/






































































































































Text
ра
ЛШ/Н
*
ВОЗДУШНЫЕ ВИНТЫ
воениздат
доспей 1^37
Ин ж. Кузьмин Г. И. Воздушные винты. Пособие дм авиатехников ВВС РККА.
Книга входит в серию специальных пособий под общей редакцией дпвпнженоров В. С. Коннерт и Е. С. Андреева н военинженера 1-го ранга А. Е. Заикина и составлена применительно к соответствующей программе занятий с авиатехниками.
Книга может быть использована также слушателями гражданских авиационных техникумов и втузов.
Г. И. КУЗЬМИН. Воздушные винты
Перед пользованием книгой необходимо исправить ошибки автора на стр. 18 (9 строка снизу).
Напечатано Следует читать
г и г + AR Дг Дг г—2" И Г+ТГ
и далее на этой же строчке
AR | &
Imp.
5
................. 8
з. Физическое представление о работе винта ..... ............. 9
4. Шаг, поступь и скольжение пинта..................................... . , ю
Б. Винты постоянного, переменного и регулируемого шага. Винты пряные и левые................................................................... in
6. Аналогия работы винта и крыла. Скоростной и силовой многоугольники . 16
1. Теория идеального пропеллера............................................... 23
8. Задачи к гл. I ......................................• 30
Глава II
Конструкция воздушных винтов
1. Деревянные винты ...................................................... 32
2. Балансировка винта .... ..................................... 37
3. Металлические винты . ... ....................... 42
4. Винты регулируемого шага .... .... ........... ... 48
Глава III
Характеристики винтов
1. Испытание винтов. \ .. ...................................... 04
2. Формулы подобия................................................... 66
3. Аэродинамическая характеристика винта.............................. 70
4. Быстроходные винты................ . .................. . . . 74
Б. Взаимное влияние винта и самолета....................... ... . 77
6. Семейства виитов ко
Глава IV
Характеристики винтомоторной группы
1. Винты фиксированного шага . . ............. 96
2. Подбор винта к самолету............................ . юу
3. Построение характеристики винтомоторной группы . .................. 107
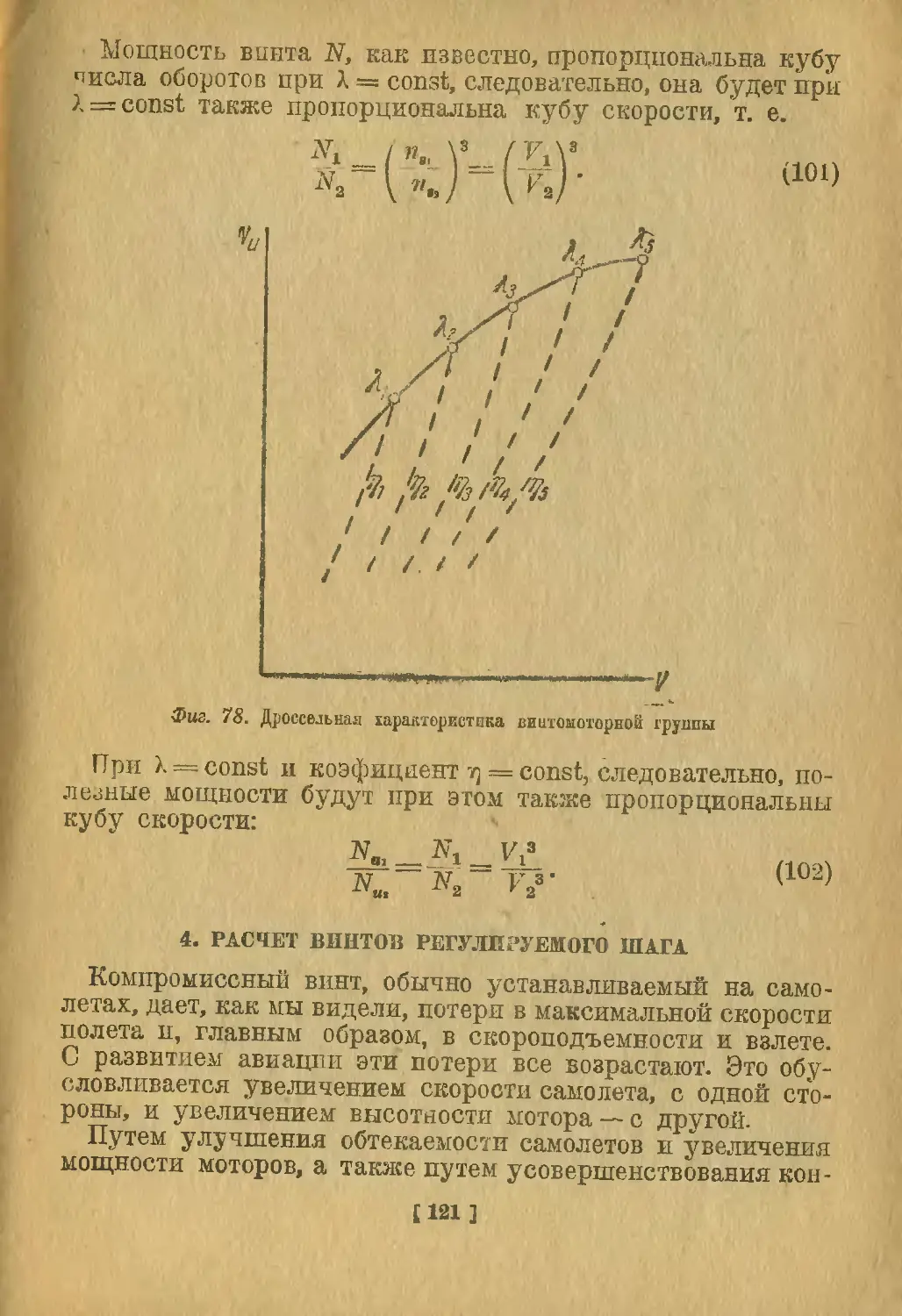
4. Расчет винтов регулируемого шага ...................................... 121
Б. Преимущества винтов регулируемого шага ................................... 129
ОГЛАВЛЕНИЕ
Глава I
Общие сведения о воздушных винтах Стр.
Назначение воздушного винта.......................................... б
Коэфициент полезного действия воз,душного винта...................... 8
з. Физическое представление о работе винта .... 9
4. Шаг, поступь и скольжение внята.......... .............. . . 10
Ь. Винты постоянного, переменного и регулируемого шага. Винты правые н левые........................................................... 14
6. Аналогия работы винта и крыла. Скоростной и силовой многоугольники . 16
7. Теория идеального пропеллера........................................ 23
8. Задачи к гл. I..................................................... 30
Глава II
Конструкция воздушных винтов
1. Деревянные винты...... ................ 32
2. Балансировка винта . ............. ..................... 37
3. Металлические винты....................................... .... 42
4. Винты регулируемого шага ............... ..... ... 48
Глава III
Характеристики винтов
1. Испытание винтов................................................. 64
2. Формулы подобия................................................... 66
3. Аэродинамическая характеристика винта.............................. 70
4. Быстроходные винты ............................................... 74
б. Взаимное влияние винта м самолета ...................... . . 77
6. Семейства винтов ... . . . 82
Глава IV
Характеристики винтомоторной группы
1. Винты фиксированного шага ..... ....................... 96
2. Подбор винта к самолету.......................... . . ... 102
3. Построение характеристики винтомоторном группы...................... 107
4. Расчет винтов регулируемого шага......... . .................. 121
5. Преимущества винтов регулируемого шага......................... . 129
ГРЕЧЕСКИЙ АЛФАВИТ
Буквы Названия Буквы Названия
Аа альфа Nv НЮ
В₽ бета Е с КСИ
г I гамма Оо омикрон
Д 8 дельта И тс пи
Ее эпсилон РР ро
ZC дзэта S о сигма
I I 7] эта Т т тау
0 0 8 тэта Г о ппсилон
I i нота Ф <р фц
Кх каппа хх хи
л л лямбда псп
Мр. мю £1 <о омега
ГЛАВА I
ОБЩИЕ СВЕДЕНИЯ О ВОЗДУШНЫХ ВИНТАХ
1. НАЗНАЧЕНИЕ ВОЗДУШНОГО ВИНТА
Движение самолету, дирижаблю, аэросаням и ряду других аппаратов сообщается винтомоторной группой. Она состоит из мотора и укрепленного на носке его вала винта. Последний в отличие от обычных в машиностроении винтов часто называют воздушным винтом, или пропеллером.
Воздушный винт состоит из двух, трех или большего числа одинаковых лопастей, симметрично расположенных радиально в плоскости вращения и скрепленных между собой ступицей или втулкой (фиг. 1). Последняя служит также для крепления винта на носке вала мотора.
Лопасти имеют весьма разнообразную форму, некоторые из них изображены на фиг. 2. Наиболее распространенными являются лопасти овальной формы, близкой к эллиптической. Поперечное сечение лопасти имеет форму профиля крыла и образует некоторый угол с плоскостью вращения винта. Этот угол называется углом наклона лопасти на радиусе г и обозначается буквой ф (фиг. 1). Обычно угол наклона ф и толщина лопасти 8 уменьшаются к концу лопасти.
Диаметр окружности, описываемой при вращении концами лопастей, называется диаметром винта. У двухлопастного винта диаметр равен расстоянию между концами лопастей. Диаметр является весьма важной характеристикой винта. Он выражается в метрах и обозначается буквой D.
Мотор преобразует тепловую энергию топлива в "механическую работу, производимую вращающимся валом. Работа крутящего момента вала мотора в единицу времени назы-
[5]
вается э ф ф е к т и в и о й мощностью мотора, или просто мощностью мотора.
Мощность мотора 1 выражается в килограммометрах в секунду (кгм!сек) или обычно в лошадиных силах (л. с.)
лопасть
Верхняя сторона, или спинна
Ь-ширина сечения
В - толщина сечения
Хорда / Плоскость Вращения -ПиМоняя сторона
Ступица
Передняя кромка
Задняя кромка
Фиг. 1. Воздушный винт; внизу—поперечное сечение лопасти
и тогда обозначается буквой N. Лошадиной силой считается мощность, равная 75 кгм]сек. Следовательно,
T = 75N. (1)
Крутящий момент мотора выражается в килограммометрах и обозначается буквой М.
Скорость вращения вала выражается числом оборотов в минуту и обозначается буквой п или числом оборотов в секунду, и в этом случае обозначается той же буквой, но с индексом s, т. е. п,. Очевидно п и п, находятся в следующем соотношении:
п = 60 п,. (2)
Крутящий момент мотора выражается через мощность и число оборотов следующей формулой:
Т
М=-т~, (3)
2т, ' '
или
М =716,2—. п
(4)
Воздушный винт воспринимает.’ крутящий момент мотора, преобразует его в силу, действующую вдоль оси вращения.
[6]
и тянет аппарат в этом направлении. Сила тяги винта сообщает самолету поступательное движение с некоторой скоростью и, следовательно, преодолевая сопротивление его движению, всегда при этом возникающее, производит работу. Работа силы тяги винта за единицу времени будет равна произведению силы тяги на скорость движения самолета в направлении силы тяги. Ее называют полезной мощностью винта или винтомоторной группы.
Фиг. 2. Форша винтов:
I—Шовьера; 2-сабивобразный; 3—Н. Е. Жуяовокого; 4 и 5— стальные
Сила тяги винта выражается в килограммах и обозначается буквой Ф. Скорость движения аппарата выражается обычно в километрах в час (км/час) и обозначается буквой V. Однако, во всех формулах, как правило, если это не оговорено особо, скорость V выражается в метрах в секунду (м/сек}. Она связана со скоростью V в км/час следующим простым соотношением:
V км/час — 3,6 V м/сек. (5)
Полезная мощность винтомоторной группы выражается, как и мощность мотора, в килограммометрах в секунду или в лошадиных силах и обозначается теми же буквами, но с индексами и, т. е. Ти кгм сек или Nu л. с.
[ 1 3
2. КОЭФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ВОЗДУШНОГО ВИНТА
Если бы мы могли построить движущий аппарат без всяких потерь, например, устроили бы его в виде зубчатого колеса, катящегося по неподвижной рейке без трения, то согласно закону сохранения энергии полезная мощность такого совершенного пропеллера равнялась бы мощности, затраченной на его работу, т. е.
ФеУ = 75?7. (6)
Здесь индексом с отмечено, что Фс — тяга совершенного пропеллера. Из формулы (6) следует, что тяга совершенного пропеллера
Фиг. 3. Изменение тяги совершенного винта Фс н действительного винта Ф с изменением скорости движения самолета V
При заданной мощности она, как видим, довольно сильно уменьшается с увеличением скорости движения самолета. На фиг. 3 дано примерное изменение величины тяги винта с изменением скорости движения при постоянной мощности винтомоторной группы.
Так как воздушный винт опирается не на твердую неподвижную рейку, а на податливый, т. е. поддающийся сжатию и сдвигу, воздух и происходит трение лопастей о воздух, то при работе винта происходят потери. Полезная мощность и тяга его будут меньше, чем полезная мощность и тяга совершенного пропеллера.
На фиг. 3 показана тяга воздушного винта; пунктирной кривой приблизительно разделены потери за счет податливости и трения воздуха.
Отношение полезной мощности винта к мощности, затраченной на его вращение, называется коэфициентом полезного действия (к. д. д.) винта. Он обозначается греческой буквой /; и выражается следующей формулой:
[8]
Чем больше коэфициент полезного действия винта, тем совершеннее последний.
У лучших современных винтов коэфициент полезного действия достигает 0,85. Обычно у самолетных винтов он близок к 0,80, а у винтов тихоходных аппаратов он равен 0,75—0,70 и даже ниже. С изменением скорости полета он также изменяется, и, например, при взлете самолета он на 5—10% ниже, чем при горизонтальном полете.
При расчете винта обычно сперва находят величину ч, а затем вычисляют тягу винта по формуле
(9)
3. ФИЗИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ О РАБОТЕ ВИНТА
Винт как аппарат для создания силы тяги был известен очень давно. Водяные винты, устанавливающиеся на судах, как по конструкции, так и по принципам работы в основном одинаковы с воздушными винтами. Как те, так и другие можно объединить под общим названием гребных винтов. Теория их в основном одинакова1. Водяные гребные винты применяются в водном транспорте уже более ста лет, и применительно к ним развивалась теория гребного винта до развития авиации.
Вначале конструкторы гребного винта представляли его работу, как ввинчивание в жидкость, аналогичное ввинчиванию обычного болта в гайку; подвижность точки опоры учитывали, вводя поправочные коэфициенты. На основании этого первые водяные гребные винты составлялись из одного или нескольких витков резьбы, но более глубокой, чем у обычных в машиностроении винтов. Резьба имела форму винтовой поверхности, т. е. такой поверхности, которая образована равномерно вращательным и равномерно поступательным в направлении оси вращения движениями линии, наклоненной под постоянным углом к оси вращения.
Все точки линии, образующей винтовую поверхность, движутся по своим винтовым линиям и за ,полный оборот проходят в направлении оси вращения одинаковое расстояние, называемое шагом винтовой поверхности. В качестве образующей винтовой поверхности обычно бралась прямая перпендикулярная оси.
[ 9 i
В дальнейшем оказалось, что у гребного винта выгоднее вместо целых витков винтовой поверхности оставить только два-три небольших сектора, симметрично расположенных в плоскости вращения. У современных водяных гребных винтов эти секторы — лопасти—имеют овальную форму, близкую к эллиптической. Нижняя, набегающая на жидкость, сторона их образована винтовой поверхностью, а верхняя сторона — выпуклая — для придания лопасти свойств равнопрочной балки. Лопасти воздушных винтов делаются в основном такими же, но только более узкими и с более плавными поперечными сечениями, подобными профилям крыльев.
При вращении винт захватывает воздух и отбрасывает его назад, и вследствие этого сам стремится двигаться вперед. На место отброшенных масс воздуха к винту притекают другие массы воздуха, которые тоже отбрасываются им назад. В результате образуется струя воздуха, пришедшего в движение. Винт все время отбрасывает все новые и новые массы воздуха назад, а этот воздух, противодействуя, толкает его вперед. Таким образом, сила тяги винта есть реакция воздуха, приведенного им в движение.
Так как лопасти винта являются отрезками винтовой поверхности, т. е. поверхности, наклоненной к оси, то отбрасывание воздуха назад неизбежно сопровождается и его закручиванием: винт закручивает воздух в том направлении, в каком он вращается. Вследствие этого появляется еще и реактивный момент, тормозящий вращение винта. Следовательно, для вращения винта и создания силы тяги необходим крутящий момент, который и сообщается мотором.
4. ШАГ, ПОСТУПЬ И СКОЛЬЖЕНИЕ ВИНТА
Если бы винт вращался в твердой гайке, специально сделанной для него, то за один полный оборот он прошел бы вдоль оси вращения расстояние, равное шагу винтовой поверхности. Это расстояние называется геометрическим шагом винта.
В действительности же вследствие подвижности воздуха продвижение винта за один оборот, так называемая поступь винта, может быть меньше и даже больше геометрического шага. Все зависит от силы, задерживающей поступательное движение винта. Если эта сила очень боль
[ Ю ]
шая, то поступь винта будет значительно меньше шага и может быть даже равной нулю, как, например, при работе винта на месте. Поступь винта бывает и отрицательной— при падении самолета на хвост. Если же вместо задерживающей винт силы будет действовать вдоль оси сила, помогающая его движению вперед, то поступь винта будет больше шага..
Например, при пикировании или при крутом планировании самолет, очень быстро снижаясь под действием собственного веса, тянет вместе с собой винт. При достаточно большой скорости этого снижения поступь будет больше шага.
При планировании’ самолета с мотором, работающим на малом газе, можно подобрать такие обороты винта, при которых он будет только рассекать воздух, не отбрасывая его назад, и следовательно, не будет развивать силы тяги. Такая поступь винта, когда винт не даст силы тяги, называется динамическим шагом. Динамический шаг обычно больше геометрического. Получается это вследствие крылообразной формы поперечных сечений лопастей.
При поступи, равной шагу, хорды сечений лопасти движутся по винтовой поверхности, и получается явление, близкое к движению крыла вдоль хорды. Как известно, крылья при таком движении дают значительную подъемную силу. Следовательно, и винты дают силу тяги при поступи, равной шагу.
Только в частном случае, когда профиль поперечного сечения лопасти тонкий и симметричный, геометрический и динамический шаги совпадают.
Разница между геометрическим шагом винта и поступью называется скольжением. Из предыдущего ясно, что скольжение может быть как положительным, так и отрицательным.
Иногда скольжение вычисляют как разность между динамическим шагом и поступью. Тогда его называют динамическим скольжением. Динамическое скольжение больше скольжения по геометрическому шагу.
Если динамическое скольжение отрицательно, то винт дает отрицательную тягу, т. е. он не тянет, а, наоборот, дает лобовое сопротивление. При большом -динамическом скольжении не только тяга, по и момент получаются отрицательными и винт обращается в ветрянку, или ветряной двигатель; он силу лобового сопротивления преобразует в крутящий момент на валу.
IU]
Шаг, поступь и скольжение выражаются в метрах. Геометрический шаг обозначается буквой Н, динамический шаг — той же буквой с индексом d, т. е. поступь — той
же буквой с индексом а, т. е. Но, скольжение — буквой 8 и динамическое скольжение — той же буквой с индексом d, т. е. Sd. Согласно определению
S=H-^-Ha (10)
и
Sd = H — IIa. (11)
Поступь винта выражается через скорость полета и число оборотов винта следующей формулой:
н.= 2_. (12)
Для сравнения винтов очень удобно давать шаг, поступь и скольжение не в абсолютных величинах, т. е. в метрах, а в относительных (безразмерных), т. е. в частях диаметра впита. Тогда получим:
относительный геометрический шаг
относительный динамический шаг
относительную поступь
D n,D’
относительное скольжение 8 , ,
относительное динамическое скольжение
(13)
(14)
(15)
(16)
(17)
I 12]
Очертим около оси винта цилиндр радиусо.м г (фиг. 4). Винтовая поверхность, образующая нижнюю сторону лопасти, пересечет его по винтовой линии. Если отрезок такого цилиндра длиной, равной шагу винтовой линии, разрезать по образующей и развернуть, то в полученном прямоугольнике OOtAB со сторонами 2кг и П винтовая линия будет диагональю О А. Угол наклона ее совпадает с углом наклона
сечения самой лопасти, которое на развертке представится в виде профиля крыла.
Из прямоугольного треугольника ОАВ получаем следующую зависимость:
И = 2кг tg ср. (18)
При работе винта сечение лопасти будет двигаться вдоль некоторой винтовой линии, шаг которой равен поступи винта. Эта винтовая линия траектории сечения пзобразится на развертке прямой ОС. Поступь винта будет ВС и скольжение — АС.
Угол винтовой линии ОС с плоскостью вращения называется углом наклона траектории сечения лопасти. Он обозначается греческой буквой р.
Угол между хордой сечения лопасти и направлением его движения будет кажущимся углом атаки сечения лопасти. Так он называется потому, что в действительности за счет скоростей воздуха, вызванных самим винтом, угол атаки будет другим. Кажущийся угол атаки обозначается греческой буквой а с индексом к, т. е. ак. Из фиг. 4 видим, что
аь=ср — р. (19)
[13]
Угол наклона лопасти <р и угол наклона траектории р выражаются через относительный шаг h и относительную поступь X следующими формулами:
h = кг tg <р, (20)
X = КГ tg р. (21)
Здесь через г с черточкой обозначен относительный радиус сечения, т. е. радиус сечения, выраженный не в.метрах, а в частях радиуса лопасти:
^=4- <22)
5. ВИНТЫ ПОСТОЯННОГО, ПЕРЕМЕННОГО И РЕГУЛИРУЕМОГО ШАГА. ВИНТЫ ПРАВЫЕ И ЛЕВЫЕ
В первые годы авиации воздушные винты делались по образцу водяных винтов и нижняя сторона их лопастей, набегающая на воздух, совпадала с винтовой поверхностью. В тех же случаях, когда и рижняя сторона лопастей делалась, как и у крыла, выпуклой или вогнутой, с винтовой поверхностью обычно совпадали хорды сечений. Такие винты называют винтами постоянного шага. У них согласно формуле (18) при постоянном шаге, т. е. Н = const, тангенс угла наклона лопасти обратно пропорционален радиусу:
*8?=^:. (23)
и, следовательно, углы наклона лопасти быстро возрастают с уменьшением радиуса (фиг. 5).
У современных винтов, спроектированных по новейшим теориям, углы наклона лопасти даются такими, что шаг, вычисленный по формуле
Н=2~г tg ср, (23а)
получается различным для различных радиусов. Обычно он возрастает к концу лопасти. Такие винты называются винтами переменного шага.
Для удобства сравнения винтов принято и для винтов переменного шага давать так называемый номинальный
[14 1
(фиг. 5).
Номинальной шаг
Н г
Фиг. 5. Изменение шага Н и угла наклона ' tp с изменением радиуса винта
шаг, вычисленный по формуле (3) на радиусе г— 34Z?, где Н — радиус винта
В последние годы получили большое распространение винты, у которых лопасти можно поворачивать в полете около их оси и, следовательно, изменять их шаг. Такие винты называют винтами с изменяемым в полете ша-г о м, или винтами регулируемого шага.
Если у винта посто
янного шага повернуть лопасти на некоторый угол около их оси, то при новом угле уста-
новки их шаг винта будет уже переменным (фиг. 6). Он будет
возрастающим к концу лопасти, если угол наклона увели-
Z
Фиг. 6. Изменение шага винта при повороте лопасти на угол + Д'р
чен за счет поворота лопасти, и убывающим, если угол наклона лопасти уменьшен.
По наклону лопастей различают правые и левые винты. Винт, у которого лопасти наклонены так, что хорды поперечных сечений лопасти совпадают с правой винтовой поверхностью, называют правым. Левым называют винт, лопасти которого наклонены так, что хорды поперечных
[15]
сечений их совпадают с левой винтовой поверхностью. При вращении по часовой стрелке правый винт стремится двигаться от наблюдателя, а левый винт — на наблюдателя.
