгиз, 1962. 300 с.
2. A. I. Nazarenko. Accuracy of Determination and Prediction Orbits in LEO. Esti¬
mation Errors Depending on Accuracy and Amount of Measurements, Seventh
US/Russian Space Surveillance Workshop, Monterey, October-November 2007.
3. R. A. Fisher, Theory of statistical estimation. Proc. Cambridge Philos. Soc. 22,
1925, p.p. 700-725.
4. Ф. P. Гантмахер. Теория матриц. М.: Наука, 1967.
5. Р. Ли. Оптимальные оценки, определение характеристик и управление. М.: Мир,
1966, 176 с.
6. В. Д. Анисимов и др. Прогнозирование и определение орбит искусственных
спутников Земли с учетом вариаций атмосферного торможения. Сб. Опреде¬
ление движения космических аппаратов. М.: Наука, 1975.
7. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем, М.: Машиностроение, 1981.
8. А. И. Назаренко. Априорная и апостериорная оценка ошибок прогнозирова¬
ния движения низковысотных ИСЗ. Космические исследования, вып. 4, 1991.
9. A. I. Nazarenko, G М. Chemiavskiy. Evaluation of the accuracy of forecast Satel¬
lite motion in the Atmosphere. U. S.-Russian second space surveillance workshop,
4-6 July 1996, Poznan, Poland, p.p. 6-17.
0. Сайт http://www.space-track.org.
Раздел 10
Матрица частных производных вектора
состояния по начальным условиям
Введение
По-видимому, в отечественной литературе рассматриваемый вопрос
впервые был изложен в публикации В. И. Чарного [1] и в монографии
П. Е. Эльясберга [2]. Наиболее полно решение проблемы представлено в
монографии П. Е. Эльясберга (раздел 10.11 «Частные производные от пе¬
кущих характеристик по начальным условиям движения в прямоугольной
системе координат (при t = const)»). В упомянутом разделе излагаются
методика и результаты построения матрицы частных производных в орби¬
тальной системе координат (Рис. 10.1). Начало этой системы совпадает с
текущим положением точки (D). Ось Dp направлена по радиусу, соеди¬
няющему притягивающий центр с точкой D, ось Dn лежит в плоскости
орбиты и направлена по движению рассматриваемого объекта (по транс-
версали), ось параллельна нормали к плоскости орбиты (направлена по
бинормали).
П. Е. Эльясберг, 1981 г.
Матрица частных производных вектора состояния по начальным условиям 175
Решается задача построения матрицы частных производных
дРФХрХ„
dp,n,v„,vn,£,vc
Фо.ло»уЛ.^
О
О
d£,ve
О’ Хо
(10.1)
Для решения задачи П. Е. Эльясберг применил дифференцирование
классических формул, описывающих невозмущенное эллиптическое дви¬
жение спутника в инерциальной геоцентрической декартовой системе коор¬
динат (xyz), по начальным условиям. Связь вариаций вектора состояния в
176
Раздел 10
инерциальной системе координат с их проекциями на оси орбитальной сис¬
темы выражается с помощью матрицы ортогонального преобразования G
dx,y,z,vx,vy,vz
dp,n,C,vp,v„„v(0
Матрица G состоит из направляющих косинусов
(Ю.2)
а
а'
а’
G =
Р
Р'
Р”
Г
/
г"
(10.3)
(Ю.4)
где а = cos и ■ cos Г2 - sin и ■ sin Г2 • cos i,
Р = cos «• sin Q + sin «• cos Cl ■ cos i,
у = sin и • sin i,
a’ = -smu -cosCl-cosu • sin Q-cos г ,
/?' = -sinw-sinQ + cos и ■ cos Cl ■ cos i,
y’ = cos и ■ sin i,
a" = sinCl-s'mi,
P" = -cosCl ■ sin i,
y" = cos i.
Здесь для элементов орбиты (долготы восходящего узла, наклонения и
аргумента широты) применены традиционные обозначения.
Ниже для рассматриваемой матрицы частных производных применя¬
ется обозначение
«и
«12
«13
«14
«15
«16
u21
«22
«23
«24
«25
«26
dp,n,£,vp,vn,v(
= u(t,t0)3 =
t
«31
«32
«33
«34
«35
«36
dp0,n0,C0,vpo,vno,Vi(>
«41
«42
«43
«44
«45
«46
«5!
«52
«53
«54
«55
«56
«61
«62
«63
«64
«65
«66
(10.5)
Матрица частных производных вектора состояния по начальным условиям 177
{3 монографии П. Е. Эльясберга приведены следующие формулы для всех
компонентов матрицы (10.5):
'JLl
1
Г. Г
\
р 1
“п = а
2
• t Н
2—-
- — + l-cos<p
Г0
го
1 го
г 7
Р
и]2 =sin (р,
“is = “is = 0 ’
' ЗУрГр0
И
и
t +—{r-VpQ-rQ-Vp)+\—-smq>
р \р
C0S(P+2L^!±(p
К п\ Г
Г ЗКо
/ \
Гп
р_
■t-
1+-^
го
1 р)
\ 1
r0 P\r j
-(vP-vPo)
L ro г гоР
Vp vPo ! г
/ \
1 + -
го^ р)
sin<p L
1 г г
“22 = 1+— COS<p .
I р р
и
р
Ы=а\ —
м
“25
М23
W
J А о
/
* t +
г
V
R-
IF
лО
Va 1
Г
/
\
(23 “ “26 — 0
1 + -
■t +
Г г
COS(p-2—A
г р
г \
£-1
у
/ \
1 +
/ \
1 + ^
1+"
I Р)
yVp-
/>А р)
r-V,
sin<p +
1+i
PJ
“31 ” “з2 —
и33 = 1 — -
^32 “з4 “з5 ^ ’
-(l-cos<p),
р
г-к
178
Раздел 10
3 М
r2-rt V Р r-r0
'l 1Л
- + —
Г rn
V V
Pa P
r]jp
(1-cos <p),
«« = UA6 =°>
3F 1
—
2— — — + l-cos<p
VP j >0
r r0 r-p
(^o-Kp)
1
г \
1+-^
г
1 р)
sm#>
w51 =——(l-cos#>),
p
1
=
z' 1 ^
vp-vPo + J—sin<P
V
«53 W56 ^ ’
ым = —sin <p,
Ucc
f \
1+-^-
V Pj
COS (p~~
W61 ~ W62 ” M64 — M65 — ^ ’
- / I
«66 =!-—(l-cosp).
P
Здесь: /л — произведение гравитационной постоянной на массу Земли.
а— большая полуось, е — эксцентриситет, p = a(l-e2), t — интервал
Матрица частных производных вектора состояния по начальным условиям 179
прогноза, <р = v - v0 — соответствующее ему угловое перемещение спутника,
v и v0 — значения истинной аномалии в прогнозной и исходной точках,
центрического расстояния, Vp= е ■ sin v и V = е ■ sin v0 — радиаль-
тангенциальные составляющие скорости в прогнозной и исходной
точках.
Значение приведенного результата состоит не только том, что он по¬
зволяет качественно и количественно оценить влияние погрешности вы¬
ведения спутника на орбиту на его последующее движение по траектории.
По нашему мнению, не менее важное прикладное значение построенных
соотношений состоит в том, что на их основе были разработаны аналити¬
ческие формулы для вычисления матрицы частных производных измеряе¬
мых параметров по начальным условиям.
Эти матрицы применяются в алгоритмах дифференциального уточне¬
ния начальных условий по измерениям. В первые десятилетия освоения
ОКП для вычисления матриц частных производных применялись трудо¬
емкие численные методы [3]. С учетом малых вычислительных мощно¬
стей того времени это приводило к исключительной трудоемкости очень
важной процедуры уточнения элементов орбит по измерениям. Затраты
машинного времени на одно уточнение в то время достигали десятков
минут и даже часов. Очевидно, что последнее обстоятельство очень за¬
трудняло проведение массовых расчетов определения элементов орбит по
измерениям.
По мере расширения космической деятельности увеличилось коли¬
чество спутников и появилась потребность регулярного определения
элементов орбит большого числа спутников Такого рода массовые расче¬
ты характерны для условий работы Центра контроля космического про¬
странства (ЦККП). Поэтому изложенные выше результаты П. Е. Эльяс-
берга по аналитическому расчету матриц частных производных были
использованы в процессе разработки алгоритмов ЦККП (60-е годы). Это
привело к существенному снижению затрат машинного времени и обес¬
печило возможность проведения массовых расчетов. По-видимому, это
было первое в нашей стране применение аналитической методики расче¬
та матрицы частных производных в процессе уточнения элементов ор¬
бит по измерениям.
В частном случае, для круговой орбиты (е = 0) формулы (10.6) при¬
нимают исключительно простой вид:
г = /»/(! +ecosv) и r0= p/(l + ecosv0) — соответствующие значения гео-
ные составляющие скорости, Vn= (l + ecosv) и V
(l + ecos v0)
180
Раздел 10
^('Л)э =
2-cos <р sin^ 0
-3^ + 2sin^ 2cos^-l 0
О 0 cos^
^(3^-sin^) ^(l-cos^) О
-^(l-cos^) -^sin^ О
О 0 -^sin^
sir\<р/ф 2(l-cos <р)1ф
-2(l-cos <р)/ф (j-Z<p + 4sm<p)l<p
О
2-cos^
-sin^
О
О
3^-2sin^
2cos^-l
О
Эта матрица удовлетворяет дифференциальному уравнению
аи{Уо)э
dt
0
-ф
0
0
0
0
ф
0
0
0
0
0
0
0
0
0
0
0
2 (ф)2
0
0
0
-ф
0
0
-(ф)1
0
ф
0
0
0
0
-(ф)2
0
0
0
О
О (р
sin (р/ф
О
о
cos <р
(Ю.7)
U(t,tQ)3, (Ю.8)
которое является весьма «красивым» и наводит на мысль о существовании
неких интересных закономерностей.
В последующие годы после выхода монографии П. Е. Эльясберга
многие исследователи «приложили руку» к решению рассматриваемой
задачи в модифицированных условиях: с применением другой методики
получения решения, с использованием других переменных, с учетом ос¬
новных возмущений на интервале прогноза и т. п. [3, 4, 5].
Одним из направлений, где исследуются вопросы, близкие к рассмот¬
ренным выше, является изучение относительного движения двух спутни¬
ков [6, 7, 8, 9]. В упомянутых работах по этой тематике изложенные выше
результаты П. Е. Эльясберга непосредственно не использовались. По-
видимому, это не вполне оправдано. Ниже данное обстоятельство будет
изложено более подробно.
Применение другого подхода
Рассмотрим другой подход к построению матрицы (10.6), который
изложен в разделе 3.1 монографии [4]. В качестве вектора состояния при¬
менены переменные Гамильтона (q, р). Здесь q — обобщенные координа¬
ты, р — обобщенные импульсы (3-мерные столбцы). Уравнения движения
Матрица частных производных вектора состояния но начальным условиям 181
в матричной форме в этом случае имеют вид (канонические уравнения,
[9,Ю,11]):
dq
dp
dt
dp
dt
дН
dq
\т
(10.9)
где Н— функция Гамильтона. Из (10.9) вытекают следующие линеаризо¬
ванные дифференциальные уравнения для вариаций компонентов вектора
состояния:
ddq д
dt dq
dd р
у
dt
_d_
dq
dH
V^Py
/
A 3
^q+—
dp
rdHV
Sp
dH
dq
\T
dq ——
dp
rdHV
dq
dp = A, ^dq + Andp,
dp = A2lJq +A22Jp.
(10.10)
Обозначив вектор вариаций компонентов вектора состояния как dx, эти
уравнения можно записать более компактно
ddx
_ d
dq
AM A12
dq
dt
dt
dp
a2, A22
dp
= A(t)-dx .
(10.11)
Из (10.10) следует, что компоненты матрицы А связаны соотношениями:
(10.12)
Решение однородной линейной системы уравнений (10.11) символи¬
чески записывается в следующей форме
A 22
II
1
>
A,2
= a[2
A2i
= K
dx(t) =
= U(t,t0)-dx(t0) = -
я(0
p(0
ч(<о)
P('o)
dq(t0)
dp(ta)
(10.13)
Матрица U(t,t0) называется фундаментальной матрицей решений системы
Уравнений (10.11). Одновременно она является матрицей частных произ-
182
Раздел 10
водных текущего вектора состояния х(/) по начальным условиям х (/fJ j
В работе [4] для построения матрицы U(t,t0) применены промежуточные
переменные — элементы орбиты спутника Э (?0) в начальный момент.
В этом случае искомая матрица может быть выражена следующим образом
U{t,t „) =
dx(t) 53(t0) dx{t)
33(t0) dx(t0) 53(t0)
dx(t0)
,33(t0).
■X(t,t0)-X(t0,t0y'. (10.14)
Таким образом, задача сводится: 1)к построению матрицы Х(ц/0)
путем дифференцирования зависимости х(?) по элементам орбиты в на¬
чальный момент; 2) к обращению матрицы X(t0,t0) и 3) к перемножению
этих матриц в соответствии с зависимостью (10.14).
Обозначим матрицу частных производных вариаций вектора состоя¬
ния, который применялся в работе П. Е. Эльясберга (см. введение), по век¬
тору элементов орбит как Х(?)э . Тогда в соответствии с выражением
(10.2) справедливо соотношение
Х(Мо)э =
GT
0
0
GT
X(t,t0) = G^X(t,t0).
(10.15)
Поэтому матрица частных производных (10.13) может быть вычислена по
формуле
U(t,t0)3=X(t,t0)3-X(t0,t0), =G^X(t,t0)-X(t0,t0y' G,. (10.16)
В рассматриваемой монографии [4] для обращения матрицы X(t,t0) приме¬
нен специальный прием, основанный на свойстве (10.12) канонических пе¬
ременных, которое называется симплектичностью [12]. Показано, что обра¬
щение матрицы Х(г,г0) может быть выполнено на основе соотношения
Здесь Р =
Х-'(м0) = С-Рг-Хг(г,/0)-Р. (10.17)
, Е — единичная матрица размерностью (3 х 3), матри-
0 -Е
Е 0
ца С выражается следующим образом
С-|=Рг-Хг(г0,г0).р.Х(г0>г0).
(10.18)
Матрица частных производных вектора состояния по начальным условиям 183
д{р,п,С,р,п,С)
Таблица 10.1. Матрица частных производных XI = 0) = —- -L-
/да
/де
Idi
dpi
г 3 и • t ■ е ■ sin v
a 2 l + ecosv J
-a cos v
0
дп /
г 3 .
ut
а 2
2 + e-cosv
а ■ sin v
l + ecosv
0
0
0
г-sin и
др/
1 1/7Г esinv 3 . 1
— — + — ut
а V Р L 2 2 J
[р l+ecosv .
=—sinv
\p 1-e
0
дп/
1 Ip l + ecosv
аур 2
|/7 e + cosv
\ p 1-e2
0
д£/
0
0
-(ecos/y+cosn)
mo.
lda>
ldM0
dpi
0
0
e-sinv
a~T=
J l = e2
dnl
/••cos/
r
1 + e-cosv
a—/
V l = e2
d£l
-/-•cosh-sin/
0
0
dpi
P [p
-—I—- cost
r\p
-^^■•(l + ecosv)
f/7 (l + ecosv)2
^P (l -e2)3/2
дп/
fp
— -e-sin v-cos г
\P
|p
— -e-sinv
V P
0
d£l
— -(esinto+sinuj-sini
V P
0
0
184
Раздел 10
d(a,e,i,n,w,M0)
Таблица 10.2. Матрица частных производных г~~
d[p,n,C,p,n,Q^
/др
!дп
1д£
да /
0
0
де/
€ + COS V
Г
sin v
a.
0
дИ
0
0
esintu + sinu
Р
да/
0
0
ecos&>+cosu
р ■ sin i
да/
sinv
в'Г
е + cos v
е-р
clgi / ч
—— • 1 e cos со + cos и J
P
дМ01
. rvr? л
-sinv* 1
в'Г р
\ )
(i-e2f.cosv
v ' е-р
0
/др
/дп
/di;
da /
fp 2а-е .
\]р l-e2 S'nV
Гр 2а2
ip г
0
del
Гр ■
— •sinv
УР
Г1.
ip
f\ Г l Г
cos v- 1 н— \ + e—
V P) P_
0
dit
0
0
[p r
cost;
УР P
да/
0
0
p r sin и
\ p p sin/'
дш/
1р cos V
\Р е
Гр sin v Г т, Л
ip el PJ
Ip r sinu
ip P tgi
дМ01
sinvf, r l
~Ы
0
Матрица частных производных вектора состояния по начальным условиям 185
Таким образом, для вычисления обратной матрицы X необхо¬
димо обратить матрицу (10.18) и затем выполнить умножение матриц в
соответствие с формулой (10.17). Составление и обращение матрицы
(10.18) оказывается более простой задачей, чем непосредственное обра¬
щение матрицы Х(/,/0). Дело в том, что компоненты этой матрицы имеют
вид так называемых скобок Лагранжа. Для распространенных элементов
орбит эти скобки известны. Многие из них равны нулю. При использова¬
нии классической системы элементов орбит (а, е, i, Q, со, М0) матрица С
имеет простой вид
(10.19)
где
С„ =
С =
C„ 0
0 cf,
*
0
-2aeyj\-e2
0
l-e2
-f1
-e2f
0
e ■ ctgi
0
2/sin г
SyfJIp
(10.20)
Построенные выражения для матриц Х(с,/0)э и Х(/0,/0)э' пред¬
ставлены в Таблицах 10.1 и 10.2. Перемножение этих матриц приводит к
тому же результату, что получен П. Е. Эльясбергом и изложен выше (фор¬
мулы (10.6)). Как и следовало ожидать, компоненты правой половины
матрицы Х(/0,/0)э' совпадают с соответствующими коэффициентами при
возмущающих силах в дифференциальных уравнениях движения для рас¬
сматриваемых элементов орбит (уравнения Ньютона).
Изложенная в данном разделе методика построения матрицы частных
производных текущего вектора состояния по начальным условиям открывает
ряд дополнительных возможностей. В частности, на этой основе можно
сформулировать ряд полезных закономерностей. Нетрудно заметить, что
компоненты приведенной выше матрицы (10.8) удовлетворяют условиям
(10.12). Это является следствием того, что в геоцентрической инерциальной
системе координат обобщенные импульсы р и производные обобщенных
координат (обобщенные скорости) q тождественно совпадают. В самом деле,
обобщенные импульсы и обобщенные скорости связаны соотношением
f д(Т + ир
T
' d
I 7
[0q
1 - г . /л
-q -q + -p-
2 q q
(10.21)
186
Раздел 10
Здесь кинетическая энергия Т зависит только от обобщенных скоростей, а
силовая функция U зависит только от обобщенных координат (рассматри¬
ваемая система является консервативной).
При выполнении условий (10.12) матрица U(t,t0) для канониче¬
ских переменных (q, р) удовлетворяет соотношению:
U(t,t0)T-P-U(t,t0) = P. (10.22)
Здесь Р — та же матрица, что приведена выше в комментариях к формуле
(10.17). Выражение (10.22) можно записать более детально, используя
представление U(t.,t0) в виде составной матрицы
^п(/До) ^12(^0)
^21(^0) ^22(^0)
(10.23)
Из соотношений (10.22), а также известного свойства рассматриваемой
матрицы £/(У,?„)■£/(?„,?) = £' вытекают следующие зависимости:
^22 (/> ^0 ) = ^11 (/о > О >
U]2(t,t0) = -U(2(t0,t), (10.24)
^21 (/До)= ~и2\ (/о’О •
Эти зависимости могут быть полезны для контроля построенных формул,
а также для разработки более компактных программ расчета матрицы ча¬
стных производных. Нетрудно проверить, что приведенные выше форму¬
лы (10.6) для компонентов матрицы частных производных удовлетворяют
условиям (10.24).
Другое удобство представления решения рассматриваемой задачи в
форме (10.14) заключается в возможности учета возмущений на интервале
прогнозирования. Для этого надо дополнительно построить матрицу част¬
ных производных текущих элементов орбиты по их начальным значениям.
Тогда решение задачи принимает следующую форму
аэ(1) дэ(д ээ(1) ,
{ , о) зэ(1) ю(10) dx(t0) щ ’} дэ(10) ( о, о) ' (
Входящие в это решение матрицы и X '(;„,?„) рассмотрены ранее.
Строить их заново нет необходимости.
Матрица частных производных вектора состояния по начальным условиям 187
Матрица U(t,t0) для относительного движения
двух близких спутников
Традиционный и широко распространенный подход к решению этой
задачи основан на решении так называемых уравнений Clohessy-Wiltshire.
Их называют также уравнениями Хилла [8]. Используется допущение, что
первый спутник движется по круговой орбите. В этом случае его угловая
скорость является постоянной. Отклонение орбиты второго спутника ха¬
рактеризуется теми же координатами, которые применялись выше и пока¬
заны на Рис. 10.1. Используя для угловой скорости принятое в упомяну¬
тых работах обозначение й = со , уравнения невозмущенного относитель¬
ного движения можно записать в матричной форме следующим образом
■ej_ -
dt
1
0
0
0
0 0
0
1
0
0
0 0
0
0
1
0
0 0
Зол2
0
0
0
2 со
0
0
0
0
-2 со
0
0
0
0
-со2
0
0
0
■V{tA)n
(10.26)
Эти уравнения отличаются от аналогичных уравнений (10.8), рассмотрен¬
ных выше. Причина различий заключается в определении вариаций ско¬
рости. Выше они рассматривались как поправки к скорости в инерциаль-
ной системе координат (формулы (10.2) и (10.15)). Здесь они имеют смысл
поправок к относительной скорости. Более подробно различия матриц
U(t,t0)3 и U(t,tQ)rel будут рассмотрены ниже.
Решение уравнений (10.26) было получено многими авторами на ос¬
нове применения традиционных математических методов [3, 7, 8, ...]. Это
решение имеет вид
иЫ* =
4-3cos<p
0
0
sin (piсо
2(1 -cos <p)/co
0
6(sin (р — (р)
1
0
-2(1 -cos <p)/a>
(-3<p + 4sin<p)/<y
0
0
0
COS(2>
0
0
sin (p/co
3<y-sin<p
0
0
cos <p
2sin^c>
0
-6<y(l- cos<p)
0
0
-2 sin <p
4cos^c>-3
0
0
0
-<y-sin^£>
0
0
cos (p
(10.27)
188
Раздел 10
Естественно, что вследствие разного определения вариаций скорости это
решение отличается от приведенного во введении выражения для матрицы
U(t,t0)3 (формула (10.7)). Здесь следует напомнить, что решение (10.7)
является упрощенным. Оно построено на основе формул (10.6) путем
приравнивания эксцентриситета (е) нулю.
При сравнении решения (10.27) с материалами предыдущих разделов
возникают естественные вопросы: 1) какая существует связь между реше¬
ниями (10.27) и (10.6) и 2) если связь существует, то какой вид имеет
обобщение решения (10.27) на случай некруговых орбит? Ниже изложены
ответы на эти вопросы. При этом использованы материалы подраздела
«Матрицы Х(?) и U(t,trj) для переменных Лагранжа в подвижной орби¬
тальной системе координат» монографии [4] (из Раздела 3.1).
В качестве обобщенных координат используются значения р, п и £
(как во введении), которые характеризуют отклонения координат второго
спутника от первого. Этот вектор обобщенных координат обозначен ниже
как q, . Координаты первого и второго спутника в геоцентрической инер-
циальной системе координат обозначим соответственно, как q0 и q .
Связь между перечисленными векторами имеет вид
Здесь G — матрица ортогонального преобразования (10.3). Производная
координат q равна
Найдем связь обобщенного импульса р, и обобщенной скорости q,.
Действуя так же, как при выводе формулы (10.21), получим
Из этого выражения видно, что обобщенный импульс Pj является проек¬
цией скорости второго спутника q на оси орбитальной системы координат.
Поэтому вариация обобщенного импульса связана с вариацией скорости
соотношением
q = q„+G q,
(10.28)
Ч - Чо + G' 4i + G • q,.
(10.29)
(10.30)
<5Pl ==GT -Sq.
(10.31)
Матрица частных производных вектора состояния по начальным условиям 189
рыше при построении матрицы U(t,t0) были применены канонические
переменные Гамильтона q и р. При этом было показано (см. формулу
(10.21)), что обобщенный импульс р совпадает с обобщенной скоростью q.
Соответственно совпадают и их вариации. Это свойство полезно использо¬
вать при установлении связи между рассмотренными в предыдущих разде¬
лах матрицами U(t,t0)3, X(t,t0)3 и аналогичными матрицами для отно¬
сительного движения двух спутников. Запишем выражение (10.15) для
матрицы X(t,t0)3 в более удобной для последующего анализа форме
Х(М„)Э =
GT
0
0
GT
dq
GTdq_
дЭ
дЭ
dq
Grdq_
дЭ
дЭ
(10.32)
В соответствии с (10.28) вариации координат связаны соотношениями
Jq = G- Jq,.
Jq, =Gr 5q
(10.33)
Из этих соотношений следует связь между частными производными
обобщенных координат по элементам орбиты
dqi =сг dq
(10.34)
дЭ дЭ
Эта частная производная является одним из компонентов матрицы X (t,t0)
для относительного движения, которая определяется как
8qi
X(MoL =
дЭ
дЭ
(10.35)
Поэтому из (10.35) следует тождественность верхних компонентов (раз¬
мерностью 3 х 6) матриц X(t,t0) и X(t,t0)3 (формула (10.32)).
Перейдем к установлению связи между нижними половинами рас¬
сматриваемых матриц. Связь обобщенного импульса р, и обобщенной
скорости q, можно найти из (10.30). Она имеет вид
190
Раздел 10
4i-Pi _(^Г Чо + GrGq,). (10.36)
Поясним смысл слагаемых в правой части выражения (10.36). Два слагае¬
мых в скобках являются проекцией переносной скорости второго спутни¬
ка на оси орбитальной системы координат. При этом первое слагаемое
GT q0 отражает влияние переносной скорости центра орбитальной сис¬
темы, а член G^G-q, — влияние скорости вращения орбитальной систе¬
мы. Вариация обобщенной скорости складывается из вариации им¬
пульса р, и вариации обобщенных координат q, . Соответствующее вы¬
ражение следует из (10.36) и (10.31):
Jq, = <Jp, - GrG ■ <5q, = GT Sq-GTG Sq^. (10.37)
Поэтому частная производная dq, /дЭ может быть выражена следующим
образом
dq, /дЭ = G1 ■ dq/дЭ -GTG-dqJd3. (10.38)
Зависимости (10.37) и (10.38) отражают существо отличия матриц
X(t,t0) и X(t,tn)э . Оно является следствием того, что вариация обоб¬
щенной скорости <5q, относительного движения отличается от проекции
вариации абсолютной скорости GT ■ dq на оси орбитальной системы коор¬
динат. Учитывая определения (10.32) и (10.35), на основе (10.34 и (10.38)
нетрудно получить соотношение между матрицами X{t,t^)rel и X(?,?„), ■
Оно имеет вид
-GTG Е
■X(t,t0)3=L{t)-X(t,t0)3. (10.39)
Из (10.29) вытекает следующее соотношение между матрицами £/(/д0)
и U(t,t0)з
U(t,t0)rel=L(t)-U{t,t0)3-L(t0)-'. (10.40)
Матрица L легко обращается:
L =
Е
0
-1
Е 0
-GrG
Е
GTG Е
(10.41)
(Матрица частных производных вектора состояния по начальным условиям 191
конкретные формулы для компонентов матрицы G1 G легко определяют¬
ся на основе приведенных во введении формул (10.3) и (10.4). Они оказы¬
ваются исключительно простыми и красивыми:
GTG =
0-10
1 0 0
ООО
(10.42)
Таким образом, проведенный анализ позволяет записать конкретные фор¬
мулы для компонентов фундаментальной матрицы решений уравнений
относительного движения U(t,t0) . Это решение является обобщением
известных формул (10.27), так как учитывает возможную эллиптичность
орбит. При записи решения для компонентов матрицы С/(?,?0) с/ исполь¬
зованы обозначения и™1. Компоненты матрицы U(t,t0)3 приведены выше
(формулы (10.6)). Итак, результат имеет вид:
= «11+И о'М15>
= и|2 — Uq -и14 ,
= ИИ,
= М,5,
— ^21 * ^25 ^
^22 U0 ’ ^24 5
= И24 ,
= м25,
= мзз >
(10.43)
= м4] +й-и4] +М0(м45 +й-и25),
192
Раздел 10
= ип+й-игг -м0(и44 +м-м24),
^44 ^ " ^24 5
= w45 + й ■ w25,
= м51 — й -ии +й0 (м55 -й -и15),
— и52 — й-м12 — й0 (м54 — й • м|4 ) ,
— ^54 — ^ * ^14 ’
— W55 _ ^ " ^15 ’
ге/ ге/ . rel rel .rel .rel .rel
Un — M16 — W23 ^26 W31 1/5 1/1
32 34 35
ге/ ге/ rel rel ..rel ..rel ..rel ..rel r\
— W43 — W46 "W53 — W56 — W61 — W62 — W64 — W65 —
Естественно, что для круговых орбит это решение совпадает с известным
решением (10.27) уравнений Clohessy-Wiltshire (Хилла).
То обстоятельство, что за прошедшие пятьдесят лет после выхода
монографии П. Е. Эльясберга [2] его решение (10.6) не было использовано
для анализа относительного движения двух спутников на случай эллипти¬
ческих орбит, автору данной статьи представляется довольно странным.
Возможное объяснение состоит в том, что классики космической балли¬
стики, которые активно работали в 50-х и 60-х годах, и к которым, несо¬
мненно, принадлежит П. Е. Эльясберг, не оставили после себя достойную
их смену. Другая причина состоит, по-видимому, в том, что бурное разви¬
тие вычислительной техники привело к возможности более широкого
применения численных методов, которые позволяют достаточно быстро и
просто решить практически любые прикладные задачи.
Численный анализ результатов
Ниже изложены некоторые результаты численной проверки формул
(10.43). Компоненты матрицы U(t,t0) на интервале одного витка рас¬
считывались тремя способами:
1) численно на основе применения метода конечных разностей (numerical);
2) аналитически по формулам (10.43) (accurate);
3) аналитически по упрощенным формулам (10.27) (approach).
Матрица частных производных вектора состояния по начальным условиям 193
Элементы орбиты принимались равными: а=10000км, е=0.3, (0=0°,
Uo=0°. При расчетах по упрощенным формулам угловая скорость прини-
-3/2
далась равной среднему значению и = /л • а
Рис. 10.2. Сравнение решений для компонентов матрицы u'}f и и^
Argument of latitude, deg
Рис.
10.3. Сравнение решений для компонентов матрицы uf, и u’f!
194
Раздел 10
На рисунках 10.2 и 10.3 представлены результаты расчетов компонен-
rpl гн/ г til ml i ж
тов ии , и21 , и45 и и55 . Из этих результатов видно, что упрощенное ре¬
шение (10.27) имеет в данном случае большие погрешности и что новое
решение (10.43) хорошо согласуется с численным решением.
Выводы
1. 50 лет назад П. Е. Эльясберг опубликовал формулы для расчета матри¬
цы частных производных текущего вектора состояния по начальным
условиям в инерциальной системе координат (U (t,t0) ). Значение это¬
го результата состоит не только том, что он позволяет качественно и
количественно оценить влияние погрешностей выведения спутника на
орбиту на его последующее движение по траектории. Не менее важное
прикладное значение построенных соотношений состоит в том, что
они применялись при уточнении параметров орбит по измерениям.
2. Традиционный подход к изучению относительного движения двух близ¬
ких спутников основан на решении так называемых уравнений Clohessy-
Wiltshire. При этом матрица частных производных U(t,tQ) строится
приближенно — только для круговых орбит. Из многочисленных совре¬
менных публикаций по этой проблеме видно, что решение уравнений
Clohessy-Wiltshire для эллиптических орбит получить не удалось.
3. Разработан новый подход к построению матрицы С/(/,/0)э , основан¬
ный на применении переменных Гамильтона. Его применение позво¬
ляет выявить ряд полезных закономерностей.
4. Разработан простой способ пересчета матрицы U[t,t0)3 в матрицу
U(t,t0)re/, пригодную для эллиптических орбит (формула (10.40)).
5. То обстоятельство, что за прошедшие пятьдесят лет после выхода мо¬
нографии П. Е. Эльясберга его решение не было использовано для ис¬
следования относительного движения двух спутников, свидетельствует
о недостаточном внимании к трудам классиков космической баллисти¬
ки, к которым, несомненно, принадлежит Павел Ефимович Эльясберг.
Литература
1. В. И. Чарный. Об изохронных производных. Искусственные спутники Земли,
вып. 16, Издательство АН СССР, 1963.
2. П. Е. Эльясберг. Введение в теорию полета искусственных спутников Земли.
М.: Наука, 1965.
Матрица частных производных вектора состояния по начальным условиям 195
3. Основы теории полета космических аппаратов, под ред. Г. С. Нариманова и
М. К. Тихонравова. Машиностроение, 1972.
4. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. Машиностроение, 1981.
}$. Ю. В. Батраков, Т. К. Никольская. Формулы для улучшения орбит близких
спутников Земли, свободные от особенностей при нулевых наклонах и экс¬
центриситетах. Бюл. ИТА, т. XV, #2, с. 71-75, 1981.
6. Ю. А. Ермилов, Е. Е. Иванова, С. В. Пантюшин. Управление сближением
космических аппаратов. М.: Наука, 1977.
7. Orbital Mechanics, edited by Vladimir A. Chobotov. Published by American Insti¬
tute of Aeronautics and Astronautics, 1996.
8. D. A. Vallado. Fundamentals of Astrodynamics and Applications. Published jointly
by Microcosm Press and Kluwer Academic Publishers, 2001.
9. D. W. Gim and К. T. Alfriend. State Transition Matrix for Relative Motion for the
Perturbing Non-Circular Reference Orbit. AAS/AIAA Space Flight Mechanics
Meeting, Santa Barbara, CA, Feb. 2001.
10. Brower D and G M. Clemence. Methods of Celestial Mechanics. New York: Aca¬
demic Press, Inc., 1961.
11. Г. H. Дубошин. Небесная механика. Основные задачи и методы. М.: Наука,
1968.
12. Р. Бэттин. Наведение в космосе. М.: Машиностроение, 1966.
Раздел 11
Рекуррентный метод
оптимального прогнозирования
гауссового случайного процесса
Введение
Рассматривается векторный гауссовый случайный процесс y(t) с ну¬
левым априорным средним и автокорреляционной функцией
лф(0-/(')}=*,Мо- О'-1)
Решается задача определения оптимальной оценки процесса у (г), t>tk
по измерениям
21=У(11) + Л 0’ *=Ь -,£• (П.2)
Здесь i = ],2,...,к — гауссовый случайный процесс с дискретным
временем и независимыми значениями с нулевым средним и заданной
ковариационной матрицей Л,.
Процессы y(t) и v(ti) принимаются взаимно некоррелированными.
Оптимальной считается оценка, ошибки которой имеют минимальную
дисперсию.
Данная задача (для скалярного стационарного процесса) впервые бы¬
ла решена А. Н. Колмогоровым [1]. В последующих работах были полу¬
чены обобщения, связанные с рассмотрением нестационарных и вектор¬
ных случайных процессов [2], [3]. Неудобство применения разработанных
методов вызвано необходимостью решения системы линейных уравнений,
порядок которой при увеличении к растет.
Значительным шагом на пути расширения области применения мето¬
дов фильтрации и прогноза случайных процессов явились работы Калмана,
Бьюси и их последователей [4]. Задача свелась к необходимости примене¬
ния формирующего фильтра и стандартных процедур решения разност¬
ных уравнений, которые легко реализуются на ЭВМ. Однако применение
Рекуррентный метод прогнозирования гауссовою случайного процесса 197
Л этого подхода связано с определенными трудностями. Сложной задачей
является построение формирующего фильтра, особенно для нестационар-
ЯЬ1Х процессов. Трудности усугубляются тогда, когда корреляционная
функция (11.1) априори плохо известна и в процессе фильтрации по полу¬
ченным оценкам у(/) производится ее уточнение, что приводит к необхо¬
димости перестройки алгоритма фильтрации и прогноза.
Из приведенного краткого обзора следует актуальность построения
такого метода фильтрации и прогноза, который был бы приспособлен для
работы с гауссовым случайным процессом общего вида. При этом корре¬
ляционная функция (11.1) может быть задана дискретно на некоторой сет¬
ке аргументов. Впервые алгоритм такого типа был описан, по-видимому, в
статьях [5] и [6]. Его основные положения были представлены выше в
разделе 7. Обоснование излагаемого ниже метода было публиковано в [7].
Вывод рекуррентных
функциональных соотношений
Для построения алгоритма применим критерий максимума апостери¬
орной вероятности
p[H01Z/] = yj- -> шах, (11.3)
где последовательность для краткости обозначена как Zi.
