/






































































































































































































































Text
К.Н.БАРИНОВ
М.Н.БУРДАЕВ
П.А.МАМОН
ДИНАМИКА
И ПРИНЦИПЫ
ПОСТРОЕНИЯ
ОРБИТАЛЬНЫХ
СИСТЕМ
КОСМИЧЕСКИХ
АППАРАТОВ
к. н. БАРИНОВ, М. Н. БУРДАЕВ,
П. А. МАМОН
ДИНАМИКА
И ПРИНЦИПЫ ПОСТРОЕНИЯ
ОРБИТАЛЬНЫХ СИСТЕМ
КОСМИЧЕСКИХ АППАРАТОВ
Москва
«МАШИНОСТРОЕНИЕ»
1975
УДК 629.783.001.2
Рецензенты: д-р техн, наук Н. М. Иванов
и канд. техн, наук В. Д. Ястребов
Баринов К- Н., Бурдаев М. Н., Мамон П. А. Динамика и
принципы построения орбитальных систем космических аппара¬
тов. М., «Машиностроение», 1975 г., с. 232.
В книге впервые освещены с единых позиций структурного
анализа общие принципы построения орбитальных систем КА
и способы их создания, вопросы структурного изменения си¬
стем и методы расчета коррекций, маршрутные задачи, возни¬
кающие при обслуживании систем, и методы их решения. Изло¬
жены аналитические методы решения перечисленных задач,
которые представлены в виде конкретных расчетных схем и
алгоритмов.
Книга рассчитана на научных работников, аспирантов, ин¬
женеров и студентов, занимающихся вопросами проектирова¬
ния орбитальных систем.
Табл. 15. Ил. 88. Список лит. 5 назв.
31904-425 „ . „
Б БЗ-40-25-75
038(01)-75
<© Издательство «Машиностроение», 1975
ПРЕДИСЛОВИЕ
Среди многообразия космических аппаратов (КА), функцио¬
нирующих нд. орбитах искусственных спутников Земли, ведущее
место занимают КА прикладного назначения: метеорологические,
связные, навигационные, геодезические спутники, а также спут¬
ники, предназначенные для исследования земных ресурсов. Ка¬
кой бы характер ни носили прикладные задачи, суть их в боль¬
шинстве случаев сводится к сбору и (передаче информации.
Состав этой информации, способы ее получения или 1передачи
определяются целевым назначением спутников. Большинство за¬
дач, решаемых с помощью спутников, носит глобальный харак¬
тер, например сбор метеорологической информации со всего
земного шара, навигационное обеспечение морского флота
и авиации и т. п. Между тем, (возможности одиночных спутников
в отношении сбора информации или ее передачи ограничены
локальными районами их функционирования. Поэтому одиноч¬
ными КА решение целого ряда задач оказывается принципиаль¬
но невозможным.
В процессе освоения космического пространства появилась
возможность применения согласованно действующих КА для гло¬
бальной связи, навигации, метеорологических наблюдений и т. п.
Согласованное функционирование нескольких КА определенного
целевого назначения осуществляется в их совместном орбиталь¬
ном полете. Такая группа КА по существу является динамиче¬
ской системой, создание и управление которой представляет
собой значительно более сложную задачу, чем запуск одиноч¬
ного КА и управление его функционированием. Для успешной
эксплуатации систем КА необходимо решить ряд проблем, свя¬
занных с синтезом оптимальных структур, анализом структурной
изменчивости орбитальных систем под"действием возмущающих
сил в процессе функционирования, а также с применением раз¬
личных видов манёвров- для коррекции орбит КА в составе
системы и при обслуживании КА на орбитах.
Авторы использовали хорошо известные общие методы анали¬
за возмущенного движения КА, расчета маневров и теорию опти¬
мизации процессов для решения нового класса задач, связанных
3
с оптимизацией структуры динамических объектов, маршрутов
облета совокупности КА и коррекций их орбит.
Рассматривая эти задачи, авторы стремились довести каждую
из них до получения решения в конечном виде, до простых алго¬
ритмов и по возможности до численных результатов.
В книге показано, что совокупность КА определенного назна¬
чения приобретает характер системного объекта благодаря функ¬
циональным связям между элементами структуры и что методы
расчета структуры вытекают из общих условий землеобзора,
а оптимизация структур сводится к задаче оптимальных покры¬
тий. Модифицирована линейная теория возмущений примени¬
тельно к относительному движению, выявлены долгопериодиче-
ские возмущения цепочки ИСЗ. Проанализирован минимум
энергозатрат корректирующих маневров и рассмотрен новый
класс маршрутных задач. Показано, что для большинства воз¬
можных маршрутов оптимум достигается на некоторых моно¬
тонных последовательностях.
Главы 1, 3, 6 написаны К. Н. Бариновым, глава 5 —
М. Н. Бурдаевым, главы 2, 4 —- П. А. Мамоном.
Авторы выражают благодарность рецензентам Н. М. Иванову
и В. Д. Ястребову за ценные замечания и советы по улучшению
книги.
Все замечания и пожелания следует направлять по адресу:
Москва, Б-78, 1-й Басманный пер., д. 3, издательство «Машино¬
строение».
Глава 1
СТРУКТУРА ОРБИТАЛЬНЫХ СИСТЕМ ИСЗ
1.1. ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Под структурой объекта любой физической природы пони¬
мают его элементы и связи между ними. В данном понятии су¬
щественно то, что структура представляется не произвольным
набором элементов, а совокупностью элементов рассматриваемо¬
го объекта и связями как единого целого. Если о структуре ска¬
зать кратко, то это есть элементы, связи и целостность.
Космическая система — это группа согласованно действую¬
щих земных и космических станций, обеспечивающих данную
космическую службу (например, метеорологию, навигацию, ра¬
диовещание и т. п.) [4]. В соответствии с этим определением кос¬
мические системы классифицируются на метеорологические,
навигационные, связные и т. п.
Каждая космическая система может быть расчленена на две
подсистемы — наземные и орбитальные станции. Если эти под¬
системы построены из однотипных станций, то их элементы
представляются в виде подмножеств
(/=1, 2,..., т),
С/ = 1, 2...., N),
где og — множество наземных станций, обслуживающих или об¬
служиваемых данной космической системой; ал — множество ор¬
битальных станций.
Согласованность действий наземных и космических станций
определяется отношением /?(ог, ал) между компонентами (эле¬
ментами) подсистем ag, Ол- Это отношение носит функциональ¬
ный характер и может отражать самые различные стороны про¬
цесса функционирования системы. В книге рассмотрена подсисте¬
ма орбитальных станций. Введем в этой связи следующее опре¬
деление.
Упорядоченную на орбитах совокупность ИСЗ, предназначен¬
ную для решения определенного круга задач, будем называть
5
орбитальной системой КА. Орбитальная система — основа любой
космической системы. Ей присущи свои закономерности и про¬
блемы, своя структура.
1.2. ЭЛЕМЕНТЫ СТРУКТУРЫ ОРБИТАЛЬНОЙ СИСТЕМЫ ИСЗ
Рассмотрим орбитальную систему ИСЗ как некоторую дина¬
мическую систему. Совокупность N ИСЗ как динамическая систе¬
ма характеризуется N орбитами, каждая из которых в свою оче¬
редь определяется шестью независимыми элементами. В качест¬
ве таких элементов рассмот¬
рим кеплеровские параметры
орбиты:
— наклонение i;
Рис. 1.2. Геометрические элементы
орбиты
— прямое восхождение восходящего узла (долгота восходя¬
щего узла) Q;
— фокальный параметр р;
— эксцентриситет е;
— аргумент перигея со;
— время прохождения перигея т.
Элементы i, Q определяют ориентацию плоскости орбиты в
абсолютной геоцентрической экваториальной системе координат
Оэхуг (рис. 1. 1).
Фокальный параметр и эксцентриситет характеризуют гео¬
метрию орбиты в ее плоскости. Например, эллиптическая орбита
определяется параметрами эллипса а, с (рис. 1.2). Вместо боль¬
шой полуоси а и линейного эксцентриситета с обычно рассмат¬
ривают эксцентриситет е = — и фокальный параметр р =
а
= а(1—е2), которые входят в уравнение кривой второго по¬
рядка
г = , (1.2)
1 + е cos &
где Ф — истинная аномалия заданной точки на орбите.
Рис. 1.1. Положение плоскости орби¬
ты относительно невращающейся си¬
стемы координат
Аргумент перигея со отсчитывается от направления на восхо¬
дящий узел 03В до направления на перигей орбиты 03л (см.
рис. 1.2). Он характеризует ориентацию орбиты в ее плоскости.
Пять параметров (/, Q, р, е, со) полностью определяют орбиту в
пространстве. Шестой параметр — время прохождения перигея —
определяет положение КА на орбите в каждый данный момент
времени t в соответствии с уравнением Кеплера:
„3/2
/ = т + —(Д-esin Е),
где Е — эксцентрическая аномалия заданной точки, связанная с
истинной аномалией О зависимостью
t8T=-|/TT7,gT;
К— гравитационная постоянная, равная 398 620 км3/с2.
Итак, орбита определена, если в каждый данный момент вре¬
мени известны ее элементы
Z, Q, р, е, со, т.
Если движение ИСЗ рассматривается в центральном грави¬
тационном поле, то элементы орбиты постоянны (не зависят от
времени). Если действующие силы отличаются от центральной
силы притяжения Земли, то элементы орбиты есть некоторые
функции времени i(t), Q(t), р (/), e(t), ©(f), являющиеся реше¬
нием следующей системы дифференциальных уравнений:
— =\/~ ——-cos nW,
dt у К р
dQ / ~р г sin ц
dt у К р sin I
^=2l/irr, (1.з:
at I/ л
~dt=^{*$ 5*П $ + [(1 + ~~j COS
d<o , Г р Г с cos $ । т (1 । г \ sin 8 lvz г ... 1
—=1/ ~s Ут Н— :UZ— Sin« ,
dt у /( [ e \ p ) e p J
/ p Г К , cos 8 Г fl I r A sin в ~|
dt~ у К [г2 ' e l р/ e .] ’
где и=со — O'; S, T, W — проекции возмущающих ускорений нс
радиальное, трансверсальное и бинормальное направления.
7
При движении ИСЗ в центральном поле возмущающие уско¬
рения S, Т, W равны нулю и решением системы (1.3) являются
постоянные кеплеровские элементы.
Система дифференциальных уравнений (1.3) при малых экс¬
центриситетах имеет особенность, заключающуюся в том, что при
е—>0 производные d&ldt и dft/dt стремятся к бесконечности. Для
устранения этого вместо элементов е, со рассматривают элементы
q=e cos о,
l=e sin co.
При этом в систему уравнений (1.3) вместо дифференциальных
уравнений
de , , \ du> , , х
at at
включают соответственно два уравнения
^-=1//"{ssin « + ^(? + cos и) — + cos«] Г+
IW ctgzsin и] ,
Р (1-4)
-^- = -1/ cos и-f-sin я) ——|- sin иj Т —
— ^—qW ctg i sin и) ,
P J
P
где r — - , а последнее уравнение относительно
1 + q cos и + I sin и
истинной аномалии ft заменяется уравнением относительно аргу¬
мента широты и:
du —У^Р (1 r-^~ ctg г sin и) .
dt Г2 к Кр )
Элементы орбиты i, й, р, е, со или 1, Й, р, q, I определяются
интегрированием системы дифференциальных уравнений (1.3)
при заданных начальных условиях, соответствующих моменту
времени Z=Zo,
(^0)==^0, ^(А)) = ^0> Р(А)) = Аь £(^о) = ^о> со(А>) = шо-
Кроме того, должны быть известны возмущающие функции S(t),
Т (f), W(t), которые определяются принятой моделью движения
и элементами орбиты.
Условимся в дальнейшем рассматривать элементы орбит си¬
стемы КА только при заранее принятой наперед для всех ИСЗ
модели движения. Тогда модель движения, поскольку она едина
8
для всей системы КА, можно не включать в число элементов
структуры.
Таким образом, структура орбитальной системы, состоящей
из zV ИСЗ, определяется совокупностью &XN функций времени:
2/W, A-W. &_■(/) (z = l, 2,..., N).
Если движение КА рассматривается в центральном гравита¬
ционном поле без учета сопротивления атмосферы, то структура
системы определится 6XN кеплеровскими элементами
2/, Л, еь ш1’ xi (д’=1, 2,..., АГ).
Вместо тг- можно использовать начальные условия Оч (t0) = Ooz
или Ui(to)=uoi, определяющие положения КА на орбите в мо¬
мент времени t—t0.
Число элементов 6XN является наибольшим в том смысле,
что всякие дополнительные ограничения, налагаемые на орбиты
системы, приводят и к его сокращению. Рассмотрим в этой свя¬
зи некоторые частные случаи.
Случай 1. Система построена на одинаковых эллиптических
орбитах заданного наклонения I. Орбиты разнесены в простран¬
стве по параметру Q,, а КА распределены, на орбитах по истин¬
ной аномалии ■&<« или по аргументу широты Uoz (4=1, 2,..., N).
В этом случае система, состоящая из N КА, будет характе¬
ризоваться в структурном отношении числом элементов 2N-+-4.
Ограничения, наложенные на четыре параметра орбиты I, р, е, со,
привели к сокращению числа элементов структуры на величину
6ХЛГ— (2JV+4)=4(tf — 1).
Таким образом, ограничение на любой элемент орбиты при¬
водит к сокращению числа элементов структуры на N— 1.
Случай 2. Система построена на круговых орбитах одинакового
радиуса г0 и наклонения i0. Орбиты разнесены в пространстве по
параметру а ИСЗ на орбитах распределены по параметру Uoz
(4=4, 2,..., N). В данном случае система будет состоять из
2-4-2N элементов.
Сопоставляя число элементов для рассматриваемых частных
случаев, убеждаемся, что ограничение на класс орбиты не приво¬
дит к заметному изменению количества элементов структуры.
При переходе от эллиптической орбиты к круговой сократились
лишь два элемента, да и то формально, поскольку для круговых
орбит е=0, а <о смысла не имеет.
1.3. КИНЕМАТИЧЕСКИЕ ЭЛЕМЕНТЫ СТРУКТУРЫ
Параметры орбит I, Q, р, е, со, т можно преобразовать в те
или иные кинематические элементы в зависимости от характера
решаемой задачи. Рассмотрим наиболее характерные из таких
элементов.
9
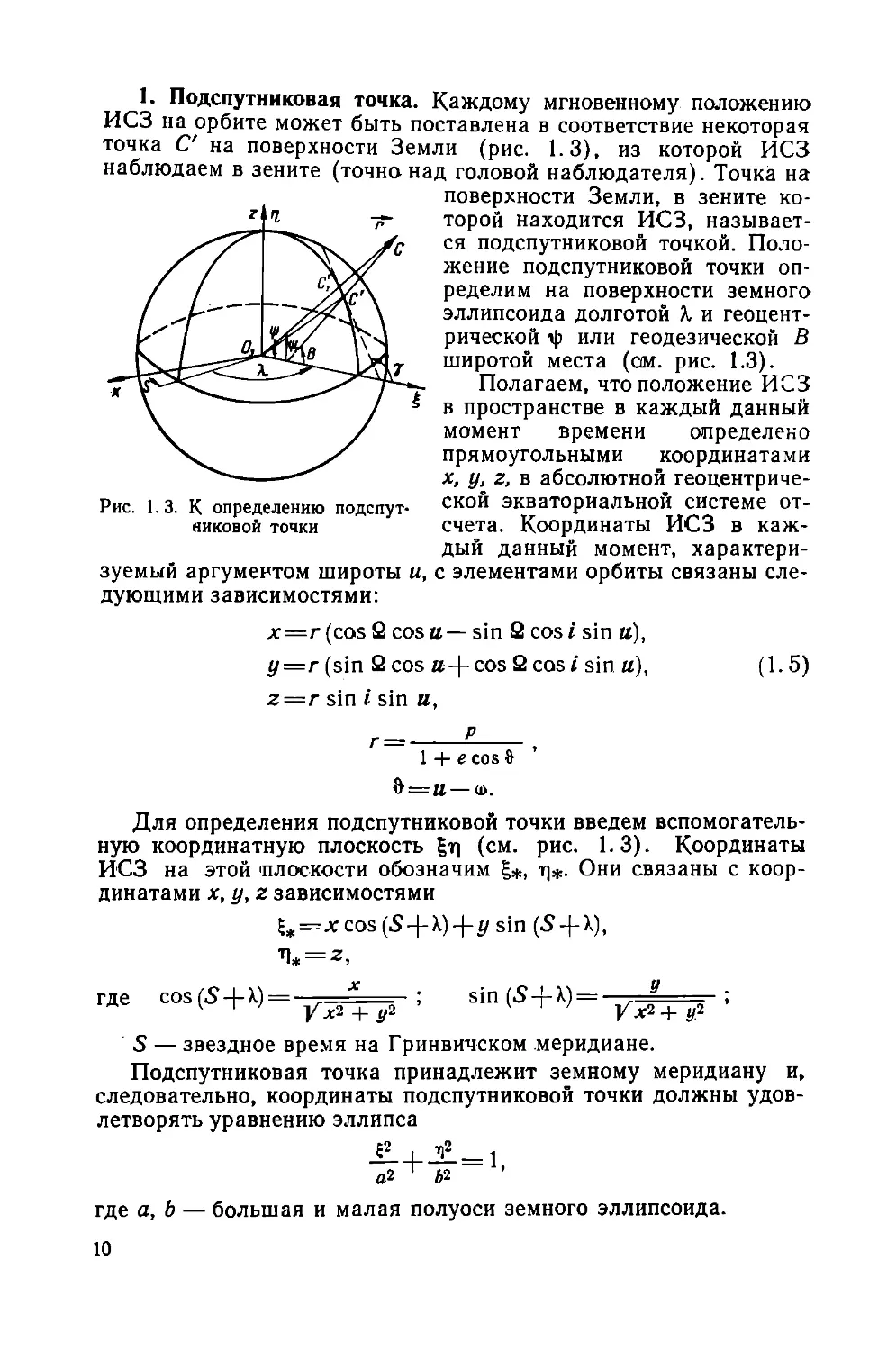
1. Подспутниковая точка. Каждому мгновенному положению
ИСЗ на орбите может быть поставлена в соответствие некоторая
точка С на поверхности Земли (рис. 1.3), из которой ИСЗ
наблюдаем в зените (точно над головой наблюдателя). Точка на
поверхности Земли, в зените ко¬
торой находится ИСЗ, называет¬
ся подспутниковой точкой. Поло¬
жение подспутниковой точки оп¬
ределим на поверхности земного
эллипсоида долготой X и геоцент¬
рической ф или геодезической В
широтой места (см. рис. 1.3).
Полагаем, что положение ИСЗ
в пространстве в каждый данный
момент времени определено
прямоугольными координатами
х, у, г, в абсолютной геоцентриче¬
ской экваториальной системе от¬
счета. Координаты ИСЗ в каж¬
дый данный момент, характери¬
зуемый аргументом широты и, с элементами орбиты связаны сле¬
дующими зависимостями:
x=r (cos 2 cos a— sin 2 cosz sin «),
y=r(sin 2 cos u-|-cos2cos/ sin и), (1.5)
z=r sin i sin a,
r = ,
1 + e cos 8
§=u— co.
Для определения подспутниковой точки введем вспомогатель¬
ную координатную плоскость £т] (см. рис. 1.3). Координаты
ИСЗ на этой плоскости обозначим £*, т]*. Они связаны с коор¬
динатами х, у, z зависимостями
£*=xcos(S4-X)-|-z/sin (54-Х),
■H* = z,
где cos (5-4-X) = г х — ; sin (54-X) = —г- у ;
v /х2 + у2 ’ VI/ /л2 + у1
S — звездное время на Гринвичском меридиане.
Подспутниковая точка принадлежит земному меридиану и,
следовательно, координаты подспутниковой точки должны удов¬
летворять уравнению эллипса
-^-+-£=1,
а2 62
где а, Ь — большая и малая полуоси земного эллипсоида.
Рис. 1.3. К определению подспут¬
никовой точки
10
Введем вспомогательный угол у между положительным на¬
правлением оси Оэ£ и касательной к меридиану в точке С'. Тан¬
генс этого угла численно равен производной dT)/dg, а сам угол у
связан с геодезической широтой зависимостью
В=у — 90°.
Вычислим производную dvjdc, в точке С', принадлежащей эл¬
липсу,
d-r\& е
dt; а2 ч
Тогда с учетом указанных зависимостей
. 1 dt>
tg У= =F—L
tg В dk
получим tg B=— — . (1.6)
62 5
Входящие в выражение (1.6) величины g, т] связаны с координа¬
тами £*, т]* соотношением
tgY = -—(1.7)
ч*—ч <*2 ч
Решая уравнения (1.7) совместно с уравнением эллипса от¬
носительно координат g, т), найдем эти вспомогательные коорди¬
наты, а затем по формуле (1. 6) вычислим геодезическую широту
подспутниковой точки. При необходимости геодезическая широта
В может быть пересчитана в геоцентрическую широту ф реше¬
нием уравнения
В=ф — a sin 2ф,
где а=—J коэффициент сжатия Земли.
298,3
Долгота подспутниковой точки X определяется непосредствен¬
но по координатам х, у, г и звездному времени S:
cos(S+X)=—* ; sin (S + X) = •■—*-=- ,
S=S0+kM,
где So — звездное время на Гринвичском меридиане в гринвич¬
скую полночь (берется по таблицам астрономического ежегод¬
ника в заданную дату); М — всемирное время, на момент кото¬
рого определяется подспутниковая точка; &= 1,0027379093 — ко¬
эффициент перевода единиц времени.
Оценим ошибку в определении координат подспутниковой
точки, если эллипсоид заменить сферой. Обозначим С/ точку
пересечения радиуса-вектора г с меридианом подспутниковой
11
точки. Тогда расстояние между точками С/С' (см. рис. 1.3}
определится по формуле
C'lC = — ф).
Если ИСЗ беспредельно удалять от центра Земли, то значе¬
ние геоцентрической широты ф1 будет стремиться к значению
геодезической широты В, а искомая дуга приближаться к мак¬
симальному значению
Разность В — ф = аз1п2ф и максимум этой разности достигается
при ф = 45°.
Таким образом, наибольшая ошибка в определении коорди¬
нат подспутниковой точки при замене эллипсоида сферой может
достигать значения
С;Стах = /?а=^-~21 км.
298,3
Для малых высот полета ИСЗ, например до 2000 км, ошибка не
превышает 3 км. Поэтому при решении многих задач, не требу¬
ющих высокой точности определения координат подспутниковых
точек, допустимо вести расчеты на сфере.
2. Трасса ИСЗ. Каждому моменту времени при заданных эле¬
ментах орбиты отвечает своя подспутниковая точка с координа¬
тами X, ф (или X, В). Геометрическое место подспутниковых то¬
чек называется трассой ИСЗ. Если подспутниковые точки нане¬
сти на глобус или карту и провести через эти точки линию, то
получим трассу относительно земных пунктов. Из этих пунктов
ИСЗ наблюдаем в зените в моменты прохождения соответству¬
ющих подспутниковых точек.
Расчет трассы ИСЗ сводится к преобразованию координат.
При этом в качестве исходных данных используются элементы
орбиты i, Q, р, е, со или /, Q, р, q, t, полученные в результате ин¬
тегрирования дифференциальных уравнений (1.3) на заданном
промежутке времени [/о, 6J- Если трасса ИСЗ строится на поверх¬
ности земного эллипсоида, то ее расчет производится по следую¬
щему алгоритму:
х = г (cos 2 cosa— sin 2 cos i sin «);
y = r (sin 2 cos « +cos 2 cos i sin к);
. . p
z = rsin4sinu; r = ;
1 + e cos 8
& = « — «>; t.* = Vx2-\-y2-, =
«2 i i
(1.8)
a2 ft2
12
х д2 vi f Л . Л \
B=arctg i- ( —|
62 е И 2 2/
, Е /1 — е , 8
tg—=1/ tg—;
2 |/ 1 + е 6 2
/ р \з/2
М = г-\- ^^7 ■ (В-е sin В), S=S0 + kM-,
cos($+X) = —===- ; sin (5+ X) = у .
V х2 + 1/2 у %2 4- у2
В алгоритме (1.8) положение ИСЗ на орбите задается аргу¬
ментом широты и, а соответствующее ему время М вычисляется
из уравнения Кеплера. При необходимости этот алгоритм можно
перестроить на случай, когда задана дискретная последователь¬
ность времен. Для этого вначале необходимо решить уравнение
Кеплера
/ Р у/2
Л1 = т-|- 1 ~(Е — е sin В)
-/к
относительно эксцентрической аномалии Е, а затем вычислить
истинную аномалию ft и аргумент широты и.
Расчет трассы на сфере существенно упрощается, так как при
этом не нужно определять вспомогательные координаты £*, т]*,
т], необходимые для вычисления геодезической широты В. Гео¬
центрическая же широта ф определяется простым соотношением
z
Sin ф = .
Если известны гринвичские координаты ИСЗ, то в этом слу¬
чае расчет трассы сводится к элементарному преобразованию
координат
cos Х=—— х ,
Кх2 + у2
sin Х= — У , (1; 9)
, z (
S1 и Ф = г . 1
V X2 + У? + Z2
' Начало трассы ИСЗ определяется начальным моментом вре¬
мени t0. В качестве начального момента времени при построении
трассы удобно взять время прохождения экватора в восходящем
узле орбиты /в- При этом время отсчитывается в витках (на¬
пример, трассы ИСЗ на 5, 7, 9 и т. д. витках). За виток прини¬
мается промежуток времени между двумя последовательными
13
прохождениями экватора в восходящем узле орбиты. Этот про¬
межуток времени называется драконическим периодом и обозна¬
чается TS.
Драконический период может быть вычислен при интегриро¬
вании системы дифференциальных уравнений (1.3) по значению
аргумента широты и. Промежуток времени, в течение которого
аргумент широты изменяет свое значение от 0 до 2л, численно
равен драконическому периоду 7е.
Качественный анализ трассы ИСЗ проведем для круговых
орбит на сфере среднего радиуса Земли У?=6371 км. Первое
допущение позволяет упростить зависимость долготы от време¬
ни, а второе упрощает расчет широты подспутниковых точек.
Возьмем в качестве независимой переменной аргумент широ¬
ты и. Тогда широта подспутниковой точки ф определится из сфе¬
рического треугольника СВЕ (см. рис. 1. 1) по теореме синусов
sn^=sin»sinu. (1-Ю)
При определении значений ф необходимо руководствоваться
следующим правилом: так как sin i всегда есть величина положи¬
тельная (0^/^л), то знак аргумента этф всегда соответствует
знаку аргумента sin и.
Для отыскания долготы подспутниковой точки X воспользуем¬
ся соотношением
S-H=Q+B£, (1.11)
где BE — дуга экватора, заключенная между восходящим узлом
орбиты и меридианом подспутниковой точки (см. рис. 1. 1). Ду¬
га BE может быть найдена из сферического треугольника ВСЕ:
sin ВЕ = ^ .
tg»
Звездное время S представим в виде суммы
S = Sa-]-<u3 (t- — ^s)>
где Sa —звездное время по Гринвичу в момент прохождения
ИСЗ восходящего узла орбиты; ш3 — угловая скорость вращения
Земли, равная 7,29211-10~5 1/с.
Подставляя в соотношение (1. 11) вместо BE и S соответст¬
вующие им выражения, получим
X—2 —Sa-|-arcsin ^-^- — <o3(Z—/а). (1. 12)
tg»
Разность величин Q — Sa численно равна географической
долготе ИСЗ Хе в момент прохождения им восходящего узла
орбиты.
14
Разность времен t—ta для круговых орбит пропорциональна
аргументу широты и
i-tQ= —=— Т,
о>0 2л
где Т — период обращения ИСЗ по круговой орбите радиуса г0,
Т = 2л 1/ -5-.
* К
Величина co3(f— te ) характеризует смещение подспутниковой
точки по долготе АХ вследствие суточного вращения Земли. Это
смещение всегда западное, независимо от значений элементов
орбиты.
Имея в виду, что угловая скорость вращения Земли опреде¬
ляется продолжительностью звездных суток Гзв=86164 с
fu>3=—V смещение трассы ИСЗ по долготе при его движе-
' Тзв'
нии по круговой орбите представится в виде
дХ=_(Вз(/_/в)=_^_^_ T'=-2L«. (1.13)
* ЭВ 1 зн
Рассматриваемое выражение для трассы (1. 12) получено из
решения сферического треугольника ВСЕ для восходящей ветви
орбиты на интервале аргумента широты 0 и -у- . При рас¬
чете трассы на интервале 0^м^2л следует пользоваться алго¬
ритмом
ф = arcsin (sin i sin u),
X=Xa-|-Sf u,
Гэн
arcsin -2-1- при 0 •< и ;
tg* и 2
BE= л —arcsin при— <Си<,— л; (1. 14)
tgZ H 2 2
о i . tg Ф 3 .. ~ o
2лarcsin y-y при— л<к<2л.
Обращаясь к первой формуле алгоритма (1. 14), замечаем,
что по мере возрастания аргумента широты и широта подспутни-
л
ковых точек непрерывно возрастает, достигая при и = — своего
максимального значения
фтах=arcsin (sin i).
15
Для орбит прямого наклонения 0 <7максимум широты
равен наклонению i, а для орбит обратного наклонения
— i л
2
Фтах = л-Д-
С.момента достижения фтах начинается нисходящая ветвь орби¬
ты, на которой широта подспутниковых точек непрерывно
уменьшается, достигая своего минимума при и = 3/2л,
sin фтш =—sin i.
Таким образом, трасса ИСЗ проходит в некотором широтном
поясе, ограниченном наклонением орбиты
-(180-/)<ф< 180-/, (_1</<л).
Предельными случаями при определении широтных поясов
являются экваториальные орбиты (4=0), для которых рассмат¬
риваемый пояс широт представляется линией экватора и поляр¬
ные орбиты — -yj, Для которых широтный пояс охватывает
весь земной шар.
Обращаясь далее ко второй формуле алгоритма (1. 14), обна¬
руживаем еще одно важное свойство трассы: начало трассы по¬
следующего витка смещено по долготе относительно начала
трассы предыдущего витка на величину
ДХМВ = —— 2л,
7 ЗВ
зависящую только от периода обращения Т. А так как за на¬
чальную точку трассы может быть принята подспутниковая точ¬
ка на любой широте ф в соответствующем широтном поясе, то
справедливо следующее утверждение: любая точка трассы на
последующем витке смещена по долготе в западном направлении
т
на одну и ту же величину ДХМВ= 2л относительно соот-
Гзв
ветствующих точек предыдущего витка.
Сформулированное свойство трассы справедливо для любых
орбит без учета эволюций, приводящих к падению периода. Из
этого важного свойства трассы вытекает простое правило
построения трассы на последующих витках по предыдущему вит¬
ку, а именно: необходимо построить трассу с помощью алгорит¬
16
Рис. 1.4 График трасс двух смежных
витков
ма (1. 14) на одном витке, а затем каждую точку этой трассы
сместить в западном направлении на величину AAMB=const.
Смещение трассы по долготе за один виток называется меж-
витковым сдвигом или межвитковым растоянием. Для орбит с
периодом обращения 1,5 ч величина ДХмВ составляет 22,5°, для
орбит с периодом Г=12 ч межвитковой сдвиг равен —л, а для
геосинхронных орбит (с периодом Т=ТЗВ) ДХМВ=—2л.
Построив трассы ИСЗ на двух смежных витках, обнаружи¬
ваем точки их пересечения, одна из которых находится в север¬
ном полушарии, другая —
в южном (рис. 1.4).
Определим положение
точки пересечения трассы
ИСЗ в северном полушарии.
Обозначим аргументы ши¬
роты точки пересечения для
Л-го и (й+1)-го витков соот¬
ветственно щ и Uft+i. Харак¬
терно, что точка пересечения
трассы лежит на восходя¬
щей ветви предыдущего вит¬
ка и на нисходящей ветви
последующего витка (см. рис. 1.4, точка /)• Имея это в виду,
условия равенства широты и долготы точки пересечения запишем
в виде
sin «ft+1 = sin Ug,
Х2 + л — arcsin *-^- — (2л + иЛ+1) = Хв + arcsin — ик.
tg ' 7ЭВ tgz Тзв
Отсюда получаем условие равенства долгот подспутниковых то¬
чек:
яА+1 = л uk,
л — 2 arcsin = — (Зл — 2«Д
tg i Т зв
Решая совместно систему трансцендентных уравнений
л — 2arcsin tgl^' = — (Зл — 2«Д
‘8*’ Гзв (1.15)
sin 4^ = sin i sin uk,
находим аргумент широты точки пересечения на k-м. витке и ши¬
роту этой точки. Затем определяем долготу точки пересечения
по формуле
, , । - tg фх т
Х. = а24-arcsin uk.
tg i Тзв
17
Аналогично можно найти координаты общей подспутниковой
точки в южном полушарии, разрешив систему уравнений
л 4- 2arcsin (п — 2цк),
‘И*’ Гзв (1.16)
sin ф2 = sin i sin tik.
Трасса ИСЗ пересекается не только на смежных витках, но
и на всех остальных витках. Получим условия пересечения трасс
для некоторого витка с порядковым номером k. Трасса этого
витка будет пересекаться с трассами Л-f-l, k-J-2 и т. д. витков.
Соответственно в уравнении долгот должен учитываться меж-
витковый сдвиг за один, два и т. д. витков:
Х2-|-л — arcsin — J— (2л,1-\-ик-\-Г) =
tgi Гэв
= Xs + arcsin uk, uk+l = n-uk, (ф>0),
tgz '3B
где I — разность порядковых номеров витков, для которых опре¬
деляется общая подспутниковая точка.
Итак, уравнения пересечения трасс (&-J-Z) -го витка с k-м вит¬
ком будут иметь следующий вид:
л— 2arcsin Л-4-=_1_ (2л/-|-л — 2ак),
‘g' Тзв ' (1.17}
sin <p=sin i sin uk, ф^>0;
n-J-2arcsin^-2=—1-(2л/-|-2л — 2ufc),
‘S* (1.18)
sin <p = sin i sin uk, ф<0.
До сих пор трасса рассматривалась на интервале времени
одних звездных суток. При переходе от данных суток к последую¬
щим обнаруживается еще одно важное свойство трасс. Если в
звездных сутках укладывается не целое число периодов (витков),
то начало первого витка вторых суток будет сдвинуто по дол¬
готе относительно начала первого витка первых суток на неко¬
торую величину ДХсут, не превосходящую межвиткового сдвига
АХмв- Суточный сдвиг трассы, если о нем судить по положению
на экваторе указанных точек, может быть как западным, так и
восточным. Проиллюстрируем сказанное на следующем примере.
Пусть в звездных сутках укладывается п' целых Т и некоторая
дробная часть витка tn', т. е.
Тзв , ,
Т
Предположим, что за первый виток вторых суток принят п-|-1 ви¬
ток. Тогда часть витка, оцениваемая величиной пг', будет при¬
18
надлежать предшествующим суткам, а остальная часть, равная
1 —т', будет относиться к новым суткам (первый виток новых
суток не целый). При этом конец рассматриваемого витка будет
смещен по долготе относительно конца 1-го витка первых суток
на величину т' (ЛХМВ) в восточном направлении. На такую же
величину будут смещены и начальные точки рассматриваемых
витков в смежные сутки.
Предположим, что за первый виток вторых суток принят
п-1-2 виток, который целиком принадлежит смежным суткам.
Тогда смещение по долготе начальных точек первых витков в
смежных сутках определится той частью витка, которая заканчи¬
вается во вторые сутки. Поскольку в смежные сутки проходит
часть витка, оцениваемая величиной 1 —т', то суточный сдвиг
трассы определится по следующей формуле:
ДХсут = (1 - т') ДХмв- (1.19)
Величина т' всегда меньше единицы, а межвитковый сдвиг Хмв
всегда отрицателен. Поэтому суточный сдвиг трассы в рассмат¬
риваемом случае является западным.
Для устранения неопределенности, возникающей при оценке
направления суточного сдвига, примем вторую схему отсчета
витков, когда сопоставляются первые витки, целиком принадле¬
жащие соответствующим смежным суткам. Алгоритм расчета су¬
точного сдвига при этом представится в виде формул
7 = 2:1 1/—,
у К
дХмв=-2л^-, (1.20)
‘ ЗВ
Тзя , ,
-^- = п , т',
Т
ДХСут (1 "I ) ДХМВ.
Трассы ИСЗ во вторые сутки полета смещены относительно
трасс соответствующих витков первых суток на величину суточ¬
ного сдвига ДХсуг. Отсюда вытекает следующее простое правило
построения трассы в смежные сутки: необходимо каждую точку
трассы для первого витка первых суток сместить по долготе в за¬
падном направлении на величину AXcyT и затем от витка к витку
произвести межвитковый сдвиг на величину АХМВ. Если такое по¬
строение проделать для всех витков вторых суток, то трасса
ИСЗ на переходящем в смежные сутки витке закончится отно¬
сительно начала первого витка предшествующих суток на дол¬
готном расстоянии, равном суточному сдвигу ДХсут.
Суточный сдвиг трассы может происходить таким образом,
что по истечении q звездных суток трасса начнет повторяться.
Если выполняется равенство <7ДХсут = АДХмв, т. е. на интервале р
19
межвитковых расстояний укладывается q суточных сдвигов, то
повторение трассы начнется через q=^^ Р суток.
дхс
Например, при —^-—14,75 трасса будет повторяться через
р 1 т
q= = = 4 суток. Если же —— =15,25, то повто-
1— т' 1 — 0,75 J Т
Р 3 4 о
рение начнется по истечении q = = ——3 суток.
1 ~~ тп I — 0,25 3
В том и другом случаях трасса повторяется по истечении 4 су¬
ток. Однако в первом случае целое число суточных сдвигов укла¬
дывается на интервале одного межвиткового расстояния, тогда
как во втором это достигается на интервале трех межвитковых
расстояний. Если отношение АХМВ/ДХсут таково, что его нельзя
представить в виде отношения простых чисел q[p, то в этом слу¬
чае трасса ИСЗ не повторяется, какова бы при этом не была
продолжительность полета.
Орбиты, трассы которых повторяются, называются квазисин-
хронными. Среди множества квазисинхронных орбит выделим
те, для которых отношение ТЗВ!Т представляется целым числом
п'. Высоты круговых квазисинхронных орбит с целым числом
витков в сутки приведены в табл. 1.1.
Таблица 1.1
п'
16
15
14
13
12
11
10
1
Н, км
263
570
904
1245
1678
2130
2752
36500
В промежутках между указанными высотами квазисинхрон¬
ных орбит, у которых т' = 0 и АХМв/АХСут=1 существует множе¬
ство орбит, у которых отношение Д%мв/АЛСут представляется
отношением простых целых чисел
ДХМВ д
ДХсут р
Такие орбиты также являются квазисинхронными и отличаются
от первых тем, что повторение трассы наступает не через каждые
сутки, а через такое количество суток, когда на интервале р меж¬
витковых расстояний укладывается q суточных сдвигов.
Рассмотренные свойства трасс ИСЗ присущи любым орбитам,
хотя эти свойства были выявлены для класса круговых орбит.
Межвитковое расстояние АХМВ и суточный сдвиг АХсУт зависят от
20
периода обращения Т, который определяется только большой
полуосью орбиты
г=2“/ Т-
Если высота полета ИСЗ такова, что действие силы сопротивле¬
ния атмосферы на достаточно длительном промежутке времени
оказывается незаметным, то период обращения Т будет сохра¬
няться на этом промежутке времени постоянным, а следователь¬
но, сохранятся неизменными межвитковое расстояние и суточ¬
ный сдвиг трассы по долготе. В случае же полета на малых вы¬
сотах, где сопротивление атмосферы приводит к падению перио¬
да, межвитковое расстояние и суточный сдвиг непрерывно ме¬
няются.
3. Зона обзора. С наземного пункта, находящегося на трассе,
ИСЗ наблюдаем в зените в момент прохождения им подспутни¬
ковой точки, совпадающей с пунктом наблюдения. Если наблю¬
дательный пункт смещен относительно трассы (находится в сто¬
роне от трассы), то с этого пункта ИСЗ наблюдаем под некото¬
рым максимальным углом возвышения над горизонтом, мень¬
шим ЭСУ*, а при достаточно большом удалении пункта от трассы
угол возвышения стремится к нулю, и ИСЗ с данного пункта
не наблюдаем.
Пусть в некоторой точке р на поверхности Земли (рис. 1.5)
размещен наблюдательный пункт. Очертим вокруг центра Зем¬
ли 03 сферу радиусом где Н — высота сферы над поверх¬
ностью Земли. Проведем через точку р касательную плоскость к
поверхности земного шара (плоскость местного горизонта). Тог¬
да любая точка пространства, лежащая внутри области, ограни¬
ченной снизу плоскостью местного горизонта, а сверху сферой:
рассматриваемого радиуса, теоретически наблюдаема с данного'
пункта. Ограниченную часть сферы будем характеризовать пре¬
дельным центральным углом <рэ. пр (рис. 1.6). Этот предельный
угол можно найти из треугольника O3pd\
?3.np = arccos • (1-21)
Пространство, ограниченное снизу плоскостью горизонта, а свер¬
ху — сферой радиуса будем называть предельной зоной
обзора с данного пункта.
Аналогично определяем предельную зону обзора Земли с
ИСЗ. Границей этой зоны на поверхности Земли является каса¬
тельная конуса, в вершине которого находится ИСЗ, с земным
шаром. При этом предельный угол зоны обзора ф3. пр для данной
высоты Н получается одинаковым как при наблюдении с назем¬
ного пункта за ИСЗ, так и с ИСЗ за наземными пунктами. Ка¬
чественная зависимость <р3. щ> от высоты Н приведена на рис. 1.7.
Характерно, что по мере увеличения высоты Н площадь земной
21
поверхности в пределах зоны обзора сначала резко возрастает,
а затем при достаточно большом удалении точки наблюдения от
поверхности Земли плавно стремится к половине поверхности
земного шара.
Предельная зона обзора возможна теоретически. В действи¬
тельности из-за ограничений, налагаемых условиями работы ап¬
паратуры, зона обзора меньше предельной. Пусть минимальный
угол возвышения наблюдаемой точки над горизонтом ограничен
некоторой величиной б, а угол обзора с борта ИСЗ ограничен
Рис. 1.5. К определению зоны об¬
зора наблюдательного пункта
Рис. 1.6. Предельная зона
обзора с космического ап¬
парата
некоторой величиной у (см. рис. 1.6). Определим допустимую
зону обзора. Для этого обратимся к треугольнику О3рс, углы
которого удовлетворяют равенству
^+8 + ?з+У = л.
По теореме синусов имеем
/л \
sin —- + »
\ 2 ' sin у
R + H ” ’
откуда с учетом равенства sin (-^-|-8) = cos 8 получим зависи¬
мости между углами Б и у.
у=arcsin (—— cos sY
кЛ+я Г
* iR + H ■ \
8 = arccosl- r sin у).
22
Рис. 1.7. График зависимости пре¬
дельного угла <рэ. пр от высоты орбиты.’
Обращаясь к исходному равенству углов, получим
Л ж
?з=^—8~ Y-
Если задана высота Н и угол у, то при определении угла обзо¬
ра <рэ необходимо пользоваться формулой
у3= у —arccos I sin yi. (4 22)
2 \ 7? /
Итак, размеры зоны обзора зависят от высоты полета ИСЗ
и от угла обзора у. Высота полета ИСЗ определяется разностью
между радиусом орбиты г и ра¬
диусом Земли 7?
Н = £ R.
14-е cos (и — ш)
Для эллиптических орбит
высота полета непрерывно из¬
меняется в зависимости от ар¬
гумента широты и, достигая
при ы = <о минимума, а при и =
= и4-л —максимума. Поэтому
величина <р3 характеризует
мгновенную зону обзора. В слу¬
чае круговых орбит имеем по¬
стоянную высоту 'полета Н, которой отвечает вполне определен¬
ная зона обзора, характеризуемая величиной <p3=const. Зона
обзора легко может быть представлена на глобусе. Для этого
достаточно из подспутниковой точки очертить на нем круг ду¬
гой 7?<р3.
4. Полоса обзора. Каждой подспутниковой точке может быть
поставлена в соответствие некоторая мгновенная зона обзора,
определяемая центральным углом <р3 (1.22). Центр этой зоны
совпадает с подспутниковой точкой (рис. 1.8). Геометрическое
место мгновенных зон обзора на сфере радиуса Земли R пред¬
ставляется некоторой областью, которую будем называть поло¬
сой обзора. Боковые границы полосы обзора представляют собой
огибающие мгновенных зон обзора, сходственные точки которых
равноудалены от трассы ИСЗ. Расстояние между сходственными
точками огибающих (точками касания мгновенной зоны обзора)
назовем шириной полосы обзора Ь. Ширину полосы обзора усло¬
вимся определять на сфере длиной дуги большого круга. В этом
случае
b=2R<p3=2R [2—у—arccos + H sin • (1-23)
23
Для эллиптических орбит ширина полосы обзора непрерывно
изменяется. Величина b достигает минимума при прохождении
ИСЗ в перигее орбиты и максимума — в апогее, высоты Н кото¬
рых соответственно равны
= = R-
1 + е 1 — е
Полоса обзора симметрична относительно трассы только для эк¬
ваториальных орбит. Наклонным орбитам отвечает несиммет¬
ричная полоса. Поскольку полоса обзора привязана своей осевой
Рис. 1.8. К определению поло¬
сы обзора
Рис. 1.9. К определению узловых
точек пересекающихся орбит
линией к трассе ИСЗ, то ей присущи все свойства трассы: пере¬
сечение, межвитковый сдвиг, суточный сдвиг.
5. Узловые точки. Орбиты, плоскости которых пересекаются,
имеют на линии пересечения плоскостей характерные точки
(рис. 1.9), которые принято называть узловыми. Такое название
этим точкам присвоено по аналогии с точками пересечения пло¬
скости орбиты с плоскостью экватора по линии узлов. Если из
двух орбит плоскость одного принять в качестве опорной, то по
аналогии с восходящим и нисходящим узлами орбиты другой
ИСЗ дважды за виток пересечет плоскость опорной орбиты.
Координаты узловых точек определим прямым восхождением
ал и склонением д&. При этом для упрощения выкладок сделаем
предположение о том, что точка k, а равно и антиподная ей точ¬
ка k' имеют аргументы широты «и, «гл или «и, Игл- лежащие
в одной четверти. Пусть для определенности 0^ил^90°,
180°^Ufe'^270°. Тогда прямое восхождение точки k, принадле¬
жащей соответственно первой и второй орбитам, определим по
формулам
24
“ifc = 2i +arcsin-^- ,
tg» i
(1-24)
a2ft = $2 + arcsin .
tg »2
Полагая alk = aih = ak, получим систему уравнений
sin(aft—2X)=-^-,
tg »i
(1.25)
sin (aft-22)= ,
tg »2
откуда после исключения tgSh и элементарных преобразований
найдем
tg a = sin2itgz1- sing2tgz2 (1 2б)
b cos 2i tg *1 — cos 22 tg Z2
Формула (1.26) каждой паре орбит с параметрами 1\, 62ь »2,
Q2 ставит в соответствие значение tga^, которому отвечают два
значения аь, отличающиеся на величину л, т. е.
Qfc' = Qft -|- Л.
Склонение узловой точки найдем, воспользовавшись одним из
уравнений (1. 25), например первым
tgSfe = tg h sin(aft-21). (1.27)
Опять-таки имеем два значения — одно в северном полушарии
(6fe>0), другое — в южном (6л<0). Если точка k лежит во вто¬
рой четверти, тогда в качестве исходных соотношений следует
взять
alt = 2.4- л — arcsin tg , агк = 2,4-л — arcsin tg 8;zfc- ,
* tg i * tgZ
которые после аналогичных преобразований приводят к следую¬
щему решению:
tg аь = sina.tgz^sins, tgz2
cosQitgzi—cos22tgZ2
tg sft = tg4(n+21-aJ.
Существуют также особые случаи решения, когда аргументы
широты точки k лежат на пересекающихся орбитах в разных чет¬
вертях. Пусть точка k на первой орбите лежит по аргументу ши¬
роты в 1-й четверти, а на второй орбите соответственно во 2-й.
Тогда исходные зависимости будут представлены в виде
au = 21-|-arcsin tg81t ,
tg»i
01 • tg В2ь
a2J,=2 л — arcsin ■ s ,
tg z2
25
, Sin22tgZo— SinQitgZi
откуда имеем tg ал = 1 Б 1 ,
cos 21 tg i[ — cos 22 tg z2
tg8*=tg/isin(a*— 2j).
1.4. СВЯЗИ МЕЖДУ ЭЛЕМЕНТАМИ СТРУКТУРЫ
Для любой организованной системы характерно то, что ее
элементы упорядочены определенным образом. Такое упорядо¬
чение осуществляется посредством связей между элементами
структуры. В нашем случае элементами структуры являются
параметры орбит системы N ИСЗ:
Ч, Qi, Pi, eh tnl (4=1, 2,..., N).
Каждому данному индексу i (порядковому номеру ИСЗ) отвеча¬
ет совокупность шести элементов, связанных между собой систе¬
мой дифференциальных уравнений (1.3). Отношение между лю¬
бой парой элементов данного индекса I определяется только диф¬
ференциальными связями. Причем шесть элементов есть то наи¬
меньшее число, которое полностью определяет орбиту.
Наряду с рассматриваемой совокупностью параметров орби¬
ты часто употребляются другие величины, например, такие как
период обращения, перигейное и апогейное расстояния и т. п.
Расширение структуры добавлением элементов сверх минималь¬
но необходимых для полного ее определения приводит к появ¬
лению линейнозависимых отношений между элементами.
Система N ИСЗ образуется из N орбит. Взаимные связи меж¬
ду элементами орбит совокупности ИСЗ могут быть теоретически
прослежены только посредством решения задачи п тел, в кото¬
рой учитывается взаимное притяжение всех п притягивающих
тел как больших, так и малых. Система дифференциальных
уравнений движения N ИСЗ относительно основного притягива¬
ющего тела имеет следующий вид:
+ f y.mj —з -3 ,
r‘ \ hj i)
N
,, i \ Kt , j \i (У)—уi \
У1=-/(гп0 + т{) -^-+/ \ mJ—з , (1.29)
ri ~ r) /
n
zl= + f V mA*' -~т),
Г1 ~ \ } /
где f — постоянная всемирного тяготения; гпд—масса основного
притягивающего тела (масса Земли); т< — масса 4-го номера
ИСЗ;
= Vr(^-^)2+(«/z-'/;)2+(^-^)2;
/=1, 2,... , N; / = 1, 2,..., W (//Z).
26
Система уравнений (1. 29) для W ИСЗ содержит в себе 3X/V
уравнений второго порядка. При этом каждый ИСЗ оказывает
влияние на движение любого другого ИСЗ, а также оказывает
влияние на ускорение системы координат, связанной с Землей.
Влияние массы ИСЗ на ускорение системы координат учиты¬
вается в первом слагаемом (1.29) значением массы mit а влия¬
ние масс /-Х ИСЗ (/=/=/) на ускорение i-ro ИСЗ учитывается в
правой части уравнений (1. 29) значениями сумм.
Если масса ИСЗ /и/ пренебрежимо мала по сравнению с мас¬
сой основного притягивающего тела то, то рассматриваемая
задача называется ограниченной задачей п тел. Если же не толь¬
ко масса mit а и массы m.j (/=1, 2,..., N, j=/=i) пренебрежимо’
малы по сравнению с массой то, то задача п тел распадается на
Л/ независимых задач движения ИСЗ в поле одного притягиваю¬
щего центра. Поскольку в действительности масса ИСЗ ничтож¬
но мала по сравнению с массой Земли, то движение М ИСЗ прак¬
тически является независимым. Отсутствие перекрестных связей
между элементами орбит для любой пары ИСЗ наводит на
мысль о том, что совокупность N ИСЗ не является системным
объектом. Действительно, с точки зрения механики полета такие
связи проявляются только в задаче п тел, решать которую для
ИСЗ как притягивающих тел смысла не имеет.
Между тем, ИСЗ системы функционируют согласованно,
а следовательно, существуют определенные связи между ними
и в конечном счете между элементами их орбит. Эти связи обу¬
словлены характером функционирования системы, поэтому их в
дальнейшем будем называть функциональными. Функциональ¬
ные связи классифицируем по следующим характерным при¬
знакам:
1) по взаимному расположению зон обзора пары ИСЗ (усло¬
вие перекрытия зон обзора);
2) по взаимному расположению полос обзора пары ИСЗ (ус¬
ловие покрытия обозреваемой поверхности полосами обзора);
3) по попаданию любой точки поверхности земного шара на
полосу обзора хотя бы одного ИСЗ (условие глобальности);
4) по попаданию заданной точки обозреваемой поверхности
в зону обзора хотя бы одного ИСЗ в каждый данный момент
времени (условие непрерывности).
Конкретное представление перечисленных условий (функцио¬
нальных связей) и их формализация будут рассматриваться в
связи с принципами построения орбитальных систем.
Глава 2
МЕТОДЫ И АЛГОРИТМЫ РАСЧЕТА ЭЛЕМЕНТОВ
СПУТНИКОВЫХ СИСТЕМ
2.1. СИСТЕМЫ КА НЕПРЕРЫВНОГО ГЛОБАЛЬНОГО ОБЗОРА ДЛЯ
МЕТЕОРОЛОГИИ И ГЕОЛОГИЧЕСКОГО ПРОГНОЗИРОВАНИЯ
Построить систему — это значит определить такие ее харак¬
теристики, при которых обеспечивается решение возложенных на
нее задач. В данном случае требуется определить количество
КА и их размещение в пространстве, исходя из условия глобаль¬
ности и непрерывности. Отметим, что способы построения систем
КА на полярных и наклонных орбитах принципиально отлича¬
ются. Рассмотрим вначале построение системы непрерывного
глобального обзора на полярных орбитах. Сделаем некоторые
предположения.
1. Орбиты космических аппаратов системы круговые.
2. Аппараты системы группируются в т плоскостях по п штук
в каждой.
3. Распределение космических аппаратов в плоскости орбиты
равномерное.
4. Углы обзора бортовой аппаратуры для всех аппаратов си¬
стемы одинаковы.
При принятых исходных предположениях задача может быть
сформулирована следующим образом. Для заданной высоты кру¬
говой орбиты Н и угла обзора бортовой аппаратуры у опреде¬
лить количество плоскостей орбит т и число КА в одной пло¬
скости п, при которых выполняется условие непрерывности
обзора.
Очевидно, что условие непрерывности будет выполнено, если
в каждый данный момент вся поверхность земного шара покры¬
вается зонами обзора. Выполнение условия непрерывности су¬
щественно зависит от географического положения обозреваемой
точки на поверхности Земли. Рассмотрим в этой связи два край¬
них случая:
а) точка, подлежащая обзору, находится на полюсе Земли;
б) точка находится на экваторе.
28
В первом случае необходимым условием непрерывности обзо¬
ра является отсутствие разрывов между зонами обзора одной
плоскости, т. е. когда между соседними зонами обзора одной
плоскости имеется хотя бы одна общая точка. При этом задача
непрерывного обзора полюса может быть решена системой КА,
Рис. 2.2. К определению полосы
непрерывного обзора
расположенных в одной плоскости, количество которых опреде¬
лится из очевидного соотношения (рис. 2. 1)
2фэп=2л, (2.1)
откуда
п = — . (2.2)
<Рз
Поскольку количество КА п не может быть дробным, то найден¬
ную величину следует округлить до целого числа в большую сто¬
рону и тогда
п = е\ —1+1, (2.3)
I ?з]
.. Г л 1 л
где Е — —целая часть —.