При принятом теперь обычно правом направлении вращения коленчатого вала мотора правые винты — тянущие, а левые — толкающие.
У современных моторов.очень часто имеется редуктор, т. е. механизм, уменьшающий число оборотов винта по сравнению с числом оборотов коленчато! о вала мотора, и ВЩ1Т укрепляется на специальном валу, соединенном с коленчатым валом зубчатой передачей. В случае если редуктор состоит из пары шестерен, вал винта по сравне; нию с коленчатым валом вращается уже в другую сторону и на правом моторе левый винт будет тянущим, а правый — толкающим. При планетарном редукторе вал винта вращается в ту же1 сторону, что и вал мотора.
Положение винта на самолете само по себе не влияет на конструкцию винта, и например, винт правого вращения остается таким же по наклону лопастей, вне зависимости от того, тянущий он или толкающий.
6. АНАЛОГИЯ РАБОТЫ ВИНТА И КРЫЛА. СКОРОСТНОЙ И СИЛОВОЙ МНОГОУГОЛЬНИКИ
Представление о работе винта как о процессе ввинчивания его со скольжением в воздух очень примитивно. Оно не разъясняет в достаточной степени того, как воздух приводится винтом в движение и каково это движение, а следовательно, не позволь ет найти и реакции воздуха на винт, т. е. силы тяги и момента винта. Для установления связи между формой и размерами винта и силами, действующими на него, требуется более глубокий анализ работы винта, аналогичный тому, какой применяется для крыльев. Ведь, в сущности, взаимодействие между лопастью винта и воздухом будет таким же, как. и между крылом и воздухом; только лопасть является более сложным крылом, и движется она более сложно, чем крыло.
В то время как все точки крыла движутся в одном и том же направлении и с одинаковыми скоростями, у лопасти винта каждая ее течка движется по своей винтовой .пинии со скоростью, складывающейся из скорости поле та и окружной скорости. Скорость полета V направлена по оси вращения винта, а окружная скорость U — перпендн-
Liej
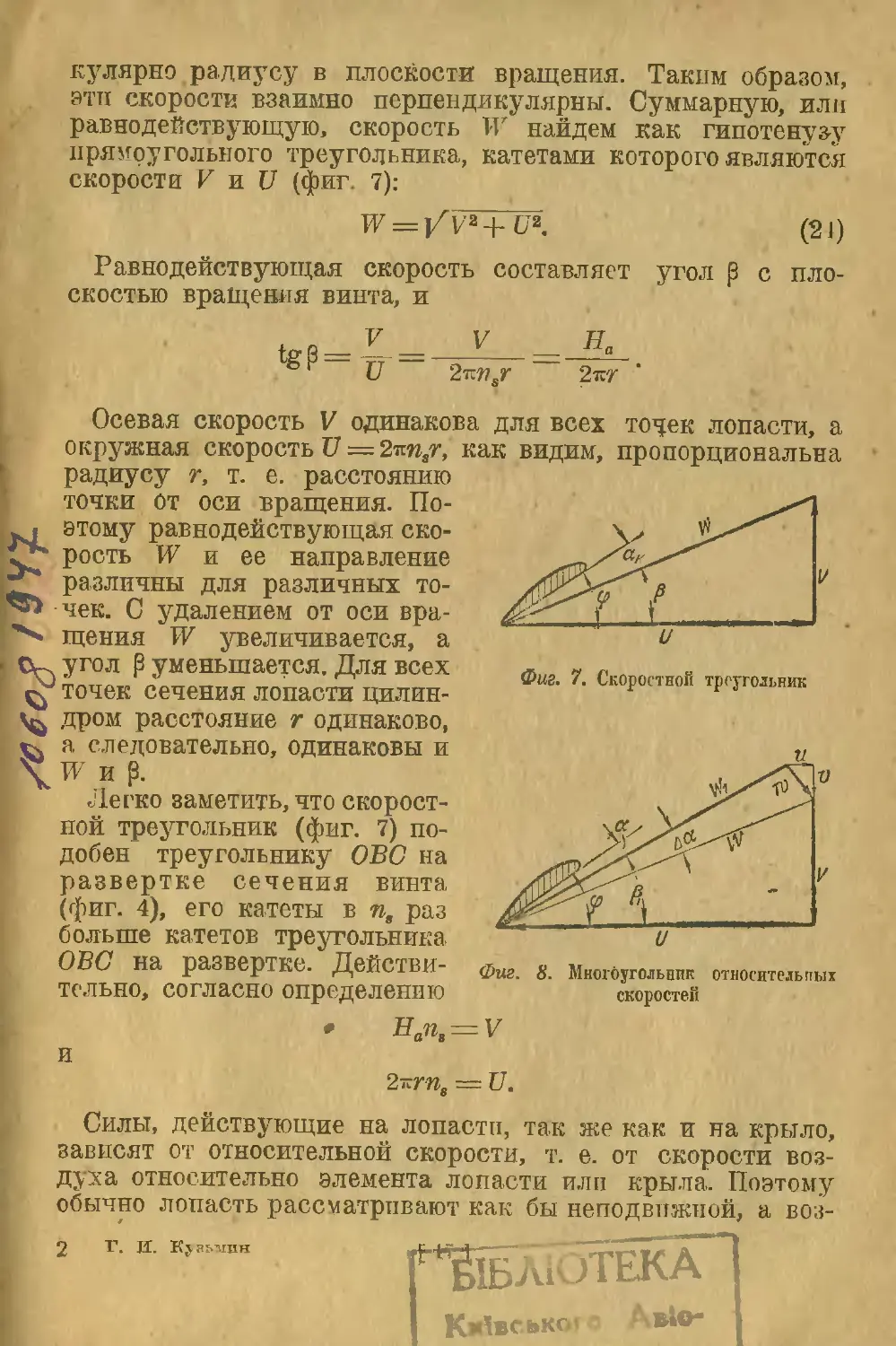
кулярно радиусу в плоскости вращения. Таким образом, эти скорости взаимно перпендикулярны. Суммарную, или равнодействующую, скорость ТГ найдем как гипотенуз-у прямоугольного треугольника, катетами которого являются скорости V и U (фиг 7):
= j/V2 -p L4 (21)
Равнодействующая скорость составляет угол р с плоскостью вращения винта, и
V П°
6 г U 2w
и
Фиг. 7. Скоростной треугольник
Осевая скорость V одинакова для всех тодек лопасти, а окружная скорость V = 2imsr, как видим, пропорциональна радиусу г, т. е. расстоянию тонки От оси вращения. По-j. этому равнодействующая ско-£* рость И7 и ее направление ”7* различны для различных то-чек. С удалением от оси вра-щения W увеличивается, а угол ₽ уменьшается. Для всех точек сечения лопасти цилин-дром расстояние г одинаково, а следовательно, одинаковы и
Легко заметить, что скоростной треугольник (фиг. 7) подобен треугольнику ОБС на развертке сечения винта (фиг. 4), его катеты в и, раз больше катетов треугольника ОВС на развертке. Действительно, согласно определению
* Han, = V
Фиг. 8. Многоугольник относительных скоростей
И
же как и на крыло, е. от скорости воз-
2~rns — U.
Силы, действующие на лопасти, так зависят от относительной скорости, т. духа относительно элемента лопасти или крыла. Поэтому обычно лопасть рассматривают как бы неподвижной, а воз-
2 Г. II. Кузьмин
^ЩиОТЕКА
КиЧвськс.»
дух — набегающим на нее со скоростью, равной по величине скорости лопасти, но обратно направленной, и кроме того, добавляют еще скорость самого воздуха, вызванную винтом.
Скорости воздуха в относительном движении изображены на фиг. 8, где вектором (направленным по скорости отрезком} w добавлена вызванная винтом скорость воздуха в плоскости его вращения. Проекции этого вектора на направление оси винта v и -на направление окружной скорости и являются соответственно осевой и окружной составляющими скорости, вызванной винтом.
Угол который образует относительная скорость Wr с плоскостью вращения, называется истинным углом притекания струй к лопасти. Угол хорды сечения лопасти с вектором Wj будет истинным углом атаки. Он отличается от кажущегося угла атаки, который хорда сечения образует с вектором скорости сечения W, на величину
Да = а — а„ (25)
называемую скосом потока.
Точное вычисление скоростей, вызванных винтом, и скоса потока является задачей более сложной, чем для крыла самолета. Существующие в настоящее время теории воздушного винта позволяют вычислить эти величины лишь приближенно. Отсюда проистекают и неточности этих теорий.
Для подсчета сил, действующих на винт, лопасти его разбивают цилиндрическими сечениями на ряд элементов. Так как лопасти имеют обычно ширину небольшую по сравнению с длиной, то в расчетах цилиндрические' сечения заменяются плоскими сечениями, перпендикулярными оси лопасти. Разница от такой замены получается очень небольшая, весьма мало влияющая на результаты расчета.
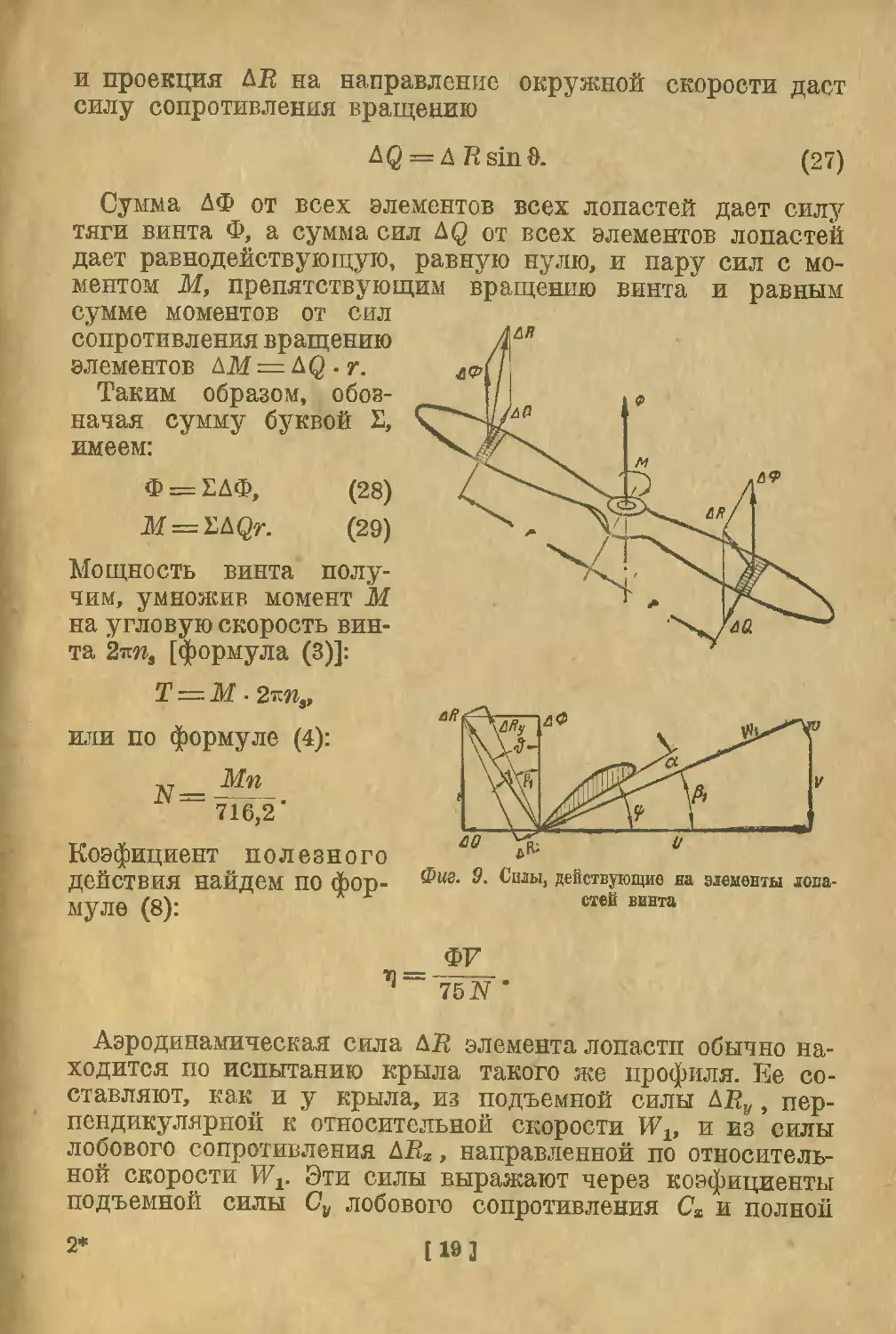
Элемент лопасти винта, ограниченный сечениями радиуса г и г 4- ДВ (фиг. 9), при небольшой длине его ДВ можно рассматривать как плоское незакрученное крылышко с постоянной шириной Ь, все точки которого движутся, как и у обычного крыла, с одинаковой скоростью Wv На это крылышко будет действовать аэродинамическая сила ДВ, направленная под некоторым углом & к скорости полета V. Проекция ее на направление полета даст силу тяги элемента лопасти *
ДФ = ДВ cos в, (26)
ИЗ]
и проекция ДЕ на направление окружной скорости даст силу сопротивления вращению
А <2 = A R sin О.
(27)
Сумма ДФ от всех элементов всех лопастей дает силу тяги винта Ф, а сумма сил AQ от всех элементов лопастей дает равнодействующую, равную нулю, и пару сил с моментом М, препятствующим вращению винта и равным
сумме моментов от сил сопротивления вращению элементов ДА? = AQ • г.
Таким образом, обозначая сумму буквой Е, имеем:
Ф = ЕДФ, (28)
М = EAQr. (29)
Мощность винта получим, умножив момент М на угловую скорость винта 2ims [формула (3)]:
Т — М • 2тш„ или по формуле (4):
АТ
Коэфициент полезного действия найдем по формуле (8):
Фиг. S. Силы, действующие на элементы лопастей винта
Ф7 ’1~ 75N *
Аэродинамическая сила ДЕ элемента лопасти обычно находится по испытанию крыла такого же профиля. Ее составляют, как и у крыла, из подъемной силы &ВУ , перпендикулярной к относительной скорости Wlr и из силы лобового сопротивления ДЕг, направленной по относительной скорости Wv Эти силы выражают через коэфициенты подъемной силы Су лобового сопротивления Сх и полной
2*
[19]
аэродинамической силы Са, подсчитывая по формулам аналогичным формулам для крыла *, т. е.
= Су Д8 р И\1 2, (30)
ДВ* = сх Д8 р П\2, (31)
ЬВ = Са Д8рИ\=. (32)
Здесь Д8=ЬД/— площадь элемента лопасти;
рИ\2 — удвоенный скоростной напор.
Скос потока Да подсчитывается по скоростям, вызванным винтом, которые находятся по вихревой теории винта. Приближенно их можно найти по теории идеального пропеллера, излагаемой ниже. Следовательно, значения Су, Сх и Са нужно взять для бесконечно длинного крыла.
Коэфициенты аэродинамических сил Су, Сх и Са зависят
в основном от профиля сечения лопасти и от угла атаки. На фиг. 10 даны кривые Cv и Сх в зависимости от угла атаки для одного из винтовых профилей. Там же дана кривая качества профиля
К = , т. е. отно-
шения коэфициента подъемной силы к коэфициенту лобо-
Фи). 10. Характеристика винтового профиля при бесконечном его размахе
вого сопротивления. У профиля, характеристика которого дана на фиг. 10, при отрицательном значении угла атаки около —4° коэфициент подъемной силы Су равен нулю. С увеличением угла атаки коэфициент подъемной силы увеличивается почти пропорционально углу атаки. Начиная с угла атаки около -f-10°, коэфициент подъемной силы увеличивается медленнее и при угле атаки около +14° достигает максимального значения, равного 0,67; при дальнейшем увеличении
1 Ввиду того что большая часть литературы по авиации написана в старых ков-
фицпентах Оу , Сх и Са , отнесенных к удвоенному скоростному напору, редакция решила'и в настоящем издании сохранить старые коэфициенты, т. е. так, как они и приводятся.
[20]
угла атаки Су уменьшается. Характер и наклон кривой Си по а остаются дочти одинаковыми для, всех профилей, и от формы профиля зависят только угол нулевой подъемной силы и максимальное значение Су. С увеличением толщины профиля угол нулевой подъемной силы становится
больше (по абсолютной величине) и максимальное значение коэфицпента подъемной силы возрастает.
Коэфицяент лобового сопротивления Сх почти постоянен на довольно большом диапазоне углов атаки и равен для
ь si а
обычных винтовых профилей 0,005 — 0,010. С увеличением толщины профиля он возрастает.
Качество профиля получается максимальным при углах атаки от 5° до 10°, доходя до 50—70 в зависимости от толщины профиля. Другими словами, подъемная сила элемента при этих углах атаки раз в 50—70 больше лобового сопротивления. Следовательно, полная аэродинамическая сила элемента лопасти составляет с подъемной силой очень
небольшой угол у, равный примерно 1°, как это легко подсчитать ио формуле
cotgy = ^- = K. (33)
На фиг. 11 и 12 даны характеристики одной из серий винтовых профилей.
Предположение, высказанное впервые Джевецким в его теории гребного винта, что у элемента лопасти винта, движущегося по винтовой линии, аэродинамическая сила получается такой же, как и у элемента крыла самолета, движущегося поступательно, легло в основу всех дальнейших теорий винта; разница между ними заключается лишь в
[22]
различном методе подсчета скоса потока. Многочисленные опыты, проводившиеся во многих странах, подтверждают допустимость этого предположения.
7. ТЕОРИЯ ИДЕАЛЬНОГО ПРОПЕЛЛЕРА
Наиболее простой теорией винта является теория идеального пропеллера. Она позволяет на основе идеальной схемы работы винта и законов общей механики, не рассматривая деталей происходящего явления, найти скорость движения воздуха, вызванного винтом, и вычислить коэ-фициент полезного действия винта.
Идеальным называется такой пропеллер, который создает тягу посредством отбрасывания воздуха в обпатную полету сторону без закручивания воздуха и без трения о него. Таким образом, идеальный пропеллер имеет только совершенно необходимые потери, без которых вообще невозможно создать в воздухе силу тяги, т. е. потери на отбрасывание воздуха назад. Для того чтобы и эти потери были минимальными, идеальный пропеллер должен иметь бесконечно большое число бесконечно узких лопастей специальной формы, создающих струю воздуха с равномерными скорэстш и по ее поперечному сечению.
Площадь круга, описываемого лопастями, называется вметаемой винтом площадью. Она обозначается буквой F. Согласно определению
Идеальный ^пропеллер можно представить себе также в виде бесконечно большою числа маленьких насосиков, равномерно распределенных по диску, диаметр которого равен диаметру винта. Насосики перекачивают воздух сквозь диск и создают перед ним разрежение, а за ним повышенное давление. Перепад давлений Ар, т. е. разность между давлением за диском и перед ним, должен быть равномерным по всей ометаемой винтом площади F и равным тяге винта Ф, разделенной на площадь F:
= (35)
Перед пропеллером вследствие пониженного там давления воздух подсасывается к нему, и по мере приближе-
I S3 1
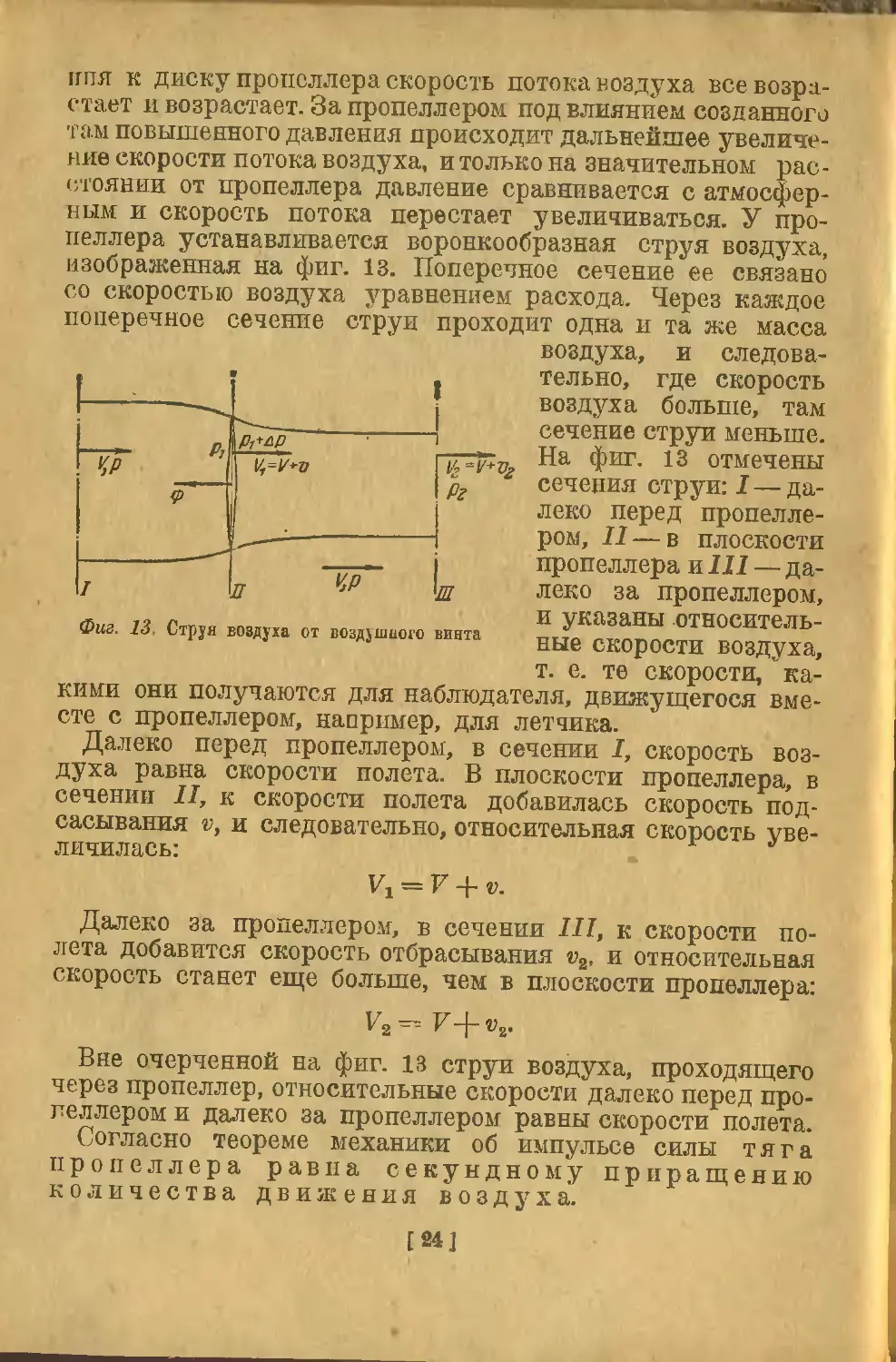
ппя к диску пропеллера скорость потока воздуха все возрастает и возрастает. За пропеллером под влиянием созданного там повышенного давления происходит дальнейшее увеличение скорости потока воздуха, и только на значительном расстоянии от пропеллера давление сравнивается с атмосферным и скорость потока перестает увеличиваться. У пропеллера устанавливается воронкообразная струя воздуха, изображенная на фиг. 13. Поперечное сечение ее связано со скоростью воздуха уравнением: расхода. Через каждое поперечное сечение струи проходит одна и та же масса воздуха, и следовательно, где скорость воздуха больше, там сечение струи меньше. На фиг. 13 отмечены сечения струи: I — далеко перед пропеллером, II — в плоскости пропеллера и III — далеко за пропеллером, и указаны относительные скорости воздуха, т. е. те скорости,' ка-
кими они получаются для наблюдателя, движущегося вместе с пропеллером, например, для летчика.
Далеко перед пропеллером, в сечении I, скорость воздуха равна скорости полета. В плоскости пропеллера, в сечении II, к скорости полета добавилась скорость подсасывания v, и следовательно, относительная скорость увеличилась:
= v + v.
Далеко за пропеллером, в сечении III, к скорости полета добавится скорость отбрасывания v2, и относительная скорость станет еще больше, чем в плоскости пропеллера:
Вне очерченной на фиг. 13 струи воздуха, проходящего через пропеллер, относительные скорости далеко перед пропеллером и далеко за пропеллером равны скорости полета.
