/







































































































































































































































Author: Кутыловский М.П.
Tags: техника средств транспорта электротехника городской транспорт электрический транспорт
Year: 1970




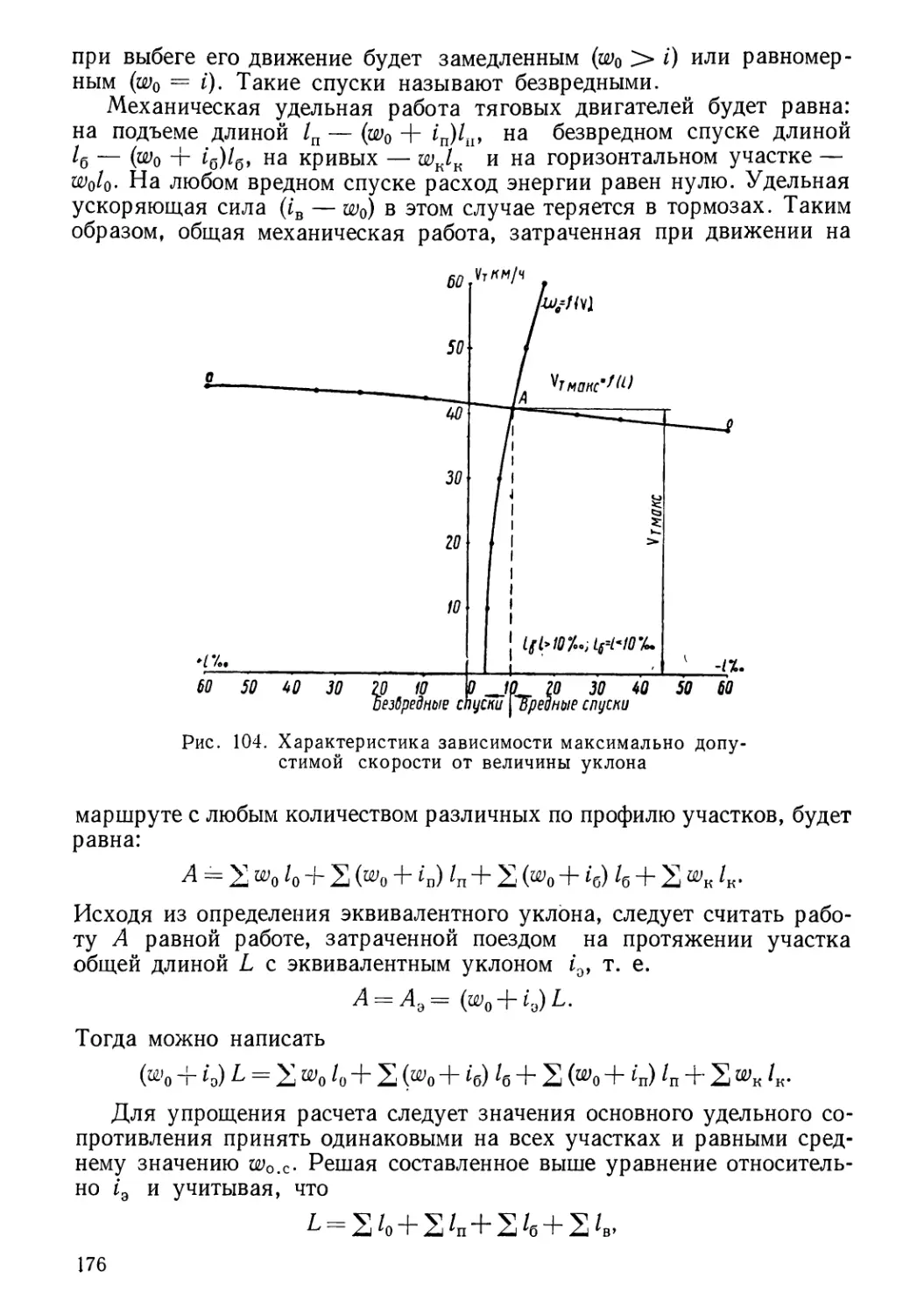
Text
Мшям
;ж
Й»М
ЖЖ'
ж
ММ
. .. . ; -ч ,? >.
ЭЛЕКТРИЧЕСКАЯ ТЯГА .
- • л . :' ' < в^шяжж ашЖйййий
.«W aw ЧЧ <W
ЛЙЖЙММГ* ......
'V^' ч-'Й' |?1>1''|^^.';’|Д 'рО.^\','ДУ''' ЖД|,|b’'ri?''v'
' ЖЖЖ й • : .
. г — . <- /,' Ч' 'V ''Й'Ч.?,.-:"' лч чу -ч-^ч •.>ч.7.:<--.'
Жчч'<''Л'
ЖЖ Ж :ЙЙАчмг^Чл.:гЧЧ1->;.))<\Ч. <л.,;>Ч<|М(е;
М. П. КУТЫЛОВСКИЙ
ЭЛЕКТРИЧЕСКАЯ ТЯГА
(городской электрический транспорт)
Издание третье, переработанное и дополненное
Допущено
Управлением кадров и учебных заведений Министерства коммунального хозяйства РСФСР в качестве учебного пособия для учащихся техникумов по специальности «Эксплуатация, ремонт и электроснабжение городского электрического транспорта»
ИЗДАТЕЛЬСТВО ЛИТЕРАТУРЫ ПО СТРОИТЕЛЬСТВУ
Москва 1970
3-18-4
298—70
В книге рассматриваются вопросы теории движения трамвайных поездов и троллейбусов, а также тяговые расчеты. Приводятся сведения об электроснабжении городского транспорта, даются рекомендации по снижению расхода электроэнергии на движение. Показан пример тягового расчета для курсового проектирования.
Книга предназначена для учащихся электромеханических техникумов и может быть использована инженерно-техническими работниками горэлектро-транспорта.
ПРЕДИСЛОВИЕ К ТРЕТЬЕМУ ИЗДАНИЮ
Книга «Электрическая тяга на городском электротранспорте» вышла в свет в 1954 г. Второе издание ее (1964 г.) было значительно переработано и дополнено. Третье издание отличается от предыдущего порядком изложения основ электрической тяги и содержанием разделов. Так, в первом разделе приведены элементарные сведения об электроснабжении городского транспорта, тяговых подстанциях, сетях и подвижном составе. В третьем и четвертом разделах дано решение типовых примеров для лучшего усвоения изучаемого материала каждой главы. В четвертом разделе показан типовой пример тягового расчета для курсового проектирования. В связи с сокращением объема и дополнением новым материалом некоторые вопросы изложены менее подробно, чем во втором издании, например глава XIV «Нагревание тяговых двигателей».
Все формулы и расчеты даются в Международной системе единиц (СИ). В этой системе (ГССТ 9867—61) основными единицами измерения приняты: масса в кг, длина в м, время в сек, сила электрического тока в а, термодинамическая температура в градусах Кельвина, сила света в свечах. Производными единицами являются, например: скорость в м/сек, ускорение в м/сек2, сила в н (единица, кратная ньютону, килоньютон). Для перевода в системы МКГСС и МКСА приведена табл. 1.
Таблица 1
Единицы измерения, применяемые в тяговых расчетах
Наименование величин и условное обозначение Единицы измерения, их сокращенное обозначение Формулы перевода
система СИ (ГОСТ 9867 — 61) системы МКГСС и МКСА и внесистемные единицы (ГОСТ 7664 — 61 и 8033 — 56)
Сила F, W, В Ньютон (н) Килограмм (кГ) 1 кГ ж 9,81 н
Вес G Килоньютон (кн) Тонна (Т)* 1 Т ~ 9,81 кн
Удельная сила /, w, Ъ Ньютон на килоньютон (н/кн) Килограмм на тонну* (кГ/Т) 1 кГ/Т—\ н/кн
Масса т Килограмм (кг) Тем (кГ • сек2)/м 1 тем ^9,81 кг
Время t Секунда (сек) Секунда (сек) —
Скорость V Метр в секунду (м/сек) Километр в час (км/ч)*— метр в секунду (м/сек) 1 км/ч = т^м/сек
Длина 1 Метр (м) Метр (м) —
Ускорение а Метр на секунду в квадрате (м/сек2) Метр на секунду в квадрате (м/сек2) —
Угол Радиан (рад) Градус (град) л ,0 = Г8оРаа
Угловая скорость со Радиан в секунду (рад/сек) Радиан в секунду (рад/сек) —
Обороты в минуту (об/мин) л 1 o6/muh = ~3q рад/сек
Угловое ускорение Момент инерции / Радиан на секунду в квадрате (рад/сек2) Килограмм-квадратный метр (кг • м2) Радиан на секунду в квадрате (рад/сек2) Килограмм-метр-секунда в квадрате (кГ-м-сек2) кг- м2 = кГ м- сек2/9,81
Продолжение табл. 1
Наименование величин и условное обозначение Единицы измерения, их сокращенное обозначение Формулы перевода
система СИ (ГОСТ 9867—61) системы МКГСС и МКСА и внесистемные единицы (ГОСТ 7664—61 и 8033—56)
Вращающий момент М Нютонометр (« • м) Килограмм-метр (кГ-м) 1 кГ -ж = 9,81 н-м
Мощность Р Ватт (вт)=дж/сек = кг*м2/сек,3 Ватт (вт) —
Электрический ток / Ампер (а) Ампер (а) —
Количество электричества Q Ампер-секунда (а-сек) (кулон) Ампер-секунда (а-сек) (кулон) —
Электрическое напряжение и э. д. с. U, Е Вольт (в) Вольт (в) —
Работа и энергия А Джоуль (дж=кг-м2/ сек2)=ватт-секунда (вт-сек) Ватт-секунда (вт-сек) Ватт-час (е/п-ч)* Киловатт-час (квт-ч) Килограммометр (кГм) 1 в/п-ч = 3,6-103 дж 1 кв/п-ч = 3,6-106 дж 1 кГм = 9,81 дж
Электрическое сопротивление Р ом ом —
Магнитный поток Ф Вебер (вб) Вебер (вб) —
Индуктивность L Генри (гн) Генри (гн) —
Количество теплоты Джоуль (дж) Калория (кал) 1 кал = 4,1868 дж
Плотность Килограмм на кубический метр (кг/м3) Тем на кубический метр кГ • сек2/м* кг/м3 = кГ • сек2/м*
Примечание. При выполнении тяговых расчетов предпочтительно применять измерения в Международной системе единиц (система СИ). Однако в пособии одновременно с системой СИ на всех электромеханических характеристиках использована система МКГСС, так как существующие в настоящее время паспортные данные и характеристики тяговых электродвигателей составлены применительно к этой системе; кроме того, применены внесистемные единицы измерения: км/ч* об/мин и др. (в таблице сл отмечены звездочкой).
РАЗДЕЛ ПЕРВЫЙ
ОБЩАЯ ЧАСТЬ
Глава I. ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРИЧЕСКОМ ТРАНСПОРТЕ
§ 1. КЛАССИФИКАЦИЯ ВИДОВ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТА
По назначению и характеру работы электрический транспорт подразделяют на магистральный, пригородный, промышленный и городской. В настоящем пособии рассматриваются общие теоретические положения, справедливые для всех видов электрического транспорта, а практические примеры и тяговые расчеты даются применительно к городскому электрическому транспорту.
На рис. 1 приведена схема классификации видов городского электрического транспорта по двум признакам: по способу передачи энергии к тяговым электродвигателям и по типу используемого пути.
По способу передачи энергии к тяговым электродвигателям виды тяги можно подразделить на три группы: / — электрическая тяга с передачей энергии от внешнего источника энергии — электростанции; II — автономная электрическая тяга — источник энергии установлен на самом подвижном составе; III — комбинированная электрическая тяга — сочетание двух первых групп. Первая группа в свою очередь подразделяется на три вида: контактный, бесконтактный и кабельный. Основным видом является подвижной состав с контактным токоприемником. Бесконтактное (индукционное) питание находится в стадии опытных исследований, а питание тяговых двигателей непосредственно через кабель нашло лишь ограниченное применение в промышленном транспорте. Вторую группу можно подразделить на различные виды по признаку первичного источника энергии (например, тепловой двигатель, химическая аккумуляторная батарея, гальваническая батарея — статический генератор, механический аккумулятор, атомный генератор). В теплоэлектрическом подвижном составе тяговый электродвигатель получает энергию от электрического генератора, приводимого в действие тепловым двигателем (например, дизелем). Это — дизельный электробус. Экипаж, в котором источником энергии для питания электродвигателя служит электрическая аккумуляторная батарея, получил название электромобиля. Возможно применение экипажа с двумя источниками энергии— тепловым двигателем и аккумуляторной батареей. Примером комбинированного вида электрической тяги является троллейный электромобиль — экипаж, работающий как троллейбус на трассе с контактной
сетью, но оборудованный аккумуляторной батареей для движения по участкам пути, не имеющим контактной сети. Более сложный экипаж— троллейный автобус, приводимый в движение на участках с контактной сетью тяговым электродвигателем, а на не оборудованных контактной сетью участках — двигателем внутреннего сгорания.
По типу пути электрический транспорт можно подразделить на рельсовый, монорельсовый (с одним рельсом) и безрельсовый, апо расположению пути — на наземный, надземный и подземный.
^Городской электрический транспорт |
Ш
Комбинированная система электротяги
(Табельный
Автономная злектричес-кая тяга
Электрическая тяга питание от внешней энергосистемы
Первичный источник энергии
Способ передачи энергии из сети __________к подвитому составу__________ Контактный Тесконтант-токоприемнин (индукиионньш]
Трамвай ^Метрополитен | ^нтробус ^лентромобйль
1. Тепловой двигатель
и Т.Контактный токоприемник
/ Аккумуляторная батарея и
1 Контактный токоприемник
ТроллейныСА Троллейный автобус Электромобиль
| Рельсовый | [ Безрельсовый ~|
Рис. 1. Схема классификации видов городского электрического транспорта
Подвижным составом рельсового транспорта являются электровозы и электровагоны — моторные и прицепные, а безрельсового — троллейбусы, электробусы, электромобили.
Электрической тягой называется вид тяги, когда движение подвижного состава осуществляется при помощи электрического привода — тяговых электродвигателей.
Электрическая тяга с передачей энергии от электростанций может осуществляться при различных системах тока и разных напряжениях. В зависимости от рода тока, подводимого к подвижному составу, различают системы электрической тяги постоянного, трехфазного и однофазного тока пониженной или нормальной частоты.
§ 2. ЭЛЕКТРИЧЕСКАЯ ТЯГА В СИСТЕМЕ ГОРОДСКОГО ТРАНСПОРТА
Проблема транспорта не имеет одинакового решения для всех городов: в каждом случае необходим анализ технико-экономических показателей каждого вида транспорта применительно к условиям данного города. Выбор одного или нескольких видов транспорта зависит от плотности пассажиропотоков данного города. Существенное влияние при этом оказывают местные условия: энергетические ресурсы города, его планировка, профиль пути, качество дорожных покрытий, климат. Поэтому прежде всего следует установить, при помощи каких транс
портных средств технически возможно осуществить заданные перевозки; затем надо выявить размер средств, необходимых для строительства и эксплуатации возможных видов транспорта, и для окончательного выбора сравнить варианты решения транспортной проблемы по их экономическим показателям.
В городах с большими пассажиропотоками (таких как Москва) необходимы все виды транспорта; в городах со средними пассажиропотоками — трамвай, троллейбус и автобус (или два вида из них); при малых пассажиропотоках целесообразно применение троллейбуса или автобуса. Примером городов, в которых интенсивно развиты все виды транспорта и четко организована их совместная эксплуатация, могут служить Москва, Ленинград и Киев, где отдельные виды транспорта взаимно дополняют друг друга.
Виды городского транспорта существенно отличаются друг от друга техническими и экономическими показателями.
Общими преимуществами электрической тяги (трамвай, троллейбус, метрополитен) по сравнению с тепловой тягой (автобусом) являются: 1) значительная экономия топлива, в том числе высокосортного (при питании от гидроэлектростанции экономия топлива составляет 100%); 2) возможность возврата (рекуперации) энергии в сеть при движении подвижного состава на спусках и торможении перед остановками; 3) отсутствие затрат на транспортирование топлива (электрические станции обычно находятся у мест добычи топлива); 4) отсутствие выделений отработанных газов, вредных для людей и зеленых насаждений, и лучше условия труда для обслуживающего персонала; 5) эксплуатационная надежность электрического тягового двигателя, способность выносить значительные перегрузки и более простой уход за ним по сравнению с двигателем внутреннего сгорания.
Общий недостаток электрической тяги — зависимость работы подвижного состава от состояния контактной сети, подстанций и электростанций. Недостатки наземного электрического транспорта: 1) вредное влияние процесса токосъема на работу радиоприемников и телевизоров и 2) загромождение улиц и площадей контактной сетью, а также рельсовыми путями трамвая. Недостаток рельсового транспорта (наземного и подземного) — наличие блуждающих токов в земле, вызывающих коррозию подземных сооружений.
Трамвай в сравнении с автобусом имеет следующие преимущества: а) значительно большая провозная способность — примерно в 1,5— 2,5 раза в зависимости от типа вагонов трамвая и автобуса; б) меньшие эксплуатационные расходы; в) меньшая себестоимость перевозок на трамвае по сравнению с автобусом; г) больший срок амортизации подвижного состава (25—30 лет против 7—10 лет у автобуса); д) для городов с суровыми климатическими условиями (длительные зимы с гололедами) большая надежность и безопасность движения. Однако автобус для того же объема перевозок требует меньших капиталовложений в связи с отсутствием таких устройств, как контактная и кабельная сети, тяговые подстанции и рельсовый путь, хотя для автобуса необходимы усовершенствованные дорожные покрытия. Движение
отдельных автобусов происходит независимо, в то время как остановка одного из вагонов трамвая вызывает задержку всех следующих за ним.
В троллейбусе сочетаются конструктивные элементы автомобиля и вагона трамвая. В нем устранены или смягчены недостатки, присущие автобусу. При этом используются преимущества электрической тяги без затрат на устройство рельсовых путей. Троллейбус, как и автобус, требует усовершенствованного дорожного покрытия. К недостаткам троллейбусного транспорта относятся: а) наличие двухпроводной контактной сети и двух токоприемников, что приводит к некоторому снижению скорости движения на спецчастях контактной сети и усложняет сеть; б) более высокий удельный расход электроэнергии по сравнению с трамваем (в 2—3 раза); в) меньшая величина максимального уклона, допустимого по условиям сцепления, особенно для городов, где возможен гололед.
Метрополитен требует значительных капиталовложений по сравнению с трамваем, но отличается более высокими скоростями движения и большей провозной способностью. Провозная способность метрополитена, в зависимости от числа вагонов в поезде и типа подвижного состава, в 2—3 раза больше, чем у трамвая. Эксплуатационная скорость его в 2—2,5 раза выше. С точки зрения безопасности движения метрополитен намного лучше наземных видов городского транспорта.
Особенно нежелательна эксплуатация в городах видов транспорта, выделяющих отработанные газы, вредно влияющие на здоровье людей. Этот вопрос можно решить заменив автобусы и автомобили автономными и комбинированными видами электрического транспорта. Применение троллейного электромобиля позволило бы, кроме того, устранить сложные контактные сети на площадях и улицах. Однако комбинированный вид транспорта не получил широкого применения вследствие большого веса, высокой стоимости и значительных эксплуатационных расходов по аккумуляторам.
Глава II. ЭЛЕКТРОСНАБЖЕНИЕ ГОРОДСКОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТА
§ 3. ПРОИЗВОДСТВО И ПЕРЕДАЧА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
Электрические виды транспорта обычно получают энергию от тепловых или гидроэлектрических станций и линий передачи, предназначенных для снабжения энергией всех отраслей народного хозяйства. На электрических станциях энергия вырабатывается трехфазными генераторами при напряжении 6—10 кв и частоте тока 50 гц. В большинстве случаев электрические станции обслуживают крупные районы и передают энергию на расстоянии в сотни и даже тысячи километров. Это определяет экономическую целесообразность передавать энергию при высоком напряжении. В СССР для линий электропередачи приме
няются напряжения от 6 до 500 кв и выше в зависимости от дальности передачи. Для повышения напряжения энергии, вырабатываемой генераторами до напряжения линий передачи, служат повысительные трансформаторы, устанавливаемые на электрических станциях. Электрическая энергия высокого напряжения через распределительные устройства поступает в линии передачи, а затем на понизительные
Рис. 2. Принципиальная схема энергосистемы
районные электростанции РЭС-\ и РЭС-2; гидроэлектростанция ГЭС; теплоэлектростанция ТЭЦ-, трансформаторные подстанции ТП-1, ТП-2, ТП-3 и ТП-4; линии электропередачи: Л4 — на 220 кв, кольцевая линия Л1—ЛЗ — на 110 кв, линии Л4 — Л8 — на 110 кв, Л9 — на 35 кв и Л10 —Л 1 2 — на 10 кв; тяговая преобразовательная подстанция ТПП; распределительный пункт РП; трансформаторные пункты ТП
трансформаторные подстанции в районе потребления, где напряжение понижается до необходимой величины. От этих подстанций через распределительные сети питаются потребители электрической энергией, работающие при более низком номинальном напряжении.
Электрические станции обычно работают параллельно на общие сети, образуя так называемые энергетические системы. Это увеличивает надежность энергоснабжения за счет взаимного резервирования и улучшает использование оборудования. На рис. 2 приведена прин
ципиальная схема энергосистемы. Четыре электрические станции РЭС-1, РЭС-2, ГЭС и ТЭЦ снабжают электроэнергией высоковольтное кольцо— линии электропередачи Л1—ЛЗ на НО кв. Подстанция ТП-2 с двухобмоточными трансформаторами напряжением 220/110 кв связывает сети двух систем 220 и 110 кв. Эта подстанция соединена линией Л4 на 220 кв с гидростанцией и линией Л7 на ПО кв с теплоэлектрической станцией. Подстанция ТП-2—проходная с трехобмоточными трансформаторами 110 на 10 и 35 кв. С ее шин 10 кв питается трансформаторный пункт ТП, который служит для питания промышленной и городской сети района. Кроме того, с шин 10 и 35 кв могут получать питание тяговые преобразовательные подстанции и крупные промышленные предприятия. Подстанция ТП-3 служит для питания тяговой подстанции ТПП, городской и промышленной сети района М. Кроме того, шины НО кв этой подстанции используются для передачи энергии с районной электростанции РЭС-2 через линию Л6. Подстанция ТП-4 является тупиковой. Она соединена линией Л8 с районной электростанцией РЭС-1 Эта подстанция питает распределительный пункт РП. Такие пункты в городе располагают в центре нагрузок потребителей и служат для питания тяговых подстанций городского электротранспорта, жилых и общественных зданий, небольших промышленных предприятий и наружного освещения города.
Трехфазные линии передачи могут выполняться подземными или воздушными. Подземные кабельные линии применяются при напряжении до 10 кв, как правило, в городах, где прокладка воздушных линий нецелесообразна.
§ 4. СИСТЕМА ПОСТОЯННОГО ТОКА В КОНТАКТНОЙ СЕТИ
Производство и передача энергии осуществляется на трехфазном переменном токе, а распределение и использование ее для целей тяги — преимущественно на постоянном токе. Поэтому между линией передачи и контактной сетью, подводящей энергию к подвижному составу, необходимо иметь промежуточное звено — преобразовательную тяговую подстанцию, понижающую напряжение и преобразующую трехфазный переменный ток в постоянный.
Основными элементами этой системы являются: 1) трехфазная линия электропередачи (воздушная или кабельная) для передачи энергии от трансформаторных подстанций или непосредственно с электростанции к тяговым подстанциям; 2) тяговые преобразовательные подстанции; 3) контактная и рельсовая сети (для троллейбуса — только контактная), осуществляющие непрерывный подвод энергии постоянного тока к движущемуся по линии подвижному составу; 4) трамвайные вагоны и троллейбусы, на которых происходит преобразование электрической энергии в механическую работу, затрачиваемую на движение подвижного состава. На рис. 3 показана принципиальная схема электроснабжения городского электротранспорта.
Преобразовательная тяговая подстанция обычно оборудована: а) распределительным устройством трехфазного
тока высокого напряжения, предназначенным для приема энергии с линии передачи и распределения ее между трансформаторами преобразовательных агрегатов и агрегатов собственных нужд подстанции; б) трансформаторами для понижения напряжения, подводимого к
Трамваи троллривус
Рис. 3. Принципиальная схема электроснабжения городского транспорта
Т— трансформатор; Ш — шины; ПК и ОК—положительные и отрицательные кабели питающих линий; КВ — кремниевый выпрямитель; КС — контактная сеть; PC—рельсовая сеть
преобразователям; в) выпрямителями для преобразования тока; г) распределительным устройством выпрямленного тока, предназначенным для распределения энергии постоянного тока, получаемой от преобразователя, между отдельными линиями, подводящими энергию к контактной сети.
На рис. 4 приведена структурная схема тяговой преобразовательной подстанции. Питание тяговой подстанции электроэнергией про-
положительные отрицательные
Рис. 4. Структурная схема тяговой преобразовательной подстанции (ТПП)
изводится от высоковольтной сети трехфазного тока напряжением 6 или 10 кв. Через вводы (на рис. 4 видны два ввода) электроэнергия поступает на сборные шины распределительного устройства высокого напряжения. Сборные шины служат для приема энергии и ее распределения по агрегатам. Шины обычно выполняются в виде голых проводников (медных, алюминиевых или стальных) прямоугольного или круглого сечения. Вводы и агрегаты снабжены автоматическими
высоковольтными выключа
телями и разъединителями. Э л ектр оизмер ител ьные п р и -
Q) 1а
фРквт
боры автоматической защиты оборудования от токов короткого замыкания и перегрузок питаются от измерительных трансформаторов тока и напряжения. Защита оборудования от перенапряжений выполняется высоковольтными разрядниками. Все эти аппараты и приборы размещаются в распределительном устройстве высокого напряжения. С шин высокого напряжения энергия поступает в трансформаторы ТР и затем в преобразователи ПР, в качестве которых обычно применяются статические преобразователи — ртутные и кремниевые выпрямители. В распределительном устройстве выпрямленного тока размещаются сборные шины постоянного тока (на 600 в), измерительная и защитная аппаратура. К положительной и отрицательной шинам присоединена сеть питающих линий, каждая из которых состоит из положительного и отрицательного кабеля.
Собственные нужды подстанции (СН) состоят из понижающих трансформаторов и сборных шин (ШСН) на 127—220 в. К шинам присоединен зарядный агрегат (ЗА), служащий для зарядки аккумуляторных батарей (А Б), и все потребители переменного тока собственных нужд подстанции (ПСИ). От аккумуляторной батареи получают питание все потребители
собственных нужд постоянного тока (ПСН).
Тяговые подстанции городского наземного электротранспорта можно классифицировать по различным признакам: 1) по назначению — трамвайные, троллейбусные, трамвайно-троллейбусные; 2) по типу преобразователей — с ртутными и кремниевыми преобразователями; 3) по количеству агрегатов — одноагрегатные и многоагрегатные; 4) по способу резервирования; 5) по способу управления (например, автоматические); 6) по конструктивному оформлению — стационарные и передвижные.
Нагрузка на сборных шинах тяговой подстанции не остается постоянной (рис. 5), так как непрерывно изменяется количество поездов, находящихся в районе подстанции, а также величина тока, потребляемого каждым поездом. Номинальная мощность тяговых подстанций в зависимости от числа агрегатов составляет 600—5000 кет, а коэффициент полезного действия 0,85—0,87.
Номинальное напряжение на шинах постоянного тока тяговых подстанций по ГОСТ составляет 600, 825, 1650 и 3300 в. На подстан-
0 2 4 6 8 10 12 16 18 10 22 t H
Рис. 5. Нагрузка подстанции а—кривая мгновенных значений тока на шинах; б--типичный график нагрузки за сутки в рабочий день
циях городского наземного электрического транспорта применяют напряжение 600 в, среднее же напряжение на токоприемниках 550 в, а для метрополитенов 825 и 750 в. На пригородных и магистральных железных дорогах вследствие больших мощностей подвижного состава экономически целесообразно применять более высокие напряжения— 1650/1500 и 3300/3000 в. Это дает возможность уменьшить сечение контактных проводов и сократить количество тяговых подстанций.
Тяговая сеть системы электроснабжения, служащая для передачи электрической энергии от тяговых подстанций к подвижному составу, состоит из питающих линий (положительный и отрицательный кабели) и контактной сети (два провода или провод и рельс).
Рис. 6. Тяговая сеть рельсового транспорта
/ — шины тяговой подстанции; 2 — тяговая сеть: ПК, — положительные кабели; nlt П2, П3 — питающие пункты; ОК — отрицательные кабели; Olf О2, О3 — отсасывающие пункты, <3 —подземные металлические сооружения
Электрический контакт с проводами создается скольжением (или качением) по ним токосъемного устройства (токоприемника) подвижного состава. С рельсами трамвая контакт осуществляется через колесные пары вагонов. Для улучшения электропроводности рельсовой сети между отдельными рельсовыми нитками устроены междурельсовые и междупутные электрические соединения. Таким образом, рельсовый путь трамвая представляет собой непрерывную электрическую цепь и помимо своего прямого назначения служит проводом, по которому ток возвращается на подстанции.
Измерения показывают, что некоторая часть токов ответвляется из рельсов в землю, а затем и в подземные металлические сооруженияг вызывают их электрохимическую коррозию. Эти токи получили название блуждающих. На рис. 6 показан путь прохождения блуждающих токов. При электролитических процессах в земле происходит разъедание металлического сооружения в местах выхода тока из них в землю (так называемые анодные зоны). При положительной полярности контактного провода опасные анодные зоны (труб водопровода, канализации и газопровода, свинцовых оболочек кабелей и т. п.) располагаются, как правило, вблизи пунктов присоединения отрицательных кабелей к рельсам, называемых отсасывающими пунктами.
Контактные провода обычно подвешиваются над рельсовым или дорожным полотном при помощи изоляторов на опорных конструкциях. На метрополитенах контактная сеть выполняется в виде изоли-14
рованного контактного рельса, укрепленного сбоку от ходовых рельсов.
Для обеспечения независимого питания частей контактной сети и сокращения длины участков, отключаемых при перегрузках или авариях, ее секционируют, т. е. разделяют на отдельные участки длиной по 500—1000 м, электрически изолированные друг от друга участковыми изоляторами.
Контактные сети бывают разветвленными и неразветвленными. На рис. 7 показана схема питания и секционирования разветвленной двухпутной городской трамвайной сети. Сеть дана в однолинейном
Рис. 7. Принципиальная схема разветвленной тяговой сети трамвая ТПП — тяговая подстанция; СИ — секционные изоляторы
изображении, так как контактные провода смежных путей обычно, как и рельсы, соединены параллельно. Секционные изоляторы устанавливаются только в контактной сети, так как рельсовая сеть не секционируется. Положительные и отрицательные кабели не показаны, а в виде точек изображены лишь места их присоединения, т. е. питающие и отсасывающие пункты.
Наивыгоднейшее место расположения тяговых подстанций, их число и мощность, а также количество и месторасположение питающих и отсасывающих пунктов устанавливается электрическим расчетом тяговой сети. На рис. 7 показаны четыре тяговые подстанции с 15 питающими пунктами. В больших городах с сильно разветвленной контактной сетью количество тяговых подстанций исчисляется несколькими десятками.
Участки неразветвленной сети встречаются на городском электрическом транспорте в виде вылетных и загородных линий или линий междугородных сообщений. Примером может служить троллейбусная междугородная горная трасса Симферополь — Ялта протяженностью 82 км, питание которой осуществляется от 19 автоматических тяговых одноагрегатных подстанций с кремниевыми выпрямителями (рис. 8). Среднее расстояние между подстанциями 4 км, мощность каждой под-
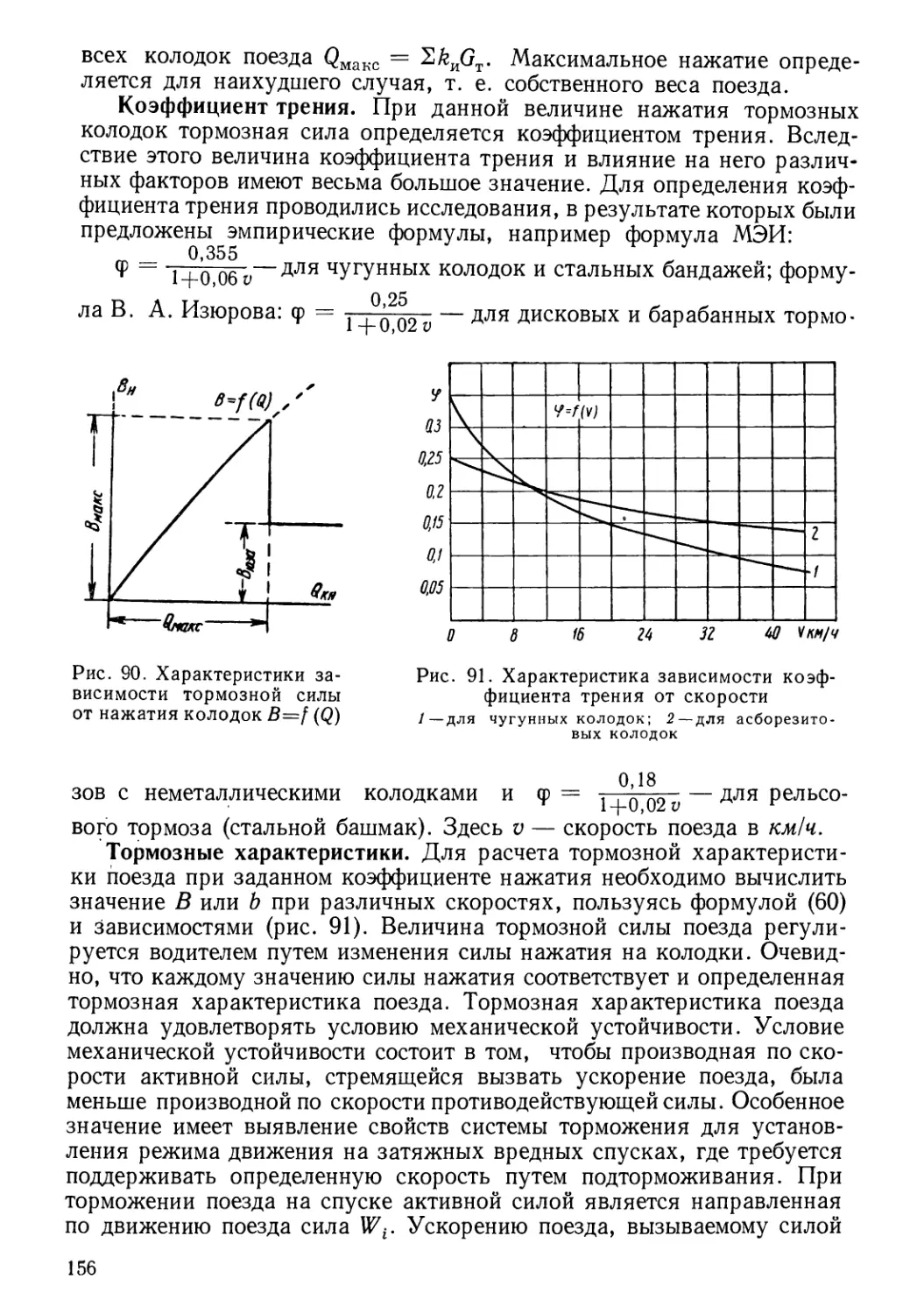
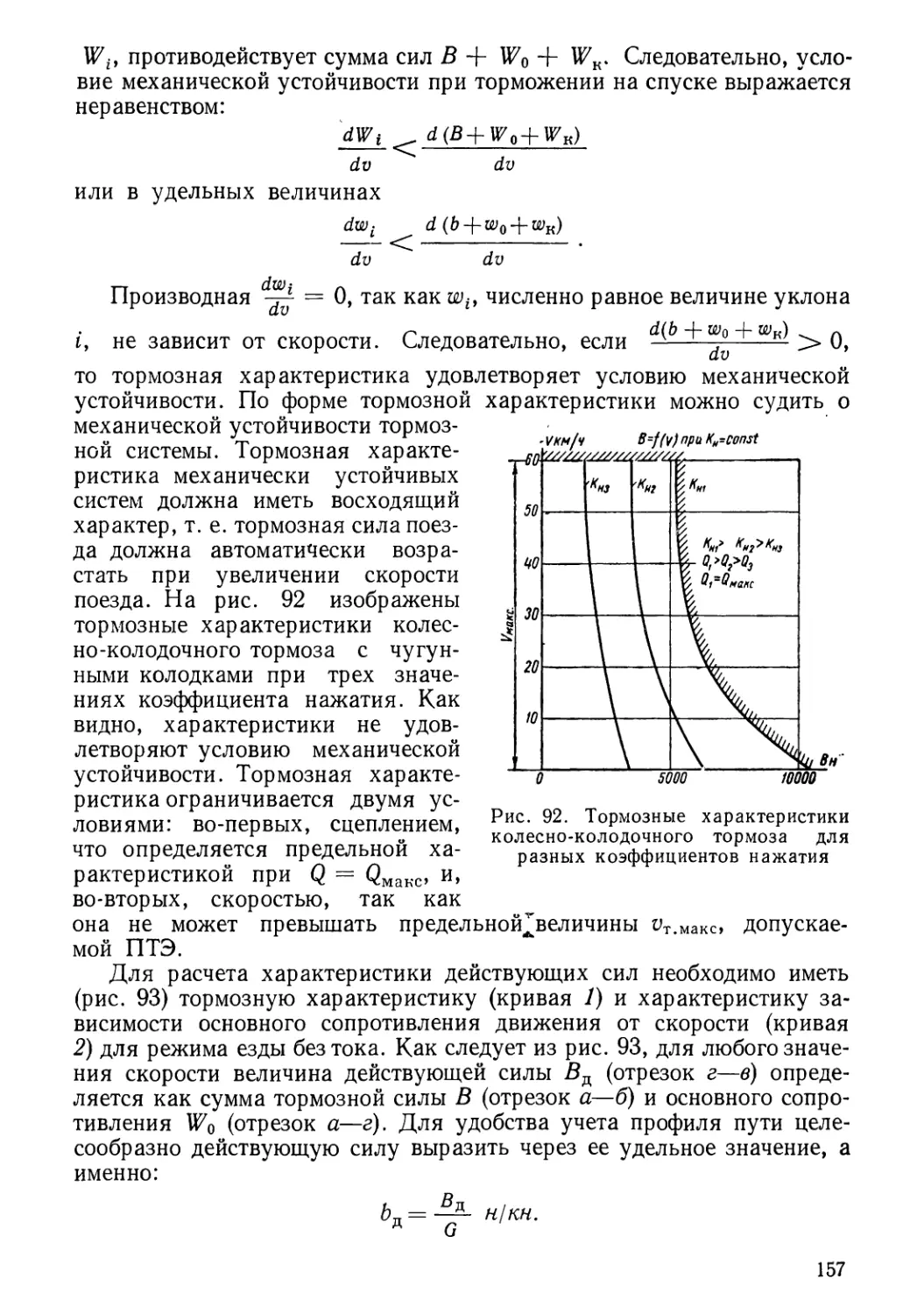
станции по постоянному току 1200 кет. При разомкнутых секционных изоляторах каждая подстанция питает участки своего района. Возможна параллельная работа всех тяговых подстанций при замкнутых изоляторах.
В контактной сети городского электротранспорта допускаются большие колебания напряжения, чем в стационарных промышлен-
Рис. 8. Принципиальная схема неразветвленной тяговой сети междугородной трассы
ТПП — тяговая подстанция; ПК — положительный кабель; П — питающий пункт; ОК—отрицательный кабель; О —отсасывающий пункт; КС —контактная сеть; СИ — секционный изолятор
ных сетях. Изменение напряжения в некоторых случаях достигает ±25% номинального напряжения сети. На рис. 9 дана диаграмма падения напряжения во всех элементах тяговой сети трамвая, отне-
Рис. 9. Диаграмма падений напряжений в тяговой сети трамвая
Пг и П2 — питающие пункты; Ot и О2 — отсасывающие пункты; ДСс— суммарное падение напряжения в тяговой сети (Д[7П —в положительном кабеле; A(7R —в контактной сети; Д[7р —в рельсовой сети; &UQ — в отрицательном кабеле)
сенная к токоприемнику движущегося поезда для двух участков питания. Напряжение на токоприемнике поезда можно выразить формулой
и. = иш- \ис = ит - (\Ua + \UK + At/p + At/0), (1)
где UT — напряжение на токоприемнике;
Um — напряжение на шинах подстанции;
Д[/(> — суммарное падение напряжения в тяговой сети (положительном кабеле, контактной сети, рельсовой сети и отрицательном кабеле).
Кроме двухпроводной контактной сети может применяться и трехпроводная (рис. 10). Сущность этой системы заключается в том, что преобразователи соединяют в две последовательные группы и на тяговой подстанции помимо положительного и отрицательного полюсов образуется также нулевая (средняя) точка (см. рис. 10, точка а). Трехпроводная система может быть с поперечным или продольным секционированием сети.
При поперечном секционировании сети (схема а) от положительной шины ток протекает по положительному кабелю и контактному проводу к тяговым двигателям вагонов А и затеки через рельсовую сеть к тяговым двигателям вагонов 5; далее через тяговые двигатели вагонов В, контактный провод и отрицательный кабель к отрицательной шине подстанции. В случае, если токи, потребляемые поездами Л и В, равны
Рис. 10. Трехпроводная тяговая сеть (а—с поперечным секционированием; б — с продольным секционированием)
/ — тяговая подстанция: / — ввод; 2 — шины трехфазного тока; 3 — ртутные или кремниевые выпрямители; 4 — шины постоянного тока; // — тяговая сеть: 5 — положительный кабель; 6 — отрицательный кабель; 7 —нулевой кабель; 8 — контактная сеть; 9 — рельсовая сеть (двухпутная); 10 — секционный изолятор; //—электрические соединения рельсов
друг другу, ток в отрицательном кабеле равен нулю, а токи в рельсах минимальны. Этим достигается экономия энергии и снижение блуждающих токов. Аналогичный эффект обеспечивается и при продольном секционировании сети (схема б). Трехпроводная система применима и на троллейбусном транспорте.
Однако исследования трехпроводной системы показывают, что экономический эффект ее применения (экономия цветного металла, уменьшение потерь энергии в сети) несуществен, вследствие чего в настоящее время эта система не находит применения.
Система постоянного тока получила широкое распространение на электрическом транспорте. Преимущества этой системы следующие: а) применение электродвигателей постоянного тока, имеющих хорошие тяговые свойства и обеспечивающих широкую регулировку скорости; б) простота конструкции и надежность в эксплуатации всего электрического оборудования подвижного состава; в) простота и экономическая целесообразность всей системы. Эти достоинства обуслов
ливают преимущественное применение постоянного тока на городском транспорте всех стран мира.
В настоящее время в СССР на городском электрическом транспорте применяется только система постоянного тока, на пригородных и магистральных дорогах — система постоянного тока и система однофазного тока нормальной частоты (с преобразованием его в постоянный непосредственно на подвижном составе).
§ 5. СИСТЕМА ПЕРЕМЕННОГО ТОКА В КОНТАКТНОЙ СЕТИ
Электрическая тяга на переменном токе может осуществляться либо на трехфазном токе, либо на однофазном токе пониженной или нормальной частоты. Наиболее современной является система однофазного тока нормальной частоты. Возможность трансформирования переменного тока непосредственно на подвижном составе позволяет применять в контактной сети магистральных дорог высокое напряжение — до 20 кв и выше, а на электровозе — понижать его до любой величины, удобной для питания тяговых электродвигателей. Эффективность такого трансформирования для системы энергоснабжения видна из следующих данных. Экономически целесообразное расстояние между соседними тяговыми подстанциями при постоянном токе составляет 10—15 км при напряжении 1,5 кв и 20—30 км при напряжении 3 кв. При этом суммарное сечение сети для двухпутной линии равно 500—600 мм2 и более. В то же время при системе однофазного переменного тока расстояние между подстанциями при напряжении 22 кв составляет 60—80 км, а требуемое сечение контактного провода снижается до 100—150 мм2.
При системе однофазного тока нормальной частоты энергия производится на электростанциях общего пользования и передается трехфазной линией передачи, расположенной вдоль железной дороги. Контактная сеть разделена на участки, поочередно питаемые от разных фаз линий передачи через понизительные однофазные трансформаторы. Напряжение контактной сети (16—22 кв) преобразуется трансформатором, установленным на подвижном составе, до необходимой величины. При данной системе можно применять следующий подвижной состав: а) с однофазными коллекторными двигателями нормальной частоты; б) с тяговыми двигателями постоянного тока и преобразователями однофазного переменного тока в постоянный; в) с трехфазными асинхронными двигателями и преобразователями однофазного тока в трехфазный. Из этих трех вариантов простейшим является первый. Основные недостатки однофазных двигателей (тяжелые условия коммутации, особенно при пуске в ход, и низкий коэффициент мощности) при нормальной частоте сказываются гораздо сильнее, чем при пониженной. Использование двигателей постоянного тока требует установки на подвижном составе преобразователей, что по существу превращает электровоз в подвижную тяговую подстанцию.
К достоинствам системы однофазного тока нормальной частоты относятся простота системы электроснабжения и тесная увязка ее общими сетями трехфазного тока, питающими промышленных потре
бителей. Недостатками системы являются: а) несимметричная нагрузка отдельных фаз трехфазной линии передачи, отрицательно сказывающаяся на работе двигателей промышленных предприятий; б) сложный и дорогой подвижной состав; в) индуктивное влияние на провода линий связи. На рис. И дана принципиальная схема электроснабжения при системе однофазного тока нормальной частоты на 22 кв — шестиосного электровоза НО с тяговыми двигателями постоянного тока с номинальным напряжением 1500 в. На электровозе установлен
Рис. 11. Принципиальная схема электроснабжения электрической железной дороги при системе переменного тока нормальной частоты
/ — высоковольтная линия электропередачи; // — трансформаторные подстанции: /—шины первичного напряжения; 2 — понижающие трансформаторы; 3 — шины на 22 кв\ /// — контактная сеть на 22 кв', /V —рельсовая сеть; V —электровоз НО; / — понижающий трансформатор; 2 — выпрямители; 3—тяговые двигатели постоянного тока
понижающий трансформатор, первичная обмотка которого подключается к сети пантографом при помощи воздушного выключателя. Вторичная обмотка трансформатора состоит из трех секций для регулирования напряжения, подводимого к выпрямителям. Вопрос о целесообразности применения переменного тока в контактной сети городского электротранспорта находится в стадии экспериментального исследования.
Глава III. ПОДВИЖНОЙ СОСТАВ ГОРОДСКОГО ЭЛЕКТРОТРАНСПОРТА
§ 6. КЛАССИФИКАЦИЯ ПОДВИЖНОГО СОСТАВА
На рис. 12 показаны принципиальные электрические схемы подвижного состава различных видов городского электрического транспорта. Почти исключительное применение находит электрическая тяга
с контактным токоприемником; автономная и комбинированная тяга имеют незначительное применение.
Подвижной состав в зависимости от назначения может быть пассажирский — для перевозки пассажиров; грузовой — для перевозки грузов; специального назначения — снегоочистители, путеизмери-тели, путеполивщики, крановые платформы, вагоны-лаборатории, вагоны-вышки, рельсотранспортеры и др.
Трамвайные вагоны классифицируют: по конструкции ходовых частей — тележечные и бестележечные; по количеству осей — двухосные, четырехосные (несочлененные и сочлененные; отличительной
г>‘ :
Рис. 12. Принципиальные электрические схемы различных видов транспорта ~
а —автобус; б — элекгром ;биль, с —троллейный электромобиль; а —троллейбус; б —моторный вагон метрополитена (с двухступенчатой перегруппировкой); а —трамвайный моторный вагон (без перегруппировки тяговых двигателей); / — дизель; 2 —генератор; 3 — тяговый двигатель; 4 — аккумуляторная батарея;
5—токоприемник; 6 — контактная сеть 6'— третий рельс; 7 —рельсовая сеть
чертой последних является наличие двух или трех кузовов со сквозным проходом); по этажности — одноэтажные и двухэтажные; по конструкции кузова — закрытые, полуоткрытые и открытые; по самоход-ности — моторные и прицепные. Моторными вагонами называются вагоны, на которых установлены тяговые двигатели. Все колесные пары моторных вагонов — движущие, колесные пары прицепных вагонов — поддерживающие.
Троллейбусы классифицируют: по количеству осей — двухосные, трехосные и четырехосные (сочлененные); по этажности — одноэтажные и двухэтажные; по конструкции — кузова и рамы.
Сформированный и сцепленный состав, состоящий из нескольких
вагонов или из одного моторного вагона, снабженный соответствующими сигналами, называется поездом.
Тип трамвайного поезда и троллейбуса для конкретных условий работы выбирают в зависимости от величины пассажирских потоков, планировки города, профиля пути, величины предельного уклона и других эксплуатационных показателей.
§ 7. КОНСТРУКТИВНЫЕ И ЭКСПЛУАТАЦИОННЫЕ ПОКАЗАТЕЛИ
Основными конструктивными и эксплуатационными показателями, дающими возможность оценить качество подвижного состава, являются: весовые характеристики, габаритные и внутренние размеры, вместимость, динамические показатели и плавность хода, удельный расход энергии, комфортабельность, взаимозаменяемость отдельных узлов и деталей, малогабаритность съемных деталей и срок их службы, стоимость подвижного состава и расходы по его эксплуатации.
Весовые показатели характеризуются: а) полным весом экипажа с пассажирами; б) весом в ненагруженном состоянии (собственный вес); в) распределением веса по осям; г) собственным весом, приходящимся на 1 м2 площади пола; д) коэффициентом использования веса вагона или троллейбуса. Собственный вес зависит от размеров, вместимости подвижного состава, конструкции и материалов, применяемых для изготовления деталей и узлов. Для отечественных моторных вагонов этот вес колеблется в пределах от 120 до 160 кн — для двухосных и от 160 до 220 кн — для четырехосных вагонов; для троллейбусов от 60 д< 100 кн — для одноэтажных, S0—130 кн — для двухэтажных и 100—160 кн — для сочлененных. Распределение веса по осям экипажа должно быть по возможности равномерным. В двухосных троллейбусах 63—70% веса приходится на заднюю и 30—37% — на переднюю ось. Чем меньше так называемый удельный вес, т. е. собственный вес, приходящийся на 1 м2 площади пола, тем совершеннее конструкция кузова и оборудования. Вагоны старых типов имеют наиболее высокие удельные весовые показатели, современные вагоны с цельнометаллическим кузовом — наиболее низкие. Чем меньше вес подвижного состава, тем меньше расход электроэнергии на его движение, меньше установленная мощность тяговых подстанций; их число, сечение проводов и кабелей тяговой сети, меньше давление колесных пар на рельсы, шин на дорогу и их износ. Следовательно, снижение веса подвижного состава, кроме уменьшения расхода энергии, уменьшает капитальные и эксплуатационные расходы по устройству электроснабжения, путевому и дорожному хозяйству. Применение конструктивных узлов из специальных сталей и более совершенных типов электрооборудования уменьшает вес подвижного состава, но увеличивает его стоимость. Это, однако, как правило, дает снижение эксплуатационных расходов.
В табл. 2 приведены некоторые весовые данные трамвайных вагонов и троллейбусов.
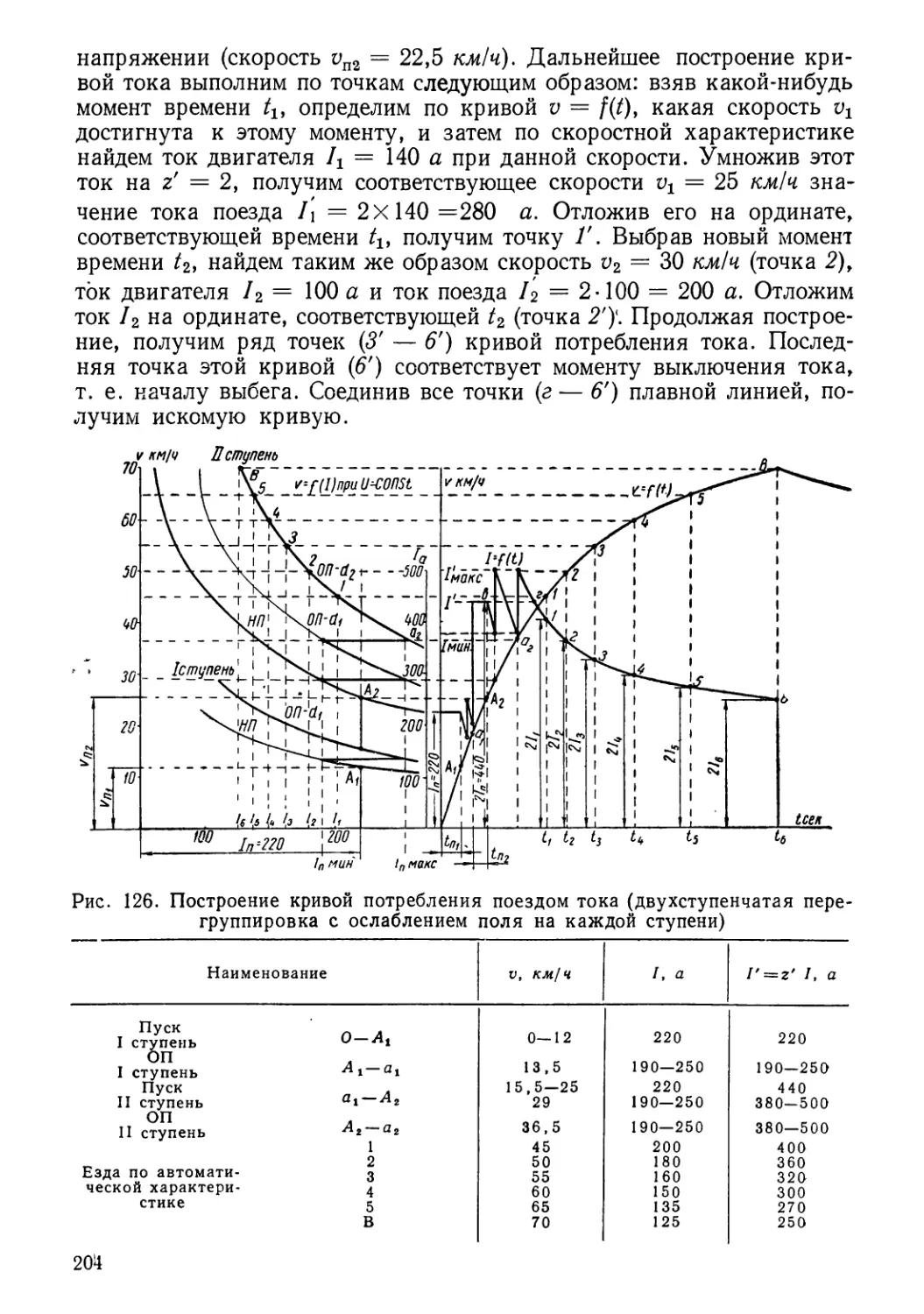
Таблица 2
Тип подвижного состава Вес в кн Масса в кг Тип подвижного состава Вес в кн Масса в кг
Трамвайные мо- 1 Трамвайные при- ।
торные вагоны: цепные вагоны:
МТВ 183 18 650 С 68,6 7 000
км 209 21 300 ЛП-49 135,4 13 800
ЛМ-49 191,3 19 500 КТП-2 78,5 7 000
ЛМ-57 177,5 18 100 Троллейбусы:
РВЗ-6 161,9 16 500 МТБ 86,3 8 800
Т-2 176,5 18 000 ЗИУ-5 97,8 9 600
КТМ-2 122,5 10 000 ТС 157 16 000
ТР-9 88,2 8 890
Полный вес вагона или троллейбуса G' определяется по формуле C' = G-\-zGn, (2)
где G — собственный вес;
z — количество пассажиров;
Gn — вес одного пассажира.
Коэффициентом использования веса т]в называется отношение веса пассажиров при нормальной нагрузке к весу ненагруженного вагона:
Для трамвайных вагонов г]в = 0,35 -4- 0,7 (например, для вагона РВЗ — 0,7), для троллейбусов т]в = 0,5-4- 0,65 (для сочлененных 0,6—0,75 и двухэтажных 0,7 — 0,8).
Вместимостью подвижного состава называется общее количество мест для сидящих и стоящих пассажиров при различной степени наполнения вагона или троллейбуса. Количество пассажиров определяется по формуле
z = zc + NS„ (3)
где zG — число мест для сидения;
Sn — свободная площадь пола вагона или троллейбуса в л/2;
N — число пассажиров на 1 м2 свободной площади пола.
Для оценки вместимости кузова принято учитывать нормальное среднее (нагрузка в часы пик) и максимальное наполнение. По ГОСТ 8802—58 для трмвайных вагонов количество человек на 1 м2 свободной площади пола при нормальном наполнении 3, среднем 5 и максимальном 10 человек и по ГОСТ 7495—63 для троллейбусов нормальное наполнение 5, нагрузка в часы пик 8, и максимальное наполнение 10 человек. Вместимость является важнейшим показателем провозной способности подвижного состава. Она зависит от размеров кузова (длины и ширины) и от планировки салона, определяемой расположением входных и выходных дверей и расположением сидений для пассажиров.
Габаритные показатели включают наибольшие внешние длину, ширину и высоту; базу тележки и базу вагона или троллей-22
буса; колею; передний и задний свес троллейбуса. Наибольшая длина обычно указывается с учетом буферов. Она обусловливается типом, вместимостью и количеством осей вагона или троллейбуса. Для моторных вагонов, находящихся в эксплуатации, эта длина колеблется в пределах от 10 до 11 м для двухосных, от 13 до 16 м для четырехосных вагонов и от 19 до 25 ж для сочлененных; для троллейбусов — от 12,5 до 17,5 м. Важным показателем габаритных размеров вагона или троллейбуса является коэффициент, характеризующий отношение полезной площади пола (площади пола без учета кабины водителя и подножек) к общей площади, занимаемой вагоном по наружным размерам,
где 5П — площадь пола пассажирского помещения кузова;
S — общая площадь (по внешним размерам).
Чем выше величина т]г, тем рациональнее спланирован кузов вагона.
Динамические показатели характеризуют тяговые и тормозные качества подвижного состава и зависят от номинальной мощности тяговых двигателей, принятой системы управления вагоном, конструкции и эффективности действия тормозных устройств. К числу основных динамических показателей относятся: ускорение, замедление и установившаяся скорость (максимальная скорость на прямом горизонтальном участке).
§ 8. ОБЩИЕ ПОНЯТИЯ О КОНСТРУКЦИИ
Трамвайный вагон и троллейбус состоят из двух основных частей: механической и электрической. Ориентировочно в зависимости от типа, например, моторного вагона вес его электрической части составляет 15—25%, а механической — 85—75% общего веса вагона.
Механическую часть вагона можно подразделить на следующие основные элементы: кузов, передаточные механизмы, ходовые части (тележки, колесные пары, буксы, рессоры), тормозное оборудование, тяговые сцепные приборы, пневматическое оборудование (компрессоры, аппараты и приборы). Вагоны таких типов, как Т-2, Т-3, КТМ-3 и др., не имеют пневматического оборудования. На рис. 13 показан вагон РВЗ-6 со снятым пантографом.
Цельнометаллический сварной кузов состоит из рамы (основание), каркаса, облицовки наружного и внутреннего оборудования. Рама выполняется сварной из стальных штампованных профилей. На раме крепится каркас с облицовкой, подвагонное оборудование и тяговые сцепные приборы. Каркас представляет собой сварную конструкцию из профилированной листовой стали различного сечения. Внутри кузов разделен перегородкой на две части: салон и кабину водителя. В кабине установлен пульт управления. Кузов вагона опирается на две двухосные поворотные тележки, с которыми он соединяется через пятниковые опоры с рессорным подвешиванием. Тележки опираются на
3160-
Рис. 13. Общий вид четырехосного вагона РВЗ-6
/ — кузов- 2 — двухосная тележка; 3 — колесная пара; 4 —рельсовый электромагнитный тормоз; 5 — кабина водителя; 6 — салон 7 —токоприемник (пантограф—на проекции а бокой вид не показан)
оси колесных пар при помощи осевых внутренних букс с роликовыми подшипниками (колесные пары с подрезиненными колесами). На каждой тележке установлены два тяговых двигателя с двухступенчатыми редукторами (см. рис. 15, схема а). К продольным балкам тележки с каждой стороны на пружинах подвешено по одному башмаку рельсового электромагнитного тормоза.
Основными элементами механической части троллейбуса являются кузов с рамой (или несущий безрамный кузов), передний мост, задний мост (один или два), ступицы с колесами, тяговая передача рес
2 — салон; 3 — штан-
говый токоприемник
пшв;внвЕвв С тО ООО 00
сорная подвеска и аммортизаторы, рулевое управление, тормозное и пневматическое оборудование. На рис. 14 дан общий вид троллейбуса Тр-9.
Электрическое оборудование трамвайного вагона или троллейбуса состоит из: 1) тяговых электродвигателей, предназначенных для приведения во вращение колесных пар вагона или полуосей троллейбуса; 2) вспомогательных электрических машин, обслуживающих вспомогательные электрические цепи (генератор управления, электродвигатели вентилятора, компрессора и генератора); 3) тяговой аппаратуры, выполняющей различные функции в электротяговой установке; 4) вспомогательной электроаппаратуры (приборы отопления, стеклообогре-вателей, низковольтного оборудования и т. п.); 5) аккумуляторной батареи, применяемой на троллейбусах и трамвайных вагонах некоторых типов.
Привод движущих колесных пар вагона или полуосей троллейбуса состоит из тягового двигателя и передаточного механизма (редуктора).
Тяговые двигатели характеризуются следующими основными данными, которые указываются на их паспортном щитке (наряду с типом двигателя, заводом-изготовителем и заводским номером): часовой (номинальной) и длительной мощностью, номинальным напря-2В. Зак. 1186 25
жением, номинальной скоростью вращения, часовым и длительным токами. Эти данные определяют основные параметры двигателя, его размеры и особенности конструктивного выполнения. В зависимости от типа вагона трамвайные двигатели могут иметь часовую мощность от 30 до 60 кет и номинальное напряжение 275 или 550 в, троллейбусные— 80—100 кет на 550 е. При напряжении t/H = 275 е двигатели с одинаковой часовой мощностью будут иметь в два раза больший часовой ток, а следовательно, большее сечение проводов обмоток и большие размеры коллектора, чем при напряжении UK = 550 е.
Работа тягового двигателя, по сравнению со стационарными машинами, протекает в значительно более тяжелых условиях. От двигателя требуется наибольшая надежность в работе, а наблюдение за ним во время движения практически невозможно. Двигатель располагается под кузовом, вследствие чего его габариты ограничиваются шириной колеи и диаметром колеса. Двигатель должен иметь возможно меньший вес для облегчения веса вагона или троллейбуса. Конструкция двигателя должна быть закрытого типа, обладать необходимой прочностью, допускать удобный осмотр внутренних частей и обеспечивать возможность нормального ухода за ним.
Тяговый двигатель должен удовлетворять следующим требованиям: 1) развивать высокий пусковой вращающий момент; 2) выдерживать перегрузку; 3) допускать возможность реверсирования; 4) обеспечивать регулирование скорости в широких пределах; 5) удовлетворительно работать генератором при электрическом торможении; 6) иметь надежную коммутацию в переходных режимах при резких изменениях напряжения в контактной сети.
Тяговые двигатели по способу установки на подвижном составе имеют два исполнения: 1) рамно-осевое — опоры одной стороны расположены на раме тележки, а другой — на оси колесной пары (буксы с подшипниками трения скольжения); 2) рамное — все опоры двигателя расположены на раме тележки или кузова. Первый вид применяется только на вагонах старых типов.
Редуктор служит для передачи вращающего момента с вала якоря на ось колесной пары или полуоси. Обычно посредством редуктора скорость вращения оси уменьшается по сравнению со скоростью вращения якоря с целью реализации большего вращающего момента Л40 > Л4. Редукторы применяются индивидуального типа, где вращающий момент с вала якоря двигателя передается на одну ось колесной пары или на пару полуосей.