Примем, что по измерениям ZM построены оценки
лф№-.Н(0м> о1-4)
м |[е(о - яо] • [z(r) - ё(г)]г izm |=ку(‘г)м ’ т - • ('11 -5)
Для определения значения y(t), доставляющего максимум критерия
(11.3), достаточно рассмотреть только числитель, так как в знаменатель
функция y(t) не входит. Запишем выражение для плотности в числителе
p[^(/),z4|z,_,] = C-exp
1
Я0-Я0м
т
К L
ЯО-ЯОм
2
*/-Я0м
LT М
(11.6)
198
Раздел 11
Здесь
м |[z/, ]ГН. •}=*Л'.->Оы +Ri’
м j[y (f) - ] ■■ [zf - у (*,.]т |z,._, | = ку (t, tt),
К L
КЛ(’е1> «уЫ м
lF м
где К, L, M— некоторые квадратные блочные матрицы размером (и хл),
п — размерность вектора^.
Нетрудно показать [5], что максимум плотности (11.6) достигает¬
ся при
НО,- = ^(0,--, + w (0-■ \}i - z(Ow ].
где
С'7)
Итак
Осталось построить апостериорную корреляционную функцию
Ky{t,T).. Выразим погрешность прогнозирования Ay(t). процесса _y(l)
на i-м шаге через соответствующую погрешность на (г - 1)-м шаге. Вос¬
пользуемся выражениями (11.8) и (11.2). Получим
Ау(0,- = у (0— у (0, = [Л0 - у (0,-, ]-w (0 • |Ч - У F )м] =
Рекуррентный метод прогнозирования гауесового случайного процесса 199
1 =м{[ау{'),-, -^(0-(МОы+v(0)]x
х[А)' (г)м - ^ (г) • (Ар(', )ы +v{h ))]Г IZm}• 01-9)
При перемножении слагаемых в правой части (11.8) учтем, что все сред¬
ние значения типа
M^Ay(t). ] = 0 и что
м {[M0W+v(0]{M0w +Ч0]Г| z,-^=Ky{w,\.x +^-
С учетом обозначения (11.7) выражение (11.9) примет вид
Таким образом, поставленная задача решена. Разработано два рекур¬
рентных соотношения (11.8) и (11.10), которые позволяют на основе ис¬
ходных данных (11.4) и (11.6) обработать последнее измерение и подгото¬
вить необходимые исходные данные для выполнения следующего шага по
обработке измерений. При этом обеспечивается максимально возможная
точность поученных оценок. Построенные рекуррентные соотношения
являются основой алгоритма фильтрации и прогноза при измерениях в
Дискретном времени. В отличие от рекуррентных соотношений фильтра
Калмана—Бьюси эти соотношения являются функциональными. Именно
Данная особенность обусловила возможность построения алгоритма
фильтрации и прогноза гауесового случайного процесса.
Пример 1
Определение корреляционной функции Ky(t,r}. при установившем¬
ся режиме фильтрации проводилось для скалярного стационарного про¬
цесса с корреляционной функцией
200
Раздел 11
о
к - г , ,
I- — > к~г<л,
Л 1 1 (11.11)
О, I/ - г| > Л.
Такой выбор обусловлен отсутствием аналитического решения для функ¬
ции указанного вида. При проведении вычислений принималось:
- число шагов сетки на интервале корреляции (Л) р = А/ А = 50;
- число шагов сетки на интервале времени между измерениями (At)
т = At/ А = 1,5,10,15,25,35,45 ;
- среднеквадратическая ошибка изменений (<j = y[R) <т=0, 0.1, 0.2,
0.3, 0.5, 0.7, 1.0.
Ниже в табл. 11.1 и на рис. 11.1 приведена матрица Ку (t, T)en(j для
одного из вариантов исходных данных.
Таблица 11.1. Корреляционная матрица Ky{t,T)end , m = 5, <7 = 0.1
г/Л
Интервал прогноза t/ А
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0
0.009
0.009
0.009
0.008
0.008
0.008
0.008
0.007
0.007
0.0064
0.000
0.1
0.009
0.140
0.138
0.134
0.130
0.126
0.122
0.119
0.115
0.1115
0.100
0.2
0.009
0.138
0.269
0.256
0.248
0.241
0.233
0.227
0.221
0.2142
0.200
0.3
0.008
0.134
0.256
0.383
0.367
0.355
0.344
0.335
0.326
0.3168
0.300
0.4
0.008
0.130
0.248
0.367
0 490
0.470
0.455
0.443
0.431
0.4193
0.400
0.5
0.008
0.126
0.241
0.355
0.470
0.589
0.566
0.551
0.537
0.5218
0.500
0.6
0.008
0.122
0.233
0.344
0.455
0.566
0.682
0.659
0.642
0.6242
0.600
0.7
0.007
0.119
0.227
0.335
0.443
0.551
0.659
0.772
0.747
0.7263
0.700
0.8
0.007
0.115
0.221
0.326
0.431
0.537
0.642
0.747
0.857
0.8288
0.800
0.9
0.006
0.112
0.214
0.317
0.419
0.522
0.624
0.726
0.829
0.9361
0.900
1.0
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.9000
1.000
Рекуррентный метод прогнозирования гауссового случайного процесса 201
Рис. 11.1. Корреляционная матрица Ку {t>T)en(j < т ~ 5, сг = 0.1
В табл. 11.1 и на рис. 11.1 представлена корреляционная матрица
Ку (^T)end Для установившегося режима фильтрации. Наибольшая точ¬
ность достигается на момент последнего измерения (время прогноза = 0).
Значения компонентов матрицы монотонно увеличиваются по мере увели¬
чения интервала прогнозирования. При интервале прогноза, равном ин¬
тервалу корреляции А, дисперсия погрешностей равна 1, т. е. значению
априорной корреляционной функции Ky(t,t) . При этом значения корре¬
ляционных моментов Ky{t,K) ^ и Ку {^■,Т)епс{ совпадают со значе¬
ниями априорной корреляционной функции (11.11). В табл. 11.2 приведе¬
ны значения СКО погрешностей в функции интервала прогноза.
Таблица 11.2. СКО погрешностей прогноза ^Ку (t^)en(j , от = 5, сг = 0.1
Интервал прогноза tj А
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.097
0.38
0.62
0.70
щшш.
0.83
0.92
0.97
1.00
202
Раздел 11
Значение CKO при t = 0 практически совпадает со значением сг = 0.1.
В табл. 11.3 приведены значения дисперсий оценок на момент времени
последнего измерения (Ку (0>0)еи^ )> т-е- результаты решения задачи
фильтрации.
Таблица 11.3. Значения Ку (®Л)еп(] ПРИ различных т и сг
т
Значения сг
0
0.1
0.2
0.3
0.5
0.7
1.0
1
0
0.0080
0.023
0.040
0.076
0.112
0.165
5
0
0.0093
0.032
0.063
0.133
0.206
0.309
15
0
0.0097
0.037
0.076
0.175
0.279
0.423
25
0
0.0098
0.037
0.079
0.187
0.305
0.464
35
0
0.0098
0.038
0.082
0.196
0.321
0.488
45
0
0.0098
0.038
0.082
0.199
0.328
0.498
Данные этой таблицы свидетельствуют об относительно слабом влиянии
величины интервала между измерениями т на точность результатов
фильтрации измерений.
Комментарий. Рассмотренный в данном примере случайный процесс,
имеющий корреляционную функцию (11.11), обладает интересными
свойствами. А именно, этот процесс следующим образом может быть
построен на основе последовательности независимых случайных чи¬
сел х j = 1,..., распределенных по нормальному закону погт(0,1):
yt =
У ok
(11.12)
Л
2>у(х^./)
Л/л.
При значении весовых коэффициентов р = 1 получается случайный
процесс с корреляционной функцией (11.11). Варьирование значениями
весовых коэффициентов позволяет строить случайные процессы с раз¬
личными корреляционными функциями. Здесь возникает важный
вопрос, существует ли корреляционная функция Ky(t,r}Q, у которой
Рекуррентный метод прог нозирования гауссовою случайною процесса 203
соответствующие коэффициенты корреляции больше, чем у функции
(11.11)? Интуитивно ясно, что в этом случае погрешности прогноза
будут меньше, чем представлено выше. Для ответа на этот вопрос рас¬
смотрим простейший случай при Л = 2 , Ку (0,0.5Л)о = ^ . В функ¬
ции (11.11) это значение равно 0.5. Нельзя ли его увеличить? Примене¬
ние модели (11.12) позволяет построить уравнения для определения
коэффициентов р] и р2. Получим:
Pi + Рг = 1.
Pi ' Pi ~ ^0.5 '
Отсюда следует, что должно выполняться условие
Р] + Рг - 2 ■ Р\ ' Рг ={Р\-РгУ =1“2 А.з ^ 0 • (413)
Очевидно, что случайного процесса со значением
^(0,0.5Л)0=£05>0.5
не существует!!!
Таким образом, можно сделать вывод, что при прогнозе случайных
процессов невозможно улучшить точность прогнозирования по сравне¬
нию с оценками, представленными в табл. 11.2.
Пример 2
Рассмотрим применение изложенной выше методики для прогнози¬
рования интенсивности радиоизлучения Солнца на длине волны 10.7 см
(индекс FW 7). Этот индекс широко используется при изучении физических
процессов в околоземном пространстве. В частности, он является одним
из аргументов современных моделей плотности атмосферы. По данным
сайта [8] на рисунках 11.2 и 11.3 представлены среднесуточные значения
индекса Fюл на интервале времени с мая 2002 г. по декабрь 2015 г. (для
периодов времени с повышенным уровнем солнечной активности). На
рисунках представлены также усредненные оценки (на предшествующем
81-дневном интервале времени).
Изменения значений индекса являются типичными. Они отражают
влияние известных 28-дневного и 11-летнего циклов солнечной актив¬
ности. Из графиков четко видны также нерегулярные (случайные) от¬
клонения, предсказание которых в настоящее время является проблем¬
ным вопросом.
204
Раздел 11
Дата, месяц, год
Рис. 11.2. Данные для интервала времени с июня 2002 г. по май 2005 г.
Дата, месяц, год
Рис. 11.3. Данные для интервала времени с сентября 2011 г. по декабрь 2015 г.
Рекуррентный метод прогнозирования гауесового случайного процесса 205
Ниже используется допущение, что отклонения текущих оценок ин¬
декса от средних значений являются случайными величинами. Для каждо¬
го момента времени вычислялись нормированные отклонения
y(0 = [^o.7(0~F81]/F81- (И.14)
Да рисунках 11.4 и 11.5 представлены статистические распределения оце¬
нок (11.14).
Построенные распределения являются похожими. В обоих случаях
имеется некоторая асимметрия. Амплитуда положительных отклонений
превышает амплитуду отрицательных отклонений от среднего. Это связа¬
но, по-видимому, с особенностями физических процессов на Солнце. Тем
не менее, гистограммы не слишком сильно отличаются от соответствую¬
щих нормальных распределений. Поэтому применение рассматриваемой
методики прогнозирования гауесового случайного процесса является при¬
емлемым.
На рис. 11.6 представлена автокорреляционная функция случайных
отклонений (11.14), построенная по данным рисунков 11.2 и 11.3.
300
250
m 200
<D
as
т
>ч
сЗ 150
о
5
s
^ 100
50
0
-0,3860 -0,2024 -0,0187 0,1650 0,3487 0,5324 0,7161
-0,2942 -0,1105 0,0732 0,2569 0,4405 0,6242
Отклонения
Рис. 11.4. Гистограмма для интервала времени с июня 2002 г. по май 2005 г.
Корреляция F10.7 " Число случаев
206
Раздел 11
240
220
200
180
160
140
120
100
80
60
40
20
0
-0,3470 -0,1285 0,0899 0,3084 0,5268 0,7453
-0,2377 -0,0193 0,1992 0,4176 0,6361
Отклонения
1.5. Гистограмма для интервала времени с сентября 2011 г. по декабрь 2015 г.
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,0
-0,1
-0,2
-0,3
Рис. 11.6. Автокорреляционная функция нормированных
отклонений индекса F10 7ot средних значений
Периоды высокой солнечной активности:
1) июнь 2002-май 2005 M(F10.7)=124,
2)сент. 2011 - дек. 2015 M(F10.7)=128.
Число измерений 2600
СКО нормированных вариаций = 0.18 (18%)
21 28 35
Время, дни
Рекуррентный метод прогнозирования гауссового случайного процесса 207
Вид построенной автокорреляционной функции является ожидаемым.
Четко видно проявление известного 28-ми дневного периода вариаций
солнечной активности. Резкое уменьшение корреляции от 1.0 до 0 проис¬
ходит за 9-10 дней. Последующие максимумы корреляции не превышают
значения 0.4. Видно также существенное уменьшение корреляции с тече¬
нием времени, которая через 2 месяца становится менее 0.1.
На рис. 11.7 представлена корреляционная матрица ^у{Г’т)епс1 > Рас'
считанная по формуле (11.10) для установившегося режима фильтрации
при значениях параметров m = 1, сг = 0.1. Эта матрица отличается от ана¬
логичной матрицы на рис. 11.1 наличием периодической составляющей.
Данное отличие является естественным следствием особенностей авто¬
корреляционной функции, представленной на рис. 11.6.
Рис. 11.7. Корреляционная матрица Ky{t,r} ^ , m = 1,
сг = 0.1, «Время» = t/А
208
Раздел 11
При интервале прогноза, равном интервалу корреляции Л («Вре-
мя»=1), дисперсия погрешностей равна 1, т. е. значению априорной корре,
ляционной функции Ку (м)0 ■ При этом значения корреляционных мо¬
ментов Ky(t,A)en(i и Ку (Л-’Т)еп(1 совпадают со значениями априорной
корреляционной функции, представленной на рисунке (11.6).
Интервал прогноза, сутки
Рис. 11.8. СКО погрешностей прогноза ^Ку > m = 1, <Т = 0.1
На рис. 11.8 представлены СКО погрешностей прогноза. Они рассчи¬
таны по оценкам диагональных членов матрицы ^у{1’т)епс1 ■ Данные оси
х — это интервал прогноза в сутках. Максимальное значение х (61) равно
интервалу корреляции А.
Данные этого рисунка существенно отличаются от аналогичных дан¬
ных, представленных в табл. 11.2. На интервале времени до 10 суток
(10/61 =0/16) СКО погрешностей быстро увеличиваются до значения 0.9.
При интервале прогноза >0 значения СКО превышают соответствующие
данные табл. 11.2. Этот факт согласуется с изложенным выше утвержде-
Рекуррентный метод прогнозирования гауссового случайного процесса 209
рием, что при прогнозе случайных процессов невозможно улучшить точ¬
ность прогнозирования по сравнению с оценками, представленными в
табл. 11.2. Учет в данном примере периодического характера априорной
корреляционной функции (11.1) не привел к повышению точности. Он
прЪявился только в медленном увеличении СКО погрешностей прогноза
от 0.9 до 1.0 при интервале прогноза более 10 суток. Объяснение данного
факта заключается в том, что на интервале времени более 10 суток коэф¬
фициенты корреляции (рис. 11.6) не превышают значения 0.4 и уменьша¬
ются до 0.
Данные, представленные на рис. 11.8, легко применить для оценки
СКО погрешностей прогнозирования индекса F)0.7. Для этого надо выпол¬
нить умножение 3-х величин: 1) Среднего значения индекса (F81), 2) СКО
относительных отклонений текущих значений индекса от среднего значе¬
ния (а), 3) СКО нормированных погрешностей по данным рис. 11.8.
В табл. 11.4 приведен пример такого расчета.
Таблица 11.4. СКО погрешностей прогноза индекса Fm ?
Источник
F81
о
Интервал прогноза, сутки
1
2
3
4
5
По данным рис. 11.8
126
0.18
6.7
9.5
12.2
14.5
16.4
240
ш 210
J! 180-
О 150 ■
Z. 120-
90 -
Ж 60
10.7 cm Solar Flux Forecasts
1,т...г,ггт..ггт.т,т.т. ! f | j { j ; { i" ! | ; |
tONCOCf>Or-f4«4f'«(OM»q»OT-(Mp14’«>iONCOOOT-NfO
ЮСОЮОО)0>ФПО)О)О)О)О>О)ООООООООООгггг
О>О)О>О>01в1в)О)(ПО)С) 0)010)00000000000000
4“ ч- ^ ч- ч- ч- Т" ч-<М«V<МГЧГЧ ГМС4 СЯ «М СЯ С4<М «М<4
2014, NOAA Space Weather Prediction Center, Boulder, CO. USA
Рис. 11.9. Данные NOAA1 о погрешностях прогноза
National Oceanic and Atmosphere Administration
210
Раздел 11
Выше упоминалось, что оценки F10.7 скачивались с сайта [8]. На этом
сайте есть много других материалов о солнечной активности. В частности
в отчете “10.7 cm Solar Flux Forecast” [9] представлены подробные стати¬
стические данные о погрешностях прогнозирования индекса на интервале
времени до 5 суток. Некоторые из этих материалов (для интервала прогно¬
за до 3 суток) приведены на рис. 11.9. Видно, что оценки “RMS Error” для
2013 г. согласуются с оценками табл. 11.4.
В табл. 11.5 приведены более подробные данные из отчета [9] а также
результаты расчета погрешностей по данным рис. 11.8, полученные при
использовании одних и тех же оценок параметров F81 и о.
Таблица 11.5. Сравнение СКО погрешностей прогноза индекса F10.7
Источник
F81
а
Интервал прогноза, сутки
1
2
3
4
5
По данным NOAA, 2013
122
0.167
5.4
8.6
11.2
13.7
15.6
По данным рис. 11.8
122
0.167
5.9
8.6
10.9
13.0
14.8
Из данных таблицы видно очень хорошее соответствие оценок погрешно¬
стей прогноза, полученных разными методами, что свидетельствует, по-
видимому, о невозможности повышения точности прогнозирования сол¬
нечной активности при современном уровне знаний ее природы.
Выводы
1. Обоснована методика оптимального прогнозирования гауссового
случайного процесса по измерениям в дискретном времени. Она от¬
личается от известных подходов возможностью задания априорной
автокорреляционной функции процесса в произвольной форме. Ре¬
шение задачи сводится к последовательному применению двух функ¬
циональных соотношений.
2. Показано, что наилучшая точность прогнозирования достигается для
процесса с линейной автокорреляционной функцией.
3. Рассмотрено применение разработанной методики для прогнозиро¬
вания индекса радиоизлучения Солнца F107 в периоды высокого
уровня солнечной активности. Сравнение полученных результатов с
соответствующими данными NOAA показало очень хорошее соот¬
ветствие оценок погрешностей прогноза. Это свидетельствует, по-
видимому, о невозможности дальнейшего повышения точности про¬
гнозирования солнечной активности при современном уровне зна¬
ний ее природы.
Рекуррентный метод прогнозирования гауесового случайного процесса 211
Литература
1. А. Н. Колмогоров. Интерполяция и экстраполяция стационарных случайных
последовательностей. Вестник МГУ, сер. мат., 1941, № 5.
2. А. М. Яглом. Введение в теорию случайных функций. Успехи матем. наук,
1955, 7 №5.
3. Ю. А. Розанов. Спектральная теория многомерных стационарных процессов
с дискретным временем. Успехи матем. наук, 1958, 13, № 2.
4. Р. Е. Калман, Р. С. Бьюси. Новые результаты в линейной фильтрации и теории
предсказания / Перевод с английского. Техническая механика, серия Д. 1,
1961,83.
5. А. И. Назаренко, JI. Г. Маркова. Методы определения и прогнозирования ор¬
бит ИСЗ при наличии погрешностей в математическом описании движения //
Прикладные задачи космической баллистики: сборник. М.: Наука, 1973. С. 36-67.
6. В. Д. Анисимов и др. Прогнозирование и определение орбит ИСЗ с учетом
оценки флуктуаций атмосферного сопротивления. В кн. Определение движе¬
ния космических аппаратов. М.: Наука, 1973.
7. А. И. Назаренко. Рекуррентный метод оптимального прогнозирования гаус-
сового случайного процесса. Измерения в дискретном времени. Известия АН
СССР. Техническая кибернетика, № 2, 1985.
8. http://www.swpc.noaa.gov.
9. 10.7 cm. Solar Flux Forecast Verification, Report NOAA Space Weather Prediction;
Center, http://www.swpc.noaa.gov/content/solar-activity-forecast-verification.
Раздел 12
Оптимальная фильтрация измерений
гауссового случайного процесса
в непрерывном времени
Введение
Рассматривается векторный гауссовый случайный процесс y(t) с ну¬
левым априорным средним и автокорреляционной функцией
лф(0-/и}=*,Мо- <12J)
Решается задача определения оптимальной оценки процесса y(t), t>z
по измерениям
г{т) = у(т) + у(т), те(т0,тк), (12.2)
где тк — момент окончания проведения измерений, г(г) — гауссовый
случайный процесс типа «белый шум» с автокорреляционной функцией
М |v(^)-vr(r)J =./?(£)• <5(г-£). Процессы y{t) и v(r) принимаются вза¬
имно некоррелированными. Оптимальной считается оценка, ошибки кото¬
рой имеют минимальную дисперсию.
Данная задача (для скалярного стационарного процесса) детально рас¬
сматривалась в работах Винера [1], Яглома [2], Крейна [3]. В частности,
было показано, что при бесконечном интервале наблюдения (т0 = —со)
задача сводится к необходимости решения интегрального уравнения Вине¬
ра—Хопфа
тс
c(t-T,7j)R + jc(t-T,7j)-K r(A-T])o-dA=K y(t-T + 7j)0, tj> 0, (12.3)
О
из которого находится весовая функция После того, как урав¬
нение решено, оптимальная оценка строится в виде
Фильтрация измерений гауссового процесса в непрерывном времени 213
Г
y(t,т)= J c(t-T,T-4)-z(4)-d^. (12.4)
—х
решение уравнения (12.3) было получено на «частотном» языке — с ис¬
пользованием таких понятий, как передаточная функция, спектральная
плотность, частотная характеристика. Общей чертой исследований, полу¬
ченных на «частотном» языке, является аналитическое задание корреля¬
ционной функции (12.1) и появление больших трудностей при попытке
решить задачу для многомерных случайных процессов и нестационарного
режима фильтрации.
Значительным шагом на пути расширения области применения мето¬
дов фильтрации и прогноза случайных процессов явились работы Калма¬
на, Бьюси [4] и их последователей. Задача свелась к необходимости при¬
менения формирующего фильтра, решению матричного дифференциаль¬
ного уравнения типа Риккати и интегрированию дифференциального
уравнения для оценки y{t,r}. Однако применение и этого подхода связа¬
но с определенными трудностями. Сложной задачей является построение
формирующего фильтра, особенно для нестационарных процессов. Труд¬
ности усугубляются тогда, когда корреляционная функция (12.1) априори
плохо известна и в процессе фильтрации по полученным оценкам y(t)
производится ее уточнение, что приводит к необходимости существенной
перестройки алгоритма фильтрации.
Из приведенного краткого обзора следует актуальность построения
такого метода фильтрации и прогноза, который был бы не связан с необ¬
ходимостью построения формирующего фильтра и был бы удобен для
реализации на современных ЭВМ. Такого рода подход был применен ав¬
тором для решения задачи фильтрации и прогноза гауссового случайного
процесса по измерениям в дискретном времени. Подробное описание это¬
го решения изложено в предыдущем разделе №11. Соответствующее ре¬
шение задачи по измерениям в непрерывном времени было опубликовано
автором в 1985 г. в статье [5].
Комментарий. Решение рассматриваемой задачи, опубликованное в
статьях [1, 2, 3], было получено до появления электронных цифровых
вычислительных машин (ЭЦВМ). Изложенные в этих работах методы
лежат в основе так называемой классической теории регулирования,
которая явилась базой для разработки систем автоматического управ¬
ления в период Второй мировой войны и в последующее десятилетие.
Применение ЭЦВМ дало толчок к разработке новых методов. В мо¬
нографии [6] об этом написано следующее. «Появление быстродейст¬
вующих цифровых вычислительных машин вызвало революцию в
методах анализа и синтеза систем управления и привело к исключи-
214
Раздел 12
тельным последствиям: выяснилась неприемлемость старых методов
и самого подхода к синтезу систем и был дал толчок к разработке но¬
вых методов. ... Для характеристики системы эта группа методов ис¬
пользует пространство состояний, и расчет системы сводится в основ¬
ном к отысканию экстремума функционала. ... В последние годы этот
современный подход получил очень быстрое распространение и стал
основным методом, используемым при синтезе систем управления».
Таким образом, материалы данного раздела можно рассматривать как
применение современного подхода к решению задачи, которая до 60-х годов
исследовалась на основе классического подхода на «частотном» языке.
Вывод исходных дифференциальных уравнений
Примем, что матрица R(^) — невырожденная, т. е. 7?”'(£) сущест¬
вует. Искомый фильтр будем стоить в виде
=g(^r)-[z(r)-j)(r,r)], (12.5)
где g{t,z) — некоторая матричная функция, которую надо найти из усло¬
вия минимизации критерия
= Sp\jCy (7д,г)^] —> min . (12.6)
Здесь используется общее обозначение для апостериорной корреляцион¬
ной функции
Ку(Ц,т) = м{Ау(1,т)-Аут(4,т)}, (12.7)
которая является функцией трех аргументов,
Ay(t,T) = y(t)-y(t,r) (12.8)
— погрешность оценки, Sp [...] — след матрицы.
С целью упрощения вывода уравнения для определения оптималь¬
ной функции g(l,r) в данном случае удобно перейти от критерия (12.6) к
другому
, , dJ(t,z)
JM = —^ = Sp
(12.9)
М
^М.Д/(,.Г) + Й
ОТ ОТ
-» 1П111 •
Фильтрация измерений гауссового процесса в непрерывном времени 215
Переход к критерию (12.9) основан на идее, близкой к принципу опти¬
мальности Р. Веллмана. Используется свойство оценки у(е,т), которая
является оптимальной для любого момента времени в интервале
£ е (г0, г). При движении объекта из точки £ в точку £ + d£ оптимальная
функция обеспечивает минимум обоих критериев /(/,£) и
/,(/,|), так как
пип
inJ(t,% + a^) = min [/(/,£) + /,(/, £)■</£] = /(/, £)opt + min /,(/,£)
■df.
Используя выражения (12.5) и (12.8), запишем производную по х для
погрешности Ду(/,г)
дА^’Г^ =-g(^r)-[Ay(r,r) + v(r)]. (12.10)
Здесь применяются обычные правила дифференцирования, т. к. процесс
y(t) от т не зависит. Решение уравнения (12.10) можно представить в
форме
т
Ду(/,г) = Ду(/,г0)- Jg(/,?7)-[Ay(?7,?7) + v(77)]-£H7. (12.11)
И)
На основе (12.10) получим выражение для первого слагаемого крите¬
рия (12.9)
(12.12)
Второе слагаемое критерия (12.9) получается из первого транспониро¬
ванием.
Для дальнейшего необходимо определить Л/|у(г)-ДуГ(дг)|. Вос¬
пользуемся выражением (12.11).
Af{v(r)-A/(<,r)}=Af{v(r)-A/(<,r0)}-
-jM[v(r)-AyT (?i,?i)]-gT (t,t])-d?]-jM[v(r)-vT (?])]-gr (t,rj)-dTj.
r0 r0
216
Раздел 12
Здесь первое слагаемое равно нулю в соответствии с исходными данными
Второе слагаемое также равно нулю, поскольку функция
имеет вид мгновенного ограниченного по величине импульса в момент
времени rj = т. При вычислении третьего слагаемого учтем известное
свойство дельта-функции, которую можно считать симметричной относи¬
тельно нуля, т. е.
а 0 ■,
fs(A)-dA = J 8{A)-dA=~, при а > 0 .
В результате получаем
M{v(r)-A/(f,r)} =-^R(r)-gT (t,z). (12.13)
Подстановка (12.13) и (12.12) в (12.9) приводит к результату
Jl(t,T)=Sp[-g(t,T)-KY(T,t,T)-KY(t,T,T)-gT(t,r) + g(t,T)-R(T)-gl(t,T)j.
(2.14)
Для определения функции g(/,£), доставляющей минимум крите¬
рию (2.14), применим методику вариационного исчисления. В соответст¬
вии с ней примем = g0(t,<^) + £-8g[t,<^) и используем условие
dJAt,T,s),
- 'у ;U=°- о2-15)
де
После выполнения соответствующих операций данное условие прини¬
мает вид
5p[<5g(/,r)-{/?(r)-g0r (/,г)-^(гд,г)}] = 0.
Так как 5g{t,г) — произвольная функция, то для удовлетворения этого
условия необходимо выполнение равенства Л(г)-gTa [t,r^-KY (г,/,г) = 0.
Отсюда следует формула для искомой оптимальной весовой функции
g0(t,T) = KY(t,T,r)-R~](T). (12.16)
Подстановка (12.16) в (12.5) приводит к первому из общих уравнений
непрерывного фильтра
Фильтрация измерений гауссового процесса в непрерывном времени 217
Второе из уравнений построим для апостериорной корреляционной
функции вида (12.7). Проделав операции, аналогичные выполненным при
выводе формулы (12.14) для критерия У, (t,г), окончательно получим
Дифференциальные уравнения в частных производных (12.17) и
(12.18) являются основой решения задачи фильтрации и прогноза гауссо¬
вого случайного процесса в общем случае. Граничные условия для ее ре¬
шения задаются исходными данными:
Ky(t,^,T0) = Ky(t^)0 и у((,т0) = О .
(12,19)
Анализ построенных
дифференциальных уравнений
Рассмотрим частный случай задачи фильтрации измерений. А имен¬
но, примем, что условия фильтрации являются стационарными. Для тако¬
го режима справедливы следующие условия:
*(£) = *, Kr(t,Z)0=Kr(t-Z)0, Ку(Ц,т) = Кг(1-т,{-т) = Р(Т,Т]),
(12.20)
Где обозначено t - т = Т, %-т = Тл, Ку (...) = Р'(-) ■ Условия (12.20) по¬
зволяют представить левую часть уравнения (12.18) в следующем виде
дК(1,£,т)
дг
dF^,^) dF(T,T\)
дТ дТ,
(12.21)
Подстановка (12.21) в (12.18), учет условий (12.20) и их применение в вы¬
ражении (12.17) приводят к системе уравнений для установившегося ре¬
жима фильтрации:
dF(T,T,) + dF(T,Tx)
дТ
дТ
218
Раздел 12
^^ = JF(^-r,0)-^l-[z(r)-j)(r(r)]. (12.23)
При численном интегрировании этой системы уравнений имеется воз¬
можность экономии памяти ЭВМ даже при г —> со . Эта возможность осно¬
вана на условии, К (t,r) = О при |г — г| > Л > 0 , которое на практике
обычно выполняется. Область запоминания функций на сетке аргументов t и
£ при фиксированном г оказывается ограниченной значениями
0<t-r<A. При t-T> Л (или £ - г > Л) справедливо условие y(t, г) = 0 .
Поэтому нет необходимости запоминать функцию К v (l,£, г J при этих зна¬
чениях аргументов, где dKy(t,£,г)/5г = 0 и Кv(t,^,z) = Ky(t,^)Q. В про¬
цессе интегрирования переменная г изменяется от г0 до тк . Существо за¬
дачи фильтрации и прогноза (t > г ) делает ненужным запоминание при дан¬
ном г всех вычисленных оценок вектора состояния на предшествующем
интервале времени.
В том случае, когда процессы y(t} и v(?) являются стационарными,
корреляционная функция меняется в процессе фильтрации от начальной
К у (t, т 0) = К у (t— £ )0 до некоторой функции двух аргументов
lim К у = Ky(t -г,£ -г) = Fit -г), (12.24)
Г->00
которая соответствует стационарному (установившемуся) режиму фильт¬
рации. Функция (12.24) удовлетворяет уравнению (12.22) для стационар¬
ного процесса. Это обстоятельство можно использовать для построения
решения уравнения (12.22) на основе интегрирования уравнения (12.18).
В заключение заметим, что при переходе к численному (дискретному)
решению задачи наряду с применение метода сеток возможно использова¬
ние алгоритма фильтрации измерений в дискретном времени, который
был рассмотрен в предыдущем разделе №11.
Пример
Покажем на конкретном примере, что уравнение (12.22) эквивалентно
уравнению Винера—Хопфа (12.3). Примем, что корреляционная функция
скалярного случайного процесса имеет вид Ку (t, £)0 = ау ■ ехр(-а ■ \t - £|) ■
Для этих условий на первом этапе рассмотрим решение уравнения
Винера—Хопфа. Непосредственной проверкой легко убедиться, что этому
уравнению удовлетворяет функция
Фильтрация измерений гауссового процесса в непрерывном времени 219
с(т,ч) = со ■схр(-а-7’)-ехр(-/9-^)
При
р=
2 2а'ау
а + у-
1
2 \г
R
, с0= /3-а.
(12.25)
(12.26)
Выражению (12.4) соответствует следующее известное соотношение
для корреляционной функции погрешностей оценок в процессе фильтрации
Ку(Т’Т<) = Ку(Т-Т1)0-\с(Т,П)-К y(Tl+J?)0-d4. (12.27)
О
После подстановки (12.25) в (12.27) и соответствующих преобразований
получим
F(T,T[) = Ky(T,T]) = (R-c0-a2y)-exp-a-(T + Tl) + a2y-exp-a-\T-Tl\.
(12.28)
На втором этапе подставим решение (12.28), полученное на основе урав¬
нения Винера—Хопфа, в новое уравнение (12.22) и убедимся в их эквива¬
лентности. Из (12.28) следует, что компоненты уравнения (12.22) выража¬
ются следующим образом:
F(T,O) = R-c0 exp -а-Т, F(Q,T^) = R-с0 -exp-a-7j,
dF(T,T{)
дТ
■ = -а-[^7?-Сд-сТуУехр-а ■ (71 + 7)) - сг -ехр-а-(7; -Г)],
(12.29)
при Tj > Т,
=~a'[(R'Co~a>)'exp~a'(T + Т') + ау ■exP-«-(7i -г)]-
Подставим эти функции в правую и левую части уравнения (12.22). Получим
= _2а ■ (R ■ с0-а2)• ехр-а • (Т + 7)),
дТ 57j v о ,/ н v (12 30)
F(T,0) R-^(0,7)) = 7? Cq - ехр-а - (Г + 7j).
Для равенства этих фикций необходимо выполнение условия
-2а • (7? • с0 - ) = 7? • . (12.31)
Нетрудно убедиться, что подстановка приведенного выше в (12.26) значения
Параметра с() в соотношение (12.31) преобразует это условие в тождество.
220
Раздел 12
Таким образом, на рассмотренном конкретном примере показано
что выведенное уравнение (12.22) эквивалентно уравнению Винера—
Хопфа (12.3).
Выводы
1. Продолжено исследование задачи, рассмотренной в предыдущем раз¬
деле №11. Его цель — показать связь современного подхода с тем,
который применялся в классической теории регулирования.
2. Обоснована методика оптимальной фильтрации измерений векторно¬
го нестационарного гауссового случайного процесса в непрерывном
времени. Эту методику можно рассматривать как применение совре¬
менного подхода к решению задачи, которая до 60-х годов исследова¬
лась на основе классического подхода на «частотном» языке. Совре¬
менный подход более приспособлен к решению задач с использова¬
нием электронных цифровых вычислительных машин.
3. Для решения задачи построена система двух дифференциальных
уравнений в частных производных (12.17) и (12.18).
4. При стационарном режиме фильтрации система дифференциальных
уравнений (12.17) и (12.18) принимает более простой вид уравнений
(12.22) и (12.23).
5. На конкретном примере показано, что уравнение (12.22), выведенное
для стационарного режима фильтрации, эквивалентно уравнению
Винера—Хопфа (12.3), которое использовалось в классической тео¬
рии регулирования.
Литература
1. Н. Винер (Wiener N). Extrapolation, interpolation and smoothing of stationary
time series. J. Wiley, New York, Second printing, 1950.
2. А. М. Яглом. Введение в теорию стационарных случайных функций. Успехи
матем. наук, 1955, 7 № 5.
3. М. Г. Крейн. Об основной аппроксимационной задаче теории экстраполяции
и фильтрации стационарных случайных процессов. Доклады АН СССР, 1954,
№94.
4. Р. Е. Калман, Р. С. Бьюси. Новые результаты в линейной фильтрации и теории
предсказания / Перевод с английского. Техническая механика, сер. Д. 1, 1961,
83, вып. 1.
5. А. И. Назаренко. Дифференциальные уравнения для оптимального прогнози¬
рования гауссового случайного процесса по измерениям в непрерывном вре¬
мени. Известия АН СССР. Техническая кибернетика, № 3, 1985.
6. Ю. Ту. Современная теория управления. М.: Машиностроение, 1971.
Раздел 13
Рекуррентный метод построения
уравнений авторегрессии
для векторных процессов
Введение
Математические модели эффективно используются в различных от¬
раслях науки и техники (механике, радио, экономике, метеорологии, био¬
медицине, океанографии, обработке изображений и др.) при решении за¬
дач прогнозирования, идентификации, распознавания. Построение мате¬
матических моделей объектов управления и процессов является необхо¬
димым этапом решения широкого круга задач оптимизации [1]. Естест¬
венный подход к построению математических моделей основан на полу¬
чении, накоплении и анализе доступных данных об эволюции состояния
объекта во времени.