Согласно теореме механики об импульсе силы тяга пропеллера равна секундному приращению количества движения воздуха.
[24]
Обозначим через 7п секундную массу воздуха, прошедшего через пропеллер. Очевидно,
да = pF (V + «),
(36)
где р — массовая плотность воздуха.
Так как воздух, находящийся вне струи пропеллера, не изменяет скорости своего движения (начальная скорость далеко перед пропеллером и конечная скорость далеко за пропеллером одинаковы), приращение количества движения получается только у массы воздуха, прошедшей через пропеллер. Конечная скорость, которую пропеллер сообщил отброшенному им воздуху, равна ?;2; поэтому согласно теореме о количествах движения
Ф = да«2. (37)
По закону сохранения энергии мощность идеального пропеллера Д должна равняться сумме его полезной мощности, равной ФУ, и потерь, равных „живой силе" воздуха, , mv/
отброшенного пропеллером, т. е. —~~. Следовательно,
т.^фу + ^1
(38)
или, заменив из формулы (37) mv2 через Ф и вынеся Ф за скобку, получим:
Т1 = ф/у + ^}. (39)
Отсюда видно, что выгоднее одну и ту же тягу создавать винтом большого диаметра, так как в этом случае масса воздуха да будет больше, а г>2 меньше; следовательно, будут меньшими и потери мощности на создание силы тяги.
Мощность идеального пропеллера можно определить и другим способом. Действительно, пропеллер движется относительно воздуха, проходящего через его плоскость, со скоростью V + v, следовательно, тяга Ф производит работу:
Д = Ф (У + г>).
[25]
(40)
Левые части выражений (39) и (40) равны; следовательно, должны быть равны и правые части их, т. е:
Ф (V + г’) — Ф
Отсюда следует, что
(41)
(42)
2
т. е. скорость подсасывания равна половине скорости отбрасывания. Это соотношение называется теоремой Фруда-Финстервальдера, по имени ученых, впервые доказавших ее. Заменив в формулах (37) и (39) г2 через 2г’ и подставив вместо ?« = рУ (У4-к), получим:
Ф = 2pF (V 4- v) v, (43)
Т4 = Ф(У + «). (44)
Коэфициент полезного действия идеального пропеллера: _ФУ_ ФУ Т< “ Ф (У + «) *
Разделив числитель и знаменатель на ФУ, получим:
Т У
(45)
(46)
Как видим, р0 зависит от отношения скоростей —. Это отношение можно выразить через тягу винта или, что удобнее для практических расчетов, через так называемый коэфициент нагрузки васметаемую винтом площадь
Ф рУУ2'
Этот коэфициент В аналогичен обычным аэродинамическим коэфициентам для сил, например, коэфициенту подъемной силы крыла:
(47)
с . .. Р . v~ ВрУ1
[М]
Разделив уравнение (43) на 2pFVz, перенеся все члены его в одну сторону и использовав равенство (47), получим уравнение:
v \2 . v В
V J 2
= 0.
Решаем это квадратное уравнение
v относительно —, при-
чем, взяв лишь положительный корень, как отвечающий условиям задачи, получаем:
Фи< 14. Коэфициент полезного действия винта в зависииости от ковфи-циеита нагрузки иа оиетаомую винтом площадь
Подставив выражение (48) в формулу (46), получим окончательно:
71я~ 1 +/T+Tir‘ (49)
Табл. 1 дает и ~ в зависимости от В.
На фиг. 14 эта зависимость изображена графически. Опыт показывает, что у действительного винта кривая rt
f 27 ]
Таблица I1
Скорость подсасывания и к. п. д. идеального пропеллера в зависимости от коэфпцпеита нагрузки В
В V *>а 8 V V чя
0,00 0,0000 1,0000 1,8 0,5724 0,6360
0,02 0,0099 0,9902 1,9 0,5954 0,6268
0,04 0,0196 0,9808 2,0 0,6180 0,6180
0,06 0,0292 0,9717 2,2 0,6619 0,6017
0,08 0,0385 0,9629 2,4 0,7042 0,5868
0,10 0,0477 0,9545 2,6 0,7450 0,5730
0,15 0,0701 0,9343 2,8 0,7845 0,5604
0,20 0,0916 0,9161 3,0 0.8229 0,5486
0,25 0,1124 0,8990 3,2 0,8601 0,5376
0,30 0,1325 0,8830 3,4 0,8946 0,5273
0,35 0,1519 0,8680 3,6 0,9318 0,5177
0,40 0,1708 0,8540 3,8 0,9663 0,5086
0,45 0,1892 0,8410 4,0 1,0000 0.5000
0,50 0,2071 0,8224 4,5 1,0811 0,4805
0,55 0,2246 0,8166 5,0 1,1583 0,4633
0,60 0,2416 0,8055 5,5 1,2321 0,4520
0,65 0,2583 0,7947 6,0 1,3028 0,4343
0,70 0,2746 0,7846 6,5 1,3708 0,4218
0,75 0,2906 0,7748 7,0 1,4365 0,4103
0,80 0,3062 0,7655 7,5 1,5000 0 4000
0,85 0,3216 0,7567 8,0 1,5616 0,3904
0,90 0,3366 0,7481 9,0 1,6794 .0,3732
0,95 0,3515 0,7399 10,0 1,7913 0,3583
1,00 0,3660 0,7321 12,0 2,0000 0,3333
1,10 0,3944 0,7172 17,5 2,5000 0,2857
1,20 0,4220 0,7032 24,0 3,0000 0,2500
1,30 0,4487 0,6903 31,5 3,5000 0.2222
1,40 0,4747 0,6781 40,0 4,0000 0,2000
1,50 0,5000 0,5667 60,0 5,0000 0,1667
1 60 0,5247 0,6559 112,0 7,0000 0,1250
1,70 0,5488 0,6459 180,0 9,0000 0,1000
идет ниже кривой т)а, и для хороших винтов можно приближенно считать, что
-Z) = О,85т;а. (50)
С точки зрения теории идеального пропеллера следует всегда стремиться брать винт возможно большего диаметра, чтобы получить малую величину для В и,, следователь
1 По вычислениям В. П. Ветчинкппа
(28 |
но, большой т]0. Однако, на практике для каждого самолета
существует нанвыгоднейший диаметр винта, обусловленный числом оборотов и мощностью мотора, а также типом самолета и его скоростью; объясняется это тем, что при малых значениях В с увеличением диаметра винта прогрессирует влияние трения лопастей о воздух.
На практике очень час-
то приходится решать задачу об определении ко-эфициента полезного действия наивыгоднейшего винта. Ее можно решить, пользуясь диаграммой, показанной на фиг. 14. Поступают следующим образом: зная тягу винта Ф, скорость полета V и диаметр винта В, подсчитывают коэфициент В по формуле (47). На графике (фиг. 14)читают для подсчитанного значения В.
Если тяга винта неизвестна, а задана его мощ
ность, то задачу решают
В так. Вычисляют коэфициент — по формуле, полученной из
V /л_. лч 75 Nr>
формулы (47) путем подстановки в нее вместо Ф = - ——
т; pFV3 '
Найденную величину — ‘откладывают, как показано на фиг.
15, на линии О^а, проведенной параллельно оси абсцисс В
через точку О1( соответствующую т} = 1. Масштаб — точно
такой же, как и масштаб В на оси абсцисс. Полученную точку а соединяют с началом координат О. Точка С пересечения луча Оа с кривой 7} определяет коэфициент полезного действия винта -jj. Справедливость этого решения следует из подобия треугольников OdC и ОаО^
[29 ]
Задачи к гл. I
1. Вычислить шаг винта, если по обмеру сечения лопасти (фиг. 16) на радиусе 7=1000 мм получились следующие результаты: 1 = 274 л<.и, 7^ = 135 мм, Ла = 215 мм.
Ответ: Н = 1,83 м.
2. Вычислить поступь и скольжение для винта с шагом Н = 4,5 м при скорости полета V = 350 км/час и оборотах пиита п = 1 900 об/мин.
Ответ: Яо = 3,07 м; S' = l,43 м.
3. При какой скорости полета у винта предыдущей задачи скольжение будет равным нулю прп тех же самых оборотах п— 1 900 об/мин?
Ответ: V = 513 км/час.
4. Найти динамический шаг винта, если известно, что геометрический шаг его равен 4,5 м и винт перестает давать тягу при угле атаки лопасти па радиусе 1 м, равном — 4°.
Ответ: На = 5,2 м.
5. Для винта предыдущей задачи найти обороты прп планировании самолета со скоростью 140 км/час, при котором винт не дает силы тяги.
Ответ: п = 450 об/мин.
6. У винтов постоянного шага D, = 3 м и Da = 4 м относительный шаг одинаков и равен
Zij = = 1,5. Вычислить угол наклона лопасти для радиуса г = s/4 R.
Ответ: — 32’30'.
7. Для виптов предыдущей задачи вычислить углы наклона для одинакового радиуса 7 = 1 М.
Ответ: <ft = 35’40'; = 43’40'-
8. У винта достоянного шага D = 3 м относительный шаг h = 1,5, число оборотов и = 2 000 об/мин и скорость полета V = 400 км/час. Вычислить скорости и кажущийся угол атаки для радиуса г = 0,5.
Ответ: (7 = 157 м/сек, V = 111 м/сек, W = 192 м/сек, аь = 8°30'.
9. У винта D = 3 м с переменным шагом относительный шаг равен: для г ~ 0,5, h = 1,3; для г = 0,75, h = 1,47; для г = 0,9, h = 1,55. Вычислить скорост/ и кажущиеся углы атаки сечений на зтих же радиусах г = 0,5; 7 = 0,75 н ~ = 0,9 при п = 2 000 об/мии и V = 400 км/час.
Ответ:
Фиг. 16. Измерение геометрического шага винта
Г и V W
0,50 157 111 192 4’20'
0,75 236 111 260 6’40'
0,90 283 111 304 ' 7’10'
[80]
10. Какие умы атаки будут у впита предыдущей задачи, если скорость полета V — 250 км'час и п — 1 900 об/мин?
Ome:i n:
г 0,5 0.75 0,9
V 69,5 69,5 69,5
V 149 224 268
W 164 235 277
sin р 0,423 0,296 0.251
L 25° 17’14' 14’33'
h = nr tg ? 1,3 1,47 1,55
h tg?= — 0,828 0,624 0,547
39’40' 32’00' 28’40'
ab = <p — £ 14’46' 14’40' 14’07'
11. Элемент лопасти винта на радиусе г — 1 000 лс.к имеет ширину Ъ = 250 мм и длину Дт = 100 мм. При числе оборотов п = 1 800 об/мии и скорости полета V = 360 км/час кажущийся угол атаки aj = 3°. Вычислить для втого влемента силу тяги и момент, если иввестно, что при заданном угле атаки сечеиия ковфициент подъемной силы С„ = 0,32 и ковфициент лобового сопротивления Сх = 0,007.
Примечание. Подсчет провести, пренебрегая скосом потока. Плотность воздуха р = 1/а.
Ответ: ДФ = 40 кг; ДМ = 22,2 кгм
12. Подсчитать приближенно скос потока (преиебрегая закручиванием и трением) по теории идеального пропеллера для влемента винта предыдущей задачи.
Примечание. Для влемента подсчет ведется точно так же, как и для всего виита. Ковфициент нагрузки на ометаемую площадь нужно подсчитать по формуле
В = —*’Д±_
bFpV* ’
где г — число лопастей винта (в задаче дай двухлопастный виит);
AF = 2го- Дг — площадь кольца, сметаемого злементом.
Ответ: Да = 1°.
13. Вычислить по теории идеального пропеллера к. п. д. т?0 винта .0=3,2 м, если при V = 250 км/час он развивает тягу Ф = 1 000 кг на уровне моря (р == 1/к).
Ответ: х?в = 0,913.
14. Вычислить п0 для винта D = 2,5 м при данных предыдущей задачи.
Ответ: *за = 0,87
I ЛАВА II
КОНСТРУКЦИЯ ВОЗДУШНЫХ винтов
1. ДЕРЕВЯННЫЕ ВЛГТЫ
В течепие ряда лет воздушные винты делались исключительно из дерева. И теперь еще такие винты имеют большое распространение. Объясняется это тем, что дерево хороших сортов во многих отношениях является прекрасным материалом для винтов. Его удельный вес невелик, а механические качества достаточно высоки. Деревянные винты легко обрабатываются, дешевы и легко ремонтируются. Вес их сравнительно невелик.
Материал при работе винта испытывает очень большое напряжение, доходящее до 250—300 ла/сж2; принимая во внимание, что коэфициент крепости дерева наГ разрыв равен 700- -900 кг ,1см2, получаем запас прочности равным всего лишь 2,5—3,0. Вследствие этого для изготовления вип-тов употребляют лишь твердые породы дерева и самых хороших сортов, без каких-либо дефектов в виде сучков, трещин, косослоя, синсзы и т. п. Перед обработкой дерево подвергается искусственной сушке и должно иметь влажность не более 10—12%.
Наилучшими породами дерева для винтов являются а м е-риканский орех и красное дерево; однако, они дороги и редко встречаются. Обычно же применяют более доступные породы, как, например, ясень, клен, дуб, бук и вяз.
Большими недостатками деревянных винтов являются их малая твердость и недостаточная стойкость по отношению к атмосферным влияниям.
В работе винт вращается с очень большим числом оборотов, и скорость конца лопасти достигает-&Ю—300 м[сгк. При
[ 32 ] Ш
Фиг. 17. Склеивание заготовки для впита (цифры указывают номера досок)
таких больших скоростях эффект удара пыли, дождя, града, водяных брызг (на гидросамолете) и т. и. получается очень большим, и вследствие малой твердости дерева поверхность винта изнашивается — становится шероховатой с выбоинами. Шероховатость поверхности винта увеличивает трение лопастей о воздух; в результате потерн мощности на трение возрастают и коэфициент полезного действия винта весьма сильно снижается.
Деревянные винты легко отсыревают и при этом сильно коробятся, т. е. теряют правильность геометрической формы. Коробленые винты вибрируют в работе, и их приходится выбрасывать.
Для уменьшения коробления заготовка для винта склеивается из нескольких тонких досок, так называемых дрок, толщиной не свыше 30 мм; при этом их располагают таким образом, чтобы у соседних досок было стремление коробиться в разные стороны (фиг. 17).
Нередко для экономии винты склеивают дешевой. В этом случае кладут доски, чередуя мягкую и твердую породы. Допускают склейку (сращивание) отдельных досок, как долевую, так и по ширине; при этом следят, чтобы в заготовке винта склеенные доски чередовалпсь с цельными.
Склеивание является самой ответственной операцией при изготовлении винтов, так как от ее совершенства зависит окончательная прочность винта. Применяют как желатиновый (мездровый), так и казеиновые клеи. Смазанные клеем доски сильно сжимают друг с другом струбцинками или в прессе со средним давлением 1,5 кг,'см2 на склеиваемую площадь и выдерживают их так около суток.
После этого заготовка выдерживается еще несколько суток для того, чтобы клей как следует просох.
3 Г. И. Куаьмип [33 ]
из двух пород дерева: дорогой и
После склеивания заготовку опиливают по очертанию винта в плане и затем, обстрагивают ее, придавая нужную форму. Грубая обработка производится на копировальных станках или вручную. После этого винт выдерживается несколько суток, при этом его обычно немного коробит. Затем рассверливается ступица, и после этого производится вручную чистовая обработка, или доводка винта.
Для примерки в процессе изготовления и для окончательной проверки винта применяют продольные шаблоны, дающие форму винта в плане и положение кромок винта по высоте, и поперечные шаблоны, дающие форму поперечных сечений лопастей.
Отклонение от размеров чертежа разрешается следующее: а) в шаге винта±0,2%, б) в диаметре винта ±0,2% при разнице в длине лопастей до 2 мм, в) в толщине лопасти ±2,5% с каждой стороны профиля для тонкой части лопасти и ± 5% для толстой части, если толщина больше 30 мм, г) в высоте ступицы ±2 мм и д) в диаметре отверстия + 6 мм.
Обычно лопасть в ее тонкой части оклеивают полотном для предохранения от раскалывания при мелких повреждениях винта.
После оклейки винт грунтуется, чистится шкуркой, покрывается масляной краской и лакируется. В результате такой обработки лопасти получаются очень гладкими, и лак предохраняет их от атмосферных влияний.
Очень часто лопасти винта оковывают латунными листами толщиной от 0,2 до 0,6 мм. Это делается для предохранения их от повреждений при ударах о траву при разбеге самолета на травянистых аэродромах, о водяные брызги при взлете гидросамолетов, о частицы пыли, капли дождя и т. д. Так как при этом особенно сильно страдает передняя кромка лопасти, то обычно ее только и оковывают. Оковка крепится к винту с помощью шурупов и заклепок, головки которых с обоих концов запаивают оловом. Она должна очень плотно прилегать к дереву, чтобы под нее не попадала вода или масло. Отсутствие воздушных прослоек легко обнаруживается по звуку при простукивании деревянным молотком. Иногда оковка делается не цельной, а секциями. Это особенно необходимо для винтов с тонкими лопастями. В работе они сильно деформируются под действием нагрузки, и цельная оковка дает трещины.
|84]
На ступице каждого винта обычно выбивают название самолета и мотора, которым он предназначен, затем диаметр, номинальный шаг и, наконец, наименование завода изготовителя и очередной номер винта.
На моторе винт укрепляется с помощью втулки (фиг. 18). Втулка 1, составляющая одно целое с фланцем 3, встав-
ляется в отверстие винта, затем накладывается фланец 3, вставляются болты 4 и сильно затягиваются гайками 5 и 6. Для избежания перекоса одновременно затягивают болты, лежащие на одном диаметре фланца. Винт надевается втулкой на носок мотора 7 и закрепляется на нем посредством гайки 8. Гайки 5, 6 и 8 должны быть законтрены.
Несмотря на то, что деревянный винт покрыт довольно толстым слоем лака, он все же со временем отсыревает, если его хранить во влажном воздухе. Поэтому в складах
з*
[85]
винты следует хранить в сухом отапливаемом помещении со средней температурой около 10—12°. Ни в коем случае нельзя винты держать около печей, труб центрального отопления и т. п., так как резкие изменения температуры ведут к короблению винтов. Винты должны быть развеше-
ны на штырях в горизонтальном положении и при земляном поле не ниже 0,5 м от поверхности его. Хранящиеся в складе винты должны раз в две недели обтираться от пыли мягкой сухой тряпкой. Само помещение должно дезинфицироваться раз в шесть месяцев, чтобы не могли
появиться насекомые, могущие повредить дерево.
При пересылке винты укладываются по два —четыре в ящик, обитый изнутри толевым картоном. Винты кладутся
Целлулоидное nokpbunue
Истерия или сетка.
Фиг. 19. Поперечное сечение гопасти винта Шварца с целлулоидным покрытием
на мягкие войлочные прокладки и прочно закрепляются в ящике, чтобы не было ударов друг о друга и о стенки ящика.
На самолете винт должен храниться в горизонтальном положении и обязательно в чехле. После полета в дождь необходимо тщательно вытереть винт мягкой тряпкой. У тех самолетов, которые обычно хранятся под откры-
тым небом, рекомендуется на винт надевать прорезиненные чехлы. Если винт загрязнен,
его следует протереть чистой тряпкой, смоченной в мыльной воде, и затем протереть насухо. Необходимо тщательно следить за лакировкой винта и при обнаружении в ней дефектов возобновлять ее.
Срок службы винта — около 300 час. полета, однако, при внимательном уходе он может быть и большим.
В последние годы получили большое распространение немецкие деревянные винты Шварца с целлулоидным покрытием. Делаются они следующим образом (фиг. 19).
Обработанный винт в зависимости от назначения оклеивается грубой тканью или тонкой стальной сеткой, и передняя кромка обшивается узким латунным листом, который крепится не шурупами и заклепками, как у обычных
[86]
винтов, а бронзовой сеткой, к которой он приварен. Затем винт смазывается клеем и покрывается листовым целлулоидом, размягченным предварительно в атмосфере ацетона. Винт заключают в резиновый мешок и помещают в камеру с давлением от 3 до 6 атмосфер при нормальной температуре. Затем винт высушивается при температуре 50° и после этого окрашивается и лакируется.
При вышеуказанной обработке целлулоидное покрытие вдавливается через материю или сетку в поры дерева, и соединение с деревом получается настолько прочным, что при сдирании слой целлулоида сдирается вместе с волокнами дерева. Целлулоидное покрытие очень твердо и вместе с тем эластично; оно очень хорошо предохраняет винт от атмосферных влияний. Хранение этих винтов просто, и они не требуют такого тщательного ухода, как обычные винты, а срок службы их значительно больше. По литературным данным некоторые такие винты проработали на самолетах более 1000 час. полета. Благодаря жесткости и прочности целлулоидного покрытия винты можно изготовлять из более дешевых сортов дерева и более тонкими, чем обычные деревянные винты.
2. БАЛАНСИРОВКА ВИНТА
Как при изготовлении, так и перед установкой па самолет винт проверяют на балансирном станке — эквили-б р а т о р е. Центр тяжести винта должен находиться строго на оси вращения; отклонение от этого допускают очень небольшое — от 2 до 5 граммометров (гл), в зависимости от быстроходности винта. Это объясняется тем, что при вращении неуравновешенного винта развивается очень большая центробежная сила, действующая в сторону смещения центра тяжести винта от оси. Так как по отношению к винту эта сила направлена в одну и ту ясе сторону, т. е. в сторону смещения центра тяжести, то по отношению к самолету она вращается со скоростью вращения винта и, следовательно, вызывает тряску самолета, расстраивая все его соединения.
Легко подсчитать ту центробежную силу, которая развивается у неуравновешенного винта. Как известно, центробежная сила С груза весом G, вращающегося с угловой скоростью w — 2^n,= на расстоянии г от оси вра
[37]
щения, выражается следующей формулой:
Г G 2
С = — <о2 г,
9
где д = 9,81 м/сек®— ускорение силы тяжести.
При неуравновешенности винта в 5 гм имеем:
Gr — 5 гм.
(52)
При вращении винта со скоростью 2 000 об/мин центробежная сила будет равна:
Gr / т.п \2
5 10-3 (3,14 -2000)2
9,81 ’ 30 —
20 кг.
Как видим, центробежная сила при неуравновешенности винта в 5 гм при п= 2 000 об/мин получается очень большая.
Существует несколько типов эквилибраторов. Идея конструкции всех их заключается в том, что винт, укрепленный на валу с центрирующими конусами, может легко поворачиваться с минимальным трением около оси вращения. При точной уравновешенности винт на эквилибраторе остается в равновесии в любом положении, как в горизонтальном, так и в вертикальном. Если же центр тяжести его смешен в сторону от оси, то винт поворачивается, стремясь занять положение с наиболее низким расположением центра тяжести.
На фиг. 20 изображен настенный консольный эквилибратор. Винт, закрепленный в обычной моторной втулке, устанавливается на вал 1 с центрирующими конусами 2 и 3 и зажимается гайкой 4. Вал смонтирован на кронштейне 5 в двух шариковых саморегулирующихся радиальных подшипниках 6 и 7. Кронштейн крепится к стене с помощью болтов 8. Штанга 9 с подвижной стрелкой 10 служит для проверки пути лопасти при провертывании винта.
На фиг. 21 изображен колесный эквилибратор. Винт крепится на длинном валу с центрирующими конусами и кладется этим валом на две пары колес, поставленных на колоннах. Колеса поставлены на шариковых подшипниках. Концы вала винта, а также и поверхности колес в местах их соприкосновения с валом должны быть тщательно отшлифованы и должны иметь ровную твердую
Г 38 J
Фм. 20. Настенный консольный эквплибратор
поверхность, иначе чувствительность эквилибратора будет недостаточной.
На фпг.22 изображен эквилибратор.с ножами. Вал
винта устанавливается своими концами на два горизонтально
поставленные в одной плоскости ножа с закругленными остриями. Винт катается по ножам с очень малым трением, и чувствительность этого эквилибратора значительно выше, чем консольного и колесного. Обычно вместо ножей применяют круглые валики с точно обработанной (шлифованной) поверхностью.
Небольшую неуравновешенность винта можно устранить подкладыванием шайб под болты втулки со стороны более легкой
Фиг. 21. Колесный эквилибратор
лопасти или нанесением дополнительных мазков лака на более легкую лопасть.