I «Рэ J «Рэ
Если зоны обзора только соприкасаются друг с другом (п —
целое число), то будем иметь в плоскости орбиты линию сплош¬
ного обзора. Если теперь увеличить количество КА в плоскости
орбиты, то получим полосу непрерывного обзора шириной 2Ь
(рис. 2.2). В пределе при и—>-оо ширина рассматриваемой поло¬
сы b стремится к <рэ. При этом условие непрерывности оказывает¬
ся выполненным не только для полюса, а для некоторой области
в окрестности полюса, характеризуемой диапазоном широт
29
Рис. 2. 1. К определению линии не¬
прерывного обзора
90°^ф^90°— b. Что же касается точек, расположенных на
меньших широтах, то там условие непрерывности при размеще¬
нии системы КА в одной плоскости не может быть выполнено
ни при каком количестве космических аппаратов.
Рассмотрим второй случай, когда обозреваемая точка распо¬
ложена на экваторе. Необходимым условием непрерывности здесь
является отсутствие разрывов между полосами сплошного обзо¬
ра. Условие непрерывности обзора на экваторе можно предста¬
вить следующим соотношением:
2л=2т-2Ь, (2.4)
отсюда число плоскостей орбит системы
/П = £,[5]+1- (2'5)
Если обозреваемая точка лежит на некоторой широте
0°<ф<90°— b (см. рис. 2.2), то выполнение условия непре¬
рывности на этой параллели потребует создания системы, имею¬
щей число плоскостей
= Е [2^]+(2-6>
, , / sin b \ ,
где bif=arcsin —ширина полосы сплошного обзора
\ cos 4 /
на данной широте ф.
Поскольку для любой геоцентрической широты больше,
чем b на экваторе, то выполнение условия непрерывности тре¬
бует меньшего числа плоскостей орбит системы. Поэтому для
обеспечения глобального непрерывного обзора достаточно выпол¬
нить условие непрерывности для экватора. Общее Количество КА
системы N при этом определится как произведение числа пло¬
скостей орбит т на количество КА в одной плоскости п, т. е.
N=mn. (2.7)
До сих пор все рассуждения производились для некоторого
фиксированного значения Ь, которому соответствует определен¬
ное количество КА в плоскости. В общем же случае ширина
полосы непрерывного обзора является также некоторой функ¬
цией числа КА в плоскости b=b (п). Поэтому общее количество
КА в системе является функцией только п, где п может прини¬
мать значения на интервале
— </г<сю. (2.8)
<?3
Когда п = — (зоны обзора в плоскости орбиты соприкаса-
<Рз
ются), полоса непрерывного обзора вырождается в линию Ь = 0
и N в этом случае обращается в бесконечность. При — ши-
?3
30
рина полосы непрерывного обзора Ь>0 и количество КА в систе¬
ме примет конечное значение. Когда п—>оо, Ь стремится к свое¬
му максимальному значению <рэ и N снова обращается в беско¬
нечность. Таким образом, существует множество значений N,
удовлетворяющих условию глобального непрерывного обзора,
т. е. поставленная задача не имеет единственного решения. По¬
этому имеются принципиальные возможности удовлетворения до¬
полнительным условиям создания системы. Потребуем, чтобы
поставленная задача решалась минимальным количеством КА.
Тогда построение системы сведется к минимизации функции
N=N(m, ri). Эта функция обладает той особенностью, что ее
аргументы — целые положительные числа и, следовательно, она
не является непрерывной. Поэтому для минимизации N=N(m, ri)
общие методы неприемлемы.
Существует много подходов к решению задач целочисленного
программирования. В наиболее общей форме задача целочислен¬
ной оптимизации имеет следующий вид [1]: найти вектор х с не¬
отрицательными компонентами Xj, j= 1,..., п в Еп, который мак¬
симизирует целевую функцию /(Xi,.... хп) при ограничениях
gi(xi xn)^0, Z= 1,..., т.
С геометрической точки зрения находится точка с целочис¬
ленными координатами в области, которая удовлетворяет огра¬
ничениям и минимизирует /. Заметим, что если опустить условие
целочисленности для вектора'решения х, то остается обычная за¬
дача линейного программирования (ЯП). При использовании
основного метода программирования поставленная задача цело¬
численного программирования (ЦП) решается без учета цело¬
численности. Если решение, полученное таким образом, удовле¬
творяет условию целочисленности, то оно и является оптималь¬
ным решением данной задачи ЦП, поскольку каждое допустимое
решение задачи ЦП является также решением соответствующей
задачи ЯП, получаемой после отбрасывания условия целочис¬
ленности. Однако если оптимальное решение задачи не является
допустимым решением задачи ЦП (условие целочисленности
нарушено), то формируется новая задача ЯП с добавлением но¬
вых ограничений. Новое ограничение выбирается так, что множе¬
ство допустимых решений новой задачи ЯП не включает опти¬
мальное решение первоначальной задачи ЯП, но включает все
допустимые решения задачи ЦП. Затем решается новая задача
ЯП. Если полученное оптимальное решение является допусти¬
мым решением задачи ЦП, то задача решена. В противном слу¬
чае процесс продолжается с добавлением новых ограничений.
Эти дополнительные ограничения называются отсечками.
Выразим неизвестные тип через заданные параметры — вы¬
соту круговой орбиты Н и угол обзора у. Для этого наряду с
шириной полосы обзора b введен в рассмотрение некоторый па¬
раметр а — половина углового расстояния между двумя смежны¬
ми КА в плоскости орбиты. Этот параметр удобен в том отно-
31
Рис. 2.3. Связь между величина¬
ми а, Ь, А
шении, что он непосредственно связан с высотой орбиты Н и уг¬
лом обзора у, с одной стороны, и с количеством КА в одной
плоскости, с другой стороны. Количество КА в одной плоскости
определяется при этом из очевид¬
ного соотношения
2л = 2ап. (2.9)
Связь величины а с Н и у по¬
лучим из сферического прямо¬
угольного ДАВС (рис. 2.3)
а = arcsin(sin <р3 sin А). (2.10)
Из этого же сферического тре¬
угольника выразим b через рас¬
сматриваемые величины:
b=arcsin . (2.11)
ktg Aj v
При заданных Я и у параметры а
и Ь являются функцией толь¬
ко угла А. Поэтому подлежащие определению величины тип
будут функцией угла А:
п = , (2.12)
arcsin (sin <р3 sin А)
ГП = , (2. 13)
„ ( tg [arcsin (sin <рэ sin А)1 1
2 a rc s i п { }
I tg А )
где
у3 = arcsin I—-— sin у) —у,
R — радиус Земли, равный 6371 км.
Таким образом, общее количество КА в системе будет пред¬
ставлено в следующем виде:
N = mn= . (2. 14)
( tg [arcsin (sin <p3 sin A)] }
2 arcsin (sin <f3 sin A) arcsin 1}
I tg A )
Угол А может принимать значения в интервале 0°<А<90р.
Причем каждому значению угла А соответствует вполне опреде¬
ленное количество плоскостей орбит т и КА в одной плоскости
п, при которых обеспечивается непрерывный глобальный обзор.
Расположение КА в системе необходимо оптимизировать с целью
получения минимума КА в системе. Оптимизация проводится по
32
углу А, характеризующему перекрытие зон обзора в плоскости
орбиты и между плоскостями.
Для нахождения оптимального угла А воспользуемся форму¬
лой (2. 14), полагая, что функция N от угла А непрерывна; и
дифференцируема
, г у \
л2 х cos <р3 arcsin х — у у 1 —х2 arcsin . ■
= Е1~л2__ , (2. 15)
дА ! У \
2(1 — х2) arcsin х arcsin —
\ K-l — х2 I
где
x = sin <p3sin А; у = sin <р3 cos А.
Рис. 2.4. График зависимости оптимального угла А
от высоты круговой орбиты Н
Приравняв (2. 15) нулю и решив ее относительно угла А, полу¬
чим оптимальное значение угла А, при котором общее количе¬
ство КА в системе минимально. Таким решением является:
sin А = ■- 1 ; cos А = /C0s'^3 . . (2. 16)
У 1 —cos <Рз у 1 + COS <Рз
Значение оптимального угла А от высоты орбиты Н и отношения
х =—приведены на рис. 2. 4.
Уз.пред
Ввиду того что функция (2. 13) целочисленна, оптимальное
значение угла, вообще говоря, может не совпадать со значением
оптимального угла при целочисленном решении, но оно будет
лежать в непосредственной близости от оптимального угла А
при целочисленном решении.
Примечание. Одна из причин, по которой аппроксимации, основанные
на выборе ближайшего целого, в линейном программировании не дают пра¬
вильного решения, иллюстрируется на рис. 2.5, где оба ограничения выпол¬
няются в вершине, а прямые, изображающие ограничения, проходят между
двумя рядами целочисленной решетки. Ближайшая целочисленная аппрокси¬
мация вершины лежит вне области допустимых значений (обведенной отрез¬
ками прямых линий) и, следовательно, не может быть использована. Как вид¬
но из рисунка, целочисленное решение задачи в действительности может дале¬
ко отстоять от решения ЛП. В нашем же случае решением являются все поло¬
жительные целые числа.
33
2 3430
Алгоритм определения минимального количества КА в систе¬
ме сводится к следующему:
— по заданному значению высоты И и угла обзора бортовой
аппаратуры у определяется угол <р3;
— находится значение угла А по формуле (2. 16);
— варьируется значение угла А в окрестности величины, по¬
лученной по формулам (2.16), определяется число плоскостей
орбит т и количество КА в плоскости орбиты:
— вычисляется значение функцииN(А),и наименьшее назна¬
чений будет решением поставленной задачи.
Рис. 2.5. Графическое изобра¬
жение целочисленной аппрок¬
симации
Рис. 2.6. Синхронизированное положение
зон обзора в двух смежных плоскостях
До сих пор предполагалось, что размещение плоскостей ор¬
бит вдоль экватора равномерное (восходящие узлы плоскостей
орбит разнесены на равновеликие расстояния). Заметим, что
найденное количество КА может быть уменьшено, если ввести
некоторую асимметрию в размещение плоскостей орбит. В этом
случае движение КА в смежных плоскостях орбит организуется
таким образом, что каждый из аппаратов одной плоскости по¬
стоянно занимает положение, соответствующее середине интер¬
вала между КА в другой плоскости (рис. 2. 6). При этом ширина
полосы непрерывного обзора возрастает на величину АЬ и число
плоскостей орбит уменьшается, а следовательно, уменьшается и
общее количество КА в системе. Однако поддержание взаимного
положения КА в двух смежных плоскостях орбиты связано с
.большими трудностями в практической реализации.
Система КА на полярных орбитах обладает тем недостатком,
что по мере увеличения геоцентрической широты ф возрастает
степень перекрытия полос непрерывного обзора и на полюсах
перекрытие достигает т-кратности.
Рассмотрим построение системы КА глобального непрерыв¬
ного обзора на наклонных орбитах. Для обеспечения глобального
покрытия угол наклонения плоскостей орбит к плоскости эквато¬
ра определяется из условия
90° — 6^4^90+6. (2.17)
34
При создании системы КА непрерывного глобального землй-
обзора на полярных орбитах полосами обзора покрывалась по¬
ловина дуги экватора и, исходя из этого, определялось число пло¬
скостей орбит. Для наклонных орбит может оказаться, что най¬
дется такая геоцентрическая широта ф, которая при равномер¬
ном распределении плоскостей орбит по экватору не будет по¬
крыта полосами непрерывного обзора.
Рис. 2.7. к определению макси¬
мального угла а между точками
пересечения плоскостью орбиты
плоскости параллели
Рис. 2.8. График зависимости
максимального угла а от геоцен¬
трической широты ф
Плоскость орбит космических аппаратов, образующих полосу
непрерывного обзора шириной 2Ь, пересекает данную геоцентри¬
ческую широту ф в двух точках, максимальный угол между кото¬
рыми (рис. 2.7) составляет
a = jt4-2arcsin . (2. 18)
\tg i )
Формула (2. 18) справедлива для широт О^ф^г. Для широт
<+Я>ф>/ угловое расстояние между точками пересечения пло¬
скостей орбит а=360°. На рис. 2. 8 представлена зависимость
а отф для четырех значений t=40°, 60°, 80°, 90°.
Определим ширину полосы непрерывного обзора по долготе
для геоцентрической широты ф. Ширина полосы непрерывного
обзора на широте ф (рис. 2.9)
^ = ВМ — ВК. (2.19)
Из сферического прямоугольного треугольника О"AN (Q"N = b\
NA — bq) получаем
,sinA=-^. (2.20)
sin Дф
2*
35
Из сферического прямоугольного треугольника ВАМ
sinA = . (2.21)
cos (ф 4-Дф) '
Взаимно приравнивая (2.20) и (2.21), получим значение Дф:
Дф = агсс1и _ cost - +tg<|») . (2.22)
\ sin b cos ф /
В сферическом прямоугольном треугольнике ВАМ известны:
угол B~i, сторона АЛ4=ф-|-Дф, тогда
Г■ 7 cos I \3 1
tg Ф + arcctg —— + tg Ф
ВМ = arcsin - \_sm & cos Ф /]_ 2 _
I tg/ J k ’
Из сферического прямоугольного
треугольника CO'D
(DO' = b\ DC = ^'}
sin C= sinfr . (2.24)
sin Дф'
Тот же угол С определяем из сфе¬
рического прямоугольного тре¬
угольника ВСК
sin С =— . (2. 25)
cos (ф—Дф')
Разрешая (2.24) и (2.25) относи¬
тельно Дф', получим
Дф' = arcctg ( — C°S- tg ф) . (2. 26)
\ sin b cos ф /
Тогда из сферического прямоугольного треугольника ВСК
{Г . I cos / , \1
tg ф— arcctg — — tg ф
L \ SID v COS у I /о O7\
—- : I . (2. 27)
tg I J
Подставим в (2.19) значение ВМ из (2. 23) и ВК из (2. 27) и
выразим ширину полосы непрерывного обзора ДХ<ь в функции от
угла наклонения плоскости орбиты к плоскости экватора /, ши¬
рины полосы обзора b и геоцентрической широты ф:
{Г. ( COS / , \1 )
tg ф + arcctg —;— — 4- tgф 11
1 \ sin b cos ф /I 1
‘ 1 — | —
tgz 1
1Г. 7 COS / , \ 1 1
tg ф— arcctg . — — tg Ф
—L cos * 1 . (2. 28)
Рис. 2.9. К определению ширины
полосы непрерывного обзора
36
Выражение (2.28) в знаменателе содержит функцию tgt и
при угле наклонения i=90° машинная реализация формулы за¬
труднительна. Проведя некоторые преобразования, получим
.,' , / sin ф cos i + sin b \ . /зтфсоз/— sin b \ /o
длф = arcsin i — ) — arcsin ( —— > 1. (2.29)
\ sin i cos Ф / \ sin i cos ф /
Оценим область применения полученной зависимости, т. е. най¬
дем диапазон геоцентрических широт, при которых для опреде¬
ления ширины полосы обзора можно пользоваться формулой
(2. 29). Из условия
sin ф cosr‘ + sin b < sin i cos<|> (2.30)
получаем
i — 6>ф. (2’31)
Для геоцентрической широты ф=1— b первый член правой ча¬
сти выражения (2. 29) будет равным л/2.
Таким образом, для геоцентрических широт
— b (2. 32)
ширина полосы обзора вдоль широты ф
_ arcsin pMcosf-sinfrx 3
2 \ sin i cos ф /
При ф=/+6 ширина полосы обзора Д2ф =0, а при 6=90° — i и
ф=90° ДАф =90°. Определим ширину полосы обзора на эквато¬
ре, для чего воспользуемся формулой (2.29),
. 1 ’ о 1 /sin b \
△Хф-о = 2 arcsin ( .
\sin i /
В случае полярных орбит (/=90°)
дХф_0=2д.
Если ширина полосы обзора Ь>1, то дХф=л для некоторого
диапазона геоцентрических широт
О^ф^фтах-
Найдем максимальную геоцентрическую широту фтах, при ко¬
торой еще будет выполняться условие дХф = л. Это будет в
том случае, если выражение в круглых скобках второго члена
правой части (2. 33) будет равно минус единице, т. е.
sin <|»m„ cost — sin 6 = — sin i cosфгаах, (2.34)
откуда фтах=^ — i. (2. 35)
37
Для географических широт ф>Я— I ширина полосы непре¬
рывного обзора определяется по формуле (2.33). На рис. 2? 10
представлены зависимости дХф от геоцентрической широты ф
для случая, когда полоса непрерывного обзора касается полюса,
т. е. z-|-6=90o. По мере возрастания геоцентрической широты ф
ширина полосы непрерывного обзора возрастает, достигая мак¬
симального значения на ф='/ — Ь и затем уменьшается до
дХф =90° при ф = 90°. На рис. 2.11 приведены зависимости
дХ^(ф) при фиксированном i=60° для й=5°; 10я; 20°. В этом
Рис. 2. 10. Зависимость ширины поло¬
сы обзора от геоцентрической широты
ф при /+&=90°
Рис. 2.11. График зависимости
ширины полосы обзора от гео¬
центрической широты ф при
i+6<90°
случае после достижения максимального значения дХф ширина
полосы непрерывного обзора уменьшается до нуля на широте
ф=г-|-&.
Число плоскостей орбит т для создания системы непрерыв¬
ного глобального обзора на наклонных орбитах определится из
условия
тдх; = а. (2.36)
Подставив значение дХф и а в формулу (2. 36), получим т для
0^ф</ — b
я 4-2 arcsin
т = . (2. 37)
(sin ф cos i + sin b\ / sin ф cos i — sin b \
; I — arcsin J
sin i cos ф / \ sin i cos ф !
38
Для i — b < ф < i
„ . / tg ф \
я + 2 arcsin I 1
m = (2.38)
(sin ф cos i — sin b \
-■ —: I
sin i cos у /
и для геоцентрической широты
2я
т = : -г- ■ (2. 39)
„ . I sin ф COS I—sin b \
я— 2 arcsin
\ sin i cos ф )
На рис. 2.12 приведены зависимости числа плоскостей орбит
т системы непрерывного глобального обзора (i+ft=90°) от гео¬
Рис. 2. 12. График зависимости
числа плоскостей орбит от
геоцентрической широты при
/+&=90с
Рис. 2. 13. График зави¬
симости числа плоскостей
орбит от ширины полосы
непрерывного обзора
центрической широты ф, из которых видно, что необходимое чис¬
ло плоскостей орбит на вполне определенных широтах достигает
максимума. Таким образом, если эту широту покрыть полосами
непрерывного обзора, то на других широтах тем более обеспе¬
чится покрытие. На рис. 2. 13 показана зависимость числа пло¬
скостей орбит системы непрерывного глобального обзора в функ¬
ции от ширины полосы непрерывного обзора Ь. Так как число
плоскостей орбит не может быть дробным, то на графике т=
= т(Ь) зависимость представляет собой ступенчатую функцию.
Показанные на рис. 2. 12 зависимости позволяют для системы
непрерывного глобального обзора построить номограмму опре¬
деления числа плоскостей орбит т и количества КА в плоскости
п при заданных высотах круговых орбит Н и угле обзора борто¬
вой аппаратуры у.
39
На рис. 2. 14 представлена такая номограмма. По заданному
Н и у определяется <рэ, на линии первых приближений отыски¬
вается полученное значение <рэ и находится число плоскостей
Рис. 2.14. Номограмма для определения необходимого количества КА в си¬
стеме непрерывного глобального обзора. Прямая в квадрате ab — линия
нахождения первых приближений
орбит т и количество КА в плоскости орбиты п (первое прибли¬
жение). В окрестности первого приближения (вправо и влево)
находятся т и п, дающее минимум N=mn, что и является ре¬
шением поставленной задачи. Для оптимального варианта нахо¬
дится /=90° — Ь.
2.2. СИСТЕМЫ КА НЕПРЕРЫВНОГО ЗОНАЛЬНОГО ОБЗОРА
Рассмотрим задачу построения системы КА непрерывного зо¬
нального обзора на полярных орбитах. Пусть требуется осущест¬
вить непрерывный обзор земной поверхности, начиная не с эк¬
ватора, а с некоторой геоцентрической широты ф. Тогда для ре-
шения указанной задачи можно создать систему с меньшим коли¬
чеством КА, чем это требовалось для глобального обзора. Выпол¬
нение условия непрерывности обзора в данном случае дости¬
гается благодаря заполнению без разрывов полосами непрерыв¬
ного обзора геоцентрической широты фн.
40
Рис. 2. 15. Схема обзора эква¬
тора при трех плоскостях орбит
Обозначим ширину полосы непрерывного обзора вдоль широ¬
ты фн через дХфн. При этом количество плоскостей орбит
определится по формуле
р-40-
где
дХ^,н=arcsin ( sin b .
\COS фн /
Дальнейшее решение задачи построения системы зонального
обзора ничем не отличается от рассмотренной задачи построения
системы глобального обзора на
полярных орбитах.
Созданная таким образом
система обладает тем свойст¬
вом, что на широтах, больших
фн, имеет место перекрытие по¬
лос непрерывного обзора, а на
меньших широтах — разрыв не¬
прерывности. Причем этот раз¬
рыв возрастает при уменьше¬
нии геоцентрической широты
и достигает максимальной вели¬
чины на экваторе.
Выберем на экваторе точку на¬
блюдения и проследим, как она
будет наблюдаться данной систе¬
мой в течение одних суток.
Предположим, что система непрерывного глобального обзора
имеет три плоскости орбиты (рис. 2. 15), а интересующая нас
точка в момент времени /о=О занимает положение «О». Начиная
, 2b „
с этого момента времени и до момента Ч=— Г33 данная
2л
точка будет непрерывно наблюдаться космическими аппаратами,
расположенными в плоскости II. В промежутке времени от t\ до
/г, где 7г=/1-|-,У3 ~ b T3f, рассматриваемая точка может на-
2л
ходиться как в секторе обзора, так и выйти из него. Подобная
неопределенность обусловлена тем, что в интервале 1—2 не вы¬
полнено условие непрерывности. На интервале времени от t2 до
л
”6* — з
t2, где /3 = £гН Т'зв, данная точка не наблюдается.
2л
В промежутке времени, пока точка перемещается из положения
3 в положение 4, существует такая же неопределенность наблю¬
дения, как и для интервала времени t2 — Л. С момента времени А
процесс наблюдения циклически повторяется. Таким образом, си¬
41
стема КА непрерывного зонального обзора на полярных орбитах
решает также задачу обзора с заданным разрывом наблюдения
на широтах, меньших фн.
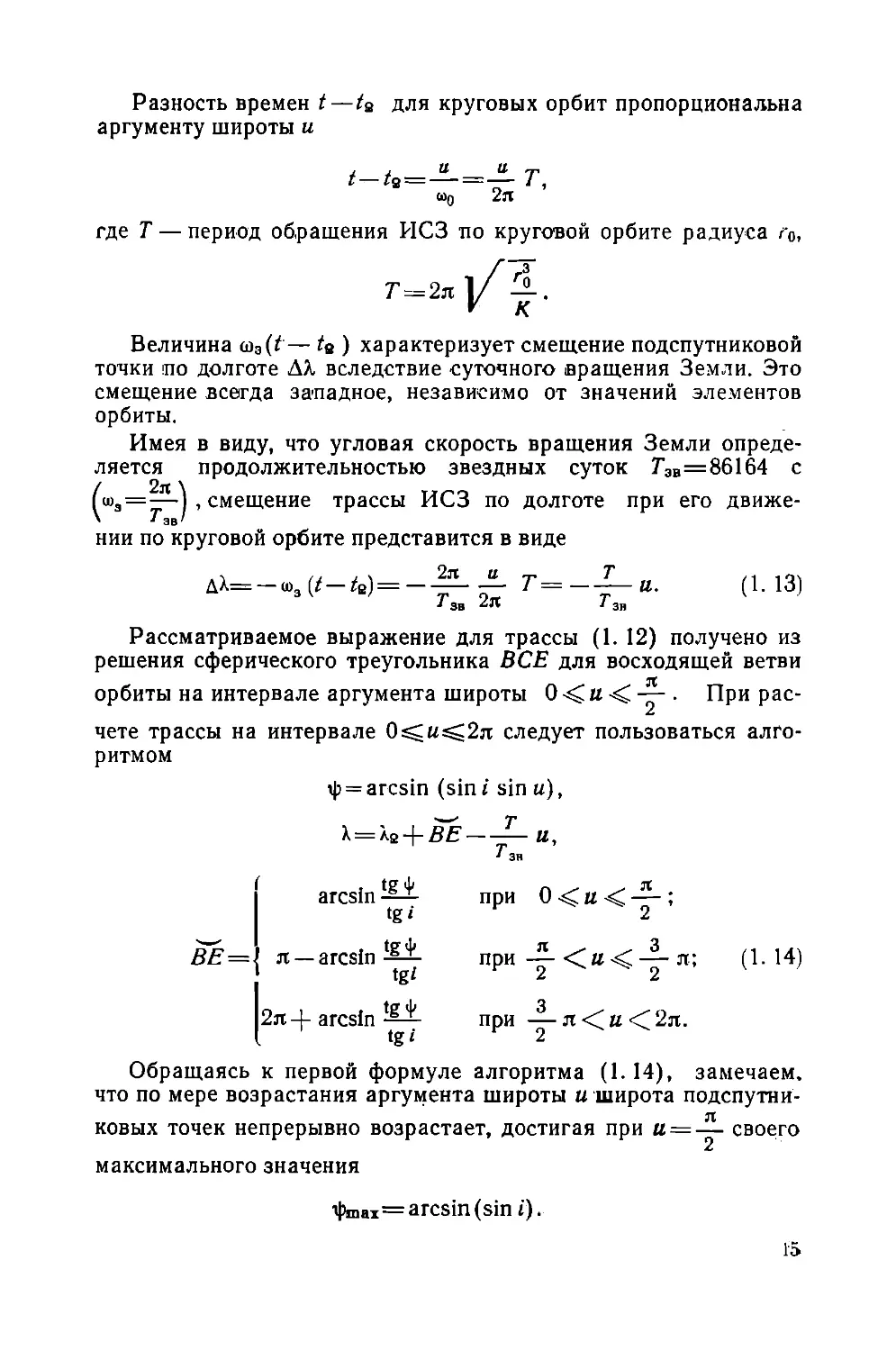
Если для полярных орбит на нижней геоцентрической широте
фн выполняется условие непрерывного обзора, то на любой дру¬
гой широте ф>фн это условие безусловно выполняется. Для по-
Рис. 2. 16. График зависимости числа плоско¬
стей орбит от геоцентрической широты ф при
t=60°
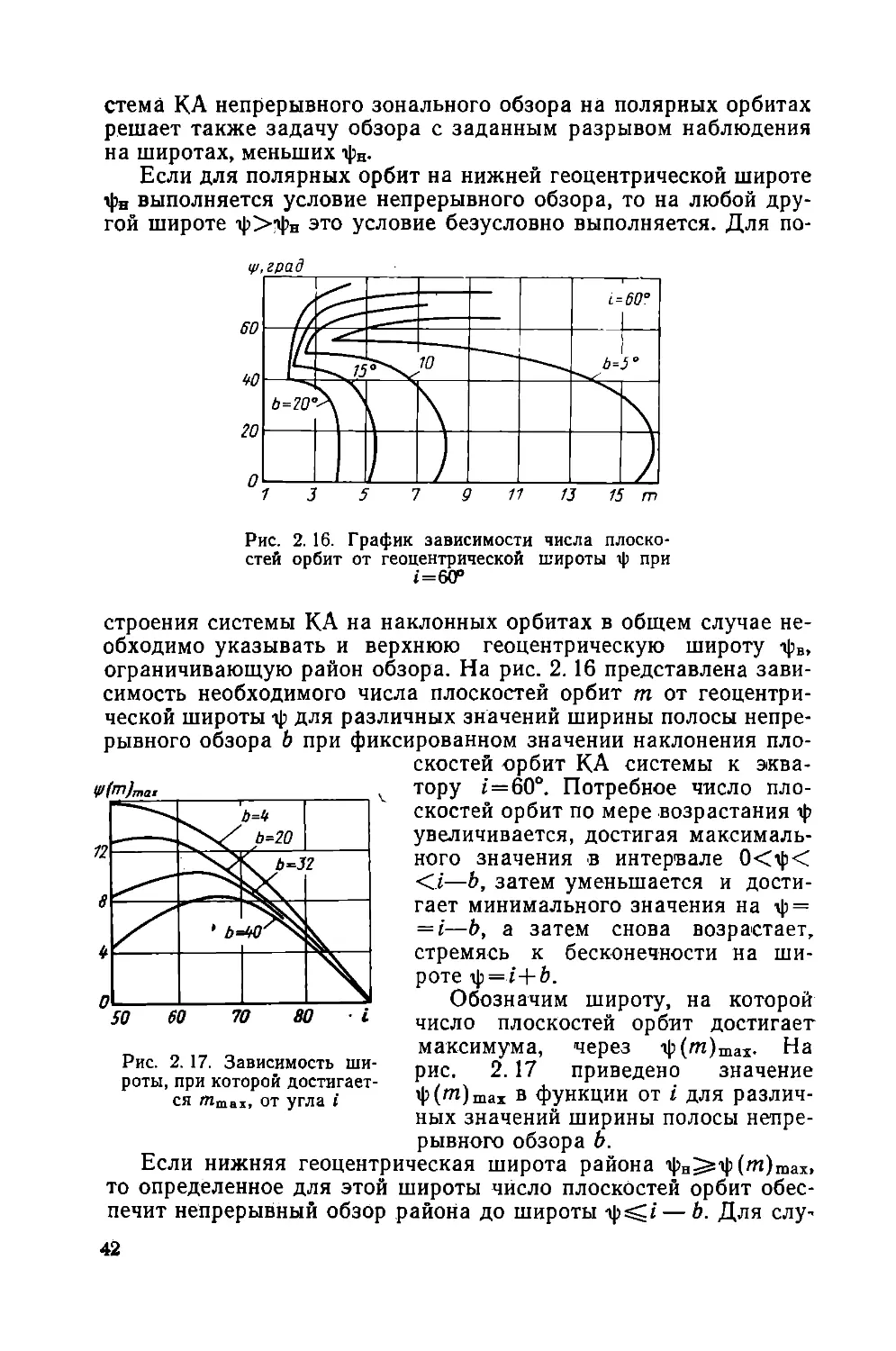
Рис. 2. 17. Зависимость ши¬
роты, при которой достигает¬
ся fflmin, от угла i
строения системы КА на наклонных орбитах в общем случае не¬
обходимо указывать и верхнюю геоцентрическую широту фв,
ограничивающую район обзора. На рис. 2. 16 представлена зави¬
симость необходимого числа плоскостей орбит т от геоцентри¬
ческой широты ф для различных значений ширины полосы непре¬
рывного обзора b при фиксированном значении наклонения пло¬
скостей орбит КА системы к эква¬
тору 1 = 60°. Потребное число пло¬
скостей орбит по мере возрастания ф
увеличивается, достигая максималь¬
ного значения в интервале 0<ф<
<z—Ь, затем уменьшается и дости¬
гает минимального значения на ф =
= t—Ь, а затем снова возрастает,
стремясь к бесконечности на ши¬
роте ф=/+6.
Обозначим широту, на которой
число плоскостей орбит достигает
максимума, через ф(щ)тах. На
рис. 2. 17 приведено значение
ф("1)тах в функции от i для различ¬
ных значений ширины полосы непре¬
рывного обзора Ь.
Если нижняя геоцентрическая широта района фн^ф('и)тах,
то определенное для этой широты число плоскостей орбит обес¬
печит непрерывный обзор района до широты ф^л— Ь. Для слу¬
42
чая же, когда фн<ф(/л)тах необходимо выбирать число плоско¬
стей, определенное для широты ф=ф(/п)шах, так как в противном
случае будут разрывы в полосах обзора для некоторого диапа¬
зона широт в окрестности ф=ф(/п)тах. Наклонение плоскостей
орбит к плоскости экватора в первом приближении может быть
выбрано из условия /^фв+ft. Затем для выбранной системы пер¬
вого приближения уточняется наклонение / методом последова¬
тельного приближения.
Для решения ряда задач непрерывность наблюдения не яв¬
ляется необходимой. Между тем, она достигается благодаря
большому количеству КА в системе. Поэтому, если требование
непрерывности заменить допустимым разрывом в наблюдении
(обслуживании), то для решения этой задачи потребуется си¬
стема с менышим количеством КА.
Если для систем КА непрерывного обзора основным элемен¬
том, определяющим необходимое количество КА в системе, яв¬
лялась ширина полосы непрерывного рбзора, то для систем КА
с разрывом обслуживания основным элементом является шири¬
на полосы обзора вдоль параллели.
2.3. ОПРЕДЕЛЕНИЕ ШИРИНЫ ПОЛОСЫ ОБЗОРА
Получим расчетные формулы для определения ширины поло¬
сы обзора на произвольной геоцентрической широте ф. Положим,
что мгновенная зона обзора представляет собой прямоугольный
кадр со сторонами 2Ь и. 2а, где 2ft —ширина кадра в направле¬
нии, перпендикулярном плоскости орбиты, и 2а—протяженность
кадра вдоль плоскости орбиты.
Вначале рассмотрим случай, когда протяженность кадра
вдоль плоскости орбиты стремится к нулю, т. е. кадр представ¬
ляет собой линию шириной 2ft.
Обзор широты ф (на восходящем витке) начнется с момента
касания ее левым концом кадра в точке D (см. рис. 2. 9) и за¬
кончится в момент схода линии обзора с геоцентрической широ¬
ты ф в точке N. Время, в течение которого широта ф находится
в поле зрения кадра (для круговой орбиты), найдем по фор¬
муле
Д/Ф=7~(“ о—и0'\ (2.41)
где и о’ — аргумент широты подспутниковой точки на момент
выхода широты ф из кадра; и0’ — аргумент широты подспутни¬
ковой точки на момент входа широты ф в кадр.
Обозначим ширину полосы обзора через АХф . Для невраща-
ющейся Земли . Для вращающейся Земли
дХф = дХф — <о3Д/ф, (2.42^
где ш3 — угловая скорость вращения Земли, равная
7,29211-10-» 1/с.
43
Определив аргументы широты «o' Wos найдем Д/ф. Через
точки О и N (см. рис. 2. 9) проведем дугу большого круга Зем¬
ли. Долготное расстояние вдоль широты ф между точками N и
О найдем по формуле
bkNo = BM-BL, (2.43)
где
гТт; . / sin ф cos i -4- sin b \
BM - arcsin ( — 1 ,
( sin i cos ф /
BL = arcsin .
\tgij
Хорда, стягивающая дугу ON,
x=2/?cos<]>sin —(2.44)
где R—'радиус Земли, равный 6371 км. Тогда дуга большого
круга Земли
ON=2 arcsin (созф sin (2-45)
Из прямоугольного сферического треугольника NO"O определим
ОО" (сторона NA = Ь):
ОО’= arccos (cos . (2.46)
\ cos b /
Таким образом,
(sin Ф\ 1 /cos ON \ ,п
) + arccos I ). (2. 47)
sin i / \ cos b j
Проведя аналогичные преобразования, получим
Ио» = arcsin (_ arccos (cos 0D , (2.48)
\ sin i j \ cos b J
где
O£)=2arcsin( cos ф sin —— ;
\ T 2 Г
k^0D z=BL—BKt
, / sin ф cos i — sin b \
BK = arcsin I I .
\ sin i cos ф /
Тогда ширину полосы обзора для рассматриваемого случая
(а—>0) найдем по формуле
• 1 . Г Г /cos ON \ । /cos OD
дХф=ДАф — ш3 — arccos ( ) + arccos [ 1 . (2.49)
2л [ \ cos b j у cos b ) j
44
Если угол наклонения плоскости орбиты к плоскости эква¬
тора i=90°, то для широты ф=0 ширина полосы обзора долж¬
на быть равна ширине полосы обзора для невращающейся Зем¬
ли. Действительно, в этом случае:
BM = b, BK=—b, ВЕ = 0, MNo = b, ^OD=b,ON = b, OD=b
и выражение в квадратных скобках второго члена правой части
(2. 49) обращается в нуль
Полученная формула (2. 49) справедлива для геоцентриче¬
ских широт 0^ф</— Ь. Для широт ф^/— b дуга ВМ (см.
рис. 2. 9) равна л/2 и тогда и,о-=я-12.
Определим аргумент широты точки О'
и0 = 5С4-Сб', (2.50)
где
ВС — arctg ftg ВК‘ 'j ;
\ cos i /
, / sin Ф cosz—sini\
BK = arcsin I 1 1 ;
\ sin i cos ф /
CO' = arcsin f 1 .
Ltg [arccos (cos BK sin/)] J
В окончательном виде для геоцентрических широт ф^/‘— Ь ши¬
рина полосы обзора
дХф = дкф — ш3——I arctg arcsin f — Yl] .
2л (2 L cos/ (tg [arccos (cos BK sin /)]/JJ
(2.51)
Для широты ф=/-|-6, дХф=О и в соответствии с формулой
(2.51) ДХф =0, что согласуется с физической картиной (поло¬
са обзора только касается данной
широты).
Рассмотрим случай, когда
кадр имеет протяженность вдоль
плоскости орбиты, равную 2а.
Ширина полосы обзора на гео¬
центрической широте ф может
быть представлена, как ширина
полосы обзора, просмотренная
фронтальной линией кадра DE
(рис. 2.18), плюс ширина полосы
обзора, обусловленная враще¬
нием Земли за время прохожде¬
ния КА углового расстояния 2а.
На рис. 2.18 показано положе¬
ние кадра ACDE на момент на¬
чала просмотра фронтальной ли¬
нией кадра DE широты ф и поло-
Рис. 2. 18. К определению ширины
полосы обзора
45
жение кадра A'C'D'E' на момент окончания просмотра широты ф
фронтальной линией кадра.
Время, в течение которого фронтальная линия кадра DE
просматривает широту ф (для круговой орбиты), определяется по
формуле
(UN' aJv)- (2.52)
2Л
Ширина полосы обзора на широте ф, просматриваемая фрон¬
тальной линией кадра (Д\ф)> по аналогии с (2.49) вычис¬
ляется по формуле
. •> .i' 7 Г /'cosОЕ'\ , /cos OD \1 ,о гп>
ДХфф=дХф — юэ — arccos )-]-arccos ( . (2. 53)
2л L \ cos Ь ) \ cos b /J
Формула (2.53) справедлива для широт 0^ф</— Ь. Для
широт ф^э4—Ь необходимо пользоваться формулой (2.51).
Ширина полосы обзора для прямоугольного кадра с учетом
вращения Земли в общем случае описывается формулой
дХ^ = дХфф-| ао)3. (2.54)
Л
Для широты ф=0 и угла наклонения плоскости орбиты к пло¬
скости экватора /=90°, как легко видеть,
длф = дХф—|— ш3—2а. (2.55)
2л
Если в формулу (2. 54) подставить АХФф из (2. 53), то выраже¬
ние в квадратных скобках второго члена правой части обраща¬
ется в нуль й получаем выражение (2.55), что подтверждает
правильность полученной зависимости.
Пусть мгновенная зона обзора КА представляет собой окруж¬
ность с геоцентральным углом фэ. В момент касания мгновенной
зоной обзора геоцентрической широты ф (на.прямом витке) КА
будет находиться на широте фн=ф—фэ- По мере движения КА
вдоль орбиты в диапазоне широт фн^ф^фв, где фв=ф+фз,
мгновенная зона обзора будет покрывать данную геоцентриче¬
скую широту ф (в долготном направлении) на величину АХ,
которая может быть выражена через хорду d мгновенной зоны
обзора на широте ф:
дХ=2 arcsin -— . (2.56)
2Ясозф
Выразим хорду мгновенной зоны обзора d на широте ф через
фэ и ф.
46
Из &ОаАС (рис. 2.19) «АСО3 = ф; <АО3С = дф, О3С=7?)
определим сторону ОаА
0л= Л? sin ф . 2 ;57)
sin (ф + Дф)
Из ДА50 (£АВО =у-<р3, = Ф +
АВ= R Я s-in-^— находим сторону ОВ
sin (ф + Дф)
= sin (ф + Дф)-/? sin ф . 2 58
cos (ф + дф — <р3)
Рис. 2. 19. К определению хорды мгно¬
венной зоны обзора
Рис. 2.20. Схема покрытия мгно¬
венной зоной обзора широты ф
Зная ОВ в мгновенной зоне обзора, определим хорду d, стяги¬
вающую дугу ДА малого круга на широте ф (рис. 2.20),
DD'=d d=2 V(CD)*~(QC)2, (2. 59)
где
C'D = R sin <p3, ОС = R sin <p3 — OB.
Подставим в формулу (2. 59) значение ОС и CD и получим' в
окончательном виде
d = 2RX
\s [sin (ф+Дф)— sin ф] [2 sin <p3cos (ф+Дф— у3) — 5т(ф + Дф) + sin ф]
S' у cos2 (ф+Дф — <р3)
(2. 60)
Тогда
дХ=2 arcsin X
ч/|K[sin (ф+Дф) — sin ф] [2 sin <р3 cos (ф+Дф — tp3)— sin (ф + Дф) + sin<p]|
I cos (ф+Дф — 3) cos ф J ’
(2. 61.)
4.7
Свяжем Дф с временем движения КА при покрытии геоцент¬
рической широты ф. При этом будем полагать, что орбита кру¬
говая, а наклонение плоскости орбиты к плоскости экватора I.
Для момента касания геоцентрической широты ф мгновенной
зоной обзора аргумент широты подспутниковой точки найдем по
формуле
йн = arcsin Г sin (<Р~Ъ1 . (2. 62)
L sin i J
В конечный момент времени (при достижении максимальной
геоцентрической широты, на которой широта ф еще покрывается
мгновенной зоной обзора)
«к = arcsin Г sin^ + ^)l (2.63)
L sin i j
Формула (2. 63) справедлива при /)>ф+ф3. Для г^ф+<р3 аргу¬
мент широты ик=л/2. Обозначим через Ди приращение аргумен¬
та широты подспутниковой точки за время ДЛ
дк = -у^д/. (2.64)
За время Д/ КА изменит широту подспутниковой точки на вели¬
чину Дф,
Дф= arcsin [sin Z sin [ин-|-у-д/jj —arcsin(sin t sin «„). (2.65)
За это же время КА пройдет долготное расстояние
дХКА = arcsin [tg ?3 + А^1 — arcsin Г tg<?~ Уз) 1 (2. 66)
к L tgz J L tgz J
и Земля повернется на угол
ДАз=ш3Д/, (2.67)
где <1)э — угловая скорость вращения Земли, равная
7,29211-10-5 1/с.
Приведем алгоритм расчета ширины полосы обзора.
1. Полагаем, что в момент касания мгновенной зоной обзора
геоцентрической широты ф долгота точки касания Л=
=Лю, аргумент широты подспутниковой точки u=uH.
2. Задаем шаг Д/ (подбирается из условия точности решения
задачи).
3. Определяем приращение аргумента широты по форму¬
ле (2. 64).
4. Вычисляем приращение геоцентрической широты за время
Д/ по формуле (2. 65).
5. Для заданных ф3, ф и полученного в пункте (<р)Дф опре¬
деляем хорду d по формуле (2.60).
48
6. Вычисляем дугу ДХ по формуле (2. 61).
7. Для выбранного AZ находим АХка и АХ3.
8. Для момента времени Zi = Zo-(-AZ определяем долготу про¬
смотренной крайней восточной точки на широте ф:
%осЛ = \> + ^-+Дхкк-Дха (2-68)
и долготу просмотренной крайней западной точки на широте
>-зап1 = А0-^+Д).КА-ДХ3. (2.69)
9. Задаем момент времени f2=^)+2A/' и начиная с третьего
пункта повторяем вычисления, но вместо А/ берем 2AZ; получаем
значения Хвост 2i Хзап2; задаем момент времени f3=/0+3A/1 и та¬
ким образом ведем вычислительный процесс пока «н-ЬАы/<«к
(положим, что процесс повторяем k раз).
10. Полученные на каждом шаге Хвост/ и Хзап/ (/=1, 2, 3,...,
...,&) преобразуем по следующим формулам:
ХВост/пр = \,ост/ + “зД<(А-/), (2.70)
Хзап j пр = Хзап j ~ М* (*—/)• (2. 71)
Ширина полосы обзора ДХф представляет собой разность между
максимальной Хвост/пр и минимальной Хза11/пр:
Дкф (Хвост у пр)тах (\зап j пр)т|п' (2.72)
2.4. СИСТЕМЫ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНОГО
ОБЗОРА С ЗАДАННЫМ РАЗРЫВОМ НАБЛЮДЕНИЯ
Условимся под разрывом наблюдения (разрывом в обслужи¬
вании) понимать интервал времени, в течение которого заданная
точка на земной поверхности не наблюдается системой КА. Вре¬
мя разрыва в обслуживании tp обычно задается, исходя из целе¬
вого назначения системы КА. При известном радиусе круговых
орбит системы КА — гКр, время разрыва однозначно связано с
углом разрыва в обслуживании в плоскости орбиты
<2-73>
Пусть необходимо просмотреть любую точку на земной по¬
верхности с разрывом в наблюдении, не превышающем двенад¬
цати часов. Предположим, что орбиты КА системы полярные,
круговые, угол обзора бортовой аппаратуры у задан. Для ряда
систем КА задается не угол обзора бортовой аппаратуры, а мини¬
мальный допустимый угол возвышения КА над горизонтом пунк¬
та — бтш- При определении геоцентрального угла <р3 необходимо
ввести время обслуживания объекта. Под временем обслужива-
49
Рис. 2.21. Схема расположения
рабочих зон на меридиане, при
которой разрыв наблюдения не
превосходит 12 ч
ния объекта понимается время, в течение которого объект дол¬
жен находиться в поле зрения космического аппарата для вы¬
полнения задачи обслуживания. Так, например, для навигацион¬
ных КА — это время, потребное для определения местоположе¬
ния наземного пункта по космическому аппарату. С учетом вре¬
мени обслуживания зона обзор j
КА сокращается на величину
Фоир-у- А.6СЛ- (2-74)
Тогда рабочее значение геоцент-
рального угла <рраб определится
по формуле
«Рраб фз~Топр- (2.75)
Ранее мы отмечали, что в об¬
ласти, где не выполнено условие
непрерывности, наибольшие раз¬
рывы в наблюдении имеют точки,
расположенные ближе к экватору.
Это явление типично для любой
системы КА на полярных орбитах.
Поскольку при постановке задачи
разрыв ограничен по верхнему
пределу, то выполнение условия
допустимого разрыва для точек,
расположенных на экваторе, гарантирует, что разрыв в наблю¬
дении за любой другой точкой поверхности Земли не превышает
допустимого-
Проанализируем возможности удовлетворения допустимого
разрыва наблюдения экваториальных точек системой КА, орби¬
ты которых расположены в одной плоскости.
Рассмотрим вначале систему КА, рабочие зоны обзора кото¬
рых соприкасаются в одной точке (рис. 2.21). Эта система имеет
линию непрерывного обзора, и поэтому она обеспечивает дву¬
кратный просмотр любой точки экватора в течение одних суток.
Легко убедиться в том, что разрыв наблюдения при этом не пре¬
вышает двенадцати часов. Длительность разрыва наблюдения
экваториальных точек может отличаться от двенадцати часов
на некоторое время А/ в меньшую сторону. Максимальное значе¬
ние А/ оценивается временем поворота Земли на угол 2фраб, т. е.
(2.76)
л
где Тзв — звездные сутки, равные 86164 с.
Рассмотрим теперь систему, имеющую некоторые разрывы
между зонами обзора в плоскости орбиты. Покажем, что и в
50
этом случае при выполнении определенных условии возможен
двукратный просмотр любой точки экватора в течение суток.
Если КА системы расположены друг относительно друга та¬
ким образом, что полосы обзора ДХФ покрывают поверхность
Земли на межвитковом расстоянии без разрывов, то в этом слу¬
чае любая точка на экваторе дважды в течение суток попадет в
поле зрения системы КА. Определим, на каком угловом расстоя¬
нии в плоскости орбиты должны быть расположены соседние
космические аппараты, чтобы при этом полосы обзора дХф
покрывали экватор без перекрытия. Это расстояние найдем из
условия, что сдвиг полосы обзора соседнего КА равен ширине
полосы обзора. Сдвиг полосы обзора по экватору на дХф про¬
изойдет за время АГ, в течение которого Земля повернется на
угол дХф . Отсюда
ДГ = ^-ГЗН. (2.77)
Если дГ^Га, то ширина полосы обзора больше либо равна
межвитковому расстоянию и в плоскости орбиты требуется один
космический аппарат.
Зная величину АГ и драконический период обращения Га,
найдем угловое расстояние между двумя соседними космически¬
ми аппаратами на орбите Ди:
До) = 2л . (2.78)
Определим требуемое количество КА системы, решающей зада¬
чу двукратного просмотра любой точки на экваторе в сутки, из
соотношения
пДш=2л, (2.79)
отсюда
п = — . (2.80)
До)
Напомним, что количество КА системы не может быть дроб¬
ным. Поэтому величину 2л/Дш следует округлить до целого чис¬
ла в большую сторону.
Созданная указанным способом система будет иметь значи¬
тельно меньшее количество КА, чем это требовалось в случае
соприкасающихся зон обзора. Например, при ширине обзора
дкф=3°77/, периоде обращения Га = 5400 с угловое рас¬
стояние между двумя соседними КА Д<о=60р и потребное ко¬
личество КА п=6. В случае же соприкасающихся зон обзора
потребовалось бы 96 КА. Таким образом, создание системы по
второму способу потребовало КА в шестнадцать раз меньше.
Однако подобное сокращение количества аппаратов в системе
достигнуто за счет неполного удовлетворения требованию допу¬
стимого разрыва наблюдения. Оценим максимальное значение
51
Рис. 2.22. К определению
времени разрыва наблюде¬
ния
времени разрыва. Предположим, что 2л/Дсо—целое число (по¬
лосы обзора на межвитковом расстоянии по экватору не пере¬
крываются).
Поскольку в плоскости орбиты между зонами обзора смеж¬
ных КА существует разрыв, мы не можем утверждать, что после¬
дующий обзор любой точки на экваторе возможен не позднее
12 ч. Однако с полной уверенностью можно сказать, что если
точка наблюдалась на экваторе в какой-то момент времени, оп¬
ределяемый центральным углом а1 = АХФ, то последующее на¬
блюдение будет иметь место при
прохождении точкой диаметральна
противоположного угла а2 = дХф
(рис. 2.22).
Предельное значение допустимо¬
го разрыва определяется двумя
условиями.
1. При прохождении угла си об¬
зор произведен в точке 1, а при про¬
хождении угла а2 — в точке 4. Тогда
время между двумя последующими
просмотрами определится временем,
необходимым для поворота Земли
относительно полярной оси на угол
л = 2дкф. Максимальное время
разрыва
^рпИ1 = ^+^2дХф. (2.81)
2. При прохождении угла <ц обзор произведен в точке 2, а при
прохождении угла а2 — в точке 3. При этом
'р п.1п = ^- -^-2ДХФ. (2.82)
Рассмотрим общий случай расчета системы КА с заданным
разрывом наблюдения.
Поставим задачу определения необходимого количества КА в
системе и их взаимного расположения при заданном разрыве
наблюдения. Расчет системы КА с заданным разрывом в наблю¬
дении можно произвести, если известны следующие исходные
данные:
— время разрыва в обслуживании tv;
— минимальный допустимый угол возвышения КА над гори¬
зонтом fimin или величина угла обзора бортовой аппаратуры у;
— время обслуживания /обсл!
— диапазон высот, в котором возможна работа системы КА,
fкр mln И Гкр max-
Эти исходные данные обусловлены ограничениями, наклады¬
ваемыми на работу как бортовой, так и наземной аппаратурой,
52
а также связаны с целевым назначением системы КА. Тогда по¬
рядок расчета системы КА с заданным разрывом в обслужива¬
нии сведется к следующему. Задаваясь значениями радиуса-век¬
тора круговых орбит гир в диапазоне Гкрпнп^Гкр^Гкртах. опре¬
делим рабочую зону:
фраб = фэ — фопр- (2. 83)
По фраб находим угол наклонения плоскости орбиты к пло¬
скости экватора:
— для системы глобального обслуживания
Zmax = 90 —фраб! (2. 84)
— для системы зонального обслуживания
'max—фв — фраб- (2. 85)
С учетом наклонения i, геоцентрической широты точки стар¬
та фп и протяженности участка выведения, можно определить
значения аргумента широты «о точки выведения КА системы на
орбиту с данной пусковой установки. Имея i, и0, Гкр, определим
драконический период КА системы по формуле
Та=Т (1 С20 ( [1+5 cos2/—6 sin2«0 sin2/]) , (2.86)
( 4 \rKpl J
/Т5-
где 7'=2л1/ ——звездный период обращения;
г К
Сго=—0,109808-10-2— коэффициент при 2-й зональной гар¬
монике разложения потенциала Земли в ряд по сфери¬
ческим функциям;
ае — экваториальный радиус Земли, равный 6378 км.
Определим прецессию узлов орбит космических аппаратов за
сутки с учетом 2-й зональной гармоники:
= -eV- <2'87)
^rKpV еЬ)
Т
где л2 = —1,77-1025 м5/с2; п’—-=^- —число оборотов КА в
1 2
звездные сутки.
Зная суточный уход узлов орбит системы КА, определим
время, необходимое для поворота Земли от восходящего узла
орбиты системы до восходящего узла этой же орбиты (эффек¬
тивный период обращения Земли — Тэфф),
7’»ФФ=7’з»(1-^г)- <2-88*
По известным значениям эффективного периода ГЭфф и дра-
конического периода Та находим межвитковое расстояние
(2.89)
53
Рис. 2.23. График зависимости меж-
виткового расстояния и ширины поло¬
сы обзора от высоты круговой орбиты
Для выбранных гКр определяем ширину полосы обзора дХф на
нижней широте района обслуживания. При этом возможны два
■случая.
1. Найдем такую высоту круговой орбиты гкр в заданном диа¬
пазоне, где выполняется условие
△Хф = дХМв. (2.90)
2. В заданном диапазоне высот условие дХф^-дХмв не вы¬
полняется.
На рис. 2.23 приведены значения ДХМВ и дХф для круговых
полярных орбит при различных значениях угла обзора бортовой
аппаратуры у. Рассмотрим пер¬
вый случай.
Если условие (2.90) выпол¬
нено, то можно определить дол¬
готный угол разрыва в обслу¬
живании
Уэфф
и необходимое количество КА
в системе
7У = Д_. (2.92)
Хр
В общем случае число КА
в системе получается дробным,
поэтому его необходимо округлять до целого в большую
сторону
^=2: (2-93)
<2 учетом целого числа аппаратов в системе определяем оконча¬
тельно время разрыва в обслуживании
(2-94)
f = ХрГзфф . (2.95)
₽ 2л
Физическая основа предложенного метода расчета систем КА
с заданным разрывом в обслуживании заключается в том, что
космические аппараты системы располагаются в околоземном
пространстве таким образом, что трассы их совпадают. Выполне¬
ние условия (2. 90) говорит о том, что межвитковые расстояния
всегда должны покрываться полосами обзора КА. Если же при
54
заданных углах обзора бортовой аппаратуры в слое высот
^кртш^Гкр^Гкртах условие (2.90) не выполняется (второй слу¬
чай), то межвитковое расстояние заполняется зонами обзора
дополнительных космических аппаратов
Хп ““ АХд.