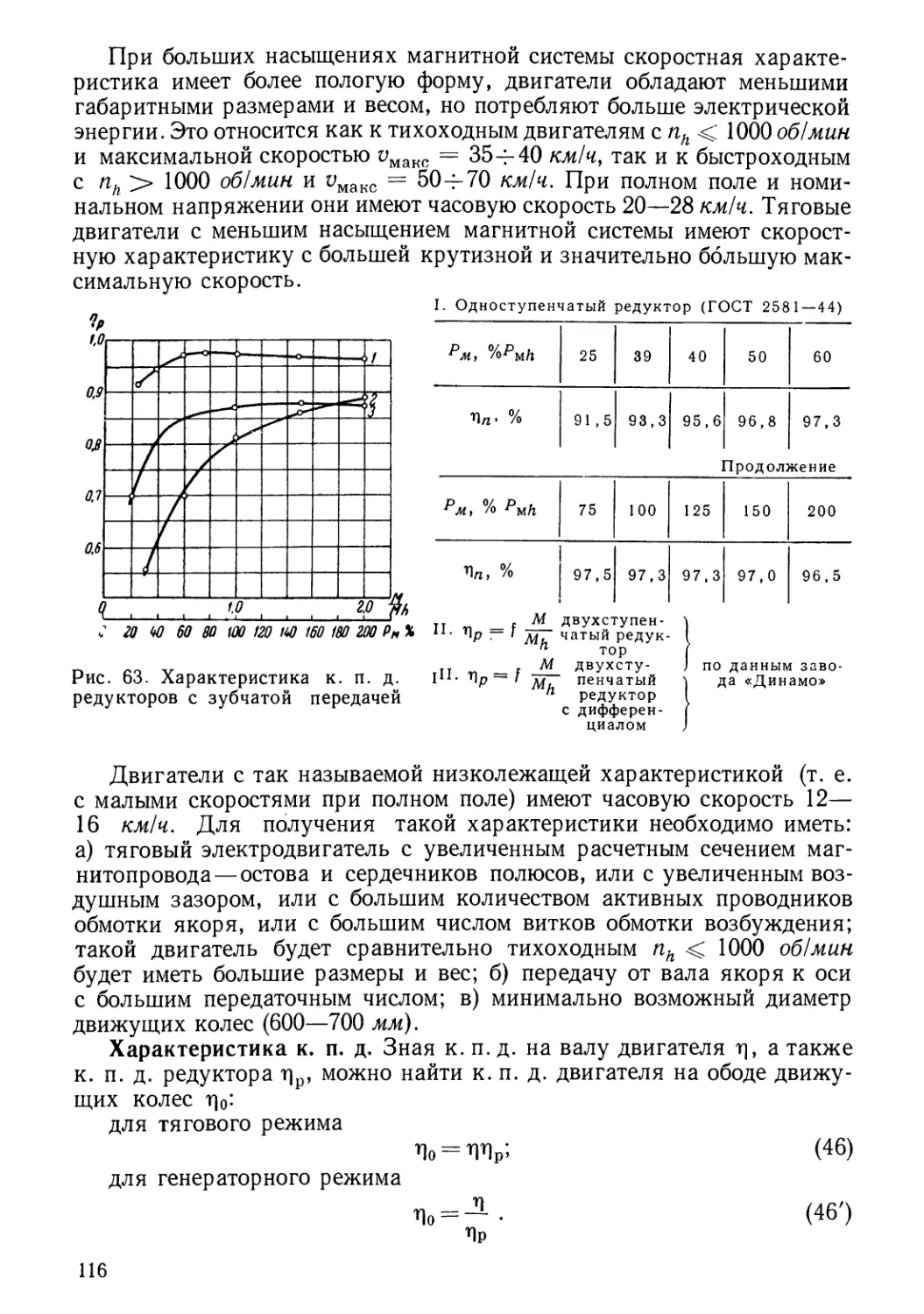
Индивидуальный редуктор может быть с зубчатой или червячной передачей. Зубчатая передача обладает высоким коэффициентом полезного действия и надежностью конструкции. Конструкции зубчатых передач, применяемых в электрической тяге, разнообразны. В зависимости от количества и расположения зубчатых колес (шестерен) редукторы подразделяются на одноступенчатые (односторонние и двусторонние) и двухступенчатые. Средний к. п. д. одноступенчатого зубчатого редуктора — 0,97, двухступенчатого (более сложного по конструкции) — 0,95 и червячного — 0,85.
На рис. 15 даны принципиальные схемы электроприводов. В схеме с рамно-осевым трамвайным двигателем и одноступенчатым односторонним редуктором с цилиндрическими шестернями с прямым или косым зубом привод имеет передаточное число р 6 и тяговый двигатель со скоростью вращения при часовом режиме nh = 1000 об/мин. Не-подрессоренная часть веса двигателя, приходящаяся на ось колесной
Рис. 15. Принципиальные схемы электроприводов
/ — трамвайные вагоны: а — рамно-осевой тяговый двигатель; с одноступенчатым редуктором; рамные тяговые двигатели; б, в—с одноступенчатым редуктором: г— с двухступенчатым редуктором; — II троллейбусы: а —с двухступенчатым зубчатым редуктором; б —с двухступенчатым редуктором бортового типа; в—с червячным редуктором; /—тяговый двигатель; 2—редуктор; 3 — ось колесной пары; 4 — карданный вал; 5— дифференциал; 6— полуоси; 7— движущие колеса; 20; zn; zn и 2 —число зубцов шестерен редуктора
пары, составляет до 3/4 полного веса, а редуктор полностью неподрес* сорен. В схеме тягового двигателя с рамным подвешиванием и попе-речным расположением передаточное число |и 9; nh < 2000 об/мин, вес двигателя полностью подрессорен. Редуктор одноступенчатый, односторонний с цилиндрическими шестернями. Вал двигателя с редуктором соединяется карданным валом. В схеме двигателя с рамным 2В* 27
подвешиванием и продольным расположением редуктор выполнен с карданным валом, двухступенчатым с парой цилиндрических и парой конических шестерен (схема г) или одноступенчатым с коническими шестернями (схема в). В схеме а троллейбусного привода — редуктор двухступенчатый с карданным валом с парой конических и парой цилиндрических шестерен. Большая цилиндрическая шестерня жестко связана с дифференциальной коробкой, внутри которой расположен механизм дифференциала, распределяющий и передающий вращающий момент Мо к движущим колесам посредством полуосей. На схеме б — редуктор двухступенчатый бортового типа. Большая коническая шестерня связана с дифференциалом, распределяющим и передающим вращающий момент полуосям, на концах которых расположены малые цилиндрические шестерни. Большие цилиндрические шестерни расположены на полуосях движущих колес троллейбуса. Червячный редуктор показан на схеме в. Червяк, соединенный с карданным валом, вращает червячное колесо, внутри которого установлен дифференциал, передающий вращающий момент полуосям.
Передаточное число одноступенчатого редуктора
а двухступенчатого
1^ = 21.21 . Zn z
Для трамвайных вагонов и троллейбусов целесообразно применять редукторы с большим передаточным числом, что делает возможным применение быстроходных тяговых двигателей (малогабаритных и с меньшим весом).
На моторных вагонах число тяговых двигателей обычно бывает равно количеству осей вагона. На троллейбусах устанавливают один тяговый двигатель и только на троллейбусах ТС (сочлененных) — два.
Тяговая аппаратура подразделяется на: 1) токоприемники (штанговые, дуговые, пантографы), которые обеспечивают подвижной контакт электрических цепей вагона с контактным проводом; 2) аппараты управления — контроллеры водителя для управления тяговыми двигателями непосредственно или через другие аппараты с ручным или педальным (ножным) приводом; контакторы (индивидуальные и групповые) для различных включений, выключений и переключений в электрических цепях; реверсоры, разъединители, переключатели и реле ускорения; 3) электрические сопротивления — реостаты для пуска, торможения и регулирования скорости, шунты и добавочные сопротивления; 4) аппараты для защиты электрического оборудования от чрезмерных перегрузок, коротких замыканий, повышения и исчезновения напряжений, а также от перенапряжений — плавкие предохранители, автоматические выключатели, реле перегрузки, реле напряжения и разрядники; 5) вспомогательные аппараты для обслуживания вспомогательных цепей — регуляторы напряжения, 28
регуляторы давления, выключатели управления, кнопочные выключатели, междувагонные соединения; 6) аппаратура низковольтных цепей.
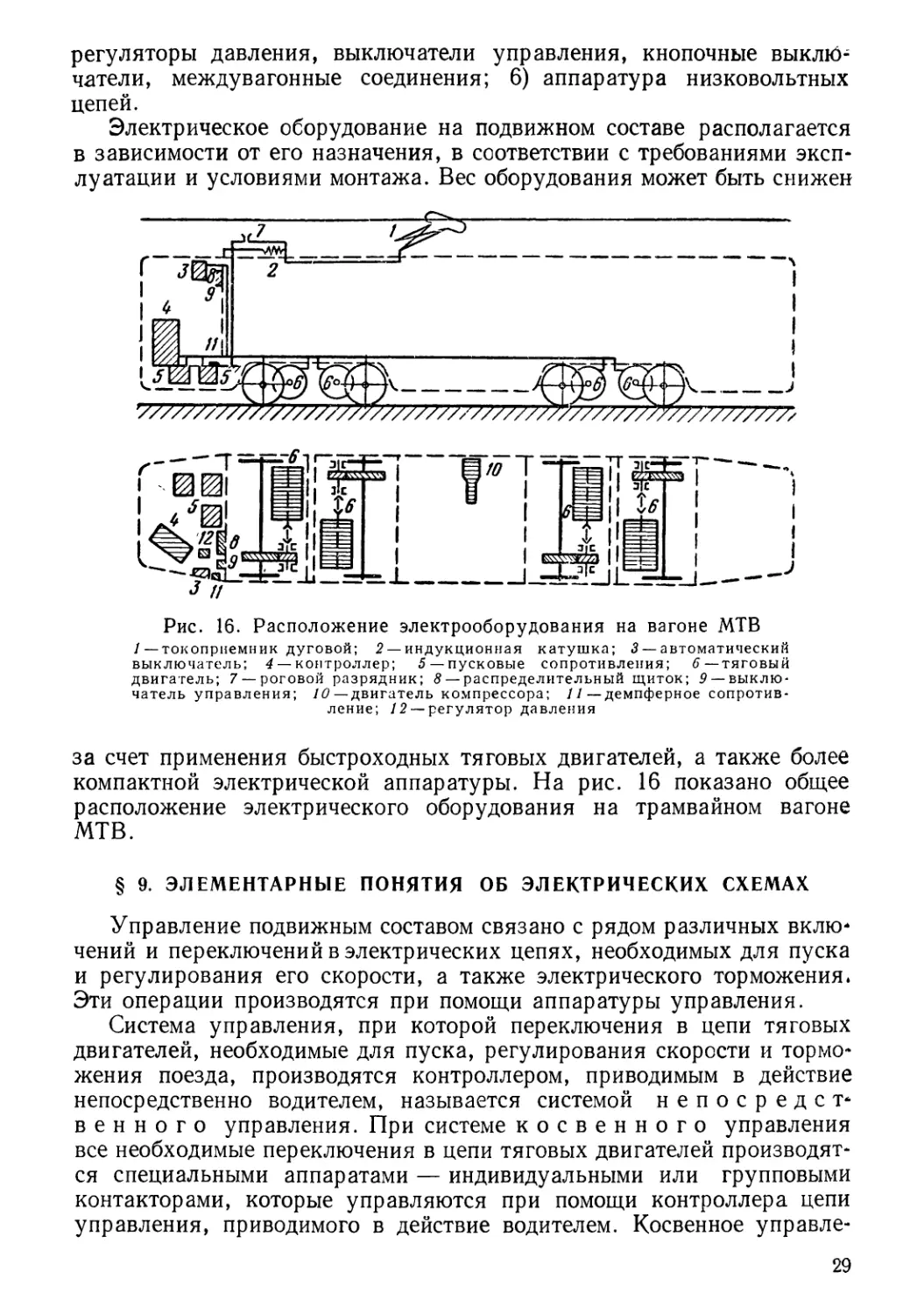
Электрическое оборудование на подвижном составе располагается в зависимости от его назначения, в соответствии с требованиями эксплуатации и условиями монтажа. Вес оборудования может быть снижен
Рис. 16. Расположение электрооборудования на вагоне МТВ
1 — токоприемник дуговой; 2 — индукционная катушка; 3 — автоматический выключатель; 4 — контроллер; 5 —пусковые сопротивления; 6— тяговый двигатель; 7 —роговой разрядник; 8 — распределительный щиток; 9 — выключатель управления; 10 —двигатель компрессора; //—демпферное сопротивление; 12— регулятор давления
за счет применения быстроходных тяговых двигателей, а также более компактной электрической аппаратуры. На рис. 16 показано общее расположение электрического оборудования на трамвайном вагоне МТВ.
§ 9. ЭЛЕМЕНТАРНЫЕ ПОНЯТИЯ ОБ ЭЛЕКТРИЧЕСКИХ СХЕМАХ
Управление подвижным составом связано с рядом различных включений и переключений в электрических цепях, необходимых для пуска и регулирования его скорости, а также электрического торможения. Эти операции производятся при помощи аппаратуры управления.
Система управления, при которой переключения в цепи тяговых двигателей, необходимые для пуска, регулирования скорости и торможения поезда, производятся контроллером, приводимым в действие непосредственно водителем, называется системой непосредственного управления. При системе косвенного управления все необходимые переключения в цепи тяговых двигателей производятся специальными аппаратами — индивидуальными или групповыми контакторами, которые управляются при помощи контроллера цепи управления, приводимого в действие водителем. Косвенное управле
ние по существу является системой управления на расстоянии и может быть названо дистанционным.
На рис. 17 приведены простейшие принципиальные схемы непосредственного и косвенного управления подвижным составом. Косвенные системы управления подразделяются на неавтоматические и автоматические.
К системам управления современного подвижного состава предъявляются следующие требования: 1) обеспечение плавного пуска и торможения при высоких значениях ускорений и замедлений; 2) возможность регулирования скорости в широких пределах; 3) автоматизация основных процессов управления; 4) минимальные габаритные размеры и вес оборудования и удобное его обслуживание; 5) надежность работы оборудования; 6) возможно меньшая стоимость подвижного состава и его оборудования.
Аппаратура силовой цепи как системы непосредственного, так и косвенного управления должна обеспечивать выполнение следующих функций, связанных с управлением тяговыми двигателями: 1) соединять силовую цепь с контактной сетью и рельсами; 2) перегруппировывать двигатели с одного способа соединения на другой; 3) переключать секции пускового реостата; 4) регулировать скорость посредством ослабления поля; 5) осуществлять электрическое торможение; 6) реверсировать двигатели; 7) отключать неисправные двигатели с сохранением работоспособности схемы на оставшихся исправных двигателях; 8) защищать двигатели от ненормальных режимов работы.
Система непосредственного управления является наиболее простой, но не обеспечивает высоких динамических показателей — пусковые ускорения и тормозные замедления подвижного состава не превышают 1 м/сек2 при малопозиционных контроллерах (10—12 позиций) и 1,5 м/сек2 — при многопозиционных контроллерах (20—22 позиции).
Увеличение ускорений и замедлений, а следовательно, и ходовой скорости подвижного состава может достигаться: путем увеличения числа пусковых и тормозных позиций, применением автоматического управления и усилением тормозных средств поезда. Современный подвижной состав обладает высокой установленной удельной мощностью двигателей, до 1—1,5 квт/кн. Автоматическая система, применяемая на вагонах с системой косвенного управления, обеспечивает плавное трогание с места и стабильность ускорения при высоком его значении— до 2—2,5 м/сек2.
В настоящее время на двухосных и четырехосных вагонах всех типов, кроме вагонов РВЗ, Т2 и ТЗ, применяется система непосредственного управления. На троллейбусах применяется система косвенного управления — неавтоматическая (троллейбусы МТБ) и автомати-тическая (троллейбус ТР-9).
Электрическую схему экипажа можно подразделить на основные элементы, исполняющие различные функции в работе подвижного состава и называемые условно цепями: 1) силовая цепь, по которой протекает ток тяговых двигателей; 2) цепи управления, предназначенные для приведения в действие аппаратуры силовой и других цепей;
j
/
3) цепи обслуживания — освещения, сигнализации и т. п. и цепи вспомогательных электрических машин — электродвигателей компрессора и вентилятора и низковольтные цепи; 4) цепь параллельного возбуждения (при применении двигателей смешанного возбуждения).
На общее построение схемы силовой цепи и на степень ее сложности оказывают влияние: система управления поездом, система возбуждения и номинальное напряжение тяговых двигателей, способ перехода с одного соединения двигателей на другое, применение ослабленного поля, применение электрического торможения, способ соединения и количество секций пусковых и тормозных сопротивлений, тип электрической аппаратуры. В зависимости от числа двигателей различают схемы с одним, двумя и четырьмя двигателями, а в зависимости от числа перегруппировок — схемы с постоянным соединением двигателей (одноступенчатые) и с двумя способами соединения двигателей (двухступенчатые). По способу возбуждения тяговых двигателей различают схемы с двигателями последовательного возбуждения и с двигателями смешанного возбуждения. В схемах с четырьмя двигателями номинальное напряжение значительно влияет на сложность построения
телей на UH = 275 в дает возможность упростить схему силовой цепи при двухступенчатой перегруппировке и построить ее по принципу схемы с двумя двигателями. При заданной системе управления применение перегруппировки двигателей и электрического торможения в наибольшей степени усложняет построение схемы. Кроме того, при непосредственном управлении усложняется устройство контроллера, а при косвенном, помимо этого, требуется большее количество контакторов.
На электрических схемах главный, кулачковый и реверсивный валы контроллеров даются в развернутом виде, а их позиции показываются вертикальными пунктирными линиями. Пальцы реверсивного вала изображаются вертикальным рядом в виде кружков, обозначенных соответствующими буквами и цифрами, а сегменты — вертикальными прямоугольниками. Впадины кулачковых шайб кулачкового вала изображаются в виде горизонтальных прямоугольников или сплошных кружков. Подвижные и неподвижные контакты обозначаются вертикальными черточками, на неподвижном контакте показывается дугогасительная катушка. При разборе схем следует иметь в виду
Рис. 17. Простейшие принципиальные схемы управления
/ — непосредственного: а —цепь выключена; б — цепь включена; II— косвенного: а — цепь включена; б — цепь выключена; СЦ — силовая цепь; ЦУ — цепь управления; /—контроллер управления; 2 — пусковой реостат; 3 — тяговой двигатель; 4 — добавочное сопротивление или потенциометр; 5—электромагнитный контактор; 6 — пантограф
схемы, а именно: применение двига-
следующее: контакты кулачкового контактора замкнуты, если вертикальная линия пересекает горизонтальный прямоугольник или на этой линии расположен сплошной кружок развертки кулачкового вала. Одинаковые цифры и буквы на реверсивных пальцах и неподвижных контактах показывают, что они соединены между собой постоянно внутри контроллера. Подвижные контакты контакторов обозначаются цифрами и буквами. Зажимы тяговых двигате-
Рис. 18. Принципиальная схема системы непосредственного управления
Рис. 19. Схемы прохождения тока (по схеме управления рис. 18)
позиции: I — III — реостатные; IV — ходовая (полное поле); V — ходовая (ослабленное поле)
1 —токоприемник; 2 — индукционная катушка; 3 — роговой разрядник; 4 — автоматический выключатель; 5 — кулачковый контроллер (а—кулачковый вал; б —подвижный и неподвижный контакты контакторного элемента; в —дугогасительная катушка; г—реверсивный барабан; д —пальцы реверсивного барабана); 6 — пусковое сопротивление; 7 — тяговый двигатель
лей и электрической аппаратуры, соответствующие пальцам и неподвижным контактам, обозначаются одноименными буквами.
Рассмотрим простейшие принципиальные схемы управления. На рис. 18 показана схема непосредственного управления одним двигателем. Силовая цепь при помощи токоприемника включается под напря-
жение контактного провода и через ходовые части вагона соединяется с рельсами (рабочее заземление), которые используют в качестве обратного провода. В силовой цепи контроллеры выполняют простейшие функции переключателя для пуска, ослабления поля и реверсирования тяговых двигателей. Схемы прохождения тока показаны на рис. 19 для всех позиций при движении «Вперед» и для позиции IV при движении «Назад». Для изменения направления движения поезда необходимо изменить направление вращения тяговых двигателей, которое зависит от направления магнитного потока полюсов и тока в обмотке якоря. Следовательно, для изменения направления вращения двигателя доста
точно изменить направление тока либо в якоре, либо в катушках главных полюсов. При системе непосредственного управления это достигается с помощью реверсивного барабана контроллера, а в схемах косвенного управления — при помощи специального реверсора.
На рис. 20 приведена простейшая принципиальная схема системы косвенного неавтоматического управления одним тяговым двигателем. В схеме предусмотрены только наиболее простые функции: пуск дви-
Рис. 20. Принципиальная схема системы косвенного управления
/ — токоприемник; 2 —роговой разрядник; 3 — индукционная катушка; 4 — автоматический выключатель; 5 — электромагнитные контакторы; 6 — пусковой реостат; 7—реверсор; 8 — шунт; 9 — тяговый двигатель; 10 — контроллер управления; // — аккумуляторная батарея; 12— междувагонное соединение
гателя, регулирование его скорости посредством ослабления поля и реверсирование. Силовая цепь моторного вагона состоит из токоприемника, аппаратуры защиты (автоматический выключатель и роговой разрядник), подвижных и неподвижных контактов электромагнитных контакторов, пусковых сопротивлений, шунта, реверсора и тяговых электродвигателей. Все переключения в силовой цепи выполняются электромагнитными контакторами. Цепь управления состоит из контроллера управления, катушек электромагнитных контакторов и реверсора. Для питания цепи управления служит аккумуляторная батарея. На прицепных вагонах имеются только контроллеры управления. Кон-
роллер управления осуществляет включение и выключение электромагнитных контакторов. При прохождении тока по катушке сердечник контактора притягивает якорь, который замыкает контакты силовой цепи, осуществляя этим необходимые соединения тяговых двигателей и реостатов в силовой цепи. Система позволяет просто осуществлять параллельную работу нескольких моторных вагонов, управляемых от одного контроллера. Провода цепи управления проложены во всех вагонах поезда. Ток управления через контроллер головного вагона проходит по всей цепи управления и посредством контакторов воздействует на силовую цепь каждого моторного вагона. Так как ток управления обычно небольшой — порядка 5—10 а, то укладка проводов через все вагоны поезда и выполнение междувагонных соединений не представляют затруднений, особенно при низком напряжении в цепи управления (50—110 в). Все контроллеры поезда присоединяются к проводам цепи управления, которые соединены параллельно, вследствие чего управление контакторами и реверсорами моторных вагонов может происходить из любого пункта поезда, где установлен контроллер.
Поезда формируются из отдельных групп вагонов, так называемых электровагонных секций. Секция состоит из некоторого числа вагонов моторных (7И) и прицепных (Л) или только моторных. Например, на рис. 20 представлена секция, состоящая из двух вагонов (М + П)-Секции могут состоять также из двух моторных вагонов (М + М). Поезда формируются из одной, двух или трех секций. В этом случае система косвенного управления носит название системы единого управления.
Глава IV. РЕГУЛИРОВАНИЕ СКОРОСТИ И ПУСК ПОДВИЖНОГО СОСТАВА
§ 10. РЕГУЛИРОВАНИЕ СКОРОСТИ
Из теории электрических машин известно, что электродвижущая сила (э. д. с.) £, индуктируемая в обмотке якоря машины постоянного тока, выражается как
Е = спФ, (4)
где п — скорость вращения якоря;
Ф — магнитный поток;
с — постоянная.
При тяговом режиме в двигателе происходит преобразование электрической энергии в механическую. Приложенное к двигателю напряжение U больше его электродвижущей силы, т. е. U> Е. Уравнение электрического равновесия между приложенным к двигателю напря-34
жением, его э. д. с. и падением напряжения в силовой цепи 1г имеет вид:
U — Е + 1г = спФ-\- 1г. (5)
На основании (4) и (5) получаем следующее выражение для скорости вращения якоря:
Е
п = — сФ
U—1г сФ
(6)
Так как скорость поезда v пропорциональна п, окончательно имеем:
где I — ток, потребляемый силовой цепью двигателя;
Ф — магнитный поток;
г — электрическое сопротивление обмоток силовой цепи двигателя (якоря, главных и добавочных полюсов);
С — постоянная, зависящая от параметров двигателя, передаточного числа редуктора и диаметра движущего колеса.
Из анализа формулы (7) следует, что скорость поезда можно регулировать изменением напряжения, подведенного к тяговым двигателям, или величины магнитного потока.
Напряжение на тяговых двигателях при заданном напряжении в контактной сети можно изменить: 1) регулируя сопротивление в силовой цепи двигателя; 2) при помощи преобразователей и 3) перегруппировкой тяговых двигателей при количестве двигателей больше единицы. Первый способ связан с большими потерями энергии. Он неэкономичен и может применяться только при кратковременной работе — пуске двигателей. Второй способ требует дополнительного оборудования. Основным является третий способ регулирования скорости, так как он вполне экономичен и не требует существенного дополнительного оборудования.
Перегруппировка тяговых двигателей, т. е. применение различных способов их соединения, возможна при двух и более тяговых двигателях на вагоне или на троллейбусе (z > 2). Общее правило при перегруппировке двигателей — переход от ступени соединения с меньшим напряжением на двигателе к ступени соединения с большим напряжением < Un < t/m. Каждому способу соединения соответствует ступень регулирования скорости, не связанная с потерями энергии в пусковых сопротивлениях. Такие ступени носят название экономических ступеней скорости или ходовых позиций.
Дву хступенчатая перегруппировка при двух тяговых двигателях (рис. 21) может быть применена в одном варианте: I ступень — последовательное соединение, напряжение на двигателе U = II ступень — параллельное соединение, U = Uc, где Uc — напряжение
а) О~1—*—if >ЛН\/—*—4. 1----►
Rn х'
Рис. 21. Принципиальные схемы соединения двух тяговых двигателей (двухступенчатая перегруппировка) I ступень — последовательное соединение; II ступень — параллельное соединение
е) °-А=>рСАА—О рС^А/—
Рис. 22. Принципиальные схемы соединения четырех тяговых двигателей:
/ — последовательного возбуждения (а — последовательное; б — последовательнопараллельное; в — параллельное соединение); // — смешанного согласного возбуждения (а —последовательное; о — последовательно-параллельное; в — параллельное соединение)
сети. Такая перегруппировка применяется на двухосных трамвайных вагонах всех типов и на троллейбусе типа ТС.
Двухступенчатая перегруппировка при четырехтяговых двигателях (рис. 22) возможна в следующих вариантах. Первый вариант:
I ступень — последовательное соединение (схема /, a), U = II ступень — последовательно-параллельное соединение (схема I, б),
U = Второй вариант: I ступень — последовательно-параллельное соединение (схема /, б), U = II ступень — параллельное соединение (схема /, в), U = Uc. Третий вариант: I ступень — последовательное соединение (схема II, a), U = II ступень — параллельное соединение (схема II, в), U = Uc.
Первый вариант перегруппировки применяется на четырехосных вагонах с тяговыми двигателями на номинальное напряжение UR = = (например, трамвайные двигатели на 275 в и двигатели для вагонов метрополитена на 375 в). Второй вариант применяется на четырехосных вагонах с тяговыми двигателями на номинальное напряжение (7Н = = 550 в. Этот вариант в сравнении с первым усложняет элект-
рическую схему вагона, но тяговые двигатели на UH = Uc имеют в два раза меньший часовой ток. Третий вариант на практике применения не нашел, вследствие четырехкратного изменения величины подводимы?; напряжений: I ступень U = II ступень U ~ UQ.
Двухступенчатая перегруппировка тяговых двигателей применяется на вагонах трамвая и метрополитена всех типов. Исключение составляют трамвайные вагоны с автоматической системой косвенного управления без перегруппировки: вагоны РВЗ — двигатели постоянно соединены по схеме II, б, вагоны «Татра» — по схеме /, б (рис. 22).
Трехступенчатая перегруппировка возможна при четырех и более тяговых двигателях. На четырехосных вагонах возможно применение только одного варианта (см. рис. 22). I ступень — последовательное соединение (схема а); II ступень — последовательно-параллельное соединение (схема б) и III ступень — параллельное соединение всех тяговых двигателей (схема в). Трех ступенчатая перегруппировка в моторвагонной тяге не применяется, так как она связана со значительным усложнением электрической схемы вагона. Этот способ широко применяется в электровозной тяге с двигателями последовательного возбуждения на шестиосных электровозах ВЛ.
Регулирование скорости изменением магнитного потока. Магнитный поток в двигателях последовательного возбуждения регулируют: 1) изменением величины тока возбуждения шунтированием обмотки и 2) изменением числа витков обмотки возбуждения.
Принципиальные схемы изменения скорости способом шунтирования приведены на рис. 23 (схема а — с одной ступенью регулирования скорости, схема б — с двумя ступенями). При нормальном магнитном поле контактор 1 разомкнут и весь ток I протекает по обмотке возбуждения. Для ослабления поля замыкают контактор 1, вследствие чего через обмотку возбуждения будет протекать ток 7В = I — /ш, уменьшится магнитный поток и при том же токе в якоре увеличится скорость. В схеме б первая ступень ослабления поля получается при включении контактора 1, а вторая ступень — при включении контакторов 1 и 2; в цепи шунта выключается сопротивление г2> уменьшается ток возбуж
дения и магнитный поток — ступень наивысшей скорости. Регулирование скорости шунтированием применяется на трамвайных вагонах при системах непосредственного (с многопозиционными контроллерами) и косвенного управления (например, вагоны Т2).
При регулировании магнитного потока посредством отключения части витков обмотка должна быть секционированной (схема в, рис. 23). При одной ступени секционирования обмотка состоит из двух секций Wi и При полном поле включенное число витков W = Wr + W2 (контактор 1 выключен), а при ослаблении поля (включением контактора 1 с последующим выключением контактора 2) W = Wr (витки W2 выключены).
Рис. 23. Принципиальные схемы регулирования скорости изменением магнитного потока
а и б — шунтировкой поля; в —секционированием; г — регулировочным реостатом 7?р в цепи параллельного возбуждения
В двигателях смешанного возбуждения регулирование поля осуществляется проще, чем в двигателях последовательного возбуждения: изменяется величина сопротивления в цепи параллельной обмотки (рис. 23, г). При изменении величины регулировочного сопротивления изменяется и ток возбуждения IR. Посредством регулировочного реостата легко получить ряд экономических ступеней скорости. При этом в реостате возникают потери энергии, но так как ток возбуждения составляет лишь небольшую часть тягового тока 1 (3—5%), а потери мощности пропорциональны квадрату тока, то эти потери не превышают 1% мощности, потребляемой из сети.
§ 11. ПУСК
Ток в силовой цепи двигателя (схема соединения при z — 1) согласно закону Ома выражается следующим соотношением:
jЕ________ U сФп
г г
где Uc — напряжение сети;
U — напряжение на зажимах двигателя; г — сопротивление обмоток.
Первым периодом движения поезда является пуск, начинающийся троганием с места (п=0). При п = 0 электродвижущая сила Е =0. Следовательно, формула (8) принимает вид / = Так как сопротивление г представляет небольшую величину, обычно десятые или сотые доли ома, то непосредственное включение неподвижного двигателя в сеть привело бы к короткому замыканию. Так, например, в момент пуска через обмотки двигателя последовательного возбуждения ДК-257А (сопротивление г = 0,05 ом) прошел бы ток
I = = — = 11 000 а,
г 0,05
превышающий часовой ток Ih = 190 а в = 68 раз. Поэтому величина тока в момент пуска поезда должна быть ограничена определенным, допустимым для данного двигателя пределом.
Величину пускового тока ограничивают, понижая напряжение,, подводимое к двигателю, для чего в его силовую цепь включают сопротивление, называемое пусковым. При включении в силовую цепь двигателя пускового сопротивления величина тока в первоначальный момент пуска определяется следующей зависимостью:
I = и° п r + Rn'
где 7?п — величина пускового сопротивления.
Как только якорь двигателя начинает вращаться, в его обмотке индуктируется э. д. с., направленная против подводимого к двигателю напряжения. С увеличением скорости вращения э. д. с. возрастает, а ток, потребляемый двигателем, уменьшается. Пусковой ток двигателя по мере роста скорости определится выражением
. — и~Е °'" r + Rn •
Пусковой ток /п двигателя при любой схеме соединения определяется из уравнения электрического равновесия для установившегося режима, а именно:
Uc = z'IuRn + z"U.
Заменяя напряжение U его значением из формулы (5), получим:
Uc = z4nRn + z"E + z"Iur, (9)
откуда
= (9'>
С Г -р с 1\ ц
где z' — число параллельных групп двигателей;
г" — число двигателей в группе, соединенных последовательно. Изменение пускового сопротивления может быть плавным (/п =
= const) или ступенчатым (/п #= const). При /п = const необходимо
плавно изменять величину пускового сопротивления (от 7?п до 0), что при металлических реостатах, применяемых на подвижном составе, связано с конструктивными затруднениями. Примером плавного пуска может служить пуск посредством угольных контактных пластин, а также практически коллекторный пуск (с коллекторным контроллером с большим числом пусковых позиций, например, на вагоне Т-2). Однако плавное регулирование пускового сопротивления усложняет систему управления. Поэтому преимущественно применяются системы управления подвижным составом, где пусковое сопротивление выводится не непрерывно, а отдельными ступенями.
Реостатный пуск может быть неавтоматическим и автоматическим. Неавтоматический пуск характеризуется тем, что каждой реостатной позиции силовой схемы соответствует определенное положение главной рукоятки контроллера управления; пока эта рукоятка находится на данной позиции, никаких изменений в схеме силовой цепи не происходит. Пуск при такой системе производится перемещением главной рукоятки или педали контроллера с позиции на позицию.
Автоматический пуск повышает экономические и эксплуатационные показатели работы подвижного состава, обеспечивает плавное трогание поезда с места, дает возможность реализовать различные по величине ускорения и замедления, обеспечивает высокие скорости движения. Особенность этого пуска состоит в том, что переход с одной реостатной позиции на другую происходит независимо от воли водителя, который имеет возможность выбрать лишь необходимую величину ускорения. При автоматическом пуске переход с одной ступени реостатной позиции на следующую регулируется особым реле минимального тока (реле ускорения) или хронометрическим вращением группового контроллера, выводящего ступени сопротивления.
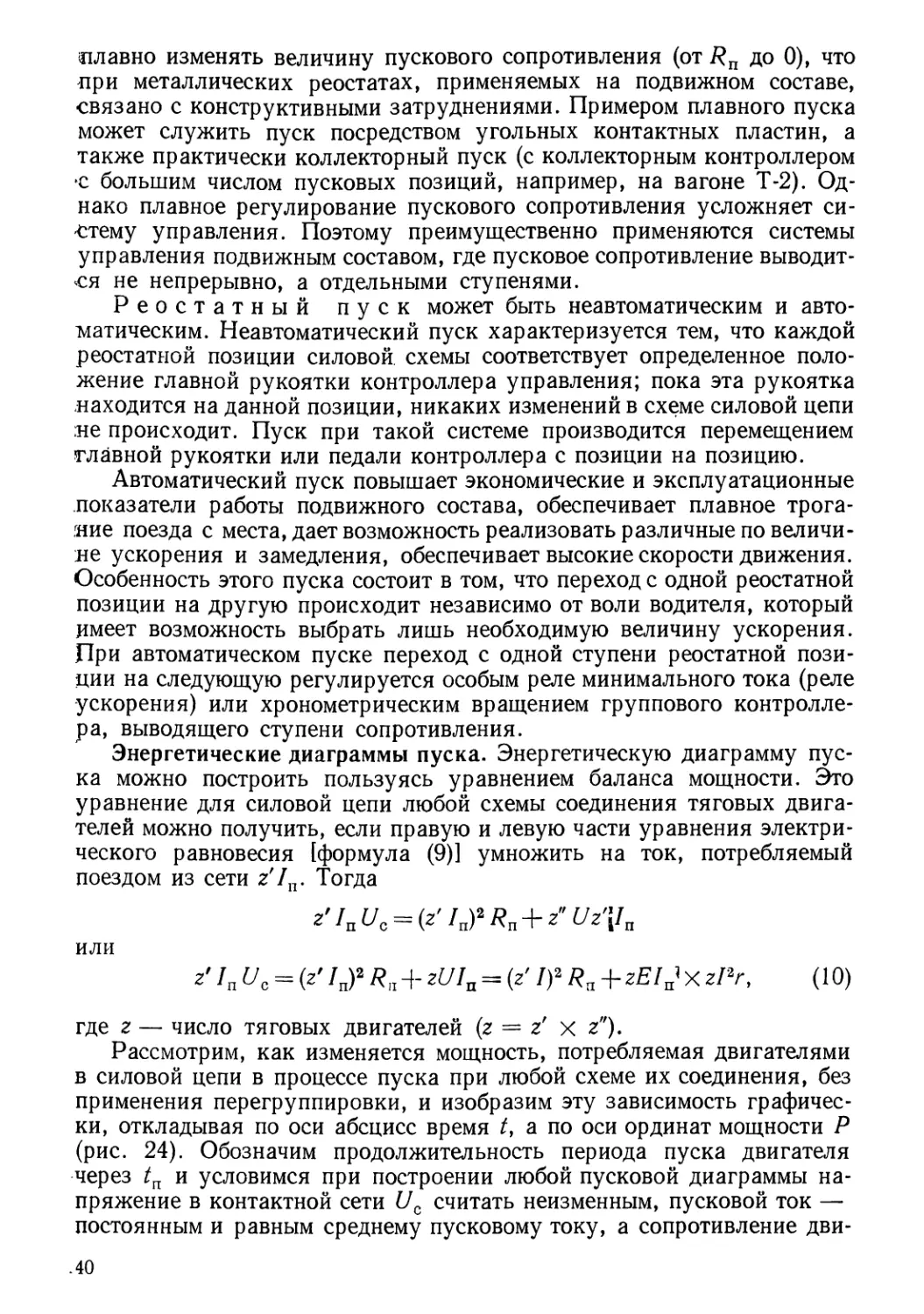
Энергетические диаграммы пуска. Энергетическую диаграмму пуска можно построить пользуясь уравнением баланса мощности. Это уравнение для силовой цепи любой схемы соединения тяговых двигателей можно получить, если правую и левую части уравнения электрического равновесия [формула (9)] умножить на ток, потребляемый поездом из сети z' /п. Тогда
z'/nt/0 = (z'/n)2/?n + z''^Vn
или
/ /п ис = (z' /п)* R. + zUIu = (г' /)2 /?п + zEIJ X zFr, (10)
где z — число тяговых двигателей (z = zf х г").
Рассмотрим, как изменяется мощность, потребляемая двигателями в силовой цепи в процессе пуска при любой схеме их соединения, без применения перегруппировки, и изобразим эту зависимость графически, откладывая по оси абсцисс время а по оси ординат мощности Р (рис. 24). Обозначим продолжительность периода пуска двигателя через /п и условимся при построении любой пусковой диаграммы напряжение в контактной сети Uc считать неизменным, пусковой ток — постоянным и равным среднему пусковому току, а сопротивление дви
жению— не зависящим от скорости. Время пуска tu можно определить зная среднее пусковое ускорение ап и скорость в конце пуска.
по формуле равноускоренного движения:
у _£п_
ап
В момент начала пуска мощность, потребляемая из сети, затрачивается в пусковом сопротивлении и на электрические потери в двигателях:
Рис. 24. Энергетическая диаграмма для любой схемы соединения а — без перегруппировки; б —без перегруппировки (уточненная)
В соответствии с этим откладываем ординату Об, равную сумме ординат Оа и аб (так как якоря двигателей еще не вращаются и Е = = спФ = 0). Мощность, теряемая в двигателях, равна z/J/и изображается на графике отрезком 0а. Так как величина малая, то очевидно,. чтоб момент пуска большая часть мощности, потребляемой из сети, затрачивается в пусковом сопротивлении (z'/u)27?n — отрезок аб) и лишь 2—5% — в обмотках каждого двигателя в зависимости от значения г. Так как напряжение сети в период пуска принято постоянным, то прямая бв изображает зависимость Р = f(t) — электрическую мощность, потребляемую поездом из сети. В момент окончания пуска (I = = /п) пусковое сопротивление полностью выключено (7?п = 0), и мощность, потребляемая двигателями, равна мощности, потребляемой из сети (отрезок вд). Уравнение (10) принимает вид:
z' IUc = zUl=--zPr + zEI.
Мощность, потребляемая двигателями в период пуска, выражается уравнением
гРэ = zUI^ = zln г + zEIn = zl^r + гСФз1п.
He учитывая влияния магнитных и механических потерь и основного сопротивления движению, можно считать, что гРэ = f(t) изменяется по закону прямой линии (см. рис. 24, а). Для построения этой прямой достаточно соединять точки а и в, от ординаты вд отнять постоянную величину zPr — электрические потери (отрезок вг) и соединить точки 0 и г; получится прямая Ог, изображающая зависимость zEIu = f(t) — электромагнитную мощность тяговых двигателей, т. е. мощность, затрачиваемую на создание внутреннего вращающего момента (момент на валу якоря и на покрытие магнитных и механических потерь). Ординаты энергетической диаграммы изображают потребляемые мощности в любой момент пуска. Так, в момент времени /1 мощность z'l^U^ подводимая к поезду, изображается ординатой жк; мощность (г'/п)2/?п, поглощаемая в пусковом сопротивлении, — ординатой ик. Мощность, подводимая к двигателям, — ординатой иж. Мощность, подводимая к двигателям, состоит из мощности zPr (ордината из), затрачиваемой на электрические потери, и мощности zEIu (ордината зж), затрачиваемой на создание внутреннего электромагнитного вращающего момента.
Энергия, потребляемая
А =
Так как на диаграмме (см. рис. 24) по оси абсцисс отложено время, а по оси ординат — мощность, соответствующие площади диаграммы изображают электрическую энергию, потребляемую двигателями и пусковым сопротивлением.
На рис. 24, б показана уточненная энергетическая диаграмма пуска. Полезная мощность двигателей изображается кривой Ог, так как изменение мощности происходит не пропорционально времени, а немного медленнее. Это объясняется некоторым уменьшением ускорения в процессе возрастания скорости, вызванным снижением силы тяги из-за увеличения механических и магнитных потерь и основного сопротивления движению. Линия ав, изображающая изменение подведенной мощности к двигателю, также будет кривой. Ордината Оа (при v = 0) пропорциональна электрическим потерям в двигателях, магнитные и механические потери отсутствуют. Ордината вг (момент окончания пуска) изображает сумму электрических, магнитных и механических потерь в электроприводах, равную:
грп = г7/с 7П(1—1]0), где рп — потери мощности в одном электроприводе (двигателе и редукторе);
т]0 — к. п. д. при полном напряжении и токе /п.
поездом из сети, равна:
С Pdt = f Uc ln dt.
J J
Полезная мощность двигателей, т. е. мощность, затраченная на создание внешнего вращающего момента (ордината дг), равна:
гРм = г(6/с/п—Рп).
Площади на уточненной диаграмме (рис. 24, б) изображают: Обед— энергию, потребляемую из сети (тяговыми двигателями и пусковым сопротивлением); Оавд — энергию, потребляемую тяговыми двигателями; абв — энергию, затраченную в пусковом сопротивлении;
Рис. 25. Энергетическая диаграмма пуска
а —при двухступенчатой перегруппировке; б — при трехступенчатой перегруппировке (по схемам рис. 22)
Оавг — энергию, затраченную на потери в тяговых двигателях; Огд — энергию, затраченную на создание внешнего вращающего момента. На диаграмме (см. рис. 24, а) площадь Огд изображает энергию, затраченную на создание внутреннего вращающего момента, а площадь Оавг — энергию, затраченную на электрические потери в двигателях. Как видно из диаграммы, потери энергии в пусковом сопротивлении без особой погрешности можно принять равными работе, совершенной двигателями за время пуска.
Рассмотрим порядок построения энергетической диаграммы пуска для любого варианта двухступенчатой перегруппировки тяговых двигателей (рис. 25, а). В момент начала пуска (I ступень соединения тяговых двигателей) мощность, потребляемая поездом из сети, затрачивается в пусковом сопротивлении и покрывает электрические потери В' двигателях:
г'/п Uc = (z'Iuy Rn + zl2nr.
В соответствии с этим откладываем ординату Об, равную сумме ординат Оа и аб. В момент окончания пуска при t = /П1 (I ступень соединения тяговых двигателей) мощность, потребляемая из сети, равна мощности, потребляемой двигателями, так как 7?п = 0. Мощность, потребляемая двигателями в период пуска, выражается уравнением zP3 = zIuUc = zlir + zEIn = zInr + гсФи!п.
Не учитывая влияния магнитных и механических потерь и основного сопротивления движению, можно считать, что zPQ = f(f) изменяется по закону прямой линии. Для построения этой прямой достаточно соединять точки а и д, от ординаты дж отнять постоянную величину zl^r — электрические потери (отрезок де) и соединить точки 0 и е\ получится прямая Ое, изображающая зависимость z£7n = /(/).
Рис. 26. Упрощенные энергетические диаграммы пуска
а — без перегруппировки; б — с двухступенчатой перегруппировкой; в —с трехступенчатой перегруппировкой
Так как мощность, потребляемая из сети на первой ступени соединения тяговых двигателей, остается за период /П1 постоянной, проводим горизонтальную прямую бв, выражающую зависимость zInUz = f(t). Точка в соответствует моменту времени работы двигателей по автоматической характеристике I ступени. Для перехода на II ступень необходимо снова включить пусковое сопротивление. Этот переход изображается ординатой в'г, величина которой в два раза больше ординаты в'в. Так как мощность, потребляемая из сети на II ступени соединения двигателей, остается за период /П2 постоянной, проводим горизонтальную прямую гд. Время пуска на I ступени соединения двигателей /П1 несколько меньше времени пуска на II ступени (/п1 < /п2), так как скорость выхода на автоматическую характеристику при половинном напряжении несколько меньше половины соответствующей скорости при номинальном напряжении.
На рис. 25, б показана энергетическая диаграмма при трехступенчатой перегруппировке с четырьмя тяговыми двигателями, соединенными по схемам рис. 22, I.
При построении энергетической диаграммы для подвижного состава с двигателями смешанного возбуждения кроме силовой цепи необходимо учесть мощность и энергию, потребляемую цепью параллельного возбуждения.
В этом случае уравнение баланса мощности для любой схемы соединения двигателей принимает вид:
/с Uc = г' /п Uc + /врс = (г' /п)2 Яп + zUI, + /в 7/с, где /с — ток, потребляемый из сети;
/в — ток, потребляемый в цепи параллельного возбуждения;
/п — пусковой ток силовой цепи одной группы тяговых двигателей.
Энергия затраченная в цепи параллельного возбуждения,
составляет 1,5—2% энергии, потребляемой из сети.
Для определения величины потерь энергии в пусковом сопротивлении при различных способах пуска и регулировании скорости построены упрощенные энергетические диаграммы (рис. 26). В этих диаграммах не учитываются механические, магнитные и электрические потери в двигателях. Отношение потерь в пусковом сопротивлении Ап к полезной работе тяговых двигателей Дд принято называть коэффициентом пуска: /Сп=— . Коэффициент характеризует эко-комичность пуска. Из рис. 26 следует, что при пуске без перегруппировки = 1, при двухступенчатых перегруппировках: /Сп = 0,5 и при трехступенчатой перегруппировке /Сп=3/8. Потери энергии в пусковом сопротивлении соответственно составляют: 50, 33,3 и 27% энергии, подведенной к поезду. Таким образом, применение перегруппировки тяговых двигателей, помимо увеличения числа экономических ступеней скорости, дает экономию электрической энергии при пуске. Однако применение перегруппировки усложняет электрическую схему подвижного состава. Уменьшить потери в пусковых сопротивлениях можно, не применяя перегруппировки, использованием тяговых двигателей с низколежащей характеристикой за счет снижения скорости окончания пускового периода.
Глава V. ТОРМОЖЕНИЕ ПОДВИЖНОГО СОСТАВА
§ 12. СИСТЕМЫ ТОРМОЖЕНИЯ
Торможение подвижного состава применяется для его остановки, а также для ограничения скорости на спусках, перед кривыми участками пути, стрелками и крестовинами. В условиях эксплуатации транспорта для обеспечения нормального и безопасного движения подвижного состава процесс его торможения имеет весьма важное значение. Увеличение мощности тормозных устройств поезда повышает безопасность движения и дает возможность допускать большие скорости.
На рис. 27 дана схема классификации систем торможения по способу создания тормозной силы и по типу привода. По способу создания
тормозной силы^системы торможения можно подразделить на две груп-п ьг 1) механическое торможение; 2) электрическое торможение.
При механическом торможении тормозная сила создается силами трения между взаимно скользящими поверхностями. Эта группа по роду трущихся поверхностей подразделена на вращательно-фрикционные и рельсовые тормоза. Приводы, осуществляющие взаимное нажатие трущихся поверхностей, могут быть непосредственного действия (ручные или ножные) и косвенного действия (пневматические, гидравлические, электромагнитные).
Электрическое торможение основано на принципе обратимости электрической машины постоянного тока. Поэтому можно использовать тяговый двигатель в качестве генератора, а генераторный
Рис. 27. Схема классификации систем торможения
режим — в качестве тормозного. Колесные пары вагона, движущегося по инерции, приводят во вращение якоря двигателей, которые при этом работают в качестве генераторов и преобразуют кинетическую энергию поезда в электрическую. Моменты, требующиеся для вращения якорей, реализуются на ободе колеса в виде тормозной силы. Электрическая энергия может быть поглощена в реостатах или отдана обратно в контактную сеть. Первый вид торможения называется реостатным, а второй — рекуперативным. Кроме того, электрическое торможение может быть осуществлено и как реверсивное. При реверсивном торможении двигатели переключаются на обратный ход, вследствие чего изменяется направление их момента: вместо тягового он становится тормозным.
Электрическое торможение по сравнению с механическим обеспечивает значительную экономию эксплуатационных расходов на смену колодок, осмотр и ремонт тормозной системы, ремонт колесных пар (смена бандажей). Применение электрического торможения повышает надежность и безопасность эксплуатации: 1) при движении на спуске любое произвольное повышение скорости сопровождается увеличением тормозного эффекта; 2) колеса при юзе обладают свойством самоосвобождения от скольжения. С другой стороны, при использовании электрического торможения в качестве служебного необходимо увеличивать на 15—30% часовую мощность двигателя и усиливать его конструк
цию. Кроме того, при электрическом торможении усложняется электрическая схема вагона, а величина тормозного замедления не превышает 1,5 м/сек2.
В принципе всякое торможение представляет собой отнятие энергии у движущегося поезда. Этот процесс связан с созданием тормозной силы, направление которой противоположно направлению движения. Указанная энергия состоит из кинетической, зависящей от скорости движения, и потенциальной, определяемой высотой положения поезда по отношению к низшей точке профиля данного участка пути. По методу отвода этой энергии виды торможения подразделяются на две группы: а) торможение, при котором энергия поезда возвращается обратно в сеть, — рекуперативное; б) торможение, при котором энергия'поезда теряется бесполезно, — сюда относятся все прочие виды торможения.
По своему назначению торможение поезда можно подразделить на служебное и экстренное. Служебное торможение применяется в нормальных условиях работы и осуществляется действием одного какого-либо привода. Экстренное торможение производится для предупреждения несчастных случаев и аварий. Тормозная сила и тормозное замедление должны быть максимальными, а тормозной путь минимальным, поэтому в действие обычно приводятся два привода. По условиям безопасности движения необходимо, чтобы тормозились одновременно все колеса поезда (G = GT), т. е. тормозной вес поезда GT должен быть равен весу поезда G.
В тормозах всех систем, кроме рельсовых, торможение осуществляется за счет внутренних моментов, создаваемых в различных элементах подвижного состава и реализуемых в виде тормозных сил при помощи сил сцепления колес с рельсами или дорогой. При рельсовом торможении тормозная сила возникает независимо от взаимодействия колеса с рельсом и, следовательно, не ограничивается условиями их сцепления.
§ 13. МЕХАНИЧЕСКОЕ ТОРМОЖЕНИЕ
Колесно-колодочное торможение. Этот вид торможения широко применяется на подвижном составе рельсового транспорта. Тормозная сила создается здесь за счет трения, возникающего при нажатии тормозных колодок на бандажи вращающегося колеса. Нажатие на колесо осуществляется одной колодкой (одностороннее нажатие) на четырехосных трамвайных вагонах или двумя колодками (двустороннее нажатие) на двухосных вагонах и вагонах метрополитена. На рис. 28, а показана схема одностороннего колесно-колодочного торможения. При нажатии тормозной колодки на обод вращающегося колеса с некоторой силой QK в результате трения между колодкой и ободом возникает касательная сила Вк (тормозная сила одной колодки) и тормозного момента Мто (пара сил Вк и Вк).
Дисковые и барабанные тормоза. Тормозная сила создается за счет трения между колодками или другими тормозными устройствами (на-
пример, лентой и вращающимися фрикционными деталями, кинематически связанными с колесными парами. В зависимости от формы поверхности трения фрикционной детали различают тормоза дисковые— с плоской поверхностью трения (рис. 28, б) и барабанные — с цилинд-
а) —I—* $ 6)
Рис. 28. Принципиальные схемы механического торможения
а —с односторонним колесно-колодочным торможением; б —с дисковым тормозом; в —с барабанным тормозом на оси колесной пары; /—колесная пара;
2 — тормозная колодка; 3 — тормозной диск; 4 — тормозной барабан
рической поверхностью трения (рис. 28, в). В зависимости от расположения фрикционной детали различают системы: 1) диск или барабан расположены на оси колесной пары (вагоны трамвая) или оси колеса (троллейбус); 2) диск или барабан расположен на валу якоря двига-
Рис. 30. Рельсовый электромагнитный тормоз а —расположение на тележке: /—контур тележки; 2—колесные пары; 3—электромагниты; пружины;
5 — рельс; б —электромагнит с продольным намагничиванием; За — сердечник; 36 — катушкой; Де —полюсы; Да —тормозной башмак; в — электромагнит с поперечным намагничиванием
Рис. 29. Схема барабанного тормоза вагона РВЗ
/—двухступенчатый редуктор; 2— тяговый двигатель; 3 — тормозной барабан; 4 — тормозные колодки;
5 —карданный вал
теля, тормозной момент передается через редуктор (рис. 29). При расположении фрикционной детали на валу якоря величина QK в 4—5 раз меньше, чем нажатие колодки.
Рельсовое торможение. Вагоны современных типов оборудованы рельсовым тормозом с электромагнитным приводом. Сущность рельсового торможения состоит в том, что подвешенные на пружинах к те* лежке или к раме кузова электромагниты свободно перемещаются в вертикальном направлении и притягиваются при возбуждении их обмотки током к рельсам (рис. 30, а). Сила притяжения зависит от конструкции башмака и величины его рабочей поверхности. Башмаки бывают двух типов: с продольным (схема б) и с поперечным (схема в) намагничиванием. Электромагнит первого типа состоит из ряда полюсов, расположенных вдоль рельса. Сила притяжения на один полюс составляет 3000—4000 н. Электромагнит второго типа состоит из двух полюсой большей длины, расположенных вдоль рельса. При такой конструкции обеспечивается нажатие башмака на рельс до 50 000 н на 1 м. Возникающая между башмаками электромагнитов ц рельсами сила трения передается через направляющие башмаков на тележку или на раму и является тормозной силой.
§ 14. ЭЛЕКТРИЧЕСКОЕ ТОРМОЖЕНИЕ
Ценным свойством электрических машин постоянного тока является их способность работать как'в режиме двигателя, так и в режиме генератора. При генераторном режиме работы двигателя происходит преобразование механической энергии в электрическую. Одним из характерных признаков тягового режима работы двигателя является противоположность направлений э. д. с. и тока якоря. Если направление тока якоря изменится, а направление э. д. с. останется прежним, то ток и э. д. с. будут совпадать по направлению, что и является признаком генераторного режима. Уравнение электрического равновесия для генераторного режима при z = 1 будет иметь следующий вид:
E = U + Ir.
Реостатное торможение. При реостатном торможении силовая цепь двигателя отключается от контактного провода и к ней подключается сопротивление, в котором выделяется в виде тепла электрическая энергия, создаваемая двигателями, работающими в генераторном режиме. В качестве сопротивления обычно используются пусковые реостаты.
При тяговом режиме U > Е, э. д. с. и ток имеют противоположное направление (рис. 31, а). При реостатном торможении, поскольку направления вращения якоря и потока остаются неизменными, э. д. с. сохраняет свое направление, а обусловленный ею тормозной ток /т будет направлен от ЯЯ к Я» т. е. противоположно току при тяговом режиме. В первый момент перехода в генераторный режим э. д. с. якоря обусловлена остаточным магнетизмом полюсов. В дальнейшем необходимо, чтобы ток в катушках главных полюсов усиливал остаточ ный магнетизм. Для этого направление тока в катушках должно оставаться таким же, как при тяговом режиме. С этой целью, поскольку при переходе на генераторный режим направление тока в якоре ме
няется, нужно переключить концы катушек главных полюсов или концы обмотки якоря (рис. 31, б и в). Если переключения не сделать, то тормозной ток, протекая через обмотку возбуждения в обратном направлении, размагнитит сердечники полюсов. Процесса самовозбуже-ния не будет, тормозной ток, а следовательно, и тормозная сила будут
равны нулю.
При торможении двумя двигателями, включенными в одну общую схему, особое значение приобретает вопрос о внутренней электрической устойчивости. Под внутренней электрической устойчивостью понимают свойство системы восстанавливать устойчивое электрическое равновесие при любых взаимных отклонениях токов, протекающих в цепях тяговых двигателей, параллельно работающих в генераторном режиме. При неравенстве э. д. с. и не
Рис. 32. Принципиальные схемы реостатного торможения с двумя тяговыми двигателями
а —последовательное соединение; б —параллельное соединение; в—перекрестная схема; г—перекрестно-петлевая схема
Рис. 31. Принципиальные схемы реостатного торможения с одним тяговым двигателем
а —тяговый режим; б и в —реостатное торможение
равномерном распределении токов в параллельных ветвях система должна выравнивать их.
Вполне устойчивая схема реостатного торможения может быть получена при последовательном соединении двигателей (рис. 32, а). Однако эта схема требует тормозного сопротивления, по величине значительно большего, чем пусковое сопротивление. При параллельном соединении двигателей тормозное сопротивление обычно не превышает величину пускового сопротивления, но для обеспечения электрической устойчивости во время торможения требуется применение специальных схем.
При параллельном соединении двух тяговых двигателей (рис. 32, б) равномерное распределение токов в параллельных ветвях может быть достигнуто лишь в том случае, если будут одинаковы э. д. с. обоих двигателей, работающих в генераторном режиме, т. е. если Ег = Е2. Тогда будут равны и тормозные токи в цепи каждого генератора = = 1у2. Однако вследствие несовпадения характеристик двигателей, разных электрических и магнитных сопротивлений, случайного «юза» и других причин, в условиях эксплуатации э. д. с. будут неодинаковы: £i #= Е2. Напряжение внешней цепи при любых условиях будет определяться следующим соотношением:
6/ = Е± —/Т1 г = Е2^1т2 г.
Любое нарушение равенства э. д. с. вызовет неравномерное распределение токов в параллельных ветвях. Даже незначительное увеличение э. д. с. первого двигателя приведет к увеличению тока /т1, причем одновременно уменьшается э. д. с. Е2 и ток </т2 второго двигателя. В результате второй двигатель несколько разгрузится. Увеличение тока /Т1 вызовет дальнейшее увеличение Е± и соответственно уменьшение Е2. Этот процесс будет продолжаться до тех пор, пока ток второго двигателя не упадет до нуля, после чего он изменит свое направление. Это приведет к изменению направления потока полюсов, а следовательно, и Е2, В контуре окажутся два последовательно включенных двигателя, работающих генераторами. Их суммарная э. д. с. вызовет ток, ограниченны^. только сопротивлением якорей и обмоток возбуждения, т. е. произойдет короткое замыкание двигателей. Таким образом, система параллельного соединения двигателей на один общий реостат внутренней электрической устойчивостью не обладает.
Для достижения устойчивости параллельно работающих в генераторном режиме двигателей необходимо применять специальные схемы (например, на двухосных вагонах — уравнительную, перекрестную и петлевую, на четырехосных — циклическую, перекрестно-уравнительную и петлевую). Рассмотрим наиболее распространенные схемы.
В схеме перекрестного соединения (рис. 32, в) магнитные катушки каждого двигателя питаются от якоря другого двигателя. Если, например, увеличится э. д. с. двигателя 2, то ток 7т2 усилит магнитное поле двигателя 1 и ослабит поле двигателя 2, вследствие чего э. д. с. двигателя 1 увеличится, а э. д. с. двигателя 2 уменьшится до полного равенства между ними. Данная схема обеспечивает достаточно полное уравнение /Т1 и /т2, т. е. нагрузок цепей обоих двигателей при торможении, и в этом отношении заслуживает предпочтения перед схемой с уравнительным соединением. Но при обрыве цепи якоря одного из двигателей тормозной эффект совершенно пропадает, так как ни один из двигателей в этом случае не возбуждается. Для устранения этого недостатка применяется перекрестно-уравнительная схема. Значительное распространение имеет схема с перекрестно-петлевым соединением (рис. 32, г). Эта схема не трубет переключения концов катушек возбуждения при переходе на тормозной режим.
При наличии на вагоне четырех двигателей следует различать два способа их соединения: 1) постоянное последовательное соединение каждой пары двигателей; 2) параллельное соединение каждой пары двигателей. В первом случае схема реостатного торможения (рис. 33,6) ничем не отличается от схемы с двумя двигателями (см. рис. 32), а во втором случае применяются специальные схемы (например, перекрестно-уравнительная (рис. 33, а).
Рассмотренные выше схемы реостатного торможения имеют следующие недостатки: 1) для плавного торможения требуется большое число ступеней реостата; 2) вследствие некоторой длительности процесса самовозбуждения торможение осуществляется недостаточно быстро; 3) эффект торможения продолжается не до полной остановки, а лишь до скоростей порядка 3—5 км/ч. Для ускорения процесса самовозбуждения предложены схемы, где предусмотрена подпитка обмоток
Рис. 33. Принципиальные схемы реостатного торможения с четырьмя тяговыми двигателями а —перекрестно-уравнительная; б — перекрестно-петлевая
последовательного возбуждения от независимого источника тока низкого напряжения или наложение вспомогательной обмотки независимого возбуждения на главные полюса.
При переходе двигателей смешанного возбуждения на реостатное торможение возможны четыре варианта (рис. 34): 1) с питанием цепи параллельного возбуждения от контактной сети — с встречным (схема а) или согласным (схема 6) включением последовательной и параллельной обмоток главных полюсов; 2) с самовозбуждением генератора — с встречным (схема в) или согласным включением (схема г). Первый вариант получил наибольшее распространение. Как видно из схемы, для перехода на реостатное торможение достаточно отключить силовую цепь от контактной сети и включить ее на тормозное сопротивление. Но тормозная сила имеет определенные пределы вследствие ограничения величины магнитного потока размагничивающим действием потока последовательной обмотки. Во втором варианте концы последовательной обмотки переключаются. Потоки последовательной и параллельной обмоток складываются. Следовательно, при тех же токах якоря получается большая тормозная сила. Схемы третьего и четвертого вариантов практически не применяют. Параллельная работа двигателей смешанного возбуждения (или группы их) при торможении требует
таких же схем соединения в силовой цепи, как при двигателях последовательного возбуждения. Скорость при торможении можно регулировать изменением величины тормозного сопротивления при неизменном токе возбуждения или изменением тока возбуждения при постоянной величине тормозного сопротивления. Преимущественное применение получил второй способ (например, на троллейбусах). Торможение начинается с меньшего значения тока возбуждения, а затем ток двумя или тремя ступенями увеличивается до наибольшего. Т орможение обеспечивает полную остановку подвижного состава.
Рекуперативное торможение. Когда тяговые двигатели работают в рекуперативном генераторном режиме, силовая цепь вагона остается присоединенной к контактной сети. Рекуперируемая энергия используется на линии поездами, работающими в тяговом режиме, или возвращается на тяговую подстанцию. Величина напряжения на зажимах генерирующего двигателя ограничена напряжением в контактной сети. Сопротивление контактной сети является величиной нерегулируемой. Поэтому величина тормозного тока при рекуперации зависит от раз-
Рис. 34. Принципиальные схемы реостатного торможения с двигателями смешанного согласного возбуждения
/ — тяговый режим; // — варианты схем реостатного торможения
Рис. 35. Схема силовой цепи троллейбуса для двух режимов а —тяги; б —рекуперации
ности э. д. с. генератора и напряжения сети и определяется из уравнения электрического равновесия (для’схемы с одним двигателем):
E = Uc + Ir.
Для перехода с тягового режима (где Uc > Е) на генераторный необходимо, чтобы э. д. с. была больше напряжения сети (Е > (/с).
При повышении скорости v при постоянной величине потока Ф наступает момент, когда Е > Uc и ток в якоре изменит свое направление, т. е. двигатель начнет работать в генераторном режиме. Однако двигатель последовательного возбуждения не может перейти автоматически в режим генератора при неизменном направлении вращения его якоря [см. формулу (8)]. Уменьшение тока I по мере роста Е вызывает уменьшение магнитного потока Ф. Очевидно, что э. д. с. Е не может стать больше t/c, а ток не может изменить своего направления. Следовательно, переход на генераторный режим автоматически, например при увеличении скорости поезда на спуске, невозможен. Двигатель можно использовать для работы в генераторном режиме на сеть при переключении обмоток главных полюсов на независимое возбуждение. Для питания обмотки возбуждения может служить возбудитель или аккумуляторная батарея. Существует большое количество схем с возбудителем — генератором, отличающихся друг от друга способом его включения и возбуждения.
На подвижном составе городского электротранспорта исключительное распространение получили рекуперативные системы с двигателями согласно-смешанного возбуждения, позволяющими без большого усложнения аппаратуры переходить с тягового режима на рекуперативный. На рис. 35 показано прохождение тока для двух режимов: тягового (схема а) и рекуперативного (схема б). По первому закону Кирхгофа ток, потребляемый из сети, равен сумме токов силовой цепи и цепи параллельного возбуждения: /с = I + /в. Ток, отдаваемый в сеть при рекуперативном режиме, /с = I — /в.
РАЗДЕЛ ВТОРОЙ.
ТЕОРИЯ ДВИЖЕНИЯ ПОЕЗДА
Глава VI. УРАВНЕНИЕ ДВИЖЕНИЯ ПОЕЗДА
§ 15. ПЕРВЫЙ И ВТОРОЙ ВИДЫ УРАВНЕНИЯ ДВИЖЕНИЯ ПОЕЗДА ‘
Движение поезда по рельсовому и безрельсовому пути характеризуется зависимостями скорости от времени и пройденного пути, а время от пройденного пути: v = f(t); v = f(l) и t = f(l). Уравнение движения поезда устанавливает в дифференциальной форме связь между скоростью v, временем t и пройденным путем Л и дает возможность построить так называемые кривые движения поезда.