Дерево — весьма неоднородный материал. Поэтому в процессе изготовления винта приходится все время следить за тем, чтобы он получился уравновешенным. Перед склейкой заготовки каждую доску выверяют на эквилибраторе и для заготовки подбирают их так, чтобы тяжелые и легкие концы чередовались, а не попадали на одну лопасть. При обработке лопасти вчистую, балансировка винта достигается подстружкой более тяжелой лопасти, но так, чтобы не нарушилась заданная форма винта. Окончательная балансировка винта достигается при лакировке нанесением более толстого слоя лака на более легкую лопасть.
Нужно иметь в виду, что такая статическая балансировка винта не обеспечивает спокойной работы его на моторе. Если центры тяжести лопастей не лежат в одной плоскости, перпендикулярной оси вращения, как это изображено на фиг. 23, то центробежные силы будут действовать с эксцентриситетом, и в работе такой винт будет трястп самолет. Центробежная сила лопасти достигает 20 000 — 30 000 кг, и даже при эксцентриситете /г = 1 jwai получается очень боль
Фиг. 22. ЗЕвилиб ратор с ножами или валиками
I 40]
шой момент 20—30 кгм, существенно изгибающий вал. Статическая балансировка винта на эквилибраторе не. дает возможности проверите правильность расположения центров тяжести лопастей в направлении оси винта, динамическая же балансировка возможна только на моторе.
В качестве косвенного контроля правильного расположе
ния центров тяжести вдоль оси вращения является, с од-
Фиг. 23. Расположение центров тяжести лопастей винта не в одной плоскости
ной стороны, точное соответствие размеров лопастей и контроль за однородностью материала и, с другой стороны, проверка пути лопастей, называемая часто проверкой биения. Вращая винт на моторе или на эквилибраторе, следят за тем, одинаков ли путь каждой лопасти; если путь лопастей разный, то винт в работе будет бить. Нужно проверить посадку его на втулку и
постараться выправить путь лопастей прокладками, вырезанными из латуни под несколько болтов. Если путь лопастей не удается выправить, то впит нужно считать негодным.
Расхождение в пути лопастей допускается не более 0,5 мм для быстроходных винтов и не
Фиг. 21. Проверка пути лопастей
более 1 мм для винтов с малым числом оборотов. Проверяется оно следующим образом.
Самолет жестко закрепляется на подставках, и вблизи винта ставится козелок, на который кладется линейка, подходящая вплотную к кромке лопасти (фиг. 24). Вращая винт, следят за тем, как проходит около линейки вторая лопасть.
На консольном и колесном эквплибраторах для проверки пути имеется специальная штанга с подвижной стрелкой.
|41]
3. МЕТАЛЛИЧЕСКИЕ ВИНТЫ
Недостатки дерева как материала для винтов все время служили побудительной причиной для перехода к металлическим винтам. Даже в первые годы развития авиации наиболее распространенными были металлические винты. Однако, их конструкция и материал были неудачными, и вследствие этого винты были очень непрочными.
Лишь в последние годы удалось выработать настолько
совершенные металлические винты, что они стали вытес-
нять деревянные. Преимуществом их является стойкость по отношению к атмосферным влияниям, долгий срок
Фиг. 25. Винты Рида: а — со съемной ступицей, б — цельный
службы и несколько лучший коэфициент полезного действия вследствие того, что их лопасти тоньше, чем у деревянных винтов.
В течение ряда лет большим успехом
пользовались метал-
лические винты,
предложенные американцем Ридом (фиг. 25). Они изготовлялись из прокатанной дюралюминиевой пластины, обработанной в форме лопасти и закрученной до нужного шага. Лопасти этих винтов делались очень тонкими и в работе сильно изгибались под действием нагрузок и занимали такое положение, что материал испытывал, главным образом, растяжение. Хотя дюралюминий — материал однородный, однако, вследствие различной механической обработки имеется небольшое расхождение в механических качествах различных лопастей. При эксплоатации лопасти винта деформируются несколько различно. Вследствие этого в работе винт получается динамически неуравновешенным, что отмечается сильным шумом, издаваемым винтом при вращении (от вибрации лопастей).
Ступица винтов Рида обычно делалась приставной, из двух половинок, изготовленных из дерева или легкого сплава, втулка же бралась стандартная, та же, что и для деревянных винтов.
Существовала и другая разновидность винтов Рида, в которой ступица винта составляла одно целое с лопастями.
142]
Такие винты делались из откованной болванки и выглядели очень похожими на деревянные винты, только ступица их была меньшей. Для таких винтов требовалась специальная втулка.
Дальнейшим развитием конструкции металлических винтов являются винты, предложенные американской фирмой „Стандарт Стил Пропеллер", с вставными лопастями (фиг. 26). Эти винты имеют в настоящее время очень большое распространение. Их с небольшими изменениями изготовляют все страны с развитой авиационной промышленностью.
Винты с вставными лопастями значительно дешевле в серийном производстве и удобнее в эксплоатацпи. В случае порчи одной из лопастей можно сменить только ее
Ф,га. 20. Винт Стандарт Стил Пропеллер со съемными лопастный
одну. Из одних и тех же лопастей можно скомплектовать винты для различных, близких по типу самолетов, нужно только укрепить лопасти во втулке под соответствующим углом.
На одном и том же самолете можно изменить установку лопастей на другой угол в соответствии с нагрузкой самолета, атмосферными условиями и желаемым наивыгоднейшим режимом полета. Например, если требуется взлететь с небольшой площадки, то можно уменьшить угол установки лопастей и дать возможность мотору при взлете развить большое число оборотов, а следовательно, большую мощность. Вследствие этого самолет быстрее наберет нужную для взлета скорость и разбег его будет меньшим. Конечно, максимальная скорость горизонтального полета самолета будет меньшей, так как при этой установке лопастей в горизонтальном полете нужно будет дросселировать мотор, иначе число оборотов чрезмерно возрастет.
Изготавливаются лопасти следующим образом. Заготовка сперва штампуется, чем ей придается вчерне форма лопасти. Затем она закаливается и правится. Следующей операцией является обточка корневого конца лопасти. Далее винт поступает на копировально-фрезерный станок, где его сечениям придается правильная крылообразная форма. Окончательная доводка винта производится вручную перенос-
Е43]
кыми фрезами, карборундовыми и наждачными кругами, после чего лопасть отполировывается наждаком. Последние операции сопровождаются многочисленными проверками по шаблонам и балансировками. Для получения взаимозаменяемости лопастей пх приходится более точно изготавливать и очень тщательно балансировать на точном эквилибраторе по эталонной лопасти.
Лопасти Изготавливают из обычного дюралюминия, состав которого следующий: меди от 3,5 до 4,0%, магния от 0,5 до 1,7%, марганца 0,5% и остальное — алюминий. После закалки и искусственного старения он имеет временное сопротивление 36—40 кг/мм2, удлинение от 18 до 25%, предел усталости 10—11 кг/мм2, модуль упругости 7 000 кг]мм2. Удельный вес дюралюминия — 2,8.
Наиболее трудной операцией при изготовлении Дюралюминиевых винтов является их термическая обработка. Нагрев при завалке лежит обычно в оченй узких пределах от 490 до 510°), при нагреве выше 510° металл может быть испорчен. Нагревают лопасти в особых печах или в соляных ваннах, причем температуру наблюдают по ряду пирометров, расположенных в разных местах по длине лопасти. Лишь после длительного нагрева металл прогревается равномерно во всю толщину. Однако, длительный нагрев в соляной ванне может повести к разъеданию лопасти, поэтому многие фирмы применяют газовые или электрические печи. Такие печи устраиваются иногда опрокидывающимися, и нагретый винт падает тогда прямо из печи в водяную закалочную ванну.
При обработке болванок ковкой и штамповкой их отжигают при 3f,o—380° в течение нескольких часов. После этого дюралюминий куется очень хорошо.
Искусственное старение закаленного винта сводится в большинстве случаев к длительному нагреву при температуре 137—19о° в печи, подогреваемой змеевиком с перегретым паром, или же в печах с электрическим подогревом. И здесь важно обеспечить равномерность нагрева винта в течение всей операции, длящейся от 6 до 8 час.
Дюралюминий легко корродирует (разъедается), поэтому необходимо Позаботиться о предохранении винта от коррозии. Для этого применялись различные способы. Наиболее простой способ защиты дюралюминия путем покрытия различными специальными лаками и красками ненадежен вследствие плохого сцепления их с металлом; такие покры
(44]
тия быстро смываются воздухом. Более надежной является
металлизация поверхности винта чистым алюминием, пинком или кадмием. Однако, практика показала, что проще и лучше всего можно избежать коррозии надлежащим уходом за винтом.
Необходимо все время следить за исправным состоянием полировки поверхности лопасти, в особенности ее передней кромки. При наличии в ней малейших углублений или царапин лопасть очень быстро разъедается, и эти углубле
ния при полете в дождь обращаются в глубокие раковины. Это особенно опасно у морских самолетов, так как брызги морской воды могут после двух-трех взлетов привести винт в полную негодность.
Для заделки таких царапин лопасти зачищают бархатными напильниками и полируют тонкой наждачной шкуркой и крокусом. Если разъедание сильное и приходится снимать много материала, то необходимо тщательно проконтролиро-
Фие. 27. Крепление лопасти на нарезке
вать, что исправление
всех лопастей сделано одинаково, и проверить балансировку.
У первых винтов с вставными лопастями последние ввин-
чивались в стальную втулку и их поворот удерживался затем посредством клиновидного кольца, зажимаемого между лопастью и стенкой втулки с помощью специальной кольцевой гайки (фиг. 27). Чтобы избежать возникновения больших местных напряжений, нарезка на корне лопасти должна быть точно пригнана к нарезке втулки. Это кроме производственных трудностей и дороговизны ведет также к неприятностям в эксплоатации, так как небольшое загрязнение нарезки вызывает заедание: лопасть очень трудно провернуть во втулке.
Более удачно крепление лопасти разрешается с помощью одного или двух заплечиков (буртиков), которые и
[4&J
воспринимают центробежную силу лопасти. Втулка делается разъемной по плоскости, перпендикулярной оси вращения винта, и ее половинки стягиваются в середине зажимной гайкой, крепящей винт на валу мотора, а по краям хомутами (фиг. 28). В этом случае изменение шага и замена лопастей значительно облегчаются.
В качестве стандартной у нас принята конструкция с двумя заплечиками; для нее разработана серия стандарт-
Фиг. 28. Лопасти и втулки металлических винтов Стандарт Стил Пропеллер
ных корней для лопастей различных размеров (фиг. 29). Конец вала мотора, втулка и стяжные хомуты также за-стандартизированы. Это уменьшает число необходимых штампов и удешевляет производство.
Корпус втулки и стяжные хомуты изготовляются штамповкой с последующей обточкой из высокосортных сталей с большим удлинением. Обычно применяют хромованадие-вую или хромомолибденовую сталь, термически обработанную до 90—100 кг [мм2.
В последнее время во многих странах разрабатывается производство электронных винтов. Электрон — это магниевый сплав, состоящий примерно из 96% магния, около 4% алюминия и 0,4% марганца. Этот сплав магния после
[«]
А В С Е D F G К d L F смятия 1-го запмч. F разрыва F среза 1-го запдеч, |
допуски С8 допуски С3 допуски л3
65-0,060 75-о,обо 56 14 17+0,035 45 63 2 15 72 14,734 22,863 27,26
8О.о,обО 92-0,070 70 18 21+0,045 60 83 3 18 95 19,674 35,940 42,88
9541,070 110-0,070 84 22 25+0,045 70 100 4 20 110 26,837 52,274 62,00
105-0,070 1 20-0,070 92 24 27+0,045 75 110 4 22 120 32,680 62,675 73,70
(106,4-0,070) 117,5-0,070 93,8 22,2 27 +0,045 68,5 106,7 4 25 125 24,885 64,194 72,36
115-0,070 130-0,080 100 26 30+0,045 80 125 4 24 130 43,173 74,016 87,96
(122-o.oso) 132-0,080 105 27 33 +0,050 90 135 4 26 150 41,469 81,281 98,96
125-0,080 142.о,о8о 109 28 32+0,050 85 130 4 26 140 55,347 88,004 102,73
135-0,080 155-0,080 118 30 35+0,050 90 135 5 28 145 57,585 103,202 120,48
145.о,о8о 167-0,080 127 32 38 +0,050 100 150 5 30 160 69,013 119,608 139,64
Фиг. 2У. Корневая часть лопасти металлического винта
[47]
штамповки обладает приблизительно следующими механическими свойствами:
Разрушающее напряжение..................28 иг/.мч2
Предел усталости , . ..................7,8 „
Модуль упругости..................... . ЗБОО—4 200 кг лш2
Удлинение ........................... 15—^0%
Удельный вес........................... . 1,8
Эти значения, хотя и ниже тех, которые имеет дюралюминий, тем не менее, благодаря пониженному удельному весу магния достаточно высоки и представляют возможность заметно уменьшить вес винта. При разработке конструкции таких винтов необходимо иметь в виду, что электрон не любит резких переходов в сечениях,—в таких местах возникают большие местные напряжения, ведущие к поломке винта.
Чрезвычайно большим недостатком электронных винтов является склонность их к коррозии. Это создает главное препятствие в применении электронных винтов. Правда, тщательная очистка металла и добавление различных составляющих, а также и различные предохранительные меры повышают сопротивление сплава коррозии. К числу последних относится погружение лопастей на 10 мин. в нейтральный раствор фосфорнокислого магния при температуре около 80°. Это дает существенную защиту, к которой с успехом может быть добавлено покрытие двумя-тремя слоями специального лака или эмали. Винт необходимо вытирать маслом каждый день или после каждого полета. Эти меры, повидимому, сделают электронные винты годными к применению в сухопутной авиации, но их применение в гидроавиации находится под сомнением из-за сильного разъедающего действия соленой воды.
Много попыток было сделано в изготовлении винтов пз других материалов, например, из пластмасс, и полых винтов ферменного типа, например, винты Хава, однако, большим успехом они не пользовались. Много внимания было уделено также созданию полых стальных винтов, сваренных из двух частей по форме лопасти или отштампованных из труб переменного диаметра и толщины. И эти винты еще недостаточно освоены.
4. ВИНТЫ РЕГУЛИРУЕМОГО ШАГА
Проблема наиболее эффективного использования мощности современных высотных авиационных моторов на всех
[48]
режимах полета привела г развитию и применению винтов регулируемого в полете шага. Нормальный винт с жестко закрепленными лопастями имеет обычно такой шаг, при котором мотор развивает максимально допустимое число оборотов при полностью открытом дросселе в горизонтальном полете на одной какой-либо определенной высоте. Такой винт в момент разбега самолета на земле уменьшает число оборотов мотора на 20—25% от максимального и соответственно снижает приблизительно на столько же процентов используемую мощность мотора. Иными словами, мотор мощностью 500 л. с. сможет отдать при этих условиях только 375—400 л. с., и вследствие этого взлет самолета затрудняется. Далее, при наборе высоты этот винт будет опять-таки снижать число оборотов на 10—15% против максимального, используя только 425—450 л. с. из 500 возможных; в результате скороподъемность самолета ухудшится.
Всех этих потерь в мощности можно избежать, применяя винты регулируемого шага. Лопасти их закрепляются во втулке на опорных роликовых или шариковых подшипниках и с помощью сцециального механизма могут быть повернуты около их осей.
Такой винт устанавливается при взлете на малый шаг, позволяя мотору развивать полную мощность. При наборе высоты шаг винта несколько увеличивается, и, наконец, при горизонтальном полете шаг устанавливается в соответствии со скоростью полета. При этом регулированием шага винта и регулированием питания мотора можно установить в полете наиболее выгодный режим работы винтомоторной группы в отношении расхода горючего на километр пути и этим увеличить экономичность и дальность полета. В случае нормального винта фиксированного (неизменного) шага эти возможности ограничены, так как регулирование мотора односторонне, оно проводится только дросселированием мотора.
Особенно большие выгоды применения винтов регулируемого шага получаются у самолетов с высотными моторами, снабженными мощными нагнетателями. В этих случаях нормальный винт фиксированного шага, подобранный для использования полной мощности мотора при горизонтальном полете на предельной высоте, будет весьма заметно снижать число оборотов мотора, а следовательно, и мощность, при взлете и подъеме самолета на малых высотах.
4 Г. II. Кузькин
[49]
Кроме того, и коэфициент полезного действия винта будет при этом весьма низким. В результате взлет и подъем самолета будут весьма затяжными и неприятными. Трудность взлета и подъема особенно велика для гидросамолетов в плохую погоду, а для сухопутных самолетов—при взлете в высокогорных местностях. В этих случаях применение
винта регулируемого шага позволяет сочетать выгоды вы-
сотных моторов с удовлетворительным взлетом.
Наконец, для скоростных самолетов применение винтов регулируемого шага неизбежно. При больших скоростях
Фиг. 30. Схема винта с механической регулировкой шага посредством системы рычагов силой летчика
приходилось у основания
требуется чрезвычайно большой шаг винта. При взлете самолета с винтом такого большого шага помимо большой потери в мощности мотора имеем и значительное снижение коэфициента полезного действия винта (на треть, а то и на половину). Такой самолет или вовсе не взлетит, или его взлет будет весьма затяжным и потребует чрезвычайно большого аэродрома.
Вот почему винты регулируемого шага получили весьма большое распространение.
Винты с механической регулировкой шага. У первых винтов регулируемого шага поворот лопастей в полете осуществлялся посредством системы рычагов (фиг. 30) силой летчика. Для поворота лопастей требовалась значительная сила. Чтобы уменьшить ее, астей делать противовесы так,
чтобы их центробежная сила давала относительно оси поворота лопастей момент, обратный тому, который получается от аэродинамических и центробежных сил лопасти.
Дополнительный вес и лобовое сопротивление противовесов, а также неизбежные значительные люфты в рычажной передаче от летчика к лопасти — вот крупные недостатки такой схемы. К этому нужно добавить и довольно
[50J
значительное время, которое летчик должен уделять перестановке шага.
В дальнейшем сила летчика для поворота лопастей была заменена силой самого мотора. Путем использования механических тормозов и системы зубчатых передач заставили сам мотор поворачивать лопасти в нужном направлении. Однако, такая схема оказалась очень сложной, мало надежной и недостаточно удовлетворительной в отношении удобства и точности перемены шага. Ее действие бывало часто слишком быстрым и неточным, так что летчику при-
Фиа. 31. Винт системы Смита с механической регулировкой шага от мотора
ходилось несколько раз менять шаг, чтобы добиться нужной перестановки.
Интересным типом винта с механической регулировкой шага является винт Смита, успешно применяющийся на воздушных линиях, в армии и во флоте СИТА. Он состоит из стальных полых лопастей Дикса, закрепленных во втулке с цельным (неразъемным) каркасом посредством многорядных шариковых подшипников, как показано на фиг. 31. Полые лопасти сварной конструкции сделаны из термически обработанной хромованадиевой стали. Снаружи лопасти кадмированы и внутри тоже защищены от коррозии. Поворот лопастей во втулке может быть осуществлен летчиком в полете на любой желаемый угол.
Механизм для поворота лопастей состоит из трех основных частей: устанавливаемого в кабине пилота рычага
4"
[61J
с приводом, прикрепленного к картеру мотора диска с выдвижной муфтой и системы червяков и шестерен, помещенных внутри втулки винта. Неподвижный диск (фиг. 31) заменяет крышку упорного шарикового подшипника мотора и крепится на болтах к передней части картера. На этом неподвпжнрм диске смонтирована муфта, которая с помощью особого приспособления под действием привода от рычага, помещенного в кабине, может выдвигаться вперед или втягиваться назад, внутрь основания. Муфта на своей внешней поверхности имеет по краям червячную резьбу:
Фиг. 32. Схема червячной передачи випта Смита
левую на переднем конце и правую на заднем. Средняя часть муфты резьбы не имеет. Муфта не вращается, она свободно входит во втулку винта и при нейтральном положении рычага ни с какими движущимися частями не соприкасается.
Операция поворота лопастей совершается летчиком с помощью находящегося в кабине рычага следующим образом.
Для увеличения шага рычаг передвигается вперед до своего крайнего положения, приблизительно на 25 мм. При этом муфта также выдвигается вперед и своей правой резьбой сочленяется с главной шестерней во втулке (фиг. 32). Главная шестерня вращается вместе с винтом и, скользя по резьбе на муфте, поворачивается силой мо
[ 52)
тора на некоторый угол и через систему червяков и шестерен поворачивает лопасти винта. Общее передаточное число в системе равно 1:18 000. Таким образом, скорость поворота лопастей зависит от скорости вращения винта. Лопасти поворачиваются на 1° в 2 сек. при вращении винта со скоростью 1 700 об/мин.
При установке рычага в заднее крайнее положение муфта втягивается назад и соприкасается с главной шестерной во втулке своей передней, т. е. левой, резьбой, тем самым поворачивая лопасти в обратном направлении.
При нейтральном положении рычага главная шестерня втулки проходит между правой и левой резьбами муфты, не соприкасаясь с последней, и лопасти винта сохраняют занятое положение. Таким образом, механизм работает только в момент изменения шага винта.
Для предотвращения возможности поворота лопастей на чрезмерно большой или чрезмерно малый угол винт Смита имеет ограничитель диапазона изменения угла, смонтированный внутри вала ведущей шестерни. Как только какой-либо предел изменения угла установки лопастей будет достигнут, механизм для поворота лопастей автоматически выключается продольным движением специальной муфты. Диапазон изменения угла установки лопастей может быть изменен на земле. Снимать для этого винт с мотора не требуется.
Винты этого типа большого распространения не получили вследствие большого износа механизма включения, а также, повидимому, и недостаточной надежности сварных стальных лопастей.
По такому же типу строит винты французская фирма Гн о м-Р он (фиг. 33] с дюралюминиевыми лопастями и с измененным механизмом включения.
Винты Гном-Рон при работающем моторе допускают изменение угла наклона лопастей до 110°^
Коэфициент редукции механизма винта 1:24 000. Основные элементы конструкции винта следующие:
В стальной втулке 1 монтируются лопасти 2 и центрируются на штырях втулки вкладышами 3 и 4, запрессованными в лопасти. Лопасти устанавливаются и удерживаются кольцевыми гайками5 через роликовый подшипник 6. Зазоры между кольцевыми гайками и лопастями закрываются уплотняющим приспособлением 7, состоящим из гайки с фланцем на конце, манжеты с коническим отворотом
Г 53]
и упругой прокладки между ними. На корнях лопастей укреплены бронзовые червячные шестерни 8. находящиеся в зацеплении с червяками 9, установленными на шарикоподшипниках 10. На концах червяков насажены червячные
зубчатки 11, находящиеся в зацеплении с другими червяками 12, которые приводятся во вращательное движение двумя кольцевыми спиралями 13 и 14: одна из них вызывает увеличение, а другая — уменьшение шага винта. Промежуточное зубчатое колесо 19 сообщает спиралям вза
[54]
имно противоположное осевое перемещение. Внешняя спираль 13 перемещается вперед с помощью вилки 15, качающейся на оси 16 штифтом 17. В это время спираль приходит в зацепление с червячным колесом 14, сидящим на червяке 12. В тот момент, когда лопасти встанут на нужный угол, летчик отпускает рукоятку, и механизм приходит в нейтральное положение с помощью стопора 18.
Эти винты находятся еще в стадии опытов.
Винты с гидравличемсой регулировкой шага. Часто используется для поворота лопастей гидравлический привод. Помещая в непосредственной близости к лопастям гидравлический цилиндр с поршнем, можно давлением масла от помпы создать силу, необходимую для поворота лопастей.
За последние годы разработан ряд удачных конструкций с таким гидравлическим регулированием шага. Одними из первых и удачных являются английские винты Глостер-Хил-Шоа-Вичем. Отличительной особенностью их является автоматичность регулирования шага, контролируемая летчиком.
У винтов этого типа поворот лопастей осуществляется гидравлическим цилиндром с поршнем двойного действия (фиг. 34). Поршень закреплен неподвижно, а цилиндр может перемещаться вдоль оси вала винта. Он приводится в движение давлением масла от специальной помпа с регулируемым ходом, работающей от мотора. Ход поршня управляется центробежным регулятором (фиг. 34), приводимым в движение также мотором. Если по каким-либо причинам число оборотов винта изменилось, то центробежный регулятор действует на помпу так, что давление масла увеличивается с одной стороны поршня и уменьшается — с другой, цилиндр перемещается и поворачивает лопасти в нужном направлении и при этом настолько, чтобы число обооотов винта осталось заданным.
