/



















































































































































Author: Михайлов Н.В.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика)
ISBN: 978-5-7325-1050-8
Year: 2014




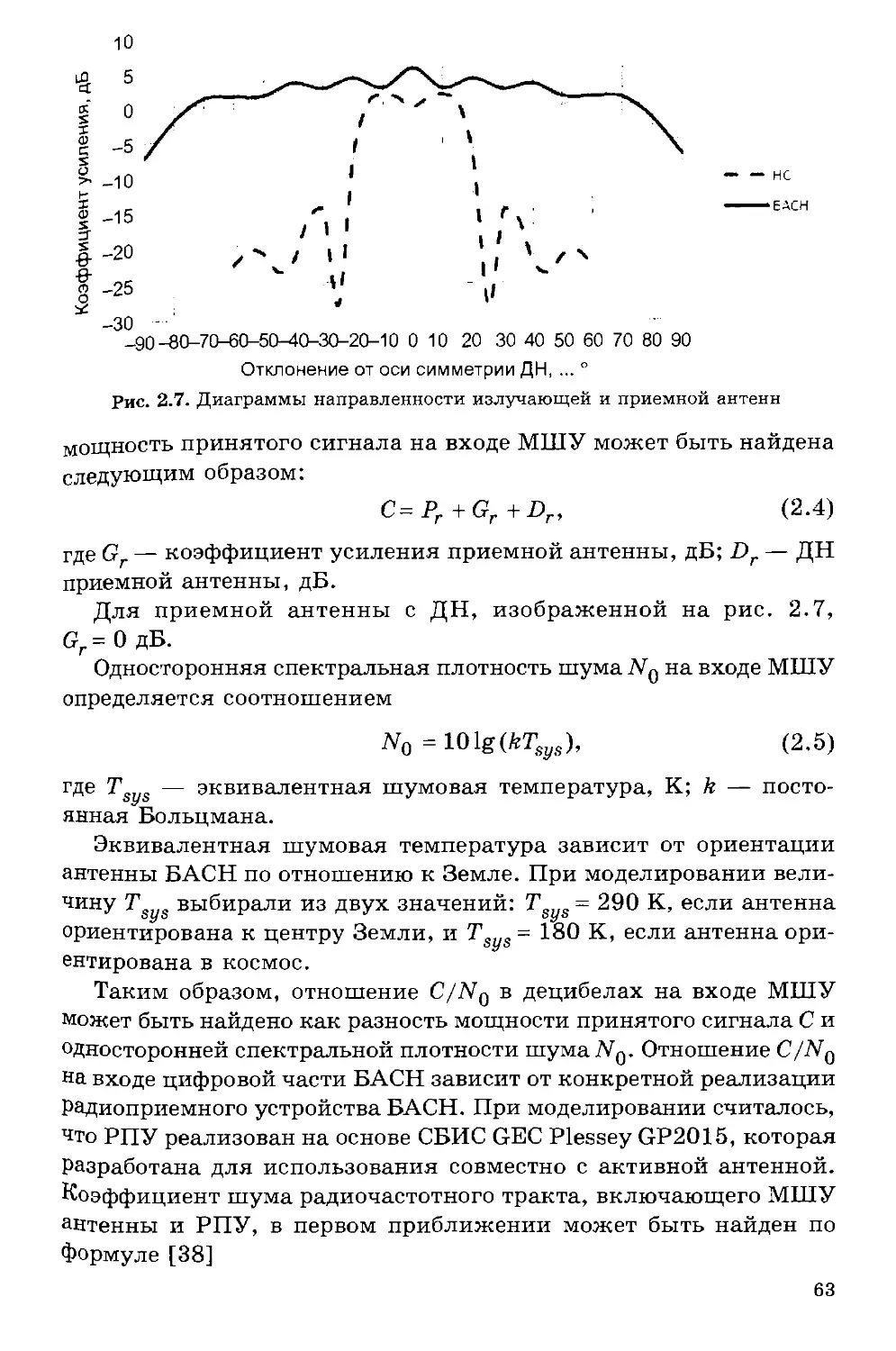
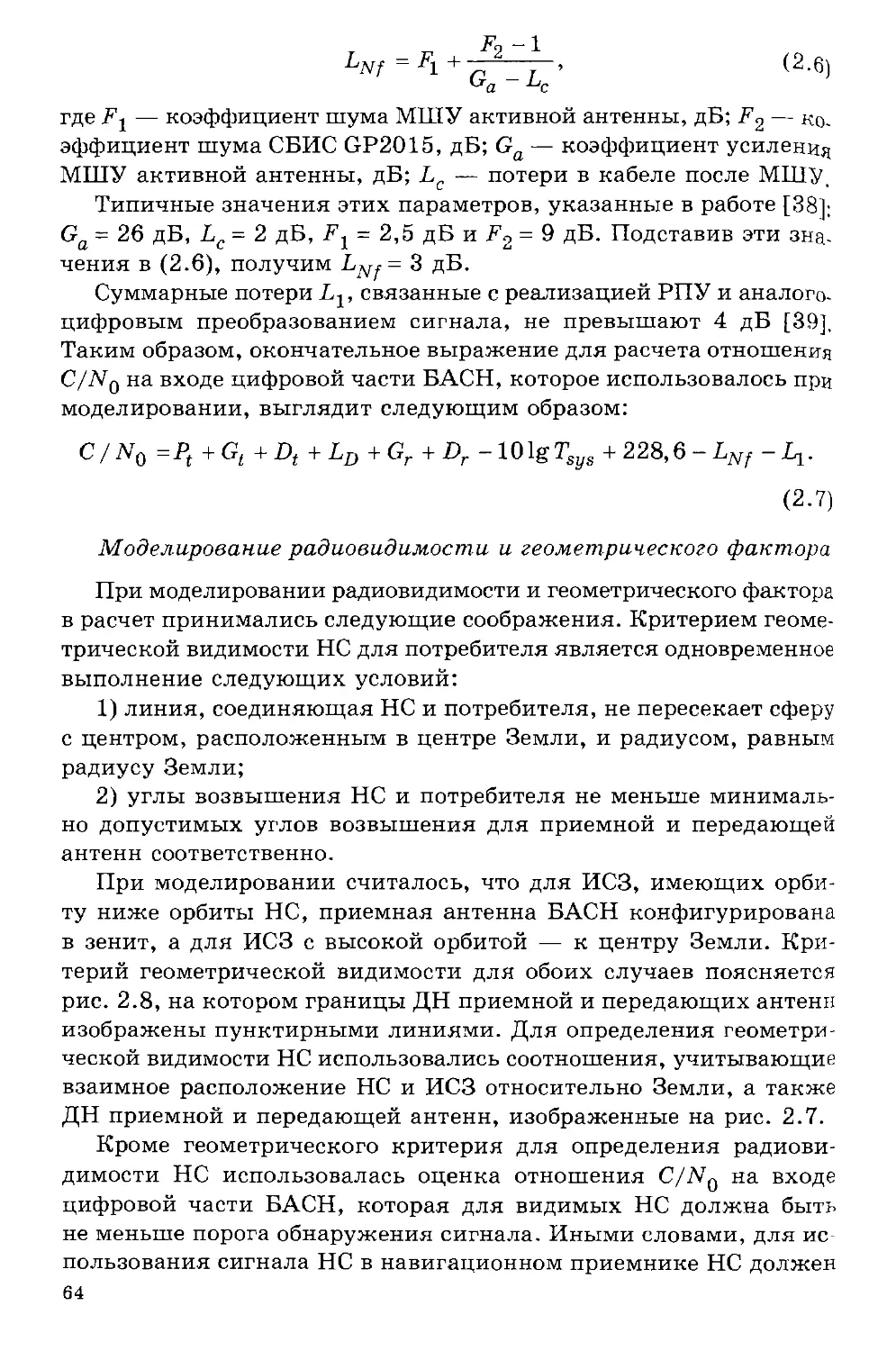
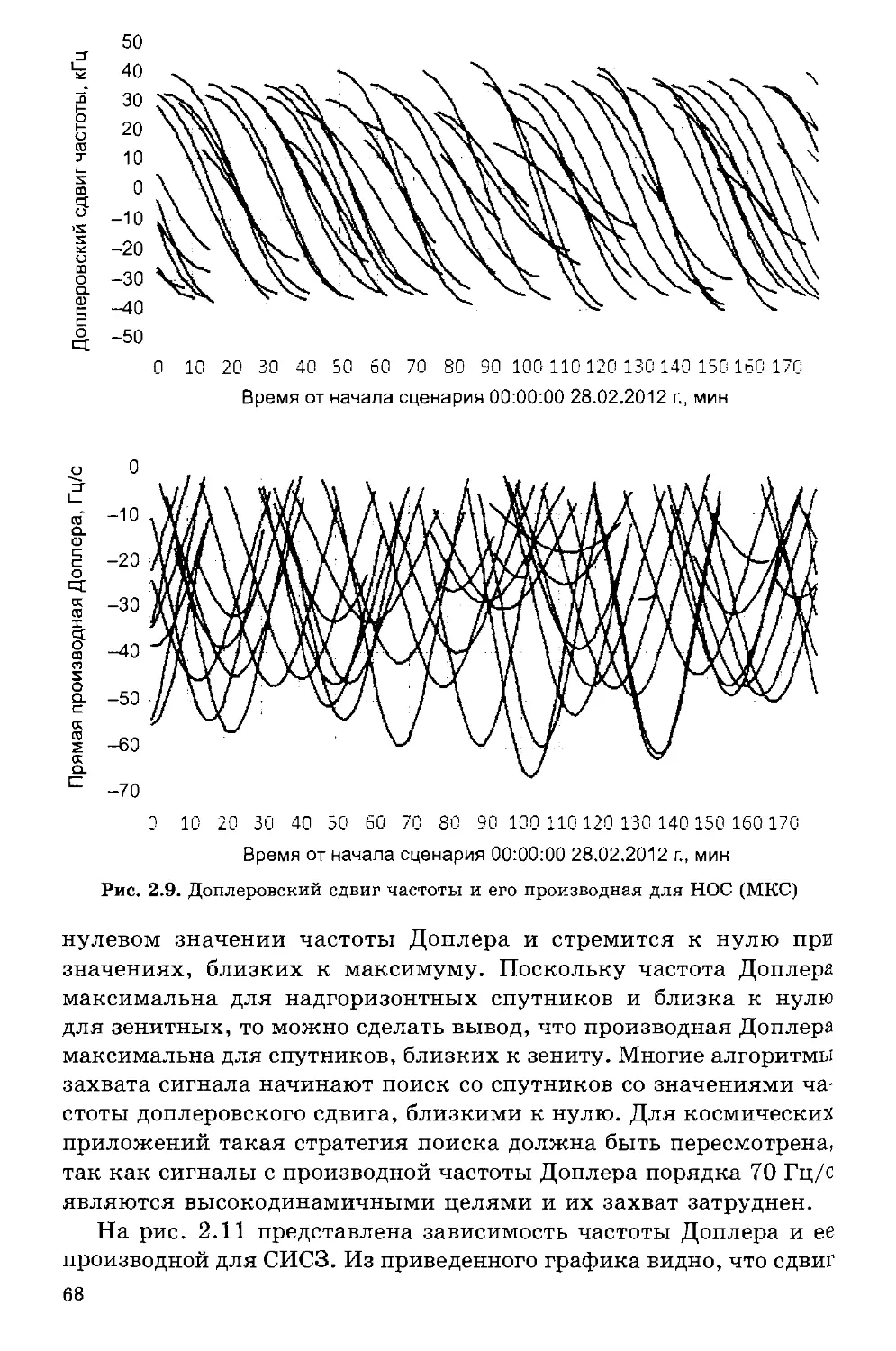
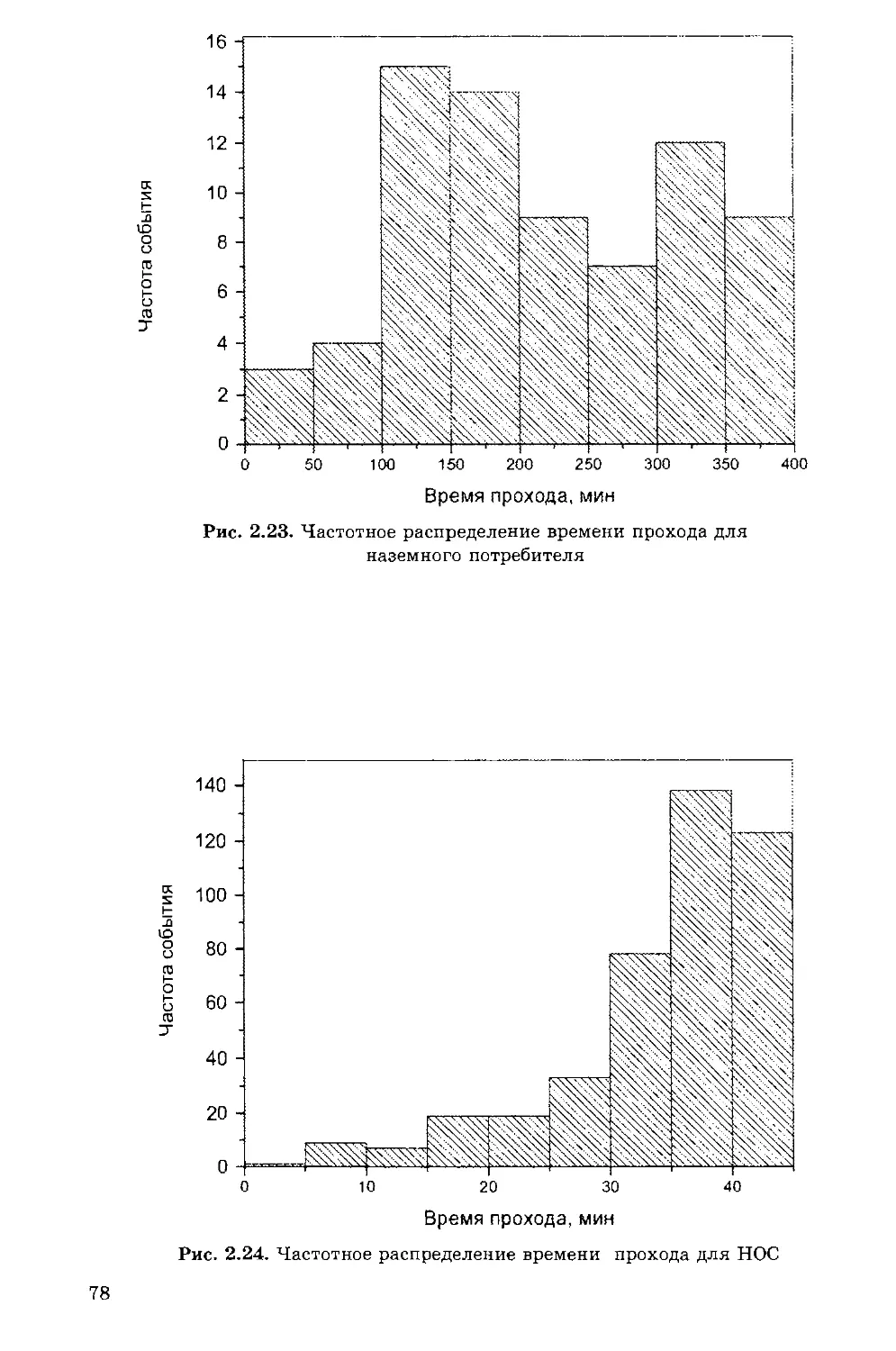
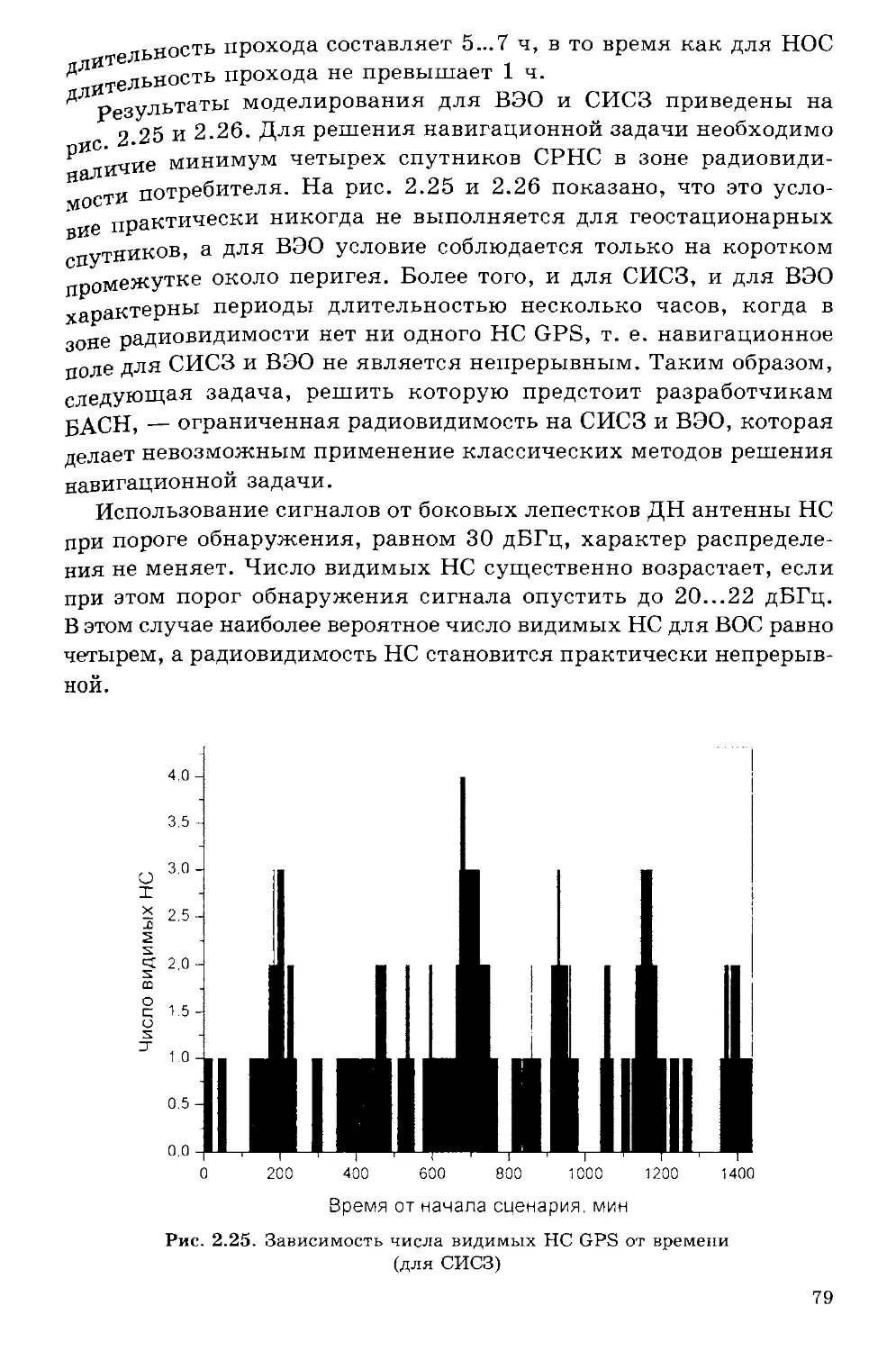
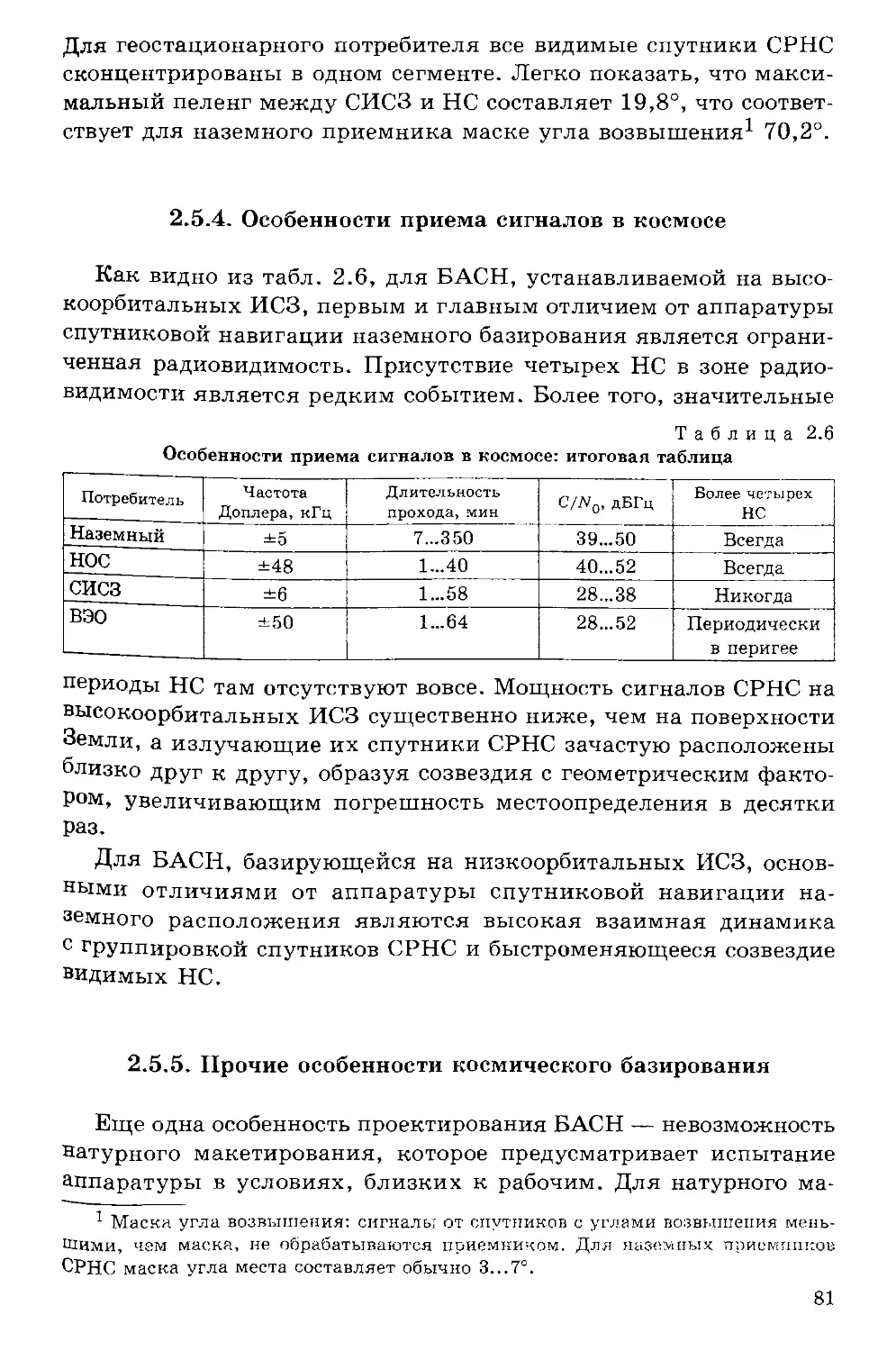
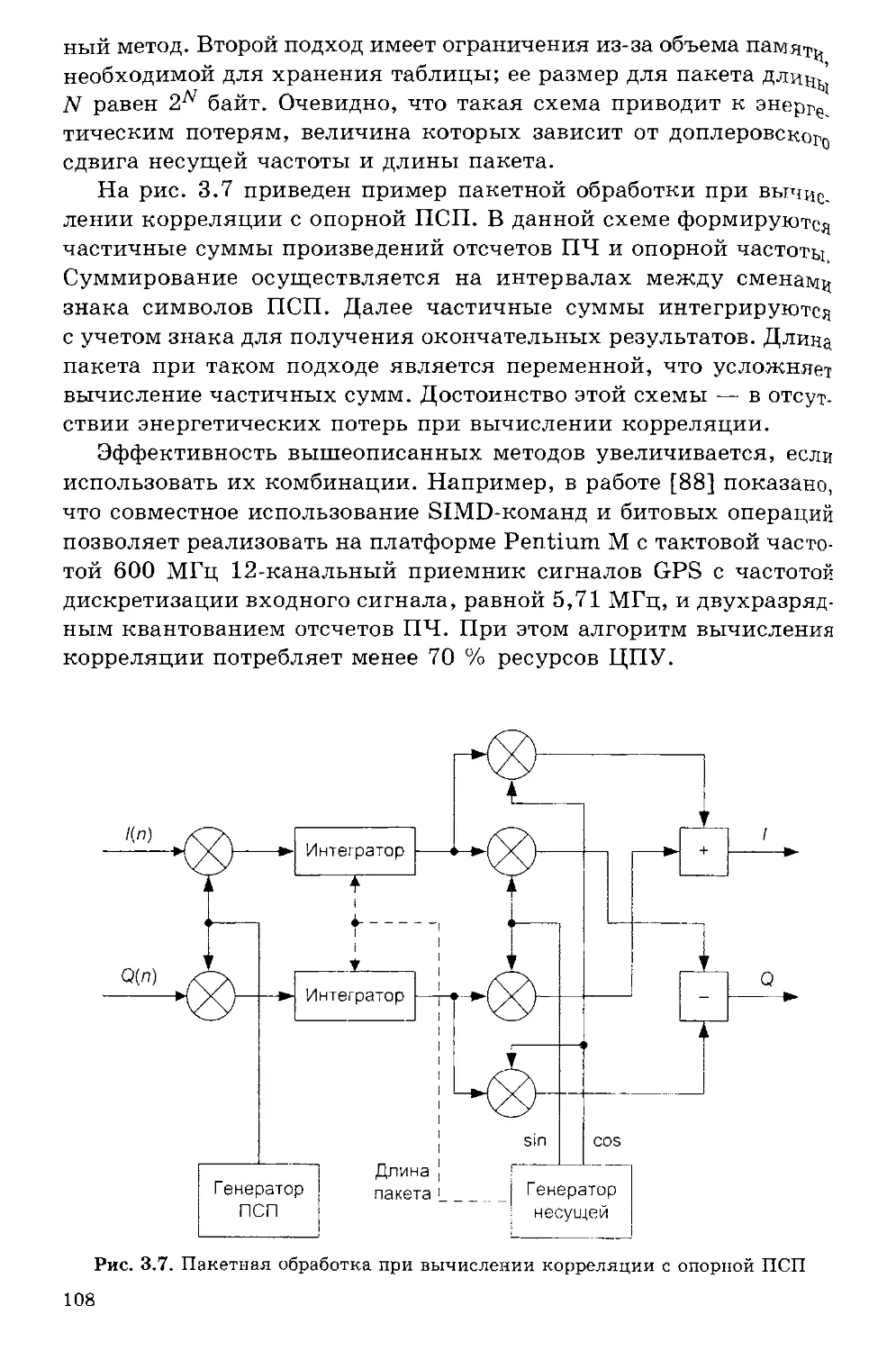
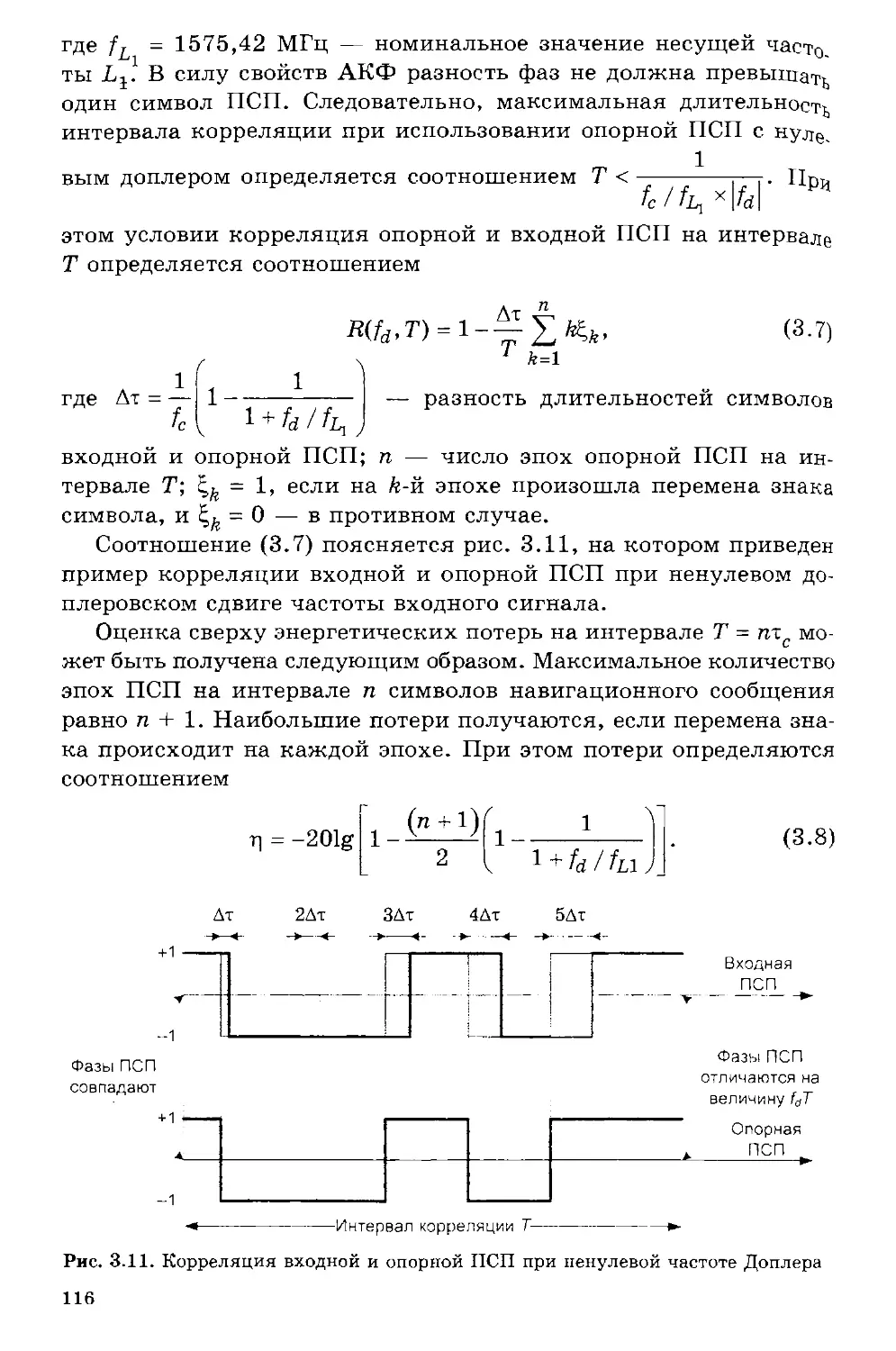
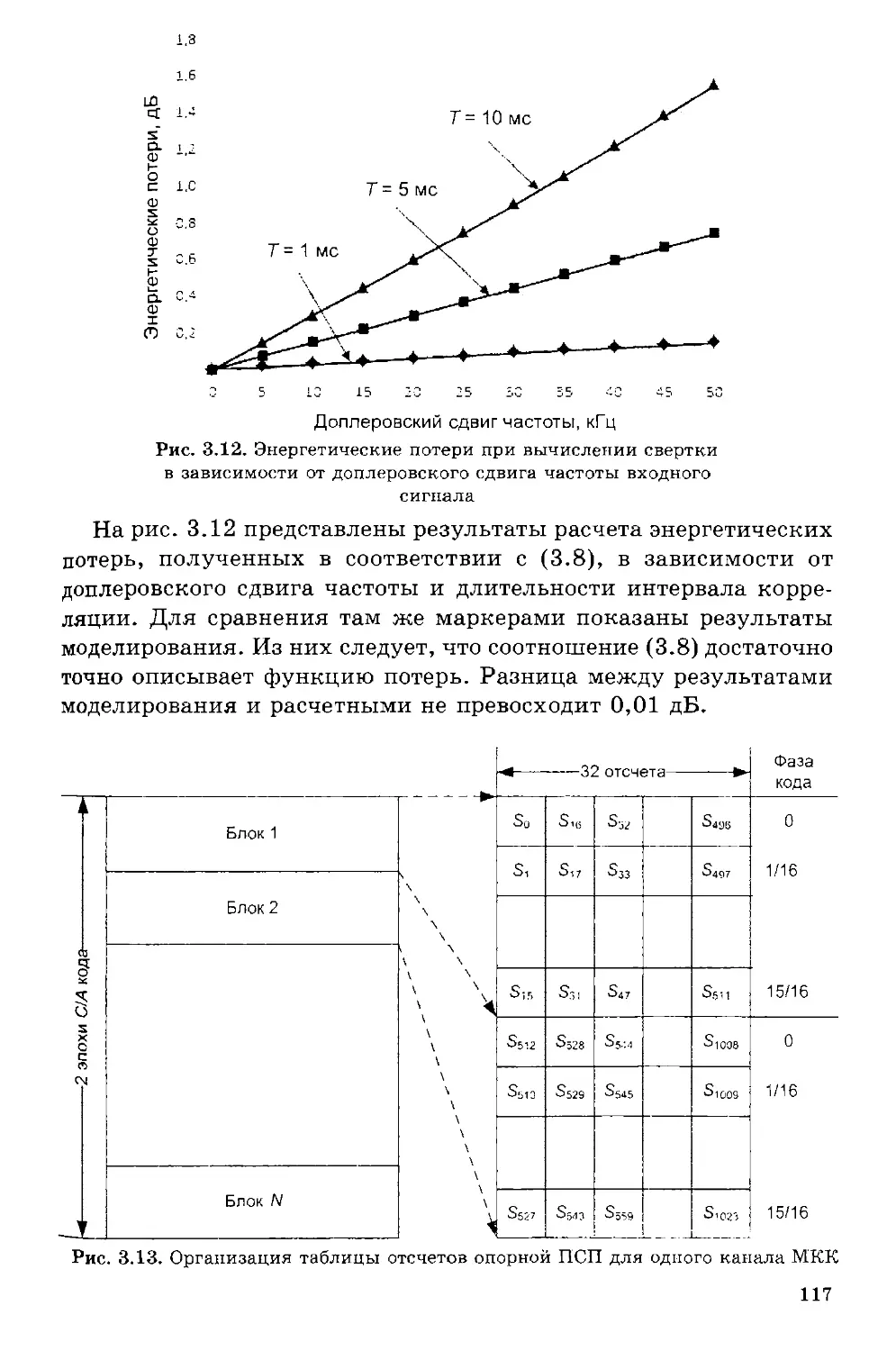
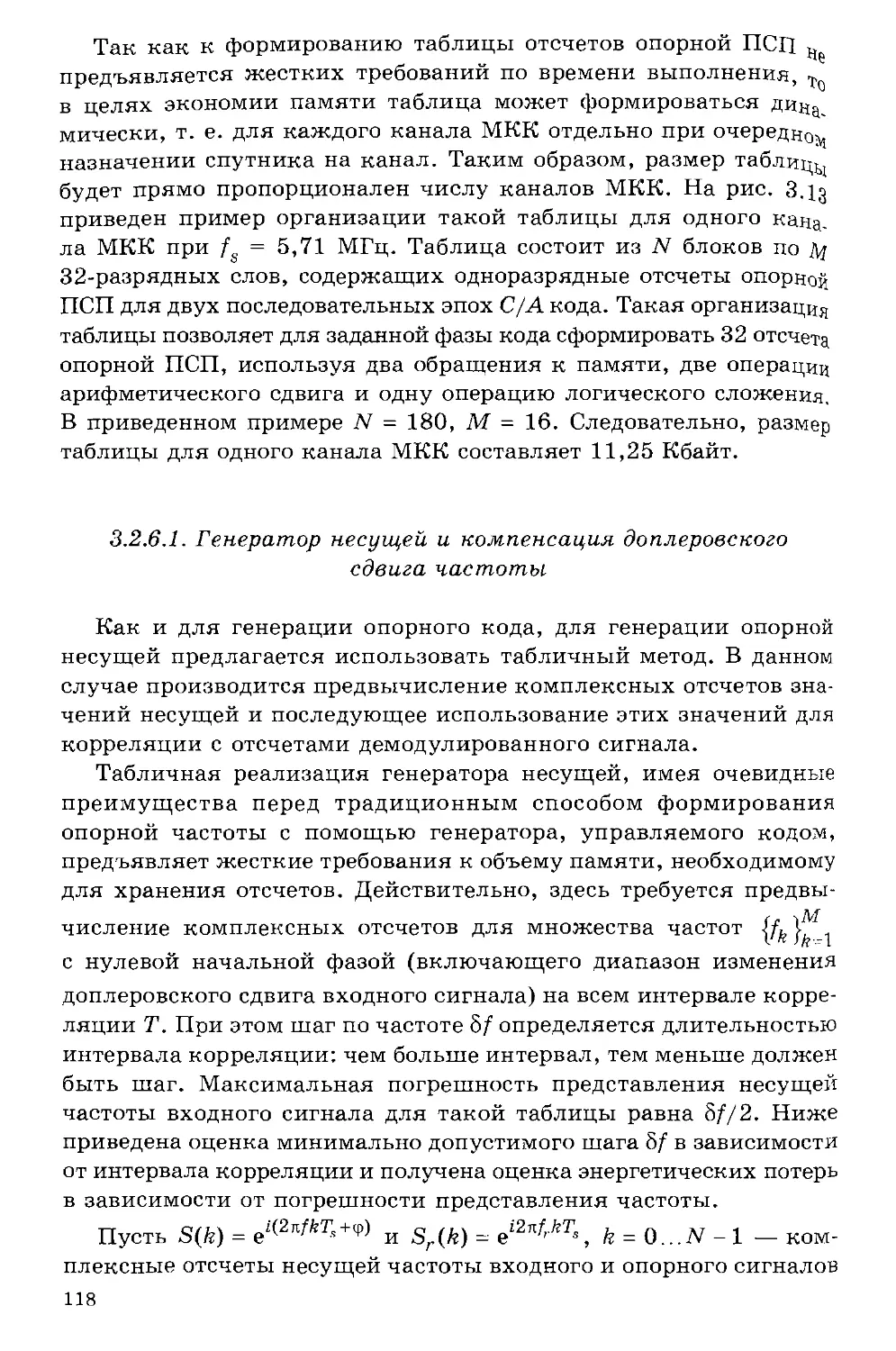
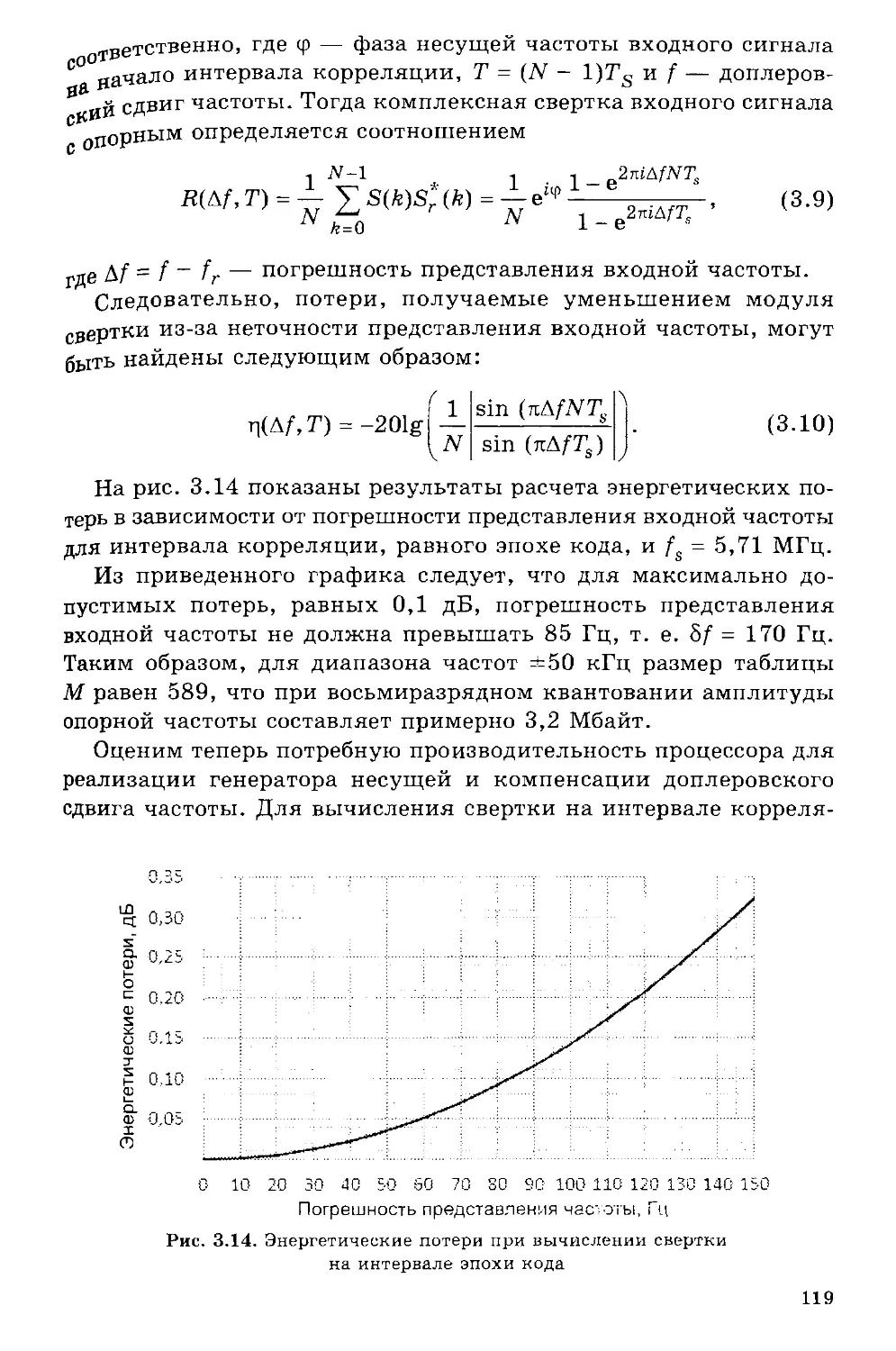
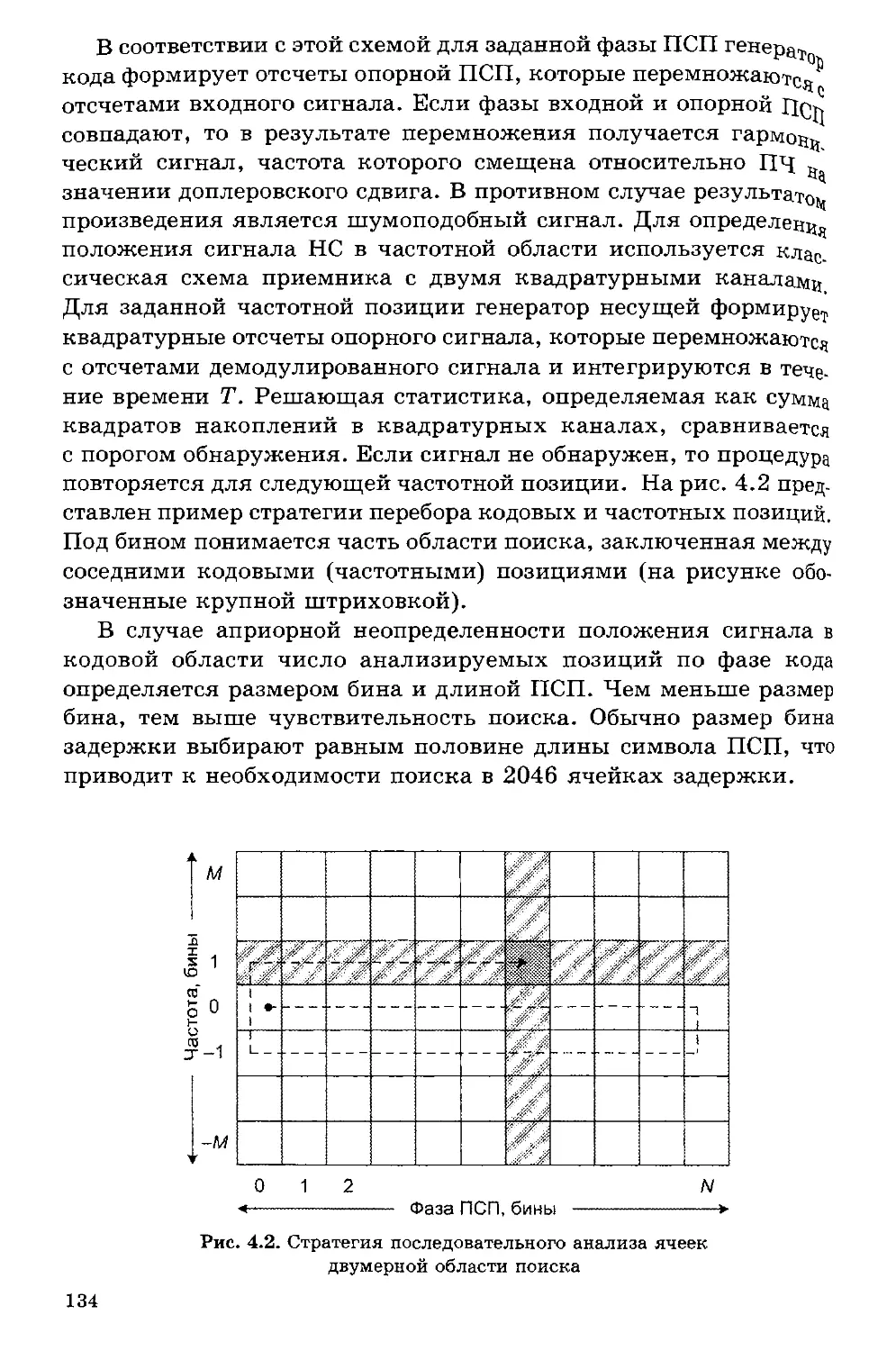
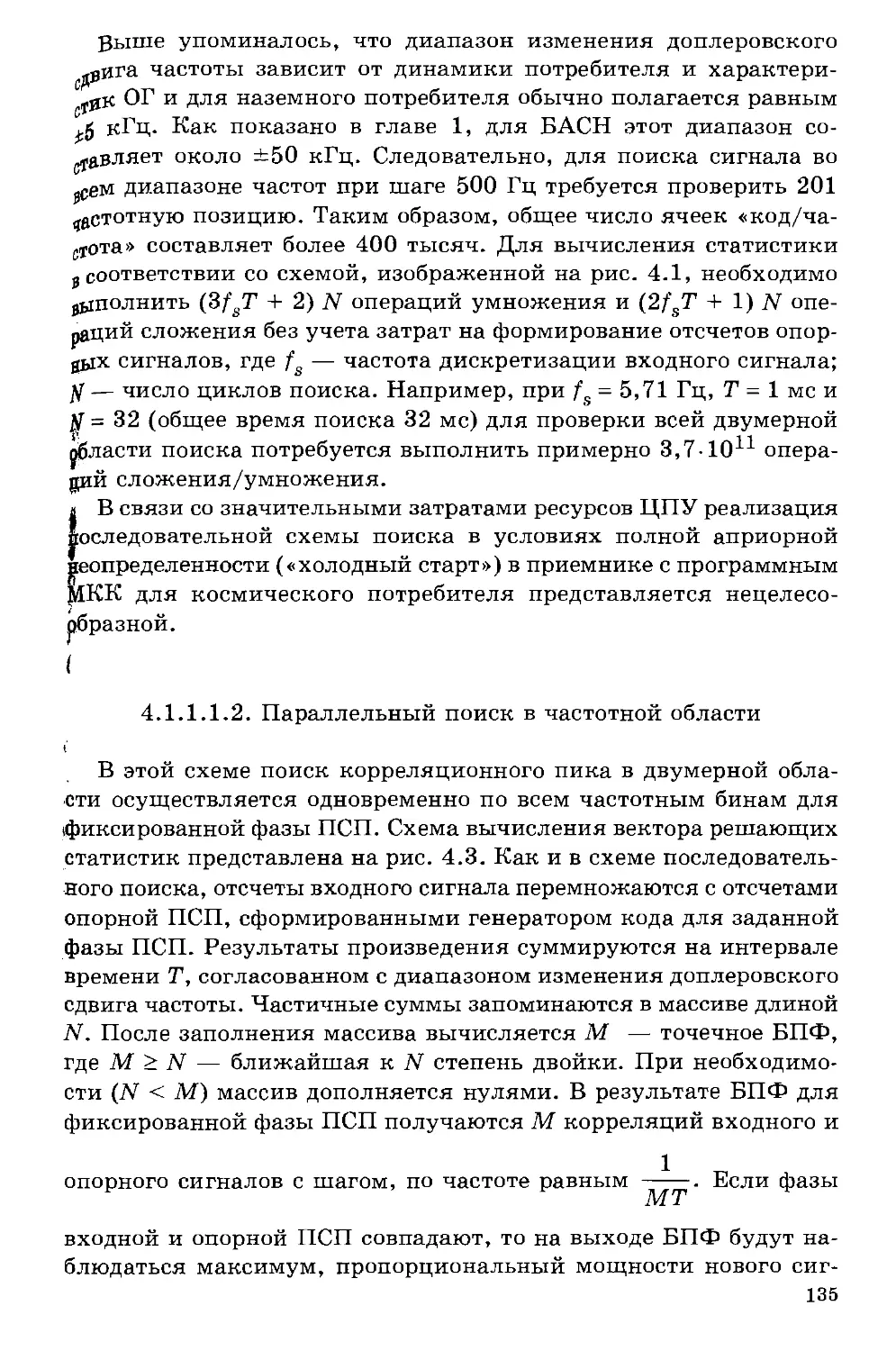
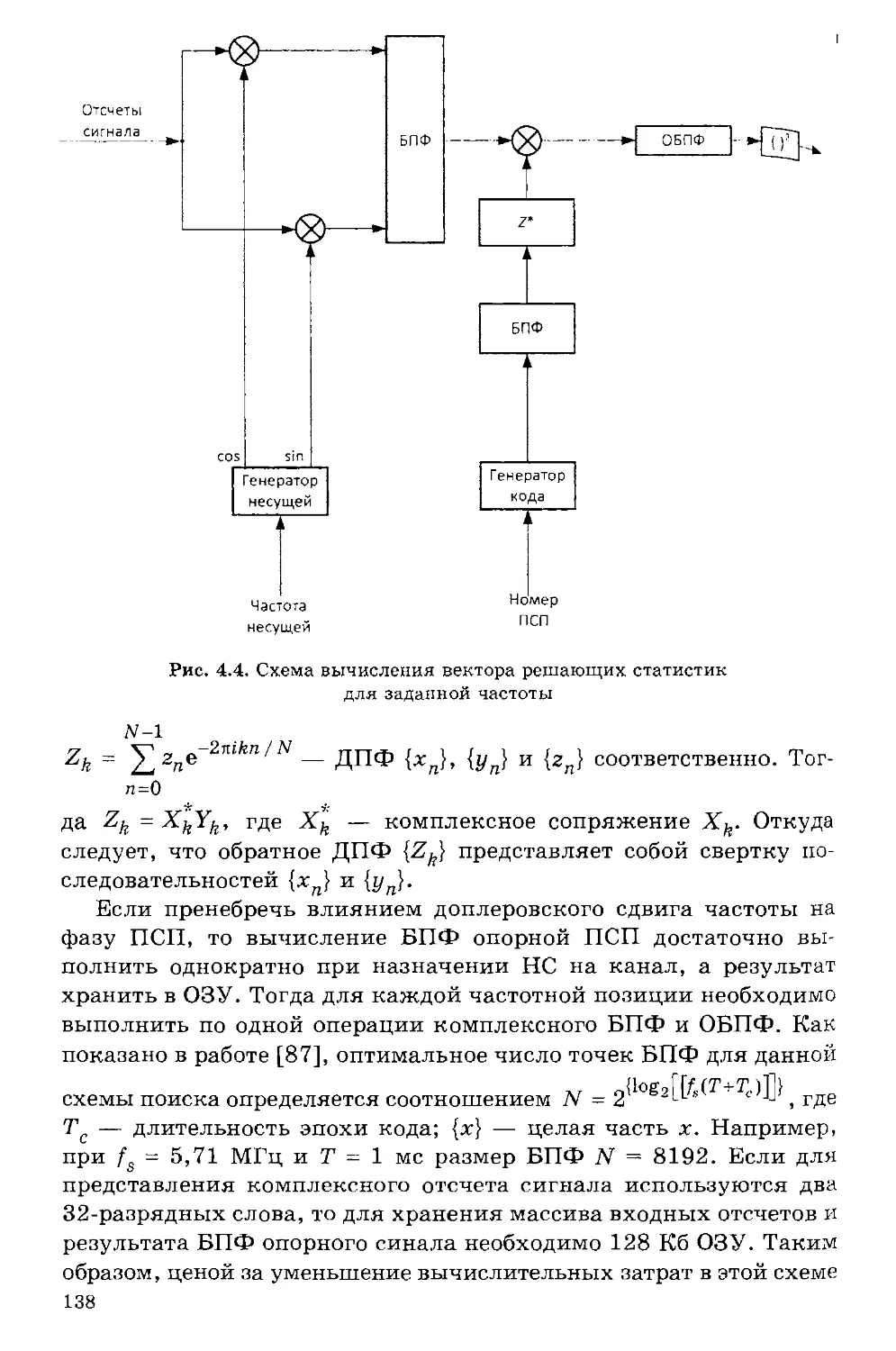
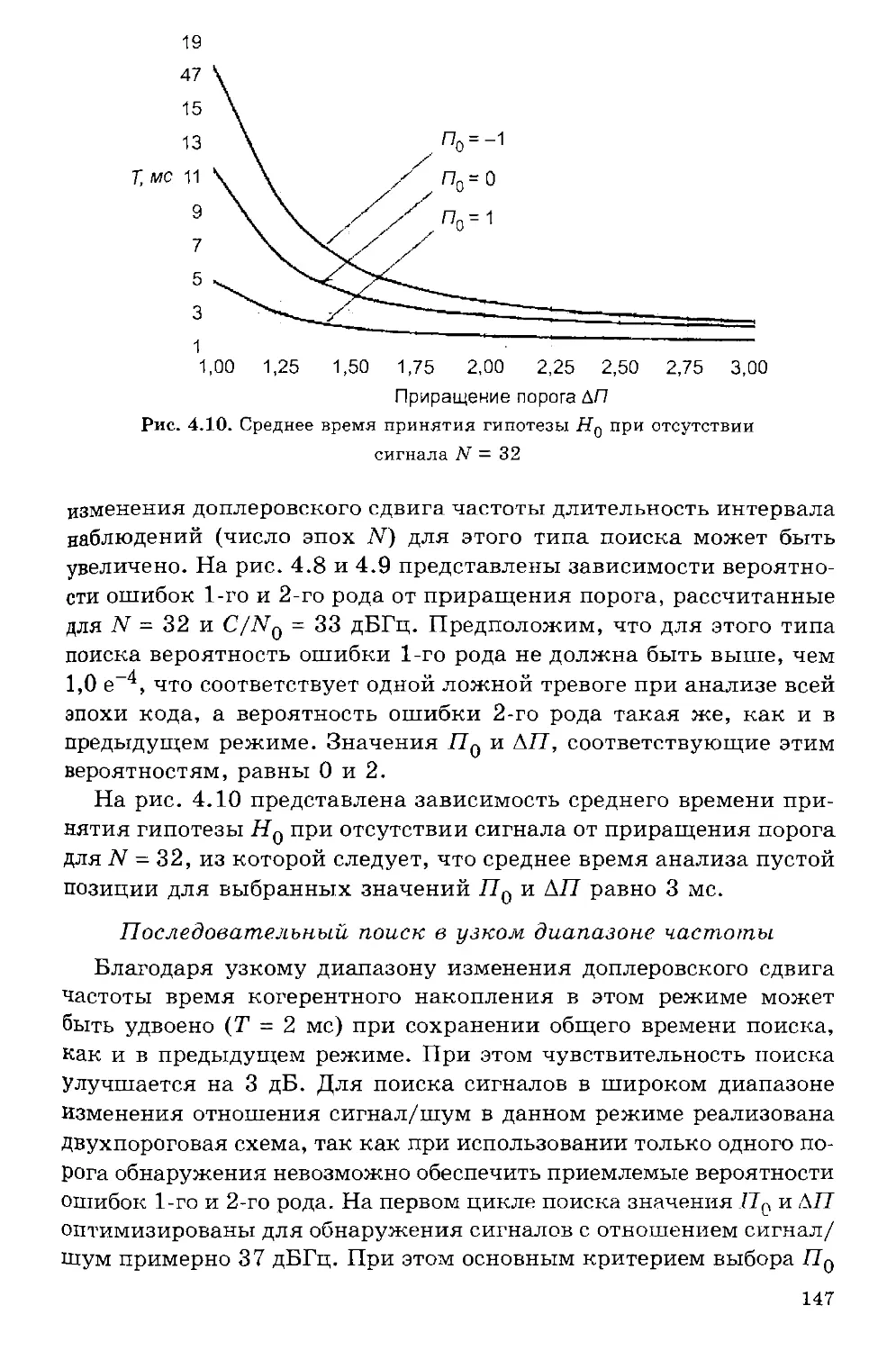
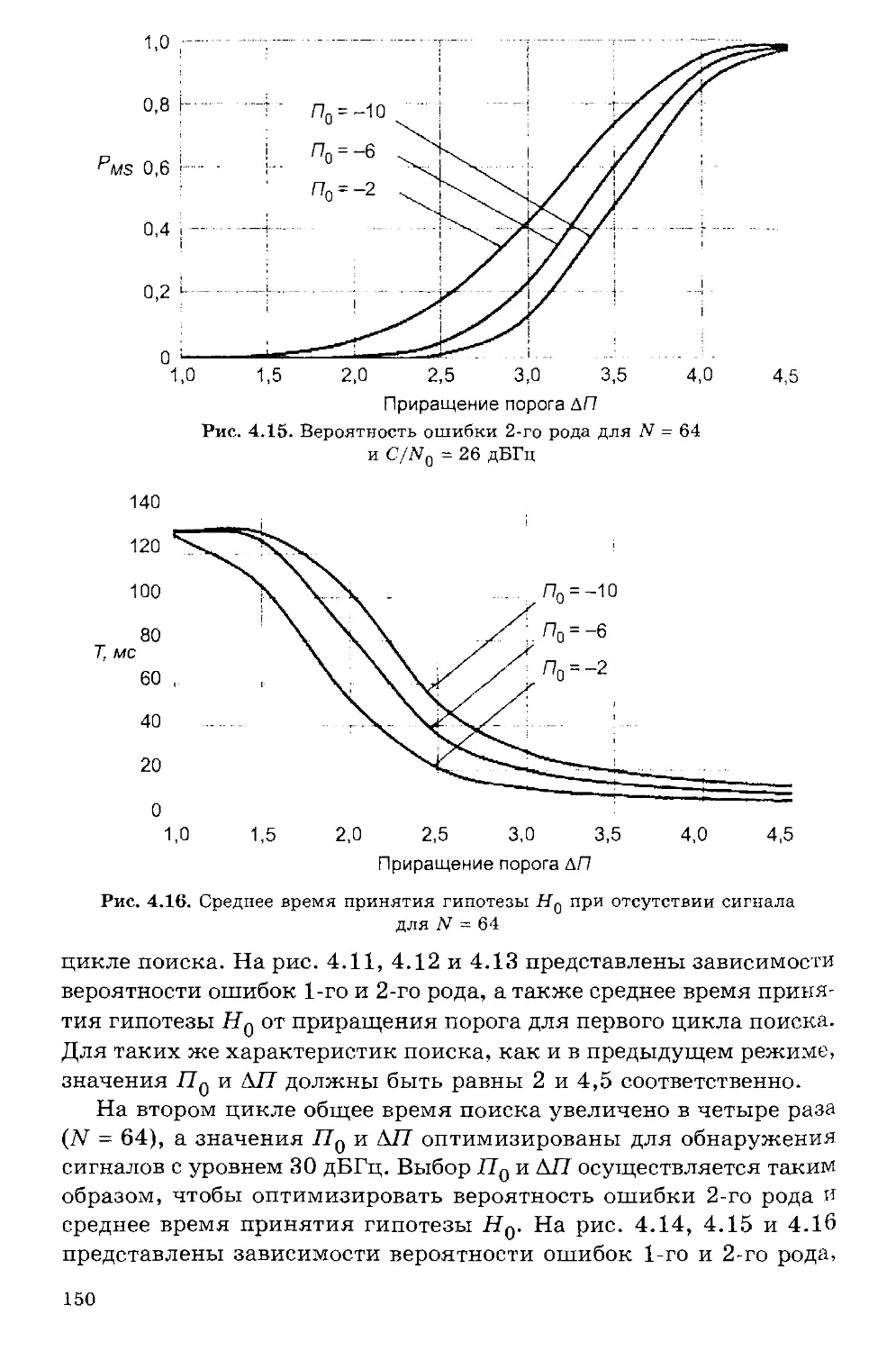
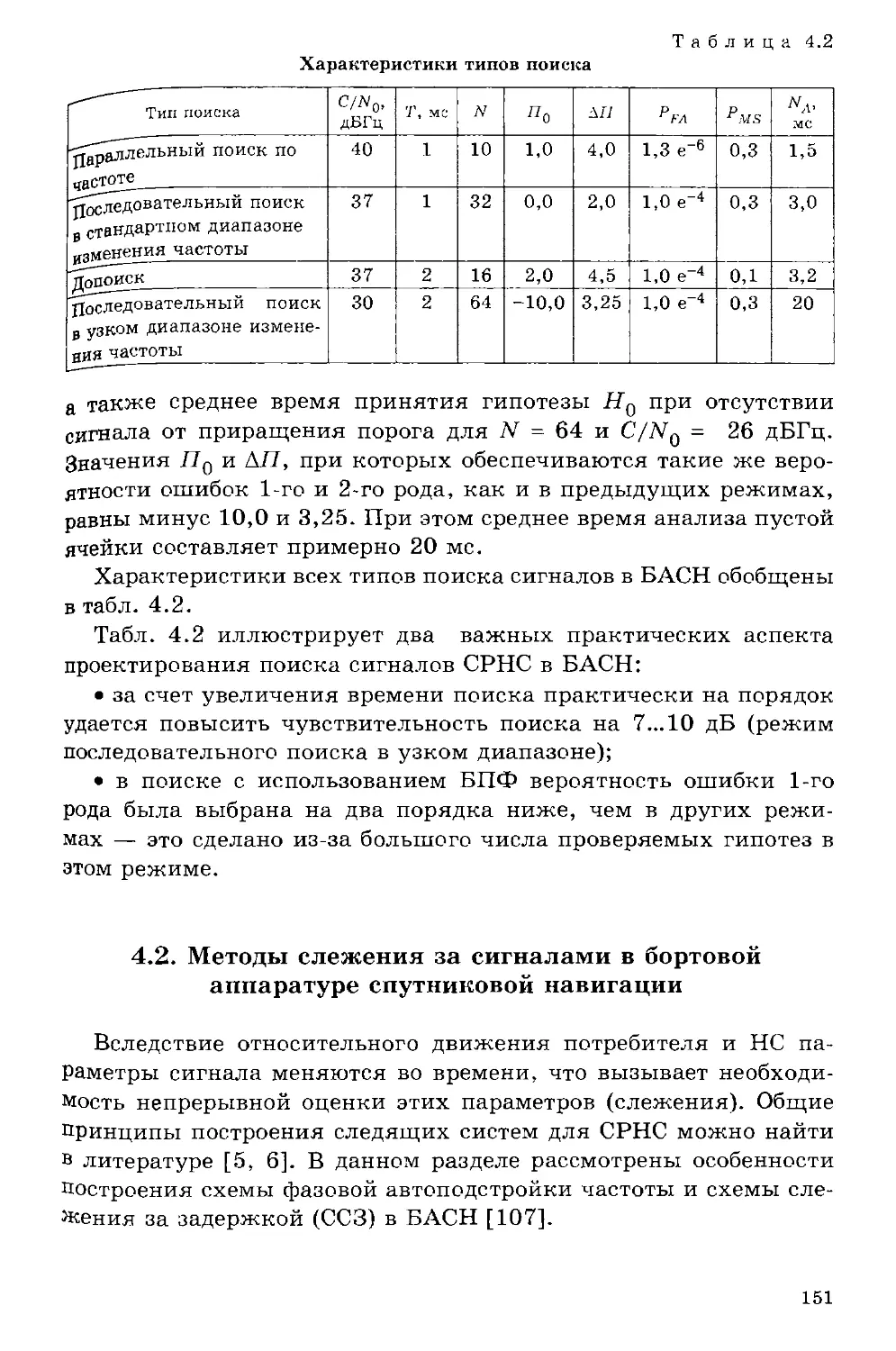
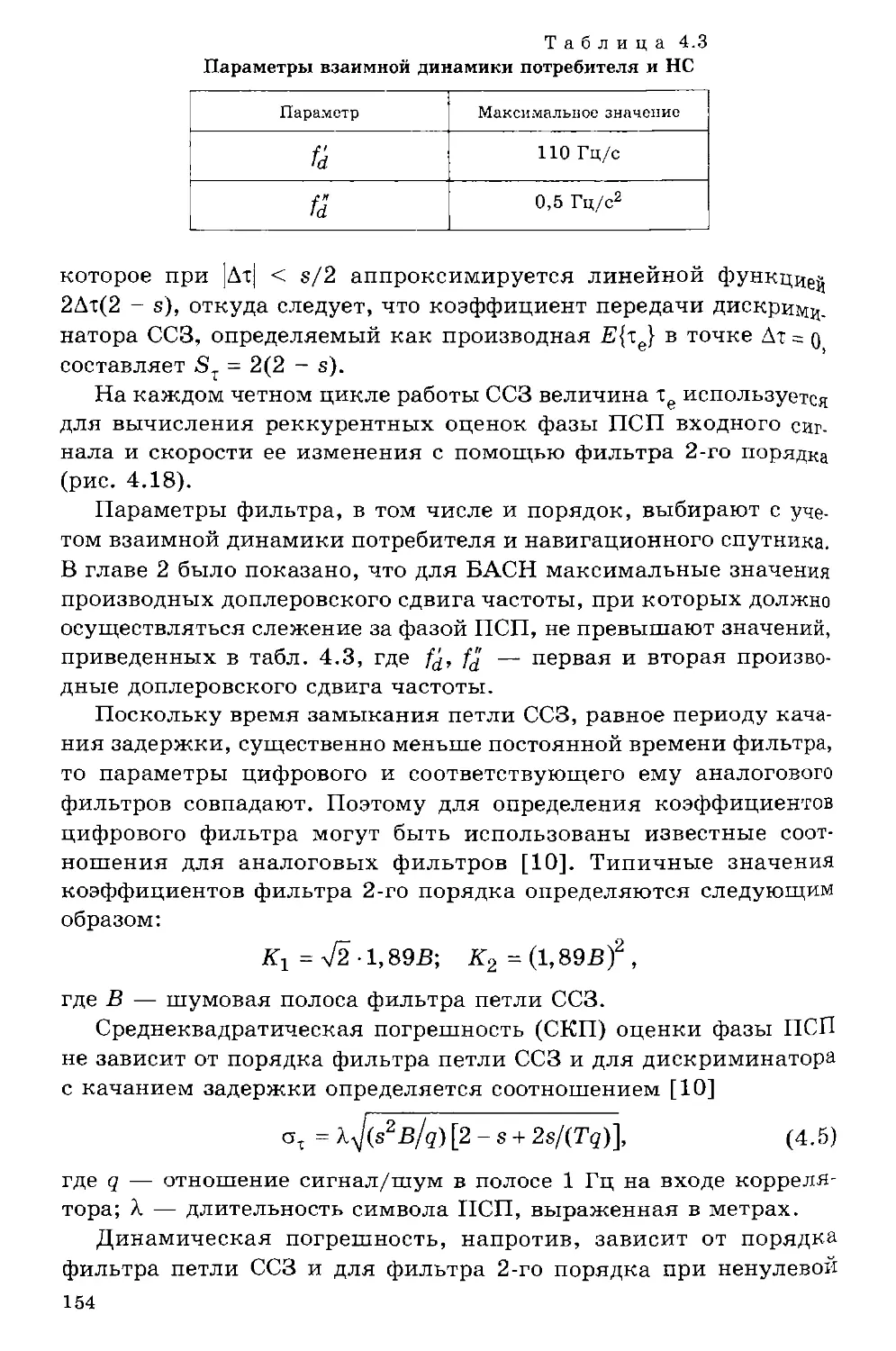
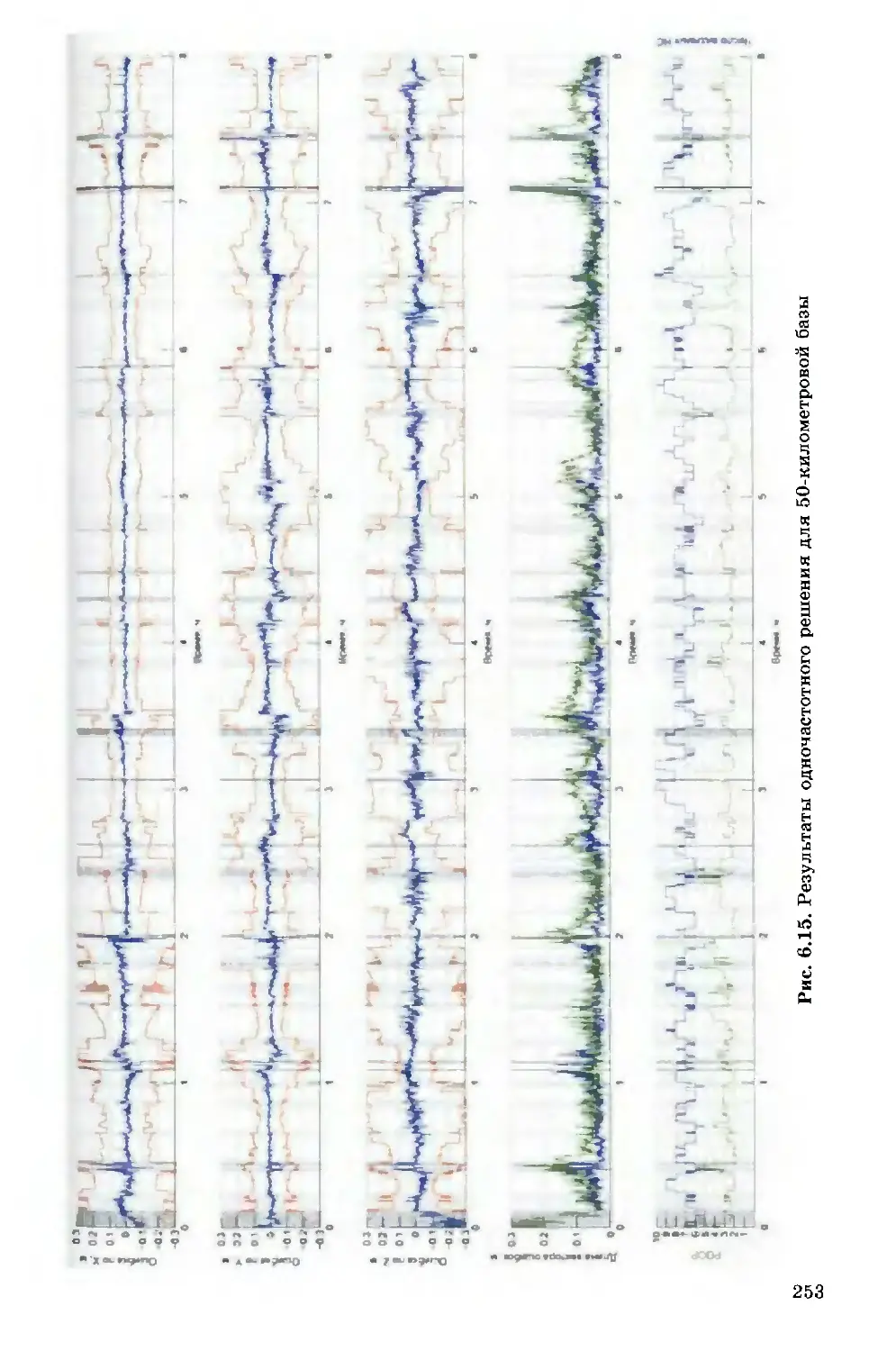
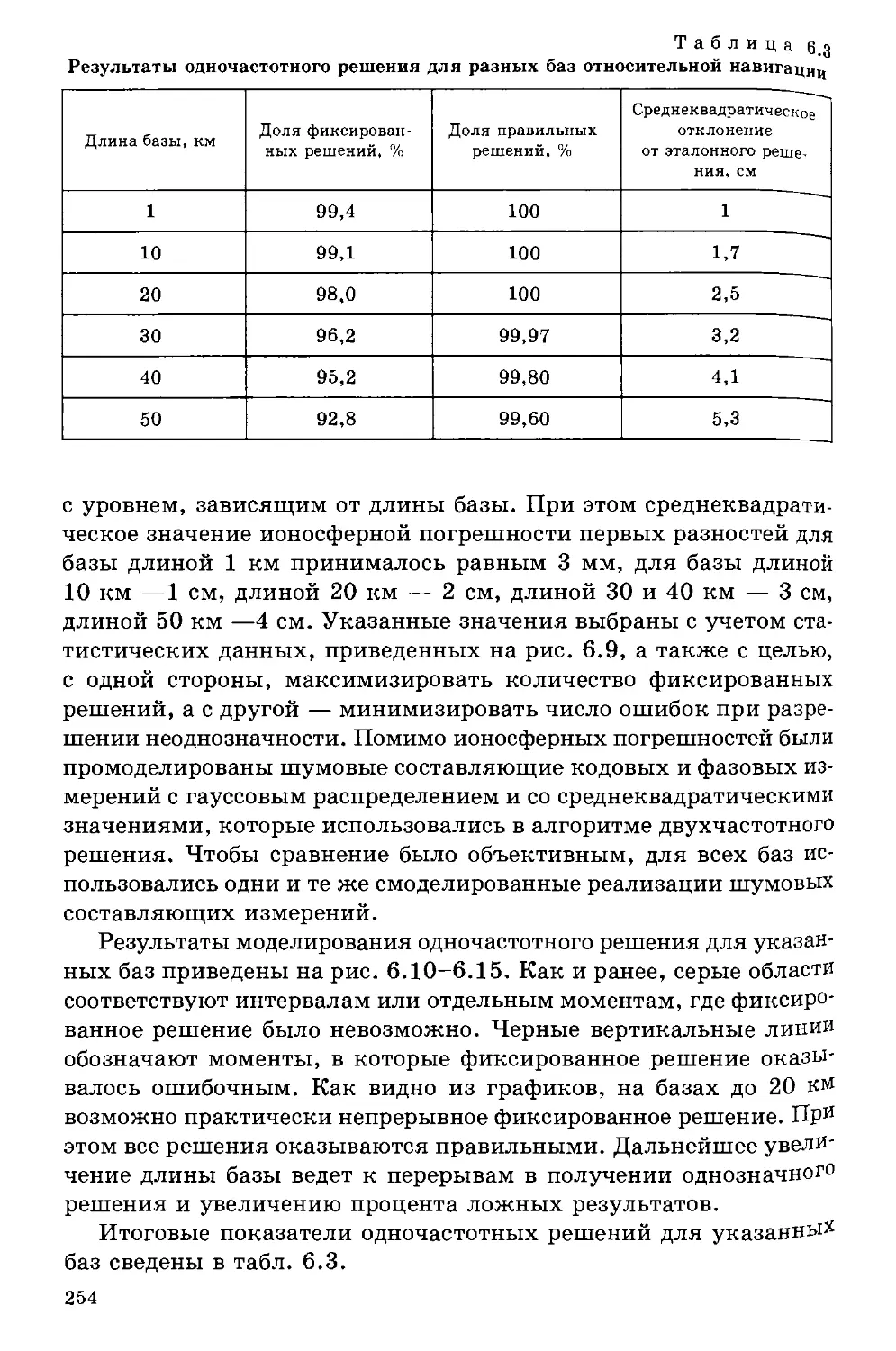
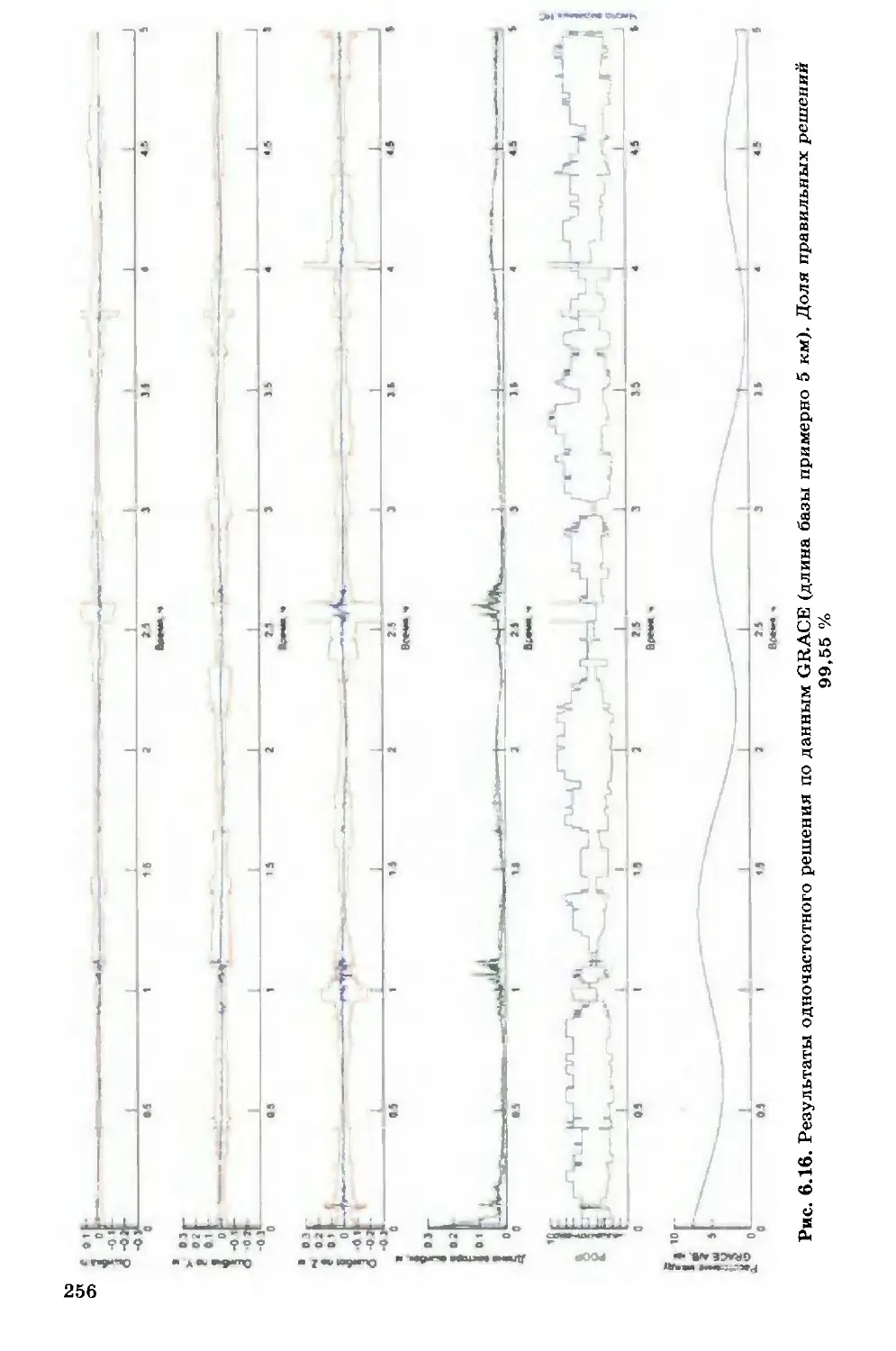
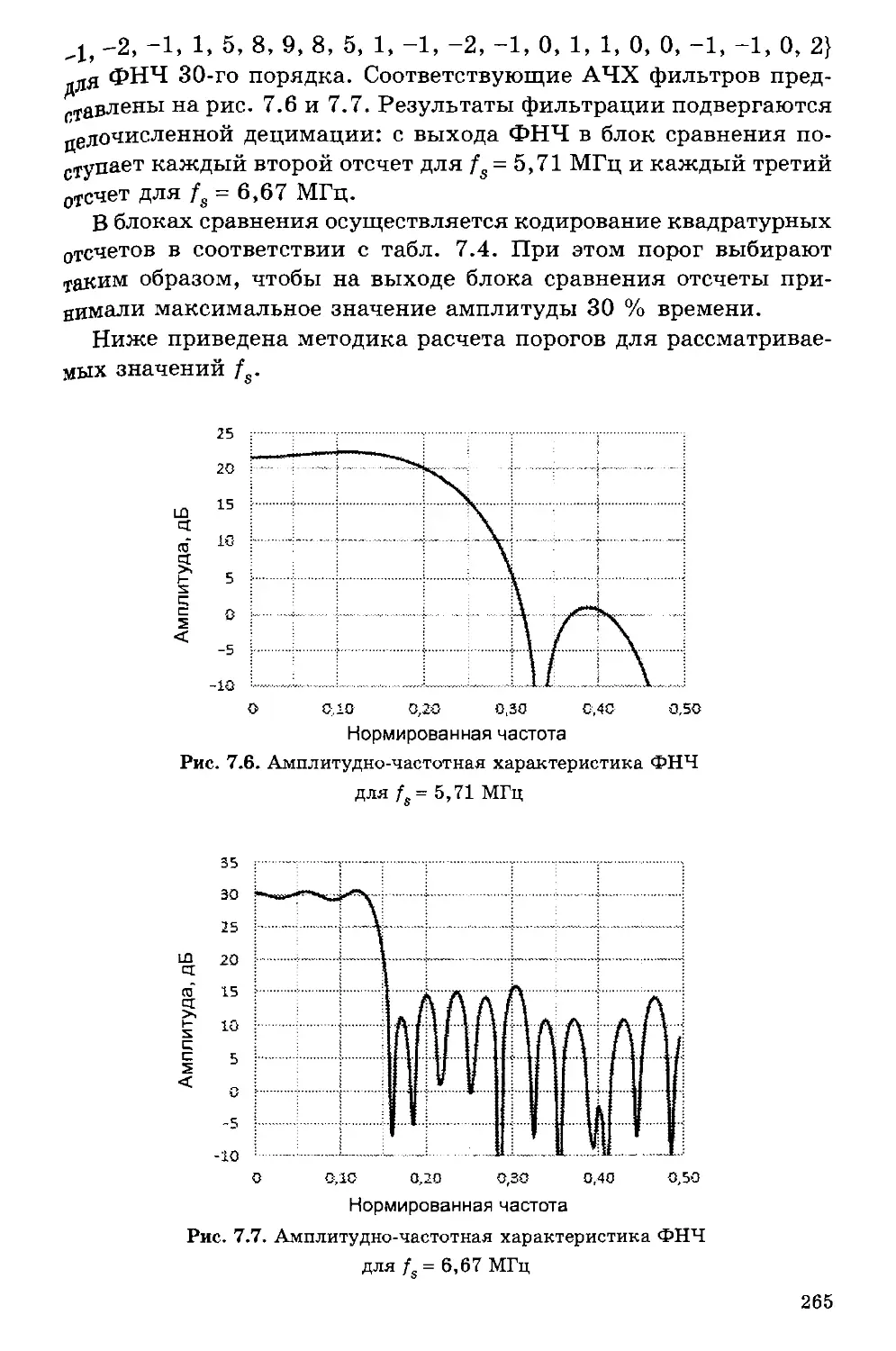
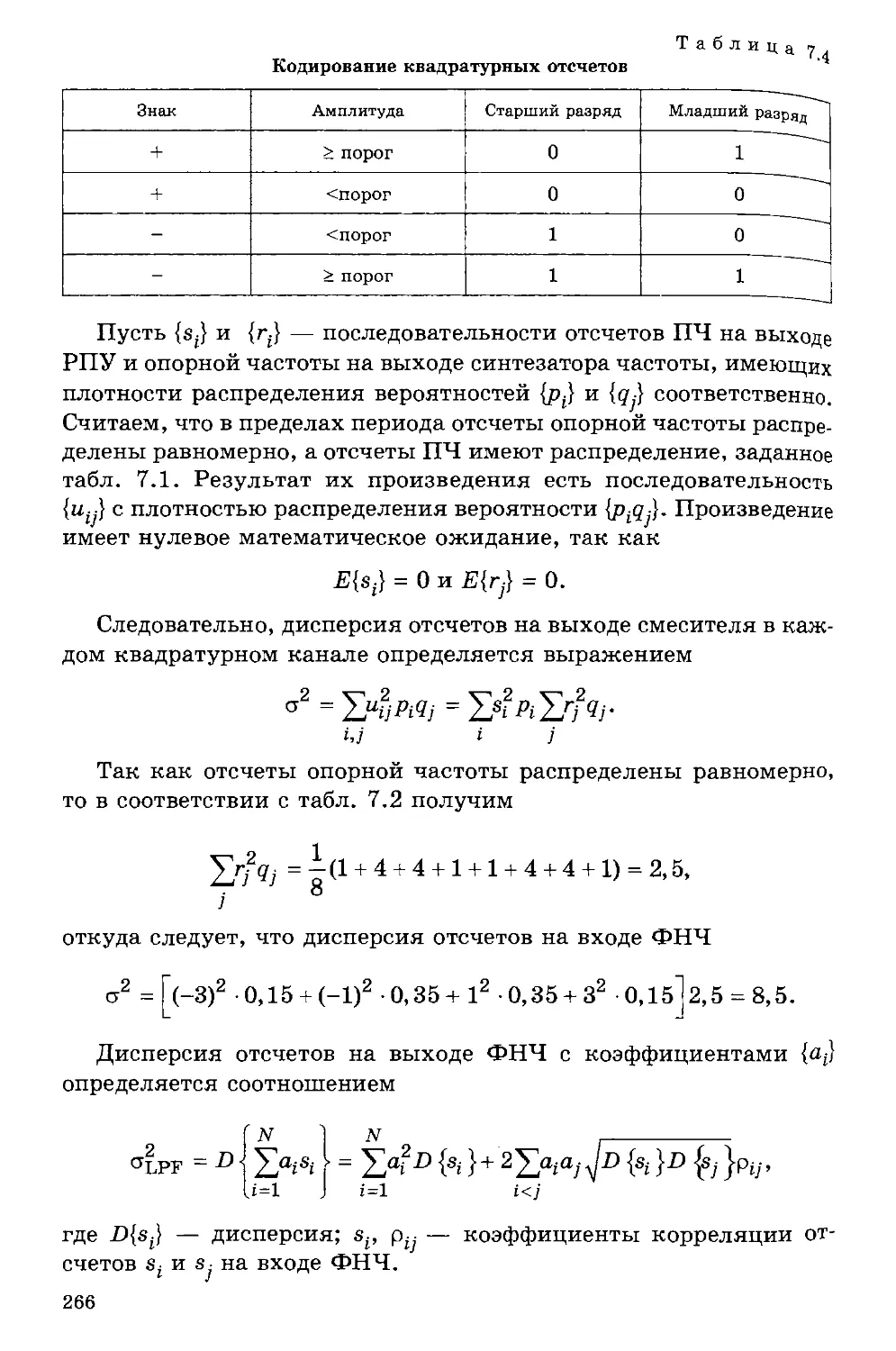
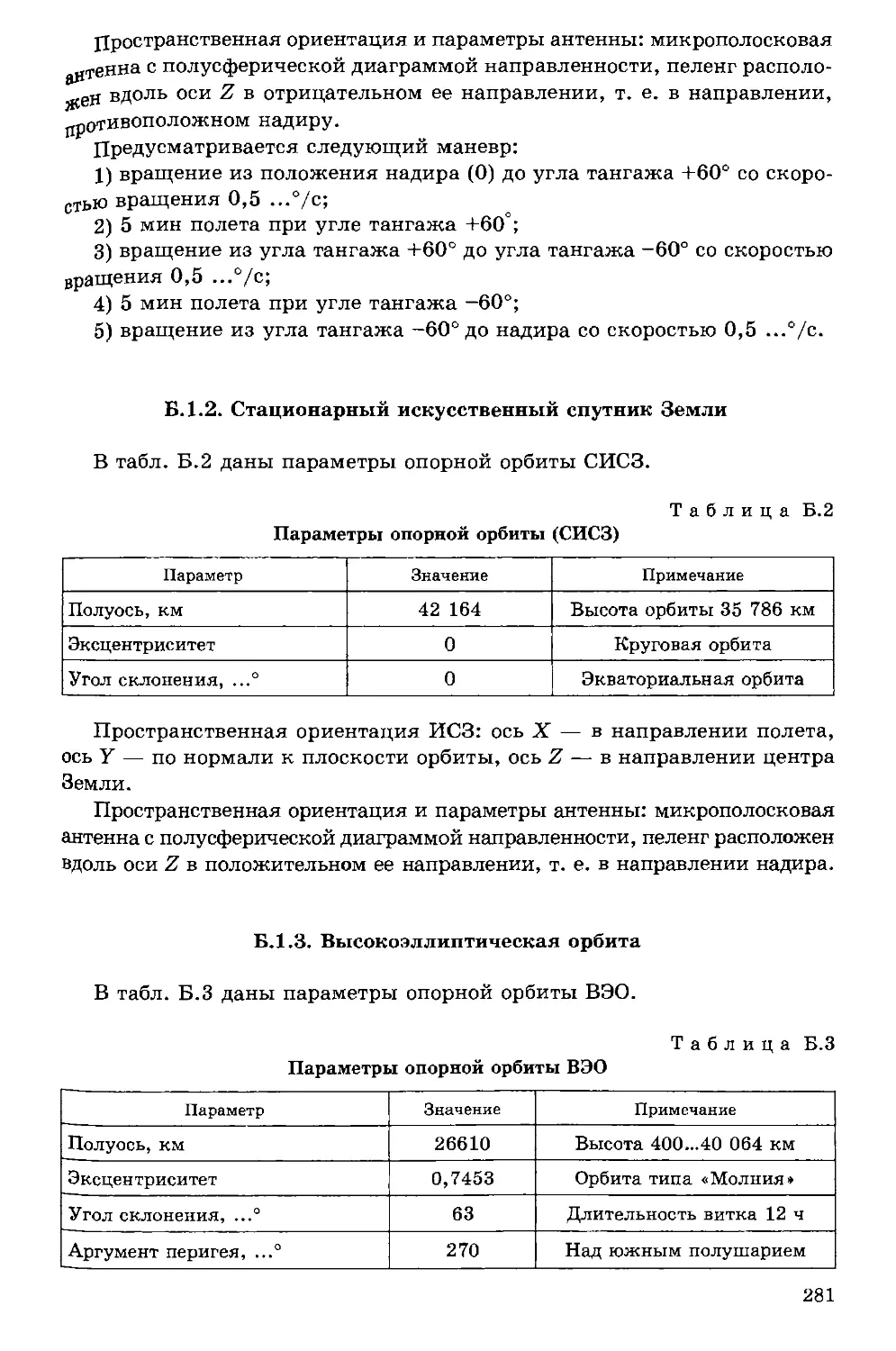
Text
Н. В. Михайлов
АВТОНОМНАЯ НАВИГАЦИЯ
КОСМИЧЕСКИХ АППАРАТОВ
ПРИ ПОМОЩИ СПУТНИКОВЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
федеральное государственное автономное образовательное
учреждение высшего профессионального образования
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
Университет ИТМО
Н. В. Михайлов
АВТОНОМНАЯ НАВИГАЦИЯ
КОСМИЧЕСКИХ АППАРАТОВ
ПРИ ПОМОЩИ СПУТНИКОВЫХ
РАДИОНАВИГАЦИОННЫХ
СИСТЕМ
П0Л/ПЕХН/1КА
ИЗДАТЕЛЬСТВО
Санкт-Петербург 2 014
УДК 629.783
ББК 39.62
М69
Работа выполнена при поддержке гранта Российского научного фонда
(проект № 14-29-00160)
Рецензенты:
Д. А. Кошаев, д-р техн. наук, ведущий научный сотрудник
ОАО «ЦНИИ „Электроприбор”»;
М. В. Михайлов, д-р техн. наук, начальник сектора ОАО «РКК „Энергия”»
Михайлов Н. В.
М69 Автономная навигация космических аппаратов при по¬
мощи спутниковых радионавигационных систем. — СПб.:
Политехника, 2014. — 362 с.
ISBN 978-5-7325-1050-8
Перед вами одна из первых отечественных книг, посвященных навигации
искусственных спутников Земли по сигналам радионавигационных систем.
Она обобщает многолетний научный и практический опыт автора по раз¬
работке бортовой аппаратуры спутниковой навигации (БАСН) космического
базирования. Мотивацией для написания монографии послужило то, что
методология проектирования БАСН, разработанная автором и успешно при¬
мененная в БАСН MosiacGNSS, не была систематически изложена.
В монографии проведен анализ особенностей применения спутниковых
радионавигационных систем на борту космических аппаратов, изложены
научно-технические принципы проектирования БАСН, рассмотрены вопро¬
сы архитектуры приемников спутниковой радионавигации космического
базирования и предложены методы проектирования первичной и вторичной
обработки сигналов в БАСН. Отдельные главы посвящены решению задачи
относительной навигации искусственных спутников при помощи БАСН и
обработке данных полетных экспериментов, что весьма важно при исследо¬
вании гравитационного поля в труднодоступных районах Земли.
Книга будет полезна аспирантам и научным работникам, занимающимся
проектированием навигационной аппаратуры потребителей спутниковых
радионавигационных систем.
УДК 629.783
ББК 39.62
ISBN 978-5-7325-1050-8
© ГУАП, 2014
© Н. В. Михайлов, 2014
This book is dedicated to three outstanding leaders
and visionaries, for giving the hope to me and my team.
To Dr. Andreas Mattissek, Dr. Steve Yang
and Mr. Konstantin Borisov.
Оглавление
Перечень сокращений и условных обозначений 5
Предисловие ?