= — 1. (2.96)
При этом, если КА на одном межвитковом расстоянии распола¬
гаются таким образом, что аргумент широты и для всех КА оди¬
наков (т. е. КА разнесены относительно друг друга в долготном
отношении на ДХФ), . то разрывы в обслуживании будут равны
заданному разрыву. Если же КА, заполняющие зонами обслужи¬
вания одно межвитковое расстояние, расположены в одной пло¬
скости и смещены относительно друг друга на угол Део, то раз¬
рывы в наблюдении будут отличаться от расчетного значения на
величину ±ДГ, (где ДУ =—-7ЗВ). Таким образом, мы опре-
2л j
делили необходимое количество КА в системе с заданным раз¬
рывом.
2.5. ПРОДОЛЖИТЕЛЬНОСТЬ СПЛОШНОГО ОБЗОРА
ПОВЕРХНОСТИ ЗЕМЛИ
Под сплошным обзором земной поверхности будем понимать
покрытие земного шара полосами обзора без разрывов. Вследст¬
вие вращения Земли смещение полос обзора на любой геоцентри¬
ческой широте в угловом измерении получается одинаковым.
Однако если рассматривать эту картину в линейных единицах,
то межвитковое расстояние получается наибольшим на экваторе.
Поэтому, если на экваторе осуществить сплошное покрытие, то
тем более оно будет обеспечено на любой другой геоцентриче¬
ской широте. Таким образом, задача сплошного обзора земной
поверхности сводится к рассмотрению покрытия полосами обзо¬
ра экватора в промежутке одного межвиткового расстояния.
Важнейшим фактором, характеризующим выполнение задачи
обзора земной поверхности, является продолжительность про¬
цесса обзора. Определим время, в течение которого достигается
однократный обзор всей земной поверхности. Для простоты бу¬
дем полагать, что обзор осуществляется только на прямых вит¬
ках (это ограничение накладывается из условия освещенности,
подспутниковых точек).
Для решения поставленной задачи необходимо знать межвит¬
ковое расстояние £э=/?ДЛМв1 суточное смещение’полос £сут=
= /?ДАСут, а также ширину'полосы обзора по экватору £р=/?ДХФ-о-
55
Что касается наклонения плоскости орбиты к плоскости эква¬
тора i, то оно для выполнения задачи сплошного обзора должно
удовлетворять очевидному условию
90—фз^йг^ЭО+фэ- (2.97)
Рассмотрим наиболее простой случай, когда между полосами
предыдущих и последующих суток имеет место перекрытие. На
рис. 2.24 показана развертка экватора земного шара в линию с
изображенными полосами обзора на каждые сутки (цифры в
круглых скобках).
Рис. 2. 24. Схема перекрытия полос обзора на экваторе
При определении времени сплошного обзора будем исходить
из того, что уже совершен один проход в течение первых суток
и требуется закрыть образовавшиеся «окна» межвитковых рас¬
стояний. Подобная геометрическая модель позволяет сразу запи¬
сать расчетную формулу для определения длительности сплош¬
ного обзора. После первых суток образуются «окна» шириной
по экватору, равные L3 — Lv, которые должны быть перекрыты
полосами обзора шириной Лсут. Тогда формула для общей про¬
должительности сплошного обзора П примет следующий вид:
П = £ £з~-£р +2. (2.98)
. z.CyT
Теперь рассмотрим более сложный случай, когда суточный
сдвиг полос получается с разрывами. При определении продол¬
жительности обзора в данном случае необходимо определить от¬
ношение межвиткового расстояния к суточному смещению
Гэ/ТсУт, которое в общем случае представляет собой непоавиль-
ную дробь вида
~^=q,k. (2.99)
ЬСут
При этом величина q характеризует количество разрывов между
полосами на межвитковом расстоянии L3, а величина k опреде¬
ляет направление, в котором происходит перекрытие полос (во¬
сточное или западное). При А<0,5 перекрытие полос происходит
в направлении, обратном суточному смещению, а при &>0,5
перекрытие осуществляется по ходу суточного смещения полос.
56
Если k=0, то перекрытие полос по экватору будет вообще от¬
сутствовать.
Получим теперь расчетные формулы для определения продол¬
жительности обзора П. Нетрудно установить, что перекрытие
образовавшихся разрывов («окон») полосами обзора начнется не
через сутки, а через ^+1 сутки. Ширина разрыва («окна») опре¬
делится как £Сут — £р- При каждом очередном наслоении полос
происходит перекрытие «окна» на величину ЛЬ, равную
Ьэ— Lcy^q. Тогда для заполнения всего промежутка £Сут—£Р
потребуется перекрытий
£сут~£р = £су1~£р ■. (2. 100)
Д£ Z-з — £сут q
Каждые сутки на интервале Ьэ добавляется одна полоса, по¬
этому для перекрытия всех q промежутков потребуется
(Лсут — £Р/£э — £Сут?)<7 суток. К этому времени следует доба¬
вить <7-|-1 сутки, прошедшие с момента начала обзора до момен¬
та начала заполнения «окон». Таким образом, формула для оп¬
ределения продолжительности обзора П примет вид
П=(?+ 1)+£ ,£сут~£р J + 1- (2. W1)
£3 ^сут^
Формула (2. 101) справедлива при /г<0,5, для случая же
&>0,5 справедлива формула
П = ^+(^+ 1) Е [. . 1 + 1- (2. 102)
\Q Н” 1) ^сут ^3
Формулы (2.101) и (2.102) справедливы лишь в том случае,
когда полосы обзора на втором витке первых суток перекры¬
ваются полосами обзора (<?+1) суток частично или полностью,
или хотя бы примыкают к ним.
В случае же двухстороннего разрыва эти формулы непри¬
емлемы. Критерием применимости этих формул служит условие
разрыва
^сутЯ Н- ^р
и (2. 103)
^-суг (я + 1) -С ^р-
Однако существуют такие орбиты, при которых вообще не¬
возможен сплошной обзор. Поэтому необходимо вначале вы¬
яснить, будет ли выполняться условие сплошного обзора.
При выводе формул для определения продолжительности
обзора мы исходили из конкретного характера наложения полос,
не рассматривая, при каких условиях это имеет место. При
этом предполагалось, что известно межвитковое расстояние по
экватору Ь3, суточное смещение полос £сут и ширина полосы об-
57
зора Lp. Перечисленные характеристики обзора являются функ¬
циями параметров орбиты и угла обзора бортовой аппаратуры у.
В частности, межвитковое расстояние L3 и суточное смещение
полосы £сут зависят только от периода обращения, что же каса¬
ется ширины полосы обзора Lp, то она является функцией пара¬
метров орбиты, угла обзора у и геоцентрической широты ф.
Для упрощения анализа ограничимся рассмотрением круго¬
вых полярных орбит. В этом случае продолжительность обзора
является только функцией двух параметров: высоты круговой
орбиты и угла обзора у.
Рис. 2. 25. Схема покрытия экватора полосами обзора, при которых сплош¬
ной обзор невозможен
Физическая картина наложения полос обзора позволяет уста¬
новить условия, при которых сплошной обзор становится невоз¬
можным, т. е. П=оо. Это, в частности, будет иметь место тогда,
когда полоса обзора на первом витке вторых суток в точности
совпадает с полосой обзора предыдущих суток. Математическое
условие полного наложения полос обзора запишем в виде
£сут=0, (2. 104)
т. е. это имеет место тогда, когда КА совершает за сутки целое
число оборотов.
Те орбиты, при которых имеет место совмещение полос обзо¬
ра в последующие сутки, называются критическими. Следует за¬
метить, что сплошной обзор невозможен не только в случае пол¬
ного наложения полос обзора через каждые сутки. На рис. 2. 25
проиллюстрированы различные случаи, когда сплошной обзор
невозможен. Рассмотрим общие необходимые условия существо¬
вания критических орбит (см. рис. 2.25, в). Из приведенного
58
примера следует, что на интервале, равном 2L3, укладывается
целое число суточных смещений, в данном случае 5 ЛСут- Отсюда
необходимое условие существования критических высот запишет¬
ся в следующем виде:
2£э=5£Сут- (2.105)
Для межвиткового расстояния
- ^-=—. (2.106)
/•сут 2
Применяя полученный результат для общего случая, условие
критичности можно представить как
- Ь_=-£- , (2. 107)
/•сут Р
где q и р — некоторые целые числа, причем q^p.
Величина q, как и ранее, характеризует число разрывов на
интервале межвиткового расстояния, что же касается величины
р, то она представляет собой минимальное число межвитковых
расстояний L3, на которых q раз укладывается суточное смеще¬
ние £Сут. Например, на рис. 2. 25, а целое число суточных сме¬
щений £Сут укладывается на одном межвитковом расстоянии три
раза (р=1, <7=3). Полученное соотношение (2.107) является
лишь необходимым условием существования критических орбит.
Будет ли орбита с параметрами, удовлетворяющими условию
(2. 107), действительно критической, зависит от ширины полосы
обзора Лр. В самом деле, если ширину полосы обзора увеличить
до межвиткового расстояния (LP=L3), то при этом независимо
от высоты орбиты всегда возможен сплошной обзор, и критиче¬
ских орбит существовать не будет. Следовательно, увеличением
ширины полосы обзора можно избавиться от тех или иных кри¬
тических высот. При увеличении ширины полосы обзора сначала
будут исчезать критические высоты с большими значениями pt
так как в этом случае меньше непросматриваемые участки. Оце¬
ним продолжительность сплошного обзора для случая, когда
Lp=L3. Число оборотов КА за звездные сутки оценивается це¬
лой частью от деления звездных суток Тэв на драконический пе¬
риод Та. Обозначим через п' целую часть числа витков, а через
т' — дробную часть, т. е.
■ ^ = гГ, т'. (2. 108)
J я
Тогда продолжительность сплошного обзора П определится по
формуле
n=(/i'+l)7V (2.109)
59
Если обзор осуществляется на восходящих и нисходящих вит¬
ках, то
П=-1-(п' + 2) Ts. (2.110)
Если же Лэ=/=ЛСут, то минимальное время обзора будет в том
случае, когда полосы обзора восходящих витков будут уклады¬
ваться с полосами обзора нисходящих витков на одном межвит-
ковом расстоянии встык, что и возможно в случае, когда Z,CVT =
1 , , ,
=— La и время обзора будет равно одним суткам.
Из совокупности орбит, при которых возможен сплошной об¬
зор, найдем орбиты, обеспечивающие обзор всей земной поверх¬
ности за минимальное время. Подобные орбиты в дальнейшем
назовем оптимальными. Очевидно, что продолжительность обзо¬
ра будет минимальная в том случае, когда полосы обзора по эк¬
ватору в последующие сутки непосредственно примыкают к поло¬
сам обзора предшествующих суток, т. е. когда
LcyT=Lp. (2.111)
Действительно, минимальное количество суток, необходимое
для сплошного обзора, равно частному от деления межвиткового
расстояния на ширину полосы обзора:
П1П1П = у2-. (2,112)
Ьр
Высота оптимальной орбиты Нот обусловлена значением уг¬
ла обзора бортовой аппаратуры у, наклонением плоскости орби¬
ты и плоскости экватора I, а также числом витков критической
орбиты, в окрестностях которой отыскивается оптимальная вы¬
сота.
Практический интерес представляет также решение обратной
задачи: при заданном времени просмотра найти оптимальные
высоты орбит и углы обзора бортовой аппаратуры. В рассмат¬
риваемом случае, с одной стороны, суточное смещение полосы
обзора должно быть равно ЛЭ/П.С другой стороны, суточное сме¬
щение £сут и межвитковое расстояние L3 связаны с параметрами
орбиты соотношениями
£сут = о>3/?(7эв —Геи'). (2.ИЗ)
L3=»3RTB. (2.114)
Из равенства Лсут = Дз/П найдем период обращения КА, обеспе¬
чивающего обзор земной поверхности за П суток,
Тот=—^ , (2.115)
—г + я'
m ■■
60
а следовательно, и оптимальную высоту орбиты. Определим те¬
перь нужный угол обзора бортовой аппаратуры у с оптимальной
высоты для заданной продолжительности обзора П. Исходной
величиной для определения угла у является ширина полосы об¬
зора Lp, которая в данном случае равна суточному смещению
£сут. Таким образом, обратная задача решена.
2.6. ПРОДОЛЖИТЕЛЬНОСТЬ ЗОНАЛЬНОГО ОБЗОРА
ПОВЕРХНОСТИ ЗЕМЛИ
Предположим, что суточное смещение по экватору больше
ширины полосы обзора, т. е. имеет место разрыв между поло¬
сами обзора предыдущих и последующих суток. Поскольку меж¬
витковое расстояние в угловом измерении по широтам не изме¬
няется, а ширина полосы обзора ДАф, начиная с экватора, воз¬
растает, то может существовать такая минимальная геоцентри¬
Рис. 2. 26. К определению верх¬
ней и нижней геоцентрических
широт, на которых отсутствует
разрыв в наблюдении
Рис. 2. 27. Условия сплошного
обзора выполняются только на
одной широте ф1
ческая широта фн, на которой разрывы между полосами обзора
исчезнут (рис. 2.26). Эту широту определим из условия равен¬
ства суточного смещения ширине полосы обзора:
ДАсут = дХф, (2.116)
где ДАСут — суточное смещение в угловом измерении.
Из рис. 2. 26 видно, что существует еще одна широта, при
которой выполняется условие (2. 116). Обозначим эту широту фв.
Очевидно, что на широтах ф>фв будет иметь место также раз¬
рыв между полосами обзора. В диапазоне же широт фн<ф<фв
ширина полосы обзора всюду больше суточного смещения, т. е.
имеет место перекрытие полос. Таким образом, для заданной ор¬
биты и угла обзора бортовой аппаратуры можно определить не
только нижнюю границу, но и диапазон широт, на которых воз¬
можен сплошной обзор. При некоторых сочетаниях параметров
i, Н и у возможен случай, когда суточное смещение дХсут = дХ+тах
61
Рис. 2.28. Случай отсутствия
широты сплошного обзора
(рис. 2.27). При этом фн=фв и область сплошного обзора вы¬
рождается в линию на параллели ф. И, наконец, возможен слу¬
чай, когда ДХсу1. >• дХф max, т. е. не существует географической
широты сплошного обзора (рис.2.28).
Определим теперь искомую продол¬
жительность зонального обзора по
формуле
П = £‘ Г—^-| + 1. (2.117)
L АХСуТ J
При варьировании наклонением
орбиты г, высотой Н и углом обзора
бортовой аппаратуры у получим
ДАсут и ДА<р в виде некоторых функ¬
ций этих параметров, используя ко¬
торые можно решать различные за¬
дачи проектировочного характера.
До сих пор мы рассматривали
способы создания систем КА без их
целевого назначения. Однако существует ряд специфических
систем КА, для которых предложенные методы построения ока¬
зываются непригодными. В последующих разделах рассмотрены
методы создания подобных систем.
2.7. СИСТЕМЫ СВЯЗНЫХ КОСМИЧЕСКИХ АППАРАТОВ
Системы связных космических аппаратов призваны обеспечи¬
вать устойчивую против естественных и искусственных помех,
надежную и быстродейственную связь. Вывод ретранслятора на
большую высоту позволяет строить линии дальней связи, состоя¬
щие из двух ретрансляционных интервалов.
Космические аппараты связи могут быть использованы в ка¬
честве активных и пассивных ретрансляторов сигналов, переда¬
ваемых на большие расстояния. Активными ретрансляторами
называют КА связи, имеющие на борту приемную и передающую
радиоаппаратуру. Пассивные ретрансляторы такой аппаратуры
не имеют, и ретрансляция сигналов осуществляется путем отра¬
жения радиоволн поверхностью космического аппарата, имею¬
щей специальное покрытие и форму.
Исходя из конструкции связных космических аппаратов си¬
стемы связи по характеру ретрансляции сообщений можно под¬
разделить на:
— системы с активной ретрансляцией и задержкой сигнала
во времени;
— системы с активной ретрансляцией сигнала в реальном
масштабе времени;
— системы с пассивной ретрансляцией.
Все множество задач, решаемых связными космическими ап¬
паратами, можно разделить на две группы: задачи обеспечения
62
Рис. 2. 29. Пересекающиеся зоны
связи стационарных КА
всемирной связи (глобальная система связи) и задачи обеспе¬
чения связи внутри отдельных районов земного шара (локальные
системы связи).
Выбор орбит KA-ретрансляторов определяется со многими
факторами и параметрами: количеством и местом расположения
наземных станций, количеством необходимых каналов между
различными наземными станциями, временем ожидания и про¬
должительностью сеансов связи, параметрами ракеты-носителя,
размерами и стоимостью наземных станций, вопросами коорди¬
нации работы элементов системы,
параметрами КА.
Выбор конкретного вида орбиты
КА для создания системы связи
определяется теми задачами, кото¬
рые призвана решать данная си¬
стема.
Для постоянной связи между
значительным количеством назем¬
ных пунктов, расположенных на
больших удалениях, используются
круговые орбиты. Для обеспечения
локальной связи целесообразнее
применять эллиптические орбиты.
Три стационарных космических
аппарата, расположенные вдоль
экватора на угловом расстоянии в 120°, обеспечивают связь
почти для всей поверхности Земли, за исключением приполюс¬
ных районов.
Если принять минимально возможный угол возвышения КА
над горизонтом 6=10°, то для стационарного КА геоцентраль-
ный угол зоны обзора <рэ=71°30', другими словами, максималь¬
но возможная широта пункта связи фтах=71°30'. Однако при
этом будут существовать такие пункты на фСфтах. связь с ко¬
торыми невозможна.
Определим необходимое количество КА на стационарных ор¬
битах для обеспечения непрерывной связи в широтном поясе,
ограниченном в северном и южном полушариях верхней широ¬
той ibB.
На рис. 2.29 показаны зоны обзора смежных стационарных
КА. Из прямоугольного сферического треугольника О^К! для за¬
данного значения <рэ и фв определим угловое расстояние между
двумя смежными КА:
2а = 2 arccos (cos <Рз1 . (2. 118)
\ cos ф /
В табл. 2: 1 приведено значение угла а в функции от геоцен¬
трической широты фв для стационарного КА при 6= 10°.
63
Таблица 2.1
Фв. град
50
60
65
68
71
71,5 ■
а, град
60,5
50,67
41,35
23,15
13
0
Фв.
град
50
60
65
68
70
шт.
3
4
5
6
9
Тогда количество КА для создания системы непрерывной связи
от —фв до +фв определится по формуле
JV = E[—1 + 1. (2.119)
L a J
В табл. 2. 2 приведено необходимое количество КА связи в
функции от геоцентрической широты фв.
Для создания глобальной системы связи необходимо обеспе¬
чить покрытие зонами связи приполюсных районов. Шесть кос¬
мических аппаратов, три из ко¬
торых создают экваториальную
цепочку (i = 0°), а три — поляр¬
ную (i=90°), обеспечивают
глобальную непрерывную связь.
При создании глобальной си¬
стемы связи потребуется ре¬
трансляция сигналов через КА.
Связь между наземными пунк¬
тами через стационарный КА возможна только в том случае,
если для каждого наземного пункта связи выполняется условие
|Хп-хкаК a = arccos/^^] , (2.120)
\cos <рп 1
где Хп — долгота пункта связи; фп — широта пункта связи; Хка —
долгота подспутниковой точки.
Если хотя бы для одного пункта связи условие (2.120) не вы¬
полняется, то необходима ретрансляция сигналов между КА.
Выведем общую формулу, определяющую условие нахожде¬
ния в зоне взаимной видимости двух или большего количества
КА. Два КА находятся в зоне взаимной видимости, если в тече¬
ние некоторого времени их можно непосредственно соединить
лучом зрения. Рассмотрим рис. 2. 30. Если вектор г, проведенный
из центра Земли, равен по модулю радиусу Земли или меньше
его, и если он перпендикулярен прямой, соединяющей концы ра¬
диусов-векторов ri и г2, определяющих положение двух косми¬
ческих аппаратов, то эти КА не имеют между собой прямой свя¬
зи. На практике принимают, что модуль вектора г должен быть
64
Таблица 2. 2
Рис. 2.30. К определению вза¬
имной видимости КА
больше радиуса Земли 7? на величину слоя атмосферы ЛН, пре¬
пятствующего связи:
гг=77 = (Т? + д//)2. (2.121)
Составим два векторных соотношения:
r-|-Q2=r2, (2. 122)
r — Q1 = r1. (2. 123)
Модули векторов г2 и Г] выразим формулами
г2=(г+е2)(г + е2)=л2+е2+2ге2, (2.124)
г?=(г — 61) (г — ei)=r2-|-Qi — 2геР (2. 125)
В моменты восхода или захода первого КА по отношению ко вто¬
рому, имеем
7q1=7q2 = 0. (2.126)
Тогда формулы (2.124) и (2.125)
принимают вид
62 = (г1-г2)1/2, (2. 127)
61 = (Н-г2)1/2. (2. 128)
Складывая формулы (2.127) и
(2-128), получим
б2 + б1Нг1-Г2)1/2+(г?-Г2)1/2.
(2. 129)
В то же время длину хорды d, соединяющей КА, определим по
формуле
^=[(г2-г1)(г2-г1)]1/2=(г!-|-г?-27172)1/2. (2. 130)
Подставляя формулу (2. 130) в (2. 129) и дважды возводя в
квадрат, получим функцию восхода и захода
^ = (rtr1)2-rlrl-\-(rl-\-rl)r2-2r2r2r1, (2. 131)
где г определяется по формуле (2. 124).
Знак при F, соответствующий условию видимости, может
быть установлен, если рассмотреть случай, при котором КА на¬
ходится вне зоны взаимной видимости. Если КА находится в диа¬
метрально противоположных точках, то г2гг = — т\г2, и функция F
приводится к виду
^=(''2+г1)гг2> 0. (2. 132)
3 3430
65
Следовательно, отрицательные значения F соответствуют непо¬
средственной связи между КА по лучу зрения, а положительные
значения F означают отсутствие такой связи.
Для расчета необходимого количества КА связи требуется оп¬
ределить время одновременной радиовидимости с некоторой тер¬
ритории.
Космический аппарат «виден» с некоторой территории, если
он «виден» с любой точки этой территории. Для расчета времени
одновременной радиовидимости КА с некоторой территории необ¬
ходимо определить на каждом витке момент радиовосхода и ра¬
диозахода КА для всех точек заданного района. Разность време¬
ни самого позднего радиовосхода и самого раннего радиозахода
и будет временем одновременной радиовидимости КА со всей
территории. Очевидно, имеет смысл производить такие расчеты
лишь для точек на границе территории. В зависимости от кон¬
фигурации территории при практических расчетах обычно огра¬
ничиваются тремя-четырьмя точками.
Сформулируем некоторые общие принципы, которыми необхо¬
димо руководствоваться при выборе орбит КА связи. В общем
случае задача ставится так: требуется обеспечить круглосуточ¬
ную непрерывную или с заданным разрывом связь для опреде¬
ленного района земного шара, группы районов или для всего
земного шара.
Выбор формы орбиты зависит от площади территории, геогра¬
фического местоположения (высокие, средние или низкие широ¬
ты) и конфигурации (протяженности в долготном и широтном
отношении). Выбор наклонения плоскости орбиты к плоскости
экватора зависит как от географического положения территории,
на которой необходимо организовать связь, так и от заданного
времени активного функционирования системы КА. При выборе
угла наклонения необходимо учитывать и условия запуска КА
на орбиту. Однако в первую очередь при выборе наклонения ор¬
биты необходимо считаться с факторами, влияющими на ста¬
бильность орбиты. Поэтому наклонение 1 — 63Р26' считается наи¬
более приемлемым для КА связи длительного функциониро¬
вания.
Для обеспечения повторяемости сеансов связи в течение всего
времени активного функционирования параметры орбиты КА
подбираются таким образом, чтобы трасса последующих суток
совпадала с трассой предыдущих суток (синхронизация орбит).
Это достигается в том случае, когда КА за время t сделает целое
число оборотов в сутки, т. е. когда
t=T39 (2- 133)
где iA)Q — прецессия линии узлов за один оборот;
Асут — количество оборотов КА в сутки.
66
Порядок расчета необходимого количества КА в системе сво¬
дится к следующему. Рассчитывается время взаимной радиови¬
димости КА для данного района или совокупности наземных
пунктов в функции от долготы восходящего узла при фиксиро¬
ванных значениях высоты перигея На, числа оборотов КА в сут¬
ки Асут, угла наклонения плоскости орбиты к плоскости эква¬
тора I, углового положения перигея со.
Если космический аппарат совершает У оборотов в сутки и
если зона взаимной радиовидимости по долготе восходящего узла
орбиты Ав. у не имеет разрывов, то данный космический аппарат
Л7Р в сутки может обеспечить
связь пунктов заданного рай¬
она.
Рис. 2.31. График зависимости
времени радиовосхода и радио¬
захода от долготы восходящего
узла орбиты для двух назем¬
ных пунктов
Рис. 2.32. График зависимости
времени взаимной радиовидимости
двух пунктов в функции от долго¬
ты восходящего узла
Для определения необходимого количества КА в системе тре¬
буется определить время взаимной радиовидимости AZ в функ¬
ции от Ав. у, время перерыва связи tpc между двумя последующи¬
ми сеансами связи одного КА, а также величину межвиткового
расстояния. Найдем необходимое количество КА в системе для
обеспечения связи между двумя наземными пунктами с геоцен¬
трическими координатами фп1 = 49°30'; Ani ='14°20' и фп2=43°50';
Хп2=132°. Пусть КА делает в сутки три оборота, высота перигея
Нп—500 км, угол наклонения плоскости орбиты к плоскости
экватора / = 63°26', угловое положение перигея со = 270°. Время
радиовосхода и радиозахода для каждого пункта в функции от
долготы восходящего узла Ав. у представлено на рис. 2.31. За¬
штрихованная область представляет собой область взаимной ра¬
диовидимости рассматриваемых пунктов. На рис. 2. 32 представ¬
лено время 'взаимной радиовидимости двух указанных пунктов в
функции от долготы восходящего узла. Космический аппарат за
эффективные сутки делает ровно три оборота и межвитковое
расстояние равно 120°. Можно поставить задачу обеспечения
максимального времени обеспечения связью заданных наземных
3*
67
пунктов одним КА. Для максимального времени связи в течение
суток необходимо найти такое начальное значение Ав. у, чтобы
за три сеанса связи сумма времени связи была максимальной.
Воспользуемся графиком рис. 2. 32, зададим начальные значения
Ав. у (для первого витка) и определим время взаимной радио¬
видимости /рв на каждом витке и суммарное время связи Zs за
сутки. В табл. 2. 3 представлены указанные величины для четы¬
рех вариантов задания начальных условий.
Таблица 2.3
Вариант
I
II
III
IV
Хв.у. град
360
240
120
300
180
60
270
150
30
290
170
50
^рв» Ч
1,8
5,9
3,6
5,2
4,0
3,1
5,9
3,7
2
5,6
3,8
3,1
Я
н.з
12,3
11,6
12,5
Таким образом, максимальное время связи в течение суток
можно получить, если выбрать Ав.у первого витка равной 290°
(IV вариант).
Для построения систем КА, обеспечивающих круглосуточную
связь, помимо времени взаимной радиовидимости необходимо
знать еще и время разрыва связи между двумя последующими
сеансами связи. Определим продолжительность разрывов связи
для рассматриваемого случая. Примем за начало отсчета время
нахождения экватора на первом витке (/о=О) и, воспользовав¬
шись графиком рис. 2. 31, нанесем сеансы связи для рассмотрен¬
ных ранее четырех вариантов на суточную временную шкалу
(рис. 2. 33).
68
Рис. 2. 33. Распределение сеансов связи на суточной временной
шкале
Для круглосуточной связи необходимо заполнить сеансами
связи образовавшиеся разрывы на суточной временной шкале,
т. е. другими словами, найти такое количество КА в системе и
определить их взаимное положение в пространстве, чтобы на су¬
точной временной шкале отсутствовали разрывы в сеансах
связи.
Построим систему КА связи таким образом, чтобы в момент
радиозахода первого космического аппарата восходил второй ап¬
парат системы и Ав. у первого аппарата была равна Ав. у второго.
Рис. 2.34. Схема покрытия сеансами связи суточной вре¬
менной шкалы
Если разрывы в радиосвязи не будут перекрыты двумя КА, до¬
полняем систему третьим КА и так далее до полного перекры¬
тия всех разрывов связи на суточной временной шкале.
Для примера воспользуемся первым и вторым вариантами
начального распределения Ав. у (табл. 2.3). На рис. 2. 34 приведе¬
ны сеансы связи для систем, состоящих из трех КА. Оказывает¬
ся, что три КА в первом варианте распределения не удовлетво¬
ряют условию круглосуточной связи, в то время как три КА с
расположением Ав.у по второму варианту удовлетворяют усло¬
вию непрерывной связи.
В нашем примере системы связных КА создавались таким об¬
разом, что Аи. у для всех КА были одинаковыми. Это удобно с
точки зрения наземных пунктов, так как сеансы связи для всех
КА системы будут в течение суток в одинаковой последователь¬
ности повторяться. Можно найти такое сочетание начального
расположения долгот восходящих узлов, что количество КА в си¬
стеме будет минимальным. Таким образом, задача создания си¬
стемы связных КА может быть сформулирована следующим
■образом. Из возможных сочетаний суточных сеансов связи, раз¬
деленных по долготе на 2n//VCyT, найти такие, которые дают ми¬
нимум космических аппаратов в системе.
2.8. СИСТЕМЫ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ
Основная задача навигации — вывод движущегося объекта в
заданную точку земной поверхности с установленной точностью
и в указанный момент времени. Чтобы избежать накапливания
69
навигационных ошибок, необходимо периодически вносить по¬
правки в движение.
В настоящее время в целях навигации применяются:
— визуальный просмотр местности и ее сличение с географи¬
ческой картой;
— общие средства навигации (магнитный и гиромагнитный
компасы, часы, указатель скорости, навигационный индикатор,
высотомеры);
— астрономические навигационные приборы (астрокомпасы,
секстанты);
— радиотехнические устройства и системы;
— инерциальные навигационные системы;
— радионавигационные системы КА.
Все эти средства навигации могут использоваться в различ¬
ных условиях и должны дополнять друг друга, повышая общую
точность определения координат объекта.
Радиотехнические средства навигации имеют ограниченную
дальность действия, неустойчиво работают в периоды магнитных
бурь и северных сияний, легко подвергаются различного рода
помехам; астрономические средства невозможно использовать
при невидимости небесных светил, инерциальные системы нави¬
гации нуждаются в коррекции их показаний, вследствие чего они
требуют комплексирования с другими системами навигации.
Система навигационных космических аппаратов в совокупно¬
сти с наземной системой обеспечения и бортовой аппаратурой
определяющихся объектов предназначена для установления ме¬
стоположения объекта в заданной системе координат в любое
время суток (при любых метеоусловиях). Навигационные систе¬
мы КА могут создать радионавигационное покрытие всего
земного шара и обеспечить навигацию кораблей, самолетов и
других подвижных объектов. При этом точность определения
навигационных координат объектов достаточно большая.
К основным тактико-техническим данным радионавигацион¬
ных устройств и систем относятся: дальность действия, точность
измерения навигационных величин, быстрота получения отсчетов,
пропускная способность, помехоустойчивость, надежность, эконо¬
мичность, рабочий диапазон волн, размеры и масса оборудо¬
вания.
При применении КА в целях навигации в качестве опорной
радионавигационной величины используется заданная по време¬
ни и пространству с определенной точностью траектория движе¬
ния КА.
На навигационных КА устанавливается оборудование двух
типов: синхронизированное приемопередающее устройство, отве¬
чающее на сигналы запроса наземной аппаратуры, и не синхро¬
низированный сигналами запроса автономный передатчик, рабо¬
тающий на излучение либо непрерывно, либо по специальной
программе в определенные интервалы времени.
70
Система навигации с применением КА включает следующие
элементы:
— несколько КА, движущихся по заданным орбитам;
— сеть наблюдательных станций, принимающих телеметри¬
ческую информацию КА и связанных с вычислительным цент¬
ром, который определяет точные эфемериды КА;
— средства связи для передачи эфемерид КА каждому
объекту;
— независимый навигационный прибор и счетно-решающее
устройство для определения координат объекта.
Бортовая аппаратура каждого КА самостоятельно или по
команде с Земли должна выдавать собственные эфемериды. Для
этого на КА устанавливается специальный блок памяти, кото¬
рый записывает информацию, передаваемую с наземных пунк¬
тов и содержащую рассчитанные вычислительным центром эфе¬
мериды, которые КА периодически передает. При получении
новых эфемерид старые автоматически стираются.
Наземная часть навигационной системы с ИСЗ «Транзит»
включает четыре доплеровских станции сопровождения КА, обес¬
печивающие регулярное определение параметров движения КА
для обновления (один-два раза в сутки) эфемерид в бортовых
запоминающих устройствах (ЗУ); две станции ввода данных в
бортовые запоминающие устройства КА; станцию эталонов
частоты и единого времени; вычислительный центр обра¬
ботки данных слежения и вычисления эфемерид и временных
поправок; центр управления. Периодичность передачи эфемерид
КА — две минуты. Каждый раз передаются три геоцентрические
координаты, соответствующие моменту начала передачи, а так¬
же 3—4 группы координат, соответствующие местоположению
КА на предшествующих и последующих интервалах времени.
Одновременно передаются сигналы точного времени. Немодули-
рованные сигналы для доплеровских измерений передаются не¬
прерывно.
Специфика задач, выполняемых навигационными КА, сказы¬
вается на выборе формы орбиты, наклонении плоскости орбиты
к плоскости экватора и высоте орбиты. От выбора этих харак¬
теристик зависит необходимое количество КА в системе и устой¬
чивость самой системы. Космические аппараты системы должны
выводиться на орбиты с такой частотой, чтобы любая точка на
земном шаре обеспечивалась навигацией не позже чем через
0,5—1 ч. Более частое появление КА считается нецелесообраз¬
ным.
Для навигационных КА наиболее желательными являются
полярные и околополярные орбиты, так как они охватывают всю
поверхность Земли, отличаются большой стабильностью, для них
проще, чем для эллиптических, рассчитывать эфемериды и учи¬
тывать влияние возмущающих воздействий. Высота орбиты обыч¬
но лежит в пределах 600—1000 км.
71
Исходными данными для расчета навигационной системы
являются:
— время разрыва между двумя последовательными навига¬
ционными определениями объекта — tp,
— минимально допустимый угол возвышения КА над гори¬
зонтом — бггпт.:
— время обсервации — Лэбс;
— диапазон высот, в котором возможна работа системы КА,
Гкр mln И Гкр шах-
Дальнейший порядок расчета системы навигационных КА из¬
ложен в четвертом разделе настоящей главы, где приводится
общий случай расчета системы КА с заданным разрывом наблю¬
дения.
Для некоторых навигационных систем определение местопо¬
ложения наземного объекта возможно только с помощью N кос¬
мических аппаратов, т. е. необходимо, чтобы в момент обсерва¬
ции определяющийся объект был в поле видимости нескольких
космических аппаратов. Произведем оценку необходимого коли¬
чества КА в данной системе. Положим, что п космических аппа¬
ратов движутся в одной плоскости и создают цепочку КА таким
образом, что зоны обзора смежных аппаратов перекрываются.
Найдем ширину полосы обзора Ь, в которой будет выполняться
М кратное наслоение мгновенных зон обзора. Кратность перекры¬
тия зависит от углового расстояния между двумя смежными КА
цепочки и геоцентрального угла <рэ мгновенной зоны обзора. Рас¬
стояние между двумя смежными КА цепочки обозначим через 2а,
2а=— , (2. 134)
п
где п — количество КА в плоскости орбиты.
Максимальная кратность перекрытия зон обзора
лггаах=4?-1+1- <2-135)
Если — целое число, то в плоскости орбиты будет един¬
ственная точка с кратностью Мпах для каждой смежной пары
космических аппаратов.
Найдем ширину полосы Ь, в которой осуществляется W крат¬
ное перекрытие зон обзора. Обозначим через (N/2) >2а расстоя¬
ние вдоль плоскости орбиты от середины зоны N кратного по¬
крытия на поверхности Земли до подспутниковой точки гранич¬
ного КА, участвующего в покрытии данной зоны.
Тогда по теореме косинусов имеем
ft=arccos cos Уз . (2. 136)
cos Na
72
Или в окончательном виде
b=arccos Г ■ С05?3 ] . (2. 137)
Na k ’
cos
L n
В формуле (2. 137) <₽3> — •
п
Дальнейшее определение необходимого количества КА нави¬
гационной системы при известной зависимости ширины полосы
непрерывного обзора в функции от кратности и числа КА в пло¬
скости орбиты, осуществляется по алгоритмам, изложенным в
разд. 2.4.
2.9. ОЦЕНКА ПОВЕДЕНИЯ ВЕРОЯТНОСТНЫХ СИСТЕМ КА
Относительное положение КА на орбите в условиях воздей¬
ствия различных возмущающих факторов с течением времени
непрерывно изменяется вследствие периодических и вековых
смещений. Поэтому, если положение КА в системе не поддер¬
живать с помощью корректирующих устройств, то такая систе¬
ма из-за вековых смещений разойдется.. При этом расхождение
системы будет обусловлено лишь той частью возмущений, на ко¬
торую отличаются вековые смещения различных КА системы.
Основными случайными возмущениями являются ошибки вы¬
ведения. Ошибки выведения вызовут рассеивание периода обра¬
щения КА системы, что приведет к смещению КА вдоль орбиты.
Естественно, что подобное непрерывное смещение КА повлияет
на способность системы полностью выполнить возложенные на
нее функции, и эффективность системы может быть при этом в
какой-то мере снижена.
Введем понятие периода обращения системы, подразумевая
под этим математическое ожидание периода Тм. Величина перио¬
да обращения системы Тм характеризует собой среднюю угловую
скорость вращения плоскости орбиты, в которой расположены
КА. Таким образом, период обращения каждого КА системы 7\
можно представить в виде суммы
7’i=7’M+67’i, (2. 138)
где 67»— случайное отклонение периода обращения.
Рассмотрим относительное перемещение КА вдоль орбиты на
плоскости, вращающейся с угловой скоростью
(2.139)
Если бы все КА системы имели нулевые случайные отклоне¬
ния периода 67\=О, то каждый КА на вращающейся плоскости
занимал бы все время строго определенное место в своей «ячей¬
ке» (расчетное положение КА на орбите) и, следовательно, ника¬
73
кого относительного перемещения при этом не было бы. В дей¬
ствительности каждый КА имеет свое случайное отклонение пе¬
риода, что вызывает относительное движение каждого КА вдоль
орбиты.
Выберем на вращающейся плоскости некоторое направление
г и рассмотрим угловое смещение КА по отношению к этому на¬
правлению (рис. 2.35).
Угловая скорость относительного смещения КА связана с
д7\ соотношением
±£- =—— — = — о>——. (2.140)
dt Т м + ът i Тм Ты + ЪТ1
Интегрируя соотношение (2. 140) от начального значения вре¬
мени t0 до текущего значения t, получим
^4— Л (2.141)
'м — 8' i
где фо, — угол, характеризующий исходное положение КА в си¬
стеме относительно выбранного направления.
Обозначим через - l—=xi относительное случайное от-
гм +
клонение периода КА. Тогда смещение КА вдоль орбиты с те¬
чением времени определится по
формуле
Дфг = —(0x7. (2.142)
Космические аппараты систе¬
мы имеют самое различное значе¬
ние Xj как по величине, так и по
знаку. Вследствие этого смещение
их вдоль орбиты будет происхо¬
дить в различных направлениях
и с различной скоростью. Други¬
ми словами, поведение системы,
имеющей случайное отклонение
периода 67\, характеризуется не¬
прерывным перемешиванием КА
вдоль орбиты. При этом на вра¬
щающейся плоскости одни КА бу¬
дут встречаться друг с другом, а другие обгонять друг друга.
Как в момент встречи, так и в момент обгона происходит полное
наслоение зон обзора пары КА и указанная пара функционирует
в системе как один КА. Чем большее число наслоений происходит
в рассматриваемый интервал времени, тем большее количество
КА «выбивается» из системы. Поэтому в качестве одного из кри¬
териев оценки динамических характеристик системы примем ко¬
личество наслоений (встреч или обгонов), происходящих за опре¬
деленный интервал времени.
Рис. 2. 35. К определению взаимно¬
го смещения КА в плоскости
орбиты
74
Кроме количества наслоений важно также знать продолжи¬
тельность, в течение которой происходит это наслоение. Под про¬
должительностью наслоения зон обзора будем понимать время
перемещения зон обзора из относительного положения / в поло¬
жение II (рис. 2. 36).
Для количественной оценки принятых динамических характе¬
ристик системы разобьем все КА системы на т разрядов, каж¬
дый из которых имеет определенный интервал х в соответствии
Рис. 2.36. К определению продолжительности
наслоения зон обзора
с законом нормального распределения. Наиболее удобно раз¬
бить систему КА на восемь разрядов, так как в этом случае раз¬
ряд от разряда отличается по х на величину одного вероятного
отклонения Е. Вероятность попадания случайной величины на
рассматриваемые интервалы при этом определится по формуле
Pi=^ [Фсо-Ф^ц], (2.143)
где I—порядковый номер разряда; Ф(г) — приведенная функция
Лапласа.
Значение вероятности Р, для различных интервалов х дано
в табл. 2. 4.
Таблица 2.4
i
1
2
3
4
I'
2'
3'
4'
X
0ч-£
Е+2Е
2Еч-ЗЕ
3£ч-4£
0ч~ Е
—Е~2Е
—2£-=—ЗЕ
—3£_2 4£
Pl
0,2500
0,1614
0,0672
0,0180
0,2500
0,1614
0,0672
0,0180
Разряды, обозначенные штрихами, будем называть штрихо¬
ванными. Пользуясь табл. 2. 4, можно определить количество КА
системы, попадающих на тот или иной интервал:
справа Zi=Piti (i= 1, 2, 3, 4);
слева Zi'=Pi'n (i=l, 2, 3, 4).
Каждый разряд КА будет характеризоваться средним значе¬
нием отклонения периода на соответствующем этому разряду ин¬
тервале х:
Xi=±.(i—0,5)Е, (»=1, 2, 3, 4), где знак минус относится к
штрихованным разрядам.
75
1
1
2
3
4
kl
1
3
5
7
Вследствие отклонения относительного периода х, все г, КА
i-го разряда будут на вращающейся плоскости совершать отно¬
сительное движение с постоянной для данного разряда угловой
скоростью
=шХ1 = Т <о£ (/ - 0,5). (2. 144'
dt
Введем в рассмотрение понятие «время одного цикла». Под
временем цикла Тц будем понимать такое время, в течение кото¬
рого КА первого разряда сделают один полный оборот на вра¬
щающейся плоскости. Величину Тц найдем из условия
△ср = а)£’(1 — 0,5)7'ц=2л,
откуда
-г 2лТм 2ТЫ ,п
ц— 2л0,5£— £ ( • >
Космические аппараты других разрядов за время цикла со¬
вершат несколько оборотов; чем больше номер разряда, тем
больше число оборотов за один цикл
— 0,5Tu)=2jiAz, (2.146)
где ki — число оборотов за цикл. Число оборотов за цикл
ki=2i— 1. (2.147):
Число оборотов каждого разряда за цикл приведено в табл. 2. 5.
Таблица 2.5 Итак, исходя из нормаль¬
ного закона распределения
установлено количество КА
в разряде, продолжительность
одного условного цикла и коли¬
чество оборотов КА каждого
разряда за один цикл. Оценим общее количество совмещений
за цикл.
За время одного цикла КА первого разряда совершат один
оборот и встретятся соответственно с КА разряда 1' два раза,
с 2' — четыре раза, с 3' — шесть раз и с 4' — восемь раз. Общее
количество встреч КА первого разряда со всеми КА штрихован¬
ных разрядов найдем в виде полинома 2-й степени:
2ZjZi + 4ZXZ<2, + 6ZXZ3 + 82^4.
В виде полинома 2-й степени будет представлена также и
сумма обгонов в каждой подгруппе.
Таким образом, общее количество совмещений КА системы за
один цикл может быть представлено в виде полинома
76
п п
(д, Л=1, 2, 3, 4), (2.148)
Z—1 ft—1
где aj, k — некоторые постоянные коэффициенты; Zj, Zh — неза¬
висимые переменные.
Поскольку количество переменных z,- равно количеству пере¬
менных Zh и выполняется условие
44j, Л 44ft, {,
то полином (2. 148) представляет собой квадратичную форму с
матрицей коэффициентов
44ц 4Z12 4Z18 а14
442i 4Z22 4Z23 ам
A = . (2.149)
44ji 4Zg2 aM a34
4441 4i42 a43 aM
Коэффициенты а,, л матрицы (2. 149) определяются следующим
образом:
ац — количество встреч КА первого разряда с КА разряда 1'.
За время цикла таких встреч будет два, следовательно, ац=2;
ац — количество встреч КА первого разряда с КА разря¬
да 2' и число обгонов КА 2' космических аппаратов разряда 1'.
Число встреч найдем из условия, что КА разряда 2' совершает
62 = 3 оборота, а КА первого разряда один оборот. Итого будем
иметь 3+1=4 встречи этих разрядов. Число обгонов будет рав¬
но 3— 1=2. Таким образом, ai2=4+2=6. Поступая аналогич¬
но, найдем все a,h матрицы (2. 149) :
2 6 10 14
6 6 10 14
Л= 10 10 10 14 ’ (2' 150)
14 14 14 14
Используя матрицу коэффициентов, общее количество совмеще¬
ний за цикл найдем по формуле
S—z'Az, (2.151)
где переменная z' берется по столбцу, a z — по строке.
77 .
Если требуется определить отдельно число обгонов или
встреч, то при этом следует пользоваться формулами:
*$нстр ABCTpZ, (1. 152)
SO6r=z'Ao6rz, (2. 153)
где
2 8 12 16
6 16 20
Австр= ю 24
14
0 4 8 12 •
0 4 8
Л°6г= 0 4
0
Поскольку z=Pn, то формула для общего количества совмеще¬
ний за один цикл может быть представлена в виде
S=[P'AP]n2. (2.154)
Выражение, стоящее в квадратных скобках, не зависит от ко¬
личества КА системы, а определяется вероятностями Р, которые
в данном случае для каждого разряда известны. Поэтому вы¬
ражение, стоящее в квадратных скобках формулы (2. 154),может
быть заранее вычислено:
[Р'ДР]=2Р?+ 12^ + 20^3 + 28^ + 6Р1 +
+20Р2Р3 + 28Р2Р4+ 10Р1+28РэР4+ 14Р1= 1,6.
Таким образом, общее количество наслоений КА за цикл
S=l,6n2. (2.155)
Формула (2. 155) получена в предположении, что все КА си¬
стемы разбиты на 8 разрядов. Если число разрядов удвоить, то
получим
S=l,6-2n2. (2.156)
Отсюда следует, что для оценки динамических характеристик
системы достаточно разбить систему КА на 8 разрядов.
Общее количество совмещений за цикл зависит только от ко¬
личества КА системы и не зависит ни от параметров исходной
орбиты, ни от точности выведения. Это объясняется тем, что вре¬
мя цикла — не постоянная величина, а некоторая функция пара¬
метров орбиты и ошибок выведения.
78
Для оценки эффективности системы наибольший интерес
представляет среднее количество совмещений за одни сутки
(для этого сначала выразим время цикла в сутках)
Т^=--^- = —— , (2.157)
ц FT FN
ЗВ I7/VcyT
где Асут — количество оборотов КА за сутки.
Разделив общее число наслоений на количество суток цикла,
получим суточное количество совмещений:
5сут=г~ = 0,8n2£WcyT. (2. 158)
' ц
Количество совмещений в сутки характеризует среднее количе¬
ство моментов, когда КА системы имеют полное совмещение зон
обзора. Чем меньше точность выве¬
дения, тем больше ScyT> а следова¬
тельно, и больше моментов совмеще¬
ния зон обзора.
Таким образом, если к оценке
эффективности системы подходить
с точки зрения числа «выбивания»
КА в сутки, то придем к очевидному
заключению о необходимости умень¬
шения ошибок выведения. Однако
подобная оценка является односто¬
ронней, а следовательно, и неполной.
Для полноты характеристики систе¬
мы необходимо оценить также об¬
щую продолжительность, в течение которой происходит процесс
наслоений при совмещении зон обзора.
Рассмотрим относительное перемещение любой пары КА в
процессе наслоения зон обзора. Обозначим через 2а расчетное
расстояние по дуге большой окружности Земли между центрами
зон обзора z-го и k-ro космических аппаратов (рис. 2.37). В про¬
цессе наслоения зон обзора КА происходит изменение расстоя¬
ния между их центрами. Это относительное перемещение КА при
одном наслоении зон обзора будет равно 4ал. Если величину это¬
го перемещения разделить на относительную скорость наслоения
А!/,, л, то получим полное время наслоения при одном совмеще¬
нии:
159>
Величина относительной скорости определяется соотношением
&Vi,k~ Дш,- kR, (2. 160)
где
д f(o(x, + xft)—при встрече;
,4> |<o(Arz — хк)~ при обгоне.
Рис. 2.37. Относительное пере¬
мещение пары КА системы
79
Таким'образом, время наслоения зон найдем по формуле
<2'161)
<2-162’
Общее время наслоения определим суммированием по всем
встречам и обгонам за один цикл
Т2=^~ z'dz, (2.163)
где d — матрица постоянных коэффициентов,
14 4 4
1 4 4
7 =
1 4
1
Заменяя z произведением вероятностей на количество КА, полу¬
чим
= пг [P'dP\. (2. 164)
wRE
Выражение, стоящее в квадратных скобках формулы (2. 164), не
зависит от количества КА системы и может быть заранее вычис¬
лено
(Р'7Р]=0,4.
Тогда
Т2=-^~ 1,6 л2.
<*RE
Заметим, что l,6ft2=S, поэтому
T2 = ^-S. (2.165)
u>RE
Величина Та характеризует не отрезок времени, в течение
которого система КА находилась в состоянии частичного или
полного наслоения, а суммарное время наслоения системы КА
за один цикл. Оценим, какую часть от общего времени функцио¬
нирования системы составляет время наслоения Та.. Для этого
рассмотрим систему КА, в которой ал = -^~ . При этом отно-
п
сительное время наслоения зон обзора системы определим по
формуле
т]=— =2ail26n2E = o о (2.166)
пГц uRErfiT,,
80
Коэффициент т] характеризует в среднем часть КА системы,
зоны обзора которых будут находиться в состоянии частичного
или полного наслоения. Из формулы (2. 166) следует, что 80%
космических аппаратов системы как бы в среднем находятся в
состоянии наслоения зон обзора и только 20% не наслаиваются
своими зонами обзора. Это означает, что перемешивание КА
системы происходит таким образом, что в одних областях будет
иметь место сгущение КА, а в других — разрежение. Характер¬
но, что коэффициент т| не зависит от точности выведения КА си¬
стемы на орбиту.
Рис. 2. 38. К определению потери линейной емкости системы
Общее количество совмещений зон обзора и относительное
время наслоения зон были получены исходя из анализа дина¬
мики поведения системы. Однако полученные значения 5сут и т]
характеризуют систему безотносительно ко времени и являются
уже некоторыми осредненными характеристиками системы.
Введем в рассмотрение понятие «линейной емкости» системы,
подразумевая под этим произведение линейного расстояния зоны
обзора вдоль орбиты на время. Если система состоит из п косми¬
ческих аппаратов и имеет линейное расстояние зоны обзора, рав¬
ное 2ал, то теоретически возможную линейную емкость такой си¬
стемы за цикл найдем по формуле
Лт = 2аля7ц. (2.167)
Фактическая линейная емкость системы, очевидно, будет
меньше, так как наслоение зон обзора неизбежно сопровождается
некоторой потерей емкости. Оценим эти потери. Изменение ли¬
нейного перекрытия зон обзора I с течением времени при наслое¬
нии i-ro и k-vo КА показано на рис. 2. 38. Предположим, что име¬
ется некоторое расчетное линейное перекрытие зон обзора систе¬
мы Дал. Тогда потеря линейной емкости за время наслоения зон
обзора одной пары КА составит
titk. (2. 168)
Величина ДА;,й характеризуется площадью заштрихованных
треугольников (см. рис. 2. 38). Для определения всей потерянной
81
линейной емкости за время цикла необходимо просуммировать
AL,, по всем наслоениям системы за один цикл:
7„ = 2Дл~ЛДл^7.,й = 2Дл~ АДл 7\. (2.169)
Поскольку Г;; = 2Дл~ АДл 1,6 Л2,
uRE
то L 2ал-Лал 2дл - Ьал t б (2> 1?(),
2 RE
Т
Разделив Ln на 7Т, получим относительную потерю линейной
емкости системы
у Ei 2дл— Да, 2ад 1,6л2 ?2
Л 2 2л пТи2ал
— РЕ
Тм
Так как 2ал —дал=-^^-,
п
то 7 = 0,4 2Дл~ ДДл. (2. 172)
2йл
Предположим, что Дал=0, т. е. в расчетной системе линейное
- / о 2л/? \
перекрытие зон обзора отсутствует хал= , тогда потеря
\ и /
линейной емкости составит 0,4. Увеличение Дал приводит к
уменьшению относительной величины 7П/7Т. В частности, при
двойном линейном перекрытии зон обзора
7=0,4 2aJ~°'5g* =о,2. (2.173)
2ал
Потеря линейной емкости характеризует .в среднем ту часть
линейных интервалов 2ал, на которые не попадает зона обзора.
Поэтому по величине L можно судить о вероятности непопада¬
ния зоны обзора на интервал 2ал или о вероятности попадания
на этот интервал.
При вероятностной оценке системы будем исходить из усло¬
вия, что положение КА системы в плоскости орбиты в каждый
момент времени является случайным, и будем оценивать вероят¬
ность того, что среди п линейных интервалов зон обзора 2ал
окажется ровно m занятых или что на интервал 2ал попадает
хотя бы один КА.
Вероятность того, что среди п отрезков будет ровно иг заня¬
тых, определится по теореме о повторении опытов:
Р„ = (2.174)
m I (л — /л) I \ л / \ п /
82
где С — среднее количество КА, приходящихся на длину 2ал,
равную линейному расстоянию зоны обзора; п — количество КА
в плоскости орбиты.
Вероятность же попадания на интервал 2ал хотя бы одного
КА найдем как сумму вероятностей Рт, т. е.
р =с Л__е_ул_1)Г1 + ("~l)g I (п-1)(п-2)С2
1 \ п/ L Т 2 (л —С) 6(n-C)2 "I”
■ (л- 1)(л — 2) (л — 3)С3 , . (л — 1)(л —2),..(л — тп + ОС"1-1
24 (л — С)3 I •••“г ml(n — C)m
(2. 175)
При вероятностной оценке системы, состоящей из достаточно
большого количества КА, можно вместо формул (2. 174) и
(2. 175) пользоваться формулами Пуассона
(~'ГП
Рт=~ге~с, Р1=\ — е~с. (2.176)
т 1
Вероятности попадания ровно т КА на интервал С=1 приве¬
дены в табл. 2. 6.
Таблица 2. 6
т
1
2
3
4
5
Рт
0,367
0,183
0,0615
0,015
0,003
Вероятность попадания хотя бы одного КА на интервал 2ал
равна 0,632. Добавление к системе Ап КА приводит к изменению
математического ожидания С. В табл. 2.7 приведено значение
вероятности Pi в функции от количества КА системы п в пред¬
положении, что расчетное значение ирас = 12.
Таблица 2. 7
п
12
14
16
18
20
22
24
Pl
0,632
0,689
0,737
0,792
0,812
0,839
0,865
п
1
2
3
4
Л рас
Pl
0,632
0,865
0,950
0,985
Таким образом, при увеличении количества КА в системе
вдвое, вероятность Pt возрастает с 0,632 до 0,865.
В табл. 2. 8 приведена вероятность Р{ при кратном увеличе¬
нии числа КА В системе. Таблица 2.8
Из таблицы следует, что
увеличение количества КА в си¬
стеме более чем в два раза по
сравнению с расчетным значе¬
нием нецелесообразно.