В том случае, когда временные ряды, описывающие стояние объекта,
являются стационарными, возможно представление математической мо¬
дели объекта в виде векторного процесса авторегрессии
z = Ф -z ,+Ф z +... + Ф -z +и (13.1)
t р,\ t-\ р,2 t-2 р,р t-p t
Здесь z; — «-мерный вектор-столбец (вектор состояния), Фр j, j = 1,р —
квадратные матрицы размером (« х «), ut — «-мерный вектор случайных
погрешностей. Принимается, что корреляционные моменты
M(zt-zT,_i) = ri,i = 0, 1,2,... (13.2)
определены по предыстории процесса или априорным данным, а также
что случайные погрешности ut нскоррелированы с предшествующими
значениями z,_f, т. е.
M(urzt_,) = 0,i>0. (13.3)
222
Раздел 13
Задача состоит в определении матричных коэффициентов Фр ,
j = 1, ■■■, р. Обычно порядок процесса р является априори неизвестным и
его необходимо найти в процессе решения задачи.
Известный метод определения коэффициентов OpJ основан на со¬
ставлении и решении т. н. уравнений Юла—Уокера [2], которые легко
строятся на основе соотношений (13.1-13.3) путем умножения правой и
левой части первого из них на z(^. ,j = 1, ...,р:
ф„, -г, , +ф„, -Г, , +... + Ф -г „
р, 1 j-1 р, 2 j-2 р,р j-p
— rj> j -1,2,...,р .
Эти уравнения удобно представить в матричной форме
RP =
фр
я
IV*
II
ft.
ф,,>
ф , ... ф
Р,2 Р,Р
=1Ь
* - 'Л-
го
б - Vi
г-\
'о - ГР-2
ъ-р
Г2-р Г0
(13.4)
(13.5)
(13.6)
(13.7)
(13.8)
Это блочные матрицы размером (и хпр), (п хпр) и (пр хпр) соответственно.
Решение уравнения (13.5) можно записать в виде
Ф=г-Я\ (13.9)
Р Р Р V 7
Известно, что число арифметических операций, требуемых для об¬
ращения матрицы размером (т хт), пропорционально т3. Поэтому при
больших значениях т = пр непосредственное решение уравнений (13.5)
требует больших вычислительных ресурсов. Известно также, что при уве¬
личении размера т ухудшается точность вычисления обратной матрицы-
Кроме того, если величина р априори неизвестна, ее приходится опреде¬
лять путем многократного решения уравнений (13.5) при различных зна¬
чениях р = 1,2,..., останавливаясь в тот момент, когда увеличениер пере¬
стает влиять на точность применения модели (13.1). Из сказанного следу¬
ет нежелательность непосредственного решения уравнений (13.5) «в лоб»
Рекуррентный метод построения уравнений авторегрессии
223
И актуальность построения рекуррентной процедуры их решения, т. е.
Процедуры, которая позволяет получить решение на (р+\ )-м шаге с ис¬
пользованием результатов выполнения предыдущего p-то шага.
Рекуррентная процедура определения коэффициентов Ф р j для
скалярного процесса (и = 1) называется алгоритмом Дарбина—Левинсона
[2-4]. Этот алгоритм имеет вид
В начале 90-х автору не удалось найти публикации, в которых бы изла¬
гался эффективный способ решения уравнений Эла—Уокера для вектор¬
ных процессов. Лишь в обзорной статье Б. Фридландера [3] указано, что
такая процедура найдена. Однако алгоритм был приведен в предельно
сжатой форме.
Потребность построения уравнений авто регрессии для векторных
процессов возникла в 80-е годы в связи с разработкой методики для по¬
строения модели флуктуаций параметров атмосферы [6]. Эта методика
была реализована в Российском центре контроля космического простран¬
ства. Она основана на анализе оценок баллистических коэффициентов
(кы .), полученных в разные моменты времени (t]) при определении па¬
раметров орбит большого числа спутников (; = 1,2, ...). Эти оценки свя¬
заны с относительными вариациями плотности атмосферы Spf р соотно¬
шением
Здесь кы — эталонное значение баллистического коэффициента i-то
р
Ф
(13.10)
Р
(13.11)
(13.12)
спутника, А;> — некоторая погрешность. На основе множества оценок
(13.12) строится модель вариаций плотности атмосферы
^(A,f) = £)(0 + Ai(0‘(A-4OO)/2OO, (13.13)
Р
в которой коэффициенты 6, и Ъ2 являются определяемыми параметрами.
224
Раздел 13
По данным статьи [7] на рис. 13.1 для примера представлены оценки
kbij, Spjр и А для одного из эталонных спутников сферической формы.
Из этих данных видно, что существенные вариации оценок кы . (тор¬
можения спутника в атмосфере) удалось компенсировать оценками ва¬
риаций плотности на высоте его полета (=300 км). СКО остаточных невя¬
зок составляет =1 %. На рис. 13.2 приведено сравнение вариаций плотно¬
сти с оценками индексов солнечной и геомагнитной активности на том же
интервале времени. Четко видно, что природа вариаций плотности связана
с солнечной активностью. Здесь важно отметить, что модель вариаций
плотности атмосферы (13.13) строилась для разных высот. Именно поэто¬
му возникла потребность в построении уравнений авторегрессии для век¬
торных процессов. Детальное обоснование разработанной методики было
опубликовано в статье [8].
t0=06.06.89.00.00.00
Рис. 13.1. Оценки kfrij, Spjр и А- для одного из эталонных спутников
на интервале времени с 6 по 23 июня 1989 г.
Рекуррентный метод построения уравнений авторегрессии
225
Рис. 13.2. Сравнение оценок 8р/р с вариациями индексов
солнечной и геомагнитной активности (июнь 1989)
Обоснование рекуррентных соотношений
Запишем уравнения (13.5) для {р + 1)-го шага с использованием со¬
отношений (13.6)—(13.8) и представим входящие в него матрицы в блоч¬
ном виде
226
Раздел 13
(13.17)
(13.18)
Подстановка матриц (13.15)—(] 3.17) в уравнение (13.14) приводит к двум
матричным уравнениям, решение которых относительно блочных матриц
Эти формулы для компонентов матрицы (13.15) не являются в полной
мере рекуррентными, так как они содержат матрицу большого размера R
обращение которой рекуррентный алгоритм как раз и не должен содер¬
жать. Для преодоления указанного недостатка проведем анализ матрицы
Ар -Rp , для которой введем обозначение
которое аналогично уравнению (13.5), но не совпадает с ним, поскольку
матрицы Ар и г не равны. Неравенство обусловлено не только тем, что
в указанных матрицах составляющие их элементы r.t , г = 0, 1, 2, ..., р рас¬
пложены в обратном порядке (слева направо и справа налево), но и тем
(а это самое существенное), что в общем случае имеет место неравенство
rt Ф rj . Равенство выполняется только для скалярных процессов (п = I )■
При п = 1 матрица Хр оказывается состоящей из тех же элементов, что и
матрица Фр, но расположенных в обратном порядке
В этом случае соотношения (13.19) и (13.20) совпадают с рекуррентным
алгоритмом Дарбина—Левинсона (13.10). В более общем случае (при
п > 1) равенство (13.10) не выполняется. Построение рекуррентного алго¬
имеет вид
фл+.,г+. = (V. -ф, Ч ) ■ ('0 - < ■ < Ч Г > (13-19)
(13.20)
(13.21)
Этому выражению соответствует уравнение
(13.22)
Xj. (13.23)
Рекуррентный метод построения уравнений авторегрессии 227
ритма достигается введением матрицы Хр+1, которая удовлетворяет урав¬
нению
(13.24)
Аналогично тому, как это сделано выше по отношению к матрицам
фр+] и Ф^,, найдем связь матриц Х^, и Х;,. Использование уравнений
(13.22), (13.24), обозначений
Хг+> =PW.
P+I.P ’
ЛТ _ т ЛТ\
лр+1 - >+1
*р+1 =
(13.25)
(13.26)
(13.27)
и изложенной выше методики приводит к результату
-х, -v;)
Х/>+!,/> - Х/; ~Хр+\,р+\ Фр-
(13.28)
(13.29)
С учетом обозначений (13.22) формулы (13.19) (13.20) принимают вид
Фри,Р+,Ч^1-фдЛ)^ХгЛ)1’ (,3-3°)
ф =ф -ф X
p+hp р P+I.P+1 р'
(13.31)
Построенные формулы (13.28)—(13.31) являются полностью рекуррент¬
ными'. значения Фр и Хр на предыдущем шаге позволяют построить со¬
ответствующие матрицы Ф;н1 и X ,, не прибегая к обращению матрицы
большой размерности Л ,, а используя лишь обращения матриц разме¬
ром (п хц).
Анализ и упрощение рекуррентных соотношений
Полученные выше рекуррентные формулы для построения матрич¬
ных коэффициентов авто регрессии отличаются от алгоритма Дарбина—
Левинсона (13.10) появлением дополнительной пары рекуррентных соот¬
228
Раздел 13
ношений (13.28) и (13.29) для компонентов формально введенной матри¬
цы Хр+1. Эти соотношения являются полным аналогом первой пары соот¬
ношений (13.30) и (13.31). При этом значения матриц Фр и на пре¬
дыдущем шаге используются в каждом из четырех рекуррентных соотно¬
шений. Значения и Х^ в каждой из пар стоят на тех местах, где в
другой паре стоят Х/( и Ф^ . Такая симметрия (двойственность) является
замечательным свойством изложенного алгоритма.
Рассмотрим возможности некоторых упрощений полученных фор¬
мул, которые позволяют сделать алгоритм вычисления коэффициентов
авто регрессии более экономным. Покажем, что множители, входящие в
правую часть уравнений (13.28) и (13.30), связаны простым соотношени¬
ем. С учетом выражений (13.9) и (13.21) для матриц Фр и Хр имеем
Каждый из указанных множителей получается из другого транспониро¬
ванием.
Введем обозначения для множителей, к которым применяется опера¬
ция обращения матриц
Построим для этих матриц рекуррентные соотношения. С учетом
обозначений (13.25), (13.26) и выражений (13.29), (13.30), (13.33) получим
Выражения (13.34), (13.35) содержат операции с матрицами разме¬
ром только (л* л) и поэтому по сравнению с (13.32) и (13.33) требуют
меньшее количество вычислительных операций. Проведенные упрощения
позволяют записать построенный алгоритм следующим образом
(13.32)
(13.33)
(13.34)
Аналогично для величины Тр-И будем иметь
(13.35)
Рекуррентный метод построения уравнений авторегрессии 229
Ф/;+1,рн1 (^/j+l
(13.36)
Y — (ут V ,гт ).т-1
Лр+],/1+1 \'р+1 лр */м1 ) 1 р >
(13.37)
ФдП = фр-фр+|,р+гх, ф„+1.,+, 1 >
(13.38)
Xp^pi\,
(13.39)
Здесь матрицы S р и Тр определяются по рекуррентным соотношениям
(13.34) и (13.35). Начальные условия для последовательного определения
коэффициентов авто-регрессии:
Тх=гъ~г\'г "W ’ х! = гРго'-
В заключение анализа рассмотрим физический смысл величин Т ,
Хр и Sp. Построим корреляционную матрицу М (yzl ■ z] j. Используя
для оценок z, уравнение авто-регрессии (13.1), с учетом корреляционных
моментов (13.2), условия (13.3), обозначений (13.6), (13.8), а также урав¬
нений (13.5), получим
М (г, • z,r) = г0 = Фр • Rp ■ Фтр + М {и, ■ uf) = гр ■ Фтр + М(и, ■ uj). (13.40)
Отсюда, с учетом (13.32), следует
м{иги]) = г0-гр-Фтр=Т1 =Тр, (13.41)
т. е. величина Т является корреляционной матрицей случайных погреш¬
ностей и, уравнения авторегрессии (13.1).
Проанализируем изменение величины Т при переходе к (р + 1)-му
Шагу, принимая, что действительное уравнение авторегрессии имеет вид
(13.1), т. е. порядок р. Определим на основе (13.1) среднее значение про¬
изведения
M(z,-z, „ i) = r„+i =ф 1 'г +ф 'i-r ,+- + Ф г.=Ф -А .
v 1 1 р'/ р+х рЛ р рЛ р-\ р>р 1 1 р
230
Раздел 13
С учетом (13.36) и (13.35) из этого выражения следует, что Ф +1 и - о
и Тр = 0. Это означает что признаком достижения истинного значения
порядка уравнения авторегрессии (р) является стабилизация значения
корреляционной матрицы Тр при переходе к следующему шагу. Данное
свойство целесообразно использовать для выработки сигнала о прекраще¬
нии итераций по р.
Для выявления физического смысла введенной формально матрицы
Хр предположим (на основе эвристических соображений), что справед¬
ливо соотношение
zt-r> = X ■ z + X . • z .+... + X . • z - + Д , (13.42)
' р р,р t p,p~i t-1 р, 1 t-p+1 1 р ’
в котором векторный дискретный случайный процесс £, удовлетворяет
условию
M{^p-zlp+) = 0, г = 1,2,..„р.
Соотношение (13.42) характеризует зависимость предшествующих значе¬
ний процесса z, от его будущих значений и может быть названо уравнени¬
ем авторегрессии в обратном времени.
С учетом приведенных выше условий, а также соотношений (13.2),
определим среднее значение произведения оценок (13.42) на их будущие
значения (при t-p>0). С учетом свойства z ( = z' получим
M(z -z] \ = rj =Х -г ,+Х ,г . ,+... + 26 -к
\ i-р i-p+i j I рр p_t р,р-1 р-1-l р, 1 1-г
i = p,p-1.,...,1.
(13.43)
Эти уравнения являются аналогом уравнений Юла—Уокера (13.4). Их
можно записать в матричной форме с учетом ранее введенных обозначе¬
ний (13.8), (13.18). Получается уравнение (13.22). Это означает, что вхо¬
дящие в (13.42) матричные коэффициенты совпадают с соответствующи¬
ми элементами матрицы Хр (13.21). Решение (13.21) уравнений (13.22)
согласуется с соотношением (13.42), которое определяет зависимость
предшествующих значений процесса от будущих, и может быть названо
уравнением авторегрессии в обратном времени.
Определение корреляционной матрицы процесса приводит к ре¬
зультату
M(Zt_p-£p) = r0-Xp.Ap=Sp. (13.44)
Рекуррентный метод построения уравнений авторегрессии 231
Это выражение является аналогом формулы (13.40). Оно раскрывает фи¬
зический смысл матрицы S.
Дополним описание физического смысла матрицы Хр ее вероятно¬
стной интерпретацией. Используем допущение, что случайные процессы
z и и, являются гауссовыми. Без ограничений общности их можно счи¬
тать несмещенными. Рассмотрим функцию распределения всех случай¬
ных величин, входящих в уравнение авторегрессии (13.1)
)= С -exp[-(l/2)-Zr • R~l ■ zj , (13.45)
где применены обозначения:
гуТ т т
z ~\zt 1-1 >
«Г |,
ro
п
Г2
ГР
ТР
т
rl
ro
Г\
Vl
0
r = m[z-zt ) =
т
h
г0
ГП2
0
<
т
Г,2
Г0
0
т„
0
0
0
Тп
Значение плотности (13.45) зависит, в частности, от z, и и: . Если
принять величины z(, ztzt , известными, a zt_ p и ut неизвестны¬
ми, то максимизация плотности (13.45) по переменным z, и ut приведет
к построению максимально правдоподобной оценки z . После ряда до¬
вольно громоздких выкладок решение этой задачи приводит к результату,
который совпадает с выражением (13.42) при £,_р = 0. Это свидетельствует
о том, что удовлетворяющая уравнению (13.22) матрица обеспечива¬
ет по последующим значениям максимально правдоподобное определение
вектора z, .
Оценка эффективности
и работоспособности алгоритма
Анализ показал, что применение рекуррентного алгоритма построе¬
ния уравнений авторегрессии обеспечивает по сравнению с традицион¬
ным алгоритмом экономию вычислительных операций в р2 раз.
232
Раздел 13
Оценка работоспособности алгоритма была выполнена в три этапа
Результаты первого этапа опубликованы в статье [8]. В качестве исход¬
ных данных использовались оценки вариаций плотности атмосферы вида
(13.13) полученные на 3-х месячном интервале (декабрь 1985 г. - февраль
1986 г.) с шагом 3 часа по времени. В качестве компонентов вектора z
принимались относительные вариации плотности атмосферы 5р/р на вы¬
сотах 200, 250,300 км, а также индексы геомагнитной возмущенности К
Полученные значения корреляционных моментов rt (после центрирования
и нормализации рядов) приведены в табл. 13.1. Эти оценки относятся к 5-ти
моментам времени i = 0, 1, 2, 3, 4 (с шагом 3 часа по времени). Для каждого
из этих моментов времени представлены матрицы rt размером (4x4). Из
этих матриц симметричной является только первая (г0). Характерной чер¬
той приведенных значений корреляционных моментов является то, что для
вариаций плотности коэффициенты корреляции существенно больше их
корреляции со значениями геомагнитного индекса. Общей закономерно¬
стью является уменьшение корреляционных моментов с течением времени.
Таблица 13.1. Значения корреляционных моментов rt, i = 0, l, 2, 3, 4
i
h = 200
h =250
h = 300
KP
1.000
0.725
0.659
0.535
0
0.725
1.000
0.981
0.652
0.659
0.981
1.000
0.625
0.535
0.652
0.625
1.000
0.974
0.712
0.649
0.556
1
0.719
0.982
0.963
0.674
0.664
0.975
0.986
0.656
0.494
0.610
0.583
0.835
0.932
0.687
0.629
0.559
2
0.701
0.943
0.928
0.681
0.658
0.950
0.956
0.672
0.448
0.558
0.533
0.712
0.889
0.656
0.599
0.552
3
0.672
0.897
0.883
0.677
0.639
0.913
0.916
0.673
0.398
0.500
0.478
0.607
0.845
0.619
0.562
0.558
4
0.636
0.847
0.834
0.666
0.611
0.869
0.870
0.665
0.339
0.442
0.425
0.542
Рекуррентный метод построения уравнений авторегрессии 233
Важной особенностью приведенных исходных данных является то,
что на рассмотренном интервале времени (12 часов) коэффициенты кор¬
реляции остаются достаточно большими: они не охватывают весь интер¬
вал корреляции, где коэффициенты имеют существенные значения (этот
интервал составляет несколько суток). При определении матричных ко¬
эффициентов авторегрессии Ф . по рекуррентным формулам (13.36)-
(13.39) установлен порядок уравнений авторегрессии р = 2. Оценки этих
матричных коэффициентов:
1.273
-0.198
0.489
0.039
0.134
1.131
0.460
0.025
0.079
0.215
1.292
0.032
0.233
0.153
0.579
0.710
-0.307
0.057
-0.351
-0.023
-0.100
-0.410
-0.245
-0.005
-0.070
-0.189
-0.369
-0.007
-0.224
-0.039
-0.569
-0.006
При найденном значении порядка р достигается стабилизация корре¬
ляционной матрицы погрешностей Т г. Диагональные значения этой
матрицы равны: Ти =0.042, Т22 = 0.020, Г33 =0.016, Тм =0.275.
Комментарии. Приведенные выше результаты испытаний рекур¬
рентного алгоритма для определения коэффициентов авторегрессии
показали его работоспособность. Однако сами результаты определе¬
ния коэффициентов Ф2, и Ф2, требуют дальнейшего уточнения. Все
дело в том, что исходный массив вариаций плотности атмосферы
8р/р недостаточен для надежного определения матричных коэффи¬
циентов корреляции . Этот недостаток проявился в существенном
уровне значений компонентов матрицы погрешностей Т 2.
Второй этап испытаний был проведен по модельным данным. Вид
случайного процесса был выбран таким образом, чтобы он был «похож»
На рассмотренные выше вариации плотности атмосферы. Такого рода
Процесс т(/,) строился на основе интегрирования системы двух стохас¬
тических дифференциальных уравнений
234
Раздел 13
dx
dt
dy_
dt
= -2 a ■ x + у + 6, • ,
= -со2 ■x + b2 -£2.
(13.46)
Здесь гауссовы случайные процессы , £2 типа белого шума являются
несмещенными и имеют единичную дисперсию. Решение соответствую¬
щей однородной системы уравнений имеет вид
x(t + г)
y(t + т)
= U(r)
= ехр(-« - г)
x(t)
кО
cos кт - ■ sin кт
sin кт
ко
-^y^-sin кт
cos кт+ су^-$ткт
но
(13.47)
Здесь к2 = со2 - а2. При достаточно малом т решение уравнений (13.46) с
учетом случайных возмущений может быть представлено в следующей
форме:
= ‘+1 | = t/(r)-z,.+
-М
ЬгЦ
vd
(13.48)
Значения параметров процесса принимались равными: а = 0.04, а> = 0.5,
Ьх =yj2 -а =0.283, Ь2= 0.05, к = yja)2 - а2 = 0.498, r= 1. Гауссова слу¬
чайная последовательность моделировалась таким образов, чтобы вы¬
полнялись условия: Е^) = 0, E^t-^^ = E и -£гг) = 0 при t* т. При
моделировании построено 10000 значений оценок и уг Эти значения
использованы для определения экспериментальной нормированной кор¬
реляционной функции. Полученные результаты расчета матричных кор¬
реляционных моментов Г; размером (2 х 2) представлены на рис. 13.3.
Для этих оценок справедливы приближенные равенства (l,l)« rt (2,2) и
л;.(1,2) «-л; (2,1). Стандартные отклонения, полученные в результате мо¬
делирования, оказались равными: сгх = 0.797, сг = 0.386.
Прежде, чем перейти непосредственно к определению матричных ко¬
эффициентов авторегрессии Фр j, j = \, р, рассмотрим, какие оценки
мы ожидаем получить. Здесь следует учесть, что исходные коэффициенты
Рекуррентный метод построения уравнений авторегрессии 235
Рис. 13.3. Значения экспериментальных корреляционных моментов г,
авторегрессии являются нормированными. Поэтому для ответа на постав¬
ленный вопрос необходимо скорректировать параметры уравнения (13.48)
таким образом, чтобы дисперсии случайных процессов х и у стали равны 1.0.
Это достигается соответствующей корректировкой коэффициентов и ^
{b,)nm=bjcjz =0.283/0.795 = 0.356,
{b2)new =Ь2/<уг =0.05/0.386 = 0.129.
(13.49)
Очевидно, что в данном случае уравнения авторегрессии имеют первый
порядок (р = 1). С учетом изложенного ожидаемые значения компонентов
Матриц Ф] j и 7^ равны:
Kl Idea!
) ideal =
“1,1 “1,2 I 0.8070 0'4470
“2,1 “2,2 Г |- 0.4798 0.8808
(ML
0
0.1267 0
0
р)2
v L / rew
0 0.0166
(13.50)
(13.51)
В табл. 13.2 приведены результаты вычислений по изложенному вы-
Hie алгоритму. При этом выполнено 3 шага итерационного процесса
236
Раздел 13
(Ртах= 3). Кроме основных величин, рассматриваемых в формулах
(13.36)—(13.39), вычислялись определители матриц Фр ), Xp j, Тр, Spt
K>L, и (Т')шы '
Полученные результаты являются весьма интересными. Их анализ
позволяет сделать следующие выводы.
1. Компоненты матрицы (Фц ) коэффициентов авторегрессии, получен¬
ной на первом шаге, хорошо согласуются с соответствующими ком¬
понентами «идеальной» матрицы (Фи)у , • Эти данные выделены в
таблице жирным шрифтом. Различие соответствующих коэффициен¬
тов не превышает 0.5 %.
Таблица 13.2. Результаты вычислений
' X,J
det
Тр
det
р
./
Tr/Sр
О-),,
(Л,
(-)„
(-)„
ф,..
(-)и
(•••),2
I
1
0.8086
0.4493
-0.4752
0.8815
0.9263
0.1273
-0.0001
-0.0001
0.0168
0.00213
1
0.8302
-0.4740
0.4481
0.8599
-
0.1045
0.0472
0.0472
0.0417
0.00213
2
1
0.7808
0.4549
-0.4748
0.8708
0.8959
-
-
-
-
1
0.8055
-0.4795
0.4412
0.8468
-
-
-
-
-
2
0.0285
0.0093
-0.0055
0.0093
-
0.1272
-0.0001
-0.0001
0.0167
0.00213
2
0.0269
-0.0077
0.0136
0.0079
-
0.1044
0.0472
0.0472
0.0417
0.00213
3
1
0.8043
0.4270
-0.4756
0.8592
0.8941
-
-
-
1
0.8469
-0.5049
0.4644
0.8250
-
-
-
2
0.0293
0.0089
-0.0055
0.0092
-
-
-
-
2
0.0279
-0.0079
0.0141
0.0077
-
-
-
3
-0.0361
0.0125
-0.0050
0.0109
-
0.1271
-0.0001
-0.0001
0.0167
0.00213
3
-0.0263 0.0426
-0.0107
0.0307
-
0.1043
0.0471
0.0471
0.0417
0.00213
Значения компонентов матриц |
фп)
'•'/ideal
Значения компонентов матриц (T\)jllnl!
1
1
0.8070
0.4470
-0.4749
0.8808
0.9231
0.1267
0
0
0.0166
0.002Ю
Рекуррентный метод построения уравнений авторегрессии
237
2. Диагональные компоненты корреляционной матрицы случайных
возмущений 7[ хорошо согласуются с соответствующими компонен¬
тами «идеальной» матрицы {T\)ideal ■ Отличия не превышают 1.5 %.
3. В процессе итераций компоненты матриц Тр и S практически не
менялись (это видно и по значению их определителей).
Таким образом, по результатам расчетов можно сделать вывод, что
порядок уравнений авторегрессии р = 1 определен правильно и что значе¬
ния коэффициентов авторегрессии Фм определены достаточно точно.
На третьем этапе испытаний в качестве исходных данных исполь¬
зовались параметры bt и Ь2 модели вариаций плотности атмосферы вида
(13.13) на 4-летнем интервале времени (декабрь 1999 г. - ноябрь 2003 г.) с
шагом 1 сутки, а также индексы солнечной активности (FW 7) и геомаг¬
нитной возмущенности (Кр) на том же интервале. Результаты этих испы¬
таний изложены в публикациях [9-11]. На рис. 13.4 представлены исход¬
ные оценки параметров 6, и Ь2.
Таблица 13.3. Статистические характеристики компонентов вектора состояния
Характеристика
Компоненты вектора состояния (z)
№
1
2
3
4
Обозначение
b]
Ьг
^10.7 _ ^81
Кр
E(z)
0.0014
0.0320
0.95
2.41
SD(z)
0.1472
0.1015
29.34
1.156
Коэффициенты авто и взаимной корреляции представлены на рисун¬
ках 13.5 и 13.6.
Значения матричных коэффициентов авторегрессии Фpj,j= 1, •••, Р
были определены по алгоритму, изложенному выше. Значения параметра
регрессии р определялись из условия увеличения определителя оценок
корреляционной матрицы Тр при переходе к следующему шагу:
det( Т,)< det^r^,). Переход от первого {р= 1) ко второму шагу (р = 2)
Привел к существенному уменьшению определителей матриц Тр и S .
Продолжение итераций привело к увеличению упомянутых определите¬
лей. Поэтому результаты второго шага приняты за окончательные. Ре¬
зультаты расчетов для 4-мсрного и 2-мерного вектора состояния пред¬
ставлены ниже.
Correlation bi> &2 coefficients
238
Раздел 13
Time
13.4. Оценки параметров bt и b2 модели вариаций плотности атмосферы
Рис. 13.5. Значения коэффициентов автокорреляции
Cross correlation
Рекуррентный метод построения уравнений авторегрессии 239
0.6
0.5
0.4
0.3
0.2
0.1
0.0
-0.1
-0.2
-0.3
Рис. 13.6. Значения коэффициентов взаимной корреляции
— Ь2 (f irst)and Ы /
2 (F10.7-F81) (first) and Ы /
3 Кр (first) and Ы J
*— (F10.7-F81 )(f irst) and bf2
5— Kp (first) and b2 J
6— -Kp (first) and (F10.7-/81) ^
/ /
/ //.'*
O-V-vdi-
\ GOST model
.\
V X'-'4
'N4 ' \ X
•'* N-
4 4. / \
^ A
''•w-.X’
2■"
’** ^ 4 ^“ v
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30
Time (lag), days
Ф,, =
ф2,2 —
1.4865
0.2695
0.0669
-0.0214
0.5424
0.9907
0.1015 -
-0.0079
0.0664
0.0947
1.1478
0.0190
0.6901
0.3491
0.0031
0.4770
-0.5489
-0.2461
-0.0682
-0.0331
-0.5433
-0.0425
-0.0885
-0.0108
-0.0807
-0.0787
-0.2127
-0.0077
-0.9455 -0.1201 -0.0070 -0.0274
ф2,, =
1.4898 0.2572
0.5603 0.9871
Ф2,2 ~
-0.5362 -0.2545
-0.5565 -0.0417
Из этих данных видно, что компоненты, соответствующие парамет¬
рам Ь\ и Ь2, для 4- и 2-мерного процессов имеют близкие значения. При
этом все значения коэффициентов авторегрессии являются существенными,
240
Раздел 13
их значения превышают величину 0.25. Взаимосвязь параметров Ь{ и Ь2 с
другими компонентами является более слабой: соответствующие значе¬
ния коэффициентов авторегрессии не превышают величины 0.10.
Prdiction interval, days
Рис. 13.7. Зависимость СКО нормированных погрешностей от интервала прогноза
Полученные значения коэффициентов авторегрессии были приме¬
нены для оценки погрешностей прогнозирования каждого из компонентов
4-мерного вектора состояния. Основные результаты расчетов (статистиче¬
ские характеристики нормированных погрешностей) представлены на
рис. 13.7. Из этих данных видно, что при интервалах прогноза до 4 суток
СКО (SD) нормированных погрешностей параметров bh Ъ2 и FW1 изменя¬
ются примерно линейно в интервале значений от -(0.2-0.3) до ==(0.6 0.7).
Для индекса геомагнитной активности соответствующие погрешности
меняются от 0.80 до 0.96. Естественно, что в дальнейшем по мере увели¬
чения интервала прогнозирования SD нормированных погрешностей всех
параметров стремятся к 1.0.
В некоторых случаях (при недостаточно корректных исходных дан¬
ных) применение уравнений авторегрессии может приводить к неустой¬
чивому решению. Для проверки того, что полученное решение является
Рекуррентный метод построения уравнений авторегрессии
241
устойчивым, было выполнено прогнозирование вектора состояния на
100 шагов (100 суток) при некоторых произвольно выбранных начальных
условиях. Результаты расчетов показал, что полученное решение является
устойчивым.
В заключение раздела сравним оценки погрешностей индекса Д0 7,
приведенные на рис. 13.7, с соответствующими результатами раздела 11
(рис. 11.9). Анализ показал, что применение метода оптимального прогно¬
зирования гауссового случайного процесса обеспечивает снижение по¬
грешностей на 10 %-12 % по сравнению с применением уравнений авто¬
регрессии. Этот эффект объясняется, по-видимому, тем, что при построе¬
нии уравнений авторегрессии не используются все исходные значения
корреляционных моментов г , так как итерации заканчиваются при отно¬
сительно небольших значениях порядка уравнений авторегрессии р.
Выводы
1. Обоснована рекуррентная методика построения уравнений авторег¬
рессии для векторных процессов, которая является обобщением из¬
вестного алгоритма Дарбина—Левинсона.
2. Испытания предложенной рекуррентной методики на статистической
модели и по реальной информации подтвердили ее работоспособность.
3. Погрешности прогнозирования на основе применения уравнений ав¬
торегрессии оказались на 10-12 % больше соответствующих резуль¬
татов применения метода оптимального прогнозирования гауссового
случайного процесса. Этот эффект объясняется, по-видимому, тем,
что при построении уравнений авторегрессии не используются все
исходные значения корреляционных моментов р .
Литература
1. Я. 3. Цыпкин. Основы информационной теории идентификации. М.: Наука,
1984.
2. Дж. Бокс, Г. Дженкинс. Анализ временных рядов. Прогноз и управление.
М.: Мир, 1974.
3. Б. Фридландер. Решетчатые фильтры для адаптивной обработки данных,
ТИИЭР. М.: Мир, 1984, т. 70, № 8.
4. В. В. Воеводин, У. У. Тартышников. Вычислительные процессы с теплице-
выми матрицами. М.: Наука, 1987.
5. Ю. П. Горохов, А. И. Назаренко. Методические вопросы построения модели
флуктуаций параметров атмосферы. Наблюдения искусственных небесных
тел. М.: АС АН СССР, № 80, 1982.
242
Раздел 13
6. А. И. Назаренко, Ю. П. Горохов и др. Методика и некоторые результаты Вы.
явления пространственно-временных закономерностей крупномасштабны*
флуктуаций плотности атмосферы. Наблюдения искусственных небесны*
тел. М.: АС АН СССР, № 82, 1987.
7. А. 1. Nazarenko, S. N. Kravchenko, S. К. Tatevian. The space-temporal variations
of the upper atmosphere density derived from satellite drag data. Adv. Space Res
Vol. 11, №6, 1991.
8. С. H. Кравченко, А. И. Назаренко. Рекуррентный метод построения уравне¬
ний авторегрессии для векторных процессов. Известия АН СССР. Техниче¬
ская кобернетика. № 1, 1992.
9. A. I. Nazarenko, V. S. Yurasov. “Atmospheric Density Correction Using Real Or¬
bital Data”. 17th International Symposium on Space Flight Dynamics, Moscow,
June 2003.
10. V. S. Yurasov, A. I. Nazarenko, P. J. Cefola, R. J. Proulx. “Near Real Time Cor¬
rections to the Atmospheric Density Model”. Fifth US/Russian Space Surveillance
Workshop St-Petersburg, September 2003.
И. V. S. Yurasov, A. I. Nazarenko, P. J. Cefola and К. T. Alfriend, “Direct Density
Correction Method: Review of Results”, IAC-06-C1.5.2.
Раздел 14
Построение пространственного
распределения концентрации
космического мусора
Введение
Очевидно, что при отсутствии детальных сведений об элементах ор¬
бит мелких (не каталогизированных) объектов их изучение требует при¬
менения статистического подхода. В то же время традиционный подход к
изучению движения спутников является детерминированным. Он основан
на интегрировании уравнений движения. При таком подходе для каждого
из объектов (или группы) формируется вектор начальных условий. Про¬
гнозирование выполняется с использованием традиционных моделей
движения. Для множества объектов результаты суммируются. Очевидно,
что такой подход является очень трудоемким: он может быть реализован
только на достаточно мощных ЭВМ. Несмотря на трудоемкость, этот под¬
ход не снимает проблемы обеспечения адекватности модели. Применяемые
в разных моделях оценки могут отличаться на порядок. Весьма сложной
задачей является также настройка модели по имеющейся ограниченной
измерительной информации. Рассмотрим, как строится пространственное
распределение концентрации в разных моделях.
В модели MASTER [1] применяется детерминированный подход в наи¬
более «чистом» виде. В сферической системе координат все пространство
разбивается на трехмерные ячейки, характеризуемые геоцентрическим рас¬
стоянием г , двумя углами ак, /Т и объемом Vjkj. Число ячеек составляет
Несколько сот тысяч. Для различных пролетов объекта через ячейки на основе
элементов орбит каждого из объектов (частиц КМ) вычисляется время пребы¬
вания объекта A/n(rt() в каждой из ячеек. Здесь п — номер пролета. Затем
вклад данного rt-ro пролета в концентрацию КМ определяется по формуле
04.1)
Vikj ' '
гДе Т — период объекта. Результаты расчета усредняются (по пролетам) и
суммируются (по объектам).
244
Раздел 14
В модели ORDEM [2] применяется “помесь” детерминированного и
стохастического подходов. Каждый из объектов характеризуется тремя
элементами орбиты: геоцентрическими расстояниями перигея и апогея
( гр и га), а также наклонением г. Концентрация принимается не зависящей
от долготы (а). «Вклад» данного объекта в концентрацию КМ в точке с гео¬
центрическими координатами (г, ji) определяется по формуле Д. Кесслера [3]
четов для различных точек ОКП суммируются (по объектам).
Комментарий I. Обратим внимание на негативную сторону подхода,
который применяется в модели MASTER. Анализ показывает, что по¬
грешности определения концентрации на основе применения «чисто¬
го» детерминированного подхода зависят от числа случаев попадания
объектов в данную ячейку (N). Зависимость СКО относительной по¬
грешности определения концентрации от N имеет вид
Отсюда следует, что для достижения точности определения концентра¬
ции в каждой из ячеек не хуже 5 % число попаданий объектов в ячейки
должно быть не менее 400. При разбиении ОКП на Nv ячеек общее
число пролетов КО через ячейки должно быть не менее 400 - . На¬
пример, при Ny = 50 000 необходимо иметь не менее 20 миллионов
попаданий КО в ячейки. Это означает, что при числе объектов в катало¬
ге, равном 12 000, число попаданий каждого из объектов в ячейки
должно быть не менее 1700. Очевидно, что такая методика является
весьма трудоемкой. Уменьшение числа прогнозов приводит к ухудше¬
нию точности и ставит под сомнение целесообразность рассмотрения
трехмерных ячеек, так как в области низких орбит при изменении дол¬
готы концентрация меняется не более чем на 5-10 %.