Введение 9
Глава 1. Методы навигации с использованием спутниковых ра¬
дионавигационных систем 16
1.1. Спутниковые радионавигационные системы 16
1.2. Принципы спутниковой навигации 17
1.3. Методы обработки сигналов и решения навигационной за¬
дачи в приемниках спутниковых радионавигационных систем 19
1.4. Навигационные сообщения в спутниковых радионавигаци¬
онных системах 24
1.5. Источники погрешностей в спутниковых радионавигацион¬
ных системах 25
1.6. Схема радионавигационного приемника 30
1.7. Характеристики радионавигационных приемников 33
1.8. Выводы 35
Глава 2. Формулировка проблемы автономной навигации искус¬
ственных спутников Земли 36
2.1. Определение автономной навигации искусственных спутни¬
ков Земли 36
2.2. Значение и роль автономной навигации в освоении космоса 37
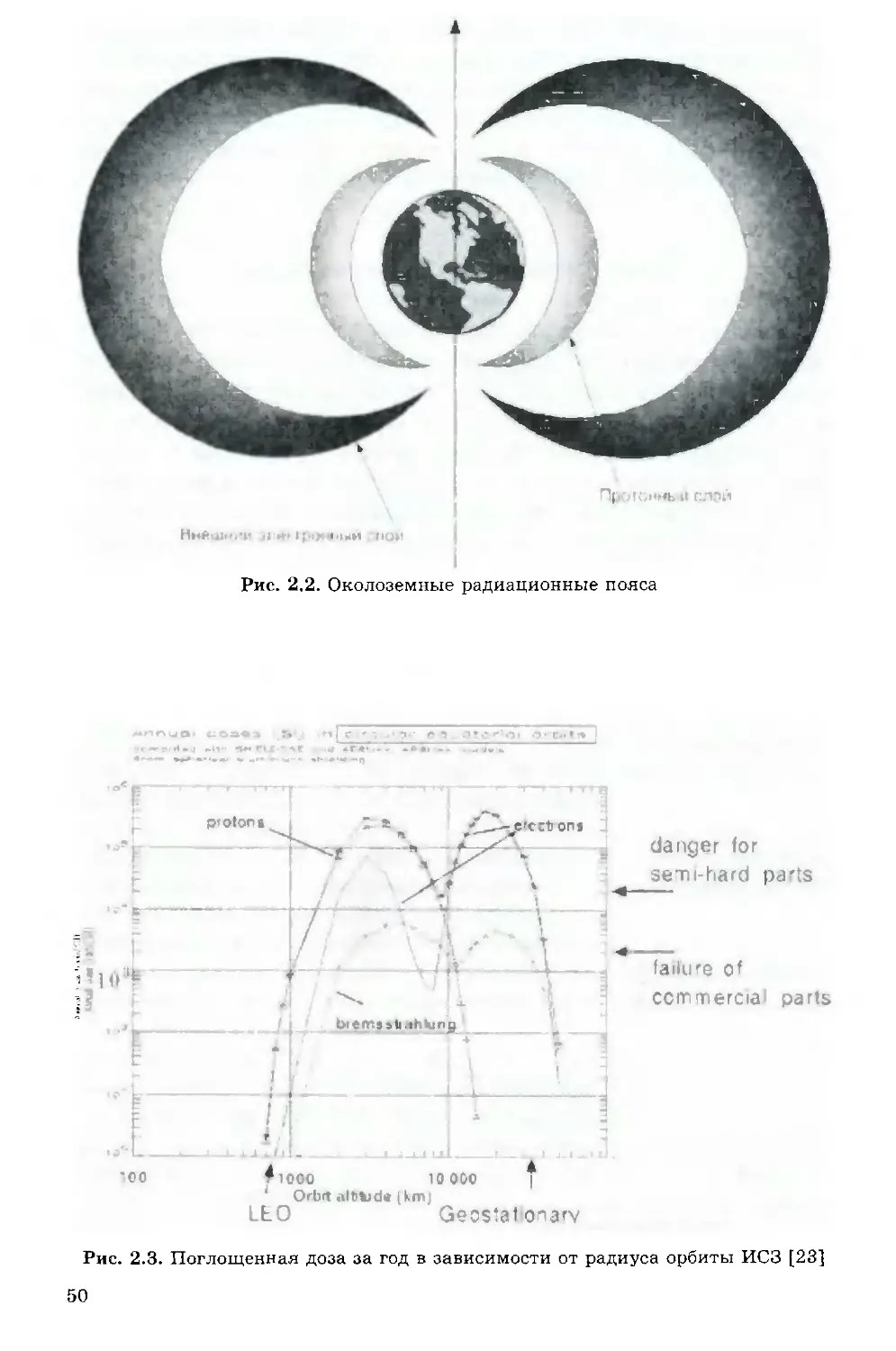
2.3. Ионизирующее излучение в космосе (по материалам [21]) 43
2.4. Воздействие ионизирующего излучения на аппаратуру спут¬
никового базирования 48
2.5. Особенности космического базирования приемников спутни¬
ковой радиационной системы 57
2.6. Требования к бортовой аппаратуре спутниковой навигации 83
2.7. Научно-технические задачи, которые нужно решить для по¬
строения бортовой аппаратуры спутниковой навигации 84
2.8. Выводы 84
Глава 3. Архитектура бортовой аппаратуры спутниковой нави¬
гации 86
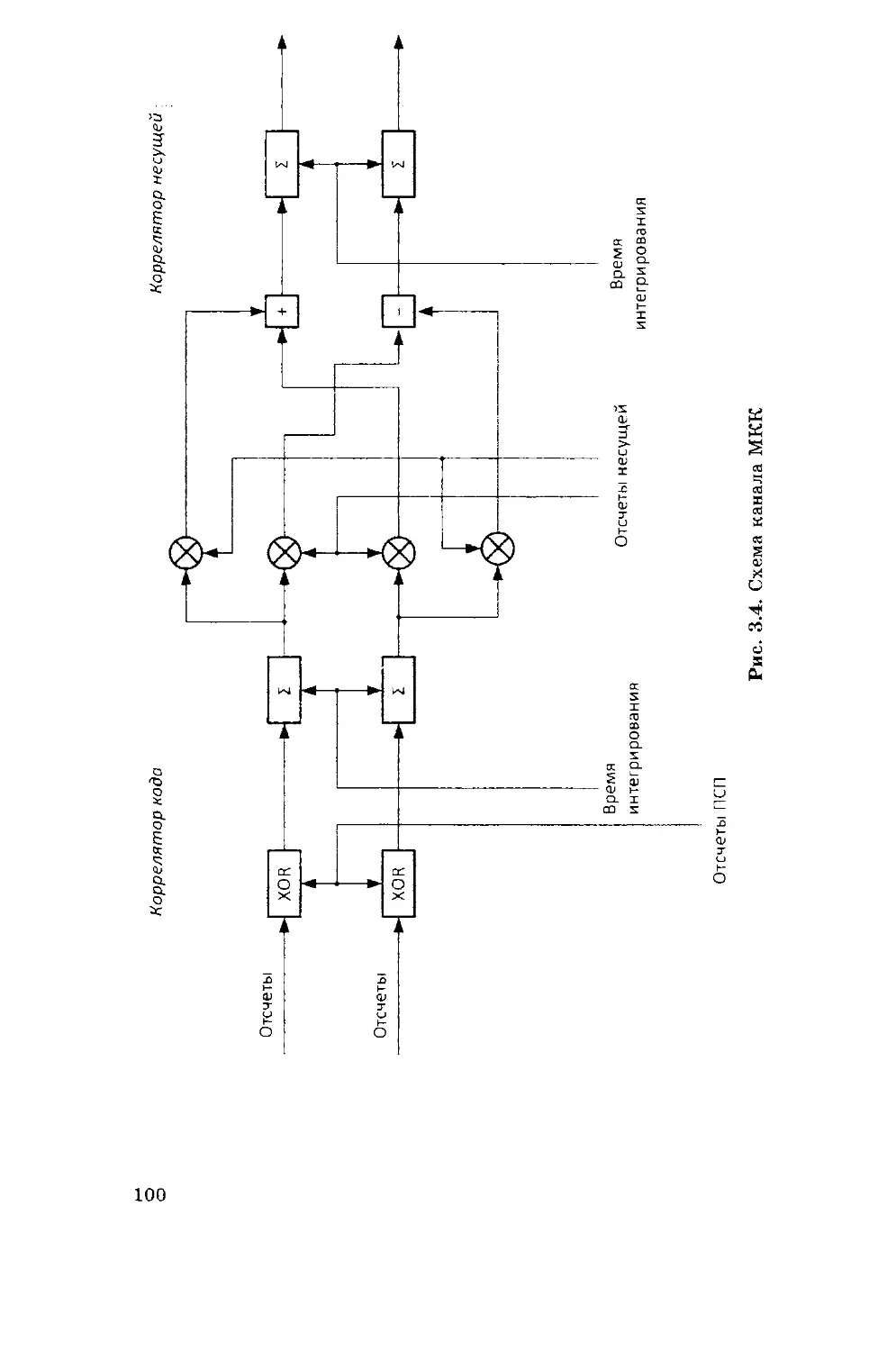
3.1. Аппаратная реализация многоканального коррелятора ... 86
3.2. Программная реализация многоканального коррелятора ... 96
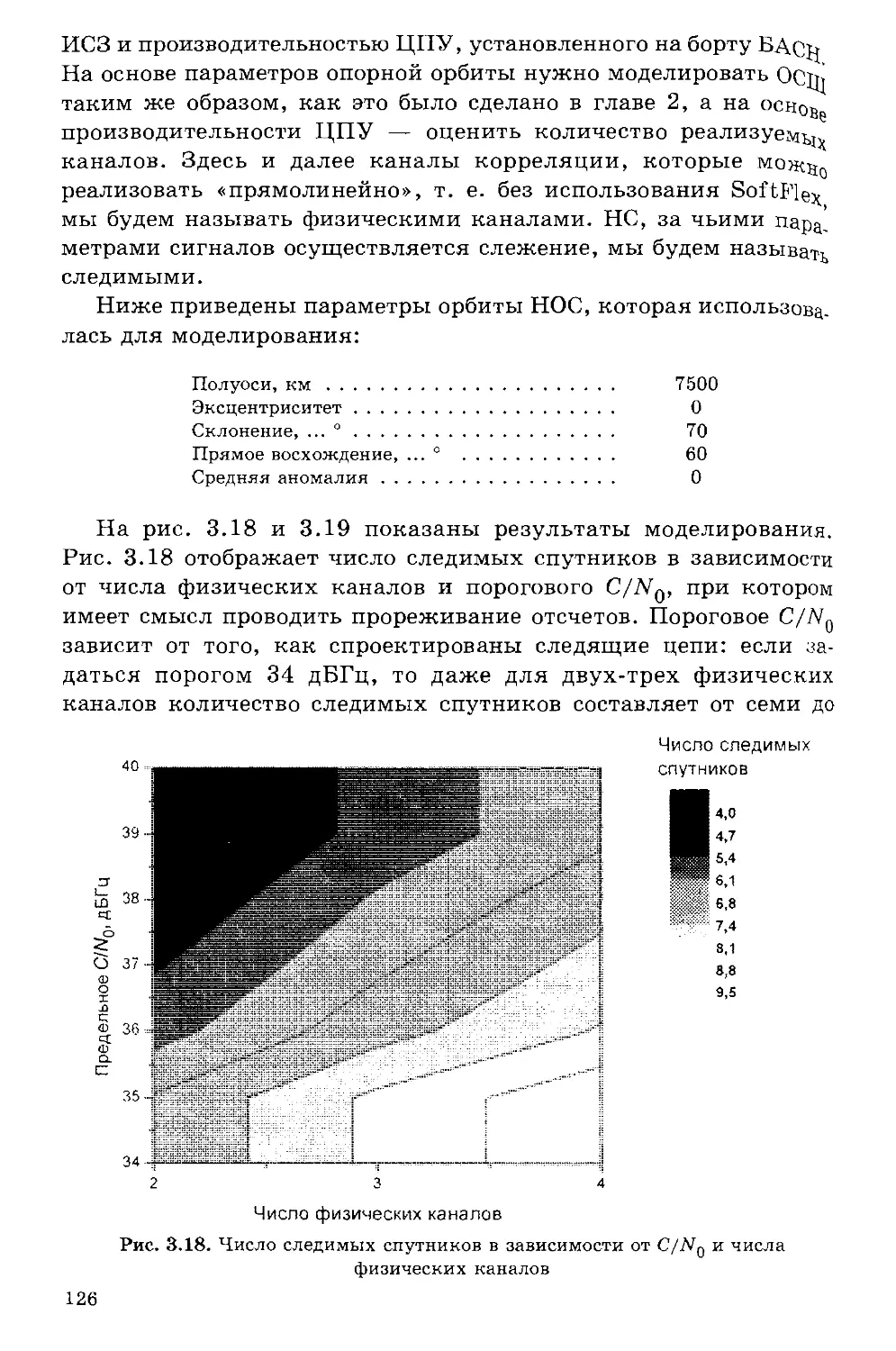
3.3. Выводы 127
Глава 4. Первичная обработка сигналов в бортовой аппаратуре
спутниковой навигации 130
4.1. Методы поиска сигналов в бортовой аппаратуре спутнико¬
вой навигации 130
4.2. Методы слежения за сигналами в бортовой аппаратуре спут¬
никовой навигации 151
4.3. Прием символов навигационного сообщения в бортовой аппа¬
ратуре спутниковой навигации 171
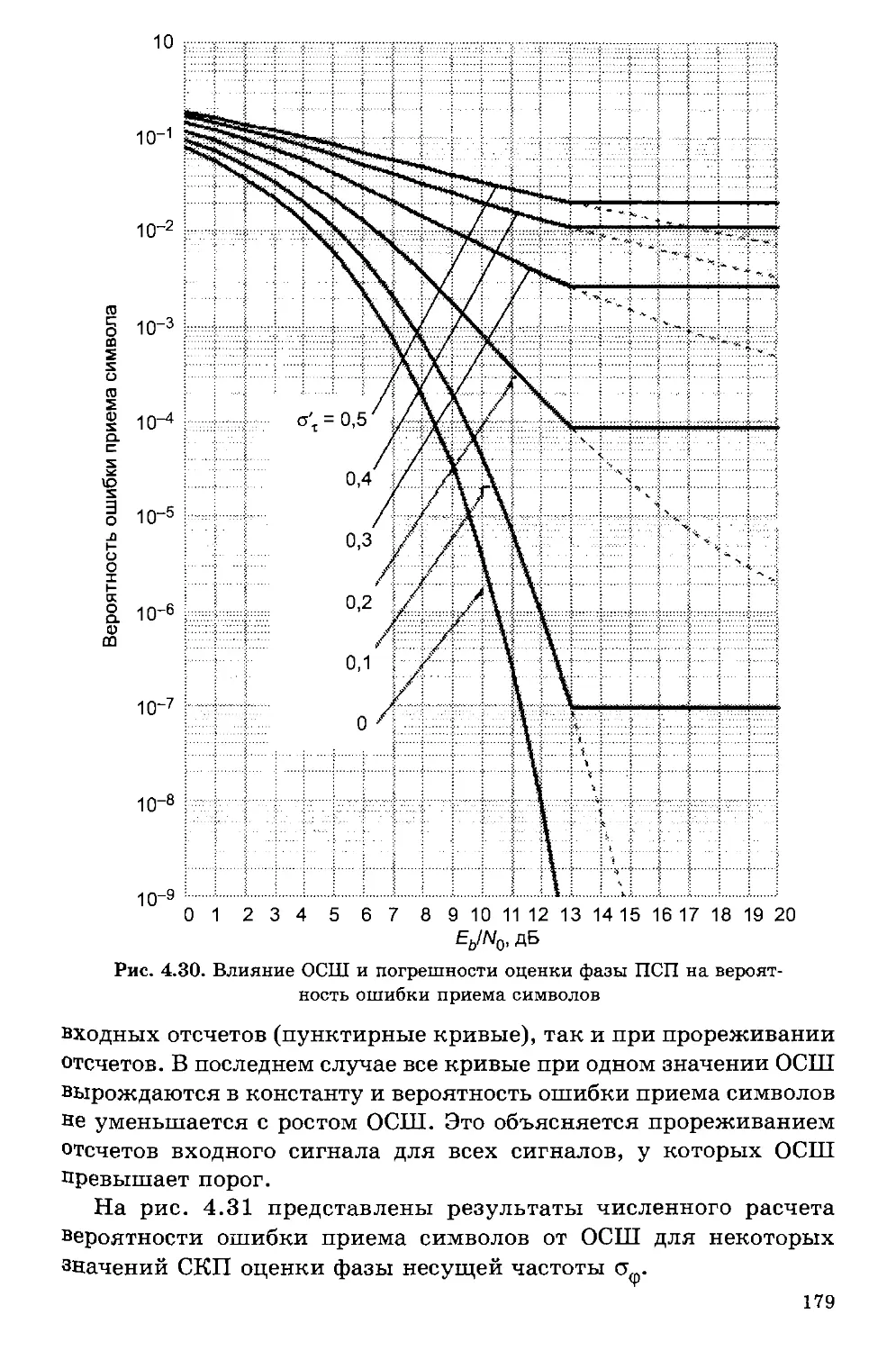
4.4. Выводы 182
3
Глава 5. Методы вторичной обработки в бортовой аппаратуре
спутниковой навигации 184
5.1. Особенности вторичной обработки в бортовой аппаратуре
спутниковой навигации 184
5.2. Обзор методов навигации стационарного искусственного спут¬
ника Земли 187
5.3. Использование спутниковой радионавигационной системы
для навигации искусственного спутника Земли 192
5.4. Метод определения координат искусственного спутника Зем¬
ли по измерениям сигналов спутниковой радионавигационной
системы 200
5.5. Результаты тестирования предложенного метода определе¬
ния координат искусственного спутника Земли по измерениям
сигналов спутниковой радионавигационной системы 206
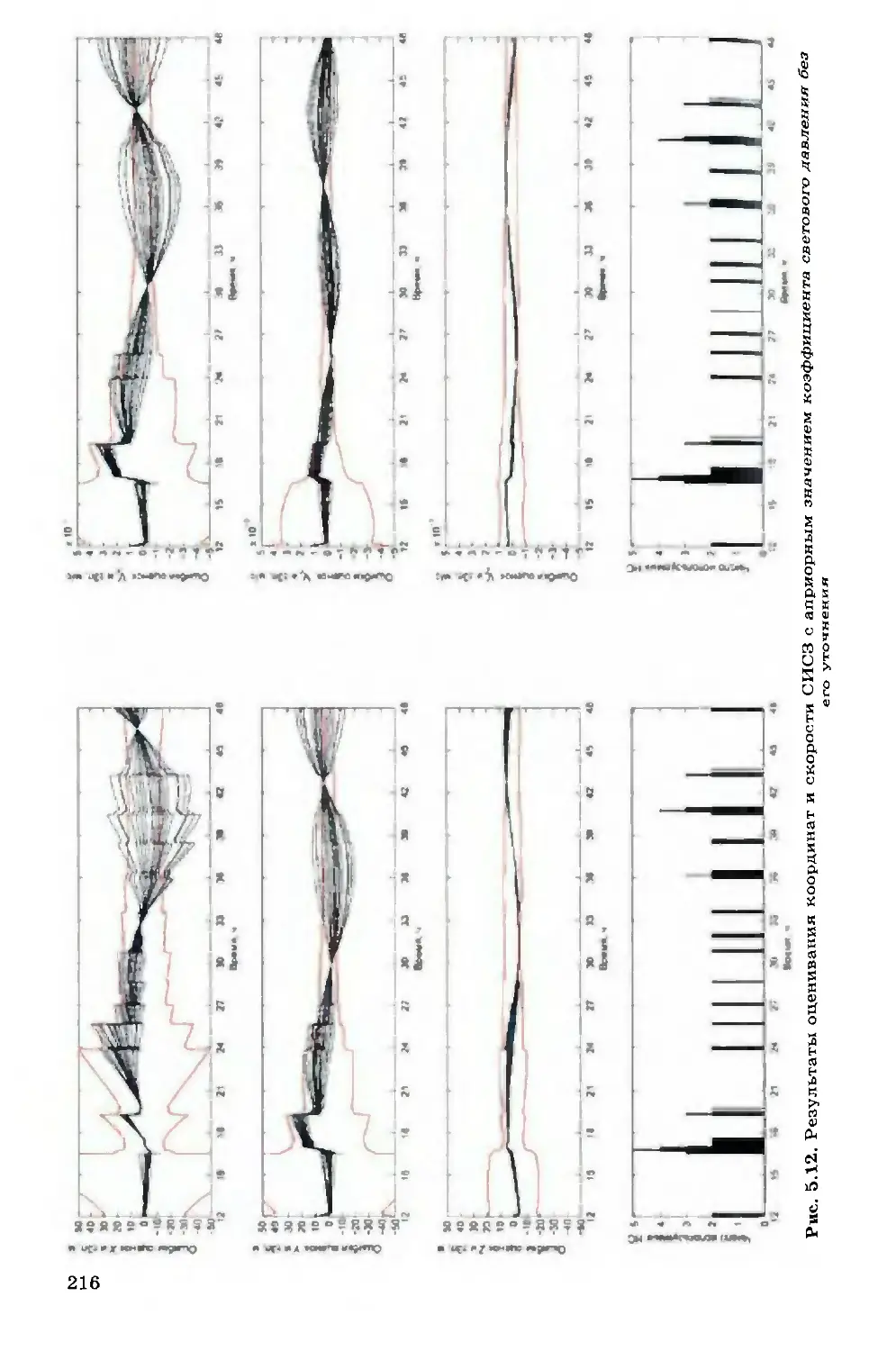
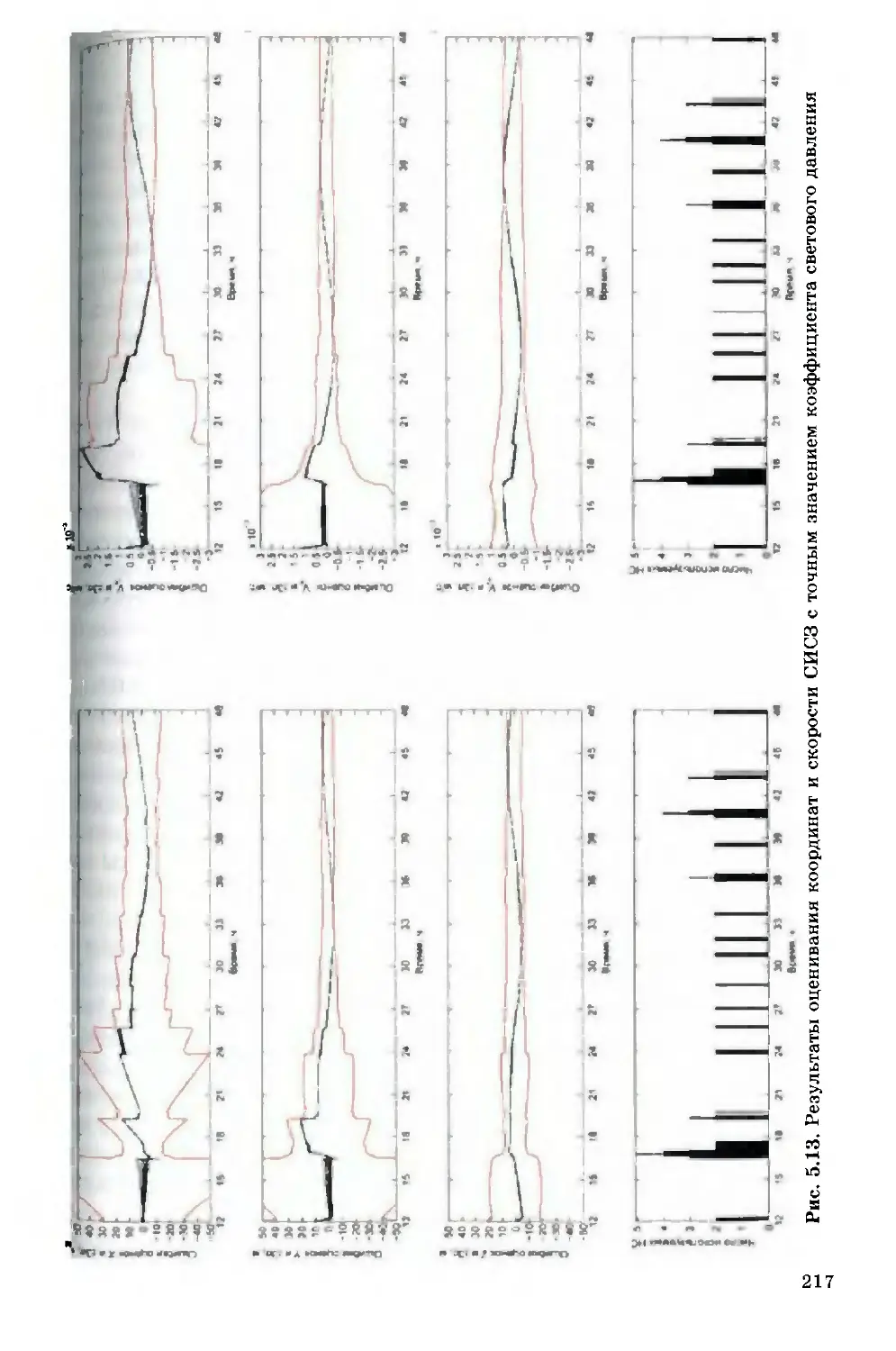
5.6. Выводы 218
Глава 6. Автономная относительная навигация искусственного
спутника Земли 219
6.1. Задача автономной навигации группы спутников 219
6.2. Принципы относительной навигации спутниковой радиона¬
вигационной системы 222
6.3. Особенности относительной навигации искусственного спут¬
ника Земли 234
6.4. Метод относительной навигации искусственного спутника
Земли 236
6.5. Результаты тестирования предложенного метода относитель¬
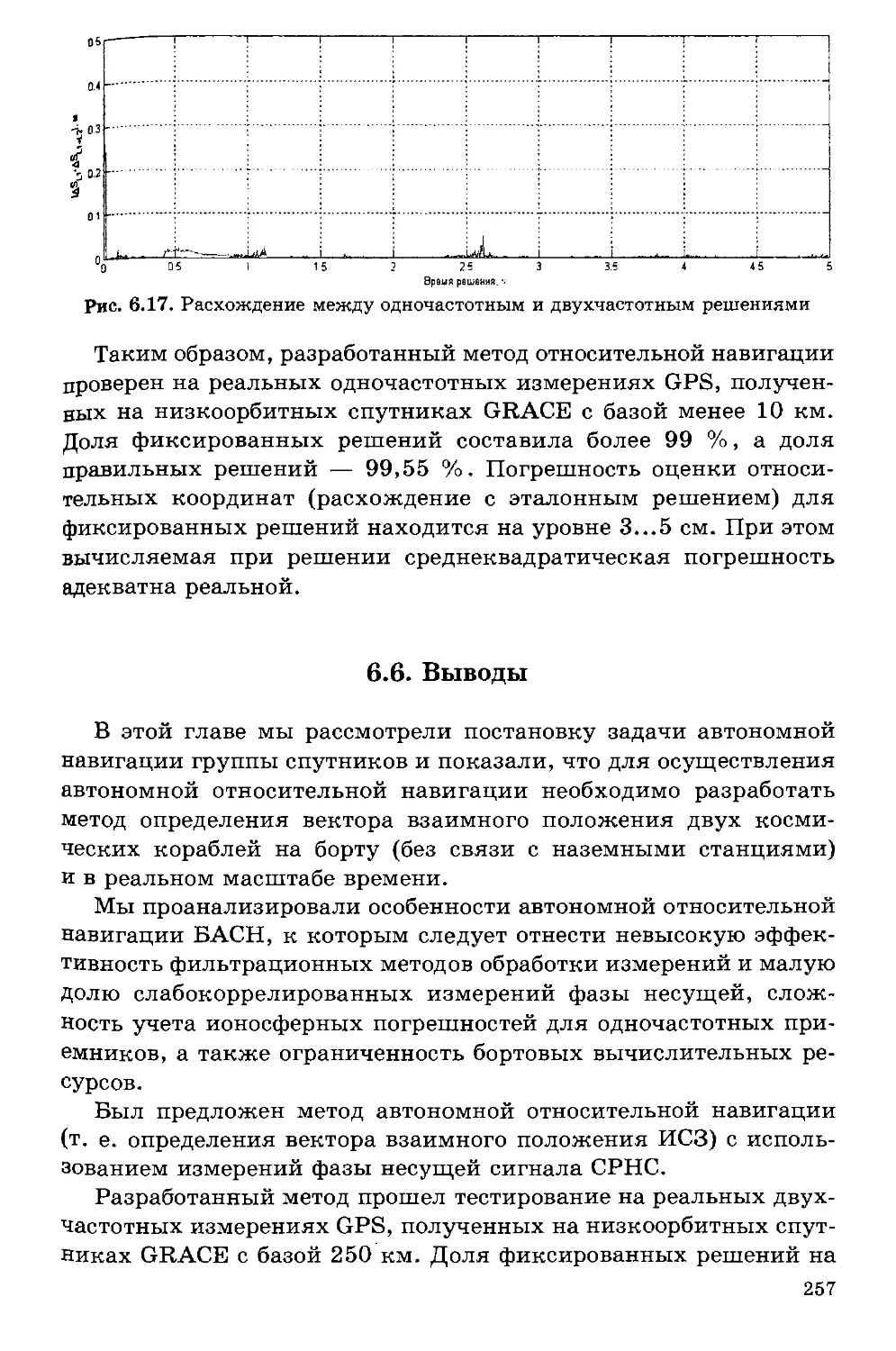
ной навигации искусственного спутника Земли 239
6.6. Выводы 257
Глава 7. MosaicGNSS — реализации принципов проектирования
бортовой аппаратуры спутниковой навигации 259
7.1. Архитектура MosaicGNSS 260
7.2. Характеристики MosaicGNSS 269
7.3. Результаты испытаний в космических полетах 270
Заключение 276
Приложение А. Приращение характеристической скорости, форму¬
ла Циолковского 278
Приложение Б. Минимальные функциональные требования к бор¬
товой аппаратуре спутниковой навигации 280
Приложение В. Расчет вероятностей ошибок 1-го и 2-го рода для
усеченной процедуры Вальда 288
Приложение Г. Математические основы определения координат ис¬
кусственного спутника Земли по измерениям сигналов спутниковой
радионавигационной системы 294
Приложение Д. Математические основы относительной навигации
искусственного спутника Земли 319
Список литературы 348
4
Перечень сокращений и условных обозначений
АКФ
—
автокорреляционная функция
АРУ
—
автоматическая регулировка усиления
АЦП
—
аналого-цифровой преобразователь
АЧХ
—
амплитудно-частотная характеристика
БАСН
—
бортовая аппаратура спутниковой навигации
БПФ
—
быстрое преобразование Фурье
ВКФ
—
взаимная корреляционная функция
БОС
—
высокоорбитальный спутник
ВЭО
—
высокоэллиптическая орбита
ГКЛ
—
галактические космические лучи
ГЛОНАСС
—
глобальная навигационная спутниковая система
ГУК
—
генератор, управляемый кодом
дн
—
диаграмма направленности
ДПФ
—
дискретное преобразование Фурье
ДХ
—
дискриминационная характеристика
инс
—
инерциальная навигационная система
исз
—
искусственный спутник Земли
ксс
—
контрольная станция слежения
мкк
—
многоканальный коррелятор
МКС
—
международная космическая станция
мнк
—
метод наименьших квадратов
МШУ
—
малошумящий усилитель
нос
—
низкоорбитальный спутник
нп
—
наземный потребитель
НС
—
навигационный спутник
ОБПФ
—
обратное быстрое преобразование Фурье
ог
—
опорный генератор
ОЗУ
—
оперативное запоминающее устройство
осш
—
отношение сигнал/шум
ПАВ
—
поверхностные акустические волны
пвз
-
параметры вращения Земли
ПЗУ
—
постоянное запоминающее устройство
плис
—
программируемая логическая интегральная схема
по
—
программное обеспечение
псп
—
псевдослучайная последовательность
пч
—
промежуточная частота
ПФ
-
полосовой фильтр
РНП
—
радионавигационный приемник
РПУ
—
радиоприемное устройство
САПР
—
средства автоматизированного проектирования
СБИС
—
сверхбольшая интегральная схема
сисз
—
стационарный искусственный спутник Земли
скл
—
солнечные космические лучи
ско
—
среднеквадраткческое отклонение
скп
—
среднеквадратическая погрешность
5
СРНС
—
спутниковая радионавигационная система
ссз
—
система слежения за задержкой
сч
—
синтезатор частоты
ФАПЧ
—
фазовая автоподстройка частоты
ФК
—
фильтр Калмана
ФНЧ
—
фильтр нижних частот
ЦПУ
—
центральное процессорное устройство
цпч
—
цифровой преобразователь частоты
ЦУП
—
центр управления полетом
ЧАП
—
частотная автоподстройка
ЭОС
—
спутник на эллиптической орбите
AGGA
—
Advanced GPS/GLONASS ASIC
CRS
—
Celestial Reference System
ESA
—
European Space Agency
GPS
—
Global Positioning System
ECEF
—
Earth Centered, Earth Fixed
FFRF
—
Formation Flying Radio-Frequency
FIFO
—
First Input First Output
GDOP
—
Geometrical Dulution of Precision
ICRF
—
International Celestial Reference Frame
IERS
—
International Earth Rotation Service
IGS
—
International GNSS Service
MMX
—
Multimedia Extensions
MIPS
—
Million Instructions Per Second
NASA
—
National Aeronautics and Space Administration
NRE
—
Non-Recurring Engineering cost
SEB
—
Single Event Burnout
SEE
—
Single Events Effects
SEL
—
Single Event Latchup
SEU
—
Single Event Upset
SIMD
—
Single Instruction Multiple Data
SSE
—
Streaming SIMD Extensions
TCXO
—
Temperature Controlled Crystal Oscillator
TLE
—
Two-Line Element
TRS
—
Terrestrial Reference System
UTC
—
Coordinated Universal Time
UERE
—
User Equivalent Range Error
URE
—
User Range Error
UEE
—
User Equipment Error
xo
—
Crystal Oscillator
6
Предисловие
Эта монография обобщает научный и практический опыт автора по
аботке бортовой аппаратуры спутниковой навигации космического
базирования (сокращенно БАСН). В книге проведен анализ особен¬
ностей применения спутниковых радионавигационных систем (СРНС)
на борту искусственных спутников Земли (ИСЗ), изложены научно-
технические принципы проектирования БАСН, даны практические
рекомендации разработчикам и представлены результаты обработки
данных БАСН, полученных во время орбитальных экспериментов.
Материал монографии организован следующим образом.
В главе 1 приводятся основные принципы спутниковой радионави¬
гации для наземных потребителей. Глава носит обзорный характер:
в ней обсуждаются известные подходы к построению аппаратуры по¬
требителей СРНС и теоретические основы радионавигации, вводятся
основные определения. Читатель, знакомый с основами СРНС, может
пропустить эту главу.
Глава 2 является ключевой для понимания сути проблемы авто¬
номной навигации космических аппаратов при помощи СРНС. Она
призвана ответить на три основополагающих вопроса:
• Что такое автономная навигация ИСЗ?
• Для чего нужна автономная навигация ИСЗ?
• Какой должна быть БАСН для осуществления автономной на¬
вигации?
Эта глава связывает две области знаний — космическую технику и
радионавигацию. Чтобы сформулировать и проанализировать требова¬
ния к БАСН, а также сформулировать основные научно-технические
задачи, которые требуется решить для создания БАСН, необходимы
знание радиотехники, понимание воздействия космической радиации
на бортовую аппаратуру спутников, использование методов прикладной
астрономии и баллистики. Представление об этой области знаний дает
глава 2. Кроме того, в главе раскрываются значение автономной навига¬
ции ИСЗ для освоения космоса, ее роль в современных и планируемых
космических исследованиях. В главе 2 также приведен исчерпываю¬
щий анализ особенностей космического базирования радионавигаци¬
онных приемников (РНП). В завершении формулируются требования
и приводится перечень научно-технических задач, которые
нужно решить при проектировании БАСН. Методам решения этих
аДач и посвящены последующие главы.
бов ГЛаве ^ исследована архитектура БАСН и проведен анализ спосо-
во „ постР°ения радиационно стойкой бортовой аппаратуры спутнико-
°тказаВИГа1^ИИ' '^есь также показана принципиальная возможность
°т аппаратных корреляторов сигнала и построения БАСН на
7
основе программного коррелятора.
В главе 4 исследованы методы первичной обработки сигналов
СРНС с учетом особенностей космического базирования, даются при¬
меры синтеза следящих цепей БАСН, приводятся алгоритмы поиска
сигналов СРНС на борту ИСЗ.
Глава 5 посвящена вторичной обработке сигналов в БАСН. Особое
внимание уделено решению навигационной задачи на борту высоко¬
орбитальных спутников в условиях ограниченной радиовидимости.
Предложены методы определения параметров орбиты ИСЗ в реальном
времени, которые могут быть реализованы на низкопроизводительных
процессорах космического базирования.
Относительная навигация космических кораблей при помощи
СРНС исследована в главе 6. Задача относительной навигации воз¬
никает, в частности при решении проблемы высокоточных измерений
гравитационного поля в труднодоступных районах Земли. Глава 6
охватывает весь спектр задач, связанных с относительной навигацией
ИСЗ, — от постановки задачи и анализа особенностей относительной
навигации в космосе до алгоритма относительной навигации и ре¬
зультатов обработки экспериментальных данных, полученных в ходе
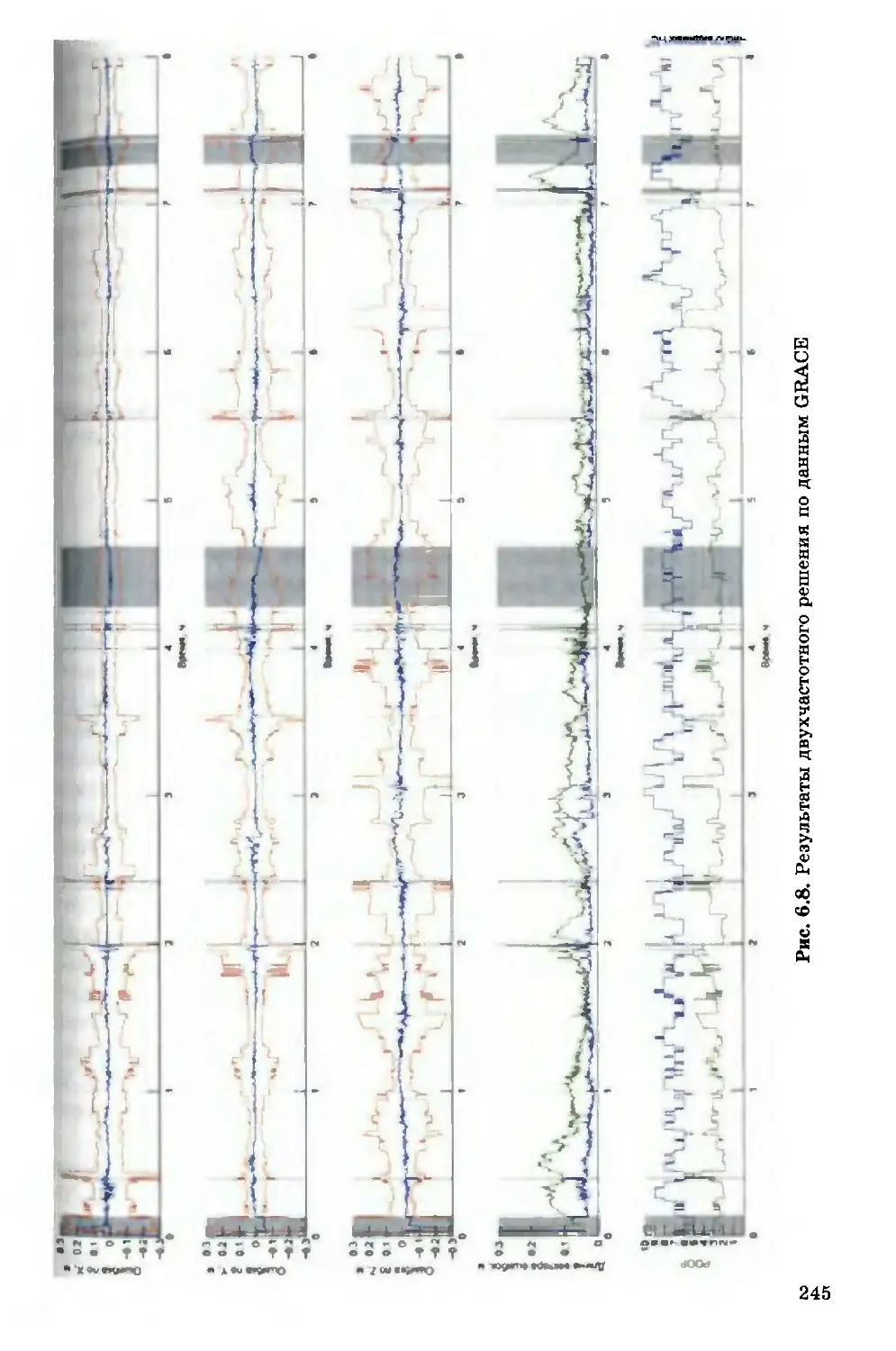
международного эксперимента GRACE, направленного на уточнение
модели гравитационного поля Земли с помощью датчиков, рас¬
положенных на двух низкоорбитных спутниках.Глава 7 завершает
книгу: в ней представлены результаты внедрения методов из глав
3-6 в БАСН MosaicGNSS.
Подача материала примечательна большим количеством приложе¬
ний: в них сосредоточены математические выводы и детали, знание
которых необязательно для понимания основных идей. Читатели,
интересующиеся математическим аппаратом, который используется
для анализа физических и инженерных задач, могут ознакомиться с
ним в приложениях; в то же время для понимания сути можно ограни¬
читься основным текстом. Такой подход позаимствован у зарубежных
авторов и должен способствовать лучшему усвоению ключевых идей,
изложенных в монографии.
Эта книга будет полезна специалистам в области космической
навигации, аспирантам и инженерам, занятым проектированием на¬
вигационной аппаратуры.
Автор выражает благодарность своим коллегам из компаний Соф-
тНав и JM Software Systeme GmbH (Берлин, ФРГ), участвовавшим в
разработке приемника MosaicGNSS. Без блестящей команды ученых,
проектировщиков и инженеров эта книга не была бы написана. Автор
также благодарит компанию AstriumGmbH (Оттобрунн, ФРГ), чья вера
в возможности российской команды сделала возможным научный и
коммерческий успех MosaicGNSS.
8
Введение
Аппаратура потребителя, использующая американскую спут¬
никовую радионавигационную систему (СРНС) GPS и российскую
СРНС ГЛОНАСС, применяется сегодня для навигации назем¬
ных, воздушных и морских объектов. Однако создание бортовой
аппаратуры спутниковой навигации (БАСН) является сложной
научно-технической задачей, поскольку существующие СРНС не
предназначены для использования на борту искусственных спут¬
ников Земли (ИСЗ).
В настоящее время навигация ИСЗ традиционно осуществляет¬
ся при помощи контрольных станций слежения (КСС). На Земле
создается сеть территориально разнесенных КСС, которые про¬
водят высокоточные измерения текущих параметров движения
ИСЗ. Результаты измерений собираются в центре управления, где
производится расчет параметров орбиты и осуществляется прогноз
движения ИСЗ. Затем по этим данным производится расчет вре¬
менного графика (программы) работы бортовой аппаратуры. После
его записи на запоминающие устройства бортовой аппаратуры и
сверки (коррекции) бортовой шкалы времени ИСЗ производится
запуск устройства управления, которое сверяет текущее время
с заданным во временной программе. При совпадении моментов
времени выполняются определяемые программой действия. Ко¬
манды бортовым устройствам выдаются наземными командно¬
измерительными станциями в ходе сеанса связи.
Существует большой положительный опыт обеспечения на¬
вигации ИСЗ сетью наземных станций траекторных измерений.
Тем не менее имеются сложности в применении этой сети. Сеть
наземных станций России размещена на ограниченной территории
и не может обеспечить проведение измерений в любой точке ор¬
биты. Поддержание, развитие и эксплуатация наземного сегмента
управления составляют значительную часть стоимости космиче¬
ских проектов. Навигационное планирование и контроль орбиты
требуют значительных трудозатрат высококвалифицированного
персонала. Если в зоне видимости одной КСС находится несколько
ИСЗ и для каждого из них нужно осуществлять планирование и
контроль, задача становится не только сложной, даже для опытных
инженеров, но и возникает существенный риск ошибки, которая
может привести к нежелательным отклонениям от орбиты и даже
к потере спутников.
Таким образом, использование КСС имеет ряд существенных
недостатков, к которым относят:
9
1) высокие затраты на создание и обслуживание КСС;
2) невозможность маневра ИСЗ вне зоны видимости КСС;
3) значительное время на подготовку маневров ИСЗ и невоз¬
можность автоматизированных маневров.
Навигация ИСЗ, осуществляемая на борту спутника автономно,
т. е. независимо от КСС, лишена вышеуказанных недостатков на¬
вигации с использованием наземных станций и представляет собой
новый шаг в освоении околоземного космического пространства.
Для того чтобы автономная навигация ИСЗ могла на практике
заменить использование КСС, БАСН должна удовлетворять целому
ряду требований, основные из которых даны ниже:
1) навигация должна осуществляться на борту ИСЗ;
2) КСС не должны быть задействованы в навигации;
3) навигация должна проводиться непрерывно;
4) погрешность навигационного определения не должна превы¬
шать погрешность навигации с использованием КСС;
5) БАСН должна легко интегрироваться в существующие бор¬
товые комплексы управления;
6) БАСН должна быть пригодна для ИСЗ всех типов орбит,
включая низкоорбитальные спутники (НОС), стационарные искус¬
ственные спутники Земли (СИСЗ) и спутники с эллиптическими
орбитами (ЭОС);
7) необходимо обеспечить применение БАСН на борту орбиталь¬
ных космических группировок, осуществляющих полет строем.
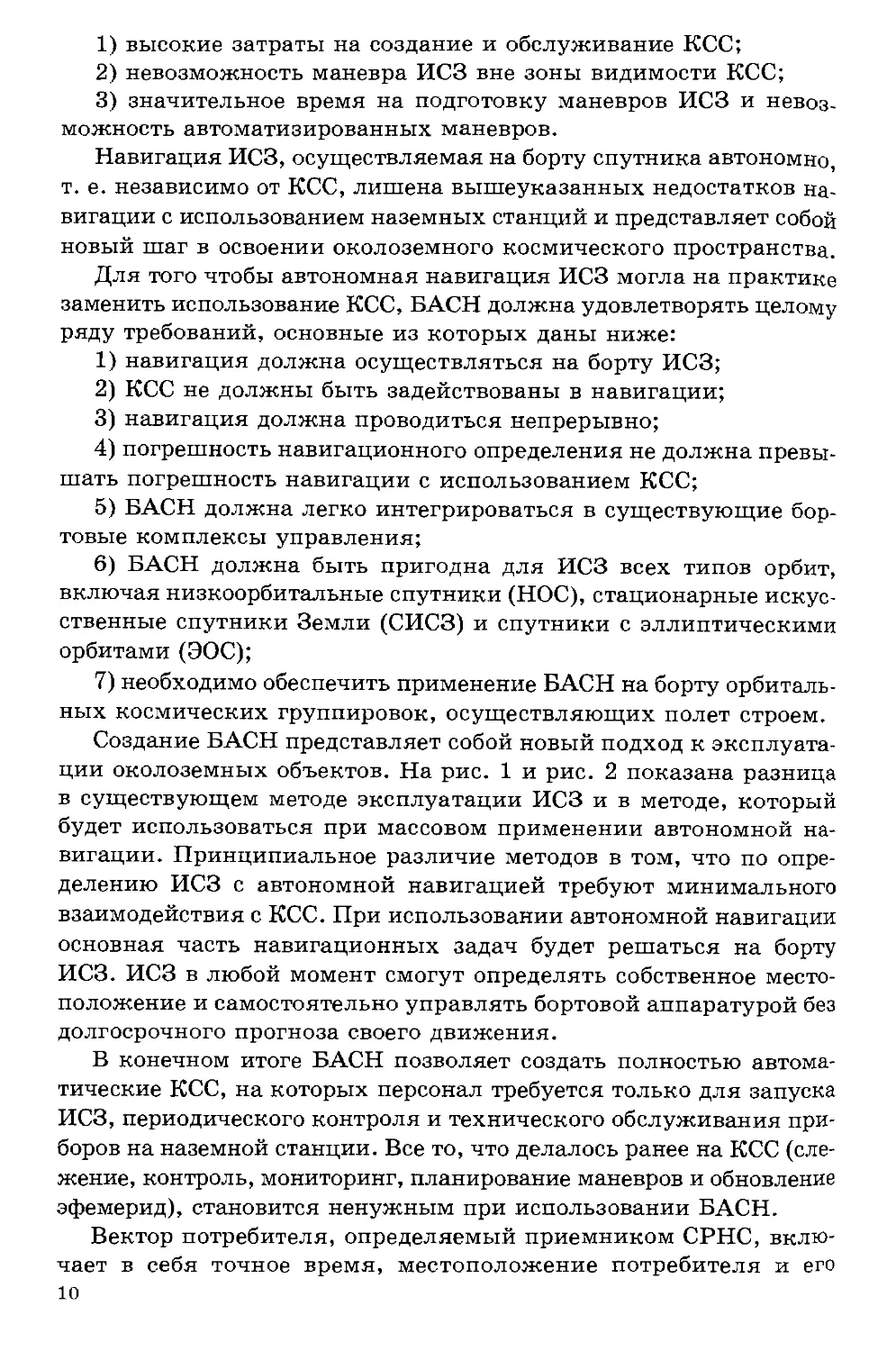
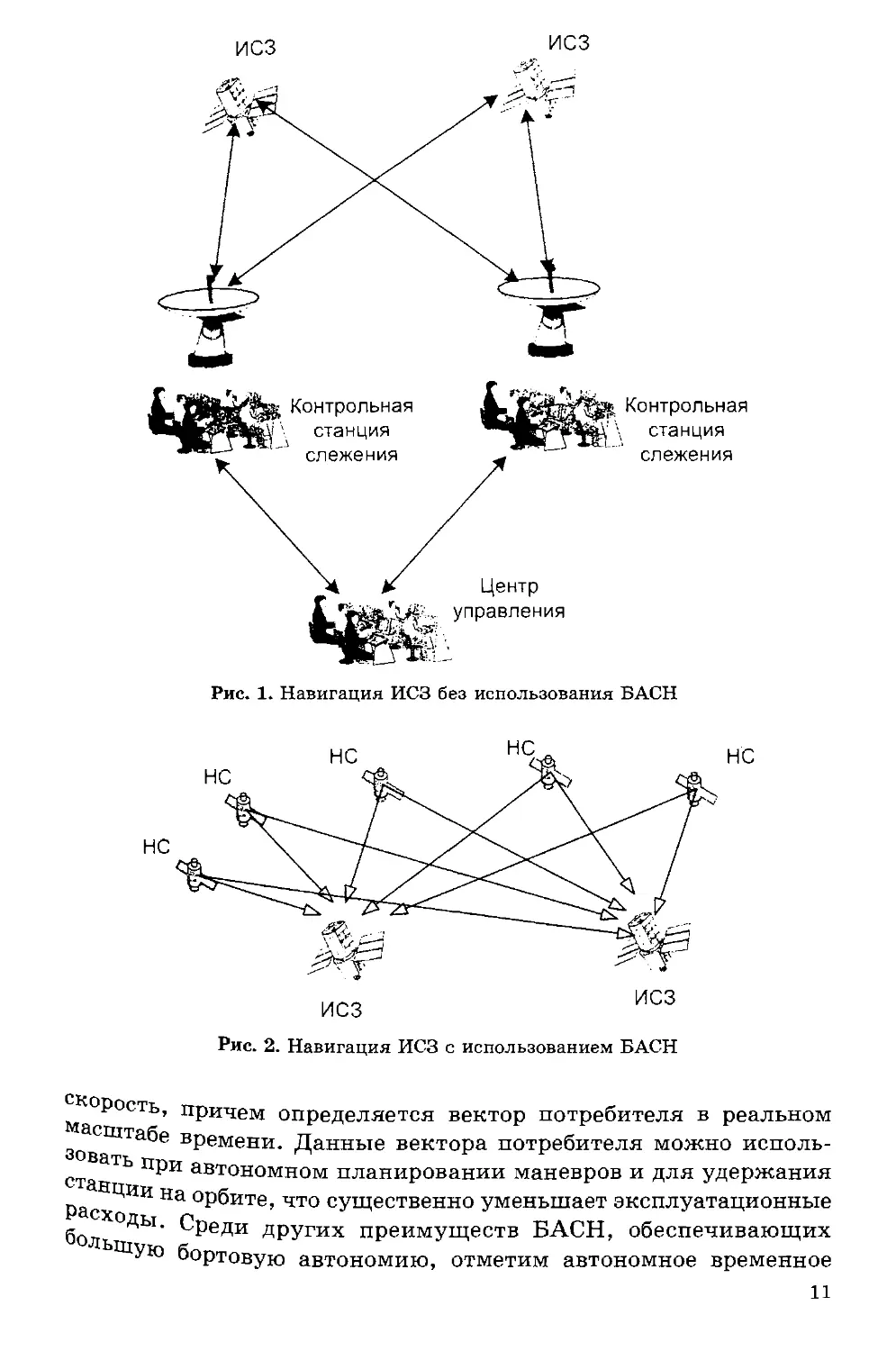
Создание БАСН представляет собой новый подход к эксплуата¬
ции околоземных объектов. На рис. 1 и рис. 2 показана разница
в существующем методе эксплуатации ИСЗ и в методе, который
будет использоваться при массовом применении автономной на¬
вигации. Принципиальное различие методов в том, что по опре¬
делению ИСЗ с автономной навигацией требуют минимального
взаимодействия с КСС. При использовании автономной навигации
основная часть навигационных задач будет решаться на борту
ИСЗ. ИСЗ в любой момент смогут определять собственное место¬
положение и самостоятельно управлять бортовой аппаратурой без
долгосрочного прогноза своего движения.
В конечном итоге БАСН позволяет создать полностью автома¬
тические КСС, на которых персонал требуется только для запуска
ИСЗ, периодического контроля и технического обслуживания при¬
боров на наземной станции. Все то, что делалось ранее на КСС (сле¬
жение, контроль, мониторинг, планирование маневров и обновление
эфемерид), становится ненужным при использовании БАСН.
Вектор потребителя, определяемый приемником СРНС, вклю¬
чает в себя точное время, местоположение потребителя и его
Ю
ИСЗ
ИСЗ
Контрольная
станция
слежения
Контрольная
станция
слежения
Центр
Управления
Рис. 1. Навигация ИСЗ без использования БАСН
ИСЗ
ИСЗ
Рис. 2. Навигация ИСЗ с использованием БАСН
корость, причем определяется вектор потребителя в реальном
зова времени. Данные вектора потребителя можно исполь-
стя П^И автономном планировании маневров и для удержания
Ра орбите, что существенно уменьшает эксплуатационные
боль * ДРУ™х преимуществ БАСН, обеспечивающих
гиую бортовую автономию, отметим автономное временное
11
обеспечение ИСЗ и автономное определение пространственной
ориентации спутников.
Преимущества автономной навигации позволяют повысить
эффективность использования ИСЗ за счет:
1) снижения времени подготовки маневра от суток до несколь¬
ких минут;
2) решения вопроса недостаточного покрытия поверхности
Земли сетью КСС;
3) уменьшения затрат на обслуживание ИСЗ за счет автома¬
тизации и упрощения мониторинга и навигационного планиро¬
вания;
4) отказа от применения КСС;
5) упрощения бортовой аппаратуры за счет исключения из ее
состава приемопередатчика для связи с КСС.
Кроме того, использование автономной навигации ИСЗ приведет
к снижению рисков освоения космоса за счет автоматизации, т. е.
за счет исключения человеческого фактора и добавления источника
информации в контур контроля ИСЗ.
Наконец, группы спутников с БАСН на борту могут образо¬
вывать виртуальные космические платформы. Они планируются
к использованию в геофизических целях и для обеспечения связи.
Создание виртуальных космических платформ представляет собой
одну из самых комплексных и сложных задач в освоении ближне¬
го космоса. БАСН открывает возможность создания виртуальных
космических платформ, но для их полной реализации необходимы
усилия в смежных областях. В частности, чтобы обеспечить полет
строем, необходимо встроить в приемник СРНС приемопередатчик
для связи с другими ИСЗ в группировке. Система навигации ИСЗ,
оснащенная приемником СРНС со встроенным приемопередатчи¬
ком и возможностью автономного планирования маневров, должна
стать основой для космических группировок, летящих строем. При
этом СРНС-приемник должен осуществлять не только определение
местоположения ИСЗ, но и относительную навигацию с другими
ИСЗ, входящими в ту же группировку.
В целом автономная навигация ИСЗ позволяет повысить
точность и оперативность по сравнению с наземным сегментом
управления и сократить затраты на баллистико-навигационное
обеспечение полета ИСЗ. БАСН представляет собой доступную по
цене аппаратуру местоопределения, средства для планирования
маневров и методов управления расположением внутри космиче¬
ской группировки.
Говоря об актуальности научно-технической проблемы создания
БАСН, необходимо учитывать политические аспекты. Приведем
12
интересную цитату из статьи главы отдела навигации немецкого
авиакосмического агентства Deutsche Luft and Raumfahrt д-ра
Оливера Монтенбрука (Dr. Oliver Montenbruck): «В рамках не¬
мецкой национальной космической программы GPS-приемники
использовались на спутниках MIR/MOMSNAV, EQUATOR-S,
ABRIXAS, CHAMP и BIRD. Кроме того, GPS-приемники приме¬
нялись на борту метеозондов TEXUS-37/38 и MAXUS-3. Во всех
случаях использовались исключительно американские приемники,
покупка которых серьезно затруднена экспортными ограничения¬
ми. Кроме этих ограничений необходимо принимать во внимание
пригодность приемников для использования в космосе, а также
доступность технической документации. Особо стоит отметить,
что использование приобретенного на распродажах устаревшего
оборудования увеличивает затраты на внедрение или приводит
к несоответствующему использованию оборудования» [1] Если
даже близкие союзники США озабочены созданием собственной
технологии автономной навигации космических кораблей на осно¬
ве СРНС (далее в той же статье, стр. 2: «Принимая во внимание
текущую ситуацию, отдел навигации немецкого центра космиче¬
ских полетов предпринимает усилия по разработке спутниковых
радионавигационных приемников космического базирования»),
то российским ученым и российским промышленникам и подавно
необходимо прилагать все усилия, чтобы не оказаться в стороне
от технологической гонки в космосе.
Важно отметить следующее: разработка радионавигационных
приемников космического базирования двойного и военного
назначения представляет собой отдельную задачу, которая вы¬
ходит за рамки этой книги. Как и наши европейские коллеги из
Германии [1, 2], Италии [3] и Франции [4], мы рассматриваем
научно-технические задачи по созданию аппаратуры граждан¬
ского применения. Такая аппаратура представляет наибольший
интерес с коммерческой точки зрения, поскольку не попадает
под экспортные ограничения и со временем сформирует рынок
гражданских радионавигационных приемников космического при¬
менения. Принципиальной характеристикой этого рынка является
его интернациональный, глобальный и открытый характер: на
нем свободно обращаются продукты производителей из разных
стран. Чтобы соответствовать этой рыночной характеристике,
навигационный приемник должен удовлетворять двум требова¬
ниям:
• использование только сигналов гражданского назначения;
* Стр. 1 из работы [1], перевод с немецкого автора.
13
• использование только элементной базы в стандартном ис¬
полнении.
В главах 2 и 3 этой книги будет показано, что эти два требова¬
ния становятся серьезным ограничением для проектирования.
Следует также отметить, что в книге рассмотрены основы про¬
ектирования БАСН, применимой не для всех фаз полета ИСЗ.
Типичные фазы полета включают в себя участок выведения на
орбиту, движение по орбите, орбитальное маневрирование, сбли¬
жение и посадку. Мы не рассматриваем создание БАСН, способной
работать при выведении ИСЗ на орбиту, а также при посадке.
Это связано с тем, что на указанных участках полета требования
к БАСН существенно различаются и требуют решения ряда сложных
научно-технических задач, таких как определение местоположения
высокодинамичных объектов в реальном времени, прохождение
радиоволн через плазму и др. Для решения этих задач используются
два подхода: автономная навигация на базе радионавигационных
приемников (РНП), работающих по сигналам высокой точности
(т. е. по сигналам военного применения), и автономная навигация
на базе комплексирования РНП и других устройств, таких как
инерциальные системы и звездные датчики.
Использование навигационных приемников на борту космиче¬
ских кораблей не получало развития по ряду причин. В их числе
отсутствие опыта разработки БАСН у предприятий космической
отрасли и сосредоточение носителей инженерно-технического
ноу-хау на рынке аппаратуры спутниковой навигации массового
применения. Компании-разработчики приемников спутниковой
навигации заинтересованы в высокорентабельном рынке бытовых
приемников и не хотят использовать свои силы для освоения но¬
вого, относительно малого рынка БАСН.
Следует отметить, что приемники СРНС запускались на борту
ИСЗ с начала 1990-х гг. Это были исследовательские запуски при¬
емников, принципиально отличных от БАСН, рассматриваемой
в данной книге. Несмотря на внешнюю схожесть архитектуры и
аппаратного обеспечения, требования к робастности и надежности
приемников, применявшихся в исследовательских целях, гораз¬
до ниже требований, предъявляемых к БАСН. Предполагается,
что данные приемников, которые запускались и запускаются
с исследовательскими целями, будут подвергаться постобработке
для извлечения максимально возможного количества научной ин¬
формации. Они не связаны с основной миссией ИСЗ, на которых
устанавливаются, и не имеют никакого отношения к управлению
ИСЗ и его жизнеобеспечению. Напротив, БАСН — это «рабочая
лошадка космоса». Она предназначена для решения научно-
14
практических задач: сокращения эксплуатационных расходов
ИСЗ, упрощения бортовой аппаратуры, уменьшения загрузки,
экономии топлива и т. п. В отличие от исследовательских прием¬
ников БАСН является не паразитным грузом, а частью бортовой
аппаратуры управления полетом. БАСН не рассчитывает на назем¬
ную постобработку данных, полученных по каналу телеметрии, но
должна обеспечивать решение навигационной задачи в реальном
времени, автономно и на борту ИСЗ. Исследовательские же при¬
емники практически представляют собой датчики, передающие
данные на наземные станции, где обработкой данных занимаются
ученые-исследователи.
До настоящего времени использование СРНС в космосе огра¬
ничивалось одиночными экспериментами, проводимыми в боль¬
шинстве случаев на низкоорбитальных спутниках. Исследования
последних лет показали возможность и необходимость применения
приемников спутниковой навигации на геостационарных спутни¬
ках и спутниках с эллиптической орбитой. За прошедшие 10 лет
сразу несколько организаций предприняло попытки создания
БАСН, предназначенной для высокоорбитальных ИСЗ. Приемник
Topstar 3000, детище французских компаний CNES и Alcatel, был
установлен на борту Stentor1; автор принимал участие в создании
приемника MosaicGNSS, разработанного немецкой компанией
Astrium GmbH; NASA сконструировало приемник PiVoT.
Но в целом мировой рынок гражданских радионавигационных
приемников космического применения находится в ранней фазе
становления и практически еще не сложился из-за того, что БАСН
только начинает развиваться. В этих условиях чрезвычайно важ¬
ную роль играет the first mover advantage. Фразу можно перевести
как «эффект первопроходца»: тот, кто выходит на рынок первым,
получает большую долю рынка. Чем раньше отечественные про¬
изводители выйдут на этот рынок, тем больше шансов у России
сохранить свои лидирующие позиции в космосе. Решению прак¬
тических вопросов, возникающих в процессе создания рыночных
моделей БАСН, и посвящена эта книга.
1 Stentor был потерян в декабре 2002 г., когда французский ЦУП принял ре¬
шение об уничтожении ракетоносителя Ariane 5 после 3 мин полета вне заданной
траектории.
15
Глава 1
МЕТОДЫ НАВИГАЦИИ С ИСПОЛЬЗОВАНИЕМ
СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
В этой главе рассматривается задача определения положения
и скорости потребителя с использованием спутниковой радиона¬
вигационной системы. Приводятся алгоритмы и методы, ставшие
уже традиционными для данной области.
1.1. Спутниковые радионавигационные системы
С начала 1990-х гг. действуют две спутниковые радионавигаци¬
онные системы (СРНС) — глобальная навигационная спутниковая
система (GPS, США) и глобальная навигационная спутниковая
система (ГЛОНАСС, Россия). Несмотря на то что обе системы раз¬
рабатывались изначально для нужд военных ведомств, позже они
стали доступны для гражданского применения и сейчас являются
системами двойного назначения. Эти системы широко и успеш¬
но используются в морской навигации, авиации, мониторинге
автомобильного транспорта, а также в геодезии, строительстве,
мониторинге подвижек земной коры.
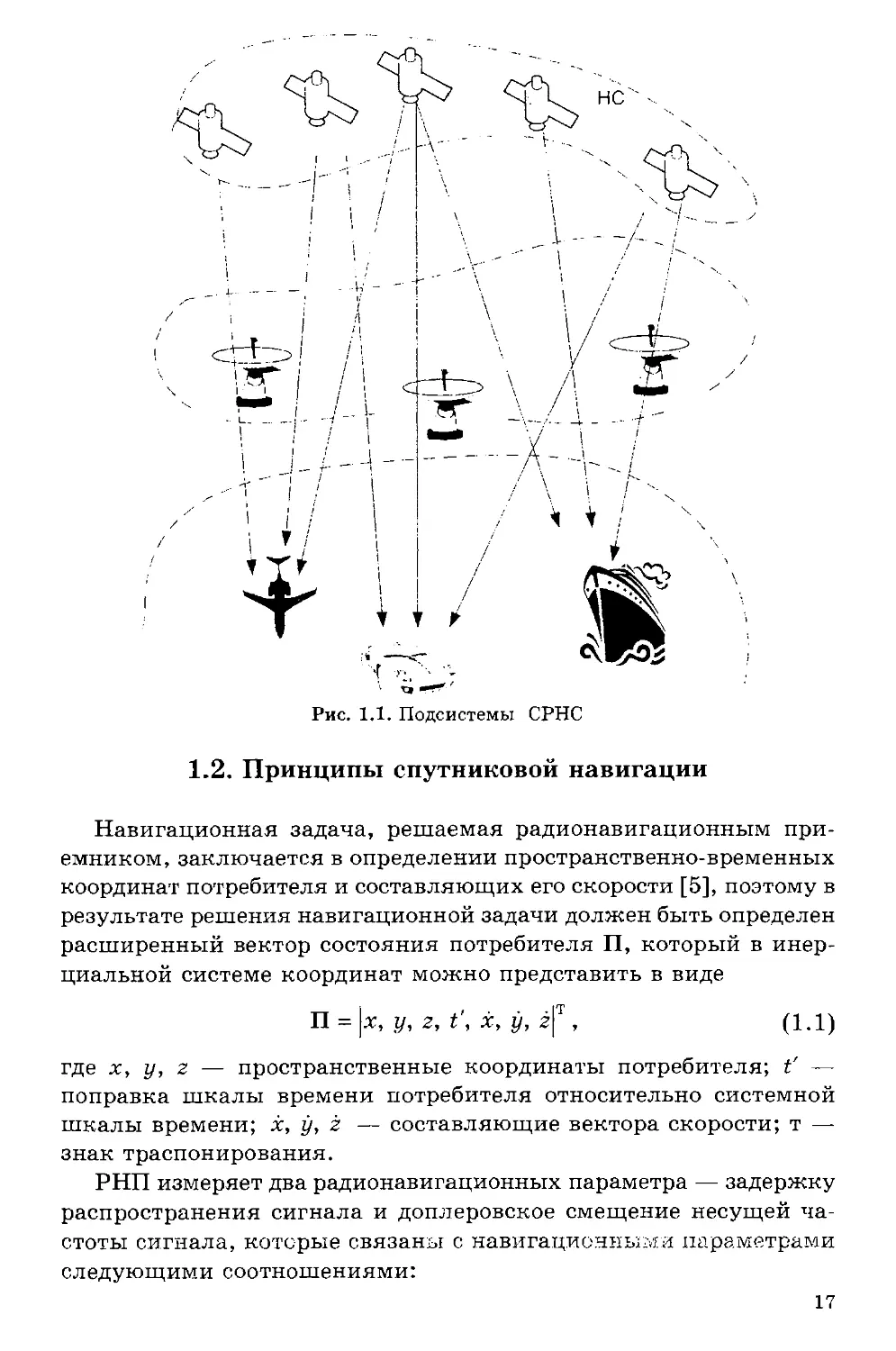
СРНС состоят из трех основных подсистем: подсистемы кос¬
мических аппаратов, подсистемы контроля и управления и под¬
системы пользователей. Обобщенная схема спутниковых навига¬
ционных систем представлена на рис. 1.1.
Космическая подсистема состоит из набора навигационных
спутников (НС). Каждый из них передает гармонический сигнал,
модулированный кодом, по которому аппаратура пользователь¬
ского сегмента (т. е. радионавигационные приемники) определяет
расстояние до спутника.
Все НС в СРНС контролируются наземным управляющим
сегментом. Его основными задачами являются слежение за НС,
формирование навигационных данных и мониторинг навигаци¬
онного поля.
16
Рис. 1.1. Подсистемы СРНС
1.2. Принципы спутниковой навигации
Навигационная задача, решаемая радионавигационным при¬
емником, заключается в определении пространственно-временных
координат потребителя и составляющих его скорости [5], поэтому в
результате решения навигационной задачи должен быть определен
расширенный вектор состояния потребителя П, который в инер-
циальной системе координат можно представить в виде
П = \х, у, z, t\ х, у, i|T , (1.1)
где х, у, z — пространственные координаты потребителя; t’ —
поправка шкалы времени потребителя относительно системной
шкалы времени; х, у, г — составляющие вектора скорости; т —
знак траспонирования.
РНП измеряет два радионавигационных параметра — задержку
распространения сигнала и доплеровское смещение несущей ча¬
стоты сигнала, которые связаны с навигационными параметрами
следующими соотношениями:
17
D = ст, (1.2)
где D — расстояние между потребителем и НС; с — скорость света;
т — задержка распространения сигнала;
(1.3)
где Vr — радиальная скорость сближения потребителя и НС;
со^ — доплеровское смещение несущей частоты; X — длина волны
несущей частоты.
Запишем уравнение трехмерной сферы с центром, расположен¬
ным в центре масс i-го НС:
где Di — радиус сферы; xt, yt, 2i —известные координаты центра
масс i-ro НС; х, у, г — координаты потребителя, которые требу¬
ется определить.
Уравнение (1.4) описывает геометрическое место точек про¬
странства, находящихся на известном удалении от НС. Для ре¬
шения уравнения (1.4) необходимы измерения от трех НС, т. е.
для определения х, у, г нужно решить систему трех нелинейных
уравнений с тремя неизвестными для i = 1, 3.
Из-за рассинхронизации шкал времени потребителя и НС на
практике возникает смещение измеренной дальности, которое
учитывается в уравнении (1.4) путем введения неизвестной, но
постоянной за время определения навигационных параметров
величины £>/:
Величину Di называют псевдодальностью, в отличие от £);, на¬
зываемой иногда геометрической дальностью. Очевидно, что при
использовании псевдодальности в качестве измеряемого параметра
для определения трех координат потребителя и поправки шкалы
времени потребителя относительно системной шкалы времени
необходимо решить систему четырех нелинейных уравнений
с четырьмя неизвестными для £ = 1,4, т. е. для решения навига¬
ционной задачи нужны псевдодальномерные измерения минимум
от четырех НС.
Щ = >/(*j - X)2 + (yt - у)2 + (2; - zf ,
(1.4)
Di=Dt + D\ = ^ - x)2 + (yt - у f + (zt - zf + D[. (1.5)
18
1.3. Методы обработки сигналов и решения
навигационной задачи в приемниках спутниковых
радионавигационных систем
1.3.1. Модель сигналов спутниковых
радионавигационных систем
Сигнал, излучаемый НС, может быть записан в виде
x(t) - Ad(t) c(t - ts)cos(®Qt + Фо). (1-6)
где A — амплитуда сигнала; d(t) — навигационное сообщение;
c(t — tg) — псевдослучайная последовательность (ПСП); tg — фаза
ПСП; ш0 — круговая частота несущей; ф0 — начальная фаза не¬
сущей частоты.
Рассмотрим подробнее составляющие сигнала из (1.6) на при¬
мере гражданского сигнала (L^ С/А) GPS. Сигнал включает в себя
три компоненты: несущую, навигационное сообщение и псевдо¬
случайную последовательность. (Амплитуда сигнала относится
к неинформационным параметрам и далее не рассматривается.)
Частота несущей составляет 1575,42 МГц, соответственно длина
волны несущей составляет около 19 см. Несущая подвергается
фазовой манипуляции двумя двоичными последовательностями:
навигационным сообщением и ПСП. Навигационное сообщение и
ПСП синхронизированы друг с другом: символы навигационного
сообщения начинаются синхронно с символами ПСП. Навигацион¬
ное сообщение принимает значения ±1 с частотой 50 Гц, т. е. длина
информационного символа составляет 20 мс. ПСП представляет
собой 1023-символьную последовательность, которая является реа¬
лизацией кода Голда и повторяется каждую миллисекунду. Длина
символа ПСП составляет 1/1023 мс, для простоты изложения ее
можно положить равной 1 мкс. Частота следования символов
ПСП составляет, очевидно, 1,023 миллиона символов в секунду.
Можно показать [6], что огибающая спектра ПСП представляет
собой набор гармоник, отстоящих друг от друга на частоту около
1 кГц, амплитуда которых модулирована функцией вида sin (х)/х
с первым нулем в 1,023 МГц. На рис. 1.2 представлен общий вид
спектра ПСП, а на рис. 1.3 — увеличенная часть спектра (около
первого нуля огибающей спектра), показывающая его линейчатый
характер.
Автокорреляционная функция (АКФ) ПСП представляет собой
острый корреляционный пик и боковые лепестки, причем отно¬
шение амплитуды наибольшего бокового лепестка к амплитуде
19
Нормированная мощность
1
3
о
5
к
со
X
X
со
5
Q.
О
X
О
-2046 -1023 0 1023 2046
Частота, кГц II
Рис. 1.2. Пример амплитудного спектра ПСП (общий вид)
Частота, кГц
Рис. 1.3. Пример амплитудного спектра ПСП (линейчатый характер)
20
Сдвиг, чипы
Рис. 1.4. Вид автокорреляционной функции ПСП
корреляционного пика не превышает 65/1023, или —23,9 дБ [6].
На рис. 1.4 приведен вид автокорреляционной функции ПСП.
Сигнал на входе радионавигационного приемника испытывает
доплеровский сдвиг частоты, вызванный взаимным движением НС
и потребителя [см. (1.3)], и может быть представлен в виде
y(t) = Ad(t)c(t - ts)cos((i)Qt + соdt + ф0) + v(£), (1-7)
где v(t) — помеха.
Тогда задача синтеза системы фильтрации формулируется как
отыскание такой системы, которая в результате обработки наблю¬
дений (1.7) в каждый текущий момент времени формирует оценку
вектора потребителя (1.1).
Теория оптимальной фильтрации позволяет решить сформули¬
рованную задачу в общем виде [7]. Однако полученные при этом
алгоритмы фильтрации достаточно сложны и в настоящее время
не реализуются. Для упрощения аппаратуры потребителя задачу
получения оценок вектора потребителя разбивают на две стадии
обработки — первичную и вторичную.
На этапе первичной обработки решается задача фильтрации
радионавигационных параметров сигнала, а на этапе вторичной —
вычисляются оценки вектора потребителя с использованием полу¬
21
ченных на первом этапе оценок радионавигационных параметров.
Заметим, что радионавигационные параметры (т. е. псевдодаль¬
ность и значение доплеровского сдвига несущей) часто называют
сырыми измерениями или просто измерениями.
1.3.2. Методы первичной обработки сигналов
Хорошо известно, что успешное решение задачи фильтрации
параметров радиосигнала возможно лишь в том случае, когда
начальная ошибка между истинным значением фильтруемого
параметра и его оценкой достаточно мала [5]. Это обусловлено не¬
линейностью радиотехнической системы фильтрации и связанной
с этим необходимостью «захвата» сигнала на устойчивое слежение
за фильтруемым параметром. В связи с этим в радионавигацион¬
ных системах различают два режима: поиск сигнала и слежение
за сигналом. В режиме поиска сигнала осуществляется грубая
(и в то же время достаточная для дальнейшего захвата следящей
системой) оценка параметров сигнала (задержки и частоты),
а в режиме фильтрации параметров реализуется непрерывное и
точное их измерение.
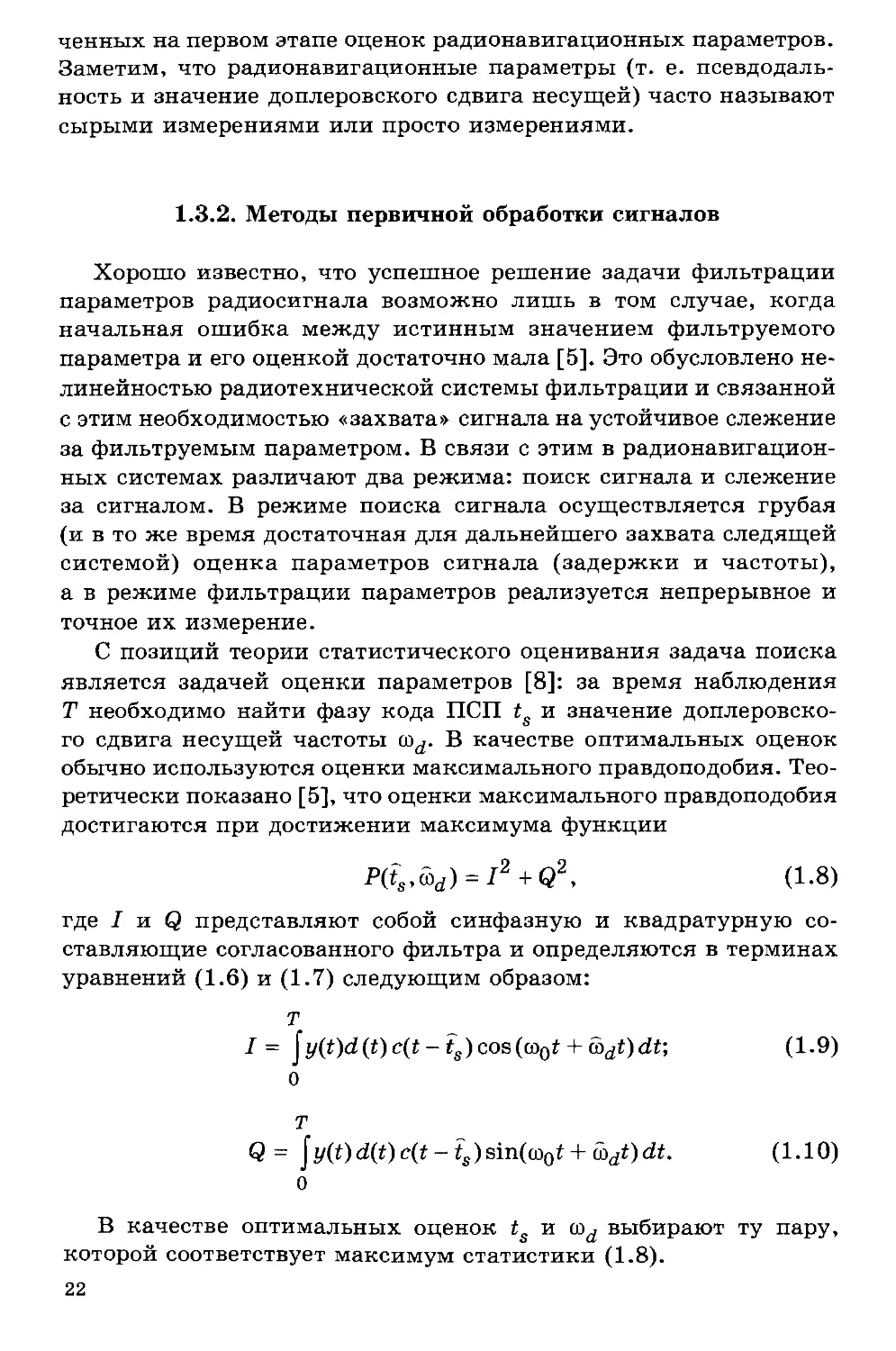
С позиций теории статистического оценивания задача поиска
является задачей оценки параметров [8]: за время наблюдения
Т необходимо найти фазу кода ПСП tg и значение доплеровско¬
го сдвига несущей частоты В качестве оптимальных оценок
обычно используются оценки максимального правдоподобия. Тео¬
ретически показано [5], что оценки максимального правдоподобия
достигаются при достижении максимума функции
P(ts,5>d) = I2+Q2, (1.8)
где / и Q представляют собой синфазную и квадратурную со¬
ставляющие согласованного фильтра и определяются в терминах
уравнений (1.6) и (1.7) следующим образом:
Т
1= \y(t)d(t)c(t -ts)cos((£>ot + G>dt)dt; (1-9)
О
т
Q= jy(t)d(t)c(t - is)sin(m0£ + (bdt)dt. (1*10)
о
В качестве оптимальных оценок tg и выбирают ту пару,
которой соответствует максимум статистики (1.8).
22
Таким образом, метод максимального правдоподобия определя¬
ет архитектуру обработки сигналов в навигационном приемнике:
приемник должен содержать генератор ПСП и генератор несущей
частоты, при помощи которых формируется опорный сигнал.
Выше было показано, что для решения навигационной задачи
необходимо наличие одномоментных измерений минимум от че¬
тырех НС. В то же время потребитель часто работает в условиях,
когда в зоне радиовидимости находится свыше четырех НС, и
первичная обработка может предоставить измерения более чем от
четырех спутников СРНС. Очевидно, что обработка большего числа
измерений должна повысить точность решения навигационной
задачи, поэтому желательно иметь соответствующий алгоритм
определения координат потребителя при избыточности измерений.
Такой алгоритм может быть найден при решении навигационной
задачи по методу наименьших квадратов.
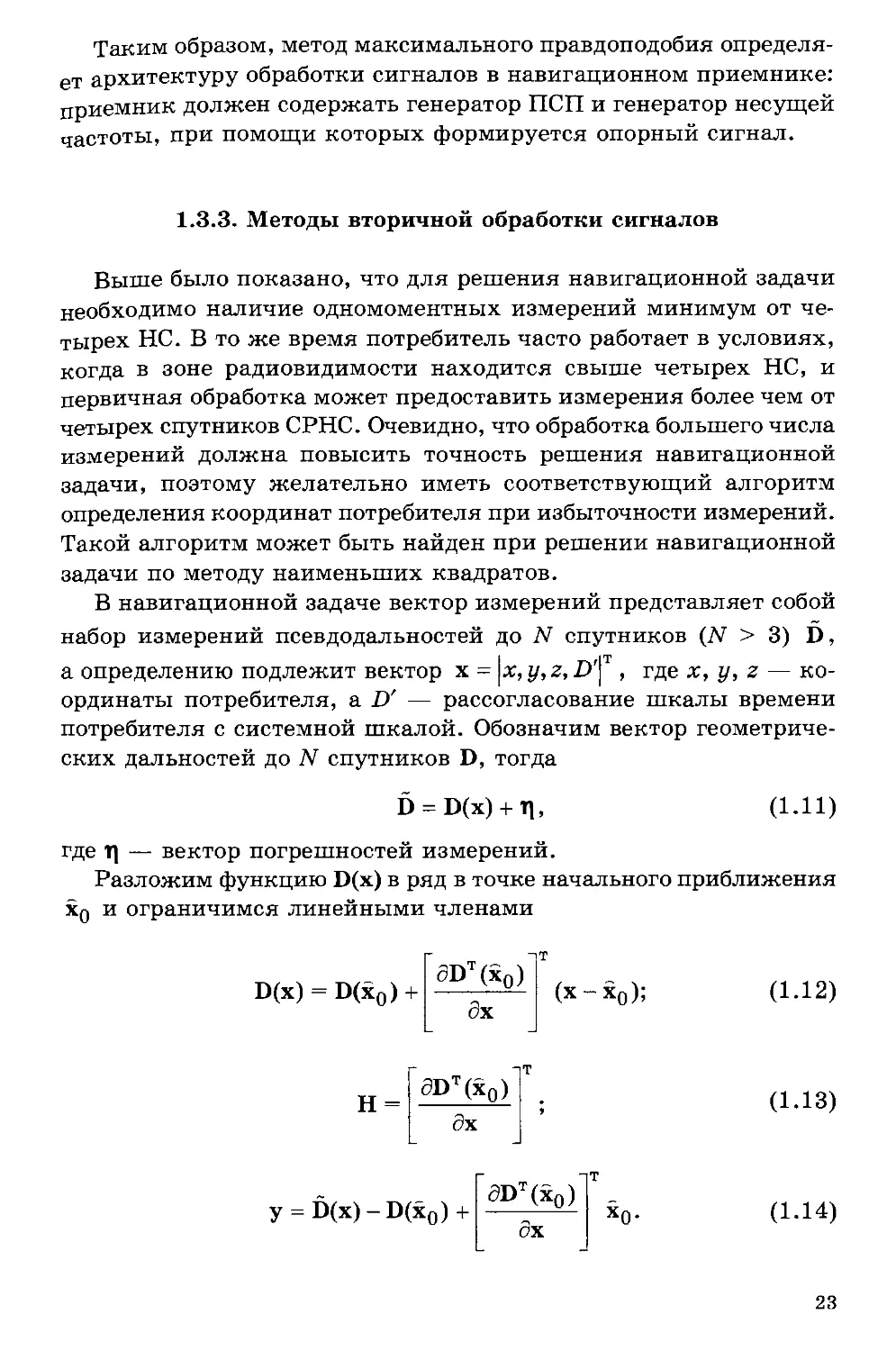
В навигационной задаче вектор измерений представляет собой
набор измерений псевдодальностей до N спутников (N > 3) D,
а определению подлежит вектор х = x,y,z,D\ , где х, у, z — ко¬
ординаты потребителя, a D' — рассогласование шкалы времени
потребителя с системной шкалой. Обозначим вектор геометриче¬
ских дальностей до N спутников D, тогда
где Т| — вектор погрешностей измерений.
Разложим функцию D(x) в ряд в точке начального приближения
х0 и ограничимся линейными членами
1.3.3. Методы вторичной обработки сигналов
D = D(x) + Т|
(1.11)
т
D(x) = D(x0) +
8DT(x0)
(х-х0);
(1.12)
(1.13)
(1.14)
23
Тогда можно преобразовать уравнение (1.11) к виду, подходя¬
щему для решения по методу наименьших квадратов,
У = Нх + Т|, (1.15)
и для случая равноточных измерений
x = i0+(HTHr1HT[D-D(x0)]. (1.16)
Уравнение (1.16) определяет архитектуру вторичной обработки
в радионавигационном приемнике: вектор потребителя х оце¬
нивается из начального грубого приближения х0 и измерений
псевдодальности D до N НС (N > 3).
1.4. Навигационные сообщения в спутниковых
радионавигационных системах
Рассмотрим структуру навигационного сообщения GPS, принци¬
пы построения которого не отличаются от принципов построения
навигационного сообщения ГЛОНАСС.
Навигационное сообщение состоит из 25 кадров по 1500 бит
(рис. 1.5). Каждый блок разбит на 5 подкадров по 300 бит. Ча¬
стота передачи составляет 50 Гц. Соответственно трансляция
одного подкадра занимает 6 с, кадра — 30 с, всего сообщения —
12,5 мин. В каждом подкадре содержится 10 слов по 30 бит, из
которых первое слово содержит телеметрическую информацию,
а второе — метки времени. За этими словами в подкадрах 2 и 3
следуют эфемериды с кеплеровыми элементами орбиты спутни¬
ка (они действительны лишь на короткое время для части его
орбиты). Указанные подкадры повторяются в каждом кадре.
Подкадры 4 и 5 несут данные об ионосферных поправках, пара¬
метрах шкалы времени, сведения о состоянии спутника, а также
альманах — сборник менее точных данных о местонахождении
всех спутников. Информация подкадров 4 и 5 разделена на 25
страниц, передается постранично и повторяется через 12,5 мин.
Структура навигационного сообщения наглядно представляется
в трехмерном виде, показанном на рис. 1.5, идея которого поза¬
имствована из работы [9] (см. fig. 2.9 в работе [9]). На рис. 1.5
TLM — это слово телеметрии, a HOW — ключевое слово (hand
over word) захвата фазы кода.
Таким образом, в навигационном сообщении GPS содержатся:
информация об эфемеридах НС, позволяющих рассчитать: их
координаты и составляющие скорости; альманах созвездия НС,
24
6
TLM HOW Поправки часов и статус спутника
3 _J
TLM HOW Эфемериды
\2
5
12
TLM HOW Эфемериды
TLM HOW Альманах, модель ионосферы, поправка к шкапе времени j
!/'
5
24
30
TLM HOW Альманах
Т
i
• Подкадры
Рис. 1.5. Структура навигационного сообщения GPS
представляющий собой приблизительные орбитальные параметры
данных для всего набора спутников; частотно-временные поправки;
метки времени; параметры ионосферной модели; сведения о ра¬
ботоспособности бортовой аппаратуры КСС и др. Эта информация
используется в аппаратуре потребителя при решении навигаци¬
онной задачи по определению координат, скорости и временной
поправки к местной шкале времени.
1.5. Источники погрешностей в спутниковых
радионавигационных системах
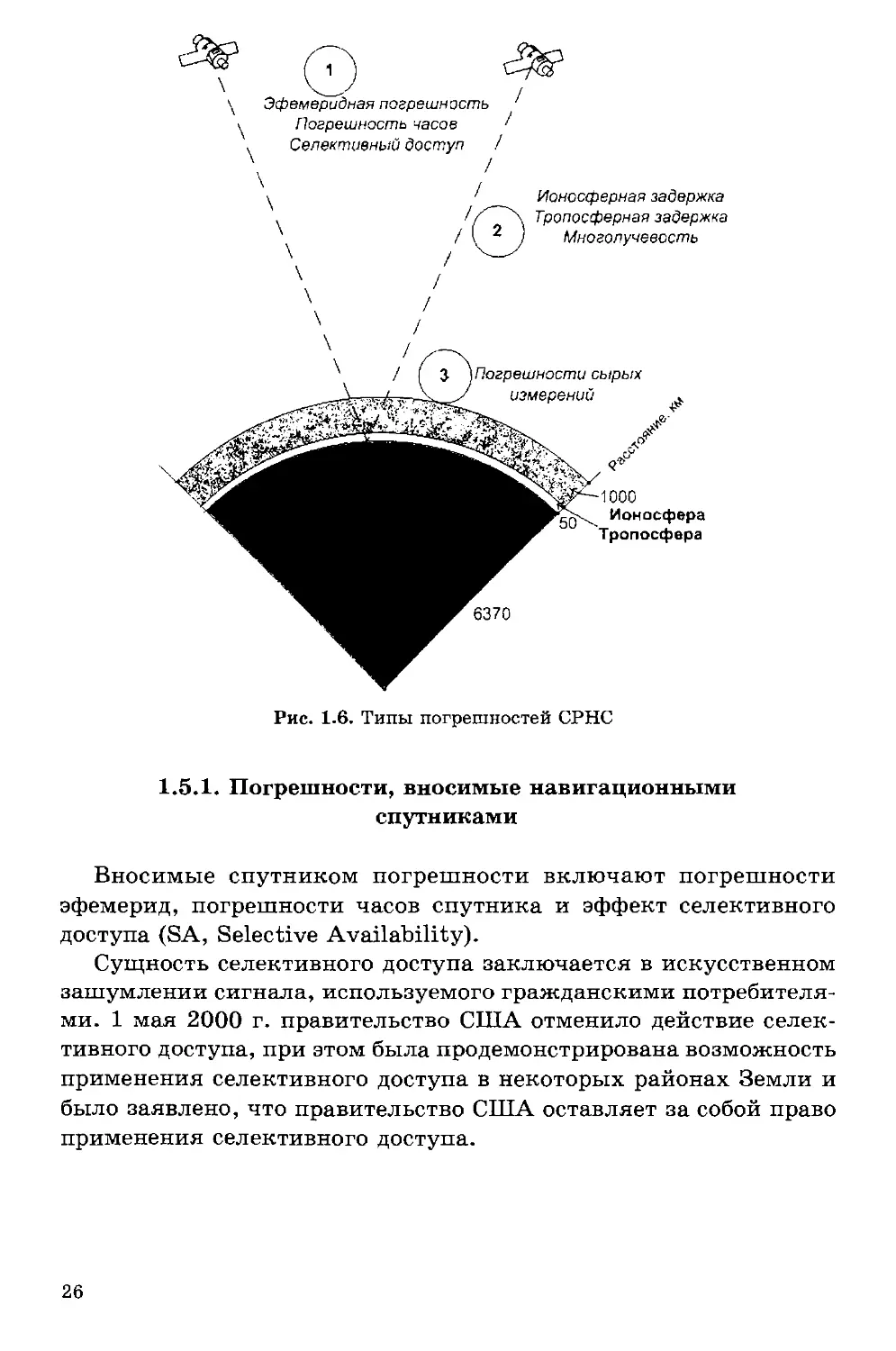
Составляющие дальномерной погрешности в зависимости от
причины их происхождения можно разделить на три группы
(рис. 1.6): погрешности, вносимые в НС СРНС; погрешности,
вносимые на трассе распространения; погрешности, вносимые
аппаратурой пользователя.
\ Эфемеридная погрешность '
Погрешность часов ^
Селективный доступ /
Тропосферная задержка
Ионосферная задержка
посферная задер*
Многолучевость
Погрешности сырых
измерений ^
1000
Ионосфера
Тропосфера
Рис. 1.6. Типы погрешностей СРНС
1.5.1. Погрешности, вносимые навигационными
спутниками
Вносимые спутником погрешности включают погрешности
эфемерид, погрешности часов спутника и эффект селективного
доступа (SA, Selective Availability).
Сущность селективного доступа заключается в искусственном
зашумлении сигнала, используемого гражданскими потребителя¬
ми. 1 мая 2000 г. правительство США отменило действие селек¬
тивного доступа, при этом была продемонстрирована возможность
применения селективного доступа в некоторых районах Земли и
было заявлено, что правительство США оставляет за собой право
применения селективного доступа.
26
1.5.1.1. Погрешность эфемерид
Координаты положения спутника в зависимости от времени со¬
держатся в навигационном сообщении и спрогнозированы исходя
из предыдущих наблюдений наземными станциями управления.
Как правило, на основе четырех часовых промежуточных данных
наземная система управления прогнозирует новые положения
спутника, которые тот будет занимать в течение следующего часа.
Модель сил, действующих на спутники, несовершенна и приводит
к погрешностям в эфемеридах.
Погрешности эфемерид образуют вектор: его составляющими
служат трансверсальная, бинормальная и радиальная погрешно¬
сти. Их значения порядка 0,6...10 м для СРНС GPS. Эти параметры
можно пересчитать в эфемеридную компоненту эквивалентной
дальномерной погрешности, представляющую собой проекцию
вектора погрешности на линию визирования спутник— потреби¬
тель. При этом наибольшие из погрешностей (продольные и по¬
перечные) входят в погрешность вычисления дальности с коэффи¬
циентом, обычно не превышающим 0,25, а радиальные 0,6...2 м
практически полностью входят в дальномерную погрешность.
В GPS среднеквадратическое значение эфемеридных составляющих
погрешности дальности составляет примерно 1 м.
1.5.1.2. Погрешность опорного
генератора навигационного спутника
Опорные генераторы (ОГ) спутников хотя и являются весьма
точными, все равно подвержены погрешностям. У ОГ существует
некоторый дрейф, оцениваемый наземными станциями слежения,
которые на основании полученных данных производят коррекцию
ОГ. Поправки закладываются на борт спутника для последующей
ретрансляции на Землю в виде полиномиальных коэффициентов
в навигационном сообщении и периодически обновляются. После
коррекции остаточная погрешность генератора спутника обычно
меньше нескольких наносекунд на интервале 1...2 ч.
Достижение высоких точностных характеристик СРНС возмож¬
но лишь при тщательном учете релятивистских и гравитационных
эффектов. Они обусловлены различием и изменением гравитацион¬
ного потенциала в точках расположения спутника и потребителя, а
также различием их скоростей. Обычно учитывают следующие эф¬
фекты: поперечный доплеровский эффект, гравитационный сдвиг
частоты и эффекты, связанные с пересчетом моментов излучения и
27
приема сигналов. Для компенсации влияния наиболее существен¬
ных из указанных эффектов частоту ОГ несколько уменьшают
относительно номинала. Коррекция остаточного влияния этих
эффектов осуществляется в аппаратуре потребителя с помощью
соответствующей поправки к шкале времени, рассчитываемой на
основе данных из навигационного сообщения.
1.5.2. Погрешности, вносимые на трассе распространения
сигнала
Вторая группа погрешностей вызвана неточным знанием усло¬
вий распространения радиоволн в атмосфере Земли. В атмосфере
выделяют несколько слоев, различающихся своими свойствами.
Нижний слой, расположенный над поверхностью Земли, на¬
зывают тропосферой; ее высота 8...10 км в полярных широтах,
10...12 км — в средних и 16...18 км — в тропиках. Слой атмосферы
от 60...90 до 500...1000 км называют ионосферой. Эти два слоя
оказывают заметное влияние на качество навигационных измере¬
ний в СРНС, которое проявляется в дополнительных задержках
сигнала, возникающих из-за рефракции сигналов спутника (ис¬
кривления трассы распространения радиоволн) при прохождении
атмосферы Земли.
1.5.2.1. Ионосферные погрешности
Электронная плотность в пределах ионосферы не постоянна,
она изменяется с высотой. Ионосфера разделена на подобласти,
или слои согласно электронной плотности. Высота и толщина этих
слоев меняются со временем в результате изменения солнечной
активности и магнитного поля Земли.
Ионосферная задержка пропорциональна числу электронов
на пути сигнала СРНС. Этот показатель называется полным со¬
держанием электронов и зависит от ряда факторов: времени дня
(уровень электронной плотности достигает ежедневного максимума
рано днем и минимума около полуночи по местному времени);
времени года (уровни электронной плотности выше зимой, чем
летом); 11-летнего солнечного цикла (уровни электронной плот¬
ности достигают максимального значения приблизительно каждые
11 лет), который соответствуют максимуму солнечной активности;
географического положения (уровни электронной плотности мини¬
мальны в области средних широт и очень нерегулярны в полярных
28
и экваториальных областях). Соответственно значение задержки
изменяется в широких пределах в зависимости от района Земли,
времени суток, года, солнечной и геомагнитной активности и т. д.
и составляет 5...500 не.
Ионосфера является диспергирующей средой, т. е. знак задерж¬
ки меняется в зависимости от измеряемого параметра радиосиг¬
нала: фазы кода или фазы несущей. В первом случае учитывается
групповая скорость распространения радиоволн, а во втором —
фазовая. Соответственно в первом случае ионосферная задержка
положительная (измеренная дальность больше истинной), а во
втором — отрицательная.
1.5.2.2. Тропосферные погрешности
Основная составляющая тропосферной погрешности навигаци¬
онных определений в СРНС обусловлена наличием тропосферной
рефракции. Рефракция сигналов СРНС в тропосфере вызвана не¬
однородностями и изменением ее диэлектрической проницаемости
и соответственно показателями преломления с изменением высо¬
ты. Дополнительная задержка сигнала НС в тропосфере может
достигать 8...80 не. Значение тропосферной погрешности зависит
от факторов, которые достаточно точно известны и прогнозиру¬
ются (взаимное расположение потребителя и НС, температура,
давление, влажность воздуха).
Значения тропосферной рефракции, так же как и ионосферной,
достигают максимума при малых углах возвышения спутника. Это
объясняется большой длиной трассы, проходимой радиосигнала¬
ми в атмосфере при малых углах возвышения. Для уменьшения
влияния атмосферных погрешностей в аппаратуре потребителей
осуществляется обработка сигналов только тех спутников, которые
находятся над горизонтом выше, чем некоторый угол — «угол
маски». Обычно этот угол составляет 5...10°.
1.5.2.3. Погрешности многолучевости
На приемную антенну аппаратуры потребителя может посту¬
пать не только прямой сигнал от навигационного спутника, но
и множество переотраженных сигналов от земной и морской по¬
верхностей и близстоящих объектов, например зданий. Уровень
мощности отраженного сигнала может быть соизмерим с прямым
сигналом.
29
Это приводит к существенным искажениям полезного сигнала.
Эти погрешности во многом зависят от взаимного расположения
спутника, приемной антенны и отражающих объектов. Экспери¬
ментальные исследования показали большой разброс значений
дальномерной погрешности из-за многолучевости, которая состав¬
ляет 0,5...2 м в лучшем случае (при использовании специальных
антенн) и до 100 м в худшем (в городских условиях с высотными
зданиями).
1.5.3. Погрешности сырых измерений
К погрешностям, обусловленным аппаратурой потребителя,
можно отнести погрешности слежения за моментом прихода (вре¬
менного положения) сигнала спутника, при этом основной вклад
вносят флюктуационные и динамические погрешности схем сле¬
жения за задержкой огибаюшей и несущей сигналов спутников.
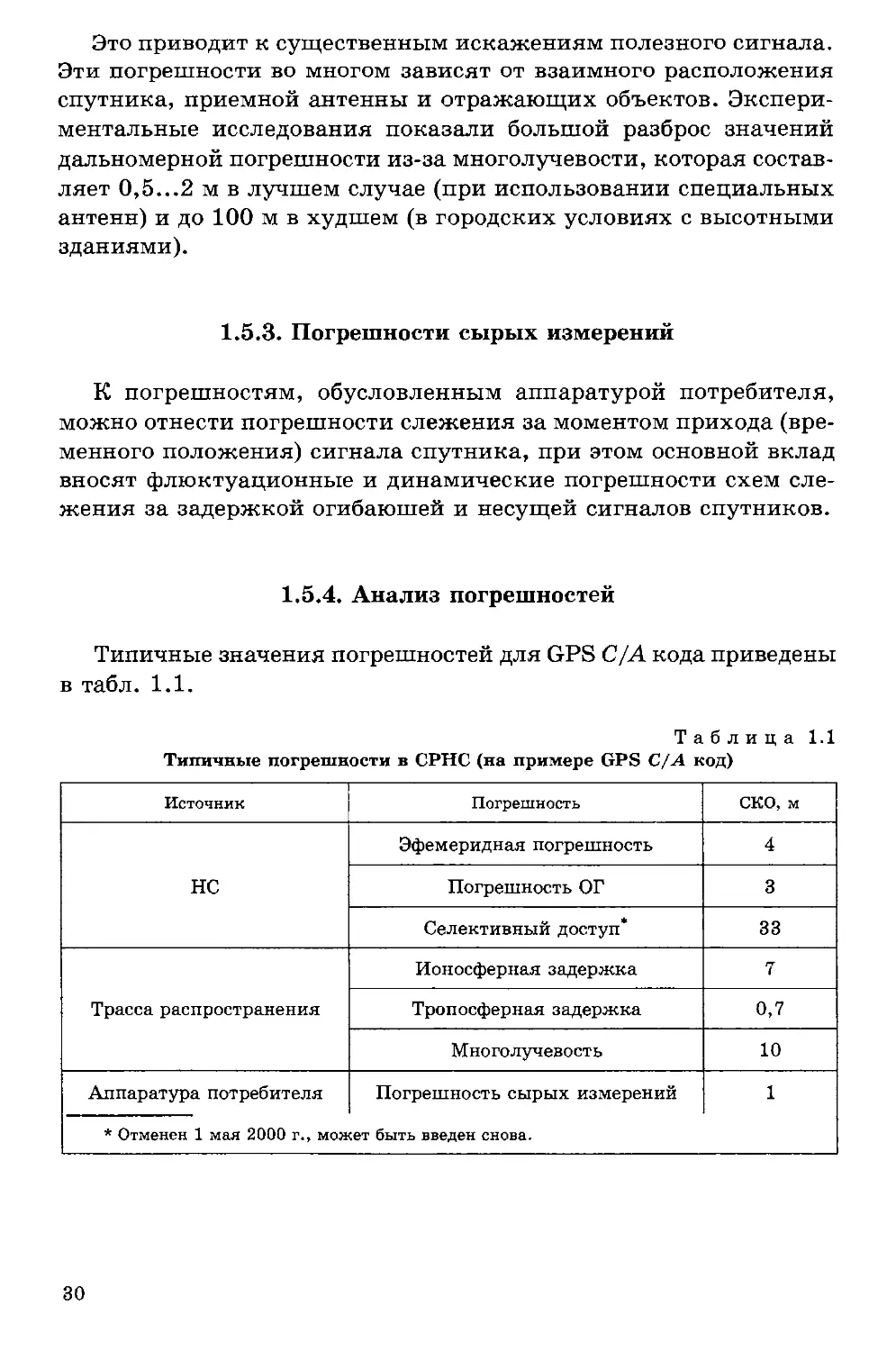
1.5.4. Анализ погрешностей
Типичные значения погрешностей для GPS С/А кода приведены
в табл. 1.1.
Таблица 1.1
Типичные погрешности в СРНС (на примере GPS С/А код)
Источник
Погрешность
СКО, м
НС
Эфемеридная погрешность
4
Погрешность ОГ
3
Селективный доступ*
33
Трасса распространения
Ионосферная задержка
7
Тропосферная задержка
0,7
Многолучевость
10
Аппаратура потребителя
* Отменен 1 мая 2000 г., мо»
Погрешность сырых измерений
ет быть введен снова.
