/


















































































































































































































































































































































Author: Бочкарев А.Ф.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника механика машиностроение самолеты аэромеханика
Year: 1985




Text
ДЛЯ ВУЗОВ
АЭРОМЕХАНИКА
САМОЛЕТА
’МАШИ1 lOCTPOLHML»
АЭРОМЕХАНИКА
САМОЛЕТА
ДИНАМИКА ПОЛЕТА
Издание второе,
переработанное и дополненное
Под редакцией
А.Ф. Бочкарева и В.В. Андреевского
Допущено Министерством высшего и среднего
специального образования СССР
в качестве учебника для студентов
авиационных специальностей вузов
S|Д ЛИu't gК ft I
МОСКВА
«МАШИНОСТРОЕНИЕ»
1985
ББК 22.253
Д46
УДК 629.7.015 (075.8)
А. Ф. Бочкарев, В. В. Андреевский, В. М. Белоконев,
В. И. Климов, В. М. Турапин
Рецензент д-р техн, наук А. М. МХИТАРЯН
Аэромеханика самолета: Динамика полета: Учебник для
Д46 авиационных вузов/А. Ф. Бочкарев, В. В. Андреевский,
В. М. Белоконов и др.;. Под ред. А. Ф. Бочкарева и
В. В. Андреевскогб. 2-е изд. перераб. и доп. —М.: Машино-
строение 1985.—360” с., ил.
В пер.: 1 р. Ю к.
3606030000-216 ' _
Д 038 (01)-8б 2,в’85’
ББК 22.263
533
© Издательство «Машиностроение», 1985 г.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Эта книга — второе издание учебника «Аэромеханика
самолета» (первое вышло в издательстве«Машиностроение» в 1977 г.).
По сравнению с первым изданием учебник существенно переработан
и дополнен с учетом последних разработок в области динамики
полета, устойчивости и управляемости, на основе опыта исполь-
зования его в учебном процессе. Во втором издании введение напи-
сано В. В. Андреевским и А. Ф. Бочкаревым совместно, в первой
части учебника гл. 1 написана В. М. Белоконовым при участии
В. В. Андреевского, главы 2, 3, 4, 5 и 6 — В. В. Андреевским,
7 и 8 — В. И. Турапиным при участии В. В. Андреевского. Общая
редакция первой части — В. В. Андреевского. Во второй части
гл. 9 написана А. Ф. Бочкаревым при участии В. В. Андреевского,
главы 10, 11, 12 и 13 — А. Ф. Бочкаревым, гл. 14 — В. В. Андре-
евским. Общая редакция второй части учебника — А. Ф. Бочка-
рева. В третьей части гл. 15 и 16 (кроме § 16.5) написаны А, Ф. Боч?
каревым, гл. 17 и 18 — В. И. Климовым, § 16.5 — А. Ф. Бочка-
ревым при участии В. В. Андреевского, гл. 19 — В, В. Андреев-
ским. Общая редакция третьей части — А. Ф. Бочкарева,
иЫ.ДЫШ.
Динамика летательных аппаратов в атмосфере — раздел
механики, в котором изучается движение летательных аппаратов
в атмосфере (ГОСТ 20058—80). Применительно к самолету, движе-
ние которого в значительной степени определяется аэродинамиче-
скими силами, вместо понятия динамика полета самолета здесь упо-
требляется понятие аэромеханика самолета, которое можно считать
эквивалентным.
Аэромеханика самолета рассматривает вопросы, связанные с ис-
следованием траекторий движения самолета, его устойчивости и
управляемости.
Без знания аэромеханики невозможно спроектировать, изготовить
и грамотно эксплуатировать самолет, отвечающий заданным техни-
ческим требованиям. Поэтому курс аэромеханики самолета занимает
ведущее место в подготовке авиационного инженера по самолето-
строению.
В своих методах исследования аэромеханика самолета опира-
ется на основные положения теоретической механики, аэродинамики,
теории двигателей, теории автоматического управления и других
дисциплин. В свою очередь аэромеханика самолета используется
при изучении таких дисциплин, как проектирование систем управ-
ления полетом самолетов, прочность самолетов, конструирование
и проектирование самолетов, техническая эксплуатация самолетов
и др.
Методы расчета летных характеристик самолета, его устойчи-
вости и управляемости постоянно развиваются и совершенству-
ются.
Научная база, позволившая проектировать надежные летатель-
ные аппараты тяжелее воздуха, была создана трудами наших сооте-
чественников Н. Е. Жуковского, С. А. Чаплыгина и их учеников,
трудами ряда иностранных ученых.
Классические работы Н. Е. Жуковского «О прочности движения»,
«Теоретические основы воздухоплавания», «Динамика аэропланов
в элементарном изложении» заложили основу теории полета.
Н. Е. Жуковский постоянно заботился о том, чтобы теория была до-
стоянием практиков. Он создал стройный метод аэродинамического
расчета самолета, известный под названием метода тяг Н. Е; Жу-
ковского, который применяется и в настоящее время.
4
Современная теория устойчивости движения летательных аппара-
тов основывается на фундаментальной работе А. М. Ляпунова «Об-
щая задача об устойчивости движения».
В годы Советской власти с развитием авиационной промышлен-
ности росла и крепл'а авиационная наука. Был создан (1918 г.)
Центральный аэрогидродинамический институт (ЦАГИ), другие
авиационные научно-исследовательские институты, в конструктор-
ских бюро создавались новые самолеты, развивалась советская школа
теории полета.
Важное место среди работ по динамике полета самолета зани-
мают капитальные труды В. ’ П. Ветчинкина «Динамика полета»
(1927 г.) и «Динамика самолета» (1933 г.), В. С. Ведрова «Динами-
ческая устойчивость самолета» (1938 г.), В. С. Пышнова «Аэродина-
мика самолета» (1935—1938 гг. и 1943 г.), «Динамические свойства
самолета» (1951 г.) и «Устойчивость и управляемость самолета»
(1953 г.), И. В. Остославского и Г. С. Калачева «Продольная устой-
чивость и управляемость самолета» (195J г.), И. В. Остославского
«Аэродинамика самолета» (1957 г.) и других авторов.
Последние десятилетия ознаменовались в авиации освоением
новых высот и скоростей, созданием нового поколения авиационной
техники.
Об успехах в нашей стране теоретических и экспериментальных
исследований в области теории полета свидетельствуют достижения
советского самолетостроения. Специалисты, работающие в- области
динамики самолета, успешно решают задачи, связанные с созданием
современных самолетов, обладающих высокими летно-техническими
характеристиками и пилотажными свойствами.
Новым вкладом в исследовании механики полета самолета стали
работы Л. М. Шкадова, Г, С. Бюшгенса, Р. В. Студнева, Н. М. Лы-
сенко, И. М. Пашковского и других ученых.
Динамика полета современных самолетов — это стройная, по-
стоянно обновляющаяся научная дисциплина, ’позволяющая решать
задачи анализа и исследования важнейших характеристик самоле-
тов на всех этапах их создания, испытаний и эксплуатации.
Полет самолета с точки зрения механики является управляемым
движением. Это означает, что при одних и тех же параметрах само-
лета и начальных условиях может быть реализовано бесконечное
множество возможных траекторий полета в зависимости от управ-
ляющих воздействий летчика, программы работы автоматических
средств управления, а также от внешних факторов, действующих
на самолет в полете. Управляющие воздействия формируются целе-
направленно для обеспечения самого полет^ и выполнения полетной
задачи. Внешние факторы определяются условиями применения
самолета, состоянием воздушной среды и т. п. и целенаправленному
изменению не поддаются. До полета они, как правило, известны
лишь приближенно, в среднем, и могут меняться как от полета к по-
лету (например, при эксплуатации самолета в различных климати-
ческих зонах, погодных условиях и т. п.), так и в ходе одного полета
(атмосферная турбулентность, колебания температуры воздуха и
5
т. п.). В первом случае говорят обычно об изменении условий полета,
во втором — о возмущающих воздействиях, возникающих в ходе
полета.
Если при исследовании движения самолета как условия полета,
так и возмущающие воздействия известны, а управляющие воз-
действия заданы, то при данных начальных условиях уравне-
ния его. движения решаются однозначно и полностью опреде-
ляют изменение по времени всех переменных, характеризующих
движение самолета. Решение уравнений движения в этом слу-
чае обычно называют прямой задачей механики или задачей ана-
лиза.
При реальном управлении самолетом, как правило, управляю-
щие воздействия в явном виде не задают, а формируют в полете
исходя из условия получения требуемого, программного характера
движения. Так, при полете по маршруту летчику задают высоту по-
лета (эшелон), скорость (график движения) и курс. Летчик контро-
лирует значения этих параметров движения по приборам и парирует
их отклонения от заданных значений, выбирая для этого в каждый
момент времени требуемые отклонения управляющих органов в со-
ответствии со своими навыками пилотирования самолета. Ту же
задачу может решать и автопилот при автоматическом управлении
самолетом в соответствии с заложенным в него законом управления.
Определение требуемого управления, обеспечивающего заданный
или желаемый характер движения, называют иногда обратной зада-
чей механики или задачей управления*.
Решение обратной задачи, имеет ряд особенностей, связанных
с наличием возмущений, изменчивостью условий полета. Очевидно,
в реальных условиях требуемые управляющие воздействия должны
зависеть от конкретных текущих значений неопределенных или слу-
чайных факторов, обеспечивать их парирование при отслеживании
заданной траектории. При этом диапазон значений таких факторов
обычно известен, а их воздействие на движение самолета ограничено.
Это позволяет условно^разделить реальное движение и потребные
управляющие воздействия на две составляющие. Первая составля-
ющая рассчитывается из-условия получения желаемой траектории
в некоторых средних условиях, при нулевых возмущениях и номи-
нальных параметрах самого самолета,'Движение, рассчитанное для
таких идеальных условий, и соответствующие ему управляющие
воздействия называются обычно опорными. Характеристики опор-
ного движения могут быть рассчитаны заранее для средних или пре-
дельных условий полета и зависят только от вида заданной или
желаемой траектории. '
' Вторая составляющая связана с действием возмущений или от-
клонений, не учтенных в. опорном движении. В результате фактиче-
* Другая обратная задача — восстановление действий летчика и фактических
характеристик самолета по записи изменения параметров движения при летных
испытаниях или расследовании летного происшествия, называется задачей иден-
тификации.
6 '
ское, или, как его называют, возмущенное движение неизбежно от-
личается от опорного. Однако такие отличия не могут быть значи-
тельными, по крайней мере, при нормальных эксплуатационных
условиях, иначе заданное движение не будет реализовано, а задача
полета не будет выполнена. Близость фактического движения к
заданному обеспечивается либо за счет собственной устойчивости
движения самолета, либо за счет'- создания летчиком (или автомати-
кой) дополнительных (по отношению к опорному значению) управ-
ляющих воздействий, парирующих отклонения. Если принять ги-
потезу малых возмущений, то можно весь круг задач, решаемых
динамикой полета самолета (как прямых, так и обратных), разбить
как бы на два уровня:
динамика опорного движения,
динамика возмущенного движения.
При этом в опорном движении, как правило, рассматриваются
те характеристики и показатели, на которые кратковременные слу-
чайные возмущения влияют, слабо. Такими показателями являются
в основном летно-технические характеристики (ЛТХ) самолета,
относящиеся к полету в целом или его этапам и характеризующие
возможности самолета и его соответствие тактико-техническим тре-
бованиям. Летно-технические характеристики включают:
диапазоны высот и скоростей, в которых возможны безопасный
полет самолета и выполнение определенных полетных задач с учетом
ограничения допустимых режимов полета;.
дальность и продолжительность полета, радиус действия в зави-
симости от заправки топливом и полезной нагрузки;
маневренные характеристики (радиус или. угловая скорость ви-
ража, скороподъемность, время выполнения заданного маневра,
действующие при этом на самолет перегрузки и т. п.);
взлетно-посадочные характеристики (включая характеристики
при отказе дзигателя на взлете и посадке).
Отдельные показатели, входящие в ЛТХ, называют летными
данными или характеристиками самолета.
Помимо этих характеристик в ЛТХ входит ряд технических
показателей, описывающих грузоподъемность самолёта, его эксплу-
атационные особенности (время наземного обслуживания, класс
аэродромов, с которых он может эксплуатироваться, требования
к системам обеспечения полета и т. п.), эффективность выполнения
задачи полета, уровень безопасности, комфорта и т. п.
При проектировании требуемые значения летных данных опреде-
ляются техническим заданием (ТЗ), а их фактические значения
находятся на основе расчетов.
Расчет летных характеристик производится либо для некоторых
стандартных условий, при которых сравниваются между собой тех-
нические решения при проектировании, либо для ряда заданных
условий из Диапазона, в котором предположительно будет эксплуа-
тироваться самолет при различных вариантах его загрузки и за-
правки топливом. Летно-технические характеристики определяются
как интегральные (время, затраты топлива, пройденная даль-
7
ность для полета в целом или его этапа) или предельные (потолок,
максимальная скорость набора высоты и т. п.) характеристики тра-
екторий движения центра масс самолета.
Для нахождения летных данных требуется обычно либо выпол-
нить расчет траекторий, соответствующих этапам полета с заданной,
чётко определенной программой управления для ряда характерных
типовых маневров (прямая задача), либо определить требуемые
управляющие воздействия, обеспечивающие заданный режим по-
лета (задача управления). Для оценки предельных значений инте-
гральных показателей проводится оптимизация программы управ-
ления самолетом при маневре (задача оптимизации).
Под маневром обычно подразумевают сравнительно короткий
этап полета, целью которого является то или иное изменение пара-
метров движения центра масс самолета — скорости, высоты, курса,
дальности и т. п. Если для достаточно продолжительного этапа
полета задана программа изменения скорости, высоты, угла наклона
траектории и т. п., то обычно говорят о выдерживании определен-
ного режима полета с заданными параметрами. Важное значение
при расчете летных характеристик самолета имеет анализ устано-
вившихся режимов полета — режимов, при которых основные кине-
матические параметры движения постоянны или меняются доста-
точно медленно.
Опорное движение рассматривается не только при расчете летно-
технических характеристик самолета, но и при решении большинства
задач, связанных с расчетом траекторий и анализом движения центра
масс самолета, так как влияние возмущений- на характеристики
движения центра масс самолета (так называемое «траекторное»
движение) обычно невелико. Без учета возмущений решается обычно
и задача оптимизации траекторий по какому-либо интегральному
показателю (время, затраты топлива и т. п.).
Особенностью расчета опорного движения является то, что для
него в каждый момент времени требуемые значения управляющих
воздействий известны или могут быть определены, причем без учета
возмущений.
В опорном движении оцениваются также некоторые показатели
управляемости — так называемые > балансировочные или статиче-
ские характеристики. При этом устанавливается соответствие между
требуемыми значениями управляющих воздействий и заданным
опорным режимом полета. Определив потребные управляющие
воздействия, можно оценить характер их изменения в зависимости
от параметров движения, а также соответствие располагаемым зна-
чениям, поскольку управляющие воздействия ограничены. Оче-
видно, разность между располагаемыми и потребными управляющими
воздействиями на любых расчетных режимах полета должна обеспе-
чивать парирование возмущений.
Что касается возмущенного движения, то здесь две задачи —
проверить, действительно ли отклонения от опорного движения при
действии тех или иных возмущений малы (задача устойчивости)
и оценить, какие управляющие воздействия требуются для париро-
8
ваиия возмущений и какие запасы на управление в возму-
щенном движении требуется предусмотреть (задача управляе-
мости) .
Заметим, что методы решения задач устойчивости и управляе-
мости отличаются от методов расчета траекторий и определения
ЛТХ самолета. Эти задачи обычно рассматривают отдельно. Следует
лишь помнить, что без обеспечения устойчивости и управляемости
самолета безопасный полет и выполнение полетного задания вообще
невозможны, так что решение задач второго уровня — необходимое
условие для рассмотрения первого. Требования к устойчивости и
управляемости самолета поэтому нормируются.* Самолет, не удовле-
творяющий этим требованиям, к эксплуатации не допускается. С дру-
гой стороны, именно летные характеристики самолета определяют
тот диапазон режимов полета, для которого нужно исследовать
устойчивость и управляемость, так что решение этих задач взаимо-
связано.
И расчет траекторий, и анализ устойчивости и управляемости
самолета могут проводиться для различных условий его эксплу-
атации.
Под условиями эксплуатации самолета при этом понимаются
обычно параметры состояния воздушной среды, включая возможные
ее активные воздействия (порывы ветра, обледенение и т. п.), по-
годные условия, состояние ВПП, условия загрузки самолета,
а также характеристики движения самого самолета — режимы
полета, режимы работы двигателей, конфигурация самолета, т. е.
положение его шасси (выпущено или убрано), механизации крыла
(убрана, находится во взлетном, предпосадочном или. посадочном
положении,) для самолетов с изменяемой стреловидностью — угол
стреловидности и т. п.
При выборе расчетных случаев различают основную, эксплуата-
ционную и предельную область условий эксплуатации.
Основная область это режимы полета, которые реализуются
практически в каждом полете и на которых выполняется основная
задача полета и условия, возникающие достаточно часто.
К эксплуатационной области относятся режимы и условия по-
лета, которые могут возникнуть при нормальной массовой эксплу-
атации самолета.
Наконец, предельная область — режимы и условия полета,
которые достигаются только в особых случаях. Выход за границу
предельной области недопустим и ведет к нарушению условий бе-
зопасности полета.
Спроектированный с учетом требований безопасности для вы-
полнения определенных задач в расчетных условиях самолет затем
проходит цикл летных испытаний, в процессе которых осуществля-
ется доводка его характеристик в соответствии с техническими
* Для гражданских самолетов СССР эти требования изложены в «Нормах
летной годности гражданских самолетов», 2-е изд. М., 1972.
9
требованиями и нормами и уточняются допустимые при эксплуатации
режимы и условия полета.
На основе расчетов и испытаний составляется .«Руководство
по летной эксплуатации» (РЛЭ), регламентирующее способы и ус-
ловия эксплуатации самолета. В'процессе эксплуатации расчеты
траекторий, оценка устойчивости и управляемости осуществляются
при модификации самолета, расширении сферы его использования,
для повышения эффективности применения в новых услдвиях или
с учетом накопленного опыта.
Таким образом, подходы и методы динамики полета (аэромеха-
ники) используются для решения технических задач, возникающих
на всех стадиях жизненного цикла самолета.
ЧАСТЬ I
механика полета самолета
ГЛАВА 1. УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА
Применение общих принципов механики при изучении
движения самолета имеет ряд особенностей, связанных с записью
уравнений движения, выбором системы координат, методами упро-
щения полученных уравнений и т. п. Эти особенности рассмотрены
в данном разделе.
§ 1.1. ПРИМЕНЕНИЕ ОБЩИХ ПОЛОЖЕНИЙ МЕХАНИКИ
К СОСТАВЛЕНИЮ УРАВНЕНИЙ ДВИЖЕНИЯ САМОЛЕТА
При изучении движения любого материального объекта
необходимо прежде всего указать систему отсчета, относительно
которой наблюдается движение.
В механике .различают инерциальные и неинерциальные системы
отсчета.
Уравнения движения самолета относительно инерциальной си-
стемы отсчета могут быть получены из основных теорем динамики
твердого тела. Движение твердого тела описывается векторными;
уравнениями ’
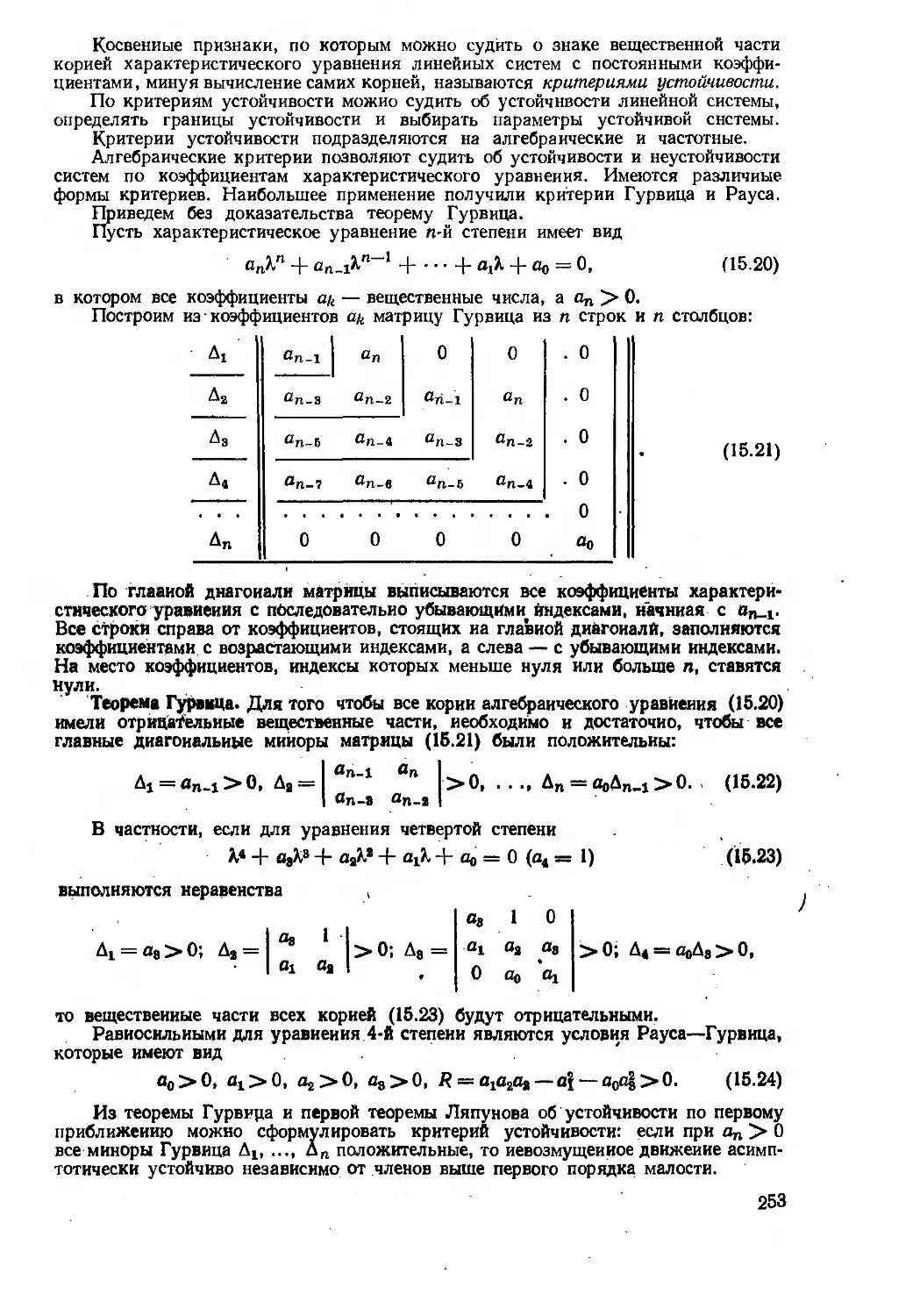
Ю- = Е' — = М, (11)
- dt г> dt ’ . v '
где Q и К главный вектор и главный момент относительно центра
масс количества движения твердого тела; F и М — главный вектор
и главный момент относительно центра масс внешних сил, действу-
ющих иа твердое тело.
Самолет не является твердым телом и должен рассматриваться
как система переменного состава. Для нее уравнения движения имеют
вид уравнений (1.1) движения твёрдого тела, если представить^ что
в данный момент система затвердела, и к полученному фиктивному
твердому телу приложены внешние силы, действующие на систему,
реактивные силы, внутренние силы Кориолиса и вариационные силы
(принцип затвердевания).
Внутренние кориолисовы силы инерции возникают из-за отно-
сительного движения масс внутри твердой оболочки тела при ее вра-
щении. Вариационные силы обусловлены нестационарностью дви-
жения масс внутри твердой оболочки тела.
Принято объединять реактивную силу, статические силы от
разности атмосферного давления и давления газов во входном ce-
ll
чении воздухозаборника и в выходном сечении сопла и вариацион-
ные силы, поскольку они непосредственно связаны с процессами,
происходящими в двигательной установке. Полученную таким об-
разом силу называют тягой двигателя и обозначают Р.
Внешние силы, не связанные с работой двигательной установки
и не включенные в тягу Р, и момент этих сил обозначим соответст-
венно FBti и Мвн.
С учетом принятого объединения сил векторные уравнения ко-
личества движения и момента количества движения самолета в инер-
циальной системе отсчета имеют вид
^- = Лн + ^ + Л<оР; (1-2)
. + Л4р + Л4кор> (1 ‘3)
где Q и К — количество движения и момент количества движения
относительно центра масс самолета как затвердевшей системы пере-
менного состава; Гвн и 7И(1Н — главный вектор и главный момент
внешних сил, не связанных с работой двигательной установки;
Р и Мр — тяга двигателей и момент тяги двигателей относительно
центра! масс; FK0V и Л4КОр — главный вектор и главный момент
относительно центра масс кориолисовых сил инерции.
Уравнение (1.2), (описывающее поступательное движение центра
масс самолета, часто называют уравнением сил, а (1.3) описывающее
вращательное или угловое движение вокруг центра масс — урав~
пением моментов.
Пренебрегая скоростью и ускорением перемещения центра масс
самолета относительно его корпуса, вычисляем производную от
количества движения по времени согласно принципу затвердевания,
как в случае твёрдого тела с постоянной массой
где т — масса самолета; Vo — абсолютная скорость его центра
масс.
Следует заметить, что в большинстве задач аэромеханики самолета
можно пренебречь влиянием кориолисовых и вариационных сил
и моментов, связанных с движением масс топлива и газа внутри са-
молета. Поэтому в дальнейшем уравнения (1.2) и (1.3) будем запи-
сывать в упрощенном виде:
= + (1-5)
d-^^MEw + Mp. (1.6)
12
Если рассматривают движение самолета относительно неинер-
циальной системы отсчета, уравнения (1.5) и (1.6) должны быть из-
менены. В этом случае при вычислении количества движения и
момента количества движения самолета рассматриваются скорости
Уг и сог относительно принятой системы отсчета. Правые части
уравнений (1.5) и (1.6) дополняются переносными Fe и кориолисо-
выми FK силами инерции и моментами этих сил Ме и Мк, связан-
ными с переносным движением неинерциальной системы отсчета.
Таким образом, векторные уравнения движения самолета от-
носительно неинерциальной системы отсчета получают, вид
dVrn -> -> z
(1-7)
(1-8)
В практических исследованиях векторные уравнения движения
заменяют эквивалентной системой дифференциальных уравнений,
являющихся проекциями векторных уравнений (1.5), (1.6) или
(1.7), (1.8) на оси выбранной прямоугольной системы координат
OXYZ. При этом соотношения, полученные из векторного уравнения
количества движения (уравнения сил), описывают поступательное
движение центра масс самолета, а из уравнения момента количества
движения (уравнения моментов) — вращательное, или угловое дви-
жение вокруг центра масс.
Систему координат OXYZ, используемую для записи векторных
уравнений движения в проекциях, не следует свешивать с системой
координат О’Х°У®20, используемрй для отсчета векторов ускоре-
ний, скоростей и перемещений (системой отсчета) рис. 1.1. Для
системы OXYZ начало координат можно помещать в произвольную,
в том числе подвижную точку -О, *гто Н£ сказывается на величине
проекций. Проекции некоторого вектора а (определенного относи-
тельно системы отсчетаОД0К02°) на оси системы.OXYZ зависят только
от направления этих осей.' Проекции производной вектора а По вре-
мени зависят, кроме того, от составляющих угловой скорости
системы координат OXYZ относительно той же системы отсчета
O°X0Y°2P:
— ax -j- (£>sflz — <о.ай;
X
I = ay-\- а>гах — <£>xaz;
' v
(1.9)
da
dt
— 4“
г
13
Рис. 1.1. Система отсчета O°X°Y°Za и
подвижная система координат OXYZ
Рис. 1.2. Инерциальная и земная си-
стемы координат 0иХиГи7и и
ОиХ0Го20, используемые в качестве
систем отсчета:
1 — плоскость экватора; 2 -- гринвич-
ский меридиан
Здесь ах, аи, az — проекции а на оси системы OXYZ\ ах, ау, az —
их производные; сож, сой и coz — проекции угловой скорости aXIJZ
на оси системы OXYZ. В частном случае, если система OXYZ фик-
сирована относительно 00Х0У07°, то <ож = = со2 =0.
§ 1.2. СИСТЕМЫ КООРДИНАТ, ПРИМЕНЯЕМЫЕ
I ВДИНАМИКЕ ПОЛЕТА ftyj
При задании уравнений движения и определении ускорений,
скоростей и перемещений| систему координат, используемую в ка-
честве системы отсчета, удобно связывать с Землей или инерциаль-
ным пространством.| В соответствии с ГОСТ 20058—80 к таким си-
стемам относятся инерциальная, земная, и стартовая.^
Для характеристики системы координат необходимо задать
положение начала координат, некоторое опорное направление и
основную плоскость. Все системы координат, используемые в дина-
мике полета, в соответствии с ГОСТ 20058—80 являются правыми.
Инерциальная (абсолютная геоцентрическая экваториальная) си-
стема координат OaX^YaZu (рис. 1.2). Начало координат Ои по-
мещается в центре Земли, основной является плоскость экватора
OuXuZa, за опорное принимается направление ОИХИ, параллельное
линии Земля—Солнце в день весеннего равноденствия. Ось Ои/И
направлена вдоль оси вращения Земли в сторону северного полюса.
Эта система координат принята за инерциальную, потому что
направление осей координат не зависит от времени, а ускорением
центра Земли в ее движении относительно Солнца можно пренебречь.
Земная (вращающаяся геоцентрическая экваториальная) система
координат O0X0Y0Z0 (см. рис. 1.2, точка О0 совпадает с Ои). Она от-
личается от инерциальной системы тем, что ее оси О0Х0 и O0Y0 свя-
заны с 'Землей и вращаются вместе с ней вокруг оси O0Z0 = O„Z„
14
Рис. 1.3. Стартовая система координат
Ос Xq FCZC:
1—меридиан точки старта; 2—парал-
лель течки старта; 3 — местная горизон-
тальная плоскость; 4— траектория само-
лета
Рис. 1.4. Нормальная система коорди-
нат OXgYgZg и., ее положение относи-
тельно земной системы:
/ — плоскость экватора; 2 — местная го-
ризонтальная плоскость, проходящая че-
рез т. О', 3 — параллель, проходящая через
точку А; 4 — меридиан, проходящий через
точку А
с угловой скоростью <о3 Земли. Опорное направление О0Х0 пересе-
кает гринвичский меридиан, образуя переменный угол coaSo с осью
0иХа, где So — звездное время на гринвичском меридиане. Поло-
жение самолета относительно этой подвижной системы отсчета
определяют сферическими, так называемыми географическими коор-
динатами: X — географическая долгота; <р — географическая ши-
рота; г — расстояние самолета от центра Земли. Система ОъХйУ^,
вообще говоря, неинерцйальна, однако в ряде задач ее неинерци-
альностью пренебрегают. *
В качестве земной системы координат может быть принята и
другая система координат, начало и оси которой фиксированы по
отношению к Земле и выбираются в соответствии с задачей. При-
мером такой системы является стартовая.
Стартовая система координат O0XcycZc или OcXcyrZc (рис. 1.3)—
система, начало которой расположено либо в центре Земли О0, либо
на поверхности Земли в точке 0с старта самолета *. Основная пло-
скость OCXCZC касается поверхности Земли в точке старта. Ось ОСХС
направлена на север по касательной к географическому меридиану,
ось OCYC направлена по продолжению радиуса, соединяющего, центр
Земли с точкой старта, ось OCZC расположена по касательной к па-
раллели и направлена на восток. Эта система координат — неинер-
циальная и вращается вместе с Землей. Траекторию самолета опре-
деляют обычно относительно стартовой системы отсчета.
1 Ускорение, скорость и перемещение самолета определяются обы-
чно в земной или стартовой системе. Скорость самолета относительно
* За точку старта Ос принимается или точка начала движения при взлете
самолета, или точка на поверхности Земли, над которой самолет находился в на-
чале рассматриваемого интервала времени,
15
земной или стартовой системы отсчета называется земной скоростью
и обозначается VK. |Инерциальная система используется при оценке
переносных кориолисовых сил и моментов, обусловленных вращением
Земли, если учитывается неинерциальность системы отсчета, свя-
занной с Землей.|
Для записи векторных уравнений движения в проекциях исполь-
зуются подвижные системы координат, начало которых О условно
помещают в центр масс самолета. Для таких систем координат
необходимо задать опорное направление и основную плоскость по
отношению к системе отсчета (например, к земной) или, что тоже
самое — эйлеровы углы, определяющие положение осей OXYZ
в системе O°X0Y°Z0, а также угловые скорости ых, ыу и сог.
В простейшем случае оси системы OXYZ можно задать совпада-
ющими с осями O0XnY0Z0 независимо от перемещений самолета
относительно Земли. Тогда систему координат OXYZ с точностью
до положения начала координат можно считать совпадающей с зем-
ной, углы Эйлера и угловые скорости сож, ыу и cdz — нулевыми.
В общем случае система OXYZ вращается по отношению к
00Х0У07о?|К таким подвижным системам координат относятся нор-
мальная, связанная, скоростная, полусвяз'йнная, траекторная
(ГОСТ 20058—80), а также введенная здесь для удобства кинемати-
ческая.
Нормальная система координат OXgYgZg (рис. 1.4). Вертикаль-
ная ось OYy направлена по продолжению радиуса-вектора О0О = г,
соединяющего центр Земли с центром масс самолета. Основная пло-
скость OXgZe совпадает с местной горизонтальной плоскостью, т. е.
плоскостью, проходящей через точку О .и перпендикулярной OYg.
Точка пересечения А радиуса-вектора г с поверхностью Земли опре-
деляет географические координаты самолета 1 и <р и описывает
трассу полета. Ось OXg направлена на север параллельно географи-
ческому -меридиану, ось OZg расположена параллельно касатель-
ной к географической параллели в направлении с запада на восток.
Углы К и ф задают также положение нормальной системы коорди-
нат относительно земной.
При перемещении самолета нормальная система координат
вследствие кривизны поверхности Земли поворачивается относи-
тельно стартовых осей с угловой скоростью <окр, которая может
быть представлена в виде суммы угловых скоростей двух элементар-
ных вращений, связанных с изменением долготы и широты самолета:
<окр = X + ф. Первый вектор этой суммы направлен вдоль оси OoZ0,
второй лежит в плоскости экватора перпендикулярно к плоскости
местного меридиана.
Связанная система координат OXYZ (рис. 1.5). Основная пло-
скость 0XY является плоскостью симметрии самолета. Оси связан-
ной системы совпадают с продольной ОХ, нормальной OY и попереч-
ной OZ осями самолета. Направление продольной оси может быть
16
Рис. 1.5. Связанная система осей OXYZ
и ее ориентация относительно нормаль-
ной системы:
/ — местная горизонтальная плоскость;
2 — плоскость симметрии самолета; 5 —
вертикальная плоскость, содержащая
ось ОХ
Рис. 1.6. Скоростная система осей
OXaY„Za и ее положение относительно
связанной OXYZ:
1 -- плоскость симметрии самолета; 2 —
плоскость, нормальная к плоскости сим-
метрии и содержащая воздушную скорость
выбрано или по базовой оси самолета *, или ио проекции средней
аэродинамической хорды (САХ) на плоскость симметрии самолета,
или по главной продольной оси инерции самолета. Положение
продольной оси должно специально оговариваться. Связанная си-
стема жестко фиксирована по отношению к самолету и ее положение
относительно нормальной системы определяет пространственное по-
ложение самолета. Оно характеризуется эйлеровыми углами рыска-
ния, тангажа и крена.
Углом рыскания ф называется угол между осью 0Хе нормальной
системы координат и проекцией продольной оси ОХ на горизон-
тальную плоскость OXgZg нормальной системы координат. Угол
рыскания положителен, когда ось 0Xg совмещается с проекцией про-
дольной оси на горизонтальную плоскость поворотом вокруг оси
0Yg против часовой стрелки, если смотреть с конца этой оси.
Угол тангажа ft — это угол между продольной осью самолета ОХ
и местной горизонтальной плоскостью. Угол тангажа положителен,
когда продольная ось находится выше горизонтальной пло-
скости.
Угол крена у — это угол между поперечной осью 0Z и осью 0Zg
нормальной системы координат, смещенной в горизонтальной пло-
скости в положение, соответствующее нулевому углу рыскания,
или, что тоже самое, между нормальной осью 0Y и вертикальной
плоскостью, содержащей продольную ось ОХ. Угол крена положи-
телен, когда смещенная ось 0Zg совмещается с поперечной осью
поворотом вокруг продольной оси против часовой стрелки, если
* Базовая ось самолета — продольная ось системы координат, используемой
при проектировании самолета (ГОСТ 22833—77). <
17
смотреть’ с конца оси. Векторы производных ф, у и Ь направлены,
как это показано на рис. 1.5.
Связанная система, как правило, используется при анализе
углового движения самолета. В проекциях на оси этой системы мо-
гут задаваться аэродинамические силы (продольная, нормальная и
поперечная) и моменты (крена, рыскания и тангажа соответственно),
действующие на самолет в полете.
Скоростная (аэродинамическая) система координат OXaYaZa.
Эта система используется, в основном, для определения аэродина-
мических сил, действующих на самолет. Поэтому основное направ-
ление в этой системе — направление воздушной скорости самолета
V — его скорости относительно воздушной среды. Если воздух
неподвижен, воздушная скорость совпадает с земной. При наличии
ветра, имеющего скорость W относительно Земли:
Рк = 17 + №.
Скоростная ось 0Ха (рис. 1.6) направлена вдоль воздушной ско-
рости V самолета, ось подъемной силы помещается в плоскости сим-
метрии самолета и направлена к верхней части самолёта, боковая
ось 0Za образует с осями 0Ха и OYa правую систему координат.
Положение самолета относительно воздушного потока, опреде-
ляющее величину аэродинамических сил, задается двумя углами
а и ^’определяющими относительное положение связанной и ско-.
ростной систем координат.
Угод атаки а — угол между продольной осью ОХ самолета и
проекцией воздушной скорости V на плоскость симметрии самолета.
"УУгол скольжения Р измеряют между вектором воздушной скоро-
сти V и плоскостью симметрии самолета. . ?.
Положительные направления отсчета углов атаки и скольжения
показаны на -рис. 1.6. Г
Обычно при определении углов атаки и скольжения использу-
ется связанная система, ось ОХ которой ориентирована по проек-
ции САХ крыла.
В некоторых случаях рассматривают пространственный угол
атаки а,,, т. е. угол между продольной осью самолета и воздушной
скоростью. Угол ал всегда считается положительным. .
По отношению к нормальной системе координат скоростная си-
стема повернута на углы фа, 0а и уа — скоростные углы рыскания,
тангажа и крена, введённые по аналогии с эйлеровыми углами ф,
6 и у для связанной системы (рис. 1.7).,
В ряде случаев удобно использовать систему координат, про-
межуточную между связанной и скоростной — полусвязанную.
Полусвязанная система координат OXeYeZe. Ее ось 0Хе сов-
падает с проекцией вектора воздушной скорости V на плоскость
симметрии самолета, ось QYr— с осью подъемной силы 0У9 в ско-
18 ’ •
Рис. 1.7. Взаимная ориентация ско-
ростной и нормальной систем:
/ — местная горизонтальная плоскость;
9 — вертикальная плоскость» содержа-
жащая воздушную скорость
Рис. 1.8. Траекторная система осей
OXKY„ZK и ее положение относительно
нормальной системы OXgYgZg:
1 —- местная горизонтальная плоскость;
2 вертикальная плоскость, содержащая
вектор земной скорости
ростной системе, 0Ze — с поперечной осью в связанной. Таким об-
разом, система OXeY£e повернута относительно скоростной на угол
скольжения Р вокруг 0Ye = 0Ya и относительно связанной на угол
атаки а вокруг 0Zt = OZ.
При анализе движения самолета относительна Земли систему
координат удобно строить на базе земной Ук (а не воздушной, V)
скорости. Соответствующая система координат называется траектор-
ной. .->
Траекторная система координат (рис.1.8). Ось
совпадает с Управлением земнбй скорости Ук самолета, фсь ОУ»
помещается в вертикальную плоскость, проходящуючерезось
ОХК, и Направлена вверх от поверхности Земли. Ось OZM образует
правую систему координат. По отношению к нормальной траектор-
ная система координат повернута на углы ¥ и; 0. Векторы 0 и V
показаны На рйс. 1.8.
Угол пути Ч*— угол между проекцией на местную горизон-
тальную плоскость OXgZg (путёвой скоростью Уп) и направлением
оси ОХв. Угол наклона траектории 0 образован направлением зем-
ной скорости У’в и местной горизонтальной плоскостью OXgZg.
При отсутствии ветра оси 0Ха и ОХК совпадают, угол пути т
совпадает со скоростным углом рыскания фа, угол наклона траекто-
рии 0 равен скоростному углу тангажа 0а.
Для удобства может быть дополнительно введена кинематическая система ко-
ординат, промежуточная между связанной и траекторной.
Кинематическая система координат OXcYcZa. Ось 0Хс совпадает с осью 0Хк
траекторией системы, ось 0Yc лежит в плоскости .симметрии самолета и 0Zc об-'
разует правую систему координат. По отношению к траекторной кинематическая
система повернута иа кинематический угол крена ус вокруг оси 0Хс = 0Хк и
19
при отсутствии ветра совпадает со скоростной. При наличии ветра ус у0. В ки-
нематической системе по аналогии со скоростной можно определить кинематические
угол атаки ас и угол скольжения Рс, совпадающие при отсутствии ветра с истин-
ными (воздушными) углами атаки и скольжения Кинематическая система удобна
для описания опорного движения при анализе влияния ветра на движение самолета.
§ 1.3. ФОРМУЛА ПРЕОБРАЗОВАНИЯ ПРОЕКЦИЙ
ВЕКТОРА В МАТРИЧНОМ ВИДЕ
| При выводе уравнений, описывающих движение самолета, часто возникает не-
обходимость пересчета проекций векторов (радиусов-векторов, скоростей, сил
и т. д.), заданных в одной системе координат, к проекциям этих же векторов в дру-
гой системе координат. Наиболее удобно этот переход выполнять, используя матрич-
ные формулы преобразования проекций вектора. 1
Рассмотрим использование матричных формул на примере перехода от нор-
мальной к связанной системе координат. Взаимное положение осей связанной
и нормальной систем координат определяется тремя эйлеровыми углами ф, •О
и у. Предполагаем известными проекции некоторого вектора а в нормальной си-
стеме. Требуется выразить проекции этого же вектора в связанной системе через
проекции в нормальной. Из векторной алгебры известно, что соответствующие
соотношения имеют вид:
ах = cos (х, xg) axg + cos (х, yg) • ayg + cos (x, zg) aZg,
av--^ cos (y, xg)-aXg + cos(y, yg)avg + ccs(y,-Zg)-azg-, (1.10)
az — cos (z, xg)-aXg +cos (z, yg)-avg + cos (z, zg)-azg.
В матричной записи формулы будут иметь вид:
"COS (X, Xg) cos (x, yg) cos (x, zg) ‘
= cos (y, Xg) Cos (y, yg) cos (y, tg)' • ayg
_COS(z, Xg) COS (Z, yg) COS(Z, Zg) Lazg~
в (1.10) и (1.11), называются направляющими косинусами.
Формулу (1.11) можно записать в сжатом вйде:
~ax~
Cly
a.
Косинусы, входящие
axg
(1.11)
(1.12)'
'— матрицы-столбцы;
м*’
‘ Г cos (х, xg) cos (х, yg) cos (х, zg)~
= cos (у, xg) cos (y, yg) cos (y, Zg) '
_ COS (Z, Xg) COS (z, yg) Cos (z, Zg) _
(1-13)
— матрица направляющих косинусов перехода от нормальных к связанным осям.
Верхний индекс х, xg матрицы М ’ g означает, что этой матрицей осуще-
ствляется переход от системы координат OXgYgZe к системе OXYZ.
Значения направляющих косинусов могут быть выражены через тригономе-
трические функции углов Эйлера путем последовательного поворота системы осей
OXgYgZg до OXYZ.
costpcosO stnO — sin ф cos О
M*’ *« =
sin ф sin y—cos ф sin 0 cos у cos 0 cos у cosip sin у + sin ф sin 0 cos у
sin ф cos y+cos ф sin -0 sin у —cos •& sin у cos ф cos y—sin ф sin 0 sin y_
(1-14)
20
Заметим, что для обратного перехода от системы OXYZ к OXgYgZg матрицу М ’ 8
достаточно транспонировать, т. е. поменять местами ее строки и столбцы
так как в силу четности cos (х, Xg) = cos (xg, х) и т. п.
Аналогично можно записать матрицы перехода между любыми системами ко-
ординат, ориентированными друг относительно друга определенной системой углов.
Матрицы направляющих косинусов, необходимые при дальнейшем изложении
курса, приведены в приложении (табл. I, II).
§ 1.4. ГЕОМЕТРИЧЕСКИЕ СООТНОШЕНИЯ МЕЖДУ УГЛАМИ
При отсутствии ветра можно, зная углы, определяющие
положение самолета (й, гр, у) и направление скорости его центра
масс ('Г, 0) относительно нормальной системы координат, найти
углы, определяющие положение самолета относительно воздушного
потока: угол атаки а и угол скольжения 0, а также угол скоростного
крена уа.
Для определения углов аир выберем те из направляющих
косинусов, которые простейшим образом выражаются через иско-
мые углы аи0.
Определяя из таблиц направляющих косинусов косинусы углов
между связанными и нормальными осями, между скоростными и
нормальными осями, после несложных преобразований получаем
геометрические соотношения для углов 0иа (при отсутствии
ветра)
cos (г, х„)« sin р = k- ia = k [cos (xuxg) ig +
cos (xay8) ~jg + cos (xaz8) kg] = cos (xax8) cos (z, x8) +
+ cos (xayg) cos (z, yg) + cos (x.,, Zg) cos (z, Zg)
или
sin p = cos 0 [sin й sin у cos (T — 4) — cos у sin (T — 4)] — sin 0 cos ft sin у;
., <1I5>
аналогично
cos (y, xa) = — sin a cos p = ] ia = j- [cos (xaxg) i8 +
+ cos(xn, y^jg -'t cos(xu,zg)lg], откуда (1.16)
sin a = {[sin O' cos у cos (V — 4) + sin у sin ('F — 4)] COS 0 —
— sin 0 COS'S1 cosy}.
Для определения угла скоростного крена уа выбираем из при-
ложения табл. (I) тот направляющий косинус, который простейшим
образом выражается через уа. Выполнив затем несложные преобра-
21
зования, получим последнее из искомых геометрических соотно-
шений:
cos(zatjg) = — cos 0 sin уи = jg = *jg• [cos (za, x) i +
+ cos (za, y) j + cos (za, z) 7e]
или
sin Ya — COsV lcoS a sln P sin ft — cos 0 (sin a sin p cos у —
— cos p sin y)]- (1.17)
Рассмотрим некоторые частные случаи полета.
1. В вертикальной плоскости без крена и скольжения. В этом
случае вертикальные плоскости, содержащие вектор скорости и
связанную ось, совпадают. Так как при этом 0=0, у = 0, ф
то из соотношения (1.16) получим а = О—0.
2. В горизонтальной плоскости (0 = 0) без крена (у = 0) с ма-
лыми углами атаки (cosaasl, sin a 0, cos О tv 1). Тогда из
соотношения (1.15) следует р = ф —¥, О == a.
3. Без скольжения (0 — 0) с малыми углами атаки (cos a « 1,
sin a « 0, •& ж 0) из соотношения (1.17) получим yu = у (при от-
сутствии ветра).
При пространственном движении самолета следует учитывать
различие между у и у„. При наличии ветра углы атаки и сколь-
жения необходимо определять с учетом ветровых возмущений.
§ 1.5. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ, Z
/ Ma tty- « <-
( Кинематические уравнения связывают между собой кине-
матические и геометрические характеристики поступательного дви-
жения центра масс самолета и вращения его относительно центра
масс,Ез также угловые скорости подвижных систем координат с па-
раметрами движения самолета?}
Кинематическое уравнение движения центра масс самолета
в векторной форме имеет вид
С-7- <u8>
где г, Уи — радиус-вектор и вектор скорости центра масс самолета
относительно рассматриваемой системы отсчета.
Для получения скалярных кинематических уравнений движения
центра масс найдем проекции вектора скорости центра масс само-
лета на оси координат, относительно которых рассматривается дви-
( жение самолета.
Х^ При изучении движения самолетов, совершающих полет вблизи
’ поверхности Земли со скоростями, малыми по сравнению с косми-
ческими, можно пренебречь кривизной поверхности Земли. При
этом оси нормальной системы координат OXgYgZg будут параллельны
22
осям стартовой системы координат OXCYCZC. Проектируя вектор
скорости Ук на нормальные оси координат!и используя таблицу
направляющих косинусов,|| получим кинематические уравнения дви-
жения центра масс самолета
^ = VKcosecos¥; 42 = ^=^sln0;
at at at K
= — VKcos Osin Ч7,' (1.19)
где xc, yc, zc — координаты самолета в стартовых осях; Н — вы-
сота полета.
При изучении движения со скоростями полета, сравнимыми с первой космиче-
ской, удобно использовать земную сферическую (географическую) систему ко-
ординат X, <р, г.
Для определения проекций вектора скорости в нормальной системе коорди-
нат можно использовать кинематические соотношения, связывающие их с изме-
нением географических координат и радиуса г:
,, d<P 1/ dr 17 dk
Vv8"~dt' rC0Sff~dF’ О-20)
где Vxg, Vvg и Vzg — проекции вектора скорости центра масс самолета Ун на
нормальные оси.
Учитывая формулы (1.20) и определяя проекции вектора скорости йа нормаль-
ные оси по формулам (1.19), получим кинематические уравнения движения центра
масс самолета в следующем виде
dtp VK cos 6 cos Чг dH . dk VI: cos ® sin ¥ .. n1.
; -(^ + /7)cosy» <L21>
где R3 + H ~ r, Rs — радиус Земли; И — высота полета.
Кинематические уравнения, описывающие вращение самолета
относительно нормальной системы координат, устанавливают связь
между производными углов ф, ft, у по времени и проекциями на
связанные оси вектора угловой скорости о> самолета относительно
нормальных осей.
Поскольку при вращении самолета изменяются углы ф, О и у,
определяющие положение самолета относительно нормальных осей,
вектор угловой скорости самолета со относительно этих осей равен
геометрической сумме угловых скоростей элементарных поворотов:
со'= ф 4~ ft 4~ V- (1.22)
Это уравнение является кинематическим уравнением вращатель-
ного движения самолета в векторной форме. Проектируя векторы
ф, ft, у на направление связанных осей OX, OY nOZ (см. рис. 1.5),
получим
<од.-= ф sinO 4 у; со^ — ф cos ft cos у | ft sin у;
<ог — — ф cos ft sin у ft cos у. (1.23)
23
Решая эти уравнения относительно ,дф , у, запишем искомые
кинематические уравнения:
ф = sec •& (ыу cos у — <ог sin у); •& — <ау sin у + <oz cos у;
у ==<£>•„ — tg •& (со^ cos у — cousin у). (1-24)
Кинематические уравнения, описывающие вращение траектор-
ной и скоростной систем координат относительно нормальной могут
быть легко получены по аналогии с соотношениями (1.23), поскольку
углы ф, •&, у и фи, yfl введены одинаково, а при отсутствии
ветра ф„ = V, ©а = 0. •
Обозначая через аха, ц>иа, a>za проекции на^ скоростные оси
вектора ыа угловой скорости скоростной системы координат от-
носительно нормальной и заменяя в (1.23) углы ф, О, у на фа, flu,
у„, получим аналогичные соотношения для скоростной системы
Wxu = Фа Sin •fl'u + уа; (Aya = фи COS COS уа -SlH ytti
“za = — ‘Фа COS Й'а Slny„ -ф COS уа. (1.25)
Положение траекторной системы координат относительно нор-
мальных осей определяется только двумя углами Y и 0. Обозначая
через соик, coZK проекции на траекторные оси вектора сок
угловой скорости вращения траекторной системы координат отно-
сительно нормальной, можно записать кинематические соотноше-
ния для траекторной системы
<окк = W sin 0; (Аук = Ф cos«0; <о2К—0. (1-26)
Напомним, что в (1.25) и (1.26) при отсутствии ветра ¥ = фи,
0.
§ 1.в. силы и моменты, действующие на сдмолет
Самолет движется в воздухе под действием аэродинамиче-
ских сил, тяги двигателей и силы тяжести. Движение самолета на
Земле происходит под действием указанных сил, а также сил реак-
ции Земли и сил трения.
Тяга двигателей Р обычно лежит в плоскости симметрии X0Y
самолета и составляет некоторый известный угол фр с положи-
тельным направлением оси ОХ.
Используя матрицу направляющих косинусов между осями
связанной и траекторной систем координат, проекции тяги двигате-
лей на оси траекторной системы получим в следующем виде:
Рхк = р cos (а + фР) cos р;
Рук = р [sin (а + фр) cos уа + cos (а + фр) sin р sin у„]; (1.27)
PZK — Р [ sin (а фр) slnyo — cos (а [ - фр) sin р cos ya].
Аэродинамические силы, действующие на поверхность самолета,
можно привести к главному вектору аэродинамических сил, при-
ложенному в его центре масс, и к паре сил, момент которых равен
24
главному моменту аэродинамических сил относительно центра масс.
Аэродинамические силы определяются из продувок в аэродинами-
ческих трубах и обычно задаются в скоростной системе координат
проекциями главного вектора jRa аэродинамических сил на оси этой
системы. При этом проекцию Т?А на ось 0Ха, взятую с обратным зна-
ком, называют силой лобового сопротивления Ха, проекцию RA на
ось 0Ya — аэродинамической подъемной силой Ya, проекцию на ось
OZa — аэродинамической боковой силой Z„. Эти силы могут быть
выражены через безразмерные коэффициенты лобового сопротивле-
ния, подъемной и боковой силы соответственно
Xu = cxaqS-, Ya = cvaqS, Za = ciaqS. (1.28)
Они зависят от углов атаки и скольжения, числа М полета, высоты,
л о pV2
конфигурации самолета и т. п. Здесь q ------скоростной напор;
V — воздушная скорость; р — массовая плотность воздуха; S —
площадь крыла самолета.
При выводе системы уравнений движения, используемой при
расчете траекторий, аэродинамическую силу проектируют на оси
траекторной системы координат. Когда ветер отсутствует, траектор-
ная система повернута относительно скоростной на угол уа вокруг
оси ОХа (ОХк). С учетом этого проекции аэродинамической силы Т?А
на оси траекторной системы координат выражаются через проекций
на скоростные оси
Rax к == Ха, RAy« ~ а уа Za sin у,,;
^Лгк = У081Пуа+^оС08уа. (1.29)
Аэродинамическая сила может быть определена и в связанной
системе осей проекциями X, Y и Z, называемыми, в отличие от
составляющих в скоростных осях, продольной, нормальной и попереч-
ной аэродинамическими силами соответственно. Коэффициенты про-
дольной, нормальной и поперечной сил обозначаются ся, су и сг.
Для перехода от X, Y и Z к Ха, Ya и Za (или от сх, си, сг к
сха, сУа и сга) используется соответствующая матрица направля-
ющих косинусов М*а> *.
При эксперименте в аэродинамической трубе аэродинамическую
силу иногда получают в проекциях на полусвязанные оси. В этом
случае для перехода от RAxt, RAyi и /?Ам к Ха, Ya и Za можно
использовать соответствующую матрицу направляющих косинусов
М.хе- х (см. приложение).
Летчик или автоматические устройства управления самолетом
управляют в полете величиной и направлением результирующей
аэродинамической силы /?А, т. е. величинами ее проекций на ско-
ростные или траекторные оси, изменяя целенаправленно ориентацию
самолета в потоке (углы а, 0, у или уа), меняя конфигурацию са-
молета (выпуск щитков,, закрылков и т. п.).
25
Составляющие аэродинамической силы Ха, Ya и Za взаимо-
связаны, и увеличение подъемной силы Ya одновременно увеличивает
и силу лобового сопротивления Ха. Более подробно аэродинамические
силы будут рассмотрены в гл. 2.
Сила тяжести самолета G приложена в его центре масс, направ-
лена по местной вертикали вниз и, следовательно, расположена в пло-
скости OXKYK траекторной системы координат. Ее проекции на оси
траекторной системы имеют вид
GXK = — mg-sin 0; GhH = — mg cos 0; GZK —0. (1.30)
Управление ориентацией самолета относительно Земли (углы О',
ф, у) или потока (а, 0) производится обычно путем целенаправлен-
ного изменения моментов, действующих на самолет и, прежде всего —
аэродинамического момента МА. Момент МА (или его проекции на
заданные оси координат) зависит от режима полета — скорости V
или числа М, высоты Я, углов атаки а, скольжения 0, угловых ско-
ростей самолета, его конфигурации и, прежде всего, от отклонения
аэродинамических органов управления. Для управления составля-
ющими момента, действующего на самолет, используются отклоне-
ние руля высоты или цельноповоротного стабилизатора (6В или <рст),
элеронов 6Э или элевонов (6ЭВ)> руля направления (6Н).
Аэродинамический момент обычно представляют составляющими
в связанной системе координат . >
тх~^— аэродинамический момент крена и его коэф-
фициент;
Ми
Mjt ту — -^§г— аэродинамический момент рыскания и его.коэф-
фициент; (1-31)
A4Z; тг = — аэродинамический момент тангажа и его коэф-
фициент. . .
Здесь I — размах и ЬА — средняя аэродинамическая хорда крыла
самолета. Детальный анализ зависимости аэродинамических моментов
от режима полета, отклонения органов управления й других факто-
ров дан в гл. 10.
§ 1.7. УРАВНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА. МАСС САМОЛЕТА
Уравнение движения центра масс в векторной форме
Положение и движение самолета в полете определяют
относительно поверхности Земли. Поэтому за основную систему
отсчета, принимают геоцентрическую неинерциальную систему ко-
ординат, связанную с Землей и совершающую вместе с ней суточное
вращение с угловой скоростью со3 (земная система отсчета).
26
Движение центра масс самолета описывается динамическим
уравнением (1.7), которое после подстановки FBH = + mgr
примет вид
m^-P + RA + rngr + Fe + FK, (1-32)
где Кк — вектор скорости движения центра масс самолета относи-
тельно Земли и gr — вектор гравитационного ускорения.
Переносную и кориолисову силы инерции, связанные с враще-
нием Земли, определяют известными из теоретической механики
выражениями
Fe — — mWe == — т [ы3 х (со3 х г)];
A=:-mF = -2m(ffl8xU. (1.33)
где г —- радиус-вектор, проведенный из начала геоцентрической си-
стемы отсчета 0° в центр масс самолета; We и WK — переносное и
кориолисово ускорения центра масс, обусловленные вращением
выбранной геоцентрической системы отсчета относительно инер-
циальной. .....
Поскольку в справочных таблицах обычно приводятся значения
ускорения свободного падения с учетом переносной силы инерции
в зависимости от высоты, то в правой части уравнения (1.32) можно
геометрическую сумму сил гравитационного притяжения. mgr и
переносной силы инерции.F* заменить силой тяжести G:
G = mgr + Fe = mg. (1-34)
В (1.34) g—вектор результирующего ускорения свободного паде-
ния и центробежной силы..
Векторное уравнение (1.32) с учетом (1.34) запишем в виде
= + + + (1.35)
Как было указано в § 1.1, при практическом применении вектор-
ное уравнение движения проектируется на оси прямоугольной си-
стемы координат. Выбор системы координат для составления- диф-
ференциальных уравнений движения центра масс самолета опреде-
ляется задачей исследования. При исследовании траекторий обычно
применяют траекторные оси. В то же время задачи устойчивости и
управляемости удобнее рассматривать в связанной системе коор-
динат.
27
Уравнения движения центра масс в траекторной системе
координат
Наиболее простую и удобную форму система динамиче-
ских уравнений движения центра масс самолета (поступательного
движения) примет, если векторное уравнение (1.35) спроектировать
на оси траекторной системы координат.
Применяя формулы (1.9) для проектирования левой части урав-
нения (1.35) и учитывая, что = VK. V!yK = Vzk =0, получим
тУк = Рхъ 4~ Ххк -|- GXK ф- Fхк;
ma^VK = Рук + УЕ -ф G,K + (1.36)
— mayvVi; — РZK + Сгк + Fzk,
где аук, сод, — проекции на траекторные оси вектора угловой ско-
рости вращения траекторной системы координат относительно
Земли; в правой части приведены проекции соответствующих сил
на траекторные оси.
Для написания этих уравнений в развернутом виде необходимо
найти проекции угловой скорости ык, а также проекции кориоли-
совой силы инерции FK на траекторные оси. Проекции внешних
сил и тяги на эти оси были определены в § 1.6.
Угловую скорость сок можно представить в виде суммы переносной
угловой скорости сокр нормальной системы 0XgYgZg в системе от-
счета ObX(,Y0Z0 и угловой скорости ыкг вращения скоростной си-
стемы относительно нормальной:
сон = cDKp -|- coKg. (1.37)
Переносная угловая скорость оэкр, в свою очередь, может быть
представлена суммой угловых скоростей:
(Окр — Хф-ф, (1.38)
• ~*
где X — угловая скорость поворота меридиональной плоскости,
содержащей центр масс О, вокруг оси вращения Земли; ф — угловая
скорость поворота радиуса-вектора центра масс в меридиональной
плоскости вокруг оси, лежащей в плоскости экватора (см. рис. 1.4).
Угловая скорость coKg также может быть представлена в виде
суммы угловой скорости Ф вокруг оси OYg и угловой скорости 0
вокруг оси OZg (см. рис. 1.5):
= (1.39)
28
Используя табл. I (см. приложение) направляющих косинусов,
находим проекции вектора ык на оси OY„ и OZK траекторной системы
— К (sin <р cos 0 — cos <p sin Ч7 sin 0) -|- Ф sin Ч7 sin 0 + Ч7 cos 0;
®zk — ^cos<psin47 — <pcos47[0, (1-40)
которые после подстановки выражений (1.21) в результате неслож-
ных преобразований будут иметь вид
ы,,и = Ч7 cos 0 — V sin Ч7 cos20 tg ф/(Я3 + Я);
югК = 0 — V cos 0/(/?3Я). (1.41)
Найдем теперь проекции кориолисовой силы инерции на траек-
торные оси. Вектор кориолисовой силы инерции определяется из-
вестной из механики формулой
FK ~— mwK = — 2m(cD3 х VK) (1-42)
и перпендикулярен со3 и Ук.
Проекции кориолисовой силы инерции на оси траекторной
системы выражаются формулами
FxK — 0; F„K = 2mco3VK cos ф cos Ч7;
(1.43)
F*K = 2mcoaVK (sin ф cos 0 — cos ф sin Ч7 sin 0).
Подставляя в (1.36) выражения для проекций угловых скоростей,
определенные формулами (1.41), проекции тяги, аэродинамической
силы, силы тяжести (см. формулы (1.27) и (1.28), а также (1.30)) и
проекции кориолисовой силы инерции, выраженные формулами
(1.43), получим систему динамических уравнений движения центра
масс самолета относительно сферической вращающейся Земли в про-
екциях на оси траекторной системы координат (при отсутствии ветра
= V, Ч7 = фи):
mV — Р cos (а -ф- ф, ) cos 0 — Xa — mg sin 0; (1.44)
mVQ = P [sin (а + фР) cos уи + cos (а фг) sin 0 sin уЭ-[- Ya cos уа —
— Zu sin y„ —- mg cos 0 -^ma3V cos ф sin Ч7 + mV^cos Q/(R3 4- Я);
7 (1-45)
— mV cos 0Ч7 — P [sin (a + (I/-) sin Уа ~ cos (a J-jpp)i sin 0 cos yj -|-
+ Ya sin + Za cos yu 4&2m«3 V (sin ф cos 0 — cos ф cos Ч7 sin 0) —
—- mV'2 cos2 0 sin Ч7 tg <[/(R3 + Я). (1.46)
Эти уравнения называют уравнениями поступательного движения.
Приведем некоторые оценки величин членов правых частей
уравнений (1.44) ... (1.46), связанных с суточным вращением Земли
и кривизной ее поверхности. Кориолисова сила, связанная с вра-
щением Земли, пропорциональна скорости полета. При скоростях
полета свыше 2000 ... 3000 м/с кориолисово ускорение составит
2 ... 3 % от ускорения свободного падения. Центростремительное
29
ускорение, обусловленное кривизной Земли, пропорционально ква-
драту скорости полета и при скорости 1000 м/с достигает около
1,6 % от ускорения свободного падения. При расчете траекторий
самолетов, летающих со скоростями до 1000 м/с, кориолисову силу *
инерции и силу инерции, связанную с кривизной поверхности Земли,
обычно не учитывают.
В динамические уравнения движения центра масс входит масса
самолета, заметно меняющаяся у некоторых типов самолетов в про-
цессе полета. В общем случае характер изменения массы самолета
из-за выгорания топлива зависит от скорости, высоты полета и
режима работы двигателя:
т = —mT = qs; (1-47)
где qa (V, Н, R) — секундный массовый расход топлива; R =
= Р/РВом — степень дросселирования тяги двигателя.
Перегрузка. Уравнения движения центра масс
в безразмерной форме
При исследовании многих задач динамики полета исполь-
зуется понятие перегрузки. Перегрузкой называется отношение
суммы векторов тяги и полной аэродинамической силы к величине
силы тяжести
' <L48>
. Вектор перегрузки характеризует маневренность самолета, по-
скольку он учитывает величину и направление сил, изменяя кото-
рые, можно управлять полетом.
Проектируя вектор перегрузки на оси координат, получим
составляющие перегрузки по осям. Проекций перегрузки на оси
скоростной системы координат равны:
Пха = — [Р cos (а + фр) cos ₽ - Хат,
»l/a = -^g[Psin(a Нр)т Уо]; ’ (1.49)
nia = [— Р cos (a -]- фр) sin ₽ + Za]
и называются соответственно тангенциальной, нормальной'скорост-
ной и боковой перегрузками.
Проекции вектора перегрузки на оси траекторной системы
координат составят (при отсутствии ветра):
Пхк== ^ cos (а + ч>р) cos р - Ха] = пха;
[sln C0S V» + cos + ‘ff’) sln ₽sln уа1 +
30 ..
+ Yacos ya — Zu sin yo} = nya cos ya — пга sin ya\ (1.50)
nZK = -^{p [sin (a + фр)sln Ta — cos (“ + фр)sin ₽ cos Tul I-
+ У a sin yo + Za cos = nlJa sin ya + nza cos ya.
В (1.49) и (1.50) аэродинамические силы определены в скорост-
ной системе осей координат. .
' Разделив левые и правые части уравнений (1.44) ... (1.46) на
G = mg, получим динамические уравнения движения центра масс
в перегрузках
-±-V = пха — 81п6;
-^-ё = Пуа cos уа - n7Osin уа - cos 0 |-
I- — «3У COS ф sin ¥ г g(/?3 + tf) , (1.51)
-----— ¥ = nya sin ya — nza cos ya — gi3V (simp cos 0 —
— cos ф cos ¥ sin 0) — V2 cos50 sin ¥ tg ф/(/?8 + H).
'При рассмотрении частных случаев движения самолета выра-
жения для проекций перегрузки значительно упрощаются.
Для^ полета без скольжения (р == 0, Za == 0) с малыми углами
атаки, когда можно принять sin (a 4- фр) « a + фр, cos (a 4-
+ Фр) » 1, формулы (1.49) и (1.50) примут вид
„ Р~Ха. Р(« + фр) + Го.
Поса~ ~mg / пча~ rig ’
пга=вО (1,52)
и, без ветра, ' ’ -
«хк = «ад пи* = пуа<хкуи-, nzK = nyas\nyu. (1.5^)
В проекциях на связанные оси вектор перегрузки может быть
представлен составляющими пх, пу и nz, которые называются
продольной, нормальной и поперечной перегрузкой соответственно.
Используя таблицу направляющих косинусов, получим
пх = пха cos a cos р + Пуа sin a — п^ cos a sin Р; 4
Пу == — nxa sin a cos P 4- nya cos a -j-nz0 sin a sin P; (1-54)
пг = nxa sin P + пга COS p.
§ 1.8. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА
ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
Исследование движения самолета относительно центра
масс (вращательного; илн углового) удобно выполнять, если ис-
пользовать динамические уравнения в проекциях на оси связанной
системы координат OXYZ. При изучении углового движения само-
ЗГ
лета так же, как и при определении траекторий центра масс, при-
меняют в качестве системы отсчета неинерциальную систему, свя-
занную с Землей.
Проектируя векторное уравнение (1.8) на оси связанной системы
координат и применяя формулы (1.9) для вычисления проекций
производных по времени от вектора кинетического момента самолета,
получим систему скалярных уравнений движения самолета относи- '
тельно центра масс (вращательного, или углового движения)
-j- cozKx mxKz = (1.55)
&хКу -- ЫуКх =
где Кх, Ку, Кг — проекции вектора кинетического момента са-
молета на связанные оси координат; <ож, со2 — проекции век-
тора угловой скорости самолета относительно Земли на те же оси;
MRx, MRll, MRz — проекции результирующего момента аэроди-
намических сил и тяги относительно центра масс на те же оси. Сле-
дует иметь в виду, что момент массовых сил (сил тяжести, центро-
бежных и кориолисовых сил инерции) вокруг центра масс самолета
равен нулю.
Угловая скорость самолета относительно Земли является сум-
мой векторов угловой скорости самолета относительно нормальной
системы координат и угловой скорости (окр вращения нормальной
системы координат относительно Земли вследствие кривизны по-
верхности Земли. Для реальных условий полета самолета последняя
составляющая со„р мала и ею можно пренебречь.
Проекции кинетического момента К на произвольные подвижные
оси записываются в теоретической механике^как
/Сзс = Jя<1)я Jxy(i>y
Ку — Jxifl^x 0
Кг = + Л®*’
где Jx, Jy, Jz — осевые, a Jxv, Jxz, ъ Ууг — центробежные моменты
инерции, которые определяются формулами:
Jx == J (р2 -j- z2) dm, Jу — J (х2 4- z-) dm-,
т т
Jz == J (х2 + у2) dm; J№y = jxz/ dm;
tn tn
JXz = J xz dm; Jyz = J yz dm.
m tn
Моменты инерции самолетов с заметно изменяющейся в полете
массой являются функциями времени.
32
Поскольку основная плоскость OXY связанной системы коорди-
нат является плоскостью симметрии самолета, то в связанных осях
центробежные моменты инерции, содержащие координаты z, равны
нулю: Jxz = Juz == 0.
С учетом этого упрощения, используя выражения (1.56), урав-
нения (1.55), запишем в виде ।
Jx^x ^ху^у ~Г г ^у) ^у^г “I- ^xif^xf^y ^Rx> *
Jу™у ху^х (Ле ' Jг) ^xf^z ^xtfly^z == (1 -57)
Лг®г I" (JV х} <^у Jху (Ок Юр) = Mfa.
Подробнее выражения для проекций результирующего момента
MRx, MRv и ТИдг будут рассмотрены во второй части книги при
анализе углового движения самолета.
§ 1.9. ОСОБЕННОСТИ АНАЛИЗА ОПОРНОГО ДВИЖЕНИЯ
САМОЛЕТА
Уравнения поступательного движения самолета (1.44) ...
(1.46) или (1.51), уравнения вращательного движения (1.57) и ки-
нематические уравнения (1.19), (1.24) образуют систему уравнений
движения самолета. При заданном начальном состоянии, условиях
полета, возмущающих воздействиях и характеристиках самолета и
двигателя движение самолета, описываемое этой системой уравне-
ний^ определяется программой или законом формирования управ-
ляющих воздействий.
Управляющими воздействиями, определяющими движение са-
молёта, являются отклонения аэродинамических органов управле-
ния (6д, бн, S8 и т. ц.), ирежим работы двигателей (значение тяги Р
или степени дросселирования Тяги/?). Изменяя режим работы двига-
теля путем отклонения рычага управления двигателем (РУД), летчик
непосредственно меняет тягу двигателя, т. е. силу, действующую
на самолет в полете, иди величину перегрузки Пзд.
Отклонение органов управления на величину аэродинамической
силы,, действующей на самолет, влияет слабо (площадь органов уп-
равления обычно невелика по сравнению с площадью крыла). Це-
лью отклонения органов управления является создание управля-
ющих моментов * за счет создания небольшой управляющей силы
на значительном плече. Под действием этих моментов самолет из-
меняет свое угловое положение. При этом изменяется как сама
величина аэродинамической силы /?л- Ya, Za\ за счет изменения
углов атаки и скольжения, так и величины ее проекций на тра-
екторные оси [см. уравнения (1.29)1, за счет изменения угла крена.
Меняются при этом перегрузки — пот, пуа, п.га [см. (1.49)1. Таким
образом,' управление аэродинамическими силами и их соста-
вляющими (или перегрузками) летчик осуществляет косвенно, че-
* Исключение составляют так называемые органы непосредственного управле-
ния силами, особенности влияния которых здесь не рассматриваются.
2 А. Ф. Бочкарев и др. 33
рез управление ориентацией (угловым положением) самолета.
Если теперь задать некоторое опорное движение или режим
полета, т. е. значения и характер изменения высоты, скорости, угла
наклона траектории, угла пути и т. п., то из уравнений сил (1.51)
или (1.44) ... (1.46) можно найти потребные для реализации этого
опорного движения составляющие перегрузки пхк, nVK, nztt (или
пяа> пуа и п2а), а по ,(1.49) — требуемые значения сил Ха, Ya, Р,
угла крена уа и т. п. Эти потребные значения реализуются (если они
достижимы, т. е. лежат в располагаемом диапазоне) отклонением
РУД и органов управления SB, 6Э, 6Н и т. п.
При этом приемистость двигателя, определяющая запаздывание
в изменении тяги после отклонения РУД, и динамика углового дви-
жения самолета, характеризующая время выхода на расчетные углы
атаки и крена или требуемые значения перегрузок пу„ и п2К,
после отклонения органов управления должны обеспечивать доста-
точно точное отслеживание заданной траектории, иначе самолет не
будет удовлетворять требованиям управляемости. Иными словами,
отклонения от опорного, желаемого движения, связанные с ограни-
ченной приемистостью двигателя, запаздыванием реакции самолета
в угловом движении на действия летчика (или автоматики), должны
быть малы и при расчете опорного движения могут не учитываться,
как не учитываются отклонения, связанные с действием случайных
возмущений. Они рассматриваются затем, как дополнительные воз-
мущающие факторы при анализе устойчивости и управляемости,
где и проверяется гипотеза об их малости. •
С учетом сказанного можно считать в опорном движении, что
требуемые значения тяги и углов атаки, креиа и скольжения (т. е.
перегрузок пхи, °zx) могут} быть реализованы практически
мгновенно (если только эти значения достйжимы и лежат в допусти-
мой области). Другими словами, для задач, связанных с определением
летных данных самолета, происходит как бы замещение управляющих
воздействий: условно считают, что лётчик (или автопилот) может
непосредственно изменять Тягу (а не положение РУД) и перегрузки
пхк, Пук или углы атаки, крена, скоЛьженйя (а не положение ор-
ганов управления). Такой подход позволяет рассматривать в задачах
оценки летных характеристик уравнения движения центра касс
самолета независимо от уравнений движения вокруг центра масс,
Ограничиваясь в опорном движении расчетом идеальных значений
потребных перегрузок или управляемых сил, т. е. используя систему
уравнений (1.44) ... (1.46) независимо от уравнений (1.57). В этой
системе управляющими воздействиями являются тяга двигателя и.
либо углы атаки, скольжения и креиа, либо значения проекций
сил Р и Ra на траекторные оси, либо 'составляющие перегрузки
ftxai Wyai ^za И
Дополнительная литература
[8], с. 4—10, 18—28; 16], с. 72—133; [91, с. 22—29; [71, с. 54,-
67—68, 71—72, 137, 147—148, 157—159, 163, 188—191;
ГОСТ 20058—80.
34
Контрольные вопросы
1. В какой системе отсчета записаны уравнения движения центра масс само-
лета? В какой системе координат?
—1►
2. Какие составляющие учитываются прн определении тягн Р?
3. Как направлены оси нормальной, скоростной, связанной, траекторной
систем координат?
*-> -1►
4. В чем различие между скоростью V и земной скоростью VK?
5. Как отсчитываются углы атаки и скольжения?
6. В чем различие между аэродинамической подъемной и аэродинамической
нормальной силами? Между боковой и поперечной?
7. Как направлены нормальная, нормальная скоростная, продольная, тан-
генциальная перегрузки?
8. В какой системе координат определяются обычно коэффициенты аэродина-
мических сил при расчетах и эксперименте в аэродинамических трубах?
9. Самолет летит без крена и скольжения горизонтально с углом атаки, рав-
ным 3°. Чему равен угол тангажа?
10. Вектор а задан проекциями ах, ау, аг в связанных осях. Запишите его
проекции на нормальные осн, если известны углы ? и у.
ГЛАВА 2. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ТРАЕКТОРИЙ
САМОЛЕТОВ
Уравнения движения центра масс самолета используют
для расчета траектория и определения летных данных Только в том
случае, если заданы параметры самолета: масса самолета гп (текущая
или начальная^ площадь; крыла- 3, запас топлива на борту, ntj,
тяга двигателя на Земле Р» или тяговооруженность TQ — Рй1тд,
условия полета, а также завгчмости, определяющие величину аэро-
динамических сил (или их коэффициентов):, изменение тяти и;удель-
ного расхода'топлива для различных условий полета. Должны
также быть заданы или рассчитаны ограничений, определяющие
предельные для данного самолета режимы полета — допустимая
эксплуатационная перегрузка, предельное число М, безопасная
высота полета и т. п.
Эти параметры и характеристики определяются при проектиро-
вании для расчетных условий полета или параметров стандартной
атмосферы, а в процессе эксплуатации —- для расчетных условий
эксплуатации.
В дайной главе рассмотрены перечень и примерный характер
зависимостей, определяющих аэродинамические, тяговые, расходные
характеристики и ограничения. Конкретные числовые значения для
них должны задаваться для рассматриваемого самолета на основе
специальных расчетов, методы которых изложены в курсах аэроди-
намики, теории двигателей и т. п.
2*
35
§ 2.1. УСЛОВИЯ ПОЛЕТА
И аэродинамическая сила RA (или ее проекции Ха, Уа,
Zn), и тяга двигателя Р, и расход топлива в полете зависят от условий
полета, и, прежде всего, от термодинамических параметров воздуха:
давления р, плотности р, температуры Т, скорости звука а, динами-
ческой вязкости р. Значения этих параметров связаны между собой
(так что достаточно задать два из них — температуру и давление)
и определяются геометрической высотой полета Н и состоянием
атмосферы.
Высота полета (геометрическая) отсчитывается от среднего
уровня моря (в отличие от так называемой истинной высоты Н„сг
над подстилающей земной поверхностью).
Изменение давления с высотой определяется законом изменения
температуры Т и может быть найдено путем интегрирования урав-
нения равновесия газа
= (2-Ч
при
p = p/RT. (2.2)
Здесь Я — удельная газовая постоянная, R = 287,05 Дж/(кг-К).
Скорость звука а зависит от температуры воздуха
а = 20,0468 VT, (2.3)
а динамическая вязкость определяется, как
1,458-10~6Т2/3
7+110,4 •
(2.4)
Расчет и сравнение летных данных и характеристик движения
самолетов проводят обычно для значений термодинамических пара-
метров воздуха, соответствующих на данной высоте так называемой
стандартной атмосфере (СА), ГОСТ 4401—81. СА дает осредненные
значения термодинамических параметров воздуха по высотам при
температуре на среднем уровне моря Тс = 288,15 К, давлении
рс = 101 325,0 Па, плотности рс = 1,2250 кг/м3, рс = 17,894 X
X К)”6 Па-с, а = 340,294 м/с.
Изменение температуры Т с высотой задается по СА градиентом
температуры, равным —6,5 К/км до Н = 11 км, нулю на Я от 11
до 20 км и +1 К/км от 20 до 32 км. Задав закон изменения темпе-
ратуры, можно, интегрируя (2.1) при условии (2.2) и используя
(2.3) и (2.4), найти изменение всех параметров атмосферы по высоте.
Таблица СА приведена в приложении (табл. III).
Приведение всех характеристик самолета к единым условиям
полета, соответствующим СА, позволяет сравнивать эти характе-
ристики между собой.
При эксплуатации самолета в условиях, отличающихся от стан-
дартных, используются другие модели атмосферы или замеряются
фактические значения параметров р, Т в полете. При этом в ряде
36
случаев удобно при определении условий полета вместо фактиче-
ского давления р задавать соответствующую ему барометрическую
высоту 7/бйр — высоту, на которой это давление р было бы достиг-
нуто для СА.
Термодинамические параметры атмосферы при данной воздушной
скорости полета У определяют величину скоростного напора
q = рУ2/2 = 0,7/гМ2, (2.5)
где число Маха
М = Via, (2.6)
число Рейнольдса
Re - р17?/р. (2.7)
В формуле (2.7) b — характерный линейный размер самолета
(обычно средняя аэродинамическая хорда крыла САХ). Наряду
с воздушной (истинной) скоростью У при определении условий
полета часто используют индикаторную скорость У, — скорость,
при которой истинное значение скоростного напора было бы полу-
чено на уровне моря в стандартных условиях,
yi = yj/'^-c. (2.8)
К условиям полета помимо термодинамических параметров атмо-
сферы, значений q, М и других можно отнести также ветер, задавае-
мый скоростью W и направлением относительно стартовых или
нормальных осей координат.. Часто выделяют горизонтальную w
и вертикальную и составляющие скорости 1У. Горизонтальная
составляющая может достигать в среднем 12 ... 18 м/с на умеренных
высотах и до 20 ... 30 м/с в стратосфере, в струйных течениях —
50 ... 80 м/с [12]. На малых высотах существенное влияние на
движение самолета оказывает сдвиг ветра — изменение скорости
ветра по высоте dwIdH, достигающее у Земли 0,2 ... 0,3 м/с на метр.
Вертикальная составляющая скорости ветра и может достигать
при отдельных порывах 18 ... 20 м/с (НЛГС-2). Средние значения
вертикальной составляющей скорости в турбулентных пульсациях
много меньше и не превышает обычно 3 ... 5 м/с при длине волны
100 ... 500 м.
§ 2.2. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ САМОЛЕТА
Аэродинамические характеристики самолета — это зави-
симости аэродинамических коэффициентов подъемной силы с1)а,
силы лобового сопротивления сха и боковой силы cza от ориента-
ции самолета в потоке (углов аир), параметров подобия обтекания
(чисел М, Re и т. п.); отклонения органов управления, конфигу-
рации самолета. Если заданы аэродинамические коэффициенты
в связанной или полусвязанной системе, производится их пересчет
к скоростным осям координат с использованием направляющих
косинусов (см. табл. I приложения). При известных сха, с,!и и cza
37
• Рис. 2.1. Типичная зависимость суа (а)
для дозвукового самолета [14]
аэродинамические силы, дей-
ствующие на самолет, опреде-
ляются выражением (1.28):
Ха == CxaqS, Y а ==
^•а == ^гаЯ^.
Аэродинамические характе-
ристики самолета определяются
его схемой и геометрическими параметрами — формой крыла (стрело-
видностью, толщиной, удлинением) и фюзеляжа. Зависят они и от
режима работы двигателя, так как изменение режима его работы
влияет на расход воздуха через воздухозаборник и характер обте-
кания хвостовой части фюзеляжа. Влияют на аэродинамические
характеристики и упругие деформации самолета в полете.
В силу симметрии крен самолета на величину коэффициентов
аэродинамических сил не влияет. С достаточной для практики точ-
ностью можно при анализе опорного движения также не учитывать
влияния иа величину аэродинамических сил вращения самолета
вокруг центра масс, хотя при этом местные скорости элементов
поверхности самолёта относительно пбтока отличаются от скорости
центра масс самолета. Не учитывают обычно и нестационарность
обтекания самолета (влияние производных углов а, ₽ и у по вре-
мени) пб крайней мере при тех значениях угловых скоростей само-
лета и производных а, Р и (>, появления которых можно ожидать на
расчетных траекториях.
При изменении угла атаки а изменяется подъемная сила Уа
и ее коэффициент свв. При небольших (до 10 ... 15°)углах а зави-
симость Суа (а) на умеренных числах М при неизменных условиях
и конфигурации самолета для большинства самолетов практически
линейна и может быть представлена в виде*
—&(а^Ов)- (2.9)
На больших углах атаки а зависимость суа (а) становится суще-
ственно нелинейной (рис. 2.1). Нарушение линейности суа (а) гово-
рит о возникновении на крыле местного срыва потока, развитие
которого часто вызывает вибрации и тряску самолета, ухудшение
его характеристик устойчивости и управляемости. Несимметричный
срыв потока с поверхности крыла приводит к асимметрии подъемной
силы, неустойчивости движения и «сваливанию» самолета. Угол
атаки ас, на котором это происходит, и соответствующее значение
Суа с называются углом атаки сваливания и коэффициентом свали-
вания. При нормальной эксплуатации разрешены меньшие значе-
* Производную можно определять либо в 1/градус, либо в 1/рад. В даль-
нейшем в числовых примерах принято 1/рад.
38s
Рис. 2.2. Влияние сжимаемости иа зна-
чения с“0 для крыльев различной стре-
ловидности (пример)
Рис. 2.3. Зависимость суат1Х и суа дов
от числа М полета для дозвукового са-
молета (пример):
1 — ограничение адоп < ас — 3°; 2 —
ограничение по «тряске*, 3 — ограничение
по устойчивости и управляемости
ния ас и суа0. Они называются допустимыми — адоц и суа доп.
Значения ас, суас, адоц и суа доп определяют при летных испыта-
ниях. При предварительных расчетах принимают обычно адоп <
С ас — 3° или fya Доп 0,8cFO с, если нет других ограничений.
Угол атаки ас можно при этом считать примерно равным акр, со-
ответствующим Срошах (см. рис. 2.1).
Значения суа доп и суа с — важные характеристики самолета,
во многом определяющие его маневренность, диапазон скоростей
полета и т. п.
• На характер изменения коэффициента суа прн больших углах атаки после
возникновения местных срывов, потока, а также на производную иа линейном
участке зависимости существенно влияет форма крыла в плане. У трапецие-
видных нестреловидных крыльев имеет место резкое падение суа после достиже-
ния суа щах. У стреловидных крыльев и крыльев малого удлинения срыв потока
развивается медленно. Коэффициенты суа доп и Суатах зависят от числа Re. С уве-
личением числа Re коэффициенты cyaaQD и сра шах возрастают. Поэтому значе-
ния суа доп и Срв пих, определенные при экспериментах в аэродинамической трубе,
из-за несоблюдения подобия по числу Re несколько меньше их значений для реаль-
ного самолета.
Прн малых числах М величина суа является функцией геометрического удли-
нения, стреловидности и сужения крыла. Чем меньше удлинение и больше, стре-
ловидность крыла, тем меньше производная с“о-
Существенное влияние на сда, суадог1 н сввтах оказывает сжимаемость воздуха
(число. М). Коэффициент подъемной силы при постоянном угле атаки а с увеличе-
нием числа М сначала растет, а затем при числе М, несколько большем кри-
тического (мкр)- падает. Подобный вид имеет и зависимость с“о в функции М.
Здесь через Мкр обозначено то критическое число М, при котором нз-за возникно-
вения на поверхности крыла значительной сверхзвуковой зоны со скачком уплот-
нения, начинается интенсивный рост сопротивления самолета.
Сжимаемость воздуха уменьшает максимальное значение коэффициента подъ-
емной силы max н максимально допустимое значение суа дОп. В качестве примера
на рнс. 2.2 и 2.3 показано влияние числа М на с^,, ctfa доц н суа
Прн больших сверхзвуковых и гиперзвуковых числах М полета зависимость
Суа (а) становится нелинейной н на малых углах а.
Коэффициент силы лобового сопротивления сха представляют
обычно в виде двух составляющих, одна из которых обусловлена
39
Рис. 2.4. Изменение составляющих ко-
эффициента схаВ в зависимости от чи-
сел М полета
Рис. 2.5. Типичная поляра дозвуко-
вого самолета (пример, см. [14])
свойствами вязкости и сжимаемости воздуха и соответствует пассив-
ному сопротивлению сха0 (включая сопротивление трения, сопро-
тивление давления или профильное и волновое сопротивление),
а другая обусловлена подъемной силой, соответствует индуктивному
сопротивлению схал и зависит от угла атаки а:
Сха == Ч- Cxai' (2- Ю)
При полете со скольжением р индуктивное сопротивление зави-
сит также от угла скольжения.
Рассмотрим зависимость сха0 от параметров самолета и условий полета. Вхо-
дящее в сха0 сопротивление трения является функцией чисел М и Re и возрастает
с увеличением площади омываемой поверхности (при неизменной характерной пло-
щади S) и с увеличением ее шероховатости.
При увеличении числа М и числа Re коэффициент трения уменьшается. Со-
противление давления для крыла на докритических числах М зависит главным
образом от толщины профиля, несколько возрастая при ее увеличении. При
числе М, большем Мкр, появляется волновое сопротивление сха Е, что приводит
к резкому росту схМ (рис. 2.4). Рост схаа происходит до числа М от 1,1 до 1,4,
после чего сХао начинает уменьшаться. Это связано с уменьшением коэффициента
волнового сопротивления, который на больших сверхзвуковых скоростях изменяется
примерно обратно пропорционально ]/”— 1.
Индуктивное сопротивление сха1, а значит, и суммарное сопро-
тивление сха зависят от величины подъемной силы. Зависимость
коэффициента сопротивления от величины коэффициента подъемной
силы cVa называют полярой самолета (рис. 2.5). В линейном диапа-
зоне углов атаки поляру с достаточной точностью можно предста-
вить в виде квадратичной зависимости 6’’“^
CjW = Схат И" А (руа ~^Суаг^ > 11)
где схат — схац
При этом минимум 0ха, равный схат, достигается при с„,,т =# О,
если профиль крыла — несимметричен, а само крыло установлено
под некоторым углом <рК1, к оси фюзеляжа. При симметричном
профиле и .0, сиат 0 и формула (2.11) имеет вид
СХа Охао At уа. (2.12)
40
Рис. 2.6. Примерная зависимость коэф-
фициента А от числа М полета:
1 — X = 30°; 2 - X = 60°
1 — дозвуковой самолет; 2 — сверхзвуке
вой самолет
Коэффициент А обычно называют коэффициентом «отвала» поляры.
Для дозвуковых скоростей он обратно пропорционален эффек-
тивному удлинению крыла
Л=1М)фф. (2.13)
Для крыла стреловидной формы в плане
______________________________*
М>Ф~ J _|_ лХ/100-СО8«Х ’
где X — геометрическое удлинение крыла; % — угол его стреловид-
ности.
При скоростях полета, соответствующих сверхзвуковому обте-
канию крыла:
..(2.14)
На рис. 2.6 представлен примерный характер зависимости коэф-
фициента А от числа М полета.
Важной аэродинамической характеристикой самолета является
его аэродинамическое качество К
Из уравнения поляры (2.12) можно получить выражение для
максимального аэродинамического качества. Для этого нужно урав-
нение (2.12) разделить на с()а, затем взять производную по суа и
приравнять ее’ нулю. Получим наивыгоднейшее значение коэффи-
циента подъемной силы, соответствующее максимальному аэроди-
намическому качеству:
= (2.16)
Значению c!ln hl, соответствует наивыгоднейший угол атаки апв.
Заметим, что термин «наввыгодпейший» здесь условен и отно-
сится только к поляре самолета. В реальном полете выгодны углы
атаки, отличающиеся от czlUi.
41
Подставив выражение для с,.а нв в уравнение (2.15) с учетом
(2.12), получим
(2.17)
На рис. (2.7) приведен характер зависимости Кгаах самолета от
числа М.гПри малых числах М Kmax « const. В диапазоне чисел М
от Мкр до М = 1,2 ... 1,4 Ктах интенсивно уменьшается из-за
увеличения сха0 и А. При больших числах М величина Ктах мало
меняется, так как произведение схаоА остается почти постоянным.
При построении поляры самолета и определении аэродинамиче-
ского качества следует учитывать, что на величину аэродинамиче-
ских сил, действующих на самолет при данных М и Re помимо угла
атаки влияет угол отклонения рулей высоты или поворотного опе-
рения, а также элеронов. Отклонение руля направления также
влияет на величину коэффициента лобового сопротивления схп.
При исследовании реального движения самолета эти зависимости
необходимо учитывать. Однако при решении задач, связанных
с определением летных данных самолета, когда расчет ведут для
типовых маневров или режимов полета и опорного движения, аэро-
динамические характеристики определяют обычно не для действи-
тельных текущих отклонений органов управления, а для их средних,
характерных значений. В качестве таких средних отклонений чаще
всего используют балансировочные отклонения рулей, т. е. такие
отклонения, при которых для данной ориентации самолета в потоке
(а, Р) суммарный момент сбалансирован и равен нулю. Заметим,
что если типовой маневр происходит в неизменной вертикальной
плоскости, а самолет симметричен, то в опорном движении баланси-
ровочные отклонения руля направления и элеронов равны нулю,
и необходимо учитывать только отклонение руля высоты или пово-
ротного оперения 6П или <рст.
При расчете аэродинамических коэффициентов сХп и суа или их
экспериментальном определении угол отклонения руля высоты
или поворотного оперения обычно варьируют, производя построение
поляры сха (c!ia, 6В) при 6В -- 6Bi для нескольких значений SBf
(рис. 2.8). Если теперь определить каким-либо способом баланси-
ровочные значения 6в. бал, соответствующие при проведении задан-
ного типового маневра тому или иному углу атаки, и отметить их
на кривых сха (сиа, 6В) (см. рис. 2.8), можно получить так назы-
ваемую балансировочную поляру, т. е. зависимость сха (суа)бЯ11,
вдоль которой каждому а соответствует балансировочное значение
5В. бал (ИЛИ фст. бал)-
Заметим, что для самолета нормальной схемы большим углам
атаки соответствует, как правило, отклонение 6В. бал> создающее
отрицательную подъемную силу на оперении, так что суа1Пах и
с1/а доп для балансировочной поляры в этом случае меньше,*[чем
для поляры, построенной при 6В =- 0.
Балансировочное отклонение руля зависит от ряда факторов —
центровки самолета, числа М полета, конфигурации. Методы опре-
42
Рис. 2.8. Построение балансировочной
поляры
-10 0 10 20 а,градус
Рис. 2.9. Аэродинамические характери-
стики дозвукового самолета в полетной
(/), первой взлетной (2) и посадочной
(3) конфигурации (пример):
--------зависимость Суа (а);
--------зависимость суа (сха)
деления балансировочных отклонений органов управления будут
более подробно изложены в гл. 11.
На взлете и посадке на аэродинамические характеристики са-
молета помимо отклонения органов управления влияют также вы-
пуск шасси, отклонение органов механизации крыла, изменение
угла установки стабилизатора и т. п. На этих режимах говорят
об изменении конфигурации самолета или его геометрического
состояния. Различают полетную конфигурацию (шасси убраны,
механизация в полетном положении и т. п.), первую взлетную (шасси
выпущено, механизация во взлетном положении), предпосадочную
(механизация в положении, соответствующем заходу на посадку,
шасси выпущено) и посадочную (механизация в посадочном положе-
нии, шасси выпущено).
Отклонение механизации (щитков, закрылков, предкрылков)
используется для увеличения максимальных и допустимых значений
Суа шах И Суа доп> а при посадке — для дополнительного увеличения
сопротивления самолета (интерцепторы и т. п.).
Выпуск щитков, закрылков, предкрылков сравнительно слабо влияет на с“а
крыла, но дает прирост коэффициента подъемной силы &суа мех, зависящий от вида
механизации и степени ее отклонения (рис. 2.9) Механизация крыла может дать
Асуа мех для прямого крыла до 0,8 ... 1,6 в посадочном и 0,5 ... 0,7 во взлетном
положении. Для крыла большой стреловидности и малого удлинения возможности
увеличения Асра мех меньше — до 0,6 ... 0,8 на посадке. Отклонение механизации
и выпуск шасси увеличивают сжа0 самолета на 0,06 ... 0,08 при сравнительно малом
влиянии на коэффициент отвала поляры А. Прирост суа на АсваМеХ эквивалентен
изменению а0 в формуле (2.9) на Ааомех<^ 0 (2.9), так что выпуск механизации
обеспечивает получение суа = Acyo мех на а = аоисх. Выпуск щитков, закрылков
и т. п. практически не меняет значений акр и адов, так что для этих типов ме-
ханизации с“адоп = суа доп + Дсуамех- Предкрылки, отклоняемые обычно только
на посадке, увеличивают акр и адоп (а значит и суа шах и суа доп) на 3 ... 6° [14].
На современных самолетах механизация крыла используется
на взлете и посадке. Не исключено и использование механизации
в полете для увеличения маневренных возможностей истребителей
43
[14]. В этом случае выпуск и уборка маневренной механизации
(управление профилем крыла в полете) должны осуществляться
автоматически, так как внимание летчика при маневре занято.
§ 2.3. ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ,
ПРИМЕНЯЕМЫХ НА САМОЛЕТАХ
На современных самолетах применяются силовые уста-
новки с турбореактивными (ТРД) воздушно-реактивными двигате-
лями (в том числе двух контурными ДТРД и форсажными ТРДФ)
и турбовинтовыми (ТВД).
В воздушно-реактивных двигателях в качестве окислителя используют атмос-
ферный кислород, поэтому их характеристики существенно зависят от параметров
потока воздуха на входе в воздухозаборники, а значит от высоты и скорости
(числа М) полета. Необходимое изменение параметров потока воздуха в камере
сгорания двигателя может обеспечиваться за счет его предварительного сжатия
в компрессоре. К бескомпрессорным воздушно-реактивным двигателям относятся
ПВРД.
К компрессорным относятся ТРД, ДТРД и ТРДФ. В компрессорных воз-
душно-реактивных двигателях поступающий в двигатель воздух сжимается как
при торможении во входном устройстве, так и в компрессоре, приводимом в дви-
жение газовой турбиной. Благодаря использованию компрессора, в этих двигателях
достигается высокое сжатие поступающего воздуха, что обеспечивает необходимые
тяговые характеристики двигателя и возможность получения тяги при работе дви-
гателя на месте.
На многих ТРД для дополнительного сжигания топлива за турбиной уста-
навливают форсажную камеру. Такие двигатели называются форсажными (ТРДФ).
Возможность дополнительного сжигания топлива обеспечивается наличием в про-
дуктах сгорания свободного кислорода, не использованного при реакции горения
в основных камерах двигателя. При этом повышение температуры газов за тур-
биной приводит к увеличению скорости истечения газов из сопла двигателя. Это
позволяет при включении форсажа увеличить тягу на 50 % и более. Естественно,
при этом возрастает и расход топлива. Время работы двигателя на форсажном
режиме ограничено.
В последние годы широкое распространение получили двухконтурные турбо-
реактивные двигатели (ДТРД). Двухконтурный турбореактивный двигатель —это
газотурбинный двигатель, в котором избыточная мощность турбины передается ком-
прессору или вентилятору, заключенному в кольцевой капот. Пространство внутри
этого капота называется вторым контуром. Туннельное расположение компрессора
внешнего контура позволяет сохранить высокий КПД компрессора на больших
скоростях полета, а также, в случае необходимости, увеличивать тягу сжиганием
дополнительного количества топлива за компрессором 'внешнего контура. После
сжатия в компрессоре воздух выбрасывается через реактивное сопло внешнего кон-
тура.
Двухконтурные двигатели бывают с различным коэффициентом двухконтур-
ности. Коэффициентом двухконтурности называется отношение количества воздуха,
проходящего через внешний контур, к количеству воздуха, проходящего через
внутренний контур. В настоящее время применяются двигатели с коэффициентом
двухконтурности от нуля до 8 ... 10.
Характеристики ТРД — зависимости тяги и удельного расхода
топлива от высоты и скорости полета — называют высотно-скорост-
ными или полетными характеристиками двигателя. На рис. 2.10
приведены типичные высотно-скоростные характеристики ТРД для
определенного режима работы двигателя поб = const.
Характер изменения тяги в функции числа М зависит от термо-
динамических параметров тракта двигателя — степени сжатия ком-
44
Рис. 2.10. Типичное изменение тяги ТРД по высоте и числу М полета:
а — дозвуковой; б — сверхзвуковой двигатель
прессора зтн, температуры перед турбиной Тг, а также степени двух-
контурности tn. Для дозвуковых двигателей тяга по М, как правило,
вначале падает. Для сверхзвуковых, особенно на форсаже, наблю-
дается рост тяги на сверхзвуковых числах М и затем ее резкое паде-
ние при приближении температуры торможения воздуха Тторм —
= Т (1 + 0,2М2) к температуре перед турбиной, т. е. на числах М
порядка 3 и выше.
С увеличением высоты полета в летном диапазоне чисел М тяга
падает, причем на высотах, больших 11 км, тяга прямо пропор-
циональна плотности воздуха р или давлению р.
Удельный расход топлива су1Х (рис. 2.11), т. е. расход массы
топлива на единицу тяги в час с увеличением числа М полета увели-
чивается. С увеличением высоты полета до 11 км удельный расход
топлива несколько снижается, а затем остается постоянным.
45
Рис. 2.12. Приведенная дроссельная характе-
ристика двигателя: суд1 — значение суд при
полной тяге (R = 1)
Характеристики, представляющие
зависимость тяги и расхода топлива
от режима работы двигателя, напри-
мер, от частоты вращения, положения
рычага управления двигателем (РУД),
степени форсажа, называют дроссель-
ными. Если рассматривать степень
дросселирования двигателя, как пара-
метр, то дроссельные характеристики
удобно построить в виде зависимости
удельного расхода топлива от относительного изменения тяги при
регулировании 7? (рис. 2.12), при 7? = Р/Ршах.
Суммарная тяга Рр = всех двигателей, установленных
на самолете, называется располагаемой тягой силовой установки.
Располагаемую тягу подсчитывают по высотно-скоростным харак-
теристикам двигателей с учетом потерь во входных каналах и сопло-
вом аппарате силовой установки.