Таким образом, регулировка шага винта полностью автоматическая. В то же время она может быть изменена по воле летчика. Путем воздействия на центробежный регулятор летчик может в полете установить любое желаемое число оборотов и в дальнейшем не следить за регулировкой шага. При любом режиме полета самолета, даже при пикировании с невыключенным мотором, обороты остаются установленные летчиком.
Винты типа Глостер-Хил-Шоа-Бичем достаточно компактны, но вес нх велик. Эти винты еще не вышли из стадии опытов.
[бб|
[56]
й-из. 34. Схема винта Глостер-Хид-Шоа Бичем с автоматической гидравлической регулировкой шага
Большим распространением пользуются американские винты Гамильтон-Стандарт (фиг. 35) с гидравлическим регулированием шага. Сотни таких винтов работали в течение нескольких лет в самых разнообразных условиях на суше и на море, показывая надежность и выносливость. Их конструкция проста и не требует большого ухода.
Фиг. 35. Разрез винта Гамильтон-Стандарт
Вначале эти винты изготовлялись такими, что в полете лопасти можно было устанавливать только при двух значениях шага. Лопасти винтов — дюралюминиевые с одним заплечиком. Они изготовляются полыми до половины со стороны корня. Механизм, поворачивающий лопасти, устроен следующим образом:
t 57 3
В нижней передней пасти картера мотора устанавливается трехходовой кран с управлением от пилота. Этот кран связан, с общей смазкой мотора, с картером мотора и с коллекторным кольцом, охватывающим шейку коленчатого вала. Через отверстия в последнем коллекторное кольцо связано с трубкой, проведенной внутри носка коленчатого вала. Другой конец трубки соединяется с цилиндром, скользящим по поршню, укрепленному в передней части втулки винта. Этот цилиндр имеет на наружной стороне пальцы, скользящие в дугообразных прорезах цилиндрических противовесов (фиг. 35). Противовесы в свою очередь соединены каждый со своей лопастью.
Схема работы механизма следующая. Для того чтобы уменьшить шаг винта, летчик ставит рукоятку привода в положение, при котором кран соединяет систему смазки мотора со втулкой винта. Масло под давлением поступает по трубке, идущей внутри коленчатого вала, в гидравлический цилиндр. Наполняя последний, масло выталкивает его вперед, причем пальцы цилиндра скользят вперед по дугообразным вырезам противовесов, поворачивая их, а значит, и связанные с ними лопасти винта, на некоторый угол. До тех пор, пока кран будет оставлен в этом положении, лопасти будут сохранять занятый угол.
Для увеличения шага винта летчик переводит кран в положение, при котором масло может свободно вытекать из втулки винта в картер мотора. Тогда противовесы, стремящиеся под влиянием центробежной силы удалиться от центра вращения, вытеснят масло из цилиндра и повернут лопасти в первоначальное положение.
Для ограничения угла поворота служат стопоры, вставленные в противовесы (фиг. 36). Они состоят из болтов с двумя гайками по концам, в которые при движении упираются выступы пальцев цилиндра. Эти гайки могут быть установлены на любое начальное и конечное положение хода поршня. Однако, полный диапазон изменения угла атаки лопастей не может превышать 6—10° в зависимости от конструкции втулки.
Способ соединения противовесов с корнями лопастей (фиг. 37) позволяет изменять относительный угол между ними с точностью до 1°. Это достигается тем, что кольцо противовеса, окружающее корень лопасти, имеет на внутренней поверхности 40 полукруглых вырезов, в то время как основание шейки имеет только 36 таких вырезов.
[68]
[59]
Физ. 36. Csc ш кивплепня допасти винта Гамлвдоп-Стандарт
Четыре пары вырезов всегда одновременно совпадают под углом в 9С° друг к другу. В эти отверстия и вставляются
закрепляющие шпильки.
Втулка винта откована из термически обработанной хромомолибденовой стали и состоит из двух разъемных частей, стянутых болтами. Система радиальных и упорных подшипников обеспечивает легкость поворота лопасти при соблюдении необходимой прочно-
Фиг. 37. Схема установки леса с тей винта Гамильтон-Стандарт
сти и жесткости винта в целом.
Для предотвращения утечки масла из цилиндра наружу кольцо вокруг поршня снабжено кожаными сальниками.
Одним из недостатков винтов этого типа является наличие только двух крайних положений — малого и большого шага, что ограничивает точный подбор шага в соответствии с режимом полета.
Другим недостатком является опасность загустевания масла во втулке винта при низких температурах.
Общий вес двухлопастного винта диаметром 3 — 3,5 м колеблется в пределах 90—120 кг.
Наиболее важными режимами
полета пассажирского самолета являются взлет и крейсирование. Малый шаг для взлета и большой шаг для крейсерской скорости — вот что необходимо для него. Поэтому винты Гамильтон-Стандарт двухшагового типа получили очень большое распространение на пассажирских само-
летах.
В последние годы фирма Гамильтон-Стандарт увеличила диапазон изменения шага винта до 20° и поставила па
моторы очень компактные специальные помпы с центробежными регуляторами. Это позволило сделать винты автоматически устанавливающими постоянное число оборотов при всех режимах полета самолета. Летчик может воздействовать па регулятор и тем самым изменять число оборотов.
Винты с электрической регулировкой шага. Очень хорошие результаты получаются и с электрической регули
[ 60 ]
ровкой шага, как, например, у винтов Тернбул, разработка которых производится фирмой Кертис (фиг. 38).
В 1931 г. фирма Кертис выпустила серию двухлопастных и трехлопастных винтов регулируемого шага. Винты этой серии были предназначены для моторов мощностью от 200 л. с. как с редукторами, так и без них. Образцы каждого типа этих винтов успешно выдержали испытание на станке при 100% перегрузке по мощности. Большое количество винтов этой серии установлено на двухмоторных транспортных самолетах Кертис-Райта, Кондор Т-32.
Фт. 38. Разрез треыопастного винта Кертис:
1—электромотор; 2—редуктзр; 3—’спирать ная пр угнана; 4—ведущая шестерня; 5—шестерня лопасти; 6—упорный подшипник; 7—радиальный подшипник; 8—кольцо коллектора; 0—щетка коллектора; 10— мотор;
11—трубка провод)в
Винт Кертис-Тернбул состоит из дюралюминиевых лопастей, скрепленных во втулке из термически обработанной хромомолибденовой стали. Корни лопастей имеют заплечики для упорных шариковых подшипников, воспринимающих центробежную силу лопасти. Изгибающие моменты от аэродинамических сил воспринимаются не только упорными подшипниками» но и другими направляющими лопасти подшипниками, помещенными на внутренних концах корневых частей. При такой системе крепления лопасти не защемляются во втулке, и поворот их осуществляется легко.
Поворот лопасти не имеет ограничений и может быть совершен в пределах от 0,5 до 360°. Пилот в любое время
t ci ]
знает положение лопастей в данный момент с точностью до 0,5°. Установка желаемого шага производится автоматически.
Конструкция механизма, поворачивающего лопасти, состоит в следующем. В передней части втулки винта в специальном цилиндрическом кожухе помещен небольшой быстроходный электромотор, ток к которому подводится через систему коллекторных колец и щеток (фиг. 37). Непосредственно с мотором соединен редуктор, замедляющий передачу вращения от мотора к ведущей шестерне в 27 000 раз. Ведущая коническая шестерня сочленяется с шестернями, насаженными на корни лопастей винта. Так как отношение передачи с ведущей шестерни на лопасти равно 4: 3, то полное передаточное число от электромотора к лопасти равно 36 000 или, иными словами, каждые 100 оборотов электромотора поворачивают лопасти винта на 1°. Такое большое передаточное число позволяет применить совсем небольшой электромотор, потребляющим меньше энергии, чем один обычный самолетный посадочный прожектор. Достаточен электромотор в */4 л. с. и 12 в. Питание электромотора производится от общего аккумулятора, устанавливающегося теперь на большинстве пассажирских и военных самолетов для освещения.
Непосредственно у электромотора, в передней его части, расположено регулирующее приспособление, отмечающее каждые 50 оборотов электромотора особым импульсом, посылаемым в прибор, расположенный на панели в пилотской кабине. Так как 1° поворота лопастей соответствует 100 оборотам электромотора, импульс отмечает поворот на каждые 0,5°.
Упомянутый выше установочный прибор имеет размеры стандартного альтиметра или тахометра. Циферблат прибора имеет деления, соответствующие числу градусов поворота лопастей. Две широкие светящиеся стрелки расположены одна над другой. Верхняя (примыкающая к стеклу) стрелка имеет рукоятку на наружной поверхности стекла и служит для установки пилотом желаемого угла лопастей; нижняя (примыкающая к циферблату) показывает угол, установленный на лопастях винта "в данный момент. Эти стрелки связаны между собой с помощью спиральной пружины. Когда стрелки расположены в одной плоскости, т. е. одна над другой, натяжения в пружине нет. Если же верхняя стрелка смещена вправо или влево,
£ 62 3
то пружина будет стремиться повернуть нижпюю стрелку до совпадения с верхней. Одновременно натяжение пружины замыкает контакты в цепи, приводящей в движение электромотор, и последний начинает вращаться. Движение нижней стрелки по направлению к верхней регулируется электрическим реле, действующим от импульсов, посылаемых регулирующим прибором. В момент, когда импульс отмечает 50 оборотов мотора, реле передвигает нижнюю стрелку на следующее полуградусное деление. Работа всего механизма будет автоматически продолжаться до тех пор, пока обе стрелки совпадут и контакты разомкнутся.
Следовательно, чтобы изменить положение лопастей на желаемый угол, от пилота требуется только одно короткое движение: установить на этот угол движок на приборе.
Время, потребное на изменение угла в пределах нескольких градусов, измеряется секундами. Один установочный прибор может быть соединен с несколькими винтами, тем самым синхронизируя изменение их шага.
Одним из преимуществ этого винта перед другими является возможность поворота лопастей на любой угол вплоть до 360°. Это качество позволяет в случае аварии одного из моторов на многомоторном самолете уменьшить сопротивление остановленного винта, повернув его лопасти параллельно плоскости потока. Опыты, проведенные на двухмоторном самолете, показали, что подобный поворот лопастей на остановленном моторе увеличил и скорость и потолок самолета по сравнению с самолетом, у которого винт оставлен в установленном для полета положении.
Винты такого же типа, но несколько отличной конструкции, изготовляются во Франции фирмой Ратье.
ГЛАВА III
ХАРАКТЕРИСТИКИ ВИНТОВ
1. ИСПЫТАНИЕ ВИНТОВ
Изучению работы винта всегда придавалось очень большое значение и уделялось много внимания. Это и понятно, так как винт является движителем самолета и от его совершенства зависят летные качества самолета. Поскольку теория работы винта очень сложна и не может охватить всего явления точным анализом, большую роль играет опыт.
Вначале вследствие отсутствия подходящей аппаратуры испытания винтов были весьма элементарными. Обычно ограничивались испытаниями винта на самолете при р а-б оте на месте, т. е. без осевой скорости.
Самолет одним колесом устанавливался на обычные десятичные весы, а под другое колесо и под костыль подкладывались доски для выравнивания его и уменьшения трения о землю. Самолет привязывался к пружинному динамометру, прикрепленному к столбу. Динамометром измерялась тяга винта, а весами — разность давлений на колесо при работающем и при остановленном моторе. Разность этих давлений q, умноженная на расстояние между колесами I, дает момент винта
М = ql (53)
Этот момент стремится опрокинуть самолет в сторону, противоположную направлению вращения винта.
Зная момент и число оборотов, можно по формуле (4) вычислить мощность винта:
[64]
Однако, на самолете винт работает на месте только пр я пробе мотора перед полетом и в момент трогания с места при разбеге. Эти режимы не являются характерными, и поэтому всегда стремились изучать винты в полетных у с л о в и я х.
При испытании в полете винт и мотор соединяются с помощью особой динамометрической втулки, позволяющей измерять тягу и вращающий момент. Н инструкция таких втулок получается очень сложной и точность измерения небольшой.
Наиболее точные результаты получаются при испытании винтов в лабораториях, где измерения производятся в бо-
фиг. 39. Схема испытания винта в аэродинамической Tpjfie
лее удобной обстановке и более точными приборами. В лаборатории винт устанавливается в трубе (фиг. 39), на специальных весах. Он не имеет поступательной скорости и только вращается, а эффект полета создается потоком воздуха, созданным вентилятором. Явление получается такое же, каким оно представляется летчику на самолете. Скорость потока воздуха в трубе и является для винта скоростью полета.
Винт приводится во вращение помещенным непосредственно за ним специальным быстроходным электромотором с очень малым диаметром. При изучении работы винта на модели самолета электромотор вделывается в фюзеляж или в крыло. В некоторых случаях электромотор помещается вне потока тпубы и мощность подводится к винту с помощью карданной или гидравлической передачи, а при малых мощностях — с помощью гибкого вала.
5 Г. И. Кузьмин [ G5 ]
В современных больших лабораториях имеются гигантские аэродинамические трубы, в которых можно испытывать самолет средних размеров в натуральную величину. В этих случаях винт приводится в движение обычным бензиновым мотором, устанавливаемым на этом самолете
2. ФОРМУЛЫ ПОДОБИЯ
Основными формулами для расчета винтов являются формулы подобия. Они выражают тягу и мощность винта через безразмерные коэфициенты, подобно тому как это
Фиг. 40. Аэродинамические силы соответственных вломентов подобных винтов
метрам Dj и D2:
делается для подъемной силы и лобового сопротивления самолета, и позволяют использовать опыты с моделями винтов в практических расчетах. Выводятся эти формулы для геометрически подобных винтов, работающих при подобных режимах.
Геометрическое подобие двух винтов различных диаметров ©! и Da (фиг. 40) заключается в том, что все линейные размеры этих винтов пропорциональны диаметрам, а соответственные углы равны. Сечения лопастей таких винтов на радиусах тх
и га, пропорциональных дпа-
(54)
и называются соответственными. Углы наклона их одинаковы, а сами сечения подобны, и все их размеры пропорциональны диаметрам 1\ и Р2. Например, ширины лопастей bi и Ь2 относятся, как диаметры и D2, т. е.
^2
(55)
Подобие режимов работы винтов заключается в том, что у соответственных сечений скоростные треугольники подобны.
[6B]
Пусть первый винт диаметром Т\ вращается с числом оборотов nSl при спорости полета Vlt а второй винт диаметром Da — с числом оборотов nS1 при скорости полета V2. Окружные скорости каких-нибудь соответственных сечений, разные
U2 — <1'^П3г Гg, будут, следовательно, принимая во внимание уравнение (54), пропорциональны произведению числа оборотов на диаметр, т. е.
Подобие скоростных треугольников требует пропорциональности скоростей V и U, т. е.
5-^ vt и;
Это соотношение можно заменить согласно уравнению (56) следующим:
Переменив получим: местами средние члены этой пропорции, Vi _ nSi
т. е. ><1 = Ха- (59)
Следовательно, режимы работы винтов будут подобны при условии постоянства относительной поступи.
При подобных режимах работы геометрически подобных винтов мы можем ожидать также кинематического подобия потоков, вызываемых ими, и, следовательно, подобия скоростных четырехугольников для соответственных сечений. Опыт и точные теории подтверждают это предположение. Поэтому при X — const действительные относительные скорости сечений Wi, и Wt, будут составлять одинаковые
5'
[ 67 ]
углы Pi с плоскостью вращения и будут пропорциональны окружным скоростям иг и U2, и следовательно:
Wi, _ nSl Dj
Wi, ~nSiD3‘
(60)
Рассмотрим теперь аэродинамические силы, действующие на элементы лопастей длиной Д гг и Д г3, пропорциональной
диаметрам: Дг, D, г ч Дга~ <61)
площади которых Д,Ч1 = й1Д/1 и Д82 = &аДг2, очевидно, пропорциональны Г/ и Р22, т. е.
Д181 Д2 z ч
Д6’2 D./' (62>
Так как элементы лопастей подобны и относительные скорости одинаково направлены и, следовательно, составляют одинаковые углы с хордами сечений, то полные аэродинамические силы, действующие на элементы, можно выразить следующими формулами:
ДВ1 = Са Д£1Р1П\ 2 и
ДР2 = СаДй3р2П\а, а их отношение — формулой
_ДВк_ Д6’1Р1Ц/1г«
ДВа ~ ASaPaW./-
Принимая во внимание уравнения (60) и (62), получим:
ДВХ _
( }
Силы Д1?х и Дйа составляют одинаковые углы 0 с направлением полета. Поэтому их проекции на направление полета, т. е. силы тяги элементов лопастей ДФХ и ДФа, будут находиться в таком же отношении, как и сами силы ДЙХ и ДВа:
ДФХ _ ДВХ _ р1ОТ„2Р/
Дфа ДВ2 - PaVA4'
[68]
Сила тяги всего винта составляется из силы тяги всех элементов от всех лопастей. Выше мы взяли соответственные элементы произвольно. Поэтому для любых соответственных элементов справедливо соотношение (65), а следовательно, оно справедливо и для всего винта в целом, т. е.
Ф2== рх пе,2 £>!4
Ф2 Pa?42jfV'
(66)
Это соотношение показывает, что при подобных режимах силы тяги геометрически подобных вгттов пропорциональны плотности воздуха, квадрату числа оборотов и диаметру винта в четвертой степени.
Переменив местами средние члены пропорции (66), получим новую пропорцию:
Ф1 _________Фа____
pan„,aDa4 ’
Обозначив это отношение через а и отбросив за ненадобностью индексы,получим формулу подобия для тяги
или
ф = apn,aD\
(68)
Коэфициент а называется коэфициентом тяги вин-т а. Для геометрически подобных винтов он постоянен для данного X.
Формулу подобия для мощности винта найдем таким же путем, как и для тяги.
Проекции полных аэродинамических сил элементов лопастей и Дй2 (фиг. 40) на направление вращения являются силами сопротивления вращению элементов Д(?г и AQ2. Эти силы точно так же, как и силы тяги, пропорциональны полным аэродинамическим силам A_RX и ДН2, и следовательно,
AQa ДЬ*2 р2п82Д24 * }
J69J
Мощности элементов лопастей бТг и Д7'а равны произведению сил сопротивления вращения и Дфа на соответствующие окружные скорости Ut п Vz:
= Д&П, и
ДТа = Д()а 17а.
Их отношение, принимая во внимание уравнения (56) п (68), равно:
__ &Q1U1 Pi п>,в Dj6
ДТ2 “ Д(2аиа ра«в,8Ла» ’
Это отношение имеет место для мощностей каждых соответственных элементов лопастей, и следовательно, в таком же отношении будут находиться суммарные мощности для целых винтов:
__ Pi Щ,8 Dj6 а Ра п‘В -^2°
Следовательно, могцности геометрически подобных винтов при подобных режимах пропорциональны плотности воздуха,f кубу числа оборотов и диаметру винта в пятой степени.
Переменив местами средние члены пропорции (71) и обозначив отношение вновь полученной пропорции через [3, а также отбросив за ненадобностью индексы, получим формулу подобия для мощности:
В = Т — 75 N
г р п3 Z)s pn,3Dd (7“)
или
N — р рп* D'a. (73)
Коэфициент р называется коэфициентом мощности винта. Для геометрически подобных винтов он постоянен для данного X.
3. АЭРОДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА ВИНТА
Коэфициенты аир для геометрически подобных винтов зависят от относительной поступи X. Эта зависимость получается опытным путем. Испытывая винт при различной
[70]
поступи X и измеряя число оборотов, тягу и мощность, а также температуру и давление воздуха для определения его плотности, находят по формулам подобия коэфициен-ты а и ₽:
Ф
в== р?г,«£й’
75 N р и,3 D5
Результаты испытания обычно дают диаграммой аир в зависимости от X (фиг. 41). Такая диаграмма называется нормальной аэродинамической характер и-стикойвинта.
Кривые а и р по X имеют обычно приблизительно одинаковый характер, но сдвинуты одна относительно другой. С увеличением относительной поступи X коэфициенты а и р уменьшаются и при очень большой поступи становятся отрицательными. Это значит, что винт дает не тягу, а сопротивление, и на вращение мощности не требует, а сам вращает вал,—винт работает как ветряной двигатель. Этим режимом иногда пользовались для
Фиг. 41. Нормальная аэродинамическая характеристика винта
заводки мотора, остано-
вившегося в полете. Переведя самолет в крутое планирование, набирали скорость. При достаточно большой ско
рости винт начинал вращаться под действием встречного
потока и раскручивал мотор.
При некоторой относительной поступи винта а = О и винт не дает тяги. Эта поступь называется относительным динамическим шагом и обозначается/^. Поступь, при которой ₽ = 0, называется поступью самовращения. Она всегда несколько больше динамического шага. При этом режиме винт вращается, не получая
171!
<»
от мотора мощности; трение лопастей о воздух компенсируется лобовым сопротивлением винта.
На нормальной аэродинамической характеристике винта обычно наносится и кривая коэфициента полезного действия винта. Его можно вычислить по коэфициентам я, р и к Действительно, согласно определению
ФУ
75N*
Подставив сюда Ф и N согласно формулам подобия (68) и (73), получаем:
я Р и,2 D4 V я V ₽Р«,3СБ ~~$пр или
а к ,
*1 = У (74)
Формула (74) показывает, что для геометрически подобных винтов коэфициент полезного действия, как и коэфи-циенты я и ₽, не зависит от плотности воздуха, числа оборотов и диаметра винта; он зависит только от относительной поступи. Например, винт у земли или в стратосфере будет иметь один и тот же коэфициент полезного действия, если относительная поступь его будет одинакова, но при этом сила тяги и мощность будут, как это следует по формулам подобия (68) и (73), пропорциональны плотности воздуха, и следовательно, в стратосфере они будут значительно меньшими, чем у земли.
Проводившиеся в различных лабораториях проверки формул подобия подтвердили правильность их. Характеристики одного и того же винта, полученные при разных скоростях испытания, совпадают между собой. Такие же результаты получаются и по испытанию геометрически подобных винтов различного диаметра.
Однако, полное совпадение результатов этик испытаний не получается вследствие того, что при этом не обеспечивается полное аэродинамическое подобие. Подробное рассмотрение закона подобия показывает, что на состояние потока, обтекающего винт, влияют вязкость и упругость воздуха, а также и деформации винта.
Теория и опыт показывают, что влияние вязкости воздуха одинаково при одинаковых числах Рейнольдса Ре,
[72]
равных скорости тела, умноженной на какой-нибудь линейный размер его и деленной на кинематическую вязкость воздуха. Для лопасти винта и его модели числа Рейнольдса равны:
V2
где Ьг и Ь2 — ширина соответственных сечений лопасти, Wi, и — относительные скорости их, a vx и va — кинематическая вязкость воздуха. Так как Ьх и Ьа пропорциональны диаметрам и Ра и скорости Ий, и ИД. пропорциональны nsJ\ и n,,Da, а кинематическая вязкость воздуха обычно одинакова, то числа Рейнольдса для модели и натуры пропорциональны n^Dj2 и nSiO22, т. е.
_ пх1\* йса
Равенство чисел Рейнольдса требует равенства и, D2:
ns,Bi2 = п,Д)а2.
Однако, опыты показали, что влияние вязкости сильно изменяется только при сравнительно малых Re. Если размеры моделей винтов и скорости испытания не очень малы, то получается почти полное совпадение их характеристик.
Вторым условием, определяющим точность формул подобия, является подобие деформации винтов. Обычно винты деформируются в работе под действием нагрузок, и шаг их несколько уменьшается. Следовательно, у винта модели и у винта натуры деформации должны быть подобными, иначе во время работы винты не будут геометрически подобными и формулы подобия не смогут применяться. Подробное рассмотрение этого вопроса показывает, что для получения подобия деформаций геометрически подобных винтов, изготовленных из одного и того же материала, необходимо испытать их при одинаковых скоростях, т. е.
= nStT)a.
[73]
4. БЫСТРОХОДНЫЕ ВИНТЫ
Большое влияние на характеристику винта оказывает упругость воздуха, в особенности при больших скоростях конца лопасти.