1
30
1.6. Схема радионавигационного приемника
Схемы построения приемников СРНС во многом идентичны для
GPS и ГЛОНАСС. Приемник СРНС обеспечивает:
• прием радиосигнала, его преобразование на промежуточную
частоту и преобразование в цифровой;
• измерение задержки распространения сигнала и доплеровского
сдвига несущей частоты;
• формирование вектора потребителя.
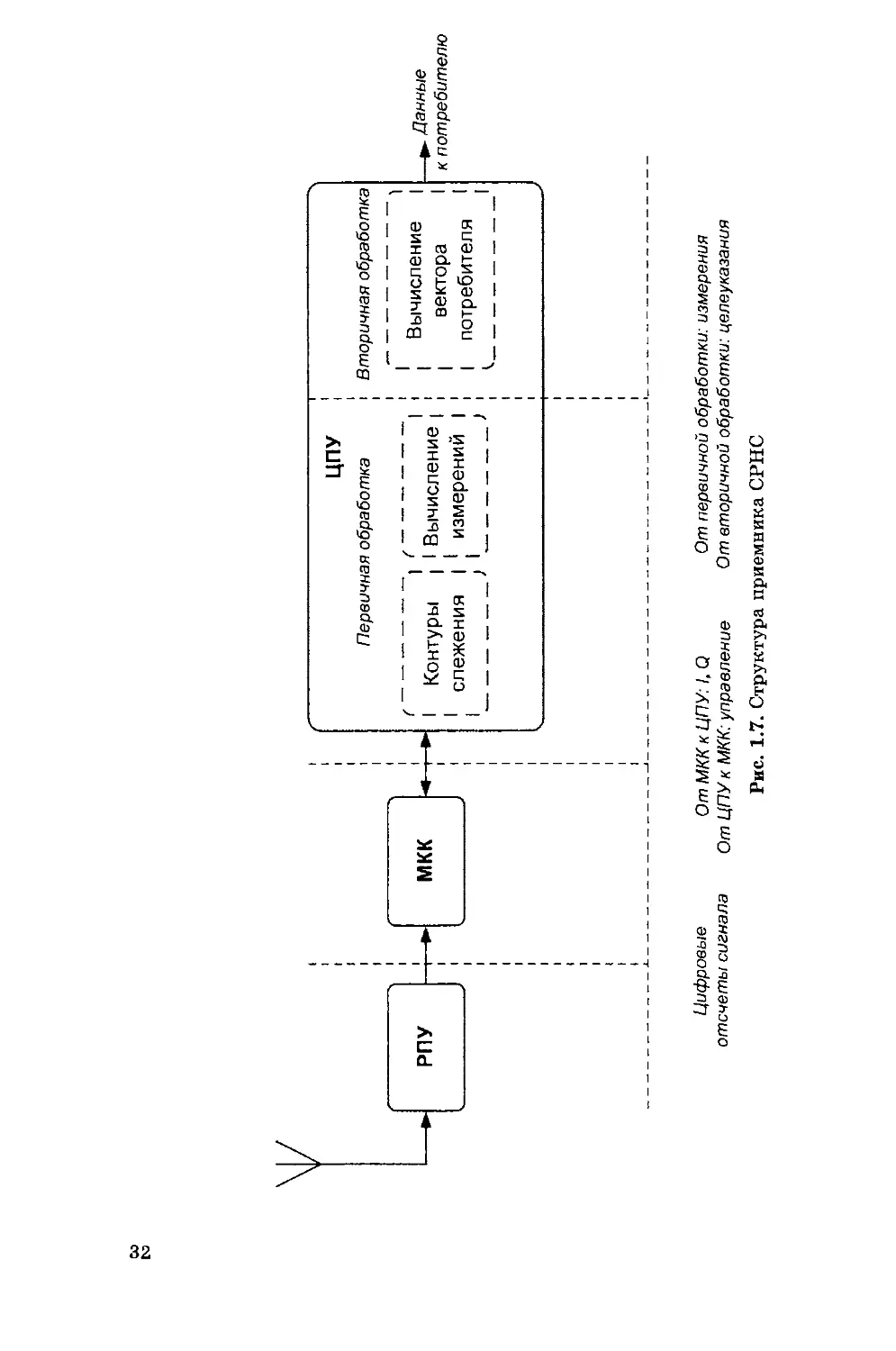
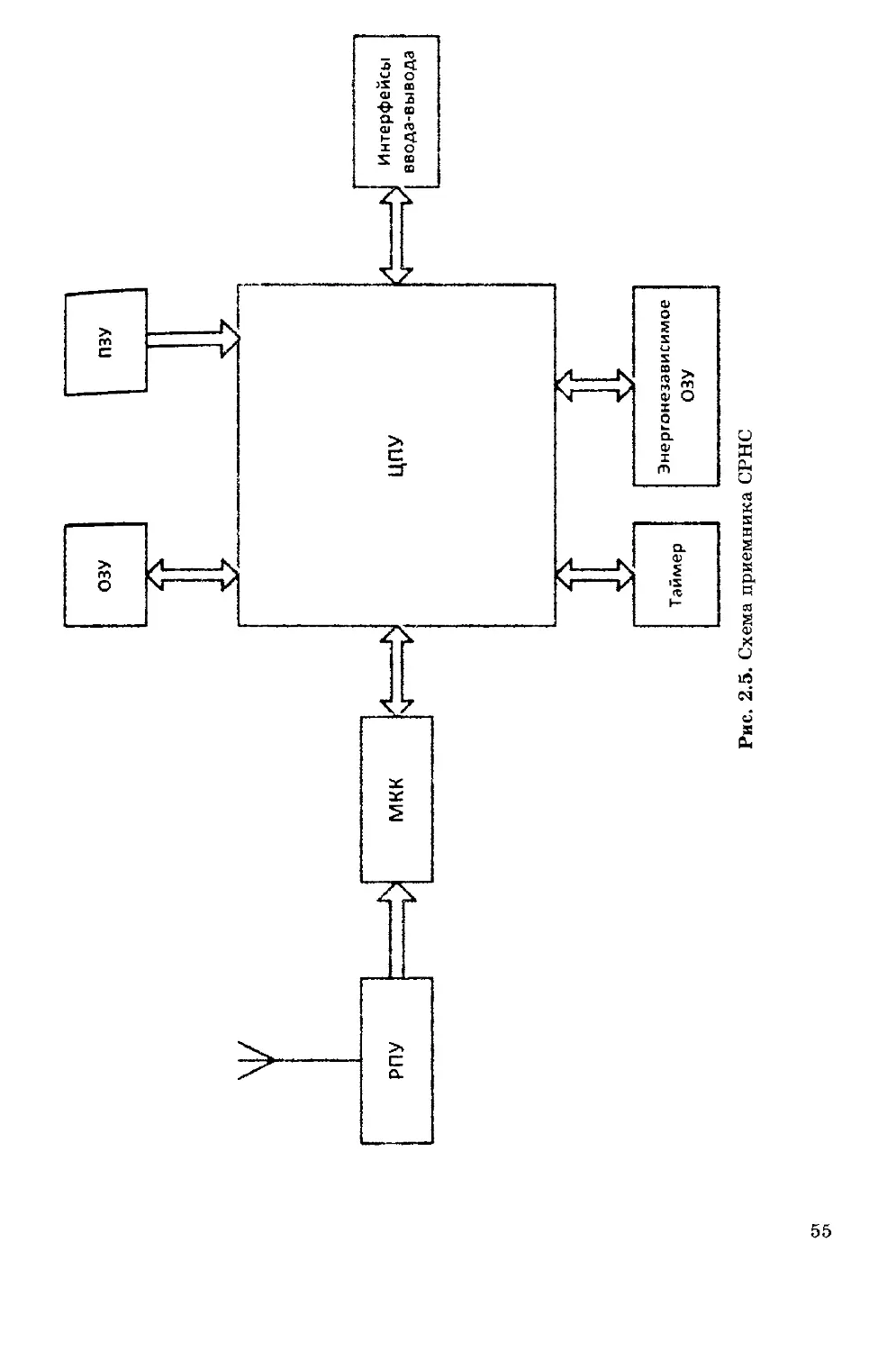
На рис. 1.7 приведена обобщенная структура приемника
СРНС, состоящая (слева направо на изображении) из следующих
блоков:
• антенно-фидерное устройство;
• радиоприемное устройство (РПУ);
• многоканальный коррелятор (МКК);
• цифровое программируемое устройство (ЦПУ), на котором ис¬
полняется специализированное программное обеспечение (ПО).
Антенно-фидерное устройство имеет диаграмму направлен¬
ности, направленную в верхнюю полусферу. Для уменьшения
уровня шума применяются активные антенны, включающие в себя
малошумящие усилители, хотя пассивные антенны не являются
исключением на сегодняшний день.
РПУ выполняет перенос спектра сигнала СРНС из области ги¬
гагерц на промежуточную частоту в мегагерцовом диапазоне с по¬
следующей его оцифровкой. Как правило, используется одно- или
трехбитное аналого-цифровое преобразование с дискретизацией
на промежуточной частоте. РПУ также содержит схему автома¬
тической регулировки усиления для удержания уровня входного
сигнала цифровой части приемника в заданном пределе.
МКК включает в себя вычисление наиболее ресурсоемких
с точки зрения вычислительных затрат функций:
1) генерацию опорной ПСП;
2) генерацию отсчетов опорной промежуточной частоты;
3) вычисление свертки опорного и входного сигналов.
В программном обеспечении, исполняемом на ЦПУ, реализу¬
ются алгоритмы первичной обработки (поиск и захват сигнала,
слежение за параметрами сигнала, вычисление измерений) и алго¬
ритмы вторичной обработки (определение вектора потребителя).
Прогресс в развитии микроэлектроники привел к тому, что с се¬
редины 1990-х гг. РПУ, МКК и ЦПУ выполняются в виде отдель¬
ных сверхбольших интегральных схем (СБИС), а в последние годы
получают распространение системы на кристалле, в которых РПУ,
МКК и ЦПУ выполнены в виде единой интегральной схемы.
31
9
§
9> Е
.а з
I о
t ф
Ф CL
^ Е
пз Ю
Ф. ф
о а
о ю
»э °
0 ‘3
1 о
э* t
3 5-
2 ^
о. о.
ф о
с Е
Е ф
О £
О
о
М
ь
о
сЗ
Я
Я
Я
S
Ф
Я
ft
Я
Я
а
>>
ь
я
>.
а
IIе.
?g 2
«5
5 * s
С > CU
Е г*
О Ь
Е
О
ф
я
I
ру Ф
С» с;
* Ф
Ф
б ~
9> 2
t е
3 ф
32
1.7. Характеристики радионавигационных
приемников
Приемники СРНС являются сложными программно-аппаратными
комплексами со специфическим рядом характеристик. К ним от¬
носятся функциональные, массо-габаритные, электрические, ме¬
ханические и другие характеристики. В данной работе большей
частью исследуются функциональные характеристики приемников
СРНС, на определении которых мы и сосредоточимся ниже.
1.7.1. Погрешность определения вектора потребителя
Точность определения вектора потребителя при использовании
СРНС зависит от совокупности источников погрешностей, дей¬
ствующих на систему, и взаимного геометрического положения
потребителя и НС.
Пользовательская погрешность определения дальности (UERE —
User Equivalent Range Error) включает в себя погрешность из¬
мерения дальности от потребителя до каждого из НС. В UERE
различают погрешность системы (URE — User Range Error)
и погрешность аппаратуры потребителя (UEE — User Equipment
Error). URE включает в себя погрешности частотно-временного
и эфемеридного обеспечений, погрешности распространения сиг¬
налов на трассе НС — потребитель (ионосферная и тропосферная
погрешности), погрешности, вызванные многолучевостью. UEE
включает в себя шумовую и динамическую погрешности измере¬
ний, обусловленные аппаратурой потребителя.
Можно показать [10], что соотношение между погрешностями
определения вектора потребителя и погрешностью определения
дальности от потребителя до каждого из НС зависит только
от геометрии взаимного расположения потребителя и НС. На
этом выводе основывается концепция коэффициента геометрии
(GDOP —Geometrical Dilutionof Precision), также называемого
геометрическим фактором. Вышесказанное формализуется в сле¬
дующем виде [10]:
Погрешность определения вектора потребителя =
= UERE х GDOP. (1.17)
На практике применяются коэффициенты геометрического
фактора, являющиеся подклассом GDOP и имеющие практическое
33
значение для координат местоположения потребителя. К ним отно¬
сятся пространственный геометрический фактор, геометрический
фактор в горизонтальной и вертикальной плоскостях, а также
геометрический фактор определения ошибки временной шкалы
потребителя.
В качестве меры погрешности определения местоположения ис¬
пользуется среднеквадратическое отклонение (СКО) от истинного
местоположения. Различают двумерное и трехмерное СКО, а также
СКО определения погрешности временной шкалы потребителя.
1.7.2. Время первого решения
Время первого решения определяется как временной интервал
между включением приемника и первым решением навигационной
задачи. Различают три типа старта (включения приемников).
Холодный старт — включение приемника при отсутствии
априорных данных о положении приемника, времени и альманахе
навигационной системы.
Теплый старт определяется как старт при наличии альманаха
навигационной системы и приблизительных значений начальных
координат и времени.
Горячий старт отличается от теплого старта наличием в при¬
емнике эфемеридной информации о НС.
1.7.3. Динамические характеристики
Динамические характеристики РНП определяют его способ¬
ность работать в условиях движения потребителя и характери¬
зуются предельными значениями скорости, ускорения и рывка
(производной ускорения). Иногда специфицируют динамические
характеристики для разных режимов работы, таких как слежение
за сигналами, захват, перезахват и др.
1.7.4. Чувствительность
Под чувствительностью РНП мы будем понимать способность
приемника принимать и обрабатывать слабые по интенсивности
сигналы СРНС.
Чувствительность является важной характеристикой аппарату¬
ры пользователя, поскольку сигналы на входе антенны наземного
34
приемника слабы даже в условиях прямой радиовидимости и
ослабляются еще больше в условиях затенения, переотражения и
пр Так, мощность сигнала передатчика НС GPS составляет 27 Вт
[6], а высота орбиты НС превышает 20 ООО км. Типичное значение
мощности сигнала СРНС на входе антенны наземного приемника
составляет минус 160 дБВт, а мощность шума в полосе 2 МГц —
минус 141 дБВт. Это означает, что сигнал находится на 19 дБ
ниже уровня теплового шума приемника.
Чувствительность приемников характеризуется минимальной
мощностью входного сигнала, при котором приемник способен вы¬
полнять заданные функции. Следует различать чувствительность
для разных режимов работы, например чувствительность захвата
сигналов, чувствительность слежения за сигналами.
1.8. Выводы
Несмотря на то что глава 1 не содержит новых научных резуль¬
татов, а представляет собой компиляцию известных сведений, она
позволяет нам сделать несколько выводов, на которые мы будем
опираться в дальнейшем.
1. Каноническая схема РНП содержит три основные части:
радиоприемное устройство, многоканальный коррелятор и цен¬
тральное программное устройство с программным обеспечением.
2. В основе обработки сигналов в РНП лежит принцип корре¬
ляционного приема — генерация опорного сигнала и его свертка
с входным сигналом для отыскания максимума корреляционной
функции.
3. Решение навигационной задачи разделяют на два этапа: этап
первичной обработки (результатом здесь являются сырые изме¬
рения) и этап вторичной обработки (используя сырые измерения,
она решает навигационную задачу).
4. Для решения навигационной задачи необходимо одновремен¬
ное наличие измерений минимум от четырех НС.
5. Знание точной модели трассы распространения сигнала
является существенным фактором уменьшения погрешности ме-
стоопределения.
6. Уровень мощности сигнала СРНС для наземного потребителя
составляет около минус 160 дБВт, что значительно ниже уровня
шума.
35
Глава 2
ФОРМУЛИРОВКА ПРОБЛЕМЫ АВТОНОМНОЙ
НАВИГАЦИИ ИСКУССТВЕННЫХ
СПУТНИКОВ ЗЕМЛИ
В данной главе сформулирована проблема автономной навига¬
ции ИСЗ. Рассмотрена постановка задачи автономной навигации,
показано значение создания теоретических основ проектирования
БАСН и проанализированы требования к БАСН. Здесь также
сформулированы основные научно-технические задачи, решение
которых необходимо для автономной навигации.
2.1. Определение автономной навигации
искусственных спутников Земли
Понятие автономной навигации имеет различные значения в
разных областях знаний. Например, автономная навигация мор¬
ских судов подразумевает использование навигационных комплек¬
сов, построенных на основе инерциальных систем (гироскопов).
Автономная же навигация роботов включает в себя не только
метод определения координат, но и исполнительный механизм
для перемещения робота. В научно-технической литературе не¬
давнего времени стало встречаться понятие автономной навигации
космических объектов, но авторы не дают строгого определения,
полагаясь на интуитивную очевидность термина.
Обратимся к Большой советской энциклопедии, где в статье
«Космонавтика» находим: «Если определение фактической ор¬
биты производится на борту летящего аппарата, то оно является
составной частью автономной навигации и состоит из измерения
углов между звездами и планетами, расстояний до планет, времени
захода и восхода Солнца и звезд относительно края планет и т. п.
и обработки измеренных данных по методам небесной механики
на бортовой вычислительной машине» [11]. Иными словами, со¬
гласно БСЭ, суть автономной навигации состоит в определении
36
орбиты спутника на борту ИСЗ. Этой же логике следовало, оче¬
видно, и Федеральное космическое агентство, когда объявляло в
начале 2007 г. конкурс «на разработку бортовой системы авто¬
номной навигации для космических средств с использованием
глобальных навигационных спутниковых систем» [12]. Целью
является «разработка бортовой интегрированной инерциально-
спутниковой системы автономной навигации объектов ракетно-
космической техники, обеспечивающей решение задач навигации
и ориентации с точностью и продолжительностью автономного
функционирования, значительно превосходящими существующие,
и формирование выходной информации в виде, приспособленном
для оперативного управления объектом». Отметим, что Роскосмос,
кроме того что определяет автономную навигацию как навигацию,
осуществляемую на борту искусственного спутника Земли, выде¬
ляет в автономной навигации следующие особенности: точность,
продолжительность автономного функционирования и интегриро¬
ванность в существующие цепи оперативного управления ИСЗ.
Исходя из вышесказанного определим автономную навигацию
искусственных спутников Земли как способность ИСЗ решать
навигационную задачу на борту без участия наземных систем
управления, непрерывно и точно.
Автономная навигация ИСЗ может производиться при помощи
инерциальных систем, датчиков звездного неба, СРНС и других
средств, а также комплексированием данных от разных навига¬
ционных датчиков. Эта книга посвящена автономной навигации
ИСЗ при помощи СРНС.
2.2. Значение и роль автономной навигации
в освоении космоса
2.2.1. Технические основы повышения эффективности
использования искусственного спутника Земли
за счет применения автономной навигации
Использование автономной навигации открывает новую эру
в освоении околоземного пространства: она позволяет автомати¬
чески и автономно определять местоположение ИСЗ и параметры
его орбиты. Это означает, что ИСЗ может двигаться по полностью
предсказуемой орбите, т. е. по такой орбите, где положение ИСЗ
в будущем можно предсказать с высокой точностью. Из полностью
предсказуемого характера орбиты следует несколько практически
важных выводов:
37
• след движения ИСЗ по поверхности Земли также предска¬
зуем;
• след движения ИСЗ по поверхности Земли может быть, если
требуется, изменен в любой момент времени;
• предсказание положения ИСЗ и его следа на Земле упроща¬
ется настолько, что может быть выполнено на микропроцессоре
общего назначения.
Кроме того, высокоточное определение орбит ИСЗ позволяет
упростить планирование полетов: в частности, облегчается пла¬
нирование использования полезной загрузки, навигационное
планирование (включая планирование маневров), планирование
взаимодействия с другими ИСЗ (радиочастотное взаимодействие
и др.).
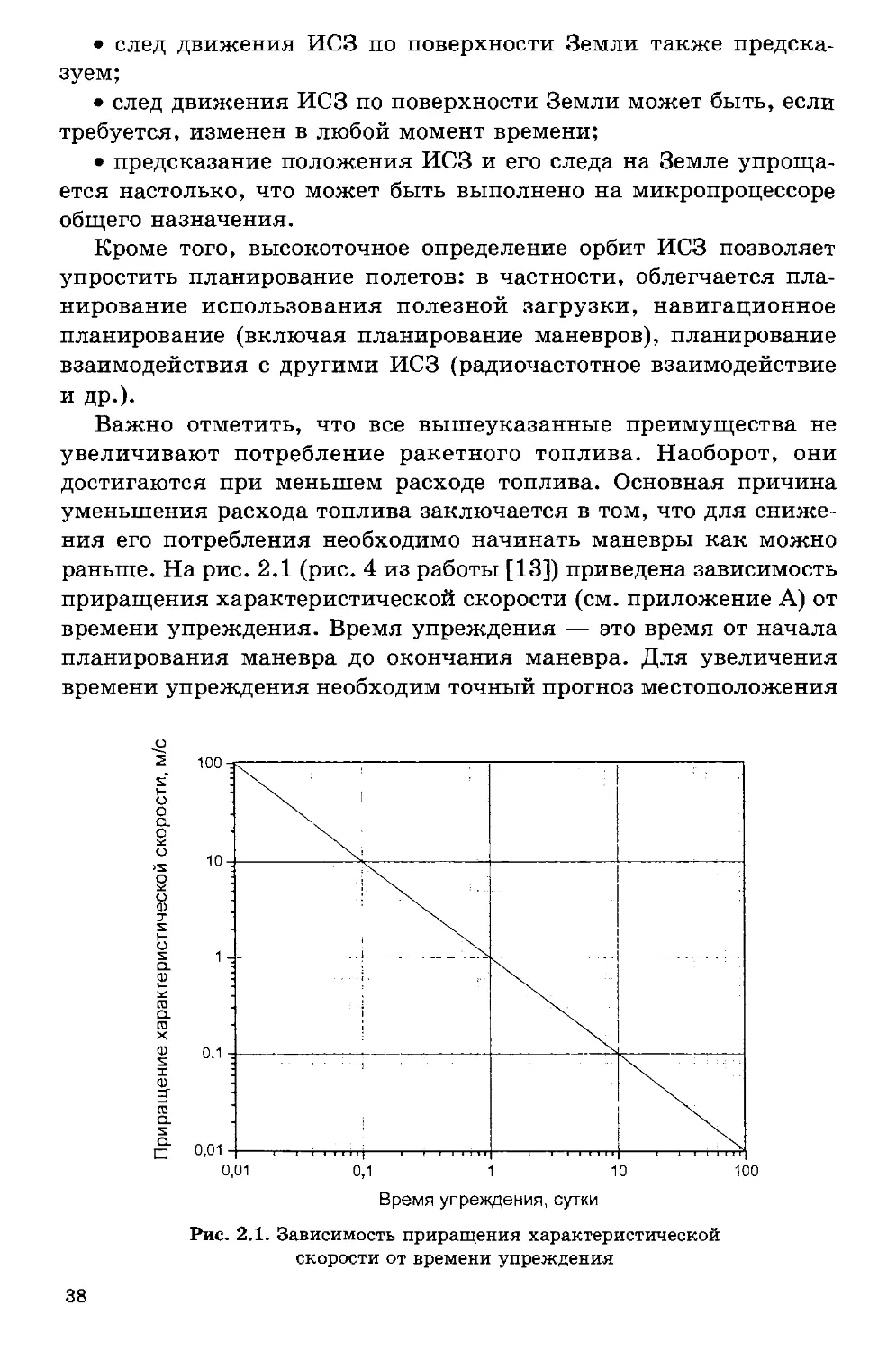
Важно отметить, что все вышеуказанные преимущества не
увеличивают потребление ракетного топлива. Наоборот, они
достигаются при меньшем расходе топлива. Основная причина
уменьшения расхода топлива заключается в том, что для сниже¬
ния его потребления необходимо начинать маневры как можно
раньше. На рис. 2.1 (рис. 4 из работы [13]) приведена зависимость
приращения характеристической скорости (см. приложение А) от
времени упреждения. Время упреждения — это время от начала
планирования маневра до окончания маневра. Для увеличения
времени упреждения необходим точный прогноз местоположения
Время упреждения, сутки
Рис. 2.1. Зависимость приращения характеристической
скорости от времени упреждения
38
ЦСЗ в будущем. При использовании автономной навигации такой
прогноз может быть осуществлен не на несколько часов или суток,
а на десятки суток, тем самым уменьшается потребное приращение
характеристической скорости ИСЗ на один-два порядка. Соответ¬
ственно изменится и расход топлива. Так, из рис. 2.1 видно, что
приращение характеристической скорости может быть сокращено
с Ю м/с до 10 см/с при увеличении времени упреждения с 2,5 ч
до Ю суток.
Другая причина повышения эффективности расхода топлива на
борту ИСЗ заключается в том, что ИСЗ с автономной навигацией
способен поддерживать максимально допустимый радиус своей
орбиты. Поскольку плотность атмосферы Земли уменьшается экс¬
поненциально с увеличением высоты, поддержание максимально
допустимого радиуса орбиты означает фактически минимизацию
влияния атмосферы. Традиционные методы контроля орбиты ИСЗ,
не имеющие возможности непрерывного и точного определения
местоположения, позволяют ИСЗ опускаться до минимально до¬
пустимых высот с последующим включением двигателей и набо¬
ром высоты. Преимущества поддержания максимального радиуса
орбиты были показаны на спутнике UoSAT-12, разработанном
компанией Surrey Satellite Technology Limited [13, 14].
2.2.2. Снижение эксплуатационных расходов
Несмотря на важность и практическую значимость вышепере¬
численных преимуществ автономной навигации, основной эконо¬
мический эффект от применения БАСН заключается в снижении
расходов на использование ИСЗ. Рассмотрим основные пути сни¬
жения расходов и повышения эффективности при использовании
БАСН.
Эксплуатационные расходы на поддержание и контроль орбиты
включают в себя расходы на наземный сбор навигационных дан¬
ных, определение орбит ИСЗ с Земли, генерацию команд управ¬
ления двигателями малой тяги и передачу команд управления
с Земли на борт. В принципе, наземные операции если не исклю¬
чаются полностью из цикла управления ИСЗ, то ограничиваются
только периодическим мониторингом.
Стоимость и сложность передачи пользователям постоянно об¬
новляемых эфемерид ИСЗ сводятся к нулю: эфемериды становятся
известными на все время полета и их обновление не требуется.
Стоимость операций по навигационному планированию, ко¬
торые составляют для некоторых типов ИСЗ 50 % эксплуатаци-
39
онных расходов [13], существенно уменьшается по следующим
причинам.
Больше не требуется дополнительного навигационного плани¬
рования, вызванного отклонением элементов орбиты от заданных.
Поскольку местоположение ИСЗ становится известным на все
время его существования, то отпадает необходимость дополни¬
тельного навигационного планирования при появлении новых
эфемерид ИСЗ.
Навигационное планирование диктуется не соображениями
астродинамики, но экономическими интересами организации —
владельца ИСЗ. Навигационное планирование делается тогда,
когда удобно, а не тогда, когда это позволяют условия видимости,
расписание и пр.
Поскольку влияние импульсов тяги двигателя минимально (им¬
пульсы становятся малыми и существенно не влияют на динамику
полета), становится ненужной координация навигационного пла¬
нирования и планирования работы полезной загрузки. Большин¬
ство аппаратуры полезной загрузки сможет работать непрерывно,
не останавливаясь на время включения импульсов тяги.
Уменьшение потребления ракетного топлива (и следовательно,
увеличение срока эксплуатации ИСЗ) и снижение эксплуатацион¬
ных расходов достигаются как при удержании ИСЗ на орбите, так
и во время маневров, включая перестроения на орбите для того,
чтобы избежать столкновения с космическим мусором или неже¬
лательного радиочастотного взаимодействия с другими ИСЗ.
Наконец, снижается стоимость и масса ИСЗ за счет:
• уменьшения размеров двигателей малой тяги;
• уменьшения возмущающих моментов, значения которых опре¬
деляют стоимость системы контроля и поддержания орбиты;
• упрощения системы контроля и поддержания орбиты (напри¬
мер, исключение гироскопов и звездных датчиков).
Особо следует отметить упомянутое выше уменьшение воз¬
мущающих моментов, создаваемых двигателями малой тяги.
Обычно включение двигателей малой тяги создает наибольший
возмущающий момент на борту ИСЗ, что отрицательно влияет
на функционирование бортовой аппаратуры. Из-за этого в работе
ИСЗ предусматривают режим удержания на орбите. В этом ре¬
жиме действие аппаратуры полезной загрузки останавливается,
включаются двигатели малой тяги, выполняется маневр и потом
работа бортовой аппаратуры полезной загрузки возобновляется.
Очевидно, что для минимизации неблагоприятных последствий
такого рода перерывы в работе должны согласовываться с потре¬
бителями услуг, предоставляемых ИСЗ.
40
Автономная навигация решает вышеуказанные задачи, посколь¬
ку возмущающие моменты, создаваемые двигателями малой тяги,
незначительны. В большинстве случаев они могут быть уменьшены
до значений, полностью отрабатываемых системой контроля ор¬
биты и не приводящих к остановке работы аппаратуры полезной
загрузки. Это делает ненужным не только режим удержания на
орбите, но и согласование операций полезной нагрузки с навига¬
ционным планированием станции.
2.2.3. Новые функциональные возможности,
предоставляемые автономной навигацией
Автономная навигация не только предоставляет возможность
высокоточного предсказания следа спутника на поверхности Зем¬
ли, но и обеспечивает такое управление орбитой, при котором след
спутника меняется по заданному закону. Принципиально то, что
параметры орбиты могут изменяться с небольшим приращением
характеристической скорости за счет большого времени упре¬
ждения. Незначительное изменение характеристической скорости
означает малую стоимость маневра; без использования автономной
навигации высокая стоимость маневров служила существенным
ограничением эксплуатационных свойств ИСЗ.
Наземному оборудованию, использующему спутниковые си¬
стемы, автономная навигация предоставляет следующую воз¬
можность: оно может поставляться конечному пользователю уже
с набором эфемерид ИСЗ. Таким образом, например, научные
исследования с участием спутниковых систем могут быть заплани¬
рованы заранее на основе знания, где на Земле и в каких условиях
будут видны спутники. Для того чтобы провести планирование
эксперимента в примере выше (или планирование другого ис¬
пользования связи с ИСЗ), не требуется прямого контакта между
наземным потребителем и спутником. Это может быть важно и
в военных применениях, когда, к примеру, находящаяся в авто¬
номном подледном плавании подводная лодка неспособна получить
обновленные эфемериды спутника.
Автономная навигация позволяет решить задачи предупре¬
ждения столкновений и минимизации нежелательного радиоча¬
стотного взаимодействия между спутниками, которым посвящены
многочисленные работы (например, [15-20]). В данных работах
показано, что принципиальным для решения этих задач явля¬
ется раннее упреждение. Оно требуется для экономии топлива
и координации маневров спутников, принадлежащих разным
41
операторам. Если оба ИСЗ используют автономную навигацию, то
задача решается просто: маневры планируются заранее или даже
периодически. Если же только один из спутников оборудован
аппаратурой автономной навигации, то задача усложняется, но
тем не менее возможность точного предсказания местоположения
ИСЗ помогает предупреждать столкновения и минимизировать не¬
желательное радиочастотное взаимодействие между спутниками.
Наконец, автономная навигация позволяет владельцам и операто¬
рам ИСЗ публиковать прогноз местоположения спутника, чтобы
операторы других спутниковых систем могли заранее рассчитать
возможные нежелательные взаимодействия.
Все вышесказанное хотя и имеет важное практическое значе¬
ние, но затмевается перспективами создания космических группи¬
ровок для полета строем: автономная навигация внесет решающий
вклад в их создание. Таблица 2.1 дает представление: о задачах,
которые нужно решить при создании космических группировок
для полета строем; трудностях, возникающих в процессе решения
этих задач; решениях, предлагаемых автономной навигацией,
включая снижение расходов, экономию топлива и уменьшение
рисков. Последние четыре столбца табл. 2.1 обозначены следую¬
щим образом: 1 — снижение периодических затрат; 2 — снижение
разовых затрат; 3 — экономия топлива; 4 — снижение риска.
Задача учета гармоник высокого порядка требует пояснения.
В отличие от других задач из табл. 2.1 она является специфической
для космических группировок. Гармоники высокого порядка вво¬
дятся в уравнения движения спутника для учета неравномерности
гравитационного поля Земли. Такая неравномерность приводит
к тому, что ИСЗ с одинаковыми полуосями, но разными плоскостя¬
ми орбиты будут иметь разные орбитальные периоды. Если один
и тот же процесс контроля орбиты используется для всех спутни¬
ков, то разные периоды их орбит будут вызывать необходимость
периодического перестроения группировки. Автономная навигация
позволяет избежать перестроения: период орбиты контролируется
раздельно для каждого из спутников таким образом, что средний
период остается одинаковым для всех ИСЗ в группировке.
Итак, применение автономной навигации должно революцио¬
низировать пути исследования звездного пространства и открыть
новую эру в развитии космических технологий. Почему же, когда
СРНС успешно используется в авиации, на Земле и на борту судов
уже не первое десятилетие, БАСН до сих пор не стала таким же при¬
вычным элементом управления космических кораблей, как приборы
спутниковой навигации на борту самолетов? Ответ на этот вопрос
прост: создание БАСН до недавнего времени считалось если не не-
42
Таблица 2,1
Роль автономной навигации в создании космических группировок
Задача
Сложности
Решение
1
2
3
4
Удержание на
орбите
Сложная техниче¬
ская задача, риск
ошибок, высокие
затраты
Минимизация стои¬
мости и риска путем
автономного решения
задачи на борту каж¬
дого из ИСЗ в груп¬
пировке
X
X
X
X
Предупрежде¬
ние столкно¬
вений (внутри
группировки)
Риск лавинооб¬
разных столкно¬
вений
Минимизация риска
за счет автономности
решения задачи на
борту каждого из ИСЗ
в группировке
X
X
X
X
Нежелательное
радиочастотное
взаимодействие
Может вызвать
перерывы в
работе
Минимизация риска
за счет раннего упре¬
ждения
X
X
X
X
Управление за¬
пасами топлива
Интенсивное
использование
топлива сокраща¬
ет жизнь ИСЗ
Минимизация исполь¬
зования топлива за
счет раннего упре¬
ждения
X
Гармоники вы¬
сокого порядка
Разные периоды
орбиты ИСЗ вну¬
три группировки
Автоматическое под¬
держание периода
орбиты у каждого из
ИСЗ
X
X
X
X
Управление
Высокая стои¬
мость, высокий
риск
Минимизация стои¬
мости и риска путем
исключения много¬
численных циклов
наземного навигаци¬
онного планирования
X
X
X
решаемой, то чрезвычайно сложной научно-технической задачей.
Для понимания трудностей создания БАСН необходимо оценить
условия, в которых должна работать аппаратура космического
базирования. Далее мы последовательно рассматриваем факторы,
влияющие на проектирование БАСН. Для начала мы вводим поня¬
тия об основных типах орбит ИСЗ и потом, начиная с радиационной
стойкости, анализируем особенности разработки БАСН.
2.3. Ионизирующее излучение в космосе
(по материалам [21])
Под космической радиацией понимаются потоки ионизирую¬
щего излучения, а именно: галактические космические лучи, ча¬
стицы радиационных поясов Земли, солнечные космические лучи
и ионизирующее электромагнитное излучение Солнца.
43
2.3.1. Космическая радиация
О потоках приходящего к нам из космоса ионизирующего из¬
лучения в атмосфере Земли известно с начала XX века, после
пионерских работ Гесса. В 20-х годах прошлого столетия советский
ученый Д. В. Скобельцын установил корпускулярную природу
этого излучения, порожденного потоками частиц очень высоких
энергий — космическими лучами. Дальнейшие исследования по¬
казали, что энергетический спектр космических лучей является
падающим степенным и тянется в область сверхвысоких энергий —
до 1020 электронвольт (эВ). Сейчас считается, что космические
лучи — протоны и другие ядра — ускоряются во вспышках сверх¬
новых звезд, которые постоянно происходят в нашей Галактике,
поэтому на сегодняшний день потоки таких частиц принято на¬
зывать галактическими космическими лучами (ГКЛ).
На своем пути к поверхности Земли ГКЛ встречают несколь
ко основных препятствий. В первую очередь это межпланетное
магнитное поле, вмороженное в плазму, истекающую от Солнца
(солнечный ветер). Максимум потока ГКЛ в межпланетной среде
наблюдается в области нескольких сотен мегаэлектронвольт, при
этом их поток может достигать десятков частиц на квадратный
метр в секунду.
Вторым, еще более мощным препятствием на пути ГКЛ явля¬
ется собственное магнитное поле Земли — магнитосфера, которая
способна отражать протоны ГКЛ с энергиями в несколько гига-
электронвольт (109 эВ), их поток составляет несколько частиц на
квадратный метр в секунду.
И, наконец, третьим и самым мощным препятствием для кос¬
мических лучей является атмосфера, которая способна поглощать
ГКЛ с энергиями до нескольких гигаэлектронвольт.
Таким образом, можно утверждать, что ГКЛ пронизывают и
заполняют собой все окружающее пространство — от межпланет¬
ной среды и околоземного космического пространства до нижних
слоев атмосферы.
ГКЛ своей высокой ионизирующей способностью вызывают
функциональные сбои в работе электроники, или, как их обычно
называют в зарубежной печати, SEE (Single Events Effects) —
эффекты одиночных сбоев, возникающие в результате выделения
энергии высокоионизирующими частицами, созданными ГКЛ
в активной области отдельных микросхем. С начала XXI века
во всем мире (не исключая России) авиация и космонавтика все
более широко используют относительно дешевые коммерческие
микросхемы высокой степени интеграции, однако они более чув-
44
ствительны к воздействию ионизирующего воздействия ГКЛ. Та¬
кая тенденция ведет к усилению зависимости устойчивой работы
бортовой электроники от потоков космических лучей, которые,
несмотря на относительную малость, существуют постоянно (с не¬
которыми изменениями по величине, о чем будет сказано ниже).
Вследствие этого суммарный эффект от воздействия ГКЛ оказы¬
вается довольно существенным.
2.3.1.1. Радиационные пояса Земли
На заре космической эры первые ИСЗ обнаружили другой ис¬
точник энергичных заряженных частиц — радиационные пояса
Земли (РПЗ). Прежде всего это протонный пояс, простирающийся
от верхней границы атмосферы (около 100 км) до трех-четырех
радиусов Земли RE и заполненный в основном протонами с
энергиями до сотен мегаэлектронвольт. Кроме того, существует
электронный РПЗ, внешняя граница которого лежит значитель¬
но выше — на высотах до (5...6) RE. Энергия электронов в РПЗ
достигает десятков мегаэлектронвольт. Частицы РПЗ не могут
проникать глубоко в атмосферу, поскольку лишены достаточной
для того энергии: они поглощаются в верхних атмосферных сло¬
ях. В этом смысле частицы РПЗ безопасны для авиации, однако
они представляют серьезную опасность для ИСЗ и пилотируемых
орбитальных станций, так как достаточно энергичны для проник¬
новения сквозь обшивку в глубь аппарата. Потоки таких частиц,
называемые проникающей радиацией, в зависимости от толщины
обшивки ИСЗ могут достигать значительных значений. Так, поток
проникающей радиации на орбитальной станции МИР (это пре¬
жде всего электроны с энергией более 5 МэВ и протоны с энергией
более 60 МэВ) составляет порядка 105 частиц на квадратный метр
в секунду. Следует отметить, что частицы РПЗ обладают меньшим
ионизирующим эффектом, чем ГКЛ, поскольку в среднем имеют
существенно меньшую энергию. Но вследствие очень больших
потоков частицы оказывают отрицательное и порой губительное
воздействие на материалы ИСЗ. Они также способны вызывать
сбои в работе электронных узлов космического аппарата.
Другой поражающий фактор связан с потоками релятивист¬
ских электронов, способных проникать сквозь обшивку ИСЗ и
по-разному накапливаться в материалах с различной проводимо¬
стью, в результате чего внутри ИСЗ образуется так называемый
объемный заряд. При большой экспозиции в интенсивных пото¬
ках релятивистских электронов объемный заряд может достигать
45
критических значений, что приводит к пробою диэлектриков и
нарушению работы электроники на борту ИСЗ.
Кроме высокоэнергичных элементов РПЗ заполнены потоками
заряженных частиц с низкими энергиями (десятки и тысячи элек-
тронвольт). Потоки этих частиц настолько велики, что способны
создавать большой поверхностный заряд, неоднородно распреде¬
ленный на обшивке ИСЗ. При этом между различными частями
обшивки спутника возникает разность потенциалов, способная при
определенных условиях достигать нескольких десятков килоэлек¬
тронвольт, что приводит к электрическому разряду на поверхности
ИСЗ. Образующиеся в момент разрядов электромагнитные помехи,
проникая в электронные цепи бортовых приборов ИСЗ, искажают
электронные сигналы и нарушают работу аппаратуры.
Более чем за тридцать лет космической эры был разработан
целый комплекс моделей, позволяющих вычислять средние по¬
токи ГКЛ и захваченной радиации для практически любой око¬
лоземной орбиты. Современные ИСЗ сконструированы с учетом
существующих моделей, однако большое число сообщений о сбоях
в работе ИСЗ и даже их потере за последнее десятилетие говорит
о том, что существующие средние модели космической радиации
не учитывают важные факторы, которые оказывают решающее
влияние на современную электронику ИСЗ. В первую очередь к
таким факторам относятся солнечные космические лучи.
2.3.1.2. Солнечные космические лучи
В отличие от ГКЛ и частиц РПЗ солнечные космические лучи
(СКЛ), генерируемые в солнечных протонных событиях (см. ниже),
не имеют постоянного потока, а приходят к Земле спорадически.
Их главными свойствами являются очень большая интенсивность,
на много порядков превышающая фоновые значения потоков ГКЛ,
и высокие энергии, иногда до нескольких гигаэлектронвольт.
Проникая в магнитосферу и атмосферу Земли, СКЛ вызывают
те же эффекты, что и ГКЛ, однако в гораздо большей степени.
С приходом СКЛ увеличивается количество SEE.
2.3.1.3. Ионизирующее электромагнитное излучение
Солнце постоянно излучает в широком спектре электромагнит¬
ных волн. Ионизирующее электромагнитное излучение (ИЭИ) от
Солнца, включающее в себя рентгеновские лучи и у-излучение,
46
практически полностью поглощается в атмосфере Земли на боль¬
ших высотах, вызывая ионизацию атомов воздуха. Во время сол¬
нечных вспышек потоки ИЭИ от Солнца возрастают на несколько
порядков, что приводит к сильному разогреву и ионизации верхней
атмосферы. Можно указать две основные сложности, возникающие
в результате воздействия ИЭИ.
Во-первых, вследствие разогрева атмосфера «раздувается», т. е.
ее плотность на фиксированной высоте сильно увеличивается. Это
представляет серьезную опасность для низковысотных ИСЗ и пи¬
лотируемых орбитальных станций, поскольку, попадая в плотные
слои атмосферы, ИСЗ может быстро потерять высоту и упасть.
Другая сложность связана с сильным увеличением ионизации
внешней области атмосферы (ионосферы) из-за прихода интенсивного
ИЭИ, что приводит к существенному изменению условий прохожде¬
ния радиосигналов через ионосферу и их отражению от нее.
2.3.2. Геомагнитные возмущения
Во время геомагнитных возмущений происходит наибольшее
число отказов в работе бортовой электроники, возникают сбои
в ориентации ИСЗ. В данном случае геомагнитные возмущения не
являются прямым агентом, непосредственно влияющим на ИСЗ,
а выступают в роли катализатора силы воздействия других факторов
космической погоды. По своей природе геомагнитные возмущения
можно разделить на два типа: геомагнитные бури и суббури.
2.3.2.1. Геомагнитные бури
Геомагнитной бурей называется сильное (десятки и сотни на¬
нотесла) изменение горизонтальной составляющей геомагнитного
поля, измеренного на поверхности Земли на низких широтах.
Средняя длительность магнитной бури составляет десятки часов
и состоит из двух фаз — главной фазы магнитной бури и фазы
восстановления. Во время главной фазы, которая длится несколько
часов, наблюдается быстрое, часто немонотонное уменьшение на¬
пряженности геомагнитного поля до своего минимального значе¬
ния. После этого наступает фаза восстановления: напряженность
низкоширотного геомагнитного поля постепенно возвращается
к своему прежнему значению в течение десятков часов.
За последнее десятилетие обнаружено и описано множество
Негативных последствий на Земле и в космосе, связанных с гео-
47
магнитными бурями. С точки зрения проектирования БАСН важе^
следующий эффект. В результате глобальной перестройки гео¬
магнитного поля во время главной фазы магнитной бури условия
проникновения в магнитосферу энергичных частиц ГКЛ и СКД
становятся более благоприятными, а значит, их потоки могут
существенно возрастать. Это в свою очередь ведет к увеличению
числа сбоев в бортовой электронике и росту дозовых нагрузок на
ИСЗ. Особенно опасно сочетание начала магнитной бури с при¬
ходом CKJT от мощного протонного события на Солнце. Во время
очень сильных магнитных бурь может происходить прямой заброс
энергичных заряженных частиц из межпланетной среды внутрь
магнитосферы, вследствие чего формируется новый радиационный
пояс, способный просуществовать несколько месяцев и тем самым
значительно увеличить радиационные эффекты на ИСЗ.
2.3.2.2. Суббури
Суббурями принято называть возмущения геомагнитного поля
с амплитудой до нескольких тысяч нанотесла и длительностью
до часа, наблюдаемые на поверхности Земли на высоких гео¬
магнитных широтах (более 70°). Суббури вызываются мощной
перестройкой геомагнитного поля на ночной стороне, которая со¬
провождается ускорением заряженных частиц (в первую очередь
электронов) до высоких энергий.
Суббури являются, пожалуй, наиболее мощным источником
электронов во внешней магнитосфере. Сильно возрастают потоки
низкоэнергичных электронов, что приводит к существенному
усилению электризации ИСЗ. Во время сильной суббуревой актив¬
ности на несколько порядков возрастают потоки релятивистских
электронов во внешнем РПЗ, что представляет серьезную опас
ность для ИСЗ, орбиты которых пересекают эту область, поскольку
внутри ИСЗ накапливается большой объемный заряд, приводящий
к выходу бортовой электроники из строя.
2.4. Воздействие ионизирующего излучения
на аппаратуру спутникового базирования
Радиационная стойкость материалов — это их способность
сохранять начальные характеристики под воздействием иони¬
зирующего облучения. Различают два фактора воздействия на
радиоэлектронные компоненты, находящиеся на борту спутника:
48
постепенное ухудшение характеристик, вызванное поглощенной
дозой радиации, и функциональные сбои в работе электроники,
возникающие в результате выделения энергии высокоионизи-
рующими частицами в активной области отдельных микросхем.
Рассмотрим оба фактора воздействия и проанализируем вклад
каждого из них для разных типов орбит ИСЗ.
2.4.1. Поглощенная доза радиации
Поглощенная доза определяется как отношение поглощенной
энергии ионизирующего излучения к массе облученного вещества.
Поглощенная доза измеряется в грэях. Один грэй равен поглощен¬
ной дозе излучения, при которой облученному веществу массой
1 кг передается энергия ионизирующего излучения 1 Дж. На
практике применяется рад — внесистемная единица дозы излуче¬
ния, поглощенной веществом (от английского Radiation Absorbed
Dose доза поглощенного излучения). 1 рад — доза радиации на
1 кг массы тела, эквивалентная энергии 0,01 Дж. 1 рад = 0,01 Гр.
Поскольку поглощенная доза зависит от вещества, указывают,
к какому химическому элементу или соединению относится по¬
глощенная доза, например: 5 рад (Si).
Практически поглощенная доза может быть вычислена на осно¬
ве энергетических спектров частиц. Так, разработанный в NASA
пакет программ Shieldose [22] позволяет на основании имеющейся
базы данных с результатами предварительно проведенных методом
Монте-Карло расчетов вычислять накопление дозы космических
ионизирующих излучений для случая облучения электронами и
протонами при произвольных энергетических спектрах частиц.
Данные, полученные при моделировании по программе Shieldose,
являются надежными с физической точки зрения и широко ис¬
пользуются при разработке методики расчета поглощенной дозы
на борту ИСЗ [23]. Европейское космическое агентство рекомен¬
дует использование этой программы для расчета накопленной
дозы [24].
Как видно из рис. 2.2, для ИСЗ поглощенная доза зависит от
типа орбиты ИСЗ и времени облучения (принято рассчитывать
годовую поглощенную дозу). Для НОС основным источником по¬
глощенной дозы являются протоны нижнего радиационного пояса,
в то время как для СИСЗ таким источником являются электроны
верхнего радиационного пояса.
На рис. 2.3 (репродукция Fig. 3 из работы [23]) приведена за¬
висимость дозы, поглощенной за год в центре сферы радиусом 4 мм
49
А
Рис. 2.2. Околоземные радиационные пояса
■ Г 1 » 1 » * - «1
protons
Zzm,
L ^
^^Hjfcctone
danger (or
semi-hard parts
У? V
ГГ' л, 1
1
1 /Л>'* т
д* '• 1 J
failure of
commercial parts
* \ л
biemssti.ihtuni
11 \ 1
11
il
± .
100 41000 10 000
Orbit alttade (km)
LEO Geostationary
Рис. 2.3. Поглощенная доза за год в зависимости от радиуса орбиты ИСЗ [23]
50
Таблица 2.2
Значения годовой поглощенной дозы для разных типов орбит
Тип орбиты
Годовая поглощенная доза (Si), крад
нос
0,4
НОС (полярная орбита)
2,5
СИСЗ
20
ВЭО (Тундра)
40
при полете по круговой экваториальной орбите. Здесь ясно видны
структура РПЗ и вклад протонного и электронного излучений
в зависимости от высоты. Для орбит НОС высотой 1000 км го¬
довая доза составит 1 крад (Si), а для СИСЗ — 20 крад (Si). До¬
полнительное экранирование уменьшает поглощенную дозу, но в
силу спектрального распределения энергии протонов на низких
орбитах оно не слишком эффективно для НОС (см., например, рис.
на с. 82 [25]). Для СИСЗ дополнительное экранирование гораздо
эффективнее, поскольку электронная составляющая излучения
экранируется лучше, нежели протонная, но в этом случае возрас¬
тает вклад тормозного излучения, вызванного взаимодействием
электронов с экранирующим материалом (рис. на с. 82 [25]).
Расчет годовой поглощенной дозы для ВЭО сложнее, чем для
НОС и СИСЗ, но очевидно, что она может быть выше, чем для
СИСЗ, поскольку орбита ВЭО может проходить через РПЗ.
В работе [24] специалисты Европейского космического агент¬
ства привели данные о годовой поглощенной дозе (Si) для разных
типов орбит при наличии четырехмиллиметрового алюминиевого
защитного экрана. В табл. 2.2 приведены значения годовой погло¬
щенной дозы для орбит, на которых предполагается использование
БАСН (данные взяты из Fig. 22 в работе [24]).
2.4.2. Эффекты одиночных сбоев
Различают три типа эффектов одиночных сбоев1:
• single event upset (SEU) — одиночный сбой;
• single event latchup (SEL) — одиночное «защелкивание»
схемы;
• single event burnout (SEB) — одиночное выгорание схемы.
SEL возникает в результате такого воздействия заряженных
частиц, при котором создается паразитная структура внутри ма¬
териала, действующая как цепь короткого замыкания. SEL может
1 В этом параграфе мы будем пользоваться терминологией, сложившейся в
иностранной литературе.
51
быть как некритичным сбоем, так и критичным, т. е. приводящие
к выводу элемента из строя.
SEB возникает в результате такого воздействия заряженных
частиц, при котором создается цепь короткого замыкания внутри
элемента, вызывающая прекращение его работы.
SEE представляют собой одно из главных препятствий для
использования микроэлектронных компонентов на борту ИСЗ.
Развитие микроэлектроники приводит к меньшим зарядам,
требующимся для SEE, и к увеличению плотности транзисторов
в сверхбольших интегральных схемах (СБИС), а следовательно,
к большей вероятности SEE.
Подверженность SEE определяется энергией, необходимой для
того, чтобы произвести один SEE. В качестве меры подверженно¬
сти используют порог линейной передачи энергии (Linear Energy
Transfer, LET), определяемый как минимальное значение LET,
достаточное, чтобы вызывать один SEE при интегральной плот-
м в ^
ности потока 107 ионов/см2. LET обычно выражают в ,
мг
что физически означает отношение потери энергии иона в мате-
МэВ
риале на заданном пути | | к плотности материала
см
мг Л
Vcm3 J
Как и в случае поглощенной дозы, указывают, к какому хи¬
мическому элементу или соединению относится LET, например
10МэВ-с"г(Ш).
МГ
Для тестирования электронных компонентов подсчитывается
количество SEE при контролируемом числе ионизирующих частиц.
Вероятность того, что одна ионизирующая частица вызывает SEU,
вычисляется как отношение SEU к количеству частиц. В ядерной
физике пользуются понятием дифференциального сечения (cross-
section), которое определяется как отношение SEU к количеству
ионизирующих частиц на квадратный сантиметр, обозначается
ст и измеряется в квадратных сантиметрах. Целью тестирования
является получение зависимости ст от LET.
На рис. 2.4 представлена типичная зависимость ст от LET.
В ней различают пороговое значение, до которого ионизация не
вызывает SEE, зону роста, длящуюся до точки изгиба, и зону
насыщения, где увеличение интенсивности потока частиц не при¬
водит к увеличению числа SEE. Заметим, что такая зависимость
52
Рис. 2.4. Типичная зависимость
дифференциального сечения от линейной
передачи энергии
может быть точно аппроксимирована распределением Вейбулла,
интегральная функция распределения которого имеет вид
Р(х) = 1-е~{х/Х)\ (2.1)
где X определяет масштаб (при ее изменении кривая распределе¬
ния сжимается или растягивается по оси абсцисс); k определяет
форму кривой. Нас интересуют случаи при k > 1, когда функция
распределения монотонно возрастает.
Распределение Вейбулла широко используется в теории надеж¬
ности систем при описании отказов, возникающих по причине
усталости тела или поверхностных слоев. Для подсчета вероят¬
ности и интенсивности отказов можно воспользоваться методами
теории надежности.
Для получения частоты появления эффектов необходимо про¬
интегрировать полученную зависимость а от LET по всему спектру
LET. Для НОС ионы с низкими значениями LET преобладают,
поскольку основной причиной SEE является влияние протонов из
нижнего РПЗ. Согласно работе [26] для НОС наибольшая интенсив¬
ность SEU наблюдается при значительном увеличении интенсив¬
ности CKJI, т. е. при довольных редких событиях с вероятностью
около 1 %. Половина CKJI вызывает существенно меньше SEU,
чем ГКС. Для СИСЗ основным поражающим фактором с точки
зрения SEE являются ГКС и CKJI.
Экранирование не является эффективным средством увеличения
защиты от SEE, особенно трудно экранировать г.ыеокознергетич-
ные ГКС.
53
Приведем также рекомендации Европейского космического
агентства [24], которые обобщают европейский опыт построение
радиационно стойкой аппаратуры для разных типов орбит.
Геостационарная орбита. На СИСЗ доминирует электронное из¬
лучение, характеризующееся выраженной временной зависимостью
с длительными периодами относительной низкой радиационной
активности и короткими периодами высокой радиационной актив¬
ности. Солнечные протоны и космические лучи беспрепятственно
проникают на геостационарную орбиту. При этом солнечные про¬
тоны вносят краткосрочный, но существенный вклад как в погло¬
щенную дозу, так и в SEE, а космическое излучение представляет
собой стационарный фактор, влияющий в основном на SEE.
Средневысотная и эллиптическая орбита. Находящиеся на
этих орбитах ИСЗ не только испытывают воздействие электронов,
как СИСЗ, но и пересекают во время орбитального движения вну¬
тренний (протоновый) радиационный пояс (см. рис. 2.2). Поэтому
для СОС и ВЭО нужно учитывать вклад протонов в SEE.
Низковысотная орбита (кроме полярной орбиты). ИСЗ на
орбитах радиусом до 500...600 км и наклоном орбиты до 55° про¬
водят часть времени в нижней части внутреннего радиационного
пояса Земли, особенно если орбиты проходят в районе Южно-
Атлантической аномалии. В результате доминирующим фактором
для НОС являются высокоэнергетичные протоны из внутреннего
радиационного пояса Земли. Несмотря на то что геомагнитное
поле Земли защищает спутники на низковысотных орбитах от
воздействия солнечных космических лучей, такая защита не обе¬
спечивает полного экранирования.
Низковысотная полярная орбита. Полярные орбиты имеют
радиус, не превышающий 1000 км, а угол их наклона составляет
80° и выше. Спутники на этих орбитах подвержены влиянию вы-
сокоэнергетичных протонов из внутреннего радиационного пояса
Земли. На высоких широтах практически отсутствует геомагнит¬
ная защита от солнечных космических лучей.
2.4.3. Радиационная стойкость элементной базы
приемников спутниковой радионавигационной системы
Рассмотрим архитектуру РНП. На рис. 2.5 представлена ти¬
пичная схема приемника СРНС, состоящего из антенно-фидерного
устройства, радиоприемного устройства, цифрового многоканаль¬
ного коррелятора, цифрового программируемого устройства, на ко¬
тором исполняется специализированное программное обеспечение
54
ОЗУ ПЗУ
55
Рис. 2.5. Схема приемника СРНС
(ПО), а также периферийных компонентов, таких как постояннее
запоминающее устройство (ПЗУ), оперативное запоминающе^
устройство (ОЗУ), устройств ввода-вывода и таймеров.
В радиочастотной части высокочастотный сигнал СРНС пре.
образуется в сигнал промежуточной частоты и оцифровывается.
Цифровой сигнал подается на вход МКК, который вычисляет
свертку входного сигнала с опорным сигналом. Результаты сверт¬
ки интегрируются и подаются в ЦПУ. Программное обеспечение
ЦПУ управляет МКК и реализует алгоритмы обработки сигна¬
лов. В современных приемниках РПУ, МКК и ЦПУ исполняются
в виде сверхбольших интегральных схем.
В последние 10 лет были проведены эксперименты, направлен¬
ные на исследование радиационной стойкости элементной базы
СРНС приемников и изучение функционирования приемников
СРНС в условиях воздействия ионизирующего излучения [1,
27-34]. Ниже приведен краткий обзор результатов, полученных
в вышеупомянутых исследованиях.
Прежде всего отметим, что СБИС общего назначения (а именно
ЦПУ и периферия) производятся в радиационно стойком испол¬
нении и часть этих СБИС доступны на рынке без ограничений.
Поэтому исследования элементной базы приемников СРНС со¬
средоточились на изучении радиационной стойкости элементов,
специфических для СРНС, а именно РПУ и МКК. Они рассмотрены
в следующих параграфах.
Все авторы отмечают, что СБИС РПУ, обычно исполняемые по
биполярной технологии, во-первых, будучи аналоговыми микро¬
схемами, не подвержены эффектам одиночных сбоев и, во-вторых,
являются относительно радиационно стойкими. Данные по радиа¬
ционной стойкости СБИС РПУ варьируются от «35 крад (Si), по¬
сле чего эксперимент был прекращен», до 100 крад (Si). На этом
основании делается вывод, что СБИС РПУ стандартного исполнения
пригодны для использования на борту ИСЗ. Следует отметить, что
исследования [27-33] в основном рассматривают использование
на борту НОС, в то время как нашей задачей является построение
БАСН, пригодной к использованию на борту всех типов ИСЗ, вклю¬
чая СИСЗ и ВЭО. Тем не менее, основываясь на данных вышеупо¬
мянутых исследований, мы соглашаемся с выводами европейских
и американских коллег: по крайней мере, при наличии защитных
экранов СБИС РПУ могут быть использованы на борту ИСЗ.
Иначе обстоит дело с МКК. Разные авторы приводят разные
результаты, но тем не менее можно с уверенностью сказать, что
радиационная стойкость распространенных СБИС МКК не превы¬
шает 10...15 крад. Обратимся к табл. 2.2 и рис. 2.3, из которых
56
Таблица 2.3
Поглощенная доза для разных типов орбит [29]
Тип орбиты
Экранирование, г/см2
Дневная поглощенная доза, рад
Полярная
3
1,0
Полярная
5
0,6
Переходная
3
8,5
Переходная
5
7,0
«Молния»
3
1,1
«Молния»
5
0,9
следует, что при отсутствии защитных экранов доза в 10...15 крад,
например, на СИСЗ будет поглощена менее чем за год. Авторы
исследований [27-33] уповают на два фактора, которые могли бы
сделать возможным применение СБИС МКК стандартного исполне¬
ния в БАСН: использование БАСН только на борту НОС и защитное
экранирование. Мы не можем воспользоваться первым фактором
по определению, поскольку наша задача заключается в построении
БАСН, пригодной к работе на борту всех типов ИСЗ, включая СИСЗ
и ВЭО. Что касается защитных экранов, то, по нашему мнению,
их эффективность преувеличена. Рассмотрим в качестве примера
табл. 3 из работы [29], часть которой составляет табл. 2.3.
Из сравнения табл. 2.3 и 2.2 следует: авторы [29] полагают, что,
например, для полярной орбиты при использовании алюминиевого
защитного экрана плотностью 3 г/см2 поглощенная доза снижается
почти в 8 раз (2500/365), что является довольно реалистичным
предположением. Для переходной же орбиты эффективность за¬
щитного экрана превышает 30 [100 000/(365-8,5)], что не может
быть справедливым. В любом случае аргументация авторов работ
[27-33] ограничивается возможностью использования СБИС МКК
на борту НОС, применимость к другим типам орбит не оценива¬
ется. Для использования на борту высокоорбитальных спутников
необходимы стойкие СБИС МКК.
2.5. Особенности космического базирования
приемников спутниковой радионавигационной системы
2.5.1. Ограниченный выбор элементной базы
Еще раз отметим, что мы рассматриваем проектирование граж¬
данской аппаратуры, предназначенной для коммерческой реализа¬
ции на гражданском рынке. Это требование косвенно противоречит
требованиям на космическую пригодность аппаратуры, особенно
57
требованиям на повышенную радиационную стойкость элемент¬
ной базы. Элементная база, обладающая такой радиационной
стойкостью, как правило, доступна в военном исполнении или
в исполнении для двойного применения. Выделим три сложности
вызванные ограниченным выбором элементной базы: отсутствие
на рынке радиационно стойких МКК, низкая производительность
радиационно стойких ЦПУ и высокая стоимость радиационно
стойких опорных генераторов.
Характерно, что информация о разрабатываемых перспектив¬
ных МКК космического базирования зачастую отсутствует, несмо¬
тря на сообщения о ведении таких разработок как в США, так и
в Европе. Отсутствие радиационно стойких интегральных схем
МКК долгое время служило препятствием для создания БАСН.
В конце 1990-х гг. Европейский союз завершил разработку МКК
AGGA (Advanced GPS GLONASS ASIC) [34] — 12-канального кор¬
релятора GPS/ГЛОНАСС с радиационной стойкостью 100 крад. К
сожалению, этот коррелятор попадает под экспортные ограничения
ЕС и не может быть применен в отечественных разработках. Из¬
вестно также, что приемник Topstar 3000, разработанный фран¬
цузскими компаниями CNES и Alcatel и установленный на борту
СИСЗ Stentor1, тоже использует МКК с радиационной стойкостью
100 крад, но он не доступен для покупателей даже внутри ЕС.
Поскольку ЦПУ является краеугольным камнем любого бор¬
тового вычислительного комплекса, радиационно стойкие про¬
цессоры разрабатываются уже десятки лет. Основное затруднение
заключается в том, что ЦПУ с радиационной стойкостью свыше
50-100 крад или попадают под экспортно-импортные ограничения,
или не обладают высокой производительностью. Низкая произво¬
дительность доступных и пригодных к космическому использова¬
нию ЦПУ накладывает серьезные ограничения на алгоритмы об¬
работки сигналов и на программное обеспечение БАСН в целом.
Еще одной сложностью, с которой сталкиваются проектиров¬
щики БАСН, является дороговизна радиационно стойких опорных
генераторов (ОГ). В отличие от МКК и ЦПУ ОГ в радиационно
стойком исполнении доступны, однако их стоимость не только
существенно отличается от стоимости ОГ наземного базирования,
но и резко дифференцирована в зависимости от характеристик.
Так, разница между относительно высококачественными ОГ и ОГ
с пониженными характеристиками может составлять тысячи и
1 Stentor был потерян в декабре 2002 г., когда французский ЦУП принял ре-
шение об уничтожении ракетоносителя Ariane 5 после 3 мин полета вне заданной
траектории.
58
дется
использовать относительно дешевые ОГ со сравнительно
плохими характеристиками.
2.5.2. Условия приема сигналов спутниковой
радионавигационной системы на борту спутников
Условия приема сигналов СРНС для космического и наземно¬
го потребителей имеют ряд существенных различий. Их следует
учитывать при проектировании алгоритмов обработки сигналов в
БАСН. Например, взаимная динамика приемника и НС, определя¬
ющая диапазон изменения доплеровского сдвига частоты, зависит
в основном от динамики НС. В случае с БАСН значительный вклад
во взаимную динамику вносит динамика самого потребителя. При
этом доплеровский сдвиг частоты, а также скорость его изменения
увеличиваются в разы. Кроме того, в зависимости от расположе¬
ния потребителя относительно орбиты НС существенно меняются
условия геометрической видимости НС и уровень сигнала НС на
входе приемной антенны БАСН.
В данном разделе анализируются особенности космического
базирования, вытекающие из условий приема сигналов на борту
разных типов ИСЗ. Для этого решаются задачи вывода соотноше¬
ний, описывающих параметры сигналов СРНС на входе БАСН,
а также задачи анализа результатов моделирования условий при¬
ема сигналов для ИСЗ с разными типами орбиты. Работа автора
[35] содержит подробное изложение этой тематики.
2.5.2.1. Классификация орбит искусственного спутника Земли
По геометрическому характеру движения ИСЗ различают сле¬
дующие основные классы орбит:
• круговые и близкие к круговым;
• слабоэллиптические;
• высокоэллиптические.
1 Для понимания уровня цен: автор участвовал в переговорах, в которых
Радиационно стойкие термокомпенсироваиные ОГ предлагались по цене 25 ООО
Долларов США за штуку при минимальной закупочной партии 10 штук.
59
Круговые и близкие к круговым орбиты имеют эксцентриситет
в пределах 0...0,03. В зависимости от высоты полета спутник^
этого класса орбит подразделяют на низкоорбитальные (НОС)
среднеорбитальные (СОС) и высокоорбитальные (ВОС).
Высота орбит НОС лежит в пределах 200... 1500 км, период об.
ращения спутников составляет около 2 ч, скорость движения
несколько километров в секунду. Примерами НОС являются пи¬
лотируемые космические корабли, спутниковые связные системы
и ИСЗ для дистанционного зондирования Земли.
Спутники ВОС движутся на орбитах выше 30 000 км, период их
обращения — около 24 ч, скорость — около 4 км/с. Особое место
среди ВОС занимают стационарные искусственные спутники Земли
(СИСЗ). Геостационарные спутники, двигаясь со скоростью вращения
Земли, «зависают» над определенной точкой земной поверхности,
которая располагается на экваторе. Это определяет основное исполь¬
зование СИСЗ как систем связи. Так, система связи ИНМАРСАТ
построена на основе четырех геостационарных спутников.
Высокоэллиптические орбиты характеризуются большими
значениями эксцентриситетов. Такая орбита представляет собой
вытянутый эллипс, в одном из фокусов которого находится Земля.
Апогей орбиты составляет 10 000...100 000 км, а перигей — 400...
700 км. Период обращения спутника на высокой эллиптической
орбите (ВЭО) в зависимости от параметров орбиты составляет от
3 до 48 ч. Для ВЭО характерно то, что их скорость в апогее зна¬
чительно меньше, чем в перигее. Следовательно, такой ИСЗ будет
находиться в зоне видимости определенного региона в течение
более длительного времени, чем спутник с круговой орбитой. ВЭО
используются в основном для обеспечения связи. Выведенный на
орбиту ИСЗ «Молния» (апогей 40 000 км, перигей 460 км, на¬
клонение 63,50°) обеспечивает сеансы связи продолжительностью
8...10 ч, причем система всего из трех спутников поддерживает
глобальную круглосуточную связь. Эллиптические орбиты с бо¬
лее низким апогеем, например Borealis (апогей 7840 км, перигей
520 км) или Archimedes (апогей 26 737 км, перигей 1000 км),
предназначены для обеспечения региональной связи.
2.5.2,2. Программно-моделирующий комплекс
для оценки приема сигналов на борту спутников
Для моделирования условий приема сигналов СРНС на ИСЗ
разных типов орбит был построен программный комплекс. Целью
моделирования являлось получение оценок уровня мощности сиг-
60
Таблица 2.4
Параметры опорных орбит
Параметр
МКС (НОС)
ИНМАРСАТ 4-F1
(СИСЗ)
«Молния 3-50» (ВЭО)
'5^коГвртя (UTC)
28.02.2012
13:12:09
29.02.2012
13:41:54 •
28.02.2012 08:14:01
ряклонение
51°6432'
2°4944'
63°4594'
•д^^Гвосходящего
V3JI&
311°8853'
342°8091'
161°5145'
чкппентриситет
0,0019879
0,0003052
0,6863464
Аргумент перигея
93°9868'
351°7809'
259°7567'
Средняя аномалия
266°3560'
173°13'
22°6137'
Среднее движение, вит¬
ков в день
15,59376864
1,00272738
2,00604318
Ориентация ИСЗ
К Земле
К Земле
Ось вращения перпен¬
дикулярна к плоскости
эклиптики
Конфигурация антенн
В зенит
В надир
Две антенны, направ¬
ленные в зенит и надир
нала НС на входе БАСН, радиовидимости НС, а также взаимной
динамики БАСН и НС.
Моделирование проводилось для спутников, чьи параметры
орбит приведены в табл. 2.4. Предполагалось, что ИСЗ движутся
по идеальным невозмущенным орбитам. Информация о параметрах
орбит ИСЗ в формате TLE доступна по адресу: http://celestrak.
com/NORAD/elements/ В качестве исходных данных о параметрах
орбит НС использовались альманахи систем GPS и ГЛОНАСС
в форматах YUMA и AGL. Для сравнения был использован опорный
наземный потребитель, расположенный в Санкт-Петербурге.
Моделирование энергетических характеристик сигнала
Для оценки энергетических характеристик сигнала использо¬
валась модель радиолинии НС — БАСН с активной приемной ан¬
тенной, изображенная на рис. 2.6. Энергетические характеристики
условий приема сигналов в БАСН принято обозначать параметром
C/N0, представляющим отношение мощности полезного сигнала
к спектральной односторонней плотности шума.
При расчете энергетического бюджета межспутниковой радио¬
линии затуханием радиосигнала в атмосфере можно пренебречь.
Следовательно, в соответствии с принятой моделью радиолинии
НС — БАСН мощность сигнала НС на входе приемной антенны
БАСН определяется соотношением
*г ~ $ + + Dt + Ld,
(2.2)
61
А
!\
Q
CD-
-?!
CD
Si
M
<!
M
О
К
к
s
в
s
4
о
s
tc
03
p.
CD
c4
я
Сч
где Pt — мощность сигнала передатчика НС, дБВт-
Gt — коэффициент усиления излучающей антенны
НС, дБ; Dt — диаграмма направленности (ДН) излу.
чающей антенны НС, дБ; LD — затухание мощности
сигнала в свободном пространстве, дБ.
На выходе передатчика НС гарантированная
мощность С/А сигнала на частоте Lсоставляет
27 Вт, или 14,3 дБВт. Коэффициент усиления
излучающей антенны может быть оценен исходя
из ширины основного лепестка ДН антенны. Для
спутников серии GPS Block II половина ширины
основного лепестка ДН 0= 21,3° [36]. Следовательно,
коэффициент усиления антенны, который определя¬
ется как отношение площадей сферы и поверхности
на этой сфере, вырезаемой конусом с углом 0, равен
14,6 дБ.
Аналитической зависимости, описывающей ДН
излучающей антенны НС во всем диапазоне углов
отклонения от оси ДН, в доступной литературе не
найдено. Поэтому была использована модель ДН, по¬
лученная путем интерполяции кубическими сплай¬
нами коэффициента усиления в узловых точках.
Для этого взяты характеристики ДН в диапазоне,
превышающем ширину основного лепестка, полу¬
ченные экспериментально в работе [37]. Модельная
ДН излучающей антенны НС как функция угла от¬
клонения от оси ДН представлена на рис. 2.7. Там
же приведена ДН типичной полусферической всена¬
правленной антенны, предназначенной для приема
сигналов СРНС. Коэффициент эллиптичности такой
антенны — не более 3,5 дБ, а коэффициент усиле¬
ния для углов в диапазоне ±75° — не менее -2 дБ
[5]. ДН приемной и передающих антенн считаются
равномерными в азимутальной плоскости.
Затухание мощности сигнала в свободном про¬
странстве описывается соотношением
Ld = 201g
X
4 nd
(2.3)
где d — расстояние между НС и ИСЗ, м; X — длина
волны несущей частоты L^, м.
В идеальном случае, когда потерь при передаче
мощности сигнала от приемной антенны к МШУ нет,
62
-30
-90-80-70-60-50-40-30-20-10 0 10 20 30 40 50 60 70 80 90
Отклонение от оси симметрии ДН, ... °
Рис. 2.7. Диаграммы направленности излучающей и приемной антенн
мощность принятого сигнала на входе МШУ может быть найдена
следующим образом:
C=Pr+Gr+Dr, (2.4)
где Gr — коэффициент усиления приемной антенны, дБ; Dr — ДН
приемной антенны, дБ.
Для приемной антенны с ДН, изображенной на рис. 2.7,
Gr=0 дБ.
Односторонняя спектральная плотность шума Nq на входе МШУ
определяется соотношением
N0 = 10lg(kTsys), (2.5)
где Tsys — эквивалентная шумовая температура, К; & — посто¬
янная Больцмана.
Эквивалентная шумовая температура зависит от ориентации
антенны БАСН по отношению к Земле. При моделировании вели¬
чину TSyS выбирали из двух значений: Tsys = 290 К, если антенна
ориентирована к центру Земли, и Tsys = 180 К, если антенна ори¬
ентирована в космос.
Таким образом, отношение C/Nq в децибелах на входе МШУ
может быть найдено как разность мощности принятого сигнала С и
односторонней спектральной плотности шума Nq. Отношение C/Nq
на входе цифровой части БАСН зависит от конкретной реализации
Радиоприемного устройства БАСН. При моделировании считалось,
что РПУ реализован на основе СБИС GEC Plessey GP2015, которая
Разработана для использования совместно с активной антенной.
Коэффициент шума радиочастотного тракта, включающего МШУ
антенны и РПУ, в первом приближении может быть найден по
формуле [38]
где Fj — коэффициент шума МШУ активной антенны, дБ; F2 — ко.
эффициент шума СБИС GP2015, дБ; Ga — коэффициент усиления
МШУ активной антенны, дБ; Ьс — потери в кабеле после МШУ.
Типичные значения этих параметров, указанные в работе [38];
Ga - 26 дБ, Lc= 2 дБ, Fj = 2,5 дБ и F2= 9 дБ. Подставив эти зна¬
чения в (2.6), получим LNf= 3 дБ.
Суммарные потери Lv связанные с реализацией РПУ и аналого-
цифровым преобразованием сигнала, не превышают 4 дБ [39],
Таким образом, окончательное выражение для расчета отношения
C/N0 на входе цифровой части БАСН, которое использовалось при
моделировании, выглядит следующим образом;
С/ N0 =Pt + Gt + Dt + Ld + Gr + Dr -101g!rsj/s + 228,6 - Ьщ - L±.
(2.7)
Моделирование радиовидимости и геометрического фактора
При моделировании радиовидимости и геометрического фактора
в расчет принимались следующие соображения. Критерием геоме¬
трической видимости НС для потребителя является одновременное
выполнение следующих условий;
1) линия, соединяющая НС и потребителя, не пересекает сферу
с центром, расположенным в центре Земли, и радиусом, равным
радиусу Земли;
2) углы возвышения НС и потребителя не меньше минималь¬
но допустимых углов возвышения для приемной и передающей
антенн соответственно.
При моделировании считалось, что для ИСЗ, имеющих орби¬
ту ниже орбиты НС, приемная антенна БАСН конфигурирована
в зенит, а для ИСЗ с высокой орбитой — к центру Земли. Кри¬
терий геометрической видимости для обоих случаев поясняется
рис. 2.8, на котором границы ДН приемной и передающих антенн
изображены пунктирными линиями. Для определения геометри¬
ческой видимости НС использовались соотношения, учитывающие
взаимное расположение НС и ИСЗ относительно Земли, а также
ДН приемной и передающей антенн, изображенные на рис. 2.7.
Кроме геометрического критерия для определения радиови¬
димости НС использовалась оценка отношения C/Nq на входе
цифровой части БАСН, которая для видимых НС должна быть
не меньше порога обнаружения сигнала. Иными словами, для ис¬
пользования сигнала НС в навигационном приемнике НС должен
64
Рис. 2.8. Геометрическая видимость НС в зависимости от высоты орбиты
потребителя: а — орбита ИСЗ ниже орбиты НКА; б — орбита ИСЗ выше орбиты
НКА
не только находиться в зоне радиовидимости. Мощность излучае¬
мого им сигнала должна быть достаточной, чтобы приемник смог
осуществить захват сигнала и слежение за его параметрами.
Для математического описания критерия геометрической ви¬
димости НС введем следующие обозначения:
а — угол между вектором ИСЗ — НС и осью симметрии ДН
антенны БАСН;
(3 — угол между вектором НС — ИСЗ и осью симметрии ДН
антенны НС;
атах — половина ширины главного лепестка ДН антенны БАСН;
Ртах — половина ширины главного лепестка ДН антенны НС;
Pmin — половинный угол затенения Землей ДН антенны НС.
Тогда условие геометрической видимости НС для случаев, изо¬
браженных на рис. 2.8, определяется системами неравенств
соответственно. Так как при моделировании положение ИСЗ и
НС задается координатами в географической системе координат,
преобразуем эти неравенства к виду, удобному для вычислений.
Учитывая монотонно убывающий характер функции косинус на
интервале [0, д/2], системы неравенств эквивалентны системам
(2.8)
cos а > cos а
cosp > cos p.
'max ’
max
cos а > cos ctmax;
(а) и < cosp > cos pmax; (6) (2.9)
cosp < cos pmin.
65
min*
Пусть Rq и Rj — радиус-векторы НС и ИСЗ соответственно
Тогда косинусы углов а и (3 определяются следующим образом;
(Rn — Ri ,Ri) (Ro — Ri ,Rn) „
cosa=-r—5 }’■. ; cosB (2.Ю;
|R0 ~ R^j x \Щ | |R0 — Щ j x |R01
где (x, у) — скалярное произведение векторов x и у; |х| — модуль
вектора х.
Моделирование взаимных динамических характеристик
ИСЗ и НС
Доплеровское смещение частоты прямо пропорционально ра¬
диальной скорости сближения потребителя и НС:
fd=vr* — > <2Л1)
с
где fd — доплеровское смещение несущей частоты, Гц; иг — ра¬
диальная скорость сближения потребителя и НС, м /с; fL - но¬
минальное значение несущей частоты LГц; с — скорость света,
м/с.
Радиальная скорость сближения потребителя и НС определя¬
ется соотношением
(Rq-Rl^-Vq)
|R0 -R,|
где Vq и Vj — векторы скорости НС и потребителя.
Скорость изменения доплеровского сдвига частоты может быть
найдена путем дифференцирования соотношения (2.11):
. (R0-Ri,v,-''o) + v?-|vo-vll 4,
и‘ T- (' 1
Взаимные динамические характеристики ИСЗ и НС модели¬
ровались с использованием формул невозмущенного движения
спутников.
В следующих разделах обсуждаются результаты моделирования
условий приема сигналов СРНС на борту разных типов ИСЗ.
2.5.3. Высокие динамические характеристики
Одним из основных и наиболее очевидных различий между кос¬
мическими и наземными объектами являются динамические харак¬
теристики потребителя. Наземные потребители по сравнению с НС
низкодинамичны, а скорости ИСЗ сравнимы со скоростями НС.
66
Таблица 2.5
Диапазон изменения частоты Доплера и ее производной для разных типов
орбит ИСЗ
Потребитель
Диапазон изменения частоты
Доплера, кГц
Диапазон изменения
производной частоты Доплера,
Гц/с
нп
±4,5
1
О
о
МКС
±45
-65...0
ИНМАРСАТ 4-F1
±10
±2
«Молния 3-50»
±50
1
сл
О
to
о
Доплеровский эффект влияет на методы обработки сигналов
в навигационных приемниках, определяя диапазон поиска сиг¬
нала и параметры следящих петель. Для наземного потребителя
доплеровский сдвиг частоты определяется в основном динамикой
НС и находится в пределах ±5 кГц. Для определения диапазона
поиска сигнала в БАСН необходимо оценить максимальное зна¬
чение взаимной скорости ИСЗ и НС.
В табл. 2.5 даны диапазоны изменения частоты Доплера и ее
производной для разных типов орбит ИСЗ.
Диапазон изменения доплеровского сдвига частоты, указанный
в табл. 2.5, не учитывает нестабильность опорного генератора,
которая для распространенных кварцевых генераторов составляет
от 4 ppm для термокомпенсированных опорных генераторов до
23 ppm. Нестабильность генератора увеличивает неопределенность
по частоте из-за неточности формирования опорной частоты в
процессе преобразования входного сигнала. Наибольшая ошиб¬
ка возникает на первой стадии преобразования, когда опорная
частота близка к частоте входного сигнала и равна ±6 кГц для
термокомпенсированных ОГ и ±35 кГц для ОГ. Таким образом,
чтобы получить диапазон изменения доплеровского сдвига часто¬
ты с учетом нестабильности ОГ, необходимо указанный в таблице
диапазон увеличить на ±6 кГц для термокомпенсированных ОГ
и ±35 кГц для ОГ.
На рис. 2.9 приведены зависимости частоты Доплера и его про¬
изводной от времени для НОС. На рис. 2.10 показаны аналогичные
зависимости для наземного потребителя. Из этих графиков сле¬
дует, что для НОС доплеровский сдвиг частоты почти на порядок
(а производная на два порядка) больше, чем для наземного по¬
требителя. Следует отметить также, что характерные особенности
Поведения частоты Доплера и ее производной у НОС и наземного
Потребителя сходны, что объясняется направленностью антенны
в зенит. Для обоих потребителей производная частоты Доплера
Практически всегда отрицательна. Она достигает минимума при
67
о
Ч
50
40
30
20
10
о
-10
-20
-30
-40
-50
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170
Время от начала сценария 00:00:00 28.02.2012 г., мин
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170
Время от начала сценария 00:00:00 28.02.2012 г., мин
Рис. 2.9. Доплеровский сдвиг частоты и его производная для НОС (МКС)
нулевом значении частоты Доплера и стремится к нулю при
значениях, близких к максимуму. Поскольку частота Доплера
максимальна для надгоризонтных спутников и близка к нулю
для зенитных, то можно сделать вывод, что производная Доплера
максимальна для спутников, близких к зениту. Многие алгоритмы
захвата сигнала начинают поиск со спутников со значениями ча¬
стоты доплеровского сдвига, близкими к нулю. Для космических
приложений такая стратегия поиска должна быть пересмотрена,
так как сигналы с производной частоты Доплера порядка 70 Гц/с
являются высокодинамичными целями и их захват затруднен.
На рис. 2.11 представлена зависимость частоты Доплера и ее
производной для СИСЗ. Из приведенного графика видно, что сдвиг
68
Время от начала сценария 00:00:00 28.02.2012 г., мин
0 10 20 30 40 50 60 70 80 90 100 110 120 130140150 160 170
Время от начала сценария 00:00:00 28.02.2012 г., мин
Рис. 2.10. Доплеровский сдвиг частоты и его производная для наземного
потребителя
Доплера не превышает ±6 кГц, а производная — 1,5 Гц/с. Из осо¬
бенностей динамических характеристик СИСЗ следует отметить
положительный знак производной, обусловленный ориентацией
приемной антенны к Земле, а также перерывы в радиовидимо¬
сти НС, вызванные затенением Земли. Прием сигналов боковых
лепестков диаграммы направленности передающей антенны НС,
с одной стороны, увеличивает время радиовидимости НС, а с дру¬
гой — расширяет диапазон изменения доплеровского сдвига часто¬
ты и его производной. В целом для СИСЗ диапазон существенно
не превышает значения частоты Доплера и его производной для
наземного потребителя.
С точки зрения взаимной динамики орбита ВЭО представляет
собой наибольшую трудность при проектировании алгоритмов
ВАСН, так как диапазон изменения значений частоты Доплера
69
о
Q.
Ф
q
С
О
П
-4
// / / /
//
1 / /П // / //
О 120 240 360 480 600 720 840 960 1080 1200 1320 1440
Время от начала сценария 00:00:00 28,02.2012 г., мин
1,8
£. 1,2
Ф
q
Л
о:
I 0,6
q
о
о
Q.
С
0 120 240 360 480 600 720 840 960 1080 1200 1320 1440
Время от начала сценария 00:00:00 28.02.2012 г., мин
Рис. 2.11. Доплеровский сдвиг частоты и его производная для СИСЗ
(ИНМАРСАТ 4-F1)
и ее производной в этом случае превосходит диапазоны для НОС
и СИСЗ, что видно на рис. 2.12. Максимальное значение частоты
Доплера составляет примерно 50 кГц и достигается около перигея.
Производная частоты Доплера меняется от 20 до 50 Гц/с.
Таким образом, высокая динамика космических аппаратов
определяет еще одну задачу, которую необходимо решить при
проектировании БАСН. Требуется разработать методы поиска
сигналов в широком диапазоне изменения частоты. Кроме того,
следует учитывать высокие динамические характеристики потре¬
бителя при проектировании следящих петель.
Пониженное отношение сигнал/шум
Полученное в результате моделирования на интервале 24 ч рас¬
пределение отношения мощности сигнала к спектральной мощно-
70
30
о
з- 20
я' Ю
а
g 0
0 -10
d
к -20
я
& -30
| -40
1 -50
0 120 240 360 480 600 720 840 960 1080 1200 1320 1440
Время от начала сценария 00:00:00 28.02.2012 г., мин
Рис. 2.12. Доплеровский сдвиг частоты и его производная для ВЭО
(«Молния 3-50»)
сти шума C/N0 на входе цифровой части БАСН для потребителей,
приведенных в табл. 2.5, изображено на рис. 2.13. Для сравнения
там же представлено распределение С/Nq для неподвижного на¬
земного потребителя.
Для наземных потребителей величина C/N0 составляет около
38...52 дБГц, что означает сравнительно равномерное распреде¬
ление мощности сигналов, принимаемых от разных НС, как по¬
казано на рис. 2.14.
Для НОС распределение С/Nq по форме и характеру совпадает
с распределением C/NQ для наземного потребителя (рис. 2.15).
В силу меньшего геометрического расстояния значения C/Nq для
НОС несколько выше по сравнению с наземными потребителями.
Отношение C/NQ, измеренное на входе цифровой части БАСН для
71
Частота события
3000
2500
2000
1500
1000
500
0
!
■ МКС
0 ИНМАРСАТ 4
в «Молния 3-Sq
с НП
20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 54
С/Л/0, дБГц
Рис. 2.13. Частотное распределение C/N0 на входе цифровой части БАСН
3000
2500
2000
1500
1000
500
0
37 39
I.
43 45 47
C/N0, дБГц
■ НП
49 51
Рис. 2.14. Частотное распределение C/N0 для наземного
потребителя
3000
2500
к
I 2000
_й
VO
о 1500
ТО
39 41 43 45 47 49 51
C/N0, ДБГц
Рис. 2.15. Частотное распределение C/Nq для НОС
Рис. 2.16. Частотное распределение C/NQ для СИСЗ
НОС и наземного потребителя, находится в пределах 39...50 дБГц,
при этом наиболее вероятные значения C/N0 45...47 дБГц.
Для СИСЗ распределение C/N0 сдвинуто в сторону пониженной
мощности более чем на 10 дБ (рис. 2.16), диапазон изменения от¬
ношения C/N0 на СИСЗ составляет 22...36 дБГц. Этого следовало
ожидать, принимая во внимание, что расстояние от НС до назем¬
ного потребителя составляет примерно 20 ООО км, а расстояние
от НС GPS до СИСЗ — около 65 ООО км. Кроме того, в силу огра¬
ниченной радиовидимости на СИСЗ есть периоды времени, когда
в зоне радиовидимости нет ни одного НС.
Поведение C/Nq на ВЭО характеризуется свойствами, присущи¬
ми как НОС, так и СИСЗ (рис. 2.17): в перигее уровень сигнала
близок к НОС, а в апогее сигнал еще слабее, чем на СИСЗ.
600
500
|
К
S
400
I
*§ 300
о
i
03
ь
о
200
i
■ ВЭО
о
03
У
100
0 ! .111 I
I
t т
21 23 25 27 29 31 33 35 37 39 41 43 45 47 51 53
С/%. дБГц
Рис. 2.17. Частотное распределение C/N0 для ВЭО
73
Низкий уровень C/Nq на ВЭО является не единственной сло>к.
ностью, которую проектировщики БАСН должны преодолеть.
Поскольку орбита ВЭО может проходить рядом с орбитами СРНс
при проектировании БАСН необходимо учитывать так называв-
мое ближнее взаимодействие, с которым наземные потребители
сталкиваются вблизи псевдоспутников. Мощность сигнала от НС
растет таким образом, что C/Nq становится близким к 60 дБГц.
Присутствие в принимаемой смеси сигналов с существенно
разным уровнем вызывает две трудности: недостаток динамиче¬
ского диапазона приемника и внутрисистемные помехи. Первая
трудность относительно легко преодолима путем выбора параме¬
тров АРУ, а вторая представляет собой непростую задачу. Суть
внутрисистемных помех заключается в следующем. Уровень бо¬
кового лепестка функции автокорреляции кодов Голда составляет
минус 23 дБ [6], т. е. при превышении уровня сигнала одного
навигационного спутника сигналом другого навигационного спут¬
ника более чем на 23 дБ возможен прием сильного сигнала. Такого
рода «перепутывание» сигналов приводит к ложным измерениям,
нарушению логики работы программного обеспечения и неверному
определению вектора потребителя. За последние годы для реше¬
ния проблемы внутрисистемных помех в аппаратуре спутнико¬
вой навигации для массового рынка был предложен ряд методов
(в работе [40] дан обзор методов борьбы с кросс-корреляционными
помехами).
Для оценки вероятности возникновения внутрисистемной по¬
мехи в БАСН было проведено моделирование разных типов орбит
ВЭО на значительном (26 недель) временном интервале. Уровень
C/Nq, превышающий 60 дБГц, наблюдался от 1 до 5 раз в неделю.
Был зарегистрирован один случай превышения уровня сигнала
70 дБГц. Время аномально высокой мощности сигнала составляло
от 10 до 25 мин.
Плохая радиовидимость и высокий геометрический фактор
Как было отмечено выше, высота орбиты СИСЗ составляет около
35 000 км, высота орбиты ВЭО в апогее — 10 000...100 000 км,
в то время как высоты орбиты GPS и ГЛОНАСС — около 20 000 км.
Иными словами, СИСЗ и ВЭО находятся выше орбиты НСНС, и в
зоне их радиовидимости находятся только НС, расположенные
за Землей.
На рис. 2.18 показано взаимное геометрическое расположение
НС и СИСЗ, НОС, ВЭО. На рис. 2.18 показана незатененная Землей
часть основного лепестка диаграммы направленности излучающей
антенны НС.
74
Рис. 2.18. Взаимное геометрическое расположение НС
и СИСЗ, НОС, ВЭО
На рис. 2.19 представлены результаты моделирования условий
радиовидимости НС для разных потребителей при атах = 85°,
Ртах = 21>3° И ртах = 13,9° [см. формулы (2.8)-(2.10)].
Сначала мы рассмотрим условия радиовидимости на НОС (оче¬
видно, они мало отличаются от таковых для наземного потреби¬
теля), а потом сосредоточимся на особенностях радиовидимости
спутников, которые расположены над созвездием СРНС, т. е.
Число видимых НС
Рис. 2.19. Частотное распределение числа видимых НС
для разных типов орбит
75
Число видимых НС
Рис. 2.20. Частотное распределение числа НС в зоне радиовидимости
наземного потребителя и НОС
ВЭО и СИСЗ. На рис. 2.20 приведены распределения числа НС
GPS в зоне радиовидимости наземного потребителя и НОС. Как и
следовало ожидать, распределения существенно не различаются.
Среднее число видимых НС для НОС меньше, чем для НП. Однако
в зоне радиовидимости НОС всегда находится не менее шести НС,
что позволяет осуществлять непрерывное позиционирование по
набору одномоментных измерений РНП.
Несмотря на сходство распределений числа видимых спутни¬
ков, НОС по сравнению с наземным потребителем обладают осо¬
бенностью — частотой смены видимого созвездия СРНС. Высокую
частоту смены созвездия необходимо учитывать при проектиро¬
вании алгоритмов навигационного планирования и особенно при
разработке методов относительной навигации ИСЗ.
На рис. 2.21 приведена зависимость числа видимых НС от
времени для наземного потребителя, а на рис. 2.22 — такая же
зависимость для НОС.
Введем понятие длительности прохода — продолжительности
нахождения навигационного спутника в видимом созвездии. На
рис. 2.23 и 2.24 приведены гистограммы длительности прохода для
наземного потребителя и для НОС соответственно. Из сравнения
рис. 2.23 и 2.24 видно, что для наземного потребителя средняя
76
Число видимых НС Число видимых НС
400 600 800 1000 1200 Л
Время от начала сценария, мин
Рис. 2.21. Зависимость числа видимых НС от времени
(для наземного потребителя)
0 200 400 600 800 1000 1200 1400
Время от начала сценария, мин
Рис. 2.22. Зависимость числа видимых НС от времени (для НОС)
77
Частота события
га
Т
О 50 100 150 200 250 300 350
Время прохода, мин
Рис. 2.23. Частотное распределение времени прохода для
наземного потребителя
140
120
100
80
60
40
20
0
О 10 20 30 40
Время прохода, мин
Рис. 2.24. Частотное распределение времени прохода для НОС
78
ельность прохода составляет 5...7 ч, в то время как для НОС
,яЛйТеЛы1ость прохода не превышает 1 ч.
^^езультаты моделирования для ВЭО и СИСЗ приведены на
2 25 и 2.26. Для решения навигационной задачи необходимо
^аличие минимум четырех спутников СРНС в зоне радиовиди¬
мости потребителя. На рис. 2.25 и 2.26 показано, что это усло-
йе практически никогда не выполняется для геостационарных
спутников, а для ВЭО условие соблюдается только на коротком
промежутке около перигея. Более того, и для СИСЗ, и для ВЭО
характерны периоды длительностью несколько часов, когда в
зоне радиовидимости нет ни одного НС GPS, т. е. навигационное
поле для СИСЗ и ВЭО не является непрерывным. Таким образом,
следующая задача, решить которую предстоит разработчикам
БАСН, — ограниченная радиовидимость на СИСЗ и ВЭО, которая
делает невозможным применение классических методов решения
навигационной задачи.
Использование сигналов от боковых лепестков ДН антенны НС
при пороге обнаружения, равном 30 дБГц, характер распределе¬
ния не меняет. Число видимых НС существенно возрастает, если
при этом порог обнаружения сигнала опустить до 20...22 дБГц.
В этом случае наиболее вероятное число видимых НС для ВОС равно
четырем, а радиовидимость НС становится практически непрерыв¬
ной.
200 400 600 800 1000 1200
Время от начала сценария, мин
1400
Рис. 2.25. Зависимость числа видимых НС GPS от времени
(для СИСЗ)
79
Время от начала сценария, мин
Рис. 2.26. Зависимость числа видимых НС GPS от времени (для ВЭО)
Важной характеристикой набора видимых НС, определяющей
точность позиционирования с использованием измерений сигналов
этих НС, является геометрический фактор рабочего созвездия. На
рис. 2.27 изображено распределение трехмерного геометрического
фактора для НП и НОС. Из приведенных графиков видно, что рас¬
пределения геометрического фактора для НОС и НП практически
совпадают. При этом наиболее вероятное значение геометрического
фактора для этих потребителей примерно 1,2.
Для потребителей, находящихся над орбитой НС, значение
трехмерного геометрического фактора редко опускается ниже 30.
160
PDOP
Рис. 2.27. Частотное распределение трехмерного геометрического фактора
для НОС и наземного потребителя
80
Для геостационарного потребителя все видимые спутники СРНС
сконцентрированы в одном сегменте. Легко показать, что макси¬
мальный пеленг между СИСЗ и НС составляет 19,8°, что соответ¬
ствует для наземного приемника маске угла возвышения1 70,2°.
2.5.4. Особенности приема сигналов в космосе
Как видно из табл. 2.6, для БАСН, устанавливаемой на высо¬
коорбитальных ИСЗ, первым и главным отличием от аппаратуры
спутниковой навигации наземного базирования является ограни¬
ченная радиовидимость. Присутствие четырех НС в зоне радио¬
видимости является редким событием. Более того, значительные
Таблица 2.6
Особенности приема сигналов в космосе: итоговая таблица
Потребитель
Частота
Доплера, кГц
Длительность
прохода, мин
C/N0, дБГц
Волее четырех
НС
Наземный
±5
7.„350
39...50
Всегда
НОС
±48
1...40
40...52
Всегда
СИСЗ
±6
1...58
28... 38
Никогда
ВЭО
±50
1...64
28...52
Периодически
в перигее
периоды НС там отсутствуют вовсе. Мощность сигналов СРНС на
высокоорбитальных ИСЗ существенно ниже, чем на поверхности
Земли, а излучающие их спутники СРНС зачастую расположены
близко друг к другу, образуя созвездия с геометрическим факто¬
ром, увеличивающим погрешность местоопределения в десятки
раз.
Для БАСН, базирующейся на низкоорбитальных ИСЗ, основ¬
ными отличиями от аппаратуры спутниковой навигации на¬
земного расположения являются высокая взаимная динамика
с группировкой спутников СРНС и быстроменяющееся созвездие
видимых НС.
2.5.5. Прочие особенности космического базирования
Еще одна особенность проектирования БАСН — невозможность
Натурного макетирования, которое предусматривает испытание
аппаратуры в условиях, близких к рабочим. Для натурного ма¬
1 Маска угла возвышения: сигналы от спутников с углами возвышения мень¬
шими, чем маска, не обрабатываются приемником. Для наземных приемников
СРНС маска угла места составляет обычно 3...7°.
81
кетирования БАСН потребовался бы запуск макета на борту ИСЗ
что, естественно, невозможно. Поэтому в процессе проверки и ве.
рификации БАСН необходимо создать стенд для функционального
тестирования, который позволил бы имитировать алгоритмы в
условия радионавигационного поля для космических приложений,
В последние годы методы создания таких стендов были описаны
в литературе, см., например, работы [41, 42].
Другой особенностью космического базирования, как и вообще
любых спутников, является отсутствие тропосферных погрешно¬
стей, неизбежных для наземных потребителей. Вместе с тем на
околоземных орбитах остается существенным влияние ионосферы,
которая простирается до высот порядка 1500 км и вызывает по¬
грешности измерения задержки сигнала от НС. Как было показано
в главе 1, ионосфера вызывает искривление траектории сигнала
(эффект рефракции), что приводит к дополнительной задержке
времени распространения сигнала от НС до приемника. В одно¬
частотной аппаратуре пользователей для расчета ионосферной
задержки используют функциональную зависимость задержки от
параметров ионосферы на участке радиотрассы «НС — аппаратура
потребителя» (метод моделирования трассы [10]). Радиотрасса
«НС —ИСЗ» принципиально отличается от радиотрассы «НС —на¬
земный потребитель», и в настоящий момент не существует до¬
ступных моделей ионосферы для космических потребителей, что
увеличивает погрешность решения навигационной задачи. При
этом следует иметь в виду, что разработанные для наземных по¬
требителей алгоритмы расчета поправок на ионосферную погреш¬
ность не годятся для ИСЗ. Причина в следующем: при расчете
поправок для наземных пользователей берется допущение, что
ионосфера представляет собой тонкий слой, расположенный на
высоте максимальной плотности электронного содержания. Такое
допущение неприемлемо для ИСЗ, где плотность электронного
содержания по линии распространения сигнала от НС к ИСЗ ме¬
няется сложным образом. В частности, линия распространения
сигнала может дважды пересекать уровень наибольшей плотности
электронного содержания. Наконец, для решения задач относи¬
тельной навигации точное знание модели ионосферы является
существенным фактором, влияющим на сходимость алгоритмов
разрешения фазовой неоднозначности.