Комментарий 2. При выборе возможного подхода к определению
концентрации объектов малого размера (не каталогизированных) ре¬
шающую роль играет то обстоятельство, что полный вектор их эле¬
ментов орбит (начальных условий для прогнозирования) неизвестен.
Поэтому применение «чистого» детерминированного подхода для
этих объектов оказывается невозможным.
р{г,Р)
1
(14.2)
|1/2 *
Здесь а = {гр+га^/ 2 — большая полуось орбиты. Затем результаты рас-
(14.3)
Построение распределения концентрации космического мусора
245
Таким образом, при отсутствии детальных сведений об элементах ор¬
бит мелких объектов изучение характеристик техногенного засорения
ОКП требует применения статистического моделирования. Альтернатив¬
ным к детерминированному подходу является применение статистиче¬
ских распределений элементов орбит разного размера. Именно такого
рода распределения положены в основу статистического моделирования
засоренности ОКП в модели SDPA.
При моделировании КМ в области низких орбит (с высотой до
2000 км) используется допущение, что статистические распределения трех
угловых элементов орбит (средней аномалии в начальный момент време¬
ни, долготы восходящего узла и аргумента перигея) являются равномер¬
ными. Другими словами, вероятность попадания значений этих элементов
в произвольный интервал (jc,jc + <5) равна д/2ж. Правомочность данного
допущения обусловлена тем, что все эти элементы подвержены вековым
возмущениям. Поэтому задача построения статистических распределений
элементов орбит упрощается: в качестве исходных данных необходимо
иметь распределения только трех элементов орбиты, характеризующих ее
высоту, эллиптичность и наклонение. Здесь возможен различный выбор
трех элементов орбиты, который не имеет принципиального значения.
Применяются также различные разбиения рассматриваемых трех элемен¬
тов орбит и возможных значений размеров КМ на «ящики». Для опреде¬
ленности примем, что этими тремя элементами орбиты являются: высота
перигея (hp), эксцентриситет (е) и наклонение (г). Таким образом, в качест¬
ве исходных данных для моделирования КМ разного размера используют¬
ся статистические распределения видаp(hp, е, i).
Оценим число вариантов различных значений элементов орбиты,
которое вытекает из применения распределения p(hp, е, г). Пусть, напри¬
мер, применяется разбиение по высоте, эксцентриситету и наклонению
соответственно на 36, 8 и 50 «ящиков». Этому разбиению соответствует
14400 вариантов различных значений элементов орбиты. Такое число
вариантов соизмеримо с числом объектов в каталоге. Тем не менее, важ¬
ное преимущество использования распределения p(hp, е, Г) состоит в его
применении для более мелких объектов, число которых достигает многих
Миллионов.
Наряду с рассмотренной выше концентрацией КМ используются и
Другие его характеристики, которые являются исходными данными для
Решения различных прикладных задач или входят в состав результатов
Решения этих задач. К ним в первую очередь относятся статистические
Распределения величины радиальной и тангенциальной составляющих
Вектора скорости частиц КМ разных размеров, а также направлений тан-
Венциальной составляющей. Наряду с концентрацией эти распределения
составляют набор данных, необходимый и достаточный для решения раз¬
246
Раздел 14
личных прикладных задач на заданный момент времени. Исходной ин¬
формацией для построения перечисленных распределений являются рас-
пределения вида p(hp, е, i).
Аналитическая методика расчета концентрации
По сравнению с моделями MASTER и ORDEM в модели SDPA сде¬
лан следующий шаг в направлении уменьшения роли детерминированного
подхода: вместо элементов орбит каждого из объектов в качестве исход¬
ных данных рассматриваются статистические нормированные распреде¬
ления трех элементов орбит: высоты перигея, эксцентриситета и наклоне¬
ния (соответственно p(hp), р(е)> p(i)).
Околоземное пространство разбивается по высоте А и по широте (р
соответственно с шагом Ah и А<р на двумерные торообразные «ящики».
В таком «ящике» концентрация равна отношению числа объектов в «ящи¬
ке» к его объему
которое находится в сферическом слое (h,h + Ah). Возможные условия
пролета объектов через этот слой показаны на рис. 14.1.
AN (h, h + Ah, (p, cp + A <p)
(14.4)
2ji-(R + h + Ah/ 2)2 -cos<p-Ah- A<p
Этап I. Определяется среднее количество объектов ДА(h,h + Ah),
а
b
с
I
Рис. 14.1. Варианты попадания объекта в сферический слой (h, h + Ah)
Условия пролета зависят от значений высот перигея hp и апогея ha. Здесь
возможны 6 вариантов. Три их них показаны на рисунке. В условиях 4-го
Построение распределения концентрации космического мусора
247
варианта объект постоянно находимся в сферическом слое, а в остальных
двух — в него никогда не попадает. Данные обо всех вариантах приведены
в табл. 14.1. Значения истинной аномалии в точках пересечения границ
сдоя рассчитываются на основе уравнений
cos(Vl) = (p-R-h)/e,
cos(v2) = (p-R-h-Ah)/e.
Здесь р — параметр орбиты, R — средний радиус Земли.
Расчет значений средней аномалии М, и М2 выполняется на основе
соответствующих значений v, и v2 по эллиптической теории движения
спутников с использованием уравнения Кеплера.
Таблица 14.1. Условия и характеристики вариантов пролета
№ п.п.
Рис.
К
К
vi
V2
Ar{hp,e)
1
а
<h
> h + Ah
=(14.5)
=(14.5)
(М2-М,)/л
2
b
<h
<h + Ah
=(14.5)
-
{n - M,)/ n
3
с
>hw<h + Ah
> h + Ah
-
=(14.5)
(л-М2)/ к
4
-
>h и <h + Ah
<h +Ah
-
-
1
5
-
>h + Ah
-
-
-
0
6
-
-
<h
-
-
0
В таблице приведены также оценки времени Ax(hp,e} (в долях периода),
в течение которого КО с элементами орбиты hp, е находится в высотном
Диапазоне {h,h + Ah). С учетом этих оценок среднее количество объектов
AN(h,h + Ah), которое находится в сферическом слое (h,h + Ah), опреде¬
ляется по формуле
AN(h,h + Ah) = Nj- Д/гр ■ Ае, (14.6)
А, -
Где Nl — общее число объектов. Суммы по аргументам hp и е берутся по
Леей области их возможных значений,
248
Раздел 14
Этап 2. Рассматривается широтный слой {<р,<р + А<р). В него попада¬
ют все КО, у которых sin i > sin<p . Для времени At, в течение которого
КО пересекает рассматриваемый широтный слой (в общем случае 2 раза),
выведена формула:
Т cos ер
4‘ = — I , 'А(Р- (Н.7),
71 s]sin г-sin <р
Отношение
Jt(i,9>)-Jl/T- . C0SV' — (14.8)
4
sin2 г- sin2 ср
л
имеет смысл условной вероятности нахождения КО в рассматриваемом
широтном слое при условии попадания его в данный высотный слой
(h,h + Ah). Отсюда следует выражение для общего количества объектов в
двумерном торообразном «ящике»:
AN(h,h + Ah,<p,<p+ А<р) = AN(h,h + Ah)-^Ar{i,(p)-p(i) ■ di =
(14.9)
NL-Y^AT{hP’e)'P{hp)'P(e)'^hp'^e
jAr(i,<p)-p(i)-di
Интеграл по наклонению i — берется только по области, где sin i > sin q> .
Так как зависящий от наклонения множитель подынтегрального выраже¬
ния не содержит элементов hp и е, то интеграл по i можно взять отдельно:
F(<p)= f I -—, при sini > sin<p. (14.10)
, ^sin2i-sin2<p
В результате подстановки (14.9) в (14.4), с учетом (14.10), получаем фор¬
мулу для расчета пространственного распределения концентрации:
P(h.<P) = — N* F(<P) .YYdz(h e)■ p(h )■ p(e)-Ah -Ae.
2ж2-(R + h +Ah/2) -Ah
(14. ИХ
Комментарий 3. Вычисление интеграла (14.10) в особой точке (при
i = tp). Рассмотрим этот интеграл в интервале значений широты (ср,ср + А)
при значениях наклонения / внутри этого интервала, т. е. при
Построение распределения концентрации космического мусора
249
<р <i < <р + А. Учтем, что при малом А можно принять p(i) = р(<р). На
указанном интервале выполним в интеграле замену аргумента i на
у = i-<p и представим знаменатель в виде
-y/sin2 г- sin2 <р = ^2-sin^-cos^ ■у[у- (Н.12)
Подстановка (14.12) в (14.10) приводит в выражению
+Т -гтЩ-- <“•»>
фт2<р Joy]y ^AA/sm2/-sm>
Здесь первый из интегралов легко вычисляется. Он равен 2-л/д . Тем
самым преодолевается отмеченная выше особенность функции
(14.10) при / = <р.
Комментарий 4. Изложенный вывод формулы (14.11) впервые был
опубликован в статье [4]. Там же и в ряде последующих публикаций
было показано достаточно хорошее согласие результатов применения
формулы (14.11) с результатами использования детерминированного
подхода.
Из приведенных выше материалов следует, что применяемые методи¬
ки расчета концентрации различаются способами разбиения ОКП на
ячейки (трехмерные или двумерные) и степенью детализации учета эле¬
ментов орбит КМ. При одинаковых исходных данных для случая, когда
концентрация не зависит от долготы и в северном и южном полушариях
принимается одинаковой, все рассмотренные методики будут приводить к
практически одинаковым результатам. Различия относятся только к затра¬
там машинного времени и памяти. Наиболее экономной является методи¬
ка, применяемая в модели SDPA.
Пример результатов расчета концентрации
для области низких орбит
Приведем результаты сравнения высотно-широтных распределений
Концентрации каталогизированных КО — модельных и рассчитанных по
Каталогу за 2007 г. Они представлены на рисунках 14.2 и 14.3 (по данным
Статьи [5]). Из этих рисунков видно хорошее согласие модельных и реаль¬
ных распределений.
250
Раздел 14
Рис. 14.2. Высотно-широтное распределение концентрации по данным каталога
Рис. 14.3. Высотно-широтное распределение концентрации
по данным модели SDPA-2007
Построение распределения концентрации космического мусора 251
В табл. 14.2 представлены оценки максимальной концентрации КМ раз-
дых размеров в 2007 г. и в 2009 г. и их сравнение с соответствующими
данными 2003 г.
Таблица 14.2. Оценки максимальной концентрации КМ разных размеров, км 3
Диапазон размеров, см
Год
0.1-0.25
0.25-0.5
0.5-1.0
1.0-2.5
2.5-5.0
5.0-10
10-20
>20
2003
4.068Е^1
3.312Е-5
6.375Е-6
1.035Е-6
2.092Е-7
7.I40E-8
2.336Е-8
5.454Е-8
2007
7.117 Е—4
5.976Е-5
1.156Е-5
1.978Е-6
4.032Е-7
1.369Е-7
4.488Е-8
1.020Е-7
2009
1.039Е-3
8.775Е-5
1.626Е-5
2.731Е-6
5.539Е-7
1.851 Е-7
5.995Е-8
1.264Е-7
Из приведенных оценок видно, что оценки максимальной концентра¬
ции КМ разных размеров увеличились в 2007 г. по сравнению с 2003 г. в
1.7-1.9 раз. Для 2009 г. соответствующее увеличение но сравнению с дан¬
ными за 2003 г. достигло 2.3-2.6 раз. Это является следствием разрушения
китайского спутника Fengun-1C в январе 2007 г. и растянутой во времени
каталогизацией фрагментов разрушения.
Расчет статистических распределений
составляющих вектора скорости
В процессе организации вычислений по формуле (14.11) организуется
также вычисление статистических распределений величины радиальной и
тангенциальной скорости КМ разных размеров на разных высотах. Эти
составляющие вектора скорости рассчитываются в цикле по высоте пери¬
гея и эксцентриситету. При расчете соответствующих гистограмм исполь¬
зуется вероятность t±z(hp,e}. Пример построения статистического рас¬
пределения тангенциальной составляющей скорости КМ размером 1,0-
2.5 см представлен на рис. 14.4.
Особенностью этого распределения является то, что возможные зна¬
чения скорости находятся в некотором диапазоне, который составляет от
0.2 до 0.3 км/с. Это объясняется влиянием некруговых орбит, т. е. возмож¬
ным разбросом их эксцентриситетов. Если бы все орбиты были круговы¬
ми, то на каждой высоте тангенциальная скорость принимала бы единст¬
венное значение.
252
Раздел 14
Рис. 14.4. Распределение тангенциальной составляющей скорости на разных высотах
Концентрация объектов в области
геостационарных орбит
Рассмотрим распределение числа объектов по высоте и широте по
данным каталога Американской системы контроля космического про¬
странства [6]. Применим разбиение по высоте и широте с шагом 100 км и
1° соответственно. Результаты расчета среднего числа КО, попадающих в
разные ящики, представлены в табл. 14.3. Рассмотрен диапазон высот от
35500 км до 36100 км и диапазон широт в интервале ±4°. Ярко выражен¬
ный максимум числа объектов достигается в районе 35700-35800 км по
высоте и ±1° по широте.
При уменьшении высоты на 100 км число КО уменьшается более чем в
100 раз, а при отклонении аргументов по другим направлениям — на поря¬
док и больше. Эти материалы подтвердили необходимость более детального
рассмотрения концентрации каталогизированных объектов в интервале вы¬
сот 35700-35900 км и в диапазоне ±1° по широте. Поэтому в дальнейшем
при рассмотрении каталогизированных КО применяется различный шаг
разбиения высотно-широтного распределения на «ящики». В интервале вы¬
сот 35700-35900 км и в диапазоне ±1° по широте применяется шаг 10 км по
высоте и 0.1° по широте, а в остальных «ящиках» применяется более грубое
Построение распределения концентрации космического мусора 253
Таблица 14.3. Оценки числа КО в разных «ящиках»
Широта с шагом 1°
|Зысота; км
-3.5
-2.5
-1.5
-0.5
0.5
1.5
2.5
3.5
35550
0.1
0.1
0.1
0
0.1
0.1
0.1
0
35650
0.3
0.3
0.2
0.8
1.1
0.1
0.2
0.1
35750
7.1
9.3
13.4
155.6
147.2
12
8.5
6.5
35850
2.4
2.9
2.6
10
18.9
4.3
3.5
3.3
35950
1.7
2.2
2.6
2.3
2.7
2.5
2.6
1.8
36050
2.7
3.1
3.1
4.4
4.2
3.5
2.8
2.6
разбиение — соответственно 100 км и 1°. Такое же более грубое разбиение
применялось для не каталогизированных КО.
Ниже изложены сведения о концентрации по материалам статьи [7].
Анализ был выполнен по данным каталога за декабрь 2002 г., в котором
содержалось 927 объектов. Для расчета концентрации применялась детер¬
минированная методика, основанная на использовании 6-мерного вектора
начальных условий по каждому из объектов. Определялось среднее число
КО, находящихся в 3-мерных «ящиках» на разных высотах (/г), широтах (8)
и при разных значениях прямого восхождения (а). Число прогнозов каждо¬
го из объектов принималось 1 ООО. Длительность прогноза выбиралась слу¬
чайным образом в интервале от 0 до 1.0 суток. Концентрация каталогизи¬
рованных КО определялась в различных точках области ГЕО.
На рисунках 14.5а и 14.5Ь представлены высотно-широтные распреде¬
ления концентрации для двух вариантов разбиения пространства на «ящи¬
ки». Максимальные оценки концентрации равны 6.1Е-9 км-3 и 2.1Е-7 км 3
Дня крупного и мелкого разбиений соответственно. Оценки концентрации
отличаются в 35 раз! Это означает, что для корректного определения кон¬
центрации на высотах h = 35800± 100км и в диапазоне широт 8 = ±0.1°
необходимо применять малый шаг разбиения. Другой важный результат
анализа заключается в том, что максимум концентрации (2.1Е-7 км-3) ока¬
зался в 4 раза больше максимума концентрации в области низких орбит
(5.4Е-8 км 3).
Приведенные данные показывают, что применение большого шага по
аргументам при оценке концентрации каталогизированных КО некоррект¬
но отражает фактическое распределение в диапазоне высот от 35700 км до
35800 км и при значениях широты в интервале от -1° до +1°. Из этих дан¬
ных очевидно, что в диапазоне высот от 35700 до 35900 км (с шагом
Ю км) и в диапазоне широт от - 1° до +1° (с шагом 0.1°) концентрация ка¬
талогизированных КО меняется на 2 порядка. Поэтому применение боль-
ПЮго шага при разбиении аргументов не является корректным.
254
Раздел 14
Normalized spatial density vs. altitude and declination
Normalized spatial density vs. altitude and declination
b) del(h)=10 km, del(decl)=0.1 °
Рис. 14.5. Оценки концентрации в функции высоты и широты, 2002 г.
Построение распределения концентрации космического мусора
255
Распределение каталогизированных объектов по прямому восхожде¬
нию (а) было построено для двух высотных диапазонов: 35700-35800 км и
35780-35790 км. В первом случае был применен большой шаг по широте
(2.0°), а во втором — существенно более мелкий (0.1°). В обоих случаях
шаг по прямому восхождению принимался одинаковым (10°). Основные
результаты вычислений представлены на рисунках 14.6а и 14.6Ь.
По данным рис. 14.6а число объектов в «ящиках» меняется в зависи¬
мости от прямого восхождения в пределах ±20%. Из данных рис. 14.6Ь
видно, что в рассмотренном высотном диапазоне и в диапазоне широт
±0.1° зависимость концентрации от прямого восхождения является более
существенной, чем по данным предыдущего рисунка. Максимум концен¬
трации достигает значения ртт =3.7 Е-7 1/км3. Минимум отличается
от максимума в 3.5 раза. Вне диапазона широт ±0.1° концентрация в по¬
давляющем большинстве случаев не превышает 1 % от максимального
значения.
Особенности расчета концентрации не каталогизированных объек¬
тов в области ГЕО.
Из многих публикаций, в частности, из материалов статей [7, 8] вид¬
но, что в области ГЕО удается каталогизировать объекты только достаточ¬
но большого размера (>75 см). В последние годы на основе обработки из¬
мерений сети станций ISON было каталогизировано несколько сотен бо¬
лее мелких объектов. Установить источник их образования оказалось не¬
возможным. Это неизвестные объекты, не «привязанные» к конкретному
запуску. Были получены оценки размеров и массы неизвестных объектов.
Большая их часть имеет размеры менее 50 см и массу менее 1 кг, в то вре¬
мя как подавляющее большинство известных КО имеет размер более
75 см и массу более 100 кг. Таким образом, неизвестные объекты — это
относительно небольшие объекты малого веса. Подавляющее большинст¬
во из них — это фрагменты разрушений (космический мусор).
Распределение неизвестных объектов по высоте сильно отличается от
распределения известных КО. По отношению к высоте геостационарной
орбиты они «размазаны» в диапазоне высот ±1000 км. На рис. 14.7 пред¬
ставлено статистическое распределение наклонений неизвестных объек¬
тов. Особенностью этого распределения является то, что большая часть
объектов имеет наклонения в диапазоне значений 7°-9° и 14°-16°. Наличие
этих двух максимумов можно объяснить следующими обстоятельствами.
Во-первых, как показано в ряде публикаций, в результате влияния лунно¬
солнечных возмущений наклонения изменяются во времени в диапазоне
(0°-15°). Во-вторых, фрагменты двух известных разрушений КА находят¬
ся в настоящее время в указанных двух областях.
256
Раздел 14
Averaged SO number in diiTerent boxes
а) Диапазон 35700-35800 km, del(decl)=2°
Spatial density (1/cub. km) vs. Right ascension and Declination
b) Диапазон 35780-35790 km, del(ded)=0.1°
Рис. 14.6. Влияние прямого восхождения
Построение распределения концентрации космического мусора
257
Данное распределение наклонений p{i) применятся для всех фрагментов
JCM размером менее 75 см. Таким образом, в области ГЕО космический му¬
сор распределен в достаточно широкой высотно-широтной области. Поэтому
для построения пространственного распределения концентрации КМ можно
применить большой шаг. Такое распределение представлено на рис. 14.8.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Наклонение, град
Рис. 14.7. Распределение числа неизвестных КО по наклонению
258
Раздел 14
Для построения этого распределения применена изложенная выще
аналитическая методика с некоторыми модификациями. Характерной осо¬
бенностью высотно-широтного распределения концентрации объектов
размером менее 75 см является независимость нормированной концентра-
ции от размеров фрагментов.
Выводы
1. Традиционный подход к построению пространственного распределе¬
ния концентрации спутников является детерминированным. Он осно¬
ван на интегрировании уравнений движения. При таком подходе для
каждого из объектов (или группы) формируется вектор начальных ус¬
ловий. Прогнозирование выполняется с использованием традицион¬
ных моделей движения.
2. По сравнению с зарубежными моделями сделан следующий шаг в на¬
правлении уменьшения роли детерминированного подхода: вместо
элементов орбит каждого из объектов в качестве исходных данных
рассматриваются статистические нормированные распределения трех
элементов орбит: высоты перигея, эксцентриситета и наклонения (со¬
ответственно p{hp), р(е), p(i)). Для этих исходных данных разра¬
ботана аналитическая методика расчета концентрации, а именно вы¬
ведена формула (14.11).
3. Работоспособность и достоинства разработанной методики подтвер¬
ждены результатами построения высотно-широтных распределений
концентрации объектов для области низких и геостационарных орбит.
Литература
1. Orbital Debris Engineering Model (ORDEM2000). NASA, JSC, October 2000.
2. S. Flegel et al, The MASTER-2009 Space Debris Environment Model. Fifth Euro¬
pean Conference on Space Debris, Darmstadt, Germany, 2009
3. D. Kessler. Derivation of the collision probability between orbiting objects: The
lifetime of Jupiter’s outer moons. Icarus 48, 1981.
4. А. И. Назаренко. Построение высотно-широтного распределения объектов в
околоземном космическом пространстве. Проблема загрязнения космоса
(космический мусор). Москва, Космосинформ, 1993.
5. A.I. Nazarenko. Results of updating the parameters of the space debris model in 2007
and in 2009. Fifth European Conference on Space Debris, Darmstadt, Germany, 2009.
6. www.space-track.org.
7. A. 1. Nazarenko, V. S. Yurasov. The detailed study of catalogued objects distribu¬
tion in GEO. IADC 2003.
8. V. A. Stepanyants, V. M. Agapov, Z. N. Khutorovsky. Refinement of Parameters
and Motion Forecast for High-Orbit Objects with a Big Area to Mass Ratio. 8
US/Russian Space Surveillance Workshop, Maui 2010.
Раздел 15
Статистические распределения величины
и направления скорости космических
объектов в инерциальном пространстве
Введение
Рассмотрим методику построения оценок величины и направления
скорости объектов в разных точках ОКП. Основная трудность построения
этих оценок обусловлена их зависимостью от параметров орбит объектов
и положения рассматриваемой точки. Возможные значения величины и
направления вектора скорости изменяются в широких пределах. Поэтому
естественным является применение статистических характеристик вели¬
чины и направления скорости объектов (частиц космического мусора).
Методика построения статистических распределений величины тан¬
генциальной и радиальной скорости объектов была кратко рассмотрена в
предыдущем разделе. Напомним ее основные положения. Рассматривают¬
ся объекты, высота перигея и эксцентриситет которых находится в диапа¬
зоне значений (h, hp + Ahp), (е,е + Ае). Пролету некоторого объекта че¬
рез сферический слой с высотами {h,h + Ah) соответствуют конкретные
значения тангенциальной и радиальной составляющих скорости Vx{hp,e^
and Уг(Ьр,е) и конкретная вероятность его попадания в указанный сфе¬
рический слой, равная
P{h,h + Ah) = Ar[hp,e)-p[hp)-р{е)-Ahp ■ Ае. (15.1)
Здесь:
Ar{hp,e} имеет смысл вероятности попадания КО в рассматривае¬
мый высотный слой (h,h + Ah) при данных элементах орбиты;
p{hp), р(е) —статистические нормированные распределения вы¬
соты перигея и эксцентриситета соответственно.
260
Раздел 15
Применение вероятности (15.1) позволяет легко построить гистограммы
распределений величины рассматриваемых составляющих вектора скоро¬
сти. Пример распределения тангенциальной составляющей скорости был
представлен на рис. 14.4.
Перейдем к анализу направления тангенциальной составляющей ско¬
рости (см. рис. 15.1). Основные положения применяемой методики изло¬
жены в публикациях [1...5]. Из данных рисунка видно, что направление
тангенциальной составляющей скорости характеризуется углом А. Значе¬
ние этого угла зависит от параметров сферического прямоугольного тре¬
угольника, у которого известны два катета (углы L и широта точки <р) а
также наклонение орбиты i.
Для расчета значения азимута А применяются известные формулы сфери¬
ческой тригонометрии:
tg i -sin L = tg (p , (15.2)
cos / sin/. /.cTi
sin/4= = , _ (15.i)
cos
Ф sin2 L-cos2 (p + sin2
Статистические распределения скорости КО в инерциальном пространстве 261
Это значение азимута находится в том же самом квадранте, что и значе¬
ние долготы L. Имеется однозначное соответствие между элементами ор¬
биты i, L и направлением (15.3) вектора скорости на данной широте (р.
Обоснование алгоритма
Положение произвольной точки в ОКП характеризуется координа¬
тами: геоцентрическим расстоянием г, широтой (р и долготой. При реше¬
нии рассматриваемой задачи в качестве долготы удобно использовать
угловое расстояние L между меридианом данной точки и положением
восходящего узла орбиты. При анализе всего множества пролетов спут¬
ника через данную точку используется допущение, что долгота L являет¬
ся равномерно распределенной случайной величиной. Плотность этого
распределения равна
Другим важным допущением является то, что статистическое распределе¬
ние значений наклонения p{i) принимается известным. Задача заключает¬
ся в построении статистических распределений азимута А в точках с раз¬
ной широтой (р.
В частном случае, когда заданная точка находится на экваторе
(<р= 0), решение задачи сильно упрощается. Из формулы (15.3) очевидно,
что в этом случае А = п/2 - г. Поэтому в данном случае решение задачи
имеет вид р(А) = p(i = п/2 - А). Это распределение представлено на
рис. 15.2. Очевидно, что «пики» в этом распределении относятся к наибо¬
лее часто применяемым наклонениям спутников, а именно, к окрестности
значений наклонений 100°, 83° и 70°. Болес 60 % всех запусков выполня¬
ется в область указанных наклонений.
В общем случае решение задачи усложняется. С математической точ¬
ки зрения она сводится к построению статистического распределения
функции двух аргументов, которые являются случайными величинами с
известными распределениями.
Принимая концентрацию р(г, <р) в данной точке известной, на первом
этапе определим число объектов, которые проходят в ее окрестности че¬
рез перпендикулярное к скорости сечение (cross-section) площадью
SF = Sr-Sr за единицу времени (один период). Общее число объектов, на¬
ходящихся в высотном слое (г, г + 8г), равно 8п = р{И)-8г, где
p(L) = \/2тг .
(15.4)
(15.5)
262
Раздел 15
Азимут, град
Рис. 15.2. Азимутальное распределение тангенциальной скорости на экваторе
При определении доли объектов (вероятности р(А)-АА), которые про¬
летают через заданный азимутальный сектор (А, А + АА), надо иметь в виду,
что только малая часть из числа этих объектов (8п) пролетает в окрестности
данной точки. Проблема состоит в определении числа объектов, которые
пролетают в окрестности данной точки в азимутальном секторе (А, А + АА)
и на расстоянии 5Ь по бинормали, удовлетворяющем условию
8Ь<8г. (15.6)
Выполнение этого условия зависит от двух элементов орбит: наклонения <
и долготы точки L относительно восходящего узла. В случае прохождения
КО через заданную точку эти параметры орбиты связаны соотношением
(15.2). Ели при некоторых заданных значениях L и / =f(L, q>) мы опреде¬
лим такие отклонения SL and 8i = F(8L), при которых выполняется усло¬
вие (15.6), то тогда при заданных априорных распределениях p(i) и p(L)
нетрудно определить искомую долю объектов, попадающих в указанную
окрестность
Sn(SL) = p(i)-p(b)-Si-SL.
(15.7)
Статистические распределения скорости КО в инерциальном пространстве 263
Это доля объектов из числа дп = p(h) дг, которые имеют долготу в интер¬
вале (L,L + 5L) и пролетают в <Я>-окрестности заданной точки.
Основная проблема состоит в определении области S значений <5? и
SL («трубки» траекторий), для которых выполняется условие (15.6). Как
только эта область S построена, криволинейный интеграл
dn(db)= j p(i)-p(L)-dS (15.8)
s
будет характеризовать долю объектов (из числа дп), которые находятся в
этой «трубке». В результате построения области S вычисление криволи¬
нейного интеграла сведено к вычислению обыкновенного интеграла (см.
Приложение)
дп(дЬ) =~—\ | p(i(L))-sini(i)-nfZ-. (15.9)
В этом выражении наклонение i связано с долготой соотношением (15.2).
Общее число объектов, которые пролетают в ^-окрестности данной точ¬
ки за один период будет равно
p(h)-dr-dn(db) = ^ ^ • | (15.10)
Таким образом, задача первого этапа решена.
Перейдем ко второму этапу — построению нормированного азиму¬
тального распределения объектов р(А). Это распределение удовлетворяет
условию
jp(A)-dA = l. (15.11)
При фиксированной широте множители перед интегралом в выраже¬
нии (15.10) не зависят от аргумента L. Их произведение можно считать
постоянной величиной (к). Поэтому подынтегральное выражение
p(i(Z)) sini'(Z) nfZ пропорционально числу объектов (доле от дп), ко¬
торые при заданных L и dL попадают в Ж-окрестность заданной точки.
Поэтому вероятность данного события можно представить как
dp(L,dL) = к ■ p(i(L)y sin i(LydL . (15.12)
264
Раздел 15
Так как конкретному значению L соответствует единственное значение
азимута A =f(L), то величина (15.12) имеет смысл вероятности P(A,dA) по¬
падания объекта в азимутальный сектор (А, А + dA), где
dA = (dA/dL)-dL.
Расчеты азимутального распределения с использованием формулы
(15.12) проводятся с использованием конкретного разбиения аргумента А
на «ящики». А именно, в модели SDPA применяется дискретное разбие¬
ние с шагом АА = 2°. При достаточно мелком шаге по долготе AL по срав¬
нению с шагом АА оценки A =f(L) попадают в сектор (А, А + АА) много¬
кратно. Сумма оценок (15.12) для всех этих попаданий в сектор
(А, А + АА) и есть искомая оценка распределения р(А), т. е.
p(A) = Zdp(L,dLlA+AA. (15.13)
Для получения корректного распределения р(А) необходимо, чтобы
число этих попаданий было не менее ста. Поэтому шаг по долготе должен
иметь величину не менее 360°/(180-100).
На основе изложенной выше методики разработана компьютерная
программа для построения распределения возможных направлений
тангенциальной скорости в различных точках ОКП. В качестве на¬
чальных условий задается распределение p(i) и набор значений широ¬
ты (р. Как было упомянуто выше, распределение p(L) принимается рав¬
номерным.
Примеры азимутальных распределений
На рис. 15.3 представлен пример картинки на экране монитора в про¬
цессе расчетов распределения р(А). Здесь по горизонтальной оси отложе¬
ны значения долготы L. На верхнем графике приведены значения накло¬
нения г, а на нижнем — значения функции (15.12), которая характеризует
вероятность попадания объектов в Ж-окрестность заданной точки.
На рис. 15.4 представлены азимутальные распределения на высоте
500 км для точек с различной широтой. Аналогичные распределения для
высот 900 км и 1400 км представлены на рис. 15.5 и 15.6.
Из представленных распределений видно, что они симметричны
относительно направления Запад—Восток. Для малых широт (до 35")
азимутальные распределения «похожи» на соответствующее распре¬
Статистические распределения скорости КО в инерциальном пространстве 265
деление на экваторе (рис. 15.2), которое совпадает с распределением
наклонений.
При увеличении широты максимумы распределений сдвигаются в
сторону линии симметрии и «лепестки» становятся шире. На высоких
широтах «лепестки» сливаются и в районе полюса распределения при¬
ближаются к равномерному.
На рис. 15.7 представлен пример картинки на экране монитора при
расчете азимутального распределения в российской модели космического
мусора SDPA.
latitude 65 deg
Л
Рис. 15.3. Построение азимутального распределения
для точки с широтой 65°
Таким образом, азимутальные распределения очень сильно различа¬
ются на разных широтах и на разных высотах. Эти распределения оказы¬
вают существенное влияние на величину и направление скорости воз¬
можных столкновений КА с космическим мусором, и поэтому их необхо¬
димо учитывать при решении этой задачи.
p(Az) P(Az)
266
Раздел 15
Азимут, град
Азимут, град
Рис. 15.4. Азимутальные распределения для точек на высоте 500 км
p(Az) p(Az)
Статистические распределения скорости КО в инерциальном пространстве 267
Азимут, град
Азимут, град
Рис. 15.5. Азимутальные распределения для точек на высоте 900 км
P<Az> p(Az)
268
Раздел 15
Азимут, град
Азимут, град
Рис. 15.6. Азимутальные распределения для точек на высоте 1400 км
Статистические распределения скорости КО в инерциальном пространстве 269
Рис. 15.7. Вывод азимутального распределения на экран монитора
Приложение
Преобразование криволинейного интеграла (15.8)
к форме обыкновенного интервала (15.9)
Разобьем область изменения аргумента L; = AL-j, j = 0...л, на множе¬
ство дискретных отрезков размером AL. Каждому из отрезков (/7, /7 + AL)
будет соответствовать область 5, значений Si и 5L и составляющая инте¬
грала (15.8), которую обозначим как
I> = \p(i)p{L)-dS (15.14)
sj
С учетом этого обозначения интеграл (15.8) принимает вид суммы
Sn(Sb) = J^Ij (15.15)
г- о
Рассмотрим интеграл Ij более детально. Его можно представить в ви¬
де двойного интеграла по аргументам dSL и dSi = F(dSL), которые изме¬
няются в интервале знамений (О, AL) и (0, $тах) соответственно. С учетом
270
Раздел 15
малости шага AL плотности распределений можно вынести за знак инте¬
грала. Получим
ДL
Ij=p{ij)-p{L)-\ J d8L-d5i = p(iJ)-p(L)-bL--8itm. (15.16)
Для определения значения <Жтах используем:
а) связь между вариациями Si и 8L, которая вытекает из соотношения
(15.2) и имеет вид
Si = -c\gu-smi-8L. (15.17)
Здесь и — аргумент широты, однозначно связанный с переменными L и /
соотношением
tgL = tgw-cos/. (15.18)
б) известное соотношение между вариациями долготы восходящего
узла, наклонения и отклонением по бинормали [6]
8Ъ = г-sinM - Si-г-cosh - sin; ■ 8L . (15.19)
Решение уравнений (15.17) и (15.19) относительно <Жтах при SL = AL
имеет вид
^ -- (15-20)
2-r-smu
Подстановка (15.20) в (15.16) и использование формулы сферической
тригонометрии sin и = sin^/sim приводит к следующему выражению для
интеграла
8bp(L) / %
1= -l-sm/. ■ AL . (15.21)
; 2-r-sinp Kj> j
С учетом допущения (15.4) значение дроби не зависит от аргументов Д и
ij. Обозначим значение этой дроби как к. Подстановка (15.21) в (15.15)
приводит к формуле
л-1
8n{8b} = k-'^p(ij'}-smij -AL (15.22)
Статистические распределения скорости КО в инерциальном пространстве 271
Здесь при стремлении AL к 0 сумма принимает форму интеграла, т. е.
л-] 2л-
lim^pfO-sin/; AZ,= f p(i(L))-smi(b)-dL- (15.23)
Ai->0 7-1 0
Таким образом, мы преобразовали криволинейный интеграл (15.14) в
форму обыкновенного интеграла.
Выводы
1. Основная трудность построения рассматриваемых распределений
обусловлена их зависимостью от параметров орбит объектов и поло¬
жения рассматриваемой точки. Возможные значения величины и на¬
правления вектора скорости изменяются в широких пределах.
2. Разработана аналитическая методика построения распределений вели¬
чины и направления скорости КО в инерциальном пространстве. Она
основана на выведенных автором формулах (15.1), (15.12) и (15.13).
В качестве исходных данных применяются статистические нормиро¬
ванные распределения элементов орбит (p(hp), р(е), p(i)).
3. Работоспособность методики подтверждена результатами построения
рассматриваемых распределений для различных точек околоземного
пространства.
4. Азимутальные распределения построены с шагом 2°. Они оказались
сильно «изрезанными» и очень различаются на разных широтах и на
разных высотах. Эти распределения оказывают существенное влия¬
ние на величину и направление скорости возможных столкновений
КА с космическим мусором, и поэтому их необходимо учитывать при
решении этой задачи.
5. Зарубежные модели космического мусора такие распределения (с ма¬
лым шагом по аргументам) строить не умеют.
Литература
1. A. Nazarenko. The Development of the Statistical Theory of a Satellite Ensemble
Motion and its Application to Space Debris Modeling. Second European Confer¬
ence on Space Debris, ESOC, Darmstadt, Germany 17-19 March 1997.
