/

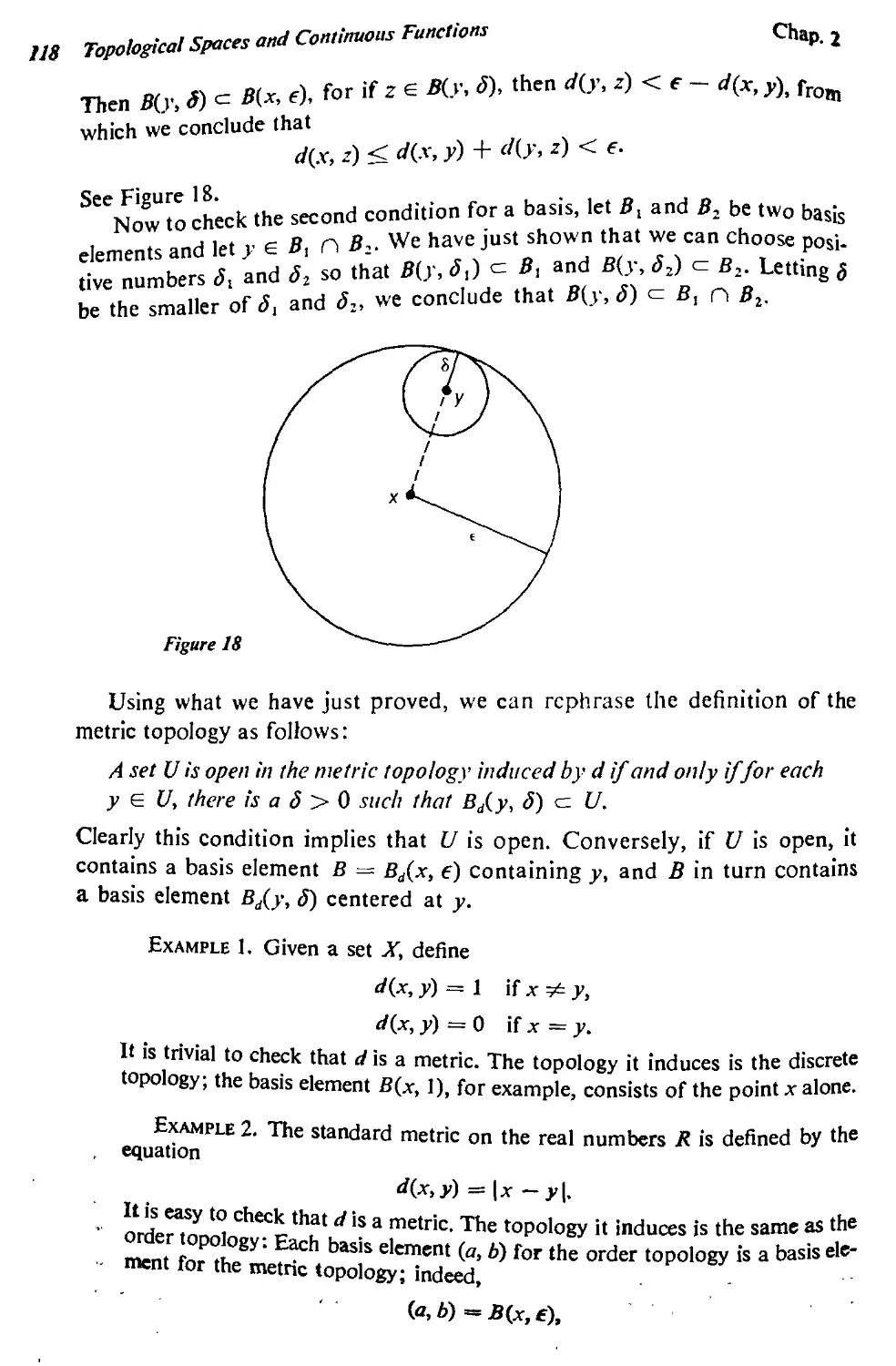
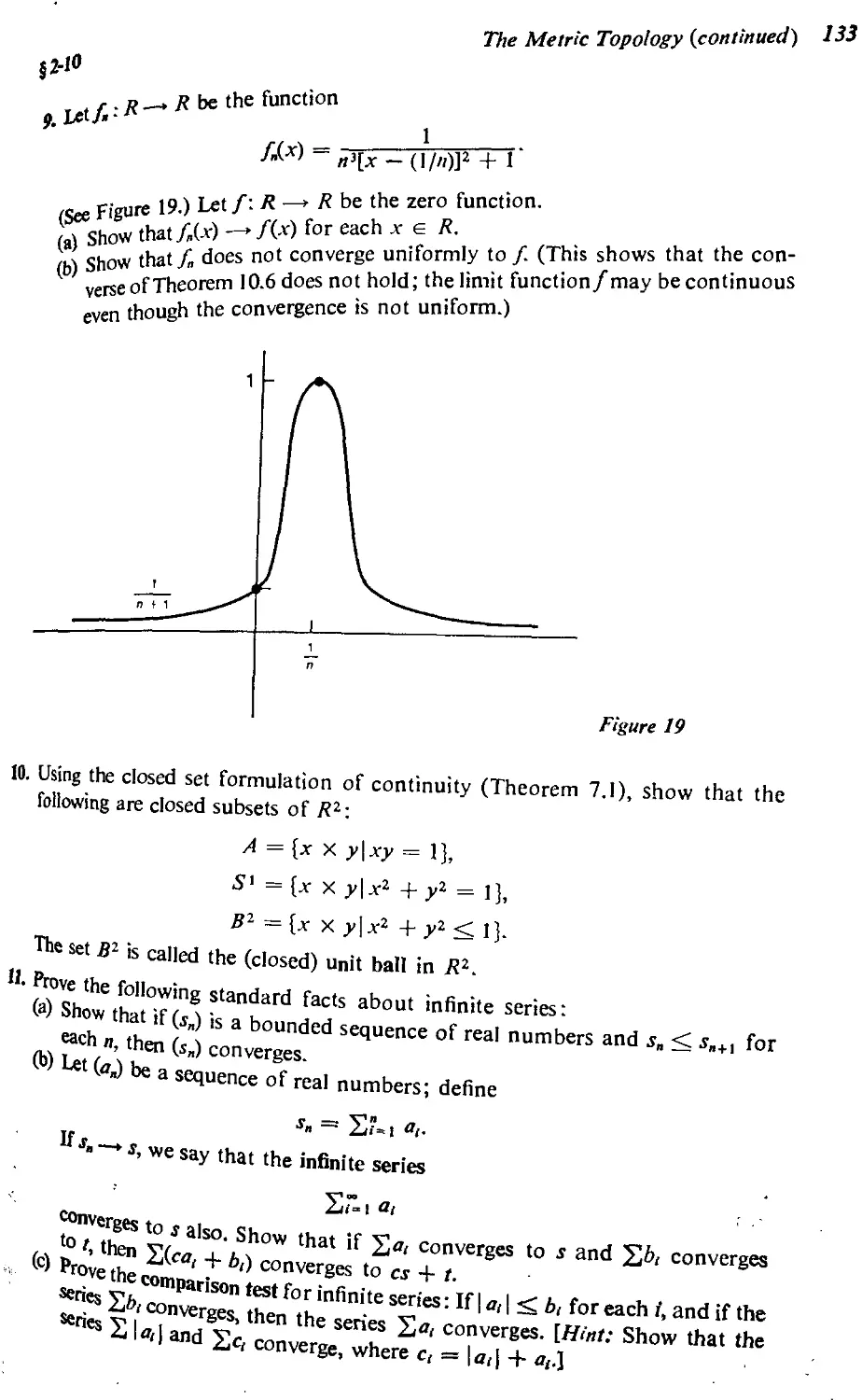



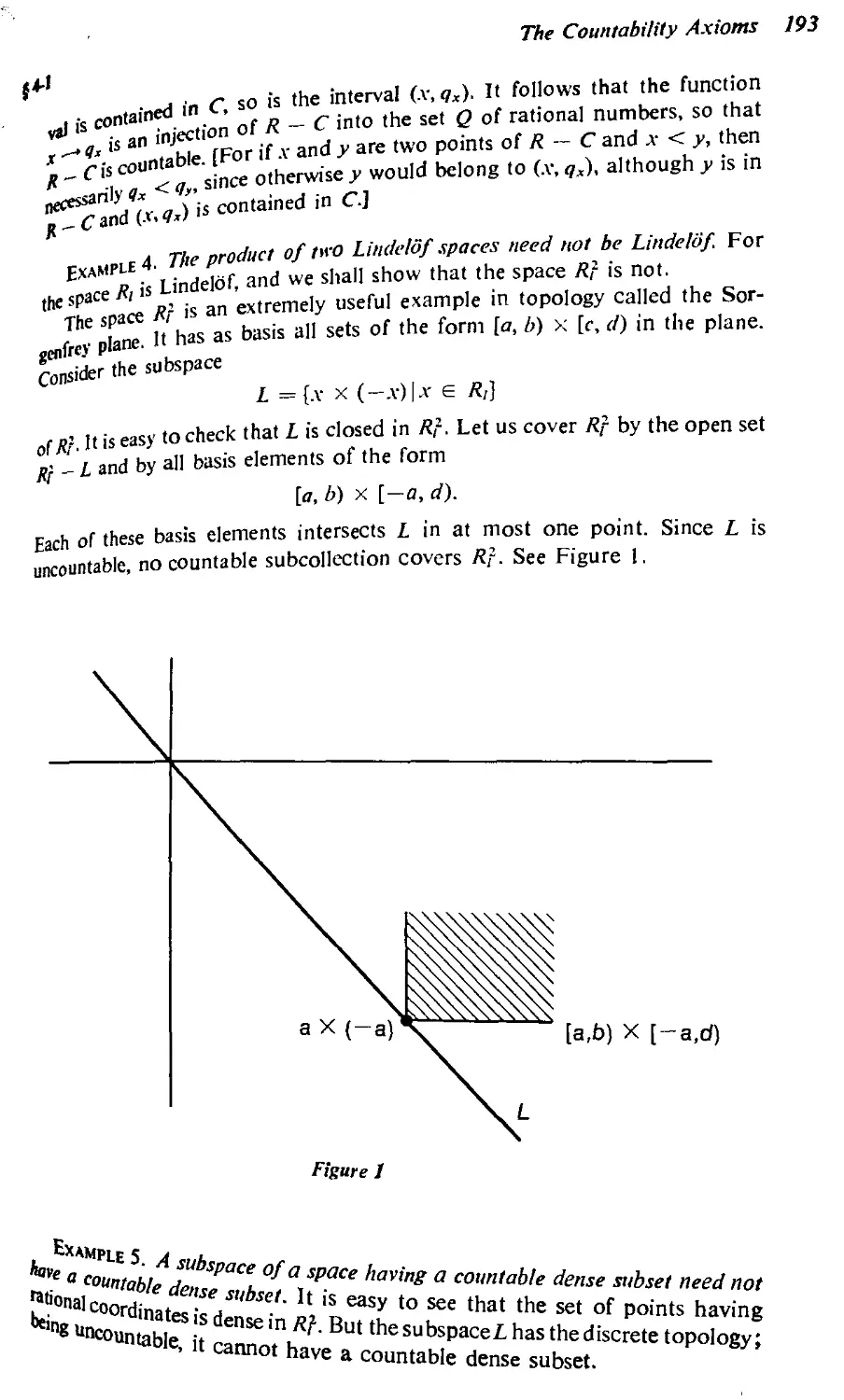


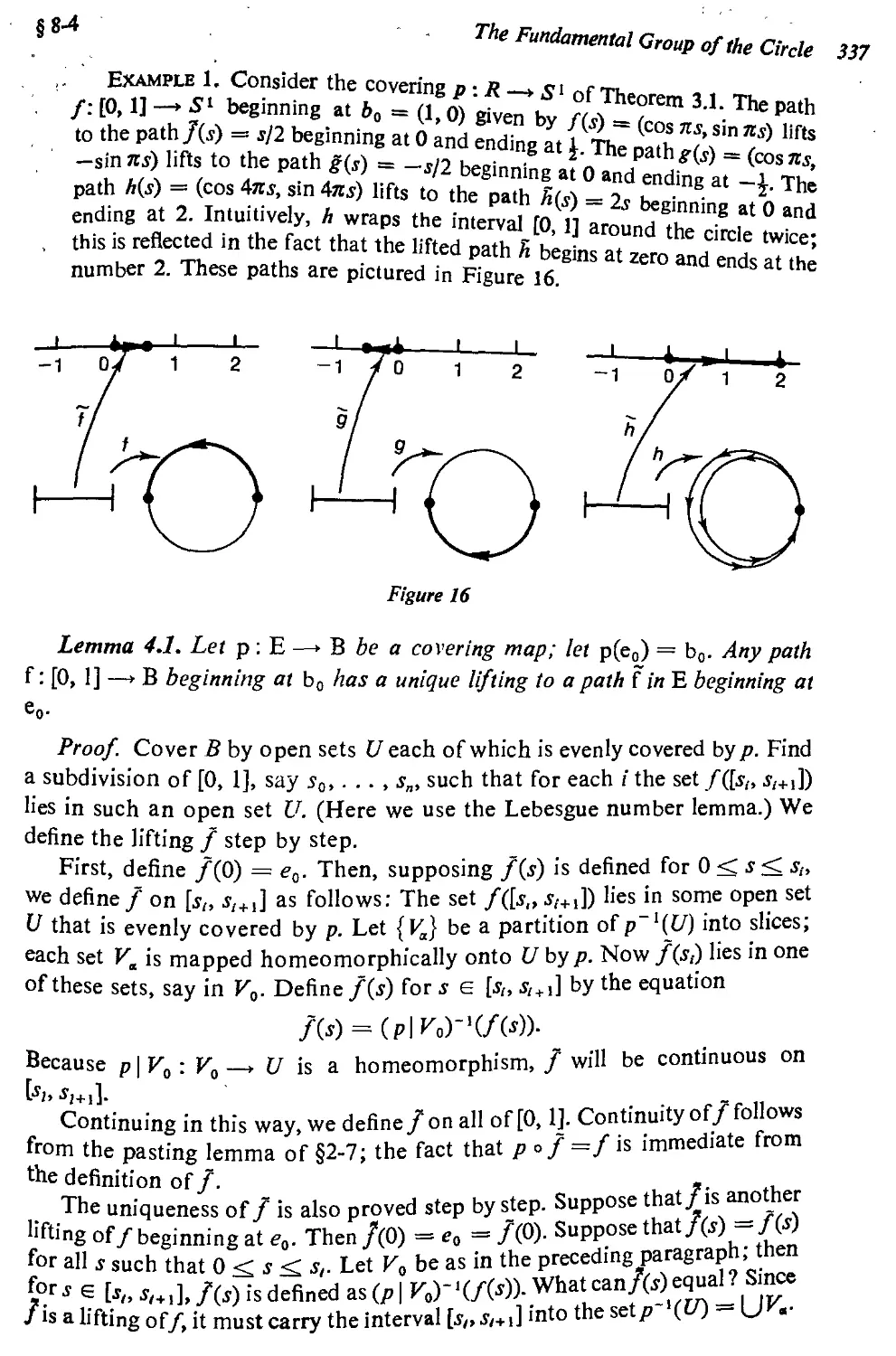





Text
TOPOLOGY
A First Course
JAMES R. MUNKRES
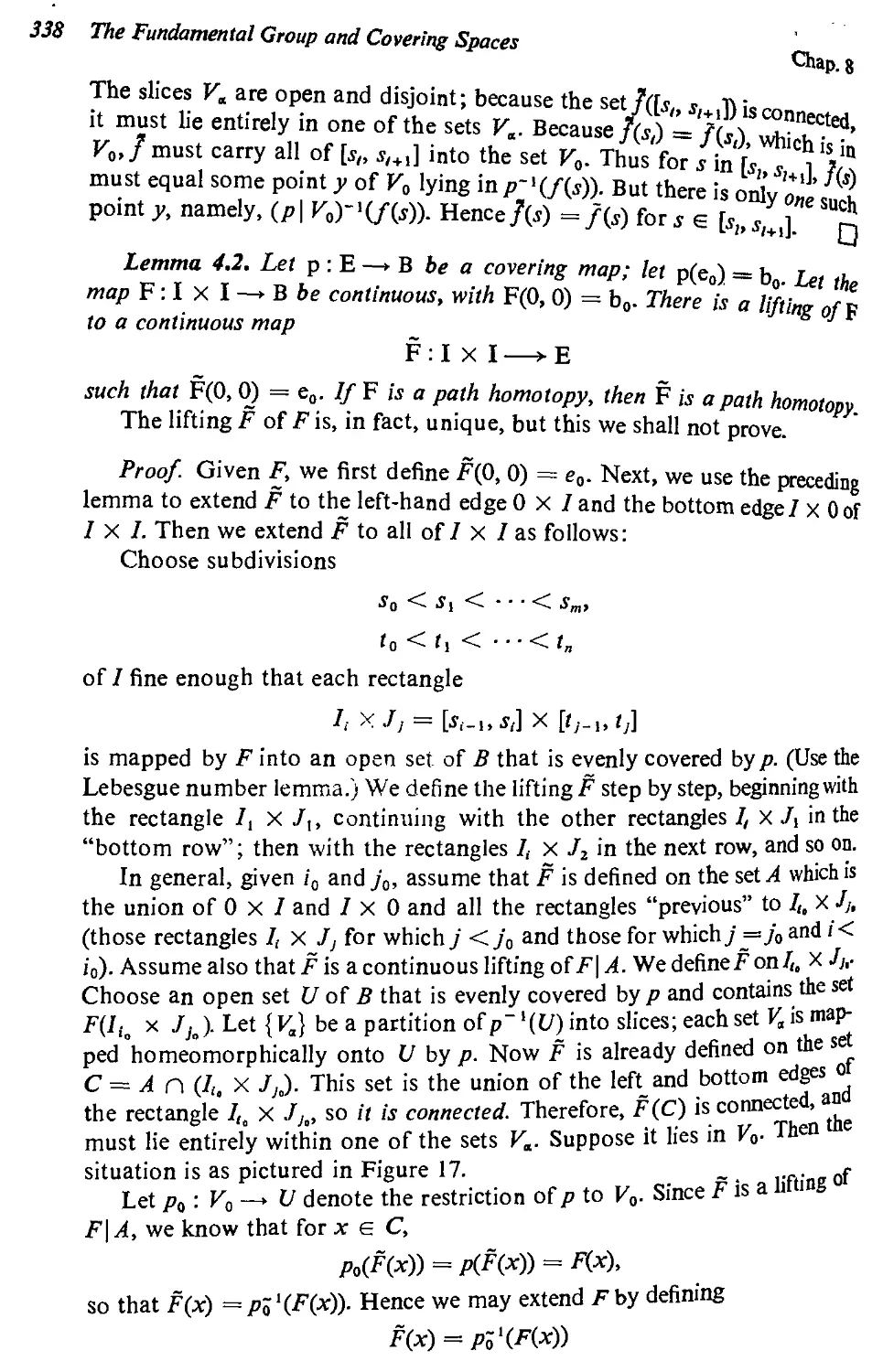
Professor of Mathematics
Massachusetts Institute of Technology
Prentice-Hall, Inc., Englewood Cliffs, New Jersey
Contents
Preface xl
A Note to the Reader xv
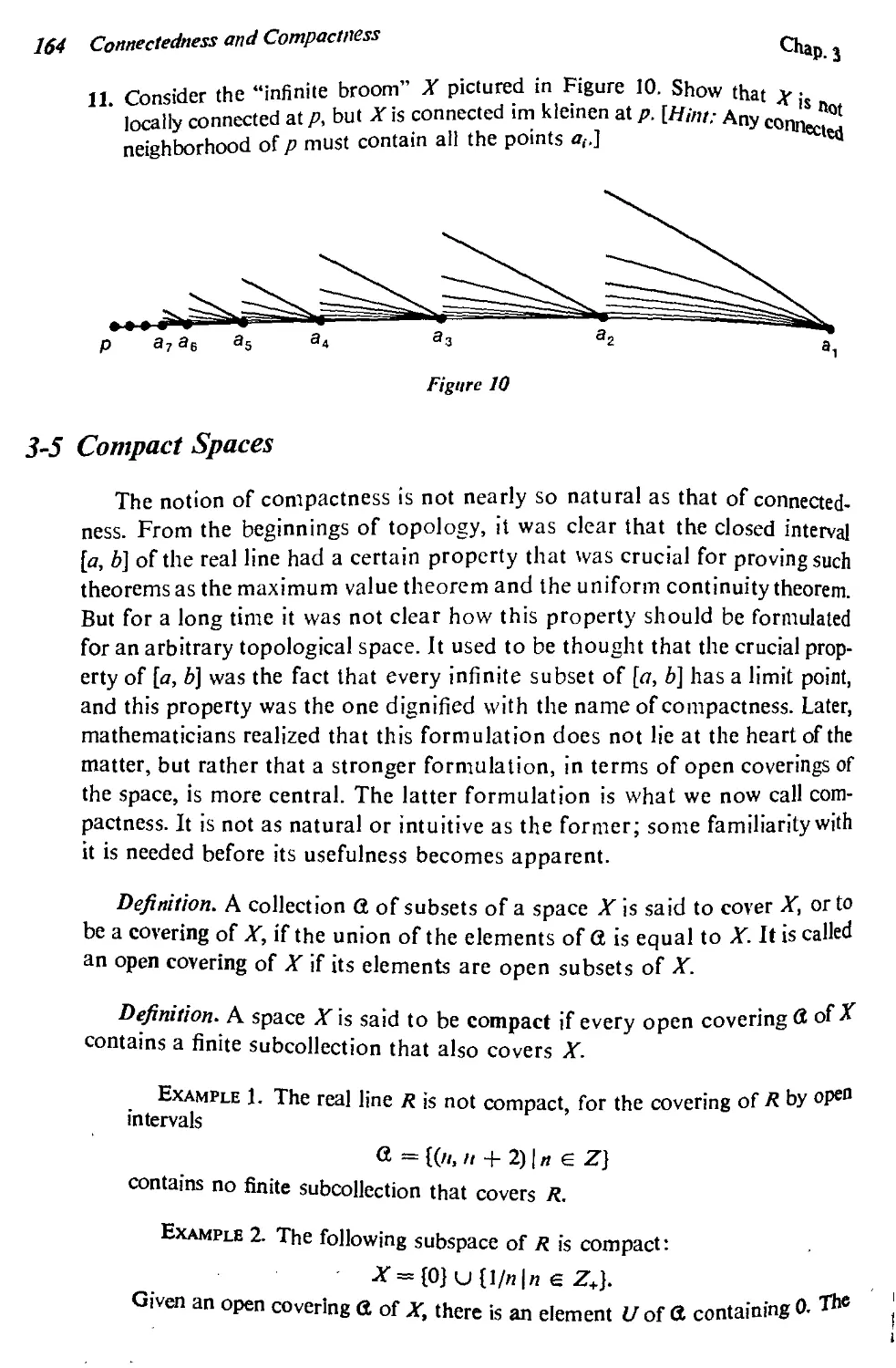
Set Theory and Logic '
1-1 Fundamental Concepts 4
1-2 Functions 15
1-3 Relations 21
1-4 The Integers and the Real Numbers 29
1-5 Arbitrary Cartesian Products 36
1-6 Finite Sets 39
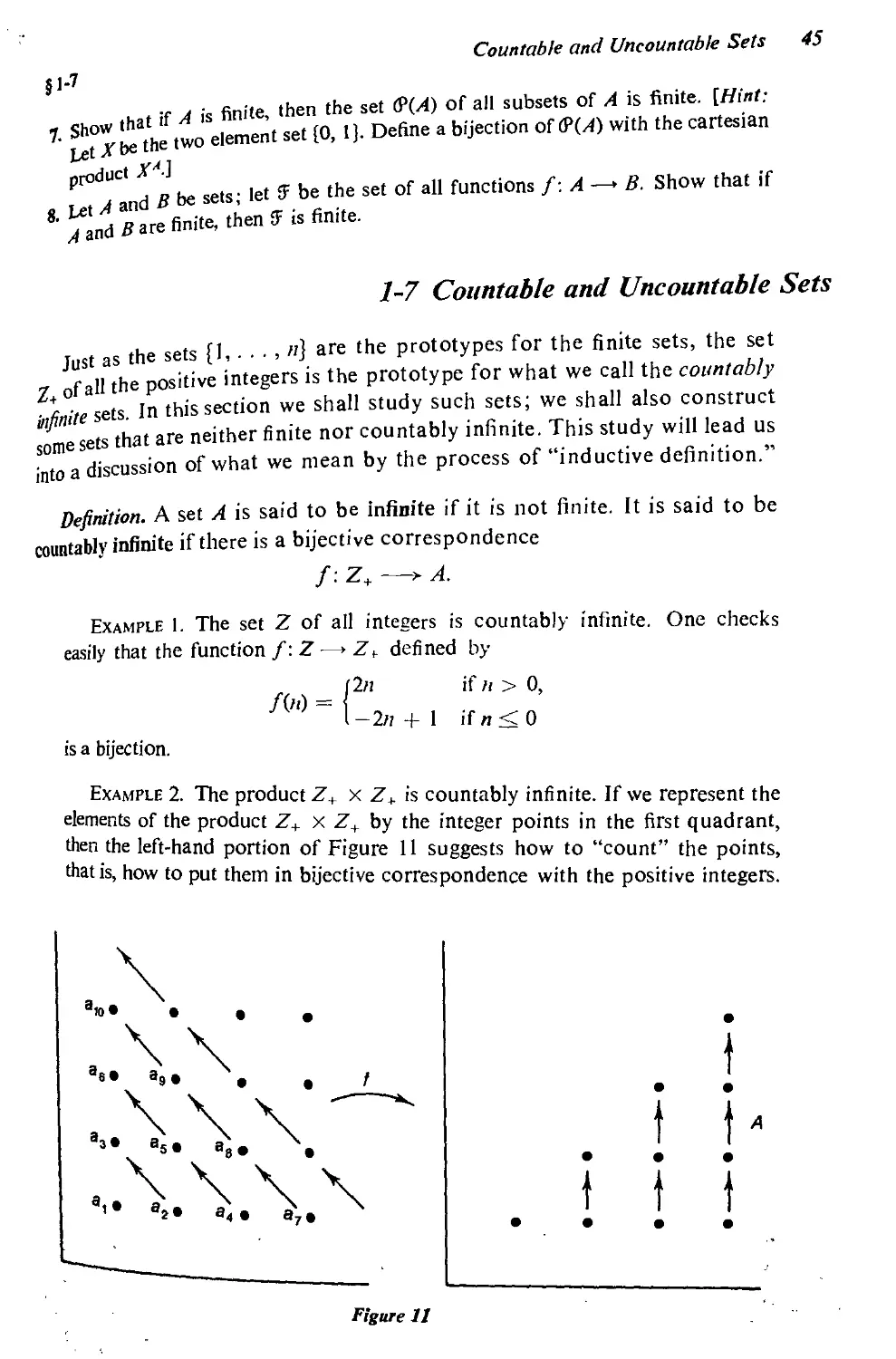
1-7 Countable and Uncountable Sets 45
*l-8 The Principle of Recursive Definition 53
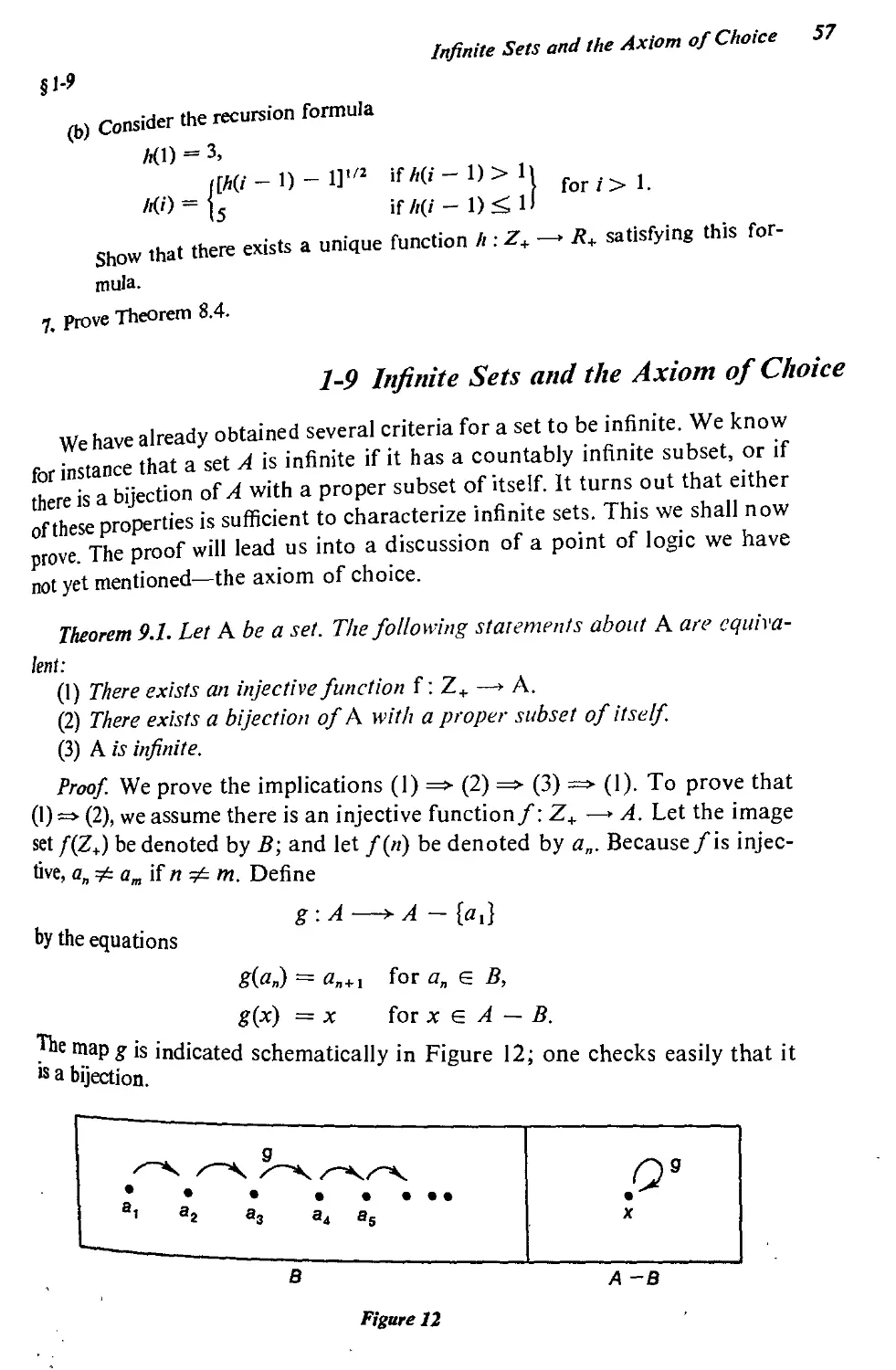
1-9 Infinite Sets and the Axiom of Choice 57