По второму закону Ньютона сила Ffl2, сообщающая поезду ускорение а, может быть выражена как произведение массы поезда т на его ускорение:
Рд = т^-=та н (н = кг-м/сек2), (И)
где т — приведенная масса поезда в кг;
а = — ускорение поезда в м/сек2',
Рд — действующая сила в н (кгм/сек2).
За единицу силы (ньютон) (кг-м/сек2) принята такая сила, которая массе 1 кг сообщает ускорение 1 м/сек2. Действующая Гд, сообщающая поезду ускорение, представляет собой равнодействующую всех сил, действующих на поезд в данный период движения. Формула (11) получила название первого вида уравнения движения поезда.
Изменение кинетической энергии поезда при его движении на любом участке пути равно работе действующей силы Рд на этом участке пути, т. 'е. произведению силы на пройденный путь. Следовательно, для бесконечно малого значения пути dl, можно записать:
dA=d—=Fadl.
2 д
Выполняя дифференцирование, получим:
A = mvdv = РД dl;
или
Fjs = mv7i н’ О2)
проверим размерность правой и левой части уравнения: кг-м/сек2 = = кг-м/сек-м/сек-м.
Формула (12) получила название второго вида уравнения движения поезда. Если в формулу (12) поставить значение v = то можно получить первую форму уравнения движения.
Приведенная масса поезда. Применяя формулы (11) и (12) для изучения движения поезда, необходимо иметь в виду, что величина т в этих уравнениях является мерой инерции поезда в процессе сообщения ему поступательного ускорения силой Ед. Если поезд изменяет свою поступательную скорость, то одновременно меняется и скорость вращения колесных пар, зубчатых колес редуктора и якорей тяговых электродвигателей. Поэтому необходимо учитывать не только кинетическую энергию, затраченную на преодоление физической массы поезда и равную , но и кинетическую энергию, необходимую для преодоления инерции вращающихся частей. Это энергия, как известно из механики, для любой вращающейся массы пропорциональна ее моменту инерций и ее угловому ускорению со и равна Jw2
Следовательно, кинетическая энергия А поезда, движущегося со скоростью v, будет равна:
/И* V2 X 1 Уд CDCD 2
^4=——Н ~TJL + дж(кг-мг/сек2), (13)
где »/д и (Од — момент инерции и угловая скорость движущих колесных пар и деталей редуктора, жестко связанных с ними;
«/я и соя — момент инерции и угловая скорость якорей двигателей с деталями редуктора;
Jn и <оп — момент инерции и угловая скорость.ведомых колесных пар.
Знак 2 показывает, что производится суммирование кинетических энергий всех якорей и колесных пар.
Угловые скорости вращающихся частей равны:
v
и)я = рид = р — ,
где и — радиусы движущих и ведомых колес по кругу качения
|х — передаточное число редуктора.
Подставляя значение угловых скоростей в уравнении (13) и вынося
у2
за скобу у, получим:
или
у 2 л=-^(/пф+/пэ)’
(14)
где тэ = ^^г + 2^-+2^-(«г = «г.ж2/л1г) (15)
имеет размерность массы и называется эквивалентной массой вращающихся частей. Обозначим отношение характеризующее соотношение эквивалентной и физической массы через у — коэффициент приведения. Если в уравнении (14) вынести за скобку величину тф и ввести коэффициент у, получим:
л^м+у).
Величину (1 + у) = ки называют коэффициентом инерции вращающихся частей, а произведение физической массы тф на величину этого коэффициента — приведенной массой поезда. Как известно, физическая масса поезда может быть выражена так:
= 1000(2
тф 9,81 •
Тогда приведенную массу поезда можно выразить так:
< 1000б£и 10006/ги /1г?ч
»—"ф‘и=—-i, (16)
где G — вес поезда в кн, a g = 9,81 м!сек2 — ускорение силы тяжести.
Если поезд состоит из нескольких вагонов с различными коэффициентами инерции вращающихся частей то приведенная масса поезда будет равна:
м^ф. м ^и. п ^ф. п> (1®)
где /пф.м и тф.п — физические массы;
zM и 2п — количество моторных и прицепных вагонов в поезде.
Вследствие сложной геометрической формы вращающихся частей поезда коэффициенты инерции обычно определяют экспериментально любым известным из механики методом. Однако и теоретическим расчетом приближенно можно определить величину коэффициента инерции. Для этого необходимо в формуле (15) вместо момента инерции J каждой вращающейся части подставить произведение ее физической массы на квадрат радиуса инерции р. Тогда получим:
VI Рд V Ря V Рп
тэ ~ тф. Д тф. я тф . и~2" • (17)
Зная вес вращающейся части, можно определить ее физическую массу и, исходя из средних значений отношений радиуса инерции к радиусу внешней окружности вращающейся части, вычислить экви-
ЗВ Зак. 1186
57
валентную массу. При расчетах можно исходить из следующих средних значений для якорей тяговых двигателей — 0,65 — 0,75; для колесных пар — 0,75—0,8; для зубчатых колес — 0,8.
Пример 1. Определить коэффициент инерции вращающихся масс прицепного четырехосного вагона, если его масса /пф = 13 800 кг, а масса одной колес-р
ной пары 450 кг. Отношение принимаем равным 0,7. Эквивалентную массу четырех колесных пар тд определяем по формуле (17):
л2
тэ = 4/Пф = 4 • 450 • 0,7г = 882 кг.
Коэффициент приведения
= = _ 882 _ о,ое5,
тф 13 800
а коэффициент инерции вращающихся масс
= (1 + ?) = 1 + 0,065 = 1,065.
Величина коэффициента инерции тем больше, чем меньше вес вагона и больше количество вращающихся частей, их размеры и, следовательно, вес. Величина коэффициента инерции двухосных вагонов меньше, чем четырехосных. Коэффициент инерции любого экипажа с пассажирами меньше, чем без пассажиров. Величина коэффициента инерции вагона КМ меньше, чем вагона МТВ, так как вес его больше, а количество вращающихся частей и их размеры одинаковы. При расчетах величину /ги можно принимать: для вагонов моторных 1,1—1,18, прицепных 1,04—1,08; для троллейбусов 1,13—1,15.
Пример 2. Определить собственную приведенную массу: а) двухвагонного поезда (моторный вагон ЛМ-49 и прицепной вагон ЛП-49) и б) троллейбуса Тр-9 (табл. 2). Величину коэффициента инерции принимаем k^= 1,15 моторного, £и = 1,07 прицепного вагона и £и = 1,14 для троллейбуса. На основании формулы (16') получим: т = 1,15Х 19 500 + 1,07-13 800 = 37 191 кг для поезда и т = 1,14X Х8890 = 9815 кг для троллейбуса. Зная приведенную массу и ускорение поезда, определим, пользуясь формулой (11), действующую силу При а = 1 м/сек2 получим: /^д = 37 191*1 = 37 191 н для поезда и = 9815*1 = 9815 н для троллейбуса.
Удельная форма уравнения движения. В тяговых расчетах удобно применять уравнение движения поезда в так называемой удельной форме. Для получения удельной формы уравнения необходимо его правую и левую части разделить на вес поезда G. Тогда уравнения движения (11) и (12) соответственно примут следующий вид:
______ т vdv ~G~~ G~'~dl ’
где — удельная приведенная масса поезда в килограммах на 1 кило* ньютон веса поезда (кг1кн), а — ускорение в м/сек2. Подставим вместо приведенной массы поезда т ее значение из (16):
/?д_ Ю00&и6 dv Т^д ЮОО/ги G vdu ~G~ 9,81 G '~dt~ ~G~ 9,81 G '~dl ‘
Сокращая правые и левые части уравнений на величину G, получим:
(18)
<19>
где /д = ^- — удельная действующая сила в ньютонах на 1 килоньютон веса поезда.
§ 16. ЧАСТНЫЕ ВИДЫ УРАВНЕНИЯ ДВИЖЕНИЯ ПОЕЗДА
Силы, определяющие характер движения поезда, по своей физической природе весьма различны. Их можно подразделять на силы, управляемые во время движения поезда водителем или автоматическими регулирующими устройствами, и силы неуправляемые. Чтобы привести в движение поезд, нужно приложить к нему силу тяги. Сила тяги поезда F создается установленными на нем тяговыми двигателями. Однако наличия только силы тяги недостаточно для управления поездом, так как она всегда действует в направлении его движения или равна нулю. Для остановки поезда необходима сила, направленная в сторону, проя тивоположную движению. Она создается тормозными средствами и называется тормозной силой^В. Сила тяги и тормозная сила, направленные противоположно, одновременно к поезду не прикладываются. К неуправляемым силам относятся сила тяжести (вес поезда G) и все остальные внешние силы, действующие на поезд в направлении его движения или в обратном направлении и не зависящие от водителя. Эти силы составляют сопротивление движению W. Положительным для силы тяги принимается направление движения поезда, а для тормозной силы и сопротивления движению поезда — направление, противоположное движению. Действующая сила Рд представляет собой равнодействующую сил, одновременно приложенных к поезду.
Различают три основных периода движения поезда: тяга, выбег и торможение. Силы, приложенные к поезду, действуют в такой комбинации: а) сила тяги F и сопротивление движению W — в период тяги; б) сопротивление движению W — в период выбега; в) тормозная сила В и сопротивление движению W— в период торможения.
На рис. 36 показаны силы, приложенные к поезду (точка 0 — центр тяжести вагона) для периода тяги.
На рис. 37 приведены кривые движения для перегона: а — с неизменным профилем пути (горизонтальный участок или небольшой уклон) и б — с переменным профилем.
Период тяги. Период тяги разделяется на периоды пуска поезда О А и езды по автоматической характеристике АБ. При пуске в ход тяговые электродвигатели развивают наибольшую силу тяги, величину которой при неавтоматическом пуске регулирует водитель, поддерживая ее в среднем постоянной. Движение поезда можно считать равномерно ускоренным, а среднее пусковое ускорение постоянным (аи = const). Тангенс угла наклона кривой движения к оси времени определяет ускорение поезда в данный момент. Постоянство ускорения в период пуска выражается прямолинейностью отрезка ОА (неизменным
Рис. 36. Силы, приложенные к поезду (четырехосный моторный вагон) при его движении на прямом горизонтальном участке пути
OA = F\ OB = W0\ ОБ = Е^\ OD = G; /—/У — тяговые электродвигатели
углом наклона а этого отрезка). В момент трогания с места сила тяги всегда должна быть больше сопротивления движению (Fu > W), а действующая сила F^ = F — W должна быть положительной. Точка А на кривой движения характеризует момент окончания пуска и выхода на автоматическую характеристику со скоростью t>rj.
В период движения по автоматической характеристике (участок А Б) характер изменения скорости поезда зависит от величины и направления действующей силы. На кривой движения, соответствующей перегону с переменным профилем пути, показаны участки езды по автоматической характеристике при различных видах движения — ускоренное, равномерное и замедленное. Если Fn > О (F > W), скорость движения будет возрастать, но медленее, чем при пуске, так как сила тяги с увеличением скорости уменьшается, а сопротивление возрастает (участок Аб — движение ускоренное, а > 0). Ускорение поезда будет постепенно уменьшаться и может стать равным нулю, при этом скорость сделается постоянной = const, а = 0 (точка б). При Fn = 0 поезд будет двигаться равномерно с постоянной скоростью (участок 66.J, а уравнение движения примет вид: F = W. Сила тяги уравновеши-60
вает сопротивление движению. Скорость движения иу в этом случае принято называть установившейся. Если вследствие изменения профиля пути (например, при входе на подъем) сопротивление движению станет больше силы тяги W > F, т. е. Бд < 0 и, следовательно, а < 0, то скорость поезда будет уменьшаться (участок движение будет замедленным и при неизменном профиле пути на этом участке может опять стать равномерным (участок б2б3) Бд = 0; F = W. Если затем вследствие изменения профиля пути (например, в момент перехода на более легкий профиль) сила тяги будет больше сопротивления движению
Рис. 37. Кривые движения поезда а —при неизменном профиле пути; б —при переменном
поезда (F > W), скорость поезда будет увеличиваться (участок б3Б)< Точка Б соответствует моменту выключения тока и началу выбега.
Период выбега. Выбег характеризуется движением поезда по инерции — тяговые двигатели выключены, сила тяги отсутствует (F = 0). Кинетическая энергия, накопленная в период движения под током, расходуется на преодоление сопротивления движению. Скорость поезда при движении на подъемах, горизонтальном участке и малых (так называемых безвредных) спусках постепенно уменьшается, ускорение имеет отрицательное значение (участок Б В). Однако на спусках движение при выбеге может быть ускоренным, например при движении на так называемых вредных спусках, если F^ <Z 0 (участок Бв), или равномерным, если W = 0, т. е. Бд = 0 (участок Бв^.
Период торможения. В этот период создается значительная по величине тормозная сила В, направленная против движения поезда. В
результате его скорость быстро уменьшается, так как отрицательное ускорение (тормозное замедление аг) имеет большую величину. На кривой движения период торможения выражается прямолинейным отрезком ВГ, движение равномерно замедленное; тормозное замедление ат = const, vT — скорость начала торможения. Величина тормозного замедления характеризуется тангенсом угла [3. Действующая сила Дд = В + W будет замедляющей силой.
Торможение поезда не всегда сопровождается уменьшением скорости. При движении поезда на вредных спусках его скорость поддерживают постоянной, но не превышающей наибольшую допустимую скорость на данном уклоне. Замедляющая сила Вд = 0, тормозное замедление ат = 0, vT = const (участок Вг). Такой режим движения называется подтормаживанием.
При недостаточной тормозной силе (Вд < 0) скорость поезда на вредных спусках увеличивается и может стать больше максимально допустимой скорости на данном уклоне (участок Вг). В этом случае при данной тормозной силе поезд остановить невозможно, его скорость может увеличиться до опасных пределов и привести к аварии.
Уравнение движения поезда (11) для различных периодов движения принимает следующие частные формы: период тяги
F^ = F — W; F—W = ma или F = ma+W\ (20)
период выбега
F = 0; Гд=— W; —W = ma или ma+W = 0; (21)
период торможения
F-0; — W — В; — В — W = ma или ma+W + В = 0. (22)
Глава VII. РЕАЛИЗАЦИЯ ТЯГОВЫХ И ТОРМОЗНЫХ СИЛ ПОЕЗДА
§ 17. РЕАЛИЗАЦИЯ СИЛЫ ТЯГИ
Образование силы тяги. Сила тяги реализуется движущими колесными парами вагона или движущими колесами троллейбуса. Движущими называются колесные пары или колеса, приводимые во вращение электроприводом. Рассмотрим процесс поступательного движения движущего колеса поезда (рис. 38). Под действием вращающего момента Мо тягового двигателя к колесу приложен момент Мо, действующий по направлению часовой стрелки — пара сил Fo и F'o, приложенная в точках 0 и а.
Из механики известно, что нарушение состояния покоя и изменение скорости движения тела или системы тел могут совершаться только под влиянием внешних сил, действующих на эту систему. Следовательно, вращающий момент Л40 не может обеспечить поступательного дви
Рис. 38. Схема реализации силы тяги поезда движущего колеса
жения поезда, так как этот момент является внутренним по отношению к поезду и не может сам по себе вызвать его перемещение. Если бы движущие колеса поезда не опирались на рельсы или на дорогу, они под влиянием только этого внутреннего момента Мо не могли бы сообщить поезду поступательное движение; движущие колеса вращались бы около своих геометрических осей, не вызывая поступательного движения поезда.
Для поступательного движения поезда необходимо наличие внешних сил. Такая внешняя сила TQ возникает в результате сцепления движущих колес с рельсом или с покрытием дороги. Момент Мо пара сил стремится повернуть колесо вокруг его геометрической оси. Сила Fq, приложенная в точке а к рельсу или к дорожному покрытию, будет стремиться создать проскальзывание опорной точки а колеса относительно пути в сторону, противоположную поступательному движению. Однако как реакция на эту силу под действием нормального давления GK колеса в опорной точке а возникает благодаря наличию сцепления
(трения) с рельсом или дорогой внешняя по отношению к колесу сила— сила сцепления То. Если сила То не превзойдет некоторой предельной величины Топ, то точка а колеса, соприкасающаяся с рельсом или дорогой, окажется как бы неподвижной (мгновенным центром вращения) и вокруг нее под действием вращающего момента начнут поворачиваться все остальные точки колеса. Сила сцепления То будет непрерывно перемещать мгновенный центр вращения, а вместе с ним и колесо вдоль пути, причем соприкасаться с рельсом или дорогой будут все новые и новые точки поверхности колеса (в точке касания колеса и пути в каждый момент создается как бы упор, от которого колесо стремится оттолкнуться). Таким образом, к колесу приложена внешняя сила То. Она представляет собой силу сцепления, направленную по касательной к поверхности колес в точке его касания с поверхностью пути и является силой тяги, вызывающей поступательное движение поезда. Поэтому силу То называют касательной силой тяги на ободе движущего колеса, а силу То, определяемую вращающим моментом тягового двигателя, называют силой тяги. При равномерном вращательном движении колеса (угловая скорость со = const), если пренебречь трением в подшипниках букс вагона или полуосей троллейбуса, можно принять То = То. Силы То и TQ равны и противоположны, так как сила То представляет собой действие, а То — противодействие (третий закон Ньютона).
При ускоренном или замедленном вращательном движении колес с учетом трения в подшипниках, силы FQ и TQ не будут равны (То #= =/= То), так как действующий на колесо результирующий момент Л4р
будет равен алгебраической сумме моментов, действующих на колесную пару: 7Ир = Мо —Mj — Mw (см. рис. 38). Следовательно, соотношение между силами FQ и TQ примет следующий вид:
а для всего поезда
<23>
Л Л yditi
где Mj = J— — момент вращения от влияния инерции колеса и связанных с ним вращающихся частей;
Mw = W6R — момент вращения от внутреннего сопротивления в подшипниках;
W6 — сопротивление движению от трения в подшипниках;
со — угловая скорость вращения колеса; d(d
— угловое ускорение;
R = -у — РаДиУс колеса;
J — момент инерции вращающихся частей.
Процесс-качения колеса при выводе формулы (23) был рассмотрен без учета упругих деформаций в точке а касания колеса и пути, так как эти деформации практически не оказывают влияния на соотношение силы тяги и вращающего момента рельсового транспорта. На безрельсовом транспорте возникает заметная просадка колес с пневматическими шинами. Радиус круга качения нагруженного колеса меньше внешнего радиуса ненагруженного колеса. Уменьшение радиуса R зависит от величины нормального давления на колесо Go и давление в шине.
Ограничение силы тяги. Сила сцепления, имеющая природу сил трения, ограничена известными пределами. Если этот предел будет превзойден,т. е. Fo— ~ — ^окажется больше максимально воз-
можной силы сцепления, то равновесие сил в точке а соприкосновения колес с рельсами или дорогой будет нарушено. Движущие колеса начнут скользить относительно пути в точке касания, вращаясь с большей скоростью, чем обусловлено поступательным движением поезда. Происходит так называемое боксование колес, при котором наблюдается повышенный износ бандажей (или шин) и пути. Кроме того, при бок-совании значительно снижается сила тяги, так как сила трения уменьшается при скольжении колеса относительно пути. Поэтому при боксо-вании поезда на тяжелых подъемах или скользкой дороге он останавливается и иногда не может тронуться с места вследствие вновь возникающего боксования. В этом случае нарушение сцепления может вызвать задержку движения. Следовательно, для предельной силы сцеп
ления всего поезда по формуле (23) получим следующие ограничивающие условия:
р —W/ _ V — — < Т
гмакс w6 R & пр’
откуда максимально возможная по условию сцепления сила тяги
F =Т л У-. — + Гб. (24}
гмакс 1 пр । dt °
Так как величины №б и 2-^ • малы по сравнению с величиной Тпрг то приближенно можно принять, что для всего поезда FMaKC = Тпр.
Предельную силу сцепления, имеющую природу силы трения, можно* выразить для поезда как произведение коэффициента сцепления ф колеса с рельсом или дорогой и нормального давления движущих колес на путь
Тпр= 1000фСс «, (25)
где Gc — сцепной вес поезда в кн.
При движении на горизонтальном участке под нормальным давлением поезда на путь (сцепным весом) следует понимать вес, приходящийся на все движущие оси:
Gq ^Gqc или Gc zG0C, если Gqi G02 ••• Gqz Goc,
i
где z — число движущих осей или полуосей поезда;
Goc — вес, приходящийся на одну движущую ось вагона или полуось троллейбуса.
Для рельсового транспорта сцепной вес — это вес моторного вагона. При аварийном режиме сцепным весом является вес, приходящийся на движущие оси исправных двигателей. Для двухосных троллейбусов сцепной вес — это вес, приходящийся на задние движущие полуоси. При движении на уклонах сцепной вес Gc меньше веса поезда, приходящегося на движущие оси, так как нормальное давление движущих осей на путь выражено равенством Gc = G cos а, где а — угол уклона в град.
При максимальных уклонах порядка 15О°/оо сцепной вес Gc = 0,99G.
На рис. 39, а показана схема реализации силы тяги для одной тележки четырехосного вагона. Условно силу тяги поезда можно считать приложенной к центру тяжести вагона 0 (см. рис. 36): ОА = F = = 4F0 (так как z = 4).
Сила Fo представляет собой силу тяги, которая создается одним двигателем, а сила F — сила тяги поезда:
F = ^F^ или F = zFq,
1
если FOi = = ••• = FOz, где z — число двигателей поезда.
На рис. 39, б показаны условия реализации силы тяги троллейбусом, Fo = F. Колеса передних полуосей, вращательное движение которых возникает в результате поступательного движения кузова, теоретически могут перейти в скольжение (юз) при условии, что предельная сила сцепления Т01 ведомой оси будет меньше силы сопротивления движению Wlf приложенной к этой оси. Однако поскольку величина силы невелика, практически сила сцепления не может быть
Рис. 39. Схема реализации силы тяги
а —одной тележки четырехосного вагона; б —двухосного троллейбуса: 1 —тяговый двигатель; 2 —редуктор (зубчатая передача); 3 — движущие колесные пары; 4 — редуктор (червячная передача); 5—движущие колеса;
6 — поддерживающие колеса
меньше даже при самых тяжелых условиях движения. Буксование задних движущих колес возможно при F > Тпр2 = 1000 фОсц, где <?сц 2/3G. При поворотах троллейбуса может произойти перераспределение сцепного веса и возникнуть буксование одного из движущих колес, так как они не имеют между собой жесткой связи.
Коэффициент сцепления при нормальном качении (относительная скорость в точке касания колеса с путем теоретически равна нулю) физически соответствует коэффициенту трения покоя, которое является частным случаем трения скольжения при относительной скорости трущихся тел, равной нулю. Коэффициент сцепления в эксплуатационных условиях не тождествен физическому коэффициенту трения покоя: он меньше последнего по величине, так как в процессе качения колеса возникает проскальзывание, т. е. скорость поступательного движения ниже окружной скорости вращения колеса. Коэффициент сцепления зависит: 1) от применяемых материалов колес (бандажей и шин) и пути (рельсов и типа дорожного покрытия); образуются различные контактные пары, например сталь — сталь (для рельсового транспорта); резина — цементобетон; резина — асфальтобетон и другие для безрельсового транспорта; каждая из контактных 66
пар характеризуется различной величиной коэффициента сцепления; 2) от состояния поверхности колеса и пути; например, при наиболее неблагоприятных условиях (загрязнение пути — грязная пленка, смазочные материалы, мокрые листья, мокрый снег и обледенение) коэффициент сцепления уменьшается до 0,08—0,1; применение кварцевого песка в этих случаях повышает коэффициент сцепления; при чистых сухих рельсах ф = 0,4. Для безрельсового транспорта для
новых шин и при чистом асфальте максимальная величина коэффициента сцепления составляет 0,8— 0,9, а при гололеде — 0,05-0,1.
Расчетный коэффициент сцепления. Выбор р асч етно го коэффи циента сцепления имеет исключительно важное значение. От его величины зависит выбор веса поезда, максимально допустимого подъема, допустимых скоростей, ускорения и замедления. Величина коэффициента сцепления при данном сцепном весе определяет величину максимальной силы тяги и силы
торможения поезда, которые могут быть реализованы по условию сцепления. Иными словами, коэффициент сцепления
Рис. 40. Характеристики зависимости от скорости
а—коэффициента сцепления ф = [ (и); б —максимальной силы тяги поезда = f (v)
показывает, какой части сцепного или тормозного веса поезда может быть равна предельная сила сцепления. Например, при ф = 0,3 максимальная сила тяги равна 300 н на 1 кн сцепного веса поезда. Следовательно, коэффициент сцепления можно выразить в удельном виде: ф'=1000 ф н!кн. Коэффициент сцепления поезда в целом меньше коэффициента сцепления отдельно взятого колеса. Это обусловливается: а) неравенством силы тяги или тормозной силы отдельных осей вследствие неодинаковости диаметров движущих колес и электромеханических характеристик двигателей; б) разным весом движущих и тормозных осей; в) загрязнением рельсов и бандажей (дорожного покрытия и шин). При индивидуальном приводе коэффициент сцепления поезда определяется коэффициентом сцепления наиболее разгруженной оси. Вследствие указанных обстоятельств величину расчетного коэффициента сцепления, например поезда, необходимо принимать меньше величины коэффициента сцепления одной колесной пары, так
как при реализации силы тяги ни одна из движущих колесных пар не должна буксовать. На основе опытных данных можно рекомендовать следующие величины расчетного коэффициента сцепления: для рельсового наземного городского электрического транспорта ф = 0,15ч-Ч- 0,17 и ф = 0,18 ч- 0,22 (при наличии обособленного пути); для метрополитена ф = 0,2 ч- 0,22 и для безрельсового транспорта ф = = 0,25 ч- 0,4.
Законы сцепления можно сформулировать следующим образом: 1) сила тяги поезда не может быть больше предельной силы сцепления F = 2F0 < 2) максимальная по условию сцепления
сила тяги поезда равна предельной силе сцепления:
^макс=^пр= lOOOifGc н, (25)
где FMaKC — наибольшая допустимая суммарная сила тяги, не вызывающая буксования ни одной из движущих колесных пар или полуосей, а бсц — сцепной вес в кн\ 3) если сила тяги больше предельной силы сцепления (F > 7"пр), то нормальное поступательное движение поезда невозможно (происходит буксование).
Пример 3. При движении поезда, состоящего из моторного вагона ЛМ-49 (0м — 191,3 кн) и прицепного ЛП-49 (0п = 135,4 кн) при коэффициенте сцепления ф = 0,25 величина предельной силы сцепления по формуле (24) будет равна: Тпр = 1000-0,25-191,3 = 47 823 н; максимально возможная по сцеплению сила тяги поезда равна предельной силе сцепления FMaKC = 47 823 н. Нормальное поступательное движение поезда возможно, если сила тяги поезда F < 47 823 н; если же F > 47 823 н, то произойдет буксование.
Для троллейбуса Тр-9 при коэффициенте сцепления 0,4 величина предельной силы сцепления равна: Тп — ЮОО-О.4-52,8 = 21 120 н (вес троллейбуса G = = 88,2; сцепной вес бсц = 52,8 (см. рис. 14 и табл. 2).
Пример 4. При движении поезда ЛМ-49 + ЛП-49 на затяжном подъеме сила тяги поезда возросла до величины F = 25 000 я, а коэффициент сцепления на данном участке пути равен: ф = 0,1. Очевидно, в этом случае предельная сила сцепления 7пр = 1000-0,1 • 191,3 = 19 130 н будет меньше силы тяги F, т. е. Т = = 19 130 < F = 25 000, следовательно, произойдет буксование движущих колесных пар. Для того чтобы поступательное движение поезда было возможным, необходимо увеличить ф, посыпая песок на рельсы. При коэффициенте сцепления
25 000 ф=--------------= 0,13
4 1 000-191,3
и больше поступательное движение будет возможно.
Пример 5. Пользуясь данными зависимости ф = f(v) (рис. 40, кривые / и 2), определим зависимость максимальной силы тяги по сцеплению от скорости для поезда типа МТБ без пассажиров (G = 183 кн). На рис. 40 приведены экспериментальные данные о коэффициенте сцепления для чистых сухих рельсов в функции скорости движения поезда ф = f(v). Полученные в результате опытов значения ф расположены между двумя кривыми / и 2. Для различных значений скорости v по кривой / найдем соответствующие им значения ф и затем по формуле (25') определим FMaKC. Так, например, для нулевой скорости коэффициент сцепления равен 0,3 (из кривой /), a FMaKC = 1000-0,3-183 = 53 991 н. При кривой 2 при v = 0; ф = 0,4; a FManc = 1000-0,4-183 = 7320 н. На рис. 40, б построены зависимости максимальной силы тяги по сцеплению от скорости поезда (кривые 1 и 2).
§ 18. РЕАЛИЗАЦИЯ ТОРМОЗНОЙ СИЛЫ
останови-действи-опирают-точке их а дейст-
силы
Точ-
Образование тормозной силы. В период торможения к поезду приложена тормозная сила. Рассмотрим процесс образования этой силы на примере рис. 41. При тормозном режиме к каждой колесной паре вагона (или колес троллейбуса), катящейся слева направо с некоторой скоростью, прикладывается тормозной момент А4Т0, направленный против часовой стрелки. Представим этот момент парой сил Во и В. Если бы колеса вращались свободно, не касаясь рельсов или дороги (были бы приподняты под уровнем пути), то под действием тормозного момента они бы быстро лись. Однако в тельности колеса ся на путь и в соприкосновения
вуетсила сцепления. Поэтому колеса не останавливаются, а продолжают катиться по пути, одновременно как бы упираясь в него под действием тормоз
ного момента. Таким образом, под действием силы Во вследствие сцепления возникает внешняя сила То, противоположная силе Во. ка а касания колеса с рельсом или с дорожным покрытием в каждый момент является неподвижной (мгновенным центром вращения). На поезд в целом действует сумма всех сил Во, которые можно заменить их равнодействующей. Эту равнодействующую условно считают приложенной к центру тяжести вагона или троллейбуса. При движении колеса силы Bq и Tq не будут равны, так как действующий на колеса результирующий момент (см. рис. 40) будет равен алгебраической сумме моментов, действующих на колесную пару: Л4р = Л4Т0 + Mj + + /Ии?, а соотношение между силами Bq и Tq примет следующий вид:
во = Bq + + ^об (для ОДНОЙ оси или полуоси)
R dt
и
= 5 + + (Для поезда).
(26)
Ограничение тормозной силы по сцеплению. Если величина тормозной силы Bq превысит величину предельной силы сцепления Тпр (в точке а соприкосновения колес с рельсом или дорогой, являющейся мгновенным центром вращения), вращение колес станет невозможным. Произойдет заклинивание колес и переход от качения к скольжению по рельсу или дороге — так называемый юз. При юзе резко уменьшается величина тормозной силы, так как она определяется коэффициентом трения между невращающимися колесом и рельсом (или до
рожным покрытием) при скольжении их относительно друг друга, а этот коэффициент всегда меньше коэффициента сцепления, соответствующего нормальному торможению. Юз весьма опасен в отношении безопасности движения, поскольку при нем возрастают время торможения и тормозной путь. Кроме того, при скольжении колес происходит местное истирание бандажей колесных пар или шин троллейбуса. Следовательно, для предельной силы сцепления всего поезда получим следующие ограничивающие условия:
тпр>вмакс+У 4-^+^;
at
откуда будем иметь следующую зависимость для максимально возможной по условию сцепления тормозной силы:
Виаис^-J^-^ <27>
Так как величины №б и 2^- • малы по сравнению с величиной Тпр, приближенно можно принять, что BQ = Тпр или для всего поезда В = Тпр.
Предельная сила сцепления при торможении для всего поезда равна:
Тпр= 1000Стф н, (28)
где GT — тормозной вес в кн.
Законы сцепления приближенно можно сформулировать так: 1) тормозная сила поезда не должна быть больше предельной силы сцепления: В < Тпр; 2) максимальная тормозная сила поезда равна предельной силе сцепления:
ямакс = Тлр = 1000GT н, (29)
где Вмакс — наибольшая допустимая суммарная тормозная сила поезда (27), не вызывающая скольжения ни одной из тормозных осей или полуосей; 3) если тормозная сила поезда больше предельной силы сцепления, т. е. В > Тпр, нормальное торможение поезда невозможно (возникает юз).
Тормозная сила поезда равна В = 2*В0 или, если BOi = S02 = ... ... = Bqz В = zBq, где z — число тормозных осей поезда.
Следует отметить, что нарушение сцепления (юз) при торможении значительно опаснее, чем буксование при тяге, так как может привести к аварии.
Пример 6. Тормозной вес поезда (см. пример 3) равен: GT = 326,7 кн. Величина предельной силы сцепления при торможении Тп^ = 1000-0,25-326,7 = = 81 468 н. Максимально возможная по сцеплению тормозная сила поезда Вмакс = 81468 кн. Юз возникает, если В > 81 468 н.
Тормозной вес троллейбуса Тр-9 равен 88,2 кн. Величина предельной силы сцепления при торможении будет равна: Тп = 1000-0,4-88,2 = 35 280 кн (см. пример 3).
Глава VIII. СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ ПОЕЗДА
Одним из основных факторов, определяющих режим движения поезда и энергетические его показатели, является сопротивление движению. При любом режиме движения поезда на него действуют силы сопротивления движению. Под сопротивлением движению понимают внешние силы, действующие на поезд и в большинстве случаев направленные против его движения, или точнее — проекции внешних не управляемых водителем сил на направление, противоположное движению поезда. Классификация видов сопротивления и их составляющих приведена в табл. 3.
§ 19. ОСНОВНОЕ СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ
К основному сопротивлению Wo отнесены все составляющие сопротивления, действующие в течение всего периода движения поезда» независимо от того, на каком участке пути он находится. При движении поезда на горизонтальном прямом участке пути действуют составляющие только основного сопротивления. Поэтому основное сопротивление можно назвать сопротивлением движению на прямом горизонтальном участке пути. Основное сопротивление движению Wo подразделяется на три вида (см. табл. 3): 1) внутреннее сопротивление подвижного состава Wf, составляющие сопротивления этого вида зависят от конструкции и состояния электропривода и букс или подшипников, полуосей; 2) сопротивление от взаимодействия подвижного состава и пути Wu — внешнее сопротивление подвижного состава, зависящее от конструкции и состояния ходовых частей вагона или троллейбуса и рельсового пути или дороги; 3) сопротивление от взаимодействия подвижного состава и воздушной среды №щ — к нему следует отнести сопротивление воздуха на открытой трассе при тихой погоде (при отсутствии ветра) для наземного транспорта и сопротивление воздуха на закрытой трассе (в тоннеле) для метрополитена.
Сопротивление движению, отнесенное к 1 кн веса поезда, называют
W
удельным сопротивлением движению w = и измеряют в ньютонах на килоньютон (н!кн).
Внутреннее сопротивление движению Wi
Сопротивление от трения в вагонных буксах или подшипниках полуосей троллейбуса W6. Можно полагать, что в момент трогания с места все сопротивление движению сосредоточено в подшипниках, а сопротивление пути и воздушной среды равно нулю. Особенно значительна величина этого сопротивления в подшипниках скольжения, так как в состоянии покоя на поверхности соприкосновения подшипника с шейкой оси почти отсутствует смазка, особенно после длительной стоянки. В этом случае в момент трогания поезда будет сухое или полусухое трение с соответствующим повышением коэффициента трения.
Таблица 3
Классификация сопротивлений движению поезда
Основное сопротивление движению =
Внутреннее сопротивление подвижного состава W'j Сопротивление от взаимодействия подвижного состава и пути Wi j Сопротивление от взаимодействия подвижного состава и воздушной среды W'HI
1. Сопротивление от трения в подшипниках колесных пар вагона или колес троллейбуса Wq 2. Сопротивление от механических потерь в тяговых двигателях и редукторах 1ГМ 1. Сопротивление качению колесных пар вагона или колес троллейбуса FK.K 2. Сопротивление от трения колесных пар вагона о рельсы из-за: а) коничности бандажа №кф; б) виляния колесных пар Гв.к; в) неодинакового диаметра бандажей н.д; г) неточной установки колесной пары И?н у; ^2=^К.ф+^В.к+^Н.д+ 4-^Н.у 3. Сопротивление от неправильной формы колеса вагона №н.ф 4. Сопротивление от упругого прогиба рельсового пути или дороги Гу.п 5. Сопротивление от неровностей пути от вертикали и в плане для рельсового транспорта или от неровностей дороги по траектории качения колес для безрельсового транспорта ^Н.П Сопротивление воздуха при тихой погоде (отсутствие ветра) на открытой трассе (трамвай и троллейбус); сопротивление воздуха на закрытой трассе (в тоннеле) (метрополитен) И?в
F,=U76 + FM ^Ц = ^К.к+^2 + ^Н.ф + + ^у.п + ^н.п — для рельсового транспорта ^П=^к.к+^у.п+^н.п- для безрельсового транспорта ГШ = ГВ
Дополнительное сопротивление движению
Сопротивление от продольного профиля пути—от уклона Wi
Сопротивление от поперечного профиля — от кривой (для рельсового транспорта) №к и от поворота (для безрельсового транспорта) Wn
Для наземного транспорта:
а) от ветра;
б) от снега;
в) от низкой температуры;
г) в тоннеле
Затем, когда шейка оси приходит во вращение, она захватывает смазку, которая проникает между трущимися поверхностями шейки и вкладыша. Между шейкой и вкладышем образуется масляная пленка (гидродинамическое трение); коэффициент трения при этом значительно уменьшается.
Коэффициент трения изменяется в зависимости от температуры окружающего воздуха. При низких температурах вязкость смазки и коэффициент трения увеличиваются, значительно увеличивается и сопро-
Рис. 42. Характеристики механических потерь Рм и сопротивления движению от механических потерь 1ГМ в функции скорости вращения вала якоря
l~PM=f по Данным испытания тяговых двигателей ДК-255Б; 2—Рм= = f (л)—то же, ДК-254А;’ 3 — ^м= f («) для одновагонного поезда MTB (G=183 кн — без пассажиров); 4 — то же (6 = 248 кн— с пассажирами);
5 —то же, для поезда КТМ + КТП (G = 200 кн}
тивление движению в момент трогания поезда после длительной стоянки. При высокой температуре вязкость смазки уменьшается. Не следует применять смазку с вязкостью ниже некоторого предела, при котором в буксе возникает процесс полусухого трения. В зимнее время следует применять менее вязкие смазочные материалы, в летнее — наоборот.
При подшипниках качения сопротивление от трения скольжения в шейках заменяется значительно меньшим сопротивлением от трения качения роликов. Наибольшую выгоду роликовые подшипники дают при трогании с места, особенно зимой, и при малых скоростях. При трогании с места сопротивление от трения в роликовых буксах составляет около 10% соответствующего сопротивления букс со скользящими подшипниками и в значительно меньшей степени зависит от продолжи
тельности стоянки поезда. Сопротивление от трения в буксах вагонов, в осевых подшипниках колес троллейбуса зависит от отношения внутреннего диаметра подшипника к диаметру круга качения колеса, от давления на шейку оси или на ось и от коэффициента трения. Коэффициент трения зависит от рода материала шейки и подшипников, качества обработки их, способа подачи масла к трущимся поверхностям, материала смазки, температуры наружного воздуха. Величина коэффициента трения в подшипниках скольжения 0,005—0,01 (0,5—1 н!кн), а в подшипниках качения 0,001—0,002, что соответствует сопротивлению движения 0,1—0,2 н/кн. Кроме того, коэффициент трения в подшипниках скольжения в значительной степени зависит от скорости вращения.
Сопротивление движению от механических потерь в электроприводе 1ГМ. Эта составляющая основного сопротивления зависит от механических потерь в двигателях и в их редукторах. Мощность, затраченную на механические потери в электроприводе, можно выразить как произведение составляющей сопротивления движению от этих потерь на скорость поезда (путь, пройденный поездом в единицу времени). Механические потери в двигателе — характеристика рм = Дп) — определяются при испытании двигателя заводом-изготовителем. На рис. 42 даны характеристики = f(n) для тяговых двигателей. По данным характеристики 1 построены характеристики удельного сопротивления от механических потерь для вагона МТВ (кривые 3 и 4), а по данным характеристики 2 — для двухвагонного поезда типа КТМ-1 + КТП-1 (кривая 5). Механические потери в редукторе ориентировочно можно принять равными 10% мощности, передаваемой с оси колесной пары на вал якоря при режиме выбега; эта мощность для трамвайных двигателей не превышает 1 — 1,5 кет.
Величина WM учитывается как сопротивление движению от механических потерь при выбеге и механическом торможении. При режиме тяги и электрическом торможении потери рм учитываются к. п. д. электропривода. Они зависят от типа якорных подшипников, конструкции щеткодержателей и типа щеток, системы вентиляции, конструкции и технологии изготовления редуктора.
Сопротивление движению от взаимодействия подвижного состава и рельсового пути или дороги
Сопротивление качению колеса 1^К(К. При качении колеса происходит упругая деформация колеса и рельса (или дороги). Колесо и рельс непрерывно меняют свою форму и снова ее восстанавливают. На упругую деформацию колеса и рельса требуется затрата энергии, чтобы преодолеть сопротивление движению при качении. Сопротивление качению колеса зависит от давления колеса на рельс или на дорогу и от радиуса круга качения колеса и, кроме того, от площади опорной поверхности колеса для рельсового транспорта, которая определяется твердостью материала, профилем бандажа и головки рельса, а для троллейбуса площадью опорной поверхности колеса, зависящей от давле
ния в баллонах, формы и состояния поверхностей шин, а также рода материала покрытия дороги. Удельное сопротивление от трения качения на рельсовом транспорте незначительно (0,2—0,4 н!кн)у на безрельсовом транспорте оно значительно больше вследствие деформации шин и других материалов контактных пар (например, резина — асфальт).
Сопротивление от трения скольжения колесных пар вагона о рельс. Одновременно с качением колеса по рельсу возникает трение скольжения поверхности качения бандажа по головке рельса и реборды о боковую поверхность рельса. Трение между колесом и рельсом является следствием: а) формы колеса по кругу качения №к,ф; б) виляния колесных пар при движении поезда к; в) неравенства диаметров колес одной колесной пары №н,д; г) неточной установки колесной пары на тележке №н>у.
Сопротивление движению от конической формы бандажа ф. При коническом профиле бандажа дополнительное сопротивление движению вызывается изменением диаметра колеса по ширине обода. Колесо катится по рельсу таким образом, что поверхностью соприкосновения колеса и рельса является некоторая коническая поверхность усеченного конуса. Без проскальзывания происходит качение только по некоторой средней окружности колеса, называемой окружностью круга качения. На всей остальной поверхности обода колеса происходит проскальзывание, так как всегда действуют силы трения. Сопротивление зависит: от коэффициента трения, давления на колесо, ширины поверхности сопротивления колеса, радиуса колеса и степени коничности его бандажа. Колесные пары трамвайных вагонов имеют цилиндрические бандажи. Однако в условиях эксплуатации они принимают коническую форму.
Сопротивление движению от виляния колесных п а р к. Качение колесных пар при поступательном движении вагона сопровождается вилянием, т. е. некоторым перемещением в поперечном направлении то в одну, то в другую сторону от своего среднего положения. Основные причины возникновения виляния колесных пар с конической формой бандажей следующие: возможность смещения центров тяжести колесных пар поперек пути вследствие зазора между ребордой бандажа и головкой рельса, т. е. возможность «разбега» колесных пар в рельсовой колее; состояние рельсового пути—уширение колеи и просадка пути; наличие разбега шеек оси в буксах и форма бандажа. При коническом профиле бандажа выведенная из равновесия движущаяся колесная пара всегда стремится возвратиться в исходное положение, т. е. установиться в поперечном направлении так, чтобы окружности качения обоих колес были одинаковы. Однако, придя в положение равновесия, колесная пара не удерживается в нем, а с разбегу переходит в положение неравновесия, затем снова возвращается обратно и т. д. Вследствие трения скольжения виляние было бы затухающим колебательным процессом. Однако по причинам, указанным выше, прежде чем успеет затухнуть одна волна колебательного процесса, возникает другая. Траектория движения колеса по рельсовой
нитке может быть представлена в виде синусоидальной линии. При цилиндрическом профиле обода колеса и одинаковых диаметрах обоих колес траектория движения колесной пары по рельсовым ниткам была бы в виде прямой линии, если бы отсутствовали боковые удары. Боковые удары перекидывают колесную пару то в одну, то в другую сторону. При неодинаковых диаметрах колес одной колесной пары последняя катится с прижатой к рельсу ребордой меньшего диаметра, и только боковые удары будут перемещать колесную пару на непродолжительное время в противоположную сторону. Траектория виляния не имеет правильной формы. Причиной виляния является не форма бандажа, а неправильность пути. При хорошем состоянии рельсового пути сопротивление движению от виляния незначительно. При вилянии колесных пар происходит постоянное трение скольжения обода колеса о головку рельсов, более или менее часто повторяющееся трение реборд о боковые поверхности рельса и как результат сопротивление движению. Оно зависит от коничности бандажа, давления на колесо, коэффициента трения, скорости движения и амплитуды виляния.
Сопротивление движению от неравенства диаметров одной колесной пары вагона й^н,д-Вследствие некоторого различия в нагрузке на колеса, неоднородности материала колеса и условий эксплуатации бандажи колесной пары изнашиваются неодинаково. Поэтому при эксплуатации диаметры бандажей будут разными. При одном и том же угловом повороте оси вследствие разных диаметров бандажей одной колесной пары происходит скольжение одного из колес, так как поступательное их перемещение одинаково. Для преодоления этого скольжения к центру колеса приложена сила, являющаяся сопротивлением движению от неодинаковости диаметров бандажей. Она будет тем больше, чем больше разность диаметров колес и коэффициент трения.
Сопротивление движению от неточной установки колесных пар вагона IFH у. Ось колесной пары должна быть перпендикулярна продольной геометрической оси вагона. В практике ось колесной пары вследствие неточности сборки и заедания шкворня тележки может находиться по отношению к геометрической оси вагона под некоторым небольшим углом (не более Г). Колесная пара стремится к боковым перемещениям, а рельсы непрерывно заставляют ее возвращаться со скольжения на правильный путь. В каждый момент колесная пара как бы дополнительно перемещается в поперечном направлении, преодолевая сопротивление от трения бандажа о рельсы. Сила, затраченная на преодоление трения скольжения, является сопротивлением от неточной установки колесной пары. Это сопротивление зависит от тангенса угла, образованного геометрической осью вагона с осью, по направлению которой стремится двигаться колесная пара, а также от коэффициента трения и от давления на рельс.
На рис. 43 и 44 даны характеристики составляющих основного сопротивления движению от скольжения колесных пар вагона МТВ, полученные автором аналитическим расчетом. Для рельсового транс-
Рис. 43. Характеристики зависимости удельного сопротивления,’ вызванного вилянием колесных пар, от скорости поезда Wв.к = f (у) при различных значениях конусности колеса iK и разбега колесной пары в рельсовой колее для вагона МТВ
порта величина этих составляющих значительна при неудовлетворительном состоянии подвижного состава и пути. Как следует из рис. 43, сопротивление движению от виляния колесных пар будет тем больше, чем больше степень коничности колеса i и разбег колесной пары в рельсовой колее Л. Из рис. 44 очевидно, что чем больше степень коничности колеса, разность диаметров Dr—D2 и tg р, тем больше будет сопротивление движению от трения скольжения.
Сопротивление движению от неправильной формы бандажа колесной пары вагона 1Ун.ф- В эксплуатации бывают случаи, когда бандаж имеет неправильную форму (например, при наличии лысок). При этом радиусы неправильной по-
Рис. 44. Характеристики составляющих удельного основного сопротивления от трения скольжения колес в функции коэффициента трения скольжения колеса о рельс
/ — от конусности колеса f
(Ф) при различных 2 —от нера-
венства диаметров колес одной колесной пары WH д = f (<р) при различных значениях D, — D2; 3—от неправильной установки колесных пар U7H y = f (Ф) при различных 0
верхности короче радиусов правильной поверхности и при поступательном движении поезда, когда с рельсом соприкасаются поверхности неправильной формы, центр тяжести колеса будет приближаться к рельсу. В результате удара колеса о рельс кинетическая энергия будет утрачиваться. Сопротивление от удара тем меньше, чем меньше нагрузка на колесо, чем меньше поверхность качения колеса отличается от правильной круглой формы, чем больше диаметр колеса и чем меньше скорость движения поезда. При эксплуатации бандажей с лысками сопротивление движению значительно увеличивается.
Сопротивление от упругого прогиба пути Wyn. При движении поезда путь имеет некоторую упругую просадку, обусловленную его прогибом. На преодоление сопротивления движению от упругого прогиба пути затрачивается определенная работа. Сопротивление от упругого прогиба зависит от конструкции пути. На рельсовом транспорте при движении поезда происходит прогиб рельсов со шпалами и сжатие верхнего строения пути. Условно конструкции рельсовых путей можно подразделить на упругие, полужесткие и жесткие. Сопротивление движению от упругого прогиба пути тем больше, чем: 1) меньше модуль упругости рельсовой стали и сечение рельса; 2) меньше жесткость основания рельсового пути (жесткость основания зависит от типа основания); 3) больше нагрузка на ось и меньше база тележки или вагона. Удельное сопротивление от упругого прогиба рельсового пути изменяется в зависимости от модуля упругости рельсового основания, типа рельса и нагрузки наколеса. Для наиболее жестких конструкций верхнего строения рельсового пути (например, рельс типа Т-65 на бетонном основании) U/yn = 0,1 4- 0,2 н!кн, а при наиболее упругих (например, рельс типа IVa на песчаном основании в летнее время) №уп = 1 н- 1,9 н!кн. С точки зрения экономии энергии целесообразно применять более жесткие типы рельсового основания и рельсы большего сечения. Кроме того, это дает более прочный и устойчивый путь, возможность повысить скорость движения и обеспечивает безопасность движения. Для безрельсового транспорта эта составляющая основного сопротивления зависит от модуля упругости пути, давления колеса и расположения колесных нагрузок по отношению друг к другу.
Сопротивление от неровностей пути по вертикали и в плане 1^н>а. Неровности пути вызывают потери кинетической энергии поезда на удары и на колебательные процессы в элементах подвижного состава. Сопротивление движению от неровностей пути по вертикали и в плане для рельсового транспорта при сварных стыках и хорошем состоянии пути незначительно. Однако при плохом состоянии и содержании пути (изношенные стыки, неравномерная подбивка шпал, неправильная рихтовка, отступление в ширине колеи, грязь, пыль, песок в желобах рельсов и т. п.) величина этой составляющей сопротивления движению значительно увеличивается. По данным отечественных и заграничных исследований, величина основного сопротивления движению в этих случаях может увеличиться в 2—3 раза. Для безрельсового транспорта это сопротивление зависит от неров
ностей пути по траектории качения колеса (форма, размер и количество неровностей дороги и типа дорожного покрытия). Кроме того, эта составляющая сопротивления зависит от скорости поезда. При плохом состоянии рельсового пути или дороги скорость движения поезда должна быть значительно снижена.
Сопротивление от взаимодействия подвижного состава с воздушной средой IV ш (IVB)
Сопротивление воздушной среды IFB можно считать пропорциональным скоростному напору воздушной среды q, характерному размеру поезда S:
рости поезда Cx = f(v) при различных значениях угла скольжения (3 / — вагон МТВ; 2 — вагон КМ; а —прямая обдувка; б—косая обдувка
так как величина скоростного напора или динамического давления
Здесь Сх — коэффициент обтекаемости;
р — плотность воздуха, равная 1,226 кг/м3 при 15° С и.
760 мм рт. ст.\
v — скорость поезда в м/сек.
Сопротивление воздушной среды возникает в результате разности давлений воздуха на переднюю и заднюю торцовые поверхности поезда, трения воздуха о боковую поверхность, трения от вихревых движений воздуха в подкузовном и междувагонном пространствах. Для поездов
Рис. 46. Характеристики сопротивления движению от взаимодействия подвижного состава и воздушной среды в = f (v)
кривые 1 и 2 — для вагона МТВ; кривые 3 и 4—для вагона КМ [/ — при 0 = 0 (МТВ); /> = 0,0166; 2 — при 3 = 20° (МТВ); /> = 0,0283; 3 — при 0 = 0 (КМ); /> = = 0,0248; 4 — при 0 = 20° (КМ); /> = 0,037]
небольшой длины характерным размером S является наибольшая площадь поперечного сечения кузова головного вагона, так называемое мидельное сечение. Основной аэродинамической характеристикой экономичности подвижного состава данного типа является коэффициент обтекаемости Сх. Путем изменения формы кузова можно в значительной степени снизить величину коэффициента обтекаемости и, следовательно, уменьшить сопротивление и расход электроэнергии. Величину Сх определяют опытным путем; для этого широко применяют испытания моделей различного вида транспорта в аэродинамической лаборатории. На рис. 45 даны х ар актер исти ки з ависимо -сти коэффициента обтекаемости от скорости воздушного потока в аэродинамической трубе для трех постоянных значений угла скольжения (угол между направлением воздушного потока и плоскостью симметрии вагона), полученные автором (6) в результате аэродинамических испытаний. Для моделей вагонов в масштабе 1:10 скорость воздушного потока в трубе соответствует 1/10 скорости движения поезда в натуре. Как видно из рисунка, величина зависит от скорости тока
по-приблизительно до значения 30 м/сек или для данного вагона в натуре 3 м/сек. При дальнейшем увеличении скорости потока величину Сх можно считать постоянной и равной: для вагонов МТВ — 0,48, для КМ — 0,82 (при прямой обдувке, т. е. при 0 = 0). С увеличением угла скольжения Сх увеличивается. При 0 = 20° (косая обдувка) Сх равен для вагонов МТВ — 0,7 и КМ—1,08. Аэродинамическая характеристика формы кузова вагона МТВ значительно лучше, чем вагона КМ. Ввиду отсутствия испытаний моделей троллейбусов в аэродинамической лаборатории для целей расчета форму кузова троллейбуса МТБ можно считать аналогичной кузову вагона МТВ.
Зная величину Сх, можно определить сопротивление от взаимодействия подвижного состава и воздушной среды в функции скорости поезда. На рис. 46 даны характеристики IFB = f(v) ддя вагонов МТВ и КМ при различных значениях Сх.
Правильный выбор формы и размеров подвижного состава имеет важное значение для экономичности транспорта, особенно при высоких скоростях движения. При скорости движения 10—15 км/ч сопротивление воздушной среды составляет 5—10% основного, а при скорости 50—60 км/ч — 60—70%. Форма кузова вагона МТВ, в сравнении с плохо обтекаемым кузовом (Сх = 1), снижает величину удельного сопротивления при скорости v = 40 км/ч на 1,66 н/кн, а при v = 15 км/ч на 0,12 н/кн. Экономия энергии при средней ходовой скорости 25 км/ч составляет приблизительно 6400 квт-ч на один вагон в год.
Для подземных линий метрополитена условия взаимодействия подвижного состава и воздушной среды отличаются от условий для наземного транспорта. Двигаясь в однопутном тоннеле, поезд выталкивает воздух подобно воздушному поршню. При этом перед поездом возрастает давление воздуха, а позади его образуется разрежение. Одновременно воздух перемещается навстречу движению поезда по зазору между ним и стенками тоннеля. Условия взаимодействия поезда и окружающей его среды в двухпутном тоннеле еще сложнее. Для подземных линий метрополитена сопротивление от взаимодействия поезда и воздушной среды в тоннеле является составляющей основного сопротивления. Для обычных линий наземного городского транспорта сопротивление в тоннеле относится к добавочному сопротивлению, но в тяговых расчетах не учитывается, так как тоннели встречаются редко и имеют небольшую длину.
Формулы для определения удельного основного сопротивления движению
Удельное основное сопротивление движению поезда для режима выбега можно выразить как сумму отдельных его составляющих (см. табл. 3). Составляющие основного сопротивления подразделяют на две группы. Первая группа — составляющие, зависящие от постоянно действующих причин, вытекающих из физической сущности процесса движения поезда, а также качества осмотра, ремонта и конструкции подвижного состава. К ним следует отнести составляющие: W6 и Ц7М — внутреннего сопротивления подвижного состава; И7К к — сопротивления качению олеса; п — сопротивления от упругого прогиба пути и И7В — сопротивления воздушной среды. При коничности бандажа вагона к этой же группе следует отнести составляющие Ц7К ф и WB к. Ко второй группе относятся все остальные составляющие, зависящие только от состояния и содержания подвижного состава и пути, качества их осмотра и ремонта. При хорошем состоянии вагонов и пути влияние этих составляющих на величину основного сопротивления не будет значительным. В эксплуатационных условиях значения отдельных составляющих основного сопротивления движению могут
4 Зак. 1 186
81
значительно изменяться в зависимости от состояния подвижного состава; например, для вагонов прежде всего потому, что цилиндрические бандажи быстро приобретают коничность, вследствие чего увеличивается величина составляющих И^в.к^к.ф (см. рис. 43). При неудовлетворительном состоянии колесных пар значительно увеличивается величина составляющих 1^н.д и И^н.у (см. рис. 44), а при неудовлетворительном состоянии пути — величина lFH.n-
Таким образом, на величину основного сопротивления движению влияют многие разнообразные постоянные и переменные факторы, взаимосвязанные и зависящие друг от друга. Вследствие этого трудоемко и недостаточно надежно определять удельное основное сопротивление аналитическим путем. Основное сопротивление движению находят не как сумму всех составляющих, а на основании опытных исследований подвижного состава различных видов транспорта, в результате которых для расчетов выводятся необходимые эмпирические формулы. Достоинство этих формул состоит в том, что их получают непосредственно на практике, а недостаток в том, что точные результаты они дают только при условиях эксплуатации, мало отличающихся от условий опыта.
Общий вид эмпирических формул следующий:
wQ = а + bv + cv2,
где а, b ис — постоянные числовые коэффициенты, получаемые опытным путем и отражающие влияние различных факторов на величину сопротивления движению. Коэффициент а характеризует внутреннее сопротивление подвижного состава, коэффициент с — сопротивление воздушной среды, сопротивление от механических потерь в приводе, виляние колесных пар. Для поездов небольшой длины коэффициент Ь обычно принимают равным нулю.
На основании экспериментальных работ предложено значительное количество формул для подвижного состава различных типов всех видов транспорта.
Формулы доц. М. П. Кутыловского для определения удельного основного сопротивления движению (29)—(30) для режима выбега, (29') — (30') для режима тяги:
для одновагонных поездов трамвая
w0 = 1,5 + 45+°’062v2 9,81; (29)
а)0= 1,5+ 8+0-038°2 9,81; (29')
' . G
для двухвагонных и трехвагонных трамвайных поездов
1 с 1 ( 51 I 6,75 + 0,7г и2 \ q Qi
«»-'1.5+(- +---------------jWl, (30>
5+++ 5-5 + 0-7z ) 9,81; (30')
° Ig G 100/ v '
Формула завода «Динамо» для вагонов РВЗ для выбега wQ = 5 + 0,0031 v2',
для тяги wQ = 0,9 (5 + 0,0031 v2)\
Формула для троллейбусов
для выбега ау0 = 12 + 0,004 v2\
для тяги ауо = О,9 (12 + 0,004г;2).
(31) (31')
(32) (32')
Рис. 47. Характеристики основного удельногр сопротивления движению поезда метрополитена (в однопутном тоннеле на горизонтальном прямом участке) (шестивагонный поезд типа Г и типа Д)
Во всех формулах приняты следующие обозначения: v — скорость поезда в км!ч\ G — вес поезда в кн\ z — число вагонов поезда; w0 — удельное сопротивление в н!кн.
На рис. 47 приведены характеристики удельного сопротивления движению поездов метрополитена по данным исследований 1954 г. на Московском метрополитене.
§ 20. ДОПОЛНИТЕЛЬНОЕ СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ
Рельсовая или безрельсовая дорога характеризуется продольным профилем, технические данные которого определяют расположение дороги на улицах города: отметки высот точек переломов профиля^ величину уклона, расположение кривых, их радиусы и длины, распо^ ложение остановочных пунктов и т. п. Уклоны на профиле можно обозначить в градусах (град) сотых (%) или тысячных (°/00)- Обычно уклоны обозначают в тысячных. За 1 °/00 принята величина такого уклона, при котором на каждые 1000 м по горизонтали уровень трассы изменяется на 1 м по вертикали. На рис. 48 приведен пример продольного профиля. Ломаная линия показывает расположение отдельных участков по отношению к горизонтали. Дроби обозначают величины укло^ 4* 83
нов всех участков (числители) и их длины (знаменатели). На продольный профиль обычно наносят также элементы плана трассы — расположение и радиусы кривых, длину прямолинейных и кривых участков пути (нижняя линия). Радиусы кривых указывают в метрах. Кружками наверху обозначают остановки. В точках излома профиля отмечают их высоты над некоторым уровнем, принятым за нуль. Эти высоты называют отметками пути. Если разность высот двух смежных точек профиля составляет h ж, а расстояние между этими точками по горизонтали
участке (тяговый режим)
(длина участка) I м, то величина уклона в °/00 для данного участка будет равна:
юооАо/оо.
Например: для второго участка профиля:
£-2= 1000^1 = 40о/оо.
На трассах городского наземного транспорта в некоторых городах имеются уклоны до 120—130°/00.
К дополнительному сопротивлению относятся составляющие сопротивления, прибавляемые к основному при некоторых условиях движения поезда, например при движении на уклоне или на кривом участке пути и т. д. (см. табл. 3). К дополнительному сопротивлению относятся: сопротивление от уклонов — для всех видов транспорта; сопротивление пути от кривых участков WK — ддя рельсового транспорта; сопротивление от поворотов Wn — для безрельсового транспорта. Они зависят от продольного и поперечного профиля города или трассы метрополитена. Кроме того, для наземного транспорта возможно дополнительное сопротивление случайного характера от снега и ветра.
Дополнительное сопротивление от уклона (подъема или спуска) является постоянной для данного уклона величиной. При движении по уклону поезд помимо горизонтального перемещения совершает
В4
подъем или спуск в вертикальном направлении, преодолевая (на по* дъеме) или используя (на спуске) силу тяжести.
На рис. 48 показаны силы, действующие на поезд при движении: 1) на подъеме (тяга); 2) на спуске (выбег) и 3) на прямом горизонтальном участке пути (тяга). Силу тяжести (вес поезда G) можно разложить на составляющие G', перпендикулярную оси пути (давление на рельсы или дорожное покрытие, определяющее сцепной вес поезда Gc) и Wl9 параллельную оси пути (дополнительное сопротивление движению поезда от уклона). Как следует из рис. 48, угол уклона пути а = О ДБ, так как А абв подобен А ОБД, Из А ОБ Д имеем, что ОБ = = ОД sin а, где ОБ — Wt, а 0Д=С. Если вес поезда G выражен в килоньютонах, а сопротивление движению в ньютонах, то Wt =
v U7. W •
= 1000 G sin а или = 1000 sin а. Отношение -у = wt есть сопротивление от уклона, отнесенное к 1 кн веса поезда, т. е. удельное сопротивление от уклона. Из А абв следует, что tga = -^ . Так как угол а даже на максимальных уклонах (120—13О°/Оо) не превосходит 8° (180 то можно считать, что sina^tga. Тогда, учитывая изложенное, получим:
wt = 1000 sin а = 1000 tg а = 1000 у = I,
где i — величина уклона, выраженная в тысячных °/00.
Следовательно, удельное сопротивление движению от уклона, выраженное в н!кн, численно равно величине этого уклона, выраженной в °/оо- На подъеме сила сопротивления движению от уклона Wt имеет направление, одинаковое с основным сопротивлением движению 1^0‘
На спуске эти силы имеют противоположное друг другу направление, а на горизонтальном участке Wt = 0. На этом основании принято считать сопротивления движению от уклона положительными на подъемах и отрицательными на спусках. Соответственно и сами уклоны считаются положительными при движении вверх (подъемы) и отрицательными при движении вниз (спуски). Величина добавочного сопротивления от уклона
н. (33)
Пример 7. Для поезда типа МТБ (G = 235 кн) дополнительное удельное сопротивление движению от подъема в 100°/Оо составит Wi~ 100 н!кн, а дополнительное сопротивление для всего поезда Wi = 100-235 = 23 500 н. Для троллейбуса Тр-9 (G = 88,2 кн) при Wi = 100 н[кн Wi = 100-88,2 = 8820 н.
Сопротивление движению кривых — это дополнительное сопротивление, зависящее от плана линии (от кривой пути, поворота) и для всех видов транспорта связанное с появлением внешней силы, вызывающей изменение направления движения поезда. Для того чтобы движущийся поезд изменил направление своего движения
к системе должна быть приложена внешняя (центростремительная) сила. Эта внешняя сила для рельсового и безрельсового транспорта возникает различно.
У рельсового транспорта внешней силой, вызывающей поворот вагона, является давление рельса на реборды бандажа. При вписывании поезда в кривую передняя колесная пара стремится двигаться по прямой линии, а рельс, оказывая давление на реборду наружного колеса, заставляет его изменять свое прямолинейное движение. Одновременно возникает реакция — давление реборды на рельс, которое выражает центробежную силу вагона. Благодаря взаимному давлению возникает трение между ребордой бандажа и внутренней поверхности головки рельса. Центробежная сила, приложенная к центру тяжести вагона, создает опрокидывающий момент и прижимает реборды колес к рельсам. В соответствии с правилами технической эксплуатации на кривой в зависимости от ее радиуса наружный рельс устанавливается с превышением й, рассчитанным для определенной скорости ик, над внутренним. При колесная пара прижимается к наружному рельсу, при v <ик — к внутреннему, а при v = vK дополнительного трения от действия центробежной силы не будет. Помимо трения реборд о головку рельса источником дополнительного сопротивления служит проскальзывание колес, жестко закрепленных на оси. Радиус внешней нитки больше радиуса внутренней, следовательно, наружное колесо проходит больший путь, чем внутреннее. В результате колеса помимо качения по рельсу должны еще скользить по нему. При входе и выходе поезда из кривой происходит поворачивание тележек, что вызывает трение шкворней и скользунов. Для определения величины сопротивления в кривых используют обычно не теоретические, а экспериментальные исследования, в результате которых составляют эмпирические формулы. Приводим одну из таких формул:
Гк = (// + /№ + /б) н/кн, (34)
где ф0 — коэффициент трения скольжения между ребордами колес и рельсами, в среднем равный 0,2—0,22 для чистых сухих рельсов;
R — радиус кривой;
Н — ширина колеи;
/б—длина жесткой базы тележки в м.