Обычно располагаемую тягу определяют для номинального Рр0М,
максимального Ррах или полного форсажного режимов работы
двигателя.
§ 2.4. ОГРАНИЧЕНИЯ ДОПУСТИМЫХ РЕЖИМОВ ПОЛЕТА
При расчете траекторий и летных характеристик самолета
необходимо учитывать ограничения, накладываемые на допустимые
режимы полета по условиям безопасности, прочности, надежной
работы силовой установки, нагрева и т. п. Уровень ограничений
зависит от области режимов полета (основные, эксплуатационные
предельные). В основной и эксплуатационной областях ограничения
жестче, в предельной, когда речь идет об особых обстоятельствах,
основные ограничения, как правило, устанавливают менее жесткими.
Обычно для самолета задают максимальные допустимые по
условиям прочности значения скоростного напора (индикаторной
скорости) — эксплуатационные или У1шах и предельные *?тах шах
или max та*. Нагрев, требования устойчивости и управляемости,
условия работы двигателей - определяют значения максимальных
эксплуатационных МШах и предельных Мшахп1йх чисел М полета.
Ограничения по (fan и Мтят могут зависеть от высоты полета. Так,
по условиям безопасности ограничения на малых высотах являются
обычно более жесткими (рис. 2.13).
Минимальные значения (jtnm и min. а значит и минималь-
ная скорость полета Vi ш1п и Vi ш1п min, также ограничены — из
условия сохранения управляемости (эффективности аэродинами-
ческих органов управления), продолжения работы двигателя и т. п.
46
Рис. 2.13. Типовые ограничения допу-
стимых режимов полета для дозвуко-
вого самолета (обозначения те же,
что на рис. 2.3)
(см. рис. 2.13). Минимальная
безопасная скорость, достиг-
нутая в процессе испытаний
самолета, называется эволютив-
ной, V8B (или У(8В). В реаль-
ной эксплуатации допустимы
значения скорости Vmln или
Vt mm, превышающие V8B или
Угэв с некоторым запасом.
Максимальная высота Ятах
может быть ограничена условиями
работы системы кондиционирования пассажирского салона, усло-
виями работы двигателей и т. п. Может быть ограничен и темп
изменения высоты |Я|тах. Предельная нормальная перегрузка пи
(или нормальная скоростная пуа) ограничена по условиям прочности,
комфорта, выносливости летчика и т. п. Ее значение в опорном
движении не должно превышать эксплуатационного ограничения
пу (или п^а). Значение зависит от класса самолета.
Ряд}режимов полета ограничен, косвенно, по величинам потреб-
ных для их реализации значений угла атаки, отклонений органов
управления и т. п. Полетные значения угла атаки це должны пре-
вышать допустимых, а < адоп. По отклонению органов управления
также вводится некоторый запас Д6заП (10° по НЛГС-2) по сравнению
с предельными конструктивными отклонениями. При назначении
ограничений допустимых режимов полета по а, 6 и другим прове-
ряется поведение самолета на этих режимах при попадании в ветро-
вые порывы и типичных отказах (отказ одного двигателя, невыпуск
механизации на посадке и т. п.).
Дополнительная литература
[1] с. 308—315; [8], с. 20-24, 147—251; [9], с. 32—50; [13],
с. 5—111; [14], с. 86—87, 112—116; [7], с. 231—235, 274.
Контрольные вопросы
1. Что такое индикаторная скорость?
Самолет летит на высоте Н = 11 000 м со скоростью 800 км/ч. Рассчитать Vt,
2. Что такое поляра самолета?
3. Что такое балансировочная поляра, для каких значений отклонения руля
„ысоты она построена?
4. Чем ограничены предельные значения суа в полете?
5. Как повлияет иа величину максимального аэродинамического качества уве-
личение коэффициента пассивного сопротивления см на 5 %?
6. Что такое дроссельная характеристика двигателя?
7, Чго такое эволютирцап скорость?
47
ГЛАВА 3. УСТАНОВИВШИЕСЯ РЕЖИМЫ ПОЛЕТА
Установившимися называют режимы полета, для которых
основные кинематические параметры движения и, прежде всего,
скорость, постоянны или меняются достаточно медленно. Если усло-
вие постоянства основных параметров движения выполняется при-
ближенно, говорят о квазиустановившихся режимах. Для установив-
шихся и квазиустановившихся режимов при анализе движения
центра масс самолета ускорение пренебрежимо мало и инерционный
член mV можно не учитывать. В установившемся полете управля-
ющие воздействия, найденные для опорного движения, углы атаки,
крена и скольжения, перегрузка, режим работы двигателя неиз-
менны, а в квазиустановившемся — почти не меняются.
На установившихся и квазиустановившихся режимах выпол-
няются многие этапы полета. Для них рассчитываются некоторые
основные летные данные самолета. Расчет летных данных самолета,
поддающихся определению по соотношениям для установившихся
или квазиустановившихся режимов полета, — предельных высот
и скоростей, скороподъемности и других иногда называют аэроди-
намическим расчетом самолета.
Обычно при выполнении установившегося полета траектория
прямолинейна (6 = const, 1F = const) или квазипрямолинейна (члены
mVQ и mW в уравнениях поступательного движения (1.45), (1.46)
малы). Исключение составляет установившийся вираж, рассматри-
ваемый в гл. 5.
§ 3.1. УСТАНОВИВШИЙСЯ ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ.
РАСЧЕТ ЛЕТНЫХ ХАРАКТЕРИСТИК МЕТОДОМ ТЯГ
В установившемся (V = 0) горизонтальном (6 = 0, Н =
= 0) прямолинейном fF = 0, уа = 0, 0=0) полете уравнения
движения центра масс самолета (1.44) ... (1.46) вырождаются в урав-
нения равновесия сил
Р=Ха1 (3.1)
Ya + Р (а 4- tpP) = mg. (3.2)
Считаем а и tpP небольшими, cos (а + tpP) « 1, sin (а + <рР) »
« а + <рР, и скорость полета не превышающей 1000 ... 1500 м/с.
При этом, как следует из (1.51) и (1.52), составляющие пере-
грузки равны
пхо = 0, Пуа—1. (3.3)
Тягу двигателей Р и аэродинамическую подъемную силу Ya можно
целенаправленно изменять в полете при управлении самолетом
путем изменения режима работы двигателя и балансировочного
угла атаки, что позволяет обеспечить балансировку сил (3.1), (3.2)
на различных высотах и скоростях. Для оценки летных характери-
стик самолета интерес представляет расчет диапазона изменения
Рис. 3.1. Определение Суаг_ п и сха (суа г> п)
по точным и приближенным соотношениям
движении удобно строить
высот и скоростей полета, в кото-
ром можно реализовать устано-
вившийся горизонтальный ’ полет,
а также определение значений
тяги и подъемной силы (угла ата-
ки, коэффициента cva), требуемых
для такого полета.
Методы аэродинамического рас-
чета, т. е. расчета летных харак-
теристик самолета в установившемся
на сравнении значений параметров, потребных для выполнения за-
данного режима, с их располагаемыми (предельными) значениями.
Н. Е. Жуковский в качестве параметра сравнения при определении
летных характеристик самолета выбрал тягу. Метод, основанный
на сравнении величин потребной и располагаемой тяг, является
и сейчас основным методом аэродинамического расчета самолетов
с ТРД. Этот метод называется методом тяг Жуковского.
Под располагаемой тягой. Рр понимается максимальная суммар-
ная Тяга всех двигателей на самолете, определенная для данного
режима полета (высоты и скорости или числа М). Потребная тяга РП
для установившегося горизонтального полета подбирается летчиком
из условия (4.1), она равна силе лобового сопротивления
Pa = Xa = cxaqS (3.4)
и не должна превышать располагаемой. Здесь q = = 0,7р М8,
а значение сха определяется по поляре самолета, сха = сха (суа)
для потребного в горизонтальном полете значения суа г. п, удовле-
творяющего условию (3.2) при Уа — cvaqS. Если принять линейную
зависимость суа от а вида суа = с“а (а — а0), условие (3.2) прн
Р = Рп можно разрешить относительно с,;а г. п:
_ mg/qS^Cxa (ар фр)
1аГ,и » + '
Уравнение (3.5) нужно решать совместно с уравнением поляры
Сха = Сха (cva) для данного числа М полета (рис. 3.1). Решение
удобно вести методом последовательных приближений, если в на-
чальном приближении принять
(3.5)
(3.6)
I _____ __mg
Суа г. п — Cyal — •
Это эквивалентно допущению, что в (3.2) Р (а + <рР) < Уа, т. е.
Уа » mg. (3.7)
Найдя по поляре сха (cval) (пунктир на рис. 3.1), можно затем уточ-
нять Суаг.п по (3.5) вплоть до получения требуемой точности. По сха
находим (формула (3.4)).
49
Рис. 3.2. Характерные режимы гори-
зонтального установившегося полета
на диаграмме тяг
В большинстве случаев при
расчете сха и Р можно ограни-
читься первым приближением
Рц Л/ РП1 = сха (cyai) qS. (3.8)
Такой приближенный метод
расчета называют упрощенным ме-
тодом тяг. В первом приближе-
нии из (3.6) и (3.8) следует также
р ____Сха __ /3 91
П 1 cyal Kv. п 1 ’
где Kr.ni — аэродинамическое ка-
чество самолета при суа = суа г.
Как видно из (3.6), значение суа1
при полете с различными скоро-
стями V на постоянной высоте меняется, причем малым V соответ-
ствуют большие суа i и наоборот. Меняется при этом и аэродинами-
ческое качество Аг.п1, достигая максимума Аг.п1 = Атах при
некотором значении сул1 = суанв (см. рис. 2.5). На этом значении
скорости потребная тяга минимальна, РП1 = mglKmax.- Режим
суа нв соответствует по поляре наивыгоднейшему углу атаки анв.
Скорость, соответствующая Рпга1п и анв, называется наивыгод-
нейшей:
V = 1/
,,D Г cvohbPS
(3.10)
Значение Vm зависит от высоты полета (плотности р) и массы
самолета, а суанв определяется по (2.16).-Расчет потребных тяг Рп
(или упрощенно Рп1) и. сравнение их с располагаемыми для ряда
высот и скоростей (чисел М) и нескольких значений расчетной массы т
при различных условиях полета является обязательным этапом
расчета летных характеристик самолета. При этом располагаемые
тяги определяются на характерных т'предельных режимах! работы
двигателей (номинал, максимальная?бесфорсажная тяга, полный
форсаж) в функции скорости (числа М) * для тех же высот, что и
потребные тяги. При детальных расчетах приводится сетка значений
тяги при различных режимах работы двигателя. На рис. 3.2 показан
совмещенный график потребных и располагаемых тяг для одной
постоянной высоты, при данной массе самолета и условиях полета.
Точки ниже кривой Рр (V) соответствуют режимам дросселирования
тяги. Условию (3.1) горизонтального установившегося полета, оче-
видно, отвечают точки, лежащие на кривой Рп (V)» т. е. Р = Рп-
При этом точка А (см. рис. 3.2) пересечения кривых Pn (V) и Рр (V)
соответствует режиму максимальной скорости (числа М) горизон-
тального установившегося полета Vmax (или Мтах) на данной вы-
* Как правило, для дозвуковых самолетов зависимости строятся в функции
скорости, сверхзвуковых — по числу М. Поскольку всегда возможен пересчет
от М к V, в дальнейшем это различие ие акцентируется.
50
соте Н. Точки, лежащие на кривой Р„ (V) левее т. А, соответствуют
горизонтальному установившемуся полету с меньшей скоростью и',
как видно из (3.5), большим значением с11а г.п. Для перехода к та-
кому режиму, например, в т. Б, на скорости Уъ (см. рис. 3.2) не-
обходимо увеличить, по сравнению с режимом в т. А, угол атаки и
уменьшить (дросселировать) тягу. Балансировочный угол атаки
летчик изменяет, отклоняя руль высоты (стабилизатор), а режим
работы двигателя подбирает, перемещая рычаг управления двига-
телем (РУД). При уменьшении скорости одновременно уменьшать
тягу нужно лишь до т. В (скорость Унв). В точке В на режиме макси-
мального качества потребная тяга наименьшая. Скорость, соответ-
ствующая на данной высоте полета минимальному значению потреб-
ной тяги, будет наивыгоднейшей VHB.
При дальнейшем уменьшении скорости горизонтального полета
необходимо увеличивать и угол атаки (т. е. суа г.п) и тягу Дви-
гателя, так как с ростом а здесь быстро увеличивается индуктивное
сопротивление. Интерес представляет точка Г касания прямой,
проведенной из начала координат к кривой Рп (V). В этой точке,
как легко видеть, отношение Pn/V минимально. Скорость и угол
атаки, соответствующие этому режиму, обозначим Уг, аг. Точка Д
касания прямой, параллельной оси координат, и кривой Р„(V)
соответствует теоретическому значению минимальной скорости гори-
зонтального полета Ут1л. Она близка к скорости сваливания на
Суа г, п•= Суа max (СМ. рИС. 2.1). В СЭМОМ ДвЛе, ПОПЫТКв уМвНЬШИТЬ
скорость здесь потребовала бы согласно (3.5) увеличения сиа г.п,
а реализовать суа г.п > cvamax при данной конфигурации самолета
невозможно. Практически и на I/min летать нельзя, так как любая
ошибка в пилотировании или вертикальный порыв ветра, увеличи-
вающий воздушный угол атаки, могут-привести к сваливанию из-за
резкого уменьшения суа на закритических углах атаки *. За прак-
тическую МИНИмаЛЬНуЮ СКОрОСТЬ ПОЭТОМУ Принимают СКОрОСТЬ Vm°n
(т. Д' см. рис. 3.2), которой соответствует сро г. п = доя (см.
гл. 2). В первом приближении, очевидно
(311>
" СИа ДОПР*
Значение суа доп определяется при летных испытаниях самолета
и зависит от числа М полета. Предупреждающими признаками
при подходе к Суа доп (адоп) служат появление тряски самолета,
самопроизвольное кренение и кабрирование, ухудшение управляе-
мости и т. п., а также сигналы автомата, предупреждающего летчика
о выходе на предельно допустимые углы атаки.
При предварительных расчетах обычно принимают суа доп *
» 0,8 ... 0,85с,,п п,яу. считая, что вплоть до суадоп сохраняется
линейная зависимость суа (а) (см. гл. 2).
* Для современных маневренных самолетов рассматривается возможность
создания крыла, для которого при а > акр зависимость суа (а) пологая, без
срыва, что позволяет реализовать закритические режимы. Но скорость Vmin ПРИ
< (/« max все равно остается минимальной в горизонтальном полете.
61
Рис. 3.3. Типичные области высот и ско-
ростей установившегося горизонтального
полета:
а дозвуковой; б — сверхзвуковой самолет
Рис. 3.4. Диаграмма потребных и рас-
полагаемых тяг
На больших высотах тяга ТРД падает и пересечение кривых
Рп (V) и Рр (V) в области малых скоростей может произойти ниже
точек Д и Д'. В этом случае минимальная скорость установившегося
полета УтТп будет ограничена располагаемой тягой, при Уmln >
Значения Утах (Я) и Vmin (Н) ИЛИ Vmln (Я) ДЛЯ ДЭННОЙ МЭССЫ
самолета и условий полета ограничивают возможный диапазон
высот и скоростей горизонтального установившегося полета
(рис. 3.3). Для самолетов с ТРД эта область замкнута сверху, так
как с ростом высоты полета располагаемая тяга падает, а минималь-
ные значения Pn Inltl = mg/Ктах не уменьшаются (рис. 3.4). На ка-
кой-то высоте Ят кривые Рп (V) и Рр (V) имеют лишь одну общую
точку — точку касания. На этой высоте, называемой теоретическим,
или статическим потолком самолета (при данной массе и условиях
полета) возможен установившийся горизонтальный полет только на
скорости Ут, т. е. Ути = Утах ™ Ут- На большей высоте Рп (V) >
> Рр (V) для любых скоростей и установившийся горизонтальный
полет невозможен.
Как было сказано в гл. 2, допустимые режимы полета, помимо
условия срз < Срадоп ограничены по соображениям прочности,
нагрева, устойчивости и управляемости. Эти ограничения сужают
диапазон возможных скоростей полета самолета, полученный ранее
по методу тяг. Их обычно наносят на график, изображенный на
рис. 3.3. С учетом ограничений определяется значение максимальной
скорости (числа М) по высотам на максимальных и номинальных
режимах работы двигателя. Наибольшее достижимое значение
Гтах max (или Мщахтах) указывается в летных характеристиках
вместе со значением высоты, на которой оно достигается. Заметим,
что для самолетов с потолком Ят, существенно превосходящим 11 км,
Vmax max обычно достигается именно на 11 км, что связано с харак-
тером изменения температуры воздуха с высотой.
52
Рис. 3.5. Влияние изменения массы самолета на Гра-
ницы области установившихся режимов полета
Максимальная скорость на малых вы-
сотах определяется, как правило, не рас-
полагаемой тягой, а различными ограниче-
ниями.
Для сверхзвуковых самолетов области
возможных скоростей и высот (см. рис. 3.3, б)
строятся для двух характерных режимов
работы двигателя — без форсажа (максимал)
и на полном форсаже. Ограничения здесь, как
правило, захватывают форсажную область.
Максимальная скорость и потолок самолета рассчитываются
либо для средней полетной массы тср, либо, при детальном анализе,
для ряда расчетных значений трасч. Соответственно строятся и кри-
вые потребных тяг, диапазоны высот и скоростей полета. Заметим,
что изменение массы влияет на Рп через изменение потребного суаг, п
па данной высоте и скорости (3.5). Поэтому при больших значениях q
(высокие скорости, умеренные высоты), когда доля индуктивного
сопротивления в сХ| (суаГ.п) мала, влияние изменения массы трасч
на величину Рп, а значит и Утахгоах, невелико. Наоборот, при
малых q, когда основная доля сопротивления — индуктивное со-
противление, обусловленное суа (левая ветвь кривой Рп (V)), влия-
ние изменения трасч на Рл существенно. Сильно влияет трасч и на
Vmln, и на Ят (рис. 3.5).
Для данной массы самолета всюду внутри области установившихся
режимов (см. рис. 3.3 или 3.5) тяга двигателя обеспечивает возмож-
ность установившегося горизонтального полета. Однако условия
пилотирования самолета в различных точках этой области различны.
Положим, в точках I и II (рис. 3.6) при скоростях Vi и Гц на
данной высоте обеспечено вследствие дросселирования тяги при
одинаковом положении РУД равновесие потребной и фактически
реализуемой тяги. При этом не безразлично, достигается ли это
равновесие на восходящей (т. /) или нисходящей (т. //) ветви кри-
вой Рп (V). В самом деле, в т. II при случайном изменении скорости
без изменения высоты и режима тяги разность между реализуе-
мой тягой Р и сопротивлением
Хи — Рп будет совпадать по знаку
с возмущением скорости, что,
по крайней мере в первый мо-
мент, приведет к нарастанию воз-
мущения. Естественной реакцией
летчика на такое нарастание бу-
дет вмешательство в управле-
ние самолетом, изменение тяги.
Рис. 3.6. Первые и вторые режимы
полета по диаграмме тяг
53
Наоборот, вт./ случайное изменение скорости полета иа AV
приводит к появлению разности Р — Ха, противоположной ДЕ
по знаку. Если самолет устойчив, то он самопроизвольно, без вме-
шательства летчика возвращается к исходному режиму. Пилоти-
ровать самолет в этом случае значительно проще. Режимы, на кото-
рых выполняется условие дРдуХа < 0 при Н = const, получили
д(Р — Ха) I п
название первых режимов, а режимы ——^-4 >0 — вторых.
Их границей приближенно является нижняя кточка кривой
Рп (V), т. е. точка, соответствующая полету с /(max и Енв при а =
= анв и Суа г.п = Суа нв. Заметим, что на вторых режимах за-
труднено не только выдерживание заданной скорости, но и управле-
ние самолетом. Так, чтобы изменить скорость на ДЕ > 0 на первых
режимах, летчик увеличивает тягу на ДР (см. рис. 3.6). Самолет раз-
гоняется до новой скорости и самопроизвольно переходит к новому
установившемуся полету. При полете на вторых режимах для уве-
личения скорости нужно сначала увеличить тягу, обеспечив начало
разгона, а затем уменьшить ее, выдерживая условие равновесия
тяги и сопротивления. Таким образом, управление скоростью на
вторых режимах требует от летчика двойного движения РУД. Как
правило, полет на вторых режимах при нормальной эксплуатации
самолета производится только при посадке самолета.
§ 3.2. УСТАНОВИВШИЙСЯ НАБОР ВЫСОТЫ.
СКОРОПОДЪЕМНОСТЬ САМОЛЕТА
Метод тяг используется не только для анализа режимов
горизонтального установившегося полета, но и при расчете уста-
новившегося набора высоты — подъема самолета с постоянной ско-
ростью. В этом случае из уравнений движения следует (при малых
а и фр)
/’нб — Ла = mg Sin®. (3.12)
При установившемся наборе высоты тяга двигателя РнС должна
уравновешивать не только силу сопротивления Ха, как в горизон-
тальном полете, но и составляющую силы тяжести mg sin 0. Сравни-
вая потребную тягу Рпв с располагаемой, легко оценить реализуе-
мость заданного режима набора высоты. При этом равенство (3.12)
можно обеспечить либо подбором режима работы двигателя или сте-
пени дросселирования тяги в пределах Ряб < Рр при заданном
значении 0, как это делается в горизонтальном полете при 0 = 0,
либо подбором угла наклона траектории 0 при данной тяге РнС,
например, при РпС = Рр. В реальных условиях второй случай
более распространен, так как поддержание заданного постоянного 0
при наборе потребовало бы от летчика непрерывного регулирования
и тяги, и угла атаки, что усложнило бы управление. Поэтому обычно
набор высоты производится на неизменном (соответствующем по-
стоянному положению РУД) режиме работы двигателя (номинал,
максимал, частичный или полный форсаж). При этом Рнс — извест-
54
ная функция высоты и скорости полета. Отклоняя ручку или штур-
вал, летчик для каждой высоты подбирает такой угол 0, при котором
скорость полета на данном режиме тяги не меняется (V = 0). Если
самолет устойчив, выдерживание постоянной скорости набора без
изменения режима тяги, т. е. плавное изменение 0 с увеличением
высоты, не требует особых усилий. Выбор угла 0 при наборе высоты
эквивалентен выбору вертикальной составляющей скорости *
= V sin 0. (3.13)
Значения 0 и Ve, соответствующие при данном режиме работы
двигателя установившемуся набору высоты, принято обозначать
звездочкой: 0*, VJ.
Очевидно:
sin 6* =^Г-^.^Пха (3.14)
г'1&
[см. (3.12)]. Поскольку при подъеме самолета с изменением высоты
меняется и Ряо, и Ха, угол 0* переменен. Однако темп изменения
0* (0 (т. е. значение 0*) обычно невелик, и во втором уравнении
поступательного движения (1.45) членом тV0 можно пренебречь,
считая режим установившегося набора высоты квазипрямолинейным.
Тогда при наборе
Уа + /’H6(a + <Pp) = /ngcos0*; (3.15)
tlya — COS 0*. (3.16)
Отсюда можно выразить потребное значение коэффициента подъемной
силы Сувнб (а значит и аяС) при наборе на данном 0 = 0*
cpalni/a — ФР)
-------i+^/%-------' (317)
Здесь cVai = -^§- [см. (3.6)], пуа определяется по (3.16) для 0*
из (3.14), а коэффициент тяги сР соответствует заданному режиму
работы двигателя:
Ср — PffilqS. (3.18)
Решая уравнения (3.17) и (3.18) совместно, при известных сяо (суа)
и (V, И) можно для заданной скорости V при наборе высоты
и для текущей высоты И иайти угол 6* (а значит Vp) и значение
cva нс- Решение, как и для горизонтального полета, проводят мето-
дом последовательных приближений. В первом приближении обычно
полагают
Сха (fya нб) & Csca (Cpa’ )> (3.19)
что позволяет, зная cval, найти sin 0 по (3.14), не решая (3.17).
Как видим, в первом приближении
sin 0* » sin 0J = , (3.20)
* Вертикальная составляющая скорости определяется в нормальных осях
координат и должна, строго говоря, обозначаться Vvg. В авиационной литературе
индекс g обычно опускают, если речь идет о скороподъемности самолета.
55
что позволяет кривые потребных тяг, построенные для горизонталь-
ного установившегося полета (Ди = Х„г. ш см. § 3.1), использовать
для приближенной оценки характеристик установившегося набора
высоты. При этом для заданного режима тяги Рн0 разность АРнб =
= Рк5 — Рп1 легко находится по диаграмме тяг графически.
Найдя sin 6Г в первом приближении, можно затем уточнить
(по (3.17)) значение су„„о с учетом того, что п„а =# 1 и сР Ф 0.
Затем снова рассчитать сха (суа нб) по поляре и уточнить, если не-
обходимо, значение Ха115, которое теперь будет отличаться от Рп1,
повторяя этот процесс вплоть до получения нужной точности. Точ-
ность можно оценить по степени близости Х„ нб при двух последо-
вательных приближениях. Расчеты показывают, что для самолетов
с умеренной тяговооруженностью на сравнительно пологих траекто-
риях (0* до 30 ... 40°) точность первого приближения при оценке
Х„ нб — 2 ... 3 %, что достаточно при проектировочных расчетах
характеристик самолета. Для самолетов с высокой тяговооружен-
ностью на крутых траекториях или при точных оценках может по-
требоваться второе, и, может быть, третье приближения, что легко
обеспечить при проведении расчетов на ЭВМ *. Если при расчетах
ограничиваются первым приближением, то говорят (как и для режи-
мов горизонтального установившегося полета), что используется
упрощенный метод тяг. Таким образом, по упрощенному методу
тяг сха определяется для суа , (вместо фактического сул г. п или
с«анб) не только в горизонтальном полете, но и на пологих траек-
ториях набора высоты. Отметим, что при этом значение сХа обычно
завышается (сиа г > суа нб), что приводит к некоторому занижению
характеристик набора высоты в первом приближении.
Качественный анализ характеристик набора высоты проводят
обычно по данным первого приближения упрощенным методом тяг.
Если расчет режимов набора высоты проводится для оценки
летных возможностей самолета, то интерес представляет определение
его предельных располагаемых характеристик. Очевидно, такие
характеристики можно реализовать при наборе высоты на макси-
мальной тяге, равной располагаемой. Для Рно = Р$ находим
в первом приближении
sin 0 = = ДРР = СГ (3.21)
и
Vy = V sin 0‘ = &NP = VnPoJn- (3.22)
Величину ДРр можно назвать относительным располагаемым из-
бытком тяги, а ДМР — относительным располагаемым избытком
мощности. В (3.21) и (3.22) Pni и СГ определяется для cxtl (cyai).
* При необходимости можно учесть и переменность 0* (0 с ростом высоты,
проводя расчет последовательно для ряда высот, определяя 0* (/) по изменению
0* (/) и определяя в (3.17) пуа не по (3.16), а по (1.51) при — 0 без учета инерцион-
ных членов (см. также (7.11)),
50
Рис. 3.7. Изменение Vypacn по высоте и скорости полета:
а — дозвуковой; б — сверхзвуковой самолет
Если APjp (или ДЯР или ПхЙп) больше нуля, т. е. кривая Рр (V)
на данной высоте и скорости выше РП1 (V), то установившийся набор
высоты возможен. При Рр < РП1 возможно только установившееся
снижение (sin 0* < 0), при Рр = Рп1 — горизонтальный устано-
вившийся полет. Таким образом, на скорости VmaX (см. точку А на
рис. 3£) установившийся набор высоты невозможен, так же как на
И > Ят.
Поскольку время установившегося набора высоты связано со
значением очевидным соотношением
«к
, f dH
‘нб =
(3.23)
-
(так как Н — Vy при V = 0), то располагаемые значения Vy ха-
рактеризуют текущую для каждой высоты и скорости скороподъем-
ность самолета. Для ее оценки строят обычно по высотам (для тех же
высот, для которых построены потребные и располагаемые тяги
в горизонтальном полете) зависимости располагаемых значений
Vy (Ю (рис. 3.7). Определяют наибольшие значения равные
на каждой высоте и соответствующие им наивыгоднейшие
скорости набора высоты VHC (Я). Имея Vpmax (Я) (рис. 3.8), можно
уточнить наибольшую высоту, на которой возможен горизонтальный
установившийся полет (т. е. Ve max 0), — высоту теоретического
потолка Ят.
По графику скороподъемности Vpmax (Я) можно, интегрируя
(3.23), найти минимально-возможное время набора высоты Я < Ят.
Зависимость времени от высоты называют барограммой набора.
Часто барограмму строят на том же графике, что и Vpmax (Я).
57
Рис. 3.8. Барограмма набора высоты:
1 — зависимость Vy max (И), 2 — зависи-
мость <нб (//)
Рис. 3.9. Типичный профиль набора
высоты МЯр (Я) для сверхзвукового
самолета:
1 — дозвуковой набор; 2 — разгон; 3 —
сверхзвуковой набор
Построеннай по Vptnax (И) барограмма является условной,
поскольку время набора для каждой высоты определяется по VJmax,
а скорость VhC, соответствующая Vpmax, с высотой меняется, т. е.
фактически набор высоты на Vpmax не является установившимся.
Реальное время набора высоты при этом несколько больше найден-
ного по Vpmax- Тем не менее, барограмма, построенная по V*max>
хорошо характеризует летные возможности самолета.
Для сверхзвуковых самолетов и характеристики располагаемых
VS (Н, М) и VytMx (Я), и барограмма набора высоты строятся
обычно для двух предельных режимов тяги — без форсажа (Макси-
мал) и на полном форсаже. На форсаже зависимость Vy (М) может
иметь два максимума, так что, вообще говоря, существуют два наи-
выгоднейших режима набора высоты — дозвуковой и сверхзвуковой.
При этом, как правило,' на небольших высотах сверхзвуковые ре-
жимы УНб попадают в область ограничений по qmax, так что набор
высоты проводится сначала на дозвуковом режиме, а затем после
разгона на средних высотах — на сверхзвуковом (рис. 3.9).
Для самолетов с очень большой тяговооруженностью (Pvlmg > 1)
величина Д^р в (3.21) может оказаться больше единицы. Это озна-
чает, что на полной, недросселированной тяге для таких самолетов
установившийся набор высоты невозможен, при подъеме одновре-
менно растет скорость полета. Режимы неустановившегося подъема
самолета рассмотрены в гл. 4.
Если рассматривать только установившийся набор высоты (при
V = 0 для ДРр < 1), можно видеть, что время набора теоретиче-
ского потолка (Vpmax = 0) стремится к бесконечности. Интерес
в этом случае представляет высота практического потолка са-
молета.
Практическим потолком Нп, „ принято называть высоту полета,
на которой максимальная вертикальная скорость не менее заданной
^JmaX 2^ ^11 п. п •
(3.24)
58
За Vgn. п принимают для дозвуковых самолетов 3 ... 5 м/с. Для
сверхзвуковых самолетов] задают Vpn.n, равной 2 ... 3 % от У„
у Земли. Может задаваться и минимальный требуемый угол набора
высоты 0£.п. Тогда 1^п.п = sin 0£.п.
§ 3.3. ХАРАКТЕРИСТИКИ УСТАНОВИВШИХСЯ РЕЖИМОВ
ПРИ РАЗЛИЧНЫХ АТМОСФЕРНЫХ УСЛОВИЯХ
Обычно диаграмма потребных и располагаемых тяг строится для не-
которых заданных или стандартных значений термодинамических параметров
атмосферы (давление, плотность, температура н т. п.) при отсутствии ветра. При
изменении параметров атмосферы потребные и располагаемые тяги, построенные
в функции высоты и скорости полета, будут, очевидно, иными. Изменяются и летные
характеристики — максимальная и минимальная скорость, скороподъемность,
потолок.
Рассмотрим, как влияет изменение условий полета на взаимное расположение
кривых потребных и располагаемых тяг. Учитывая, что и аэродинамические силы Ха
и Уд и тяга определяются истинной воздушной скоростью V, находим, что при
наличии ветра расположение Рв и Рр ие изменяется, как и летные характери-
стики самолета, если под V^caTx или M^CJX понимать их истинные воздушные значения.
Скорость самолета относительно Земли в этом случае определяется с учетом ветра
как
Ук = У-Гв, (3.26)
где Wg — скорость эквивалентного встречного ветра, действие которого равно-
сильно действию фактического ветра со. скоростью W с продольной <Уор (на-
встречу) и боковой Wa составляющими:
= ^пр + (1 - /1 - (tFe/V)») V. (3.26)
Изменение давления р и температуры воздуха Т влияет как на
потребную, так и на располагаемую тягу. Потребная тяга PBi в пер*
вом приближении может быть определена по барометрической вы*
соте Яа«р» соответствующей данному р (а не по фактической вы-
соте Я), и для числа М полета (зависящего от фактической темпе-
ратуры 7ф при данной скорости полета). Кривые потребной тяги,
построенные в функции числа М, при изменении р перестроения не
требуют. Для дозвуковых самолетов часто строят РЯ1 в функции не
числа М, а приведенной скорости Vnpm
VDPhb = VKW;, (3.27)
что эквивалентно построению Ри1 в функции М. (Здесь 7СТ — тем-
пература на высоте Я по данным стандартной атмосферы.) Распола-
гаемая тяга зависит как от давления, так и от температуры воздуха.
В общем случае требуется построение сетки кривых располагаемой
тяги для ряда значений температуры. Если такая сетка построена,
изменение давления можно учесть через одновременное изменение
барометрической высоты на ДЯ и температуры воздуха на ДТ =
== ДЯ, где дТ1дН — градиент температуры по высоте. Если
сетки кривых Pv М, Т) нет, но есть сетка кривых потребных
тяг для различных значений расчетной массы, то, как следует из
соотношений упрощенного метода тяг, изменение давления можно
59
(3.29)
свести к эквивалентному изменению массы от фактической к при-
веденной:
тприв — т ~~п~ (3.28)
и пропорциональному пересчету Рр и Рп1 для тприв по формуле
„СТ
р — р р
J прив - г НСХ
Поскольку при расчете Мтах на условие равенства Рр и Р1П пересчет по (3.29)
ие влияет, то при определении Мпм.\- и высоты //т изменение давления полностью
эквивалентно изменению массы по (3.28). Рост давления эквивалентен на той же гео-
метрической высоте пропорциональному увеличению массы. В этом случае гово-
рят, что для режима полета на Мщах существует подобие по (т/р). Что касается
влияния температуры воздуха, то, как уже говорилось, при данном М изменение Т
не влияет иа РП1. В то же время Рр с ростом Т падает, таким образом, летные
характеристики при повышении температуры воздуха ухудшаются. Для дозву-
ковых бесфорсажных ТРД с нерегулируемыми в полете воздухозаборниками влия-
ние изменения температуры воздуха на тягу и расход топлива эквивалентно изме-
нению частоты вращения двигателя от пвр к пр'рИ"
пТв = пвр/гст/г”- О-30)
Для таких двигателей, имея сетку характеристик установившихся режимов полета
для ряда пвр, можно легко рассчитывать эти характеристики для различных Т.
Здесь существует подобие установившихся режимов по параметру (пвр/р^Т). Если
такого подобия нет, зависимости Рр(Н, М, 7), Мтах(Я, 7), Нт (7), V*max(H, 7)
рассчитываются специально.
Если летные характеристики V^caTx (или М^сатх), Ят, V,/max и другие найдены
в ходе летных испытаний, возникает задача их пересчета к стандартным усло-
виям. Для этого в ходе летиых испытаний нужно, не только определить сами зна-
чения искомых параметров, но и оценить их чувствительность к изменению условий
полета, т. е. значения частных производных 6V^caTx/d7, дНт/дТ и т. п. Существует
ряд методов, позволяющих провести такую оценку в ходе одного полета, меняя
высоту, скорость, перегрузку и т. п. Существенно сокращается объем необходи-
мых измерений, если существует подобие моделируемых режимов по каким-либо
параметрам. Так, при подобии по параметру (nBp/^"7) летный эксперимент для
ряда значений ивр легко реализуемый в ходе одного полета, позволяет строить
зависимости тех или иных характеристик от температуры, и наоборот. Анало-
гично вследствие подобия по (m/р), проводя определение V^aTx для ряда высот
(в одном полете), можно получить зависимость V^ax от расчетной массы и т. п.
Если принять, что в летном эксперименте уточняются только абсолютные значения
тех или иных показателей, а относительное их изменение по условиям полета
сохраняется, для приведения результатов летных испытаний к стандартным усло-
виям можно использовать сетки характеристик, полученные расчетным путем.
§ 3.4. УСТАНОВИВШЕЕСЯ СНИЖЕНИЕ. ПЛАНИРОВАНИЕ
Рассмотрим режимы установившегося (V = 0) прямоли-
нейного (0 = 0) или квазипрямолинейного (0 — мало) снижения
самолета без крена и скольжения (т. е. при ¥ — 0). При снижении
с работающим двигателем, как и при наборе высоты
Ал — ~ mg sin Вен. (3.31)
60
Считая Р (а + Ч7>) < Уа, находим
У а ~ mg cos 6 . (3.32)
Отсюда получаем
|g д» ______Х„ CH РСН ___ Сха (Суд Сн) Ср Ги /д дд.
Еа сн Суа сн
где Ср сн PcH^jS.
Снижение с V --- 0 возможно только при Ха > РС11. Вводя эффек-
тивное качество самолета /СЭфф
К;,ФФ =------’ <3’34)
t у Ср f и
1 — Лен —
Lya сн
находим из (3.33)
tg6c*„ = — . (3.35)
Лафф
В формуле (3.34) Ксн = С"°си ;--------аэродинамическое ка-
сха \суа сн)
чество при Суа — Суа сн. Соотношение (3.35) позволяет либо найти
угол бен при известной тяге, т. е. сР сн .== -^г-, высоте и скорости
(определяющих суа сн), либо определить тягу Рсн при данных Н,
V И бед.
В первом приближении, для пологих траекторий в (3.32) можно
положить cos 6JH « 1, что приведет к соотношением упрощенного
метода тяг. В этом случае анализ режимов снижения можно вести
по диаграмме потребных тяг (Хасн«Рп1).
Если снижение осуществляется при нулевой тяге или при тяге
малого газа (планирование), т. е. Рск < Ха, то из (3.33) следует
tge^ = —(з.зб)
Лил
Если при планировании задана скорость Упл на данной высоте,
то КПл определяется по сиа пл из (3.32) методом последовательных
приближений. Если планирование происходит при заданном зна-
чении угла атаки апл (т. е. суапл’и 7<пл), то угол 6ЛЛ определяется
но (3.36), а установившаяся скорость планирования равна
V
ПЛ
2mgcos6*fl
Суа плР^
(3.37)
Скорость Упл, как видим, меняется с высотой, хотя и медленно,
гак что планирование на постоянных апл и б’л не является строго
установившимся и должно рассматриваться, как квазиустановив-
шееся.
61
Дальность при снижении находим из очевидного соотношения
= tg бпл. Отсюда для планирования:
Но
Ьпл = [ tge*n dH== J 7^7'kw <3,38)
Ho H^
(при Ho > Як). При планировании с Кцл = const
Ьпл = Кпл(Но-Як). (3.39)
При крутом планировании (например, при экстренном снижении
самолета) для увеличения скорости сниженияпл нужно плани-
ровать с малым аэродинамическим качеством. При этом могут исполь-
зоваться воздушные тормоза и т. п. При пологом планировании
для получения наибольшей дальности аэродинамическое качество Кпл
должно быть максимально, что достигается выбором угла атаки аив
и скорости планирования, соответствующей суа пл = суп нв. При
очень крутом снижении нестационарность движения становится
существенной. Исследовать такие режимы по соотношениям для
квазиустановившегося снижения нельзя.
§ 3.5. МЕТОД МОЩНОСТЕЙ
Для самолетов с винтовыми и турбовинтовыми двигате-
лями, характеристики которых задаются в виде зависимости мощ-
ности от скорости и высоты полета, аэродинамический расчет произ-
водится обычно по методу мощностей.
Метод мощностей аналогичен упрощенному методу тяг. Для
определения основных летных характеристик самолета вместо совме-
щенных графиков потребных и располагаемых тяг строят совме-
щенные графики потребных и располагаемых мощностей (рис. 3.10).
Рис. 3.10. График’потребных и распо-
лагаемых мощностей
Рис. 3.11. Характерные режимы полета
иа графике потребных и располагае-
мых мощностей
62
I (отребная для горизонтального установившегося полета мощ-
ность равна произведению потребной тяги на скорость полета
Nn = PnV = XaV. (3.40)
Подставив формулу в выражение (3.40) для потребной тяги,
получим
<м1>
где Кг. m — аэродинамическое качество самолета при суа1.
Потребную мощность, так же как и потребную тягу, рассчиты-
вают для нескольких полетных масс самолета и высот полета от
Н = 0 до потолка.
Точка пересечения кривых потребной и располагаемой мощностей
соответствует максимальной скорости установившегося горизон-
тального полета.
Вертикальная скорость установившегося набора высоты
= (3.42)
л *7 « гл
где ДЛ/р = -——--------относительный располагаемый избыток мощ-
ности на данной скорости полета.
В аэродинамическом расчете нас обычно интересует максималь-
ная вертикальная скорость Уртах. При расчете по методу мощностей
она получается на той скорости полета, на которой избыток мощности
максимальный:
Vp max = Д-^тах1 (3.43)
На кривой потребных для горизонтального полета мощностей
имеются две характерные точки (рис. 3.11). Точка Е касания гори-
зонтальной прямой с кривой потребной мощности соответствует
полету на режиме минимальной мощности. Точка В касания прямой,
проведенной из начала координат к кривой потребной мощности,
соответствует полету на наивыгоднейшем режиме, так как в этом
случае отношение NnlV = Рп будет наименьшим, а аэродинамиче-
ское качество максимальным Хг.п1 = Кти-
Реальный крейсерский полет с минимальным километровым
расходом топлива происходит обычно на крейсерской скорости,
довольно близкой к скорости минимальной мощности.
Дополнительная литература
[81, с. 35—87; 19], с. 60—105, 150; [131, с. 322—338.
Контрольные вопросы
1. Какой режим полета можно считать квазиустановившимся?
2. Чему равны нормальная скоростная и тангенциальная перегрузка в гори-
||>птальном установившемся полете? При установившемся наборе высоты с 6 =
30°? При установившемся планировании с 0пл = —30°?
63
3. Как рассчитать потребную тягу Горизонтального полета в первом прибли-
жении?
4. Чем определяется максимальная скорость горизонтального установившегося
полета? Минимальная скорость?
5. Чем отличаются теоретический и практический потолок самолета?
6. Почему барограмма набора, построенная по V*max, дает заниженное значе-
ние времени набора высоты?
7. В чем сложность пилотирования самолета на вторых режимах?
8. Может ли самолет совершать установившийся набор с 0> 6*?
9. Как повлияет рост температуры воздуха на высоту практического потолка
самолета?
10. Для дозвукового самолета с нерегулируемым ТРД (при подобии по т/р)
потолок при расчетной массе нграоч — 14 000 м. Чему будет равна высота потолка
при массе, равной 1,17/Прасч? (Определите с использованием таблицы СА, данной
в приложении.)
ГЛАВА 4. НЕУСТАНОВИВШИЕСЯ КВАЗИПРЯМОЛИНЕЙНЫЕ
РЕЖИМЫ ПОЛЕТА
Многие характерные режимы полета современных ско-
ростных самолетов связаны с достаточно быстрым изменением ско-
рости и высоты (а значит и уровня энергии). Такие режимы нельзя
считать установившимися. В то же время, если этапы полета с пере-
менной высотой и скоростью достаточно продолжительны, а изме-
нение направления вектора скорости при этом невелико (т. е. про-
изводные в и У малы), то движение здесь можно считать квазипря-
молинейным, по крайней мере в среднем для всего этапа полета.
В частных случаях при = 0 и 6 = 0 получим строго прямолиней-
ные режимы. Предположение о малости 0 и Ч? существенно упрощает
расчеты.
По соотношениям для квазилрямолинейных неустановившихся
режимов полета определяются характеристики неустановившегося
набора высоты (набор с разгоном), снижения с переменной ско-
ростью, разгона и торможения в горизонтальном полете (горизон-
тальная приемистость). Эти показатели, важные для оценки летных
характеристик маневренных самолетов, называют иногда показа-
телями энергетических возможностей самолета.
При этом такие показатели энергетических возможностей, как
время неустановившегося набора высоты с разгоном (или энер-
гетическая скороподъемность), время снижения с торможением и
• другие зависят не только от параметров самолета и его характери-
стик, но и от выбора программы полета на рассматриваемом этапе.
Такие показатели определяются либо для какой-то типовой, заранее
заданной из условий применения самрлета программы, либо для
наивыгоднейшей — оптимальной по рассматриваемому показателю
программы полета.
Определение оптимальных энергетических возможностей само-
лета важно как для оценки и сравнения различных технических
вариантов при проектировании, так и для наиболее эффективного
использования самолета.
64
§ 4.1. НЕУСТАНОВИВШИЙСЯ НАБОР ВЫСОТЫ.
ОСНОВНЫЕ СООТНОШЕНИЯ ДЛЯ РАСЧЕТА
НЕУСТАНОВИВШЕГОСЯ КВАЗИПРЯМОЛИНЕЙНОГО РЕЖИМА
ПОЛЕТА
Для неу становившегося квазипрямолинейного режима по-
лета (при скорости, меньшей 1000 ... 2000 м/с, считая mVQ и mW"
малыми в сравнении с mg и предполагая, как и в гл. 3, что sin (а +
+ фу) « а + фр и cos (а + фр) « 1), можно записать уравнения
движения центра масс самолета в виде:
V =S^-~--g^ 6 = gnxa — £sln0; (4.1)
Уа + Р (ос + фр) = mg cos 6; (4.2)
И = Vy = V sin 0; ч(4.3)
L = V cos 6. (4.4)
С учетом соотношений (1.50) и (1.53) составляющие перегрузки
n«a = y + sine; (4.5)
пуо = COS 6. (4.6)
Выражение (4.2) для баланса нормальных составляющих сил в ква-
зипрямолинейном движении совпадает с аналогичным выражением
(3.21) в гл. 3. Поскольку требуемое значение суа, которое можно
определить по Уа из (4.2), зависит от тяги Р (или сР) и угла 6 [см.
(3.17)1, а величина сяа при подсчете Ха в (4.1) определяется по по-
ляре для данного суа, то соотношения (4.1) и (41.2) нужно рассматри-
вать совместно.
Интегрируя уравнения (4.1) ... (4.4) при заданной программе
полета, можно найти изменение скорости, высоты и дальности вдоль
траектории. Задать программу полета здесь можно, определив ре-
жим работы двигателя, т. е. задав Рно = Р»б V) для этого ре-
жима и задав для каждого текущего момента времени либо угол
наклона траектории 0, либо ускорение V (что равносильно заданию
закона изменения скорости по времени V (0 или по высоте V (Я),
так как V можно определить из этого закона Дифференцированием).
Заметим, что при анализе установившегося набора высоты или
снижения достаточно было задать только режим работы двигателя,
т. е. Рнв (Я, V), так как там предполагалось, что V = 0. Для не-
установившегося набора высоты или снижения при заданном режиме
работы двигателя соотношения (4.1) ... (4.4) определяют не един-
ственный режим полета, а множество таких режимов, различа-
ющихся значением V, причем каждому V по (4.1) соответствует
(при известном РНб) определенный угол 0, а значит и вертикальная
скорость Vy — V sin 0.
3 А. Ф. Бочкарев н др.
65
Задавая ту или иную программу полета, выделяют из этого мно-
жества единственную траекторию неустановившегося квазипрямо-
линейного полета.
Наиболее распространенная форма представления программы
полета на квазипрямолинейных участках — задание профиля на-
бора, т. е. зависимости скорости от высоты V (И). Задав профиль
набора высоты или снижения, можно .определить для каждой теку-
щей высоты
V'=^ М
(графически или через приращения AV и АЯ). Тогда из (4.1) и (4.2)
можно найти
sin 0 — нха /g । । — n^fPi
и
V = g (пха - sin 0) = gnxa (1 - х).
(4-8)
(4-9)
Здесь величина i/(VV'!g + 1) для краткости обозначена х.
Строго говоря, решение системы (4.1), (4.2) для заданного про-
филя полета требует последовательных приближений. В самом деле,
при данном V' значение sin 0 зависит от пжа = ——- °, а пХа, в свою
очередь, через Ха = cxaqS — от потребного (по формуле (3.17)) зна-
чения суа. Поскольку в (3.17) через пуа входит cos 0, то в первом
приближении принимают cos 0 « 1. Рассчитывают значение суа ж
« суа1 по приближенной формуле (3.6) для горизонтального полета.
Для этого значения с„о1 определяют по поляре cxa(cyat). Теперь
можно"рассчитать Ха — cxaqs, а при известной тяге — пха для суа1
и, при заданном V' — величину sin 0. -После этого рассчитывается
во втором приближении
mgcose —Рнб(«о + <Рр)
?5+рнб/с«о
(4.Ю)
суа—
для найденного значения 0, и процедура повторяется. Если ограни-
читься первым приближением, то Пха « пха1 = Рнб^Ра1 и не за-
висит от О'и V'. Величина i по первому приближению полностью
определяется режимом работы двигателя, высотой и скоростью полета
и может быть найдена по диаграмме потребных и располагаемых тяг
для горизонтального ^становившегося полета, так как в первом при-
ближении cos 0 «ж 1. При точном анализе (2-е приближение) с изме-
нением 0 (или V') меняется и пха при тех же-значениях V и Н, однако
это изменение обычно незначительно.
Рассмотренные соотношения позволяют, как видим, либо при-
ближенно (первое приближение) либо точно (второе и последующие
приближения) рассчитать при заданных Рнв (Н, V) и V потребное
значение суа, величины Х,„ пха и 0 [см. (4.1) ... (4.6)1.
В некоторых случаях программа неустановившегося квазипрямо-
линейногб Этапа полета может быть задана и в другой форме.
66
Например, вместо зависимости V (Н) может быть задана требуемая
ависимость 6 (И) или 6 (t), что исключает необходимость последова-
к-льных приближений, так как cos 6 в (4.10) может быть, найден
сразу В остальном принципы расчета квазипрямолинейной траекто-
рии при заданном 9 (И) или 6 (t) не отличаются от расчета при задан-
ном профиле V (И).
При анализе неустановившихся режимов полета важное значение
имеет оценка изменения уровня энергии самолета на траектории.
ту2
(>тпесем полную энергию самолета W = mgH Ч-— к величине mg:
Нэ = —=-^-+Я. (4.11)
3 mg 2g г ' •
1 Изученная величина имеет размерность высоты и называется энер-
гетической высотой самолета. Энергетическая высота характеризует
i.uiac полной энергии самолета и представляет собой условно наи-
большую высоту, на которую мог бы подняться самолет, летящий,
со скоростью V на высоте Я, если бы вся его энергия без потерь пере-
шла в потенциальную, а скорость снизилась до нуля.
Производнай Нв по времени будет:
Яэ=-^+Я. (4.12)
Подставив в это выражение (4.1) и (4.3), находим
Яэ = Упаа = К±^«_ = УДРр. (4.13)
Как видим, fпроизводная Я, при данной скорости полета опреде-
ляется величиной пха или ДАР. Как уже говорилось, пяв или АРр
и свою очередь определяется режимом работы двигателя, высотой и
скоростью полета и слабо зависит от угла наклона траектории 6
(через cos 0 в (4.10) при сяо »cm(eva)L В первом приближении
//,„ и АРр могут определяться по диаграмме потребных и распола-
гаемых тяг для горизонтального полета (cos 0 «« 1), хотя расчет Я,
ведется для режимов набора высоты или снижения.
Оценим теперь долю прироста потенциальной энергии dH в при-
росте полной энергии dH3 с учетом (4.3) и (4.8):
dH sine 1
dHg ~ пха VV'/g+l *
(414)
Как видим, при данной скорости V эта доля определяется величиной
I", а при данном пжо — выбором 0. Другими словами, полный при-
рост энергии dHg определяется для данной высоты Н и скорости V
режимом работы двигателя (величиной пха) и почти не зависит от
программы полета, а доля прироста потенциальной энергии dH опре-
деляется при этом именно выбором программы полета V (Н) или
<> (0, реализуемой, летчиком.'
С учетом сказанного, значения пжа1 и Нд « Vnxai можно рас-
сматривать как универсальные, практически не зависящие от про-
। раммы полета на неустановившёмся режиме, показатели, характе-
67
ризующие на данной высоте и скорости энергетические возможности
самолета. Величина nxai определяет при этом горизонтальную при-
емистость самолета — время разгона от скорости до скорости
Vi, поскольку при 6=0
V = gnxal (4.15)
и
<416>
Vi
при V2 < VmaxycT> иначе пХ: обращается в 0. Величина Яэ имеет
размерность скорости (м/с) и характеризует темп изменения энерге-
тической высоты. Поэтому ее иногда называют энергетической скоро-
подъемностью. В частном случае, при установившемся наборе вы-
соты V = 0 и
H3 = H=V'U. (4.17)
В общем случае вертикальная скорость при неустановившемся на-
боре высоты обличается от Н3:
Н.= (4-18)
Зависимость располагаемых Нв (Н, V) для ряда расчетных режимов
работы двигателя (номинал, максимал, полный форсаж и т, п.) сов-
падает, как это видно из (4.13), с зависимостью Vy (Н, У), построен-
ной для установившихся режимов набора высоты (см. гл. 3), и ха-
рактеризует в более общем случае не только скороподъемность при
V = 0, но и энергетическую скороподъемность самолета.
Трактовка величины Н — Vnxa как энергетической скороподъем-
ности особенно важна для самолетов с очень высокой тяговооружен-
ностыо, для которых установившийся набор высоты может оказаться
нереализуемым и определение Vy как скороподъемности при уста-
новившемся наборе теряет смысл.
Теперь с точки зрения энергетических возможностей самолета
характерные области на диаграмме тяг получают новое толкование.
В первом приближении при Х„ = Рп1 и при равенстве потребной
и реализуемой тяги Р = РпЪ пха1 = 0, Н3 =0 [см. кривую 1 на
рис. 4.1] и полет происходит с постоянной энергией. При этом воз-
можны и набор высоты и снижение, Однако при наборе высоты ско-
рость будет падать, при снижении — расти, и только при Н = const
будет V =0. Если фактическая тяга Р больше РпЪ то пка1 > 0,
Н3 > 0 и энергетическая высота растет. При этом от выбора 6 (или
V') зависит, куда пойдет этот прирост — на увеличение высоты
(Я > 0) или скорости (V > 0). Граничным является режим с 6 == 0*
[см. (3.20)], при котором V = 0, Н = Н3 или и = 1.
Для режимов с Р < РП1 получаем Н3 < 0, пха х < 0. При этом
может реализоваться снижение (Н < 0) или торможение (V < 0),
68
Рис. 4.1. Области с переменной энер-
гией на диаграмме тяг:
1 — постоянная энергия; 2 — рост энер-
гии; 3 — уменьшение энергии
Рис. 4.2. Области с переменной энер-
гией в координатах Н, V
в зависимости от выбора 6 или V'. На крутых траекториях возможен
даже разгон при сохранении условия Нв < 0 для пЯо г < 0.
Границы Утах (Я), Vmin (Я), Нт области установившихся режимов
(рис. 4.2) являются также границами области, где возможен прирост
энергии, Яя. расп > 0.
На границе Vlmx(H) можно отметить точку, где энергетическая
высота максимальна (см. рис. 4.2). Очевидно, достижение энергии,
превышающей Яэтах, без дополнительного увеличения тяги невоз-
можно.
§ 4.2. НЕУСТАНОВИВШЕЕСЯ СНИЖЕНИЕ САМОЛЕТА
Выведенные в § 4.1 уравнения справедливы не только для
режимов полета с увеличением уровня энергии самолета, но и для
режимов снижения и торможения, когда общий уровень энергии
уменьшается.
Режиму полета с На < 0 соответствует, как видно из (4.13.),
дефицит тяги или мощности двигателей ДР < 0, ДЯ < 0, пха < 0.
Такой режим реализуется обычно при дросселировании двига-
теля (Р < Рр) или при неработающем двигателе (Р = 0).
Выразим V' для режима неустановившегося снижения из (4.8);
dV _ V _ g / sin 6
dH ~ p ~ . V \ sin 0*
(4-19)
где согласно (3.20) sin 0* < 0 при nxa < 0.
Из (4.19) видно, что если на траектории снижения выдерживать
угол наклона 0 меньшим по абсолютной величине, чем 0* в устано-
вившемся снижении, то производная V’ = dVIdH будет положитель-
69
ной, а этому при Н < 0 соответствует V < 0. Следовательно, когда
0 < 0 и | 6 | < | 6* |, снижение происходит с торможением.
При | 0 | > | 0* | производная V' отрицательна и снижение проис-
ходит с разгоном.
Из (4.19) получаем
slnO = T^?F = sln0*.x. . (4.20)
Это соотношение связывает выбор угла наклона траектории при
снижении с заданным законом -изменения скорости по высоте. Из
него следует, что если самолет в начале снижения обладает достаточ-
ным запасом скорости (по сравнению с ее минимально допустимым
или заданным конечным значением), то вследствие потери скорости
при V < 0 можно существенно уменьшить крутизну траектории по
сравнению с режимом установившегося снижения. Наоборот, при
V > 0 (снижение с разгоном’) можно увеличить крутизну траектории,
что важно при экстренном снижении самолета.
Рассмотрим неустановившееся снижение самолета при нулевой
тяге двигателя Р = 0 (планирование) *. В этом случае уравнения
движения (4.1) ... (4.4) будут иметь вид:
= (4-21)
Fo = mfSin0w,; (4.22)
^«Vsine^-Чнл. (4.23)
Представляя производную скорости по времени V как V = VH и
используя (4.21) ... (4.23), находим
VV' sin 6ЦЛ = g + sln епл), (4.24)
где Кпп — аэродинамическое качество самолета при планировании.
Из (4.24) найдем угол наклона траектории при неустановившемся
планировании:
tg 6ПЛ = — Кпл vv,/g _|_-г = - • (4.25)
С другой стороны, tg 0ПЛ = dHIdL, и, следовательно, пройденная
самолетом дальность L при неустановившемся планировании будет
равна
<4 26>
«, нк
* Строго говоря, планирование обычно осуществляется на режиме малого
таза, когда тяга не равна нулю. Но значение тяги малого газа приближенно считаем
близким к нулю/
70
Учитывая, что dH = х dHB, можно записать
Л,л = J 4А (4.27)
«а. к
Если планирование происходит с энергетической высоты /7ЭО
до /7Н. 1( при постоянном значении аэродинамического качества, то
1пл = КпЛ(Нао-Н:>.к). (4.28)
Следует, однако, учесть, что режим планирования с торможением
сложен с точки зрения пилотирования, требует выдерживания вдоль
траектории переменных значений суапл, а значит непрерывного кон-
троля со стороны летчика или автоматических устройств.
- § 4.3. ДИНАМИЧЕСКИЕ РЕЖИМЫ ПОЛЕТА
Рассматривая область достижимых для данного самолета
высот и скоростей полета, заметим, что для скоростных самолетов
максимально возможный уровень энергетической высоты Нв 1ПЯХ зна-
чительно превышает теоретйческий потолок Ят.
На установившихся режимах достижение высот, больших Ят,
как уже говорилось, невозможно. Однако если набор высоты сопро-.
вождается потерей скорости (V' < 0 при Н > б), то возможен вы-
ход на высоты, где АЛ'р < 0, хотя_общий уровень удельной энергии
при этом падает, так как Нв = kN. Такие режимы наиболее харак-
терны для скоростных самолетов при значительном запасе скорости.
Режимы полета на высотах Н > Нт называются динамическими,
а максимальную высоту, которую может достигнуть самолет на дина-
мических режимах, сохраняя управляемость, называют динамиче-
ским потолком НД.%
На высотах Ят < Н < Нл горизонтальный полет возможен лишь
при быстрой потере скорости, а маневренные возможности самолета
ограничены. Однако, при достаточном запасе скорости возможно
выполнение определенных полет-
ных задач.
В первом приближении вы-
соту динамического потолка
можно определить как точку b
= const
пересечения кривых Нв тах
и V = Уэв (рис. 4.3).
Уровень//втах определяется для
точки касания линии с наибольшим
Рис. 4.3. Область динамических высот по-
лета Д:
/ - область установившихся режимов; 2 —
линия максимальной энергии Нэ »» Нэ тах;
;1 - - граница минимальных скоростей V =»
ЭВ
71
На и границы области установившихся режимов, (точка а на
рис. 4.3), где скорость достигает VmaTx (Н). Точка b соответствует
высоте Нь и скорости Уь, которых мог бы достичь самолет без потерь
энергии. Фактически при наборе высоты часть энергии теряется, и
действительный динамический потолок будет меньше Нь (т. Ь'). По-
тери энергии нетрудно рассчитать по (4.13), если задать программу
9 (Н) или V (Н) в области 1 рис. 4.3.
Дополнительная литература
[81, с. 73—75; [131, с. 68—72, 143—151; [7], с. 332—342.
Контрольные вопросы
1. Можно ли считать движение квазипрямолинейным, если при наборе вы-
соты со скоростью 200 м/с за 20 с угол наклона траектории изменился с 0,4
до 0,3 рад?
2. Чему равна нормальная скоростная перегрузка для вопроса 1?
3. При наборе высоты самолет разогнался от = 200 м/с на Но — 4000 м
до VK = 220 м/с на Ик = 6000 м. Оценить (по средним значениям скорости и V')
угол наклона траектории 0 и фактическую вертикальную скорость, если пха =0,5?
4. Чему равна энергетическая высота при полете на Н = 15 000 м при ско-
рости 500 м/с?
5. Найти время разгона самолета от М = 0,8 до М = 1,6 на высоте 11 км
(а = 295 м/с) при среднем значении пха j = 0,3?
6. Чему равна дальность . неустановившегося планирования с Но = 4000 м
н Vo = 240 м/с до Нк = 1000 м н VK = 180 м/с при среднем значении аэроди-
намического качества Кпл = 8?
7. Почему на Н > НТ нельзя обеспечить полет с увеличением энергии (т. е.
с На > 0)?
Г Л А В А 5. ЗАТРАТЫ ТОПЛИВА И ВРЕМЕНИ
НА РАЗЛИЧНЫХ РЕЖИМАХ ПОЛЕТА .
Затраты топлива в полете являются одним из важнейших
показателей эффективности применения самолета, как транспорт-
ного средства. Проблема экономии топлива во многом определяет и
облик проектируемого самолета, и выбор режимов его использования
при эксплуатации. В соответствии с (1.47) затраты топлива в интер-
вале времени от t0 до tK могут быть найдены, как
mT = j <?s(//, M, /?...)dl (5.1)
Л)
и зависят от длительности полета (tK — t0) и значений секундного
расхода топлива qs. Секундный расход топлива в свою очередь
определяется режимом полета (//, М), режимом работы двигателя
(его тягой Р, степенью дросселирования Р или частотой вращения
72
ротора поб и т. п.) и может быть представлен через удельный часо-
вой расход топлива суд*, как
<7® = сУд(Я, М, 7? ...)Р/3600. (5-2)
В общем случае для расчета затрат топлива надо интегрировать (5.1)
вдоль траектории. Однако на характерных этапах полета — в гори-
зонтальном установившемся полете, при наборе высоты и снижении
по квазипрямолинейным траекториям (т. е. на большей части типич-
ной траектории самолета) можно, подставив в (5.2) соотношения для
потребной тяги, исследовать качественный характер зависимости
расхода топлива от параметров самолета и режима полета, что важно
при проектировании самолета и его эксплуатации.
Не меньшее значение, чем расход топлива, имеют затраты времени
в полете или на его основных этапах, во многом определяющие преи-
мущество и саму возможность использования самолета. Затраты
топлива и времени тесно связаны между собой и их удобно рассма-
тривать совместно по этапам полета.
§ 6.1. ЗАТРАТЫ ТОПЛИВА И ВРЕМЕНИ
В ГОРИЗОНТАЛЬНОМ УСТАНОВИВШЕМСЯ ПОЛЕТЕ
Крейсерский (или маршевый) полет, т. е. полет с постоян-
ной скоростью на постоянной или почти постоянной высоте (для
гражданских самолетов — на постоянном эшелоне, т. е. в заданном
по условиям безопасности диапазоне высот) является обязательным,
а для многих самолетов — основным этапом полета. Именно на крей-
серском этапе, на маршевом режиме полета достигается основная
дальность, затрачивается большая часть топлива и времени.
В горизонтальном установившемся полете
qs = Суд (Н, М, Rr, п) Рд/3600, (5.3)
а часовой расход топлива составит
<7ч = суд(#, М, Яг.п)Рп. (5.4)
В (5.3) и (5.4) 1?г.п и Суд должны определяться для того режима
работы двигателя, на котором Р = Р„. В первом приближении, при
Рп ~ mg! Кг. п 1 И 7?г. п — Рц1^Рр
„ __ суд (77. М, RT, п) mg г.
3600Кг. Г11 '
При этом Kr.ni необходимо определять по балансировочной поляре
самолета с учетом отклонения органов управления при данном угле
атаки аг. п, числе М полета, центровке самолета и т. п. Как видно
из (5.5), qs зависит от текущего значения массы самолета. Отметим,
* При записи (5.2) подразумевается, что размерность суд — расход массы
топлива за час на единицу тяги (кг/(Н-ч). Если размерность тяги при задании суд
отличается от СИ, необходим соответствующий пересчет.
73
Рис. 5.1. Типичная за-
висимость <71(м от вы-
соты и скорости (чис-
ла М) полета:
а — дозвуковой; б -г
сверхзвуковой самолет
что в (5.5) от массы зависит и степень дросселирования тяги 7?г.п,
а значит суд.
На километр пути затраты топлива составят
_ 10009в _ Суд(я, м, ₽г.п) W
Чкм — у 3,6КГ.П1У
Величина q„M называется километровым расходом топлива и зависит
от высоты, скорости полета и массы самолета (причем суд опреде-
ляется при степени дросселирования тяги /?г. п, соответствующей
РП1 на данных Н и М). Типичная зависимость q^ (Н, М) показана
на рис. 5.1. Заметйм, что .на данной высоте q^ имеет минимум по
, скорости. Скорость, на которой для данной высоты достигается ми-
нимальное значение <?Км =<?им. «₽> называют крейсерской Унр. При
Суд, слабо зависящем от числа М полета, минимум примерно соот-
ветствует минимуму Рщ/V (см. т. Г на рис. 3.2). Если учесть, что Суд
обычно возрастает по М, то точное значение УЯр, как правило, ниже
скорости Уг, соответствующей наименьшему Рщ/V, но выше Унв.
С высотой наименьшее значение qKVl. кр уменьшается вплоть до
высот, близких к Ят, так что с точки зрения расхода топлива полет
на больших высотах выгоднее.
Величина ?км (н 9км. кр) зависит от условий полета. С изменением температуры
воздуха меняются н суД, н число М полета (прн той же скорости V) вследствие
изменения скорости звука а. Однако н сул> н а меняются при этом пропорцио-
нально VT. Если задавать дкм в функций числа М или приведенной скорости
УпрИв '= V -тр- (где Тст температура по СА на данной барометрической
высоте) н выдерживать в полете заданное значение М или Уприв> а не воздушную
скорость V, то 9км> 9км. кр Н режим (Мкп, //бар. кр) или (Уприв. кр» //бар. кр)
остаются неизменными при изменении Т. Изменение давления учитывается введе-
нием барометрической высоты //бар- При ветре необходим пересчет скорости отно-
сительно Земли по (3.26).
Соотношение (5.6) показывает, как влияют на километровые за-
траты топлива основные проектные параметры самолета. Эти затраты
пропорциональны массе самолета и обратно пропорциональны аэро-
динамическому качеству. На крейсерском режиме качество близко
к максимальному. Поэтому из (5.6) следует, как важно обеспечить
для проектируемого самолета высокое максимальное аэродинамиче-
ское качество Увеличение Кт» достигается, в первую очередь,
74
за счет уменьшения пассивного сопротивления с^о (см. § 2.2).
Совершенная аэродинамическая схема, улучшение (ламинаризация)
обтекания, использование профиля крыла с малыми схаОкр и Лкр
(суперкритического профиля), оптимальный выбор стреловидности,
толщины крыла, удлинения — вот основные средства, которыми рас-
полагает конструктор для уменьшения qKK. На дозвуковых скоростях
максимум /<тах и минимум ^км. кр достигается для самолета с крылом
большого удлинения и умеренной стреловидности, причем величина
удлинения ограничена, прежде всего, условиями прочности. На
сверхзвуковых скоростях, когда основным является волновое со-
противление, оптимальным является стреловидное или треугольное
крыло малого удлинения и малой относительной толщины.
Если учесть, что в (5.6) /СГ.П1 — балансировочное качество, то
ясно, что один из способов уменьшения <7КМ — уменьшение потерь на
балансировку, т. е. потерь подъемной силы и роста сопротивления
при отклонении органов управления. Подробнее этот вопрос рассмо-
трен в гл. 11. Приведенные рассуждения справедливы при оценке
затрат топлива на режимах, близких к крейсерскому или наивыгод-
нейшему, когда Kr.ni близко к Кпшх и слабо зависит от cv,:r. п (см.
рис. 2.5). Несколько иначе обстоит дело при полете на умеренных
высотах и больших скоростях, когда значение скоростного напора q
велико, а значит, коэффициент султ.п мал (см. (3.6)]. Мало в этом слу-
чае и индуктивное сопротивление с^, а аэродинамическое качество
- сЦа. С|й
сха 0 + cxat Сха О
примерно пропорционально сиаГ,„. Тогда из(5.6).с учетом выражения
для cva , =получаем приближенно
(М
Таким образом, при больших q километровый расход определяется?
уже не максимальным аэродинамическим качеством, а пассивным
сопротивлением cxat)qS и слабо зависит от массы самолета. Киломе-
тровый расход топлива на малых высотах и больших скоростях
обычно значительно выше, чем на крейсерском режиме.
Не меньшее значение для 9НМ, чем аэродинамическое совершен-
ство самолета; имеет и экономичность двигателя — величина суд,
ее зависимость от числа М полета. При небольших дозвуковых ско-
ростях наиболее экономичны ДТРД с высокой степенью двухкон-
турности или ТВД. На около- и сверхзвуковых скоростях выгодна
небольшая степень двухконтурности. Полет на форсаже всегда зна-
чительно менее экономичен (большие
Определим теперь интегральные затраты топлива в маршевом
полете •при заданной дальности LK.
При этом рассмотрим три варианта построения маршевого полета:
маршевый полет на заданной высоте с постоянной скоростью;
75
Рис. 5.2. Графическое определе-
ние LM
определение т,г м (^реб)
и
маршевый полет с постоянной скоростью при постоянном значе-
нии суа г. п и слабопеременной высоте полета (или, как его называют,
полет с постоянной балансировкой);
оптимальный в смысле затрат топлива и времени маршевый полет.
Маршевый полет на заданной высоте с постоянной скоростью.
Пусть самолет совершает маршевый, полет на строго постоянных
высоте Нм и скорости VM. По мере выгорания топлива масса самолета
будет уменьшаться; т = —тТ. В соответствии с (3.5) или (3.6) будет
уменьшаться и потребный коэффициент суш. п (или cvai), а значит
Сха (Cjrar.ii)- При этом изменяется аэродинамическое качество /Сг. п =
= Суа г. п/Сха (Суа г. „).
Пусть теперь требуется рассчитать затраты топлива тт, м при за-
данной дальности LM. Рассмотрим сначала обратную задачу — рас-
считать дальность LM маршевого полета при заданных затратах топ-
лива тт.м и массе,самолета в начале маршевого участка /пом-' Зада-
ваясь с некоторым шагом значениями массы'самолета от щОм в на-
чале этапа до тк,м — — тт.м в конце, определяем при данных
Н№ и AfM величину сиаг. я по (3.6) или (3.5) для каждого значения
текущей массы. Затем по поляре самолета Сха (суа) находим коэффи-
циент сопротивления, а значит потребную тягу Рп = Ха = cxaqs
(при q =рмУм/2). Рассчитав Ри, определяем потребную степень
дросселирования по отношению потребной тяги к располагаемой для
данных т, Нм и VM. Для найденного режима работы двигателя по его
характеристикам получаем значение Суд и можем рассчитать <?нм (т).
Из определения <?нм = 10’ dm^dL следует, что LM (в км) составит
тк. м . "’ом
I _ f dmT _ f dm R.
M~ J 9км ("0 j <7км(т)- '
"’ом "’k.M
Интегрируя (5.8) численно или графически (рис. 5.2) от начальной
том до текущей т массы, легко получить зависимость пройденной
дальности от расхода топлива, а до конечной массы — полную даль-
ность маршевого этапа. Имея зависимость £м (т), можно решить и
исходную задачу— найти требуемые затраты топлива тт.м на реали-
зацию заданной дальности (рис. 5.3). Если изменение массы само-
76
лета при выгорании топлива не превышает 25 ... 30 %, интегриро-
вание можно выполнять приближенно. Представим <7„м (т) так:
<7бм (т) = , (5.9)
'L
где
Гь = 3’^Г-Г1Г • (5.Ю)
₽суд
Из сказанного ясно, что fL зависит от текущей массы как вследствие
изменения /Сг. и (суа г.п)> так и вследствие изменения потребной сте-
пени дросселирования тяги по мере выгорания топлива. Однако, если
полет происходит на /Сг.п, близких к /Стах, и на режиме тяги, близ-
ком к номинальному, 7<г. п от cv,ir. п и ст от степени дросселирования
зависят слабо и значение fL с изменением массы почти не меняется.
Определив fL для средней * массы самолета на рассматриваемом уча-
стке полета (mcp = V тттк.^, можно проинтегрировать (5.8) ана-
литически:
LM = Il (mCn) In = ( З'^г~ In---------------L— (5.11)
м in ср/ тк м §суд /ср M >
при
/Ик. м —/Пом "Ч. м И /Йт, м =/Пт, И В КМ.
При полете на режимах, близких к крейсерскому или нанвыгодней-
шему (см. гл. 3), это выражение обеспечивает высокую точность рас-
чета с учетом основного влияния изменения массы на <?нм.
Если же полет проходит на умеренных и малых высотах при боль-
ших скоростях, когда , с^г. п < суа ив, следует пользоваться другой
приближенной формулой. В этом случае, как видно из (5.7), значе-
ние </нм (т) в (5.8) постоянно,
?км(т)=<7км(том) и
г ___ тт ________ / 3,6КГ, п^м \ л м /е |м
~ 9км (/Пом) “ \ ёъ /о Т-м-------------( }
где /пт.м = /пт.м//Пом-
Из (5.11) и (5.12) можно найти затраты топлива при заданной даль-
ности £м в км:
в первом случае
/пт. м = том (1 - (тс₽)) (5.13)
и во втором
/Пт. м — /ИомДм//д (/По) = Т.м<7км (/По). (5.14)
Маршевый полет с постоянной балансировкой самолета. Рас-
смотрим второй возможный, режим маршевого полета. Пусть движе-
ние происходит с постоянной скоростью VM на постоянном баланси-
* Использование среднего геометрического значения массы обеспечивает здесь
большую точность, чем среднего арифметического, так как интегральное соотно-
шение содержит логарифм массы.
77
ровочном значении суа = суам (т. е. при постоянном ост. пм). Практи-
чески такой режим полета возможен, если самолет сбалансирован
на схбал = аг- п м и летчик вмешивается в управление только для
парирования возмущений.
При этом из условия (3.7) равенства сил, направленных по нор-
мали к траектории, получаем (в первом приближении)
Рм —
Суа м^м
(5.15)
что позволяет найти высоту полета Ны для любой текущей массы т
по таблицам стандартной атмосферы (или для фактических значений
р (Я), если атмосфера отлична от стандартной). Из (5.15) видно, что
по мере выгорания топлива при суа м — const высота полета растет
(рм уменьшается). Однако изменение высоты здесь не более 1 км на
200 ... 500 км пути, что определяет применимость для рассматривае-
мого режима соотношений для полета с постоянной энергией. В от-
личие от маршевого полета на постоянной высоте при полете на
Суам = const по мере выгорания топлива практически не происходит
изменения qHM. В самом деле, положим, что полет происходит на Н >
> 11 км, где температура воздуха и скорость звука с высотой не
меняются. Тогда при VM = const число Мм полета также постоянно,
независимо от изменения высоты при выгорании топлива. Практиче-
ски постоянны при этом (на ам = const) и аэродинамическое качество
Кг. пы, и коэффициент сха (с„ам). При постоянной температуре
воздуха удельный расход топлива зависит (на данном Мм) только от
степени дросселирования тяги (режима работы двигателя), а степень
дросселирования также постоянна, так как и располагаемая, и по-
требная тяга здесь пропорциональны плотности воздуха (давлению).
Тогда при полете с постоянным суа№ будет fL = const и из (5.8) сле-
дует
З.бКг. р (Им) \ |n 1
gcyH '0 1 — mT. м
(5.16)
Если задана дальность LM, потребные затраты топлива составят ,
-е-^Дд^м)). (5.17)
В (5.16) и (5.17) дальность LM в км.
' На высотах, меньших 11 км, величина fL, вообще говоря, зависит
от высоты из-за изменения скорости звука и температуры, но если
рассматривать полет не на заданной постоянной скорости, а на задан-
ном значении Мм, это влияние незначительно. Скорость Ум можно
при этом подсчитать по скорости звука, найденной для средней на
маршевом этапе высоты полета.
Заметим, что при малых тТ. м можно считать ln-j—L »/пт.м
и выражения (5.11) и (5.16) совпадают с (5.15) с точностью до том «
« тср, так что формула (5.12), или аналогичная ей (5.14), может ис-
пользоваться, как приближенная, и при полете на Кг.п « Кшах,
78
Рис. 5.4. Зависимость (l от режима полета и опреде-
ление VKP> HKV
и при полете сам = const, хотя точные зна-
чения тт. м (LM) она дает только при полете
на малых суа г. п < сиа нв.
Оптимальные режимы маршевого полета.
Предположим, что высоту Нм (или значение
суа м) и скорость Уы маршевогс полета можно
свободно выбирать в определенных пределах,
а запас топлива тг, м задан. Рассмотрим
задачу получения максимума дальности
маршевого полета LM при этих условиях. Из (5.8) очевидно, что в
в маршевом полете максимум дальности будет достигнут, если при
каждом текущем значении массы самолета (от тпм до тк.м) киломе-
тровый расход топлива будет минимален. Если при этом время полета
/м ( в часах) на дальность L (в км) задано, то тем самый определена
скорость маршевого полета VM = LM/3,6fM. Оптимальному выбору
при этом подлежит только высота маршевого полета Нм (или сиа м)
при данной скорости Ум.
Если же время полета не обусловлено, то оптимизации подлежат
и значение Ны, и значение Ум.
Оптимальным при этом будет крейсерский режим полет?,, (У™,
ЯНр), обеспечивающий qKK =<7кМ.кр для каждого значения тёкущей
Массы самолета т. При этом функция
f ______ З.бКгП. нр^нр
'дкр~ 4»уд.*Р
(5.18)
максимальна (рис. 5.4). На высотах Н > 11, км скорость Укр и число
М„р, соответствующие максимуму (минимуму <?««), не зависят
от текущего значения массы и постоянны для всего маршевого уча-
стка. Постоянно и оптимальное значение суакр, причем значения
Уир и суа кр обычно таковы, что оптимальная высота Нкр близка к Ят
(полет «по потолкам»).
Если по условиям эксплуатации полет происходит на постоян- *
ной (оптимальней только в среднем) высоте Н* — const, то выбор
Ямор1 и VM opt проводится путей оптимизаций fL нР по Ям и Ум для
средней массы самолета. Затраты топлива при этом выше, чем при по-
лете с Суа „р = const.
При оптимизации маршевого режима может быть рассмотрена
и задача о минимуме времени полета на заданную дальность. Время
маршевого полета (в часах) определяется по формуле
/ __J000_ / или t _____
или 4м час — з
(5.19)
При заданной дальности продолжительность полета определяется
выбором скорости Уь, а затраты топлива — выбором скорости и вы-
соты Ям (или значения c,iatA). Если запас топлива при этом достато-
чен, то минимуму времени полета на LM очевидно соответствует по
79
(5.19) максимальная скорость полета Vmax в рассматриваемом допу-
стимом диапазоне установившихся скоростей. Сам режим полета при
этом называется скоростным. Однако с ростом скорости полета Ум
свыше крейсерской, Ум > Укр, растет и километровый расход топ-
лива (см. рис. 5.1). Поэтому, если запас топлива ограничен, его мо-
жет и не хватить на достижение заданной дальности LM на макси-
мальной скорости Vmax (особенно если максимум скорости достигается
на форсаже). В этом случае оптимальным по времени является тот
скоростной режим полета, при котором запаса топлива /пт.м еще
хватает на достижение LM.
Заметим, что оптимизация высоты и скорости маршевого режима
может производиться только в некоторой допустимой области
которая, прежде всего, ограничена диапазоном возможных режимов
горизонтального установившегося полета (гл. 3). На допустимые
значения Ум (Ям) могут накладываться и дополнительные техниче-
ские и эксплуатационные ограничения.
Если по каким-либо соображениям требуется не уменьшить,
а увеличить время пребывания в воздухе при ограниченном запасе
топлива и свободной дальности, то оптимальным будет режим полета,
при котором максимизируется функция
ft = (5-20)
а время полета составит
1п_..4^. (5<21)
\ gc-fjl /opt 1 — /Пт
Этот режим близок к режиму полета .на Ктлх-
§ 6.2. ЗАТРАТЫ ТОПЛИВА И ВРЕМЕНИ
НА КВАЗИПРЯМОЛИНЕЙНЫХ ЭТАПАХ ПОЛЕТА
С ПЕРЕМЕННОЙ ЭНЕРГИЕЙ
При определении затрат топлива и времени с достаточной
для практики точностью такие этапы, как набор высоты (как уста-
новившийся, так и с переменной скоростью) и снижение можно, как
правило, считать квазипрямолинейными. При этом условие квази-
прямолинейности (mVQ « 0 и тУФ « 0) выполняется здесь лишь
интегрально, в среднем. Это означает, что на отдельных участках
при наборе высоты или снижении значения 8 и могут существенно
отличаться от нуля. Но если в целом для этапа величина аэродинами-
ческого сопротивления Х£рям, найденного приближенно для cval
при 0 = 0 « 0 и Ф и 0 или для cva при среднем значении nva =
= cos 0ср по (3.17), мало отличается от фактической величины Ха,
найденной по (3.17) с учетом пиа =# cos 0 на участках сёт^ОиЧ'^О,
т. е.
80
(5.22)
(5.23)
(5.24)
----. 4 (5.25)
+ 1
то с точностью до е режим полета можно считать квазипрямолиней-
ным в среднем. Если это условие выполняется, то в первом прибли-
жении для этапа с переменной энергией (Яэ #= 0) при заданной про-
грамме (профиле) набора УПр (Н) уравнения движения удобно запи-
сать, как
dt 1 1 ,
dHB ~ Vnxal ~ V* ’
dm? fa ________ qs
dL __ cos 6 cos 6cp _ cos 6PpV
nxa 1 Hxal Vy
Здесь nXa x, qs и Vy = Vnxa x при заданном режиме работы двига-
теля — известные функции высоты и скорости (числа М) полета [см.
(3.21), (3.22), (5.3)]. Как правило, с достаточной точностью их зна-
чения можно определять не для текущей массы самолета т, а для
средней на данном этапе /пср. Соотношение (5.23) используется
в этом случае не для расчета текущей массы самолета при интегриро-
вании, а для оценки затрат топлива на рассматриваемом этапе
полета.
Высота Н определяется для квазипрямолинейного этапа из соот-
ношения
dH 1
dHa ~ W
е
Скорость находим по заданной программе У„р (Я), угол 0 — по вы-
ражению (4.8).
Если рассматриваются режимы набора высоты и разгона (Нв > 0).
на располагаемой тяге, и для самолета заранее построена диаграмма
потребных и располагаемых тяг, а также кривые VJ (V, Н) и nxai
(V, Н) (для средней массы /пср на данном этапе полета), то эти
графики используются при интегрировании (5.22) ... (5.25). Так,
имея сетку Vy (К, Н) для ряда высот полета (см. рис. 3.7), на данном
режиме работы двигателя, и программу Упр (И), можно, снимая по
сетке значения Vy для каждой расчетной высоты при скорости
V2 1
Упр (Я) и определяя Нв = Н + —построить f1(HB)=-y^~
в функции Нв (рис. 5.5). Графическое интегрирование fx даст при этом
время полета от Но и Упр (Яо) до Нк и Упр (Як) при соответствующих
НВ.О И Нв, к-
Для расчета дальности строится и графически интегрируется зави-
симость fs =---р в функции Нв, для расчета затрат топлива —
vv
fs =qe/Vy. Таким образом, в первом приближении по сетке зави-
симостей Vy (или пха i) и qs от V и Н можно рассчитать затраты топ-
81
1
V*
vy
Рис. 5.5. Определение /,1р по зависи-
мости 1/IZ* от Яэ
Рис. 5.6. Оптимизация профиля набо-
ра высоты и разгона при минимальном
времени /нр:
I — линии равных Н0; 2 — линии рап-
ных V'J; 3 — оптималь
лива, времени и пройденную дальность, если набор высоты произ-
водится на тяге, равной располагаемой (максимал или полный фор-
саж), а профиль полета Упр (Я) задан.
Можно также рассмотреть задачу о выборе наивыгоднейшего
в том или ином смысле профиля Уцр (Я) набора высоты с перемен-
ной скоростью (при заданном режиме тяги). Пусть, например, тре-
буется увеличить энергию самолета от Я80 до Яв.к при Нв,к > Нв0
за минимальное время /™pn • Найдем (на заданном режиме работы
двигателя) оптимальный для этого профиль полета Vopt (Я). Из соот-
ношения (5.22)
(5.26)
Очевидно, что /нр будет минимально, если при каждом текущем зна-
чении Нв максимизировать Vy. Графическую иллюстрацию этого
метода оптимизации можно дать на графике, гд₽ нанесены линии
равных значений Vy в координатах Я, V или Я, М (рис. 5.6). Проведя
сетку кривых для разных постоянных значений Яв = Я + -к—
можно видеть, что точки касания лцний Vy — const и Н9 = const
соответствуют максимальным Vy при данном Яв. Соединив эти точки,
получаем наглядное представление оптимальной программы Vopt (Я)
илиМор|(Я) и значений VJOpt и Яв. opt вдоль нее. Интегрирова-
ние по (5.26) и определение /°р* не составляют труда, как и учет
ограничений по <7шах, Мшах и т. п. Аналогичный графический метод
можно использовать и для оптимизации затрат топлива по (5.23),
т. е. по максимальным значениям Vy/qa. Заметим что при оптими-
зации затраты топлива и времени тт.нр и /Нр зависят не только от
выбора профиля Упр (Я), но и (для данной средней массы самолета
шср) от режима работы двигателя. При оптимизации времени для
82
Я8. к > Нм очевидно, что чем больше тяга двигателя, тем меньше
/нр. Оптимальным здесь является движение на максимальной рас-
полагаемой тяге (если позволяет запас топлива). При минимизации
тт.нр от режима работы двигателя зависит не только Vy, но и q8,
причем с уменьшением тяги при дросселировании q8 уменьшается.
Поэтому при оптимизации траектории по затратам топлива необхо-
димо сравнивать для каждой текущей высоты и скорости V (энергии
Нв) несколько режимов тяги, выбирая наивыгоднейший при сохра-
нении условия Рнб > Хо, т. е. На > 0 (если в условии задачи не
оговорено специально, что движение происходит на заданном неиз-
менном режиме работы двигателя).
И при минимизации затрат топлива, и при минимизации времени,
необходимого для получения заданного прироста энергии от Я80
до Яэ,к рассмотренный метод оптимизации не предполагает’выпол-
нения каких-либо дополнительных граничных условий. Здесь не
заданы ни конечное значение дальности Лнр, ни конечное время fHP
при минимизации затрат топлива, ни допустимые затраты топлива
тт.нр при минимизации времени. Более того, приданных Я80 и Явн
нельзя задавать раздельно Но и Уо, так же как Нк и Уи. Эти ‘значения
получаются автоматически для данных значений На0 и Нвк при оп-
тимизаций. Полная задача оптимизации сведена здесь к задаче опти-
мизации со свободными граничными условиями. Полученное опти-
мальное решение носит поэтому,приближенный характер. Реальные
затраты топлива или времени на. траектории, для которой выпол-
нены (путем задания соответствующей программы Упр (Я)) гранич-
ные условия по Vo, Но, Уи и Яи будут несколько выше минимальных,
найденных для оптимальной траектории со свободными граничными
Vo (Нт) и Уи (Я,. и) (при тех же Яво и Я8<ж). Но, как правило, это
отличие невелико, и‘оптимальные значения $р*, m?ptHp можно ис-
пользовать для оценки летных данных самолета. Программу полета
Упр (tf)» отвечающую граничным условиям по У и Я получают
обычно, сопрягая оптимальную программу, соответствующую задана
ному критерию, с граничными точками Уо, Яо и Ум, Як.
v В ряде задач, связанных с расчетом дальности и продолжитель-
ности полета, возникает необходимость сравнить затраты топлива и
времени на участках с переменной энергией с аналогичными затра-
тами в горизонтальном установившемся полете на заданной высоте
Ям со скоростью Ум— маршевом режиме полета.
При полете с переменной энергией на высоте Я со скоростью V
(при Я Ям и V #= Ум в общем случае) при тяге двигателя Р =
= Рнб (или Р = Рон при снижении и торможении) затраты топлйва
и времени определяются соотношениями (5.22), (5.23). Воспользовав-
шись (5.24), можно записать
= тИг ~ (-аг) (5.27)
ane anQ \ aL /м ап 9 ' '
d Дтт. в _ dmT ( dm? \dL' ооч
dHe ~dHa \dL /м dHa
(индекс «э» означает режим с переменной энергией).
83
С учетом (5.24) находим отсюда
'6-29>
d /л п \ /к
"ТП ~ ' I/*” Шкм. нб ?нм. м)> (O.oUj
U*1 Ъ * у
где ^км. нб = Суз ^fH6 ИЛИ gKM. СП = Су з^Г” для снижения.
Значения d Lm.r. 3!dH3 и d Ы31dH3 можно рассматривать как своего
рода «чистые» затраты на изменение энергии. В самом деле, из пол-
ных затрат dtn.JdH3 и dtldH3 здесь вычитаются те затраты, которые
потребовались бы, чтобы пройти на маршевом режиме ту же элемен-
тарную дальность dL, что и на участке с переменной энергией, т. е.
затраты связанные с достижением дальности dL. Затраты dm.JdH^
и dtldHe теперь могут быть представлены как сумма затрат на дости-
жение дальности dL при постоянной энергии и чистых затрат
d &тТ' 3/dH3 и d &t3/dH3 только на изменение энергии.
Программа набора и разгона Уир (И) может оптимизироваться по
критерию минимальных чистых затрат топлива Дтт.э или времени
Д/а при данных Н3,о и Нэ. к, тем же методом, что и по критерию пол-
ных затрат /нр или тТ1Ир.
Заметим, что величине «чистых» затрат топлива Д/т?т.э можно
сопоставить так называемую «потерянную» (по топливу) дальность
Д<п при
= ' (5.31)
““в vy \ <7км. нб '
и оптимизация по (5.30) эквивалентна минимизации потерянной даль-
ности Д£п.
Потерянная дальность Д£п — уменьшение дальности полета при
наборе высоты и разгоне по сравнению с дальностью в маршевом по-
лете на Ум, Ям ПРИ тех же затратах топлива.
При снижении и торможении Н9 < 0. Характерным режимом
снижения является планирование, когда Рпл « 0, хотя в общем
случае, на заданном режиме тяги Р — Рси =/= о, причем Рсн < Ра
для горизонтального полета.
Если минимизировать затраты топлива, то легко найти, что тяга
на этапе снижения должна быть равна нулю или тяге малого газа,
если отключение двигателя не предусматривается, а аэродинамиче-
ское качество — максимально. Минимум времени Снижения дости-
гается обычно при скоростном профиле снижения, когда на каждой
текущей высоте скорость максимальна и определяется ограничением
по 9тах или Мтах. В формулах (4.25) и (4.26) в этом случае следует
использовать значение качества, соответствующее суа пл при предель-
ной скорости (см. гл. 4).
Дополнительные затраты топлива и времени Д<э и Д/пт, э для сни-
жения и торможения определяются так же, как для набора и раз-
гона. Но значения Д/пт.в при этом отрицательны («экономия» топ-
лива за счет уменьшения энергии).
84
Если рассчитываются затраты топлийа и времени на криволиней-
ных участках полета, то сопротивление Ха и потребная тяга для его
преодоления определяются с учетом нормальной скоростной пере-
грузки пиа #= 1. В первом приближении
Хо = Рп1 + Ха^-1). (5.32)
где
А
Ха = —5------mg
уа г. п
и Л — коэффициент отвала поляры (см. гл. 2).
В остальном расчет затрат топлива для криволинейных участ-
ков аналогичен расчету для квазипрямолинейных участков. Затраты
времени (в секундах или в часах) на криволинейных участках цели-
ком определяются скоростью и криволинейной дальностью (в км)
вдоль траектории S
dt _ 1000 dt 1
dS ~ V ИЛИ dS ~ 3,6V ’
Отметим, что для полета в целом или его продолжительного этапа
доля участков с перегрузкой пуа, существенно отличной от единицы,
обычно невелика и это отличие при расчете полных затрат топлива и
времени, как правило, не учитывается.
Дополнительная литература
[8], с. 89—104, [9], с. 112—116; [10], с. 191—206, [151, с. 249—
251.
Контрольные вопросы ,
1. Что такое километровый расход топлива? Какова размерность этой вели-
чины?
2. Объясните по диаграмме тяг, почему крейсерский режим (или, приближенно,
режим с минимальным Рщ/Р) соответствует высоте, близкой к Ят?
3. Почему километровый расход топлива при полете на малых высотах с вы-
сокой скоростью слабо зависит от массы самолета?
4. Рассчитайте, используя таблицу СА, данную в приложении, как изменится
высота полета при выгорании топлива; составляющего 20 % от массы самолета,
при начальной удельной нагрузке на крыло самолета ps = = 400-^р-, ско-
рости полета 250 м/с и при полете на постоянном с^а.м = 0,4.
5. Чему будет равна дальность в горизонтальном установившемся полете
со скоростью 720 км/ч (200 м/с) на крейсерском режиме с дг. п = 16 при с?я =
=0,07 и при выработке топлива, составляющего 20 % от начальной массы
самолета?
6. Объясните, почему при приближенной оптимизации траектории набора
высоты н разгона от Нв. 0 до Нв. к графическим методом не обеспечивается выпол-
нение граничных условий по Н и V раздельно?
7. Что такое потерянная дальность при наборе высоты и разгоне? Рассмо-
трите аналогичное понятие при планировании самолета. Какой знак в этом случае
будет иметь величина Д£п?
8. Почему набор высоты за минимальное время нужно осуществлять на макси-
мальной тяге?
85
ГЛАВА 6.ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА
Дальность и продолжительность полета, радиус действия—
важные показатели, входящие в перечень летно-технических харак-
теристик самолета. Они должны определяться интегрально, для
полета в целом. Полет в этом случае рассматривается как последова-
тельность типовых этапов — взлет, набор высоты и разгон, крейсер-
ский (маршевый) полет, снижение, заход на посадку, посадка и дру-
гие возможные этапы полета. Достижимые дальность и продолжи-
тельность полета ограничены, прежде всего, запасом топлива. По-
скольку затраты топлива в полете существенно зависят от скорости,
достижимое значение дальности тесно связано с продолжитель-
ностью, т. е. временем полета. В летно-технические характеристики
входят обычно достижимые ‘значения дальности и продолжитель-
ности полета для различных вариантов заправки самолета топли-
вом, его загрузки и для типичных или наивыгоднейших режимов
полета.
§ 6.1. ПОЛНЫЕ ЗАТРАТЫ ТОПЛИВА И ВРЕМЕНИ
В ПОЛЕТЕ ПРИ ЗАДАННОЙ ПРОГРАММЕ
Дальность полета LB исчисляется вдоль поверхности
Земли от аэродрома вылета до аэродрома приземления.
Через километровый расход дальность связана с затратами топ-
лива, а через скорость полета — с его временем (продолжитель-
ностью). В реальном полете дальность задана и задача расчета —
определить требуемый на ее достижение запас топлива (требуемую
заправку самолета), в зависимости от времени (графика) полета.
При оценке летных характеристик самолета важно знать макси-
мальную — предельно достижимую (без дозаправки, при данных
запасе топлива и загрузке самолета) дальность полета. Для ее рас-
чета также требуется рассчитывать полные затраты топлива на
полет, так как максимальное значение дальности ограничено запа-
сом топлива на борту самолета.
Под полными затратами топлива на полет понимают обычно
затраты от страгивания самолета с места после получения команды на
взлет до полной его остановки при посадке. Запас топлива на борту
самолета определяется емкостью топливных баков и допустимой
взлетной массой самолета. Из него может резервироваться опреде-
ленный аэронавигационный запас топлива (АНЗ), а также запас
топлива на выполнение полетного задания. Оставшаяся часть учи-
тывается при расчете дальности.
Затраты топлива, как и продолжительность полета, зависят от
программы полета — последовательности этапов, из которых скла-
дывается полет, выбора высоты и скорости (или программы их изме-
нения) и режима работы двигателя на каждом из этапов полета.
Рассмотрим задачу, расчета полных затрат топлива и времени
в полете при заданной дальности и программе полета.
86
Пусть заданы полная дальность полета Ln, общая схема полета
(последовательность характерных этапов и их протяженность) и
программа выполнения каждого из этапов — режим маршевого по-
лета VM, Яы, программа Vnp (Н) и режим тяги для каждого из эта-
пов полета с переменной энергией, аэронавигационный запас топлива
(АНЗ), а также взлетная масса самолета т^.
Заданы длительность /взл и /вос и режим тяги на этапах взлета и
посадки, что позволяет рассчитать соответствующие затраты топлива
™ __ СУД. взлРвэл^взл . /с 1 \
тт-ввл--------3600 ’ ' '
-------------- Суд. посРпос^пос_ZC п\
'«т.'пос________________________§600 •
Здесь /взл И /пос — В с.
Рассмотрим в качестве примера простейшую схему полета —
взлет, набор высоты с разгоном на полной располагаемой тяге РНб =
=Рр при заданном профиле набора УНр (Я), маршевый полет на
постоянных VM и Ны (или постоянных Ум и cva м и ам), планирование
(с заданным УГ)Л (Я) и Рпл» 0) и посадка.
Суммарные затраты топлива на полет будут
U == ™т. ВВЛ -Ь нр Ч- ^Т. М “1" ^Т. ПОС (®'3)
(при тт. пл « 0, так как Рпл « 0) и должны удовлетворять ограни-
чению
тТ. п + /пт. анз < /п?асп, (6.4)
где /п?асп — масса заправленного перед полетом топлива; /пт.анз—
аэронавигационный запас топлива.
Расчет затрат топлива ведется по (6.3) последовательно. Сначала
учитываются затраты на взлет, затем, в соответствии с гл. 5 [см.
(5.23)], рассчитываются методом интегрирования затраты топлива на
набор и разгон до Нм, Ум, т. е. до энергии На.м, дальность £нр,
пройденная на этом участке полета и масса самолета к концу этапа,
затем по (5.11) или (5.17) — затраты топлива в маршевом полете.
Для маршевого полета дальность LM определяется при этом из усло-
вия
LM = Ln-(LHp + LnB), (6.5)
где £пл — дальность планирования, которую можно найти из (4.28).
Выкладки существенно упрощаются, если в первом приближении
осреднить массу самолета на этапе маршевого полета. Тогда из (5.12)
для т ~ тСр
м = ^м?нм. м (^ср)’. (6.6)
^т. п ~ "Я. вал ~|~ ^т. пос "Ь «г. пр Ч~ (Д1 Д1р Д1л) ?нм. м (^ср)- (6-7)
В (6.6) дальность Ьщ измеряется в км.
Одновременно с расчетом затрат топлива рассчитывается про-
должительность полета (в с)
tn = 'вал + /пос +-/..Р + Ю00 + /пл. (6.8)
* м
87
Для любой более сложной
Рис. 6.1. Изменение /ит и t по дальности L:
-------m,r;---'---t
Часто интерес представляет не
полное время полета, а время вы-
хода в заданный промежуточный
пункт полета. Его значение рассчи-
тывается аналогично.
Результаты расчета хорошо иллю-
стрируют графики зависимости mT (L)
и t (L) (рис. 6.1).
схемы полета приведенные рассужде-
ния несколько усложняются, однако их сущность сохраняется.
§ 6.2. МИНИМИЗАЦИЯ ПОЛНЫХ ЗАТРАТ ТОПЛИВА
В ПОЛЕТЕ. ТЕХНИЧЕСКАЯ, ПРАКТИЧЕСКАЯ ДАЛЬНОСТЬ.
РАДИУС ДЕЙСТВИЯ
При проектировании самолета рассчитываются не затраты
топлива в конкретном полете, а диапазон достижимых значений
дальности при полной заправке самолета топливом. При определении
такого диапазона программа полета оптимизируется. Если оптими-
зация ведется по критерию минимальных затрат топлива (киломе-
тровых для маршевого, «чистых» — для этапов с переменной энер-
гией), то дальность полета при данной загрузке самолета и заправке
его топливом будет максимальной.
Максимальная достижимая дальность полета самолета при пол-
ной заправке топливом и полной выработке его расходуемого запаса
к моменту приземления, рассчитанная для стандартных атмосферных
условий, без ветра называется технической дальностью самолета.
Техническая дальность — характеристика условная, так как
в реальном полете посадка с пустыми баками обычно недопустима по
соображениям безопасности. Однако ее значение — важный пока-
затель предельных возможностей самолета, входящий в его летно-
технические характеристики (ЛТХ).
Более реальный показатель, также включаемый в ЛТХ самолета—
практическая дальность, расчет которой ведется в предположении,
что при полете без ветра и в стандартных условиях к моменту по-
садки остается заданный аэронавигационный запас топлива (АНЗ).
Для гражданских самолетов по НЛГС-2 АНЗ должен обеспечивать
компенсацию возможных отклонений условий полета от расчетных
и, если необходимо, достижение запасного аэродрома и ожидание
в воздухе в зоне аэродрома назначения. При оценочных расчетах
часто принимают-АНЗ равным 10 % от общего запаса топлива. При
детальных расчетах необходимо более обоснованное назначение АНЗ.
Зная километровые затраты топлива в полете по маршруту и часовой
расход топлива на режиме ожидания, а также влияние ветра, темпе-
ратуры и т. п. на расход топлива, можно рассчитать величину АНЗ
для конкретного самолета.
88
Практическая дальность самолета — максимальная дальность,
при которой для полета в стандартных условиях без ветра и при
посадке на аэродроме назначения остается запас топлива, равный
аэронавигационному.