1-10 Weil-Ordered Sets ' 63
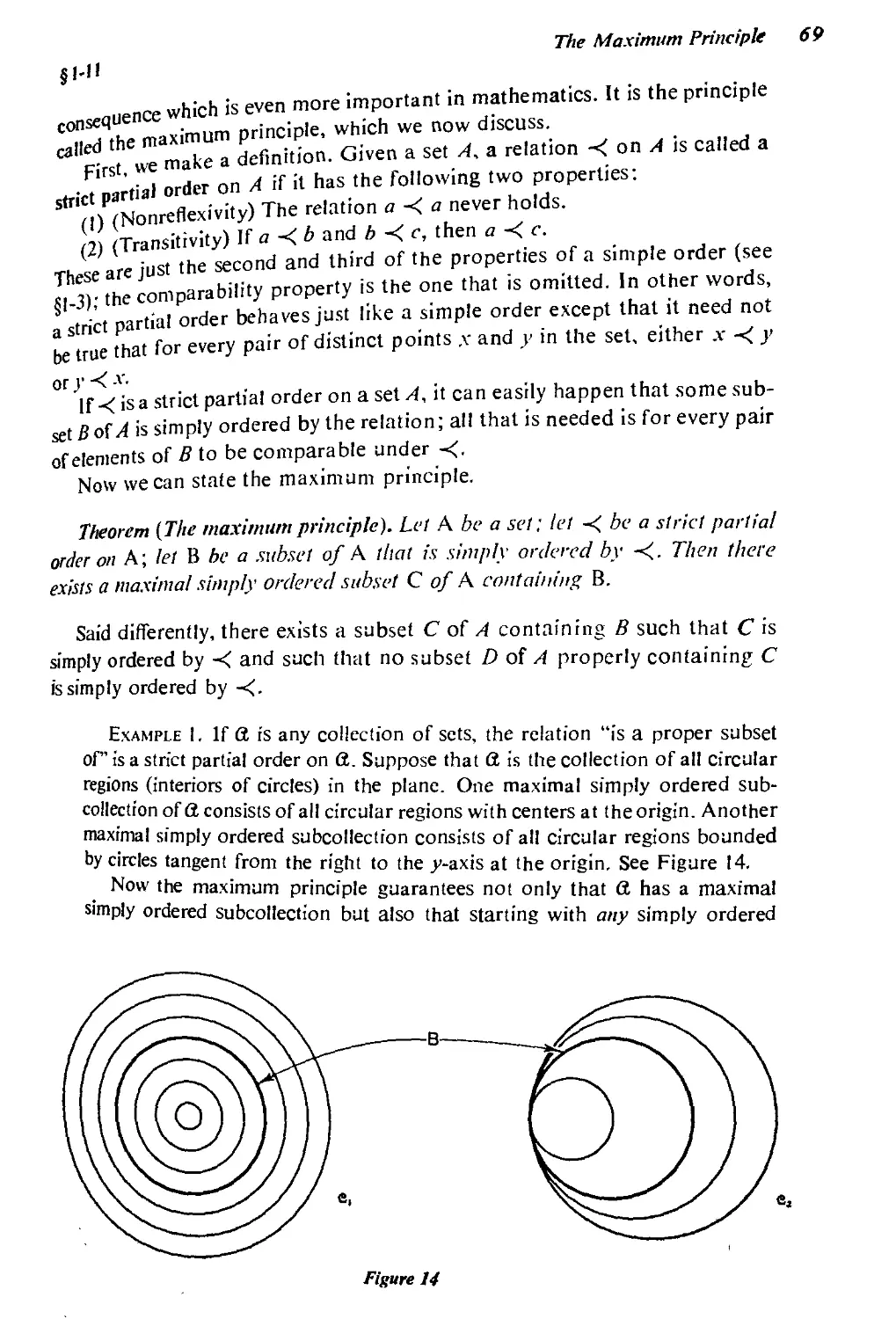
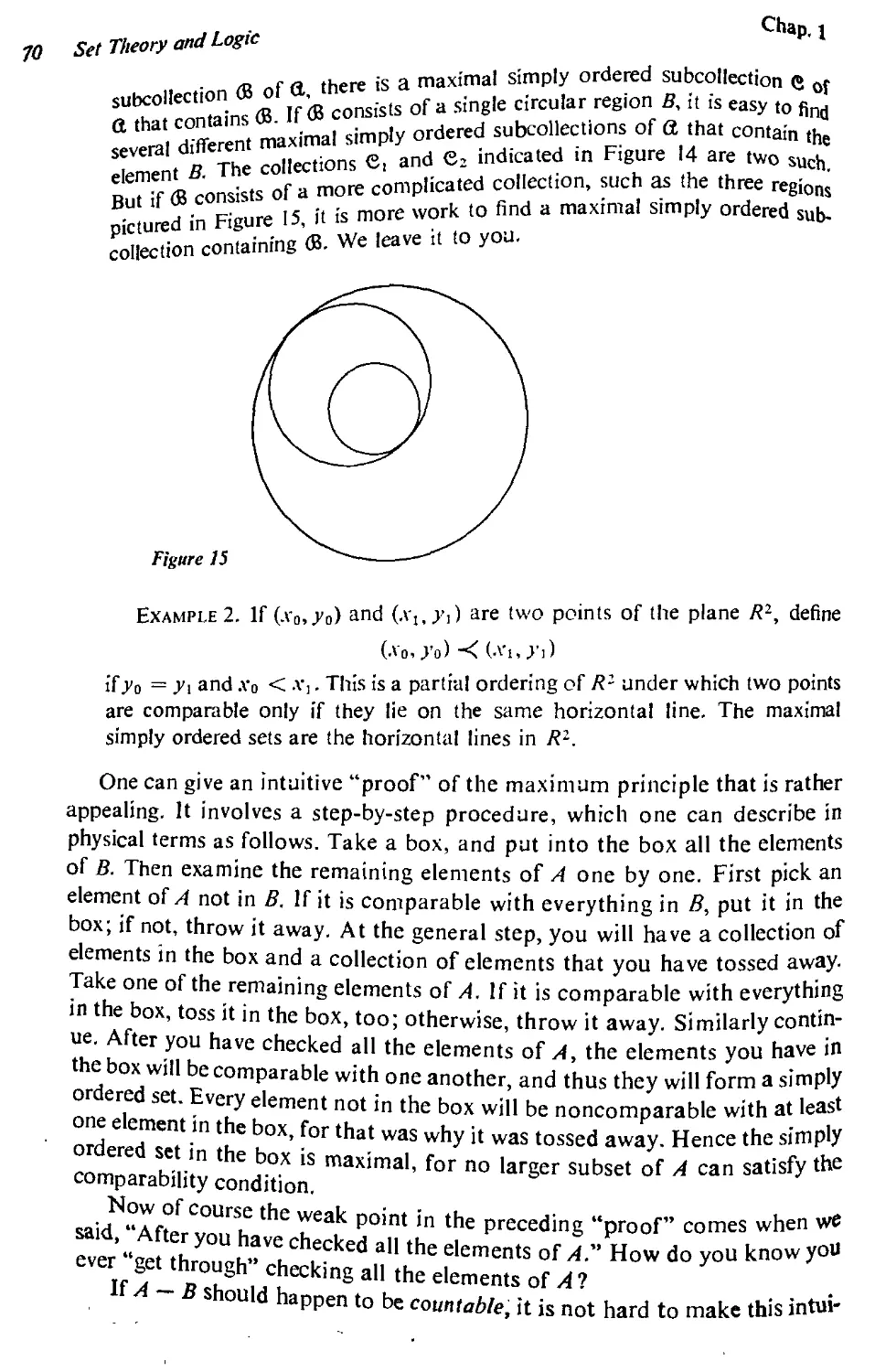
*1-11 The Maximum Principle 68
•Supplementary Exercises: Well-Ordering 72
vii
viii Contents
Chapter 2. Topological Spaces
and Continuous Functions
Topological Spaces
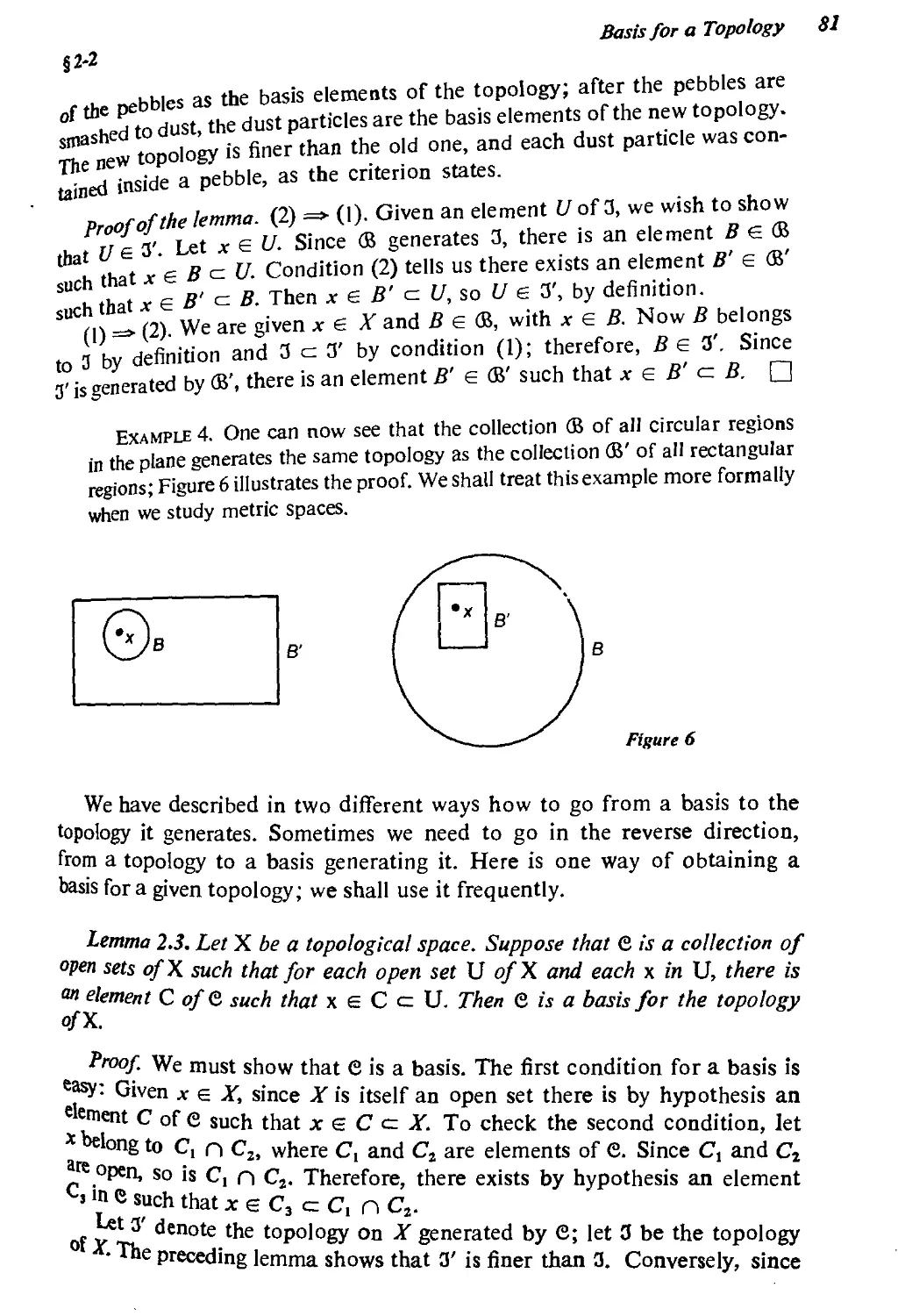
Basis for a Topology
The Order Topology
The Product Topology on X x Y
The Subspace Topology
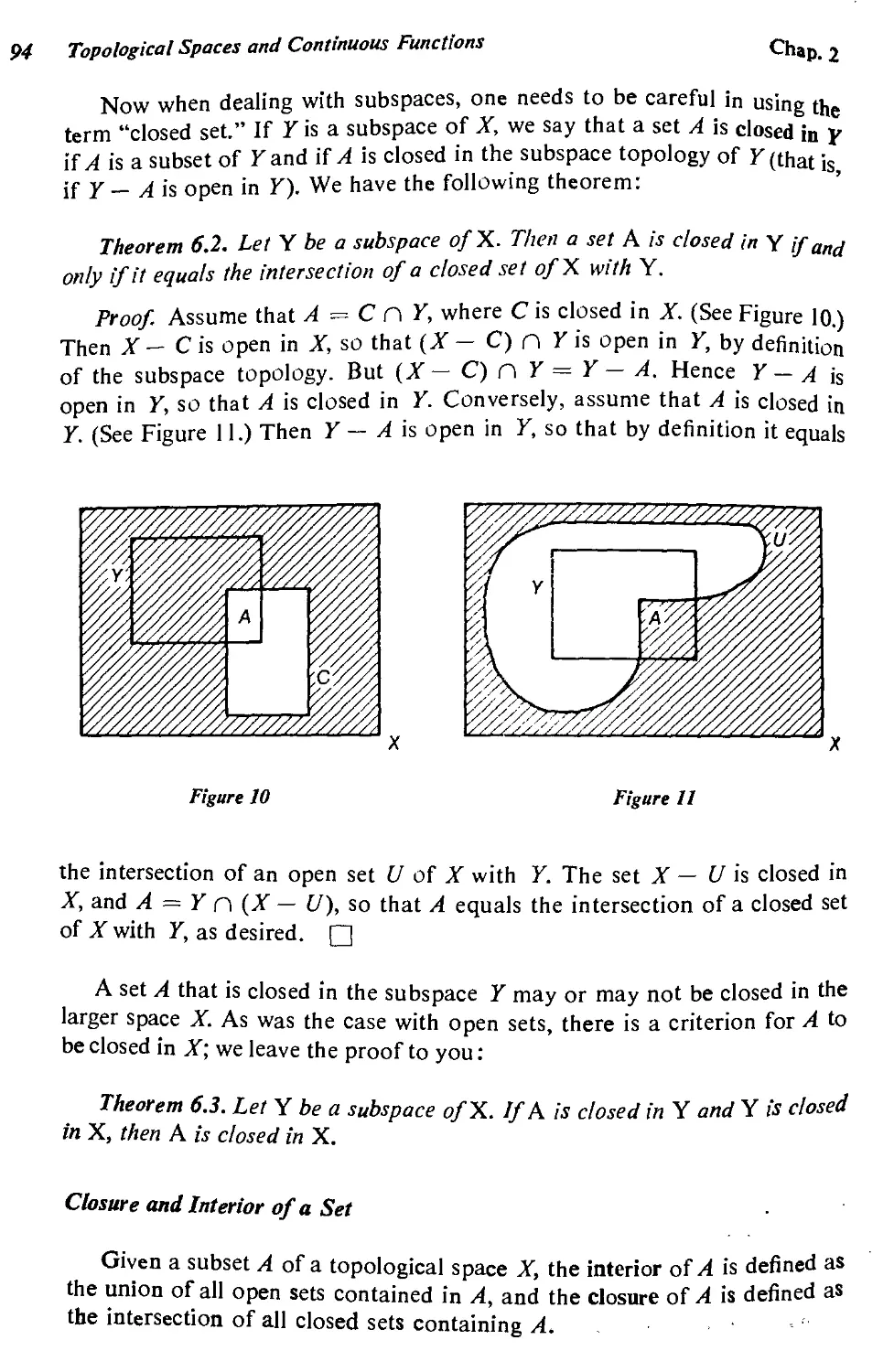
Closed Sets and Limit Points
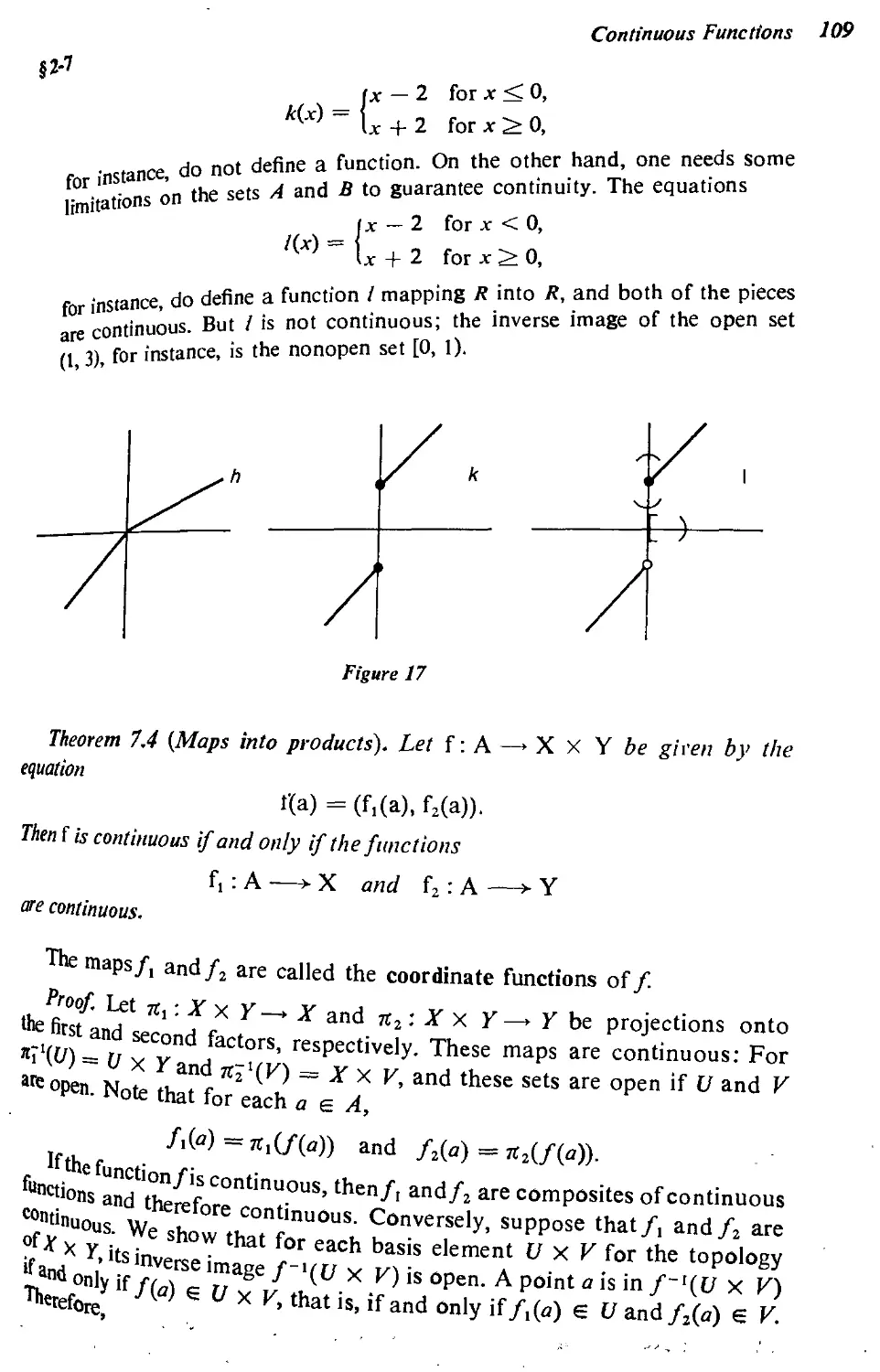
Continuous Functions
The Product Topology
The Metric Topology
The Metric Topology (continued)
The Quotient Topology
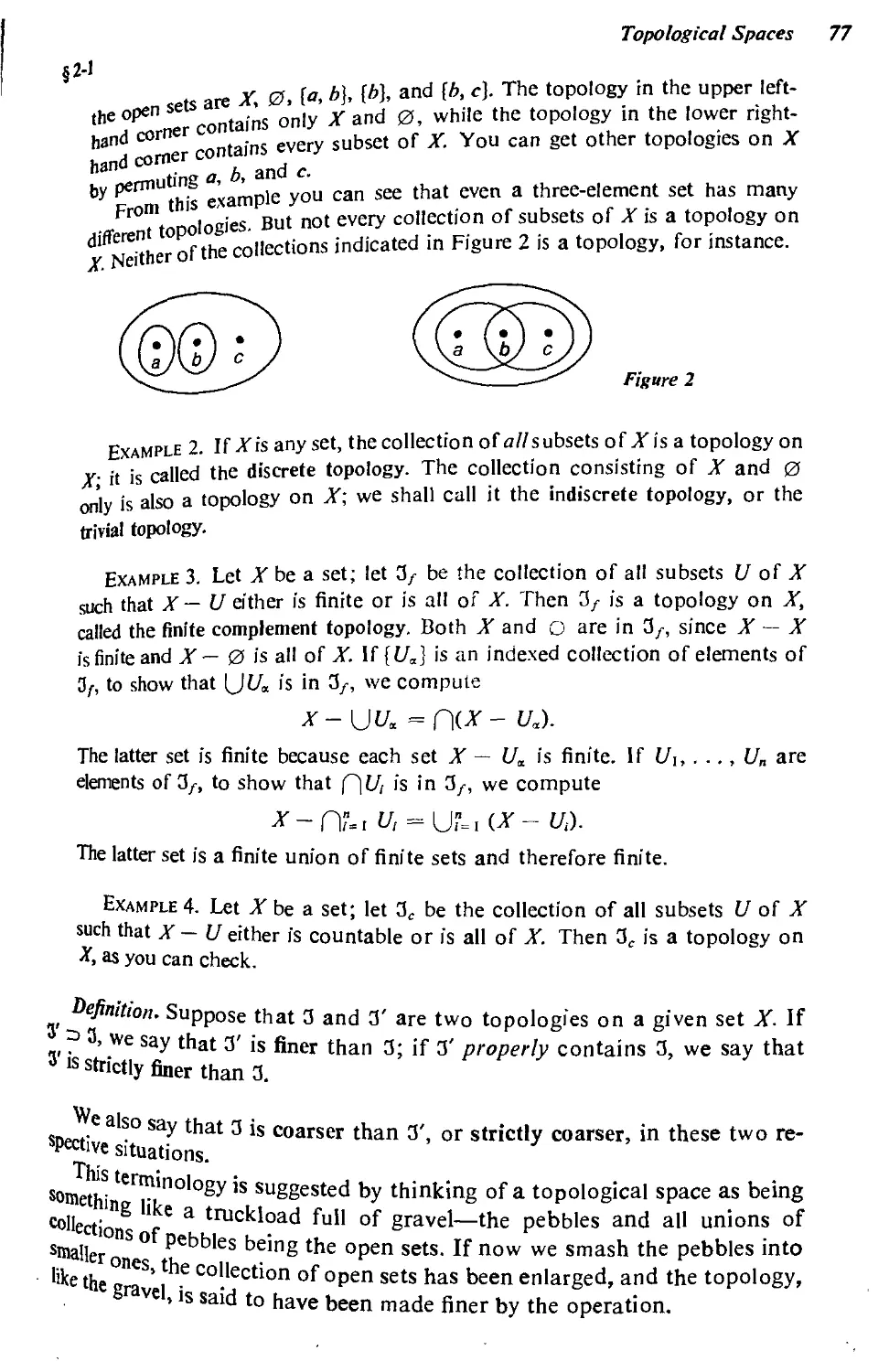
2-1
2-2
2-3
2-4
2-5
2-6
2-7
2-8
2-9
2-10
♦2-11
♦Supplementary Exercises: Topological Groups
Chapter 3. Connectedness and Compactness
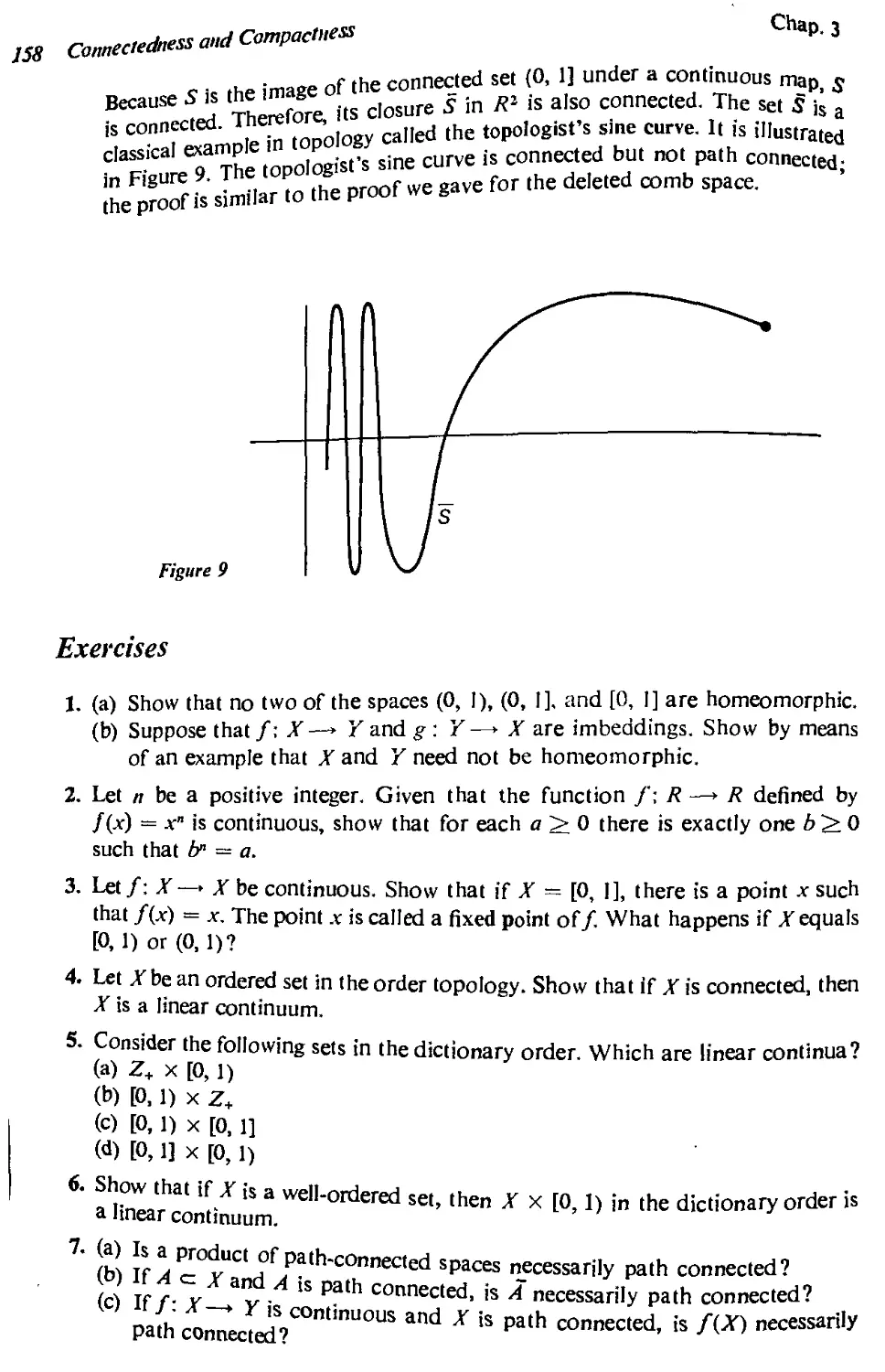