На основании формулы (42) для подвижного состава трамвая нормальной колеи 1524 мм WK следует определять по формулам:
для двухосных вагонов
Гк = — н/кн, (34')
R
для четырехосных вагонов
\FK = (410-г 430) н/кн^ (34")
Четырехосные вагоны, имеющие поворотные тележки с небольшими расстояниями между осями колесных пар, вписываются в кривые значительно лучше.
Дополнительное сопротивление движению от кривых для всего поезда вычисляют по формуле
WK = wKG н. (35)
При движении поезда на прямом участке R = оо и IFK = 0.
Пример 8. Определить дополнительное со противление движению поезда МТВ (G = 235 кн) при движении в кривой радиу са R = 50 м. База тележки Iq = = 1,75 м, ширина колеи Н = 1524 мм, коэффициент трения <рс = 0,22. На основании формулы (34) удельное сопротивление
1000-0,22 , г_______________ 422 499
“’к = t1’524 + Т 1>5242 + 1’752) = -R = S = 8’4 Н/КН’
а сопротивление от кривой для всего поезда
№к = 8,4.235 = 1974 н.
На подвижной состав безрельсового транспорта при повороте действует также центростремительная сила и неизбежно возникает некоторое добавочное сопротивление. Общая величина добавочного сопротивления на повороте у безрельсового транспорта гораздо меньше, чем у рельсового на кривой, и при расчетах ею в большинстве случаев пренебрегают.
Дополнительное сопротивление движению от влияния метеорологических условий
Сопротивление движению поезда при ветре значительно отличается от сопротивления движению при тихой погоде. Результирующая скорость поезда относительно воздушной среды при ветре в общем случае равна:
v' = V ± vBcosfi, где v — скорость поезда;
vB — скорость ветра;
(3 — угол между направлением ветра и направлением движения поезда.
Сопротивление ветра как добавочный вид сопротивления в тяговом расчете городских видов транспорта обычно не учитывается. Однако в некоторых эксплуатационных условиях добавочное сопротивление ветра может быть значительным в зависимости от скорости и направления ветра.
Дополнительное сопротивление от снега зависит от толщины слоя снега и его свойств, а также от типа рельсового полотна и дорожного покрытия. В эксплуатационных условиях при сильном снегопаде удельное сопротивление движению может увеличиваться в сравнении с нормальными условиями в 3—5 раз (в зависимости от скорости поезда и состояния участка пути).
Сопротивление движению зависит от температуры и плотности окружающего воздуха. С понижением температуры незначительно увеличивается плотность воздуха и возрастает сопротивление. Значительное влияние температура воздуха оказывает на величину внутреннего сопротивления подвижного состава— на коэффициент трения в подшипниках букс или полуосей осевых подшипников и в подшипниках редукторов.
Дополнительное сопротивление движению поезда при трогании с места возникает в момент его перехода из состояния покоя в состояние движения и больше сопротивления, соответствующего начальным скоростям движения. Удельное сопротивление, подсчитанное по эмпирическим формулам при v = 0, несколько меньше действительного. Главные факторы, влияющие на сопротивление движению при трогании поезда с места: 1) состав поезда; 2) вес поезда; 3) температура окружающего воздуха; 4) продолжительность стоянки поезда на остановке или в депо; 5) сорт смазки и 6) тип подшипников. На городском транспорте дополнительное сопротивление движению при трогании с места не учитывается. Таким образом, в тяговых расчетах на городском транспорте учитываются дополнительные сопротивления: для рельсового транспорта от уклонов Wt и от кривых 1ГК для безрельсового— только Wt.
§ 21. ПОЛНОЕ СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ
Полное сопротивление движению для рельсового транспорта выражается суммой
W = W0±Wi + Wi{ н или в удельных величинах:
G G ± G ' G '
т. е. w = w0=bwi + wE HjKH, а для безрельсового транспорта
W = wo±wi н или w = w0 ± wt н/кн.
Знак плюс соответствует движению на подъемах, а минус — на спусках. Не на всех участках пути полное сопротивление движению включает все составляющие. Например, на прямом участке отсутствует №к, а на горизонтальном Только основное сопротивление движению во всех случаях входит в полное сопротивление, так как сопротивления пути, воздушной среды и подвижного состава существуют при любых условиях движения.
На рис. 49 по формулам (29) и (29') построена характеристика зависимости удельного основного сопротивления движению поезда МТВ от скорости для режимов выбега и тяги. Кривая 1 является характерн
стикой действующей силы в период выбега. Пользуясь характеристикой №0 = можно определить действующие силы не только на прямых горизонтальных участках, но и при любом профиле. Сопротивление движению от уклонов и кривых не зависит от скорости, поэтому кривые Wq = f(v) или wQ = f(v) при различных уклонах имеют одинаковый вид и только смещаются вправо или влево. Для того чтобы
Рис. 49. Характеристики удельного сопротивления движению поезда
кривая 1—при выбеге; кривая 2 — при езде под током (тяга или электрическое торможение)
можно было ограничиться построением только одной кривой сопротивления движению Wq = f(v), необходимо ниже оси абсцисс провести горизонтальную прямую — линию уклонов (см. рис. 49). На этой линии в соответствующем масштабе отложить величину уклонов в °/00’ вправо от нуля — для спусков, а влево — для подъемов. Тогда сопротивление движению на любом уклоне можно определить путем переноса оси ординат на величину wt = i. Смещенное положение оси ординат показано: для подъема 4,5°/00 (вертикаль /) и для спуска 8°/00 (вертикаль //). Пользуясь кривой / — характеристикой действующей силы при режиме выбега /до = wQ = f(v) — можно определить величину /д = w при любой скорости движения на участках различного профиля. Так, например, при скорости v± = 50 км/ч значение /д выражается отрезками: аб — на горизонтальном участке (ау0 = 9,7 н/кн); вб — на подъеме 4,5°/00 (w = w0 + wt = 9,7 + 4,5 = 14,2 н/кн); гб — на спуске 8°/00 (w = w0 — = 9,7—8 = 1,7 н/кн). Действую-
щая сила (отрезок гб) будет наименьшей, так как на спуске сопротивле
ние от уклона вычитается из основного сопротивления. При движении поезда выбегом на спуске 8°/00 при скорости оу = 42,5 км/ч (точка д') действующая сила равна нулю, и поезд движется равномерно. Если скорость v > vy, действующая сила будет замедляющей (движение замедленное), а при v<vy — ускоряющей (движение ускоренное). При движении поезда на спуске 12°/00 (вертикаль III) со скоростью v = = 50 км/ч действующая сила определяется отрезком бд (w = wa — — Wi = 9,7—12 = —2,3 н/кн). Движение поезда в этом случае будет ускоренное, и скорость поезда может увеличиваться до оу = 59 км/ч, после чего движение станет равномерным. Удельное сопротивление от кривых можно учитывать как удельное сопротивление от подъема. Например, если wK = 5 н/кн, то численно это эквивалентно величине уклона i = 5°/оо.
§ 22. МАКСИМАЛЬНЫЕ (ПРЕДЕЛЬНЫЕ) УКЛОНЫ
Количество прицепных вагонов в составе поезда ограничено условиями сцепления.
Максимальные подъемы. Увеличение состава поезда при одних и тех же условиях сцепления увеличивает возможность буксования при движении на тяжелых подъемах. Величину максимального подъема, допустимого по сцеплению для данного состава поезда, можно определить из условия Емакс > W при трогании поезда с места (движение ускоренное) или из условия FMaKC—W при равномерном движении поезда на подъеме. Максимальную силу тяги поезда определяют по формуле (25). Сцепной вес поезда принимают без учета веса пассажиров, т. е. для наихудшего случая. Из уравнения движения поезда можно определить величину максимального подъема, допустимого по сцеплению:
F^^ma + Wv + Wi + W"
ИЛИ
фбс = та + w0 G + G + wK G.
Так как wt = fMaKC получим:
при ускоренном движении
i|)Gc - та-w0 G-w* G Gc ma Q .
*макс =------q--------— W0 Wk /00»
при равномерном движении
= ^c-WoG-WkG = Gc _Wo_WkO/w. (36') G 0
При движении поезда на прямом участке формула (36) принимает вид:
^макс ~ Ф ^о°/оо»
н G
а для поезда, состоящего только из моторного вагона,
*макс ~ Ф
Максимальные спуски. Для каждого вида транспорта существует определенная предельная величина спуска, при которой еще допустимо нормальное движение. Величину максимального спуска, на котором можно затормозить поезд, определяют из условий сцепления. Торможение возможно, если 6макс + wo + = wt — ПРИ равномерном
движении и 6макс + = wi + тат — ПРИ замедленном дви-
жении. Отсюда, учитывая формулу (22), получим формулы для определения максимального спуска, допустимого по сцеплению:
при равномерном движении
'макс = + Wo + </оо; (37)
при замедленном движении
GT + w0G + wKG — maT GT—maT 0
*макс —---------Q--------- —------q-----г wo "Г /оо- Р' )
Если в поезде все оси тормозные G = GT, формула (37) принимает вид:
'макс = Я5' — ~ + w0 + = Я5' — J 02Аи ат + Wo + wK°/00. (37")
G
Следует отметить, что величина ф зависит от скорости. При очень больших спусках возможно, что 6макс + ^0 + В этом СЛУ'
чае эксплуатация транспорта недопустима, так как остановить поезд на таких спусках невозможно. Максимальным спуском для эксплуатации транспорта является такой спуск, на котором можно получить некоторую минимальную величину замедления (0,3—0,5 м/сек2) при экстренном торможении.
§ 23. ПРИМЕРЫ ПО МЕХАНИКЕ ДВИЖЕНИЯ ПОЕЗДА
Общие данные для примеров 9—17: а) тип поезда — один вагон МТВ, вес G = 235 кн, приведенная масса т = 27 780 кг, удельное сопротивление движению поезда определяется из характеристик (см. рис. 49); б) тип троллейбуса —МТБ, вес G = 86,3 кн, приведенная масса т = 10 000 кг, удельное основное сопротивление движению определяется по формуле (32).
Пример 9. Определить пусковую силу тяги поезда в момент трогания на прямом и горизонтальном участке, если пусковое ускорение ап = 1 м/сек2.
Для вагона МТВ из характеристики (см. рис. 49) при v = 0 находим w0 = = 1,7 н/кн. Пусковую силу тяги определяют по формуле (20): Гп = 27 780-1 + + 1,7-235 = 28 180 н.
Для троллейбуса: по формуле (32) при v = 0 w0 = 12 н/кн. Пусковая сила тяги Fn = 10 000-1 + 12-86,3 = 11 035 н.
Пример 10. Определить ускорение поезда при движении на прямом и горизонтальном участке со скоростью v — 50 км/ч, если сила тяги F = 5000 кн.
Для поезда МТБ по кривой 2 (рис. 49) при v = 50 км/ч находим ку0 = 5,8 н/кн. Ускорение поезда
5000 — 5,8*235
а =----------------= 0,13 м/сек2
27 780
[по формуле (20)].
Для троллейбуса МТБ по формуле (32') при v = 50 км/ч находим = = 0,9(12 + 0,004 *502) = 19,8 н/кн. Ускорение троллейбуса
5000—19,8-86,3 Л а =---------------= 0,33 м сек2.
10 000
Пример 11. Определить силу тяги поезда при движении на прямом и горизонтальном участке со скоростью v = 60 км/ч.
Для вагона МТБ по характеристике 2 при v = 60 км/ч находим = 8,5 н/кн. При равномерном движении (а = 0) сила тяги F = W [формула (20)]. Следовательно, F = 8,5-235 = 1998 н.
Для троллейбуса МТБ по формуле (32') при v= 60 км/ч находим ш0= 0,9(12+ + 0,004-602) = 24,2 н/кн. При а = 0 F = W. Следовательно, F = 24,2-86,3 = = 2088 н.
Пример 12. Определить величину ускорения поезда МТБ в момент трогания на спуске 8°/00 с кривой R = 102 л, если пусковая сила тяги Fn = 25 500 н. Из характеристики 2 при v = 0 находим w0 = 1,8 н/кн. Удельное сопротивление от кривой определяем по формуле (35):
410
“'k = I^ = 5H/'CW-
Полное сопротивление движению поезда W = 1,8-235 — 8*235 + 5*235 = = —282 н. Ускорение поезда определяем по формуле (20):
25 500 —(—282)
а~------пгт -----= 1 м/се^2‘
27 780
Пример 13. Определить величину замедления поезда при его движении выбегом на прямом участке пути со скоростью 30 клАприг, равном: О°/оо; + 5°/00; —3‘°/00; — 1О°/оо.
Для вагона МТБ по характеристике 1 при 30 км/ч находим = 5,7 н/кн. Полное сопротивление движению будет равно: на горизонтальном участке W = = 5,7-235 = 1342 н; на подъеме W = (5,7 + 5)235 = 2507 н\ на спуске 3°/00 W = (5,7 — 3)235 = 637 н; на спуске 1О°/оо W = (5,7 — 10)235 = —1010 н. Ускорение определяем по формуле (21):
на
горизонтальном участке
1342 а =-------= 0,05 м/сек2,
27 780
(движение замедленное);
на
на
на
подъеме
2507 а =--------= 0,09 м/сек2,
27 780 1
спуске 3°/00
637 а =--------= 0,02 м /сек2,
27 780
спуске 1О°/оо
—1010
а= 27 73Q ~—0’04 м/се*2 (движение ускоренное).
(движение замедленное);
(движение замедленное);
Для троллейбуса МТБ полное сопротивление движению будет равно: при i= О°/оо W = (12 + 0,004-302)86,3 = 1356 н; при i = 5°/00 W = 1356 + 5-86,3 = = 1788 «; при i= — 3°/00 № = 1356 — 3-86,3 = 1097 «; при i = — 1О°/оо № = = 1356 — 10-86,3 = 493 н. Ускорение троллейбуса определяется аналогично трамвайному вагону по формуле (21); во всех четырех случаях движение троллейбуса будет замедленным.
Пример 14. Определить величину тормозного замедления при механическом торможении вагона МТВ: 1) на прямом и горизонтальном участке; 2) на подъеме 30°/00; 3) на спуске 1О°/оо и 4) на спуске 5О°/оо, если тормозная сила вагона В = = 20 ООО «, а скорость начала торможения vT = 20 км/ч. У дальнее основное сопротивление движению определяем для wT>c = 10 км/ч по кривой Г. &у0 = = 3,8 н/кн. Полное сопротивление движению: на прямом горизонтальном участ* ке W — 3,8-235 = 893 н\ на подъеме W = (3,8 + 10)235 = 3243 к; на спуске 10°/оо W = (3,8 — 10)235 = —1457 н\ на спуске 5О°/оо W = (3,8 — 50)235 = = —10 857 н. Тормозное замедление соответственно равно [см. формулу (22)]:
20 000 + 893
ат =-------------
27 780
20 000+ 3243
= 0,7; ат=-------1-----=0,8;
’ т 27 780
20 000— 1457
27 780
—
20 000— 10 857 Л
= 0,66; ат =---------------=0,3 м/сек2.
т 27 780
Пример 15. Определить, возможно ли остановить одновагонный поезд МТВ при механическом торможении на спуске 1О,35°/оо, если тормозная сила поезда В = 20 700 «, а скорость начала торможения ут = 10 км/ч. Удельное основное сопротивление движению приутс = 5 км/ч (находим по кривой /) = 3,5 н/кн.
Полное удельное сопротивление движению W — (3,5 — 103,5) = —100 н/кн. Полное удельное сопротивление движению W = —100-235 = —23 500 н. Тормозное замедление
20 700 — 23 500
ат =----------------= — 0,1
27 780
м/сек2
— движение равноускоренное. При заданной тормозной силе поезд остановить невозможно, необходима тормозная сила В > 23 500 н.
Пример 16. Механическое торможение поезда МТВ происходит на спуске 93,8°/00 с установившейся скоростью v — 10 км/ч. Определить величину тормозной силы поезда. Удельное сопротивление движению (по кривой /) ш0 = 3,8 н/кн. Полное сопротивление движению W = (3,8 — 93,8)235 = 21 350 н. При торможении в режиме равномерного движения В = W = 21 350 н.
Пример 17. Определить, при каком значении коэффициента сцепления будет невозможна реализация тормозной силы, найденной в предыдущем примере. Из формулы находим:
Вмакс 21 350
_м^с.= =0,09 (90 н/кн),
т GT 235000
т. е. при коэффициенте сцепления ф < 90 н/кн.
Примеры 14 —17 аналогично решаются и для троллейбуса.
Пример 18. Определить зависимость величины максимально допустимого подъема (на прямом участке) от величины коэффициента сцепления (в пределах ф = 1004-300 н/кн) для трамвайных поездов (одновагонных всех типов, двухвагонных типа КМ + Си КТМ-1 + КТП-1, трехвагонных типа КМ-г 2С и КТМ-1 + 2КТП-1) и троллейбусов всех типов
/ 2 \
\ /
При расчете принимаем собственный вес вагонов КМ равным 200 кн, КТМ—122,5 кн и С—68,6 кн. Средняя величина удельного основного сопротивле
ния движению принята: для вагонов доср = 5 н!кн> а для троллейбуса &уср = = 16 н!кн. Результаты расчета даны на рис. 50. Например: при равномерном движении на подъеме для одновагонных поездов всех типов, пользуясь формулой (36), получим:
‘макс = 300 — 5 = 295°/00 (при ф = 300 н/кн} и
‘макс = ЮО — 5 = 95°/00 (при ф = 100 н/кн)\
2 2
для троллейбуса *макс=?= ~ Ф~^о= ~ 300 —16 = 200—16-— 184°/00 О о
(при ф = 300 н/кн) и *макс = 5О°/Оо (при ф= 100 н/кн).
Пример 19. Определить зависимость величины максимально допустимого спуска (на прямом участке) от величины коэффициента сцепления (в пределах 0,1—0,3) для одновагонного поезда — МТБ (без пассажиров) при равномерно замедленном движении с ят = 0,2 м!сек2. Пользуясь формулой (37), получим: ‘макс = 300—102-1,15 X Х 0,2 + 5 = 282°/00 (при ф = 0,3) и ‘макс = ЮО - 102• 1,15-0,2+ 5 = 82<700 (при ф = 0,1).
Пример 20. Максимальный уклон в городе N составляет 100°/оо. Участок пути прямой. Определить, возможна ли на данном маршруте эксплуатация трехвагонных поездов типа КМ + 2С. Из рис. 50 следует, что для данного типа поезда величина максимального подъема, допустимого по сцеплению, равна: при ф = 0,1 /макс = 58°/00, при ф = 0,3 ‘макс = 176°/00. Реализация коэффициента сцепления 0,3 возможна лишь при чистых сухих рельсах, а при неблагоприятных условиях, например при гололеде ф = 0,1. Принимая расчетное значение коэффициента сцепления для климатических условий города N 0,15, найдем из рис. 50 £макс = 85°/Оо для трехвагонного поезда и 1Макс = = 100°/оо для двухвагонного. Следовательно, на данном маршруте по условию
Рис. 50. Зависимость величины максимального подъема от величины коэффициента сцепления [/макс=/ (Ф)] / — для одновагонного поезда любого типа; 2— для двухвагонного поезда КМ4-С; 3 — для двухвагонного поезда КТМ-1-|--НКТП-1; 4 — для трехвагонного поезда KM-f-2C; 5 — для трехвагонного поезда КТМ-1 4- 2КТП-1 ; 6 — для троллейбуса любого типа при GC = 2/3G
безопасности движения допустима эксплуатация двухвагонных и одновагонных поездов. Проверим, возможна ли эксплуатация двухвагонного поезда при движении на спуске. Величину максимального спуска при равномерном движении (все оси тормозные) определяем по формуле (37): приф = 0,3 1*Макс = 300 + +6 = 306; при ф = 0,1 гмакс = Ю6°/00.
Однако с точки зрения безопасности движения необходимо проверить, возможно ли торможение поезда равномерно замедленное с ат = 0,2 м!сек2. Применяя формулу (37") при G = бт, получим: /макс — 130 — 102-1,12.0,2 + 5 = = 132°/оо (ПРИ Фер = 0,15) и 82°/00(приф = 0,1). Следовательно, эксплуатация двухвагонных поездов может быть допущена, но с применением песка для посыпки рельсов при неблагоприятных метеорологических условиях. Для троллейбусов всех типов при Gc = 2/3G величину максимального уклона в зависимости от коэффициента сцепления находят непосредственно по кривой 6 (см. рис. 50). Так, например, при ф = 0,1 1Макс ~ 5О°/оо, а при ф = 0,3 /Макс ~ 170°/Оо (в условиях города уклоны на маршрутах троллейбусов не бывают больше 8О°/оо).
РАЗДЕЛ ТРЕТИЙ ХАРАКТЕРИСТИКИ ТЯГОВОГО И ТОРМОЗНОГО РЕЖИМОВ ПОЕЗДА
Глава IX. ХАРАКТЕРИСТИКИ ТЯГОВОГО РЕЖИМА ПОЕЗДА
§ 24. СРАВНЕНИЕ ТЯГОВЫХ ДВИГАТЕЛЕЙ РАЗЛИЧНЫХ СИСТЕМ ВОЗБУЖДЕНИЯ
В двигателях постоянного тока возможны следующие системы возбуждения: последовательная, параллельная, смешанная и независимая. Каждая система возбуждения обладает своими характерными особенностями, которые и определяют степень ее пригодности для той или другой цели. При независимом возбуждении в зависимости от способа включения и системы возбуждения возбудителя могут быть получены свойства, соответствующие последовательному, параллельному и смешанному возбуждению.
При работе поезда на линии требуется, чтобы электродвигатели обладали характеристиками, наиболее выгодными для тяги. Степень соответствия электродвигателей различных систем возбуждения целям тяги в значительной мере зависит от формы их характеристик.
Зависимость одной переменной величины от другой, характеризующая рабочие свойства двигателя, носит название его характеристики. Существуют следующие виды характеристик, применение которых определяется конкретной целью анализа или расчета: 1) магнитные, определяющие зависимость магнитного потока от тока возбуждения; 2) электромагнитные, характеризующие зависимость электромагнитного момента от тока якоря; 3) электромеханические на валу двигателя; 4) электромеханические на ободе движущего колеса или электротяговые; 5) тяговые; 6) характеристики действующих сил.
На рис. 51 приведены магнитные и электромеханические характеристики: а) двигателя последовательного возбуждения: в правом квадрате двигательный, т. е. тяговый режим; в левом — генераторный режим при независимом возбуждении, б) двигателя параллельного возбуждения; в) двигателя смешанного возбуждения (смешанного согласного при тяге—правый квадрат и смешанного встречного возбуждения при генераторном режиме — левый квадрат).
Характеристики двигателя имеют различный вид в зависимости от системы возбуждения. Практически в электрической тяге используются скоростные характеристики, у которых с увеличением скорости снижается величина тока. Степень снижения скорости при увеличении тока может быть различной не только у двигателей разных типов, но и у одного и того же двигателя. Этот процесс может быть охарактери-
зован так называемым коэффициентом жесткости х, представляющим » dl
собой значение производной тока двигателя по скорости: х = — ,
где знак минус введен потому, что < 0. Характеристики, при которых
Рис. 51. Магнитные и электромеханические характеристики
а —последовательного; б —параллельного; в—смешанного возбуждения: /—магнитная; 2 —скоростная; 3 — коэффициент полезного действия; 4 — электромагнитного момента; 5 — внешнего вращающего момента; 6— тормозного момента; участок БАВ — рабочая зона характеристики
ток резко снижается с увеличением скорости, называются жесткими. При жестких характеристиках даже большие изменения величины тока вызывают незначительные изменения скорости. Характеристики с ма
лым коэффициентом жесткости (скорость резко изменяется с изменением силы тока) называют мягкими. Примером жесткой характеристики является скоростная характеристика двигателя параллельного возбуждения. Примером мягкой характеристики служит характеристика двигателя последовательного возбуждения, причем мягкость ее не остается одинаковой во всем диапазоне изменения тока. При малых нагрузках — наибольшая мягкость, а при больших нагрузках — наибольшая жесткость. Характеристики двигателя смешанного возбуждения при тяговом режиме занимают промежуточное положение, причем степень жесткости возрастает с увеличением тока параллельного возбуждения. В области генераторного режима они являются мягкими; их мягкость возрастает с увеличением нагрузки.
Рассмотрим характеристики тяговых двигателей с точки зрения их соответствия требованиям, предъявляемым условиям эксплуатации подвижного состава на линии.
Тяговый режим
Электрическая устойчивость. Под электрической устойчивостью двигателя будем понимать его способность автоматически стремиться к состоянию электрического равновесия между приложенным напряжением, э. д. с. двигателя и падением напряжения в его силовой цепи при пуске, переходе с одного режима работы на другой и при всех возможных случайных отклонениях от состояния равновесия.
Работа двигателя в электрически установившемся тяговом режиме определяется уравнением электрического равновесия U = Е-\- 1г. Для качественной оценки электрической устойчивости достаточно рассматривать лишь силовую цепь двигателя и не учитывать возникающих в якоре вихревых токов, вызывающих некоторое отставание величины магнитного потока от изменений значения тока возбуждения. Уравнение переходного процесса для силовой цепи двигателя при принятых нами допущениях имеет следующий вид: U = Е + Ir + Ес, где Ес = = —L-&— электродвижущая сила самоиндукции; L — индуктивность силовой цепи двигателя.
При установившемся режиме (/ = const) = 0, и уравнение переходного процесса принимает вид, соответствующий состоянию электрического равновесия. При отклонении от состояния равновесия в направлении уменьшения тока двигателя изменения в соотношении между напряжением и э. д. с., возникающие в электрически устойчивой системе, должны стремиться вернуть ее к первоначальному состоянию. Очевидно, при этом э. д. с. самоиндукции должна иметь положительный знак. Наоборот, при увеличении тока двигателя э. д. с. самоиндукции имеет отрицательный знак, т. е. стремится вызвать уменьшение тока и вернуть систему в состояние равновесия. Следовательно, в электрически устойчивой системе знак изменения тока и знак э. д. с. самоиндукции должны быть противоположны, т. е. — А/ со
ответствует +ЕС, а +Д/ — величине —Ес. Общий критерий устойчивости любой системы при всех режимах работы формулируется так: производная действующей в системе силы должна быть меньше производной противодействующей силы. В нашем случае это запишется так:
dU_ d(E+fr) d! di
На рис. 52 дано графическое изображение уравнений электрического равновесия и переходного процесса для двигателей последовательного,
Рис. 52. Характеристики
/—напряжение сети; 2 — э. д. с. двигателя; 3 — падения напряжения в тяговом двигателе; а —при последовательном; б — при параллельном; в — при смешанном согласном возбуждении
параллельного и смешанного согласного возбуждения. При анализе кратковременных электрических переходных процессов допустимо скорость поезда принять постоянной. Горизонтальная линия 1 изображает приложенное напряжение (постоянное по величине), кривая 2 —э. д. с., наклонная 3— падение напряжения в силовой цепи двигателя. Ординаты заштрихованной площади представляют собой э. д. с. самоиндукции. Точки Р пересечения прямых 3 с кривыми 2 являются точками электрического равновесия, так как при токе /у имеем соотношение: U = Е + 1г; Ес = 0. Ординаты изображают: аб — U; аР — Е; Рб— 1г.
Рассмотрим устойчивость электрического равновесия двигателя последовательного возбуждения (см. рис. 52,а). Допустим, что по какой-либо причине ток двигателя уменьшился на величину Л/ и стал равным: Г = 1у — Д/. Очевидно, при токе Г уравнение переходного процесса примет следующий вид: U = Е + 1г + Ес.
При случайном увеличении тока до значения I" = /у + Д/ это уравнение запишется U = Е + 1г — Ес. Таким образом, при любых изменениях тока знак э. д. с. самоиндукции и знак изменения тока противоположны. Следовательно, точка Р является точкой устойчивого электрического равновесия.
Применяя этот принцип анализа устойчивости к двигателям параллельного и смешанного согласного возбуждений, можно сделать вывод, что на рис. 52,6 и в точки Р± и Р — соответствуют состоянию электрического равновесия, а точка Р2 является точкой, характеризующей неустойчивое электрическое равновесие.
На основании изложенного можно сделать выводы: 1) в полной мере электрической устойчивостью обладают двигатели последовательного и смешанного согласного возбуждения; 2) двигатель параллельного возбуждения устойчив при нормальных нагрузках, но может оказаться неустойчивым при значительных перегрузках.
Рис. 53. Тяговая характеристика поезда (кривая /) с двигателями: последовательного (а); параллельного (б) и смешанного согласного возбуждения (в) и характеристика основного сопротивления движению (кривая 2)
Механическая устойчивость. Из уравнения движения поезда при тяговом режиме следует, что динамическое равновесие (соответствующее равномерному его движению), определяемое условием Рд = = F — W = 0, будет устойчивым, если после некоторого увеличения скорости поезда движение его станет замедленным, т. е. <0, для чего должно быть F < W, т. е. Рд < 0, а после некоторого уменьшения скорости — будет ускоренным > oj, для чего Fn = F — №>0. Следовательно, условие динамической устойчивости может быть выражено неравенствами
. / dv\ а т — dF^ V < Q- d(F~~w) dv dv ’ dv ’ dv dv
т. e. производная активной силы F по скорости должна быть меньше производной противодействующей силы W. Иными словами, производная сила Рд по скорости должна быть отрицательна, а тяговая характеристика должна иметь падающий характер.
На рис. 53 представлены тяговые характеристики двигателей различных систем возбуждения и характеристики сопротивления движе
нию. Точка Р пересечения этих характеристик соответствует установившемуся режиму (равномерному движению поезда):
F =0; F = W\ — =0. д dt
Абсциссы заштрихованных площадей характеризуют величину действующей силы Рд. Из рис. 53 следует, что при любом увеличении скорости на некоторую величину + Ду сила тяги будет меньше сопротивления движению (F < №), а ускорение а = — отрицательно, движе
ние поезда замедленное, пока скорость поезда не достигнет установив-
шейся величины уу. Наоборот, при некотором уменьшении скорости Рд положительно (F>W) и 37 > 0;
at
движение поезда ускоренное до тех пор, пока скорость поезда не достигнет установившегося значения. Как видно из рис. 53, тяговые двигатели обладают устойчивым динамическим равновесием.
Распределение нагрузок между двигателями. На равномерность распределения нагрузки между
Рис. 54. Влияние разницы в диамет- двумя или несколькими двигате-
рах движущихся колес на нагрузку лями влияет разница в диаметрах
двигателей движущих колес и расхождение в
/-последовательного возбуждения; 2- СКОРОСТНЫХ ХараКТерИСТИКЗХ. параллельного возбуждения г г
При параллельном соединении двигателей неравномерное распределение нагрузок проявляется в потреблении двигателями различных токов. Допустим, что вагон оборудован двумя двигателями последовательного возбуждения, скоростные характеристики которых одинаковы, а диаметры колес разные. Первый двигатель вращает колесную пару с диаметром колеса Dlf а второй — колесную пару с диаметром колеса Z)2. Двигатели соединены параллельно. При неодинаковых диаметрах колес (Z)2 >&i) скорости их вращения будут обратно пропорциональны
диаметрам, так как скорость поступательного движения всех колес вагона одинакова. Якорь второго двигателя будет иметь скорость вращения м2, которая меньше скорости пг первого двигателя. Ток, потребляемый каждым двигателем, найдем по характеристике 1 (рис. 54). Двигатель, вращающий колесную пару большего диаметра, будет нагружен больше на величину тока А/ = /2 — /х. Неравномерность распределения токов влечет за собой и различие в соответствующих вращающих моментах. Если пренебречь различием в к. п. д. при токах /х и /2, то можно принять, что
Ali пт« /х 6/; M2n2»U
откуда M.r: М2 ж : У2, т. е. распределение вращающих моментов, а следовательно, и сил тяги прямо пропорционально распределению токов.
Если вагон оборудован двигателями параллельного возбуждения, то при тех же условиях ток, потребляемый каждым двигателем, можно найти по характеристике 2. Значительно перегружен второй двигатель и недогружен первый.
К таким же результатам можно прийти и в том случае, когда скоростные характеристики двигателей неодинаковы, что почти всегда неизбежно вследствие отклонений в качестве материала магнитной системы и производственных допусков на размеры различных
Рис. 55. Влияние разницы в характеристиках двигателей на их нагрузку а —при параллельном; б —при последовательном их соединении
деталей при изготовлении. Для тяговых электродвигателей (ГОСТ 2582—50) допускаются отклонения в скорости вращения до ±4% типовой характеристики.
На рис. 55 показано влияние разницы в характеристиках двигателей на их нагрузку при равных диаметрах колес. Поскольку диаметры колес одинаковы, при данной скорости движения вагона все двигатели будут иметь одинаковую скорость вращения. Для этой скорости вращения найдем на соответствующих характеристиках ток, потребляемый двигателем. Для двигателей последовательного возбуждения получим незначительную перегрузку одного из них (ДУ = 12— Ух), а для двигателей параллельного возбуждения — значительную перегрузку одного и недогрузку другого (ДУ' = У2 — Л). Если двигатели последовательного возбуждения I и параллельного возбуждения Г работают с одинаковой нагрузкой У = У', то двигатель последовательного возбуждения будет иметь скорость вращения nlt а параллельного возбуждения — п2. Нагрузка параллельно работающих с ними двигателей II и 1Г будет неодинакова (У < У'), причем также Д/ц > ДУ/. При скорости вращения п' (п' > п) двигатель Г (болеетихоходный) будет работать в тормозном режиме (точка г), а двигатель 1Г — в тяговом
(точка g). В эксплуатационных условиях обычно одновременно возникает и наравенство диаметров колес и несовпадение характеристик двигателей; в наихудшем случае возможно, что и та и другая причины будут вызывать перегрузку одного и того же двигателя.
Таким образом, неравенство токов и силы тяги параллельно соединенных двигателей тем больше, чем более жесткой является их скоростная характеристика. Наименьшую неравномерность в распределении токов имеют двигатели последовательного возбуждения, а наибольшую— параллельного. Большая неравномерность в нагрузках приводит к перегреву наиболее загруженных двигателей и к буксованию их колесных пар. Указанное обстоятельство является основным эксплуатационным недостатком двигателей параллельного возбуждения.
Рассмотрим распределение нагрузок при последовательном соединении двигателей. В этом случае через все двигатели будет протекать один и тот же ток. Различие в диаметрах колес и в скоростных характеристиках приводит к нераспределению напряжений между двигателями. При одинаковых диаметрах колес и одинаковых характеристиках напряжение сети распределяется между двигателями поровну ^(7 = »
т. е. при 2=2^= £72. Предположим, что на вагоне КТМ два двигателя имеют неодинаковые характеристики, но равные диаметры колес. Тогда при последовательном их соединении более быстроходный (первый) двигатель будет работать при напряжении <275 в, а менее быстроходный (второй) при напряжении (72>275 в(см. рис. 55, б). Пренебрегая разницей в к. п. д. при напряжениях Ur и t/2, можно написать: M^iiy 1и± и М2п2^ IU2, откуда М1\ М2^ Ur : (У2, т. е. вращающие моменты, а следовательно, и силы тяги последовательно соединенных двигателей пропорциональны их напряжениям. При последовательном соединении двигателей различие в развиваемых ими вращающих моментах значительно меньше, чем при параллельном соединении, и зависит не столько от формы характеристики, сколько от различия в скоростных характеристиках.
Влияние изменения напряжения сети на работу двигателя. В контактной сети городского электротранспорта допускаются большие отклонения и колебания напряжения, чем в стационарных промышленных сетях. Рассматривая влияние изменения напряжения в сети на работу тяговых двигателей, следует различать два режима: длительное постепенное изменение (отклонение) напряжения на токоприемнике и резкое кратковременное (колебание).
При постепенном понижении напряжения, например вследствие увеличения падения напряжения в связи с удалением вагона от пункта питания, скорость поезда снижается в соответствии с изменением напряжения на токоприемнике [формула (7)].
Электромагнитный момент возникает в результате взаимодействия тока якоря / и магнитного потока Ф. Его величину можно определить из выражения
Мэ = с'1Ф, (38)
где с' — величина постоянная для данного типа машины.
При последовательном возбуждении, когда магнитный поток Ф создается током нагрузки, выражение (38) принимает вид:
M3 = c'Ik.
Следовательно, Мэ не зависит от напряжения, приложенного к двигателю. Показатель k для двигателей ненасыщенных, работающих на прямолинейном участке Оа, характеристики сФ = f(I) (см. рис. 51, кривая /), равен 2, а для двигателей, работающих с некоторым насыщением магнитной си
стемы, находится в пределах 2>£>1.
При параллельном возбуждении магнитный поток создается током /, величина которого пропорциональна приложенному напряжению U. Следовательно, из формулы (38) следует, что М3= IU. Таким образом, на внешний вращающий момент двигателя последовательного возбуждения практически не влияет изменение напряжения. Пони-
Рис. 56. Влияние повышения напряжения сети на работу тяговых электродвигателей / — последовательного возбуждения; 2 — парал-. дельного- возбуждения
жение напряжения сети при
водит лишь к уменьшению скорости, но сила тяги остается неизменной. В двигателях параллельного возбуждения и, в меньшей степени, в двигателях смешанного возбуждения понижение напряжения сети вызывает уменьшение магнитного потока. Поэтому скорость поезда снизится в меньшей степени, но для сохранения того же вращающего момента должен увеличиться ток в силовой цепи. Следова-
тельно, понижение напряжения вызывает дополнительную нагрузку двигателей, а увеличение нагрузки приводит к дальнейшему увеличению падения напряжения в сети и к перегрузке двигателя, контактной сети и подстанций.
Рассмотрим теперь, как влияют на работу двигателей кратковременные резкие изменения напряжения. Ток, потребляемый из сети силовой цепью двигателя, независимо от системы возбуждения опреде-^ ляется из закона Ома. Предположим, что в данный момент двигатели работали при напряжении и одинаковом токе (рис. 56), а в следующий момент напряжение на зажимах увеличилось на величину AU и стало равным U2. Вследствие инерции поезда скорость его движения, а значит, и число оборотов якоря не могут измениться мгновенно, поэтому переход на скоростные характеристики при напряжении U2 произойдет при тех же скоростях вращения nL и п2. Однако мгновенное изменение напряжения от до U2 вызовет увеличение токов двигателей, и после окончания электрического переходного процесса ток, например, в двигателе последовательного возбуждения будет равен:
Л + Д/ =
Ur+ ьи — сФ'п
где Ф' — магнитный поток при напряжении U2 и соответствующем токе Л. Для двигателя последовательного возбуждения увеличение тока составит: Л/ — /2—Ilt а для двигателя параллельного возбуждения &Г = /2 — /ь где Л/' > Д/ (так как в рабочей зоне
скоростные характеристики двигателя параллельного возбуждения более пологи, чем характеристики двигателя последовательного
возбуждения). В действительности изменения
тока при колеба-
Рис. 57. Сравнение характеристик двигателей 1, Г — последовательного возбуждения; 2, 2' — параллельного возбуждения (скорости вращения и вращающие моменты при часовом режиме одинаковы)
ниях напряжения будут меньше вследствие влияния индуктивности обмоток силовой цепи двигателя. При этом в двигателях последовательного возбуждения смягчающее действие индуктивности будет более сильным, так как в их силовую цепь помимо обмотки якоря и добавочных полюсов входит обмотка главных полюсов. Кроме того, в двигателе параллельного возбуждения обмотка главных полюсов, обладающая
большой индуктивностью, способствует замедленному изменению тока возбуждения параллельной цепи, а следовательно, и увеличению потока, что приводит к еще более резкому увеличению тока при повышении напряжения.
Влияние характеристик двигателя на нагрузку системы энергоснабжения. На рис. 57 приведены скоростные характеристики 1 и 2 и характеристика вращающего момента Г и 2' двигателей последовательного и параллельного возбуждения, имеющих одну и ту же номинальную (часовую) мощность. При движении поездов по пути с одинаковым профилем вращающий момент, а значит, и сила тяги, независимо от типа возбуждения двигателя, будут во всех случаях одинаковы (если пренебречь некоторым неравенством сопротивления движению вследствие неравенства скоростей пг и п2). При некотором значении вращающего момента М двигатель последовательного возбуждения будет потреблять ток /х, а параллельного /2. Двигатель параллельного возбуждения будет работать с большей нагрузкой на величину тока Л/=/2— /х и с большей скоростью вращения на величину \п=п2 — п1. Следовательно, при реализации вращающих моментов двига-
тель последовательного возбуждения потребляет меньшую мощность,
но развивает меньшую скорость, а при реализации вращающих моментов M<zMh развивает значительно большую скорость, но потребляет большую мощность.
Характеристики, приведенные на рис. 57, показывают, что поезд, оборудованный двигателями последовательного возбуждения, меняет свою скорость в широких пределах в зависимости от сопротивления движению, автоматически уменьшая ее на подъемах, благодаря чему исключается чрезмерное потребление мощности, которое было бы неизбежным, если бы скорость оставалась постоянной. Поезд, оборудованный двигателями параллельного возбуждения, сохраняет почти постоянную скорость независимо от профиля пути и затрачивает в одинаковых условиях большую мощность. Вращающий момент двигателей параллельного возбуждения изменяется приблизительно пропорционально величине подъема.
Таким образом, с точки зрения нагрузки тягового двигателя и системы электроснабжения наиболее благоприятными являются мягкие характеристики двигателей последовательного возбуждения, так как: 1) при движении поезда на тяжелых подъемах эти двигатели потребляют значительно меньшую мощность; 2) в одинаковых условиях движения требуется меньшая часовая мощность двигателя; 3) двигатель, контактная сеть и подстанции имеют более равномерную нагрузку, а чем равномернее нагрузка, тем меньше пики нагрузки тяговых подстанций и в первичной сети, а также падение напряжения и потери мощности в тяговой сети; 4) равномерная нагрузка системы электроснабжения дает возможность лучше использовать преобразовательные агрегаты и уменьшить сечение контактных приводов и кабелей; 5) при одной и той же мощности тяговых подстанций на линию может быть выпущено большее количество подвижного состава или при одном и том же количестве подвижного состава требуется меньшая мощность тяговых подстанций. Вследствие этого двигатели последовательного возбуждения в экономическом отношении выгоднее двигателей параллельного возбуждения.
Пуск и регулирование скорости. При одинаковых пусковых токах /п двигатель последовательного возбуждения развивает больший вращающий момент и сообщает поезду большее ускорение, чем двигатель параллельною возбуждения Л4п2 <; Л4П1 (см. рис. 57), а при одинаковых пусковых моментах — меньшей величины пусковой ток. Кроме того, скорость выхода на автоматическую характеристику у двигателей последовательного возбуждения меньше (точки и Л2), а следовательно, и меньше потери энергии в пусковых сопротивлениях. Регулирование скорости принципиально проще у двигателей параллельного и смешанного возбуждения; оно может быть достигнуто изменением магнитного потока посредством регулировочного реостата в цепи параллельного возбуждения (см. рис. 23).
Тормозной (генераторный) режим
Электрическая устойчивость. Рассмотрим, какая из систем воз буждения электрических машин наиболее удовлетворяет требованиям, предъявляемым к рекуперативному торможению. На рис. 58 приведены внутренние характеристики генераторов последовательного и смешан
кого возбуждения Е,= f(I) (кривая 1) при v = const и характеристики U + Ir = f(J) (прямая 3), по которым может быть установлена неустойчивость рекуперативного торможения с генератором последовательного возбуждения. Разность ординат характеристик 1 и 3 представляет собой величину Ес = —В режиме рекуперации (при переходном процессе): Е = сФи = U + Ir + EQ. Точка Р± соответствует электрическому равновесию системы Е = U + Ir. Однако это равновесие неустойчивое. Напряжение контактной сети представляет собой сильно колеблющуюся величину.
Рис. 58. Характеристики генераторов при рекуперативном торможении
а —последовательного возбуждения; б —смешанного встречного возбуждения; 1— э. д. с. E~f (/) при y = const; 2 — напряжение сети; 3 — падение напряжения в обмотках якоря и полюсов; 4 — напряжение
Если напряжение сети возрастет, то ток уменьшится. При уменьшении тока рекуперации э. д. с. становится меньше суммы U + /г, а Ес < 0, что влечет за собой дальнейшее уменьшение тока до полного размагничивания, а затем и перемагничивания машины. Генератор перемагничивается, э. д. с. меняет свое направление, и в результате возникает короткое замыкание машины при ее последовательном включении в сеть.
Если напряжение сети упадет, то тормозной ток и тормозная сила возрастут, а так как возбуждение осуществляется непосредственно током якоря, то э. д. с. при данной скорости также возрастет. Происходит увеличение тока (Е > U + Ir, а Ес > 0). Процесс продолжается до тех пор, пока ток не достигнет значения /у2 (точка Р2)- Электрическое равновесие в этой точке устойчивое. Но эта зона больших токов практически не может быть использована для рекуперации.
Общим условием электрической устойчивости рекуперативного торможения является следующее неравенство:
dE d(U+lr)
di di ’
где Е — действующая сила; U + 1г — противодействующая сила. Следовательно, условие устойчивой работы на сеть при U = const сводится к требованию, чтобы внешняя характеристика генератора Е — 1г = /(/) (кривая 4) была падающей. Такому условию удовлетворяют двигатели смешанного, независимого и параллельного возбуждения. Как следует из рис. 58,5, точка Р является точкой устойчивого электрического равновесия для генератора смешанного встречного возбуждения. Как отмечалось выше, двигатели последовательного возбуждения не могут автоматически переходить с тягового режима на генераторный, а двигатели параллельного и смешанного возбуждения автоматически, при помощи контроллера управления, переходят в генераторный режим. Однако работа двигателей параллельного возбуждения в генераторном режиме страдает теми же недостатками, что и работа в тяговом режиме (неравномерное распределение нагрузок, даже при небольшом расхождении характеристики и диаметров колес; резкое изменение нагрузки при колебании напряжения в сети).
Рассмотрим, какая из систем возбуждения наиболее удовлетворяет требованиям, предъявляемым к реостатному торможению. При использовании двигателей последовательного возбуждения различают системы с самовозбуждением, дающие характеристику генератора последовательного возбуждения, и системы с независимым возбуждением, при которых может быть получена любая внешняя характеристика. При установившемся режиме реостатного торможения уравнение электрического равновесия для силовой цепи имеет вид: Е = СФи = /тг + + /т7?т. В период от момента включения тягового двигателя на реостатное торможение до достижения тормозным током установившегося значения происходит переходный процесс возбуждения. Для переходного процесса можно написать следующее уравнение:
Е = сФЬ = /т г + /т 7?т + ёс,
где — тормозное сопротивление (внешняя цепь);
г — сопротивление обмоток генератора (внутренняя цепь). При переходе к установившемуся режиму следует принять Ес = 0. На рис. 59 графически представлены составляющие уравнений установившегося режима и переходного процесса. Установившийся режим возможен только при одном значении тока / = /у, определяемом пересечением внутренней характеристики (кривая /)‘ с характеристикой падения напряжения во внешней и внутренней цепи генератора (прямая 2). Точка Р соответствует электрическому равновесию при данной скорости. Скорость поезда по-прежнему принята постоянной вследствие большой инерции поезда. Величина Ес изображена заштрихованной разностью ординат кривой 1 и прямой 2.
Самовозбуждение генератора возможно лишь при наличии в момент включения цепи э. д. с. EQ, вызванной полем остаточного магнетизма. Рассмотрим, возможно ли устойчивое электрическое равновесие в точке Р. Предположим, что вследствие ухудшения сцепления возникает юз. Тогда окружная скорость на ободе колес снизится, что приведет к уменьшению э. д. с. до величины Ес (точка а), ток в цепи умень
шится до значения Г. В результате снижения тормозной силы юз прекратится, и причина уменьшения э. д. с. будет устранена. Так как э. д. с. Еа больше падения напряжения а'а" во внутренней и внешней цепи, Ес > 0, и ток будет увеличиваться до момента равновесия (точка Р). Подобным же образом в случае увеличения э. д. с. до величины £б (точка б) при устранении причины повышения э. д. с. схема вернется в состояние равновесия (точка Р): э. д. с. не в состоянии уравновесить падение напряжения, и ток начинает уменьшаться (Ес < 0).
Следовательно, в электрически устойчивой системе знаки отклонения тока и производной должны быть противоположны, а именно:
Рис. 59. Характеристики генератора последовательного возбуждения при реостатном торможении
/—э. д. с.; 2 —падение напряжения во внутренней и внешней силовой цепи генератора
Рис. 60. Характеристики генератора встречного смешанного возбуждения при реостатном торможении
/—э. д. с.; 2 —падение напряжения во внешней и внутренней силовой цепи генератора
Е = /т г'+ /т Ят — L— при dt
Е = ITr + ITRT + L— при
а’/>0 (+dl)-
dlcO (—di).
Общее условие электрической устойчивости при реостатном тор-~4~^т^т) ° ми
можении -ц < -gj у где действующей силон является э. д. с., а противодействующей — падение напряжения /т(г + 7?т). Если бы не было выполнено переключение в соответствии со схемами б и в (см. рис. 31), то ток якоря имел бы противоположное направление и линия 2 переместилась бы во второй координатный угол (линия 2'). Установившийся ток в этом случае определяется точкой Р'. Величина этого тока /у0 настолько мала, что не может вызвать заметного тормозного эффекта.
На рис. 60 показаны внутренняя характеристика Е = /(/т) при v = const и характеристика падения напряжения /т(г + 7?т) = /(/т)
в цепи генератора смешанного возбуждения. Разность ординат кривой 1 и прямой 2, равная э. д. с. самоиндукции, характеризует скорость изменения тока в переходном режиме. В точке Р создается устойчивое электрическое равновесие. Следовательно, система реостатного торможения обладает электрической устойчивостью при любой схеме возбуждения.
Механическая устойчивость. Схема обладает механической устойчивостью, если при повышении скорости поезда возрастают э. д. с. и тормозной ток, а следовательно, внутренний тормозной момент и тормозная сила. Этому условию удовлетворяют все системы возбуждения (см. рис. 51, левый квадрат — характеристики электромагнитного 4 и тормозного 5 моментов, и рис. 53, левые квадраты — тормозные характеристики). Однако тормозная характеристика генератора смешанного возбуждения (см. рис. 53, в) механически устойчива только при значениях скорости ^<^макс (точка 5), а при ^>^макс механически неустойчива, так как с увеличением скорости тормозная сила поезда уменьшается.
Конструктивные качества двигателей. В конструктивном отношении двигатели параллельного и смешанного возбуждения уступают двигателям последовательного возбуждения, имеющим более компактную обмотку, меньшие размеры и меньший вес при одинаковой часовой мощности. Обмотка параллельного возбуждения состоит из провода небольшого сечения с большим количеством витков, занимает больше места, имеет худшую теплопроводность и в электрическом и механическом отношении менее надежна, чем обмотка последовательного возбуждения, состоящая из небольшого количества витков провода большого сечения. Кроме того, обмотка параллельного возбуждения обладает большей самоиндукцией. В момент выключения тока это приводит к значительной э. д. с. самоиндукции, которая, складываясь с напряжением сети, может привести к пробою изоляции обмотки или к возникновению трудногасимой дуги между размыкающими контактами. Для предотвращения этого параллельно обмотке возбуждения необходимо включать активное (так называемое разрядное) сопротивление. Технология осмотра и ремонта тягового двигателя параллельного и смешанного возбуждения сложнее, а эксплуатационная надеж-, ность меньше.
В результате сравнения двигателей различных систем возбуждения следует признать, что основным требованием электрической тяги наиболее полно удовлетворяют двигатели последовательного возбуждения. Поэтому они получили наибольшее распространение. В СССР они применяются на подвижном составе магистральных и пригородных электрических железных дорог и метрополитена. Все типы подвижного состава трамвая оборудованы двигателями последовательного возбуждения, за исключением вагонов РВЗ, на которых установлены двигатели смешанного возбуждения. Двигатели смешанного возбуждения применяются на отечественных троллейбусах всех типов, кроме троллейбусов ТС (сочлененного типа), где используются двигатели последовательного возбуждения. В ряде городов СССР находятся в эксплуата
ции троллейбусы ЧССР с двигателями последовательного возбуждения. На подвижном составе городского электротранспорта с тяговыми двигателями последовательного возбуждения генераторный режим используется для реостатного торможения, а при смешанном возбуждении — для реостатного и рекуперативного торможения.
§ 25. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ НА ВАЛУ ДВИГАТЕЛЯ
Режим работы двигателя любой системы возбуждения характеризуется: а) полезной мощностью Рм, т. е. механической мощностью на валу якоря; б) коэффициентом полезного действия tj; в) скоростью вращения якоря и; г) моментом вращения Af, развиваемым на валу якоря. Все эти величины изменяются в процессе работы тягового электродвигателя и находятся между собой в определенной зависимости.
К основным электромеханическим характеристикам на валу двигателя относятся следующие (рис. 61): а) скоростная характеристика п = f(J), устанавливающая зависимость между скоростью вращения якоря и током, потребляемым силовой цепью электродвигателя при различных нагрузках; б) характеристика полезной мощности двигателя Рм = f(I); в) характеристика коэффициента полезного действия т] = /(/), характеристика вращающего момента на валу якоря М = = /(/). Эти четыре характеристики, соответствующие постоянному напряжению на зажимах двигателя и постоянному току возбуждения для двигателей параллельного и смешанного возбуждения, устанавливают зависимость между его электрическими и механическими параметрами, и поэтому носят название электромеханических характеристик на валу двигателя. Они могут быть получены двумя способами: путем испытания двигателя на стенде и на основе электромагнитного расчета (при проектировании двигателей).
Скоростная характеристика. Формула (6) дает возможность исследовать зависимость скорости вращения якоря двигателя от его тока. Форма скоростной характеристики определяется характеристикой сФ = f(J) (см. рис. 51, кривая /). При последовательном возбуждении с увеличением тока (нагрузки двигателя) магнитный поток Ф увеличивается, а скорость вращения уменьшается до тех пор, пока не наступит насыщение магнитной цепи двигателя; после этого магнитный поток становится почти постоянным, а скорость вращения с дальнейшим ростом тока хотя и уменьшается, но незначительно (вследствие увеличения падения напряжения в цепи якоря двигателя). С уменьшением тока магнитный поток уменьшается, а скорость вращения увеличивается. При небольших токах двигатель может развить такую скорость вращения, которая будет опасна для прочности якоря. Наибольшая скорость вращения пмакс, при которой двигатель может нормально работать, носит название предельной конструктивной скорости вращения. Работа двигателя при скорости вращения п > /гмакс (рис. 51, а) и соответствующих токах I < /М1Ш недопустима. На скоростной характеристике двигателей отмечен ток /мин.
При смешанном возбуждении скорость вращения якоря зависит от магнйтного потока, создаваемого намагничивающими силами (н. с.) обеих обмоток и падения напряжения в цепи якоря. При тяговом режиме полная н. с. равна сумме н. с. последовательной и параллельной обмоток . Fu ( с = Fh . С . в+ FH . с . В . П • Пр И изменении тока I от нуля до двойного часового магнитный поток меняется сравнительно мало, так как в создании его большую роль играет параллельная обмотка возбуждения, особенно при максимальном значении /в. Также незначительно меняется и э. д. с. Поэтому при тяговом режиме скоростная характеристика получается пологой (рис. 51, в), При токе I = 0 скорость и вращения якоря п0 = точка А (кривая 2 на рис. 51, в), а магнитный поток Ф создает-
квт
ся исключительно н. с. параллельной обмотки. Э. д. с. равна приложенному напряжению. При дальнейшем увеличении скорости поезда (п> >>п0), например при движении
Рис. 61. Электромеханические характеристики на валу якоря трамвайного двигателя ДК-254 при
О’ =600 в Р ,=50 кет; I.=95 а; г = 0,161; н M/Z п Я
г =0,0877; гтт = 0,0784 ом при 100° С в д
на спуске, увеличивается э. д. с., которая становится больше приложенного напряжения. Ток I в якоре изменит свое направление [формула (8)], а скорость определится выражением
__U+Ir сФ
Магнитный поток своего направления не изменит, так как направление тока в параллельной обмотке останется прежним. Происходит автоматический переход из тягового режима в генераторный (рекуперативный). Магнитный поток создается н. с., равной разности н. с. параллельной и последовательной обмоток: F^.c = FH.CtB—FH,c.B.n- Скорость вращения с увеличением нагрузки быстро увеличивается вследствие уменьшения магнитного потока (за счет действия н. с. последовательной обмотки и реакции якоря) и увеличения падения напряжения.
Характеристика к. п. д. двигателей различных систем возбуждения имеет одинаковый вид. К. п. д. равен нулю в тяговом режиме при токе холостого хода /х, а в генераторном режиме при токе якоря, равном току /в (см. рис. 51). К. п. д. представляет собой отношение полезной мощности к затраченной. При тяговом режиме это будет отношение механической мощности к электрической:
__ _ Рм ____________Рм_____ /од\
Рэ UI + UIB El + Pr + U^1 V '
а при генераторном — отношение электрической мощности к механической:
л = Рэ-Ш* = EI—Pr — UIB > (39/)
Р М Р м
где EI — Рзм — электромагнитная мощность;
Рг — электрические потери в силовой цепи;
UIB — электрические потери в цепи параллельного возбуждения.
Для двигателя последовательного возбуждения формула (39) принимает вид:
Л = (39")
Потери мощности в двигателе состоят из электрических, магнитных и механических. Как видно из рис; 51, при небольших токах к. п. д. стремится к нулю, так как в этом случае мощность, подводимая к двигателю, расходуется в основном на покрытие механических и магнитных потерь (при холостом ходе). По мере увеличения тока к. п. д. быстро возрастает и при некоторой мощности достигает своего максимума. После достижения максимума кривая к. п. д. постепенно снижается под влиянием быстрого увеличения электрических потерь, пропорциональных квадрату тока. Полные потери в двигателе можно выразить следующим образом:
Рп = Рэ + Рмаг + РМСХ или Pa=UIU — *))• (4°)
Отсюда для к. п. д. получим следующую зависимость:
Л = (40')
Очевидно, что чем больше развиваемая двигателем мощность, тем больше потери в нем. Для современных тяговых электродвигателей к. п. д. при номинальном (часовом) режиме равен 0,88—0,93 (88—93%).
Характеристики полезной мощности. Полезная мощность двигателя Рм может быть представлена как произведение внешнего вращающего момента М и угловой скорости вращения якоря: Рм = ТИсо. Угловая скорость вращения якоря выражается зависимостью
со =---=— рад сек (сек~'\
60 30
Следовательно, полезную мощность двигателя можно выразить так: I-, 7V1 л л / л 1 \
Рм=^6~бт’ <41>
где п — скорость вращения якоря в об!мин\
М — в ньютонометрах (н-м) (1 ньютонометр в секунду равен 1 впг). На основании формулы (39") полезную механическую мощность двигателя последовательного возбуждения можно записать в виде:
Р^ = иИ}вт. (42)
Полезная мощность двигателя может быть равна нулю в двух случаях: 1) при моменте на валу двигателя, равном нулю, т. е. при холостом ходе, что для двигателя последовательного возбуждения недопустимо ввиду того, что при этом п > пмакс; 2) при остановке двигателя под током, т. е. при п = 0, что может происходить при чрезмерной нагрузке, которая недопустима по условиям нагрева, коммутации и механической прочности.
При генераторном режиме полезная (электрическая) мощность, т. е. мощность, отдаваемая в сеть, будет равна Рэ = UI — U/в.
Работоспособность двигателя характеризуется его полезной мощностью, т. е. наибольшей нагрузкой, которую он может выдержать без повреждений. Величина этой нагрузки ограничивается следующими требованиями: а) достаточной механической прочностью всех частей двигателя; б) надежной коммутацией, т. е. отсутствием опасного искрения на коллекторе, способного перейти в круговой огонь; в) допустимым нагревом.
На характеристиках (см. рис. 51) отмечен ток /макс, устанавливающий предел работоспособности двигателей по условиям коммутации при тяговом (точка Б) и генераторном (точка В) режимах. Ограничения по механической прочности требуют, чтобы при токе /макс наибольший вращающий момент электродвигателя не вызывал появления на валу якоря остаточной деформации. Однако для тяговых электродвигателей ток /макс обычно ограничивается условиями коммутации. Рабочая часть характеристик (зона безопасной работы) расположена между вертикальными пунктирными линиями, проходящими через точки А—Б (двигатель последовательного возбуждения) и через Б—В (двигатели смешанного и параллельного возбуждения).
Характеристика вращающего момента на валу двигателя. Вращающий момент является основным параметром двигателя, так как он определяет величину тока, потребляемую двигателем, а следовательно, и его мощность. При работе двигателя с постоянной скоростью вращающий момент равен моменту сопротивления, приложенного к валу двигателя. Если вращающий момент меньше момента сопротивления, то скорость вращения двигателя будет уменьшаться, а ток возрастать до тех пор, пока не наступит равновесие моментов. Если же, наоборот, вращающий момент больше момента сопротивления, то скорость вращения двигателя будет увеличиваться, а ток — уменьшаться. Вращающий момент на валу якоря М (так называемый внешний момент) можно
выразить как разность двух моментов (см. рис. 51) — электромагнитного (внутреннего) момента Л4ЭМ и противомомента ДЛ4, т. е. М = Л4ЭМ — АЛ4 = с'1Ф — ЛМ (см. рис. 51). Электромагнитный момент создается электромагнитной мощностью Рэм = £/, а противо-А л, Ро-ЗО
момент ЛМ = ----магнитными и механическими потерями По-
следовательно,
М = с'1Ф—^н-м.
Т1П
(43)
Внешнему вращающему моменту соответствует мощность, развиваемая на валу двигателя. Из формулы (41) можно получить следующую зависимость для внешнего момента:
ЛЛ ЗОРМ 30£//т) , 2/ 2\ /лл\
М = —— =-----------1н-м (или кг-м2/сек2), (44)
ли ли
где Рм в вт; п в об/мин.
Так как при изменении напряжения на зажимах двигателя с изменением скорости вращения п пропорционально изменяются потери По [формула (43)], то внешний момент двигателя последовательного возбуждения практически можно считать независящим от напряжения.
При генераторном режиме тормозной момент Л4Т на валу двигателя будет больше внутреннего тормозного момента на величину противомомента ЛМ (см. рис. 51), т. е.
Л4Т = /Иэм + ЛМ = с'1Ф + Л М.
Пример] 21. Даны характеристики п = /(/) и т| = /(/) при U = 600 в (см. рис. 61). Для значений I = 40 а, п = 2620 об/мин и ч = 0,8 требуется определить вращающий момент и полезную мощность. Полезную мощность определяем по формуле (42): Рм = 550-40-0,8 = 176 000 вт = 37,6 кет, а внешний вращающий момент — по формуле (44):
„ 30-17 600
М= ---------= 74 н-м.
3,14-2620
Пример 22. Даны характеристики п = f(J) и М = f(I). Для значений I = = 100 а, п = 1600 об/мин при 600 в и М = 320 н-м (33 кГ-м) определить полезную мощность и к. п. д. Решение:
320-3,14-1600
Рм =-------------- =53 586 вт [формула (4Г)];
о U
53 586
~ 600~100 = ° ’9 ’ ИЛН 9°% [формула
§ 26. ЭЛЕКТРОТЯГОВЫЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ
К электротяговым характеристикам относятся: 1) скоростная характеристика nQ = f(I) или v = /(/), устанавливающая зависимость между скоростью вращения колесной пары nQ (или скоростью поезда v) и током, потребляемым в силовой цепи тягового двигателя; 2) характеристика полезной мощности Рм0 = /(/) — зависимость между
полезной мощностью на оси и током; 3) характеристика к. п. д. т] = = f(J) — зависимость между к. п. д. на оси и током; 4) характеристика вращающего момента Л40 = — зависимость между вращающим
моментом на оси и током; 5) характеристика силы тяги FQ = f(I) — зависимость между силой тяги двигателя и током.
Скоростная характеристика двигателя, отнесенная к ободу движущего колеса, строится на основе зависимости скорости вращения якоря двигателя п от тока. Скорость движения поезда можно выразить следующим образом:
или
Л£)П-3,6 , /лг/\
v =------— = с1п км/ч, (45 )
бОр,
где D — диаметр движущего колеса в м;
р — передаточное число редуктора;
п0 = -^---скорость вращения колеса в об/мин\
3,6 — числовой коэффициент, служащий для перевода м!сек в км/ч\
ЛР*3,6 О
C1 = "ббй----числовой коэффициент.
Скоростная характеристика v = f(J) имеет такой же вид, как характеристика и отличается от нее лишь размерностью. Форма
скоростной характеристики зависит от конструктивных особенностей двигателя и обусловливает его тяговые свойства и расход электрической энергии. На рис. 62 даны скоростные характеристики трамвайных двигателей различных типов при полном поле и номинальном напряжении 275 в.
При больших насыщениях магнитной системы скоростная характеристика имеет более пологую форму, двигатели обладают меньшими габаритными размерами и весом, но потребляют больше электрической энергии. Это относится как к тихоходным двигателям с nh < 1000 об/мин и максимальной скоростью Умакс = 35-4-40 км/ч, так и к быстроходным с nh > 1000 об/мин и vMaKC = 50-4-70 км/ч. При полном поле и номинальном напряжении они имеют часовую скорость 20—28 км/ч. Тяговые двигатели с меньшим насыщением магнитной системы имеют скоростную характеристику с большей крутизной и значительно большую максимальную скорость.