В некоторых случаях на траектории из технических и эксплуа-
тационных соображений выделяются этапы, для которых программа
или режим полета заданы и не могут оптимизироваться (например,
этап применения самолета).
Дальность полета, рассчитанная для таких траекторий, с учетом
АНЗ называется тактической или эксплуатационной.
Расчет технической, практической и эксплуатационной даль-
ности предполагает оптимизацию программы полета по критерию
минимума полных затрат топлива.
Задача минимизации полных затрат топлива может ставиться и
при эксплуатации самолета.
Рассмотрим эту задачу подробнее.
Минимизация полных затрат топлива в полете
Несколько усложним схему полета, рассмотренную
в § 6.1. Пусть режим маршевого полета VM и Ям (а значит и энергия
Нв.м) не заданы заранее, а выбираются исходя из минимума сум-
марных затрат топлива на полет в целом при заданной дал ьности La*.
.Используя введенное в гл. 5 понятие «чцстыду затрат топлива на
изменение энергии, можно записать для этапов"нагора, разгона и
планирования:
А^Т. нр = тт. нр ; ^нр^км. М> (6'9)
' ЛлИт, пл = ^пл9км. м (6.10)
При /Пт. пл = 0.
С учетом (6.9) и (6.10) суммарные затраты топлива (6.3) можно пред-
ставить теперь (при осреднении массы на маршевом участке) в виде
тт. ПЛ = ВВП 4~ П1т. ЦОС 4“ Ат1, нр 4“ А/71Т, ПЛ 4- Qutth М^П- (6.11)
Если осреднения не делать, то в (б.Н)вместо ^нм.м^-п надо подста-
вить /пт.м (£п), определенное по (5.13) или (5.17) для полной даль-
ности La. В остальном ход рассуждений не меняется.
Выражение (6.11) имеет одну важную особенность. В нем от La
зависит только слагаемое mT. м (Ln) = q^. MLn, а протяженность
отдельных этапов полета — £яр, Апл, LH вообще не входит явно в
формулу (6.11). Можно сказать, что в этом выражении затраты топ-
лива разделены. В то время как в (6.3) или (6.7) тт>нр учитывает и
затраты топлива на изменение энергии от Яэ<0 до Нв.м, и затраты
на достижение дальности LHp на этапе набора и разгона, в (6.11)
Дтт.нр учитывает только «чистые» затраты топлива на увеличение
энергии. Аналогично, Дтт.пл— «чистая» экономия топлива при
* Эта задача отличается от рассмотренной в § 5.1 тем, что оптимизируются •
затраты не на маршевый полет, а на полет в целом.
89
уменьшении энергии от На. м до Hs.^ перед посадкой. Слагаемое
тт.м/-п) или приближенно 9км. MLn соответствует теперь полной доле
затрат на достижение всей дальности Ln (а не только дальности мар-
шевого участка LM, как в (6.3)), т. е. характеризует «чистые» затраты
топлива на дальность Ln без учета изменения энергии.
Такое разделение затрат топлива позволяет более наглядно
провести оптимальный выбор маршевого режима полета Ум и Ям.
Положим вначале, что от выбора Ям и Ум зависит только величина
"гт. м (^п)*через значение 9КМ. м (VM, Нм). Тогда минимум тт.и будет
достигнут при крейсерских (Укр, Нкр) режимах, обеспечивающих
наименьшее значение qrK. м = 9км.кр.
В соответствии с гл. 5 здесь можно говорить либо о выборе по-
стоянной крейсерской высоты Ны — Нир = const, либо о выборе
значения суаИР. Тогда выбор Нк проводится для начала маршевого
этапа по (5.15), а в дальнейшем высота полета растет. При полете на
постоянной высоте оптимизация проводится для средней массы само-
лета [см. (5.18)]. Крейсерскому режиму (Hw, Укр) соответствует
J/2
определенная энергетическая высота Яэ.ир — Нкр 4- . Те-
перь затраты Д/пт.Нр по (5.30) будут определяться программой на-
бора высоты и разгона Унр (Я), режимом работы двигателя РкВ на
этом этапе и перепадом энергетических высот [Яэо,. На, кр] при ин-
тегрировании. Оптимизируя Укр (Я) и /-’„б по критерию «числи»
затрат топлива на изменение энергии Дтт. нр, т. е. обесценивая при
каждом текущем значении Я9 от Ям до Н9,К9 минимум функции
[см. (5.30)].
F4(V, РнС, Я9) = -^-(^ЕЕ^«--дкм.кр), (6.12)
при найденном ранее 9»й. нр, находим оптимальную программу
набора высоты. Очевидно, минимизация Дтт. нр обеспечит при фик-
сированном Яв.кР и минимум тт.йл. Определив программу Унр (Я)
и Рнр можно теперь, {как это было рассмотрено в § 6.1, найти для нее
время, дальность и затраты топлива на этапе набора и разгона от
Яво до Яв. н.
Затраты топлива на- планирование Дт.г.пп можно считать
известными, так как оптимальным здесь является снижение
на режиме максимального качества. Дальность планирования в этом
случае определяется по (3.39) для *Я80 — На. Кр.
Полная оптимальная траекторий, состоит теперь из участка на-
бора и разгона, с программой, оптимальной по критерию «чистых»
затрат топлива, этапа крейсерского полета с Укр и Н„р и планиро-
вания с /( = Ее построение базируется на предположении, что
от выбора Ям и Ум в (6.11) зависит только' слагаемое /пт. м (Ln) =
= 9км. мЬп- Это предположение не совсем верно, так как выбор Ям
и Ум — это одновременно и выбор Я8. м, т. е. верхнего предела ин-
тегрирования при определении Д/пт. мр и .Дтт.пл. С уменьшением
Н3. м сумма |Дтт. Нр + Дтт. пл несколько уменьшается. В то же
время, уменьшение Я8. м . по сравнению с Я8. кр означает отход от
90
Рис. 6.2. Определение тт
крейсерского режима на участке
горизонтального установившегося
полета, что приводит к росту 9КМ. м
(так как кр — наименьшее
возможное значение 9КМ. м), а зна-
чит и росту 9км. м^п- Если одно
слагаемое, входящее в /г?т. п; при
уменьшении Яэ. м растет, а другое
убывает, то можно ожидать, что
существует оптимальное значение
Яэ. м, меньшее Яв. кр. Увеличение На. м по сравнению с Яэ, кр выиг-
рыша дать не может, так как при этом растет и (Дтт. кр +ЛД/пт.пл),
И <7км.м (из-за отхода от крейсерского оптимального режима).
Различие ЯэРм и Нэ. кр иллюстрируется на рис. 6.2, где пред-
ставлены совместно составляющие (Дтт. нр + Д/пт. пл) и тт, м (Ln)
в функции Я0.м.
Величина смещения Я,Рм относительно Яв. ,(р зависит от отно-
сительной значимости составляющих т»,п (рис. 6.2). Если протя-
женность полета значительна (Ln > 2 ... 3 тыс. км), то значения
Дтт. кр и Д/пт. пл малы по сравнению с т,. м (Ln) и минимум m?. п
по Яв,м. достигается вблизи минимума mT.M (L,;) по Я».м» т. е. при
близком к Яв. кр. В этом случае маршевый полет проводится
практически на крейсерском режиме Якр, Укр, оптимальном по
9«м. м* Для крейсерского режима и определяется в зависимости от La
значение затрат топлива /пт. п на достижение заданной дальности.
Если \(Д/пт.нр + Д/Пт.пл) малы по .сравнению С т*.м (Ln), то за-
траты на изменение энергии Дтт<жр и Дапт. пл нужно учитывать в об-
щем балансе затрат топлива, как и затраты на взлет и посадку, но
отдельно можно не оптимизировать. При больших дальностях они
входят в m,.n как постоянный составляющие, рассчитанные один
раз при заданной по техническим соображениям программе набора
высоты и планирования, и не зависят от Ln.
Если же дальность полета L„ невелика (менее 800 ... 1000 км),
то чистые затраты на изменении энергии (Д/ит. нр + Дтт,пл) могут
оказаться сравнимыми с тТ.ы (L„).
В этом случаеминимум /пт. „ по Яв. м не совпадает с минимумом
т.Т, м и 9км. м> и нужно проводить оптимизацию маршевого режима
(Ум, Ям) по полным затратам топлива т1#п. Для этого зависимость
(Д/пт. нр + Д/пт. пл) суммируется с зависимостью /пт.м (Le) от Яв.м,
построенной для маршевого режима, и находится Яэ?1, при кото-
ром mT. D минимально, как на рис. 6.2.
Если затраты Д/лт.кр существенны, то оптимизация программы
набора и разгона и значения Яв.м может дать существенный вы-
игрыш как по затратам топлива,.так и по достижимой дальности
полета.
91
Если проводится оптимизация программы набора высоты и раз-
гона или планирования, то при подсчете /пт>п и оптимизации Н3. м
используются именно оптимальные Дтт. нр и Дтг.пл. Оптимизация
при этом требует перебора ряда значений /73. м < Н.„ кр, выбора
для каждого из них ЕмР* (#э.м), расчета (Нэ. м) и тт. м (Ln),
затем построения оптимальных программ набора и снижения, рас-
чета Дпгт#нр, Д/Пт.пл, определения суммарных тг.п (/7Э. м) для
данной Ln и, после этого, выбора оптимальной Я;).м. Выполнять та-
кой расчет целесообразно с помощью ЭВМ.
Проведя оптимизацию маршевого режима и, если это необходимо
(т. е. если протяженность соответствующих участков существенна)
оптимизацию нестационарных этапов полета, можно при заданной
схеме полета получить наивыгоднейшую (по топливу) программу
(профиль) полета на заданную дальность. Время полета при этом не
задано заранее, а определяется по (6.8) для найденной программы
полета.
На основе построения оптимальной по полным затратам топлива
программы полета можно теперь рассмотреть задачу определения
максимальной технической или практической дальности.
Максимальная дальность полета
Затраты топлива при полете по наивыгоднейшей про-
грамме монотонно зависят от заданной дальности La. Монотонность
зависимости шт. п (L„) позволяет при прочих равных условиях счи-
тать задачу минимизации затрат топлива при заданной дальности
обратимой, эквивалентной задаче максимизации дальности при за-
данном расходе топлива. Если рассмотреть полную заправку самолета
топливом, то оптимальной по топливу программе полета будет соот-
ветствовать максимально достижимая для самолета (при данной
загрузке, взлетной массе и заданной схеме полета) дальность ,Lnmax.
Чтобы ее найти, нужно, вообще говоря, провести рассмотренную ра-
нее оптимизацию траектории для ряда значений Ln, построить зави-
симость (Ln) и затем, задав значение пг?пспп соответствующее
полной заправке самолета топливом, найт1Г~£ПП1я77рис. 6.3). Пол-
ному запасу топлива на борту при этом будет соответствовать техни-
ческая дальность, а запасу топлива за вычетом АНЗ — практиче-
ская дальность полета.
тТ.ПСП ттл
Расчет существенно упрощается, если учесть, что максимальная
дальность полета для большинства самолетов достаточно велика и
при полете на LtJ max затраты (Д/ит. НР +
+ ^т.пл) существенно меньше т,.м(Ц.
Тогда в первом приближении можно не
оптимизировать Н3, м по tnr, п, а рассчиты-
вать маршевый этап полета для Яэ.кр. В этом
случае последовательность расчета макси-
мал ьной дал ьности полета будет следующей.
Рис. 6.3. Определение L_ по т£ас™
4 П Ш4Л 1 . 11
92
1. Определяется располагаемый запас расходуемого топлива
соответствующий либо полной заправке самолета топливом,
либо полной заправке за вычетом тт. дНз> а также — взлетная масса
самолета т0, как сумма массы пустого снаряженного самолета с эки-
пажем тп.с, топлива т?асп и полезной нагрузки т„,г:
гпо = тп,с + т?асп + т„. г. (6U3)
Рассчитывается конечная масса тк (с учетом или без учета АНЗ),
средняя масса тср = тотк. Рассчитываются также по формулам
(6.1) и (6.2) затраты топлива на взлет и посадку при заданных дли-
тельности и режиме тяги на этих этапах.
2. Для средней массы самолета и ряда высот /7М и скоростей Ум
маршевого полета рассчитывается у11М. м по (5.6) (с учетом дроссели-
рования тяги). Отыскивается минимум qKM. м, равный <7„м. кр, и соот-
ветствующие ему Нкр и У,1р, рассчитывается Я.,. Если предпо-
лагается, что маршевый полет происходит не на -- const, а на
суацр =~ const, то определяется по (3.6) значение сиа Itp (mcp), а за-
тем по (5.15) высота HOi.p и энергия ЯвОкр в начале маршевого
этапа при массе самолета, равной (0,8 ... 0,85) т*, а также высота
Нк, кр в конце маршевого этапа, перед планированием (при т —
= тк 4- тт, пос).
3. Для средней массы самолета при наборе высоты и разгоне
тнр при изменении энергии от Яэ0 после взлета до Нд. кр проводится
оптимизация программы набора и разгона Унр (Н) и режима тяги.
Режим тяги может и не оптимизироваться, если тяга при наборе и
разгоне задана из эксплуатационных соображений. Тогда расчет
ведется для максимальной Рнр = Рр (Н, М) (без форсажа). Оптими-
зация ведется в соответствии с § 5.2 по критерию А/пт.э, т. е. при
каждом текущем значении Нд от Яв0 до Я8.кр обеспечивается ми-
нимум функции FT, см. (6.12). Интегрированием рассчитывается
величина Дтт. э, а также для найденной оптимальной программы —
значения LHp> 4iP и тТ.Ну по (5.22) ... (5.24). Уточняется масса са-
молета в конце набора и разгона
^нр. К = ^Т. ВЭЛ ™T. нр- (6.14)
Если необходимо, проводится второе приближение для уточненной
массы
_ 1
^нр. ср -^0 ^Т. ВЗЛ ~2~ t^T. нр-
4. Рассчитывается дальность планирования
^пл = Ктах(Яэ.кр-Яа.к) (6.15)
для Яэ. к перед посадкой.
* Масса самолета в начале маршевого этапа, равная массе в конце этапа набора
и разгона, уточняется после расчета этапа набора и разгона. По уточненному зна-
чению может быть выполнено второе приближение.
93
5. Рассчитывается располагаемое количество топлива для мар-
шевого полета:
а) при расчете технической дальности
м == тт Л1т. взл пос ^Пт. нр> (6.16)
б) при расчете практической дальности
/Пт. м = /И? — /Пт. взл /Пт. пос — /Пт. нр — ГПт. АНЗ1 (6.17)
Определяется дальность маршевого полета по формуле (5.11) прн
полете на Якр = const и по (5.16) при полете на ' суа = супир —
const. При приближенных расчетах используется формула
^-м “ /«т. нр> (6.18)
однако значения LM получаются заниженными. Определяется время
ZK = 1O«LM/VM. (6.19)
6. Определяется максимальная (техническая или практическая,
в зависимости от использования (6.16) или (6.17)) дальность, как
^*п. mix = Ч-^ + ^пл, (6.20)
и время полета
А1 = ^взл + ^нр + + ^пл + 4ioc- (£.21)
Радиус действия самолета
Когда полетное задание предусматривает не перелет само-
лета из одного пункта в другой, а возвращение самолета на аэродром
вылета после выполнения заданной операции в зоне применений,
то говорят не о дальности, а о радиусе действия. Под радиусом
действия понимается наибольшее расстояние от аэродрома вылета,
на которое может удалиться самолет при гарантированной по запасу
топлива возможности возвращения на тот же аэродром. Радиус
действия также может быть техническим, практическим или тактиче-
ским. Расчет радиуса действия производится теми же методами, что
и дальность полета. При необходимости. учитывается изменение
массы самолета при сбросе груза. Без сброса груза и в безветрии
максимальный радиус действия равен половине максимальной даль-
ности
• ^п. max = ~2~Ап пих* (6.22)
Если учесть сброс груза массой mcffs в точке максимального удале-
ния, находим
Rn max'— max 1П —— —L V " •* (6.23)
°-®Лсбр + У 0.25Лсбр + тк
Здесь тТ = т,/то, йсвР = тсСр/т0, Ак = (т0~т^ — тобр)/т0.
Влияние загрузки самолета на дальность
Техническая и практическая дальность, так же как и
радиус действия, зависят, как ясно из предыдущего, от массы само-
лета (через километровый расход топлива, см. формулу (5:6)), а зна-
94
Рис. 6.4. Зависимость Ln от тп. г=
1 — полная заправка топливом; 2 — ограни-
ft пРеД
ченне по ^взл: 3 ~~ ограничение тп*_ г
чит, — от массы полезной или
коммерческой нагрузки. Рассмот-
рим эту зависимость подробнее.
Очевидно, наибольшим будет
значение Ln 1пах при полете пол-
ностью заправленного пустого са-
молета без полезной или коммерче-
ской нагрузки, /пп. г = 0. Если
теперь увеличить массу полезной
нагрузки тп.г при неизменной заправке топливом /пт, то растет
взлетная масса т0, начальная и средняя массы на каждом этапе
полета, километровые затраты топлива, уменьшается относитель-
ный запас топлива, /пт = В результате с ростом тс,Т моно-
тонно уменьшается техническая и практическая дальность La max
(участок 1 рис. 6.4). При реальной эксплуатации возможность уве-
личения /пП1Г, однако, ограничена. При заданных условиях с дан-
ной ВПП взлет самолета возможен до определенного значения
т0 < /п£ред, отсюда
тт + та. г < mJ₽eA — /ппс. (6.24)
Здесь /ппс — масса пустого снаряженного самолета с экипажем,
но без топлива и полезного- груза — величина постоянная. Отсюда
следует, что при увеличении /Пц,г сверх некоторого значения, назы-
ваемого расчетным,'/Пп. г, необходимо по условиям взлета не пол-
ностью заправлять самолет топливом- Расчетная полезная нагрузка
равна • 1
„р — „.ПОЛИ ,/д Het
/Пп. Р = т0 — тПс — т? » (6.25)
где /п?°-пн—масса топлива при полной заправке. При тп. г > /nJ. г
увеличение /лп.г связано с уменьшением расходуемого запаса топ-
лива /пт, что приводит к более быстрому падению максимально
достижимой дальности (участок 2 рис. 6.4), чем при постоянном /пт.
Характерная техническая или практическая, дальность, соответ-
ствующая /»п. г и полной заправке топлива, называется расчетной
дальностью Lv. Наряду с расчетным значением массы полезной
нагрузки требуемое значение £р задается при проектировании само-
лета. Задается обычно и предельное значение /Пп?*д, ограниченное
вместимостью отсеков самолета, эксплуатационными и техническими
соображениями (участок 3 рис. 6.4). Как правило, самолет эксплуа-
тируется в пределах Дальностей до £р и тп. г до mJ. г, что связано
с дополнительными требованиями кЪезопасиости полета.
Если легкий , самолет необходимо эксплуатировать на дально-
стях, превышающих Lnmax (или Lp), можно использовать дополни-
тельные топливные емкости — внешние подвесные баки, сбрасывае-
95
мне в полете после выгорания топлива. Расчет затрат топлива или
максимальной дальности в этом случае необходимо вести с.учетом
изменения сопротивления самолета из-за внешних подвесок. Другой
способ увеличения дальности — дозаправка самолета в воздухе. Для
этой цели создают специальные самолеты — заправщйки, которые
перекачивают часть топлива из своих топливных баков в топливные
баки заправляемого самолета. Заправляемый самолет должен быть
также оборудован специальной системой дозаправки, обеспечива-
ющей контактирование с самолетом-заправщиком и прием от него
определенного количества топлива.
Влияние ветра на затраты топлива в полете, максималь-
ную дальность полета и радиус действия
Техническая, практическая дальность или радиус действия рассчитываются
в безветрии (возможность действия ветра учитывается для практической дальности
лишь введением некоторого дополнительного гарантийного запаса топлива —
АНЗ). При необходимости расчета затрат топлива с учетом ветра эти затраты счи-
таются для истинной воздушной скорости, а путевая скорость определяется с учетом
ветра, как
Vn = V - Й7Э, (6.26)
(6.27)
где W3 — скорость эквивалентного встречного ветра [см. (3.26)].
С учетом ветра километровые затраты топлива изменяются в отношении
<7км (Ю = <7км |ц7=о 1_W'g/V ' ’
как и удельные затраты топлива иа нестационарных участках (при пологой траек-
тории). Здесь 9км|ю'-о — километровый расход топлива без ветре, 1УВ = 0.
Соответственно, в первом приближении при заданной дальности затраты топлива
увеличиваются в отношении *ак же, как н время полета. Радиус
действия самолета при постоянно действующем в одном направлении ветре будет
меньше, чем при полете в безветрии, независимо от .того, каков будет ветер при
полете к цели — попутный или встречный:
(W2
*----рГ
(6.28)
§ 6.3. СКОРОСТНАЯ ДАЛЬНОСТЬ. МИНИМУМ ВРЕМЕНИ
ПОЛЕТА. СТОИМОСТНЫЕ ПОКАЗАТЕЛИ
В § 6.2 рассмотрены наивыгоднейшие по топливу режимы
полета при свободном, неограниченном времени и соответствующая
этим режимам техническая или практическая дальность полета (ра-
диус действия). В ряде случаев важное значение приобретает не ми-
нимизация топлива, а минимизация времени всего полета или каких-
либо его этапов.. Рассмотрим задачи, связанные с минимизацией
времени полета самолета на заданную дальность.
Пусть запас топлива на борту самолета заведомо достаточен для
достижения заданной дальности на максимальных скоростях полета.
Режимы, соответствующие минимуму времени при достаточном, не
лимитирующем скорости запасе топлива, называют скоростными.
96
Очевидно, на скоростной траектории наивыгоднейшим режимом мар-
шевого полета будет полет на максимально возможной скорости Vmax
(отметим, что задача о минимуме времени обычно рассматривается
для скоростных самолетов, так что речь идет о форсажных режимах).
Скорость Vraax ограничена либо располагаемой тягой, либо пре-
дельным числом Мтах полета.
Если теперь перейти к задаче минимизации полного времени по-
лета, то нужно, как и при минимизации топлива, задать схему
полета. Если схемой предусмотрены набор и разгон, маршевый
участок и снижение *, а полная дальность Ln задана, то оптимизи-
руется суммарное время полета
— ^вел 4“ А/Нр 4~ (^п) ~Ь А/сн ~Ь ^пос (6.29)
по величине Яэ.м при условии полета на 1/дах для каждой варьируе-
мой Нв. м. Здесь (Ц) = iO8Ln/IZniax. В первом приближении
Н3.ы можно не оптимизировать, задав в качестве наивыгоднейшего
маршевый режим полета на высоте Нск, на которой впервые дости-
гается максимальная скорость IZmax, ограниченная Мпих, а если
такого ограничения нет—на высоте 8 ... 11 км. Соответственно,
для скоростного режима
V2
Я и и । ’max.
в. м — ле. ск ~ лск “Г 2g ' ’
Этап набора высоты и разгона для скоростных траекторий
оптимизируется по критерию А£э (см. (5.29)). При оптимизации
для каждой Н3 от Нз0 до Н3,ск определяется наивыгоднейшая
скорость, обеспечивающая минимум подынтегральной функции
‘ Режим тяги ПРИ наборе и разгоне — полный
форсаж. После оптимизации определяется /нр» Ьнр, тт, мр. Затем,
для найденных ранее Угагх и лск рассчитывается время полета
на Lin — (или Lm === L^ ~~ jLnP Есн> если участок сни-
жения включен в оптимизируемый этап полета) и затраты топлива
в маршевом полете по (5.8) или (5.12). Оптимальным по времени
режимом снижения является крутое планирование на предельных
углах -наклона траектории или вертикальных скоростях. Если по-
мимо снижения требуется затормозить самолет, погасив его энергию,
этап выполняется с использованием тормозных щитков и при уве-
личении индуктивного сопротивления вследствие одновременного
выполнения маневра с пиа > 1.
Для скоростной траектории затраты топлива монотонно зависят
от заданной дальности, и при данном расходуемом запасе топлива
можно определить максимально достижимую (с учетом или без учета
навигационного запаса) техническую или практическую скоростную
дальность полета. При условии возвращения на аэродром вылета
определяется скоростной радиус действия. При наличии ограниче-
ний, связанных с тактикой использования (например, если тре-
* В ряде операций этап снижения по времени может не оптимизироваться.
4 А Ф Бочкарев и др 97
буется выполнить часть полета на малой высоте), говорят о тактиче-
ском скоростном радиусе действия.
Скоростная дальность LCK, скоростной радиус действия 7?сн
для самолета с ТРДФ обычно значительно меньше максимальной
технической или практической дальности Ln.max (или радиуса дей-
ствия /?п. max), так как расходы топлива на форсаже существенно
больше, а скорость 1/1(р на наивыгоднейшем режиме — обычно до-
звуковая, т. е. значительно меньше 1/тах на форсаже. .
Если теперь задать Ln больше LCK при заданном запасе топ-
лива /ит.ц (но меньше Lnmsa), то выполнить весь полет на ско-
ростном режиме не удастся — не хватит топлива. В то же время
полет на крейсерском режиме может оказаться слишком медлен-
ным, а в конце пути при Ln <Lnmax остается неистраченное топ-
ливо. Поэтому для промежуточных дальностей существует широкий
спектр возможных режимов полета, выбор которых производится
в зависимости от важности показателей /пт, п* и t„.
Отметим один из таких режимов — режим минимальной стои-
мости [15]. При прочих равных условиях затраты на полет Си за-
висят от его программы
Сп = Стщт. ц -|- Cttn -|- Со, (6.30)
где Ст — цена топлива; Ct — стоимость единицы времени полета
без учета стоимости топлива, определяемая ’стоимостью' (ценой)
самолета, сроком его службы и т. и.; Со — составляющая, не зави-
сящая от программы полета (разовые затраты).
Критерий Сп отражает, например, стоимость тонно-километра
перевозки груза/лп. г
при заданной дальности полета LD.
Этот критерий является промежуточным между критерием мини-
мума времени t„ и минимума затрат топлива mT. п при заданной
дальности и широко используется для гражданских самолетов.
Для оптимизации по критерию Сп маршевый полет нужно оптими-
зировать не по критерию ?Км. м (см. § 5.1), а по обобщенному пока-
зателю JM, определяемому по формуле
(6.32)
а этап набора и разгона.— не по Дтт, э или Д/е, как в § 5.2, а по
обобщенному показателю Д/в
Д/а = Ст Д/Пт, в -f- Ct (6.33)-
что соответствует минимизации подынтегральной функции
- -тр [с’-гаг( - ’-«) + с* (> - тт)] • «в-34’
Оптимальному значению критерия Сп соответствуют траектории
с маршевой скоростью, большей Укр, но меньшей 1/шах.
98
Для скоростных самолетов аналогом критерия (6.30) может яв-
ляться критерий
<7ц --п>
в котором и Хт определяются задачей полета.
Дополнительная литература
[91с. 116—132, [10] с. 206—228, [13] с. 406—420, [8], с. 91—97.
Контрольные вопросы
1. Что такое аэронавигационный запас топлива?
2. Что такое техническая, практическая дальность полета?
3. По какому критерию следует оптимизировать программу набора высоты'
и разгона при расчете технической дальности? При расчете скоростной дальности?
4. В каком случае маршевый участок траектории' юлета иа максимальную
дальность целесообразно выполнять на крейсерском режиме?
5. Что такое радиус -действия самолета?
6. Радиус действия самолета — 1000 км при. скорости 400 м/с. Как изме-
нится этот радиус при полете с боковым ветром (WnD = 0) со скоростью Wg ==
— 20 м/с?
7. Что отражают коэффициенты Ст и Q в формуле (6.30)?
г л А в А 7 МАНЕВРЕННЫЕ ХАРАКТЕРИСТИКИ САМОЛЕТА
Под маневром самолета понимают обычно сравнительно •
короткий этап полёта, целью которого является заданное изменение .
параметров движения центра масс самолета — скорости1?(ее вели-
чины V и направления, т. е> углов наклона траектории ° и пути МО,
положения самолета в пространстве (высоты, дальности). Строго
говоря такие этапы полета, как маршевый (крейсерский) полет,
набор высоты, снижение также являются маневрами, так как их
задачей является именно изменение положения самолета. Но эти
этапы обычно достаточно протяженны, их длительность сравнима
с полной продолжительностью полета, а движение можно считать
установившимся (квазнустановившимся) или прямолинейным (ква-
зипрямолинейным), см. гл. 3, 4. Поэтому обычно для таких протя-
женных этапов полета говорят о режиме полета, используя термин
«маневр» только для коротких этапов с интенсивным изменением
параметров движения. Именно в этом смысле рассматриваются здесь
и маневренные характеристики самолета — его способность быстро
изменять положение центра масс в пространстве, скорость, направ-
ление и высоту полета при выполнении требуемого маневра.*“f.
Показателями маневренности самолета могут считаться при этом
либо располагаемые значения ускорений (нормального или танген-
циального) в зависимости от высоты и скорости полета, массы само-
лета, режима работы двигателей и других, либо время маневра при
заданном изменении параметров движения»
4*
99
Первая группа показателей не зависит от вида выполняемого
маневра и определяется характеристиками самолета и двигателя —
располагаемыми значениями перегрузки, тяги двигателя и т. п.
Их обычно называют общими показателями маневренности. При
определении общих показателей располагаемые ускорения можно
наглядно выразить через составляющие перегрузки в скоростных
осях [см. (1.49)], оценивая маневренность по располагаемым зна-
чениям именно перегрузок пжа, пуа, nza.
Время маневра или, что эквивалентно, изменение параметров
движения за заданное время, является интегральным показателем и
зависит от конкретного вида маневра, программы его выполнения,
граничных условий. Здесь обычно говорят о частных показателях
применительно к определенной задаче маневра. Зная общие показа-
тели маневренности и программу маневра, можно найти значение
того или иного частного показателя. Для оценки их предельных
значений нужно решать задачу оптимизации программы маневра.
В общем случае маневр самолета является пространственным,
он связан с изменением как высоты и угла наклона траектории, так
и бокового смещения и угла пути. Однако достаточно полное пред-
ставление о маневренных возможностях самолета дает анализ пока-
зателей его маневренности для двух упрощенных случаев — ма-
невра только в вертикальной плоскости (угол пути постоянен, крена
и скольжения нет) и только в горизонтальной плоскости (угол на-
клона траектории равен нулю, высота постоянна).
f 7.1. РАСПОЛАГАЕМАЯ ПЕРЕГРУЗКА И ИЗМЕНЕНИЕ
УРОВНЯ ЭНЕРГИИ ПРИ МАНЕВРЕ. ОБЩИЕ ПОКАЗАТЕЛИ
МАНЕВРЕННОСТИ
Располагаемые значения нормального и тангенциального
ускорения при маневре самолета определяются предельной величи-
ной сил, действующих на него в полете, или, что то же самое, — диа-
пазоном располагаемых перегрузок, которые можно создать с по-
мощью этих сил:
„ ____ Р — Хд _________ Уа + («+ фо)
«яа — , '1ца
ъ-ф Р')
mg
Рассмотрим располагаемые значения пха, пуа, пга.
Располагаемое значение нормальной скоростной перегрузки пуа,
как видно из (7.1), определяется предельным значением подъемной
силы, которую можно создать при данных мгновенных высоте и
скорости полета, так как обычно угол (а + фр) мал и Ya > Р (а +
+ фр) (если не предусмотрен поворот вектора тяги).
Подъемная сила Ya = cyaqS ограничена, так как ограничено
предельно допустимое значение коэффициента подъемной силы Суа <
< Суа доп (см. 2.3), Отсюда
и = уа ? (стдоп + фр)
пуа расп-----------------——~
(7.2)
где адоп — угол атаки, на котором достигается суа р0П.
юо
I
только аэродинамическими
Рис. 7.1. Ограничения пуа расп-‘
э
/ — по с^цдоп И управляемости; 2 — по пуа
В первом приближении обычно по-
лагают
„ Гуд ДОП?*$ /у q\
aVa расп ~ mg » V,а/
несколько занижая при этом значение
Следует учитывать, что на неко-
торых режимах полета значение
пуа расп может быть ограничено не
особенностями обтекания крыла (а1!р, ас), но и условиями устойчи-
вости и управляемости самолета, которые ухудшаются с ростом
угла атаки.
При больших скоростных напорах q == pV2/2 располагаемая пе-
регрузка ограничена также допустимым эксплуатационным значе-
нием, связанным с требованиями прочности и другими ограниче-
ниями:
Пуа '•< Пуа-. • (7>4)
Маневренные самолеты допускают перегрузки по прочности по-
рядка 8... 9, неманевренные — 2,5 ... 3*.
Величина перегрузки ограничена также физическими возможно-
стями летчика, комфортом пассажиров.
Заметим, что пуа определяется для опорного, невозмущенного
движения самолета и, значит, она меньше расчетной перегрузки
непрочности с учетом запаса на отклонение режима полета от опор-
ного.
Примерный характер зависимости ограничения л„арасп по (7.2)
и (7.4) показан на рис. 7.1. Очевидно, с ростом высоты (уменьшением
скоростного напора q при той же скорости полета) ограничение (7.2)
все более сужает область располагаемых пуа. Если задать какой-
либо требуемый уровень пуа трев < п9уа> то, как видно из (7.3)
и рис. 7.1, существует минимальная для каждой высоты скорость
Vmin (пуа треб)» на которой этот уровень реализуем. Приближенно
Vml„ (Пуа треб) = V
г роСуа доп
С ростом ВЫСОТЫ Vmin (ПУа треб) растет, как И С ростом пуа трев,
вплоть до выхода на пуа. При пВЯТРеб = 1 Vmm совпадает с Vmmr.n
(гл. 3).
* Требованиями прочности ограничена нормальная перегрузка’в связанных
осях координат. Это ограничение легко пересчитывается для скоростных' осей ко-
ординат по (1.54) при малых ₽ и nza «0.
101
Рис. 7.2. Перегрузочная поляра само-
лета для заданных Н, ДО и тср
Рис. 7.3. Зависимость пха (пуа, М):
./ — ограничение по суа доп и управляемо-
сти; 2 — ограничение no ртах нлн Мтах
Для реализации нормальной скоростной перегрузки пуа в рас-
полагаемом диапазоне пуа < п уа расп требуется значение суа,
равное
qS+P/сЪ ~
и соответствующий ему угол атаки а.
Располагаемые значения тангенциальной перегрузки пха, как
видно из (7.1), зависят от тяги двигателя и величины сопротивле-
ния Ха, а значит — от высоты и скорости (числа М) полета и через
поляру самолета — от суа при маневре, а значит, от пуа. Макси-
мальное располагаемое значение пха, равное пЯор8СП (пуа), дости-
гается на данных Н и V при максимальной тяге Р = Рг.. Сростом пуа
это располагаемое значение уменьшается из-за роста индуктивного
сопротивления на ббльших суа. Типичная зависимость пха раОп (nva)
для определенных значений п, V (или М).и массы самолета т пока-
зана на рис. 7.2. При nya = 1 величина nxopacn равна пхаг (см.
гл. 4), На максимальных пуа значение пХа раСп обычно отрица-
тельно.
Зависимость nxa (nVa) на данных Н, V (или М), при данной
массе т и для определенного режима работы двигателя (максимал,
полный форсаж) называется перегрузочной полярой самолета.
Для разных чисел М на заданной высоте можно построить серий)
перегрузочных- поляр.
Минимальное значение пха при данных Н и V (или М) дости-
гается при Р » 0 (т. е. на режиме малого газа). Здесь пХа < О
для всех пуа. Для маневренных самолетов можно дополнительно
уменьшить, выпустив воздушные тормоза, т. е. увеличив сопротив-
ление Сха о (см. рис. 7.2, пунктир).
Перегрузочная поляра хорошо характеризует общие маневрен-
ные возможности самолета на данных высоте и скорости (числе М)
полета. Чтобы обобщить эту характеристику на весь диапазон по-
летных скоростей на данной высоте Н (и при данной массе само-
лета т), строят зависимость пха расп (М) для ряда постоянных
значений пУа (рис. 7.3). Для этого, построив серию перегрузочных
поляр по числам М, задают значение пуа, снимают для него пхз
для каждого М по соответствующей перегрузочной поляре и откла-
102
дывают точку в координатах пха (М). Построение повторяют для
нескольких п!1а от 1 до Пуа, учитывая, что на малых М (или'V) вели-
чина Пуа ограничена свадоп, а на больших — пуа (см. рис. 7.1).
На этот график наносят также ограничение по Vmin (пиа) для каж-
дого из значений nva и ограничение по М (по скоростному напору,
нагреву и т. п.). При пуа — 1 график пха (М) совпадает с пж.(1 (М)
в горизонтальном полете (гл. 4), а точка пЖа1 = 0 соответствует
Vniax уст на данной высоте.
Построение перегрузочной поляры и зависимостей пха (М) для
заданного значения пуа упрощается, если поляру сХа (cva) можно
аппроксимировать квадратичной зависимостью вида
G-a = Сха 0 4" Лс^о (7.7)
(см. гл. 2). Тогда для пуа =/= 1 по (7.3) находим:
Пха= Пха! ' Асуо 1 (пуа 1). (7.8)
Снимая пха1 с диаграммы потребных и располагаемых тяг для го-
ризонтального полета пха1 — (Рр— P„i)/mg и определяя cWQ1
по (3.6) как суа1 =i= ,можно теперь пересчитать кривую пха1 (М)
(см. рис. 7.3) для любой другой перегрузки nva.
Располагаемое значение пжарасп (ty0) характеризует возмож-
ность проведения маневра с данной перегрузкой nva с разгоном
(пхл > 0) на постоянной энергии (пХа = 0) или только с торможе-
нием (пХа < 0). Если возможен маневр с разгоном, то возможен и
маневр с постоянной энергией или торможением, так как тягу дви-
гателя при маневре можно уменьшить Р <Рр.
Темп изменения энергии при манёвре связан со значением пХа
соотношением (см. гл. 4)
Й9 = VnXa.
Вместо сетки кривых пха (М, пра) на рис. 7.3 можно строить кри-
вые Нв = Vnxa ='f (М, про), по которым легко оценить возмож-
ность сохранения или изменения уровня энергии при маневре с раз-
личной нормальной перегрузкой. Сравнивая характеристики пЖа (М,
пиа) или Нд (М, пра) для различных самолетов, можно судить об их
маневренных преимуществах на.расчетной высоте полета. Однако
при использовании этих графиков затруднено сравнение маневрен-
ности на различных высотах. С этой точки зрения более наглядно
построение области скоростей и высот, в которых возможен тот или
иной маневр. Можно выделить два характерных случая: разгон
на постоянной высоте (nBo = 1) с перегрузкой Пха, не менее задан-
ной пжатрвв, и установившийся (или изоэнергетич.еский) маневр
с пха = 0 при пра, не менее требуемой пуа треб.
Для оценки характеристик разгона кривые рис. 7.3 при nva = 1
(т. е. зависимость пха1 от М) строят для ряда высот. На каждой
кривой выделяют диапазон, где пХа г > пХа трев, и . откладывают
его в координатах V (Н) или М (Н) (рис. 7.4) для соответствующей
юз
Рис. 7.4. Области разгонов самолета
с пха 1 Треб (форсаж)
Рис. 7.5. Области установившихся ма-
невров с ястреб (Ф0Рсаж)
высоты. В результате среди возможных режимов полета выделяется
более узкая область, где реализуем полет с пХа1 > пха треб. на"
пример разгон с V > gnXa треб. Если учесть, что при наборе вы-
соты пуа — cos 0 < 1, то в этой области возможен также устано-
вившийся набор высоты с 0* > arcsin (пжа треб) или Vy >
> Vnxa треб- • '
Область установившихся маневров строится на основе графиков
рис. 7.3 для ряда высот полета, если на каждом из них выделить
диапазон скоростей (чисел М), при которых пха > 0 для nva *₽
= пИатРеб (например, на рис. 7.3 — для пуа = 2). Этот диапазон
переносится для каждой высоты на график рис. 7.5 возможных
режимов полета в координатах V (Н) (или М (Я)), что позволяет
выделить область значений V и Я, где реализуем маневр с пуа треб
без потери энергии, пХа (пуа треб) >0. Яэ > 0, а при постоянной
высоте — без потери .скорости, т. е. изоэнергетический или устано-
вившийся манёвр. При оценке маневренности и построении границ
областей рис. 7.4 и 7.5 важное значение имеет определение нормаль-
ной скоростной перегрузки установившегося маневра Прарасп, т. е.
той максимальной перегрузки п„п, при которой (на данном режиме
работы двигателя, при данных Я, V и т) возможен маневр без потерн
энергии Я8 = 0, расп = 0- Значение ИрГрасп легко опреде-
ляется графически по рис. 7.2.
Если поляра задана в виде (7.7), то из (7.8) находим при
Пха расп — 0
Ярд расп = ПХа ll(Cyn. 1 Л) 4“ 1 • (7.9)
Выражение (7.9) имеет смысл при nxai > 0.
§ 7.2. ХАРАКТЕРНЫЕ МАНЕВРЫ САМОЛЕТА
В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Типичные маневры в вертикальной плоскости (Чг = const)
выполняются без крена и скольжения. Управление движением осу-
ществляется здесь выбором программы изменения нормальной ско-
104
ростной перегрузки пуа и тяги двигателя, а также, если необходимо,
путем выпуска воздушных тормозов.
Уравнения движения центра масс самолета в этом случае можно
записать в виде
V = g (пха — sin 6); (7.10)
0 = g/V (nva — cos 0); (7.И)
Н = V sin 0; (7.12)
L — V cos 0; (7.13)
th = cwp T 3600 ’ (7-14)
Если время маневра невелико по сравнению с временем полета, по-
следнее уравнение можно не рассматривать, а массу самолета при
маневре — осреднять. Уравнение для дальности L также может
не рассматриваться, если в задачу маневра не входит выход в опре-
деленную точку.
В вертикальной плоскости рассмотрим два характерных ма-
невра — пикирование и горку.
Пикирование самолета
Неустановившееря крутое снижение самолета, сопрово-
ждаемое быстрой потерей высоты, называется пикированием само-
лета. Будем считать, что траектория пикирования (рис. 7.6, а)
лежит в вертикальной плоскости. Условно ее можно разбить на три
участка. Вход в пикирование — криволинейный участок 1—2, слу-
жащий для перехода от горизонтального полета к снижению. Далее
следуют прямолинейный участок пикирования 2—3 с углом наклона
траектории к горизонту 0П и криволинейный участок выхода из пи-
кирования 3—4.
Вход в пикирование и выход из
него представляют собой неустано-
вившиеся движения по криволиней-
ным траекториям. При обычном
входе в пикирование из горизон-
тального полета летчик отклоняет
руль высоты, уменьшая угол атаки
крыла, а следовательно, и подъемную
силу, которая уже не уравновешивает
силу тяжести. Получившаяся центро-
стремительная сила искривляет тра-
екторию полета вниз. Чтобы траекто-
рия была криволинейной, необходимо
Рис. 7.6. Траектория пикирования:
а — обычный ввод; б — ввод с креком 90°; в —
ввод с переворотом
105
на всем участке входа выдерживать перегрузку пуа вв < cos 0.
Как только достигнуто необходимое значение угла наклона траек-
тории, летчик переводит самолет в прямолинейный полет, сохраняя
перегрузку пгМп=со5 0п постоянной. Чем меньше будет п;;авв,
тем круче вход в пикирование. Однако отрицательные перегрузки,
превышающие по модулю 0,5 ... 1, обычно недопустимы. На прак-
тике часто применяется вход в пикирование с разворотом при на-
кренении самолета примерно на 90° при пуапв, близкой к единице
(рис. 7.6, а, б). Крен обеспечивает летчику хороший обзор. В этом
случае искривление траектории происходит под действием только
силы тяжести. Применяется еще метод входа с переворотом на 180°,
позволяющий использовать большие положительные перегрузки и
значительно уменьшающий радиус входа, но требующий вы-
сокой квалификации пилота. На прямблинейном участке nvaa =
= cos 0П.
Тягу двигателя можно принять равной нулю, если нежелателен
быстрый рост скорости и, наоборот, максимальной, если целью
пикирования является быстрый разгон. На крутых траекториях,
во избежание выхода на скорость, превышающую допустимую (с уче-
том ограничений по (/max)» используется выпуск воздушных тор-
мозов.
Для вывода самолета из пикирования необходимо создать цен-
тростремительную силу. С этой целью, отклоняя руль высоты, лет-
чик увеличивает угол атаки, создавая перегрузку nV0BKB > cos 0.
Траектория искривляется кверху, угол ё (отрицательный) увеличи-
вается, пока не достигнет нужного значения 0К (в частном случае
это может быть 6К =0, соответствующее горизонтальному по-
лету). . '
Расчет траектории пикирования выполняется численными мето-
дами по уравнениям (7.10) ... (7.14) для выбранных пуат на участке
ввода, пуа = cos 0П на прямолинейном участке и пуа выв на участке
вывода с учетом зависимости пяо от пуа по (7.8), изменения плот-
ности и скорости звука с высотой. Если учесть, что граничные усло-
вия для начального и конечного участков маневра заданы по 0
(выход на 0П для участка входа, на 0К’ для участка вывода), то при
интегрировании этих участков программу по пуа целесообразно
задавать не по времени, а по углу 0.
При постоянном значении пуа уравнения для участков ввода и
вывода можно проинтегрировать аналитически, если принять, что
на этих участках пха « 0, итэнергия меняется мало. Запишем урав-
нения (7.10) ... (7.12) в виде
dV у Пха — sln й __ iz Sin 6 /7 1
dS У Пуа — COS0 Пуа — COS 0 ' ’ ‘
И
dH __ У*sine (7 .х»
Н0 пуа — cos 0 ' > '
106
В уравнении (7.15) переменные разделяются и его можно проинте-
грировать аналитически
у __ V Пуа — cos
° Пуа — cos 6
(7-17)
Изменение высоты полета в результате маневра можно получить
исходя из следующих простых соображений. Если пяа « 0 (произво-
дится изоэнергетический маневр), то полная энергия должна остаться
постоянной
V? V?
то -у- + т^Н0 = т1 — + т^Н^ (7.18)
Отсюда, пренебрегая изменением массы, получим
7/1 = //o+-^(Vo-V?). (7.19)
Если пха =/= 0, уравнения интегрируются только численно.
Горка
Горкой называется маневр самолета, проводимый с целью
быстрого набора высоты по S-образной траектории, лежащей в вер-
тикальной плоскости (рис. 7.7); Для начала маневра летчик увели*
чивает угол атаки, создавая перегрузку пуа >1. Самолет переходит
в криволинейный полет по восходящей траектории — вход в горку
(участок 1—2). По достижении требуемого угла наклона траекто-
рии 6тах самолет переводится в прямолинейный полет с п™ =
== fcos 0шах (участок 2—ЗЬ Криволинейный выход из горки (уча-
сток 3—4) совершается с перегрузкой пуа < cos 0. Расчет входа
в горку и выхода из нее производят так же, как и расчет выхода
из пикирования и входа в него. Определение параметров движения
на прямолинейном участке произ-
водится численным интегрированием
системы (7.10) ... (7.14) при пуа =
= cos ©шах или методами, изложен-
ными. в гл. 4, если этот участок до-
статочно протяженный. Необходимо
учитывать, что . в отличие от пикиро-
вания скорость при выполнении
горки, как правило, уменьшается,
если угол 0шах достаточно велик
(больше 0*, см. гл. 3). Поэтому, если
после горки должен следовать гори-
зонтальный участок полета, нужно,
Рис. 7.7. Траектория горки:
а — обычный вывод; б — вывод с переворотом
(полубочкой)
107
чтобы в конце горки скорость была больше минимальной скорости
горизонтального полета на этой высоте. Если горизонтальный полет
не обязателен, то скорость должна быть не меньше скорости, при
которой аэродинамические рули сохраняют достаточную эффектив-
ность для управления угловым положением самолета 1/эв.
§ 7.3. МАНЕВРИРОВАНИЕ САМОЛЕТА
В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ. РАЗВОРОТ И ВИРАЖ
САМОЛЕТА
При маневре в горизонтальной плоскости 0=0=0 и
в каждый момент времени
nva cos + nza sin = 1 (7.20)
или
пуа = 1/COS уа - nza tg уа. (7.21)
Нормальное ускорение mVV создается за счет боковой составляющей
подъемной силы Ya и за счет боковой силы Za, связанной со сколь-
жением р,
тУЧ = [Га + Р (« - Фр)] sin уа + Za (р) cos уа (7.22)
или
¥ = -у- пуа sin Уа + nza cosуа. (7.23)
Боковая перегрузка nza ограничена по условию выносливости лет-
чика и комфорта экипажа значениями 0,2 ... 0,3, и при интенсивном
маневре с высокими нормальными перегрузками пуа ее доля (т. е.
доля боковой силы Za (Р)) в создании нормального ускорения неве-
лика. Поэтому при оценке летных данных'самолета часто рассматри-
вают маневр в горизонтальной плоскости без учета скольжения
(р « 0, nza < Пуа) *.
Мане р, при котором условие р — 0 и nza = 0 выполняется
точно, называется координированным.
Для координированного маневра в горизонтальной плоскости
Пуа = 1/cOS у а', (7.24)
If = glVtlya sin уа, (7.25)
а перемещения описываются уравнения к и
х0 = V cos Т; (7.26)
zc = V sin (7.27)
где хс и zc — координаты в стартовой системе, связанной с нача-
лом маневра. Скорость при ь аиевре определяется из
V = gnxa, (7.28)
* Исключение составляют самолеты с органами непосредственного управления
боковой силой (ОНУБС), для которых специально рассматривается маневр при
nz (®нубс) 0.
108
Рис. 7.8. Схема сил, действующих на
самолет при вираже
где пха можно найти для расчет-
ной перегрузки nva по перегру-
зочной поляре или (7.8). Масса
при быстроте ном маневре обычно
осредняется. В (7.25) угловое
ускорение выражено через скоро-
стной крен уа и нормальную ско-
ростную перегрузку. Как следует из (7.24), для характеристик коор-
динированного маневра в горизонтальной плоскости достаточно
задать один из этих параметров движения. Испо ьзуя (7.24), на-
ходим
* = tgYo = -f-I-
(7.29)
Как видно из (7.27), при пиа > 1 или уо Ф 0 происходит изменение
угла пути Чг, т. е. меняется направление полета. Маневр, выполняе-
мый для изменения направления полета (угла пути Т), называется
разворотов. Развороты могут происходить как с набором высоты,
так и со снижением. В частном случае самолет может совершать
разворот в горизонтальной плоскости. Полный разворот на 360°
называется виражом. Вираж в горизонтальной плоскости, при вы-
полнении которого скорость, углы атаки, крена и скольжения
остаются постоянными, называется установившимся. Установив-
шийся вираж без скольжения считается правильным. В дальнейшем
будем говорить только о вираже, считая, что разворот является его
частью.
' Правильный вираж самолета* При этом р — 0, пга — 0, 6 = О
и V = 0. Схема сил, действующих на самолет при вираже, дана
на рис. 7.8. Для правильного виража пха = 0. Из (7.25), используя
очевидное соотношение Ф = К/7?в, найдем радиус виража:
R - уЯ
® gnva Sin у0"
(7.30)
В это уравнение входят и перегрузка, и угол крена. Исключая
с помощью (7.24) каждую из этих переменных поочередно, получим
уа уа
(7-31)
Время выполнения виража при 4‘к = 360° (или 2л)
________________ 2nRB 2пУ 2пУ
(7.32)
Из полученных выражений следует, что для определения всех
параметров правильного виража достаточно задания двух величин,
например, скорости и перегрузки или скорости и угла крена уо-
109
Рис. 7.9, Характеристики предельного
виража:
а — потребная тяга н ограничения по
суа доп и рр* 6 РаДиус виража
Поскольку пуа > 1, то для выпол-
нения виража необходимо увели-
чить c,ja по сравнению с суа i на той
же скорости 1см. (7.3)]. При этом
возрастает сопротивление, а зла-
v. чит потребная тяга при вираже
Р В > Р П1'
Диапазон скоростей и высот,
в котором возможен правильный
вираж с заданной перегрузкой пуа,
определяется областью устано-
вившихся режимов (см. рис. 7.5).
На границе этой области Рв = Рр.
Внутри области тягу двигателя
необходимо дросселировать. Пра-
вильный вираж выполняется на
перегрузке пуа < п*"асп. .Рас-
смотрим, как меняются параметры
виража при изменении скорости
от У mln Г. п (пРис|/в1 Ирадой)
и nxai = 0) на данной высоте Н (рис. 7.9).'
Vminr.n и Vmax (точки 1 и 2 на рис. 7.9) пра-
vXSr (при Ра = Р,
При скоростях
вильный вираж невозможен, так как увеличению перегрузки сверх
единицы в первом случае препятствует невозможность увеличения суа
(пуа раоп == 0> а во втором — недостаток располагаемой тяги
(Пра- расп = 1). .
Внутри ЭТОЙ области пуа расп > 1 (так как Саа 1 < сиа доп) И
п^Грасп >1 (так как nxai >0, при пуа = 1), так что правильный
вираж выполним. Минимальный радиус правильного виража будет
при максимальной возможной перегрузке пуа (см. 7.31),• ограни-
ченной Либо расп (пО УСЛОВИЯМ Суа доп И Пуа Про),
либо ПрдТрасп (по условию пха = 0). Правильный вираж минималь-
ного радиуса называют предельным. Рассчитать радиус предельного
виража на данной высоте, и скорости можно, используя
ние (7.9) для «рГрасп и (7.3) для Пуа расп. Выбирая в
Пуа пр наименьшее из значений (п|а, пиа расп и ПрГрасп),
ляем его в (7.31) и находим Рв.пр‘-
R - _
в’пр g V Пуа цр — 1
Угловая скорость предельного виража
выраже-
качестве
подстав-
(7.33)
иг —— ° |/ пг _______1
*пр — “рГ у "уа пр *
(7-34)
110
и время
2лУ
£ пуа пр
(7.35)
Характеристики предельного виража в зависимости от скорости
представлены на рис. 7.9 вместе с графиком потребной для устано-
вившегося виража с заданной перегрузкой тяги РЕ. Видно, что
ограничение по суа доп и по тяге определяет характеристики пре-
дельного виража (т. 3 и 4 на рис. 7.9). Зависимость RB. пр от ско-
рости имеет минимум Re.'np при скорости VB, называемой для
данной высоты наивыгоднейшей скоростью виража. При ограниче-
нии Рв. Пр по Пуа, как на рис. 7.9, УЕ соответствует обычно пере-
ходу от ограничения по суа доп к ограничению по пуа, т. 3 рис. 7.9.
На больших высотах или умеренной тяговооружеиности (например,
без форсажа) участка 3—4 ограничения по п9уа (см. рис. 7.9) может
не быть (ограничения по суа доп и Рв — Рр сливаются при пуа <
< п»й). Тогда скорость VB определяется тяговыми характеристи-
ками двигателя.
С ростом высоты полета ограничения по суа Ron и Pv (см. рис. 7.9)
сближаются, а радиус предельного виража растет.
Радиус, угловая скорость (или время) предельного виража на
расчетной высоте — важные показатели маневренности, включаемые
в летные данные самолета. Заметим, что поскольку радиус предель-
ного виража (как и его время) зависят только от располагаемых
значений пуа и пха, то эти характеристики относят к общим пока-
зателям маневренности.
^установившийся вираж. На больших скоростях полета уста-
новившееся значение перегрузки п$р«сп, на котором совершается
предельный вираж, меньше, чем ее максимальное значение, огра-
ниченное Пуа или Яра р<сп (см. рис. 7.9). Поэтому существует воз-
можность выполнения виража с перегрузкой, превышающей пр"расп,
вплоть до Пуа, если допустить торможение самолета. Вираж1 выпол-.
няемый на пуа > Прорасп с торможением, называют, форсированным
виражом, так как этот маневр более энергичен,' чем предельный
вираж. Выполнять форсированный вираж имеет смысл на большой
скорости, когда торможение в процессе маневра допустимо.
Изменение скорости при форсированном неустановившемся ви-
раже определяется по (7.26), уравнения (7.24) ... (7.29) и (7.31)
сохраняют силу, если в качестве пуа рассматривать пуа гаах.
Мгновенные значения радиуса форсированного виража Яв.ф
в сравнении с радиусом предельного виража на той же скорости
(для одной и той же высоты полета Н и массы т) показаны на рис. 7.9
пунктиром. Видно, что форсированный вираж обеспечивает более
интенсивный разворот вплоть до скорости в т. 4, на которой целе-
сообразен переход к предельному виражу. Если задача маневра —
как можно быстрее осуществить разворот, то при форсированном
111
вираже целесообразно ускорить торможение самолета, переходя
на пониженный режим работы двигателя, выпуская воздушные
тормоза и т. п.
Расчет неустановившегося и, в частности, форсированного ви-
ража ведется на основе численного интегрирования уравнений
(7.25) ... (7.29) при заданном или предельном значении пиа и [пха,
определяемом по (7.8) для заданного режима работы двигателя.
Если граничные условия заданй как условия достижения заданного
угла разворота, можно при интегрировании перейти к независимой
переменной Т. Помимо координированных маневров, при которых
боковая сила в горизонтальной плоскости создается вследствие
крена самолета, возможно также выполнение маневров без крена
за счет скольжения Р (силы Za = cLp?S) или за счет силы, создава-
емой органом НУБС (Za — Сг^УБС6нуБс?5 — плоский разворот
самолета).
§ 7.4. ПРОСТРАНСТВЕННЫЙ МАНЕВР САМОЛЕТА
Рассмотрены виды движения, траектории которых строго
лежат либо в вертикальной, либо в горизонтальной плоскостях.
Это, конечно, некоторая схематизация, но вполне допустимая.
Однако в общем случае траектория полета не лежит в одной пло-
скости, а является пространственной. К таким маневрам относятся
боевой разворот, спираль, косая петля, бочка и др. Рассмотрим пер-
вый из перечисленных маневров.
Боевым разворотом называется маневр самолета, прй котором
одновременно с изменением направления полета производится набор
высоты. Пространственная траектория такого маневра является
как бы комбинацией виража и горки (рис. 7.10). При расчете боевого
разворота влияние боковой силы Za и перегрузки nza невелико,
Рис. 7.10. Траектория боевого разворота (о), петли Нестерова (б), полупетли (в)
112
Рис. 7.11. Типичная программа изменения
крена уа и перегрузки пуа при боевом
развороте
Рис. 7.12. Пространственные маневры
самолета:
а — косая петля; б — спираль; в — бочка
и маневр можно считать координированным, 0 « 0, nza « 0, если
не применяются органы НУБС.
< Расчет боевого разворота ведется численным интегрированием
уравнений (7.10) ... (7.14).
Для расчета траектории боевого разворота кроме задания режима
работы двигателя (обычно принимается максимальный режим) не-
обходимо иметь еще две управляющие функции, за которые удобно
принять nvo (Т) и fF).
Типичный вид изменения крена и перегрузки приведен на рис. 7.11.
Выбор величин параметров Tamax и пуа тах зависит от поставлен-
ной задачи боевого разворота. Из уравнений движения видно, что
чем меньше перегрузка, тем меньше угловая скорость вращения,
и тем большим будет время выполнения боевого разворота. Увели-
чение крена при заданной перегрузке приводит к уменьшению на-
бираемой высоты. В предельном случае можно подобрать столь
большой крен, что боевой разворот превратится в вираж. При очень
малых углах крена траектория будет приближаться к траектории
горки.
Если к боевому развороту предъявить требование минимального
времени маневра, не ставя условия максимального набора высоты,
то по уравнению (7.11) видно, что с увеличением перегрузки и угла
крена растет угловая скорость поворота траектории. С этой точки
зрения обычный закон изменения этих параметров, показанный на
113
рис. 7.11, невыгоден, ибо в. конце маневра произведение nva sin уа
получается малым и разворот затягивается. Можно сократить время
боевого ’разворота, применив закон изменения крена, показанный
на рис. 7.11 пунктиром. В этом случае к концу разворота самолет
оказывается почти в перевернутом положении и можно до самого
конца маневра выдерживать постоянную максимальную перегрузку.
Такой боевой разворот по аналогии с виражом можно назвать фор-
сированным. Если задача разворота — повышение высоты, то сле-
дует принимать небольшую перегрузку, а закон изменения крена
взять обычный.
Схемы некоторых других пространственных маневров даны на
рис. 7.12.
Возможности выполнения любого маневра, как плоского, так
и пространственного, ограничены располагаемым значением нор-
мальной перегрузки п^араСп и минимальной эволютивной ско-
ростью полета, на которой возможен маневр (пуа раСп >1, сохра-
няется эффективность органов управления, не происходит свали-
вания и т. п.).
Маневренные возможности можно повысить, если принимать для
самолетов, для которых требуются высокие показатели маневрен-
ности, крыло с профилем, изменяемым по режимам полета (по ско-
рости, углу атаки). Так, отклоняя в полете при выходе на большие
углы атаки предкрылки и закрылки, можно существенно увели-
чить акр и Суа доп, предотвратить срыв и сваливание, существенно
уменьшить границу минимальной скорости при маневре 114]. Такое
управление конфигурацией крыла при маневре должно выполняться
автоматически, так как внимание летчика при пилотировании пере-
гружено. Быстродействие приводов, управляющих элементами, ма-.
невренной механизации крыла, должно быть достаточным, чтобы
гибко изменять их положение, при энергичных маневрах. Однако
если такую систему можно создать, то маневренные возможности
самолета на малых скоростях значительно возрастают.
Дополнительная литература
[8], с. 104—114, ПО], с. 278—294, [13], с. 339—390.
Контрольные вопросы
1. Какой маневр называется координированным?
2. Почему при координированном маневре в горизонтальной плоскости суще-
ствует однозначная свизь между Пуа и уа?
3. Чем ограничено располагаемое значение пуа на малых индикаторных ско-
ростях полета? На больших?
4. Почему с ростом луо треб растет минимальная скорость полета Vmin (ява треб)?
5. Выведите формулу для 7?в. пр при пуа уст, определяемом по (7.9). Про-
анализируйте зависимость Кв. ир от высоты.
6. Покажите примерный характер изменения перегрузки пуа при выполнении
петли Нестерова, бочки.
114
ГЛАВА 8. ВЗЛЕТНЫЕ И ПОСАДОЧНЫЕ ХАРАКТЕРИСТИКИ
САМОЛЕТА
Взлет и посадка во многом являются наиболее напряжен-
ными этапами полета самолета. К их характеристикам предъявляются
жесткие требования по условиям безопасности, а схема выполнения
обычно жестко регламентирована (НЛГС-2). При проектировании
самолета режимы взлета и посадки во многом определяют требова-
ния к самолету и его системам [14]. Скорости, расстояния (дистан-
ции), характеризующие маневры взлета и посадки, определяют воз-
можность эксплуатации самолета с того или иного аэродрома.
§ 8.1. ВЗЛЕТ САМОЛЕТА. НАЧАЛЬНЫЙ НАБОР ВЫСОТЫ
Взлетом самолета называется движение самолета от на-
чала разбега до достижения безопасной скорости и высоты. Безопас-
ной высотой по международным нормам считается высота 10,7 м
(НЛГС-2). Безопасной скоростью является скорость, на которой
самолет обладает устойчивостью и управляемостью и может перейти
к следующему этапу — начальному набору высоты. Положение
органов механизации крыла (щитки, закрылки и т. п.), режим ра-
боты двигателя при взлете регламентируются при эксплуатации
Руководством по летной эксплуатации (РЛЭ) данного самолета,
составленным на основе расчетов и летных испытаний. Взлет, выпол-
няемый в соответствии с РЛЭ при всех работающих двигателях и
системах самолета, называется нормальным. Безопасную скорость
принято обозначать -высоту — Нй. Схема нормального взлета
представлена на рис. 8.1. Как видно из этого рисунка взлет состоит
из двух участков:, ускоренного движения по Земле — разбега и
участка ,набора высоты Ht — воздушного участка взлета. Момент
перехода от разбега к воздушному участку — отрыв самолета,
происходит на скорости Votp, меньшей V2, так что. на воздушном
участке необходим дор азгон до V = Кв. Скорость Vt должна быть
не меньше 1,15 КОтр и превосходить эволютивную скорость У8В
не меиее чем на 10 %, а скорость сваливания Усж — на 20 %.
Здесь Увв и VCB определяются для взлетной конфигурации самолета.
Кроме того, при Ve должен обеспечиваться набор высоты с заданным
градиентом установившегося набора т]н. Под градиентом набора
понимается величина
Ч = tg 0„-100 %. (8.1)
Требуемый градиент набора
должен составлять более 3 ...
5 % при нормальном взлете.
Градиент набора определяется
из условия sin 0Н = Рва” ~
Рис. 8.1. Схема взлета самолета
115
для взлетной тяги Рвзл и взлетной конфигурации самолета (взлет-
ной поляры) при Суа = С yai НЯ СКОрОСТИ V2 (СМ. ГЛ. 3).
Расчет ведется либо для стандартных условий (СА) при высоте
аэродрома над уровнем моря Н = 0, либо для расчетных усло-
вий (РУ).
При расчетных условиях р = 1,120 кг/м3 и Т = 303 К (+30 °C).
Обычная методика взлета с аэродрома с твердым покрытием та-
кова. Механизация самолета находится во взлетном положении.
Находясь в точке старта, после получения разрешения на взлет
пилот переводит двигатели на взлетный режим, затем отпускаются
колесные тормоза, и самолет начинает движение с ускорением по
взлетной полосе в стояночном положении а = аст. После достиже-
ния определенной скорости V„.CT, при которой аэродинамические
рули становятся достаточно эффективными, производится плавный
подъем передней стойки шасси и соответствующее увеличение угла
атаки. При дальнейшем росте скорости подъемная сила вместе
с вертикальной составляющей тяги уравновешивает силу тяжести
самолета и на скорости V0Tp происходит отрыв его от поверхности
аэродрома. Далее самолет переводится в набор высоты с разгоном
от скорости отрыва V0Tp до безопасной скорости полета V2 на вы-
соте Я2.
За взлетом следует начальный набор высоты вплоть до достиже-
ния Н = 400 м со скоростью не менее V2, в ходе которого убирается
шасси, механизация переводится в основное полетное положение,
меняется, если это предусмотрено полетной конфигурацией, угол
установки стабилизатора. На высоте Н = 400 м скорость дости-
гает 1,25УВ. Основными параметрами нормального взлета являются
характерные скорости Vn. ст/+отр, V2, т)я и расстояние, пройден-
ное к моменту окончания взлета, — взлетная дистанция £вал.
Взлетная дистанция складывается из длины разбега Lp и длины
воздушного участка LB.y. При подсчете полной взлетной1 дистан-
ции Ьполн. вал учитывается также дальность начального набора
высоты до Н = 400 м.
Разбег самолета. Рациональная программа разбега
Рассмотрим разбег самолета с трех колесным шасси с пе-
редним колесом по твердой горизонтальной поверхности при отсут-
ствии ветра. Примем также, что траектория разбега прямолинейна
и лежит в вертикальной плоскости. При этих условиях уравнения
движения запишутся Следующим образом:
mV — Р cos (а + <рР) — Ха — Fr — Fn; (8.2)
mg = Р sin (а + фр) + Ya + Nr + М- (8.3)
Они отличаются от уравнений горизонтального полета наличием
сил'нормальных реакций на основные стойки Nr и переднюю стойку
шасси Nn, а также сил Прения FT = fTNr и Fn = fnNa (рис. 8.2).
116
Рис. 8.2. Схема сил, действующих на
самолет при разбеге
Момент Л12, действующий на само-
лет, считаем сбалансированным.
Считая, что коэффициенты трения
fr и /в примерно равны, получим
Fr + Fn = f(Mr + Mn). ' (8.4)
Определяя сумму нормальных реакций из уравнения (8.3),
получим
Ft + F„ = f[mg-Ya — Р sin (а + <рР)]. (8.5)
На большей части разбега для самолетов с силовой установкой
обычного типа угол (а + <рР) мал, поэтому с достаточной степенью
точности можно принять sin (а + <рР) « 0, a cos (а + <рР) « 1.
Подставляя (8.5) в (8.2) и раскрывая Ха и Уа, получим выра-
жение для ускорения
? (Сха 2 mg
(8-6)
Выражение в квадратных скобках при”задацном режиме работы
двигателя является функцией скорости и угла атаки и представляет
собой тангенциальную перегрузку пха (V, а). Сокращенно первое
уравнение движения запишется так:
V = gnxa (V, а). (8.7)
Интегрируя (8.6), получим выражение для времени разбега
и
1 ^отр
J = f - ™ (
” J gnccaty, а)
О
Если преобразовать левую часть (8.6)
dv dV dL у dV .
~dT = ~dL~dT = V -dL^S^atV, a),
(8.8)
то можно получить длину разбега'
V
г отр
L = f -------У..М (8.9)
р J gnxa(V, a) ' '
о
В этих выражениях перегрузка пха зависит от а через коэффи-
циенты сха и сиа. Если задать программу a (V), то время и дистан-
ция разбега могут быть определены обычными численными или
графическими методами, так как подынтегральные выражения будут
функциями только скорости.
Таким образом, а (V) является управляющей функцией, и ее
можно выбрать так, чтобы оптимизировать какую-либо характери-
117
стику разбега. Обычно программу а (V) выбирают из условия ми-
нимизации Lp, что при заданной скорости отрыва соответствует
максимизации пха. При определенном режиме работы двигателя
для этого нужно так выбрать угол атаки, чтобы получить минимум
суммы сил трения и лобового сопротивления, т. е. минимум выраже-
ния \сха — fcya).
Если принять аналитическое выражение для сха в форме сха —
= сха0 + Асуа, где А — коэффициент отвала взлетной поляры са-
молета, то минимум выражения (сха — fcva) получается при суа opt =--
= fl2A.
Величина коэффициента трения меняется от 0,02 для сухого бе-
тонного покрытия до 0,10 ... 0,12 для грунтового или заснеженного
аэродрома, значит, оптимальное значение суа может изменяться
в 5 6 раз. Физически это означает, что при разбеге по мягкому
грунту (большое f) выгодно выдерживать большие а, уменьшая
силу давления на грунт, а тем самым и силу трения, которая преоб-
ладает в этом случае над Ха. Однако при практическом выборе ра-
циональной программы разбега следует учитывать эксплуатацион-
ные факторы, а именно: ухудшение обзора при большом а, труд-
ность выдерживания направления при поднятой передней стойке,
кроме того, нежелательно отвлекать внимание летчика на выдержи-
вание нужного а при разбеге. Если еще учесть, что минимум по а
получается весьма пологим, то рационально проводить большую
часть разбега в стояночном положении при а = аст. По этим сооб-
ражениям при взлете с хороших аэродромов стояночный угол атаки
сохраняется до скорости подъема передней стойки, равной Уп. ст =
= (0,9 ... 0,95) Уотр. Затем плавным подъемом передней стойки
увеличивают а так, чтобы к моменту достижения Уотр или немного
раньше он стал равным аотр. При таком пилотировании вследствие
небольшого увеличения Lp (так как стояночный угол атаки близок
к оптимальному при выпущенных закрылках) улучшается удобство
пилотирования и повышается безопасность при взлете.
Отрыв самолета происходит прн скорости V0Tp< когда подъем-
ная сила плюс вертикальная составляющая тяги уравновешивают
силу тяжести. При этом нормальная реакция равна нулю.
Положив в (8.3) Nr + Na — 0 и приняв sin (а + фР) = аотр 4-
+ фр, получим суа 0TpS Р-^р 4- Р (аотр 4- фр) = mg.
Отсюда скорость отрыва
Уотр = ]/р5срТьтр [1 “ <а°тР + ] * <8’10)
Из (8.10) видно, что для уменьшения Уотр при заданной массе
самолета нужно увеличивать суа отр. (Из-за опасности несимметрич-
ного срыва потока и сваливания на крыло суа отр принимают не
больше 0,9сйа св. Кроме того, аотр не должен превышать наибольший
угол атаки иа взлете, допускаемый компоновкой самолета так,
чтобы расстояние От нижней точки хвостовой части самолета до земли
118
было бы не менее 0,2 м. В этом случае суа отр можно определить
по обычной формуле
Суа отр — Суа (®отр ®о)> (8.11)
где Суа и а0 должны быть определены при взлетном положении
механизации крыла и. с учетом влияния земли.
Во всех случаях Уотр должна превышать не менее чем на 5 ...
10 % скорость сваливания для взлетной конфигурации самолета.
Вычисление Lp по (8.9)^получается довольно громоздким, так
как входящие в пха величины обычно задаются графически или
численно. Если большая точность не нужна, то £р можно подсчиты-
вать по приближенной формуле. Приняв в (8.9) пха = пха ср =
= const, получим
V2
отр
2gnxa Cp
(8.12)
За среднюю величину перегрузки можно принять ее значение
при V — Vop в процессе разбега:
пха ср — mg f (fixa fCya)vr ~2mg * (8.13)
Примем VcP = 0,5УотР, т. e. Vcp = 0,71 V0Tp. Тогда, разделив и
умножив последнее слагаемой в (8.13) на суоотр, равное суа 0Тр =
» будем, иметь
V2
та • (814>
--------------------------------------57
, I W *суа отр-д
Величину Pop нужно брать при V = УОтр- Для ТРД прибли-
женно Рср = О,95Ро; для ДТРД Рср » О,9Ро. Величина (cxafcua)ct
берется для стояночного угла атаки.
Воздушный участок взлета
После отрыва самолет переводится в неустановившийся
набор высоты.
Траектория воздушного участка взлетной дистанции, на которой
происходит разгон от Уотр до VB с одновременным набором вы-
соты Яв, являётся криволинейной. Длина ее проекции на плоскость
взлетной полосы определяет дистанцию воздушного участка LB. у
при наборе с разгоном до Нв = 10,7 м.
В зависимости от типа самолета и программы полета вид траек-
тории может быть различным. Однако ввиду малой протяженности
этого участка точный расчет траектории необязателен.
С достаточной для практики точностью LB. у можно] ^подсчитать,
используя энергетический метод, который состоит в сравнении при-
ращения полной энергии самолета в двух точках траектории с рабо-
той внешних сил на этом участке.
119
Полная энергия самолета в момент отрыва Еотр — mVmP/2,
л „ mV2 .
в конце набора высоты Е2 — —— + mgn^.
Работа внешних сил, действующих в направлении движения
А = J ДР dl, где избыток тяги АР = Р — Ха, а интеграл вычис-
i
ляется по длине траектории набора высоты.
Если принять ДР » ДРср = const и учесть, что углы наклона
траектории невелики, cos 0 я» 1, то А « ДРсрЬв. у.
Величину ДРср можно принять равной полусумме избытков тяги
в начале и конце этого участка.
Приравнивая изменение энергии произведенной работе, получим
/ у2_ V2 \
+ <8Л5)
Скорость в конце набора должна быть не менее Va = 1,2VC
и V2 = 1,1эВ и обеспечивать требуемый градиент набора высоты
по (8.1). Высота конца взлетной дистанции, как указывалось ранее,
= 10,7 м.
Полная взлетная дистанция будет равна сумме длин разбега и
набора высоты с разгоном
1*ВВП ~ Lp “Ь у.
Прерванный и продолженный взлет
При взлете самолета с нисколькими двигателями может
произойти отказ одного или части двигателей при разбеге. Тяго-
вооруженность современных самолетов позволяет совершить взлет
при работе половины двигателей, поэтому при отказе двигателя
возможно и продолжение взлета на работающих двигателях, и пре-
кращение взлета. В первом случае взлет называется продолженным,
во втором — прерванным.
Принятие решения о прекращении или продолжении взлета за-
висит от величины скорости, при которой произошел отказ Котк.
Очевидно, что при отказе на малой скорости следует прекратить
взлет, а если Уогк близка к скорости отрыва, то летной полосы мо-
жет не хватить для прекращения взлета, и тогда его следует продол-
жать на оставшихся работающих двигателях.
Критерием для принятия решения является так называемая кри-
тическая скорость принятия решения — Ух. Это наибольшая дости-
гаемая самолетом скорость, при которой в случае отказа двигателя
возможно как безопасное прекращение взлета в пределах распола-
гаемой длины взлетной полосы, так и продолжение взлета. Для опре-
деления Vi необходимо, задавшись рядом значений VOti;> рассчи-
тать длину продолженного взлета, в которую входят: участок раз-
бега на всех двигателях от V = 0 до V0TK, участок разбега при
одном неработающем двигателе от V0TK до V0Tp и участок набора
высоты 10,7 м. Для тех же значений V0TK рассчитывается длина
120
Рис. 8.3. Определение критической скорости взлета
и сбалансированной длины ВПП >
прерванного взлета. В нее входят: уча-
сток разбега на всех двигателях, участок
разбега при одном неработающем двига-
теле и участок торможения до V — 0.
Участок разбега при одном неработающем
двигателе определяется временем, необ-
ходимым летчику для принятия решения
о прекращении взлета (это время прини-
мают равным 3 с).
Соответствующие длины строятся на графике (рис. 8.3) в функ-
ции V0TK. Точка пересечения этих двух кривых определяет Vx.
При отказе на скорости, меньшей Vx, взлет следует прекратить.
При V0Tlt > Vx взлет следует продолжать. Потребная взлетная
дистанция, соответствующая и прекращению, и продолжению взлета
при отказе двигателя на V0T.< = Vx, называется сбалансирован-
ной Lc6. Длина ВПП (вместе с полосой безопасности) должна быть
больше LoB, и по крайней мере, на 15 % больше LB3n при нормаль-
ном взлете (НЛГС-2).
§ 8.2. ПОСАДКА САМОЛЕТА
Посадка самолета — конечный этап полета, включающий
снижение с высоты 15 м до касания ВПП (воздушный участок) и
движение по ВПП с торможением вплоть до остановки самолета —
пробег. При стандартном заходе на посадку самолет выходит на вы-
соту Ни = 15 м практически над входной кромкой ВПП (рис. 8.4)
при скорости Ухв, которая должна быть не менее 1,3 от скорости
сваливания в посадочной конфигурации и не менее 1,05 от эво-.
лютивной. Скорость Ухв примерно равна скорости захода на по-
садку Ув. п. На скорости Vxe должен также обеспечиваться гори-
зонтальный полет и разгон при отказе одного двигателя и полной
тяге остальных, что обеспечивает возможность ухода на второй круг
с отказавшим двигателем.
Основные параметры посадки — скорость У1в и посадочная ди-
станция 1Пос> складывающаяся из длины пробега Lnj и дистанции
воздушного участка LB. у. Собственно посадке предшествует маневр
захода на посадку с высоты 400 м. На этой высоте самолет переходит
от горизонтального полета к снижению с заданным углом — углом
глиссады 0гл (при автоматизированном управлении принят угол
глиссады 6ГЛ = —2° 40'). Управление при заходе на посадку проис-
ходит по радиосигналам
ближнего приводного радио-
маяка (БПРМ) и глиссад-
ного радиомаяка (ГРМ) и
v~o
^пос
77,77777777777777777777777/'7777777777777,
ж___________Z-g.y
.LntJC
i-np
Рис. 8.4. Посадочная дистанция
самолета
121
обеспечивает выход самолета к кромке ВПП на Н16 — 15 м. Ско-
рость при снижении (скорость захода на посадку) V3, п — не менее
1,3 скорости сваливания для посадочной конфигурации самолета,
тяга на участке захода на посадку . не равна нулю, чтобы обеспе-
чить пологое снижение.
Воздушный участок
Траектория воздушного участка посадочной дистанции
является криволинейной, однако ввиду малости углов наклона
можно принять ее длину равной ее проекции LB. у, а расчет послед-
ней вести энергетическим методом, базируясь на средних данных.
Приравнивая изменение полной энергий работе внешних сил,
находим
/ у2 _ у2 \
mg ( 3 -n2g + Нгб] = (Хо - Рпоо)ср Lf. у. (8.16)
Тяга двигателя определяется здесь из условия V = 0, т. е. Рпос —
— Ха = sin егл < 0 на скорости захода на посадку V3,n. Ско-
рость Vnoc — скорость в момент касания ВПП (посадочная ско-
рость самолета).
Полагая приближенно Ya — mg и обозначая Ya/(Xa — PnoJcp —
= с учетом ненулевой тяги двигателей, получим
/у2 _у2 \ '
LrzHOC I 3. П ПОС . I rj I /О 1
в. у — Аэфф I 2g, г -Ппос I > (О* 1 /)
где К5фф — эффективное среднее качества с учетом тяги на воздуш-
ном участке в посадочной конфигурации (отклоненные закрылки и
выпущенное шасси). Из условия 0 = 0ГЛ [см. (4.25) 1 находим
Лэфф = 20 ... 25;
Посадочная скорость Vnoo определяется по формуле
<818)
* суа посР^
где cva пос берется равным 0,85 ... 0,9Cj,amax для ограниченных
конструктивно посадочных углов самолета (углов атаки) при поса-
дочной конфигурации. Скорость снижения VCH = Vs. п соответ-
ствует Суа в.п = (0,5 ... 0,6) Суаты и должна быть не менее 1,3VO.
Пробег самолета
При пробеге на самолет действуют те же силы, что и при
разбеге (см. рис. 8.2), с той разницей, что тяга двигателей после
касания ВПП убирается и соответствует режиму малого газа, а при
возможности реверсирования может быть отрицательной. Уравне-
ния (8.2) и (8.3) полностью справедливы и при пробеге. Однако так
как колеса основных стоек шасси при пробеге тормозятся, то коэф-
122
фициенты трения /п и /г различны по величине, и /г — существенно
больше, чем при разбеге.
Для упрощения вычислений введем понятие приведенного коэф-
фициента трения, определяемого из условия
/пр (Nr + N„) = frNr + f„Nn. (8.19)
Величина /пр зависит от состояния поверхности аэродрома и на-
стройки автомата торможения, не допускающего юза колес. В сред-
нем /пР — 0,20 ... 0,30 для сухого бетона. С учетом введенного
обозначения тангенциальная перегрузка равна
пха (V) = /пр (сяо /прсуа) ^mg ’ (8.20)
Длина пробега, согласно (8.9) и с учетом пяо < 0, получится
равной
0 ^пос
J — f VdV - f VdV
пр~ J ~gnxalv) ~ J UwioT’
У пос 0
Приближенное выражение для длины пробега получится из тех же
соображений, что и (8.14)
V2
/г *»1' (8-22)
/пр ~г п- I
L пос "Ч? J
Сумма длин воздушного и наземного участков определяет длину
посадочной дистанции. Потребная длина посадочной полосы для
обеспечения безопасности в случае отклонений от оптимального
режима посадки должна быть в* 1,67 раза больше посадочной дистан-
ции для сухой полосы (НЛГС-2).
§ 8.3. СПОСОБЫ УЛУЧШЕНИЯ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК САМОЛЕТА
Потребная длина ВПП (с учетом возможных ошибок в пи-
лотировании и удовлетворения требованиям прерванного или про-
долженного взлета) достигает для современных самолетов 2500 ...
3000 м. Высокая стоимость полос такой длины с твердым покрытием,
трудность нахождения площадки подходящих размеров, особенно
вблизи больших городов, ставит задачу резкого улучшения взлетно-
посадочных характеристик самолетов.
Как видно из'(8.1б), основными средствами для этого являются
увеличение тяговооруженности и уменьшение скорости отрыва.
Первое достигается применением взлетных (форсажных) режимов
основных двигателей, а также установкой дополнительных источни-
ков тяги, в качестве которых могут применяться ракетные двигатели
твердого или жидкого топлива (ускорители), используемые только
на взлете, подъемные двигатели й. т. п. [14].
123
Очень существенным фактором является уменьшение Уотр. Для
увеличения суа отр при ограниченном аотр применяются различные
виды механизации крыла (выдвижные закрылки, многощелевые за-
крылки, предкрылки и др.). Во избежание значительного при-
роста сха при взлете закрылки отклоняют не на полный угол (т. е.
35 ... 40°), а на меньший (15 ... 20°).
Для уменьшения длины пробега необходимо максимально уве-
личивать тормозящую силу. С этой целью применяют реверс тяги,
торможение колес, используют тормозные парашюты, тормозные
щитки и крыльевые интерцепторы. Последние кроме увеличения сха,
вызывая срыв потока, уменьшают суа при пробеге, что дает возмож-
ность более интенсивного торможения. Реверс тяги является мощ-
ным средством уменьшения длины пробега. Основным преимуществом
реверса является его независимость от состояния поверхности аэро-
дрома, поэтому он особенно эффективен при посадке на мокрую или
обледеневшую полосу. Но реверс нельзя применять на пыльных
и заснеженных аэродромах. Второй путь уменьшения Lnp — это
уменьшение посадочной скорости. Из (8.22) следует, что для этого
надо стремиться к получению максимально возможных значений
суа пос. применяя различные типы механизации крыла.
Мощным средством увеличения суа является применение управле-
ния пограничным слоем (УПС). Струйные закрылки, отсос и сдув
пограничного слоя, обдув крыла струей от двигателей позволяют
получить величину коэффициента подъемной силы порядка четы-
рех и больше, т. е. резко снизить скорость отрыва и посадки [14].
Однако в' чистом виде системы УПС неработоспособны в случае
отказа силовой установки, что является их серьезным недостатком,
особенно в случае аварийной посадки. С этой точки зрения предпочти-
тельнее комбинированная механизация, сочетающая в себе жесткую
и струйную. Она сохраняет работоспособность при отказе подачи
воздуха и, кроме этого, требует меньших энергетических затрат и
улучшает устойчивость самолета на малых скоростях.
Необходимо отметить, что при посадке воздушный участок поса-
дочной дистанции проходит над ВПП и- нужно стремиться к сокра-
щению всей Lnoc, а не только пробега. Анализ показывает, что при
фиксированной скорости прохождения входной кромки ВПП вы-
годно увеличивать посадочную скорость так, чтобы она отличалась
от Усн на 15 ... 20 км/ч. В этом случае некоторое увеличение длины
пробега компенсируется большим уменьшением длины воздушного
участка, так как торможение на земле происходит более интенсивно,
чем в воздухе. Правда это несколько усложняет посадку.
Рассмотрим в заключение влияние атмосферных условий иа взлетно-посадоч-
ные характеристики самолета.
На длину разбега в условиях эксплуатации влияют также такие факторы, как
ветер и отклонение метеоусловий от стандартных.
Поскольку аэродинамические силы, и прежде всего подъемная сила, определя-
ются воздушной скоростью самолета, то при ветре скорость отрыва относительно
земли будет
Vk. отр — Котр— W>:
где W — скорость ветра, положительная при встречном ветре.
124
Тогда по (8.12) длина разбега при ветре будет
£р^=£р^=о(1—•
Попутный ветер увеличивает длину разбега, встречный — уменьшает.
Влияют на £Взл и температура и давление (плотность). Рост температуры и
падение давления приводят к росту Гвал и Готр- Поэтому расчетные условия (РУ)
t = +30°С, р = 1,12 кг/м3, р = 973,35 ГПа являются более тяжелыми, чем стан-
дартные t = 4-15 °C, р = 1,225 кг/м8, р = 1013,25 ГПа.
При посадке встречный ветер уменьшает £Пр и Упос, уменьшение давления
и плотности увеличивает их.
Дополнительная литература
[14], с. 72—82,'[81, с. 115-132, [10], с. 348—368.
Контрольные вопросы
1. Если известно значение суас, соответствующее скорости срыва Vc, как
найти Vs при взлете? суа при Vt на Ht = 10,7 м?
2. Какие средства механизации используются на взлете и посадке?
3. Почему взлетное положение механизации обычно отличается от посадоч-
ного и как?
4. Как связаны суа с и суа 3. п. VBB и4Ув. п?
5. Как найти градиент набора высоты при известной взлетной тяге Рвэл и ско-
рости V = V» (изложите последовательность расчета)?
6. Как можно уменьшить посадочную дистанцию? Как влияет на нее величина
удельной нагрузки йа крыло рд = m/S?
Ч А С Т Ь II
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
ГЛАВ А 9. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ И УПРАВЛЯЕМОСТЬ
САМОЛЕТА
Устойчивость и управляемость самолета являются его
важными свойствами, определяющими возможность и безопасность
полета, Требуемые усилия летчика при управлении самолетом, уро-
вень комфорта экипажа и пассажиров в полете. Требования к ха-
рактеристикам устойчивости и управляемости являются обязатель-
ными и нормируются для самолетов различных классов. В данной
главе дается предварительное определение этих свойств самолета и
рассматриваются способы их описания.
§ вл. ПОНЯТИЕ УСТОЙЧИЙОСТИ и управляемости
Многообразие условий применения задач, решаемых при
выполнении различных этапов полета, требует, чтобы в каждый мо-
мент времени летчик мог целенаправленно воздействовать на ха-'
рактер движения самолета — управлять полетом.
В опорном движении, в расчетных условиях, идеальное управле-
ние обеспечивает ориентацию самолета в потоке воздуха (углы а
и ₽), режим работы двигателя и конфигурацию, при которой в каж-
дый момент времени точно реализуются желаемые параметры дви-
жения, а значит — обеспечивается требуемое значение сил или пере-
грузок, действующих на,самолет, Моменты, действующие на самолет
в установившемся опорном движений, уравновешены (сбалансиро-
ваны), а углы а, Р, и перегрузки постоянны. В неустановившемся
опорном движении эти параметры меняются.
Первая задача, решаемая при управлении самолетом, — обеспе-
чить именно эти, требуемые значения перегрузок, углов атаки,
скольжения, крена, необходимые для реализации заданного движе-
ния, и их изменение при переходе с одного установившегося’опор-
ного режима на другой или в ходе неустановившегося опорного
движения.
Однако реальное движение самолета всегда отличается от идеаль-
ного, опорного из-за отличия характеристик самого самолета, воз-
душной среды от опорных, неточности пилотирования, турбулент-
ности воздуха и ветровых воздействий, пульсации и -разброба тяги
двигателей и т. п.
126
В результате возникает вторая Задача управления полетом —
парирование возмущающих воздействий и сохранение заданных или
близких к ним параметров движения при действии возмущений.
И первая и вторая задача управления самолетом могут быть решены,
если самолет надлежащим образом реагирует, отзывается на управ-
ляющие воздействия, т. е. обладает управляемостью.
Управляемостью самолета называется его спосрбность выполнять
в ответ на целенаправленные действия летчика или автоматики лю-
бой предусмотренный в процессе эксплуатации маневр (причем
наиболее просто при минимальных затратах энергии летчика) в лю-
бых допустимых условиях полета, в том числе и при наличии воз-
мущений (НЛГС-2).
В зависимости от канала управления рассматривают: продоль-
ную управляемость (относительно оси 0Z) или управляемость по тан-
гажу, путевую (относительно оси OY) — по рысканию и поперечную
(относительно оси ОХ) — по крену.
Характеристики управляемости зависят от особенностей движе-
ния, параметров самолета, эффективности его органов управления,
диапазона изменения управляющих сил и моментов и могут быть
определены по уравнениям, описывающим движение.
Когда возмущения малы и действуют кратковременно, то управ-
ление полетом существенно упрощается, если опорное движение
устойчиво.
Под устойчивостью самолета понимается его способность само-
стоятельно, без участия летчика сохранять заданный опорный ре-
жим полета и возвращаться к нему после непроизвольного отклоне-
ния от него под действием внешних возмущений (НЛГС-2).
Различают устойчивость по отношению к бесконечно малым воз-
мущениям — устойчивость «в малом», и устойчивость по отношению
к ограниченным, конечным возмущениям— устойчивость «в боль-
шом». Исследование устойчивости <в большом» имеет смысл только,
если движение устойчиво «в малом». _
В большинстве технических задач важна устойчивость «в малом»,
так как при значительных возмущениях в управление вмешивается
человек или автоматика.
Приведенное определение устойчивости характеризует сущность этого понятия,
но оно непригодно для решения конкретных задач и должно быть подкреплено более
строгим, позволяющим устанавливать количественные критерии устойчивости.
Наиболее общая соответствующая сути физического явления постановка задачи
об устойчивости движения и строгие методы ее решения даны А. М. Ляпуновым
в его труде «Общая задача об устойчивости движения» (1892 г.). Теорию Ляпунова
широко применяют в многочисленных задачах техники. .
Рассмотрим движение произвольной динамической системы, которое может
быть описано системой дифференциальных уравнений нормального вида
У».....Уп) (s= 1, 2.....п), (9.1)
где у» — параметры, определяющие движение (координаты, скорости или некоторые
функции этих величин); Yt — аналитические функции величин yit уй, .... уп.
Выделим из всех возможных движений, описываемых системой (9.1), одно
частное и назовем его иевозмущенным.' На практике за невозмущенное движение
127
принимают такое, которое желательно осуществить, т. е. опорное. Пусть этому
частному движению соответствует частное решение ys — y°s (t) уравнений (9.1).
Всем другим частным решениям будут соответствовать движения, которые будем
называть возмущенными.
Для исследования устойчивости удобно рассматривать не сами параметры воз-
мущенного движения ys, а их малые отклонения от параметров невозмущенного
движения i/® (t), т. е. Ays =ys —i/® (s = 1, 2, ..., п). Преобразуем систему урав-
нений (9.1) к переменным Д«/в
= ДГ8 (t, ЬУ1, Ьу....Дуп), (9.2)
где ДГ8 (t, Ду]...Ду„) = Ys (/, Ai/! + у°х, , куп + у°п) —
.....Я).
Каждому движению рассматриваемой динамической системы будет соответство-
вать частное решение уравнений (9.2). Невозмущенному движению соответствует
решение Ai/j = Дг/2 = ... = Д//п = 0.
Определение устойчивости по Ляпунову в переменных Дг/8 формулируется
следующим образом.
Если для любого заданного сколь угодно малого положительного числа е можно
подобрать другое положительное число т) (е) <С е, такое, что для всех возмущенных
движений, для которых в начальный момент времени t0 начальные отклонения
удовлетворяют условиям
I ДММКШ. (9-3)
а в любой момент времени t > to выполняются неравенства
|Ai/s(t)|<e, (9.4)
то невозмущенное движение устойчиво; в противном случае — неустойчиво.
Если невозмущенное движение устойчиво и при этом любое возмущенное дви-
жение при достаточно малых начальных отклонениях, удовлетворяющих неравен-
ствам (9.3), стремится к невозмущенному движению, т. е., если
| Дуе (t) | -> 0 при t -» оо,
то невозмущенное движение называется асимптотически устойчивым.
В приведенном определении рассматривается устойчивость движения по отно-
шению к возмущениям начальных условий, когда причина возмущений действует
мгновенно.
В работах Н. Г. Четаева, Г. Н. Дубошина, И. Г. Малкина и других дается
определение устойчивости при постоянно действующих возмущениях, которое яв-
ляется обобщением устойчивости по Ляпунову.
§ 9.2. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
И УПРАВЛЯЕМОСТЬ САМОЛЕТА
Как следует из § 9.1, при оценке устойчивости движения
нужно выделить некоторое желаемое, опорное движение, рассчитан-
ное без учета возмущений, и рассмотреть поведение системы для слу-
чая, когда реальное движение под действием возмущений отклони-
лось от опорного.
Многие опорные режимы, реализуемые в полете, таковы, что
угловое ускорение или равно нулю, или невелико. В этом случае
можно принять
Мл = 0, (9.5)
128
где J,„ — момент инерции самолета относительно мгновенной оси
вращения; о> — вектор угловой скорости самолета относительно
земли; MR — вектор моментов, действующих на самолет относи-
тельно его центра масс.
Режимы полета, в которых можно с достаточной степенью точ-
ности не учитывать в опорном движении инерционный член
и считать действующие на самолет моменты уравновешенными, сба-
лансированными (MR = 0), называются балансировочными.
Отклонение органов управления креном (элероны), рысканием
(руль направления) и тангажом (руль высоты, управляемый стаби-
лизатор, элевоны), обеспечивающее равенство нулю моментов
МЕХ = 0, MRv = 0 и /ИД2 = 0 для данного опорного режима полета,
называется балансировочными отклонениями органов управления. Эти
отклонения подбираются летчиком или автоматикой так, чтобы
создаваемый ими момент уравновешивал остальные моменты в за-
данном Опорном движении на заданных углах атаки, скольжения,
скорости и т. п.
Потребные для балансировки самолета на различных режимах
отклонения органов управления, перемещения рычагов управления,
усилия на них в установившемся опорном движении количественно
характеризуют статическую управляемость самолета.
Основными количественными показателями статической управ-
ляемости являются производные отклонений рычагов управления и
усилий, прикладываемых к ним, по параметрам движения, характе-
ризующим реакцию самолета на действия летчика, например, в про-
дольном движении -4^-, 4^-, где хв — величина линейного откло-
апуа “Пуа
нения ручки управления рулем высоты; Ръ — усилие, прикладывае-
мое к ручке, а представленные производные — градиент хода ручки
и усилия по перегрузке. Аналогичные показатели используются
для оценки управляемости по скорости, путевой (по рысканию) и
поперечной (по крену) статической управляемости. Оцениваются
также максимальные значения отклонения рычагов управления,
усилий, сама возможность балансировки на предельных режимах
полета и т. п.
Другая группа показателей управляемости — характеристики
динамической управляемости.
При оценке динамической управляемости рассматривается ха-
рактер реакции самолета на отклонение органов управления от их
балансировочных значений для перехода от одного установившегося
режима полета к другому, для парирования возмущений и для вы-
полнения существенно неустановившихся маневров.
Оценка устойчивости опорного (невозмущенного) движения само-
лета производится с помощью количественных показателей статиче-
ской и динамической устойчивости. Статическая устойчивость само-
лета характеризует равновесие сил и моментов в опорном движении.
5 А. Ф. Бочкарев и др. 129
Статически устойчивым по тому или иному параметру движения
называют самолет, у которого отклонение этого параметра от опор-
ного значения сразу же приводит к появлению силы (в поступатель-
ном движении) или момента (в угловом движении), направленных
на уменьшение этого отклонения. Если сила или момент направлены
на увеличение отклонения, самолет статически неустойчив.
Поясним это на примере продольного движения. Пусть в опорном продольном
движении моменты тангажа, действующие на самолет, сбалансированы, уравнове-
шены. Если теперь в результате возмущающих воздействий угол атаки отклонится
от опорного на малую величину Да, а положение органов управления не изменится,
то равновесие моментов будет нарушено. Возникнет неуравновешенный момент
тангажа, стремящийся либо уменьшить начальное отклонение угла атаки, либо
увеличить его. В линейном приближении величина этого момента будет равна
ДЛ1г = Л4® Да, (9.6)
• дМ%
где М, = —т-=------частная
z да.
производная момента тангажа по углу атаки.
Если частная производная Л4® будет отрицательной, то при Да > 0 возни-
кает пикирующий момент ДЛ42 = Л4®Да<1 0, а при Да <С 0 — кабрирующий
ДЛ42 > 0. В обоих случаях возникший после прекращения действия возмущений
момент будет стремиться вернуть самолет в исходное положение равновесия — са-
молет будет обладать продольной статической устойчивостью по углу атаки.
Если Л4“ > 0, то при Да > 0 возникнет неуравновешенный кабрирующий мо-
мент ДЛ42 =; Mg Да > 0, а при Да < 0 — пикирующий ЛМг = М“ Да < 0, ко-
торые будут стремиться увеличивать начальное отклонение угла атаки — самолет
будет статически неустойчив по а.
Подобными рассуждениями можно придти к выводу о том, что если частная
производная момента рыскания по углу скольжения отрицательная то
самолет обладает путевой статической устойчивостью по р, а при < 0 — по-
перечной статической устойчивостью по р.
Влияние отклонения тех или иных параметров движения на статическую устой-
чивость самолета может быть и более сложным. Так, отклонение перегрузки nva
от спорной (в частности, от nva = 1 для горизонтального полета) при постоянной
скорости связано с изменением н угла атаки, и угловой скорости ioz, поэтому стати-
ческая устойчивость по перегрузке будет определяться как производной Mg, так
и Mgz.
К количественным показателям статической устойчивости само-
лета относятся степень продольной, путевой и поперечной статиче-
ской устойчивости. Другая группа показателей — характеристики
динамической устойчивости. При определении динамической устой-
чивости оценивается уже не начальная тенденция .к устранению
возмущения, а .конечное состояние — устойчивость или неустойчи-
вость в смысле Ляпунова (обычно асимптотическая). К характери-
стикам динамической устойчивости относятся также показатели ка-
чества процесса уменьшения (затухания) возмущений: время зату-
хания отклонений, характер движения в процессе их уменьшения,
максимальные значения отклонений, колебательность или монотон-
ность (апериодичность) процесса затухания и- т. п. Динамические
характеристики устойчивости рассмотрены в гл. 16, 17.,
130
Требования к количественным характеристикам (показателям)
устойчивости и управляемости закреплены в Нормах летной год-
ности гражданских самолетов (НЛГС-2) и других аналогичных
документах.
По требованиям, предъявляемым к показателям устойчивости
и управляемости, самолеты в зависимости от их массы и основного
назначения делятся на классы: маневренные самолеты, ограниченно
маневренные и неманевренные со взлетной массой до 100 т и свыше
100 т. Вид требований может быть различен в зависимости от. целе-
вых задач самолета и этапов полета, их выполнение является необ-
ходимым условием допуска самолета к летной эксплуатации.
Разработка требований к показателям устойчивости и управ-
ляемости самолета данного класса проводится на основании анализа
и обобщения полученных в летных испытаниях оценок самолетов
летчиками. В последние годы при формировании требований нашло
широкое применение математическое моделирование процесса пило-
тирования самолета, что позволяет глубже понять процесс взаимо-
действия самолета с летчиком.
В процессе проектирования самолета выбор ряда проектных
параметров (прежде всего таких, как параметры оперения и органов
управления, положение ЦМ самолета и др.), удовлетворяющих тре-
бованиям к характеристикам устойчивости и управляемости, прово-
дится на основе соответствующих расчетов. Показатели устойчи-
вости и управляемости детально проверяются в процессе летных
испытаний и доводки самолета. i .
Как показывает опыт, только средствами аэродинамической ком-
поновки нельзя обеспечить для современного скоростного (особенно
сверхзвукового) самолета, статическую и динамическую устойчи-
вость й хорошую управляемость во всем диапазоне высот скоростей
полета. Только включение в систему управления специальных авто-
матических устройств позволяет получить необходимые характери-
стики устойчивости и управляемости самолета.
$ 8.3. УПРАВЛЕНИЕ ДВИЖЕНИЕМ САМОЛЕТА
В любом процессе управления участвуют объект управле-
ния и управляющая система. При управлении полетом объектом
управления является самолет. В режиме автоматического управле-
ния управляющей системой является автопилот; а в режиме ручного
(штурвального) управления — летчик с необходимым комплексом
пилотажно-навигационных приборов.
Процесс управления осуществляется по замкнутому контуру,
в котором самолет можно рассматривать как звено системы управ-
ления. . '
Если управляющей системой является автопилот, то в совокуп-
ности с самолетом они образуют систему автоматического управле-
ния — САУ.
Укрупненно структуру САУ можно представить в виде схемы
(рис. 9.1).
5*
131
Рнс. 9.1. Укрупненная схема замкнутой САУ самолетом
В этой схеме выходной величиной является управляемый или
контролируемый параметр движения у, например Ь или Н, или пуа.