82
2.6. Требования к бортовой аппаратуре
спутниковой навигации
В этом разделе обобщены особенности БАСН и сформулированы
требования к аппаратуре потребителя космического базирования.
Ниже приводятся характеристики БАСН MosaicGNSS [2] — GPS-
приемника космического базирования, предназначенного для
реализации на открытом рынке коммерческой аппаратуры, про¬
шедшего испытания и успешно эксплуатируемого на нескольких
европейских спутниках.
СКО погрешности решения
НОС СОС ГЕОС
Координаты, м, не более 10 10 10
Скорость, м/с, не более 0,01 0,01 0,01
Время, не, не более 200 200 200
Время первого решения, мин, не более
Холодный старт 8
Теплый старт 4
Массогабаритные характеристики
Масса, г, Габаритные размеры,
не более мм
Приемник 800 250x250x25
Антенна 200 0100x20
Динамические характеристики
Частота Доплера, кГц ±65
Скорость изменения частоты Доплера, Гц/с ±60
Скорость вращения ИСЗ, ...°/с 0,5
Чувствительность, дБГц
Слежение 26
Захват 30
Диапазон температур, °С
Рабочих -25...+60
Нерабочих -40. ..+75
В приложении Б даны требования к БАСН, по которым разра¬
батывалась БАСН MosaicGNSS. Как и всякие требования к аппа¬
ратуре, они представляют собой весьма формализованный набор
строго определенных характеристик. Читатель, заинтересованный
в детально-формальном методе описания требований к БАСН,
может обратиться к приложению Б. Для понимания физических
основ требований к БАСН достаточно материала этой главы.
83
2.7. Научно-технические задачи, которые нужно
решить для построения бортовой аппаратуры
спутниковой навигации
Для исследования особенностей приема сигналов СРНС в BAQj
разработан программный комплекс и проведено моделирование
условий приема сигналов СРНС GPS для потребителей с разной
высотой орбиты. Ниже сформулированы задачи, стоящие перед
разработчиками архитектуры и первичной обработки сигналов
в БАСН. Следующие разделы книги посвящены созданию методов
решения задач по разработке:
• архитектуры навигационного приемника, отличающейся тем,
что в ней используется радиационно стойкая элементная база, до-
ступность которой для гражданского потребителя ограничена;
• методов и алгоритмов обработки сигналов, не предъявляющих
высоких требований к производительности ЦПУ;
• алгоритмов поиска сигналов, которые способны работать при
низком отношении «сигнал — шум»;
• алгоритмов поиска сигналов в широком диапазоне частот;
• методов решения навигационной задачи, отличных тем, что
они не требуют четырех и более НС в зоне радиовидимости.
Кроме того, для построения БАСН необходима разработка ме¬
тодов решения задачи относительной навигации, при которых не
используется модель ионосферных задержек и не предъявляются
высокие требования к производительности ЦПУ.
2.8. Выводы
В этой главе проанализирован один из основных факторов,
влияющих на БАСН, — космическая радиация, даны физические
основы воздействия ионизирующих лучей на аппаратуру спут¬
никового базирования и показана необходимость использования
радиационно стойкой элементной базы для создания БАСН.
Исследованы особенности космического базирования прием¬
ников СРНС и влияние этих особенностей на БАСН. Из анализа
особенностей космического применения приемников СРНС сле¬
дует, что использование СРНС на борту ИСЗ представляет собой
сложную научно-техническую проблему.
Рассмотрено значение автономной навигации искусственных
спутников Земли и показана актуальность решения проблемы
автономной навигации. Преимущества автономной навигации по
сравнению с существующими способами навигации ИСЗ заклю-
84
гЯ в повышении эффективности использования спутников,
^ижении эксплУатационных Расходов спутниковых систем и
СВ доставлении новых, до сих пор недоступных функциональных
прВД «
возможностей.
Главными результатами данной главы стали выявление и фор-
ja лирование научно-технических задач, которые нужно решить
создания БАСН, а также определение требований к БАСН
ажданского применения. Следующие главы посвящены реше¬
нию сформулированных в этой главе научно-технических задач
и разработке метода проектирования БАСН.
85
Глава 3
АРХИТЕКТУРА БОРТОВОЙ АППАРАТУРЫ
СПУТНИКОВОЙ НАВИГАЦИИ
В главе 2 показано, что архитектура навигационного при¬
емника космического базирования должна строиться на основе
радиационностойких элементов. Также выделены три сложности,
вызванные ограниченным выбором элементной базы: отсутствие
на рынке радиационно стойких МКК, низкая производительность
радиационно стойких ЦПУ и высокая стоимость радиационно
стойких опорных генераторов. С архитектурной точки зрения
определяющим является отсутствие подходящих МКК, в то время
как низкая производительность ЦПУ космического базирования и
низкие характеристики доступных радиационно стойких опорных
генераторов представляют собой факторы, влияющие на характе¬
ристики БАСН и требующие разработки новых алгоритмов, но не
определяющие архитектуру БАСН. Поэтому данная глава посвя¬
щена решению задачи проектирования БАСН на основе доступных
гражданским потребителям радиационно стойких электронных
компонентов.
3.1. Аппаратная реализация многоканального
коррелятора
Естественным решением для проектировщиков БАСН могут
стать разработка и производство радиационно стойкой интеграль¬
ной схемы (ИС) МКК. В этом разделе рассмотрены пути создания
радиационно стойких сверхбольших интегральных схем (СБИС),
а далее проанализированы возможности разработки и производ¬
ства СБИС МКК.
Как показано в главе 2, различают два фактора воздействия
ионизирующего излучения на радиоэлектронные компоненты, на¬
ходящиеся на борту спутника: постепенное ухудшение характери¬
стик, вызванное поглощенной дозой радиации, и функциональные
86
сбои в работе электроники, возникающие в результате выделения
энергии высокоионизирующими частицами в активной области
отдельных микросхем.
Мы отсылаем читателя к доступным материалам ЕКА [43] и
NASA [44] для получения полного представления об организации
процесса проектирования СБИС, пригодных для использования
в условиях космической радиации. Ниже дан краткий обзор тех
особенностей разработки радиационно стойких СБИС, которые про¬
ектировщики БАСН должны принимать во внимание при решении
начать разработку СБИС МКК космического применения.
Отметим, что в настоящее время большинство фирм — разра¬
ботчиков СБИС являются так называемыми фаблесс-компаниями
(т. е. не имеют собственной производственной базы). В этом
случае изготовление кристаллов осуществляется на мощностях
специализированных кремниевых фабрик. При таком разделении
труда компания-разработчик проектирует СБИС [как правило, при
помощи средств автоматизированного проектирования (САПР) и
библиотек для логического синтеза, предоставленных фабрикой],
а специалисты фабрик осуществляют окончательную доработку
фотошаблонов и изготовление кристалла. Ниже проанализированы
три этапа полного жизненного цикла разработки СБИС от концеп¬
ции до внедрения: проектирование, производство и тестирование.
Кроме этого, показано влияние требований к радиационной стойко¬
сти СБИС на каждом из этапов жизненного цикла разработки.
3.1.1. Проектирование при помощи средств
автоматизированного проектирования
Электронная промышленность — очень динамично развиваю¬
щаяся отрасль. Число транзисторов на кристалле увеличивается
за год в разы, соответственно уменьшаются проектные нормы. На
сегодняшний день нормы составляют 0,1...0,05 мкм и позволяют
размещать на одном кристалле до 500 млн транзисторов.Такая
тенденция приводит к тому, что физические явления, которые
ранее не учитывались при проектировании СБИС, стали суще¬
ственными: они требуют новых физических моделей и новых
САПР. Хотя производители САПР вкладывают огромные денеж¬
ные средства в совершенствование аппаратного, математического,
информационного и программного обеспечения для учета новых
физических процессов и явлений, заметных в современных СБИС,
анализ рынка общедоступных средств автоматизации проектиро¬
вания показывает, что ни одно из них не позволяет учесть или
87
заложить в проект какие-либо аспекты радиационной стойкое-^
(см. также [45, 46]).
Европейское космическое агентство составляет списки cep-vjj
фицированных производителей — Qualified Manufacturers Lis^
(QML). Единственный в Европе производитель СБИС, входящие
в QML ЕКА, — компания Atmel [47]. Она предлагает не только
специальные библиотеки для логического синтеза радиационно
стойких СБИС [48], но и специальную методику проектирования
[49]. Эта методика основана на встраивании в САПР функция
моделирования радиационного облучения и моделирования
ухудшения характеристик элементов. При использовании такой
методики разработчик может в процессе проектирования найти
самый ненадежный стандартный элемент и заменить его радиа¬
ционно стойким. Atmel утверждает, что их САПР позволяет смо¬
делировать облучение заданной дозой радиации, провести синтез,
сформировать список цепей (gate level netlist), осуществить вре¬
менную (timing verification) и поведенческую (behavioral testing)
верификации.
Кроме того, в библиотеке логических компонентов содержится
несколько подобных триггерных ячеек с различной чувствитель¬
ностью. В зависимости от технических требований к разрабаты¬
ваемому устройству порог переключения может варьироваться
в напряжении.
Для защиты от жесткого ионизирующего излучения также мо¬
жет применяться механизм внутренней коррекции. Применение
кодов с проверкой на четность или других помехоустойчивых алго¬
ритмов позволяет существенно снизить количество ошибок. Тогда
защита от одиночных случайных ошибок становится системной
задачей, что позволяет минимизировать такие сбои применением
высокочастотных заградительных фильтров и управляемой си¬
стемой прерываний.
Казалось бы, использование методики и САПР Atmel (или
аналогичных зарубежных решений) должно открыть дорогу
к разработке радиационно стойких СБИС вообще и к разработке
радиационно стойких МКК. Тем не менее этого не происходит на
практике, и причина не столько в чрезвычайно высоких ценах
на САПР, поддерживающих разработку радиационно стойких
СБИС, сколько в политике компаний-производителей. САПР,
позволяющие разработать радиационно стойкие СБИС, обходятся
на порядок дороже стандартных версий, т. е. их стоимость может
достигать сотен тысяч евро. Но не сверхвысокая цена представля¬
ет собой главный барьер, препятствующий использованию этих
САПР. Автор принимал участие в российско-немецком проекте.
88
где рассматривалась возможность разработки радиационно стой¬
кой СБИС МКК. Переговоры с компанией Atmel зашли в тупик
после того, как выяснилось, что планируется участие российских
специалистов — пользователей САПР Atmel. К сожалению, это
не случайность, а система, отражающая позицию компаний —
производителей САПР. Как писал в 2006 г. наш российский
коллега,«несмотря на то что они [зарубежные компании — раз¬
работчики САПР] предлагают свои программные продукты, при¬
обрести современное проблемно-ориентированное программное
обеспечение практически невозможно. Ведущие зарубежные
фирмы считают, что такой подход позволит им сохранить лидер¬
ство в ближайшей и долговременной перспективе. Даже создавая
совместные предприятия в тех странах, которые целенаправлен¬
но проводят политику создания национальной элементной базы,
эти фирмы стремятся максимально сохранить за собой ведущую
роль» [46].
Наконец, у нас есть все основания полагать, что методика САПР
Atmel (как и другие методы схемотехнического проектирования)
не может гарантировать радиационную стойкость разрабаты¬
ваемых СБИС. Сошлемся на руководства для проектировщиков
радиационно стойких СБИС. Наиболее полным из находящихся
в открытом доступе руководств является, очевидно, «Обеспечение
космической пригодности СБИС», выпущенное специалистами
NASA [44]. Авторы этого исчерпывающего документа призна¬
ют, что «методы проектирования оказывают определенное воз¬
действие на радиационную стойкость, но только ограниченные
улучшения [радиационной стойкости] могут быть достигнуты на
схемотехническом уровне. Схемотехнические решения не могут
помочь в преодолении таких фундаментальных проблем, как про¬
бой транзисторов в результате инверсии защитного слоя оксида
и эффект одиночного сбоя в результате накопления большого
пространственного заряда»1 [50]. С этим высказыванием нельзя
не согласиться.
3.1.2. Производство
В период холодной войны военные заказы требовали радиаци¬
онно стойких ИС, изготавливаемых по специальным технологиям.
Радиационно стойкие изделия, выпуск которых осуществлялся
в достаточно больших объемах, использовались не только в во¬
1 Перевод автора.
89
енной, но и в космической технике гражданского назначенцу
(спутники связи, навигации и т. п.). Однако с окончанием этог0
периода резко снизились заказы на радиационно стойкие ЙС
и их производство стало нерентабельным. Этот процесс харац.
терен для всех ведущих производителей радиационно стойких
изделий, включая американские. Он принял массовый характер
начиная с 1994 г. В мае 1995 г. фирмы Мотого1а и AMD прекра.
тили поставки интегральных схем с военной приемкой. В 1996 г.
фирма Harris фактически перестала выпускать микросхемы ц0
технологии «кремний на сапфире». Сокращение (а в ряде случаев
и прекращение) производства радиационно стойких ИС привело
к значительному их удорожанию. Поэтому в последнее время
применение дорогих радиационно стойких изделий стало эконо¬
мически невыгодным [51].
В результате «ни одна из доступных зарубежных кремниевых
фабрик не ориентирована на изготовление радиационно стойких
изделий и не гарантирует стабильность уровня стойкости СБИС»
[45]. В России положение не лучше: с распадом СССР за пределами
Российской Федерации осталось более 50 % предприятий элек¬
тронной промышленности, производивших радиационно стойкие
интегральные схемы [52]. Далее последовали экономический спад
и резкое снижение объемов государственного оборонного заказа,
что привело к сокращению (и в большинстве случаев к прекра¬
щению) производства существенной части номенклатуры радиа¬
ционно стойких схем. С недавнего времени в России наметилась
тенденция к возобновлению выпуска ИС в радиационно стойком и
пригодном для космического использования исполнении, что от¬
крывает потенциальную возможность тиражирования СБИС МКК.
Вероятно, основным сдерживающим фактором для такого произ¬
водства станет большая себестоимость радиационно стойких СБИС
и, следовательно, высокая цена для конечного потребителя.
3.1.3. Тестирование
Для любых изделий, которые должны сохранять работоспо¬
собность под воздействием радиации, необходимо проводить
тестирование на радиационную стойкость. Правила и процедуры
таких тестов стандартизованы (например, американская MIL [53],
европейская ESA/SCC [54]). Тестирование производится фабри-
кой-производителем и включает проверки как на поглощенную
дозу радиации, так и на эффекты одиночных сбоев (см., например,
[49]). Также по согласованию с заказчиком могут проводиться
90
дополнительные тесты. Необходимо понимать следующее: фабри¬
ки, производящие радиационно стойкие микросхемы, входят в
QML крупнейших заказчиков, таких как космические агентства,
министерства обороны и др. Для того чтобы войти в QML, компа¬
ния должна доказать способность не только выпускать продукты
с требуемыми характеристиками, но и организовать тестирование
производимых продуктов в соответствии со стандартами. Поэто¬
му тестирование радиационно стойких СБИС не представляет ни
технической, ни организационной сложности, хотя и приводит
к удорожанию продукта (см. раздел 3.1.4).
3.1.4. Экономические аспекты проектирования и производства
радиационно стойких сверхбольших интегральных схем
Чтобы оценить, насколько радиационно стойкие СБИС дороже,
чем СБИС в стандартном исполнении, рассмотрим экономические
основы производства СБИС. Затраты на производство складыва¬
ются из постоянных и переменных затрат. Согласно определению
из Современного экономического словаря [55], «постоянные за¬
траты — расходы предприятия, не зависящие непосредственным
образом от объема производимой продукции, которые не могут
быть в течение короткого периода времени ни увеличены, ни
уменьшены с целью роста или сокращения выпуска продукции.
Переменные затраты — затраты, величина которых зависит пре¬
жде всего от объемов производства товаров и услуг».
Запишем в соответствии с этими определениями
A = Afixed + Avar^ (3-D
где Л — затраты; Afixed — постоянные затраты; Луаг — переменные
затраты; N — количество единиц продукции.
Себестоимость СБИС выражается затратами на единицу про¬
дукции An, которые определяются как
AN = Afixed N + \ат’ (3-2)
где Afixecj н — постоянные затраты на единицу продукции.
Перед тем как мы рассмотрим, из каких составляющих скла¬
дываются постоянные и переменные затраты на производство
СБИС, и оценим влияние требований к радиационной стойкости
на каждую из составляющих, следует привести важную цитату
из Майкла Дж. С. Смита (Michael J. S. Smith), признанного экс¬
перта, автора прекрасного учебного пособия по разработке СБИС
91
[56]. «Сравнение стоимости [производства СБИС] — опасное зац^,
тие, поскольку стоимость быстро меняется, а полупроводников^
промышленность печально известна тем, что надежно дерщ^
в секрете издержки, цены и ценовую политику» [57]1. Полностью
принимая точку зрения эксперта, мы подчеркнем, что все данные
о затратах, себестоимости, стоимости и ценах являются приблц,
зительными, устареют на момент выхода книги и используют^
только в качестве иллюстративного материала. Наконец, следу6т
помнить, что задачей этого раздела является не количественная
оценка затрат на разработку радиационно стойких СБИС, но каче-
ственная оценка увеличения стоимости разработки и производства,
вызванного требованиями на радиационную стойкость.
Следуя подходу из [56], выделим следующие составляющие
постоянных затрат:
• затраты на подготовку персонала: обучение персонала работе
с новыми инструментами для проектирования, внедрение новых
схемотехнических подходов и т. д.;
• затраты на приобретение и использование инструментов для
проектирования: не только стоимость САПР, но и стоимость инфра¬
структуры для развертывания САПР (рабочие станции и пр.);
• затраты на проектирование: оплата труда проектировщиков
и все сопутствующие расходы (аренда помещений, аренда обору¬
дования, налоги на фонды оплаты труда и пр.);
• однократные затраты на внедрение в производство (Non-
Recurring Engineering cost, NRE); включают в себя стоимость
производства металлизированного фотошаблона, часто называе¬
мого маской, и стоимость услуг фабрики-изготовителя; к услу¬
гам фабрики-изготовителя обычно относят услуги по предпроиз-
водственному тестированию (см., например, [56] для подробного
описания тестирования при помощи тестовых векторов);
• однократные затраты на производственное (фабричное) тести¬
рование ИС; для выпуска радиационно стойких СБИС фабрика-
производитель должна организовать тестирование на стойкость
к воздействию радиации (см. раздел 3.1.3).
В табл. 3.1 приведены результаты сравнения постоянных затрат
на проектирование СБИС для обычного и радиационно стойкого
исполнения.
Видно, что основными факторами, влияющими на постоянные
затраты, являются необходимость приобретения и внедрения
специализированных САПР и специфическое производственное
тестирование. Затруднительно точно оценить увеличение себе-
1 Перевод автора.
92
Т а 6 л и ца 3.1
Сравнительный анализ постоянных затрат на проектирование СБИС
Вид затрат
СБИС стандартного исполнения
Радиационно стойкие СБИС
Подготовка пер¬
сонала
Низкие или даже нулевые —
при наличии инженеров-раз-
работчиков с опытом работы
в нужной САПР
Необходимы затраты на обуче¬
ние методикам проектирования
радиационно стойких СБИС,
обучение специализированным
САПР и библиотекам логического
синтеза
Инструменты
проектирования
Стоимость САПР может до¬
стигать сотен тысяч долларов
США
Стоимость САПР для разработки
радиационно стойких СБИС зна¬
чительно превышает стоимость
стандартных САПР, если они
вообще доступны (см. раздел
3.1.1)
Внедрение в
производство
(Non-Recurring
Engineering
cost, NRE)
Существенно не различаются при использовании одинакового
производственного процесса'
Тестирование
* Мы не расе
кремний на саифи
схем с радиациот
1 Мрад.
Нет
матриваем использование специа
ре и БиКМОП, которые использу
ой стойкостью, значительно прев>
Существенные затраты, покры¬
ваемые покупателем
лизированных процессов, таких как
ются для изготовления интегральных
плающей требуемую в БАСН -- более
стоимости за счет использования специализированных САПР, но,
зная политику производителей средств проектирования, разумно
предположить, что специализированная САПР может увеличить
бюджет проекта на сотни тысяч долларов. Сходный рост затрат
вызывается тестированием СБИС на радиационную стойкость.
Переменные затраты включают в себя:
• затраты на подложку — полупроводниковую пластину (мо¬
нокристалл), из которой при помощи маски производится кри¬
сталл;
• затраты на корпусирование (упаковку кристалла в пластико¬
вый или керамический корпус с контактами);
• затраты на тестирование.
Для радиационно стойких СБИС затраты на подложку и корпу¬
сирование не отличаются существенно от аналогичных расходов на
СБИС в стандартном исполнении, если не принимать во внимание
специальные типы корпусов, используемых для интегральных
схем с радиационной стойкостью, избыточной для БАСН.
Кроме значительного увеличения постоянных затрат, на се¬
бестоимость СБИС также существенно влияют объемы выпуска.
Рынок БАСН — типичный пример рынка верхнего эшелона
93
(high-end market), т. e. дорогих высококачественных товаров,
выпускаемых малым тиражом. Например, БАСН MosaicGNSS
была изготовлена всего в нескольких десятках экземпляров, что
не помешало ей стать одним из самых продаваемых РНП косми¬
ческого базирования в мире. Все более широкое использование
спутниковой навигации на борту ИСЗ, увеличение количества
запусков и другие благоприятные для БАСН тренды не позволяют
тем не менее говорить, что БАСН будут производиться в тыся¬
чах экземпляров; реалистичной можно полагать оценку размера
партии МКК СБИС, равной 100. В табл. 3.2 приведены очень
приблизительные оценки затрат. Выбирая 1 500 ООО долларов
в качестве иллюстративной оценки постоянных затрат, получим
постоянные затраты на единицу продукции Afixed N = $15 ООО.
При такой величине постоянных затрат в расчете себестоимости
(3.2) можно пренебречь переменными затратами.
Таким образом, себестоимость одной микросхемы многоканаль¬
ного коррелятора составит десятки тысяч долларов, в то время как
себестоимость СБИС общетехнического производства колеблется от
единиц до сотен долларов. Этот вывод также соответствует оцен¬
кам, опубликованным в России и за рубежом. По утверждению
одного из мировых лидеров в области разработки и производства
радиационно стойких микросхем Harris Semiconductor (США),
«стоимость радиационно стойких интегральных схем примерно
в 100 раз выше стоимости аналогичных изделий общетехниче¬
ского исполнения» (цитируется по работе (52]). В исследовании
[51] указывается, что затраты на производство высоконадежных
и радиационно стойких интегральных схем увеличивают их стои¬
мость на два-три порядка.
Напомним, что целью настоящей монографии является раз¬
работка такой методики проектирования БАСН, которая может
быть применена к созданию РНП космического базирования,
предназначенных для реализации на открытом рынке. С точки
зрения маркетинга все продукты в свободном обращении проходят
единый жизненный цикл — от выхода на рынок до прекращения
реализации на рынке. Жизненный цикл товара описывает изме-
Таблица 3.2
Примерные постоянные затраты на производство радиационно стойких СБИС
Вид затрат
Стоимость, тыс. $
Подготовка персонала
1...10
Инструменты проектирования
100...1000
NRE
300...1200
Тестирование
20...200
Итого
420...2400
94
• ВЫХОД на рынок;
• рост ,
, зрелость;
• спад.
Эти стадии обычно иллюстрируют так называемой S-кривой,
подробное описание которой можно найти в любом учебнике
маркетинга. Мы будем следовать упрощенной модели из работы
[56], которая предполагает, что рост и спад продаж зависят ли¬
нейно от времени. Жизненные циклы двух продуктов с разным
временем выхода на рынок показаны на рис. 3.1. Тогда площадь
под ломаной, демонстрирующей зависимость объема продаж про¬
дукта в единицу времени с течением времени, представляет собой
объем продаж за все время жизненного цикла. Видно, что для
второго продукта, который был выведен на рынок позже, объем
продаж меньше. На рисунке показана область, иллюстрирующая
разность объемов продаж, обусловленную поздним выходом на
рынок второго продукта.
При разработке БАСН время, затраченное на проектирование,
производство и тестирование, определяет дату выхода продукта
на рынок и, следовательно, подлежит минимизации. Из при¬
веденного выше анализа очевидно, что цикл «проектирование—
производство—тестирование» для радиационно стойких СБИС
существенно дольше, чем тот же цикл для СБИС общего при¬
менения. Это обусловлено большими временными затратами на
подготовку персонала, проектирование при помощи САПР и тести-
к
Задержка
выхода на рынок
Время
Рис. 3.1. Жизненный цикл СБИС
95
рование. По оценке автора, основанной на опросе представителе
европейской космической промышленности, а также на аналц3е
данных о сроках разработки СБИС МКК AGGA-2 [34], создацце
микросхемы многоканального радиационно стойкого коррелятор^
занимает около 4 лет.
Чтобы оценить влияние задержки выпуска продукта на объец,
его продаж, нужно задаться (см. раздел 1.4.3 в работе [56] для прй.
мера расчета потерь в продажах из-за позднего выхода на рынок
для СБИС общего применения) длительностью жизненного цикл^
продукта и динамикой объема продаж. Не имея даже приблизц.
тельных маркетинговых данных, мы не будем оценивать влияние
существенной (годы) задержки в выходе на рынок. Ограничимся
лишь констатацией факта: такая задержка способна существенно
снизить прибыль от продаж БАСН.
3.1.5. Анализ целесообразности аппаратной реализации
многоканального коррелятора
Из предыдущих разделов следует вывод, что разработка микро¬
схемы МКК занимает годы и стоит миллионы долларов, что непри¬
емлемо во многих практических проектах. Этот вывод усиливается
двумя практическими соображениями. Во-первых, мы оставили
почти вне рассмотрения еще один этап цикла разработки — по¬
лучение сертификата пригодности для использования в космосе.
Сертификация радиационно стойких СБИС для использования
в составе БАСН проводится в соответствии с требованиями конеч¬
ного покупателя БАСН, процедуры сертификации различаются
в зависимости от страны покупателя. Независимо от страны и
процесса сама сертификация приводит к дальнейшему увеличению
сроков разработки и еще большему удорожанию БАСН. Далее,
изучение руководств по проектированию радиационно стойких
СБИС (например, [58]) показывает, что для достижения радиаци¬
онной стойкости необходимо идти на ухудшение характеристик:
у радиационно стойких микросхем или выше энергопотребление,
или больше размер кристалла.
3.2. Программная реализация многоканального
коррелятора
Итак, разработка микросхемы МКК и получение сертифика¬
та пригодности для космоса занимают годы и стоят миллионы
долларов, что недопустимо с точки зрения затрат и сроков. Тре-
96
буется новое научно-техническое решение, которое позволяет на
практике проектировать БАСН, оставаясь в рамках разумного
бюджета и минимального времени на разработку. Около 15 лет
назад автором и его коллегами была предложена архитектура
БАСН на основе программного коррелятора [59-64]. Именно это
научно-техническое решение позволило создать один из самых
успешных в мире приемников спутниковой навигации космиче¬
ского базирования — MosaicGNSS [2, 59, 65-68].
3.2.1. Принципы построения программных
корреляторов
В середине 1990-х годов появились новые высокопроизводи¬
тельные процессоры, такие как Pentium IV, TMS320C62xx или
новое поколение ADSP фирмы Analog Devices серии Tiger Shark,
на которых стало возможно выполнять цифровую обработку сиг¬
налов спутниковых радионавигационных систем за практически
приемлемое время. В те же годы стало формироваться целое на¬
правление исследований в целях создания радионавигационных
приемников на основе программной реализации функций корре¬
ляции. В нашей стране пионерскими в этой области, вероятно,
следует считать патент [62], зарегистрированную программу для
ЭВМ [63] и публикацию российских ученых на конференции
Института навигации (Institute of Navigation, ION) в Теннесси,
США, в 1999 г. [60]. Примерно в тоже время или позже появи¬
лись схожие работы российских [69, 70] и зарубежных [71-73]
авторов. Через 15 лет после начала исследований радионавига¬
ционные приемники СРНС с программной реализацией функций
корреляции уже рассматривались многими авторами в качестве
прямого конкурента приемникам с коррелятором, реализованным
аппаратно. Использование программной реализации коррелятора
в аппаратуре спутниковой навигации выходит далеко за рамки
Данной книги - программные корреляторы успешно применяются
не только в аппаратуре космического базирования, но и в прием¬
никах для массового рынка, авиации, а также экспериментальных
и исследовательских приемниках. Обзор состояния дел в этой
области можно найти в работе [74], мы же сосредоточимся на
методе проектирования бортовой аппаратруры спутниковой нави¬
гации.
Каноническая структурная схема РНП, показанная на рис. 2.5,
при использовании программного коррелятора изменяется и пре¬
вращается в схему на рис. 3.2.
97
Рис. 3.2. Структурная схема приемника СРНС на основе программного
коррелятора
Как следует из названия и из рис. 3.2, принципиальная осо¬
бенность архитектуры БАСН на основе программного коррелятора
заключается в том, что функции корреляции в ней реализуются
программно, а не аппаратно. Эти функции включают в себя:
• формирование вектора отсчетов опорной псевдослучайной
последовательности;
• формирование векторов квадратурных отсчетов опорной ча¬
стоты;
• сложение/вычитание/умножение этих векторов с вектором
отсчетов промежуточной частоты (ПЧ);
• вычисление суммы элементов векторов, полученных на
предыдущем шаге.
На рис. 3.3 приведена структурная схема программного кор¬
релятора, представляющего собой многоканальное устройство,
в котором на вход каждого из каналов подается сигнал после
квадратурного преобразования, а на выходе образуются синфаз¬
ная I и квадратурная Q составляющие свертки опорного сигнала
с входным. В программном корреляторе различают операции, ис¬
полняемые с высоким темпом, и операции, совершаемые с низким
98
Канал N
Канал 1
Высокий Низкий
темп темп
Рис. 3.3. Схема программного коррелятора
темпом. С высоким темпом исполняются операции, необходимые
для получения демодулированного сигнала — формирование от¬
счетов опорной ПСП и их свертка с входными отсчетами. К опе¬
рациям, исполняемым с низким темпом, относятся генерация
опорной частоты и ее свертка с демодулированным сигналом.
Схема канала программного МКК изображена на рис. 3.4.
Одноразрядные квадратурные отсчеты сигнала поступают на
вход МКК с частотой f /2, где / — частота дискретизации. Эти
отсчеты в корреляторе кода перемножаются с опорной кодовой
последовательностью (блок XOR), а результат интегрируется. На¬
копление результатов свертки входных отсчетов с опорной ПСП
осуществляется в интеграторе, полоса пропускания которого
согласована с частотным диапазоном, содержащим возможные
значения доплеровского сдвига и смещение частоты, вызванное
уходом опорного генератора. Для БАСН этот диапазон не превыша¬
ет ±60 кГц. Выходы интеграторов коррелятора кода представляют
собой отсчеты демодулированного сигнала, которые поступают на
вход коррелятора несущей с частотой / /32. Коррелятор несущей
состоит из комплексного смесителя демодулированного и опорно¬
го сигналов со следующим за ним интегратором. Таким образом,
в корреляторе несущей формируются синфазная / и квадратурная
Q компоненты свертки входного сигнала с опорным.
При практической реализации программного корррелятора
перед проектировщиками стоит задача эффективной организации
вычислений, которая должна решаться в каждом случае по-своему,
Исходя из таких особенностей, как частотный план приемника,
Представление входных данных, используемый ЦПУ, размеры до¬
ступного ОЗУ и ПЗУ и системные требования, такие как целевые
Чувствительности захвата и слежения.
99
Коррелятор иода Коррелятор несущей
100
Рис. 3.4. Схема канала МКК
3.2.2. Расчет потребной производительности центрального
процессорного устройства для программного коррелятора
В настоящее время опубликован ряд работ, содержащих расчет
потребной производительности ЦПУ для реализации программного
коррелятора [66, 67, 75].
В конце 1990-х гг. в качестве ЦПУ космического базирова¬
ния рассматривались два процессора, изготовляемых компанией
Temic, ныне Atmel — ERC32 [76] и TSC21020 [77]. Первый из
них представлял собой радиационно стойкую версию процессора
LE0N [78], а второй являлся процессором ADSP 21020 компании
Analog Devices в стойком к радиации исполнении.
На практике приходится принимать решение о целесообраз¬
ности использования того или иного ЦПУ, не имея доступа
к образцам ЦПУ и не имея возможности провести натурные
эксперименты. Такая ситуация может быть вызвана высокой
стоимостью ЦПУ, большими сроками поставки, особенностями
контракта и др. В этих условиях можно воспользоваться доступ¬
ным эталонным процессором, а потом пересчитать полученную
оценку производительности для целевого ЦПУ. Для оценивания
производительности ERC32 и TSC21020, образцы которых были
недоступны, мы воспользовались процессором TMS320C31 ком¬
пании Texas Instruments. Оценивание производилось в четыре
этапа:
1) исполнение тестовой программы для оценки производитель¬
ности TMS320C31;
2) получение оценки удельного веса операций, исполняемых
тестовой программой в общей загрузке процессора;
3) сравнительный анализ TMS320C31, ERC32 и TSC21020;
4) пересчет оценок, полученных на TMS320C31 для ERC32 и
TSC21020.
На первом этапе была разработана тестовая программа для
TMS320C31, исполнявшая операции, входящие в программный
коррелятор:
• чтение входных отсчетов синфазной и квадратурной состав¬
ляющих;
• вычисление отсчетов локальной копии псевдослучайной по¬
следовательности;
• перемножение входных отсчетов синфазной и квадратурной
составляющих с локальной копией ПСП и последующая фильтра¬
ция результатов фильтром низких частот с полосой пропускания
60 кГц;
• вычисление отсчетов опорного сигнала несущей;
101
• перемножение отсчетов опорного сигнала несущей с выходов
предыдущей операции с последующей фильтрацией фильтром
с полосой пропускания 1 кГц.
В тестовой программе был реализован только один канал кор.
реляции, настроенный на сигнал от одного НС. Тестирование про.
водилось для одно- и двухбитного квантования входных отсчетов.
Результаты приведены в табл. 3.3, из которой видно, что одид
канал корреляции на TMS320C31 может быть надежно реализован
только для одноразрядного представления входных данных (95 %
загрузки на практике недопустимы).
В приемнике с программным МКК собственно программный
коррелятор является самым большим, но не единственным по¬
требителем производительности процессора. В классических при¬
емниках корреляция выполняется аппаратно, а программно реа¬
лизуются алгоритмы первичной и вторичной обработки сигналов,
функции обмена, операционной системы и т. п. Следовательно,
для того чтобы получить более точную оценку загрузки ЦПУ при
программной реализации коррелятора, необходимо к загрузке из
табл. 3.3 прибавить загрузку, вызываемую остальной программно
реализованной функциональностью. Для этого было взято про¬
граммное обеспечение приемника ASN-22 [79], использующего
аппаратный коррелятор компании GEC Plessey и TMS320C31,
и была произведена оценка того, какую загрузку процессора вы¬
зывает обработка данных одного канала корреляции. Как видно
из табл. 3.4, на TMS320C31 один канал при аппаратной реализа¬
ции коррелятора занимает 17 % производительности процессора.
Таблица 3.3
Загрузка TMS320C31 одним каналом программного коррелятора
Разрядность входного АЦП, бит
Загрузка процессора, %
1
65
2
95
Таблица 3.4
Загрузка TMS320C31 на один канал при аппаратной реализации коррелятора
Программный модуль
Загрузка, %
Комментарий
Операционная система
8
Включает в себя обмен данными
с хостом
Первичная обработка сигналов
2
От выхода аппаратного коррелято¬
ра до производства сырых измере¬
ний и подкадров навигационного
сообщения
Вторичная обработка сигналов
7
Для 12 каналов
Итого
17
102
Таблица 3.5
Загрузка TMS320C31 при реализации одноканального приемника
е программным коррелятором
Разрядность входного АЦП, бит
Загрузка процессора, %
1
82
" 2
112
Тогда, суммируя данные из табл. 3.3 и 3.4, получим оценку за¬
грузки TMS320C31 для реализации одноканального приемника с
программным коррелятором для разных разрядностей входного
АЦП (табл. 3.5).
Результаты сравнительного анализа TMS320C31, ERC32 и
TSC21020 даны в табл. 3.6. Значение коэффициента в последней
строке таблицы соответствует производительности ЦПУ относи¬
тельно TMS320C31. Очевидно, что этот коэффициент зависит от
структуры программы, которая используется для оценки произ¬
водительности. Если исходный код такой программы содержит
только команды типа «регистр-регистр», то коэффициент будет
определяться отношением тактовых частот. Увеличение быстро¬
действия процессора дает использование параллельных команд,
переключения контекста и встроенной поддержки циклических
буферов. Однако доля этих команд в структуре ПО приемника
невелика. Поэтому эти возможности процессора не учитывались
при сравнении. Существенным фактором, влияющим на быстро¬
действие, является наличие раздельных шин данных и команд,
что позволяет за один цикл работы процессора осуществить вы-
Таблица 3.6
Сравпение характеристик TMS320C31, ERC32 и TSC21020
Характеристика
TMS320C31
ERC32
TSC21020
Тактовая частота, МГц
16
10
20
Количество инструкций
113
64
22
Количество условных команд и кодов
завершения
20
48
32
Длина инструкций, бит
32
32
48
40-битная арифметика с плавающей
точкой
Есть
Есть
Есть
Переключение контекста
Нет
Есть
Есть
Конвейер
Есть
Есть
Есть
Параллельные операции
Есть
Нет
Есть
Кэш инструкций
Есть
Нет
Есть
Поддержка циклических буферов
Есть
Нет
Есть
Перемножитель
Есть
Нет
Есть
Раздельные шины данных и команд
Нет
Нет
Есть
Коэффициент
1,0
0,6
2,0
103
Таблица 3
Загрузка ERC32 и TSC21020 для реализации одноканального приемника
с программным коррелятором
Разрядность входного АЦП, бит
Загрузка ERC32, %
Загрузка TSC21020, ^
1
136
41 "
2
186
56
борку команды, а также операндов из памяти данных и памятц
команд. В зависимости от доли команд типа «регистр-память»
в структуре тестовой программы благодаря раздельным шинам
можно достичь двукратного увеличения быстродействия по срав-
нению с архитектурой на основе объединенной шины. В качестве
тестовой программы для оценки производительности использова¬
лась процедура вычисления корреляции, в которой доля команд
типа «регистр-память» составляет примерно 60 %. Поэтому для
TSC21020, кроме соотношения тактовых частот, учтен множитель
1,6, обусловленный наличием раздельных шин данных и команд
в этом процессоре.
Учитывая коэффициент из табл. 3.6 в табл. 3.5, получим
окончательно табл. 3.7, из которой видно, что одноканальный
приемник с программным коррелятором невозможно реализовать
на ERC32, а на TSC21020 такая реализация возможна как для
одно- так и для двухбитного квантования входного сигнала. Бо¬
лее того, на TSC21020 возможна реализация двух параллельных
каналов корреляции.
В работе [67] была произведена оценка потребной производи¬
тельности для слежения за сигналом одного спутника при про¬
граммной реализации коррелятора и было выведено соотношение,
связывающее производительность ЦПУ, выраженную в MIPS,
с частотой модулирующей ПСП
MIPS = 3,5 + 2,2 fc, (3.3)
где MIPS — производительность в MIPS, a f — тактовая частота
ПСП в мегагерцах. Эта формула была получена эмпирически и
подтверждена моделированием. Для частоты следования кода GPS
1МГц необходимая для слежения за одним спутником произво¬
дительность процессора составляет 5,7 MIPS. Производительность
TSC21020 — 20 MIPS, и он согласно (3.3) сможет обрабатывать
сигнал не более чем от трех спутников. На практике требуется
решить и другие задачи первичной и вторичной обработки: вы¬
числительные ресурсы потребляются также операционной систе¬
мой, интерфейсами и другими задачами, и максимальное число
каналов слежения не превысит двух. Такая оценка совпадает
с полученной ранее.
104
3.2.3. Методы реализации программного коррелятора
Основным потребителем ресурсов ЦПУ в навигационном при¬
емнике СРНС с программным МКК является алгоритм вычисления
свертки входного сигнала с опорным. Как показано в предыдущем
разделе, прямолинейная реализация МКК предъявляет к про¬
изводительности ЦПУ чрезмерно высокие требования. Поэтому
основные усилия разработчиков приемников с программным МКК
направлены на оптимизацию вычислений при реализации алгорит¬
ма корреляции. Данный раздел представляет собой обзор наиболее
известных методов, позволяющих в разы уменьшить количество
операций, необходимых для реализации МКК.
Очевидный способ ускорить вычисление корреляции — исполь¬
зовать SIMD-команды. Некоторые разработчики ЦПУ (такие как
Intel, AMD, ARM, MIPS) к основному набору инструкций процессора
добавили ряд специализированных команд, позволяющих осущест¬
влять одновременную и независимую обработку сразу нескольких
элементов данных. К ним относятся, например, ММХ-команды
(а также их расширение SSE для процессоров серии Pentium и
3DN0W, для процессоров AMD, начиная с Кб 3D). Хотя выполнение
одной такой инструкции занимает больше времени, чем процедура
аналогичной инструкции из основного набора команд, их грамотное
использование при реализации алгоритмов позволяет увеличить
быстродействие ЦПУ в 4...6 раз [80] и реализовать обработку сиг¬
налов в реальном масштабе времени на этих платформах.
Алгоритм корреляции включает в себя следующие этапы:
1) формирование вектора отсчетов опорной ПСП;
2) формирование векторов квадратурных отсчетов опорной
частоты;
3) сложение/вычитание/умножение этих векторов с вектором
отсчетов ПЧ;
4) вычисление суммы элементов векторов, полученных на
предыдущем шаге.
Для ускорения вычислений на третьем и четвертом этапах могут
быть использованы ММХ-команды, а также их расширение SSE.
Примерами удачного применения SIMD-команд для реализации
программного МКК являются GPS-приемники на платформах
Intel Хеоп 2,4 [80], Pentium IV 1,7 ГГц [81] и Pentium II 266 МГц
[69]. Существенный недостаток этого подхода — привязка SIMD-
команд к архитектуре ЦПУ, что делает практически невозможным
Портирование кода на другую платформу.
Эффективным методом ускорения вычисления корреляции
служит использование битовых операций [82, 83]. В отличие от
105
SIMD-команд битовые операции универсальны и реализован^
в большинстве ЦПУ, используемых для цифровой обработки
К таким операциям относятся, например, логические битовые orte,
рации XOR, AND и OR, позволяющие организовать параллельную
обработку входного потока данных. Для этого разряды отсчетов
ПЧ с выхода РПУ упаковываются в отдельные слова — обычц0
в одно слово, содержащее знаковые разряды, и в несколько слов
содержащих разряды амплитуды. В зависимости от компоновки
разрядов корреляция входного сигнала с опорным может осу.
ществляться одновременно — для множества последовательных
отсчетов сигнала одного НС или одномоментных отсчетов сиг¬
налов нескольких НС. Варианты упаковки для двухразрядного
представления отсчетов ПЧ изображены на рис. 3.5. Для такой
организации входных данных умножение отсчетов ПЧ и опорной
ПСП можно выполнить с использованием операции XOR.
При этом за одну операцию осуществляется умножение сразу
нескольких отсчетов. Выигрыш в быстродействии зависит от раз¬
рядности FIFO (рис. 3.5, а) или числа параллельных каналов МКК
(рис. 3.5, б). Умножение отсчетов демодулированного сигнала
и опорной частоты для каждого квадратурного канала реализуется
с помощью одной логической операции XOR и переопределения
разрядов, содержащих амплитуду [82].
Максимальная эффективность использования битовых операций
достигается при одноразрядном квантовании входного сигнала. Од¬
нако в этом случае наблюдаются и максимальные энергетические
потери (2 дБ). Очевидно, что при увеличении разрядности пред-
а)
s
Ф
Q.
СО
АЦП
S1
т,
s2
m2
sk
mk
FIFO
Д-разрядное)
sk
s2
s,
mk
m2
m,
-Время-
б)
АЦП
Si
m,
s2
m2
Sx
mk
4—N разрядов—►
Sk
Sk
sk
mk
mk
rrk
s2
s2
s2
m2
rr2
nr2
s,
Si
S,
m,
m,
in,
Рис. 3.5. Варианты упаковки
отсчетов ПЧ для двухразрядного
квантования
5
0)
Cl
СО
106
здения отсчетов ПЧ эффективность параллельной обработки
СГ^ясяется. Примерами РНП (с программным МКК), использую¬
щих данный подход, являются приемники сигналов СРНС GPS
Й платформах AMD Athlon 1,73 ГГц [82, 83, 84] и TMS320C6201
200 МГц [69, 85].
Снижение требований к производительности ЦПУ также до¬
стигается за счет пакетной обработки отсчетов [86, 87]. На неболь¬
ших интервалах времени опорные сигналы меняются медленно
Л поэтому могут считаться постоянными (в рамках интервалов).
Следовательно, операции умножения отдельных отсчетов ПЧ и
опорного сигнала можно заменить операцией умножения пакета
отсчетов ПЧ на среднее значение опорного сигнала на этом интер¬
вале. Различают два типа пакетной обработки при вычислении
корреляции. На рис. 3.6 изображена схема одного канала МКК,
где пакетная обработка используется при вычислении корреляции
с опорной частотой.
После умножения отсчетов ПЧ и опорной ПСП в каждом
квадратурном канале формируются частичные суммы отсчетов
демодулированного сигнала, которые затем умножаются на от¬
счеты опорной частоты. Таким образом, вместо 4N операций
умножения (где N — длина пакета) при вычислении корреляции
с опорной частотой достаточно выполнить всего четыре операции.
Дополнительное ускорение вычислений можно получить, если
формирование частичных сумм реализовать аппаратно на основе
программируемых интегральных схем или использовать таблич-
Рис. 3.6. Пакетная обработка при вычислении корреляции с опорной частотой
107
ный метод. Второй подход имеет ограничения из-за объема памят^
необходимой для хранения таблицы; ее размер для пакета длищ^
N равен 2N байт. Очевидно, что такая схема приводит к энеряе
тическим потерям, величина которых зависит от доплеровско^
сдвига несущей частоты и длины пакета.
На рис. 3.7 приведен пример пакетной обработки при вычис.
лении корреляции с опорной ПСП. В данной схеме формируются
частичные суммы произведений отсчетов ПЧ и опорной частоты
Суммирование осуществляется на интервалах между сменами
знака символов ПСП. Далее частичные суммы интегрируются
с учетом знака для получения окончательных результатов. Длина
пакета при таком подходе является переменной, что усложняет
вычисление частичных сумм. Достоинство этой схемы — в отсут¬
ствии энергетических потерь при вычислении корреляции.
Эффективность вышеописанных методов увеличивается, если
использовать их комбинации. Например, в работе [88] показано,
что совместное использование SIMD-команд и битовых операций
позволяет реализовать на платформе Pentium М с тактовой часто¬
той 600 МГц 12-канальный приемник сигналов GPS с частотой
дискретизации входного сигнала, равной 5,71 МГц, и двухразряд¬
ным квантованием отсчетов ПЧ. При этом алгоритм вычисления
корреляции потребляет менее 70 % ресурсов ЦПУ.
Рис. 3.7. Пакетная обработка при вычислении корреляции с опорной ПСП
108
0цтимизации организации вычислении в программном кор-
ддторе известными путями, такими как использование SIMD-
битовых операций и пакетной обработки, недостаточно
* преодоления фундаментальной трудности низкой производи-
еЛьЯ0СТИ космического базирования. Как писал в своей дис-
сертан,ионной работе разработчик одного из радионавигационных
приемников на основе программного коррелятора, «практическая
еализация программных навигационных приемников наталки¬
вается на существенные трудности из-за того, что возможности
Программируемых процессоров по многоканальной обработке
широкополосных сигналов, в том числе навигационных, все еще,
как правило, недостаточны» [85]. Отметим, что в работе [85] рас¬
сматривалась реализация программного коррелятора на таких
ЦПУ, как ADSP 2189 с тактовой частотой 80 МГц и TMS320C6201
с тактовой частотой 200 МГц, в то время как проектировщики
БАСН до недавнего времени имели в распоряжении лишь радиа¬
ционно стойкий аналог ADSP 21020 с тактовой частотой, не пре¬
вышающей 20 МГц.
Ширина спектра входного сигнала составляет единицы мега¬
герц. Частота взятия отсчетов, согласно теореме Котельникова,
должна превышать ширину спектра входного сигнала как мини¬
мум в два раза. Таким образом, программный коррелятор должен
сформировать опорный сигнал и вычислить его свертку с миллио¬
нами отсчетов входного сигнала в секунду. Как было показано
выше, такая задача не всегда по силам даже современным ЦПУ
общего назначения, не говоря уже о низкопроизводительных про¬
цессорах, используемых на борту ИСЗ.
3.2.4. Использование неполного ансамбля
входных отсчетов
Автором и коллегами был предложен простой и эффективный
Метод [60], позволяющий осуществлять одновременную обработку
сигналов нескольких навигационных спутников за счет избыточ¬
ной помехоустойчивости при приеме сигналов. Идея метода состоит
в экономии ресурсов ЦПУ благодаря использованию неполного
ансамбля входных отсчетов при обработке сигналов НС в МКК.
При этом освободившиеся ресурсы ЦПУ могут быть использованы
Для обработки сигнала следующего НС.
Похожий метод использовался при проектировании мульти¬
плексных приемников СРНС GPS/ГЛОНАСС [89]. Особенностью
Этих приемников является переключение одного канала корреля-
109
тора на прием сигнала каждого следующего НС через интервалу *
времени в несколько миллисекунд. Целью мультиплексирован^
было улучшение эксплуатационных характеристик приемни^
при сохранении возможности работы одновременно по несколькщ,
НС. Наименьшая допустимая частота переключения канала пр^
мультиплексировании определяется скоростью передачи символу
навигационного сообщения и составляет 50п (Гц), где п — чисд0
НС, чьи сигналы обрабатываются одновременно. Следовательно
для обработки сигнала одного НС в мультиплексном приемнике цс.
пользуется в п раз меньше отсчетов входного сигнала, что позволя-
ет реализовать на основе одного канала коррелятора п виртуальных
каналов без потери символов навигационного сообщения. При этом
энергетические потери в каждом виртуальном канале составляют
10 lg п (дБ) независимо от уровня принимаемого сигнала.
3.2.5. Метод SoftFlex
В приемниках с программным многоканальным коррелятором
использование неполного набора входных отсчетов может быть
усовершенствовано таким образом, чтобы перераспределить поте¬
ри между каналами МКК в зависимости от уровня принимаемых
сигналов. Это означает, что потери в каналах с низким уровнем
сигнала можно уменьшить за счет тех каналов, в которых имеется
некоторый запас помехоустойчивости. Благодаря программной
реализации МКК использование входных отсчетов в каждом
канале коррелятора может осуществляться порциями с разной
длительностью и периодичностью. Допустимое количество пропу¬
щенных отсчетов в канале МКК определяется уровнем мощности
принимаемого сигнала.
Пусть qt — отношение сигнал/шум (ОСШ) для N-го НС, a q0 —
минимальное значение ОСШ, начиная с которого целесообразно
прореживание входных отсчетов. Тогда коэффициент использо¬
вания сигнала N-го НС, который определяется как отношение
количества входных отсчетов, использованных при вычислении
свертки на некотором интервале времени Т, к общему числу от¬
счетов на этом интервале,
1» 4i -%>
h = ,
l<Zo / Qi> >%•
Таким образом, потери в г-м канале МКК при прореживании
составят 10 lg (<?j/g0) дБ, что соответствует превышению ОСШ в
этом канале относительно выбранного порогового значения. Сле-
110
тельно, чем меньше ОСШ в канале МКК, тем меньше потери
^Й0М канале. Для тех каналов, в которых ОСШ меньше д0, при
8 ^числении свертки используются все входные отсчеты. Таким
в^а3°м в отличие от мультиплексного приемника, в приемнике
° программным МКК, реализующем метод SoftFlex, число каналов
является пеРеменным и зависит от условий приема сигналов.
SoftFlex — патентованное решение цифрового приемника спут¬
никовой навигационной системы. Оно отличается дополнительно
введенным измерителем загрузки процессора и блоком управления
коррелятором. Фактически это означает реализацию обратной свя¬
зи от измерителя загрузки к коррелятору, как показано ниже.
На рис. 3.8 представлена архитектура программного обеспече¬
ния (т. е. основные модули ПО и потоки данных между ними) для
реализации технологии SoftFlex. На рисунке не показаны вход¬
ные отсчеты, вектор потребителя и набор видимых НС, которые
не являются поканальными, но едины для всего приемника, в то
время как остальные данные (такие как фаза кода и несущей,
ОСШ и пр.) относятся к одному каналу.
Для реализации SoftFlex используются четыре основных бло¬
ка — коррелятор, блок первичной обработки, блок вторичной об¬
работки и менеджер каналов. Коррелятор производит первичные
накопления / и Q. В блоке первичной обработки накопления / и Q
в каждом из каналов используются для того, чтобы получить оцен¬
ки фазы кода, фазы несущей, а также ОСШ. На основании оценок
фазы кода и фазы несущей проводятся так называемые сырые
измерения — псевдодальность и псевдоскорость. В блоке вторич¬
ной обработки осуществляется вычисление вектора потребителя
на основании сырых измерений, полученных в разных каналах.
Кроме того, на основании альманаха системы, передаваемого в на¬
вигационном сообщении, и положения потребителя вычисляется
набор видимых НС, сообщаемый менеджеру каналов. Менеджер
каналов, используя данные о наборе видимых спутников, статусе и
ОСШ в каждом из каналов, управляет коррелятором, устанавливая
Для каждого из каналов коэффициент использования сигнала.
Пусть Ti = к^Т — интервал времени, на котором осуществляется
вычисление свертки входного сигнала с опорным сигналом i-го НС.
На рис. 3.9 представлена временная диаграмма работы канала
МКК при обработке сигналов п НС. Заштрихованные области на
Диаграмме соответствуют порциям входных отсчетов, которые
Используются для вычисления свертки в i-м виртуальном канале.
При таком способе применения отсчетов входного сигнала в МКК
средняя и максимальная загрузки ЦПУ, обусловленные вычисле¬
нием свертки, совпадают и не зависят от длительности интервала
111
А
О
X
о; ц
5 СГ:
0
сг у
О о
X н
Ш О
112
Рис. 3.8. Программное обеспечение для технологии SoftFlex
HKAi
НКАг
НКАП
й
♦-7V-M—Тг ► <—Тп—
< Т ►
4-7Y-*—Т2—► +— гп—►
< Т ►
Рис. 3.9. Временная диаграмма работы канала МКК при обработке
сигналов п НС
времени Т. Кроме того, период вычисления свертки для всех НС
одинаков и равен Т. Для приема сигналов НС без потери символов
навигационного сообщения период вычисления свертки должен
быть меньше длительности символа. Более жесткое ограничение
на Т накладывает темп замыкания петли слежения за фазой не¬
сущей частоты, определяемый полосой фильтра схемы фазовой
автоподстройки частоты (ФАПЧ). Для динамичных объектов темп
замыкания ФАПЧ не превосходит 5 мс.
Требование к кратности Tt эпохам кода существенно сужает
множество возможных значений коэффициентов kt из-за ограниче¬
ний на Т. При Т = NTC, где Тс — период эпохи кода, коэффициенты
Канал 2
Канал 1
Высокий
темп
Низкий
темп
Рис. 3.10. Схема программного коррелятора при использовании метода SoftFlex
113
kt могут принимать только N возможных значений, что при небодь
ших значениях N снижает эффективность использования pecypCOj
ЦПУ. С другой стороны, при T-t меньше эпохи кода ухудшают^
кросс-корреляционные свойства ПСП, так как для вычислен^
свертки используется укороченная ПСП. Однако, как показац0
далее, кросс-корреляционные свойства укороченной ПСП могут
быть восстановлены в режиме когерентного слежения за фазой
несущей частоты. Поэтому целесообразным представляется выбор
периода вычисления свертки, равного 1 мс, а прореживание отсче¬
тов входного сигнала лучше осуществлять внутри эпохи кода.
Таким образом, схема коррелятора в архитектуре SoftFlex
меняется по сравнению с канонической: в него для каждого из
каналов вводится коэффициент использования сигнала, который
применяется как в генераторах (ПСП и несущей), так и в корре¬
ляторах (рис. 3.10).
3.2.6. Проектирование бортовой аппаратуры спутниковой
навигации с использованием метода
SoftFlex
В целях минимизации загрузки ЦПУ при формировании отсче¬
тов опорной ПСП предлагается использовать табличный метод. Он
заключается в предвычислении значений ПСП с шагом, заданным
частотой / /2, и последующем использовании этих значений для
корреляции с отсчетами входного сигнала.
При реализации данного метода возникают два источника энер¬
гетических потерь. Первый — квантование фазы опорной ПСП,
требуемое для того, чтобы обеспечить совпадение фаз входной и
опорной ПСП с погрешностью до единиц метров. Второй источник
потерь — использование нулевого доплеровского сдвига частоты
при формировании опорной ПСП, необходимое для минимизации
вычислительных расходов. Ниже получены соотношения для
оценки энергетических потерь в генераторе кода, использующем
табличный метод.
Отсчеты опорной ПСП вычисляются при нулевом доплеров-
ском сдвиге частоты для N = 2п значений начальной фазы кода.
Квантование фазы приводит к энергетическим потерям, которые
определяются уменьшением корреляции опорной и входной ПСП.
Если 5 = Ts/N — шаг квантования фазы ПСП, где Tg = 2/f —
интервал дискретизации, то максимальная ошибка представления
фазы ПСП равна §/2, а энергетические потери, вызванные кван¬
тованием, определяются соотношением
114
n = -201gfl|||,
(3.4)
где — нормированная АКФ ПСП.
Максимальные потери наблюдаются для ПСП, имеющих наи¬
более узкий корреляционный пик. В этом случае корреляционный
пцк на интервале ±1 символа ПСП описывается соотношением
Д(т) ' 65
1-1 +
1023
т — длительность символа ПСП.
(3.5)
где -с
Из соотношений (3.4) и (3.5) следует, что
Л = -201g
1-
65
1023 JNI
fc
(3.6)
где fc= — = 1,023 МГц; / — частота дискретизации.
В табл. 3.8 приведены результаты расчета энергетических
потерь, вызванных квантованием фазы опорной ПСП, для / =
= 5,71 МГц.
Выбор числа уровней квантования фазы кода опорной ПСП
определяется разумным компромиссом между объемом памяти,
требуемым для хранения отсчетов ПСП, и энергетическими по¬
терями, вызванными квантованием фазы.
Потери от использования нулевого доплеровского сдвига часто¬
ты определяются доплеровским сдвигом частоты входного сигнала
fd и длительностью интервала корреляции Т. Если фазы опорной
и входной ПСП в начале интервала корреляции совпадают, то
в конце интервала фазы отличаются на величину
Аф = Т:~fdT>
fh
Таблица 3.8
Энергетические потери, вызванные квантованием
фазы опорной ПСП
N
П. ДБ
1
1,84
2
0,87
4
0,42
8
0,21
16
0,1
32
0,1
115
где fL = 1575,42 МГц — номинальное значение несущей часто
ты Lj. В силу свойств АКФ разность фаз не должна превышав
один символ ПСП. Следовательно, максимальная длительность
интервала корреляции при использовании опорной ПСП с нуле_
вым доплером определяется соотношением Т < ;—г. Прц
fc / 4] x\fdI
этом условии корреляция опорной и входной ПСП на интервале
Т определяется соотношением
где Ат = —
f
1с
Ат п
R(fd,T) = 1-—
Ч 1 k = l
(3.7)
1 —
V
разность длительностей символов
1 + &//L,
входной и опорной ПСП; п — число эпох опорной ПСП на ин¬
тервале Т; b,k = 1, если на k-тк эпохе произошла перемена знака
символа, и ^ = 0 — в противном случае.
Соотношение (3.7) поясняется рис. 3.11, на котором приведен
пример корреляции входной и опорной ПСП при ненулевом до-
плеровском сдвиге частоты входного сигнала.
Оценка сверху энергетических потерь на интервале Т = пхс мо¬
жет быть получена следующим образом. Максимальное количество
эпох ПСП на интервале п символов навигационного сообщения
равно п + 1. Наибольшие потери получаются, если перемена зна¬
ка происходит на каждой эпохе. При этом потери определяются
соотношением
т] = -201g
1 (п + 1)
1 11
2
1 1 + fd / fbl J_
(3.8)
+1 ■
Фазы ПСП
совпадают
Дт
2Дт
ЗДт
4Дт
5Дт
Входная
ПСП
Фазы ПСП
отличаются на
величину fdT
Л
Опорная
* ПСП
1
•* Интервал корреляции Т ►
Рис. 3.11. Корреляция входной и опорной ПСП при ненулевой частоте Доплера
116
1.3
LD
cl
S
CL
Ф
h-
o
с
Ф
Ф
a.
ф
x
(0
Доплеровский сдвиг частоты, кГц
Рис. 3.12. Энергетические потери при вычислении свертки
в зависимости от доплеровского сдвига частоты входного
сигнала
На рис. 3.12 представлены результаты расчета энергетических
потерь, полученных в соответствии с (3.8), в зависимости от
доплеровского сдвига частоты и длительности интервала корре¬
ляции. Для сравнения там же маркерами показаны результаты
моделирования. Из них следует, что соотношение (3.8) достаточно
точно описывает функцию потерь. Разница между результатами
моделирования и расчетными не превосходит 0,01 дБ.
117
Так как к формированию таблицы отсчетов опорной ПСП це
предъявляется жестких требований по времени выполнения,
в целях экономии памяти таблица может формироваться дин^
мически, т. е. для каждого канала МКК отдельно при очередно^,
назначении спутника на канал. Таким образом, размер таблиц^
будет прямо пропорционален числу каналов МКК. На рис. З43
приведен пример организации такой таблицы для одного кана¬
ла МКК при / = 5,71 МГц. Таблица состоит из N блоков по Д?
32-разрядных слов, содержащих одноразрядные отсчеты опорной
ПСП для двух последовательных эпох С/А кода. Такая организация
таблицы позволяет для заданной фазы кода сформировать 32 отсчета
опорной ПСП, используя два обращения к памяти, две операции
арифметического сдвига и одну операцию логического сложения.
В приведенном примере N = 180, М = 16. Следовательно, размер
таблицы для одного канала МКК составляет 11,25 Кбайт.
3.2.6.1. Генератор несущей и компенсация доплеровского
сдвига частоты
Как и для генерации опорного кода, для генерации опорной
несущей предлагается использовать табличный метод. В данном
случае производится предвычисление комплексных отсчетов зна¬
чений несущей и последующее использование этих значений для
корреляции с отсчетами демодулированного сигнала.
Табличная реализация генератора несущей, имея очевидные
преимущества перед традиционным способом формирования
опорной частоты с помощью генератора, управляемого кодом,
предъявляет жесткие требования к объему памяти, необходимому
для хранения отсчетов. Действительно, здесь требуется предвы-
числение комплексных отсчетов для множества частот |Д, | ^
с нулевой начальной фазой (включающего диапазон изменения
доплеровского сдвига входного сигнала) на всем интервале корре¬
ляции Т. При этом шаг по частоте 5/ определяется длительностью
интервала корреляции: чем больше интервал, тем меньше должен
быть шаг. Максимальная погрешность представления несущей
частоты входного сигнала для такой таблицы равна 5//2. Ниже
приведена оценка минимально допустимого шага 5/ в зависимости
от интервала корреляции и получена оценка энергетических потерь
в зависимости от погрешности представления частоты.
Пусть S{k) = е!'(2я^+(р) и Sr{k) = ei2nf'kT°, k = 0...N-l — ком¬
плексные отсчеты несущей частоты входного и опорного сигналов
118
R(Af,T) = ±- Y,S(k)S*(k)
1
N-l ^ 1.1 p^ni^fNTs
— e 4
N 1 _ e2mAfTs ’
(3.9)
k=0
где Af = f ~ fr — погрешность представления входной частоты.
Следовательно, потери, получаемые уменьшением модуля
свертки из-за неточности представления входной частоты, могут
быть найдены следующим образом:
На рис. 3.14 показаны результаты расчета энергетических по¬
терь в зависимости от погрешности представления входной частоты
для интервала корреляции, равного эпохе кода, и / = 5,71 МГц.
Из приведенного графика следует, что для максимально до¬
пустимых потерь, равных 0,1 дБ, погрешность представления
входной частоты не должна превышать 85 Гц, т. е. 5/ = 170 Гц.
Таким образом, для диапазона частот ±50 кГц размер таблицы
М равен 589, что при восьмиразрядном квантовании амплитуды
опорной частоты составляет примерно 3,2 Мбайт.
Оценим теперь потребную производительность процессора для
реализации генератора несущей и компенсации доплеровского
сдвига частоты. Для вычисления свертки на интервале корреля-
0,35
(3.10)
(
О 10 20 30 40 50 50 70 30 90 100 110 120 130 140 150
Погрешность представления частоты, Гц
Рис. 3.14. Энергетические потери при вычислении свертки
на интервале эпохи кода
119
дни Т в одном канале МКК в соответствии с (3.9) требуется 4^
операций умножения и 2N + 2(N — 1) операций сложения.
выполнение операции сложения/умножения осуществляется
один такт работы ЦПУ, то для реализации одного канала МКк
производительность ЦПУ должна быть не ниже 4fg. Для частоты
взятия отсчетов fs = 5,71 МГц производительность ЦПУ долясд3
быть выше 20 МГц, что недопустимо для БАСН.
Для снижения требований к ЦПУ предлагается использовать
пакетную обработку входных отсчетов при вычислении свертки
Идея пакетной обработки состоит в использовании одного отсче¬
та опорной несущей частоты для нескольких последовательных
отсчетов несущей частоты входного сигнала. Это возможно, если
изменение фазы опорной несущей частоты за время пакета незна¬
чительно. В таком случае соотношение (3.9) примет вид
JVj-1 fjv2-l ] .
Л(Д/,Г)«— £ £ S(N2m + n) S;(A2m), (3.11)
™ m=0 [ п=0 J
где N = N^2. Тогда для вычисления свертки в одном канале МКК
необходимо 4операций умножения и 2А1 + 2(N - 1) операций
сложения, т. е. требования к производительности ЦПУ можно
снизить в 4А2/(А^2 + 3) раз. Например, при N2 = 16 производи¬
тельность ЦПУ должна быть не ниже 1,1875 fs.
Оценим теперь энергетические потери при вычислении свертки,
вызванные пакетной обработкой. Заметим, что длина пакета за¬
висит от доплеровского сдвига несущей частоты входного сигнала:
чем больше сдвиг, тем короче должен быть пакет. Для внутренней
суммы в (3.11) справедливо соотношение
N2-l л J2nfN2T.
£ S(^2m + n)=eW2^+v) (ЗЛ2)
п-0
1-е1
В предположении, что погрешность представления несущей
частоты входного сигнала равна нулю и с учетом (3.12), соотно¬
шение (3.11) может быть записано в виде
1 ■ 1 — a^nf^2Ts
Д(Д/,Г)= — ег(Р —(3.13)
N 2 1 - е ' *
Следовательно, энергетические потери определяются соотно¬
шением
4(f,N2) = ~201ё
1
sin (nfN2Ts
N2
sin (nfTg)
(3.14)
120
о 5 10 15 20 25 30 35 40 45 50
Доплеровский сдвиг частоты, Гц
Рис. 3.15. Энергетические потери при пакетной обработке отсчетов
демодулированного сигнала
На рис. 3.15 представлены результаты расчета энергетических
потерь при пакетной обработке в зависимости от доплеровского
сдвига частоты входного сигнала для f = 5,71 МГц.
Принимая во внимание бинарное квантование входного сигна¬
ла, вычисление внутренней суммы в соотношении (3.11) может
быть осуществлено с использованием таблицы размером 2^2 байт,
содержащей предвычисленные значения частичных сумм. Таким
образом, для вычисления свертки в одном канале МКК потребуется
4iV^ операций умножения, 2Л^ + 2(Л^1 — 1) операций сложения и
2Ny обращений к таблице, что вполне приемлемо для БАСН.
3.2.7. Восстановление кросс-корреляционных свойств
укороченной псевдослучайной последовательности
Следует отметить, что при уменьшении длительности интервала
корреляции увеличивается уровень боковых лепестков АКФ, что
является следствием ухудшения ортогональных свойств укорочен¬
ных кодов Голда. Очевидно, что уменьшение соотношения между
глобальным и локальными максимумами АКФ ведет к ухудшению
кросс-корреляционных свойств укороченной ПСП и, следователь¬
но, к снижению помехоустойчивости БАСН в условиях широкого
Динамического диапазона уровня входного сигнала (свойственного,
Например, ЭОС). В этом разделе мы получим соотношения для
121
анализа характеристик квадратурных отсчетов на выходе Ml^
с переменным временем интегрирования, а потом предложи^,
метод, позволяющий восстановить свойства ПСП в режиме ког^.
рентного слежения за несущей частотой.
Пусть Т = NTg — длительность интервала корреляции. Обо.
значим через т, fd, ср (соответственно) задержку фазы ПСП, допле.
ровское смещение и фазу несущей частоты на начало интервала
корреляции. Комплексные отсчеты сигнала на входе МКК S и щ.
счеты опорного сигнала МКК Sг запишем в виде
S(n) = с(пТ$ - x)e^2nfdnTs+<P);
Sr(n) = c(nTs- т)е4(2я^п:г*+ф), п = 0, ..., iV-1, (3.15)
где c(tn) — отсчет ПСП входного сигнала в момент времени i ;
x,fd,ф— оценки т, fd, ф на начало интервала корреляции, полу¬
ченные в результате работы ССЗ и ФАПЧ. Тогда комплексный
выход МКК определяется соотношением:
R = j-N^S(n)S*(n) = j-N^c(nTs - x)c(nTs -
n=0 n=0
(3.16)
где Д/ = fd -fd и Дф = ф^ - (pd — погрешности оценки доплеров-
ского смещения и фазы несущей частоты.
При условии AfT « 1, которое выполняется в фазе установ¬
ленного режима работы следящих систем, третий сомножитель
в сумме (3.16) является медленно меняющейся функцией времени.
Поэтому его можно заменить средним значением этой функции
в интервале корреляции. Соответственно (3.16) преобразуется
К виду
R * Рт(Дт)ег(лА^+А<р)зтс(Д/Г), (3.17)
1 N-1
где Рт-(Дт) = — ^ c(nTs - т)c(nTs - т) — АКФ ПСП; Дт = т - т —
N п=0
погрешность оценки фазы ПСП.
Квадратурные накопления на выходе МКК определяются как
вещественная и мнимая части результата свертки: I = Re {R},
Q = Im {R}.
Если длительность интервала корреляции кратна периоду ПСП,
то функция рт(Дт) не зависит от т. Действительно, пусть для про-
122
тотЫ х- mTg. Тогда выражение для АКФ с учетом периодичности
jjCH может быть записано в виде рт(Лт) = S-^ + S2, где
, тп-1
Si = — £ С [(и - т + N)TS ]с [(п-т + N)TS + Дт];
п=О
, N-1
S2 = ^ Z С [(П _ m^Ts ]с _ m^Ts + Лт}
п=т
Сделав замену индексов суммирования, получим
, N-1
Sl=— £ c(nTs)c(nTg+ Дт);
n=N-m
, N-m-1
S2 = Т7 Z c(nTs )c(nTs+Дт).
^ л=0
Д-1
Следовательно, рт(Дх) =— ^ c(nTs)c(nTg + Дт) зависит только
N п=0
от погрешности оценки фазы ПСП. Если длительность интервала
корреляции меньше периода ПСП, то при анализе характеристик
квадратурных отсчетов на выходе МКК необходимо учитывать
фазу ПСП на начало интервала корреляции. На рис. 3.16 при¬
ведены примеры нормированной мощности сигнала на выходе
МКК, полученной при нулевом доплеровском смещении частоты
для интервалов корреляции, равных 1 и 0,5 мс.
Из представленных графиков видно, что при уменьшении интер¬
вала корреляции в два раза уровень боковых лепестков АКФ для
выбранной ПСП увеличился примерно на 5 дБ. В табл. 3.9 приве¬
дена зависимость уровня боковых лепестков АКФ от длительности
интервала корреляции, полученная путем моделирования при нуле¬
вом доплеровском смещении частоты. Результаты, представленные
Фаза кода, символы ПСП Фаза кода, символы ПСП
Рис. 3.16. Нормированная мощность на выходе МКК
123
Таблица 3.9
Зависимость уровня боковых лепестков АКФ
от длительности интервала корреляции
Время корреляции, мс
Локальный максимум АКФ,
дБ
ОД
-6,9
0,2
-9,2
0,3
-11,5
0,4
-13,1
0,5
-13,6
0,6
-15,7
0,7
-16,5
0,8
-18,2
0,9
-19,4
1
-23,3
в таблице, соответствуют наибольшему значению локального мак¬
симума АКФ по всем начальным фазам и номерам ПСП.
В целях повышения помехоустойчивости алгоритмов слеже¬
ния за параметрами входного сигнала в установившемся режиме
работы ФАПЧ и при известном положении границы символа на¬
вигационных данных относительно внутренней шкалы времени
БАСН результат свертки (3.17) усредняют на интервале, равном
нескольким эпохам кода. Погрешности оценок задержки фазы
ПСП, частоты и фазы несущей частоты в этом режиме меняются
медленно, поэтому их можно считать постоянными на данном
интервале. Пусть Rm — свертка входного сигнала с опорным,
вычисленная на т-й эпохе кода в соответствии с (3.17). Тогда
выражение для среднего значения свертки на интервале М эпох
кода может быть записано в виде
1 (М-1 1
Дт=— ХРгт(Дт> е1'(лЛ/Г+Лф)зтс(Д/Т), (3.18)
[m=0 J
j N-1
где рт (Дт) = — У]с(пТ3-тт)с(пТ8-хт) и тт —задержка фазы
т N п
п=0
ПСП и ее оценка на начало т-то интервала корреляции. Предпо¬
ложим, что начало m-то интервала корреляции выбирается таким
образом, что выполняется соотношение тт =тт_1 - Т. Тогда
^ М-1 1 M-1N-1
М X Ртт (Дт) = X X с [(n + mN^TB - т0 ]с [(« + mN) Ts - т0 ].
m=0 т=0 п=0
R = — X
М ^
т=О
124
Время
Слежение
к =0,5
Размер
окно
Время
Сдвиг окна
Рис. 3.17. Временная диаграмма работы канала МКК
Заменив индексы суммирования тип на k = n + mN, полу¬
чим
, М-1 МЛГ-1
„ 2Х<4т> = Ш I ФТ,-ч)ФТ,-Ч).
11 т=О 11П k=0
т. е. среднее значение суммы М корреляций на интервале Т равно
значению корреляции входной и опорной ПСП на интервале МТ.
Следовательно, соотношение глобального и локального максиму¬
мов среднего значения суммы АКФ для укороченной ПСП такое
же, как у АКФ для ПСП в М раз длиннее. Например, если М
кратно Тс/Т, где Т — длительность эпохи кода, то усредненная
АКФ будет иметь такие же характеристики, как АКФ исходной
ПСП. Описанный алгоритм схематично изображен на рис. 3.17,
где k обозначает долю отсчетов, используемых в вычислении
свертки.
3.2.8. Оценка характеристик радионавигационного приемника
на основе метода SoftFlex
Оценим при помощи математического моделирования коли¬
чество спутников, за которыми можно осуществить слежение,
используя SoftFlex. Для этого нужно задаться опорной орбитой
125
ИСЗ и производительностью ЦПУ, установленного на борту BACjj
На основе параметров опорной орбиты нужно моделировать ОСЦ}
таким же образом, как это было сделано в главе 2, а на осноВе
производительности ЦПУ — оценить количество реализуездЬ15(
каналов. Здесь и далее каналы корреляции, которые мо®В()
реализовать «прямолинейно», т. е. без использования Softb'lex
мы будем называть физическими каналами. НС, за чьими парв.
метрами сигналов осуществляется слежение, мы будем называть
следимыми.
Ниже приведены параметры орбиты НОС, которая использова¬
лась для моделирования:
Полуоси, км 7500
Эксцентриситет О
Склонение, ... ° 70
Прямое восхождение, ... 0 60
Средняя аномалия 0
На рис. 3.18 и 3.19 показаны результаты моделирования.
Рис. 3.18 отображает число следимых спутников в зависимости
от числа физических каналов и порогового C/NQ, при котором
имеет смысл проводить прореживание отсчетов. Пороговое C/Nq
зависит от того, как спроектированы следящие цепи: если за¬
даться порогом 34 дБГц, то даже для двух-трех физических
каналов количество следимых спутников составляет от семи до
Число следимых
Cl
С
35
34 - i—,г——1,
2 3 4
Число физических каналов
Рис. 3.18. Число следимых спутников в зависимости от C/Nq и числа
физических каналов
126
40-
39 -
38-
2
О 37 -
й>
0
1
£>
ё зб -
а
0)
а
С
35-
34-
Время первого
решения, с
I
150
175
200
225
250
275
290
Число физических каналов
Рис. 3.19. Время первого решения (с) в зависимости от C/Nq и числа
каналов корреляции
девяти. Современные аппаратные корреляторы представляют со¬
бой многоканальные устройства с числом каналов от 12 до 16.
Иными словами, программный коррелятор при использовании
метода является решением, сравнимым по числу каналов с клас¬
сическими аппаратными корреляторами даже при реализации на
низкопроизводительных ЦПУ.
В рамках проверки архитектуры БАСН на основе программного
коррелятора было также проведено моделирование важнейшей си¬
стемной характеристики БАСН, которая зависит от числа каналов
слежения,— времени первого решения. Как видно из рис. 3.19,
время первого решения в условиях холодного старта для порого¬
вого отношения 34 дБГц и числа физических каналов, не превы¬
шающего три, не будет более 220 с, что приемлемо для БАСН.
3.3. Выводы
В этой главе рассмотрено решение задачи проектирования БАСН
на основе доступных гражданским потребителям радиационно
стойких электронных компонентов. В рамках решения данной
задачи предложена архитектура БАСН на основе программного
коррелятора. Она обладает следующими преимуществами по срав¬
нению с классической архитектурой:
127
• упрощение аппаратной части приемника;
• снижение стоимости разработки;
• снижение времени разработки;
• гибкость, адаптируемость, легкость модификации.
Но самое главное преимущество предложенной архитектур^
заключается в том, что она позволяет построить БАСН с исполь.
зованием доступных электронных компонентов. Это основной
результат данной главы.
Мы подробно рассмотрели реализацию предложенной архитек.
туры БАСН на базе программного коррелятора и показали, чТо
основным потребителем ресурсов ЦПУ является алгоритм вычис¬
ления корреляции входного сигнала с опорным. Поэтому усилия
разработчиков приемников СРНС с программным МКК должны
быть направлены на его оптимизацию.
В рамках анализа возможных способов оптимизации были рас¬
смотрены три практических аспекта:
1) методы реализации программного МКК;
2) способы организации памяти;
3) пути уменьшения загрузки ЦПУ.
Найдены методы реализации программного МКК, позволяющие
в разы уменьшить число операций, необходимых для вычисления
свертки, и снизить таким образом требования к производитель¬
ности ЦПУ. Использование SIMD-команд, битовых логических
операций, а также пакетной обработки отсчетов позволяет осу¬
ществлять обработку сигналов под управлением ЦПУ с темпом
поступления отсчетов.
Получены оценки размера памяти, необходимой для хранения
отсчетов ПСП, и энергетических потерь, связанных с табличной
реализацией генератора кода МКК. Показано, что в условиях
максимальной динамики потребителя эти потери не превышают
0,3 дБ. В целях снижения требований к производительности ЦПУ
при компенсации доплеровского смещения частоты использована
пакетная обработка отсчетов демодулированного сигнала. Полу¬
чена зависимость энергетических потерь при пакетной обработке
от доплеровского смещения частоты и длительности пакета. По¬
казано, что при максимальном доплеровском смещении частоты
потери, связанные с пакетной обработкой, не превосходят 1,2 дБ.
Таким образом, суммарные потери описанной реализации МКК
в наихудшем случае составят 1,5 дБ.
Была проведена эмпирическая оценка производительности
ЦПУ, необходимой для программной реализации одного канала
слежения за сигналами НС. Показано, что для известных методов
программной реализации МКК при одноразрядном квантовании
128
входного сигнала производительности доступных радиационно
стойких процессоров недостаточно для реализации даже трех
параллельных каналов. Для решения была предложена архитек¬
тура программного МКК с переменным временем интегрирования.
Рассмотрен принцип работы МКК с переменным временем инте¬
грирования, который заключается в использовании неполного
ансамбля входных отсчетов для вычисления корреляции входного
сигнала с опорным. При этом число отсчетов, используемых при
обработке, зависит от уровня принимаемого сигнала и выбранного
порога, начиная с которого целесообразно прореживание входных
отсчетов. Таким образом, один канал МКК может быть исполь¬
зован для обработки сигналов нескольких НС без увеличения
загрузки ЦПУ.
Очевидно, что за увеличение количества измерений мы платим
Ухудшением их качества. Для оценки этого ухудшения был про-
веден анализ характеристик квадратурных отсчетов на выходе
МКК и была получена зависимость отношения локального макси¬
мума АКФ к глобальному от длительности интервала корреляции.
При времени корреляции, равном 10 % длительности ПСП, это
отношение составляет минус 7 дБ, что ведет к ухудшению поме¬
хоустойчивости в условиях широкого динамического диапазона
Уровня входного сигнала. Предложен метод, позволяющий в режи¬
ме когерентного слежения за фазой несущей частоты восстановить
кросс-корреляционные свойства укороченной ПСП.
Все вышесказанное можно обобщить следующим образом: в гла-
Ве 3 разработан и детально описан метод проектирования БАСН на
основе доступных гражданским потребителям радиационно стой-
кИх электронных компонентов. Следует отметить, что принципы
Построения программных корреляторов и использование метода
SotPlex выходят за рамки космических применений. Примеры
Можно найти в работах автора, посвященных проектированию
Приемников сигналов системы Galileo [90] и GPS/ГЛОНАСС при-
емникам массового применения [91-96].
129
Глава 4
ПЕРВИЧНАЯ ОБРАБОТКА СИГНАЛОВ В БОРТОВОЙ
АППАРАТУРЕ СПУТНИКОВОЙ НАВИГАЦИИ
В предыдущей главе мы представили архитектуру БАСН на
основе программного коррелятора. В настоящей главе мы рассмо¬
трим методы первичной обработки сигналов в БАСН на базе пред¬
ложенной архитектуры. Эти методы частично изложены в работах
автора [35, 97-99]. Выделяют два режима работы радионавигаци¬
онных систем: поиск сигнала и слежение за ним [5]. В режиме по¬
иска сигнала осуществляется грубая (и в то же время достаточная
для дальнейшего захвата следящей системой) оценка параметров
сигнала (фазы ПСП и частоты Доплера), а в режиме слежения
реализуется непрерывное и точное их измерение. Эта глава состоит
из двух частей. Первая часть посвящена методам поиска сигналов
в БАСН, а вторая — методам слежения за сигналами.
4.1. Методы поиска сигналов в бортовой аппаратуре
спутниковой навигации
4.1.1. Принципы поиска сигналов в спутниковой
радионавигационной системе
Целью поиска сигналов СРНС является обнаружение сигнала за¬
данного НС в принимаемой смеси сигналов и шума, а также оценка
фазы ПСП и доплеровского сдвига несущей частоты с точностью,
достаточной для инициализации петель слежения за параметрами
сигнала этого НС. Поиск сигнала осуществляется в двумерной
области, определяемой погрешностями априорных оценок фазы
ПСП и доплеровского сдвига несущей частоты. Задача поиска
решается на ограниченном интервале времени, длительность
которого выбирают исходя из двух противоречащих друг другу
критериев. С одной стороны, для большей точности оценок фазы
ПСП и частоты Доплера необходимо удлинять интервал времени
130
иска поиска. С другой стороны, при увеличении времени поиска
*°оЯ(ет перестать выполняться условие постоянства (или малости
^енения) оцениваемых параметров на интервале поиска. Для
стайДаРТНЬ1Х значений мощности сигнала и внутреннего шума
дриемника относительная точность предварительных оценок пара¬
метров сигнала достигается при времени обработки сигнала одного
ДС, равном 5... 10 мс [5]. В такие интервалы времени задержка и
доплеровское смещение частоты сигнала меняются незначительно,
т е. их можно считать константами.
Измерение задержки сигнала основано на обработке ПСП, ко¬
торая является периодическим сигналом (с периодом 1 мс). Сле¬
довательно, временная задержка сигнала однозначно может быть
определена лишь при ее изменении в пределах одного периода
ПСП. Поэтому целесообразно задать статистические характери¬
стики задержки в виде равномерного распределения значений на
интервале 0...1 мс.
Диапазон возможных значений доплеровских частот зависит от
взаимного движения НС и потребителя, а также от характеристик
0Г. С учетом возможного движения для наземного потребителя
обычно полагают, что диапазон вероятных значений доплеровского
смещения частоты равен ±5 кГц, и в пределах этого диапазона
задают равномерное распределение частоты Доплера [5].
Поскольку априорные плотности вероятного распределения
искомых параметров сигнала приняты равномерными в заданных
диапазонах значений, их роль сводится к фиксации двумерной
области, где задаются возможные изменения задержки и частоты
Доплера.
Можно показать [5], что при использовании критерия макси¬
мального правдоподобия в качестве решающей статистики берется
мощность выходного сигнала коррелятора Х(т, /), зависящая от
двух искомых параметров — задержки т и частоты Доплера f. Для
оптимальной оценки выбирают ту комбинацию параметров (т, /},
которой соответствует максимальное значение статистики Х(т, f),
{т,/} = arg max Х(т,/), (4.1)
т,/е[ДГ,АУ]
где arg шах — аргумент максимизации — значение аргумента,
при котором функция достигает максимума; АТ — область воз¬
можного изменения задержки; AF — область возможного изме¬
нения частоты.
Таким образом, задача сводится к процедуре поиска максимума
в двумерной области параметров. Эта задача может быть решена
131
методом перебора всех возможных значений задержки и частот^
Доплера и вычисления решающей статистики (4.1) для кажд0^
из комбинаций параметров сигнала.
Область возможных значений задержки и частоты Доплера
практике дискретизируется, т. е. считается, что параметры т д
/ в диапазонах AT е [xmin, ттах ] и AF е [/min, /тах ] (соответствен,
но) могут принимать дискретные значения = Ат г и fj = Afj, где
i = ш; И j = Щр = W-~Tmin. и Nf= Прк
Ат А/
дискретизации поиск по непрерывным аргументам заменяется
более простой процедурой поиска по конечному числу значений
двух аргументов — т, и
Обоснование размеров выбора ячейки поиска Ат и А/ можно
найти в работе [5]. Там же показано, что для размера ячейки
Ат, равного половине символа ПСП, энергетические потери из-
за дискретизации области поиска по фазе ПСП не превышают
2,5 дБ. При возрастании размеров ячейки на ее краях ухудша¬
ются условия обнаружения сигнала. Поэтому Ат и А/ выбирают
из условия допустимого ухудшения характеристик обнаружения.
Максимальный шаг поиска по частоте А/тах зависит от времени
когерентного накопления отсчетов в корреляторе Т. Допуская
двукратное уменьшение мощности на выходе коррелятора, по-
2
лучим / = — [5]. Например, при Т = 1 мс шаг поиска должен
3 Т
быть не более 667 Гц. На практике при Т = 1 мс шаг выбирают
равным 500 Гц. Наибольшее значение энергетических потерь,
вызванных дискретизацией области поиска по частоте, при шаге,
равном А/тах, составляет 1,65 дБ и достигается в случае, когда
доплеровский сдвиг частоты находится посередине между сосед¬
ними ячейками.
То, что шаг поиска по частоте обратно пропорционален време¬
ни когерентного накопления, является одним из существенных
ограничений при выборе конкретного значения данного параметра.
При приеме слабых сигналов необходимо увеличивать значение
отношения сигнал/шум за счет времени накопления Т до 10 мс
и более. А при увеличении Т следует помнить, что одновременно
необходимо уменьшать размер ячейки разрешения по частоте А/,
а это удлиняет период поиска сигнала. Увеличение времени на¬
блюдения существенно — более чем на 1 мс — порождает еще одну
сложность. Навигационный сигнал, кроме модуляции дальномер-
ным кодом, модулирован еще и навигационным сообщением. При
Т » 1 мс возникают ситуации, когда на интервале когерентного
132
0дления происходит смена знака информационного символа
^ ,т»лттт1пгп рппйтттонтяа ифл пт.тчт.тпаоф puounu rba qt-t поот7тт1.ггтт_
ягационного сообщения, что вызывает скачок фазы результи-
^^щей фазоманипулирующей последовательности. Оптимальное
авйЛ0 обнаружения (4.1) не предусматривает возможность та-
*, скачка и, следовательно, не является оптимальным в этих
словиях. Показано [5], что при увеличении времени накопления
Уозрастает вероятность смены (за данное время) значения символа
навигационного сообщения. Это может вызвать пропуск сигнала в
0бнарУжителе- Решение задачи синтеза оптимального обнаружи¬
теля при возможных случайных скачках фазы сигнала за время
наблюдения приводит к очень сложным алгоритмам обработки
сигнала, которые не реализуются на практике [5].
4.1.1.1. Обзор схем поиска сигналов спутниковой
радионавигационной системы
В данном разделе приведен краткий обзор основных схем по¬
иска, используемых в приемниках сигналов СРНС [6, 85—87,
100-103].
4.1.1.1.1. Последовательный поиск
Данная схема поиска предполагает последовательный анализ
ячеек двумерной области в соответствии с принятой стратегией
перебора кодовых и частотных позиций. Схема вычисления ре¬
шающей статистики для одной ячейки изображена на рис. 4.1.
Частота
несущей
Рис. 4.1. Схема вычисления решающей статистики для одной ячейки
133
В соответствии с этой схемой для заданной фазы ПСП генерат
кода формирует отсчеты опорной ПСП, которые перемножаютс^
отсчетами входного сигнала. Если фазы входной и опорной HClj
совпадают, то в результате перемножения получается гармод^
ческий сигнал, частота которого смещена относительно ПЧ
значении доплеровского сдвига. В противном случае результатов
произведения является шумоподобный сигнал. Для определен^
положения сигнала НС в частотной области используется клас.
сическая схема приемника с двумя квадратурными каналами
Для заданной частотной позиции генератор несущей формируй
квадратурные отсчеты опорного сигнала, которые перемножаются
с отсчетами демодулированного сигнала и интегрируются в тече-
ние времени Т. Решающая статистика, определяемая как сумма
квадратов накоплений в квадратурных каналах, сравнивается
с порогом обнаружения. Если сигнал не обнаружен, то процедура
повторяется для следующей частотной позиции. На рис. 4.2 пред¬
ставлен пример стратегии перебора кодовых и частотных позиций.
Под бином понимается часть области поиска, заключенная между
соседними кодовыми (частотными) позициями (на рисунке обо¬
значенные крупной штриховкой).
В случае априорной неопределенности положения сигнала в
кодовой области число анализируемых позиций по фазе кода
определяется размером бина и длиной ПСП. Чем меньше размер
бина, тем выше чувствительность поиска. Обычно размер бина
задержки выбирают равным половине длины символа ПСП, что
приводит к необходимости поиска в 2046 ячейках задержки.
м
ё 1
5-1
-м
X/
/
/ V
У ./
/ / '
•Ч'
г
- V
■Ж--М
[у ■
V /
\
! •-
t
—
п
»
"J
L
■у-
1
/ '
у
/
Фаза ПСП, бины
Рис. 4.2. Стратегия последовательного анализа ячеек
двумерной области поиска
134
Выше упоминалось, что диапазон изменения доплеровского
сдвйга частоты зависит от динамики потребителя и характерн¬
ых ОГ и для наземного потребителя обычно полагается равным
£§ кГц. Как показано в главе 1, для БАСН этот диапазон со-
^авляет около ±50 кГц. Следовательно, для поиска сигнала во
5Сем диапазоне частот при шаге 500 Гц требуется проверить 201
частотную позицию. Таким образом, общее число ячеек «код/ча-
стота» составляет более 400 тысяч. Для вычисления статистики
8 соответствии со схемой, изображенной на рис. 4.1, необходимо
^полнить (3fsT + 2) N операций умножения и (2fgT + 1) N опе¬
раций сложения без учета затрат на формирование отсчетов опор¬
ных сигналов, где f — частота дискретизации входного сигнала;
у — число циклов поиска. Например, при f = 5,71 Гц, Т = 1 мс и
у = 32 (общее время поиска 32 мс) для проверки всей двумерной
^бласти поиска потребуется выполнить примерно 3,7-Ю-^ опера¬
ций сложения/умножения.
# В связи со значительными затратами ресурсов ЦПУ реализация
последовательной схемы поиска в условиях полной априорной
неопределенности («холодный старт») в приемнике с программным
МКК для космического потребителя представляется нецелесо-
рбразной.
(
4.1.1.1.2. Параллельный поиск в частотной области
В этой схеме поиск корреляционного пика в двумерной обла¬
сти осуществляется одновременно по всем частотным бинам для
фиксированной фазы ПСП. Схема вычисления вектора решающих
статистик представлена на рис. 4.3. Как и в схеме последователь¬
ного поиска, отсчеты входного сигнала перемножаются с отсчетами
опорной ПСП, сформированными генератором кода для заданной
фазы ПСП. Результаты произведения суммируются на интервале
времени Т, согласованном с диапазоном изменения доплеровского
сдвига частоты. Частичные суммы запоминаются в массиве длиной
N. После заполнения массива вычисляется М — точечное БПФ,
где М > N — ближайшая к N степень двойки. При необходимо¬
сти (N < М) массив дополняется нулями. В результате БПФ для
фиксированной фазы ПСП получаются М корреляций входного и
опорного сигналов с шагом, по частоте равным . Если фазы
входной и опорной ПСП совпадают, то на выходе БПФ будут на¬
блюдаться максимум, пропорциональный мощности нового сиг-
135
Отсчеты
сигнала
<S>-*
Генератор
кода
4
1
/
' it
2
l
БПФ
! \2
\ /
n'A
\
N - 1
1
N
Номер и
фаза ПСП
Рис. 4.3. Схема вычисления вектора решающих статистик
для заданной фазы ПСП
нала на частоте, соответствующей ПЧ, плюс доплеровский сдвиг
несущей. Если корреляционный пик не обнаружен, то процедура
повторяется для следующей фазы ПСП.
Формирование частичных сумм вызвано необходимостью
уменьшения объема входных данных для БПФ. Если применить
БПФ к отсчетам, взятым с исходной частотой дискретизации, то
для получения достаточного разрешения по частоте число точек
БПФ должно быть очень большим. Например, для / = 5,71 МГц
и шага по частоте 500 Гц (время когерентного накопления 1 мс)
М = 16384. Учитывая, что для вычисления М — точечного ком-
-М + 2 операций ком-
М
плексного БПФ — требуется —logoM
2 z
плексного умножения и M\og2M операций комплексного сложения
[86], для проверки одной позиции по фазе ПСП необходимо вы¬
полнить порядка одного миллиона обычных операций сложения/
умножения. Следовательно, для перебора всех позиций по фазе
ПСП потребуется около двух миллиардов операций сложения/
умножения, т. е. реализация этой схемы поиска без децимации
частоты дискретизации предъявляет чрезмерные требования к про¬
изводительности ЦПУ в БАСН. Еще одним аргументом в пользу
уменьшения числа точек БПФ является увеличение относительной
погрешности БПФ с ростом М в случае представления данных в
формате с фиксированной точкой [104].
Чувствительность такой схемы поиска по частоте определяется
двумя факторами: параметрами БПФ и временем когерентного
накопления Т. БПФ можно рассматривать как набор цифровых
h
фильтров с центральными частотами Д. = ■
МТ
, г, „ М
k - 0, ± 1, ..., ± —
Ci
и имеющих АЧХ, описываемые соотношением sin с2[я(/ — fk) NT].
136
а АЧХ БПФ представляет собой огибающую АЧХ отдель-
х фильтров. Наибольшие энергетические потери при исполь-
аВии БПФ получаются, когда доплеровский сдвиг частоты
Э°х0дится посередине между соседними бинами и составляет
■ \~
20lg
л N
smci
2 М
дБ. Например, при f = 5,71 МГц, Т = 32/f и
= 256 шаг поиска по частоте составляет 667,5 Гц, а максималь¬
ные энергетические потери равны 1,8 дБ. Дополнительные потери
связаны с децимацией частоты дискретизации fs и составляют
20 lg[зтс(яД/Т)](дБ), где —— < Af < — рассогласование
2 Т QT
частот входного и опорного сигналов. Наибольшие потери на¬
блюдаются на границе интервала изменения Дf (при больших
значениях доплеровского сдвига частоты) и составляют 3,9 дБ.
Таким образом, максимальные суммарные энергетические потери
для данной схемы поиска составляют примерно 6 дБ.
4.1.1.1.3. Параллельный поиск в кодовой
области
Наиболее привлекательной с точки зрения минимизации вы¬
числительных затрат является схема параллельного поиска по
фазе кода. Действительно, если в предыдущей схеме для поис¬
ка корреляционного пика требуется проверить 1023/Дт позиции
в кодовой области, где Дт — шаг по фазе ПСП, то в этой схеме
достаточно проверить AF/Af позиций в частотной области, где AF
и Дf — диапазон поиска и шаг по частоте. Например, при AF =
100 кГц, Дт= 0,5 символа ПСП и Дf = 500 Гц число проверяемых
позиций в этой схеме на порядок меньше, чем в предыдущей. Схе¬
ма вычисления вектора решающих статистик для параллельного
поиска в кодовой области представлена на рис. 4.4.
Идея поиска основана на теореме о свертке, связывающей дис¬
кретное преобразование Фурье (ДПФ) циклической свертки двух
последовательностей с ДПФ самих последовательностей. Пусть
N-1
zn = xmyn+m — циклическая свертка последовательностей
т=0
{*„} и {уп) длины N, axk= ^хпе~2™ы/N; Yk = ^уne~^ikn ' N
п=0 п=0
137
Отсчеты
сигнала
ОБПФ
несущей
Рис, 4.4, Схема вычисления вектора решающих статистик
для заданной частоты
N-1
zk = ^ zne~2nikn 1N — ДПФ {хп}> {уп} и {zn} соответственно. Тог-
п-О
V.*
да Zk = XkYk, где Xk — комплексное сопряжение Xk. Откуда
следует, что обратное ДПФ {Zk} представляет собой свертку по¬
следовательностей {хп} и {уп}-
Если пренебречь влиянием доплеровского сдвига частоты на
фазу ПСП, то вычисление БПФ опорной ПСП достаточно вы¬
полнить однократно при назначении НС на канал, а результат
хранить в ОЗУ. Тогда для каждой частотной позиции необходимо
выполнить по одной операции комплексного БПФ и ОБПФ. Как
показано в работе [87], оптимальное число точек БПФ для данной
.. O{iog2rr/,(T+T,)]l}
схемы поиска определяется соотношением N = 2 LL' JJ , где
Т — длительность эпохи кода; {х} — целая часть х. Например,
при fs = 5,71 МГц и Т = 1 мс размер БПФ N = 8192. Если для
представления комплексного отсчета сигнала используются два
32-разрядных слова, то для хранения массива входных отсчетов и
результата БПФ опорного синала необходимо 128 Кб ОЗУ. Таким
образом, ценой за уменьшение вычислительных затрат в этой схеме
138
иска являются повышенные требования к объему используемого
реализация параллельного поиска по фазе Г1СП в БАСН за-
руднена из-за ограниченных ресурсов памяти.