3-1 Connected Spaces
3-2 Connected Sets in the Real tine
*3-3 Components and Path Components
*3-4 Local Connectedness
3-5 Compact Spaces
3-6 Compact Sets in the Real Line
3-7 Limit Point Compactness
*3-8 Local Compactness
♦Supplementary Exercises: Nets
Chapter 4. Countability and Separation Axioms
4-1 The Countability Axioms
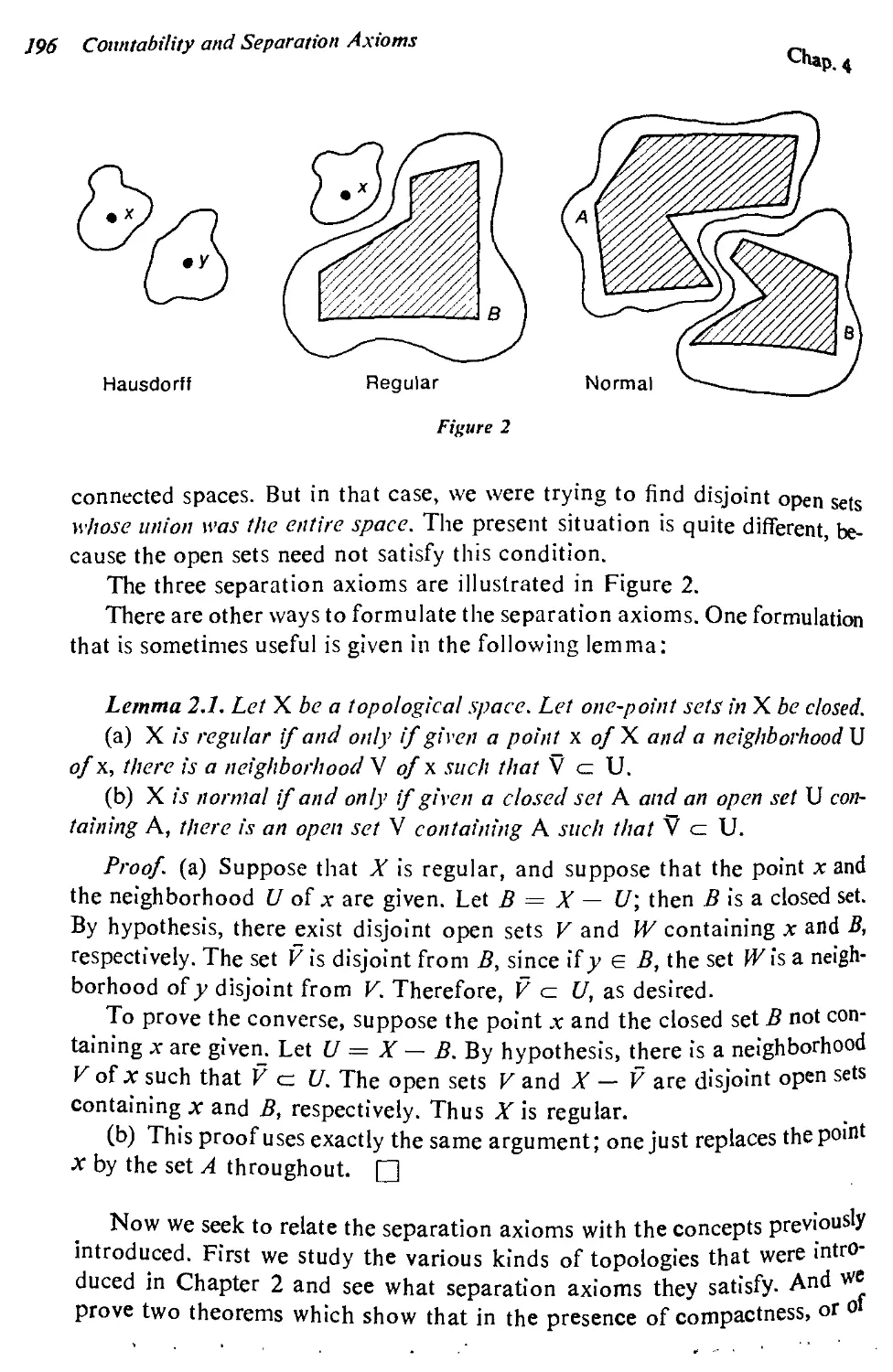
4-2 The Separation Axioms
4-3 The Urysohn Lemma
4-4 The Urysohn Metrization Theorem
*4-5 Partitions of Unity
♦Supplementary Exercises: Review of Part I
PARTn
227
Chapter 5. The Tychonoff Theorem
5-1 The Tychonoff Theorem
5-2 Completely Regular Spaces
5-3 The Stone-Cech Compactification
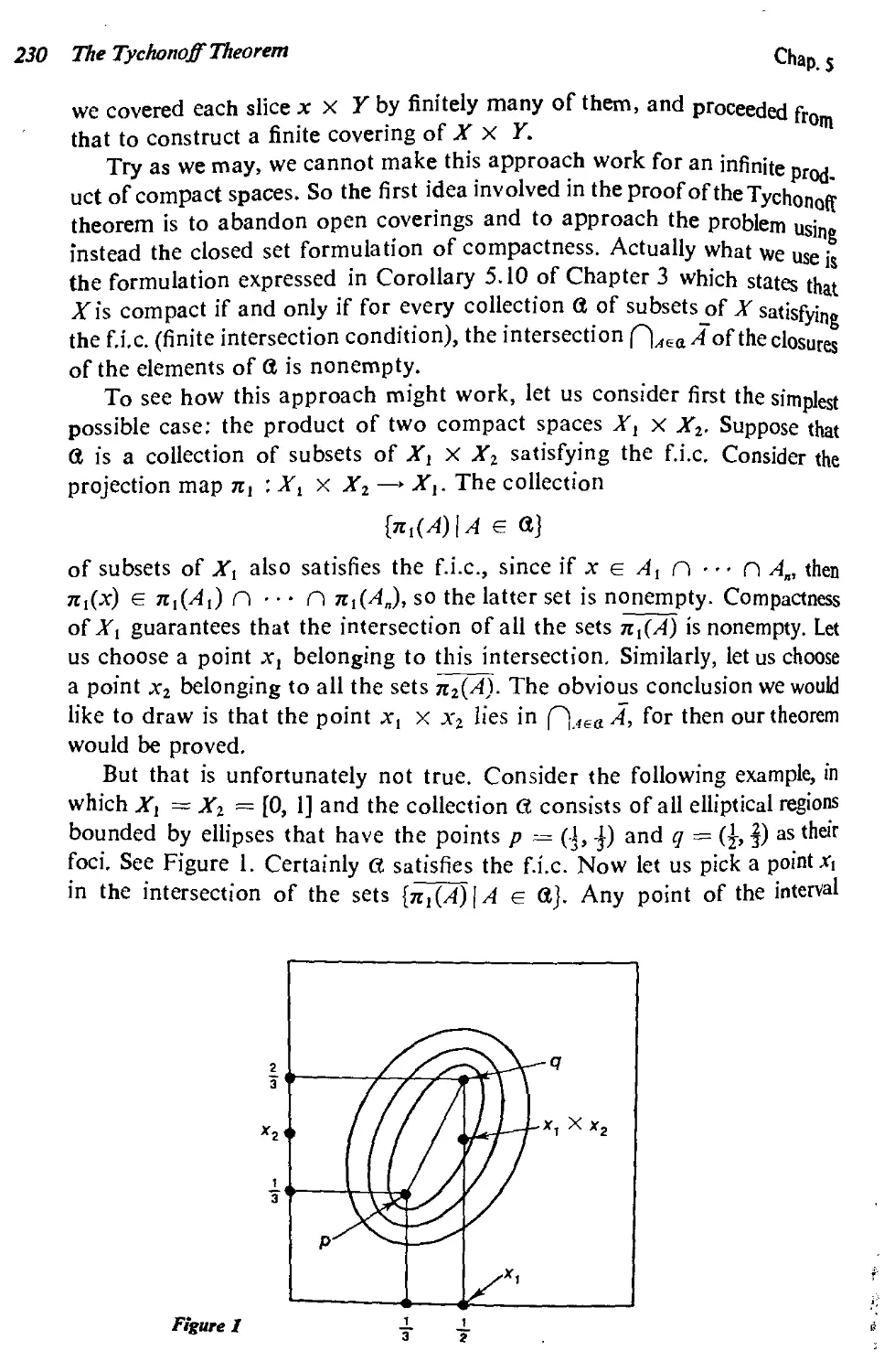
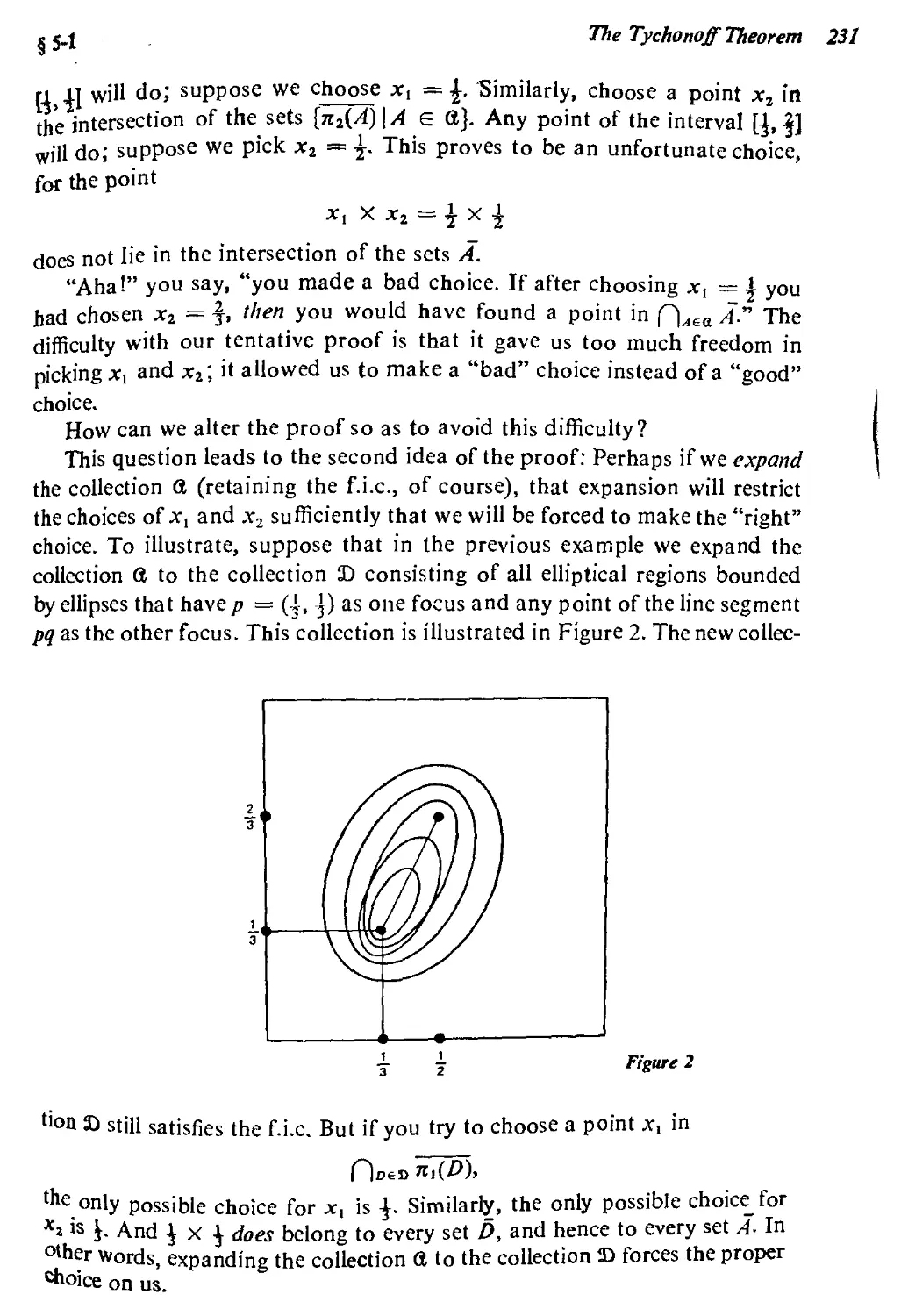
229
229
235
238
Contents ix
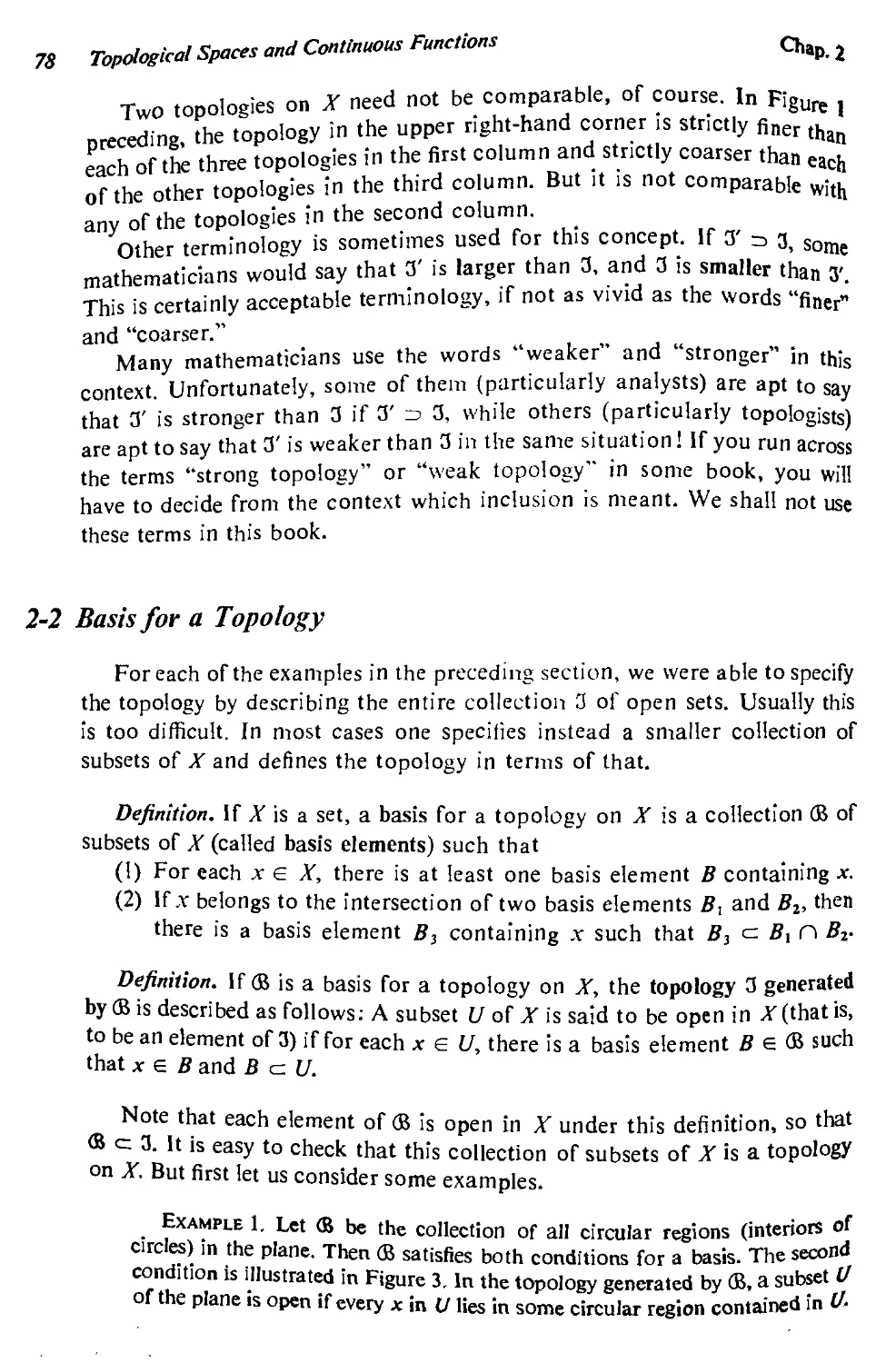
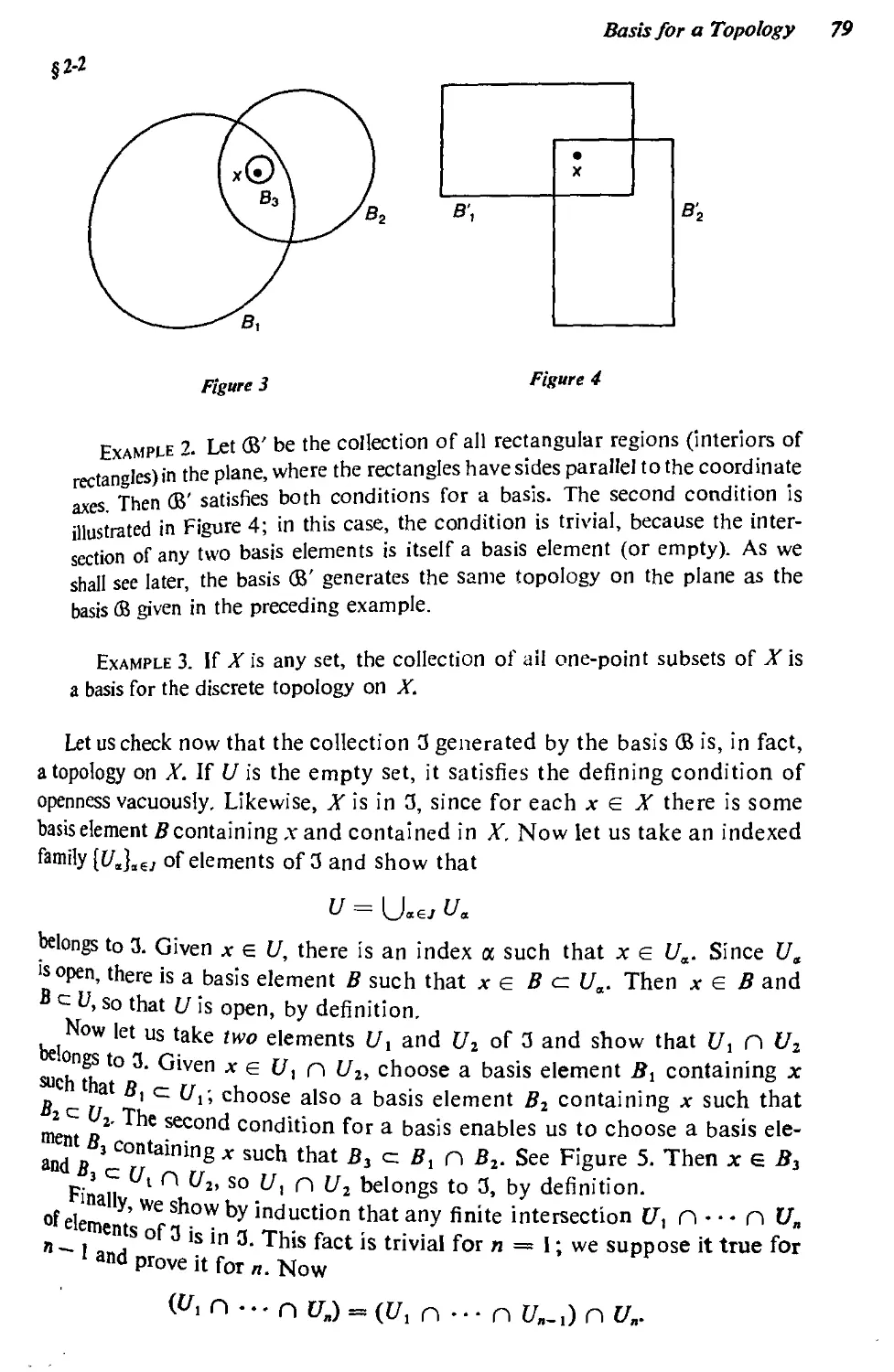
Chapter 6.