Входной величиной является заданное значение у3311 этого пара-
метра движения, постоянное (уззл = const) или переменное Гг/эад (£)],
а также возмущающее воздействие f. Значение параметра t/3ai на
входе вводится летчиком или специальным блоком.
Обратная связь делает систему управления полетом замкнутой.
Она реализуется с помощью измерительного элемента автопилота,
который измеряет фактическое значение у* в каждый момент вре-
мени.
С измерительного элемента информация поступает в устройство
сравнения САУ, в котором фактическое значение параметра движе-
ния z/* сравнивается с заданным узел и определяются в каждый
момент времени ошибка управления или рассогласование е =
_ z/* — узлл. По рассогласованию е вычислительное устройство САУ
в соответствии с заложенным в нем законом управления вырабаты-
вает сигнал управления и. Сигнал управления поступает в испол-
нительный элемент автопилота, а затем на рулевой привод, который
отклоняет соответствующий орган управления на 60. у для устране-
ния рассогласования.
Замкнутая система самолет — автопилот должна быть устойчи-
вой и обеспечивать высокое качество процессов управления — обла-
дать достаточной точностью и быстродействием при выполнении тре-
бований безопасности полета.
При одновременном управлении несколькими параметрами дви-
жения самолета САУ имеет несколько взаимосвязанных замкнутых
контуров управления. Такие системы называются многосвязными
или многоконтурными.
При ручном режиме управления летчик сравнивает фактические
значения у* параметров движения самолета — перегрузки, углов
тангажа, рыскания, крена, угловых скоростей, высоты, скорости
полета и других с желаемыми для выполнения того или иного ма-
невра ужел. При рассогласовании он отклоняет соответствующие
органы управления непосредственно через тяги от рычага управле-
ния для обратимой системы или через силовой привод — бустер
для необратимой системы управления на 60,у- Под действием воз-
132
Рис. 9.2. Укрупненная схема замкнутой системы ручного управления самолетом
пикающих при этом моментов меняются углы атаки, скольжения,
крена и, как следствие, — силы, действующие на самолет, пере-
грузки, а также углы тангажа и рыскания и другие параметры дви-
жения (рис. 9.2). Приспосабливаясь к особенностям реакции само-
лета на отклонение органов управления, летчик непрерывно кон-
тролирует отличие фактических параметров движения от желае-
мых — осуществляет управление с обратной связью, обеспечивая
тем самым малость отклонений даже при наличии возмущающих
воздействий f. При анализе ручного управления часто говорят
о системе самолет—летчик, как о единой замкнутой системе управ-
ления движением.
Независимо от развития автоматических систем, ручное управле-
ние самолетом остается основной формой управления на наиболее
ответственных этапах полета. Летчик обладает большой приспособ-
ляемостью к изменению внешних условий. Он способен управлять
самолетом при неполной информации и в неожиданных ситуа-
циях.
Вместе с тем возможности летчика ограничены. Он сравнительно
медлённо и неточно производит вычислительные операции, у него
значительное запаздывание реакции и т. д. Летчик в состоянии
обеспечивать Всей системе самолет—летчик хорошие динамические
качества только в том случае, если сам объект управления — само-
лет имеет хорошие характеристики устойчивости и управляемости
во всем диапазоне возможных режимов полета. Это означает, что
отклонения рычагов управления самолетом и усилия на них опре-
деленным образом связаны с режимом полета. Должна быть исклю-
чена возможность непрёднамеренного вывода самолета на опасные
режимы. Переходные процессы при отклонении органов управления
должны протекать быстро и плавно без значительных забросов.
Однако на современных многорежимных самолетах, рассчитанных
на полет в широком диапазоне скоростей (чисел М) и высот полета,
обеспечить приемлемые характеристики устойчивости и управляе-
мости только средствами аэродинамической компоновки, выбором
центровки и параметров оперения и органов управления не удается.
Улучшить статические характеристики управляемости можно,
вводя в необратимую систему ручного управления автоматы регули-
ровки управления (АРУ), меняющие передаточный коэффициент
рулевого тракта и градиент загрузки рычагов управления по режи-
мам и условиям полета.
из
Рис. 9.3. Укрупненная схема системы ручного управления самолетом с СУУ
Этот автомат не формирует сам отклонения органа управле-
ния 60. у, но меняет соотношение между отклонением органа управ-
ления и соответствующего рычага управления летчиком в зависи-
мости от измеренных значений высоты, скорости полета и т. п.
Это соотношение — передаточный коэффициент рулевого тракта
определяется как
. *-=£- (М>
где хя — перемещение рычага (ручки, педалей) летчиком. Меняя
автоматически величину Кт по режимам полета, АРУ ..уменьшает
изменение, таких характеристик управляемости, как расход рычага
управления на выполнение того или иного маневра, упрощая тем
самым управление самолетом. Регулирует АРУ и требуемое уси-
лие Ря на рычаге управления для необратимых бустерных систем
управления, облегчая пилотирование на различных режимах полета.
Для улучшения устойчивости и динамических характеристик
управляемости автомата регулировки управления недостаточно.
Необходима быстродействующая автоматическая система, работа-
ющая непрерывно, параллельно летчику при ручном управлении
самолетом и обеспечивающая для летчика' приемлемые характери-
стики устойчивости и динамической управляемости (рис. 9.3). Такая
система — система улучшения устойчивости и управляемости (СУУ)
формирует управляющие сигналы на основе измерения мгновенных
отклонений углов, атаки, скольжения, крена, тангажа, рыскания,
перегрузок, узловых скоростей сож, <аи, сог от их значений, соот-
ветствующих прн идеальном управлении текущим действиям лет-
чика (положениям рычагов управления) или опорному движению.
При работе таких автоматов летчик воспринимает самолет вместе
с СУУ как объект управления, обладающий удовлетворительными
характеристиками независимо от собственных характеристик изо-
лированного самолета. В зависимости от задач, решаемых СУУ,
в' них применяются автоматы различных типов. Простейшим из
автоматов является автомат демпфирования или демпфер. Этот
автомат включает измерительное устройство для измерения угловой
скорости тангажа, рыскания или крена (датчик угловой скорости
134
I VC) и исполнительный механизм, позволяющий параллельно
н 'чику и независимо от него формировать сигнал на отклонение
1 иогветствующего органа управления. Суммарное отклонение органа
\ правления 60. у складывается в этом случае из отклонения по сиг-
налу летчика 6о.у.л и демпфера 6о.у.а
60. у = 60. у. л + Йо. у. а- (9-8)
< Сигнал от демпфера пропорционален угловой скорости (о в соответ-
ствующем канале управления
®о. у. а = (9-9)
Для канала тангажа это (oz, для крена — (оя, для рыскания — (ов.
Знак отклонения 60. у. а выбирается так,| чтобы гасить, демпфи-
ровать возникшее вращение. Демпфер позволяет уменьшить коле-
бательность возмущенного движения, сделать его более плавным.
Рассмотрим принцип работы демпфера для канала тангажа.
Пусть опорное движение самолета — установившийся прямолиней-
ный полет ((oz = 0). Положим далее, что под действием порыва
ветра или по другим причинам самолет начал вращаться с угловой
скоростью (о2 > 0. Если летчик не вмешивается в управление (6В, л =
= 0), то автомат демпфирования отклонит руль высоты, причем на
6В. а >0, т. е. против вращения. Отклонение руля создаст пики-
рующий момент (Мх (6В.<) < 0), препятствующий вращению, и,'
если этот момент достаточен, вращение прекратится. Если же посту-
пает сигнал от летчика (бв. л #= 0), то он складывается с бв.а.
При этом летчик всегда может «пересилить» автоматику бв, л S
> 6В. а, т. е. он сохраняет контроль за самолетом и может выполнить
любой требуемый маневр', в том Числе и с угловой скоростью <о? #= 0.
Заметим, что без вмешательства летчика демпфер может остано-
вить вращение, но не возвращает самолет в исходное положение,
к исходным значениям углов атаки, скольжения, перегрузки njo,
п°а и т. п. Как только вращение прекращается, сигнал от демпфера
исчезает.
Возвращение на исходный режим .полёта обеспечивает более
сложный автомат — автомат устойчивости, в котором сигнал бс,у,а
формируется по измерению не только угловой скорости, Но й угло-
вого огклонения — Да; Д0 или отклонения перегрузок Дпуо, Дпго
(отклонение перегрузки пропорционально при данной скорости по-
лета значениям Да, Д0). Например, для автомата продольной ус-
тойчивости (канал тангажа) руль высоты отклоняется по закону
6в.а = Ки(ог + КвДа (9.10)
при измерении отклонения угла а или
®в. а = KoWi 4“ Кп ДПуд (9. И )
при измерении отклонения перегрузки от расчетного значения
в опорном движении. *
Автоматы устойчивости, как ясно из названия, повышают устой-
чивость, а при правильном подборе и Кп (Кв) — улучшают
динамические характеристики самолета как объекта управления.
135
И автоматы устойчивости, и демпферы могут примениться во
всех каналах управления при управлении рулем высоты, рулем
направления и элеронами (или другими органами управления
в каналах тангажа, рысканья и крена).
Заметим, что и САУ, и летчик, и СУУ воздействуют на движение
самолета только через отклонение органов управления и изменение
режима работы двигателя. Поэтому при любом способе управления
результат управления будет зависеть от характера реакции самолета
на отклонение органов управления. Если управляемость самолета
не обеспечена, то никакая автоматика не улучшит ее характеристик.
Для самолетов с АРУ, автоматами демпфирования и устойчивости
требования к показателям устойчивости и управляемости относятся
не к изолированному самолету, а к самолету с автоматикой, если
только обеспечена ее надежность (практическая безотказность).
Если практическая безотказность не обеспечена, то даже при нали-
чии автоматики изолированный самолет должен иметь удовлетвори-
тельные характеристики, чтобы отказ автоматики не привел к опас-
ной ситуации (отказобезопасные автоматы). При этом требования
к изолированному самолету с отказобезопасной автоматикой могут
быть менее жесткими, чем без автоматики.
Дополнительная литература
[12] с. 107—123, [8], с. 301—303, [4] с. 54—81, [2] с. 243—
250, [11] с. 180—218.
Контрольные вопросы
1. Почему возникает необходимость в постановке задачи об устойчивости не-
возмущенного (опорного) движения?
2. Что понимается под управляемостью и устойчивостью движения самолета?
3. Что понимается под статической устойчивостью самолета?
4. Дайте определение устойчивости невозмущенного движения по Ляпунову.
5. Какие автоматы используются в СУУ?
ГЛАВА Ю. МОМЕНТЫ, ДЕЙСТВУЮЩИЕ НА САМОЛЕТ
В ПОЛЕТЕ
При исследовании устойчивости и управляемости само-
лета, для решения уравнений его движения вокруг центра масс и ана-
лиза условий балансировки в опорном движении, необходимо опре-
делить величину моментов, действующих на самолет в полете.
Результирующий момент MR складывается из аэродинамиче-
ского М и момента тяги МР.
В связанных осях координат момент MR может быть представлен
в виде составляющих: момента крена MRX — относительно про-
дольной оси самолета ОХ, рыскания MRy — относительно нормаль-
ной оси OY и тангажа MRz — относительно поперечной оси OZ.
136
Рис. 10.1. Моменты, действующие на самолет в полете, отклонение управляющих
органов и рычагов (педалей) управления
Положительные направления моментов Л4ЛЗС, MRv и /ИЛ2 показаны
на рис. 10.1.
Аэродинамические моменты тангажа Mz, рыскания Mv и крена Мх
сложным образом зависят от аэродинамической схемы и геометри-
ческих, параметров самолета, его конфигурации, режима полета
(скорости, высоты и числа М), углов атаки и скольжения, угловых
скоростей крена сож, рыскания (ow и тангажа со2, производной а
и других, а также от отклонения управляющих органов: руля вы-
соты (6В) или управляемого стабилизатора (<рст), руля направления
(6Н)> элеронов (6,) или элевонов (6ЭВ). Положительные направления
отклонений аэродинамических органов управления показаны на
рис. 10.1..
Отклонением аэродинамических органов управления создаются
управляющие моменты, обеспечивающие требуемое изменение ориен-
тации самолета относительно земли и потока.
Длй отклонение руля высоты (стабилизатора) при ручном (штур-
вальном) управлении летчик перемещает ручку (штурвальную ко-
лонку) вперед-назад, для отклонения элеронов (или других органов
управления креном) — вправо-влево. Отклонение руля направления
осуществляется перемещением педалей управления. Соответствие
между знаком отклонения ручки (штурвала), педалей и соответ-
137
ствующих органов управления также представлено на рис. 10.1.
Органы управления могут отклоняться и по сигналу от автоматов
системы управления. Определение аэродинамических моментов (или
их безразмерных коэффициентов) в зависимости от режима полета,
отклонений органов управления — моментных характеристик само-
лета наиболее надежно проводить экспериментальным путем. При
проектировании самолета моментные характеристики определяются
расчетным путем. Методы такого расчета излагаются в курсе «Аэро-
динамика самолета». Моменты, связанные с работой двигателя,
также определяются опытным или расчетным путем.
Рассмотрим основные моменты, действующие на самолет в по-
лете, перечень и качественный характер его моментных характе-
ристик.
§ 10.1. АЭРОДИНАМИЧЕСКИЙ МОМЕНТ ТАНГАЖА
САМОЛЕТА В УСТАНОВИВШЕМСЯ ПРЯМОЛИНЕЙНОМ
ПОЛЕТЕ
Согласно принятому правилу знаков момент тангажа
считается положительным, если он направлен в сторону кабрирова-
ния, т. е. .увеличения углов атаки и тангажа, и отрицательным —
при вращении самолета в сторону пикирования — уменьшения а и О
(см. рис. 10.1).
Выделяя основные составляющие, определяющие устойчивость
и управляемость самолета, момент Мг удобно представить как
алгебраическую сумму аэродинамических моментов тангажа. само-
лета без горизонтального оперения AfzC. г. о> момента горизонталь-
ного оперения MZT,O (при нейтральном положении органов управ-
ления) и управляющих моментов A!zynpi
Alz = Mz с. г. о ~Ь Afz г. о + Afz уПр.
Рассмотрим эти составляющие аэродинамического момента тан-
гажа самолета.
I
Аэродинамический момент тангажа самолета без
горизонтального оперения
Момент Mz б.г. о складывается из моментов, создаваемых
крылом (MZKp), фюзеляжем гондолами двигателей (М2ГД)
и другими частями самолета с учетом интерференции. Основную
долю AfZ6.r.o составляет аэродинамический момент крыла:
Момент крыла. При определении момента тангажа крыла произ-
вольной формы в плане используется понятие средней аэродинами-
ческой хорды (САХ).
Средняя аэродинамическая хорда крыла представляет собой
отрезок, параллельный базовой плоскости самолета, длина кото-
рого определяется из соотношения
1/2
&а=4- \b'‘(z)dz, (10.1)
о
138
Рис. 10.2. Средняя аэродинамическая
хорда и эквивалентное крыло:
/ -— контур крыла; 2 — проекция контура
крыла на его базовую плоскость; 3 — эк-
вивалентное прямоугольное крыло
где I — размах крыла; b' (z) —
длина проекции местной хорды
b (г) на базовую плоскость
крыла (рис. 10.2). Базовой пло-
скостью самолета называется
плоскость 0RXRYR базовой
системы . координат, относи-
тельно которой большинство
элементов самолета располо-
жено симметрично слева и справа. Базовая плоскость крыла —
это плоскость,-содержащая центральную хорду крыла и перпен-
дикулярная базовой плоскости самолета (ГОСТ 22833—77). Исполь-
зование в (10.1) величины b' (z) позволяет учесть крутку и угол
поперечного V крыла.
Базовая система координат 0RXRYRZR может быть помещена
в носок центральной хорды, носок фюзеляжа и т.п. Базовая ось
самолета ORXR расположена в базовой плоскости самолета и на-
правлена вперед (см. рис. 10.2).
Координаты носка САХ в базовой системе координат самолета
вычисляются по формулам
Z/2
jb'(z)x(z)dz;
о
//2
Уа = -^~\b'(z)y(z)dz.
о
(10.2)
Здесь х (г) и у (z) — координаты носка Ь' (г) в базовой системе
координат.
САХ крыла обычно трактуют как хорду эквивалентного прямо-
угольного крыла, у которого площадь, аэродинамическая сила й
момент от этой, силы такие же, как у действительного крыла произ-
вольной формы в плане.
Используя выражения (10.1) и (10.2) для крыла сложной формы
в плане с прямолинейными очертаниями величину САХ и ее поло-
жение можно определить аналитически. В частности, для крыла
трапециевидной формы
Ьд — 3 [1 + п(1 + т]) ] ’ ха~ 6 ( 1] + 1) tgХп>
Ил— ('0-3>
где'Ьоги^к — центральная и концевая хорды; т] = bolbK — сужение
крыла; %п. к — угол стреловидности по передней кромке; <р — угол
поперечного V крыла.
139
Рис. 10.3. Центр давления и силы, дей-
ствующие на крыло в полете
Рис. 10.4. Определение аэродинамиче-
ского момента тангажа крыла ‘ с ис-
пользованием фокуса по углу атаки
Определив длину ЬА и координаты хА и уА САХ, можно заменить
действительное крыло произвольной формы в плане условным
эквивалентным прямоугольным крылом и для него находить аэро-
динамический момент тангажа.
В результате обтекания крыла потоком воздуха возникает аэро-
динамическая сила 7?лкр. приложенная в центре давления. Проек-
тируя эту силу на связанные оси координат ОХ и OY, получим
аэродинамические силы — нормальную Укр = с,7 [ips<? и продольную
XKp = cXKpsq. Определим момент'этих сил относительно оси Z,
проходящей через точку Т с координатами хт и ут (рис. 10.3)
Alz кр “ (^Д Укр УтХцр,
где хд — координата центра давления.
Наиболее распространено определение момента тангажа с исполь-
зованием понятия фокуса по углу атаки, введенного С. А. Чаплы-
гиным. Фокусом по углу атаки называется точка (расположенная
на линии пересечения плоскости OXZ связанной системы координат
с плоскостью симметрии летательного аппарата или на САХ Крыла),
относительно которой момент тангажа остается постоянным при
/ \*
малых изменениях только угла атаки I--g™' — 01 .
Это определение применимо к летательному аппарату при учете
и без учета функционирования его двигателей, аэроупругих дефор-
маций, а также к части летательного аппарата и к комбинации
нескольких его элементов (ГОСТ 20058—80).
Тем же ГОСТом вводится понятие фокуса по отклонению органа
управления тангажом как точки, относительно которой аэродина-
мический момент тангажа остается постоянным при малых измене-
/ dmz
ниях только угла отклонения органа управления тангажом =
— 0). Этот фокус расположен на САХ стабилизатора. Иногда гово-
рят о фокусе по отклонению механизации крыла (щитков, закрылков
и т. п.) — точки, относительно которой Mz не меняется при выпуске
механизации. Этот фокус расположен на САХ крыла (второй фокус
крыла).
* В дальнейшем, наряду с термином «фокус по углу атаки» будем применять
краткую форму — «фокус».
140
Используя понятие фокуса по углу атаки, представим аэроди-
намическую силу в виде двух составляющих: Т?д01!р при а =
= %кр — независящую от изменения угла атаки а и 7?дкр (а) —
зависящую от изменения угла атаки от ссОьр до а и приложенную
в фокусе крыла (FBp). Далее разложим силу 7?д кр (а) на составля-
ющие по связанным осям координат на нормальную Угр (а) и про-
дольную Х„р (а). В фокусе крыла приложим также ХОиР — состав-
ляющую ^докр связанной оси ОХ, т. е. перенесем XOi(p из центра
давления по линии ее действия в фокус крыла. Тогда в фокусе будет
приложена сила Хнр = ХОкР + Х,р (а).
Схема сил, действующих на крыло в полете, с использованием
понятия фокуса по углу атаки представлена на рис. 10.4. Из рисунка
видно, что аэродинамический момент тангажа крыла относительно
оси OZ, проходящей через точку Т будет равен
^ZKp — ^Z01<p ‘ (•*/<’кр ~~ %т) ^кр (а) 1/т-^кр> 0.0.4)
где величина момента Л4гОкр определяется- при .а ап зависи-
мость УКр (а) в летном диапазоне углов атаки считается линейной
Укр (а) = У^р (а—аОкр); xFKp — координата фокуса крыла — рас-
стояние от носка САХ крыла до FKp.
Фокус по углу атаки FKp в линейном диапазоне изменения
/?дкр («) от угла атаки не завйсит, его положение по САХ крыла
(xfkp) постоянно для данного числа М полете. Поэтому понятие
фокуса оказывается весьма удобным при анализе вопросов устой-
чивости.
С учетом сказанного можно теперь определить фокус крыла как
точку приложения приращения аэродинамической силы Ядьр(сс)
(или силы Уд ,,р. (а)) при изменении только угла атаки от а0 кр до а.
Вводя безразмерный коэффициент аэродинамического момента
тангажа mz = MjSqbfi, можно записать для т2Кр
mz кр = ni2o ъР-j” (^т кр) кр (а) сХКрУ^, (10.5)
где су вр (а) — приращение коэффициента нормальной силы при
изменении угла атаки от аокр до а; cXhip — коэффициент продольной
силы,; хт = Хт/Ьд-, у? — Ут lb д', xF кр = xF Кр1Ьд — относительные
координаты точки Т и фокуса крыла.
Отметим, что при п^окр = 0 (симметричные профили и отсут-
ствие совместного влияния крутки и стреловидности крыла) фокус
крыла FKp совпадает с центром давления. Когда mzOrp 0, центр
давления не совпадает с фокусом и перемещается по САХ при изме-
нении угла атаки.
Между коэффициентами су, сх и суа, сха в связанной и скорост-
ной системах координат имеется определенная связь. Так как углы
атаки не велики, то на практике принимают су « суа и сх а? сха —
— ас у а, тогда
кр == П12о кр “Ь 0>т %F кр) Сра кр (а) крУт> (10.6)
где tnz о кр — коэффициент аэродинамического момента тангажа
141
крыла при нулевой подъемной силе (при а = аОнр); cvaKp(a) =
= Суакр (а — ао.<р) — приращение аэродинамического коэффици-
ента подъемной силы крыла при изменении угла атаки от аокр
(КОГДа Суакр — 0) ДО a, Cxrp = Схаьр CLCya гр*
В дальнейшем будем считать, что хт и i/T являются координа-
тами центра масс самолета относительно носка САХ крыла. Следо-
вательно, выражения (10.4) ... (10.6) будут представлять собой аэро-
динамический момент тангажа крыла Л4гкр и его коэффициент
/пг„р относительно поперечной оси OZ, проходящей через центр
масс самолета.
Если у-г 0 — центр масс самолета расположен на САХ крыла,
то момент тангажа от продольной силы Хнр будет равен нулю и тогда
кр = кр "Ь (*^т Хр кр) Суа кр (а)• (10.7)
На величину /и20кр и координату фокуса xFlip влияют форма
крыла в плане, его профиль, геометрическая крутка и т. п. Для
крыла данной формы и профиля значения iniOlp и xF,p изменяются
по числам М полета. Фокус крыла на-доэву коиых- -скоростях рас-
положен обычно на 20 ... 30 % САХ^рткр = 0,20 ... 0,3мНа сверх-
звуковых скоростях FKp смещаетсй—назад до 40тгг50 % САХ*.
Величина смещения фокуса зависит от геометрии крыла и несколько
уменьшается с ростом стреловидности, уменьшением удлинения,
*а также при наличии на крыле передних наплывов.
На больших углах атаки 'Зависимость сра (а) становится нели-
нейной и положение фокуса xF зависит от величины а. У стрело-
видного крыла срывные явления развиваются прежде всего на
концах крыла» поэтому на больших углах атаки подъемную силу
создает, в основном, центральная часть ?рыла и фокус с ростом
угла атаки смещается вперед.
Момент самолета без горизонтального оперения» Для самолета
без горизонтального оперения так же, как и для изолированного
крыла, справедливо понятие фокуса — точки, относительно кото-
рой изменение угла атаки не приводит к изменению аэродинамиче-
ского момента (или коэффициента момента) тангажа.
Используя понятие фокуса и относя момент самолета без гори-
зонтального оперения к СДХ крыла, при ут = 0 можно записать
б. г. о == itftO б. г. о 4“ (.Хт Хр б. г. 0) Суа с. г> о («)• (Ю.8)
Здесь Суаб.г.о (а) = с“аб. г. о (а—а0б.г.о) — коэффициент подъемной
силы самолета без горизонтального оперения (с учетом несу-
щих свойств фюзеляжа и интерференции), обусловленной изменениём
угла атаки от а0б.г.о до а при сиа с. г. 0 (а0 б. г. о) = 0; тг0в.г.о —
коэффициент момента при нулевой подъемной силе (когда а =
— «о б. г. о); Хр о. г. о = xF с. г. 0/Ьа —относительная координата фо-
куса самолета без горизонтального оперения. Ее отсчитывают,
как и для изолированного крыла, от носка САХ назад и относят
к длине САХ крыла. В первом приближении можно принять сра б. г. с*~
(X
Суа кр И а0С.г.о «окр*
142
Величину /п20б.г. о можно представить как сумму /тг20кр и
поправки, учитывающей, влияние фюзеляжа Д/п20ф и гондол дви-
гателей А/тггОг. д _
«р ~4~ А/п2рф Afflior^p) (10.9)
Основную роль играетздёсь величина mZOKp, причем для крыльев
дозвуковых самолетов обычно mz0Kp < 0.
Аналогично координату фокуса самолета без горизонтального
оперения можно представить в виде
%* б. г. о == Хр кр “Ь АхГф Ах у г> д, (10.10)
где ДхГф = Дхрф/Ьд, Дхрг.д — l^xFr.zlbA — безразмерные вели-
чины смещения фокуса за счет влияния фюзеляжа и гондол дви-
гателей.
Так как фокус фюзеляжа обычно расположен впереди фокуса
крыла (особенно у фюзеляжей с сильно развитой носовой частью),
то фокус системы крыло—фюзеляж будет находиться впереди фокуса
изолированного крыла. Влияет на положение фокуса и геометрия
воздухозаборников, расположенных на фюзеляже, особенно на
сверхзвуковых скоростях полета.
Гондолы двигателей, расположенные на крыле, смещают фокус
вперед, -а расположенные в хвостовой части самолета — назад.
На положение фокуса и т20б.г.п влияют также внешние подвес-
ные баки, обтекатели шасси и т. п.
Для определения величин Дт20ф, Axf<j> и AxPr.n имеются
приближенные формулы [6, 91.
При изменении конфигурации самолета (выпуск шасси, меха-
низации) меняются и моментные характеристики самолета без го-
ризонтального оперения. Определение момента тангажа самолета,
во взлетной и посадочной конфигурации рассмотрено в гл. 13,
Положение фокуса самолета без горизонтального оперения, как
и фокус крыла, сильно зависит от числа М полета. При переходе
от дозвуковых к сверхзвуковым, скоростям фокус самолета без
горизонтального оперения смещается назад.
Если координата ЦМ самолета рт = У^Ьл 0, то появится
момент тангажа от продольной силы Хс.г.0= cxo.r.0Sq. В этом
случае
б. г. о = >«zo б. г. о Ч" (^т %F б. г. о) Суа б. г. о (а) Сх б. г. о9т> ( 10
Где Сх с, г, 0 = (сха ОСуа) б. г. о-
Аэродинамический момент тангажа горизонтального
оперения при нейтральном положении органов
управления
Для обеспечения продольной устойчивости и управляе-
мости у самолетов нормальной схемы и схемы «утка» служит гори-
зонтальное оперение. Горизонтальное оперенйе может состоять из
управляемого стабилизатора, из подвижного стабилизатора и руля
ИЗ
Рис. 10.5. Схема аэродинамических сил,
действующих на горизонтальное опе-
рение самолета нормальной схемы
Рис. 10.6. Определение угла атаки го-
ризонтального оперения
высоты и из неподвижного стабилизатора и руля высоты. У самолета
нормальной схемы горизонтальное оперение расположено за крылом,
а у схемы «утка» — впереди крыла. Профиль оперения обычно
симметричный.
Схема аэродинамических сил, действующих на горизонтальное
оперение в установившемся прямолинейном полете, показана на
рис. 10.5. Нормальная Уг. о и продольная Хг. 0 силы приложены
в центре давления горизонтального оперения.
Так как момент, создаваемый продольной силой Хг. о. мал по
сравнению с моментом от нормальной силы, то момент тангажа
горизонтального оперения относительно оси OZ, проходящей через
ЦМ самолета, можно приближенно принять равным
Мг г, о === Yр, о^Г. o'® ^ог. о^-т. о» (10.12)
где Lr о — плечо горизонтального оперения. За LT; 0 приближенно
принимают длину проекции на продольную ось самолета отрезка,
соединяющего заданную точку на САХ крыла (обычно в диапазоне
центровок самолета) с точкой, лежащей на 1/4 САХ горизонтального
оперения (ГОСТ 22833—77). Lr. о >0 для самолета нормальной
схемы и Lr, о < 0 — для схемы «утка».
Аэродинамическая подъемная сила горизонтального оперения
при нейтральном положении органов управления (в линейном диа-
пазоне углов атаки аг.о) будет /у/.;
Уо Г. О — Суд г. oSr. оЧг. О = Суд'г>. о«Г, 0<Sr. сЛг. О?» (10. 13)
где Sr. о — площадь горизонтального оперения; kr, 0 = qr. Jq —
коэффициент торможения потока в области горизонтального опере-
ния, равны^Пг, о » 0,85 ... 0,95^>уз дозвуковых скоростях полета
и kr. о « 0,/Т. 0,35"— Ий сверхзвуковых/""^ ~~--------------—~~
Из рис. 10.6 видно, что угол атаки горизонтального оперения
«г. о ~ 01. Н- фуст 8> оСО (10.14)
где а — угол атаки крыла; <ру(!т — угол установки стабилизатора;
е — угол скоса потока в области горизонтального оперения.
В достаточно широком диапазоне углов атаки крыла средний
угол скоса потока е является линейной функцией коэффициента
подъемной силы сьа с. г. 0 и угла а
е — е0 + есуСуа о, г. о = ео + -------— ео Ь (а -- а0 с. г> 0), (10.15)
С^об. Г, Р
144
Рис. 10.7. Примерный характер измене-
ния угла скоса потока в области опере-
ния от числа М
где е0 — угол скоса потока при
нулевой подъемной силе самолета
без горизонтального оперения; ev
и Еа — частные производные е по
Qac.r.o И углу атаки.
На величину угла, скоса по-
тока существенное влияние оказы-
вает сжимаемость воздуха. На рис. 10.7 показан примерный вад
зависимости е от числа М полета самолета [14.1.
Для расчета угла е можно использовать работы [6], [9J, [11]
и др.
С учетом (10.15) выражение (10.14) примет вид:
®г. о ~ б. г. о 4~ фуст ~|“ (1 в ) (® ’ «о р, г, р). (10.16)
Подставляя значение аг. о в (10.13), получим
Уаг. о— Уаг. о (а) h Суаг?о$г. сЛг. о (®0 б. г. о 4" Фуст — ®о) <?> (10.17)
где Уог, о (а) — прирост Уаг, 0 при изменении а:
У а г. о (а) = £уог? <Дг. о^г. о (1 8 ) (а Ло б. г. о) Я' (10.18)
Подставив (10.17) в (10.12) и разделив на $дЬд, получим коэффициент
момента тангажа горизонтального оперения при неотклоненных
органах управления
7W/ г. о ~^г0г. о — £^аТфусД-г. о — Суа* (1 — 8*) — (Xq б. г, о)^-г. о»
(10.19)
где rn^or.o — коэффициент момента тангажа горизонтального опе-
рения при Уог.о (а) = 0 и <руст ~ 0;
ч .Wljto г. о — Суа^&Ъ б- г. о — 8)
О \ ~------&
(10.20)
Суд^ о$г. 4 (HL21)
5г. о= 5Г. 0/5; Lr, 0 == £<г?о75а. Л50
Аэродинамические управляющие моменты .
Рассмотрим случай, когда управление самолетом нормаль-
ной схемы осуществляется отклонением руля высоты. При отклоне-
нии руля высоты на горизонтальном оперении возникает дополни-
тельная аэродинамическая нормальная сила, которую можно .при-
ближенно Принять равной аэродинамической подъемной силе? ли-
нейно зависящей от бв,
&Уа в а= &Суа в5г. ot/r. о == Суа г? oH-B^pSr. o^f. oQ>
(10.22)
145
Z Сг
0
где 6В — угол отклонения руля высоты (6В >0 — при отклонении
задней кромки руля вниз) и пв = с^г. o/cjw'no— коэффициент
относительной эффективности руля высоты.
Управляющий аэродинамический момент тангажа самолета при
отклонении руля высоты будет
ОС
. bMZB = -AYaBLГ. О --- Суаг. о^-г. о^-г. о<7-
(Считаем приближенно, что приращение ДУав приложено на том же
плече, что и Yar. 0).
Разделив ДЛ12В на sqbt, получим
Дщгв 4®fibLr.o, (10.23)
ГДе Суд — Суд г. о*5г. с^в^г. о Суа Пф (10.24)
Величина лв определяется экспериментальным путем; при от-
сутствии опытных данных пв можно определить по приближенным
формулам: _____.
Пв = VSB/Sr, 0, при М < 1
и
nB = SB/Sr.о,- приМ>1, (10.25)
где SB — площадь руля высоты.
Влияние числа М на па связано с перестройкой обтекания при
переходе через скорость звука. На малых дозвуковых скоростях
возмущения давления, вызванные отклонением руля, распростра-
няются (со скоростью, близкой к скорости звука) не только по по-
току, но и вперед, воздействуя на в<гю поверхность горизонтального
оперения. Это .приводит к приросту подъемной силы на всей поверх-
ности горизонтального оперения — эффективность руля будет сравни-
тельно высокой.
При больших околозвуковых скоростях, когда на поверхности
стабилизатора перед рулем возникают местные скачки уплотнения,
возмущения давления, вызванные отклонением руля, не передаются
вперед, за скачки уплотнения. Нагрузка на части стабилизатора,
расположенной перед скачками уплотнения, не изменяется. Эффек-
тивность руля снижается.
На сверхзвуковых скоростях полета возмущения давления не
могут распространяться вперед по потоку н воздействовать иа
поле давлений- стабилизатора. Аэродинамическая нагрузка изме-
няется только на руле — эффективность руля резко падает. Из-за
сильного падения эффективности руля высоты при М > 1 на совре-
менных сверхзвуковых самолетах устанавливается управляемый
стабилизатор.
Аналогичными рассуждениями можно получить коэффициент
управляющего момента тангажа самолета, когда органом управления
является управляемый стабилизатор:
Amzq) = — СуаТЧ>стЬг. о, (10.26)
где Фи — угол отклонения.управляемого стабилизатора по потоку.
14S
У самолетов схемы «бесхвостка» при отклонении элевонов появ-
ляется управляющий момент тангажа ДЛ1гэв = —ДУаэв£эв, коэф-
фициент которого
ктг эв = mz0B63B, (10.27)
где mz3B — коэффициент эффективности элевонов ,
mf®B = — с“аЛэв^эв; (10.28)
L)B = Ь^Ьа — относительная величина плеча элевонов.
Относительный коэффициент эффективности элевонов пзВ —
- сУаъ1с^а определяется опытным путем. При отсутствии опытных
данных приближенно можно принять n8B = VSaB/S при М < 1 и
«„и == S3B/S при М > 1, где S3B — площадь элевонов.
Аэродинамический момент тангажа самолета
в установившемся прямолинейном полете без
скольжения при отклоненных органах управления
Суммируя (10.8), (10.19) и (10.23), получим коэффициент
аэродинамического момента тангажа самолета нормальной схемы
(т2) при уТ — 0, в линейном диапазоне углов атаки:
ГПг ~ ntzo б. г. о + ’(*Т — %F б. г. о) Суа б. г. о (а —’ «0 б. г. о) 4".
|" ITlzQ г. о Суа фуст^г. о Суа 0 8 ) X
X (ОС— &о б. г. о)Тг. о — CyabJ^r. Ь» (10.29)
С другой стороны, используя понятие фокуса по углу атаки для
самолета в целом, по аналогий с крылом, аэродинамический момент
тангажа самолета при у, = 0 можно представить в виде
ЛТг0 4~ (хт — Хра) 4- ДМ2В + ДМдар. (10.30)
Здесь Afz0 — момент тангажа самолета при нулевой подъемной
силе и фуСТ = 6В = 0; х1а— координата фокуса самолета по углу
атаки, отсчитанная от носка САХ крыла в отрицательном направле-
нии полуоси ОХ; Д/И2В и — моменты тангажа, обусловленные
отклонением руля высоты и наличием угла фуСт ¥> 0; У а («) =
= Суа (а—а0) Sq — аэродинамическая подъемная сила самолета,
приложенная в его фокусе Fa и обусловленная изменением угла
атаки от а0 до а; а0 — угол атаки при нулевой подъемной силе
самолета; Суа — производная коэффициента подъемной силы по
углу атаки.
Аэродинамическая подъемная сила Уо (а) равна
Уа (а) ~ У а б. г. о (®) 4* У а г. о (®) ~
= Суа б. г. о (а — б. Г; о) Sq 4~ У а г. о (°0-
147
Подставив в это выражение вместо Yar. 0 (а) ее значение (10.18)
и поделив на Sq с учетом (10.21), получим:
Суа (« а0) = Суа б. г, о (ot ~~~ СХО б. г. о) 4“ Суа (1 8 ) (tX (Хо б. г. о)*
Если приравнять правые и левые члены этого выражения с а и
без а, то
Суа — Суа б. г. о СуаГ (1 ~ 8 )> — а0б. г. о- (10.31)
Разделим (10.30) на SqbA. Тогда с учетом (10.23) и (10.26) коэф-
фициент аэродинамического момента тангажа самолета при г/т = 0
будет иметь вид
Щг — СПгъ “4“ (Хт ' XFa) Суа (Ct OCq) О/абдЕр. о Суа фустЕг. о» (10.32)
где xFo = xFalbA — безразмерная величина аэродинамического фо-
куса самолета, отнесенная к САХ крыла.
Определим тг0 и хГа из сопоставления выражений (10.29) и
(10.32) для коэффициента тг самолета. Положив в (10.29) а =
= «об.г.о = «о и 6В ~ фуст= 0, получим коэффициент момента
тангажа самолета при нулевой подъемной силе и <рует = 6П — 0
tnz0 = та б.о + г. о- (10-33)
' ' — — _ ... «
Для определения фокуса самолета xFa приравняем члены, содер-
жащие углы атаки. С учетом (10.31) получим
(хт Хра) Суа = (Хт Хр б. г. о) Суа б. г. о Суа1 (1 В ) Ег. о Ч~
(Хт — XF6. г. о) Суа"1 (1 ~ в”) — (Хт *- Хр б. г. о) (1 — 8а),
откуда
с^ст _
Хра ~ Хр б. г. о Н-(1 — 8 ) (Ег,- о + Хт — Хр б. г. о)- (10,34)
С“а
Раскрывая с^?т по (10.21) и учитывая, что у современных самолетов
хт и xFC.v. о обычно близки, можно записать
Л. о
Хратхр6. г. о + *г. оА,о-^(1 — е“) или (10.35)
суа , ’
XFa = Хр б. г. о Н- AxF г. о
при Axf г. о = kr, ОАГ. 0 ° (1 - е“).
сиа
(10.36)
Здесь Лг. 0 =
Sr. рЕг. о
®>А
— безразмерный статический момент пло-
щади горизонтального оперения относительно центра масс самолета.
Величина AxFr.o учитывает смещение («сдвиг») фокуса самолета
из-за влияния горизонтального оперения. Для самолета нормальной
схемы Аг. о >0, е“ обычно меньше единицы и AxFr. 0 >0, т. е.
148
фокус самолета сдвинут относительно Fc. г. 0 назад, у схемы «утка» —
вперед.
Статический момент Лг. 0 — важный параметр горизонталь-
ного оперения, сильно влияющий на устойчивость и управляемость
самолета. У современных самолетов нормальной схемы он состав-
ляет обычно 0,18 ... 0,6 и более.
Выражение (10.32) с учетом (10.21) и (10.24) можно записать
в виде
ГПг = fflzQ -Н*т — ХРа) Суа (й ~ Оо) + ^“Sb mzСТ<руст- (10.37)
Здесь тг* и wizCT — частные производные от тг по 6В и <рСт, назы-
ваемые соответственно коэффициентами эффективности руля вы-
соты и стабилизатора, равны
т?ст = -$г”Л. сА-.о, (Ю.38)
/ПгВ = — Суа г° /п2>СТ/1в. (10.39)
В (10.37) с учетом (10.20),V(lCtr21jH (10.23)
ЩгО — ТЦгОб. г. о — Суа г? о^г. оА. о («0 ®о). (10.40)
Выражение (10.37) для тг часто записывают в виде
Шг — Шго + т^Суа (а) + т2СТфуст + /ИгВ6», (10.41)
где
= Хт — xFa. (10.42)
При этом следует помнить, что в (10.41) сиа (а) — не полный коэф-
фициент аэродинамической подъемной сиды, а только его состав-
ляющая, обусловленная изменением угла атаки от а0.до а. Полный
коэффициент аэродинамической подъемной силы самолета суа (а, в)
определяется как Efi,
Суа (я, 6) = Суа (СС — «о) Суа^ъ ~Ь ГудТ<Руст, (10.43)
где Суа и с^т определяются по (10.24) и (10.21).
Если в качестве управляющего органа служит управляемый
стабилизатор, то в (10.41) надо принять вв — 0, а <руст = <рСт.
Для самолета схемы «утка» надо принять kr.o = 1, е0 = е“ = 0,
А. о < 0 и добавить величину Amz б. г. о> учитывающую прирост
момента тангажа, обусловленный скосом потока у крыла от гори-
зонтального оперения [9, 7].
Для самолета схемы «бесхвостка» коэффициент аэродинамиче-
ского момента тангажа при z/T = 0
Шг = Wlz 6. г. о + /Пг8В6эв. (10.44)
Соотношения для тг, полученные ранее, справедливы только для
линейной зависимости аэродинамических сил на крыле и оперении
от местного угла атаки. Реальные зависимости тг{а) обычно сложнее.
149
Рис. 10.8. Примерная зависимость mz = f (суа)
На рис- 10.8 представлена зависимость
mz = f (сиа) самолета нормальной схемы при
различных положениях руля высоты, М =
= Const И ГПСг — Хт — xFa <0. Видно, что
С приближением Суа К Суд max линейность
/п2 = f (сиа) нарушается и на кривых может
получиться «ложка» из-за попадания оперения в зону интенсивного
торможения потока или в зону наиболее интенсивного скоса потока.
При этом уменьшается подъемная сила на горизонтальном оперении
и появляется прирост кабрирующего момента Дт2Г0 >0. Появ-
ление «ложки» при росте суа получается также из-за того, что у стре-
ловидных крыльев (х >0) срыв потока на больших углах а возни-
кает вблизи концов крыла — за ЦМ самолета. Это вызывает умень-
шение подъемной силы крыла в области срыва потока, центр давле-
ния перемещается вперед и появляется прирост кабрирующего
момента Д/п^р >0.
На величину момента тангажа существенное влияние оказывает
центровка (положение центра масс) самолета, которая численно
выражается через координаты хт и #т. Положение ЦМ впереди
фокуса самолета хт < xFa обеспечивает тс? < 0. При хт = xFa
получим. rri? =. 0, а при хт >хГа будет т? >0.
Помимо центровки на величину и характер ее изменения
по углу атаки (или суа («)) влияет число М полета. Из курса аэро-
динамики известно, что при изменении числа М полета меняются
аэродинамические характеристики itF, ^»о>. е“> $»> с&т. о и др.
Наиболее сильно влияет на тг изменение' по числам М положения
фокуса самолета. Как и фокус крыла, фокус самолета с ростом
чисел М, начиная приблизительно с М = 0,7 ... 0,8, начинает сме-
щаться назад, вплоть до чисел М = 1,1 ... 1,3. Так как наклон
кривой тг = f (суа) характеризуется производной т? = хт — xFa,
то при смещении фокуса назад (при xv < xFa. и. неизменной цен-
тровке самолета) кривая зависимости mz — f (суа), имеющая отри-
цательный наклон, становится более крутой.
Из сказанного следует, что каждому числу М полета будет соот-
ветствовать своя кривая тг = f (суа).
На рис. 10.9 пунктиром представлено семейство кривых mz —
— f (срч), построенных при различных значениях М = const.
В установившемся прямолинейном полете каждому числу М
будет соответствовать определенное значение суа. Например, в уста-
новившемся горизонтальном полете (пуа = 1) коэффициент подъем-
ной силы при изменении числа М должен удовлетворять условию
Суа = 2mg/Spa?Ma.
Задаваясь числами М, для которых построены пунктирные
кривые т{ ==. f (суа), и определяя для каждого числа М величину суа,
150
Рис. 10.9. Влияние сжимаемости воздуха на аэродинамический момент тангажа
самолета:
а — с прямым крылом; б — с крылом большой стреловидности
получим на каждой кривой точку, соответствующую установив-
шемуся горизонтальному полету на заданной высоте.
Соединив отмеченные точки плавной кривой, получим зависи-
мость тг =-<р (суа, М) при заданных углах отклонения руля вы-
соты бв или управляемого, стабилизатора <рст (сплошные кривые
на рис. 10.9).
Сравнивая кривые тг = <p (суа, М) с кривыми mt =f (сиа)
без учета влияния сжимаемости воздуха (пунктирные кривые при
М = 0,2), видим, что у самолета с прямым крылом с увеличением
числа М из-за влияния сжимаемости воздуха появляется сначала
небольшой прирост кабрирующего момента, а затем при дальней-
шем увеличении числа М (уменьшением суа) — значительный при-
рост пикирующего момента. У самолета с крылом большой стрело-
видности в этих условиях образуется прирост кабрирующего мо-
мента, возрастающего с увеличением скорости. Кабрирующий момент
перестает расти на сверхзвуковых скоростях полета из-за сильного
смещения фокуса назад. На рис. 10.9 прирост моментов обозначен
штриховкой.
Если =/= 0, то появится дополнительный момент тангажа от
сил сопротивления. Коэффициент аэродинамического момента тан-
гажа самолета будет равен . .
тг = mzo 4* т^Суа (a) -f- m’CTq>yCT -|- — (сха — acvo) уТ. (10.45)
Как показывают расчеты при дозвуковых скоростях полета,
если смещение ЦМ по высоте не превышает 10 % САХ крыла (уТ >
>0,1), то доля момента тангажа от сил сопротивления пренебре-
жимо мала, и тогда нелинейным членом в (10.45) можно пренебречь.
Однако при около- и сверхзвуковых скоростях полета вследствие
сильного возрастания сил сопротивления положение центра масс
по высоте может оказать заметное влияние на mz самолета, а следо-
вательно, и на характеристики продольной устойчивости и управ-
ляемости.
151
Результирующий момент тангажа самолета
в прямолинейном установившемся полете
Результирующий момент тангажа самолета складывается
из аэродинамического, определенного в (10.30), и момента от тяги,
учитывающего работу двигателей самолета MRz = Mz + MPz.
Момент тангажа от тягн. Рассмотрим лишь простые расчетные соотношения,
позволяющие приближенно оценить влияние работающего двигателя на tnRz са-
молета.
В общем случае ось двигателя не проходит через ЦМ. самолета, поэтому возни-
кает момент тангажа от тяги Р относительно оси OZ (рис. 10.10).
Кроме того, при наличии косой обдувки аР =/= 0 у самолетов с ВРД на входе
в воздухозаборник двигателя теряется часть количества движения секундной рас-
ходуемой массы воздуха в направлении, перпендикулярном к оси двигателя, в ре-
зультате чего появляется нормальная составляющая тяги, приложенная на входе
в воздухозаборник. Ее величина равна потерянному количеству движения в еди-
ницу времени:
Pv — m*Vy — m*V sin ар яа m*aPV,
где т* —секундная масса воздуха (в кгс'1); ар = а + <рр == а0 + + Ч>Р,
<рр — угол между осью двигателя и продольной осью самолета.
Заменяя т* из выражения Р = т* (Уо — V), получим
Рар
Ру ~ ValV - 1 ’
где Va — скорость истечения газов из сопла двигателя.
Нормальная сила Ру возникает и на работающем винте у самолетов с винтовыми
двигателями. Ее величину можно определить по приближенной формуле [9, 8]
Pv = 0,05Dacyo (a) q, (10.46)
где D — диаметр винта.
Суммарный момент тангажа, создаваемый двигательными установками,
МРг = ^НРУр-РЛ)> <10-47)
где I — число двигателей; ур — плечо тягн Р, ур > 0, если лнння действия тягн
проходит выше ЦМ самолета; хр — плечо силы Ру, хр > 0, если воздухозабор-
ник двигателя (воздушный вннт) расположен впереди ЦМ самолета.
Подставив в (10.47) вместо Р ее значение и поделив на SqbA, получим коэффи-
циент момента тангажа
= AWWa)1 (10.48)
где для самолетов с винтовыми двигателями
^Pzl------1срУр>
для самолетов с ВРД
(10.49)
(10.50)
Рис. 10.10. Определение момента танга-
жа, создаваемого двигательной установ-
кой самолета с ВРД
152
Здесь ср = P/Sq — безразмерный коэффициент тяги; ур = ур/Ь4; хр = хр1Ьд,
^хрр — безразмерная величина смещения фокуса, выраженная в долях САХ
крыла.
Для самолетов с винтовыми двигателями
D2
Дхрр = -0,05/Хр-§- ; (10.51)
для самолетов с ВРД
Смещение фокуса при работе двигателей связано с тем, что момент Mpz за-
висит от угла атаки, и значит, при изменении угла атаки условие dmRzlda. -- 0
для фокуса самолета должно выполняться с учетом Мрг (а) или А1р2(с;/П (а)).
Суммируя (10.41) и (10.48), получим коэффициент момента тан-
гажа самолета с горизонтальным оперением в установившемся
прямолинейном полете при работающем двигателе, когда ут = 0
трг = тЛ + т^гСуа (а) + т2СТфуст + В6В + ГИрг\, (10.53)
где т#г — частная производная коэффициента момента тангажа
по коэффициенту суа (а) при фиксированной тяге двигателей
= хт — х/с; (10.54)
%FC == %Fa 4-&xfp. (10.55)
Если ф 0, то
== т20 + тс^гСуа (а) + т’стфуст + т2в6в + тРЛ — (сха — осуа) уТ.
(10.56)
Здесь, как и в (10.41), суа (а) =с“0(сб—а0).
При управляемом стабилизаторе в (10.53) и (10.56) надо принять
6В = 0 И фуст ~ фот-
Для самолета схемы «утка» надо учесть все замечания, приведен-
ные ранее.
Для самолетов схемы «бесхвостка»
fflpx == Кх б. г. о “Н /Цг0В6эв ГПрг- (10.57)
§ 10.2. ДОПОЛНИТЕЛЬНЫЕ МОМЕНТЫ ТАНГАЖА
В КРИВОЛИНЕЙНОМ НЕУСТАНОВИВШЕМСЯ ПОЛЕТЕ
Движение самолета является неустановившимся (неста-
ционарным), если его кинематические параметры изменяются с тече-
нием времени. Изменение кинематических параметров обусловливает
зависимость аэродинамических сил и моментов от времени. Поэтому
в общем случае, при определении коэффициентов аэродинамических
153
сил и Моментов следовало бы Исходить из того, ЧТО Ойи зависят
от кинематических параметров и их производных по времени, вплоть
до высоких порядков. Однако при решении задач динамики полета
самолета й диапазоне полетных углов атаки и скольжения оказы-
вается, что эта зависимость невелика и можно считать, что аэроди-
намические коэффициенты сха, суа и сга (коэффициенты сил) от
производных .кинематических параметров движения при заданных
М, Re и конфигурации самолета не зависят.
Коэффициенты моментов следует считать зависящими от угловых
скоростей созе, Ыу и сог, а также от производных а, 0 и, если органы
управления расположены впереди крыла (схема «утка») — от 6В.
При этом, в силу симметрии самолета, моменты рыскания и крена
MRv и MRx практически не зависят от со2, 6В (или <рст) и а, и опре-
деляются при данных скорости (числе М) и угле атаки параметрами
бокового движения 0, сод, сои, 6Э, 6Н... Момент тангажа, напротив,
практически не зависит от малых отклонений в боковом движении
и определяется скоростью и числом М полета и значениями а, со2,
6В, (фст)> а и т. п.
Демпфирующий момент тангажа самолета
Пусть самолет, летящий со скоростью V, одновременно
вращается вокруг оси OZ с угловой скоростью тангажа со2. В резуль-
тате сложения поступательного и вращательного движений линии
тока искривятся, и местные углы встречи потока с элементами
поверхности самолета изменятся. Возникнут дополнительные аэро-
динамические силы, действующие на отдельные части самолета,
которые можно свести к равнодействующей Л/?, приложены эй
в центре масс самолета и моменту ДМг относительно поперечной
оси OZ. Величина Д/? мала, и в расчетах аэродинамических сил ею
обычно пренебрегают. Момент ДМг при полете на докритических
углах атаки препятствует вращению, и поэтому его называют демп-
фирующим моментом. Его надо учитывать.
Демпфирующий момент тангажа 'самолета складывается из демп-
фирующих моментов горизонтального оперения, крыла и фюзеляжа.
Демпфирующий момент, создаваемый горизонтальным оперением.
Большую долю демпфирующего момента тангажа самолета создает
горизонтальное оперение, как наиболее удаленное от оси вращения.
Рассмотрим возникновение демпфирующего момента на горизонталь-
ном оперении. При вращении самолета с угловой скоростью со2
оперение, находящееся на расстоянии Lr 0 от центра масс самолета,
приобретает дополнительную скорость ДУГ 0 = Lr. ош2, направ-
>0 ленную по вращению. В резуль-
тате изменяется местный угол
^Мдг.#01^ атаки оперения (рис. 10.11).
v
дМ' Рис. 10.11. Определение демпфирующего
момента тангажа горизонтального опере-
ния
154
г. о
г. о
Ц&г, (10.58)
са-
углах атаки
Изменение величины скорости потока у оперения при этом прене-
брежимо мало.
Изменение угла атаки горизонтального оперения (при малых а)
составит ... , .
A«r..«arctg^®^i
У г. о У1
Прирост подъемной силы горизонтального оперения
ДКа г. о = tyar. <>До&г. о^г. о<?г. о-
Дополнительный момент тангажа, вызванный вращением самолета,
S I
ДМ2 Г. О — — а г. oLr. о = — Суа г1, ol^r. о —“Г-
°А
ЬА
где со2 = -у- со2 — безразмерная угловая скорость тангажа
молета.
Как видно, момент ДЛ4гг-0 на докритических
(когда Суа°. о > О) является демпфирующим, так как действует
в сторону, обратную вращению.
Поделив (10.58) на SqbA, получим коэффициент демпфирующего
момента тангажа горизонтального оперения .
ДЩг г. о = т2 г. оОг = о —у~ (10.59)
где mfr. о — частная производная коэффициента демпфирующего
момента тангажа по безразмерной угловой скорости а>2
в>2 _ аг
г. о — Суа
S L2
Вг 0 = г-°;г- °-безразмерная величина момента инерции пло-
&0А
щади горизонтального оперения относительно ЦМ самолета.
Производная mzf.o на докритических углах атаки отрицательна.
Аналогично, при вращении самолета из-за изменения местного
угла атаки изменяется и момент тангажа, создаваемый крылом и
фюзеляжем.
Величина демпфирующего момента тангажа крыла ДМгкр =
= rrhKptozSqbA при прочих равных условиях зависит от формы
крыла в плане, положения центра масс и числа М полета. Стреловид-
ное крыло создает существенно больший демпфирующий момент,
чем прямое.
Демпфирующий момент тангажа фюзеляжа меньше демпфиру-
ющего момента крыла и, тем более, оперения. При расчетах на до-
звуковых скоростях /Пгкр.ф для крыла и фюзеляжа вместе считают
т2 кр. ф ~ 0 > 15 • • • 1>25) т2 кр-
* Приближенное значение т?*р и 'т^ можно определить по формулам [6],:
19] и другим источникам.
(10.60)
Т. Oi
> Z.2
г. о г. о
155
Суммарный коэффициент демпфирующего момента тангажа са-
молета можно теперь записать
© й, Ь.
лтг = тг а>г = тг -y-coz,
(10.61)
где
& &z &z &z
mz = тг Г. о + rrtz кр + т2ф.
Момент тангажа, обусловленный запаздыванием скоса
потока
При неустановившемся движении угол атаки крыла из-
меняется с течением времени со скоростью d = daldt. В соответствии
с изменением угла атаки изменяется и скос потока за крылом. Однако
скошенный поток достигает горизонтальное оперение не мгновенно,
а с некоторым запаздыванием во времени. Время запаздывания Д<
зависит от расстояния Аг. 0 и скорости ]/г. 0, с которой свободные
вихри сносятся от крыла к оперению Д/ = Lr O/Vr_ 0 = Lr_ 0/V Vkr_ 0.
Поэтому угол скоса потока в области оперения в данный момент
времени t будет определяться углом атаки, который имело крыло
раньше, т. е. в момент времени t — At
За время Д£ угол атаки крыла изменится на величину Да =
= —а Ы = —aLr, JV VЛг. о> а угол скоса потока — на величину
Де = еа Да = —еа ,. а.
V /*г. о
Вследствие запаздывания скоса потока угол атаки горизонталь-
ного оперения будет отличаться от угла атаки при установившемся
движении на величину Даг.о = —Де. Это явится причиной появле-
ния дополнительной подъемной силы горизонтального оперения
ДУдг. о = О Лаг. о$г. о?г. 6 = С»аг° 0 Oq И ДОПОЛ-
нительного момента тангажа
ДМ,й = - ДУа r. 0Lr. о = - ос“/Лг. о г о d9, (10.62)
° А
- ЬА •
где а = -у-а.
Из (10.62) видно, что этот момент препятствует изменению угла
атаки, действует в ту же сторону, что и демпфирующий момент
горизонтального оперения.
Поделив (10.62) на SqbA, получим коэффициент момента тангажа
от запаздывания скоса потока у оперения
Д/Игй = mz а — а, (10.63)
где
ова <А. q = q. (10.64)
156
Рис. 10.12. Примерный характер зависимости тг z
и т“ от числа М
У самолетов схемы «утка» и «бесхво-
стка» при неустановившемся движении
возникает дополнительный момент крыла
от запаздывания скоса потока, вызван-
ного нестационарностью. обтекания горизонтального оперения
(дестабилизатора), ЛЛ42 (6).
т т й
На величину производных mzz и тг существенное влияние ока-
зывает сжимаемость воздуха (число М полета). Это объясняется из-
менением Суа, СуагУ. с, И Лг. 0, ВХОДЯЩИХ В Выражения ДЛЯ ГПгг
и /Пг (рис. 10.12).
§ 10.3. РЕЗУЛЬТИРУЮЩИЙ МОМЕНТ ТАНГАЖА
В НЕУСТАНОВИВШЕМСЯ КРИВОЛИНЕЙНОМ ПОЛЕТЕ
Ранее были получены выражения для дополнительных
моментов тангажа в неустановившемся полете. При движении само-
лета эти дополнительные моменты складываются с моментом тангажа
mRz для прямолинейного полета (см. § 10.1).
Суммируя (10.53), (10.61) и (10.63), получим коэффициент ре-
зультирующего момента тангажа для самолета нормальной схемы
в неустановившемся полете при у? — 0
тРг — та -р т&руа (а) + m’CTq>ycT + гпг В6В + тРЛ +
+ п^г&г 4- т|а. (10.65)
При учете влияния положения центра масс самолета по высоте
у, =/= 0 в (10.65) надо добавить величину (сха — асуа) у?.
При управляемом стабилизаторе надо принять 8В = 0 и <руст =
= Фет-
Выражение (10.65) справедливо и для самолета схемы «утка»,
но при определении величин, входящих в него, надо учитывать рас-
смотренные ранее особенности их расчета, а также коэффициент
момента т*б.
Для самолета схемы «бесхвостка» коэффициент результирующего
момента тангажа можно получить суммированием (10.57) и (10.61),
а при наличии дестабилизатора надо еще учесть влияние скоса потока
от него на крыло.
§ 10.4. БОКОВЫЕ СИЛЫ И МОМЕНТЫ В ПРЯМОЛИНЕЙНОМ
УСТАНОВИВШЕМСЯ ПОЛЕТЕ СО СКОЛЬЖЕНИЕМ
Боковые аэродинамические силы и моменты самолета
могут возникать только при несимметричном обтекании его воздуш-
ным потоком, Симметрия потока относительно плоскости XOY
157
в установившемся прямолинейном движении нарушается при полете
самолета со скольжением (₽ 0) и при отклонении органов управле-
ния креном и рысканием. Боковые моменты возникают и при одно-
стороннем отказе двигателя (двигателей) в полете от несимметричной
тяги.
Наиболее надежно боковые силы и моменты определяются экспе-
риментальным путем. При отсутствии опытных данных их можно
приближенно определять расчетом. Рассмотрим структуру и каче-
ственный характер зависимости боковых сил и моментов от пара-
метров самолета, условий полета и характеристик движения.
Боковая аэродинамическая сила
При скольжении самолета аэродинамическая поперечная
сила Z возникает в результате перераспределения воздушной на-
грузки на его боковых поверхностях. Если скольжение самолета
происходит на правое полукрыло (0 >0), то поперечная сила будет
направлена по отрицательной полуоси OZ.
Аэродинамическая поперечная сила самолета, в основном, скла-
дывается из поперечных сил, действующих на фюзеляж верти-
кальное оперение ZB. 0 и гондолы двигателей Zr. д, ‘
Z = Zt ZB, о Zr. д = ctSq, (10.66)
где гф = сгф5ф^;
2В, о~схв. о^в. о^в. о9»
2г. д = к* г. д^г.
SB. о *— площадь вертйкального оперения; S*, Sr. д — характер-
ные площади фюзеляжа и гондол двигателей (обычно площади
миделевых сечений); kB, 0 = <?в. 0/q; kr, я — qr, K/q — коэффициенты
торможения потока в области вертикального оперения и гондол;
i — число незатененных гондол. Коэффициент kB 0 приближенно
может -быть принят таким же, как и у горизонтального оперения.
Величина коэффициента аэродинамической поперечной силы са-
молета при нейтральном положении руля направления
сг — 40>
где 4 = + 4в. «К о (1 - eg) ^2- + i£. Л. ; (Ю.67).
ев — производная среднего по высоте вертикального оперения
угла бокового скоса потока. Значение eg при принятом правиле
знаков отрицательно.
Так как в полете обычно углы скольжения невелики, то можно
считать, что поперечная сила Z приближенно равна. боковой Zo,
Т. е. Cj- Czin 4 4д.
158
Аэродинамический момент крена самолета
при нейтральном положении органов управления креном
и рысканием
Аэродинамический момент крена самолета Мх относи-
тельно связанной оси ОХ считается положительным, если он стре-
мится повернуть самолет от оси 0Y к оси 0Z, т. е. накренить на
правое полукрыло.
Через безразмерный' коэффициент момент крена самолета вы- •
ражается как Мх — tnxSql, где тх — коэффицйент аэродинамиче-
ского момента крена самолета; I — размах крыла.
В установившемся прямолинейном полете со скольжением коэф-
фициент тх самолета при - 6Н — 6., =0 можно представить как
алгебраическую сумму коэффициента моментов крена крыла, верти-
кального оперения и интерференции крыла и фюзеляжа
/Их = тх кр -|~ тх в. о ]- тх инт. (10.68)
Некоторый момент крена создает и горизонтальное оперение.
Однако по сравнению с другими составляющими момента крена само-
лета он мал и им обычно пренебрегают.
Момент креиа крыла. Крыло при скольжении самолета создает
наибольшую долю момента крена. На его величину влияет форма
крыла в плане, угол поперечного V и число М полета.
Рассмотрим влияние стреловидности на момент, крена изолированного крыла
без угла поперечного V (рис. 10.13). Из рисунка видно, что у выдвинутого вперед
(скользящего) полукрыла эффективный угол стреловидности уменьшается на ве-
личину угла скольжения (х — ₽). а У отстающего увеличивается (х + Р). Это при-
водит к изменению яагрузки по размаху крыла и изменению несущих свойств крыла.
У скользящего полукрыла возникает прирост подъемной снли ДУа > 0, а у бтста-
ющего ДУа<<СО, где ДУ0 = Дс^о-g-
Если приближенно считать, что коэффициенты подъемных сил стреловидного
суа и прямого суа х-е крыльев связаны соотношением суа = суа х-о cos х. то при
скольжении стреловидного крйла с углом 0 получим на правом и левом полукрыльях
Суа Р - Суа х==0 cos (X Т ₽) = Суа х-0 (cos х cos ₽ ± sin х sin ₽).
I. . ' -
Принимая для небольших В cos ₽ « 1 и sin 0 будем иметь cya& =
= Суа х-о (cos х ± ₽ sin X) =“ Суа (Г ± ₽ tg %). Отсюда прирост Коэффициента подъ-
емной силы стреловидного крыла при скольжении будет Ьсуа = ±ctf0₽ tg х, знак
(+) для скользящего, а (—) для отстающего полукрыльев.
Таким образом, прирост подъемной силы скользящего полукрыла ДУи =
= -i-CyoPSfl tgx> а момент крена стреловидного крыла, вызванный скольжением,
7Ихх ~ —2ДУагд = —CyafrSqin tg %•. Здесь гд — координата точки приложения
прироста подъемной силы Д га на правом полукрыле. Приближенно за гд можно
принять расстояние от плоскости симметрии до центра тяжести площади полукрыла
[11]. Поделив на Sql, получим коэффициент момента крена
m*x = /nSx₽* <10-69)
где (10.70)
159
Рис. 10.13. Возникновение момента
крена стреловидного крыла при сколь-
жении
Рис. 10.14. Определение составляющей
вектора скорости, нормальной к пло-
скости крыла с поперечной V-образно-
стью, при полете со скольжением
Несимметричность обтекания крыла при скольжении приведет к появлению
момента крена и при наличии угла поперечного V крыла (рис. ГО. 14).
Пусть на прямое (нестреловидное) крыло набегает воздушный поток с неко-
торым углом скольжения р. Разложим вектор скорости V иа компоненты V cos Р
и V sin р, параллельные осям ОХ и OZ, а боковую составляющую V sin р разложим
еще на направление, перпендикулярное к плоскости хорд V sin р sin ф и парал-
лельное плоскости хорд V sin р cos <р (см. рис. 10.14).
Составляющая V sin р sin ф у скользящего полукрыла направлена вверх,
а у отстающего — вниз. Наличие составляющей V sin р sin ф вызовет изменение
. . , V sin р sin ф , . „ _
угла атаки на каждом полукрыле на величину tg. Да = ± —yCoSft в ± *8 Р *
X sin ф » ±Рф « Да, знак (+) — для выдвинутого вперед (скользящего) полу-
крыла, а (—) — для отстающего.
Изменение угла атаки приведет к приросту подъемной силы на полукрыльях
ДУоф = ± rg-с”0Рф5<7 и к возникновению момента крена Л40Сф, стремящегося на-
кренить самолет на отстающее полукрыло Л4Жф = —2ДУОфгд = —с“орф$дгд,
где гд — координата точки приложения силы ДУоф на правам полукрыле.
Переходя к коэффициенту момента, получим mx<f =с^0Рф—
Этот коэффициент для стреловидного крыла, имеющего угол поперечного V,
будет
отхф = тхф₽- (10-71)
где т₽ф = — с“аф -& cos® %.
(10.72)
Из (10.72) видно, что положительный угол ф > 0 увеличивает поперечную
статическую устойчивость самолета, так как при этом тРф<0.
Прн наличии геометрической несимметрии крыла, вызванной производствен-
ными ошибками, возникает дополнительный момент крена тх0. Наибольшее влия-
ние оказывает ошибка в угле установки крыла.
160
Суммируя найденные значения составляющих коэффициента мо-
мента крена крыла, получим
тх Кр = тхй | т% крр,
где гпх кР = tr&7 + т2«р- (10.73)
• *
Если самолет выполнен по схеме «утка», то в дополнение к рас-
смотренным моментам надо добавить момент крена крыла, вызван-
ный при скольжении неравномерным распределением угла скоса
потока (от горизонтального оперения) по размаху крыла (Л4же).
Значения этого момента лучше определять опытным путем.
Момент крена вертикального оперения (при неотклоненном руле
направления); Поперечная сила, действующая на вертикальное
оперение при скольжении самолета ZB>0, создает момент крена
относительно оси ОХ Мх в. 0 = ZB. оув_ 0, где t/B. 0 — плечо попе-
речной силы. Его можно принимать равным расстоянию от оси ОХ
до середины высоты вертикального оперения.
Если подставить значение ZB. 0 и поделить на Sql, получим коэф-
фициент момента крена вертикального оперения
ГПХ в. о — ГП% в. ор. (10.74)
где m2..0 = ck о(1-евР)^в.о5в-^-°- . (Ю.7Б)
Частную производную Ла. о можно с достаточной для практики
точностью принять равной Лв.о»—Л°в. о. При приближенных
расчетах величиной Л можно пренебречь.'
Момент креиа от интерференции крыла и фюзеляжа. Фюзеляжи
современных самолетов близки к телам вращения, центр масс са-
молёта обычно расположен вблизи оси фюзеляжа, поэтому фюзеляжи
практически не создают момента крена. *
Однако при полете со скольжением фюзеляж изменяет харак-
тер обтекания прилегающих к нему частей крыла, нагрузки вдоль
размаха крыла перераспределяются, что приводит к возникновению
момента крена от интерференции МЖ||НТ.
Коэффициент момента крена от интерференции
нит = ввтр. . (10.76)
Величину производной тх вит можно определить по ЭМПИрИЧв"
ским формулам [6], 19] и др.
Суммируя (10.73), (10,74) и (10.76), получим коэффициент аэро-
динамического момента креиа.самолета при нейтральном положении
органов управления креном и рысканием в установившемся прямо-
линейном полете со скольжением
тх = тхо+т%, ' (10.77)
где mJ = т5Кр + тр в. о +нит! характеризует, поперечную
статическую устойчивость самолета.
6 А. Ф. Бочкарев и др. 161
Если самолет выполнен по схеме «утка», то надо добавить вели-
чину т-хв, характеризующую влияние скоса потока горизонтального
оперения на крыло при скольжении.
. Аэродинамический момент рыскания самолета
при нейтральном положении органов управления креном
и рысканием
Момент Му считается положительным, если он стремится
повернуть самолет от оси OZ к оси ОХ — развернуть влево.
Согласно формулам подобия момент рыскания Mv = tnySql,
где Шу — коэффициент аэродинамического момента рыскания са-
молета.
В установившемся прямолинейном полете со скольжением Му
самолета при нейтральном положении органов управления прибли-
женно можно представить как' алгебраическую сумму моментов
рыскания фюзеляжа, вертикального оперения и. гондол двигателей,
создаваемых аэродинамическими силами z$, zB. 0, zr. д
= Муф -|- Му в. 0 -j- Му г. д-
Некоторую долю моментов рыскания создает и крыло. Однако
основную часть Mv создает фюзеляж и вертикальное оперение.
На рис. 10.15 представлена схема боковых сил, действующих
на самолет. Равнодействующая этих сил Z приложена в точке Fp —
фокусе самолета по углу скольжения.
Момент рыскания, создаваемый фюзеляжем, будет равен
Л4уф — 2ф (Хд, ф хт, ф),
где Хд. ф, хт. ф — координаты точки приложения поперечной силы Z$
и центра масс самолета, отсчитываемые от носка фюзеляжа.
Замёнив Zф его значением и поделив на Sql, получим коэффициент
аэродинамического момента рыскания фю-
зеляжа
(10.78)
(10.79)
Щуф — ^гф (Хд. ф Хх. ф)"^ •
Так как производная с?ф <0, а
> хд. ф, то частная производная т^ф
фюзеляж создает дестабилизирующий мо-
мент рыскания, стремящийся увеличить воз-
никшее в результате действия возмущений
скольжение. Так, например, при скольжении
Рис. 10.15. Схема боковых сил, действующих на са-
молет при р > 0
162
на правое полукрыло (Р > 0) на фюзеляже появится положи-
тельный момент рыскания > 0), который будет разворачивать
самолет влево и увеличивать начавшееся скольжение. Увеличение
носовой части фюзеляжа (хт. ф) у современных скоростных само-
летов приводит к возрастанию дестабилизирующего момента ры-
скания фюзеляжа.
Момент рыскания, создаваемый вертикальным оперением, равен
в. о = ZB. 0LB. о, где Лв. 0—плечо вертикального оперения,
ZB о — аэродинамическая поперечная сила оперения.
Подставив значение ZB. 0 и поделив на Sql, получим коэффициент
момента рыскания вертикального оперения
где
Шу В. О -- В. оР,
tdy в. о == Сг в. о (1 8В) Лв. о^в. о>
(10.80)
(10.81)
С 1
Лв.„ = —в~ в,р---относительная величина статического момента
площади вертикального оперения относительно ЦМ самолета. Обычно
она лежит в пределах 0,05 < Лв-0 < 0,15.
Так как 4в. о <0, Лв.о > 0, 1, то, как видно из (10.81),
т^в. о < 0,—вертикальное оперение компенсирует дестабилизи-
рующий момент фюзеляжа и других частей самолета и обеспечивает
самолету путевую устойчивость,- Причем главную роль играет
параметр Лв.о.
Момент рыскания, создаваемый гондолами двигателей, Mv г. д =
= Zr> ДЛГ, д, где Lr. д ~ расстояние от ЦМ самолета до точки при-
ложения силы Zr. д, отсчитанное по отрицательному направлению
оси OX, LP д > 0, если гондолы расположены за ЦМ самолёта и
£г.д <0 — до ЦМ.
Подставляя значение Zr д и переходя к коэффициенту, получим
ту г..д — г. д.Р» (10.82)
^г.д=-^г.дЛг,д-^^Д. . (10.83)
где
Так как с£г. д < 0, то при расположении гондол за ЦМ самолета
(Lr д > 0) г. д < 0 — гондолы увеличивают путевую устой-
чивость, а впереди центра масс (Lr.n < 0) — уменьшают.
Для оценки влияния крыла на момент рыскания можно исполь-
зовать эмпирическую формулу
mt,Kp=mJKp₽, (10.84)
где /nJ кр== — 0,06cj,otgx — осЩдкр- (10.85)
Отсюда видно, что с ростом углов атаки (посадка или полет
на больших высотах) путевая устойчивость уменьшается из-за
неблагоприятного влияния поперечной статической устойчивости
крыла.
6*
163
Суммируя (10.78), (10.80), (10.82), (10.84), получим коэффициент
аэродинамического момента рыскания самолета при 6И = 6Э — 0
в установившемся прямолинейном полете со скольжением
(10.86)
где т» = /п^ф + /п^в.о + ^г. д+/п£кр, (10.87)
Шу характеризует путевую статическую устойчивость самолета.
Боковые управляющие силы и моменты самолета
Боковое управление самолетом осуществляется отклоне-
нием элеронов и руля направления. За положительные отклонения
органов управления принято считать отклонение правого элерона
6ьпр вниз, а руля направления 6Н — вправо (см. рис. 10.1).
На скоростных самолетах вместо элеронов или наряду с ними
применяются интерцепторы, вызывающие отрыв пограничного слоя
на верхней поверхности крыла в сечениях с выдвинутым интерцеп-
тором. В этих сечениях нормальная аэродинамическая сила умень-
шается, а продольная увеличивается. Возможно использование и
дифференциального отклонения стабилизатора.
Рассмотрим моменты, создаваемые элеронами. Отклонение в по-
лете элеронов вызывает несимметричное изменение аэродинамиче-
ской нагрузки по размаху крыла (рис. 10.16). В результате чего на
полукрыле с отклоненным вниз элероном возникает дополнительная
положительная нормальная сила Дгв >0, а на полукрыле с подня-
тым элероном ДК8 < 0. Пара этих сил создает управляющий момент
крена ’ ‘
' дМ„ = -2ДГА, (10.88)
где га — координата точки приложения силы ДУВ. Ее приближенно
можно принять равной расстоянию от оси ОХ самолета до середины
размаха элерона.
Прирост нормальной силы ДУ8 приблизительно равен при-
росту аэродинамической подъемной силы’[ДГов,
йХоэ == ± ДСуа~2^ Я —
=±4в0в»44=-с?«б»^4Н’ <10-89)
где пд — Су1/суа — относительный коэффициент эффективности эле-
ронов; пя « / Se/Si — при дозвуковых и Пд « Sa/Sj — при сверх-
звуковых скоростях полета; S3 —
площадь обоих элеронов; Si — пло-
щадь крыла, обслуживаемая элеро-
нами; k — коэффициент, учитыва-
Рис. 10.16. Изменение аэродинамической на-
грузки по размаху крыла .при отклонении
элеронов:
1 — не отклонены; 2 — отклонены; 3 — опущены;
4 — подняты
164
ющий изменение с%а по размаху крыла. Для докритических
чисел М полета можно принять k 0,6 + 0,066 (г) — 1), а для сверх-
звуковых скоростей k « 1,0.
Подставив в (10.88) значение ДУЭ т ЬУаз (10.89) и поделив
на Sql, получим коэффициент управляющего момента крена
/пдэ= /п*»6э, (10.90)
где
(Ю.91)
Частная производная тха называется коэффициентом эффектив-
ности элеронов.
Эффективность элеронов так же, как и элевонов, при полете
на больших углах атаки в результате отрыва пограничного слоя
на крыле уменьшается, особенно у самолетов со стреловидными
крыльями, у которых отрыв пограничного слоя начинается на концах
крыла.
Эффективность элеронов падает на околозвуковых и сверхзву-
ковых скоростях полета из-за уменьшения с“в и пэ,
При отклонении элеронов в сечениях крыла, где расположены
элероны, изменяются не только нормальные, но и продольные силы.
Вследствие этого возникает момент рыскания ДМ№, направленный
в сторону .полукрыла с опущенным элероном. Коэффициент этого
момента
<10-92>
Для уменьшения момента ДЛ4#в (мешающего управлению) при-
меняют дифференциальное управление элеронами, при котором
углы отклонения элеронов вниз меньше углов отклонения вверх.
Производная тив <0, а ее абсолютная величина на - малых
углах атаки мала и возрастает с ростом' а.
При отклонении руля направления на вертикальном оперении
изменяется поле давлений, в результате чего возникает дополни-
тельная поперечная сила
• = XPz в. о^в. oQp. о =
оМв o?Bo = CL о"А5в Ло?’ ' (10'93)
где nH =Czb.o/czb. о — относительный коэффициент эффективности
руля направления; nH = V SH/SB.O при дозвуковых и n„ = SH/SB, 0
при сверхзвуковых скоростях полета;. SH — площадь руля на-
правления.
От поперечной силы ZH возникнут моменты относительно осей ОХ
и OY ДМЖН — ^иУв. 0, ДМу„ = ZHLB. 0.
165
Подставив в эти выражения значение ZH и разделив на Sql, полу-
чим коэффициенты моментов крена и рыскания
= . (10-94)
гдет> = ^в.опЛ.о^НК’
^н = %4. (10-95)
где me“ = с13 п k А — т? п .
М у zb. о н в. о в. о у в. о и
Величина т*н <0, так как Сгв.о <0.
Частная производная туа называется коэффициентом эффек-
тивности руля направления. Эффективность руля направления
падает на сверхзвуковых скоростях полета из-за уменьшения Сгв. о,
Пн И k-в, 0.
u -’l- Ч
Результирующие боковые моменты самолета
в прямолинейном установившемся полете
со скольжением яго>
В установившемся полете реЗ^ЪТирующгте ^оковые^мо*
менты складываются из аэродинамических, определенных в § 10.4,
и дополнительных боковых моментов от работающих двигателей.
Учет всех факторов, влияющих на боковые моменты, при раз-
личных режимах работы двигателей возможен только ‘на основе
экспериментальных данных.
В основном, работа двигателей приводит к появлению поп^реч>
•ной силы Рг и моментов от нее МРх и МРу за счет косой обдуйкй
воздухозаборников при скольжении. Сила Рг определяется в зави-
симости от угла скольжения 0 так же, как сила Ру в зависимости
от угла атаки а (см. § 10.1). Моменты Л4Рзс и Л4Ри пропорциональны
углу ₽ (при малых ₽).
Коэффициенты моментов крена и рыскания ' * . .
тРж—тЪ$, , (10.96)
тру—т§>$, • (10.97)
где для воздушно-реактивных двигателей
' (10.98)
-^-1 «
для двигателей с воздушными винтами
трх = ikуР, тру — ik^- хР, (10.99)
о о
Ур = УрМ'г хР = Хр11\ уР и хР имеют тот же смысл, что и в § 10.1;
k < 1 — коэффициент, определяемый по статистическим данным.
166
Момент рыскания возникает и при несимметричной тяге дви-
гателей.
Суммируя (10.77), (10.90), (10.94) и (10.96), а также (10.86),
(10.92), (10.95) и (10.97), получим коэффициенты результирующих
моментов крена и рыскания самолета с отклоненными органами
управления в прямолинейном установившемся полете со скольжением
тРх = тхь I Ф 1“ Фэ ’ Н Фн- (10-10°)
тяу = И Фэ И Фн’ (Ю.Ю1)
где тРх = т% + m%v = т% nfi>y. (10.102)
Производные, входящие в эти выражения, определяются по
ранее приведенным формулам или опытным путем.
§ 10.5. ДОПОЛНИТЕЛЬНЫЕ БОКОВЫЕ МОМЕНТЫ
В КРИВОЛИНЕЙНОМ ДВИЖЕНИИ. РЕЗУЛЬТИРУЮЩИЕ
БОКОВЫЕ МОМЕНТЫ САМОЛЕТА
При вращении самолета вокруг осей ОХ и OY с угловыми
скоростями соя и (йу возникают дополнительные аэродинамические
моменты крена и рыскайия.
Возникают также боковые моменты от запаздывания скоса потока
у вертикального оперения. Однако для летательных аппаратов
самолетной схемы они малы и ими можно пренебрегать [11].
Аэродинамические моменты, возникающие при вращении само-
лета вокруг оси ОХ. При вращении самолета с угловой скоростью (ож
•ю.- .икают боковые моменты крыла и вертикального оперения.
Некоторую долю боковых моментов создают горизонтальное опере-
ние и фюзеляж, но она мала и в приближенных расчетах не учиты-
вается.
Пусть крыло самолета вращается с угловой скоростью <ож. Тогда
на опускающемся полукрыле местные углы атаки будут увеличи-
ваться, а на поднимающемся — уменьшаться (рис. 10.17, а). В ре-
зультате изменения углов атаки возникнут дополнительные нор-
мальные ДУ и продольные АХ аэродинамические силы. Пара нор-
мальных сил создает момент крена Д7ИЖКр. Шд. = Л4^рсож, кото-
рый на докритических углах атаки будет демпфирующим, так как
он препятствует начавшемуся вращению. Продольные силы создадут
относительно оси OY момент рыскания АМ^крш,,. = МДрЮх, кото-
рый будет поворачивать самолет в сторону опускающегося полу-
крыла. Этот момент называется 'перекрестным или спиральным
моментом рыскания.
Если разделить АМхкро^ и ДЛ^крш на Sql и ввести безраз-
мерную угловую скорость крена йж = сож1/2У, то получим коэф-
фициенты этих моментов
Кт — т&х й ; кт = т&х й . (10.103)
пхкрстж "‘хнр »’ кр С0ж (/кр * ' >
Рис. 10.17. Определение аэродинамических моментов крыла (а) и вертикального
оперения (б) при вращении самолета вокруг оси ОХ •
При вращении самолета вокруг оси ОХ на вертикальное опере-
ние будет набегать дополнительный поток со скоростью ®ху, в ре-
зультате чего изменятся местные углы скольжения и появится
дополнительная поперечная сила Д2В.О. Поперечная сила AZB,0
создает момент крена ЛМхв.0Шх = препятствующий
вращению (демпфирующий момент крена), и спиральный момент
рыскания ДМ и в.о<о* = в. о«х. стремящийся развернуть само-
лет в сторону-опускающегося полукрыла (см. рис. 10.17, б).
Переходя к коэффициентам, получим-
д^в.о<.ж="&<А; ьти<.0*х=ту?.0&х- (Ю.104)
Аэродинамические моменты, возникающие при вращении само-
лета вокруг оси OY. При вращении самолета с угловой скоростью
со, возникают боковые' моменты крыла, вертикального оперения
и фюзеляжа.
При вращении крыла скорость потока, набегающего на полу-
крыло, идущее вперед, будет ббльшей, а на полукрыло, идущее
назад, меньшей, чем скорость полета. Следовательно, нормальная
и продольная силы у полукрыла, идущего вперед, увеличатся,
а у идущего назад — уменьшатся. Нормальные силы создадут
спиральный момент крена бМхирау — МЖр <оу, накреняющий
самолет на отстающее полу крыло. Продольные силы создадут демп-
фирующий момент рыскания ЛМукрау = Мугону, препятствующий
вращению относительно оси OY (рис. 10.18, а).
Если разделить эти моменты на Sql и ввести безразмерную угло-
вую скорость рыскания <ву = ту112 V, то получим их коэффициенты
Лт — m&v ю : Кт = т&« . (10.105)
“ хкр у' 1Лукр<ау укр у
168
Рнс. 10.18. Определение аэродинамических моментов крыла (а) и вертикального
оперения (б) при вращении самолета вокруг оси 0Y
При вращении самолета с угловой скоростью <ov на вертикальное
оперение будет набегать дополнительный поток .со скоростью со^х,
в результате чего изменятся местные углы скольжения. Вызванная
изменением угла скольжения поперечная сила Дгв>0 (см. рис. 10.18,6)
создаст спиральный момент крена &Mx1t,oa>v — МХв.0<Лу, стремя-
щийся опустить полукрыло, идущее назад, н демпфирующий момент
рыскания &Мув.0№у = Му^.оа*, препятствующий вращению са-
молета вокруг оси OY.
. Переходя к коэффициентам, получим
^У В. О Жд = 0®у’
Некоторую часть демпфирующего момента рыскания самолета
создает фюзеляж. Учет этого момента производится введением
поправочного коэффициента 1,2) к демпфирующему моменту
рыскания вертикального оперения.
Учитывая выражения (10.103) ... (.10.106), получим коэффициенты
дополнительных аэродинамических моментов самолета
поло?)
= + ^2F V (10108)
где m*« = m*»p + m** 0» + «ft. 0!
169
in'“x и myv — частные производные коэффициентов демпфирующих
моментов крена и рыскания самолета по угловым скоростям <дж
и бу на докритических углах атаки — отрицательные; производные
коэффициентов спиральных моментов крена и рыскания тх * и mv ,
как правило, отрицательные.
Все частные производные определяются опытным путем. При от-
сутствии опытных данных на небольших дозвуковых скоростях
для приближенных расчетов можно пользоваться следующими фор-
мулами, которые здесь приводятся без вывода [91
- - 4 (ч.*+«=ч’„ л. .
- - тг (2 - *<) V т“л..-А..
tn х
1/кр
с а 4- с
х Г ^уа
т&х = 2ср k
ув. О г в. 0 1
(10.109)*
где для трапециевидных крыльев £2 = Поправочный коэф-
фициент kt приближенно можно принимать равным kt = 0,63 4- 0,03Х.
На величину производных демпфирующих и спиральных момен-
тов крена и рыскания оказывает влияние сжимаемость воздуха,
особенно на околозвуковых и сверхзвуковых скоростях полета,
где они с увеличением числа М уменьшаются.
Суммируя (10.100), (10.107), а также (10.101), (10.108), получим
общие выражения коэффициентов моментов крена и рыскания,
действующих на самолет в неустановившемся криволинейном полете
mRx = т*о + mR$ + 4бэ + (10-110)
mRy = mR$ + (10-110
Значения коэффициентов, входящих в эти выражения, опреде-
ляются по соответствующим формулам, приведенным в § 10.4 и 10.5.
Следует заметить, что некоторые коэффициенты могут оказаться,
по сравнению с другими, настолько малы, что ими можно пренебречь.
* В работе [7] приведены приближенные формулы для определения производ-
ных при различных числах М полета.
170
§ 10.6. шарнирные МОМЕНТЫ органов
УПРАВЛЕНИЯ САМОЛЕТОМ
Аэродинамическими шарнирными моментами называют
моменты аэродинамических сил, действующих на органы управления
относительно их осей вращения.
Шарнирный момент считается положительным, если он стремится
отклонить руль (элерон) в положительном направлении.
У самолетов с обратимой системой управления от величины
шарнирных моментов зависят усилия, прикладываемые летчиком
к рычагам управления. При автоматическом или ручном управлении
с рулевым приводом (бустером) шарнирными моментами определяется
мощность рулевого привода, отклоняющего органы управления.
Шарнирный момент любого органа управления
Мш = тш8рЬА pk011q, (10.112)
где тш — коэффициент шарнирного момента; Sp, Ьдр — соответ-
ственно площадь и средняя аэродинамическая хорда органа управле-
ния; kon — коэффициент торможения потока в области оперения.
У современных скоростных самолетов, имеющих большие раз-
меры органов управления и совершающих полет с большими ско-
ростными напорами, шарнирные моменты велики. Снизить величину
шарнирного момента можно уменьшением коэффициента тш при
помощи аэродинамической компенсации. Рассмотрим основные виды
аэродинамической компенсации.
Осевая компенсация. При смещении оси вращения назад от передней кромки
часть руля, находящаяся перед осью вращения (компенсатор), создает шарнир-
ный момент обратного знака. Это приведет к уменьшению суммарного шарнирного
момента руля (рис. 10.19, а). Если ось вращения совместить с центром давления
руля, шарнирный момент станет равным нулю — наступит полная компенсация.
При дальнейшем смещении оси вращения назад наступит перекомпенсация и изме-
. нится знак шарнирного момента.
Рис. 10.19. Основные виды аэродинамической компенсации и схема работы трим- ,
мера: '
а — осевая; б — внутренняя; в — сервокомпенсация; а — с помощью триммера; 1 —
ось вращения; 2 — компенсатор; 3 — тяга управления рулем; 4 — триммер; Б — тяга управ-
ления триммером
171
Осевая компенсация наиболее распространена из-за простоты конструктивного
выполнения и хороших аэродинамических характеристик, однако осложняется
тем, что положение центра давления руля зависит от числа М полета.
Внутренняя компенсация близка по идее к осевой и чаще применяется иа эле-
ронах (см. рис. '10.19, б). Шарнирный момент уменьшается благодаря моменту сил,
действующих на компенсатор, расположенный в полости с узкими щелями внутри
крыла (оперения). Верхняя часть полости герметически отделена от нижней гибкой
диафрагмой. Компенсатор воздушным потоком не обтекается, а находится под дей-
ствием разности давлений, возникающей в полости при отклоиеиии элерона (руля).
Компенсатор не вносит возмущений в поток, что особенно важно при больших чис-
лах М. Недостатком такой компенсации является ограничение диапазона откло-
нения органов управления, в особёиности, при тонком профиле крыла (оперения).
Сервокомпейсация—это дополнительный руль, кинематически связанный
с основным рулем и неподвижной частью оперения так, что при отклоиеиии основ-
ного руля иа некоторый угол сервокомпенсатор отклоняется на пропорциональный
ему угол в противоположную сторону (см. рис. 10.19, в). При этом на сервокомпен-
сатор действуют аэродинамические силы, уменьшающие' шарнирный момент руля.
На легких дозвуковых самолетах применяется роговая компенсация, пред-
ставляющая собой часть поверхности руля, вынесенную впереди оси вращения и
расположенную у края рулей. Недостатком такой компенсации является возмож-
ность возникновения тряски оперения из-за срыва потока при больших углах
отклонения руля.
Уменьшить шарнирный момент руля высоты можно также отклонением (пере-
становкой) подвижного стабилизатора.
Аэродинамическая компенсация, если она правильно подобрана,
уменьшает шарнирный момент, но не .сводит его к нулю.
При продолжительном полете на каком-либо режиме целесо-
образно шарнирный момент свести к нулю. Для этой цеди приме-
няются триммеры.
Триммер представляет собой вспомогательную поверхность на
задней части руля или элерона, не связанную кинематически с от-
клонением руля (см. рис. 10.19, г). Управление триммером само-
стоятельное из кабины летчика. * ' • -
. Для получения нулевого шарнирного момента триммер откло-
няется на соответствующий угол, противоположный по знаку углу
отклонения основного руля.
При определении шарнирных моментов единственно надежным
способом является экспериментальный.
Результаты обработки экспериментальных данных показывают,
что в пределах плавного, обтекания коэффициенты шарнирных
моментов являются линейными функциями углов атаки (сйольження),
углов отклонения рулей (элеронов) и триммера
= + (10.113)
тш. в = <Г- °«г. о + тшвбв + <ВТв; (10.1 14)
тш. н = тш₽+тшвн+тштв- (10.115)
Приближенные расчетные формулы для оценки производных
шарнирных моментов при проектировании приведены в [9].
На величину коэффициента шарнирного момента значительное
влияние оказывает сжимаемость воздуха. С наступлением волнового
172
Рис. 10.20. Примерная зависимость коэффи-
циента тш от числа М
кризиса центр давления на рулевых
поверхностях перемещается назад и
коэффициент шарнирного момента
на околозвуковых скоростях резко
возрастает (рис. 10.20).
§ 10.7. ВЛИЯНИЕ СТАТИЧЕСКИХ УПРУГИХ ДЕФОРМАЦИЙ
НА ВЕЛИЧИНУ МОМЕНТОВ, ДЕЙСТВУЮЩИХ НА САМОЛЕТ
В ПОЛЕТЕ. ИЗГИБ И КРУЧЕНИЕ КРЫЛА, ДЕФОРМАЦИЯ
ФЮЗЕЛЯЖА И ОПЕРЕНИЯ
Ранее моменты тангажа, крена и рыскания определялись
в предположении, что самолет является абсолютно жестким телом.
Реальный самолет является упругим телом. Поэтому в полете под
действием аэродинамических и массовых сил элементы конструкции
самолета деформируются. Самолет меняет свою исходную геометри-
ческую форму, что приводит к изменению аэродинамической на-
грузки по поверхности самолета. В свою очередь, дополнительная
нагрузка, обусловленная деформацией, Приводит к изменению самих
деформаций. Если процесс изменения дефо дации и нагрузки уста*
навливается, то самолет приобретает определенную геометрическую
форму и его аэродинамическая нагрузка стабилизируется. Если же
деформации будут возрастать (явление дивиргенцин), то аэродинами-
ческая нагрузка будет увеличиваться, Что может явиться причиной
потерн устойчивости конструкции и ее разрушения.
Изменение аэродинамической нагрузки в результате деформации
конструкции приводит к изменению действующих на самолет аэро-
динамически* сил и моментов и характеристик его устойчивости
и управляемости..
Величина, упругих деформаций и обусловленный ими эффект
сильно возрастают с увеличением скоростного напора и увеличении
размеров самолетов. г Ь < ,
В возмущенном движении изменение аэродинамической нагрузки
происходит довольно быстро, возбуждаются упругие колебания
конструкции. Самолет подвергается воздействию аэродинамических,
упругих и инерционных сил. Влияние упругих деформаций на харак-
теристики возмущенного движения может оказаться значительным.
В этом случае надо учитывать зависимость деформации от времени.
Деформации должны определяться из дифференциальных уравнений,
отражающих условия работы упругой конструкции Самолета.
В опорном движении на установившихся и квазиустановившихся
режимах полета нагрузки, действующие на самолет, изменяются
медленно. Упругие крутильные и изгибные колебания конструкции
не возникают. В этрм случае влиянием инерционных сил можно
пренебречь и рассматривать только статические упругие деформации
173
и использовать так называемую «квазистатическую» модель упругих
деформаций самолета.
На устойчивость и управляемость самолета оказывают влияние
следующие виды упругих деформаций: кручение и изгиб крыла и
оперения, изгиб фюзеляжа, деформации проводки управления,
деформации аэродинамического триммера (при обратимой системе
управления).
Будем рассматривать влияние только статических упругих де-
формаций. При этом ограничимся лишь качественными соображе-
ниями, так как для точного количественного учета влияния упру-
гости конструкции требуется специальный расчет, объем и содержа-
ние которого выходят за пределы книги.
Для определения статических деформаций на расчетном режиме
полета находят аэродинамические силы и моменты и их распределение
по отдельным частям самолета, предполагая при этом, что конструк-
ция самолета является жесткой. По найденным аэродинамическим
нагрузкам определяют изгибающие Мнз и крутящие Мк моменты
в сечениях конструкции самолета.
Из условия статического равновесия изгибающих (крутящих)
моментов и моментов сил упругости определяются угловые дефор-
мации в сечениях упругой конструкции и их влияние на местные
углы атаки крыла и оперения.
Определив величину изменения углов атаки, можно иайти при-
ращения аэродинамических сил и моментов, действующих на упру-
гий самолет и выяснить влияние упругости конструкции на харак-
теристики устойчивости и управляемости.
Влияние деформации конструкции самолета на момент
тангажа
Кручение и изгиб крыла. Будем считать крыло консольной балкой, жестко
защемленной по корневому сечению. Предположим, что упругая ось балки (линия
центров изгиба) совпадает с осью жесткости (линией центров кручения сечений).
Такое представление можно считать обоснованным для тонкостенных конструкций.
Крутящий момент в каждом сечении крыла Мк возникает из-за несовпадения
аэродинамического фокуса и центра жесткости сечения (рис. 10.21). Знак Л1К за-
висит от взаимного расположения
фокуса и центра жесткости.
Под действием Мк сечение крыла,
перпендикулярное оси жесткости, за-
кручивается иа угол <рн
г* М
фк = j (Ю.116>
о
где AfK, GJp — крутящий момент от
аэродинамических сил и жесткость
крыла на кручение в сечении г».
Рис. 10.21. Определение изменения
местного угла атаки из-за деформации
изгиба и кручения стреловидного крыла:
1 — линия фокуса сечений крыла; 2 — ли-
ния центров жесткости
174
В результате деформации угол атаки в том же сечении изменится на величину
Дак = (рк.
Изгиб крыла вызывается нормальными аэродинамическими силами У, его
можно трактовать как появление дополнительной V-образности крыла.
Изгиб упругого стреловидного крыла сопровождается изменением местных
углов атаки, обусловленных прогибом оси жесткости. При изгибе каждое сечение
крыла поворачивается в плоскости, перпендикулярной оси жесткости. Угол пово-
рота (девиация) сечения равен
гж
Ч’ИЗ==_^Г= f (10.117)
о
где у — прогиб оси жесткости в сечении zai;y М^з, EJ — изгибающий момент от
аэродинамических сил и' жесткость на изгиб в том же сечении.
Можно показать, что приращение угла атаки в любом сечении г крыла, па-
раллельном центральной хорде от кручения и изгиба, равно
= <рк cos X — <риз sin %.
(10.118)
В частности, для прямого крыла Дау = <рк — деформация изгиба ие влияет
иа изменение угла атаки.
Отсюда видно, что с увеличением жесткости Дау будет уменьшаться. При уве-
личении угла стреловидности влияние деформаций кручения на Дау ослабевает,
а изгиба — возрастает.
Из рис. 10.21. видно, что если центр жесткости расположен за фокусом, то
кручение вызывает увеличение угла атаки упругого крыла *. При М > 1 фокус,
перемещаясь назад, может оказаться за центром жесткости, и тогда деформация кру-
чения вызовет уменьшение угла атаки. Деформации изгиба при всех числах М по-
лета самолета уменьшают углы атаки.
Приращение углов атаки сечений крыла приводит к изменению скоса потока
и угла атаки горизонтального оперения, что скажется иа величине момента тангажа
оперения.
Упругие деформации при определенных условиях могут вызвать явление ди-
вергенции крыла — апериодической неустойчивости конструкции крыла на кру-
чение,
Для прямого кры;/а из условия равновесия моментов аэродинамических сил и
сил упругости относительно оси жесткости можно получить среднее значение угла
закручивания^ крыла <рк. ср — Дау. ср
(«соЧ- с“ краД*) SqbA
Фк'с₽-------GJpd-q/q^
— кр; хж, Хр кр — координаты центра жесткости и фокуса крыла;
9К д — критический скоростной напор дивергенции, равный
QJP
А s С А
суа
(10.119)
где Дх = хж
ДЛ = кх!Ьд\
(10.120)
Из этих формул видно, что если центр жесткости расположен за фокусом
(Дх > 0), то с увеличением скоростного напора q угол закручивания будет возра-
стать и при q = ?к. д станет бесконечно большим — наступит дивергенция крыла.
Жесткость конструкции крыла должна быть такой, чтобы была исключена
возможность появления дивергенции в эксплуатационном диапазоне скоростных
напоров.
В случае стреловидного крыла деформации изгиба уменьшают местные углы
атаки. Аэродинамическая нагрузка иа крыло уменьшается и, следовательно, явление
* На современных самолетах центр жесткости находится на расстоянии от
носка хорды сечения, приблизительно равном хж = (0,35 ... 0,4) Ь.
175
д>0
«М ЦД
И)
ЦД Ц*
о)
Рис. 10.22. Распределение давления по
горизонтальному оперению:
а — руль в нейтральном положении; б —
руль отклонен вниз
дивергенции может возникнуть при
ббльших значениях скоростных напоров,
чем при чистом кручении.
На сверхзвуковых скоростях по-
лета, когда Дх<С 0, дивергенция не на-
ступает.
Фюзеляж можно рассматривать как балку
Деформации фюзеляжа и оперения.
переменного сечения, закрепленную на крыле. Нагрузка на фюзеляж будет склады-
ваться из распределенных аэродинамических и массовых сил и сосредоточенной
подъемной силы горизонтального оперения.
Если полагать нагрузку приложенной в плоскости симметрии самолета XOY,
то она вызовет только изгиб фюзеляжа в этой плоскости, который приведет к по-
вороту горизонтального оперения.
Угол поворота упругой оси фюзеляжа в области горизонтального оперения
'Ф
qJ (EJ )ф
6ф =
(10.121)
где Л4из. ф — изгибающий момент фюзеляжа в сечении х; (Е/)ф — жесткость
сечения фюзеляжа на изгиб; /ф — расстояние от узлов крепления крыла до шарни-
ров горизонтального оперения.
Деформация изгиба фюзеляжа изменит угол атаки горизонтального, оперения
Ааг. о ф = — Оф. а следовательно, и коэффициент момента тангажа оперения.
Упругое горизонтальное оперение, как и крыло, под действием внешних сил
изгибается и закручивается. Направление закручивания оперения зависит от
взаимного расположения его линии фокусов и оси жесткости. Изгиб стреловидного
оперения приводит к уменьшению местных углов атаки н тем больше, чем дальше
расположено сечение от центральной хорды.
Приращение угла атаки стреловидного оперения в сечениях, параллельных
центральной хорде, от деформации кручения и изгиба равно
д*г. о. у = фи. г. о с0® Хг. о — Фив.г. о sin Хг. о- (10.122)
Значения фк.г. о и фи»г. о можно определить по формулам (10.116) и (10.117),
в которых надо брать моменты и жесткости, подсчитанные Для горизонтального опе-
рения.