4.1.2. Методы поиска сигналов в бортовой аппаратуре
спутниковой навигации
4.1.2.1. Комбинированный поиск
Анализ приведенных выше методов поиска сигнала показы¬
вает, что приемы последовательного поиска вряд ли применимы
в БАСН из-за большого диапазона неопределенности по частоте.
При этом параллельный, основанный на использовании преобразо¬
вании Фурье, поиск выглядит предпочтительным с точки зрения
минимизации вычислительных затрат.
О популярности схем поиска, основанных на преобразовании
Фурье, говорит автор опубликованной в 2005 г. диссертации
[85, с. 38]: «Подобные схемы или близкие им по идеологии при¬
меняют все без исключения авторы, представленные во всех без
исключения проанализированных публикациях». Тем не менее
там же указаны «важные недостатки» подхода, основанного на
использовании преобразования Фурье:
• при однобитном квантовании возможна параллельная об¬
работка потоков данных, которая по эффективности вычислений
не уступает БПФ;
• невозможно реализовать многопоточную обработку данных;
• схема с использованием БПФ не может быть применена для
ПСП, период повторения которых превышает интервал когерент¬
ного накопления;
• невозможно организовать одновременную работу каналов,
находящихся в режимах поиска на базе БПФ и слежения.
Первые три недостатка из списка выше не являются практиче¬
ски важными для рассматриваемой задачи проектирования схемы
поиска в БАСН, поскольку:
• в работе [85] эффективность вычислений двух подходов не
сравнивается;
• многопоточность не является необходимым условием построе¬
ния приемника;
• использование длинных ПСП, таких как P(Y) код GPS, в
ВАСН не рассматривается.
Невозможность же организации параллельной работы каналов
слежения и поиска действительно представляет собой практиче-
139
ски важную проблему. Дело в том, что если даже использовдт
ресурсы ЦПУ исключительно для поиска, то поиск потребует Су
щественного процессорного времени (несколько секунд, по оцед^
[85]) для обработки входного массива данных. В течение этог0
времени на вход процессора поступит несколько мегабайт новьц
отсчетов. Выделение буфера данных подобного объема в BAQj
практически невозможно. В этом случае часть входных отсчетов
придется не брать в обработку, что приведет к задаче поддержания
шкалы времени приемника: потеря входных отсчетов в прием,
нике с программным МКК означает потерю тактовых импульсов
задающего генератора и сбой шкалы времени. Сбой шкалы време¬
ни — практически недопустимая ситуация, поскольку она требует
пересчета оцененных в ходе поиска параметров сигнала к новой
шкале времени. Такой пересчет не только влечет дополнитель¬
ные вычислительные расходы, но и не является алгоритмически
тривиальной задачей. Таким образом, исключать часть входных
отсчетов из обработки нецелесообразно, вместо этого необходимо
организовать одновременную работу как поисковой машины,
основанной на БПФ, так и МКК для следящих каналов. Заметим,
что задача подготовки параллельной работы каналов поиска и
слежения встанет тогда, когда часть каналов уже будет находиться
в слежении, но потребуется повторить процедуру поиска. В этой
ситуации потеря входных отсчетов, накапливающихся во время
работы схемы поиска, совершенно недопустима, поскольку при¬
ведет к срыву слежения. В работе [85] отмечается, что «выход из
этой ситуации не описан ни в одной работе».
В случае БАСН диапазон поиска по частоте увеличивается на
порядок по сравнению с наземными потребителями, и последова¬
тельная схема поиска становится неприменимой с вычислитель¬
ной точки зрения. В БАСН, очевидно, необходимо использовать
параллельную схему поиска на основе БПФ, для чего требуется
решить задачу организации одновременной работы каналов сле¬
жения и поиска.
Задача организации одновременной работы БПФ-поисковой
машины и каналов слежения сводится к следующему. Парал¬
лельный поиск осуществляется в фоновой задаче, вне реального
времени. Следовательно, за время поиска его результаты могут
устареть. Поэтому слежение за параметрами сигнала сразу после
обнаружения невозможно и требуется уточнение оценок параме¬
тров найденного сигнала в реальном масштабе времени.
Предлагается для уточнения оценок параметров, полученных
в параллельном поиске, а также для перехода к реальному времени
использовать последовательную схему поиска, которую мы будем
140
Типы поиска
Таблица 4.1
Тип поиска
Условия применения
Параллельный поиск по
частоте
Используется в случае отсутствия априорной информа¬
ции о доплеровском сдвиге частоты. Максимальный диа¬
пазон изменения частоты Доплера достигает ±50 кГц.
Этот тип поиска позволяет анализировать весь частот¬
ный диапазон одновременно для фиксированной фазы
ПСП и приводит к результату существенно быстрее, чем
последовательная схема поиска
Последовательный по¬
иск после БПФ (допо-
иск)
Используется непосредственно после параллельного
поиска по частоте для уточнения оценок параметров
сигнала, полученных в параллельном поиске. Диапазон
поиска по частоте в допоиске вычисляется как произ¬
ведение максимального значения модуля производной
частоты Доплера на максимальное время выполнения
процедуры параллельного поиска. На практике это
приводит к неопределенности по частоте 8 кГц. Анализ
области поиска по частоте осуществляется в сторону
уменьшения частоты Доплера. Шаг поиска по частоте
равен 0,75 кГц
Последовательный по¬
иск в стандартном диа¬
пазоне изменения ча¬
стоты
Используется, если априорная неопределенность по
частоте такова, что просмотр двумерной области по¬
иска «код/частота» осуществляется быстрее, чем па¬
раллельный поиск по частоте. Для этого типа поиска
диапазон изменения частоты не превышает ±5 кГц.
Поиск сигнала осуществляется в двух направлениях,
начиная с предвычисленного значения частоты Доплера,
с шагом 0,75 кГц
Последовательный по¬
иск в узком диапазоне
изменения частоты
Используется в случае, когда априорная неопределен¬
ность по частоте не превосходит 2,5 кГц и применяется
для поиска слабых сигналов. Этот тип поиска реализо¬
ван при помощи двухпроходной двухпороговой схемы
последовательного поиска. Первый порог рассчитан для
отыскания сигналов на уровне 37 дБГц. Если сигнал не
обнаружен при первом проходе, то процедура поиска
повторяется, и на втором проходе используется порог,
оптимизированный для поиска сигналов с уровнем
30 дБГц. Благодаря узкому диапазону неопределенности
по частоте, время когерентного накопления квадратур¬
ных компонентов может быть удвоено. Шаг по частоте
для этого типа поиска равен 0,25 кГц. Ценой возмож¬
ности приема слабых сигналов является увеличение
времени поиска в пять раз для одного частотного бина
141
называть допоиском. Оценки параметров сигнала, полученные
допоиске, можно использовать в следящих системах. Во-первЬ1)(
они были получены в реальном масштабе времени и могут быТа
отнесены к определенному времени измерения на шкале прие^
ника, а во-вторых, они являются более точными, нежели оценку
полученные параллельным поиском.
Таким образом, мы приходим к комбинированному поиску а
БАСН. Комбинированный поиск основывается на том, что вместо
одного типа поиска используется несколько, при этом в каждые
момент времени наиболее эффективная схема поиска выбирается
автоматически на основании априорной информации о частоте
Доплера. Типы поиска, реализованные в БАСН, представлены в
табл. 4.1.
4.1.2.2. Метод расчета параметров усеченной процедуры
Вальда для поиска сигналов в спутниковой
радионавигационной системе
Для обнаружения сигнала в бортовой аппаратуре спутниковой
навигации использована процедура усеченного последовательно¬
го анализа Вальда, гарантирующая минимальное среднее число
наблюдений до принятия окончательного решения для заданного
уровня вероятности ошибок 1-го и 2-го рода [105]. В соответствии
с этой процедурой решающая статистика, вычисленная на интер¬
вале корреляции Т и представляющая собой мощность принятой
смеси сигнала и шума, итерационно суммируется в течение N
последовательных эпох. На каждой итерации статистика сравни¬
вается с порогом, который является линейной функцией номера
итерации. При этом производная этой функции выбирается таким
образом, чтобы в случае отсутствия сигнала в принимаемой смеси
порог увеличивался быстрее статистики, а при наличии сигнала —
медленнее. Решение об отсутствии сигнала принимается, если
на очередной итерации статистика оказывается меньше порога.
В случае если гипотеза об отсутствии сигнала не отвергнута на
интервале N эпох, принимается решение об обнаружении сигна¬
ла. Параметрами алгоритма последовательного анализа, которые
следует оптимизировать, являются начальный порог обнаружения
77q и скорость его изменения Д17. Очевидно, что 770 и АП являют¬
ся функциями мощности шума на выходе коррелятора, которая
зависит от конфигурации приемника (разные малошумящие уси¬
лители, симулятор сигналов СРНС или антенна). Для того чтобы
устранить эту зависимость, мощность шума должна оцениваться
142
jjjiM алгоритмом поиска. В предлагаемом методе оценка мощ-
^ шума обновляется на каждой итерации, когда принимается
0 щеяие °б отсутствии сигнала.
g 0бщем виде аналитических зависимостей вероятности ошибок
jrO0 2-го рода от я0 и АЛ для усеченной процедуры Вальда не
0дучено. Известны лишь верхние границы для этих вероятностей,
jcoT0Pbie ПРИ небольших значениях N являются достаточно грубы¬
ми [10б1- Однако для рассматриваемого случая, когда обработка
сигнала ведется в квадратурных каналах и можно полагать, что
квадратурные компоненты свертки входного сигнала с опорным
являются независимыми нормально распределенными случайными
величинами с единичной дисперсией, такие зависимости можно
получить. Математический вывод этих зависимостей приведен
в приложении В. Метод проектирования, включающий в себя рас¬
чет порогов для заданных вероятностей ошибок 1-го и 2-го рода,
а также позволяющий оценить время поиска сигналов, сводится
к трем шагам:
1) задаться вероятностями ошибок 1-го и 2-го рода;
2) вычислить значения 170 и АП, соответствующие этим веро¬
ятностям;
3) оценить среднее время анализа пустой ячейки для выбран¬
ных П0 и АП.
В следующем разделе рассмотрены примеры применения этого
метода ко всем типам поиска, предложенным для БАСН.
4.1.2.3. Расчет параметров усеченной процедуры Вальда.
Параллельный поиск по частоте
В этом режиме поиска корреляция входного сигнала с опорным
вычисляется на одной эпохе ПСП, т. е. на интервале Т = 1 мс. Как
показано выше, влиянием доплеровского сдвига частоты на фазу
опорной ПСП при этом можно пренебречь. Однако с увеличением
длительности интервала корреляции возрастают энергетические
потери, связанные с использованием отсчетов опорной ПСП с нуле¬
вой частотой Доплера. Число последовательных эпох N, на которых
осуществляется накопление решающей статистики, определяется
Диапазоном изменения доплеровского сдвига частоты. Ограничив
Допустимые энергетические потери 2 дБ, получим, что в случае
BACH N < 10. Для минимизации общего времени поиска сигнала
НС с использованием БПФ процедура усеченного последователь¬
ного анализа может быть применена отдельно к каждому ча¬
стотному бину. На рис. 4.5, 4.6 и 4.7 представлены зависимости
143
1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
Приращение порога Д/7
Рис. 4.5. Вероятность ошибки 1-го рода для N = 10
Приращение порога Д/7
Рис. 4.6. Вероятность ошибки 2-го рода для N = 10 и C/N0 = 36 дБГц
144
1,0 2,0 3,0 4,0 5,0 6,0
Приращение порога АП
Рис. 4.7. Среднее время принятия гипотезы Н0 при отсутствии сигна¬
ла для N = 10
вероятности ошибок 1-го и 2-го рода, а также среднего времени
принятия гипотезы Hq при отсутствии сигнала от приращения
порога, полученные для некоторых значений нормированного на¬
чального порога при N = 10 и C/Nq = 36 дБГц с использованием
соотношений из приложения В.
Значения 17q и АП для данного типа поиска могут быть по¬
лучены следующим образом. Предположим, что вероятность
ошибки 1-го рода не должна превосходить одной ложной тревоги
при анализе двумерной области поиска. Если число точек БПФ
М = 256 и размер кодового бина равен f Т/2, где / = 5,71 МГц, то
общее число проверяемых позиций код/частота составляет 256 х
2857 = 7,3е5. Следовательно, вероятность ошибки 1-го рода для
одной позиции код/частота не должна превышать 1,3е~6. Пусть
вероятность ошибки 2-го рода не превосходит 0,1. В силу выбора
размера кодовых и частотных бинов такая вероятность является
Допустимой. Значения порога 770 и его приращения АП для этих
вероятностей равны 1 и 4 соответственно. Среднее время принятия
гипотезы Н0 при отсутствии сигнала в этом случае составляет 1,5
мс, т. е. анализ пустой позиции в большинстве случаев занимает
1 или 2 эпохи ПСП.
Последовательный поиск в стандартном диапазоне
изменения частоты
Этот тип поиска рассматривается совместно с допоиском, ис¬
пользуемым после БПФ для уточнения полученных оценок фазы
ПСП и доплеровского сдвига частоты, так как оба алгоритма ис¬
пользуют однопороговую схему с одинаковым временем когерент¬
ного накопления, равным 1 мс. Благодаря небольшому диапазону
145
10
Приращение порога АП
Рис. 4.8. Вероятность ошибки 1-го рода для N = 32
0,4
Приращение порога АП
Рис. 4.9. Вероятность ошибки 2-го рода для N = 32
и C/N0 = 33 дБГц
19
Приращение порога АП
Рис. 4.10. Среднее время принятия гипотезы Hq при отсутствии
сигнала N = 32
изменения доплеровского сдвига частоты длительность интервала
наблюдений (число эпох N) для этого типа поиска может быть
увеличено. На рис. 4.8 и 4.9 представлены зависимости вероятно¬
сти ошибок 1-го и 2-го рода от приращения порога, рассчитанные
для N=32 ж C/Nq = 33 дБГд. Предположим, что для этого типа
поиска вероятность ошибки 1-го рода не должна быть выше, чем
1,0 е-4, что соответствует одной ложной тревоге при анализе всей
эпохи кода, а вероятность ошибки 2-го рода такая же, как и в
предыдущем режиме. Значения П0 и А77, соответствующие этим
вероятностям, равны 0 и 2.
На рис. 4.10 представлена зависимость среднего времени при¬
нятия гипотезы Н0 при отсутствии сигнала от приращения порога
для N = 32, из которой следует, что среднее время анализа пустой
позиции для выбранных значений П0 и АП равно 3 мс.
Последовательный поиск в узком диапазоне частоты
Благодаря узкому диапазону изменения доплеровского сдвига
частоты время когерентного накопления в этом режиме может
быть удвоено (Т = 2 мс) при сохранении общего времени поиска,
Как и в предыдущем режиме. При этом чувствительность поиска
Улучшается на 3 дБ. Для поиска сигналов в широком диапазоне
изменения отношения сигнал/шум в данном режиме реализована
Двухпороговая схема, так как при использовании только одного по¬
рога обнаружения невозможно обеспечить приемлемые вероятности
ошибок 1-го и 2-го рода. На первом цикле поиска значения 770 и АП
оптимизированы для обнаружения сигналов с отношением сигнал/
Шум примерно 37 дБГц. При этом основным критерием выбора Н0
147
10
2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
Приращение порога Д/7
Рис. 4.11. Вероятность ошибки 1-го рода для N = 16
0,4 г
Приращение порога Д/7
Рис. 4.12. Вероятность ошибки 2-го рода для N = 16 и
C/N0 = 33 дБГц
148
2
2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
Приращение порога АП
Рис. 4.13. Среднее время принятия гипотезы Н0 при отсутствии
сигнала для N = 16
и АП на этом шаге является оптимизация вероятности ошибки 1-го
рода и среднего времени принятия гипотезы Hq, так как ошибка,
связанная с пропуском сигнала, может быть исправлена на втором
1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5
Приращение порога АП
Рис. 4.14. Вероятность ошибки 1-го рода для N = 64
149
Приращение порога Д/7
Рис. 4.15. Вероятность ошибки 2-го рода для N = 64
и C/Nq - 26 дБГц
140
Приращение порога Д/7
Рис. 4.16. Среднее время принятия гипотезы Hq при отсутствии сигнала
для N = 64
цикле поиска. На рис. 4.11, 4.12 и 4.13 представлены зависимости
вероятности ошибок 1-го и 2-го рода, а также среднее время приня¬
тия гипотезы Нq от приращения порога для первого цикла поиска.
Для таких же характеристик поиска, как и в предыдущем режиме,
значения Пq и АП должны быть равны 2 и 4,5 соответственно.
На втором цикле общее время поиска увеличено в четыре раза
(N = 64), а значения IJq и АП оптимизированы для обнаружения
сигналов с уровнем 30 дБГц. Выбор П0 и АП осуществляется таким
образом, чтобы оптимизировать вероятность ошибки 2-го рода и
среднее время принятия гипотезы Н0. На рис. 4.14, 4.15 и 4.16
представлены зависимости вероятности ошибок 1-го и 2-го рода,
150
Характеристики типов поиска
Таблица 4.2
Тип поиска
C/N0,
дБГц
У, мс
N
по
Ml
PFA
PMS
"л-
мс
-^^^лельный поиск по
.уяггготе
40
1
10
1,0
4,0
1,3 е“б
0,3
1,5
•доГдадовательный поиск
в стандартном диапазоне
вменения частоты
37
1
32
0,0
2,0
1,0 е“4
0,3
3,0
ДлПОИСК
37
2
16
2,0
4,5
1,0 е-4
0,1
3,2
Последовательный поиск
в узком диапазоне измене¬
ния частоты
30
2
64
-10,0
3,25
1,0 е-4
0,3
20
а также среднее время принятия гипотезы Hq при отсутствии
сигнала от приращения порога для N = 64 и С/N0 = 26 дБГц.
Значения Л0 и АП, при которых обеспечиваются такие же веро¬
ятности ошибок 1-го и 2-го рода, как и в предыдущих режимах,
равны минус 10,0 и 3,25. При этом среднее время анализа пустой
ячейки составляет примерно 20 мс.
Характеристики всех типов поиска сигналов в БАСН обобщены
в табл. 4.2.
Табл. 4.2 иллюстрирует два важных практических аспекта
проектирования поиска сигналов СРНС в БАСН:
• за счет увеличения времени поиска практически на порядок
удается повысить чувствительность поиска на 7... 10 дБ (режим
последовательного поиска в узком диапазоне);
• в поиске с использованием БПФ вероятность ошибки 1-го
рода была выбрана на два порядка ниже, чем в других режи¬
мах — это сделано из-за большого числа проверяемых гипотез в
этом режиме.
4.2. Методы слежения за сигналами в бортовой
аппаратуре спутниковой навигации
Вследствие относительного движения потребителя и НС па¬
раметры сигнала меняются во времени, что вызывает необходи¬
мость непрерывной оценки этих параметров (слежения). Общие
принципы построения следящих систем для СРНС можно найти
в литературе [5, 6]. В данном разделе рассмотрены особенности
построения схемы фазовой автоподстройки частоты и схемы сле-
Ясения за задержкой (ССЗ) в БАСН [107].
151
4.2.1. Схема слежения за задержкой сигнала в бортовой
аппаратуре спутниковой навигации
В этом разделе вначале описана классическая ССЗ, после чег
показаны особенности ССЗ для БАСН и даны практические реко°
мендации для проектирования ССЗ в БАСН.
4.2.1.1. Классический метод слежения за задержкой
Слежение за задержкой сигнала используется для уточнения
оценок фазы псевдослучайной последовательности входного сигна
ла и скорости ее изменения, полученных в результате процедуру
поиска. Для БАСН на основе программного коррелятора, в котором
необходимо уменьшить загрузку ЦПУ, предложена одноканальная
некогерентная схема ССЗ с качанием задержки [60]. В этой схеме
на каждом цикле работы алгоритма, равном половине периода
качания, вычисляется свертка входного сигнала только с одной
копией опорной ПСП. Ценой за использование такой схемы явля¬
ется увеличение флюктуационной погрешности оценки фазы ПСП
по сравнению с двухканальной схемой. Объясняется это тем, что
в двухканальной схеме при вычитании опорных сигналов вслед¬
ствие коррелированности отсчетов входного сигнала происходит
компенсация шумов. Благодаря использованию в алгоритме сле¬
жения за задержкой некогерентного дискриминатора втягивание
ССЗ в синхронизм происходит независимо от работы петли фазовой
автоподстройки частоты. Кроме того, в целях минимизации чис¬
ла операций при вычислении сигнала ошибки ССЗ в приемнике
с программным коррелятором целесообразно использовать дис¬
криминатор на основе разности мощностей сигнала, полученных
для опережающей и задержанной копий ПСП.
Начальные оценки Оценка частоты
Рис. 4.17. Схема слежения за задержкой
152
Охема ССЗ представлена на рис. 4.17. Многоканальный корре¬
ктор вычисляет квадратурные составляющие свертки вход¬
ного сигнала с опорным сигналом, а дискриминатор ССЗ вычисляет
йГ0аЛ ошибки те обусловленной несовпадением фаз ПСП:
ГДе -^Е’ — свертка входного сигнала с опорным сигналом для
опережающей и задержанной копий ПСП соответственно; Р —
М01ДНОСТЬ входного сигнала на интервале корреляции.
Сигнал ошибки вычисляется за два цикла работы ССЗ: на пер¬
вом цикле вычисляется квадрат модуля свертки входного сигнала
с опорным для опережающей копии ПСП i?E, а на втором — для
задержанной копии ПСП и их нормированная разность. Период
качания задержки равен длительности информационного символа.
В установившемся режиме работы системы слежения за несущей
частотой погрешность оценки частоты близка к нулю, поэтому
выражение для свертки на интервале корреляции Т имеет вид
re = rl = (1//л/2)ар(Дт Т s/2)eiA(p + п, (4.3)
где U = yj2Р — амплитуда входного сигнала; а = ±1 — значение
информационного символа данных на интервале корреляции Т;
р(.) — автокорреляционная функция ПСП; Дт — погрешность
оценки фазы ПСП, измеряемая в символах кода; s — удвоенное
значение опережения/задержки опорной ПСП, измеряемое в сим¬
волах кода; Дф — погрешность оценки фазы несущей частоты;
п — белый гауссов шум с нулевым средним и дисперсией ст2.
Следовательно, для математического ожидания сигнала ошибки
те справедливо соотношение
Е{те } = р2(Дт - s/2) - р2(Дт + s/2), (4.4)
Оценка частоты Начальная оценка
Начальная оценка из ФАПЧ фазы ПСП
Рис. 4.18. Структурная схема фильтра петли ССЗ
153
Таблица 4.3
Параметры взаимной динамики потребителя и НС
Параметр
Максимальное значение
%
110 Гц/с
и
0,5 Гц/с2
которое при |Дт| < s/2 аппроксимируется линейной функдце^
2Дт(2 - s), откуда следует, что коэффициент передачи дискрицц.
натора ССЗ, определяемый как производная Е{хе} в точке Ат = о
составляет ST = 2(2 - s).
На каждом четном цикле работы ССЗ величина те используется
для вычисления реккурентных оценок фазы ПСП входного сиг¬
нала и скорости ее изменения с помощью фильтра 2-го порядка
(рис. 4.18).
Параметры фильтра, в том числе и порядок, выбирают с уче¬
том взаимной динамики потребителя и навигационного спутника.
В главе 2 было показано, что для БАСН максимальные значения
производных доплеровского сдвига частоты, при которых должно
осуществляться слежение за фазой ПСП, не превышают значений,
приведенных в табл. 4.3, где f'd, — первая и вторая произво¬
дные доплеровского сдвига частоты.
Поскольку время замыкания петли ССЗ, равное периоду кача¬
ния задержки, существенно меньше постоянной времени фильтра,
то параметры цифрового и соответствующего ему аналогового
фильтров совпадают. Поэтому для определения коэффициентов
цифрового фильтра могут быть использованы известные соот¬
ношения для аналоговых фильтров [10]. Типичные значения
коэффициентов фильтра 2-го порядка определяются следующим
образом:
= ^2 1,89В; К2= (1,89В)2,
где В — шумовая полоса фильтра петли ССЗ.
Среднеквадратическая погрешность (СКП) оценки фазы ПСП
не зависит от порядка фильтра петли ССЗ и для дискриминатора
с качанием задержки определяется соотношением [10]
a, =X^(s2B/q)[2-s + 2s/(Tq)], (4.5)
где q — отношение сигнал/шум в полосе 1 Гц на входе корреля¬
тора; А. — длительность символа ПСП, выраженная в метрах.
Динамическая погрешность, напротив, зависит от порядка
фильтра петли ССЗ и для фильтра 2-го порядка при ненулевой
154
ой производной доплеровского сдвига частоты определяется
^еДУюЩИМ обРазом [10];
й
(1 • 89В)2 ft,
> (4.6)
гДе fl — номинальное значение несущей частоты диапазона L^;
скорость света.
Повышение точности оценки фазы ПСП достигается исполь¬
зованием оценки несущей частоты, полученной системой ФАПЧ,
для слежения за задержкой [10]. Комплексирование ССЗ и ФАПЧ
осуществляется на протяжении всего времени слежения за параме¬
трами сигнала НС, за исключением интервала, необходимого для
захвата несущей частоты системой ФАПЧ. Поэтому выделяют два
режима функционирования ССЗ - захват и слежение. Шумовую
полосу фильтра петли выбирают в зависимости от режима работы
алгоритма ССЗ. В режиме захвата для обеспечения приемлемой
динамической погрешности полосу целесообразно выбирать рав¬
ной 1 Гц. Тогда в условиях наихудшей взаимной динамики по¬
требителя и НС динамическая погрешность в соответствии с (4.6)
не будет превосходить 6 м. При этом СКП оценки фазы ПСП для
сигналов с уровнем 34 дБГц на входе коррелятора (4.5) составит
4 м. В режиме слежения в целях повышения точности оценки
фазы ПСП полоса фильтра петли ССЗ может быть сужена на
порядок. Благодаря комплексированию с ФАПЧ такое сужение
полосы не приводит к ухудшению динамических характеристик
ССЗ. С другой стороны, сужение полосы на порядок уменьшает
СКП оценки фазы ПСП более чем в три раза.
4.2.1.2. Метод слежения за задержкой в приемниках
с программным коррелятором
Реализация в БАСН описанной выше классической схемы ССЗ
сталкивается с рядом сложностей и требует разработки новых
методов проектирования ССЗ, принимающих во внимание особен¬
ности программного коррелятора.
Первая особенность БАСН, которую необходимо принимать во
внимание при проектировании ССЗ, связана с ограниченностью
вычислительных ресурсов на борту ИСЗ. В предыдущем разделе
показано, что для повышения точности оценки фазы ПСП тре¬
буется комплексирование ССЗ и ФАПЧ. Комплексирование схем
слежения за задержкой сигнала и фазой его несущей подразуме-
155
i E i_ P E L P
! '■ ! ► Время I I l—l 1 ► Время
■*—Период качания ► <—Период качания—►
Рис. 4.19. Временная диаграмма работы канала МКК: а — режим захвата-
б — режим слежения
вает их параллельную во времени работу. Для обеспечения парад,
лельной работы систем ССЗ и ФАПЧ в навигационных приемниках
традиционно используются результаты одновременной свертки
входного сигнала с задержанной, синхронной и опережающей ко¬
пиями ПСП [10]. В целях уменьшения загрузки ЦПУ в приемнике
с программным МКК предлагается использовать временное разде¬
ление вычислений свертки с разными копиями ПСП. Диаграмма
работы канала МКК при таком подходе в двух разных режимах
функционирования ССЗ приведена на рис. 4.19, где символами
Е, Р, L обозначены интервалы сверток сигнала с опережающей,
синхронной и задержанной копиями ПСП соответственно.
В режиме захвата для оценки фазы ПСП и частоты используется
полный набор квадратурных накоплений на выходе коррелятора,
а в режиме слежения — только 10 % квадратурных накоплений.
Следствием уменьшения числа накоплений, используемых для
вычисления сигнала ошибки ССЗ в режиме слежения, является
увеличение дисперсии т , которое компенсируется сужением по¬
лосы фильтра петли ССЗ.
Второй особенностью и основным фактором, влияющим на ха¬
рактеристики ССЗ в приемнике с предложенным методом обработ¬
ки сигнала, является использование неполного ансамбля входных
отсчетов при вычислении свертки на периоде ПСП. Если в режиме
захвата ССЗ для вычисления квадратурных составляющих свертки
используется полный набор входных отсчетов на интервале корре¬
ляции, то в режиме слежения, в зависимости от уровня сигнала
НС, число используемых отсчетов может быть существенно умень¬
шено, вследствие чего ухудшаются кросс-корреляционные свойства
ПСП. В главе 3 (см. также работу автора [60]) предложен метод
восстановления указанных свойств при помощи когерентного на¬
копления квадратурных составляющих свертки на нескольких
последовательных эпохах. Однако для ССЗ этот метод неприменим,
так как в соответствии с диаграммой работы канала МКК в режиме
слежения вычисление свертки входного сигнала с опорным для
опережающей/задержанной копии ПСП осуществляется точно на
одной эпохе ПСП за период качания.
Погрешность фазы ПСП, символы
Рис. 4.20. Влияние внутрисистемной помехи на дискриминационную
характеристику ССЗ
Поэтому при наличии во входной смеси сигналов нескольких
НС результаты вычисления свертки входного сигнала с опорным
искажаются, что вызывает:
1) изменение коэффициента передачи дискриминатора S ;
2) появление смещения оценки фазы ПСП.
Первый эффект приводит к изменению флюктуационной по¬
грешности оценки фазы ПСП, а второй — к появлению система¬
тической погрешности оценки.
На рис. 4.20 приведены примеры дискриминационных харак¬
теристик ССЗ, полученных для s = 0,5 при использовании 10 %
входных отсчетов и наличии во входной смеси сигнала одного НС
(кривая 1) и двух НС с одинаковыми уровнями сигнала и раз¬
ностями фаз ПСП, равными 0,1 (кривая 2), 0,3 (кривая 3) и 0,5
(кривая 4) символа ПСП.
Оценим влияние уменьшения числа используемых отсчетов
на каждый из двух указанных ранее эффектов. Пусть сигнал на
входе приемника представляет собой аддитивную смесь сигналов
нескольких НС и «белого» гауссовского шума. Сигнал k-ro НС
можно рассматривать как внутрисистемную помеху при приеме
сигнала /-го НС. Если свертка входного сигнала с опорным осу¬
ществляется на целой эпохе ПСП, то влиянием этой помехи можно
пренебречь в силу ортогональности ПСП от разных НС. Однако
При уменьшении интервала корреляции ортогональные свойства
ПСП нарушаются, вследствие чего необходимо учитывать влияние
внутрисистемной помехи на оценку параметров принимаемого
сигнала. Квадратурные отсчеты на входе коррелятора определя¬
ется соотношением
157
Х(к) = S Ujaj(kT8 + 5j)Pj(kTs + Xj)el^kT^ + n(k), (4
/=1 ’
где L — число спутников; Uj — амплитуда сигнала; Tg — интерв^
дискретизации входного сигнала; 8у — задержка информации
ного символа; pj — ПСП /-го НС; т■ — задержка символа ПСД-
fj — доплеровский сдвиг частоты; фу — фаза несущей частоты-
n(k) — отсчеты шума.
Предположим, что оценки т-, /у и фу для /-го НС известны абсо¬
лютно точно. Тогда отсчеты опорного сигнала /-го НС для опере,
жающей и задержанной копий ПСП имеют вид
Y(k) = Pj(kTs + т;- ± s/2)el(27t^Ts+^).
Для простоты рассмотрим случай L = 2. Кроме того, будем
считать, что на интервале корреляции амплитуда и знак инфор¬
мационного символа каждого из сигналов не меняются. В этом
случае выражение для свертки входного и опорного сигналов
может быть записано в виде
N-1
nr = Т7 Е n(l)Y(l).
iV 1=0
В наихудшей ситуации, когда доплеровские сдвиги и фазы не¬
сущих частот /-го и k-vo НС совпадают, выражение для свертки
(4.8) преобразуется к виду
re=rl= ujajPjj(xj ± s/2) + Uk4Pkj(xk’ xj ± s/2) + rar> (4-9)
Следовательно, для математического ожидания сигнала ошибки
Р этом случае справедливо соотношение
х-|2
Е&} =
Pjj \ тг т/ - f) + ^kjPkj (**. ^
Рц (тг т/ + §)+ ^7 V*/ (ТС т/ + f)
(4.10)
где
|^ + 1, Cij — CLfe,
[-1, cij *ak.
В окрестности глобального максимума | т | < 1 и для автокор¬
реляционной функции ПСП справедлива аппроксимация р^(т) =
si — |т|. Аналогично при |т — tq| < 1 для взаимнокорреляционной
функции (ВКФ) имеем
рkj(x) * (1-|т-т0|),
где т0 — положение экстремума ВКФ на временной оси; А — зна¬
чение ВКФ при т = Tq, которое зависит от длительности интервала
корреляции. Например, если свертка вычисляется на интервале
Т, равном эпохе ПСП, то А принимает только два значения [10]:
63/1023 = 0,062 и -65/1023 =-0,064.
Влияние внутрисистемной помехи на вычисление модуля сверт¬
ки для возможных значений поясняется на рис. 4.21.
В случае синфазного (E,kj = 1) сложения полезного сигнала и
помехи, имеющих АКФ и ВКФ, обозначенные на рис. 4.21 как
р^-(х) и р£;-(т) соответственно, модуль свертки суммы возрастает,
a) f 6) *
Рис. 4.21. Влияние внутрисистемной помехи на вычисление модуля свертки
159
что приводит к увеличению коэффициента передачи дискрц^
натора Sx. При противофазном (^- = -1) сложении сигнал^
помехи значение Sx уменьшается, что эквивалентно сужедц^
шумовой полосы фильтра ССЗ. Как отмечалось ранее, благодар
комплексированию ССЗ и ФАПЧ, это не приводит к ухудщец^
динамических характеристик ССЗ.
Подставив аппроксимации АКФ и ВКФ в выражение (4.1Q)
получим
i2
1-
S
т
2
Ча
U:
т-т0
и 2
S
1-
х + —
2
т - т0 + —
0 2
(4.11)
Линейный участок функции -Е{те} в окрестности точки устой¬
чивого слежения при |т0| < s определяется следующим образом:
£{xe}=2(2-s)
1 + -
Ui
иь
U; 1
Т0 J7~^kjA
u i
(4.12)
В режиме слежения сигнал ошибки те имеет нулевое среднее.
Значение т, при котором -Е{те} = 0 определяет смещение оценки
фазы ПСП, вызванное влиянием внутрисистемной помехи:
т = т0
(Uk/UjKkjA
1 + (Uk/Uj)i,kjA
(4.13)
Производная дискриминационной характеристики в точке т,
определяемой соотношением (4.13), имеет вид
S{ =2(2-s)[l + (t/ft/t//)^-A].
(4.14)
На рис. 4.22 приведена зависимость коэффициента передачи
дискриминатора ССЗ, нормированного на Sx, от длительности ин¬
тервала корреляции Т, полученная с использованием соотношения
(4.14) для отношения амплитуд помехи и полезного сигнала 3 дБ
(кривые 1 и 4), 0 дБ (кривые 2 и 5) и -3 дБ (кривые 3 и 6). Кривые
1-3 построены при = 1, а кривые 4-6 — при ^ . = —1. Значения
максимума модуля ВКФ для Т, кратных 0,1 мс, были получены
численным расчетом. Как следует из приведенных графиков,
в худшем случае СКП оценки фазы ПСП увеличивается не более,
чем в четыре раза. Подставляя (4.5) в 37 дБГц в качестве порого-
160
ОД 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Длительность интервала корреляции, мс
Рис. 4.22. Зависимость коэффициента передачи дискриминатора ССЗ
от времени корреляции
вого отношения сигнал/шум, начиная с которого осуществляется
прореживание отсчетов входного сигнала, шумовую полосу филь¬
тра петли ССЗ 0,1 Гц и s = 0,5, получим СКП оценки фазы 0,85 м.
Таким образом, в худшем случае СКП оценки фазы огибающей,
выраженная в метрах, не превосходит 3,4 м, что допустимо для
приемников подобного класса. Поэтому влиянием внутрисистемной
помехи на флюктуационную погрешность оценки фазы ПСП можно
пренебречь независимо от длительности интервала корреляции.
На рис. 4.23 приведена зависимость смещения оценки фазы
ПСП от длительности интервала корреляции, полученная с ис¬
пользованием соотношения (4.13) (нумерация кривых аналогична
рис. 4.22). Из приведенных графиков следует, что для минималь¬
ной длительности интервала корреляции смещение оценки фазы
ПСП составляет не менее 20 м во всех рассматриваемых случаях.
Если же помеха складывается с полезным сигналом в противо-
фазе, то смещение существенно увеличивается. Так как такое
смещение оценки является неприемлемым, то при выборе длитель¬
ности интервала корреляции, кроме уровня полезного сигнала,
необходимо учитывать также доплеровское смещение частоты
и уровень сигнала остальных НС. В качестве альтернативного
Решения задачи выбора длительности интервала корреляции при
Наличии в зоне радиовидимости приемника по крайней мере еще
одного НС с близким доплеровским смещением частоты можно
Предложить экстраполяцию оценки фазы ПСП с использованием
оценки частоты, полученной системой ФАПЧ, в течение интер¬
вала времени Гшах, на котором доплеровские смещения сигналов
этих НС совпадают. При этом СКП оценки фазы ПСП ухудшается
в соответствии с выражением
161
0,2 0,3 0,4 0,5 0,6 0,7
Длительность интервала корреляции, мс
0,8 0,9
Рис. 4.23. Зависимость смещения оценки фазы ПСП от времени корреляции
где ат - СКП оценки фазы ПСП на начало интервала экстрапо¬
ляции; оД(р - СКП оценки приращения фазы несущей частоты
системой ФАПЧ; у - коэффициент пересчета приращения фазы
несущей частоты в приращение фазы ПСП.
Путем моделирования установлено, что для космического по¬
требителя Ттах < 10 с, т. е. при типичных значениях СКП оценки
приращения фазы несущей частоты ухудшение ат составит не
более 1 м.
4.2.2. Схема слежения за фазой несущей частоты сигнала
в бортовой аппаратуре спутниковой навигации
В этом разделе вначале описана классическая ФАПЧ, после чего
рассмотрены особенности реализации системы ФАПЧ в БАСН.
4.2.2.1. Классический метод слежения за фазой несущей
частоты
Под термином «несущая частота» подразумевается сумма но¬
минального значения ПЧ и доплеровского смещения частоты. Без
ограничения общности можно считать, что номинальное значение
ПЧ равно нулю. Целью алгоритма слежения за параметрами не¬
сущей частоты является оценка фазы несущей и ее производных.
Так как слежение за фазой непосредственно после процедуры по-
162
а невозможно из-за большой погрешности начальной оценки
стоты, то алгоритм разбивают на три этапа:
уточнение оценки частоты, полученной после завершения
ароЦеДУРы поиска;
2) захват фазы несущей частоты;
3) слежение за фазой.
Погрешность начальной оценки частоты равна половине шага
поиска, т. е. составляет сотни герц. Для уменьшения этой по¬
грешности на первом этапе алгоритма слежения за параметрами
десущей частоты используется система частотной автоподстройки
(ЧАП) на основе дискриминатора с временным сдвигом квадратур¬
ных составляющих свертки [5]. Выбор дискриминатора этого типа
обусловлен тем, что он имеет оптимальные характеристики при
малых отношениях сигнал/шум и не требует существенных затрат
ресурсов ЦПУ для его вычисления [10]. Особенностью данной реа¬
лизации системы ЧАП является использование квадратурных со¬
ставляющих свертки, полученных для опережающей/задержанной
копии ПСП, что при s = 0,5 приводит к энергетическим потерям
2,5 дБ. Такая реализация системы ЧАП определяется временной
диаграммой работы канала МКК, изображенной на рис. 4.19.
Параметры используемого дискриминатора даны в табл. 4.4.
Апертура дискриминационной характеристики (ДХ) составляет
±-^—. Это означает, что для захвата частоты непосредственно по-
2 Т
еле поиска сигнала (при шаге поиска по частоте, равном 500 Гц)
интервал когерентного накопления квадратурных составляющих
свертки не должен превышать 2 мс.
В табл. 4.4 использованы следующие обозначения: q — от¬
ношение сигнал/шум в полосе 1 Гц с учетом потерь, связанных
с использованием квадратурных составляющих свертки для вы¬
числения дискриминатора; Т — интервал вычисления свертки;
k — номер интервала.
Выражение для флюктуационной погрешности оценки частоты
системой ЧАП, полученное с использованием характеристик дис¬
криминатора, приведенных в табл. 4.4, имеет вид
Таблица 4.4
Параметры частотного дискриминатора
Тип дискриминатора
Крутизна ДХ
Флюктуационная
характеристика
IE{k)QL(k + 1) - Ц (А + 1) QE[k)
4 q2T6
i , 1 i- — j
I 2 дт)
163
rJ
■t-
D
35.0
30.0
25.0
20.0
15.0
10.0
5,0
0
•
— е =
-*—е =
— е =
1
: \ ;
1: -V ■
: Ч ;
1 ч-« N
' Щ.—"*
i
К
к...
L
£3
Ь —
25 27 29 31 33 35 37 39 41 43 45 47 49
C/N0, дБГц
Рис. 4.24. СКП оценки частоты системой ЧАП
G* =
где В - шумовая полоса фильтра петли ЧАП.
На рис. 4.24 представлена зависимость СКП оценки частоты
системой ЧАП от отношения сигнал/шум для Т = 1 мс и шумовой
полосы В, равной 0,5; 1 и 2 Гц.
Поскольку слежение за несущей частотой должно осуществлять¬
ся при динамических условиях, указанных в табл. 4.3, порядок
сглаживающего фильтра петли ЧАП должен быть не ниже 2-го.
Для фильтра 2-го порядка оценка частоты имеет нулевую систе¬
матическую погрешность при движении потребителя с постоян¬
ным ускорением. При наличии ненулевой производной ускорения
(рывка) систематическая погрешность для оптимального фильтра
2-го порядка определяется выражением (Ю]
= 2^'
(1,89 В)
где fa — вторая производная доплеровского смещения частоты.
При максимальном значении , приведенном в табл. 4.3, и
В < 0,5 Гц величина Af не превышает 1 Гц.
Для устойчивой работы системы ЧАП предельная погрешность
оценки частоты (по уровню вероятности 0,997) должна удовлетво¬
рять неравенству Зетf [10]. Как видно из рис. 4.24, при
7 7 4т
Т - 1 мс и выбранных значениях шумовой полосы В устойчивое
слежение за частотой осуществляется во всем диапазоне изме¬
нения отношения сигнал/шум, характерного для космического
164
gjisce. апертура ДХ системы ФАПЧ составляет
где §Ф — погрешность оценки фазы несущей частоты.
Следовательно, для захвата частоты системой ФАПЧ погреш¬
ность оценки частоты 5f должна удовлетворять неравенству
Длительность интервала вычисления свертки Т в режиме ФАПЧ
составляет 1 и 5 мс, в зависимости от режима работы алгоритма
символьной синхронизации. Поэтому погрешность оценки частоты
не должна превышать 125 и 25 Гц соответственно. Это условие
выполняется при В = 1...2 Гц.
На следующих этапах алгоритма осуществляется дальнейшее
уточнение оценки частоты путем измерения приращений фазы
несущей. Для этого необходим синхронизм фаз несущих частот
входного и опорного сигналов, что достигается с помощью системы
ФАПЧ, схема которой изображена на рис. 4.25. Тип дискримина¬
тора и параметры ДХ ФАПЧ приведены в табл. 4.5.
Используемый фазовый дискриминатор имеет оптимальные
характеристики при низком отношении сигнал/шум.
С учетом параметров дискриминатора, приведенных в табл. 4.5,
флюктуационная погрешность оценки фазы несущей частоты
системой ФАПЧ 5^ с полосой сглаживающего фильтра петли В
может быть найдена следующим образом:
Начальные оценки
частоты и ее производной
Кп) /
I
Фаза несущей
МКК
Q(n) (/-й канал)
* Дискриминатор
ФАПЧ
Фильтр 2 (З)-го производная фазы
порядка 2-я производная фазы
Оценка
фазы ПСП
Оценка
частоты
Рис. 4.25. Схема системы ФАПЧ
165
Таблица 4.
Параметры фазового дискриминатора 'а
Тип дискриминатора
Крутизна ДХ
Флкжтуационная характеристик
Ip(k)QP(k)
A q2T2
8t?3T3|l + 1
2 дТ
На рис. 4.26 представлена зависимость СКП оценки фазы не-
сущей частоты системой ФАПЧ от отношения сигнал/шум для
Т = 5 мс и шумовой полосы В равной 10, 15 и 25 Гц. Для обе¬
спечения требуемой точности определения навигационных пара¬
метров в условиях динамики потребителя сглаживающий фильтр
петли системы ФАПЧ должен иметь порядок не ниже 3-го. Для
устойчивости фильтра 3-го порядка должно выполняться условие
В < 18 Гц [10]. С другой стороны, в целях уменьшения длительно¬
сти переходного процесса на выходе фильтра полосу В желательно
увеличить. Поэтому в алгоритме слежения за несущей частотой на
этапе захвата фазы используется система ФАПЧ с фильтром 2-го
порядка, которая устойчива для любых значений В. При ненулевой
первой производной доплеровского смещения частоты оценка фазы
25 27 29 31 33 35 37 39 41 43 45 47 49
С/Л/0, дБГц
Рис. 4.26. СКП оценки фазы несущей частоты системой ФАПЧ
166
Таблица 4.6
Параметры систем слежения за несущей частотой
Система
^топодстройки
Порядок
фильтра
Полоса
фильтра, Гц
Когерентное
время, мс
Период замыка¬
ния петли, мс
ЧАП
2
2
1
20
ФАПЧ
2
15
1 или 5
5
3
25
системой ФАПЧ с фильтром 2-го порядка имеет систематическую
погрешность, определяемую выражением [10]
д<2> =
360
(1,89В)
-й-
Для максимального значения приведенного в табл. 4.3, и
шумовой полосы В = 25 Гц величина и 18°, т. е. условие устой¬
чивой работы системы ФАПЧ: Заф + Дф ^ < 45° [10] выполняется
при отношениях сигнал/шум выше 32 дБГц.
Для фильтра 3-го порядка систематическая погрешность за¬
дается соотношением
360
Д<3> =
ф
(1,27В)'
■й-
Подставив максимальное значение из табл. 4.3, получим,
что Д<?> < 1° для всех значений шумовой полосы В, приведенных
на рис. 4.26. Целесообразным выбором в этом случае является
В = 15 Гц. При этом предельная погрешность оценки фазы несущей
частоты (по уровню вероятности 0,997) не превосходит 45° во всем
диапазоне изменения отношения сигнал/шум. Параметры алго¬
ритма слежения за несущей частотой суммированы в табл. 4.6.
4.2.2.2. Влияние внутрисистемной помехи на параметры
фазовой автоподстройки частоты
В приемнике с программным МКК, имеющем переменное время
интегрирования в режиме слежения за фазой несущей частоты,
в зависимости от отношения сигнал/шум, для вычисления квадра¬
турных составляющих свертки может использоваться неполный
ансамбль отсчетов входного сигнала. В этом случае характеристики
системы ФАПЧ определяются двумя факторами.
167
1. Использование неполного ансамбля входных отчетов ^
вычислении свертки приводит к увеличению флюктуациовв^-.
погрешности оценки фазы несущей частоты. Погрешность оцец^
определяется значением отношения сигнал/шум, начиная с ко^
рого допускается прореживание отсчетов. Чем выше это значецйе
тем меньше погрешность оценки фазы. Однако при этом умедь’
шается число виртуальных каналов приемника. Компромиссу
значение отношения сигнал/шум определяется эмпирически.
2. Ухудшение кросс-корреляционных свойств укороченной
ПСП приводит к снижению помехоустойчивости системы ФАПЧ
Как и в случае ССЗ, это приводит к изменению флюктуационной
погрешности и появлению смещения оцениваемого параметра
Следует заметить, что смещение оценки фазы не влияет на оценку
частоты, полученную на основе приращения фазы, но сказывается
на устойчивости системы ФАПЧ и вероятности ошибки демоду.
ляции информационных символов.
Ниже приводится анализ влияния внутрисистемной помехи на
оценку фазы несущей частоты системой ФАПЧ в наименее благо¬
приятных условиях с учетом временной диаграммы работы МКК,
описанной в разделе 4.2.1.2.
Пусть входной сигнал представляет собой аддитивную смесь
сигналов у'-го и k-ro НС и белого гауссового шума. Предположим,
что на интервале корреляции Т амплитуды сигналов НС не ме¬
няются. Кроме того, будем считать, что начало интервала корре¬
ляции синхронизировано с границей информационного символа
у'-го НС, т. е. процедура символьной синхронизации для этого НС
завершена. Так как погрешности оценок фазы ПСП и несущей
частоты в установившемся режиме работы систем ССЗ и ФАПЧ
пренебрежимо малы, выражение для свертки входного и опорного
сигналов на интервале Т можно записать в следующем виде:
R = Ucaei5(? + Unbp( Ai:)sinc(A/T)e;(5(p+A't') + п,
где Uс, Uп — амплитуды сигналов у-го и k-ro НС; а = ±1, & = ±1 —
значения информационных символов у-го и k-ro НС на интервале Т‘,
5ср — погрешность оценки фазы несущей частоты у-го НС системой
ФАПЧ; р(Ат) — ВКФ ПСП; Ат — разность фаз ПСП; А/ — разность
доплеровских смещений; Д\д — разность фаз несущих частот; п —
белый Гауссов шум.
В наихудшем случае, когда доплеровские смещения несущих
частот у-го и k-ro НС совпадают, математическое ожидание
сигнала ошибки сре системы ФАПЧ вычисляется в соответствии
с выражением
168
Е {фе} = -^[С/са соз(5ф) + Е/п£?р(Дт) соз(5ф + Дф)]х
х[С/сазт(5ф) + [/п6р(Дт)зт(5ф + Дф)], (4.15)
2
Р = UC — мощность сигнала j-го НС.
Пусть
А =—— р(Дт) и £, = ab = ± 1.
Тогда выражение (4.15) преобразуется к виду
Е {фе} = — зт(25ф) + — А2 зт2(5ф + Дф) + А!;зт(25ф + Дф). (4.16)
2 2
Так как Е |фе |£, = +1,Дф} = Е |фе |£, = -1,Дф + л}, можно рас¬
сматривать только один случай, например +1. Максимальное
влияние внутрисистемной помехи на оценку фазы несущей ча¬
стоты наблюдается при использовании минимально допустимого
ансамбля входных отсчетов. На рис. 4.27 представлены примеры
ДХ ФАПЧ при использовании 10 % отсчетов входного сигнала
для вычисления свертки в случае Uс = Uп и когерентном нако¬
плении квадратурных составляющих свертки на интервале N = 5
последовательных эпох ПСП. Кривая, изображенная на графике
сплошной линией, соответствует неискаженной ДХ.
Решая уравнение -Е{фе} = 0 относительно 5ф, получим смещение
ДХ
-90-75 -60 -45 -30 -15 0 15 30 45 60 75 90
Погрешность фазы несущей частоты, ...°
Рис. 4.27. Влияние помехи на дискриминационную характеристику ФАПЧ
169
Л/а,
Л/ = з
Л/ = 5
Л/ = 7
^ = 1Q
-30
-180-144 -108 -72 -36 0 36 72 108 144 180
Разность фаз Дц, ...°
Рис. 4.28. Смещение оценки фазы в зависимости от разности фаз полезного
сигнала и внутрисистемной помехи
На рис. 4.28 приведена зависимость смещения ДХ от разности
фаз полезного сигнала и помехи для случая U = U п при использова¬
нии 10 % входных отсчетов, построенная с помощью полученного
соотношения для некоторых значений N. В рассматриваемом слу¬
чае когерентное накопление квадратурных составляющих свертки
на интервале N = 10 эпох ПСП эквивалентно корреляции входного
сигнала с опорным на одной эпохе с использованием полного ан¬
самбля входных отсчетов. В общем случае когерентное накопление
результатов свертки на интервале N последовательных эпох ПСП
с коэффициентом использования входных отсчетов, равным k,
эквивалентно корреляции входного и опорного сигналов на одной
эпохе с коэффициентом Nk. Как видно на рис. 4.28, в наихудшем
случае смещение оценки фазы несущей частоты, обусловленное
внутрисистемной помехой, присутствует даже при максимальном
времени интегрирования в МКК. При Nk > 0,5 смещение оценки не
превышает 12°, что является допустимым, так как условие устой¬
чивости системы ФАПЧ с параметрами из табл. 4.6 выполняется
с запасом для отношений сигнал/шум выше 30 дБГц. Далее будет
показано, что при таком смещении оценки фазы обеспечивается и
приемлемая вероятность ошибки демодуляции информационного
символа. Исходя из этих соображений, минимальное значение
коэффициента использования входных отсчетов целесообразно
определить следующим образом:
170
2,5
2,0
- • - N= 1
Л/ = 3
N = 5
Л/ = 7
Л/ = 10
о
-180-144 -108 -72 -36 0 36 72 108 144 180
Разность фаз Д\у, ...°
рнс. 4.29. Зависимость крутизны дискриминационной характеристики ФАПЧ
от разности фаз полезного сигнала и внутрисистемной помехи
Крутизна ДХ ФАПЧ (S^) определяется как производная £{фе'
в точке пересечения ДХ с осью абсцисс:
S = cos (28ф) + A2 cos 2(8ф + Дф) + 2 A cos (28ф + Дф),
где 8ф - смещение ДХ.
Зависимость крутизны ДХ ФАПЧ от разности фаз Дф для случая
Uc - Uп при использовании 10 % входных отсчетов изображена
на рис. 4.29. Максимальное значение крутизны ДХ достигается
при совпадении фаз полезного сигнала и помехи и определяется
соотношением
О — 1
°Ф шах х
— р(Дт)
ел
^-р(Дт) + 2
В рассматриваемом случае max = 1,5. Учитывая, что систе¬
матическая погрешность при этом равна нулю, условие устойчи¬
вости системы ФАПЧ выполняется во всем диапазоне изменения
отношения сигнал/шум.
4.3. Прием символов навигационного сообщения
в бортовой аппаратуре спутниковой навигации
Пусть граница информационного символа определена в ре¬
зультате процедуры символьной синхронизации. Существует
вероятность ошибки приема символов, на которую влияют как
энергетические параметры полезного сигнала, так и внутриси¬
стемные помехи.
171
В приемнике с программным МКК, имеющем переменное BpeiVl
интегрирования, энергия полезного сигнала зависит от коэффрц^4
ента использования входных отсчетов. Задачей данного разд6д^
является получение зависимостей вероятности ошибки прце1й
символов от погрешностей оценок параметров полезного сигнад
и внутрисистемной помехи для такого приемника.
4.3.1. Вывод аналитических соотношений
В соответствии с оптимальным алгоритмом когерентный демо¬
дулятор вычисляет статистику
АГ-1
л= Ел».
т= О
где Im = Ke{Rm} — синфазная компонента свертки на т-м ин¬
тервале корреляции [5]. Число М определяется длительностью
символа навигационных данных. Решение о переданном символе
принимается на основе анализа знака статистики Л: если Л > О,
то символ равен +1, в противном случае -1. Вероятность ошибки
приема символа определяется по формуле полной вероятности
Ре = Р {Л > 0|а = -1}Р{а = -1} + Р{Л < 0 | а = +1} Р{а = +1}, (4.18)
где а — переданный символ.
В случае приема аддитивной смеси полезного сигнала и белого
гауссового шума математическое ожидание статистики Л опреде¬
ляется соотношением
Е {Л} = аС/р(Дт)соэ(лД/Т + Acp)sinc(A/T), (4.19)
где а = ± 1; U — амплитуда полезного сигнала, которую считаем
постоянной на интервале длительности символа; р(Ат) — авто¬
корреляционная функция псевдослучайной последовательности,
вычисленная на интервале МТ; Ат, A/ и Лер — погрешности оценок
задержки, частоты и фазы несущей, рассматриваемые как неслу¬
чайные (фиксированные) величины. В установившемся режиме
системы слежения погрешность оценки частоты не превосходит
единиц герц, т. е. Д/Т << 1. Поэтому можно считать, что Е{А} за¬
висит только от переданного символа, уровня полезного сигнала
и погрешностей оценок фаз ПСП и несущей частоты. Поскольку
символы +1 и —1 равновероятны, выражение можно преобразо¬
вать к виду
172
Ре=\{Ъ+Ъ}>
гДе
Р1 = Р {Л > 0 | а = -1}, Р2 = Р {Л < О | а = +1}. (4.20)
Статистика Л, являясь суммой независимых нормально распре¬
деленных случайных величин, также имеет нормальное распреде¬
ление. Поэтому для условных вероятностей Рг и Р2 справедливы
соотношения:
со (*--ф|а=-1})2 „
Р, = —j= Г е 2°2 dx = - ■==■• Г е 2 dt =
о ^ £{л|а=_1}
а
0 (*-Е{л|а=+1}>2 ю
Р2 = —1= f е 2°г dx = — Г е 2 dt =
^ Е (л[д=+1}
а
\е {л I а = +1}1
= Q\~ (4-21)
где а2 — дисперсия Л; Q(x) = —== f е 2 dt.
тт р и2мт
Пусть = — энергия полезного сигнала на интервале
2
МТ, a NQ = ст2МТ — односторонняя спектральная плотность бело¬
го гауссова шума. Тогда ст = I U, что согласно (4.19), (4.21)
2 Еъ
позволяет определить вероятность ошибки приема символов сле¬
дующим образом:
ре = р(Ат) c°s Дф 1. (4.22)
173
Для МКК с переменным временем интегрирования величщ,
Еь зависит от коэффициента использования входных отсчет0
Еь = kE'b, где Е'ь — энергия сигнала, приходящаяся на один сц^
вол.
Сначала рассмотрим случай, когда фаза несущей частоты да
вестна абсолютно точно, и оценим влияние погрешности оценд^
фазы ПСП на вероятность ошибки приема символов. Потом оценщ,
влияние погрешности оценки фазы несущей частоты на веродх
ность ошибки приема символов при точно известной фазе ПСП
4.3.2. Влияние погрешности оценки фазы псевдослучайной
последовательности на вероятность ошибки приема
символов
Рассмотрим случай, когда фаза несущей частоты известна абсо¬
лютно точно. В установившемся режиме работы ССЗ погрешность
оценки фазы ПСП мала и не выходит за пределы линейного участ¬
ка дискриминационной характеристики. Поэтому можно считать,
что Ат имеет нормальное распределение с нулевым математическим
о
ожиданием и дисперсией стт. АКФ ПСП с достаточной точностью
аппроксимируется функцией
р(Дт)
Ат . .
1-{-—-,|Ах| < тс;
тс
О, |Дт| > тс.
Пусть
р( т) =
2&.
стт\/2л
е т —
плотность распределения погрешности оценки фазы ПСП. Тогда
безусловная по отношению к Ат вероятность ошибки приема сим¬
волов при Дф = 0 определяется соотношением
+®_ 1
Ре= fp;(T)p(T)dT»-^jQ<
о
щ
I Na
(1 - т) [>е 2ст'г dx, (4.23)
где а’т = ах / хс — нормированная СКП оценки фазы ПСП.
174
4.3.3. Влияние погрешности оценки фазы несущей частоты
на вероятность ошибки приема символов
Предположим, что погрешность оценки фазы ПСП равна нулю.
j£aK и в слУчае ССЗ, в установившемся режиме работы ФАПЧ
^оясн0 считать, что погрешность оценки фазы несущей частоты
дцеет нормальное распределение с плотностью
ф2
/>(ф) =
афл/2л
Тогда безусловная по отношению к Дф вероятность ошибки
приема символов при Дт = 0 будет определяться соотношением
Ф2
+°о ГГ оо ( 1птр 1 2
Ре = JРе (ф)р(ф)^ф = 1= JQ | J~^cos Ф [ е 2°Ф d<f>- (4.24)
4.3.4. Влияние внутрисистемных помех на вероятность
ошибки приема символов
Влияние внутрисистемной помехи на вероятность ошибки
приема символов объясняется тем, что принимаемый сигнал
представляет собой аддитивную смесь шума и сигналов всех НС,
находящихся в зоне радиовидимости БАСН. Поэтому отсчеты
сигнала на интервале корреляции Т определяются следующим
образом:
L
S(n) = YUk4Ws + h)ck(nTs + xk)ei(-2n^nTs+4>k\ (4.25)
k=l
где Uk, 5fe, %k, fk, фд, — амплитуда, временные задержки символа
Навигационных данных и ПСП, доплеровский сдвиг и фаза не¬
сущей частоты сигнала k-vo НС, относящиеся к началу интервала
корреляции; L — число НС, находящихся в зоне радиовидимости
БАСН.
В силу ортогональности кодов Голда при малом диапазоне изме¬
нения уровня сигналов НС математическое ожидание статистики,
Используемой для принятия решения о знаке переданного символа,
Определяется только уровнем полезного сигнала и практически
не зависит от сигналов остальных НС. Однако если диапазон из¬
менения сопоставим с относительным уровнем бокового лепестка
175
АКФ ПСП, то значительный вклад в математическое ожидац^
Л могут вносить другие НС, оказывая влияние на вероятное^
ошибки приема символов. Следует отметить, что описанная ос0
бенность касается только тех НС, уровень сигналов которых более
чем на 20 дБ ниже максимального уровня принимаемого сигнал^
Учитывая, что типичное пороговое значение qQ > 30 дБГц, а мак.
симальное значение уровня сигнала не превосходит 50 дБГц, дЛя
этих НС при вычислении свертки используется полный набор
входных отсчетов.
Предположим, что погрешности оценок параметров у-го НС
равны нулю и амплитуды сигналов НС не меняются на интервале
длительности символа. Тогда выражение для свертки входного
сигнала с опорным сигналом у-го НС на т-м интервале корреля¬
ции примет вид
Rf1 = djUj +
+ !тгiW"5-. ^Z)ct(nT, + tpeW7»^S> 1 (4 26)
k*j 71 = 0 )
где cij=±l — значение символау'-го НС; = ak(nTs +5k)aj(nTs + о;),
АЩ = f™ - fj71 и А= ф” - ф” — разности доплеровских сдвигов
и фаз несущих частот k-ro и у'-го НС. В силу относительно мед¬
ленного изменения доплеровского сдвига частоты можно считать,
что АЩ не меняется на интервале длительности символа. Кроме
того, как было показано ранее, при вычислении Rj1 можно пре¬
небречь влиянием доплеровского сдвига частоты на фазу ПСП
и считать, что отсчеты ПСП соответствуют нулевому сдвигу.
В этом случае временная задержка ПСП не зависит от номера
интервала корреляции. Для простоты рассмотрим случай, когда
в принимаемой смеси кроме полезного сигнала присутствует
сигнал только одного k-ro НС. Тогда выражение для свертки пре¬
образуется к виду
Я," + 74)c,(nTs
(4.27)
В целях упрощения вывода соотношения для свертки будем
считать, что граница символа k-ro НС совпадает с границей ин¬
тервала корреляции. Это предположение не влияет существенно
на окончательный результат, так как при вычислении статистики
176
моЖЯО не учитывать слагаемое, соответствующее интервалу,
^ котором произошла смена символа. При этом энергетические
Оотери не пРевысят 0,45 дБ. Если на интервале корреляции нет
лереХ0Да символов> то величина на нем не меняется. При
этом ^hj Равно если символы fe-ro и /-го НС совпадают, и —1
0 противном случае. Значение свертки на интервале длительности
сйМв0Ла определяется как сумма Rj1:
Rj = ajMUj + Uk + тk)Cj(nTs + | x
x{xVA<l- (4.28)
Так как в произведение двух ПСП с одинаковым периодом идет
дискретный спектр с ненулевой амплитудой в точках, кратных
частоте, определяемой этим периодом, то сомножитель
±%ск(пТа + т k)Cj(nTs + т;.)е2™А^п7;,
^ п=О
являющийся преобразованием Фурье произведения ПСП в точке
Дfhj, отличен от нуля, только если Afkj совпадает с одной из ком¬
понент спектра, т. е. ДfkjT — целое число. В этом случае А
для всех интервалов корреляции имеет одинаковое значение и
выражение преобразуется к виду
Rj = ajMUj + Uk jl-+ 4)Cj(nTs + T;.)eW*'пГ* J x
M-i
(4.29)
m-0
Рассмотрим наихудшую с точки зрения приема символов ситуа¬
цию, когда модуль второго слагаемого в выражении максимален.
Это достигается при следующих условиях:
1) доплеровские сдвиги несущих частот /-го и fe-ro НС совпа¬
дают (Д fkj = 0);
2) начальные фазы несущих частот /-го и k-то НС, относящиеся
к началу интервала корреляции, отличаются на величину, кратную
П(Дфй;. = 7iq, qeZ);
177
3) на интервале вычисления свертки нет перехода символов
k-vo НС
М-1
X %kj = ±М
\т=О
Тогда выражение для математического ожидания статистика
Л может быть записано следующим образом:
E{A} = ajMUj ±MC/ftmax|p^(Tft,T;-)|, (4.30)
j N-1
Здесь pkj(xk,Tj) = — ^c^nTg-z^CjinTg-Xj); где T = NTg. Если
n=0
T равно длительности эпохи ПСП, то pft- будет зависеть только от
разности фаз ПСП Дт^. = - т., а не от их конкретных значений.
Вероятность ошибки приема символов, порожденной внутриси¬
стемной помехой (присутствием в смеси сигнала fe-ro НС), опреде¬
ляется в соответствии с выражением (4.20):
Р. = ~ Q
С/. | I
l+-f-max\pkj(Axkj)\
i
l--^-max|pft;-(ATfe;)|
4.3.5. Результаты расчета
На рис. 4.30 и 4.31 представлены зависимости вероятности
ошибки приема символов для МКК с переменным временем инте¬
грирования от погрешностей оценок фаз ПСП и несущей частоты.
В качестве примера порог отношения сигнал/шум (ОСШ), начиная
с которого осуществляется прореживание отсчетов входного сиг¬
нала, выбран равным 37 дБГц. Штриховые линии на графиках
соответствуют вероятности ошибки приема символов при ис¬
пользовании полного набора входных отсчетов при вычислении
свертки.
На рис. 4.30 показана зависимость вероятности ошибки приема
символов от ОСШ для некоторых значений СКП оценки фазы ПСП,
нормированной к длине символа ПСП. Кривая для стт = 0 пред¬
ставляет собой описанный в литературе случай точно известной
фазы несущей и фазы ПСП. Кривые для ненулевых значений а'х,
т. е. для случая, когда фаза ПСП оценивается с некоторой по¬
грешностью, приводятся как при использовании полного набора
178
10
(О
§
IS
2
s
о
го
2
о
s
о.
с
s
*
ID
s
3
о
о
о.
о
00
Eb/N0' дБ
Рис. 4.30. Влияние ОСШ и погрешности оценки фазы ПСП на вероят¬
ность ошибки приема символов
входных отсчетов (пунктирные кривые), так и при прореживании
отсчетов. В последнем случае все кривые при одном значении ОСШ
вырождаются в константу и вероятность ошибки приема символов
не уменьшается с ростом ОСШ. Это объясняется прореживанием
отсчетов входного сигнала для всех сигналов, у которых ОСШ
превышает порог.
На рис. 4.31 представлены результаты численного расчета
вероятности ошибки приема символов от ОСШ для некоторых
значений СКП оценки фазы несущей частоты
179
Вероятность ошибки приема символа
10
Рис. 4.31. Влияние ОСШ и погрешности оценки фазы несущей частоты
на вероятность ошибки приема символов
180
Вероятность ошибки приема символа
10
10~9
0 1 2 3 4 5 8 7 8 9 10 11 12 13 14 15 18 17 18 19 20
EbfN0, дБ
Рис. 4.32. Влияние внутрисистемной помехи на вероятность ошибки приема
символов
181
На рис. 4.32 представлены результаты численного расчет^
вероятности ошибки приема символов от ОСШ для некоторЬ13(
значений отношения амплитуд сигнала Uп и внутрисистемной
помехи Uc.
4.4. Выводы
В первой части главы 4 представлен метод проектирования
поиска сигналов в БАСН, который основан на анализе особен¬
ностей космического базирования, выявленных ранее. Показано,
что большой диапазон неопределенности по частоте Доплера и
ограниченность вычислительных ресурсов на борту ИСЗ не по¬
зволяют использовать в общем случае методы параллельного или
последовательного поиска сигналов.
Предложено использовать комбинированный поиск, где вместо
одного типа поиска применяется несколько, при этом в каждый
момент времени наиболее эффективный тип поиска выбирается
автоматически на основании априорной информации о частоте До¬
плера. Предложено четыре типа поиска сигналов в БАСН, включая
работающий на пониженном отношении сигнал/шум.
Для процедуры усеченного последовательного анализа Вальда
получена аналитическая зависимость вероятности ложной тревоги
и пропуска сигнала от значения начального порога обнаружения и
скорости его изменения. На основе этой аналитической зависимости
разработан метод проектирования поиска сигналов СРНС в БАСН.
Рассмотрено проектирование каждого из четырех режимов поиска,
даны практические рекомендации для разработчиков БАСН.
Предложенный метод поиска сигналов решает две научно-
технические задачи, стоящие перед проектировщиками БАСН:
1) разработка алгоритмов поиска сигналов, способных работать
на пониженном отношении сигнал/шум;
2) разработка алгоритмов поиска сигналов, отличных тем, что
они способны осуществлять поиск в большом диапазоне частот.
Во второй части главы 4 предложены методы проектирования
следящих систем в БАСН, которые построены на основе программ¬
ного коррелятора, рассмотренного в главе 3.
Метод проектирования ССЗ позволяет существенно снизить
загрузку ЦПУ по сравнению с традиционным подходом за счет
временного разделения работы петель слежения за несущей и оги¬
бающей сигнала НС. Для этого метода проведен анализ влияния
внутри системной помехи на оценку фазы ПСП при использова¬
нии неполного ансамбля отсчетов входного сигнала. Получены
182
^адитические зависимости для флюктуационной погрешности и
сМещения оценки фазы ПСП от параметров помехи в наихудшей
с11Туации, когда доплеровские сдвиги полезного сигнала и помехи
совпадают. Показано, что на практике при выборе минимальной
длительности интервала, на котором осуществляется свертка
рхоДного и опоРного сигналов, кроме отношения сигнал/шум не¬
обходимо учитывать влияние внутрисистемной помехи на значение
оценки фазы ПСП при близких доплеровских сдвигах частоты
долезного сигнала и помехи.
Проведен анализ характеристик системы слежения за несущей
частотой в режиме ФАПЧ при использовании неполного ансамбля
входных отсчетов. Показано, что характеристики ФАПЧ определя¬
ются двумя факторами: увеличением флюктуационной погрешно¬
сти оценки фазы из-за уменьшения интервала вычисления квадра¬
турных составляющих свертки и снижения помехоустойчивости,
вызванного ухудшением ортогональных свойств укороченной ПСП.
Первый фактор является платой за увеличение числа виртуаль¬
ных каналов приема. Путем выбора значения отношения сигнал/
шум, начиная с которого допускается использование неполного
ансамбля отсчетов, может быть достигнут разумный компромисс
между погрешностью оценки фазы несущей частоты и числом
виртуальных каналов. Снижение помехоустойчивости системы
ФАПЧ проявляется в увеличении флюктуационной погрешности
и смещении оценки фазы несущей частоты при наличии во вход¬
ной смеси внутрисистемной помехи. Получены аналитические
зависимости для погрешностей оценки фазы при воздействии
на сигнал внутрисистемной помехи в наименее благоприятных
условиях. Показано, что система ФАПЧ остается устойчивой
даже при этих условиях, а максимальные энергетические потери
не превосходят 3,5 дБ.
Разработанные методы слежения за сигналами позволяют
решить еще одну научно-техническую задачу, стоящую перед
проектировщиками БАСН: разработку методов и алгоритмов об¬
работки сигналов, отличных тем, что они не предъявляют высоких
требований к производительности ЦПУ.
Кроме того, исследована и решена еще одна задача, которая
была выявлена не в процессе анализа особенностей космического
базирования, но в результате использования МКК с переменным
временем интегрирования — оценка влияния внутрисистемной
помехи на алгоритмы первичной обработки сигналов, включая
методы приема символов навигационного сообщения.
183
Глава 5
МЕТОДЫ ВТОРИЧНОЙ ОБРАБОТКИ В БОРТОВОЙ
АППАРАТУРЕ СПУТНИКОВОЙ НАВИГАЦИИ
5.1. Особенности вторичной обработки в бортовой
аппаратуре спутниковой навигации
Особенности космического базирования (космические скорости
движения потребителя; иное расстояние по сравнению с назем¬
ным от потребителя до навигационного спутника; ограниченная
радиовидимость и многие другие), проанализированные в главе 2,
изменяют классические условия задачи проектирования, внося
дополнительные (характерные только для БАСН) требования на
вторичную обработку сигналов СРНС.
Как отмечалось в главе 2, характеристики приема сигналов
СРНС (такие как ОСШ, поведение частоты Доплера и условия
радиовидимости) у НОС близки к характеристикам для наземного
потребителя. Для СИСЗ эти характеристики существенно отлича¬
ются, а в ЭОС они представляют собой смесь характеристик НОС
и СИСЗ. Таким образом, для анализа особенностей космического
базирования достаточно ограничиться рассмотрением особен¬
ностей, наблюдаемых на НОС. До конца этой главы мы будем
рассматривать вторичную обработку сигналов применительно
к СИСЗ. Этот подход можно считать общепринятым (см., напри¬
мер [108, с. 189].
В главе 2 были сформулированы две задачи, которые необхо¬
димо решить для построения вторичной обработки в БАСН:
• разработка методов и алгоритмов обработки сигналов, от¬
личных тем, что они не предъявляют высоких требований к про¬
изводительности ЦПУ;
• разработка методов решения навигационной задачи, отлич¬
ных тем, что они не требуют четырех и более НС в зоне радио¬
видимости.
Зона геометрической видимости НС для СИСЗ ограничена
двумя основными факторами: диаграммой направленности из-
184
Рис. 5.1. Распространение сигналов от НС к СИСЗ
лучаюгцей антенны (рассчитанной на наземных потребителей) и
затенением Землей (рис. 5.1). Кроме затенения Землей следует
также рассматривать затенение ионосферой. Дело в том, что сиг¬
налы, проходящие вблизи поверхности Земли, испытывают воз¬
действие ионосферного слоя в большей степени, нежели сигналы,
проходящие по трассе «НС — наземный потребитель». Причиной
тому расстояние, проходимое сигналами от НС к СИСЗ: двигаясь
по касательной к поверхности Земли, они преодолевают больший
путь через ионосферу. Учет ионосферных погрешностей методом
моделирования трассы в таких обстоятельствах затруднен. Для
одночастотного приемника, не имеющего возможности компен¬
сировать ионосферную погрешность, может оказаться целесо¬
образным не обрабатывать сигналы, проходящие слишком близко
от Земли, где значительна концентрация электронов [109]. При
этом доступными для решения навигационной задачи имеет смысл
считать сигналы, не затененные Землей и ионосферой, что и по¬
казано на рис. 5.1.
В результате указанных выше ограничений зона видимости
НС для геостационарного потребителя в полярных координатах
представляет собой узкое кольцо (рис. 5.2). При этом на графике
по дуге откладывается азимут направления на НС, а в радиальном
направлении — угол его восхождения относительно плоскости,
проходящей через СИСЗ перпендикулярно к направлению на
Центр Земли. Направление для угла восхождения в 90° здесь со¬
ответствует надиру. Ширина зоны видимости, т. е. диапазон углов
восхождения видимых НС, составляет около 2°. Этот диапазон
Находится в районе 80° по шкале углов восхождения.
Столь ограниченная зона видимости приводит к тому, что потре¬
битель на СИСЗ располагает измерениями от очень малочисленного
созвездия НС, которое почти никогда не бывает полным (четыре
Или более НС). Но даже на тех коротких интервалах, когда для
185
N
Рис. 5.2. Расположение зоны видимости НС
для СИСЗ
наблюдения доступны не менее четырех НС, их геометрический
фактор очень велик (обычно несколько сотен), что не позволяет
с приемлемой точностью получить независимое для данного мо¬
мента навигационное решение.
Второй эффект, существенно влияющий на проектирование
вторичной обработки сигналов в БАСН, — влияние погрешности
опорного генератора (ОГ). Она вносит значительно больший вклад
в погрешность определения координат БАСН, нежели для назем¬
ного потребителя. Причина в том, что сырые измерения (псевдо¬
скорость и псевдодальность) включают в себя погрешности ОГ.
Для наземного потребителя с числом навигационных спутников
более трех эти погрешности определяются по одномоментному
набору измерений вместе с координатами и скоростями объекта.
Если же количество доступных НС меньше четырех, то погреш¬
ность ОГ может быть устранена только путем использования не¬
скольких последовательных одномоментных наборов измерений
(псевдодальностей и псевдоскоростей) и модели, которая описы¬
вает погрешности ОГ в разные моменты времени. Требования на
точность и сложность модели ОГ можно существенно ослабить
путем использования высокоточного ОГ. Как отмечалось в главах
2 и 3, использование высокоточного ОГ на борту ИСЗ зачастую
невозможно из-за их высокой стоимости. Высокостабильные ОГ
в космическом и радиационно стойком исполнении чрезвычайно
186
дороги, и на практике в БАСН часто используют более дешевые, но
jieHee стабильные термокомпенсированные опорные генераторы.
Мы вернемся к принципам проектирования вторичной обра¬
ботки в БАСН в разделе 5.3 после рассмотрения существующих
щетодов навигации СИСЗ.
5.2. Обзор методов навигации стационарного
искусственного спутника Земли
Этот раздел не содержит результатов оригинальных исследова¬
ний, но является обзором, в котором использовались материалы
[108], а также работ автора [110—112].
Геостационарные спутники — ИСЗ, которые остаются (прак¬
тически) неподвижными относительно поверхности планеты
в процессе своего орбитального движения. Очевидно, что указан¬
ная неподвижность обеспечивается при равенстве двух векторов
угловых скоростей — скорости вращения спутника по околозем¬
ной орбите и скорости вращения Земли вокруг собственной оси.
Общеизвестно (см., например [108]), что для модели Земли в виде
шара с концентрическим распределением плотности, равномерно
вращающегося с периодом, равным звездным суткам, и при учете
влияния на движение спутника только силы земного притяжения
необходимые условия выполнения указанного равенства скоростей
состоят в следующем:
• сидерический период обращения спутника вокруг Земли
по такой орбите должен совпадать со звездными сутками, а на¬
правление полета — с направлением вращения Земли вокруг
собственной оси;
• требуемая орбита обязана быть круговой, т. е. ее эксцентри¬
ситет равен нулю;
• эта орбита должна быть экваториальной, т. е. наклонение
плоскости орбиты к плоскости земного экватора равно нулю.
Перечисленным условиям удовлетворяет множество круговых
экваториальных орбит с радиусом примерно 42 164,2 км, отличаю¬
щихся друг от друга лишь долготой точки стояния спутника, т. е.
его угловым расстоянием относительно гринвичского меридиана.
Обеспечение полной неподвижности геостационарного спутника
относительно земной поверхности является недостижимым мате¬
матическим идеалом из-за того, что реальная форма Земли далека
от идеального шара с концентрическим распределением плотно¬
сти, а на движение спутника помимо центральной силы земного
Притяжения оказывают возмущающее влияние силы притяжения
187
Солнца, Луны, световое давление и другие факторы. Это приводи?
к неизбежному смещению (дрейфу) спутника относительно земной
поверхности [108, 113—115].
В общем случае орбитальное движение СИСЗ может быть опи¬
сано системой обыкновенных дифференциальных уравнений 2-го
порядка и размерности:
v(f)
|1Г(0
d_
dt
r(t)
v(f)
r(fl f
Z Si
(5.1)
где r(t) — радиус-вектор центра масс спутника в заданной систе¬
ме координат; v(i) — вектор скорости спутника в той же системе
Ht)
координат;
v(f)
— вектор параметров движения спутника на
момент времени t; ц = 6,67384-10 11 м3/(с-кг) — гравитационная
постоянная Земли; y^ g- —сумма ускорений от всех учитываемых
возмущающих сил.
В табл. 5.1 приведены значения ускорений от действия возму¬
щающих сил, а также максимального смещения СИСЗ в результате
действия этих сил с интервалами 5 и 30 суток [108, 116].
В литературе [108, 114, 115, 117, 118] распространено мнение
о том, что для большинства практических применений достаточен
учет влияния следующих возмущений:
Таблица 5.1
Ускорения и максимальные смещения СИСЗ под влиянием возмущающих сил
Возмущения
Ускорение, м/с2
Максимальное
отклонение, км
за 5 суток
за 30 суток
Полярное сжатие Земли
1,7-1(Г5
96
576
Притяжение Луны
7,3-10_6
56
332
Притяжение Солнца
3,3-НГ6
20
114
Аномалии геопотенциала
2,5-10“7
16
110
Прямое световое давление
2,310-7
4
24
Отраженное световое давление
2,1-НГ9
0,04
0,2
Сила притяжения Венеры
4,4-10_1°
0,02
0,014
Приливные деформации Земли
2,7-Ю-10
0,0016
0,008
Сила притяжения Юпитера
5,2-НГ11
0,0004
0,0018
Океанские приливы
2,7-Ю-11
0,00016
0,0008
188
• составляющих силы гравитационного притяжения Земли, обу¬
словленных наличием полярного сжатия и аномалий геопотенциала
0 представляемых обычно в виде ряда по сферическим функциям
с удержанием гармоник до 4-го-8-го порядка [108, 117—119];
• гравитационного притяжения Солнца и Луны как точечных
щасс;
• прямого светового давления.
Непосредственное аналитическое решение системы (5.1) воз¬
можно лишь при целом ряде упрощающих предположений. Обыч-
пьш подход состоит в применении метода численного интегриро¬
вания системы (5.1) для получения параметров движения ИСЗ
в любой заданный момент времени. Нахождение частного решения
системы 2-го порядка и размерности три требует задания шести
постоянных интегрирования — орбитальных элементов, например
fr(i)l
компонент вектора на начальный момент времени tn.
[_v(*)J
Влияние указанных возмущений приводит к тому, что практи¬
чески удается реализовать лишь так называемую квазигеостацио-
нарную орбиту, отклонения параметров которой от идеальных ста¬
ционарных значений могут считаться приемлемыми в конкретных
приложениях и удовлетворять международным ограничениям.
Смещение спутника из номинальной точки стояния изме¬
няется во времени достаточно сложным образом. В долготном
направлении это постоянно возрастающее отклонение в сторону
ближайшей точки устойчивого равновесия с ускорением, завися¬
щим от первоначальной удаленности от этой точки и с суточными
гармоническими колебаниями. Смещение по широте представляет
собой гармонические колебания относительно плоскости экватора
с суточным периодом и с переменной амплитудой, определяемой
текущим наклонением плоскости орбиты спутника к плоскости
экватора. Изменение самого наклонения имеет явно выраженную
монотонную составляющую (примерно от 0,767 до 0,957° в год,
или в среднем от 7 до 10" за сутки [108, 120, 121]), а также ряд
периодических составляющих.
5.2.1. Требования к точности навигации стационарного
искусственного спутника Земли
Основными показателями качества навигации СИСЗ являются
точность, надежность и экономическая эффективность. Могут
применяться и некоторые дополнительные критерии, например
189
оперативность, реализуемость, автономность, универсальность
степень загрузки измерительных средств, загрузка персонал^
ЦУП и др.
Под точностью навигации СИСЗ понимается степень отличия
рассчитанных в результате решения навигационной задачи ор¬
битальных параметров спутника на каком-то интервале от их
истинных значений. Обычно требования к точности являются
определяющими и зависят от целевого назначения СИСЗ. Для
спутников связи и вещания обоснование требований к точности
навигации производят исходя из условия обеспечения удержания
СИСЗ в заданной области по долготе и широте относительно номи¬
нальной (официально заявленной) точки стояния. Необходимым
и достаточным условием при этом является выполнение заданных
требований к точности определения и прогнозирования текущей
долготы и широты спутника. Могут вместо этого предъявляться
требования к точности определения положения по долготе, широте
и, кроме того, к точности определения сидерического периода об¬
ращения (ошибки которого показывают скорость нарастания сбоев
прогнозирования положения спутника по долготе). Требования к
остальным параметрам орбитального движения СИСЗ обычно не
являются столь важными. В простейшем случае требования к точ¬
ности могут формулироваться как доля от области удержания.
Типовой уровень допустимых ошибок навигации для удержа¬
ния геостационарного спутника в области ±0,05° составляет [122,
123]:
• по широте — от 7 до 12 км;
• по долготе — от 3 до 6 км;
• по периоду обращения спутника — от 0,1 до 0,2 с.
Для геостационарных спутников, входящих в систему глобаль¬
ной метеорологии (либо при их использовании для целей наблю¬
дения), требования к точности определения и прогнозирования
параметров движения обусловливаются не удержанием спутника в
заданной точке стояния на геостационарной орбите, а, как прави¬
ло, более жесткими требованиями к точности привязки объектов
наблюдения. Например, для спутника «Электро-JI» выполнение
целевой задачи (мониторинг перемещения облачного покрова) воз¬
можно лишь при условии обеспечения предельной погрешности
знания его положения не более 1 км.
Для СИСЗ, входящих в систему TDRSS и выполняющих роль
навигационных ориентиров, требования к точности навигации
составляют несколько десятков метров.
Наиболее высокие требования к точности навигации предъявля¬
ются для СИСЗ, которые предполагается использовать в одном из
190
вариантов навигационной системы Galileo (ее подсистемы верхнего
эшелона EGNOS). Они составляют не более 10 м по положению
СЙСЗ [119, 124].
5.2.2. Средства навигации стационарного искусственного
спутника Земли
Согласно [108], наиболее распространенными измерительны¬
ми средствами навигации СИСЗ являются сегодня контрольно¬
измерительные станции (КИС), т. е. наземные станции слежения
[108, с. 117). Как мы уже многократно отмечали выше, исполь¬
зование наземных станций не соответствует самому принципу
автономной навигации. Как справедливо указано в работе [108,
с. 156], «для большинства коммерческих приложений примене¬
ние многопунктового метода с использованием нескольких КИС
является непозволительной роскошью». Заметим также, что ис¬
пользование целевых каналов КИС (в частности, связного канала)
хотя и является более экономически эффективным, но не решает
проблему автономной навигации.
К другим средствам неавтономной навигации СИСЗ относятся
лазерные спутниковые дальномеры и фазовые системы, такие как
фазовые пеленгаторы и радиочастотные датчики (англ. Formation
Flying Radio Frequency, FFRF), сходство которых с СРНС мы рас¬
сматриваем в следующей главе. Оба типа измерительных систем
обеспечивают прецизионную точность измерения, но являются
чрезвычайно дорогостоящими как сами по себе, так и в эксплуа¬
тации. Кроме того, функционирование лазерных дальномеров
зависит от погодных условий.
Астрономические средства наземного базирования хотя и
обеспечивают высокую точность определения внеплоскостных
параметров орбиты и их использование обычно не является до¬
рогостоящим, но зависимость от погодных условий снижает на¬
дежность навигации с их применением.
Относительно бортовых средств навигации в работе [108] отмечает¬
ся: «Применение данных от бортовых датчиков системы ориентации
и стабилизации спутника позволяет существенно повышать эконо¬
мическую эффективность навигации, но реализуемая точность пока
Уступает точности наземных измерительных средств» [108, с. 117].
Интересно, что в работе [108] в качестве перспективных из¬
мерительных средств наряду с БАСН выделены астрономические
средства орбитального базирования, а также аппаратура межспут-
Нйковых радиолиний.
191
5.3. Использование спутниковой радионавигационной
системы для навигации искусственного спутника Земли
В разделе 5.1 были определены задачи, которые необходимо
решить при проектировании вторичной обработки сигналов в
БАСН. К ним относится, во-первых, разработка методов вторичной
обработки, отличающихся тем, что они не предъявляют высоких
требований к взаимному геометрическому расположению СИСЗ
и НС, и, во-вторых, разработка алгоритмов вторичной обработки,
отличающихся тем, что они способны моделировать поведение ОГ
с низкой стабильностью. Следует также подчеркнуть, что все раз¬
рабатываемые методы и алгоритмы должны отвечать требованиям
автономности, т. е. не запрашивать обмен информацией между ИСЗ
и наземными станциями и не предъявлять высоких требований
к производительности ЦПУ.
В условиях, когда при навигации СИСЗ приходится сталки¬
ваться с продолжительными (несколько часов) интервалами, когда
в зоне радиовидимости вообще нет НС, решение навигационной
задачи невозможно обеспечить без дополнительной информации
о параметрах движения потребителя. В качестве источника такой
информации может служить инерциальная навигационная система
(ИНС), вырабатывающая показания координат и скорости объекта
на основе измерений кажущегося ускорения и угловой скорости,
полученных акселерометрами и гироскопами. При запуске ИНС
предполагается использование приближенных начальных условий
по координатам, составляющим скорости и углам ориентации.
Благодаря тому что ошибки ИНС растут достаточно плавно, по¬
является возможность оценить их, накопив достаточное количе¬
ство разномоментных измерений от СРНС. Оценки ошибок ИНС
вводятся в качестве поправок в ее показания либо учитываются
во внутренних алгоритмах ИНС, обеспечивая получение уточ¬
ненного навигационного решения. Использование ИНС является
универсальным средством восполнения скудости информации, по¬
ступающей от внешних по отношению к потребителю источников.
При этом динамика потребителя может варьироваться в широких
пределах, важно только соблюдать допустимый для чувствитель¬
ных элементов диапазон перегрузок и угловых скоростей.
Несмотря на отмеченные положительные качества ИНС, их ис¬
пользование на борту коммерческих СИСЗ не всегда Приемлемо-
Действительно, из-за сильно прореженной диаграммы поступления
измерений в рассматриваемой задаче эффективной может быть
только ИНС высокого класса точности, приобретение которой
192
Практически невозможно для рассматриваемого уровня БАСН.
Необходимость выполнения требования радиационной стойкости
также приводит к существенному удорожанию нужного инерци-
ального обеспечения.
Наиболее перспективным способом обойтись без применения
дорогостоящей аппаратуры на борту СИСЗ видится использование
уравнений динамики его движения (5.1). Такой подход пред¬
ставляется вполне приемлемым благодаря сравнительно малому
уровню неопределенности возмущений, действующих на СИСЗ,
и наличию в настоящее время детально проработанной модели
движения космических тел.
Использование модели движения геостационарных или вы¬
сокоорбитных ИСЗ для их позиционирования либо определения
параметров орбит привлекает внимание исследователей не одно
десятилетие [109, 125, 126]. Работа [125] носит общий характер
и направлена в первую очередь на освещение идейной стороны
навигации ИСЗ с учетом уравнений их движения. В работе [127]
обсуждаются (без формализации) особенности навигации различ¬
ных ИСЗ, в том числе геосинхронных без наземной поддержки,
и приводятся результаты испытаний.
В работе автора и коллег [109] представлено конкретное реше¬
ние, предполагающее использование сигналов СРНС и применяю¬
щее известные из прикладной астрономии методы определения
орбит. В работе [109] показано, что задействовать существующие
приемы определения орбит в БАСН проблематично: во-первых,
ресурсы на борту ИСЗ ограничены, во-вторых, традиционные ме¬
тоды не автономны, т. е. предусматривают обмен информацией
с наземными станциями. Выше уже отмечалось, что серьезными
ограничениями ресурсов являются небольшой объем оперативной
памяти на борту и недостаток вычислительной мощности ЦПУ
космического базирования. Эти ресурсы необходимы для расчета
Моделей возмущающих сил в уравнении (5.1). В частности, значи¬
тельный объем памяти требуется для хранения эфемерид Солнца
и Луны. В работе [109] показано, что аналитические эфемериды
Солнца и Луны [126] обеспечивают достаточную точность расчета
Положения этих небесных тел, не требуя таких объемов памяти,
Как эфемериды серии DE [128].
Кроме того, традиционные методы определения орбит нуждают¬
ся в обмене информацией с наземными станциями: при переходе
°т системы координат ECEF (Earth-Centered Earth-Fixed) к ICRF
(International Celestial Reference Frame) [128] используются пара¬
метры вращения Земли (ПВЗ), которые не могут быть измерены
борту ИСЗ. ПВЗ можно определить или из наблюдений, или
193
путем экстраполяции предыдущих значений ПВЗ, что означа6т
необходимость передачи ПВЗ с Земли на ИСЗ, а это в силу треб0
вания автономности решения недопустимо. Для устранения этой
сложности было проведено математическое моделирование оценкц
влияния погрешности определения ПВЗ на точность вычисление
орбиты ИСЗ. Моделирование показало [109], что в субметрово^
диапазоне погрешности определения орбиты, изменения положе¬
ния полюса Земли практически не влияют на точность расчета
орбиты. Заметим, что UTl-TAI-коррекции могут быть рассчитаны
с достаточной точностью либо из UTC-TAI-данных (см. ICD-GPS-
200 GPS документ для описания параметров UTC), либо простой
линейной экстраполяцией предыдущих значений UT1-TAI.
Таким образом, чтобы преодолеть ограничения ресурсов
в БАСН, предлагается использовать аналитические эфемериды
Солнца и Луны вместо эфемерид серии DE и пренебречь измене¬
ниями ПВЗ, поскольку эти изменения сказываются только в суб-
метровом диапазоне погрешностей определения орбиты.
Предложенное в работе [109] решение сводится к оцениванию
начальных условий для координат и составляющих скоростей
СИСЗ, относящихся к первому моменту сеанса измерений СРНС.
При этом используется сложный механизм вычисления так назы¬
ваемых изохронных производных, т. е. производных от текущих
координат и составляющих скорости по начальным условиям. По
результатам оценивания начальных условий происходит детерми¬
нированное восстановление текущего положения и скорости ИСЗ.
Такой подход является традиционным в задачах определения орбит
по астрономическим наблюдениям.
Перейдем теперь к рассмотрению ОГ с низкой стабильностью.
В работах [109, 129] подробно описано моделирование ОГ в БАСН.
Известны два основных подхода к моделированию погрешности
ОГ: детерминистический и стохастический. Детерминистический
подход предполагает, что погрешности ОГ могут быть пред¬
ставлены полиномом низкого порядка, коэффициенты которого
определяются из сырых измерений СРНС (т. е. из псевдодально¬
сти и псевдоскорости). Степень полинома зависит от качества ОГ
и требований к точности модели. Например, погрешности ОГ на
НС GPS моделируются полиномом второй степени на промежутке
4...6 ч. Погрешность такого приближения не превосходит 1 не.
Чтобы оценить степень полинома, необходимую для построения
адекватной модели термокомпенсированного ОГ, был проведен
следующий эксперимент. На суточном интервале были записаны
сырые измерения для всех наблюдаемых НС GPS, полученных
по двум GPS/ГЛОНАСС-приемникам, присоединенным к общей
194
адтенне. Интервал между записями составлял б с. Для каждой
записи и для каждого из спутников, наблюдаемых одновременно
в обоих приемниках, были рассчитаны разности псевдодальностей
и псевдоскоростей. Предполагалось, что текущее смещение ОГ
Л его дрейф равны средним значениям вычисленных разностей
псевдодальности и псевдоскорости (соответственно). При помощи
метода наименьших квадратов были посчитаны коэффициенты
полинома, пригодные для аппроксимации смещения ОГ.
На рис. 5.3 приведены невязки между аппроксимирующим
полиномом сотой степени и реальными измерениями. Очевидно,
что даже полином высокой степени не представляет погрешности
ОГ адекватно. Таким образом, стохастическая компонента по¬
грешности ОГ слишком велика, чтобы быть соответственно пред¬
ставленной полиномом даже высокого порядка.
Рассмотрим теперь стохастический подход к моделированию
погрешности ОГ [130]. Основная его идея заключается в пред¬
положении случайного характера поведения погрешности ОГ.
Стохастические характеристики опорных генераторов обычно
характеризуются дисперсией Аллана, данные о которой предо¬
ставляются производителями ОГ. Эта информация позволяет по¬
строить ковариационную матрицу, которую можно использовать
в фильтре Калмана для оценки смещения и ухода шкалы ОГ. На
рис. 5.4 показаны невязки между оценками, полученными при
помощи фильтра Калмана и тем же набором реальных измерений,
что и на рис. 5.3. Эти невязки не содержат каких-либо система¬
тических смещений, а остаточные шумы практически такие же,
как шумы измерений.
По результатам эксперимента в работе [109] сделаны выводы
о том, что стохастические модели ОГ достаточно полно представля¬
ют низкостабильные термокомпенсированные опорные генераторы,
используемые в БАСН. При этом для реализации стохастической
модели ОГ было предложено применять более сложные подходы,
Время, с
Рис. 5.3. Зависимость невязок от времени (детерминистический подход)
195
2
1
5
of О
<r>
к
m
i -1
-2
0 12 000 24 000 36 000 48 000 60 000 72 000 84 000
Время, с
Рис. 5.4. Зависимость невязок от времени (стохастический подход)
такие как фильтр Калмана, а не классический метод наименьших
квадратов.
Работа [109] также интересна тем, что в ней приводятся ре¬
зультаты применения методов вторичной обработки данных, по¬
лученных на борту космической станции «Мир». СКП трехмерной
погрешности измерения местоположения и скорости космической
станции «Мир» составили около 15 м и 0,15 м/с соответственно.
Следует отметить, что эксперимент проводился в условиях работы
режима селективного доступа GPS, который серьезно ухудшал
точностные характеристики навигационных определений.
Не отрицая полезности результатов, полученных в работе [109],
отметим, что использование любой модели генератора опорного
сигнала представляется нежелательным, так как требует скру¬
пулезного анализа его характеристик на основе большого объема
статистических данных. Но даже при проведении соответствую¬
щих исследований решение, основанное на той или иной модели
генератора, останется уязвимым к немоделируемым (неизученным)
особенностям поведения его погрешности. Поведение ОГ к тому же
может меняться в ходе эксплуатации. Более надежным представля¬
ется применение в навигационной задаче не исходных измерений
псевдодальности и псевдоскорости, а их разностей, сформированных
для разных НС. Понятно, что при таком решении теряется часть
информации. В частности, здесь вообще не предусматривается воз¬
можность обработать измерение от единственного наблюдаемого НС.
Тем не менее этот прием выглядит привлекательно с практической
точки зрения. Он избавляет потребителя от необходимости тонкой
настройки навигационного обеспечения на конкретную модель
генератора, т. е. дает инвариантность навигационного решения по
отношению к его характеристикам.
Другим отличием рассматриваемого далее решения от предло¬
женного в работе [109] является отказ сводить задачу к оцениванию
196
одних и тех же параметров (начальных условий) в каждый момент
времени. Ведь если речь идет не об оценивании параметров орбит,
а только о текущих координатах и составляющих скорости, то
операции с выражением текущих параметров через их начальные
значения и обратном представлении выглядят избыточными с вы¬
числительной точки зрения. Более рациональной в рассматриваемой
ситуации выглядит схема с непосредственным оцениванием теку¬
щих координат и скорости. Для этого имеются все условия: модель
динамики оцениваемого процесса в форме дифференциальных
уравнений и эффективный математический аппарат оценивания —
фильтр Калмана, который, впрочем, требуется адаптировать к осо¬
бенностям задачи (нелинейному характеру уравнений динамики и
измерений). Важным доводом в пользу прямого решения задачи
оценивания текущих параметров СИСЗ является еще и возможность
учета здесь стохастических возмущений в уравнениях динамики.