Metrization Theorems and
Paracompactness
6-1 Local Finiteness
6-2 The Nagata-Smirnov Metrization Theorem
(sufficiency)
6-3 The Nagata-Smirnov Theorem (necessity)
6-4 Paracompactness
6-5 The Smirnov Metrization Theorem
244
245
247
251
254
260
Chapter 7. Complete Metric Spaces
and Function Spaces
7-1 Complete Metric Spaces
7-2 A Space-Filling Curve
7-3 Compactness in Metric Spaces
7-4 Pointwise and Compact Convergence
7-5 The Compact-Open Topology
7-6 Ascoli's Theorem
7-7 Baire Spaces
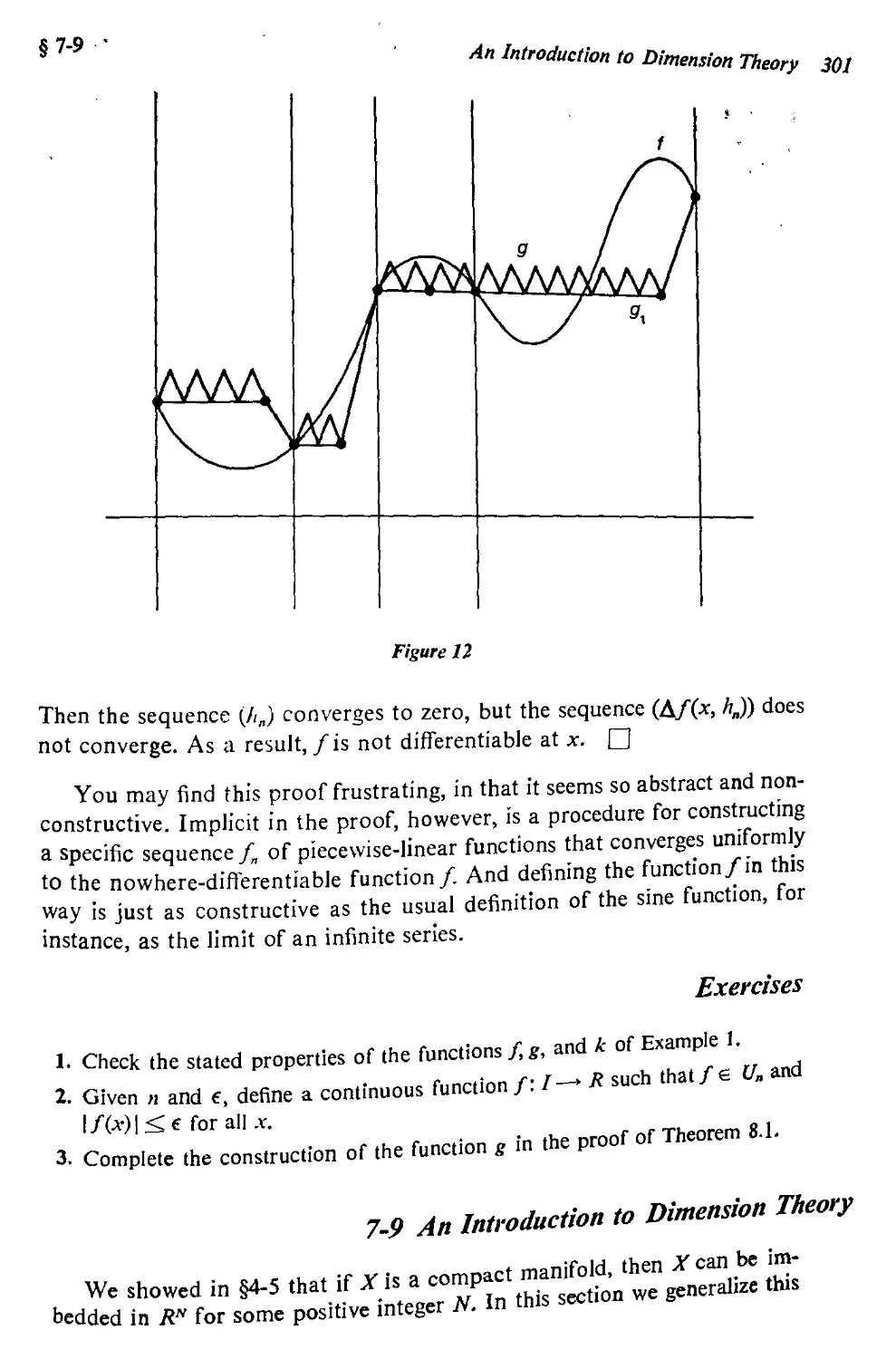
7-8 A Nowhere-Differentiable Function