2. А. И. Назаренко. Проблема «Космического мусора» в околоземной среде.
Раздел 8. Экологические проблемы и риски воздействий ракетно-космиче¬
ской техники на окружающую среду. Справочное пособие под редакцией
Адушкина В. В., Козлова С. И. и Петрова А. В. Издательство «Анкил», Моск¬
ва, 2000. с.с. 382—432.
272
Раздел 15
3. А. И. Назаренко. Моделирование техногенного загрязнения околоземного
космического пространства. Астрономический Вестник, том 36, № 6, 2002
с. 555-564.
4. Модель Космоса, том II, Воздействие космической среды на материалы и
оборудование космических аппаратов. М.: Изд-во «Университет, Книжный
дом», 2007.
5. А. И. Назаренко. Моделирование космического мусора. Монография, ИКИ
2013.
6. А. И. Назаренко, Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. Машиностроение, 1981.
Раздел 16
Оценка характеристик столкновения
спутника Земли с космическим мусором
Введение
Проблема анализа столкновений космических объектов искусствен¬
ного происхождения является относительно новой. Она стала актуальной
и привлекла внимание большого числа специалистов в разных странах
только в последние годы. В настоящее время это направление находится в
стадии интенсивного развития.
Все множество применяемых подходов к оценке столкновений КО
можно разбить на две большие группы: детерминированные и стохастиче¬
ские. Детерминированный подход уместен тогда, когда известны парамет¬
ры движения и размеры сближающихся космических объектов. В этом
случае на основе использования алгоритмов прогнозирования движения
ищется точка максимального сближения пары объектов. Если минималь¬
ное расстояние между объектами оказывается соизмеримым с их размера¬
ми, то возникает опасность столкновения. Однако, в большинстве случаев
погрешности определения положения объектов в точке максимального
сближения существенно больше размеров КО. Поэтому вероятность
столкновения оказывается маленькой. Если она превышает величину по¬
рядка 1.0Е-4 -ь 1.0Е-5, то возможно принятие решения о маневре КА для
предотвращения возможного столкновения. Число прецедентов такого
рода не превышает несколько случаев в год.
Методика расчета минимальных сближений каталогизированных КО
разработана в конце 60-х годов. Она, в частности, использовалась в экспе¬
риментах по наблюдению КО экипажем пилотируемых орбитальных
станций. Эта методика является весьма трудоемкой: требует существен¬
ных затрат машинного времени, так как связана с многократным обраще¬
нием к алгоритму прогнозирования движения КО.
Наиболее типичным примером расчета вероятности столкновений на
основе расчета сближений является работа [1]. Авторы назвали свой под¬
ход «прямым методом». О трудоемкости и сложности реализации прямого
Метода говорит следующее: поиск сближающихся в течение суток пар
объектов при интервале сближения 50 с требует «пропустить» через ком¬
274
Раздел 16
плексную вычислительную процедуру 10й пар КО. Для каждой пары
сближающихся объектов с учетом точности элементов орбит и размеров
объектов рассчитывается вероятность их столкновения. Характерной осо¬
бенностью этого расчета является то, что вероятность относится только к
конкретному сближению. Ниже в табл. 16.1 приведена полученная в ука¬
занной работе гистограмма минимальных расстояний между всеми ката¬
логизированными КО. Видно, что сближения на дальности менее 100 м.
являются относительно редкими.
Таблица 16.1. Число сближений за 1 день
AR, км
0.1
0.2
0.3
0.5
1.0
2.0
3.0
Число
0.75
3.0
4.6
11.9
47.7
190
426
Комментарий. Приведенные здесь оценки опубликованы в 1993 г. За
прошедшие 20 лет уровень загрязнения ОКП увеличился многократ¬
но. Поэтому в настоящее время трудоемкость применения «прямого
метода» увеличилась на порядок.
Применение данных о сближениях для расчета вероятности столкно¬
вения некоторого объекта с другими КО связано с необходимостью разви¬
тия и применения статистических методов для оценки характеристик
столкновений. Необходимость в их развитии становится тем более оче¬
видной, когда речь идет о не каталогизированных КО и будущих моментах
времени, т. е. об условиях, в которых необходимых начальных условий для
прогноза сближений не существует. В качестве типичного примера оценки
опасности столкновения КО на основе статистического подхода можно
назвать методику Д. Кесслера [2, 3]. Среднее число столкновений опреде¬
ляется по формуле
N = S■ p-Vrel ■ At, (16.1)
где S — площадь сечения объекта,
р— средняя концентрация,
Vrd — средняя относительная скорость двух КО,
At — интервал времени.
Зависимость (16.1) широко применяется для оценки опасности столк¬
новений. Естественно, что результаты расчетов в значительной степени
зависят от того, насколько удачно задаются применяемые оценки концен¬
трации и средней скорости сближения. Дальнейшее развитие статистиче¬
ского подхода связано не только с необходимостью уточнения оценок кон¬
центрации и средней скорости, но и с необходимостью учета разнообразия
Характеристики столкновения спутника Земли с космическим мусором 275
направлений возможных столкновений, а также конструкции (формы) КА.
рассмотрим эту проблему более подробно, начиная с простейших постано¬
вок задачи по определению числа столкновений некоторого объекта с дви¬
жущимися частицами. Путем постепенного усложнения постановки задачи
постараемся приблизиться к приемлемому описанию реальной картины.
Развитие методики для оценки
вероятности столкновений
Рассмотрим несколько простых примеров [4]. Они представлены на
рис. 16.1.
I i ill s Hi ! >
I t ill I I I * V
i i И i i H i 11
1 1 Hi ! H 1 1 1
i i Hi 1 if i i i
i I i|i i Hi i e
а) Неподвижный
объект,
одно направление
потока
I S ,|
VAt
t+ At
1! i i;;11111
\\'ШХ 'J
\ \ \ ь /д.,
и п I * Ш ^2 Tjf
б) Подвижный
объект,
одно направление
потока
1 I 1 ; ; 1 | 1 , 1
11i1 !i1 1
. i i : i 11 i i JA.
,r 1 i'll1/!
ViLir K'fL&L
в) Подвижный
объект,
несколько направ¬
лений потока
Рис. 16.1. Различные схемы потока частиц относительно объекта
276
Раздел 16
1. Простейшая схема (рис. 16.1а). Объект неподвижен, скорость дви_
жущихся относительно него частиц постоянна (и по величине, и по на¬
правлению). Понятный для всех пример такой задачи — определение чис¬
ла частиц града, упавшего на заданную поверхность в единицу времени.
Обозначим площадь объекта S, а скорость падающих на него частиц (/,
Очевидно, что при концентрации частиц р (число частиц в единице объе¬
ма) за интервал времени At но площадку упадет AN =S-p V-At частиц. Ско¬
рость прироста среднего числа упавших частиц будет равна
^- = S-p-V. (16.2)
at
Величина Q= p-V называется удельным потоком объектов (cross sectional
area flux).
2. Скорость частиц постоянна по времени и по направлению, но объ¬
ект не неподвижен, а движется. Отличие данного случая от предыдущею в
том, что в качестве скорости V должна использоваться не абсолютная ско¬
рость частиц, а их относительная скорость Vrel = V2 - Vt. При расчете чис¬
ла столкновений объекта с частицами с помощью формулы (16.2) в каче¬
стве скорости V должна использоваться упомянутая выше относительная
скорость.
3. Усложним предыдущую постановку. Будем считать, что имеется
несколько (конечное число) направлений движения частиц (Рис. 16.1 в).
Скорости каждого из этих направлений имеют постоянную величину. Зна¬
чения удельного потока частиц /-го направления обозначим Q: = pi • Уп<,.
Сумма всех потоков дает суммарную оценку удельного потока в данной
точке пространства. Аналогично, общее число столкновений объекта бу¬
дет рано сумме числа столкновений с частицами разных потоков
dN
— = s-Xprvrc<!.. (16.3)
at /
Здесь использовано допущение о постоянстве площади сечения S для ка¬
ждого из направлений подлета объектов к данному КА. В общем случае
это допущение справедливо только для шара.
4. Примем, что число возможных направлений потоков частиц явля¬
ется не ограниченным, а бесконечным. Каждое из направлений в 3-мер¬
ном пространстве определяется двумя углами. Используем углы свя¬
занной с объектом сферической системы координат: а именно азимут А
и угол места В. Концентрацию частиц каждого из направлений в общем
случае будем характеризовать непрерывной плотностью распределения
р(А,В). Для более компактной записи формул ниже будем учитывать
Характеристики столкновения спутника Земли с космическим мусором 277
только зависимость плотности распределения от азимута А. Такое уп¬
рощение не является существенным, т. к. во первых, всегда можно лег¬
ко перейти к более полной записи формул с учетом двух аргументов и,
во вторых, основной поток космических объектов расположен в доста¬
точно малой окрестности горизонтальной плоскости. Это является
следствием того, что подавляющее число объектов имеет малые экс¬
центриситеты. С учетом изложенного концентрация объектов в задан¬
ной точке пространства в секторе, ограниченном значениями азимута,
Д. и Д +АА, будет равна
Р,- =Р'Р(А)'АА • (16.4)
После подстановки этого значения в выражение (16.3) получим
^ = S-p-Zp(Ai)- VJAJ- АА (16.5)
dt /
Это выражение используется при вычислении числа столкновений N, ко¬
гда непрерывное распределение р(А) реализуется в виде дискретной гис¬
тограммы, содержащей множество значений р(А1)-АА Для корректного
аналитического представления формулы (16.5) в непрерывном случае не¬
обходимо сумму заменить на интеграл. Будем иметь
dN 2к
?- = S-p-\p(A)-VJA).dA. (16.6)
dt А=0
5. Развивая предыдущую постановку задачи, учтем переменность ха¬
рактеристик потока объектов в различных точках траектории полета рас¬
сматриваемого космического аппарата. В разделах 14 и 15 было показано,
что и концентрация объектов р, и их азимутальное распределение р(А)
очень сильно зависят от высоты и широты КА. В частности, при измене¬
нии широты концентрация объектов может измениться в несколько раз, а
азимутальное распределение меняется от сильно «изрезанного» (на эква¬
торе) до равномерного (над полюсами Земли).
Так как при интегрировании уравнений движения КА высота и широ¬
та точки, где он находится, являются функциями времени, то учет пере¬
менности характеристик потока объектов легко осуществляется на основе
Уравнения (16.6) путем учета времени t во всех входящих в правую часть
Переменных величинах. В результате можем записать
dN ~п
- = S p{t)- | p(t,A)-Vrel(t,A)-dA
dt А=0
(16.7)
278
Раздел 16
Входящая в правую часть этого выражения величина
Q{t) = p{t)- f p(t,A)-VrJt,A)-dA (16.8)
А=0
имеет смысл удельного относительного потока объектов в данной точке
орбиты. А интеграл имеет смысл средней относительной скорости КО. Из
выражения (16.8) следует, что величина
&Q(t) = p(t)-p(t,A)-Vrd(t,A)-M 16.(9)
имеет смысл удельного потока объектов через азимутальный сектор
(А, А + АА) в текущей точке траектории. Суммирование и усреднение этих
оценок на интервале одного витка является основой построения закона
распределения величины и направлений относительной скорости.
Характерная особенность изложенной здесь методики заключается в
том, что она, с одной стороны, детально учитывает переменность потока
КО как функцию элементов орбит рассматриваемого КА и его положения в
околоземном пространстве и, с другой стороны, позволяет на основе полу¬
ченных формул достаточно просто рассчитать среднее ожидаемое число
столкновений КА с космическим мусором и статистические характеристи¬
ки относительной скорости. Упомянутая возможность достаточно простого
применения изложенной методики для практических расчетов характери¬
стик возможных столкновений КА с космическим мусором основана на
условии, что входящие в правую часть выражения (16.7) переменные
функции p(t),p(t,A) и V(t,A) известны. Методика и некоторые результаты
построения этих величин изложены выше в материалах разделов 14 и 15.
Переменные, входящие в правую часть выражения (16.7), являются
почти периодическими функциями. Основная входящая в них периодиче¬
ская составляющая имеет период, равный периоду обращения рассматри¬
ваемого КА. Долгопериодическая и вековая составляющие связаны с мед¬
ленной эволюцией элементов орбиты КА и медленным изменением степени
загрязнения околоземного пространства техногенными объектами. В связи с
изложенным имеет смысл проводить усреднение потока КО через единич¬
ное сечение за 1 виток (за период времени, равный периоду КА Т). Это
среднее значение вычисляется по формуле
Q = i‘] P(0-T p(t,A)Vrel(t,A)-dA-dt. (16.10)
1 1=0 А=0
Если среднее значение потока Q определено, то достаточно точную
оценку числа столкновений КА с космическим мусором на большом вре-
Характеристики столкновения спутника Земли с космическим мусором 279
ценном интервале t -10 можно вычислить по очень простой формуле, ко¬
торая аналогична формуле (16.1)
N = S-Q-(t-t0). (16.11)
Для удобства проведения простых инженерных расчетов на основе
формулы (16.11) имеет смысл организовать вычисление значений среднего
удельного потока Q для различных типов КА, для космического мусора
различных размеров, а также для текущего и будущих моментов времени.
Все изложенные выше способы расчета ожидаемого среднего числа
столкновений объекта с частицами основаны на предположении, что эти
частицы являются мелкими, т. е. что их размеры намного меньше размеров
рассматриваемого объекта. Это допущение отражено в приведенных выше
формулах тем, что в них входит только средняя площадь сечения рассмат¬
риваемого объекта S. Для учета размеров частиц (если они соизмеримы с
размерами объекта) необходимо дальнейшее уточнение методики.
6. Примем, что космический мусор может иметь разные размеры, в
том числе такие, которыми пренебречь нельзя. Возможные размеры час¬
тиц будем характеризовать плотностью распределения p(d) их среднего
диаметра d. Учет плотности распределения p(d) позволяет внести в урав¬
нение (7) изменения, обеспечивающие учет переменности размеров час¬
тиц. При этом средний диаметр рассматриваемого КА обозначим D. В ре¬
зультате получим
■p{t)\ p{t,A)-Vrel{t,A)-dA. (16.12)
А=0
Здесь выражение в квадратных скобках имеет смысл суммарной расчетной
площади КА и рассматриваемого космического мусора. В остальном это
выражение совпадает с (16.7). Идея использования суммы (D + d) в каче¬
стве основного параметра, влияющего на вероятность столкновения объ¬
ектов разных размеров используется в ряде работ [1, 4]. Такой учет оправ¬
дан в тех случаях, когда допустима аппроксимация формы сталкивающих¬
ся частиц сферой. В противном случае, когда форма сечений КА при под¬
лете к нему с разных направлений сильно меняется, например при нали¬
чии больших солнечных батарей, требуется дальнейшее усложнение ме¬
тодики. Эта проблема еще требует своего решения.
Для расчета вероятности (Р) хотя бы одного столкновения при из¬
вестном N во многих работах рекомендуется применять распределение
Пуассона
Р(А) = 1-ехр(-А).
(16.13)
280
Раздел 16
Однако очевидно, что при малом N « 1 значение вероятности мало отли¬
чается от N, т. с. Р ~ N. В этом случае нет необходимости применять фор.
мулу (16.13). Можно принять, что вероятность столкновения равна сред¬
нему числу ожидаемых столкновений N. При N > 1 также нет большого
смысла в применении формулы (13), так как с увеличением N вероятность Р
стремится к 1. Это означает, что данная формула приспособлена к расчету
только одного столкновения, что не является корректным при оценке
столкновений с мелкими техногенными частицами, число которых являет¬
ся очень большим и на значительных временных интервалах создает угро¬
зу многих столкновений. Таким образом, и в этом случае более объектив¬
ную оценку дает сама величина N.
7. При решении ряда прикладных задач необходимо знать статисти¬
ческое распределение направлений относительной скорости pVrei{Az).
Здесь угол между вектором относительной скорости и вектором скорости
КА обозначен как Az. Этот угол легко определяется на основе данных о
соответствующих векторах (см. рисунок).
Угол Az зависит от упомянутого выше угла Aj и направления вектора скоро¬
сти КА в данной точке. Возможный диапазон значений этого угла (0-360°)
разбивается на п секторов (в модели SDPA п = 180). Дискретное статистиче¬
ское распределение pV^Az) определяется на основе соотношения
(16.14)
где ктах — число случаев попадания направления вектора относительноИ
скорости в сектор (Azj ±ж/п). Аналогично определяется усредненная за¬
висимость величины относительной скорости от ее направления
Характеристики столкновения спутника Земли с космическим мусором 281
Ктах k=l к
п
Распределение pV^Azj) удовлетворяет соотношению Y,PVrel{AZj) = \ ■
j=i
В соответствии с изложенным среднее значение относительной скорости
определяется как
(16.15)
Н
Рассмотренное здесь распределение возможных направлений относи¬
тельной скорости и соответствующее ее среднее значение характерны тем,
что они построены на множестве частиц космического мусора.
При оценке последствий возможных столкновений КА, в частности
при расчете вероятности пробоя стенок КА, корректным усреднением яв¬
ляется усреднение на множестве возможных столкновений. Поэтому для
такого типа прикладных задач распределение р Vnl(Azj) не вполне пригодно.
Оно не учитывает разный «вклад» частиц в вероятность столкновения,
который пропорционален значению относительной скорости. Необходи¬
мое для таких случаев статистическое распределение направлений воз¬
можных столкновений может быть определено следующим образом:
рв^Лг)--17ТГГУТГ^- <1616)
)Vrel{Az)' PVrAA2)-dAz
Соответствующее значение средней скорости столкновений будет равно
^=1Х/(^)-/>е,е,К). (16.17)
j=i
Примеры расчетов
Определение средних значений скорости в известных моделях не явля¬
ется единообразным. В модели ORDEM2000 выходной характеристикой яв¬
ляется некая средняя скорость, смысл которой строго не определен. Модель
MASTER’99 вообще не содержит эту характеристику в качестве выходной
Информации. В модели SDPA рассчитываются оба вида распределений и
соответствующие оценки средней скорости. В табл. 16.2 приведены выход¬
ные данные моделей ORDEM2000 и SDPA2000 об относительной скорости
И скорости столкновений. Элементы круговой орбиты КА: высота 400 км,
Наклонение 51.6°. На рис. 16.3 представлены распределения pVre/(Az) и
PQk^Az), а также зависимость Vre/(Az), рассчитанные по модели SDPA.
282
Раздел 16
5 15 25 35 45 55 55 75 85 95
Угол А, Гр
Рис. 16.2. Статистические распределения: (1) скорости возможных столкновений и
(2) относительной скорости (левая шкала), а также (3) зависимость относительной
скорости от ее направления (правая шкала)
Таблица 16.2. Оценки средней скорости столкновений (VQ )
и средней относительной скорости (Vre/ ) (км/с)
Модели и оценки
Размеры космического мусора
> 1 мм
> 1 см
> 10 см
ORDEM2000
V0
-
-
-
Xw
7.74
7.77
7.69
SDPA2000
Vq
10.56
10.55
10.55
v„,
8.30
8.29
8.29
Приведенные оценки представляются весьма важными. Они свиде¬
тельствуют о существенных различиях оценок относительной скорости,
связанных с областью усреднения, которые составляют 27-37 %. В модели
ORDEM2000 усреднение проводится, по-видимому, на множестве частиИ
космического мусора, а в модели SDPA2000 — на обоих множествах (час¬
тиц и возможных столкновений). Видно также, что в распределении
Характеристики столкновения спутника Земли с космическим мусором 283
Рв reiHAz) доля столкновений, близких к «лобовым», — намного больше,
чем в распределенииpV^Az).
В табл. 16.3 представлены данные о средней скорости столкновений
КА с космическим мусором на разных орбитах, отличающихся высотой и
наклонением. Зависимость от размеров частиц не приведена, так как она
Проявляется слабо.
Таблица 16.3. Оценки средней скорости столкновений
Наклонение,
градусы
Значения средней относительной скорости (км/с)
на различных высотах (км)
400
600
800
1000
1200
1400
55
10,8
10,7
10,6
10,9
11,2
11,2
65
11,3
11.2
11,1
11,7
11,6
11,5
75
12,2
12,2
12,1
12,0
12,4
12,3
85
12,5
12,4
12,3
12,9
12,8
12,7
95
13,2
13,1
13,0
12,7
12,6
12,6
Из этих данных видно, что значения средней скорости возможных столк¬
новений меняются в пределах от 10.8 до 13.2 км/с в зависимости от h и i.
Наибольшее влияние на эти оценки оказывает наклонение. Остальные
факторы являются несущественными.
Рис. 16.2. Распределение направлений относительной скорости
284
Раздел 16
Скорость, км/с
Рис. 16.3. Распределение величины относительной скорости
Платность лотсяз наем*чесжого мусора дли КА в «бдест* ПОНС
ЕШ
|вкл1мш вцшр«х1|»г<юЬк По к»; im» ла*ы> Еиюл
' U а»с»: OJOI mi 1 002К 2»*0oj 5ЯПао| 1О0Л0! >20 |
270 Ллоеое распределение плотности потока 3-010-0 26
Период 130.6 мры
Высота пе»риге* <50 юч
bar. гонение 51 6(1 градус
Аргумент г repute* 200 гросде
I Шптиостъ потока 0 00691 /<i 1ДМВ
■■•iMuiillllilllh.
Рис. 16.4. Панель модели при расчете характеристик потока КМ относительно КА
Характеристики столкновения спутника Земли с космическим мусором 285
На рисунках 16.2 и 16.3 представлены полученные распределения ве¬
личины и направления скорости возможных столкновений для КА с высо¬
кой 950 км и наклонениями 55°, 75° и 95°. Направление возможного
столкновения характеризуется отклонением (по часовой стрелке) вектора
относительной скорости приближающегося КО от направления движения
КА. Как видно из рис. 16.2, при увеличении наклонения КА увеличивает¬
ся доля возможных столкновений с КО на встречных курсах («лобовых»
Comparison of ORDEM 2000, MASTER 2001 and SPDA 2000
Fnrtlele dlame2er > i mm, eccentricity - О
□ MASTER 2001
И SPDA 2000
Flux of particles larger than 1 mm for eccentricity = 0,
all models, log scale
Рис. 16.5. Сравнение оценок плотности потока частиц размером более 1 мм
286
Раздел 16
столкновений). Это находит отражение в распределении величины скоро,
сти столкновения (рис. 16.3): относительная доля случаев с большими
скоростями растет.
Приведенные данные отражают общие закономерности распределений
величины и направления скорости столкновений. В то же время следует
отметить, что они не исчерпывают всего многообразия возможных условий
взаимодействия КА с частицами космического мусора. Для эллиптических
орбит характер рассматриваемых распределений сильно меняется — появ¬
ляется асимметрия возможных направлений столкновений, высота и аргу¬
мент перигея орбиты становятся существенными влияющими факторами.
Поэтому в общем случае для более детального анализа условий возможных
столкновений необходимо проводить расчеты на модели.
На рис. 16.4 представлена панель модели SDPA при расчете характери¬
стик потока КМ размером 0.1-0.25 см относительно спутника на эллиптиче¬
ской орбите с периодом 130.8 мин, высотой перигея 450 км и наклонением
51.6°. Полученная оценка плотности потока составила 0.0069 м-2 год-1.
Было выполнено сравнение оценок потока КО по данным разных мо¬
делей [6]. Один из результатов представлен на рис. 16.5. Рассмотрены кру¬
говые орбиты на разных высотах, с разными наклонениями.
Результаты расчетов показали приемлемое общее согласие оценок по¬
тока частиц размером более 1 см и более 10 см, хотя имеются и некоторые
различия. Имеется хорошее согласие моделей ESA (MASTER) и нашей
(SDPA). Результаты начинают сильно отличаться для частиц размером ме¬
нее 1 см (особенно для модели NASA (ORDEM).
Учет формы и ориентации КА
Рассмотрим обобщение изложенной выше методики для оценки
среднего числа столкновений КА с мелким космическим мусором на слу¬
чай, когда форма КА отличается от сферической [7-9]. Применим исполь¬
зуемый в аэродинамике способ учета формы КА. Разобьем всю внешнюю
поверхность КА (F) на элементарные участки площадью dF. Общий поток
космического мусора через элементарную площадку будет складываться
из потоков частиц с разными направлениями относительной скорости
(угол Az). Введем в рассмотрение угол Р между внешней нормалью к пло¬
щадке и произвольным направлением вектора относительной скорости
набегающего потока космического мусора. Тогда общий поток частиц че¬
рез элементарную площадку будет равен
/V /•
= dQ(dF) = dF • p(t)• f cos P(Az) ■ p((,Az)-Vre/(t,Az)-dAz . (16.18)
dt i
Характеристики столкновения спутника Земли с космическим мусором 287
При определении потока мусора через внешнюю поверхность КА в по¬
дынтегральное выражение должны входить только такие слагаемые, для
которых cos/? > 0.
Суммирование потока (16.18) по всем элементарным площадкам даст
искомую оценку потока космического мусора через поверхность рассмат¬
риваемого КА. Соответствующее уравнение примет вид
= Q = jdQ(dF) = p(t)J J cos /3-p(t,Az)-Vrel(t,Az)-dAz-dF . (16.19)
Q* F FA-7
Здесь интеграл в правой части берется по всей поверхности КА. Ус¬
ловием получения правильной оценки суммарного потока является отсут¬
ствие затенений внешней поверхности. Формально условие затенения оз¬
начает, что на поверхности имеется некий элемент, внешнее направление
потока к которому пересекается с другим элементом поверхности данного
аппарата
По аналогии с выражением (16.8) представим суммарный поток Q в
виде произведения характерной площади S, плотности p(t), средней ско¬
рости столкновений в данной точке и некого коэффициента CN . Получим
В соответствии с (16.19) и (16.20) коэффициент CN определяется выраже¬
нием
Коэффициент Сд, является безразмерным. Он учитывает форму КА. В ча¬
стном случае для КА сферической формы и при S = k-R2 значение этого
коэффициента равно 1. Таким образом, выражение (16.20) является обоб¬
щением формулы (16.7), учитывающим влияние формы КА на число
столкновений с космическим мусором. Этот коэффициент является анало¬
гом коэффициента Сх, широко применяемого в аэродинамике.
По аналогии с применяемым в аэродинамике подходом для удобст¬
ва проведения простых инженерных расчетов на основе формулы (20)
— = Q = CN-S-p{t)-Vrel{t).
at
(16.20)
(16.21)
А
288
Раздел 16
имеет смысл выполнить вычисление коэффициента CN и средних значений
относительной скорости космического мусора для различных условий
полета КА. Так как средние значения являются более стабильными по
сравнению с мгновенными, создается возможность их предварительного
определения для достаточно широких условий и табуляции.
Как видно из выражения (16.21) значения коэффициента CN зависят
от распределения направлений встречного потока частиц мусора p(t,Az) и
возможных значений скорости столкновений Vrel(t,Az). Для космического
мусора характер этих зависимостей существенно отличается от их анало¬
гов в аэродинамике. Принципиально отличаются направления встречного
потока. Как отмечено выше, распределение направлений встречного по¬
тока частиц техногенного мусора является плоским и «сильно изрезан¬
ным». Кроме того, оно сильно зависит от широты: на экваторе совпадает
с распределением наклонений, а над полюсами является равномерным.
Примеры этих распределений были представлены в разделе 15 на рисун¬
ках 15.4—15.6.
Таким образом, аналогия между аэродинамикой и оценкой опасности
столкновения КА разной формы с техногенным космическим мусором не
является полной. Имеется ряд существенных различий, которые вызывают
необходимость проведения специальных исследований и расчетов для
оценки влияния формы КА на опасность столкновений.
Для решения данной задачи разработана специальная программа.
Ниже для примера рассмотрены 4 типовых формы элементов конструкции
КА: цилиндр, конус, панель и полусфера. При заданных элементах орбиты
выполняется интегрирование уравнения (16.19) в пределах одного витка.
Поверхность типового элемента разбивается на элементарные площадки.
Для каждой из них с учетом всех возможных направлений набегающего
потока частиц определяется вероятность столкновения и строится гисто¬
грамма значений косинуса угла отклонения вектора относительной скоро¬
сти от нормали к поверхности. Суммарные данные определяются путем
интегрирования по всем элементарным площадкам.
Рассмотрим более подробно способ задания формы и ориентации ти¬
повых блоков. Форма задается с помощью признаков соответственно для
цилиндра, конуса, панели и полусферы. Размеры цилиндра характеризу¬
ются диаметром и длиной, конуса — большим диаметром, длиной и ма¬
лым диаметром, панели — ее площадью, а полусферы — диаметром. Ори¬
ентация задается с помощью двух углов А и В в подвижной связанной с
КА декартовой системе координат. Направим ось ОХ по радиусу — векто¬
ру, а ось 0Y — в плоскости обиты в направлении движения (по тангенци¬
альной составляющей скорости). Ось 0Z дополняет систему до правой-
Характеристики столкновения спутника Земли с космическим мусором 289
Угол А является аналогом азимута. Он отсчитывается в горизонтальной
плоскости (Y0Z) по часовой стрелке от оси 0Z. Угол В является аналогом
угла места. Это угол между задаваемым направлением и горизонтальной
плоскостью. Для цилиндра, конуса и полусферы задается ориентация оси,
а для плоского элемента — ориентация нормали к поверхности.
Для типовых элементов в виде тела вращения расчет параметров их
столкновений с космическим мусором ведется только для соответствую¬
щих внешних поверхностей. Торцевые поверхности не рассматриваются.
При необходимости их надо задавать в виде отдельных плоских элементов.
Таблица 16.4. Исходные данные и результаты расчета коэффициента CN
N
вар.
Форма
Размеры, м
Характерная
площадь
S, M2
A,
град
в,
град
C,\
1
Цилиндр
£> = 4.2,
£ = 6.0
S = DL
25.2
90
0
0.493
2
Цилиндр
к
U 1»
25.2
0
90
1.0
3
Цилиндр
а
tt 55
25.2
0
0
0.882
4
Конус
D = 4.2,
£=1.6
S = 0.5D-L
3.36
90
0
3.408
5
Панель
S= 10
(площ)
S
10.0
90
0
0.821
6
Полусфера
£> = 4.2
S = k D2 /4
13.9
90
0
0.911
На рис. 16.6, а также в таблицах 16.5-16.7 приведены результаты рас¬
чета коэффициента CN для всех возможных вариантов ориентации типо¬
вых элементов. Расчет проведен для орбиты с высотой 450 км и наклоне¬
нием 51.6°. Эти данные отражают объективные закономерности влияния
формы и ориентации на интенсивность столкновений различных элемен¬
тов КА с космическим мусором. Естественно, что при приближении утла
В к 90° (перпендикуляру к плоскости потока) значения коэффициента CN
становятся независимыми от утла А (азимута). При этом они стремятся:
Для цилиндра и конуса — к 1, для панели — к 0, для полусферы — к 0.5.
Все эти предельные значения равны отношению площади осевого сечения
элементов к соответствующей характерной (расчетной) площади.
290
Раздел 16
Рис. 16.6. Зависимость коэффициента CN от ориентации цилиндра
Таблица 16.5. Конус (угол конусности 15 градусов)
в,
Угол
А, г р а д у с ы
гр
5
15
25
35
45
55
65
75
85
5
0.869
0.912
0.938
0.948
0.949
0.948
0.946
0.938
0.928
15
0.880
0.921
0.946
0.957
0.958
0.954
0.950
0.947
0.944
25
0.899
0.939
0.966
0.980
0.986
0.986
0.985
0.984
0.983
35
0.923
0.961
0.989
1.007
1.018
1.023
1.025
1.026
1.027
45
0.948
0.983
1.010
1.030
1.044
1.052
1.058
1.061
1.062
55
0.970
1.000
1.025
1.044
1.059
1.070
1.077
1.081
1.083
65
0.988
1.011
1.031
1.047
1.061
1.071
1.079
1.083
1.086
75
0.999
1.013
1.027
1.038
1.048
1.056
1.062
1.065
1.067
85
1.002
1.007
1.012
1.016
1.020
1.023
1.025
1.027
1.028
Характеристики столкновения спутника Земли с космическим мусором 291
Таблица 16.6. Панель
В,
Угол
А, г р а д у с ы
гр
5
15
25
35
45
55
65
75
85
5
0.281
0.351
0.429
0.515
0.601
0.679
0.744
0.791
0.815
15
0.273
0.340
0.416
0.499
0.583
0.659
0.721
0.767
0.790
25
0.256
0.319
0.390
0.469
0.547
0.618
0.677
0.719
0.742
35
0.231
0.288
0.352
0.424
0.494
0.559
0.612
0.650
0.670
45
0.200
0.249
0.304
0.366
0.427
0.482
0.528
0.561
0.579
55
0.162
0.202
0.247
0.297
0.346
0.391
0.428
0.455
0.469
65
0.119
0.149
0.182
0.219
0.255
0.288
0.316
0.335
0.346
75
0.073
0.091
0.111
0.134
0.156
0.176
0.193
0.205
0.212
85
0.025
0.031
0.037
0.045
0.053
0.059
0.065
0.069
0.071
Таблица 16.7. Полусфера
в,
Угол
А, г р а д у с ы
1Р
5
15
25
35
45
55
65
75
85
5
0.536
0.607
0.674
0.735
0.790
0.836
0.871
0.896
0.908
15
0.535
0.603
0.668
0.728
0.781
0.826
0.860
0.884
0.895
25
0.533
0.597
0.658
0.714
0.764
0.805
0.838
0.860
0.871
35
0.530
0.588
0.643
0.694
0.738
0.776
0.805
0.825
0.835
45
0.526
0.576
0.623
0.667
0.706
0.738
0.764
0.781
0.790
55
0.521
0.561
0.600
0.636
0.667
0.693
0.714
0.728
0.735
65
0.516
0.545
0.574
0.600
0.623
0.642
0.658
0.668
0.673
75
0.510
0.528
0.545
0.561
0.575
0.587
0.597
0.603
0.606
85
0.503
0.509
0.515
0.521
0.525
0.529
0.533
0.535
0.536
292
Раздел 16
Выводы
1. Основы изложенной выше методики для оценки вероятности столк¬
новений объектов с космическим мусором были разработаны автором
в начале 90-х годов [4, 5]. Для решения задачи построены соотноше¬
ния (16.7), (16.10) и (16.12). Принципиальное отличие разработанной
методики от зарубежных аналогов заключается в учете детальных
статистических распределений величины и направления скорости КМ
при расчете вектора относительной скорости.
2. При решении ряда прикладных задач необходимо знать статистиче¬
ское распределение направлений относительной скорости. Рассмот¬
рено два возможных подхода к построению такого распределения, от¬
личающихся областью усреднения. Показано, что для оценки послед¬
ствий столкновений усреднение необходимо проводить по множеству
возможных направлений потока частиц.
3. Разработан способ учета формы и ориентации КА при расчете веро¬
ятности столкновений [7-9]. Введен в рассмотрение некий безраз¬
мерный коэффициент CN, аналогичный коэффициенту Сх в аэроди¬
намике. Для решения задачи выведены соотношения (16.20) и (16.21).
4. На основе разработанной методики выполнено большое число раз¬
личных исследований, подтвердивших ее корректность. Основные ре¬
зультаты нашли отражение в ряде публикаций [10-18].
Литература
1. Z. Khutorovsky, S. Kamensky, Direct method for the analysis of collision probabil¬
ity of artifical space objects in LEO: techniques, results and applications, First Eu¬
ropean Conference on Space Debris, Darmstadt, Germany, April 1993.
2. D. Kessler. Collision Probability at Low Altitudes Resulting from Elliptical Orbits,
Adv. Space Res., vol. 10, № 3-4,1990.
3. D. Kessler. Collision Cascading: The Limits of Population Growth in Low Earth
Orbit, Adv. in Space Res., Vol 11, № 12, 1991.
4. A. I. Nazarenko. Evaluation of the Collision Probability of Space Objects of Artifi¬
cial Origin. Orbital Debris Monitor, vol. 7(2), April 1994.
5. A. I. Nazarenko. The Statistic Motion Theory of a Satellite Ensemble. Development
and Application. International Symposium ’’Space Flight Dynamics”, St.-Petersburg"
Moscow, May, 1994.
6. P. Beltrami, M. Matney, A. 1. Nazarenko, P. Wegener. Comparison of Debris Flux
Models, Report on the Action Item 19.2, raised by 19th I ADC meeting, held in Co¬
logne, Germany. Eta max space document 1ADC-2001-AI19.2, Rev. 1.0, 2002'
09-23.
7. A. 1. A. 1. Nazarenko. Aerodynamical analogy of interaction between the surface of
spacecraft of various configurations and space debris. 46th IAF Congress, Oslo.
October 1995.
Характеристики столкновения спутника Земли с космическим мусором 293
8. А. И. Назаренко Аэродинамическая аналогия взаимодействия поверхности
космических аппаратов разной формы с космическим мусором // Космиче¬
ские исследования. 1996. Т. 34. N. 3. С. 317.
9. A. I. Nazarenko. The development of the statistical theory of a satellite ensemble
motion and its application to space debris modeling. Second European Conf. on
Space Debris, ESOC. Darmstadt, Germany: 17-19 March 1997. P. 233-238.
10. Обеспечение экологической безопасности ракетно-космической техники.