Высказанные выше соображения учтены в изложенном в работе
[131] методе навигации СИСЗ по измерениям СРНС. В предложен¬
ном методе с использованием разностных измерений псевдодально¬
стей для разных НС оценивается вектор состояния СИСЗ с учетом
уравнения его динамики. Состав вектора состояния не оговарива¬
ется, но он, очевидно, предполагает в числе прочего координаты
и составляющие скорости СИСЗ. Оценка вектора состояния и ко¬
вариационная матрица ее погрешности определяются с помощью
процедуры калмановского типа, где применяется линеаризация
уравнений динамики и измерений относительно спрогнозирован¬
ных значений параметров. Идеологически данный метод выглядит
вполне разумным, тем более что он согласуется с рассмотренным
еще в работе [125] решением. Однако более детальный анализ
метода позволяет выявить в нем ряд существенных недостатков,
заставляющих усомниться в его пригодности для практического
применения. Такие сомнения косвенно подтверждаются тем, что
в открытой печати не удается обнаружить каких-либо сведений о
результатах апробации представленного в работе [131] метода.
Перечислим недостатки, вызывающие наибольшее беспокой¬
ство.
1. Используется избыточное число разностей измерений псев-
Додальностей, а именно М = N(N — 1)/2, где N — количество
рабочих НС. На самом деле нужно использовать разность N — 1,
т. е. разности измерений для одного опорного и N — 1 вспомо¬
гательных НС. Дополнительные разности представляют собой
функции указанного набора из (N - 1)-й разности и поэтому не
содержат никакой новой информации. Обработка избыточных раз¬
ностей измерений не только приводит к бессмысленной нагрузке
197
на процессор, но и порождает дополнительные вычислительна^
ошибки в фильтре Калмана.
2. Не учитывается корреляция между шумами разностных ц3.
мерений, которая неизбежно возникает из-за участия измереццч
одного и того же НС в образовании различных разностей.
3. Не учитывается наличие коррелированных во времени помех
(цветных шумов) измерений.
4. Не дается никаких пояснений, как вычислять переходную
матрицу для линеаризованной модели динамики вектора состоя,
ния.
5. Не используются измерения псевдоскорости, обработка
которых дает положительный эффект для точности прогноза но.
ложения ИСЗ при отсутствии или малом числе рабочих НС.
6. Используется классическая форма фильтра Калмана, которая
в условиях неблагоприятной геометрии рабочих НС относительно
ИСЗ не обладает устойчивостью к вычислительным ошибкам.
При этом ковариационная матрица со временем теряет свойство
положительной определенности, и фильтр расходится.
7. Не предусматривается итерационная обработка измерений,
относящихся к одному моменту времени, что при значительной
начальной неопределенности координат и скорости ИСЗ приво¬
дит к дополнительным погрешностям получаемых оценок из-за
существенно нелинейного характера модели динамики ИСЗ и
измерений.
Некоторые из перечисленных недостатков вполне очевидны,
другие выявляются при попытке апробации с реалистичным
сценарием.
Крупной работой, посвященной навигации СИСЗ, как авто¬
номной, так и поддерживаемой наземными станциями, является
исследование [108]. Интересно проанализировать два способа реше¬
ния навигационной задачи из работы [108]. Первый способ пред¬
полагает оценивание начальных условий СИСЗ с их последующим
пересчетом на текущий момент времени. Он классифицируется
как кинематический метод навигации. По существу, это решение,
которое применено в работе [109]. В монографии [108] указывается
на возможность получения такого решения по исходным измере¬
ниям СРНС при условии использования приемника с высокоста¬
бильным генератором либо по разностным (для разных спутников)
измерениям уже без жестких требований на стабильность генера¬
тора. Представленные результаты демонстрируют существенный
недостаток данного метода: начиная с определенного момента
возрастает погрешность позиционирования. Это происходит, не¬
смотря на периодические обсервации по СРНС. В качестве причин
198
называются наличие систематических погрешностей измерений
И неадекватность модели динамики СРНС. Заметим, что первая
причина может быть устранена путем включения систематических
0Ли коррелированных погрешностей измерений в подлежащий
оцениванию вектор состояния. Это сделано в предлагаемом нами
далее методе. В то же время следует заметить, что, поскольку
эТот способ решения требует пересчета начальных условий на все
более удаленный момент времени, он особенно чувствителен ко
второй причине деградации точности — погрешностям знания
динамики СИСЗ.
Второй из рассмотренных в работе [108] вариантов навигации
СИСЗ основан на применении итерационной калмановской про¬
цедуры фильтрации для оценивания текущих параметров СИСЗ —
так называемый динамический метод навигации. Идеологически
он совпадает с методом из работы [131], если не принимать в расчет
явных недоработок последнего. Здесь, однако, также не идет речи
об использовании устойчивой к вычислительным ошибкам моди¬
фикации фильтра Калмана, которая требуется в связи с плохой
обусловленностью ковариационной матрицы погрешностей оценок
из-за неблагоприятной геометрии наблюдаемых НС.
Заметим, что, подобно [125], оба обсуждаемых в работе [108]
решения оговариваются лишь в общих чертах без конкретных
выражений, позволяющих составить однозначное представление
об их реализации.
Работы автора [132, 133] могут быть интересны не только тем,
что там проанализированы реальные измерения СРНС, полученные
на борту орбитальной космической станции, но и тем, что в них
проводится сравнение метода определения орбит (кинематический
метод в терминологии [108]) и классической фильтрации (динами¬
ческий метод в терминологии [108]). Примечательно, что приемник
СРНС, установленный на борту станции «Мир», оказался наиболее
точным из всех используемых навигационных средств. Поэтому,
когда при обработке результатов орбитального эксперимента по¬
требовалось оценить погрешность местоопределения, в качестве
опорных координат использовались точки орбиты, полученной по
измерениям СРНС методом определения орбит. Важно понимать
Две особенности такого подхода:
• обрабатывались данные НОС, при моделировании движения
которого нужно учитывать большее количество возмущающих
факторов; в работах [132, 133] учитывалось не только притяжение
Луны и Солнца, аномалии геопотенциала и световое давление, но
И приливные деформации Земли, океанские приливы, сопротив¬
ление атмосферы, а также релятивистские эффекты;
199
• постобработка данных не накладывает таких жестких огра.
ничений на вычислительные ресурсы, как автономная навигд.
ция, которая ведется на борту ИСЗ в реальном масштабе вре_
мени.
Пожалуй, наиболее ценной в методическом плане работой
посвященной оцениванию орбит ИСЗ на основе стохастического
подхода, является монография [134]. В ней детально, с наглядны,
ми примерами и упражнениями изложены теоретические основы
методов определения орбит с использованием вероятностного
описания динамики ИСЗ и погрешностей измерений (в том числе
от СРНС). В качестве основных инструментов здесь выступают
метод наименьших квадратов и фильтр Калмана. Рассматриваются
их итерационные версии, а также модификации, использующие
квадратные корни из ковариационных матриц, которые обладают
повышенной устойчивостью к вычислительным ошибкам. Анали¬
зируется чувствительность решений к неучтенным погрешностям
в знании параметров модели динамики ИСЗ, неадекватности
априорной ковариационной матрице оцениваемых параметров и
ковариационной матрице шумов измерений. Однако, несмотря
на развернутое изложение материала, из данной работы нельзя
заимствовать какой-либо готовый работоспособный алгоритм
для определения координат и скорости СИСЗ по измерениям
СРНС.
В следующем разделе мы рассматриваем формальную постанов¬
ку задачи определения координат ИСЗ по измерениям сигналов
СРНС и даем метод ее решения [135, 136]. Метод, с одной сторо¬
ны, свободен от обсужденных выше недостатков существующих
способов, а с другой — вбирает в себя наиболее эффективные из¬
вестные приемы оценивания и представлен с высокой степенью
подробности.
5.4. Метод определения координат искусственного
спутника Земли по измерениям сигналов спутниковой
радионавигационной системы
5.4.1. Постановка задачи
Пусть трехмерные векторы rCRS и v^s координат и составляю¬
щих скорости СИСЗ в геоцентрической инерциальной системе CRS
(Celestial Reference System) определяются системой дифференци¬
альных уравнений вида [137]:
200
pCRS = VCRS.
CRS
< vCRS = -GM9 - + F(rCRS, vCRS, t). (5.2)
|j.CRS |
Здесь GMffl — произведение гравитационной постоянной на
массу Земли; F( •) — возмущающее ускорение, которое связано
с несферичностью гравитационного поля Земли, притяжением
Луны, Солнца, Венеры, Юпитера, давлением прямых и отражен¬
ных от Земли солнечных лучей, твердотельными приливами,
релятивистскими эффектами; t - время.
Следует отметить, что структура и параметры F( •) на практике
могут носить приближенный характер. В рассматриваемой же
постановке неопределенность F( •) порождена только отсутствием
точного значения постоянного коэффициента отражения СИСЗ,
влияющего на световое давление. Представляется удобным ввести
в рассмотрение параметр С, равный увеличенному на единицу
коэффициенту отражения, поскольку именно такая величина
определяет возмущающее ускорение из-за действия солнечного
давления. Считаем, что для начального момента f0 имеются апри¬
орные значения координат и скорости СИСЗ Гц, v0 и известны
ковариационные матрицы их погрешностей Pro,PV(). Кроме того,
полагаем известными априорную оценку С0 параметра влияния
солнечного света и дисперсию ее погрешности ст^. .
Отнесем координаты СИСЗ к антенне приемника сигналов GPS,
установленного на его борту, и предположим, что в дискретные
моменты времени с помощью этого приемника вырабатываются
измерения псевдодальностей и псевдоскоростей. Количество на¬
вигационных спутников, используемых для получения измере¬
ний, со временем меняется и может быть вообще нулевым, что
преимущественно и имеет место для СИСЗ. Моменты поступления
измерений нерегулярны, но они могут отличаться от регулярных
моментов tk -10 + kAt, k = 1,2,... (где At > 0 — постоянный пара¬
метр) лишь на величину 8t£ps , которая по модулю не превышает
известного порога 5f^ax <<:
Введем в рассмотрение вектор Sk = (<s|, S^k)T системных
номеров НС, для которых вблизи момента tk, т. е. в интервале
k5 tk + ^maxL получены измерения псевдодальностей и псевдо¬
скоростей. В случае отсутствия измерений формально имеем nk = О
и Sk = 0. В общем случае для НС может быть получена только
псевдодальность или только псевдоскорость. Но такая ситуация,
201
усложняющая выкладки и не вносящая в задачу ничего принцц
пиально нового, рассматриваться не будет.
Существующие измерения представим в форме:
=vl[r(tk+8tGkp%tk+8takps] + ^k+8tk+^Vk; (5.3)
ZL = [r^fe + S^fePS)> + §0, h + §^fePS] + &fk + , (5.4j
R. k
где j = 1 ,nk — порядковый номер измерения для данного момен¬
та; ^(•ь Ц(-) — известные функции, передающие зависимость
дальностей и радиальных скоростей для НС, имеющего номер
от времени измерений и относящихся к этому времени векторов
положения г и скорости v антенны бортового приемника в системе
WGS-84; 8tk и 5fk — погрешности генератора приемника в вы¬
работке времени и частоты; (J , (J- — белошумные погрешно-
k k
сти измерений; 3^ — коррелированные во времени погрешности,
для которых приемлема стохастическая аппроксимация в виде
стационарных марковских процессов первого порядка. Полагаем,
что белошумные Cj , Cj. и коррелированные 3^ погрешности
k vk
независимы друг от друга и подчиняются центрированному га-
уссовому распределению вероятности. Причем статистические
характеристики этих составляющих — дисперсии для CL. , С,}-,
uk vk
дисперсии и интервалы корреляции для 3^ — одинаковы для
всех НС.
Время t в приведенных формулировках свяжем с системным
временем GPS.
В данной постановке модель для погрешностей генератора 5tk,
8fk не привлекается. Как отмечалось во введении, это придает
алгоритму решения универсальный характер, и для его при¬
менения не требуется детального анализа свойств конкретного
приемника.
Ставится задача: опираясь на модель (5.2), оценить значения
г, v для регулярных моментов времени tk = t0 + kAt, k = 1,2,... по
измерениям zj,, V = V, t>, I = hk, j = 1,nk вида(5.3), (5.4). Помимо
оценок в задаче требуется определить еще и среднеквадратические
погрешности (СКП) оценивания компонент векторов г и v.
Как известно [138], оптимальной с точки зрения СКП оценкой
является условное по отношению к измерениям математическое
ожидание оцениваемой величины. Однако имея в виду возмож-
202
0Ость решения данной задачи в реальном времени, целесообразно
^пользовать субоптимальный алгоритм оценивания, в котором
Принят ряд допущений, направленных на снижение вычисли -
тедьных затрат.
5.4.2. Структура решения
Сразу отметим, что отсутствие априорной информации о по¬
грешностях генератора приемника 5/fe приводит к неинфор-
лативности единовременных измерений от одного НС (nk - 1).
Поэтому, как уже говорилось во введении, обработке подвергаются
не исходные (5.3), (5.4), а разностные единовременные измерения
от двух и более НС, в которых 5tk, 5Д, исключаются. Разностные
измерения формируются путем вычитания из измерений для
одного (опорного) НС того же типа измерений для остальных
(вспомогательных) НС. В результате при наличии в рабочем со¬
звездии nk спутников образуется mk = - 1 разностных измерений
нсевдодальностей и столько же измерений псевдоскоростей.
Основу представленного ниже алгоритма решения составляет
итерационный фильтр Калмана (ФК) [139]. Необходимость вы¬
полнения итераций обусловлена существенно нелинейной зави¬
симостью измеряемых параметров — дальностей и радиальных
скоростей — от координат и скоростей СИСЗ при значительной
неопределенности последних. Вектор состояния, оцениваемый
фильтром, включает векторы погрешностей координат Дг, скоро¬
сти А\, параметр С влияния солнечного света на движение СИСЗ,
а также вектор коррелированных погрешностей Д'й разностных
измерений псевдодальностей. При этом с помощью стандартных
соотношений калмановской фильтрации обрабатываются измере¬
ния, в которых дальности и радиальные скорости представляются
в виде, линеаризованном относительно оценок векторов г и v,
полученных на предыдущей итерации или, если это первая ите¬
рация, то относительно оценок прогноза г и v. В ковариационных
соотношениях ФК на этапе прогноза используются уравнения
Динамики СИСЗ (5.2), линеаризованные в точке, соответствующей
оценкам координат и скорости на предыдущем шаге.
Оценки прогноза координат и скорости на момент k вычисля¬
ются путем интегрирования нелинейных уравнений типа (5.2), где
в качестве начальных условий берутся относящиеся к моменту
& — 1 значения г и v, скорректированные с учетом выработанных
Фильтром оценок для Дг и А\. Такая процедура обработки изме¬
рений аналогична схеме коррекции с обратной связью, которая
203
применяется в интегрированных навигационных системах [14qj
где полученные с помощью фильтра оценки погрешностей
вигационной системы используются далее при интегрирован^
уравнений ее идеальной работы. Таким образом, входящие в вектор
состояния Дг, Av — это погрешности прогноза координат и скор0_
сти по измерениям, полученным на предшествующих шагах реще.
ния. В отличие от варианта, в котором уравнения интегрируются
от априорных начальных значений г0 и v0, а ФК соответственно
оценивает погрешности, порожденные неточностью этих значений
выбранный метод позволяет иметь дело с существенно меньшими
погрешностями координат и скорости. Малость погрешностей по¬
зволяет более корректно выполнить линеаризацию, необходимую
для применения ФК.
Еще одной особенностью используемого алгоритма является
применение модификации ФК на основе C/D-разложения [141].
В этой модификации вместо ковариационной матрицы погреш¬
ности оценок Р вычисляются верхнетреугольная матрица U
с единицами на диагонали и диагональная матрица D, такие
что Р = UDUT. По сравнению с классическим вариантом ФК UD-
модификация более устойчива к вычислительным ошибкам, что
особенно актуально для рассматриваемой задачи, где приходится
сталкиваться с плохой обусловленностью ковариационной ма¬
трицы Р из-за редкого поступления измерений, а также малого
количества и неблагоприятной геометрии расположения доступ¬
ных для наблюдения НС. Применение С/П-разложения несколько
повышает вычислительные затраты, но в свете указанного выше
преимущества эти затраты вполне окупаются.
Схема решения задачи при наличии измерений представлена
на рис. 5.5. Как отмечалось, ФК в ходе нескольких итераций (i —
номер итерации) по разностным измерениям оценивает вектор
состояния = (Дг^, Av£, С, ДФ^)Т, где Ark, Avk — погрешности
_ АЛ
оценок прогноза rk, vfe. Оценки Ark, A\k, полученные с помо¬
щью ФК, после каждой итерации используются для уточнения
rk, \k и последующей линеаризации измеряемых дальностей V
и радиальных скоростей V. В результате на последней итерации
Л Л
формируются финальные оценки rk , vk и соответствующие зна¬
чения СКП.
Л Л
Если измерения отсутствуют, то оценкам rk , \k и составля¬
ющим t/O-разложения ковариационной матрицы их погрешностей
присваиваются значения, полученные на этапе прогноза.
204
Рис. 5.5. Схема решения задачи навигации СИСЗ
205
Обращаем внимание, что при решении задачи в реальц0]у[
времени верхний блок, наиболее затратный с точки зрения вы
числений, может выполняться до поступления очередных из
мерений.
Поясним также, что определение опорного НС, измерения
которого участвуют в образовании всех разностных измерений
представляет собой отдельную подзадачу. Если бы помехи измере.
ний носили исключительно белошумный характер либо в вектор
состояния включались бы коррелированные помехи для исходных
(не разностных) измерений, то в качестве опорного мог бы высту¬
пать любой НС. Результат был бы одинаковым. Однако наличие
в векторе состояния разностей коррелированных погрешностей
ДО требует некоторой разборчивости в выборе опорного НС. Этот
выбор должен обеспечивать преемственность текущих разностных
измерений по отношению к предшествующим, т. е. текущие раз¬
ностные измерения должны содержать максимальное число неза¬
висимых комбинаций из предшествующих разностных измерений.
Благодаря правильному выбору опорного НС результаты для
можно в полной мере учесть при оценивании ДО^.
В приложении Г представлено подробное изложение операций,
выполняемых при решении задачи навигации СИСЗ, которое
сопровождается необходимыми пояснениями и обоснованиями.
Там же заинтересованный читатель найдет математические де¬
тали реализации метода. Мы же сосредоточимся на обсуждении
результатов его применения.
5.5. Результаты тестирования предложенного метода
определения координат искусственного спутника Земли
по измерениям сигналов спутниковой
радионавигационной системы
В целях апробации разработанного алгоритма были проведе¬
ны эксперименты с использованием реализаций кодовых и до-
плеровских одночастотных измерений, полученных для СИСЗ с
помощью имитатора сигналов GPS и приемника DualStar фирмы
MStar Semiconductor. Решения выполнялись с дискретностью
At = 1 с в камеральном режиме по измерениям, записанным на
двухсуточном интервале, с частотой 1 Гц. При формировании
траектории СИСЗ учитывались только три рассмотренных выше
возмущающих фактора, а именно: несферичность гравитацион¬
ного поля Земли, притяжение Луны и Солнца, давление прямого
солнечного света.
206
В измерениях не учитывались ионосферные и эфемеридные
погрешности. В то же время «рабочими» считались только те НС,
для которых выполнено три условия:
• отношение сигнал/шум не ниже 32 дБГц;
• угол между линиями НС — СИСЗ и НС — центр Земли состав¬
ляет не более 20,2°, что несколько меньше полуширины основного
лепестка диаграммы направленности антенн у НС GPSBlockllA
для частоты Lj [125] и у НС более новых типов — BlockllR,
BlockllR(M), BlockllF [125, 142, 143];
• сигналы, направленные на СИСЗ, не проходят через слой
ионосферы высотой до 1000 км.
Первое и второе условия в определенном смысле дублируют
друг друга. Они запрещают работать с НС, доставляющими на
СИСЗ сигнал с периферии диаграммы направленности. Третье
о
с
180°
Рис. 5.6. Траектории НС GPS, наблюдаемые с СИСЗ
207
2,5
1,5
cl
Я
0,5
I
m
Числоодновременно наблюдаемых НС
Рис. 5.7. Суммарное время наблюдения с СИСЗ
за различными по числу НС созвездиями GPS на суточном
интервале
условие отсекает НС, которые затеняются Землей и ионосферным
слоем со значительной концентрацией электронов. Таким образом,
с точки зрения доступности НС рассматривался пессимистичный
сценарий из-за уменьшенного значения допустимого угла между
линиями НС — СИСЗ и НС — центр Земли и отказа от сигналов,
проходящих через основную часть ионосферы.
Чтобы наглядно представить навигационную обстановку,
складывающуюся на геостационарной орбите для проводимых
экспериментов, на рис. 5.6 показан график, где в сферических
координатах обозначены траектории видимых с СИСЗ «рабочих»
НС, отобранных согласно трем указанным выше условиям, в те¬
чение суток. Из графика видно, что доступные для использования
НС находятся в узком кольце, опоясывающем Землю (на графике
это незатененная область). Отсюда очевидно, что геометрия рас¬
положения НС по отношению СИСЗ является весьма неблагопри¬
ятной в силу скученности НС.
Отметим и другой аспект, связанный со спецификой навига¬
ционной задачи для СИСЗ, — малое число единовременно на¬
блюдаемых НС и кратковременность интервалов, на которых они
доступны. На рис. 5.7 показана диаграмма суммарной продолжи-
208
дьности наблюдения за разным числом НС на первом суточном
Интервале. Обращаем внимание, что полное или избыточное со-
ездие (четыре и более НС) в общей сложности появляется лишь
17 мин в течение суток. При этом значение пространственного
геометрического фактора PDOP составляет не менее 200.
При проведении эксперимента в алгоритм решения закладыва-
ддсь следующие характеристики погрешностей измерений: средне-
кваДРатические значения белошумных помех псевдодальности
, = 2 м и псевдоскорости о . = 0,02 м/с, среднеквадратическое
V D ~ 1 к
значение коррелированных помех псевдодальности = 1,5 м и их
интервал корреляции = 10 мин. Эти характеристики основаны
на результатах статистического анализа погрешностей измерений
используемого приемника.
Полученные в ходе решения оценки координат и составляющих
скорости вычитались из эталонных значений, которые использова¬
лись при имитации сигналов GPS. Таким образом формировались
погрешности всех шести навигационных параметров (три компо¬
ненты вектора координат г и три компоненты составляющих ско¬
рости v). Они выводились в сопровождении утроенных значений
СКП, рассчитываемых по ковариационным соотношениям ФК,
что позволяло понять адекватность вырабатываемых алгоритмом
характеристик точности.
Как уже отмечалось, длительность решения составляла 48 ч.
При этом СИСЗ располагался примерно на оси Y в системе коор¬
динат WGS-84. Истинные значения координат и скорости были
квазистационарными, т. е. аппарат на интервале решения не был
полностью неподвижен относительно Земли. Так, на суточном ин¬
тервале его смещение относительно первоначального положения по
осям X, Y и Z достигало уровня 30, 10 и 2 км соответственно. Для
определения границ сходимости алгоритма проводились решения
Для различных значений начальной неопределенности в коорди¬
натах и скорости. Не претендуя на точное определение границ
Неопределенности, при которой обеспечиваются сходимость и при¬
емлемая точность решения, приведем положительные результаты
Использования рассмотренного алгоритма при ковариационных
о
Матрицах погрешностей начальных координат Рг = о Ей скоро-
о ^ 0
стей Pv = av Е (Е — единичная матрица) с двумя комбинациями
сРеднеквадратической погрешности начальных координат аг^ и
скоростей аи0 с аг = 10 км, аи = 10 м/с. При моделировании
тРаектории СИСЗ возмущение от светового давления рассчиты-
внлось исходя из коэффициента светового давления С = 1,4 и
°тношения площади сечения СИСЗ к его массе 0,01 м2/кг, что
209
210
Рис. 5.8. Результаты оценивания координат и скорости СИСЗ на интервалах О...4 ч и 4...12 ч от начала решения
с уточнением коэффициента светового давления
)JI5 является заниженным показателем для реальных спутников
рдзи. Неопределенность априорного знания С задавалась СКП:
= 0,1. Обработка измерений выполнялась с применением двух
^ерадий ФК. Получены результаты решений для 20 вариантов
^грешностей начальных условий и коэффициента отражения,
сгенерированных случайным образом по гауссову закону для
данных оГо, сгио и аСо>
На рис. 5.8 и 5.9 показаны реализации погрешностей —
черные линии и утроенные значения СКП — красные линии.
СКП практически одинаковы для всех 20 реализаций решения,
результаты приведены на двух рисунках, чтобы в разных мас¬
штабах нагляднее показать динамику уточнения навигационных
параметров на различных стадиях решения. На каждом рисунке
внизу показаны графики количества использованных НС, которые
объясняют изменение погрешностей оценок и их СКП. Рисунок
5.8 демонстрирует начальные 0...4 ч и 4...12 ч интервалы, где
эпизодически используются только два НС в течение коротких
периодов продолжительностью в среднем 15...20 минут при одно¬
двухчасовых перерывах в поступлении измерений. Тем не менее
этого достаточно для существенного уточнения решения. К концу
двенадцатичасового интервала СКП позиционирования составляет
десятки метров. Дальнейшее уточнение, как видно из рис. 5.9, про¬
исходит медленнее. При этом зависимость текущих погрешностей
от их начальных значений ослабевает: все реализации стягиваются
в плотный пучок. По прошествии 30 часов можно говорить о ста¬
билизации точности: предельная погрешность по координатам при¬
ближенно оценивается 20 м, а по скорости - 1 мм/с. На рис. 5.10
показаны погрешности оценки коэффициента светового давления
С также в сопровождении утроенных СКП (красные линии) и
числа используемых НС. Интересно, что в течение первых суток
коэффициент С практически не уточняется, но к концу двухсуточ¬
ного интервала его погрешность сокращается до 0,01...0,02. Это
объясняется тем, что на первых сутках погрешности координат
и скоростей СИСЗ, порожденные неопределенностью начальных
Условий, еще слишком велики, чтобы заметить в них влияние
Неточного знания С. Важно отметить соответствие рассчитанных
в алгоритме значений СКП реальным погрешностям оцениваемых
Параметров на протяжении всего решения, т. е. можно говорить
об адекватной оценке точности.
Представляет интерес сопоставить рассмотренное выше реше¬
ние, в котором коэффициент С оценивается наряду с координа¬
тами и скоростями СИСЗ, с упрощенными вариантами, когда С
Не оценивается. Дополнительные варианты рассмотрим только на
211
>смгч»ф«*0
Рис, 5.9. Результаты оценивания координат и скорости СИСЗ на интервале 12...48 ч от начала решения с уточнением
ЭМ <м«»4*«иеиэя аль
213
Рис. 5.10. Результаты оценивания коэффициента светового давления
интервале 12...48 ч после начала решения, когда резкого изадеце
ния уровня погрешностей уже не происходит. При этом решец^
выполнялись для той же траектории движения СИСЗ, реализации
измерений, реализаций погрешностей начальных условий СИсд
и коэффициента С, что и в первоначальном варианте.
Так на рис. 5.11 показаны результаты, полученные без како
го-либо учета влияния светового давления. Погрешности, д0
стигающие по координатам 250 м, а по скоростям — 0,015 м/с
говорят о проигрыше этого варианта на порядок по сравнению
с полноценным решением, где используется априорное значение С
и происходит его последовательное уточнение. Более того, тут не
приходится говорить о получении сколько-нибудь достоверной
характеристики точности — рассчитанные СКП не имеют ничего
общего с реальным уровнем погрешностей.
На рис. 5.12 отражен случай использования априорного зна¬
чения С, имеющего, как и в первом варианте, СКП 0,1, но без
его уточнения по ходу решения. Этот результат намного ближе
к первоначальному варианту, чем второй. Однако и здесь уровень
погрешности оказывается заметно — в два-три раза — выше того,
что получается, если ввести коэффициент С в число оцениваемых
параметров.
Наконец, рис. 5.13 демонстрирует решение в идеальном с точки
зрения информации о С случае, когда этот коэффициент известен
абсолютно точно. Тут к исходу двухсуточного интервала предель¬
ные погрешности по координатам снижаются до уровня 10 м, а по
скоростям — до 0,5 мм/с, что вдвое лучше точности, которая до¬
стигается при оценивании коэффициента С за то же время.
Таким образом, представленные результаты демонстрируют
высокую эффективность разработанного алгоритма навигации
СИСЗ, подтверждая обоснованность использованных упрощающих
приемов. Однако следует иметь в виду, что для реальных СИСЗ
потребуется некоторая доработка алгоритма — учет дополнитель¬
ных возмущений в уравнениях динамики СИСЗ, более детальная
модель влияния солнечного света на движение, а также, не исклю¬
чено, и модели погрешности измерений с учетом влияния верхних
слоев ионосферы. При описании дополнительных возмущений
в некоторых случаях нужно принять во внимание неточность
знания их параметров (их погрешности должны быть включены
в вектор состояния). Помимо этого, в вектор состояния могут быть
введены изменяющиеся стохастические составляющие возмуЩе'
ний. Важно подчеркнуть, что рассмотренный алгоритм открыт
для уточнения используемых в нем моделей динамики СИСЗ я
измерений.
214
ют ори У» »•"«
1"
- 1
-4 *
] ft
- *
й.
1
1 -*1
. *
'
I
Л
_
1
__ыят
L
| 1.
216
Рис, 5.12. Результаты оценивания координат и скорости СИСЗ с априорным значением коэффициента светового давлении без
Т
* I
9 \
X
■ X
ь
И»
I I* >. xMfw mqii'd j* не. и *л *•-"»»- «(««го
A
J
Г
я
я
•я
я
-fc
88?чТ»ТЙ5^11к' *?stxf°
■\ч>
g§ g 8“°Й ft «Й?
я JC» и/хх^члв^гто
217
Рис. 5.13. Результаты оценивания координат и скорости СИСЗ с точным значением коэффициента светового давления
5.6. Выводы
В главе 5 предложен метод решения навигационной задай
который не требует четырех и более НС в зоне радиовидимос^
(см. задачи, стоящие перед проектировщиками БАСН, в глаа
2). Разработанный метод можно назвать интердисциплинарньщ
поскольку он использует сведения и подходы из теории стоха'
стического оценивания, прикладной астрономии и баллистики
Тем важнее полученные результаты: апробация метода не только
показала его принципиальную пригодность для решения зададй
навигации СИСЗ в составе БАСН, но и продемонстрировала, чТо
потенциальная точность метода удовлетворяет точностным тре¬
бованиям к БАСН.
Анализ описанных в литературе методов применения СРНС
на борту СИСЗ позволил разработать подход, свободный от недо¬
статков существующих решений, т. е. полностью автономный и
вычислительно эффективный, с одной стороны, и позволяющий
оценивать координаты СИСЗ в условиях воздействия возмущаю¬
щих факторов — с другой. Такой баланс достигнут за счет субопти¬
мальности лежащего в основе метода алгоритма. С позиций теории
стохастического оценивания сформулирована постановка задачи
навигации СИСЗ по измерениям СРНС. С расчетом на бортовую
реализацию разработан субоптимальный алгоритм ее решения,
в котором используются исходные нелинейные уравнения динами¬
ки СИСЗ и в то же время применяется метод калмановской итера¬
ционной фильтрации на основе линеаризованного представления
уравнений динамики и измеряемых параметров — дальностей
и скоростей. Полученные с помощью фильтра Калмана оценки
текущих координат и составляющих скорости учитываются при
интегрировании уравнений движения СИСЗ до следующего мо¬
мента решения.
Предложенный метод навигации ИСЗ по сигналам СРНС
с применением модели движения ИСЗ может использоваться и
в условиях избыточного состава измерений, например на НОС.
В этом смысле метод обладает универсальностью (но требует в
общем случае более мощного ЦПУ).
Наконец, важно отметить, что полнота изложения всех матема¬
тических и алгоритмических особенностей метода и рекомендации
по его применению позволят проектировщикам БАСН использо¬
вать его в качестве метода проектирования вторичной обработки
сигналов в БАСН.
218
Глава 6
АВТОНОМНАЯ ОТНОСИТЕЛЬНАЯ НАВИГАЦИЯ
ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ
6.1. Задача автономной навигации группы
спутников
Полет ИСЗ строем входит в число проектов, реализация
которых изменит облик околоземной космонавтики. При по¬
лете строем несколько спутников образуют координированную
группу или строй [144]. Как правило, группа ИСЗ используется
для решения тех же задач, которые традиционно решает оди¬
ночный (больший по размеру) спутник. Полет строем имеет ряд
преимуществ по сравнению с одиночным. К ним, по мнению
NASA [145], относятся простота проектирования спутников,
меньшее время их производства, а также относительно простой
и недорогой процесс замены ИСЗ на орбите. Иными словами, не¬
редко вместо запуска одиночного, большого и дорогого спутника
экономически эффективнее использовать группу маленьких и
недорогих аппаратов.
Кроме перечисленных технико-экономических преимуществ,
полет строем кардинально расширяет возможности использования
ИСЗ, поскольку позволяет преодолеть ограничения традиционных
одиночных космических полетов. Такое расширение достигается
за счет, во-первых, избыточности измерений, получаемых от
спутников, и, во-вторых, за счет существенно больших и кон¬
фигурируемых апертур [146]. Последнее преимущество является
решающим, например, для радиолокационных станций обзора
Земли с цифровым синтезированием апертуры антенны.
Полет строем требует координированного управления всеми
спутниками в группе. Использование контрольных станций сле¬
жения для управления полетом в группе имеет те же недостатки,
Что и управление полетом одиночного спутника, а именно: вы¬
сокие затраты на создание и обслуживание КСС, невозможность
Маневра спутников вне зоны видимости контрольных станций,
219
значительное время на подготовку маневров ИСЗ и невозмож
ность автоматизированных маневров. Отметим, что невозможность
автоматизированных маневров делает полет строем практически
неосуществимым. Кроме того, многие авторы [146—148] отмечают
что использование наземных станций для управления и контроле
группы спутников накладывает существенные ограничения ца
точность управления и ведет к неоптимальному использованию
бортовых ресурсов, прежде всего топлива.
Навигация группы ИСЗ, осуществляемая на борту каждого из
ИСЗ автономно (т. е. независимо от наземных станций слежения),
лишена вышеуказанных недостатков навигации с использова¬
нием наземных станций. Только автономная навигация группы
спутников может обеспечить их полет строем. В литературе особо
отмечается присущая такой навигации возможность своевремен¬
ного реагирования на непредвиденные обстоятельства, например
отклонения одного из спутников группы от заданной орбиты [147,
148]. Наконец, с точки зрения фунциональности постоянно расту¬
щие требования к временному и пространственному разрешению
изображений Земли могут быть удовлетворены только при помощи
автономной навигации ИСЗ, образующих строй [147]. Остановимся
на этом подробнее для иллюстрации необходимости определения
взаимного месторасположения ИСЗ внутри группы в реальном
масштабе времени. Рассмотрим использование группы спутников
в составе фазированной антенной решетки (ФАР). В такой группе
на каждом из спутников установлена антенна, при этом относи¬
тельные фазы сигналов каждой из антенн изменяются таким об¬
разом, чтобы, например, сузить луч диаграммы направленности
ФАР для повышения точности определения угловых координат
источника излучения. Управление фазами сигналов каждой из
антенн предполагает знание их взаимного месторасположения.
Следовательно, такое управление возможно в том случае, если
антенны неподвижны друг относительно друга. Если взаимное
месторасположение антенн изменяется, как в случае их установки
на борту ИСЗ, то алгоритм управления фазами сигнала должен
принимать во внимание такие изменения. Поэтому для построе¬
ния ФАР на основе группы спутников необходимо в реальном
масштабе времени определять взаимное месторасположение ИСЗ
внутри группы.
В настоящее время, несмотря на растущие потребности промыш¬
ленности, бизнеса и науки, а также многообещающие теоретиче¬
ские исследования, автономный полет строем не вышел за пределы
исследовательских лабораторий. Причина такого разрыва междУ
теоретическими исследованиями и практическим применением
220
заключается в отсутствии надежной, опробованной технологии
автономной навигации группы спутников.
Сейчас для относительной навигации ИСЗ могут использо¬
ваться оптическая лазерная локация и радары в так называемом
^-диапазоне (англ. K-Band) — 20...40 ГГц. Оба метода обеспечива¬
ют малую погрешность относительной навигации — от нескольких
десятков микрон до одного-двух миллиметров, обладая в то же
время рядом существенных недостатков. К недостаткам следует
отнести узкий угол обзора, высокую стоимость и главное — одно¬
размерный характер их измерений: обе системы обеспечивают из¬
мерение расстояния между ИСЗ только по линии видимости, в то
время как для автономной относительной навигации необходимо
определение трехмерного вектора расстояния. Последний недоста¬
ток делает невозможным использование существующих методов
для решения задачи автономной относительной навигации ИСЗ
и требует новых подходов.
Настоящая глава посвящена методам проектирования относи¬
тельной навигации ИСЗ при помощи СРНС как перспективного
способа автономной навигации группы спутников.
Использование спутниковых радионавигационных систем для
относительной навигации ИСЗ является естественным выбором для
разработчиков космических систем. Оно интенсивно обсуждалось в
последние годы [149-154]). Отметим три характерные особенности
работ [149—153]. Во-первых, исследования основаны на данных,
полученных на симуляторе сигналов СРНС, а не на результатах
космических экспериментов. Во-вторых, рассматривается только
постобработка данных, а не обработка в режиме реального време¬
ни. В-третьих, предполагается, что решение задачи относитель¬
ной навигации производится на Земле, а не на борту ИСЗ. Эти
особенности не позволяют применить разработанные методы для
автономной относительной навигации, задачей которой является
определение вектора взаимного положения двух космических ко¬
раблей на борту (без связи с наземными станциями) и в реальном
масштабе времени. В последние несколько лет были опубликованы
исследования по обработке данных эксперимента GRACE (см., на¬
пример [155, 156]), которые показывают возможности наземной
постобработки, но не предлагают решения задачи автономной
относительной навигации.
Относительная навигация искусственных спутников Земли
весьма важна при реализации одного из современных методов
изучения гравитационного поля в труднодоступных районах Зем¬
ли, основанного на использовании специализированных научно-
исследовательских спутников. Эти методы хотя и уступают по
221
точности традиционным подходам, основанным на выполнении
детальной гравиметрической съемки, выполняемой с воздушных
носителей [157-159] , тем не менее, получают активное развитие
в последнее время в силу их высокой производительности. Приме¬
рами успешного решения задачи изучения гравитационного поля
с использованием низкоорбитных спутников служат европейские
проекты GRACE и GOCE [160]. Низкие орбиты спутников и вы¬
сокая точность бортовой геодезической аппаратуры позволили в
2013 г. улучшить точность определения геоида до 1-2 см на мас¬
штабах порядка 100 км. Благодаря этим проектам в последние
годы появились современные глобальные модели гравитационного
поля Земли высокой точности и пространственного разрешения в
виде разложения геопотенциала в ряд по сферическим функциям,
рекомендованные к использованию Международным центром по
глобальным моделям Земли — International Centre for Global Earth
Models (ICGEM): модель EGM-2008 до 2190-й степени разложе¬
ния; модель EIGEN-6C2 до 1949-й степени разложения; модель
EIGEN-6C3 до 1949-й степени разложения.
6.2. Принципы относительной навигации спутниковой
радионавигационной системы
6.2.1. Фазовые измерения в спутниковой
радионавигационной системе
В современных приемниках СРНС реализуется не только из¬
мерение смещения фазы кода ПСП, но также измерение фазового
смещения самой несущей частоты по отношению к опорному сиг¬
налу. Поскольку период несущей составляет для GPS сигнала
около 19 см, а фазовое разрешение приемника можно положить
равным 0,02...0,03 длины волны, то погрешность определения фазы
несущей лежит в миллиметровом диапазоне. При этом, правда,
невозможно измерить количество циклов1, укладывающихся на
линии «спутник — приемник», и с миллиметровой погрешностью
измеряется лишь «хвостик» — дробная часть фазового сдвига.
Определение целого числа циклов представляет собой задачу раз¬
решения фазовой неоднозначности.
Рассмотрим математическую модель фазы и фазовых измере¬
ний в СРНС. По определению, фаза гармонического колебания Ф
1 Мы будем использовать также слово «цикл» в качестве синонима длины
волны.
222
5 момент времени t
t
Ф (t) = ф(£0) + J7(s)ds, (6.1)
fo
где f(s) — частота гармонического колебания; ф(£0) — начальная
фаза в момент времени tQ.
Для коротких интервалов времени, определяя номинальную
частоту f0 на интервале, получим
cp(t) = cp(t0) + f0(t-t0). (6.2)
В навигационных приемниках для измерения фазы использу¬
ются схемы фазовой автоподстройки (см. главу 4), в которых при
начале слежения за фазой определяется разность фаз сигнала, при¬
нятого от НС, и локальной копии сигнала. После осуществления
захвата схема автоподстройки позволяет определить в каждый из
моментов измерения количество целых периодов и изменение раз¬
ности фаз внутри периода колебания. Предположим, что опорные
генераторы на борту НС и в навигационном приемнике идеально
синхронизированы друг с другом и идеально точны. Тогда
ф(0 = Фн(0-Фс(*-Т)+Лг> (6.3)
где Фн(0 — фаза несущей частоты локальной копии сигнала в
момент времени t; фс(£ - т) — фаза несущей частоты сигнала,
излученного спутником в момент времени t — т; N — фазовая не¬
однозначность — неизвестное число целых периодов несущей.
Выражение (6.3) означает следующее. В момент, когда при¬
емник начинает слежение за фазой несущей сигнала, состояние
счетчиков целых циклов произвольно и это состояние входит в ре¬
зультат первого измерения фазы. В ходе последующих измерений
расстояние от приемника до спутника меняется, и эти изменения
отражаются в изменениях измеренной фазы. Таким образом, неиз¬
вестным является только начальное целое число циклов, которое
нужно добавить к первому и последующим измерениям, чтобы
получить истинное значение псевдодальностей до спутника. Ма¬
тематически это выражается следующим образом. Поскольку
Фс^-'сНФс^)-/'1’ (6-4)
ТО
ф(0 = fx + N = r-{t-'1 + N, (6.5)
X
гДе f — частота несущей сигнала; X — длина волны несущей
°Игнала; r(t, t - т) — расстояние между положением приемни-
223
ка в момент времени t и положением навигационного спутниц
в момент времени t — т.
Опуская индексы времени, учитывая погрешности опорные
генераторов, а также другие источники погрешностей, запишем-
r + 1 + T c(8ta-8tc) жт
Ф- ^^ + ЛГ + еф> (6.6)
где I — задержка распространения сигнала в ионосфере, и3_
меренная в метрах; Т — задержка распространения сигнала
в тропосфере, измеренная в метрах; 8^н — погрешность опорно,
го генератора навигационного потребителя; Ыс — погрешность
опорного генератора НС; с — скорость света; — погрешность
измерения фазы.
Заметим следующее: в наших рассуждениях мы предполагали,
что слежение за фазой несущей сигнала происходит непрерывно,
без сбоев. В случае же даже одиночного сбоя мы не можем узнать
количество пропущенных циклов несущей и для последующего
ряда наблюдений приходится вводить дополнительный неизвест¬
ный параметр. Таким образом, в общем случае для разрешения
фазовой неоднозначности необходимо определить значения не¬
скольких неизвестных, общее количество которых равно числу
наблюдаемых спутников плюс общее количество сбоев слежения за
фазой. Еще раз отметим, что все неизвестные, значения которых
мы собираемся определять для разрешения фазовой неоднознач¬
ности, принимают только целочисленные значения.
6.2.2. Первые и вторые разности фазовых измерений
Рассмотрим два навигационных приемника, обозначенных и и г
(от принятых в англоязычной литературе сокращений user и rover),
осуществляющих непрерывное слежение за фазой несущей частоты
сигнала СРНС. Разность фаз несущей сигнала от одного и того же
НС k в приемниках в один и тот же момент времени составит:
(гик) ~ rrk)) - (4Й) - Trk)) + (Tuk) ~ тгк))
Фи — Фг ~ ^ |“
+f(5tu - 5tr) + (Nik) - ЛГ<*>) + (е£> - е£>). (6.7)
Используя обозначение Д для разности, получим:
дф(й) = Аг( } ~ ] + АГ( } + fA5t + ЛЛг(й) + Ае(й)- (6'8)
224
Заметим, что погрешность опорного генератора НС является
общей для обоих приемников и ее нет в правой части выражения
(6.8), называемого уравнением первых разностей. Запишем урав¬
нение первых разностей для другого НС с индексом I:
{}\ Дг<*> — М(1) -ь АТ^ ал (i\
Дф(/) = + fA8t + AN1[l) + Де(/). (6.9)
Я.
Из сравнения (6.8) и (6.9) видно, что слагаемое fA8t, представ¬
ляющее собой произведение частоты несущей на разность погреш¬
ностей опорных генераторов навигационных приемников, является
общим для всех НС. Это наводит на мысль о вычислении вторых
разностей — разностей фазы несущей частоты между первыми
разностями для разных НС:
(к) Л (П (Дг(й)-Дг(0)-(Д/(Й)-Д/(/)) + (ДТ(й)-ДТ(г))
Д({у ' - Aqr ' = ь
X
+ (ANW -ДЛГ(г)) + (Де(й) -Д£(/)). (6.10)
Используя обозначение УД для второй разности, запишем:
УДф(И) = —А^(.Л~_УД^( 1 + VAT< } +VANikl) + VAe(kl). (6.11)
Для случая, когда каждый из навигационных приемников
осуществляет слежение за фазой М НС, можно сформировать
М(М - 1) двойных разностей, но только 2(М - 1) двойная раз¬
ность является линейно независимой, а остальные не содержат
дополнительной информации.
Расстояние между приемниками называют базой. Строго говоря,
базой называется не расстояние между приемниками, а расстояние
между фазовыми центрами антенн приемников. Введем понятие
короткой базы, определив его как такое расстояние между при¬
емниками, на котором можно пренебречь разностью задержек
распространения сигнала в атмосфере [члены УДи УД
в выражении (6.11)]. Короткую базу сложно измерить в единицах
Длины: при спокойном состояния ионосферы и 100-километровая
база может быть определена как короткая, а в условиях высокой
активности ионосферы для базы 25 км величинами УДнельзя
Пренебречь.
Для короткой базы запишем уравнения первых разностей:
ДФ<*> = + fA8t + AN(k) + Az(k)
X
(6.12)
225
Центр Земли
Рис. 6.1. Геометрическое представление первых разностей
измерений
Центр Земли
Рис. 6.2. Геометрическое представление вторых разностей измерений
227
и вторых разностей:
VAcp(W) = VA^ + VAN(kl) + VAe(kl). (6.13)
Рассмотрим теперь рис. 6.1, на котором приведено геометриче¬
ское представление первых разностей. Далее мы будем жирным
шрифтом обозначать векторы и матрицы. Предполагая, что база
измерений существенно меньше, нежели расстояние от центра
Земли до каждого из приемников, запишем для первой разности
псевдодальностей
Ar(k) =-1(гк)киг (6.14)
и для первой разности фазовых измерений
ДФ(*) = + fAst + дту(*0 + Де(*). (6.15)
Для вторых разностей (рис. 6.2), получим аналогично
S7ArW =-(l(rft)-l(/))xIir, (6.16)
(л № _ 1 (^) w
уДф(Ы) = уX ‘.г.. 2V. + vAiV(W) + VAe{kl). (6.17)
X
6.2.3. Понятие относительной навигации
при помощи спутниковой радионавигационной системы
Мы видим, что при образовании разностей исключается влияние
погрешностей, одинаково искажающих оба ряда измерений —
погрешностей опорного генератора НС для первых разностей и
погрешностей опорных генераторов РНП для вторых разностей.
За исключение влияния погрешностей приходится платить опреде¬
ленную цену: из решения системы разностных уравнений можно
получить только разности координат между приемниками, а не
координаты каждого из приемников. Определение разности ко¬
ординат между приемниками и является задачей относительной
навигации.
Для пояснения сути относительной навигации с использованием
СРНС рассмотрим простейший случай. Есть два неподвижных на¬
вигационных приемника, обозначенных и и г, осуществляющих
непрерывное слежение за фазой несущей частоты сигнала СРНС
228
(рис. 6.3). Необходимо измерить базу d, зная 0О — угловое по¬
ложение НС относительно базы.
Из рис. 6.3 очевидно, что в момент времени tQ разность фаз
несущей, измеренной приемниками и и. г, составит некоторое
целое число циклов N и дробную часть фазы <рд0, которая в силу
периодического характера несущей и будет измерена системами
слежения за фазой. Тогда, обозначая символом Д разность фаз <р,
запишем:
дФиг(*о) = Фи(*о) “ Фг(*о) = Фдо + N- (6.18)
Поскольку (см. рис. 6.3)
dcos(0o) = Цфд0 + N), (6.19)
определив N, можно измерить базу d. Для определения N можно
воспользоваться тем, что НС непрерывно двигаются, и для момента
времени можно записать:
dcos^) = Цфд1 + N). (6.20)
229
>
I I
V Cl
X
I
с
3
>
>
g
5
С
«
2
CD
J> X
H
X s
5 g
X X
t 1
’ >
n
5 |
т S
I 2
с
О
230
Рис. 6.4. Принцип относительной навигации ИСЗ
РЧ Г1ЛСЖ
РЧ-блок
s' д Приемка* аи!емна
^ Q Приемопередаю<1^я аигемна
Рис. 6.5. Обобщенная схема навигации при помощи
радиочастотных датчиков
Выражения (6.19) и (6.20) представляют собой систему двух
уравнений с двумя неизвестными d и N. Для трехмерного случая
при определении базы нам понадобились бы измерения фазы не¬
сущей трех НС.
Рассуждения выше упрощенно иллюстрируют задачу относи¬
тельной навигации. На практике она должна решаться, как прави¬
ло, в реальном времени, и мы не можем ждать изменения взаимно¬
го геометрического положения базы и навигационных спутников;
измерения фазы неидеальны и содержат как систематическую,
так и шумовую погрешности; фазовые соотношения замеряются
в каждом из приемников относительно фазы опорного генератора,
что вызывает дополнительные погрешности; при больших базах
условия приема сигналов разные для антенн приемников и и
г — это касается как многолучевости, так и влияния тропосферы
и ионосферы. Тем не менее этот простейший пример позволяет
понять суть задачи относительной навигации и необходимость
разрешения фазовой неоднозначности для ее выполнения.
Рисунок 6.4 объясняет принцип относительной навигации ИСЗ.
Для относительной навигации используются два РНП, которые
обмениваются сырыми измерениями СРНС через радиолинию.
Каждый из РНП решает навигационную задачу. Кроме того,
приемник, расположенный на ведущем ИСЗ, вычисляет разности
измерений, полученных на обоих спутниках, и решает задачу от¬
носительной навигации.
В последние годы популярным методом автономной навига¬
ции групп ИСЗ стал метод навигации полета строем при помощи
Радиочастотных датчиков (англ. Formation Flying Radio Frequency,
PFRF) [161-170]. Подробный анализ данного метода выходит за
Рамки этой книги; его принцип действия показан на рис. 6.5.
Как указывают авторы, в основе FFRF лежит тот же принцип,
Нто и в относительной навигации при помощи СРНС, — использо-
нание фазовых измерений несущей и разрешение фазовой неодно-
231
значности. Приемопередающие антенны на рис. 6.5 обеспечиваю^,
обмен сырыми измерениями, в то время как приемные антенны
служат для приема СРНС-подобного сигнала. Очевидно, что прц
использовании FFRF задача относительной навигации сведется
к задаче разрешения фазовой неоднозначности, которой и посвя¬
щен следующий раздел.
6.2.4. Методы разрешения фазовой неопределенности
Рассмотрим уравнение (6.16) и представим вектор относительно¬
го местоположения хцг в виде начальной оценки х0 и неизвестного
линейного члена 5х:
хиг=хо + 5х- (6-21)
Тогда, подставляя (6.21) в (6.13), получим:
VAcp(W) = VArP..~(-1r ~-J j-5x + VAN(kl) + VAs(kl), (6.22)
X
где VAr0 = (1(гй) -1^)х0.
Определим:
VA<p(W) = VAr0 ~(1гА) -4f))8x + VANW) + уд£(^); (6.23)
А.
VAy = VAcp-^g-; (6.24)
X
VAg = -i^ ±L±. (6.25)
Тогда
X
VA у = VAg6x + V AN + VAe. (6.26)
Уравнение (6.26) представляет собой линейное уравнение
вторых разностей, полученное на одной измерительной эпохе по
одной паре НС. Рассмотрим подробнее члены этого уравнения.
Величина VAy является разностью между вычисленным и изме¬
ренным значениями вторых разностей фазы несущей для началь¬
ного значения относительного местоположения; VAg — вектор,
описывающий взаимное геометрическое расположение приемника
и НС; 5х — неизвестная линейная добавка к начальному значе¬
нию относительного местоположения; VAN — искомая фазовая
неоднозначность.
232
Можно объединить все линейные уравнения, полученные по
всем комбинациям спутников на г-й измерительной эпохе, в сле¬
дующем виде:
у(г) = G(/)§x + N + е (г)- (6.27)
Для случая, когда каждый из навигационных приемников
осуществляет слежение за фазой М НС, можно сформировать
— 1) двойных разностей, но только 2(М - 1) двойная разность
является линейно независимой. Обозначая К = 2(М - 1), запишем
размерности векторов и матриц в уравнении: у — (К х 1), G —
(К х 3), 8х — 3 х 1, N — К х 1, е — (К х 1).
Для статического пользователя 8х не зависит от времени, и для
(г + 1)-й измерительной эпохи справедливо1:
у(г +1) = G(Z + 1)5х + N + е(г + 1). (6.28)
Комбинируя (6.27) и (6.28), получим:
" у(») "
' G(i) '
5х +
I
N +
е(г)
_у(/ +1)_
G (£ +1)
I
_ е(г +1)
где I — единичная матрица.
В общем виде
у = G8x + AN + е, (6.30)
и нашей задачей является нахождение вещественного вектора 5х
размерностью (3 х 1) и целочисленного вектора N размерностью
К х 1, которые минимизируют целевую функцию /:
/(5x,N) = ||y-G5x-AN||2, (6.31)
где ||»|| означает операцию взятию нормы вектора.
Эта задача решалась бы при помощи метода наименьших
квадратов, если бы не ограничение на целочисленный характер
вектора N. В результате решения системы уравнений получаются
вещественные значения вектора N, в то время как по смыслу
элементы вектора N могут принимать только целочисленные
значения. На практике решение задачи разбивают на два этапа.
Первый этап состоит в получении оценки N без учета целочис¬
ленного характера. Этот этап называют плавающим решением.
Второй этап, называемый фиксированным решением, состоит
в уточнении плавающего решения с учетом целочисленности.
Фиксированное решение представляет собой очевидную слож¬
ность: округление полученных вещественных значений до бли¬
1 Мы ограничимся этим упрощенным случаем. Для движущегося пользователя
8х зависит от времени, но это не меняет сути задачи и принципов ее решения.
233
жайшего целого совершенно не обязательно дает верное искоад0е
значение. Искомое значение находится внутри доверительного
интервала, определяемого погрешностью измерений плавающего
решения. Погрешность плавающего решения часто велика, что
делает невозможным прямой перебор целых в доверительном
интервале.
Рассмотрим простейший пример. Предположим, что погрегц.
ность определения координат составляет 1 м, длина волны не¬
сущей — около 20 см. Следовательно, неопределенность каждого
из измерений будет составлять ±5 циклов. Если нужно оценить
шестиразмерный вектор, то необходимо вычислить значения
целевой функции (6.31) для 610 (т. е. более 60 миллионов) значе¬
ний элементов вектора N. В последние 20 лет были предложены
многочисленные методы разрешения фазовой неоднозначности,
основанные на разных способах уменьшения области поиска и по¬
вышении эффективности его алгоритмов [167, 171—174].
6.3. Особенности относительной навигации
искусственного спутника Земли
Задача определения взаимного положения ИСЗ по сигналам НС
имеет некоторые общие черты с аналогичным вопросом для на¬
земных пользователей, но содержит и ряд существенных отличий
[175]. Сразу отметим, что в настоящее время задача относительной
навигации для СИСЗ и ЭОС не представляет собой практического
интереса, поскольку относительное местоположение ИСЗ нужно
знать для взаимных маневров (стыковка, сближение) и для по¬
лета строем. И взаимные маневры, и полет строем используют¬
ся в основном для НОС. Если вопрос относительной навигации
в будущем будет поставлен и получит практическое значение, то
для его решения при помощи СРНС нужно будет существенно по¬
высить чувствительность приемников, которые в настоящее время
не способны осуществлять устойчивое слежение за фазой, несущей
на борту СИСЗ. В этой книге мы ограничимся рассмотрением от¬
носительной навигации НОС.
Для НОС не возникает трудности недостаточного созвездия
видимых НС, поскольку высота орбит НОС составляет сотни кило¬
метров, а орбиты НС имеют высоту примерно 20 ООО км. В главе 2
было показано, что количество видимых НС и их геометрический
фактор для НОС принципиально не отличаются от типичных значе¬
ний, которые имеют место для наземных потребителей. Несмотря
на сходство количества видимых НС и геометрического фактора
234
для НОС и для наземных потребителей, навигация НОС имеет
свою специфику. Поскольку НОС обращается вокруг Земли на¬
много быстрее, чем НС, состав видимых для НОС НС изменяется
значительно чаще (см. разделы главы 2, посвященные времени
прохождения спутника).
Быстрая смена созвездия и короткое время прохождения НС
влияют как на плавающее решение, так и на фиксированное.
Короткое время прохождения ухудшает эффективность фильтра¬
ционных методов обработки измерений, таких как сглаживание
цсевдодальномерных измерений по измерениям фазы несущей
(англ. CAS — computer aided smoothing) и фильтры Калмана,
применяемые во вторичной обработке. Фильтрационные методы
направлены на подавление медленно меняющихся составляющих
погрешностей измерений и, естественно, нуждаются в достаточно
продолжительном интервале непрерывного поступления изме¬
рений. Иногда говорят об инерционности решения, имея в виду
возможность учета полученных ранее измерений при определении
текущего положения. Чем больше интервал времени, на котором
используются ранее полученные измерения, тем выше инерцион¬
ность решения. Очевидно, что уменьшение инерционности реше¬
ния, вызванное коротким временем прохождения НС, неблаго¬
приятно сказывается на погрешности получаемого плавающего
решения.
Короткое время прохождения двояко влияет на фиксирован¬
ное решение. Во-первых, нахождение фиксированного решения
затрудняется из-за высокой погрешности плавающего решения.
Во-вторых, короткий интервал прохождения означает увеличение
доли измерений несущей, полученных на близких эпохах изме¬
рения. Такие фазовые измерения сильно коррелированы между
собой, и их использование затрудняет разрешение фазовой не¬
однозначности .
Другой особенностью относительной навигации НОС, как и
вообще любых ИСЗ, является отсутствие тропосферных погреш¬
ностей, неизбежных для наземных потребителей. Вместе с тем
На околоземных орбитах остается существенным влияние ионос¬
феры, которая простирается до высот около 1500 км и вызывает
ногрешности измерения задержки сигнала от НС. Как отмечалось
в главе 1, для двухчастотных приемников ионосферная погреш¬
ность может быть исключена. Однако при использовании одно-
Частотных приемников ее необходимо учитывать при обработке
Измерений. При этом следует иметь в виду, что разработанные
Для наземных потребителей алгоритмы расчета поправок на ионо¬
сферную погрешность не годятся для НОС. При расчете поправок
235
Таблица 6 j
Особенности задачи относительной навигации ИСЗ
Положительные
Отрицательные
Наличие достаточного для навига¬
ционного решения созвездия НС.
Отсутствие тропосферных погреш¬
ностей
Невысокая эффективность фильтрационных
методов из-за короткого времени прохож¬
дения.
Малая доля слабокоррелированных изме¬
рений фазы из-за короткого времени про¬
хождения.
Сложность учета ионосферных погрешностей
при одночастотном решении.
Ограниченность вычислительных ресурсов
приемника
для наземных пользователей используется допущение о том, что
ионосфера представляет собой тонкий слой, расположенный на
высоте максимальной плотности электронного содержания [176].
Такое допущение неприемлемо для НОС, которые фактически
летают внутри ионосферы. Для НОС плотность электронного со¬
держания по линии распространения сигнала от НС к НОС ме¬
няется сложным образом. В частности, линия распространения
сигнала может дважды пересекать уровень наибольшей плотности
электронного содержания.
Наконец, еще одна важная особенность относительной нави¬
гации НОС по сигналам СРНС — жесткое ограничение на объем
вычислительных затрат. Использование программных коррелято¬
ров вызывает ряд дополнительных трудностей, связанных с реа¬
лизацией остальных функций приемника: слежение за сигналом,
решение навигационной задачи. Реализация программного кор¬
релятора «съедает» значительную часть ресурсов процессора при¬
емника (см. главу 3). В этой связи особенно актуально построение
вычислительно эффективных методов относительной навигации.
Настоящая глава как раз посвящена обсуждению вычислительно
эффективного метода решения задачи относительной навигации
ИСЗ по фазовым измерениям СРНС. Как и для наземных потре¬
бителей, основные усилия при решении этого вопроса направлены
на минимизацию вычислительных затрат, связанных с наиболее
трудоемким этапом — исключением неоднозначности фазовых
измерений, т. е. с фиксированным решением.
Указанные выше позитивные и негативные факторы, имеющие
место при решении задачи относительной навигации ИСЗ, сведены
в табл. 6.1.
236
6.4. Метод относительной навигации искусственного
спутника Земли
Приложение Д содержит подробное описание разработанного
автором метода относительной навигации, математические и алго¬
ритмические подробности, а также сравнительный анализ метода
[177-179]. Читатель, заинтересованный в математических подроб¬
ностях и в деталях программной реализации метода, найдет их
там. В этом разделе мы ограничимся общим описанием метода и
перейдем к изложению результатов его тестирования.
При решении задачи относительной навигации ИСЗ, как уже
было показано, особенно важной задачей является сокращение
вычислительных затрат. Это заставляет очень тщательно подойти
к разработке метода решения. Следует, однако, сказать, что вы¬
числительная экономичность метода решения не должна дости¬
гаться в ущерб его надежности и точности, поскольку точность
навигационного обеспечения ИСЗ в конечном счете отражается
на качестве множества проводимых на его борту исследований и
измерений и в отдельных случаях может иметь жизненно важное
значение (при сближении и стыковке). Поэтому помимо эконо¬
мичности метод решения задачи относительной навигации НОС
должен обладать способностью вырабатывать адекватные оценки
погрешности полученного решения. Этого можно добиться, если
сократить до приемлемого уровня риск получения ложного реше¬
ния на этапе исключения неоднозначности фазовых измерений.
Чтобы обоснованно принять полученную оценку целого числа
периодов фазы в качестве истинного значения или отказаться от
использования целочисленной оценки, необходимо располагать
соответствующей характеристикой достоверности.
Достоверность исключения неоднозначности фазовых измере¬
ний обычно оценивается с помощью различных статистических
критериев [167, 172-174]. При этом для предполагаемого значения
Целого числа периодов вычисляется квадратичная форма. Она
проверяется на соответствие закону распределения вероятности,
который должен иметь место в случае, если предполагаемое зна¬
чение совпадает с истинным (распределение %2, распределение
Стьюдента). Существуют варианты оценки достоверности, где ис¬
пользуется пара конкурирующих значений целого числа периодов
[180]. Здесь критерием достоверности служит отношение квадра¬
тичных форм для этих значений: оно сопоставляется с порогом
Для распределения Фишера. Указанные подходы достаточно эко¬
номичны, однако страдают неполнотой используемой для оценки
Достоверности информации.
237
Применительно к НОС вместо статистических критериев мЬ[
предлагаем использовать апостериорную вероятность предпола-
гаемого целочисленного значения, т. е. вероятность условную ц0
отношению ко всем полученным к текущему моменту измерениям
Если эта вероятность достигает установленного заранее порога
(близкого к единице), целочисленная оценка периодов использу¬
ется для получения окончательного решения — относительных
координат. Апостериорная вероятность является наиболее объ¬
ективным критерием исключения неоднозначности, поскольку
опирается на всю полученную информацию. Понятно, что расчет
этой вероятности требует больше вычислительных затрат, чем
при использовании статистических критериев. Однако ее при¬
менение оправдано, так как обеспечивает высокую надежность
окончательного решения.
Отметим, что на практике двухчастотные измерения доступны
на борту ИСЗ далеко не всегда. Более того, получение и исполь¬
зование двухчастотных измерений выходит за рамки этой книги,
цель которой — создание основ проектирования БАСН на основе
открытых, доступных на рынке электронных компонент. В случае
использования одночастотных измерений, как отмечалось, будет
невозможно исключить ионосферную погрешность. Следовательно,
метод относительный навигации ИСЗ должен иметь универсальный
характер, т. е. он должен быть применим как к одночастотыым,
так и к двухчастотным измерениям.
С алгоритмической точки зрения разработанный метод опреде¬
ления относительных координат низкоорбитных спутников по
фазовым измерениям GPS выгодно отличается от существующих
аналогов. Отличие предложенного фиксированного решения за¬
ключается в его разбивке на два этапа и в более рациональной ор¬
ганизации перебора целого числа периодов фазовых измерений.
На первом этапе фиксированного решения отыскивается наи¬
более вероятное значение целого числа периодов фазы. Полный
перебор целого числа периодов здесь не выполняется. Высокая
скорость выполнения этого этапа обеспечивается тем, что область,
в которой производится поиск, постоянно сужается по мере на¬
хождения новых «кандидатов» на наиболее вероятное значение.
Второй этап служит для оценки апостериорной вероятности
найденного значения целого числа периодов. Существенно, что ее
оценка формируется последовательно в ходе перебора возможных
значений целого числа периодов. Причем величина оценки апо¬
стериорной вероятности монотонно убывает по мере учета новых
целочисленных значений. Благодаря такой технике создается воз¬
можность отказаться от недостоверного фиксированного решения,
238
ge вычисляя полностью его апостериорную вероятность и не вы¬
полняя перебор всех возможных значений периодов фазы.
В ходе выполнения перебора на первом и втором этапах при¬
меняется «автоматическая» нумерация значений компонент век¬
тора периодов фазы, которая обеспечивается легко выполнимыми
целочисленными операциями и не требует запоминания больших
массивов данных. Кроме того, необходимое на первом и втором
этапах вычисление квадратичных форм выполняется не с нуля для
каждой новой комбинации целого числа периодов, а с учетом про¬
межуточных результатов для уже рассмотренных комбинаций.
6.5. Результаты тестирования предложенного метода
относительной навигации искусственного спутника Земли
6.5.1. GPS-данные проекта GRACE
Эффективность разработанного метода определения относитель¬
ных координат НОС проверена, в частности, с использованием GPS-
данных, записанных в ходе выполнения проекта GRACE (Gravity
Recovery And Climate Experiment). GRACE является совместным
проектом NASA—National Aeronautics and Space Administration
(США) и DLR — Deutsches Zentrum fur Luft und Raumfahrt (Гер¬
мания). Основная цель проекта — исследование гравитационного
поля Земли с помощью датчиков, расположенных на двух НОС.
Запуск спутников GRACE состоялся 17 марта 2002 г. с космодрома
Плесецк (Россия).
Проект рассчитан на пять лет. Оба HOC (GRACE А/В) снабже¬
ны одинаковыми приемниками GPS для решения навигационной
задачи. Приемники используют кодовые и фазовые измерения на
Двух частотах. В открытом доступе имеются записи измерений
GPS, с помощью которых можно тестировать алгоритмы обработки
информации GPS на НОС.
Спутники GRACE имеют призматическую форму, которая обе¬
спечивает наиболее точное выравнивание и стабилизацию. Общая
Масса двух НОС составляет менее 950 кг. Помимо навигацион¬
ных GPS-антенн, расположенных сверху, на борту НОС разме¬
щены антенны для измерения взаимного положения с помощью
Радиосигналов в специальной полосе частот (K-band) и лазерные
Дальномеры, также предназначенные для уточнения орбит спут¬
ников. Кроме того, имеются блоки акселерометров для измерения
Ускорений и астрономическая система определения ориентации.
Совокупность указанных навигационных средств обеспечивает
239
Таблица 6.2
Параметры орбит GRACE
Параметр орбиты
Начальное значение
Погрешность
Значение при
завершении проекта
Большая полуось, км
6878
±10
6678
Эксцентриситет
Менее 0,005
-
Менее 0,005
Наклонение, ...°
89
±0,05
89
высокоточное позиционирование спутников GRACE.
Массивы координат, полученных в результате постобработки,
открыты для общего пользования и могут рассматриваться как
эталонные данные при проверке эффективности собственных ал¬
горитмов обработки навигационной информации.
Спутники GRACE движутся по компланарным, околополяр-
ным орбитам. Основные параметры орбит приведены в табл. 6.2.
Между НОС поддерживается номинальное расстояние 220 км при
допустимом его увеличении на 50 км.
Как видно из табл. 6.2, спутники GRACE не выходят за пределы
ионосферы, а база относительной навигации превышает 200 км,
и ее нельзя полагать короткой. Одна из основных трудностей,
возникающих при обработке данных эксперимента, — влияние
ионосферных погрешностей на погрешность относительной нави¬
гации при использовании одночастотных измерений.
Верификацию предложенного метода относительной навигации
мы разбили на три этапа:
1) относительная навигация без ионосферной погрешности по
двухчастотным измерениям;
2) относительная навигация с моделированной ионосферной
погрешностью по одночастотным измерениям;
3) относительная навигация с реальной ионосферной погреш¬
ностью по одночастотным измерениям.
На первом этапе описанный в приложении Д метод относи¬
тельной навигации применялся к двухчастотным измерениям
GRACE. Задачей этого этапа было тестирование предложенного
метода относительной навигации в условиях, когда ионосферная
погрешность отсутствует. На втором этапе моделировались одно¬
частотные измерения с учетом ионосферной погрешности для
коротких баз относительной навигации. Целью этого этапа было
определение размеров баз, при которых предложенный метод от¬
носительной навигации применим к измерениям, включающим в
себя ионосферную погрешность. Заметим, что на момент написания
данной книги двухчастотные измерения были доступны только
240
для приемников, использующих КОД ВЫСОКОЙ ТОЧНОСТИ, Т. е. ВЫ¬
ВОДЯЩИХ за рамки книги. Нашей задачей является создание основ
Проектирования гражданской аппаратуры, предназначенной для
коммерческой реализации на гражданском рынке. Это и опреде¬
лило необходимость исследования границ применимости пред¬
ложенного метода относительной навигации при использовании
одночастотных измерений.
Для проведения численного эксперимента использовались дан¬
ные GRACE так называемого уровня 1В. Это данные, которые уже
прошли первичную обработку, связанную со снижением частоты
и временной привязкой. Для проведения расчетов использовались
два пакета данных: GPS Flight Data Format Record (GPS1B) и GPS
Navigation Data Format Record (GNV1B). Первый пакет содержит
записанные с темпом 10 с кодовые и фазовые измерения GPS-
приемников на частотах L1 и L2. Второй пакет — 60-секундные
результаты навигационного решения, сопровождающиеся точ¬
ностными характеристиками. Судя по этим характеристикам, по¬
грешность определения координат спутников GRACE находится на
уровне 2...3 см. Поскольку координаты из пакета GNV приведены
с большей дискретностью, чем измерения, они пересчитывались
с применением сплайн-интерполяции 6-го порядка на моменты за¬
писи измерений. Тем самым создавалась возможность сопоставить
каждый полученный с помощью тестируемого метода результат
с эталонным GNV-решением.
Необходимые для решения навигационной задачи координаты
НС GPS формировались на основе данных IGS— International GPS
Service [170]. При этом использовались файлы igsWWWWD.sp3
(WWWW— номер недели GPS), содержащие наиболее точные
координаты (final precise ephemerides), полученные с учетом не¬
дельных данных из глобальных и региональных решений. IGS-
данные представляют собой 15-минутные записи координат НС
GPS в связанной с Землей прямоугольной системе координат ITRF.
Чтобы получить координаты НС GPS на моменты измерений (их
дискретность составляет 10 с), применялась сплайн-интерполяция
8-го порядка. При этом учитывалось, что система координат ITRF
за время прохождения сигнала от НС до приемников поворачивает¬
ся на угол, равный произведению тU, где т — время прохождения
сигнала от НС до приемника; U— скорость вращения Земли.
Отметим, что при решении не учитывались поправки на смеще¬
ние фазовых центров антенн приемников. Пренебречь ими пред¬
ставляется возможным, поскольку они практически одинаковы
Для GRACEA/B ввиду использования на них одинаковых прием¬
ников, а различия в ориентации антенн незначительны.
241
Конвертация из двоичного формата
242
Рис, 6,6. Программное обеспечение для обработки данных GRACE
гт
£
. п
г
*» о еэ
SdO ■ за и м1 А иэ idartOH
243
Время решвмкя, *•
Рис. 6.7. Диаграмма используемых приемниками GRACE А/В навигационных спутников GPS
на выбранном интервале решения
На рис. 6.6 представлена схема программного обеспечение
разработанного для проверки эффективности изложенного вьцце
метода определения относительных координат НОС (закрашенный
блок). Полученный результат здесь сопоставляется с эталонным
GNV-решением. Разности этих решений рассматриваются как
погрешности полученного решения, которые сопоставляются
с рассчитанными в используемом методе среднеквадратическими
значениями погрешностей. Таким образом, проверяется не только
сама погрешность, но и адекватность ее оценки.
Для тестирования были использованы данные от 31.05.2006 г.
При этом для решения был выбран восьмичасовой интервал,
в течение которого не происходило перерывов в поступлении изме¬
рений от GPS. Причем в каждый момент этого интервала имеются
измерения по крайней мере от четырех спутников. Максимальное
количество видимых спутников достигает десяти.
На рис. 6.7 представлена диаграмма используемых НС GPS. Как
видно из диаграммы, используемые НС часто меняются, что обу¬
словлено малым периодом обращения HOC GRACE вокруг Земли
(примерно 1,5 ч). Время непрерывного наблюдения НС в большин¬
стве случаев находится в пределах 20...40 мин (рис. 6.7).
6.5.2. Результаты обработки двухчастотных
данных GRACE
Длина базы на рассматриваемом интервале составляла около
250 км, а высота орбиты — примерно 350 км.
На рис. 6.8 представлены результаты решения задачи относи¬
тельной навигации по вторым разностям двухчастотных измере¬
ний, полученных приемниками GRACE А/В.
На трех верхних графиках синими линиями изображены разно¬
сти полученных в ходе решения оценок относительных координат
и эталонных значений из пакета GNV. Красные линии передают
утроенные среднеквадратические значения погрешности, рас¬
считанные при решении. Затемненные области графиков — это
интервалы, где фиксированное решение оказалось невозможным и
имеется только плавающее решение, не учитывающее целочислен¬
ный характер периодов фазы. Отметим, что отсутствие фиксиро¬
ванного решения в начале интервала обусловлено необходимостью
исключения неоднозначности сразу для всех НС. По существу,
начало интервала соответствует ситуации возобновления приема
сигналов GPS после перерыва. На четвертом сверху графике при¬
ведена квадратичная норма разности трехмерных векторов полу-
244
245
Рис. 6.8. Результаты двухчастотного решения по данным GRACE
ченного и эталонного решений, т. е. пространственное отклонен^
от эталонного решения. Для сравнения здесь приведены графи^
квадратичных норм для однозначного и плавающего решения (Со
ответственно синяя и зеленая линии). На нижнем графике показа
ны число видимых спутников (синяя линия) И соответствующий
им геометрический фактор (зеленая линия).
Можно видеть, что фиксированное решение удается получить
примерно в 90 % случаев. Там, где неоднозначность исключена
отклонение от GNV-решения, как правило, не превышает 5 см
Эти отклонения укладываются в расчетный коридор утроенных
среднеквадратических значений, т. е. погрешность полученного
решения оценивается адекватно. Эффективность фиксированного
решения по сравнению с плавающим существенно варьируется.
Иногда погрешности обоих решений очень близки, но есть интер¬
валы, где фиксированное решение на порядок точнее.
6.5.3. Результаты одночастотного решения
на разных базах по данным моделирования
Для анализа возможности получения фиксированных решений
по одночастотным измерениям было проведено моделирование
ионосферной погрешности для двух НОС, расположенных на раз¬
личных базах. В качестве траектории одного из НОС была принята
реальная траектория GRACE В на рассмотренном выше восьми¬
часовом интервале. Моделирование ионосферных погрешностей
проводилось путем интегрирования плотности электронного содер¬
жания по линии распространения сигналов от НС до приемника.
Интегрирование осуществлялось от приемника до граничного слоя
ионосферы (его высота была принята равной 1500 км). При этом
интегрируемая плотность электронного содержания определялась
исходя из вертикального полного электронного содержания, кото¬
рое, в свою очередь, отыскивалось в виде разложения по сфериче¬
ским гармоникам с параметрами, взятыми из ion-файла службы
IGS [170]. Алгоритм расчета вертикального полного электронного
содержания и ее вид взяты из диссертационной работы [176]. Мо¬
делирование одночастотного решения проводилось для баз длиной
1, 10, 20, 30, 40 и 50 км.
На рис. 6.9 приведены частотные распределения смоделирован¬
ных ионосферных погрешностей первых разностей измерений. Там
же указаны среднее, среднеквадратическое и максимальное (п°
модулю) значения. При решении ионосферная погрешность учиты¬
валась в виде дополнительной гауссовой шумовой составляющей
246
Среднее -0.000м
иинэненс овюэнтгом
иинакенс оаюэьииох
247
Рис. 6.9. Частотные распределения ионосферных погрешностей первых разностей измерений для частоты Lj (результаты
моделирования)
-01
248
Рис. 6.10. Результаты одночастотного решения для километровой базы
249
Рис. 6.11. Результаты одночастотного решения для 10-километровой базы
я х ou »*g~*o
250
Рис. 6.12. Результаты одночастотного решения для 20-километровой базы
251
Рис. 6.13. Результаты одночастотного решения для 30-километровой базы
я Х*»«Ф««0
252
Рис. 6.14. Результаты одночастотного решения для 40-километровой базы
i
n
253
Рис. 6.15. Результаты одночастотного решения для 50-километровой базы
Таблица б.з
Результаты одночастотного решения для разных баз относительной навигацци
Длина базы, км
Доля фиксирован¬
ных решений, %
Доля правильных
решений, %
Среднеквадратическое
отклонение
от эталонного реше¬
ния, см
1
99,4
100
1
10
99,1
100
1,7
20
98,0
100
2,5
30
96,2
99,97
3,2
40
95,2
99,80
4,1
50
92,8
99,60
5,3
с уровнем, зависящим от длины базы. При этом среднеквадрати¬
ческое значение ионосферной погрешности первых разностей для
базы длиной 1 км принималось равным 3 мм, для базы длиной
10 км —1 см, длиной 20 км — 2 см, длиной 30 и 40 км — 3 см,
длиной 50 км —4 см. Указанные значения выбраны с учетом ста¬
тистических данных, приведенных на рис. 6.9, а также с целью,
с одной стороны, максимизировать количество фиксированных
решений, а с другой — минимизировать число ошибок при разре¬
шении неоднозначности. Помимо ионосферных погрешностей были
промоделированы шумовые составляющие кодовых и фазовых из¬
мерений с гауссовым распределением и со среднеквадратическими
значениями, которые использовались в алгоритме двухчастотного
решения. Чтобы сравнение было объективным, для всех баз ис¬
пользовались одни и те же смоделированные реализации шумовых
составляющих измерений.
Результаты моделирования одночастотного решения для указан¬
ных баз приведены на рис. 6.10-6.15. Как и ранее, серые области
соответствуют интервалам или отдельным моментам, где фиксиро¬
ванное решение было невозможно. Черные вертикальные линии
обозначают моменты, в которые фиксированное решение оказы¬
валось ошибочным. Как видно из графиков, на базах до 20 км
возможно практически непрерывное фиксированное решение. При
этом все решения оказываются правильными. Дальнейшее увели¬
чение длины базы ведет к перерывам в получении однозначного
решения и увеличению процента ложных результатов.
Итоговые показатели одночастотных решений для указанны*
баз сведены в табл. 6.3.
254
6.5.4. Результаты обработки одночастотных
данных GRACE
Приведенные выше результаты моделирования одночастотных
данных требовали экспериментальной проверки. Эта задача пред¬
ставлялась практически неразрешимой, поскольку номинальное
расстояние между спутниками GRACE насчитывает 220 км, а гра¬
ницы применимости метода для одночастотных данных составля¬
ют 40...50 км. К счастью, 10 декабря 2005 г. спутники GRACE
выполняли маневр, который привел к сближению GRACE А и
GRACE В до 400 м (!). Измерения GPS, полученные 10 декабря
2005 г., находятся в открытом доступе и представляют собой уни¬
кальную возможность для тестирования алгоритмов относительной
навигации, использующих одночастотные данные.
На рис. 6.16 представлены результаты решения задачи от¬
носительной навигации по вторым разностям одночастотных
измерений, полученных приемниками GRACE А/В [181]. Как
и на рис. 6.15, на трех верхних графиках черными линиями
изображены разности полученных в ходе решения оценок от¬
носительных координат и эталонных значений. Красные линии
передают утроенные среднеквадратические значения погреш¬
ности, рассчитанные при решении. В отличие от рис. 6.8 на
рис. 6.16 отсутствуют затемненные области, т. е. удалось полу¬
чить фиксированное решение почти на всем интервале наблю¬
дения. На четвертом сверху графике приведена квадратичная
норма разности трехмерных векторов полученного и эталонного
решений, т. е. пространственное отклонение от эталонного реше¬
ния. Отклонение решения от эталонного не превышает 3...4 см.
На пятом графике показаны число видимых спутников (синяя
линия) и соответствующий им геометрический фактор (зеленая
линия), а на нижнем графике — база, т. е. расстояние между
GRACE А и GRACE В.
Интересно сравнить результаты моделирования с обработкой
реальных данных. Сравнивая рис. 6.16 и табл. 6.3, можно заклю¬
чить, что моделирование было адекватным, но все-таки давало
излишне оптимистичные результаты в части предсказанной по¬
грешности решения.
Также интересен рис. 6.17, на котором приведены расхождения
решений, полученных для одночастотных и двухчастотных из¬
мерений. Показано, что существенное (более 10 см) расхождение
Между решениями наблюдается лишь в начале обработки. Такой
Результат ожидаем, с учетом того что фазовая неоднозначность
Разрешается практически на всем интервале наблюдения.
255
«• в* 33V*0
Wm мм№Л*^
Рис. 6.17. Расхождение между одночастотным и двухчастотным решениями
Таким образом, разработанный метод относительной навигации
проверен на реальных одночастотных измерениях GPS, получен¬
ных на низкоорбитных спутниках GRACE с базой менее 10 км.
Доля фиксированных решений составила более 99 %, а доля
правильных решений — 99,55 %. Погрешность оценки относи¬
тельных координат (расхождение с эталонным решением) для
фиксированных решений находится на уровне 3...5 см. При этом
вычисляемая при решении среднеквадратическая погрешность
адекватна реальной.
6.6. Выводы
В этой главе мы рассмотрели постановку задачи автономной
навигации группы спутников и показали, что для осуществления
автономной относительной навигации необходимо разработать
метод определения вектора взаимного положения двух косми¬
ческих кораблей на борту (без связи с наземными станциями)
и в реальном масштабе времени.
Мы проанализировали особенности автономной относительной
навигации БАСН, к которым следует отнести невысокую эффек¬
тивность фильтрационных методов обработки измерений и малую
долю слабокоррелированных измерений фазы несущей, слож¬
ность учета ионосферных погрешностей для одночастотных при¬
емников, а также ограниченность бортовых вычислительных ре¬
сурсов.
Был предложен метод автономной относительной навигации
(т. е. определения вектора взаимного положения ИСЗ) с исполь¬
зованием измерений фазы несущей сигнала СРНС.
Разработанный метод прошел тестирование на реальных двух¬
частотных измерениях GPS, полученных на низкоорбитных спут¬
никах GRACE с базой 250 км. Доля фиксированных решений на
257
восьмичасовом интервале составила около 90 %. Погрешность
оценки относительных координат (расхождение с эталонны^
решением) для фиксированных решений находится на уровце
3...5 см.
Также проведено моделирование одночастотного решения ддя
спутников GRACE на различных предполагаемых базах. Резуль.
таты моделирования показывают удовлетворительное качество
оценки относительных координат на базах до 30 км: доля фикси¬
рованных решений — 96 %, из которых практически все правиль¬
ные, погрешность относительных координат для фиксированных
решений — на уровне 3...4 см.
При реальных одночастотных измерениях GPS с базой ме¬
нее 10 км погрешность оценки относительных координат нахо¬
дится на уровне 3...5 см при доле фиксированных решений более
99 %.
Предложенный способ автономной относительной навигации
представляет собой составную часть метода проектирования БАСН.
Практическая ценность метода для проектировщиков БАСН за¬
ключается не только в том, что метод был успешно опробован
на модельных и реальных данных, но и в том, что он подробно
описан. Приведены математические детали метода, подробно разо¬
бран алгоритм разрешения фазовой неоднозначности и обсуждены
практические аспекты реализации метода в программном обе¬
спечении БАСН.
Отметим также универсальность предложенного метода. Он
применим как к одночастотным, так и к двухчастотным измере¬
ниям СРНС; область его использования не ограничивается БАСН;
наконец, способ работает не только для СРНС, но и для радио¬
частотных датчиков.
258
Глава 7
MOSAICGNSS — РЕАЛИЗАЦИИ ПРИНЦИПОВ
ПРОЕКТИРОВАНИЯ БОРТОВОЙ АППАРАТУРЫ
СПУТНИКОВОЙ НАВИГАЦИИ
MosaicGNSS — один из самых успешных в мире приемников
спутниковой навигации космического базирования. Первый за¬
пуск MosaicGNSS состоялся в 2006 г., по состоянию на январь
2012 г. восемь запущенных приемников отработали на орбите
более 18 лет, а всего у немецкой компании Astrium GmbH — про¬
изводителя MosaicGNSS — к началу 2012 г. было заказано более
40 приемников [2]. Ожидается, что к моменту выхода в свет этой
книги число проданных приемников превысит 50, что сделает
MosaicGNSS самой покупаемой БАСН в мире.
MosaicGNSS спроектирован автором и коллегами по заказу
Astrium GmbH с использованием представленных в этой книге
методов. Приемник построен на основе предложенной в главе 3
архитектуры, в нем использованы методы первичной обработки
сигналов из главы 4 и методы вторичной обработки из главы 5.
Предложенный в главе 6 метод автономной относительной на¬
вигации пока еще не был опробован в космосе, но мы полагаем,
что он будет применен в будущих полетах следующих поколений
БАСН на основе MosaicGNSS.
Материал заключительной главы построен следующим обра¬
зом. Сначала раскрыта архитектура приемника, включая описа¬
ние аппаратных блоков и структуры программного обеспечения.
Далее приведены заявленные производителем характеристики
устройства. Финальная часть главы посвящена описанию летных
испытаний MosaicGNSS.
259
7.1. Архитектура MosaicGNSS
Основные аппаратные блоки MosaicGNSS представлены jja
рис. 7.1. Выход малошумящего усилителя (МШУ) антенны соедц
нен с входом радиочастотного приемного устройства, реализован,
ного на основе СБИС GEC Plessey GP2015. Управляемая частотой
10 МГц, СБИС GP2015 преобразует входной сигнал на частоте
1575,42 МГц в вещественный сигнал на промежуточной частоте
(ПЧ), равной 4,309 МГц, с полосой 2 МГц.
Аналого-цифровой преобразователь (АЦП) осуществляет пре¬
образование вещественного сигнала в цифровую форму с часто¬
той дискретизации fg. Отсчеты сигнала на выходе СБИС GP2015
представлены двумя разрядами (знак и амплитуда). В цифровом
преобразователе частоты (ЦПЧ) последовательность этих отсчетов
преобразуется в квадратурные отсчеты на нулевой промежуточной
частоте. Суммарные энергетические потери, вызванные квантова¬
нием входного сигнала в РПУ, составляют 2,55 дБ. СБИС GP2015
разработана для использования с активной антенной. Коэффици¬
ент усиления МШУ антенны выбран достаточно большим (около
26 дБ), поэтому коэффициент шума всего РПУ определяется ко¬
эффициентом шума МШУ, равным 3 дБ.
Следовательно, потери в отношении C/Ng на входе МКК со¬
ставляют около 6 дБ. Цифровая обработка сигналов, включая
функции коррелятора в MosaicGNSS, осуществляется программно
под управлением TSC21020F с тактовой частотой 20 МГц.
На рис. 7.2 представлена схема СБИС GP2015, которая ис¬
пользуется в РПУ MosaicGNSS для преобразования и фильтра¬
ции сигналов НС диапазона GPS L1. СБИС имеет архитектуру
с тройным преобразованием входной частоты. Все опорные часто¬
ты, используемые для трансформации входного сигнала, форми-
Рис. 7.1. Схема MosaicGNSS
260
Or
антенны
/’ = 1400 МГц f2 = 1400/10 МГц /3 = 1400/45 МГц
4*1
ПФ
ПФ
АРУ ■
ПФ
s3(f:
УС
f0 = 175,42 МГц fQ = 35,42 МГц
8 > 2 МГц 8 = 1,9 МГц
Г0 = 4,308 МГц
8= 1,8 МГц
Управле¬
ние АРУ
Аналоговый
выход ПЧ
S4(f)
к ЦПЧ
АЦП
L = 40/7 МГц
Рис. 7.2. Схема СБИС GP2015
руются входящим в состав СБИС синтезатором частоты (СЧ) (на
рисунке не изображен).
Синтезатор частоты управляется термокомпенсированным опор¬
ным генератором, формирующим номинальную частоту 10 МГц.
Полосовые фильтры (ПФ), расположенные после смесителей,
применяются для подавления внеполосных помех и паразитных
гармоник, возникающих в результате преобразования частот.
В основном подавление внеполосных помех (свыше 40 дБ) до¬
стигается за счет параметров фильтра между вторым и третьим
смесителями. Двухкаскадная схема автоматической регулировки
усиления (АРУ), расположенная после второго смесителя, исполь¬
зуется для поддержания заданного уровня мощности на выходе
АЦП. АРУ настроено таким образом, что на выходе АЦП ампли¬
туда отсчетов ПЧ принимает максимальное значение в среднем
30 % времени. При этом вес максимального значения амплитуды
равен трем, а минимального — единице. В табл. 7.1 представлено
распределение вероятности отсчетов ПЧ на выходе РПУ.
Преобразование спектра входного сигнала в СБИС представлено
на рис. 7.3. Здесь изображен только основной лепесток спектра
сигнала НС, огибающая которого имеет вид функции sin (х)/х.
На третьей стадии преобразования сигнал НС переносится на ПЧ,
Таблица 7.1
Распределение вероятности отсчетов ПЧ на выходе РПУ
Кодирование отсчета на выходе АЦП
Значение отсчета
Вероятность
Знак
Амплитуда
1
1
-3
0,15
1
0
-1
0,35
0
0
+1
0,35
0
1
+3
0,15
261
U h h
5ц(0
|S(0I
S3(/)' 'S2(// \(0* 4(0
-575,42 -175,42 -35,42 -4,308 0 4,308 35,42 175,42 1575,42 '*'
f; Mr4
Рис. 7.3. Частотный план СБИС GP2015
-7,12 -7, -4,308
-1,41 0 1,41
4,308 f. 7,12 f, МГц
Рис. 7.4. Преобразование спектра при дискретизации сигнала по времени:
а — спектр сигнала после третьей стадии преобразования частоты; б — спектр
сигнала на выходе РЧ-блока
равную fL - - /2 ~ /з - 4,308 МГц. АЦП, тактируемое частотой
fs, преобразует этот сигнал в цифровую форму.
Так как при дискретизации сигнала по времени его спектр
становится периодическим, можно считать, что аналоговый
сигнал на ПЧ, равной 4,308 МГц, преобразуется в цифровой
сигнал на частоте fL - - /2 - /3 ~ fs> которая равна примерно-
минус 1,41 МГц для fs = 5,71 МГц и примерно минус 2,36 МГц
для fs = 6,67 МГц. Это преобразование поясняется на рис. 7.4 для
случая fs = 5,71 МГц.
Отрицательный знак ПЧ цифрового сигнала на выходе РПУ
означает, что в процессе дискретизации происходит инверсия
фазы входного сигнала. В отличие от трех аналоговых стадий
преобразования сигнала, в которых опорная частота ниже вход¬
ной, на четвертой стадии опорная частота, равная /5, выше ПЧ-
В результате положительное приращение фазы входного сигнала
262
ЦС, вызванное доплеровским сдвигом частоты, преобразуется
g отрицательное на ПЧ. Этот эффект необходимо учитывать при
реализации системы ФАПЧ.
7.1.1. Цифровой преобразователь частоты
Цифровой сигнал на выходе РПУ имеет периодический спектр
с полосой 2 МГц и центральной частотой 4,309 + kfs (МГц) [38],
где k е Z,fs — частота дискретизации, которая может принимать
два значения: 40/7 = 5,71 МГц или 40/6 = 6,67 МГц. Цифровой
преобразователь частоты предназначен для трансформации этих от¬
счетов в квадратурные на нулевой ПЧ, упаковки их в 32-разрядные
слова и буферизации слов для дальнейшей обработки в ЦПУ. На
рис. 7.5 представлена схема ЦПЧ, включающего в себя следующие
функциональные компоненты:
1) цифровой синтезатор частоты;
2) комплексный смеситель;
3) блок упаковки и буферизации FIFO.
Синтезатор частоты формирует квадратурные отсчеты опорной
частоты, равной 1,41 МГц для fs = 5,71 МГц или 2,36 МГц для
fs = 6,67 МГц, которые перемножаются в комплексном смесителе
с отсчетами ПЧ, полученными на выходе РПУ. Поскольку отсчеты
ПЧ имеют двухразрядное представление, то и квадратурные от¬
счеты опорной частоты достаточно представить двумя разрядами,
что определяет шаг по фазе при формировании таблицы предвы-
2-разряд-
ные
отсчеты
Комплексный смеситель
,'СХ
М У. н
Таблица
sin/cos
ГУК
ФНЧ
Блок
сравнения
ФНЧ
Синтезатор частоты
Блок
сравнения
Пороги
. Инкремент фазы
-f,
Блок упаковки и FIFO
Блок
сдвига |~У
Блок _|.
сдвига “К
FIFO
fj 32
7 /, Q
пакеты
Рис. 7.5. Схема цифрового преобразователя частоты
263
Таблица 7^
Формирование отсчетов несущей
Фаза, циклы
0
1/8
2/8
3/8
4/8
5/8
6/8
7/8
Синус
1
2
2
1
-1
-2
-2
-1
Косинус
2
1
-1
-2
-2
-1
1
2
численных значений синуса и косинуса, равный 2~(п+1\ где п —.
разрядность представления отсчетов (табл. 7.2).
Двоичное представление квадратурных отсчетов на выходе
синтезатора частоты приведено в табл. 7.3.
Разрядность накапливающего сумматора генератора, управ¬
ляемого кодом синтезатора частоты, равна 13 и позволяет фор¬
мировать сетку опорных частот в диапазоне от 0 до f /2 с шагом
4/213.
В каждом квадратурном канале результаты перемножения от¬
счетов поступают на вход фильтра низких частот (ФНЧ), являюще¬
гося фильтром с конечной импульсной характеристикой шестого
порядка для f3 = 5,71 МГц и 30-го порядка для fs = 6,67 МГц. Син¬
тез ФНЧ осуществлялся средствами MATLAB в классе фильтров
с равноволновой амплитудно-частотной характеристикой (АЧХ) и
коэффициентами с фиксированной точкой. Исходные данные для
синтеза фильтров приведены ниже:
Частота дискретизации, МГц 40/7 40/6
Нормированная частота среза полосы пропускания . . . 0,179 0,142
Неравномерность в полосе пропускания, дБ 3 3
Нормированная частота среза полосы подавления. . . . 0,313 0,15
Допустимый уровень боковых лепестков в полосе подав¬
ления, дБ, не более -15 -15
Коэффициенты синтезированных фильтров равны {—1, 0, 4, 6,
4, 0, -1} для ФНЧ шестого порядка и {2, 0, —1, -1, 0, 0, 1, 1, О,
Таблица 7.3
Квадратурные отсчеты на выходе генератора несущей
Кодирование квадратурного отсчета
Значение отсчета
Знак
Амплитуда
1
1
-2
1
0
-1
0
0
+1
0
1
+2
264
Л( -2, -1, 1, 5, 8, 9, 8, 5, 1, -1, -2, -1, О, 1, 1, О, О, -1, -1, 0, 2}
ддя ФНЧ 30-го порядка. Соответствующие АЧХ фильтров пред¬
ъявлены на рис. 7.6 и 7.7. Результаты фильтрации подвергаются
делочисленной децимации: с выхода ФНЧ в блок сравнения по¬
купает каждый второй отсчет для fg = 5,71 МГц и каждый третий
отсчет для fs = 6,67 МГц.
В блоках сравнения осуществляется кодирование квадратурных
отсчетов в соответствии с табл. 7.4. При этом порог выбирают
таким образом, чтобы на выходе блока сравнения отсчеты при¬
нимали максимальное значение амплитуды 30 % времени.
Ниже приведена методика расчета порогов для рассматривае¬
мых значений fg.
Нормированная частота
Рис. 7.6. Амплитудно-частотная характеристика ФНЧ
для fs = 5,71 МГц
35 • : 1 : : V ■ 1
Нормированная частота
Рис. 7.7. Амплитудно-частотная характеристика ФНЧ
для fs = 6,67 МГц
265
ТаблицаТа
Кодирование квадратурных отсчетов
Знак
Амплитуда
Старший разряд
Младший разряд
+
> порог
0
1
+
<порог
0
0
-
<порог
1
0
-
> порог
1
1
Пусть {Sj} и (rj — последовательности отсчетов ПЧ на выходе
РПУ и опорной частоты на выходе синтезатора частоты, имеющих
плотности распределения вероятностей {р;} и {qj} соответственно.
Считаем, что в пределах периода отсчеты опорной частоты распре¬
делены равномерно, а отсчеты ПЧ имеют распределение, заданное
табл. 7.1. Результат их произведения есть последовательность
{иу} с плотностью распределения вероятности {pflj}. Произведение
имеет нулевое математическое ожидание, так как
Е{вЛ = 0 и Е{г,} = 0.
L J
Следовательно, дисперсия отсчетов на выходе смесителя в каж¬
дом квадратурном канале определяется выражением
°2 = TtfjPiQj = YtfPiYrfa-
i,j i j
Так как отсчеты опорной частоты распределены равномерно,
то в соответствии с табл. 7.2 получим
Yffqj = —(1 + 4 + 4 + 1 +1 + 4 + 4 +1) = 2,5,
8
]
откуда следует, что дисперсия отсчетов на входе ФНЧ
2,5 = 8,5.
а2 =
(-3)2 0,15 +(-1)2 0,35+ I2 0,35 +З2 0,15
Дисперсия отсчетов на выходе ФНЧ с коэффициентами {at}
определяется соотношением
CTLPF = D |ZaiSi (• = YAD {si }+ 2lLaiai'lD {Si fD {s7 }Pij'
N
I
i=1
i<]
где -D{s;} — дисперсия; st, рг- — коэффициенты корреляции от¬
счетов st и Sj на входе ФНЧ.
266
Последовательность {s^ представляет собой стационарный слу¬
чайный процесс с дисперсией ст2. Следовательно,
CTLPF = ст2 | Xla£2 + 2Y,aiajPij ['
[i=l i<j J
АКФ отсчетов {s;} определяется полосой фильтра РПУ; по
уровню минус 3 дБВ = 2,5 МГц [38].
При п > —-— отсчеты st и si+n можно считать некоррелирован-
2ВТ
ными. Следовательно,
N
CTLPF = для fs = 2В■
i=1
Учитывая, что п > 1,14 для / = 5,71 МГц и п > 1,33 для
fs = 6,67 МГц, дисперсия отсчетов на выходе ФНЧ определяется
соотношением
Г N N-1 1
CTLPF = °2 ] Хаг2 + 2Р X aiai+1 Г >
U=1 г=1 J
где р — коэффициент корреляции между соседними отсчетами.