7-9 An Introduction to Dimension Theory
262
263
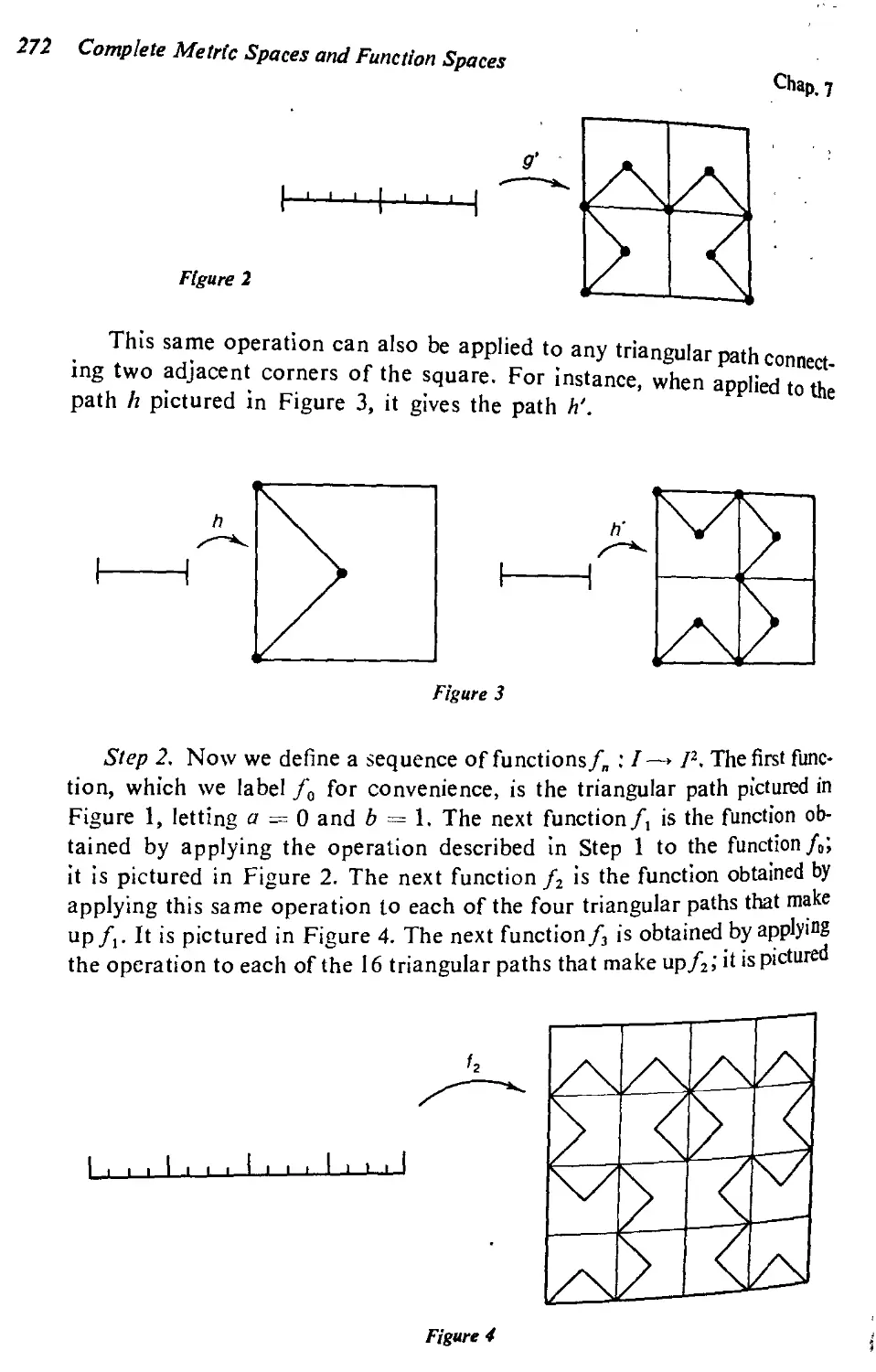
271
274
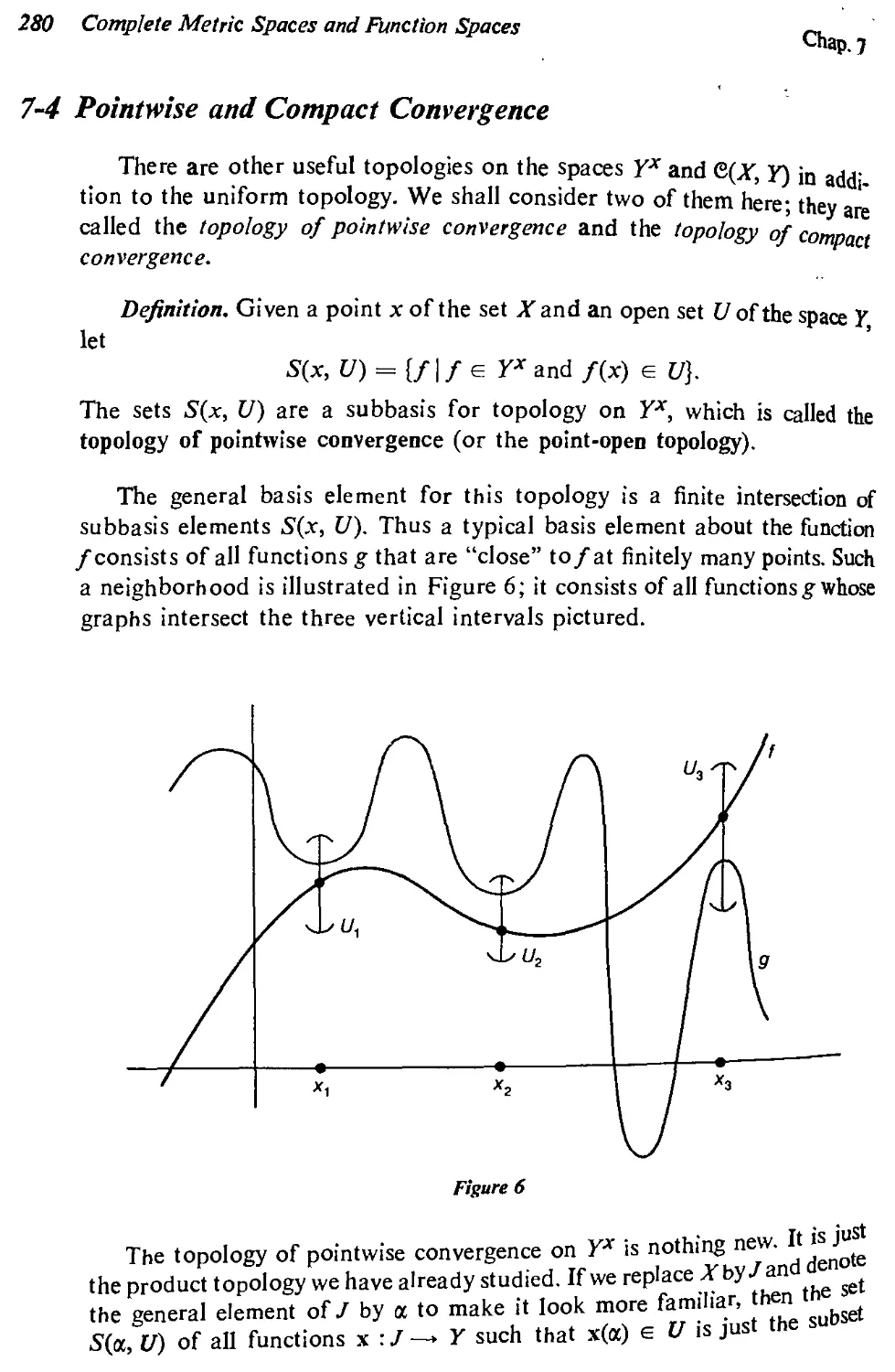
280
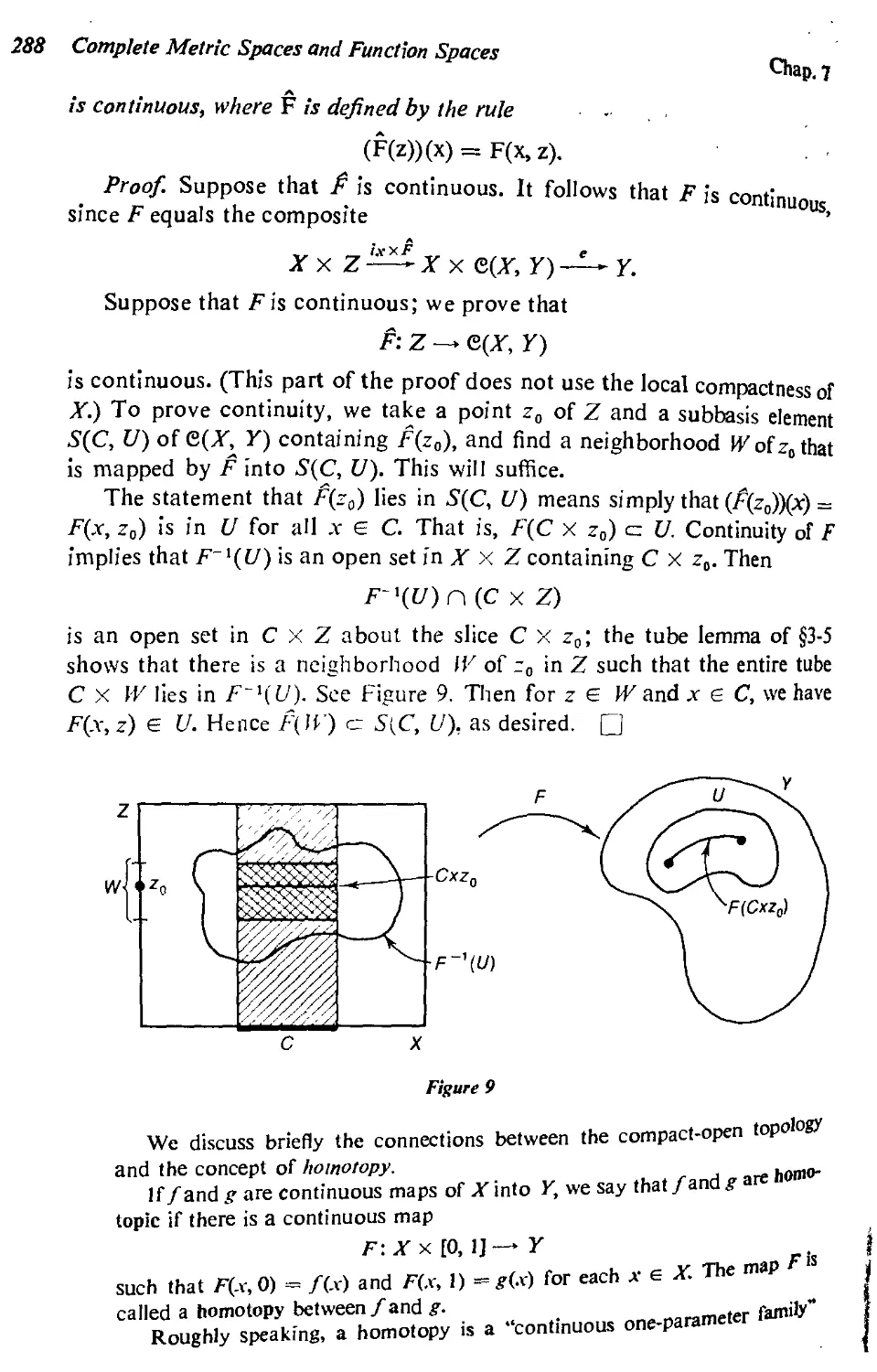
285
289
293
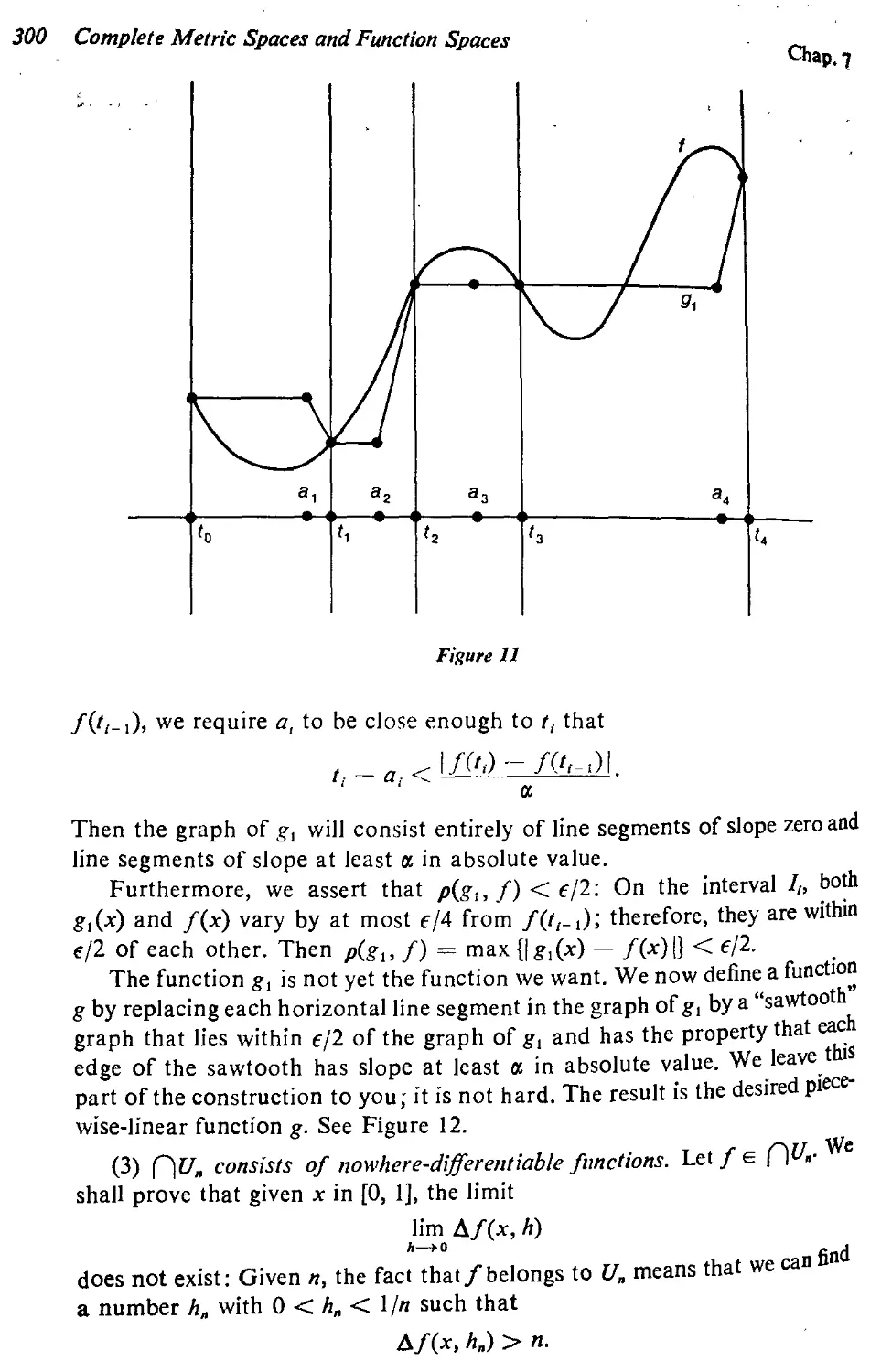
297
301
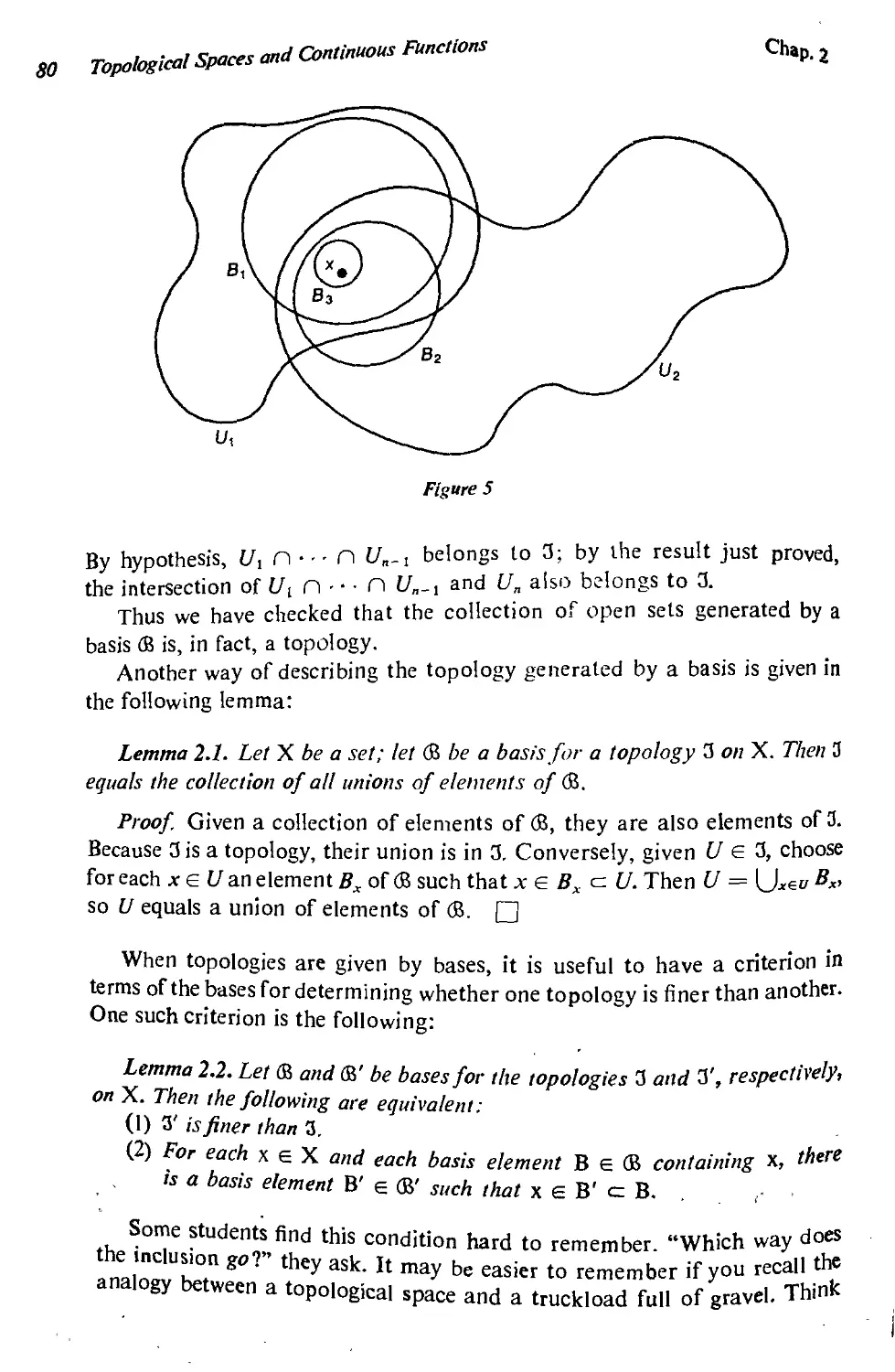
Chapter 8. The Fundamental Group and
Covering Spaces
8-1
8-2
8-3
8-4
8-5
8-6
8-7
8-8
8-9
8-10
8-11
8-12
8-13
8-14
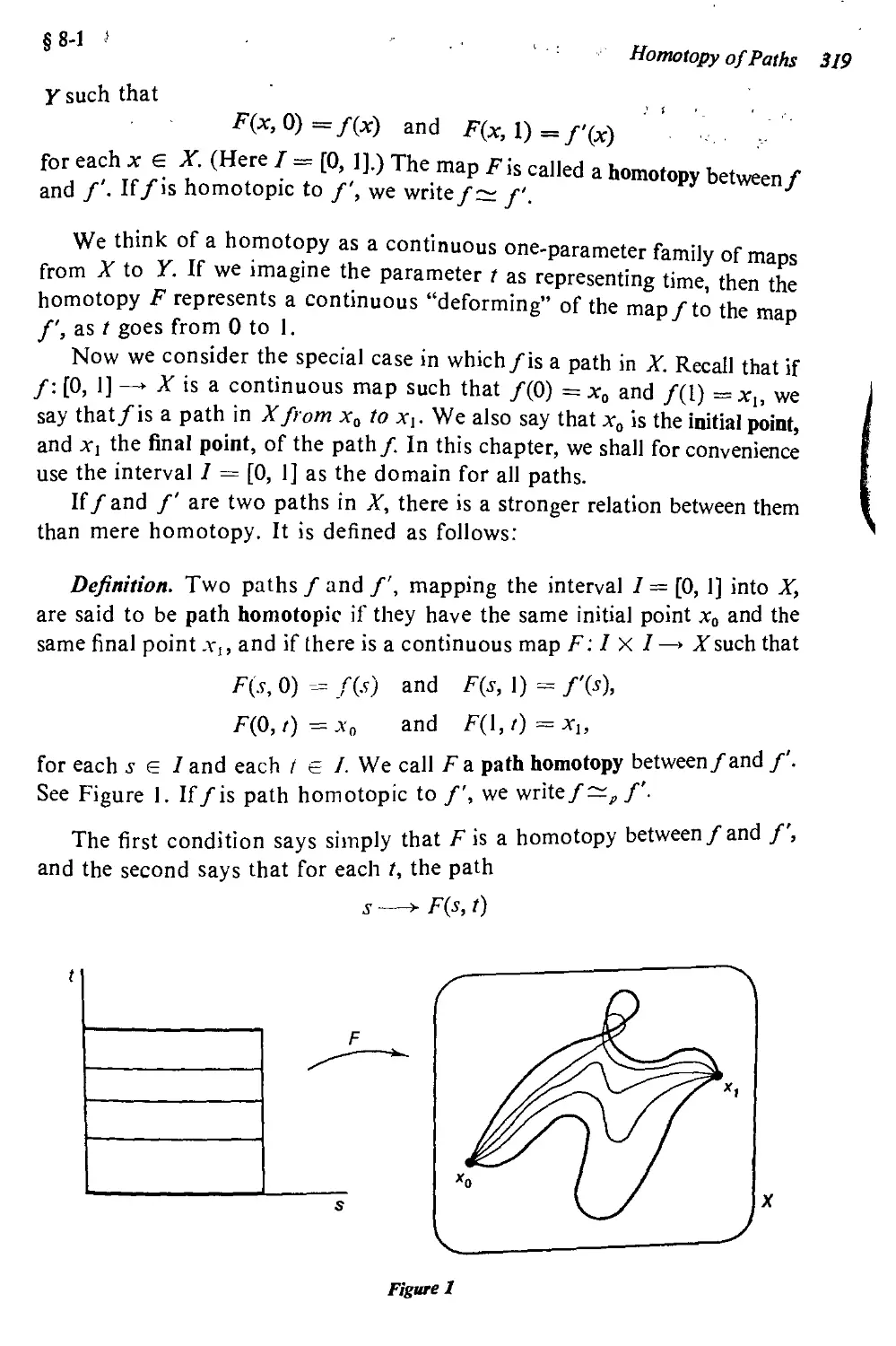
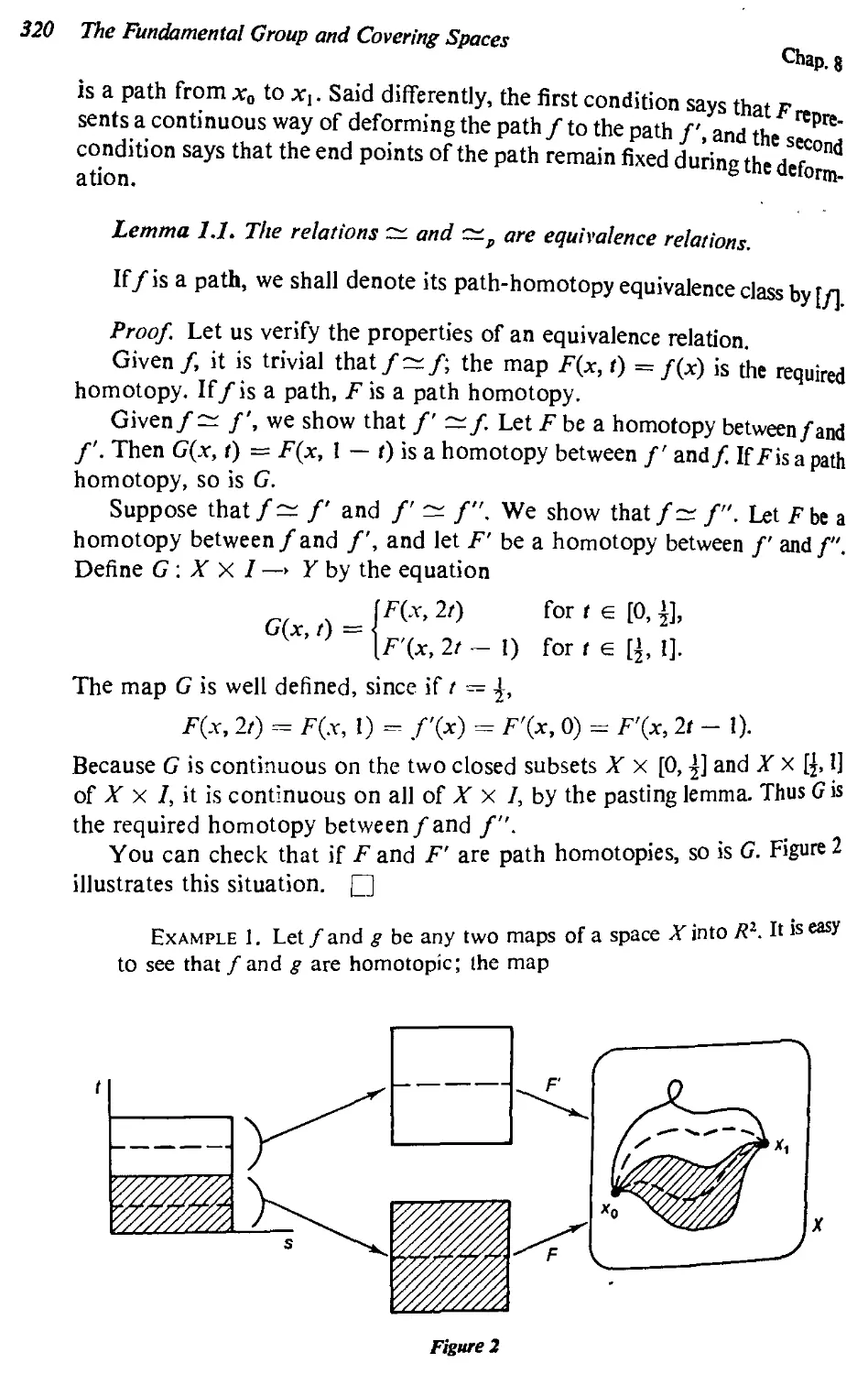
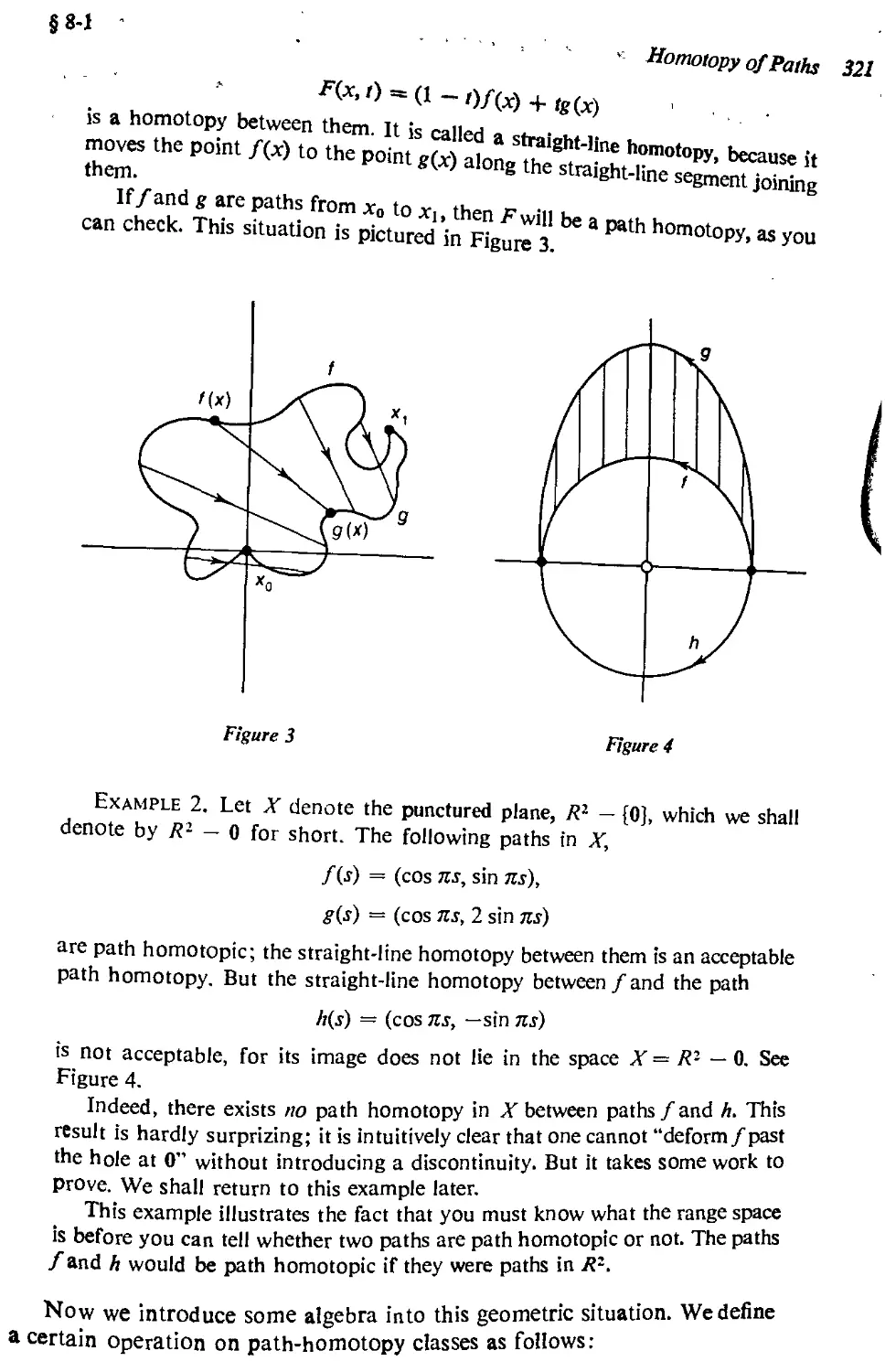
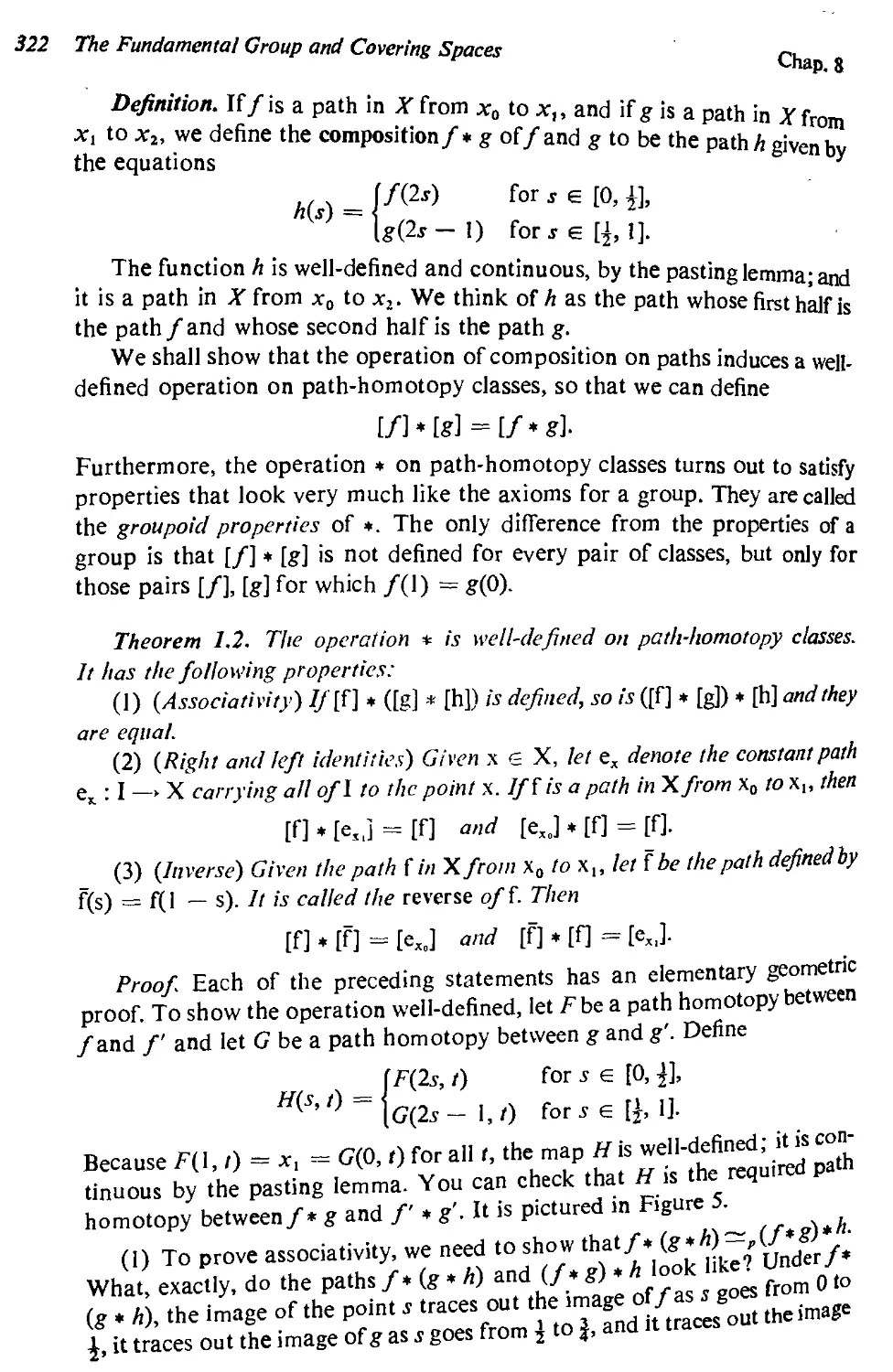
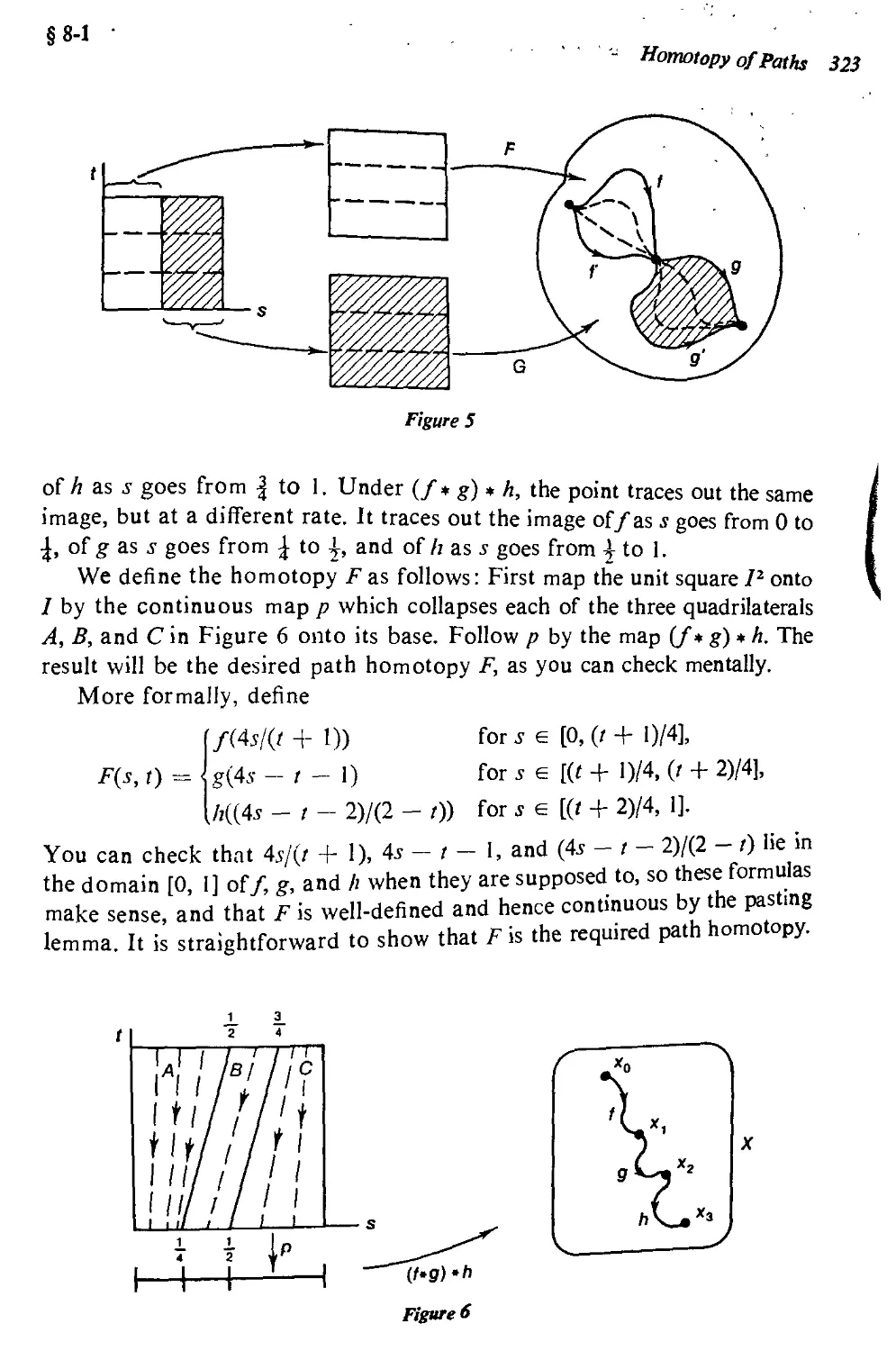