Прирост угла атаки Дат. 0. у вызовет изменение момента тангажа горизонталь-
ного оперения.
Так же, как и у крыла, дивергенция оперения может наступить, когда скорост-
ной напор, потока $г. о достигнет величины критического скоростного напора ?д. г. о-
На сверхзвуковых скоростях полета, когда линия фокусов оперения перемещается
за ось жесткости, явление дивергенции оперения не возникает.
Упругость конструкции существенно влияет на эффективность органов управ-
ления.
Пусть, например, руль высоты отклоняется вниз с целью получения положи-
тельного прироста подъемной силы на оперении и создания пикирующего момента
тангажа самолета нормальной схемы. У упругого фюзеляжа его задняя кромка
поднимется вверх и уменьшит усол атаки горизонтального оперения. Это вызовет
на оперении прирост подъемной силы, направленной вниз, который будет создавать
кабрирующий момент. Эффект от отклонения руля высоты вниз из-за изгиба фюзе-
ляжа уменьшится. При отклонении руля высоты вниз центр давления аэродина-
мических сил иа оперении переместятся к задней кромке и может оказаться за цен-
тром жесткости (рис. 10.22). Деформации кручения оперения уменьшат его угол
атаки, а у стреловидного — и деформации изгиба. Эффект от отклонения руля
уменьшится.
176
Таким образом, эффективность руля высоты упругого самолета нормальной
схемы уменьшается от изгиба фюзеляжа и деформаций оперения, причем тем силь-
нее, чем больше скоростной напор.
При некотором значении скоростного напора наступит равенство прироста подъ-
емной силы оперения от отклонения руля и уменьшения ее вследствие упругих
деформаций. Руль высоты полностью теряет эффективность. При отклонении руля
управляющий момент не создается.
Скоростной напор 9кр. рев, при котором руль полностью теряет эффективность,
называется критическим скоростным напором реверса руля.
При q > ?Кр. рев будет иметь место реверс руля, при котором эффект от откло-
нения руля будет обратным ожидаемому. Для борьбы с реверсом надо увеличить
жесткость оперения.
Деформации конструкции влияют на характеристики демпфирования самолета.
У самолетов с упругими фюзеляжем и стреловидным оперением демпфирование про-
дольного движения уменьшается по сравнению с жестким самолетом >0).
Изменение углов атаки, эффективности руля высоты и демпфирования из-за
деформации конструкции самолета обусловит прирост коэффициента момента тан-
гажа самолета на величину kmzv. Это приведет к изменению характеристик про-
дольной устойчивости и управляемости самолета.
Анализ показывает, что у самолета нормальной схемы деформации крыла уве-
личивают продольную статическую устойчивость на тех режимах полета, когда
'линия фокусов лежит за осью жесткости (в частности при М> 1), илн же, когда
изменение углов атаки от изгиба больше, чец от кручения (большая стреловидность
крыла). Деформации оперения увеличивают, продольную статическую устойчивость
самолета нормальной схемы в том случае, когда деформации кручения, превалируют
над деформациями изгиба, причем линия фокусов будет находиться впереди оси
жесткости горизонтального оперения. Изгиб фюзеляжа приводит к уменьшению
статической устойчивости.
Влияние деформации конструкции самолета на боковые
моменты
При анализе продольного установившегося движения было показано,
что деформации изгиба и кручения приводят к изменению местных углов атаки
крыла й горизонтального оперения, в результате чего изменяются моментцйе ха-
рактеристики самолета. В боковом установившемся движении наличие скольжения
приводит к несимметричному относительно плоскости XOY распределению дефор-
маций частей самолета н к возникновению дополнительных, по сравнению с жестким
самолетом, боковых моментов.
Предполагая, хак и ранее, что ось жесткости совпадает с линией центров изгиба
н Хж * Х> рассмотрим влияние деформаций крыла, фюзеляжа и вертикального опе-
рения на боковые моменты.
Кручение и изгиб крыла. При скольжении на полукрыле, идущем впереди
(скользящем), эффективный угол стреловидности уменьшается, а у отстающего
увеличивается. Следовательно, у скользящего полукрыла составляющая вектора
скорости набегающего потока, перпендикулярная к оси жесткости V cos (х — ₽)
будет больше, чем у отстающего. Это обусловит различие в распределении аэродина-
мической нагрузки иа скользящем и отстающем полукрыльях. Крутящие и изги-
бающие моменты от аэродинамической нагрузки и деформации кручения и изгиба
от иих в сечениях, перпендикулярных оси жесткости иа скользящем полукрыле,
будут больше, чем на отстающем в аналогичных сечениях.
Различие деформаций иа полукрыльях обусловит несимметричное изменение
углов атаки и дополнительной V-образиости как в сечениях, перпендикулярных
к оси жесткости, так и в сечениях, параллельных центральной хорде крыла. Де-
формации и изменение местных углов атаки можно определять по формулам
(10.116) ...(10.118), в которых значения крутящего и изгибающего моментов,
а также косинусов и синусов углов надо брать с учетом скольжения ₽. Несимме-
тричное распределение приращений углов атаки по размаху крыла и изменение
угла поперечного V приводят к возникновению дополнительного момента крена.
Момент рыскания изменяется несущественно.
177
Деформации крыла увеличивают поперечную статическую устойчивость, а на
больших скоростях полета снижают демпфирующие свойства крыла. При отклоне-
нии элеронов упругие деформации крыла снижают эффективность элеронов, что
существенно сказывается на поперечной управляемости. Причина падения эффек-
тивности элеронов та же, что н у руля высоты.
При положительной стреловидности момент крена, создаваемый отклонением
элеронов на упругом крыле, меньше момента крена, при тех же углах отклоне-
ния элеронов на жестком крыле, следовательно,
/я.® I nfy. < 1.
Ху I л Six
Эффективность элеронов на упругом крыле уменьшается тем сильнее, чем
больше скоростной напор q. При достижении критического скоростного напора
реверса элеронов q = ^Кр. рев. э элероны полностью теряют эффективность, а при
q > ?кр. рев. в наступает реверс элеронов. В этом случае, например, при откло-
нении левого элерона вниз, а правого вверх возникает левый крен вместо ожидае-
мого правого.
Явление реверса опасно для скоростных самолетов с крыльями большой стре-
ловидности, у которых потеря эффективности элеронов усиливается изгибом крыла.
Прн полете с большими сверхзвуковыми скоростями аэродинамический нагрев кон-
струкции уменьшает ее жесткость, что снижает величину д1ф. рез. в и увеличивает
опасность реверса.
Для увеличения эффективности элеронов и исключения возможности появле-
ния реверса надо увеличивать жесткость крыла на изгиб и кручение, применять
интерцепторы и другие аэродинамические средства, смещать элероны ближе к кор-
невой части крыла.
Деформации фюзеляжа и вертикального оперения. При полете самолета со
скольжением поперечная сила, действующая на вертикальное оперение ZB, о будет
изгибать фюзеляж в боковой плоскости XOZ и закручивать его относительно
оси ОХ. Кроме того, сила ZB, о будет закручивать и изгибать вертикальное опе-
рение.
Деформации изгиба и кручения фюзеляжа и оперения изменяют углы сколь-
жения в сечениях вертикального оперения. Величину деформации и приращений
углов скольжения Др8. Оу можно определять по формулам для горизонтального
оперения (10.122), заменив в них индекс «г. о» на «в. о» и Даг. 0 на ДРВ. о-
Изменение углов скольжения обусловит возникновение дополнительных по-
перечных сил и боковых моментов. Наибольший прирост получит момент рыскания.
Это повликет на статическую устойчивость и демпфирование бокового движения.
Наиболее существенно деформации фюзеляжа и вертикального оперения сказы-
ваются на путевой устойчивости. С ростом скоростного напора путевая устойчивость
уменьшается. Уменьшаются демпфирующие свойства вертикального оперения и
эффективность руля направления.
В полете возникают деформации в деталях механизмов и проводке управления,
которые вызывают запаздывание в системе управления и вносят ограничения в ее
работу.
Дополнительная литература
[14] с. 458—480, [9] с. 231—274, 310—325, [8] с. 134—144,
150—155, [6] с. 251—284.
Контрольные вопросы
1. Что называется фокусом по углу атаки? Чем характерна эта точка?
2. Как влияет горизонтальное оперение, фюзеляж и расположение двигателей
на положение фокуса самолета?
3. Каково влияние сжимаемости воздуха на аэродинамический момент тангажа
самолета?
4. Какие части самолета оказывают наибольшее влияние на величину попереч-
ной силы и моменты крена и рыскания?
5. Чем осуществляется управление продольным и боковым движением самолета?
6. Что называется шарнирным моментом органов управления? Виды аэроди-
намической компенсации.
178
7. Какие части самолета в основном создают демпфирующий момент таигажа?
8. Как влияет запаздывание скоса потока на момент таигажа?
9. Поясните причину возникновения дополнительных моментов крена и ры-
скания при вращении самолета вокруг осей ОХ и OY.
10. Как влияют упругие деформации стреловидного крыла на величину мест-
ных углов атаки?
11. Объясните явление дивергенции крыла и реверса элеронов.
12. Как влияют упругие деформации конструкции на. эффективность органов
управления и демпфирующие свойства самолета?
ГЛАВА 11. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ САМОЛЕТА
В ПРОДОЛЬНОМ ДВИЖЕНИИ. ПРОДОЛЬНАЯ
БАЛАНСИРОВКА. СТАТИЧЕСКАЯ УПРАВЛЯЕМОСТЬ
Ранее, в гл. 9 было дано определение статической устой-
чивости самолета. Напомним, что статическая устойчивость харак-
теризует начальную тенденцию, наличие в начальный момент после
отклонения от опорного сбалансированного движения возвраща-
ющего момента или силы. Начальная тенденция — важное, но не
достаточное условие устойчивости. В процессе возмущенного дви-
жения и моменты, и силы, и отклонения будут изменяться, и началь-
ная тенденция еще не гарантирует окончательного устранения
отклонений, т. е. устойчивости в смысле Ляпунова (см. § 9.1).
Статическая устойчивость оценивается раздельно по параметрам
Движения, от которых зависят моменты. В продольном движении
принято рассматривать статическую устойчивость по скорости и
статическую устойчивость по перегрузке nva-
Статическая управляемость характеризуется балансировочными
отклонениями руля (стабилизатора) и их изменением (градиентом)
при изменении скорости и перегрузки пиа.
$ 11.1. ПРОДОЛЬНАЯ СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
САМОЛЕТА
Статическую устойчивость самолета рассматривают как
при фиксированных органах и рычагах управления, так и при осво-
божденном управлении.
Продольная статическая устойчивость
прн фиксированном руле высоты
Сначала рассмотрим статическую устойчивость по пере-
грузке. Пусть самолет с фиксированным рулем высоты (6В = const)
совершает квазиустановившийся криволинейный полет в верти-
кальной плоскости с постоянной скоростью и а = 0. В этом случае
коэффициент момента тангажа (10.65).
+ m&Cva (а) + mzCT<pyCT + т6гв8в + mP21 + т2 %.
179
Здесь сьа (а) — коэффициент подъемной силы, связанной с измене-
нием только угла атаки,
Суа(&) — Суа (® ССо)
Представим с,.а (а) как (аг. п —а0) + Дс,/а,
(П-2)
где аг. п — угол атаки самолета в установившемся горизонтальном
полете; Дсуа = суа Да — коэффициент подъемной силы, искрив-
ляющий траекторию полета; Да = а — аг. „ — приращение а в кри-
волинейном полете по сравнению с аг. п.
Найдем (ог из условия равенства подъемной силы Д/?уа, искрив-
ляющей траекторию и силы инерции triV*lr — mVQ, возникающей
в криволинейном движении,
Д/?уи = mVQ.
Величина Д7?уо, обусловленная изменением только угла атаки Да,
с учетом составляющей тяги равна"
ДЯРа = &Уи + Р sin да « дУо + Р да = (дсуо И сРда) Sq,
или
Д/?Уа — Дсуа | 1 + ~£~
Sq.
Дифференцируя по времени выражение & = а + 0 и имея в виду,
что а — 0, получим 0 = 'G = coz = X- й2. Следовательно,
"Л
Дс(/а ( 1 4
откуда
Гуо / J 1 Ср \
(П.3)
а» 1 ц- -££-\
И \
относительная плотность самолета в продольном
движенЙПГ^^
Подставляя в (11.1) выражения (11.2) и (11.3), получим
/пЯх = тг0 4- т£суа (аг. п) 4- гпг ст<р,ст 4- /пгвбв + тРЛ +
(П.4)
Так как опорное движение сбалансировано, т. е. при Дсуа (а) = О
rnRt = тг0 + т^гРуа (аг. п) + тТстФуст + пцв6в 4- тРЛ = О,
mRz =
180
Рис. 11.1. Изменение коэффициента самолета в зависимости от суа при М =
= const и 6В = const:
а — статически устойчивый по перегрузке самолет; б — статически неустойчивый
Возьмем полную производную от по Дс&0 при V =
= const (, обозначив ее ап:
\ аСуа /V — const
йг
= (П-5)
Имея в виду (10.54),
(П.6)
---- ----И \ Ъ)
Полная производная коэффициента момента тангажа по коэф-
фициенту подъемной, силы при фиксированном руле высоты в ква-
зиустановившемся криволинейном движении самолёта в вертикаль-
ной плоскости с постоянной скоростью называется степенью про-
дольной статической устойчивости по перегрузке при фиксирован-
ном руле высоты и обозначается через оп.
Если cplcya < 1, а Дхвв мало по сравнению c ift, можно при-
нимать >
(11.7)
\ Г* \
где mtv =»' — хра- --------------~~
По знаку производной оп можно судить о продольной статиче-
ской устойчивости самолета по перегрузке. Величину и знак произ-
водной можно определять по приведенным формулам или тангенсу
угла наклона моментной кривой тла = f (cva) в точке, соответст-
вующей режиму балансировки (тЛх = 0).
В качестве примера. рассмотрим два самолета, имеющих моментные кривые
mRt = f (cfta). полученные экспериментальным или расчетным путем при фикси-
рованном положении рули высоты и постоянном числе М полета (рис. 11.1).
Точки пересечения кривых с осью абцисс определяют балансировочные значе-
ния Суа бал, при которых тцг = 0.
181
Пусть у самолета, совершающего кваЗиуСтановившийся криволинейный полет
с постоянной скоростью, зависимость mRz == f выражается кривой (см.
рис. 11.1, а). Допустим, что в какой-то момент времени на самолет подействовали
возмущения таким образом, что угол атаки увеличился на величину +Да и по-
явился прирост Дсрд (а) > 0. При этом, как видно из рисунка, у самолета
возник неуравновешенный пикирующий момент тангажа ^mRz 0, стремящийся
уменьшить угол атаки, т. е. вернуть самолет в исходное, положение равновесия.
Если же под действием возмущений угол атаки уменьшится (Дсуа 0), то возни-
кает кабрирующий момент Дтн? > 0, тоже стремящийся вернуть самолет в исход-
ное положение равновесия. Этот самолет будет обладать продольной статической
устойчивостью по перегрузке. Моментная кривая рассматриваемого самолета харак-
теризуется тем, что тангенс угла наклона касательной, проведенной в точке, со-
ответствующей режиму равновесия, является отрицательным, и производная оп < 0.
У самолета, имеющего зависимость mpz~f(cva) (см. рис. 4,1, б), наклон
касательной в точке mRz — 0 положительный и производная оп > 0. Этот самолет
будет статически неустойчивым по перегрузке, так как, например, при увеличении
угла атаки + Да (Дсо{/ > 0) появляется неуравновешенный кабрирующий момент
Д/пИг > 0, под действием которого угол атаки будет еще больше увеличиваться,
а самолет — все больше отклоняться от исходного положения равновесия.
Наконец, при оп = 0 самолет будет статически нейтрален по перегрузке.
Из (11.5) ... (11.7) видно, что оп зависит от взаимного располо-
жения фокуса и центра масс самолета и продольного демпфирования.
Демпфирование продольного движения увеличивает статическую
устойчивость по перегрузке (тгг < 0), однако основную долю в оп
вносит частная производная т& = хт — хРй.
Рассмотрим статическую устойчивость по скорости. Этот вид
устойчивости характеризует поведение самолета после воздействия
на него возмущений в прямолинейном полете с изменяющейся ско-
ростью при постоянной нормальной скоростной перегрузке.
Так как изменение скорости при постоянной перегрузке сопро-
вождается и изменением угла атаки, то коэффициент момента тан-
гажа будет зависеть как от угла атаки [Дс^ (а) ], так и от скорости
полета (числа М). В этом случаев об устойчивости по скорости самолета
с фиксированным на балансировочном значении для исходного ре-
жима полета рулем высоты (или с фиксированным управляемым
стабилизатором) судят по полной производной коэффициента mRt
ПО cva при Пуа = Const, КОТОруЮ обозначают Оу
Ov = №&\ + (11.8)
где частная производная берется при условии М = const,
a tn^z — при условии cva = const. ,
Полная производная коэффициента момента тангажа по коэф-
фициенту' подъемной силы оу в установившемся прямолинейном
движении самолета называется степенью продольной статической
устойчивости по скорости при фиксированном руле высоты.
В частном случае, когда установившимся прямолинейным дви-
жением является Горизонтальный полет (пиа — 1)
. (11.9)
\aCya /пуа = 1
182
Рис. 11.2. Определение продольной ста-
тической устойчивости по скорости по
моментной диаграмме
Из условия cva г. п т mg/qS при q = 0,7рМ2 находим
М
^•суа г- п
Тогда
Су м м
Оу — ftlRV пТ,
Ыуа г. п
(11.10)
Судят о статической устойчивости по скорости по знаку произ-
водной Оу. Величину и знак производной ov можно определить по
приведенным формулам или по тангенсу угла наклона моментной
диаграммы, построенной для различных чисел М при пуа = const,
6В = const в точке, соответствующей режиму балансировки по ско-
рости (числу М) mRz = 0 (рис. 11.2).
Если Оу < 0, то самолет статически устойчив по скорости; при
Оу > 0 — неустойчив, а когда Оу = 0 — статически нейтрален по
скорости.
На рис. 11.2 заштрихована область неустойчивости по скорости.
Пунктирной линией показана зависимость mRz = f (cva) при малых
числах М. У современных самолетов потеря устойчивости по скорости
может возникнуть на околозвуковых скоростях.
Потеря устойчивости по скорости связана с приростом пикиру-
ющего момента, обусловленного развитием волнового кризиса (когда
с ростом М, из-за смещения фокуса назад частная производная
т#г < 0). Особенно-сильно это проявляется у самолетов с прямыми
крыльями.
В общем случае производная mRt, характеризующая степень
изменения коэффициента момента тангажа по числу М, зависит и
от величины балансировочного угла отклонения руля высоты (управ-
ляемого стабилизатора).
Представим коэффициент момента тангажа в установившемся
прямолинейном полете в виде тй2 = (^яг)вв=-о + /па®6в.
Частная производная от mRZ по числу М будет
mRz = = О 4- 6It- (11.11)
Отсюда видно, что при dmzB/dM. 0 производная triRZ является
функцией угла отклонения руля высоты. Влияет на mRz и изменение
Шго (М).
При полете на малых скоростях (когда = 0) справедливо
равенство Оу = т&.
183
Продольная статическая устойчивость
при фиксированном рычаге управления
На самолетах с необратимой системой управления приме-
няются автоматы, отклоняющие органы управления при воздействии
возмущений по определенному закону независимо от действия лет-
чика. В этом случае степень статической устойчивости при фикси-
рованном руле высоты (6В = const) будет отличаться от степени устой-
чивости при фиксированном положении рычагов управления (ручки,
штурвала, хв = const). Покажем это на примере работы отдельных
автоматов.
Рассмотрим статическую устойчивость по перегрузке. Пусть
в канале продольного управления включен демпфер тангажа (авто-
мат демпфирования), отклоняющий руль высоты с помощью необ-
ратимого бустера при изменении угловой скорости со2. Будем при-
ближенно считать, что демпфер представляет собой безынерционное
усилительное звено, работающее по закону
Дб р. а — ( Ц • 12)
где Д6В. а — угол отклонения руля высоты автоматом демпфиро-
вания; /Со» = dbjdatj — передаточный коэффициент демпфера. Для
самолета нормальной схемы >0.
При отклонении руля демпфером появится прирост коэффициента
момента тангажа
= (И 13)
гдедта^/С^"-^. • (U.14)
Так как Дт** < О, то автомат увеличивает демпфирование
продольного движения. - ' ' ,
. Степень статической устойчивости по перегрузке с фиксирован-
ной ручкой управления с учетом дейпфера изменится на величину
Л.-(^)г.^-.^Ш—/
Учитывая выражение для <вж (11.3), получим
, =—/1 и тогда
\ dCya /V = const р I ' са I
АОг
ДО»»---+4V ("••5)
Степень статической устойчивости по перегрузке самолета с фикси-
рованной ручкой управления (аПф) при включенном демпфере тан-
гажа станет равной
О„ф = о» + ДО»д = Оп (1 , (11.16)
где оп определяется по формуле 01.5) или (11.6).
184
Из (11.16) видно, что включение деь пфера тангажа повышает
устойчивость по перегрузке.
Рассмотрим влияние автомата продольной устойчивости на опф.
В отличие от демпфера он отклоняет руль высоты (стабилизатор)
не только при’изменении угловой скорости сог, но и при изменении
нормальной перегрузки или угла атаки
Д®р. а ~ Д/1ро; (И-17)
Дбр.а = КихСОНКаДа, (11.18)
где Дпва = Дс^/с^г.п и Да = ^сиа/с^ Кп, — пере-
даточные коэффициенты автоматов, положительные для самолета
нормальной схемы.
При включении автомата, отклоняющего руль высоты по закону
(И.17), возникает дополнительный момент тангажа, коэффициент
которого равен
дт2а == /п®вд6Е. а = Дт«z&z + Кпгпгв -~Суа .
суа г- п
Степень статической устойчивости по перегрузке с фиксированной
ручкой управления изменится на величину
Д па /у*. Const
/« । СР \ । > т«В
(11.19)
и тогда
Опф = Ол+Д0я. = Ол + ~+
(11.20)
Если включен автомат (11.18), то
Ао ____/s I \ IV wa" /ц on
Д^па цЬ. I* + а I гАв в • (11.21)
\ ct>a J суа
Степень статической устойчивости по перегрузке самолета с фикси*
рованной ручкой управления при включенном автомате продольной
устойчивости (11.18) будет равна
__ I д_ J_ _ I /’It СР \ I V ^*«В
°пф — Пп + Д°па — On П jjrj • I 1 4~757|
\ суа ] . суа
(1122)
Из выражений (11.20) и (11.22) видно, что при включенных
автоматах степень устойчивости по перегрузке самолета с фиксиро-
185
ванной ручкой апф будет больше, чем при фиксированном руле
высоты ап.
Рассмотрим статическую устойчивость по скорости. Так как при
определении устойчивости по скорости рассматриваются устано-
вившиеся режимы полета, в которых пуа = const и coz = О, то демп-
фер и автомат продольной устойчивости, отклоняющие руль высоты
при изменении а>г и перегрузки, не будут оказывать влияние на
степень статической устойчивости по скорости.
На устойчивость по скорости самолета с фиксированным рычагом
управления (хв = const) влияет автомат регулировки управления
(АРУ), изменяющий коэффициент передачи = d&BldxB при из-
менении скорости полета (У), а также автомат устойчивости,
отклоняющий руль высоты при изменении угла атаки и др.
Изменение автоматом регулировки управления коэффициента передачи Кш
при изменении скорости полета на величину Д V = V — Уисх приводит при не-
изменном положении ручки (хв = const) к дополнительному отклонению руля
высоты (стабилизатора), а следовательно, к появлению дополнительного момента
тангажа и изменению устойчивости по скорости.
Приведем без вывода формулу, определяющую изменение степени устойчивости
по скорости при включении АРУ и автомата с законом управления (11.18) для уста-
новившегося режима полета с пиа =1 и о2 = О
вв
*_ .______1 т* х и /Мш\
v ~ 2 cya г. п )v = уиох +
+ *а-П5Г ( 1 + $ > (1123)
сда^ *CVa г,п/
где v <0 задается законом регулирования.
Первое слагаемое (11.23) характеризует изменение av из-за влияния АРУ,
а второе — автомата устойчивости.
Так как > 0, mBB<Z 0 (самолет нормальной схемы), а 1 с^ >
> 0, то включение автомата приводит к увеличению устойчивости по скорости.
АРУ может увеличивать или уменьшать устойчивость по скорости в зависимости
от положения ручки управления в исходном режиме полета. Если ручка зафикси-
рована впереди нейтрального положения *в > 0 (при этом у самолета нормаль-
ной схемы руль высоты отклонен вниз (6В > 0), то АРУ повышает устойчивость
по скорости, а позади (хв<СО) — уменьшает. В обоих случаях этот эффект нара-
стает с увеличением скорости полета.
Степень статической устойчивости по скорости самолета с фиксированной
ручкой управления при включенном автомате устойчивости и АРУ станет равной
+ Доу> (11.24)
где <Уу определяется по формуле (11.8) или (11.10).
В заключение отметим, что устойчивость по перегрузке, естественная или обеспе-
чиваемая средствами автоматики, является более важным условием безопасности
полета самолета, чем устойчивость по скорости.
На самолете, устойчивом по скорости, легче точно выдерживать скорость и
число М полета. Однако опыт показывает, что небольшая степень неустойчивости
по скорости лишь создает некоторые трудности в процессе точного пилотирования
и не всегда замечается летчиком при обычном управлении самолетом.
186
Продольная статическая устойчивость самолета
при освобожденном управлении
Термин «освобожденное управление» ие применим к самолетам, име-
ющим необратимое бустерное управление. У таких самолетов при освобождении
рычагов управления рули не будут свободно отклоняться под действием шарнирных
моментов, а будут удерживаться бустерами. Поэтому устойчивость самолета с осво-
божденным управлением не будет отличаться от устойчивости самолета с фикси-
рованной ручкой управления (апс = опф и аус = о^).
У самолетов с обратимой системой управления при освобождении рычага управ-
ления (ручки, штурвала) руль высоты отклоняется под действием шарнирных
моментов и устанавливается в положение, при котором шарнирный момент ра-
вен нулю.
Допустим, что самолет совершает установившийся полет с балансировочным
углом отклонения руля высоты, необходимым для равновесия моментов тангажа.
При этом иа руль действует некоторый шарнирный момент, уравновешенный мо-
ментом усилия, приложенного к рычагу управления.
При освобождении руля высоты в первый момент времени иа руль будет дейст-
вовать ничем не уравновешенный шарнирный момент. Руль отклонится от перво-
начального положения и через некоторое время займет новое, соответствующее
нулевому значению шарнирного момента. При новом положении руля равновесие
моментов тангажа нарушится. Самолет начнет вращаться относительно оси OZ
до тех пор, пока не установится новый режим полета, при котором будет одновре-
менно равновесие моментов тангажа и равенство нулю шарнирных моментов.
Так как при освобождении руля изменяется момент тангажа, то и изменяется
статическая т£ и вращательная тгг производные этого момента.
Приведем без вывода формулы для определения этих производных
= (И.26)
с„„-
(11.26)
> Of, о _
о
тгсв = «« ~
г "г. о
где Тг = LT y/bj.-, *м = 1 + cj' 2ё~— (ПРИ изменении скорости).
При полёте с постоянной скоростью и изменяющейся перегрузкой = I Ш1-
Следовательно, степень продольной статической устойчивости по перегрузке
при освобожденном управлении
й.
с„ т«ся
апс = св Ч
(11.27)
СР
суа
Учитывав?.И^раження (11.5), (11.25) и (11.26),
(11.28)
Степень продольной статической устойчивости по скорости при освобожден-
ном управлении
(п-29)
187
Из этих формул видно, что продольная статическая устойчивость по пере-
грузке и скорости самолета нормальной схемы при освобожденном управлении
уменьшается по сравнению с фиксированным управлением, так как пгшг- °/тшв >
>0,(1— еа) > 0, Lr 0 > 0, а /п®в < 0.
§ 1Д.2. БАЛАНСИРОВКА САМОЛЕТА И характеристики
СТАТИЧЕСКОЙ УПРАВЛЯЕМОСТИ В ПРОДОЛЬНОМ
ДВИЖЕНИИ
Отклонения органов управления, рычагов управления
(ручка, штурвал, педали) и усилия на рычагах управления зависят
от режима полета — скорости, высоты, перегрузки и т. п.
Графические зависимости управляющих параметров (отклонение
органа и рычага управления и усилие на рычаге) от управляемых
параметров движения (углов атаки, скольжения, перегрузки, ско-
рости и числа М полета и др.) на характерных режимах установив-
шегося’ полета называются балансировочными кривыми.
В продольном движении в качестве характерных режимов рас-
сматриваются установившийся прямолинейный полет с постоянной-
перегрузкой, равной единице или близкой к ней, и установившийся
(квазиустановившийся) криволинейный полет с постоянной ско-
ростью.
По аналогии с продольной статической устойчивостью балан-
сировочные кривые в установившемся прямолинейном полете иногда
называют балансировочными кривыми по скорости, а в установив-
шемся криволинейном полете — балансировочными кривыми по пе-
регрузке.
Одним из упра'вляющих параметров.является усилие на рычаге
управления Pv. Определим это усилие.
Сначала рассмотрим простейшую механическую систему про-
дольного управления, в которой отсутствуют рулевые приводы
(бустерк) и автоматические устройства, улучшающие устойчивость
и управляемость самолета (рис. П.З).
Эта система управления надежна и удобна в эксплуатации,
Однако класс самолетов при такой системе ограничен (спортивные
самолеты, небольшие пассажирские самолеты местных авиалиний
и др.).
Рис. 11.3. Кинематика управления .тангажем самолета:
в) — нормальной схемы; б) — схемы «утка»
1вв
Рис. 11.4. Структурные
схемы систем управления
самолетом:
а) — обратимые бустерные
системы; б) — необратимые
бустерные системы; Б — бу-
стер
При такой системе управления (СУ) шарнирный момент Л4Ш,
действующий на рулевые поверхности, будет полностью уравнове-
шиваться моментом усилия, прикладываемого летчиком к ручке
управления.
Пренебрегая потерями на треиие в СУ, на основании принципа
возможных перемещений запишем Рв dxB + Л4пДбв — 0, откуда
Рв = -ктМш, (11.30)
где хв — линейное отклонение ручки управления; “’-д—- —
передаточный коэффициент в системе продольного управления.
По принятому правилу знаков положительным считается давящее
(от себя), а отрицательным—тянущее (на себя) усилие. За положи-
тельное значение хв > 0 принимается отклонение ручки (штурвала)
вперед.
. Для самолетов нормальной схемы и схемы «бесхвостка» коэф-
фициент > 0, а для схемы «утка» Кш < 0.
Величина Кш У самолётов различных классов изменяется сравни-
тельно в небольших пределах,
Заменив в (11.30) Л1ш его значением из (ГО.112) и (1и.114)7получим
Рв = — ЯшЗ>АаЛ.о (тшг‘ °®г.о + /Пш вв + /Пш“тв) <7- (11.31)
Отсюда видно, что величина усилия Рв зависит от геометрических
размеров рулевых поверхностей, скоростного напора и числа М по-
лета, а также отклонения триммера тв. В установившемся полете
усилие Рв можно снять, отклоняя триммер. Однако изменение 6В
вновь потребует усилия от летчика.
На современных скоростных самолетах в систему управления
включаются силовыё рулевые приводы (бустеры), непосредственно
присоединенные К рулевым поверхностям и выполняющие функции
усилителей мощности (рис. 11.4). Бустерное управление на самолетах
появилось в 50-е годы.
Наибольшее распространение получили бустеры гидравлического
типа — гидроусилители. Гидроусилители в отличие от аэродина-
мических компенсаторов не изменяют величину шарнирных момен-
тов, а только уменьшают усилия на рычагах управления, воспри-
нимая частично или полностью шарнирный момент рулевых поверх-
ностей.
При обратимой системе, как и в простейшей схеме, имеется об-
ратная связь от руля к рычагам управления. Усилие, которое летчик
;189
должен приложить к рычагу управления для отклонения рулевой
поверхности, равно
РЪ - ^Сш^обр^в^Ав^г. О «Г. О + /Ош^В ~h (1 1.32)
где ^обр — коэффициент обратимости системы, обычно^71оТ7~1/2^
При необратимой системе управления гидроусилитель~Вбспри-
нимает весь шарнирный момент. Летчик для отклонения рулевой
поверхности прикладывает к рычагу незначительные усилия для
преодоления сил трения в механической проводке управления
и в золотнике бустера. Аэродинамический шарнирный момент не
ощущается летчиком, так как он полностью передается на конструк-
цию самолета через опору бустера. При этом обратная связь от
руля к рычагу управления отсутствует. Из-за отсутствия усилий на
рычагах управления, зависящих от Мш, у летчика при управлении
утрачиваются привычные ощущения выполняемых самолетом режи-
мов полета. Поэтому в систему управления включаются загрузочные
механизмы (обычно пружинные загружатели), которые искусствен-
ным путем создают определенные усилия на рычагах управления.
Загрузочные механизмы могут создавать усилия с коррекцией по
скоростному напору, перегрузке, числу М полета и др.
Чтобы не утомлять летчика на продолжительных установившихся
режимах полета усилия с рычага управления снимаются с помощью
специального механизма, который по аналогии с аэродинамическим
триммером называется триммерным механизмом или механизмом
триммерного эффекта;
Необратимая система управления применяется на самолетах
с большими околозвуковыми и сверхзвуковыми скоростями полета.
Обратимая бустерная система управления менее универсальна,
чем необратимая, поэтому применяется реже и только на самоле-
тах, не достигающих критических чисел М полета.
При необратимой системе и линейной характеристике загру-
зочного механизма усилие на ручке управления равно
Рв=-^в=М.. (11-33)
где kx = dPB/dxB — характеристика жесткости загрузочного ме-
ханизма.
Большим недостатком загрузочных механизмов с линейной ха-
рактеристикой является создание малых усилий Рв при малых
р потребных отклонениях ручки хв. Это затруд-
няет управление самолетом, особенно на боль-
ших дозвуковых скоростях и малых высотах,
/ т. е. при больших скоростных напорах, когда
._______(_______ небольшое отклонение ручки (а значит и не-
"~1 о xg большое усилие на ней) может вызвать значи-
/ тельную нормальную перегрузку. Наоборот,
Рис. 11.В. Характеристика загрузочного механизма
190
при больших потребных расходах ручки летчику требуется при-
кладывать к ручке большие усилия.
Поэтому для создания большего усилия при малых отклонениях
ручки и умеренного — при больших, применяются загрузочные
механизмы с нелинейной характеристикой жесткости («изломом»)
(рис. 11.5).
Балансировка самолета в установившемся
горизонтальном полете
Определим углы отклонения органов управления танга-
жем, а также отклонение ручки и усилие на ней, потребные для
балансировки самолета в установившемся горизонтальном полете.
При этом для упрощения анализа будем предполагать, что влияние
продольной силы на момент тангажа пренебрежимо мало.
Приравнивая нулю выражение (10.53), получим условие балан-
сировки самолета, имеющего стабилизатор и руль высоты
+ т^уа (аг. „) + т’^фуст + тгБ6в + тРЛ = 0, (11.34)
где Суа (аг. п) = Суа (аг. п — а0) — коэффициент подъемной силы,
создаваемой только вследствие изменения угла атаки от а0 до аг.п,
определяемый при 6В = Фет = 0. Полный коэффициент подъемной
силы в горизонтальном полете будет
Суа г. п — Суа (®г. п) 4“ с*1ОТфуст 4” Оудбв. (11.35)
Используя выражения (10.38), (10.39), (10.24) и (10.21), получим
tya = -m^ \LT,0-, с^ = -т^ llT.o. . (11.36),
Определив из (11.35) значение суа (аг,п) с учетом (11.36) и под-
ставив его в (11.34), получим условие балансировки в виде
тгй 4“ г. п 4“ Щг^’фуст 4“ 4“ тРЛ — (1 1.-37)
где /Иг#т и «г* — коэффициенты эффективности стабилизатора и*
руля высоты при постоянном значении cva, рамыа-^
(Н.38)
Из (11.37) можно определить потребный для балансировки само:
лета угол отклонения руля высоты в зависимости от суа г.п. Однако
удобнее представлять бв в функции скорости или числа М полета.
Заменяя суа г. п его приближенным значением суог^ «, получим
е. ------V + '"« + + -Sr^- (П-39)
mz*
191
Если балансировка осуществляется управляемым стабилиза-
тором, то
%т — 5^" (mz0 + тРг 1 + 5рД тРг) '
тг*
(11.40)
Для самолета схемы «бесхвостка»
бвв ~ к,Пга6-г- 0 трг1 SpV8 тРг) > (11.40а)
где т®§в = ст’эв f 1 _j_ .
\ Ь*в /
Если tnCRZlLv.o мало, как это обычно имеет место для дозвуко-
вых самолетов нормальной схемы, можно записать приближенно:
6в = ~ “J? (^го Ь тРг 1 + <°Т<Руст + "ty) •
т2
г ___ Д»в
Лв ~ "W »
а Лш
(11.41)
Потребное для балансировки отклонение ручки управления
(штурвала) в установившемся горизонтальном полете определим
из выражения для Кш
V — v фот
' Кш ’ Хт
где да, Фет и двВ берутся из (11.39)-*(11.4Qa).
По формулам (11.39)... (11.41) можно построить балансировоч-
ные кривые, характеризующие зависимость углов отклонения орга-
нов управления и отклонения ручки (штурвала) от скорости или
Числа М полета.'
Балансировочные кривые. строятся для нескольких значений
высоты полета, полетных масс и центровок самолета и для основных
режимов работы двигателя.
На рис. 11.6 показаны балансировочные кривые для дозвукового
самолета нормальной схемы без учета влияния сжимаемости воздуха.
Из рисунка видно, что характер изменения дв, фот и х„ при
изменении скорости (числа М) полета- для статически устойчивого,
неустойчивого и нейтрального самолетов различен. Следовательно,
по виду балансировочных кривых, полученных расчетом или в ре-
зультате летных испытаний само-
лета можно судить о наличии ста-
тической устойчивости самолета.
Изменение балансировочных
углов и отклонений ручки харак-
Рис. 11-6. Балансировочные кривые для са-
молетов:
/ — статически устойчивого; 2 — статически не-
устойчивого; 3 — статически нейтрального
теризуется величиной и знаком производных db^/dV, d(fCT/dV и
dxJdV. Определим эти производные исходя из следующих рассу-
ждений.
Допустим, что самолет совершает установившийся горизонталь*
ный полет с перегрузкой, равной единице, при этом mRz — 0. С из-
менением скорости полета возникает неуравновешенный момент,
коэффициент которого ктПг- Летчик, отклоняя руль высоты на
угол Дбв уравновесит этот момент, обеспечивая тем самым балан-
сировку самолета на новом режиме. При этом выполняется условие
ДщЛ/ + тг* Дбв = 0, откуда Д6В = —&mRz/mz*.
Возьмем полную производную от этого выражения по скорости
ПрИ Пуа = 1
/ d6B \ __ d6B __________1 / ^mRz \ dcya ____
kW/^=1 “ dCya dV ~ \ dCya ]пуа~\ dV “
6В
«г*
dCya
~dV~’
dCya / dCya \ d№ 2Cya r. п 2с^а r. и
ГДе ~dv~ = \~dAF )nya= 1 ~dv Ma V
r — m«
Ч/ат.и— 0,7pM»S *
Следовательно,
/ d8B \ 2 ay
k dv )nya^~ v ~^c^'
rV _ V / A, \ . aY r
B ~ 2 k dv In =1 lf~cl/ar.n-
' ' "pa * mJ!
Аналогично
так как
(11.42)
(11.43)
(11.44)
„V aV
фст — 5“ cva r. n>
Полную производную от отклонения ручки управления (штур-
вала) по скорости представим в виде
/ dxp \ __dxB / ^6В __ 1 / ddp
k dV 'nua=l d^a \ dV >nva=^i Кш к dV /п =1
f/ч уи уи
Учитывая выражение (11.42), в котором av заменим степенью
статической устойчивости по скорости с фиксированной ручкой
управлёния (Оуф), получим
2 k dV )п а=1 к с»“ Г-П' (11.45)
Производная Хв называется коэффициентом расхода ручки управ-
ления (штурвала) по скорости. Это потребная величина отклонения
7 А. Ф. Бочкарев и др. 193
рычага управления для изменения скорости исходного установив*
шегося горизонтального полета на 50 %.
При отсутствии в системе управления автомата регулировки
управления в выражении (11.45) надо брать /Сш — const и не учи-
тывать влияние АРУ на Оуф.
Если в систему управления включен АРУ, то в (11.45) надо
брать Лщ (V) и учитывать влияние автомата на оуф [см. (11.24)].
Можно показать, что изменение коэффициента расхода ручки
по скорости при включении АРУ будет равно
ayV__ V Г Яш 11- Хв ^исх / ^Яш (V) \.
ЛХв~Хв1"етТ ]~Яш(У) 2 k dV
(П.46)
где Хв и Кш — значения коэффициентов при отсутствии в системе
управления АРУ.
Из (11.46) видно, что расходы ручки на изменение скорости
полета при включении АРУ зависят от знака и величины баланси-
ровочного значения хв в исходном режиме полета и могут быть уве-
личены или уменьшены.
Величина и знак производных бв, фУт, и хв оказывают су-
щественное влияние на управление самолетом. Если, например,
у самолета нормальной схемы бУ >0, а следовательно, при Кш «
= const и %в >0 (так как Кт >0), то при увеличении скорости
полета (ДУ >0) для балансировки самолета на новом установив-
шемся режиме полета руль отклоняется вниз (Дбв >0), а ручка —
от себя. При уменьшении скорости (ДУ < 0) руль высоты откло-
няется вверх (Дбв < 0), а ручка — на себя (Дхв < 0). Такой ха-
рактер отклонения ручки является нормальным — соответству-
ющим естественным рефлексам летчика.
У самолетов нормальной -схемы и схемы «бесхвостка» для нор-
мального управления в установившемся горизонтальном полете
желательно выполнение условий: бв >0 (или фи >0), б»в >0
и £ > 0, а у самолетов схемы «утка»: бв < 0 (или фУг < 0), хв > 0.
- Нарушение этих условий на основных режимах^ полета не допу-
скается. Для выполнения этих условий требуется, чтобы самолет
любой схемы был статически устойчивым по скорости прн фиксиро-
ванном управлении (оу <0, о^ф < 0). 1см. (11.43) ... (11.45)].
Из трех балансировочных кривых, представленных на рис. 11.6,
только кривая 1, построенная для тЛ = — л>0 < 0» отвечает
условию av < 0 и о^ф < 0.
Определим усилие иа ручке управления в зависимости от‘скорости (числа М)
в установившемся горизонтальном полете на режимах, соответствующих балан-
сировке самолета по моменту.
Предварительно найдем кс^ффнциеит расхода усилия Рвт иа единичное (Д^т =
= 1) смещение центровки.
194
Дифференцируя выражение (11.32) для Рв по хт, в котором от хт зависит только
угол отклонения руля высоты, получим
х G х
Р»т = -КпАбР«вЧ Л. о"Лт.
Имея в виду, что в выражении для 6В (11.39) гп^г = хТ — с, найдем произ-
водную 6ВТ
' т8 = _ с^г-п.. (11.47)
Следовательно, при обратимой системе управления
| (И.48)
mJ J
При необратимой системе управления
. у
р*т _ ^Рв dxB dbB _ dPB 6ВТ
в ~ dxB абв dxT - dxB
рхт~. dPB Cj/ar.n . ' (Ц.49)
В dxB к ~вВ
%
Производная Рвт характеризует величину усилия, которое должен приложить
летчик к ручке при единичном (на величину САХ крыла) смещении центровки
самолета для сохранения балансировки моментов тангажа иа неизменном режиме
полета (Д₽в = Р,т Дхт = Рвт)‘
Я ' ' '
После определения Ржт найдем усилие На ручке управления рулем высоты,
необходимое для балансировки моментов тангажа, в зависимости от скорости
(числа М) в установившемся горизонтальном полете.
Подставляя в (11.32) балансировочное значение угла вв (11.39), а угол атаки
горизонтального оперения в виде
аг. о = ° 4* фуст ~ ~ 4* фуст ~ е» 4—х- ®а) Суо г. п
суа
и учитывая (11.48), получим для самолетов с обратимой системой управления
Р = РвТ-^^2св. (11.60)
Здесь тЛг св — коэффициент момента тангажа самолета при, освобожденном управ-
лении,
тЛгсв в тЯ<0св4" т^гсВсуат. п> (11.51)
в_
ГД6 т/?г0св ~ /nzo4- тРв14-тйтфуСт-----3“ [m«»’ ° (“о+'Руст “ ео) + тшВтп]’
ИШВ
т^св определяется по формуле (11.25), в которой надо положить тгв = mJ.
7*
195
Рис. 11.7 Балансировочные кривые са-
молета нормальной схемы:
а) — статически устойчивого; 6) — стати-
чески неустойчивого
Рис. 11.8. Балансировочные кривые
устойчивого по перегрузке самолета
с учетом влияния сжимаемости воздуха
Для самолетов с необратимой системой управления усилие на
ручке, потребное для балансировки моментов тангажа, равно
= (П-52)
иХд flXg Лш
где бв определяется выражением (11.39).
По формулам (11.50) или (11.52) можно построить балансировоч-
ные кривые Рв = / (V) или Рв =* ф (М). На рис. 11.7 представлены
балансировочные кривые самолета нормальной схемы при отсут-
ствии влияния сжимаемости воздуха на аэродинамические харак-
теристики.
С помощью аэродинамического триммера или механизма трим-
мерного • эффекта можно на каком-либо режиме установившегося
горизонтального полета снять усилие с ручки управления — сба-
лансировать самолет по усилию. Режим полета, на котором Рв = 0
называется балансировочным по усилию (Убал)-
Изменяя положение триммера (триммерного механизма) можно
получить различные значения Увал» при которых Рв = 0. При этом
балансировочные кривые будут эквидистантно смещаться.
Из рис. 11.7 видно, что характер изменения усилий при изме-
нении скорости (числа М) полета для статически устойчивого и не-
устойчивого самолета различен. Изменение усилий характеризуется
величиной и знаком производной dPBldV.
Определим dPjdV для саь!олета с обратимой системой управления. Возьмем
' полную производную от усилия (11.50) по скорости при Рв = О (когда mRt св =
= 0), так как это соответствует случаю освобожденного управления:
/ dPB \ / dPB \ dcya рят Sq dcya
\ dV )Рв=о \ dcva /Рв=о dV в mg Vc dV
dcva 2cua г. п 2 mg / dPB \ 2 Dx
Так как v » V Sq > ™ \ dV )pa=0~ V Pb
(11.53)
где Oyc — степень статической устойчивости по скорости при освобожденной
Я
ручке управления; Рвт определяется по формуле (11.48).
196
Коэффициент расхода усилий на скорость, т. е. усилие, которое
должен приложить летчик к рычагу управления для изменения
скорости исходного установившегося полета на 50 %, при nva = 1
будет равен
(”И)
Для самолетов с необратимой системой управления этот коэф-
фициент
Рв = - РвЧ'ф, (11.55)
где Рвт определяется по формуле (11.49).
Если в систему управления включен АРУ, то в (11.49) надо
брать (V) и учитывать влияние АРУ на о^ф-
Для нормального управления самолетом требуется, чтобы знак
производной Рв был положительным. Так как Рвт >0, то из (11.54)
и (11.55) видно, что условие Рв > 0 будет выполняться в том случае,
если самолет будет статически устойчивым по скорости при осво-
божденном управлении (у самолета с необратимой системой управ-
ления Оус = Оуф).
Балансировочная кривая а на рис. 11.7 соответствует самолету
с нормальным управлением, так как ее наклон положительный
и Pl >0.
Если Рв < 0, летчику приходится удерживать самолет от само-
произвольного стремления повышать скорость; для балансировки
самолета требуются обратные усилия.
Производные *в и Рв относятся к числу основных показателей
статической управляемости самолета.
На управляемость самолета влияет не только знак %в и Рв, но
и их абсолютная величина. Если они будут слишком малы, то само-
лет будет строгим в управлении, так как при небольшом отклонении
ручки и усилия на ней .будет сильно изменяться скорость полета.
Если они излишне велики, то для перевода самолета с одного режима
на другой потребуются большие усилия — самолет- будет тяжелым
в управлении.
Известно, что (см. § 11.1) в околозвуковом диапазоне скоростей
полета самолет теряет устойчивость по скорости. Это окажет влия-
ние на вид балансировочных кривых.
На рис. 11.8 показаны балансировочные кривые с учетом влияния
сжимаемости воздуха, построенные для самолета нормальной схемы
статически устойчивого по перегрузке.
Из рисунка видно, что почти во всем летном диапазоне скоростей
сохраняется нормальное управление (6в>0, Хв >0, Рв >0).
Только в диапазоне скоростей, где имеет место статическая
неустойчивость по скорости, производные'бв, Хв и Рв меняют знак
и становятся отрицательными. В этом диапазоне скоростей при пере-
ходе с одного установившегося режима полета на другой требуются
197
двойные движения ручкой управления рулем высоты. Первое дви-
жение — прямое, предназначенное для изменения режима полета
и требует для увеличения спорости отклонения ручки «от себя»
(руль вниз) и приложения давящего усилйя, а для уменьшения ско-
рости — ручку «на себя» (руль вверх) и приложения тянущего уси-
лия. Второе движение — обратное, предназначенное для баланси-
ровки самолета на новом режиме. В этом движении для балансировки
самолета на новом режиме с большей скоростью требуется ручку
отклонять на себя (руль вверх) и прикладывать тянущие усилия,
а на режиме с меньшей скоростью — ручку от себя (руль вниз)
и прикладывать давящие усилия (см. рис. 11.8).
Двойное движение ручки является нежелательным, так как
оно усложняет пилотирование.
Чтобы избежать «обратного» управления, нужно применять ав-
томаты устойчйвости по скорости или автоматы балансировки.
Балансировка самолета в установившемся
криволинейном полете
Определим углы отклонения органов управления танга-
жом, отклонение ручки (штурвала) и усилие на ней, потребные
для балансировки самолета в установившемся криволинейном полете.
Приравнивая нулю выражение (11.4) для коэффициента момента
тангажа и имея в виду (11.5), ^получим условие балансировки са-
молета
+ mfcya (аг. п) + гпг стФуСТ + т«в6в + тРЛ + оп Дс^ =0, (11.56)
где ап — степень статической устойчивости по перегрузке, а
тф°т т&в
Суа (ССГ, п) = Сиа г. п 4 = Фуст 4 т
Ь[\ о о
с учетом (11.35) и (11.36).
Выразим teya через приращение нормальной скоростной пере-
грузки. Принимая приближенно
&Cya3q ^Суа8я &Суа
т8 Суа г, п$Я Суа г. п *
получим
ДС{/а = АПуаСуа г.п- (11.57)
Подставляя в (11.56) вместо сиа (аг.п) и &сьа их значения, после
некоторых преобразований условие, балансировки самолета примет
вид
^20 4“ тРгСуа г. п 4“ ^2^Тфуст 4“ ^г*6в 4“ МрЦ 4" г. п Д^а = 0,
(11.58)
где /п^т и nh* определяются по (11.38).
198
Из этого уравнения определим угол отклонения руля высоты,
потребный для балансировки самолета в установившемся криволи-
нейном полете с постоянной скоростью
6В = g (^*0 i 'Густ Г niRzCija г. ц ~Ь ^п^уа г. ц •
тг*
(11.59)
Возьмем производную от этого выражения по перегрузке
& = --%-суаг,п. (11.60)
, тг*
Тогда (11.59) примет вид
«в- + (11.61)
где 6в.г.п — угол отклонения руля высоты, потребный для ба-
лансировки самолета в установившемся горизонтальном полете
с той же скоростью и на той же' высоте, что и в установившемся
криволинейном полете, и'определяется по формуле (11.39).
Формулу (11.61) для любого органа управления тангажом можно
представить
бо, у — 60, у. г. п Т~ 60. у кПуа, (11.62)
62. у
°п с
а ьуа г. п»
(Ц.63)
где под 6О.У понимается угол отклонения руля высоты, управляе-
мого стабилизатора или элевона.
Потребные для балансировки отклонения ручки управления
(штурвала) в установившемся криволинейном полете определятся
из выражения хв = 6о.у/Кш, которое с учетом (11.62) можно пред-
ставить в виде
Хв == ^в. г. п Ч” ХвАП(/д, (11.64)
®о. у. г. п .
г де Хв. г. п==z V ’
Хп__ г. п
в~ dnytl- Кщт^.у
(11.65)
спф — степень статической устойчивости по перегрузке при фикси-
рованной ручке управления.
Производная я" называется коэффициентом расхода ручки (штур-
вала) на перегрузку (потребная величина отклонения рычага управ-
ления для изменения нормальной перегрузки самолета на единицу
при coz = const, V = const и М = const).
Из полученных формул видно, что балансировочные значения
6о. у и хв являются линейной функцией Дпуа и зависят^ от режима
полета, эффективности органов управления тг°-7 и’ степени стати-
ческой устойчивости по перегрузке при фиксированном управле-
199
Рис. 11.9. Балансировочные кривые
бв = / (А/1иа) самолета нормальной схе-
мы при V — const и Н = const
Рис. 11.10. Балансировочные кривые
Рн — f (пуаУ-
1 — статически устойчивый самолет; 2 —
статически неустойчивый самолет
нии (ап, апф), а следовательно, от аэродинамических и конструк-
тивных параметров самолета. По этим формулам можно построить
балансировочные кривые — зависимости 60. у (Дпуа) и хв (Дпеа).
На рис. 11.9 представлена балансировочная кривая SB = f (&пиа)
самолета нормальной схемы. Аналогичный вид будет иметь хв =
= <р (Дпуо).
Величину усилия на ручке (штурвале) при управлении танга-
жом, необходимую для балансировки самолета в криволинейном
установившемся полете представим в виде
^В —: Рв. г. П + Д^В»
(11.66)
где Рв. г. п — усилие на ручке в установившемся горизонтальном
полете с той же скоростью, и числом М полета; ДРВ — приращение
усилия на ручке по сравнению с усилием в установившемся гори-
зонтальном полете.
При обратимой системе управления, имея в виду (11.32), будем иметь
ДРВ = - VoCpVaA. 0 ° Даг. 0 + Дбв).9. (И.67)
Приращение угла атаки горизонтального оперения Дар, 0 в криволинейном
установившемся полете связано с приростом подъемной силы, искривляющей
траекторию, и вращением самолета с угловой скоростью тангажа <ох
Ао&г. о —
о
dCya
&Суа Ч
о
Vr. о
®zLr. о
Р^г. о
= —— (1 -- е“) Дера +
суа
получим
Имея в виду, что Дс„о = &пуасуа Г1
Aotr. о —
суа г. п &пуа- (11.68)
Приращение балансировочного угла отклонения руля высоты Д6В (органа
- управления таигажом Д60. у)
Дбв = 6” ^пуа -----5— ^пуасуа г. п- (11 -69)
тг*
200
Подставляя (11.68) и (11.69) в (11.67), после преобразований получим
= (11.70)
рп =р*тст (1171)
в dnva в пс U '
где опс — степень продольной статической устойчивости самолета по пере-
грузке с освобожденным управлением.
Для самолетов с необратимой системой управления
^ = Рвтопф. .. ’ (11.72)
Производная Рв называется коэффициентом расхода усилий на
перегрузку (потребная величине усилия, которую должен приложить
летчик к рычагу управления для изменения нормальной перегрузки
самолета на единицу при сог = const, V = const, М = const).
Подставляя значение ДРВ (в 11.66), получим выражение для
усилия на ручке управления тангажом в криволинейном устано-
вившемся полете
Л, = Л..г.п-| -РЧЬп^. (11.73)
Я
Величины Рвт, Рв. г, п и Рв при обратимой системе управления
определяются по формулам (11.48), (11.50) и (11.71), а при необра-
тимой— по формулам (11.49), (11.52) и (11.72).
Используя (11.73), можно построить балансировочные кривые —
зависимости Ръ = 1(пуа) (рис. 11.10).
Величина и знак производных хв и Рв оказывают большое влия-
ние на управление самолетом при маневре. Для самолетов любой
схемы эти производные должны быть отрицательными (хв < 0,
Рв < 0). В этом случае для увеличения перегрузки (Дл^ >0)
и балансировки самолета на новом режиме (с измененной перегруз-
кой) летчик должен отклонять ручк^на себя (Дхв < 0) и приклады-
вать тянущие усилия (ДРВ < 0), а’для уменьшения перегрузки и
балансировки на новом режим.е наоборот — ручку от себя (Дхв >
>0) и прикладывать давящие усилия (ДРВ >0). Такое управление
будет нормальным, естественным для летчика.
Если производные хв и Рв будут положительными, то потре-
буется двойное движение ручки — прямое для изменения пере-
грузки и обратное для балансировки самолета на новом режиме,
что является нежелательным.
Из (11.65), (11.71) и (11.72) видно, что для нормального управле-
ния самолетом требуется наличие продольной статической устой-
чивости по перегрузке с фиксированным и освобожденным управле-
нием (опф < 0 и
^ПС < 0).
Если Рв и хв слишком велики по абсолютной величине, то само-
лет будет тяжел в управлении при выполнении интенсивного ма-
невра; если же они очень малы, то самолет будет строгим в управле-
201
нии и создается опасность непроизвольного вывода самолета на не-
допустимо большие перегрузки или раскачки самолета.
Диапазон изменения Рв и х£ для самолетов различных классов
задается Нормами летной годности гражданских самолетов
(НЛГС-2). Коэффициент расхода усилий Р" и расхода ручки Хв
на перегрузку являются важнейшими критериями, определяющими
управляемость самолета, и являются основными показателями ста-
тической управляемости самолета при выполнении им продольного
маневра.
Предельные значения и х" нормируются. Так, для граждан-
ских самолетов ^НЛГС-2) допустимы и
а максимальные значения этих величин не должны превышать ми-
нимальные более чем в три раза. •
. Особенности продольной балансировки на больших
углах атаки. Влияние упругости конструкции и
деформации проводки управления на балансировку
и показатели статической устойчивости
и управляемости *
Некоторые особенности продольной балансировки само-
лета пр скорости вбзнйкаюг йри его выходе па бслЫиие йспл^атМ^
ционные углы' атаки, когда появляется срыв потока с крыла, вызы-
вающий срывную трясКу й нарушение устойчивости и управляе-
мости самолета. ’ •
У самолетов со стреловидным крылом при больших углаХ атаки
срыв потока Первоначально начинается на верхней поверхности
концов крыла.Несущая способность кондов крыла падает. Это
приводит к смещению центра давления (фокуса) на крыле вперед,
к увеличению; угла скоса потока в области оперения н уменьшению
аг.о. Появляется прирост кабрирующего момента, способствующий
дальнейшему увеличению угла атаки и расширению области конце-
вого срыва потока. Смещение фокуса самолета вперед уменьшает
продольную статическую устойчивость (Ат/ >0). Как только
фокус окажется впереди центра масс, самолет станет статически
неустойчивым по перегрузке. Для балансировки возникшего в ре-
зультате срыва потока кабрирующего момента потребуется откло-
нять рулв высоты вниз (Аов >0), а ручку — от себя (Ахв >0).
На балансировочной кривой при потере устойчивости появляется
«ложда» (рис. 11.11). Производные 6о. у и хв иа больших а изменят
свой знак — нормальное управление самолетом, нарушается.
При неудачной компоновке самолета неустойчивость и падение
эффективности руля высоты на больших углах атаки может также
вызываться затенением горизонтального оперения, особенно у само-
летов с Т-образным оперением и двигателями, расположенными
в хвостовой части фюзеляжа. При полете на околокритических
углах атаки могут возникать неблагоприятные особенности и в про-
202
Рис. 11.11. Балансировочные кривые
по скорости полета на больших углах
атаки самолета со стреловидным кры-
лом
перегрузке
Рнс. 11.12. Балансировочная кривая
по перегрузке при полете на больших
углах атаки
цессе балансировки самолета по перегрузке на околозвуковых
скоростях.
Известно, что в сверхзвуковом полете статическая устойчивость
по перегрузке сильно возрастет из-за смещения аэродинамического
фокуса назад. Уменьшается, эффективность органов управления
тангажом. Все это существенно ограничивает в сверхзвуковом
полете продольный маневр на больших высотах (при больших а).
Поэтому при проектировании сверхзвукового самолета приходится
.смещать центр масс самолета назад и тем самым ограничивать про-
дольную устойчивость при М > 1. Однако при этом снижается
устойчивость в дозвуковом полете.
Для саыолетов с малым, запасом устойчивости, в траисзвуновой
области может набдюдаться так называемый еолне эй подхват —
резкое возрастание перегрузки nva при торможении от сверхзву-
ковой до дозвуковой скорости при фиксированном, или балансиро-
вочном полоок&ими ручки хж — const или стабилизатора <рм — const.
Интенсивное торможение может быть связано с высокими я„4,
а значит с Лм (0*. гл. 7).
В этом случае волновой подхват проявляется. как нрозкиданное
для летчика возрастание перегрузки я угла атаки в ходе маневра
при переходе через трансзвуковую область. Связан волновой под-
хват с тем, что при уменьшении устойчивости резко уменьшается
расход ручки на перегрузку. ,
Уменьшение устойчивости по перегрузке на больших углах
атаки в околозвуковой области окажет влияние на характер балан-
сировки самолета по перегрузке. На балансировочных кривых'
появится «Ложка» (рис. 11.12). Изменится знак производных 6". у
и х1, и нарушатся нормал ное управление самолетом.
Из сказанного следует, что у самолета с крылом большой стре-
ловидности возникают неблагоприятные особенности при полете
на больших углах атаки как на малых, так и на околозвуковых
скоростях из-за потери устойчивости по перегрузке. Степень не-
устойчивости по перегрузке обычно возрастает с увеличением стре-
ловидности крыла. Поэтому увеличение стреловидности крыла тре-
бует проведения специальных мер, направленных на улучшение
продольной устойчивости самолета на больших докритических
углах атаки.
203
К конструктивно-аэродинамическим мероприятиям, затягивающим развитие
на крыле концевого срыва потока и противодействующим сильному смещению
центра давления вперед, относятся:
устройства, уменьшающие накапливание пограничного слоя на концах крыла
(аэродинамические гребни на верхней поверхности крыла, «запилы» с наплывом
в передней кромке стреловидного крыла, отсос и сдув пограничного слоя и т. д.);
постановка на концах крыла профилей с большей несущей способностью, чем
в корневых сечениях, установка концевых предкрылков и отклоняющихся носков
крыла;
применение геометрической и аэродинамической крутки крыла с отрицатель-
ными углами закручивания на концах крыла;
размещение горизонтального оперения вне зоны сильных изменений nd углам
атаки скоса потока от крыла и фюзеляжа и др.
Помимо конструктивно-аэродинамических мероприятий, способ-
ствующих повышению устойчивости по перегрузке на больших
углах атаки, применяются специальные автоматы, включаемые
в систему управления самолетом.
Ранее было показано (см. § 10.7), .что упругие деформации кон-
струкции самолета вызывают изменение момента тангажа, продоль-
ной статической устойчивости, уменьшают демпфирование и сни-
жают эффективность органов управления. Все это оказывает влия-
ние на балансировку самолета и показатели статической управляе-
мости. Учесть это влияние можно введением поправок. (Д/Пг|,
и Д/Пгу) в выражения потребных для балансировки значений бв,
хв и Рв, а также в показатели статической управляемости *в, хв,
Рв и Р%.
Кроме упругих деформаций конструкции на характеристики
продольной статической устойчивости и управляемости самолета
влияют упругие деформации механических элементов проводки
управления.
Упругие деформации проводки, вызванные усилиями, прикла-
дываемыми летчиком к ручке (штурвалу) управления, нарушают
однозначную связь между углом отклонения руля и положением
ручки, что приводит к изменению балансировочных кривых хв =
— f (V) и хв = <р (Пуа), а также показателей устойчивости и управ-
ляемости опф, ОГуф, Хв, Хв. . ;
При упругой проводке линейные перемещения ручкн возрастают и зависят не
только от углов отклонения руля 6В; но н от величины усилий, прикладываемых
к ручке управления Рв:
хв. -у ~ хв "Ь хв^в
где хв. у — потребная величина перемещения ручки для отклонения руля на
угол 6В при упругой проводке; хв — то же при недеформируемой проводке; х* —
коэффициент упругости проводки управления рулем высоты, х* = 0 при абсолютно
жесткой (недеформируемой) проводке.
В качестве примера приведем без вывода выражения для количественной оценки
влияния упругих деформаций проводки на показатели статической управляемости.
Изменение х" и х%, обусловленное упругими деформациями, равно
= Ч.у = <К)тв- (11.74)
204
Отсюда видно, что деформации проводки приводят к увеличению х" у (так
как одного знака с х"). Величина Дхв может существенно меняться в за-
висимости от положения аэродинамического триммера тв (из-за изменения 1тв)"
У тяжелых самолетов, имеющих большую протяженность про-
водки управления, упругие деформации механических элементов
проводки должны учитываться при анализе их устойчивости и
управляемости.
На маневренных самолетах, где протяженность проводки и дей-
ствующие на нее силы невелики, влияние упругих деформаций на
характеристики устойчивости и управляемости незначительно и его
обычно не учитывают.
В связи с широким использованием в контуре управления само-
летом различных автоматических устройств в последние годы стали
разрабатываться электродистанционные (проводные) системы управ-
ления (ЭДСУ). В ЭДСУ механическая связь между рычагами управ-
ления летчика и рулевыми поверхностями заменяется электриче-
скими связями. Большая часть механической проводки заменяется
электрической.
ЭДСУ позволяет: повысить точность управления за счет суще-
ственного уменьшения деформации проводки, уменьшения трения,
люфтов и зон нечувствительности; сэкономить массу (особенно на
больших самолетах); упростить взаимодействие с автопилотом, и
повысить «живучесть» системы. Но при этом для обеспечения на-
дёжности работы ответственных систем ЭДСУ, определяющих без-
опасность полета, требуется трех-, четырехканальное резервирование.
$ 11.3. ПОТЕРИ НА БАЛАНСИРОВКУ.
БАЛАНСИРОВОЧНАЯ ПОЛЯРА
Ранее, для горизонтального полета полный коэффициент
подъемной силы самолета с отклоненным рулем высоты был записан
в виде (11.35)
Суа г. п ~ Суа (аг. п ®о) 4“ Суа фуст 4“ СуаЬв. (11.75)
Рассмотрим подробнее слагаемые с^а’фуст и сУа бв с учетом выражения
(11.39) для балансировочного отклонения бв:
Лсуа сал = cjr Фуст + iB6B = + . (11.76)
ьг. о
Для балансировки, осуществляемой управляемым стабилизатором,
будет
&суа Сал = $тФст = „ (1 J 77)
ьг. о
205
При значительных суа г. п = когда величина Ас^ бал суще-
ственна, можно считать в первом приближении т^суат.п > mzo +
+ тРг 1 и
А^бал^—gil/Or-n . (И.78)
Lr, о •
Для устойчивого по перегрузке самолета нормальной схемы т£г <
< 0, a Lr_ о>0 и, значит, ксиа Сал < 0. Таким образом, коэф-
фициент сиа г. п с учетом балансировки меньше, чем Суа («г. п — ао)
при фуст = 0 и 6В = 0 (или фст — 0). Величину АсуОбал поэтому
можно назвать потерями коэффициента подъемной силы на балан-
сировку, а отношение
Ас«а бал _ 01 79ч
суа г. п Lt. о '
— относительными потерями. Как видно из (11.79), эти потери
тем больше, чем больше по модулю т$г — хТ — xF (т. е. чем больше
расстояние между фокусом и центром масс самолета) и чем меньше
Аг. о — плечо горизонтального оперения.
Потери подъемной силы приводят к изменению балансировочного
значения с“абал по сравнению с с“а прн Ь* — Фуст = Р (или <рст = 0)
Суа бал == 1 4~ ' " | (11.80)
. » X ьо /
и соответствующему уменьшению максимального (Суа ы>) и допу-
стимого (Суа доп) значения cte.
Потерям подъемной силы Aegean по поляре самолета можно
сопоставить увеличение сопротивления
A^scd бал = С»а (Суд г. п) — Cjm Ifye (®гп)]> (11.81)
где . '
/ тХ \
Суа г. и = Суа (аг. п) + &Суа бал ^Суа (аг. п) \ 1 “Ь ~тг ) '
' ьг, о ’
Для квадратичной поляры прирост сопротивления
АсМбал« - (11.82).
Lr. о
(с точностью до малых второго порядка и без учета изменения индук-
тивного сопротивления оперения), что позволяет легко пересчитать
поляру самолета с учетом балансировки.
206
(11.83)
к’ — Д'исх
Атах бал — Атах
п-
(11.84)
Точный расчет сха самолета при а — аг. п и балансировочных
отклонениях 6В и <руст (или <рст) можно провести известными мето-
дами аэродинамики. При этом угол атаки'самолета
______ г. п / mz0 + mFzl
аг. п_Ь I «0 = ——
^абал \ г. сА//а
Поляра .самолета сха (суа)блп, построенная с учетом отклонения
органов управления, называется балансировочной.
.Увеличение сха на ^cxaCan при суа ~ суаг.п приводит к умень-
шению аэродинамического качества. При суа г. п — суа нв> когда
при неотклоненных рулях К. = /С^Гх находим
Lr. о
Для современного пассажирского самолета т£г = —(0,1 ... 0,2),
Lr. o — порядка 4 ... 5 и потери максимального аэродинамического
качества из-за балансировки могут достигать 5 % и более. Переход
к предельно задним, близким к нейтральной, центровкам, когда хт
и xFc почти совпадают и tn& tv 0, существенно сокращает потери,
однако приводит к резкому уменьшению запаса статической устой-
чивости по перегрузке и оп и скорости Су и уменьшению расхода
ручки (штурвала) на единицу перегрузки*" 1см. (11.7), (11.10)
и (11.65)1. Поэтому для самолетов с малыми *Гс требуется
введение специальных автоматических устройств (автоматов устой-
чивости, АРУ и т. п.) при обязательном обеспечении их надежности,
исключающем возможность отказа системы.
Дополнительная литература
19] с. 278, 333 [81 с. 133—170/111 ] б. 126—160
Контрольные вопросы
1. Что понимается под продольной статической устойчивостью по перегрузке
и скорости?
2. Что называется степенью продольной статической устойчивости по пере-
грузке и скорости при фиксированном руле высоты?
3. Каково взаимное расположение фокуса и центра масс у статически устой-
чивого самолета?
4. Как влияют автоматы демпфирования и устойчивости на ап и ау? Приведите
пример.
б. Напишите условия балансировки самолета в установившемся горизонталь-
ном и криволинейном полете.
6. Сделайте анализ балансировочных кривых для статически устойчивого и
неустойчивого самолета. Укажите основные показатели продольной статической
управляемости.
7. Каковы особенности продольной балансировки на больших углах атаки?
207
ГЛАВА 12. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ САМОЛЕТА
В БОКОВОМ ДВИЖЕНИИ.
БОКОВАЯ БАЛАНСИРОВКА САМОЛЕТА,
ХАРАКТЕРИСТИКИ ПОПЕРЕЧНОЙ И ПУТЕВОЙ
СТАТИЧЕСКОЙ УПРАВЛЯЕМОСТИ
Боковая статическая устойчивость самолета характери-
зует равновесие моментов рыскания и крена.
Предположим, что, обеспечив такое равновесие, летчик больше
не изменяет положение органов управления. Если у сбалансирован-
ного самолета, совершавшего установившийся прямолинейный полет
без скольжения, под воздействием возмущений появится скольже-
ние, то возникнут моменты креиа й рыскания (см. § 10.4) — боковое
равновесие самолета нарушится.
Так как при скольжении возникают и рыскание и крен, то боко-
вую статическую устойчивость условно разделяют на путевую или
флюгерную статическую устойчивость — относительно оси OY и
поперечную устойчивость — относительно оси ОХ.
Вводится также понятие путевой и поперечной статической
управляемости, характеризующей условия балансировки самолета
в боковом движении, градиенты расхода ручки (штурвала), педалей
и усилия на них при изменении режима полета.
Боковая балансировка. самолета осуществляется отклонением
элеронов и руля направления.
В качестве характерных установившихся режимов полета при
балансировке самолета рассматриваются прямолинейный полет со
скольжением, прямолинейный полет с несимметричной тягой и
установившийся криволинейный полет.
§ 12.1. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ САМОЛЕТА
В БОКОВОМ ДВИЖЕНИИ
Путевая и поперечная статическая устойчивость самолета
рассматривается с фиксированными и освобожденными органами,
и рычагами управления.
Сначала рассмотрим статическую устойчивость самолета с фикси-
рованными рулем направления (6н = const) и элеронами (ба —
= const).
Путевая (флюгерная) статическая устойчивость. Под путевой
статической устойчивостью самолета понимается его способность
самостоятельно, без вмешательства летчика в управление, противо-
действовать изменению угла скольжения. Если в исходном устано-
вившемся полете скольжение отсутствовало, а в результате воздей-
ствия возмущений оно появилось, и при этом у самолета возник
момент рыскания МЛЕ), стремящийся устранить возникшее сколь-
жение, то такой самолет обладает путевой устойчивостью.
О путевой устойчивости и неустойчивости судят по знаку частной
производной коэффициента момента рыскания по углу скольжения,
208
Рис. 12.1. Зависимость коэффициента момента рыскания самолета от угла сколь-
жения при М = const:
устойчивый в путевом отношении самолет; —---------неустойчивый самолет
взятой в точке, соответствующей mRy = 0. Если производная
mRy < 0, то самолет обладает путевой устойчивостью, так как
в этом случае, например, при возникновении скольжения на правое
полукрыло (ДР >0) возникает отрицательный момент рыскания
(Д/пди = tnRy ДР < 0), стремящийся развернуть самолет вправо,
т. е. уничтожить скольжение. Если т%и > 0, то самолет не обладает
путевой устойчивостью, так как, например, при положительном
скольжении (Др >0) возникает положительный момент рыскания
(Дт^ =/п^Др >0), стремящийся развернуть самолет влево и
тем самым увеличить начальный угол скольжения. И, наконец,
если под действием возмущений начинается скольжение, на какое-
либо полукрыло с некоторым углом ДР и при этом не возникает
момент рыскания (Д/пЛг/ = 0), самолет будет статически нейтрален.
= 0).
Частная производная т%у называется степенью путевой стати-
ческой устойчивости самолета.
На рис. 12.1 показана зависимость mRy = f (Р) при М = const
для устойчивого и неустойчивого самолета. Из рисунка видно, что
если фокус по углу скольжения, в котором приложен прирост попе-
речной силы Д-Z, лежит за центром масс самолета, то самолет об-
ладает путевой устойчивостью *.
Путевая устойчивость сравнительно мало изменяется по числам М
на дозвуковых и существенно на сверхзвуковых скоростях полета.
* Фокусом по углу скольжения называется точка, расположенная в плоскости
симметрии самолета, относительно которой момент рыскания и крена остаются
/ дтг>„
= 0;
эр
постоянными при малых изменениях только угла скольжения
' dmRx ...
209
Рис. 12.2. Зависимость = f (М)
при а = const
Рис. 12.3. Возникновение скольжения
в результате крена
На рис. 12.2 приведена характерная зависимость т%у = f (М)
при а ~ const. Видно, что в трансзвуковом диапазоне чисел М
(0,8<М<1,2), где несущие свойства вертикального оперения
(производная |cfB. 0|) наибольшие, самолет имеет большую путевую
устойчивость. При дальнейшем увеличении числа М путевая устой-
чивость самолета быстро падает. Так как дестабилизирующий момент
рыскания фюзеляжа с увеличением числа М изменяется (увеличи-
вается) слабо, то падение путевой устойчивости самолета на сверх-
звуковых скоростях при а = const происходит, главным образом,
потому, что снижается стабилизирующий момент рыскания верти-
кального оперения из-за существенного уменьшения производной
С увеличением углов атаки возрастает-затенение крылом и фюзе-
ляжем высокорасположенного вертикального оперения. Эффектив-
ность оперения уменьшается, что способствует падению путевой
устойчивости самолета.
При некотором значении числа М стабилизирующий момент
вертикального оперения становится равным дестабилизирующему
моменту фюзеляжа, а при числах М, превышающих это значение,
самолет теряет путевую устойчивость.
Сильное снижение путевой устойчивости на сверхзвуковых ско-
ростях полета приводит к тому, что самолет под действием возмуще-
ний легче входит в режим скольжения, боковое раскачивание уси-
ливается, динамика возмущенного движения ухудшается, сильнее
проявляется взаимосвязь продольного и бокового движения. Все
это ухудшает эксплуатационные свойства самолета.
Для увеличения путеврй статической устойчивости надо увели-
чивать площадь вертикального оперения, применять симметричные
кили, устанавливать шайбы на горизонтальном оперении, исполь-
зовать автоматические средства повышения устойчивости и др,.
Поперечная статическая устойчивость. Прежде чем сформули-
ровать понятие поперечной статической устойчивости рассмотрим
поведение самолета при его накренении. При этом будем иметь
в виду, что крен непосредственно не влияет на величину сил и мо-
210
ментов, действующих на самолет, а его ЬЛиЯйие на них сказывается
через появляющееся скольжение, обусловленное креном.
Пусть самолет, совершающий прямолинейный установившийся
полет без скольжения, под воздействием возмущений внезапно
накренился, например, на правое полукрыло на угол Ду >0.
В результате крена появится ничем неуравновешенная проекция
силы тяжести на поперечную ось (mg)z = mg sin Ду, которая начнет
искривлять траекторию центра масс самолета в сторону опущенного
полукрыла (рис. 12.3). При искривлении траектории самолет в пер-
вый момент не будет поворачиваться вокруг оси OY, так как крен не
приводит к нарушению равновесия моментов MRy. Но, если траек-
тория движения центра масс искривляется, а самолет продолжает
совершать поступательное движение, то у него возникает скольже-
ние на опущенное правое полукрыло (Др >0). Появление скольже-
ния обусловит возникновение боковых сил и моментов крена и рыска-
ния. Если момент крена (&mRx = тВхДр) будет действовать в сто-
рону отстающего поднятого полукрыла (в нашем случае левого),
то он стремится устранить первоначальный угол крепа — самолет
статически устойчив в поперечном отношении. Если же момент крена
будет действовать в сторону скользящего (опущенного правого)
полукрыла, то первоначальный крен увеличится — самолет ста-
тически неустойчив.
Из сказанного следует, что самолет обладает поперечной стати-
ческой устойчивостью, ’если при появлении скольжения возникает
момент крена, стремящийся опустить «отстающее» полукрыло.
Можно дать и другое определение поперечной устойчивости.
Под поперечной статической устойчивостью самолета понимается
его способность при возникновении скольжения крениться в сторону
отстающего пол укрыл а.
О'наличии или отсутствии у самолета поперечной статической
устойчивости судят по знаку частной производной взятой
в точке,- соответствующей mRx = 0. Если- m&t < 0, то самолет
обладает поперечной статической устойчивостью. В этом случае при
скольжении, например, на правое полукрыло (ДР >0), .возникает
отрицательный момент крена (Д/пдж = m&r Д₽ < 0), стремящийся
опустить отстающее (левое) полукрыло. При т^х >0 самолет
статически неустойчив в поперечном отношении, а при mRx = 0 —
статически нейтрален.
Частную производную называют степенью поперечной ста-
тической устойчивости самолета.
На рис. 12.4 показана зависимость mRx = f (Р) ПРИ М = const
для статически устойчивого и неустойчивого самолета.
Поперечная статическая устойчивость современного самолета
изменяется по углам атаки и числам М полета.
Зависимость от угла атаки связана с тем, что при скольжении
стреловидного крыла возникает момент крена [см, (10.69) ], который
при суа = Суа («—«о) >0 является стабилизирующим. • Причем
211
Рис. 12.4. Зависимость коэффициента
момента крена самолета от угла сколь-
жения при М = const:
------устойчивый в поперечном отноше-
нии самолет; — — — — неустойчивый са-
молет
Рис. 12.5. Зависимость = f (М)
в горизонтальном (пуа = 1) и криво-
линейном (nvu > 1) полете
с увеличением углов атаки (до определенного значения) этот момент
растет и поперечная статическая устойчивость самолета повышается
[см. (10.70)1.
Влияние числа М на т^х становится существенным на около-
звуковых и сверхзвуковых скоростях полета. Так как величина
пг^х при заданном угле атаки пропорциональна производным суа
и Сгв. о, то характер изменения т%х по числам М будет сходным
с изменением с“Л и с?в. с При сверхзвуковых скоростях полета
с ростом чисел М производные |с“а| и | с£в.о | уменьшаются, по-
этому степень поперечной статической устойчивости будет умень-
шаться.
На околозвуковых скоростях уменьшение статической устой-
чивости связано с несимметричным развитием волнового кризиса
на скользящем и отстающем полукрыльях. У полукрыла, выдвину-
того вперед, вследствие уменьшения эффективного угла стреловид-
ности (х — Р), волновой кризис начинает развиваться раньше, при
меньших числах М и сопровождается уменьшением подъемной силы,
а на отстающем, у которого (% + £), такого явления еще не на-
блюдается. Падение подъемной силы у скользящего полукрыла
приводит к уменьшению стабилизирующего момента крена и умень-
шению поперечной статической устойчивости. Если же у отстающего
полукрыла при некотором значении числа М подъемная сила станет
больше, чем у скользящего, то начинается кренение на скользящее
полукрыло, производная т%х станет положительной — самолет по-
теряет поперечную статическую устойчивость.
На рис. 12.5 показана примерная зависимость т%х = f (М)
в горизонтальном и криволинейном полете. Из рисунка видно, что
с увеличением углов атаки (пуа > 1) падение поперечной статиче-
ской устойчивости несколько замедляется.
Обращаем внимание на условность понятия путевой и попереч-
ной статической устойчивости. Это справедливо только при изоли-
рованных друг от друга движениях крена и рыскания. В реальных
212
условиях при неуправляемом полете эти два движения действуют
одновременно и взаимосвязано между собой. Тем не менее характе-
ристика поперечной устойчивости (т«х) наряду с путевой (т^)
оказывает существенное влияние на устойчивость самолета в бо-
ковом движении.
Боковая статическая устойчивость при фиксированных рычагах
управления. Если в каналах крена и рыскания имеются автоматы
устойчивости, то степень поперечной и флюгерной устойчивости
при фиксированных рычагах управления будет отличаться соответ-
ственно от т.^х и т#у при фиксированных органах управления.
В качестве примера рассмотрим простые автоматы поперечной
и путевой статической устойчивости, чувствительные элементы кото-
рых формируют сигналы вида
ДЙЭ = 4~
где Ках, Кар — передаточные числа автомата поперечной статиче-
ской устойчивости; Кау, Кн(з — автомата путевой статической устой-
чивости.
При отклонении автоматами органов управления возникают
дополнительные моменты крена и рыскания, коэффициенты которых
равны
Ат» = тх9 А6, = тх9К^х 4- тхвКа$-,
Ьти — гпуя А6Н *= туяКю^>у 4- туиКи$.
Взяв частные производные от А/па и А/пв по углу скольжения
и углбвым скоростям и <йу, получим
^ту — К^тйуи; (12.1)
A/n^^rn®3; (12-2)
Следовательно, при фиксированных рычагах управления
m&r ф = т^х 4- Д/и£ = т^х 4- /Сь₽/п®в; (12.3)
"&у ф = т^у 4- Дт£ = т%у 4- /Сн₽т®н; (12.4)
И1*ф — тх 4- КахШц ~— » (12.5)
„/^у ) if 2V , туф — ту 4- . (12.6)
Из (12.1) ... (12.6) видно, что автоматы в каналах крена и рыска-
ния одновременно увеличивают демпфирование колебаний и ста-
билизируют движение самолета на заданном ему угле скольжения.
Степень поперечной и путевой статической устойчивости и демпфи-
рование при фиксированных рычагах управления у самолетов
с автоматами будет больше, чем при фиксированных органах управ-
ления.
213
Статическая устойчивость При освобожденном управлении. В боковом движе-
нии, так же как и в продольном у самолетов с обратимой системой управления при
освобожденном управлении изменяется степень поперечной и флюгерной устойчи-
вости. Приведем без вывода значения производных и т^св при освобож-
денном управлении
св = mRx-----ГТГ~ т*° “tg Х’ (12’7)
* Т «Э т 8
л rrfi
<4уС (12.8)
тш
где k.d — степень дифференциальности управления элеронами, учитывающая раз-
личие в отклонении элеронов вверх н вниз. Отсюда видно, что при освобожденном
управлении поперечная и флюгерная статическая устойчивость самолета становится
меньше, чем при фиксированных рычагах управления.
У самолетов с необратимой системой управления при освобождении рычагов
„0 _ в я ____ 6
mRx св ~ тЯ* ф’ mRy св ~ mRy ф-
§ 12.2. БАЛАНСИРОВКА САМОЛЕТА В УСТАНОВИВШЕМСЯ
БОКОВОМ ДВИЖЕНИИ. ХАРАКТЕРИСТИКИ ПОПЕРЕЧНОЙ
И ПУТЕВОЙ СТАТИЧЕСКОЙ УПРАВЛЯЕМОСТИ
Определим углы отклонения органов управления креном
и рысканием, а также отклонения рычагов управления и усилия
на них, потребные для балансировки самолета в установившемся
боковом движении.
Балансировка самолета в установившемся
прямолинейном полете со скольжением
Установившийся прямолинейный полет со скольжением
выполняется при посадке самолета с боковым ветром, несимметрич-
ном отказе двигателей и других случаях.
Для равновесия самолета необходимо, чтобы сумма моментов
относительно связанных осей ОХ и ОУ, а также сумма проекций
всех сил на поперечную ось 0Z были равны.нулю
Л4«« = 0; М№ = 0; FB = 0. (12.9) '
В установившемся прямолинейном по-
лете с креном и скольжением на самолет
будут действовать поперечная сила Rz и
проекция силы тяжести (mg), = mg sin у
(рис. 12.6), следовательно, .
Ft = ₽, + »4ffstay,
Рис. 12.6. Схема сил, действующих на самолет при
полете с креиом и скольжением
214
где 7?z = Z + 1Рг\ Z — поперечная аэродинамическая сила; Рг —
поперечная составляющая тяги двигателя; I — число двигателей.
Из условия равновесия сил по оси OY (см. рис. 12.6)'имеем
mg cos у « Y w Ya, откуда mg = Ka/cos у, и, тогда mg sin у =
— Ya tg у. Следовательно, третье условие (12.9) запишется
Рг = Rz + Ya tg у = R& + /?Х + Ya tg у = 0.
Так как PZH — 0, то 7?zH = Z6”.
Перейдем от сил и моментов к их коэффициентам, для чего разде-
лим силы на Sq, а моменты на Sql. Значение коэффициентов моментов
крена и рыскания приведены в (10.100) и (10.101).
Условия равновесия боковых моментов и сил (12.9) примут вид
тхо Ч- Ч~ /ижя6э 4" Ч~ ifipx — 0;
m^p + mX + ^H6H = 0; (12.10)
С^гР + СгН8в + Cva г. п tg У = 0.
Здесь с&г = 4~ 4*; = i \Ги7^_ 1 ~ Для воздушно-реак-
тивных двигателей и = —для поршневых и турбовин-
товых двигателей.
Балансировочные значения углов 8Я> и у определяются из
системы (12.10) в зависимости от угла скольжения. Если в (12.10)
пренебречь малыми, величинами /п»» гп/ и трх, то получим
A«-^-₽; y^tgy=-§-₽; (12.11)
v(*—02.12)
9 л Ж
dV СгИ те ’ 4». /10 141
--ж------- I Сд*------г- mRy I <=®>- . (lz. 1О)
др Дуй г. п у m “ / сИа п
Потребные для балансировки самолета отклонения педалей хя
и боковое отклонение ручки (штурвала) хя равны
Х‘ <1214>
где /(ш. н = dbjdxg,, /Сщ.в = dd9/dxa — коэффициенты передачи со-
ответственно для путевого и поперечного управления самолетом;
йхя 1 (1вя , dxy 1 d6e .. п । -.
Кш.п rf₽ ’ “dp (1^.10)
В (12.16) производные d&B/d$ и dl)B/dfi определяются по формулам
(12.12), в которых степень путевой и поперечной статической устой-
216
чивости надо брать при фиксированных рычагах управления, т. е.
и
Линейные отклонения рычагов управления хн и хя считаются
положительными, когда правая педаль отклоняется вперед (руль
направления вправо 6Н >0), а ручка (штурвал) влево (правый
элерон вниз 6Э >0).
Из выражений (12.11)... (12.14) видно, что с увеличением степени
поперечной и путевой статической устойчивости расходы руля
направления, элеронов и рычагов управления растут.
Балансировочные значения 6Н> $э, хн и ха можно выразить
ив зависимости от угла крена. В этом случае
(12.16)-
rf6o.y d®0. у dp . dxp _ dXp dp
ГДе dy ~ dP dy ’ dy “dp dy •
Так как dfi/dy >0, то производные v/dy и dxp/dy будут иметь
такой же знак как dft0, y/d|3 и dxp/d$. Значения производных y/d$,
d$/dy и dxp/dfi определяются по формулам (12.12), (12.13) и (12.15).
Усилия на рычагах управления элеронами и рулем направления
в прямолинейном установившемся полете со скольжением.
Усилие на ручке (штурвале) считается положительным (Рв >0),
если летчик давит на ручку влево. При этом ручка отклоняется
влево (хэ >0), а правый элерон вниз (6Э >0).
Усилие на ручке при обратимой системе управления зависит от разности шар-
нирных моментов, действующих иа правый и левый элероны. Исходя из принципа
возможных перемещений получим
Рв = — Аш. эАобр (Мш. пр — Мш. л) = — Аш. 3^обр5в1^э (б!ш. эфф. пр?пр —
— Иш. эфф. л9л)> (12.18)
где Кш. э = dbjdxg, dxa — элементарное перемещение ручки; fe06p С 1 — коэф-
фициент обратимости системы управления элеронами; 5Э1 — площадь одного эле-
рона; Ь„ — САХ элерона; тш. Эфф. Пр> тш. эфф. л — эффективные значения коэф-
фициентов шарнирных моментов правого и левого элеронов; fnp, дп — эффективные
значения скоростных напоров для правого и левого полукрыльев. Эффективные
значения тт и д берутся в сечениях крыла, перпендикулярных линии фокусов.
После замены тш. Эфф и д для правого и левого элеронов и соответствующих
преобразований выражение (12.18) запишется [9]
*ш. з^обр^э^зтш
т<ш
atg xsinp +
, 6э Г cosa (х — Р) + cosa(x + Р)
“г 2 I. ' созах
(12.19)
где S;) = 2Хэ1—площадь обоих элеронов; знак 60 берется по правому элерону.
* Здесь под 60. у подразумеваются углы 6Н или 6а, а под хр — отклонения
рычагов управления хи или хэ.
216
Для небольших, по Сравнению с X, углов Скольжения выражение (12.19) при-
мет вид
б„ / 1 + /г.л nF. \
Рэ = - *ш. ?06pSAm^ —5— 6а + аР tg X q. (12.20)
\ /
Определим усилия на педалях при обратимой системе управления. За положи-
тельное усилие принимается давящее усилие на правой педали (Рн > 0). В этом
случае правая педаль отклоняется вперед (хн > 0), а руль направления вправо
(6н > 0).
' Исходя из принципа возможных перемещений получим Pudx[t /г()брЛ7ш. п don —
— 0, откуда
Ра ~ Яш. н^обрМщ. и — — Кш. 1Л)бртш. п^п^н^в. о?> (12.21)
где Кш. н = d6H/dxn; dxH — элементарное линейное отклонение педали; fe06p 1 —
коэффициент обратимости системы управления рулем направления.
В пределах плавного обтекания при неотклонениом триммере коэффициент шар-
нирного момента руля направления равен
тш. н = тш₽8. о + «ш 6н = «ш (1 - ев) Р + тш’6н-
тогда
Ра = - *ш. H*o6pW». о [< (’ “ «£) ₽ + тН1 <?• (’2-22)
Подставляя в (12.20) и (12.22) вместо 6а и бц их балансировочные значения
(12.11), получим усилия на ручке и педалях, потребные для балансировки самолета
в зависимости от угла скольжения.
₽s = ^.9WsM-^(-(J4^)4xcB₽: (’2.23)*
в„
Ра = *ш. н^обр^н^н^в. о? Г" свР. (12.24)
т*
Усилия на ручке и педалях, потребные для балансировки само-
лета с обратимой и необратимой системой управления, можно пред-
ставить в виде
Рэ = -^рили Р8 = -^-у; (12.25)
= или Рн = -^-у. . (12.26)
Для обратимой системы уйравлеиия производные усилия определяются путем
дифференцирования выражений (12.23) и (12.24) по углу скольжения
^=Wo6pV8?^(-4^)<CB; <12'27)
dPa dPs И 9 9ЯЪ
dy dy ’
Здесь предполагается тхн « 0.
217
•
A' fc C t / P
M *ш. гЛобр^н^Лв. o'? 6 mR4CB’
' - my
d>,i dPH dP
(12.29)
(12.30)
dy dp dy ’
где dpidy рассчитывается по формуле (12.13).
Так как при необратимой системе управления усилия, которые
должен приложить летчик к рычагам, зависят от характеристик
загрузочных механизмов, то эти
dPa _ dPB dba .
dp d6a dp ’
dPн __ dP н dfiH .
dp d6H dp ’
rfle'dPB/d6a и dPald&B — градиенты
ристик загрузочных-механизмов; производные <i6a/iZf3, d^ldp, d&a/df
и d6H/dy определяются по формулам (12.12), (12.17) и (12.13), в ко-
торых вместо т^у и т^х надо брать /п^ф и /п|Хф.
На рис. 12.7 представлены балансировочные кривые статически
устойчивого и неустойчивого в поперечном и путевом отношении
самолета при хт = const, Н = const, М = const, тэ = const, тн =»
= const, неизменных конфигурации самолета и режима работы
двигателя.
Наклон балансировочных кривых для статически устойчивого
и неустойчивого самолетов различен. Следовательно, по виду ба-
лансировочных кривых можно судить о^поперечной и флюгерной
производные будут иметь
dP э ___ dPg ddg
dy ~ d6e dy ’
dPB __ dPH d6g
dy dfiH dy ’
усилий — берутся
вид
(12.31)
(12.32)
из характе-
Рис. 12.7. Балансировочные кривые статически устойчивого и неустойчивого в по-
перечном *и путевом отношении самолета:
------ устойчивый самолет;------неустойчивый самолет (Ят = const; Н = const; М =»
= const; Та =: const; тн «= const)
218
устойчивости самолета. Отрицательный наклон кривых свидетель-
ствует о наличии у самолета поперечной и флюгерной статической
устойчивости при фиксированном (хр = const, S0.y = const) и осво-
божденном (Рв = О, Ри = 0) управлении.
Для нормального управления самолетом требуется выполнение
следующих условий:
У суа г. п Суа г. п ^7
dxH п. dPэ л. dPн
dy ’ dy ’ dy
dg—'-v; -^<0; . -^-<0; 4>-<0. (12.34)
В этом случае для балансировки самолета, например, при поло-
жительном скольжении (при положительном угле крена), требуется
руль направления отклонять влево 6Н <* 0 (левую педаль вперед,
хн < 0 и Рн << 0), а правый элерон вверх 6, <5 0 (ручку вправо,
хэ < 0 и Рв << 0). При таком характере управления не требуется
двойного движения ручки и педалей для осуществления прямоли-
нейного полета со скольжением и балансировки самолета в таком
полете.
Условия (12.33) или (12.34) будут выполняться, если самолет
обладает поперечной и путевой статической устойчивостью при
фиксированном и освобожденном управлении [см. (12.12), (12.15),
(12.27) ... (12.32)1.
Производные dP.Jdy и xl называются коэффициентами расхода
усилий и ручки (штурвала) управления на крен. Они являются пока-
зателями поперечной статической управляемости самолета й пред-
ставляют собой усилие, которое должен приложить летчик к ручке
и потребную величину ее хода для изменения угла крена на единицу
в установившемся прямолинейном полете со скольжением.
Показателями путевой статической управляемости являются
производные и х„. Они называются коэффициентами расхода
усилий и педалей на крен. Представляют собой усилие, которое
должен приложить летчик к педали, и потребную величину ее хода
для изменения угла крена на единицу в установившемся прямолиней-
ном полете со скольжением.
Для того, чтобы самолет не был слишком «тяжелым» или «строгим»
V V dPB dP«
в поперечном и путевом управлении, производные xj, xi, d~ и
не должны выходить за допустимые пределы.
Гармоничность управления в прямолинейном установившемся
полете со скольжением характеризуется соотношением потребных
для балансировки самолета отклонений ручки и педалей
__ dX8 _ Лш. н mj»H тЯ*Ф
s —0*-^ г
1
суа г. п
d60.y
или "
х9
Лн
(12.33)
/п*в
(12.35)
219
Рис. 12.8. Определение момента &МРу при односторон-
нем отказе двигателя
Производная хэя называется коэффициентом
гармоничности управления и также является
показателем статической управляемости.
Во всем диапазоне возможных углов сколь-
жения максимальные усилия, прикладываемые
летчиком к рычагам управления, не должны пре-
вышать его физических возможностей:
|Рэшах! «200 Н; | Ратах| < 700 Н.
Рассмотрим боковую балансировку самолета в прямолинейном
установившемся полете с несимметричной тягой. Несимметричная
тяга возникает в результате одностороннего отказа одного или не-
скольких двигателей.
Отказ двигателя является одним из наиболее опасных отказов,
вызывающих опасную ситуацию *. Особенно опасным является
отказ двигателя при выполнении разворота с той стороны, куда
происходит разворот, -так как в этом случае летчику значительно
труднее по поведению самолета быстро определить отказ.
При отказе двигателя возникают дополнительные силы и мо-
менты. К ним относятся: момент рыскания, создаваемый тягой
работающего двигателя, симметричного отказавшему, и силой до-
полнительного сопротивления отказавшего двигателя (рис. 12.8);
приращение поперечной силы вертикального оперения (Д2В. 0),
обусловленное изменением бокового скоса потока из-за влияния
несимметричности струй двигателей; моменты крена (ДЛ4ХВ. 0) и
рыскания (ДМув. о), создаваемые этой силой; момент крена от по-
перечной составляющей тяги работающего двигателя (Р sin <рР «
« Рфр), а у самолетов с винтовыми двигателями еще момент крена,
возникающий из-за несимметричного обдува крыла винтами
(ДМяовд). Таким образом имеем
ДЛ4ру — (Р ДАд) 2Д ДЛ4у в. 0;
ДЛ4ря = Р<Рр2д ДЛ4к в. о 4“ ДМа о0д>
az = дгв. 0
где 2Д — координата оси отказавшего (выключенного) двигателя.
Переходя к коэффициентам сил и моментов, получим
Д/Пру = 0,5 (Ср Дски) Хд 4~ t^nu в- 0,
ДтРя = 0,5срфрХд + Дтя в. о + Д/пх о0д;
дг —г₽ ь Зв. о р
LM'Z -''Z В. огев. О £ СВ’
(12.36)
* Опасная ситуация характеризуется тем, что предотвратить перевод ее в ава-
рийную или катастрофическую можно лишь своевременным и правильным действием
членов экипажа.
220
Имея в виду (12.10) и (12.36), получим условия равновесия бо-
ковых сил и моментов в установившемся прямолинейном полете
с несимметричной тягой
т%>$ + 1ПхаЬэ + гпхк6н + ктРх = 0;
4- гпув8н -|- &тРу = 0; (12.37)*
+ c®HgH Ci/a г> п tg у 4- Дсг = 0.
Из решения этой системы получим потребные для балансировки
самолета углы 6Н, 6Э и у
, _ dS3 _ . 1 тх л л
Оэ zffi Р b С I 6 ^fftPy L±tnPx
н т„э \ m„H
А У
(12.38)
tgy
dy
d₽
1____
cya г. п
С и
g Attlpy ^Сг
где производные d^/dfi, d6a/d0 и dy/dp определяются по формулам
(12.12) и (12.13).
По формулам (12.38) можно построить балансировочные кривые.
На рис. 12.9 приведены балансировочные кривые 6Н(0), МР)> Т(Р)
при прямолинейном установившемся полете самолета с отказавшим
левым двигателем.
В отличие от балансировки самолета в прямолинейном устано-
• вившемся полете со скольжением, балансировка при полете с не-
симметричной тягой может требовать отклонения рулей и создания
угла крена даже при полете без скольжения (см. рис. 12.9).
Из всех возможных режимов прямолинейного установившегося
полета самолета с несимметричной тягой можно выделить три ха-
рактерных режима.
Полет без крена (/ режим на рис. 12.9). Этот режим, с точки
зрения комфорта экипажа и пассажиров, особенно при полете в слож-
ных метеорологических условиях,
является наиболее приемлемым.
Но при этом потребные для балан-
сировки углы отклонения руля
* В уравнениях не учтены величины
тх0, туъ и тРх.
Рис. 12.9. Балансировочная диаграмма
отклонений руля направления, элеронов
и угла крена в прямолинейном устано-
вившемся полете самолета с отказавшим
левым двигателем
221
направления приближаются к максимальным, что приводит к боль-
шим усилиям на педалях. Если же отказавший двигатель расположен
на значительном расстоянии от плоскости симметрии самолета, то
балансировочное значение 6Н может оказаться неприемлемо большим.
Скольжение при этом происходит на отказавший двигатель.
Полет без скольжения (// режим). При таком способе баланси-
ровки получается меньше величина лобового сопротивления само-
лета и требуется меньшая тяга работающих двигателей, но потреб-
ный крен может быть значительным.
Полет с креном и скольжением на полукрыло с работающим двига-
телем (III режим). Этот способ балансировки применяется при боль-
шом разворачивающем моменте рыскания ДЛ4Вэ и малом запасе
руля направления. Однако в этом случае может существенно воз-
расти потребный угол крена, что нежелательно.
Выбор того или иного способа балансировки самдлета при по-
лете с несимметричной тягой зависит от запаса тяги двигателей
и эффективности руля направления и его триммера.
Балансировка самолета в установившемся
криволинейном полете
В установившемся криволинейном полете появляются до- •
полнительные моменты, обусловленные вращением самолета относи-
тельно связанных осей Ол, 0Y и OZ, которые должны быть урав-
новешены дополнительным отклонением органов управления креном,
рысканием и тангажом.
В качестве примера рассмотрим балансировку самолета при пра-
вильном вираже. В этом случае самолет вращается относительно
вертикальной оси O0Ye с угловой скоростью со; скольжение отсут-
ствует; центр масс самолета движется в горизонтальной плоскости^
а плоскость его симметрии наклонена относительно оси O0Ye под
углом у.
Составляющие угловой скорости со по осям связанной системы
координат при небольших углах тангажа равны
сож==со81пФ«(оФ; <йу = (а cos О cos у «со cos у; (12.39)
(ог — — со cos'Osin у « — со sin у,
где со = ± Пу0 — 1; знак (+) — для левого, а (—) — для
правого виража.