АКФ отсчетов на выходе идеального ФНЧ с полосой В описы¬
вается функцией р(п) = sine (2ВпТ). Следовательно,
_ ГО, 14, fs =5,71 МГц;
Р~ [0,30, fs =6,67 МГц.
Подставив в выражение для дисперсии значения коэффициентов
фильтра, получим
2 _ j26,632, fs =5,71 МГц;
CTLPF - 1 9
[60,842, fs = 6,67 МГц.
Считая, что отсчеты на выходе ФНЧ имеют нормальное рас¬
пределение, порог может быть определен следующим образом:
R = [1 ,03ctjj}jt], где [л:] — целая часть х.
Таким образом, в диапазон [-Д...Д] попадает 70 % отсчетов
с выхода блока сравнения, что оптимально для двухразрядного
квантования.
267
7.1.2. Архитектура программного обеспечения
MosaicGNSS
Архитектура программного обеспечения (ПО) MosaicGNSS изо
бражена на рис. 7.8. ПО MosaicGNSS состоит из четырех основных
блоков: МКК, блоков первичной и вторичной обработки сигнала
а также менеджера каналов. В МКК осуществляются формирова_
ние отсчетов опорного сигнала, свертка этих отсчетов с отсчетами
сигнала, полученными на выходе ЦПЧ, а также интегрирование
результата свертки для получения первичных квадратурных на¬
коплений / и Q. В блоке первичной обработки эти накопления
используются для оценки текущей фазы кода и фазы несущей
а также отношения C/Nq для каждого из каналов. На основании
оценок фаз кода и несущей производятся измерения псевдодаль¬
ности и псевдоскорости. Кроме того, в блоке первичной обработки
осуществляется декодирование навигационного сообщения.
/, Q отсчеты Псевдодальность
Рис. 7.8. Архитектура ПО MosaicGNSS
В блоке вторичной обработки на основании измерений псевдо¬
дальности и псевдоскорости, полученных в разных каналах, вы¬
числяется вектор состояния потребителя. Кроме того, на основании
альманаха системы, передаваемого в навигационном сообщении,
и вектора состояния потребителя вычисляется набор НС, находя¬
щихся в зоне радиовидимости приемника. Управление обработкой
сигналов в МКК осуществляется при помощи менеджера каналов,
который на основе данных о наборе видимых НС, статусе кана¬
ла и отношении C/Nq устанавливает время интегрирования для
каждого из каналов, а также принимает решение об изменении
числа параллельных каналов МКК.
268
7.2. Характеристики MosaicGNSS
Отметим характеристики БАСН, достижению которых посвя¬
щена данная книга.
1. MosaicGNSS представляет собой универсальное решение для
ЦОС, СИСЗ и ЭОС, полученное за счет гибкой архитектуры и вы¬
делительно эффективных методов обработки.
2. Заявленная радиационная стойкость 100 крад обеспечена
благодаря отказу от аппаратного коррелятора и использованию
только радиационно стойких компонент. Интересно, что про¬
граммная реализация обработки сигналов (включая корреляцию)
отнесена производителем к уникальному преимуществу аппара¬
туры спутниковой навигации.
3. Высокая чувствительность приемника (26 дБГц в слежении
за сигналом и 30 дБГц в поиске сигналов) достигается за счет, во-
первых, минимизации потерь в обработке сигналов и, во-вторых,
вследствие разработанных методов первичной обработки.
4. Доступность навигационного решения при наличии только
двух спутников в зоне радиовидимости возможна благодаря раз¬
работанным методам вторичной обработки сигналов.
5. Способность приемника функционировать в условиях высо¬
кой динамики (при частоте Доплера до ±60 кГц и скорости из¬
менения до ±60 кГц/с) достигается при помощи разработанных
методов первичной обработки сигналов.
6. Заявленная точность приемника (трехмерная погрешность
определения координат менее 10 м для НОС и менее 150 м для
СИСЗ) является интегральной характеристикой, которая была по¬
лучена как за счет минимизации потерь в обработке, так и за счет
разработанных методов первичной и вторичной обработки.
7. Наконец, MosaicGNSS работает по гражданскому сигналу
GPS L1 и не включает в себя элементную базу военного приме¬
нения.
Ниже приведены характеристики приемника MosaicGNSS [2].
Уникальное свойство — программная обработка сигналов (быстрое первое
решение, обработка слабых сигналов для СИСЗ).
Навигация поддерживается при двух навигационных спутниках в зоне радио¬
видимости.
Программное обеспечение может быть изменено и сконфигурировано во время
полета.
ПО работает на НОС, ВЭО и СИСЗ.
Масса приемника, кг
Габаритные размеры, мм
Мощность, Вт
Интерфейсы — SpaceWire, RS-422, Mil Bus 1553.
Антенна — SMA, 50 Q.
Приемник восьмиканальный LI С/А GPS.
3,2
272x260x25
10
269
Система
Положение, м,
не более
Скорость, см/с,
не более
Время, не,
не более
НОС
10
10
100
сос
30
20
200
СИСЗ
150
20
750
Рабочие диапазоны:
• частота Доплера — ±60 Гц;
• производная частота Доплера — ±60 Гц/с;
• угловое вращение — 0,5...°/с.
Чувствительность:
• слежение — 26 дБГц;
• захват — 30 дБГц.
Выходные данные:
• частота выдачи — 1 Гц;
• шкала времени — GPS;
• система — ECEF или ECI;
• синхроимпульс — 1 Гц, RS-422.
Прочие характеристики:
• рабочая температура -20...+60 °С;
• радиационная стойкость — 100 крад;
• время жизни 15 лет.
7.3. Результаты испытаний в космических
полетах
В этом разделе обсуждаются результаты испытания MosaicGNSS
на борту немецкого спутника Terra SAR-X [169, 182].
Спутник TerraSAR-X — немецкий спутник дистанционного
зондирования Земли; предназначен для радарной съемки поверх¬
ности Земли в гражданских интересах. ИСЗ запущен 15 июня
2007 г. с космодрома Байконур при помощи ракеты-носителя
«Днепр». TerraSAR-X изготовлен компанией EADS Astrium. На
спутнике установлен радар с синтезированной апертурой, кото¬
рый позволяет вести съемку поверхности Земли. На борту были
установлены два приемника СРНС — MosaicGNSS и геодезический
двухчастотный приемник IGOR, разработанный специалистами
GeoForschungsZentrum в Потсдаме на основе американского
(NASA-JPL) устройства Black Jack. Для оценки характеристик
MosaicGNSS в качестве опорной орбиты использовались как данные
от IGOR, так и результаты наземной лазерной локации.
Внешний вид MosaicGNSS приведен на рис. 7.9.
На рис. 7.10 показаны положения обоих приемников на борту
спутника TerraSAR-X, из которого видно, что антенны IGOR и
Mosaic ориентированы в разных направлениях. Антенны IGOR
270
Рис. 7.10. MosaicGNSS и приемник IGOR на борту Terra SAR-X
271
нацелены строго в зенит, в то время как антенны MosaicGNSS
сориентированы в направлении, противоположном направление
антенны радара, сканирующего поверхность Земли. В стандартно^
режиме сканирования, когда антенна радара отклонена вправо от
направления полета спутника, максимум диаграммы направлен¬
ности антенны GPS отстоит влево от наведения в зенит на 33,8°.
Из рис. 7.10 можно определить тип антенны — с подавлением
многолучевости (типа choke ring). Пассивная антенна компании
Antenna Research соединена с МШУ Delta Microwave, что обе¬
спечивает в максимуме диаграммы направленности отношение
мощности сигнала к спектральной плотности шума C/Nq около
45 дБГц.
Влияние смещения антенны MosaicGNSS относительно зенита
хорошо видно на рис. 7.11 (см. Fig. 2 в работе [182]), где изобра¬
жены пути перемещения спутников GPS, обрабатываемых при¬
емником, в полярной системе координат.
На рис. 7.11 видно, что число спутников (количество и плот¬
ность линий) в левой полусфере MosaicGNSS значительно выше,
чем в правой полусфере. Вслед за коллегами из немецкого аэро¬
космического центра DLR [182] отметим гибкость программного
обеспечения MosaicGNSS в части навигационного планирования:
приемник обрабатывал сигналы от «подгоризонтных» ИСЗ (вне
Forward (Az-0 dcqi
Backward (Az-180 dcgi
Рис. 7.11. Пути перемещения НС GPS в полярной
системе координат [182]
272
Distribution of the observed PRNs
Tutsi number of epochs 3640
Рис. 7.12. Гистограмма
распределения числа НС,
используемых MosaicGNSS [182]
выделенной жирным линии горизонта на рис. 7.11). Интересно, что
число анализируемых спутников в направлении полета (в передней
полусфере) меньше, чем их число в задней полусфере. Это объ¬
ясняется ограниченным числом каналов и высокими частотами
Доплера: двигающиеся с космическими скоростями спутники GPS
успевают достичь большого возвышения к моменту переназначения
канала от заходящего спутника к восходящему.
Из гистограммы распределения числа следимых спутников
(рис. 7.12, см. Fig. 2 в работе [182]) видно, что MosaicGNSS обе¬
спечивает слежение за сигналами в среднем шести спутников, но
очень редко достигает заявленного максимума в восемь ИСЗ.
Оба приемника включались на борту TerraSAR-X на интервалы
от нескольких часов (15 июня 2007 г.) до нескольких дней (на¬
чиная с 17 июня 2007 г.). Во время всех включений MosaicGNSS
аппаратура работала без сбоев и в соответствии с заявленными
характеристиками. При этом наблюдалось серьезное ухудшение
характеристик MosaicGNSS при включении приемника IGOR, под¬
твержденное выключением IGOR в 6:00 28 июня 2007 г. Наземные
эксперименты, проведенные Центром космических исследований
Университета Техаса, показали, что из-за плохого заземления
внешних МШУ IGOR излучал СВЧ-сигнал, воздействовавший
на MosaicGNSS. Подробнее лабораторные испытания и причины
Низкой электромагнитной совместимости IGOR описаны в работе
[182].
В предполетных испытаниях на имитаторе сигналов GPS СКП
Измерения фазы ПСП составляла 4...5 м, а СКП измерения фазы
Несущей — 2...3 мм [182].
273
IW
«0
80
70
L во
| 50
й 40
30
20
10
.•I
I
I \—I ) Е i—I—\ 1 !—
0 1 2 3 4 » 6 7 8 9 10 11 1?
Observations per epoch
Рис. 7.13. СКП фазы ПСП на борту спутника TerraSAK-X [182]
О 50 100 150 200 250 300
3D RMS, см
Рис. 7.14. Погрешность определения орбиты
спутника Terra-SAR-X, по данным БАСН
MosaicGNSS [169]
Полет на TerraSAR-X показал, что эти оценки были пессими¬
стичны. В периоды, когда приемник IGOR был отключен, СКП
измерения фазы ПСП составляла 2,1 м, а при включенном IGOR—
3,7 м [182]. На рис. 7.13 (см. fig. 6 в работе [182] для описания
метода, которым были получены графики) показана СКП изме¬
рения фазы ПСП при выключенном приемнике IGOR (верхний
график) и включенном приемнике IGOR (нижний график).
Трудно представить себе лучший способ верификации изме¬
рений БАСН, чем многомесячный эксперимент, проведенный
независимыми и скрупулезными экспертами. В исследовании
[169] представлена постобработка данных с борта TerraSAR-X;
в числе прочих выводов был получен ответ на вопрос о пригод¬
ности сырых измерений MosaicGNSS для точного определения
орбит ИСЗ. Для этого по сырым измерениям MosaicGNSS были
определены параметры орбиты TerraSAR-X. Полученная орби¬
та сравнивалась с опорной, известной из результатов лазерной
274
локации- Обработка значительного массива данных (более пяти
месяцев полетного времени) позволяет заключить, что «измерения
MosaicGNSS полностью удовлетворяют требованиям, предъявляе¬
мым к точности определения орбиты спутника TerraSAR-X (СКП
трехмерного определения орбиты менее двух метров)» ([169, с. 4],
деревод автора). Предпосылкой для такого заключения послужило
то, что СКП определения орбиты при помощи сырых измерений
MosaicGNSS не превышала 70 см.
На рис. 7.14 приведена гистограмма распределения трехмерной
СКП определения орбиты Terra-SAR-X по сырым измерениям
MosaicGNSS (см. Fig. 7 из работы [169]). Всего было обработано
около 500 витков орбиты, наблюдаемых в период с 19 июня по
19 ноября 2007 г. Медиана распределения составляет около 1 м,
на основании чего специалисты немецкого центра авиации и кос¬
монавтики сделали вывод: «Точное быстрое определение орбиты,
полученное с использованием одночастотных измерений Mosaic
GNSS, демонстрирует достижимость трехмерной СКП определе¬
ния орбиты, не превышающей двух метров» ([169, с. 4], перевод
автора).
275
Заключение
Проектирование БАСН — не только важная научно-техническая
проблема, решение которой требует междисциплинарных ис¬
следований по проектированию аппаратуры, радионавигации,
статистической обработке сигналов, прикладной астрономии, циф¬
ровой обработке сигналов и физике космического пространства.
Это еще и новая проблема. На момент выхода эта книга являлась
(насколько известно автору) единственной в мире монографией,
которая систематизировала методы разработки БАСН и предлагала
практические решения, основанные на опыте создания успешно
опробованной аппаратуры. Проектирование БАСН, безусловно,
будет развиваться: этого требует и логика развития космической
отрасли, и складывающийся рынок космической радионавигации.
Эта книга призвана заложитьосновы проектирования БАСН.
Кроме того что БАСН пригодна как для абсолютной, так и
для относительной навигации, она представляет собой недоро¬
гое устройство, которое при соответствующем алгоритмическом
обеспечении может решить широкий спектр задач, таких как
временное обеспечение ИСЗ, определение и контроль ориента¬
ции спутников. В итоге БАСН станет «сердцем» комплексной
навигационной системы космических аппаратов, которая будет
обеспечивать определение местоположения, контроль параметров
орбиты, контроль ориентации и координацию с другими спутни¬
ками внутри группировки.
Эволюция БАСН только начинается. В ближайшие годы зако¬
номерно ожидать постановки и решения следующих задач:
1) повышение точности навигации благодаря учету эффектов
распространения сигнала, в частности многолучевости и ионос¬
ферной погрешности;
2) определение ориентации ИСЗ в пространстве на основе
СРНС;
3) решение задачи относительной навигации в космосе для
произвольных баз навигации;
4) использование функциональных дополнений (WAAS, EGNOS,
MSAS) СРНС в космосе;
276
5) построение многосистемных навигационных приемников,
0Сцользующих новые сигналы GPS и Galileo, а также активное
использование ГЛОНАСС.
Для решения этих задач потребуются усилия научного сообще¬
ства, специалистов космической промышленности, микроэлектро¬
ники и других отраслей хозяйства. Автор будет рад, если его книга
принесет пользу создателям следующих поколений БАСН.
277
Приложение д
Приращение характеристической скорости,
формула Циолковского
Первые исследования поступательного прямолинейного движения
ракет были выполнены К. Э. Циолковским и опубликованы в 1903 г.
Допустим, что ракета движется поступательно в бессиловом простран¬
стве. Пусть относительная скорость отбрасываемых ракетным двигателем
частиц Vr постоянна и направлена противоположно скорости центра масс
ракеты. Если при выгорании топлива центр масс ракеты не смещается
относительно ее корпуса, то движение ракеты описывается дифференци¬
альным уравнением движения точки:
dw
Р = тп——, (А.1)
dt
где тп — масса ракеты; v — вектор скорости центра масс; Р — сила тяги
двигателя.
Реактивную силу Рг можно представить в виде произведения расхода
dm.
массы топлива на скорость истечения продуктов сгорания v :
dt
р = (А.2)
dt г
Тогда уравнение движения центра масс ракеты примет вид уравнения
Мещерского:
dx dm ,. о\
т— = V.. (А.о)
dt dt
Положим, что в начальный момент времени tu начальные масса
и скорость равны соответственно тд и vH. Тогда изменение скорости
Av = vK - vu на интервале времени At = tK - tH дается интегрированием
уравнения (А.З):
a *Kf dm
Ах = хг = xr m
т
(А.4)
V'k ;
t-TI
Отношение начальной массы ракеты к ее конечной массе называется
числом Циолковского:
Z=^AL. (А.5)
278
Окончательно формула Циолковского приобретает вид
Av = vr In (Z). (A.6)
Из нее вытекают следующие основные закономерности движения
ракеты в бессиловом пространстве:
• скорость ракеты в конце активного участка прямо пропорциональна
скорости истечения продуктов сгорания из сопла ракетного двигателя;
• скорость ракеты в конце активного участка возрастает при увели¬
чении отношения начальной массы ракеты к конечной по логарифмиче¬
скому закону;
• скорость ракеты в конце активного участка не зависит от закона
изменения массы ракеты (режима работы двигателей).
Формула Циолковского позволяет определить скорость ракеты при
движении в бессиловом пространстве, т. е. так называемую характе¬
ристическую скорость. Характеристическая скорость — это скорость,
которую приобрела бы ракета с данной начальной и конечной массами
т0 и m-у под действием реактивной тяги, если бы ракета двигалась в без¬
воздушном пространстве и в отсутствии сил тяготения. Предположим,
что vH = 0 (наземный старт), тогда
vK = vrln (Z). (АЛ)
Физически значение приращения характеристической скорости Av
представляет собой интеграл ускорения, произведенного двигателями
ракетной тяги за время At = tK - tw. Поэтому Av, иногда обозначаемая
dx, используется в ракетодинамике как показатель количества топлива,
требуемого для маневра. Например, для вывода спутника на круговую
околоземную орбиту требуется развить первую космическую скорость,
равную 7920 м/с. В нашей терминологии это означает, что приращение
характеристической скорости должно составить 7920 м/с. Ниже при¬
ведены примеры приращения характеристической скорости для разных
типов орбитальных маневров:
dv в год, м/с
Компенсация влияния атмосферы для НОС с радиусом орбиты 500 км 20...25
Удержание СИСЗ на орбите 50...55
Контроль ориентации ИСЗ 2...6
Раскрутка для стабилизации 5...10
279
Приложение £
Минимальные функциональные требования к бортовой
аппаратуре спутниковой навигации
Ниже приведены минимальные требования, которым должна удо¬
влетворять БАСН MosaicGNSS. Минимальными требования называются
потому, что невыполнение любого из них означает несоответствие аппа¬
ратуры заявленной цели и ее непригодность для автономной навигации.
Функциональные требования специфицируют (оставляя в стороне механи¬
ческие, электрические и другие характеристики), какие функциональные
характеристики должны быть достигнуты.
Б.1. Опорные орбиты
Определяются опорные орбиты трех типов — НОС, СИСЗ и ЭОС. Во
всех случаях предполагается, что пространственная ориентация ИСЗ кон¬
тролируется таким образом, что скорость вращения ИСЗ вокруг любой
из осей составляет не более 0,5...°/с.
Б.1.1. Низкоорбитальный спутник
В табл. Б.1 приведены параметры опорной орбиты НОС.
Таблица Б.1
Параметры опорной орбиты (НОС)
Параметр
Значение
Примечание
Полуось, км
7792
Высота орбиты 1414 км
Эксцентриситет
0
Круговая орбита
Угол склонения, ...°
52
-
Угол прямого восхождения, ...°
0
-
Пространственная ориентация ИСЗ: ось X — в направлении полета,
ось Y — по нормали к плоскости орбиты, ось Z — в направлении центра
Земли.
280
Пространственная ориентация и параметры антенны: микрополосковая
антенна с полусферической диаграммой направленности, пеленг располо¬
жен вдоль оси Z в отрицательном ее направлении, т. е. в направлении,
противоположном надиру.
Предусматривается следующий маневр:
1) вращение из положения надира (0) до угла тангажа +60° со скоро¬
стью вращения 0,5 ...°/с;
2) 5 мин полета при угле тангажа +60 ;
3) вращение из угла тангажа +60° до угла тангажа -60° со скоростью
вращения 0,5 ...°/с;
4) 5 мин полета при угле тангажа -60°;
5) вращение из угла тангажа -60° до надира со скоростью 0,5 ...°/с.
Б. 1.2. Стационарный искусственный спутник Земли
В табл. Б.2 даны параметры опорной орбиты СИСЗ.
Таблица Б.2
Параметры опорной орбиты (СИСЗ)
Параметр
Значение
Примечание
Полуось, км
42 164
Высота орбиты 35 786 км
Эксцентриситет
0
Круговая орбита
Угол склонения, ...°
0
Экваториальная орбита
Пространственная ориентация ИСЗ: ось X — в направлении полета,
ось У — по нормали к плоскости орбиты, ось Z — в направлении центра
Земли.
Пространственная ориентация и параметры антенны: микрополосковая
антенна с полусферической диаграммой направленности, пеленг расположен
вдоль оси Z в положительном ее направлении, т. е. в направлении надира.
Б.1.3. Высокоэллиптическая орбита
В табл. Б.З даны параметры опорной орбиты ВЭО.
Таблица Б.З
Параметры опорной орбиты ВЭО
Параметр
Значение
Примечание
Полуось, км
26610
Высота 400...40 064 км
Эксцентриситет
0,7453
Орбита типа «Молния»
Угол склонения, ...°
63
Длительность витка 12 ч
Аргумент перигея, ...°
270
Над южным полушарием
281
Пространственная ориентация ИСЗ: ось Z — в направлении лицц
апсид на апогей. 11
Пространственная ориентация и параметры антенны: микрополосков
антенна с полусферической диаграммой направленности, пеленг расподо
жен вдоль оси Z в отрицательном ее направлении, т. е. в направлении
надира в апогее и в направлении, противоположном надиру в перигее
Б.2. Функциональные требования
Чтобы строго сформулировать требования, введем в рассмотрение два
случая взаимного пространственного расположения ИСЗ и созвездия НС
GPS — «под GPS» и «над GPS». В первом случае в зоне радиовидимости
непрерывно находятся четыре и более НС GPS, во втором случае в зоне
радиовидимости находятся не более трех НС GPS. Первый случай соот¬
ветствует высотам полета до 10 ООО км, а во втором случае высота полета
превышает 30 ООО км.
Здесь и далее C/N0 обозначает отношение мощности сигнала к спек¬
тральной плотности шума.
Б.2.1. Захват сигнала и слежение за сигналом
Б.2.1.1. Захват сигнала
Следующий набор условий должен выполняться для захвата сигнала:
• минимальное C/N0 на выходе приемной антенны составляет 36 дБГц
для случая «под GPS»;
• минимальное C/N0 на выходе приемной антенны составляет 30 дБГц
для случая «над GPS»;
• максимальное C/N0 на выходе приемной антенны составляет 50 дБГц
для случаев как «над GPS», так и «под GPS»;
• доплеровский сдвиг частоты несущей не превышает ±65 кГц для
случая «под GPS»;
• доплеровский сдвиг частоты несущей не превышает ±2 кГц для
случая «над GPS»;
• скорость изменения доплеровского сдвига частоты несущей не пре¬
вышает 78 Гц/с для случая «под GPS»;
• скорость изменения доплеровского сдвига частоты несущей не пре¬
вышает 5 Гц/с для случая «под GPS»;
Если выполнен набор этих условий, то должны удовлетворяться сле¬
дующие требования.
Требование 1. «Над GPS» сигнал НС GPS, находящийся в зоне
радиовидимости, без априорного знания вектора потребителя и альманаха
GPS должен быть захвачен в течение 540 с.
Требование 2. «Под GPS» сигнал НС GPS, находящийся в зоне
радиовидимости, без априорного знания вектора потребителя и альманаха
282
(jpS, должен быть захвачен в течение максимум 100 с, а среднее значение
времени захвата не должно превышать 10 с.
Б.2.1.2. Слежение за сигналом
Бели выполняется набор условий из раздела Б.2.1.1, то должны удо¬
влетворяться следующие требования.
Требование 3. «Над GPS» приемник должен быть способен
осуществлять слежение за фазой несущей сигналов до трех НС GPS одно-
временно.
Требование 4. «Под GPS» приемник должен быть способен
осуЩествлять слежение за фазой несущей сигналов до восьми НС GPS
одновременно.
Требование 5. После захвата сигнала и начала слежения за
фазой несущей сигнала приемник должен быть способен осуществлять
слежение за фазой несущей сигналов непрерывно, если удовлетворяются
условия из раздела Б.2.1.1.
Б.2.1.3. Перезахватп сигнала
Чтобы строго сформулировать требования, введем в рассмотрение два
случая перезахвата: с потерей решения и без потери решения. В первом
случае при потере слежения за сигналом в канале вектор состояния потреби¬
теля остается известным, во втором случае — становится неизвестным.
Требование 6.В случае без потери решения, если НС GPS на¬
ходится в зоне радиовидимости и слежение за его несущей осуществля¬
лось, но было прервано на 3 с или менее, приемник должен быть способен
выполнить перезахват несущей сигнала в течение 2 с, если соблюдаются
условия из раздела Б.2.1.1.
Требование 7. В случае с потерей решения, если НС GPS нахо¬
дится в зоне радиовидимости и слежение за его несущей осуществлялось,
но было прервано на 0,5 с или менее, приемник должен быть способен
выполнить перезахват несущей сигнала в течение 2 с, если соблюдаются
условия из параграфа Б.2.1.1.
Б.2.2. Сырые измерения
Б.2.2.1. Псевдодальность
Требование 8. Приемник должен производить вычисления
псевдодальности, используя С/А-код, до каждого из следимых НС GPS
не реже чем один раз в секунду.
Требование 9. «Под GPS» СКП псевдодальности должна быть
не более 5 м, если исключены внешние факторы, такие как селективный
доступ, многолучевость, ионосферные эффекты и пр.
283
Требование 10. «Над GPS» СКП псевдодальности должна быТь
не более 15 м, если исключены внешние факторы, такие как селективный
доступ, многолучевость, ионосферные эффекты и пр.
Б.2.2.2. Частота Доплера (псевдоскорость)
Требование 11. Приемник должен производить вычисления
псевдоскорости на частоте GPS L1 до каждого из следимых НС GPS не
реже чем один раз в секунду.
Требование 12. «Под GPS» СКП псевдоскорости должна быть не
более 1 см/с, если исключены внешние факторы, такие как селективный
доступ, многолучевость, ионосферные эффекты и пр.
Требование 13. «Над GPS» СКП погрешности измерения псев¬
доскорости должна быть не более 20 см/с, если исключены внешние
факторы, такие как селективный доступ, многолучевость, ионосферные
эффекты и пр.
Б.2.2.3. Интегрированные измерения псевдоскорости
Требование 14. Приемник должен производить вычисления
интегрированной псевдоскорости на частоте GPS до каждого из сле¬
димых НС GPS не реже чем один раз в секунду.
Требование 15. Период интегрирования должен составлять 1 с,
измеренную как временной интервал между двумя последовательными
секундными метками времени по внутренней шкале приемника.
Требование 16. СКП интегрированной псевдоскорости должна
быть не более 3 см, если исключены внешние факторы, такие как селек¬
тивный доступ, многолучевость, ионосферные эффекты и пр.
Б.2.2.4. Синхронизация сырых измерений
Требование 17. Сырые измерения должны быть синхронизи¬
рованы с GPS-временем.
Б.2.3. Вторичная обработка
Здесь и ниже мы будем использовать следующие определения.
Следимым называется спутник, сигнал которого отслеживается зам¬
кнутыми следящими петлями приемника.
Валидным (англ. valid) называется следимый спутник, который не
исключен алгоритмом контроля целостности и на который есть текущие
эфемериды.
284
В.2.3.1. Общие требования
Требование 18. В приемнике должны быть реализованы два
^еТода вторичной обработки — динамический и кинематический.
Требование 19. Должна быть предусмотрена возможность пере¬
хода от кинематического метода к динамическому и обратно.
Требование 20. Приемник должен быть способен использовать
кинематический метод при наличии более трех валидных НС GPS в зоне
Требование 21. Приемник должен быть способен использо¬
вать динамический метод при наличии более одного валидного НС GPS
в зоне радиовидимости.
Требование 22. При применении динамического метода вектор
потребителя должен быть представлен в инерционной системе коорди¬
нат J2000. Представление в системе координат, связанной с Землей, не
является обязательным.
Требование 23. При использовании кинематического метода
вектор потребителя должен быть представлен в системе координат, свя¬
занной с Землей. Представление в инерционной системе координат J2000
не является обязательным.
Требование 24. Должна использоваться шкала времени GPS.
Требование 25. Алгоритмы навигационного планирования
должны предусматривать использование информации о пространственной
ориентации ИСЗ, получаемой от бортовых инерциальных систем.
Требование 26. Если информация о пространственной ориентации
ИСЗ недоступна, то навигационное планирование должно предполагать
ориентацию антенны в надир с осью Z, направленной к Земле, а осью
Y — по нормали к орбите.
В табл. Б.4 приведены системы координат и шкалы времени, которые
должны использоваться в приемнике. В таблице использованы сокраще¬
ния ECEF — Earth Centered Earth Fixed (начало координат расположено в
центре масс Земли и направления осей связаны с Землей) и ECI — Earth
Centered Inertial (геоцентрическая инерциальная система координат).
Таблица Б.4
Использование систем координат и шкал времени
Параметр
Кинематический
метод
Динамический
метод
Шкала времени (инициализация при¬
емника)
GPS, UTC*
GPS, UTC*
Шкала времени (выходные данные)
GPS, UTC**
GPS, UTC**
Внешние (инициализационные) местопо¬
ложение и скорость
ECI
ECI
Выходные местоположение и скорость
* В инициализации могут также использова
между шкалами времени GPS и UTC.
** Опция.
ECEF, ECI**
ться время по шкале в]
ECI, ECEF**
>емени GPS и разница
285
Б.2.3.2. Режимы навигации
Требование 27. Приемник должен использовать кинематически -
метод навигации, если число следимых спутников больше трех.
Требование 28. Динамический метод навигации должен цс
пользоваться по команде и при наличии начального вектора потребителе
(от кинематического решения или от внешнего источника данных).
Требование 29. Приемник должен использовать динамически^
метод навигации, если невозможно использовать кинематический метод
навигации.
Б.2.3.3. Секундная метка времени
Если приемник определяет вектор потребителя, то секундная метка
времени синхронизирована с временем GPS таким образом, что передний
фронт импульса секундной метки соответствует началу очередной секун¬
ды по шкале времени GPS. Если же вектор потребителя не определяется
приемником, то передний фронт импульса секундной метки соответствует
началу очередной секунды по внутренней шкале приемника.
Требование 30. Приемник должен обеспечивать импульс се¬
кундной метки времени.
Требование 31. Выходное сообщение приемника, содержащее
вектор потребителя, должно содержать информацию об абсолютном вре¬
мени (по шкале времени GPS) переднего фронта первого следующего за
этим сообщением импульса секундной метки времени.
Требование 32. Выходное сообщение приемника, содержащее
вектор потребителя, должно посылаться не позже чем за 100 мс до
переднего фронта следующего за этим сообщением импульса секундной
метки времени.
Б.2.3.4. Погрешности определения вектора потребителя
Требование 33. Для опорной орбиты НОС, определенной в
Б.1.1, СКП определения трех координат должна быть не более 15 м, СКП
определения скорости — не более 50 см/с, СКО погрешности определения
времени — не более 120 не.
Требование 34. Для опорной орбиты СИСЗ, определенной
в Б. 1.2, СКП определения трех координат должна быть не более 150 м,
СКП определения скорости — не более 20 см/с, СКО погрешности опреде¬
ления времени — не более 750 не.
Требование 35. Для опорной орбиты ВЭО, определенной в Б.1.3,
СКП определения трех координат должна быть не более 300 м, СКП
определения скорости — не более 5 см/с, СКО погрешности определения
времени — не более 1000 не.
286
Б.2.3.5. Время первого решения
Время первого решения определяется как промежуток времени от
включения приемника до первого определения вектора состояния по¬
требителя, такого что определяются три пространственные координаты
местоположения при наличии минимум четырех валидных спутников
в зоне радиовидимости.
Условия теплого старта определяются как наличие в приемнике апри¬
орного знания о векторе состояния потребителя и знания альманаха GPS,
причем СКП местоопределения не превышает 100 км, СКП скорости не
выше 500 м/с, СКП определения времени 15 с, возраст альманаха не
более четырех недель.
Условия холодного старта определяются как отсутствие в приемнике
в любой априорной информации.
Требование 36.С вероятностью 95 процентов время до первого
решения при холодном старте должно быть меньше чем шесть минут.
Требование 37. С вероятностью 95 процентов время до первого
решения при теплом старте должно быть меньше чем три минуты.
Б.2.3.6. Контроль целостности решения
Требование 38. В навигационном решении не должны участво¬
вать сырые измерения от тех спутников, которые объявлены нездоровыми
в навигационном сообщении (т. е. в эфемериде или в альманахе).
Требование 39. Каждое местоположение НС GPS, полученное
на основе эфемериды, должно сравниваться с местоположением НС GPS,
полученным на основе альманаха. Если модуль вектора разности место¬
положений превышает 100 км, этот НС GPS должен быть исключен из
решения.
Требование 40. Если следимы пять и более НС GPS и исполь¬
зуется метод кинематической навигации, должен проводиться тест по
критерию «хи-квадрат», при этом вероятность ложной тревоги должна
быть 0,0001.
Требование 41. Если следимы шесть и более НС GPS и исполь¬
зуется метод кинематической навигации, должно проводиться исключение
сырых измерений ошибочных спутников.
Требование 42. Если используется метод динамической навига¬
ции, то должен использоваться алгоритм обнаружения ошибочных псевдо¬
дальностей, использующий невязки псевдодальностей, определяемые как
разность между измеренными и предсказанными псевдодальностями.
Требование 43. Если контроль целостности решения исключил
сырые измерения по какому-то спутнику, то этот спутник должен быть
объявлен невалидным на 300 с.
287
Приложение £
Расчет вероятностей ошибок 1-го и 2-го рода
для усеченной процедуры Вальда
Пусть Zk = I2 + Q2, где Ik, Qk — квадратурные компоненты сверТКи
входного сигнала с опорным на ft-м интервале корреляции, нормирован
ные к СКП шума. Так как компоненты I k и Qk являются независимыми
нормально распределенными случайными величинами с единичной дцс.
Персией, то величина имеет х2-распределение с двумя степенями сво¬
боды и параметром нецентральности Aft, плотность вероятности которого
описывается выражением
. zk+'kk
P(zk) = ge 2 Io^JAkzk’ №-1)
где Xk = Е2 {lft}+ -E2{Qft}> E{x} — математическое ожидание величины х;
Iq(x) — модифицированная функция Бесселя нулевого порядка.
В случае справедливости гипотезы Hq параметр Хк равен нулю, а рас¬
пределение случайных величин Zk преобразуется в экспоненциальное с
плотностью вероятности:
p(Zk\H0) = ±e-z>/2, Zk> 0. (В.2)
Так как ZN являются независимыми, то их совместная
плотность распределения вероятности равна произведению плотностей
каждой из них:
1 -1/2IA
p(Zx,Z2, ..., ZN |Я0) = — е *-i . (В.З)
2n
Рассмотрим линейное преобразование Z^, Z2, ZN, описываемое
системой уравнений
= i = hN. (В.4)
i=1
Очевидно, что дляЛ-р Л2, ..., Ад, выполняются неравенства
О < Л^ — А-2 — ^ со* (В.5)
Так как якобиан преобразования (В.4) равен 1, то совместная плотность
распределения вероятности величин Лр Л2, ..., Ад, имеет вид
Р(Л1,Л2, ..., Лдг 1 Я0) = -Le-^/2. (В.6)
Вероятность ложной тревоги для усеченной процедуры Вальда опреде¬
ляется выражением
^FA (П1>-->Пдг) = Р |Aj > п Л2 > П2 n...n Лдг > Пдг | Hq }. (В.7)
288
Учитывая неравенства (В.5), выражение (В.7) может быть записано
в виде
со А// Л2
PpA^l’ •••’ Плг) = J J Jp(^i>A2> ^-N I Н0)йА^йА2 ...dAN. (В.8)
ГЦ
Подставляя (В.6) в (В.8), получим:
^ Aw Л2
PfA(n1,...,nw) = — Je“A"/2 J ... JdAidAa-.dA^. (В-9)
Пусть
9Г
В \r nv_i п,
N
h-l
N
Q(An)~ J ■■■ \d^idK2...dKN_i - ^qk^
nw_i ГЦ k=l
Тогда выражение (В.9) примет вид
РрЛ(П1( ..., П№) = ^ Je-AN/2Q(AN)dAw. (В.10)
2 nN
Используя свойство линейности интеграла, преобразуем (В.10) сле¬
дующим образом:
1 N
PFA (п1> •••, П^)= — ^gftFft(nN),
2 A=l
где
ОС
^*(Плг)= J xk~^eTx /2dx. (В.11)
uN
Значения Fk(YlN) могут быть вычислены при помощи рекуррентного
соотношения
Fk(UN) = 2n^Vn*/2 + 2(k-l)Fk^(.TlN),
где
F1(TlN) = 2e~UN/2. (В. 12)
Коэффициенты полинома Q(AN) вычисляются итерационно:
av-v
qf=—_i = N—2’
V1’ J-v (ВЛЗ)
q(i) _1^ПМ-2 _ при 1<t^N'
Значения коэффициентов полинома на 1-й итерации определяются
следующим образом:
289
«#>= 0,^=0,
Учитывая, что Пк = + (k - 1)ДП, вероятность ложной тревоги уСе
ченной процедуры Вальда является функцией только трех параметр0в
т. е. Пдг) = Pfa(N, П1( АП).
Вероятность пропуска сигнала для усеченной процедуры Вальда за.
дается выражением
•••, Пдг) = Р {Aj < ITj и Л2 < П2 и... и An < TlN | Щ }. (В.14)
При низком отношении сигнал/шум и небольших значениях N можно
использовать следующую аппроксимацию. Так как вероятность того, что
произойдет хотя бы одно из N событий, равна единице минус вероятность
того, что не произойдет ни одно из этих событий, то последнее выражение
может быть записано в виде
•••, Пдг) = 1 - Р |Лг > П-l п Л2 > П2 п ... n An > TlN | Щ }. (В.15)
Учитывая неравенства (В.5), вероятность пропуска сигнала находится
следующим образом:
°° Aw А2
..., Пдг) = 1 — J J ... Jp(Ai,A2> •••» Лдг | JT1)dA1dA2...dAj\r>
rij
(В.16)
где р(Л1,Л2, ..., Лдг | J/j] — совместная плотность распределения вероят¬
ности Aj, Л2, ..., Ад, при условии справедливости гипотезы Н^. В этом
случае плотность распределения вероятности Zk имеет нецентральное
^-распределение с параметром нецентральности Xk. Будем считать, что
на интервале N эпох средняя мощность принятой смеси сигнала и шума
не меняется, т. е. A.J = Х2 = ... = XN = X. Используя представление /о(л0
в виде ряда, выражение для плотности распределения вероятности Zk
может быть преобразовано к виду
p{Zk I Нг) = z -Х*2к 1~У ,Zk> 0. (В. 17)
г i=o (‘О
В силу независимости Z^, Z2, ..., ZN их совместная плотность распре¬
деления вероятности определяется следующим образом:
- -I/2J J^Z^NX
p(Z1,Z2, ..., ZN I Щ) = —j^-e *=1
2
x y (хг,/4)^...(хгы/ф (ВЛ8)
H, ,iN (ii02...(^!)2
290
Индексы суммирования в (В. 18) принимают все возможные значения
8 диапазоне от 0 до +оо . Следовательно, при условии справедливости
гипотезы Нi выражение для совместной плотности распределения веро¬
ятности случайной величины Л^, Л2, AN с учетом соотношений (В.4)
имеет вид
ид, л»1н.)~=-,л“*т!'2 I (jj*
(В.19)
yAii4A2-A1p...(AN-AN_1)1»
(h ^)2---(iN !)2
Введем обозначения:
n 1 „-NX/2 j. (k/4)il+ -+lN '
N 2N ’*!•••••
С . =(-l)^+-+^Ch,...,CiN,
’ l2 lN
где С/ — число сочетаний из i по j. Тогда выражение (В. 19) может быть
преобразовано к виду
p(A1;A2, An I Н]) -
= aN^\,...,ij'Lck^iN^N/2A£+Ьа£-Ь+Ь ...A^-i»}. (В.20)
Индексы суммирования /2, jN изменяются в диапазонах: 0 < у2 <г2,
0 <jN<iN. Подставив (В.20) в (В. 16), получим следующее выражение
для вероятности пропуска сигнала:
•••, nN) =
= •••>(В-21)
где
(П!’ Па) =
= J J ... je~AN/2A^+^A2h~i2+i3 ...ANlN~iNdA1...dAN.
Пусть
<V-.**(Aw> = J - |A*A£...A]*dA1dA2...dA*_1 =
nw-i ni
м
=
*=1
где NL = h-y + 2 + ... + hjy + N.
291
Тогда выражение для Р, t } j (Щ, П^), с учетом (B.ll), M03i{
м
быть записано в виде: (Пх, Пдг) = ^qkFknN. КоэффИЦй
А=1
енты полинома ^ (х) могут быть найдены итерационно:
„0-1)
(О Ч+-+^-1+»-1 .
%+...+ki+i +A,._i+j_ 1’
„О-D
(О = 4k2+...+ki_1+i-2 .
%+...+fci+/-l ^2 +... + + i - 2 ’
.,0-1)
,(0
+1
„w _ "t-i .
^.1+fci + 2 ^_1+1«
o(0 '1 4-1 ' • - ГГ"- - - ,, -
ki+1 + ... + kl_1 +1-1 1-1 fcj_l+1 ,_1
(B.22)
Для первой итерации значения коэффициентов определяются следую¬
щим образом:
(i)=jl> n = h1+l;
п [0, гаг^+1.
При больших значениях N наиболее эффективным методом получения
оценки вероятности 2-го рода является статистическое моделирование.
В случае справедливости гипотезы Н0 среднее число наблюдений, необ¬
ходимое для принятия этой гипотезы, определяется выражением
N
N^N,11^ ДП) ='£kPk+ (N + 1)РРЛ(^,П1,ДП), (В.23)
k=l
где Рк — вероятность того, что гипотеза принята на fe-м шаге.
Введем обозначения:
Ак =Л1 > П-l п Л2 >П2п...пЛы >nMnAt <ПА;
Bk =АХ >П1пЛ2 >П2п...пЛА_1 >ПыпЛ4 >ПА;
Ск = Ак < П*.
Тогда Pk = P{Ak}. События -Bfe-i r' ^к и Bk_^ n Ck являются взаимно
исключающими. Следовательно, вероятность того, что произойдет одно
из этих двух событий, равна сумме вероятностей появления отдельных
событий:
Я,
,0-1) „0-D
^+...+^^+1-1 +.+;-! _ fe;_i Ы r-Ikl_] +1
P{(Bk_irCk)^(Bk-ie^Ck)} ~ rCk) + P{Bk-inCj}.
292
С ДРУгс,й стороны
(Bk_irPk)\j(Bk_ir^Ck) = -Bfc-in(CfcVjCfc) = Bk-i-
Таким образом, справедливо соотношение:
P{Bk_inCft} = P{Bk_i) - P{Bk_1r\Ck).
Осталось заметить, что
Bn_xrQk = Ak,Bk_inC^ = Bk, т. e. P{Ak} = Ptf^} - P{Bk).
Учитывая, что
P{Bk} = PFA(k,UvAU),
выражение для Pk может быть записано следующим образом:
р _ |^а(*-1>п1>ап)-р^а(*>п1>ап) при
k~[ l-P^a.n^An) при k = l. (В'24)
Таким образом,
N
=1-РрЛ(1,П1,АП) +
ft=l
N
+ £(/г -1,Пх, АП) - PFA (k,Пх, АП)}. (В.25)
k=2
После упрощения (В.25) выражение для среднего числа наблюдений
преобразуется к виду
N
^(ЛМ^ДП) = 1 + ^Рр^П^ДП). (В.26)
k=l
293
Приложение р
Математические основы определения координат
искусственного спутника Земли по измерениям сигналов
спутниковой радионавигационной системы
Г.1. Постановка задачи
Пусть трехмерные векторы rCRS и vCRS координат и составляющих
скорости СИСЗ в геоцентрической инерциальной системе CRS (Celestial
Reference System) определяются системой дифференциальных уравнений
вида [137]:
j.CRS _ VCRS.
CRS
• ^crs = _GMsj _E + F(rCBS, vCRS, t). (Г.1)
jj,CRS j
Здесь GM9 — произведение гравитационной постоянной на массу
Земли; F(-) — возмущающее ускорение, которое связано с несферично-
стью гравитационного поля Земли, притяжением Луны, Солнца, Венеры,
Юпитера, давлением прямых и отраженных от Земли солнечных лучей,
твердотельными приливами и релятивистскими эффектами; t — время.
Следует отметить, что структура и параметры F( ) в рассматриваемой
постановке предполагаются известными, тогда как в действительности
часть этой информации может носить приближенный характер. Считаем,
что для начального момента t0 имеются априорные значения координат
и скорости СИСЗ г0, v0 и известны ковариационные матрицы их погреш¬
ностей Рг ,Р„ .
г0 v0
Отнесем координаты СИСЗ к антенне установленного на его борту
приемника сигналов GPS и предположим, что в дискретные моменты
времени с помощью этого приемника вырабатываются измерения псев¬
додальностей и псевдоскоростей. Количество навигационных спутников
(НС), используемых для получения измерений, со временем меняется и
может быть вообще нулевым, что преимущественно и имеет место для
СИСЗ. Моменты поступления измерений нерегулярны, но они могут от¬
личаться от регулярных моментов tk = t0 + kAt, k = 1,2 где At > 0 — по¬
стоянный параметр, на величину 8t£FS, которая по модулю не превышает
известного порога 8« At.
Введем в рассмотрение вектор Sk = (S^, ..., S£*)T системных номеров
НС, для которых вблизи момента tk, т. е. в интервале [th; tk +
получены измерения псевдодальностей и псевдоскоростей. В случае от¬
сутствия измерений формально имеем nk = 0 и Sk = 0. В общем случае
для НС может быть получена только псевдодальность или только псев¬
доскорость. Но такая ситуация, усложняющая выкладки и не вносящая
в задачу ничего принципиально нового, рассматриваться не будет.
294
Существующие измерения представим в форме
ZL = Di№k + S tfs),tk + Sifs] + si + Ык + ±; (Г.2)
k k
ziD = HW** + s*r), y(tk + stf»). f* + «Г] + 84 + . (Г.З)
k k
где у = 1 ,nk — порядковый номер измерения для данного момента; D^(-),
j)^( ) — известные функции, передающие зависимость дальностей и ра¬
диальных скоростей для НС, имеющего номер S■£, от времени измерений
и относящихся к этому времени векторов положения г и скорости v ан¬
тенны бортового приемника в системе WGS-84; 8ffc, 8fk — погрешности
генератора приемника в выработке времени и частоты; Сд > — бе¬
лошумные погрешности измерений; 3^ — коррелированные во времени
погрешности, для которых приемлема стохастическая аппроксимация
в виде стационарных марковских процессов 1-го порядка.
Полагаем, что погрешности С]п , (J- (белошумные) и 3{ (коррелирован¬
ий Dk
ные) независимы друг от друга и подчиняются центрированному гауссову
распределению вероятности. Причем статистические характеристики
этих составляющих — дисперсии для С,-L , , дисперсии и интервалы
пк ик
корреляции для 3^ — одинаковы для всех НС.
Время t в приведенных формулировках свяжем с системным време¬
нем GPS.
В данной постановке модель для погрешностей генератора Ы^, bfk не
привлекается. Как отмечалось во введении, это придает алгоритму реше¬
ния универсальный характер, когда для применения способа не требуется
детального анализа свойств конкретного приемника.
Ставится задача: опираясь на модель оценить значения г, v для
регулярных моментов времени tk = t0 + kAt, k = 1,2, ... по измерениям
Z!p , Р = D, D, I = hk, j = 1, tifc вида (Г.2), (Г.З). Помимо оценок в задаче
требуется определить еще и среднеквадратические погрешности (СКП)
оценивания компонент векторов г, v.
Как известно [138], оптимальной с точки зрения СКО оценкой явля¬
ется условное по отношению к измерениям математическое ожидание
оцениваемой величины. Однако имея в виду возможность решения данной
задачи в реальном времени, целесообразно использовать субоптимальный
алгоритм оценивания, в котором принят ряд допущений, направленных
на снижение вычислительных затрат.
Г.2. Общая структура решения
Сразу отметим, что отсутствие априорной информации о погрешностях
генератора приемника 8tk, 8fk приводит к неинформативности единовре¬
менных измерений от одного НС (nk = 1). Поэтому, как уже говорилось
295
во введении, обработке подвергаются не исходные (Г.2), (Г.З), а разност
ные единовременные измерения от двух и более НС, в которых 5tk, g^
исключаются. Разностные измерения формируются путем вычитаний
из измерений для одного (опорного) НС того же типа измерений ддя
остальных (вспомогательных) НС. В результате при наличии в рабочем
созвездии пк спутников образуется тп^ = пк - 1 разностных измерений
псевдодальностей и столько же измерений псевдоскоростей.
Основу представленного ниже алгоритма решения составляет итера¬
ционный фильтр Калмана (ФК) [139]. Необходимость выполнения ите¬
раций обусловлена существенно нелинейной зависимостью измеряемых
параметров — дальностей и радиальных скоростей — от координат и
скоростей СИСЗ при значительной неопределенности последних. Вектор
состояния, оцениваемый фильтром, включает векторы погрешностей
координат Дг, скорости Av, а также вектор коррелированных погрешно¬
стей А& разностных измерений псевдодальностей. При этом с помощью
стандартных соотношений калмановской фильтрации обрабатываются
измерения, в которых дальности и радиальные скорости представляются
в виде, линеаризованном относительно оценок векторов г и v, полученных
на предыдущей итерации или, если это первая итерация, то относительно
оценок прогноза г, v. В ковариационных соотношениях ФК на этапе про¬
гноза используются уравнения динамики СИСЗ (Г.1), линеаризованные в
точке, соответствующей оценкам координат и скорости на предыдущем
шаге.
Оценки прогноза координат и скорости на момент k вычисляются
путем интегрирования нелинейных уравнений типа (Г.1), где в качестве
начальных условий берутся относящиеся к моменту k — 1 значения г, v,
скорректированные с учетом выработанных фильтром оценок для Дг и Av.
Такая процедура обработки измерений аналогична схеме коррекции с об¬
ратной связью, которая применяется в интегрированных навигационных
системах [140], где полученные с помощью фильтра оценки погрешности
навигационной системы используются далее при интегрировании уравне¬
ний ее идеальной работы. Таким образом, входящие в вектор состояния Дг
и Av — это погрешности прогноза координат и скорости по измерениям,
полученным на предшествующих шагах решения. В отличие от вариан¬
та, в котором уравнения (Г.1) интегрируются от априорных начальных
значений г0 и v0, а ФК соответственно оценивает погрешности, порож¬
денные неточностью этих значений, выбранный метод позволяет иметь
дело с существенно меньшими погрешностями координат и скорости.
Небольшая величина погрешностей позволяет более корректно выполнить
линеаризацию, необходимую для применения ФК.
Еще одной особенностью используемого алгоритма является при¬
менение модификации ФК на основе UD-разложения [141]. В этой
модификации вместо ковариационной матрицы погрешностей оценок Р
вычисляются верхнетреугольная матрица U с единицами на диагонали
и диагональная матрица D, такие что Р = UDUT. По сравнению с клас¬
сическим вариантом, ФК Ш5-модификация более устойчива к вычисли¬
тельным ошибкам, что особенно актуально для рассматриваемой задачи,
296
где приходится сталкиваться с плохой обусловленностью ковариацион¬
ной матрицы Р из-за редкого поступления измерений, а также малого
количества и неблагоприятной геометрии расположения доступных для
наблюдения НС. Применение f/Н-разложения несколько повышает вы¬
числительные затраты, но в свете указанного выше преимущества эти
затраты вполне окупаются.
Схема решения задачи при наличии измерений представлена на
рис. 5.5. Как отмечалось, ФК в ходе нескольких итераций (i — номер
итерации) по разностным измерениям оценивает вектор состояния
X, = (Дг*т, ДуI, М1)\
А А
где Дг^, Avk — погрешности оценок прогноза rk, \k. Оценки Дг*, Ду*,
полученные с помощью ФК, после каждой итерации используются для
уточнения fk, \k и последующей линеаризации измеряемых дальностей V
и радиальных скоростей V . В результате на последней итерации форми-
л л
руются финальные оценки г*, V*, и соответствующие значения СКО.
Л Л
Если измерения отсутствуют, то оценкам г*, V*, и составляющим UD-
разложения ковариационной матрицы их погрешностей присваиваются
значения, полученные на этапе прогноза.
Обращаем внимание, что при решении задачи в реальном времени
верхний блок, наиболее затратный с точки зрения вычислений, может
выполняться до поступления очередных измерений.
Поясним также, что определение опорного НС, измерения которого
участвуют в образовании всех разностных измерений, представляет собой
отдельную подзадачу. Если бы помехи измерений носили исключительно
белошумный характер либо в вектор состояния включались бы коррели¬
рованные помехи для исходных (не разностных) измерений, то в качестве
опорного мог бы выступать любой НС. Результат был бы одинаковым.
Однако наличие в векторе состояния разностей коррелированных по¬
грешностей ДФ требует некоторой разборчивости в выборе опорного НС.
Этот выбор должен обеспечивать преемственность текущих разностных
измерений по отношению к предшествующим, т. е. текущие разностные
измерения должны содержать максимальное число независимых ком¬
бинаций из предшествующих. Благодаря правильному выбору опорного
НС результаты для можно в полной мере учесть при оценивании
В следующем разделе представлено подробное изложение операций,
выполняемых при решении задачи навигации СИСЗ. Оно сопровождается
необходимыми пояснениями и обоснованиями.
Г.З. Алгоритм решения
1. Формирование начальных условий (шаг k = 1).
А А
Здесь принимается го = Гц, v0= v0 и определяются 7x7 матрицы
297
Un
furn
0
СО
fDrn
0
0 ^
г0
3x3
3x1
г0
3x3
3x1
3x3
3x3
0
uVn
0
> D0 —
0
Dyn
0
3x3
v0
3x1
7 yj
3x3
v0
3x1
3x3
3x3
0
1^*3
0
1x3
1
J
0
^ 1x3
0
1x3
4
У
в которых Uqo, Dqo ■
элементы C/D-разложения для Pqo, q = г, v, oCQ
среднеквадратическая погрешность априорного знания коэффициента от¬
ражения. Для ясности здесь и далее под обозначением некоторых матриц
указывается их размерность.
В частном случае, когда матрицы Pqo диагональны, имеем Uqo = Е,
Dqo = Pqo. Нетрудно убедиться, что в общем случае диагональные эле¬
менты матрицы D и элементы матрицы U определяются следующим
образом:
1>М =
Рц при i = 1;
i-l
Рг,г - X Uu,iDu,u ПРИ * > Ъ
и-1
=
1 при г = у;
О при г > у;
1
Рг,У ~ X ^u,i^u,j^u,u
и=1
DM
при г < 3 и г < у, / = 1,3, у = 1,3.
Первый индекс указывает на номер строки, второй — на номер столб¬
ца.
Для упрощения записи здесь при матрицах опущено обозначение
параметра qQ.
А А
2. Пересчет векторов r*_i, v*-i из WGS-84 в Terrestrial Reference
System (TRS) и далее в CRS.
ACRS л CRS
Результатом этого пересчета являются r*_i, v*_i. Пересчет выполня¬
ется с помощью процедур преобразования, приведенных в серии руково¬
дящих документов IERS (International Earth Rotation Service), например
в работе [183], и воспроизведенных с дополнительными пояснениями
в работе [184].
При этом для пересчета параметров СИСЗ из WGS-84 в TRS исполь¬
зуются выражения:
1 5<п -5ц/
-5(0 1 5s
5ц/ -5s 1
/_TRS У
гх
/
TRS
1
ТУ
(1 + 5s)
TRS
t
V 2 У
-1
V
'О
ГУ
-
АУ
Jzj
Оу
298
fvTRS^
v*
TRS
1
v</
(1 + 5s)
TRS
I
VVZ
1 5 со
-5со 1
5у —5е
-5\|Л 1 (
5s
в которых для упрощения записи опущен временной индекс k - 1,
а смещения Ах, А у, A z, малые углы поворотов 5ш, 5щ, 5е и поправка 5s
К масштабному коэффициенту являются известными параметрами.
Для перехода из TRS в CRS рассчитывается временной аргумент
в долях столетия:
Т = (dTT -dj2000)/36525,
где dTT — выраженный в сутках по шкале ТТ (Terrestrial Time) момент
tk-l’ ^J2000 = ^ 451 545,0 — количество суток на момент 12 часов 1 ян¬
варя 2000 г. ТТ. Координаты в CRS вычисляются по формуле:
rCRS = p(r)N(r)K(T)W(T)rTRS,
(Г.4)
учитывающей преобразование координат из-за отклонения небесного
эфемеридного полюса:
W(D = тгх(ур)Пу(хр),
вращения Земли вокруг своей оси:
ЩТ) = nz(-TGST),
движения Земли, связанное с нутацией:
ЩТ) = 'Я.х(-гА)'Я2(А\\1)П2(гА)'Ях(£А + Де),
прецессии ее оси:
Р (Г) = n2^A)'R.y(-QA)n2(zA).
Здесь lZj( •), j = х, у, z — матрица поворотов вокруг соответствующих
осей, т. е.:
'1
0
0 '
cos a
0
-sina'
Пх(а) =
0
cos a
sin a
; Пу( a) =
0
1
0
-sin a
cosa,
4sina
0
cos a ,
П(а) =
cos a sin а 0)
-sin a cos а 0
О 0 1
Аргументами этих матриц являются хр, ур — публикуемые IERS от¬
клонения небесного эфемеридного полюса в TRS; tgst — приведенное
в угловой мере звездное время по гринвичскому меридиану — Greenwich
Sidereal Time; С,А, вА, zA, — параметры прецессии, которые приближенно
определяются в виде полиномов третьей степени от Т; Ду, As — парамет¬
ры нутации, определение которых варьируется в различных выпусках
299
стандарта IERS. Например, в работе [183] для Д\у, Де приводятся срав¬
нительно простые выражения вида:
^тах Ьпах
Дv = X (Ai +AiT)sin(a£); Де = £ (В; + В-Т)cos(at),
i=1 i=1
где a£ = A,1! + Af Г + Аг (L - Г2) + NfV + А?П; А/, i = 1, ,/ = 1,5- Це.
лые числа; I — средняя аномалия Луны; V — средняя аномалия Солнца;
L — средняя долгота Луны; Г2 — средняя долгота восходящего узла Луны;
V — средняя элонгация между Луной и Солнцем. Величины I, Г, L, Q(
V представляют собой полиномы четвертой степени от Г с известными
коэффициентами.
Для получения времени xGST, которое требуется при нахождении Е(Т),
используется формула:
tgst = TGMST + ду cos (Ед) + 5-l sin (Q) + 52 sin (2Q).
Здесь 8^, 52 — известные параметры; xGST — выраженное в угловой мере
среднее звездное время по гринвичскому меридиану (Greenwich Mean
Sidereal Time), определяемое как
_GMST GMST , „/AUT1 , aUTC-.
т =т0чиТ1+Р(Д +t )>
где tGTG — соответствующие моменту время по шкале UTC (Coordina¬
ted Universal Time); Дит1 — публикуемая в Бюллетенях А и В IERS
разность между временем по шкале UT1 (Universal Time), связанной
с вращением Земли, и временем по шкале UTC; t0h^Iti и Р — полиномы со¬
ответственно третьей и второй степени от Т" = d'u / 36525; d'u — количество
суток, прошедших с момента 12 часов 1 января 2000 г. по шкале UT1.
Для преобразования вектора скорости из TRS в CRS применяется
приближенная формула:
: ¥(Т)ЩТ)
R(T) W(T)vTRS + Ж(Г) W(T)rTRSl, (Г.5)
dt J
непосредственно вытекающая из (Г.4) без учета изменчивости Р(Т), N(T),
W(Т). Значение производной от ЩТ), как и всех матриц, берется для
момента tk_^.
3. Интегрирование дифференциальных уравнений движения.
Л
Интегрирование уравнений движения Со производится на интервале
^ CRS ^ rRS ^
[tk_i; tk] с начальными условиями и С = <Cfe-i. В качестве
принимается априорная оценка для С. Интегрирование уравнений вы¬
полняется с применением метода Рунге-Кутта четвертого порядка. Хотя
это может быть и другой численный метод, выбор которого здесь не об¬
суждается. Интегрирование уравнения представляет собой достаточно
трудоемкую процедуру, что главным образом связано со сложностью вы¬
числения возмущающего ускорения F. Для СИСЗ основными являются
составляющие F, вызванные несферичностью гравитационного поля Земли
Fffi, притяжением Луны F, и Солнца Fe, а также действием прямого
солнечного света F^.
300
Г.4. Возмущение от несферичности гравитационного
поля Земли
Составляющая Fffl определяется сначала в TRS как производная по век¬
тору rTRS от потенциала внешнего гравитационного поля Земли, т. е.:
FTKS
» =
8U
-TRS •
(Г.6)
Потенциал U при этом представляется в виде ряда по сферическим
гармоникам
U = GMe Re £ RS £ (Cn,m ~ VB>m , (Г.7)
_n-0 m=0
в котором Rs — экваториальный радиус Земли; Сп , Sn — нормализо¬
ванные гармонические коэффициенты; Vnm — комплексные функции,
V„
cos (тХ) + i sin (тХ)
171 + 1
р™ cos е,
(Г.8)
где X, 0 — долгота и полярный угол притягиваемой точки (СИСЗ) в TRS;
Р™() — присоединенная функция Лежандра 1-го рода степени п и по¬
рядка т.
Коэффициенты ряда Сп т, Sn т зависят от модели геопотенциала.
В частности, для JGM-3 их значения приводятся в работе [185]. Значения
и число этих коэффициентов уточняются по результатам новых исследо¬
ваний, и поэтому для одной и той же модели с разными датами опубли¬
кования они могут различаться. Для величины N, определяющей длину
ряда (Г.7), обычно принимается значение в диапазоне 4...8 [108].
5V
Для вычисления необходимых при получении F0 производных п,т
дг,
1 = х, у, z применяется экономичный алгоритм Каннингэма, предложенный
в работе [186]. Производные здесь определяются по значениям Vn , кото¬
рые находятся по рекуррентному правилу для п = О, N + 1:, m = 0, п + 1:
V.
1/|г| при п = m = 0;
,тв
-—- V0 q при п = m = 1;
V3(r™s + ir™s)
,TRS
2п + 1 rx + it,
„TRS
2 n
j(2n - l)(2n + П (r™8)2
\ (n - m)(n + m)
-K
(2n - l)(2n + 1) (r™s)2
(n-m)(n + m) IJ2
71-1,771
71-1,771
(n + m-1 )(n - m - l)(2n + 1) 1
,2 ^71-2,771
(n - m)(n + m)(2n - 3) |r|
при п>0кт<п-1;
при n > 0 и т = п -1.
301
Искомые производные от Vn т для п = 0,N, т = 0, л рассчитываются
с помощью выражений:
dV„
-ап,о Rel/n+i,i ПРИ т = 0;
gj,TRS j ®п,т ^л+1,ш+1 + Ьп,т ^п+1,т-1 ПРИ ® < Ш < tl,
~ап,т Vn+l,m+l при 0 < т = л;
дК
п,т _
3-.TRS
агу
-an,0ImVn+l,l ПРИ т = 0;
i ап,т ^п+1,т+1 +it>
п,т Vп+1,т-1
при 0 < т < п;
ап,т ^л+1,т+1
при 0 < тп = п;
dV,
п,т
1(2п + 1)(л + т + 1)(л - тп +1)]
дг5
2п + 3
п+1.т*
dV,
dr.
п’ИУ. = с V л
trs п,тгп+1,т’
где
1(2л + 1)(л + 1)(л + 2)
2(2л + 3)
при т. = 0;
ип,т
V
1 |(л + тп + 1)(л + т + 2)(2 л +1)
2V 2л+ 3
1 /2(2л + 1)(л -т + 1)(л - лг + 2)
2л + 3
при т> 0;
при т = 1;
1 |(2л + 1)(л - т + 1)(л - т + 2)
2л + 3
при лг > 1;
^п,т
_ 1(2п + 1)(л + т + 1)(л - лг + 1)
2л + 3
По этим производным согласно (Г.6), (Г. 7) вычисляются компоненты
F™ . Наконец, вектор F™s переводится в CRS, в которой производится
интегрирование уравнений.
Г.5. Возмущение от притяжения Луны и Солнца
Составляющие F, и F0 определяются непосредственно в CRS согласно
закону всемирного тяготения:
К = GMh
Ъ = D, О,
(Г.9)
где GMb — произведение гравитационной постоянной на массу Луны/
Солнца; — вектор координат Луны/Солнца в геоцентрической инер-
циальной системе координат CRS.
302
Компоненты этих векторов для данного t определяются в виде рядов
до многочленам Чебышева первого рода с коэффициентами, которые на
текущую дату извлекаются из эфемериды серии de, предоставляемой JPL
(Jet Propulsion Laboratory) [187]. Раскроем наиболее важные аспекты
ррс грс
определения векторов rj и г0 .
Отметим, что данные по объектам солнечной системы в de разделе¬
ны на 32-суточные интервалы, представленные в шкале времени TDB
(Barycentric Dynamic Time). Поэтому сначала необходимо установить
32-суточный интервал, которому принадлежит данный момент времени
t, преобразованный в TDB, т. е. tTDB. Вместе с тем для Луны, центра
масс связки Земля — Луна и Солнца из вспомогательного header-файла
требуется узнать порядок разложения в ряд, число подынтервалов внутри
32-суточного интервала, для которых справедливо это разложение, и нача¬
ло данных для каждого из трех рассматриваемых объектов в 32-суточном
массиве. Далее устанавливается подынтервал, охватывающий tTDB, и для
него извлекаются коэффициенты разложения координат:
^ = щч),
1=0 i=0
Ъ = © -3) ,©,; = х, у, г. (Г.10)
Здесь — векторы координат Солнца и связки Земля — Луна в
системе координат, расположенной в центре масс Солнечной системы
(SS); а.щ — коэффициенты разложения; Т;(т) — многочлен Чебышева
первого рода i-ro порядка;
oj.tdb .rain .max
2Г - tb - tb
~h ~ : '
u .max .min
%
где t™111, tbaax — границы текущего подынтервала, т. е. t™m < fTDB < t™3*.
При таком определении всегда имеем —1 < < 1. Обращаем внимание,
что коэффициенты разложения для определения координат Солнца непо¬
средственно в CRS не предоставляются. В табл. Г.1 приведены характе¬
ристики используемых в de200 разложений координат по многочленам
Чебышева для трех рассматриваемых объектов.
Таблица Г.1
Разложения координат небесных тел по многочленам Чебышева
Объект
солнечной системы b
Система координат
Порядок
разложения
"ь
Длительность
подынтервала
.max ,min _
tb -tb , сут
Луна
Геоцентрическая
12
4
Земля — Луна
Барицентрическая
Солнечной системы
15
16
Солнце
15
32
303
Как известно, для полиномов Чебышева первого рода порядка N спра
ведлива рекуррентная формула [188]
7}+1(т) = 27}(т)-7]_1(т), i = l,N-l при Г0(т) = 1, Г1(т)=т.
Однако для вычисления рядов типа (Г. 10) более удобным является
применение рекуррентной схемы Кленшоу (Clenshaw) [189], согласно
которой
г = Cj - тс2,
где величины с-у, с2 определяются в результате выполнения последова¬
тельности расчетов:
cl = 2xci+1 - ci+2 + ai> 1 = N ~ 1. •••> 1 ПРИ CN = aN’ CN+1 = °"
Выше для упрощения записи опущены индексы j = х, у, г, Ь = 5,
©-}, О.
После вычисления r|Sj, r®s вектор координат Солнца в
геоцентрической системе определяется с помощью соотношений
CRS
ПВ® • rSS - rSS _rCRS- „CRS _ SS „SS
* 1Ф-3) *Ф-^ > г© — гО гф *
GM0/GM, +1
з указанным о
для вычисления по формуле (Г.9) составляющих Fj и F0 .
CBS CBS
Полученные указанным образом значения ij и г0 используются
Г.6. Возмущение от светового давления
Составляющая F^, определяется в CRS с помощью формулы [134,
184]
CRS _ CRS
F& =-KV-Cau2— -, (Г.11)
Ц l„CRS „crs|
|rO —г i
где к = 4,5605'10_6 н/м2 — поток импульса, действующего на СИСЗ;
s — площадь поперечного сечения СИСЗ, м2; р — масса СИСЗ, кг, аи —
астрономическая единица, м; v — так называемая функция тени, представ¬
ляющая собой отношение площади Aj, видимой на СИСЗ незатененнои
части солнечного диска, к полной площади Аэ видимого Солнца, т. е.
v = А» /Аэ • Векторы координат Солнца и Луны в CRS используются те
же, что и при определении Fj и F0 . Таким образом, в остается определить
только функцию тени V, что и делается ниже.
Затенение Солнца может быть вызвано Землей и Луной. Процедуру
расчета функции тени изложим, следуя монографии [184], исправив
опечатки и дав более подробные иллюстрации.
Определим угловые размеры Земли ае, Луны aj и Солнца а©, ви¬
димые с СИСЗ, а также углы р0, ftj между линиями визирования на
304
Рис. Г.2. Параметры видимости Солнца, Земли и Луны (Ъ = © , 5)
центр Солнца Oq и на центры Земли (Д и Луны как показано на
рис. Г.2. Для вычисления этих углов используются формулы:
а® = arcsm
(Л® / |rCRS]); а2 = arcsin (i?2 / |r^RS - rCRS|);
arcsm (jR© /|roRS — rCRS 1);
a©
= arccos
(r ) (rQ ~r )
LcrsILcrs _crs|
|r |r© -r
CRS CRS Lcrs _crs
I1)) “r ||rO “r I
Здесь Лф , Щ , Л© экваториальные радиусы Земли, Луны и Солнца.
Введем также обозначения для площадей незатененных Солнца и Луны
р о
при наблюдении с СИСЗ: Д© = да© , -А© = ла3.
Процедура расчета функции тени включает проверку ряда условий,
поэтому ее удобнее представить в виде схемы, как на рис. Г.З. Данная
процедура вытекает из геометрических построений. Так, условия возник¬
новения солнечного затмения на СИСЗ вытекают из рис. Г.2. В случае
частичного затмения Землей или Луной возможны два варианта, кото¬
рые приводят к различным формулам для определения незатененной
площади солнечного диска Аф. Эти варианты представлены на рис. Г.4,
где раскрывается смысл вспомогательных геометрических параметров
У;, <р;, Д, г = 1,2, 5, используемых при определении функции тени v.
Значение v позволяет окончательно определить по формуле (Г. 11) воз¬
мущающее ускорение Г^, вызванное давлением солнечного света, которое
совместно с F®, F, и F0 учитывается при интегрировании системы в
правой части уравнения для скорости СИСЗ.
4. Пересчет векторов rf^, v£RS в WGS-84.
В результате данной операции, которая является обратной по отноше¬
нию к операции 2, получаются rft, vft. Операция, очевидно, выполняется
для момента t
5. Формирование матриц линеаризованной непрерывной модели ди¬
намики вектора состояния
305
Рис. Г.4. Варианты частичного солнечного затмения со вспомогательными
параметрами для расчета функции тени
Рис. Г.З. Процедура расчета функции тени
306
X = АХ + Bw (Г.12)
для интервала [; tfe]. Здесь w — вектор белых шумов, матрица ин¬
тенсивностей которых представляет собой единичную матрицу. Отме¬
тим, что вектор состояния X включает погрешности оценок координат,
скорости, вектор коррелированных помех Д& разностных измерений
псевдодальностей (Г.2) и коэффициент С влияния солнечного давления
на движение СИСЗ. Модель (Г. 12) нужна для построения ФК, предпо¬
лагающего линейный характер динамики вектора состояния. Эта модель
используется в ковариационных соотношениях ФК. Сами же оценки
координат и скорости, напомним, определяются на основе нелинейных
уравнений (Г.1). В части погрешностей координат и скорости линеаризо¬
ванная модель динамики выводится из уравнений (Г.1) путем вариации
переменных г и V. В части коррелированных помех & модель динамики
исходно линейная. Она описывает марковские стационарные процессы
1-го порядка. В части остальных компонент вектора состояния (С и ДН)
модель динамики исходно линейная: С = 0, а компоненты Д& представ¬
ляются в виде марковских стационарных процессов 1-го порядка
Размерность вектора состояния X, а следовательно, и размерность
матриц в модели (Г.12), зависят от числа компонент вектора Дй^, т. е.
тпк_1 = nh_x - 1. Сами матрицы в (Г. 12) определяются как
'^WGS
0 >
f 0 1
7x7
7xmk-l
7xmk_i
О
A#
; B =
Be
mk~1*7
V
TWGS _ WGS1 , A WGS . ТCRSp, WGS 1 „„„
Здесь А — («CRS ) ( CRS «CRS '’
Gv
г
-i WGS
‘•'CRS
3x3
-I WGS
‘•'CRS
3x3
О
о
3x3
‘•'CRS
3x3
о
о
3x1
О
3x1
о
3x3
Е
3x3
о
3x1
GMa
3rCRS(rCRS)T — |rCRS Г
dr
3x3
CRS
О
1x3
О -kv
3*3 ц
о
1x3
-CRS _CRS
S 2 гО ~г
— au ——
L.CRS
го
i ПГ
Ae = Е; Вй = ста —
Е +
-1 + + 1
I IT
307
где cts, тэ — среднеквадратическое отклонение и интервал корреляции
для коррелированных помех псевдодальностей, представляющие собой
параметры марковского процесса 1-го порядка; 1т — то-мерный вектор,
состоящий из единиц.
Отметим, что ВаВ
2а|
(E + ImAiI^ ). Тем самым в структуре Ве
учитывается взаимная корреляция между порождающими шумами для
различных компонент й, которая обусловлена использованием в задаче
разностных одномоментных измерений.
dF
При определении производной
можно ограничиться учетом со-
drCRS
ставляющих, связанных с несферичностью гравитационного поля Земли
и притяжения Луны и Солнца, т. е.
dF dF-t,
dr
dr
c£Fq dFff
- + “7;—h -
dr
dru
При этом два первых слагаемых на основании (Г.9) выглядят следую¬
щим образом:
А?ь. , ощ 3Art(Artf-|Агь|2Е_ ь 0_
dr
где Щ = гь
Для получения
dFffi
drCRS
F®, нужно вычислить:
согласно приведенным в п. 3 выражениям для
dFl
дг
= GM„ Re
N
Z К Z (Cn,m-iSn,m)
п=0 m=О
d2V
U V 71,771
d2V
u n,m
d2V
U 71,771
d(r™f
dr^dr™
dr™dr™
d2V
u v n,m
d2V
U V 71,771
d2V
U У 71,771
dr™dr™
-»/„TRS\2
o(ry )
dr™dr™
d2V
U 71,771
d2V
U V 71, 771
d2V
U V 71,771
дг™дг™
is-.TRS '-'-TRS
dry orz
a(r2TRS)2
где
d2v„
o_.TRS д TRS
j
rl,0 Re gj.TRS
dK
при m = 0;
Tl +1,771 + 1
*71,771
or.
,TRS
av,
7i+l,m-l
drj™
av
71+1,771 + 1
drjRS
при 0 < m = n;
при 0 < m < n; j = x, y;
308
d2V,
п,т
5(r™s)2
ln, 0
T 9Vn+1,1 л
Im при m- 0;
^__TRS
by
dV,
i a
nym
n+l>m+l
^__TRS
+ i b,
dV,
71,771
^__TRS
при 0 < m < n;
dV,
i a„
ra+l,m+l
5r,™s
при 0 < m = n;
d2V,
n,m
dV,
n+l,m
5r/RS0rJRS
^n,m
dr
] = x, y, x.
Искомое значение
dFff
формируется из
arc
drCRS ‘ ‘ ‘ PrTRS
с помощью двусто¬
роннего матричного преобразования, соответствующего переходу от TRS
к CRS.
dF
Дадим пояснения, касающиеся значений переменных rCRC,
dr
C^^s, входящих в выражения для матрицы динамики. Очевидно, что
эти переменные зависят от времени. Однако ввиду малости интервала
дискретности решения At представляется допустимым пользоваться их
значениями для какого-либо одного момента в интервале [^_j. ^], на¬
пример для tk_y. Таким образом, в приведенных выражениях следует
использовать
-CRS.
Tk-1-
dF
drCR£
dF
dr
_CRS a CRS + +
Г =rk_lJt=tk_l
pWGS _ pWGS
(h-1)-
Это упрощение вполне оправдано, поскольку линейная модель (Г. 12)
имеет вспомогательный характер. Она используется в ковариационных
соотношениях ФК, которые отвечают за расчет СКО и коэффициентов
усиления фильтра. Сами же оценки прогноза координат и скорости
определяются, напомним, в результате интегрирования нелинейных
уравнений (Г.1).
6. Определение матриц дискретной модели вектора состояния
X, =oAx,_1+r,w„
(Г. 14)
где — т^-мерный вектор дискретных белых шумов с единичной
ковариационной матрицей. Определению подлежат переходная матрица
ФА и матрица шумов Гк.
Матрицы ФА, ГА выбирают так, чтобы математическое ожидание и
матрица ковариаций непрерывного процесса (Г. 12) совпадали в момент
tk с аналогичными параметрами для дискретной последовательности
(Г. 14). Эти условия с некоторой степенью приближения выполняются,
когда матрицы Фк, Тк определяются с помощью рядов [140] с заданным
числом слагаемых L:
309
предполагающих, что матрицы А и В постоянны на интервале ^
Поскольку в действительности элементы матриц А и В изменяются, но
это происходит медленно, представляется возможным использовать ддя
расчета Фк, Tk значения
При непосредственном использовании приведенных рядов возникают
вычислительные ошибки, связанные со сложением значительно различаю¬
щихся по уровню величин. Эти ошибки уменьшаются при использовании
следующей процедуры:
Применительно к рассматриваемой задаче процедура получения ма¬
триц дискретной модели упрощается, если учесть структурные
особенности матриц А и В (Г.13) непрерывной модели, которые обуслов¬
лены независимостью погрешностей Дг, Av и помех Дй, а также то, что
в матрице А от времени зависят только элементы верхнего 6x6 диа¬
гонального блока. Элементы нижнего диагонального mk_-^ х mfe_1 блока
матрицы А не зависят от времени в силу стационарного описания помех
измерений. Меняется лишь размер этого блока. Указанные обстоятельства
позволяют ограничиться на каждом шаге вычислением на основе (Г. 15)
только верхнего 7x7 диагонального блока матрицы Фк. Элементы для
нижнего х mh-i диагонального блока матрицы <t>fe и нижнего блока
той же размерности для матрицы Г^ могут быть вычислены по форму¬
лам (Г.15), (Г.16) заранее для данных значений сгй, тв. Это скалярные
вычисления лишь для одного диагонального элемента каждой из двух
матриц. Из предвычисленных диагональных элементов в зависимости
от состава используемых на предыдущем шаге НС формируются нижние
блоки Фк и Гк (верхний 7 х mh_1 блок является нулевым). Далее с
использованием последнего выражения в (Г.16) определяется Г^.
7. Получение оценки прогноза вектора коррелированных помех раз¬
ностных измерений предыдущего шага решения при тпft_1 > 0:
Фк для вектора состояния; ДЙ£-1 — нижний mh_1 -мерный подвектор
k ~
В (tk) + В^^)
2
АЪк= ф| Д й/г-1,
где ф| — нижний (тп^ х mk_^) диагональный блок переходной матрицы
л
А
оценки вектора состояния на предыдущем шаге Х/г-1 •
310
8. Определение верхнетреугольной (7 + тх (7 + mk_^) матрицы
XJk с единичными диагональными элементами и диагональной матрицы
той же размерности, таких что
+ТкТ%.
Произведение в левой части этого равенства представляет собой кова¬
риационную матрицу ошибок прогноза вектора состояния, куда помимо
погрешностей координат и скорости СИСЗ входят коррелированные по¬
мехи разностных измерений предыдущего шага. Для получения
используется известная процедура [141].
Данная процедура выполняется за 7 + mk-l шагов (по размерности
вектора состояния Х^_1). Здесь последовательно вычисляются диаго¬
нальные элементы Dj j матрицы и векторы иг = (Uw и^1>г.)т
наддиагональных элементов матрицы .
В начале процедуры формируются матрицы
У =
NxN
/
; 0 -
rT
I )
NxN
V
О
О
Е
mA-lxmA-l
где N = 6 + N = N + mk_ly и определяются: W =\|/т0; ^ дг ~ ^N-
Далее для i = N, N - 1, ..., 1 последовательно вычисляются:
6М = QvW,
Uj =Wt_! Ci/DM при i > 1;
(i-l)xl (i-l)xN Nx 1
N
(Li-1 = Vi-l- Z Ui-1,/ С; ПРИ 1 > !•
N* 1 Afxl j=i Nx 1
Здесь — i-й столбец матрицы Л)/; W;-1 — матрица, образованная
первыми (i - 1) строками W. В приведенных выше формулах временной
индекс k в некоторых обозначениях опущен с целью облегчения записи.
Существенно, что операции 2...8, связанные с выполнением прогноза,
можно выполнять, не дожидаясь поступления очередных измерений.
9. Проверка поступления в интервале [f^; +8^gSx] измерений от
двух или более НС и при их наличии, т. е. при nk > 1, переход к операции
10. В противном случае — переход к операции 23.
10. Определение номера опорного НС и вектора номеров вспо¬
могательных НС. Эти действия выполняются согласно выражениям:
SI =
если Sk_i e Sk;
Щ, если e Sk и Sk * 0;
если g Sk и Sk = 0;
Si =
s;
AS*k
(Г.17)
311
Здесь £ и г — соответственно наличие и отсутствие среди компонент
вектора данного значения; П ; где П — операция отбора
компонент с одинаковыми значениями в обоих векторах; 0 — отсут¬
ствие вектора; S^, — первые компоненты соответствующих векторов;
= (Sfe без Sfc ) о S^_1 — вектор номеров вспомогательных НС, которые
уже использовались на предыдущем шаге; = (Sft без S£ и Sj) —.
вектор номеров «новых» вспомогательных НС, не использованных на
предыдущем шаге; Sq =0; Sq = 0. При этом также определяется
тк = пк ~ 1 и mk= dim(Sft)-
Использование выражений призвано разделить разностные измере¬
ния текущего k-vo шага на две группы. Первая группа образована из
комбинаций измерений предыдущего шага, вторая включает измерения,
полученные с использованием НС, отсутствующих в составе рабочего со¬
звездия предыдущего шага. Такое разделение облегчает учет взаимосвязи
между векторами и Дй^_1.
11. Образование нового вектора номеров используемых НС
Sfo )т и соответствующее переформирование векторов исходных
измерений (Г.2), (Г.З).
12. Расчет векторов координат и составляющих скорости для
НС с номерами S^, j = 1, п^, на момент излучения сигнала в системе
координат в момент приема. Расчет выполняется на основе
эфемеридной информации в соответствии со стандартной процедурой
[125].
13. Определение оценки прогноза вектора состояния = (Дг£, Av^,
С, Дв£) :
Хь =
( О л
(6 + /П^)х1
IV
Cft-i
(6+m.^)x 1
Л
С*-1
о
■
, если mk = 0;
, если mk > 0,
где = rn.fi — тп^ — число разностных измерений псевдодальности,
полученных с участием «новых» НС, номера которых образуют AS^;
Мь
х ) -матрица с элементами
312
ч1 =
1, если = S^Li',
—1, если Sk = Sk_1;
О, если и Ф Sk-\m
14. Формирование (7 + mk) x (7 + пг^-матриц и , являющихся
элементами HD-разложения для ковариационной матрицы ошибки про¬
гноза вектора состояния = (Ar^, Avj£, С, ДФ^):
Ufc =
Здесь U^, — верхнетреугольная матрица с единичными диаго¬
нальными элементами и диагональная матрица, такие что
( и*
О )
(
О ]
(7+m*)x(7+mj)
(7+тк )хАтк
(7+m*)x(7+mj)
(7+т^ )хД
О
Е
II
л;
О
о
2ctqE
Дт*х(7+т*)
Д mfc хД
Дт*х(7+тк)
\
Дт^хДт^
где
d*u*dau I = м*и АиЭДЕ,
Е О , если mh = 0;
7x7 7хт*_1 1
-
Е О л
7x7 7 xmk—i
\\
О
пгкх 7
щ
mkxmk-l
, если mk > 0.
По существу, XJk, Dk — это составляющие HD-разложения для
ковариационной матрицы ошибок прогноза вектора, включающего
погрешности координат и скорости СИСЗ, а также часть вектора A#ft,
связанную с измерениями от «старых» НС, номера которых образуют
S^. Для вычисления U^, используются последние четыре форму¬
лы из п. 8, в которых подразумевается: N = 7 + N = 7 + тп^_^;
V = UM; e = D*.
Отметим, что при формировании оценки прогноза и матриц и
Bk из соображений простоты компоненты для «новых» НС считаются
некоррелированными друг с другом и с компонентами для «старых» НС.
В то же время корреляция между порождающими шумами для всех ком¬
понент &&k учитывается корректно на каждом шаге [см. выражение для
после (Г.13)]. Таким образом, корреляция не учитывается только для
начальных значений коррелированных помех, что при малом интервале
корреляции представляется несущественным.
л л
15. Назначение номера итерации i = 1 и оценок г* = rk, vk = v^,
A A
Ark = 0, A vk = 0, необходимых для формализации итерационной про¬
цедуры оценивания.
313
16. Вычисление дальностей V£ радиальных скоростей T>k и их про¬
изводных для НС с номерами S^, j = 1, при использовании оценок
координат и скоростей СИСЗ, полученных на предыдущей (г - 1)-й ите¬
рации (для г > 1) или на этапе прогноза (для г = 1):
] +
Tk~Tk
ki
Vk =
И-* tf
]
л/
Vk
dt>l
dr r=?+ dv v=£+
Л~г{ _dV>
л i
Vk
dr
Л 4. Л
r=rk,v=v*
л i
Vk
f Л2
A7'
Vk
V У
“ +
rk ~Tk
^ "t" ^ Л _ Qpq
где rfe = Tk+ 'Vk §tk .
17. Определение линеаризованных измерений для отдельных НС:
л;
Vk
А г&;
\ У г
S7 = Z1. -VI-
ък т>к k
/ Л
^7
Л
/ ^
к]
Л
Агй-
Vk
Avjfe
\ )
г
V у1
V
j = 1, m+ 1, разностных линеаризованных измерений
^k Vk Vk
AVk
и соответствующих им матриц наблюдения
у = 1, m-ь,
(
Н7
дт>.
CD*)' -CZ>?)r о L7
1x3
Umk J
н7^ =
дт>.
m*x3
хЗ
mkxmh
314
Здесь Arfe, Av* — векторы, состоящие соответственно из 1-3 и 4-5
компоненты оценки вектора состояния X, полученной после (i - 1)-й итера-
Л .
ции (при i = 1 они заданы равными нулю); )q — матрица, образованная
из производных
Sq
, Р = Т>, Т> q = г, v для НС с номером S}k ;
r=rk,v=vk
L — матрица-строка, у-и элемент которой равен единице, а остальные
тк
(mk - 1) — нулю.
Поясним, что измерения Zi- , Z^. являются линеаризованными в
Vk vk
том смысле, что они могут быть приближенно представлены в линейном
по отношению к ошибкам прогноза виде:
Zi
А.
( V
Л j
T>k
\p(.h)- h ] + Щ + £x>. ’
\ / г
f \
л. j
f
( \
Л J
T>k
[г(^)-гй] +
T>k
V ^
г
ч
[v(^)-v*]+54+^ .
К этим выражениям нетрудно прийти в результате разложения функ¬
ций P^(T,tk + 5^PS), + 8tkPS) в ряды Тейлора по г и v в точке
А+ Л
Гй, vfc и отбрасывания в них квадратичных и более старших членов.
Кроме того, здесь учтены приближенные равенства:
r(tk + 8tkFS) ~ r(tk) + v(tk)8tkps ~ r(tk) -г vk 8tkps;
v(tk+8t%pa)*v(tk),
вытекающие из малости §^PS и невысокой динамичности СИСЗ.
18. Определение вектора Ък измерений с некоррелированными бело¬
шумными помехами, а также соответствующей матрицы наблюдения Нк
и ковариационной матрицы белошумных помех.
Компоненты Z' вектора невязок, строки матрицы наблюдения
н' и элементы Кд-р ковариационной матрицы белошумных помех
k ^
для разностных измерений параметров V = 7), 7) определяются на осно¬
вании выражений:
Z* = ъ]
hVk mk
■7 + 1
Щ
l=j+1
Zr2,1 . ymk _ гт?тк .
AR ’ AR АР, ’
315
R
U -
AVU
о ТПь — 7 + 2 . ,
а-p —- , если ] = I;
mk-j+l
О, если j ф I,
где j, I = 1, , Up — дисперсия белошумных помех исходных измере¬
ний параметра V.
Далее формируются:
-‘AV,
JAVU
Tjmk
ИАЪ ~
н
AVh
У AVkJ
ч =
\ K)
II
Je
X
V n)
II
Je
К
О
mkxmk
О
mk xmk
R
AVU
Отметим, что матрицу RA достаточно определить только на первой
итерации, так как она в отличие от ZA и не зависит от оценок.
Необходимость выполнения данной операции обусловлена тем, что
процедура калмановской фильтрации на основе [/.D-разложения предпо¬
лагает диагональный вид ковариационной матрицы белошумных помех
измерений. Ковариационная же матрица белошумных помех разностных
2
измерений для параметра V ~Т>, Т> представляет собой ~aV®k'
I , где Im — состоящий из единиц m-мерный вектор, и,
®k - Е н
mkxrnk
очевидно, является недиагональной. Приведенные выше преобразования
в матричном виде можно записать как:
ZAVk HADfe =^@k^AVk’
Rad - ctdU01rad. - cj^D0 ,
R R R R R
где &Apk =
Z
AV,
jmk
<4;
; H
AV,
ЕГ
AV,
j mh
AD,
; U®*’ *4 — элементы UD-разло-
жения для матрицы ®k.
19. Определение векторных (7 + тпк) х 1 коэффициентов усиления
KJk, j = 1, 2171^ для ФК, а также верхнетреугольной (7 + mk) х (7 + mk)
матрицы с единичными диагональными элементами и диагональной
матрицы той же размерности, таких что
= u*D*uj -WX(HtuAu;Hj +Rk)-1HktjkbkiJl.
Матрицы U^, являются составляющими С/Л-разложения ковариа¬
ционной матрицы погрешности оценки вектора состояния с использо¬
ванием вектора измерений сформированного в п. 18. Для получения
U^> Dft используется процедура [140], в которой последовательно для
каждого у'-го измерения, т. е. для у = 1,2т^, вычисляются диагональ¬
ная матрица и верхнетреугольная матрица U^, удовлетворяющие
равенству
uiDi(ui)T = иГЧ^иГ V -
иГЧ"1 (иг1 )T(Hj )т Hjuj-^r1 (иг1 )т
где U° = Ufc, D® = Dft, Hj - j-я строка матрицы наблюдения Hft;
Rfr — у'-й диагональный элемент ковариационной матрицы шумов из¬
мерений Rft.
В начале для данного у определяются вспомогательные векторы:
ТУ =(Ui-1)T(Hi)T; §/ = Di-S^.
Затем для i = l, N, где N = 7 + mk, последовательно вычисляются:
S/=S^1+(Tl/)2D/_u_1, SU/S(;
U/ =v{~1-r]ixL/sU При г > 1;
(i-l)xl
(i-l)xl
V-
l)xl
( j
%[ +
Tj7—1
i+1
pi ^
Si+l
*г+1 =
Ы\
ixl
при г < N — 1
(г+1)х1
\
sL
7
Здесь Sq = R^, = D/j — диагональный элемент матрицы D^;
j^)T — вектор наддиагональных элементов матрицы
U^; Т]{ и —г-е компоненты соответствующих векторов.
После завершения цикла по г рассчитывается коэффициент усиления
для у-го измерения:
Ki=u{-4v4-
317
В итоге по завершении цикла по у = 1,2получаем: Dk = ;
uft=u lm*.
20. Вычисление оценки вектора состояния, которое выполняется путем
так называемой скаляризованной обработки измерений:
л j л j-1 ■ • л j-1 л о
Xft = Xft + K'(Z' — Н' Х& ); у = 1, 2mk, Xft = X^,
где — у-я компонента вектора Zk; — /-я строка матрицы с за-
л л2т*
ключительным назначением Xft = Xft
л л л
21. Формирование Arft, Д v/j из 1—3 и 4—6 компонент вектора Xft
л л л л
соответственно и получение г* = + Д г*, v* = + Д v* .
22. При i < imax увеличение на один номер итерации i и переход к
Л Л
операции 16. В противном случае вывод оценок Tk, vfc с соответствующи¬
ми СКО, которые рассчитываются как yU^D^U^T, где у = 1,6 — номер
строки, увеличение на один номер шага k и переход к операции 2.
о * Л - Л
23. Назначение mk = 0, Sk = 0, S^, = 0, rfc = vk= v^,, присвоение
матрицам ~Uk, значений верхних (7 x 7) диагональных блоков Uft, Dft,
увеличение на один номер шага k и переход к операции 2.
318
Приложение Д
Математические основы относительной навигации ИСЗ
Д.1. Постановка задачи
Пусть в дискретные моменты времени tk, k = 1, 2..., для двух низко¬
орбитных спутников (НОСА, НОСв) по одному и тому же созвездию из
(mk + 1) НС получены вторые разности кодовых (по С/А коду) и фазовых
(на несущих Z1; L2) измерений:
VAZC/A(tk) = VAD[SA(tk), SB(tk), tk] + VAeC/A(tk);
VAZL'(tk) = VAD[SA(tk), SB(tk), t^ + Х^АЩ + VAe^(tk); (Д-1)
VAZL4tk) = VAD[SA(tk), SB{tk), tk] + \2VAN2+VAeL4tk).
Здесь и далее символ А обозначает первые разности (разности между
величинами, относящимися к НОСА, HOCg); символ V обозначает вторые
разности (разности между величинами, относящимися к опорному и
вспомогательным НС); VAD[SA(tA), SB(tk), tk] —вектор вторых разностей
дальностей между НОСА, HOCg на момент приема и НС на моменты из¬
лучения сигналов; SA, Sg — трехмерные векторы геоцентрических ко¬
ординат НОСА, HOCg, VАеР' А, VAe^1, VAe^2 — векторы вторых разностей
погрешностей кодовых и фазовых измерений; Х2 — длины волны для
соответствующих несущих сигналов НС; VAN1(VAN2 — векторы вторых
разностей целого числа периодов фазовых измерений.
Будем считать, что погрешности вторых разностей измерений обуслов¬
лены ионосферной задержкой и шумами приемников, т. е.:
VAec/A(tk) = + УАИС' A(tk);
К
VA e^(tk) = --AEpLl + VA$\tk); (Д'2>
К
VA e^(tk) = -УАУа) + VA^(tk),
fi
где VAe — составляющая, связанная с ионосферной задержкой; f^,
f2 — частоты несущих; VAftc^А,VА-Ь1^,VAbL — вторые разности шумов
приемников.
Полагаем, что VAdC// А, УДО^1, VAftL имеют белошумный характер (т. е.
некоррелированы во времени) и гауссово распределение вероятности.
Причем шумы для измерений от разных спутников независимы друг от
друга, вследствие чего их ковариационные матрицы имеют структуру
вида
319
гдл:. Д I +
Ддгч
rM‘ (tk)
i - С / A, Lj, L2. (Д.З)
mk у
Здесь r i(tk) = r.j (tk) + r.i (tfe) — дисперсия шумов первых разностей
Л1,У Vi,A ®j,B
измерений по у-му НС (нулевой НС выступает в качестве опорного); где
г., (th), r.; (ft) — дисперсии шумов измерений по у-му НС для приемни-
вУ.А "у.В
ков, установленных на НОСд, HOCg; I — тй-мерный вектор, состоящий
из единиц.
При отсутствии модели ионосферной составляющей погрешности
VAe(ffc) опишем ее также с помощью белошумной последовательности
с ковариационной матрицей Дуде (**)» аналогичной по структуре (Д.З),
и предположим, что она подчиняется гауссову закону распределения
вероятности.
Предположим, что при mk > 3 имеются оценки SA(tk), SB(tk) координат
НОСд, НОСд, полученные по кодовым измерениям в недифференциальном
режиме. Используя эти оценки, представим вторые разности дальностей
VAD[SA(tfc), SB(tk), tk\ в линеаризованном относительно погрешностей
SA (h) “ &А (fk )> SB (fk) - &B (tk) виде:
VAD[SA(tft), SB(tfc),£fe] - VAD[S^(tfc),S5(£fc),tfe] +
SVD(S ,t„)
3S
[Sa(**)-Sa (**)] +
3VD(S, tk)
s=s A(t„)
dS
[Sb(**) ~ Sg(^)].
(Д-4)
Учитывая небольшое расстояние между НОСд и НОСд по сравнению
с дальностями до НС, пренебрежем различием между входящими в (Д.4)
производными, т. е. будем считать, что
3VD(S,fft)
3S
3VD(S,tb)
as
= G(tk).
(Д-S)
s=sB(t*)
S=Sx(t*)
Исходя из (Д. 5) выражение (Д.4) принимает вид
УДБ[8д(^),8д(^),^] = VAD[Sa (tk),SB(tk),tk] + G(t*)5S(^), (Д.6)
где 5S(tk) — разность погрешностей оценок SA(tk),SB(tk).
Сформируем теперь разности
VAzl(tk) = VAZ*(tfe) — VAD[£^(tj,), S5(£fc),tfc], i = С / A, Lj, Ь2 (Д-7)
которые, пользуясь (Д.6), представим как:
320
VAzC / A (th) = G (tk )5S(i*) + VAeC /A(th);
VAz^ (tk) = G(t*)5S(t*) + ^VA^ + VAe^ (**); (Д.8)
VAzL2(tfe) = G(ift)5S(^) + *.2VAN2 + VAeL2(^).
Ставится задача: оценить вектор погрешностей 5S(t^) по всем по¬
лученным до fc-ro момента измерениям (Д.8).
Решение задачи разобьем на две части. Первая часть — плавающее
решение — состоит в получении оценок 5S(ift), VAN^, VAN2 и ковариа¬
ционной матрицы их погрешностей без учета целочисленного характера
VAN1; VAN2. Эта часть выполняется рекуррентно с использованием ре¬
зультатов плавающего решения на предыдущих шагах. Вторая часть —
фиксированное решение — заключается в уточнении результатов первого
этапа с учетом целочисленности VANj, VAN2 . В ходе выполнения вто¬
рой части решения делается попытка однозначно определить значения
VANj, VAN2 . Если это не удается, итоговым считается плавающее ре¬
шение. Получаемая в итоге оценка 5S(tft) служит для уточнения базы
НОСд — HOCg, априорным значением которой считается SA(tk) - Sy(tk).
В качестве математического доказательства правомерности решения
задачи сначала без учета целочисленного характера периодов фазовых
измерений и последующим уточнением результата с учетом их целочис¬
ленности приведем следующие выкладки.
Объединим все полученные к моменту th вторые разности фазовых и
кодовых измерений в единый вектор
z = Нх + v, (Д-9)
где v — гауссов центрированный вектор погрешностей измерений с ко¬
вариационной матрицей R, х = (SST, VANT)T, 5S = [5S(^)T,..., SS(£fe)T]T,
VAN = (VAN^1, VAN2t)t при наличии двухчастотных измерений и
VAN = VANj при наличии одночастотных измерений; Н — матрица на¬
блюдения, структура которой определяется уравнениями (Д.8).
Ставится задача определить
х* = argmin (z — Hx’)TR_1(z - Нх'), (Д. 10)
х'
где х1 = (5ST,VAN1T)T; i— номер конкретного значения VAN.