Двигатели с так называемой низколежащей характеристикой (т. е. с малыми скоростями при полном поле) имеют часовую скорость 12— 16 км/ч. Для получения такой характеристики необходимо иметь: а) тяговый электродвигатель с увеличенным расчетным сечением магнитопровода— остова и сердечников полюсов, или с увеличенным воздушным зазором, или с большим количеством активных проводников обмотки якоря, или с большим числом витков обмотки возбуждения; такой двигатель будет сравнительно тихоходным nh < 1000 об/мин будет иметь большие размеры и вес; б) передачу от вала якоря к оси с большим передаточным числом; в) минимально возможный диаметр движущих колес (600—700 мм).
Характеристика к. п. д. Зная к. п. д. на валу двигателя т], а также к. п. д. редуктора т]р, можно найти к. п. д. двигателя на ободе движущих колес т]о:
для тягового режима
По = ппР; (46)
для генераторного режима
= —• (46')
Пр
На рис. 63 даны характеристики к. п. д. редуктора: одноступенчатого — в функции полезной мощности (за 100% принята часовая мощность) и двухступенчатого — в функции отношения вращающего момента М к вращающему моменту часового режима Mh. Пользуясь характеристиками (см. рис. 63) и формулой (46), можно определить т]о Для различных значений тока.
Характеристика полезной мощности. Зная мощность на валу якоря двигателя Рм и к. п. д. редуктора т)р, полезную мощность, переданную на ось колесной пары, можно определить так:
-Рм.[о — Рм (47)
Так как часть мощности, передаваемой с вала двигателя на его ось, затрачивается на потери в передаче, мощность на оси будет меньше, чем на валу. Подставив в формулу (47) значение Рм из формулы (42), получим:
Рм. о = 7//т]Г]р = вт. (47')
Характеристика вращающего момента. Вращающий момент с вала двигателя посредством редуктора передается на движущую ось. В редукторе быстрое вращательное движение вала якоря преобразуется в более медленное вращательное движение оси, благодаря чему увеличивается величина передаваемого колесам вращающего момента. Если принять во внимание потери в редукторе, то вращающий момент будет определяться по формуле
Л40 —Л4рг]р н-м. (48)
Некоторую особенность представляет построение кривой тормозного момента на ободе колеса при генераторном режиме. В отличие от тягового режима, при котором вращающий момент вала двигателя передается колесам не полностью, так как часть его теряется в передаче, при тормозном (генераторном) режиме к тормозному моменту на валу двигателя Л4Т добавляется момент от потерь в редукторе, так как он увеличивает тормозной эффект. В этом случае соотношение между моментами на валу и на оси выражается формулой
уИто = ^1Ек.Л. (48')
Пр
Характеристика силы тяги двигателя. Если бы в двигателе не было магнитных и механических потерь, вся электромагнитная мощность преобразовалась бы в полезную механическую мощность, и двигатель развивал бы так называемую электромагнитную силу тяги Рэм. Но действительная сила тяги двигателя Ро меньше электромагнитной на величину ДР из-за магнитных и механических потерь мощности в двигателе и потерь в редукторе, т. е. Ро = Рэм — ДР-
Вращающий момент, сообщаемый двигателем колесу, реализуется в виде пары сил (см. рис. 38) и может быть выражен как произведение силы Ро на плечо -%:
., г? D
f о •
Отсюда сила тяги двигателя, отнесенная к ободу движущих колес, будет равна:
Г0 = ^1»н. (49)
u D
Заменив Мо через М, получим:
F0 = ^p- н, (49')
где D — в м, М — в нм. Для генераторного режима, учитывая фор мулу (48'), получим:
Во
2МТ р.
(49")
где Во — тормозная сила на ободе движущего колеса (см. рис. 28);
Л4Т — тормозной момент в н-м.
Установим зависимость между силой тяги и скоростью поезда. Мощность есть работа в единицу времени. Следовательно, полезная мощность двигателя, отнесенная к ободу ведущего колеса, может быть выражена:
РнГ^НМ/Ч
Рис. 64. Электротяговые характеристики трамвайного двигателя ДК-258 при 550 в
/—скоростная v=f (/); 2 — к. п. д. т] = = f (/); 3—силы тяги FQ=f (/); Рм=50 кет; ^а= 550 в> 530 об/мин; Ih= 150 а; zoo=85 °; £>=780 мм; ц=7,98; с>макс = = 70 км/ч; г=0,36 ом при 100° С (передача ТМ-271)
PM.o = F0v вт, (50) где Fo — сила тяги двигателя в я; v — скорость поезда в м!сек (т. е. путь, пройденный поездом в единицу времени).
Из формулы (49) следует, что сила тяги Fo при данной мощности будет тем больше, чем больше передаточное число и меньше диаметр колеса; для скорости поезда, согласно формуле (45), существует обратная зависимость. Уменьшая ц и увеличивая £), при одном и том же токе получают большую скорость поезда, но меньшую силу тяги, и наоборот.
Эл ектр отя говые х ар актер исти-ки двигателя служат исходными данными для тяговых расчетов при проектировании. Завод «Динамо» им. С. М. Кирова обычно дает следующие электротяговые характеристики: для двигателей последовательного возбуждения — скоростную, к. п. д. и силы тяги
Рис. 65. Электротяговые характеристики трамвайного двигателя ДК.-259А1
/>м/г=43 кет, £д=275 в; 7^=176 а; 7^=135 а; 73 = 700 мм; [1 = 7,7; t»MaKC=70 км/ч; г=0,129 ом; гвш=10,2 ом при 125° С (характеристики к. п. д., силы тяги и тормозной силы даны без учета потерь в редукторе)
с©
Рис. 66. Электротяговые характеристики троллейбусного двигателя ДК-207 А на номинальное напряжение 550 в для пяти ступеней регулирования скорости
/—скоростные; 2 —к. п. д.; 3 — силы тяги; 4 —тормозной силы (для двух ступеней)
^мй=95 кет; 1^=\92 а; 1^=155 а; гя+гд=0,148 ом; гв=0,022; гвш=160(ш при 100°С; D= 1070 jw.m;
ц=П,22; »макс=68 км/ч
при номинальном напряжении (рис. 64), а для двигателей смешанного возбуждения — скоростную, к. п. д., силы тяги и тормозной силы при номинальном напряжении для двух или трех значений тока возбуждения (рис. 65).
На рис. 66 приведены характеристики троллейбусного тягового двигателя ДК-207А для всех экономических ступеней скорости при напряжении 550 в. Скоростная характеристика, соответствующая току /в = 0, является наивысшей.
Полные электромеханические характеристики — это электромеханические характеристики для всех режимов работы тягового двигателя данного типа. Они строятся для схем: 1) без перегруппировки двигателей с ослаблением поля; 2) с перегруппировкой без ослабления поля и 3) с перегруппировкой и с ослаблением поля. Для троллейбусов всех типов, имеющих один двигатель, несколько экономических ступеней скорости можно получить только путем изменения тока параллельного возбуждения (двигатели смешанного возбуждения) или путем шунти-ровки поля и секционирования (двигатели последовательного возбуждения).
При выполнении тяговых расчетов часто приходится пересчитывать заданные электромеханические характеристики на валу или на ободе колеса в связи с изменением режимов работы или параметров подвижного состава. Ниже рассмотрим порядок пересчета характеристик: 1) с вала якоря на обод колеса; 2) с обода колеса на вал; 3) при изменении параметров подвижного состава — передаточного числа редуктора или диаметра колес; 4) при изменении режима работы двигателя (напряжения или возбуждения).
Пересчет характеристик с вала якоря на обод колеса, и наоборот, можно выполнить пользуясь формулами (39)—(50). Рассмотрим порядок пересчета характеристик на примерах.
Пример 23. Даны характеристики п = f(l) иг| = /(/) при напряжении 600 в (см. рис. 61) необходимо определить и, Рм.о, т]0 и Fo и построить соответствующие характеристики, если ц = 5, D = 0,85 м и Лр.ср = 0,97. Для значения / = = 40 а п = 2600 об/мин, т] = 0,8. Определяем по формуле (45) скорость вагона:
3,14-0,85 о = —— п = 0,069 я = 23 м/сек (или 82,8 км/ч)-,
к. п. д. находим по формуле (46):
Т10 = 0,80-0,97 = 0,78;
полезную мощность — по формуле (47):
Рм>о = 550-40-0,78=17 160 вт
и силу тяги — по формуле (50):
р Рм.о И 160
Fo =-----=--------= 746 н.
0 v 23
Определив и, Рм.о, По и Fo для других точек в пределах значений тока от 30 до 200 а, можно построить искомые характеристики.
М.0
Пример 24. Пересчитать характеристики (см. рис. 64) с обода на вал. При / = 200 a v = 21 км/ч (5,8 м/сек), Fo = 13 734 н, Чо = 0,78. Определяем скорость вращения по формуле (45):
60 ц 60-7,98
п = —— v = —-——- v = 199,5 v = 1157 об/мин\ nD 3,14-0,78
к. п. д. по формуле (46):
полезную мощность по формуле (42):
Рм = 550-200-0,8 = 88 000 вт\
вращающий момент на валу якоря по формуле (49'):
D 0,78
М = ----- Го = ~ n Fo = 0,005-13 734 = 687 н-м
2цт)с 2-7,98-0,97
и т. д. для других значений I в пределах от 200 до 40 а.
Рассмотрим порядок пересчета электротяговых характеристик при изменении параметров подвижного состава — диаметра колеса D и передаточного числа р. Величины^? и р ограничены конструктивными соображениями. Для вагонов трамвая применяются колеса с диаметром качения 600—850 мм\ для тролл ейбусов — 1016 и 1060 дш. Передаточ-
ное число зависит от диаметра колеса и конструкции редуктора. Для подвесно-осевых двигателей с одноступенчатым зубчатым редуктором р 6, для двигателей с независимой подвеской при одноступенчатом зубчатом редукторе р 9 и при червячном редукторе р = 10-? -?12. Если дана характеристика двигателя v = /(/) при рх и Dr и требуется пересчитать ее на р2 и Р2, то можно применить формулу (45). Скорость поезда при новых условиях будет равна:
£2
Dr ’
Ex 4
Ц2
(51)
^2=^1
Характеристику двигателя Fo = /(/) при рх и Dr можно пересчитать на р2 и D2, пользуясь формулой (49). Силу тяги при новых условиях можно выразить как
Fa = Fi^.^, (52)
Ь>2 Ц1
40 60 60 190 1Z0 МО Ю0 (60 ZOO 220 240 260 ZSO 300 320 Л<7 3601а
Рис. 67. Электротяговые характеристики двигателя для трех разных диаметров движущих колес и одного и того же передаточного числа
Следовательно, для одного типа двигателя можно получить различные варианты электромеханических характеристик на ободе колеса в зависимости от величины диаметра движущего колеса и передаточного числа привода. Формулы (51) и (52) дают возможность пересчитывать характеристики на ободе движущих колес при изменении р и D. На рис. 67 даны электротяговые характеристики двигателя для трех разных диаметров колес при одном и том же передаточном числе.
§ 27. ПЕРЕСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ С ОДНОГО НАПРЯЖЕНИЯ НА ДРУГОЕ
Если для двигателей данного типа имеются характеристики только при номинальном напряжении £/н, может возникнуть необходимость в пересчете их на другое рабочее напряжение (7. Для пересчета нужно установить зависимость между характеристиками двигателя при напряжении U и при номинальном напряжении (7Н.
Скоростная характеристика при любом напряжении может быть рассчитана по формулам (6) и (7), если известна характеристика сФ = f(J) двигателя. Если зависимость сФ = f(I) не задана, то ее можно определить пользуясь скоростной характеристикой при каком-либо напряжении U и формулой (7) в следующем виде: сФ — = U • Однако более удобен непосредственный пересчет с одного напряжения на другое, без построения промежуточной кривой. На основании формул (6) и (7) скорость вращения двигателя и скорость поезда при напряжении U выражается соотношениями
U —1г п =-----;
сФ
и —1г v =----;
СФ
а при напряжении
U^—Ir . сФ
и г —1г СФ
^1 =
Так как величина магнитного потока двигателя последовательного возбуждения зависит только от тока нагрузки /, то при данном токе магнитный поток Ф будет иметь одну и ту же величину при любых напряжениях двигателя. На основании этого, разделив первое уравнение на второе, получим:
«1 п
Ui—Ir
или
_ и± — 1г
v ~ и—1г
Отсюда скорость вращения якоря и скорость поезда при напряжении LJr будут соответственно равны:
п1 = п
Ui—Ir U—Ir
Uy-Ir U—Ir
(53)
и
vx = V
Скоростные характеристики для двигателей смешанного возбуждения пересчитывают с одного напряжения на другое при постоянном
токе возбуждения /в = const также по формуле (53). Для генераторного режима работы двигателей формула (53) принимает вид:
«1 = «Т7+77 и(53')
Пример 25. Пересчитать скоростную характеристику (см. рис. 64) на 275 в, если сопротивление обмоток двигателя равно 0,26 ом, а при I = 30 a v= 70 км/ч. Пользуясь формулой (62), находим:
275 — 30-0,26 гц = 70 ------------= 34,4 км/ч.
550 — 30-0,26
Расчет аналогичен для других значений тока I.
Ориентировочно, пренебрегая падением напряжения в силовой цепи двигателя, можно считать, что
Ui их
— ---- и -----~----- •
п и v и
В случае если изменение напряжения, подведенного к тяговому двигателю, осуществляется включением последовательно с якорем сопротивления 7? (например, пускового реостата), характеристику скорости для пусковых позиций можно построить, если известна скоростная характеристика на ходовой позиции. Действительно, скорость поезда для любой схемы соединения двигателей при выключенных пусковых сопротивлениях, согласно формуле (7), составляет:
т
— — Ir г" v =-------,
СФ
а при включенных сопротивлениях г — —--------------------------------—
, Z" Z" V = --------------- .
СФ
Взяв соотношение скоростей при одном и том же токе, получим:
или
— —-------—' п г
=
— — Ir г"
Пользуясь формулой (53"), можно рассчитать и построить скоростные характеристики для пусковых позиций при любой схеме соединения тяговых двигателей.
Характеристика к. п. д. При отсутствии данных о механических и магнитных потерях в двигателе данного типа характеристику к. п. д. можно пересчитать на другое напряжение только приближенно, если принять, что при одинаковых токах сумма магнитных и механических потерь pQ пропорциональна квадрату скорости, а следовательно, и квадрату напряжения, т. е.
Poi
Если полные потери рп при напряжении U равны рп = pQ + I2rf т. е. pQ = р — 12г, то потери рп1 при напряжении могут быть выражены:
Pul = Ро-^ + ^ = (Рп-/2Н (54)
Тогда, определив величину рп по формуле (40), пользуясь формулой (54), можно найти величину потерь рп1, а затем по формуле (40')— величину т] при напряжении Utl для различных значений тока:
—Pni
г11-_ U.I
Пример 26. Пересчитать характеристику к. п. д. при 300 в на 150 в, при сопротивлении обмоток г = 0,085 ом, / = 50 а, г) = 0,65. Определяем величину потерь: при напряжении 300 в по формуле (40):
рп = 300.50 (1—0,65) = 5250 etn
И при напряжении 150 в по формуле (54):
, 1502
рп= (5250—502.0,085) -^ + 502-0,085= 1612 вт.
К. п. д. находим по формуле (40'):
150-50—1612
Т]: =-----------= 0,78
11 150-50
аналогично и для других значений тока /).
К. п. д. при пониженном напряжении в области малых нагрузок увеличивается вследствие снижения магнитных и механических потерь и уменьшается при средних и особенно больших нагрузках из-за увеличения удельного веса электрических потерь.
Характеристики вращающего момента силы тяги. В двигателях последовательного возбуждения электромагнитный момент, как отмечалось, не зависит от напряжения. Величины внешнего вращающего момента и силы тяги должны несколько повыситься при понижении напряжения за счет уменьшения потери момента ДЛ4, вызванного уменьшением магнитных и механических потерь. Потери вращающего момента внутри двигателя при пониженном напряжении несколько уменьшаются, так как магнитные и механические потери р0 зависят от скорости вращения якоря. Но так как одновременно с уменьшением р0
J 24
понижается скорость вращения п, то при переходе с одного напряжения на другое величина М изменяется незначительно. Вследствие этого практически характеристики вращающего момента и силы тяги могут быть приняты общими для любых рабочих напряжений при движении поезда на линии, так как величина ДЛ4 или ДР незначительна по сравнению с М и Fq.
Для тяговых двигателей смешанного возбуждения из формулы (43) для внутреннего вращающего момента следует, что при неизменном токе обмоток параллельного возбуждения вращающий момент и сила тяги не зависят от напряжения. Поэтому при данном значении тока параллельного возбуждения характеристика всегда остается неизменной, независимо от того, какое напряжение подводят к двигателю. Но если изменение напряжения двигателя вызывается не переключениями в схеме, а колебаниями напряжения в сети, то изменяется и ток обмоток параллельного возбуждения, что приводит к изменению вращающего момента и силы тяги при неизменном токе якоря. Таким образом, и для этого типа двигателя при постоянном токе возбуждения характеристики внешнего момента и силы тяги будут общими для всех рабо* чих напряжений.
§ 28. ПЕРЕСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПРИ ИЗМЕНЕНИИ МАГНИТНОГО ПОЛЯ
Степень изменения н. с. тягового двигателя последовательного возбуждения характеризуется коэффициентом регулирования возбуждения а, представляющим отношение FU,C.H = /в.н^п при измененном поле к Fh.c.h. = /b.h №н при нормальном поле и при том же токе якоря;
а ^н. с. и . и
РН. с. н 4. н
Тогда коэффициент регулирования будет (см. рис. 23): а = при ' в.н
шунтировке поля (так как число витков И7П = Ц7Н) и а = —п при сек-
М/ н
ционировании обмоток возбуждения (так как /в.н = Л.и). Регулирование поля при а < 1 называется ослаблением поля, а при а > 1 — усилением поля; коэффициент а = 1 при нормальном поле.
В тяговых двигателях применяется ослабление поля до 30%. На рис. 68 даны электромеханические характеристики двигателя ДК-257А при номинальном напряжении для полного и ослабленного поля. Так как на практике возможны случаи отсутствия заводских характеристик при ослаблении поля, рассмотрим теоретический способ построения этих характеристик, если известны характеристики двигателя при нормальном возбуждении.
Скоростная характеристика при измененном поле может быть рассчитана по формуле (7). В этом случае для расчета скоростной характеристики должны быть известны характеристики сФ = = f(IB) при / = const для различных токов якоря. При отсутствий этих характеристик расчет выполняется приближенным способом. Из
скоростной характеристики при нормальном возбуждении, например, двигателя последовательного возбуждения найдем скорость поезда v при таком режиме работы, когда через обмотку якоря, а следовательно, и обмотку возбуждения, протекает ток / = /в, равный току в обмотке возбуждения при ослаблении поля, т. е. I = 1Ъ = /в = а/'» где I — ток в обмотке якоря при ослаблении поля; /в — ток в обмотке возбуждения при ослаблении поля. Тогда согласно формуле (7) скорость поезда при нормальном поле будет:
__ U — У*!' (гя гд гв) сФ
а скорость при ослаблении поля, когда через якорь протекает ток а через обмотку возбуждения — ток /в- а/':
/ _U---[I' (гя гд) Ч~а^/гв]
сФ'
Разделив второе выражение на первое, получим:
= сФ^_ и —[Г (Гя + 'д) + ^^в1 v сФ' U — аГ (гя + гд + гв)
(55)
По условию потоки Ф и Ф' создаются одинаковыми н. с., равными а/'П7в, но вследствие влияния реакции якоря поток Ф несколько больше потока Ф'. Таким образом, дробь несколько больше единицы. Вторая дробь 126
U—Г [(^я + гд)+а/в]
а/'(гя + гд + гв)
из-за незначительной величины сопротивления обмоток двигателя весьма мало отличается от единицы, причем в меньшую сторону. Поэтому произведение обеих дробей правой части можно считать равным v' 1
единице, откуда - 1.
Рис. 69. Электротяговые характеристики тягового двигателя ДК-Ю8Г на номинальное напряжение 375 в
1,1' — скоростные; 2,2' — к. п. д.; 3,3' — сила тяги; Ркат’ //г=210а; I^q— = 170 а; 0=900 мм; ц=5,3; г— 0,122 ом при 100° С
Следовательно, v' = v, т. е. скорость поезда при ослаблении поля и токе в якоре Г приблизительно равна скорости поезда при нормальном поле и токе в якоре I = аГ. На основании изложенного, имея скоростную характеристику при нормальном поле, можно приближенным графическим способом построить скоростные характеристики при ослабленном поле. Более точно скорость поезда при ослаблении поля можно определить по формуле (55). Скоростные характеристики на валу якоря можно построить также графическим способом, полагая п' = п или пользуясь формулой, аналогичной формуле (55). Так, например, при а = 0,5 скорость вращения п = 1600 об/мин соответствует току I = 200 а (см. рис. 61, точка Л'), а при а = 1 —Т0КУ Ю0 а.
Пример 27. На рис. 69 показано графическое построение скоростной характеристики для степени ослабления поля а = 50% при напряжении U = 375 в.
При токе 7Х = 50 а и нормальном поле скорость согласно характеристике составляет =/= 73,5 км/ч (точка /). При ослабленном поле ту же скорость и\ = = 73,5 км/ч двигатель развивает при токе
£ a
50
0,5
=100 a.
Отложив скорость Uj, получим точку Г искомой характеристики.
При токе /2 = ЮО а и нормальном поле скорость движения составляет v2 = = 43,5 км/ч (точка 2). При ослабленном полету же скорость v'2 = 43,5 км/ч двигатель развивает при токе
, 100
/2 = ^-^ = 200 а (точка 2 ). Таким же путем построены точки 3 и 5', 4 и 4'.
Характеристику к. п. д. можно пересчитать с полного поля на ослабленное так же, как и скоростную, приближенно — путем сопоставления потерь рп при ослабленном поле с потерями рп при нормальном поле при одном и том же токе в обмотке возбуждения /в = al. Эти потери можно выразить так:
р'п=р'о + 12(гя + гд) + (а1)2г0 (I)
— при ослабленном поле;
Pn = Po+Wf (II)
— при полном поле,
где I — ток в якоре при ослабленном поле. Если принять, пренебрегая разницей в добавочных потерях, что при обоих режимах вследствие равенства скоростей и магнитных потоков магнитные и механические потери одинаковы, т. е. pQ = pOt то потери рп при ослабленном поле можно выразить так:
pn=>0 + /2(rH + rH) + (a/)2rB. (Ill)
Вычитая из уравнения (III) уравнение (II), получим формулу для определения потерь при ослабленном поле:
Рп = Рп — (а/)2 г + Р (гя + гд) + (а/)2 гв. (56)
Потери рп и к. п. д. г/ соответственно можно определить по формулам (40) и (46), которые для данного случая принимают следующий вид:
U1— р'
рп = 4/а/(1 —л) и Т|' = ———.
Пример 28. Пользуясь характеристикой к. п. д. при нормальном поле и U = = 600 в (рис. 61), рассчитать и построить характеристику к. п. д. при ослабленном поле а' = 50% и том же напряжении, если г = 0,337 ом при 100° С. Построение характеристики рассмотрим на примере расчета только одной ее точки. Итак, для тока якоря = 100 а находим величину к. п. д. при нормальном поле: т] = = 0,9. Зная т]х, на основании формулы (40) определим потери в двигателе: рп = = 600-100 (1—0,9) = 6000 вт. Величину потерь при ослабленном поле, пользуясь формулой (56), надо определить при токе якоря
, Zi 100
/ = — = — = 200 а.
а 0,5
Тогда получим: рп = 6000 — 1002-0,337 + 2002-0,249 + 1002-0,088 = = 13 470 вт. Определив рп, найдем, пользуясь формулой (40'), к. п. д. двигателя при ослабленном поле, соответствующем току якоря 200 а,
, 600-200 — 13 470
л =------------------= 0,89,
1 600-200
или 89% (см. точку А рис. 61). Аналогично рассчитывают данные для построения других точек характеристики.
Характеристика к. п. д. при ослабленном поле расположена выше, чем при нормальном, в области средних и больших нагрузок (вследствие уменьшения электрических потерь) и несколько ниже в области малых нагрузок (из-за увеличения механических потерь} (см. рис. 68 и 69).
Характеристику полезной мощности Рм = — f(T) можно построить, если известна характеристика т|' = f(I) при ослабленном поле, пользуясь формулой (42).
Характеристику вращающего момента М' = = /(/) и силы тяги Fq = f(I) рассчитывают по данным характеристик t)' = f(I) и Рм — f(I) при ослабленном поле на основании формул (42} и (44).
Пример 29. Определить полезную мощность и внешний вращающий момент при ослабленном поле а = 50% и U = 600 в, если при I = 200 а т] = 0,89. Полезную мощность двигателя определяем по формуле (42): Рм = 600-200-0,89= = 106 800 вт. Для определения внешнего вращающего момента необходимо знать скорость вращения якоря п при а = 0,5. Так как на рис. 61 характеристики п = = /(/) при а = 0,5 нет, то прежде всего найдем скорость вращения п графическим способом: при токе / = 100 а и нормальном поле скорость вращения п = = 1600 об!мин. При ослабленном поле (а = 0,5) току якоря 200 а будет соответствовать п =f= 1600 об/мин (см. точку А'). Теперь, пользуясь формулой (44), определяем величину момента:
ял 30-106 800
М = ————= 637 н»м.
3,14-1600
Если пренебречь изменением к. п. д., то при одинаковых токах полезные мощности двигателя можно считать равными. Исходя из этого условия и формулы (44), можно установить простую зависимость между вращающими моментами М и М' на валу двигателя при нормальном и при ослабленном поле:
Мп TJr М'п' J1T , М' п
— = С//т| и --------= или —— ,
130 30 М п'
так как можно принять, что т] т|'. Здесь п — скорость вращения якоря при нормальном поле; п' — при ослабленном поле и том же токе I якоря.
Следовательно, при одной и той же величине тока / вращающие моменты при обоих режимах работы приблизительно обратно пропор-
циональны скоростям вращения. Такая же зависимость имеет место между силой тяги и скоростью поезда:
Рр ~ V Л) и' ’ где Fo — сила тяги при нормальном поле, a Fo — при ослабленном поле; v — скорость поезда при нормальном, a v' — при ослабленном поле.
Из характеристик, приведенных на рис. 68, следует, что при одинаковом токе /, потребляемом из сети, и нормальном поле двигатель развивает большую силу тяги, но меньшую скорость, чем при ослабленном поле, и наоборот. Так, например, при /х =f= 200 а и vr = 26 км/ч, FQ1 = 600 кГ (5886 «), а при щ = 56 км/ч Fp\ = 270 кГ (2649 н). В одинаковых условиях движения (например, на одном и том же тяжелом подъеме) при ослаблении поля тяговые электродвигатели потребляют из сети больший ток, чем при нормальном поле, так как вращающие моменты и сила тяги, развиваемые двигателями в обоих случаях, определяются одним и тем же сопротивлением движению и имеют равную величину М = М , a FQ Fo. Например, для получения одинаковой силы тяги, например Fo = 800 кГ, ток, потребляемый двигателем при ослаблении поля, должен возрасти от значения /а до величины /б. Найдем эти значения. При FQ = 800 кГ = 7848 н (рис. 68, точки а и б) /а = 245 а\ /б = 365 а. Внутренний вращающий момент двигателя, как известно из формулы (38), пропорционален произведению тока в якоре на магнитный поток. А так как при ослаблении поля магнитный поток Ф уменьшается, то. для поддержания того же вращающего момента должен увеличиться ток, потребляемый двигателем. К такому же выводу приводит закон сохранения энергии, так как согласно формулам (41) и (50) полезная мощность двигателя пропорциональна произведению вращающего момента или силы тяги на скорость. При неизменном профиле, если пренебречь увеличением сопротивления движению вследствие повышения скорости, необходимый вращающий момент и сила тяги двигателя остаются постоянными независимо от степени ослабления поля. Скорость же при ослаблении поля возрастает, что приводит к увеличению потребляемой двигателем мощности, а следовательно, и тока. Поэтому при работе на тяжелом профиле езда на позициях ослабленного поля запрещается.
§ 29. ПУСКОВЫЕ ДИАГРАММЫ
Условия пуска. Пусковой период имеет весьма важное значение во всем процессе движения подвижного состава, и параметры этого периода необходимо выбирать так, чтобы обеспечивались наиболее экономичные и безопасные условия его работы. К процессу пуска подвижного состава предъявляется ряд требований. Пуск должен быть плавным, т. е. движение равномерно ускоренным. Пусковое ускорение а следовательно, пусковую силу тяги и пусковой ток необходимо выбирать возможно большими. С увеличением пускового ускорения по-130
вышается ходовая скорость движения поезда и уменьшаются потери в пусковом сопротивлении, что особенно важно для городского транспорта, так как вследствие коротких перегонов пуски достаточно частые. Кроме того, с увеличением ускорения при одной и той же ходовой скорости уменьшается расход энергии. Однако величина пускового ускорения ограничена условиями сцепления, мощностью тяговых двигателей и механической прочностью тягового прибора.
Рис. 70. Диаграмма реостатного пуска а — непрерывного; б—ступенчатого
Плавный реостатный пуск. Движение поезда в период пуска должно быть равномерно ускоренным, т. е. при ап = const. Из уравнения движения [см. .формулу (20)] следует, что для удовлетворения этого требования при постоянной массе поезда необходимо, чтобы сила, сообщающая ему ускорение, была постоянной
Гд n = Fn — = const.
Если принять во внимание, что при небольших скоростях величина сопротивления движению изменяется незначительно (см. рис. 49), то для достижения постоянства ускорения необходимо в период пуска
сохранять постоянной силу тяги поезда (Fn = const). Так как сила тяги является функцией тока двигателя FQ = f(I) (рис. 70, а), то для ее постоянства (Fu = const) нужно, чтобы ток, потребляемый двигателем в период пуска, также был величиной постоянной (/п = const). Из формулы (9) вытекает, что для выполнения этого условия пусковое сопротивление должно изменяться согласно следующей зависимости (при z = 1):
= t/c-E Е r__Uc г СФи.
Лт Ai Al Ат
При постоянной величине тока /п величина магнитного потока Ф также будет постоянной. Обозначив постоянную величину — г че-1 п
л СФ D
рез Л, а — через В, получим следующую зависимость:
Rn = A — Bv.
В момент пуска двигателя, когда v = 0, величина пускового сопротивления должна иметь максимальное значение:
'п
В период пуска двигатель развивает силу тяги, соответствующую току /п, и скорость поезда увеличивается от нуля до vn. Одновременно с увеличением скорости возрастает э. д. с., и поэтому пусковое сопротивление необходимо непрерывно уменьшать пропорционально повышению скорости поезда. Если сопротивление 7?п оставить неизменным, произойдет уменьшение тока /п.
Изобразим графически зависимость пускового сопротивления от скорости 7?п = f(v) при /п = 100 а = const, определяемую уравнением = А — Bv (при z=l). Для этого (см. рис. 70) по оси ординат отложим скорость v, а по оси абсцисс — ток двигателя J (вправо) и пусковое сопротивление (влево). В правом координатном углу построим скоростную характеристику v = f(J). Так как зависимость 7?п = f(v) при /п = const является прямолинейной, то график ее может быть построен по двум точкам: точка а с координатами v = 0, Rn = = 5,35 ом и точка б с координатами г?п = 20 км/ч, 7?п = 0. Пусковая скорость при токе 7П может быть найдена по характеристике v = = я/)-
Точка А соответствует моменту выхода на автоматическую характеристику. Если эту точку снести на ось ординат, как показано на рис. 70, то получится точка б. Точка а соответствует моменту начала пуска двигателя (v = 0). Пусковое сопротивление при этом (а следовательно, и положение точки а на оси абсцисс) определяется из уравнения
р __
^п — ----
(так как Е = 0).
По мере увеличения скорости поезда пусковое сопротивление должно уменьшаться по закону прямой линии (прямая аб). Точка б соответствует моменту выхода на автоматическую характеристику — при этом пусковое сопротивление выключено (7?п = 0). После выключения пускового сопротивления двигатель работает по автоматической характеристике и ток изменяется в зависимости от сопротивления движению и скорости поезда. Таким образом, для того чтобы в период пуска движение было равномерно ускоренным, необходимо пусковое сопротивление изменять непрерывно от величины 7?п = 5,35 ом до нуля.
Ступенчатый реостатный пуск. Пусковое сопротивление подразделяется на отдельные секции. Провода от каждой секции присоединяются к электромагнитным контакторам (система косвенного управления) или к контакторам контроллера (система непосредственного управления). В процессе разгона поезда, закорачивая и соединяя необходимым образом секции реостата, ступенями уменьшают величину сопротивления. При ступенчатом выключении пусковых сопротивлений ток, сила тяги и пусковое ускорение изменяются в некоторых пределах от максимума до минимума. Пределы этих изменений должны быть выбраны с таким расчетом, чтобы процесс пуска был достаточно плавным. Плавность пуска характеризуется относительными отклонениями пускового тока, силы тяги и ускорения от их средних значений (так называемыми коэффициентами неравномерности по току Кь силе тяги Kf и ускорению /Са). Эти коэффициенты выражаются следующими отношениями:
г/ __ Ai. макс ^п. мин __ . rz F макс — Рмин __ ^Р .
2/п ‘~/п’ F~ 2Fn “Fn’
д __ ап, макс ап. мин _
ап ап
где /п, Fn и ап — средние значения тока, силы тяги и ускорения в процессе пуска. Соотношение этих коэффициентов для одного и того же расчетного режима следующее: Ki < Kf< K&. Чем больше коэффициент неравномерности, тем больше колебание соответствующих величин (от максимума до минимума) и менее плавен разгон поезда в период пуска. Для обеспечения плавности пуска следует выбирать возможно меньший коэффициент неравномерности. Однако, чем меньше этот коэффициент, тем больше требуемое число пусковых позиций в контроллере. Увеличение же числа секций реостата и позиций контроллера усложняет электрическую схему, утяжеляет реостаты и контроллеры.
На рис. 70, б показана кривая изменения пускового тока v = f(I) при ступенчатом выключении пускового сопротивления, состоящего из трех секций: r19 r2, г3 для четырех пусковых позиций. Ток и сила тяги изменяются в некоторых пределах от максимального до минимального значения (от /п.макс = 130 а и до /п.мин = 90 а и соответственно от ^п.макс до Xi.мин). Пусковое сопротивление выводится ступенями а1Р1а2 — • — Рза.Р^. При езде на первой позиции при постоянной величине сопротивления 7?п скорость поезда возрастает, э. д. с. увеличивается, а ток уменьшается от/п. макс до /п.мин (от 130 до 90 а). В
(57)
момент, когда ток равен I п.мин, выводится часть пускового сопротивления Г1 и ток скачком увеличивается до /п.макс. На второй и последующих позициях (3 и 4) процесс пуска протекает аналогичным образом — вплоть до момента выхода на автоматическую характеристику. Ломаная линия в—г изображает процесс изменения скорости в функции тока. В точке г все пусковое сопротивление выведено (7?п = 0), позиция 5 — ходовая. Пуск поезда закончен, происходит езда по автоматической характеристике.
Число и величину сопротивления на каждой пусковой позиции можно определять графическим методом. При этом число позиций устанавливают в зависимости от принятых пределов колебаний тока. Однако на практике часто приходится рассчитывать пусковые реостаты для уже существующих контроллеров с определенным числом пусковых позиций, и тогда задачей расчета является вычисление только величины этих сопротивлений. Величина пускового сопротивления для любой схемы соединения определяется по формуле (9)
n Uc гг" г"Е
/ Т f f J
Z Z Z In
Порядок расчета следующий. В зависимости от системы управления и типа подвижного состава выбирают коэффициент неравномерности пуска по току = 5-?-20%, что примерно соответствует 30—6 пусковым позициям. При среднем значении пускового ускорения ап < 1 м/сек2, Ki > 104-20% среднее значение пускового тока /п на всех позициях может быть принято одинаковым. Плавность трогания поезда с места характеризуется приращением ускорения в единицу Да -
времени и постепенное его увеличение придает пуску большую плавность. Чтобы обеспечить постепенное увеличение среднего пускового ускорения до расчетной величины при ап > 1 м/сек2, рекомендуется постепенно повышать средний пусковой ток /п на первых трех— пяти позициях. В соответствии с ГОСТ 8802—69 величина не должна быть более 2 м/сек3. Верхний предел колебания тока /п.макс должен быть проверен исходя из условия сцепления по формуле (25) при расчетном коэффициенте сцепления, а также по условиях ускорения (по уравнению движения поезда), чтобы сила тяги не превосходила предела сцепления, а ускорение поезда не превышало допустимых величин для данной системы пуска. Для рельсового транспорта величина /п.макс обычно лимитируется условием сцепления, а для безрельсового — допустимой величиной ускорения. Среднее значение необходимо сравнить с часовым током. Для самовентилируемых двигателей должно быть: /П<(1,6 4- 1,8)Д. Практически целесообразно соблюдать следующие значения среднего пускового ускорения: при малопозиционных системах управления (4—6 пусковых позиций первой ступени и 2—4 позиции второй ступени) ац < J м/сек2', при многопозиционных (15—25 позиций) неавтоматических системах— 1—1,5 м/сек2', при многопозиционных автоматических— 1,5—2 м/сек2 (расчет ведется для поезда 134
00
Рис. 71. Графический расчет пусковых сопротивлений при /п = const ) — 4, 6, 7 —пусковые (реостатные) позиции; 5, <9 —ходовые позипиу
без пассажиров). Значение среднего пускового тока на первых 2—6 позициях следует принять нарастающим (7П1< *7п2 < ••• < 7п6), а на последующих позициях — постоянным (7П = const).
На рис. 71 приведен пример графического расчета пускового сопротивления при постоянных пределах колебаний тока 7 п.макс 7 п.мин для всех пусковых позиций каждой ступени. Перегруппировка двухступенчатая, без ослабления поля. Справа диаграмма пуска дана в системе координат 7П — и, а слева — в системе координат 7? — v. Построение каждой из прямых Rn = f(v) при 7п.Макс = const (прямая а — а') и при 7п.мин = const (прямая б — б') выполняется по двум точкам: прямая а — а' (точка а — координаты: v = 0 и 7?п = 4,1 ом и точка а (и = ип и Rn = 0); прямая б—б (точка б — координаты: о = 0 и 7?п = 5,76 ом; точка б — координаты v = иб и 7?п = 0). Величина сопротивлений Rn и 7?п определяется по формуле (57), где при у = 0 (момент трогания) э. д. с. = 0. Колебание тока принимаем ±15%. Так как в действительности сопротивление пускового реостата будет выключаться ступенями, то прямые а — а' и б — б' являются ограничивающими, при соблюдении которых пусковой ток будет изменяться в пределах от 7п.Макс до 7п.Мин- Ограничиваясь найденными прямыми линиями, строим ломаную линию аб1а1...б4 а', которая определяет собой все ступени пускового реостата, их количество и величину. Выключив последнюю ступень пускового реостата, выходим на автоматическую характеристику при последовательном соединении двигателей при токе 7п.макс (точка а'), чем подтверждается, что пределы колебания тока выбраны правильно. Если при выключении последней ступени этого не получилось, то пришлось бы повторить построение, выбрав другие пределы колебания тока.
В момент начала пуска должно быть включено сопротивление Rn = = 4,1 (первая позиция). При езде на каждой пусковой позиции скорость поезда увеличивается, ток уменьшается, а сопротивление остается постоянным. При переходе с одной позиции на другую выключается часть сопротивления, ток мгновенно увеличивается от 7П.МИН до 7п.Макс, а скорость поезда практически остается постоянной. Например, на первой позиции скорость поезда увеличивается от 0 до 3,5 км/ч, ток уменьшается от 117 до 86 а, сопротивление пускового реостата остается неизменным 7?п = 4,1 ом. При переходе с первой позиции на вторую выключается часть сопротивления г' = 1,4 ом, ток возрастает от 86 до 117 а, скорость поезда практически остается неизменной и т. д.
Определив число ступеней пускового реостата для I ступени соединения двигателей, переходим к расчету для параллельного соединения. При этом принимаем другое значение коэффициента колебания тока (18%), чтобы использовать сопротивление четвертой позиции для шестой позиции. Ограничивающие прямые в — в' иг — г' строим так же, как и для I ступени. Определив по формуле (57) сопротивления 7?п = 2 ом и Rn = 3 ом при 7П. макс и 7П.МИН, откладываем их на диаграмме при v = 0, в результате чего находим точки виг. Точки в' и г' соответствуют скорости выхода на автоматическую характеристику при 136
токе /п.макс = 125 а, /п.мин = 87 а. Если предположить, что переходные положения будут пройдены практически мгновенно, то величина пускового сопротивления первой позиции параллельного соединения двигателей (шестая позиция) будет пропорциональна величине отрезка g— g' = 0,75. Вписывая в пределах построенных прямых в — вг иг — г' ломаную линию д—в', определим количество пусковых позиций и величину сопротивления на каждой позиции параллельного соединения двигателей. При переходе с восьмой позиции на девятую выходим на автоматическую характеристику v = f(J) при U = 550 в.
Рис. 72. Графический расчет пусковых сопротивлений при неодинаковых пределах колебания пускового тока на первых трех позициях (1—3). Вес вагона G = 178 кн, приведенная масса вагона 20 815 кг; 1Г0 = 765 кн при v = 0; сопротивление обмоток двигателя г = 0,09 ома при 100° С, среднее пусковое ускорение а= 1,22 м]сек? const для 4—8 пусковых позиций при /п = 182 а
На рис. 72 изображено построение пусковой диаграммы при постепенном увеличении среднего пускового тока на первых трех пусковых позициях 7П1 < /п2 < /п3 < /п. Для последующих позиций /п = const. Такая диаграмма обеспечивает постепенное увеличение среднего пускового ускорения, начиная с момента трогания с места до четвертой позиции. Расчет выполнен графически. Порядок расчета и построения диаграммы следующий: 1) из условия сцепления определяют /п.макс, выбирают величину коэффициента неравномерности и подсчитывают /п макс и 7П. макс для всех позиций (см. рис. 72), начиная с четвертой проверяют величину пускового ускорения и отношение среднего пускового тока к часовому; 2) выбирают величину максимального-ускорения при трогании с места (на первой позиции) ап. макс = 0,3 м/сек2 „
устанавливают величину приращения пускового ускорения для первых трех позиций: — О, 3, а2-3 = 0,4 и а3_4 = 0,22 м/сек2, и находят
максимальные пусковые1 ускорения для второй, третьей и четвертой позиций: ап2 = 0,3 + 0,3 = 0,6 м/сек2\ ап3 = 0,6 + 0,4=1 м/сек2, и Яп4 = 1,22 м/сек2; 3) для найденных значений а по уравнению движения определяют соответствующие максимальные значения силы тяги {^п.макс = /Я0п.макс+ ^о) и затем по характеристике Го = /(/) находят соответствующие им токи; 4) устанавливают предел колебаний тока
Рис. 73. Пусковые диаграммы
а —расчетный пуск при /п; б —замедленный пуск (/cp<Zn); в —ускоренный пуск (Zcp > 7п)
А/ ДЛЯ каждой ИЗ Трех ПОЗИЦИЙ: ОТ /п.макс1 ДО 7п.мин1, ОТ /п.максг до Лт.минг и от Льмаксз До Лт.минз (так, например, для первой ПОЗИЦИИ A/i = = 20 а); 5) по формуле (57) для всех значений пусковых токов определяют величины: 7?п1 и /?п!; Rnz и #n2i Япз и ^пз; и #п; 6) по двум точкам, как было описано выше, строят ограничивающие прямые для первой позиции — б—б' и а—а', для второй — г—г' и ж—ж'\ для третьей д—д' и е—е'\ для четвертой — з—з' и ж—ж'\ 7) в пределах построенных прямых, начиная от точки а, вписывают ломаную линию а—ж', которая определяет величину и количество пусковых позиций контроллера (восемь позиций); 8) в правой части диаграммы строят кривую изменения величины тока в зависимости от скорости (ломаная линия Н—Л).
Плавность пуска и разгона поезда при неавтоматической системе управления полностью зависит от водителя. Процесс пуска соответствует расчетному (рис. 73, а) лишь при автоматической системе управления. Пуск при неавтоматической системе управления обычно откло-йяется от расчетного в ту или другую сторону. Если переход с одной позиции на другую совершается при токах /ср> /п (ускоренный пуск),
то колебания тока (и силы тяги) будут больше расчетных (рис. 73, в). Средний пусковой ток, а следовательно, и ускорение за период пуска также будут больше расчетных. Процесс пуска будет происходить менее плавно и протекать быстрее. Если же переход с позиции на позицию совершается при токах, /ср < /п (замедленный пуск), то колебания тока и силы тяги будут меньше расчетных, так же как средний ток и ускорение за период пуска. Процесс пуска будет более плавным, но с большей затратой времени.
Рис. 74. Пуско-тормозные характеристики трамвайного вагона ЛМ-57 правый координатный угол — режим тяги; левый — реостатное торможение
Скоростные характеристики пусковых позиций. На рис. 71 и 72 изменения тока двигателя на пусковых позициях (в пределах от максимального до минимального) в зависимости от скорости поезда изображены прямыми линиями, так как точного построения этих зависимостей при графическом расчете не требуется. Точно построить кривые v = f(I) при езде на реостатных позициях можно, если известна скоростная характеристика на ходовой позиции.
Пример 30. Рассчитать и построить скоростные характеристики на пусковых позициях для вагона ЛМ-57 с тяговыми двигателями ДК-255 (сопротивление обмоток г=0,09 ом) для I ступени соединения двигателей (см. схему 1, а рис. 22). На позиции 1 пусковое сопротивление /?п = 4,46 ом; точка 1 — / = 80 а, скорость v = 20 км/ч при U = 137,5 в (рис. 74, позиция 11 ходовая). Скорость и' определяется по формуле (53"), которая при z' = 1 и z" = 4 принимает вид:
550 80-4,46 _ п
— —------— —80-0,09
4 4
---------------------— 6 км/ч
-— — 80-0,09
4
и'=20
и т. д. для других значений тока в пределах 60—НО а. Для II ступени соединения: г' || 2 и г" = 2 (схема 1, б, рис. 22). Позиция 12: 7?п = 0,66; точка /: 1 = = 100 а\ v = 36 км/ч при U = 275 в (рис. 74, позиция 17 ходовая). В соответ-твии с формулой (53") получим
v’ = 36
275 —100-0,66— 100-0,09
-----—----—--------- =27 км/ч
275-100-0,09
и т. д. для значений тока в пределах от 100 до 300 а.
На рис. 74 даны скоростные характеристики для всех пусковых позиций: 1—10 и 12—16 (позиции 11 и 17 ходовые).
Рис. 75. Пуско-тормозные характеристики вагона РВЗ-6 (тяговые двигатели ДК-256Г)
правый координатный угол —режим тяги; левый — реостатное торможение
На рис. 75 приведены пуско-тормозные характеристики вагона РВЗ-6 (с тяговыми двигателями ДК-256Г). В правой части — режим двигателя: характеристики 1—12 — для пусковых позиций и характеристики 13—25 — для ходовых позиций при различных токах возбуждения (при 7?п = 0). Характеристика позиции 25 соответствует 140
Рис. 76. Пусковая диаграмма при двухступенчатой перегруппировке двигателей (средняя величина тока одинаковая) 1п = Г = 1"
1 — 8, 11 — 13 — пусковые позиции; 9, 10, 14 — 16 — ходовые позиции
Рис. 77. Пусковая диаграмма при двухступенчатой перегруппировке двигателей (среднее значение силы тяги одинаковое) Fon = Fq = f"q 1—7, 10—12—пусковые позиции; S, 9, 13—15— ходовые позиции
ступени с наивысшей скоростью движения (наименьшему току возбуждения).
Пользуясь пусковой диаграммой, расчетную выдержку времени для каждой пусковой позиции можно определить по формуле
Дип П 3,6 ап ’
где Лип — приращение скорости на соответствующей позиции (определяется из пусковой диаграммы), ап — среднее пусковое ускорение.
На рис. 76 дана диаграмма пуска с двухступенчатой перегруппировкой тяговых двигателей и ослаблением поля на I ступени—позиция 10 — и на второй ступени — позиции 15 и 16. Переход с нормального поля (позиция 0) на ослабленное (позиция 10) происходит при тех же колебаниях тока, что и на пусковых позициях 3—8 (при среднем токе /ср = /п), на II ступени соединения двигателей при переходе с позиции нормального поля (позиция 14) на позиции ослабленного поля (позиции 15 и 16) колебания тока приняты несколько большими, но при том же значении среднего тока /ср = /п. Следовательно, если в период пуска и регулирования скорости средние значения тока одинаковы: /ср = /ср= /п = const, на позициях ослабленного поля уменьшается средняя сила тяги (F0.n > FQ > Fo) и среднее значение ускорения.
На рис. 77 показана диаграмма пуска с двухступенчатой перегруппировкой двигателей и применением ослабления поля на каждой ступени соединения при сохранении одинаковой средней силы тяги на позициях нормального и ослабленного поля FQ = Fo = Fon.
Очевидно, в этом случае увеличится среднее значение тока на позициях ослабленного поля /П<ЛР < /Ср* Следует отметить, что на позициях ослабленного поля можно допускать большие пределы колебаний тока, чем на пусковых позициях, так как толчки тока сглаживаются индуктивностью цепи.
§ 30. ТЯГОВЫЕ ХАРАКТЕРИСТИКИ ПОЕЗДА
Тяговой называют характеристику, устанавливающую зависимость силы тяги двигателя или поезда от скорости, т. е. FQ = f(v) или F = f(v) при постоянном напряжении U = const.
Для построения тяговой характеристики необходимо иметь электромеханические характеристики на ободе — скоростную и силы тяги. На рис. 78 показано построение тяговой характеристики двигателя последовательного возбуждения. Принцип построения ясен из рисунка. Для того чтобы получить тяговую характеристику поезда, необходимо соответствующие значения силы тяги двигателя увеличить в z раз. Тяговая характеристика двигателя смешанного возбуждения строится так же, как и для двигателя последовательного возбуждения (рис. 79, б, правый квадрат). В левом квадрате рис. 79, б
строится тормозная характеристика рекуперативного режима. При z = 1 характеристика двигателя и поезда является общей.
Тяговые характеристики принято строить так, чтобы ось силы тяги F располагалась горизонтально, а ось скоростей v — вертикально.
Рабочая часть тяговой характеристики ограничена условиями сцепления движущих колес с рельсами или дорогой, надежной работой двигателей по коммутации и механической прочностью. Ограничение силы тяги поезда по сцеплению определяется формулой (25). Чтобы
Рис. 78. Построение тяговой характеристики поезда с тяговыми двигателями последовательного возбуждения
а — электромеханические характеристики (7 —скоростная; // — силы тяги); б —тяговая характеристика двигателя (при z > 1)
У макс
установить максимальную силу тяги по условию сцепления, следует построить кривую предельной силы сцепления в функции скорости FMaKC = f(v) (см- рис. 40). Ограничение по условию устойчивой коммутации определяется соотношением FMaKC = 2ГЛ (где Fh — сила тяги при часовом токе /Л), а ограничение по максимально допустимой скорости — конструктивной скоростью данного типа поезда имакс. Низшая точка тяговой характеристики соответствует тому из рассмотренных ограничений, которое дает наименьшую силу тяги. Для рельсового транспорта такая точка обычно определяется ограничением по сцеплению, а для безрельсового — ограничением по коммутации (так как в последнем случае ГмакСк < FMaKCc).
На тяговой характеристике (рис. 78) показаны: линия 1 — ограничение по сцеплению, линия 2 — по коммутации и линия 3 — по конструктивной скорости. Рабочая часть характеристики (участок СВ)
ограничивается: точкой С — по условию сцепления и точкой В — конструктивной скоростью Умакс. Точка К — ограничение по коммутации — находится за пределами рабочей части характеристики. На рис. 79 рабочая часть характеристики (участок КВ) при тяговом режиме (рис. 79, б, справа) определяется ограничением по условию коммутации FMaKC = 2Fh (точка /С). Точка С—ограничение по условию сцепления — находится за пределами рабочей части характеристики. Точка В (генераторный режим, рис. 79, б, слева) — наивысшая точка характеристики. Максимальная тормозная сила Вмакс не должна
Рис. 79. Построение тяговой и тормозной характеристик поезда с тяговыми двигателями смешанного согласного возбуждения
а — электромеханические характеристики (/ — скоростная; // — силы тяги F0 = f (/); III — тормозной силы B0=f (/); б —тяговая и тормозная характеристики поезда (при z=l — двухосный троллейбус)
превосходить максимальную силу сцепления, предела механической устойчивости и ограничения по коммутации. Первое из этих условий существенного значения не имеет, так как тормозные силы, развиваемые двигателями при режиме смешанного встречного возбуждения, невелики по сравнению с тяговыми, в чем можно легко убедиться, рассматривая характеристики двигателей (см. рис. 65 и 66). Кроме того, явление «юза» при рекуперации ликвидируется автоматически самим двигателем. Наивысшая точка характеристики определяется условием механической устойчивости, которое связано также с условием нормальной коммутации.
При ступенчатом пуске одновременно с колебаниями тока изменяется и сила тяги. Поэтому для пускового периода тяговая характеристика имеет такой же зигзагообразный вид, как и зависимость v = = /(/).
На рис. 80 в правом координатном углу показаны кривые изменения скорости в функции тока поезда, а в левом — в функции силы тяги поезда при двухступенчатой перегруппировке двигателей без ослабления поля. На рис. 80 справа видно, что, начиная с момента переключения на II ступень, величина тока поезда удваивается. В тяговых расчетах обычно не учитывают изменения силы тяги при пуске от Fn, макс До Ль мин, а на тяговой характеристике откладывают среднюю пуско-144
вую силу тяги поезда (вертикальная линия аА2). Точки Аг и А2 соответствуют моменту выхода на автоматическую характеристику соответствующей ступени при среднем значении тока и силы тяги.
Как отмечалось, возможны два метода расчета для периода пуска: метод средней пусковой силы тяги и метод среднего пускового тока.
При ручном пуске заслуживает предпочтения метод средней силы тяги Fn = F' = F", так как водитель передвигает рукоятку или педаль контроллера по позициям, руководствуясь собственным ощущением ускорения, развиваемого поездом, т. е. стремится выдержать какую-то
Рис. 80. Скоростные и тяговые характеристики поезда при двухступенчатой перегруппировке двигателей
/ ступень —последовательное соединение; II ступень —последовательно-параллельное соединение (четырехосный вагон)
постоянную среднюю силу тяги поезда за весь период пуска и регулирования скорости до выхода на характеристику наивысшей ступени скорости (см. рис. 81, точка Л5, позиция 15). На этом же рисунке показаны тяговые характеристики, построенные для всех экономических ступеней скорости, приведенных на рис. 77 (ходовые позиции 8, Р, 13—15 .
Метод среднего пускового тока применяют при автоматическом пуске, так как реле ускорения отрегулировано на некоторые заданные пределы колебаний тока. Поэтому приближенно можно считать среднее значение тока постоянным за весь период пуска и регулирования скорости до выхода на характеристику (см. рис. 76, точка Л5, позиция 16).
На рис. 82 показаны тяговые характеристики, построенные для всех экономических ступеней скорости, изображенных на рис. 76. Участки аАг и А2А3 соответствуют пуску на I и II ступенях соединения тяговых двигателей. Участки АЛ2 и Л3Л5 соответствуют переходу с одной позиции ослабленного поля на другую. Для построения отдельных точек этих участков находят по характеристикам двигателя скорость
и силу тяги, соответствующие позиции ослабленного поля. Все изложенное относится также к двигателям смешанного возбуждения.
На рис. 83 даны тяговые характеристики поезда для полного поля и одной ступени ослабленного поля (система управления — косвенная автоматическая). Изменения средней пусковой силы тяги в период пуска характеризует линия а—А. С момента начала пуска при v = = 0 до скорости 12 км/ч (кривая а—а') постепенно увеличивается среднее значение пусковой силы тяги от 10 772 до 39 240 н, а затем пусковая сила тяги остается неизменной (линия а' — Л) до выхода на автоматическую характеристику при полном поле — точка А (23 км/ч).
Рис. 81. Тяговые характеристики поезда с двухступенчатой перегруппировкой двигателей (при одинаковом среднем значении силы тяги поезда) 5—9; 13—15 — ходовые позиции
Рис. 82. Тяговые характеристики с двухступенчатой перегруппировкой двигателей (при одинаковом среднем значении тока)
9—10; 14—/5 —ходовые позиции
Линия А—А' показывает изменение средней силы тяги в период перехода с характеристики полного поля на характеристику ослабленного поля. На этом же рисунке показаны характеристики силы тяги поезда в функции тока для полного и ослабленного поля.
На рис. 84 даны тяговые характеристики двигателя троллейбуса ТР-9 при номинальном напряжении 600 в для нормального поля (позиция Р), двух ступеней ослабления поля (позиции 10, 11) и всех пусковых позиций с 1 по 8.
§ 31. ХАРАКТЕРИСТИКИ ДЕЙСТВУЮЩИХ СИЛ ПОЕЗДА
При любом режиме ведения поезда характер его движения в любой момент определяется действующей силой. Поэтому для тяговых расчетов необходимо иметь характеристики действующих сил. С целью построения характеристики действующих сил в тяговом режиме для соответствующей экономической ступени необходимо иметь тяговую характеристику и характеристику для езды под током на горизонталь-
Рис. 83. Тяговые и электромеханические характеристики вагона Т-2 с двигателями ТМ-22 Z —тяговые f (и) и // — электромеханические F=f (/)
ZOO 400 000 800 1000120014001600180020002200240026002800 3000 80кГ
Рис. 84. Тяговые и электромеханические характеристики троллейбуса Т-9 с двигателем AL
I — тяговые; ZZ —электромеханические; Z—8 — пусковые; 9—11 —ходовые позиции; t7H=600 a; РмЛ= 115/cem; Zh=208 а
ном и прямом участке пути. Очевидно, характеристика Вд = f(v) при U = const строится путем вычитания абсцисс кривой = f(v) из абсцисс кривой F = f(v). На рис. 85 показано построение характеристики действующих сил для поезда с тяговыми двигателями последовательного возбуждения,- а на рис. 86—с тяговыми двигателями смешанного возбуждения.
Характеристики действующих сил (см. рис. 85) строят, начиная с периода пуска (участок аА), а затем для езды по автоматической характеристике (участок А—9). Принцип построения точек а—Л, 3—9 понятен из рисунков.
Рис. 85. Построение характеристики действующих сил поезда с двигателями последовательного возбуждения
тяговая характеристика F=f(v), характеристика и характе-
ристика действующих сил Гд=1 (v)
Рассмотрим более подробно построение характеристики, приведенной на рис. 86. В момент начала пуска при v = 0, вычитая из отрезка 0-а (Fn) отрезок 0—а (Ц70), получим отрезок а—а' (Ffl.n). В момент выхода на автоматическую характеристику (точка Д), вычитая из отрезка б—А отрезок б—в, получим отрезок в—А. До момента установившейся скорости (точка В) действующая сила будет ускоряющей силой. При скорости vB действующая сила FA = 0, так как отрезок б'—В = *= F = Wo. При всех значениях скорости v > vB действующая сила будет замедляющей. При значениях скорости от vB до v6 сила тяги меньше сопротивления движению. При скорости v5 сила тяги равна нулю. Действующая сила равна основному сопротивлению движения Вд = *= Го (отрезок 5—в'). При всех значениях скорости действует тормозная сила. Величина замедляющей силы будет равна сумме соответствующих отрезков. Так, например, при скорости t>7, складывая отрезок б" — 7 (В — тормозная сила) с отрезком б"—в"(^о), получим отрезок 7—в" (Вд = В + U70). Отложив этот отрезок влево от оси ординат, получим точку 7 искомой характеристики и т. д.
Величина сопротивления движению зависит не только от скорости, но и от места расположения поезда на линии, т. е. от продольного и поперечного профиля пути. Характеристикой действующих сил, построенной по данным тяговой характеристики и характеристики основного сопротивления движению, можно пользоваться не только на прямом горизонтальном участке, но и на участках любого профиля. Так как при любом уклоне i сопротивление движению изменяется по сравнению с горизонтальным участком на величину, не зависящую от скорости Wt = wt G, то на ту же постоянную величину должна быть
Рис. 86. Построение характеристики действующих сил поезда с двигате лями смешанного возбуждения
изменена и при любой скорости. Следовательно, для определения действующих сил на уклоне достаточно перенести ось ординат параллельно самой себе на величину Wt влево при спуске (см. рис. 85, линия О\С) и вправо (линия 01/7) при подъеме, а отсчет действующих сил вести по той же кривой до нового положения оси ординат (точки Ох или 01). На рис. 87 пунктирная линия у2о соответствует положению оси ординат для отсчета действующих сил на подъеме i = 2О°/оо, а пунктирная линия у10 — на спуске i = 1О°/оо. Отрезки а—б и а—д в масштабе изображают сопротивление уклона Wt= IG. Таким образом, при скорости Vi значения действующей силы выражаются: для горизонтального участка — отрезком а—в, для подъеме 2О°/оо — отрезком б—в и для спуска Ю°/оо — отрезком д—в. Для кривых участков рельсового пути действующие силы определяют так же, как для подъемов, т. е. ось абсцисс смещают вправо на величину, соответствующую сопротивлению от кривой (Ц7к == wKG).
Для удобства учета профиля пути целесообразно действующую силу выразить в удельных величинах. На рис. 87 дан пересчет действующей силы из абсолютных в удельные величины н/кн (вес поезда 200 кн). Достаточно теперь провести ниже оси абсцисс вспомогательную горизонтальную прямую линию уклонов и на этой линии в соответствующем масштабе отложить величину уклонов в °/00 (помня, что 1°/00 численно
равна 1 н/кн), вправо от нуля — подъемы, а влево — спуски. Тогда, пользуясь рис. 87, можно легко определить величину удельной действующей силы /д на любом уклоне, перенося ось ординат вправо или влево на величину уклона, выраженного в °/00.
Характеристика /д = f(u) (см. рис. 87) позволяет определить полную и удельную действующие силы, установившуюся скорость и характер движения поезда при любой скорости на любом участке пути.
Рис. 87. Характеристики действующих сил поезда полная Гд = [ (и) и удельная /д = f (v) при U = const
Удельная или полная действующая определяется величиной соответствующего горизонтального отрезка. Например, при скорости поезда 35 км/ч удельная действующая сила равна: на прямом и горизонтальном участке 60 н/кн (отрезок а—в); на подъеме 2О°/оо — 40 н/кн (отрезок б—в), на подъеме 1ОО°/Оо — 40 Н1КН (отрезок в—г) и спуске 1О°/оо — 70 н/кн (отрезок д—в).
Установившаяся скорость поезда определяется точкой пересечения вертикальной прямой, соответствующей какому-либо уклону, с характеристикой. Например, на прямом горизонтальном участке установившаяся скорость равна 60 км/ч (точка у0); на подъеме 2О°/оо — 47 км/ч (точка у20) и спуске 1О°/оо — 70 км/ч (точка #_ю), а действующая сила равна нулю.
Характер движения поезда (знак и величина ускорения) при любой скорости и на любом уклоне определяется следующим образом. Например, при движений поезда на подъеме 8Оэ/оо при скорости 35 км/ч действующая сила будет замедляющей (—20 н/кн). При неизменном про-150
филе пути движение будет замедленным (величина действующей силы уменьшается) до тех пор, пока /д не станет равным нулю при скорости vy = 32,5 км/ч (точка ж), а далее движение поезда будет равномерным. Зная величину действующей силы, по формулам (20) можно определить величину ускорения.
При переходе поезда с участка пути с одним профилем на другой возможны три случая. Рассмотрим характер движения поезда в момент
с двигателем ДК-207А и характеристика w0 = f (v) в удельных величинах
перехода с подъема 100/оо на подъем 2О°/оо для трех значений скорости: 40, 50 и 47 км/ч. Как следует из характеристики, установившаяся скорость на подъеме 1О°/оо равна 52 км/ч, а на подъеме 2О°/оо — 41км/ч. В первом случае при скорости 40 км/ч движение поезда на том и другом участках будет ускоренным, скорость увеличивается, действующая сила и ускорение уменьшаются. При скорости 47 км/ч движение на подъеме 2О°/оо станет равномерным. Во втором случае при скорости 50 км/ч на подъеме 10°/оо движение поезда было ускоренным, при переходе на подъем 2О°/оо — станет замедленным. В третьем случае при скорости 47 км/ч при движении поезда на подъеме 1О°/оо движение ускоренное, а после перехода с одного участка на другой действующая сила будет равна нулю, и на подъеме 2О°/оо движение становится равномерным.
Пример 31. Рассчитать и построить тяговые характеристики и характеристики действующих сил для всех экономических ступеней скорости тролллейбуса ЗИУ-5 с тяговым двигателем ДК-207А. Исходные данные: электромеханические характеристики (см. рис. 66) и характеристики С0О = f(v) (рис. 88). Вес троллейбуса 107 кн. По электромеханическим характеристикам рис. 66 для всех значений тока возбуждения строим тяговые характеристики (рис. 88), как было показано на рис. 86. Найдем верхний предел колебания тока /п.макс по Ус' ловию сцепления. Приняв расчетный коэффициент сцепления ф=400 н/кн, най
дем по формуле (25) максимальную силу тяги по условию сцепления ^д.макс — = 400-60=24 000 я, где 60 кн—сцепной вес. Согласно характеристике Fo = f(I) при /в = 3,44 а (см. рис. 66) найденному значению максимальной силы тяги соответствуют ток /п.макс = 290 а. Примем колебания тока ± 8%. Тогда средний пусковой ток
100
/п = 290 — = 270 а.