Рис. 3. 1. Цилиндрическая система
координат
Глава 3
ДИНАМИКА ОРБИТАЛЬНЫХ СИСТЕМ
3.1. ВОЗМУЩЕНИЯ ЦЕПОЧКИ ИСЗ НА ОКОЛОКРУГОВЫХ ОРБИТАХ
В ЦЕНТРАЛЬНОМ ГРАВИТАЦИОННОМ ПОЛЕ
Возмущенное движение цепочки на околокруговых орбитах
наиболее наглядно представлено в цилиндрической системе ко¬
ординат. Начало координат этой
системы совпадает с центром
Земли (рис. 3.1), за опорную
плоскость принята плоскость не¬
возмущенной орбиты, а опорное
направление фиксировано на ее
восходящий узел.
Движение ИСЗ в каждый дан¬
ный момент времени t опреде¬
ляется координатами г, и, г, при¬
чем г и z характеризуют
радиус возмущенной орбиты
Q=}/r2 + z2, а угол и опреде¬
ляет положение ИСЗ на возму¬
щенной орбите относительно на¬
правления на восходящий узел опорной орбиты- Движение це¬
почки ИСЗ определено на опорной орбите весьма простыми зави¬
симостями:
Гу = г0= const,
zz = 0, (3. 1)
+ 7=1- 2, п),
Г о
где Uoi — аргумент широты i-ro ИСЗ в некоторый момент вре¬
мени to, принятый за начальный.
Получим уравнения возмущенного движения ИСЗ в приня¬
той системе координат, для чего введем три единичных вектора
ls, h, (см- Рис- 3. 1), определяющих соответственно радиаль¬
ное, трансверсальное и бинормальное направления из центра
84
масс ИСЗ. При этом вектор скорости центра масс представим
в виде
17 = VTfr + V4t + VJw- (3- 2)
Производная от этого вектора по времени равна ускорению, вы¬
званному действием всех внешних сил, которое в свою очередь
слагается из ускорения, обусловленного действием центральной
силы притяжения
(3.3)
и возмущающего ускорения
7возМ=^+Пг + ^4- (3-4).
Возьмем производную от вектора скорости (3. 2)
+i/r—/7+^—+-^ 4+—.
dt dt^ dt dt dt dt dt
(3.5)
Поскольку трехгранник единичных векторов совершает движение
. dU
с угловой скоростью <0= , то, пользуясь известными прави-
dt
лами дифференцирования единичного вектора, получим
J[t=—= (3.6)»
dt dt dt dt 0 dt v
С учетом зависимостей (3. 6) выражение для производной (3. 5)
примет вид
—=(—+ + V'r —17r + -^-z4- (3.7)
dt \ dt ' dt ) s ' \ dt 1 ' dt I T dt w v 7
Приравнивая компоненты производной вектора скорости к со¬
ответствующим компонентам ускорения, придем к следующей
системе дифференциальных уравнений:
yxJ!L=S — K —
dt dt q3 ’
+ = (3-8)
at at
-K
dt Q3
Система дифференциальных уравнений (3.8) является точ¬
ной и степень ее приближения будет определяться различными
ограничениями на правые части. Если движение рассматривает¬
85
ся в центральном гравитационном поле, то составляющие уско¬
рения S, Т, W равны нулю. Каждой модели движения отвечает
своя совокупность величин S, Т, W. Величины S, Т, Ц7 являются
некоторыми функциями координат, если рассматриваются раз¬
личные модели гравитационного поля Земли; функциями коор¬
динат и составляющих вектора скорости, если учитываются аэро¬
динамические силы и, наконец, функциями координат и времени,
если учитывается притяжение Луны, Солнца или планет, а так¬
же световое давление.
Для интегрирования системы дифференциальных уравнений
(3. 8) должны быть заданы начальные условия t=t0:
rl(.Io) — rOit Vrl (4) = ^rob
Hi (A)) = ^-oii ti (^o)=VtOZ, (3.9)
Zi(to) = ZOb V zl (^o) = zOb
(i=l, 2,.... n).
Широкое применение при качественном анализе возмущенно¬
го движения ИСЗ получила линейная теория возмущений. Вос¬
пользуемся этой теорией для качественного анализа движения
цепочки ИСЗ.
Представим кинематические элементы возмущенного движе¬
ния центра масс ИСЗ в виде сумм
г = г0 + дг, Vr = Vr0+^r,
и = Ио + Ди, V\ = V\o-|-дУ\, (3. 10)
z = z0+Az, =
Для опорной круговой орбиты имеем zo=O, У20=0, 7^=0.
При этом линеаризация системы уравнений (3.8) приводит к
следующей системе линейных дифференциальных уравнений с
постоянными коэффициентами:
-^-ш2дг-2и)0д1/х = 5,
dt °
dtzV^
-^ + ^Vr=T,
^ + <n2z = M/, (3.11)
— (дИх —<ьодг) = О.
dt r0
Начальными условиями для интегрирования системы уравнений
(3. 11) являются начальные отклонения
Дго = г(А>) —го, д^го= Vr(4),
д«о=и(/о) —и0, д1Ло = 1Л(/о)— Их, (3.12)
^zo=z(Io)i Д^/г0 = И2 (/0),
86
Физическая природа этих отклонений различна. В одних случаях
это ошибки выведения ИСЗ на орбиту, в других—ошибки кор¬
рекции орбиты, в третьих — преднамеренно созданные началь¬
ные отклонения.
Проведем анализ изменчивости структуры цепочки ИСЗ при
наличии начальных возмущений. Для этого воспользуемся си¬
стемой однородных линейных дифференциальных уравнений с
постоянными коэффициентами (3.11), решение которых полу¬
чается в элементарных функциях следующего вида:
Д1^ g
Дг = дг0 (2 — cos ш0/) + 2 (1 — cos uiot) -| sin <_о0/,
“о “о
(Дгп \ / Зга ДИ.П \
I--J7—)«V— 2 ( И2——) sin wot—
А) ^кр/ \ r0 ^кр /
_2-^£0.(1-cosO>0/), (3.13)
Vxp
Д2 = 20 COSu)0/+А^г0 sin (О0/,
"0
/Д'
круговая скорость для опорной орбиты; t —
го
время, отсчитываемое от Л>=0.
Возмущения вектора скорости при необходимости легко могут
быть получены дифференцированием зависимостей (3. 13),
а именно:
</Дг ... du , , dbz
ДИГ = ——; Д1Л = г0—-}-а>0Дг, дУг=——.
at at at
Если последовательно применить зависимости (3. 13) для оценки
возмущений какой-либо пары ИСЗ в цепочке, то можно найти
относительные отклонения ИСЗ этой пары. Относительное поло¬
жение пары ИСЗ в цепочке удобно характеризовать дальностью
измеренной в плоскости опорной орбиты и боковой даль¬
ностью ztj (здесь /, / — порядковые номера, присвоенные ИСЗ в
цепочке, причем i=£ j).
Пусть г,-, г/ — проекции на опорную плоскость радиусов ор¬
бит ИСЗ, имеющих соответственно порядковые номера I и /,
Aujj = uj—щ—угловая дальность, измеренная между г; и г,.
Тогда, обращаясь к кинематической схеме (рис. 3.2), получим
формулу
А; = — 2г1Гj COS 8и»У (3- 14)
Подставив в формулу (3. 14) вместо г{ и г,- их значения, выра¬
женные через радиус опорной орбиты г0 и отклонения Агг-, Аг, от¬
87
Рис. 3.2. Кинематиче¬
ская схема отклонения
КА
бросив квадраты Дг2, Дг? и произведения малых величин дг,-,
Ar,, получим
Dt j = V 2г0 (г0 + Дг, -|- дгу) (1 — cos 8Иу у). (3. 15)
Боковая дальность между ИСЗ оценивается разностью боковых
отклонений
2/у = дгу—Д2у, (3.16)
Дальность Dij, измеренную непосредственно между двумя ИСЗ
в цепочке, найдем по формуле
(3. 17)
Компоненты этой дальности для линейной модели движения
независимы. Поэтому правомерен покомпонентный анализ даль¬
ности Dij.
Прежде чем приступить к анализу
отклонений ИСЗ, в цепочке необходимо
четко оговорить, какой момент времени
принимается за начальный и каким
образом определены начальные откло¬
нения для совокупности ИСЗ.
Условимся отсчитывать время t от
момента to = O, которому отвечает неко¬
торое начальное состояние движения
системы в целом. Тогда боковые откло¬
нения любой пары ИСЗ под номером ij
определятся по общей формуле (3.13):
Z[ = Д20у COS u>0/+ -—sjn
<i)0
ДУ,гО/ ,
Z, = Д£о .■ COS со„/ -] Sin <o0t,
“о
откуда почленным вычитанием получаем искомую зависимость
для относительной боковой дальности
zlj = z> — Zi= Bz0cossin (3. 18)
где Bzo = Azoy —дг0/,
W z0=
Анализируя структуру формулы (3. 18), приходим к выводу
о том, что относительные боковые отклонения между любой па¬
рой ИСЗ в цепочке не зависят от относительного положения па¬
ры в цепочке, а определяются исключительно начальными отно¬
сительными боковыми отклонениями в момент времени to=O.
В каждый данный момент времени относительное боковое от¬
88
клонение z,j изменяется по тому же закону, что и для одиночного
ИСЗ.
Таким образом, при исходном начальном состоянии системы,
определенном на некоторый момент времени £о=О, боковые от¬
клонения не зависят от структуры цепочки. При этом может
иметь место взаимная компенсация боковых отклонений, по¬
скольку они определяются разностями начальных отклонений.
Предположим теперь, что начальные отклонения определены в.
момент прохождения ИСЗ какой-либо характерной точки, напри¬
мер, точки выведения ИСЗ на орбиту, точки прохождения эква¬
тора в восходящем узле орбиты и т. п. Обозначим через —
время прохождения ИСЗ через начальную точку. Тогда для боко¬
вого отклонения любой пары ИСЗ в цепочке получим следующие
зависимости:
△Zy= Дго1 cosa)0(Z —Z0y)+ AVZzOf sin WO(Z —/ог),
(l)0
j
дг, = дг0,со5и>0((— Zoy)-| sin u0(t — t0J).
“o
Пусть toi = O. При этом tо7=ы°у~ ц°' = Вц°г/ и формула для
“О “О
относительного бокового отклонения будет иметь вид
Zi — kZj— дг(. = Д20;соз(ш0/—8a0) sin (a>0Z — 8«0) —
“0
. j Д17zOZ • ,
— Д2о; COS wor — Sin O)0r.
“0
Отсюда можно сделать вывод, что структура цепочки через
угловую дальность 6wOij оказывает влияние на относительное
боковое отклонение пары ИСЗ.
Пусть 6uo,j=n. Тогда формула (3. 18) для пары ИСЗ примет
вид
ztj= — (Дг0,+ Az0Z)cosa)0f—AV*0^ + AV*0' sin ю0/.
“о
При 8«0,у=-^-будем иметь
/ Д V\n,' \ • 1 I I \ z
Zu= kzoj sin Ш0/ — Д£о/ COS (ОО/.
\ “0 / \ “0
Если по начальным отклонениям рассчитать по формулам
(3.13) текущие отклонения и принять некоторое состояние на
момент времени t0 за начальное, то от второй схемы задания
начальных отклонений перейдем к первой. При этом влияние
структуры цепочки на боковые отклонения проявится на этапе
приведения начальных отклонений к единому начальному мо¬
менту времени. По отношению же к приведенным начальным
89
отклонениям структура цепочки ИСЗ не оказывает влияние на
относительное боковое отклонение.
В результате анализа боковых отклонений оценим частные
производные.
Частная производная J_=_ZY_. Отсюда следует,
ojg 2л
что чем больше высота орбиты (больше период обращения Т),
тем чувствительнее орбита к начальным возмущениям боковой
скорости. Частная производная — 1 и не зависит от
высоты орбиты.
Таким образом, боковая дальность между двумя ИСЗ в це¬
почке при малых начальных возмущениях останется малой вели¬
чиной независимо от интервала времени.
Обратимся теперь к зависимости (3.15) и проанализируем
изменение дальности по времени t. Для этого представим
зависимость (3. 15) в виде
-Оч=-|//Г2( 1+-^-+-^-)(1-cos8«(7). (3.19)
Го V к г0 г0 )
Рассмотрим каждый сомножитель подкоренного выражения
в отдельности. Сначала проанализируем первый сомножитель.
Изменчивость этой величины во времени определяется зависимо¬
стью
= -^2-(2 — cos(о0/)-] — (1 — cos w0Z)+-^г0 sin ю0/,
го го VKp ИКр
или
Дг о / Дго । Д'Ло \ ( Дг0 1 о А'Ло \ , ।
= 2 —— — (—°+2 ——)со5Шо/ + ——sin «>07 (3.20)
Г о \ г0 гкр / \ г0 Гкр / Гкр
/ Д<о ДИ^ \
Постоянная величина 2 1 характеризует среднее
\ го Икр .
изменение радиуса орбиты, которое имеет тот же порядок мало¬
сти, что и начальные возмущения. Что же касается периодиче¬
ских составляющих, то они, как и в случае боковых возмуще¬
ний, представляют собой малые колебания.
Итак, первый сомножитель подкоренного выражения близок
к единице и отличается от нее на малые величины порядка на-
. ДГо Д'Ло
чальных возмущении , ——, ——.
<0 ' кр ■'кр
90
Второй сомножитель подкоренного
выражения (3.19) определяется измен¬
чивостью аргумента дщ-у, который пред¬
ставляет собой функцию времени
8и/у=и0} — uoi - 3 h —— o>0t +
\ Т’о *кр
. / Бгп БУ п \
+ 2| 1-2 1 sin ш0^ —
\ fQ VKp /
— 2 (1 — cos (d0/), (3.21)
VKp
где 8r0= Дг0; —Дг0/,
81ZT0= Д^у— AV\oi,
^ГО= А^ГО/'
Начальные отклонения Ar0, AV\o,
АУго ДЛя пары ИСЗ приведены к неко¬
торому общему начальному моменту
времени to = O- При пересчете началь¬
ных отклонений на другой момент вре¬
мени следует пользоваться матрицей,
элементы которой относятся соответст¬
венно к отклонениям Ar, AVr, г0Аи,
AVx, Az, AVZ, а время t отсчитывается
от моментов /Ог, для которых опреде¬
лены исходные начальные отклонения.
Переходим к анализу относитель¬
ного смещения вдоль орбиты пары
ИСЗ. Разность аргументов широты
Uoj—uoi определяется структурой це¬
почки. Если в плоскости орбиты п ИСЗ
распределены равномерно, то угловая
дальность между соседними ИСЗ
равна 2я!п.
, Br0 6Vt0 \
Величина 3 ] не-
k Го 1 Укр )
прерывно возрастает или убывает в за-
/ Ъго , BV\o \
висимости от знака .
к Го VKp )
Периодические составляющие в фор¬
муле (3.21) характеризуют малые ко¬
лебания в окрестности линейной функ¬
ции времени
, 8У_П \
«О/ a0i — 3 j Шо/.
\ Го ^кр )
91
При неограниченном возрастании времени t величина би,/ либо
( 8г0 бК 0 \
неограниченно возрастает при I 1 1 < 0, либо неог-
V ГО VKp )
I 8Tq 8И_Л \
раниченно убывает при 1 |^>0. Однако величина
1 — cos бы,/ остается ограниченной. Она может принимать значе¬
ния в пределах 04-2.
Если ограничиться вековыми возмущениями, то изменение
квадрата относительной дальности —— будет характеризовать-
2'о
ся долгопериодическими колебаниями вида
£>?. г бгп 3V „ \ 1
-2Z-=l_cos 8«0О-3(-5-+—шД (3.22)
2/q L \ го гкр / J
Период долгопериодических колебаний найдем из условия
3(—+-^±Wu=2n,
откуда Гц= аго 2ябИ- . (3.23)
3 + ШО
Го г кр
„ о 8r0 BV\0
Покажем, что величина 3 1 численно равна отноше-
Г 0 ^кр
8ГО
НИЮ .
то
Линейное приращение периода обращения ИСЗ Т, обуслов¬
ленное начальными возмущениями Дг0, Дк\0, дИг0, имеет сле¬
дующее выражение:
дт= ДГО+» Д^о+(^-) ДИг0. (3.24)
\ дг /о \ av^/o \дгг /о
Представим формулу для периода обращения в виде функции
величин г, Их, Vr:
„ 2л J 2л / г \Э/2 2л ■ К \3/2
1 = ал12= / \ =. 1 \ . ел
/к Ук[ 2л_22_\ /к 2—-и2-и2) S
\ — У г ’ г ”
\ г/'
Вычислим частные производные от периода (3. 25) по парамет¬
рам г, Их, Иг:
/ дТ \ 2л _3_/ X! \3/2-1Х
I дг )о“/К 2 9_К_ и _V2
\ z _ г хО v г0 )
\ го /
X =зг0—,
' 01 z , г хО г rO I
\ г0 /
92
/ дТ \ _ 2л 3 / К \ з/2|-1
, z
\ _ тО v rO /
4 г0 1
XZ У
I дТ \ 2л 3 / к >. з/2-i
U^, к~VК 2 _к_ » 2 Л
\ z , ~ v -сО~ v rO I
\ r0 /
X Wo = ЗГ0 (3.26)
(2 —— V2„ — V2n Y (2 —— — И2
I , *тО ’ rO I 14 _ и о ]
\ го ) \ г 0 )
Для опорной круговой орбиты имеем: а=г0, V’To=VItB, — =
у а
= П’2Р, И,о=О и, следовательно, формулы для искомых произ¬
водных принимают вид:
(—; f^r-^=3—; Р^=о.
\ дг /о г0 /о Пкр \ dVr /о
Возвращаясь к формуле (3. 24), получим
△7' = ЗГ0 — + ЗГоА-^, (3.27)
г О •'кр
что и требовалось показать.
С учетом зависимости (3. 27) формулы для периода долго¬
периодических колебаний дальности и квадрата дальности при¬
мут вид:
о
т 2л О /Q ПО.
“ |ВТ,7| 2л |87,у|* ( ’
То Гр
. / Б7*/ j \
—j-= 1 — cos/8aon —2л—-А (3. 29)
2г2о \ г2 ;
Если периоды обращения пары ИСЗ в цепочке одинаковы, то
6Тц=0 и долгопериодические колебания отсутствуют. Такая си¬
туация возможна в двух случаях:
а) ®7о = О, 8V\o=O;
б) 2121 = 0.
/"о ^кр
93
Характер колебаний при этом получается различным. В слу¬
чае а
Dsi , _ AVfOi И- Л17roi
= J/2(1 —cos8«,--) 1/ 1-| sin ш0/;
ГО V VKp
в случае б
Di i ,
= |/2( 1 — cos 8м,-,-) X
го
VI / i i + AVroj . ДИ ог + ДИтОу
XI/ 1Н г sin ‘V г, cos °V-
г ‘'кр ^кр
Если радиальные возмущения скорости у пары ИСЗ отсутствуют
или одинаковы по модулю, но противоположны по знаку, то в
первом случае дальность внутри пары ИСЗ в цепочке сохраняет¬
ся постоянной, а -во втором — имеют место малые колебания
вдоль радиуса, не превышающие суммарного начального откло¬
нения ДГог + ДГо;-
В общем случае, когда имеют место начальные отклонения
Дг0, △ VTo, ДИг0, дальность Оц изменяется во времени путем на¬
ложения колебаний с частотой обращения ИСЗ <1)0=2л/7'о на
долгопериодические колебания с частотой 2л/7’ц. Период дол¬
гопериодических колебаний Тц характеризует временной интер¬
вал одного цикла изменения циклической координаты бм^- в
относительном движении пары ИСЗ. Промежуток времени, рав¬
ный Тц/2, характеризует интенсивность максимальной изменчи¬
вости дальности Dij (структуры цепочки). За это время относи¬
тельная угловая дальность диц изменяется на величину л, что
отвечает максимальному расхождению пары ИСЗ в цепочке. За
время TJ2 два ИСЗ из одинаковой исходной позиции (6uoiz =
= 0) расходятся на максимальное удаление, занимая по отноше¬
нию к центру масс Земли антиподное положение. Приведем фор¬
мулу для периода Та (3.28) к виду, удобному для качествен¬
ного анализа. Для этого выразим период Тп в звездных сутках
= = ! (3.30)
7зв Тза\ЪТи\ \ЪТц\
То
где п= ——число витков, совершаемых ИСЗ в сутки.
То
Предположим, что относительное отклонение периода обра¬
щения составляет 1%, а орбита ИСЗ такова, что п=15 (Но=
=550 км). Тогда будем иметь
= ! ^6,66 сут.
Тзв 150,01
Этому варианту отвечает начальное отклонение периода
87 — 8®1®£.0,01=57,6с^1 мин.
15
94
Пусть далее тоже относительное отклонение периода пары ИСЗ
имеет место на суточной орбите. Тогда получим
-^-= - = 100 сут. при 87,-, = 861с = 14,5 мин.
Тзв 1-0,01 к "
Наконец, положим, что отклонение периода ДТц= const незави¬
симо от высоты орбиты. При этом условии будем иметь
7Ц __ Тр _ тзв <3 21.
Тзв п\ъти\ п2\ЪТ„\' k ■ 7
Таким образом, одно и то же относительное отклонение пе¬
риода ItTij/Tg для различных высот орбиты приводит к появле¬
нию долгопериодических колебаний с различными периодами
7Ц. С увеличением высоты орбиты период 7Ц увеличивается в
1/п раз. Тот же период при постоянном значении 67,-j с увели¬
чением высоты орбиты увеличивается в 1/п2 раз. Это означает,
что для больших радиусов орбит характерна меньшая интен¬
сивность изменчивости структуры, обусловленная начальными
отклонениями. Поскольку одно значение максимальной дально¬
сти Djj, отвечающее ее изменчивости на интервале Тц/2 с увели¬
чением высоты орбиты возрастает пропорционально г0, то пред¬
ставляет интерес оценить среднюю скорость изменения
дальности в диапазоне 0-=-£>тах. Для этого воспользуемся фор¬
мулами (3. 28), (3. 29) и составим отношение
А/max , (3.32)
7ц 72 17
2
Отношение —^'у^ах средняя скорость изменения дальности,
обусловленная начальным отклонением периода пары ИСЗ. Фор¬
мулу (3.32) легко преобразуем в функцию одного переменного
г0, если учесть, что
Di,ma* = ——— 187,- -|=— JJAlL. (3. 33)
7ц (2л)2 з 1 Л2 г2
2 К Г°
Отсюда можно сделать вывод: чем выше орбита, тем меньше
средняя скорость относительного дрейфа пары ИСЗ. В частно¬
сти при |ЬТц| =const эта скорость с высотой уменьшается про-
1
порционально Обратимся к данным, использованным при
го
оценке периода долгопериодических колебаний:
п= 15, 7=5760 с, го=692О км;
п='1, 70=86164 с, Го=42 000 км;
( Го1 у/42000 у_37
\ roi5 / \ 6920 /
95
Следовательно, скорость дрейфа при ЬТц=const на высоте су¬
точного ИСЗ Яо=35600 км меньше, чем на высоте Яо=55О км в
37 раз. Полезно вспомнить, что продолжительность цикла Тц при
тех же условиях сравнения возрастает в га2=225 раз.
Если зафиксировать относительное отклонение периода
dTij/T0=const, то соответственно получим такие характеристики
сравнения:
— скорость дрейфа возрастает на орбите суточного ИСЗ в
1 / -^-^2,5 раза;
V rms
— продолжительность цикла увеличивается в п=15 раз.
Изменение средней скорости относительного дрейфа в зави¬
симости от высоты орбиты при &Tjj= 1 с оценивается величиной
^=<XKU/C' (3'34)
где пг0 — половина дуги круговой орбиты, /(=398 620 км3/с2.
Оценим погрешность формул линейной теории по значению
периода долгопериодических колебаний, для определения кото¬
рого имеем точную формулу.
В рамках кеплеровской теории имеем
/2л 2л \ ,
8«.,= /,
7 \ Л Т, )
откуда, приравнивая бы,3 = 2л, найдем период долгопериодиче¬
ских колебаний
Г* = — = — (3.35)
ц I 2л _ 2л i [Ti~ г‘’1
I Tt ~ T j I
Для сравнения с приближенной формулой (3. 28) возьмем отно¬
шение
т\ _ TJj _ (Го + ДГ/)(Г0+ дту) _ t дт,- + дгу ДГ,ДТУ
7 ц “ Т’о “ 7-0 “ + то + Г2
(3.36)
Рассматривая ДТ^/То, ДТ,/Т0 как малые величины, приходим
к заключению, что отношение точного периода к приближенному
равно единице с точностью до малых величин, характеризующих
отклонение периодов обращения ИСЗ от расчетного значения.
Если рассматриваются ошибки выведения, то сумма A7’i/7’o+
+ДТ,1Т0 составляет 1%, а ошибки коррекции оцениваются еще
меньшей величиной. Естественно, что чем точнее оценивается ли¬
нейной теорией период долгопериодических колебаний, тем точ¬
нее оцениваются текущие отклонения кинематических величин
относительно движения ИСЗ на интервале времени
96
Обращаясь к формуле (3.36), замечаем, что точность линейной
теории возрастает, если отклонения периодов обращения и
АТ; получаются противоположного знака. В самом деле, при ус¬
ловии АТ{=—ДТ; отношение Тц*/Тд равно единице с точностью
до квадрата малой величины AT2/T02. Покажем, что имеется
принципиальная возможность существенного повышения точно¬
сти линейной теории путем соответствующего выбора опорной
орбиты для пары ИСЗ.
Итак, пусть известны периоды обращения пары ИСЗ Т<, Tj.
Введем в рассмотрение эквивалентные радиусы круговой орбиты
для этих ИСЗ:
г г =л/(3.37)
‘ V (2л)2 °J V (2л)2
Если радиус опорной орбиты выбрать таким образом, чтобы вы¬
полнялось равенство
7'о = /777, (3.38)
то при этом отношение периодов долгопериодических колебаний
Тц*1Тц будет равно 1с точностью до квадрата малой величины:
21=1 + ДГ'АГ>
Гц т2 ’
где дТ t=Tj Т0', ДТ } = Тj То,
причем знак погрешности получается всегда постоянным, по¬
скольку произведение АЛДТ;-<0.
Для определения радиуса опорной орбиты воспользуемся фор¬
мулами (3. 37)
° V (2п)2 |/ (2л)2‘ (
Выбор радиуса орбиты из условия (3. 39) не только повышает
точность определения относительного смещения вдоль орбиты,
но и повышает точность определения дальности В особенно¬
сти повышается точность формулы (3.39) благодаря тому, что
отбрасываемые величины Ar,+Arj имеют противоположные
знаки и фактически эта сумма близка к нулю.
Основным элементом при анализе относительного движения
цепочки ИСЗ является относительное движение пары ИСЗ. При
этом для каждой пары должна выбираться своя опорная орби¬
та. Однако это не сопряжено с какими-либо неудобствами, по¬
4 3430
97
скольку основные характеристики относительного движения Di:,
и Тц рассчитываются непосредственно по исходным данным:
D‘)=y (2л)2 2 р — cos (8k0Z;. — 2 л t )], (3.40)
Г,Г,
Тц =—(3.41)
\Tj— ТА k
При использовании формулы (3. 40) необходимо иметь в ви¬
ду, что она при диг-;=0,2 л,... дает значение дальности Эц,
Рис. 3.3. Геометриче¬
ский смысл формулы
(3. 42)
Рис. 3.4. К определению предель¬
ной дальности связи между КА
цепочки
равное нулю. Поэтому при малых величинах Ьиц необходимо
пользоваться формулой
д7=умм2+(м2> (3-42:
в которой учитываются периодические колебания с частотой об-
2л
ращения ИСЗ ш0= ’ Геометрический смысл формулы
То
(3. 42) проиллюстрирован на рис. 3. 3. Возмущения орбит ИСЗ
приводят в конечном счете к нарушению ее упорядоченности как
в смысле номеров ИСЗ в порядке их следования по орбите, так
и в смысле относительного расстояния между соседними ИСЗ в
цепочке. То и другое приводит к изменению структуры цепочки.
Пусть требуется обеспечить ретрансляционную связь в цепоч¬
ке ИСЗ. Обозначим минимальную высоту прямой видимости
между ИСЗ через Лдоп (рис. 3.4). Тогда условие того, что связь
между соседними ИСЗ в цепочке возможна, запишется в виде
неравенства
А/С/2 [г2-(/?0+АД0П)2]. (3.43)
Вычислив для каждой пары ИСЗ цепочки значение £>,•/ и сопо¬
ставив его с правой частью формулы (3.43), установим факты
осуществимости или неосуществимости прямой связи между
9&
рассматриваемыми парами. Однако такой подход требует пере»
бора всех возможных сочетаний из п по два. Более того, только
по значению дальности нельзя составить правильного сужде¬
ния об упорядочении ИСЗ на орбите. Поэтому наряду с дально¬
стью рекомендуется рассматривать би,;-.
Для определения порядка следования ИСЗ по орбите доста¬
точно принять любой из совокупности п ИСЗ за базовый и отно¬
сительно его по формуле (3. 21)
8«н = 8ц0 <оо( — 21 ——[-2 ) sin <d0Z —2 (1 — coS(d0Z)
70 \ г Укр / Укр
вычислить угловую дальность на заданный момент времени t. Оп¬
ределив п — 1 значение Ьиц, производим упорядочение ИСЗ по
возрастанию или убыванию угловой дальности, отбрасывая соот¬
ветственно значения, кратные 2л. После этого для соседних ИСЗ
вычисляется дальность Dij, которая сопоставляется с максималь¬
но допустимым ее значением
£>ШаЖ=/2 /2-(/?+Адоп)2]. (3.44)
Каждому моменту времени t отвечает свой порядок следова¬
ния ИСЗ в цепочке и относительные дальности Dij(t). Порядок
следования изменяется в дискретные моменты времени, а даль¬
ность D^ изменяется непрерывно.
Изменение порядка следования определяется моментами вре¬
мени, при которых относительная дальность б«г3=0 или кратна
2л. Если в момент времени to=O ИСЗ равномерно распределе¬
ны в цепочке, то ближайший момент смены порядка определит¬
ся временем
Тп
с3-45)
2 Л о/ [J
ЪТц
Пусть ——=0,01, я=8, тогда получим
7о
2л
Ml} 8 1 1 ю к,
=12,5' витка.
Тд 2л 0,01 0,08
8 Гм
Если =—0,01, то получим отрицательное время, что озна-
7о
чает, что смена позиции произошла витков тому назад.
4*
89
3.2. ВОЗМУЩЕНИЯ ЦЕПОЧКИ ИСЗ НА ОКОЛОКРУГОВЫХ ОРБИТАХ
В НОРМАЛЬНОМ ГРАВИТАЦИОННОМ ПОЛЕ
Потенциал нормального поля Земли отличается от потенциа¬
ла центрального поля на величину
A77 = C20/?2A3sin2<p~1 , (3.461
э 2гЗ
где С2о= —1098,08-10~6— коэффициент при второй зональной
гармонике разложения потенциала Земли в ряд;
/?э=6378 км — экваториальный радиус Земли;
/(=398620 км3/с2— гравитационная постоянная Земли.
Возмущающему потенциалу (3. 46) отвечают возмущающие
ускорения S, Т, W, определенные частными производными
s T=’dMJ (3.47)
dr dv ’ dn ’
где г, т, п — соответственно радиальное, трансверсальное и би¬
нормальное направления.
Для вычисления значений частных производных (3. 47) в лю¬
бой точке орбиты достаточно представить широту ф как функ¬
цию параметров орбиты, а также через эти параметры выразить
тройку элементарных направлений дг, дх, дп. Широта ф в точке
орбиты с аргументом широты и имеет значение, определенное
формулой
sin ф=sin i sin и. (3.48)
В этой же точке орбиты элементарные направления представля¬
ются следующими соотношениями (рис. 3.5):
дг=дг,
дх=гди,
дп=г sin udi. (3.49)
Вычисляя частные производные от возмущающего потенциала
по соответствующим направлениям, получим возмущающие
ускорения по этим направлениям
л 3 IS S1П I § 1 п и ~~ 1
о = — с20/<эл —
7=Ac20/?2Ksin2j^^, (3.50)
«7=±С.2Ж sin 2/-^.
2 * И
100
За время Af, когда ИСЗ совершает один оборот вокруг Земли,
аргумент широты и пробегает значения от 0 до 2л, а радиус ор¬
биты изменяется в соответствии с формулой
г = .
1 + е cos (ш — и)
Для околокруговых орбит изменение возмущающих ускорений
определяется тригонометрическими функциями аргумента широ¬
ты и соответственно компонентами sin2 и, sin 2и и sin и. Хотя воз¬
мущающее ускорение изменяется сложно, сама величина этого
ускорения, оцениваемая по максимуму, мала. В самом деле, не¬
трудно убедиться в том, что модуль возмущающего ускорения не
превосходит следующего значения:
ЗСМ/?2 2L= 3 -1098-10-6 =0,0325 м/с2.
20 э р4 63782
Сопоставляя это значе¬
ние с укорением притяже¬
ния у поверхности Земли
/</63712^9,8 м/с, убеждаем¬
ся, что оно составляет не бо¬
лее 0,35% от номинала.
С увеличением высоты эта
доля уменьшается по закону
1/г2. Поэтому вследствие ма¬
лости возмущающего уско¬
рения элементы орбиты ИСЗ
в нормальном поле претер¬
певают малые изменения.
Для анализа изменчивости
элементов орбит обратимся к системе уравнений (1.3), предста¬
вив ее в виде
di г-, г cos и
—=г —г w;
du У Кр
dQ р. г sin и
du УКр sin i ’
^P-=2F — rT;
du у К
= -^[Ssin& + ( l+^cos&r+e-^r];
du У к L \ p) p J
du p , f p Г p cos» । /. । /• \ sin» T r , . . Iv.l
—’/ — — 5 H 1 +— -T ctgl sinaMZ ;
du У F L e 1 \ ' p J e p J
(3.51)
101
Рис. 3. 5. Три элементарных направления
от, di, ди
-^-=F\ 0=и —u>; r= ;
du 1 ■+• e cos 6
= .
Vkp / r3 \
/1 — sin и ctg iW I
г* \ Kp 6 )
Используем систему уравнений (3.51) для оценки возмуще¬
ний на интервале времени одного периода (витка). В рассмат¬
риваемом промежутке времени элементы орбиты, содержащиеся
в правых частях дифференциальных уравнений, будем считать
в силу малости величин S, Т, W неизменными. Тогда система
уравнений (3.51) распадется на 6 независимых дифференциаль¬
ных уравнений.
Рассмотрим последовательно возмущения каждого из эле¬
ментов в отдельности, предположив, что F = -^__2. Изме¬
нение наклонения орбиты в соответствии с первым уравнением
(3. 51) представится в виде следующего интеграла:
и
^i = i — i0=-^-C20Rl j* S nf2<' s*n u cos u^u- (3.52)
b ?
Для эллиптической орбиты радиус г определяется по формуле
г= Р- ,
I + е cos (и — <■>)
т. е. зависит от элементов орбиты р, е, со. В соответствии с при¬
нятыми допущениями эти параметры, а также наклонение I при
вычислении подынтегральных функций полагаются неизменны¬
ми, вследствие чего подынтегральная функция является функци¬
ей только аргумента широты и. Особенно простой вид эта функ¬
ция имеет для околокруговых орбит, когда р~г ~г0. В этом
частном случае имеем
и
3 / Р \2
Д1 = — Сад I —2-) sin 2z0 \ sin и cos udu,
2 \ Гд j J
О
откуда после интегрирования получаем расчетную формулу
Д/ = —Сзд sin 2ie (cos8ii - 1). (3.53)
Для эллиптических орбит интеграл (3. 52) представляется в виде
а
3 / \ 2
Д/ =—С20( —2-) sin 2z0\ [l+^cos(iz— ш)] cos и sin arfii,
2 \ P I J
0
102
и расчетная формула для Ai получается сложнее, а именно:
д/ =— sin 21 L—~(1 — cos2 и)(cos3 и— 1)+
2 \р J (2 3
+ е0 8И1<о0 sin3gj (3 54)
Обращаясь к формулам (3.53), (3.54), обнаруживаем, что на¬
клонение орбиты за время одного периода не накапливает воз¬
мущений, т. е.
А/(2л) = Ай=0.
Внутри интервала 0<и<2л наклонение испытывает малые от¬
клонения постоянного знака, которые не превосходят величины
-|-С2о (-y-jsin 2/o=yО,И- 10-2д=0,000825 рад.
Поскольку (cos2u— 1)^0 и Сго<О, то отклонение Ai при i<9(f
отрицательно, а при />90°—положительно. Этому эффекту мо¬
жет быть дано простое физическое толкование: дополнительная
сила иритяжения вследствие полярного сжатия Земли стремится
«подтянуть» ИСЗ к экватору. Однако суммарный эффект за пе¬
риод обращения ИСЗ получается нулевым. Переходя от возму¬
щения одиночного ИСЗ к относительному возмущению пары
ИСЗ, получим формулу для относительного изменения накло¬
нения
=4- г-^422- (1 -cos2 (1 -cos2 и»'4
L roz J
Если опорная орбита одинакова, то будем иметь
д/х7=4-С20 (-у-12 sin 2i0(cos2 ио; — cos2 яОу). (3. 55)
Относительное отклонение Aijj в отличие от отклонений А£, Aij
знакопеременно. Максимальное отклонение имеет место при
би17=90° и 6Uij=270°, когда
cos2a — cos2^ « + -^-j= 1 —2 sin2it.
Эта функция на интервале изменения и [0,2 л] принимает значе¬
ния от 1 до —1.
Если рассмотреть возмущения орбиты для пары, совершаю¬
щей движение в антиподных точках (6ui;j=n), то для нее по¬
лучим
cos2 и, — COS2 (ю+л)=0,
т. е. в антиподных точках относительное возмущение наклоне¬
ния отсутствует.
103
Переходим к рассмотрению второго параметра, характеризу¬
ющего положение плоскости орбиты в пространстве, — прямого
восхождения восходящего узла Q. Уравнение возмущения эле¬
мента Q имеет вид
—=ЗС20/?2cosz s-^-du. (3.56)
du 3 pr
Расчет возмущения AQ сводится к вычислению интеграла
/?2 г
2—20]=д2=ЗС20—A-cosz0 I [l + ecos(a> —zz)]X
р2 J
о
Xsinazzrfzz=3C20-^- cos zo -1- sin 2lZ-|-£0COSa>0.S1-”3tt +
+^0 sin ш0 fcoszz— 1+ c°s3a— 1 \1 (3.57)
\ 3 / J
Для круговой орбиты имеем
д2 =— С20 cos z0 ( zz —J- sin 2zzY (3.58)
2 rl \ 2 /
Приступая к анализу возмущения AQ, прежде всего отметим
весьма существенный факт — накопление этого возмущения по
мере обращения ИСЗ по орбите. Это накопление за один виток
составляет
R2
д21 = ЗлС20—— cosz’0. (3.59)
Р2
Максимальное смещение восходящего узла за виток не превос¬
ходит значения
A^lmax < I ЗлС20 |,
ИЛИ Д21тах<°>01 рЭД (0,57°).
Однако накапливаясь от витка к витку, уход узла за одни сутки
на низких орбитах достигает значительной величины, порядка
10° (для почти экваториальных орбит). Как это следует из за¬
висимости (3. 59), уход узла зависит от наклонения орбиты i0 и
фокального параметра р.
Для орбит, наклонение которых лежит в промежутке
0<к90°, восходящий узел смещается в западном направлении,
а для наклонений 90°<i<180° характерен восточный дрейф вос¬
ходящего узла. Полярные орбиты не испытывают возмущения
плоскости орбиты вообще, поскольку для полярных орбит поляр¬
ное сжатие Земли не вызывает сил, нормальных к меридиональ¬
ной плоскости. Наибольшая скорость прецессии узла имеет ме¬
сто у почти экваториальных орбит.
104
Влияние высоты орбиты на уход узла проявляется через фо¬
кальный параметр р: с увеличением высоты орбиты скорость
прецессии уменьшается по закону 1/р2. Используем зависимости
(3.57), (3.58) для анализа изменения структуры цепочки ИСЗ.
Для этого достаточно проанализировать относительное смещение
восходящего узла орбит любой пары ИСЗ из состава цепочки.
Если пара ИСЗ имеет одинаковые радиусы орбиты и одинако¬
вые наклонения, то вековое смещение восходящего узла' полу¬
чается одинаковым и накопления возмущения от витка к
витку не наблюдается. Такая пара испытывает лишь колебание
узла, причем эти колебания происходят с удвоенной частотой.
Проанализируем их более подробно.
Для почти круговых орбит относительное смещение узла про¬
исходит по формуле
ч /?2
д2„ = С20 —— cos / (sin 2uy — sin 2at). (3. 60)
4 rl
Прежде всего отметим, что для антиподных ИСЗ в цепочке от¬
сутствует относительное колебание восходящего узла. В этом
легко убедиться, переписав формулу (3.60) в виде
з Л2
д2п= С20 —Л cost0 [sin 2а —sin 2(а + 8а/у)[. (3. 61)
4 r20
Для антиподных ИСЗ Su,3 = л, выражение, стоящее в квадратных
скобках (3.61), равно нулю независимо от текущего аргумента
широты. Пара ИСЗ в цепочке, расположенных на угловой даль-
— л 3 —
ности 8«,, = — или—л, колеблется в отношении изменчивости
4 2 2
восходящего узла по закону
sin 2а — sin 2^ a+-^-j = 2 sin 2u,
т. e. относительное смещение восходящего узла колеблется с
двойной частотой обращения ИСЗ по орбите^ Эти колебания про¬
исходят с амплитудой
о /?2
д2/^= — С20—— cos i0.
2 ro
Рассматривая пару ИСЗ, расположенную в цепочке на угло¬
вой дальности получим для нее более сложные коле-
бания:
sin 2а — sin 2^a-|--l) = sin 2a — cos 2a.
105
Таким образом, любая пара ИСЗ с одинаковыми элементами
опорной орбиты совершает колебания в отношении восходящих
узлов с амплитудой, не превосходящей величины
3 г
- VC20^cosz« •
1 го
Если пара ИСЗ имеет различные начальные элементы I, р,
то возникают наряду с периодическими колебаниями накопления
отклонения Дй</ во времени.
Частные производные от этого отклонения по параметрам I, р
оцениваются по формулам
дД2// /?2
т: — ЗлС20 — sin i0,
Л
° (3.62)
ЭД2,7 Л2
’ — vJTw 2q COS Zq *
dP Pg
Возмущения AQ,7 за n витков оцениваются по формуле
j^2 £2
Д&4= — ЗлС20 —- «8Z,, sin i0 6лС20 —-nbp;j cos Zo. (3. 63)
Ро Ро
Формула (3. 63) устанавливает зависимость изменчивости струк¬
туры от ошибок выведения по наклонению и по фокальному па¬
раметру. Если ошибки выведения известны, а допуск на рас¬
хождение узлов задан, то из условия (3. 63) можно найти про¬
межуток времени в витках, в течение которого не разрушается
структура. В качестве примера дадим оценку изменчивости струк¬
туры из-за ошибки выведения в фокальном параметре
ft Pl j
= 0,01 для низких орбит при наклонении Zo=45°:
Ро
д2/у = -6лС20^| cos-Z—а=-6-3,14-1098-10-«. 10,707- 0,01л=
Ро Р
= —0,083°/г.
За 100 витков накапливается смещение узлов примерно на 8°.
Перейдем к анализу фокального параметра. Его изменчи¬
вость оценивается дифференциальным уравнением
*P-=2Fif Я-гТ = 2-^—л/ 7_.-Lcao/?2/<sin2Z^^- =
du У К укГр У К 2 20 э г4
= ЗСм/?2 sin2Z0— [ 1 + £ cos (и — си)] sin 2а. (3. 64)
р
106
Интегрируя (3. 64) йа интервале [0, л], получим
Л2 с
р — Ро—ЗС2о—— sin2Z01 [l-|-ecos(a — о>)] sin 2adu. (3.65)
Р о
Для орбит, близких к круговым, когда е—И), имеем
Я2 г
д/>=да=дг = ЗС20 —— sin2 i0 \ 2 sin и cos udu =
Р J
о
/?2
= ЗС^ —— sin2 z0 sin2a. (3. 66)
Р
Для эллиптических орбит изменение фокального параметра
подчиняется более сложной зависимости
Ьр= 6С20 sin2 i0 [4- с°С03 ш° (cos3 и - 1)+-°sin —sin3 и .
р L 2 3 3
(3.67)
Изменение фокального параметра за один виток равно нулю.
В этом легко убедиться, подставив в формулы (3. 67), (3. 66)
и=2л. Следствием полярного сжатия, таким образом, являют¬
ся малые периодические колебания фокального параметра, вели¬
чина которых для околокруговых орбит не превосходит значения
3C20sin2/. Максимальная изменчивость фокального параметра
имеет место при /=90° в момент прохождения высокоширотных
точек.
Для пары ИСЗ относительное изменение фокального парамет¬
ра определяется следующей зависимостью:
/?2
ДА = С20 — sin2 /0 {3 (sin2 (а + 8а0) — sin2 и] +
Ро
-j-2e2 cos ш0 [cos3 (а+8а0)— cos’a] + 2e0sin <u0[sin3(«4-8a0)— sin’a]}
(3. 68)
Эксцентриситет орбиты, так же как и фокальный параметр,
не имеет вековых уходов, а его периодические колебания не ока¬
зывают какого-либо ощутимого влияния на относительное дви¬
жение ИСЗ в цепочке.
Рассмотрим изменчивость аргумента перигея и. Дифферен¬
циальное уравнение для параметра <в содержит в себе все три
составляющие возмущающего ускорения:
±L=r.[_S ^uzctg/sin «1.
du К [ е \ р J е р J
107
Подставляя вместо S, Т, W их выражения по формулам (3. 50)
и, полагая <во=О> получим
р2
-^-=А С20 — (3 sin2 i sin2 и — 1) (1 + е cos a)2 cos и +
du 2 20 fie
О Р2
_]_с20 —[(1 + е cos а)2+ 1 + е cos «] sin2 i sin и sin 2 a —
— — C20 —— sin 2z ctg i (1 + e cos и) sin2 a. (3.69)
2 p2
Интегрируя ino частям на интервале ue[0, 2л], будем иметь
р2 г2"
(3 sin2z sin2a—1)Х
Lb
2тс
Х( 1 +е cos м)2 cos udu + j (2 -j- Зг cos и-\-е2 cos2 «)Х
о
2”
Xsin2z sin и sin 2udu — 2е cos2z (1+е cos a) sin2 udu. (3.70)
6
Выделим те слагаемые подынтегральной функции, которые дакн
вековой уход перигея:
2п
1) 2е у 3 sin2z sin2 и cos2 udu = 6е-^~ sin2i,
6
2) — 2е } cos2 udu =—2ел,
о
2х
3) бе sin2i у sin2« cos2 udu = бе sin2/,
6
2я
4) — 2ecos2z s\n2udu= — 2ecos2zn.
6
Путем почленного суммирования интегралов получим
бе sin2 i — 2ел-{- бе ~ sin2 i — 2е cos2 /л = (1 — 5 cos21) ел.
Обращаясь снова к интегралу (3.70), получим расчетнук
формулу для определения векового ухода перигея за один вито?
, р2
△шх=— С20 —— л (1 — 5 cos2 z0). (3. 71
2 »
108
При выводе этой формулы было принято допущение о том, что
(о = 0. Однако она справедлива для любого значения <о, посколь¬
ку в сущности формула (3.71) определяет среднюю скорость
ухода перигея. Пара ИСЗ не имеет (векового смещения
перигея, если орбиты имеют одинаковый фокальный параметр и
одинаковое наклонение. В противном случае имеет место отно¬
сительное смещение перигея
п2
Д(0 = - ЗС20 —л (1 -5 cos2 /0) -
Р2 Ро
| » •
— 15С20 —л cos i0 sin z0— . (3. 72)
Ро *о
Максимальный относительный уход перигея при отклонении
фокального параметра =0,01 не превышает значения
Ро
< |ЗСм4л • 0,011 0,025°.
Однако при достаточно большой продолжительности, например
в течение года, возможно отклонение
АщГОд=365-15-0,025= 140°.
Возмущающие ускорения, вызывающие вековые уходы перигея
и восходящего узла, приводят также к возмущению дракониче-
ского периода обращения ИСЗ. Драконический период может
быть вычислен, если воспользоваться дифференциальным урав¬
нением
dt г2 1
du У К р г3 ’
1— sinzzctgzIT
Кр
проинтегрировав его по аргументу широты и в пределах от ид
до «0 + 2я,
zZq + 2ic
™ [• r2du
Та= \‘
I VKp(l-—Sinuctgiwj
Для околокруговых орбит расчетная формула представляется в
следующем виде:
Ts=--y=-r%2 l-4c2o^(l+5cos2Zo~6sin2«0sin2/0) . (3.73)
Применим формулу (3.73) к анализу изменчивости цепочки
ИСЗ. Предположим, что радиус опорной орбиты и наклонение
109
одинаковы для всех ИСЗ цепочки. Тогда на основании формулы
(3.73) относительное изменение драконического периода пред¬
ставится зависимостью
9 ч R2
tTai)=—?=:го12 —<^2о-т 6 sin2/(sin2«о/— sin2a0Z). (3-74)
У К 4 rg
f3/2
Поскольку величина 2л _ представляет собой кеплеровский
у К
период Т, то формулу (3. 74) можно также записать в виде
■6Г°г/- = 4'С2<* ~Т sin2/0 (sin2 «0/-sin2 «о,). (3.75)
‘ z го
Пусть Uoj=«oi+n. Такая пара антиподных ИСЗ не имеет отно¬
сительного отклонения драконического периода обращения, по¬
скольку
sin2(«0Z + n) — sin2 Ио, = 0.
Во всех других случаях пара ИСЗ будет иметь отклонение в дра-
коническом периоде, вследствие чего появится изменение угло¬
вой дальности за один виток
ЙУ / г
8«(7 = 8Ио;. + 2л .
По прошествии п витков произойдет накопление ухода и угло¬
вая дальность между ИСЗ определится по формуле
ЪТ t j
8а/у = 8«0//+2лл-у—. (3.76)
Определим, через какое количество витков произойдет измене¬
ние относительной дальности на 8aZy=2n:
87+
2л = 2лл т ,
у ЪТ j j g
откуда п = . Величина + —С20 + 0,005. Поэтому
ЪТ t j Т 2
П 200 витков.
В сущности, это не такой уж длительный промежуток време¬
ни, например, при Тэв/Г=15 такое количество витков совершает¬
ся примерно за две недели.
Все сказанное выше о влиянии драконического периода на
изменчивость структуры относится к случаю, когда исходная
структура цепочки характеризовалась одинаковым радиусом
всех орбит го и одинаковым наклонением /0.
ПО
Отклонения радиуса и наклонения орбиты вызывают допол¬
нительные возмущения драконического периода.
В заключение данного раздела проведем оценку изменчиво¬
сти структуры, когда пара ИСЗ совершает движение в одной,
плоскости на встречных курсах (рис. 3. 6). В этом случае орбита
ИСЗ под номером i прецессирует в западном направлении, а ор¬
бита ИСЗ под номером /, имеющая обратное наклонение, пре¬
цессирует в восточном направлении. Если радиусы орбит одина¬
ковы, то за один виток накапливается следующее относительное
смещение узла:
jr>2
д2пу=ЗлС20 [cos (180° — z0) — cos z0] = — 6лС20 cos z0,
ro ro
(3. 77)
где i0 — наклонение орбиты
ИСЗ под номером i-
Минимальное число витков,
при котором относительное сме¬
щение восходящих узлов соста¬
вит 2л, определится из усло¬
вия
2л = 6л/г | С20|,
откуда имеем
п=— =300 витков,
з |С20|
что характерно почти для
экваториальных орбит, когда
cosz'o=l. Для полярных орбит, копда cosio=0, относительное
смещение восходящих узлов отсутствует.
3.3. О ВЛИЯНИИ АЭРОДИНАМИЧЕСКИХ СИЛ НА ОТНОСИТЕЛЬНОЕ
ДВИЖЕНИЕ ЦЕПОЧКИ ИСЗ
При движении ИСЗ в разреженных слоях атмосферы Земли
возникают аэродинамические возмущающие силы, которые зави¬
сят от элементов орбиты, баллистического коэффициента
£ = * м ориентации ИСЗ относительно набегающего потока.
Возмущенное движение в разреженной атмосфере обычно изу¬
чают в предположении, что ИСЗ имеет постоянную ориентацию,
при которой полная аэродинамическая сила направлена строго
против вектора скорости V. Данное допущение позволяет развя¬
зать систему дифференциальных уравнений движения ИСЗ и рас¬
сматривать движение центра масс независимо от движения отно¬
сительно центра масс. Если к этому присовокупить еще допу¬
Рис. 3. 6. Схема движения пары
КА на встречных курсах
Ш
щение о том, что вращающаяся Земля не увлекает верхних слоев
атмосферы, то при этих условиях плоскость орбиты не будет
испытывать возмущений, поскольку вектор возмущающего уско¬
рения а<2= — CqVV лежит в плоскости орбиты, где q— массо¬
вая плотность воздуха; V — скорость орбитального полета ИСЗ.
Компоненты вектора скорости в проекциях на радиальное и
трансверсальное направления соответственно равны
И. = |4 — sin 8; V, =1/ — (l-|-ecos&).
VP V Р
В соответствии с этим компоненты возмущающего ускорения
принимают следующий вид
5= — CqV \ / — £ sin 8;
V р
(3.78)
T=-CqV л/ —(l+ecosft),
у р
где
V= 1 / — yi +2е cos& + е2,
V Р
Q = Q(r).
Покажем на примере круговых орбит, что сопротивление ат¬
мосферы вызывает вековые возмущения периода обращения.
Для этого обратимся к дифференциальному уравнению
^Д=2 —Г
М К ’
которое после подстановки в него выражения для возмущающе¬
го ускорения Т из (3. 78) представляется для круговой орбиты в
виде
з
^-=-2 4-ео —C=-2CrU (3.79)
do К р
Интегрируя (3. 79) на интервале бе[0, 2л], получим возмущение
фокального параметра за один виток
ДА = — 4лСго8о (г0). (3. 80)
Характерно, что под действием силы аэродинамического со¬
противления круговая орбита остается круговой, т. е. Де=0. Для
того чтобы убедиться в этом, рассмотрим дифференциальное
уравнение
^■ = у- 5 sin &+ (l + y)cos8r + y e/j,
112
которое после подстановки в него выражений возмущающи:
ускорений (3.79) принимает вид
7=- тссл' 1/7 [г sl"‘9+('+7) cos9+<!] '
По теореме о среднем имеем
г 2л 2л
Ее,— — I — CqV Л/ — | ей sin2 $</$-{-2 cos
u и AU <?
+ e0 cos2 M&4~ J , (3.81
о 0
где
2ic 2k
e0 sin2M& = £0n; e0cos2 W$ = £on;
0 b
2я 2л
^cos&d& = 0; e0d^ = e02n.
0 6
Таким образом, эксцентриситет орбиты от витка к витку
уменьшается, и степень этого уменьшения оценивается зависи¬
мостью
= - (— CqV 1 /4е0л. (3. 82
\к V pJcP
Поскольку эксцентриситет орбиты физически не может быть от¬
рицательным, то в пределе Aei—>-0. Следовательно, круговая
орбита под действием силы сопротивления атмосферы изменяв!
свой радиус, оставаясь при этом почти круговой. На этом осно¬
вании приходим к заключению, что
Ар1=Дл=Да1.
Для того чтобы перейти от возмущения Др] к возмущению дра-
конического периода, необходимо знать возмущение аргумента
перигея <о под действием тех же аэродинамических сил.