Модель пространственно-временного распределения плотности потоков тех¬
ногенного вещества в околоземном пространстве. ГОСТ Р В 25645.164-97.
11. А. И. Назаренко и др. ОСТ 134-1022-99. Пространство околоземное космиче¬
ское. Модель пространственно-временного распределения плотности потоков
техногенного вещества. Российское космическое агентство.
12. А. И. Назаренко. Проблема «Космического мусора» в околоземной среде.
Раздел 8. Экологические проблемы и риски воздействий ракетно-космиче¬
ской техники на окружающую среду. Справочное пособие под редакцией
Адушкина в. В., Козлова С. И. и Петрова А. В. Издательство «Анкил», Моск¬
ва, 2000. с.С. 382^132.
13. А. 1. Nazarenko, I. L. Menchikov Engineering model of space debris environment,
Third European Conf. on Space Debris. Darmstadt, Germany: March 2001. P. 293-298.
14. A. 1. Nazarenko. The solution of Applied Problems Using the Space Debris Predic¬
tion and Analysis Model. Chapter 4. Space Debris. Hazard Evaluation and Mitiga¬
tion. Edited by Nickolay N. Smirnov. Taylor & Francis Inc. 2002
15. А. И. Назаренко. Моделирование техногенного загрязнения околоземного
космического пространства. Астрономический Вестник, том 36, № 6, 2002.
с. 555-564.
16. А. 1. Nazarenko. Collision of Spacecraft with Debris Particles Assessment, 17th
ISSFD Symposium, Moscow, July 2003.
17. ГОСТ P 25645.167-2005 «Космическая среда (естественная и искусственная).
Модель пространственно-временного распределения плотности потоков тех¬
ногенного вещества в космическом пространстве», Москва, Стандартин-
форм, 2005.
18. А. И. Назаренко. Моделирование космического мусора. Монография, ИКИ,
2013.
Раздел 17
Расчет вероятности
взаимных столкновений
объектов разных размеров
Введение
В 1978 г. Дональд Кесслер, сотрудник НАСА, опубликовал статью [ 1],
в которой высказал предположение, что с течением времени загрязнение
космоса может достигнуть критического уровня. В этом случае взаимные
столкновения спутников приведут к такой интенсивности образования
космического мусора, которая превысит интенсивность его естественной
убыли, и как следствие, возникнет каскадный процесс саморазмножения
космического мусора. Такой гипотетический сценарий получил название
«синдром Кесслера».
За прошедшие годы количество крупных (каталогизированных) объ¬
ектов выросло многократно. Специалисты разных стран приложили суще¬
ственные усилия для развития методики расчета вероятности взаимных
столкновений и для оценки возможности возникновения каскадного про¬
цесса [2-10]. Обратим внимание на выводы отчета «Stability of the future
LEO environment» [9], подготовленного представителями 6-ти космиче¬
ских агентств. Они таковы:
«Результаты подтверждают нестабильность уровня загрязнения об¬
ласти низких орбит. Они содержат два ключевых положения, направлен¬
ных на долгосрочную стабилизацию обстановки. Во-первых, выполнение
рекомендации по уводу аппаратов на орбиты со сроком существования
менее 25 лет является первоочередной мерой по ограничению загрязне¬
ния. Необходимо подчеркнуть важность полного выполнения этой реко¬
мендации. Предположение о 90 %-м ее выполнении превышает текущие
возможности. Если международное сообщество не сможет в ближайшее
время достигнуть этого уровня, будущий рост загрязнения будет суще¬
ственно выше ожидаемого, что затруднит выработку дальнейших мер-
Во-вторых, для стабилизации обстановки должны быть рассмотрены более
решительные меры, такие как удаление космического мусора. Вмешатель¬
ство в окружающую среду после 50-летней космической деятельности яв¬
ляется сложной и трудной проблемой. Потребуется международное со¬
трудничество и большие затраты ресурсов...».
Расчет вероятности взаимных столкновений объектов разных размеров 295
Комментарий. Изложенные в отчете результаты относятся только к
объектам размером более 10-20 см. Как показано в наших публика¬
циях [3-8], рассмотренные меры не предотвратят монотонный рост
числа более мелких объектов, образующихся в результате взаимных
столкновений. Каскадный процесс саморазмножения КМ уже идет.
Замалчивание этого факта является некорректным. То, что данный
факт не удалось подтвердить зарубежным специалистам, является
следствием методических трудностей моделирования столкновений
мелких объектов, которые они не сумели преодолеть. В 2000 г. была
опубликована наша статья [3], в которой, по-видимому, впервые была
обоснована оценка влияния каскадного эффекта на текущий уровень
загрязнения ОКП (рис. 17.1). Из данных рисунка видно, что для час¬
тиц размером 0.25-0.5 см «вклад» взаимных столкновений на высотах
800-1000 км достигает 40 %.
altitude, km
Рис. 17.1. Распределение числа КО по высоте при различных сценариях
За прошедшие годы западные специалисты не смогли ни подтвердить,
Ни опровергнуть эту оценку.
Вывод соотношений для расчета
вероятности взаимных столкновений
Основы методики построения пространственного распределения ве¬
роятности и других характеристик возможных столкновений состоят в
следующем [3, 4]. Для оценки числа (N) столкновений КА сферической
296
Раздел 17
формы площадью сечения F с мелкими частицами космического мусора
используется дифференциальное уравнение
(17.1)
Здесь p(t) — концентрация частиц, Vrd (t) — скорость столкнове¬
ния. Входящие в правую часть функции /?(/) и Иге/(^) могут сильно ме¬
няться в пределах одного витка (в зависимости от широты и высоты точ¬
ки), но обычно мало отличаются на разных витках, поскольку общий уро¬
вень техногенного загрязнения в течение года меняется медленно (на не¬
сколько процентов). Поэтому интегрирование уравнения (17.1) целесооб¬
разно выполнять на интервале одного витка (7). В результате получим
следующую оценку числа столкновений в единицу времени
N^+T)=F~ j p{t)-Vn,{t)-dt = F-Q{t,). (17.2)
*0
Это полный поток частиц через поверхность данного КА с площадью се¬
чения F. В известной литературе широко применяется понятие удельного
потока Q (cross-sectional area flux), который имеет смысл потока через по¬
верхность КА с единичной площадью сечения. В (17.2) эта величина обо¬
значена как Q(tn).
Учитывается возможность взаимных столкновений объектов, отно¬
сящихся к разным по размеру группам — крупным (каталогизированным),
средним (от 1 до 20 см), более мелким (например, от 0.1 до 1 см) и т. д.
Концентрация частиц размером более произвольного значения d выража¬
ется в виде произведения некоторого безразмерного коэффициента k(d) на
концентрацию частиц размером более заданной величины d0:
p(d,t) = k(d)-p(d0,t). (17.3)
Принимается, что коэффициент k(d) не зависит от времени. Из (17.3) оче¬
видно, что приращение концентрации частиц в интервале размеров
{d, d + dd) будет равно
dp(d,t) = dk(d)-p(d:,t). (17.4)
Обозначим производную коэффициента k(d) как f (d) - dk(d) I dd . Тогда
концентрация частиц размером в диапазоне (d],d2) может быть выражена
следующим образом
Расчет вероятности взаимных столкновений объектов разных размеров 297
p(d„d2,t) = -\ f(d)-dd■ p(da,t) = \_k(d^)-k(d2)\-p{da,t). (17.5)
Обобщением выражения (17.2) для этого случая является соотношение
Здесь D — диаметр спутника. Удобство применения аппроксимации (17.2)
здесь проявилось в том, что выражение в квадратных скобках оказалось
независимым от времени. Поэтому нет необходимости вычислять инте¬
грал в квадратных скобках на каждом шаге интегрирования по времени.
Его достаточно вычислить один раз.
С использованием этого обозначения число столкновений рассматривае¬
мых КО на интервале time может быть записано так
Здесь стоящий в правой части удельный поток Q(d0,t) вычисляется в
соответствии с интегралом (17.2). При этом в качестве концентрации ис¬
пользуется концентрация p(d0,t) частиц размером более заданной вели¬
чины d0. В качестве величины d0 удобно выбрать нижнюю границу раз¬
меров каталогизированных объектов. Она составляет примерно 20 см.
В этом случае Q(d0,t) — это удельный поток каталогизированных КО
относительно некоторого заданного спутника.
Таким образом для некоторого заданного спутника (размером D) по¬
лучена оценка числа столкновений N(D,dl,d2) за время time со всеми
Другими КО, имеющими размер в интервале (dt,d2). Для перехода от
оценки N(^D,d], d2) к оценке среднего числа столкновений группы объек¬
тов размером в диапазоне (D,,D2), которые находятся в некоторой высот¬
ной области (h,h +Аh), со всеми КО размером (dl,d2) (эта оценка обозначена
Как N (/г, h + Л/г)ш ) необходимо просуммировать оценки N(D,di,d2) для
всех КО данного размера, находящихся в данном высотном диапазоне.
(17.7)
N(D,dud2) = Fd-Q(d0,t)-time.
(17.8)
298
Раздел 17
При этом при достаточно малом Ah все оценки Q(d0,t) можно считать
одинаковыми. В результате получим следующую оценку
N(h,h + Ah)Dd =
Q{d0J0)' time .
(17.9)
Здесь в квадратных скобках суммирование значений Fd, вычисленных в со¬
ответствии с выражением (17.7), ведется по всем КО с размерами в диапазоне
(Z),, Z)2), у которых высоты находятся в диапазоне (h,h + Ah). Выражение в
квадратных скобках можно записать несколько иначе, если ввести в рассмот¬
рение общее число объектов n^D>D^ размером (D>Dj) и функцио¬
нальную зависимость числа объектов от их размеров, аналогичную (17.3):
n(Dj >D) = k(D)-n(h,h + Ah)cat. (17.10)
Здесь функция k(D) — та же, что применена выше в выражении (17.3), а
n(h,h + — число каталогизированных объектов в диапазоне высот
(h,h + Ah). На основе (17.10) легко определить число объектов, имеющих
размеры в интервале (D,D + dD). Оно равно f(DydD-n(h,h + Ah)r
С учетом изложенного суммирование в (17.9) заменяется на интеграл.
В результате получим
D~i d2
Л O’ + df-f(d)-dd-f(D)-dD
■n(h,h + Ah)cai. (17.11)
В правой части выражение в квадратных скобках обозначим как Ры-
В результате выражение (17.9) примет вид
N(h,h +
М)м = Fd</ -n(h’h + Ah)ca, ■ (17.12)
Здесь FDd вычисляется по формуле
II
В(2) d(2)
j(D + df.f(d).dd.f(D).dD
0(1) «'(l)
(17.13)
Выражение (17.12) характеризует пространственное распределение веро¬
ятности (среднего числа) столкновений.
Расчет вероятности взаимных столкновений объектов разных размеров 299
Вычисление оценок (17.13) для разных групп КО и сравнение полу¬
ченных значений между собой дает относительные оценки вероятности
столкновений КО внутри разных групп и между группами. При проведе¬
нии конкретных расчетов нами использовано допущение, что связь между
логарифмом плотности и логарифмом размеров внутри каждой из групп
является линейной. Дискретные значения функции k(d) в точках dj,
j= 1, ..., т будем считать известными. Здесь т — число групп, на которые
разбиваются все рассматриваемые размеры объектов. Тогда в интервале
(dj,dj+1) функция k(d) будет иметь вид
с,
(17.14)
где = -
ln(k(dj)/k(d^))
ln{dj+l/dj)
(17.15)
Из (17.14) следует, что функция f(d) имеет вид
/М=-
С:
X'-
(17.16)
Подстановка (17.16) в (17.13) приводит к следующей формуле для вычис¬
ления величины Fn.:
FDd С, ■ Xj ■ Х; х
1
ч"1
1
Q
|
Dw
1' ■"
ч
^3
i
Jj2} + 2
D 2 *i
°(2)
1 •
i
1
^з !
i
_3“V
D(o
1
1
|
1
N)
1
1
D(0
i
N)
1
J*
1
£>' Xj
D(2)
1
4~
1
*^3
i
1
1
1
W0)
3-xi
(2)
V).
(17.17)
Эти оценки вычисляются для всех сочетаний Д, dj (г, j = 1, ..., т).
Пример 1
В приведенном ниже примере все КО размером более 0.1 см разбиты
По размерам на 9 групп [6, 7]. Минимальные размеры объектов и оценки
4d) в каждой из групп приведены в табл. 17.1
300
Раздел 17
Таблица 17.1. Характеристики объектов в разных группах
j
1
2
3
4
5
6
7
8
У
dj , м
0.001
0.002
0.005
0.010
0.022
0.046
0.100
0.200
2.5
т
14230
1045
168.1
24.4
4.6
1.4
0.4
1.0
0.24
Результаты расчетов площади Fod приведены ниже в табл. 17.2.
Таблица 17.2. Матрица значений FDd для КО разных размеров, (кв. м)
i/j
1
2
3
4
5
6
7
8
9
1
275.28
109.7
55.43
29.25
43.68
67.95
58.6
3092
12363
2
109.73
32.69
12.84
5.64
7.67
11.38
9.59
496.84
1982.7
3
55.43
12.84
3.80
1.27
1.47
2.00
1.60
80.06
318.26
4
29.25
5.64
1.27
0.30
0.27
0.30
0.22
9.97
39.26
5
43.68
7.67
1.47
0.27
0.18
0.16
0.09
3.66
14.16
6
67.95
11.38
2.00
0.30
0.16
0.10
0.05
1.39
5.16
7
58.60
9.59
1.60
0.22
0.09
0.05
0.02
0.30
1.03
8
3092
496.8
80.06
9.97
3.66
1.39
0 30
1.11
11-08' '■
9
12363
1982
318.26
39.26
14.16
5.16
1.03
2.08
10.72
Приведенные результаты представляются весьма интересными и
важными. Из них видно, что при уменьшении размеров рассматриваемых
КО число столкновений увеличивается на несколько порядков — как
внутри данной группы, так и между группами.
Из выражения (17.12) очевидно, что общее число столкновений объ¬
ектов 8-й и 9-й групп между собой за 1 год равно произведению величины
F = FM = (F8g + + Fw + F99) / 2 = (1.11 + 2-2.08 + 1.12)12 = 3.49 кв. м.
и суммы
Sum = + Д/г) -Q(d0,t0)ytime . (17.18)
j j
Ниже в табл. 17.3 приведены значения F для КО из разных диапа¬
зонов размеров. Напомним, что эта величина есть сумма всех компонентов
матрицы Fod при d > d f, разделенная на 2.
Расчет вероятности взаимных столкновений объектов разных размеров 301
Таблица 17.3. Оценки F для КО из разных диапазонов
J
1
2
3
4
5
6
7
8
9
F, м2
18988
3029
486.6
79.79
29.63
11.47
4.83
3.49
0.86
Общее число столкновений Nwm объектов разных размеров равно произ¬
ведению величин F и Sum:
N sum~ F Sum (17.19)
Таблица 17.4. Оценки среднего числа ожидаемых столкновений за 1 год
j
1
2
3
4
5
6
7
8
9
Nsum
203
32.4
5.20
0.854
0.317
0.123
0.052
0.038
0.009
В табл. 17.4 приведены значения Nsum (среднего числа ожидаемых
столкновений за 1 год) для КО разных размеров в 2000 г. [7]. Эти данные
еще раз свидетельствуют о том, что число (вероятность) взаимных столк¬
новений очень сильно зависит от размеров КО. В частности, при умень¬
шении размеров от 10 см (j = 7) до 0.1 см (j = 1), т. е. на 2 порядка, число
взаимных столкновений увеличивается в 4000 раз. Для частиц размером
более 0.1 см получена оценка -200 столкновений в год. Из этих данных
видно также, что в конце 90-х годов вероятность столкновения каталоги¬
зированных КО составляла 0.038 за 1 год. Т. е. средний интервал между
столкновениями составлял 27.5 лет.
Особенности учета столкновений
при прогнозе обстановки
Корректное решение данной задачи является исключительно трудной
Проблемой. Основные трудности обусловлены случайным характером
столкновений, зависимостью вероятности и условий столкновений от
большого числа факторов, характеристики которых меняются во времени,
И отсутствием достоверной модели оценки последствий столкновений.
Ниже при изложении результатов прогноза обстановки минимальный
размер сталкивающихся объектов принят равным 1.0 см. Разбиение КО по
размерам и оценки доли КО соответствующего размера («доля в группе»)
Представлены в табл. 17.5.
302
Раздел 17
Таблица 17.5. Характеристики КО, учитываемые при взаимных столкновениях
Группы
1, Не каталогизированные КО
2, Каталогизированные КО
Диапазон, см
1-2.5
2.5-5
5-10
10-20
20-50
50-100
100-250
250-500
>500
dсреднее
1.6
2.7
7.0
14
31
70
160
350
700
Доля p(d)
0.7310
0.1662
0.0598
0.0265
0.0066
0.0033
0.0026
0.0039
0.0001
Доля в группе
0.9835
0.0165
dkdid)
44.303
10.072
3.624
1,606
1
kd(>d)
60.605
16.302
6.230
2.606
1
Здесь сумма оценок p(d) равна 1. Среди объектов рассмотренных размеров
доля каталогизированных КО составляет всего 1.65 %. Остальные 98.35 % —
это не каталогизированные КО, имеющие размеры в диапазоне от 1 см до
20 см. dkd{d) — отношение числа КО данного диапазона размеров к числу
каталогизированных КО. kd(>d) — отношение числа КО размером, не менее
заданного, к числу каталогизированных КО.
На последних сессиях IADC рассматривались результаты исследова¬
ния последствий столкновений каталогизированных объектов на загрязне¬
ние ОКП [9, 10]. Столкновения более мелких объектов не рассматрива¬
лись. Автор полагает, что это объясняется двумя причинами:
1. Существующие модели фрагментации в недостаточной степени при¬
способлены к учету многообразных условий столкновений.
2. Большое число не каталогизированных объектов (миллионы) вызыва¬
ет существенные методические и вычислительные трудности модели¬
рования столкновений.
Ниже рассмотрены некоторые особенности прогнозирования обста¬
новки с учетом столкновений. Более подробно эти вопросы будут рас¬
смотрены в разделах 18 и 19. Как изложено в докладах [3, 4], особенно¬
стью излагаемой ниже методики учета последствий столкновений по
сравнению с материалами отчета [9] является расширение диапазона раз¬
меров сталкивающихся объектов. В связи с этим, а также для удобства
сравнения с предшествующими результатами, все возможные столкнове¬
ния разбиты на 3 типа (группы):
Группа 1. Взаимные столкновения КО в диапазоне размеров от 1 см
до 20 см.
Группа 2. Взаимные столкновения каталогизированных КО размером
более 20 см.
Группа 3. Столкновения КО в диапазоне размеров от 1 см до 20 см с
каталогизированными КО размером более 20 см.
Расчет вероятности взаимных столкновений обьектов разных размеров 303
В результате моделирования последствий столкновений для всех трех
упомянутых групп были определены вероятности возможных столкнове¬
ний в каждой группе. Они представлены в табл. 17.6.
Таблица 17.6. Вероятности столкновений в разных группах
№ группы, i
1
2
3
Вероятность Р,
0.967272
0.000269
0.032259
Сумма этих вероятностей равна 1.0. Важной особенностью этих оценок
является то, что вероятность взаимных столкновений не каталогизирован¬
ных КО размером от 1 до 20 см в =3600 раз больше вероятности взаимных
столкновений каталогизированных КО.
При прогнозе обстановки в процессе расчета текущей вероятности
столкновений надо учитывать изменение концентрации объектов. Дело в
том, что вероятность столкновения объектов в каком либо высотном слое
пропорциональна квадрату концентрации объектов в данном высотном
слое. Это распределение представлено на рис. 17.2. Данные относятся к
началу 2012 года. Видно, что наиболее ожидаемым районом столкновений
является диапазон высот от 700 до 1000 км. В нем происходит 82 % всех
столкновений.
Рис. 17.2. Нормированная вероятность столкновения в высотном слое
в предположении, что эта вероятность пропорциональна квадрату концентрации
В процессе прогнозирования обстановки эта вероятность столкнове¬
ний (среднее число) меняется. Для вычисления данной величины в произ¬
вольный момент времени удобно воспользоваться приближенным соот¬
ношением
304
Раздел 17
Ко,{() = Кы{(о)-
Y.n{hJ’hJ+Ah)-Q(hJ)
(О
Хи(ауЛ- + ла)-6(а,)
(О
p(h,ta)
(17.20)
Здесь в качестве высоты надо выбирать высоту, где концентрация является
максимальной. В соответствии с данными рис. 17.2 эта высота находится в
диапазоне от 700 до 900 км.
Пример 2 [3, 4]
Пусть вероятность столкновений каталогизированных КО в единицу
времени равна некоторому значению РсШ. Сравним для примера число
фрагментов размером 0.10-0.25 см, которое образуется на высоте 700-
800 км, при условии, что на интервале времени 1/Рса( произошло одно
столкновение каталогизированных КО. На этом же интервале ожидаемое
число столкновений 1-го типа будет в Р] / Р2 = 3600 раз больше, а столк¬
новений 3 типа — в Р3/Р2 = 120 раз больше. Соответствующие оценки
приведены в табл. 17.7.
Таблица 17.7. Число фрагментов размером 0.10-0.25 см
на высоте 700-800 км, которое образуется на интервале 1/ Pcat
(при одном столкновении каталогизированных КО)
№ группы, /
1
2
3
Число фрагментов Nl
7.90-106
0.87 -106
1.39 -106
Отношение /V, / N2
9.1
1.0
1.6
Из этих данных видно, что «вклад» столкновений 1-го и 3-го типа в обра¬
зование мелких фрагментов намного больше «вклада» столкновений 2-го
типа (соответственно в 9.1 раз и на 60 %).
Методика расчета вероятности (числа) столкновений Рcat основана на
применении формулы (17.19) при F= 3.49 м2. В результате по данным
каталога на начало 2012 г. (13100 объектов) оценка среднего интервала
между столкновениями составила ~5 лет:
Рсш~ Ncol = 0.218 столкновений в год. (17.21)
Расчет вероятности взаимных столкновений объектов разных размеров 305
Рассмотрим, как определяется вероятность столкновений не каталоги¬
зированных КО. В этом случае целесообразно воспользоваться представ¬
ленными в табл. 17.6 вероятностями столкновений КО разных типов (из
разных групп), которые получены при условии одного столкновения КО
размером более 1 см, и оценкой (17.21) вероятности столкновения каталоги¬
зированных КО. Из этого следует, что оценки среднего числа столкновений
обьектов 1 -го и 3-го типа за год в начальный момент t0 равны:
= (17.22)
2
tfS('o) = ^4 =26- (17.23)
О
Для оценки вклада последствий столкновений в уровень загрязнения
ОКП мелкими фрагментами был выполнен прогноз обстановки с 1990 по
2010 г. В табл. 17.8 приведены оценки числа объектов в диапазоне высот
от 400 до 2000 км в исходный момент времени, а также в 2010 г. Прогноз
был выполнен при предположении, что в интервале времени с 1990 г. по
2010 г. единственным источником образования космического мусора были
случаи фрагментации КО в результате взаимных столкновений. Во второй
строке таблицы представлены результаты прогноза обстановки с 1990 г. по
2010 г. с учетом взаимных столкновений объектов размером более 1 см, в
третьей стоке — соответствующие данные модели SDPA за 2010 г. (без
учета столкновений), а в последней строке — отношение прогнозных и
модельных оценок за 2010 г.
Таблица 17.8. Число объектов разных размеров в области низких орбит
Год
Номер диапазона и соответствующие размеры КО, см
1
2
3
4
5
6
7
8
0.1-0.25
0.25-0.5
О
т
О
1.0-2.5
2.5-5.0
5.0-10
10-20
>20
Модель,
1990
76.75-106
5.66- О6
975000
144500
28000
8960
2830
5320
Прогноз,
2010
597.0-106
67.7-106
14.6-106
3.3-106
352000
59800
6350
5110
Модель,
2010
193.6-106
14.5-106
2.45-106
367000
71150
22600
7060
13120
Отношение
3.1
4.7
5.9
9.0
5.1
2.6
0.90
0.39
306
Раздел 17
Полученные результаты являются довольно неожиданными. Они сви¬
детельствуют об очень сильном влиянии взаимных столкновений на засо¬
ренность ОКП фрагментами размером от 1 мм до 5.0 см. По сравнению с
оценками модели SDPA за 2010 г. прогнозное число фрагментов указанно¬
го размера оказалось в 5-9 раз больше. Для объектов размером от 10 д0
20 см прогнозные и модельные оценки согласуются достаточно хорошо, а
для каталогизированных КО (размером более 20 см) прогнозные оценки
оказались в 2.5 раза меньше. Этот результат является естественным след¬
ствием малой вероятности взаимных столкновений каталогизированных
КО, а также большим вкладом запусков новых КА и непредвиденными их
разрушениями, которые не учитывались при прогнозе обстановки.
В табл. 17.9 представлены оценки среднего числа взаимных столкно¬
вений на интервале прогноза. Оценки относятся к трем типам столкнове¬
ний, рассмотренным выше. В связи с тем, что при прогнозе обстановки не
учитывались запуски новых КА и случаи аварийных разрушений, эти
оценки являются заниженными.
Таблица 17.9. Среднее число взаимных столкновений на интервале прогноза
№ группы
1
2
3
Число столкновений
2330
0.65
78
Годы
Рис. 17.3. Изменение числа фрагментов размером 1-2.5 мм на интервале прогноза
Расчет вероятности взаимных столкновений объектов разных размеров 307
Напомним, что к 1 -й группе относятся взаимные столкновения объек¬
тов размером от 1 см до 20 см. Ожидаемое число такого рода столкнове¬
ний на интервале времени с 1990 по 2010 г. превысило 2000.
На рис. 17.3 представлен типичный пример изменения числа мелких
фрагментов столкновений на интервале прогноза, а именно, число образо¬
вавшихся фрагментов, сгоревших и оставшихся в ОКП. Из этих данных
видно, что на интервале прогноза в результате столкновений ежегодно
образовывалось =30 000000 фрагментов размером от 1.0 до 2.5 мм. В ре¬
зультате влияния торможения в атмосфере =10 % из них сгорело. Вариа¬
ции числа сгоревших объектов объясняются изменением интенсивности
торможения в связи с 11 -летним циклом солнечной активности.
Выводы
1. Проблема достижения критического уровня загрязнения ОКП при¬
влекла внимание мировой общественности. Однако в настоящее вре¬
мя нет общепризнанного ответа на вопрос, начался ли каскадный
процесс саморазмножения космического мусора. По оценкам автора
(в части объектов размером менее 10 см) этот процесс уже идет.
2. Разработана методика расчета числа (вероятности) взаимных столк¬
новений объектов разных размеров. Для решения задачи выведены
соотношения (17.12), (17.13) и (17.19).
3. Установлено, что в конце 90-х годов вероятность взаимных столкно¬
вений каталогизированных КО за 1 год составляла 0.038, т. е. средний
интервал между столкновениями составлял 27.5 лет. На начало
2012 г. аналогичная оценка оказалась равной ~5-ти годам.
4. Показано, что число столкновений более мелких (не каталогизиро¬
ванных) объектов размером более 1 см между собой, а также с ката¬
логизированными КО в =3600 раз больше числа взаимных столкнове¬
ний каталогизированных КО.
5. Таким образом, основным источником образования мелких фрагментов
являются взаимные столкновения не каталогизированных объектов. То,
что данный факт не удалось подтвердить зарубежным специалистам,
является следствием методических трудностей моделирования столк¬
новений мелких объектов, которые они не сумели преодолеть.
Литература
1. D. J. Kessler and В. G. Cour-Palais, “Collision Frequency of Artificial Satellites:
The Creation of a Debris Belt”, Journal of Geophysical Research, vol. 83, No. A6,
pp. 2637-2646, June 1, 1978.
308
Раздел 17
2. D. J. Kessler (1991). «Collisional Cascading: The Limits of Population Growth in
Low Earth Orbit•». Advances in Space Research 11: 2637-2646. DOI: 10.101
0273-1177(91)90543-S.
3. N. N. Smirnov, A. I. Nazarenko, A. B. Kiselev. LEO technogeneous contaminants
evolution modeling with account OF satellites collisions, IAA-00-IAA.6.4.10
4. A. I. Nazarenko. The solution of Applied Problems Using the Space Debris Predic¬
tion and Analysis Model. Chapter 4. Space Debris. Hazard Evaluation and Mitiga¬
tion. Edited by Nickolay N. Smirnov. Taylor & Francis Inc. 2002.
5. A. I. Nazarenko, “Space debris status for 200 years ahead & the Kessler effect»
29-th IADC 2011
6. A. 1. Nazarenko, «Estimation of the contribution of the effect of collisions of ob¬
jects larger than 1 cm in size», 30-th IADC 2012.
7. А. И. Назаренко. Моделирование космического мусора. Монография, ИКИ,
2013.
8. A. I. Nazarenko, I. V. Usovik. Instability of the Future LEO Environment. Com¬
ments to the content of the IADC AI 27.1, Rev 1, report “Stability of the Future
LEO Environment”, 31th IADC Meeting, 2013.
9. Stability of the Future LEO Environment. 1ADC-12-08, Rev. 1 January 2013.
10. 20 YEARS of IADC. 51st Session of the Scientific and Technical Subcommittee
United Nations Committee on the Peaceful Uses of Outer Space, February 2014.
Раздел 18
Уравнения для прогнозирования
статистического распределения
космического мусора по высоте
Введение
При прогнозировании техногенного загрязнения [1, 8] в области
низких орбит (LEO) принимается, что на эволюцию пространственно-
временного распределения космического мусора основное влияние оказы¬
вают два фактора: прирост количества новых объектов в результате запус¬
ков, технологических операций, взрывов, аварий и т. п., а также торможе¬
ние в атмосфере, в результате влияния которого происходит уменьшение
высоты перигея КО и их сгорание в верхних слоях атмосферы.
Для решения рассматриваемой задачи применяются два подхода.
Традиционный (детерминированный) подход широко применяется зару¬
бежными специалистами. Он, в частности, применяется в модели NASA
“EVOLVE”. Используемая при моделировании методика основана на по¬
штучном прогнозе движения каждого образующегося объекта разных раз¬
меров. На предшествующем интервале (с 1957 г.) при выполнении шага по
времени в качестве источника образования космического мусора модели¬
руются все запуски и все известные случаи разрушений (фрагментации)
спутников (при этом используется стандартная модель разрушений Джон¬
соновского космического центра NASA, а также модель последствий
столкновений). Объекты, вошедшие в плотные слои атмосферы, считают¬
ся сгоревшими и исключаются из числа рассматриваемых. Отличие моде¬
лирования на будущем временном интервале — в том, что все случаи
фрагментации формируются по методу Монте-Карло. При этом делается
несколько реализаций прогноза. Очевидно, что эта методика является
очень трудоемкой по затратам машинного времени. Даже на современных
больших ЭВМ она не позволяет корректно прогнозировать обстановку на
сотни лет. О трудоемкости решения рассматриваемой задачи свидетельст¬
вует приведенная ниже выдержка из доклада [8]:
As one of the more time consuming operations of our model deals with the
orbital propagation of the sixth orbital elements for each objects of the
310
Раздел 18
population, the code of MEDEE has been designed to take advantage of
massively parallel, computer system available at CNES. This means that
the orbital propagation module has been parallelized, in order to propagate
the population at each time-step over all available cores.
The computer system in which MEDEE is executed is formed by 360 cores
summing a total RAM of 24 Go and an overall computing power of 4 Tflops/
second.
Хотя детерминированный подход является трудоемким, он не решает про¬
блему обеспечения адекватности. Точность моделирования фрагментации
объектов неизвестна. Настройка параметров модели по имеющимся экс¬
периментальным данным является очень трудной задачей.
В российской модели SDPA (Space Debris Prediction and Analysis) [7, 9]
применяется другой (статистический) подход к формированию источни¬
ков загрязнения ОКП и прогнозированию обстановки. Его основное отли¬
чие состоит в том, что вместо данных о конкретных запусках и случаях
разрушения используются усредненные данные об их пространственном
распределении и о числе ежегодно образующихся объектов разных разме¬
ров. В качестве обоснования именно такого подхода использованы сле¬
дующие доводы.
- Количество КО разных размеров в течение года меняется незначи¬
тельно (на несколько процентов). Поэтому более детальное (по вре¬
мени) моделирование источников загрязнения является излишним:
практически не влияя на точность, оно сильно усложняет модель.
Примечание. Данное утверждение не исключает возможность и целе¬
сообразность детального моделирования последствий разрушения на
коротких временных интервалах, когда «облако» фрагментов остается
достаточно компактным. Однако известно, что процесс «рассасывания»
облака идет обычно достаточно быстро. Продолжительность этого
процесса — порядка нескольких месяцев.
- Причины и условия разрушения спутников, в результате которых обра¬
зовалось большинство мелких фрагментов космического мусора, явля¬
ются исключительно разнообразными. Поэтому трудно ожидать, что
результаты моделирования последствий разрушений (число частиц,
скорости разлета в будущие моменты времени) являются достаточно
точными. Уровень погрешностей такого моделирования неизвестен.
В российской модели SDPA при прогнозировании обстановки с уче¬
том торможения КО в атмосфере рассматриваются различные КО, высота
перигея которых не превышает 2000 км. Принимается, что из учитывае¬
мых факторов только высота перигея (hp) оказывает существенное влия¬
ние на эволюцию распределения числа КО по высоте. Остальные элементы
Прогнозирование статистического распределения космического мусора 311
орбиты обозначаются как Э. Все множество объектов с различными эле¬
ментами Э разбивается на некоторое конечное количество подмножеств
(групп) с элементами Э/, /= 1,2, /тах. Плотность распределения высо¬
ты перигея объектов из выбранной группы в момент времени t обознача¬
ется как p(h,t). Требуется изучить закономерности изменения этой плотно¬
сти во времени. Ниже при анализе эволюции распределения конкретной
группы КО индекс / опущен.
При расчете эволюции распределения числа КО по высоте учитыва¬
ются следующие факторы: торможение КО в атмосфере на высотах до
2000 км.; разбиение всех КО по элементам Э на группы, отличающиеся
размером d, значениями эксцентриситета е и баллистического коэффици¬
ента S; исходное распределение КО различных типов по высоте; ожидае¬
мая интенсивность p(h,t)„ew образования новых КО различных типов в ре¬
зультате запусков и взрывов; нестационарность учитываемых факторов, а
именно, плотности атмосферы в связи с изменением солнечной активно¬
сти в 11 -летнем цикле и интенсивности новых запусков.
Среди перечисленных учитываемых факторов (параметров) особую
роль играет высота перигея. Ее характерная особенность состоит в том,
что она, оказывая основное влияние на торможение, сама изменяется под
его воздействием (перигей опускается и спутники сгорают в атмосфере в
окрестности высоты 100 км). Поэтому высота перигея является одним из
аргументов эволюционного уравнения и в разбиение не входит. Совсем
иной характер имеет влияние баллистических коэффициентов и размеров
КО: они практически не изменяются в процессе эволюции орбиты. Про¬
межуточный характер имеет влияние эксцентриситета — он, вообще гово¬
ря, изменяется (уменьшается) под действием торможения, но это измене¬
ние не играет существенной роли, так как большая часть КО имеет обиты
с малыми эксцентриситетами.
Вывод и решение эволюционных уравнений
Рассмотрим методику прогнозирования распределения КО p(h,t) по
высоте перигея [1]. Выведем соотношение для определения этой плотно¬
сти на разных высотах в момент времени t + At. При дискретном разбие¬
нии аргумента h на некотором заданном интервале с шагом Ah исходное
распределение p(h,t) задается на этой сетке значений аргументов.
На рис. 18.1 представлены значения распределения p{h,t) при двух
значениях аргумента: h и h + Ah. Количество объектов в этом интервале
высот перигея равно
Ni.t)hMsk=PM^h-
(18.1)
312
Раздел 18
р(М)
p(h+Ah,t)
P(n.tJ
•—Ah(t)—
V<h,t) • At
V(h+Ah, t) • At
-> hD
h(t) * h(t)+Ah(t)
U ~Ah(t+At)-^
* j
h(t+At) h(t+At)+Ah(t+At)
Рис. 18.1. Схема изменения распределения КО по высоте перигея
Скорость уменьшения высоты перигея объектов с высотой И обозна¬
чена как V(h,t). Аналогично скорость уменьшения высоты перигея объек¬
тов с высотой h + Ah обозначена как V(h + Дh,t).
Рассмотрим, что произойдет с распределением p(h,t) через некоторое
время, а именно в момент времени t + At. Очевидно, что количество объ¬
ектов (18.1) в рассматриваемом интервале высот изменится в результате
трех обстоятельств.