Если в выражениях (10.110), (10.111) И (10.65) пренебречь ма-
лыми величинами тиэ, а также иметь в виду, что в рассматри-
ваемом примере 0 = 0 и т* = 0, то условия балансировки моментов,
действующих на самолет при правильном вираже, примут вид
mRx = тххйх + тху<Ьу + т®нбн 4- т®вб8 = 0;
тЛ1, = т®х&х 4- m®v&y 4- /Пуябч = 0; (12.40)
222
mRz - ntRz0 4- m^zCya 4- m“zcjz 4- m/6„ = 0,
где mRza = mz() | m2 T<fyCT ( тРЛ; c,Ja « y- -
Из решения этой системы определим потребные для балансировки
самолета углы отклонения органов управления в зависимости от
перегрузки (или угловой скорости и)
би =----J- (т°хах 4-(12.41)
тук
(вн \ / в \
&х тх &Х 1 - I / &и тх &у I - ' .
тх----g- mvx <ок + тх"---—тУ ;
туК J \ туП J
(12.42)
бв ----(тЛг0 т&Суа 4- т“гй2). • (12.43)
mzB
где йк = -^го>х « и* = ± - 1; .
« yjr ® cos у = ± У Пуа - 1. cos у;
= -у- <0jr « — -у- СО Sin у = ± I nja — 1 -Sin у.
Отсюда видно, что с ростом перегрузки и уменьшением скорости
полета балансировочные значения углов отклонения органов управ-
ления при правильном вираже увеличиваются.
Зная балансировочные углы бн, 6Э и 6В, можно определить со-
ответствующие отклонения рычагов управления и усилия на них.
Характеристики (показатели) боковой статической управляемо-
сти самолета в установившемся криволинейном движении. Для
их определения принято рассматривать установившееся изолиро-
ванное движение крена, вызванное отклонением элеронов и руля
направления, а также установившееся изолированное движение
рыскания, вызванное отклонением руля направления. При таком под-
ходе получим условные показатели, которые не полностью отражают
фактическую управляемость, но оценивают ее довольно хорошо.
В качестве примера подробно рассмотрим изолированное движе-
ние крена, вызванное отклонением элеронов.
Если в выражении (10.110) положить nfeo’^O^H ^ = 0 и при-
ближенно считать в)у « 0, ₽ « 0, то условие" равновесия моментов
крена (балансировки) запишется
тКя=тхх&х 4- тха6, = 0.
Отсюда найдем значение установившейся угловой скорости крена
при отклонении элеронов на угол ба
вй а
й» или <ож = — 2.~ д,. - (12.44)
«г ' »•*
223
Дифференцируя (12.44) по 6.,, получим
ба
dax 21/ тх
йбэ I т^х
(12.45)
где тх берется при фиксированном положении элеронов.
Производная d<ax/df>B характеризует эффективность элеронов
в движении крена. Для нормального управления требуется, чтобы
dtoxldb^ <Z О.В этом случае, например, при отклонении ручки влево
(хэ >0) и правого элерона вниз (6Э >0) самолет крениться на левое
полу крыло с угловой скоростью соя << 0.
Из (12.45) видно, что при неизменных тхв и тхх производная
dtox/dfi, растет пропорционально скорости полета. На больших ско-
ростях полета вследствие сжимаемости воздуха и деформации крыла
коэффициент эффективности элеронов тх3 уменьшается. На некото-
рой критической скорости при недостаточной жесткости конструкции
крыла на кручение элероны полностью теряют эффективность (тхэ ~
= ‘0). При скорости больше критической производная тх меняет
знак (тхв >0), что приводит к изменению знака производной
dcox/d6, — наступает реверс элеронов. Реверс элеронов совершенно
недопустим.
Производная dx9ld&x, характеризующая потребную величину
отклонения ручки (штурвала) для создания единицы угловой ско-
рости крена при ₽иох = 0 и М = const, равна
Л» dxe dxB d6B 1 l mx$ /194R\
s ~ da>x ~~dST dax ~ Кш,8 2V ' V *•*«»)
тх
При отсутствии демпфера крена тЯф =
Производная х3х называется коэффициентом расхода ручки уп-
равления на угловую скорость крена.
Из (12.46) видно, что с уменьшением скорости полета Хэх растет,
но не так интенсивно, как при отсутствии демпфера крена.
Усилия на ручке управления, потребные для создания единицы
угловой скорости крена при 0ИСХ = 0 и М = const оцениваются про-
изводной Р9Х — dPBldu)x, которая называется коэффициентом рас-
хода усилий на угловую скорость крена.
При обратимой системе управления [9, 141
в8
р>=4- ММ V
(12.47)
224
где производная коэффициента демпфирующего момента крена по йя
самолета с освобожденной ручкой управления
&х йх 2 еэ тш
гпхсв = тхх - 1 + fe- тх —g- zs. (12.48)
У самолета с необратимой системой управления
а
nwx___ d?э _ йРв d68 dx8 _ 6Рв (19 4Q\
э ~ dax ~ d8B dxb dax ~ dde «8 2V ’
mx
выраже-
где dP3/d63 — характеристика загрузочного механизма.
При учете влияния упругости конструкции самолета в
ниях для хах и Рэ надо тх и тх брать с учетом упругости.
„ , . <0 „СО
Коэффициенты расхода на угловую скорость крена Хэ и Рэх
являются важными показателями поперечной статической управля-
емости самолета. Для нормального управления они должны быть
отрицательными, а чтобы поперечное управление самолетом не было
слишком тяжелым или строгим, их величина не должна выходить
за определенные пределы.
При анализе установившегося вращения по крену, вызванному ’
отклонением руля направления, аналогичными рассуждениями можно
получить формулы для определения коэффициентов расхода усилий
и педалей на угловую скорость крена, т. е. усилие, которое должен
приложить летчик к педали, и потребная величина ее хода для созда-
ния единицы угловой скорости крена при М = const
pwx _ dPH аж__ сЬСд
н —3S7’
Эти коэффициенты также являются показателями боковой стати-
ческой управляемости.
Ограничимся определением установившегося значения угловой
скорости крена при отклонении руля направления на угол и ее
производной по 6н.е
Пренебрегая с целью упрощения анализа коэффициентами пере-
крестных моментов крена и рыскания в выражениях (10.110) и
(10.111) и считая, что mxv « 0 и а>у ж 0, получим условие балан-
сировки самолета при б8 = 0
’ mRx = т^х$ + + тхяйх = 0;
mRv = т%$ + /и®н6н = 0. (12.50)
Из этой системы найдем значение установившейся угловой скорости
крена
и,_ ‘ (12.61)
тх* I тКи / 1
8 А. Ф. Бочкарев и др.
225
Дифференцируя юя по би, получим
dcox
Ж
mRx
mRU
®н 6н
ту — тх
2V
I *
(12.52)
1
т х
При наличии автомата путевой устойчивости следует еще рассматри-
вать dcax/MH при фиксированных педалях.
Производная d<nxldt)a характеризует реакцию самолета по крену
на отклонение руля направления.
Если d(i)xldbn >0, то самолет обладает прямой реакцией по крену.
Он будет крениться в сторону поворота руля направления. Так при
отклонении руля вправо (Дбн >0) возникает скольжение с углом
Д0 < 0, и самолет под действием момента Д/и* = т|*Р >0 начи-
нает крениться на правое полукрыло. Такая реакция самолета яв-
ляется привычной для летчика.
Если duijdb^ <0, то у самолета появляется обратная реакция
по крену на отклонение руля направления. При отклонении руля на-
правления вправо возникает левый крен.
Обратная реакция по крену явление нежелательное, оно услож-
няет точное пилотирование, требует от летчика дополнительных кор-
ректирующих движений рулями и повышенного внимания при выпол-
нении маневра.
Так как ль* < 0, а >0, то условием прямой реакции по
крену является
-^-т5и-/п5и<0. . (12.53)
При отрицательных.производных mJ" и тхя выполнение этого
условия возможно только при наличии у самолета определенной
величины степени поперечной статической устойчивости < 0,
Обратная реакция по крену может наблюдаться не только при
потере поперечной статической устойчивости (т|х 0) в околозву-
ковой области (М « 0,9 ... 1,1), но и вследствие уменьшения степени
поперечной статической устойчивости при полете самолета на-малых
углах атйкй;
Явление обратней реакции характерно для самолетов с относи-
тельно малыми углами стреловидности крыла (х = 30 ... 40°). Пере-
ход к крыльям с большей стреловидностью позволяет ослабить ин-
тенсивность обратной реакции, а при хорошей компоновке самолета—
устранить это явление. Применение автомате® поперечной статической
устойчивости позволяет устранить обратную^реакцию по крену на
отклонение руля направления.
В качестве показателей путевой статической управляемости при-
нимаются коэффициенты расхода усилий и педалей на угловую ско-
_w„ dP« dxw
рость рыскания Рау = и xKv Они представляют
собой усилие, которое должен приложить летчик к педалям, и пот-
226
ребную величину хода для создания угловой скорости соу = рад/с
при М = const. Их величину можно определить из анализа устано-
вившегося вращения самолета вокруг оси OY, вызванного отклоне-
нием руля направления.
Имеются и другие показатели статической управляемости.
Отметим, что все показатели статической управляемости могут
определяться как расчетным путем, так и из летных испытаний са-
молета.
Дополнительная литература
191 с. 298, 325, 487, 111] с. 152—180, [8] с. 170—205
Контрольные вопросы
1. Что понимается под путевой н поперечной статической устойчивостью са-
2. Каково влияние сжимаемости воздуха на степень путевой и поперечной ста-
тической устойчивости?
3. Как влияют автоматы демпфирования и устойчивости на т^х и т^? При-
ведите пример.
4. Укажите способы балансировки самолета при несимметричном отказе (вы-
ключении) двигателя.
5. Перечислите основные показатели боковой статической управляемости.
6. Что понимается под обратной реакцией по креиу при отклоиеиии руля на-
правления?
ГЛАВА 13. ОСОБЕННОСТИ БАЛАНСИРОВКИ САМОЛЕТА
НА ВЗЛЕТЕ И ПОСАДКЕ
Балансировка самолета на воздушном участке взлета и
посадки имеет свои бсоб^врсти/об^слоц^ц^е взлетно-посадочной
конфигурацией самолета, влиянием близости земли (экрана), влия-
нием бокового ветра и режима работы двигателей.
f 13.1. ОСОБЕННОСТИ ОПРЕДЕЛЕНИЯ МОМЕНТОВ , ' •
ТАНГАЖА САМОЛЕТА ПРИ ПОЛЕТЕ ВБЛИЗИ ЗЕМЛИ
При определении аэродинамических моментов тангажа на
воздушном участке взлета и посадки надо учитывать влияние откло-
нения органов механизации крыла, выпуска шасси, влийиие земли
(экрана), а также изменение коэффициента торможения потока
в области оперения.
При отклоиеиии механизации крыла увеличивается кривизна
профилей крыла в сечениях, обслуживаемых- механизацией *. Это
приводит к приросту пбдъемной силы ДУ0Мех (6) и момента при ну-
левой подъемной силе AAfJ}jx крыла. Кроме того, увеличивается
на некоторый угол.скос потока от Крыла у оперения.
* В дальнейшем под термином «отклонение механизации» будем понимать
отклонение закрылков, щитков, предкрылков.
8* 227
Прирост подъемной силы ДУамех приложен в фокусе по углу от-
клонения механизации (или, как его часто называют — вторым фокусом
крыла), под которым понимается точка, расположенная на той же
линии, что и фокус по углу атаки, относительно которой аэродина-
мический момент тангажа остается постоянным при малых измене-
ниях только угла отклонения механизации крыла, т. е. dmjdb^^ =
= 0.
Выпуск шасси обусловливает дополнительный момент тангажа
при нулевой подъемной силе (Дш2ош) от сил сопротивления шасси.
При полете самолета вблизи земли воздушный поток между кры-
лом и землей тормозится и давление на нижней поверхности крыла
увеличивается. При этом происходит дополнительное перетекание
масс воздуха снизу на верхнюю поверхность крыла, где скорость
потока возрастает, а давление уменьшается. В результате разность
давлений между нижней и верхней поверхностью крыла увеличится
и появится дополнительный положительный прирост подъемной силы
(Лсуазем)- Влияние земли на подъемную силу существенно, когда
расстояние от фокуса самолета до земли (Zi) меньше полуразмаха кры-
ла (hit < 0,5). В этом случае подъемная сила может увеличиться
более чем на 20 %.
Кроме того, земля, как экран, отражает скошенный крылом
поток. Индуцированная вихревой системой крыла вертикальная
составляющая скорости потока Д Vv- падает, что приводит к сущест-
венному уменьшению угла скоса потока у оперения.
Таким образом, угол скоса потока у оперения увеличивается
вследствие отклонения вниз органов механизации и уменьшается от
влияния экрана. Однако преобладающим является влияние экрана.
Поэтому при полете самолета вблизи земли угол скоса потока умень-
шается. Это приводит к росту аг. 0 и увеличению эффективности го-
ризонтального оперения. Продольная статическая устойчивость -
из-за некоторого смещения фокуса самолета назад в результате роста
подъемной силы горизонтального оперения повышается.
Полет самолета с отклоненной механизацией на больших взлетно-
посадочных углах атаки сопровождается увеличениём торможения
потока у оперения и, как следствие, уменьшением коэффициента
торможения потока /гполн == о» где k < 1 берется из опытных
данных.
Учитывая изложенное, коэффициент момента тангажа самолета
нормальной схемы при полете самолета вблизи земли с отклоненной
механизацией и j/T < 0,1 можно записать
fflRz — ЩгОвХ ~Ь (Хг — Хрс) (суа + Дс^а з) +
+ К - <ех) Дс”Г + + <ст<руи + тр (13.1)
где т*™ — коэффициент момента тангажа при суа (а) = 0, 6В — 0
и <руст — 0, равный
мех мех
== ^гоб.г.о j Ош Wlz (ССО — Ео — Д®мех- — (13.2)
228
Суа — Суа (« — «о) — коэффициент подъемной силы самолета при
6мех = 0 и 6В = 0; х"ех = Хр^1ЬА\ х“ех — координата фокуса по
углу отклонения механизации, отсчитанная от носка САХ крыла
в направлении отрицательной полуоси ОХ.
На режиме посадки величины а, <руст, Лт“ох, Лемех и A%
берутся для посадочной, а на режиме взлета— взлетной конфигура-
ции. При расчете коэффициента тРЛ и АхР. Р надо иметь в виду,
что при взлете используется взлетный (максимальный) режим ра-
боты двигателей, а на посадке — режим «малого газа».
§ 13.2. продольная балансировка самолета
ПРИ ВЗЛЕТЕ И ПОСАДКЕ
В продольном движении определяются потребные для
балансировки самолета углы отклонения руля высоты (управляе-
мого стабилизатора), отклонения ручки управления и усилия на ней
при заходе самолета на посадку, предпосадочном планировании, по-
садке и уходе на второй круг, а также на взлете при подъеме переднего
колеса и после отрыва самолета от земли.
На участке захода на посадку самолет выводится на высоту круга
и курс посадки. На этом этапе полета производится снижение скорости,
выпуск шасси и механизации, а также перестановка стабилизатора
в посадочное положение. Для определения балансировочных зна-
чений 6В в зависимости от коэффициента подъемной силы или ско-
рости можно использовать выражение (13.1), приравняв его к нулю.
Так как высота захода на посадку составляет несколько сотен мет-
ров, то влиянием близости земли можно пренебречь.
При посадке самолета определяют балансировочные значения
6В, хв и Рв на всех этапах полета начиная от предпосадочного
планирования до касания колесами земли.
Приравнивая нулю выражение (13.1) и подставляя соответству-
ющие значения входящих в него величин, можно определить балан-
сировочные значения угла йв на всех этапах полета при поседх*.
На этапе выравнивания в выражение (13.1) надо добавлять велн-
чину тгхаг.
В качестве примера определим потребную для балансщжжки
самолета величину 6В на участке посадки перед касанием колесами
земли. Приравнивая нулю выражение (13.1), получим .условие ба-
лансировки самолета на этом участке:
Z7lzo + (Хт Xffl) (Суа пос + &Суа з) 4” 'X» •— Хр / &Суа ПОс 4"" посбв 4~
4~ пос^Рпос — 0, (13.3)
т"оех определяется из выражения (13.2); суапоа соответствует
посадочному углу атаки апос, суопос = с®0 (апос — а0) при 6меХ =
= бв = 0; Ас”опос — прирост коэффициента подъемной силы вслед-
ствие отклонения механизации при посадке; <рпос — угол установки
229
стабилизатора при посадке. В выражении (13.3) не учтены из-за
малости mPzl и ДхРР. Решая (13.3) относительно бв, получим
бв —-----ё---1тг0 4“ (*т — Хра) (руа пос Ч" ^уа з) Ч~
Ч-(-^т—Хр ) &Суа пос Ч~ тг посфпосК 03.4)
Где пос ==—Суа г, о^полнЧг. о> пос == Щг посИв> (13.5).
Если на самолете управляемый стабилизатор, то в (13.3) надо
положить бв = 0, срП0С = фст, а затем определить потребный для
балансировки угол отклонения стабилизатора (срСт).
Так как выпуск шасси и отклонение механизации, а также влия-
ние земли создают пикирующий момент, то расход руля высоты
вверх на балансировку самолета перед касанием земли, .как,правило,
наибольший. При некоторой передней центровке может оказаться
недостача руля высоты для балансировки самолета. Поэтому одним
из расчетных случаев определения предельной передней центровки
является балансировка самолета на посадке.
Усилия на ручке управления, необходимые для балансировки
самолета в момент касания земли, получаются максимальными, по-
этому предъявляется требование, чтобы они не превосходили опреде-
ленной допустимой величины.
Особенность балансировки самолета при вынужденном уходе
на второй круг состоит в том, что при посадочной конфигурации
используется Максимальный режим работы двигателей.’ Поэтому
в выражении (13.4) Надо учитывать тРЛ и &хРр, подсчитанные для
этого режима работы двигателей.
Условием балансировки самолета на взлете после отрыва само-
лета от земли будет равенство нулю выражения (13.1), в котором
надо положить а = аотр, = Дс”»8Л и Демех = Де2« при
б£ех, а величины ДхРР и mPz г определять для взлетного .режима
работы двигателей. Из уравнения тВг — 0 (условие балансировки)
можно определить балансировочные значения угла отклонения руля
высоты (управляемого стабилизатора).
Балансировку самолета при взлете после отрыва от земли обе-
спечить легче, чем при посадке, так как угол отклонения механизации
и коэффициент подъемной силы в момент отрыва меньше, чем при
посадке. Исключением может явиться случай, когда создается зна-
чительный, пикирующий момент от тяги' высокорасположенных
двигателей.
Определим потребный для балансировки угол отклонения руля
высоты в момент подъема переднего колеса шасси при разбеге само-,
лета. В этом случае на саМолет будет действовать дополнительный
момент тангажа от сил реакции поверхности земли (рис. 13.1).
Суммарный момент таигажа будет равен
Д^Вг п= Д^Йг NTXr FTy,
где Nr, Ft.'— нормальная составляющая реакции земли и сила
трения, действующие на основные колёса шасси; хТ — измеренное
230
Рис. 13.1. Определение момента танга-
жа самолета при разбеге в момент подъ-
ема переднего колеса шасси
по горизонтали расстояние от
центра масс самолета до основ-
ных колес шасси; у — расстоя-
ние от ЦМ самолета до земли
при стояночном положении.
Проектируя силы на вертикальную ось (без учета составляющей .
Р sin tip и 0), получим Nr == mg — Ya и, тогда Fr = fNr — (mg —
— Ya) f, где f — коэффициент трения колес о землю.
Следовательно,
MRz п = MRt — (mg - Ya) (хг + fy).
Переходя к коэффициентам, получим
Wrz п — ntfiz SqR к СТОян) (13.6)
где </п. к = pVn. к/2 — скоростной напор потока в момент подъема
переднего колеса; cve ОТ0)Я1 = + AcJJT 4- fyya а — коэффициент
подъемной силы соответствует стояночному углу атаки. (аСТОяН)
при взлетной конфигурации самолета; суа — Суа («стоян ®о) при
®мех = 0 И 6В = 0.
Подставляя в (13.6) вместо mRz его значение (13-1) и приравнивая
нулю mRzn, получим условие балансировки самолета
4" (Ху— Xfc) (Суа 4“ &Суа э) 4" (^Т— *F ) ^Суа 4~ И1ввбв -|-
4“ и1гс*фуст 4~ три ~ sqn к— (*г 4~ fu) ~ О* 03«7)
Отсюда найдем потребный для балансировки 6В
бв == — —g— * 4- (*т — Хрс) (Суа 4- &Суа а) 4“ (*• — *) &Суа* 4~
V
-|- /ИгСтфуст 4“ тРг1 ~ Sqn к — Суа СТОЯИУ^Г 4" * .(13.8)
Отметим, что при взлете самолета расход руля высоты вверх
будет максимальным в момент подъема переднего колеса, так как
в этом случае надо еще сбалансировать пикирующий момент от сил
реакции поверхности земли. При некоторой передней центровке
может не хватить руля высоты для балансировки самолета. Поэтому
балансировка самолета при подъеме переднего колеса является вто-
рым расчетным случаем для определения предельной передней
центровки.
23]
§ 13.3. БОКОВАЯ БАЛАНСИРОВКА ПРИ ПОСАДКЕ
С БОКОВЫМ ВЕТРОМ
Особенность боковой балансировки самолета при посадке
и взлете связаны с влиянием бокового ветра.
Боковой ветер стремится изменить направление полета на угол,
равный W = WF1/V, где W6 — боковая составляющая скорости ве-
тра, перпендикулярная к оси взлетно-посадочной полосы (ВПП);
V — воздушная скорость самолета.
Для того чтобы вектор путевой скорости самолета (У„) совпадал
с направлением оси ВПП, необходимо парировать снос самолета.
Это достигается двумя способами: созданием скольжения или из-
менением курса полета на величину угла сноса. Первый способ назы-
вается «посадкой со скольжением», а второй — «посадкой с упре-
ждением по курсу» (рис. 13.2).
При посадке со скольжением продольная плоскость симметрии
самолета совпадает с направлением оси ВПП. Вектор скорости са-
молета V отклонен в сторону действия ветра на угол скольжения
₽ « W6/V. (13.9)
Для обеспечения прямолинейности движения самолет надо
накреничь на наветренное полукрыло и тем самым уравновесить
поперечную силу Rz, возникающую при скольжении. Для нормаль-
ного приземления перед касанием колесами ВПП производится
уборка крена отклонением ручки (штурвала) по направлению ветра.
Потребные для балансировки самолета углы бн, б0 и у будут
равны [см. (12.11) ... (12.13)]
6Я =
тЪу №б
“\ V ’
‘У
т„н
(13.10)
А — 1 «А ''i Г«5 . «Ч1П
о8 —----— I /Ид* --— тру I , (43. 11)
тХЪ \ muH /
V
<%г W0 ,
суа г. п V
(13..12)
1___
Суа Г» п
Отсюда видно, что наибольшие
отклонения элеронов и руля на-
правления требуются при посадке,
когда скорость наименьшая (V =
:= Упос)- самолетов с треуголь-
ными и стреловидными крыльями
с ростом угла атаки (уменьшением V)
увеличивается степень поперечной
Рис. 13.2. Схема предпосадочного движения
самолета при наличии бокового- ветра;
а — со скольжением; б — с упреждением по курсу
232
статической устойчивости. Это вызывает необходимость дополни-
тельного отклонения элеронов [см. (13.11)].
С увеличением скорости бокового ветра растут потребные для ба-
лансировки углы 6, и бн. При некоторой скорости потребные
отклонения элеронов и руля направления на посадке станут равными
располагаемым (предельным). Эта скорость бокового ветра является
предельной, при которой еще возможна посадка со скольжением.
Такие же рассуждения применим и к взлету самолета.
При посадке с упреждением по курсу самолет ведут под углом
Y — к оси ВПП без скольжения. Нос самолета развернут
в сторону ветра (см. рис. 13.2). Так как отсутствует скольжение, то
не возникают боковые силы и моменты и отпадает необходимость
в их балансировке. В этом случае непосредственно перед касанием
колесами ВПП или в момент касания энергичным отклонением руля
направления надо довернуть самолет по полосе. Этот способ позво-
ляет производить посадку при больших скоростях бокового ветра,
чем при посадке со скольжением. В настоящее время способ посадки
с упреждением по курсу получил широкое распространение, но
он сложнее по технике пилотирования.
Дополнительная литература
[91 с. 249, 529—536, [8] с. 282—300.
Контрольные вопросы
1. Каковы особенности в определении момента тангажа самолета при полете
вблизи земли?
2. Поясните способы посадки самолета при наличии бокового ветра.
ГЛАВА 14. ОГРАНИЧЕНИЕ ДОПУСТИМЫХ ЦЕНТРОВОК.
ТРЕБОВАНИЯ К ПАРАМЕТРАМ ОПЕРЕНИЯ
ПРИ ПРОЕКТИРОВАНИИ
Проведенный в гл. 11—13 анализ условий статической
устойчивости и управляемости позволяет сформулировать некото-
рые требования к параметрам и характеристикам самолета, связан-
ные с этими условиями. Такие требования предъявляются в первую
очередь к выбору положения центра масс самолета, а при проекти-
ровании — к параметрам его оперения и органов управления, по-
скольку именно эти параметры наиболее сильно влияют на харак-
теристики устойчивости и управляемости самолета.
$ 14.1. ОГРАНИЧЕНИЯ ДОПУСТИМЫХ ЦЕНТРОВОК
САМОЛЕТА
Положение центра масс самолета относительно САХ
(центровка) определяется при проектировании его компоновкой,
а при эксплуатации — заправкой или выработкой топлива, загруз-
кой и т. п.
Поскольку положение центра масс (координаты хт и ут, см.
гл. 10) сильно влияет на величину т£г, а значит, на степень стати-
233
Рис. 14.1. Положение фокуса и точки
нейтральной центровки на САХ крыла
Рис. 14.2. Зависимость характерных
центровок от числа М полета:
1 — взлетно-посадочные режимы; 3 — по-
летная конфигурация; 3 — допустимая
область
ческой устойчивости самолета и условия балансировки, диапазон
допустимых значений хт и ут ограничен требованиями устойчи-
вости и управляемости. В процессе эксплуатации самолета из-за
изменения загрузки, выгорания топлива и т. п. центровка самолета
может меняться в некотором диапазоне Дхт и &ут. При этом диапа-
зон изменения координаты хт более значителен и оказывает большое
влияние на характеристики устойчивости и управляемости самолета,
чем изменение ут. В дальнейшем для простоты считаем Длт Дут
и рассматриваем только влитие изменения хт.
Найдем характерные Модельные значения хт характерные
значения центровки саьщ^еТа? \
Нейтральная центровка. Как видно из (11.6), положение центра
масс (координата Ят) влияет на степень статической-устойчивости
самолета по ’ перегрузке ап. При
степень устойчивости становится равной нулю, а самолет — ней-
тральным по перегрузке. Такую центровку самолета называют
нейтральной. Очевидно, нейтральное положение центра масс хн
— точка нейтральности лежит позади фокуса (так - как /п2 г < ОХ
как это видно на рис. 14.1, причем поправка на демпфирование
п^г1\к. составляет 0,5 ... 2 % САХ, так что различие между xFe
и хн обычно невелико •. На сверхзвуковых скоростях точка нейтраль-
ности вместе с фокусом смещается назад. Нейтральная центровка —*
характерное положение центра масс, с которым удобно сравнивать
его фактическое положение при оценке устойчивости и управля-
емости. Разность между фактическим и нейтральным значениями
продольной относительной координаты центра масс, отнесенная
* Отметим, что в (14.1) ср1<%а мало по сравнению с единицей и при ма-
лости tr^z/y, можно считать приближенно nfyly, 11 -]-j
\ суа /
234
к ЬА, дает непосредственно степень устойчивости самолета по пере-
грузке .
ап = хт — хн. (14.2)
Предельно задняя центровка. Степень статической устойчивости,
самолета во многом определяет и условия его пилотирования и тре-
бования к характеристикам системы управления и бортовой авто-
матики. Поэтому для самолета данного класса с системой управления
определенного типа обычно ограничена минимальная требуемая
степень устойчивости
I °n I I °п треб I (14.3)
при оп < 0 и оп треС < 0 (или степень неустойчивости ап < оп треб
при ап Треб >0, если автоматика системы управления допускает
собственную неустойчивость самолета). Из (14.2) нетрудно найти,
что требуемая степень статической устойчивости (или допустимая
степень неустойчивости) по перегрузке обеспечивается, если центр
мас.с самолета расположен впереди некоторой границы хт.а, назы-
ваемой допустимой задней центровкой самолета
. Хт Хт. з = треб' (14.4)
При опТпеб<4 0 граница хт,в лежит впереди нейтральной центровки
(рис. 14.2). Поскольку нейтральная центровка fB зависит от режима
(числаМ) полета, границу хт. в надо определять для .наихудших
условий, когда точка хя предельно' смешена вперед, т. е. на дозву-
ковых скоростях полета. Положение центра масс, -обеспечивающее
для таких наихудшим условий требуемое значение 6П т'рёб» назы-
вается предельно задней центровкой, хт. п. в (рис. 14.2).
Предельно передняя центровка. Допустимое смещение, центра
масс самолета вперед определяется.!™ условиям балансировки..само-
лета, При . балансировке должно обеспечиваться равновесие моментов
тангажа. В прямолинейном полете
ШРг i + ^0 + nt&Cya (а — «о)+ тг Вв> -|- т^ст(руст = 0. (1’4.5)
Здесь
/пД = хт — хл;
. mIc’ = -Zr.o$”; (14:6)
И.®В____7 св'в 7 г^п
— ^г.о^уа— Ьг. olya пв*
Задав по конструктивным соображениям и требованиям безопасности
предельно допустимое отклонение органа управления тангажом
6В = бв.прад и рассматривая требуемое для данного режима полета
значение угла атаки а =аг.п,Треб, находим из (14.5), считая Д . 0
постоянным и не зависящим от хт (т. е. хт L*. 0):
f __ у ____ = L ~m*0~ mP*t "F ^г. °СрлТ (лв®впред + Фуст) ЛД 7\
хт — хт.п — xFC | —-------------------------. ц**./j
С|Ю (аг. п. треб “о)
Условие (14.7) определяет допустимые передние центровки самолета.
235
При центровке хт > хт. п, т. ё. положений центра масс самблёТй
позади границы передней центровки, самолет может быть сбалан-
сирован по тангажу при | бв | <4| 6В. пред |- При хт <5 хт. п баланси-
ровка с | 6В | <51 бв. Пр=д | невозможна *.
Значение хт. п, как и хт. 3, зависит от режима полета, и кроме
того, от требуемой величины угла атаки аг. п1реб- Предельно перед-
няя центровка хт.п.п определяется для наихудших условий.
Наихудшими в смысле балансировки являются режимы захода на
посадку при малых скоростях, предельно допустимых углах атаки
°т. п. треб = апос < адоп и выпущенной механизации. В этом слу-
чае соотношение (14.7) принимает вид (при тРг1»0)
С
л ПОС __
лт. П---
(14.8)
причем xFc и Суа определяются с учетом влияния близости Земли.
Если на самолете установлен при схеме стабилизатор-руль пе-
реставной стабилизатор, то расчет по (14.8) ведется для посадочного
положения стабилизатора
(14.9)
фуст — фпос-
Балансировка упрощается при отрицательных срП0С. В (14.7) ...
(14.8) отклонение стабилизатора <руст и фпос ' отсчитывается от
нейтрального положения, для которого определено значение
(Фет = 0).
Другим критическим случаем, для которого определяется пре-
дельно передняя центровка, может являться балансировка самолета
при разбеге в момент отрыва переднего колеса. Здесь необходимо
учитывать дополнительные моменты, связанные с силами, действу-
ющими на основные колеса шасси (см. уравнение (13.7)). Для сверх-
звуковых самолетов должна проверяться возможность баланси-
ровки на предельных числах М (когда фокус и нейтральная центров-
ка смещены назад) на предельно допустимых для этих режимов углах
атаки. Для облегчения балансировки самолета на сверхзвуковых
скоростях может использоваться управление положением центра
масс в результате перекачки топлива в специальный балансировоч-
ный бак в хвостовой части самолета. В этом случае требования к хТвП
на дозвуковой и сверхзвуковой скорости могут быть различными.
Допустимые центровки. При положении центра масс самолета
в диапазоне хт.п.п < хт < хт. п. в обеспечивается балансировка
самолета на всех режимах полета и требуемая степень статической
устойчивости (или допустимая степень неустойчивости) по перегруз-
ке. При этом требования балансировки (а значит величина хт. п. п)
практически не зависят от характеристик системы управления са-
* Заметим, что для самолета нормальной схемы • прн достаточно больших
аг. п. треб балансировочные углы 6В отрицательны и в (14.7) следует- подставлять
236
молета и определяются схемой самолета и параметрами органов
управления. Требуемая степень устойчивости ап треб, напротив,
определяется классом самолета, типом и характеристиками системы
управления, степенью автоматизации процесса пилотирования, на-
дежностью, безопасностью и т. п. Для гражданских самолетов без
эффективной системы улучшения устойчивости обычно принимают
требуемые значения | ап треб| не менее 0,2 ... 0,3 (прн аптреб<3 0).
Если в целях уменьшения потерь на балансировку для гражданских
самолетов используются малые запасы устойчивости | ап треб | <
<4 0,05 ... 0,1, то должна обеспечиваться практическая безотказность
системы улучшения устойчивости. Для современных маневренных
самолетов степень автоматизации управления высока, так что иногда
допустима и неустойчивость самолета в известных пределах (ап тоеб >
>0).
Помимо требований статической устойчивости и балансировки
выбор центровки влияет й на другие показатели управляемости и
пилотажные характеристики самолета. Так, при постоянном переда-
точном коэффициенте рулевого тракта изменение хт приводит
к изменению градиента отклонения ручки (штурвала) по перегрузке
х" = -----СЛ2™-------(14.10)
Lr.o (1-т^г)/£г.о
Если учесть, что допустимые значения из условий удобства пи-
лотирования ограничены
(*в)т!п <Хв < С^в)тах> (14.11)
то в зависимости от типа системы управления необходимо вводить
либо автоматическое регулирование по режимам полета и цент-
ровке, либо дополнительно ограничивать допустимый диапазон
центровок. _ '
Влияет положение центра масс самолета и на динамические ха-
рактеристики самолета в возмущенном движении. Это влияние ком-
пенсируется введением автоматики, улучшающей динамические ха-
рактеристики самолета (см. гл. 16), и при выборе допустимых хт
для самолета с системой улучшения устойчивости не учитывается.
В допустимом диапазоне при эксплуатации самолета следует
стремиться к реализации более задних центровок, что снижает по-
тери на балансировку (см. гл. 11).
$ 14.2. ТРЕБОВАНИЯ К ПАРАМЕТРАМ
ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ ПРИ ПРОЕКТИРОВАНИИ
Параметры горизонтального оперения (площадь Sr.o и
плечо £г. 0) и органов управления тангажом (бВПред> SB и т. п.)
при проектировании самолета обычно выбираются исходя из требо-
ваний статической устойчивости и управляемости. Основным здесь
является условие, чтобы на всех допустимых режимах цолета и
при любых, предусмотренных условиями эксплуатации самолета
237
Рис. 14.3. Допустимые центровки и требуемые
значения Лг. 0
вариантах загрузки обеспечивались
требуемая степень статической устой-
чивости по перегрузке и балансировка
на предельных эксплуатационных углах
атаки, т. е. чтобы
%Т. П. 3 Хт. П. П Дхт,
(14.1-2)
где Дх? — максимальный эксплуата-
ционный диапазон центровок, а хт. п. п
и хг.п. в определены для наихудших
возможных условий полета.
При этом в целях проектирования выявляется влияние парамет-
ров оперения и органов управления на хт. п. п и хт. п. 8 (см. § 14.1).
Нетрудно видеть, что с ростом площади Sr. 0 и плеча Lr. 0 гори-
зонтального оперения (т. е. статического момента оперения Аг. 0 —
— Sr. ОЬГ. о) фокус самолета, а значит и хт. п. в сдвигается назад.
Одновременно,-при неизменной относительной площади руля высо-
ты $в растет эффективность органов управления и хт. п. п сдвигается
вперед (рис. 14.3). Таким образом, увеличение Лг.0 приводит к ро-
сту допустимого диапазона (хт. 3— хт. п. п), что позволяет выбрать
минимальное (при данном $в) значение Лг.о, при котором выполня-
ется условие (14.12). Увеличение S8 для схемы стабилизатор-руль
для дозвуковых самолетов до определенного предела также увеличи-
вает разность х.г. п. з — хт. п. п, однако требует увеличения мощности
рулевых приводов или ведет к увеличению усилия на рычагах управ-
ления ддя^обратимой системы управления. На практике $в обычно
не выш£Д2... Используя переставной или поворотный стаби-
лизатор, отклоняемый ца взлете и посадке на угол срп0С < 0, также
можно упростить балансировку самолета и увеличить хт. п. в — хт. п. п,
однако отклонение стабилизатора требует дополнительных конструк-
тивных мер и ограничено углами — 2 ... —7°. Для сверхзвуковых
самолетов схема стабилизатор-руль не эффективна, и используется
управляемый стабилизатор. Здесь всегда SB = 1 и выбор $г. 0 —
основной путь обеспечения требуемого значения Дх? при проекти-
ровании.
Отметим, что выбор параметров горизонтального оперения и ор-
ганов управления не является единственным способом обеспечения
требуемой устойчивости и управляемости самолета, поскольку
положение фокуса xFc (а значит хт. п,3), эффективность органов
управления и другие параметры зависят и от общей аэродинамиче-
ской схемы самолета, и от положения крыла на фюзеляже, а требо-
ваниями Дх? могут быть уточнены при изменении компоновки само-
лета и расположения грузов и топливных баков, перекачки топлива
238
в полете и т. п. Изменение параметров оперения является лишь
основным, наиболее сильным средством влияния на характеристики
• устойчивости и управляемости в сложном многоэтапном процессе
проектирования самолета, в ходе которого выбор всех проектных
параметров неоднократно уточняется. Эффективным дополнитель-
ным средством улучшения общих характеристик самолета является
ослабление требований к его статической устойчивости введением
автоматики в контур управления самолетом. Уменьшая ] ац треб I
(для устойчивого самолета) можно сдвинуть назад границу хт. п. в.
Это, во-первых, приводит к уменьшению требуемой площади ГО
(как это видно из рис. 14.3), и, во-вторых, уменьшает потери на ба-
лансировку, при эксплуатации самолета с центровками, близкими
к хт, п. а. Следует, однако, помнить, что уменьшение степени устой-
чивости допустимо лишь при гарантированной надежности автома-
тики, что требует ее многократного дублирования и резервирования.
§ 14.3. ТРЕБОВАНИЯ К ПАРАМЕТРАМ ВЕРТИКАЛЬНОГО
ОПЕРЕНИЯ
Вертикальное оперение самолета характеризуется относи-
тельными площадью Sb. о = ° , плечом LB. 0 == L^Jl или от-
носительным статическим моментом Ав. 0 == SB. 0LB. 0. На верти-
кальном оперении обычно расположен орган управления рысканием—
руль направления с относительной площадью SH = SH/SB. 0. Вы-
бор параметров вертикального оперения и руля направления про-
изводится при проектировании самолета исходя из требований путе-
вой устойчивости самолета на расчетных режимах полета и баланси-
ровки при боковом ветре или при отказе одного двигателя (для много-
двигательных самолетов).
Условие путевой устойчивости
I ту | > I my Треб | (14.13)
(при mf < 0 и /потреб < 0) позволяет найти требуемое значение
т4в. о, если учесть, что
mv = туб. в. о + Amp.+ о- (14.14)
Здесь б. в. о = ф + г [см. 10.34] — производная mf для са-
молета без вертикального оперения (обычно положительна), Дт£
учитывает влияние работы двигателя, выпуска шасси и других па-
раметров на данном режиме полета, а последнее слагаемое — влия-
ние вертикального оперения [см. (10.82)]:
В. О = Ав. C.Cz в. O&B. О ( 1 . ^-в) (14.15)
(присев, о <0).
Отсюда по условию путевой устойчивости
А > тУтРеб~ в-о~~АтУ М4 16ч
В-°УСТ^. ^Л.о('Ч) ( }
239
А.„ Рис. 14.4. Ограничения требуемых значений
Аотк, > Л4'. . Ав. о и пн
Д (при потреб < О). В этом выражении
A R- сг в.о* туб в. о, зависят от числа М
А полета, конфигурации самолета и т. п.
/X Минимальное потребное значение Лв.оуСт
At определяется для наихудших условий —
либо при больших числах М полета и
на больших углах атаки, либо при по-
садке. Граница Л™‘оУст зависит от на-
значения /потреб, а значит — от класса
самолета и принятой концепции системы
н управления, и уточняется в ходе проек-
тирования в зависимости от изменений проектных параметров само-
лета, влияющих на /^б,в,оит. п. Примерный вид ограничения
Л™о уст показан на рис. 14.4.
Условие балансировки самолета на расчетном режиме имеет вид:
^/Н6нпред -\-rnv расч — О (14.17)
при предельном отклонении руля направления 6а.Пред- Здесь расчет-
ный момент при боковом ветре будет
/и|/расЧ(Ю = ^Р(Ю> . (14.18)
где Р (IF) — WcokIV, а определяется по (14.14).
При отказе двигателя (для Р = 0)
m°TpKaC4 = , (14.19)
где Ротк и z0TK — тяга (до отказа) и плечо отказавшего двигателя.-
Определим коэффициент эффективности руля направления т*
через момент, создаваемый ВО, как (10.96)
туп— ту в.оПн. (14.20)
где при дозвуковой скорости «н = SH, здесь SH — доля площади
ВО, занятая рулем направления. Подставляя выражения для т*
и т^в.о в (14.17) для каждого из расчетных случаев, получаем гра-
ничную зависимость Лв. о («„), при которой обеспечиваются усло-
вия балансировки. Примерный характер границ Л^о (пн) при от-
казе двигателя и Ав. о (пн) при боковом ветре (для mf6. в. о >0) по-
казан на рис. 14.4 совместно с границей Ав. о Лв.*оУст_по условию
устойчивости. Фактические значения Лв. 0 и величина SH, обеспечи-
вающая требуемое пн, выбираются в допустимой области при рацио-
нальных по конструктивным и аэродинамическим соображениям
значениях SH в диапазоне 0,1 ... 0,3. Выбор параметров Лв. 0 (а зна-
240
чит и SB. 0 при данном плече LB. о, определяемом длиной фюзеляжа)
и ин (т. е. SH) зависит от принятой геометрической конфигурации
оперения (стреловидность, удлинение, геометрия ВО), от схемы са-
молета, расположения двигателей, расчетной скорости ветра на
посадке и т. п.
Требуемые значения SB. 0, LB. 0, SH (пн) и конфигурация опере-
ния многократно уточняются в ходе проектирования и по результатам
продувок модели самолета.
§ 14.4. ТРЕБОВАНИЯ К ПОПЕРЕЧНОЙ СТАТИЧЕСКОЙ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ САМОЛЕТА
Поперечная устойчивость самолета определяется величи-
ной тх < 0 и в значительной мере определяет его фактическую ус-
тойчивость и характеристики управляемости по крену. Располага-
емое (фактическое) значение т% определяется параметрами верти-
кального оперения, стреловидностью % и углом <ркр поперечного V
крыла
(14.21)
При этом с достаточной точностью
^хв.о= of-=S^ - а), (14.22)
\ ЬВ. о /
гДе Ув. о — плечо вертикального оперения вдоль связанной- оси OY,
а а — угол атаки в радианах.
Значение т* кр определяется в зависимости от угла <ркр и угла атаки
а экспериментально или на основе аэродинамических расчетов для
данной формы крыла в плане. Как правило, можно считать зависи-
мость /тг£кр от а и <рКр линейной (при данной стреловидности, суже-
нии, удлинении и форме крыла в плане, см. гл. 10)
m*K₽ = j а + дфкр ) фкр. (14.23)
определяя экспериментально или расчетным путем для данной схемы
крыла производные dtr&^lda и <5т^кр/<5сркр.
Потребное значение т£треб определяется из условий поперечной
устойчивости
mLpe6<0 (14.24)
и отсутствия обратной реакции по крену (см. гл. 16).
вн
/л£треб (14.25)
тУв
I ен \
I при п^у < 0 и —%— « -----а >• 0),
у /ПуВ ^-В. О У
241
где Ун—плечо руля направления вдоль оси 0Y связанной
системы. Сравнивая (14.25) и (14.21), находим [с учетом (14.22)
и (14.23)1 допустимую область Ав. 0 (сркр) на расчетных режимах
полета (определяющих угол атаки а и число М). По этой расчетной
области выбирается и уточняется при необходимости допусти-
мое значение Лв. 0, найденное ранее по условиям путевой устойчи-
вости. Заметим, что требуемое эффективное значение /Ихэфф может
быть обеспечено не только аэродинамически, путем выбора Лв. о, и
<ркр, но и установкой на самолете автомата поперечной устойчивости.
При этом условие собственной устойчивости < О может не выпол-
няться, однако предъявляются повышенные требования к эффек-
тивности элеронов.
Поперечная управляемость самолета (управляемость по крену)
обеспечивается выбором плеча га и площади SB элеронов и характе-
• ризуется (см. гл. 10) значением установившейся угловой скорости
крена
Л = —Э4ПРеЛ • (14.26)
тхХ
При этом коэффициент эффективности элеронов /и*3 определяется их
плечом и площадью, а также схемой и параметрами крыла и под-
* дается определению обычными методами аэродинамического расчета,.
так же как значение тях (см. гл. 10).
_ ’ о &
Рассчитав или определив экспериментально т** и тхж, можно^
найти потребные значения 5ви по условию
г»)^Ы»треб. - . (14$7)
Значения острее нормируются для различных.классов самолетов.
Найденные значения и £а проверяются до условиям балансировки
самолета при отказе двигателя.
Дополнительная литература
[14] с. 187—203, 459—472, 493—496, 503—506
Контрольные вопросы
1; Что такое центровка самолета, чем она характеризуется, как изменяется
в полете?
- 2. Что такое нейтральная центровка?. Почему точка нейтральности располо-
жена позади фокуса самолета? Сохранится ли такое расположение для схемы «утка»?
3. Какие требования устойчивости и управляемости не будут удовлетворены,
если центр масс будет впереди точки с координатой хт. п?. Позади точки хт, 3?
4. Почему на посадке устанавливают отрицательный угол <рСт?
5. Почему целесообразно в допустимой области выбирать возможно более зад-
нюю центровку? '
6. Как повлияет возможность перекачки топлива в полете на требованяя
К АВф О К Ху?
7. Какие расчетные требования и условия полета определяют- выбор Ав. о?
242
ЧАСТЬ HI
ДИНАМИКА ВОЗМУЩЕННОГО ДВИЖЕНИЯ
САМОЛЕТА
ГЛАВА 15. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
САМОЛЕТА И МЕТОДЫ ИХ ИССЛЕДОВАНИЯ
В реальном движении значения кинематических парамет-
ров V, 6, а, О, у, Т, <р, сох и других перегрузок- пха, пуа, пга. от-
личаются от значений этих параметров при опорном (невозмущенном)
движении, Равновесие сил и баланс моментов, характерные для
установившегося (или квазиустановившегося) нёвозмущенного дви-
жения нарушаются, возникают неуравновешенные силы и моменты,
вызывающие дальнейшее изменение параметров движения.
Для исследования устойчивости и управляемости самолета удо-
бно использовать уравнения движения центра масс, записанные
в траекторной системе координат, а уравнения движения относи-
тельно центра масс—в связанной системе координат*.
Собирая вместе динамические (1.44)... (1.46) и кинематические
(1.19) уравнения движения центра масс, динамические (1.67) и ки-
нематические (1.24) уравнения движения относительно центра масс,
а также геометрические соотношения между углами (Г. 15)... (1.17)
и . пренебрегая малыми величинами, учитывающими влияние кри-
визны поверхности земли и ее суточного вращения, получим систему
уравнений, ,описывающую пространственное возмущенное движение
абсолютно жесткого самолета при отсутствии ветра
2) = FVK;
3) —тУсозбФ = FZK;
4) *0 = V cos 9 cosT;
5) И = Vsi’n 0;
6) ic = —V cos 0 sin T;
7) JXiiX JXg ((О, <Х>Ж<0г) -j- (Jt Jy)
8) Jg&y — JXy (<ЬЯ -|- a>p(oz) -j- (Jx — u>x(i)z = MRy’,
9) — Jxy (о# — toj) + (Jу — Jx) (лхыу = МЯг-,
V . ,
* При исследовании задач устойчивости и управляемости используются и урав-
нении движения самолета, записанные полностью в связанных осях: координат.
243
10Й = cos\ И/cos У - “г sin у);
11) ft = (Оу sin у -|-mzcosу; (15.1)
12) у = иж — tg ft (сои cos у — и2 sin у);
13) sin а = -COs"p~ IIsi11 cos У cos ~ 4’) F 3in У X
x sin(4r — 4)]cos0 sin 6 cos ft cos y);
14) sin [3 = [ sin ft sin у cos (Чг — ф) — cos У sin — Ф)1cos 6 ~
— sin 6 cos ft sin y;
15) sin уa — [cos a sin p sin ft cos ft (sin a sin p cos у —
— cos p sin y)J,
где
FXK = P cos (а H <Pp)cosP Xo —mgslnO;
FUK = P [sin (a -h фР) cos y„ + cos (a i фр) sin p sin ya] 4-
h Ya cos ya — Za sin ya - mg cos 6;
FZa = P [sin (a + фр) sin ya — COS (a + фр) sin p cos ya] ]-
+ yasln y„ + ZQcosyQ.
Здесь аэродинамические силы определены в скоростных осях ко-
ординат.
Левые части уравнений (15.1) содержат 15 переменных: V, 6,
T, хс, Н, zc, tojc, а>у, со2, ф, ft, у, а, р и у0. При анализе правых
частей уравнений предполагается, что аэродинамические характери-
стики самолета и характеристики силовой установки, необходимые
для определения сил и моментов, действующих на самолет, заданы
на основе предварительных расчетов или получены экспериментально.
Силы и моменты, входящие в правые части уравнений (1—3) и (7—9)
системы (15.1), могут быть найдены по этим характеристикам и зави-
сят помимо перечисленных переменных от заданных управляющих
воздействий: углов отклонения органов управления самолетом и
степени дросселирования двигателя, а также от возмущающих фак-
торов, действующих на самолет в полете.
Уравнения (15.1) представляют собой систему нелинейных обык-
новенных дифференциальных уравнений с переменными коэффици-
ентами. Аналитические методы решения таких систем не разработаны.
Поэтому их решение производится методами численного интегриро-
вания • с применением ЭВМ. Численными методами можно решать
конкретные задачи, но получать решение задачи в общем виде не-
возможно. В то же время для оценки влияния аэродинамических,
конструктивных параметров и режима полета на устойчивость и
управляемость самолета необходимо иметь решение в общем виде.
Поэтому наряду с уравнениями (15.1), которые назовем условно
«точными», надо иметь приближенные уравнения, позволяющие при-
менять аналитические методы решения.
244
Для получения приближенных уравнений, позволяющих’решать
многие задачи устойчивости и управляемости летательных аппара-
тов широко используется линеаризация уравнений движения при
помощи метода малых возмущений.
§ 15.1. ЛИНЕАРИЗАЦИЯ УРАВНЕНИЙ ВОЗМУЩЕННОГО
ДВИЖЕНИЯ САМОЛЕТА
Прежде чем перейти к линеаризации уравнений возмущенного движения са-
молета (15.1), рассмотрим методику линеаризации нелинейных дифференциальных
уравнений возмущенного движения произвольной динамической системы (см. 9.1)
-^--К4(/, У1, Уп) (а =1.2.......п). (15.2)
Пусть невозмущенному (опорному) движению соответствует одно из частных
решений уравнений (15.2) вида ys ~ 1/° (/). Подставляя это частное решение в (15.2),
получим следующие равенства, отвечающие опорному движению,
. о
-^- = ys(t, ..........у°п). (15.3)
Будем считать, что кинематические параметры возмущенного движения ув
мало отличаются от соответствующих параметров опорного движения 1/, в одни
и те же моменты времени
!/, = !/S + A!/s, О5-4)
где &уа — малые отклонения (вариации) параметров движения.
Вычитая из каждого уравнения системы (15.2) соответствующие равенства
(15.3) и имея в виду (15.4), получим
-Т- = (*• !/1. У2.Уп) - (<• !/?. У°2.у°п)- (15.5)
Разложим нелинейную функцию Yt (t, ylt у2 уп) в ряд Тейлора по сте-
пеням вариаций в окрестности значений переменных у° (невозмущенного дви-
жения)
М- Л- У*........Уп) = Уб((> У°’У°2....!/„) +
++О). *+••+(&). (<•
(15.6)
где производные (dKg/dj/Jo.(дУ ,/ду-п)0, взятые в окрестности невозмущенного
движения; У* (/, &yv Дра, ..., Aj/n) — совокупность членов разложения выше
первого порядка малости.
Подставляя (15.6) в (15.5) и пренебрегая в первом приближении величинами
второго и выше порядка малости (У* « 0), получим линейные уравнения возмущен-
ного движения произвольной динамической системы
—— flsi Aj/i + asa &У» + • • • + asn &Уп (s = 1, 2.n), (15.7)
. . / дУв \ / дУя \
где коэффициенты asl = , ..., авП = ( \.
Коэффициенты уравнений (15.7) будут переменными в случае неустановившегося
невозмущенного движения и постоянными, когда невозмущенйое движение уста-
новившееся.
В соответствии с изложенной методикой линеаризации будем
считать, что кинематические параметры возмущенного движения
245
самолета мало отличаются от параметров опорного движения в одни
и те же моменты времени: V — V0 + ДУ, а = а0 + Да, ..., toy =
~ A COjr, ...
Здесь V0, а0, ..., со«, ... — параметры опорного (невозмущен-
ного) движения; ДУ, Да, ..., Ди$ ... — мальТе отклонения пара-
метров возмущенного движения от их значений в опорном дгпжении.
Условие малости угловых отклонений Дх позволяет принять
cos Дх « 1, a sin Дх «г Дх, где х : а, 0, 6, ...
При линеаризации уравнений (15.1) будем пренебрегать произ-
ведениями малых отклонений как величинами рыше первого порядка
малости.
Правые части уравнений 1—3 и 7—9 системы (15.1) разложим
в ряды Тейлора по степеням отклонений (ДУ, Да, ...) в окрестности
невозмущенного движения, сохранив при этом только величины
первого порядка малости.
В качестве примера рассмотрим линеаризацию первого уравнения системы
(15.1). Принимая массу самолета постоянной, получим
dV°
Так как в невозмущеином движении справедливо равенство т »
то линейное дифференциальное уравнение примет вид
+ F*K Д0 + /в да + р®н де + рР
где
' pV _ ( . . рр _ (,SFxk \ .
** ~ k dV /о...... хк ~ \ дР )0' 1 • •
Подобным образом можно провести линеаризацию остальных уравнений си-
стемы (15.1).
Обращаем внимание на то, что вид линеаризованных уравнений
н значения коэффициентов ГУК» ••• зависят от выбранного опор-
ного (невозмущенного) движения, относительно которого рассма-
триваются отклонения ДУ, Да, Д0, ...
Наиболее простым, но достаточно характерным является случай,
когда в качестве опорного рассматривается прямолинейный устано-
. вившийся полет без крена и скольжения. В этом движении У® =
= const; a® = const; 6° = const; 4го = ф° = const; 0® = у® = yg =
= 0; to$= cog = coj = 0; б£ = б£ = 0 и, следовательно, FgK = 0;
' % = 0; F°K = 0; М, = 0; = 0 и Л% = 0.
При линеаризации будем предполагать, что направление нор-
мальной оси OXg выбрано таким образом, что в невозмущенном дви-
246
жении углы пути и рыскания 4го и 4° являются малыми величинами.
Кроме того, приближенно будем считать, что влияние приращения
высоты ЛЯ в возмущенном движении на аэродинамические силы
и моменты и на тягу двигателей мало и учитывать его не будем.
После линеаризации уравнений (15.1) система линейных диф-
ференциальных уравнений возмущенного движения самолета при-
нимает вид
m ДУ — ДУ 4 F“K Да 4 Г®к Д6 4 г£к Др 4
4 fpxk Ы> 4- Fx° Лбв 4- F6* Лбн 4- • •
mV0 лё = ДУ 4- г“к Да 4- де 4 Др 4- 4- Д^в 4
4-^кД6н4...,
-тУ° cos 0° ДT=FZK ДУ + FZKДа 4- FZ₽K Др 4 F% Ду0 4 F% Дб„ 4 • • •;
д£ = cos е°ДУ - У» Sin 0°Д0;
ДЯ = sin 0°ДУ 4 у» cos е°Д0;
Ы - - У0 cos е°ДТ;
jx д<ьх — jxy Абл=mvrx ДУ 4 ^rx Дй 4 др 4
4 ЛЬ?*Да>»4Д®#4МяхДбн4МфсД£»4 • • •>
Jу Дсо^ — JХу Д(0х == Д1ях/ ДУ 4 А^я# Д® 4” А^я# ДР 4_ Д^я'^ &с&х 4"
4- Д^яи Д<»^ 4 Ж Дбн 4 ДР» 4 • • •;
Л ДсЬ, = лТд» д у 4 м я» Д® 4- др 4 Мя» Д« 4- Мя1 Д^г 4
4 мРл ДР 4 Л<я” Дви 4 Д*я“ Двв 4- • • •;
ДФ — Дсог;
Ду = Дсох — tg G® Доу
Да = ДО — Д6;
ДУ = Дф4 sl"^ Ду —-^L-;
Т ' COS 6® ' cos 6°
Дуо=^0оДР4-^-Дт. (15.8)*
Если в качестве опорного движения рассматривать неустановив-
шийся прямолинейный полет, то коэффициенты в уравнениях (15.8)
будут переменными, а в случае установившегося — постоянными.
Полученную сложную систему линейных дифференциальных
уравнений (15.8) можно разделить на простые подсистемы, которые
можно исследовать независимо друг от друга.
* Здесь и в дальнейшем через. AL обозначена величина Ахс, а у Аг индекс «с»
опущен.
247
§ 15.2. РАЗДЕЛЕНИЕ УРАВНЕНИЙ ВОЗМУЩЕННОГО
ДВИЖЕНИЯ САМОЛЕТА. УРАВНЕНИЯ ПРОДОЛЬНОГО
И БОКОВОГО ДВИЖЕНИЯ
Исследование движения самолета можно существенно уп-
ростить, если иметь в виду симметричность самолета относительно
плоскости OXY и принять за опорное движение прямолинейный
полет без крена и скольжения.
При этих условиях первые производные сил и моментов FKB
FVK и Мй2, действующих в продольной плоскости по параметрам
бокового движения (0, у, а>х, ьзу, вн, 68, ...), будут равны нулю F?K =
б р (О
= Fxk = Рук — ••• = Mrx = ... = 0. Это объясняется тем, что
разложение сил и моментов в ряд Тейлора при линеаризации урав-
нений проводилось в окрестности опорного движения, а производные
Fxk, F₽K, ••• в точке, соответствующей опорному движению, равны
нулю в силу симметрии функции типа Fxl. = f (0) (рис. 15.1).
Производные сил и моментов F21t, MRx и MRy, действующих
в плоскостях XOZ и YOZ по параметрам продольного движения,
также равны нулю, так как изменение этих параметров в плоскости
X0Y не может привести к скольжению или крену, а следовательно,
и к возникновению боковых сил и моментов в возмущенном движении,
которые отсутствовали в опорном. Следовательно,
FVXK = F?K = MvRx = MvRy = MaRx = MRv = • = 0.
Таким образом, система уравнений (15.8) разделяется на две
независимые подсистемы, одна из которых описывает продольное
возмущенное движение, а другая — боковое.
Система уравнений, описывающая продольное возмущенное дви-
жение
tn AV — FXk AV — FXK Atx — FXK A0 = Fj£‘ т Д60. у -}- FXK AP -|- Fx K.
mV° A0 - fJk AV - F“ Да - F®K Д0 = f£°- * A60. y + F* AP + Fy K. B;
J, A<o, — MRx A V — MRz Аа — Act — Л4Й2 Aco» =
. = MR°, * A6o. y + MRt AP + MRt B; (15.9)*
ДО = A to*;
ДО = Да + Д0;
ДЬ = cos 0® AV—V® sin0® Д0;
ДЯ = sin 0° AV + V® cos 0° Д0.
f FXK
-fi 0
248
* В этих уравнениях под Дб0. у пони-
мается приращение угла отклонения руля вы-
соты, управляемого стабилизатора или эле-
_____ ВОНОВ.
(£=0
--------► Рис. 15.1. Зависимость продольных сил и
+fi моментов от параметров бокового движения
Система уравнений бокового возмущенного движения
—mV° cos 0° ДФ - F2₽k Др - /&“ Дуа = F% Д6„ + Fz к. в:
«/х Д0)% ' — Jху — М*х Др — Д^х —
- Дсо, = М& Дбн + Д69 + MRx в;
»/У ДсЬ^ Jху Д^х ^Ry ^Р Ry Д^х
- Мь» toy = MRHy Дбн + М*°у Д6. + MRy
Дф = ;
* cos -&0
Ду — Дсох — tgff0 Д(оу;
Д¥ = Дф + ^_ДТ---------LAL;
Y 1 cos 6° 1 cos 6°
Дуа = 1ё00Др+-^-Ду;
LUO V
Д£ = —V°cose°AT. (15.10)
В уравнениях (15.9) н (15.10) величины FXk , Fy , MRzb,
Fz* , МЯяв и Л4Я1,В представляют собой возмущающие силы и
моменты, не обусловленные непосредственно изменениями кинемати-
ческих параметров в возмущенном движении. Они могут быть либо
функциями изменения параметров атмосферы, либо другими извест-
ными функциями.
Если на самолете имеются органы непосредственного управления
силами (непосредственное управление подъемной силой — НУ ПС
и боковой силой — НУБС), то в правые части динамических урав-
нений систем (15.9) и (15.10) надо добавлять соответствующие члены.
Системы. (15.9) и (15.10) являются системами обыкновенных ли-
нейных неоднородных дифференциальных уравнений.
Если управляемое движение самолета с относительно малыми
углами атаки сопровождается развитием больших угловых скоро-
стей, то в уравнениях движения надо сохранять нелинейные члены,
содержащие произведения угловых скоростей. Разделять такую
систему уравнений нельзя. Надо рассматривать пространственное
движение самолета.
§ 16.3. МАТЕМАТИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ
ДИНАМИКИ ВОЗМУЩЕННОГО ДВИЖЕНИЯ САМОЛЕТА
В дальнейшем при исследовании возмущенного движения самолета
придется рассматривать системы однородных и неоднородных линейных дифферен-
циальных уравнений с постоянными коэффициентами.
Система линейных однородных дифференциальных уравнений, правые части
-которых равны нулю, описывают собственное возмущенное движение самолета.
Такое движение можно получить, если находящемуся в равновесии самолету сообщить
некоторые начальные возмущения, а затем предоставить самому себе.
249
Если в полете самолет будет подвергаться постоянно действующим возмуще-
ниям, то его возмущенное движение будет описываться системой неоднородных урав-
нений, правые части которых представляют собой некоторые известные функции
времени. Такими функциями могут быть внешние силы, вызванные управляющими
воздействиями или какими-либо другими возмущениями, например ветровыми.
Известно, что общее решение системы линейных неоднородных дифференциаль-
ных уравнений состоит из общего решения соответствующей системы однородных
уравнений и частного решения полной (неоднородной) системы. Общему решению
однородной системы соответствует собственное возмущенное движение самолета,
а частному — вынужденное. Следовательно, система неоднородных линейных диф-
ференциальных уравнений описывает движение, которое можно представить как
сумму собственного и вынужденного движений.
При исследовании собственного возмущенного движения самолета выясняется
устойчивость опорного движения. Анализ вынужденного движения позволяет опре-
делить реакцию самолета па управляющие воздействия и сделать оценку его управ-
ляемости.
Для линейных систем обыкновенных дифференциальных уравнений с постоян-
ными коэффициентами имеются методы решения, которые приводятся в курсах
высшей математики. К ним относится так называемый «классический метод» и метод,
основанный на операционном исчислении.
Решение линейных дифференциальных уравнений
с постоянными коэффициентами классическим методом
В качестве примера возьмем линейную однородную систему дифференциальных
уравнений с постоянными коэффициентами четвертого порядка, записанную в форме
Коши. Такие системы в дальнейшем будут встречаться при исследовании устой-
чивости иевозмущенного движения самолета.
Пусть имеем однородную систему линейных дифференциальных уравнений
(15.7), в которой, s= 1, 2, 3, 4
assAys — — aatAyt — 0, (1-5.11)
где Ду8 — отклонения (вариации) параметров движения; а(и — известные постоян-
ные коэффициенты. ‘
Общее решение системы получается из суммы произведений частных решений
на произвольные постоянные. Поэтому вначале надо иайти линейно независимые
частные решения системы (15.11).
Ищем частные решения в виде
Ays = Asez/ (s -1, 2.3, 4). (15.12)
Требуется определить постоянные А, и Z так, чтобы функции Ааем удовлетво-
ряли системе уравнений (15.11). -
Подставляя (15.12) в (15.11) и сокращая на множитель е^, получим систему
линейных однородных алгебраических уравнений относительно Ai, As, As и А<
(оц — ^) Aj + <>iaAs + algAg + auA( = 0; OgiAi (а88— 1) A2 + аиА8 +
+ оь«А4 = 0; agiAi + OggAg -4- (ajs — ^) As O34A4 == 0; (15.13)
Д41А1 + a4iAt + а43Аз + (au — Z) A4 = 0.
Из курса математики известно, что для получения ненулевых решений таких
уравнений определитель системы (15.13)-должен быть равен нулю.
Составим определитель системы (15.13) и приравняем его нулю
®н —& Olt 013 014
Oil ctgg — Z Ogg Og4
А = O31 O32 Озэ — z О34 = 0. (15.14)
O41 a4t a«s 044 — Z
250
Раскрывая определитель (15.14), получим уравнение четвертого порядка для
определения 1, которое называется характеристическим уравнением для системы
(15.11)
4* с3Х3 4* с2Х2 4* CjX 4* ао = 0, (15.15)
где а0, ах, а2 и а3 — коэффициенты характеристического уравнения, которые вы-
ражаются через известные постоянные коэффициенты уравнений (15.11).
При решении характеристического уравнения возможны случаи, когда все
корни — различные (простые) или все (или часть) корней будут кратными.
Допустим, что все четыре корня уравнения (15.15) действительные и различные.
Для каждого корня (Л = 1, 2, 3,4) напишем систему уравнений (15.13). Таких
систем буДет четыре, из которых определим 16 коэффициентов Л^, Л2ь Agk и Л4*.
Причем в каждой системе уравнений один из коэффициентов будет-произвольным,
который можно принять равным единице (например, А^ = 1).
Подставляя найденные значения А* и Aak в (15.12), получим частные решения
системы (15.11)
Af/sfe = Ashe'hi‘ (15.16)
Следовательно, общее решение рассматриваемой системы (15.11) будет иметь вид
Дуг — С^Аце^1^ 4- С2А12е>2* 4" C3>ll8e^’^ 4-
Ay2 — CiA2le^,t-{-C2Atitfi*t-{-C3A2l^2t-^-CaA2i^it', (15 17)
Дуа = С1Л81е>1< 4" C2AS2e^'^ 4" C2Agrf?”t 4- С<Лз4е^4';
Ду< = 4- С2^ 4- 4- С4е*<
где С}, С2, Са и С4 — произвольные постоинные, подлежащие определению из
начальных условии.
Подставляя в (15.17) начальные условия (Ду4 = Аул при i = 0), получим
С14ц + С1ЛЦ 4* 4- С4Ли = Дуц>;
4* Cj^m4~ С3Л33 4" С^Ац — ДУао» (15.18)
СхЛи 4* С2А32 4* СзЛц 4* С<Лм = Дузо;
Ci 4- Ci 4- Сз 4- С< = Д^.
Эта система алгебраических уравнений является неоднородной, в ией неизвестными
являются произвольные постоянные Ck(k= 1.......4), которые можно иайти по фор-
мулам Крамера Ck =DijD, где D — определитель системы (15.18), составленный
из коэффициентов* Л4ц; Dk — определитель, получающийся из D заменой столбца
при неизвестном Сц, столбцом, составленным из свободных членов Дузе-
Из общего решения (15,. 17) видно, что когда все А* действительные, то откло-
нения Ду8 изменяются с течением иремени по апериодическому .закону н будут воз-
растать или убывать в зависимости от знаков корней характеристического уравне-
ния Если все Хц будут отрицательными, то при t-*-oo все Ду8 -*-0, и, следо-
вательно, иевозмущенное движение будет асимптотически устойчивым, так как все
параметры в возмущенном движении будут стремиться к параметрам иевозмущен-
пого. Если среди корней А* найдется хотя бы одни положительный, то при t оо
все Ду8 будут неограниченно возрастать, и, следовательно, иевозмущенное движе-
ние будет неустойчивым. >
Рассмотрим случай, когда среди простых корней характеристического уравне-
ния имеются комплексные сопряженные.
Пусть два корня окажутся комплексно сопряженными, например А1&=х4-
+ IV, = х — iv. Этим корням будет соответствовать частное решение
д1/з(1.2) = Аз1еМ + Лй«’1,< (s=l, 2. з, 4),
251
где постоянные Л81 и Ак2 определяются из решения системы (15.13) и являются
комплексными сопряженными числами
Asi = as — ibs и As2 = as + ibs, тогда
tys (i, 2) = (as — ibB) е(и+(у) * + (°s + »6s) e^-^’ * =
= asex/ (eM + - ibs^ (elvt - e~cvt).
Пользуясь формулами Эйлера ttvi 4- e— Cvt = 2 cos vt, tivt — t~ivt = 2i sin vt,
получим
Ays ii, 2) = 2asex/ cos vt + 26sex< sin vt = Asex< sin (vt + ф8), (15.19)
где Ag = 2 j/a2s bf, ф8 = arctg -------новые произвольные постоянные. •
Из (15.19) видно, что частное движение, соответствующее паре комплексных
сопряженных корней, будет колебательным с амплитудой Авех<, круговой частотой v
и фазой ip8. Амплитуда колебаний будет неограниченно возрастать, если веществен-
ная часть комплексного корня — положительная (х > 0) и затухать, если х 0.
В рассматриваемом случае собственное возмущенное движение, описываемое
уравнениями (15.11), представляет собой наложение одного колебательного и двух
апериодических движений, соответствующих действительным корням Ха и Л4.
Обобщая полученные результаты, можно сделать вывод, что для устойчивости
невозмущенного установившегося движения необходимо и достаточно, чтобы все
корни характеристического уравнения имели отрицательные вещественные части.
Этот вывод получен на основании анализа линейных дифференциальных урав-
нений (уравнений первого приближения). Допустимость суждения об устойчивости
и неустойчивости невозмущеииого движения по уравнениям первого приближения
не является очевидной, потому что нелинейная система заменяется линейной, т. е.
одна задача подменяется другой. Может оказаться, что иевозмущёниое движение
в силу линейных уравнений будет устойчивым, а иа самом деле неустойчивым.
Отсюда возникает вопрос, когда уравнения первого приближения полностью
решают задачу об устойчивости и неустойчивости иевозмущениого движения. Эту
важную задачу механики впервые поставил и решил А. М. Ляпунов.
Приведем без доказательства теоремы Ляпунова. позволяющие судить об устой- ,
чнвости и неустойчивости установившихся невозмущениых движений по уравне-
ниям* первого приближения.
Первая теорема- Если вещественные части всех корней характеристического
уравнения системы первого приближения отрицательны, то иевозмущениое Движе-
ние асимптотически устойчиво независимо от членов выше первого порядка малости
в дифференциальных уравнениях возмущенного движения.
Вторая теорема. Если среди корней характеристического уравнения системы
первого приближения имеется хотя бы одни с положительной вещественной частью,
то невозмущеииое движение неустойчиво, независимо от членов выше первого '
порядка малости в дифференциальных уравнениях возмущенного движения.
Возможны случаи, когда среди корней характеристического уравнения имеются
такие, вещественная часть которых равна нулю, а остальные корни имеют отри-
цательную вещественную часть. Во всех этих критических случаях устойчивость
(неустойчивость) иевозмущениого движения определяется членами выше -первого
порядка малости. При этом задача будет тем сложнее, чем больше число критиче-
ских случаев. Ряд задач был решен Ляпуновым и другими учеными.
Непосредственное исследование устойчивости иевозмущениого движения по
корням характеристического уравнения является простым лишь для уравнений
первого и второго порядка. Для характеристических уравнений третьего и четвер-
того порядков получаются сложные и часто непригодные для практического исполь-
зования формулы для определения корней. Для уравнений более высоких порядков
(п > 4) задача определения корней в виде аналитических выражений неразрешима;
корни могут быть определены лишь численно.
Однако для решения вопроса об устойчивости или неустойчивости иевозмущен-
ного движения можно не определять корни характеристического уравнения, а надо
лишь определить знак вещественной части всех корней.
252
Косвенные признаки, по которым можно судить о знаке вещественной части
корней характеристического уравнения линейных систем с постоянными коэффи-
циентами, минуя вычисление самих корней, называются критериями устойчивости.
По критериям устойчивости можно судить об устойчивости линейной системы,
определять границы устойчивости и выбирать параметры устойчивой системы.
Критерии устойчивости подразделяются на алгебраические и частотные.
Алгебраические критерии позволяют судить об устойчивости и неустойчивости
систем по коэффициентам характеристического уравнения. Имеются различные
формы критериев. Наибольшее применение получили критерии Гурвица и Рауса.
Приведем без доказательства теорему Гурвица.
Пусть характеристическое уравнение n-й степени имеет вид
-ф an_il" 1 + * * * + + °о = 0, (15.20)
По главной диагонали матрицы выписываются все коэффициенты характери-
стического уравнения с последовательно убывающими Индексами, начиная с ап-1.
Все строки справа от коэффициентов, стоящих иа главной диагонали, заполняются
коэффициентами с возрастающими индексами, а слева — с убывающими индексами.
На место коэффициентов, индексы которых меньше нуля или больше п, ставятся
нули.
Теорема Гурвица. Для того чтобы все корни алгебраического уравнения (15.20)
имели отрицательные вещественные части, необходимо и достаточно, чтобы все
главные диагональные миноры матрицы (15.21) были положительны:
дх = ап.х > 0, Д, = I fln-1 вп I > 0.........Дп = а0Дп_х > 0. (15.22)
I On-8 аП-1 I
В частности, если для уравнения четвертой степени
К* -ф п8Х3 -|- ~Ф OiK -ф п® = 0 (at =1) (15.23)
выполняются неравенства
Дг = <з8 > 0; Д8 —
аз
ai
а»
>0; Д8 = ai
а» । ,0
)
>0; Д« = аоДа>0,
1 0
Од ^8
то вещественные части всех корней (15.23) будут отрицательными.
Равносильными для уравнения 4-й степени являются условия Рауса—Гурвица,
которые имеют вид
а0>0, а1>0, аг > 0, а8>0, R = > 0. (15.24)
Из теоремы Гурвица и первой теоремы Ляпунова об устойчивости по первому
приближению можно сформулировать критерий устойчивости: если при Оп > 0
все миноры Гурвица Дь ..., Дп положительные, то иевозмущеииое движение асимп-
тотически устойчиво независимо от членов выше первого порядка малости.
253
НайдеМ границы устойчивости. На границе устойчивости будут равны нулю
действительный корень (К =0) или вещественная часть комплексных сопряженных
корней (X = IV). Если в характеристическое уравнение (15.20) подставить Z = 0,
то получим границу апериодической устойчивости: ай = 0 или Дп — 0 (при всех
остальных положительных минорах Гурвица}. Подставляя в уравнение (15.20)
вместо к его значение X=iv, получим границу колебательной устойчивости: А;1_л
= 0, причем все остальные миноры Гурвица положительны. Третья граница устой-
чивости соответствует бесконечному корню X = со, и согласно уравнению (15.20)
будет при ап — 0 *.
Между границами устойчивости будет находиться область устойчивости.
Критерий Гурвица предпочтителен для систем порядка п 4, так как позво-
ляет в общем виде установить соотношения между физическими параметрами си-
стемы, при которых обеспечивается устойчивость.
Для систем порядка п > 5 критерии Гурвица и Рауса сильно усложняются
и требуют большого объема вычислительных работ. Если возмущенное движение
самолета описывается системой линейных неоднородных дифференциальных урав-
нений с постоянными коэффициентами, то общее решение такой системы состоит
из общего решения однородной и частного решения неоднородной системы.
Общее решение однородной системы рассмотрено ранее. Частное решение не-
однородной системы зависит от вида правой части этой системы. Для нахождения
частного решения может быть применен метод вариаций произвольных постоянных,
а в случае специальных правых частей метод неопределенных коэффициентов. Э.1Л
методы изложены в курсах высшей математики.
Решение линейных дифференциальных уравнений
с постоянными коэффициентами операторным методом
Наряду с классическим методом в инженерной практике получил распростране-
ние операторный метод. Особенно широко, этот метод применяется в теории автома-
тического управления полетом летательных аппаратов.
Сущность этого метода состоит в том, что посредством интегрального преобра-
зования от систем линейных дифференциальных уравнений переходят к вспомога-
тельной системе алгебраических уравнений. Затем находят решение вспомогатель-
ной системы, а из него при помощи обратного преобразования получают решение
заданной системы дифференциальных уравнений.
В качестве интегрального преобразования обычно используют преобразование
Лапласа
+~
У (р) = £(у(0]^ J
о
где параметр р — некоторое комплексное число; у (0 — кусочно-непрерывная
и ограниченная функция независимой переменной t, называемая оригиналом; г (р) —
изображение функции у (0.
Помимо прямого преобразования существует обратное преобразование Лап-
ласа, позволяющее по изображению У (р) находить оригинал у (0. Сокращенное
обозначение обратного преобразования L"1[К (р)1 = у (0.
В курсах операционного исчисления приводятся таблицы прямого н обратного
преобразования Лапласа основных функций.
Если оригинал р'(0, имеющий изображение У (р), подвергается математической
операции (сложению, дифференцированию н т. п.), то для нового оригинала можно
найти изображение по формулам, приведенным в табл. 15.1.
В приведенных для дифференцирования формулах величины р0> ....Уо
представляют собой значения функции у (0 и ее производных в начальный момент
времени (начальные условия).
При анализе возмущенного движения самолета иногда возникает необходимость
определить предельные значения решения дифференциального уравнения по виду
этого уравнения, ие решая его. Например, надо оценить поведение функции у (0
* Случай А =оо в динамике полета ие встречается.
254
Таблица 15.1
Математичес кая операция Оригинал Изображение
Исходное преобразова- ние Сложение оригинала Умножение па постоян- ное число Дифференцирование n-кратное дифференци- рование Интегрирование Сдвиг оригинала на т У (0 У1 (0 + Уг (О су (0 dyldt dy/dt, у0= 0 dny/dtn dnyldtn при нулевых начальных условиях t J У (t) dt y(t-r) Y(P) Yi (P) + Yz (p) cK(p) pY (p) — Уо pY(p) р"Г(р)-[рп-,у° + + р"-2Уо+ F Po-'l PrtF (P) vy(₽) е-^Г (p)
вблизи t = 0, т. е. в самом начале двияЛиия, и вблизи t = со, т. е. для боль-'
ших /, при условии, что система устойчива.
Эту задачу можно решить с помощью следующих теорем о предельном переходе
(предельных свойств преобразований Лапласа):
1. Если существует предел функции lim [у (0J#^q, то
Um [у (0W = Ит \pY (р)]р_. (15.25)
2. Если существует предел функции lim [у (0 ]/_►,»> то
Пт [у (01^те - lim {pY (р)1^0. (15.26)
Из этих формул видно, что для определения предельных значений функции
у (0 надо подставить в ее изображение, умноженное иа р, значение р = оо или
Р = 0.
В качестве примера рассмотрим решение дифференциального уравнения второго
порядка операторным методом [11J
S + М + ОоУ = х (0. (15.27)
Переходя от оригиналов у (0 и х (0 к изображениям по формулам, приведенным
в табл. 15.1, получим изображение уравнения (15.27) в виде
(р®‘+ а^р + Оо) У (р) = X (р) + у0 + (Д1 + р) у0.
Отсюда найдем изображение Y (р) функции у (0
Соответствующий этому изображению оригинал
у Г п»-Л(Г-1-д • 1+м х
L Г + Р1Р т ао J
Х [ Pa+aiP + ao ] V,L [ Рл+ oiP + ‘
255
Предполагается, что корни рг и р2 знаменателя ра + aiP + ао простые и дей-
ствительные. По таблицам перехода от изображений к оригиналам находим
L-1 Г 1 1 = еР1< ~ еР2< • I -1 Г Р ]
L Р2 + aiP + °о J Pi — Ра ’ L Р2 + И1Р + «о J
pteP1< — р2еРа*
Pi — Ра ’
и тогда
Г X (п) 1 еР1< — еРа/
Y & = £’* п»-!-Я л ±д.... + + ~п-----------п---+
L Р + Й1Р + «о J Pl — Pi
Р1ер'* - p2ePaf = Г Х(р) 1 1
Pi — Pa L Р2 + «1Р -I- «о J Pi — Ра
X (|Ро + (ai + Pi) Pol ер,< — IРо + (<2i -h Pa) Pol еР2< )•
Для определения оригинала, соответствующего изображению —,
надо задаться конкретным видом функции х (Z). В частности, если х (/) = 0, т. е.
уравнение (15.27) однородное, решение будет иметь вид
У & л ’ п......1+ (ci + pi> еР1< ~ + (C1 + Ра) У°еРг‘ I’ (|5-29)
Р1 — Рг
Аналогично можно получить решение и для случая комплексных или кратных
корней уравнения р2 + Й1Р + «о — 0.
Подобным образом можно осуществить решение'дифференциальных уравнений
более высоких порядков или систем уравнений.
Достоинство операторного метода состоит в том, что объем и сложность вычисли-
тельных работ получается меньшим по сравнению с классическим методом. При
операторном методе отпадает трудоемкая операция определения произвольных
постоянных из условия удовлетворения заданным начальным условиям, так как
сразу находится решение дифференциальных уравнений, удовлетворяющее этим
условиям.
Исследование управляемого движения самолета
с помощью передаточных функций
При выполнении любой летной операции самолет последо-
вательно осуществляет ряд режимов полета. Для перехода от одного
режима к другому и для компенсации возмущений требуется управ-
ление самолетом. Следовательно, самолет является объектом управ-
ления.
Под управлением самолета понимается процесс формирования
управляющих воздействий, обеспечивающий требуемый режим дви-
жения.
Управляющие воздействия формируются на основе получения
и обработки информации о характере движения самолета и заданной
программы полета и осуществляются отклонениями органов управ-
ления самолета и двигателя.
Результат управления зависит от реакции самолета на управля-
ющие воздействия, которая определяется его статическими и дина-
мическими характеристиками и законом управления. Поэтому для
оценки управляемости различных самолетов принято рассматривать
их реакцию на скачкообразное (ступенчатое) отклонение органов
управления и на отклонение по гармоническому закону.
256
При ступенчатом отклонении изучаются переходные или времен-
ные характеристики (фун^дии) самолета, а при гармоническом —
частотные.
Частотными характеристиками системы (звена) называют за-
висимость отношения амплитуды выходной величины к амплитуде
входного сигнала и сдвига по фазе выходной величины по отношению
к входному сигналу от частоты входного воздействия.
("Для самолета выходными величинами могут быть управляемые
параметры движения (скорость, углы атаки, тангажа и.другие пере-
грузки и т. п.), а входными — управляющие или возмущающие
воздействия.
При изучении переходных характеристик (процессов) любой
динамической системы (звена), описываемой линейными дифферен-
циальными уравнениями с постоянными коэффициентами, удобно
пользоваться передаточными функциями, а частотных характери-
стик — частотными функциями.
Передаточной функцией называют отношение изображения вы-
ходной величины к изображению входной при нулевых начальных
условиях
Здесь Y (р) и X (р) — соответственно изображение по Лапласу
выходной и входной величины. Двойной индекс Wvx (р) указывает,
что выходной величиной является у (/), входной — х (/).
Рассмотрим пример определения переходной функции звена с помощью его
передаточной функции. Пусть это звено описывается линейным дифференциальным
уравнением второго порядка с постоянными коэффициентами
Др (/) + 2Л Др (0 + ш» Др (0 = К А* (<). (16.31)
Найдем передаточную функцию, соответствующую этому” уравнению. Для этого
определим изображения по Лапласу выходной Др (0 и входной. Дх (0 величии при
нулевых начальных условиях.
Переходя от оригиналов Др (0 и Дх (0 к их изображениям по формулам табл. 15.1
получим вспомогательное алгебраическое уравнение
(р’ + 2Лр +с?) ДГ(р) = КДХ(р). (15.32)
Atz/x КДХ(р)
Откуда &Y (р) = pa^ 2/ip + <o« * 1 пеРедаточиая функция:
Передаточную функцию можно рассматривать как удобную форму записи ли-
нейных дифференциальных уравнений с постоянными коэффициентами, которая
позволяет сравнительно просто исследовать динамические процессы.
Поскольку знаменатель передаточной функции составляется по левой- части
уравнения, то ои является характеристическим полиномом дифференциального
уравнения (15.31) с той лишь разницей, что вместо К стоит параметр р.
Приравнивая нулю знаменатель передаточной функции (15.33), получим
р» + 2йр 4- ©» = 0. (15.34)
Кории этого уравнения называются полюсами передаточной функции или корнями
характеристического уравнения для системы (15.31).
Если (е>« — Л1) > О, то корни будут комплексными сопряженными
РХ, а = ~h ± i . (15.36)
9 А. Ф. Бочкарев и др. 257
В этом случае будет колебательный процесс изменения выходной величины и звено
является колебательным.
Если (<п2 — h2) <Х 0, то оба корня будут'"'действительными рг 2 = — h ±
± К й2 — о)2; процесс будет апериодическим, а звено — апериодическим второго
порядка.
Выражая ЛЕ (р) через передаточную функцию (15.33), получим
ЛЕ (р) = Wvx (р) ЛХ (р) == ЛХ (р).
Для определения переходной (временной) функции надо за входное воздействие
принять единичную ступенчатую функцию х (t) — 1 (/), изображение которой
X (р) -= ——. Следовательно,
Р
Y (Р) == -.7 2 ', • (15.36)
Р (Р + 2йр + ш)
Переходя при помощи таблиц от изображения к оригиналу для случая (ы2—К2) >
> 0, получим переходную функцию колебательного звена
у (Г) = к 1 -е-« , (!5.37)
где К — передаточный коэффициент; h — коэффициент демпфирования; v =
= Кео® — h2 — круговая частота колебаний; со — опорная частота илн частота
недемпфированных колебаний; сдвиг по фазе —
(sfi — h2
ф я= arctg — • (15.38)
В (15.37) первое слагаемое определяет вынужденное движение, а второе —
собственное (свободное) колебательное движение, определяющее переходной про-
цесс.
Для определения реакции самолета на гармоническое воздействие
рассматриваются лийейные неоднородные уравнения с постоянными
коэффициентами, правые части которых изменяются по гармониче-
скому закону.
Входное гармоническое воздействие вызовет выходной процесс
(возмущенное движение), состоящий из собственной и вынужденной
составляющих.
В устойчивой системе собственная составляющая, определяемая
из решения однородных уравнений, с течением времени затухает.
Поэтому при изучении выходных процессов, вызванных гармониче-
ским воздействием, ограничиваются только вынужденной состав-
ляющей, предполагая, что система устойчива.
Вынужденная составляющая определяется как частное решение
неоднородной системы уравнений. Если на вход системы (звена)
подается гармонический сигнал Дх (О = sin cof, то на выходе
вынужденная составляющая будет изменяться по гармоническому
закону с той же частотой со, но с другой амплитудой и со смещением
по фазе
ку (() = Ai sin (cof + у), (15.39)
где А2 и со — амплитуда и частота вынужденных колебаний выходной
величины; у — сдвиг по фазе.
258
Рис. 15.2. Определение модуля и аргу-
мента частотной функции
Рис. 15.3. АФЧХ системы (звена)
Величины Л2 и у весьма просто определяются по частотной функ-
ции W (ico), представляющей собою комплексную величину.
Можно показать, что W (ico) получается из передаточной функ-
ции W (р) (15.30) путем замены р = tco, где со— частота вынужден-
ных колебаний.
Частотную функцию можно представить в виде
W («о) — Re (со) 4~ i Im (со) — А (со) (15.40)
где Re (со), Im (со) — соответственно вещественная и мнимая часть
А
частотной функции; А (со) = —/ = | W (ico) | — модуль частотной
функции, называется амплитудно-частотной характеристикой
(АЧХ); у (со) = arg W (ico) — аргумент частотной функции, назы-
вается фазовой частотной характеристикой (ФЧХ).
Для определения модуля и аргумента частотной функции изо-
бразим W (ico) на комплексной плоскости для одного значения со
(рис. 15.2).
Из рис. 15.2 видно, что
А (со) = = /Re8 (со) + Im2 (со), (15.41)
т = агс‘е-к>- <15-42)
С помощью этих выражений можно строить амплитудную и
фазовую частотные характеристики системы (звена) при изменении
частоты вынужденных колебаний со от 0 до +оо..
Кроме этих характеристик можно построить амплитудио-фазовую частотную
характеристику (АФЧХ), представляющую собой кривую на комплексной плоско-
сти, по которой перемещается конец вектора частотной функции W (tco) при изме-
нении частоты входного сигнала со от 0 до оо.
Для построения АФЧХ надо для каждого значения частоты вычислить по фор-
мулам (15.41) и (15.42) А (со) и у (со). Затем иа комплексной плоскости под углом у
из начала координат провести луч, на котором отложить значение А (со). Совокуп-
ность точек образует АФЧХ системы (звена) — рис. 15.3.
АФЧХ так же как передаточная функция IF (р) и дифференциальное урав-
нение системы (звена) определяет ее динамические свойства, но обладает тем пре-
имуществом, что может быть построена экспериментально.
Частотный метод анализа для линейных систем широко при-
меняется в теории автоматического управления и динамике управ-
ляемого движения самолета. В дальнейшем при изучении реакции
9*
259
самолета на управляющие и возмущающие воздействия будем ис-
пользовать передаточные функции и частотные характеристики само-
лета.
До сих пор рассматривались системы линейных дифференциаль-
ных уравнений с постоянными коэффициентами.
В случае неустановившегося опорного движения системы ли-
нейных дифференциальных уравнений (15.9) и (15.10) будут с пере-,
менными коэффициентами. Интегрирование таких систем можно
проводить численными методами на ЭВМ. Для получения аналити-
ческого решения задачи в инженерной практике иногда пользуются
приближенным методом «замороженных коэффициентов». Сущность
этого метода состоит в том, что отрезок времени t, в течение которого
происходит исследуемое движение, разбивается на отдельные интер-
валы. На этих интервалах коэффициенты уравнений принимаются
постоянными и равными их значениям в начале интервала. Тогда
математически задача будет описываться совокупностью систем
дифференциальных уравнений с постоянными коэффициентами.
Число таких систем равно числу интервалов времени. Однако о до-
пустимости этого метода с достаточной для практики достовер-
ностью можно судить только после анализа конкретных характе-
ристик летательного аппарата и систем стабилизации на основании
численного интегрирования уравнений с переменными коэффициен-
тами с помощью вычислительной техники.
Дополнительная литература
19.] с. 228, [11 ] с. 180—209, (81 с. 234—246.
Контрольные вопросы
1. Какова методика линеаризации нелинейных уравнений возмущенного дви-
жения? Проведите линеаризацию одного цз нелинейных уравнений возмущенного
движения самолета.
2. При каких условиях возмджно разделение линейных уравнений возмущен-
ного движения самолета?
3. Каковы математические методы исследования динамики возмущенного дви-
жения самолета?
4. Когда линейные уравнения полностью решают задачу об устойчивости и
неустойчивости иевозмущеииого движения?
5. Сформулируйте алгебраический критерий устойчивости.
ГЛАВА 16. ДИНАМИКА ПРОДОЛЬНОГО ВОЗМУЩЕННОГО
ДВИЖЕНИЯ САМОЛЕТА
В § 15.2 была получена система линейных дифференциаль-
ных уравнений (15.9), описывающая продольное возмущенное дви-
жение самолета. Производные F<K, Г“к.Г^к, .... MvRz, ..., вхо-
дящие в эти уравнения, можно получить путем разложения в ряд
Тейлора величин FXK, и Мя,, значения которых приведены
в (15.1).
260
Подставляя в (15.9) вместо F*lt, Г?к, FVVK, MvRz,
их значения, принимая cos (а + <рР) «1 и sin (а + <рР) « (а +
<рР), а также полагая, что момент тангажа в опорном движении
сбалансирован (/иРг)° = 0, после преобразований получим
АЙ-XДУ4~р?Да [F^ Д6 + F®°-уД60.у + Ff ДР +F„;
ДО = FVy ДУ + f“ Да 4- К де + Fy0'У у + Рув!
Дшг = MRz ДУ - L Л^г Да + MRz Да + Л^г2 Д<ог + Л&у Дбо. у 4
4 MRZ^P | MRzii-, .
ДА = Д <вг; (16.1)*
Дф = Да + ДО;
Д1 = cos ОДУ — У sin ОДО;
дл = sin еду + у cos еде,
где Fvx = ~ [2 (ср - сха) | - (ср — сха) М]
-Х-с^- Fflo.y_£^Z__JLAy-
Т рхо’ Г— т — т Схи ,
• Гх ‘ Гх 1
Гх —- ' — —J? COS v, F t: — — " <t
т ь.. * т т
Г ^суа
у mV тИ
гСС в
р“_ Fp __ I л,
Fv—mV----
Fa
‘ X-
т
» 1 хв
feo. у
У
mV
— — с6°'у ’
— - Суа у
Лгв
m
м dM
. Суа dCya
С* )” рв°' у —
Lyab гу ~
рВ в
sin 0- F •— /->в
mV ~ V Sln °’ РР* mV
Jz
Mpa.
(16.2)
mvRz~^ = dz^*-, MR°-y
J 2 V
* TT^ cti a .
= z = Dz^^zfyay MRz — —j------------j
Jz Jz Jz
7л* __ . г» .. . MRz в
Лтд»----L>ztnz -р—, mRz в —---------.
-П<о, © Ь.
MRz — -j — Dztnz у ;
T_ 2m . n _ SqbA . pV2
T-=-pSiT’ Dz_-—, q^-^,
Ур~Ур!^а\ Cp — P/Sq\
* Здесь и в далькейшем индекс «к» при FXK и FyK для сокращения записи
опущеи.
6., - .
Уру
т —
261
Р — суммарная тяга двигателей. Все коэффициенты в (16.1) и (16.2)
определяются для опорного движения (индекс «О» для сокращения
записи опущен).
В системе (16.1) отсутствуют малые по сравнению с остальными
величины:
-п V
&Fx Да —-----— ср (а + <р₽) Да,
АЁ^ ДУ = Jp- (срМ + 2сР) (а + <рР) ДУ
При необходимости их можно ввести в уравнения. Если опорным дви-
жением является установившийся горизонтальный полет, в котором
6 = 0 и сР = сха, то тогда Fvx = -у- (ср — с^); Ё® = — g;
2т ... mgV _ V
Гу — V, Т — SpV - Sqg - g Cyar.n.
В системе (16.1) параметры Д£ и ДЯ при принятых ранее допу-
щениях не входят в правые части пяти первых уравнений, поэтому
эти уравнения могут рассматриваться независимо от двух последних.
Для анализа устойчивости систему (16.1) удобно представлять
в форме Коши. Если за опорное движение принять установившийся
горизонтальный полет, исключить Да из правой части третьего урав-
нения с помощью соотношения Act = Aft — Д0 = Дсог — Аё и
заменить Д6 на Aft — Да, то получим
ДУ 4~ Оц ДУ 4~ Ои Да “У аи = Ьц-Д60. у -I- bia АР 4” fi>
Да 4” А У 4* tyt Аа 4” «аз Асог = feat Дбо. у4~
Дйх 4- Озг АУ 4- tZja Да 4~ Язз Ав>х = ftsi А60. у 4” ^за АР 4~ (16.3)
Д61 4- Oja Асог = 0.
В этой системе
«п =---лТ; «12 = Ё® - Ё?; а14 = -Ё®;
Oai= Ё^; Огг = /Г*; Огз — —1;
0з1 == MrzFu — аза = МргРу — Мрг\ азз — — (Мдх + Мд*)'» (16.4)
043----1; Ьц=Ё>*; б12 = ЁГ; 621 = -Ё>у;
Ь31 = у - M*zF6u°- b32 = Mr,-,
fi = Ёхв‘» fz = —FyB; fs = Mrz в — M%iFyb.
В главе 16 будет показано, что системы (16.1) и (16.3) поддаются
дальнейшему упрощению, что позволит получить простые критерии
для оценки динамических характеристик самолета в продольном дви-
жении.
262
§ 16.1. СОБСТВЕННОЕ (СВОБОДНОЕ) ПРОДОЛЬНОЕ
ВОЗМУЩЕННОЕ ДВИЖЕНИЕ САМОЛЕТА. УСЛОВИЯ
УСТОЙЧИВОСТИ ОПОРНОГО ДВИЖЕНИЯ
Собственное возмущенное движение описывается системой
однородных дифференциальных уравнений (см. § 15.3), анализ ко-
торых позволяет оценить устойчивость опорного движения.
Система (16.3) будет описывать собственное движение, если ор-
ганы управления самолетом и двигателем зафиксированы в балан-
сировочном положении (Д60.у = 0и ДР = 0) и отсутствуют внеш-
ние возмущения /у = f2 = /8 = 0. В этом случае из (16.3) получим
следующую систему однородных дифференциальных уравнений
с постоянными коэффициентами
ДV + ап &V 4- On Да + 014 Д^ = 0;
Да + а21 ДУ + а22 Да с2э Дсо2 = 0; (16.5)
Дй2 -1 аЯ1 ДУ И о32 Да |- .а33 До2 = 0;
ДА у а43 До2 = 0.
Эта система описывает собственное продольное возмущенное
движение самолета, возникновение которого обусловлено началь-
ными возмущениями ДУ0, Да0, Д<вг0 и Д-&0.
Так как коэффициенты уравнений (16.5) постоянные, то будем искать
частные решения в виде
ДР = Ае^*, Да = Вем, Дсог = Се^ и ДО = De*’*.
Подставляя эти решения в (16.5) и сокращая иа общий множитель еМ, по-
лучим систему однородных алгебраических уравнений: ' .
(X 4- Лц) А -|- G]зВ -|- ~ 0;
“Ь (^ ”Ь ®zz) 4“ “ 0* (16.6)
йз1А 4- Оза® “Ь “Ь ^зз) С = 0;
Ц43С -|- KD ~ 0.
Характеристический определитель имеет вид|
> 4- °ы °13 0
4" ^22 ^23 0
^31 ЙЯ2 4“ ^33 б
0 0 (2дд К
Раскрывая определитель и приравнивая его нулю, получим характеристиче-
ское уравнение
X4 4“ 4~ tZjX 4~ = 0, (16.7)
где аэ = а14 (a2ia82 — #22a3.i)> Pi = йи (й22азз + йзг) — ci2 (°3i + й21°эз) — cu°3i;
fl2 = ^11 (^22 “Ь я3э) — °12й21 "Ь ^22а33 “Ь ^32> (16.8)S
й3 = Й11 + й22 а33-
263
Характеристическое уравнение (16.?) имеет четыре корня. Ёсли они все дей-
ствительные и простые, то общее решение системы (16.5) будет иметь вид
AV = А^*' 4- А2ек’* + Л3еХа/ + А4ем;
Да = B^lt + В*?‘‘ + B8eia' + В4ех<
Acoz = Сгем 4-Cje*’* + CseM + С4ем; (16.9)
Д» = ^е1*' 4- D2e7 *' 4- Dsex»' 4- D4eM.
Постоянные Ak, Bk, Ck и D* (k — 1, ...,4) находятся из решения системы
(16.6) с использованием начальных условий: при t = /0 = О, ДУ = A Vo, Да = Дос®,
Д<ог = Д<о2о, ДО = Д»о.
Из (16.9) видно, что когда все А* действительные и простые, возмущенное дви-
жение представляет собой наложение четырех апериодических частных движений.
Рассмотрим случай, когда характеристическое уравнение имеет две пары ком-
плексно-сопряженных корней Xlj2 = х ± tv и ^3|4 = р ± й). В этом случае общее
решение системы (16.5) имеет вид
ДИ = Л'еи/ sin (vt 4- tpi) 4- Л"ем< sin (rjf 4- Yi)>
Да = B'ex< sin (v/ 4- ’I’») + sin (T]t 4- y2); (16.10)
Д<в2 --- C'ex< sin (vt 4- <ps) 4- C”eu/ sin (тр 4- y8);
ДО = D'ex< sin (vt 4- ф4) + D^1 sin (тр 4- y4).
Постоянные A', A"......D', D", ...,i|>i, .... т|>4, y1(.... определяются из ре-
шения системы (16.6) с использованием начальных условий.
Как видно из (16.10) возмущенное движение самолета в рассматриваемом слу-
чае будет представлять собой наложение двух колебательных движений. Величины
Л*ех<.....D'e*', Л*®**'....D"^* представляют собой амплитуды колебаний; v
и п—круговые частоты; ф1( ...,ф4, Y1» •••• Y« — сдвиг фаз. Периоды колебаний
будут равны Tj = 2n/v, Т2 — 2л/т).
Продольное иевозмущенное движение будет устойчивым, если все X* < 0 (в слу-
чае действительных корней) или и<Оиц<0 (в случае комплексных.сопря-
женных корней).
Условия А* < 0 или х < 0 и р < 0 будут иметь место, если выполняются
условия Рауса—Гурвица [см. (15.24) ]
До > 0, 01 > 0, а2 > 0, а8 > 0, (16.11)
R = — а® — аоа| >0.
В области продольной устойчивости должны выполняться условия (16,11). Апе-
риодической границей области устойчивости является уравнение Од — 0, а коле-
бательной R = а^Оз — а| — ада| = 0 (см. § 15.3).
Об устойчивости опорной траектории в собственном продольном возмущенном
движении можно судить по изменению линейных отклонений Д£ и АН, которые
описываются двумя последними уравнениями системы (16.1). Если опорным дви-
жением будет установившийся горизонтальный полет, то эти уравнения прини-
мают вид
Д£ = ДУ; АН = V ДО = V (Д» — Да).
Подставляя в иих найденные из решения системы (16.5) величины ДУ (t), Д» (0
и Да (0 и интегрируя, получим
Д£ = j Д V (0 dt 4- Ci; АН = V j Д'» (t) dt — V j Да (h dt 4- C2.