Изменение аргумента перигея подчиняется дифференциаль¬
ному уравнению
^-=-TLCqV [-cas&sin»+ 2 + ecos* sin ftl. (3.83)
d§ К. у p [ e J
113
Отсюда по теореме о среднем имеем
До>1=— — CqV 1/ —I X
\ к I/ р /
\ ' Г г /ср
2к 2л
X — \ sin & cos М& + — \ (2 + ^0 cos ft) sin ЪсГЬ =0. (3.84)
J e0 J
L о о
Естественно, что подобное осреднение правомерно проводить
только для орбит с малым эксцентриситетом. Поэтому на осно¬
вании условия (3.84) можно лишь сделать вывод о том, что эл¬
липтические орбиты с малым эксцентриситетом почти не испы¬
тывают смещения перигея. Это означает, что
д7'2 = дГ = 2л ( |/(го+^г)3|/~_^ (3.85)
Итак, если орбиты пары в цепочке ИСЗ имеют одинаковый
радиус rOi=rOj, то атмосфера Земли не вызывает накапливаю¬
щихся относительных отклонений. Если орбиты пары в цепочке
ИСЗ имеют начальные возмущения радиуса орбиты дг0=
= ArOj — Дго,, то вследствие различной средней скорости паде¬
ния периода возникает накопление относительного возмущения
ЬТц, приводящее к непрерывному изменению относительной уг¬
ловой дальности би,,.
Возмущения орбит, обусловленные сопротивлением верхней
атмосферы, имеют ту особенность, что они прогрессируют с те¬
чением времени. Поэтому возмущение орбиты за один виток
нельзя распространять на множество витков. Обратимся в этой
связи к формуле (3. 80). В этой формуле от витка к витку меня¬
ется величина r02Q0(r0): r0— уменьшается, a р0— возрастает,
причем плотность q возрастает с уменьшением радиуса орбиты в
гораздо большей степени, чем г02. В табл. 3. 1 приведены значе¬
ния r02Qo(г0) в зависимости от радиуса орбиты.
Таблица 5. t
Н, км
150
200
300
400
500
600
700
е.
КГС2/м4
3,01-10-ю
4,25-10-и
6,11-10-12
1,57-10-12
5-10-13
1,77-10-13
6,7-10-14
'oSo('o)
12600
1840
262
72
24
8,7
3,35
Относительное изменение радиуса орбиты пары ИСЗ можно
характеризовать следующей зависимостью:
5Лу=-4лС[Ц^1 8г00. (3.86)
L Jq
114
Производная к по мере уменьшения радиуса орбиты
L dr J
резко возрастает, что обусловливает прогрессирующий характер
изменения относительных величин Ьр-ц, 6Тц.
К прогрессирующим возмущениям может привести не только
отклонение радиуса орбиты дг,д но и отличие баллистических
коэффициентов &Сц=С;—С{. Отличие в баллистическом коэф¬
фициенте может возникнуть, например, вследствие различной
ориентации ИСЗ. При этом на некотором промежутке полета с
различной ориентацией возникает относительное отклонение
бгц, которое затем прогрессирует даже при одинаковом балли¬
стическом коэффициенте (при одинаковой ориентации по отно¬
шению к вектору скорости, одновременном раскрытии панелей
солнечных батарей и т. п.).
Итак, действия аэродинамических возмущающих сил приво¬
дят к (прогрессирующим возмущениям элементов орбиты, опре¬
деляющих ее геометрию независимо от того, какова причина, вы¬
звавшая первоначальное возмущение. В конечном счете эти воз¬
мущения приводят к изменению структуры цепочки, в частности
к изменению угловой дальности биц.
3.4. ИЗМЕНЧИВОСТЬ СТРУКТУРЫ ОРБИТАЛЬНЫХ СИСТЕМ
Каждой структуре может быть поставлено в соответствие упо¬
рядочение ИСЗ в пространстве, определяемое прежде всего клас¬
сом орбит, например, системы ИСЗ на полярных круговых орби¬
тах, на наклонных эллиптических орбитах, на стационарных
орбитах и т. п. Однако упорядочение ИСЗ в пространстве, есте¬
ственно, не исчерпывается определением класса орбит, а пред¬
полагает, что каждому ИСЗ в системе отводится свое место.
Многообразию распределения ИСЗ в пространстве можно при¬
дать определенную общность, если в качестве элемента струк¬
туры рассматривать цепочки, состоящие из одного и более ИСЗ
в каждой (рассматриваются только такие цепочки, для которых
характерна одинаковая геометрия орбиты в одной плоскости).
Тогда все многообразие структур представится совокупностью
цепочек и уложится между двумя предельными структурами, ког¬
да N ИСЗ образуют одну цепочку и когда W ИСЗ распределены
по одному в каждой цепочке.
Распределение ИСЗ в пространстве определим на небесной
сфере совокупностью трех углов $+, uk (/s=il, 2 N). На¬
клонение орбиты z\ и прямое восхождение восходящего узла
определяют плоскость орбиты ИСЗ, имеющего порядковый но¬
мер k, а аргумент широты ик определяет положение ИСЗ в пло¬
скости орбиты. Аргумент широты является обобщенным па¬
раметром, и он, в свою очередь, определяется совокупностью
величин Pk, еь, ш, тл и текущим временем t.
115
Каждому моменту времени t на небесной сфере отвечает впол-
ie определенное состояние системы, характеризуемое элементами
h, fih, uh (k=\, 2,..., N). Под изменчивостью структуры будем
юнимать отклонения элементов
8zzy, 82zy, 8azy(Z, /=1, 2,..., ДГ; I =/= /),
»бусловленные возмущениями орбит под действием возмущаю-
цих сил различной физической природы.
Среди рассматриваемой совокупности величин наибольшей
лабильностью отличаются наклонения орбит. Поэтому если оце-
щвается изменчивость структуры на относительно небольшом
громежутке времени функционирования системы (порядка не-
жольких месяцев), то относительное изменение наклонения
4ожет быть принято равным нулю. Тогда изменчивость структу¬
ры определится совокупностью двух величин:
82/у, 8И/у(г, >=1, 2,..., N, i / /).
. Относительные возмущения бЙг7 и биц достаточно полно про-
шализированы в предыдущих разделах настоящей главы для
тары ИСЗ в составе цепочки (с одинаковыми исходными эле¬
ментами орбит l’o, Йо).
Дополним этот анализ рассмотрением общего случая, когда
тара ИСЗ не принадлежит одной цепочке. При этом воспользу¬
емся тем свойством, что возмущения восходящего узла не зави-
:ят от начального значения прямого восхождения восходящего
/зла Йо- Это свойство непосредственно следует из системы диф¬
ференциальных уравнений (3.51), в правых частях которой не
содержится элемента орбиты й0.
Пусть Pj — значения фокального параметра орбит t-ro и
/-го ИСЗ, a iit ij соответственно наклонения этих орбит. Тогда,
обращаясь к формуле (3. 59), будем иметь
Л2 /?2
8217 = ЗлС20 -^-cosz'y у cos ii . (3.87)
1_Ро/ Poi J
Предположим, что система построена на орбитах одинаковой
геометрии (pOi=Poj)- Тогда максимальная изменчивость восхо¬
дящего узла будет иметь место для пары орбит, имеющих наи¬
большее различие в наклонении
7?2
тах = ЗлС20 — (COS tj COS Zz)max-
Ро
Произведем оценку структурной изменчивости системы ИСЗ,
построенной на различных наклонениях в диапазоне от ттщ до
116
180° — tmin- Возьмем в качестве примера й1п = 50°. р0=г0=
(т \
-у- =151. При этих исходных данных получаем
следующую оценку суточной изменчивости структуры:
т R2
Д^сут = —J-COS lmIn =
‘ Ро
= 15-6-180-1098 -(-7-^-0,643-10-»=9,75°.
(6900)2
По той же причине несферичности Земли максимальное откло¬
нение драконического периода
О рЗ . .
△7a==r4c20-|-6(sin2zmln-sin2^ =
4 го \ 2 '
= 5750-0,75-1098-10“6-0,85-6-0,59 = 14,3 с.
Этому отклонению драконического периода соответствует отно¬
сительное суточное смещение по аргументу широты
8ц = — д7\>^-=—• 14,3-15= 13,4°.
Т Т 5750
Полученные предельные оценки изменчивости структуры систе¬
мы, созданной на различных наклонениях в пределах от йш до
180° — z'min, показывают, что подобная структура обладает силь¬
ной изменчивостью даже при отсутствии ошибок выведения на
орбиту.
Если назначить допустимое расхождение системы по угловым
величинам 6Q, би±10°, то вследствие влияния только второй
зональной гармоники Сго допустимая структура разрушится к
концу первых суток функционирования.
На основании проведенных оценок можно сделать вывод о
том, что система ИСЗ, построенная на орбитах различного на¬
клонения, склонна к непрерывной изменчивости структуры даже
при условии коррекции ошибок выведения. Отсюда можно сде¬
лать вывод: с целью уменьшения структурной изменчивости целе¬
сообразно создавать системы на орбитах одинакового наклоне¬
ния (ife=constД= 1, 2,..., N).
О структурной изменчивости или структурной стабильности
можно говорить лишь относительно в рамках рассматриваемой
математической модели движения. При этом отдельно должна
рассматриваться изменчивость структуры, обусловленная началь¬
ными возмущениями (ошибками выведения или ошибками кор¬
рекции) и отдельно изменчивость, обусловленная действием воз¬
мущающих сил различной природы при принятой математиче¬
ской модели.
117
Предположим, что начальные возмущения отсутствуют (на¬
чальные отклонения скорректированы полностью). Тогда для
некоторых моделей движения можно выделить такие структуры,
для которых отсутствует прогрессирующая изменчивость.
Поскольку возмущенное движение рассматривается по отноше¬
нию к движению в центральном гравитационном поле, то модель
центрального гравитационного поля рассматривать не имеет
смысла, так как в центральном поле параметры орбит постоян¬
ны во времени и структура, следовательно, не меняется.
Для нормального гравитационцого поля, возмущение кото¬
рого оценивается второй зональной гармоникой С20, существует
множество стабильных структур при следующих трех условиях.
Во-первых, орбиты всех ИСЗ системы должны иметь одина¬
ковую геометрию на плоскости (р, е, ы), во-вторых, все орбиты
должны иметь одинаковое наклонение, наконец, в-третьих, на¬
чальные значения аргументов широты UQk должны быть кратны
2л, т. е.
Uqj Uoi+А2л,
где А — любое целое число или нуль.
При одновременном выполнении этих трех условий дракони-
ческий период оказывается одинаковым для всей системы ИСЗ,
а вековые возмущения восходящих узлов орбит происходят с
одинаковой угловой скоростью. В итоге элементы структуры би,/
82,-;.(/, 7=1, 2 N; t^j)
вековых возмущений не имеют и структура, следовательно, яв¬
ляется стабильной.
Если модель нормального гравитационного поля Земли до¬
полнить стандартной атмосферой и дополнительно к трем усло¬
виям потребовать одинаковой ориентации всех ИСЗ, то структу¬
ра также будет стабильной в смысле изменчивости элементов
Ьиц. Однако состояние системы во втором случае будет
существенно отличаться от состояния системы в первом случае.
Под действием возмущающей силы сопротивления атмосферы
орбита в конце концов разрушается, и ИСЗ прекращает свое
существование. Поэтому, строго говоря, о стабильности струк¬
туры имеет смысл говорить для какого-то ограниченного проме¬
жутка времени, определяемого допустимой продолжительностью
функционирования.
Дополним далее модель гравитационного поля Земли первым
приближением, учитывающим влияние притяжения Луны и Солн¬
ца. Определим положение притягивающего тела Afi, в системе
координат 03£г]£ (рис. 3.7). Ось 03g направлена на перигей ор¬
биты, ось Оэ£ по нормали к плоскости орбиты в сторону поло¬
жительного направления угловой скорости обращения ИСЗ по
118
Рис. 3. 7. Система координат
при учете влияния притяжения
Луны и Солнца
орбите, ось Оэт] лежит в плоскости орбиты и дополняет систему
координат до правой. Положение небесного тела Afj в принятой
системе координат определяется углами а и у. Угол у характе¬
ризует возвышение притягивающего тела над плоскостью орби¬
ты, а угол а — его положение от¬
носительно направления на пери¬
гей орбиты.
По отношению к направлению
из центра Земли на притягиваю¬
щее тело углы а и у определяют
ориентацию орбиты относительно
Луны или Солнца.
Возмущения элементов орби¬
ты за один виток, обусловленные
притяжением небесных тел, могут
быть оценены по следующим фор¬
мулам [5]:
ба = 0;
8е =—— — V е ]/ 1 —е2 cos у sin 2а;
2 Ко \ rj
8i = — л — ( —V 1 [(14- 4е2) cos а cos ш—
2 Ко \ п / /1- е2
— (1 — е2) sin а sin ш] sin 2у; (3.88)
82 = — л — (—V — 1 [(1 4-4е2) cos а sin u>4-
2 Ко \ И / /1 — е2 sin i u 1
+ (1 — е2) sin а cos ш] sin 2у;
8(о = Зл — (—-У У1 — е2 (4 cos2 у cos2 а—cos2 у sin2 а—1)—82 cos
Ко \г\)
Для почти круговых орбит квадратом эксцентриситета е2 можно
пренебречь и тогда формулы (3. 88) принимают вид
8а = 0; 8е = 0;
8z = — л У sin 2ycos(u>-|-a); (3.89)
2 Ко \ <1 I
82=Ля^(^_у51п 2у sin(“+-g)-.
2 Kq X. ri / sin z
Сумма углов <о-|-а численно равна аргументу широты проек¬
ции радиуса-вектора притягивающего тела г на плоскость орби¬
ты ИСЗ.
' При оценке возмущений за несколько витков необходимо учи¬
тывать изменение ориентации плоскости орбиты Относительно
Луны и Солнца.
119
Если определить возмущения элементов орбит на интервале
времени, соответствующем нескольким виткам, например на
интервале времени, численно равном периоду обращения притя¬
гивающего тела Ti, и затем разделить накопившиеся за время
Т1 возмущения на число витков ИСЗ на этом интервале времени,
то получим осредненные вековые уходы 61, дй за каждый виток
ИСЗ.
Характерно, что осредненные на интервале времени (О, Т)
вековые уходы за один виток ИСЗ не зависят от прямого вос¬
хождения восходящего узла орбиты й, тогда как отклонения за
виток, вычисленные по формулам (3.88), зависят от й через
углы а, у. Следовательно, если выполняются указанные выше
три условия, то учет притяжения Луны не внесет каких-либо за¬
метных изменений в структуру на интервале времени периода
обращения Луны. То же самое справедливо и относительно влия¬
ния притяжения Солнца. На этих промежутках времени в от¬
дельные моменты относительные отклонения элементов орбит
могут достигать локального максимума, но значения относитель¬
ных отклонений остаются ограниченными в силу периодического
характера изменения углов а, у.
Таким образом, системы КА, построенные на орбитах одина¬
ковой геометрии, при одинаковом наклонении орбит и кратных
2л начальных аргументах широты, сохраняют свою стабильность
в нормальном гравитационном поле с учетом влияния атмосфе¬
ры и притяжения Луны и Солнца.
Глава 4
СПОСОБЫ СОЗДАНИЯ СПУТНИКОВЫХ СИСТЕМ
4.1. СОЗДАНИЕ ДЕТЕРМИНИРОВАННЫХ СИСТЕМ КА НЕПРЕРЫВНОГО
ОБЗОРА
Создание системы заключается в выведении всех КА на за¬
данные орбиты. Создать систему — значит получить требуемую
структуру. Продолжительность создания системы оценивается
временем от момента запуска первого КА до запуска последнего
КА. Это время в основном будет зависеть от количества КА в
системе, параметров орбиты системы, числа пусковых площадок,
их взаимного расположения и способа создания системы.
В детерминированной системе КА каждый аппарат выводится
в строго расчетную «ячейку». Ввиду ограниченного числа пуско¬
вых площадок наиболее приемлемым способом создания детер¬
минированной системы КА является последовательный запуск с
одного старта всех КА системы с учетом сдвига вдоль орбиты
запущенных КА.
Система КА в зависимости от характеристик и условий рабо¬
ты бортовой аппаратуры, возможности ракеты-носителя и целе¬
вого назначения определяется следующими параметрами:
— радиусом круговой орбиты/"кро;
— наклонением плоскостей орбит КА к плоскости эквато¬
ра i;
— количеством КА в плоскости орбиты п;
— числом плоскостей орбит т\
— аргументом широты точки выведения КА системы на ор¬
биты с заданного старта по заданной программе ракеты-носи¬
теля tig.
Кроме того, в зависимости от технологического графика под¬
готовки КА и ракеты-носителя к запуску или из соображений
создания системы можно определить время между очередными
запусками КА системы на орбиту:
— (i = 2, 3, 4 N). (4. 1)
Причем AZ, накладывает ограничение снизу, но оно может не
удовлетворять условиям попадания КА в плоскость орбиты или
121
в расчетную «ячейку» на орбите. Так как круговые орбиты си¬
стемы должны иметь одинаковые параметры, а система создается
с одного старта штатным носителем, то программа выведения
КА на орбиты у носителя должна быть одинаковой для всех КА
системы. Такая программа носителя обеспечивает минимальные
■отклонения параметров орбит КА системы. Кроме того, эта про¬
грамма жестко связывает точку старта (Хст, фст) с точкой выве¬
дения КА на орбиты (иа, Хо), время выведения по этой програм¬
ме для всех КА системы также остается постоянным.
Пусть требуется обеспечить-выведение системы КА, состоя¬
щей из т плоскостей орбит и п космических аппаратов в каждой
плоскости. Космические аппараты двух смежных плоскостей ор¬
бит не синхронизированы. Задача сводится к обеспечению созда¬
ния одной плоскости орбиты, так как последующие плоскости
■создаются аналогично и общее время создания будет в т раз
превышать время создания одной плоскости. Для обеспечения
выведения КА системы необходимо выполнить следующие усло¬
вия:
— в момент выведения очередного КА на орбиту точка кон¬
ца активного участка, жестко связанная с вращающейся Землей,
должна находиться в создаваемой плоскости КА;
— точка конца активного участка должна находиться на yr-
с. , 2л
ловом расстоянии Р01-=±— от аппарата системы, который
п
был запущен перед вновь запускаемым.
Таким образом, задачу создания системы КА с одного стар¬
та можно сформулировать следующим образом. Исходя из вре¬
мени запуска очередных КА системы с учетом их готовности к
старту и попадания в расчетную плоскость орбиты определить
радиус круговой орбиты гКр, наиболее близкий к расчетному
Ар о, который бы обеспечивал выведение КА в расчетные ячей¬
ки плоскости орбиты.
В общем случае точка конца активного участка дважды в
сутки попадает в создаваемую плоскость орбиты, но так как
азимут пуска не меняется, то выведение КА можно осуществить
через интервалы времени, кратные суткам, т. е. время между
запусками очередных КА системы должно быть кратно суткам.
Если учесть, что орбиты КА имеют прецессию восходящего уз¬
ла, то можно сказать, что запуск очередных КА системы воз¬
можен через k суток с учетом прецессии узла орбит системы.
Время между двумя последовательными прохождениями восхо¬
дящего узла орбиты точкой земной поверхности назовем эффек¬
тивными сутками 7эфф:
™ 2л
афф-/2л
7"-д2
V ЗВ J
122
где Д2 = ЗС2О 7— cosi —угловая скорость прецессии
V крО / 2
восходящих узлов орбиты системы; С2д=—1098,08-10-6 — ко¬
эффициент при второй зональной гармонике разложения потен¬
циала Земли в ряд; £?э — экваториальный радиус Земли, рав¬
ный 6378 км;
7’а=-|=- гкро 11 — — С20 Y (15 cos2 z0 — 6 sin2u0 sin2i0)|
г К ( 4 \гкр / )
— драконический период околокруговых орбит; К — грави¬
тационная постоянная Земли, равная 398620 км3/с2.
Назовем произведение АТэфф темпом создания системы. Есте¬
ственно, что АТэфф должно быть больше Д£.
Таким образом, для создания системы КА необходимо подо¬
брать такие круговые орбиты, которые бы дали возможность за
А эффективных суток сделать целое число оборотов плюс минус
расчетный угол между КА в плоскости системы:
^7эфф . „
~^-=РЯ, (4- 3)
1 S
где р — целая часть витка за А эффективных суток;
q— дробная часть витка, причем = — при заполнении
2л
плоскости орбиты космическими аппаратами по ходу
движения, 9=1 — ^ —против хода движения.
2л
Так как при создании системы параметры орбит io и «о оста¬
ются постоянными, то можно варьировать только двумя пара¬
метрами: темпом запуска А и радиусом круговых орбит системы.
Задавая А— 1, 2, 3... или (что тоже самое) число эффек¬
тивных суток между очередными пусками, определяем разность
между дробной частью витка qQ, полученной при начальных усло¬
виях Гиро, «о, 1’0 и требуемой q, найденной по формуле (4.3),
±Я=Яо~Я- (4-4)
„ дд
Определим производную
огкр
/Тэфф \ Q 1
ду _ \ тв ) ~ С1Гкр + ~2~ С2Гкр3/2 + 2СзГкр3
ЭгКр дгкр (^1гкр“^2гкр3^~ С3Г2р)2
где С1= —2п ,
Тзз V К
с2 =4 С20 0+5 COS2Z0 — 6 sin2 «о sin2 z'o),
* * зв У Л
= ^20
123
Тогда необходимое изменение высоты круговой орбиты будет
Лгкр = -^-, (4.6)
дг кр
а необходимый радиус круговой орбиты
Ар <Кро + Агкр- (4- 7)
Варьируя темпом запуска k — 1, 2, 3 ..., можно найти радиус
круговых орбит системы, близкий к rKp0, который был получен
при баллистическом обосновании системы КА. Темп запуска за
висит только от времени подготовки ракеты-носителя и КА к за¬
пуску. Получив радиус круговых орбит гкр с учетом создания
системы, необходимо проверить, выполняет ли система при но¬
вом гкр поставленную перед ней задачу. Если задача не выпол¬
няется, то уточняется необходимое количество КА в системе на
новой высоте и порядок расчета повторяется до тех пор, пока
не будет найдена высота круговой орбиты, удовлетворяющая
условию запуска и решению поставленной перед системой за¬
дачи.
4.2. СОЗДАНИЕ ДЕТЕРМИНИРОВАННЫХ СИСТЕМ КА С ЗАДАННЫМ
РАЗРЫВОМ ОБСЛУЖИВАНИЯ
При создании систем КА с заданным разрывом в обслужи¬
вании tp могут встретиться два случая: 1) ширина полосы обслу¬
живания равна межвитковому расстоянию; 2) ширина полосы
обслуживания превышает межвитковое расстояние.
Рассмотрим первый случай. При создании такой системы не¬
обходимо выполнить два условия:
— в момент //=14±1р, где — время выведения l-го КА си¬
стемы на орбиту, трасса предыдущего КА должна пройти через
проекцию точки конца активного участка на поверхности Земли;
— в mqmcht выведения очередного КА системы на орбиту £,
предыдущий КА должен иметь аргумент широты
«oi=«o±7^-^P> (4.8)
где ид— аргумент широты точки выведения; tp — заданное вре¬
мя разрыва в обслуживании.
За k эффективных суток КА должен совершить целое число
оборотов, т. е. через k эффективных суток КА должен пройти
через точку конца активного участка. Это условие запишем сле¬
дующим образом:
—^ = P,<h (4-9)
• 2
где q=0.
124
При выполнении этого условия запуск очередных КА на орби¬
ту будет осуществляться через интервал времени
Д/(-= 7-i + АТ'зфф /р, (4. 10)
если восходящие узлы орбит последующих КА необходимо раз¬
местить в плоскости экватора с запада на восток, и через интер¬
валы
Д/,- = 6—1 + ^7Эфф —|—Zp, (4.11)
если узлы требуется расположить с востока на запад.
Для случая, когда ширина полосы обслуживания превышает
межвитковое расстояние, задача создания системы КА может
быть сформулирована следующим образом: необходимо найти
такие круговые орбиты системы, чтобы за время k эффективных
суток плюс минус время, за которое повернется Земля на угол,
равный дХф, КА сделал целое число оборотов, т. е.
/ ДЧ \
I k ± 2- ) Гэфф
=Р,Ч, (4.12)
1 2
где q=0.
В формуле (4. 12) знак плюс обеспечивает расположение уз¬
лов в плоскости экватора с востока на запад, а минус — с запа¬
да на восток.
Система КА с заданным разрывом в обслуживании будет вы¬
полнять свою задачу в том случае, если ширина полосы обзора
при радиусе гкр будет не меньше, чем при гкро, т. е.
(гкр) ДХФ (^кро)’ (4- 13)
Так как при фиксированных параметрах бортовой аппаратуры
ширина полосы обзора зависит только от радиуса круговой ор¬
биты, то условие (4. 13) означает, что радиус круговых орбит си¬
стемы гкр должен быть ближайшим числом по отношению к ра¬
диусу гкро с учетом Темпа запуска k.
4.3. СОЗДАНИЕ ВЕРОЯТНОСТНЫХ СИСТЕМ КА
Принципиально вероятностную систему можно создать следу¬
ющим образом:
1) запуском КА системы одновременно с п стартов с выведе¬
нием их практически в одну точку пространства;
2) запуском системы с п стартов с выведением на орбиту
каждого из КА в свою расчетную «ячейку»;
3) запуском всей системы КА с одного старта по одной и
той же программе выведения. В этом случае возможно выведе¬
ние всех КА системы последовательно в одну точку вращающей¬
ся плоскости орбиты и выведение КА с некоторым постоянным
сдвигом вдоль плоскости орбиты;
125
4) выведением КА с ограниченного числа стартов, действу¬
ющих одновременно или последовательно с некоторым сдвигом
по времени;
5) созданием системы КА с малой массой одного космическо¬
го аппарата при достаточно больших мощностях ракеты-носи¬
теля путем вывода одновременно нескольких КА в капсуле с по¬
следующим разбрасыванием КА со скоростью нескольких мет¬
ров в секунду.
Первый способ выведения системы КА требует очень большо¬
го числа стартов. Кроме того, созданная таким образом систе¬
ма будет эффективна только по прошествии определенного ин¬
тервала времени, необходимого для расхождения КА системы.
Система КА, созданная по второму способу, в отличие от пре¬
дыдущей является эффективной с самого начала ее выведения.
Однако создание подобной системы, когда необходимо каждый
КА вывести в определенное место орбиты, представляет собой
технически трудно осуществимую задачу. Заметим также, что
строгая расстановка КА системы, имеющих ошибки выведения,
для вероятностных систем является ничем не оправданной, так
как система-после вывода расходится.
Третий и четвертый способы выведения системы КА являются
наиболее простыми. В этом случае всю систему КА можно со¬
здать одним носителем с одной или нескольких пусковых пло¬
щадок.
Пятый способ создания системы КА для вероятностных си¬
стем наиболее приемлем. Рассмотрим поведение отдельных кос¬
мических аппаратов на орбите при получении ими произвольно
направленного импульса скорости. На расхождение отдельных
КА вдоль орбиты будет влиять составляющая скорости AVU.
Если считать, что КА выбрасываются по всем направлениям от
капсулы, то процесс образования плоскости орбиты можно счи¬
тать законченным, когда расстояние между капсулой и выбро¬
шенным вперед КА станет равным половине длины окружности.
Начальное возмущение скорости AVU приводит к изменению
углового положения КА вдоль орбиты за один оборот на вели¬
чину
д<Р(2я)=-6л-^, (4.14)
что приводит к изменению периода на величину
ДТ=ЗГО . (4.15)
Таким образом, при наличии начального возмущения скоро¬
сти вдоль орбиты КА начинает смещаться в обратном направле¬
нии со скоростью, равной утроенной скорости начального воз¬
мущения.
126
Определим время создания системы Лист в данной плоскости
орбиты (время расхождения КА вдоль плоскости орбиты):
7ИСТ = —= —— , (4.16)
ист 2дг 6 дии v
где Кьр — расчетная скорость круговой орбиты.
Время создания системы при AVu=14-5 м/с и Н=
= 5004-4000 км колеблется в пределах 15—30 сут.
Разброс КА можно осуществить вращением капсулы. Опре¬
делим необходимую скорость вращения капсулы для создания
системы КА в заданное время. Для простоты предположим, что
ось вращения капсулы перпендикулярна плоскости начальной
орбиты капсулы. Тогда скорость вращения капсулы определим
по формуле
а>ка11С=—, (4.17)
12ЯГка1)С »сис?
где гкапс — расстояние от оси вращения капсулы до центра масс
КА.
В случае если капсуле по техническим причинам невозможно
придать необходимую скорость вращения или нельзя разместить
в одной капсуле необходимое количество КА по условию превы¬
шения допустимого груза, то потребуется вывод на орбиту КА
в нескольких капсулах. Если капсулы разместить равномерно
вдоль орбиты, то время создания системы сократится в Q раз,
где Q — количество капсул, выводимых на одну орбиту.
Поведение системы в начальный период существенно зависит
от характера распределения ошибок между конкретными КА
Полученные ранее закономерности будут проявляться не сразу
после запуска, а по прошествии некоторого интервала времени,
необходимого для расхождения КА вдоль орбиты.
4.4. ВОССТАНОВЛЕНИЕ СИСТЕМЫ КА
Качество функционирования системы КА изменяется в про¬
цессе работы вследствие выхода из строя отдельных элементов
системы, изменения взаимного расположения аппаратов из-за
неточностей их вывода на расчетные орбиты, а также вследствие
влияния возмущений в процессе функционирования системы. Со
структурой непосредственно связана эффективность выполнения
задачи системой КА. При изменении структуры система может
перейти в такое состояние, когда она поставленную задачу с за¬
данной вероятностью 'выполнить не сможет.
В теории полета есть понятие «время существования ИСЗ» —
продолжительность полета с момента выведения его на орбиту
до входа в плотные слои атмосферы. Для системы КА также
существует некотора'я продолжительность полета, в течение кото-
127
рой система выполняет поставленную задачу с заданной веро¬
ятностью. Эта продолжительность обусловлена следующими
факторами:
— нарушением структуры КА;
— истечением гарантийного срока работы аппаратуры КА;
— израсходованием запаса рабочего тела для обеспечения
ориентации и стабилизации КА;
— выходом из строя элементов бортовых устройств и др.
Наименьшее из времен, определяемых перечисленными фак¬
торами, и является временем активного существования системы.
Естественно, что время активного существования системы дол¬
жно быть меньше времени существования ИСЗ.
Восстановить систему — это означает привести ее в состояние
активного функционирования. Если изменилась структура систе¬
мы, то восстановить систему можно коррекцией орбит при усло¬
вии наличия на КА соответствующих двигательных установок.
При отсутствии корректирующих устройств в образовавшиеся
«окна» можно запустить новые КА. В этом случае говорят о вос¬
полнении системы. Если один или несколько КА системы вышли
из строя и система задачу не выполняет, то возможны два спо¬
соба ее восстановления.
1. Если ресурс системы еще не выработан, то система допол¬
няется новыми КА.
2. Если ресурс всей системы уже почти выработан, то вышед¬
ший из строя КА заменять новым нет смысла и в этом случае
заменяется вся система.
В принципе возможна организация ремонта КА в космосе и
восстановление системы непосредственно на орбите.
Для функционирующей системы КА может быть воспроизве¬
дена картина поведения системы. При этом можно прогнозиро¬
вать «пропуски» на поверхности Земли и ликвидировать их в
нужный момент, другими словами, временно повысить эффек¬
тивность существующей системы КА. Это можно сделать двумя
способами.
1. Путем запуска дополнительных КА сверх расчетного значе¬
ния в места пропусков на орбите. Этот способ позволяет повы¬
сить эффективность существующей системы на сравнительно не¬
большой период времени. При этом оказывается, что не всегда
возможен запуск в предвычисленную точку на орбите при усло¬
вии ограниченного времени запуска и малого числа стартовых
площадок.
2. Путем упорядочения КА на орбитах корректирующими
маневрами. Этот способ, по сравнению с первым, имеет то
преимущество, что он позволяет многократно повышать эффек¬
тивность, но при этом КА усложняются и надежность работы си¬
стемы снижается.
Глава 5
МЕТОДЫ РАСЧЕТА ОРБИТАЛЬНЫХ МАНЕВРОВ
ПРИМЕНИТЕЛЬНО К СИСТЕМАМ КА
5.1. КЛАССИФИКАЦИЯ ОРБИТАЛЬНЫХ МАНЕВРОВ
Маневром КА называется преднамеренное изменение его ор¬
биты под действием управляющих сил. В данном определении
подчеркиваются две существенные стороны маневра, а именно:
маневр всегда преследует конкретную цель и его выполнение тре¬
бует наличия на борту двигательной установки с запасом топли¬
ва и системы управления.
С точки зрения динамики систем КА маневры можно разде¬
лить на два основных класса: маневры, связанные с поддержа¬
нием заданной структуры системы (корректирующие маневры),
и маневры, преследующие цель изменения структуры системы
или ее отдельных характеристик.
В свою очередь, корректирующие маневры подразделяются на
однопараметрические и многопараметрические. Однопараметри¬
ческая коррекция предполагает целенаправленное изменение
какого-либо одного параметра орбиты. При этом на другие ее
параметры могут налагаться определенные ограничения. Напри¬
мер, изменение периода обращения при условии, чтобы эксцент¬
риситет орбиты не вышел за пределы допустимых его значений,
или же изменение фокального параметра при условии, чтобы вы¬
сота перигея после коррекции была бы не менее допустимой.
Задача однопараметрической коррекции не имеет единствен¬
ного решения, в связи с чем представляется возможным выби¬
рать наилучшее в том или ином смысле решение, например по
минимуму энергозатрат.
Многопараметрическая коррекция предполагает целенаправ¬
ленное изменение двух и более параметров орбиты. Маневр пред¬
полагает целенаправленное изменение структуры системы, обу¬
словленное изменением требований к ней, либо условий ее функ¬
ционирования. Такая необходимость маневра может возникнуть,
например, при сокращении интервала времени разрыва наблю¬
дений, когда в состав системы добавляется один или несколько
9 3430
129
КА и при этом требуется изменить взаимное положение других
КА, входящих в систему.
По характеру выполнения маневры делятся на плоские и про¬
странственные. Плоские предполагают изменение элементов ор¬
бит без изменения положения ее плоскости в инерциальном
пространстве. Пространственные обязательно предполагают из¬
менение положения плоскости орбиты в пространстве. При этом
элементы плоского движения могут сохраняться неизменными
или быть изменены.
По способу создания управляющих сил маневры делятся на
импульсные, с малой тягой, аэродинамические и комбинирован¬
ные.
К импульсным относятся такие маневры, при которых дли¬
тельность полета с тягой мала по сравнению с периодом обра¬
щения КА.
Маневры с малой тягой отличаются большой продолжитель¬
ностью действия управляющих сил, соизмеримой с периодом об¬
ращения.
Особенностью аэродинамических маневров является исполь¬
зование аэродинамического качества при полете в атмосфере.
Наконец, комбинированные маневры могут включать в себя:
различные сочетания способов создания управляющих сил.
Наибольшее применение на практике находят импульсные ма¬
невры. Поэтому в данной главе ограничимся только их рассмот¬
рением. Если маневр совершается с помощью одного управляю¬
щего импульса, его называют одноимпульсным. При использова¬
нии последовательности двух или трех импульсов, маневр на¬
зывается соответственно двух- или трехимпульсным.
Конкретная схема формирования вектора управляющего им¬
пульса зависит от характеристик двигательной установки и си¬
стемы управления КА: от количества управляющих двигателей-
и их размещения, от возможностей системы ориентации и стаби¬
лизации.
Различают две схемы создания управляющих импульсов: по¬
лярную и декартову. В полярной схеме необходимая ориента¬
ция вектора управляющего импульса в пространстве достигается
изменением ориентации КА. В декартовой схеме вектор управ¬
ляющего имшульса создается покомпонентно включением не¬
скольких двигателей по фиксированным направлениям.
В заключение сформулируем основную гипотезу импульсных:
маневров. Для этого рассмотрим связь между приращением ско¬
рости и импульсом скорости.
Запишем векторные уравнения управляемого движения
с тягой:
dT Р К-
dt т г3
130
Рис. 5. 1. Кинематическая
схема импульсного маневра
и свободного движения:
К_-
dt ~ (г')3
Вычитая почленно из первого уравнения второе, получим
dV ' Р_ 1
dt dt dt т L (г')3 г3 J
Проинтегрировав последнее уравнение на интервале времени дей¬
ствия тяги Д/ при допущении постоянства массы, будем иметь
т 1(Г )3 Г3 J
Первое слагаемое в правой части
этого равенства представляет собой
управляющий импульс скорости (по
теореме об изменении количества
движения тпД7=РД/); второе сла¬
гаемое — изменение скорости вслед¬
ствие разности гравитационных
ускорений при свободном и управ¬
ляемом движении.
Поскольку эта разность является
малой величиной, а Д/ по определе¬
нию импульсных маневров также
является малой величиной, то их
произведение является величиной второго порядка малости.
Таким образом, приращение скорости на малом промежутке
времени действия тяги равно управляющему импульсу скорости
с точностью до величины второго порядка малости.
В основу теории импульсных маневров положено отождест-
_ р
вление приращения скорости ДУ с импульсом скорости — Д/.
т
Следствием этой основной гипотезы является то обстоятель¬
ство, что точка приложения импульса одновременно принадле¬
жит исходной и конечной орбитам маневра, т. е. в точке прило¬
жения импульса происходит разветвление траекторий. Точность
применяемой гипотезы тем выше, чем меньше интервал времени
действия тяги Д/. Кинематика импульсного маневра показана на
рис. 5. 1.
5.2. ВЛИЯНИЕ МАЛЫХ ПРИРАЩЕНИЙ СКОРОСТИ НА ПАРАМЕТРЫ
плоского ЭЛЛИПТИЧЕСКОГО ДВИЖЕНИЯ
Параметры орбиты в ее плоскости могут быть вычислены,
если известны любые три взаимно независимые элементы тра¬
ектории. Для наглядности изложения выберем в качестве ца-
5*
131
чальных условий радиус рассматриваемой точки орбиты г, вели¬
чину скорости движения КА V и угол наклона вектора этой ско¬
рости к местному горизонту 0 (или к местной вертикали ф)
(рис. 5.2). Для расчета остальных параметров могут быть ис¬
пользованы следующие первые интегралы дифференциальных
уравнений движения КА:
а = , (5. 1)
rV2 k ’
2 — —
К
, (5. 2)
К1/2 / ,У2 43/2 V ’
I К )
,2IZ2 cos2 0 ,с q.
Р = 7 > (5-3)
А
1 2 cos2 0 ,
К I К )
(5-4)
= sin9cos9 , (5.5)
Б К г!Г2 1 '
1 — cos2 0
к
где а — большая полуось орби¬
ты; Т — ее период; р — фокаль¬
ный параметр орбиты; е — экс¬
центриситет орбиты; б — истинная аномалия рассматриваемой
точки на орбите; К — гравитационная постоянная поля тяготе¬
ния. Для Земли К=398620 км3/с2.
Импульс скорости dV изменяет величину или направление
вектора V скорости движения КА (рис. 5.3). Величина и на¬
правление 0К вектора скорости КА после создания управляюще¬
го импульса определяют новую орбиту КА. Параметры этой ор¬
биты могут быть рассчитаны по формулам (5. 1) — (5. 5).
При выполнении маневров обычно используется один из двух
видов ориентации КА: 1) в скоростной орбитальной системе ко¬
ординат или 2) в местной горизонтальной орбитальной системе
координат.
Оси х и у систем лежат в плоскости исходной орбиты, ось z
перпендикулярна к ней. Различие состоит в том, что в скорост¬
ной системе ось х направлена вдоль вектора скорости движения,
ось у — перпендикулярно к ней, а в горизонтальной системе ось
х ориентирована в плоскости орбиты по местному горизонту,
а ось у — по местной вертикали.
В случаях когда два эти варианта ориентации не обеспечи¬
вают требуемого направления управляющего вектора скорости,
нрименяются различные другие методы: одноосная солнечная
132
Рис. 5. 2. Параметры эллиптическо¬
го движения
ориентация, трехосная звездная ориентация, программные раз¬
вороты, пассивный полет на гироскопах и т. д.
Если управляющий импульс скорости параллелен вектору на¬
чальной скорости Vo, то он называется тангенциальным. Такой
импульс создает следующие изменения параметров исходной ор¬
биты:
da = dVT\
К /2 rV2 у
\ К /
dT= &nr^2V 5 dVp,
№/2 rV2^5/2 т
dp = 2 YYL cos2 0z/KT; (5.6)
rV (rV2 \
2— —cos20
de =— К \ К ) dV
Г rV2 , rV2\ „ „ T
1 / 1 — I 2 — | cos2 0
|/ К k К )
d&=- dV .
V К l rV2\ T
+ )COS26
Формулы (5.6) получены дифференцированием уравнений
(5. 1) - (5. 5).
Управляющий импульс скорости, перпендикулярный вектору
скорости Vo и лежащий в плоскости исходной орбиты, называется
нормальным. Он обозначается dVN и поворачивает вектор ско¬
рости КА на угол dB=dVN/Vg, не изменяя величины скорости
КА. Из уравнений (5. 1) и (5. 2) следует, что он не изменяет ве¬
личин большой полуоси а и периода обращения Т орбиты.
Остальные параметры движения изменяются под воздействием
нормального импульса скорости следующим образом:
dp= — sin20rfIZA-;
К
I 2 — 1 sin 0 cos 0
de = — } K dVN-, (5.7)
К Г rV2 ! rV2\ n
j/1- —(2-^)cos26
1 -(2—~4)cos2 6-+-1
- dVN.
V К rV2\
— 12 — 1 cos2 0
rV2 k к )
133
Рис. 5. 3. Параметры коррек¬
ции скорости движения
Уравнения (5.7) получены дифференцированием (5.3) —
(5. 5) по dVN.
При ориентации осей тяги двигателей КА в горизонтальной
орбитальной системе координат управление орбитой произво¬
дится радиальными импульсами скорости dVT, направленными
по местной вертикали, и горизонтальными импульсами d]/rT,
направленными по линии пересечения плоскостей местного го¬
ризонта и исходной орбиты.
Рис. 5.5. Компоненты горизонтального
импульса скорости
Рис. 5.4. Компоненты радиально¬
го импульса скорости
Радиальный импульс скорости dVT может быть представлен
в виде двух составляющих (рис. 5. 4):
dy=dVTs\n 0; dVN=dVrcosb. (5.8)
Используя уравнения (5.6), (5.7) и (5.8), можно получить
формулы для расчета изменения параметров эллиптической ор¬
биты при создании радиального импульса скорости dVr-
, da . o,,z 2r2V sin 6 ,.z .
da— sin odVr= dv
dVT r К /
V “ К J
dT . O,1Z 6яг5/2У sin 0 j.z
dT - sin bdV.= 575 dvr;
Г К I
dp = {-^~ sin cos 6^ dl/r=0; (5.9)
134
. I de . a . de 0\,lz г2Из sin 6 cos2 6</Уг
de = sin 94 cos 6\dV.= r ;
\dVT 1 rfVjy / X2 , / rV2! rV2 \
)cos2fl
d^ = (-^~ sin 04—cos 9^ dV.=
\dVT 1 dVN I r
I rV2 \
— I + —— COS2 61 cos в
=—i - £ dVr.
\ rV2 I rV2\ 1 Г
vp—K~ cos2e
Горизонтальный импульс скорости dV. можно аналогично раз¬
ложить на две составляющие (рис. 5. 5):
dV,=dVx cos 9;
dV N= — dV\ sin 9
и затем, подставляя эти соотношения в уравнения (5.6) и (5.7),
можно получить формулы для расчета изменений параметров
эллиптической орбиты, обусловленных горизонтальным импуль¬
сом скорости dV\'.
da - cos 9zZl/x= dv\', (5.10)
dT^— cos (5.11)
dVT ffi/2 /2_—
dp=(-^— cos9—sin 9^ z/I/x=2r^— cos9ofl/t; (5.12)
и \ dVT dVN J К k
de= ( de cos 9 sin 9^ dVz =
dV.; dVN )
rV2 [rV2 1
—- (1 + cos2 fl)— 2 cos в
= 1 K J dVx\ (5. 13)
/ rV2 / rV2 \ 4 ’
VI/ 1 — 2- 1 cos2 0
у к \ к J
dd = (-^- cos 9 sin 9^rfVt =
dVN )
I rV2 \
I — 1 + —— cos2 6 1 sin 6
= —* dVx. (5.14)
Г rV2 I rV2 \1 k ’
и I-”— I 2 — —— cos2 6 I
L a \ A /J
135
Отметим, что согласно уравнению (5. 14) знак производной
меняется на границе
V (1 + cos20) = 2.
При параметрах эллиптической орбиты, соответствующих реше¬
ниям этого уравнения, ее эксцентриситет под действием гори¬
зонтального импульса скорости не меняется.
Управляющий импульс скорости dV может иметь в общем
случае любое направление в плоскости орбиты. Это направле¬
ние может быть задано, например, величиной угла А между ним
и местной вертикалью в точке создания импульса (см. рис. 5. 3).
В этом случае вектор dV можно разложить на составляющие:
dVT — dV sin (X-l-0), (5.15)
dVN = dV cos(X-|-0). (5.16)
Решая совместно уравнения (5.6), (5.7), (5.15) и (5.16),
получаем формулы для расчета изменений параметров эллип¬
тических орбит, вызываемых произвольно направленным в пло¬
скости орбиты импульсом скорости dV\
da=—dV sin (Х + 0) = 2г2У sin (Х + 9) dV\ (5.17)
dV, v 7 (2-— V
\ К )
sin (X + 0)dl/= 6яг35^ sin(X + fl) (5.18)
1 /<3/2 / rV2 \2
V К /
dp = \-^~ sin (X-|-0)-j—^-cos(X—0)1 dV = ^-^cos 0sin \dV\
14УТ dV N I К
(5. 19)
de = [ de sin (X-|- 0) cos (X -|- 0)1 dV =
I dVT dVn J
rV2 3 sin X + sin (X + 20) .
1 —2 sin X
= -A 2 — rVcos6 dV; (5.20)
, Г ■ rV2 / rV2 \ к
]/ г-~{2~~)СО52в
= sin(x+0) + ^cos (X4-0)l dV =
\.dvr dV N J
rV2
— cos (X — 0) -| cos2 0 cos (X + 0)
=—r< , 1—dv- <5-2»
136
Во многих случаях параметры плоскости эллиптического дви¬
жения задаются в виде инвариантов времени. Обычно для этого
выбирают большую полуось орбиты а и ее эксцентриситет е.
Вместе с истинной аномалией ■& эти параметры позволяют при¬
вести формулы для расчета изменений характеристик орбит к
другому виду, где в качестве исходных параметров использу¬
ются не три переменных во времени величины, а только одна —
истинная аномалия О точки маневра на исходной орбите и две
постоянные: а и е.
Чтобы получить такие уравнения, используем следующие фор¬
мы первых интегралов эллиптического движения:
г = а(1~е2) ; (5.22)
1 + е cos &
rV2 2 1 — е2 1 + 2е cos & + е2 , г 23)
К 1 + е cos 6 1 + е со.® &
у=з/JL L+2ecos9+g2; (5.24)
у а 1 — е2
sin 8= . ; (5.25)
У1 + 2е cos &+е2
п 1 + е cos & ,г-
cos 8 = . (5. 26)
У 1 + 2е cos &+е2
С помощью уравнений (5.22) — (5.26) получаем из формул
(5.7), (5.9) и (5.10) — (5.14) для тангенциального импульса
скорости dVx\
da = 2 l+2ecosT+grfI/
у К 1-е2
6л о / 1 -Ь 2е cos 8 -Н е2 ,,.
dl =— а I / dV '
К у 1-е2
, О / а3(1 _ е2)3
dp = 2 1/ 1 dVp,
у К (I + 2е cos 8 + е2) f
de=2 (е + cos 8) ■ / — 1 ~ g2 dVp,
у К I + 2e cos 8 + e2 T
— 2 sin & 1 f —(— — 1) 1 dV^.
у К \e2 / 1 + 2e cos 0 + e2
Для нормального импульса dVN
da = 0,
dT = 0,
137
dp=-2ae(A- е») —— dVN,
l + e cos ft
de = sin* 1 / (i-e2)3ZZ,
1 + e cos ft у К 1 + 2e cos ft + e2
rfft = (e + ■ e + cosft ) 1 /Л-р__- - -1 ,
\ 1 + e cos ft ) у К \ e2 ) 1 + 2e cos ft + e2
Для радиального импульса скорости dVT
da=2 Г — sin МИ,;
V
6л a2 sin ft ,,,
liT=r /, ,dv"
]/ ~1
dp = Q,
de = ^-^(^«кН^И,,
1 + e cos ft у К
(1 + e cos ft) cos ft Z a /J 1 \ dy
1 + 2e cos ft + e2 у К. \ e2 ) r
Для горизонтального импульса скорости dVt
da = 2 1 / —— (14-е cos &) dV\\
у К (1— e2) 1
dT 6л Д2(1 + ecos ft) dy ,
~ К т’
dp=—2 dv4-
1 + e cos ft у К
de=( g + cosft- 4- cos ft]/— (\-e2)dV^
\14-ecosft ) у к
(2 + e cos ft) sin ft Г Л
1 + 2e cos ft + e2 у 7<\e2 /
Чтобы получить аналогичные уравнения для произвольного
направления X импульса скорости dV, нужно вывести некоторые
дополнительные соотношения:
sin (X 4-0) = sin X cos 04-cos X sin 0 = Lz*~e cos - sin X4-
k ' ‘ /1 + 2e cos ft+e2 1
. e3sin X _ cQs x= _sinX_+_esin_(X^ft)_ (5> 27)
)71 + 2e cos ft+e2 p4l+2e cos ft + e2
138
sin (X-|-26) = sin X cos 29 +cos X sin 26= sin X (1 — 2 sin2 6)+
, о . D 0 i [(l+ecos0)2—e2 sin2 8] sin X ,
1 + 2e cos 8 + e2
, 2e sin 8 (1 + e cos 8) cos X e2 sin (X + 28) + 2e sin (X + 8)+sin X ,r „n .
1 + 2e cos 8 + e2 1 + 2e cos 8 4- e2
„„„ M i D । • i . a (1 + e cos 8) cos X+e sin 8 sin X
cos (X— 9) = cos X cos 8 + sin X sin 9=-—< ' =
У1 +2e cos 8 + e2
cos X+e cos (8— X) . /Ч QQ'i
У1 + 2e cos 8 + e2 ’
cos (X I 8) (*+e cos 8) cos X — e sin 8 sin 8 cos X+e cos (8 + X) ,r qq
У1 +2e cos 8 + e2 У1 + 2e cos 8 + e2
Используя уравнения (5.17) — (5.21), (5.22) — (5.26) и
(5.27) — (5.30), получаем формулы для расчета изменения па¬
раметров эллиптических орбит в функции большой полуоси а,
эксцентриситета е и истинной аномалии исходной орбиты при
произвольном направлении X импульса dV\
da = 2 ]/ к^-е2) [sinX+esin (*+»)]^; (5.31)
dT = sin X + e sin (X + 8)_ dV 5 3
К У1 - e2 ’
dp = 2 -] f a3(!—g3) sjn x dy- (5. 33)
1 + e cos 8 у К k
(7e = [sinX(e + C0S a> + sin (X + »)l — (\-e2)dy; (5.34)
L 1 + e cos 8 J I/ К
d^ — sin X sin 8 + (1 — e cos 8) cos (X + 8) / a /_1
1 + 2e cos 8 + e2 у К \ e2 /
(5. 35)
5.3. ИЗМЕНЕНИЕ ПАРАМЕТРОВ ПЛОСКОГО ЭЛЛИПТИЧЕСКОГО
ДВИЖЕНИЯ МГНОВЕННЫМ ИМПУЛЬСОМ СКОРОСТИ конечной
ВЕЛИЧИНЫ
В предыдущем разделе были выведены формулы, позволяю¬
щие определить изменения параметров эллиптических орбит при
наличии малых импульсов, когда можно считать эти изменения
линейной функцией величины создаваемого импульса скорости.
Применяя выведенные выше соотношения, получим точные
формулы для расчета параметров эллиптического движения пос¬
ле создания мгновенного импульса скорости любой величины,
лежащего в плоскости исходной орбиты.
139
Будем считать, что управляющий импульс скорости ДУ на¬
правлен, как принималось выше, под углом А к местной верти¬
кали в точке его создания. Радиус этой точки г, величина ско¬
рости КА до маневра Vo, после маневра Ук. Угол вектора ско¬
рости КА к местному горизонту до маневра 0о, после маневра
0К (см. рис. 5. 3).
Если исходное движение задано его параметрами в точке ма¬
невра (г, Уо, 0о), то параметры орбиты после маневра можно оп¬
ределить с помощью формул (5. I) — (5. 5). Для этого необходи¬
мо предварительно вывести некоторые вспомогательные соотно¬
шения, воспользовавшись кинематической схемой, приведенной
на рис. 5. 3,
У2 = У о + д У2 — 2УодУ cos (90° - 0О + Л) = Уо + Д У2 +
+2У0дУ sin (Х4- 0О) = (УО cos 0о-|-дУ sin Х)2-|-(У0 sin 0о-|- дУ cosX)2;
cos 0 = Уо cos Op + ДУ sin X =
к V(Урcos ®о + Д'7 sin X)2 + (Уо sin ®о + ДУ cos X)2
1 .
/7 Ур sin fl0 + ЬУ cos X \2 ’
|/ \ Уо cos 0О + ДУ sin X /
о Уп sin 0О + ДУ cos X 1
Sin 0К = —у 2 = ;
У к / /Уосо5 0р+ДУ sin Х\2
|/ \У0 sin 0О+ДУ cos X/
У2 cos2 0К = (УО cos 0о-|-ДУ sin X)2;
У2 sin 0К cos 0К = (УО sin 0О + ДУ cos X) (Уо cos 0О + дУ sin X);
Подставляя эти выражения в формулы (51) — (5.5), полу¬
чаем
ак = — - ; (5. 36)
2 — — (Уо cos 6р + ДУ sin X)2 — (Уо sin 0О + ДУ cos X)2
7К = — ; (5. 37)
Г к 13/2 к
2 —— (Уо cos Ор + ДУ sin X)2 (Уо sin 0р + ДУ cos X)2
р = — (У0соэ 0О + дУ sin X)2; (5.38)
К
А = 1 - у (Уо cos 0о+ АУ sin X)2 X
ГХ{2- у [(Уо cos 0О+ ДУ sin X)2 + (y0sin 0о+дУ cos X)]2); (5. 39)
tg$K = Ур sin Op + ДУ cos X _ (5 40)
—— — —- + Уо cos 0p+ ДУ sin X
г (Уо cos Op + ДУ sin X)
140
Формулы для расчета параметров эллиптических орбит после
маневра можно представить в виде функции инвариантов исход¬
ной орбиты, например, как уже выбиралось выше, большой полу¬
оси а и эксцентриситета е. В качестве третьего независимого па¬
раметра здесь также выберем истинную аномалию точки маневра
на исходной орбите бо-
Чтобы получить искомые формулы, используем соотношения
(5.22) — (5.26). Подставляя их в уравнения (5.36) — (5.40),
получаем
«к= (5.41)
1 ду ( Г к 1
77 + 2 1/ 77 2\~ [S*n X + е0 sin (X + $о)]}
Лд К [ У ао(1 — ед) }
у. 2л .
к /1 ДИ \ ( / R I3/2'
XV2 —ДУ+ 21/ 7- 2T[sinX+eosin(X + »o)]
\ до К / ( у ао (1 — ео) J
(5.42)
,, 9\ II ДИ sin X л / °o(l~ ед) . о.