1. Часть объектов в окрестности высоты И снизится настолько, что их
высота перигея станет меньше высоты И. Количество этих объектов равно
N(t,t + AtjHhh=V(h,t)-At-p(h,t). (18.2)
2. Часть объектов в окрестности высоты >h + Ah снизится настолько,
что их высота перигея станет меньше высоты h + Ah. Количество этих
объектов равно
N(t,t + At){^ =V(h + Ah,t)-At-p(h + Ah,t). (18.3)
3. В результате запусков и взрывов добавятся новые КО. Количество
этих объектов равно
N(t’t+AttL=p(h’t)^-Ah-At-
(18.4)
Прогнозирование статистического распределения космического мусора 313
Общее количество объектов в рассматриваемом интервале высот перигея в
момент времени t + At будет равно
По своему содержанию соотношение (18.5) и есть эволюционное
уравнение в дискретной форме для прогноза распределения КО по высоте
перигея на 1 шаг по времени. Искомая плотность распределения высот
перигея в момент времени t + At определяется на основе оценки (18.5) по
простой формуле
Таким образом, соотношения (18.5) и (18.6) позволяют рассчитать
изменения распределения числа КО по высоте перигея при прогнозе об¬
становки на один шаг по времени. Последовательное применение этих
соотношений в цикле по высоте и по времени обеспечивает решение рас¬
сматриваемой задачи. Для решения уравнения (18.5) применяется специ¬
ально разработанная численно-аналитическая процедура. При выборе
числа разбиений множества КО на группы необходим компромисс между
детальностью анализа и реализуемостью алгоритма: при слишком деталь¬
ном разбиении требуется много памяти и увеличивается время счета.
Кроме того, следует учитывать, что исходные данные для прогноза обста¬
новки имеют довольно значительную неопределенность, которая делает
бессмысленной излишнюю детализацию.
Общей закономерностью эволюции распределения p(h,t) в области
низких орбит является уменьшение высоты перигея спутников под дейст¬
вием атмосферных возмущений. Этот факт характеризует процесс само¬
очищения ОКП от космического мусора в результате торможения объектов
в атмосфере. Данный процесс идет тем сильнее, чем ниже высота перигея
спутников (чем больше скорость снижения высоты перигея).
Определенный интерес представляет преобразование соотношений
(18.5) и (18.6) в форму дифференциального уравнения, принимая дискрет¬
ные значения Ah и At бесконечно малыми величинами (dh и dt). В этом
случае выражения (18.1)—(18.4) и (18.6) принимают вид [9]:
(18.5)
(18.6)
N(t,t + Л)1+дл =V(h,t)-dt-p(h,t),
'hMdh
314
Раздел 18
N(t,t + dt)h+dh = V(h + dh,t)-dt- p(h + dh,t) =
= V(h + dh,t)-dt-
dh
N(t’t + *t)2iH=P(h>t)'a,-dh-dt’
AT{t+ dt)hh+M = p(h,t + dt)-dh = p(h,t)-dh +
dp(h,t)
dt
■dt-dh .
Здесь F(A + dh,t) = F(A,?)h ^ ^ dh .
dh
Подстановка этих выражений в (18.5) после сокращения в правой и левой
части одинаковых слагаемых, а также множителя dt-dh приводит к сле¬
дующему уравнению в частных производных, которое описывает эволю¬
цию распределения числа КО по высоте перигея
dt v ’ dh v ’ dh y !new
Рассмотрим полный дифференциал распределения p(h,t) в точке (k,t)
(18,7)
’ dh dt
(18.8)
С учетом определения скорости снижения высоты перигея
dh/dt = -V(h,t) (18-9)
подстановка в (18.8) выражения (18.7) и применение обозначения
dV(h,t)/dh=A(h,t) (18.10)
приводят к уравнению
dp(h,t) dV[h,t)
dt
dh
p(h,t) + p{h,t) = A(h,t)-p(h,t) + p(h,t) . (18.10
Здесь в соответствии с уравнением (9) высота h является известной функ¬
цией времени h{t). По своему содержанию выражение (18.11) — это эво-
Прогнозирование статистического распределения космического мусора 315
люционное уравнение в дифференциальной форме. А именно, это линей¬
ное неоднородное дифференциальное уравнение первого порядка. Как
известно, общее решение уравнения (18.11) является суммой общего ре¬
шения однородного уравнения
dx/dt = A(t)-x, (18.12)
которое имеет вид
с(0~хо - exp
Z=to
= x0-u(t,t0), (18.13)
и частного решения неоднородного уравнения. С использованием функ¬
ции u(t,tQ) решение уравнения (11) принимает вид
Важным результатом проведенного анализа является то, что решение
рассматриваемой задачи удалось свести к решению (18.14) достаточно
простого обыкновенного дифференциального уравнения (18.11).
Рассмотрим более подробно производную которая в (18.11)
обозначена как A(h,t). Учтем то обстоятельство, что при заданных эле¬
ментах орбиты КО и известном его баллистическом коэффициенте ско¬
рость снижения высоты перигея К(А,г) пропорциональна плотности ат¬
мосферы в перигее p(h,t) • По мере увеличения высоты плотность атмо¬
сферы уменьшается. При экспоненциальной зависимости плотности атмо¬
сферы от высоты производная dp{h,t)jdh имеет вид
мм.-4*4, 08.15)
dh H(h,t)
где H(h,t) — т. н. шкала высот (высота однородной атмосферы). С учетом
этих данных рассматриваемая производная может быть записана как
316
Раздел 18
В частном случае, когда коэффициент А не зависит от времени, решение
(18.14) упрощается
В связи с отрицательным значением коэффициента А значение функции
Таким образом, обоснованы два способа решения рассматриваемой
задачи. Первый способ основан на решении эволюционного уравнения
(18.5) в дискретной форме. Второй способ заключается в применении ана¬
литического решения (18.14).
В заключение раздела рассмотрим особенности эволюционных урав¬
нений. Из данных рис. 18.1 очевидно, что все объекты, которые в момент
времени t находились в области высоты перигея (h(t), h(t) + Ah(t)), пере¬
мещаются со временем в область меньших высот. А именно, в момент
времени t + At они оказались в области (h(t + At), h(t + At) + Ah(t + At)).
Ширина этой области высот Ah{t + At) зависит от разности скоростей
V(h,t) и V(h + Ah,t)\
Очевидно, что в связи с положительным значением разности в квадратных
скобках данная величина с течением времени увеличивается. Таким обра¬
зом, объекты, которые в начальный момент времени находились в некото¬
ром высотном диапазоне (h, h + Ah) со временем оказываются в более ши¬
роком диапазоне высот.
На основе разностного уравнения легко составить дифференциальное
уравнение для диапазона Ah(t). Действуя так же, как при выводе уравне¬
ния (18.7), получим
Это уравнение отличается от уравнения (18.12) только знаком. Его обшее
решение имеет вид
p(A4) = exp[^-(f-f0)]-p(A0,f0)+ J exp[^-(f-£)]-p(/z,£)new-rf£. (18.17)
exp [А •(?-?„)] уменьшается течением времени.
Ah(t + At) = Ah(t) + [v(h,t)-V(h + Ah(t),t)]-At . (18.18)
dAh(t) _ dV(h,t)
dt dh
-^Al-Ah(t) = -A(h,t)-Ah(t). (18.19)
Ah(t) = U(t,t0)-Ah(t0),
(18.20)
где
(18.21)
Прогнозирование статистического распределения космического мусора 317
Нетрудно показать, что общие решения однородных уравнений (18.12) и
(18.19) связаны соотношением
U(t,t0) = u(t,toy' =u(t0,t). (18.22)
Таким образом, построена зависимость для определения диапазона
Дh(t) в любой момент времени.
Выше отмечалось, что все объекты, которые в начальный момент на¬
ходились в диапазоне высот (Л0, h0 + Ah(t(l)) перемещаются со временем в
другой диапазон высот перигея h(t) + Ah(t)). Убедимся, что решение
(18.14) согласуется с этим утверждением. Умножим правую и левую часть
решения (18.14) на (18.20), принимая p(h,t~) = 0 и используя формулу
(18.22). Получим
p{h,t)-Ah(t) = u{t>t0)-p{hQ,t0)-U{t,t0)-Ah{ta) = p{h0,tQ)-Ah{t0). (18.23)
Определение скорости снижения высоты перигея
Движение многих КО происходит в разреженных слоях верхней ат¬
мосферы, где аэродинамические силы невелики по сравнению с их значе¬
ниями в нижних слоях атмосферы. Однако длительное время полета КО и
диссипативный характер влияния сил сопротивления воздуха приводят к
тому, что на высотах до 600-1000 км торможение в атмосфере оказывает
существенное влияние на эволюцию орбит КО. Действие силы аэродина¬
мического сопротивления на КО с массой т вызывает ускорение
F = K-P'V* (18.24)
где величина
кь = (м2/кг) (18.25)
2т
называется баллистическим коэффициентом.
Здесь Сх — безразмерный коэффициент аэродинамического сопротивле¬
ния, S — характерная площадь КО, р — плотность атмосферы, Vrd —
скорость набегающего потока газа, равная скорости полета КО относи¬
тельно воздуха. Коэффициент Сх является функцией многих величин:
геометрической формы и ориентации КО, свойств материала его поверх¬
ности, состава атмосферы и ее параметров. В большинстве случаев для
верхних слоев атмосферы этот коэффициент находится в пределах 2.0-2.5.
318
Раздел 18
Площадь S — это площадь максимального сечения КО, нормального к
вектору скорости Vrel. Для ориентированных КА она строго определяется
его геометрией; для неориентированных КО площадь S оказывается пе¬
ременной, что приводит к необходимости применения ее усредненных
значений. Плотность атмосферы р является пространственно-временной
функцией
P = f(h,a,8,Fl07,ap„Ci,i = l,2..y (18.26)
Конкретный вид этой функции задается моделями верхней атмосферы [ 10,
11, 12]. Основными аргументами динамических моделей верхней атмо¬
сферы являются следующие величины: h — высота точки над поверхно¬
стью Земли, а, 8 — сферические координаты точки в геоцентрической
инерциальной системе координат (ГИСК), F107 — индекс солнечной ак¬
тивности, равный интенсивности радиоизлучения Солнца (1 Solar Flux
Units (SFU) = 10 22 Вт/(м2 Гц) на волне 10.7 см); ар (или Кр) — индекс,
характеризующий геомагнитную активность; t — время, которое исполь¬
зуется в (26) при вычислении полугодового эффекта; С, — параметры
модели. Высота h зависит от радиус-вектора (г) и широты точки (<р)
h = r-RE-(l-e-sm2<p). (18.27)
Наиболее существенным аргументом в модели (18.26) является высота.
Например, при ее изменении в диапазоне от 200 до 600 км плотность ме¬
няется в 700-3100 раз. В относительно небольшом диапазоне высот зави¬
симость плотности от высоты достаточно хорошо аппроксимируется вы¬
ражением
P(h) = p(hо)'ехр(“~77^)- (18.28)
Здесь Н — т. н. высота однородной атмосферы (шкала высот).
Влияние координат а и 8 на плотность атмосферы связано с так на¬
зываемым суточным эффектом. Происхождение этого названия объясняет¬
ся различной степенью разогрева верхней атмосферы в дневное и ночное
время. Влияние тепловой инерции приводит к тому, что максимум суточ¬
ного изменения плотности приходится на 14-15 часов местного времени.
Амплитуда суточного эффекта зависит от высоты точки и уровня солнеч¬
ной активности. Максимальное отношение дневной плотности к ночной
достигается на высотах 500-600 км и составляет 2-3.
Прогнозирование статистического распределения космического мусора 319
Рассмотрим, как изменяется высота перигея под действием торможе¬
ния в атмосфере. Воспользуемся формулами для возмущения полуоси (Sa )
и эксцентриситета (8е) за виток, опубликованными в статьях [13, 14, 15].
Sh = (\-e)-Sa-a-Se = -Ал-{кь ■ р-р)~~-exp(-z)x
X {/0(z) - /, (z) + е • [/, (z) - 0.5 • 70(z) - 0.5 • /2(z)] +...} (18.29)
Здесь аир — полуось и параметр орбиты, р — плотность атмосферы в
перигее, z = а-е/Н , /.(z) — функции Бесселя мнимого аргумента по¬
рядка j. Множитель (кь- р-р) является безразмерным. Он характеризует
уровень атмосферных возмущений. Произведение exp(-z) ■{...} учитывает
влияние формы орбиты. Для круговых орбит (е = 0) оно рано 1. При уве¬
личении эксцентриситета его значение уменьшается.
Формула (18.29) является приближенной [16]. В фигурных скобках
отсутствуют слагаемые, пропорциональные е2, е3 и т. д. Кроме того,
формула (18.29) не учитывает влияние «вздутия» атмосферы и отличие
орбиты от эллипса. Величина этих погрешностей имеет порядок 10 %.
Такой же порядок погрешностей имеют расчетные значения плотности
атмосферы. Таким образом, в соответствии с определением (18.9) и вы¬
ражением (18.29) для определения скорости снижения перигея применя¬
ется формула
V(h,t) = -Sh/T, (18.30)
где Т— период обращения спутника.
Основные погрешности применения формулы (18.29) для расчета
эволюции космического мусора связаны с большим разбросом возможных
значений баллистических коэффициентов. Этот разброс достигает 4-х по¬
рядков и более.
Учет разброса возможных значений
баллистических коэффициентов
Рассмотрим данные о разбросе оценок торможения каталогизирован¬
ных объектов. На рис. 18.2 представлены оценки изменения периода под
действием атмосферы за виток ( АТ ) всех каталогизированных объектов с
высотами перигея от 100 до 1000 км. Эти оценки определены по данным
каталога за октябрь 2011 г. [17].
320
Раздел 18
о
TLE Catalogue, October 2011
.E -3
E
-7
-2
-6
-8 — — —
100 200 300 400 500 600 700 800 900 1000
Perigee altitude, km
Рис. 18.2. Оценки параметра A T объектов на разных высотах
Уменьшение средних значений этого параметра с ростом высоты объ¬
ясняется уменьшением плотности атмосферы. На всех высотах разброс
оценок составляет несколько порядков. На малых высотах разброс мень¬
ше, чем на больших высотах, что обусловлено двумя причинами. Во-пер¬
вых, объекты с большими баллистическими коэффициентами на высотах
до 300-400 км долго не существуют. Во-вторых, на высотах более 600-
700 км, где торможение в атмосфере относительно мало, погрешности
определения параметра А Т могут достигать 100 % и более. Поэтому дан¬
ные о разбросе торможения на высоте 400-500 км наиболее объективно
характеризуют разброс возможных значений баллистических коэффици¬
ентов каталогизированных объектов. В большинстве случаев этот разброс
не превышает двух порядков.
При моделировании эволюции распределения числа КО по высоте
перигея учитывается статистическое распределение p(d,kb) возможных
значений баллистических коэффициентов объектов разных размеров. Это
распределение представлено в табл. 1. Возможные значения кь разбиты на
6 диапазонов. Средние значения кь находятся в интервале от 0.005 м2/кг до
1.5 м2/кг, т. е. максимальные возможные значения отличаются от мини¬
мальных в 300 раз.
Прогнозирование статистического распределения космического мусора 321
Таблица 18.1. Статистическое распределение p(d,kb ) КО разных размеров
Размеры
КО, см
Значения баллистического коэффициента, м2/кг
0.005
0.015
0.05
0.15
0.5
1.5
0.1-0.25
0
0
0
0.43
0.43
0.14
0.25-0.5
0
0
0.08
0.35
0.43
0.14
0.5-1.0
0
0
0.272
0.364
0.272
0.091
1.0-2.5
0
0.077
0.308
0.308
0.230
0.077
2.5-5.0
0
0.202
0.267
0.267
0.200
0.066
5.0-10
0.059
0.235
0.235
0.235
0.176
0.060
10-20
0.157
0.210
0.210
0.210
0.157
0.056
>20
0.05
0.35
0.40
0.15
0.05
0
Здесь сумма значений плотности p^d,kb^ в каждой строке равна 1. В по¬
следней строке приведены данные для каталогизированных КО. Их при¬
менение для расчета характеристики торможения (АТ) КО на разных вы¬
сотах приводит к результатам, представленным на рис. 18.3. Видно, что
эти расчетные данные достаточно хорошо согласуются с реальными оцен¬
ками параметра торможения на разных высотах (рис. 18.2).
Perigee altitude, km
Рис. 18.3. Расчетные значения параметра АТ для каталогизированных КО
322
Раздел 18
Для более мелких (не каталогизированных) КО разброс возможных
значений баллистических коэффициентов определялся по результатам ста¬
тистического моделирования. А именно, было рассмотрено 3 типа объектов:
- сплошной шар диаметром d,
- сферическая оболочка диаметром d с толщиной оболочки 8,
- тонкая панель диаметром d с толщиной оболочки 8.
Принято, что толщина сферической оболочки и пластины находится
в пределах: от 0.01 см до 0.1 d. Результаты расчетов представлены в
табл. 18.1. Все эти данные показывают, что при уменьшении размеров
рассматриваемых объектов от 10 до 0.1 см область возможных значений
их баллистических коэффициентов также уменьшается на два порядка.
Изложенные данные о возможных значений баллистических коэффициен¬
тов КО разного размера используется при построении модели их про¬
странственного распределения.
В заключение раздела отметим, что учет разброса возможных значе¬
ний баллистических коэффициентов (табл. 18.1) является основным фак¬
тором, определяющим точность прогнозирования пространственного рас¬
пределения космического мусора. Естественно, что конкретные значения
распределения p(d,kb) со временем могут уточняться.
Пример прогнозирования пространственного
распределения объектов
В процессе моделирования эволюции каталогизированных объектов
высотные распределения ежегодного прироста числа КО по высоте кор¬
ректируются таким образом, чтобы обеспечивалось согласие модельных и
фактических распределений числа каталогизированных КО в разные годы.
Учет изменения числа запусков во времени осуществляется с использова¬
нием формулы
P(h’ti)ne»= PWo'Wi) ■ (1831)
В результате построены: а) номинальное распределение ежегодного при¬
роста p(h)о, а также б) оценки коэффициентов k(tt), с помощью которых
рассчитываются распределения ежегодного прироста в разные годы. На
рис. 18.4 представлены нормированные высотные распределения: а) числа
КО в каталоге на разных высотах (конец 2012 г) и б) номинального еже¬
годного прироста числа КО. Оценка номинального ежегодного прироста
числа КО составила 413 объектов.
Для каждой кривой сумма приведенных на рисунке оценок равна 1 •
Из данных этого рисунка видно, что на высотах до 1000 км характер рас¬
пределений является различным. Здесь доля ежегодного прироста сущест¬
Прогнозирование статистического распределения космического мусора 323
венно больше доли КО на тех же высотах в каталоге. Этот эффект объяс¬
няется влиянием торможения КО в атмосфере. На малых высотах многие
КО снизились настолько, что прекратили свое существование. Значения
коэффициента k(t,) представлены в табл. 18.2.
Большие значения коэффициента k(t,) в 2007 и 2009 гг. объясняются
уникальными случаями фрагментации КО в эти годы.
На рис. 18.5 представлены результаты моделирования числа катало¬
гизированных КО на интервале времени с 1960 г. по конец 2012 г. Перио¬
дические вариации числа КО в результатах прогноза объясняются влияни¬
ем солнечной активности на их торможение в атмосфере. Рост числа объ¬
ектов в 2007 и 2009 гг. вызван уникальными случаями фрагментации.
На рис. 18.6 представлены соответствующие данные НАСА [16]
(ODQNvl7il).
500 700 900 1100 1300 1500 1700 1900
Высота перигея, км
Рис. 18.4. Нормированные высотные распределения
Таблица 18.2. Значение коэффициента ОД
Данные за разные годы
Годы
1960-1990
1990-2006
2007
2008
2009
2010
2011
2012
т
1.0
0.8
5.0
1.5
3.0
2.0
0.8
1.5
324
Раздел 18
1960 1965 1970 1975 1980 1985 1990 1995 2000 2005 2010
Годы
Рис. 18.5. Прогноз числа каталогизированных объектов
Monthly Number of Objects in Earth Orbit by Objoct Type
Monthly Number of Cataloged Objects in Earth Orbit by Object Type: This сheft <f splays a summery cl eff objeots in Earth orbit
officially cataloged by the U.S. Space Surreitlanoe Network 'Fragmentation debris' incft/dbs sateJMo b/Bataj> debris and anomalous
went debris, wMe ^mission-related debris'includes aO objects dispensed, separated, or released as part of the planned mission.
Рис. 18.6. Данные НАСА о росте числа КО в каталоге
Прогнозирование статистического распределения космического мусора 325
Данные этого рисунка приемлемым образом согласуются с результатами
прогноза. Здесь число КО в каталоге несколько больше потому, что оно
включает объекты на разных высотах — вплоть до области ГЕО.
Выводы
1. При использовании традиционного подхода выполнение долгосроч¬
ных прогнозов характеристик космического мусора оказывается весь¬
ма трудоемкой вычислительной задачей. Даже применение современ¬
ных суперкомпьютеров не позволяет в достаточной степени учесть
существенные влияющие факторы, например, последствия взаимных
столкновений объектов разных размеров.
2. Разработана численно-аналитическая методика долгосрочного прогно¬
зирования пространственного распределения космического мусора,
основанная на составлении и решении новых эволюционных уравне¬
ний (18.5), (18.11) и (18.14). Эти уравнения представлены в двух фор¬
мах — разностной и дифференциальной. В последнем случае задача
сводится к интегрированию системы двух обыкновенных дифферен¬
циальных уравнений.
3. Применение построенных эволюционных уравнений позволяет учи¬
тывать при прогнозе обстановки основные влияющие факторы и на
несколько порядков снизить затраты машинного времени.
Литература
1. А. 1. Nazarenko Prediction and Analysis of Orbital Debris Environment Evolution.
First European Conference on Space Debris, Darmstadt, Germany, April 1993.
2. Г. М. Чернявский, А. И. Назаренко. Моделирование загрязнения околоземно¬
го пространства. Сборник “Столкновения в околоземном пространстве. Кос¬
мический мусор”. Институт астрономии РАН, Космосинформ, 1995.
3. В. Reynolds. Documentation of Program EVOLVE: A Numerical Model to Com¬
pute Projections of the Man-Made Orbital Debris Environment, System Planning
Corp. Technical Report OD91-002-U-CSP, February, 1991.
4. P. Eichler, B. Reynolds. Mid- and Long-Term Debris Environment Projection using
the EVOLVE and CHAIN Models. 46th International Astronautical Congress, Oc¬
tober 2-6, 1995, Oslo, Norway.
5. N. N. Smirnov, A. I. Nazarenko, A. B. Kiselev. LEO technogeneous contaminants
evolution modeling with account of satellites collisions. IAA-00-IAA.6.4.10
6. A. I. Nazarenko. The solution of Applied Problems Using the Space Debris Predic¬
tion and Analysis Model. Chapter 4. Space Debris. Hazard Evaluation and Mitiga¬
tion. Edited by Nickolay N. Smirnov. Taylor & Francis Inc. 2002.
7. A. 1. Nazarenko. Application of average contamination sources for the prediction of
space debris environment. AAS/AIAA Space Flight Mechanics Meeting. Monte¬
rey, CA, February 1998. AAS 98-161.
326
Раздел 18
8. J. С. Dolado-Perez el al. Introducing MEDEE — a new orbital debris evolutionary
model. Proc. ‘6th European Conference on Space Debris ’ Darmstadt, Germany
April 2013.
9. А. И. Назаренко. Моделирование космического мусора. М.: ИКИ РАН, 2013. 216.
10. L. G. Jacchia. New Static Models of the Thermoshere and Exosphere with Empiri¬
cal Temperature Profdes, Smithonian. Astrophys. Report 313, 1970.
11. Earth’s Upper Atmosphere. Density Model for Ballistic Support of Flights of Arti¬
ficial Earth Satellites GOST 25645.115-84, Publishing House for the Standards,
Moscow, 1985. [24]
12. J. M. Picone, A. E. Hedin, D. P. Drob and A. C. Aikin. NRLMS1SE-00 empirical
model of the atmosphere: Statistical comparisons and scientific issues, J. Geophys.
Res., 107(A12), 1468, doi: 10.1029/2002JA009430, 2002.
13. D. G King-Hele The descent of an Earth-satellite through the upper atmosphere,
J. Brit. Interpl. Soc., vol. 15, p. 314, 1956.
14. Д. E. Охоцимский, Т. М. Энеев, Г. П. Таратынова. Определение времени су¬
ществования искусственного спутника Земли и исследование вековых воз¬
мущений. Успехи физ. Наук, т. 63, 1а, 1957.
15. П. Е. Эльясберг. Зависимость вековых изменений элементов орбит от сопро¬
тивления воздуха. Сб. «Искусственные спутники Земли», 1958, вып. 1, с. 21.
16. А. И. Назаренко и Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. Изд-во «Машиностроение», 1981.
17. http://www.space-track.org.
18. Журнал Qrbital Debris Qurterly News, сайт http://www.nasa.gov, ODQNvl7il.
Раздел 19
Оценка последствий
взаимных столкновений
Введение
В 2010-2013 гг. на сессиях IADC обсуждалось влияние последствий
столкновений каталогизированных объектов на загрязнение ОКП [1].
Столкновения более мелких объектов не рассматривались. Автор полагает,
что это объясняется двумя причинами:
• Существующие модели фрагментации в недостаточной степени при¬
способлены к учету многообразных условий столкновений.
• Большое число не каталогизированных объектов (миллионы) вызы¬
вает существенные методические и вычислительные трудности мо¬
делирования столкновений.
В разделе 17 была подробно рассмотрена методика расчета вероятно¬
сти взаимных столкновений. На основе представленных материалов были
сделаны следующие выводы:
1. В настоящее время нет общепризнанного ответа на вопрос, начался
ли каскадный процесс саморазмножения космического мусора. По
оценкам автора (в части объектов размером менее 10 см) этот про¬
цесс уже идет.
2. Разработана методика расчета числа (вероятности) взаимных столк¬
новений объектов разных размеров. Для решения задачи выведены
соотношения (17.12), (17.13) и (17.19).
3. Установлено, что в конце 90-х годов вероятность взаимных столкно¬
вений каталогизированных КО за 1 год составляла 0.038, т. е. средний
интервал между столкновениями составлял 27.5 лет. На начало
2012 г. аналогичная оценка оказалась равной ~5-ти годам.
Очевидно, что для корректной оценки последствий взаимных столк¬
новений целесообразно учесть эти результаты. Кроме того, необходимо
уточнить модель фрагментации объектов при столкновениях, а также ме¬
тодику учета последствий столкновений при прогнозе обстановки.
328
Раздел 19
Модель фрагментации
В зарубежных моделях КМ для оценки последствий фрагментации
применяется следующее соотношение для числа образующихся частиц с
массой более т [2, 3]:
N (>/и) = А-(т / М)В . (19.1)
Здесь В < 0. Для случая, когда разрушаются оба объекта (катастрофиче¬
ское столкновение) в этой формуле применяется сумма масс М = т] + т2.
Определим суммарную массу всех фрагментов массой более mmin на осно¬
ве выражения (19.1) и условия
^(>тггах) = А-(тггах/М)В=\. (19.2)
Здесь /итах — масса наибольшего (единственного) фрагмента. Отношение
выражений (19.1) и (19.2) приводит к модификации формулы (19.1).
N(>m) = (m/ тшлх)В. (19.3)
В интервале значений масс (т, т + dm) находится dN(m) объектов. Это
число равно
dN(m) = -B-(rn/rnmm)B~l-В(т/ттт). (19.4)
Масса объектов в этом интервале равна
dM (т) = dN(m)- т = -В ■ mmdx-(т / ттт)В ■ d(m / wmax). (19.5)
Просуммируем оценки (19.5) в интервале значений масс от ттдо /ипшх.
Получим следующее выражение для массы всех фрагментов в этом ин¬
тервале
^(Wmm>Wmax) = -4^TL'[1™(Wmm /Wma,)'+Sl- 09-6)
1 + £) L -I
Очевидно, что при ттjn= ттах. эта масса равна 0. Поэтому, а также с уче¬
том условия (19.2) масса всех фрагментов массой более ттjn будет равна
М Wm,n ) = М (wmin >™mux ) + T1 + B ' (fflmin 1 )'+а] • (19-7)
1 + £) L. J
Этим выражением необходимо пользоваться для вычисления массы т,тк
при известных значениях ттт и М (> mmin). Обратим внимание на то, что
в зарубежных моделях отсутствует обоснование выбора минимальной
Оценка последствий взаимных столкновений
329
массы фрагментов. Ее значение просто назначается. В частном случае, при
ттт = 0 суммарная масса всех фрагментов связана с массой максимально¬
го фрагмента соотношением
т^=М-(\ + В). (19.8)
Мы здесь подробно останавливаемся на выводе формул (19.7) и (19.8)
потому, что в известных публикациях они или не приводятся, или приво¬
дятся с ошибками. А именно, в документации модели MASTER [3] вместо
формулы (19.8) применяется другая (ошибочная)
(19.9)
—D
Эта формула легко выводится из соотношения (19.6), если в нем сохра¬
нить только слагаемое Af (wmin,wmax) и пренебречь слагаемым ттш. Оче¬
видно, что такой вывод является грубым упрощением.
Применение модели фрагментации (19.1) было рассмотрено выше для
случая катастрофического столкновения, когда разрушаются оба объекта.
В более общем случае масса, которая будет фрагментирована, выбирается с
учетом количества выделившейся при столкновении удельной энергии (и)
и оценки энергии, необходимой для разрушения объекта (и*). В зарубеж¬
ных моделях для расчета удельной энергии и применяется формула
и = т''Vrd . (19.10)
2-т2
где Vrei — относительная скорость столкновения. В случае, когда энергия
столкновения и меньше и*, объект с меньшей массой (т{) полностью раз¬
рушается, а в объекте с большей массой образуется кратер. В качестве
критического значения рекомендуется оценка и* = 40 дж / г..
Здесь важно отметить, что формула (19.10) для определения выде¬
лившейся при столкновении энергии справедлива только при условии
т]« т2. Она является частным случаем более общей формулы, приме¬
нимой для различных условий столкновения
u = U/M=~kx-k2-V*, (19.11)
где U — выделившаяся энергия, кх = mt jМ , к2 =т2/М . Ниже изложен
вывод формулы (19.11). Он основан на допущении, что столкновение не
является упругим, т. е. в момент столкновения объекты «вминаются» друг
в друга.
330
Раздел 19
Воспользуемся законом сохранения количества движения в векторной
форме
m,-V,+m2-V2 =M-VM, (19.12)
Откуда следует, что скорость суммарной массы в момент столкновения
равна
V*=VV.+VV2. (19.13)
Построим выражения для значений кинетической энергии до (Еи) и
после столкновения (£)„/). Для угла между векторами V: и V2 введем
обозначение а.
£0=(1/2)-(«,-F;2+m2-K22) = (l/2)-M-(V^+VK22), (19-14)
Еы = (1/2) -М ■ (■\м • VM) = (1/2) • М • ((*, • V, + к2 • V2) • (*, • V, + к2 • V2)) =
= (1/2) ■ М • (А:,2 • V,2 + к2 ■ V2 + 2 ■ к, ■ к2 ■ V, ■ V2 ■ cosa) =
= (1/2)-М ■ (к, ■ Vt + к2 ■ V2 )2-(1/2)-М ■ 2■ к, ■ к2 ■ V, ■ V2 ■ (1 -cosa).
(19.15)
Нетрудно заметить, что при равенстве скоростей ( Fj = V2 = V), что справед¬
ливо для круговых орбит, первое слагаемое в (19.15) совпадает со значе¬
нием кинетической энергии до столкновения (19.14). Второе слагаемое в
(19.15) является отрицательным. Это означает, что после столкновения
кинетическая энергия уменьшилась на эту величину, которая имеет смысл
выделившейся при столкновении энергии
U =М - кх-к2-Уг -(l-cosor). (19.16)
При упрощении этого выражения удобно учесть то обстоятельство, что
относительная скорость сталкивающихся объектов равна
Vrd =2-V-sin(а/2) = л/2 -V--s/l-cosа . (19.17)
С учетом этого выражения формула для удельной энергии столкнове¬
ния принимает компактный и красивый вид (19.11). Очевидно, что в част¬
ном случае, когда т2» тх выражение (19.11) совпадает с формулой
(19.10). В этом случае выделившаяся энергия U равна
2 ге1, (19.18)
т. е. кинетической энергии частицы меньшего размера (ударника).
Оценка последствий взаимных столкновений
331
Ограничение минимального размера фрагментов
В данном разделе рассмотрена коррекция модели фрагментации КА
при его столкновении с КМ. В основу положены данные статьи [4], в ко¬
торой изложены результаты двух наземных экспериментов по оценке
фрагментации КА при его столкновении с более мелкими объектами.
Условия эксперимента. Рассмотрены столкновения с малой (Low Ve¬
locity Impact, LVI) и большой (High Velocity Impact, HVI) скоростью удара
частицы по цели. В первом случае алюминиевый сферический ударник
весом 40 г имел скорость 1.5 км в секунду. А во втором случае алюминие¬
вый сферический ударник весом 4 г имел скорость 4.4 км в секунду.
В обоих случаях удельная энергия столкновения была одной и той же
(и = 55 дж/г), и в этих условиях в результате столкновения образовалось
по 1500 фрагментов. Эти фрагменты были взвешены, измерены и проана¬
лизированы с использованием стандартной модели фрагментации НАСА
[5]. В табл. 19.1 приведены основные данные об эксперименте.
Таблица 19.1. Данные об эксперименте
Тип стол¬
кновения
Масса цели
М„ кг
Масса ударника
Мр, г
Мр/М,
%
Скорость
км/с
Катастрофи¬
ческое?
LVI
0.74
39.2
5.3
1.5
Да
HVI
0.74
4.0
0.54
4.4
Да
Цель в виде модели спутника имела размеры 150x150x150 мм и вес
740 г. Она представлена на рис. 19.1.
Рис. 19.1. Вид цели до столкновения
332
Раздел 19
Внешние слои и боковые панели были выполнены из Carbon Fiber Re¬
inforced Plastic (CFRP), а внутренние три слоя были выполнены из Grass
Fiber Reinforced Plastic (GFRP) и скреплены угловыми полосками и пла¬
стиковыми вставкам. Толщина внешних слоев — 2 мм, а внутренних сло¬
ев и боковых панелей — 1 мм. При анализе использовалась модель НАСА
для оценки числа объектов разных размеров вида 19.1 при значениях па¬
раметров А = 0.78, В = -0.68.
дой
a) LVI b) HVI
Рис. 19.2. Фрагменты, образовавшиеся при столкновении
На рис. 2.4 представлены фотографии образовавшихся фрагментов
(по 500 фрагментов для каждого из экспериментов). Видно, что при высо¬
коскоростном ударе образовалось больше фрагментов линейной формы
(см. правый нижний угол), чем при низкоскоростном ударе.
a) LVI b) HVI
Рис. 19.3. Сравнение распределений фрагментов по размерам
Оценка последствий взаимных столкновений
333
Для обоих проведенных экспериментов на рис. 19.3 представлены
распределения фрагментов по размерам. Сплошная линия относится к
оценке по аналитической модели фрагментации НАСА. Результаты этого
рисунка характерны тем, что число частиц размером менее 3 мм не увели¬
чивается по мере уменьшения их размеров, что вступает в противоречие с
модельными данными. Для частиц размером более 3 мм согласие с резуль¬
татами моделирования является вполне приемлемым. При высокоскорост¬
ном столкновении (HVI) количество частиц малого размера несколько
больше, чем при столкновении LVI.
Отмеченное расхождение между экспериментальными и расчетными
данными имеет принципиальное значение для рассматриваемой проблемы
моделирования последствий столкновений. Очевидно, что невозможно
корректно оценивать на модели число фрагментов малых размеров (по¬
рядка нескольких мм и меньше), если в этом диапазоне размеров модель
фрагментации дает неправильные результаты. Причина расхождения меду
модельными и экспериментальными оценками числа фрагментов малых
размеров кроется в том, что модель вида (19.1) является аппроксимацион-
ной. Она построена по экспериментальным данным, которые относились к
ограниченному диапазону размеров. Такая модель не гарантирует воз¬
можность получения достоверных результатов в более широких условиях
по сравнению с исходными экспериментами. Как показано в работах
А. Б. Киселева [6], модель фрагментации вида (19.1) не учитывает ограни¬
ченное количество энергии, которое выделяется при столкновении. Оче¬
видно, что необходимые затраты энергии на фрагментацию растут по мере
уменьшения размеров фрагментов и увеличения их числа. Поэтому размер
фрагментов не может бесконечно уменьшаться. Всегда существуем некий
минимальный размер (масса) образующихся фрагментов, который зависит
от количества энергии, выделившейся при столкновении.
Для оценки энергии, которая выделяется при столкновении, выведена
формула (19.11). При расчете энергии, необходимой для образования
фрагмента, имеющего площадь поверхности разрушения Sj , использует¬
ся допущение, что эта энергия пропорциональна площади поверхности
разрушения, т. е.
uj=Sj-g. (19.19)
Здесь g — некоторая константа, которая зависит от материала фрагмента.
С учетом изложенного алгоритм расчета на модели последствий столкно¬
вения, учитывающий оценку выделенной энергии (и), состоит из следую¬
щих операций:
1. Вычисляются максимальная масса и размер фрагментов из условия
^"0=1-
334
Раздел 19
2. Организуется цикл по возможным (дискретным) значениям размеров
фрагментов (d] Л), начиная с самого крупного фрагмента;
3. Для каждого размера фрагментов в диапазоне ( dj, dj+l) вычисляются
значения средней площади поверхности разрушения , объема и
значения массы т], mjtl . При этом используются допущения о воз¬
можной форме фрагментов и их удельном весе. На данном этапе воз¬
можен случайный выбор этих параметров (метод Монте-Карло);
4. Вычисляется оценка (19.19);
5. На основе модели вида (19.1) вычисляется число фрагментов jV . в
рассматриваемом диапазоне размеров;
6. Вычисляется энергия uN(uj} = Uj -Nj, необходимая для образования
всех фрагментов размером (d], dj+]).