с двигателем ДК-207А
Проверим найденное значение /п на условие /п = 270 < 1,6 = 1,6-192, что
допустимо. Согласно характеристике Fo = f(I) при /в = 1,44 а средняя пусковая сила тяги Fn = 2300 кГ (22684 кн), а средняя удельная сила тяги
22 684
/п = 107 ~ = 212 Н/КН'
Принимая среднее значение пусковой силы тяги в период пуска постоянным, отложим /п = 212 н/кн (линия 1—2 на рис. 88). Максимальное и среднее значения силы тяги следует проверить на условие допустимого ускорения, пользуясь формулой (18). Пользуясь тяговыми характеристиками и характеристикой удельного основного сопротивления движению (см. рис. 88), строим характеристики удельных действующих сил для всех токов возбуждения (рис. 89). Расчетные данные для построения характеристики при /в = 3,44 а приведены в табл. 4.
Данные для построения характеристики действующих сил (троллейбус ЗИУ-5 с тяговым двигателем ДК-207А)
V, км/ч fo И bOt н/кн Wq, н/кн /д.О’ HlKH Примечание
0 212 12 200 Тяговый режим
t’n] = 19 212 13 199 То же
20 136,0 13,6 132,4 »
23,8 14,5 14,5 0 —
30 89 15,6 —104,6 Генераторный режим
35 108 16,9 —124,9 То же
40 119 18,4 — 137,4 »
Глава X. ХАРАКТЕРИСТИКИ ТОРМОЗНОГО РЕЖИМА ПОЕЗДА
§ 32. ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКОГО ТОРМОЖЕНИЯ
Процесс торможения поезда определяется его тормозными характеристиками В = f(v) или характеристикой удельной тормозной силы b = Kv)> где b = Каждая система торможения имеет свою тормозную характеристику, которая дает возможность определить, удовлетворяют ли тормозные средства поезда условиям технической эксплуатации.
Уравнение движения для периода торможения [формула (22)] имеет вид (J
Вд = В + Г0±^ + Гк = тат
или в удельных величинах
bJSt=b + wQ±wi + wK= 102&иат, ' (58)
Чем больше величина тормозной силы, тем больше и Величина замедления и меньше тормозной путь при заданной начальной скорости торможения или тем выше допустимая скорость начала торможения при заданном тормозном пути. При служебном торможении необходимо обеспечить плавную остановку поезда. Если регулирование тормозного режима осуществляется непосредственно водителем, то величина ат выбирается от 0,8 до 1,2 м/сек\ в зависимости от вида тормоза и транспорта. При системе автоматического управления допустимы служебные замедления 1,5—2 м/сек2. При экстренном торможении величина тормозного замедления должна быть максимально возможной (например, при рельсовом тормозе — до 4 м/сек2). При движении поезда на участке пути любого профиля максимальная величина тормозного
замедления определяется из уравнения движения для периода торможения
п ______ ^макс + ±
Нт. макс —
Ш
ИЛИ
йт макс = 6макс + ^±шг + шк г. (59)
102
Тормозная сила при рельсовом тормозе не ограничена сцеплением колес с рельсами, благодаря чему возможно применение высоких тормозных замедлений при экстренном торможении (до 4 м/сек2).
Тормозная сила поезда может быть выражена следующей зависимостью (если допустить, что нажатие всех колодок одинаково):
1) для колесно-колодочного тормоза:
В = 1000 Qq> или b = ЮОО.ф ; (60)
G
2) для дискового или барабанного тормоза
B = 100Qn<p или Ь = 1000 ф—; (60')
G
3) для рельсового тормоза
В = 1000 Зф или b = 1000 ф?. (60")
Z
Здесь: В = SBK — тормозная сила поезда в «; Вк — тормозная сила 1
Z
одной колодки; Q = SQK — суммарное нажатие всех колодок поезда 1
в кя; QK — нажатие одной колодки; Qn — приведенное суммарное нажатие; ф — коэффициент трения колодки с фрикционной деталью (обод колеса, барабан, диск или рельс); b = — удельная тормозная сила в н/кн (1 ньютон на 1 килоньютон).
Эффективность тормозных средств поезда характеризуется его тор-мозным коэффициентом поезда kT = т. е. отношением суммарного нажатия к весу поезда. Для барабанного и дискового тормоза kT = Следовательно, для любого вида тормоза удельную тормозную силу поезда можно выразить так:
b = 1000 ф кт н/кн. (61)
Ограничение по сцеплению. Величина Q или Qn — важный расчетный параметр для конструирования тормозной системы. Увеличение силы нажатия колодок на фрикционную деталь приводит к повышению тормозного эффекта. Однако при этом не должен быть нарушен закон сцепления. На рис. 90 показана зависимость тормозной силы от нажатия колодок. До тех пор, пока условия сцепления не нарушены, тор
мозная сила В растет почти пропорционально нажатию Q. Но как только наступает юз, тормозная сила резко снижается, а затем остается неизменной, сколько бы ни увеличивалось нажатие колодок, так как при юзе тормозная сила создается только за счет трения скольжения бандажа по рельсу. Для колесно-колодочного тормоза можно получить следующую зависимость, отнесенную ко всему поезду:
<pQ < i|)GT или q>QMaKC = i|>GT,
откуда следует, что:
^- = ^ = кн или ^=± = йн.уакс. (62) О'г ф Of ф
Для дискового и барабанного тормозов можно написать: при
тормозе
на оси колес
фОт; при тормозе на валу двигателя
Ф<2— . Приведенные выражения можно объединить, если вели-
D Пр
чины Q — и Q —. рассматривать как приведенную к ободу D D т|р
колес силу нажатия колодок Qn. Тогда, независимо от места рас
положения тормоза
фСп 3 ффп. макс — фСт,
откуда следует, что
или
макс макс. (62')
От ф
Величина kH называется коэффициентом нажатия колодок и определяет наибольшее суммарное нажатие колодок в долях от давления поезда на тормозные оси,, т. е. от тормозного веса. При GT = G коэффициент нажатия и тормозной коэффициент равны kT = kH. Величину коэффициента нажатия необходимо выбирать в соответствии с формулой (62) таким образом, чтобы устранить возможность юза. Наибольшая опасность юза возникает при малых скоростях, так как коэффициент сцепления в меньшей степени, чем коэффициент трения колодок, зависит от скорости движения поезда. Наихудшие условия будут соответствовать минимальному коэффициенту сцепления при максимальном коэффициенте трения. В расчетах принимают: 1) при колесно-колодочном тормозе kH = 0,84-1,0 (чугунные колодки) и 0,5—0,6 (асборези-товые); 2) при дисковых и барабанных тормозах ku = 0,74-0,9 — для трамвайных вагонов и ku = 1,5 4- 2 для троллейбусов.
Зная коэффициент нажатия колодок, можно определить суммарную силу нажатия по формуле (62). Если поезд состоит из вагонов с различными значениями kn, то суммарная максимальная сила нажатия
всех колодок поезда QMaKC = S6WGT. Максимальное нажатие определяется для наихудшего случая, т. е. собственного веса поезда.
Коэффициент трения. При данной величине нажатия тормозных колодок тормозная сила определяется коэффициентом трения. Вследствие этого величина коэффициента трения и влияние на него различных факторов имеют весьма большое значение. Для определения коэффициента трения проводились исследования, в результате которых были предложены эмпирические формулы, например формула МЭИ:
ф —q6 v—для чугунных колодок и стальных бандажей; форму-
Рис. 90. Характеристики зависимости тормозной силы от нажатия колодок B=f (Q)
Рис. 91. Характеристика зависимости коэффициента трения от скорости /—для чугунных колодок; 2 —для асборезито-вых колодок
зов с неметаллическими колодками и ф = jzpj"o2T — для Рельсо“ вого тормоза (стальной башмак). Здесь v — скорость поезда в км/ч.
Тормозные характеристики. Для расчета тормозной характеристики поезда при заданном коэффициенте нажатия необходимо вычислить значение В или b при различных скоростях, пользуясь формулой (60) и зависимостями (рис. 91). Величина тормозной силы поезда регулируется водителем путем изменения силы нажатия на колодки. Очевидно, что каждому значению силы нажатия соответствует и определенная тормозная характеристика поезда. Тормозная характеристика поезда должна удовлетворять условию механической устойчивости. Условие механической устойчивости состоит в том, чтобы производная по скорости активной силы, стремящейся вызвать ускорение поезда, была меньше производной по скорости противодействующей силы. Особенное значение имеет выявление свойств системы торможения для установления режима движения на затяжных вредных спусках, где требуется поддерживать определенную скорость путем подторможивания. При торможении поезда на спуске активной силой является направленная по движению поезда сила Wt. Ускорению поезда, вызываемому силой 156
№;> противодействует сумма сил В + Wo + №к. Следовательно, условие механической устойчивости при торможении на спуске выражается неравенством:
dWj d(B + W0+WK)
dv dv
или в удельных величинах
dwi d (6 + ^о + ^к)
dv
dv
Производная = 0, так как wi9 численно равное величине уклона г, не зависит от скорости. Следовательно, если > Qt
то тормозная характеристика удовлетворяет условию механической
устойчивости. По форме тормозной механической устойчивости тормозной системы. Тормозная характеристика механически устойчивых систем должна иметь восходящий характер, т. е. тормозная сила поезда должна автоматически возрастать при увеличении скорости поезда. На рис. 92 изображены тормозные характеристики колесно-колодочного тормоза с чугунными колодками при трех значениях коэффициента нажатия. Как видно, характеристики не удовлетворяют условию механической устойчивости. Тормозная характе
характеристики можно судить о
ристика ограничивается двумя ус-
ловиями: во-первых, сцеплением, Рис- 92- т°Рмозные характеристики r и колесно-колодочного тормоза для
что определяется предельной ха- разных коэффициентов нажатия рактеристикой при Q = QMaKC, и> во-вторых, скоростью, так как
она не может превышать предельной^величины ^т.макс, допускаемой ПТЭ.
Для расчета характеристики действующих сил необходимо иметь (рис. 93) тормозную характеристику (кривая 1) и характеристику зависимости основного сопротивления движения от скорости (кривая 2) для режима езды без тока. Как следует из рис. 93, для любого значения скорости величина действующей силы Вд (отрезок г—в) определяется как сумма тормозной силы В (отрезок а—б) и основного сопротивления Wo (отрезок а—г). Для удобства учета профиля пути целесообразно действующую силу выразить через ее удельное значение, а именно:
н/кн.
д G
На рис. 93 показан пересчет действующей силы в удельные величины (вес поезда G = 200 кн). На оси абсцисс для уклонов в соответствующем масштабе отложены: вправо от0 спуски, а влево — подъемы в °/00. При движении поезда на спуске 11О°/оо установившаяся скорость равна 28 км/ч (точка у), a b + w0 = wi9 т. е. действующая на поезд сила равна нулю. При этом справа от точки у ускорение поезда будет положи-
Рис. 93. Построение характеристик действующих сил
/ — тормозная; 2 — основного сопротивления движению и 3 —действующих сил
тельным, а слева — отрицательным. При случайном увеличении скорости на величину Д^ действующая сила станет меньше сопротивления от уклона и произойдет дальнейшее увеличение скорости. При уменьшении скорости на величину Ди2 действующая сила станет больше сопротивления от уклона, и поезд будет замедлять свое движение до полной остановки.
Пример 32. Рассчитать и построить тормозные характеристики для колесноколодочного тормоза вагона МТВ при значениях коэффициента нажатия колодок kH = 1; 0,9 и 0,7, а также характеристику действующих сил при kH = 1. Принимая различные значения скорости, найдем соответствующие значения коэффициентов трения ср по эмпирической формуле или по кривой (см. рис. 91) и занесем их в табл. 5 (графы 1 и 2). Вычислим, пользуясь формулой (61), соответствующие величины удельной тормозной силы при различных коэффициентах нажатия (графы 3—5). Так, например, при kn = 1 имеем b = 1000-0,335-1 = 335 н/кн. Затем, по данным граф 1 и 3; 1 и 4; 1 и 5, построим искомые тормозные характеристики поезда при различных kR (рис. 94).
Данные для построения тормозных характеристик и характеристики действующих сил механического тормоза
V, км/ч Ь, н/кн
Лн=0,9 Л„=0,7 н/кн н/кн
1 2 3 4 5 6 7
0 0,335 335 302 214 3,4 338,4
10 0,209 209 188 130 3,7 212,7
20 0,152 152 137 96 4,4 156,6
30 0,120 120 108 76 5,7 125,7
40 0,099 99 87 61 7,4 106,4
50 0,083 83 75 53 9,7 92,7
Рис. 94. Тормозные характеристики (кривые /) и характеристика действующих сил (кривая 2) вагона МТВ
Для расчета характеристики действующих сил необходимо знать удельное основное сопротивление движению. Для вагона МТВ зависимость w0 = f(v) приведена на рис. 49 (кривая /). Заносим эти данные в графу 6. Действующая сила Ьд = b + йУ0- Находим величину &д для различных значений скорости и результаты вычислений заносим в графу 7. Так, например, 6Д = 335 + 3,4 = 338,4 н/кн (точка / при &н — 1 и т. д.), По данным граф 1 и 7 строим характеристику действующих сил (кривая 2). По характеристике 2 можно определить величину при движении поезда на любом участке пути. Например, при скорости 30 клт/ч на подъеме 5О°/Оо = 125,7 + 50 = 175,7 н/кн (отрезок в — б); на спуске 2О°/оо £д = 125,7 — 20 = 105,7 н/кн (отрезок г—в); на горизонтальном прямом участке Ьд = 125,7 н/кн (отрезок а — б).
Пример 33. На рис. 95 построены характеристики действующих сил барабанного тормоза троллейбуса МТБ. Исходные данные: характеристика основного сопротивления движения и тормозная характеристика при коэффициенте нажатия кп = 1,4. Вес троллейбуса принят равным G = 88,3 кн\ GT = G.
Рис. 95. Характеристики тормозного режима троллейбуса МТБ
/ — тормозная характеристика механического тормоза B=f (и); 2 — характеристика WQ=f(v)\ 3 — характеристика действующих сил Вд=/ (v) при /Сн= 1,4
Таким образом, видим, что рассмотренные системы механического торможения являются системами, обусловливающими механически неустойчивое торможение. Тормозная характеристика поезда с асборезитовыми колодками имеет более пологий характер по сравнению с тормозной характеристикой тормоза с чугунными колодками, так как коэффициент трения асборезитовых колодок сравнительно меньше изменяется с ростом скорости. Следовательно, механическая неустойчивость в этом случае выражена гораздо слабее.
Существенными недостатками механического тормоза являются: 1) падение тормозной силы с увеличением скорости, особенно резкое для колесноколодочного тормоза при чугунных колодках, что приводит к недоиспользованию возможной по сцеплению тор
мозной силы при высоких скоростях; 2) увеличение тормозной силы при уменьшении скорости движения, что способствует возникновению и развитию юза и требует широкой регулировки водителем тормозной силы поезда для его. остановки; 3) механическая неустойчивость. Однако неустойчивость, нежелательная при движении поезда на
спуске, не исключает широкого применения механического тормоза; вследствие большой инерции поезда механические нестационарные процессы протекают медленно, и водитель имеет возможность не до-
пустить чрезмерного повышения или понижения скорости соответствующим изменением степени нажатия колодок.
§ 33. ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ
Характеристика рекуперативного торможения. Для любой электрической схемы соединения тяговых двигателей уравнение электрического равновесия при рекуперативном торможении имеет следующий вид:
z"E = z" (U + Ir) = UC + z" Ir = z” СФг)\ (63)
т. e. необходимо, чтобы сумма э. д. с. двигателей, соединенных последовательно, превосходила напряжение сети: z"£ > (7С = z”U. Ток рекуперации / (одной группы двигателей) равен при этом:
z”C<Dv-Uc а
г "г
(63')
а тормозная скорость
vr
UC + 2" Ir z" СФ
км/ч.
(64)
При переходе на рекуперативный режим изменяется только знак электромагнитной силы F9M, так как направление магнитного потока сохраняется прежним, а направление тока якоря изменяется на противоположное. Величина тормозной силы равна:
В==гВ0 = (/?эм+А/7)г-г(3,6СФ/+Д/7) н, (65)
где г — число тяговых двигателей поезда;
Во — тормозная сила одного двигателя.
К. п. д. представляет собой отношение отданной электрической мощности к механической, равной произведению тормозной силы на скорость, следовательно
3,6 (Я/—ZB £/)
Во у
(66)
2V-f(l)npif U~ const
Рис. 96. Характеристики генераторного режима при смешанном встречном возбуждении
/ — магнитная; 2—скоростная; 3 — тормозная
где /в(7 — мощность в вт, потребляемая в цепи параллельного возбуждения. Формулы (63)—(66) позволяют построить характеристики рекуперативного торможения, если известна зависимость СФ — f(I) (рис. 96, кривая /). На рис. 96 даны характеристики генератора смешанного возбуждения. Точка А характеристики тормозной силы соответствует моменту начала нарушения механической устойчивости. Характеристика 3 механически устойчива для всех значений скорости v, меньших имакс (ус vMaKC). Построение тормозной характеристики показано на рис. 79, а характеристики действующих сил — на рис. 86. Действующая сила рассчитывается по формуле Вд.о = В + Wo, где основное сопротивление движению определяется для режима езды под током (см. кривую 2, рис. 49), так как механические потери в электроприводе уже учтены величиной Во-На рис. 88 слева даны тормозные характеристики, а на рис. 89 — характеристики действующих сил рекуперативного режима для троллейбуса ЗИУ-5 (см. пример 31).
Регулирование скорости при рекуперации осуществляется так же, как при тяге: либо изменением напряжения двигателей (в схемах с перегруппировкой), либо путем постепенного увеличения тока параллельного возбуждения. Процесс управления поездом состоит из пуска и разгона поезда под пусковыми и регулировочными реостатами до момента выхода на любой из характеристик ходовых позиций, напри
мер, с самой верхней характеристики (см. рис. 66 при токе возбуждения ID = 0). Переход на рекуперацию с этой позиции может быть осуществлен при различных скоростях движения поезда. Например, при скоростях 55—60 км/ч при постепенном изменении тока возбуждения с 0 до 3,44 а происходит рекуперативное торможение. Возможен автоматический переход при работе поезда на одной из остальных характеристик (токи возбуждения 3,44; 2,4 и 1,5). Например, при работе на характеристике при токе возбуждения 2,4 а, если скорость при движении на спуске станет больше 32 км/ч, двигатели с тягового режима автоматически перейдут на рекуперативный, а при работе на автоматической характеристике для /в = 3,44 — если скорость поезда станет больше 23 км/ч. Рекуперативный режим возможен до критической скорости рекуперативного торможения. Величина этой скорости зависит от степени насыщения тягового двигателя. В двигателях с низколежащими характеристиками критическая скорость без перегруппировки равна 18—20 км/ч, а в двигателях с нормальной характеристикой — 22—25 км!ч. При двухступенчатой перегруппировке двигателей критическая скорость значительно ниже (11—13 км!ч).
На рис. 75 показан (линия а—б) автоматический переход стягового режима (позиция 25 при v = 60 км!ч) на рекуперативный (позиция 13 при v = 54,4 км!ч, см. слева). На позиции 13 рекуперация возможна до скорости 20 км/ч.
Характеристики реостатного торможения. Расчет и построение при последовательном возбуждении двигателя. Для любого замкнутого контура силовой цепи схемы с несколькими двигателями уравнение электрического равновесия имеет следующий вид (второй закон Кирхгофа):
z"E = z7T/?T + z7Tr. (67)
Величина тормозного тока одного генератора или одной группы определяется из закона Ома:
Z"
— г + /?т z
откуда тормозной ток генератора
1,= -= г'№’-. (68)
+ z"r-{-z RT
Скоростную характеристику vT = f(JT) при RT = const для любой схемы торможения можно рассчитать, пользуясь формулой (68), из которой можно получить следующее выражение для определения скорости поезда:
V = /т (г"г-|-г'7?т) (б9)
г"СФ
Для расчета скоростной характеристики по формуле (69) должна быть известна зависимость: СФ = f(I). Если же эта зависимость не дана, то
величина СФ определяется на основании данных скоростной характеристики v = f(J) тягового режима и формулы (7)
U—Ir СФ =------- ,
v
где v — скорость тягового режима при токе I и напряжении U.
На рис. 74 слева показаны скоростные характеристики (генераторный режим) реостатного торможения вагона ЛМ-57, а на рис. 75 (слева) вагона РВЗ-6 (реостатные позиции 1—12). Зигзагообразная линия показывает переход с одной реостатной позиции на другую (с позиции 1 при vT = 28 км/ч на позицию 12 при vT = 6 км/ч и затем реостатное торможение в соответствии с характеристикой этой позиции до v = 0).
Характеристика тормозной силы В = f(IT). Электромагнитная тормозная сила поезда для любой схемы соединения будет равна:
В = zB0 = (3,6СФ/Т + AF)z н.
Величина AF может быть подсчитана так же, как и при двигательном режиме, по формуле
AF = -^ .
V
Возможен и другой способ построения характеристики Во = }(!?). Механические и магнитные потери вместе с потерями в передаче нетрудно выразить, зная к. п. д. и сопротивление обмоток двигателя:
p0 = UI(\— г]0) — /2г em, (I)
а величину AF можно определить по формуле
AF = <Рп —/2')3,6 '
Принимая приближенно А^д = AFr, можно определить величину тормозной силы. Так как
во = ^эм + д^г, а F0 = F3M —AFH, то очевидно
B0 = F0 + 2AF. (Ill)
Отсюда, зная величину Fo из характеристики силы тяги Fo = f(J), можно для каждого значения тока определить Во и, таким образом, найти искомую зависимость.
Пример 34. Построить характеристику Во = Д/т) реостатного торможения. Исходные электромеханические характеристики тягового двигателя приведены на рис. 97. Расчетные данные для построения характеристики будем заносить в табл. 6. В графу 1 впишем несколько значений тока, в графы 2—4 вставим соответствующие значения силы тяги, к. п. д. и скорости, взятые из соответствующих характеристик рис. 97. Для заполнения граф 5—8 необходимо произвести соот-
/, а F0, « rlOt % V, км/ч Pn = W (7 — ’Io) вт /2 г, вт 2AF, н В, н ^ЭМ
1 2 3 4 5 6 7 8 9
50 700 62 48 5 700 213 824 1 524 1 112
100 2 300 80 36,5 6 000 850 1236 3 536 2918
200 6 500 84,5 28 9 300 3400 1510 8010 7 255
300 11 000 81 24 17 100 7650 2804 13 804 12 402
ветствующие вычисления. Так, например, для точки 1 получим суммарные потери в двигателе и редукторе:
рп = 300-50(1— 0,62) = 5700 вт;
электрические потери в двигателе
рэ = 502• 0,085 = 213 вт;
Рис. 97. Характеристики / — силы тяги; // — электромагнитной силы; /// — тормозной силы тягового двигателя последовательного возбуждения
магнитные и механические потери
ро = 5700 — 213 = 5487 вт, (I) а сила тяги, затрачиваемая на магнитные и механические потери в двигателе и редукторе:
Тормозная сила двигателя
Во = 700 + 2.412= 1524 н. (III)
На основании данных граф 1,8 и 9 построим характеристику тормозной Во = = /(/т) и электромагнитной F3M = /(/т) силы (рис. 97, кривые II и III).
Тормозная характеристика поезда В = f(v) при /?т = const. На рис. 98 приведены тормозные характеристики поезда для различных значений тормозного сопротивления. Тормозную характеристику двигателя или поезда строят, пользуясь характеристиками vT = f(JT) (см. рис. 74) и BQ = f(J) (см. рис. 97).
Тормозная характеристика при наибольшем значении сопротивления имеет крутой наклон к оси абсцисс. При работе на такой характеристике двигатели изменяют тормозную силу с изменением скорости сравнительно медленно. Наоборот, при малых значениях RT характеристики расположены полого: незначительному уменьшению скорости соответствует резкое снижение тормозной силы. Отсюда вытекает необходимость в частом регулировании тормозного сопротивления и в большом количестве ступеней регулирования.
На рис. 98 показаны ограничения режима реостатного торможения, которые обусловливаются следующими условиями: 1) максимально допустимым током Л.макс по условию коммутации и механической
Рис. 98. Тормозные характеристики реостатного торможения для различных RT
прочности; на характеристике BQ = j\(v) этому максимальному току соответствует максимальная тормозная сила Вмакс (линия /); 2) максимально допустимой по сцеплению тормозной силой Вмакс [см. формулу (28)]; ограничение показано линией 2. В данном примере Вмакс по условию сцепления меньше Вмакс по условию коммутации (для безрельсового транспорта обычно бывает наоборот); 3) конструктивной скорости поезда (линия 3); величина этой скорости определяется типом подвижного состава; 4) максимально допустимым напряжением двигателя при торможении £/макс (линия 4). Очевидно, для реостатного торможения величина э. д. с. £т = (7макс + 7Т г, а для тягового режи-
ма Е = Un — Ir. Разделив почленно одну формулу на другую, получим
£т ^макс±^тг
Е Un—1г
Так как = СФимакс, а Е = СФи, то
^макс_^макс ± г
v Un—lr
где (7Н — номинальное напряжение двигателя:
имакс — маскимальная скорость поезда при торможении, допустимая по условию ограничения напряжения;
v — скорость поезда при тяговом режиме, соответствующая току / = /т (находится из скоростной характеристики двигателя). Пользуясь этой формулой, можно определить имакс для различных значений /т и построить линию 4 — ограничение по максимально допустимому напряжению. Следует помнить, что при тяговом режиме наибольшим токам соответствуют наименьшие скорости, например, току I соответствует скорость v = 14—25 км/ч, а э. д. с. незначительно превышает напряжение. При тормозном режиме, особенно при экстренном торможении с большой начальной скоростью (40—60 км/ч), необходимо получить большую тормозную силу. Например, чтобы получить тормозную силу, равную пусковой силе тяги, необходимо допустить э. д. с. в два раза большую, чем э. д. с. при номинальном напряжении в отношении ^м-кс. Поэтому для тяговых двигателей величина допуски
тимого напряжения должна быть (7макс = 21/н-
В процессе торможения скорость постепенно понижается, вследствие чего уменьшаются э. д. с., ток и тормозная сила. Поэтому для получения более или менее постоянной тормозной силы и тормозного замедления необходимо с понижением скорости уменьшать сопротивление реостатов или увеличивать возбуждение. Скорость и тормозная сила при реостатном торможении двигателей последовательного возбуждения обычно регулируют изменением сопротивления 7?т.
Расчет реостата можно выполнить графическим методом. Порядок расчета следующий: 1) выбирается коэффициент неравномерности торможения по току в зависимости от системы управления (±104-25%), что соответствует 5—30 реостатным позициям; 2) верхний предел /т.макс должен быть проведен по условию сцепления (расчетный коэффициент ф на 20% меньше, чем при пуске), величина тормозного замедления ат< < 1 4- 1,5 м!сек2 обычно ограничена условиями сцепления при всех видах торможения, кроме рельсового; 3) определяется максимально допустимая ит по условию ограничения напряжения £/макс = 1,5-4-- 267н.
На рис. 99 приведен пример графического расчета при постоянных колебаниях тормозного тока. Скорость- начала торможения принята ит = 50 км/ч. Диаграмма торможения дана справа в системе координат /т — и, а слева — в системе координат — v. Прямые а — б 166
При /т.мин = const И а—в При /т.макс = Const СТрОЯТСЯ ПО Двум ТОЧКЭМ. Координаты точки б будут ит и 7?т> а точки b — от и Rr. Координаты точки а следующие: ит = 0, a t\ = —— 0,084.
Величины RT и RT определяются из формулы (68) для токов /т.макс = = 200 а и 7т.мин = 134 а, которая для заданной схемы принимает вид
Е
Рис. 99. Графический расчет тормозных сопротивлений при /T=const
Величины э. д. с. определяют из формулы (5), так как при одном и том же токе она изменяется пропорционально скорости, а именно:
E = (U-Ir)^,
где ит — скорость начала реостатного торможения;
v — скорость поезда при токе / из характеристики v = /(/) тягового режима. Между построенными ограничительными линиями вписывается ступенчатая линия а' — в и определяются величины тормозного сопротивления для каждой позиции.
На рис. 100 даны тормозные характеристики реостатного торможения и показаны ограничения: по сцеплению (линия /), по коммутации (линия 2), по максимальному напряжению (линия 3) и по конструктивной скорости (линия 4).
Действующая сила при торможении определяется по формуле Вд.о = = В + №0, где основное сопротивление WQ определяется по формулам для режима езды под током.
При смешанном встречном возбуждении расчет характеристик тормозного режима, если известна кривая СФ = f(J), выполняется на основе формул, приведенных выше для генератора последовательного возбуждения. Кроме того, тормозную характеристику можно легко рассчитать, пользуясь электромеханическими характеристиками реку-
тормозную силу реостатного торможения такой же, как и при рекуперации (для одинаковых значений тока якоря и одном и том же токе в цепи параллельного возбуждения). Скорость при реостатном торможении
___ В ___Iт ^Т~Ь г т ~ СФ~ СФ
а при рекуперации
щ = В = и + 1тг СФ СФ
Разделив первое выражение на второе, получим
vT__/т 7?т + г
г?т U -\-1т г
откуда
lT(RT + r) . (1)
т U+ITr
Пример 35. На рис. 101 построены характеристики реостатного торможения для троллейбуса ЗИУ-5 для двух значений тока возбуждения 2, 4 и 3,44 а при постоянной величине тормозного сопротивления 7?т = 2,3 ом.
Исходными данными для расчета тормозной характеристики b = f(v) при /в = 3,44 а и RT = 2,3 ом являются характеристики В = /(/т) и v = /(/) при /в = 3,44 а (см. рис. 66). Для тока якоря в 100 а по характеристике В = f(v) при токе 3,44 а находим величину тормозной силы при рекуперации (точку а), равную 990 кГ (9752 к), или в удельном виде
, 9752 .
Ь =----= 75 н кн,
130
(где 130 кн — вес троллейбуса с пассажирами), а по характеристике v = f(IT) — скорость торможения fT = 30 км/ч (точка б). Тормозную силу при реостатном торможении принимаем равной 75 н/кн, а скорость находим по формуле
ит = 30
100-0,17+100-2,3 550+ 100-0,17
= 13 км/ч.
VjKH/ч
Рис. 101. Характеристики реостатного торможения троллейбуса ЗИУ-5 с двигателями ДК-207А
1 и /'—удельной тормозной силы; 2 —удельного основного сопротивления движению; 3 и 3' — удельной действующей силы
So +1%о50
2 Wa.f(v)
100 150fgM^KH
З'вцЧМооо^о
при Rr 2,5
Мд =f(v) при Ig
Отложив по оси абсциссе == 75 н/кн, а по оси ординат vT = 13 км/ч (см. рис. 101)> получим точку 1 тормозной характеристики. Получив для различных значений тока ряд пар точек b и vT, построим искомую тормозную характеристику b = = f(vT) при токе возбуждения 3,44 а (характеристика /). Исходными данными для расчета тормозной характеристики Г при токе 2,44 а являются характеристики: В = f(/T) и v = f(IT) при /в = 2,44 а (см. рис. 66). Характеристики действующих сил 3 и 3' строим по данным характеристик 1 и Г и о/0 = f(v) (кривая 2). Так, например, при vT = 13 км/ч удельная действующая сила будет равна: ЬД = 75 + 13 = 88 н/кн (т. е. сумма отрезков: al + а2 = аЗ) и т. д. для других значений скорости.
РАЗДЕЛ ЧЕТВЕРТЫЙ
ТЯГОВЫЕ РАСЧЕТЫ
Глава XI. КРИВЫЕ ДВИЖЕНИЯ ПОЕЗДА
§ 34. ОБЩИЕ ПРИНЦИПЫ РАСЧЕТА И ПОСТРОЕНИЕ КРИВЫХ ДВИЖЕНИЯ
Построение кривых движения обычно сводится к решению уравнения движения первого или второго вида [формулы (11) и (12)1. Для решения дифференциального уравнения необходимо его интегрировать. Интегрирование уравнения движения первого вида дает возможность построить кривую движения v = f(f) (рис. 102, а). Разделяя переменные и интегрируя уравнение движения [формула (11)1, приняв массу поезда величиной постоянной, получим:
t2 v2
j, mdv (* j j. C dv
at =----; \ at = m \ —
Гд J J Гд G vi
ИЛИ
Z‘2 t±
dv
(70)
где t2 — /i — время, в течение которого скорость движения изменяется от начальной скорости до конечной скорости v2.
Для построения кривой движения v = f(l) (рис. 102, б) следует интегрировать уравнение движения второго вида [формула (12)]. Разделяя переменные и интегрируя, получим:
/2 v2 U2
dl = mv-y-; j dl = m^ v^v-; /2—— (71)
д Z1 и, д fl
где /2 — Zi — путь, пройденный поездом за время изменения скорости от Vi до v2.
Для решения интегралов в правой части уравнений необходимо установить аналитическую зависимость действующей силы от скорости движения поезда. Характеристики действующих сил для режима тяги, выбега и торможения (служебного и экстренного) даны на рис. 103. В общем случае эти характеристики не могут быть выражены аналити-170
чески достаточно просто, поэтому решение интегралов формул (70)—(71) сложно. Аналитическое определение данных для построения кривых движения не получило практического применения. Для интегрирования уравнений движения обычно пользуются методом конечных приращений, который теоретически может дать любую степень приближения для характеристик действующих сил. Сущность этого метода состоит в том, что в уравнениях дви-* жения бесконечно малые приращения dv, dl и dt заменяют некоторыми конечными приращениями Av, AZ и А/ и в каждом интервале Av величина действующей силы Fa или /д считается постоянной и равной ее среднему значению FA.C или/д.с. Принимая в каждом интервале скорости Av действующую силы за величину постоянную, действительное движение с переменным ускорением или замедле-нием заменяем равноускорен
Рис. 102. Кривые движения поезда а —скорость в функции времени; б —скорость в функции пройденного пути; в—время в функции пути
ным или равнозамедленным.
В тяговых расчетах для городского электрического транспорта обычно принято измерять путь в метрах, время — в секундах, а скорость в километрах в час или в метрах в секунду. Чтобы в уравнении движения получить ускорение в м/сек*, а скорость поезда выражать в км/ч, необходимо перевести скорость из размерности км/ч в м/сек
км/ч соответствует м/сек У Так как Z2 — = At, a Z2 — 4 =
= А/, то уравнения (70) — (71) примут вид:
А/ = сек (72)
^д. с
или А , т Ду z„,4
AZ =---------- сек (72 )
3,6Гд.с v 7
и
А у tnvc\v
А/ = —-— м (73)
^д. с
или
mvc
.6* гд.
(73')
где tn — масса поезда в кг;
Ед.с — среднее значение действующей силы в ньютонах, а скорость поезда выражена в м/сек [в формулах (72) и (73)] и в км/ч [в формулах (72') и (73')].
Подставляя в формулу (73) вместо Ду его значение из формулы (72), соответственно получим:
Д/ = ус Д/ м (74)
Рис. 103. Характеристики удельных действующих сил
/—-тягового режима; 2 —выбега; 3 — служебного торможения; 4 — экстренного торможения
ИЛИ
Ы = ^Ым. (74')
3,6
Средняя скорость движения поезда определяется через его начальную и конечную скорости
vc = V1~^V? м/сек (или км/ч). (75)
Так как
о2 = Vj -|- Дv м/сек (или км/ч), (76)
то
vc = + -у- м/сек (или км/ч). (77)
Если в выражениях (73) и (73') заменить До и ус, их значениями из формулы (75) и (76), то тогда соответственно получим:
Ед. с Д/ = -у (у%—Vi) нм . (78)
или
Гд.сД/ = —?L_ (vI-v^hm. (78')
2-3,62
Уравнения (72)—(78) могут быть использованы для построения кривых движения поезда. Среднее значение действующей силы Рд,с для небольших приращений скорости можно приближенно найти по средней скорости vc в соответствующем интервале Ду, считая каждый элемент характеристики = f(v) в пределах Ду за отрезок прямой линии. При приближенном интегрировании в пределах каждого интервала скорости действительная кривая движения у = /(/) заменяется отрезком прямой, а кривая у = f(l) — отрезком параболы.
В зависимости от приемов вычисления Л/ и Л/ и порядка построения кривых движения способы, основанные на методе конечных приращений (приближенного интегрирования), разделяют на расчетно-графические и графические. Точность метода конечных приращений при любом способе построения будет тем больше, чем меньше будут взяты интервалы скорости.
Удобно для практических расчетов применять уравнение движения в удельном виде. Тогда формулы (72) и (73) при переходе от бесконечно малых приращений к конечным примут следующий вид:
А/ = 102*иДц сек (79)
/д. с или
А/ = 28,3 сек (79')
/д. С
И
А/=Pc..Atl м (80)
/д. С
ИЛИ
А/ = 7,87 м, (80')
/д. С
где
/д.с =----- Н/КН,
G
а скорость поезда в м/сек в формулах (79) и (80) и в км/ч в формулах (79') и (80').
Площадь, ограниченная кривой движения у = f(t) и осью времени, в определенном масштабе соответствует величине пройденного пути, / 2
поскольку I = ^vdt. Условимся называть масштабом любую величину, ti
соответствующую при графическом ее изображении одному миллиметру. Обозначим масштаб скорости mv, а масштаб времени mt. Следовательно, 1 мм соответствует mv км/ч или mt сек. Тогда на рис. 102, а путь, равный м, будет соответствовать площади в 1 мм?. Так как
площади в 1 лш2 соответствует путь то всей площади 5 будет соответствовать длина перегона, равная:
т т,
L = (81)
Если нужно определить путь, пройденный между любыми моментами времени и /2 (см. рис. 102, а), то нужно подсчитать соответствующую площадь кривой движения и затем применить формулу (81). Если для одного и того же перегона построено несколько разных кривых движения, то все их площади будут одинаковы при одинаковых масштабах скорости и времени.
Будем называть время пробега перегона временем хода, обозначая его через /х, время хода плюс среднее время стоянки на промежуточных остановочных пунктах назовем временем сообщения по перегону /с = ^х + 4- До известного предела весьма выгодно уменьшить общее время движения поезда по перегону, так как это приводит к увеличению ходовой скорости. Под средней ходовой (технической) скоростью понимают такую скорость, с которой поезд мог бы пройти перегон, двигаясь равномерно за то же время, что и при действительной скорости движения
L
vx = — м/сек tx
или
— 3,6L /оо\
Vx = —км/ч, (82)
*х
где L — длина перегона в м.
Скорость, рассчитанную с учетом стоянки на промежуточных остановках, называют скоростью сообщения
L ve = — м с / *с
ИЛИ
ие = 3,3 L км/ч. (83)
•С
Под эксплуатационной скоростью понимают среднюю скорость с учетом стоянки на конечных станциях. Скорость сообщения определяет время поездки пассажира. Эксплуатационная скорость определяет потребное количество подвижного состава на линии, штат обслуживающего персонала и объем тягового хозяйства. Выбор наивыгоднейшей эксплуатационной скорости составляет важную технико-экономическую задачу. Важными средствами увеличения эксплуатационной скорости являются снижение продолжительности остановок и увеличение средней длины перегона. Максимальной называют скорость, которую можно допустить на улицах города, исходя из условий безопасности движения транспортных средств, а также пешеходов. Мак
симальная скорость устанавливается правилами технической эксплуатации (ПТЭ). Конструктивной скоростью называют наибольшую скорость, которая допустима для данного типа подвижного состава по условию конструктивной надежности работы его оборудования. В ГОСТ 8802—58 записано: «Установившаяся скорость вагона-одиночки при движении с нормальной нагрузкой, при номинальном* напряжении в контактной сети, на горизонтальном участке пути должна быть: для четырехосных вагонов — не менее 65 км!ч\ для двухосных вагонов — не менее 60 км!ч\ конструктивная скорость для двухосных вагонов — не менее 70 км!ч\ для четырехосных — не менее 80 км/ч.
§ 35» ЭКВИВАЛЕНТНЫЙ УКЛОН
Эквивалентным уклоном называется такой неизменный по величине уклон, при котором на движение поезда затрачивается такая же энергия, как на действительном профиле, при равной длине участка пути. В об' щем случае профиль пути имеет участки горизонтальные /0, подъемы (fn> /п), безвредные спуски (f6/6), вредные спуски (ZB, ZB) и кривые участки (шк, ZK). При движении поезда по некоторому действительному профилю энергия, потребляемая им из сети, расходуется на преодоление основного сопротивления движению, дополнительного сопротивления кривых и на сообщение поезду кинетической и потенциальной энергии. Если поезд поднимается вверх по подъему, то его потенциальная энергия увеличивается, а если он идет по спуску — она уменьшается.
Спуски, на которых необходимо подтормаживать поезд, чтобы он не развил чрезмерно большую скорость, вследствие чего часть потенциальной энергии теряется в тормозах, называется вредными. При движении на вредных спусках скорость поезда до торможения увеличивается (Z > ау0). Так как с увеличением скорости основное сопротивление также возрастает, то вопрос о необходимости подтормаживания определяется тем, при какой скорости w0 сделается равным Z. Если, например, для данного спуска допустима скорость 25 км/ч, a w0 достигает величины i при скорости 20 км/ч, то спуск безвредный; если же w0 становится равным i при скорости 30 км/ч, то спуск вредный, так как и после наибольшей допустимой на данном уклоне скорости (25 км/ч) поезд будет продолжать разгоняться. ПТЭ определены ограничения скорости на спусках и кривых.
На рис. 104 показана характеристика действующих сил при выбеге и ограничение скорости поезда по тормозам в зависимости от уклона (линия а—б). Точка А определяет величину наибольшего спуска для поезда данного типа, при котором можно длительно ехать без подтормаживания при допустимой наибольшей скорости. Следовательно^ в данном случае все спуски i> Ю°/оо следует считать вредными ZB. Можно считать вредными спуски, превышающие для трамвая 6—100/Оо»-а для троллейбуса —15—2О°/оо-
На спусках, на которых основное сопротивление движению больше или равно уклону ш0 i, не приходится тормозить поезд, так как
при выбеге его движение будет замедленным (&у0 > 0 или равномерным (&у0 = 0- Такие спуски называют безвредными.
Механическая удельная работа тяговых двигателей будет равна: на подъеме длиной /п — (до0 + на безвредном спуске длиной Z6 — (wQ + Z6)/6, на кривых — и на горизонтальном участке — WqIq. На любом вредном спуске расход энергии равен нулю. Удельная ускоряющая сила (7В — до0) в этом случае теряется в тормозах. Таким образом, общая механическая работа, затраченная при движении на
Рис. 104. Характеристика зависимости максимально допустимой скорости от величины уклона
маршруте с любым количеством различных по профилю участков, будет равна:
А = 2 w010 + 2 (ш0 + tD) /п + £ Н + i6) k + 2 1К-
Исходя из определения эквивалентного уклона, следует считать работу А равной работе, затраченной поездом на протяжении участка общей длиной L с эквивалентным уклоном Zo, т. е.
А = АЭ= (w0 + ia)L.
Тогда можно написать
(w0 + i0) L = £ w0 l0 + 2 (w0 + i6) l6 + 2 (ш0 + in) /п + 5>JK.
Для упрощения расчета следует значения основного удельного сопротивления принять одинаковыми на всех участках и равными среднему значению о>о.с- Решая составленное выше уравнение относительно i3 и учитывая, что
L = 2/o+2/n+X/6 + 2/B>
получим следующую формулу для расчета эквивалентного уклона по заданному профилю
~ ------------------г-------:--------- /00-
о.с
(84)
L
По формуле (84) можно вычислить эквивалентный уклон для какого-нибудь одного направления движения. Для противоположного направления эквивалентный уклон будет иметь другую величину. Общий для обоих направлений эквивалентный уклон можно найти как среднее арифметическое из обеих величин. Если применяется рекуперация энергии, то в формулу (84) должны быть введены добавочные члены, учитывающие возвращение в сеть избытка потенциальной энергии на вредных спусках. Эквивалентным уклоном целесообразно пользоваться для многих предварительных расчетов, связанных с ориентировочным определением средней скорости движения поездов по сети в целом и вычислением расхода энергии на движение поездов и мощности тягового электродвигателя.
Пример 36. Определить величину эквивалентного уклона для действительного профиля участка пути длиной L = 475 м (см. рис. 48). Для направления движения поезда,указанного стрелкой, имеем: 1) подъемы 4°/00 (участок /) и 4Оо/оо (участок 2); 2) безвредный спуск 8°/00 (участок 5); 3) вредные спуски 2О°/Оо (участок 4) и 5О°/оо (участок б); 4) горизонтальный участок 5; 5) кривые участки — 7?! = 120 м\ /j = 40 м и = 3,6 н/кн\ — 40 м\ 12 = 30 м, и оуК2 = Ю,8 н/кн [по формуле (34)]. Применяя формулу (84), получим
40-125 + (3,6-40+ 10,8-30)—8,50 —(10,50 +10-100) п
*э =-----------------------—------------------------= 7,6°/оо-
475
Аналогично находим для обратного направления
(56-100 + 8-50 + 20-50)+ (3,6-40 +10,8-30)—4-50 —10-125 пп,
*э— —12,2 °/00,
475
где ajOtC = 10 н/кн (см. рис. 104). Общий для обоих направлений эквивалентный уклон будет равен:
7,6+12,2
*э =---------= 9,9 о/оо.
§ 36. РАСЧЕТНО-ГРАФИЧЕСКИЙ СПОСОБ ПОСТРОЕНИЯ КРИВЫХ ДВИЖЕНИЯ
Этот способ применяется преимущественно в тех случаях, когда исследованию подлежит движение поезда на эквивалентном перегоне, а также на одном или нескольких перегонах действительного профиля. Для расчета и построения кривых движения необходимо иметь характеристики действующих сил для периодов движения поезда (см. рис. 103). Расчет следует вести при помощи табл. 7 в следующем порядке. На характеристиках действующих сил намечается ряд последовательных интервалов (приращений) скорости, которые заносятся в графу 1 табл. 7, а. Затем в. графы 2 и 3 вписываются скорости в начале и конце каждого интервала. Далее определяют среднюю скорость движе-
00
Таблица 7а
Расчетные данные для построения кривых движения — периоды тяги и выбега
Ди, км/ч vlt км/ч V2, КМ/Ч ис, км/ч ^д. с., или /д. с>, н/кн Д/, се к ЕД/, сек АЛ, м ЕД/, М
1 2 3 4 5 6 7 8 9
Приращение скорости выбирают Начальная скоростьдля каждого интервала Определяют по формуле (76) Определяют по формуле (77) Находят из характеристик действующих сил (полных или удельных) Определяют по формулам (72 или 79) + д/2+••• Определяют по формуле (74) 2Д/ = Д/Х + + д/2+ •••• ... + М2
Таблица 76
Расчетные данные для построения кривых движения — период торможения
vT, км/ч /т, сек /т, м
Выбирают Определяют по формуле (85) Определяют по формуле (86)
ния поезда (графа 4). По средней скорости, пользуясь соответствующей характеристикой (см. рис. 103), находят величину действующей силы — полной или удельной (графа 5). Для каждого выбранного интервала скорости определяют Д/ и Д/, а полученное значение записывают соответственно в графы 7 и 9, подсчитывают общее время t = = 5Д/ и пройденный путь I = 5Д/ от принятого начала отсчета (например, для периода тяги — с момента трогания поезда).
Расчет кривых движения начинают с периода тяги. Характеристику 1 (см. рис. 103) разбивают на интервалы (по оси скоростей), начиная с момента трогания и кончая установившейся скоростью. Для периода пуска интервалы скорости берут большими, так как действующая сила изменяется незначительно. При двухступенчатой перегруппировке двигателей без ослабления поля следует первый интервал скорости ограничить точкой выхода на автоматическую характеристику I ступени, а второй интервал — то же, II ступени. Для периода пуска следует брать четыре интервала, так как при переходе с позиции полного поля на ослабленное сильно изменяется сила тяги, а следовательно, и действующая сила. После выхода на автоматическую характеристику действующая сила будет изменяться значительно, поэтому во избежание грубых ошибок необходимо пользоваться малыми интервалами скорости. Для городского электротранспорта можно брать интервал Ди = 24-4 км/ч, а на участке характеристики вблизи установившейся скорости — еще меньше: Ду = 0,5 4- 1 км!ч.
Затем следует приступить к расчету кривой движения для периода выбега, начиная с максимально возможной (установившейся скорости периода тяги) для данного поезда скорости. Если при выбеге w0> wiy скорость движения будет снижаться, поэтому и приращения скорости Ду берут не положительными, а отрицательными. Построение кривой ведут до момента начала торможения. При движении на спуске, когда Wq <С wif скорость увеличивается, следовательно приращения скорости берут положительными. Разбивка скорости по интервалам и соответствующие значения йУ0.с (характеристики 2) показаны на рис. 103.
Рассчитывая кривую движения для периода экстренного торможения, заполняют таблицу, аналогичную табл. 7а. Интервалы скорости в пределах от ут.макс ДО заданной скорости ут или полной остановки следует выбирать 4—2 км/ч. Величину замедляющей силы 6Д находят по характеристике 4 (см. рис. 103). При служебном торможении замедляющую силу принимают постоянной, используя характеристику 3 (см. рис. 103), а движение — равномерно-замедленным (ат = const = = 0,8 4- 1,5 м!секг в зависимости от системы торможения).
Время торможения и тормозной путь для разных значений скорости ут при заданном ат определяют по формулам равномерно-замедленного движения:
/т = -^- сек, (85)
ИЛИ
= сек (85')
3,о flip
v2 i т
T о
2tz>p
(86)
ИЛИ
v2
(86')
2 • о j о ci^p
где tT и ZT — соответственно время торможения и пройденный тормозной путь от скорости начала торможения vT до полной остановки поезда у0; скорость поезда в м/сек [формулы (85) и (86) и в км/ч [формулы (85') и (86')]. Для построения кривой торможения в этом случае составляют табл. 7, б. По данным граф табл. 7 строят кривые движения.
Рис. 105. Построение кривых движения поезда расчетно-графическим способом при заданной скорости начала торможения
Построение и сопряжение между собой кривых для отдельных периодов движения. Порядок построения и сопряжения кривых зависит от поставленной задачи. В тяговых расчетах обычно задается одно из следующих условий, определяющих конкретные особенности задачи: а) задана определенная скорость начала торможения; б) требуется обеспечить максимальную для данного подвижного состава среднеходовую скорость или заданную среднеходовую скорость; в) задана определенная величина времени выбега в процентах от общего времени движения по перегону при максимальной среднеходовой скорости (так называемый коэффициент выбега 0).
Рассмотрим порядок построения кривых движения на перегоне постоянного профиля или эквивалентном уклоне, если задана скорость начала торможения. Выбрав масштабы для скорости, времени и пути, располагают координатную систему v—I и v—/, как показано на рис. 105, и приступают к построению кривых движения в следующем порядке: 1) по данным табл. 7 а последовательно для каждой величины Ду или у2 по осям t и I откладывают значения Д/ и Д/ (графы 6 и 8) или 2Д/ и 2Д/ (графы 7 и 9), по которым вычисляют истекшее время и весь пройденный путь (от точки 0 — начала системы координат). Через полученные точки 1—9 и Г—9' проводят кривые движения
для периода тяги (7—Г); 2) из точки D (конец перегона) по данным табл. 76 строят кривую III для периода торможения; 3) от точки С (момент начала торможения) снизу вверх, по данным табл. 7а, наносят точки С, 2, 1 и проводят через них кривую II для периода выбега. Возможен и другой порядок построения кривой выбега, а именно: пользуясь табл. 7, строят кривую выбега 770, начиная от оси ординат сверху вниз (точки Г — 3"), а затем кривую 110 переносят параллельно ей самой в точку С и получают кривую 77. Пересечение кривой II и I определит точку В — момент выключения тока; 4) точку В снося! на кривую получают точку В' — момент выключения тока на кривой v = f(t)\ 5) кривую выбега По строят от оси ординат по точкам 7"' — 3"', пользуясь данными табл. 7а. Затем эту кривую переносят
Рис. 106. Построение кривых движения поезда (с периодом равномерного движения) расчетно-графическим способом при заданной скорости начала торможения /—/' — тяга; //—//' —выбег; ///—///'—торможение
в точку В', как показано на рис. 105. На перенесенную кривую 1Г сносим точку С. Точка С' определит момент начала торможения на кривой v = f(t) (6). По данным табл. 76 строим прямую C'D' — периоды торможения. Отрезок OD' равен по величине, в принятом масштабе, времени хода поезда по перегону /х.
При большей длине перегона возможно, что при сопряжении кривых движения выбег начнется при скорости, равной установившейся скорости vy тягового режима. Тогда перенос точки В кривой v = f(l) на кривую v = f(t), как это сделано на рис. 105, будет вообще невозможен. Если же скорость v близка к vy (установившейся скорости), то этот перенос может дать большую ошибку из-за пологости кривой 7. В этом случае (рис. 106) порядок построения кривых 7, II и III остается прежним. Пересечение кривых I и II также определяет момент начала выбега (точку В). Величина отрезка ВВ± соответствует длине пути, пройденного поездом с установившейся скоростью. Зная 1у и
Vy, следует определить время, соответствующее периоду равномерного движения: ty = Отложив отрезок В\В', равный ty, как показано на рис. 106, получим точку В'. Далее порядок построения аналогичен
предыдущему.
Рассмотрим порядок построения кривых движения при заданной средней ходовой скорости. В этом случае совмещение кривых движения выполняют в следующем порядке: определив ходовое время tx [по формуле (82)], откладывают его на оси времени (tx = 59 сек — отрезок ОД на рис. 107). Строят от начала координат кривую I движения под током. Кривую выбега (пунктирная линия) строят, начиная от точки О' оси ординат, а прямую III (торможение) — от точки О, как
V км/ч 60\—
v=I(I): дано чх -30,5км/ч
L=500m
Рис. 107. Построение кривой движения расчетно-графическим способом при заданной средней ходовой скорости (кривая 0BCD) и максимальной ходовой скорости ох макс (кривая OB'D')
показано на рис. 107. После этого перемещают пунктирную кривую выбега параллельно ей самой вдоль оси времени до тех пор (кривая //), пока площадь OBCD, ограниченная участками всех трех кривых и осью времени, не станет равна площади S = 2250 мм2, пропорциональной в принятых масштабах заданной длине перегона L = 500 м [см. формулу (81) и рис. 107]. В построенной таким образом диаграмме точка В соответствует моменту выключения тока, точка С — моменту начала торможения.
При заданной максимально возможной средней ходовой скорости на диаграмме движения должен отсутствовать период выбега. Диаграмма без выбега (OB'D'), как видно из рис. 107, строится так же, как
V км/ч SO
Рис. 108. Построение кривых движения расчетно-графическим методом для различных значений ходовой скорости
vx макс = 36,4; fx2 = 35»7’ г*з = 35,2; f^4 = 33,6 и 0*5 = 30,6 км/ч
И- км/ч
Рис. 109. Характеристика зависимости ходовой скорости от скорости начала торможения
диаграмма с периодом выбега (OBCD). Прямую /// перемещают параллельно ей самой в положение ///' так, чтобы площади В В'в = = BCDD'.
Можно не определять площадь кривой v = f(t), если одновременно с построением диаграммы движения в координатах скорость — время строить диаграмму движения в координатах скорость — путь. Для этого располагают оси, как показано на рис. 108, и откладывают влево от начала координат отрезок OD, равный в масштабе длине перегона L = 545 м, а вправо — отрезок OD соответствующий величине ходового времени tx = 58,4 сек. В обеих координатных системах строят от начала координат кривые I и Г (тяговый режим) и кривые торможения в функции времени от точки D4 (кривая ///') и в функции пути от точки D (кривая ///). После этого остается так расположить кривые выбега, чтобы площадь кривой v = f(t) соответствовала длине перегона. Если установившаяся скорость на перегоне не достигается, то, передвигая кривые выбега //0 и //0 в горизонтальном направлении параллельно себе, всегда можно добиться, чтобы точки С4 — С', с одной
стороны, и точки В4 и Вс другой стороны, находились на одинаковом уровне, т. е. соответствовали попарно одинаковым скоростям, так как скорость начала выбега и скорость торможения должна быть одинаковой как на диаграмме скорость — время, так и на диаграмме скорость — путь. При удовлетворении данного требования построенные диаграммы OB4C4Z)4 и ОВ4С4 D' будут соответствовать одному и тому же перегону и одной и той же среднеходовой скорости. Перемещая кривую выбега //0 — //о и прямую периода торможения IIГ в координатах v — t (соблюдая условия равенства соответствующих площадей), можно получить ряд диаграмм движения, соответствующих одному и тому же перегону и разным значениям ходовой скорости (площади всех пяти диаграмм одинаковы).
На рис. 109 дана зависимость ходовой скорости от скорости начала торможения, построенная по данным диаграмм движения рис. 108. Имея такую кривую, можно для любого заданного значения ходовой скорости определить соответствующую скорость торможения и построить диаграммы движения так, как это показано на рис. 105.
Рассмотрим порядок построения кривых движения на перегоне переменного профиля. В этом случае надо одновременно с вычисление^м А/ и А/ для каждого интервала скорости вести построение кривых 184
v = f(t) и v = f(l). Предположим, что по точкам уже построена кривая движения поезда на элементе профиля с уклоном до точки 3 (рис. 110) и достигнута скорость v3. Выбрав новое приращение скорости Лу4, вычислим Л/4 и Л/4, отложим соответствующие отрезки Д/4 и Д/4, получим точки 4 и 4'. Точка 4 окажется за переломом профиля. Приближенно можно считать, что скорость, которую поезд достигнет в точке перелома профиля, определится точкой 4 я, т. е. вместо скорости у4 в пределах этого элемента будет достигнута скорость Дальнейшие вычисления произведем для следующего элемента профиля с уклоном f2. За начальную скорость для нового интервала Ду5 примем скорость в точке 4н. При заполнении расчетной таблицы действующие силы
Рис. ПО. Построение кривых движения расчетно-графическим способом при переменном профиле
будем брать уже для уклона Z2. Сначала проверим по скорости 4н, будет ли при этом уклоне действующая сила положительной или отрицательной. В последнем случае приращения скорости Д^б и Ду6 возьмем также отрицательными, т. е. скорость в конце каждого интервала будет меньше, чем скорость в его начале а4н > v5 > v6. Движение поезда будет замедляться. Если при скорости на уклоне i3 действующая сила окажется равной нулю, то поезд, вступая на новый элемент профиля, сразу начнет двигаться равномерно с установившейся скоростью vy = убн- При длине элемента профиля с уклоном i3, равной /3, время движения по нему составит
h== vQH ‘
Приращение скорости Ду7 будет равно нулю, а конечная скорость равна начальной у6н = v7.
Для совмещения кривых движения, если задана ходовая скорость, приходится строить ряд кривых выбега для всех уклонов, на которых возможно движение выбегом. Например, для профиля, изображенного на рис. 111, при вероятности выбега на элементах профиля с уклоном /2 и is кривые выбега 20, 20, 3Qf и 30 нужно строить для обоих уклонов. При совмещении кривых в единую диаграмму движения выбег начинают от какой-либо пары точек В — Blf передвигают горизонтально
7В Зак. 1 186
185
до этих точек ту из построенных пар кривых выбега, которая соответствует уклону i2 данного элемента профиля (кривые 20 и 20 в положении 2 и 2'). Обнаружив, что кривая 2 пересекает вертикаль перелома профиля в точке Б, проводят горизонталь Бх — Б, а затем в точки Бг и Б переносят вторую пару кривых выбега 30 и Зо, соответствующую уклону f3, и т. д.
Если задана скорость начала торможения, кривую выбега строят начиная от точки С, учитывая профиль пути до пересечения с кривой периода тяги.
Рис. 111. Совмещение кривых движения, построенных расчетнографическим способом, при переменном профиле
§ 37. ГРАФИЧЕСКИЙ СПОСОБ ПОСТРОЕНИЯ КРИВЫХ ДВИЖЕНИЯ
Возможность сравнительно быстрого построения кривых движения на большом количестве перегонов при наличии элементов профиля с различными уклонами обеспечила самое широкое применение графических способов в практике тяговых расчетов. Наибольшее распространение получил графический способ Липец—Лебедева. По этому способу сначала строят кривую движения v = f(l) и затем на ее основе зависимость t = f(l).
Построение кривойи = /(/). Если в уравнение (72) вместо А/ подставить его значение из уравнения (74'), то можно путем преобразования получить следующие формулы:
А/ vc tn
Av ^д. с
или
А/ vcm . / s
Av 3,62Гд.с * ' }
Из полученного выражения следует, что Ди может быть представлен как катет вб (рис. 112) прямоугольного треугольника Овб, у которого другой катет Ов пропорционален А/, а противолежащий этому катету угол 0 равен углу а треугольника 1дО\ у которого катеты соответственно пропорциональны ис и Гд.с.. Гипотенуза Об треугольника 186
Овб представляет собой элемент кривой движения v = f(l). Идея графического метода состоит в том, чтобы сделать равными между собой тангенсы углов а и 0 (а следовательно, и самые углы). Луч /, проведенный через точки 1 и О', перпендикулярен лучу Г, проведенному через точку 0. Очевидно, достаточно приложить линейку и угольник так, как показано для одного интервала скорости на рис. 112, и провести отрезок Об. При наличии большого угольника один из его катетов может заменить линейку. При графическом построении необходимо определенное соотношение между масштабами скорости пути и дей-
Рис. 112. Принцип графического способа построения кривой движения v = f (Z) ,
ствующих сил /ир, в которых ведется графическое построение. Если принять, что 1 мм соответствует т1 м и mv км/ч, или 1 мм—mv м/сек и тг н, то, деля какую-нибудь величину на ее масштаб, получим то число миллиметров, которому соответствует взятая величина при данном масштабе. Из рис. 112 следует, что
Д/ mv vc mF
— • — , a tg а =----------- • —— •
Ди mt Гд.с tnv
При условии tga = tg0^ будем иметь следующее соотношение:
Д/ mv vnmP
—с F • (б)
Ду/и^ Гд.сПЬ
7В*
Разделив почленно выражение (а) на выражение (б), получим следующую зависимость между масштабами:
2 2 mtn* шт*
mF= ИЛИ tnF= ml 3,62/7?z h/mm\ (87)
102 k m 2 102&и/п2
tn , — v и nu tn и v /Q7'\
HLf — ИЛИ llLf " J 7 3,62/nz rt/txn d 1 AlAl, (0/ )
187
где масштабы: в 1 мм — ту км/ч или в 1 мм — mv м/сек\ в 1 мм — т1 метров, в 1 мм — mF ньютон и в 1 мм — т$ ньютон на килоньютон (н/кн).
При построении кривой движения можно произвольно выбирать лишь два масштаба, а третий необходимо определять на основании уравнений (87) и (87'). Практически желательно выбирать заранее масштабы пути и скорости, а масштаб действующих сил определять по формуле, так как при расчетах часто приходится пользоваться кривыми скорость — путь. Установив масштабы пути, скорости и действующих сил, необходимо построить в принятом масштабе характеристики действующих сил при тяге, выбеге и торможении.
Рис. 113. Построение кривой движения v = f (I) для периода тяги графическим способом (профиль пути неизменный)
Рассмотрим порядок построения кривых движения на перегоне/ неизменного профиля. Кривую движения для периода тяги строят следующим образом. Располагают кривую действующих сил, как показано на рис. 113. Выбирают какое-нибудь приращение скорости, например А^ (изменение скорости от = 0 до v2), и приводят луч 1 к точке 1 кривой действующих сил, соответствующей средней скорости t/cp под углом а' к оси скоростей. Тогда под равным ему углом к оси пути 0' = = а' можно провести из начала координат 0 первый отрезок О—б искомой кривой v = f(l) до пересечения с горизонталью, соответствующей скорости v2, т. е. следует через точку 0 провести луч перпендикулярный лучу 1 (отрезок Об искомой луча 1 и представляет собой элемент кривой движения для приращения At^). Затем берут новое приращение скорости Ау2 и для средней скорости уср2 проводят луч 2 через точку 2 и точку О1 (начало координат характеристики действующих сил). К лучу 2 через точку б проводят перпендикулярный ему луч 2', отрезок б-в луча 2' является элементом кривой движе-
ния для приращения Др2. Луч 3 проводят через точки 3 и О'. Луч 3', перпендикулярный ему, проводят через точку в. Отрезок вд является элементом кривой движения для приращения Ди3. Поступая таким образом, можно построить кривую движения для периода тяги. Построение кривых движения выбега и торможения также основано на изложенном принципе. Их строят в обратном порядке от конца перегона. Расположив тормозную характеристику В = f(v) (кривая II) и характеристику w0 = f(v) (кривая III), как показано на рис. 114, строят в один—три приема кривую торможения ОС от скорости, равной нулю, до скорости начала торможения vm (точка С). Если скорость начала торможения выбрана, то от скорости
Рис. 114. Построение кривой движения для периодов торможения и выбега
1 — кривая движения; характеристики действующих сил: // — служебного торможения; /// — выбега
vm (точки С) в том же обратном порядке строят кривую выбега, для чего пользуются кривой сопротивления движению, т. е. действующей силы (III). Интервалы изменений скорости не должны быть слишком велики, так как скорость при выбеге меняется сравнительно медленно. Кривую выбега (рис. 114) строят до пересечения с кривой движения периода тяги (см. рис. 113), после чего получается полная диаграмма движения v = f(l) для данного перегона (см. рис. 102, б).