Фив. 42. Коэфициент р впита при различных скоростях конца лопасти (числа у кривых показывают скорость в частях скорости звука, т. е. числа Бэрстоу Ба)
Опыт показывает, что с увеличением скорости конца
лопасти наступает такой момент, когда работа винта начи-v......................... нает резко ухудшаться. Это
’ 1 । ’ Г““П наступает обычно при скоро
Фчг. 43. Коэфициент полезного действия впита при различных числах Бэрстоу Ва
сти конца лопасти, несколько меньшей скорости звука в воздухе. До этой критической скорости коэфициенты а и р возрастают с увеличением скорости, а коэфициент полезного действия винта при постоянной поступи остается почти неизменным (фиг. 42 и 43). При увеличении скорости за критическую, коэфициент р продолжает возрастать, а коэфициент а начинает уменьшаться, и в результате этого коэфициент полезного действия резко уменьшается. Объясняется это тем,
что при таких больших скоростях обтекание лопастей воздухом резко изменяется.
[74]
У поверхности лопасти вследствие ее кривизны имеются области, где относительная скорость воздуха больше скорости лопасти. При достаточно большой скорости лопасти на ее поверхности появляются области со скоростями, большими звуковой. При таких скоростях в воздухе образуются волны сгущений и разрежений, распространяющиеся подобно звуковым волнам На образование их затрачивается энергия, которая и является источником дополнительных потерь, не имевших места при малых скоростях. Эти явления сопровождаются чрезвычайно сильным и резким шумом, весьма неприятным не только для людей, находящихся на самолете, но и для населения тех мест, над которыми он летит.
Уменьшение коэфициента полезного действия за счет волнового сопротивления получается весьма значительным. Опыты показывают, что у винтов малого шага каждый процент увеличения скорости конца лопасти за критическую ведет к уменьшению коэфициента полезного действия винта приблизительно тоже на 1%. У винтов большого шага уменьшение коэфициента полезного действия н * такое большое, но все же довольно значительное. Приближенно его можно найти по диаграмме, показанной на фиг. 44, где дан поправочный коэфициент К, на который нужно умножить коэфициент полезного действия винта, соответствующий скорости ниже критической. Следовательно, коэфициент полезного действия винта при сверхкритических скоростях равен:
цк = Кт1. (75)
Поправочный коэфициэнт К дан на фиг. 44 для ряда значений X в зависимости от отношения скорости конца лопасти
W = /Va4-(4|,D)a
к критической для данного винта скорости.
Критическая скорость конца лопасти зависит от формы и толщины профиля лопасти. На фиг. 45 дан график, по котопому можно приближенно найти критическую скорость конца лопасти винта. Этот график получен на основании обработки результатов опытов с винтами, имеющими двояковыпуклые сечения. Как показывает опыт, у винтов с плоско-выпуклыми сечениями критическая скорость меньше при-
J75J
w
f.3
. И'
Фиг. 44. Поправочный коэфпциент для tq при сверхкритически! скоростях конца лопасти
близительно на 2%. На фиг. 45 по горизонтали отложены
8
относительные толщины конца лопасти винта с = —, а по
Фиг- 41. Критические числа Гюрстоу для винтов с профилями Кларк-У и ВС-2 в зависимости от относительной толщины лопасти
конца лопасти WK, выраженные в частях скорости звука в воздухе а. Эти числа называются критическими числами Берстоу и обозначаются Вак:
Вак=^. (76)
Как известно из физики, скорость звука в воздухе зависит от температуры: она прямо продор-
[7G1
циональна коршо квадратному из абсолютной температуры (Т = 273-J- ?). При температуре t —15° скорость звука приближенно можно считать равной 340 м/сек (точнее 311 .м/сек). Для любой другой температуры она равна
а = 340
Т 288 ’
(77)
С изменением высоты полета скорость звука изменяется. Так, например, на высоте Н = 10 000 jh, где по стандартной атмосфере температура воздуха равна — 50°, скорость звука равна примерно 300 м/сек.
&. ВЗАИМНОЕ ВЛИЯНИЕ ВИНТА И САМОЛЕТА
В лабораториях час го испытывают винт изолированно от самолета, причем стремятся создать та'кие условия, при которых не было бы посторонних влияний на его работу. Для этого вращение винту дают электромотором очень малого диаметра или же мотор помещают вне потока трубы.
На самолете же условия работы винта другие. Обычно вблизи винта находятся фюзеляж, крылья и другие детали, имеющие довольно большие по сравнению с винтом размеры. Поэтому возникает довольно сильное взаимодействие между винтом и самолетом.
Влияние самолета на винт в основном заключается в изменении скорости потока воздуха в плоскости винта. Винт, помещенный, например, перед фюзеляжем или перед толстым крылом, работает не при скорости полета, а при несколько меньшей скорости, так как фюзеляж тормозит поток перед собой. При расположении винта над крылом винт работает при скорости, большей скорости полета.
Изменение скорости потока воздуха, вызванное самолетом, различно для разных мест плоскости вращения винта. Обычно в расчетах берут среднее для ометаемой винтом площади изменение скорости. Его можно определить при испытании модели самолета по средней скорости Ve воздуха в осевом направлении, в плоскости расположения винта. Обычно V, меньше скорости полета V, и поэтому разность скоростей
А 7= V—F,
£77]
(78)
называют торможением скорости. У винта, расположенного над крылом, торможение будет отрицательным, так как над крылом скорость V, больше скорости полета.
Очевидно, торможение скорости пропорционально скорости полета; его обычно выражают через коэфициент торможения скорости е, равный
Д7
(79)
В расчетах винтов коэфициент торможения скорости фюзеляжем обычно находят по экспериментальной формуле е = 5т]/^’ (79а)
где 8$—площадь миделя фюзеляжа;
°ф — ~Хд6^- — приведенная площадь лобового сопротивления фюзеляжа;
т,
F = —-----сметаемая винтом площадь.
Пренебрегая небольшим влиянием самолета на скорость потока, вызванного винтом, т. е. на скорость подсасывания v и скорость закручивания и, можно считать, что при одном и том же числе оборотов у винта на самолете при скорости полета V и у винта изолированного при скорости V., меньшей скорости полета на величину торможения скорости ДУ, т. е. при скорости
7, =7 —Д7 = 7(1 —е), (80)
углы атаки сечений будут одинаковы (фиг. 46), а следовательно, тяга и мощность их будут равны. Правда, вследствие различного торможения скорости на различных радиусах в действительности получаются только в среднем одинаковые углы атаки, однако, некоторая разница в углах атаки у отдельных сечений не играет большой роли.
С учетом влияния торможения на скорость подсасывания соотношение между скоростями V, и V получается следующим:
[78]
(81)
F= V, (14-е-
Здесь ^„ — идеальный ковфициент полезного действия изолированного винта.
Обычно в расчетах пользуются формулой (81), считая т]в=1, т. е. формулой
7=7, (14-е). (82)
Вследствие того, что у винта на самолете тяга и мощность при скорости полета 7 такие же, как и у изолированного винта при меньшей скорости 7,, коэфп-циент
, ФУ
Т| ~75N
(83)
будет больше коэфициента полезного действия изолированного винта
ФУ, ‘‘ /751V
(84)
Фиг 46. Изолированный винт п изолированный фюзеляж
па столько же, на скорость V больше
сколько
У», т. е.
V = г, -^ = 71 (1 4- <
(85)
Однако, V есть кажущийся ковфициент полезного действия винта па самолете, так как он не характеризует полностью баланса энергии. При достаточно большом торможении скорости коэффициент -ф может получиться и больше единицы, чего с коэфициентом полезного действия случиться, вообще говоря, не может. В балансе энергии винта необходимо учесть увеличение лобового сопротивления самолета, вызванное винтом.
Передняя часть фюзеляжа самолета или моторной гондолы находится непосредственно за винтом, где давление повышенное (фиг. 47). Поток воздуха от винта давит на фюзеляж и тем увеличивает его лобовое сопротивление на
I 79 I
некоторую величину Вр. Как показывают теория и опыт, ато увеличение лобового сопротивления фюзеля;ка или моторной гондолы за счет повышения давления за винтом компенсирует почти полностью тот выигрыш в коэфици-енте полезного действия винта, который получался от торможения скорости. Как показывают теория и опыт, коэффициент, вычисленный по формуле
... ($-A)F
75 Д’
(8G)
получается- приблизительно таким же, как и коэфициент полезного действия изолированного винта, т. е.
TQ ^7).
(87)
Лобовое сопротивление самолета возрастает еще вследствие обдувки винтом некоторых его частей. Фюзеляж, ради-
атор, отчасти крыло и другие части самолета находятся в отходящей от винта, вращающейся и завихренной струе воздуха, имеющей скорость, большую скорости полета. Следовательно, их лобовое сопротивление будет большим, чем в том случае, если бы винта не было.
фк,г '7. Взаимное ишшпе винта и фюзеижа
Если, например, фюзеляж вне потока винта гри скорости полета V имел лобовое сопротивление Во, то в струе винта, где скорость воздуха V2=V+2v, его лобовое сопротивление будет:
/ К\2 B = Bo(^j ,
(88)
т, е. оно увеличится за счет обдувки винтом на величину
= в - в0 = г;0 | ( _у — 1"].
(89)
Г SO J
Из теории идеального пропеллера имеем: /г„\а ?ф
( 2 __1 = 2В = —- - -
\Vl рМ!’ (90)
а лобовое сопротивление фюзеляжа Ro можно выразить через его коэфициент :
Вь — С^ S^F\ (91)
где S# —мидель (наибольшее поперечное сечение) фюзеляжа. Следовательно, ДВ„ можно выразить, принимая во внимание уравнения (90) и (91), следмющей формулой:
= ф. (92)
В таком же отношении возрастет за счет обдувки и лобовое сопротивление всех других частей самолета, находящихся в струе винта. Следовательно, суммарное увеличение лобового сопротивления самолета за счет обдувки будет равно:
Вг = -ДК„=-^^_ф, (93)
где ZQS есть сумма СХЯ всех обдуваемых винтом частей самолета. К этому следует добавить еще небольшое сопротивление 7?,, равное около о оз Ф, за счет вращения струи и некоторого увеличения лобового сопротивления самолета вследствие завихренности и неравномерности потока воздуха от винта.
Вычитая из тяги винта на валу добавочное лобовое сопротивление, вызванное винтом, получим эффективную тягу,
фе = ф - Вр _2?В -1?,=ф, (94)
] де с — коэфициент обдувки, равный
Эффективный коэфициент полезного действия винта на самолете равен:
Ф v
ч ’ <yfi)
о Г. И, Кувьжип [ 81 ]
или
= — С). (87)
На фиг. 48 дана характеристика винта изолированного и на самолете с учетом взаимного влияния винта и самолета.
48. Характеристика винта изолированного (сплошные линии) и на самолете (пунктирные .’инни)
в. СЕМЕЙСТВА ВИНТОВ
Если, у винта изменять какой-нибудь один параметр, например, шаг, число лопастей, ширину лопасти, то получим ряди винтов, называемые сериями или семействами. Такие семейства винтов обычно и изучаются в аэродинамических лабораториях, а результатами этих исследований часто пользуются для расчетов винта и самолета, в особенности для предварительных изысканий.
Характеристики семейства винтов обычно даются лабораториями в виде диаграмм-сеток, на которых нанесены кривые ₽ в функции X для различных значений относительного шага h или различных углов наклона лопастей <? (фиг. 48). На этих диаграммах нанесены такие и кривые равных значений д. По такой диаграмме можно найти р и т; для винта любого шага.
Для- винтов, с другой шириной лопастей и с другим числом лопастей составляют другие подобные же диаграммы. Их часто получают не по испытанию, а путем пересчета характеристик испытанных винтов на другую ширину и другое число лопастей. Операция пересчета по
I 82 j
своему смыслу аналогична пересчету крыла на другое удлинение. Изменение числа лопастей в аэродинамическом отношении равноценно соответствующему увеличению ширины лопастей, т. е. уширение лопастей вдвое равноценно постановке четырех узких лопастей или трохлодастный винт равноценен двухлопастному, но с лопастями в полтора раза шире, чем у трехлопастного винта. Однако, принимая вс внимание, что сечения лопасти остаются подобными и вместе с шириной изменяется на столько же и толщина их, прочнее будет винт с уширенными лопастями, а легче —с увеличенным числом лопастей.
Фиг. 49. Харавтерсстика серии английских двухлопастных винтов постояигого
6* [ 88 ]
шага
Па фиг. 49 дана характеристика серии английских винтов постоянного шага. Чертеж лопасти этих винтов дан на фиг. 50. Лопасти винта — тонкие для деревянных винтов, но толстые для сплошных металлических. Такие винты нужно изготовлять из дерева высшего качества.
Фиг. 50. Английский винт. (Все равыеры даны в процентах диаметра; середины хорд сечений располагаются по оси OOj)
На фиг. 51 дана характеристика двухлопастного американского металлического винта при углах установки от 7° до 40°, составленная группой винтов 6-й бригады ЦКВ завода. № 39 по американским испытаниям винта D = 2,718 м в присутствии самолета VE-7, при углах установки лопастей ф —11,5°, 16,5°, 19,5°, 23,8° и 27,5° на радиусе 7 = 0,75В (результаты испытаний приведены в отчете NACA № 306). Винты эти имеют (фиг. 52, 53 и 51) очень тонкие и узкие лопасти, и их коэфпциенты полезного действия очень высоки. Винт испытывался на биплане с мотором водяного охлаждения, и, следовательно, взаимное влияние винта и самолета, изображенного на фиг. 51 в правом верхнем углу,
[84J
[eel
х/в 0,025 0,05 0,1 0.2 J 0,4 0,5 0,6 0,7 0,8 0 J
Vlb 0,41 0,59 0,78 0,86 1,00 0,98 0,95 0,97 0,74 0,56 0,35
Фиг. 52. Металлический американский вив г 4412 с профилем ДАК-6
учтено в характеристиках винта. При постановке таких винтов на другие самолеты взаимное влияние будет другим. Считая для самолета, испытанного с винтом, е0 — 0,07 и с0 = ==0,08, взаимное влияние для любого другого самолета с коэфициентами е и с нужно учесть по формулам:
1 +в
1 +е0
1+е
1,07 ’
(08)
1 — С 1 — С fao\
’1=’1Т=^=Ч 0,92 - (">
Г 86 3
[87 3
Фиг. 54. Относительные шаги Л по радиусу г металлического американского винта 4412 (справа у жирных кривых указаны углы наклона допасти на радиусе г — 0,75)
[ 88 ]
Фиг. 65. Характеристика трехдопастного американского мотагачче',кого винта. (Получена пересчетом характеристики двухлопастного винта 4412, испытанного в присутствии самолета VE-7. Пунктир относится к примеру подбора винта—см. § 2, гл. 4)
# # а л.. fi . л я а п п п л а я rt с‘о я. а
[ Я9 ]
•ПЕЙ)
Фиг. t>6. Характеристика четырехлопастного американского металлического винта. (Получена пересчетом характеристики двухлопастного винта 4412, испытанного в присутствии самолета VE-7. Пунктир относится к примеру подбора винта—см. 8 2, гл. 4)
[ 90 ]
I IG 1
Фиг. 58. 1оэфнцичпты мощности аы^рьЛа^скиг мета«„ачески1 винтов 2124 с профилям поперечных сечений лопасти KAF-6 т и 4878 с ирофпмм Кдарк-У
[ £6 I
Фиг, 59. Коэфициенты полезного действии американских метгллшоских винтов 2124 с профилями RAF-6ffl и 4878 с профилями Кл?рк-У
Фиг. 60. ГеометршесЕпе характеристики американских металлических киитов
2124 и 4878
[ 94 ]
На фиг. 55 и 56 даны характеристики трехлопастных и четырехлопастных американских винтов, полученные путем пересчета характеристик двухлопастных винтов.
г/6 0,025 0,05 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 *
... V/o 0,41 0,59 0,79 0,95 1,00 0,99 0,95 0,87 0,74 0,56 0,35 1 0,081' 1
0.3 0,4 0.5
V ®/д 0,025 0,05 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
С, 13 0,56 0,68 0,82 0,97 1,00 0,98 0,90 0,75 0,63 0,46 0,24 0
0,13 0,08 0,04 0 0 0 0 0 0 0 0 0
Фив. 61. Профили американских металлических винтов: вверху RAF-6 т и внизу Кларк-У
На фиг. 57, 58 и 59 для сравнения даны диаграммы коэфициентов а, р и ?) в зависимости ст X для ряда значений углов наклона лопастей американских винтов с плоско-выпуклыми профилями сечений BAF-6-м и с профилями Кларк-У. Размеры этих винтов даны на фиг. 60 и 61.
[ 95 ]
ГЛАВА IV
ХАРАКТЕРИСТИКИ ВИНТОМОТОРНОЙ ГРУППЫ
1. ВИНТЫ ФИКСИРОВАННОГО ШАГА
Нормальный винт с жестко закрепленными лопастями — впит фиксированного шага (сокращенно ВФШ) — не позволяет использовать мотор полностью при всех режимах полета самолета. Он ограничивает число оборотов мотора, и эти границы различны для каждой скорости и высоты полета. Таким образом, нормальный винт не обеспечивает таких идеальных условий эксплоатации мотора, при которых число его оборотов в случае необходимости можно было бы довести до максимального при полном открытии дрос селя и тем самым снять с мотора наибольшую допустимую мощность. Это получается вследствие различия в характеристиках винта п мотора.
Мощности винта и мотора изменяются с изменением числа оборотов по совершенно различным законам (фиг. 62). Как известно, мощность винта изменяется прямо пропорционально кубу числа оборотов (N — const • па), мощность же мотора изменяется пропорционально числу оборотов в степени a (Ne= const-n*). Показатель степени а обычно несколько меньше единицы и зависит от конструкции мотора. Он равен единице в случае постоянства крутящего момента (мощность прямо пропорциональна числу оборотов) и нулю в случае постоянства мощности при различном числе оборотов.
Скорость полета совсем не влияет на мощность мотора, если не считать возможного небольшого влияния скорости на наполнение двигателя. Мощность же винта очень сильно меняется с изменением скорости полета. Если при неизменном числе оборотов увеличим скорость полета, то
I 96 ]
углы р подхода воздуха к лопасти возрастут (фиг. 62), скорость лопасти также несколько возрастет, а углы атаки а сильно уменьшатся. Так как уменьшение углов атаки более значительно, чем увеличение скорости лопасти, то аэродинамические силы уменьшатся, а следовательно, уменьшится и мощность винта. Характер изменения мощности винта с изменением скорости полета при неизменном числе оборотов представлен на фиг. 63; он точно такой же, как и характер изменения коэфициента мощности винта р при изменении относительной поступи X.
Фиг. 62. Изменение мощности мотора и винта с оборотами:
крапая М—изяепение мощности мотора при полном открытии дросселя; кривая а—изменение мощности винта при постоянной относительной поступи Ъ—изменение мощности
влнта при другом, тоже постоянном, значении Х2, меньшем, чем Направо даны для сечении лопасти окружные скорости U, скорости полета V, вызванные винтом ско-р сти wlf относительные скорости Wt, углы подхода струи р и углы атани а вверху для к! и внизу для >.2 ври одинаковых с бэротах. За счет большего угла атани для случая e(X2<Xi) аэродинамическая ои«а ДВ, действующая на элемент лопасти, и ее проекции на управление полета ДФ и на напрыщение -окружной скорости AQ получаются большими, чрм для случая а
Мощности винта и мотора изменяются с увеличением высоты полета по совершенно различным законам (фиг. 64). Как известно, мощность винта изменяется с изменением высоты прямо пропорционально плотности воздуха р. Следовательно, с подъемом самолета на высоту' мощность впита при прочих равных условиях падает.
Мощность мотора изменяется с изменением высоты по различным законам для различных типов моторов. Последние можно разделить на два класса, резко отличающихся друг от друга: а) моторы с нормальным питанием — невысотные моторы и высотные моторы с пересжатием, и б) моторы с нагнетателями.
7 Г. И. Кузьмин
[»7]
У нормальных невысотных моторов мощность при постоянных числах оборотов уменьшается с увеличением высоты несколько быстрее плотности воздуха, У высотных моторов с пересжатием мощность поддерживается постоянной от земли до некоторой высоты и, далее, с увеличением высоты падает по такому же закону, как и у нормальных невысотных моторов. Сохранение мощности мотора постоянной до предельной высоты у высотного мотора с пересжатием достигается добавочным наполнением двигателя с помощью
дополнительного открытия дросселя и, следовательно, со-
провождается изменением числа оборотов мотора; у земли число оборотов меньше, чем на высоте.
У моторов с нагнетателями закон изменения мощности с изменением высоты различен и зависит от типа нагнетателя. В случае не-выключающегося приводного нагнетателя, имеющего в настоящее время наиболь-
„ шее распространение, мощ-
Фиг. 63. Изменение мощности винта с из- ~ * 5
иейепием скорости полета прп иежменпом НОСТЬ МОТОра С увеличением числе оборотов ВЫСОТЫ При = COHSt СЯа-
чала увеличивается до некоторой предельной высоты, а потом уменьшается несколько быстрее уменьшения плотностп воздуха.
У моторов с выключающимся приводным нагнетателем мощность на малых высотах при выключенном нагнетателе уменьшается; затем, начиная с некоторой высоты, на которой нагнетатель включается, мощность увеличивается до предельной высоты, выше которой мощность опять уменьшается по тому же закону, как и в случае невыключаю-щегося приводного нагнетателя. В случае применения
нагнетателя другого типа характер изменения мощности мотора будет приблизительно таким, как представлено на фиг. 64. На графиках фиг. 64 пунктиром показано для сравнения изменение мощности винта с изменением высоты. Как видим, особенно резко различаются законы изменения
мощности винтов моторов с нагнетателями.
Вследствие такого резкого различия в законах изменения мощности винта и мотора винт на самолете является хоро-
[98]
-----—. — изменение мощности'винта при п'=const ------------изменение мощности мотора при rm const
-----. изменение мощности мотора с Винтом фиВсиробанно?'-ло шага, j'
Фиг. 64. Ивменовие мощности мотора с изменением высоты
7*
[99]
шпм, полностью использующим мотор только на каком-нибудь одном режиме полета.
Можно спроектировать скоростной винт, наилучший для горизонтального полета. На расдетним режиме этот винт полностью использует мотор и имеет наивыгоднейший коэфициент полезного действия. При взлете и при подъеме самолета, а также и при горизонтальном полете на высотах, больших расчетной, этот винт будет тяжелым; на этих режимах полета мотор не в состоянии развить максимальное число оборотов и отдать максимальную мощность.
Уменьшение числа оборотов при взлете и подъеме происходит вследствие уменьшения скорости самолета, по сравнению с горизонтальным полетом. Уменьшение скорости полета вызывает увеличение углов атаки лопастей (фиг. 62) и повышение вследствие этого мощности винта при одном и том же числе оборотов. У современных быстроходных самолетов уменьшение числа оборотов при подъеме по сравнению с горизонтальным полетом у земли получается примерно на 1Е%, а при разбеге до 20% и больше, чю равносильно потере примерно стольких же процентов мощности мотора.
При горизонтальном полете уменьшение числа оборотов на высоте обусловлено, главным образом, более быстрым уменьшением мощности мотора по сравнению с винтом, а также и пониженной скоростью полета. Па фиг. 64 представлен характер изменения мощности вигта и мотора с изменением высоты (пунктирные кривые); штрихе зкой показана потеря мощности за счет уменьшения числа оборотов.
При подъеме самолета на потолок число оборотов уменьшается й за счет пониженной скорости и за счет высоты; в результате потеря мощности получается значительной, скороподъемность самолета недостаточно хорошей и потолок низким.
Можно спроектировать высотный винт, с которым самолет будет иметь наилучшую скороподъемность, на этом режиме винт полностью использует мотор и имеет наивыгоднейший коэфициент полезного действия. Размеры этого винта будут уже не те, что у скоростного винта: диаметр больше, шаг меньше.
При горизонтальном полете этот винт будет легким,— с ним при полном открытии дросселя винт и мотор раскрутились бы до чрезмерно большого числа оборотов, недопу-
[ 100]
стимого по условиям прочности и охлаждения мотора; необходимо поэтому дросселированием мотора поддерживать число оборотов не свыше максимально допустимого. Вслед-
ствие дросселирования мы имеем значительные потери мощности (фиг. 65). Дополнительные потери при горизонтальном полете с высотным винтом получаются за счет довольно значительного снижения коэфицпента полезного действия винта по сравнению с наивыгоднейшим для дан
ного режима.