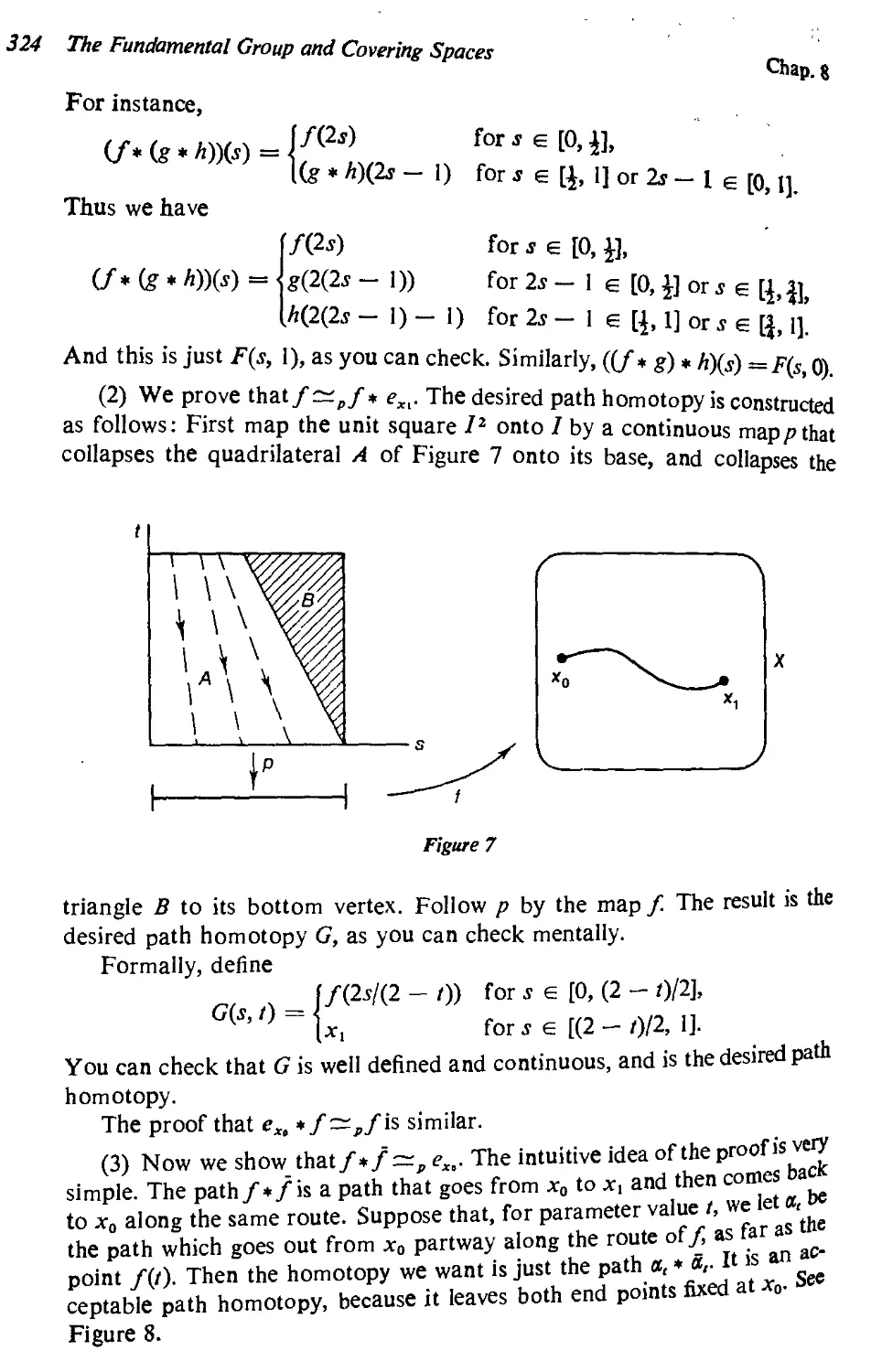
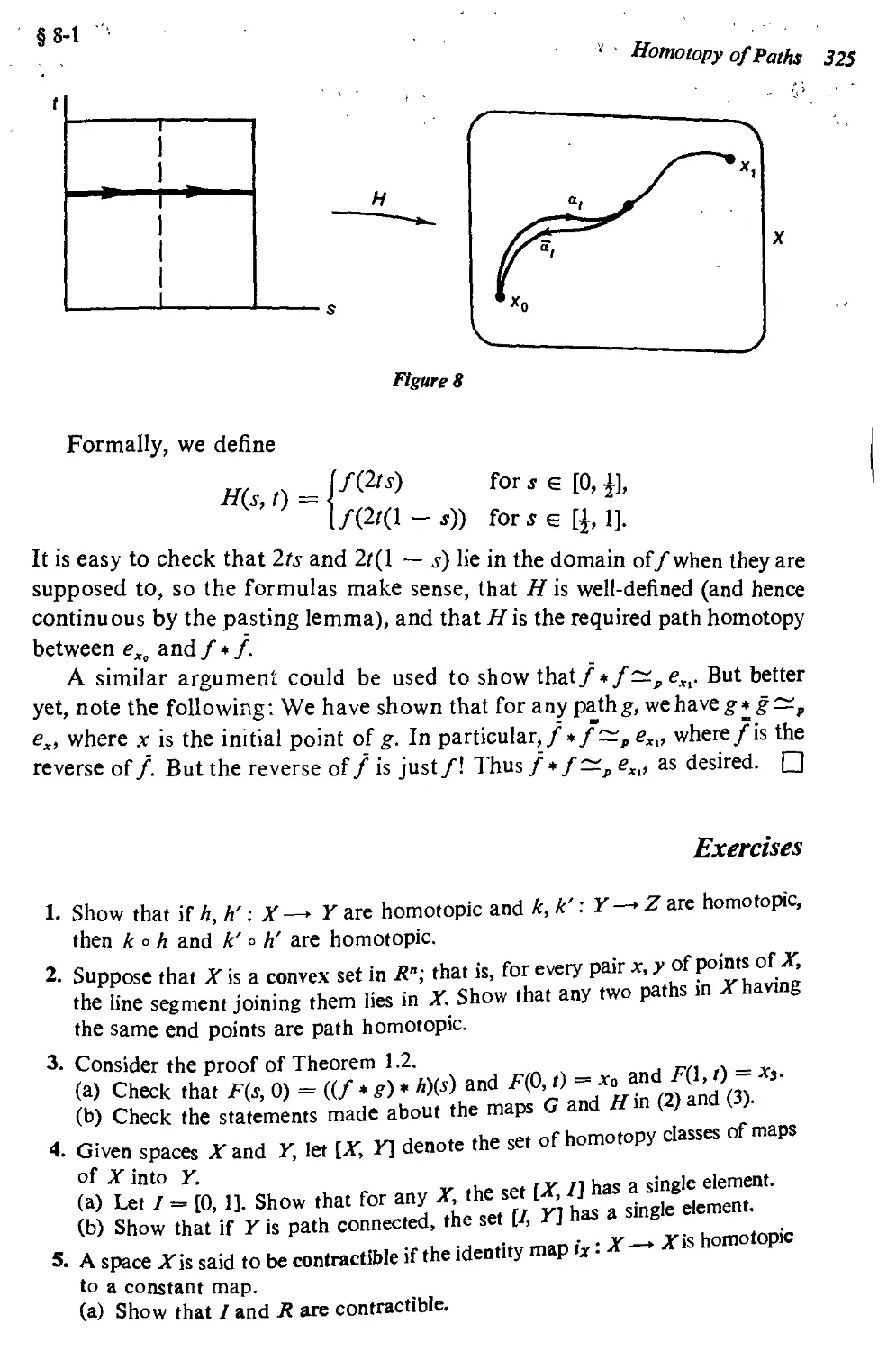
Homotopy of Paths
The Fundamental Group
Covering Spaces
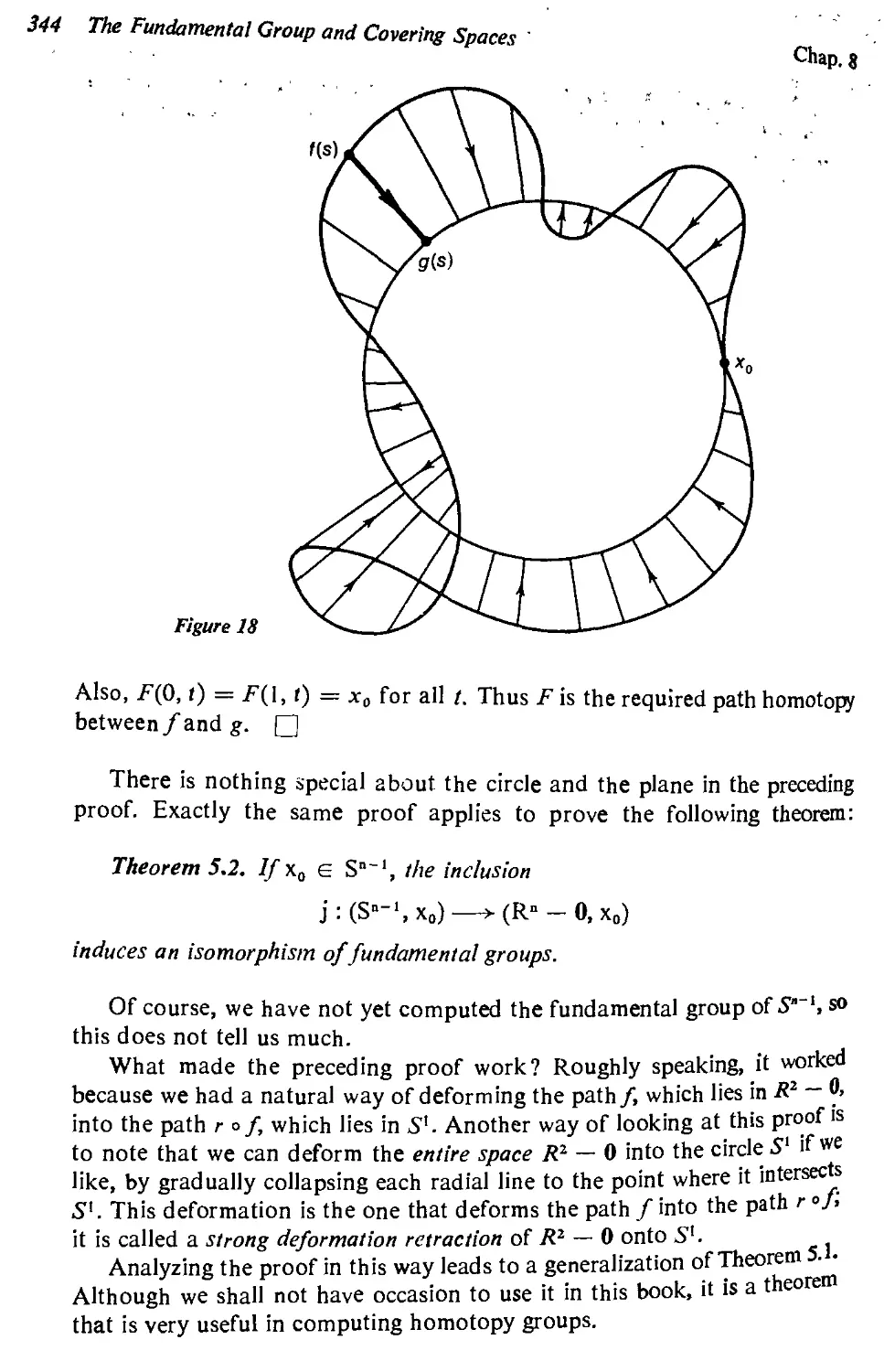
The Fundamental Group of the Circle
The Fundamental Group of the Punctured
Plane
The Fundamental Group of S"
Fundamental Groups of Surfaces
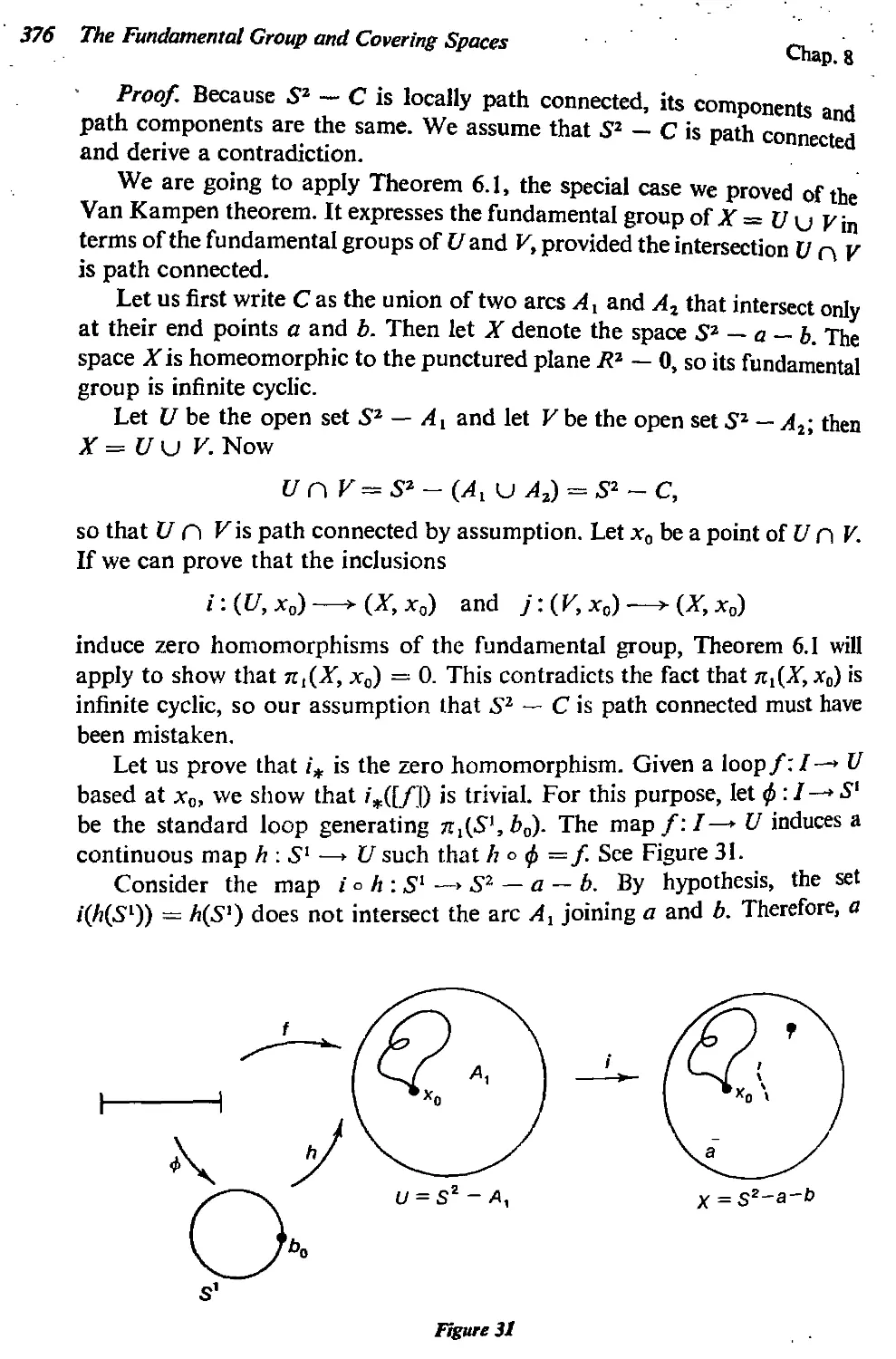
Essential and Inessential Maps
The Fundamental Theorem of Algebra
Vector Fields and Fixed Points
Homotopy Type
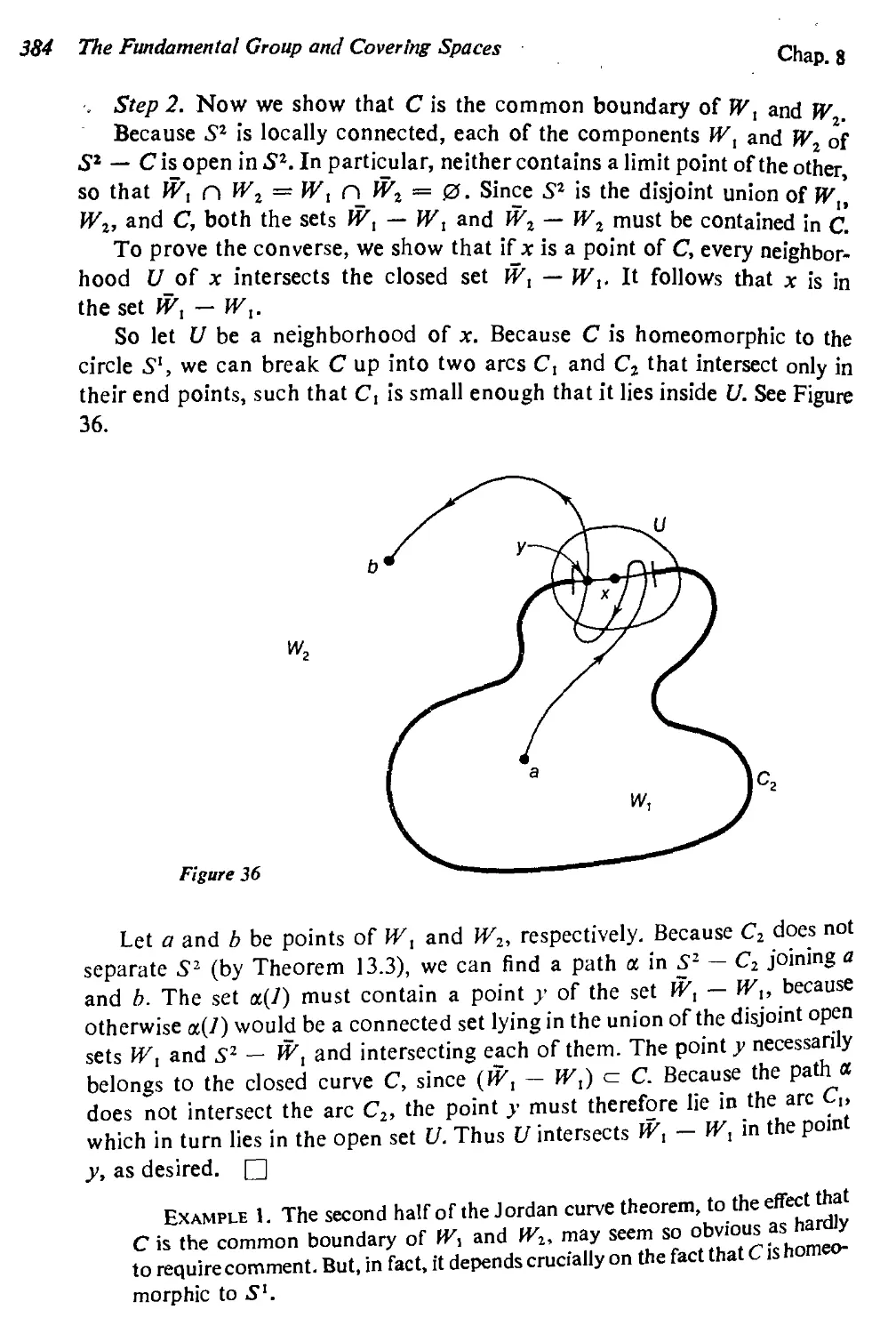
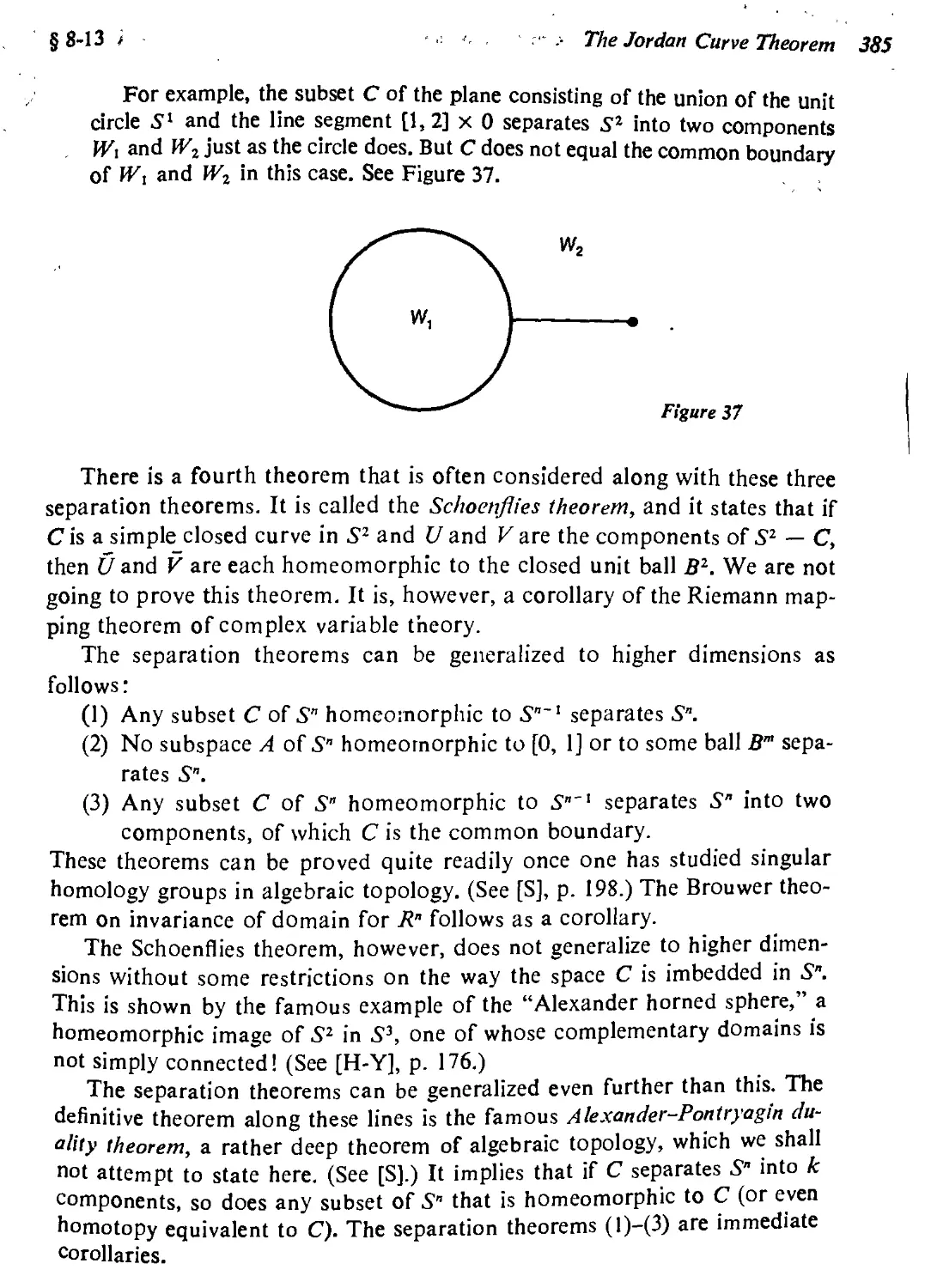
The Jordan Separation Theorem