рк=а0(1-е2) 1 + -——— 1/ - v ; (5.43)
I + е0 cos «о г К
_ / 1 _ аоО~ео) Г ДИ sin X v
к V К [1 + e0cosft0 "Г у д0(1-^)]А
V ( / Fl 2\
X (1-г2)П-(^Л-2дИ/ Д°-( [sinX+gosin(X+M ;
(5. 44)
1 / ; йт- еп sin ft + ДИ cos X
trt=—и
-г J— (1 + eg cos ft) + ДИ sinX —
/ ~к
1 / т пт- е0 sin ft + ДИ cos X
* (5.45)
K(l + e0cos ft)
a0(l —6q) 1/ —2^(1 + e0 cos ft) + ДИ sin X
[_ У ao (* eo)
5.4. ГОДОГРАФИЧЕСКИИ МЕТОД ИЗОБРАЖЕНИЯ И РАСЧЕТА
ХАРАКТЕРИСТИК ОРБИТ И ОДНОИМПУЛЬСНЫХ МАНЕВРОВ
Многие из приведенных выше аналитических зависимостей
можно сделать наглядными, если представить их в виде графи¬
ков. Существует большое количество возможных вариантов гра-
141
фического изображения взаимных связей параметров кеплеров¬
ских орбит. Для анализа и приближенных расчетов одноимпульс-
ных плоских маневров наиболее удобны годографы характери¬
стик компланарных орбит, пересекающихся в одной точке.
В основе годографического метода изображения параметров
кеплеровских орбит лежат два принципа. Первый из них состоит
в том, что внутриплоскостные параметры любой орбиты однозна¬
чно определяются тремя ее параметрами в любой точке: радиу¬
сом этой точки г, величиной
вектора скорости V и углом
между вектором этой скорости
и каким-либо характерным на¬
правлением в плоскости исход¬
ной орбиты, например мест¬
ным горизонтом или местной
вертикалью в этой точке.
Конец вектора скорости К
отмечает на расчетной плоско¬
сти скоростей, совпадающей
с плоскостью орбиты, точку,
однозначно соответствующую
определенной орбите. Зная по¬
ложение этой точки в выбран¬
ной заранее системе коорди¬
нат, можно вычислить все па¬
раметры этой орбиты.
Второй принцип годографического изображения параметров
кеплеровских орбит заключается в том, что, изменяя величину и
направление вектора скорости V в расчетной точке по определен¬
ным законам, можно концом этого вектора, как пером самопис¬
ца, вычертить на расчетной плоскости линии равных значений
любого параметра движения для всех возможных орбит. Такими
параметрами могут быть большая полуось, эксцентриситет,
истинная аномалия расчетной точки и т. д.
Задавшись величиной радиуса г и несколькими значениями
каждого из параметров орбиты, можно, используя уравнения
(5. 1) — (5. 5), рассчитать и построить семейства линий для этих
значений параметров орбитального движения. Такие семейства
линий называются изопараметрическими сетками.
На рис. 5. 6 в качестве примера показана сетка больших по¬
луосей а для эллиптических орбит, пересекающихся в точке с
геоцентрическим радиусом г=6620 км (Н—250 км). Из уравне¬
ния (5. 1) следует, что величина большой полуоси орбиты не за¬
висит от направления скорости, а определяется ее величиной V,
радиусом г точки, для которой строится сетка, и гравитацион¬
ной постоянной поля тяготения К. Поэтому сетка больших полу¬
осей представляет собой семейство концентрических окружно-
142
Рис. 5. 6. Сетка линий равных значе¬
ний больших полуосей для г=6620 км
стей. На рис. 5. 6 изображена только четверть этой сетки для
0=0°+ 90°.
Такой же вид имеет сетка периодов Т эллиптических орбит.
При тех же условиях сетка линий постоянных значений экс¬
центриситета е имеет вид, показанный на рис. 5. 7. В отличие
от сеток больших полуосей и периодов она симметрична только
относительно местной вертикали и местной горизонтали.
Таким же свойством обладает сетка равных значений истин¬
ных аномалий Ф, показанная на рис. 5. 8.
Рис. 5.7. Сетка линий равного экс¬
центриситета
Рис. 5. 8. Сетка линий равных значе¬
ний истинных аномалий
Сетка линий равных значений фокальных параметров р пред¬
ставляет собой семейство прямых линий, параллельных местной
вертикали.
Для контроля и коррекции радиусов перигея гп и апогея га
орбит используются сетки их постоянных значений. Уравнения,
описывающие эти сетки, имеют вид:
С-1) .
к ( г «V , ’
I — cos О I — 1
k г" 7 (5.46).
г(1-тг)
К (г „\2
1 — I — cos 0)
\ г а '
Для решения различных задач перечисленные сетки совмеща¬
ются на одном графике в необходимых сочетаниях. Чтобы не
строить все эти сетки заново для каждого значения радиуса ор¬
14»
Рис. 5.9. Обобщенный вектор
скорости V и вектор скорости V
биты, используется следующий прием: уравнения сеток записы¬
ваются в обобщенной форме, и графики сеток строятся в тех же
обобщенных параметрах. В группе уравнений (5.1) — (5.5) к
обобщенной форме требуется привести только три первых фор¬
мулы:
а 1
~~О ГУ2 :
К
т 2л .
г312 х1/2^_£^у/2’
JL = ^Cos20.
г К
Для уравнений (5.4), (5.5),
(5.46) и (5.47) обобщенными па¬
раметрами являются угол 0 меж¬
ду вектором начальной скорости
V. и местным горизонтом и отно¬
шение скорости полета V к мест¬
ной круговой скорости УНр в рас¬
четной точке
V= —У— = л/-Ь- V.
VKP |/ К
Обобщенный вектор скорости Г совпадает по направлению
с вектором реальной скорости V. Поэтому углы между обобщен¬
ным вектором V и местным горизонтом 0 или местной верти¬
калью ф равны тем же углам для реального вектора V (рис. 5. 9).
На обобщенной диаграмме вектор скорости, соответствующий
движению по круговой орбите при любом ее радиусе, изобра¬
жается отрезком оси абсцисс от ее начала до точки с координа¬
той, равной единице (рис. 5. 10). Внешняя граница области на
расчетной плоскости, в пределах которой изображаются харак¬
теристики эллиптических орбит, изображается окружностью, ра¬
диус которой равен /2. Эта окружность отображает семейство
параболических траекторий.
По оси абсцисс обобщенной диаграммы отсчитывается гори¬
зонтальная составляющая скорости полета КА, выраженная в
долях местной круговой скорости УКр в расчетной точке поля тя¬
готения. По оси ординат отсчитывается радиальная составляю¬
щая той же скорости в том же масштабе. На поле диаграммы
могут быть нанесены сетки любых рассмотренных выше пара¬
метров эллиптических орбит. Один из возможных вариантов та¬
кой диаграммы показан на рис. 5. 11.
144
Одним из ценных свойств рассмотренных диаграмм является
равенство масштабов изображения скорости полета по любому
направлению. Вследствие этого на них удобно выполнять графи¬
чески векторные построения при расчете одноимпульсных манев¬
ров. Величины углов в этих расчетах отображаются в натураль¬
ном масштабе.
Очевидно, что управляющий импульс скорости на диаграммах
отображается в том же масштабе, что и скорость полета, углы
Рис. 5. 10. Сетка линий равных значе¬
ний безразмерных (обобщенных) ве¬
личин Г/Га И Г/Гп
Рис. 5. 11. Вариант обобщенной сетки
параметров эллиптических орбите и О
его наклона к осям диаграммы те же, что к соответствующим
осям местной горизонтальной орбитальной системы координат в
точке маневра. Вектор скорости КА после маневра Ук опреде¬
ляется графическим построением на поле диаграммы как геомет¬
рическая сумма вектора начальной скорости Vo и управляющего
импульса скорости АУ. Пример такого графического расчета для
определения параметров орбиты после одноимпульсного манев¬
ра показан на обобщенной диаграмме на рис. 5. 11.
Сетки годографов позволяют решать многие задачи динамики
и управления полетом КА, в частности, наглядно показать и про¬
анализировать особенности управления эллиптическим движе¬
нием при различных его характеристиках в точке маневра и при
различных параметрах управляющего импульса. Если выбран
достаточно крупный масштаб, эти графики позволяют численно
решать разнообразные задачи с высокой точностью.
6 3430
145
5.5. ОСНОВНЫЕ ВИДЫ ПЛОСКИХ ОДНОИМПУЛЬСНЫХ МАНЕВРОВ
КА В ОРБИТАЛЬНЫХ СИСТЕМАХ
При импульсном управлении движением КА принято считать,
что изменение параметров орбиты происходит мгновенно в одной
ее точке. Эта точка является общей для исходной и конечной
орбит маневра. Ее радиус-вектор принадлежит обеим орбитам
и совпадает с линией пересечения их плоскостей.
Отсюда следует, что применение одноимпульсного маневра
возможно только в тех случаях, когда исходная и конечная орби¬
ты пересекаются или имеют точку касания.
Одноимпульсный маневр называется плоским, когда управля¬
ющий импульс скорости лежит в плоскости исходной орбиты.
В этом случае плоскости исходной и конечной орбит совпадают.
Импульс скорости может одновременно изменять величину
и направление вектора скорости КА или только одну из этих ха¬
рактеристик движения. В общем случае при этом изменяются
все параметры исходной орбиты, кроме радиуса-вектора точки
маневра. Однако при маневрировании можно сохранить неиз¬
менным какой-либо один из параметров исходного движения,
например период обращения, фокальный параметр и т. д. Каж¬
дому из этих условий соответствует определенное семейство
параметров движения. Иначе говоря, при заданном изменении
одного параметра задача одноимпульсного маневра имеет бес¬
численное множество решений. Она решается однозначно в тех
случаях, когда заданы два взаимно независимых параметра ко¬
нечного движения. При этом один из них может иметь одина¬
ковую величину для исходной и конечной орбит.
Из перечисленного следует также, что при одноимпульсном
маневре можно изменить не более двух взаимно независимых
параметров орбиты.
С точки зрения обеспечения функционирования системы КА
не все параметры их орбит имеют одинаковое значение. Одним
из важнейших управляемых параметров движения КА в системе
является период обращения. От точности уравнивания периодов
орбит всех КА в системе зависит длительность сохранения ими
заданного взаимного положения (структуры).
При регулировании периода обращения должно учитываться
ограничение минимальной допустимой величины радиуса пери¬
гея орбиты. Это ограничение вводится для обеспечения заданной
длительности существования каждого КА на орбите.
Вторым управляемым параметром движения КА в системах
является фокальный параметр орбиты. Этот параметр определя¬
ет угловую скорость прецессии плоскости орбиты в реальном
поле тяготения Земли, и так же, как и период обращения, влия¬
ет на изменчивость структуры системы КА.
Третьим регулируемым параметром движения КА в системах
может быть эксцентриситет орбиты. От его величины зависят
146
максимальные периодические отклонения КА по положению и
скорости от среднего движения системы.
Три указанных параметра связаны между собой известной
зависимостью
Поэтому выбор значений любых двух из них определяет одно¬
значно величину третьего параметра.
В отдельных случаях могут регулироваться другие парамет¬
ры движения КА, например, положение линии апсид орбиты в ее
плоскости, радиус апогея и т. д.
Рассмотрим характеристики управления перечисленными па¬
раметрами с помощью плоских одноимпульсных маневров.
Управление периодом обращения Т
Одноимпульсный маневр для управления периодом обраще¬
ния может выполняться в любой точке орбиты. При этом его
эффективность зависит от выбора точки маневра и направления
импульса скорости dV. Эффективность управления периодом об¬
ращения характеризуется величиной частной производной dTjdV,
которая в соответствии с уравнением (5.32) выражается
формулой
—= r 6яа2 -[sinX + esin(X+&)]. (5.48)
dV /К(1— е2)1 1 1 1 л
Определим углы А, соответствующие максимуму эффективно¬
сти управления периодом Т в произвольно фиксированной точке
орбиты ($=const)..Для этого возьмем частную производную от
(5.48) по углу А и приравняем ее нулю:
д ( дТ \ блд2 д г . . । . /11 йц
— ( ] = — [sin X+e sin (X+v)l =
дХ \ дУ / VК (1 — е2) дХ 1 ' к
_ 6яд2 [cos х_i_е cos х cos &0 — е0 sin &01 = 0.
//((1 — е2) 1 10 ° ° 01
Отсюда находим
tgx^1 +g°cosfto. (5.49)
еэ sin 80
Учитывая, что
tg8= esinft , (5.50'
1 + е cos 8
получаем tgX=ctgQ
или Х112=-^—8 + Ajt. (5.51
6*
147
Полученные значения Ai,2 соответствуют направлениям танген¬
циальных импульсов. При Xj= —— 0, когда импульс скорости
направлен на увеличение скорости полета, период Т увеличивает¬
ся. При — © импульс скорости уменьшает величину ско¬
рости движения, период обращения Т уменьшается.
Величины производных dTjdV в обоих случаях одинаковы,
а знаки их противоположны.
Таким образом, для управле¬
ния периодом обращения Т в фик¬
сированной точке орбиты наибо¬
лее целесообразно использовать
импульсы, направленные вдоль
вектора скорости движения КА.
При этом изменение других па¬
раметров движения КА можно
определить из уравнения (5.6)
или (5. 17).
Рассмотрим теперь зависи¬
мость эффективности управления
периодом обращения от положе¬
ния точки маневра на орбите.
Для этого сначала возьмем част¬
ную производную от (5.48) по истинной аномалии О точки
маневра
/ дТ \ д г ■ 1 । • j q ч, блд2
= sin X4-en sin (Х4- va) г — -
д* \dV } dV 1 10 k 1 071 У К (1 - е2)
= е cos (X+&) 6яд2
7/К(1-е2)
Приравняв эту производную нулю, при заданном А найдем
истинную аномалию точки орбиты, в которой импульс скорости
создает наибольшее изменение периода Т,
е cos (Х-|- $) = О,
откуда —Х-|-Лл.
Таким образом, если величина угла А задана, то наибольшая
эффективность управления периодом достигается в точке, где
истинная аномалия О такова, что управляющий импульс скоро¬
сти направлен перпендикулярно большой полуоси орбиты
(рис. 5. 12). Но при этом импульс скорости dV может быть в
общем случае направлен не вдоль вектора скорости движения,
а поэтому эффективность управления не будет максимальной.
Чтобы определить точку орбиты, в которой эффективность уп¬
равления достигает наибольшей возможной величины, подставим
Рис. 5.12. К определению точки
наиболее экономичного управления
периодом орбиты Т при А=const
148
в (5. 48) величину А, соответствующую направлению тангенци¬
ального импульса из (5.49). Для этого преобразуем (5.48) к
виду
дТ бла2 г . . , • /ч I ом бла2
= г ■ =~ [sin а 4-е sin (X + fl) = r — X
dV /К(1 — e2) J УК(1 — e2)
X[sin (14- e cos sin & cosX] = 6jta- X
zxl k 1 J ук(1-е2) zx
ч / r . . , , -at о -л 6ла2е sin ft /sin2 X , , \
X sin XtgAe sin v + esin » cosxl = — 1- cos X i =
V К (1 — e2) \ cos X /
бла2е a . / i , бла5/2 , 2 (1 + e cos ft0)
= , sin W 1/ 1 -4-tg2X = 1 / — — =
—e2) ь /х V a(l —e2)
= 6ла3/2р/А_. (5.52)
Полученное соотношение показывает, что эффективность уп¬
равления периодом обращения с помощью тангенциального им¬
пульса скорости зависит только от радиуса орбиты и достигает
максимума в ее перигее.
Одноимпульсный маневр не изменяет величины периода обра¬
щения, если ориентация управляющего импульса скорости выбра¬
на из условия
sin Х+е sin(X+'fl') =0,
. е sin ft
откуда имеем ^л3,4— •
1 + е cos ft
Используя (5. 50), получаем
tgX3,4=— tg80
или Аз, I——0о+&л.
Эти значения углов соответствуют направлениям нормальных им
пульсов скорости. Изменения параметров орбиты при этом вари
анте управления можно рассчитать по формулам (5.7) ил1
(5. 17) — (5.21).
При конечной величине управляющего импульса скорости Д1
период орбиты после маневра определяется из (5.37). Направ
ление имшульса AV, при котором период обращения сохраняете!
неизменным, связано с величиной этого импульса, начально!
скоростью и углом 0о зависимостью
л о , / л । . ДК \
л, 4 = 0О + k arcsin —— ,
1,4 2 0 - ( 2 1 2V0 /
в которую fl следует подставлять со своим знаком (рис. 5. 13)
6* 3430
149
Рис. 5. 13. К определению
углов ориентации им¬
пульса скорости не изме¬
няющего периода обра¬
щения
Угол между вектором скорости после маневра Ук и местным
горизонтам в точке маневра в этом случае равен
од, • AV
% + arcsin .
0 - 2 70
Управление фокальным параметром р
Величина фокального параметра
практически полностью определяет
угловую скорость прецессии орбиты
в несферичном поле тяготения [5].
Вследствие этого ее регулирование не¬
обходимо для синхронизации прецес¬
сии плоскостей орбит КА в системах.
При малых величинах управляю¬
щих импульсов скорости изменение
фокального параметра характеризует¬
ся уравнением (5.33).
Максимальная эффективность
управления фокальным параметром
в фиксированной точке орбиты соот¬
ветствует условию
<ЭХ \ дУ /
Применив его к уравнению (5.33),
получаем
д f др \ 2 , / а3(1 —е2)3 . л
дХ \ дУ / 1 + е cos 8 у К
откуда для направлений М, Х2 импульса скорости, обеспечиваю¬
щих максимум эффективности управления, имеем
COSAi,2 = 0
и,следовательно,
Х2 = ТЯ- (5'53)
Таким образом, наибольшая эффективность управления фо¬
кальным параметром достигается при создании горизонтальных
импульсов скорости. Можно показать, что импульс, направлен¬
ный на увеличение скорости полета, всегда увеличивает фокаль¬
ный параметр, тормозной импульс всегда уменьшает его.
Исследуем, как зависит эффективность управления фокаль¬
ным параметром от положения точки маневра на орбите при
условии (5. 53). Подставим (5. 53) в (5. 33):
dp= 2 1/д3(1~е2)3 dV (5. 54)
1 + е cos 8 у К
150
и возьмем частную производную этого выражения по истинной
аномалии точки маневра б:
д / др \ 2е sin ft / ал (1 — е2)3 ,г гп
~д»~ 7— (1+, ecos »)2 |/ '
Приравняв (5.55) нулю, получаем для экстремумов функции
(5. 54) условие sin б!, 2=0 или 61 = 0; б2=л.
Подставляя эти значения в (5.54), получаем для апогея ор¬
биты
/ dp \ 2 /~ а3 (1 — е2)3
1-е У К
для перигея
7 dp \ _ 2 /~ д3(1 —ё2)3-
\ dV 1,“1 +е у К
Отсюда приходим к заключению, что максимальная эффектив¬
ность управления фокальным параметром имеет место при со¬
вершении маневра в апогее исходной орбиты. При значительных
величинах управляющих импульсов скорости фокальный пара¬
метр после маневра может быть рассчитан по формуле (5.43).
Управление эксцентриситетом орбиты е
При движении КА по круговой орбите ее радиус г, скорость
движения V, угол наклона вектора скорости к местному горизон¬
ту 0, угловая скорость « радиус-вектора КА постоянны. Эксцен¬
триситет такой орбиты равен нулю. Увеличение эксцентриситета
приводит к изменению радиуса орбиты в различных ее точках
и появлению неравномерности угловой скорости со. С ростом
эксцентриситета орбиты эти отклонения от среднего движения
увеличиваются. В системах КА могут существовать ограниче¬
ния отклонений движения от кругового и отклонений взаимного
положения КА от заданного. В связи с этим возникает необходи¬
мость управления эксцентриситетом орбиты.
Как и период обращения, эксцентриситет может регулиро¬
ваться в любой точке орбиты. Эффективность управления им
также зависит от выбора точки маневра и направления импуль¬
са скорости. Мерой эффективности управления здесь также яв¬
ляется изменение эксцентриситета на единицу создаваемого им,-
пульса скорости. Эту характеристику можно определить в общем
виде из уравнения (5. 34):
_де_= / аЦ-е^ Г * + cos ft/ + 1 5 5б)
dV |/ К | 1 + е cos ft J
Найдем углы ориентации Xi,2 управляющего импульса ско¬
рости dV, соответствующие максимуму эффективности; управле-
6**
151
Рис. 5. 14. Характерные направления
импульсов скорости dV при изменении
эксцентриситета орбиты
ния эксцентриситетом в фиксированной точке орбиты. Прирав¬
нивая нулю частную производную (5. 56) по X
д ( де \ , Га (1 — е2) Г е + cos 8 , ,, , „
=1/ — —- cos Х4- Sin (Х4- 0) = 0,
д\ \dV ) у К L 1 + е cos 8 1 J
получим
tgX1>2 = —— — - + cos&). 5.57
Из формулы (5. 57) следует, что экстремальных углов два;
направления вектора dV для них противоположны, а величины
de/dV одинаковы. Укажем на¬
правления Х3,4, при которых
малый импульс скорости
dV не изменяет эксцентри¬
ситет орбиты. Они соответ¬
ствуют условию de[dV = 0 или,
из (5. 56)
sin X+sin (лн-«) = 0,
1 + е cos 8
откуда
., sin 8
tg 4b 4 О
е + cos 8
+ cos 8
1 + е cos 8
(5.58)
Сравнивая (5.57) и (5.58), на¬
ходим, что
- , я
3,4 Л1,2 ± 2 •
Характерные направления управляющих импульсов скорости
Xi,2, з, 4 можно наглядно показать на сетке линий равного экс¬
центриситета (рис. 5. 14). Углы Хз,4, при которых эксцентриситет
сохраняется неизменным после одноимпульсного маневра, опре¬
деляют направление касательной к линии e=const для эксцент¬
риситета исходной орбиты. Углы Xi,2 указывают направления,
перпендикулярные к этой касательной.
Определим оптимальное управление эксцентриситетом. Для
этого преобразуем уравнение (5. 56) к виду
де /"а (1 — е2) / е + cos 8 . . , . , п , „ . • а \
I / — sin X 4- sin X cos v 4- cos a sin v =
dV У К k 1 + e cos 8 /
= л f —еЧ Г/ e + cos 8 1_ cos $ \ sjn x_|_ cos x sjn
I/ К Lk 1 +«cos 8 / J
152
и подставим в него из (5. 57) величину
е + cos ft i Q . a , ,
к COS » = sin vtgX.
1 + e cos ft
Преобразуем полученное выражение:
g^~g2\tgXsin Xsin tf-|-cosXsin 9)=
= 1 / , / 1+ e + cosft_/ e + cos ft + 2 CQS (5. 5g)
|/ К у 1 + e cos ft \ I + e cos ft /
Чтобы выяснить зависимость эффективности управления экс¬
центриситетом от положения точки маневра на орбите, возьмем
частную производную от (5. 59) по истинной аномалии О:
д / де \ / а (1 — е2)'/
"aft" ' "дУ )— у К /Хч
д / е + cos ft \ / е + cos ft \ е + cos ft
—— ( I — + cos ft — sin ft
dft \ 1 + e cos ft 1 \ 1 + e cos ft)1 + e cos ft
/ e + cos ft / e + cos ft „ \
I / 1 + — -I — — + 2 cos ft)
У 1 + e cos ft \ 1 + e cos 8 /
В этой формуле
д , е + cos ft X (ео ~~ 9 sin 8 ,5 61 х
dft ( I + e cos ft J (1 + e cos ft)2
После подстановки (5.61) в (5.60) получаем
д ( де X f а (I —
"дГ \’dF) ~ у К
X sin ft [е2 cos3 ft + Зе cos2 ft — (3 — e2) cos ft — e3 — e2 + 2e]
/e + cos 8 i e + cos 8 \
1 + ( + 2 cos 8)
1 + e cos ft \ 1 4- e cos 8 }
Приравняв эту производную нулю, находим четыре экстремаль¬
ные точки на орбите. Две из них соответствуют условию sinO=
= 0, или 04,2=0; л. Две другие точки определяются действитель¬
ным корнем уравнения
e2cos3O+3e cos2O — (3 — e2)cosO' — е3 — е2+2е=0.
Значение этого корня зависит от величины эксцентриситета ор¬
биты. При е<0,1 он близок нулю. В соответствии с этим для
малых значений е
а л . 3
34 2 2
153
Первые две экстремальные точки совпадают с апсидами орбиты.
Подставляя в (5.59) значения 61,2, можно найти, что в апсидах
орбиты эффективность управления эксцентриситетом одинакова
и равна
(£)..г2/^-
Для второй пары экстремальных точек можно получить соотно¬
шение
—=1/ — (1-.е2)/ТТ72.
dV у К k ' г т
Поскольку/1-)-е2 О 2, то, следовательно, управление эксцент¬
риситетом орбиты целесообразно выполнять в ее апсидальных
точках. При конечной величине управляющего импульса скоро¬
сти расчет эксцентриситета орбиты после одноимпульсного ма¬
невра может быть выполнен по более точной формуле (5.44).
Величины других параметров орбиты после одноимпульсного ма¬
невра изменения эксцентриситета могут быть определены по фор¬
мулам (5.31) — (5.35) и (5.41) — (5.45).
Управление положением линии апсид
Изменять положение линий апсид в плоскости орбиты тре¬
буется в случаях, когда положение перигея или апогея не соот¬
ветствует заданному или необходимо изменить характер относи¬
тельного движения КА в системе.
Рассчитать новое положение линии апсид после одноимпульс¬
ного маневра можно, используя формулу (5.35) или (5.45).
Найдем направления М.г импульса скорости, соответствующие
максимуму эффективности управления положением линии апсид.
Для этого преобразуем (5. 35) к виду
— =1/ — (1-е2) X
dV у К
У sin X sin ft—(1—ecos ft) cos X cos ft + (1 — e cos ft) sin X sin ft
1 + 2e cos ft + e2
Za (1 — e2) (2 — e cos ft) sin X sin ft—(1 — e cos ft) cos X cos ft ,c
У К 1 + 2e cosft + e2
Затем возьмем чаЬтную производную от этого соотношения по
углу ориентации импульса X и приравняем ее к нулю
д I dft \ / я (1 — g2)\z
’’дхДЙН7/ у К
у (2—е cos ft) cos X sin ft — (1 — e cos ft) sin X cos ft q
1 + 2e cos ft + e2
154
Это условие выполняется при
sin X cos 0 (1 — е cos 0) = — (2 — е cos &) cos X sin $,
откуда следует
tgXi,2=- 2-gcos* tg». (5.63)
1 — e cos 8
Используя (5.63), получаем из (5.62) формулу для опреде¬
ления эффективности управления положением линии апсид в лю¬
бой точке орбиты при наиболее рациональном направлении им¬
пульса скорости dV\
— (1 — е cos 8)tg X
, sin X sin 8 — (1 — e cos 8) cos X cos 8
58 tg8 vz
dV 1 + 2e cos 8 + e2
Xi / —e2)= — (1~ecos»)cos8 Гу j । t 2x=
К 1 + 2e cos 8 + e2 |/ К
= 1/ — U-e2)X
1 + 2e cos 8 + e2 |/ К
XK(1 — ecos &)2 + (3 — 2e cos 0) sinaf> = (1 — g2) X
у | g cos ft -| sin 2 ft)2 — sin2 8 cos2 8
1 + 2e cos 8 + e2
Можно найти углы X3p 4, при которых одноимпульсный маневр
не изменяет положения линии апсид в плоскости орбиты. Эти
случаи соответствуют условию d'&/dV=0. Применив его к (5. 62),
получаем
(2 — geos 0)sin Xsin ft=(l — geos ft) cosXcosft,
откуда tgXa,4=ctg& i~CCOiY . (5.65)
2 — e cos ft
Сравнивая (5. 63) и (5. 65), нетрудно установить, что
tg Х3,4 = - Ctg Х1(2
и, следовательно,
Ч,4=Л.2 ±^~-
Направления, характеризуемые углами Xi, 2,3,4» наглядно изо¬
бражаются на сетке линий равных истинных аномалий (рис.
5. 15). Углы Хз, 4 соответствуют двум противоположным направ¬
лениям, совпадающим с касательной к линии ,&=const при рас-
155
Рис. 5. 15. Характерные направления
импульсов скорости при управлении
положением линии апсид
четных параметрах исходной орбиты в точке маневра. Углы Xi, а
указывают направления, перпендикулярные к этой касательной.
Определим точки орбиты, в которых при наивыгоднейших
направлениях Xi,2 импульса скорости эффективность управления
положением линии апсид достигает экстремальных значений.
Приравняем нулю частную производную от (5. 64) по истинной
аномалии точки маневра б:
д [ \ f а .. Г” д ч/
1=1/ —(1 — е2)—X
<?» \ dV ) [/ К v 7 dft 74
yz / К(1 — cos ft)2 + (3 — 2е cos ft) sin2 ft \ g
\ 1 + 2e cos ft + e2 J
Отсюда получаем условие наличия экстремумов
2е sin & [(1 — е cos б)2 -|- (3 — 2е cos б) sin2 б] =
= sin б0 [Зе cos2 б + (е2 - 3) cos б — 2е] [ 1 + 2е cos б + е2]. (5. 66)
Из соотношения (5.66) имеем
четыре значения истинной ано¬
малии б, соответствующие
экстремумам эффективности
управления положением линии
апсид. Два значения получаем
из условия
sin 61,2 = 0
или
б, ,2 = 0; л.
Вторую пару значений истин¬
ной аномалии находим после
преобразования (5.66) к фор¬
ме
2е2 cos3 б Зе (1 + е2' cos2 б -|-
-|-(е44-2е3— 3^со4б — 2е(5-|Х
+ е2) = 0.
Действительный корень этого уравнения зависит от эксцентри¬
ситета орбиты. В табл. 5. 1 приведены некоторые его приближен¬
ные значения и соответствующие им истинные аномалии.
Таблица 5. t
е
0
0,01
0,10
COS ft3,4
0
—0,033
—0,334
бз,4
90°; 270°
91’54': 268’06'
109’30'; 250’30'
156
Подставляя найденные значения 01,2, з, 4 в (5. 64), вычисляем,
что в перигее орбиты
/ д& \ 1 — е /д(1 —е2)
Л (1+е)2 У К
D / <Э8 \ 1 + е /’а(1 — е2)
В апогее | = 1/ —
к дУ /а (1 - е2) У К
Для второй пары экстремумов при малых эксцентриситетах
орбиты (&34^л)
I дЪ \ 2 / а (1-е2)
Uv 'з,4~ I + е2 у К
При конечной величине управляющего импульса скорости из¬
менение положения линии апсид в плоскости орбиты может быть,
определено с помощью формул (5.40) или (5.45). Изменение
других параметров движения в этом случае может быть рассчи¬
тано по формулам (5.36) — (5.39) или (5.41) — (5.44).
Управление высотой апсид
Существует ряд причин, обуславливающих необходимость
регулирования апсид. Если высота апогея орбиты не должна пре¬
вышать некоторых пределов, величина которых ограничена уров¬
нем космической радиации или максимальной дальностью дейст¬
вия бортовой аппаратуры, то от высоты перигея зависит про¬
должительность существования КА на орбите.
При известных величинах большой полуоси и эксцентриситета
исходной орбиты радиус ее перигея гп рассчитывается по фор¬
муле
гп=а(1 — е).
Используя полученные ранее соотношения, можно найти зави¬
симость изменения радиуса перигея от величины dV и направле¬
ния X малого управляющего импульса:
drр drI, да ■ дг,, де . , да де
~dV~ да ~дУ~' д~е дУ ' дУ дУ
Подставляя сюда из (5.31) и из (5.34) получаем
4;7- = 2 (1 — е)\/~— [sin ХЦ-е sin (Х-|-&)] —
дУ v У К(1 —е2)1 1 v । 'J
- У |2+«(1 + cos 41 sin k- sin » cos X] .
(5. 67'
157
Определим направления Ai, 2, при которых эффективность уп¬
равления перигеем достигает максимальной величины в фикси¬
рованной точке орбиты
_д_ / дгп \ Ла3(1 —е)3 f I — cos 8
д\ \ dV J у К (1 + е) ( 1 + е cos 8
X [2-|-е (14-cos 0)] cos Х-|- sin Я sin xj = 0,
откуда
tg X, 2 = - 2 + g(1 + cos . (5. 68)
l+ecos8 sin 8
Подставим эту величину в (5. 67) и выявим, как зависит эффек¬
тивность управления перигеем от положения точки маневра на
орбите
(дг„ \ / а3 (1 — е)3 . । а
М,.,= ± |/ к<1 + .) (tgXsln 8 s,n А+sl" ’ с“ Ч=
= +]/5E2l/f+tpxsin9= + ,/2i£=^x
-у Х(1+е) Б -у X(l+e)zx
х 1 /sin2a+(^-±cos*)[2 + e(1 + c^ . (5. 69)
у 'I 1 + е cos 8 J v
Исследование уравнения (5. 69) показывает, что экстремальные
значения эффективности управления перигеем достигаются при
условии
sin '0'1,2=Ал, А=0, 1,...
т. е. в апсидах орбиты. При этом в перигее орбиты
=о.
k 0V )„
Действительно, если одноимпульсный маневр в перигее не при¬
водит к повороту линии апсид, то величина перигея не может
измениться, так как не меняется радиус точки маневра. Это поло¬
жение сохраняет силу пока при маневре радиус второй апсиды
превышает радиус точки маневра.
Если управление перигеем осуществляется из апогея, то эф¬
фективность управления достигает максимального значения
/ dru X =4 /д3 (1 - е)
\дУ )а у /<(1+е)’
Таким образом, изменение радиуса перигея орбиты наиболее
целесообразно осуществлять созданием импульса скорости в ее
апогее. Направление импульса, как это следует из (5. 68), долж¬
но быть горизонтальным.
158
Отметим одну особенность формулы (5. 67). Для перигея она
•становится неопределенной. Применив известные методы раскры¬
тия неопределенности, можно выяснить, что для перигея углы
Xi, 2 равны 0 или л.
Физический смысл этого решения состоит в том, что радиаль¬
ный импульс скорости изменяет направление линии апсид. При
этом перигей уходит в другую точку орбиты, радиус которой
меньше радиуса точки маневра независимо от того вверх или
вниз направлен радиальный импульс скорости. От направления
импульса здесь зависит только направление смещения линии
апсид.
Эффективность такого метода управления перигеем значи¬
тельно меньше, чем при создании горизонтального импульса в
перигее.
Из уравнения (5.67) можно найти направления Хз, 4, при ко¬
торых импульс скорости не меняет радиуса перигея. Положив
drn/dV=0, имеем
= sin ft (1 + ecos ft) _ (5. 70
3,4 (1 — cos ft) [2+e (1 + cos ft)] k
Сравнивая уравнения (5.68) и (5.70), видим, что направления
Х1.2 и Хз. 4 взаимно перпендикулярны. На сетке линий равных
радиусов перигеев направления Хз, 4 соответствуют касательным
к этим линиям в точках маневров, а направления Xi,2 — перпен¬
дикулярам к этим касательным (рис. 5. 16).
Аналогично можно получить подобные уравнения для регу¬
лирования ашогея орбиты:
га=а(1--Н),
дгя дгя да , дгя де ,, . ч да , де
dV да dV де dV k 1 ’ dV 1 dV
/ a (1 + e)3 ( I + cos ft ro ... лм • i i - a d
= 1/ [ [2 — e(l — cos6) sin X4-sin v cos XI.
у К (1 — e) I 1 + ecos ft 1 k 'J 1 J
Направления импульса скорости для максимальной эффективно¬
сти управления апогеем определяются из уравнения
. (1 + cos ft) [2—е (1 — cos ft)]
1,2 sin ft (1 + e cos ft)
Наибольшая эффективность управления апогеем достигается при
подаче горизонтального импульса скорости в перигее орбиты:
/' дгя \ = 4 Xа3(1+е)3_^ / д3(1 + е)в
I dV )„ 1 + еу К(\~е) |/ К (1-е)'
159
Малый импульс скорости не меняет радиуса апогея, если его на¬
правление X соответствует условию
sin ft (1 + е cos 8)
° 3,4 (1 + cos 8) [2—е (1 — cos 8)] '
Рис. 5. 16. Характерные направления
импульсов скорости при управлении
перигеем
Рис. 5. 17. Характерные направления
импульсов скорости при управлении
апогеем
Направления Xi,2 и Х3, 4 взаимно перпендикулярны и также ори¬
ентированы по касательной к линиям равных апогеев (Х3,4) и
перпендикулярам к ним (Х1,г) в точке маневра (рис. 5. 17).
Переход в заданную точку плоскости исходной орбиты
Переход с орбиты в заданную точку ее плоскости может быть
выполнен из любой точки этой орбиты по бесчисленному множе¬
ству траекторий.
Рассмотрим основные свойства траекторий перехода при за¬
данных радиусах начальной Г\ и конечной г2 точек перехода и
геоцентрическом угле между ними АФ. Параметры траектории
перехода в начальной и конечной ее точках могут быть записаны
в виде
Гл = ; г2 = , (5.71)
1 + е cos 8[ 1 + г cos (8л + Д8)
где ■От — истинная аномалия начальной точки на траектории
перехода. Из уравнений (5.71) определим эксцентриситет е и
фокальный параметр этой траектории в функции начальных ус¬
ловий и истинной аномалии От:
Tj(l -)-е cos ^) = г2 [1 -\-е cos/^-f- дО)].
160
Преобразуем полученное выражение
ri + г\е cos б = г2 + гге cos $1 cos Дб — r2e sin бх sin Дб,
откуда
1-^
е = . (5. 72)
(—— — cos Aft | cos ftj + sin Aft sin fti
Г2 J
Подставляя (5.72) в (5. 71), получаем
/ \
p=ri 1+ - . (5. 73)
\ —— — cos Aft + sin Aft tg ftj J
\ r 2 J
Решим уравнение (5.3) относительно V и подставим в получен¬
ное выражение (5. 73)
v —. / Л Р— =
|/ Г2 COS2 61
= I f f 1 + —~■ (5. 74)
■/ /"i cos I /i- —cos д»+sin Afttg»! I
’ \ r2 /
Преобразуем соотношение (5. 50) с помощью (5. 72) к виду
( — — cos Aft j ctg fti + sin Aft
ctg 61 = . + ctg 6j=a/2 : P
e sin fti r\
Г2
$ (1—cos Aft) ctg &i + sinAft
1-^
Г2
it получим
tg 6, = _LzCos_Aft (5 75,
(1 — —— | ctg 6[ — sin Aft
\ Г21
161
Рис. 5. 18. Вид годографа скорости
перехода
Подставим (5. 75) в (5. 74) и упростим полученное выражение
X н =
/Г „ I — cos Д8
— — cos Д8 4- sin Д8
Го / Г] \
I 1 — — I ctg 01 — sin Д8
\ А /
= /~ 1 ~ cos (5.76)
1 / К Г гх ]
|/ — — cos 0j—cos (Д84-01) cos 0i
у n L A J
Уравнение (5. 76) связывает между собой величину Vi и на¬
правление 01 скорости КА в начальной точке траектории пере¬
хода при известных гь г2 и
АФ. Следовательно, оно пред¬
ставляет собой уравнение
годографа начальных скоро¬
стей перехода из точки г\
в точку г2. Примерный вид
такого годографа показан на
рис. 5. 18.
Годограф скоростей пе¬
рехода имеет некоторые ха¬
рактерные свойства. Он сим¬
метричен относительно бис¬
сектрисы угла, образованно¬
го местной вертикалью ОА
в начальной точке перехода
и прямой АВ, соединяющей
граничные точки перехода.
Направлению этой бис¬
сектрисы соответствует ми¬
нимальная величина началь¬
ной скорости перехода. Обе
ветви годографа асимптоти¬
чески стремятся к бесконечности. Асимптотами являются ука¬
занные выше прямые ОА и АВ.
Для эллиптических орбит максимальная величина начальной
скорости перехода ограничена местной скоростью освобождения
Коев в начальной точке. Соответственно этому ограничен диапа¬
зон начальных углов перехода 9 ь Длительность перехода между
162
заданными точками ДА,2 определяется по уравнению Эйлера —
Ламберта
а3/2
Д/,2 = 4 —/ = —sin Е] ,
где *К (5.77)
Е=2 arctg (|/ tg A).
Существуют различные пути расчета времени перехода с по¬
мощью этого уравнения. Например, один из возможных способов
состоит в том, что задают истинную аномалию 6( начальной точ¬
ки на орбите перехода, затем по приведенным выше формулам
(5.72), (5.73) и (5.77) рассчитывают величины эксцентриси¬
тета е, фокального параметра р и эксцентрической аномалии Е„
находят величину большой полуоси, пользуясь формулой
Р
а~ 1 - е2 ’
и, подставляя полученные величины в (5.77), находят время
перехода.
Объем промежуточных вычислений можно заметно сократить,
если привести уравнение Эйлера — Ламберта к функции гранич¬
ных условий перехода и направления 0, вектора начальной ско¬
рости перехода. С этой целью запишем уравнение перехода из
конечной точки в начальную в том же направлении, что и в фор¬
муле (5. 76):
У Г к 1 — cos (2л — Aft)
2 "I / Гч cos2 flo г2
I/ — — cos (2л — Aft) + sin (2л — ДО) tg 02
/~ К 1 — cos Aft
"1 / г2 cos2 02 г2 . „
1/ — — cos Дй — sin Aft tg 02
F r 1
и преобразуем его к виду
iz плп а ГI/ 1 — Cos Aft
Г21Г2 COS 62=^ / /Ст 2 -
I/ —-—cos Aft-f- sin Aft tg 02
Из уравнения (5.76) получим аналогичное выражение:
^1» 1 COS Oj— j j\ Г.
I/ .—-—cos Дб+sin Aft tg Oi
r <2
163
Согласно второму закону Кеплера
r1V1 cos b1 = r2V2 cos 02.
Следовательно,
— — cos д& — sin д& tg 02 = — ( — — cos д^+sin д$ tg 0t 1 ,
П ri \ )
откуда имеем
tg02=(^-l)ctg^-^tg01. (5.78)
\ Г\ / 2 Г1
Выполним следующее преобразование:
Е , /~ 1 — е , _L
2tg 2 () J/ I + e g 2
e sin E = e = 2e =
. E 1 — e ' 8
1 + tg2 — 1 + tg2 —
8 2 1 + e 8 2
= /Т^Т2 ——= I / J- tg 0. (5. 79)
1 + e cos 8 у a
В соответствии с двумя последними выражениями
е sin Е2 — е sin Ег = \/ -Д (tg 02 —tg 0J =
у а
= |/ — [(—_1)ctgT-(~ + 1) tg01l-
у а [Л ri J 2 \ n / J
Разность эксцентрических аномалий представим в виде
^-£,=2^(1/ l^tg-^)-arctg (j/-
/ 81 -I- Д8 81 \
„ |/ ——«т
= 2arctg
1 — е 81 + Д8 81
1 ч tg tg —
1 + е 8 2 8 2
, Д8
у 1 — е2 sin —
= 2arctg
Д8 I Д8 \
cos — + е cos 1^81 + — 1
=2arctg —м _
ctg (I + е cos 81) — е sin 81
= 2arctg . (5. so)
(△v \
Ctg Ctg 6 — 1 j
164
Преобразуем входящее в (5. 80) отношение
f 1 1 _
е sin 8i е2 sin2 8! sin2 8i
/ i — — cos Д8) ctg 8i + sin Д8
= 1/ ~ - Ctg2 - 1 =
' _ 1 r2
/ 2 77i \ ( T\\ ~ 2 sin Д8 /ri \
V x
’ Г2
yX ctgOj—1 =
= 1/—(l + ctg2-^-)ctga ©i— (ctg ^-ctg 0J- l)2
и подставим полученное в (5. 80):
/Г] / Д& \ / Д$ \2
1 + Ctg2— ctg2 01— Ctg —Ctg0i—1
Го \ 2 / \ Z J
n2-n1 = z arcig - =
ДО
Ctg —ctg 01— 1
= 2 arctg "I / — 1 =
■/ / Д8 . Д8 \2
F (Cos 2 ~ S'n 2 )
o Г f r2 [ Д8 Д8 . д \
= 2arccos |/—(cos sin — tg0, .
У Г1 \ 2 2 J
В итоге получаем формулу для расчета времени перехода
в виде
ДЛ,а=^(2arccos Гi/^-^-sin (ctg tg 01')]+
V К ( у Г1 2 2 }
+1/— [ctg V + tg01 - — (ctg V- fg 01)1 ■
1/ a L 2 ri \ 2 /j
165
Большую полуось для этого уравнения находим из (5, 1), коэф¬
фициент при втором слагаемом — из (5. 1) и (5.3):
V а V К \ К. !
Г»
Величина —— определяется из уравнения (5.76):
К
1 — cos Aft
к \ ‘
( — + sin Aft tg 0! — cos Aft 1 cos2 0j
\ r2 )
Рис. 5. 19. К расчету импульса скорости ДИ
для перехода в заданную точку орбиты
При известных параметрах движения КА на исходной орбите
в начальной точке перехода и 0О импульс скорости для пере¬
хода АУперех рассчитывается по формуле косинусов (рис. 5. 19):
ДV = V+ cos(01 —0О). (5.81)
Изменяя направление управляющего импульса скорости, можно
регулировать время перехода в широких пределах.
Направление импульса AVi определяется по формуле
X = arctg ■ Vi sin I1 ~Xo_sin_BO-. (5. 82)
Kj cos 0] — Vo cos 0q
Квадрант, в котором находится угол %, определяется по знакам
числителя и знаменателя правой части уравнения (5.82).
166
Одноимпульсная плоская коррекция периода обращения Т
и фокального параметра р орбит КА в системе
Выше было установлено, что для сохранения положения КА
в системах в заданных пределах относительно других КА и Зем¬
ли необходимо постоянно поддерживать близкими к заданным
значениям величины периода орбиты Т и ее фокального пара¬
метра р. Обе эти величины при выводе КА на орбиту и последу¬
ющих ее коррекциях реализуются с некоторыми ошибками.
Поэтому их требуется периодически регулировать. Выше указы¬
валось также, что задача коррекции любого одного параметра
орбиты имеет бесконечное множество решений. Однозначное ре¬
шение получается при заданных значениях после коррекции двух
взаимно независимых параметров орбиты. Поэтому удобно и це-.
лесообразно корректировать величины Тир совместно.
Пусть известны фактические параметры орбиты Т и р й тре¬
буемые Тд и рд. Предположим, что их разности
6Т=Т — Тд (5. 83);
и бр=р — рд (5.84)
настолько малы, что возможна коррекция с применением малых
импульсов скорости. Для расчета такой коррекции применимы
уравнения (5.32) и (5.33). Чтобы привести параметры факти¬
ческой орбиты к заданным значениям, требуется изменить их со¬
ответственно на величины
dT=—6T,dp=—6р. (5.85)
Для определения величины ДУ и направления А управляющего
импульса скорости решим совместно уравнения (5. 32) и (5.33)3
sinX + eo sin (Х + 80) + cQs & } бла2 / К ОТ.
sin X v -° 2К у до(1 — ео) dP
и далее
sin X + е0 sin X cos 80 + е0 cos X sin 80 (। g cos $ )_
sin X
Up oTCflg
(1+ <?оcosctgAsin &0)(l + e0cos&0)=-^1/ ,
UJIr V UQ Up
откуда
. 1 Г 1 ] /" К (г— eg)3 dT . ч
Cg е0 sin 80 Зл (l+e0cos 80) у а0 dp £ COS 0
(5. 86)
Подставляя (5. 86) в (5. 33), получаем формулу для расчета dV:
= 1 + е0 cos % Z /< (1 + ctg2 Xf
2 у '
167
Одноимпульсная коррекция возможна, когда фактическая и за¬
данная орбиты пересекаются. Это условие математически запи¬
сывается в виде
г=г0; (5.87)
» = &0 + дШ) (5.88)
где Асо — угол между направлениями на перицентры фактической
и заданной орбит.
•Используем известные уравнения
г = , е = 1/1-^=1/l-p(-^L-f/3, (5.89)
1 + ecos ft |/ а у \У КТ ) '
где г, р, е, а, Т — параметры некоторой орбиты. Систему урав¬
нений (5. 87) и (5. 88) можно свести к равенству
/ 2л \2/з ~ / / 2л \2/з '
1 “ Р \dKf) cos 9 1 + |/ 1 ~ Ро (/77 } cos + Д9)
Р Ро
(5.90)
решение которого приводит к следующему результату:
//——1 ——1/1 —— \
sin2 Aft—I — р * -+cosAft |х
\ ' У
tg-|-= Л - -° :
Ро — 1 - Ро 1 / 1 _ р
р р V а
+ cos ft
l/1-— -
у ао
X I Р—У. COS Aft
\ 1/ 1-— /
\ у а0 J
Р Р V а
+ cos ft
1/1-—
У ао
Точка пересечения орбит существует, если выражение под
корнем в числителе правой части этого уравнения неотрицатель¬
на
Рис. 5. 20. Схема двухимпульсного
межорбитального перехода:
/—исходная орбита; 2—конечная орбита;
3—переходная орбита
но. Отсюда получаем математическую формулировку условия
возможности применения одноимпульсной коррекции:
j Ро I Ро । V / Ро \2 / । Р \ । 2 \/
X р / \ Р / \ а/ р
Я)СО5д8- (5-91)
5.6. ПЛОСКИЕ ДВУХИМПУЛЬСНЫЕ МАНЕВРЫ
При управлении движением КА в системах двухимпульсный
плоский маневр может применяться для решения двух видов за¬
дач: перехода на новую орбиту и фазирования КА.
Переход на новую орбиту с применением двухимпульсного
маневра выполняется в тех случаях, когда конечная и исходная
орбиты не имеют общих точек.
Фазированием КА называется
изменение его истинной анома¬
лии («фазы») на заданной ор¬
бите в заданный момент вре¬
мени. При этом изменяется
время прохождения КА всех
точек конечной орбиты. По¬
этому фазирование обычно вы¬
полняется путем изменения
времени движения КА между
двумя заданными точками,
одна из которых принадлежит
исходной, а другая — конечной
орбите.
Поскольку перелет между
двумя заданными точками
центрального поля тяготения
может осуществляться по бес¬
численному множеству траек¬
торий с различным временем
движения, переход на новую орбиту часто совмещается с фази¬
рованием КА, т. е. с выбором длительности перехода, обеспечи¬
вающей прохождение конечной точки маневра в заданное время.
Требуемая длительность перехода определятся из соотношения
△^1,2 = ^в (5.92)
где /],2 — длительность перехода между заданными точками ис¬
ходной и конечной орбит; tA — время прибытия КА в начальную
точку перехода A; tB — заданное время прибытия КА в конеч¬
ную точку перехода В (рис. 5. 20).
Фазирование при двухимпульсном переходе на новую орбиту
может осуществляться не только путем выбора времени пере¬
7 3430
169
хода и соответствующей ему траектории, но и включением
в состав траектории полета управляемого КА дополнительного
одного или нескольких целых витков орбиты перехода (см.
рис. 5. 20). Выбор орбиты перехода при этом определяется усло¬
вием:
Ni,2 = T в Тк пТф, (5.93)
где п—число дополнительных целых витков орбиты перехода,
используемых для фазирования; Т$ — период орбиты перехода.
Фазирование как самостоятельный маневр имеет место, когда
; исходная и конечная орбиты совпадают. В этом случае траекто¬
рия фазирования состоит из целого числа витков, и расчеты по
фазированию заметно упрощаются. Изменение момента прохож¬
дения конечной точки маневра Л/ф при этом рассчитывается по
формуле
Д/ф=п(7’ф-7’о), (5.94)
где То — период исходной орбиты; п — число фазирующих вит¬
ков.
Рассмотрим более подробно перечисленные виды маневров.
Плоский двухимпульсный
межорбитальный переход
В качестве начальных условий плоского двухимпульсного
межорбитального перехода всегда известны по два взаимно неза¬
висимых параметра для начальной и конечной орбит и угол
между направлениями на их перицентры. Кроме того, могуг
быть заданы дополнительные условия: положение начальной
точки перехода на исходной орбите; положение конечной точки
перехода на заданной конечной орбите, время прибытия в задан¬
ную точку конечной орбиты или длительность перехода между
фиксированными точками начальной и конечной орбит. Во мно¬
гих случаях к межорбитальному переходу могут предъявляться
и другие требования, например, требования минимизации затрат
топлива или времени на его осуществление.
Наиболее просто задача межорбитального перехода решается,
когда заданы только начальная и конечная орбиты граничных
точек перехода на них. В этом случае траектория перехода мо¬
жет выбираться свободно с учетом лишь общих ограничений ус¬
ловий перехода. К их числу относятся ограничение максималь¬
ной начальной скорости перехода величиной местной скорости
освобождения и максимально допустимым временем перехода,
когда КА движется через апогей орбиты перехода, и ограничение
минимального радиуса перигея орбиты перехода, допустимого по
влиянию атмосферы, когда переход выполняется через перигей
его траектории.
Предположим, что заданы большие полуоси а0, ак и эксцен¬
триситеты е0, ек начальной и конечной орбит, между которыми
170
осуществляется переход, угол Асо между направлениями на их
перицентры и истинные аномалии граничных точек перехода на
обеих орбитах 6о и 6К (см. рис. 5.20). Тогда параметры движе¬
ния по исходной и конечной орбитам в граничных точках пере¬
хода рассчитываются по формулам (5.22) — (5.26). Затем вы¬
бирается направление б t начальной скорости перехода Vi, рас¬
считывается ее величина по формуле (5. 76) и величина импуль¬
са скорости AVi для перехода в заданную точку конечной орбиты
по формуле (5. 81). Величина скорости прибытия КА в эту точку
наиболее просто определяется с помощью уравнения (5.1) из
соотношения
2 — 1/2 = 21/2, (5.95)
Г1 г2
откуда I/2 = | f l/2-|-2/cf—
у \ г2 ri 1
Направление 02 скорости прибытия У2 в конечной точке пере¬
хода определяется из уравнения (5.78). Величина импульса ско¬
рости АГ2 необходимого для перехода на заданную конечную
орбиту, рассчитывается по формуле (5.81), в которую вместо
Vo, Vi, 0о и 01 подставляют величины У2, Гк, 02 и 0К.
Направления управляющих импульсов скорости AVi, ДГ2 оп¬
ределяются с помощью формулы (5. 82).
Оптимизация маневра по расходу суммарного импульса ско¬
рости в этом случае выполняется численными методами при
варьировании углами 0ь
Двухимпульсный маневр для управления движением КА в си¬
стеме выполняется при обязательном условии вывода КА в ко¬
нечную точку перехода в заданное время. При этом условии не¬
обходимая величина и направление импульса скорости АГ] в
начальной точке перехода определяется также численными мето¬
дами варьированием по 0 j для времени перехода АЛ, г, заданного
условиями (5.92) или (5.93).
Если начальная и конечная точки перехода не заданы, ста¬
новится возможной оптимизация маневра путем выбора их по¬
ложения на орбитах. В частном случае, при переходе между кру¬
говыми орбитами наиболее экономичным является переход по
эллипсу, касающемуся граничных орбит своими апсидами.
Дв ухимпульсное фазирование
на заданной орбите
Это наиболее простой вариант фазирования, при котором ис¬
ходная и конечная орбиты совпадают. Первый импульс перево¬
дит КА на фазирующую орбиту с периодом, отличающимся от
периода исходной орбиты. По ней КА совершает один или не¬
сколько целых витков. Второй управляющий импульс скорости
7*
171
прикладывается в той же точке фазирующей орбиты, что и пер¬
вый. Он равен ему по величине, противоположен по направлению
и переводит КА на орбиту, совпадающую с исходной.
Период фазирующей орбиты зависит от характеристик исход¬
ного движения, от величины и направления первого управляюще¬
го импульса скорости AVj и определяется по формуле (5.42).
Если необходимо изменить время прохождения КА конечной точ¬
ки фазирования на величину А/, то в соответствии с (5. 94) в об¬
щем случае требуется выполнить условие
Т 2л:
* 11 AV2 2Д1Л 13/2
— -укМ1_„г) |sl"11 +!i"1
=Г,+-^-.