Если все X* < 0, то при t-t-oo А V (0 -> 6, Д6 (0 -> 0, Да (0 -> 0 (см. (16.9))
• и тогда Д£-><?!, а ДЯ-> С2.
Следовательно, самолет по отношению к опорной траектории будет устойчив,
ио не асимптотически. Для возвращения самолета на исходную траекторию требуется
вмешательство летчика или подключение автопилота.
264
§ 16.2. ВЫДЕЛЕНИЕ БЫСТРОЙ И МЕДЛЕННОЙ
СОСТАВЛЯЮЩИХ ПРОДОЛЬНОГО ВОЗМУЩЕННОГО
ДВИЖЕНИЯ
Анализ продольного движения самолета показывает, что
при обычных условиях * характеристическое уравнение (16.7) имеет,
как правило, два больших и два малых корня. При §том часто встре-
чающимся является случай наложения друг на друга двух колеба-
тельных движений. Одно колебательное движение соответствует
двум большим комплексным сопряженным корням = Xs, а второе —
малым Х8 — 14. Первая пара корней по модулю существенно (в де-
сятки раз) превышает вторую.
Так как вещественная часть комплексного корня характеризует
степень затухания возмущенного движения, а коэффициент при мни-
мой части — частоту колебаний [см. (16.10)], то большим корням
соответствует быстрозатухающее движение с большой частотой
(малым периодом), а малым — медленнозатухающее с малой часто-
той (большим периодом).
Возмущенное движение, определяемое парой больших комплекс-
ных корней, называется быстрым — короткопериодическим, а па-
рой малых —медленным — длиннопериодическим.
При анализе собственного движения также выясняется сущест-
венное различие и в величине постоянных А' и А”, &• также
В' и В".
В выражениях (16.10), где первые слагаемые характеризуют бы-
стрые составляющие продольного движения, а вторые — медленные,
величина А* во много раз (примерно на два порядка) меньше вели-
чины А”, т. е. | А' | < | А" |, тогда как | В' | ] В" |. Следовательно,
отклонение ДУ определяется, главным образом, медленной соста-
вляющей, а Да — быстрой составляющей.
Хотя после нарушения опорного движения короткопериодическое
и длиннопериодическое движения возникают одновременно, тем не
менее в начале возмущенного движения преобладает короткопериоди-
ческое, в котором изменяются в основном Да и ДФ, а скорость прак-
тически не изменяется (ДУ « 0). Короткопериодическое возмущен-
ное движение — вращательное. Оно связано с установлением нару-
шенного равновесия моментов тангажа и заканчивается в течение
нескольких секунд. Затем в длиннопериодическом движении заметно
начинает изменяться скорость и угол наклона траектории, а угол
атаки изменяется сравнительно мало. Длиннопериодическое движе-
ние продолжается до тех пор, пока не наступит равновесие сил, дей-
ствующих на самолет.
Из сказанного следует, что короткопериодическая и длинно-
периодическая составляющие продольного движения самолета как бы
* Исключением являются самолеты с малым или нулевым запасом статиче-
ской устойчивости по перегрузке. Одиако для таких самолетов анализ собственного
возмущенного движения смысла не имеет, так как устойчивость опорного движения
достигается с помощью системы обеспечения устойчивости и управляемости са-
молета (СУУ),
265
разнесены во времени. Это дает возможность рассматривать их раз-
дельно, что существенно упрощает анализ продольного возмущенного
движения.
Однако раздельно рассматривать длиннопериодическое движение
можно только в том случае, когда установлено, что короткопериоди-
ческое движение затухающее (или для неустойчивого самолета его
затухание обусловлено работой СУУ).
Роль короткопериодической и длиннопериодической составляю-
щей продольного возмущенного движения для летной практики раз-
лична.
По отношению к длиннопериодическому движению выдвигается
требование отсутствия апериодической неустойчивости, при которой
отклонения параметров движения увеличиваются с нарастающей во
времени интенсивностью. Для парирования этих отклонений тре-
буется частое вмешательство летчика в управление. Колебательная
неустойчивость в длиннопериодическом движении, в отличие от апе-
риодической, развивается медленнее, и, если не предъявлять жестких
требований к точному выдерживанию заданных параметров движения,
то она не внесет трудностей в управление самолетом и даже может
не замечаться летчиком.
Неустойчивость самолета в короткопериодическом движении
недопустима. Это объясняется тем, что при частоте колебаний свыше
0,3 0,4 Гц летчик в силу запаздывания реакции не может свое-
временно и правильно отклонять органы.управления для париро-
вания колебаний и может даже усиливать колебаний, раскачивая
самолет.
Решающее.значение для летной практики имеют характеристики
короткопериодического движения.*
§ 16.3, СОБСТВЕННОЕ ПРОДОЛЬНОЕ КОРОТКОПЕ-
' РИОДИЧЕСКОЕ ВОЗМУЩЕННОЕ ДВИЖЕНИЕ САМОЛЕТА.
УСЛОВИЕ УСТОЙЧИВОСТИ ОПОРНОГО ДВИЖЕНИЯ
Рассмотрим поведение самолета в продольном коротко-
периодическом возмущенном движении при фиксированных органах
управления и отсутствии постоянно действующих внешних возмуще-
ний. Выясним характер собственного возмущенного движения и
определим условия устойчивости опорного движения самолета.
Для этой цели получим однородные дифференциальные уравне-
ния, описывающие собственное короткопериодическое возмущенное
Движение самолета. Причем за опорное движение примем установив-
шийся горизонтальный полет. Воспользуемся упрощенной теорией
короткопериодического движения, основанной на том, что в начале
возмущенного движения скорость не успевает заметно измениться,
и можно считать ДУ = 0. Тогда первое уравнение системы (16.1),
характеризующее изменение ДУ, выпадает, а в остальных надо счи-
тать ДУ = 0.
При таких предположениях из уравнений (16.1) получим следую-
щую систему однородных дифференциальных уравнений с постоян-
266
ними коэффициентами, описывающую собственное продольное ко-
роткопериодическое возмущенное движение самолета
Д0 = Г“Да;
Д®2 =MaRz Да + Ж Да + М^г Дсо2; (16.12)
ДА - Да>2; Да = ДО — Д6.
Преобразуем эту систему, исключив из второго уравнения пере-
менную Д®2 с помощью остальных уравнений
Да 2hk Да + col Да = 0; ДО = Да;
ДА = Д®г; ДА = Да + Д6,
где hK = ^-(Fay-M<lRz~MR^ =
(16.13)
(16.14)
(16.15)
4 = - 4- = -D2c“flan.
Первое уравнение системы (16.13) не зависит от остальных и
его можно решать отдельно. После определения Да (/) по остальным
уравнениям можно найти ДО (/), Дсо2 (/) и ДО (/)
Однородное дифференциальное уравнение
Да2йк Да + ®к Да = 0 (16.16)
имеет характеристическое уравнение второй степени
X.2 + 2 V + «к = 0, (16.17)
корни которого
Х.1, 2 = —ZiK±}AZi^ — (16.18)
определяют характер собственного короткопериодического возмущен-
ного движения самолета.
При со2 > hl и > 0 корни уравнения (16.17) будут комплекс-
ными Сопряженными, а собственное короткопериодическое движе-
ние — колебательным .
Xi, 2 = —h^ ± i yf сок — Лк- (16.19)
Решение уравнения (16.16) имеет вид
Да — Ath&t sin (vKf + Ф). (16.20)
где hK — коэффициент демпфирования (затухания); vK = / со£—hl-
круговая частота собственных колебаний; — опорная ча-
стота или частота недемпфированных колебаний; ф — фазовый угол
сдвига.
Постоянные Лиф определяются по заданным начальным усло-
виям Да = а0 и Да = Да0 при t = t0 = 0.
267
Если hl 5s ©,<, то корки ХаракТерйСтиЧеСкоГО уравнения будут
действительными (16.18). Собственное возмущенное движение будет
апериодическим, состоящим из двух движений.
Решение уравнения (16.16) при hl > ©к
Да = С1е’-1'+С2еМ> (16.21)
а при hl = ©к > 0, Xj = Х2.
+ (16.22)
Постоянные С\ и С2 находятся из начальных условий.
Определив Дос (/), можно найти спорость изменения угла наклона
траектории Д0 (/) и перегрузку Дпиа (О-
Из второго уравнения системы (16.13) видно, что
Дё(с) = Г“Да(0- (16.23)
Уа + Р sin (а + <рг) (У“ + Р) а
Линеаризуя выражение п1)а=-=—2-------,
получим
Д%< = Да = 7? (с“а +с₽) Да = Да- (16,24)
Следовательно, отклонения Д0 и Дпио в собственном коротко-
периодическом возмущенном движении изменяются пропорционально
изменению Да. >
В соответствии с уравнениями (16.12)
Д®2 = Да + Д6.
Дифференцируя (16.20) по времени и учитывая (16.23), получим из-
менение Д©г в собственном короткопериодическом движений
Ди2 = Ле"й«‘ [(?£ - Ли) sin (vk/ + ф) + v„ cos (v„/ + ф)].
Необходимыми и достаточными условиями устойчивости опорного
движения являются
Лк>0 и ©£>0. (16.25)
Эти условия получаются из критериев (15.22) для характеристиче-
ского уравнения второй степени (16.17).
При выполнении условий (16.25) отклонения параметров Да,
Дё, A©z и Дпио в процессе собственного короткопериодического воз-
мущенного движения будут затухать.
Рассмотрим выполнимость условий устойчивости.
Так как Dz = —> 0 и суа > 0, то из (16.15) видно, что ус-
J Z
ловие ©к > 0 эквивалентно условию
и оно выполняется при наличии продольной статической устойчиво-
сти по перегрузке самолета с фиксированными органами управле-
ния.
268
Покажем, что, если оп > 0, т. е. (Ок <0, неустойчивость самолета
в короткопериодическом движении может быть только апериодиче-
ской. При со2 < 0 корни характеристического уравнения будут дей-
ствительными [см. (16.18)], причем один из них отрицательный, а
другой Х, = — hK + /hl — <в2 — положительный, и, следовательно,
опорное движение самолета апериодически неустойчиво.
Колебательная неустойчивость возможна только при со2 > 0
и hK < 0, однако такой случай'в практике не встречается.
Так как полет самолета происходит при c,ja < сводоп < сватах»
когда mzz < 0, mz < 0 и суа > 0, то, как видно из (16.14), условие
устойчивости hK > 0 выполняется.
На динамику короткопериодического возмущенного движения
самолета существенное влияние оказывает режим опорного движе-
ния (V и Н). В частности, при переходе от дозвуковых к сверхзвуко-
вым скоростям полета из-за роста статической устойчивости по пере-
грузке увеличивается частота собственных колебаний, а уменьшение
по абсолютной величине производных тг , тг и суа приводит к ухуд-
шению затухания колебаний и увеличению времени переходного
процесса. При увеличении высоты полета происходит уменьшение
плотности воздуха, что при V — const приводит к некоторому убы-
ванию частоты собственных колебаний и ухудшению затухания коле-
баний, обусловленному уменьшением демпфирующих моментов.
Упругие деформации конструкции самолета приводят к умень-
шению степени устойчивости и демпфирующих моментов, что также
обусловит увеличение времени переходного процесса.
В заключение рассмотрим изменение Д6 (/) и ДФ(/) в'коротко-
периодическом движении. Подставляя найденные значения Да (<)
во второе и четвертое уравнения системы (16.13), получим
де(/) = Г“ j Да(0^ + С;_ Дй(0 = Да(/) + 7^| Да (/) Л + С
Отсюда видно, что при выполнении условий (16.25) Да (/) -*• 0,
в то время как отклонения углов траектории и тангажа стремятся
к определенному пределу С. Это объясняется отсутствием равнове-
сия сил, действующих на самолет в короткопериодическом движе-
нии. В дальнейшем в длиннопериодическом движении при наступ-
лении равновесия сил у устойчивого самолета Д6 и ДО станут рав-
ными нулю.
§ 16.4. СОБСТВЕННОЕ ПРОДОЛЬНОЕ ДЛИННО-
ПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ САМОЛЕТА. УСЛОВИЕ
УСТОЙЧИВОСТИ ОПОРНОГО ДВИЖЕНИЯ
Будем считать, что в конце короткопериодического этапа
движения практически наступает равновесие моментов тангажа
J z£& = 0, а Дшг и Да становятся настолько малыми, что ими в даль-
нейшем можно пренебречь.
269
Имея это в виду и принимая за опорное движение установившийся
горизонтальный полет, из уравнений (16.1) при фиксированных ор-
ганах управления и отсутствии постоянно действующих внешних
возмущений получим систему линейных дифференциальных уравне-
ний с постоянными коэффициентами, описывающую собственное дли-
ннопериодическое возмущенное движение самолета
ДУ = ДУ + Да + FUe;
Д0 = F^ ДУ + F£ Да; MxRll ДУ + MaRz Да = 0. (16'26)
Исключая из первого и второго уравнений с помощью ^третьего Да,
получим систему, описывающую изменения вариаций ДУ и Д0
/ mv \
ДУ |- I F“-=^- —F* j ДУ — F? Д0 = 0;
V j
/_ Mv _ \
Д0 + F?-=£- — Fy ДУ = 0. . (16.27)
Характеристическое уравнение этой системы
Mv
Ь + -ft
Раскрывая определитель, получим
X* + 2 V + соД = 0, (16.28)
где
с“
с“
сца
2#!
(16.29)
(16.30)
Здесь принято (1 Н—j « 1.
\ суа !
Корни характеристического уравнения (16.28)
Ч s = —hR ± —
(16.31)
определяют характер-собственного длиннопериодического возмущен-
ного движения самолета.
Если (Од > hl и сод > 0, то корни уравнения (16.28) будут ком-
плексными сопряженными
Чг =----Ч ± i У^СОц — Лд> (16.32)
270
а собственное длиннопериодическое движение — колебательным (та-
кое движение называют фугоидным).
Подразумевая под Дх любую из величин АV и Д0, общее решение,
системы (16.27) в этом случае можно записать в виде
Дх = sin (v„i Ц- <р), (16.33)
где ha — коэффициент демпфирования; vs = (Од — hl — круговая
частота собственных колебаний; (од — опорная частота или частота
недемпфированных колебаний; <р — фазовый угол сдвига.
При йд а>д корни уравнения (16.28) будут действительными
(16.31), а собственное движение — апериодическим.-Решение урав-
нений (16.27) при йд > сод
Дх = Ц- Л2ек**, (16.34)
а при йд = <0д, Xj = Ха
Дх = (А + А/)еМ. (16.35)
Постоянные A', Alt Л2 и в выражениях (16.33) .... (16.35) ощ
ределяются по заданным начальным условиям.
Необходимыми и достаточными условиями устойчивости опор-
ного движения являются
йд>»0 и (0д>0. (16.36)
Как видно из (16.29), знак коэффициента затухания йд опреде-
ляется взаимным расположением центра масс и .фокуса самолета
(m«z = хт — XfC), разностью производных (с^ — Ср) и частной
производной /прг, которые зависят от числа М полета. Если влияние
сжимаемости воздуха незначительно, то при трг < 0 знак йд оп-.
ределяется только разностью (с^ — с₽), так как производная трг
либо очень мала или равна нулю, либо положительна.
Отметим, что в (16.29) и трг определяются для постоянного,
исходного значения угла атаки а,, а Ср — для постоянного режима
работы двигателя (положения РУД).
Второе условие устойчивости ((од > 0) при т^2 < 0 выпол-
няется, как это видно из (16.30), только при наличии у самолета ста-
тической устойчивости по скорости при фиксированных органах уп-
равления ((Ту < 0).
При отсутствии устойчивости по скорости сод < 0, корни характе-
ристического уравнения станут действительными, один из которых
х = -йд + /йГг’ (Од > 0. Опорное движение будет апериоди-
чески неустойчивым.
Условие (Од > 0 обеспечивает^устойчивость только при наличии
демпфирования, т. е. когда > 0. Если й < 0, а сод > 0, то воз-
можны два вида неустойчивости: когда йд > (од характеристическое
уравнение будет иметь два действительных положительных корня,
271
что соответствует’апериодической неустойчивости, а при (Од > йд —
колебательная неустойчивость.
Рассмотренные случаи относятся к анализу собственного длин-
нопериодического движения в предположении.о невмешательстве лет-
чика или САУ в управление самолетом (Д60. у = 0). В ряде случаев
представляет интерес анализ длиннопериодического движения,, когда
летчик или САУ отклоняют органы управления (Д60. у ¥= 0) для вы-
держивания горизонтального полета или полета по заданной траекто-
рии снижения 6° — const. В этокГ случае перегрузка сохраняется
постоянной, а Л.пуа = 0, Д0 = 0 и^Дб = 0.
При таких условиях и малых FX°'T «0, /^°'т ~ 0 первое и вто-
рое уравнения системы (16.26) для 0° = 0 примут вид
ДУ—Fx ДУ — F“ Да = 0; Fvy ДУ + F% Да = 0.
Определяя из второго уравнения Да и подставляя в первое, по-
лучим
ДУ + йлДУ = 0, (16.37)
где йд = - fc -
м I Fa I \ (IV /л. ==const
\ У )
Характеристическое уравнение для (16.37) X + kR = 0, откуда
X = —йд. Следовательно, движение будет устойчиво, если йд > 0.
Раскрывая выражение для kR, находим, что устойчивость обеспе-
чивается при
-^-(Р-Х«)г.п<0. . (16.38)
При полете самолета на первых режимах это условие выполняется —
движение устойчиво. На вторых режимах (Р — Ха)г. п > 0
и, следовательно, длиннопериодическое движение ’ при выдержи-
вании пуа = const или стабилизации угла траектории неустойчиво.
Аналогично можно рассматривать длиннопериодическое движе-
ние самолета при условии, что летчик или САУ стабилизируют за-
данные исходные значения угла тангажа или угла атаки при возму-
щениях по скорости ДУ или углу наклона траектории Д6.
§ 16.5. РЕАКЦИЯ САМОЛЕТА В ПРОДОЛЬНОМ ДВИЖЕНИИ
НА ОТКЛОНЕНИЕ ОРГАНОВ УПРАВЛЕНИЯ
В продольном движении управление самолетом осуществ-
ляется отклонением органов управления 60. у и йзменением тяги
двигателей ДР.
Если за опорное движение принять установившийся горизонталь-
ный полет, то продольное возмущенное движение самолета при откло-
нении органов управления может быть описано уравнениями (16.3),
если в них принять /т — /2 = fs — 0.
Решая уравнения при нулевых начальных условиях, можно
найти реакцию самолета на управляющие воздействия Д60. у или ДР.
272
Пусть таким воздействием является отклонение руля высоты Д6В.
После преобразования по Лапласу уравнения (16.3) при отклоне-
нии руля высоты примут вид
(р + Ои) ДУ (р) 4- «п Да (р) + «14 Дй (р) = hnА6В (р);
«21 ДУ (р) + (р + «22) Да (Р) + «23 Д<02 (р) = &21 Д6В (р);
«зг ДУ (р) + аа2 Да (р) + (р + п38) Дсог (р) = Д6В (р);
р ДО (р) + а4Э Дсо2 (р) = 0. (16.39)
Из решения этой системы можно определить изображения откло-
нений параметров возмущенного движения ДУ (р), Да’(р), Дсог(р)
и ДФ (р):
ду(р)=4г: Да(р)==’т-;. Awz(p)==-^; д#(р)=-^-.
(16.40)
Здесь Д — характеристический определитель, составленный из коэф-
фициентов при неизвестных в уравнениях системы (16.39)
Р 4" «11 «12 0 «14
Д__ «21 7? 4 «22 «23 0 (16 411
«31 «32 Р 4" «33 О
О 0 й43 р
Раскрывая определитель, получим полином четвертой степени
А = Р4 4" «зР3 4" «гР2 + «1Р 4- «о = D (р). (16.42)
где значения коэффициентов ак определяются по формулам (16.8).
Определители Ау, А&, АИг и А© получают заменой в (16.41)
соответствующих столбцов правыми частями уравнений (16.39)
Ду =* Ддв (р) Л (р); Аа = Ддв (р) Fa (р);
где значения полиномов F, (р) получаются после раскрытия определи-
телей А{.
С помощью формул (15.30), (16.40), (16.42) и (16.43) получим пере-
даточные функции самолета, характеризующие его реакцию на от-
клонение руля высоты
Wv6(p)
W^(p)
ДУ(р) Р1(р).
Дбв (Р) D (р) ’
_ Д<Ог (р) Рз (р) .
ДР в (Р) D (р) ’
\Уав(р)
1Уое(р)
Д«(р) __ Ра (р) .
Д6В (р) D (р) ’
. ДА (р) = Р4 (Р)
Дбв(р) О(р) ‘
(16.44)
Таким же способом можно получить передаточные функции
самолета, если управляющим воздействием будет изменение тяги
двигателей.
Из (16.44) видно, что изображения параметров возмущенного
движения, а следовательно, и реакция самолета на управляющее
273
воздействие полностью определяются, с одной стороны, характером
воздействия, в данном случае законом отклонения руля высоты, с дру-
гой — передаточными функциями самолета.
Передаточные функции (16.44) с большой точностью характери-
зуют динамические свойства самолета, однако они неудобны для
анализа продольной управляемости. Дело в том, что для определения
отклонений параметров ДУ, Да и других необходимо'вычисление по-
люсов и нулей передаточных функций, т. е. корней алгебраических
уравнений D (р) = 0 и Ft (р) = 0. В связи с высоким порядком этих
уравнений их корни нельзя точно представить в общем виде через
коэффициенты полиномов D (р) и Ft (р), т. е. через конструктивные,
аэродинамические параметры самолета и параметры режима полета,
а только можно определить в виде чисел для какого-либо конкрет-
ного случая.
Поэтому для анализа продольной управляемости чаще исполь-
зуют передаточные функции, полученные из уравнений короткопе-
риодического и длиннопериодического возмущенного движения.
Передаточные функции самолета в короткопериодическом
возмущенном движении
Наиболее важными параметрами, определяющими про-
дольное возмущенное движение, являются угол атаки и нормаль-
ная перегрузка. Эти параметры после отклонения органа управления
тангажом в основном формируются на этапе короткопериодического
движения, в ходе которого восстанавливается равновесие моментов
тангажа. На этом этапе изменением скорости полета можно прене-
бречь. Поэтому для определения ответной реакции самолета по углу
атаки и нормальной перегрузке на отклонение руля высоты можно
воспользоваться упрощенными передаточными функциями.
Для определения упрощенных передаточных функций исполь-
зуем уравнения короткопериодического возмущенного движения.
Если за опорное (невозмущенное) движение принять установив-
. шийся горизонтальный полет, то короткопериодический этап возму-
щенного движения самолета, обусловленный отклонением руля высо-
ты, будет описываться следующей системой уравнений:
Дё-Р“Да = Г®вД6в;
ДО - М%г Да - М^г Да - ДО = 70& Д6В; (16.45)
ДО + Да — ДО — 0.
После преобразований по Лапласу получим систему неоднород-
ных алгебраических уравнений
рД0(р)-Р“Да(р)=7;®вД6в(р);
- (М%г + Яр) Да (р) + (р2 - А^р) ДО (р) = М& Д6В (р);
(16.46)
ДО (р) + Да (р) — ДО (р) = 0.
274
Из решения этой системы определим
Аа(р) = -^; А0(р) = -^-; А9(р) = ^- (16.47)
Определитель системы (16.46) имеет вид
°_
—Мрг^~Мргр р2~М%р
1 —1
= — Р (р2 + 2ftftp + со;),
(16.48)
где йк и со£ определяются по формулам]^ 16.14) и (16.15).
Определители Аа, Ае и А© получим заменой в (16.48) соответст-
вующих столбцов правыми частями уравнений (16.46); после их рас-
крытия
Аа = - [М^р - F> (р2 - М^р) ] Абр (р);
де=- +Ту* [р2 - (м^+Р - Дбв (р);
Ае = - [лй (р + F“) - FyB (М& + Мйър)] А6В (р)- (16.49)
Для самолета нормальной схемы приближенно можно принять
FyB « 0. В этом случае
Аа = —Л4двр Дбв (р) = — DztnzBp А6В (р);
Ае = —РуМ^г А6В (р) =------- {ср -|- с^с) /п2в Д6В (р);
Ае = —(р + Гу) Дбв (р) = —DzmtB £р + — (ср + Су0) J А6В (р).
(16.50)
Имея в виду (16.47), (16.48) и (16.50), получим~передаточные
функции самолета по углам a,J0 и & в короткопериодическом возму-
щенном движении
лл6в
М = = p2 + 2AKT+w2 = 7V+W±^: (16,51)
«7 /п\__ Д6 (р) _ у______________Ке_______.
И'еб \Р) - дбв (р) - р (р2 + 2ЛкР + ws ) - р (Т*Р* + %-Тр ± 1) ’
(16.52)
П7--СМ (р) ^°(р + ^) Ле(Т1Р+1)
w06 W - дев (Р) ~ Р (р2 + 2йкр + 0)2) “ Р (TV + 2£7р ± 1)•
(16.53)
275
В этих выражениях: передаточные коэффициенты
^4
I <°к|
постоянные времени
т2 — * •
' |“2кГ
относительный коэффициент демпфирования
~hKT.
Отрицательный знак свободного члена в знаменателях переда-
точных функций имеет место при отсутствии у самолета продольной
статической устойчивости по перегрузке, когда ип > 0.
В дальнейшем будем рассматривать случай, когда свободный
член знаменателя передаточных функций имеет положительный знак,
т. е., когда ап < 0.
Преобразуя выражение (16.24) по Лапласу при F/ яь 0, получим
(р) -у Да (Р) = (ср Ь Д« (Р)-
Тогда передаточная функция по перегрузке
или
\г? . в
W 7-Л Кс
W'nelP;— дбв(р) - Г2р2 + 2^Тр + 1 ’
где передаточный коэффициент по перегрузке
1Z V rfalZ У Lr
1\с--— ГуКа
Так как
Гу —
m
суаап
а
суа Я
Суа г. п V
к -
а
а„
к т*
Г'С — г п
Суа г. пап
(16.54)
6п
в
(16.55)
1
Дифференцируя выражения (16.52) и (16.53) по времени, получим
передаточные функции по угловым скоростям
W - жёгw- TV +Х+1' <16'66>
• (р) - !}. j (16.57)
276
Передаточные функции самолета по а, пуа и 0 представляют со-
бой передаточные функции колебательного звена при £ < 1 (когда
Юк > йк и сок > 0). При | > 1 колебательное звено распадается на
два устойчивых апериодических звена.
Если на самолете руль высоты отсутствует, а управление самоле-
том осуществляется отклонением стабилизатора, то в полученных
передаточных функциях надо заменить Д6В (р) на Дфст (р), -а mz® —
Фет *
на тг .
По полученным передаточным функциям можно определить ре-
акцию самолета на отклонение органов управления тангажом в ко-
роткопериодическом движении.
Реакция самолета на ступенчатое отклонение органов
управления тангажом в короткопериодическом движении.
Характеристики переходных процессов самолета
Как уже отмечалось, реакция самолета на управляющие
воздействия зависит от его динамических характеристик и от харак-
тера управляющих воздействий.
При необходимости совершить интенсивный маневр в вертикаль-
ной плоскости летчик энергично отклоняет руль высоты (управляе-
мый стабилизатор). В этом случае закон отклонейия руля высоты
довольно близок к скачкообразному (ступенчатому). Реакция само-
лета на такое воздействие характеризует выход самолета на неко-
торую заданную перегрузку (угол атаки). Причем формирование но-
вых значений угла атаки и нормальной перегрузки происходит на
этапе короткопериодического движения.
Ввиду того, что короткопериодическое движение протекает
очень интенсивно, характеризуется большой частотой колебаний,
оно четко фиксируется летчиком. На оценку управляемости самолета
летчиком влияет как характер переходного процесса при отклоне-
нии руля высоты, так и параметры движения самолета по его окон-
чаний.
При мгновенном отклонении руля высоты на угол Д6В = const
после окончания переходного процесса самолет выйдет на новые
установившиеся значения угла атаки и перегрузки, равные соот-
ветственно (а0 + Дауст) и (Пуа + Дп^ауст), где
Аауст = А6В lim Wan (р) = Ка Д6В;
Р-0
уст Абв lim (р) = Дбв.
р—0
Рассмотрим изменение перегрузки самолета, вызванное ступен-
чатым отклонением руля высоты. Поскольку движение самолета опи-
сывается линейными уравнениями, то. при отклонении руля на про-
извольную величину А6В перегрузка и другие параметры движения
изменятся пропорционально А6В. Поэтому можно рассматривать
реакцию самолета на единичное изменение А6Й (/) = 1 (t) (Дов = 1
при 1 0 и Д6В = 0 при t < 0), т. е. так называемую переходную
277
функцию, которая полностью определяется передаточной функцией
самолета Wn(> (р).
Имея в виду, что изображение по Лапласу единичной функции
А6В (/) = 1 (t) равно А6„ (р) =у и используя выражение (16.54),
найдем изображение перегрузки
1 к
^Пуа (Р) = — Wnb (р) = р .
Переходя от изображения к оригиналу, получим изменение пере-
грузки в переходном процессе после единичного отклонения руля
высоты (переходную функцию) при | < 1
(0 — уст
или
(16.58)
Ап,а (/) = Ап^ уст [ 1 - sm + Ф)] , (16.59)
где Кпиа уст = К с, Т — постоянная времени; | — относительный
коэффициент демпфирования; ф — arcsin у/1 — — сдвиг собст-
венных колебаний по фазе; vK = •/ coj — hl.
Так как передаточные функции по перегрузке и углу атаки
имеют одинаковую структуру, то переходная функция для угла атаки
будет иметь аналогичный вид.
На основании выражения (16.58) и (16.59) можно определить
динамические показатели устойчивости и управляемости самолета
в короткопериодическом колебательном движении, по которым оце-
нивают качество переходного процесса
период собственных колебаний самолета
Тк = - .2±Г , с; (16.60)
к Ki—v« •
частоту собственных колебаний
Гц;
* к
(16.61)
Йшт — время переходного процесса (время практически полного
затуханияХколебаний) — промежуток времени, по истечении ко-
торого отклонение регулируемого параметра движения (например
Апуи и Аа) будет отличаться от его конечного установившегося зна-
чения (Апуауст, Дауст) на 5 %
(16-62)
число колебаний до практически полного затухания
Пзат = ~ о,48 = 0,48
* к Пн S
(16.63)
278
относительный заброс перегрузки (угла атаки, при достижении
ими своего первого экстремального значения
А Л ~лйк ~я5
д_ = fln^wax-^gycT = е vK = £ (16.64)
&Пуа уст
соответствует моменту времени ^ ——7-;
время срабатывания — время первого выхода регулируемого
параметра движения на его установившееся значение (^пуа уст,
Дауст) или, при | > 1, на значение, равное 0,95 от установившегося,
t cv==-^^t.
Р /1-£а
(16.65)
Иногда рассматривают изменение амплитуды колебаний за один
период, время уменьшения амплитуды вдвое (t2) и т. п.
На рис. 16.1 приведены основные характеристики колебатель-
ного переходного процесса.
Большая продолжительность переходного процесса /зат и значи-
тельный заброс Any отрицательно сказываются неуправляемости и
маневренности самолета.
Рассмотрим влияние заброса на перегрузку и маневренные воз-
можности самолета.
Из (16.64) имеем
Д^уа шах == Д^уа уст (1 Д^у).
Следовательно, максимальное значение перегрузки в переходном
процессе (с учетом перегрузки в опорном движении) будет равно
Пуа max == Пуа уст (1 +Дйу). (16.66)
Отсюда видно, что при наличии большого заброса перегрузка
в переходном процессе может значительно превосходить установив-
шуюся.
Это снижает маневренные возможности самолета. В самом деле,
если при nVa тах будет полностью реализовано допустимое значение
коэффициента подъемной силы, равное безопасному (суа — суабев),
то при наличии заброса установившаяся перегрузка, которую.
можно получить при выполнении ма-
невра, будет меньше перегрузки, со-
ответствующей Суа без,
пуа max
П1ЮТСТ = Т+Дй^-
Потери маневренности из-за коле-
бательности переходного процесса
Рис. 16.1. Основные характеристики колеба-
тельного переходного процесса
279
можно характеризовать коэффициентом использования маневрен-
ных возможностей самолета Км, равном
= = . (16.67)
Пуа max суа без ^пу
Отсюда видно, что при наличии заброса 7<м < 1.
Если относительный коэффициент демпфирования £ > 1 (Лк >
> ©к), то корни характеристического уравнения ра + 2h„p +‘
+ ад = 0 будут действительными, Р1>г = — Лк ± 7/Лк — Юк, и
тогда
Дл„и(0 = Д««ауеТ (1 + 77^-е₽,' + 7^7е₽,/)- Пб-бв)
Короткопериодическое возмущенное движение, обусловленное ступен-
чатым отклонением руля высоты, будет апериодическим. При отрица-
тельных корнях самолет устойчив и величина Апва (t) асимптотически
стремится"^к установившемуся значению ^Пуаус^.
Для апериодического движения такие показатели динамической
устойчивости и управляемости, как Тк, fh, &hy, n33t, теряют практи-
ческий смысл. За время 'срабатывания принимается время создания
перегрузки Лпуа = 0,95Дпуо гот.
Увеличением демпфирования до 5 > 1 можно избавиться от коле-
бательности и обеспечить переходный процесс без заброса, но в этом
случае ухудшается быстродействие, увеличивается время переход-
ного процесса.
Реакция самолета на отклонение органов управления
тангажом по гармоническому закону в
короткопериодическом движении.
Частотные характеристики самолета
Реакция самолета на гармонический сигнал характеризует
его способность «ходить» за рычагами управления и определять ка-
чество таких важных маневров, как прицеливание, заход на посадку,
полет в строю и т. п.
Пусть у самолета, совершающего прямолинейный установив-
шийся горизонтальный полет, начиная с некоторого момента времени,
руль высоты (стабилизатор, элевоны) начинает отклоняться по гармо-
ническому закону с частотой ю и амплитудой, равной единице;
Д6В — sin at.
В этом случае возмущенное короткопериодическое движение
будет описываться неоднородными дифференциальными уравне-
ниями (16.45) и будет слагаться из собственной и вынужденной со-
ставляющих. Собственное движение определяется как общее решение
однородных уравнений (без правой части). Для устойчивого самолета
это движение быстро затухает, и далее остается только вынужден-
ная составляющая.
280
Ё дальнейшем будем рассматривать только вынужденную состав-
ляющую возмущенного движения, так как собственное движение
было рассмотрено ранее.
Изменение перегрузки (угла атаки) в вынужденном движении
будет также иметь гармонический характер, но будет отличаться по
амплитуде и по фазе. Так перегрузка в вынужденном движении
будет изменяться по закону
Anya (0 = A sin (®/ + у), (16.69)
где А — амплитуда вынужденных колебаний; ® — круговая частота
вынужденных колебаний; у — сдвиг по фазе.
Аналогичное выражение можно получить и для угла атаки.
Амплитуда и фаза вынужденных колебаний определяется по ча-
стотной функции W (i®).
Заменяя в (16.54) р = i®, получим^ частотную функцию по пере-
грузке
Fn (i®) = j _ + 2£Гс0|. = 1 _ ^2 + > (16.70)
где *ф = = Т® — относительная частота вынужденных коле-
®к
баний.
Чтобы избавиться от комплексной величины в знаменателе,
умножим числитель и знаменатель Wn (i®) на сопряженную вели-
чину (1—ф2) — 2£ф1, тогда
Д'. (М- (16.71)
откуда
ре - КсО-Ч’2) - _ 2КсЕф
(1 _ -фа)а _|_ 4|а^2 » шцш) (i _ 4£а^а •
(16.72)
Подставляя (16.72) в (15.41) и (15.42), получим амплитуду и фазу
вынужденных колебаний Апуа, выраженных через относительную
частоту и относительное демпфирование — амплитудную частотную
характеристику (АЧХ)
А = — (16.73)
К(1 — W + W '
фазовую частотную характеристику (ФЧХ)
. ?==—arctgp^L. (16.74)
Эти характеристики можно представить графически.
По этим формудам можно построить и амплитудно-фазовую
частотную характеристику.
На рис. 16.2 приведена АФЧХ при 5 — const. Длина вектора,
проведенного из начала координат в точку на АФЧХ, равна ампли-
туде вынужденных колебаний при соответствующей частоте, а угол
между вектором и действительной полуосью — сдвиг этих колебаний
по фазе.
281
Из (16.72) ... (16.74) при | = const для различных гр получим:
Таблица 16.1
Re (о.) Im (ь>) А V
0 Ас. 0 Кс 0
1 0 -АС/2Е, Ас/2£ —л/2
СЮ 0 0 0 —л
Отсюда видно, что при изменении относительной частоты от О
до оо вектор 1ГП (ёсо) поворачивается по часовой стрелке (в отрица-
тельном направлении) на угол —л, т. е. сдвиг по фазе изменяется от О
до —180°. При этом амплитуда колебаний перегрузки (угла атаки)
изменяется от Кс (Ка) до нуля, переходя через максимум.
При изменении относительного коэффициента демпфирования В
будут меняться амплитудно-фазочастотные характеристики. .С умень-
шением В кривая 1ГП (ко) охватывает все большую часть нижней полу-
плоскости и при В = 0 разрывается на две ветви, лежащие на действи-
тельной оси. Точка разрыва соответствует частоте гр = 1, т. е. <о =
— <ок (рис. 16.3).
Амплитудную и фазовую частотные характеристики можно по-
строить раздельно по формулам (16.73) и (16.74). Вид этих характе-
ристик при различных значениях £ приведен на рис. 16.4 и 16.5.
Из частотных характеристик видно, что:
гармоническое отклонение руля высоты Д6В — sin <£>t с весьма
малой частотой <о вызывает вынужденные колебания перегрузки
(угла атаки) с амплитудой в /(с (7<а) раз большей амплитуды колеба-
ния Д6В (см. АЧХ, рис. 16.4), при этом-у мала;
колебания перегрузки практически не будут отставать от коле-
баний Д6В (см. ФЧХ, рис. 16.5);
при отсутствии демпфирования (| = 0) на резонансной частоте
вынужденных колебаний <о = <ор — <ок, или гр = 1, амплитуда коле-
баний Атах = оо;
Рис. 16.2. АФЧХ при £ = const
Рис. 16.3. Влияние относительного
демпфирования % на АФЧХ|
282
Рис. 16.4. Амплитудная частотная ха-
рактеристика
Рис. 16.5. Фазовая частотная характе-
ристика
при наличии демпфирования резонансная частота «р, при ко-
торой амплитуда колебаний достигает максимального значения, равна
ыр = мк/1 — 2|2 = у/юк — 2Лк, при этом Атах « Ас/2^. Следо-
вательно, отклонение руля высоты с частотой <ор или близкой
к ней при слабом демпфировании может привести к весьма большим
(недопустимым) перегрузкам (углам атаки);
по АЧХ можно судить о величине амплитуды вынужденных коле-
баний перегрузки (угла атаки). Если амплитуда слишком велика,
то самолет будет строгим в управлении, что усложняет пилотирова-
ние. Если амплитуда слишком мала, то для получения необходимой
величины Дпуя требуется отклонять рули на больший угол, самолет
при маневре тяжел в управлении. Отсюда возникает требование
Amin < А < Атах;
при отсутствии демпфирования (£ = 0) в диапазоне частот 0 <
< ф < 1 сдвиг вынужденных колебаний перегрузки по фазе отсут-
ствует (у = 0), а на частоте ф = 1 он скачком меняется от 0 до
—180°. При наличии демпфирования (В =j= 0) изменение сдвига по
фазе плавное, причем с увеличением частоты сдвиг по фазе увеличи-
вается (см. ФЧХ, рис. 16.5). Следует отметить, что для всех | Ф 0
при ф = 1 запаздывание по фазе одно и то же —g-;
по ФЧХ можно судить о слежении самолета за отклонением ру-
лей, т. е. о времени запаздывания изменения параметров движения
(ДпуО, Да) от отклонения рулей Д/вап = ?/<». Чем меньше Д4ап.
тем лучше управляемость. Отсюда выдвигается-требование у < уп,ах.
Из анализа частотных характеристик можно сделать следующий
вывод.
Качество реакции самолета на гармонические отклонения руля
определяется амплитудой и фазой вынужденных колебаний пара-
метров движения самолета. Чем меньше будут изменения амплитуды
и меньше фазовые искажения в рабочем диапазоне частот ы, тем точ-
нее самолет будет «ходить» за рычагами управления, тем легче лет-
чику управлять самолетом.
283
Рис. 16.6. Границы допустимых значений £ и г|>
Требования у <1 Утах И /1т1п -4 ^тах
накладывают ограничения на В и гр = £о/юк,
а следовательно, и на параметры самолета,
от которых они зависят (хт, Лг. 0 и др.).
С помощью формул (16.73) и (16.74) можно
построить в координатах гр, | кривые при
Tmax = Const J, ЛГП1П = COnst2, Лтах = COllst3
и выявить область допустимых значений гр
и £, обеспечивающих заданное качество ре-
акции самолета на отклонение рулей по
гармоническому закону. Если же в этой плоскости провести ли-
нии Bmax = const4 и gmtn = const5, обеспечивающие высокое каче-
ство переходных процессов при А6В (0 == 1, то получим область
допустимых значений гр и В, обеспечивающих заданные характери-
стики управляемости при ступенчатом и гармоническом отклоне-
ниях руля высоты (рис. 16.6).
При проектировании самолета, зная характерные значения ча-
стоты отклонения руля о, потребные для выполнения расчетных ма-
невров, можно по допустимым гр и В определить необходимую вели-
чину опорной частоты шк = ог/гр и коэффициента демпфирования hK =
— В<ок, которые могут быть обеспечены выбором параметров гори-
зонтального оперения (элевонов), положения центра масс и др.
Граничные линии могут быть использованы для определения
в первом приближении передаточных чисел автоматов демпфирова-
ния и устойчивости, если необходимые характеристики устойчивости
и управляемости не могут быть обеспечены без автоматов.
В заключение отметим, что помимо рассмотренных частотных ха-
рактеристик в настоящее время применяются логарифмические
частотные характеристики, особенно при проектировании систем
автоматического управления самолетом.
Реакция .самолета на вертикальные ветровые
возмущения *
При анализе характеристик самолета в короткопериоди-
ческом движении важное место занимает определение его реакции
на вертикальные ветровые порывы и знакопеременные ветровые воз-
мущения, связанные с турбулентностью . атмосферы.
Реакция самолета в этом случае описывается, как и в собственном
движении, уравнениями (16.12) с той разницей, что силы и моменты
определяются истинным углом атаки а (обозйачим его для большей
определенности через ав). Кинематическую связь между углами тан-
гажа и наклона траектории определяет кинематический угол атаки ас,
связанный с истинным соотношением
осв — ас -j- ацр,
(16.75)
284
где aw — ветровая или турбулентная составляющая истинного
угла атаки, равная
ajF = arctg-^«-^ (16.76)
при вертикальной скорости восходящего потока воздуха (для
нисходящего потока Wy < 0 и a.w < 0).
С учетом сказанного уравнения (16.12) можно записать в виде
Д6 — Fy Дав = 0;
ДФ - М%г Дав - Дав - ДА = 0; (16.77)
Дав — Да^ |~ ДО — ДО = 0.
В этой системе Да^ = Wv/V можно, считать входным воздейст-
вием (ступенчатым или периодическим, в зависимости от вида ветро-
вого воздействия), а ДО, ДО, Досв и Дсо2 — ДО — выходными пара-
метрами, определяющими реакцию самолета на ветровое воздействие.
Исключая из второго уравнения системы (16.77) переменную ДО,
можно записать
Дав 2ЛК Дав + ®к Дав = Да^ Ц- <от Денг, (16.78)
где ют = —Л4«2 = —Dzm^z ; hK и а>к имеют прежние значения
(16.14) и (16.15).
Остальные переменные определяются как
ДО = F“ Досв; Д<£>2 = Дав — Да^-f-ДО. (16.79)
Перегрузка Ьпуа определяется истинным углом атаки, а величина
отклонения перегрузки составляет
= (16.80)
По уравнению (16.78) можно оценить реакцию самолета на сту-
пенчатое и гармоническое (или любое периодическое, которое может’
быть представлено как сумма’гармонических) вертикальное ветро-
вое воздействие.
После преобразования (16.78) по Лапласу получим передаточную
функцию самолета по Дав на воздействие Доск,
Н7 . (п\ — Р(Р+ р2 + 2Лкр + ©£ ” Передаточная функция по перегрузке (при вид р(р + <от)у?“ = -2 . рг + 2>1кр+<1?к (16.81) а 0) примет (16.82)
285
Реакция на мгновенное ступенчатое изменение ветрового воздей-
ствия Wy = Wy0 (переходная функция) будет
_h t sin (К1-£а4- + <р)
Дав(0 = е « -3-----—I-------<Да^0 (16.83)
при В = и Ф—-arctg . (16.84)
В начальный момент времени Дав (0) = Да®,0 = Wyo/V и Да®,
максимально. В конце движения для устойчивого самолета (<о| > 0)
при В < 1 Да®, (0 0 и истинный угол атаки возвращается к исход-
ному балансировочному значению. Характер изменения Дав пока-
зан на рис. 16.7. Самолет, как говорят, «приводится к ветру», и в по-
стоянном восходящем потоке занимает тоже положение, что было в не-
возмущенном, поднимаясь (при Wy > 0) вместе с воздушным пото-
ком. Перегрузка пуа при этом равна единице (Дмуя (0 -* 0).
Максимальное значение Дпуа реализуется в начальный момент
времени и равно
VV7
Дп^=^а-^. (16.85)
Характеристики переходного процесса по Дав (0 и Дп„0 (0
(заброс, время затухания и др.) определяются по формулам (16.58) ...
... (16.68).
При гармоническом изменении ветрового воздействия
Да®. = Да®0 sin (16.86)
реакция самолета определяется его амплитудной частотной характе-
ристикой и составляет
Дав = Aw (ft)®') sin (to®'/ — <p®,)j (16.87)
Дп^а®'= Дав< (16.88)
Представляя амплитудную характеристику Aw (о®,) графически
в логарифмическом масштабе (рис. 16.8), находим, что при низких
частотах aw <вт величина Aw (<ow) мала и перегрузки AnyaW
незначительны даже при заметных Да®, (0 (самолет успевает при-
вестись к ветру при колебаниях Да®, (0). При высоких частотах,
to®, > ft>T, амплитуда Дав равна амплитуде Да®,0 и Дпуа®, =
= «“аДа^о, как и при ступенчатом порыве. При этом положение са-
молета в пространстве (угол ft) практически неизменно, и он, из-за
инерционности, не разворачивается «по ветру» при смене знака вет-
— J V 1 ‘ t 286 рового порыва. На средних частотах возможны две ситуации: ft>T < ft>K и ft>T > Рис. 16.7. Переходный процесс по Дав при действии ступенчатого порыва ветра
Рис. 16.8. Амплитудные частотные характеристики Ау (ыц?) по Лац? при действий
гармонического ветрового возмущения:
а — ы,г < с>к; б — ш,г > к>к
> <ок (см. рис. 16.8). В первом случае (см. рис. 16.8, о) при лю-
бых амплитуда ветровых возмущений по &nvuW меньше
максимальной, определяемой (16.85). Во втором случае возможен
своего рода резонанс колебаний, когда амплитуда изменения пере-
грузки существенно больше n^a/\awo (см. рис. 16.8, б). К такой ре-
акции может привести чрезмерное демпфирование (в том числе и с по-
мощью автоматики) при недостаточной устойчивости самолета, так
I “zl
как <от растет с ростом |тг |, а ик падает с уменьшением запаса
устойчивости [см. (16.15)].
Реальные знакопеременные турбулентные ветровые воздействия
представляют собой не единичные гармонические воздействия, а
сумму (спектр) таких воздействий со случайными частотами и ампли-
тудами. При этом появление воздействий с большой амплитудой на
высоких частотах маловероятно, а на низких частотах нарастание
порыва идет медленно и амплитуда перегрузок &nvaW невелика даже
при больших Д Wu. Поэтому при оценке реакции самолета на турбу-
лентные возмущения основное значение имеют средние частоты <о^.
Если характерная частота со (г, определяемая так называемым мас-
штабом турбулентности Lw (периодичностью в пространстве ветровых
возмущений), лежит в области малых амплитуд (сод7 а>кисот < <ок),
то реакция самолета на турбулентные воздействия незначительна
(см. рис. 16.8).
Значение (nr можно определить исходя из характерного масштаба
турбулентности Lw, равного 100 ... 500 мм [8]
= 2л .
Aw-
Более детальный анализ реакции самолета на ветровые возму-
щения требует использования методов теории вероятности и статисти-
ческой динамики [81.
287
Реакция самолета на управляющие и возмущающие
воздействия в длиннопериодическом движении*
Управление движением центра масс самолета
Анализ реакции самолета на управляющие и возмущаю-
щие воздействия в длиннопериодическом движении представляет ин-
терес, когда они действуют длительное время и приводят к заметным
изменениям параметров движения центра масс самолета (А У, Л6,
А// и др.)- Для такого анализа необходимо в уравнениях (16.26)
учесть управляющие и возмущающие воздействия:
АV - Рх АУ Да -1 Л ДО | - Fpx LP F„\
Дё = F* ДУ j- Да -J- F®0-у Або. у 4 Д,в; (16.89)
MrzLV [M^La | Мк0г-уА60.у | M^AP = 0.
Здесь принято Fy «0, Fx°’y « 0. Значения Fx, , Fx, ... опре-
деляются по (16.2). j
Из этих уравнений могут быть найдены передаточные функции
самолета в длиннопериодическом движении на изменение тяги АР
(при Д60. у — 0) и на отклонение органа управления А60, у (при АР =
= 0) или на возмущения FXB и FyB по каждому из параметров дви-
жения. Передаточные функции по высоте могут быть найдены при
0° ~ 0 из уравнения
АД = VAG. (16.90)
Однако при управлении движением центра масс самолета (или, как
его часто называют траекторным движением) эти характеристики,
как правило, не показательны. Дело в том, что управление про-
дольным движением самолета строится обычно по двухконтурной
схеме (рис. 16.9). Внутренний контур — управление перегруз-
кой пуа и параметрами углового движения (углы а, •&, угловые ско-
рости <oz, 6). Внешний контур — управление движением центра масс
Рис. 16.9. Схема управления движением центра масс самолета через задание желае-
мых значений п™л, ажел ... для контура управления угловым движением:
1 — вычислительное устройство контура управления движением центра масс; 2 — летчик
илн автопилот; 3 — привод системы управления; 4 — динамика углового движения самолета;
5 — динамика движения центра масс самолета, кинематика; 6 — измерение фактических
пуа’ °" 7 “ измерение фактических параметров движения центра масс самолета
288
самолета или траекторией (угол G, скорость V и высота полета Н).
При такой схеме управление во внешнем «траекторном» контуре про-
изводится не непосредственно за счет требуемого для этого отклоне-
ния Дб0, у, а путем формирования во внутреннем контуре необходи-
мых значений пуя, 0 или О.
Реальный процесс управления с точки зрения контроля и инфор-
мации представляется проходящим как бы на двух уровнях. На верх-
нем, внешнем уровне управляющими контролируемыми летчиком или
автоматикой воздействиями являются тяга ДР и пуа, 0, Ь при пере-
менных. 6о.у, обеспечивающих их отслеживание, а выходными, же-
лаемыми параметрами движения — скорость, высота и угол траек-
тории 0. На нижнем уровне путем отклонения руля высоты или ста-
билизатора формируется требуемое для верхнего уровня значение пи„,
0 или Ф. Рассмотрим управление траекторным движением с этой точки
зрения, учитывая требуемые изменения Дбо у в длиннопериодическом
движении.
Пусть управляющим воздействием будет изменение скоростной
перегрузки &пуа. Тогда движение центра масс самолета (при допу-
щениях, соответствующих анализу только длиннопериодической со-
ставляющей) будет описываться уравнениями
Д^ = Г£ДУ + Г£Да4-Г£дв4-Р£ ДР*, ДВ=-^ДпИ0.
Из условия Д-Дпуа = Ру ДУ 4~ Рр Да при малом Ру0,у находим
Да = Д/1уа - Pyv ДУ) . (16.92)
Из третьего уравнения системы (16.89) определим при ДР = О
Д6о.у = -=г—(АСДУ + М&Да). (16.93)
Подставляя (16.92) в (16.91), получим
ДУ + kR ДУ - Р° Д0 = Pf ДР + Дпуи; (16.94)
г у
ДО = -у- &пуа.
Здесь Ад = —^-(P-XQ)r.n = -P^P;-J [см. (16.37)].
г у
После преобразования (16.94) по Лапласу при нулевых началь-
ных условиях будем иметь
^ДР(Р) + Д, р + р^ДМр) ; (16.95)
Д0(р) = у уД«ра(Р)- (16.96)
УгЮ А. Ф. Бочкарев н др.
289
Если теперь во внутреннем контуре управления отслеживается
заданная перегрузка пуа = 1 + Апиа (при АР = 0), то реакция са-
молета будет определяться следующими передаточными функциями
* X
-=^-4- |
hi (16.97)
^уа(Р) Р(₽ + М V ' '
Wen (р) = =—4. (16.98)
°п &Пуа (р) р V ' '
Эти передаточные функции в линейном приближении описывают
маневр самолета с постоянной перегрузкой (см. гл. 7).
При изменении тяги двигателя на величину АР и стабилизации
перегрузки (&пуа = 0) из (16.95) и (16.96) получим
06.99)
Таким образом, изменение тяги при пуа = 1 приводит, как и следо-
вало ожидать, к разгону (торможению) до новой скорости, отличаю-
щейся от исходной на
рр
AVyCT = + -iLAP (16.100)
«д
(здесь Лд > 0 на первых режимах).
Это соотношение верно только при малых АР и АУуст, когда допу-
стима линеаризация Рп и Fx по скорости.
Переходный процесс изменения скорости в соответствии с
(16.99) — апериодический. Время выхода на значение AVyCT при-
мерно равно 3//гд и обычно достаточно велико. На начальном этапе
движения после изменения тяги ускорение составляет
ДУ«Р*АР. (16.101)
Для начального этапа передаточные функции самолета при управле-
нии движением центра масс со стабилизацией или отслеживанием
заданной перегрузки в контуре углового движения будут
_р (16.102)
WVP(p) = -f-‘, W6P(p) = 0.
Подобным образом можно рассмотреть и другие расчетные слу-
чаи, например, стабилизацию или отслеживание во внутреннем кон-
туре требуемого угла тангажа или угла атаки.
Следует помнить, что приведенные выражения справедливы лишь
для малых'отклонений от опорного движения. При значительных от-
290
клонениях надо рассматривать нелинейные соотношения для движе-
ния центра масс (см. гл. 4, 7). в которых управляющие воздейст-
вия пуа, а и другие формируются в соответствии с принятой струк-
турой внутреннего контура управления самолетом.
В некоторых задачах представляет интерес реакция самолета
на горизонтальные ветровые воздействия Wx (t). Если в уравнениях
(16.89) положить АР = 0, FlB = О, = 0, a FXB — Wx, то по-
лучим приближенную систему уравнений, с помощью которой можно
написать передаточные функции самолета (р), (р) для ре-
жимов полета с заданной перегрузкой, или углом тангажа, или а.
По передаточным функциям можно определить реакцию самолета
(изменение AV и А6) при воздействии Wx ф 0.
Возмущающее воздействие Wx может быть обусловлено измене-
нием скорости ветра у земли по высоте (так называемым «сдвигом
ветра») Wx = Н.
Не приводя подробного анализа, отметим, что, например, на ре-
жимах полета с постоянным углом тангажа производная скорости
ветра Wx Ф 0 вызывает возмущение по 6, а следовательно, и углу
атаки (Аа = —А6 при АФ = 0). Эти возмущения могут быть значи-
тельными и привести к выходу самолета на а > адоп. При снижении
самолета, например, при -заходе на посадку выход на углы атаки,
превышающие допустимые, особенно опасен из-за малых скоростей
и малого запаса высоты.
§ 16.6. ВЛИЯНИЕ КОНСТРУКТИВНЫХ] ПАРАМЕТРОВ
САМОЛЕТА| И РЕЖИМА^ ПОЛЕТА НА ПРОДОЛЬНУЮ
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
Из анализа движения самолета с фиксированными орга-
нами управления и при типовых отклонениях последних видна тес-
ная связь характеристик устойчивости, управляемости и маневрен-
ности самолета. Балансировка самолета в опорном установившемся
движении, возмущенное собственное и управляемое движение само-
лета зависят от целого ряда параметров: положения центра масс,
площади крыла, горизонтального оперения, скорости и высоты по-
лета, аэродинамических характеристик суа, п\г , тг и т. д. Иногда
требования устойчивости и управляемости совпадают, иногда они
противоречивы.
Принимая во внимание условия работы самолета как звена замк-
нутой управляемой системы, при выборе тех или иных параметров
следует предпочтение отдавать характеристикам управляемости.
Только при хорошей управляемости могут быть в полной мере реали-
зованы все возможности самолета, заложенные в его конструкции,
аэродинамике и силовой установке.
Рассмотрим влияние центровки самолета хт на его устойчивость
и управляемость. При смещении центра масс вперед увеличивается
VHO* 291
степень продольной статической устойчивости по перегрузке оп.
Так как коэффициент демпфирования Ли от центровки не зависит,
а опорная частота пропорциональна корню квадратному из оп, то
смещение центра масс вперед приведет к увеличению частот ©к
и vK = у/ Ык — Лк и к уменьшению относительного коэффициента
демпфирования £ = йк/©к. В результате время переходного процесса
tgaT = 3/ЛК практически не изменится; число колебаний за время
3 vK -
переходного процесса пзйт = величина заброса в переход-
* ZJV Hr
~~яйк
ном процессе Дпа = е Vr увеличатся. Коэффициент использова-
ния маневренных возможностей Км = . ,1Л- и передаточный коэф-
1 -f- llfly
фициент по перегрузке Кс станут меньше. Следовательно, слишком
передняя центровка и большая степень продольной статической
устойчивости по перегрузке ухудшают динамику самолета, его управ-
ляемость и маневренность. Однако и слишком малая степень стати-
ческой устойчивости по перегрузке (задняя центровка) приводит
к нежелательным последствиям. Уменьшается частота ©к, растет по-
стоянная времени Т и относительное демпфирование В результате
увеличивается время срабатывания tcp = Т. Существенно
ухудшаются частотные характеристики. Из-за малой опорной ча-
стоты ©к относительная частота ф = а>/а>к может оказаться больше
единицы, что приведет к большим фазовым искажениям (у > 90°)
и уменьшению амплитуды вынужденных колебаний (Д < Дт1п).
Таким образом, степень продольной статической устойчивости по
перегрузке и центровка самолета должны находиться в некоторых
оптимальных пределах
Рассмотрим влияние площади крыла и полетной массы самолета.
С уменьшением площади крыла уменьшаются величины Кс, Ли и ©„.
Приближенно можно считать, что коэффициент демпфирования /ц,
пропорционален площади крыла, а ©к пропорциональна корню
квадратному из площади S. Следовательно, с уменьшением S относи-
тельное демпфирование £ = hKla>K уменьшается, что может привести
к существенному ухудшению качества переходного процесса, частот-
ных характеристик и маневренности самолета.
Увеличение полетной массы при прочих равных условиях при-
ведет к увеличению момента инерции Jz и уменьшению величин hR
и ©к. Так как уменьшение hK будет более существенным, чем ©к,
то относительное демпфирование уменьшится. Следовательно, изме-
нение характеристик устойчивости, управляемости и маневренности
при увеличении массы самолета’будет происходить в том же направ-
лении, что и при уменьшении площади крыла.
Влияние приборной скорости (скоростного напора). В диапазоне
докритических чисел М с уменьшением приборной скорости умень-
шаются коэффициент демпфирования hK, опорная частота ®к и коэф-
фициент по перегрузке К,о. Так как пропорционален первой сте-
292
пени скоростного напора, a wK — корню квадратному этой величины,
относительное демпфирование с уменьшением приборной скорости
падает. Уменьшение скоростного напора в данном случае приводит
к тем же последствиям, что и уменьшение площади крыла.
В области закритических чисел М, когда существенно сказывается
й
влияние сжимаемости воздуха на а„, тг , mz и другие аэродинами-
ческие характеристики, картина будет более сложной. Коэф-
фициенты hK, Кс, а также wK и & будут являться функциями числа М
полета. Это приведет к изменению частотных характеристик само-
лета и характеристик качества переходного процесса по числам М
полета.
С ростом высоты полета коэффициенты демпфирования hK и £
уменьшаются. На больших высотах, порядка 20 ... 30 км и более,
естественное демпфирование возмущенного движения очень слабое,
характеристики устойчивости, управляемости и маневренности само-
лета ухудшаются.
Тенденция к уменьшению относительного демпфирования —
характерная особенность современных самолетов. Целый ряд фак-
торов: повышение удельной нагрузки на крыло, упругие деформации
конструкции, увеличение продольной статической устойчивости по
перегрузке, большие высоты применения, характерные для совре-
менных сверхзвуковых самолетов, приводят к падению относитель-
ного коэффициента демпфирования до величин, не обеспечивающих
удовлетворительные характеристики устойчивости и управляемости.
Только применение специальной автоматики в системе управления,
в частности автоматов демпфирования, делает возможной эксплуа-
тацию этих самолетов.
§ 16.7. УЛУЧШЕНИЕ УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
САМОЛЕТА СРЕДСТВАМИ АВТОМАТИКИ
В настоящее время для скоростных многорежимных само-
летов удовлетворительные характеристики устойчивости и управляе-
мости при ручном пилотировании обеспечиваются путем включения
в контур управления системы улучшения устойчивости и управляе-
мости (СУУ), включающей автоматы демпфирования, устойчивости
и т. п.
Эти автоматы в режиме ручного пилотирования работают парал-
лельно летчику, улучшая динамические характеристики самолета
как объекта управления.
Чтобы проанализировать влияние СУУ на характеристики само-
лета как объекта управления, рассмотрим свойства системы само-
лет—летчик при ручном пилотировании.
Как звено системы управления летчик воспринимает полетную
информацию (вход) и отвечает на нее перемещением рычага управле-
ния (выход). Связи между входной информацией и реакцией летчика
носят сложный и неоднозначный характер. Человек способен адапти-
роваться — менять свою реакцию в зависимости от характеристик
Ю Л. Ф. Бочкарев и др.
293
Рис. 16.10. Схема замкнутой системы са-
молет—летчик
объекта, на его действия влияют индивидуальные различия, особен-
ности ситуации, характер поставленной задачи.
В первом приближении в задаче отслеживания заданного вход-
ного сигнала (по тангажу, перегрузке и т. п.) при возмущениях
действия летчика можно описать передаточной функцией вида
“?-И=-т?^- = '(»ётте‘’< <|6Л03>
Здесь Кл — коэффициент усиления; ТЛ1 и Тл2 — постоянные вре-
мени опережения и запаздывания, вводимые летчиком; тл — за-
паздывание реакции летчика. Значения Кл, Тл1, Тл2 могут ме-
няться в известных пределах, обеспечивая летчику возможность
более точного отслеживания входного сигнала в. Характерной осо-
бенностью передаточной функции (16.103) является наличие в ней
неустранимого постоянного запаздывания
и7т(р) = е-тлР. (16.104)
Это звено не изменяет амплитуды входного сигнала, но «отслеживает! его с запаз-
дыванием тл порядка 0,2 ... 0,3 с [4].
Соответствующая частотная передаточная функция будет иметь вид
ТГ,(М==е"'“’я. (16.105)
Отсюда видно, что летчик вносит в систему управления самолетом запаздывание
по фазе на угол
Дул = сотл. (16.106)
Рассмотрим один из каналов ручного управления самолетом — канал управле-
ния тангажом с помощью руля высоты. Схема замкнутой системы самолет—летчик
представлена на рис. 16.10.
Эта система, прежде всего, должна быть устойчивой. Кроме того, она должна
обеспечивать высокое качество процессов управления — обладать достаточной
точностью и быстродействием.
За исходный иевозмущенный режим примем установившийся горизонтальный
полет; для большей наглядности а .простоты будем считать, что, сохраняя этот
режим, летчик реагирует на отклонение только одного параметра движения—
перегрузки.
Рассмотрим условия устойчивости замкнутой системы самолет—летчик, вос-
пользовавшись критерием устойчивости Найквиста—Михайлова. Согласно этому
критерию система будет устойчива в замкнутом состоянии, если амплитудно-фазовая
частотная характеристика ее в разомкнутом состоянии не охватывает критическую
точку с координатами (0; —1). При этом сдвиг по фазе на частоте среза (когда
амплитуда А — 1 или 1g А = 0) должен быть меньше —л. В противном случае
замкнутая система самолет—летчик будет неустойчивой.
Известно, что при последовательном соединении звеньев передаточная функция
системы в разомкнутом состоянии равна произведению передаточных функций,
составляющих ее звеньев.
Если ограничиться только звеном запаздывания летчика, частотная передаточ-
ная функция системы летчик—самолет в разомкнутом состоянии будет иметь вид
W (1<о) = Wn (ito) (ito) = Wn (ito) e^V (16.107)
294
Рис. 16.11. АФЧХ самолета и Системы самолет—летчик:
— — — — изолированный самолет; —» система самолет—лет-
чик
Следовательно, амплитудная и фазовые частотные ха-
рактеристики системы принимают вид
Лс. Л = Л; ус. л = Т — дТл> (16.108)
где А и у — амплитудная и фазовая частотные ха-
рактеристики самолета, определяются формулами
(16.73) и (16.74), а
Дул сотл = сокфтл.
Амплитудно-фазовую частотную характеристику разомкнутой системы самолет—
летчик для заданных £ и сок при изменении частоты со от 0 до оо можно построить
по формулам (16.108) или путем перестроения АФЧХ самолета (см. рис. 16.2).
Для этого надо каждую точку АФЧХ самолета переместить в отрицательном направ-
лении по дуге окружности, проведенной из начала координат на угол Дул = штл
(рис. 16.11).
Чем большей частоте соответствует точка, тем на больший угол она переме-
щается. АФЧХ разомкнутой системы самолет—летчик принимает спиральную
форму, асимптотически приближаясь к началу координат при со -> оо (см. рис. 16.11).
С уменьшением относительного демпфирования £ самолета при тех же значе-
ниях коэффициента Кс и опорной частоты сок (см. рис. 16.3) АФЧХ разомкнутой
системы будет приближаться к критической точке (0; —1), запас устойчивости
системы самолет—летчик будет падать, время и колебательность переходного про-
цесса будет расти. При некотором значении относительного демпфирования, назо-
вем его критическим £кр, замкнутая система самолет—летчик будет находиться
на границе устойчивости (АФЧХ разомкнутой системы пройдет через критическую
точку 0; —1), а прн £<С£Кр выйдет за ее пределы — замкнутая система ста-
новится неустойчивой, летчик не сможет управлять самолетом.
Рассмотрим влияние другого параметра частотной передаточной функции са-
молета — постоянной времени Т или, что то же самое, опорной частоты соц = 1/7
на устойчивость замкнутой системы.
При £ = const и Кс — const форма АФЧХ самолета остается одной и той же,
независимой от изменения <ок. Меняются лишь значения частот <о в одних и тех
же точках характеристики.
С учетом постоянного запаздывания лётчика точки АФЧХ разомкнутой системы
самолет—летчик поворачиваются по часовой стрелке (в отрицательном направле-
нии) иа угол Дул = сотл = а>кфтл. С увеличением опорной частоты <ок закручива-
ние этой характеристики, уменьшающее устойчивость системы, будет более зна-
чительным. Следовательно, увеличение сок самолета при прочих равных условиях
тоже может ухудшить динамические характеристики управляемости самолета и,
в конечном итоге, привести к потере устойчивости замкнутой системы самолет—
летчик.
Хотя математическая модель летчика, принятая при анализе устойчивости
системы самолет—летчик, является грубой, она правильно отражает основные
тенденции изменения характеристик устойчивости этой системы в зависимости от £
н сок самолета.
Ранее было показано, что на больших скоростях полета, особенно
й, й а
при переходе за скорость звука, производные тг , тг и суа сущест-
венно уменьшаются, а следовательно, и уменьшается коэффициент
демпфирования самолета hK. [см. (16.14) ]. В то же время из-за сме-
щения фокуса крыла назад, степень статической устойчивости по
перегрузке оп увеличивается, что приводит к росту опорной частоты
со,,, [см. (16.15) ]. Следовательно, относительное демпфирование & —
= hK/wK падает.
ю*
295
Относительное демпфирование совремейных самолетов на боль-
ших скоростях полета' принимает недопустимо’7малые [значения,
а с изменением режимов полета более, чем на порядок.
Для улучшения демпфирования в системе улучшения устойчи-
вости'и управляемости самолета применяются автоматы демпфиро-
вания.
В гл. 11 было показано, что при работе демпфера тангажа, от-
клоняющего руль высоты по закону Д6В. а = /(т2сог, производная
демпфирующего момента тангажа изменяется на величину Дш2 z —
= -г— < 0 1см. (16.14) ]. Это приведет к существенному росту
коэффициента демпфирования Лк [см. (11.14) ] и некоторому увеличе-
нию ап [см. (11.15)1, а следовательно, и <вк. Относительный коэффи-
циент демпфирования £ увеличится.
Автомат демпфирования позволяет не только увеличить относи-
тельное демпфирование самолета, но и во много раз сократить его
изменение по режимам полета. Для этого передаточный коэффициент
Kaz с помощью несложной автоматики меняется в зависимости от
величины приборной скорости (скоростного напора). Это способст-
вует получению требуемых характеристик устойчивости и управ-
ляемости на всех режимах полета
Так как демпфер реагирует на угловую скорость, то при маневре
самолета он противодействует маневру. Желая создать перегрузку,
летчик отклонением руля высоты (ов. л = Кшхв) создает угловую
скорость вращения самолета со2. При этом демпфер тангажа начинает
отклонять руль на угол Д6В. а = КШ2со2, противоположный по знаку
6В. л. Интенсивность маневра начнет снижаться. Для компенсации
отклонения Дбв. а с целью сохранения первоначального темпа вра-
щения самолета, летчик должен будет дополнительным отклонением
ручки управления на величину Дхв обеспечить равенство Дбв. а +
+ Д6в. л = О ИЛИ К<а2СОг + Дщ Ахв = 0.
Следовательно, при включенном демпфере тангажа потребные
отклонения ручки для создания перегрузки Дпва возрастут на вели-
чину
Дхв = -4^-о)2 = -4^-4Дп^ (16.109)
Ащ Ащ У У
Коэффициент расхода ручки на перегрузку также возрастет
•Дх2=--^-4<о. (16.110)
Этого можно избежать, если сигнал от чувствительного элемента
демпфера передавать через фильтр, не пропускающий низкие частоты.
Тогда демпфер при выполнении маневра будет как бы автоматически
отключаться и не препятствовать маневру.
На современных самолетах применяются автоматы устойчивости.
Особенностью этих автоматов является то, что помимо угловой скоро-
сти они реагируют на изменение угла атаки или нормальной пере-
грузки. В гл. 11 было показано, что применение таких автоматов уве-
296
личивает производную тгг и степень статической устойчивости по
перегрузке 1см. (11.22)]. Следовательно, автомат устойчивости воз-
действует одновременно на коэффициент демпфирования hK, на опор-
ную частоту сок и на коэффициент £ =
Для обеспечения требуемых законов изменения коэффициентов
расхода ручки х* =------и усилия » /гжх" на пере-
Кщтг
грузку в продольном канале управления скоростных самолетов уста-
навливаются автоматы регулирования управления (АРУ). Эти авто-
маты в соответствии с изменением высоты и скорости полета (или
числа М) регулируют величину коэффициента передачи Кт = d&B/dxB
и жесткость загрузочного механизма kK — dPB/dxB и тем самым обес-
печивают требуемые значения Хв и Рв, а следовательно, и потребные
перемещения ручки хв и усилия на ней Рв для создания перегрузки.
АРУ включает в свой состав механизм нелинейной передачи 6В =
= f (хв) и загрузочный механизм.
Коэффициент расхода ручки на перегрузку х", а, следовательно,
и потребная величина отклонения ручки хв зависит от скорости и
высоты полета. При больших скоростях полета на малых и средних
высотах хв и хв могут оказаться малыми. В этом случае АРУ с по-
мощью механизма нелинейной передачи уменьшает величину Кш»
что приводит к росту Хв и потребной величины отклонения ручки
управления хв. При полете иа больших высотах или с малой ско-
ростью хв может оказаться излишне большим. В этом случае АРУ
увеличивает Кш> в результате чего х2 и хв уменьшаются.
Обеспечив необходимые перемещения ручки, нужно добиться
также определенных усилий на ручке управления. Чтобы на режи-
мах полета с большой приборной скоростью летчик не мог непроиз-
вольно вывести самолет на большие перегрузки, усилие на ручке
должно увеличиваться с ростом скоростного напора. Должен расти
коэффициент расхода усилия на перегрузку Рв. Это обеспечивает
АРУ регулировкой величины /гж загрузочного механизма.
АРУ оказывает влияние и на устойчивость по скорости (см.
(11.23)].
Из изложенного видно, что применение.автоматов позволяет по-
лучить необходимые статические и динамические характеристики
устойчивости и управляемости самолета и системы самолет—летчик.
При работе автоматов возможны их отказы. Отказы приводят
к изменению динамических характеристик самолета и возникновению
дополнительных возмущений от самопроизвольного отклонения ру-
левых поверхностей.
В качестве примера рассмотрим влияние возможных отказов
демпфера тангажа.
Характерными отказами автомата демпфирования могут быть:
остановка раздвижной тяги в каком-либо крайнем положении и об-
рыв в цепи обратной связи.демпфера. Остановка раздвижной тяги
297
приводит к одностороннему отклонению руля (уводу руля), а обрыв
обратной связи — к колебаниям руля.
При отказе, связанном с уводом руля, неожиданно создается мо-
мент тангажа, приводящий к непроизвольному изменению пере-
грузки (угла атаки). Если маневр осуществляется с перегрузками или
углами атаки, близкими к максимально допустимым, то неожидан-
ный отказ демпфера может привести к их превышению. Из-за оста-
новки раздвижной тяги в крайнем положении меняется балансиро-
вочное положение ручки управления.
При обрыве обратной связи нарушается пропорциональность
между величинами угловой скорости со2 и отклонением руля высоты
Абв. а. Руль будет отклоняться на всю величину, контролируемую
демпфером, независимо от величины <о2. В этом крайнем положении
руль будет удерживаться до тех пор, пока ыг в процессе колебаний
не станет равной нулю. При перемене знака угловой скорости в про-
цессе колебаний произойдет резкая перекладка руля в пределах
хода раздвижной тяги в противоположную сторону. Все это приво-
дит к росту частоты колебаний и ухудшению их затухания. Если же
собственные частоты колебаний самолета и демпфера будут близкими
друг к другу, то могут возникнуть незатухающие колебания параме-
тров движения (Дпуа, Да).
Отказы автомата демпфирования наиболее опасны при полете
самолета на малой высоте с большой дозвуковой скоростью вследст-
вие большой эффективности руля на этих режимах.
Так как пределы изменения длины раздвижной тяги небольшие,
то отклонение руля демпфером невелико (не более 5°). Поэтому при
отказе демпфера летчик может управлять самолетом.
В заключение отметим, что надежность систем управления регла-
ментируется Нормами летной годности гражданских самолетов
(НЛГС-2).
Дополнительная литература
[11] с. 226—274, [8] с. 247—265, [14] с. 484—508.
Контрольные вопросы
1. Каковы условия устойчивости продольного невозмущенного движения са-
молета? Укажите границы продольной устойчивости.
2. Чем обусловлена возможность разделения продольного возмущенного дви-
жения на короткопериодическое и длиннопериодическое?
3. Укажите необходимые и Достаточные условия устойчивости опорного движе-
ния и их выполнимость на короткопериодическом и длиннопериодическом этапах
возмущенного движения самолета.
4. Перечислите динамические показатели устойчивости и управляемости в про-
дольном короткопериодическом колебательном движении.
5. Чем определяется качество реакции самолета иа гармонические отклоне-
ния руля высоты? Изобразите АФЧл для перегрузки в. короткопернодическом воз-
мущенном движении.
6. Как влияет центровка, Скорость и высота полета иа динамические показатели
-устойчивости и управляемости самолета в короткопериодическом движении?
298
ГЛАВА 17. ДИНАМИКА БОКОВОГО ВОЗМУЩЕННОГО
ДВИЖЕНИЯ
Изолированное боковое возмущенное движение рассма-
тривается при решении задач, связанных с исследованием боковой
устойчивости и управляемости самолета. При этом имеется в виду,
что органы управления продольным движением фиксированы, а на-
чальные возмущения параметров продольного движения и возмуща-
ющие воздействия, влияющие на продольное движение, отсутствуют.
Рассматривается или свободное возмущенное движение самолета
с фиксированными органами бокового управления — элеронами, ру-
лем направления, органами непосредственного управления боковой
силой — ОНУБС, или движение, вызванное отклонением этих ор-
ганов (60, 6Н, 6Z). Характеристики боковой устойчивости и управляе-
мости играют чрезвычайно важную роль в обеспечении безопасности
полета самолета и хорошей маневренности, определяя в значитель-
ной мере качество маневров, связанных с изменением направления
полета и ориентации самолета относительно земли. Ввиду того, что
боковое'движение сопровождается вращением относительно двух
осей, оно в известном смысле сложнее, чем продольное. В общем
случае при достаточно больших возмущениях боковое движение
вызывает существенное изменение параметров продольного движения,
т. е. возмущенное движение самолета принимает в этом случае про-
странственный характер. Таким образом, в отличие от продольного
изолированное боковое движение может рассматриваться только
при малых возмущениях. Малых в том смысле, Что становится воз-
можным пренебрегать нелинейными членами в уравнениях движения.
Кроме того, исследование бокового возмущённого движения незави-
симо от продольного возможно лишь при условии, что гироскопиче-
ские моменты от силовой установки, нарушающие динамическую
симметрию самолета, невелики, а за исходный невозмущенный ре-
жим принят прямолинейный горизонтальный установившийся полет
без крена и скольжения. При перечисленных допущениях характе-
ристики боковой устойчивости и управляемости определяются с по?
мощью достаточно простых математических моделей, позволяющих
получить простые инженерные соотношения между характеристи-
ками боковой устойчивости и управляемости, с одной стороны, и
конструктивными параметрами и режимами полета самолета,
с другой.
§ 17.1. УРАВНЕНИЯ И СТРУКТУРА БОКОВОГО
ВОЗМУЩЕННОГО ДВИЖЕНИЯ
В боковом возмущенном движении, как и в продольном,
реализуются три степени свободы, но в отличие от продольного здесь
две степени свободы связаны с вращением самолета относительно
центра масс — движениями крена и рыскания, а одна — с поступа-
тельным движением самого центра масс в направлении, перпендику-
лярном плоскости симметрии. Таким образом, боковое возмущенное
299
Движение будет описываться, как й Продольное, тоже Тремя уравне-
ниями динамики, но два из них будут уравнениями проекций мо-
ментов относительно осей ОХ и OY, а одно — уравнением проекций
сил относительно оси 0Z. При составлении уравнений динамики
целесообразно воспользоваться связанной системой осей координат.
За связанную ось ОХ принимают или одну из главных осей инерции,
или базовую ось самолета, от которой отсчитывается угол атаки.
В последнем случае оси связанной системы ОХ и 0Y, как правило,
не являются главными, а ось 0Z совпадает с главной осью вследст-
вие симметрии самолета ^относительно плоскости XOY. Если оси
связанной системы координат не являются главными, центробежный
момент инерции самолета Jxy отличен от нуля. Два других центро-
бежных момента инерции Jxz и Jyz можно считать равными нулю,
так как массы самолета разнесены практически симметрично относи-
тельно плоскости OXY.
Уравнения моментов относительно связанных осей ОХ и 0Y
были приведены ранее — уравнения 7 и 8 системы (15.1). Записав
уравнение сил в связанной системе осей координат, получим систему
уравнений динамики для бокового движения самолета
т (Vt — V^u + == FRz;
Jx&x (Jy Jxy(®y— (17.1)
JyG>y — (Jz Jx) ЮХЮ2 Jxy (®sc <й^(0ж) = Mfiy.
Здесь FRz — проекция равнодействующей аэродинамических и гра-
витационных сил, действующих на самолет; MRx, MRy — результи-
рующие моменты крена и рыскания от аэродинамических сил и тяги
относительно связанных осей. В нормальных условиях полета (при
симметричной тяге) моменты от силовой установки равны нулю, и
МЛа: = Мх, MRy = Му; Vx, Vy, Vz — проекции вектора скорости
центра масс на связанные оси; юх, — проекции вектора угло-
вой скорости вращения самолета вокруг центра масс на те же оси.
В силу сделанных допущений о том, что в исходном режиме а* =
= ©2 = = 0, нелинейные члены в левых частях уравнений мо-
ментов можно исключить. Проекции скорости центра масс в уравне-
нии равновесия сил выразим через углы а и ₽
Уж = V0 cos р cos a0; Vy = — V° cos 0 sin а0; Vz = V°sinp.
Таким образом уравнения (17.1) можно представить в следующем
виде (при\£ = 0):
• mV0 (Р — cosa0©^ — 81па°а>ж) = F^z;
J У&У == Ми', (17.2)
JJху®у ~ Мх.
Решив первое уравнение системы (17.2) относительно Р, а два
последних относительно <вж и й^, получим
Р =F/k + cos аюУ4- sin асож; &v~My, &Х — МХ. (17.3)*
* Поскольку при боковом движении V0, а0, О0 и другие параметры опорного
движения неизменны, индекс «°» для простоты опускаем.
300 ' . "Z. ГА <5-^7
Через FRz обозначено отношение поперечной силы FRz к произведе-
нию массы на скорость. Условно назовем это отношение приведен-
ной поперечной силой. Она складывается из проекций аэродинами-
ческой и гравитационной сил на ось 0Z:
Ffy = cosdslny я; Z + -£ cos fly = ^-nz + cos Оу.
(17.4)
z
Здесь Z — поперечная аэродинамическая сила; пг == ----по-
перечная перегрузка. Величины Мх и Ми можно назвать приве-
денными моментами рыскания и крена. Решив систему уравнений
моментов (17.2) относительно и получим
Если оси OX, 0Y главные, то Jxy = 0 и тогда
МУ = ^ = МУ, МХ=^ = МХ. (17.6)
Поперечная перегрузка и моменты аэродинамических сил* при ма-
лых возмущениях параметров бокового движения или малых откло-
нениях рулей являются линейными функциями этих параметров и
углов отклонения органов управления боковым движением. Осевые
и центробежный моменты инерции в интервале времени, в течение
которого протекает возмущенное движение, можно считать постоян-
ными. Таким образом, уравнения динамики (17.3) преобразуются
в систему трех линейных неоднородных дифференциальных урав-
нений с постоянными коэффициентами и четырьмя неизвестными:
Р, (ох (Оу, у. Добавив к ним кинематическое уравнение, связы-
вающее производную угла крена с угловыми скоростями крена и
рыскания, получим замкнутую систему линейных дифференциаль-
ных уравнений с постоянными коэффициентами, описывающую боко-
вое возмущенное движение
Р = Z₽p + cos sin асох -у cos dy 4~ zH + Z6z6z;
S - л^р++<4+M6y^+mX; (17.7)
= m£p + +mH+mH;
Y = — tgdcoy.
При исследовании траекторного движения к уравнениям (17.7) сле-
дует добавить кинематические уравнения [см. (15.8)1
Дгс ——VAT; ДТ = ф + 81пау-Р; Ф =
301
В более общем виде уравнения бокового возмущенного движения
можно записать следующим образом:
Р = W11P “ I" п12юг/ + П13®зс “ I" П14? ~Ь ~Ь т12^э + т1з^г;
= ПЯ1Р + n22<My + И23®ЗС ~Ь m2l^H + m22^3 Ч~ m23^z; (17-8)
(Вд = П31р -|- П^Шу 4- П33СОХ 4- Шз1^н 4- т32^э + m33^z<
Y = 4- «42®И-
Коэффициенты п1} имеют вид
f, _ 7₽ _ z₽ _ е г$- пЬ— „ с2 . с _ mg .
— mV - V пг> пг~ mg~ срг.п’ C^-n~Sq'
п12 = cos a; a == аг. ц;
/its = sin a;
«и = -y cos fl = cos ar. n;
nai = M^ = Dy(ml
D W
Uy / /2
J 1 x«
Jv I 1--Fj^
\ Jx->v
. ,ay JXV \.
I* -1—b
Jx /
Jxy \ ,
«22 — Muv — ^v~2V~ {ve 4~ mj
nw = M*x = Du -±- (™tx + -^-p
na = ^ = Dx(mP + /ng-^.);
\ Jy /
D _ sqi
Vx— 2
J ( | Xy
Jx I 1 FT^
\ JxJy
n„ - <* = D, (mJ- + m““ ±£.);
n« = — tgfl = — tgar.n;
ен A
пг =-----
* mg
l
x 2V
dx'W
Ju /
(17.9)
m -h-7^-JLn^
czK
cy Г. П
mla==~rip-
m % 2 7®z JL fi t.
«*13 —-^jT—л —-[Г"г>
m81 = MpH = DJ/(/n'
6Z Zz
nz=-^
czz .
Су Г. П
/«22 = = Dy (m° + ’
\ Jx /
302
tn23--= Myz = Du (m* + 4* ф);
\ J x 2
msl = Мхи = Dx (mx* + m®« 5
rfi-л / ®я । ea ^ад \
m32 = М2 = Dxlmxa + ma —=— ;
\ . J4 /
. _ / 6- 6, Jxu \
«33 = М2 = Dx (m2 4- muz—f— •
\ Jy /
В уравнениях (17.8) отсутствуют слагаемые, содержащие коэффи-
циенты п24 и «34, так как угол крена влияет на моменты Мх и Ми
только вблизи земной поверхности. Мало слагаемое с коэффи-
циентом «112, так как отклонение элеронов практически не влияет
на поперечную силу Z. Если самолет имеет ОНУБС, коэффициенты
«128 и «1зз должны быть малыми, так как в противном случае управле-
ние этим органом будет сопряжено с большими трудностями.
Уравнения (17.8) с коэффициентами (17.9) справедливы незави-
симо от того, являются ли оси^связанной системы координат глав-
ными осями инерции или нет. В первом случае в коэффициентах
(17.9) следует считать Jxy = 0.
Управляемое боковое движение самолета описывается системой
неоднородных линейных дифференциальных уравнений, в которой
управляющие воздействия бн, б» и считаются известными
функциями времени. При исследовании боковой устойчивости
полагают, что 6И = 6, » = О, а один или несколько параметров
бокового движения в начальный момент времени ие равны нулю.
В этом случае возмущенное движение самолета будет описываться
системой четырех однородных дифференциальных уравнений, кото*
рая получается из уравнений (17.8) путем отбрасывания слагаемых,
содержащих 6Н, 6Э, 62.
Структура собственного бокового возмущенного движения опре-
деляется общим решением системы однородных дифференциальных
уравнений, которая получается из системы (17.8) при 6* = б8 '«=
— 6г = 0. Эта система четырех линейных дифференциальных урав-
нений с постоянными коэффициентами. Характеристический опре-
делитель этой системы Д имеет вид
(Л — «11) —«и —«13 —«14
д _ —пп — лм) —п93 0
—Из1 —Пзл — nss) 0
0 “— 1
Раскрыв определитель Л, получим характеристическое уравнение
бокового движения
№ ~Ь й3К8 П1Х -j- tig = 0.
(17.10)
303
Оно имеет тот же вид, что и характеристическое уравнение продоль-
ного движения, но значения коэффициентов at здесь иные. Они вы-
ражаются следующим образом:
а2 = —Jftg cos а — Af§ sin а 4~ Z₽A4^ 4- Af““ (Z* 4- AfJ>) - A4?A4““;
а2 = М*М°Х cos а - 7₽ (Л4^7Й“Я - А4“*М>) -
— A4*cosa^Af“*4--p-) — sina^AffM*1*-f-у Af^ —
а0= - ' ^cosaAf^ b sinaAf*3^ — Mx ^slnaMyx f- cosaAf^J •
(17.11)
Характеристическое уравнение бокового движения, как правило,
имеет два действительных (%х и %а) и Два комплексных сопряженных
(Х314) корня. С учетом этого характеристическое уравнение (17.10)
можно записать следующим образом:
А = (% _ Хх) (Х-Ха) (Х2|-2Лб7.+ (о1)= 0 . (17.12)
Общее решение уравнений бокового движения имеет вид
Р = Лхе^*^ -f- Алек‘* + Лае sin cog — hfa-t 4~ <Pi),
©и = + B*M + Baeh^ sin •/ + ФгХ (17.13)
юж = + C2eKtt 4- C8tFhJ Sin (/^Г=й1-< + q>8);
у = D2Jl1 -}- £>aex,/ 4~ Daeh^ sin (-j/cog — h'c-t 4- фД
Формулы (17.13) отражают типичную структуру бокового возму-
щенного движения, которое состоит из двух апериодических и одного
колебательного движения.
Один действительный корень по модулю гораздо меньше другого
I I С Ri |- [Приближенное значение большого корня, которое
значительно больше единицы, можно получить, отбрасывая в урав-
нении (17.10) слагаемые со степенями X ниже третьей.
Получим Хх « — а3
или
k1«M““ + A4“1'4-Z₽.
Из трех слагаемых наибольшим здесь является Мхх. Точные расчеты
показывают, что « Мхх-
Приближенное значение малого корня, которое много меньше
единицы, можно получить, отбросив, в уравнении (17.10) три первых
слагаемых. Получим
Х2 « — ajaj,.
Приближенные значения действительных корней можно уточнить
графически, построив график функции F (X) = X4 4- aj? 4- паХ2 4-
304
+ aY\ + а0 в окрестностях приближенных значений и Х2. Точки
пересечения кривой F (?.) с осью, по которой откладывается ‘к, дадут
значения действительных корней с тем большей точностью, чем круп-
нее масштаб построения. Могут быть использованы и другие методы
уточнения, например, метод последовательных приближений Нью-
тона.
Определив действительные корни, можно найти йб, соб и Х3>4
при Х3,4 == — h6 ± i jAcoe — Ле •
Из уравнений (17.10) и (17.12) следует
2йб — (^<1 + = аз>
Откуда <й| = , 2h6 = а3 -|- Xi -|- 212-
Анализ коэффициентов характеристического уравнения (17.10) пока-
зывает, что у самолета, обладающего поперечной и путевой_статиче-
ской устойчивостью, на докритических углах атаки
а3 >0, а2 >0, at >0.
Что касается коэффициента а0, то он может быть как положитель-
ным, так и отрицательным. Следовательно, при упомянутых усло-
виях больший по модулю корень всегда отрицателен, а меньший ко-
рень 12 может иметь любой знак. При Х2 > 0 самолет будет медленно
отклоняться от исходного режима по апериодическому закону.
Медленно нарастающий крен вызовет разворот и снижение самолета,
т. е. центр масс будет двигаться по пологой спирали. В связи с этим
движение, соответствующее малому корню, называется спиральным.
Из приближенного выражения для большого корня следует,
что он связан с движением крена. На докритических углах атаки,
когда Мхх < 0, движение по крену быстро затухает, демпфируется.
На закритических углах наоборот МХК >0 и вместо демпфирующего
момента возникает момент самовращения. Большой корень стано-
вится при этом положительным, а самолет апериодически неустой-
чивым. Подробно об этом будет сказано в гл. 19.
Колебательная составляющая бокового возмущенного движения
по характеру протекания довольно близка к короткопериодической
составляющей продольного движения. Движение крена, если оно
устойчиво, и колебательное движение развиваются быстро и отно-
сятся к быстрой фазе бокового движения (см. § 17.3).
§ 17.2. УСТОЙЧИВОСТЬ САМОЛЕТА В БОКОВОМ
ДВИЖЕНИИ
Поскольку возмущенное боковое движение самолета опи-
сывается системой линейных дифференциальных уравнений с по-
стоянными коэффициентами, воспользуемся для анализа его устой-
305
чивости критерием Рауса—Гурвица. Согласно этому критерию само-
лет будет устойчив в боковом движении, если все коэффициенты
характеристического уравнения (17.10) будут положительны и поло-
жительно выражение
7? = а1й2а3 — озО0 — а?. (17.14)
При полете самолета со скоростями меньше гиперзвуковых на до-
Ч,
критических углах атаки все вращательные производные, кроме тих,
СО
имеют отрицательный знак. Производная тух может быть как отри-
цательной, так и положительной, но по модулю она невелика по
сравнению с другими производными.
Отсюда следует, что согласно (17.11) коэффициенты alt а2, а3 на
упомянутых выше режимах всегда положительны, если самолет ста-
тически устойчив (т| < 0, ту < 0). Что касается коэффициента а0,
то он может быть в этих условиях и положительным, и отрицатель-
ным. Таким образом, устойчивость самолета в боковом движении
будет определяться по существу двумя условиями: а0 > 0 и R >0.
Первое неравенство является условием спиральной устойчивости
самолета, т. е. условием того, что малый корень имеет отрицатель-
ныйзнак. На самом деле, из формулы (17.12) следует, что а0 = kjX2(o§.
Для самолета, спроектированного в соответствии с нормами летной
годности, на докритических углах атаки большой корень 2^ всегда
отрицателен, а ©б >0. Следовательно, при а0>-0 малый действи-
тельный корень будет отрицательным, а при а0 < 0 положительным.
Неравенство R >0 является условием устойчивости колебатель-
ного движения. На границе колебательной устойчивости, когда
комплексные корни характеристического уравнения Х3 и стано-
вятся чисто мнимыми = ±₽i, выполняется условие R = 0.
Это легко доказать, подставив в характеристическое уравнение зна-
чение X = р/. В левой части полученного тождества
Р* — asp8i •— й2Р2 + OxPi + ng = 0
комплексная величина. Действительная и мнимая части этой вели-
чины должны быть тождественно равны нулю, т. е.
Р4 — аара + а0 = 0;
—а3р3 4- ПхР = 0.
Таким образом, при наличии чисто мнимого корня X = Pi имеем
два уравнения относительно р.
Определив из второго уравнения Ра = aja3 и подставив это зна-
чение в первое уравнение, получим соотношение между коэффициен-
тами характеристического уравнения в случае чисто мнимых корней
306
Умножив правую и левую части на — af, напишем условие, при ко-
тором характеристическое уравнение имеет чисто мнимые корни,
следующим образом:
— of = О,
или, с учетом выражения (17.14), R = 0.
Несмотря на простоту условий устойчивости, ее исследование
является непростой задачей, так как коэффициенты характеристи-
ческого уравнения являются довольно сложными функциями кон-
структивных параметров, аэродинамических характеристик и ре-
жима полета самолета. Чтобы сделать анализ боковой устойчивости
более наглядным, несколько преобразуем уравнения бокового воз-
мущенного движения — приведем их к безразмерному виду. Для
этого все размерные величины выразим через соответствующие без-
размерные. Кроме того, будем считать, что за связанные оси приняты
главные оси инерции, ввиду чего выражения статических и враща-
тельных производных от моментов крена и рыскания значительно
упрощаются. Перейдем от действительного натурального времени t
к безразмерному времени У, связанному с действительным размерным
временем через масштаб времени т = rn/pSV. Полагая, что t — ?т,
заменим в дифференциальных уравнениях dt на dlr. Силу Z и моменты
Мх, Му выразим через безразмерные коэффициенты сг>. тл, ту\
угловые скорости сох, со^ — через безразмерные угловые скорости й>х,
о>у
- 2V . _ 2V .
— ®sc ~— tHy —j—,
моменты инерции — через безразмерные радиусы инерции гх и rv
Jx = f2xtn(-j-yf; Jp = r*m(-j-)S.
Сократив в полученных уравнениях общие множители и обозначив
тх _ mv
= -^- = ту,
X гу
получим вместо (17.7) систему четырех дифференциальных уравне-
ний в безразмерной форме. При фиксированных органах управления
эта система имеет следующий вид
• С а
0 — 0 + Рб cos айу + ре sin айж 4- ~ cos Оу;
= /п₽₽ 4~ fhyv&y 4-
й* = /п^₽ 4- tnxv&u 4- тх х&х; (17.15)
Y = P6 (йх- tgOSJ.
Здесь р0 — ----безразмерная величина, так называемая отно-
сительная плотность самолета в боковом движении.
307
Характеристическое уравнение этой системы будет иметь тот же
вид, что и для исходной системы уравнений (17.7):
№ + as№ + ааХа 4~ 4- а0 = О,
но коэффициенты этого уравнения будут выражаться теперь иначе
с? _®~ _®о
а3 = — -f- — тхх — туу\
Я2 = mxxmyv 4- -у-\mx 4- muv) — mxvmux — pecosam£ —
— |i6sinam£; (17.16)
®,i ©« — ®_. — fi.A > —r( — ®*> ®,A <
ai = \mxvmvx — tnxxniuv) + HewJ (cos am/ — slnazn^j 4~
4- (sin am/ — cosam^j ;
aa = Pc cos & ~ [m£ (m®B + tg dm®1) - thy (mxv tg
Так как за исходный режим принят горизонтальный прямолинейный
установившийся полет, то a = § = аг. п.
Поскольку безразмерные коэффициенты at не содержат скорости
полета, можно сделать вывод о том, что возмущенное движение
самолета по своему характеру не зависит от скорости полета. С из-
менением скорости меняется лишь масштаб времени, следовательно,
переходные процессы будут с уменьшением скорости как бы растяги-
ваться, а с увеличением — сжиматься. На устойчивость самолета
скорость влияет только через влияние числа М (сжимаемости).
Особый интерес представляет вопрос о влиянии статической устой-
чивости —-поперечной и флюгерной — на устойчивость бокового
движения. Это связано с тем, что степенью статической устойчивости
конструктор может варьировать сравнительно легко в широких
пределах, меняя такие конструктивные параметры самолета, как
угол поперечного V крыла, площадь и плечо вертикального оперения.
Поэтому построим границы спиральной и колебательной устой-
чивости бокового движения на плоскости параметров ml, т%. Для
этого всем величинам, входящим в выражения коэффициентов ха-
рактеристического уравнения (17.16), кроме ml, т% дадим конкрет-
ные числовые значения. Из выражения для коэффициента а0 видно,
что граница спиральной устойчивости а0 = 0 на плоскости параме-
тров ml, thy будет представлять собой прямую линию, проходящую
через начало координат (рис. 17.1).
Граница колебательной устойчивости представляет собой гипер-
болу, которая в интересующем нас квадранте при ml <_ 0, ml < О
идет очень полого. Ее нетрудно построить, но проанализировать на
308
Рис. 17.1. Границы боковой устойчивости:
----- граница апериодической устойчивости;
—— — — ш О
у границы колебательной устой-
чивости
со
-----т х < о
U
основании точных уравнений ана-
литически невозможно. Поэтому
упростим уравнения бокового воз-
мущенного движения (17.15), ис-
ключив из первого уравнения гравитационную силу —cos Фу, так
как она мало влияет на колебательное движение. Тогда можно исклю-
чить и последнее кинематическое уравнение. Получим систему трех
дифференциальных уравнений с тремя неизвестными (0, а>х, йв).
Характеристическое уравнение этой системы имеет вид
X8 + Ь2№ + bj. + Ьо = 0. (17.17)
Можно показать, что bs = as; = а2; b0 — av
Условием колебательной устойчивости линейной системы третьего
порядка будет неравенство b2bi > b0 (произведение средних коэффи-
циентов должно быть больше произведения крайних коэффициентов)
или — Ьо >0.
Граница колебательной устойчивости определяется уравнением
— b2bi — bo — 0.
На плоскости ml, mfy это будет прямая линия, проходящая вблизи
начала координат. Так как нас интересует главным образом наклон
этой граничной линии, можно в выражении (17.14) отбросить свобод-
ный член.
Тогда уравнение границы колебательной устойчивости на пло-
скости ml, ml будет иметь вид
{ . СР\
tg«r.n +mUX
ml = — --------------------р— ml. (17.18)
© й © P
На докритических углах атаки производные тх, muv, mxv,cz всегда
отрицательны. ту может быть как положительной, так и отри-
цательной.
При тих < 0 граница колебательной устойчивости будет прохо-
дить во втором и четвертом квадранте (см. рис. 17.1). Ее характер
при тух >0 зависит от угла атаки. При достаточно больших углах
атаки она проходит через второй и четвертый, а при малых — пер-
вый и третий квадранты.
309
Границы спиральной и колебательной устойчивости, приведен-
ные на’рис. 17.1, позволяют сделать следующие выводы о влиянии
статической устойчивости на боковую устойчивость самолета. При
увеличении путевой статической устойчивости самолет прибли-
жается к границе спиральной устойчивости и может стать спирально
неустойчивым. Степень путевой статической устойчивости, при ко-
торой произойдет потеря спиральной устойчивости тем больше, чем
больше поперечная статическая устойчивость самолета.
Если увеличивается поперечная статическая устойчивость при
fhy = const, самолет удаляется от границы спиральной устойчи-
вости, но при этом ухудшается затухание его колебательного движе-
ния. В некоторых случаях возможна потеря колебательной устой-
чивости. Такой характер влияния статической устойчивости на боко-
вое движение можно объяснить следующим образом. Пусть самолет
получил начальное возмущение — положительный угол крена, на-
кренился на правое полукрыло. В соответствии с первым уравнением
системы (17.15) следствием этого будет возникновение положитель-
ного угла скольжения и пропорциональных, ему моментов и
MjJp. Если самолет обладает статической устойчивостью в боковом
движении, эти моменты будут отрицательными. Под действием мо-
ментов 7И₽Р и самолет начнет поворачиваться относительно
продольной оси ОХ, уменьшая крен, и относительно Нормаль-
ной оси ОУ, уменьшая угол скольжения. Если велика путе-
вая статическая устойчивость, самолет будет двигаться без скольже-
ния, момент крена будет равен нулю, начальный угол крена
сохранится и вызовет движение самолета по спирали. Если наоборот,
путевая устойчивость мала по сравнению с поперечной, то угол сколь-
жения будет уменьшаться медленно, а угол крена — быстро. В мо-
мент, когда крен станет нулевым, положительное скольжение еще
останется, следовательно, самолет будет продолжать вращаться отно-
сительно продольной оси, увеличивая крен на левое полукрыло.
Отрицательный угол крена приведет к скольжению на левое полу-
крыло, появится положительный момент крена Л1$р и самолет начнет
крениться в обратную сторону. Будет иметь место движение самолета
типа «голландского шага», сопровождающееся колебательным дви-
жением самолета с полукрыла на полукрыло вокруг продольной оси
и разворотами вокруг нормальной оси. Траектория движения будет
иметь форму змейки.
Таким образом, требования к характеристикам статической
устойчивости с позиций спиральной и колебательной устойчивости
противоречивы.. При увеличении спиральной устойчивости ухуд-
шаются характеристики колебательного движения.