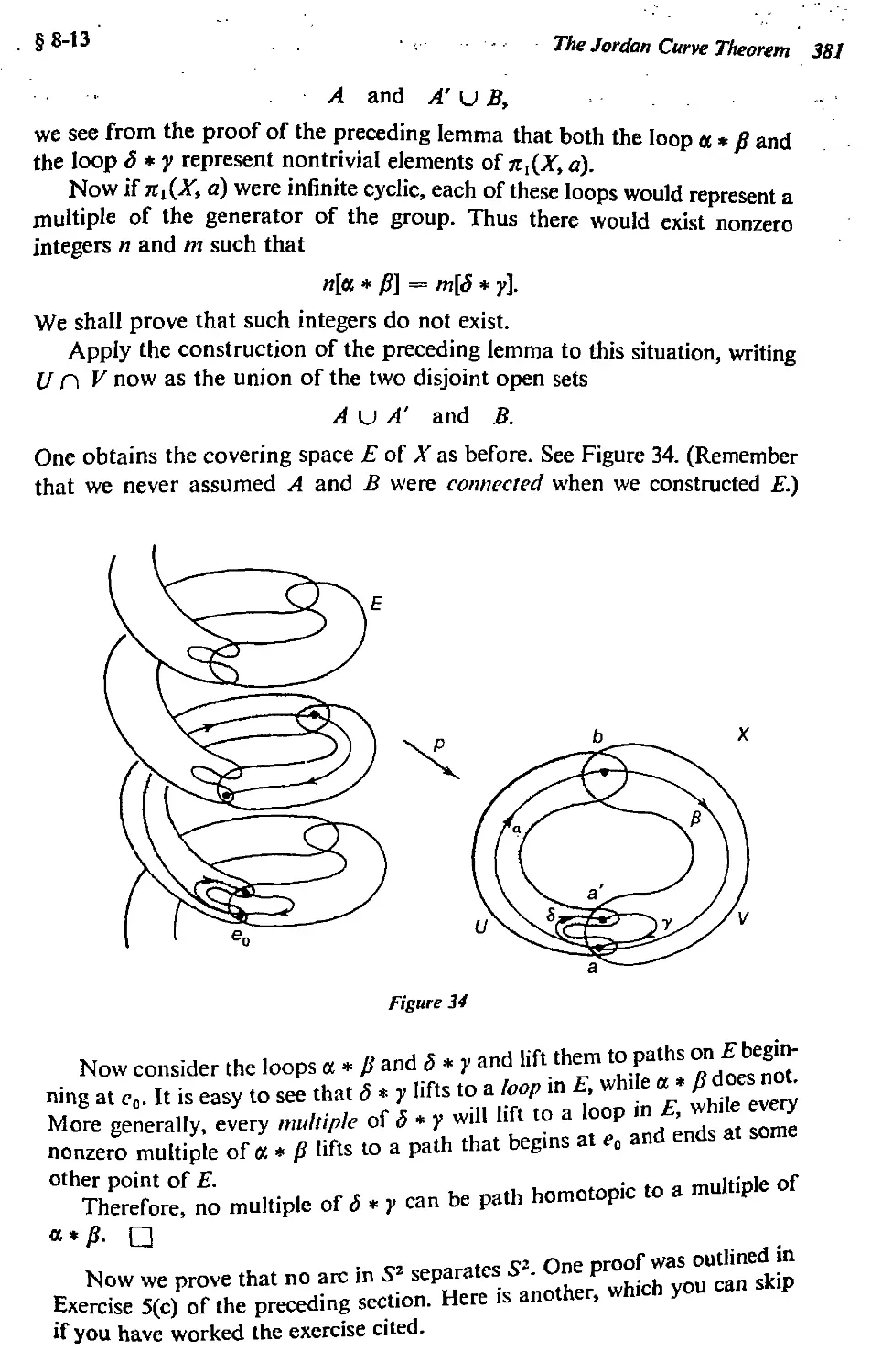
The Jordan Curve Theorem
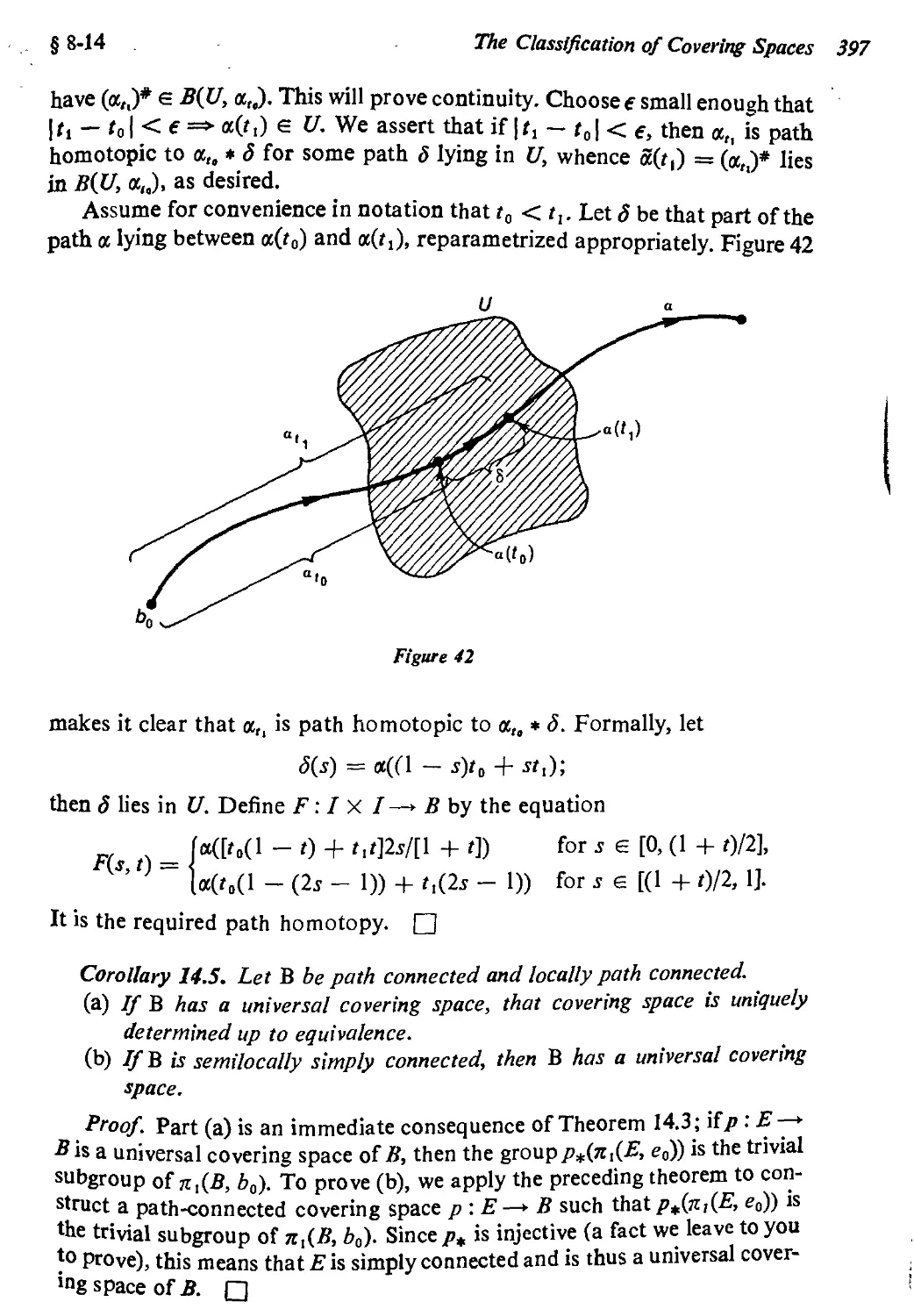
The Classification of Covering Spaces
Bibliography
Index
316
318
326
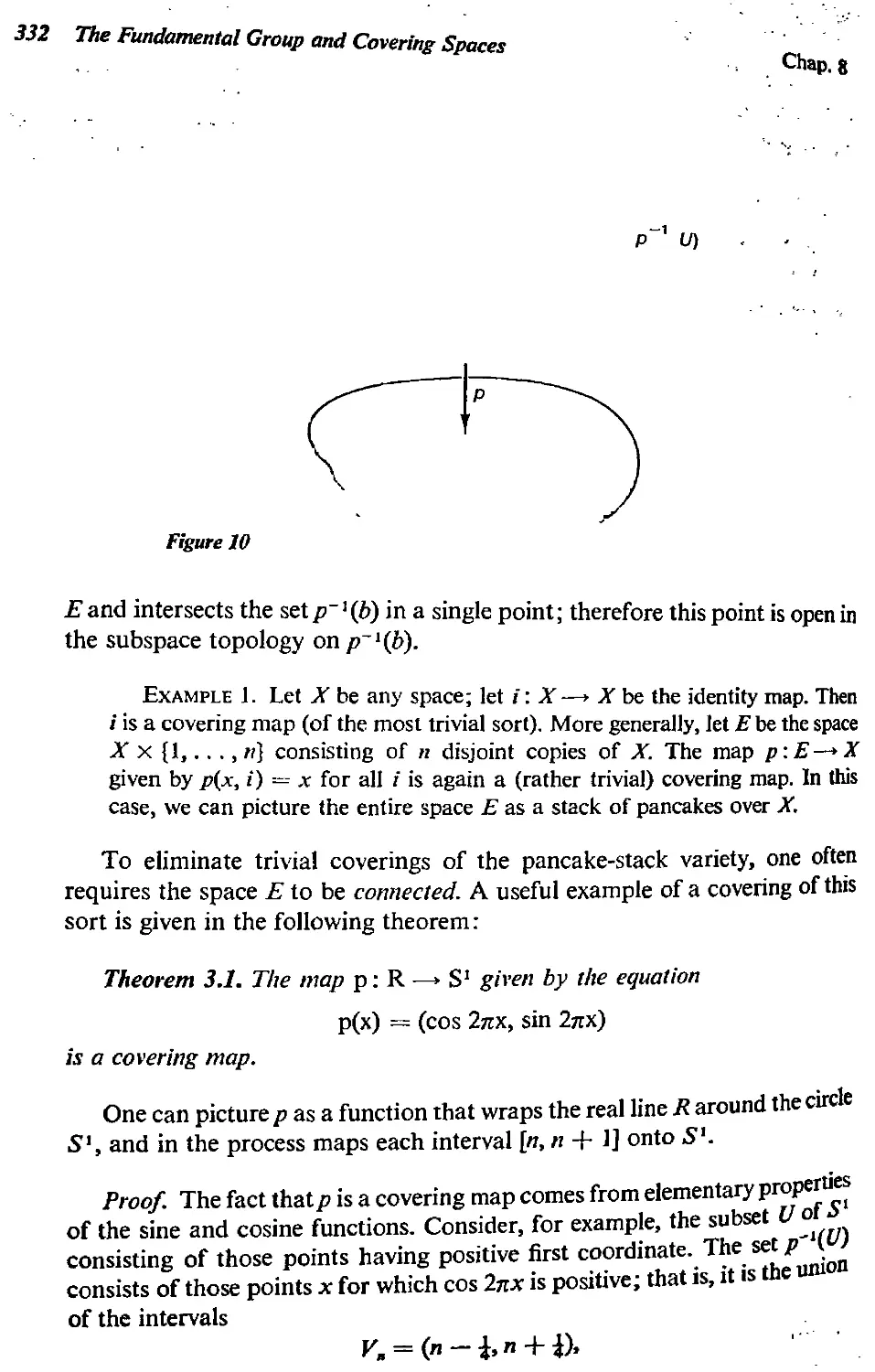
331
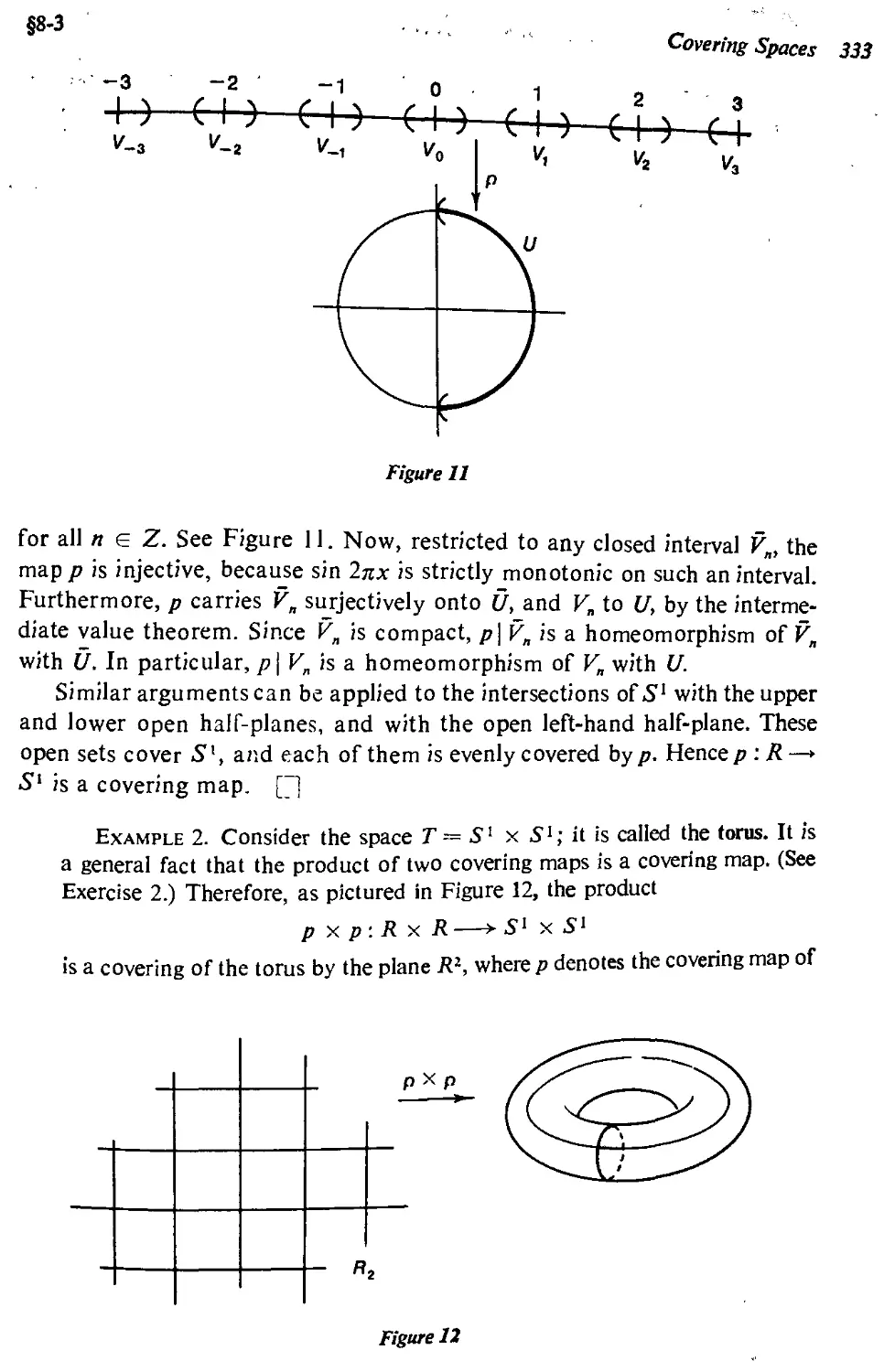
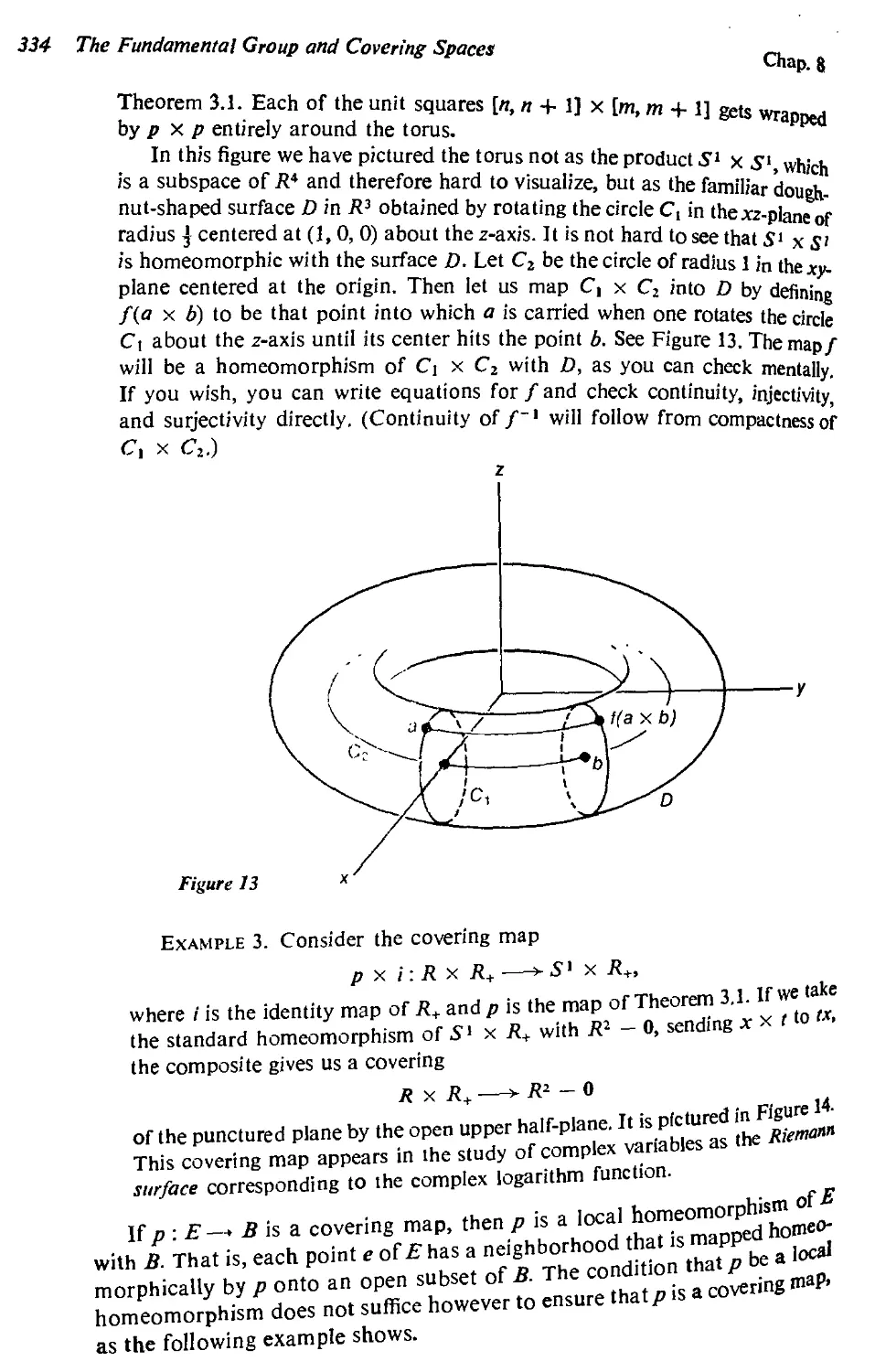
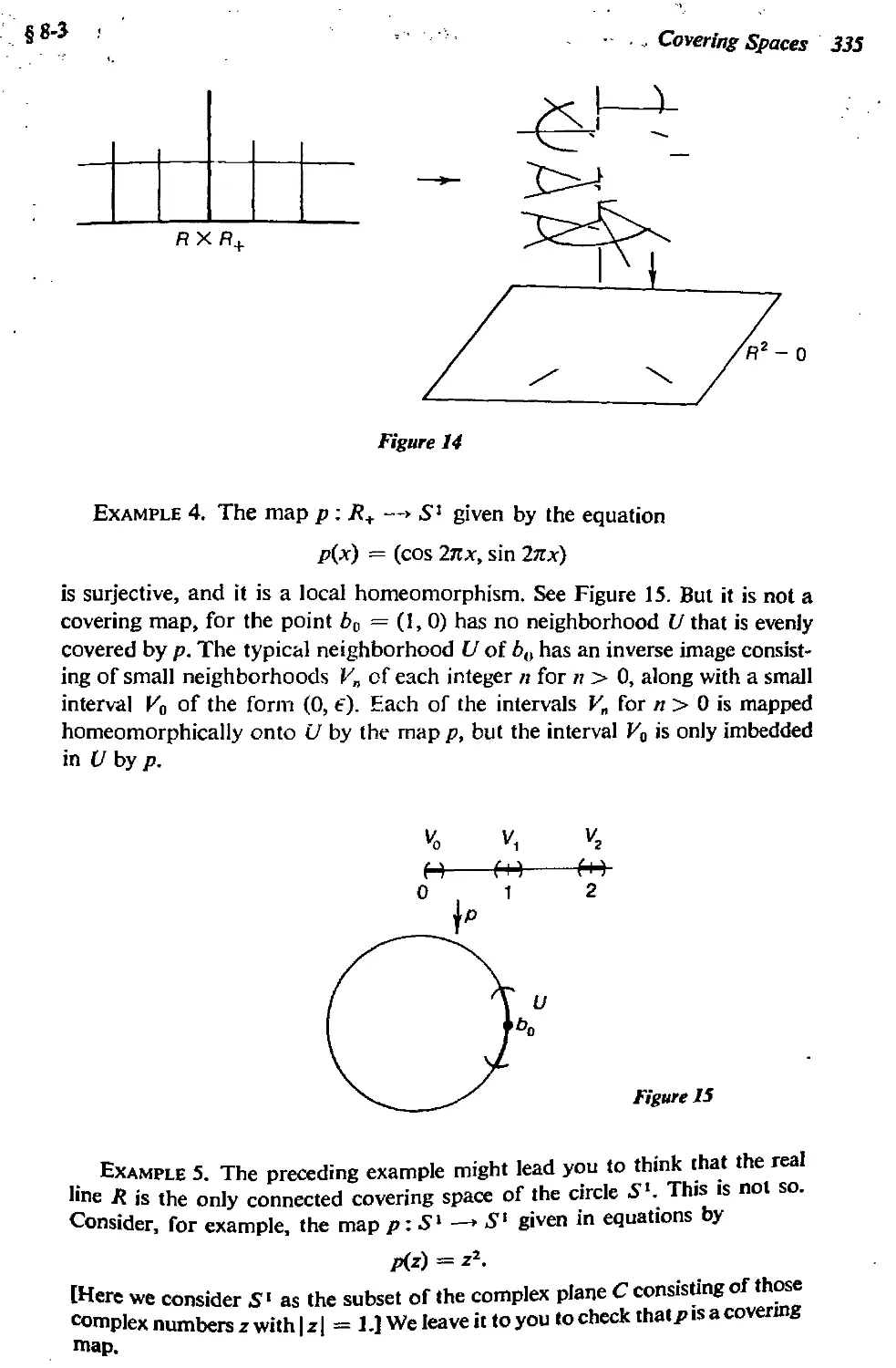
336
343
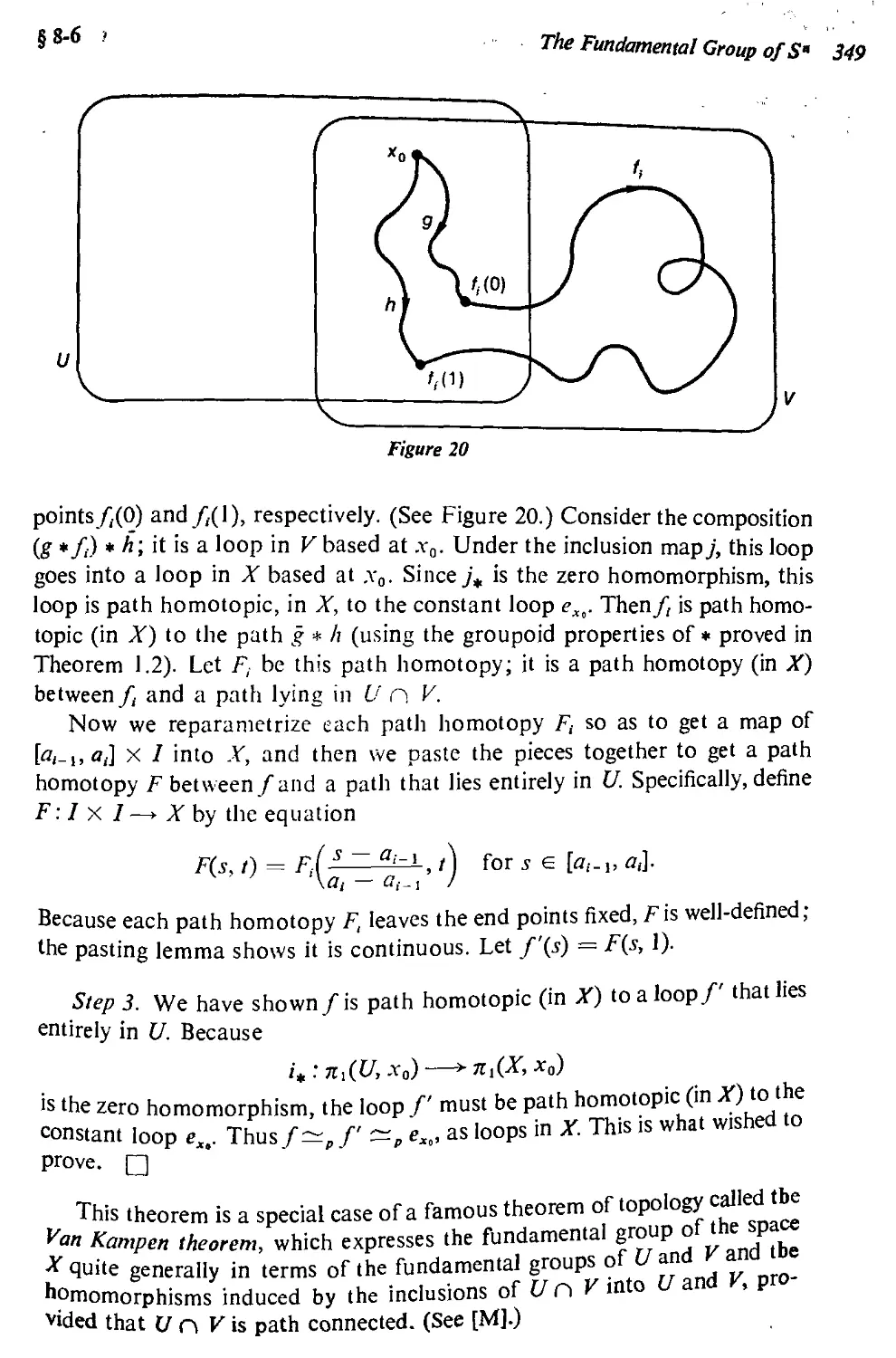
348
351
357
361
364
369
374
378
387
399
401
Preface
This book is intended as a text for a one- or two-semester introduction
to topology, at the senior or first-year graduate level.