Рассмотрим порядок построения кривых движения на перегоне переменного профиля. При построении кривой v = f(l) необходимо соответственно каждому уклону переносить точку 0 (начало координат кривой действующих сил) влево для подъемов и вправо для спусков. Лучи надо проводить через начало координат соответствующего уклона. На рис. 115 показано построение кривой движения v = f(l) для профиля с различными уклонами. На первом участке (горизонтальном) проводим луч 1 через точки 1 и 0 (начало координат для участ
ка О°/оо) и перпендикулярно ему луч Г, а затем луч 2 через точки 2 и О и перпендикулярно ему луч 2' через точку 1. На втором участке проводим луч 3 через точки 3 и 012 (начало координат для подъема 12°/00) и перпендикулярно ему луч 3'. Момент перехода с участка с подъемом 12°/00 на участок с подъемом 50% скорость поезда v3 больше величины установившейся скорости уУ5о, значит действующая сила будет замедляющей (—Fd4). Поэтому приращение скорости надо взять отрицательным (—Д^4), а луч 4 провести через точки 4 и 05О. Луч 4', перпендикулярный лучу 4, как видно из рис. 115, пойдет вниз. Скорость поезда будет уменьшаться до тех пор, пока не достигнет установившегося значения
О
Рис. 115. Построение кривой движения v = f (I) для периода тяги на пути переменного профиля
vy = уу50, после чего движение поезда будет равномерным до момента перехода на участок с другим уклоном (точка 4'). Если затем поезд перейдет на участок с подъемом меньше 5О°/оо или на горизонтальный участок, или любой спуск, то скорость поезда будет возрастать, так как установившаяся скорость на любом из них будет больше установившейся скорости на подъеме в 5О°/оо. Приращения скорости в этих случаях следует брать положительными. Если i будет больше 5О°/оо> приращение скорости берут отрицательным. Следовательно, приращение следует брать: положительным, если vy > v\ отрицательным, если < v и равным нулю, если = v, где v — скорость поезда в момент перехода с участка одного профиля на другой.
При построении кривой v = f(l) чаще всего бывает, что последняя точка, например в (рис. 116), построенная для первого участка с уклона = 0, попадает за его предел на следующий участок с другим уклоном i2, а не точно на перелом профиля, как, например, точка Ь. Если точка находится вблизи линии перелома профиля (например, точка в), то скорость в точке в может быть принята за начальную скорость для дальнейшего построения кривой движения. Если же точка будет на
ходиться далеко (например, g), то надо повторить построение, взяв меньшее приращение скорости (вместо Ду3 Дуз или Дуз), чтобы построенная вновь точка g' или g" совпала бы или находилась близко к вертикальной линии перелома профиля.
Построение кривой движения поезда с двигателями смешанного согласного возбуждения для периода тяги ничем не отличается от построения, приведенного на рис. 114 и 115, и лишь некоторые особенности имеют место при режиме рекуперации. На рис. 117 (в правой части) изображены характеристики действующих сил при рекупера-
Рис. 116. Примеры построения кривой движения v = f (/) для периода тяги
тивном торможении (РТ) для трех значений тока возбуждения /в и при служебном реостатном торможении (СТ). В левой части рисунка показана кривая движения поезда для периода торможения, начиная с момента окончания режима тяги (точка В). До момента начала торможения двигатели работают по самой верхней характеристике (при наименьшем токе возбуждения /Б4). Для осуществления рекуперативного режима водитель должен увеличить возбуждение двигателя, т. е. перейти на другую автоматическую характеристику. Процесс перехода совершается практически мгновенно, и скорость поезда не успевает сколько-нибудь заметно измениться. Поэтому проводим горизонталь В'С до пересечения с характеристикой при /в2 в точке С (останавливаться на характеристике при /вз в данном случае бесполезно, так как при данной скорости действующая сила слишком мала). Начиная с точки С будет происходить процесс торможения. Приращение скорости рекомендуется брать небольшим (1—3 км/ч) в зависимости от жесткости характеристики. На характеристике при /В2 берем одно приращение Ду.
Проводим луч 1 через точки 1 (средняя скорость ов2 для данного интервала) и О', а к нему луч /', перпендикулярный лучу /, через точку В. Отрезок Вв представляет собой участок кривой движения. В точке С' переходим на характеристику, соответствующую току /в1. Переходы с одной характеристики на другую и все интервалы скорости показаны в виде зигзагообразной линии В'СС'С"С'". По окончании рекуперации (точка С"') переходят на механическое или реостатное
Рис. 117. Построение кривой движения для периода торможения
^—характеристики действующих сил (СТ —служебного торможения и РТ — рекуперативного торможения); II — кривая движения v=f (/)
торможение, и при построении пользуются характеристикой служебного торможения С Т (Аг>4 лучи 4 и 4'). При движении поезда на больших спусках возможно, что В + W0. В этом случае отрезок кривой движения будет наклонен вверх, и скорость поезда будет возрастать (например, на спуске при начальной скорости торможения vT и движении по характеристике /в2). При этой же скорости, но при переходе на характеристику /В1 действующая сила будет больше нуля, и скорость поезда начнет уменьшаться.
Построение кривой t = f(l), так же как и кривой v = f(l), основано на замене отношений физических величин [формула (74')] отношениями отрезков, выражающих эти величины на графиках. Из графического построения рис. 118 следует, что А/ можно представить как катет аГ
прямоугольного треугольника ОаГ, у которого другой катет Оа равен AZ, а угол у', противолежащий катету Оа, имеет тангенс, пропорцио-М
нальныи отношению -п-: А/
А/ т, tgv =77 ' ~ ’ At т1
В свою очередь угол у' равен углу у прямоугольного треугольника вОб с катетом Об, пропорциональным vc, и катетом Ов, равным отрезку h. Луч 1 проведен через точку 0 перпендикулярно лучу Г, прове-
Рис. 118. Принцип графического способа построения кривой движения t = f (I)
денному через точки б и в. Так же, как раньше, идея метода состоит в том, чтобы сделать равными углы у и у', а следовательно, и их тангенсы. Заменяя тангенсы углов у и у' их значениями из треугольников ОаГ и Овб (рис. 118), получим
AZ mf vc
kt htnv
Разделив это выражение на выражение = vc из формулы (74) и сократив переменные величины, получим следующую зависимость:
или
3,6 т.
h =——- мм, (88)
тдр: 1 мм — mt сек\ 1 мм — mv м/сек\ 1 мм — mv км/ч и 1 мм — т1 м.
При наличии выбранных масштабов пути т19 скорости mv и времени mt длина отрезка должна быть вычислена по формуле (88). Построение кривой t = f(l) показано на рис. 119. Интервалы скорости
.взяты такими же, как при построении кривой v = f(l), где Аи4 = 0. Точки 1—6 на оси ординат соответствуют среднему значению скорости для соответствующего приращения Аи. Лучи 1—6 проходят через точку А и соответствующую точку средней скорости 1—6 (например, луч 1 — через точки Л и/, а перпендикулярно ему луч Г и т. д.). Отрезки Оа, >аб, ..., дк являются элементами кривой движения. Построение удобно вести при помощи линейки и угольника, как показано на рис. 118, или одного большого угольника.
Построение кривых движения графическим методом следует вести в следующем порядке: выбрать удобные для практического пользования масштабы пути, скорости и времени. Затем определить масштаб действующих сил [по формулам (87) или (87')] и величину отрезка h
(по формуле (88)]. Размеры листа миллиметровой бумаги определяются длиной рассматриваемого маршрута и масштабом пути и времени. В верхней части листа, предназначенной для построения кривых движения, наносят профиль всего участка пути и разбивают его на перегоны. В нижней части параллельно основанию профиля проводят ось
Рис. 120. Кривые движения v = f (I) и t = f (/); кривые потребления тока Г = f (/) для нескольких перегонов маршрута сложного профиля при двух направлениях движения поезда
пути, разделяемую на отрезки, соответствующие перегонам. Оси скорости и времени проводят для каждого отдельного перегона. Характеристики действующих сил со шкалой уклонов для удобства пользования ими вычерчивают на отдельном листе и по мере построения кри
вых движения для каждого перегона перемещают вдоль оси пути. Время остановки на каждом пункте показывают в виде отрезка, откладываемого вниз по оси времени от конца кривой t = f(l) данного перегона. Продолжительность остановки зависит от типа подвижного состава и характера остановочного пункта. Для трамвая и троллейбуса она составляет в среднем 10—20 сек, для метрополитена — 20 сек. Если движение происходит в обе стороны, то кривые обычно располагают так, как показано на рис. 120. Кривые движения строят для маршрутов электрического транспорта любого вида обычно за целый рейс. В качестве примера на рисунке показаны кривые движения с = f(l) и t = = f(l), а также кривые тока / = /(/), построенные для четырех перегонов трамвайного маршрута сложного профиля (для двух направлений движения). На диаграмме участок ВВ первого перегона с подъемом 35°/00 соответствует периоду тяги с установившейся скоростью; участок В'В" — периоду торможения для снижения скорости перед вредным спуском; участок ВБ' — периоду торможения при установившейся скорости (равномерное движение) на спусках 35 и 22,5°/00. Точка Б' соответствует моменту начала торможения для остановки поезда. Торможение при ут = const применяется также при движении поезда в обратном направлении на четвертом, втором и первом перегонах. При движении поезда на четвертом перегоне (туда) имеет место повторный пуск.
Пример 37. Определить масштабы для построения кривых движения графическим методом на маршруте длиной 10 км для поезда МТВ (приведенная масса т — 27 700 кг) и троллейбуса МТВ (приведенная масса 10 000 кг). Выбираем масштабы: скорости mv = 0,4 км/ч в 1 мм, пути mi = 4 м в 1 мм, времени mt = = 1 сек в 1 мм. Масштаб для действующих сил определяем по формуле (87)
27 700-0,42
тР~------------= 85 н в 1 мм\
F 3,62-4
по формуле (88) находим величину отрезка
3,6-4 h =-----= 36 мм.
0,4-1
Для троллейбуса МТБ, выбирая те же масштабы, получим mF = 31 н, a h = = 36 мм. Для менее длинных маршрутов (меньше 5 км) можно выбрать масштабы: mv = 0,25 км/ч в 1 мм; mi — 2 м в 1 мм и mt = 1 сек в 1 мм (а при перегонах небольшой длины (250—300 м) — 0,4 сек в 1 мм).
§ 38. ТОРМОЗНЫЕ ЗАДАЧИ
Тормозные средства подвижного состава при экстренном торможении должны обеспечить остановку поезда на заданном по условию безопасности тормозном пути. Наибольшая допустимая скорость поезда не должна превышать значения скорости начала .экстренного торможения, при которой тормозной путь получается равным заданному расчетному. Чем эффективнее тормозные средства поезда, тем безопаснее движение и тем более высокие скорости поезда могут быть допущены.
В ПТЭ указана длина расчетного тормозного пути, т. е. такого пути, на котором при любых условиях тормозные средства должны обеспечивать остановку поезда. Тормозной путь при скорости vT = 30 км/ч, нормальной нагрузке, сухих чистых рельсах, на горизонтальном участке пути при служебном торможении должен быть: для четырехосных вагонов и поездов — не более 25 ж, для двухосных вагонов и поездов — не более 30 м. При экстренном торможении с дополнительным применением рельсового электромагнитного тормоза: для четырехосных вагонов и поездов — не более 10 ж, для двухосных вагонов и поездов — не более 12 м (ГОСТ 8802—50). Для троллейбусов тормозной путь при скорости ут = 30 км/ч, без пассажиров, при сухой чистой дороге, на горизонтальном участке пути при торможении пневматическим тормозом должен составлять не более 13 ж, а при электропневматическом— не более 11 м (ПТЭ).
В ПТЭ метрополитена длина расчетного тормозного пути приведена в зависимости от скорости и профиля пути. Так, например, для шестивагонного состава типа Г при скорости начала торможения 75 км/ч на площадке длина расчетного тормозного пути должна быть не более 220 м, — на подъеме 40°/оо — 155 мм, на спуске 4О°/оо — 350 м.
Решая тормозные задачи, нужно анализировать условия безопасности движения. Эти условия определяются особенностями каждого вида транспорта, его тормозными средствами, организацией движения, профилем пути и метеорологическими условиями.
Тормозной путь поезда зависит от тормозной силы, тормозной скорости и профиля пути (уклона). Для того чтобы можно было в любой момент остановить поезд на протяжении расчетного тормозного пути, необходимо установить зависимость между величиной этого пути, тормозной силой, тормозной скоростью и уклоном. Возможны следующие четыре задачи: 1) по заданному тормозному пути, уклону и тормозным характеристикам определить тормозную скорость; 2) по тормозному пути, уклону и тормозной скорости найти параметр тормозных средств поезда — коэффициент нажатия; 3) определить тормозной путь по заданным прочим трем величинам и 4) найти величину уклона. Кроме того, тормозные задачи необходимо решать при конструировании нового подвижного состава для определения параметров тормозных устройств. В условиях эксплуатации приходится решать и такую задачу: при заданной допустимой скорости движения определять безопасную дистанцию и интервал между двумя попутно следующими поездами.
При решении тормозных задач исходят из уравнения движения поезда для периода торможения и характеристик действующих на него сил. Расчетный тормозной путь /тр есть путь, проходимый поездом с момента возникновения необходимости торможения до полной остановки. Кроме действительного тормозного пути /т, он включает добавочный путь подготовки к торможению /п, который будет пройден за время /п, необходимое для появления реакции водителя на обнаруженную опасность, приведения им в действие тормоза и, наконец, сра< батывания тормозной системы: /тр = 1т + 1п.
Движение за время подготовки к торможению можно считать равно-
мерным, а поэтому
1 ___
п~ 3,6
М.
Время /п для всех видов городского электротранспорта не превышает 1—2 сек.
Пример 38 (первая тормозная задача). Определить допустимые скорости движения поезда типа Т-2, если даны: расчетный тормозной путь /тр = 35 м; уклоны: —60, —35, —25, —10,0, +10,+25,+35, +6О°/Оо; характеристика удельных действующих сил торможения при ат = 2,8 м/сек2, 6Д = 102X 1,15X2,8 =
Рис. 121. Графическое решение первой тормозной задачи для трамвайного поезда Т-2
/ — характеристика действующей силы; // — кривые движения для периода торможения; /// — кривая зависимости = f (Z)
Т • Мали
= 325 н/кн [формула (58)]. Чтобы построить кривые движения для периода торможения графическим методом, выбирают масштабы: скорости mv ~ 0,66 км/ч в 1 мм, пути mi = 0,5 м в 1 мм. По формуле (87') определяем масштаб удельной
102-1,15-0,662 mf~ 3,62-0,5
=10 н/кн
действующей силы в 1 мм, где kn = 1,15 — коэффициент энергии вращающихся частей. На диаграмме движения (рис. 121) по оси абсцисс откладываем влево от 0 (начало координат) расчетный тормозной путь /тр = 35 м. В правом координатном углу в соответствующих масштабах строим характеристику удельных действующих сил /д, а в левом — кривые движения для всех заданных значений
уклонов. Затем для любого значения скорости, например 60 км/ч, определяем путь подготовки (время подготовки принято 1 сек)
Отложив отрезок аб, как показано на рисунке, и соединив точки О и б, получим. прямую линию Об. Ординаты точек 1 —9 пересечения прямой Об с кривыми торможения определят тормозные скорости, которые и будут равны наибольшим допустимым скоростям движения на соответствующих уклонах пути. Пользуясь полученными данными, строим кривую vT.MaKC = f(i) (см. рис. 121).
Пример 39 (вторая тормозная задача). По заданным величинам расчетного тормозного пути ZTp = 35 м, скорости начала торможения vT = 28 км/ч и уклона i = 0°/оо найти соответствующее значение коэффициента нажатия /гн. Выбираем в широком диапазоне три различных значения коэффициента нажатия /гн1г
Рис. 122. Графическое решение второй тормозной задачи (поезд МТВ)
feH2 и kH3. Для каждого коэффициента нажатия в правой части рис. 122 строим удельные характеристики действующих сил /д = f(v), а в левой — три кривые движения vT = f(lT) для периода торможения.
Выбираем масштабы: mv = 0,8 км/ч в 1 мм\ mi= 1 м в 1 мм. Масштаб nif в мм определяем по формуле (87)
102-1,15-0,82 „
mf=------3*64----~=5,66 н/кн.
Затем так же, как и в предыдущих примерах, построим прямую О'б и опре-делим скорости начала торможения для каждого коэффициента нажатия. Пользуясь полученными данными, строим, как показано на рис. 122 (то точкам а, бг в), кривую зависимости тормозной скорости от коэффициента нажатия /гн = = f(vT). Для заданного значения vT = 28 км/ч по кривой kn = f(vT) находим соответствующую величину коэффициента нажатия kn = 0,8 (точка х).
Тормозные задачи для троллейбуса решаются аналогично примерам-38 и 39.
Пример 39а. Для троллейбуса МТБ весом G = 88 кн (без пассажиров) определить максимальный спуск, на котором допустима скорость 20 км/ч при тормоз-
ном пути, не превышающем ZTp = 30 м. Найдем ориентировочное аналитическое решение задачи. Путь подготовки торможения:
Действительный тормозной путь 1Т = /тр — /п = 30 — 8,3 = 21,7 м. При начальной скорости vT = 20 км/ч для остановки троллейбуса на таком тормозном пути требуется замедление
VT 202
ат =----—— =-------------= 0,7 м/сек2.
2-3,62/тр 2-3,62-21,7
Принимая коэффициент сцепления равным 150 н/кн (плохое состояние дороги), а коэффициент инерции 1,15, при торможении на все оси получим
i = ф' — Ю2 ат = 150—102-1,15-0,7 = 68 °/оо-
§ 39. КРИВЫЕ ПОТРЕБЛЯЕМОГО ПОЕЗДОМ ТОКА
Одной из задач тяговых расчетов является построение: 1) кривой I' = /(0 — зависимости потребляемого поездом тока от времени, которая может быть использована для определения энергии, затрачиваемой на движение поезда, и расчета системы электроснабжения; 2) кривой /' = /(/) — зависимости потребляемого поездом тока от пути, которая необходима для расчета системы электроснабжения, так как токораспределение (при параллельной работе питающих линий) и падение напряжения в сети зависят от величины и расположения нагрузки вдоль линии между подстанциями; 3) кривой / = /(/) — зависимости потребляемого тяговым двигателем тока от времени, которая необходима для расчета нагревания двигателя.
Построение кривых потребления тока при двигателях последовательного возбуждения. Кривые /' = /(/) и Г = /(/) строятся на основании кривых движения и скоростной характеристики v = f(J) двигателя (или кривой Г = f(v), характеризующей ток, потребляемый поездом на заданной ступени регулирования скорости). На рис. 123 показано построение кривой Г = f(v) по данным скоростных характеристик v = для поездов с разными системами пуска и регулирования скорости: I — при двухступенчатой перегруппировке для z = = 2 (см. рис. 21) и z = 4 (см. рис. 22, схемы а и б); II — при двухступенчатой пегрегруппировке для z = 4 (см. рис. 22, схемы в и б); III — без перегруппировки с тремя позициями ослабленного поля. Ток, потребляемый поездом, зависит от схемы соединения двигателей. Показатель z' обозначает число двигателей или число их групп, соединенных параллельно. Для любой схемы соединения тяговых двигателей ток, потребляемый поездом /' = z'/, где I — ток одного двигателя или группы двигателей, соединенных последовательно. Так, например (см. рис. 22), для схемы a z' = 1, для схемы б z' = 2, для схемы в z' = = 4. При ступенчатом пуске величина пускового тока на каждой позиции меняется от /п.макс до /п.мин, но ввиду кратковременности периода пуска принято при построении кривых потребления тока считать ток двигателя неизменным и равным величине среднего пускового тока /п. На рис. 124 (/) показано построение кривой Г = f(t) для периода 200
пуска при неизменном среднем пусковом токе, а на рис. 124 ((//) — построение кривой Г = f(t) для периода пуска при неодинаковой величине среднего пускового тока (см. пусковую диаграмму, рис. 72), При переходе с нормального поля на ослабленное, а также с одной сту-
Рис. 123. Кривые зависимости тока, потребляемого поездом от скорости
I — I ступець, ток поезда /п = /п=140 а; // — ступень —/п= 21п = 280 а;
II—I ступень, ток поезда /п=21п = 240 а; II ступень /п = 41п = 480 а;
/// —/п = /п= 140 а
пени ослабления поля на другую можно строить кривые потребления тока, показав его изменения от максимума до минимума (рис. 124, 16 или Нб) или приняв для каждой ступени регулирования (в моменты
— A4) ток, равным его среднему значению (см.рис. 124, 1в — участок — А4: Iai = = 21п или рис. 124, Не — участок At — А4:
4 < h < /з < 4)-
Кривые тока строят по точкам. Для ряда моментов времени 4, /2, 4, •••» th или для ряда значений пройденного пути /х, /2, ...» lh находят по кривым движения v = f(t) и I = f(v) соответствующие значения скорости t>i, v2t ..., vk. Для этих скоростей по кривым/' = f(v) (см. рис. 123) находят значения токов /', /2,...» /ь потребляемых поездом, которые и откладывают в выбранном масштабе как ординаты
Рис. 124. Принцип построения кривых потребления тока
/ — при одинаковом значении среднего тока на всех пусковых и ходовых позициях ослабленного поля (z=4; z' = 2; z"= 2 — одноступенчатый пуск тяговых двигателей); // — при неодинаковом значении среднего тока на первых пусковых и всех ходовых позициях ослабленного поля (z= 1)
точек искомых кривых тока с асбциссами, равными соответственно tlf t2, ...» tk или /1, /2, ..., /А. Можно пользоваться непосредственно скоростными характеристиками, по которым находят ток, потребляемый двигателем, и затем, зная схему соединения двигателей, — ток поезда. На кривой тока необходимо отмечать точки, соответствующие моментам перехода с одной ступени соединения двигателей на другую, на
пример с последовательного соединения на параллельное, а также со ступени нормального поля на ступень ослабленного поля. Так как на кривых движения наиболее точными являются точки, соответствующие границам конечных приращений, по которым они рассчитывались, то значение тока следует устанавливать именно для этих точек.
Рассмотрим на примере методику построения кривых потребления тока поездом при двухступенчатой перегруппировке двигателей без применения ослабленного поля (рис. 125). В период пуска величина тока двигателей определяется пусковыми сопротивлениями. Первая
Рис. 125. Построение кривой потребления поездом тока (двухступенчатая перегруппировка)
Периоды V, км/ч 1, а I' = z4, а
( I ступень 0-11 190 190
Пуск ' 11 ступень 1 1 — 22,5 190 380
1 25 140 280
2 30 100 200
3 35 70 140
Езда по автомати- 4 40 50 100
ческой характе- 5 45 44 88
ристике б 50 40 80
ступень пуска до момента /п1 происходит при последовательном соединении двигателей. Ток поезда равен /п = /п = 190 а. Отложим ординату Оа, равную 190 а, и проведем отрезок аб. При достижении скорости vnl = 11 км/ч двигатели переключаются на последовательнопараллельное соединение. Ток поезда удваивается, и на второй ступени пуска равен: /п = 21п = 380 а. Отложим ординату бв, равную 380 а, и проведем отрезок вг до пересечения с вертикалью, соответствующей моменту /п2 выхода на автоматическую характеристику при полном
напряжении (скорость уп2 = 22,5 км!ч). Дальнейшее построение кривой тока выполним по точкам следующим образом: взяв какой-нибудь момент времени 4, определим по кривой v = f(t), какая скорость достигнута к этому моменту, и затем по скоростной характеристике найдем ток двигателя Ц = 140 а при данной скорости. Умножив этот ток на z' = 2, получим соответствующее скорости = 25 км/ч значение тока поезда 1\ = 2X140 =280 а. Отложив его на ординате, соответствующей времени t19 получим точку Г. Выбрав новый момент времени /2, найдем таким же образом скорость v2 = 30 км/ч (точка 2), ток двигателя /2 = ЮО а и ток поезда Л = 2-100 = 200 а. Отложим ток /2 на ординате, соответствующей t2 (точка 2')‘- Продолжая построение, получим ряд точек (3' — 6') кривой потребления тока. Последняя точка этой кривой (6') соответствует моменту выключения тока, т. е. началу выбега. Соединив все точки (г — 6') плавной линией, получим искомую кривую.
Рис. 126. Построение кривой потребления поездом тока (двухступенчатая перегруппировка с ослаблением поля на каждой ступени)
Наименование V, км/ч I, а Г —г' I, а
. ПусК О-А 1 ступень w 0—12 220 220
оп л I ступень — ai 13,5 190-250 190-250
Пуск . 15,5-25 220 440
II ступень ai 29 190-250 380-500
ОП . II ступень я2 —а2 36,5 190-250 380-500
1 45 200 400
2 50 180 360
Езда по автомати- 3 55 160 320
ческой характери- 4 60 150 300
стике 5 65 135 270
в 70 125 250
На рис. 126 показано построение кривой потребления тока при двухступенчатой перегруппировке тяговых двигателей (рис. 22, схемы 1а и 16) с применением одной позиции ослабления поля — при последовательном соединении двигателей и двух позиций — при последовательно-параллельном. При построении кривой потребления тока на всех позициях ослабленного поля колебания тока от /мин до /макс показаны одинаковыми; линия вг соответствует среднему значению
Рис. 127. Построение кривых потребления поездом тока
тока. Последующее построение — обычное, причем зависимость тока от скорости определяется скоростной характеристикой двигателя на II ступени при ослабленном поле, т. е. v = /(/) при U = const; ОП — а2.
Построение кривых потребления тоха по кривым v=f (/) и t = = (/), построенным графическим методом. Сначала следует построить кривую тока в функции пути Г = f (/). Построение ее аналогично предыдущему, но вместо времени по оси абсцисс отложен путь. Эта кривая показана в верхней части рис. 127. Но для определения расхода энергии нужно построить кривую Г = f(t). С этой целью сносим точки Alf А2, 6 с кривой v = f(l) на кривую t = f(Z), как показано на
рис. 127, и для каждого момента времени (Лх, Л2, Л 6) отложим соответствующую величину тока (/п, 2/п, /ь /2, ..., /6). Получим та-
ким способом ряд точек и, соединив их плавной линией, — кривую I' = f(t).
Построение кривых тока для двигателей смешанного согласного возбуждения. Построение основано на том же принципе, что и при дви» гателях последовательного возбуждения, т. е. на соответствии какой-нибудь точки кривой скорости вполне определенной величины тока якоря согласно характеристике двигателя при каком-либо токе параллельного возбуждения. На рис. 128 даны скоростные характе-
ристики троллейбусного тягового двигателя. Точка В соответствует моменту начала рекуперативного торможения. Ломаная линия В22'С показывает изменение скорости при рекуперации при токах возбуждения /в2 и /в1. Точка С соответствует переходу на механическое или реостатное торможение. На рис. 129 показано построение кривых тока для рассматриваемого тягового двигателя. На кривой движения v =
= /(/), построенной для перегона, показан участок ОА — пуск троллейбуса в ход (средний пусковой ток /п = 200 а), участок А А' — разгон под регулировочным реостатом (при постоянном среднем значении силы тяги Fn = 1800 кГ, т. е. при неавтоматическом пуске) и участок А'В — езда по автоматической характеристике (/в4); участок ВС — рекуперативное торможение (при токе /в2 — участок В2 и при токе /В1 — участок 2С); участок CD — торможение (механическое или реостатное). На рис. 129 построены: I = f(t) — кривая потребления 206
тока в силовой цепи тягового двигателя в период тяги; /в = f(f) — кривая потребления тока в цепи параллельного возбуждения для периода тяги и рекуперации и /р = f(t) — кривая отдачи тока в сеть при рекуперации. Построение кривой потребления тока в силовой цепи аналогично построению кривой Г = f(t), приведенной на рис. 126. При разгоне под регулировочным реостатом показаны колебания тока от ^мин ДО ^макс при переходе с одной характеристики низшей скорости к характеристике наивысшей скорости. Так как на участке АА' средняя величина силы тяги одинакова для всех позиций, то средние значения тока и пределы его колебаний будут неодинаковы. В точке В движение при тяговом режиме прекращается, и двигатель переводит-
Рис. 129. Построение кривых потребления тока с тяговым двигателем смешанного согласного возбуждения
Тяга Рекуперация
Режим точки V, км/ч /, а /в . а точки V, км/ч 'р' а /в » я
Пуск 0—А 0-18 200 3,2 В 1 2 50 41 35 110 80 50 2, 1
Регулирование скорости 19 20,5 24 180-200 190—250 200—325 3,2-2, 1 2, 1 — 1 , 1 1 , 1—0,4
2 3 4 35 28 25 22,5 175 125 80 25 3,2
Езда по автоматической характеристике Д* 1 2 3 4 5—6 25 30 35 40 45 50 280 215 160 125 100 85 0,4 0,4 0,4 0,4 0,4 0,4
ся в режим рекуперативного торможения посредством увеличения возбуждения. Кривая отдачи тока при рекуперации расположена ниже оси абсцисс. В точках 5В (см. рис. 128) происходит переход с возбуждения /в4 на возбуждение /в2. При скорости, определяемой точкой В (50 км/ч), найдем величину тока якоря по этой характеристике двигателя: /в = 110 а. Отложим эту величину в масштабе тока на вертикали в точке В вниз от оси абсцисс (рис. 129, отрезок еВ'). По той же характеристике (см. рис. 128) найдем значения тока /х и /2 для скорости = 41 км/ч и v2 = 35 км/ч. Отложим найденные значения тока /х = 80 а и /2 = 50 а на вертикалях в точках 1 и 2 — отрезки в' 1 и б"2. Переход с характеристики /в2 на характеристику /В1 соответствует горизонтальной линии 2 — 2'. Для скорости 35 км/ч, соответствующей точке 2', по характеристике /В1 находим ток 12 = 175 а (рис. 128). Отложим ток /2 по вертикали в точке 2 (рис. 129) — отрезок в"2' и т. д. для всех последующих точек. Через отложенные точки проводим ломаную линию — кривую отдачи тока в сеть при рекупе-рации /р = f(t).
Для построения кривой потребления тока в цепи параллельного возбуждения выбираем больший масштаб, так как этот ток намного меньше тока*якоря. При пуске поезда ток возбуждения равен 3,2 а\ в период разгона под регулировочными реостатами величина тока уменьшается с 3,2 до 0,4 а. При езде по автоматической характеристике в регулировочном сопротивлении протекает ток 0,4 а. При рекуперативном торможении (участок В2) ток /в2 = 2,1 а, а затем его значение увеличивается до 3,2 а.
Глава XII. МЕТОДЫ ОПРЕДЕЛЕНИЯ РАСХОДА ЭЛЕКТРОЭНЕРГИИ НА ДВИЖЕНИЕ ПОЕЗДА
§ 40. ОПРЕДЕЛЕНИЕ РАСХОДА ЭЛЕКТРОЭНЕРГИИ ПО КРИВЫМ ДВИЖЕНИЯ
Расход электроэнергии иа движение по кривым потребления тока. Электрическая энергия Д, расходуемая на движение поезда за какое-либо время t сек, определяется как:
t
A = I'dt вт-сек, о
где Uc — напряжение на токоприемнике;
Г — ток, потребляемый всеми двигателями; t — время езды под током.
При расчетах обычно принимают напряжение Uc неизменным и равным среднему значению напряжения сети: 550 в для наземного электротранспорта и 750 в для метрополитена. Тогда
t
А = Uc $ I'dt, о
451И км/у
Рис. 130. Определение расхода энергии по кривой потребления поездом тока
№ А/ I с Q = IC Ы
1 4,5 200 900
2 5,3 400 2120
3 3,0 300 900
4 2,5 220 550
5 2,5 192 480
6 2,5 170 425
7 1 .9 153 290
Ис А/ — 5665 а • се к
8 Зак. 1186
209
t
где f Гdt = Q количество электричества в ампер-секундах (кулонах), о
Если кривая потребления тока построена в функции времени, то количество электричества в некотором масштабе изображается площадью, ограниченной кривой Г = f(t) в заданных пределах и осями координат (рис. 130).
Если площадь этой кривой равна S мм2, то количество электричества
t
Q = ^rdt = Smjtnt а-сек, (89)
о
где mi — масштаб тока в а/мм\
mt — масштаб времени в сек!мм.
Измерив каким-либо способом площадь S, например планиметром, можно, пользуясь формулой (89), определить количество электричества, а расход энергии на движение подсчитать по формуле
A = (70Q вт-сек, или А = вт-ч. (90)
0 3600 4 7
Для определения расхода энергии на движение поезда при двигателях смешанного согласного возбуждения (см. рис. 129) необходимо измерить площади: 1) кривой потребления тока в силовой цепи в период тяги I = f(f); 2) кривой потребления тока в цепи параллельного возбуждения при тяге и рекуперации ZB = /(/); 3) кривой отдачи тока в сеть при рекуперации /р = /(/). Обозначив эти площади соответственно через Sc, SB и Sp, количество электричества через Qc, QB и Qp и масштабы тока через тс, /ив, тр а!мм, получим следующую формулу для определения количества электричества:
Q = Qc + Qb—Qp = Smcmt+SmBmt—Stnpmt а-сек. (91)
Очевидно, что в этом случае общий расход энергии на движение поезда также определяется по формуле (90).
Можно определить количество электричества, затраченное на движение поезда, и не определяя площади S. Кривую разбивают на участки, на которых ток изменяется незначительно, и принимают для каждого участка некоторую среднюю величину тока /с- Время А/, затраченное на движение по каждому участку, находят из кривой I = f(t). Тогда количество электричества можно вычислить по формуле
k
Q = ^IcAt а-сек, (92)
1
или Q = Ia A + /с2 A t2 + ... 4- /ск А /к — для поезда с двигателями последовательного возбуждения и Q = 2 Л At + ^ZB —
с At а-сек— для поезда с двигателями смешанного согласного возбуждения.
Экономичность электротранспорта характеризуется удельным расходом энергии на измеритель работы: кило/ньютоно-километр или вагоно-километр. Эти показатели дают возможность сравнивать экономичность различных видов городского электротранспорта. Удельный расход, отнесенный к 1 кн-км, выражает затрату энергии, вызываемую перемещением 1 кн веса поезда на расстояние в 1 км — в среднем за какой-нибудь пробег, например за один рейс или за сутки работы. Второй показатель выражает расход энергии на перемещение единицы подвижного состава (вагона или машины) на расстояние в 1 км. При определении удельного расхода энергии на 1 ваг-км пользуются понятием приведенного 1 ваг-км.
Удельный расход электрической энергии на движение поезда можно определить по формуле
Лу = ~ вт -ч/кн-км, (93)
где L — весь путь, пройденный поездом, в км;
G — вес поезда в кн;
А — количество электроэнергии в вт-ч, израсходованное поездом на всем участке;
Лу — удельный расход электроэнергии в вт-ч на 1 н-км.
Если требуется определить удельный расход энергии при движении многих единиц подвижного состава, например за календарный месяц, то необходимо измерить общий расход энергии на их движение (обычно по счетчикам, установленным на подстанциях) и подсчитать общую сумму кн-км или ваг (маш)-юи, пройденных подвижным составом, а затем применить соответствующие формулы.
Пример 40. Определить расход энергии на движение трамвайного поезда по кривой потребления тока (см. рис. 130). Измерив площадь кривой Г = /(/), находим S = 1120 мм2. Количество электричества определяем по формуле (89): Q = 1120-5 -1 = 5 600 а -сек (здесь масштабы: тока — в 1 мм 5 а, времени — в 1 мм 1 сек). Расход энергии находим при напряжении сети Uc = 550 в [по формуле (90)]: А = 5600 X 550 = 3 080 000 вт-сек, или 856 вт-ч.
Пример 41. Определить количество электричества, затраченное на движение поезда, по кривой потребления тока (см. рис. 130), пользуясь формулой (92). Для этого разбиваем время потребления тока на семь интервалов А/ и находим для каждого из них средний ток /с, а затем и количество электричества. Результаты расчета даны в таблице на рис. 130. Общее количество электричества, затраченное на всем перегоне, Q = 5665 а-сек. При расчете количества электричества по площади кривой Г = f(t) (см. рис. 130) было получено Q = 5600 а -сек, т. е. относительная разница между результатами расчетов по обоим способам составляет 1,2%.
Пример 42. Определить расход энергии на движение троллейбуса (вес ПЗяя при среднем наполнении). Исходные данные: кривые потребления тока в силовой цепи при тяге и в цепи параллельного возбуждения при тяге и рекуперации, а также кривая отдачи тока в сеть при рекуперации. Масштабы: тока в силовой цепи тс в 1 мм 5 а, тока возбуждения тв в 1 мм 0,1 а, тока рекуперации znp в 1 мм 5 а и времени t в 1 м 0,5 сек. Для определения расхода тока подсчитаем площади всех трех кривых тока: Sc = 1800 мм2, SB = 610 мм2; Sp = 85 мм2. Количество электричества определяем по формуле (89): Qc = 1800X5X0,5= 4500 а-сек, QB= = 610X0,1 X 0,5 = 30,5 а-сек и Qp = 85Х 5X0,5 = 221,5 а»сек. Общее количество электричества, потребляемое из сети, равно: Q = 4500 + 30,5 — 221,5 =
= 4309 а-сек. Расход энергии на движение троллейбуса: А = 4309X550 = 658
= 2,37-10е вт-сек или 658 вт-ч. Удельный расход энергии Лу = 113.95 = = 11,8 вт- ч/кн-км, где 0,5 — длина перегона в км.
Графический способ определения расхода энергии на движение поезда. Исходными данными для этого способа являются: кривая в функции пути v = f(l) и кривая потребляемого поездом тока в зависимости от скорости Г = f(v) (рис. 131). Расход энергии на любом участке пути длиной А/ равен:
Рис. 131. Графический способ определения расхода энергии на движение поезда
АЛ = Uc Ic Ы,
где /с — средний ток, потребляемый поездом на участке AZ, соответствующий среднему значению скорости vc. Заменив величину А/ ее значением из формулы (74'), получим:
АД = U(. 1С с с Ус
или
Д^ Ic UQ • / I \
3,6Д/ — vc 1
Из графического построения (см. рис. 131) следует: поскольку прямоугольные треугольники Оа! и О'а'Г подобны и tg р = tg р', то
ЬАт. Iс mv
----L = -L-L. (П)
Д/тл vc mI
Разделив формулу (I) на формулу (II) и сократив все пере-менные величины, получим тА и /и,
= —• <94)
О j О /72^ ZTZp
Следовательно, произвольно можно выбрать только три масштаба из четырех.
Пример 43. Выбираем масштабы: расхода энергии тА — 36 000 вт-сек в 1 мм, или 10 вт-ч в 1 мм, пути mi — 2 м в 1 мм и скорости mv — 0,4 км/ч в 1 мм. Масштаб тока определяем в соответствии с формулой (94):
Рис. 132. Определение работы, совершаемой тяговыми двигателями, по кривой F = f (/) (см. табл. 9, графы 1 и 2)
Период движения V, км/ч F, н
Пуск (ОЛ^г) Автоматическая характеристика 0—27 28 000
1 30 18 750
2 35 10 000
3 38 8 000
36000-0,4 mi~ 550-3,6-2
3,63 а/мм.
В левой части рис. 131 располагаем кривую тока Г = f(v),
а в правой — кривую движе-
ния v = f(l). На кривой Г = f(v) отмечаем точки 1—8 средних значений тока /С1 — /с8 для средних скоростей движения усх — ис8 на участках пути Д/х — Д/8. В эти точки из начала координат О проводим лучи 1—8. Параллельно каждому лучу на диаграмме кривой движения проводим прямые в границах соответствующих приращений пути Д/. Так, например, из точки О' проводим прямую О' Г, параллельную лучу /; затем из точки Г проводим прямую Г 2' параллельно лучу 2, из точки 2' прямую 2'5' параллельно лучу 5' и т. д., как показано на рис. 131. Отрезки ДЛХ — ДЛ8 представляют собой расход энергии на каждом
участке, а А = 2ДЛ = ДЛХ + ДЛ2 + ... + ДЛ8 — общий расход энергии. 1
Из построенной кривой Л = /(/) следует, что расход энергии на движение поезда составляет 575 em-ч. Если бы за периодом выбега (участок В Г) был бы опять период тяги (участок ГД — повторное включение), то на участке, соответствующем выбегу, надо провести горизонтальную линию 8'9 (показана пунктиром), а затем, начиная от точки 9, продолжать дальнейшее построение кривой Л = f(l)
до вторичного момента выключения тока.
Определение работы, совершенной тяговыми двигателями поезда по кривой — сила тяги в функции пути. На кривой движения (рис. 132) построена кривая F = f(l). Эту кривую строят по данным тяговой характеристики F = f(v) или электромеханической характеристики двигателя Fo = f(l) и кривой движения v = f(l). Работа А, совершенная тяговыми двигателями на пути I м, может быть выражена интегралом i
Лд = f Fdl. Интеграл определяется площадью S мм2, заключенной о
между кривой F = f(l) и осями координат. Следовательно:
A = SmFtnl нм, (95)
где trip — масштаб силы тяги в н!мм, т1 — масштаб пути в м/мм. Отношение работы, совершенной тяговыми двигателями за период тяги, к энергии, потребляемой ими из сети, представляет собой среднее значение к. п. д. экипажа за все время его работы
i
Пп.с=-Л-------- <96>
uc$idt о
Пример 44. Определить работу, совершенную тяговыми двигателями поезда МТВ, по кривой F = /(/) (рис. 132). Измерив площадь кривой F = /(/), находим 5 = 775 мм2. Работа, совершенная тяговыми двигателями, будет равна: Лд = = 775-800-2 = 1 240 000 вт-сек [формула (95)], где тр = 800 н/мм, а /и/ = = 2 м!мм, следовательно, в 1 мм2 содержится 800-2 = 1600 нм.
§ 41. ОПРЕДЕЛЕНИЕ РАСХОДА ЭЛЕКТРОЭНЕРГИИ АНАЛИТИЧЕСКИМ МЕТОДОМ
Методом, изложенным в предыдущем параграфе, можно определить только суммарный расход энергии за движение поезда. Недостатки этого метода: а) сложность, так как он требует предварительного построения кривых движения; б) невозможность анализировать величину расхода в отношении влияющих на него факторов. Рассматриваемый метод дает представление не только об общем расходе энергии, но и о влиянии на него отдельных факторов. Однако сначала необходимо рассмотреть, из каких элементов состоит расход энергии.
1. Энергия на движение поезда: а) преодоление основного сопротивления движению, дополнительного сопротивления от кривых и от уклонов, потери потенциальной энергии, вызванной торможением на вредных спусках; б) потери в тормозах при нормальных торможениях перед остановками, а также при подтормаживаниях, вызванных особенностями трассы (снижение скорости на пересечениях, узлах, стрелках, кривых) и условиями уличного движения; в) потери в электроприводе (двигателях и редукторах); г) потери в в пусковых и регулировочных сопротивлениях.
2. Энергия на собственные нужды поезда: а) на вспомогательные электрические машины, на питание аппаратов и приборов цепей управления; б) на освещение; в) на отопление; г) на сигнализацию и т. п.
3. Расход энергии в системе электроснабжения: а) на потери в контактной и кабельной сетях постоянного тока; б) на потери в преобразовательных агрегатах тяговых подстанций; в) на собственные нужды тяговых подстанций.
Энергия, идущая на движение поезда, и энергия, расходуемая на его собственные нужды, вместе составляют расход энергии, отнесен
ной к токоприемнику. Этот расход находят тяговым расчетом. Определение расхода энергии в системе электроснабжения является задачей электрического расчета системы. В первом приближении этот расход может быть учтен ориентировочным к. п. д. системы питания. Энергия, расходуемая на движение поезда, составляет основную часть (не менее 70—80%) всей энергии, потребляемой электрифицированным транспортом.
Найдем прежде всего выражение для определения работы тяговых двигателей. Эта работа, совершаемая за период тяги, равна сумме работ, затрачиваемых на преодоление сопротивления движению поезда и на накопление в нем кинетической энергии, и может быть выражена так:
/» 2
/ mv
Лд = 2б(^о+0Л/4—y
О
(I)
где // — путь, пройденный под током;
— скорость в момент выключения тяговых двигателей.
После выключения тяговых двигателей за время выбега скорость поезда снижается с величины vB до скорости начала торможения vT, вследствие чего за счет уменьшения кинетической энергии поезда преодолевается сопротивление движению на пути выбега /в. Очевидно, что уравнение энергетического баланса за период выбега можно выразить так:
^-^ = 2с(ш0-н)Д/. (П)
о
Подставляя в (I) значение величины vB из (II), получим z/ + zb mv2
лд= 2 (по
о
Кинетическая энергия поезда в момент начала торможения равна сумме энергий, затраченных в тормозах Ат и на преодоление сопротивления движению, т. е.
2
—L = AT + ^G(w0+i)M. (IV)
о
Подставив это значение в (III), получим
L
Лд = ^G (wQ + i) А/ + Лт, о
так как G + /в + /т = L (длина перегона).
Из анализа формул (I)—(IV) следует, что работа тяговых двигателей равна сумме работ, затраченных на преодоление сопротивления движению:
L
о
и на потери энергии в тормозах при остановке поезда
лт=^-2о(^о+ОД/. о
Потери энергии в тормозах равны кинетической энергии поезда в момент начала торможения за вычетом работы сил сопротивления движению на тормозном пути ZT.
Для того чтобы получить общий расход энергии на движение поезда, следует учесть еще потери в пусковом сопротивлении. Как было установлено ранее (см. пусковые диаграммы на рис. 26), потери энергии в пусковых сопротивлениях
Лп kn Лд kn
4- 2 G К + 0 А/ о
(V)
где Лд — полезная работа тяговых двигателей за период пуска, равная кинетической энергии в момент окончания пуска поезда (при пусковой скорости цп), плюс работа сил сопротивления движению на пусковом пути /п; kn — коэффициент пуска.
Для упрощения расчета введем в формулы (I)—(V) вместо переменной величины i величину эквивалентного уклона гэ и заменим удельное основное сопротивление о>0, величина которой зависит от скорости поезда, некоторым средним значением сопротивления движению оу0.с за соответствующий период движения. Скорость поезда будем подставлять в эти формулы в м/сек, вес — в кн, а приведенную массу — в кг. С учетом сделанных допущений получим формулы для определения отдельных составляющих расхода энергии на движение поезда по перегону.
Работа, затрачиваемая на преодоление сопротивления движению на перегоне, равна:
Aw = G(w0. c+iQ)L нм(нм=кн-н/кн*м=дж). (96)
Энергия, затрачиваемая в тормозах при полной остановке поезда (без применения рекуперации):
9 2 2
mv mvz vz
AT = -~— G(w0. c + i3)/T = — ---------G(^o.c + i9)~— нм, (97)
Z Z Z6Z<p
v2
где lT = —- (движение равнозамедленное).
2flT
Энергия, расходуемая в пусковом сопротивлении:
2
/пи„
- |- G (шо. с + i8)
mvn On 1
—\нм, (98)
Z J
= йп
где /п = —— (движение равноускоренное).
2ап
Общий расход энергии на движение будет равен сумме отдельных составляющих:
A = AW+AT+An. (99)
Если значение работы поезда определяется для целого маршрута общей длины L км, то формула (99) примет вид:
А = Aw + zAT + zATl нм, (100)
где z — число перегонов на данном маршруте.
Учитывая в формуле (99) к. п. д. на ободе движущих колес т]0.с, получим
д Лд' + Лт . вт.сек> или i43 = _J_ (Лт+Лт)вШ‘Ч. (101) По.с 3600 По.с
Имея в виду неизбежные отступления от нормально принятого режима движения (в частности, дополнительные подтормаживания и пуски), следует величину расхода энергии, найденную по формуле (101), увеличить на 5—15% в зависимости от условий движения. Тогда полный расход на движение поезда будет равен:
Лэ = (1,05—1,15)Лэ вт-ч, а удельный расход
Л,=-^- вт'Ч,1кн-км.
7 GL
На величину расхода энергии на собственные нужды влияют многочисленные факторы, например продолжительность пребывания подвижного состава на линии в течение рабочего дня, время года, установленная мощность аппаратуры, средняя длина перегона и т. п. Зная среднюю мощность, расходуемую на собственные нужды, можно определить удельный расход энергии на эти нужды по формуле
где — эксплуатационная скорость в км!ч.
Общий удельный расход энергии, потребляемой поездом с учетом потерь в тяговой сети и тяговых подстанциях, равен:
Л у = Лу"'?4':- »дУ . вт. ч/кн. км> ‘Пт. П ‘Пт. С
где т]т с — к. п. д. тяговой сети; т]т.п — к. п. д. тяговых подстанций.
Пример 45. а) Рассчитать аналитическим способом расход энергии на движение поезда МТВ на перегоне 500 м. Профиль пути — прямой, горизонтальный. Пуск — двухступенчатый, kn = 0,5. Собственный вес поезда 183 кн, коэффициент инерции 1,15, приведенная масса поезда тп = 1,15X 18 650 = 21 448 кг, пусковое ускорение ап = 1,27 м/cei^, пусковая скорость уп = 27 км/ч (7,5 м/сек), тормозная скорость ит = 30 км/ч (8,3 м/сек), тормозное замедление аТ = 1 м/сек2.
Среднее удельное основное сопротивление движению находим их характеристик (см. рис. 49), а именно: для пускового периода при скорости 2/3 ип (18 км/ч) ^о.с = 2,4 н/кн\ для тормозного периода при 2/3 vT (20 км/ч) ш0.с — 2,5 н/кн и для всего периода движения при vx = 29,5 км/ч ад0.с = Ьн/кн. Работу, затраченную на преодоление сопротивления движению, определяем по формуле (96): Aw = = GwOtCL = 183-5-500 = 457 500 нм', энергию, затраченную в тормозах, — по формуле (97):
л 21 448-8,З2 8,32
АТ =-----------— 183-2,5-уу-=725980 нм,
и энергию, затраченную в пусковом сопротивлении, — по формуле (98):
21 448-7,52 7,52 \
----— +183-2,4 0,5 = 305 105 нм.
Общий расход энергии на движение поезда в соответствии с формулой (99) будет равен: А = Aw + Ат + Ап = 1 487 885 нм (em-сек). Принимая общий расход энергии за 100%, для данного примера получаем Aw = 31%; Ап = 21% и Ат = = 48%. Принимая средний к. п. д. на ободе движущих колес т]ОеС = 0,86, определим энергию, потребляемую поездом из сети, по формуле (101):
л 1 / 457 500 + 725 980 \
Лэ = —- --------------------+ 305 105 =480 вт-ч.
3600 \ 0,86 J
Удельный расход энергии на движение на заданном перегоне (0,5 км) составит:
480 у“ 183-0,5
= 5,3 ет-ч/н*км.
б) Этим же методом можно определить расход энергии на движение троллейбуса МТБ. Данные для расчета L = 500 м, профиль горизонтальный. Пуск одноступенчатый (£п = 1). Собственно вес G = 86,3 кн\ ки= 1,12; mn = 1,12X Х8800 = 9856 кг\ ап = 1,3 м/сек2', ип = 18 км/ч (5 м/сек)', an = 1 м/се^\ ит = = 21,6 км/ч (6 м/сек) (без рекуперативного торможения).
Удельное основное сопротивление движению определяем по формуле (32). Так, например, для периода движения при vx = 30 км/ч до0.с = 12 + 0,004 -302= = 15,6 н/кн. Работа, затраченная на преодоление сопротивления движению, определяется по формуле (96): Aw = 86,3-15,6-500 = 673 130 нм (больше, чем для вагона МТВ). Далее расчет выполняется по формулам (97) — (101) аналогично примеру 45а.
Глава XIII. МЕТОДЫ СНИЖЕНИЯ РАСХОДА ЭЛЕКТРОЭНЕРГИИ НА ДВИЖЕНИЕ ПОЕЗДА
§ 42. ОБЩИЕ ПРИНЦИПЫ ЭКОНОМИИ ЭЛЕКТРОЭНЕРГИИ
Электрифицированный транспорт — крупный потребитель электроэнергии. Поэтому даже незначительное снижение расхода энергии имеет существенное значение. Расход электроэнергии на 1 кн-км в зависимости от типа транспорта и профиля пути колеблется в очень широких пределах. Среднее значение удельного расхода в вт-ч!кн-км примерно следующее: троллейбус 12—20, трамвай 4—9; метрополитен 4—6 (удельный расход в вт-ч/т-км будет в 9,81 раза больше). Для отдельных маршрутов тяжелого профиля и некоторых типов подвижного состава может быть и больший удельный расход энергии. Высокий удельный расход энергии на троллейбусе связан с большим удельным сопротивлением. Повышенный удельный расход энергии на метрополитене в сравнении с пригородными железными дорогами объясняется более короткими перегонами и повышенным удельным сопротивлением движению в туннелях.
Величина отдельных составляющих расхода энергии зависит также от типа транспорта. Так, например, в условиях электрической тяги магистральных железных дорог основная часть энергии расходуется на преодоление сопротивления движению и на подтормаживание на вредных спусках и, следовательно, зависит главным образом от скорости движения и профиля пути. Потери в тормозах и пусковые потери из-за большого расстояния между остановками незначительны и составляют в среднем около 10—20% всего расхода энергии. На городском электрическом транспорте, для которого характерны короткие перегоны (300—500 jw), пусковые и тормозные потери, наоборот, очень значительны и составляют 60—80% общего расхода энергии, особенно при высокой скорости начала торможения и при отсутствии рекуперации. Наоборот, на длинных перегонах, особенно с тяжелым профилем, возрастает доля энергии, расходуемая на преодоление сопротивления движению.
Энергия, которую получает поезд из сети во время движения под током, частично расходуется на преодоление сопротивления, частично переходит в потенциальную энергию поезда (при подъемах) и частично превращается в кинетическую энергию. При рекуперации теоретически можно вернуть в сеть почти всю накопленную кинетическую энергию и значительную часть потенциальной, которая иначе была бы потеряна в тормозах. На городском транспорте, где движение сопровождается частыми остановками, возвращение кинетической энергии особенно важно.
Определим ориентировочно процент рекуперируемой кинетической энергии. В момент начала торможения поезд имеет кинетическую энергию
^г.2
к 2
Эта энергия подведена к поезду из сети. Но так как часть энергии затрачивается на потери в двигателях и в передаче, то на сообщение поезду кинетической энергии нужно взять из сети следующее количество энергии:
„,„2
2т]о
Из этой энергии часть будет потеряна, так как рекуперация невозможна до полной остановки.
Обозначив критическую скорость, до которой происходит рекуперация, через ит.к, получим величину энергии, отдаваемой в сеть:
m(VT-VT.K) 4
2
^к. о
Однако при обратной отдаче энергии в сеть часть ее будет снова потеряна, поэтому в действительности сеть получит
Определим отношение отданной энергии в подведенной. Приняв к. п. д. двигателя при тяговом режиме равным к. п. д. при рекуперации, получим
Ьр.к —
Ад. о л'к
9 2
т
Из этой формулы следует, что чем больше скорость начала торможения и чем меньше критическая скорость, тем будет больше доля подведенной энергии, возвращаемая в сеть.
Пример 46. Подсчитаем процент кинетической энергии, возвращенной в сеть при рекуперации, если vT = 40 км/ч'-. 1) с перегруппировкой двигателей ит<к = = 10 км/ч\
402 — Ю2
*р.к = 0,862й—----- 100 = 69,4%;
2) без перегруппировки (тяговый двигатель с низколежащей характеристикой) цт.к = 14 км/ч\ £р.к = 64,6; 3) без перегруппировки (троллейбус) ут#к = 24 км!ч\ йр.к = 45%. Средний к. п. д. принят равным 0,86.
Пример 47. Определим долю рекуперируемой потенциальной энергии. Предположим, что имеется уклон i со средним основным сопротивлением движению w0.с. При движении на подъем каждый кило-ньютон веса поезда испытывает общее удельное сопротивление движению i + ш0.с- Если длина подъема равна /, то работа, затраченная поездом на этом подъеме, будет б(/ + ш0.с)^ а энергия, потребляемая из сети:
Лц = б (/ + ш0. с) I *
По. с
При спуске с уклона могут встретиться два случая: 1) i < w0 — уклон не может действовать на поезд ускоряющим образом; потенциальная энергия подъема не-
посредственно расходуется на преодоление поездом сопротивления движению; излишка энергии, который нужно было бы отдавать в сеть, здесь нет; 2) i > wo — в этом случае на каждый кило-ньютон веса поезда действует ускоряющая сила
— ®о)-
Если скорость движения поезда остается неизменной, то в сеть может быть возвращена энергия Лп.о = G(i — иуо.с)^1о.с- Определим отношение отданной
Лп о —^0 С 2
энергии к подведенной: = —---------тк г.
р‘п Ап i + w0. с
Из этой формулы следует, что чем больше подъем, тем большая доля подведенной энергии может быть возвращена в сеть.
Подсчитаем процент потенциальной энергии, возвращенной в сеть при рекуперации: на подъеме 2О°/оо и на подъеме 1ОО°/оо. Принимая ку0.с = 5 н/кн, а Ло.с = 0,86, получим:
20___5
п =------- 0,862-100 = 44% (на подъеме 20°/оо) и
20 -f- 5
^Р-н= uvkrl 0,862-100 = 67% (на подъеме ЮО°/оо).
1UU “т“ О
Следовательно, при рекуперации можно возвратить в сеть потенциальную и кинетическую энергии, которые при реостатном торможении теряются в тормозах. Количество рекуперируемой энергии зависит от профиля пути, частоты остановок, критической скорости, скорости начала торможения и ряда других факторов. Применение рекуперативного торможения на городском транспорте зависит от экономических факторов. С одной стороны, рекуперация обеспечивает более или менее значительную экономию энергии, расходуемой для целей тяги; с другой стороны, она вызывает необходимость дополнительных затрат на оборудование подвижного состава и тяговых подстанций. Тяговые подстанции должны иметь специальные устройства для использования этой энергии, например, балластные сопротивления, подключаемые в момент рекуперации к шинам подстанций при помощи быстродействующего реле, или инверторные установки, позволяющие осуществлять обратное преобразование постоянного тока в переменный. Мощность двигателей, выбираемых для рекуперации, приводится устанавливать на 30—35% выше мощности двигателей, предназначенных только для тягового режима.
Расчеты показывают, что рекуперируемая энергия может составлять от 5 до 25—35% общей энергии, расходуемой предприятием. Для городов с легким профилем этот процент значительно ниже и в особенности для двухосного троллейбуса и вагонов без перегруппировки тяговых двигателей. Особую ценность представляет рекуперация в городах с тяжелым профилем, где в сеть возвращается значительная часть потенциальной и кинетической энергии. Преимуществом рекуперации является возможность некоторого сокращения установленной мощности тяговых подстанций, а при сохранении существующей мощности — возможность обслуживания большего количества поездов.
Снижение расхода энергии может быть обеспечено мерами конструктивного и эксплуатационного характера. Остановимся вкратце
на конструктивных мерах. Наибольшее влияние на общий расход энергии оказывает вес подвижного состава. При этом собственный вес составляет 60—70% всего веса поезда. Следовательно, снижая этот вес на 1 %, можно уменьшить общий расход энергии на 0,6—0,7%. Поэтому при конструировании новых типов подвижного состава необходимо стремиться к всемерному их облегчению. Изменив и улучшив конструкции отдельных элементов подвижного состава и пути, можно значительно уменьшить величину основного сопротивления движению, например, за счет перехода от подшипников скольжения к подшипникам качения, за счет придания вагону большей обтекаемости, более совершенной конструкции и технологии изготовления тяговых двигателей и редукторов, увеличения жесткости пути, а для рельсового транспорта — также и уменьшения числа стыков, смягчения продольного профиля (путем уменьшения величины уклонов), увеличения радиусов закруглений пути и т. п.
Весьма важную роль в снижении расхода энергии играет правильная организация эксплуатации транспорта. За счет эксплуатационных мероприятий могут быть снижены: а) основное удельное сопротивление движению — путем поддержания в хорошем техническом состоянии подвижного состава и путевого хозяйства (в соответствии с ПТЭ); б) сопротивление от кривых посредством качественного содержания рельсового пути; в) потери в тормозах на вредных спусках — установлением наиболее правильного режима вождения подвижного состава; г) потери в пусковых сопротивлениях и тормозных устройствах — устранением лишних пусков, торможений, подтормаживаний, а также другими мерами наиболее рационального режима вождения поезда на линии.
§ 43. ВЛИЯНИЕ ОСНОВНОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ НА РАСХОД ЭЛЕКТРОЭНЕРГИИ
Работа, совершаемая тяговыми двигателями по преодолению сопротивления движению поезда, составляет значительную часть всей их работы. Поэтому величина основного удельного сопротивления движению оказывает большое влияние на значение потребляемой из сети энергии. Чем меньше сопротивление движению, тем меньше расход энергии. Величина сопротивления движению для подвижного состава данного типа определяется его техническим состоянием и состоянием путевого хозяйства. Для снижения сопротивления движению необходим тщательный уход за подвижным составом и рельсовыми путями или дорогами. По опытным данным, при удовлетворительном состоянии подвижного состава, рельсового пути или дороги величина основного удельного сопротивления движению при низких скоростях не должна превышать для моторных вагонов 3,9—4,1 н/кн цля троллейбусов 10—12 н/кн (меньшие цифры относятся к летним, а большие — к зимним условиям). При плохом состоянии подвижного состава и пути основное удельное сопротивление может возрасти до 20—30 н/кн для вагонов и до 50—60 н/кн &ля троллейбусов. В настоя
щее время принято регулярно проверять величину удельного сопротивления движению подвижного состава. Для такой профилактической проверки вполне достаточно определять основное удельное сопротивление при низких скоростях (5—8 км/ч). В этом случае не учитывают скоростную прибавку cv2 (см. эмпирические формулы, стр. 82), так как при небольших скоростях движения величина ее незначительна [например, при v = 5 км/ч cv2 = 0,1 н/кн см. для троллейбуса формулу (32)]. В результате измерения получают величину, приблизительно равную коэффициенту а, т. е. формула принимает вид: wQ
а н/кн*. Величина этого коэффициента в основном характеризует сопротивление движению, зависящее от конструкции и состояния подвижного состава. Величина основного удельного сопротивления движению для вагонов и троллейбусов одного и того же типа является показателем не только расхода энергии, но и качественного состояния подвижного состава.
Способы определения основного сопротивления движению основаны на применении уравнения движения поезда. Определение сопротивления движению при тяговом режиме значительно сложнее и менее точно, чем при выбеге. При тяговом режиме наиболее простым является метод установившегося тока. Однако в экспериментальных условиях сложно получить режим равномерного движения при различных скоростях. Кроме того, при тяговом режиме необходимо пользоваться электромеханическими характеристиками двигателя, которые могут отличаться от характеристик двигателей поезда, подлежащего испытанию.
Метод выбега. Испытания проводятся на горизонтальном участке или с небольшим и постоянным по величине уклоном (до2°/00). Величина удельного сопротивления определяется по формуле
w0 = 102 kH — ± н/кн. (а)
dt
Для упрощения расчетов в условиях депо при малых скоростях движение поезда в период выбега принимают равномерно замедленным, и удельное сопротивление движению относят к средней скорости за данный период. При равномерно замедленном движении замедление можно выразить формулой
где I — путь, пройденный при выбеге, в м; t — время движения в сек; а — замедление в м/сек2. Подставив в формулу (а) значение а из формулы (б), получим
1^0. с = —yfo1- н/кн. (102)
• Для вагонов трамвая а « 3—4 н/кн в зависимости от типа поезда [см. формулы (29) и (30)], а для троллейбусов а = 12 н/кн [см. формулу (32)].
Практически измерение осуществляют так: выбирают прямолинейный и горизонтальный участок пути для вагонов или горизонтальный для троллейбусов, сообщают на нем поезду некоторый разгон под током и затем, выключив ток, определяют секундомером время выбега до полной остановки и пройденный при выбеге путь I (рис. 133). Подставив в формулу (102) измеренные величины I и /, подсчитывают среднее удельное сопротивление движению испытываемого поезда. Если подсчитанная величина сопротивления движению окажется больше нормированного значения, принятого для данного типа подвижного
и
I ----------1_______________________________________
2 4 6 8 10 и т.д.
» | ---------------------------------------
I
I 1*50м___________
Участок 1=0"/». прямое
Рис. 133. Определение удельного сопротивления движению методом выбега /—момент начала разбега; // — момент включения секундомера при выбеге; /// — момент остановки вагона и секундомера
состава, то техническое состояние его признают неудовлетворительным. Такой подвижной состав требует осмотра и ремонта. Метод выбега получил наибольшее применение для контроля технического состояния подвижного состава в депо или парке.
Пример 48. На горизонтальном участке пути при замере удельного сопротивления движения поезда МТВ (£п = 1,15) путь, пройденный выбегом, I = = 44 м (см. рис. 133), а время t = 17 сек. Пользуясь формулой (102), найдем 204.1,15-44
ш’о.с =---—------ =3,6 н/кн < пуОфН = 3,9 н/кн (допустимого по нормам).
Аналогично замеряется ^удельное сопротивление движению троллейбуса.
Для определения основного удельного сопротивления поездов любого типа можно применить метод выбега, основанный на замерах начальной и конечной скорости движения при выбеге на специально оборудованном контрольном участке контактной сети с применением электромагнитных реле и электрического секундомера [81. Принципиальная схема для измерения удельного сопротивления движению рельсового транспорта приведена на рис. 134. Эта же схема применима и для троллейбусного транспорта, причем роль рельсовой сети выполняет отрицательный контактный провод. В начале и в конце контрольного участка АВ устанавливаются контактные салазки I и II (длиной 4 и Z2), соединенные проводами с катушками электромагнитных реле. Блок-контакты реле включены в цепь переменного тока и производят включение и выключение электрического секундомера. В процессе движения поезда выбегом в момент соприкосновения токоприемника
вагона с контактными салазками А включается секундомер, который работает до тех пор, пока токоприемник не разомкнет цепь питания катушки реле. В этот момент секундомер отметит время движения 4 поезда на первом контактном участке Точно так же секундомером фиксируется время движения t2 поезда на втором участке /2. По данным показаний электрического секундомера, для первого и второго участков определяется скорость поезда в начале и конце контрольного участка и у2. Величина удельного основного сопротивления определяется из уравнения движения поезда для режима выбега через разность
Рис. 134. Принципиальная схема для измерения удельного сопротивления движению
Л и В—контактные участки;
1 и 2—электромагнитные реле; 3—электрические часы
кинетических энергий на первом и втором участках по формуле (78'), которая для режима выбега в удельном виде запишется так:
(»«±
откуда находим
3,9 ( 2 2\ -г- / , \
wQ= ^1—Wi—wh (н/кн).