Как видим, для каждого режима полета самолета нужен свой винт, что, очевидно, практически невозможно. Поэтому
на самолете обычно ставится компромиссный винт, с которым, жертвуя несколько в максимальных скоростях горизонтального полета, мы получаем достаточно хорошие взлет и скороподъемность.
Для мотора с нормальным питанием подбирают обычно такой компромиссный винт, который снимает с мотора максимальную расчетную мощность при максимальном числе оборотов и максимальной скорости горизонтального полета на уровне моря (в слу-
Фиг. 65. Характеристика винтомоторной группы дм скоростного (кривая я) высотного (кривая Ь) и компромиссною (кривая с) винтов; кривая d — характеристика самолета
чае невысогного мотора) или на критической высоте (в случае высотного мотора).
Наивыгоднейшим этот компромиссный винт получается но при максимальной, а при несколько меньшей скорости полета. Достигается это некоторым увеличением диаметра
и уменьшением шага по сравнению со скоростным винтом. Этот винт использует мотор так же, как и скоростной винт, но его коэфициент полезного действия при максимальной
скорости полета ниже, а при меньших скоростях полета выше, чем у скоростного винта. В результате сравнительно небольших жертв в максимальной скорости улучшаются взлет и подъем самолета.
Постановка легкого зинта в большинстве случаев нерациональна, так как ведет к значительным потерям в максимальной скорости самолета.
[101]
2. ПОДБОР ВИНТИ К САМОЛЕТУ
Часто к самолету подбирают винт из серий, испытанных в лабор ।тории. Делается это следующим образом.
Прежде всего устанавливают в зависимости от назначения самолета расчетный режим винта, т. е. назначают скорость полета V, высоту полета Н, число оборотов винта п и мощность мотора Ns.
Затем находят наибольший диаметр винта, допустимый конструкцией самолета, а именно: высотой шасси, расстоянием между моторами (на многомоторном самолете) или расстоянием’ от конца лопасти до фюзеляжа и т. д.
Находят также критический диаметр винта, исходя из критической скорости конца лопасти, для ряда серий винтов, из которых предполагается выбрать винт. Его определяют так:
По чертежу винта находят относител! ную толщину лопасти с =вблизи конца. По графику (фиг. 45) находят Еак и по формуле (77) — скорость звука на расчетной высоте, подставив в нее для расчетной высоты температуру воздуха по стандартной атмосфере.
Критическая скорость конца лопасти подсчитывается по формуле (76):
= Вда.
Критическая окружная скорость конца лопасти UK = tm,Dk — —V®.
Следовательно, критический диаметр
DK - —
л яя, я п.
(100)
Далее, приступают к выбору диаметра винта, пользуясь характеристиками ряда семейств винтов, графики кстирых имеются в распоряжении конструктора, например,, показанные на фиг. 51, 55 и 56.
Подбор винта к самолету производится методом проб. Задавшись каким-нибудь значением диаметра винта I), вычисляют по формулам подобия для расчетных данных с учетом торможения скорости самолета ₽ и 1 и по этим координатам отмечают точку на характеристике семейства
[ 102 J
винтов (фиг. 51). Для этой точки интерполированием на графике находят т), а также h или угол наклона лопасти с?. Исправляют значение iq с графика, умножая его на (1 — с) для учета обдувки.
Задавшись рядом значений D, находят по характеристике серии винтов соответствующие значения т; и отмечают то значение D, при котором т( — наибольшее для данной серии винтов. Если все точки ложатся в области плохих у, то это значит, что данная серия непригодна и что нужно взять другую.
Испробовав таким путем целый ряд серий винтов, отличающихся друг от друга формой, числом и шириной лопастей, выбирают тот винт, у которого коэфициент полезного действия наилучший. При этом нужно следить, чтобы диаметр наивыгоднейшего винта был меньше или равен Dh, иначе на самолете его tq будет меньше, чем получился с графика. По графику фиг. 44 можно найти поправочный коэфициент К, на который нужно умножить tj с графика, чтобы получить действительный тдс с учетом потерь за счет высоких скоростей лопасти. Диаметр подбираемого винта не должен превосходить предельное значение D, определяемое конструкцией самолета.
Пример
Пусть требуется подобрать впит к самолету, максимальная скорость которого Vmax = 410 км/час на высоте 4 250 м. Мощность мотора на этой высоте N, = = 700 л. с. при максимальном числе оборотов п = 1 900 об/мин.
Подберем металлический винт африканской серии 4412, геометрические характеристики которой даны на фиг. 53 н 54, а аэродинамические характеристики для двух-, трех- и четырехлопастных винтов 4412 даны на фиг. 51, 55 и 56.
Винты 4412 испытаны на самолете, и поэтому взаимное влияние модели винта диаметром 2,718 м и самолета, изображенного на фиг. 51, включены в аэродинамиче сине характеристики. В данной нам задаче взаимное влияние может быть другим. Поэтому необходимо вычислить коэфив.нснты: торможения е0 и обдувки с0 для модели а также s в с для подбираемого впита.
При испытании модели ввита площадь миделя фюзеляжа 8ф = 0 892 м* Сха = = 0,15.
Приведенная площадь лобового сопротивления фюзеляжа в эквивалентной площади пластинки
CxtfiSf/i 0,15-0,892
= —ОДЙ-----= °>21 м'
Ометаемая винтом площадь при D = 2,718 м будет'
F = 5,8 лА
[108 J
Коэфициент торможения е0 для модели винта равен:
аф -в Г ~8ф . 0,21 -в /С,802
'•=5^И У = ажГг ^°’07-
Следовательно, для модели
1+во = 1,О7.
Коэфициент обдувич для модели, считая £ Са8 = 0,13, равен е0 =1,07 С-8- + 0,03^ = 0,08,
1 — с„ = 0,92.
Для заданного примера пусть мидель фюзеляжа 8ф = 1,64 .м2 и коэфициент лобового сопротивления его Схф = 0,09.
Приведенная п-ощадь лосевого сопротивления фюзеляжа
0,09-1,64 п„„с , ’*=Sr =О’236Л-
Коэфициент торможения
5 - 0,216 V'Т54 134
~ 5 Р V F ~
Расчетная скорость для выбора винта будет:
,, 1+2о_ 114-1,07 122
V» = ^тах = - г + £ = ^7-
Коэфициент обдувки с находится по формуле:
с =(1 + я) + 0,03 ) = (1 + Л) + 0,03 ) ,
считая для данного примера
£0x8 = 0,22.
Для учета потерь ьрп '•верхкрптических скоростях нужно знать число Берстоу для конца лопастч подбираемого впита и кри.лческое значение числа Берстоу Ялд для данной серпи
Значение Вая найдем по графику (фиг. 45; для относительной толщины лоьасти с, взятой по чертежу выбранной серии винтов пли по диаграмма геометрических характеристик этой серии (например, для американских винтов 4412 по фиг. 53).
Скорость коьца лопасти винта
w = у V/+ uj,
где Vp — рал”етпая скорость полета,
Uа — окружная скорость конца лопасти.
Число Берстоу для конца допасти будет равно:
( 104 1
где а — скорость звука в воздухе на расчетной высоте равная
Здесь 2'д—температура воздуха на расчетной высоте.
Если число ‘Берсгоу конца лопасти больше критического, то нужно ч, взятый с графика характеристики серии винтов, исправить, т. е. нужно его умножить на поправочный коэфициент, взятый с графика фиг. 44.
Вычисления при подборе винта удобно расположить в специальной таблице (табл. 2), в которой даны результаты подбора двух-, трех- п четырехлопастиых впнтов (фиг. 51, 55 и 56).
Результаты представлены на графике фиг. 66. Итак, иаилучшим винтом является трехлопаствый винт /> = 2,9 м, tp = 31°, чс=0,82.
Описанный выше подбор винта дает скоростной винт.
Компромиссный винт получим, если выберем винт несколько большего диаметра по сравнению с напвыгодней-шим. В вышеприведенном примере можно было бы взять D = 3,0 м, г = 2. Суждение о лучшем винте для всех режимов полета можно иметь в результате сравнения характеристики винтомоторной группы, т. е. диаграммы тяги или полезной мощности в зависимости от скорости полета на различных высотах.
[105]
Таблица 2
D 2,6 2,8 3,0 3,2
F 6,3 6,15 7,05 8,05
F yV 12,2 15,3 18,8 22,9
E 0,11 0,088 0,071 0,059
14~e 1,04 1,02 1,0 0,99
v, 110 112 114 115
1 — c 0,876 0,89 0,90 0,91
1 — e 0,96 0,97 0,98 0,99
1 — c0
u0 259 279 299 319
67 000 77 800 89 200 102 000
V 12 100 12 600 13 000 13 200
IV2 79 100 90 300 102 200 115 200
W 281 300 320 339
Ba 0,87 0,93 0,99 1,05
Ba Bat 0,92 0,98 1,04 1,11
K. 1,0 1.0 0,98 0,94
1 1,34 1,26 1,2 1,14
₽ 0,171 0,118 0,0835 0,0605
ч при i = 2 — 0,78 0,843 0,855
<p » i — 2 — 37° 32° 29°
» i = 2 — 0,758 0,820 0,795
ч » i — 3 0,786 0,834 0,843 0,832
? > i=3 37,7° 33° 29,4° 27°
Г), > 1 = 3 0,745 0,81 0,81 0,775
TQ > 1=4 0,812 0,832 0,816 0,77
<f> > i=- i 35° 31° 28е 28,5°
ve' » t = 4 0,772 0,81 0,782 0,72
f 10в 3
8. ПОСТРОЕНИЕ ХАРАКТЕРИСТИКИ ВИНТОМОТОРНОЙ ГРУППЫ
Для построения характеристики винтомоторной группы необходимо иметь характеристику винта и мотора. Характеристика винта получается в результате подбора винта к самолету. Выбрав винт определенной серии и с определенным D и ? или h, имеем на диаграмме характеристики
серии его характеристику. Отдельно она изображена на фиг. 67. Удобно для расчета составить табличку характеристики винта, записав в ней значение £ и т] для ряда значений к
X 0,5 0,7 0,9 1,0 1,1 1,2 1 3
₽ 0,143 0,141 0,136 0,129 0,119 0,104 о’О87
Ч 0,42 0,63 0,752 0,795 0,823 0,841 0,841
Характеристика мотора дается заводом, изготовляющим мотор. Она имеет вид, изображенный на фиг. 68, где даны
мощности мотора при полном открытии дросселя по числу
[107]
физ. 68. Характеристика мотора (числа у кривых справа указывают высоту Н л<)
[Ю8]
оборотов для ряда высот. Иногда характеристика мотору дается в виде диаграммы мощности мотора Ne в зависимости от высоты Н для ряда чисел оборотов (фиг. 69). Удобнее для построения характеристики винтомоторной группы диаграмма Ne по п.
Фиг. 69. Характеристика мотора
Характеристика винтомоторной группы строится следующим методом.
Задаются каким-нибудь режимом работы винта X и вычисляют для него мощность при различных числах оборотов для интересующей нас высоты. Согласно формуле подобия мощности винта имеем:
N — ₽р I?,3 D6 = Сп,а,
[100]
т. е. для данного значения относительной постуди и высоты полета мощность винта пропорциональна кубу числа оборотов. Коэфициент пропорциональности
С=1_₽р1)в
75
Эту кривую (кубическую параболу) мощности винта строят на той же диаграмме, где изображена внешняя характеристика мотора для той же высоты (фиг. 70). В некоторой
Фиг. 10. Определение располагаемого числа оборотов для винта D => 2,9 м, ср=31°, » — 3
точке эти характеристики пересекаются. Число оборотов, соответствующее точке пересечения винтовой и моторной характеристик, называется располагаемым. В полете при данном значении К нельзя получить число оборотов, большее располагаемого, так как мощность мотора будет
[110]
недостаточна. Число оборотов, меньшее располагаемого, можно получить путем дросселирования мотора.
Для различных режимов винта на одной и той же высоте располагаемое число оборотов получается различным, так как для каждого значения X получается своя кривая мощности винта с коэффициентом пропорциональности С, изменяющимся вместе с изменением р, в то время как кригая мощности мотора остается одной и той же для всех режимов винта на данной высоте.
По относительной поступи X и располагаемому числу оборотов п подсчитывают соответствующую им скорость полета, пользуясь формулой
1+ео
Располагаемую полезную мощность винтомоторной группы находят умножением мощности мотора N, при располагаемом числе оборотов п на коэфициент полезного действия винта для заданного значения К и на коэфициент, , 1 — с
учитывающий обдувку т------, т. е.
1 с0
N = N п 1 с
Располагаемую тягу винта подсчитывают по формуле ф__.
V '
Проделав такие подсчеты для ряда значений X, находят соответствующие им значения п, V, Nu и Ф. Обычно результаты представляют в виде диаграмм п, Na и Ф в зависимости от V (фиг. 71, 72 и 73). Вычисления для вышеприведенного примера даны в табл. 3.
Располагаемое число оборотов можно найти и другим методом, более удобным, так как вычислений при этом требуется меньше. Делается это так. Для ряда значений числа оборотов пересчитывают мощность мотора на коэфициенты р по формуле
75 N, Н р??>ЗГ)5
и строят кривую р по п (фиг. 74). Вычисления для вышеприведенного примера даны в табл. 4.
Для заданного значения X имеем р винта. Соответствующее этому значению ~Р число оборотов на характеристике
[И1]
полета на высоте Н — k 250 .и для американского металлического винта 4413, £> = 2,9 <р = 31°, г = 3
[112]
мотора (фиг. 74) и является искомым располагаемым числом оборотов. Зная число оборотов, вычисляют и строят характеристику винтомоторной группы так же, как указано выше. Вычисления приведены в табл. 5—8. На фиг. 75—77 дана полная характеристика винтомоторной группы для ряда высот.
Нужно иметь в виду, что построенная так характеристика винтомоторной группы дает наибольшие значения п, Nu и Ф,
Фиг. 73. Располагаемая гяга по скорости полета на высоте Н—к 250 м для металлического винта 4412, 75=2,9 м, <р=31°, 1=3
какими летчик располагает в полете при полной мощности мотора. Любое меньшее значение он может получить путем регулирования питания мотора.
В некоторых случаях, например, при расчете дальности полета, интересуются значениями коэфициента полезного действия при полете на задросселированном моторе. Легко показать, что \ остается постоянным в любой точке кубической параболы, проведенной на диаграмме по V через начало координат (фиг. 78). Действительно, при k = const скорость и число оборотов изменяются прямо пропорционально, т. е.
Л •
8 Г. И. Кузьмин
[118]
Построение характеристики винтомоторной группы для высоты кубических
Ps = 205,1
7 п об/мин
' 1 400 1 500 и,’ 1 600 '
'12 704 15 625 N л. с. 18 963’
0,5 0,42 0,143 0,0319 405 500 605
0,6 0,53 0,142 0,03165 402 494 601
0,7 0,63 0,141 0,03145 400 493 597
0,8 0,70 0,140 0,03125 396 488 593
0,9 0,752 0,136 0,03035 — 475 577
1,0 0,795 0,129 0,02880 — 450 546
1,1 0,823 0,119 0,02660 — — 505
1,2 0,841 0,104 0,02320 — —
1,3 0,841 0,087 0,01940 — — —
Пересчет характеристики
D—2,9 м____________________________
п об/мин f?e3 Н = 0 <► Н = 2 000 м
Л7. л. с. N ₽ = 2,92 N, л. с. Р = 3,545 —
1 400 12 704 530 0,1217 570 0,1594
1 500 15 625 553 0,1034 590 0,1344
1 600 18 963 570 0,0877 610 0,1140
1 700 22 750 589 0,0756 628 0,0980
1 800 27 000 600 0,0648 640 0,0841
1 900 31 750 609 0,0560 649 0,0725
2 000 37 040 613 0,0484 655 0,0627
2 100 42 880 615 0,0417 660 0,0545
2 200 49 300 619 0,0366 663 0,0477
[И4]
Таблица 3
Н = 4 250 м для трехлопастного винта 25 = 2,9 м (<? = 31°) методом парабол
п об/мин V м/сек Хи Л. С. ф кг V км /час об/мин Л. с.
1 70011 800 11 9001 2 0001 2 100 и8а
22 750(27 000(31 750|37 040(42 880 N л. с.
_ 1 507 509 36,6 208 427 132
-в — В " - — 1 515 510 44,0 263 448 158
— — — — — - — 1 525 515 51,8 317 458 187
- —* »»' » 1 535 520 60,0 356 445 216
691 — — - — 1 560 535 68,5 392 429 246
655 — — — — 1 615 564 78,8 437 415 284
606 719 — — — 1 705 612 91,7 491 401 330
528 627 738 — — 1 855 683 108,5 560 386 391
— - 615 718 834 1 995 712 126,6 584 345 457
Таблица 4
мотора на коэфпциеиты {3
Н = 4 250 jw Я = 6 000 м Н = 8 000 jk Н = 10 000 м
N, Л. с. N ₽ = 4,48 Д п. N, л. с. 8 = 5,45^| г п,“ Хе л. с. К В = 6,76-4 1 и,3 хе л. с. N [3 = 8,7— Г пв3
463 0,1635 360 0,1585 270 0,1440 205 0,1405
505 0,1450 409 0,1430 303 0,1314 220 0,1225
555 0,1314 445 0,1280 333 0,1186 240 0,1100
610 0,1200 485 0,1164 363 0,1080 260 0,0993
659 0,1094 525 0,1060 395 0,0991 283 0,0913
700 0,0990 569 0,0977 425 0,0906 305 0,0836
713 0,0865 609 0,0897 455 0,0832 330 0,0776
713 0,0745 653 0,0828 485 0,0764 355 0,0720
713 0,0649 700 0,0774 — —* — —
8
[Нб]
Таблица 5
Построение характеристики винтомоторной группы дм Н = 4 260 м, D = 2,9 м, <р = 31е __________________(Второй метод)_______________
1 ч = 0,975 г ₽ п оЬ/ътп КеЛ. с. W„ = л. с. V м/сек ф_*и75 avh.'wv А
F
0,5 0,42 0,409 0,143 1 523 519 212 37,1 136
0,6 0,53 0,517 0,142 1 530 523 270 44,8 452 161
0,7 0,63 0,614 0,141 1 535 520 320 52,5 457 189
0,8 0,70 0,683 0,140 1 542 525 358 60,3 445 217
0,9 0,752 0,733 0,136 1 570 540 396 68,8 430 248
1,0 0,795 0,775 0,129 1 620 568 441 79,0 418 284
1,1 0,823 0,803 0,119 1 709 614 493 91,7 403 330
1,2 0,841 0,820 0,104 1 850 680 558 108,4 386 390
1,3 0,841 0,820 0,087 2 000 713 584 127,0 344 457
Таблица 6
Построение характеристики винтомоторной группы
Н = 0 Н = 2 000 м
Лг,
V I л«/се«:
N‘ N, л. с. 1
- V
и м/сек
Ф
§
я
Ф
8 у
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
0,409 0,517 0,614
0,683 0,733 0,775 0,803
0,820 0,820
0,143 1
0,142
0,141
0,140
0,136
0,129
0,119
0,104
0,087
300
305
504
207
505
309
506
313
261
311
508
330
513
363
348
375
520
403
414
533
427
499
552
609
574
453
31,7
38,2.
44,7
51,2
58,4
66,4
75,8
87,7,
489
512
522
510
482
455
423
386
471|102,0'
346
1141 465,
137 1 469,
161
184
210
239
273
316
367
584
585
1 473;
1 478^
1 493}
1 523
1 573
1 600
1 780,
585
586
590
595
605
620
638
,302 360
400
432
461
35,8
43,0| 50,4] 57,7] 65,6| 74,4 84,5
97,3
502
527
536
520
494
465
129
155
181
208
236
267
'480| I
508
,524113,0
431
392
348
304
350
407
1
1
1
1
1
1
1
1
[116J
Таблица 1
Построение характеристики винтомоторной группы Н = 6 000 .и Н = 8 000 м
X ₽ п об/мин о fe; Ч Nu л. с. та та ,А, О •У « i Л п N, Nu =г Ф С» §
0,5 0,409 0,143 1500 409 168 36,6 344 131,6 1409 273 112 34,4 244 123,6
0,6i0,517 0,142 1509 412 213,5 44,2 362 159,4 1 215 275 142,4 41,4 257,5 149,4
О,7|о,614 0,141 1 513 413 253,5 51,6 368 186 1423 278 171,0 48,70 263 175,4
0,8,0,683 0,140 1520 415 283,5 59,3 358 213,5 1430 279 190,6 55,8 256 201
0,9,0,733 0,136 1545 425 312 67,7 345,5 244 1460 289 212 64,2 247 231
1,0,0,775 0,129 1 593 443 343,5 77,7 331,0 280 1 515 309 240 74,0 243 266,5
1,1 (о,803 0,119 1 679 478 384 90,3 319 324,5 1 599 333 267,5 85,8 233,5 309
1,2'0,820 0,104 1 825 538 442 107 310 385 1 745 378 310 102,5 226,5 369
1,3'0,820 0,087 2 040 625 513 129,5 297 467 1 950 440 361 123,7 219 446
Таблица 8
Построение характеристики винтомоторной группы Я = 10 000 м
X Ъ ₽ п об/мин Лге л. е. V Mjcen 1 Ф Р км;час
0,5 0,409 0,143 1 389 203 83,3 33,8 185 122
0,6 0,517 0,142 1 393 203 105 40,7 193 147
0,7 0,614 0,141 1 399 204 125,4 47,8 196 172
0,8 0,683 0,140 1 403 205 140,3 54,7 192 197
0,9 0,733 0,136 1 423 209 153,4 62,5 184 225
1,0 0,775 0,129 1 460 215 167 71,3 175 256
1,1 0,803 0,119 1 529 228 183 82,0 167 295
1,2 0,820 0,104 1 650 250 205 96,7 159 348
0,820 0,087 1 855 295 242 117,7 154 424
[Ш]
I Sill
-s
..... ...
.
w ш ism Wo m m zwboioo n oS/muh
Фие. 14. Характеристика мотора: |3n по n для Z3=2,9 м
100 ZOO 300 400 500 ОНМ^ОС
физ. 76. Располагаемое вдело оборотов ко скорости полета для винта: D = 2,9 л» = 31°, I e 3
[ OcI 1
Фиг. 76. Располагаемая подешя мощность по скорости для винта: Л — 2,9 м, rf — 31е, г = 3
Фиг. 77. Распыагаеиая Taia по скорости дли влкта: D = 2,9 л», ® = 31°, г = 3
Мощность винта N, как известно, пропорциональна кубу числа оборотов при X = const, следовательно, она будет при >. = const также пропорциональна кубу скорости, т. е.
Фиг. 78. Дроссельная характеристика винтомоторной группы
При 1 = const и коэфициент т) = const, следовательно, по-
лезные мощности будут при этом также пропорциональны кубу скорости:
Na, _ _ У?
П2з-
(102)
4. РАСЧЕТ ВИНТОВ РЕГУЛИРУЕМОГО ШАГА
Компромиссный винт, обычно устанавливаемый на самолетах, дает, как мы видели, потери в максимальной скорости полета и, главным образом, в скороподъемности и взлете. С развитием авиации эти потери все возрастают. Это обусловливается увеличением скорости самолета, с одной стороны, и увеличением высотности мотора —с другой.
Путем улучшения обтекаемости самолетов и увеличения мощности моторов, а также путем усовершенствования кон
1121 ]
струкций моторов и самолетов, летные качества последних улучшаются. Растут максимальные скорости самолета. Это улучшает коэфициент полезного действия винта при максимальной и крейсерской скоростях, но ухудшает взлет и скороподъемность самолета вследствие большого шага винта, ведущего к значительной потере числа оборотов и снижению коэфициента полезного действия.