Ввиду того; что спиральное движение протекает вяло, так как
определяется малым корнем, оно слабо ощущается летчиком, даже
в случае'некоторой спиральной неустойчивости. Колебания самолета
по крену и рысканию со.значительной частотой, напротив, очень за-
трудняют пилотирование. Поэтому предпочтение отдаётся характе-
310
ристикам колебательного движения. Оно не только должно быть без-
условно затухающим, но и должно обладать определенными количест-
венными характеристиками. Помимо колебательной устойчивости
регламентируется качество колебательной составляющей переход-
ного процесса в боковом возмущенном движении.
Так, в Нормах летной годности гражданских самолетов сказано,
что затухание боковых колебаний до 5 % начальной амплитуды
должно происходить не более чем за 12 с на взлетно-посадочных ре-
жимах и не более чем за 20 с на крейсерских режимах полета.
Что касается спирального движения, то Нормами допускается и
его неустойчивость, но при этом время увеличения угла крена вдвое
должно быть не менее 20 с.
Важное значение в оценке боковой устойчивости самолета имеет
амплитуда колебаний угловой скорости крена, а следовательно,
и угла крена, отношение максимальных амплитуд угловых скоростей
крена и рыскания | <ож |тах/| соу |тах = х в свободном возмущенном
движении самолета. Так как главную роль в колебаниях <ож и
играют моменты от скольжения, в первом приближении показатель х
можно определйть через отношение ускорений от этих моментов
т$ Jx
В связи с тем, что у современных самолетов из-за стреловидности
крыльев сильно возросла поперечная статическая устойчивость
(особенно на больших углах атаки), а отношение моментов инерции
JyUx увеличилось до 10 и более (вместо 3 ... 4 у самолетов прошлого),
показатель х современных самолетов значительно возрос (х « 1 ... 3)
Эта неблагоприятная тенденция в изменении динамики бокового
движения современных самолетов компенсируется увеличением демп-
фирования боковых колебаний с помощью автоматики. Несмотря на
большие величины отношения угловых скоростей крена и рыскания,
переходные процессы при большом демпфировании не восприни-
маются летчиком, как неудовлетворительные ввиду небольших абсо-
лютных значений угловых скоростей.
(17.19)
§ 17.3. ПРИБЛИЖЕННЫЙ АНАЛИЗ БЫСТРОГО БОКОВОГО
ДВИЖЕНИЯ
В предыдущем разделе была рассмотрена структура бо-
кового возмущенного движения и отмечено, что медленное спираль-
ное движение не оказывает существенного влияния на устойчивость
самолета; в то время как характеристики быстрого колебательного
движения являются определяющими в оценке его возмущенного дви-
жения. Апериодическая составляющая быстрого движения на до-
критических углах атаки всегда носит быстро затухающий характер,
и поэтому никаких специальных требований к ней не предъявляется.
Чтобы выявить связь быстрого движения и главной его составля-
ющей — колебательного движения с аэродинамическими, конструк-
тивными характеристиками самолета и режимами полета, проведем
311
приближенный анализ быстрого бокового Движения, полагая, что
возмущения параметров бокового движения и угла атаки самолета
невелики. Тогда считая cos а = 1, a sin а = 0, в первом уравнении
системы (17.7) кроме слагаемого, содержащего угол крена, можно
отбросить слагаемое, содержащее угловую скорость крена. Во вто-
ром уравнении можно пренебречь малой величиной Мух, считая ее
равной нулю.
Тогда собственное быстрое движение самолета можно описать
системой уравнений следующего вида:
₽ = Z₽₽ + со/, (Ь, = М₽0 + (17 2())
В полученной приближенной системе уравнений (17.20), описы-
вающей быстрое боковое возмущенное движение, первые два урав-
нения описывают движение рыскания, третье уравнение —движе-
ние крена.
В силу сделанного допущения о малости угла атаки, движение
рыскания можно рассматривать независимо от движения крена.
Если боковое возмущенное движение вызвано начальными воз-
мущениями по углу скольжения или угловой скорости рыскания,
его можно рассчитать, определив сначала 0 и из двух первых
уравнений, а затем со^ из третьего уравнения.
Характеристический определитель изолированного движения ры-
скания будет иметь вид *
(Х-2₽)-1
— М% (Ь’-Лф')
Раскрыв его, получим характеристическое уравнение
Л2 + 2Лб% 4-“б = 0, (17.22)
где
2йб = —(zB + X>) ;
со? = - + zPffi. (17.23)
Корни уравнения (17.22) получаются комплексными и движение но-
сит колебательный характер.
Таким образом, колебательная составляющая бокового возмущен-
ного движения при малых углах атаки определяется, главным обра-
зом, движением рыскания. Его параметры будут иметь следующий
вид:
0 = 4е~'’с' sin (]Л4-Лб-/ + Ф1) ; (17.24)
а>у=Ве Лс< sin + ср2)-
* Будем считать, что за связанные оси приняты главные оси инерции.
312
Подставив эти значения [3 и а>у в третье уравнение системы (17.2б),
получим неоднородное дифференциальное уравнение первого по-
рядка, описывающее движение крена, вызванное возмущениями
в канале рыскания. Характеристическое уравнение этого неоднород-
ного уравнения будет иметь вид
К-Мхх = 0. (17.25)
Решение этого уравнения дает большой действительный корень
Х1=7Й“Х. (17.26)
Изменение углодой скорости крена в возмущенном движении будет
определяться суммой общего решения уравнения (17.25) и частного
решения последнего уравнения системы (17.20) с учетом (17.24)
а>х = Ce+Xtt + Йе'"6' sin (]/о4- <р3). (17.27)
Большой корень определяет, таким образом, быстрое апериодиче-
ское движение крена.
Проанализируем подробнее составляющую быстрого бокового
движения, определяемую движением рыскания. Если она имеет
колебательный характер, то при малых углах атаки эти колебания
всегда будут затухающими, так как Z <0, Myv < 0. Неустойчи-
вость движения может иметь только апериодический характер.
Устойчивость движения рыскания при малых углах атаки будет
определяться неравенством > 0 при
= (17.28)
Здесь
-Р
<17-29)
По аналогии с продольным Движением ор можно назвать сте-
пенью статической устойчивости по каналу рыскания. Из формул
(17.28), (17.29) видно, что, если самолет обладает флюгерной стати-
ческой устойчивостью, движение в канале рыскания будет устой-
чивым.
Такой вывод справедлив, если в опорном невозмущенном режиме
угол атаки мал. При полете на больших углах атаки, которые для
современных самолетов могут достигать значений л/6 и более, суще-
ственное влияние на движение рыскания оказывает движение крена.
Чтобы проанализировать это влияние, отбросим из первого урав-
нения системы (17.7) слагаемые, содержащие углы крена и скольже-
ния. Эти слагаемые определяют поперечную силу. Их влияние на
быстрое движение невелико, так как они определяют движение цен-
тра масс. Зато оставим в уравнении член, содержащий угловую ско-
рость крена. Во втором и третьем уравнениях условно отбросим сла-
гаемые, определяющие демпфирование.
313
. Тогда уравнения собственного быстрого движения будут иметь
вид _ _
0 « cosacoj, + sinaco/, <ЬХ a? M*p. (17.30)
Дифференцируя первое уравнение по времени и подставляя в него
значение производных от угловых скоростей из двух последних
уравнений системы (17.30), получим
_ Р — (cos аМ^ + sin аМх) Р = 0. (17.31)
Соответствующее характеристическое уравнение имеет вид
X2 — (cosam„ + sinam* ~Г’')'7^== 0- (17.32)
Оно не будет иметь положительных корней при условии
— (cosa/n^ 81па/тгх-Л)>0. (17.33)
Это условие устойчивости движения рыскания.
Из неравенства (17.33) следует, что наличие флюгерной устойчи-
вости еще не гарантирует устойчивости движения рыскания и, наобо-
рот, при отсутствии флюгерной статической устойчивости Движение
рыскания может быть устойчиво благодаря влиянию канала крена.
Влияние этого канала тем больше, чем больше углы атаки. На самом
деле взаимодействие движений крена и рыскания будет сложнее
из-за влияния демпфирующих и спиральных моментов. Границы
устойчивости колебательного движения, полученные с учетом этого
взаимодействия, приведены на рис. 17.1.
§ 17.4. РЕАКЦИЯ САМОЛЕТА НА ОТКЛОНЕНИЕ ОРГАНОВ
УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ
Управление бокввым движением самолета осуществляется,
как правило, органами путевого и поперечного управления. Органом
путевого управления является руль направления, органами попереч-
ного управления являются элероны, дифференциально отклоняемые
рули высоты, интерцепторы. Чаще на самолете используют один из
способов поперечного управления, иногда для увеличения эффектив-
ности управления самолеты снабжают несколькими видами органов
поперечного управления (элероны и интерцепторы, элероны и диф-
ференциальные рули и т. д.). Отклонение органов путевого и попе-
речного управления позволяет изменять направление полета, ориен-
тацию самолета относительно Земли и вектора скорости, а также
сохранять прямолинейную траекторию при полете с боковым ветром
и несимметричной тягой. Изменение направления полета осущест-
вляется, как правило, отклонением органов поперечного управления
и кренением самолета, реже отклонением руля направления и созда-
нием скольжения. У маневренных самолетов имеются органы непо-
средственного управления боковой силой (ОНУБС), позволяющие
производить разворот и без крена, и без скольжения Из всех пере-
314
численных органов управления боковым движением основными яв-
ляются органы поперечного управления. Ими снабжены все самолеты,
и используются эти органы при самых разнообразных маневрах.
Руль направления играет вспомогательную роль или для ликвида-
ции скольжения при правильном вираже, или для компенсации'мо-
мента при несимметричной тяге и боковом ветре. Несмотря на то, что
органы поперечного или путевого управления предназначены для
изменения момента относительно продольной или нормальной свя-
занных осей самолета, в действительности отклонение каждого
органа приводит к изменению моментов относительно и той и
другой оси. Так при отклонении элеронов наряду с моментом крена
возникает момент рыскания. Это усложняет реакцию самолета на
отклонение каждого органа управления боковым движением. Управ-
ляемое движение при этом сопровождается одновременно и креном и
рысканием. Летчиком такая реакция самолета воспринимается, как
удовлетворительная, в зависимости от величины, направления от-
дельных компонентов, бокового движения и соотношения между ними.
Полагая, что за связанные оси координат приняты главные оси
инерции самолета, будем анализировать реакцию самолета на откло-
нение органов поперечного управления б0 и руля' направления бн.
Передаточные функции самолета в боковом движении
После преобразования по Лапласу системы дифферен-
циальных уравнений бокового управляемого движения самолета
(17.7) получим систему неоднородных алгебраических уравнений
первого порядка. Неизвестными в этой системе будут изображения
параметров бокового возмущенного движения, вызванного отклоне-
нием органов управления боковым движением р (р), (р), ах (р),
V (Р)
(р - Z₽) р (р) - cos a (р) - sin а (р) -
— cos О у (р) = 2вн6н (р);
-М^(р) + (р-мЭДМР)-
- МуЪк (р) = Му” 6Н (р) + /Й®86э (р); (17.34)
- ЖР (Р) - М%у (Р) + (р - М“я) X
X содг (р) = МЖ”ЪН (р) -|- Мхв 6Э (р);
tg О (Р) - а>х (р) + ру (р) = 0.
Задавшись одним из управляющих воздействий 6f и полагая осталь-
ные воздействия равными нулю, приведем правые части уравнений
к виду
z4(p), Му%(р), Мх%(р).
315
Решение системы (17.34) будет иметь следующий вид:
Р(р)=4г; <Мр)=^г> y(p)=4l-
Здесь А —определитель системы. Он представляет собой полином
четвертой степени, подобный левой части характеристического урав-
нения (17.10); Ар, Аюх, Аад, Av —определители, в которых соот-
ветствующие столбцы заменены правыми частями уравнений (17.34).
Раскрыв эти определители, получим полиномы второй степени вида
(Ь2/Р2 + Ьир 4- boi) Bi (р). Коэффициенты полиномов даны в § 17.2.
Передаточные функции, характеризующие реакцию самолета
на управляющие воздействия, будут выражаться следующим
образом:
. — MlSPL ____+ t>UP + t>oi____ ,| - леч
yi/6i Bi (p) P* + «sP® + «аР® + «1Р + Oo ' ' ’ '
Формулы для определения значений а3 as, alt а0 приведены ранее
(см. (17.11)). Передаточные функции в форме (17.35) позволяют опре-
делить реакцию самолета на управляющие воздействия в виде откло-
нения элеронов, руля направления, органов НУБС с большой точ-
ностью, но при этом из-за сложности этих функций качественный
анализ характеристик управляемости невозможен. Поэтому в даль-
нейшем будем пользоваться упрощенными передаточными функ-
циями, полученными путем упрощения системы уравнений (17.34),
описывающей боковое возмущенное движение.
В качестве первого шага на пути упрощения математической
модели бокового движения отбросим из первого уравнения слагае-
мое, содержащее силу тяжести. Далее будем считать Z и = 0, т. е.
будем пренебрегать поперечной аэродинамической силой, возника-
ющей при отклонении руля направления. Эти силы влияют на мед-
ленное траекторное движение. Поэтому при исследовании управляе-
мости, характеристики которой определяются, главным образом,
быстрым движением, ими можно пренебречь. При сделанных допуще-
ниях первые три уравнения системы (17.34) могут решаться незави-
симо от последнего, т. е. порядок полинома в знаменателях переда-
точных функций понизится на единицу и знаменатель может быть
представлен в виде
Д = (Р-Рк₽)(Р2 + 2Л6р + со|), (17.36)
—G)
гДе Ркп = = Мхх — большой действительный корень, опреде-
ляющий апериодическое движение крена; h6, соб — коэффициенты,
определяющие затухание и частоту боковых колебаний.
Реакция самолета на отклонение органов поперечного
управления
Органы поперечного управления служат для создания мо-
мента относительно продольной оси самолета ОХ (Мхэ6.,), но, в об-
щем случае, она сэздгог не только этот момент, ио и -момент М/6,-
316
Направление ЭтоГо момента И его величина Могут существенно ме-
няться, оказывая влияние различного характера на поперечную
управляемость самолета, т. е. на то, как самолет реагирует на откло-
нение органов поперечного управления.
Чтобы проанализировать это влияние, опишем движение само-
лета при отклонении элеронов (или других органов поперечного
управления) на угол 68 с помощью следующей упрощенной системы
дифференциальных уравнений:
Р = 2^Р + а>у',
(17.37)
<ЬХ = Л1хР + -}- Л4Х86Э.
Здесь наряду с упомянутыми допущениями о несущественном влия-
нии сил гравитации принято, что cos а = 1, sin а = 0, т. е. рассма-
тривается движение самолета при небольших углах атаки. Не учи-
тываются здесь спиральные моменты крена и рыскания
Мхуа>у и
При сделанных допущениях связь движений рыскания и крена опре-
деляется только за счет моментов от отклонения органов поперечного
управления.
После преобразования уравнений (17.37) получим
— Лф (р) +-(/>- <*) <оу (р) = (р); (17.38)
- <р (р) + (р - л^х) (р) = МХ (р).
Составим и раскроем определитель системы А
(р-2е) -1 О
-М* (р-Муу) о
-М о (р-М?*)
= (Р ~ Ркр) (р2 + 2ЛбР + Юб).
(17.39)
Здесь
«б = - + Z^My* = —Mf + -f- f&Myy.
При исследовании реакции самолета на отклонение 6Э наиболь-
ший интерес представляет скорость крена, вызванная этимуправля-
317
ЮЩим воздействием. Поперечная управляемость самолета оцени-
вается как удовлетворительная только в том случае, если знак
противоположен знаку б., и максимальная величина угловой скорости
крена не менее 0,25 ... 0,3 1/с.
Для определения передаточной функции е
х 9 Оэ \Р) Л
составим определитель Аюх, заменив последний столбец определи-
теля А правыми частями уравнений (17.38)
(р - Zp) — 1 0
-Мр (р-л&) МуВЬэ(р)
о м>Мр)
-бэЛТ®а(р2|2/1бр|Мб),
(17.40)
где (О1==соб
Л7“а
Следовательно, искомая передаточная функция будет иметь следук>
щий вид:
W Л#(р2 + 2Лбр + <оО
(р-М>)(рЧ2Л6р + <о2)’
(17.41)
С помощью выражения (17.41) легко установить характер реакции
самолета по угловой скорости крена на отклонение органов попереч-
ного управления.
Как видим, решающее значение здесь имеет отношение квадратов
частот и сод. Если эти частоты равны, а это возможно, когда откло-
нение элеронов не вызывает изменения угла рыскания (Мув = 0)
или когда самолет нейтрален в отношении поперечной статической
устойчивости (/Ир = 0), при отклонении элеронов или иных органов
поперечного управления в соответствии с принятыми допущениями
(sin а -= 0, тух = 0, тху —. 0) будет иметь место изолированное
движение крена. Передаточная функция по угловой скорости крена
будет иметь характер устойчивого апериодического звена с постоян-
ной времени Тд = —JX)MXX и коэффициентом усиления Кэ =
- ...
Кэ
(17.42)
Переходный процесс после мгновенного отклонения элерона на
один градус будет определяться формулой
/ t \
318
Рис. 17.2. Реакция-на отклонение эле-
ронов в изолированном движении кре-
на:
®х/“?суст: вэ
Рис. 17.3. Частотная характеристика
самолета (канал крена):
-------------А;-------------ф
Время этого переходного процесса /п, по истечении которого отличие
угловой скорости крена от установившегося значения будет равно
7'
5 %, определится из условия е 3 = 0,05, откуда /„ — — In 0,05 X
X Ts = ЗТЭ.
Установившееся значение угловой скорости крена при отклоне-
нии элеронов на один радиан можно определить из передаточной
функции (17.42). Подставляя в передаточную функцию р == 0, полу-
чим значение сожуст при мгновенном, отклонении ^элеронов на угол,
равный единице (1 рад.):
Ох: уст ~ Аэ = •
М*
Характер переходного процесса в изолированном движении крена
изображен на рис. 17.2. Реакция самолета на отклонение элеронов
по гармоническому закону (6а = sin со/) будет иметь тоже гармони-
ческий характер (по окончании переходного процесса), но гармог
ника сож — A sin (со/ + ср) будет иметь иную- амплитуду и будет
сдвинута по фазе. Амплитуда А и запаздывание по фазе будут зави-
сеть от частоты со, как показано’на'рис. 17.3.
Так’как угол крена равен интегралу от угловой скорости крена,
реакция самолета по крену на ступенчатое (скачкообразное) откло-
нение органов поперечного управления при coi/cog “ 1 будет иметь
вид, изображенный на рис. 17.4, а. В общем случае сог и сос в числи-
теле и знаменателе передаточной функции (17.41) неравны, следова-
тельно, реакция самолета по крену и угловой скорости крена на от-
клонение органов поперечного управления будет иной.
Пусть самолет обладает поперечной статической устойчивостью
и при отклонении элеронов на положительный угол момент рыска-
ния от элеронов тоже положителен (Мув > 0). Тогда, имея в виду,
что Мх° < 0, получим _6
со? = 4 + 4“ >со2е; 4 > 1. (17.43)
Мхэ “б
319
, °?
0) “2
“в
Рис. 17.4. Влияние взаимодействия крена
мость:
и рыскания на поперечную управляв-
“1
б) —
“в
, “1
в) ~2
“в
“й
Из формул (17.41) и (17.43) следует, что установившаяся скорость
крена возрастет по сравнению с предыдущим случаем из-за взаимо-
действия движений крена и рыскания. Произойдет как бы «под-
крутка» самолета. На первый взгляд может показаться, что здесь
возрастает эффективность управления и увеличение частоты
играет положительную роль, но это не так. При более или менее зна-
чительном увеличении отношения <о?/со§ возникает раскачка само-
лета летчиком, управляемость самолета ухудшается.
Если производная MVB будет отрицательной, то при наличии
у самолета поперечной статической устойчивости отношение <of/<b§
будет меньше единицы. Угловая скорость крена при отклонении
элеронов будет в этом случае меньше, и по мере уменьшения отноше-
ния частот наступает так называемое зависание самолета по крену,
угловая скорость начинает падать, нарастание угла крена или замед-
ляется, или прекращается совсем. Это ощущается летчиком, как
падение эффективности поперечного управления.
Если отношение частоты станет отрицательным, возникнет
обратная реакция самолета на отклонение 6В, что, безусловно, не-
допустимо. Объяснить влияние взаимодействия между движениями
крена и рыскания на поперечную управляемость можно из простых
физических соображений. Пусть у самолета, обладающего попереч-
ной статической устойчивостью (М* < 0), производная от момента
рыскания по углу отклонения элеронов положительна. Тогда поло-
жительный угол 6Э приведет к возникновению положительного мо-
мента рыскания М/68. Под действием этого момента самолет приоб-
ретает положительную скорость av и, как следствие, положительное
скольжение [см. уравнения (17.37)1. Из-за положительного сколь-
жения возникает отрицательный момент крена который, скла-
дываясь с отрицательным моментом М*®68, будет «подкручивать»
самолет. При Миа < 0 и прочих равных условиях картина будет
320
обратной. Момент Л4г/°бв будет вызывать отрицательную скорость
рыскания и отрицательное скольжение (на левое полу крыло). Вслед-
ствие этого скольжения возникает положительный момент крена
который будет тормозить движение крена или даже изменит его на-
правление.
Было рассмотрено взаимодействие крена и рыскания из-за мо-
мента возникающего при отклонении органов поперечного
управления. На самом деле на это взаимодействие влияет также ки-
нематическая связь между движением крена и рыскания. Эта связь
обусловлена наличием в уравнении сил для бокового движения са-
молета слагаемого sina-co^. Чем больше угол атаки самолета, тем
больше будет влияние движения крена на движение рыскания,
больше угол скольжения и сильнее обратное влияние движе-
ния рыскания на движение крена. В отличие от предыдущего
случая, кинематическая связь всегда оказывает тормозящее воз-
действие на движение крена, способствуя зависанию самолета по
крену.
В итоге реакция самолета по крену на отклонение органов по-
перечного управления будет иметь вид, изображенный на рис. 17.4.
Типичным для современных самолетов со стреловидными крыльями
является наличие зависания по крену (см. рис. 17.4, в). Особенно
значительно оно на больших углах атаки, когда поперечная стати-
ческая устойчивость возрастает, а путевая уменьшается. Производ-
ная от момента рыскания по углу отклонения элеронов на больших
углах атаки отрицательна. При этом отношение квадратов частот
<о?/со§ будет меньше единицы. Летная практика показывает, что
если уменьшение угловой скорости крена вследствие зависания
будет значительным, то поперечная управляемость самолета оцени-
вается, как неудовлетворительная. Так как повышение поперечной
статической устойчивости на больших углах атаки у современных са-
молетов со стреловидными крыльями неизбежно, уменьшать вели-
чину Дсоа: приходится путем увеличения поперечного демпфирования,
которое уменьшает колебательность переходного процесса по угло-
вой скорости крена.
Как видно из выражения (17.42), с увеличением демпфирующего
момента крена, при прочих равных условиях, падает установившееся
значение угловой скорости крена, а это ухудшает поперечную управ-
ляемость. В соответствии с Нормами летной годности установившаяся
угловая скорость крена при полном отклонении органов поперечного
управления пассажирского самолета не должна быть меньше 0,25 1/с.
Для маневренных самолетов эта величина должна быть в несколько
раз больше. Поэтому, увеличение поперечного демпфирования на
больших у'глах атаки должно сопровождаться повышением эффектив-
ности поперечного управления, увеличением модуля величины Мхв.
С этой целью иногда снабжают самолет несколькими органами попе-
речного управления. Например, наряду с основными органами упра-
вления — элеронами, на больших углах атаки могут подключаться
интерцепторы или дифференциальные рули.
321
Реакция самолета на отклонение руля направления
Ранее было отмечено, что руль направления при управ-
лении боковым движением играет как бы вспомогательную роль.
Однако это не означает, что характер реакции самолета на отклоне-
ние руля направления не оказывает существенного влияния на управ-
ляемость самолета. Эта реакция должна быть достаточно быстрой,
переходный процесс должен затухать в течение довольно короткого
времени, отклонение руля направления — «дача ноги» — не должно
сопровождаться обратной реакцией по крену. При перемещении пра-
вой педали вперед (отклонении руля направления на положитель-
ный угол) не должно быть отрицательного крена, т. е. крена на левое
полукрыло. Причинами кренения самолета при отклонении руля
направления являются моменты Л4/бн и М*0. Для анализа реакции
самолета на отклонение руля направления используем упрощенную
систему уравнений (17.37), заменив в ней моменты от органов попе-
речного управления моментом от руля направления
₽=+ <v, =7й₽0 + м^<»у +
йх = + М*х<ъ + М>бн. (17.44)
Определитель Д этой системы был получен ранее (см. (17.39)). За-
менив в определителе (17.39) соответствующие столбцы величинами
ТИ/бц и М/6Н, получим
О
Му*Ъ (р)
мХ (р)
= мХ(р)(р-Х*);
(р-&)
' -мРу
о
мХ(р)
лТН(р)
О
мХ(р)
/йХ(Р)
\оу --
(р-2₽)
-Ml
-Ml
- 1
(р-Л4^)
О
= М*в,!6н(р)(Р2 + 2Лбр + <о1).
322
Здесь
(oi = co| + Л4Р^_.
/И/
(17.45)
Передаточные функции, характеризующие реакцию
отклонения руля направления, будут иметь вид
г. Л» -
₽ н Д р2+2Лбр+<о2б ’
Mfap-zV)
самолета на
(17.46)
^ау____________________________________
Д р2 + 2Абр + «^ р2 + 2Лбр + (of
(p2+2ft6p + <al)
(р2+2АбР + “б)’
(17-47)
(17.48)
Пу . ___Дыж
Р —
Как видно, передаточные функции по углу скольжения и угло-
вой скорости рыскания подобны передаточным функциям по углу
атаки и угловой скорости тангажа, полученным при V = const и
FUB = 0. Следовательно, реакция самолета по углу скольжения
и угловой скорости будет напоминать реакцию самолета по а
и <вх на отклонение руля высоты. Характер этой реакции будет
определяться, главным образом, свойствами колебательного звена
с передаточной функцией
П7 —___!___
7^ +2^+1 ’
(17.49)
где
т ____ 1 •
6 ыс ’
t ____ fi6
<0б *
Требования к колебательному переходному процессу сводятся
к тому, чтобы он был безусловно затухающим, и время затухания
не превышало определенной величины. Для пассажирских само-
летов время затухания боковых колебаний в переходном процессе
определено Нормами летной годности. Оно не должно превышать 12 с
на взлетно-посадочных режимах и 20 с на остальных режимах по-
лета. ДЛя маневренных самолетов эта величина должна быть не-
сколько меньше.
Для анализа реакции самолета по крену на отклонение руля
направления рассмотрим передаточную функцию (17.48). Прямая
или обратная реакция по крену на отклонение руля 6Н будет опре-
деляться отношением частот <оа и <об. Если это отношение больше
323
нуля, будет иметь место обратная реакция. Рассмотрим, чем будет
определяться эта реакция. Из выражения (17.45) следует:
4=1+M₽J^_. (17.50)
“б /И°н<о|
Для самолета, обладающего поперечной и путевой статистиче-
ской устойчивостью М% <0, tog > 0. Частные производные от
моментов крена и рыскания по углу отклонения руля направления
при обычных компоновках самолета, когда вертикальное оперение
находится над фюзеляжем, всегда имеют отрицательный знак. Сле-
довательно, второе слагаемое в формуле (17.50) будет отрицательным.
Уменьшение по модулю этого слагаемого будет способствовать
обратной реакции по крену — правый крен при «даче левой ноги»
(отклонении руля направления влево, т. е. на отрицательную ве-
личину).
Как видно из формулы (17.50), обратная реакция по крену на
«дачу ноги» может наступить при уменьшении поперечной устой-
чивости и при увеличении по модулю производной Мхи, а.это воз-
можно при полете современного скоростного самолета на малых
углах атаки.
§ 17.5. УЛУЧШЕНИЕ ХАРАКТЕРИСТИК БОКОВОЙ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ С ПОМОЩЬЮ
АВТОМАТИКИ
Необходимость применения автоматических устройств для
улучшения характеристик боковой устойчивости и управляемости
современных самолетов в основном определяется следующими
обстоятельствами:
ухудшением поперечного и путевого демпфирования современ-
ных самолетов, как вследствие изменения ких геометрии, так и
в связи с широким диапазоном^ высот и скоростей их полета;
значительным изменением путевой ~и поперечной статической
устойчивости на различных режимах полета, уменьшением путевой
статической устойчивости на больших скоростях полета вплоть до
полной потери устойчивости;
неблагоприятными характеристиками поперечной управляемости
из-за взаимодействия движений крена и рыскания.
В соответствии с этим широкое применение нашли такие авто-
матические устройства, как автоматы поперечного и путевого демп-
фирования, автоматы путевой устойчивости, автоматы, уменьшаю-
щие или исключающие вообще неблагоприятное взаимодействие
движений крена и рыскания, нормализующие поперечную управля-
емость самолета.
Автоматы путевой устойчивости, поперечного и путевого демп-
фирования по своим принципам подобны соответствующим автома-
там, применяемым для улучшения характеристик продольной устой-
чивости и управляемости (см. гл. 12). Особенностью этих автоматов
324
является то, что каждый из них одновременно влияет на характе-
ристики и поперечного движения, и движения рыскания. Это за-
трудняет выбор их параметров.
Рассмотрим работу автомата путевой устойчивости с законом
управления 6И — Кр₽. Включение в контур управления этого
автомата приведет к появлению дополнительных моментов
ДМЖ = m>6h = k₽₽mJh;
AM,==mX = K₽0mJh.
Это приведет к изменению и путевой, и поперечной статической
устойчивости на величины Д тх = К$пхя и Д п?и = Kp/nJ1*.
Аналогичным образом действует демпфер рыскания, отклоняю-
щий руль направления пропорционально угловой скорости: Д 68 =
= Каув>д. При "работе демпфера появляются дополнительные мо-
менты
ДМ^М^Ки/о,
и
ДМ, = Л4^н/Са/о₽.
Первый из них изменяет путевое демпфирование второй —
спиральный момент крена (м*р).
Принципиальные отличия имеет автоматика, осуществляющая
связь между отклонением элеронов и руля направления, пред-
назначенная для улучшения поперечной управляемости самолета.
Чтобы устранить скольжение при отклонении органов поперечного
управления и не допустить зависания по крену, автомат отклоняет
руль направления пропорционально отклонению элеронов Д =
= КА 8,. Коэффициент К выбирается таким образом, чтобы р = 0.
Из уравнения
Р — cos a -f- <»я sin а = 0
следует, что
- а>у( а>х — —tg а.
Можно считать, что угловые скорости пропорциональны ускорениям,
возникающим при отклонении автоматом органов управления.
Тогда получим:
..."Г" —— е=: —— ig ф,
Л°»Д8,4-Л°яЛДб,
Отсюда можно определить величину коэффициента усиления К,
обеспечивающую разворот самолета относительно продольной оси
без скольжения:
W”8 + '^tggW**
325
Как видно из приведенного выражения, коэффициент К зависит
от угла атаки.
Для современных самолетов с широким диапазоном высот и
скоростей полета автоматы улучшения характеристик боковой
устойчивости и управляемости должны иметь передаточные числа
(коэффициенты усиления по отдельным параметрам), переменные
как по скорости (числам М), так и по углам атаки.
Дополнительная литература
[2] с. 167—215, [41 с. 40—45, 104—114, [12] с. 231—242.
Контрольные вопросы
1. Какие параметры движения меняются в процессе бокового возмущенного
движения самолета?
2. Какова типичная структура бокового возмущенного движения? Какие
корни получаются при решении характеристического уравнения бокового движения?
3. Какими критериями определяется устойчивость спирального, колебатель-
ного движения? _
4. Как влияет путевая (флюгерная) и поперечная статическая устойчивость
иа боковую устойчивость самолета?
Б. Какой характер имеют переходные процессы при отклонении органов по-
перечного, путевого управления?
6. Каково влияние демпферов, автоматов устойчивости на качество переходных
процессов?
ГЛАВА 18. ДИНАМИКА ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ.
АЭРОИНЕРЦИОННОЕ ВЗАИМОДЕЙСТВИЕ
В гл. 16 и 17 устойчивость и управляемость самолета
исследовались в предположении о независимости продольного и
бокового возмущенного движения, без учета взаимодействия между
ними. В гл. 15 было показано, что такой подход при исследовании
динамики самолета возможен при выполнении следующих условий:
во-первых, возмущенное движение должно мало отличаться от
невозмущенного, т. е. должен быть применим метод малых возму-
щений, во-вторых, самолет должен обладать динамической симме-
трией относительно плоскости X О Y — проекции аэродинамической
силы на оси OX, OY и момент этой силы относительно оси OZ дол-
жны быть симметричными функциями параметров бокового движе-
ния (угла скольжения, угловых скоростей крена и рыскания),
в-третьих, исходным невозмущенным режимом должен быть прямо-
линейный полет без крена и скольжения. При выполнении этих
трех условий производные X , Y , Mz , Мгу, Z , Мх, Му, Му\
Zv, М-У будут равны нулю и система уравнений возмущенного дви-
жения самолета распадается на две независимые системы, описы-
вающие изолированное продольное и изолированное боковое воз-
мущенное движение. Выполнение первого условия при. исследовании
326
Рис. 18.1. Обтекание самолета при полете
со скольжением. Эффект «косой обдувки»
устойчивости самолета обеспечи-
вается самой постановкой задачи —
рассматривается устойчивость при
малых возмущениях. Второе усло-
вие, строго говоря, никогда не выполняется. Даже при полной
геометрической симметрии самолета динамически он несимметричен
из-за действия кориолисовых сил инерции и их моментов, возника-
ющих при вращении самолета относительно центра масс. Момент
внутренних кориолисовых сил связан, главным образом, с работой
силовых установок самолета. Благодаря наличию в их составе
частей, вращающихся с большими угловыми скоростями и облада-
ющих значительными моментами инерции — роторов ВРД, воз-
душных винтов — при повороте самолета относительно центра масс
возникают гироскопические моменты. Так как ось вращения ро-
тора ТРД или винта примерно параллельна продольной оси само-
лета, можно считать тхгар = 0. Значения Му гяр и М2Гир будут
определяться из формул
ГИр = — JMt fgp — J
Здесь JP — момент инерции вращающихся частей силовой установки,
<вР—их угловая скорость.
Знак гироскопического момента меняется при изменении направ-
ления вращения самолета, функция Mt = f(cop) несимметрична.
Следовательно, из-за гироскопического момента производная от
момента тангажа по угловой скорости рыскания не равна нулю, так
же, как и производная Мр*.
Взаимодействие каналов продольного и бокового движения
из-за влияния гироскопических моментов (гироскопическое взаимо-
действие) очевидно, однако для обычных самолетов оно сравни-
тельно невелико и им, как правило, можно пренебречь. Невыпол-
нение третьего условия имеет место на многих важных режимах
полета. Прежде всего это прямолинейный полет со скольжением.
Такой полет наблюдается при движении самолета с боковым ветром
или с нессиметричной тягой. Здесь также происходит взаимодей-
ствие продольного и бокового возмущенного движения, которое
можно назвать аэродинамическим. В основе этого взаимодействия
лежит зависимость аэродинамических сил и моментов, определяю-
щих характер бокового движения, от параметров продольного
движения и наоборот. При полете со скольжением обтекание са-
молета несимметричное (рис. 18.1). Имеет место, так называемая;
косая обдувка. При таком обтекании возмущения по углу скольже-
ния разного знака приводят к разным изменениям аэродинамиче-
ских сил Ха, Ya и момента Мг. Производные от этих величин по
углу скольжения в окрестности исходного режима не будут равны
нулю, следовательно, возмущения параметров бокового движения
327
Рис. 18.2. Кинематическая связь каналов рыскания и тангажа
приведут к возмущениям параметров продольного движения — ско-
рости, углов атаки, тангажа, угла наклона траектории. С другой
стороны, возмущения угла атаки при несимметричном обтекании при-
ведут к появлению дополнительного несимметричного скоса по-
тока за крылом самолета обычной схамы или за горизонтальным
оперением самолета схемы «утка». В результате появятся моменты
крена и рыскания, которые вызовут изменение параметров боко-
вого движения. Аэродинамическое взаимодействие каналов про-
дольного и бокового движения при полете со скольжением особенно
значительно у самолетов схемы «утка». Взаимодействие продольг
ного и бокового движения будет более интенсивным, если исходный
невозмущенный режим сопровождается вращением самолета отно-
сительно центра масс. Здесь наряду с аэродинамическим взаимо-
действием будут иметь место взаимодействия кинематическое и инер-
ционное.
Сущность кинематического взаимодействия легко уяснить, рас-
сматривая некоторое условное прямолинейное движение самолета,
сопровождаемое его вращением вокруг продольной оси (рис. 18.2).
Представим себе, что в некоторый начальный момент времени угол
атаки самолета а(0) положителен, а угол скольжения равен нулю.
Так как вектор скорости сохраняет постоянное положение и лежит
Л
в плоскости чертежа, при повороте самолета на угол -у угол атаки
станет равным нулю, а угол скольжения будет равен а0. При
повороте на половину оборота самолет окажется в перевернутом
положении. Теперь скольжение снова будет нулевым, а угол атаки
’ -г з
станет орицательным. После поворота на угол — п.угол атаки станет
равным нулю, угол скольжения — отрицательным и равным — а0.
При повороте на полный оборот восстановится начальное положение.
Можно доказать, что графики изменения углов атаки и скольжения
будут иметь в этом случае вид гармоник с одинаковой амплитудой,
но сдвинутых по фазе на угол -у-. Связь между углами атаки и
скольжения в данном случае определяется только кинематикой.
328
Рис.
18.3, Инерционное взаимодействие
каналов рыскания и тангажа
Физическую сущность инерционного взаимодействия можно объ-
яснить наиболее наглядно, рассматривая движение самолета, сопро-
вождаемое вращением его относительно вектора скорости. В этом
случае вектор скорости центра масс V и вектор угловой скорости
вращения Q совпадают по направлению. Как видно из рис. 18.3
при а ф 0 центробежные силы инерции дают момент относительно
оси OZ, а при р Ф 0 момент относительно оси OY. Чтобы проанали-
зировать влияние этих моментов на устойчивость самолета, заменим
реальное распределение масс самолета условным, при котором вся
масса самолета будет сосредоточена в четырех дискретных точках
таким образом, чтобы соответствующие осевые моменты инерции
не изменились. Из равенства соответствующих осевых моментов
инерции реального самолета и самолета с условным распределе-
нием масс следует (см. рис. 18.3):
Jx — 2/njaa = 2m4d2;
— (18.1)
Jz = 2тасй.
При вращении самолета на сосредоточенные массы будут дей-
ствовать силы инерции
где /, — центростремительное ускорение, равное произведению ква-
драта угловой скорости вращения на расстояние от соответствую-
щей точки до оси вращения. Выразив эти расстояния через коор-
динаты а, Ь, с, а, получим
/пхй2а cos a; F2 — т&РЬ sin а; (18.2)
Fs = пцОРс sin Р; Г4 = m4£22 d cos р. (18.3)
Силы и Fa дадут момент относительно оси OZ, силы Fa, Ft — мо-
мент относительно OY.
Как видно из рис. 18.3, плечи сил инерции можно выразить
через углы атаки и скольжения, а также координаты точек, в ко-
11 А. Ф. Бочкарев и др. - 32®
Торых находятся сосредоточенные массы. Выполнив эту операцию,
получим
Mzi = 2ш2£22Ь2 sin a cos а — 2ш1£22а2 sin а cos а;
(18.4)
Myi — 2m3£22c2 sin p cos p — 2/n4£22 d2 sin p cos p.
С учетом формул (18.1)
Mzi = £22 sin a cos a (Jy — Jx);
Myi = £22 sin p cos p (Л - Jx). (I8,5)
Так как cox = £2 cos а или £2 cos p (см. рис. 18.3),
= —£2 sin a, g>z = £2 sin p,
инерционные моменты выразим через проекции угловой скорости
на связанные оси
Mzi = (Jy Jk)> _
Myi=^z(Jz-Jx).
Из формул (18.6) видно, что при маневрах со значительной уг-
ловой скоростью крена (бочках, переворотах через крыло, раз-
воротах) имеет место инерционное взаимодействие каналов рыскания
и тангажа — угловая скорость в одном из каналов приводит к по-
явлению инерционного момента, действующего в другом канале.
Чтобы уяснить последствия такого взаимодействия, запишем
формулы инерционных моментов несколько иначе. Полагая sin а =
= а, sin р = р, cos а = cos Р = 1, из уравнений (18.5) получим
Мгг = £22(/,-Л)а;
. М^ = £22(Л-/а)р.
Как видно, инерционные моменты, как и моменты аэродинами-
ческих сил, являются функциями углов атаки и скольжения. Сум-
мируясь с аэродинамическими моментами, они влияют на величины
производных Мг и Му, а следовательно, как бы изменяют степень
продольной и путевой статической устойчивости самолета
Д/п“:
S96a ’
“"‘I* Sql
(18.8)
Величины Д/л“ и Д/nJ тем больше, чем больше угловая скорость
вращения. Моменты инерции Jy, Jz значительно больше момента
инерции Jx. Поэтому А/п“ и Д/nJ будут всегда положительными.
Следовательно, инерционные моменты оказывают дестабилизирую-
щее воздействие на самолет, уменьшают его статическую устой-
чивость. С увеличением скорости вращения самолет, устойчивый
в прямолинейном полете, может стать неустойчивым. Величины
угловой скорости, при которых происходит потеря статической
ззо
устойчивости по каналам тангажа или рыскания, называются кри-
тическими. Меньшая из этих скоростей называется первой крити-
ческой скоростью, большая — второй. Какой канал определяет
первую, какой — вторую критическую скорости зависит от зна-
чений соответствующих осевых моментов инерции самолета и глав-
ным образом от «запасов» статической, устойчивости по каналам
тангажа и рыскания. Воспользовавшись упрощенной моделью само-
лета с сосредоточенными массами и рассматривая вращение такого
самолета относительно вектора скорости, получим, в первом при-
ближении, значения критических скоростей, приравнивая нулю
частные производные от суммарных моментов
Му = Муа -J- Myt и Mz = Mza -j- Mzl
по углам атаки и скольжения. Из уравнения
wfySql + 0£р р (Jz — Jx)—Q
найдем критическую скорость вращения £2|фр, определяемую по-
терей статической устойчивости в канале рыскания:
й«р ₽ = jx^x (I8-9)
и аналогично
где £2кр а — критическая скорость по каналу тангажа.
Эти приближенные значения критических скоростей, полученные
на основе грубой модели самолета, без учета влияния демпфирую-
щих моментов на статическую устойчивость, позволяют выявить
главное — устойчивость при вращении самолета зависит от скорости
вращения, степени путевой (флюгерной) и продольной статической
устойчивости, а также от распределения масс самолета, его эллип-
соида инерции, определяющего осевые моменты инерции относи-
тельно связанных осей. Становится понятным почему летная прак-
тика до второй половины сороковых годов не отмечала случаев
потери устойчивости самолетов из-за инерционного взаимодей-
ствия, а затем при испытаниях околозвуковых и сверхзвуковых
самолетов имели место тяжелые летные происшествия, вызванные
аэроинерционным взаимодействием (катастрофы самолетов F-100,
Х-2 и др.).
Околозвуковые и сверхзвуковые самолеты благодаря их специ-
фической геометрии и компоновке — более удлиненный фюзеляж,
тонкие крылья малого удлинения, размещение основных грузов
в фюзеляже — имели другое соотношение между осевыми моментами
инерции, более вытянутый эллипсоид инерции.
Если отношения JjJx и JjJx для дозвуковых самолетов были
порядка 2 ... 3, то для околозвуковых самолетов эти отношения
достигают 10 ... 15. Соответственно и разности моментов инерции
J,, — Л — значительно возросли, ЧТО привело к снижению
II*
331
критических скоростей, которые для самолетов прошлых лет были
просто недостижимы. Снижение критических скоростей (около- и
сверхзвуковых) было обусловлено и другим важным фактором —
значительным уменьшением флюгерной устойчивости и ростом про-
дольной статической устойчивости на больших скоростях. Благо-
даря этому приходится мириться с малыми запасами продольной
статической устойчивости на малых скоростях и флюгерной устой-
чивости на больших. Вследствие этого на малых скоростях полета
первая критическая скорость определяется, как правило, каналом
тангажа, а на больших — каналом рыскания.
Ранее была рассмотрена сугубо приближенная модель возму-
щенного пространственного движения самолета, исходный невозму-
щенный полет которого сопровождается вращением по крену.
На самом деле характер этого явления при маневре самолета
с большой угловой скоростью крена будет гораздо сложнее. Изме-
нения углов атаки и скольжения; вызванные кинематическим взаи-
модействием, приведут к изменению аэродинамических моментов
Да и Му Др. Балансировка самолета относительно нормальной
и поперечной осей нарушится, появятся соответствующие угловые
ускорения. Самолет будет поворачиваться с угловыми скоростями
и отслеживая изменение углов атаки и скольжения. При
этом будут действовать моменты демпфирования М^у(ау и Мгга>г.
Таким образом, в реальном полете с угловой скоростью крена будет
одновременно иметь место и аэродинамическое, и кинематическое,
и инерционное взаимодействие каналов продольного и бокового
движения. Поэтому, необходимо рассмотреть более сложную модель
пространственного движения самолета, учитывающую все пере-
численные факторы.
§ 18.1. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
САМОЛЕТА С УЧЕТОМ АЭРОИНЕРЦИОННОГО
ВЗАИМОДЕЙСТВИЯ
Опишем возмущенное движение самолета при маневре
с постоянной скоростью крена, сделав ряд допущений, упрощаю-
щих постановку задачи, но не вносящих изменений принципиаль-
ного характера в физическую картину явления. Во-первых, будем
считать скорость полета в процессе возмущенного движения по-
стоянной. Это вполне допустимо. Все негативные явления, свя-
занные с потерей устойчивости при маневре, развиваются чрезвы-
чайно быстро, поэтому достаточно исследовать начальную фазу
возмущенного движения, на протяжении которой скорость полета
практически не успевает измениться. Во-вторых, не будем учиты-
вать действие гравитационной силы, т. е. силы тяжести. Это не
окажет существенного влияния на начальную фазу возмущенного
движения, так как сила тяжести влияет, в основном, на медленную
составляющую возмущенного движения. Будем считать, что в исход-
ном режиме угловые скорости твигежк и рыскания равны нулю,
дз?
Тогда возмущения этих угловых скоростей будут равны самим
скоростям.
Уравнения движения запишем в связанной системе осей коор-
динат, приняв за связанные оси главные оси инерции самолета.
При этом центробежный момент инерции самолета будет равен
нулю наряду с центробежными моментами инерции Jxz и J,jz. Тогда
/71 (Vу Vг(Ох VRy>
МК - + Уь(0ж) == яг; (18
Jи&у Н- (*Лс *^г) г==
J z&z ~Ь х) ^у === Мг.
Здёсь Rv, Rz — проекции результирующей силы иа оси OY, 0Z.
Если принять, что тяга параллельна продольной оси самолета, то
это будут проекции аэродинамической силы Y и Z. Му, Мг — мо-
менты аэродинамических сил и тяги относительно связанных осей.
Будем считать, что момент тяги равен нулю. а>х — постоянная
угловая скорость крена. сой, сог — угловые скорости рыскания и
тангажа. Массу самолета т и осевые моменты инерции самолета Jx,
J,., Jг будем считать постоянными.
Благодаря допущениям о постоянстве составляющих скорости
центра масс и угловой скорости крена остальные два уравнения
движения могут быть отброшены.
Выразим проекции скорости центра масс на связанные оси через
углы атаки и скольжения и, считая углы атаки и скольжения ма-
лыми, получим
Vx « V;
Vy « — Va; (18.12)
Vz « V₽.
Здесь V = const (скорость полета приняли постоянной). С учетом
(18.12) уравнения равновесия сил примут вид
mV (— а — сйхр 4- сог) = У;
mV (Р — ©у — а>ха) = Z.
Решив эти уравнения и уравнения моментов относительно произ-
водных а, р, <вв, &г, получим
« = —-^г + ®г-(ожр;
' Mz ( Jy — Jx \
Jz \ Jг
. z (18.13)
₽ — + Wj + “зд;
л ^у , t Jz — Jx \
J* + \
833
При сделанных ранее допущениях система (18.13) представляет
собой замкнутую систему четырех нелинейных дифференциальных
уравнений с четырьмя неизвестными. Нелинейный характер уравне-
ний определяется здесь лишь тем, что аэродинамическая сила и
ее момент являются нелинейными функциями параметров движения
самолета. Линеаризуем эту систему в окрестности исходного ре-
жима — движения самолета с постоянной угловой скоростью крена,
постоянной скоростью центра масс и нулевыми скоростями рыска-
ния и тангажа. Угол атаки а° (t) и угол скольжения р° (/) будут
в этом режиме какими-то переменными величинами, характер которых
нас не интересует. Наша задача — анализ возмущенного движе-
ния. Полагая, что а = а° + Да, р = р° + Д0, ю — ©° + Д©
и считая, что при малых возмущениях силы У, Z и моменты Mv,
Мг являются линейными функциями вида
У = У°4-УаДа; z = z° + 23Ap;
= М° + М3Др + Му^у + Мухих-,
Мг = л£ + М?Да + M^<oz,
запишем уравнения (18.13) иначе
а° + Да = — + ©° - ©яр° - ~ Да + Д©2 - ©ХДР;
. О I А A1Z ( Jy ^х\ О I А |
©г + Д©г — - jT-—j (£>xdi>y + fat +
A4Mz I j j \
1 "Lz а / Jy Jx \ *
+ —Д©г—------------^©ЖД©4
Р° -J- Др = -J- ©° + <оха° Др Дюй 4_ “«Аа;
©° + А©, =©^ + ^-АР+
м^у it t \
+ А©£, 4- ( * * ) ШхА©г + -Г- ©х-
У ' J у • J у
Принимая во внимание, что
• о У0 . о п0.
а = —^4-©г-©хр,
л0__ М0 / Jy — JX \ 0.
©г — -j----------j t£>xU)y,
^=w+"S+"^
334
J $
й обозначив для краткости —~ ' = А; ——- — В;
J и J г
— ~м-
1 --- zvtz>
JZ
[zP
mV ~
My,
получим
Да = —У“Да + Дмг — ЮлДр;
Дй = Л1“Да 4 /И? 2Дсо, — 5(охДсои;
Г v (18.14)
Др = 2₽Др 4- Диг/ г со^Да;
Дсо^ = 7ЦРДр 4 МыууЬа>и 4- Лб^Дсо,, | Л1“*сож.
Уравнения (18.14) представляют собой линейные уравнения про-
странственного возмущенного движения самолета. В соответствии
с допущениями V = const, Jx — const, Jy = const, Jz ~ const,
m — const это линейные дифференциальные уравнения с постоян-
ными коэффициентами. Неизвестными в этих уравнениях являются
вариации — возмущения углов атаки, скольжения, угловых ско-
ростей рыскания и тангажа.
§ 18.2. ВЗАИМОДЕЙСТВИЕ ПРОДОЛЬНОГО И БОКОВОГО
ДВИЖЕНИЯ САМОЛЕТА ПРИ МАНЁВРЕ*
В § 18.1 показано, что при маневре с постоянной угловой
скоростью крена начальную фазу пространственного возмущенного
движения самолета можно описать системой четырех линейных диф-
ференциальных уравнений с постоянными коэффициентами. Следо-
вательно, устойчивость такого возмущенного движения можно
исследовать теми же методами, которые применялись ранее при
исследовании устойчивости изолированного продольного и изолиро-
ванного бокового возмущенного движения. Характеристическое
уравнение системы дифференциальных уравнений пространствен-
ного возмущенного движения. будет иметь тот же самый вид
Л4 4- а3ка + а3№ 4- 4- а0 = 0, (18.15)
но коэффициенты этого уравнения будут выражаться, конечно,
иначе. Они будут определяться характеристиками и продольного,
и бокового каналов.
Условия устойчивого пространственного движения будут выра-
жаться известными неравенствами 7? = а^а.^ — а% — а3а0 > 0;
а3 > 0, as > 0; Qi > 0; Оо > 0> последнее из которых является
условием апериодической устойчивости.
Расчеты устойчивости пространственного движения показывают,
что если выполняется это последнее условие, выполняются и все
33S
предыдущие. Поэтому остановимся подробнее на Выражении для
коэффициента а0. Получим его, раскрывая определитель системы
(18.14). Свободный^член характеристического уравнения (18.15)
имеет следующий вид:
а0 = - (в<& +7Й“ + (Лю* + Mf - М^) +
+ 4 (BZ₽ К") (Х?" - (18.16)
Как видно из выражения (18.16), на апериодическую устой-
чивость движения самолета с угловой скоростью крена влияет ве-
личина этой скорости. Если она мала (с£>ж->0), неравенство а0 > О
удовлетворяется при условиях
(лТ? + М2“гГ“) < 0; (18.17)
(18.J8)
Это означает, что самолет устойчив в пространственном движении
при наличии продольной статической устойчивости по перегрузке —
неравенство (18.17) и путевой (флюгерной) статической устойчи-
вости — неравенство (18.18).
При больших скоростях крена положение меняется. Чтобы
с большей наглядностью выявить особенности апериодической
устойчивости пространственного движения самолета при больших
угловых скоростях крена, выделим основную часть в выражении
свободного члена характеристического уравнения, отбросив второе
менее существенное слагаемое. Тогда приближенно’ а$ будет иметь
следующий вид:
аа = - (в<& + + 7И№) (л4 + Ml - M^ZP)'. (18.19)
Из полученного выражения видно, что несмотря на наличие
у самолета продольной статической устойчивости по перегрузке и
путевой (флюгерной) статической устойчивости, свободный член а0
при увеличении угловой скорости крена до некоторого критического
значения меняет знак с положительного на отрицательный. Это
значение угловой скорости называют первой критической скоростью
крена. При достижении такой скорости самолет при маневре выхо-
дит на границу апериодической устойчивости, а при небольшом
превышении ее становится апериодически неустойчивым.
В первом приближении моменту потери устойчивости соответ-
ствует изменение знака одного из множителей в выражении (18.19).
При дальнейшем увеличении скорости крена она достигает такой
величины, когда и второй множитель меняет знак — это вторая
критическая скорость. С превышением ее самолет становится снова
устойчивым. Наиболее типичная зависимость свободного члена ха-
рактеристического уравнения от угловой скорости крена показана
на рис. 18.4, а. Она характеризуется наличием двух критических
скоростей, приближенное значение которых можно получить, при-
336
Рис. 18.4. Типовые зависимости а0 =
= f W)
Рис. 18,5. Границы абсолютной устой-
чивости пространственного движения
равнивая нулю каждый из множителей выражения (18.19). Вели-
чина одной из этих скоростей определяется, как видно, характери-
стиками продольной устойчивости, другой — характеристиками бо-
ковой устойчивости. Обозначив критические скорости соответственно
через ©а и ©р, получим их приближенные значения
Как видно из формул (18.20) и (18.21) критические скорости
крена зависят от частот свободных колебаний в изолированном
продольном и изолированном боковом движении, а также от соот-
ношения между осевыми моментами инерции самолета. Меньшая из
этих скоростей — первая критическая скорость — может опреде-
ляться как характеристиками продольной, так и характеристиками
боковой устойчивости.
Могут иметь место случаи, когда критические скорости юа и
©р равны. Тогда зависимость свободного члена характеристического
уравнения от скорости крена будет иметь вид, изображенный на
рис. 18.4,6. Если строить зависимость а0 = /(©„) с'помощью не
приближенного, а точного выражения для а0 [формула (18.16)],
то можно получить и иной [характер этой зависимости (см.
рис. 18.4, в). Это будет случай, когда самолет не теряет устойчи-
вости в пространственном (движении при любых значениях ско-
рости крена, т. е. обладает абсолютной устойчивостью. Так как из
всего множества величин, входящих в выражение (18.16) и влия-
ющих на устойчивость самолета, с наименьшими трудностями под-
даются изменению^характеристики статической устойчивости, най-
дем границу абсолютной устойчивости ца плоскости т“, т^.
Для этого дадим конкретные числовые значения всем величинам
в формуле свободного члена (18.16), кроме т“ и т%. Варьируя зна-
337
чения угловой скорости крена, получим семейство гипербол, изобра-
женное на рис. 18.5. Огибающая этого семейства — парабола.
Она"и будет искомой границей устойчивости. Внутри этой границы
находится область абсолютной устойчивости пространственного
движения, т. е. такие значения тг и т'и, при которых самолет устой-
чив в пространственном движении при любых значениях угловой
скорости крена. Анализ области устойчивости показывает, что
самолет, обладающий абсолютной устойчивостью при некоторых
значениях т“, пгРу, будет приближаться к границе устойчивости и
может выйти за ее пределы, если будет увеличиваться разница
между этими значениями. Полагая, например, = const, ви-
дим, что при чрезмерном увеличении и уменьшении флюгерной
статической устойчивости изображающая точка на плоскости /и“,
т$, выходит за пределы зоны устойчивости. Если построить границы
устойчивости при различных значениях продольного и путевого
демпфирования, можно убедиться, что с увеличением демпфирую-
щих моментов область устойчивости увеличивается.
Из приведенных ранее данных следует, что проблема сохранения
устойчивости при маневре для современных самолетов стала акту-
альной и достаточно сложной по ряду причин. Это и изменение
инерционных характеристик современных самолетов вследствие их
специфической геометрии. Это и изменение аэродинамических ха-
рактеристик в связи с широким диапазоном скоростей и влиянием
сжимаемости на около- и сверхзвуковых скоростях полета. Как
известно, вследствие влияния сжимаемости продольная статическая
устойчивость самолета на больших скоростях растет, тогда как
флюгерная устойчивость падает. Как видно из рис. 18.5, различные
уровни продольной и флюгерной устойчивости не обеспечивают
устойчивости пространственного движения с угловой скоростью
крена. Неизбежна потеря устойчивости* приУскоростях,”* больших
первой критической и меньших второй критической скорости. Ма-
лая продольная статическая устойчивость на дозвуковых скоростях
и малая флюгерная статическая устойчивость на сверхзвуковых
скоростях снижают первую критическую скорость до величин,
достижимых при реальных маневрах самолета. Избежать*^этого
рациональной компоновкой удается далеко не всегда.
Обеспечение устойчивости пространственного движения совре-
менных сверхзвуковых самолетов достигается, в основном, вслед-
ствие применения автоматики, которая одновременно служит и для
улучшения иных характеристик самолета. Так нашедшие широкое
применение автоматы демпфирования, автоматы устойчивости на-
ряду с улучшением устойчивости и управляемости в продольном и
боковом движении позволяют обеспечить в рабочих диапазонах
режимов полета и устойчивость пространственного движения при
маневре.
Дополнительная литература
[2] с. 38—58, [8] с. 359, [12] с. 143—159.
338
Контрольные вопросы
1. Какова сущность кинематического, аэродинамического и инерционного
взаимодействий между продольным и боковым движениями?
2. Что произойдет при маневре самолета с угловой скоростью крена, большой
первой н меньшей второй критической скорости?
3. Чем определяются величины критических скоростей крена?
4. При каких условиях сохраняется устойчивость пространственного движения
независимо от величины скорости крена?
5. Почему проблема инерционного взаимодействия приобрела актуальность лишь
в_связи с созданием около- и сверхзвуковых самолетов?
ГЛАВА 19. КРИТИЧЕСКИЕ ФОРМЫ ДВИЖЕНИЯ САМОЛЕТА
На некоторых режимах полета движение самолета может
самопроизвольно принять форму, для прекращения которой от
летчика требуются полная мобилизация сил и, как правило, при-
менение особых, специфических приемов пилотирования. Такие
заведомо опасные формы обычно называют критическими формами
движения (или критическими состояниями движения), а режимы
полета, на которых они могут возникнуть — критическими режи-
мами полета. Критические режимы должны лежать вне области
нормальной эксплуатации самолета, однако при некоторых усло-
виях (ошибки пилотирования, отказы в системе управления, особо
интенсивные внешние возмущения) они все. же могут реализоваться
в полете. Поэтому оценка границ области критических режимов,
анализ поведения самолета при возникновении критических форм
движения и разработка способов их прекращения являются обяза-
тельным элементом исследования устойчивости и управляемости
любого вновь создаваемого самолета как при проектировании, так
и при летных испытаниях. При обучении летчиков и освоении ими
нового самолета также предусматривается получение необходимых
навыков пилотирования для прекращения критических форм дви-
жения.
Для новых типов самолетов, особенно самолетов новых схем
или с качественно новыми характеристиками, могут возникать свои,
новые критические формы движения.
Для современных самолетов характерны следующие типичные
критические формы движения: сваливание, штопор, аэрринерцион-
ное самовращение, срыв, самопроизвольное кренение 112]. Два
первых свойственны как дозвуковым, так и сверхзвуковым самоле-
там и возникают из-за потери устойчивости и авторотации на боль-
ших околокритических и закритических углах атаки. Аэроинерци-
онное самовращение характерно для скоростных маневренных
самолетов и возникает при превышении в процессе маневра крити-
ческой угловой скорости крена. Срыв самолета связан с потерей
боковой (флюгерной) устойчивости и возникает, как правило, при
превышении эксплуатационных значений числа М полета. Самопро-
извольное кренение возникает при превышении эксплуатационных
значений индикаторной скорости V» (скоростного напора), связано
339
с развитием упругих деформаций, и, прежде всего, с реверсом эле-
ронов.
Для критических форм движения самолета характерно сущест-
венное влияние нелинейности аэродинамических характеристик,
кинематических связей и т. п. Из-за этих нелинейных эффектов
развитие критических форм движения зависит от исходных условий
полета, начальных значений параметров движения, конфигурации
самолета и т. п.
§ 19.1. СВАЛИВАНИЕ САМОЛЕТА
Сваливанием самолета называют его непроизвольное
быстро развивающееся движение со значительной угловой скоро-
стью или амплитудой, обусловленное потерей устойчивости на боль-
ших околокритических и критических углах атаки. Область углов
атаки а и соответствующих значений суа (а), на которых возможно
сваливание, показана на рис. 19.1 (области 1 и 2).
Сваливание возможно как на положительных, так и на отри-
цательных углах атаки, и сопровождается переходом в их закрити-
ческую область. Выход на околокритические и закритические углы
атаки возможен в результате грубых ошибок пилотирования, при
полете в сложных метеоусловиях и т. п. К выходу на большие око-
локритические углы атаки может, например, привести действие
резкого восходящего порыва ветра, когда истинный угол атаки
определяется, как
, W /ю п
а — осисх —I » (19.1)
где W — скорость восходящего потока.
К выходу на критические углы а может привести и отказ в си-
стеме управления, связанный с быстрым неконтролируемым откло-
нением (уводом) руля высоты.
Рис. 19.1. Критические режимы полета
в координатах суа (а):
1 — режимы сваливания; 2 — режимы
штопора
Рис. 19.2. Влияние запаса7устойчнво-
сти на положение области сваливания
по углам атаки:
1 — малые; 2 — большие запасы устой-
чивости; а — область сваливания; б —об-
ласть неустойчивости на малых а
340
В начальный момент времени при сваливании движение проис-
ходит под действием дестабилизирующего момента тангажа, нара-
стающего с ростом угла атаки из-за неустойчивости самолета на
больших углах атаки по перегрузке (оп >0) или по углу атаки
« >0).
При достаточном запасе устойчивости самолета в линейной
области эти явления возникают только вблизи суа тах и акр из-за
срыва потокана крыле (область а рис. 19.2). В некоторых случаях
(например, из-за концевого срыва для стреловидного крыла, при
небольших запасах устойчивости в линейной области) неустой-
чивость по углу атаки может возникнуть и при углах атаки, мень-
ших критического, соответствующего cva гаах и акр (см. рис. 19.2,
область б). В этом случае сваливание может происходить и на таких
умеренных ас, если запас устойчивости самолета недостаточен.
Дальнейшее развитие движения при сваливании зависит от
начальных условий, характера возмущения, схемы и конфигурации
самолета, положения органов управления.
При сваливании на скоростях, близких к минимальной, пере*
грузка пуа близка к единице, боковые возмущения невелики н
движение развивается, в основном, в продольной плоскости.
При сваливании на больших скоростях, а также при наличии
в момент выхода на околокритические углы атаки значительного
скольжения или угловой скорости крена (сваливание при выполне-
нии маневра) из-за несимметричности обтекания консолей крыла
в процессе движения возникают значительные моменты крена и
рыскания, и сваливание характеризуется быстро развивающимся
апериодическим пространственным движением с нарастанием угла
крена.
Для сваливания характерна быстрая потеря высоты, что осо-
бенно опасно на режимах взлета и захода на посадку.
Обычные приемы пилотирования (попытка парировать вращение
по крену с помощью элеронов и т. п.) при сваливании неэффек-
тивны и могут оказывать противоположное действие, способствуя
развитию пространственного движения, вплоть до перехода самолета
в штопор, т. е. к другой, более опасной критической форме движе-
ния. При правильном пилотировании в процессе сваливания тре-
буется прежде всего резким отклонением органов управления тан-
гажом уменьшить углы атаки до допустимых и лишь затем пари-
ровать возникшее вращение самолета по крену и рысканию.
Углы атаки сваливания определяются при специальных испыта-
ниях. Выход на ас при нормальной эксплуатации недопустим.
Для предупреждения сваливания на самолете устанавливают
сигнализаторы выхода на опасные углы атаки, автоматические
средства управления, ограничивающие угол атаки или управляю-
щее воздействие летчика, если оно может вывести самолет на такие
углы.
При эксплуатации самолета ограничивают предельные углы
атаки допустимыми значениями с заданным запасом по отношению
к углу сваливания.
341
Ё процессе проектирования й доводки самолета границы сва-
ливания можно сдвинуть в сторону больших углов атаки повыше-
нием устойчивости самолета по перегрузке в области значитель-
ных а, как собственной, так и обеспечиваемой автоматикой (послед-
нее, как правило, требует введения в систему управления датчиков
углов атаки). Конструктивными средствами, предупреждающими
сваливание, являются правильный выбор формы крыла в плане
и его крутки, исключающий появление концевого срыва на допу-
стимых углах атаки, отсутствие у самолета боковой асимметрии и т. п.
§ 19.2. ШТОПОР
Одной из наиболее опасных критических форм движения
самолета является штопор.
Штопором называюг движение самолета по нисходящей спира-
леобразной траектории малого радиуса на значительных закрити-
ческих углах атаки, развивающееся в результате авторотации крыла
и дестабилизирующего инерционного момента. Область углов атаки,
при которых развивается штопор, показана на рис. 19.1 (область 2).
Попадание в штопор происходит под действием возмущений или
ошибок пилотирования, приводящих к появлению угловой скорости
крена (о.х на околокритических углах атаки. На этих углах атаки
при появлении угловой скорости (ох на крыле возникает момент
самовращения (авторотации) A4xx(ox >0, направленный в отличие
от соответствующего момента на малых углах атаки (демпфирую-
щего момента крена Л4ххсох < 0) на увеличение сох.
Появление момента самовращения связано с падением коэффициента
подъемной силы профиля суа пр при достижении в сечении крыла
критического местного угла атаки акр. пр. Местный угол атаки
в сечении крыла при вращении самолета по крену с угловой скоро-
стью (Од. складывается из угла атаки самолета ос. и дополнитель-
ного угла
Давр = ^> (19.2)
где zIip — расстояние от продольной оси самолета до рассматрива-
емого сечения крыла. Добавочный местный угол Асс.вр суммируется
с а для нолукрыла, идущего вниз, и вычитается из а для нолукрыла,
идущего вверх. Ес Л и угол атаки самолета а далек от критического,
то увеличение местного угла атаки приводит к увеличению подъем-
ной силы профиля в рассматриваемом сечении, а уменьшение мест-
ного а — к падению суа. На опускающемся полукрыле подъемная
сила возрастает, па идущем вверх — уменьшается, что приводит
к появлению дополнительного момента крена, пропорционального
(ох и направленного против вращения, Мхха>х < 0 (см5гл. 10) —
демпфирующего момента крена (рис. 19.3).
| Если же исходный угол атаки близок к критическому, увели-
чение местного угла атаки на идущем вниз полукрыле на Аавр
342
Рис. 19.3. Влияние угла атаки на
«А
момент МХХ(ИХ крыла:
1 — демпфирование; 2 — самовращение
Скольжение
Рис. 19.4. Влияние угла скольже-
ния па характеристики штопора:
1 область авторотации
приводит к уменьшению подъемной силы. В то же время на закри-
тических а (см. рис. 19.3, т. 2) уменьшение угла атаки на Лавр для
опускающегосй полукрыла связано с увеличением с„а (а). В резуль-
тате при вращении по крену с угловой скоростью сох момент ТИ/'со*
направлен по вращению, Л4™хсох >0 (момент авторотации).
Момент авторотации может значительно возрасти при наличии
«внешнего» (всторону, противоположную вращению), скольжения, что
расширяет границы возможного возникновения штопора (рис. 19.4).
> Под действием момента авторотации вращение самолета при
штопоре развивается до появления спиральной формы движения
с быстрой потерей высоты и установившимся вращением самолета
относительно всех осей.
Штопор может быть крутым (более 45° к горизонту) и плоским
(менее 45°), нормальным (пуа >0, летчик в положении «головой
вверх») и перевернутым (nva <; 0, «головой вниз»), устойчивым и
неустойчивым (прекращается при установке рулей в нейтральное
положение или нет).
Вывод самолета из штопора, как правило, требует специаль-
ных действий летчика, отличающихся от его привычных действий
при нормальном пилотировании, и зависящих от вида штопора.
Характерной особенностью выхода самолета из штопора является
замедленная (через несколько витков) реакция па управляющие
воздействия летчика.
Штопорные характеристики самолета определяются в процессе
специальных исследований и испытаний.
§ 19.3. АЭРОИНЕРЦИОННОЕ САМОВРАЩЕНИЕ, СРЫВ
Как было рассмотрено при анализе пространственного
движения, интенсивное вращение самолета по крепу (сод. 0)
приводит, за счет аэроинерционного взаимодействия продольного
343
Рис. 19.5. Изменение по числам М
полета для различных ос:
1 — область сверхзвукового срыва
и бокового движения, к уменьшению степени устойчивости самолета
на малых и умеренных углах атаки. При достаточно больших, так
называемых критических угловых скоростях крена сож;.р устой-
чивость теряется (см. гл. 18), и развивается движение с резким
изменением углов аир, большой амплитудой перегрузки, действу-
ющей на самолет, и нарастанием самой угловой скорости сож (см.
рис. 19.4, область ао<;0). Эта форма движения называется аэро-
инерционным самовращением. Она характерна для скоростных
самолетов, компоновка которых определяет значительное инерцион-
ное взаимодействие (большие отношения JVIJX, \JZ/JX) и является
для них одной из опасных форм движения.
Инерционное самовращение возникает самопроизвольно при ин-
тенсивных маневрах по крену на малых и отрицательных углах
атаки и продолжается как после постановки органов управления
в нейтральное положение, так и при отклонении их против движения.
При самовращении для летчика крайне затруднена простран-
ственная ориентация. По некоторым признакам самовращение по-
хоже на штопор, но в отличие от штопора угловые скорости сож
при самовращении выше, а углы атаки, даже местные, не дости-
гают критических, так что вращение обусловлено не автороти-
рующим моментом, а инерционным взаимодействием.
Для предотвращения выхода на аэроинерционное самовращение
в полете ограничивают допустимые угловые скорости сож доп, осо-
бенно при выполнении маневров на околозвуковых и сверхзвуко-
вых скоростях и при отрицательных углах атаки.
Еще’одна критическая форма движения — срыв — связана с не-
устойчивостью самолета в боковом движении.
Неустойчивость самолета по углу скольжения может возникнуть
в полете при нулевых или малых угловых скоростях крена вслед-
ствие потери путевой (флюгерной) устойчивости. Степень путевой
статической устойчивости пг^ зависит, в первую очередь, от эффек-
тивности вертикального оперения (ВО) и сильно изменяется в за-
висимости от числа М полета и углов атаки. На больших сверх-
звуковых скоростях эффективность ВО (т. е. момент /т$в.о<0)
падает. В то же время растет дестабилизирующий эффект фюзеляжа
(т^Ф >0). На больших углах атаки ВО может затеняться, что
также уменьшает степень путевой устойчивости.
В результате при выходе на режимы, на которых самолет не-
устойчив по рысканию, при малых возмущениях быстро возрастают
углы скольжения. Как следствие возникает момент крена (за счет
nix #= 0) и начинается интенсивное пространственное вращение
самолета — срыв, с резким возрастанием боковой перегрузки,
30
уходом по курсу и необычной реакцией самолета на отклонение
рулей.
Наиболее характерен сверхзвуковой срыв — срыв, развивающийся
при достижении в полете чисел М, на которых теряется путевая
устойчивость (рис. 19.5).
§ 19.4. НЕУПРАВЛЯЕМОЕ ДВИЖЕНИЕ КРЕНА
ПРИ РЕВЕРСЕ ЭЛЕРОНОВ
Ряд критических форм движения может быть связан
с потерей устойчивости или управляемости самолета из-за упругих
деформаций конструкции. Наиболее характерной формой такого
критического движения является неуправляемое движение крена
при реверсе элеронов. Такое движение может возникнуть при пре-
вышении в полете по каким-либо причинам допустимых значений
индикаторной скорости Уг (т. е. скоростного напора q = pV2/2),
что приводит к росту аэродинамических нагрузок и упругих дефор-
маций элементов планера самолета. Нагрузки на элементы конструк-
ции планера возрастают и при росте углов атаки.
Рассмотренное в гл. 10 явление реверса элеронов возникает при
превышении допустимой (критической) по реверсу скорости полета.
Если самолет имеет боковую асимметрию (а значит, элероны
отклонены даже в прямолинейном полете), то при превышении кри-
тической по реверсу скорости возникает самопроизвольное боковое
движение по крену и скольжению при обратной реакции на попытку
летчика парировать крен путем дополнительного отклонения эле-
ронов. Аналогично развивается движение крена при превышении
критической скорости реверса и при боковом возмущении.
Особенно опасно неуправляемое движение крена при слабой
или обратной реакции самолета по крену на отклонение руля на-
правления (см. гл. 16).
В этом случае из-за взаимодействия движения крена и сколь-
жения при реверсе элеронов теряется боковая управляемость и
самолет резко переходит к снижению по спиралеобразной траекто-
рии с увеличением скорости, что усугубляет опасность ситуации.
Для предупреждения самопроизвольного кренения из-за реверса
элеронов необходимы как обязательное выдерживание ограничений
на скорость полета при эксплуатации самолета, так и правильный
выбор жесткости крыла и места установки элеронов при проектиро-
вании, а также использование на больших скоростях других орга-
нов поперечного управления — не элеронов, а интерцепторов, диф-
ференциального стабилизатора и т. п.
Дополнительная литература
[12] с. 264 - 295, [5] с. 83 - 92, 193—200.
Контрольные вопросы
1. Перечислите основные критические режимы полета.
2. Объясните возникновение момента авторотации при штопоре.
3. В каких случаях возможен реверс элеронов?
345
ПРИЛОЖЕНИЕ
Таблица 1
Направляющие косинусы для преобразования составляющих векторов
(по ГОСТ 20058—80)
Нормальная система координат
Г OYg ozg
Связанная ох cos чр cos ft sin ft —sin ф cos ft
OY sin чр sin у — — cos чр sin ft.cos у cos 0 cos у cos ф sin у + + sin ф sin ft cos у
OZ sin ф cos у + + cos ф sin ft sin у —cos ft sin у A cos ф cos у — —sin ф sin 0 sin у
Скоростная оха cos фа cos fto sin fta —sin фа cos fta
OYa —cosi|?asin ftacos y0+ + sin фо sin ya COS fta COS yo cos фа sin ya + + sin фа81п vacos yo
OZa cos 4pasin ftasin yo + + sin фа cos yo —COS fta Sin y& cos фа cos vo — — sin tpaSin vasin yn
Траекторная охк cos ф cos 0 sin 0 —sin ф cos 0
OYK —созф sin 0 cos 0 sin ф sin 0
ozK з1пф 0 cos a sin ft — —sin a cos 0 cos у созф
Полусвязанная ОХ„ cos a cos ft cos <p — —sin a (sin ф sin у — —sin ft cos ф cos y) —cos a cos ft sin q> — —sin a (cos ф sin у + + sin v sin ф cos y)
OYe sin a cos ft cos ф + + cos a (sin ф sin у — —sin ft cos ф cos у) sin a sin ft + + cos a cos ft cos у —sin a sin ф cos ft + + cos а (совф sin у + + sin ft sin ф cos y)
oze sin 0 cos ф sin у + + sin ф cos у —cos ft sin у cos ф cos у — —sin ft sin Ф sin у
346
Таблица It
t 1 Связанная система координат
OX OY OZ
Скоростная оха cos a cos P —sin a cos P sin P
0Y а sin a cos a 0
oza —cos a sin p sin a sin P cos P
Траекторная охк cos a cos P —sin a cos P sin P
0Yv sin a cos ya + + cos a sin p sin ya cos a cos va — — sin a sip p sin ya —cos p sin Ya
0ZK sin a sin — —cos a sin p sin cos a sin Ya + + sin a sin p cos Ya —cos p sin Ya
Полусвязанная 0Х„ cos a —sin a 0
0Ye sin a cos a 0
OZ, 0 0 1
Примечание. Для траекторной системы соотношения даяы без учета ветра. При наличии ветра использовать ас, ₽с, ус или двойной переход от связанных осей к траекторным через нормальные. _ • _ _
f Скоростная система коордияат
oxa 0Ya OZa
Траекторная охк 1 0 0
0YK 0 COS Ya —sin Ya
oz„ 0 Sin Ya COS Ya
Полусвязанная oxe cos P 0 —sin p
0Ye 0 1 0
oze sin P 0 COS P
Примечание. Без ветра. Прн наличии ветра использовать двойяой переход от скоростяой к траекторной системе через нормальную.
347
Таблица Ill
Характеристики стандартной атмосферы (значения параметров округлены)
Высота Н, м Температура Т, К Давление Р, Па Плотность р, кг/м8 Относитель- ная ПЛОТ- НОСТЬ А = р/Ро Скорость звука я, м/с
0 288,2 101 330 1,23 1,000 340,4
1 000 281,7 89 880 1,11 0,903 336,6
2 000 275,1 79 490 1,01 0,821 332,7
3 000 268,6 70 130 9,09- IO’1 0,739 328,7
4 000 262,1 61 660 8,19-Ю"1 0,666 324,7
5 000 255,6 54 050 7,37-10-1 0,599 320,7
6 000 249,1 47 210 6,60- ю-1 0,537 316,6
7 000 242,6 41 090 5,90-10-1 0,480 312,4
8 000 236,1 35 650 5,26-10-1 0,428 308,2
9 000 229,6 30 790 4,67-10-1 0,380 303,9
10 000 223,2 26 290 4,14-10-1 0,337 299,6
11 000 216,7 22 690 3,65-10-* 0,297 295,2
12 000 216,7 19 390 3,12-10-1 0,254 295,2
13 000 216,7 16 570 2,67-10-1 0,217 295,2
. 14 000 216,7 14 160 2,28-10-1 0,185 295,2
15 000 216,7 12 110 1,95-10-1 0,159 295,2
16 000 216,7 10 350 1,67- 10~Л 0,136 295,2
17 000 216,7 8 850 1,42-10"1 0,115 295,2
18 000 216,7 7 560 1,22-10"1 0,099 295,2
19 000 216,7 6 470 1,04- IO"1 0,084 295,2
20 000 216,7 5 530 8,89-10~2 0,072 295,2
21 000 216,7 4 730 7,60-10~2 0,061 295,2
22 000 216,7 4 040 6,50-10“2 0,058 295,2
23 000 216,7 3 460 5,56-10-2 0,045 295,2
24 000 216,7 2 950 4,75-10~2 0,039 295,2
25 000 216,7 2 530 4,06» 10-? 0,033 295,2
СПИСОК ЛИТЕРАТУРЫ
jf j vZi _ t 'i -
,?сг H2(T
1. Аржанников H. С., Садекова Г. С. Аэродинамика летательных
аппаратов. М.: Машиностроение, 1984. 359 с.
2. Бюшгенс Г. С., Студнев Р. В. Аэродинамика самолета. Динамика про-
дольного и бокового движения. М.: Машиностроение, 1979. 349 с.
3. Бюшгенс Г. С., Студнев Р. В. Динамика пространственного движения
самолета. М.: Машиностроение, 1967. 226 с.
4. Гуськов Ю. П., Зайганов Г. И. Управление полетом самолетов. М.: Маши-
ностроение, 1980. 213 с.
5. Калачев Г. С. Самолет, летчик и безопасность полета. М.: Машинострое-
ние, 1979. 222 с. >
6. Лебедев А. А., Чернобровкин Л. С. Динамика полета беспилотных летатель-
ных аппаратов. М.: Машиностроение, 1973. 618 с.
7. Механика полета (инженерный справочник)/С. А. Горбатенко, Э. М. Мака-
шов, Ю. Ф. Полушкин и др. М.: Машиностроение, 1969. 420 с.
8. Мхитарян А. М. Динамика полета. М.: Машиностроение, 1978. 428 с.
9. Остославский И. В. Аэродинамика самолета. М.: Оборонгиз, 1957. 491 с.
10. Остославский И. В., Стражева И. В. Динамика полета. Траектории лета-
тельных аппаратов. М.: Машиностроение, 1969. 500 с.
11. Остославский И. В., Стражева И. В. Динамика полета. Устойчивость
и управляемость летательных аппаратов. М.: Машиностроение, 1965. 467 с.
12. Пашковский И. М. Устойчивость и управляемость самолета. М.: Маши-
ностроение, 1975. 328 с.
13. Практическая аэродинамика маневренных самолетов/Под ред. Н. М. Лы-
сенко. М.: Военнздат, 1977. 439 с .
14. Проектирование самолетов/С. М. Егер, В. Ф. Мишин, Н. К. Лисейцев
и др.; Под ред. С. М. Егера. М.: Машиностроение, 1982. 616 с.
15. Скрипничеико С. Ю. Оптимизация режимов полета самолетов. М.: Маши-
ностроение, 1975, 191 с.
I
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автомат демпфирования (см. демпфер)
134, 184, 296
— продольной устойчивости 135, 185,
296
— путевой устойчивости 213, 315, 324
— регулирования управления (АРУ)
133, 297
Атмосфера стандартная (СА) 36, 60,
116, 348
Аэродинамический расчет самолета 48
Аэроииерционное самовращение 345,
Б
Балансировка < 1молета 42, 129, 191
Балансировочная кривая 188, 192—
196,. 200, 202
— поляра 42, 205
Балансировочные отклонения органов
управления 42, 129, 188, 191, 198,
202, 205, 214, 221, 222
Барограмма набора высоты 57
Боевой разворот 112
Боковое возмущенное движение 299,
303, 314
Быстрое боковое движение 311, 316,
322
В
Ветер 37, 59, 96
Ветровые возмущения 284
Вертикальное оперение (ВО) 239, 161,
163, 178
Взлет самолета нормальный 115
---прерванный 120
---продолженный 120
Вираж правильный 109, 222
— предельный 110
— установившийся 109
— форсированный 111
350
Возмущающие воздействия 6, 284
Возмущенное движение, общие урав-
нения, определение 7, 245, 248, 249
-----продольное 260, 265
— ~~ боковое 299, 303, 311, 314
— — короткопериодическое 266, 272,
284
— —- длинное периодическое 269, 288
----- крена 312
----- рыскания 312
-----спиральное 307, 310
-----быстрое боковое 311, 314, 316,
322
Волновой подхват 203
Вращение Земли 15, 27, 29
Время затухания переходного про-
цесса 258, 278, 279, 319, 323
— набора высоты 57, 82
— полета 79, 80, 87, 94, 97
— разгона 68
— срабатывания 279
Высота полета барометрическая 37, 59
----- безопасная 115
— — геометрическая 23, 36
-----истинная 36
-----энергетическая 67, 71
Г
Гармоничность управления 220
Горизонтальная приемистость 68, 103
Горизонтальное оперение (ГО) 143,
154, 237
Горка 107
Границы устойчивости бокового дви-
жения 305, 309
—продольного движения 263, 266,
д
Дальность полета маршевого 75, 77,
79, 86, 92
— — потерянная 84
--- практическая 89
--- расчетная 95
— — скоростная 97
— •— техническая 88
Двигатели воздушно-реактивные 44
Движение крена 312
Демпфер тангажа 134, 184, 296
— рыскания 315
Деформации упругие 173, 345
Дивергенция 175
Динамика самолета 4
Дистанция взлетная 116
— посадочная 121
— сбалансированная взлетная 121
Длиннопериодическое движение 269,
288
3
Заброс по перегрузке 279
Зависание самолета по крену 320
Запас топлива аэронавигационный
(АНЗ) 87, 88
----располагаемый 87, 89, 93, 95
Затраты топлива в полете 88, 92, 94
Заход на посадку 121
Земная система координат 14
К
Качество аэродинамическое 41, 50,
62, 207
Конфигурация самолета 9, 43, 227
Короткопериодическое движение 265,
266, 272
Косинусы направляющие 20, 346
Коэффициент использования манев-
ренных возможностей 280
— передаточный рулевого тракта 134,
189
— передаточный самолета по пере-
грузке 276, 277
— подъемной силы 25, 38, 39, 42
— расхода ручки на перегрузку 199
Крейсерский полет 73, 74, 79, 90
Критерии устойчивости 127—128, 130,
252, 253
Критическая скорость принятия реше-
ния при взлете 121
Критическая угловая скорость крена
331, 336, 344
Критические формы движения 339
Л
Летные данные (характеристики) 7
Летно-технические । характеристики
(ЛТХ) 7
Линеаризация уравнений движения 245
«Ложка» балансировочной кривой 196
М
Масса самолета 30, 35, 53, 76, 87, 89,
93, 95
Матрицы направляющих косинусов 20,
346
Маневр самолета 8, 99, 104, 105, 107,
108, 112
Маршевый полет 73, 76, 77, 79, 87,
89, 91, 93, 97
Метод мощностей 62
Метод тяг 49, 56, 68
Механизация крыла 43, 116, 227
Момент аэродинамический крена 26,
159—162
—.— рыскания 26, 162—166
— — тангажа 26, 138—157
----шарнирный 171
Н
Набор высоты 54, 63, 65, 66, 81—
85, 89
Нагрузка полезная (коммерческая) 95
Напор скоростной 25, 37, 46
Нормальная система координат 16
О
Обратная реакция самолета по крену
226, 324
Опорное движение 6, 34, 245
Органы управления 137
Ось системы координат базовая 17
------- боковая 18
------- нормальная 16
-------подъемной силы 18
------- поперечная 16
------- продольная 16
------- скоростная 18
П
Параметры самолета 35
Планирование 61, 70
Плечо оперения вертикального 161,
163, 239
----горизонтального 144, 237
Перегрузка боковая 30, 100
— нормальная 31
— нормальная скоростная 30, 48, 55,
65, 100, 102, 108
— поперечная 31
351
J
Перегрузка продольная 31
— располагаемая 101
— тангенциальная 30, 48, 100
— установившегося маневра 104, 109
— эксплуатационная 47, 101
Передаточный коэффициент рулевого
тракта 134, 189
-----самолета по перегрузке 276, 277
Передаточная функция самолета в бо-
ковом движении 257, 315, 317, 323
-----в продольном движении 257,
273, 275, 285, 290
Переходная функция по перегрузке 279
Пикирование 105
Подобие режимов полета 60
Показатели маневренности 99—104
Поляра балансировочная 42, 207
— перегрузочная 102
— самолета 40, 207
Посадка самолета 121
Потери на балансировку 42, 207
Потолок самолета динамический 71
—----практический 58
— •— статический (теоретический) 62,
58
Пробег 122
Продольное возмущенное движение
248, 260, 263, 265
Профиль набора высоты (снижения)
66, 81, 82
Р
Радиус действия самолета максималь-
ный 94
------- скоростной 97
Разбег 116 ;
Разворот 109
— боевой 112
Расход топлива километровый 74
— — секундный 30, 72, 73
— •— удельный 45, 73
----- часовой 73
Реверс элеронов 183, 345
Режим полета 8
•----балансировочный 42
второй 54
динамический 71
-----квазиустановившийся 48
----- крейсерский 73, 90
-----первый 54
-----скоростной 96
-----установившийся 8, 48
— работы двигателя 46
С
Сваливание 38, 39, 340
Связанная система координат 16
Сдвиг ветра 37
352
Сила аэродинамическая 25, 37
— лобового сопротивления 25, 39
— подъемная 25, 38
— тяжести 26
Система координат 14, 16
Система отсчета 14
Система улучшения устойчивости и
управляемости (СУУ) 134
Скорость безопасная при взлете 115
— воздушная (истинная) 18
— земная 16
Скорость индикаторная 37
— крейсерская 74
— критическая принятия решения при
взлете 121
— максимальная 46, 52
— минимальная 46, 51
— наивыгоднейшая 50
— набора высоты наивыгоднейшая 57
— отрыва 115
— планирования 61
— приведенная 59
— сваливания 38, 51
— угловая крена критическая 336
— эволютная 46
Скоростной напор 25, 37, 46
Скоростная система координат 18
Скос потока у оперения 144, 154
Снижение 60, 69
Средняя аэродинамическая хорда
(САХ) 139
Срыв самолета 345
Стартовая система координат 15
Степень статической устойчивости 130,
182, 184, 187, 209, 211
Спиральное движение 307, 310
Т
Траекторная система координат 19
Турбулентные возмущения 284
Тяга двигателя 24, 44
--- потребная 49
---располагаемая 46, 49
Тяговооруженность 35
У
Угол атаки 18
— горизонтального оперения 144
— крена 17
— наклона траектории 19
— пути 19
— рыскания 17
— скольжения 18
— тангажа 17
Угловая скорость крена критическая
336
Управляемость самолета поперечная
214, 219, 224 , 223, 318, 321
— — продольная 188, 199, 277, 291
----путевая 214, 219, 223, 322
Уравнения движения бокового 249, 299
----быстрой фазы 311
----возмущенного линеаризованные
247
----длиннопериодического 270
----кинематические 22
---- короткопериодического 267
---продольного 248
----углового (вращения, моментов)
31, 243
----центра масс (поступательного
движения, сил) 26, 28, 30, 48, 65,
105, 108, 243
Ф
Фокус самолета 140
ц
Центр давления 140
Центровка самолета 233
Ч
Частотные характеристики 259
Ш
Штопор 342
Э
Энергетическая высота 67
— скоросподъемность 68
Энергетические возможности самолета
68
г
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию.................................... 3
Введение.......................................................... 4
Часть I
Механика полета самолета.............................................. 11
Глава 1. Уравнение движения самолета.................................. 11
§ 1.1. Применение общих положений механики к составлению
уравнений движения самолета................................ 11
§ 1.2. Системы координат, применяемые в динамике полета. . . 14
§ 1.3. Формула преобразования проекций вектора в матричном
виде....................................................... 20
§ 1.4. Геометрические соотношения между углами............. 21
§ 1.5. Кинематические уравнения............................ 22
§ 1.6. Силы и моменты, действующие на самолет.............. 24
§ 1.7. Уравнения движения центра масс самолета............ 26
§ 1.8. Динамические уравнения движения самолета относи-
тельно центра масс..................................... 31
§ 1.9. Особенности анализа опорного движения самолета. . . 33
Глава 2. Исходные, данные для расчета траекторий самолетов........ 35
§ 2.1. Условия полета.................................. 36
§ 2.2. Аэродинамические характеристики самолета........ 37
§ 2.3. Характеристики двигателей, применяемых иа самолетах 44
§ 2.4. Ограничения Допустимых режимов полета........... 43
Глава 3. Установившиеся режимы полета............................. 48
§ 3.1. Установившийся горизонтальный полет. Расчет летных
характеристик методом тяг......................... 48
§ 3.2. Установившийся набор высоты. Скороподъемность само-
лета ..................................................... 54
§ 3.3. Характеристики установившихся режимов прн различ-
ных атмосферных условиях 59
§ 3.4. Установившееся снижение. Планирование....... 60
§ 3.5. Метод мощностей............................. 62
Глава 4. Неустановившиеся квазипрямолииейные режимы полета........ 64
§ 4.1. Неустановившийся набор высоты. Основные соотноше-
ния для расчета неустановившегося квазипрямолинейного
режима полета............................................. 65
§ 4.2. Неустановившееся снижение самолета................. 69
§ 4.3. Динамические режимы полета......................... 71
Глава 5. Затраты топлива и времени на различных режимах полета... 72
§ 5.1. Затраты топлива н времени в горизонтальном установив-
шемся полете............................. 73
§ 5.2. Затраты топлива и времени на квазипрямолинейных эта-
пах полета с переменной энергией...................... 80
354
Глава 6. Дальность и продолжительность полета.......................... 86
§6.1. Полные затраты топлива и времени в полете прн заданной
программе ................................................. 86
§ 6.2. Минимизация полных затрат топлива в полете. Техниче-
ская, практическая дальность. Радиус действия.... 88
§ 6.3. Скоростная дальность. Минимум времени полета. Стои-
мостные показатели......................................... 96
Глава 7. Маневренные характеристики самолета........................ 99
§ 7.1. Располагаемая перегрузка и изменение уровня энергии
при маневре. Общие показатели маневренности. . . . 100
§ 7.2. Характерные маневры самолета в вертикальной плоско-
сти ..................................................... 104
§ 7.3. Маневрирование самолета в горизонтальной плоскости.
Разворот и вираж самолета........................... 108
§ 7.4. Пространственный маневр самолета .................. 112
Главой. Взлетные и посадочные характеристики самолета............... 115
§ 8.1. Взлет самолета. Начальный набор высоты............. 115
§ 8.2. Посадка самолета................................... 121
§ 8.3. Способы улучшения взлетно-посадочных характеристик
самолета.................................................. 123
Ч а С Т Ь II
Устойчивость и управляемость самолета................................ 126
Глава 9« Устойчивость движения и управляемость самолета............... 126
§9.1. Понятие устойчивости и управляемости............... 126
§ 9.2. Статическая устойчивость и управляемость самолета 128
§ 9.3. Управление движением самолета..................... 131
Глава Ю. Моменты, действующие иа самолет в полете..................... 136
§ 10.1. Аэродинамический момент таигажа самолета в устано-
вившемся прямолинейном полете............................ 138
§ 10.2. Дополнительные моменты тангажа в криволинейном не-
установившемся полете.................................... 153
§ 10.3. Результирующий момент таигажа в неустановившемся
криволинейном полете..................................... 157
§ 10.4. Боковые силы и моменты в прямолинейном установив-
шемся полете со скольжением.............................. 157
§ 10.5. Дополнительные боковые моменты в криволинейном
движении. Результирующие боковые моменты самолета 167
§ 10.6. Шарнирные моменты органов управления самолетом 171
§ 10.7. Влияние статических упругих деформаций на величину
моментов, действующих на самолет в полете. Изгиб
и кручение крыла, деформация фюзеляжа и оперения 173
Глава !! Статическая устойчивость самолета в продольном движении.
Продольная балансировка. Статическая управляемость. . . 179
§ 11.1. Продольная статическая устойчивость самолета. . . . 179
§ 11.2. Балансировка самолета и характеристики статической
управляемости в продольном движении ....... 188
§ 11.3. Потери на балансировку. Балансировочная поляра. .'. 205
Глава 12. Статическая устойчивость самолета в боковом движении']
Боковая балансировка самолета. Характеристика поперечной и
рутевой статической управляемости 208
' 355
г
§ 12.1. Статическая устойчивость самолета в боковом движении 208
§ 12.2. Балансировка самолета в установившемся боковом дви-
жении. Характеристика поперечной и путевой статиче-
ской управляемости ....................................... 214
Глава 13. Особенности балансировки самолета на взлете и посадке. . . . 227
§ 13.1. Особенности определения моментов тангажа самолета
при полете вблизи земли................................... 227
§ 13.2. Продольная балансировка самолета при взлете и по-
садке .................................................... 229
§ 13.3. Боковая балансировка при посадке с боковым вектором 232
Глава 14. Ограничение допустимых центровок. Требования к параметрам
оперения при проектировании........................................... 233
§ 14.1. Ограничение допустимых центровок самолета........ 233
§ 14.2. Требования к параметрам горизонтального оперения
при проектировании ....................................... 237
§ 14.3. Требования к параметрам вертикального оперения . . . 239
§ 14.4. Требования к поперечной статической устойчивости и
управляемости самолета ................................... 241
Ч а с т ь III
Динамика возмущенного движения самолета............................... 243
Глава 15. Уравнения возмущенного движения самолета и методы их иссле-
дования . . . -....................................................... 243
§ 15.1. Линеаризация уравнений возмущенного движения са-
молета ................................................... 245
§ 15.2. Разделение уравнений возмущенного движения само-
лета. Уравнения продольного и бокового движения. . . 248
§ 15.3. Математические методы исследования динамики возму-
щенного движения самолета .'............................. 249
Глава 16. Динамика продольного возмущенного движения самолета. . . 260
§ 16.1. Собственное (свободное) продольное возмущенное дви-
жение самолета. Условия устойчивости опорного дви-
жения .................................................... 263
§ 16.2. Выделение быстрой и медленной составляющей продоль-
ного возмущенного движения................................ 265
§ 16.3. Собственное продольное короткопериодическое возму-
щенное движение самолета. Условие устойчивости опор-
ного движения............................................. 266
§ 16.4. Собственное продольное длиннопериодическое движение
самолета. Условие устойчивости опорного движения 269
§ 16.5. Реакция самолета в продольном движении на откло-
нение органов управления ................................. 272
§ 16.6. Влияние конструктивных параметров самолета и режима
полета на продольную устойчивость и управляемость 291
§ 16.7. Улучшение устойчивости и управляемости самолета
средствами автоматики..................................... 293
Глава 17а Динамика бокового возмущенного движения.................... 299
§ 17.1. Уравнения и структура бокового возмущенного движе-
ния ...................................................... 299
§ 17.2. Устойчивость самолета в боковом движении........ 305
§ 17,3. Приближенный анализ быстрого бокового движения ЗЦ
350
§ 17.4. Реакция самолета на отклонение органов управления
боковым движением ....................................... 314
§ 17.5. Улучшение характеристик боковой устойчивости и управ-
ляемости с помощью автоматики............................ 324
Глава 18. Динамика пространственного движения. Аэроинерциониое взаимо-
действие ........................................................... 326
§ 18.1. Уравнения возмущенного движения самолета с учетом
аэроинерционного взаимодействия.......................... 332
§ 18.2. Взаимодействие продольного и бокового движения
самолета при маневре .................................... 335
Глава 19« Критические формы движения самолета. ...................... 339
§ 19.1. Сваливание самолета............................... 340
§ 19.2. Штопор............................................ 342
§ 19.3. Аэроинерциониое самовращение, срыв................ 343
§ 19.4. Неуправляемое движение крена при реверсе элеронов 345
Приложение .......................................................... 346
СпиСок литературы.................................................... 349
Предметный указатель................................................. 350
Александр Филиппович Бочкарев,.
Витан Викторович Андреевский,
Виталий Михайлович Белоконов,
Валентин Иванович Климов,
Вячеслав Михайлович Ту ретин
АЭРОМЕХАНИКА САМОЛЕТА
Динамика полета
Редакторы: В. Г. Гатаеоеу, В. А. Ермолаев
Художественный редактор В. В. Лебедев
Технический редактор Т. И. Андреева
Корректоры: А. А. Снастина, Л. Е. Сонюшкина
ИБ № 4631
Сдано в набор 24.01.86. Подписано в печать
21.08.86. Т-08093. Формат 60Х90*/к. Бумага
типографская № 1. Печать высокая. Гарнитура
литературная. Усл. печ. л. 22,6-Усл. кр.-отг. 22,6.
Уч.-иад. л. 24,88. Тираж 7860 эка. Заказ № 10.
Цена 1 р. 10 к.
Ордена Трудового Красного Зкамени издатель-
ство «Машиностроение» 107076, Москва,
Стромынский пер., 4
Ленинградская типография № 6 ордена Трудового
Красного Знамени Ленинградского объединения
«Техническая книга» нм. Евгении Соколовой
Союзполиграфпрома при Государственном коми-
тете СССР по делам издательств, полиграфии и
книжной торговли.
JP3I44, г. Ленинград, ул. Моисеенко, 1Q,
УВАЖАЕМЫЕ ЧИТАТЕЛИ!
Среди книг по летательным аппаратам, выпускаемых
издательством «Машиностроение» в 1986 г., Вы можете
приобрести следующие издания:
Журавлев В. Ф., Бальмонт В. Б. Механика шарикоподшипников
гироскопов. 18 л.
Рассмотрена механика гироскопов летательных аппаратов (ЛА)
Описаны упругие свойства гироскопов и их элементов, общая жесткост-
ная модель, удобная для инженерных расчетов. Исследованы статика,
кинематика и динамика иеидеальных шарикоподшипников. Предло-
жена теория вибрации гироскопов с иеидеальиыми шарикоподшип-
никами главной оси, изучены возможности снижения вибрации, влия-
ние собственной вибрации на уходы астатического и динамически на-
страиваемого гироскопа.
Для научных работников. Книга будет также полезна инженерно-
техническим работникам, занятым созданием гироскопов ЛА, а также
других машни, и приборов с шарикоподшипниковыми опорами.
Еидогур А. И., Вайнберг М. В., Иерусалимский К- М. Сотовые
конструкции: Выбор параметров и проектирование. 15 л.
Рассмотрены вопросы рационального проектирования агрегатов
авиационных конструкций, выполненных из панелей с сотовым запол-
нителем. Изложены методы определения механических характеристик
сотовых заполнителей и несущей способности панелей и оболочек.
Особое внимание уделено выбору оптимальных параметров панелей
и агрегатов и вопросам конструирования узлов и соединений.
Для инженеров, занятых проектированием конструкций летатель-
ных аппаратов.
УВАЖАЕМЫЕ ЧИТАТЕЛИ!
Среди книг по летательным аппаратам, выпускаемых
издательством «Машиностроение» в 1986 г., Вы можете
приобрести следующие издания:
Козарук В. В., Ребо Я. Ю. Навигационные зргатические комп-
лексы самолетов. 18 л.
Рассмотрена эффективность обеспечения безопасности полетов
навигационными эргатическими комплексами (НЭК) системы экипаж-
самолет, которые включают в себя человека-оператора и технические
средства, применяемые для навигации самолетов. Обоснованы критерии
технической, точностной и целевой эффективности НЭК, связывающие
показатели надежности и точности навигационных систем со свойствами
человека-оператора. Показаны пути повышения эффективности НЭК.
Для авиационных инженеров, разрабатывающих и эксплуатиру-
ющих навигационное оборудование.
Брондз Л. Д. Технология и обеспечение ресурса самолетов. 13 л.
Рассмотрены пути обеспечения ресурса деталей и агрегатов само-
летов технологическими средствами, главным образом упрочнением
поверхности пластическим деформированием. Приведены примеры
влияния технологии производства на ресурс конструкции. Даны реко-
мендации по выбору рациональной технологии при проектировании и
по ее применению при изготовлении конструкций.
Для конструкторов и технологов авиационной промышленности.
Книга будет полезна инженерам других отраслей машиностроения.