п
Определим отсюда взаимную зависимость параметров первого
управляющего импульса AVi и А. Для этого выполним следую¬
щие преобразования последнего уравнения:
1 2ДИГ f • ч । • п ! а и г 2я 12/3
. ■ [sin X! -Но sin (Хх + М = — ,
К Укао(1-е2о)
откуда
△И + 2 1/ /Л 2Г lsin х1 + ^о sin (Хх + »0)] AI/-.
У ао (1 - *о)
+ 2яУ .]2/3 = 0. (5.96)
“ 1Г" + Т
Из двух корней этого уравнения физическому смыслу задачи фа¬
зирования соответствует один
Д1Л= - (.К -2<— [sin Xj-Ho sin (ХН&Я +
у <ZO(1 — е0)
+ , Г--К- -2 -[sinX1 + gosin(X1 + »o)]+—У/3-
1/ до(1-«2о) а° И"+ “77
" (5.97)
Ранее было показано, что наибольшее изменение периода орби¬
ты на единицу затраченного импульса скорости достигается при
использовании тангенциальных импульсов в перигее' исходной
орбиты. Для тангенциальных управляющих импульсов, исполь¬
зуя уравнения (5.49) и (5. 24), получаем из (5. 97)
172
a 1/ Г 1/2 I l 2ЛЙ \2/3 yr
A^mrn = _/ Уо+~ 4 ~ I
у *
Скорость Vo в перигее исходной орбиты га0 может быть опреде¬
лена из уравнения (5.7):
Уо = 1/2— К(1 -). (5.98)
V ГпО а0 у \ ГпО а0 /
Подставляя (5. 98) в предыдущее уравнение, получаем формулу
для расчета величины первого управляющего импульса скоро¬
сти АУцпщ:
I/ 1/F Г / 2 * / ~2
Д^т.п-УЛ гм УК ДМ2/3 I/ гп0 а0 ’
У р+^г~)
(5. 99)
Для малых изменений периода орбиты при заданном времени
фазирования Д/ в количестве фазирующих витков п можно ис¬
пользовать приближенную формулу, полученную из (5.52)
и (5.94):
д1Л = ! 1/ -^д/= ! -|/ -СП2.ДЛ (5.100)
вяа^п У 2 За0(Т0п) У 2 V
В уравнении (5. 100) Топ — общая длительность маневра фа¬
зирования, приведенная к исходной орбите. В случаях когда она
ограничена максимально допустимой величиной Ттах, число фа¬
зирующих витков не должно превышать предельного значения:
т
„ 1 max
""max —
1 0
5.7. ПОВОРОТ ПЛОСКОСТИ ОРБИТЫ
Управляющие импульсы скорости, направления которых при¬
надлежат плоскости исходной орбиты, изменяют только внутри-
плоскостные характеристики этой орбиты. Ориентация плоскости
орбиты в инерциальном пространстве при этом не меняется. Для
поворота плоскости орбиты используются импульсы скорости,
перпендикулярные к ней. Такие импульсы называют бинормаль¬
ными.
Бинормальный импульс скорости ДУг поворачивает вектор
скорости КА и вместе с тем плоскость его орбиты на угол Ду,
приближенно равный
ду=--^_. (5.101)
V cos О
173
Рис. 5. 21. Схема изменения параметров
орбиты при боковом маневре
Здесь V cos 0 — горизонтальная составляющая вектора скорости
КА. Знак минус присутствует в формуле потому, что в правой
горизонтальной орбитальной системе координат, ось х которой
направлена в сторону полета, положительный импульс скорости
AVZ поворачивает вектор скорости КА и плоскость его орбиты
на отрицательный угол Ду относительно местной вертикали
(оси у).
Величину горизонтальной составляющей скорости КА можно
представить с помощью уравнений (5. 24) и (5. 26) в виде
V cos 9 = (1cos б0) д / — .
V ао(1 — ео)
Следовательно, угол поворота плоскости орбиты при известных
величинах Оо, е0 и 60 может быть определен из соотношения, по¬
лучаемого подстановкой последнего уравнения в (5. 101),
Д¥= 1/ (5.102)
1 +ecosft0 УК k
Положение плоскости орбиты в инерциальной геоцентриче¬
ской экваториальной системе координат определяется двумя
параметрами: прямым вос¬
хождением Q восходящего
узла А орбиты и ее наклоне¬
нием i. В общем случае при
боковом маневре изменяется
также аргумент широты пе¬
ригея орбиты со.
Прямое восхождение вос¬
ходящего узла орбиты отсчи¬
тывается на небесной сфере
от направления на точку
весны, наклонение орбиты —
от плоскости экватора, аргу¬
мент широты перигея орби¬
ты —от восходящего узла
в направлении движения КА.
Связи между перечислен¬
ными параметрами до и пос¬
ле бокового маневра опреде¬
лены уравнениями сфериче¬
ской тригонометрии. В сферическом треугольнике АВС (рис.
5.21) известны наклонение орбиты i0 до начала маневра, аргу¬
мент широты точки маневра, равный сумме аргумента широты
перигея исходной орбиты то и истинной аномалии точки маневра
на ней 6о, и угол поворота плоскости орбиты Ду.
174
Наклонение орбиты после маневра iK определяется из фор¬
мулы косинусов:
cos iк = cos i0 cos ду — sin i0 sin Ду cos (o>0 60).
Анализ этой зависимости показывает, что наибольшее изме¬
нение наклонения орбиты достигается в случаях, когда боковой
маневр выполняется в восходящем или нисходящем узлах орби¬
ты. В этих точках изменение наклонения Дг по величине равно
углу поворота плоскости орбиты Ду.
На любой орбите существуют две точки, в которых боковой
маневр не изменяет ее наклонения. Чтобы найти эти точки, по¬
ложим iK=io- При этом условии получаем
COS(w0 + 60)=-ctgi0tg-/-. (5.103)
Согласно (5. 103) одна из этих точек лежит в северном полу¬
шарии, а другая — в южном. Их кратчайшее угловое расстояние
от восходящего узла превышает л/2 при Ау>0, что соответст¬
вует повороту вектора скорости КА влево по полету, или состав¬
ляет менее л/2, когда Ду<0 (поворот вектора скорости КА впра¬
во по полету).
Кроме того, из (5. 103) следует, что такие точки существуют
только при выполнении условия
- 1 <ctgiotg^-< 1. (5.104)
Изменение прямого восхождения восходящего узла орбиты Дй
при боковом маневре определяется с помощью теоремы синусов:
Sin д2 = sin_Ay_sin_(a>o + »0). (5. 105)
sin iK
Истинная аномалия точки приложения импульса на орбите при
боковом маневре не меняется. Поэтому из сферического треу¬
гольника АВС (см. рис. 5.21) можно определить новое значение
аргумента широты перигея орбиты после маневра:
тк=АС—п9хэ, (5.106)
где АС — сторона сферического треугольника АВС.
По теореме синусов
sin АС sin (юр + ftp) ,д 1Q7)
sin ip sin ZK
Используя зависимости (5.106) и (5.107), получаем
toK=arcsin [ sin io- sin (u>0-|-60)l — 60.
L sin J
175
Изменения fi, in © можно определить более просто, исполь¬
зуя приближенные формулы для узких сферических треугольни¬
ков, в которых угол при одной из вершин очень мал. Такие
формулы широко применяются в сферической астрономии.
При боковом маневре угол поворота плоскости орбиты всегда
мал ввиду большого требуемого для него расхода топлива. Из
(5. 101) видно, что, например, для поворота плоскости круговой
орбиты на угол величиной в один радиан необходимо израсхо¬
довать импульс скорости, равный по величине орбитальной ско¬
рости движения. Расход топлива на такой маневр близок к его
затратам для вывода КА с земли на орбиту. Запасы топлива на
борту КА всегда ограничены, поэтому боковой маневр использу¬
ется на практике для разворота плоскости орбиты КА на неболь¬
шие углы. В таких условиях применение формул узких сфериче¬
ских треугольников к расчету характеристик бокового маневра
вполне оправдано.
Для узких сферических треугольников выводятся приближен¬
ные формулы соотношений их элементов. В обозначениях
рис. 5.21 они выглядят так:
до>= — д2созг (5.108)
и A2 = sin(<D0+ »0) (5.109)
sin I
Подставив (5.109) в (5. 108), получаем
Дю = — ^.Р-^ + ^о) ду> (5 ! 10).
tg 1о
Чтобы найти изменение Д1 наклонения орбиты при боковом ма¬
невре, используем одну из формул Деламбра. В принятых выше
обозначениях она записывается в виде
Д2 . I — in . Ду / , Q । \
COS Sin -=Sin ——COS ((Oo + ^oH •
2 2 2 2 /
Полагая здесь
Д2 _ , . i— in M Ду Ду n
cos ssl;sin ; sin—; ^0
2 - 2 2 2 2 2
получаем искомую приближенную формулу:
Ы = ду cos (<D0 + 60). (5.111)
176
Используя (5.102), можно привести формулы (5.109), (5.110)
и (5. 111) к виду
д2= У* sin (ш° + "I f а° (1 ~ ео) .
(1 + е0 cos ft0) cos ig V К '
До) _ vz sin (<->о + ftp) -j Л доО — ео) .
(I + е0 cos »р) tg i0 У К '
Д{- _ _ vz cos (ш0 + ftp) 1/ Дор —ер)
I + е0 cos ftp Г К '
5.8. ПРОСТРАНСТВЕННЫЙ МАНЕВР КА В СИСТЕМЕ
В предыдущих разделах было показано, что для изменения
собственных параметров орбиты управляющие импульсы скоро¬
сти создаются в ее плоскости и что поворот этой плоскости осу¬
ществляется с помощью бинормальных (боковых) импульсов
скорости.
Необходимость управления отдельными параметрами орби¬
тального движения может появляться в разное время. В таких
случаях управление осуществляется соответственно с помощью
только внутриплоскостных или только боковых импульсов ско¬
рости.
Однако возможны случай, когда целесообразно или необходи¬
мо одновременно изменить орбиту и положение ее плоскости.
Тогда оба вида управления реализуются совместно. Такая опе¬
рация называется пространственным маневром.
При малых величинах управляющих импульсов скорости
влияния внутриплоскостных и бинормальных импульсов на дви¬
жение КА можно считать взаимно независимыми. При этом ус¬
ловии пространственный маневр приближенно рассчитывается
как два различных маневра — плоский и боковой, выполняемые
одновременно в одной точке орбиты. Для расчетов используются
ранее выведенные уравнения.
С большей точностью характеристики пространственного од¬
ноимпульсного маневра могут быть определены из векторных
соотношений (рис. 5. 22). Из △ BOD
VK=VOEP + BD2, (5.112)
здесь BD=АЕ = дИбок. (5. ИЗ)
В △ AOD угол OAD, как видно из рис. 5.22, равен л—(А—фо) .
Следовательно,
OD— у ИИД^л4г2дИплИоед5(Х-'ф<!), (5. 114)
177
где ДГпл — внутриплоскостная составляющая пространственного
импульса скорости; X — угол между этой составляющей и мест¬
ной вертикалью в точке приложения импульса; фо— угол между
вектором начальной скорости Го и местной вертикалью в той же
точке.
Рис. 5. 22. К определе¬
нию кинематических
соотношений в точке
приложения управля¬
ющего импульса
Подставляя (5. 113) и (5. 114) в (5. 112), получаем
ГГк = /^+дИ2л+д1/2ок + 2д^()со5(Х-ф0).
Угол фк между вектором скорости КА после маневра Гк и мест¬
ной вертикалью в точке маневра определяется из соотношения
, ОС V0cos Фо + 4Vr Уо cos фо + ДУПЛ cos X
cos о — 1 —-
DB Ук Ук
Ур cos фр + ДУ„Л cos X
|/Уо + Д^пл + ДГбок + 2ДУплУо cos (X- Фо)
Угол 0К, как указывалось выше, равен
0к=л — фк.
Для расчета точного значения угла поворота плоскости орбиты
может быть использована формула, полученная из △ BCD (см.
рис. 5.22),
У BD ДУбок ДУбок
CD Vo sin фо + ДУ Уо sin ф0 + ДУПЛ sin X
178
В случаях когда КА выполняет сложный маневр с двумя или
более управляющими импульсами скорости, параметры его ор¬
биты после каждого импульса могут быть рассчитаны, как при
одноимпульсном маневре. Учитывая, что требования к точности
управления движением КА в системах наиболее высоки, целе¬
сообразно производить измерения орбиты для ее контроля и уточ¬
нения параметров следующего импульса после каждого маневра.
В этих условиях любой сложный маневр выполняется как после¬
довательность одноимпульсных маневров, связанных общей за¬
дачей.
Рис. 6.1. Углы ориента¬
ции вектора скорости в
орбитальной системе ко¬
ординат
Глава 6
МАРШРУТНЫЕ ЗАДАЧИ, ВОЗНИКАЮЩИЕ ПРИ
ОБСЛУЖИВАНИИ ОРБИТАЛЬНЫХ СИСТЕМ В КОСМОСЕ
6.1. ОБЛАСТИ ДОСЯГАЕМОСТИ УПРАВЛЯЕМОГО КА
Управляемый КА, находясь на орбите, обладает определен¬
ным запасом топлива или соответствующим запасом характери¬
стической скорости. Расходуя этот запас частично или полностью,
КА в состоянии изменить свою первоначальную орбиту в опре¬
деленных пределах. Область космического пространства, каждая
точка которой досягаема управляемым КА ,при старте его из
любой точки исходной орбиты, назы¬
вается областью досягаемости.
Построим область досягаемости управ¬
ляемого КА при старте его с исходной
круговой орбиты в предположении, что
задан радиус этой орбиты и запас харак¬
теристической скорости AVg. Поскольку
для построения областей не требуется
высокая точность, то воспользуемся ли¬
нейной теорией возмущений орбит ИСЗ
при наличии начальных отклонений.
В качестве начальных отклонений рас¬
смотрим компоненты отклонений вектора
скорости AVr, AVi, AVZ, которые в дан¬
ном случае будем создавать преднаме¬
ренно с помощью управляющего импуль¬
са тяги. Для определенности задачи по¬
лагаем, что вектор управляющего импульса скорости AV может
быть ориентирован в пространстве произвольно. Обозначим углы
ориентации этого вектора в орбитальной системе координат че¬
рез аир (рис. 6. 1). При этом проекции вектора импульса ско¬
рости ДУ на радиальное, трансверсальное и бинормальное на¬
правления соответственно равны
дУг = дУ sin а,
дУх = дУ cos а cos р, (6.1)
дУ г = дУ cos а sin р.
180
Для построения области досягаемости достаточно каждому
времени маневра t, прошедшему с момента приложения импуль¬
са /о=О, поставить в соответствие изменение координат А/’,
Az, Au.
Построим область досягаемости в плоскости орбиты. Для это¬
го воспользуемся зависимостью (3.20), подставив в нее вместо
ДУГ, АУт соответствующие выражения (6. 1), а величину Дгр,
положив равной нулю,
- ^-= - sin a sin —|— 2 —У— cos а(1 — cos а>0/), (6. 2)
< о VKp VKp
где 1/Кр = -|/А ш0=2^_) Т0=2л1/ Уу-
\ го то Г К
вычисляемые для радиуса исходной орбиты величины.
Формула (6. 2) каждому времени маневра t ставит в соответ¬
ствие множество значений Аг/г0 в зависимости от значений мо¬
дуля вектора управляющего импульса скорости АУ и угла его
ориентации в плоскости орбиты а. Между тем как для построе¬
ния области досягаемости достаточно найти ее границу, опреде¬
ляемую экстремальными значениями Ar (max, min). Исследуем
функцию Ar/r0=f(AV, а) на экстремум. В силу линейной зависи¬
мости Аг от ДУ и ограниченности АУ, экстремальные значения
Аг будут достигаться на верхней границе, т. е. при максималь¬
но возможной величине характеристической скорости ДУтах=.
=АУв. Поэтому достаточно исследовать на экстремум функцию
одного переменного — угла ориентации вектора AVg. Возьмем
д—
г0
частную производную — и приравняем ее нулю
да
— ^— = [cos a sin ш0/ —2 sin а(1 — cos(n0/)]=0,
да . Укр
откуда имеем
tg аопт=тгт; 9—IT- 6- 3)
2(1 — COS а>оО
Приходим к заключению, что каждому времени маневра /
отвечает свой оптимальный угол ориентации вектора АУ^. Зави¬
симость этого угла от угловой дальности маневра <р=ш0/ приве¬
дена на рис. 6.2. Формула (6.3) при дальности маневра соо/=0
0 г>
дает неопределенность типа —. Раскрывая эту неопределенность,
получим при (оо/—>0 а0Пт—На рис. 6.3 изображены обла¬
сти досягаемости при значениях дальности маневра <pi, фг, <рз, ф4,
181
каждой из которых отвечает свой оптимальный угол ориентации
вектора Wg (см. рис. 6.2). Огибающая, проведенная из точки
орбиты, в которой приложен управляющий импульс, через мак¬
симально удаленные по радиусу точки при различной дальности
маневра <рг- и явится границей области достигаемости в рассмат¬
риваемом диапазоне дальностей 0 — л (на рис. 6.3 эта граница
показана пунктирной линией).
Рис. 6.2. Оптимальный угол ориентации вектора
скорости
Аналогично строится граница области досягаемости для все¬
го диапазона дальностей 0 — 2л в соответствии с решением экс¬
тремального уравнения (6. 3)
0<)ср<С2л 0<а<)—,
г 2
шах Дг
л <4 с₽ <S 2л —— <4 а <4 0;
Y 2
(6.4)
' Л
U < ср < л —<а<л,
Y 2
min дг
' ' 3
л <С ср <С 2Л л < а <_ —л.
В итоге получаем некоторую фигуру на плоскости орбиты
(рис. 6.4), каждая точка которой, включая и границу, досягае¬
ма для КА, стартующего в момент времени to = 0 из точки А
исходной орбиты.
Примечание. Досягаемость границы области вовсе не означает, что
КА может совершать движение вдоль границы.
Итак, каждой паре характеристик AVg и г0 может быть по¬
ставлена в соответствие вполне определенная область досягае¬
мости, положение которой в пространстве определяется плоско¬
стью орбиты и положением точек старта А.
Если рассмотреть все возможные моменты старта с орбиты,
то тогда можно говорить об области досягаемости с заданной ис¬
182
ходной орбиты. Для круговой исходной орбиты эта область дося¬
гаемости представится в виде кольца, внешняя и внутренняя гра¬
ницы которого соответственно равны
Z”+ Z’g-!- △Z’max, Г— Гд Англах"
Максимум функции дг (а, ш0/) достигается при дальности
при аОПт = 0, и этот максимум численно равен
4Vg
АЛлах =4——г0. (6.5)
У кр
Для радиуса орбиты г0=7 370 км (До=ЮОО км) отношение
-^-=10+3 с. При этом получается следующий эквивалент меж-
Укр
ду запасом характеристической скорости ДГ^ и возможным из¬
Рис. 6. 3. Область дося¬
гаемости при различных
дальностях маневра
Рис. 6. 4. Пространст¬
венная область дося¬
гаемости
менением радиуса орбиты ДгШах : 1 м/с скорости отвечает измене¬
ние радиуса на 4 км. Следовательно, если запас характеристиче¬
ской скорости на борту КА составляет ДУв=250 м/с, то область
досягаемости будет представлять собой кольцо шириной 2000 км.
Естественно, что из этой области должна быть исключена та ее
часть, досягаемость которой недопустима по различного рода ог¬
раничениям (недопустимость захода в плотные слои атмосферы
Земли и т. п.).
Линейная теория дает вполне удовлетворительные оценки для
энергетических характеристик. Если -^~<Д,5, то ошибка в оп-
го
ределении энергозатрат не превосходит примерно 5% по отноше¬
нию к номинальному значению характеристической скорости.
При меньших значениях Дг точность получается еще большей,
183
например при г0=6640 км, Дг^ах=>1600 км приближенное Зна¬
чение ДУ составляет 396 м/с, а точное — 405 м/с (ошибка поряд¬
ка 2%). Эти цифры подтверждают также, что указанный выше
эквивалент выдерживается в достаточно широкой окрестности
орбит относительно Го=7370 км. В данном случае го=664О км,
шах 1600 __ Qg КМ
ДУ 395 ’ м/с
Переходим к рассмотрению пространственной области дося¬
гаемости, которая образуется при боковой составляющей управ¬
ляющего импульса скорости AVZ.
Управляющий импульс ДУг вызывает в соответствии с форму¬
лой (3. 13) боковое отклонение
ДУ
дг =—— sin <и0/
шо
или с учетом (6.1)
дг = дУсоэ a sin р sin ш0Л (6.6)
Для построения области досягаемости необходимо знать Дгтах.
Максимум функции Az (ДУ, а, р) при фиксированной дальности
маневра <p=tiW имеет место тогда, когда достигает максимума
произведение ДУ cos a cos р, в котором АУе[0, ДУдоп], ае[0, 2л],
ре[0, 2л]. В силу линейной зависимости максимизируемо,й функ¬
ции от ДУ ее наибольшее значение достигается на верхней гра¬
нице, т. е. при ДУ=ДУв. Далее, поскольку переменные а и р не¬
зависимы, то экстремум Дз(р) имеет место при значении cosa=
= 1 (a=0). '
Таким образом, экстремальное уравнение
= д!Zg cos p sin ш0/=0 - (6.7)
удовлетворяется при cosp=0. Решение экстремального уравне¬
ния (6.6) представлено в следующем виде:
0<?<л р=^-,
шах
л<(<рО2л р=— л;
2 (6.8)
з
0<<р<л р = —-л,
min дг
л О <р О 2л р=-^-.
Если проследить за экстремальными боковыми отклонениями
в зависимости от дальности маневра <ро=©о(, то здесь, в свою
184
очередь, существует экстремум функции Az=Az(<p). Причем
в начальной и антиподной ей точках боковое отклонение отсут¬
ствует, а при дальностях ср=л/2, <р=— л имеет место экстремум
этой функции (минимум или максимум).
Что же представляет собой фигура пространственной зоны
досягаемости? Уравнение поверхности этой фигуры представляет¬
ся весьма сложным. Даже уравнение кривой в поперечном сече¬
нии зоны досягаемости получается плохо обозримым. Последнее
имеет следующий вид:
р2 = Дг2-|- Ez2—-^- {[sin a sin ср-j-2 cos a cos р(1 — cos <₽)]2 +
4-(cos a sin p sin cp)2}.
В частном случае, когда р=-^~, ФУНКЧИЯ б(а) принима¬
ет вид
Q* = • (sin2 а соз2 а),
0)2
, - АУ
т. е. представляет собой окружность радиуса q = .
ш
Вообще же поперечное сечение области досягаемости при
каждой дальности <р получается различным и его приближенно
можно принять за эллипс, большая полуось которого есть Дгтах,
а малая полуось AiZmax. Примерные фигуры сечений зоны дося¬
гаемости для четырех характерных дальностей <р показаны на
рис. 6. 4.
Зона досягаемости для круговой орбиты в целом получается
путем вращения зоны досягаемости, построенной при старте из
А У g
точки А. Ее радиальные размеры составляют +4 г0, а по
Укр
дуг
нормали к плоскости орбиты + г0. Поперечное сечение
Укр
этой зоны имеет форму, близкую к эллипсу.
До сих пор предполагалось, что исходная орбита круговая.
Однако изложенный аппарат можно с успехом применять и для
расчета зон досягаемости в случае эллиптических орбит с экс¬
центриситетом е^0,1. При этом вместо г0 необходимо взять зна¬
чение большой полуоси ад, а при построении зон необходимо Аг
и Аг откладывать от эллиптической орбиты.
Зона досягаемости является весьма важной характеристикой
управляемого КА, поскольку она, являясь косвенной энергети¬
ческой характеристикой в то же время характеризует возмож¬
ности обслуживания космоса данными КА. Любая точка этой
зоны, включая и границу, досягаема для КА. Причем точки,
185
лежащие на границе, достигаются при полном израсходовании
запаса характеристической скорости, а достижение внутренних
точек происходит при частичных энергозатратах. Поскольку для
внутренних точек характерны неполные энергозатраты, то за счет
израсходования оставшихся запасов характеристической скоро¬
сти возможен переход из одних точек пространства зоны досягае¬
мости в другие точки этой зоны. Поэтому имеются необходимые
предпосылки для отыскания внутри зоны досягаемости такого
ограниченного пространства, которое сплошь контролируемо
данным КА. В этой связи докажем следующее принципиальное
положение.
При заданном запасе рабочего тела характеристическая ско¬
рость не зависит от числа включений двигателя. Для доказатель¬
ства этого положения воспользуемся известной формулой, связы¬
вающей приращение характеристической скорости с изменением
массы рабочего тела,
дУ=—1У1п( 1-—\ (6.9)
\ т0 ]
где W — скорость истечения газов; т0 — начальная масса КА.
Составим последовательность АУ,, определенную для п вклю¬
чений,
дУ^-rinf
дУ2=—IVlnf 1
\ т\ — bm\J
дУ = - IV In ( 1 ); (6.10)
\ mi—Д/П1—\т2 /
>
дУ = - uzinf 1 —
\ mi — Д/П! — ... — Дтл—1 /
Проведем суммирование в левых и правых частях последователь¬
ности равенств (6. 10)
AV\+ AV\+ аУ3+... + дул= - W in [( Ш1~^1 )х
/ т\ — &mi — hm2 \ flmi——Ьт2 — \
'д mi —Д/П1 /\ mi—Д/П] —Длг2 /
(mi — Am; — ... — Ьтп \~[
т\— hmi — ... — Д^я—1 / J
Рассматривая сомножители, стоящие под знаком логарифма,
замечаем, что числитель дроби предыдущего сомножителя равен
186
знаменателю дроби последующего. Поэтому после очевидных со¬
кращений получаем
Д^1+дК2+дИ8+... + дК„=-иПпХ
X / mi — АдЧ — А/я2 — Дотз — ... — Дтл\
Обозначим
Al/j-j- д1/2-|- д Vs-|-... -|- д1/я = д!/ г.
Егг^ + д тг д т3 -|-... д тп = дтЕ.
Тогда с учетом принятых обозначений будем иметь
д1/1=-Г 1п( 1--^-)- (6.И)
Формула (6.11) определяет характеристическую скорость как
некоторый эквивалент израсходованной массы Ат независимо от
того, каким образом эта масса была израсходована — сразу или
последовательным включением двигателей.
Вернемся снова к отысканию таких областей, каждая точка
которых последовательно достижима. Пусть имеем исходную
круговую орбиту радиуса г0 и пусть управляемый КА имеет за¬
пас характеристической скорости ЛГг. Требуется определить та¬
кую область пространства, каждая точка которой досягаема.
Ранее было показано, что АгШах достигается при а=0, <р=л,
т. е. при трансверсальном управляющем импульсе. Если в точке
А (рис. 6. 5) последовательно прикладывать элементарные им¬
пульсы, то все заштрихованное пространство сплошь окажется
заполненным орбитами. А это означает, что каждая точка этого
пространства контролируема данным КА. Зона сплошного конт¬
роля, естественно, меньше зоны досягаемости.
Для сопоставления между собой области досягаемости и зо¬
ны сплошного контроля представим последнюю в виде кольце¬
вого слоя на плоскости орбиты.
Кольцевому слою на плоскости орбиты может быть постав¬
лен в соответствие плоский переход между двумя круговыми ор¬
битами. Энергетически оптимальный межорбитальный переход
при отношении большего радиуса орбиты к меньшему, не превос¬
ходящему 15,6, осуществляется с помощью двух трансверсальных
импульсов АУ1 и |ДГ2, точки приложения которых являются апси¬
дальными по отношению к переходной эллиптической орбите
(рис. 6. 6).
Распределим характеристическую скорость AVg между пер¬
вым и вторым управляющими импульсами так, чтобы получи¬
лась максимальная толщина кольцевого слоя.
187
Энергетически оптимальные управляющие импульсы скорости
в данном случае являются трансверсальными и их величины свя¬
заны с изменением радиуса орбиты следующими зависимостями:
-^-(v7-Vn)2; (6.12)
△v\= V7)2, (6.13)
где р 2Г1Г2 — 2Г1(Г1 +Аг).
Г1 + г2 2Г1 + Дг
Рис. 6.6. Двухимпульсный
межорбитальный переход
Рис. 6. 5. Область пространства,
сплошь контролируемого кос¬
мическим аппаратом
В соответствии с поставленной задачей требуется найти такое
Аг, при котором выполняется условие
ДУ14“ Д У 2 = Д Vg- (6. 14)
Подставляя в формулу (6. 14) зависимости (6. 12) — (6. 13)
и произведя элементарные упрощения, получим
+1/~1-,/ZEZ.
У И /2Г1 + Дг У г! +Дг У 2г1 + Дг
(6. 15)
Решение этого трансцендентного уравнения относительно Аг
дает искомую величину толщины слоя Аг в зависимости от запаса
188
характеристической скорости ДУЯ и радиуса исходной орбиты rlr
Исследуем отношение импульсов
ДУ1+ Дг V2ri + 2Дг — V2/-] + дг ,g
ДУ2 ri /гТГ+'д? —/27?
Абсолютная величина в формуле (6. 16) представляет собой мед¬
ленно изменяющуюся функцию. В табл. 6. 1 приведены значения
этой величины, а также отношение ДУ]/ДУ2 в зависимости от
Лг/Л в достаточно широком диапазоне изменения радиуса.
Таблица 6. t
Дг
И
0
1
2
3
4
5
М|
1
0,84
0,75
0,71
0,69
0,67
ДУ;
ДУ2
1
1,68
2,25
2,84
3,45 '
4,0
При малых запасах характеристической скорости, когда от¬
ношение AVi/Д У2~ 1, т. е. AVg делится примерно пополам, тол¬
щина кольца зоны сплошного контроля составляет примерно
одну четвертую часть от толщины кольца зоны досягаемости.
В пределах справедливости линейной теории имеем
п
ДГспл _ 2 укр1 _ 1
2.4АУе^ 4 '
• кр!
По мере возрастания запаса характеристической скорости
доля первого импульса непрерывно возрастает, а вместе с ним
увеличивается сплошь контролируемая часть зоны досягаемости.
Если запас характеристической скорости составляет 0,536 Укр,
то при этом сплошь контролируемое в плоскости орбиты косми¬
ческое пространство заключено в пределах от до оо. Для того
чтобы покрыть весь кольцевой слой орбитами, необходимо вна¬
чале расчленить в точке 1 (см. рис. 6.6) первый импульс, а за¬
тем, когда для последней орбиты значение суммарного импульса
станет равным ДУ), расчленить в точке 2 второй импульс.
6.2. ФАЗИРОВАНИЕ В ОБЛАСТИ ДОСЯГАЕМОСТИ
Зона досягаемости, построенная в окрестности исходной орби¬
ты, гарантирует лишь досягаемость с этой орбиты любой точки,
лежащей внутри зоны и на ее границе. Однако часто требуется
189
Рис. 6. 7. К определению ма-
неэра фазирования
не просто достигнуть определенной точки космического простран¬
ства, а прибыть в заданный пункт в назначенное время. Пока¬
жем, что существует принципиальная возможность одновремен¬
ного удовлетворения условия достижения заданного пункта и
времени прибытия в этот пункт при энергозатратах, достаточных
лишь для его достижения.
Маневр, в результате которого управляемый КА достигает
заданной точки космического пространства в определенный мо¬
мент времени, называемый фазированием. Пусть имеем исход¬
ную круговую орбиту радиуса г0 (рис. 6. 7) и пусть в зоне дося¬
гаемости управляемого КА задан некоторый пункт полярными
координатами г, и. Предположим да¬
лее, что в этом пункте периодически
с интервалом времени Тс появляется
некоторый объект С. Примем момент
времени, отвечающий нахождению объ¬
екта С в пункте с координатами гс, ис,
за начальный. Определим время прибы¬
тия КА в заданный пункт на последо¬
вательности времен
/=0;
t=Tc-,
t = 2Tc\ (6. 17)
t = mTc.
Требуется найти такую переходную орбиту, двигаясь по которой
управляемый КА достиг бы точки с координатами гс, ис в один
из моментов времени (6. 17) и при этом затраты характеристи¬
ческой скорости на маневр были бы минимальными.
Поставленную задачу будем решать в центральном гравита¬
ционном поле, когда плоскость орбиты сохраняет свою перво¬
начальную ориентацию в пространстве.
Условию минимума энергозатрат отвечает переходная орбита,
достигающая заданного пункта в апогее или перигее. В рассмат¬
риваемом случае гс>гр, что соответствует достижению пункта в
апогее переходной орбиты. Минимальный управляющий импульс,
потребный для достижения заданного пункта, определится по
формуле
4У"'" = 1//(1/(6'18)
V Г° \ Г гс + г0 /
Определим такой момент времени приложения управляющего
импульса, чтобы управляемый КА после совершения маневра
прибыл в заданный пункт в один из моментов последовательно¬
сти времен (6. 17). Для этого представим баланс времени. Обо¬
значим время, прошедшее с момента /0 ДО момента старта через
190
tow и назовем его временем ожидания на исходной орбите. Тог¬
да последовательность времен достижения заданного пункта
можно представить в следующем виде:
Л = Лж + — -\-пТ,
с ож 2 ’
где Т — период обращения для переходной орбиты; п — число пе¬
риодов ожидания на переходной орбите.
Период обращения Т найдем по формуле
Т=2лу^-^~, а = 2-(Го + Гс).
Управляемый КА (УКА) и объект С прибудут в назначенный
пункт одновременно, если будет выполняться равенство времен
Лж + ^- + «Т' = т7’с, (6.19)
где m — целое число периодов для орбиты объекта С.
Время ожидания на исходной орбите представляет собой так¬
же дискретные моменты времени, которые отмечают времена про¬
хождения точки старта с исходной орбиты 1. Обозначим через АЛ
минимальный промежуток времени, прошедший с момента начала
отсчета времени to=O до момента прохождения управляемым КА
точки старта. Тогда дискретные моменты времени ожидания оп¬
ределятся соотношением
Лж = ДЛ + ^о, (6.20)
где То — период обращения на исходной орбите; q — число вит¬
ков ожидания на исходной орбите.
Промежуток времени АЛ определяется аргументом широты
УКА в момент времени tg. Обозначим этот аргумент широты че¬
рез ид. Если исходная орбита круговая, то АЛ определится по
формуле
дЛ = .цо~+- =и0 + п-ис (6.2i)
2л 2л
Для эллиптических орбит время АЛ находится из уравнения
Кеплера.
С учетом соотношения (6. 20) зависимость (6. 19) примет вид
дЛ+^о + (« + О,5)7’ = /п7’с. (6.22)
Зависимость (6.22) представляет собой уравнение с тремя
целочисленными неизвестными. Из всех возможных значений
q, п, т, удовлетворяющих (6.22), выберем такую совокупность
целых чисел, при которых фазирование достигается за минималь¬
ное время. Поскольку время перехода из точки 1 в точку С не
191
зависит от времени фазирования и составляет полпериода, то
минимум времени фазирования будет достигаться при Щщ.
Таким образом, задача расчета фазирования сводится к ми¬
нимизации целочисленной функции целочисленных аргументов
™==т^[^ + 7^ + (п + °’5)-Н (6-23>
(q,n) L тс Тс Тс J
Проанализируем минимизируемую функцию. Для этого по¬
строим непрерывные функции m(q) и izn(n), обозначив q и п че¬
рез х (рис. 6. 8). Пусть и=0, т. е. ожидание происходит только
на исходной орбите. При этом минимизируемая функция будет
Рис. 6. 8. Пример минимизации целочис¬
ленной функции Целочисленного аргу¬
мента
Рис. 6. 9. Фазирующие орбиты
представлена линейной зависимостью, обозначенной q. Решени¬
ем (6.23) является ближайшая к началу координат угловая точ¬
ка, через которую проходит прямая m(q). Этой точке отвечают
искомые целые знания ш и q.
Аналогично находим решение при q=0, т. е. когда ожидание
осуществляется только на переходной орбите (зависимость п на
рис. 6. 8). Минимизация m по двум переменным может быть осу¬
ществлена путем перебора всех возможных вариантов п-1-q. Од¬
нако в этом нет необходимости по следующей причине.
Целочисленные значения при целочисленных аргументах
функция m(n, q) принимает на полуплоскости положительных
х, т весьма редко. В этой связи особо остро встает проблема
расширения области существования решения поставленной выше
задачи. В разд. 6. 2 настоящей главы доказано принципиальное
положение о том, что импульс досягаемости можно расчленить
на сколь угодно большое число управляющих импульсов и при
этом конечный результат в отношении достижимой точки и не¬
обходимых энергозатрат не изменится. Разделим управляющий
импульс на две части так, чтобы первый переводил КА с исход¬
ной орбиты на фазирующую орбиту, а второй — с фазирующей
орбиты в заданную точку (рис. 6.9).
192
Под фазирующей орбитой в данном случае понимаем неко¬
торую промежуточную между исходной и переходной орбитами.
Обратимся снова к рис. 6. 8 и поставим перед собой вопрос
о том, нельзя ли реализовать целочисленные значения, которые
функция m(q, п) принимает не на самих прямых m(q) и т(п)г
а в области, ограниченной этими прямыми. Напомним, что гра¬
ницами этой области являются прямые, одна из которых соот¬
ветствует случаю ожидания только на исходной орбите (п=0),
а другая — только на переходной орбите (<?=()). Но эти же гра¬
ницы можно рассматривать как предельные случаи фазирующей
орбиты, когда они совпадают либо с исходной; либо с переход¬
ной орбитой. Таким образом, каждой фазирующей орбите мож¬
но поставить в соответствие прямую т(х), лежащую внутри или
на границе заштрихованной на рис. 6. 8 области и, наоборот,
каждой точке этой области можно поставить в соответствие неко¬
торую фазирующую орбиту. Получив удовлетворительный ответ
на поставленный вопрос, перейдем к расчету фазирующего ма¬
невра.
Построим функции
mro = [^+?y^ + 0,5-^-1; (6.24)
L ' £ * С • С J
Г Д/1 I Т , л г г ]
тг — \—i—\-п к 0,5 .
L Тс тс J
Найдем ближайшую к началу координат угловую точку в обла¬
сти, ограниченной прямыми (6. 24). Обозначим найденные значе¬
ния оптимальных параметров фазирования через т*. х*. Тогда,
обращаясь к формуле
т*= [тг+7?+°’5 7?]’ (6-25)
найдем период фазирующей орбиты
Т*=-!?*-Тс д<1 + 0,5г . (6.26)
По значению периода фазирующей орбиты и исходным дан¬
ным найдем фазирующий импульс AV*. Для этого воспользуемся
следующими зависимостями:
= — (6.27)
У гх а*
3 / т2—
W7®? (6-28>
t.V. = Vt-\/ IL, (в, 29)
г Г1 ад
193
Недостающую часть импульса для перехода с фазирующей орби¬
ты в точку встречи С найдем по формуле
(6.30)
У Г1 о, у г 1 а*
где а — большая полуось переходной орбиты.
Фазирующие орбиты можно трактовать как улучшенные двух-
импульсные переходные орбиты энергетически оптимальных ма¬
невров с точки зрения сокращения их продолжительности.
Переход с орбиты в заданную точку с фазированием осуще¬
ствляется следующим образом. В момецт прохождения точки
Рис. 6. 10. Две схемы маневра фазирования
исходной орбиты с аргументом широты U] = uc— л космическому
аппарату сообщается трансверсальный управляющий импульс,
переводящий КА на фазирующую орбиту с периодом Т*. Затем
КА совершает п витков на фазирующей орбите, после чего про¬
изводится маневр в той же точке орбиты 1 для достижения за¬
данного пункта по переходной орбите. Для этого КА сообщается
вторая часть трансверсального импульса досягаемости, величина
которого находится по формуле (6. 30).
Область решения задачи перехода в заданный пункт с фази¬
рованием может быть расширена, если допустить некоторый
перерасход характеристической скорости сверх минимально необ¬
ходимой для досягаемости этого пункта. При этом возможны две
схемы маневра, показанные на рис. 6. 10. Для первой схемы ха¬
рактерно фазирование на орбите с периодом Т*, меньшим, чем
исходный, а для второй фазирование происходит на орбите с пе¬
риодом Т*, большим Т.
Из двух схем фазирования выбирается та, которой отвечает
меньшее значение т*.
194
6.3. ЭНЕРГЕТИЧЕСКИ ОПТИМАЛЬНЫЕ ТРАЕКТОРИИ ОБЛЕТА ТОЧЕК
КОСМИЧЕСКОГО ПРОСТРАНСТВА
Рассмотрим следующую физическую’ модель. Пусть на орби¬
тах, параметры которых предполагаются известными, находится
некоторая совокупность КА. Кроме того, имеется также один
управляемый КА, который способен достаточное количество раз
изменить параметры своей первоначальной орбиты путем им¬
пульсного приложения тяги. Требуется последовательно осущест¬
вить облет каждого КА рассматриваемой совокупности с мини¬
мальными затратами топлива.
Перейдем к математической формулировке поставленной за¬
дачи облета. При этом будем исходить из следующих предпо¬
ложений.
1. Движение всех КА происходит в поле одного притягива¬
ющего центра при отсутствии сопротивления атмосферы.
2. Орбиты рассматриваемой совокупности КА принадлежат
одному классу и имеют мало отличающиеся параметры.
3. Маневрирование управляемого КА осуществляется в пло¬
скости его исходной орбиты.
4. На скорость встречи управляемого КА с орбитальными
объектами ограничений не налагается.
В качестве критерия оптимальности траектории облета при¬
мем суммарную характеристическую скорость. При принятых
предположениях относительно математической модели движения
траектория облета будет представлять собой некоторую последо¬
вательность дуг переходных эллипсов в плоскости исходной ор¬
биты управляемого КА.
Пусть движение каждого из N аппаратов системы определе¬
но параметрами орбит
ij, 2/, Pj, tj, “/, тп/ (/=1, 2, .... N). (6.31)
Плоскость маневрирования управляемого КА зададим парамет¬
рами Д), Qo- Тогда каждая орбита с номером j будет пересекать
плоскость маневрирования в двух узловых точках. Для определе¬
ния координат узловых точек необходимо воспользоваться фор¬
мулами, приведенными в гл. 1. По этим формулам находятся пря¬
мое восхождение ах и склонение 8х каждой узловой точки. Этих
данных вместе с известными параметрами орбит Л, 2х, Рх, шх
и/0,20 достаточно для определения координат узловых точек на
плоскости маневрирования. Аргументы широты узловых точек
найдем из решения сферических треугольников, получаемых на
сфере пересечением плоскостей орбит Л, 2х и /0, 20. В частно¬
сти, из прямоугольного сферического треугольника с вершиной в
узловой точке находим
, tg(ax-so) _
tg<pX = : (6.32)
cos г о
195
Для орбит с наклонением /<90° положительному значению
tg(ax — й0) отвечают две узловые точки в 1-м и 3-м квадран¬
тах, а отрицательному значению этой величины отвечают две точ¬
ки во 2-м и 4-м квадрантах. Для определения радиуса узловых
точек необходимо знать их аргументы широты в плоскости орби¬
ты КА, которые находят по аналогичной формуле
. ‘g(“x-2x) ,R
tg ?x = : • (6. 33)
cos
После этого радиусы узловых точек вычисляют по формулам
'х=— (6.34)
1 +excos (n-a>x)
г' = р±_, .
х 1+ excos (<рх-о>х)
Заданной совокупности N КА отвечает 2N узловых точек на
плоскости маневрирования
гх, /Д, г', (Х=1, 2, .... N). (6.35)
В центральном поле сил координаты узловых точек (6.32) с те¬
чением времени не меняются.
Составим из переходных эллипсов траекторию управляемого
КА, последовательно проходящую через одну из двух узловых
точек каждого КА данной совокупности N. Назовем эту состав¬
ную траекторию вместе с N пунктами маршрутом облета систе¬
мы N пунктов. Определим на множестве маршрутов облета N
пунктов функционал
= (6.36)
7=1
где ДVj — характеристическая скорость, соответствующая одно¬
му (очередному) переходу в последовательности маневров.
Требуется среди множества маршрутов, удовлетворяющих ус¬
ловию прохождения через каждый пункт X (%= 1,2,... ,N), найти
тот, на котором функционал (6.36) достигает минимально воз¬
можного значения, а также найти оптимальные параметры
исходной орбиты в плоскости i0, Йо и оптимальные значения
управляющих импульсов.
Найти маршрут — это значит определить последовательность
облета пунктов, каждому из которых припишем свой порядковый
номер, а также найти параметры переходных эллипсов, из кото¬
рых составлен маршрут. '
Выделим из множества узловых точек, определяемых коорди¬
натами (6. 35), любую пару, обозначив ее соответственно своими
196
номерами v, р, (v=/=p.). Предположим далее, что орбита управ¬
ляемого КА проходит через точку v и имеет параметры/?,, е,, ш,.
Для перехода с этой орбиты в точку ц необходимо так изменить
элементы орбиты/?,, <«„ чтобы новая орбита проходила через
точку ц. Следовательно, формально переход из точки v в точку ц
на плоскости сводится к преобразованию трех элементов орбиты
/?,, е,, ш, в /?|х, и>а. Запишем условия сопряжения переход¬
ных эллипсов.
Траектория управляемых КА представляет собой кривую вто¬
рого порядка, уравнение которой в параметрической форме име¬
ет вид
г (и) = - .
1 + е cos (и — ш)
Траектория всюду непрерывна, в том числе и в точках сопряже¬
ния переходных орбит. При импульсном управлении разрыв тер-
dr Iz
пит производная = Vr„ а также изменяет свое значение кон-
dl
станта ]//(/?=С.
Таким образом, условия сопряжения переходных орбит при¬
нимают следующий вид:
/?, Рц. .
1 + е, cos (u — wv) 1 + cos (и — шД ’
\f — e(1cos(u —w|1)=l/ — <?, cos (и — о>,)-|-д Vr; ($• 3?)
V р» V р.
где г, и — координаты точки сопряжения; AVr, AV, —радиаль¬
ная и трансверсальная составляющие управляющего импульса
скорости в точке сопряжения.
О сопряжении переходных орбит можно говорить отвлечен¬
но, т. е. не привязываясь к конкретным параметрам одной из со¬
прягаемых орбит, а можно говорить конкретно, когда орбита,
проходящая через точку v, известна и нужно найти сопряжение с
ней орбиты, проходящей через точку ц. Для построения мар¬
шрута существенен второй вариант, когда по исходному состоя¬
нию находится продолжение траектории, проходящей через точ¬
ку ц, не лежащую на орбите.
Из трех условий (6.37) только одно (первое) может быть
использовано как уравнение для определения переходной орбиты
и точки сопряжения. Два другие используются для определения
управляющего импульса AVr, AV„ а следовательно, и характе¬
ристической скорости
aV=VaV,2+aV2.
197
Переходная орбита, проходящая через точку ц, и сопряжен¬
ная с другой переходной орбитой, проходящей через точку v,
должна удовлетворять следующим условиям:
___ г ■
• р.)
1 + е cos (и — ш )
и и (6.38)
Р' .
1 4-e^cos (и — «dJ 1 + е, cos (и — и,)
Уравнения (6. 38) содержат четыре неизвестные величины: три
параметра переходной орбиты р^., е^, ©р. и аргумент широты и,
характеризующий положение точки сопряжения.
Таким образом, при одноимпульсном маневре семейство пере¬
ходных орбит является двухпараметрическим. Параметры орби¬
ты Рр, вр, ша и аргумент широты точки приложения импульса и
выбираются такими, чтобы выполнялись уравнения связей (6. 38)
и функционал J = 4^М/2у дУ2, определенный в силу послед¬
них двух условий сопряжения (6. 37), достигал наименьшего зна¬
чения.
Рассмотрев сопряжение переходных орбит, перейдем к по¬
строению энергетически оптимального маршрута. Ранее отмеча¬
лось, что линейная теория дает вполне удовлетворительные ре¬
зультаты при оценке энергозатрат маневров, совершаемых в до¬
статочно широком кольцевом слое (порядка половины радиуса
Земли). Для того чтобы воспользоваться линейной теорией, допу¬
стим, что узловые точки лежат в некотором кольцевом слое, ха¬
рактеризуемым средним радиусом гСр- Радиальное отклонение от
этой средней орбиты определяется зависимостью
Ar л У 2ДУ_
— = -sin (? - Фо)+ —2 [ 1 - cos (? - Фо)|, (6. 39)
Гер *кр кр
где Фо — начальное значение аргумента, отвечающее точке при¬
ложения импульса; ДУГ, дУ\ —компоненты управляющего им¬
пульса.
В рамках линейной теории отклонение, вычисленное по фор¬
муле (6.39), можно рассматривать как отклонение от исходной
орбиты. Именно этим положением и воспользуемся для формали-
ду
зации маршрутной задачи. Обозначим через у= относи-
V кр
тельную радиальную составляющую импульса, а х=тг
VKp
соответственно трансверсальную составляющую. Тогда гранич¬
ные условия для первой посещаемой точки запишем в виде
О/?')- —го ^0 sin (<Pi — Фх) + 2a7i [1 — cos (<рд,—Фх)]- (6. 40)
гср Qp
198
Здесь величины rt, <рх — координаты узловой точки под номе¬
ром 1; Го(ф1)—радиус исходной орбиты при значении аргумен¬
та <р=<р!. Параметрами управления являются ylt xlt Фь Для вто¬
рой посещаемой точки граничные условия имеют более сложный
вид
M?2). = roCp2) ^^sin (<р2-ф1)4-2х1[1 — cos (ср2— Фх)] +
/"ср Гер
+ «/2sin(?2-®2) + 2x2[l-cos (<р2-Ф2)]. (6.41)
Каждое последующее граничное условие связи будет содержать,
очевидно, параметры х, у, Ф всех предшествующих импульсов.
Поэтому для произвольной точки с порядковым номером k мож¬
но записать
= V {yt sin (<р4 — Ф,) + 2хг [ 1 — cos (cpft - Ф,.)| ].
rcp
(6.42)
Всего таких уравнений связи Л/ по числу КА. В системе уравне¬
ний связи содержатся 3N неизвестных параметра управления
xi, У г, Ф1 (i=l, 2,N). Поэтому 2W параметра могут быть вы¬
браны произвольно.
Задача состоит в определении оптимальных значений пара¬
метров управления х1У yiy Фл, дающих экстремум выражению
AIZ
при наличии связей вида (6. 42). Составим функцию Лагранжа
W ( к
^•—2 +#'+2 М2 sin ф/)+
1-1 к-l U-1
+ 2х, [ 1 - cos (<pft - Ф,)] - ~ r°(?ft) ) . (6.44)
гср J
Тогда система экстремальных уравнений будет иметь следующий
вид:
77 = i + ki sin (с?! - Фх) + Х2 sin (?2 - Фх)4-...
... -f-Хдг sin (<р№ Фх)=0,
77 = /Д—-2 + 2Хх [ 1 — cos (?1 - Фх)] + 2\ [ 1 - cos [<р2 - Фх)] +...
• • • + 2XW [ 1 - cos (Тлг- Фх)]=О,
199
= xi [f/icos (<P1 - ф1) + 2* *1sin (?1 - ф1)] + • • •
• • - + ^[«/1 соз((рдг—Ф1)-|-2х1 sin (Тд— фх)]=0,
-^ = —-== + X2sin (<р2—Ф2) + sin (<f>s- Ф2)+...
дУ2 у х2+у2
• ■. + \vsin (ф№ Фг)=О.
+ 2Х, [ 1 - cos (Т1 - фа)] + 2Х3 [ 1 - cos (<р8- Ф2)] +. ..
дх2 У х2+у22
. • • 2Хд [ 1 — cos (<рд — Ф2)] = 0, (6.45)
^- = Х2 [у2 cos(cp2— ®2)+2x2sin (<р2—Ф2)]+- • -
аФ2
• • • + Хд [у2 cos (<рд — Ф2) 2х sin (срд — Ф2)] = 0,
— = -Л^=-|-Хд51п(<рд-Фд) = 0,
/4+^
УУ- = ■ Xn ■ ■ + 2М1 - cos (<рд - Фд)] = 0,
dxN У X2N+y2N
= [Ум СО5(фд— Фд)-|-2Хд sin (<рд — Фд)] = 0.
Для определения 4N неизвестных систему (6.45) необходимо
решать совместно с уравнениями связей (6.42). Для исследова¬
ния рассматриваемой системы 3N экстремальных уравнений пре¬
образуем ее к виду, удобному для анализа. Умножим уравнения
dL п dL А
= 0, = 0 соответственно на х, и.на щ и вычтем из no¬
di// dX;
следних первые. Проделав это, получим
\ {2Ух [1 - cos (?1- Фх)] -Ху sin (¥1- Фх)} +...
• .• + Хд{2//1[1 — соэ(срд— Ф2)] — jqsin (<рд—Ф1)} = 0;
*2 {2у2 [ 1 — cos (<р2 — Ф2)] — х2 sin (<р2 — Ф2)} +...
... + Хд [2//2 [1 — cos (<рд — Ф2)] — х2 sin (<рд — Ф8)} =0, (6. 46)
Фур [1 — cos (<рд — Ф/v) — Xn sin (<рд — Фд)} = 0.
200
Исключив далее с помощью уравнений -^-=0 переменную xit
ОФ;
будем иметь
У1 {^-1 — 3 cos (срх — Ф1)]-(- • • • + ^лг [4 — 3 cos (4W— Ф1)]? =0,
У г {^2 [4 — 3 cos (?2 — ®г)] 4" • • • Н" ^Л’ [4 — 3 cos (<pjv — Ф2)]} =0,
(6.47)
Уы-1 < *ЛГ-1 [4 — 3 COS («рлг-! — Ф/v—1)] + ...
• • - + ^лг-1 [4 — 3 cos (cpjy — Флг_1)]}=0,
Уы (KN [4 — 3 COS (<рдг— Фдг)] ] =0.
Из уравнений (6. 47) непосредственно вытекает возможность
существования решения при
1/4=0 (i=l, 2,.... N). (6.48)
Исследуем этот случай, когда последовательность управляющих
импульсов содержит только трансверсальные импульсы х,. Нач¬
нем с анализа последнего импульса, для чего выпишем соответ¬
ствующие ему экстремальные уравнения
, , + hr sin (<jw — флг) = 0,
V xn+Vn
Г , ЛГ „ + [ i — COS — Флг) = О,
V xn+&
f'N [/Av cos (?№ Фл^ + ^Лдг sin (<рдг— Флг)] = 0,
которые при i/n=0 принимают вид
Хдг sin (срлл — Флг)=О, (6 49)
1 + [ 1 — cos (jfN — ФдО] = O'
Решение уравнений (6. 49) дает
Ф^ = ?^“л; Лдг — —— . (6.50)
Поступая аналогично с экстремальными уравнениями для
последующего импульса, получим
^лг-i sin (срлг—j. — <рлг—х) -|- A.JV sin (<рдг— ®jv-i)=O,
1 -{-2X^2 [1 — COS (<p№1 — Фдг—1)] “t^Xjy [1 — COS (cpjv—Флг-i)] =0,
8 3430
201
откуда, исключив An-i, будем иметь
Sin (<рдг_д — Фдг-д) -j- 2)-N [sin (<рдг_д — Ф.у-!) —
— sinter— Флг-i) — sin (cpyv —(рдг-J^O. (6.51)
Легко убедиться в том, что уравнение (6.51) также удовле¬
творяется при Ф2у_1 = ср,у — л. В самом деле при Фдг-1=^— л
имеем
sin (срлт-д — Ф/v-i) + 2Хдг [sin (срдг_д — Фдг-1) — sin (<рдг — Фдг_д) 4"
+ sin (срдг — <р/у_д)] = sin (срлг — <рлг-д) + 2\n 2 sin (<рдг —<рдг-д) =
= sin (срдг — срлг-д) (1 — 4Хдг)=0.
Поскольку = —1/4, то действительно 1 4-4AN = 0, что и требо¬
валось показать.