(103)
Для точных замеров целесообразно применять секундомер, обеспечивающий измерение с точностью до 0,001 сек, и электромагитные реле с собственным временем включения цепи переменного тока 0,001 сек. Контрольный участок, в зависимости от его назначения, может быть оборудован на линии или в депо. Профиль пути на контрольном участке — прямой участок горизонтальный или с уклоном не более 2—30/00-Длина контрольного и контактных участков выбирается в зависимости от типа поезда и скорости движения. Скорость поезда в моменты I и II определяется по формуле
3,63,6, Z2 v1 =---- и v2 = —— км/ч.
tx t2
Пример 49. Методом выбега на контрольном участке длиной I = 40~лГ(пря-мой с подъемом в 1°/Оо) с контактными участками Zx = Z2 = 2 м при замене сопротивления движению поезда МТВ (&и = 1,15) были получены показания секундомеров: tr = 20 сек, t2 = 0,209 сек. Следовательно, скорости поезда в моменты I и II равны:
3,6-2
Vj = -Q — 36 км/ч
3,6-2
vji = = 35 км/ч,
11 0,209 '
а удельное основное сопротивление движению поезда [формула (103)]
3,9-1,15
wQ = ~ --— (362 — 352) —1 = 7,2 н/кн.
40
Метод установившегося тока. На участке пути, предназначенном для замеров сопротивления движению, испытываемый поезд должен достигнуть установившегося режима. При установившемся режиме движения сила тяги поезда равна сопротивлению движения F = W.
Рис. 135. Принципиальные схемы для замера удельного сопротивления движению методом установившегося тока
а —схема питания участка от контактной сети через реостат (для рельсового транспорта); б —то же, для безрельсового; о—схема питания от двигателя-генератора
При достижении установившейся скорости измеряют потребляемый поездом ток I. Пользуясь электромеханическими характеристиками, находят силу тяги F, а затем, зная вес поезда, определяют величину W
w = -Q-. При испытании поезда на линии необходимо иметь достаточно длинные прямые участки пути, на которых возможно достижение установившейся скорости. Поэтому испытания должны проводиться на специально оборудованном участке (рис. 135) длиной от 30 до 60 м и при пониженном напряжении 50—200 в, в зависимости от схемы соединения и числа тяговых двигателей поезда. Контактный провод на этом участке секционируют (отсоединяют изоляторами от соседних участков) и подводят к нему напряжение от контактной сети через специальный реостат (схема а для рельсового транспорта и схема б для безрельсового), или от генератора постоянного тока (схема в), или от выпрямителя, питаемого от сети переменного тока. В цепь питания секционированного участка контактной сети включен амперметр для измерения потребляемого тока, помещаемый на испытательном стенде. Благодаря пониженному напряжению установившаяся скорость испытываемого поезда невелика и поэтому достаточно короткого пути для ее достижения. Испытатель наблюдает за режимом движения поезда по амперметру. Когда стрелка амперметра перестает перемещаться, ток, потребляемый поездом, фиксируют, и по заранее подготовленным
таблицам находят величину удельного сопротивления. Преимущества метода: большая пропускная способность, экономия энергии (замеры можно проводить при выпуске поездов на линию). Однако на точность измерения могут оказать значительное влияние: неодинаковость электрического сопротивления и электромеханических характеристик
Рис. 136. Электротяговые характеристики двигателя ДК-255Б при различных напряжениях
тяговых двигателей и диаметров колес. При использовании данного метода необходимо иметь характеристики Fo = f(J) для напряжения, применяемого при испытании.
Пример 50. На рис. 136 даны электромеханические характеристики тягового двигателя ДК-255Б для различных напряжений, а на рис. 137 — тяговая характеристика для напряжения 50 в и характеристика основного сопротивления движению w0 = f(v). Как видно из рис. 137, установившаяся скорость поезда на прямом и горизонтальном участке равна 12,5 км/ч (точка В). На I ступени соединения двигателей, имеющих напряжение по 50 в, напряжение в сети установки
должно быть равно 200 в. Если, например, при испытании вагона МТВ установившийся ток будет равен 25 а, то, пользуясь характеристикой Fo = f(I), найдем Fq = 19 кГ (186 кн), а сила тяги поезда F = 4-186 = 744 н. При равномерном движении сила тяги поезда равна сопротивлению движения (F = W), следовательно
744
где 183 кн — собственный вес поезда.
Метод непосредственного измерения. Сущность метода состоит в том, что поезду сообщается равномерное движение путем воздействия на него постоянной внешней силы. Для этого можно использовать лебедки с
Рис. 137. Тяговая характеристика двигателя ДК-255Б при U = 50 в и кривая движения v = f(l)
ручным или электрическим приводом, аккумуляторную тягу или вагон-лабораторию. Во всех случаях сила тяги измеряется динамометром, который при равномерном движении вагона или троллейбуса показывает величину, равную сопротивлению движения.
§ 44. ВЛИЯНИЕ ТЯГОВЫХ И ТОРМОЗНЫХ ПАРАМЕТРОВ И ДРУГИХ ФАКТОРОВ НА РЕЖИМ ДВИЖЕНИЯ ПОЕЗДА
Режим движения поезда по данному перегону определяется: 1) тяговыми и тормозными параметрами подвижного состава — типом поезда, типом тягового двигателя (часовой мощностью и электромеханическими характеристиками), системой управления (непосредственная, косвенная — автоматическая или неавтоматическая), тормозными средствами поезда, способом вождения — в период пуска и езды по автоматической характеристике; 2) продолжительностью выбега при подходе к остановочному пункту, которая определяется скоростью и в момент начала торможения и тормозным замедлением; 3) трассой маршрута (продольный и поперечный профиль, длина перегонов).
При рассмотрении влияния этих факторов возможны два случая: а) поезд имеет заданное электрическое тяговое оборудование; б) электрическое тяговое оборудование может быть выбрано в зависимости от наиболее рационального режима вождения поезда.
Режим езды обусловливает величину ходовой скорости и расход электроэнергии. Влияние основных тяговых параметров и способа вождения поезда на ходовую скорость и расход электроэнергии следует анализировать раздельно. Необходимо выявить: 1) как изменяется ходовая скорость vx, поскольку это будет вызывать соответствующее изменение расхода электроэнергии. При всех возможных диаграммах движения v = f(t) площадь S, ограниченная кривой движения, будет одинаковой, так как L = const; 2) как изменяется расход электроэнергии при постоянной ходовой скорости, т. е. при vx = const. В этом случае при всех возможных диаграммах движения будут одинаковыми не только площади S, но и ходовое время tx.
Рис. 138. Влияние пускового ускорения
а —на ходовую скорость; б — на расход энергии при =const; / — кривая движения при ускорении ап1‘ //-тоже, при аП2-Г, //' — кривые потребления тока /' = f (/)
Рассмотрим влияние способа вождения поезда и его параметров на ходовую скорость и расход энергии при заданном типе поезда и заданной длине перегона.
Влияние пускового ускорения. Для одного и того же поезда различные пусковые ускорения можно получить изменением режима пуска. При системе непосредственного управления помимо нормального может быть ускоренный или замедленный пуск, если водитель не будет соблюдать определенный темп перевода контроллера на очередную позицию (см. пусковые диаграммы, рис. 73). При автоматической системе косвенного управления (например, при управлении вагоном РВЗ) на горизонтальном прямом участке, в зависимости от положения главной рукоятки контроллера управления, пусковое ускорение изменяется от 0,4 до 1,55 м/сек2. Кроме того, пусковой режим для данного типа и тягового двигателя можно изменить за счет пускового тока (пусковой мощности), меняя величину пусковых сопротивлений. При различных
пусковых токах будут другие пусковые диаграммы, различные пусковые силы тяги, а следовательно, и пусковые ускорения.
Рассмотрим влияние величины пускового ускорения на ходовую скорость и расход электроэнергии. При изменении величины пускового ускорения одновременно меняется и пусковая скорость (рис. 138, а)\ ап1 > ап2» uni < ип2- Большее ускорение может быть получено при большей силе тяги и, следовательно, при большем пусковом токе. Так как ап1 > ап2, то /П1 > /п2. При неодинаковых пусковых токах будут разными скорости выхода на автоматическую характеристику: ип1 <;
Рис. 139. Влияние пускового ускорения на ходовую скорость при уп1 =
Уп2
I и II — кривые движения поезда
< ип2. Различные пусковые ускорения при одинаковой пусковой скорости — ап1 > ап2 и vnl = ип2 (рис. 139) и одном типе тяговых электродвигателей можно получить лишь для поездов с неодинаковыми диаметрами движущих колес или неодинаковыми передаточными числами. Площади, ограниченные кривыми / и II (см. рис. 138—139), одинаковы, так как соответствуют одинаковому перегону. Поэтому заштрихованные на рисунках площадки также должны быть равны.
На рис. 138, а можно установить влияние пускового ускорения на ходовую скорость при одной и той же скорости начала торможения и тормозном замедлении. Очевидно, что чем больше ускорение, тем меньше ходовое время и больше ходовая скорость (ап1 > ап2; /Х1 < ^х2> ^х1 >
Влияние пускового ускорения на расход электроэнергии можно установить из рис. 138, б, где показаны диаграммы движения при одинаковых значениях ходовой скорости и кривые потребления тока для двух различных пусковых ускорений. Как видно из рисунка, при большем ускорении уменьшается время езды под током (/д < ti2), а следовательно, увеличивается продолжительность выбега и уменьшается тормозная скорость от ит2 до ит1. Поэтому при более высоком ускорении уменьшаются потери в тормозах пропорционально квадрату тормозной скорости [формула (97)1. Кроме того, экономия энергии происходит и за счет снижения пусковых потерь, пропорционально полезной работе, совершенной двигателями за период пуска. Эта полезная работа снижается из-за уменьшения пусковой скорости, а следователь
но, и кинетической энергии, а также из-за уменьшения пускового пути, а следовательно, и работы сил сопротивления движению [формула (96)1. В случае, указанном на рис. 138, а, расход энергии снижается только за счет пусковых потерь, так как vT1 = ит2, a vnl < ип2.
Таким образом, увеличение пускового ускорения безусловно выгодно с точки зрения экономии электроэнергии на движение поезда и увеличения ходовой скорости. В то же время повышение ускорения увеличивает нагрузку тяговых двигателей и тяговых аппаратов, а
Рис. 140. Зависимость удельного расхода энергии от пускового ускорения Ау = f (ап) при vx = const
/ — поезд MTB, L=580 м, G=226 кн, ат=0,9 м/сек2;
2 —поезд 6Л/ (тип D), L=] 200 м, G= 2 200 кн, ат = 1 м/сек1
также тяговых сетей и подстанций и в некоторых случаях вызывает необходимость применения тяговых двигателей большей часовой мощности. Кроме того, при повышении пускового тока снижается к. п. д. двигателя и увеличиваются потери энергии в нем. Поэтому повышать пусковое ускорение целесообразно лишь до известного предела. Относительная выгода, которую может дать повышение пускового ускорения, уменьшается по мере увеличения длины перегона, так как на длинных перегонах пусковые потери составляют меньшую долю от общего расхода энергии.
Зависимость удельного расхода энергии от величины пускового ускорения приведена на рис. 140. При увеличении ускорения свыше примерно 1,5 м/сек* удельный расход энергии снижается незначительно. Поэтому даже при многоступенчатой системе управления едва ли
целесообразно доводить ускорение выше 1,5—1,8 м1сек2. Если водитель в пусковой период соблюдает определенный темп переключения контроллера, что в общем является для него обязательным (система непосредственного управления), или применяет определенный режим разгона (автоматическая система), то процесс пуска происходит при одном и том же среднем пусковом ускорении. В этом случае режим вождения поезда можно изменять только за счет изменения тормозных параметров. ~~
Влияние скорости начала торможения. Чтобы выяснить сущность этого влияния, рассмотрим движение поезда по перегону с однородным профилем. Если водитель во всех случаях соблюдает один и тот
Рис. 141. Влияние скорости начала торможения на ходовую скорость и расход энергии
I — VI — кривые движения при различных значениях а
же пусковой режим, то разгон поезда на данном перегоне всегда будет происходить по кривым движения, изображенным на рис. 141 (прямая О А и кривая О А'). Эти линии представляют собой диаграмму движения поезда под током в период пуска. В дальнейшем при движении по автоматической характеристике водитель может выключить ток в точке Вг и ехать далее до самой остановки выбегом без торможения. При этом будет наибольший возможный выбег, наибольшее время движения поезда по перегону /Х1 и наименьшая ходовая скорость их1. Чтобы увеличить vx, необходимо применить торможение. Если торможение начинается в момент, когда поезд имеет некоторую скорость vT, то он обладает кинетической энергией, которая и должна быть у него отнята в процессе торможения. При этом отнятая энергия теряется бесполезно, если только не применяется рекуперация. При подходе к остановке водитель может начинать торможение со скорости ит1, ит2, ...,уТ2. Чем больше скорость начала торможения, тем будет более короткий выбег, меньше ходовое время и больше ходовая скорость. Как крайний случай, можно выключить ток в точке В6 — торможение поезда с мо-
мента выключения тока. Выбег в этом случае отсутствует, ходовое время /хб — наименьшее, а ходовая скорость их6 — наибольшая. Во
всех случаях торможение происходит с постоянным замедлением.
На рис. 141 показаны шесть кривых движения поезда v = f(t) hv = и кривая потребления тока / = f(t) для одного и того же перегона. Площади всех кривых движения v = f(t) одинаковы (5Х = = 32 = ... = S5 = S6). Кривая / — режим движения без торможения с выбегом до полной остановки: кривые //—V — с выбегом и тор-
142. Зависимость удель-расхода энергии от времени сообщения
т. е. всего лишь на на 75%. Потери в
можением: ит2 < ит3 < ит4 < ит5; кривая VI — без выбега с торможением при ит6 = ут.макс- Чем больше тормозная скорость итб > ут5 > > ... > ит2 > ит1 = О, тем меньше ходовое время (/х6< /х5 < ... < /х2 < < ^xi), больше ходовая скорость (ихб > > их5 > ... > ух1) и больше расход электроэнергии (Л6 > Д5 > ... > Л^. Как видно из рис. 141, кривой движения / соответствует минимальное время езды под током, а кривой VI — максимальное.
На рис. 142 дана- диаграмма удельного расхода энергии в функции времени сообщения, которую можно разделить на два участка: АВ и ВС. На
участке ВС сокращение времени поезд- Рис. ки по перегону с 123 до 73 сек, т. е. ного на 40%, повышает расход энергии на 45%, а на участке АВ сокращение времени поездки по перегону от 73 до 62,5 сек, 10,5 сек, или 14%, повышает расход энергии
пусковых сопротивлениях во всех случаях движения одинаковы. Работа сил сопротивления движению при увеличении скорости увеличивается незначительно. Потери в тормозах изменяются от нуля — при отсутствии торможения до максимума — при отсутствии выбега, возрастая пропорционально квадрату скорости ут. Наибольшая скорость начала торможения и наибольший расход энергии получается при отсутствии выбега — кривая VI (см. рис. 141).
Влияние тормозного замедления. При одной и той же скорости начала торможения, а следовательно, при одной и той же величине кинетической энергии поезда можно произвести торможение в более или менее короткий промежуток времени, в зависимости от величины тормозного замедления. На рис. 143, а показано влияние тормозного замедления на ходовую скорость при разных ут(ут1 < ит2). Время движения под током, а следовательно, и расход энергии в обоих случаях одинаковый, увеличение тормозного замедления повышает ходовую скорость. На рис. 143, б показано влияние тормозного замедления на режим движения поезда при равных ит(ут1 = ит2). Чем больше величина тормозного замедления, тем при прочих равных условиях боль-
Рис. 143. Влияние тормозного замедления на ходовую скорость
а —при ут1 < уТ2‘, Ь —при Ут1 = ^т2
Рис. 144. Влияние тормозного замедления на расход энергии
Z — при ат 1; // — при аТ2
ше ходовая скорость. Время же движения под током и расход энергии в этом случае хотя и увеличиваются, но весьма незначительно.
При постоянной ходовой скорости с увеличением тормозного замедления уменьшается время езды под током, увеличивается время выбега и уменьшается скорость начала торможения ит1 < ит2 (рис. 144, а), следовательно, снижаются потери в тормозах и расход электроэнергии. Увеличение ат снижает расход энергии в меньшей степени, чем повышение ап.
Зависимость удельного расхода электроэнергии от величины тормозного замедления показана на рис. 145. Как видно из этого рисунка, увеличение ат существенно сказывается на уменьшении расхода энергии лишь до значений 1,5 м/сек2. При ат > > 1,3 4- 1,5 м/сек2 удельный расход энергии снижается незначительно. Следовательно, в отношении расхода электроэнергии целесообразно увеличивать служебное замедление не более чем до 1,5 м/сек2.
Влияние ослабления поля. На рис. 146, а показаны диаграммы движения и кривые потребления тока для двух способов вождения
Рис. 145. Зависимость удельного расхода энергии от величины тормозного замедления
поезда: 1) при полном (нормальньм) поле тяговых двигателей и 2) при ослабленном поле. При пуске поезда обе диаграммы движения совпадают, а при езде по автоматической характеристике диаграмма // расположена выше. На рис. 146, а построены диаграммы движения при различных ходовых скоростях. Из сопоставления диаграмм видно, что ослабление поля дает возможность повысить ходовую скорость. Если же принять, что ходовая скорость остается постоянной, то можно сни-
зить скорость начала торможения и потери в тормозах при неизменных потерях в пусковых сопротивлениях (рис. 146, б). В этом случае ослабление поля вызовет снижение расхода энергии, причем тем значительнее, чем больше степень ослабления поля (кривая III ОП—0,67). Кроме того, ослабленное поле несколько увеличивает средний к. п. д. двигателя. Езда с ослабленным полем целесообразна и не должна применяться лишь на участках очень тяжелого профиля.
Рекуперация энергии. Рассмотрим влияние рекупер ативного торможения на ходовую скорость и расход энергии. На рис. 147 приведены диаграммы движения троллейбуса на
Рис. 146. Влияние ослабления поля
а — на ходовую скорость; б —на расход энергии; / — при полном; II и III — при ослабленном поле (S' = S")
одном и том же перегоне при
четырех различных режимах. Процесс пуска и разгона троллейбуса одинаков для всех случаев и соответствует одной и той же автоматической характеристике. Точка С соответствует началу реостатного торможения. В первом случае (диаграмма а) не применяется рекупе
ративное торможение, время езды подтоком наименьшее, ходовое время наибольшее, а ходовая скорость наименьшая. Влияние продолжительности выбега в этом случае аналогично анализу рис. 141. Во втором случае (диаграмма б) — движение без выбега с рекуперативным тор-
можением — увеличивается время езды под током, уменьшается ходовое время, увеличивается ходовая скорость и некоторое количество энергии (участок ВС) возвращается в сеть. Однако в зависимости от длины перегона и профиля пути общий расход энергии может быть меньшим, равным или большим, чем в первом случае. В третьем случае после момента окончания периода тяги применяется рекуперация
(участок ВСХ), а затем выбег (участок СХС) В четвертом случае наоборот — сначала выбег, а затем рекуперация. Вопрос о целесообразности применения выбега перед рекуперацией следует решать исходя из конкретных условий движения. Можно привести лишь общее соображение, что чем короче перегон, тем меньше путь, проходимый при выбеге. На подъемах и безвредных спусках при скоростях, близких к макси-
Рис. 147. Кривые движения и кривые потребления тока при различных режимах вождения поезда
а — с выбегом ВС без рекуперации; б — с рекуперацией ВС без выбега; в —с рекуперацией BCi и выбегом Ct С; г—с выбегом ВС' и рекуперацией С’С; / — кривая движения; II — кривая потребления тока
мальной, безусловно целесообразно пользоваться выбегом; наоборот, на вредных спусках более выгодно сразу после разгона переходить к рекуперативному подтормаживанию.
На рис. 148 приведены данные, полученные при испытании троллейбуса МТВ в г. Киеве для определения расхода электроэнергии. В нижней части рисунка показан продольный профиль маршрута (отметки профиля в м, величина уклона в °/00 и соответствующая длина участка в м и места остановок). В верхней части рисунка изображены: 1) кривые потребления тока из сети I = 2) кривые возврата тока
в сеть при рекуперации /р = /(/); 3) кривые движения v = f(l) и 4) кривая изменения величины напряжения сети. Удельный расход энергии на движение на данном маршруте составил 14 вт-ч на 1 н-км, а доля рекуперации около 4°/00.
Влияние пусковой скорости. Диаграммы движения I и II, приведенные на рис. 149, соответствуют различным электромеханическим
to
ОЭ
Рис. 148. Данные испытания троллейбуса МТБ (в г. Киеве)
характеристикам на ободе движущих колес, т. е. при одном типе тягового электродвигателя соответствуют различным диаметрам колеса или передаточным числам, так как при одинаковых характеристиках на ободе различные пусковые скорости могут быть получены только при разных пусковых ускорениях. Кроме того, такие же диаграммы можно получить для двух разных типов двигателей при одном и том же редукторе и диаметре движущего колеса. Зависимость ходовой ско
рости от пусковой показана на рис
Рис. 149. Влияние пусковой скорости а — на ходовую скорость; б —на расход энергии
149, а. Из этого рисунка следует, что чем больше скорость выхода на автоматическую характеристику (пусковая скорость оп2, момент окончания пуска— точка А2), тем меньше ходовое время и больше ходовая скорость vx при одном и том иже пусковом ускорении.
Рис. 150. Зависимость удельного расхода энергии от величины пусковой сиорости
Изменение расхода электроэнергии в зависимости от скорости выхода на автоматическую характеристику показано на рис. 149, б (при равных ап и ат vx = const). Как видно из этого рисунка, при увеличении оп снижается скорость начала торможения. Следовательно, потери в пусковых сопротивлениях растут [формула (98)1, а потери в тормозах уменьшаются [формула (97)1. Так как те и другие потери пропорциональны квадратам соответствующих скоростей, то при большой скорости от и малой скорости vD будут преобладать потери в тормозах, а увеличение гт с одновременным уменьшением вызовет снижение суммарных потерь. Однако при дальнейшем увеличении vn начнут быстро расти потери в сопротивлениях, а потери в тормозах будут снижаться медленнее. В результате суммарные потери будут увеличиваться. Имеется некоторое значение vn (и соответственно от), при котором удельный расход энергии будет минимальным. На рис. 150 дана зависимость удельного расхода энергии от величин пусковой скорости. Ско
рость^п.о является наивыгоднейшей (оптимальной) с точки зрения расхода энергии на движение поезда. Если бы ходовая скорость повышалась без увеличения пусковой скорости, то снижались бы только потери в тормозах и пусковые потери не возрастали бы. Тогда повышение быстроходности тяговых двигателей приводило бы к сокращению расхода энергии. Тяговые двигатели с низколежащей характеристикой (12—15 км/ч) при полном поле в период пуска имеют сравнительно небольшую пусковую скорость, а при ослаблении поля (до 30%) обеспечивают достижение высоких максимальных скоростей.
Рис. 151. Влияние длины перегона на режим движения поезда
Параметры Длина перегона в jm
300 | 500 | 700 1000
Ходовое время /х, сек ........... 40,5 67 83 104,5
Ходовая скорость их, км/ч 26,6 26,9 30 34,5
Расход энергии А, вт>ч 453 650 770 970
Удельный расход энергии Ау, вт-ч/кн^км 58 5 4,2 3,8
Тяговые двигатели с нормальной (высоколежащей) характеристикой при полном поле для одного и того же типа поезда и том же перегоне будут иметь диаграмму движения, соответствующую большей ходовой скорости (см. рис. 149, а, /). При одинаковой ходовой скорости (см. рис. 149, б, //) в зависимости от соотношения величины пусковых скоростей поезд с быстроходными тяговыми двигателями может иметь меньший общий удельный расход энергии за счет снижения скорости начала торможения.
Влияние передаточного числа и диаметра колеса. Изменение передаточного числа редуктора или диаметра движущего колеса при заданном типе двигателя приводит: 1) при заданной пусковой мощности, а следовательно, при том же пусковом токе — к изменению пусковой скорости и оказывает на ходовую скорость и расход энергии влияние,
аналогичное рассмотренному в диаграмме рис. 149; 2) при разных пусковых мощностях, а следовательно, и разных пусковых токах — к изменению величины пускового ускорения.
Влияние длины перегона. На рис. 151 показаны четыре диаграммы движения и кривые потребления тока для одного и того же поезда на четырех перегонах в 300, 500, 700 и 1000 м. Скорость начала торможения и тормозные замедления одинаковы для всех перегонов. Чем больше длина перегона, тем больше ходовая скорость и общий расход энер-
Рис. 152. Влияние состава поезда на режим его движения
Параметры
Количество вагонов в поезде
один два три
Вес поезда G, т...............
Ходовое время /х, сек ........
Ходовая скорость vx, км/ч .. . Пусковое ускорение ап, м/сек* . Расход энергии А, вт-ч . . . . Удельный расход энергии Ду, вт-ч/кн-км......................
15,1 26
65 67
27,7 26,9
1 0,9
610 650
8 5
36,9 69
26,5
0,6
780
4
гии, но меньше удельный расход энергии. Увеличение длины перегона снижает удельный вес потерь в пусковых сопротивлениях и тормозах на маршруте (см. формулу (100)].
Влияние состава поезда. На рис. 152 даны диаграммы движения и кривые потребления тока для трех поездов различного состава для перегона в 500 м. Скорость начала торможения и тормозное замедление во всех случаях приняты одинаковыми, поэтому моменты начала выбега будут разными. Одновагонный поезд (кривая /) дает наибольшую ходовую скорость при меньшем общем расходе энергии, но наибольший удельный расход энергии. При одинаковой ходовой скорости об-240
ts3
/ и /'— при последовательном соединении; 2— 2' при параллельном соединении тяговых двигателей
щий расход энергии также будет меньшим у одновагонного поезда. Удельный расход энергии в сравнении с удельным расходом на движение двухвагонного (кривая 2) или трехвагонного (кривая 3) поезда будет значительно большим.
Влияние способа соединения тяговых двигателей при перегруппировках. При движении поезда на участке любого профиля через каждый двигатель проходит одинаковый ток независимо от способа соединения. Но ток, потребляемый поездом из контактной сети, на второй ступени соединения будет вдвое больше, чем на первой ступени для всех типов поездов с двухступенчатой перегруппировкой. Поэтому мощность, потребляемая из сети, будет в два раза больше на второй ступени соединения. Ходовая скорость поезда также примерно вдвое больше, ходовое время примерно в два раза меньше, а расход энергии на движение поезда приблизительно одинаковый.
На рис. 153 построены кривые движения двухвагонного поезда типа КТМ+КТП с тяговыми двигателями ДК-254А на перегоне с тяжелым профилем пути (f = 9О°/оо): кривые 2 и 2'— при параллельном соединении (II ступень) и кривые 1 и Г — при последовательном соединении (I ступень). Как видно из рис. 153, ходовое время (61 сек, II ступень) приблизительно в два раза меньше (114 сек, I ступень). Поэтому ходовая скорость vn = 23,6 км/ч примерно в два раза больше vxi = = 12,1 км/ч, а расход электроэнергии приблизительно одинаковый (площади кривых потребления тока примерно одинаковы). Применение режима движения поезда на II ступени соединения тяговых двигателей: 1) увеличивает пропускную способность участков с тяжелым профилем; 2) благоприятнее влияет на нагрев тяговых двигателей; 3) увеличивает нагрузку тяговой сети и тяговой подстанции — при равномерном движении поезда на подъеме в 90°/00 из сети потребляется ток 350 а (при параллельном соединении) и лишь 160 а (при последовательном). При езде на I ступени соединения значительно ухудшается к. п. д. двигателей, так как они работают при пониженном напряжении.
Влияние кривых участков пути. Значительное влияние на увеличение расхода энергии и снижение ходовой скорости оказывают кривые участки пути. Кривые малого радиуса, расположенные в середине перегона, оказывают наихудшее влияние. На рис. 154, а построены кривые движения для одного и того же поезда на перегоне в 500 м: 1) с кривой радиусом 20 м и длиной 32 м, расположенной в начале перегона, и 2) с кривой того же радиуса и длины, расположенной в середине перегона. На рис. 154, б дана кривая движения поезда этого же типа для перегона в 500 м на прямом участке пути.
Технологическая карта. На основании технических данных эксплуатируемого подвижного состава путем построения кривых движения можно выявить наиболее выгодный по расходу энергии при заданной скорости режим движения и получить необходимые данные для составления инструкции для водителей.
На рис. 155 приведена так называемая технологическая карта скоростных и энергетических режимов движения поезда для одного пе-242
Рис. 154. Влияние кривых участков пути на режим вождения поезда
Кривые движения v = f(t) и кривые тока I = f(t) /х, сек их, км/ч А, в/П‘Ч
Кривые I и Г (рис. 154, а) .... 84 21.4 1030
Кривые 2 и 2' (рис. 154, а) ... 95 18,9 720
Кривая III (рис. 154, б) 67 26,9 650
V км/ч
п=25
О
О
40
30 Л tQQ ПО 120 секунды
Рис. 155. Технологическая карта скоростных и энергетических режимов движения трамвайного поезда
регона (L = 680 м, tx= 129 сек), составленная техническим отделом Ленинградского трамвайно-троллейбусного управления. В левой части карты изображен профиль перегона, а в правой — диаграммы движения v= f(t) (кривая 1) и I =f(t) (кривая 2), а также кривая потребления тока / = f(t) (кривая 3). На перегоне на расстоянии 25 м от пункта О на спуске 2°/00 находится узловое соединение рельсового пути, а на расстоянии 100 м — участковый изолятор контактной сети. Далее, на расстоянии 320 м начинаются кривые участки пути (R — = 25 м), первый — на подъеме 2,4°/00, второй — на подъеме 22°/00. На расстоянии 600 м расположено второе узловое соединение рельсового пути (на подъеме 1,6°/00). Движение поезда показано на перегоне от пункта О до пункта А. Пользуясь рис. 155, можно установить режим движения поезда в любой точке трассы. Например, в момент Б (см. вертикаль БВ): время от начала движения — 70 сек (см. отрезок ОБ)\ скорость поезда — 12 км/ч (отрезок БГ)- пройденный путь — 380 м (отрезок БЖ); ток, потребляемый поездом,— 115 а (отрезок БМ); профиль пути — подъем 22°/00 (точка У), кривая R = 25 м (точка К.). В момент Л (см. вертикаль ЛР)-, ОЛ = t = 95 сек-, ЛС = v = 24,4 км/ч-, ЛР = I = 500 м-, ЛТ = I = 200 а, спуск i = 2°/00 (точка Ф), участок прямой (точка П).
Пуск поезда производится только на последовательном соединении двигателей (I ступень) при токе 145 а, так как вблизи на расстоянии 25 м находится узловое соединение. Проехав узловое соединение, водитель переключает двигатели с последовательного соединения на параллельное. При скорости 28 км/ч поезд проходит без тока участковый изолятор. Затем продолжается езда под током. В момент, соответствующий скорости 32 км/ч (пройденный путь 180 м), ток выключается, и поезд идет выбегом. Выбегом поезд проходит 120 м. На расстоянии 300 м от пункта О при подходе к кривой имеет место период торможения с начальной скоростью 28 км/ч до скорости 10 км/ч. Часть кривой проходится выбегом, затем включается ток и идет езда на I ступени соединения двигателей. Езда под током продолжается до 80 сек, с 80 до 93 сек поезд идет выбегом. Затем продолжается езда под током на II ступени соединения двигателей, выбег и торможение. Узловое соединение пути поезд проходит со скоростью 14 км/ч. Затем на 112 сек включается ток на I ступени соединения двигателей. Езда под током продолжается до скорости 18 км/ч. После небольшого выбега со скорости 18 км/ч начинается период торможения до полной остановки поезда.
Глава XIV. НАГРЕВАНИЕ ТЯГОВЫХ ДВИГАТЕЛЕЙ
§ 45. СВЕДЕНИЯ ИЗ ТЕОРИИ НАГРЕВАНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ
Допустимая по нагреву нагрузка двигателя зависит от величины потерь мощности в нем и времени его работы. Зависимость допустимого по нагреванию тока от длительности работы двигателя представ-
лена на рис. 156, а и б. Допустимая длительность работы возрастает по мере уменьшения тока. При токе Л» (длительный ток) работа двигателя уже не ограничивается временем, и все тепло, выделяющееся в нем, полностью отводится при максимально допустимом перегреве в окружающую среду; дальнейшее повышение температуры двигателя прекращается. Длительный ток тем больше, чем больше теплоотдача двигателя. Область допустимой работы двигателей заштрихована. Для двигателя последовательного возбуждения она ограничена нагреванием (линия АБВ) (см. рис. 156, а) и величиной максимального/мако и минимального /мин тока, а для двигателя смешанного возбуждения—
Рис. 156. Зависимость допустимого по нагреву тока от времени работы дви гателя
а—последовательного возбуждения; б—смешанного возбуждения
нагреванием и максимальным током /макс (линия АВ — режим двигателя, линия А'В' — режим генератора) (см. рис. 156, б).
Работоспособность тягового двигателя в условиях резко меняющейся нагрузки ограничена не только его теплоотдачей, но и теплоемкостью. Поэтому для тяговых двигателей должна быть известна временная перегрузочная способность по условию нагревания, определяемая его теплоемкостью. Временная перегрузочная способность характеризуется условно часовым током двигателя.
Таким образом, работоспособность тягового двигателя по условию нагревания характеризуется длительным и часовым /п токами. Температура двигателя, зависящая от температуры окружающей среды, не может непосредственно характеризовать его тепловые свойства. Для этого необходимо знать перегрев двигателя, т. е. разность температуры двигателя и окружающей среды. Допустимые перегревы зависят от класса изоляции (Л, В и С), системы вентиляции (самовенти-ляция или независимая вентиляция), режима работы (часового, длительного) и способа измерения температуры (термометром, методом сопротивления и др.). Указанные в ГОСТ 2582—50 перегревы могут быть допущены при температуре окружающей среды 25° С.
Мощность двигателя ограничена предельным перегревом наиболее нагретых его частей. Наибольшей опасности перегрева сверх допусти-246
мого по нормам подвергаются обмотки якоря и полюсов двигателя, теплоемкость изоляции которых ограничивает допустимую нагрузку. Измеряя перегрев обмоток двигателя при испытании в лаборатории, можно получить кривые перегрева при различных нагрузках. Пример таких кривых дан на рис. 157, где по оси абсцисс отложено время, а по оси ординат — перегрев. Каждая из указанных кривых соответствует постоянной нагрузке. Чем больше нагрузка, тем перегрев будет больше. Характер кривых объясняется тем, что в начале работы двигателя перегрев быстро увеличивается, так как разность температур двигателя и окружающей среды незначительна, а следовательно, незначительно количество тепла, отдаваемого во внешнюю
Рис. 157. Зависимость перегрева двигателя от времени работы при различных нагрузках
среду. Затем отдаваемое количество тепла начинает увеличиваться, и приращение перегрева уменьшается до тех пор, пока не будет достигнут установившийся режим. Рассматривая кривые рис. 157, можно сделать следующие выводы: 1) при токах I < /<*> = /в двигатель может работать неограниченное время; 2) при токе двигатель достигает предельно допустимого длительного перегрева; 3) при токах I > продолжительность работы двигателя ограничена определенным временем.
Потеря мощности в тяговом электродвигателе вызывает его нагрев. Нагрев отдельных частей двигателя происходит в результате выделения тепла за счет потерь во всем двигателе. Однако нагрев каждой части двигателя в основном зависит от тех потерь, которые возникают в ней самой, и лишь в некоторой степени от потерь в смежных частях. Поэтому определение нагрева каждой части двигателя представляет очень сложную задачу, решение которой практически весьма затруднительно. Задачу расчета обычно упрощают, принимая двигатель за однородное тело, нагреваемое всей суммой потерь в нем. Если мощность потерь, выделяемых в теле, равна рп вт, то за малый промежуток времени dt энергия, превращаемая в тепло, будет равна dA = pndt вт-сек. За тот же промежуток времени часть энергии, равная Bxdt, будет передана окружающей атмосфере за счет теплоотдачи тела. Кроме того, под
влиянием выделяемого тепла тело нагревается на величину dr за счет его теплоемкости, на что должно быть затрачено тепло Cdx. Следовательно, уравнение баланса потерь энергии в дифференциальном виде можно выразить так:
pndt = Вх dt + C dx, (104)
где х — перегрев тела по отношению к окружающей среде в °C;
С — теплоемкость тела в вт-сек!град\
В — теплоотдача тела в вт!град\
dt — время в сек.
Т°к
Рис. 158. Графическое изображение уравнения нагревания
Интегрируя и затем потенцируя дифференциальное уравнение баланса потерь энергии [формула (104)], определим зависимость между перегревом тела х и временем /:
___t__ _t__
т = £п_(1 — Ю) г+то-1О т °C, (105)
В
где Т = 2,302-g- — постоянная времени, а 2,302 — переводный коэффициент от натуральных к десятичным логарифмам. Изображаемые графически уравнения (105) представляют собой кривые 1, 2 и 3 (рис. 158), форма которых зависит от начальных условий. Кривая 1 соответствует х = 0 (температура тела в начале процесса нагревания равна температуре окружающей среды). Если начальный перегрев т0 не равен нулю, но меньше т^, то процесс нагревания протекает по кривой 2. Если т0 > т^, тело будет отдавать в окружающую среду больше тепла, чем в нем выделяется. В этом случае происходит процесс остывания до т^ (кривая 3).
Для определения перегрева, которого достигает тело через продолжительное время, следует в формуле (105) принять t = се; тогда получим °C. Из этого уравнения можно получить уравнение ба-
ланса потерь в теле для длительно установившегося режима работы: Рп = т<*> В, Очевидно, что вся энергия, выделяемая в единицу времени, отводится от тела теплоотдачей, и, следовательно, оно больше не нагревается. То же самое можно получить из формулы (104) при перегреве dr = 0.
Формула (105) дает возможность исследовать также процесс охлаждения двигателя. Если ток выключен и потери отсутствуют (рп — _______________________________________t_
= 0), формула примет вид: т = т0-10 т . Величина перегрева будет снижаться, и через большой промежуток времени (теоретически бесконечно большой) он станет равным нулю — тело охладится до окружающей температуры (см. рис. 158, кривая 4), Если принять t = Т,
То
получим т = рр т. е. постоянная времени есть такое время, в тече-ние которого перегрев тела при его охлаждении уменьшается в 10 раз. Практически как при нагревании, так и при охлаждении окончательная температура тела устанавливается через промежуток времени, равный 4 — 57. Чтобы использовать уравнение для определения перегрева двигателя, необходимо иметь характеристики теплоотдачи и постоянную времени двигателя.
§ 46. МЕТОДЫ ПРОВЕРКИ НАГРЕВАНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ
Тяговый электродвигатель в процессе работы на линии проходит ряд циклов нагревания и охлаждения в соответствии с профилем пути, расположением остановок, весом поезда и другими факторами. Температура отдельных частей двигателя при этом колеблется, увеличиваясь в периоды движения под током и уменьшаясь при выбеге и на остановках. В периоды механического торможения температура понижается, а при электрическом торможении возрастает.
Задачей проверки нагревания двигателей является определение его перегрева. Величина этого перегрева должна быть меньше перегрева тн, допустимого по нормам при данной температуре окружающей среды т <тн. Проверка нагревания двигателей должна производиться в наиболее тяжелых условиях его работы (для наиболее тяжелого маршрута). Если расчетный перегрев равен или больше допустимого т тн, то необходимо для заданных условий работы выбрать тяговый двигатель большей часовой мощности. Слишком малая величина расчетного перегрева в сравнении с допустимым указывает на недоиспользование мощности выбранного двигателя по нагреванию.
Для проверки нагревания двигателя используют следующие расчетные методы:!) построение кривых перегрева по сетке температурных кривых; 2) построение кривых перегрева по уравнению нагревания; 3) метод эквивалентного тока. Первый метод требует наличия сетки температурных кривых (кривых нагреваний и охлаждения дви
гателя при различных режимах), а второй — характеристик теплоотдачи и постоянной времени. Наиболее простым является метод эквивалентного тока. При этом методе учитывают, что на температуру обмоток влияют главным образом потери в меди двигателя. Вследствие этого потери, вызывающие нагрев, предполагаются пропорциональными квадрату тока. Так как за время работы двигателя потребляемый им ток непрерывно меняется, то общая величина потерь энергии выразится суммой произведений квадратов тока и соответствующих отрезков времени, умноженной на сопротивление обмоток:
Лп = (/? +/2 ••• 4е г-
Введем понятие средненагревающего или эквивалентного тока /э, который, проходя при неизменном значении через двигатель в течение некоторого промежутка времени рейса, вызывает такие же потери энергии, как действительный меняющийся ток, т. е.
/э2 г/э = (/? А/2 + ... + I2k Mk) г = г Z* 72 А/.
Откуда эквивалентный ток двигателя
(Ю6)
Понятие эквивалентного тока используется для замены действительного переменного режима нагревания двигателя при работе на линии стационарным режимом с постоянной нагрузкой, при которой температура двигателя будет постепенно возрастать до установившейся, а общее количество энергии, обращенной в тепло, будет равно ее количеству,при действительном режиме. Критерием проверки пригодности двигателя по нагреву является неравенство тс <; тн (т. е. средний перегрев должен быть меньше перегрева, допустимого для длительного режима). Однако можно приближенно неравенство перегревов заменить неравенством токов: /э < или /С3/э < /со, где — длительный ток, а — коэффициент, учитывающий различие в теп-лоотдачах, влияние неравномерности распределения нагрузок между двигателями, возможность кратковременных значительных превышений температуры обмоток над средней установившейся, а также неизбежные в эксплуатации отступления от расчетного графика движения. Этот коэффициент может-быть принят равным 1,15—1,20.
§ 47. ПРИМЕР ТЯГОВОГО РАСЧЕТА
Тема. Проверить нагрев тягового двигателя методом эквивалентного тока и определить удельный расход энергии на движение поезда.
Исходные данные: 1) поезд МТВ (собственный вес 183 кн); 2) электротяговые характеристики двигателя ДК-255 (рис. 159); 3) профиль пути — эквивалентный уклон О°/оо, длина перегона L=500 м; 4) режим вождения поезда — последовательно-параллельное соединение тяговых двигателей (см. рис. 22, схема 1, б), скорость начала торможения ут = 30 км/ч, тормозное замедление ат = 1 м/сек2.
1. Определение веса поезда при нормальном наполнении: 1) г = 40 — число мест для сиденья; S = 12,5 м2 — площадь свободного пола вагона; N = 3 —
Рис. 159. Электротяговые характеристики двигателя ДК-255Б
число пассажиров на 1 .и2 свободной площади пола; количество пассажиров [по формуле (3)] z = 40 + 3-12,5 = 78 человек; 2) полный вес вагона G' определяем по формуле (2): G' = 183 + 78-0,687 = 235 кн, где 0,687 кн— вес одного пассажира.
II. Расчет и построение характеристики = f(v). Величину удельного основного сопротивления определяем по формулам (30) и (30'), которые для поезда с пассажирами принимают вид: = 3,375 + 0,0025 v2 н/кн —для режима выбега и и>0 = 1,83 + 0,0016 v2h/kh — для режима езды под током. Подставляя в эти формулы различные значения скорости и, определим удельное сопротивление. Вычисляем удельные сопротивления с точностью до десятых долей н/кн. Результаты вычислений сведены в табл. 8, по данным которой построены (см. рис. 49) характеристики 1 — для режима выбега и 2 — для режима тяги.
III. Расчет и построение тяговой характеристики поезда. Пользуясь электротяговыми характеристиками двигателя (см. рис. 159), для различных значений тока находим соответствующие значения скорости поезда и силы тяги двигателя и заносим их в графы 1, 2 и 3 табл. 9, а. Соответствующие значения силы тяги поезда F = 4Г0 заносим в графу 4. Удельные величины силы тяги поезда определяем по формуле
f = —— ~ “— Н КН.
1 G 235
Таблица 8
1’, км/ч о>0, н/кн C0Q н/кн V, км/ч ш9, н/кн , н/кн
0 3,4 1,8 40 7,4 4,4
10 3,7 2,0 50 9,7 5,8
20 4,4 2,5 60 12,4 8,5
30 5,7 3,3
Данные для построения тяговой характеристики (а) и характеристики действующих сил (б)
а б
№ /, а V, км/ч Fo, н F, н f, н/кн № V, км/ч f, к/кн н/кн 7д, Н/КН
1 2 3 4 5 1 2 3 4
В(1) 40 58 470 1880 8 а 0 155 1,8 153,2
2 50 52,5 822,5 3 290 14 ^1 13 155 2,3 152,7
3 70 44 1 704 6816 29 Л2 27 155 3 152
4 100 37 2 820 11 280 48 1' 30 100 3,3 96,7
5 150 30 5 875 23 500 100 2' 35 56 3,8 53
6 180 28 7 295 29 180 128 3' 40 39,4 4,4 35
Л4 210 27 9 100 36 424 155 5' 50 19 5,8 13,2
8 240 26 10 500 42 000 178 4' 45 27,1 5,1 22
6' 55 13,5 6.5 7
1 1 В 58 8 8 0
^Результаты вычислений заносим в графу 5 (табл. 9, а); откладывая по оси абсцисс (рис. 160) величины f (графа 5), а по оси ординат соответствующие им значения v (графа 2), получим точки (В, 2, ..., 6, Л2). Проведя через них кривую, имеем тяговую характеристику поезда f = f(v) при V = 300 в. На этом же рисунке] по данным табл. 8 (графы 1 и 3) построим характеристику w = f(v) для режима тяги.
!У. Выбор пусковых параметров. Найдем верхний предел колебаний тока Ль макс по условиям сцепления. Принимая коэффициент сцепленияф = 200 н/кн
Рис. 160_Характеристика удельной силы тяги и характеристика сопротивления движению поезда МТВ с двигателями ДК-255Б
(для обособленного полотна), найдем по формуле (25) максимальную силу тяги по условию сцепления Fn,MaKC = фб = 208-183 = 38 064 н или
38 064 ,
fn. макс— 235 ~ н/кн>
а затем максимальную силу тяги одного двигателя:
38 064 /гоп.макс= . —9516 н.
4
Согласно характеристике FQ = /(/) (рис. 159), найденному значению силы тяги двигателя F0MaKC соответствует ток /п.макс=220 а; следовательно, верхний предел колебаний пускового тока будет равен /п.макс = 220 а. Примем колебания тока ±5% . Тогда средний пусковой ток двигателя
100
/п = 220 —^210 а,
а минимальный ток /п.мин = 0,95-210 ~ 200 а.
Проверим найденное значение / на условие /п < 1,6 /^ : 210 < 1,6-192,. т. е. допустимо. Согласно характеристике Fo = /(/) (см. рис. 158) току /п = = 210 а соответствует средняя пусковая сила тяги двигателя Гоп = 9100 н. Средняя пусковая сила тяги поезда Fn = 9600-4 = 38 400 н. Найдем среднюю удельную пусковую силу тяги
38 400 .
fn-'-oo- =165 «/««•
Отложим величину средней удельной пусковой силы тяги на рис. 160.
Проверим найденные значения максимальной и средней силы тяги на условие допустимого ускорения на прямом горизонтальном участке. Удельное основное сопротивление определим для среднего значения пусковой скорости ип.с = ип 27
= ~2 = ~2 = 13,5 км/ч по формуле (30')
8+0,038.13,5а
^0= 1,5+--------—-------9,81 = 2,3 н/кн.
183
Максимальное пусковое ускорение определяем по формуле (20)
fn. макс—wq. с 162 — 2,3
«п.макс- 102*и =!02.1,15“ 1,37 ’
а среднее пусковое ускорение
155 — 2,3 вп“ 102-1,15
= 1,31 м/сек2,
что для одновагонного поезда с непосредственной системой управления и много-позиционным контроллером допустимо. Таким образом, принятые при расчете пределы колебаний тока и его максимальное значение вполне допустимы по условиям сцепления, ускорения и соотношения с часовым током.
V. Расчет и построение характеристики удельных действующих сил /д = = f(v) при U = 300 в (рис. 161). Удельную действующую силу для каждого значения скорости определяем как разность числовых величин граф 2 и 3 (табл. 9, б), так как/д = f — w0; так, например, точка aw = 0; /д.п = 155 — 1,8 = 153,2 н/кн. Результаты вычислений заносим в графу 4, затем по данным граф 2 и 4 отклады
вая по оси абсцисс удельные действующие силы, а по оси ординат соответствующие значения скорости, найдем точки aAlt А2/', ...» 6'В. Соединив их, получим характеристику удельных действующих сил /д = f(v) при V = 300 в. Ниже оси абсцисс проводим вспомогательную линию уклонов, где 1°/оо численно равно 1 н/кн.
VI. Построение кривых движения поезда (расчетно-графическим методом).
Период тяги. Характеристику действующих сил разбиваем на интервалы скорости в пределах от v = 0 до установившейся скорости 58 км/ч (см. точку В на
V КМ/
153,2
Рис. 161. Характеристика удельных действующих сил поезда МТВ с двигателями ДК-255Б
рис. 161). Результаты расчета заносим в табл. 10, А. Интервал 1. Начальная скорость Vi = 0, приращение скорости А^ = 13 км/ч, конечная скорость v2 = 13 км/ч, средняя скорость:
13 „
ус = —= 6,5 км/ч
(графы 1—4). Для средней скорости 6,5 км/ч по характеристике /д = f(v) (см. рис. 161) находим величину удельной действующей силы /д<с1 = 153,2 н/кн (заносим эту величину в графу 5). Теперь найдем по формуле (79') приращение времени:
А2 28,3^иАу 28,3.1,15-13 32,5-13
Af1 =-----—5---= — -----------= —-------=2,8 сек,
fa. с 153 153
а по формуле (74') — приращение пути:
Op1 6,5
А/г = — 2,8 = 5 м
3,6 3,6
(графа 8). Эти же величины занесем соответственно в графы 7 и 9.
А. Данные для построения кривых движения
№ ин-герва- Av, км/ч vt, км/ч км/ч vc , км/ч 1д.С- Н/КН Д/, сек ЕД/, сек Ы, м ЕД/, м
1 2 3 4 5 6 7 8 9
I. Тяга
1 13 0 13 6,5 153,8 2,8 2,8 5 5
2 14 13 27 20 152,3 3 5,8 17 22
3 4 27 31 29 107 1,2 7 10 32
4 4 31 35 33 1 65 2 9 18 50
5 4 35 39 37 43 3 12 31 81
6 4 ’ 39 43 41 32 4,1 16,1 47 128
7 4 43 47 45 22 5,9 22 74 202
8 3 47 50 48,5 16 8,1 30,1 109 311
9 2 50 52 51 12 5,4 35,5 76 387
10 2 52 54 53 10 6,5 42 96 483
11 2 54 56 55 7 8,5 50,5 130 613
12 2 56 58 57 3 16,2 66,7 284 897
II. Выбег
1' 4 30 34 32 6 21 21 186 186
2' 4 34 38 36 6,6 19,8 40,8 198 384
3' 2 38 40 39 7,2 9 49,8 96 480
III. Торможение
vT, км/ч t. г, сек 1т, м
60 16,7 139
t ю 13,8 96,6
L 10 11,1 61,1
От = = 30 8,3 34,7
20 5,5 15,4
1 10 2,8 3,9
Б. Данные для построения кривой потребления тока
Период движения V, км/ч /, а = а /2, а2
1 2 3 4
Пуск, I ступень (а — б) Пуск, II ступень (в'—в) Автоматическая характеристика, точки: 0,13 210 210 44 100
13—27 210 420 44 100
3 31 140 280 19 600
4 35 108 216 И 664
В 38 88 176 7 744
6 44 70 140 4 900
7 47 63 126 3 969
8 50 55 ПО 3 025
В9 52,5 50 100 2 500
Интервал 2. Дц2 = 14; = 13; v2 = 27 и ис,2 = = 13 +
14
+ ~2 = 20 км/ч (графы 1—4). Удельную действующую силу /Д,С2 = 152,3 н/кн (графа 5) находим на рис. 160 для средней скорости 20 км/ч. Тогда
32,5-14
Д?а = ~ ~ = 3 сек (графа 6) и
152, о
20 (графа 8). Д/2 = —- 3=17 м 3,6
Так как теперь уже достигнута скорость выхода на автоматическую характеристику vA2 == км/ч, то при дальнейших вычислениях будем брать интервалы изменения скорости значительно меньшей величины Ди = 4 4- 2 км/ч. Продолжая вычисления для следующих интервалов, заполним все графы для периода движения тяги. Время от момента начала пуска и до конца каждого последующего интервала и соответствующий им путь определяем суммированием приращений (графы 7 и 9).
Период выбега. Характеристику 1 (см. рис. 49) разбиваем на интервалы скорости по 4 км/ч, так как сопротивление движению в зависимости от скорости изменяется сравнительно незначительно. Расчет начинаем от скорости начала торможения. Для 1-го интервала: = 30 км/ч; Дих = 4; v2 = 34;
4
dc1 = 30 + — = 32 км/ч
графы 1—4). Для средней скорости 32 км/ч по характеристике / (см. рис. 49) находим величину действующей силы /Д.С1 = ^o.ci = 6 н/кн (графа 5). Тогда
А 32,5ДЦ]. 32,5-4
Д^ =--------—-------= 21 сек (графа 6)
ci 3
32-21
Д^-^Д^-—= 186 м (графа 8);
0,0 0,0
для 2-го интервала: Ди2=4; = 34; v2 = 38; vC2 = 36 км/ч. Для средней
скорости 36 км/ч
32,5-4 /д. с2 = 6,6 н/кн; &t2 = - = 19,8 сек,
6,6
36-19,8 1ЛО
Д/2 = - =198 м.
3,6
Суммирование Д^ и Д/ приведено в графах 7 и 9.
Период торможения. Тормозной путь и время торможения определяем по формулам равнозамедленного движения (85')—(86) для различных значений скорости начала торможения от 60 до 10 км/ч. Так, например:
ит 60
1) <т =---1—=---------=16,7
’ 3,6ат 3,6-1
о* 602
1Т =----1---=-----------= 139
т 2-3,62ат 2-3,62-1
50 502
2) t7 = ----=13,8;
’ 1-3,6
30
/т =----= 8,3 сек;
т 3,6-1
сек;
м;
= 96,6 м;
*т 2-3,62-1 302
/т =-------— = 34,7 м
т 2-3,62-1
и т. д. Кривую /т = f(vT) строим по точкам (графы 1 и 3) формулы (86')- Кривую» ит = /Vt) строят по двум точкам (графы 1 и 2); формула (85') — уравнение прямой линии.
По данным табл. 10 строим в координатах скорость — время и скорость — путь соответствующие кривые v = /(/) и v = f(l) (рис. 162) так, как было* показано на рис. 105. Теперь, зная ходовое время, можно определить ходовую-скорость
3,6 Л 3,6-500 Л
Ох = — ----= —77— = 30 КМ/Ч
t'T OU
Рис. 162. Кривые движения [поезда МТВ с двигателями ДК-255Б для двух, режимов вождения кривая v=f(l)
ОВС—с выбегом; OB' С —без выбега
и скорость сообщения
3,6-500 _ п
Уе = ^ГГ0 = 25’7
где /0 == Ю сек — средняя продолжительность стоянки. Проверим, соответствует ли площадь построенной кривой и = /(Z) заданной длине перегона [по формуле (81)]. При длине перегона 500 м площадь кривой движения должна быть следующей:
о 3,6 А 3,6-500 о
S = — — = ———= 1800 мм2,
mvmt 1,1
где mv = 1 км/ч/мм\ mt = 1 сек/мм. Площадь кривой движения v = f(t) равна 5 = 1820 мм2, что находится в пределах точности построения и вполне допустимо.
Максимально возможная среднеходовая скорость соответствует режиму движения без выбега (уМакс = 52,5 км/ч — точка В'). Снесем точку В' на кривую v = /(/), найдем точку В — момент начала торможения, а затем минимально возможное ходовое время /х.мин = 53 сек и максимальную ходовую скорость
3,6-500 макс = -о =34 км/ч. оо
VII. Расчет и построение кривой потребления тока. Кривая потребления тока построена (рис. 163) для двух режимов движения: с выбегом (кривая оабб'вВ) и без выбега (кривая оабб'вВ'), по данным табл. 10, Б (графы 1 и 3). Порядок построения аналогичен рис. 125.
VIII. Определение расхода энергии. Измерив площади кривой Г = f(t) (см. рис. 163), находим S = 2052 мм2 для режима движения с выбегом (кривая
Оабб'вВ) и <S2 — 4032 мм2 для режима движения без выбега (кривая Оабб'вВ2).
Количество электричества определяем по формуле (89)
Q1 = S1tnImf = 2052-5-0,33 = 3420 а-сек и Qa = 4032-5-0,33 = 6720 а-сек, где масштабы: тока тх = 5 а!мм и времени mt = 0,33 сек!мм.
Рис. 163. Кривые потребления тока поездом МТВ с двигателями ДК-255Б
Оабб' вВ — выбегом; Оабб' без выбега
Расход энергии для режима движения:
а) выбегом равен [формула (90)]:
ylj = £7С= 550-3420= 1 881 000 вт-сек, или 522,5 вт-ч1
а удельный расход [формула (93)]:
522 5
Л v — ~!— = 5,7 "вт. ч/кн - км;
у 183-0,5
б) без выбега
Л2 = 550.6720 = 3 696000 вт-сек, или 1027 *т-ч;
_ 1027
А у = - —= Н,2 вт- ч/кн - км,
у 183-0,5
Определим средний к. п. д. поезда за время его работы на данном перегоне при режиме езды с выбегом:
Лм. 1 240 000 п ’1г1-с А 8 1 881 000 ’ ’
где Лм = 1 240 000 вт-сек (см. пример 44). В примере 45 для данных условий был подсчитан расход энергии аналитическим методом.
IX. Проверка нагрева тягового двигателя методом эквивалентного тока. На рис. 164, по данным табл. 10, Б (графы 1—2), построена кривая потребления тока одним двигателем. Построена Удалее кривая квадратов тока /2 = f(t) одного двигателя (графа 4) для двух режимов движения, с выбегом (кривая Оабв)
и без выбега (кривая Оабг). Площадь кривой /2 = f(t) в определенном масштабе соответствует 5/2Д/(для режима с выбегом площадь заштрихована на рисунке).
Следовательно, можно написать следующую формулу:
t3 = ^I2 ^t = Smj mt,
Рис. 164. Кривая потребления тока двигателем ДК-255Б и кривая квадратичного тока двигателя
откуда
° = V /э Ч ’
где масштабы квадратов тока — в 1 мм тга2 и времени — в 1 мм пц сек. Площадь кривой /2 = f(t) равновелика площади прямоугольника оа'б'в', а его высота в'а графически определяет величину эквивалентного тока. Измерив площади <$! и S2 кривой /2 = f(t) (S± = 1950 мм2 и S2 = 2510 мм2), определим эквивалентный ток (для режима с выбегом)
т / 1950-400-0,5 „
' = ]/ -----то----“75“
и (для режима без выбега),
, . / 2510.400-0,5
'=|/ -------т------84“'
где масштабы квадратов тока — в 1 мм2 400 а2 и времени — в 1 мм 0,5 сек или в 1 льм2 = 200 а2*сек, а /0 = /х + tQ = 70 сек.
Сравнивая полученную величину эквивалентного тока с током длительного режима (/^ = 130 а), видим, что она значительно меньше. Следовательно, двигатель по истечении дня работы на данном профиле нагревается ниже предела, допустимого при длительном режиме работы, и поэтому он вполне пригоден для этого профиля.
Приведенный пример тягового расчета является типовым для подвижного состава любого вида.
ЛИТЕРАТУРА
1. Загайнов Н. А. Тяговые подстанции городского электрического транспорта. Изд-во МКХ РСФСР, 1960.
2. ЕфремовИ. С. Троллейбусы. «Высшая школа», 1969.
3. КутыловскийМ. П., Федотов А. И. Подвижной состав трамвая. Изд-во МКХ РСФСР, 1948.
4. Кутыловский М. П. Электрическое оборудование вагонов трамвая. Изд-во МКХ РСФСР, 1960.
5. К у т ы л о в с к и й М. П., Хавин М. Н. Вагоны РВЗ. Изд-во МКХ РСФСР, 1957.
6. Кутыловский М. П. Аэродинамические испытания модели вагона МТВ. «Электромеханика и автоматика», 1959, № 3.
7. К У т ы л о в с к и й М. П. Исследование сопротивления движению подвижного состава. «Электромеханика и автоматика», 1958, № 2.
8 КутыловскийМ. П. Определение величин сопротивления движению городского электрического транспорта. «Жилищно-коммунальное хозяйство», 1958, № 7.
9. Кутыловский М. П., К о б з е в В. М., Хавин М. Н., Ш р е д е р Б. А. Механическое оборудование подвижного состава трамвая. Изд-во МКХ РСФСР, 1963.
10. К н ер ель Г. М. Техника управления трамвайным поездом. Л., 1954.
11. Розенфельд В. С., Чеботарев Е. В., Сидоров Н. И., Бол -д о в Н. А. Основы электрической тяги. Госэнергоиздат, 1957.
12. Р е б р о в С. А. Расход энергии на движение троллейбусов. Киев, 1958.
ОГЛАВЛЕНИЕ
Предисловие к третьему изданию................................... 3
Раздел первый
Общая часть
Глава I. Общие сведения об электрическом транспорте.............. 6
§ 1. Классификация видов электрического транспорта........... 6
§ 2. Электрическая тяга в системе городского транспорта...... 7
Глава II. Электроснабжение городского электрического транспорта . . 9
§ 3. Производство и передача электрической энергии .......... 9
§ 4. Система постоянного тока в контактной сети..............11
§ 5. Система постоянного тока в контакной сети...............18
Г л^а в а III. Подвижной состав городского электротранспорта ... 19
§ 6. Классификация подвижного состава........................19
§ 7. Конструктивные и эксплуатационные показатели............21
§ 8. Общие понятия о конструкции.............................23
§ 9. Элементарные понятия об электрических схемах............29
Г[л а в а IV. Регулирование скорости и пуск подвижного состава ... 34
§5-10. Регулирование скорости................................34
§ 11. Пуск ..................................................38
Глава V. Торможение подвижного состава.......................45
§ 12. Системы торможения.....................................45
§ 13. Механическое торможение................................47
§ 14. Электрическое ^торможен не.............................49
Раздел второй
Теория движения поезда
Г[л а в а VI. Уравнение движения поезда..........................55
§р5. Первый и второй виды уравнения движения поезда .... 55
§ 16. Частные виды уравнения движения поезда..................59
Глава VII. Реализация тяговых и тормозных сил поезда.............62
§ 17. Реализация силы тяги....................................62
§ 18. Реализация тормозной силы...............................69
Глава VIII. Сопротивление движению поезда...................... 71
§ 19. Основное сопротивление движению.........................71
§ 20. Дополнительное сопротивление движению...................83
§ 21. Полное сопротивление движению...........................88
§ 22. Максимальные (предельные) уклоны........................90
§ 23. Примеры по механике движения поезда.....................91
Раздел третий
Характеристики тягового и тормозного режимов поезда
Глава IX. Характеристики тягового режима поезда..................95
§ 24. Сравнение тяговых двигателей различных систем возбуждения 95
§ 25. Электромеханические характеристики на валу двигателя . .110
§ 26. Электротяговые характеристики двигателя...............114
§ 27. Пересчет характеристик двигателя с одного напряжения на другое................................................... 122
§ 28. Пересчет характеристики двигателя при изменении магнитного
поля ..................................................125
§ 29. Пусковые диаграммы.....................................130
§ 30. Тяговые характеристики поезда..........................142
§ 31. Характеристики действующих сил поезда..................146
Глава X. Характеристики тормозного режима поезда................153
§ 32. Характеристики механического торможения................153
§ 33. Характеристики электрического торможения...............160
Раздел четвертый
Тяговые расчеты
Глава XI. Кривые движения поезда................................170
§ 34. Общие принципы расчета и построение кривых движения . . 170
§ 35. Эквивалентный уклон...................................175
§ 36. Расчетно-графический способ построения кривых движения . 177
§ 37. Графический способ построения кривых движения.........186
§ 38. Тормозные задачи......................................196
§ 39. Кривые потребляемого поездом тока.....................200
Г лава XII. .Методы определения расхода электроэнергии на движение поезда.......................................................... 208
§ 40. Определение расхода электроэнергии по кривым движения . 208
§ 41. Определение расхода электроэнергии аналитическим методом 214
Глава XIII. Методы снижения расхода электроэнергии на движение поезда...........................................................219
§ 42. Общие принципы экономии электроэнергии.................219
§ 43. Влияние основного сопротивления движению на расход электроэнергии ..........................................................222
§ 44. Влияние тяговых и тормозных параметров и других факторов на режим движения поезда.............................................228
Глава XIV. Нагревание тяговых двигателей..............................245
§ 45. Сведения из теории нагревания тяговых двигателей............245
§ 46. Методы проверки нагревания тяговых двигателей...............249
§ 47. Пример тягового расчета....................................250
Литература.................................................... . . 260
Кутыловский Михаил Петрович ЭЛЕКТРИЧЕСКАЯ ТЯГА (городской электрический транспорт) ♦ * * Стройиздат
Москва, Третьяковский проезд, д. 1 ♦ * *
Редактор \Д. К, Томлянович Редактор издательства М. А. Оточева Внешнее оформление художника Г. Е. Левченко Технический редактор Н. В. Высотина
Корректоры И, А. Зайцева, Г. Г. Морозовская
Сдано в набор 18/V 1970 г. Подп. к печати 30/IX 1970 г.
Т-15615 Бумага 60 X ЭО1/™-8,25 бум. л.
16,5 печ. л. (уч.-изд. 17,9 л.)
Тиражк5000 экз. Изд. № АШ-1633 Зак. № 1186 Цена 72 коп.
Московская типография № 4 Главполиграфпрома Комитета по печати при Совете Министров СССР Б. Переяславская