Весьма эффективным средством повышения скорости самолета является полет на больших высотах с высотным мотором. С подъемом на высоту лобовое сопротивление самолета уменьшается пропорционально плотности воздуха, а мощность нормального невысотного мотора уменьшается быстрее; в результате скорость самолета уменьшается с увеличением высоты. Если же тем или иным способом мы сохраним мощность мотора до некоторой высоты, то вследствие уменьшения плотности воздуха на этой высоте и уменьшения за этот счет лобового сопротивления самолета скорость полета увеличится. Чем выше предельная высота, до которой сохраняется мощность мотора, тем больше скорость полета. В настоящее время уже не удовлетворяются высотностью моторов порядка 1500—2 000 м, осуществляемой обычно повышением степени сжатия и добавочным наполнением двигателя с помощью дополнительного открытия дросселя, а все чаще и чаще применяют моторы с нагнетателями, т. е. с приборами, повышающими давление воздуха, поступающего в мотор, вследствие чего мотор сохраняет' мощность до больших высот. Нагнетатель уже становится обычной деталью мотора. Однако, разница в законах изменения мощности винта и мотора и обусловленные этим потери мощности получаются настолько большими, что применение высотных моторов с мощными нагнетателями и нормальными винтами становится нерациональным.
Конструкторы и изобретатели уже давно работают над созданием такого винта, который позволял бы летчику при любых условиях полета менять режим мотора вплоть до максимального числа оборотов в зависимости от необходимости. При этом учитывается, что в некоторых случаях желательна даже автоматическая регулировка винтом режима мотора. На военном самолете в боевой обстановке летчик не может уделять много внимания регулировке мотора, и поэтому винт, автоматически регулирующий режим мотора и позволяющий при всех условиях полета самолета снимать с мотора максимальную мощность, был бы
[122 1
весьма желателен. Особенно же подходящим и ценным был бы такой винт, который одновременно с автоматической регулировкой позволял бы устанавливать режим работы мотора и по воле летчика, так как режим максимальной мощности является весьма напряженным для мотора и неэкономичным, а поэтому не всегда желательным.
Предлагались различные схемы винтов, предусматривающие изменение в полете или шага, или диаметра, или ширины и кривизны лопастей. Каждый из этих принципов позволяет частично решить поставленную задачу, а совокупное осуществление их могло бы дать такой винт, с которым мотор полностью использовался бы на всех режимах полета с наивыгоднейшим коэфициентом полезного действия. Однако, удачному разрешению этой проблемы препятствуют чрезвычайно большие конструктивные трудности. Задача чрезвычайно усложняется большими окружными скоростями винта и возникающими при этом большими инерционными силами.
Распространение получил как конструктивно наиболее рациональный принцип изменения шага' винта во время полета путем поворота лопастей относительно их продольной оси. Достаточным поворотом лопастей можно получить реверсивный винт, который может давать тягу и в обратном направлении. Самолет с реверсивным винтом требовал бы значительно меньшую площадку для посадки (возможность торможения обратной тягой).
Винт с поворотными в полете лопастями, т. е. в; нт регулируемого шага (сокращенно ВРШ) не является полным решением задачи создания винта, наивыгоднейшего для всех режимов полета самолета. Поворот всей лопасти на некоторый угол дает чрезмерное изменение шага на конце лопасти и недостаточное изменение шага у втулки; в результате получается недостаточно хорошее в аэродинамическом отношении распределение шага вдоль лопасти. Однако, расчеты показывают, что ВРШ близок к наивыгоднейшему.
При каждом фиксированном положении лопастей ВРШ является в аэродинамическом отношении нормальным ВФШ. Поэтому его характеристика при этом положении лопастей может быть представлена так же, как и характеристика нормального винта. Таким образом, полной характеристикой ВРШ, т. е. его характеристикой при различных положениях лопастей, служи? характеристика серии нормальных ВФШ, отличающихся углами установки лопастей.
Е 123 ]
При выборе диаметра ВРШ можно исходить илп из скорости полета при наивыгоднеишем подъеме, или из максимальной скорости горизонтального полета, или из некоторой средней скорости самолета. Выбирая для каждой из этих скоростей наивыгоднейший диаметр, получаем: в первом случае высотный винт, наивыгоднейший для взлета и подъема самолета, во втором случае (наивыгоднейший диаметр будет меньшим, чем в первом случае) скоростной винт, наивыгоднейший для горизонтального полета, и в третьем случае компромиссный винт. Однако, разница в летных качествах самолета с каждым из этих винтов, как показывают расчеты, невелика. Проблема высотного скоростного и компромиссного ВРШ не имеет того значения, которое она имела для ВФШ, потому что разница в эффективности этих винтов получается только за счет коэфициента полезного действия, в то время как в случае ВФШ разница получалась и за счет коэфициента полезного действия, и за счет числа оборотов винта. В качестве иллюстрации этого на фиг. 79 представлены результаты аэродинамического расчета, проведенного Вейком для самолета VE-7 с мотором 200 л. с. при 1800 об/мин.
Характеристика винтомоторной группы подсчитана и изображена на диаграмме фиг. 79 как для нормального скоростного винта, так и для ВРШ, и кроме того, дана характеристика винтомоторной группы в случае ВРШ с изменяемым диаметром. Из диаграммы видно, что лишь при малых скоростях полета получаются заметные преимущества ВРШ с изменяемым диаметром по сравнению с ВРШ неизменяемого диаметра.
Выбор диаметра ВРШ, так же как и нормального винта, часто ограничивается предельной окружной скоростью конца лопасти.
Иногда выбор диаметра винта ограничивается конструктивными соображениями, а именно, высотой шасси, расстоянием между моторами на многомоторном самолете и т. д.
Подбор наивыгоднейгйего диаметра винта с учетом всех указанных выше условий является, таким образом, наиболее сложным вопросом при конструировании винта.
Наивысшая характеристика винтомоторной группы с ВРШ получается при условии, что при всех скоростях полета мотор развивает максимально допустимые число оборотов и мощность. При таком режиме коэфициент полезного действия винта не всегда получается наивыгоднейшим. Воз
[124)
никает мысль, не получим ли мы лучшие результаты, уменьшив число оборотов винта настолько, чтобы при данной скорости полета коэфициент полезного действия винта был наивыгоднейшим. Расчеты показывают, что путем уменьшения числа оборотов можно улучшить работу винта и по-
Фиг. 79. Характеристика винтомоторной группы для винта фиксированного шага, винта регулируемого шага с постоянным диаметром и винта регулируемого шага с изменяемым диаметром
высить его коэфициент полезного действия, но при этом потеря мощности за счет падения числа оборотов получается более значительной, чем выигрыш в ко.эфициенте полезного действия винта, и в результате полезная мощность винтомоторной группы Nu будет меньше. Следовательно, в тех случаях, когда нас интересует экономичность работы винтомоторной группы, например, при расчете дальности
[125 3
полета, можно получить лучшие результаты прп наивыгод-неишем коэфицпенте полезного действия винта; в других же случаях, например, когда нас интересуют максимальная скорость горизонтального полета и наилучшая скороподъемность, лучшие результаты получаются при максимальном форсировании мотора.
При построении характеристики винтомоторной группы нужно иметь в виду ограничения в форсировании мотора, обусловливаемые прочностью и регулировкой мотора, а также и его охлаждением.
Для современных моторов обычно допускают очень большое максимальное число оборотов (на 15—20% больше нормального). При взлете и подъеме, когда скорость самолета мала, нельзя допускать максимальное число оборотов мотора на продолжительное время, иначе мотор перегреется. При взлете и подъеме самолета число оборотов мотора обычно ограничивают нормальным.
Построение характеристики винтомоторной группы проводят следующим образом.
Находят коэфициент мощности 0 винта для условий полета у земли по формуле
75 Л% ’ р Pow,W8 ’
подставляя в эту формулу максимальную мощность мотора у земли Ne0, максимальное секундное число оборотов выбранный диаметр винта D и плотность воздуха у земли Ро = Vs- Для всех скоростей полета на уровне 'моря коэфициент мощности считают одинаковым, так как наивыгоднейшая характеристика винтомоторной группы с ВРШ получается при. постоянном числе оборотов и мощности, равных максимальным. Подсчитанное значение ₽0 отмечают горизонтальной прямой на диаграмме характеристики винта (фиг. 80).
Затем задаются рядом значении скорости полета V и подсчитывают относительную поступь X с учетом торможения скорости. Она прямо пропорциональна скорости V:
у- V
~w,D(l + <
Эти значения отмечают на характеристике винта вертикальными прямыми (фиг. 80).
[12С]
По точкам пересечения вертикалей К с гопизонталью р0 на диаграмме характеристики ВРШ читают углы установки лопастей <р и коэфициент полезного действия тр Полезную мощность NB найдем умножением мощности мотора Nt на коэфициент полезного действия tj винта и на коэфициент (1 — с) для учета обдувки:
= (1—с).
На высоте коэфициент мощности изменяется как за счет изменения мощности мотора с изменением высоты, так и за
Фиг. 80 Определение ч и <р для винтя регулируемого шага
счет изменения плотности воздуха. Представляем для высоты Н мощность мотора Ne н и плотность воздуха рд через значения их у земли:
Ne иL -4й/с0, Рн — Др0-
Здесь А — коэфициент, характеризующий изменение мощности мотора с изменением высоты, и Д — относительная плотность воздуха.
[127]
Следовательно, для высоты Н имеем:
₽н = "д^Рб-
Величина коэфициента А для мотора с нормальным питанием (без нагнетателя) дана в табл. 9. Там же даны зна-А чения относительной плотности воздуха и коэфициента —.
Таблица 9
Относительная плотность воздуха Д, коэфициент А изменения мощ-ностп нормального мотора с изменением высоты и коэфициент -у для высоты
Я 500 1 000 1 500 2 000 2 500 3 000 3 500 ' 4 000
д 0,953 0,907 0,864 0,822 0,781 0,742 0,705 0,669
А 0,939 0,883 0,826 0,774 0,725 0,678 0,634 0,592
А Л 0,987 0,974 0,957 0,943 0,928 0,914 0,900 0,886
Е 4 500 5 000 5 500 6 000 6 500 7 000 7 500 8 000
Д 0,634' 0,601 0,569 0,538 0,509 0,481 0,454 0,428
А 0,552 0,515 0,480 0,446 0,415 0,385 0,357 0,331
л д 0,872 0,857 0,843 0,829 0,815 0,801 0,786 0,773
н 8 500 9 000 9 500 10 000
д 0,404 0,381 0,358 0,337
А 0,307 0,284 0,262 0,242 *
А Д 0,761 0.746 о г:-: 0,719
[128]
Подсчитав для ряда высот Я значения (3, наносим их горизонталями на диаграмму характеристики ВРШ. По точкам пересечения этих горизонталей с ранее проведенными вертикалями X читаем углы установки <р и коэфи-циент полезного действия tj. Эти значения <р и tq соответствуют тем скоростям полета, какими мы задались ранее при подсчете Л. Полезную мощность находим до уравнению:
(108)
5. ПРЕИМУЩЕСТВА ВИНТОВ РЕГУЛИРУЕМОГО ШАГА
Преимущества ВРШ по сравнению с нормальным винтом очевидны. Потери мощности мотора, обусловленные изменением числа оборотов, вследствие различия в характеристиках мотора и нормального винта не имеют места для ВРШ. Последний позволяет летчику при любых условиях полета менять режим мотора вплоть до максимального числа оборотов при полном открытии дросселя и снимать наибольшую допустимую мощность, если в этом имеется необходимость. Поворотом лопастей винта и регулированием питания мотора летчик может установить в полете режим мотора, наиболее выгодный для каждого случая. Этого нельзя сделать при нормальном винте, когда регулировка режима мотора проводится только дросселированием.
Применение ВРШ ведет, конечно, к улучшению летных качеств самолетов. Увеличиваются скорости горизонтального полета, в особенности улучшается скороподъемность, значительно повышается потолок, увеличивается экономичность полета, значительно уменьшается разбег и возрастает радпус действия. У многомоторного самолета значительно улучшается полет с одним или несколькими выбывшими из строя моторами так как лопасти винтов этих моторов можно поставить под такими углами, при которых их лобовое сопротивление наименьшее.
Насколько улучшаются летные качества самолета в случае замены нормального винта винтом регулируемого шага, нельзя решить в общем виде, так как летные каче ства самолета зависят и от характеристики самолета, и от характеристики мотора, я от характеристики винта. Приходится для каждого конкретного случая продель вать полный аэродинамический расчет. В литературе имеется
V Г И. Куяьмии [ 129 ]
несколько таких решений. Так, в винтовой секций АЙО ЦАГИ инж. Д. В. Халезовым были проведены аэродинамические расчеты для четырех самолетов (Д. В. Халезов, „Исследование работы винта с изменяемым шагом". Труды ЦАГИ, 1935).
Наиболее точный и полный ответ можно получить по летным испытаниям самолета с нормальным винтом и с ВРШ.
Такие сравнительные испытания неоднократно проводились и во всех случаях отметили большие преимущества ВРШ по сравнению с нормальным винтом.
Отметим, что полетные исследования преимуществ ВРШ по сравнению с нормальным винтом можно провести, даже не имея ВРШ. Устанавливая перед полетом на земле лопасти нормального металлического винта под различными углами и совершая полеты при этих фиксированных положениях лопастей, можно получить все интересующие нас данные. невидно, каждое положение лопастей будет наи-выгодненшим для какого-либо одного режима полета.
Результаты аэродинамического расчета самолета истребительного типа с невысотным мотором 570 л. с. при 2 000 об/мин, проведенные Д. В. Халезовым, даны в табл. 10 (стр. 132) и на фиг. 81, 82 и 83.
Расчеты проведены с металлическим винтом диаметром 2,8м подобранным по американским графикам (фиг. 51). У ВФШ угол установки лопастей на условном радиусе 0,75 был равен 23,1°, а у ВРШ этот угол был переменным и подбирался для каждого режима таким, чтобы число его
[130]
оборотов было постоянным и равным максимальному. Диапазон изменения угла установки лопастей оказался равным приблизительно 6°. Проведен также аэродинамический расчет самолета с учетом увеличения его веса за счет большего веса ВРШ по сравнению с нормальным винтом. В расчете принято, что вес ВРШ на 80% больше веса нормального металлического винта; это соответствовало увеличению веса самолета приблизительно на 2%.
Фиг. 82. Углы установки лопастей винта регулируемого шага пи высотам для самолета с нормальным невысотным мотором
Так как ВРШ и ВФШ развивают одинаковое (максимальное) число оборотов при максимальной скорости горизонтального полета на уровне моря и геометрические размеры обоих винтов одинаковы, очевидно, н максимальные скорости самолета в обоих случаях будут одинаковыми. О подъемом на высоту скорость горизонтального полета самолета, снабженного ВРШ, будет несколько больше, чем с нормальным винтом, но увеличение скорости на малых высотах сравнительно невелико (фиг. 81 и табл. 10).
9Г
[131]
Таблица 1(1
Результаты расчета одноместного истребителя Випт металлический D = 2,8 м
Режим полна Высота ВФШ Без учета увеличения веса С учетом увеличения веса
ВРШ ВРШ в % от ВФШ ВРШ ВРШ в % от ВФШ
Vmax ««/час 0 3 000 260 250 260 253 100 101 — —
в ооо 212 225 106 —
и м сен 0 12,6 13.5 107 13,3 10»
3 000 6,5 7 9 122 7,6 121
6 000 1,6 2,8 175 2,6 163
II м 7 050 7 830 111 7 700 11/9
t мни. 3 000 5,5 20,6 4,65 84,5 5,0 91,0
6 000 14,8 72,0 16,0 78,0
Скороподъемность самолета и барограмма подъема значительно улучшаются за счет ВРШ. Увеличение максимальных вертикальных скоростей на всех высотах равно в среднем 1,3 м[сек (без учета увеличения веса самолета за счет большего веса ВРШ), что составляет 9% от максимальной вертикальной скорости подъема у' земли с нормальным винтом. Потолок самолета повышается на 780 .и. Время подъема на высоту 3 000 м уменьшается на 15%, а на 6 000 м — на 28%.
С учетом увеличения веса самолета за счет ВРШ улучшение летных качеств самолета получается несколько меньшим, но все же значительным. Максимальная вертикальная скорость подъема увеличивается в среднем для всех высот на 1 м/сек, пли на 8%, по сравнению с максимальной вертикальной скоростью у земли с нормальным винтом. Потолок повышается па 650 м, время подъема па
[ 132 |
высоту 3 000 м уменьшается на 9%, а на высоту 6 000 л— на 22%.
Результаты летных испытаний, проведенных в Америке на самолете-разведчике О-2Н с мотором Либерти, приведены в табл. 11 (стр. 134).
Из табл. 11 видно, что помимо значительного повышения скороподъемности за счет ВРШ уменьшается на 15% длина разбега самолета и значительно улучшается крейсирование самолета. Крейсерская скорость с ВРШ повышается на 3% при одновременном увеличении радиуса
с нормальным невысотным мотором
действия на 5%. С уменьшением же крейсерской скорости на 8% (при другом положении лопастей) радиус действия самолета увеличивается на 20%.
Такое значительное увеличение радиуса действия получается благодаря подбору режима полета, наивыгоднейшего в отношении характеристики самолета, характеристики мотора и характеристики винта. Полет совершается при наибольшем качестве самолета с наивыгоднейшим коэ-фициентом полезного действия винта, получающимся благодаря соответствующему подбору шага лопастей и числа оборотов, и наконец, с таким дросселированием мотора, при котором совместная работа винта и мотора получается наивыгоднейшей в отношении расхода горючего на 1 км пути.
У высотных моторов с пересжатием мощность поддерживается постоянной от земли до некоторой предельной высоты путем дополнительного открытия дросселя. Такой
Г 1
Таблица 11
Ревультаты американских испытаний разведчика 02-Н с мотором Либерти
Высота полета Н = О
Режим полета ВФШ ВРШ ВРШ ВФШ 100%
Горизонтальный полет Скорость В К.И/ЧЛС . . Число об/мин ... 213 1 715
Подъем Скорость в км/час . . Число об/мин Скороподъемность в м ’сек 126 1 560 4,6 5,2 113
Крейсирование Скорость в км/час . . . Число об/мин ... Длина пути на 1 кг топлива в км/кг . . Дальность полета в км Продолжительность полета в часах .... 171 440 2,65 785 4,6 <Р2 % ^2
176 1 300 2,78 825 4,7 156 1 200 3,19 946 6,0 103 90 105 105 102 91 83,5 120 120 130
Разбег Длина разбега в м . 260 220 85
мотор имеет достаточный запас числа оборотов с подъемом на высоту, и нормальный винт при горизонтальном полете с максимальной скоростью использует его максимальную допустимую мощность до предельной высоты для данного мотора. ВРШ в этом случае будет снимать с мотора точно такую же мощность, как и нормальный винт, и поэтому он не даст увеличения скорости горизонтального полета на высотах от земли до предельной для данного мотора. С подъемом же самолета на высоту, большую
Г 134 1
предельной, мощность мотора с пересжатием падает по-такому же закону, как и мощность нормального невысотного мотора. Следовательно, улучшение летных качеств самолета за счет ВРШ на этих высотах будет таким же, как и в случае нормального мотора.
Фиг. 84. Характеристика мотора с нагнетателей
Весьма значительные преимущества ВРШ по сравнению с нормальным винтом получаются у моторов с нагнетателями. На фиг. 84—87 и в табл. 12 (стр. 136) представлены результаты аэродинамического расчета одноместного истре-
Фиг. 85. Скорости самолстк с высотным мотором с нагнетателем
[ 136 ]
бителя с мотором, снабженная приводным центробежным нагнетателем. Характеристика мотора дана на фиг. 81. Нормальный винт подобран для максимальной скорости на предельной высоте для данного мотора, т. е на 3 650 ли ВРШ взят того же типа и диаметра, что и нормальный винт. Диапазон изменения угла установки лопастей равен примерно 9°. С подъемом самолета на высоту угол установки лопастей сначала растет до предельной высоты для мотора, а затем уменьшается.
Таблица 12
Результаты аэрединнмического расчета одноместного истребителя с мотором, снабженным нагнетателем, нормальным впитом и ВРШ
Л’тах = 570 л. с.; «щах = 2 000 Об/мин
Гшах = 297 к.и час; D =2,9 м: h = 1,132
Режим полета .... Высота в м ВФШ ВРШ ВРШ 100°/ ВФШ /о
0 234 248 106
Утах К.и час 3 650 297 297 100
8 000 267 275 103
0 8. 1 12,7 157
и м с к 3 650 12,1 13,6 112
8 000 3,5 4,8 137
Н м 9 700 10 650 * ПО
t мин. 3 650 6,2 4,7 76
8 000 16,6 13,5 81
Как видно из диаграмм фиг 84—87 и табл. 12 за счет ВРШ возрастает максимальная скорость горизонтального полета у земли на 6%, наибольшая вертикальная скорость подъема на 57% у земли, на 12% на высоте 3 650 м и на 37% на высоте 8 000 м. Время подъема на высоту 3 650 м уменьшается на 24%, а на высоту 8 000 м — на 19%. Эти результаты получены без учета увеличения веса самолета
[ 136 I
I ш 1
Фиг. 86. Максимальные вертикальные скорости л барограммы подъема самолета с высотным мотором с нагнетателем
за счет ВРШ и при максимальном форсировании мотора. Если число оборотов мотора с ВРП1 при подъеме ограничим нормальным и учтем увеличение веса самолета за счет ВРШ, то выигрыш за счет ВРШ получим несколько меньший, но все же значительный.
В табл. 13 приведены результаты американских испытаний двухмоторного самолета Boeing-247, снабженного нор-
Фиг. 8V. Углы установки лопастей винта на высоте для самолета с высотным мотором с нагнетателем
мальными винтами и винтами Гамильтон-Стандарт (двухшагового типа). На самолете стоят высотные моторы Уосп, безредукторные, серии SJDJ, мощностью 350 л. с. при 2 000 об/мин на высоте 1525 м. Так как при испытаниях фирмы самолет показал лучшие данные с трехлопастным винтом диаметром D — 2,675 ль то сравнительные испытания были проведены с тем же винтом, как с нормальным. ВРШ был двухлопастным, диаметром В—.2,80 ль Вес двухлопастного
[1381
Таблица 13
Результаты американских испытаний двухмоторного пассажирского самолета Boeing-247 с нормальными винтами и с ВРШ
ВФШ: D = 2,675 м — трехлопастный металлический ВРШ: 0 = 2,80 м — двухлопастный двухшагового типа
Режим полета ВФШ ВРШ Улучшение в %
Разбег 6 = 5950 кг Угол лопастей , ..... 18,3° 15,9е —
Длина разбега в л ..... К 282 226 20
Время разбега в сек. 19,0 15,2 20
Число оборотов в конце разбега . 1 650 1 930 —
Подъем 6 = 5750 кз Вертикальная скорость подъема в л/сек 4,11 5,0 22
Подъем за 10 мин. в м . 2 530 2 900 14
Число оборотов на высоте 1 530 м 1 835 2 150
Потолок с одним мотором G = 5 750 кг 2 000
6 = 5 950 кг. ....... — 4 000 100
Крейсирование <7 = 5 750 кг Угол лопастей <f°. ...... 18,3е 21° —
Скорость в км'час ...... 260 275 5,5
Число оборотов ........ 2 ООО 2 000 —
Давление на всасывании в мм 655 718 —
Мощность в л. с . , 345 395 14,5
[139]
ВРШ очень мало отличается от веса нормального трехлопастного винта.
Испытания самолета Boeing показали большие преимущества ВРШ двухшагового типа по сравнению с нормальным винтом. Длина и время разбега уменьшились на 20%, максимальная вертикальная скорость подъема увеличилась на 22%, высота подъема за 10 мин. возросла на 14%, потолок при полете с одним мотором, даже при большем весе, с ВРШ, увеличился вдвое. Крейсерская скорость возросла на 5,5%, а максимальная скорость на высоте 1 525 м уменьшилась только на 1,5 км]ча,с.
Отмечается также, что при уменьшении крейсерской скорости может быть значительно уменьшен расход горючего на 1 км пути.
Редакторы майор В. И. Внуков и военинженер 3-го ранга Е. Ф. Бурче Технич. ред. И. Дуду ев и Г. Дукашкин Корректор Л. Косоурова Выпускающий Б. Астафьев
Сдано в производство 15.10.3fl Подписано к печати 27.12.36 Формат бумаги 82X108/32 Объем 8% п. л., 7,2 авт. л.
Упоен. Гпавлита Г-6052. Изд. № 181. Зак. Ла 812, Тираж 50 СОО »ка.
Цена книги 1 руб. 50 коп.» переплета 60 коп.
Текст отпечатан на бумаге Окуловской ф-ки
Адрес изд-ва: Москва, Орликов пер., д. 3.
Отпечатано в 1-й типографии Государств, военного пад-ва НКО СССР.
Москва, ул. Скворцов а-Степанова, д. 3.