7. Оценки затрат энергии суммируются Sum(uj) = Sum{uj^ '} + uN(u]);
8. Цикл прекращается при выполнении условия Sum
Последний размер фрагментов dj и есть наименьший их размер, ко¬
торый возможен при данной величине выделившейся при столкновении
энергии (и).
Приведенный выше алгоритм был применен для адаптивного опреде¬
ления параметра g, который используется в формуле (19.19) для расчета
затрат энергии на фрагментацию. В результате определялось такое значе¬
ние параметра g, которое обеспечивает согласие результатов моделирова¬
ния с данными эксперимента, а именно общее число фрагментов рано
-1500, а их минимальный размер ~ 2 мм. Использовалось допущение, что
вся конструкция выполнена из алюминия.
Результаты применения адаптивного уточнения параметра g
(-3000 дж/г-м2) представлены на рисунках 19.4 и 19.5). На этих рисунках
показана левая граница размеров фрагментов (— 2 мм), соответствующая
равенству выделившейся энергии (и) и затратам энергии на фрагментацию
(красная кривая). Количество фрагментов размером более 2 мм в обоих слу¬
чаях оказалось близким к 1500. Левее указанной границы размеров фрагмен¬
ты не образуются. Соответствующий участок кривой jV(> rf) = /[log(flf)]
окрашен в синий цвет. Это как раз тот диапазон размеров, для которого по
данным эксперимента число фрагментов не увеличивается по мере умень¬
шения их размеров.
N(>d) N(>d)
Оценка последствий взаимных столкновений
335
log(d, m)
Рис. 19.4. Моделирование низкоскоростного столкновения (LVI)
log(d, m)
Рис. 19.5. Моделирование высокоскоростного столкновения (HVI)
u, J/g и, J/g
336
Раздел 19
Кроме изложенной выше модификации была выполнена коррекция
модели фрагментации КА на основе данных о столкновении КА Кос¬
мос 2251 и Иридиум 33 [7, 9]. В частности, определены параметры ал¬
горитма для учета многообразия форм фрагментов, а также для опре¬
деления скорости их разлета. Реальная диаграмма Габбарда представле¬
на на рис. 19.6, а на рис. 9.17 — соответствующая диаграмма, построен¬
ная по скорректированной модели фрагментации для объектов размером
более 10 см.
Из сравнения расчетной диаграммы с данными рис. 19.6 видно их
достаточно хорошее согласие. Имеющиеся расхождения, в частности в
левой части диаграмм, объясняются тем, что они относятся к разным мо¬
ментам времени. Расчетная диаграмма построена для момента столкнове¬
ния, а реальная (по данным каталога) — через 40 дней после столкнове¬
ния. За это время часть фрагментов сгорела, а у других фрагментов с ма¬
лым периодами высоты перигея и апогея уменьшились под действием
торможения в атмосфере.
Period (min)
Altitude distribution of 731 cataloged debris on 20 Match 2009.
An additional piece of cataloged debris had already fallen back to Earth.
Рис. 19.6. Реальная диаграмма Габбарда
Оценка последствий взаимных столкновений
337
Период, мин
Рис. 19.7. Расчетная диаграмма Габбарда
Принятие решения, является ли данное столкновение катастрофиче¬
ским или нет, осуществляется следующим образом. На основе данных о
размерах ударника и цели вычисляются значения минимальной удельной
энергии м, и и2, необходимой для фрагментации соответственно ударни¬
ка и цели. Не катастрофическим считается столкновение, для которого
выполняются условия (0.9-м < и2) и (0.9-и > иу). В этом случае разруша¬
ется только ударник.
Учет последствий столкновений
при прогнозе обстановки
При моделировании эволюции статистического распределения кос¬
мического мусора по высоте используются данные о ежегодном приросте
числа объектов разного размера на разных высотах p{h,t) . Использование
этих распределений при прогнозе обстановки было детально рассмотрено
338
Раздел 19
в предыдущем разделе (формула (18.11)). Основная трудность подготовки
исходных распределений p(h,t) с учетом столкновений связана с не¬
возможностью предсказания аварийных ситуаций. Единственным спосо¬
бом преодоления этой проблемы является применение т. н. метода стати¬
стических испытаний (Монте-Карло) [10]. Этот метод широко применяет ¬
ся при моделировании систем, где существенную роль играют случайные
события.
Применение случайного выбора условий столкновения при прогнози¬
ровании КМ осуществляется по разному. В зарубежных моделях выполня¬
ется несколько случайных реализаций прогноза обстановки [1]. В связи с
трудоемкостью число реализаций оказывается небольшим (несколько де¬
сятков). В модели SDPA применяется другой подход. Распределение
p[h,t) для последствий столкновений выбранной группы объектов
строится заранее (до выполнения прогнозов). Усреднение проводится е
учетом всех основных случайных факторов, с применением большого
числа реализаций.
Алгоритм расчета усреднённых последствий столкновений состоит из
следующих основных операций [7, 8].
1) Выбираются два объекта разного размера.
2) Выбирается высота столкновения в диапазоне высот от 400 до
2000 км (с шагом 100 км), и возможный угол 0 между направлениями
векторов скорости объектов.
3) Последствия столкновений рассчитываются путем обращения к стан¬
дартному программному модулю фрагментации и усредняются с уче¬
том всех возможных основных влияющих факторов. При этом учиты¬
ваются следующие вероятности (шесть случайных факторов):
- pih) — вероятность столкновения на заданной высоте (1 жребий).
- р(в) — вероятность столкновения при данном угле 0 между скоро¬
стями (1 жребий).
- p(dl) и p(d2) — доли объектов данного размера (2 жребия).
- p(d,A/m) — вероятность того, что объект данного размера будет
иметь такой баллистический коэффициент (2 жребия).
Общее число реализаций — несколько миллионов. Выходными
данными являются распределения числа ежегодно образующихся фраг¬
ментов разного размера по высоте. При этом используется сетка раз¬
биения фрагментов по размерам с минимальным размером фрагментов,
равном 1 мм.
На этом рисунке для примера представлено высотное распределение
числа объектов разного размера, образующихся в результате одного
Оценка последствий взаимных столкновений
339
столкновения двух каталогизированных спутников (размером более
~20 см). Как упоминалось выше, это распределение учитывается в правой
части эволюционных уравнений. Аналогичные распределения построены
и для столкновений других типов объектов (мелких с мелкими и мелких с
крупными).
Высота, км
Рис. 19.8. Прирост числа КО с учётом столкновений
каталогизированных объектов (2012)
Пример прогнозирования обстановки
с учетом столкновений
На основе результатов уточнения параметров модели SDPA на начало
2012 г. был выполнен прогноз обстановки на интервале времени до 2032 г.
При этом учитывались последствия взаимных столкновений объектов
размером более 1 см. Использовалось допущение, что никаких новых за¬
пусков и аварийных случаев фрагментации (взрывов) на интервале про¬
гноза не будет. В качестве основных исходных данных на начало 2012 г.
использовалось трехмерное распределение числа объектов по размерам,
высоте и баллистическим коэффициентам. Этому распределению соответ-
340
Раздел 19
ствует оценка среднего числа столкновений каталогизированных КО r
единицу времени, равная 0.215 столкновений в год. Данная оценка совпа¬
дает с соответствующей оценкой (17.21), приведенной в разделе 17. Ос¬
новные результаты прогноза приведены в табл. 19.2.
Таблица. 19.2. Число объектов разных размеров
в диапазоне высот 400-2000 км
Год
Номер диапазона и соответствующие размеры КО, см
1
2
3
4
5
6
7
8
0.1-0.25
0.25-0.5
0.5-1.0
1.0-2.5
2.5-5.0
5.0-10
10-20
>20
Модель,
1990
76.75-106
5.66-106
975000
144500
28000
8960
2830
5320
Модель,
2012
652.0-106
74.0-106
16.0-106
3.85-106
429800
78500
10730
13580
Прогноз.
2032
1071-106
122.6-106
27.3-106
6.35-106
685560
116400
12370
9890
Отношение
1.64
1.65
1.70
1.71
1.65
1.48
1.15
0.73
Эти результаты прогноза являются ожидаемыми, а именно взаимные
столкновения объектов приведут к продолжению монотонного роста
фрагментов размером менее 10 см. По сравнению с данными за 2012 г. их
количество увеличится через 20 лет на 50-70 %.
В качестве дополнительных иллюстраций к полученным результатам
на рисунках 19.9 и 19.10 приведены графики роста числа объектов разме¬
ром 1.0-2.5 мм и более 20 см. Из этих данных видно, что монотонный
рост числа мелких фрагментов будет продолжаться даже при полном пре¬
кращении запусков новых КА и аварийных случаев фрагментации. Для
фрагментов размером 1-2.5 мм средний ежегодный прирост их числа со¬
ставит 40-106. При этом число объектов размером более 20 см будет
уменьшаться за счет торможения в атмосфере и сгорания. Их число
уменьшится ~ на 30 %.
На последнем рисунке представлены также оценки среднего числа
взаимных столкновений каталогизированных КО. На 20-ти летнем интер¬
вале прогноза ожидается 4—5 столкновений. В табл. 19.3 приведены дан¬
ные об ожидаемом числе взаимных столкновений не каталогизированных
КО (группа 1), а также их столкновений с каталогизированными КО
(группа 3). Наибольшее число столкновений произойдет в первой группе —-
17500 столкновений. Именно они внесут основной вклад в загрязнение
ОКП мелкими фрагментами.
Оценка последствий взаимных столкновений
341
Годы
Рис. 19.9. Изменение числа фрагментов размером 1.0-2.5 мм на интервале прогноза
14000
12000
10000
8000
6000
4000
2000
0
Каталогизированные объекты
размером более 20 см
-1- Осталось
Сгорело
— Находилось
—»- Число столкновений
Ю
2
2012 2014 2016 2018 2020 2022 2024 2026 2028 2030 2032
Годы
Рис. 19.10. Изменение числа объектов размером >20 см на интервале прогноза
Число КО в 100 км слое Число КО в 100 км слое
342
Раздел 19
Высота, км
Рис. 19.11. Распределение числа КО по высоте в 2010 г
Высота, км
Рис. 19.12. Ожидаемое распределение числа КО по высоте в 2032 г.
Оценка последствий взаимных столкновений
343
Таблица 19.3. Среднее число взаимных столкновений на интервале прогноза
№ группы
1
2
3
Число столкновений
17500
4.88
585
На рис. 19.12 представлены ожидаемые распределения числа КО раз¬
ных размеров по высоте в 2032 г. Характер этих распределений — такой
же, как на рис. 19.11 для 2010 г. Отличие только в том, что число мелких
фрагментов станет больше, особенно в диапазоне высот 800-1000 км.
В этом диапазоне оно увеличится на 70 %.
В заключение раздела приведем данные об отношении kN{jd) числа
объектов разных размеров к числу каталогизированных КО.
Таблица 19.4. Значения коэффициента kN(jd) на интервале прогноза
Диапазон
размеров, см
Годы
2012
2019
2026
2032
0.1-0.25
137855
172617
199221
227319
0.25-0.5
15690
19792
22755
26063
0.5-1.0
3452.9
4365.0
5103.2
5843.4
1.0-2.5
791.1
1003.0
1174.4
1346.5
2.5-5.0
85.43
107.86
126.33
144.57
5.0-10
14.14
17.70
20.61
23.49
10-20
1.28
1.53
1.73
1.93
>20
1.00
1.00
1.00
1.00
Эти данные еще раз иллюстрируют изложенную выше закономер¬
ность, что рост числа мелких фрагментов будет происходить с большей
интенсивностью, чем рост числа крупных объектов.
Приведенные выше результаты полезно сравнить с данными извест¬
ного рис. 19.13, на котором представлены обобщенные оценки потока КО
различных размеров, построенные на основе проведенных измерений
космического мусора [11].
Здесь представлены обобщенные данные об измерениях потока косми¬
ческого мусора. Показаны области, где были проведены измерения. Харак¬
терной особенностью этих данных является монотонный рост числа объек¬
тов по мере уменьшения их размеров. Дополнительно пунктирной линией
нарисована полученная зависимость. Максимальное отличие этих оценок от
данных радиолокационных измерений является 10-кратным. При оценке
этого факта надо иметь в виду, что данные измерений получены на отно¬
сительно небольших высотах, а также, что они получены до 2000 г. По¬
этому согласие полученных оценок с обобщенными данными об измере¬
ниях потока следует считать приемлемым.
344
Раздел 19
Cross-sectional dux of a given size and larger
(number/m’-yr)
1.0E+6 ,
1.0E+4
‘1-.*
#_
1.0E+2
1.0E+0
1.0E-2
%
l Ш
-к-
1.0E-4 1 1 SDPA2012<£XX
750 km.
- - Melecrolds, 400 tan
SSN catalog tux, 400 km
Mr* 1997
Haystack flux. 350-600 tan
- - №X flux 450-600 ton
• LDEF IDE, 3C(MOO km
« SI4M impacts
x LDEF craters (Humes)
• HST impacts (Drotshagen), 500 km
ft Space Flyer Unit. 460 km
о Goktstone radar. 300-600 km
ft SI4M holes
x SMM craters. 500-570 km
* Л LDEF craters (Hon)
• ВЯЕСА impacts (Drotshagen),
500»;*,
1.0E-6
1.0E-8
10
100 1 000
0.00001 0.0001 0.001 0.01 0.1 1
Diameter (cm)
Рис. 19.13. Характеристики потока космического мусора по данным различных
источников и оценки с учетом взаимных столкновений
Таким образом, основным источником образования мелких фраг¬
ментов являются взаимные столкновения не каталогизированных
объектов. Вклад этого источника в образование космического мусора
размером от 1 мм до 10 мм на порядок больше вклада взаимных столк¬
новений каталогизированных КО.
Выводы
1. Для корректной оценки последствий взаимных столкновений целесо¬
образно учесть результаты, изложенные в предыдущих разделах.
Кроме того, необходимо уточнить модель фрагментации объектов при
столкновениях, а также методику учета последствий столкновений
при прогнозе обстановки.
2. На основе традиционной модели фрагментации выведена формула
(19.8) для расчета массы максимального по размеру фрагмента.
3. Применяемая в зарубежных моделях формула (19.10) для определения
выделившейся при столкновении энергии справедлива только для част¬
Оценка последствий взаимных столкновений
345
ного случая при условии т1« т2. Для более общего случая выведена
формула (19.12), применимая для различных условий столкновения.
4. На основе использования оценки выделившейся при столкновении
энергии разработана методика определения минимальной массы
фрагментов. Параметры алгоритма уточнены по данным наземного
эксперимента и данных о столкновении спутников Космос 2251 и
Иридиум 33.
5. Выполнен прогноз обстановки на интервале времени до 2032 г. При
этом учитывались последствия взаимных столкновений объектов
размером более 1 см и допущение, что никаких новых запусков и ава¬
рийных случаев фрагментации (взрывов) на интервале прогноза не
будет. Установлено, что взаимные столкновения объектов приведут к
продолжению монотонного роста фрагментов размером менее 10 см.
По сравнению с данными за 2012 г. их количество увеличится через
20 лет на 50-70 %.
6. Таким образом, основным источником образования мелких фрагмен¬
тов являются взаимные столкновения не каталогизированных объек¬
тов. Вклад этого источника в образование космического мусора раз¬
мером от 1 мм до 10 мм на порядок больше вклада взаимных столк¬
новений каталогизированных КО.
Литература
1. Stability of the Future LEO Environment. IADC-12-08, Rev. 1 January 2013.
2. D. J. Kessler and B. G Cour-Palais. Collision Frequency of Artificial Satellites: The
Creation of Debris Belt. Journal of geophysical research, vol. 83. A6, June 1978.
3. H. Sdunnus, H. Klinkrad. An Introduction to the ESA Reference Model for Space
Debris and Meteoroids. First European conference on space debris, ESA SD-01, 1993.
4. Y. Tsuruda, T. Flanada et al. Comparison between new impact test results and the
NASA standard breakup model, IAC-06-B6.3.8.
5. R Krisko. Proper Implementation of the 1998 NASA Breakup Model. ODQN
v. 15, i. 4.
6. А. Б. Киселев. Численное моделирование процессов деформирования и раз¬
рушения при взрывном нагружении // Препринт механико-математического
факультета МГУ им. М. В. Ломоносова. 1996. JVs 6. 36 с.
7. А. И. Назаренко. Моделирование космического мусора. М.: ИКИ РАН, 2013. 216.
8. AI. Nazarenko. The forecast of near-Earth space contamination for 200 years and
the Kessler Syndrome. Site “http://www.satmotion.ru”.
9. ODQN, vol. 13 i. 2, 2009.
10. H. П. Бусленко, Ю. А. Шрейдер. Метод статистических испытаний (Монте-
Карло) и его реализация на ЦВМ. М.: Физматлит, 1961. 228 с.
11. Технический доклад о космическом мусоре. Нью-Йорк: издание ООН, 1999.
50 с.
Заключение
Изложенные в монографии материалы по развитию математических
методов решения ряда актуальных задач космической баллистики изло¬
жены в хронологическом порядке. Они охватывают почти 60-летний пе¬
риод времени. На каждом из этапов автор сталкивался с актуальной про¬
блемой, для решения которой было необходимо привлечь вычислитель¬
ную технику. И на каждом этапе для получения приемлемого по качеству
решения возникала потребность совершенствования известных вычисли¬
тельных методов на основе вывода новых математических формул и раз¬
работки новых алгоритмов. Характерно, что эта потребность возникала
на фоне существенного улучшения характеристик вычислительной тех¬
ники. И, тем не менее, оказывалось, что в связи с расширением круга
проблем и их усложнением совершенствование вычислительной техники
«не успевало» за потребностями практики.
Убедительным подтверждением справедливости изложенного выше
утверждения являются материалы последнего раздела монографии
«Оценка последствий взаимных столкновений». В нем показано, что вза¬
имные столкновения объектов приведут к продолжению монотонного
роста фрагментов размером менее 10 см. Таким образом, т. н. каскадный
эффект из гипотезы превратился в реальность, а именно лавинообразный
процесс саморазмножения космического мусора уже идет. Этот процесс
остановить невозможно. Однако зарубежные специалисты пишут о
возможности стабилизации уровня техногенного загрязнения ОКП (“Sta¬
bility of the Future LEO Environment”). Данное разногласие обусловлено
тем, что при оценке последствий столкновений объектов размером менее
10 см они не сумели преодолеть возникшие вычислительные трудности.
Ниже на рисунках знаком вопроса (?) отмечены те оценки, которые в
настоящее время не удалось получить. Для ответа на эти вопросы необхо¬
димо преодолеть соответствующие вычислительные трудности. Автор
надеется, что материалы данной монографии будут способствовать по¬
учению ответов на эти и другие аналогичные вопросы.
Размеры,
см
0.1-1.0
1.0-10
>10
0.1-1.0
7
7
7
1.0-10
7
800
30
>10
7
30
0.25
Число (вероятность) взаимных столкновений объектов разных размеров в 2012 г.
Заключение
347
Публикации автора
по рассмотренным вопросам
1. А. И. Назаренко. Математическое моделирование и исследование динамики
кривошипно-шатунного привода станов холодной прокатки труб. Труды
ВНИИМЕТМАШ № 3, 1961.
2. А. И. Назаренко. О целесообразности учета новых уточняющих факторов в
математическом описании некоторых систем. Сб. Анализ и синтез систем ав¬
томатического управления. М.: Наука, 1968, с.с. 334-337.
3. А. И. Назаренко. Некоторые вопросы оптимизации обработки орбитальных
измерений искусственных спутников Земли. Космические Исследования.
1968, т. 6, с.с. 674-683.
4. Основы теории полета космических аппаратов. Под ред. Г. С. Нариманова и
М. К. Тихонравова. М. Машиностроение, 1972.
5. А. И. Назаренко. О составлении усредненных уравнений движения искусст¬
венных спутников Земли. Сб. Современные проблемы небесной механики и
астродинамики. Москва, Наука, 1973, с.с. 148-154.
6. А. И. Назаренко, Л. Г. Маркова. Методы определения и прогнозирования
орбит ИСЗ при наличии погрешностей в математическом описании движе¬
ния. Сб. Прикладные задачи космической баллистики. М.: Наука, 1973,
с.с. 36-67.
7. А. И. Назаренко, Б. С. Скребушевский. Эволюция и устойчивость спутнико¬
вых систем. М. Машиностроение, 1981.
8. А. И. Назаренко. Рекуррентный метод оптимального прогнозирования гаус-
сового случайного процесса. Измерения в дискрегном времени. Известия АН
СССР. Техническая кибернетика. № 2 (1985).
9. А. И. Назаренко. Оптимальная фильтрация измерений гауссового случай¬
ного процесса в непрерывном времени. Известия АН СССР. Техническая
кибернетика.
10. А. И. Назаренко. Априорная и апостериорная оценка ошибок прогнозирова¬
ния движения низковысотных ИСЗ. Космические исследования, вып. 4, 1991.
11. С. Н. Кравченко, А. И. Назаренко. Рекуррентный метод построения уравне¬
ний для случайных векторных процессов. Техническая кибернетика. АН РФ,
№ 1, 1992.
12. А. И. Назаренко. Моделирование эволюции распределения техногенных час¬
тиц и объектов. Проблема загрязнения космоса (космический мусор). Моск¬
ва, Космосинформ, 1993.
13. А. И. Назаренко. Построение высотно-широтного распределения объектов в
околоземном космическом пространстве. Проблема загрязнения космоса
(космический мусор). Москва, Космосинформ, 1993.
Публикации автора по рассмотренным вопросам
349
14. А. 1. Nazarenko. Evaluation of the Collision Probability of Space Objects of Artifi¬
cial Origin. Orbital Debris Monitor, vol. 7(2), April 1994.
15. A. I. Nazarenko. The Statistic Motion Theory of a Satellite Ensemble. Deve¬
lopment and Application. International Symposium ’’Space Flight Dynamics”,
St.-Petrsburg—Mscow, May, 1994.
16. A. I. Nazarenko. Aerodynamical analogy of interaction between the surface of
spacecraft of various configurations and space debris. 46th IAF Congress, Oslo,
October 1995.
17. Aerodynamic analogy for interactions between spacecraft of different shapes and
space debris by Nazarenko A. I. Cosmic Research, vol. 34, № 3, 1996.
18. The development of the statistical theory of a satellite ensemble motion and its
application for space debris modeling by Nazarenko A. I. European Space Agency,
(Special Publication) ESASP, (1997).
19. A. I. Nazarenko. Determination and Prediction of Orbits with Due Account of Dis¬
turbances as a “Color” Noise. AAS/AIAA Space Flight Mechanics Meeting. Monte¬
rey, CA, February 1998. AAS 98-191.
20. A. 1. Nazarenko, V. A. Chobotov. The Investigation of Possible Approaches of
Cataloged Space Objects to Manned Spacecraft. Space Debris. Vol. 1, № 2, 1999.
Kluwer Academic Publishers.
21. A. I. Nazarenko. The solution of Applied Problems Using the Space Debris Predic¬
tion and Analysis Model. Chapter 4. Space Debris. Hazard Evaluation and Mitiga¬
tion. Edited by Nickolay N. Smirnov. Taylor & Francis Inc. 2002.
22. A. I. Nazarenko. Modeling Technogeneous Contamination of the Near-Earth
Space. Solar System Research, vol. 36, № 6, 2002, pp 513-521.
23. A. I. Nazarenko. Collision of Spacecraft with Debris Particles Assessment. 17th
1SSFD Symposium, Moscow, July 2003.
24. A. I. Nazarenko. Collision of spacecraft of various shape with debris particles as¬
sessment. 14th AAS/AIAA Space Flight Mechanics Conference, Maui, Hawaii, Feb.
2004, AAS 04-180.
25. A. I. Nazarenko. State transition matrix of relative motion for the noncircular orbit.
Relation with partial-derivative matrix in the satellite coordinate system. AIAA
57th International Astronautical Congress, IAC 2006, vol. 7 (2006).
26. A. I. Nazarenko, К. T. Alffiend. Development of the technique for covariance pre¬
diction using the gravity color noise. Advances in the Astronautical Sciences,
vol. 134 (2009).
27. А. И. Назаренко. Погрешности прогнозирования движения спутников в гра¬
витационном поле Земли, Монография, Москва, Институт космических ис¬
следований РАН, НТЦ «КОСМОНИТ» ОАО «Российская корпорация ракет¬
но-космического приборостроения и информационных систем», 2010.
28. А. И. Назаренко. Моделирование космического мусора. Монография, Москва,
Институт космических исследований РАН, 2013.
29. A. I. Nazarenko. Application of the method for optimum filtering of measurements
for determination and prediction of spacecraft orbits, A. 1. Solar System Research,
vol. 47 (2013).
IM'SSHII nJSSHn nj'SSHII nJSSHII nj-SSlin
URSS.ru URSS.ru URSS.ru URSS.ru
Представляем Вам следующие книги:
/Быков Л. ВМолчанов А. М., Щербаков М. А., Янышев Д. С. Вычислительная
механика сплошных сред в задачах авиационной и космической техники.
/Торшин В.В., Пащенко Ф.Ф., Круковский Л.Е. Перспективные машины и
аппараты для энергетики и транспорта. URSS
v Краснов Н. Ф. Аэродинамика: Основы теории. Аэродинамика профиля и крыла.
■/Краснов Н.Ф. Аэродинамика: Методы аэродинамического расчета.
/Галимов Э. М. Кому нужны лунные камни? Выступления, интервью,
научно-популярные публикации: 50 лет в науке.
/ Циолковский К. Э. Труды по воздухоплаванию.
/Полякова Е. Вьюга А. А., Титов В. Б. Орбитальный космический полет в задачах
с подробными решениями и в числах.
/ Циолковский К. Э. Труды по ракетной технике.
/Вениаминов С. С. // Veniaminov Stanislav S. Англо-русский и русско-английский словарь
по контролю космического пространства и его техногенному засорению //
English-Russian Dictionary and Russian-English Dictionary on Space Surveillance and
Orbital Debris.
/ Эльясберг П. E. Введение в теорию полета искусственных спутников Земли.
✓ Белецкий В. В. Очерки о движении космических тел.
/ Рвухин Л. Н. Радиациоппо-стимулированные изменения диэлектрической дисперсии.
/Лысенко Г. П. Транспортные ветродвигатели.
/Филин В. М., Пчелинцев Л. А. и др. Оптимизация диагностики космического
разгонного блока.
/Мещерский И. В. Работы по механике тел неременной массы.
/ Эльясберг П. Е. Определение движения по результатам измерений,
у Вениаминов С. С. Выявление скрытых структурных закономерностей в процессах
и сигналах: От космических исследований до анализа трендов рынка.
/Володин С. В. Стратегическое управление проектами: На примере аэрокосмической
отрасли.
/ Володин С. В. Управление сроками, стоимостью и результатами наукоемких программ:
На примере аэрокосмической отрасли.
✓ Раков Д. Л. Структурный анализ и синтез новых технических систем на базе
морфологического подхода.
/Калошин А. М., Пчелинцев Л. А. и др. Наземная отработка космических аппаратов.
/Космодемьянский А. А. Динамика космического полета.
/Пайсон Д. Б. Космическая деятельность: Эволюция, организация, институты.
✓ Поляхова Е. Н. Космический полет с солнечным парусом.
/Афанасьев В. А., Лебедев В. А., Монахова В. П., Мышелов Е. Я, Ножницкий
Ю.А. Техническое регулирование и управление качеством.
/Иванов М. Г. Безопорные двигатели в автомобилестроении, авиации и космонавтике.
/ Иванов М. Г. Безопорные двигатели космических аппаратов.
/Яковлев О. И., Павельев А. Г., Матюгов С. С. Спутниковый мониторинг Земли:
Радиозатменный мониторинг атмосферы и ионосферы.
/Скопец Г. М. Внешнее проектирование авиационных комплексов: Методологические
аспекты.
/ Зверев Г. Я. Оценка надежности изделия в процессе эксплуатации.
/ Шлёкин С. И. Введение в этику космизма.
/Холин Н.Н., Головешкин В. А., Андрущенко В. А. Математическое моделирование
волновых явлений в конденсированных средах и динамика метеороидов.
URSS.ru URSS.ru URSS.ru URSS.ru
URSS.ru URSS.ru URSS.ru URSS.ru URSS.ru
nj'SSHII IM'SSHII njssun nJSSHn IMSSMII
URSS.ru IIRSS.ru URSS.ru llRSS.ru
Представляем Вам следующие книги:
у Малинецкий Г. Г. (ред.) Будущее прикладной математики: Лекции для
молодых исследователей. Поиски и открытия,
уЛогачев О. А., Сальников А. А., Смышляев С. В., Ященко В. В. Булевы функции
в теории кодирования и криптологии.
s Губин С. П., Ткачев С. В. Графен и родственные наноформы углерода,
у Чирков Ю. Г. Дарвин в мире машин.
у Шамис A. J1. Загадки жизни и разума: Нерешенные вопросы понимания
и моделирования живого,
уИванов В. А., Рабинович А.Д., Хохлов А. Р. (ред.) Методы компьютерного
моделирования для исследования полимеров и биополимеров.
■гМанюк В. И., Каплинский Я. П., Хиж Э. Б., Манюк А. П., Ильин В. К. Наладка
и эксплуатация водяных тепловых сетей: Справочник,
у Саймон Г. Науки об искусственном.
у Варшавский В. И., Поспелов Д. А. Оркестр играет без дирижера: Размышления
об эволюции некоторых технических систем и управлении ими.
у Манаев Е. И. Основы радиоэлектроники,
у Каганов М. И., Цукерник В. М. Природа магнетизма,
у Ворожцов А. В. Путь в современную информатику,
у Малинецкий Г. Г. (ред.) Робототехника, прогноз, программирование,
у Горобец Б. С. Секретные физики из Атомного проекта СССР: Семья Лейпунских.
у Нерода В. Я., Проскуряков С. Ф. Толковый словарь англоязычных терминов
по нечеткому управлению.
■гКутищев Г. П. Толковый экспресс-словарь иностранных физико-технических
и математических терминов и общенаучных слов (для инженеров).
j-Шимукович П. Н. ТРИЗ-противоречия в инновационных решепиях: PN-метод.
у Дрейфус X. Чего не могут вычислительные машипы: Критика искусственного разума,
у Тарасов Л. В. Четырнадцать лекций о лазерах.
у Морозов Е. М., Муйземнек А. Ю., Шадский А. С. AN SYS в руках инженера:
Механика разрушения,
у Петров К. П. О достижениях аэродинамики летательных аппаратов,
у Шевченко В. Я. (ред.) Белая книга по нанотехнологиям: Исследования в области
наночастиц, наноструктур и нанокомпозитов в Российской Федерации (по материалам
Первого Всероссийского совещания ученых, инженеров и производителей в области
нанотехнологий).
Наши книги можно приобрести в магазинах:
«НАУКУ - ВСЕМ!» (н. Профсоюзная, Нахимовский пр-т, 56. Тел. (499) 724-2545)
«Библио-Глобус» (м.Лубянна, ул. Мясницкая, Б. Тел. (495) 625-2457)
«Московский дом книги» (м. Арбатская, ул. Новый Арбат, 8. Тел. (495) 203-8242)
«Молодая гвардия» (м. Полянка, ул. Б. Полянка, 28. Тел. (495) 238-5001,
(495) 780-3370)
«Дом научно-технической книги» (Ленинский пр-т, 40. Тел. (495) 137-6019)
«Дом книги на Ладомсной» (м. Бауманская, ул. Ладожская, 8, стр. 1.
Тел. (495) 267-0302)
«Санкт-Петербургский Дом книги» (Невский пр., 28. Тел. (812) 448-2355)
«Ннижный бум» (г.Ниев, книжный рынок «Петровка», ряд 62, место 8
(павильон «Академкнига»). Тел. +38 (067) 273-5010)
Сеть магазинов «Дом книги» (г. Екатеринбург, ул. Антона Валена, 12.
Тел. (343) 253-5010)
URSS.ru URSS.ru URSS.ru UHSS.ru
Тел./факс:
+7(499)724-25-45
(многоканальный)
E-mail:
URSS@URSS.ru
http://URSS.ru
URSS
URSS.ru URSS.ru URSS.ru URSS.ru URSS.ru
URSS.ru URSS.ru URSS.ru URSS.ru URSS.ru
URSS.ru
URSS.ru
URSS.ru
URSS.ru
Уважаемые читатели! Уважаемые авторы!
Наше издательство специализируется на выпуске научной и учеб¬
ной литературы, в том числе монографий, журналов, трудов ученых
Российской академии наук, научно-исследовательских институтов
и учебных заведений. Мы предлагаем авторам свои услуги на выгод¬
ных экономических условиях. При этом мы берем на себя всю ра¬
боту по подготовке издания — от набора, редактирования и верстки
до тиражирования и распространения.
URSS
Среди вышедших и готовящихся к изданию книг мы предлагаем Вам следующие:
/ Баскаков С. И. Радиотехнические цепи и сигналы.
/Логвинов В. В. Открытия и достижения НАУКИ И ТЕХНИКИ ЗА ПОСЛЕДНИЕ
570 ЛЕТ: Летопись: 1440-2010. Свыше 12 ООО событий.
■/Крылов А. Н. МОИ ВОСПОМИНАНИЯ. Рассказы выдающегося ученого: об истории
кораблестроения, математики, механики, астрономии; о Военно-морской академии
и строительстве Военно-морского флота СССР; о работе в Главной физической
обсерватории, Физико-математическом институте.
/Серый А. А., Серая Е. И. Изобретая инструменты науки будущего: Ускоряющая науку
ТРИЗ: Физика ускорителей, лазеров, плазмы.
/ Пенроуз Р. Новый ум короля. О компьютерах, мышлении и законах физики.
/Сонин А. С. Жидкие кристаллы: первые сто лет. В 2-х кн.
/ Шилов В. В. История логических машин.
/Пер Бак. Как работает природа: Теория самоорганизованной критичности..
/Хала И., Навратил Дж. Д. Радиоактивность, ионизирующее излучение и ядерная
энергетика.
/ Майнцер К. Сложносистемнос мышление: Материя, разум, человечество.
Новый синтез.
/Халафян А. А., Боровиков В. П., Калайдина Г. В. Теория вероятностей, математическая
статистика и анализ данных: Основы теории и практика на компьютере. STATISTICA.
EXCEL. Болес 150 примеров решепия задач.
/Суздалев И. П. Нанотехнология: Физико-химия нанокластеров, наноструктур
и наноматериалов.
/Ланге В. Н. Физические парадоксы, софизмы и занимательные задачи. В 2-х кн.
/ Тьюринг А. М. Может ли машина мыслить?
/Катона В. Энергетика ЛАТИНСКОЙ Америки: Смогут ли ведущие державы
справиться с последствиями кризиса и пробиться в число ВЫСОКОРАЗВИТЫХ
СТРАН?
/ Чернышев С. Л. Моделирование и классификация наноструктур.
/Абаимов С. Г. Статистическая физика сложных систем: От фракталов
до скейлинг-поведспия.
/Рапопорт Г. И.. Герц А. Г. Биологический и искусственный разум.
По всем вопросам Вы можете обратиться к нам:
тел. +7 (499) 724—25—45 (многоканальный)
или электронной почтой URSS@URSS.ru
Полный каталог изданий представлен
в интернет-магазине: http://URSS.ru
Научная и учебная
литература
URSS.ru
URSS.ru
URSS.ru
URSS.ru
nJ'SSUn nj'SSMfl nj-sSUn ilJSSUfl nJSSUR
Андрей Иванович
НАЗАРЕНКО
Окончил с отличием МВТУ им. Баумана в 1956 г. В последующие годы,
работая в КБ и НИИ, занимался применением математических методов
для решения различных технических задач. На выбор этого направле¬
ния исследований оказало влияние знакомство в 1960 г. с известным
специалистом по математическому моделированию Н. П. Бусленко.
В1962 г. защитил кандидатскую диссертацию, а в 1969 г. — докторскую,
в 1991 г. получил звание профессора. За работы в области космической баллистики награжден
Государственной премией СССР (1971). Является автором (соавтором) 8 монографий и более
100 публикаций в российских и зарубежных журналах.
Наше издательство предлагает следующие книги:
21329 ID 227332
785971 0463
63"
Издательская группа
Каталог изданий
а Интернете:
http://URSS.ru
E-mail: URSS@URSS.ru
117335,Москва. Телефон/факс
Нахимовский (многоканальный)
проспект, 56 +7 (499) 724 25 45
Отзыв» о «гтоаиды кадгмм а шсмс сбюружвеые
апвдткм прмеыпзмт» по адресу URSSgURS&ru.
Bouw замечания и градгемныя будут учтены
и отряпмы на *еЬ-стрэ*ице атпи ючгк ма сarm
hapAURSS-ru