Возвращаясь к уравнению AN-isin(<pW-i—Ф]у-1)4~
4-Ajvsin(<рдг — ф2у_д)=0, убеждаемся далее, что при фдг_] = =
—чрту ■—л множитель Лагранжа X«r—i равен нулю. Для последо¬
вательности трех последних импульсов по аналогии имеем
Хдг_3 sin (срдг-2 — Ф/У-г) + Хдг-Д sin (<Р№Д— Ф/V-l)+
4-Хдг sin (<рдг — Фдг-2) = 0,
14* 2Хдг_2 [ 1 — COS (срдг_2 — Фд'-2)| + 2Хдг_д[ 1 — COS (<рдг_д — Фдг-2)] +
4~Хд г [1 — COS (срдг— Фдг-2)] = 0,
откуда при A.v-i = 0, получаем
sin (срдг-2— Фдг_2) + 2XjV [sin (<рдг_2 — Фдг_2)— sin (cp,v — Фдг_2)4~
Sin (срдг — Фдг_2)]=0.
Опять-таки убеждаемся, что Фд_2=ч^ — л есть решение экс¬
тремального уравнения, а ХЛг_2=0.
Поступая аналогично, можно доказать, что для любого им¬
пульса k точка приложения имеет координату
фЛ=фдг — л, а Ал=0.
Итак, энергетически оптимальная последовательность управ¬
ляющих импульсов в маршрутной задаче облета N узловых то¬
чек представляет собой совокупность трансверсальных импуль¬
сов, приложенных в точке орбиты, отстоящей по аргументу широ¬
ты на угол л от последнего пункта.
Остается определить область существования оптимального
решения ук—О, Фл=<Ич — л (£=4, 2,..., К). Для этого перепи¬
шем уравнения связей с учетом равенства нулю yk и при Ф& =
= фту — Jtl
Г1 (Ф1) — ГО(У1) =2Х1 11+со5(^_?1)]1
Г ср
202
Г2(^-ГОМ = 2Л1 (J + cos (?N _ ?2)] + 2л.2 [ 1 + cos (cpjv _ ?2)] J
г3(?3)-г0(Уз) = 2Х1 [ 1 + cos - <р3)] + 2х2 [ 1 - cos (^ - ср3)] +
гср
+ 2лэ[1 —cos (<?„-%)], (6.52)
гДЫ-гоМ =2[1 + cos V х1У
Гср
_ 4 х
г ср
( = 1
Обозначим безразмерную величину
rkM-rp^k) ~
2гср[1+ cos(^ —<р*)] к- ■ ( • )
Величина ДД представляет собой меру близости пункта k к
исходной орбите. Эту меру примем в качестве обобщенного па¬
раметра, характеризующего узловые точки. Величина Дг* может
быть заранее вычислена по известным координатам узловых то¬
чек ги, <рь и известному радиусу исходной орбиты Го(фй) при
условии, что последняя точка маршрута определена своей коор¬
динатой <Pjv-
Каким образом среди множества узловых точек выбрать ту
из них, которую следует принять за конечный пункт маршрута?
Для ответа на этот вопрос запишем последовательность транс¬
версальных импульсов с учетом зависимостей (6.52) и (6.53):
х1 = Ег1,
X2-^ Дг 2 Дг 1.
х3 = Дг3—Дг2,
///// (6.54;
хк= Erk- Егк_1У
XN=EPn — &rN-l-
8*
203
или
Функционал AVs /1/кр при у,=0 представляет собой линейную
форму
ДИ,,
—— = х1 + х2+хэ + - ■ • + х* + +*лг- (6.55)
V кр
Минимизация суммарной характеристической скорости в виде
линейной формы (6. 55) имеет смысл только в том случае, когда
эта линейная форма является знакопостоянной.
Таким образом, условие существования решения с трансвер¬
сальными управляющими импульсами сведется на основании
(6. 54), (6. 55) к проверке системы неравенств
Дгк - дгк_х > О
или
Дгй—Дг*-1<0 (k= 1, 2,..., N). (6.56)
Если пункты маршрута расположены относительно друг дру¬
га так, что их можно упорядочить по норме (6. 53) в виде убы¬
вающей или возрастающей последовательности (6. 56), то на этой
последовательности суммарная характеристическая скорость бу¬
дет минимальна.
Проиллюстрируем сформулированный принцип поиска опти¬
мального маршрута облета N пунктов на конкретном примере.
Предположим, что некоторой совокупности шести КА отвеча¬
ют на плоскости управляемого КА узловые точки, имеющие ко¬
ординаты, приведенные в табл. 6. 2. Данное предположение не
является принципиальным, поскольку любой системе КА всегда
можно поставить в соответствие некоторую совокупность узло¬
вых точек на заданной плоскости i0, Qo с помощью алгоритма
. sin aotg/o— sin Sfetgife
k cos 20 tg Zo — cos 2* tg ik
cos г’о
t&8* = tg/0 sin (aft- 20), (6.57)
lga,=.tg(-~2tl,
cos iu
r = Pk .
k 1 + eftcos (тл—
Входом для алгоритма (6. 57) являются параметры орбит
Pk, ek> ro, (A=l, 2,..., N),
а на выходе его получаются координаты узловых точек гк, <рк, гк,
?*•
204
Таблица 6.2
k
1
2
3
4
5
6
rb, км
6690
6640
6750
6670
6836
6930
156
136
ПО
76
68
34
k'
1
2
3
4
5
6
гк, км
6650
6640
6680
6670
6670
6884
336
316
290
256
248
214
В табл. 6. 2 КА пронумерованы по аргументу широты в по¬
рядке его убывания. Можно было бы на этом этапе вычислений
упорядочить систему иначе или оставить присвоенные ранее но¬
мера.
Поскольку речь зашла о распределении узловых точек на пло¬
скости /0, Йо, то стоит, хотя бы кратко, охарактеризовать это рас¬
пределение. Предположим, что все орбиты полярные, а плоскость
орбиты управляемого КА имеет наклонение /о=9О°. Тогда неза¬
висимо от положения восходящих узлов узловые точки распо¬
ложатся на одной линий (над полюсами). Если же наклонение
орбит различно, но все они имеют одинаковый восходящий узел
(fik = Qo=const), то в этом случае узловые точки также сосре¬
доточатся на одной линии (над экватором). Во всех других слу¬
чаях узловые точки будут распределены на плоскости /0, й0 как
по радиусу г, так и по аргументу широты. Наибольший практи¬
ческий интерес представляет случай, когда орбиты имеют одина¬
ковое наклонение i\=Qo=const.
Обращаясь к формулам (1.49)
sin(aft-20)=-^; sin (aft— 24) = -^А_
‘g i0 fg
и, полагая '\=i0. получим
sin (aft-20)=sin (aft-2Д
Отсюда следует, что либо аь — Qo—ax — йь, либо ак — йл=
=1180° — (at — Йо).
Однако первое равенство имеет место только при т. е.
в случае компланарных орбит. Из второго равенства находим
„ я । + 2о
* 2 ' 2
205
При этом распределение узловых точек по аргументу широты
найдем по формуле
/л — 20 \
82 + 2 )
‘8’*= ёоД> '
Характерно, что при ift=/0=const узловые точки группируются
л ,
в окрестности ф*=—, т. е. в области максимальных и мини¬
мальных широт.
Уяснив, что характер распределения узловых точек на пло¬
скости маневрирования может быть самым различным, но впол¬
не определенным для конкретных данных, перейдем к построе¬
нию оптимального маршрута облета узловых точек. При этом
потребуем, чтобы маршрут проходил через одну из двух узло¬
вых точек каждого КА.
Основным принципиальным моментом построения оптималь¬
ного маршрута в соответствии с изложенной выше теорией явля¬
ется поиск монотонной последовательности пунктов по норме
близости
д- = гк (<рХ) — г0 (<pft)
к 2гср [1 + cos (<p/v — <рл)] ’
По исходным данным узловые точки расположены в слое 6640—
6930 км. Будем полагать, что орбита управляемого КА имеет вы¬
соту нижней границы кольцевого слоя. Тогда среднее значение
радиуса кольцевого слоя определим по формуле
6640 + 6930 о
гс0 = = 6785 км, 2гг0= 13570 км.
Для вычисления АД необходимо задаться конечным пунктом
маршрута, которому отвечает аргумент широты <pw. Поскольку
относительно выбора конечного пункта оптимального маршрута
не имеется каких-либо рекомендаций, то остается перепробовать,
все возможные варианты, которых в данном случае 2М=12. Та¬
кое количество вариантов перебора не вносит каких-либо прин¬
ципиальных трудностей, поскольку речь идет об элементарных
вычислениях величины Егк по простой формуле.
Величины Art, вычисленные по данным табл. 6. 2 для четырех
вариантов перебора, приведены в табл. 6. 3.
Значения Arft=oo означают, что сместить точку под номером
k при оптимальной схеме маневра принципиально невозможно.
Составим по данным табл. 6. 3 монотонные последовательности.
Для этого достаточно в каждом столбце расположить номера k
или k' в порядке возрастания обобщенного параметра Агх.
Обработку данных табл. 6. 3 удобно проводить с помощью
табл. 6. 4.
206
Таблица 6. 3
k, k'
Д'*
Н*=6
^*=6'
Р-*=5
Р*=3
1
7,9-Ю-з
2,4-Ю-з
3,7-Ю-з
5,3-Ю-з
2
0
0
0
0
в
6,55-Ю^з
13,7-Ю-з
4,22-Ю-з
4,05-Ю-з
4
1,25-Ю-з
6,67-Ю-з
1,19-Ю-з
1,27-Ю-з
5
7,9-Ю-з
7,25
7,2-Ю-з
8,3-Ю-з
6
10,7-Ю-з
ОО
11,7-Ю-з
17,2-Ю-з
1'
1,39-Ю-з
1,56-Ю-з
0,73-Ю-з
12,1-Ю-з
2'
0
0
0
0
3'
3,85-Ю-з
2,37-Ю-з
8,9-10—з
ОО
4'
7,9-Ю-з
1,26-Ю-з
2,2-Ю-з
13-Ю-з
5'
14,5-Ю-з
1,20-Ю-з
ОО
6,7-Ю-з
6'
ОО
9-Ю-з
48,5-Ю-з
23,7-Ю-з
Таблица 6. 4
0
1,25-Ю-з
1,39-Ю-з
3,85-Ю-з
7,9-Ю-з
10,7-Ю-з
2(2')
4
1'
3'
5
6
Н*=6'
0
2(2')
1,2-Ю—з
5'
1,26-Ю-з
4'
1,56-Ю-з
1'
2,37-Ю-з
3'
9-Ю-з
6'
li*=5
0
2(2')
0,73-Ю-з
Г
1,19-Ю-з
4
4,22- Ю-з
3
7,2-10-з
5
11,7-Ю-з
Н*=3
0
2(2')
1,21-Ю-з
4
4,05-Ю-з
3
Наличие или отсутствие монотонной последовательности по
табл. 6. 4 определяется тем, какой столбец занимает в порядке
очередности номер пункта, являющийся входом для табл. 6.3.
Если обозначенный пункт попадает в крайний столбец, как это
имеет место при р.*=6 и ц*=6', то монотонная последователь¬
ность существует. В противном случае последовательность обры¬
вается на соответствующем номере, как это имеет место при
|lh = 5 ИЛИ (Л* = 3.
На монотонных последовательностях характеристическая ско¬
рость достигает своего наименьшего значения (минимума). По¬
этому для окончательного выбора оптимального маршрута до¬
207
статочно сопоставить выявленные монотонные последовательно¬
сти по критерию
6=1
Такую оценку весьма просто сделать, поскольку значение
обобщенного параметра Дгь для конечного пункта маршрута
численно равно
Л-
дг*=—•
v кр
В данном конкретном случае наименьшие энергозатраты име¬
ют место для маршрута {2, 5', 4', Г, 3', 6'} и минимальная ве¬
личина характеристической скорости составляет
aVs = 9- 10-3 i /— = 9-10-3-7750 = 70 м/с.
у <0
Оптимальный маршрут целиком лежит в кольцевом слое
Дг=6884 — 6640=244 км.
Если монотонные последовательности в наиболее удаленную
точку маршрута выявлены, то среди них наверняка будет содер¬
жаться энергетически оптимальный маршрут. Если же монотон¬
ных последовательностей по норме Дгй не существует, то тогда
изложенный выше метод неприменим и нужно искать иные пути
решения маршрутной задачи. Хотя такие случаи на практике
могут встретиться весьма редко, однако они не утрачивают на¬
учного интереса.
Можно, например, порекомендовать путь разбиения множест¬
ва узловых точек на два подмножества, для каждого из кото¬
рых производится упорядочение по норме близости, а затем
«склеивание» двух ветвей энергетически оптимального маршру¬
та. Такой путь эквивалентен задаче покрытия узловых точек на
плоскости зонами досягаемости (непрерывными зонами конт¬
роля).
6.4. ОПТИМАЛЬНЫЕ МАРШРУТЫ ОБЛЕТА СИСТЕМЫ ИСЗ
В УЗЛОВЫХ ТОЧКАХ
Используем метод оптимизации маршрута облета узловых то¬
чек для решения более сложной задачи — оптимизации маршру¬
та облета совокупности ИСЗ. Маршрутная задача облета ИСЗ
в узловых точках от маршрутной задачи облета узловых точек
отличается тем, что к уравнениям связи (6.42) добавляются
условия встречи в этих точках управляемого КА с орбитальными
объектами.
208
Если на продолжительность маршрута по времени никаких
ограничений не наложено, то выполнение условий встречи воз¬
можно благодаря фазированию каждой встречи на каждом пунк¬
те маршрута. В свою очередь фазирование может быть выпол¬
нено без дополнительных энергозатрат путем деления переход¬
ного управляющего импульса на две части. Из проведенных рас-
суждений следует, что минимум характеристической скорости при
облете ИСЗ достигается на энергетически оптимальном маршру¬
те облета соответствующих узловых точек. Обозначим оптималь¬
ную последовательность облета узловых точек
М{Xi, %2, • •., Xjv}. (6. 58)
Этой очередности облета поставим в соответствие последователь¬
ность времен
Л, Л, • • •, tn- (6. 59)
Требуется найти такие значения времен (6.59), при которых в
моменты прибытия управляемого КА в каждый пункт заданного
маршрута (6. 58) в этих пунктах произойдет встреча с ИСЗ, име¬
ющими соответствующие номера %i, Х2, . . ., Xjy.
Таким образом, для определения энергетически оптимального
маршрута облета ИСЗ в узловых точках достаточно дополнить
задачу оптимизации маршрута облета узловых точек алгоритмом
фазирования.
Для расчета фазирования необходимо определить дискретные
времена прибытия каждого ИСЗ в свою узловую точку. Зафикси¬
руем время t0—0, и вычислим на данный момент времени аргу¬
менты широты для всей совокупности КА
«<Ю, «01, «02, • • •, «ON-
Далее решим вспомогательную задачу по расчету ближайшего
времени прибытия каждого ИСЗ в узловую точку, принятую в
маршруте. При этом используем аргументы широты узловых
точек
«1, «2, • • -, «N-
Интервал времени, соответствующий изменению аргумента ши¬
роты с «юл до «л, будет искомым временем, которое найдем из
уравнения Кеплера
= Дл-sin £'oft)], (6.60)
где Тк — период обращения ИСЗ; ЕОл, Дл — эксцентрические ано¬
малии, соответствующие аргументам широты «юл и «л,
= 1 / 1-сЧс
К 2 |/ 1 + ек & 2 ’
tp £oft = 1 f 1—
2 J/ 1 + ел 2
209
Вычислив ближайшие моменты прохождения узловых точек Д/ь
Л/2, А/з, ..&tN, определим дискретные моменты времени про¬
хождения узловых точек
Д/1 + гпТ\,
t2 = М2-\-_шТ2, (6.61)
tfr— Mn 4~ N
^tn=), 2, 3, ...).
После этого можно приступать к расчету фазирования по ме¬
тодике, изложенной в разд. 6. 2 настоящей главы. Поскольку
положение точки приложения управляющих импульсов для энер¬
гетически оптимальной схемы облета точек сохраняется неизмен¬
ным, то целесообразно отсчет времен вести по моментам прохож¬
дения управляемым КА этой точки. Определим ближайший мо¬
мент времени прохождения точек старта. Промежуток време¬
ни с момента прохождения исходного аргумента широты и0 до
момента прохождения оптимального аргумента широты, отстоя¬
щего от аргумента широты узловой точки последнего пункта
маршрута <рдг на угол л, определим по формуле (6. 60)
д/o^-p-Ifoi —-^о — ^о (sin £'о1—sin £0)],
2ТС
tff д f 1 — tg ц0~ ц0
ё 2 |/ 1 + ео ё 2
t £qi = - Г1 — ерt <рм— л—о>р
2 у 1 + е0 ё 2
Для круговых орбит этот промежуток времени найдем по
формуле
Д/о1 = 4^-(^—я —сро).
Далее введем в рассмотрение исходное рассогласование, по¬
нимая под этим разность времени прохождения узловой точки
управляемых КА и ИСЗ при отсутствии ожидания. Этот проме¬
жуток времени определяется разностью времени ДАи — Д4 плюс
время движения управляемого КА из точки приложения управ¬
210
ляющего импульса в узловую точку. Последний отрезок времени
найдем из уравнения Кеплера
—esinFi) ПРИ ri>roi.
8г2=—— [Е^ — л — е sin (Ех — л)] при Г1<гох, (6.62)
2 л
tg = 1 / 1~е tg ?1-Ф?у + я
2 у 1+е S 2
Обозначим рассогласование через Дт. Тогда время рассогла¬
сования в первом пункте маршрута будет равно
ДТХ = Д/^х “j” 8Т1 д/р
Для определения периода переходной орбиты в первый пункт
маршрута ti необходимо решить вспомогательную задачу по рас¬
чету перехода с орбиты в заданную точку.
Переходная орбита должна удовлетворять граничным усло¬
виям
р
Н — ~ " —Г01,
1 + е cos «01
И = <f>!, = гj. (6.63)
1 4- е cos (&oi 4- <р 4- «— T/v)
Если исходная орбита круговая (или почти круговая), то точ¬
ка приложения оптимального трансверсального управляющего
импульса является либо перигеем (когда ri>rOi), либо апогеем
(когда Г1<го1). Поэтому истинная аномалия точки приложения
импульса на переходной орбите равна 0 или л. При этом реше¬
ние уравнений (6. 63) получается в следующем виде:
Р 1 4- cos (?,v — ?i)
>
Г° —— + COS (<рдг — <P1)
fl
e=\ ——1 . (6.64)
I ro
После этого находим все прочие величины, характеризующие
переходную орбиту, в том числе и период обращения Тр Расчет
фазирования проводится путем отыскания целочисленного зна¬
чения т в области, ограниченной лучами
m (6.65)
Т 1 Ту 1 Т1 Ту к
Минимальное целочисленное значение х, при котором функция m
также достигает целочисленного значения, является решением
211
задачи фазирования. Обозначим это значение х через xh а пе¬
риод соответствующей фазирующей орбиты через Т1». Тогда вре¬
мя встречи в первом пункте маршрута определится в виде суммы:
Л = Мп + -7+*1Ь*- (6.66)
Период обращения ri* для фазирующей орбиты рассчитывается
по алгоритму, изложенному в разд. 6. 2.
Исходный момент для перехода во второй пункт маршрута
{Xi, Аг, • . ., X/v} в соответствии с принятым ранее правилом от¬
счета времени найдем по формуле
4г= АЛ14“ $”44“ 4“ (Ti $Ti)= ААн4“ 4" (6. 67)
На данный момент на маршруте очередной ИСЗ сделает т2 вит¬
ков в соответствии с равенством времен
Д4и 4“ xiTi* 4- Ti = Д4 4“ тгГ2,
откуда т2 = А^-Д^ + хщ. + Т! . (6 68)
Т2
Дробная часть т2 определит ближайший момент прохождения
ИСЗ узловой точки. Пусть дробная часть (6. 68) равна \т2. Тог¬
да ИСЗ пройдет узловую точку через промежуток времени
Т2(1 — Дт2).
Рассогласование времен при этом найдем по формуле
дт02 = Т'2(1 — дт2) —Вт2, (6.69)
где бт2 — промежуток времени движения КА по переходной ор¬
бите от точки приложения управляющего импульса до узловой
точки. Для определения периода переходной орбиты т2 необходи¬
мо произвести расчет перехода с орбиты в заданную точку. Для
этого следует воспользоваться формулами (6.64), подставив в
них вместо ф1Г1 соответственно координаты очередной узловой
точки фг, г2.
Расчеты фазирования проводятся путем отыскания целечис¬
ленного значения х в области, ограниченной лучами
= = + (6.70)
/ 2 1 2 1 2 >2
Пусть решением (6.70) являются х2 и т2». Тогда время встречи
во втором пункте маршрута определим по формуле
Л==44_^Т2 4_-’С2Т2*- (6-71)
Одновременно с этим найдем исходный момент для расчета
встречи в следующем пункте маршрута:
Лз = 4 4~ З'г4_-^2^2*- ■ (6-72)
212
Последующие этапы фазирования проводятся аналогично.
При этом время встречи в последнем пункте маршрутов tN опре¬
делит длительность маршрута по времени.
Продолжительность облета ИСЗ по маршруту с фазированием
зависит от распределения пунктов маршрута в пространстве и
периодов обращения ИСЗ. Чем сильнее по периоду отличаются
последующие переходные орбиты от предшествующих, тем шире
область существования решений фазирования и, как следствие
этого, меньше время фазирования.
6.5. МАРШРУТНАЯ ЗАДАЧА ПОСЕЩЕНИЯ УПРАВЛЯЕМЫМ
КА СОВОКУПНОСТИ ИСЗ НА РАЗНОВЫСОКИХ ОРБИТАХ
Посещение отличается от облета тем, что в момент прибытия
управляемого КА на очередной пункт маршрута происходит
уравнивание скорости полета (гашение относительной скорости
до нуля). Если на время ограничений не наложено, то для осу¬
ществления каждого посещения нужно совершить двухимпульс-
ный межорбитальный переход. Первый импульс, как и прежде,
служит для достижения заданного пункта, тогда как второй
предназначен для гашения относительной скорости.
С энергетической точки зрения межорбитальный переход яв¬
ляется более энергонапряженным маневром, чем переход с ор¬
биты в заданную точку пространства. Особенно велики энергоза¬
траты при некомпланарных межорбитальных переходах. Поэто¬
му о маршруте посещаемых объектов имеет смысл говорить
только в том случае, когда орбиты близки к компланарным.
Рассмотрим совокупность ИСЗ на компланарных разновысо¬
ких круговых орбитах, плоскость которых совпадает с плоско¬
стью управляемого КА. Возьмем две произвольные орбиты среди
имеющейся совокупности и запишем для этой пары орбит сум¬
марную характеристическую скорость оптимального 1^ежорби-
тального перехода
при Г|А>г.(, (6.73)
при ги < г„ (6. 74)
где р= Е фокальный параметр оптимальной переходной
Ч + 'V
орбиты; г„ Гр. — радиусы орбит, содержащие соответственно
v-й и ц-й пункты маршрута.
213
Преобразуем формулу (6. 73) к виду, удобному для анализа,
=—]/2 (l/^-VT-yL. (6.75)
ул^р. L vri + ri
или
iW^-r^). (6.76)
/W \ рг. + г, У
о У У + УУ
величина — При любых значениях г„ всегда боль-
V ri + ri
ше единицы. Поэтому выражение У 2 и + * — 1 положи-
/га+ rv
тельно и знак AV\p. полностью определяется разностью
Уг?). Поскольку характеристическая скорость не может
быть отрицательной величиной, то при ги<(г, в формуле (6.76)
необходимо поменять местами уменьшаемое и вычитаемое.
Зависимость (6.76) примечательна тем, что от радиуса орби¬
ты в наибольшей степени зависит разность (Уг^ — У г,), тогда
как относительное изменение других величин менее заметно.
с УУ + к У 1 \
Если Ги.= г„ то выражение У 2— 1 равно
/г—, J
единице и для тонкого слоя справедлива приближенная зависи¬
мость
=уу— УУ_
v"’ Vd + Ут.)
или ^ = ±2 Л». (6.77)
V 9 г 4
v кр 'ср
На основании изложенного можно сделать вывод о том, что
минимум характеристической скорости достигается на таком мар¬
шруте, когда посещаемые орбиты упорядочены по радиусу, г в
виде возрастающей или убывающей последовательности. При¬
чем, если исходная орбита управляемого КА имеет наименьший
радиус среди всех орбит (посещаемых КА, то оптимальный мар¬
шрут будет проходить в строгом порядке увеличения радиуса
орбит. Если же исходная орбита имеет наибольший среди всех
рассматриваемых орбит радиус, то оптимальному маршруту бу¬
214
дет отвечать убывающая последовательность радиусов. Наконец,
если исходная орбита занимает промежуточное положение, то
минимум характеристической скорости также будет достигаться
на упорядоченных по радиусу орбитах, но оптимальный марш¬
рут будет включать две монотонные последовательности (воз¬
растающую и убывающую или наоборот).
Таким образом, при посещении круговых компланарных ор¬
бит маршрут заранее предопределен исходной орбитой управ¬
ляемого КА и распределением орбит ИСЗ по радиусу. При этом
расчет управляющих импульсов скорости ведется по формулам
(6.73) и (6.74), в которых первое слагаемое относится к пер¬
вому импульсу скорости, а второе — ко второму импульсу двух-
импульсного мсжорбптального перехода.
Первый импульс, в свою очередь, делится на две части, пер¬
вая часть которого используется для перехода на фазирующую
орбиту, а вторая — для достижения орбиты посещаемого КА.
Расчет фазирования производится так же, как и в случае облета
узловых точек. Приведем ниже полный алгоритм расчета марш¬
рута посещения совокупности ИСЗ на круговых компланарных
орбитах.
1. Исходные данные
rk, %* (£=1, 2. М
Г0> ?0 (ГО<СГ*к
2. Упорядочение орбит по радиусу
Гд, Г1> Г2, •••> 'Л'-
3. Расчет управляющих импульсов
Д^и=1/ —(]/ -^7 Л
У ro \ V ro + ri /
дп22=./-М 1- ■/ ,
У Г2 \ у Г1 + г2
. 1/ л f к К / 2гN \
ДУ 1N — 1/ I 1/ — —— 1 ,
V '7V-1 \ г 'zv-i 'N /
Т rN X Г rN-l + rN ‘
215
4. Расчет периода переходных орбит
^о±2Х, т 2л г/
1 2 1 у К
_ rN-l + rN _ <)_ 1 / a?N
aN — , xN = 2a у
5. Фазирование при посещении первого пункта маршрута
. 4 ар + л —■ Uj ~
1— 2л ’ 11
_ '®1 “о + Я— И! 7-
До1-т 2л 711
т
?! ?!
д- - —zXx,
т Д’01 I 4- Т1
tnr, г х
?! ?1
™ Дт01 I „ т1*
mt\T 1 Дт01
т1*— ,
Х1 Х1
4=л1т1* 4“ т •
6. Фазирование при посещении второго пункта маршрута.
Посещение предполагает выполнение определенных операций
в космосе в окрестности ИСЗ или непосредственно на самом
ИСЗ. Поэтому после фазирования управляемый КА уравнивает
скорости в точке встречи и совершает в дальнейшем полет вместе
с ИСЗ. Обозначим через тР время выполнения операций на по¬
сещаемом ИСЗ. Тогда время начала маневра при переходе ко
второму пункту маршрута определится по формуле
42=xiti* 4" “7” 4- Т1Р-
Второй ИСЗ к этому времени совершит т2 витков относительно
своего первоначального положения
■®i
т ^1Т1* + g + Tip
■Vu 4 7 4" Т1Р = тгГ21 т2 = — •
2 ‘2
Предположим, что xip равно целому числу витков при дви¬
жении управляемого КА по орбите ИСЗ-1. Тогда точка прибы¬
216
тия в пункт 1 в то же время будет являться точкой отправления
в пункт 2. Если прибавить дробную часть витка 6т2 з угловом
измерении к исходному аргументу срм, то найдем положение
ИСЗ-2 на момент времени fos- ИСЗ-2 пройдет точку предстоящей
встречи в момент времени
J I ! ?0—?02—2л6/П2 \ у,
/о2 + ( Гл Г2'
В эту же точку управляемый КА может прибыть в ближайший
момент времени
t I Т2
Рассогласование времен оценивается величиной
—?02—2л5/И2 у-
дт«2=Т Гл
Далее строятся границы области существования решения за¬
дачи фазирования
Дт02 | у. Т\ . т Дт02 । Т2
rrltl = г Л ? ГЛ ’
Г, Т2 т2 Т2
и пр изложенному выше правилу находим х2 и т,2*,а затем
Т2, И /2 =/02 + х2т2» +•
Фазирование при посещении последующих ИСЗ рассматри¬
вается так же, как и при посещении второго ИСЗ в последо¬
вательности. Для удобства вычислений ниже приведены расчет¬
ные формулы фазирования при посещении ИСЗ под номером
Е>2
m Дтол । yTh—y
~—г х ~—
Тк Тк
— ^>хк>
тхк=--—гх~
Tk тк
4=1 И- xkx^ 'у* •
По прибытии в последний пункт маршрута определяются tN и
которые являются основными характеристиками марш¬
рута. Время tN характеризует общую продолжительность полета
КА по маршруту, а ДУ^ —суммарные энергозатраты на манев¬
ры. При этом с меньшими энергозатратами осуществить после¬
довательное посещение N пунктов невозможно. В этом смысле
найденные характеристики дУвд и tN можно трактовать как
энергетически оптимальные.
217
Энергозатраты на оптимальные маневры зависят только ог
радиусов орбит г0, г,, . . гп, а время облета зависит от радиу¬
сов орбит и исходного положения ИСЗ на своих орбитах по ар¬
гументу широты. В основном на маршруте время затрачивается
на ожидание благоприятных условий для осуществления встре¬
чи. Суммарное время ожидания не превосходит величины, опре¬
деляемой по следующей формуле:
N N
V =- V Tk-lTk
*=i *=i
Если маневрирование происходит в тонком слсе, в котором
орбиты ИСЗ равномерно распределены по периоду, то .
Пусть — 0,1. Тогда суммарное время ожидания не
Ро
N
превзойдет величины -у— — витков. При облете, например,
шести ИСЗ суммарное время ожидания не превзойдет 60 витков.
66. МАРШРУТНАЯ ЗАДАЧА ПОСЕЩЕНИЯ УПРАВЛЯЕМЫМ КА
ЦЕПОЧКИ ИСЗ
Пусть имеем цепочку N ИСЗ, равномерно распределенных по
аргументу широты орбиты r0=const. Предположим далее, что
управляемый КА в момент времени to = O посетил один из ИСЗ
цепочки и располагает характеристической скоростью ДЕЙ.
В данном случае, когда радиусы орбит ИСЗ одинаковы, задача
оптимизации энергозатрат имеет смысл только при ограничении,
наложенном на время маневра. В самом деле любое сколь угод¬
но малое изменение периода дает требуемое смещение вдоль ор¬
биты за время Д/—>-оо в соответствии с равенством
<— — ')д/=—, (6.78)
То+ът) N
2л 2л . .
где —относительная угловая скорость; Дг— время
Т* 'P i St Т* ' 1 ' 1
Рд Р о + °Р
относительного смещения вдоль орбиты на угловое расстояние
2л
ди — .
N
Требуется распределить имеющийся запас характеристиче¬
ской скорости между маневрами таким образом, чтобы управляе¬
мый КА за минимальное время посетил все ИСЗ цепочки и воз¬
вратился в исходный пункт маршрута (на базовый ИСЗ). Будем
полагать, что относительное рассогласование устраняется путем
фазирования. Фазирование, как об этом уже говорилось ранее,
достигается путем соответствующего изменения периода обра-
218
щения. Рассмотрим энергетически оптимальный маневр, связан¬
ный с изменением периода. На рис. 6. 11 и 6. 12 представлены
две схемы энергетически оптимального изменения периода. Этим
Рис. 6.11. Схема маневра при
увеличении периода
Рис. 6. 12. Схема маневра при
уменьшении периода
двум схемам отвечают два значения большой полуоси фазиру¬
ющей орбиты аа, «р, определяемые зависимостями '
(6-79)
(6-80)
и соответственно два значения периода обращения
К
_ f а»
7\ = 2л1/
V К
Время фазирования на всем маршруте найдем из очевидного со¬
отношения
о 2л 2л I ,
2л = Et,
Т Г01
откуда, полагая Т=Та и Т = Гр, имеем
л/ Т*Г° л/ — Гр7'° (6 811
—17 7 1 ’ 17 71 ■ (6.01)
1~«— го| —'о|
219
Из двух схем энергетически оптимальных маневров предпоч¬
тение должно быть отдано той схеме, для которой суммарное вре¬
мя фазирования, определенное по формулам (6.81), будет наи
меньшим. При этом должны приниматься во внимание ограниче¬
ния на высоту полета управляемого КА. При второй схеме ма¬
невра высота перигея фазирующей орбиты не должна быть
менее /гтт. которая принимается из условия допустимого паде¬
ния периода, обусловленного аэродинамическим сопротивлением.
При первой схеме маневра возможны ограничения на высоту
апогея, потеря не должна превосходить /гтах.
Остается определить допустимые значения характеристиче¬
ской скорости, приходящейся на каждое фазирование.
При равномерном распределении ИСЗ по аргументу широты
каждое очередное посещение эквивалентно предыдущему в энер¬
гетическом отношении. Поэтому общий запас характеристической
скорости должен быть разделен на равных частей. В свою оче¬
редь, каждый такой .запас характеристической скорости должен
быть поделен пополам, одна часть которого предназначается
для перехода на фазирующую орбиту, а вторая часть — для пога¬
шения относительной скорости в точке встречи (возвращения на
исходную орбиту).
Таким образом, характеристическая скорость, из которой сле¬
дует исходить при расчете фазирующей орбиты по формулам
(6. 79), (6.80), оценивается величиной
a/»-
(6‘82)
Решение задачи фазирования на всем маршруте будет оптималь¬
ным в том и только в том случае, если найденные по форму¬
лам (6.79), (6.80) значения ал и яя с учетом (6.82) дают вели¬
чинам
ЛГ|ГВ-ТО| ’ Л7|Гр—Го| '
целочисленные значения. Если же это условие не выполняется, то
необходимо перераспределить характеристическую скорость на
маршруте так, чтобы достигался минимум суммарного времени
фазирования как функции целочисленных аргументов при стро¬
гом равенстве дУ ъ= дУ g-
Приведем ниже приближенное решение поставленной марш¬
рутной задачи при условии, что округление величин (6.83) до
целого числа делается на каждом переходе от одного пункта
маршрута к другому.
Округление величин (6.83) до целого числа в силу ограни¬
чений на энергозатраты возможно только в одну сторону, а имен¬
но, в сторону увеличения времени фазирования. При этом на
каждом переходе высвобождается некоторое количество недо¬
расходованного топлива, эквивалентное величине характеристи¬
220
ческой скорости 6V. Этот резерв недостаточен, чтобы уменьшить
время фазирования на один виток. Однако, накапливаясь от од¬
ного перехода к другому по мере посещения пунктов маршрута,
образуются резервы, достаточные для такого изменения времени
фазирования на некотором этапе маршрута. Будем полагать, что
образующиеся резервы используются на последнем переходе.
Тогда алгоритм расчета маршрута можно представить в следу¬
ющем виде.
1. Расчет большой полуоси фазирующей орбиты
а = .
/ \2
2 — / i ± = \
( 2Х
\ I го/
2. Расчет периодов обращения для исходной и фазирующей
орбит
7’о = 2л]/^-; Г = 2л1/^-.
3. Расчет времени фазирования на одном переходе
. Тд
Т N\Tg—T\
4. Округление времени фазирования до целого числа витков
( =Е Г Тд 1
\Tj* I Wo-Т| J ’
5. Уточнение периода фазирующей орбиты
|г°“Л|=м1Г;
\ Т '*
Т’* = Го + |Г0 — Т*\ при фазировании по схеме а,
Тл=Т0 — \Т0 — 7\\ при фазировании по схеме р.
6. Уточнение большой полуоси фазирующей орбиты.
a*=(TVkl2n)213.
7. Уточнение характеристической скорости
д1/а=- — fl/ 2 — — 1 ) при фазировании по схеме а,
V го \ V а* J
— — ^|//Г2—— — 1^ при фазировании по схеме р.
221
8. Определение резерва энергозапасов, образующегося на од¬
ном переходе
Ve Vg
814=—-д!4; 814=—— — д!4.
2W р 2W р
9. Накопление резервов к моменту совершения последнего
перехода
8I4 = ((V- 1)8У.
10. Уточнение значения характеристической скорости, соот¬
ветствующей последнему переходу на фазирующую орбиту,
Д^ = ^ + (^-!)8У.
11. Расчет фазирования на заключительном этапе маршрута
(повторение пп. 1—4).
12. Определение суммарного времени фазирования
txri = (N- 1)——1_ е Г 1 TN_y.
14-41 L ЩТо~ 4v-il J
Приближенность данного алгоритма заключается в том, что
не производится оптимального перераспределения накапливаю¬
щегося резерва характеристической скорости, а использование
этого резерва заранее предписано на заключительном этапе
маршрута.
До сих пор предполагалось, что ИСЗ в цепочке распределены
равномерно. Покажем, что при замкнутом (кольцевом) маршруте
неравномерность распределения ИСЗ по аргументу широты не
приводит к увеличению продолжительности маршрута. Предста¬
вим время полета по маршруту в виде суммы
Л/ ТрГ 1 ДЦ1 । Tori ^и2 । । TqTn /с од1
и |ГХ-4| 2л |Г2-Г0| 2л '"Г|4v-4| 2л’
Предположим далее, что фазирующая орбита одинакова для
всех маневров. Тогда равенство (6. 84) примет следующий вид:
N
Д/и = ðà . (6.85)
и |Т—41 2л v
Поскольку для кольцевого маршрута сумма 2 &Ui = 2n, то
/-I
= ðà .
Г —41
Сопоставляя полученный результат с формулами (6. 81), при¬
ходим к заключению, что продолжительность полета по кольце¬
222
вому маршруту при неравномерном распределении ИСЗ совпа¬
дает с продолжительностью полета по маршруту равномерно рас¬
пределенных ИСЗ.
Доказанное положение имеет принципиальное значение для
оценки требуемых энергозатрат: запас характеристической ско¬
рости, при котором обеспечивается облет равномерно распреде¬
ленных ИСЗ за заданное время tp., достаточен для облета той
же совокупности ИСЗ за то же время tp. при любом распределе¬
нии ИСЗ в цепочке.
В заключение данного раздела приведем простые оценки ха¬
рактеристики маршрута по линейной теории. Пусть имеем сле¬
дующие исходные данные: Яо=ЮОО км, Vg=600 м/с, М=6. Тог¬
да для совершения одного маневра будем иметь
1Z vg 600 ,
дИ =— = —=50 м/с.
2ЛГ 2-6
При таком незначительном возмущении скорости линейная тео¬
рия дает вполне удовлетворительные оценки.
Изменение периода в зависимости от приращения скорости
ДЕ определяется следующим приближенным соотношением:
Д7 ^3 ДУ
т О ^0
Продолжительность полета по маршруту представим в виде сум¬
мы продолжительностей каждого маневра
N
= (6’86*
7-1 ‘
v N
где =
лл
(/=<■)
Предположим, что характеристическая скорость распределена
равномерно (поделена на N равных частей). Тогда будем иметь.
t 2N_y Vjr^2N_ _
3-2n VgZi 3 Ve k
i =1
Подставляя в формулу (6. 87) исходные данные, получим следу¬
ющую оценку
, И0Г0 2N 7350-6300 □ с-
/u. = -!L-L = 12 = 3,5 сут.
* 3 Vg 3-600
Предположим далее, что характеристическая скорость распре¬
делена пропорционально угловой дальности Л«г- (такое распре-
223
деление представляется наиболее естественным). Тогда формула
(6. 86) примет вид
2л 2д/- 2N-
и 3-2л Vg ~ 3 Vg
Таким образом, при равномерном распределении характери¬
стической скорости, а также при распределении характеристи¬
ческой скорости пропорционально угловой дальности Ди,, про¬
должительность кольцевого маршрута получается одинаковой и
не зависит от распределения ИСЗ в цепочке по аргументу широ¬
ты. Для случая равномерного распределения ИСЗ в цепочке эта
продолжительность при энергетически оптимальном фазировании
получается наименьшей. Если же ИСЗ в цепочке распределены
неравномерно, то возникает проблема минимизации времени по¬
лета по маршруту, которая в линейной постановке сводится к за¬
даче нелинейного программирования
3 АИ,
/=1
△«! 4” Д«2 4“ • • ■ 4“ Eli к =2л, (6.88)
V+
д1/1+д1/г+...4-дИ„=-Л
При этом наименьшее значение — численно равно или, по край¬
не
, й А УдТд 2N
ней мере, меньше (но не больше) величины .
3 Vg
Последнее обстоятельство позволяет вести расчет требуемо¬
го запаса характеристической скорости, исходя из условия
, _И0Т0 2W
" 3 Vg ’
откуда = (6.89)
Решим следующую задачу. Пусть требуется оценить запас
характеристической скорости для последовательного посещения
цепочки ИСЗ, состоящей из шести ИСЗ, на высоте До=1000 км,
за время /^,= 1 сут.
Обращаясь к формуле (6.89), непосредственно находим
I/ -7ОСЛ 2-6-6300 О1<л
I2 =7350 =2140 м/с.
е 3-86400
Формула (6.89), в сущности, представляет собой функцию
обмена энергозатрат на выигрыш времени полета по маршруту.
В первом приближении эта зависимость имеет характер гипер¬
болы.
224
6.7. ЭНЕРГЕТИЧЕСКИ ОПТИМАЛЬНЫЙ МАРШРУТ ПОСЕЩЕНИЯ
СОВОКУПНОСТИ ИСЗ НА НЕКЮМПЛАНАРНЫХ ОРБИТАХ
Положение (ориентация) орбит в пространстве характеризу¬
ется совокупностью параметров
Ч, Qj (j=l, 2,...,N).
Рассмотрим из этой совокупности некоторую пару ИСЗ с поряд¬
ковыми номерами v, ц, имеющими соответственно параметры iv
2„ ip., 2р... Независимо от того, каким образом ориентировать
плоскости орбит в пространстве, их относительное положение с
точки зрения маневров можно характеризовать одним парамет¬
ром — углом некомпланарности у,и.
Угол некомпланарности связан с элементами орбит зависимо¬
стью (5. 224), которую представим в виде
yX(1 = arcsin sin (2И — 2,) (6.90)
[sinu^
где Up—аргумент широты узловой точки на линии пересечения
орбит, определяемый с помощью алгоритма (6. 57).
Переход с v-й орбиты на р-ю при одинаковой их геометрии
сводится к повороту одной из плоскостей орбиты относительно
линии их пересечения на угол у,и.
При малых углах у,и справедлива формула (6. 101)
ДУ
связывающая изменение угла некомпланарности у с бинормаль¬
ным управляющим импульсом скорости, отнесенным к трансвер¬
сальной составляющей скорости в точке приложения импульса.
Предположим, что все орбиты рассматриваемой совокупно¬
сти ИСЗ круговые и притом, имеющие одинаковый радиус гд.
Тогда для любой пары ИСЗ характеристическая скорость межор¬
битального перехода определится следующей зависимостью:
дк\а = |/А у,и. (6.91)
Формула (6.91) является приближенной и степень ее прибли¬
жения определяется тем, насколько справедливо приближенное
равенство у = 2 sin-= При больших углах некомпланарности
следует пользоваться строгим равенством
Д1ЛИ=2 1/ — sin-^ (6.92)
У г о 2
или дУ,р=2 — ]Г 1 — cos у,и. (6.93)
У Гд
225
Управляющий импульс, найденный по формулам (6.91),
(6.92) или (6.93), обеспечивает лишь межорбитальный переход.
Для достижения встречи управляемого КА с у.-м ИСЗ после по¬
сещения v-ro ИСЗ необходимо осуществить фазирование. В этой
связи наряду с исходной v-й и конечной ц-й орбитами рассмот¬
рим также фазирующую эллиптическую орбиту, получаемую пу¬
тем сообщения КА трансверсального импульса скорости д1/хф
в одной из узловых точек. При этом время фазирования будет
определяться разностью аргументов широты и^ = и^. — ич и вели¬
чиной трансверсального импульса Д1/Тф, от которой зависит из¬
менение периода обращения. Для малых изменений периода АГ
можно воспользоваться формулой (5.7), которая при r0=const
принимает вид
д7- = Е0-3 _ . (6.94)
/
|/ ''о
Тогда время фазирования определится по следующей формуле:
Ди Т Т &и т 1
д/ф = —= L-. (6.95)
ф 2л |Д74| 2л
Покажем, что если отсутствуют ограничения на время фа¬
зирования, то при некотором угле некомпланарности существу¬
ет принципиальная возможность посещения ИСЗ на некомпла¬
нарных орбитах при энергозатратах, не превышающих значения
характеристической скорости, потребной для поворота плоскости
орбиты на угол у.
Поскольку при одинаковом радиусе круговых орбит периоды
обращения ИСЗ одинаковы, то так или иначе необходимо изме¬
нять период обращения управляемого КА для обеспечения его
встречи с посещаемым ИСЗ.
Итак, за разворотом плоскости орбиты должен следовать
фазирующий маневр. Изменим последовательность маневров:
сначала произведем фазирование, а затем в апогее фазирующей
орбиты разворот плоскости орбиты и по прибытии в точку встре¬
чи (в перигей фазирующей орбиты) уравняем периоды обра¬
щения управляемого КА с ц-м ИСЗ.
Рассматриваемой последовательности маневров отвечают сле¬
дующие энергозатраты:
Д V г = дК, -|- 14у,р.-)- д V,. (6.96)
Но при этой схеме маневра трансверсальная составляющая ско¬
рости И, в узловой точке будет меньше круговой. В соответст¬
вии с линейной теорией возмущений положительный трансвер¬
сальный импульс скорости вызывает максимальное изменение
226
скорости в апогее, равное Зд1/Т. Тогда формула (6.96) может
быть записана в виде
д!/1 = 2д1/1 + -|/Л -^-у^-ЗдЕ.у^. (6.97)
Потребуем, чтобы суммарные энергозатраты (6. 97) не превосхо¬
дили минимально возможных на некомпланарный переход между
круговыми орбитами дЕЛ,(1 = ] / — у,и. Данное требование выпол-
I/ г0
няется, если ЗдЕ\у,и > 2д1/х или у,и> 2/3.
Таким образом, получили весьма интересный результат: при
углах некомпланарности -у>2/3 или у>38° возможно фазирование
без дополнительных энергозатрат. При углах некомпланарности
у<38° необходимо на фазирование выделять некоторые энерго¬
запасы сверх того, что необходимо для поворота плоскостей ор¬
бит. Обозначим дополнительную характеристическую скорость на
одну операцию встречи через &VP. Формула (6. 97) при этом
примет вид
дУе = 2д1/т+-|/ -^у^-ЗдЕ^ + д!/,.
I/ <0
Нетрудно видеть, что дополнительные энергозатраты на фазиро¬
вание при принятой схеме маневров всегда меньше удвоенного
трансверсального импульса скорости 2д1/т. По определению до¬
полнительных энергозатрат получим
2д1/т-Зд1/,у^+д1/р = О, (6.98)
отсюда
ДУР= ДЕ\(2 — Зут)=2дЕ\^1 yvj .
Соотношения (6. 98) можно также использовать для расчета
трансверсального управляющего импульса в схеме трехимпульс-
ного разворота плоскости орбиты
Д1/Х=- Ь (6.99)
Зная величину зарезервированной на каждое фазирование
характеристической скорости АЕР и угол некомпланарности ор¬
бит у,ц, по формуле (6. 99) находим значение характеристиче¬
ской скорости, фактически приходящееся на изменение периода
227
обращения, а затем по формуле (6. 90) оцениваем время фазиро¬
вания Д/ф:
Да т- ^(1
Д/ф=—— —— . (6. 100)
ф 2л / К_ 3lxVp к ’
У ri
Время фазирования зависит от отношения величин . Если
суммарные энергозапасы, отводимые на фазирование, распреде¬
лить пропорционально величине ди,и, то время фазирования для
каждого очередного посещения будет одинаковым. В принципе,
правомерна следующая задача о минимизации времени полета по
маршруту посещения N ИСЗ на некомпланарных орбитах.
Пусть заданы орбиты Л/ ИСЗ параметрами r0; i}, (/=
=4, 2,.. ., N) и выделен резерв характеристической скорости на
фазирование AVg. Полагаем далее, что последовательность посе¬
щаемых пунктов маршрута М= {4, Аг,..., An} известна. Тогда
продолжительность полета КА по маршруту представится в ви¬
де следующей зависимости:
/ 3 \
Дц,|х(1— 2 7v|i)
Л/ - Го 1 V , (6- 101)
|/ Го
2Д^=ДГ?. (6.102)
V,U = 1
Требуется так распределить запас характеристической скорости
ДУЙ на маршруте Л1= {Ai, Аг,..., An}, чтобы функция (6. 101)
достигала минимума при условии (6. 102).
Перейдем теперь к определению маршрута М= {Аь Аг,..., An}.
Для отыскания энергетически оптимального маршрута необходи¬
мо минимизировать функцию энергозатрат
VM = min Д Vv(i ДУф;
Ы (6. ЮЭ)
228
Согласно соотношению (6.91) минимизируемую функцию пред¬
ставим в виде явной зависимости от углов некомпланарности
'/м=1/ — > .пипу,и,
V г0
(6. 104)
(Хх, Х2,. . . , Хдг),
Sin i
Y,M. = arcsin sin(2„ —2J .
[sin
Требуется найти такую последовательность {М, Х2, • • ■, Xn}, для
которой функция (6. 104) достигает наименьшего значения.
В данной постановке решение задачи сводится к локальной оп¬
тимизации номеров маршрутов, отличающихся номером первого
пункта и соответственно последовательностями {Хь Х2,.. ., Xn}.
На первом шаге вычислений отыскивается орбита, имеющая
наименьший угол некомпланарности с исходной, принятой за на¬
чальную,
Yx,.x2 = min у„и,
vu.= 1, 2,... , N,
v/p..
На втором шаге отыскивается орбита, имеющая наименьший
угол некомпланарности с ц-й орбитой под номером Х2,
Yx1,x, = minYv,
vp.= 1, 2,... , N,
V ф [А,
V[A / Xj,
На последующих шагах вычислений решается аналогичная
элементарная задача для отыскания минимальных углов неком¬
планарности среди оставшихся номеров орбит.
В результате проделанных вычислений можно составить та¬
кую последовательность {Хь Х2,..., Xn}, для которой сумма
Yx,xa + Yxax3 + • • • + Yx-i,N = niin. (6. 105)
Но в соответствии с формулой (6. 104) минимуму (6. 105) отве¬
чает наименьшее значение характеристической скорости.
229
Повторив N раз рассмотренную процедуру (для каждого но¬
мера пункта, принимаемого за первый), найдем N локально-оп¬
тимальных маршрутов, каждому из которых отвечает свое зна¬
чение характеристической скорости VM- Тот маршрут, для кото¬
рого характеристическая скорость имеет наименьшее значение,
и принимается в качестве энергетически оптимального. Одновре¬
менно находится исходная орбита, с которой следует начинать
посещение заданной совокупности ИСЗ.
Определив оптимальный маршрут М*= {Ai, А2, •.An}, при¬
ступаем к решению второй задачи по отысканию наименьшего'
времени фазирования на данной последовательности путем мини¬
мизации функции 6. 101.
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев К. Б. и др. Маневрирование космических аппаратов. М., «Ма¬
шиностроение», 1970, с. 15—50.
2. Беляков А. И. Графо-аналитический метод исследования движения кос¬
мических аппаратов. М., «Машиностроение», 1973, 148 с.
3. Инженерный справочник по космической технике. М., Воениздат, 1969,
с. 81—380.
4. Маленькая энциклопедия. Космонавтика. М„ «Советская энциклопе¬
дия», 1970, 591 с.
5. Эльясберг П. Е. Введение в теорию полета искусственных спутников
Земли. М., «Наука», 1965, 494 с.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . 3
Глава 1. Структура орбитальных систем ИСЗ .... . . 5
1.1. Общие понятия и определения . . о
1.2. Элементы структуры орбитальной системы ИСЗ . . . 6
1.3. Кинематические элементы структуры 9
1.4. Связи между элементами структуры 26
Глава 2. Методы и алгоритмы расчета элементов спутниковых систем 28
2. 1. Системы КА непрерывного глобального обзора для метеоро¬
логии и геологического прогнозирования 28
2. 2. Системы КА непрерывного зонального обзора 40
2. 3. Определение ширины полосы обзора чЗ
2 4. Системы космических аппаратов глобального обзора с задан¬
ным разрывом наблюдения 49
2. 5. Продолжительность сплошного обзора поверхности Земли 55
2. 6. Продолжительность зонального обзора поверхности Земли . . 61
2. 7. Системы связных космических аппаратов 62
2. 8. Системы навигационных космических аппаратов 39
2. 9. Оценка поведения вероятностных систем КА 73
Глава 3. Динамика орбитальных систем 84
3.1. Возмущения цепочки ИСЗ на околокруговых орбитах в цент¬
ральном гравитационном поле 84
3.2. Возмущения цепочки ИСЗ на околокруговых орбитах в нор¬
мальном гравитационном поле 100
3.3. О влиянии аэродинамических сил на относительное движение
цепочки ИСЗ 111
3.4. Изменчивость структуры орбитальных систем 115
Глава 4. Способы создания спутниковых систем 121
4. 1. Создание детерминированных систем КА непрерывного обзора 121
4. 2. Создание детерминированных систем КА с заданным разрывом
обслуживания 124
4. 3. Создание вероятностных систем КА 125
4. 4. Восстановление системы КА 127
Глава 5. Методы расчета орбитальных маневров применительно к систе¬
мам КА 129
5.1. Классификация орбитальных маневров 129
5.2. Влияние малых приращений скорости на параметры плоского
эллиптического движения 131
5. 3. Изменение параметров плоского эллиптического движения мгно¬
венным импульсом скорости конечной величины 139
5.4. Годографический метод изображения и расчета характеристик
орбит и одноимпульсных маневров . 141
231
Стр.
5. 5. Основные виды плоских одноимпульсных маневров КА в орби¬
тальных системах 146
5. 6. Плоские двухимпульсные маневры 169
5. 7. Поворот плоскости орбиты 173
5. 8. Пространственный маневр КА в системе 177
Глава 6. Маршрутные задачи, возникающие при обслуживании орби¬
тальных систем в космосе 180
6. 1. Области досягаемости управляемого КА 180
6. 2. Фазирование в области досягаемости 189
6. 3. Энергетически оптимальные траектории облета точек космиче¬
ского пространства 195
6. 4. Оптимальные маршруты облета системы ИСЗ в узловых точках 208
6. 5. Маршрутная задача посещения управляемым КА совокупности
ИСЗ на разновысоких орбитах 213
6. 6. Маршрутная задача посещения управляемым КА цепочки ИСЗ 218
6.7. Энергетически оптимальный маршрут посещения совокупности
ИСЗ на некомпланарных орбитах 225
Литература .... .... 230
Константин Никитович Баринов,
Михаил Николаевич Буодаев, Петр Андреевич Мамон
ДИНАМИКА И ПРИНЦИПЫ ПОСТРОЕНИЯ
ОРБИТАЛЬНЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ
Редактор издательства Н. А. Педченец
Техн, редактор Н. Н. Скотникова Корректор Л. Е. Хохлова
Сдано в набор 3/VI 1975 г. Подписано к печати 1/IX 1975 г. Т-13453
Формат 60x90'/ie Бумага № I
Печ. л. 14,5 Уч.чизд. л. 13,18
Тираж 1500 экз. Изд. заказ 421. Цена 1 р. 43 к.
Издательство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7. Тип. эак. 3430