Имеется в виду, что при определении (Д. 10) значения компонент
вектора VAN выбирают из всего множества целых чисел. Отметим, что
минимизация квадратичной формы в (Д. 10) равносильна максимизации
А
функции правдоподобия /(z/x), т. е. условной по отношению к вектору
х плотности вероятности вектора измерений z.
С учетом того что при фиксированном VAN = VAN1 значением 5S,
А _
минимизирующим квадратичную форму в (Д. 10), является оценка 5S1 ,
321
которая вычисляется с использованием метода наименьших квадратов
(МНК), для определения х* достаточно найти
VAN = arg min | z-Hx1
VAN'
R_1 z-Hx'
(Д.11)
где 5S*= I 5SIT,VANiT
В свою очередь, эта задача на основании равенства
\Т / А \ / А ЛТ
z-Hx
R_11 z-Hx'
z - Нх
R_11 z-Hx
VAN' - VAN
-1
rVAN
VAN' - VAN
(Д-12)
сводится к поиску
VAN = arg min
van'
VAN' - VAN
PVAN_^! VAN' — VAN
(Д.13)
Здесь x ;
5ST, VAN1
— оценка вектора x, полученная по измерению
(Д.9) с помощью МНК; Pvan — ковариационная матрица погрешности
Л
оценки VAN.
Ниже приводится доказательство равенства (Д.12).
Л А .
Итак, для оценок х, 5S' имеем следующие выражения:
5ST,VANT
= PsHR_1z;
(Д-14)
Р5 =
6S
5S,VAN
P8S,vanT Pvan
(HTR-1H)-1,
(Д-15)
5S'= 5S+ P,
5S,VAN VAN
VAN' - VAN
(Д.16)
Введем в рассмотрение вектор 8'= х-х‘, с помощью которого квадра¬
тичную форму в левой части равенства (Д. 12) представим в виде
322
Заметим, что согласно (Д.16) вектор 8' можно записать как
( . . \ г „Л
Л Л
8S-8S’
VAN- VAN1
P5S,vanpvan_1(VAN! - VAN)
VAN’ - VAN
f ТУ - \
6S,VAN
V PVAN J
-1
rVAN
VAN - VAN
у
: -PsFPvan_1 I VAN’ - VAN
. (Д-18)
Здесь Г = (О Е)т , где E — единичная матрица, размерность которой со¬
ответствует вектору VAN. Принимая во внимание (Д. 18), (Д. 15), третье
слагаемое в правой части выразим следующим образом:
5*THTR_1H5i=
VAN' - VAN x
xPVAN lpTpxFPVAN 1
VAN’ - VAN
4 J
VAN’ - VA N
pvan VAN - VAN
(Д-19)
В то же время, учитывая (Д.14), (Д.15), получим:
z - Нх
R-1H = zT(E - HP5EHtR_1)tR_1H = 0. (Д.20)
Откуда следует, что второе слагаемое в правой части (Д. 17) представ¬
ляет собой нулевую матрицу.
Формулы (Д.17), (Д.19), (Д.20) доказывают справедливость равенства
(Д.12), а значит, и выражения (Д.13) для VAN* . Таким образом, для
получения искомого значения х вектора х [см. (Д.10)] можно сначала
А
с помощью МНК получить оценку х этого вектора, далее найти VAN*
в результате минимизации (Д.13) и, наконец, опять с использованием
Л >
МНК вычислить оценку 5S* в предположении, что VAN = VAN . Оценка
^ и представляет собой плавающее решение рассматриваемой задачи,
а оценка х , учитывающая целочисленный характер компонент VAN, —
фиксированное решение.
323
Отметим, что для получения плавающего решения более удобной яв¬
ляется рекуррентная форма МНК, рассматриваемая далее.
Следует сказать, что помимо самого значения VAN* интерес пред¬
ставляет оценка его достоверности. Интерпретируя VAN как случай¬
ный вектор с априорно равновероятными целочисленными значениями
компонент, в качестве характеристики достоверности фиксированного
решения можно использовать апостериорную вероятность значения VAN*.
Такая интерпретация вектора VAN не противоречит использованному
выше критерию (Д.10), где VAN рассматривался просто как неизвестный
целочисленный параметр. Трактуя VAN как случайный вектор, о VAN*,
минимизирующем квадратичную форму в (Д. 13), можно говорить как о
наиболее вероятном значении.
Д.2. Плавающее решение
При mk > 3 по измерениям (Д.7) определим оценку вектора х(^) =
= [5S(^)T, VAN}7, VAN2t]t и ковариационную матрицу ее погрешности.
Воспользуемся для этого рекуррентными формулами МНК:
K(tk) = + [VAz(fft) - H(f£) хй ]; (Д.21)
Рх(^) = [Рх^Г1 +H(^)TRvae(^r1H(^)p1, (Д.22)
где VAz(f*) = [VAzC ' А (tk f, VAz^ {tk )\ VAz^ (tk f f; щ) =
РХ(^Г
0
3x3
\
3^1
VAN (th)
0 Pvan(^)
-l
; VAN(ifc) и Рудк (tk) — оценка вектора
VAN = (VANj, VANj>)T и ковариационная матрица ее погрешности, по¬
лученные по результатам предыдущего (ft - 1)-го шага решения; H(tk) и
Иуде (tk) — матрица наблюдения и ковариационная матрица погрешностей
для вектора измерений VAz, имеющие вид:
H(tk) =
СК**)
G(tk)
G(tk)
G(tk) E
/1L ^ X11L ^
0
0
X2 E
324
RVAe(*fc) -
/
.4 +Куд^А(^)
/1
rvae(*a)
fl
\
RVAe(*fe)
fifi
RVAe(*fe)
fi
RVAe(*ft) _ .
Л +RVA«ii(iA)
h
rvae(**)
fifi
RVAE
h2fi
rvae (*a )
fifi
rva£(^) p . .
J
(Д-23)
Если же mk < 3, то получить оценки относительных координат нельзя,
но возможность оценить VAN сохраняется. Сама по себе оценка VAN
не имеет смысла. Однако при увеличении созвездия наблюдаемых НС
до четырех полученная на предыдущих шагах плавающая оценка VAN
будет полезна для исключения неоднозначности фазовых измерений,
а следовательно, и для повышения точности оценки 5S(tk).
Для получения оценки VAN при mk < 3 сформируем разности
между фазовыми и кодовыми измерениями, в которых исключается
VAD[SA(ift), SB(tA), tk] (см. (Д.1)):
VAZ^ (tk)-VAZC/A(tk) =
=X1VAN1--|vAe(^)-VA-eC/A(^) + VA-eii(^);
VAZ^(tk)-VAZC/A(tk).
(Д-24)
— ЛоVANо
к+ fi
fifi
VAe(fA) - VAaC/A(tk) +
и снова применим MHK. Искомая оценка VAN и ковариационная матрица
ее погрешности определяются по формулам типа (Д.21) и (Д.22):
VAN(f*) =
= VAN(fА) + PVAN (tk )Н(tk f RVAe (tk Г1 [ VAz(tk) - H(tk )VAN(tk)]; (Д. 2 5)
-l-l
-li
(Д.26)
Для вектора измерений, матрицы наблюдения и ковариационной
матрицы погрешностей измерений в (Д.25), (Д.26) использованы такие
же, как в случае mk > 3, обозначения VAz(^), H(fA), RVAe(ift), но здесь
они определяются как:
VAz(f А) = {[VAZ1! (tk) - VAZC / Л (tk )]т, [VAZ^ (tk )-VAZC/A (tk )]T
325
H(t*) =
Хг E
ть*ть
0 Xo
RvAe^k) ~
4
—4 Rvде Да) + Rvддс 1A Д* )
A
щ2+ fi)
A4fi
Rvae Да) + Rva©c/a Д*)
2(/i2 + fj)
A4fi
(fl+fj)2
A%4
RVA6 (Д) + Rva6c/a Да)
rva e Да) + R VAff'A Да)
(Д.27)
Отметим, что в выражении для Иуде не учитываются дисперсии
шумов фазовых измерений ввиду их малого значения по сравнению с
дисперсиями кодовых шумов и ионосферных погрешностей.
Если на (к - 1)-м шаге измерения не поступали, либо текущий шаг
решения является начальным, либо в текущем созвездии содержится
менее двух НС из используемых на (к — 1)-м шаге, принимается:
VAN(t*) = 0; PvAN^r^O.
В противном случае, т. е. когда в текущем созвездии содержится более
двух НС из созвездия на предыдущем шаге, формирование векторов вто¬
рых разностей измерений начинается с измерений от НС, используемых
на (к - 1)-м шаге, а значения VAN(ffc), РудмДа)-1 определяются как:
( Л ^
О
VAN (tk) =
C(^)VAN2(^_!)
rVAN
Д*)
_Яп_Да) ! 0
o'
0
0
)
!0
Q12 Да)
0
!°
0
0
1
! о
Q22 Да)
0
! 0
0
0
(Д.28)
где С(tk) — (rhfc x тп^)-матрица, определяемая ниже; mk + 1 — число НС, об¬
щих для текущего и предыдущего шагов решения; §пДа)> Ql2(fA)’ §22Да)
(mk х пгА)-блоки матрицы
Q(*a) =
^пДа) Q12 Да)
^12Да) Q22 Д*),
СДа )PVAN,! Да-1 )СДа )Т СДа )PVAN12 Да-1 )С(Д )Т
СДа )Pvan12 Да-i )т С Д* )т С (tk )РУйщ2 (t*_! )С (tk у
4-1
326
pVANn’ pvan12> pvan22 — (mk x -блоки матрицы
Матрица С(tk) формируется в зависимости от того, сохранился ли НС,
выполнявший роль опорного на (ft — 1)-м шаге, в текущем созвездии.
Если опорный НС предыдущего шага сохранился в текущем созвез¬
дии, он продолжает использоваться в том же качестве. При этом каждая
j-я строка матрицы С(tk) состоит из нулей, кроме единицы в столбце
с номером, под которым у-й НС текущего созвездия входил в созвездие на
(ft - 1)-м шаге. Например, в случае, когда в текущем созвездии отсут¬
ствует последний из используемых на (ft - 1)-м шаге пяти НС, матрица
C(tk) имеет вид
Если НС, который был опорным на (ft - 1)-м шаге, в текущем созвездии
отсутствует, в качестве опорного выбирают какой-либо другой НС из ис¬
пользуемых на (k - 1)-м шаге. В этом случае каждая у-я строка матрицы
С(tk) содержит два ненулевых элемента: минус 1 в столбце с номером,
под которым опорный НС текущего созвездия входил в созвездие на
(ft - 1)-м шаге, и 1 в столбце с номером, под которым у'-й НС текущего
созвездия входил в созвездие на (ft - 1)-м шаге. Например, в случае, когда
в текущем созвездии отсутствует опорный и последний из используемых
на (ft - 1)-м шаге пяти НС, матрица С(tk) имеет вид
Исходя из вышесказанного алгоритм плавающего решения может быть
представлен с помощью схемы, изображенной на рисунке Д.1.
Отметим, что представленный алгоритм плавающего решения мож¬
но легко модифицировать для задачи с одночастотными фазовыми
измерениями. При этом оцениваемый с помощью МНК вектор x(ift)
будет представлять собой x(i^) = [5S(tft)T, VAN1T ]т, а вектор измерений
VAz(tk) иметь вид VAz(ift) = [VAzC/A(^)t, VAz*1 (f*)T]T ДЛЯ 771 £ ^ 3 И
сократятся размерности матриц H(f^), R4Ae(tk), Px(tk), PVAP$(tk).
Целью фиксированного решения является определение наиболее веро¬
ятного значения вектора VAN. В случае, если вероятность этого значения
'1 0 0 0'
С (**)= 0 10 0.
1о 0 1 oj
1 о
О 1
VAz(^) = VAZ^1 (tk) - VAZC/ A(tk) для mk < 3. Соответствующим образом
Д.З. Фиксированное решение
327
fc = 1
~k: »*■*■ l|*-^ mA> 0
}л>
H*r
(t>1
0»
, f _
Опр*,Лел*ми* НС, общи* ДМ A'-fO и
\k~lt-fo шагов решение
1 Hfft
О р число общих t
Л»
Фоемирлмии» 4V.vV*i,^fJA-(rt»
1Д »1
«.H.lfj'V
Эфемеред* не »ы
ШЦЙМ ислучрми»,
СИГМАЛОЙ
Нет Дл
т. >2
Вычисление дальностей и
каприо.-мощи* яосммусов дм НС
{**»[$■ («*)Л<'*>•*]. °<ri')
Удгс<Ац'|
' К
1 1
i I
Формирование
<д2$к<дг«
Формирован»*
|Д.71,(Д24|
I
Вычмсллим* Гл.У<
щ ге
f# 1 A-vvlH •
L<ft27) 1
вычислемме X 1- р‘к |
•Л 22), <Д 2 Л ,
Н алгоритму
фиксированного решений
Рис. Д.1. Алгоритм плавающего решения
достигает установленного порога (близкого к единице), отыскивается
уточненная оценка вектора погрешностей координат базы 6S(tk) в пред¬
положении, что наиболее вероятное значение VAN является истинным.
Строго говоря, пользуясь результатами плавающего решения, среди всех
возможных целочисленных значений VAN1 , i — номер значения, здесь
требуется найти такое VAN (tk), которое имеет наибольшую апостериор¬
ную, т. е. условную ко всем полученным измерениям VAz(^), ..., VAz(fft),
вероятность
/(i*) = P[VAN = VAN*(th)/vAz(ti), ..., VAz(t*)] =
= maxP[VAN = VAnVvAz^), ..., VAz(tft)]. (Д.29)
VAN*
328
При выполнении условия
Р* (Ч) = Р> (Д-30)
_ А*
где р « 1 — заданный порог, определяется оценка 5S (tk) как условное
математическое ожидание
5S\tk) = м[б8(^)/удг(^), ..., VAz(*ft),VAN = VAN* (**)].
Кроме того, вычисляется ковариационная матрица погрешности
Л
оценки 5S(tk):
P5s(^) =
:М<
/VAz^),..., VAz(£ft), VAN = VAN (fft)
Для 5S (tfc), P5S(f*) с учетом гауссовости погрешности плавающего
решения, вытекающей из предполагаемой гауссовости погрешностей из¬
мерений VAeC/,j4, VAtf^1, VAtf^2 и VAe справедливы формулы:
\-1
8 S (tk ) - 8 S(tk ) + Pgg, VAN )PVAN (4 )
VAN (tft)-VAN(^)
; (Д-31)
P5S (tk) - P§s (fk)~ P5S, VAN )PVAN (4) lp5S,VAN(*fc)T> (Д-32)
A
где 5S(fb) — полученная при плавающем решении оценка вектора л
Л о гх/ , ,
[подвектор x(ift) P5S van (tk) — соответствующие блоки ковариа¬
ционной матрицы Px(£fc) погрешностей плавающего решения.
Полагаем все целочисленные значения VAN1 априорно равновероят¬
ными. Выше было показано, что в этом случае наиболее вероятное зна-
* Л
чение VAN (tk) связано с результатами плавающего решения VA N(fft) ,
Pvan (tk) выражением
VAN*(fft) = arg min g(VAN;,fft), (Д.ЗЗ)
VAN'
VAN'-VAN(t*) PvAN^r1 VAN;-VAN(fft) .
где q(VAN‘,tk) =
Нетрудно также показать, что апостериорная вероятность этого зна¬
чения определяется как
expj-^g[VAN*(tft),tft]j
p\tk) = Lf- L-. (Д.34)
X exp -ig[VAN! (**),**]
VANf *- t
329
Далее для простоты в обозначениях будем опускать временной аргу.
мент tk.
Заметим, что непосредственное использование выражений (Д.33)
(Д.34) для поиска VAN (tk) и вычисления невозможно из-за не¬
обходимости выполнять перебор неограниченного числа значений VAN'
Ясно, что на практике перебор приходится осуществлять лишь в некото¬
рой ограниченной области П.
Очень просто организовать перебор в прямоугольной области, ограни¬
ченной неравенствами типа
VAN;-VAN;(t*)
- (Д-35)
и
где VANy,VAN;(£ft) — j-я компонента вектора VAN и соответствующая
оценка плавающего решения; PvaN-.(^a) — Р® диагональный элемент
11 Л
матрицы Pvan(^a) [дисперсия погрешности оценки VAN;(tfe) ]; q - не¬
который заданный порог. Однако эта область непригодна для практиче¬
ского использования, поскольку в ней содержится много «бесполезных»
значений VAN, для которых величина квадратичной формы q(VANl ,tk)
велика и которые поэтому не оказывают существенного влияния на апо¬
стериорную вероятность p*(tk) [см. (Д.34)]. Особенно велико количество
«бесполезных» значений VAN в случае использования двухчастотных
фазовых измерений, а также при избыточном числе (больше трех) одно¬
частотных измерений.
Для того чтобы в (Д.ЗЗ), (Д.34) не тратить вычисления на значения
VAN1, характеризующиеся большой квадратичной формой q(VANl,tk),
целесообразно ограничиться перебором VAN1, находящихся в эллипти¬
ческой области, определяемой неравенством
q(V&rf,tk)<q, (Д. 36)
где порог q выбирают исходя из погрешности вычисления вероятности
p*(tk). Однако определение целочисленных значений VAN1, принадлежащих
области (Д.35), представляет собой нетривиальную задачу, так как при ис¬
пользовании двухчастотных фазовых измерений либо избыточного числа
одночастотных измерений собственные числа ковариационной матрицы
Рудщ(£*) различаются на порядки. Вследствие этого эллипсоид (Д. 36) оказы¬
вается сильно вытянутым, и, чтобы найти охватываемые им целочисленные
значения VAN* , приходится разрабатывать специальный алгоритм.
Далее рассматривается экономичный в вычислительном отношении
алгоритм, обеспечивающий поиск наиболее вероятного значения (Д.ЗЗ)
и вычисление его апостериорной вероятности (Д.34) с использованием
значений VAN* из области (Д.36). В целях сокращения вычислительных
затрат алгоритм разделен на два этапа.
330
Назначение первого этапа состоит в скорейшем нахождении значения
VAN без вычисления его апостериорной вероятности р*. При отыскании
каждого нового значения VAN*, удовлетворяющего неравенству типа
(Д.36), величина соответствующей ему квадратичной формы g(VAN*) при
последующем поиске выступает в качестве порога q в правой части (Д.36).
Таким образом, в ходе выполнения данного этапа область поиска постепенно
сужается. Такой подход позволяет минимизировать число перебираемых
при поиске VAN значений VAN*. Понятно, что при определении VAN
будет определена и величина <j(VAN*). Однако сама по себе эта величина
не может служить характеристикой достоверности значения VAN . Ведь
даже при нулевом значении этой величины апостериорная вероятность р*
значения VAN может быть близка к нулю, если существуют другие зна¬
чения VAN1, для которых g(VAN‘) мала. Данный этап процедуры носит
вспомогательный характер, обеспечивая последующую возможность по¬
лучать предварительную оценку сверху для вероятности р*.
На втором этапе выполняется поиск других значений VAN*, сопрово¬
ждающийся вычислением вероятности р*. Существенно, что по мере нахож¬
дения новых значений VAN* в области (Д.36) производится оценка этой
вероятности сверху. Причем оценкар* с каждым новым значением VAN*,
учтенным в знаменателе (Д.34), увеличивается. Поэтому в случае, когда
еще не окончательно вычисленная вероятность р* оказывается меньше
порога р, становится ясно, что неравенство (Д.30) невыполнимо, и про¬
цедура фиксированного решения прекращается. Тем самым удается из¬
бежать неоправданных вычислительных затрат, связанных с получением
недостоверного фиксированного решения. Если после учета всех значений
VAN* в области (Д.36) апостериорная вероятность р* оказалась не ниже
Л ,
порога р , производится вычисление оценки 5 S (tk) погрешностей базы
НОСА — НОСв и ковариационной матрицы P§s(^)> характеризующей
точность этой оценки, в предположении, что наиболее вероятное значение
VAN является истинным.
Следует отметить, что в организованном по указанной схеме алго¬
ритме имеет место повторный перебор некоторых комбинаций значений
компонент вектора VAN. Действительно, часть комбинаций значений
компонент VAN, формируемых при поиске на втором этапе выполнения
алгоритма, уже формировалась на первом этапе в ходе поиска значения
VAN , минимизирующим квадратичную форму g(VAN*). Однако повторное
формирование некоторых значений вектора VAN несущественно осла¬
бляет преимущество двухэтапного алгоритма, позволяющего оценить до¬
стоверность фиксированного решения и своевременно отказаться от него,
не производя полного объема вычислений, необходимых для получения
апостериорной вероятности.
В соответствии с изложенными принципами построения алгоритма
его общая структура может быть представлена в виде схемы, изобра-
331
Фиксированное решение
недостоверно
Рис. Д.2. Алгоритм поиска наиболее вероятного значения вектора VAN с оцен¬
кой его апостериорной вероятности
женной на рис. Д.2. Как отмечалось, на первом этапе при поиске VAN
используется уменьшающееся значение порога q^\ тогда как на втором
этапе значение порога q^ не меняется. Заметим также, что начальное
значение порога на первом этапе q^ и значение порога на втором этапе
q® различаются. Их выбирают исходя из соображений, приводимых в
следующем разделе. В последующих разделах будет детально раскрыто
содержание процедур поиска на каждом из этапов.
Итак, в качестве областей перебора of-l\ I = 1,2 (номер этапа фикси¬
рованного решения), как уже указывалось, используются эллипсоиды,
определяемые неравенствами типа (Д.36), т. е.
332
П(г) = {VAN : g(VAN) < д(г)}, 1 = 1,2. (Д.37)
Понятно, что на первом этапе, предназначенном только для поиска
значения VAN , необходимо использовать область П®, содержащую хотя
бы одно возможное значение вектора VAN. Вероятность невыполнения
этого условия меньше вероятности того, что истинное значение вектора
VAN окажется за пределами области поиска, т. е.
Р(П(1) = 0) < P(VAN <2 П(1)) = Р [^g(VAN) > g(1) j. (Д.38)
Отметим, что погрешность полученной с помощью МНК оценки
А
VAN является гауссовой центрированной величиной с ковариационной
матрицей PvaN- Отсюда следует, что квадратичная форма g(VAN) для
истинного значения VAN подчиняется распределению %2 с М = im сте¬
пенями свободы, где i — количество частот, на которых используются
о
фазовые измерения, т. е. представляет собой величину %м■ Учитывая
это обстоятельство, неравенству можно придать вид:
р[о(1) =0]<р[х^ >д(1)] = а1. (Д-39)
Таким образом, задавшись значением верхней границы вероятно¬
сти р[п(1) = 0 j, значение порога q^ целесообразно принимать равным
квантилю порядка (1 - ах) распределения f cAf степенями свободы,
2
т. е.
На втором этапе, в ходе которого производится вычисление апосте¬
риорной вероятности р* значения VAN , область перебора помимо
значения VAN должна содержать и другие значения вектора VAN, ко¬
торые существенно влияют на величину р*. При этом очевидно, что раз¬
мер области должен быть значительно больше размера области П^,
которая может содержать только одно значение вектора VAN. Значение
порога q^2\ определяющего размер области целесообразно задавать
исходя из желаемой точности вычисления р*. Покажем связь погрешности
вычисления вероятности р* со значением порога
Нетрудно видеть, что для относительной погрешности определения р*
с помощью выражения (Д. 34) справедливо равенство:
Ър =
X ехР
VAN* еП<2)
-|g(VAN*)
X exp -itfVAN*)
VAN* L
(Д.40)
Заменим суммы в (Д.40) интегралами и поделим каждый из них на
л/с2тг)
MlPVAN|- В результате, учитывая, что
333
N(VA N;VAN,Pvan) =
(2л)М |P,
шхр
VAN
--g(VAN)
представляет собой гауссову плотность вероятности вектора VAN, по¬
лучим следующее выражение, позволяющее оценить погрешность §р*
вычисления апостериорной вероятности из-за ограниченного числа ис¬
пользуемых значений VAN:
J N
* _ fit»)
VAN; VAN,P,
VAN
dVAN
J
| N\ VAN;VAN,Pv&n dVAN
= P VAN £ fi
,(2)
•[gr(VAN) > g(2)
(Д-41)
Здесь через П^ обозначена неограниченная область всех значений
вектора VAN, не принадлежащих области й®. На основании (Д.41) с
учетом того, что квадратичная форма (/(VAN), как было отмечено выше,
подчиняется распределению %2 с М степенями свободы, можем записать:
;Р[хм >9(2)] = «2-
2)
(Д-42)
Опираясь на это выражение, порог q предлагается устанавливать
равным xL2,M, предварительно выбрав значение а2, руководствуясь
желаемой точностью определения р .
Очевидно, что порог для квадратичной формы q на втором этапе должен
2 2
быть больше, чем на первом, т. е. Xi_ai>M < ^1-а2,М> откуда a2 < oij.
Раскроем теперь содержание процедур поиска значений вектора VAN,
удовлетворяющих неравенству типа (Д.36). Сразу отметим, что в этих
процедурах используется особая организация перебора значений вектора
VAN, обеспечивающая «автоматическое» упорядочивание значений ком¬
понент VAN, которое способствует выполнению скорейшего перебора.
Для вычисления квадратичной формы
g(VANf) =
VAN1 - VAN Р
VAN
VAN' - VA N
будем пользоваться рекуррентной формулой
f
VAN j — VA Ny/y_i
4j = 4j-1 + 2 —» j = q0=0; q
aJ/j-l
, (Д.43)
334
где VANi/o = VANi, crf/0 = of; VANy/y_i, сJy/y_i, J = 2, M—услов¬
ные по отношению к вектору VAN у = (VAN1; VANy)T математическое
ожидание и дисперсия VAN.-, определяемые как:
„ Г л
VA N у / у-i = VA Ny + Ky_j
VANy_! - VANy-i
,j = 2,M; (Д.44)
Ky-i = Р
j = 2, М;
2
у/у—1
; сту - Ку^Ру у^) , j = 2, М.
(Д-45)
(Д-46)
Входящие в формулы (Д.43)...(Д.45) величины ay, Р- j_lt Р-_2 явля¬
ются составными частями ковариационной матрицы Pvan погрешностей
плавающего решения: ст
■ дисперсия погрешности оценки компоненты
VANy; Ру y_j — матрица-строка взаимных ковариаций между погреш¬
ностями оценок компоненты VANy и вектора VANy_x ; р._1 — ковариа¬
ционная матрица погрешности оценки вектора VANy_j . Отметим, что
справедливость рекуррентного выражения можно подтвердить следую¬
щим разложением гауссовой плотности N\ VAN;VAN,Pi
rVAN
VANy; VA Ny / у —1, c*y / y_i
N VAN; VA N, Руд^ = П N
v / j=1
Поскольку значения qv ..., qM образуют неубывающую последова¬
тельность, на каждом j-м шаге рекуррентного вычисления квадратичной
формы q = qM можно определить, существует ли возможность того, что
эта квадратичная форма не превысит значение установленного порога для
рассматриваемых значений компонент VAN^, ..., VANy, и в случае отсут¬
ствия такой возможности взять другое значение компоненты VANy.
В целях сокращения вычислительных затрат, связанных с перебором
значений вектора VAN, предлагается организовать перебор, используя
нумерацию значений компонент VAN. Применительно к j-й компоненте
VAN эта нумерация вводится по правилу:
VANyS;>
^VANy/у-i ) при Sy = 1;
VANy '
(-1) I (Sy - 1) при Sy > 1,
где Q — операция округления до ближайшего целого числа;
(Д.47)
Р; =
О при (VANy1:> - VANy/у-i) < 0;
1 при (VANy1:> - VANy/у-i) > 0.
(Д-48)
335
Рис. Д.З. Нумерация значений й компоненты вектора VAN
Таким образом, значения компоненты VAN.- будут пронумерованы по
1 л
мере их удаления от математического ожидания VAN;/;-i (рис. Д.З).
Отметим, что согласно выражению (Д.47) для всех j = 1, М величина д.
будет увеличиваться с ростом номера Sj значения j-й компоненты VAN.
В связи с этим в качестве первого рассматриваемого значения /-Й компо¬
ненты вектора VAN целесообразно использовать VANj1>, а в качестве по¬
следующих брать VANf2>, VANf3> и т. д. до тех пор, пока ff,- <s.>
1 1 ^ IVAN, = VAN, '
не превысит установленный порог. 1 ‘
Рассмотрим далее возможность сокращения вычислительных затрат,
Л
связанных с пересчетом условных математических ожиданий VANy/y-i
для значений вектора VAN/_;, у которых совпадают начальные компо-
Введем величины и = 1,/-1, определяемые с помощью рекур¬
рентного соотношения
w и—1 тг и
^у-1 — М-у-1 + j-1
VANU - VANц
, P°_1=VANj, (Д.49)
где К“_ 1 — ц-й элемент матрицы-строки К-^.
Отметим, что согласно (Д.32)
VANy/j-\ = (Д. 50)
Допустим, что значение вектора VANj_1, для которого в данный
Л
момент требуется вычислить VAN//;-i, отличается от значения этого
Л
вектора, для которого VAN;//-i было вычислено ранее, компонентами,
имеющими номера с Y; по j — 1. Понятно, что в этом случае величина
у . —
для текущего значения вектора VANj_i будет такой же, как и
для значения VANy_; , используемого ранее. Поэтому для определения
Л
VAN;/1, соответствующего текущему значению VANy_;, достаточно вы¬
числить величины Ц/_1, и = уj,j - 1 по формуле (Д.49). Очевидно, что при
Л
использовании такого способа вычисления VA N; /1 требуется выполнить
336
на у- — 1 операций умножения меньше, чем при непосредственном вы-
Л
числении VAN///-X. Это существенная экономия, поскольку вычисление
Л
математических ожиданий VANy/y-x составляет значительную долю от
общих вычислительных затрат, связанных с определением VAN* и р*.
Чтобы реализовать рассмотренный выше способ пересчета условных
Л
математических ожиданий VANy/y-x в алгоритме поиска наиболее ве¬
роятного значения VAN' и вычисления его апостериорной вероятности,
следует: в начале первого и второго этапов алгоритма все уу, / = 2, М
задать равными единице; в ходе выполнения этапа после вычисления
Ру_у, и = уу,/ —1 для / < М в случае, когда Уу+х > у у, величине Yy+x при¬
своить значение у., а затем величине у • присвоить значение / - 1.
Как уже отмечалось, на первом этапе перебор значений вектора VAN
происходит с использованием уменьшающегося порога q^ для квадратич¬
ной формы q, который принимает значение наименьшей q из вычисленных
на текущий момент. На втором этапе выполнения алгоритма порог для q
не меняется, поскольку здесь требуется определить все значения вектора
VAN, попадающие в заранее заданную область. В заключение второго
этапа при условии, что апостериорная вероятность значения VAN* не
превысила заданный порог, рассчитывается оценка вектора погрешностей
относительных координат 5S(tk) и соответствующая ковариационная
матрица в предположении, что VAN = VAN .
На рис. Д.4 и Д.5 и представлены составленные на основании выска¬
занных выше соображений блок-схемы первого и второго этапов алгоритма
фиксированного решения. Здесь в скобках, как и ранее, указаны номера
формул, по которым производятся соответствующие вычисления. Этапы
отличаются друг от друга начальными блоками и частями, которые об¬
ведены штриховой линией.
Рассматриваемое ниже дополнение к предлагаемым процедурам
связано с одним очевидным обстоятельством: с точки зрения конечного
результата безразлично, каким образом из имеющихся фазовых измере¬
ний составлены векторы VAz^1 и VAz^2, т. е. здесь не важно, какому
конкретному измерению соответствует та или иная компонента этого век¬
тора.Однако объем необходимых для получения окончательного решения
задачи вычислений в немалой степени зависит от того, каким образом
сформированы векторы измерений VAz^1 и VAz^2. В связи с этим возни¬
кает вопрос, как переставить компоненты вектора VAN, чтобы повысить
экономичность предлагаемых процедур. Для получения ответа на данный
вопрос рассмотрим случай, в котором VAN — двумерный вектор, а об¬
ласть перебора, т. е. или £2^, представляет собой сильно вытянутый
эллипс, изображенный на рис. Д.6.
Здесь узлы сетки представляют собой возможные (целые) значения
компонент вектора VAN. Предполагается, что L» 1. Обращаем внима¬
ние, что в данном случае для каждого из L значений VAN1; входящих
337
VAV Д-, ,v “ результаты плавающего решения, cq
1
Вычисление AT/-_J, «Ту,- / = 2,М (Д-45), (Д.46)
Определение Хц,.м> 0(l> := Х«,,,w.
Формирование УДЛО'1' (Д.47)
Вычисление с/; при УДЛ^-= УД\'уЛ,> (Д.43)
./ := ] + 1
Вычисление р“_1 (Д-49) при
УД/V,, = У ДЛ^'» =•; „ = yj,j-\;
УДЛ'/., 1
VA/V
Ко 2-му этапу
II.
J
Рис. Д.4. Первый этап фиксированного решения
VA.ty*, ij{,) = ?(УДЛ'*), КI.|, 07 j - 2,М - определены на 1-м этапе
УЛЛ - мланающая оценка, си, р
Рис. Д.5. Второй этап фиксированного решения
339
в область перебора, приходится дважды вычислять квадратичную фор¬
му д2, соответствующую разным значениям VAN2 • При этом второй раз
д2 Для одного и того же значения VAN^ вычисляется только для того,
чтобы принять решение о переходе к следующему значению VANj . Если
же поменять местами VANj и VAN2 > то объем вычислений значительно
сократится, так как в этом случае потребуется только L + 1 раз вычис¬
лить квадратичную форму д2 Для одного значения первой компоненты
(в качестве которой будет выступать VAN2).
Учитывая высказанные применительно к рассмотренному частно¬
му случаю соображения, в общем случае для повышения экономич¬
ности рассматриваемых процедур представляется целесообразным
вместо исходного вектора VAN использовать преобразованный вектор
VA7V* = (VAN^, ..., VANUm)t. При составлении этого вектора номера Uj
образующих его компонент исходного вектора определяются последова¬
тельно (сначала затем и2 и т. д.) по правилу:
arg min ст„ при j = 1;
u=l,M
о
arg min <S„ , при j > 1,
u=i,M /J
(Д.51)
2 —
где Su/j-l — условная по отношению к вектору VAA=(VANUi,
VANU )т дисперсия погрешности оценки VANU. Обращаем внимание, что
^ ^ 2
определение Uj осуществляется параллельно с вычислением <5>ц ^ и Kj_ j,
для которых справедливы выражения, аналогичные (Д.45), (Д.46):
Ъ-1 = (Д.52)
с2 -
с> , . - ~ С7
Uj/]-1 Uj
(Д.53)
340
где "Рцт ._х — матрица-строка взаимных ковариаций погрешностей оценки
компоненты VANU и вектора VAAPj-1 — ковариационная матрица
погрешностей оценок вектора VAA/’;_1-
Понятно, что для формирования значений j = 1,М, вы-
Л
числения математических ожиданий VAAfj/j-i, j = 2,М и значений
квадратичной формы q можно использовать выражения (Д.43)...(Д.46),
Л Л ^2
заменив в них VAN; на VANU;, К“_г на j/j-l на После
определения наиболее вероятного значения VAAГ* вектора VAA/" значение
VAN* можно получить в результате обратной перестановки компонент
vaaT в соответствии с равенствами VAN* = VAAfj, j = 1 ,M.
Конечно, определение наиболее подходящего варианта преобразования
вектора VAN требует определенных вычислительных затрат. Однако
эти затраты несущественны по сравнению с положительным эффектом,
который дает такое преобразование при выполнении процедуры перебора
значений VAN.
Необходимо сказать, что предлагаемое преобразование вектора VAN
является простым, но оно не претендует на минимизацию затрат, связан¬
ных с перебором значений VAN. Экономичность перебора может быть зна¬
чительно повышена за счет предложенного в [190] перехода от исходного
вектора VAN к вектору, полученному в результате специального линей¬
ного преобразования — Least-squaresAMBiguityDecorrelationAdjustment
(LAMBDA). Особенность этого преобразования состоит в том, что возмож¬
ными значениями компонент преобразованного вектора, как и исходного
вектора VAN, являются целые числа. При этом ковариационная матрица
для преобразованного вектора имеет вид близкий к диагональному, что
способствует более экономичной реализации методов поиска. Следует,
однако, отметить, что матрица, соответствующая такому преобразованию,
может быть определена только численно (с помощью итерационной про¬
цедуры), а это очевидно связано с дополнительными затратами.
Д.4. Анализ существующих методов фиксированного решения
и их сопоставление с предлагаемым методом
В настоящее время существует ряд методов получения фиксирован¬
ного решения, т. е. значения VAN*, минимизирующего квадратичную
форму g(VAN).
Например, в работе [180] первичный набор значений вектора VAN
определяется с помощью неравенств типа (Д.35). Отобранные с помощью
(Д.35) значения далее проверяются на выполнение неравенств
VAN; -VAN;' - VAN;
ll n lz
-VAN
12
341
где а2. . — вычисленная на основании Рудя дисперсия погрешностей
оценок разности VANy - VANy . Для значений вектора VAN , прошед¬
ших такую проверку, вычисляются квадратичные формы q, из которых
отбираются наименьшая q* и следующая за наименьшей q**. В случае
выполнения неравенства
q /q > ^i-a,м,М' (Д-55)
где F\-a,M,M — квантиль порядка 1 - a (a « 1) для F-распределения
(распределения Фишера) сМиМ степенями свободы, значение VAN*, со¬
ответствующее q*, принимается в качестве истинного. Применение
условия (Д.55) основано на том, что отношение квадратичных форм,
сформированных из гауссовских векторов и соответствующих им кова¬
риационных матриц, подчиняется распределению Фишера. Поэтому при
выполнении неравенства (Д.55) значение VAN**, соответствующее <?**,
не может быть истинным.
Отметим, что дополнительное по отношению к (Д.35) ограничение
области перебора неравенствами (Д. 54) не позволяет кардинально сокра¬
тить число перебираемых значений и вычисления квадратичной формы
q для этих значений. Кроме того, отношение квадратичных форм (Д.55)
является менее очевидной характеристикой достоверности VAN*, чем
апостериорная вероятность.
Д.5. Рекуррентное вычисление квадратичной формы
на основе разложения Холецкого
Метод, предложенный в работе [191], опирается на возможность пред¬
ставления матрицы Рудр} в виде произведения
PviiV = STS, (Д-56)
где S — треугольная матрица. Операция такого разложения симметричной
матрицы носит название декомпозиции Холецкого.
Представление матрицы PvIn в виде (Д.56) удобно тем, что с его
помощью можно достаточно легко вычислять квадратичную форму q,
используя рекуррентную процедуру. При этом на каждом шаге рекур¬
рентного вычисления q можно проанализировать целесообразность его
продолжения. Например, если S — нижнетреугольная матрица, то вы¬
числение квадратичной формы q производится по формуле
[ i ^
9i=9j-i+ ZSy.j(VAN; -VAN;)
v=l J
= q0 =0, q = qM, (Д.57)
где Sy i — элементы матрицы S (j — номер строки, i — номер столбца).
Для каждого j значения q■ проверяются на выполнение неравенства типа
qj <q и в случае отрицательного результата этой проверки вычисления
342
(Д.57) для данного значения вектора VAN прерываются и начинаются
вычисления для следующего значения.
Благодаря применению рекуррентной формулы (Д.57) объем вычис¬
лений, связанных с определением квадратичной формы q, существенно
снижается, однако число перебираемых значений здесь велико из-за
использования простейших неравенств (Д.35) для ограничения области
проверяемых значений VAN.
Д.6. Ограничение перебираемых компонент
с помощью условных интервалов
Следующим усовершенствованием алгоритма фиксированного реше¬
ния можно считать метод из работы [192], где искомое значение VAN
определяется с помощью условных интервалов для компонент этого
вектора. Условными такие интервалы являются в том смысле, что при
их определении учитываются значения предшествующих компонент.
Указанные интервалы имеют вид
VANj — VAN;/;—1
= 1>м>
(Д-58)
о
где VANy/y-ijCTy/;-.; — условные по отношению к VAN;,i = 1,у -1
математическое ожидание и дисперсия у-й компоненты вектора VAN,
определяемые по формулам (Д.44), (Д.46). Математические ожидания
Л
VA N;/;—1 вычисляются последовательно по мере увеличения у. Вы-
А
числение VANy/y-i при у > 1 осуществляется только для тех значений
компонент VAN1; ..., VAN^_1, которые принадлежат соответствующим
интервалам вида (Д. 58). В случае, когда все интервалы (Д. 58) содержат по
одному целому числу, истинное значение вектора VAN считается опреде¬
ленным. При этом в качестве компонент VAN выступают найденные це¬
лые числа. В противном случае среди значений вектора VAN, компоненты
которых принадлежат интервалам (Д.58), определяется пара значений,
соответствующих двум наименьшим значениям квадратичной формы q,
т. е. q* и q"*. При выполнении неравенства (Д.55) значение вектора VAN,
соответствующее наименьшей квадратичной форме q*, принимается за
истинное.
Очевидное достоинство этого метода заключается в том, что исполь¬
зуемая в нем область перебора значений вектора VAN имеет значительно
меньший объем по сравнению с объемом области, определяемой неравен¬
ствами (Д.35) и (Д.54). Тем не менее область перебора здесь более обширна,
чем область, которая определяется неравенство q(VAN) < q.
343
Д.7. Использование условных интервалов и рекуррентной
формулы для квадратичной формы
Наиболее удачным из существующих методов фиксированного реше¬
ния представляется метод, предложенный в работе [193]. По существу,
он объединяет в себе положительные черты изложенных выше способов.
В этом методе определяются условные интервалы для каждой j-тк компо¬
ненты вектора VAN и одновременно вычисляются соответствующие этим
компонентам промежуточные значения д;- квадратичной формы q. При¬
чем условные интервалы для /-й компоненты здесь, в отличие от (Д.58),
формируются с учетом Таким образом, реализация этого метода
заключается в определении для VAN^, удовлетворяющих неравенству
VANy -VAN;/;—1
(Д. 59)
значений qj по формуле (Д.43).
Следует, однако, иметь в виду, что наряду с очевидным преимуществом
такой организации перебора значений VAN перед рассмотренными выше
методами (меньшее число проверяемых значений вектора VAN ) она име¬
ет недостаток, заключающийся в использовании трудоемкой операции
извлечения квадратного корня. Эту операцию приходится выполнять
всякий раз, когда происходит смена значений компонент вектора VAN
с номерами от 1 до М - 1.
Д.8. Алгоритмы перебора с использованием уменьшающегося
порога для квадратичной формы
Понятно, что при поиске VAN определять значения VAN, для ко¬
торых величина квадратичной формы q превышает наименьшее из уже
полученных значений этой квадратичной формы, не имеет смысла. Учесть
отмеченное обстоятельство позволяют алгоритмы Depth-First и Best-First,
описанные в работе [194]. Эти алгоритмы рассчитаны на случай, когда
исходный набор возможных значений вектора VAN задается неравен¬
ствами (Д.35) для некоторого значения порога q.
В алгоритмах предполагается использование одного из рекуррентных
способов вычисления квадратичной формы q [(Д.43) или (Д.57)]. В обоих
алгоритмах используется величина д, которая играет роль дополнитель¬
ного (по отношению к q) порога для квадратичной формы д. Порог 9
принимает значение наименьшей из вычисленных на текущий момент
квадратичных форм д. При этом порог q уменьшается по мере того, как
отыскиваются значения вектора VAN, для которых квадратичная форма
g меньше установленной ранее величины g. В алгоритмах на каждом j-м
шаге рекуррентного вычисления квадратичной формы g проверяется, не
превышает ли полученное промежуточное значение д - этой квадратичной
формы значения порога д. В случае, когда указанное превышение имеет
344
место, рассматриваемая комбинация значений компонент VANy, VANy
не получает дальнейшего развития, т. е. вектор VAN с такими значениями
компонент формироваться не будет. Поскольку формирование значений
вектора VAN начинается с первой компоненты, работа алгоритмов за¬
вершается, когда все значения этой компоненты будут исчерпаны. Ис¬
комое значение VAN определяется как значение вектора VAN, величина
квадратичной формы g для которого была присвоена порогу q на момент
завершения поиска.
Различия алгоритмов Depth-First и Best-First заключаются в способах
перебора значений вектора VAN. В Depth-First перебор осуществляется
путем организации вложенных циклов для компонент вектора VAN,
пробегающих все возможные целые значения, удовлетворяющие соот¬
ветствующим неравенствам вида (Д.35). При этом цикл по компоненте
VANj^ вкладывается в цикл по компоненте VAN^_y и т. д. Во внешнем
цикле происходит перебор значений компоненты VAN}. Таким образом,
работа алгоритма начинается с вычисления для одного из значений
вектора VAN квадратичной формы q, величина которой принимается в
качестве начального значения порога q . Затем осуществляется перебор
остальных значений вектора VAN с одновременным вычислением соот¬
ветствующих квадратичных форм q. При этом сначала в векторе VAN,
для которого была вычислена квадратичная форма q, изменяется значение
компоненты VANj^. После того как все значения этой компоненты будут
исчерпаны, изменяется значение компоненты VANAf_1 и т. д. Обращаем
внимание, что в данном алгоритме помимо q для каждого j = l,M — l
требуется запоминать лишь по одному значению qу.
Понятно, что для скорейшего определения значения VAN* при исполь¬
зовании порога q важно как можно раньше определить такое значение
вектора VAN, для которого величина квадратичной формы q близка к
минимальной, т. е. желательно организовать перебор значений вектора
VAN так, чтобы порог q уменьшился как можно быстрее. Вариант такой
улучшенной организации перебора применяется в алгоритме Best-First.
В этом алгоритме, перед тем как полностью вычислить квадратичную
форму q для каких-либо значений вектора VAN, проводится ряд подгото¬
вительных действий, направленных на выявление таких значений VAN,
от которых можно скорее всего ожидать, что для них величина q будет
близка к минимальной. Подготовительные действия состоят в том, что
на каждом у-м шаге алгоритма величина ду вычисляется не для одного
значения компоненты VAN у, а сразу для всех ее значений, удовлетворяю¬
щих неравенству (Д.35). При этом в случае, когда / > 1, предполагается,
что значения компонент VAN;, i = l,y —1 зафиксированы, т. е. д- при
j = 2, М вычисляются для какой-либо одной комбинации значений этих
компонент. После вычисления величин ду выполняется их сортировка,
по результатам которой вводится нумерация значений компоненты VAN у
так, что ду для первого значения VANy наименьшая, а для последнего —
наибольшая. При этом нумеруются лишь те значения VANy, для которых
ду не превышает порог д. Значения VANy, которые не удовлетворяют
345
этому условию, на последующих шагах алгоритма не используются. На
(j + 1)-м шаге алгоритма вычисление величин д;+1 сначала выполняется
для первого значения компоненты VAN;-, которое затем меняется на вто¬
рое значение этой компоненты и т. д. Таким образом, при формировании
значений вектора VAN приоритет отдается тем значениям компонент
VANy, для которых величина д. меньше.
Заметим, что при реализации алгоритма Best-First возникает необхо¬
димость единовременного хранения массивов значений qf для каждого
j = 1, М — 1. До вычисления первой квадратичной формы q, т. е. до того
как будет определена величина порога Я, эти значения определяются
неравенствами (Д.35). Количество таких значений может быть очень
велико. Поэтому для реализации схемы Best-First требуется большой объ¬
ем оперативной памяти. Важно также отметить, что хотя этот алгоритм
и ориентирован на более быстрое по сравнению с Depth-First выявление
значения вектора VAN, для которого квадратичная форма q близка
к минимальной, это усовершенствование требует выполнения сортировки
величин q ■, j = 2, М -1 после каждого изменения значения компоненты
VANy_j. В связи с этим время работы Best-First не всегда оказывается
меньше, чем у Depth-First.
Если не принимать в расчет алгоритмы Depth-First и Best-First, в ко¬
торых используется уменьшающийся порог q для значений квадратичной
формы q, то метод, основанный на использовании выражения (Д.47), можно
назвать самым совершенным из существующих методов фиксированного
решения, поскольку в нем одновременно используются два из отмеченных
выше эффективных приема: рекуррентный способ вычисления q и условные
интервалы для компонент VAN, границы которых определяются с учетом
промежуточных результатов вычисления q. Представляется целесообраз¬
ным попытаться модифицировать этот метод с тем, чтобы использовать
в нем еще и третий из отмеченных выше приемов — уменьшающийся порог
Я. Но, к сожалению, такое объединение оказывается малоэффективным,
поскольку после каждого изменения Я возникает потребность в пересчете
границ условных интервалов для всех компонент вектора VAN. Отсюда
следует, что для существенного снижения вычислительных затрат нужно
использовать принципиально новую организацию перебора значений век¬
тора VAN, которая позволит ограничить множество анализируемых значе¬
ний этого вектора с помощью более простых средств, не препятствующих
эффективному использованию уменьшающегося порога Я ■ Именно такая
организация перебора и была предложена выше.
Д.9. Анализ преимуществ предлагаемого метода
фиксированного решения
Итак, обсудим достоинства предложенного варианта перебора значе¬
ний вектора VAN.
Отметим, что использование нумерации (Д.47), (Д.48) значений ком¬
понент вектора VAN позволяет организовать перебор без необходимого в
346
методе, основанном на (Д.59), вычисления границ условных интервалов,
содержащих перебираемые значения компонент VAN. С точки зрения
экономичности это обстоятельство представляется существенным, по¬
скольку определение границ указанных интервалов, как уже отмечалось,
связано с выполнением трудоемкой операции извлечения квадратного
корня. В предлагаемых процедурах выполнения подобных трудоемких
операций при переборе значений вектора VAN не требуется. Отказ от
применения условных интервалов открывает также возможность более
эффективного использования уменьшающегося порога Q. Предлагаемая
организация перебора не приводит к необходимости пересчета каких-либо
промежуточных результатов при уменьшении порога q.
Обсудим теперь преимущества предлагаемой организации перебора
значений вектора VAN по сравнению с алгоритмами Depth-First и Best-
First, в которых также применяется уменьшающийся порог q. В первую
очередь отметим, что значения вектора VAN в предлагаемом методе бе¬
рутся в таком же порядке, как и в Best-First, т. е. первым всегда берется
то значение компоненты VANy, для которого величина qj меньше. Но в
отличие от данного алгоритма предлагаемый метод не требует заранее
вычислять, сортировать и запоминать массивы величин для множеств
значений VANy, ; = 1,М-1, поскольку выражения (Д.47), (Д.48) авто¬
матически определяют значения VANy в порядке возрастания соответ¬
ствующих им <jy. Важно при этом отметить, что определение значений
VANy осуществляется с помощью легковыполнимых операций с целыми
числами. Несмотря на указанное сходство с Best-First, предложенный
метод фиксированного решения по характеру перебора близок к Depth-
First, в котором единовременно формируется только одно значение VAN .
Но в Depth-First значения компонент VAN не упорядочиваются в со¬
ответствие с величиной Qj, как это делается в алгоритме Best-First и в
предлагаемом методе.
Таким образом, демонстрируемая организация перебора значений век¬
тора VAN обладает основными достоинствами существующих подходов,
и в то же время она свободна от их недостатков.
Кроме того, еще одним преимуществом предлагаемого метода фикси¬
рованного решения является использование в нем экономичной схемы
Л
пересчета условных математических ожиданий VANy/y-i для значений
вектора VAN У которых совпадают начальные компоненты [см. вы¬
ражения (Д.4^), (Д.50)].
347
Список литературы
1. A GPS Receiver for Space Applications / О. Montenbruck, M. Markgraf,
S. Leung, E. Gill // Proceedings of the 14th International Technical Meeting
of the Satellite Division of The Institute of Navigation (ION GPS 2001). —
Salt Lake City, UT, 2001. — P. 227-232.
2. Mosaic GNSS Receiver LEO, MEO, GEO [Электронный ресурс]. —
Режим gocTyna:http://www.astrium.eads.net/en/equipment/mosaicgnss-
receiver.html. (дата обращения: 04.04.2014).
3. GPS ReceiversSolutions [Электронный ресурс]. — Режим досту¬
па: http://www.thalesgroup.com/Portfolio/Documents/GPS_Receivers_
Solutions/ (дата обращения: 10.10.2013).
4. Topstar 3000 — An Enhanced GPS Receiver for Space Applications
[Электронный ресурс]. — Режим доступа: http://www.esa.int/esapub/
bulletin/bulletl04/gernerl04.pdf (дата обращения: 04.04.2014).
5. ГЛОНАСС. Принципы построения и функционирования / Под ред.
А. И. Перова, В. Н. Харисова. — М.: Радиотехника, 2010. — 800 с.
6. Misra P., Enge P. Global Positioning System. Signals, Measurements
and Performance. — Ganga-Jamuna Press, 2006.
7. Харисов В. H., Яковлев А. И., Глущенко А. Г. Оптимальная филь¬
трация координат подвижного объекта // Радиотехника и электроника. —
1984. — № 29. — Вып. 10. — С. 1939-1947.
8. Перов А. И. Оценка параметров сигнала. — М.: Изд-во МЭИ,
1997.
9. Van Diggelen F. S. Т. A-GPS: Assisted GPS, GNSS and SBAS. —
Artech House, 2009. — 380 p.
10. Kaplan E.D., Hegarty C. Understanding GPS: Principles and
Applications. Artech House Mobile Communications Series. — Artech House,
Inc., Boston, Second Edition, 2006.
11. Космонавтика — БСЭ — Яндекс. Словари [Электронный ресурс]. —
Режим доступа: http://slovari.yandex.ru/~% D0% ВА% D0%BD% D0% B8
% DO % B3 % DO % В8/ % DO % 91 % DO % A1 % DO % AD/ % DO % 9A% DO % BE%
Dl% 81% D0% BC% D0% BE% D0% BD% D0% B0% D0% B2% Dl% 82% D0%
B8%D0%BA%D0%B0/ (дата обращения: 04.04.2014).
12. Разработка бортовой системы автономной навигации для космиче¬
ских средств с использованием глобальных навигационных спутниковых
систем (шифр: ОКР «Борт- САН») [Электронный ресурс]. — Режим досту¬
па: http://www.all tenders. ru/tender_podrob_new.asp?KodTendera^ 182 239
(дата обращения: 03.03.2013).
13. Gurevich G., Wertz J. R. Autonomous On-board Orbit Control:
Flight Results and Cost Reduction // JHU/APL Symposium on Autonomous
Ground Systems for 2001 and Beyond. — Laurel, Maryland, April 25-27,
2001. — P. 25-27.
14. Gurevich G., Bell R., Wertz J. R. Autonomous On-board Orbit Control:
Flight Results and Applications // AIAA paper 2000-5226. — Long Beach,
CA, CA, Sept. 19-21, 2000. — P. 19-21.
348
15. Chobotov V. A., Herman D. E., Johnson C. G. Collision and Debris
Hazard Assessment for a Low-Earth-Orbit Constellation // Journ. of
Spacecraft and Rockets. — March-April, 1997. — P. 233-238.
16. Jenkin A. B. Analysis of the Non-Stationary Debris Cloud Pinch
Zone. Paper N AASS-93-625 // AAS/AIAA Astrodynamics Conference. —
Victoria, BC, Canada. — August, 1993.
17. Jenkin A. B. Debris: A Computer Program for Debris Cloud Modeling.
Paper N IAA.6.3-93-746 // 44th Congress of the International Astronautical
Federation. — Graz, Austria. — October, 1993.
18. Jenkin A. B. Probability of Collision During the Early Evolution of
Debris Clouds // 46th Congress of the International Astronautical Federation,
October. — Oslo, Norway. — October, 1995.
19. Johnson N., McKnight D. Artificial Space Debris.— Malabar: Orbit
Book Company, 1991.
20. Preservation of Near-Earth Space for Future Generations / Ed.
J. A. Simpson. — Cambridge: Cambridge University Press, 1994.
21. Гальперин Ю. И., Дмитриев А. В., Зеленый Л. М. Влияние косми¬
ческой погоды на безопасность авиа- и космических полетов // [Электрон¬
ный ресурс]. — Режим доступа: http://www.kosmofizika.ru/pdf/sp_wtr.
pdf (дата обращения: 04.04.2014).
22. Seltze S. М. Electron, Electron-Bremsstrahlung and Proton Depth-
Dose Data for Space-Shielding Applications // IEEE Trans. Nucl. Sc. — N 26.
1979. — Vol. 6. — P. 21-60.
23. Daly E. J., Drolshagen G., Hilgers A., Evans H. D. R. Space
Environment Analysis: Experience and Trends // Environment Modeling
for Space-Based Applications— ESTEC, Noordwijk, The Netherlands, Sept.
18-20, 1996. — P. 15-22.
24. ECSS-E-ST-10-04C [Электронный ресурс]. — Режим доступа:
http://www.spacewx.com/Docs/ECSS-E-ST-10-04C_15Nov2008.pdf (дата
обращения: 04.04.2014)
25. Kayali S. Space Radiation Effects on Microelectronics [Электронный
ресурс]. — Режим flocTyna:http://parts.jpl.nasa.gov/docs/Radcrs_Final.pdf
(дата обращения: 04.04.2014)
26. Panasyuk М. I. Space Storms and Space Weather Hazards //
Proceedings of the NATO Advanced Study Institute on Space Storms and
Space Weather Hazards. — Hersonissos, Crete, Greece. — 19-29 June,
2000. — P. 251-284.
27. Leyssens J., Markgraf M. Evaluation of a Commercial-Off-The-Shelf
Dual-frequency GPS Receiver for use on LEO Satellites // Proceedings
of the 18th International Technical Meeting of the Satellite Division of
The Institute of Navigation (ION GNSS 2005). — Long Beach, CA, USA,
2005. — P. 1208-1218.
28. PiVoT GPS Receiver / M. D. Wennersten, A. V. Banes, G. J. Boegner
[et al.]// Proceedings of the 14th International Technical Meeting of the
Satellite Division of The Institute of Navigation (ION GPS 2001). — Salt
Lake City, UT, 2001. — P. 855-861.
29. Unwin M. J., Oldfield М. K., Underwood С. I. The use of commercial
technology for spaceborne GPS receiver design // Proceedings of the 11th
349
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GPS 1998). — Nashville, TN, 1998. — P. 1983-1989.
30. Design of a GPS Tracking ASIC for Space Applications /
D. M. Gruenbacher, K. Strohbehn, W. S. Devereux [et al.] // Proceedings of the
12th International Technical Meetingof the Satellite Division of The Institute
of Navigation (ION GPS 1999). — Nashville, TN, 1999. — P. 895-900.
31. „GPS On A Chip” — An Advanced GPS Receiver for Spacecraft /
T. Meehan, C. Duncan, C. Dunn [et al.] // Proceedings of the 11th
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GPS 1998). — Nashville, TN, 1998. — P. 1509-1517.
32. Preliminary orbital results from the SGR space GPS receiver /
M. J. Unwin, М. K. Oldfield, S. Purivigraipong [et al.] // Proceeding softhe
12 th International Technical Meetingof the Satellite Division of Thelnstitute
of Navigation (ION GPS 1999). — Nashville, TN, 1999. — P. 849-
855.
33. Markgraf М., Montenbruck O. Total Ionizing Dose Testing of the
Orion and Phoenix GPS Receivers [Электронный ресурс]. — Режим до¬
ступа: http://www.weblab.dlr.de/rbrt/pdf/TN_0401.pdf (дата обращения:
04.04.2014)
34. Hollreiser М. Advanced GPS/GLONASS ASIC (AGGA2) [Электронный
ресурс]. — Режим доступа: http://microelectronics.esa.int/presentation/
AGGA2.pdf (дата обращения: 04.04.2014)
35. Михайлов Н. В., Чистяков В. В. Приемники спутниковой нави¬
гации космического базирования: архитектура и первичная обработка
сигналов. — Воронеж: Науч. кн., 2014. — 124 с.
36. Aparicio М., Parkinson В. W., Spilker J. J. Jr. GPS satellite and
payload // Global Positioning System: Theory and Applications. — Vol. 1. —
Washington, DC: s.n., 1996. — P. 209-244.
37. Czopek F. Description and Performance of the GPS Block I and II L
Band and Link Budget // Proceedings of ION-GPS-93. — P. 37-43.
38. GEC Plessey Semiconductors, Global Positioning Products Handbook,
August, 1996.
39. Ward P. Effects of RF Interference on GPS Satellite Signal Receiver
Tracking, Chapter 6 in E. D. Kaplan (editor), Understanding GPS: Principles
and Applications, Artech House Publishers, 1996.
40. Method of Cross-correlation and Continuous Wave Suppression for
GPS Signal and Associated GPS Receiver / A. Bochkovskiy, M. Goloubev,
S. Pospelov [et al.] // Pat. N US 7 688 262 B2, March, 2010.
41. Стенд для испытаний в реальном масштабе времени бортовой систе¬
мы определения пространственного положения и параметров орбиты ис¬
кусственных спутников Земли / М. Митнахт, Е. Готтцайн, М. Хартрампф
[и др.]// Гироскопия и навигация. — 2004. — № 2. — С. 25-36.
42. Автоматизированное функциональное регрессионное тестирование
GNSS приемников / Н. В. Михайлов, А. В. Никандров, П. С. Глушков [и
др.] // Материалы XVI Санкт-Петербургской международной конферен¬
ции по интегрированным навигационным системам. — СПб.: Концерн
«ЦНИИ „Электроприбор”». — 2009.
350
43. Space product assurance ASIC and FPGA development [Элек¬
тронный ресурс]. — Режим доступа: https://escies.org/download/
webDocumentFile?id=19656 (дата обращения: 04.04.2014).
44. The NASA ASIC Guide: Assuring ASICS for Space [Электронный
ресурс]. — Режим доступа: http://parts.jpl.nasa.gov/asic/TOC.html (дата
обращения: 04.04.2014).
45. Никифоров А. Ю. Актуальные задачи создания радиационно
стойких изделий микроэлектроники // Материалы науч. сессии МИФИ-
2005. Т. 1. Автоматика. Микроэлектроника. Электроника. Электронные
измерительные системы. Компьютерные медицинские системы. — М.,
2005. — С. 206-207.
46. Ачкасов А. В. Разработка средств автоматизации проектирования
комплементарных микросхем с учетом статических видов радиации кос¬
мического пространства: дис. ... канд. техн. наук: 05.12.13. — Воронеж,
2006. — 155 с.
47. ESCC Qualified manufacturers List [Электронный ресурс]. — Режим
доступа: https://escies.org/download/webDocumentFile?id=60322 (дата
обращения: 04.04.2014).
48. ATC18RHA [Электронный ресурс]. — Режим доступа: http://www.
atmel.com/products/other/space_rad_hard_ics/rad_hard_asics.aspx (дата
обращения: 04.04.2014).
49. Atmel: Aerospace Products Radiation Policy [Электронный ре¬
сурс]. — Режим доступа: http://aerosupport.atmel.com/Atmel/doc4170.
pdf (дата обращения: 04.04.2014).
50. JPL. Section Three: Chapter Four [Электронный ресурс]. — Режим
доступа: http://parts.jpl.nasa.gOv/asic/Sect.3.4.html#A0 (дата обращения:
04.04.2014).
51. Попов В. Проблемы и возможности применения коммерческих
интегральных схем в военной и космической технике [Электронный ре¬
сурс]. — Режим доступа: http://chipnews.gaw.ru/html.cgi/arhiv/99_05/
stat_28.htm (дата обращения: 03.03.2013).
52. Методы повышения радиационной стойкости интегральных
микросхем НПО «Интеграл», предназначенных для условий работы в
космических летательных аппаратах [Электронный ресурс]. — Режим
доступа: http://www.1551a3.ru/datafiles/1817vfll.pdf (дата обращения:
03.03.2013).
53. Department of Defense. Test Method Microcircuits [Электронный
ресурс]. — Режим доступа: http://scipp.ucsc.edu/groups/fermi/electronics/
mil-std-883.pdf (дата обращения: 03.03.2013).
54. European Space Components Information Exchange System [Элек¬
тронный ресурс]. — Режим доступа: URL: https://escies.org/ (дата об¬
ращения: 05.05.2013).
55. Райзберг Б. А., Лозовский Л. Ш., Стародубцева Е. Б. Современный
экономический словарь. — 5-е изд., перераб. и доп. — М: ИНФРА-М,
2007. — 495 с.
56. Smith М. J. S. Application-Specific Integrated Circuits. — Addison-
Wesley, 1997.
351
57. Economics of ASICs [Электронный ресурс]. — Режим доступа: http://
wwwl0.edacafe.com/book/ASIC/Book/CH01/CH01.4.php#pgfId=44056
(дата обращения: 03.03.2013).
58. The NASA ASIC Guide: Assuring ASICS for Space / J. Wall,
A. Macdonald (Eds.) [Электронный ресурс]. — Режим доступа: http: //
parts.jpl.nasa.gov/asic/title.page.html (дата обращения: 03.03.2013).
59. Mosaic GNSS: Anembedded GPS Receiver for Space Applications /
N. Mikhailov, W. Fichter, M. Bruder [et al.] // Proceeding sof the AAS/
IFAC/ESA/ION International Workshop on Aerospace Applications of
the Global Positioning System. Breckenridge. CO, USA, January 31 —
February 2, 2000.
60. SoftFlex: An Advanced Approach to Design of GNSS Receiver
with Software Correlator / A. Botchkovski, V. Chistyakov, M. Golubev //
Proceeding sof the 12th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS 1999). — Nashville, TN,
1999. — P. 353-362.
61. Botchkovski A., Mikhailov N., Pospelov S. GNSS Software Receivers:
Recent Developments // In Proceedings of 7th St. Petersburg International
Conference on Integrated Navigation Systems. — St. Petersburg, May,
2000.
62. Пат. 2140090 Российская Федерация. МПК 6G01S1PO G01S1/30,
G01S5/12. Цифровой приемник спутниковой радионавигационной систе¬
мы / A. JI. Бочковский, М. В. Васильев, М. А. Голубев и др. // Заявитель
и патентообладатель ООО «Софт Нав». — № 99104407/09; заявл. 12.03.99;
опубл. 20.10.99. — 14 с.
63. Комплекс встроенного программного обеспечения для навигацион¬
ного приемника GPS на основе программного коррелятора: свидетельство
об офиц. регистрации программы для ЭВМ 990066 Российская Федера¬
ция / ООО «Софт Нав». — № 980694; опубл. 15.02.99.
64. Михайлов Н. В., Бочковский А. Л., Поспелов С. С. Приемники
GNSS с программным коррелятором: современные разработки // Мате¬
риалы VII Санкт-Петербургской междунар. конф. по интегрированным
навигационным системам. — СПб.: Концерн «ЦНИИ „Электропри¬
бор”». — 2001.
65. Correlation in Software in Comparison to Correlation in Hardware /
P. A. Krauss, S. Berberich, M. Mittnacht [et al.] // International Workshop
on aerospace Applications of the Global Positioning System, Breckenridge,
Colorado, 2000.
66. Development of the MosaicGNSS, a spaceborne GPS/GNSS Receiver to
be used in LEO, GEO and GTO / P. A. Krauss, W. Fichter, M. Mittnacht [et
al.] // In Proceedings of DASIA-2000, Montreal.
67. Pospelov S., Botchkovski A. GNSS Software receivers // GPS
Solutions. — 2000. — Vol. 4, N 1. — P. 48-55.
68. Berberich S., Krauss P. A., Botchkovski A. Development of a Prototype
Spaceborne Galileo Navigation Signal Receiver // Proceedings of the 13th
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GPS 2000). — Salt Lake City, UT, 2000. — P. 855-861.
352
69. Fridman A., Semenov S. Architectures of Software GPS Receivers //
GPS Solutions. — 2000. Vol. 3, N 4. — P. 58-64.
70. Fridman A., Semenov S. Architecture of Software of TFAG50
Low-Cost Low Power GPS/GLONASS Receiver // Proceedings of the 14th
International Technical Meeting of the Satellite Division of The Institute
of Navigation (ION GPS 2001). — Salt Lake City, UT, 2001. — P. 768-
777.
71. Accord’s Next Generation High Performance GPS/WAAS Receiver
Based on the Soft-Correlator / M. R. Shenoy, C. S. Nagaraj [et al.] //
Proceedings of the 14th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS 2001). — Salt Lake City,
UT, 2001. — P. 329-336.
72. Lin D., Tsui J. Acquisition schemes for software GPS receiver //
Proceedings of the 11th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS 1998). — Nashville, TN,
1998 — P. 317-326.
73. Schamus J. J., Tsui J. B. Y. Acquisition to Tracking and Coasting
for Software GPS Receive // Proceedings of the 11th International Technical
Meeting of the Satellite Division of The Institute of Navigation (ION GPS
1998). — Nashville, TN, 1998. — P. 325-328.
74. Won J.-H. GNSS Software Defined Radio, Real Receiver or Just a
Tool for Experts? [Электронный ресурс]. — Режим доступа: http://www.
insidegnss.com/auto/julyaug06-WP.pdf (дата обращения: 04.04.2014).
75. A Software-Defined GPS and Galileo Receiver: A Single-Frequency
Approach, Birkhauser / Borre K., Akos D. М., Bertelsen N. [et al.]. —
2007. — P. 75-86.
76. ERC32 page at ESTEC [Электронный ресурс]. — Режим доступа:
http://www.esa.int/TEC/Microelectronics/SEM2XKV681F_0.html (дата
обращения: 04.04.2014).
77. TSC21020F Radiation Hard 32/40-bit IEEE Floating Point DSP
[Электронный ресурс]. — Режим доступа: http://www.atmel.com/Images/
doc4153.pdf (дата обращения: 04.04.2014).
78. Processors. Aeroflex Gaisler. [Электронный ресурс]. — Режим до¬
ступа: http://gaisler.com/index.php/products/processors (дата обращения:
04.04.2014).
79. ASN-22 Combined GPS/GLONASS Receiver Module — Architecture,
Technical Characteristics and Performance Analysis / T. Felhauer, T. Tews,
A. Botchkovski [et al.] // ION-GPS-97, Kansas City, MI, September, 1997. —
P. 81-87.
80. Heckler G. W., Garrison J. L. Architecture of a Reconfigurable
Software Receiver // In proceedings of ITN-2004, ION, Long Beach, CA. —
P. 947-955.
81. Implementation and Testing of a Real-Time Software-Based GPS
Receiver for x86 Processors / S. Charkhandeh, M. G. Petovello, R. Watson
[et al.] // Proceedings of NTN-2006, ION, Monterey, California.
82. Bit-Wise Parallel Algorithms for Efficient Software Correlation
Applied to a GPS Software Receiver / В. M. Ledvina, M. L. Psiaki,
353
S. P. Powell [et al.] // IEEE Transactions on Wireless Communications,
Vol. 3, N 5, September, 2004.
83. A 12-Channel Real-Time GPS LI Software Receiver / В. M. Ledvina,
S. P. Powell, P. M. Kintner [et al.] // Proceedings of NTM-2003, ION,
Anaheim. — P. 762-782.
84. Performance Tests of a 12-Channel Real-Time GPS LI Software
Receiver / В. M. Ledvina, A. P. Cerruti, M. L. Psiaki [et al.] // In proceedings
of ION GPS/GNSS 2003, Portland. — P. 679-688.
85. Семенов С. А. Методы программной реализации приемников
спутниковых радионавигационных систем: дис. ... канд. техн. наук:
05.12.2014. — М., 2005. — 152 с.
86. Baracchi-Frei М. Real-Time GNSS Software Receiver Optimized for
General Purpose Microprocessors / Marcel Baracchi-Frei. — Neuchatel,
2010. — [Электронный ресурс] Режим доступа: http://doc.rero.ch/
record/20498/files/00002162.pdf (дата обращения: 04.04.2014).
87. Waelchi G. Architecture of a Real-Time Platform Independent GPS
LI Software Receiver [Электронный ресурс]: Thesis of PhD / Waelchli
Gregorie. — Lausanne, 2010. — Режим доступа: http://infoscience.epfl.ch/
record/150473/files/EPFL_TH4832.pdf (дата обращения: 04.04.2014).
88. Tao J., Yu W. A Real-Time GPS Software Receiver Correlator Design
for Embedded Platform // In proceedings of ITM-2011, ION, Portland. —
P. 808-812.
88. Botchkovski A., Chistyakov V., Golubev M. [et al.] SoftFlex : An
Advanced Approach to Design of GNSS Receiver with Software Correlator //
Proceedings of the 12th International Technical Meeting ION GPS. —
1999. — P. 353-362.
89. Бортовые устройства спутниковой навигации / И. В. Кудрявцев [и
др.]; под ред. В. С. Шебшаевича. — М.: Транспорт, 1988. — 201 с.
90. Разработка опытного образца бортового спутникового приемника
навигационного сигнала Galileo / П. Краусс, С. Берберих, Н. В. Михайлов
[и др.] // Гироскопия и навигация. — 2002. — № 1. — С. 108—121.
91. Михайлов Н. В., Чистяков В. В. Опыт использования метода
«Softflex» в аппаратуре потребителей спутниковой навигации // Гиро¬
скопия и навигация. — 2012. — № 4. — С. 105-111.
92. Михайлов Н. В., Чистяков В. В. Опыт использования метода
«SoftFlex» в аппаратуре потребителей спутниковой навигации // Материалы
XIX Санкт-Петербургской междунар. конф. по интегрированным навигаци¬
онным системам. — СПб.: «Концерн «ЦНИИ „Электроприбор”». — 2012.
93. Mikhailov N. V., Chistyakov V. V. The SoftFlex Approach in the User
Equipment for Satellite Navigation: Examples of Application // Gyroscopy
and Navigation. — 2013. — Vol. 4. — P. 50-56.
94. Михайлов H. В., Бочковский A. JI., Поспелов С. С. Опыт проек¬
тирования совмещенного приемника GPS/ГЛОНАСС и результаты его
предварительных испытаний // Гироскопия и навигация. — 2012. —
№ 1. — С. 3-13.
95. Mikhailov N. V., Bochkovskii A. L., Pospelov S. S. GPS/GLONASS
receiver for consumer market // Gyroscopy and Navigation. — 2012. —
Vol. 5, N 3. — P. 181-187.
354
96. Botchkovski A. L., Mikhaylov N. V., Pospelov S. S. GPS/GLONASS
receiver in land vehicle: Expectations and reality //In ITS Telecommunications
(ITST) the 11th International Conference on Telecommunications for
Intelligent Transport Systems. — 2011. — P. 287-292.
97. Михайлов H. В., Михайлов В. Ф. Методы первичной обработки
сигналов в радионавигационных приемниках космического базирова¬
ния // Сб. материалов VII Санкт-Петербургской междунар. конф. по
интегрированным навигационным системам. — СПб.: Концерн «ЦНИИ
„Электроприбор”». — 2009.
98. Михайлов Н. В., Михайлов В. Ф. Методы первичной обработки сиг¬
налов в радионавигационных приемниках космического базирования //
Гироскопия и навигация. — 2009. — № 4. — С. 35-44.
99. Mikhailov N. V., Mikhailov V. F. Methods for digital signal processing
in space-based radionavigation receivers // Gyroscopy and Navigation. —
2010. — Vol. 1, N 3. — P. 163-169.
100. Стиффлер Дж. Дж. Теория синхронной связи. — М.: Связь,
1975. — 488 с.
101. Спилкер Дж. Цифровая спутниковая связь: пер. с англ. / Под
ред. В. В. Маркова. — М.: Связь, 1979. — 592 с.
102. Михайлов Н. В., Чистяков В. В. Методы поиска сигналов спутни¬
ковых навигационных систем в приемниках космического базирования.
Ч. 1. Комбинированный поиск // Гироскопия и навигация. — 2013. —
№ 4 (83). — С. 60-71.
103. Mikhailov N. V., Chistyakov V. V. Signal Search Methods for
Space Based GNSS Receivers. Part 1. Combined Search // Gyroscopy and
Navigation. — 2014. — Vol. 5, N 2. — P. 83-89.
104. Signal Compression for an Efficient and Simplified GNSS Signal
Parallel Acquisition // M. Fantino, M. Pini, P. Mulassano [et al.] // In
proceedings of ION GNSS. Savannah, GA., 2008. — P. 159-166.
105. Сейдж Э., Меле Дж. Теория оценивания и ее применение в свя¬
зи и управлении: пер. с англ. / Под ред. Б. Р. Левина. — М.: Связь,
1976. — С. 146-156.
106. Вальд А. Последовательный анализ. — М.: Гос. изд-во физ.-мат.
лит., 1960. — 328 с.
107. Михайлов Н. В., Чистяков В. В. Метод слежения за задержкой
сигнала в бортовой аппаратуре спутниковой навигации с программным
коррелятором // Изв. высш. учеб. заведений России. Радиоэлектрони¬
ка. — 2013. — Т. 5. — С. 60-66.
108. Махненко Ю. Ю. Экономически эффективные технологии нави¬
гации геостационарных спутников: дис. ... д-ра техн. наук: 05.07.09. —
М., 2008. — 356 с.
109. Михайлов Н. В., Васильев М. В., Михайлов В. Ф. Автономное
определение параметров орбиты искусственных спутников земли с ис¬
пользованием спутниковых радионавигационных систем // Гироскопия
и навигация. — 2010. — № 4. — С. 41-52.
110. Михайлов Н. В. Автономная навигация космических кораблей
с использованием GPS// Сб. материалов XIV Санкт-Петербургской меж¬
дунар. конф. по интегрированным навигационным системам. — СПб.:
Концерн «ЦНИИ „Электроприбор”». — 2007.
355
111. Михайлов H. В., Михайлов В. Ф., Васильев М. В. Автономная
навигация космических кораблей с использованием GPS // Гироскопия
и навигация. — 2008. — № 1. — С. 3-21.
112. Mikhailov N. V., Vasil’ev М. V. Autonomous satellite orbit
determination using spaceborne GNSS receivers // Gyroscopy and
Navigation. — 2011. — Vol. 2, N 1. — P. 1-9.
113. Жодзишский А. И., Махненко Ю. Ю. Оценка достижимой точно¬
сти удержания спутников на геостационарной орбите // Электросвязь. —
2002. — Вып. 8.
114. Бартенев В. А. Чернявский Г. М. Орбиты спутников связи. — М.:
Связь, 1978.
115. Бартенев В. А., Малышев В. А., Чернявский Г. М. Управление
орбитой стационарного спутника. — М.: Машиностроение, 1984.
116. Rudenko S. Software for the Analysis of Photographic Observations
of Geosynchronous Satellites // Proceeding of the Workshop „Accurate orbit
determination and observations of high Earth satellites for Geodynamics”. —
Walferdange, Luxembourg, 1994. — P. 63—70.
117. Бартенев В. А., Лебедев А. А., Решетнев М. Ф. Управление и нави¬
гация ИСЗ на околокруговых орбитах. — М.: Машиностроение, 1988.
118. Махненко Ю. Ю. Выбор модели движения для навигации геоста¬
ционарного спутника [Электронный ресурс]. — Режим доступа: http://
www.sci-journal.ru/articles/2008/092.pdf.
119. Su Hua. Precise Orbit Determination of Global Navigation Satellite
System of Second Generation // Institute of Geodesy and Navigation,
University FAF Munich, Germany, 2000.
120. Agrawal B. N. Design of Geosynchronous Spacecraft. — Englewood
Cliffs, NJ 07632: Prentice-Hall, Itc., 1986.
121. Улыбышев Ю. П. Геостационарная орбита как исчерпаемый
ресурс // Полет. — № 7. — 2008. — с. 20-25.
122. Soop М. Handbook of Geostationary Orbits — Space Technology
Library, Kluwer Academic Publishers, 1994.
123. Красильщиков М. H., Лебедев А. А., Малышев В. В. Оптимальное
управление движением космических летательных аппаратов. — Москва:
Машиностроение, 1974.
124. Gill Е. Precise Orbit Determination of the GNSS-2 Space Segment
from Ground-Based and Satellite-To-Satellite Tracking// 2nd European
Symposium on Global Satellite Navigation Systems GNSS 98. — Toulouse,
1998.
125. Parkinson B. W., Spliker Jr. J. J. Global Positioning System: Theory
and Applications. — 1996. — Vol. 1, 2.
126. Bretagnon P., Francou G. Planetary Theories in Rectangular and
Spherical Variables // Astron. Astrophys. — 1998. — P. 309-315.
127. New Techniques for Orbit Determination of Geosynchronous,
Geosynchronous-Transfer, and Other High-Altitude Earth Orbiters [Элек¬
тронный ресурс]. — Режим доступа: http://trs-new.jpl.nasa.gov/dspace/
bitstream/2014/22478/l/97-0971.pdf (дата обращения: 04/04/2014).
128. McCarthy D. D. IERS Standards, IERS Technical Note 21,
Observatoire de Paris, Paris, 1996.
356
129. Михайлов Н. В., Михайлов В. Ф. Автономное определение па¬
раметров орбиты искусственных спутников Земли с использованием
спутниковых радионавигационных систем // Сб. материалов XVII Санкт-
Петербургской междунар. конф. по интегрированным навигационным
системам. — СПб.: Концерн «ЦНИИ „Электроприбор”». — 2010.
130. Axelrad P., Brown R. G. GPS Navigation Algorithms // GPS: Theory
and Applications. Progress in Astronautics and Aeronautics. — 1996. —
N 1. — P. 409-434.
131. Пат. RU 2325667 Cl Российская Федерация. МПК G01S 5/12
(2006.01) Способ определения вектора состояния космического аппара¬
та по сигналам космических навигационных систем / И. Е. Ислентев,
Гречкосеев А. К., Кокорин В. И. / Заявитель и патентообладатель
ФГУП «Научно-производственное объединение прикладной механики им.
акад. М. Ф. Решетнева»; заявл. 07.11.2006; опубл. 27.05.2008. — 13 с.
132. „Soyuz”—„Mir” Orbital Flight GPS / GLONASS Experiment /
V. Branets, M. Mikhailov, Y. Stishov [at al.] // Proceedings of the 11th
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GPS 1998). — Nashville, TN, 1998. — P. 2303-2312.
133. Soyuz-Mir Orbital Flight GPS/GLONASS Experiment: First Results /
S. Klyushnikov, S. Filatchenkov, N. Mikhailov [at al.] // In Proceedings of
the 6th Saint Petersburg International Conference on Integrated Navigation
Systems. — St. Petersburg, May, 2000. — P. 1-10.
134. Tapley B. D., Schutz В. E., Born G. H. Statistical orbit determina¬
tion. — Burlington: Elsevier Academic Press, 2004.
135. Михайлов H. В., Михайлов В. Ф. Метод определения координат
и скорости геостационарного космического аппарата по измерениям спут¬
никовых навигационных систем // Успехи современной радиоэлектро¬
ники. — 2013. — № 2. — С. 113-121.
136. Михайлов Н. В., Михайлов В. Ф. Применение метода определения
параметров орбиты геостационарного спутника Земли с использованием
спутниковых радионавигационных систем // Изв. высш. учеб. заведений
России. Радиоэлектроника. — 2013. — № 2. — С. 71-76.
137. Brumberg V. A. Essential relativistic celestial mechanics. — CRC
Press, 1991.
138. Медич Дж. Статистически оптимальные линейные оценки и
управление. — М.: Энергия, 1973.
139. Bell В. М., Cathey F. W. The iterated Kalman filter update as
a Gauss-Newton method // IEEE Transactions on Automatic Control. —
N 38(2). — P. 294-297.
140. Ивановский P. Ю., Костров А. В., Ривкин С. С. Статистическая
оптимизация навигационных систем. — JI.: Судостроение, 1976.
141. Brown R. G., Hwang P. Y. С. Introduction to Random Signals and
Applied Kalman Filtering. — 2nd ed. — New York: Wiley, 1992.
142. The GPS space service volume / F. H. Bauer, М. C. Moreau,
М. E. Dahle-Melsaether [et al.] // Proceedings of the 19th International
Technical Meeting of the Satellite Division of The Institute of Navigation
(ION GNSS 2006), Forth Worth. — 2006. — Т. X. — P. 2503-
2514.
357
143. Miller J. J., Moreau М. C. Enabling a Fully Interoperable GNSS
Space Service Volume // Presentations from 7th Meeting of the International
Committee on Global Navigation Satellite Systems (ICG-7). :— Beijing, China,
November, 2012.
144. Short N. M. The LANDSAT Tutorial Workbook: Basics of Satellite
Remote Sensing [Электронный ресурс]. — Режим доступа: http://hdl.
handle.net/2060/19830002188 (дата обращения: 03.03.2013).
145. Satellite formation flying concept becoming a reality [Электрон¬
ный ресурс]. — Режим доступа: http://spaceflightnow.com/news/
n0106/04formation / (дата обращения: 04.04.2014).
146. Burlacu М. М., Lorenz P. A survey of small satellites domain:
challenges, applications and communications key issues. ICaST, Institute for
Computer Sciences, Social-Informatics and Telecommunications Engineering
(ICST). — P. 1-11.
147. D'Amico S. Autonomous Formation Flying in Low Earth Orbit [Элек¬
тронный ресурс]. — Режим доступа: http://repository.tudelft.nl/assets/
uuid: al0e2d63-399d-48e5-884b-402e9al05c70/Damico_PhD_l5012010.pdf
(дата обращения: 04.04.2014).
148. Autonomous formation flying at DLR’s German space operations
center (GSOC) / T. Rupp, S. D’Amico, O. Montenbruck, E. Gill [Электрон¬
ный ресурс]. — Режим доступа: http://elib.dlr.de/51388/l/IAC_07D12.
pdf (дата обращения: 04.04.2014).
149. Highsmith D., Axelrad P. Relative state estimation using GPS flight
data from co-orbiting spacecraft // Proceedings of the 12th International
Technical Meeting of the Satellite Division of The Institute of Navigation
(ION GPS 1999). — Nashville, TN, 1999. — P. 401-409.
150. Ebinuma T. Precision spacecraft rendezvous using global positioning
system: an integrated hardware approach: Ph. D. dissertation. — University
of Texas, 2001.
151. Высокоточная относительная навигация ИСЗ по спутникам
системы GPS / Н. В. Михайлов, М. Миттнахт, М. Хартрампф и др. //
Материалы IX Санкт-Петербургской междунар. конф. по интегрирован¬
ным навигационным системам. — СПб.: Концерн «ЦНИИ „Электропри¬
бор”». — СПб., 2002.
152. Busse F. D. Precise Formation-State Estimation in Low Earth Orbit Using
Carrier Differential GPS : Ph. D. dissertation. — Stanford University, 2001.
153. Leung S., Montenbruck O. Real-time navigation of formation-flying
spacecraft using global-positioning-system measurements // Journal of
Guidance, Control and Dynamics. — 2006. — N 28(2). — P. 226-235
154. Precise relative navigation of space vehicles with GPS / M. Mitt-
nacht, M. Hartrampf, M. Vasilev [at al.] // In Proceedings of the 9th Saint
Petersburg International Conference on Integrated Navigation Systems. —
St. Petersburg, May, 2002. — P. 2002.
155. Precise GRACE baseline determination using GPS / R. Kroes,
O. Montenbruck, W. Bertiger [at al.] // GPS Solutions. 2005. — Vol. 9,
N 1. — P. 21-31.
156. Kroes R. Precise relative positioning of formation flying spacecraft
using GPS [Электронный ресурс]. — Режим доступа: http: //repository.
358
tudelft.nl/view/ir/uuid:la68ee94-3d55-44b9-9d8b-25fa44e96922/(flaTa об¬
ращения: 04/04/2014).
157. Степанов О. А., Блажнов Б. А., Кошаев Д. А. Исследование эф¬
фективности использования спутниковых измерений при определении
ускорения силы тяжести на летательном аппарате // Гироскопия и на¬
вигация. — 2002. — № 4. — С. 33-47.
158. Краснов А. А., Соколов А. В. Изучение гравитационного поля
труднодоступных районов Земли с использованием мобильного гравиме¬
тра «Чекан-АМ»// Труды Института прикладной астрономии РАН. —
2009. — № 20. — С. 353-357.
159. Конешов В. Н., Непоклонов В. Б., Соловьев В. Н. Сравнение
глобальных моделей аномалий гравитационного поля Земли с аэрогра-
виметрическими измерениями при трансконтинентальном перелете//
Гироскопия и навигация. — 2014. — № 2. — С. 86-94.
160. Современные глобальные модели гравитационного поля земли и их
погрешности / В. Н. Конешов, В. Б. Непоклонов, Р. А. Сермягин, Е. А. Ли-
довская // Гироскопия и навигация — 2013. — № 1 — С. 107-118.
161. Пат. 2419807 Российская Федерация. МПК G01S5/02. Устройство
контроля относительного(ых) положения(й) путем анализа двухчастотных
сигналов для космического аппарата группы космических аппаратов при
полете строем / Заявитель и патентообладатель ТАЛЬ (FR) / П. Эстелль,
К. Мелен; — опубл. 27.05.2011- 12 с.
162. Rodriguez A. G., Martinez А. М. В., Mehlen С. GNSS in Space-Part 2
Formation Flying Radio Frequency Techniques and Technology // Inside
GNSS. — Vol. 4 (1). — P. 43-51.
163. Autonomous Formation Flying RF Ranging Subsystem / C. Bourga,
C. Mehlen, P. Colmenarejo [at al.] // Proceedingsofthe 16th International
Technical Meeting of the Satellite Division of The Institute of Navigation
(ION GPS/GNSS 2003). — Portland, OR, 2003. — P. 2194-2200.
164. Garcia-Rodriguez A. Formation Flight (FF) Radio-Frequency (RF)
Metrology // ESA/ESTEC Technology Dossier. — 2008. — N1,2.
165. Formation flying radio frequency instrument: First flight results
from the PRISMA mission / Delpech M. [et al.] //In Proceedings of the 5th
ESA Workshop on Satellite Navigation Technologies and European Workshop
on GNSS Signals and Signal Processing (NAVITEC). — 2010. — P. 1-8.
166. The FFIORD Experiment — CNES' RF Metrology Validation and
Formation Flying Demonstration on PRISMA / Delpech M. [et al.] // In
Proceedings of the 3rd International Symposium on Formation Flying,
Missions and Technology, ESA/ESTEC. — 2008.
167. Teunissen P. J. G., de Jouge P.J., Tiberius С. C. J. M. Performance of
the LAMBDA Method for Fast GPS Ambiguity Resolution // Navigation. —
1997. — N 44. — P. 373-383.
168. Autonomous Formation Flying RF Sensor Development for the
PRISMA Mission / L. Lestarquit, J. Harr, T. Grelier [et al.] // Proceedings
of the 19th International Technical Meeting of the Satellite Division of
The Institute of Navigation (ION GNSS 2006), Forth Worth. — Т. X. —
2006. — P. 2571-2578.
359
169. Terra SAR-X precise trajectory estimation and quality assess¬
ment / Y. T. Yoon, M. Eineder, N. Yague-Martinez, O. Montenbeuck //
Geoscience and Remote Sensing, IEEE Transactions on. — 2009. —
N 47(6). — P. 1859-1868.
170. Global Ionosphere Model For Day 073,1996 [Электронный ресурс]. —
Режим доступа: ftp://igscb.jpl.nasa.gov/igscb/product/, ftp://igscb.jpl.
nasa.gov/pub/data/format/sp3.txt (дата обращения: 04.04.2014).
171. Remondi В. W. Performing Centimeter-Level Surveys in Seconds
with GPS Carrier Phase: Initial Results // Navigation. — 1985. —
N 32(4). — P. 386-400.
172. Teunissen P. J. G. GPS carrier phase ambiguity fixing concepts //
In GPS for Geodesy. — Springer Berlin Heidelberg, 1996. — P. 319-388.
173. Diggle D. W., van Graas F., Hueschen R. M. Interferometric GPS
Flight Reference / Autoland System: Flight Test Results // Navigation. —
1994. — N 41(1). — P. 57-82.
174. Van Graas F., Lee Sh.-W. High Accuracy Differential Positioning
for Satellite-based Systems without Using Code-Phase Measurements //
Navigation. — 1995. — N 42(4). — P. 605-618.
175. Михайлов H. В., Михайлов В. Ф. Автономная относительная
навигация космических кораблей с использованием GPS // Сборник
материалов XV Санкт-Петербургской междунар. конф. по интегриро¬
ванным навигационным системам. — СПб.: Концерн «ЦНИИ „Электро¬
прибор”». — 2008.
176. Shaer S. Mapping and Predicting the Earth’s Ionosphere Using the
Global Positioning System [Электронный ресурс]. — Режим доступа: ftp://
ftp.unibe.ch/aiub/papers/ionodiss.pdf (дата обращения: 04.04.2014).
177. Михайлов Н. В., Михайлов В. Ф. Метод разрешения неоднознач¬
ности фазовых измерений GPS при относительной навигации космических
объектов // Гироскопия и навигация. — 2008. — Т. 4. — С. 9-20.
178. Михайлов Н. В., Михайлов В. Ф. Применение метода разрешения не¬
однозначности фазовых измерений GPS для относительной навигации косми¬
ческих кораблей // Гироскопия и навигация. — 2009. — N 2. — С. 37-48.
179. Mikhailov N. V., Mikhailov V. F. Application of the ambiguity
resolution method of phase GPS measurements for relative navigation
of spacecraft// Gyroscopy and Navigation. — 2011. — Vol. 1, N 1. —
P. 2-9.
180. Frei E., Beutler G. Rapid static positioning based on the fast
ambiguity resolution approach FARA: theory and first results // Manuscripta
geodaetica. — 1990. — N 15(6). — P. 325-356.
181. Михайлов H. В. Автономная относительная навигация космиче¬
ских кораблей при помощи одночастотного приемника сигналов GPS //
Изв. вузов. Приборостроение. — 2011. — Т. 54, 8. — С. 71-77.
182. In-flight performance assessment of the single frequency MosaicGNSS
receiver for satellite navigation / O. Montenbruck, Y. Yoon, J. S. Ardaens
[at al.] // In the 7th International ESA Conference on Guidance, Navigation
and Control Systems, 2008. — P. 2-5.
183. McCarthy D. D. IERS Technical Note // US Naval Observatory. —
July, 1992.
360
184. Xu G. Orbits. — Berlin-Heidelberg: Springer Verlag, 2008.
185. Capderou M. Sattelites: Orbits and missions. — Springer, 2005. —
Vol. 1.
186. Cunningham L. E. On the computation of the spherical garmonic
terms needed during the numerical integration of the orbital motion of an
aircraft satellite. Vol. 2. — Celest. Mech., 1970. — P. 207-216.
187. JPL Solar System Dynamics [Электронный ресурс]. — Режим до¬
ступа: http://ssd.jpl.nasa.gov (дата обращения: 04.04.2014)
188. Корн Г., Корн Т. Справочник по математике для научных работ¬
ников и инженеров. — М.: Наука, 1968.
189. Clenshaw С. A note on the summation of Chebyshev series // Math.
Tabl. Aids. Comput. — 1955. — Vol. 9. — P. 118-120.
190. Teunissen P. J. G. A New Method for Fast Carrier Phase Ambiguity
Estimation // Proceedings of Position Location and Navigation Symposium. —
Las Vegas, 1994. — P. 562-573.
191. Landau H., Euler H. J. On-the-fly ambiguity resolution for precise
differential positioning //Proceedings of the 5th International Technical
Meeting of the Satellite Division of The Institute of Navigation (ION GPS
1992). — Alexandria, VA, 1992. — P. 607-613.
192. Chen D., Lachapelle G. A Comparison of the FASF and Least-Squares
Search Algorithms for Ambiguity Resolution On The Fly // In Proceedings
of the International Symposium on Kinematic Systems in Geodesy, Geomatics
and Navigation. — Banff, Canada, 1994. — P. 371-390.
193. Teunissen P., De Jonge P., Tiberius С. C. J. M. The Volume of
the GPS Ambiguity Search Space and its Relevance for Integer Ambiguity
Resolution // In Proceedings of the 8th International Technical Meeting of
the Satellite Division of The Institute of Navigation (ION GPS 1995). —
Kansas City, MI, 1996. — P. 889-898.
194. Hein G., Werner W. Comparison of different on-the-fly ambiguity
resolution techniques //In Proceedings of the 8 th International Technical
Meeting of the Satellite Division of The Institute of Navigation (ION GPS
1995). — Palm Springs, CA, 1995. — P. 1137-1144.
361
Mikhaylov, Nikolay
Autonomous navigation of space vehicles with GNSS. — SPb.:
Politechnika, 2014. — 362 p.: il.
It is one of the first Russian books about autonomous navigation
of space vehicles with satellite navigation systems. The book examines
the lessons learned by the author in development of the spaceborne
GNSS receivers.
The approach to design of space based GNSS equipment developed
by the author and his colleagues and applied in Mosaic GNSS, one
of the most successful spaceborne GNSS receivers, has never been
published in a system. A book by the author about the architecture
and signal processing in space based navigation receiver was recently
published (in Russian). Yet a consistent and systematic explanation
of how to design architecture of a receiver for space applications,
develop signal and navigation processing as well as how to solve
relative navigation task on board of a satellite did not exist so far.
This book is to make up for the shortage bysystematicallycoveringt
hewholedesign cycle from architectural considerations to navigation
processing.
The monograph provides an analysis of GNSS signal reception
conditions on board of space vehicles and the details of the approach
to design of spaceborne GNSS receivers. It also covers architecture,
signal and navigation processing in the satellite navigation receivers
working on board of the satellites.Relative navigation of space vehicles
and flight data processing are discussed in separate chapters.
The book will be useful for postgraduate students and researchers
working in the field of GNSS equipment development.
362
ISBN 978-5-7325-1050-8
9 785732 510508
НАУЧНОЕ ИЗДАНИЕ
Николай Викторович МИХАЙЛОВ
АВТОНОМНАЯ НАВИГАЦИЯ КОСМИЧЕСКИХ АППАРАТОВ
ПРИ ПОМОЩИ СПУТНИКОВЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Редактор М. И. Козицкая
Корректор Т. Г. Николаева
Компьютерная верстка Т. М. Каргапольцевой
Подписано к печати 09.09.14. Формат 60 х 84 1/16.
Бумага офсетная. Уел. печ. л. 23,0. Уч.-изд. л. 24,2.
Тираж 500 экз. (I завод - 50 экз.) Заказ № 438.
ОАО «Издательство „Политехника”».
191023, Санкт-Петербург, Инженерная ул., д. 6.
Отпечатано в Редакционно-издательском центре ГУАП.
190000, Санкт-Петербург, Б. Морская ул., д. 67.
Н. В. Михайлов
АВТОНОМНАЯ НАВИГАЦИЯ КОСМИЧЕСКИХ
АППАРАТОВ ПРИ ПОМОЩИ СПУТНИКОВЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Перед вами одна из первых отечественных книг, посвященных
навигации искусственных спутников Земли по сигналам радио¬
навигационных систем. Она обобщает многолетний научный и
практический опыт автора по разработке бортовой аппаратуры
спутниковой навигации (ВАСН) космического базирования.
Мотивацией для написания монографии послужило то, что мето¬
дология проектирования БАСИ, разработанная автором и успешно
примененная в одной из самых коммерчески успешных БАСН
MosiacGNSS, не была систематически изложена. Консистентного,
обоснованного и логически изложенного описания того, как спроек¬
тировать архитектуру БАСН, первичную и вторичную обработку
сигналов, а также как решить задачу относительной навигации на
борту спутника, до сих пор не было. Недавно вышла монография
автора, посвященная архитектуре БАСН и методам первичной
обработки сигналов в ней, эта книга призвана восполнить пробел в
полном и систематическом изложении вопроса от архитектуры
радионавигационного приемника, до решения задач навигации с его
помощью. ,
В монографии проведен анализ особенностей применения
спутниковых радионавигационных систем на борту космических
аппаратов, изложены научно-технические принципы проектирования
БАСН, рассмотрены вопросы архитектуры приемников спутниковой
радионавигации космического базирования и предложены методы
проектирования первичной и вторичной обработки сигналов в БАСН.
Отдельные главы посвящены решению задач относительной
навигации искусственных спутников Земли при помощи БАСН и
обработке данных полетных экспериментов.
Книга будет полезна аспирантам и научным работникам,
занимающимся проектированием навигационной аппаратуры
потребителей спутниковых радионавигационных систем.
ш