The subject of topology is of interest in its own right, and it also serves
to lay the foundations for future study in analysis, in geometry, and in
algebraic topology. There is no universal agreement among mathematicians
as to what a first course in topology should include; there are many topics
that are appropriate to such a course, and not all are equally relevant to
these differing purposes. In the choice of material to be treated, I have tried
to strike a balance among the various points of view.
Prerequisites. There are no formal subject matter prerequisites for study-
studying most of this book. I do not even assume the reader knows much set
theory. Having said that, I must hasten to add that unless the reader has
studied a bit of analysis or "rigorous calculus," he will be missing much of
the motivation for the concepts introduced in the first part of the book.
Things will go more smoothly if he already has had some experience with
continuous functions, open and closed sets, metric spaces, and the like,
although none of these is actually assumed. In Chapter 8, we do assume
lamihanty with the elements of group theory.
^ Most students in a topology course have, in my experience, some knowl-
ge ot the foundations of mathematics. But the amount varies a great deal
JCI
xii Preface
from one student to another. Therefore I begin with a fairly thorough chapter
on set theory and logic. It starts at an elementary level, and works up to a
level that might be described as "semi-sophisticated." It treats those topics
(and only those) which will be needed later in the book. Most students will
already be familiar with the material of the first few sections, but many of
them will find their expertise disappearing somewhere about the middle of
the chapter. How much time and effort the instructor will need to spend on
this chapter will thus depend largely on the mathematical sophistication and
experience of his students. Ability to do the exercises fairly readily (and
correctly!) should serve as a reasonable criterion for determining whether
the student's mastery of set theory is sufficient for him to begin the study
of topology.
How the book is organized. When this book is used for a one-semester
course, some choices will have to be made concerning what material to
cover. I have attempted to organize the book as flexibly as possible, so as
to enable the instructor to follow his own preferences in this matter.
Part I of the book, consisting of the first four chapters, deals with that
body of material which in my opinion should be included in any introductory
topology course worthy of the name. This may be considered the "irreducible
core" of the subject, treating as it does topological spaces, connectedness,
compactness (through compactness of finite products), and the counta-
bility and separation axioms (through the Urysohn metrization theorem).
Certain sections are marked with an asterisk; these do not form part of the
basic core and may be omitted or postponed with no loss of continuity.
Part II of the book consists of four chapters which are entirely indepen-
independent of one another. They depend only on the material of Part I; the instruc-
instructor may take them up in any order he chooses. Furthermore, if he wishes
to cover only a portion of one of these later chapters, he can consult the
introduction to that chapter, where there appears a diagram showing the
relations of dependence among the sections of the chapter. The instructor
who wishes, for instance, to conclude his course with a proof of the Jordan
curve theorem can determine from this diagram which of the earlier sections
of Chapter 8 are essential, and which peripheral, to his purpose.
Some of the material of the later chapters depends on one or more of the
asterisked sections in Part I. Each such dependence is indicated in a footnote
at the beginning of the asterisked section, and again in the introduction to
the chapter in question. Some of the exercises also depend on earlier aster-
asterisked sections, but in such cases the dependence is obvious.
Possible course outlines. Most instructors who use this text for a one-
semester course will wish to cover the "core" material of Part I, along with
the Tychonoff theorem (§5-1). Many will cover additional topics as well.
One might, for instance, treat some of the asterisked sections of Part I. (l
Preface xiii
ally do local compactness, at least.) Or he may choose one or more
^ cs from Part II. Possibilities include: the Stone-Cech compactification
r«5-3)» metrization theorems (Chapter 6), the Peano curve (§7-2), one or
both versions of Ascoli's theorem (§7-3 and §7-6), dimension theory (§7-9),
the fundamental group and applications (§8-l-§8-10), or the Jordan curve
theorem (§8-13). I have in different semesters followed each of these options.
For the instructor who wishes to emphasize algebraic topology, one
ssible course outline would consist of Chapters 1 to 3 followed by Chapter
8 in its entirety. Omitting Chapter 4 will cause no difficulty, provided one
skips Exercise 5 of §8-12, which involves the concept of normality.
Still another possible outline is the one suggested by the Committee on
the Undergraduate Program in Mathematics (of the Mathematical Associa-
Association of America) for a one-semester course in topology at the first-year
graduate level. It would consist of Chapters 2, 3, and 4, followed by §5-1;
§6-1, §6-3, §6-4; §7-1; §8-1 through §8-5, §8-8 through §8-11, and §8-14.
This program assumes that the student has already had an introduction to
set theory equivalent to our Chapter 1.
In a two-semester course, one can reasonably expect to cover the entire
book.
Acknowledgements. Most of the topologists with whom I have studied,
or whose books I have read, have contributed in one way or another to this
book; I mention only Edwin Moise, Raymond Wilder, Gail Young, and
Raoul Bott, but there are many others. For their helpful comments con-
concerning this book, my thanks to Robert Mosher and John Hemperly, and
to my colleagues George Whitehead and Kenneth Hoffman. My apprecia-
appreciation goes to Miss Viola Wiley, who deciphered my handwriting and con-
converted it into neat copy, and to the employees of Bertrick Associate Artists,
Inc., who drew the illustrations.
But most of all, to my students go my most heartfelt thanks. From them
I learned at least as much as they did from me; without them this book
would be very different.
J.R.M.
1. Set Theory and Logic
We adopt, as most mathematicians do, the naive point of view regarding
set theory. We shall assume that what is meant by a set of objects is intuitively
clear, and we shall proceed on that basis without analyzing the concept
further. Such an analysis properly belongs to the foundations of mathematics
and to mathematical logic, and it is not our purpose to initiate the study of
those fields.
Logicians have analyzed set theory in great detail, and they have formula-
formulated axioms for the subject. Each of their axioms expresses a property of sets
that mathematicians commonly accept, and collectively the axioms provide a
foundation broad enough and strong enough that the rest of mathematics
«an be built on them.
It is unfortunately true that careless use of set theory, relying on intuition
alone, can lead to contradictions. Indeed, one of the reasons for the axio-
roatjzation of set theory was to formulate rules for dealing with sets that would
ajoid these contradictions. Although we shall not deal with the axioms explic-
'ily.the rules we follow in dealing with sets derive from them. In this book,
y°u will learn how to deal with sets in an "apprentice" fashion, by observing
you ^ handle them and by workin« with them yourself. At some point of
detr.^tu°les y°u may wish to study set theory more carefully and in greater
'■» then a course in logic or foundations will be in order.
Chap, i
4 Set Theory and Logic
1-1 Fundamental Concepts
Here we introduce the ideas of set theory, and establish the basic terrnU
noloTv and notation. We also discuss some points of elementary logic that,
,n our experience, are apt to cause confusion.
Basic Notation
Commonly we shall use capital letters A, B,... to denote sets, and lower-
lowercase letters a, b,... to denote the objects or elements belonging to these sets.
If an object a belongs to a set A, we express this fact by the notation
a e A.
If a does not belong to A, we express this fact by writing
a $ A.
The equality symbol = is used throughout this book to mean logical
identity. Thus when we write a = b, we mean that "a" and "b" are symbols
for the same object. This is what one means in arithmetic, for example, when
one writes £ = \. Similarly, the equation A = B states that "A" and "B" are
symbols for the same set; that is, A and B consist of precisely the same ob-
objects.
If a and b are different objects, we write a ^ b; and if A and B are different
sets, we write A ^ B. For example, if A is the set of all nonnegative real
numbers, and B is the set of all positive real numbers, then A ^ B, because
the number 0 belongs to A and not to B.
We say that A is a subset of B if every element of A is also an element of
B; and we express this fact by writing
A c B.
Nothing in this definition requires A to be different from B- in fact if A = B,
it is true that both A <= B and B «= A. If A cz B and A is different from B,
we say that A is a proper subset of B and we write
B.
one^fr.T f , a Set ? If the set has only a few elements,
2dmems^18 ^ ^CtS ^ thE SEt' Witin« "A is the *« consisting of
elements a, b, and c." In symbols, this statement becomes
A={a,b,c},
where braces are used to enclose the list of elements
The usual way to specify a set, however, isTo Uke some set A of objects
Fundamental Concepts
§!-'
property that elements of A may or may not possess, and to form
a"d Consisting of all elements of A having that property. For instance, one
AC ht take the set of real numbers and form the subset B consisting of all
ttI integers. In symbols, this statement becomes
B = [x\x is an even integer}.
the braces stand for the words "the set of," and the vertical bar stands
fofthe words "such that." The equation is read, is the set of all x such that
x is an even integer."
The Union of Sets and The Meaning of "or"
Given two sets A and B, one can form a set from them that consists of all
the elements of A together with all the elements of B. This set is called the
union of A and B and is denoted by A U B. Formally, we define
A u B = {x\x £ A or x e B}.
But we must pause at this point and make sure exactly what we mean by the
statement "x e A or x e B."
In ordinary everyday English, the word "or" is ambiguous. Sometimes the
statement "P or Q" means "P or Q, or both" and sometimes it means "P or
Q, but not both." Usually one decides from the context which meaning is
intended. For example, suppose I spoke to two students as follows:
"Miss Smith, every student registered for this course has taken either a course
in linear algebra or a course in analysis."
"Mr. Jones, either you get a grade of at least 70 on the final exam or you will
flunk this course."
In the context, Miss Smith knows perfectly well that I mean "everyone has
had linear algebra or analysis, or both," and Mr. Jones knows I mean "either
he gets at least 70 or he flunks, but not both." Indeed, Mr. Jones would be
exceedingly unhappy if both statements turned out to be true!
In mathematics, one cannot tolerate such ambiguity. One has to pick just
°ne meaning and stick with it, or confusion will reign. Accordingly, mathe-
mathematicians have agreed that they will use the word "or" in the first sense, so
«pat the statement "P or Q" always means "P or Q, or both." If one means
°r Q, but not both," then one has to include the phrase "but not both"
explicitly,
^te 'th th'S understandinS> the equation defining Au Bis unambiguous; it
h&t a u Bis the set consisting of all elements x that belong to A or to
° °r to both.
6 Set Theory and Logic Chap, j
The Intersection of Sets, The Empty Set, and The Meaning
of "If... Then"
Given sets A and B, another way one can form a set is to take the com-
common part of A and B. This set is called the intersection of A and B and is
denoted by A n B. Formally, we define
A n B = {x\x e A and x e B}.
But just as with the definition of A U B, there is a difficulty. The difficulty is
not in the meaning of the word "and"; it is of a different sort. It arises when
the sets A and B happen to have no elements in common. What meaning does
the symbol A n B have in such a case?
To take care of this eventuality, we make a special convention. We intro-
introduce a special set which we call the empty set, denoted by 0, which we think
of as "the set having no elements."
Using this convention, we express the statement that A and B have no
elements in common by the equation
A n B = O.
We also express this fact by saying that A and B are disjoint.
Now some students are bothered by the notion of an "empty set." "How,"
they say, "can you have a set with nothing in it?" The problem is similar to
that which arose many years ago when the number 0 was first introduced.
The empty set is only a convention, and mathematics could very well get
along without it. But it is a very convenient convention, for it saves us a good
deal of awkwardness in stating theorems and in proving them. Without this
convention, for instance, one would have to prove that the two sets A and B
do have elements in common before one could use the notation A D B,
Similarly, the notation
C = {x\x e A and x has a certain property}
could not be used if it happened that no element x of A had the given prop-
property. It is much more convenient to agree that A n B and C equal the empty
set in such cases.
Since the empty set 0 is merely a convention, we must make conventions
relating it to the concepts already introduced. Because 0 is thought of as
"the set with no elements," it is clear we should make the convention that for
each object x, the relation x e 0 does not hold. Similarly, the definitions of
union and intersection show that for every set A we should have the equations
A U 0 = A and A n 0 = 0.
The inclusion relation is a bit more tricky. Given a set A, should we agree
that 0 <= A ? Once more we must be careful about the way mathematicians
use the English language. The expression 0 <= A is a shorthand way of writ-
Fundamental Concepts
§1-1
"Every element that belongs to the empty set also belongs
ing ^ sent ^, ^ ^ ^ ^^ formally) «For every object x, if * belongs to
t0 ^ ntv set, then x also belongs to the set A."
th£ "Xfc statement true or not? Some might say "yes" and others say no.
Ml never settle the question by argument, only by agreement. This is a
Y°U nt of the form "If P, then Q," and in everyday English the meaning
stateme^ ^en,, construction is ambiguous. It always means that if P is
°f then Q is true also. Sometimes that is all it means; other times it means
Tmething more: that if P is false, Q must be false. Usually one decides from
thTcontext which interpretation is correct.
The situation is similar to the ambiguity in the use of the word "or." One
n reformulate the examples involving Miss Smith and Mr. Jones to illus-
illustrate the ambiguity. Suppose I said the following:
"Miss Smith, if any student registered for this course has not taken a course
in linear algebra, then he has taken a course in analysis."
"Mr. Jones, if you get a grade below 70 on the final, you are going to flunk
this course."
In the context, Miss Smith understands that if a student in the course has
not had linear algebra, then he has taken analysis, but if he has had linear
algebra, he may or may not have taken analysis as well. And Mr. Jones knows
that if he gets a grade below 70, he will flunk the course, but if he gets a grade
of at least 70, he will pass.
Again, mathematics cannot tolerate ambiguity, so a choice of meanings
must be made. Mathematicians have agreed always to use "if. . . then" in the
first sense, so that a statement of the form "If P, then Q" means that if P is
true, Q is true also, but if P is false, Q may be either true or false.
As an example, consider the following statement about real numbers:
Ifx > 0, then x3 ^ 0.
It is a statement of the form, "UP, then Q," where P is the phrase ux > 0"
icalled the hypothesis of the statement) and Q is the phrase "x3 ^ 0" (called
me conclusion of the statement). This is a true statement, for in every case for
™ch the hypothesis x > 0 holds, the conclusion x3 ^ 0 holds as well.
Another true statement about real numbers is the following:
Ifx2 <0, then x = 23;
^uT^tT0 f°r Whi°h thC hypothesis holds>the conclusion holds as well. Of
esjs hold PCnS'" th'S example that there are no cases for which the hypoth-
To t Statcment of this sort is sometimes said to be vacuously true.
0 c a\Trn,now t0 the emPty set and inclusion, we see that the inclusion
* € 0 th" f°» CVCry SCt A' Writin8 0 c A is the same as saying, "If
• en*e A," and this statement is vacuously true.
8 Set Theory and Logic
Contrapositive and Converse
Our discussion of the "if... then" construction leads us to consider
another point of elementary logic that sometimes causes difficulty. It concerns
the relation between a statement, its contrapositive, and its converse.
Given a statement of the form "If P, then Q," its contrapositive is defined
to be the statement "If Q is not true, then P is not true." For example, the
contrapositive of the statement
Ifx > 0, then x1 ^ 0,
is the statement
Ifx3 = 0, then it is not true that x > 0.
Note that both the statement and its contrapositive are true. Similarly, the
statement
Ifx1 < 0, then x = 23,
has as its contrapositive the statement
If x^ 23, then it is not true that x2 < 0.
Again, both are true statements about real numbers.
These examples may make you suspect that there is some relation between
a statement and its contrapositive. And indeed there is; they are two ways of
saying precisely the same thing. Each is true if ind only if the other is true;
they are logically equivalent.
This fact is not hard to demonstrate. Let us introduce some notation first.
As a shorthand for the statement "If P, then Q,'' we write
P=>Q,
which is read "P implies Q." The contrapositive can then be expressed in the
form
(not Q) =* (not P),
where "not Q" stands for the phrase "Q is not true."
Now the only way in which the statement "P => Q" can fail to be correct
is if the hypothesis P is true and the conclusion Q is false. Otherwise it is
correct. Similarly, the only way in which the statement (not Q) => (not P)
can fail to be correct is if the hypothesis "not Q" is true and the conclusion
not P" is false. This is the same as saying that Q is false and P is true. And
ttns, in turn, is precisely the situation in which P => Q fails to be correct
Thus we see that the two statements are either both correct or both incorrect;
mey are logically equivalent. Therefore, we shall accept a proof of the state-
statement not Q => not />» as a proof of the statement "i> => Q."
Tt i«\k !* anOth°r statement that ca" be formed from the statement P => Q-
U is the statement
Fundamental Concepts
■ h • called the converse of P => Q. One must be careful to distinguish
W ' a statement's converse and its contrapositive. Whereas a statement
betWftTcontrapositive are logically equivalent, the truth of a statement says
a"tiiin at all about the truth or falsity of its converse. For example, the true
nt
statement
>
has as its converse the statement
Ifx3 ^ 0, then x > 0,
which is false.
If it should happen that both the statement P => Q and its converse
n => P are true, we express this fact by the notation
P<=>Q,
which is read "P holds if and only if Q holds."
Negation
If one wishes to form the contrapositive of the statement P => Q, one has
to know how to form the statement "not P," which is called the negation of
P. In many cases, this causes no difficulty; but sometimes confusion occurs
with statements involving the phrases "for every" and "for at least one."
These phrases are called logical quantifiers.
To illustrate, suppose that X is a set, A is a subset of X, and P is a state-
statement about the general element of X. Consider the following statement:
(*) For every x e A, statement P holds.
How does one form the negation of this statement? Let us translate the prob-
problem into the language of sets. Suppose that we let B denote the set of all
those elements x of X for which P holds. Then statement (*) is just the state-
statement that A is a subset of B. What is its negation? Obviously, the statement
that A is not a subset of B; that is, the statement that there exists at least one
dement of A that does not belong to B. Translating back into ordinary lan-
language, this becomes
For at least one x e A, statement P does not hold.
,lfoerefore'wt0 form the negation of statement (*), one replaces the quantifier
or every" by the quantifier "for at least one," and one replaces statement
r ^ Us negation.
e process works in reverse just as well; the negation of the statement
. For at least one x e A, statement Q holds,
ls the statement
For every x e A, statement Q does not hold.
Chap, i
10 Set Theory and Logic
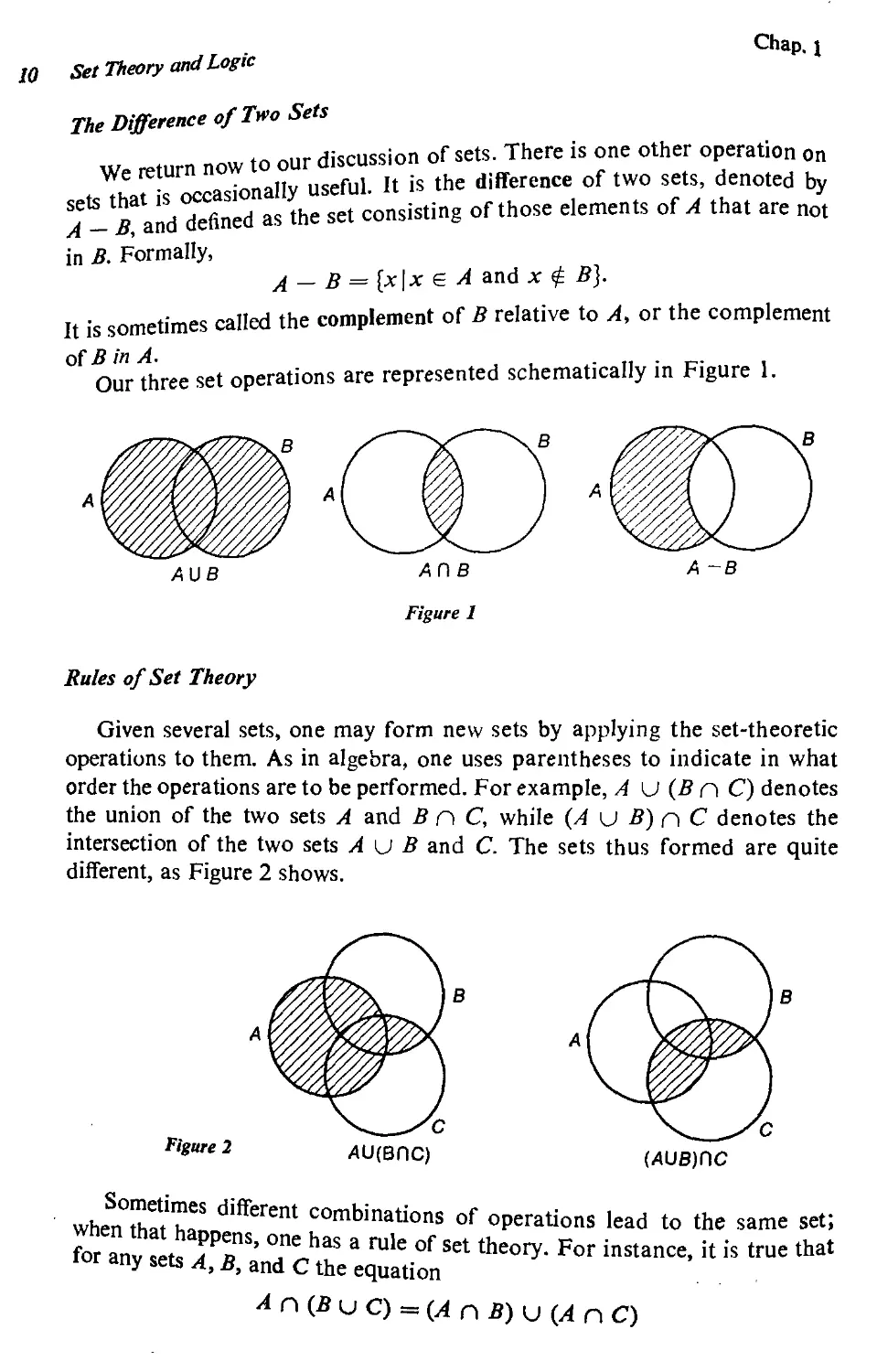
The Difference of Two Sets
w. «>turn now to our discussion of sets. There is one other operation on
t TtaHoccasionally useful. It is the difference of two sets, denoted by
J^Tand defined as the set consisting of those elements of A that are not
in B. Formally,
A _ b = [x\x e A and x $ B}.
It is sometimes called the complement of B relative to A, or the complement
of B in A. . „ . _. ,
Our three set operations are represented schematically in Figure 1.
AVB
A ~B
Rules of Set Theory
Given several sets, one may form new sets by applying the set-theoretic
operations to them. As in algebra, one uses parentheses to indicate in what
order the operations are to be performed. For example, A U (B n C) denotes
the union of the two sets A and B n C, while (A U B) n C denotes the
intersection of the two sets A\J B and C. The sets thus formed are quite
different, as Figure 2 shows.
Figure 2
*U(BnC) (AUB)nC
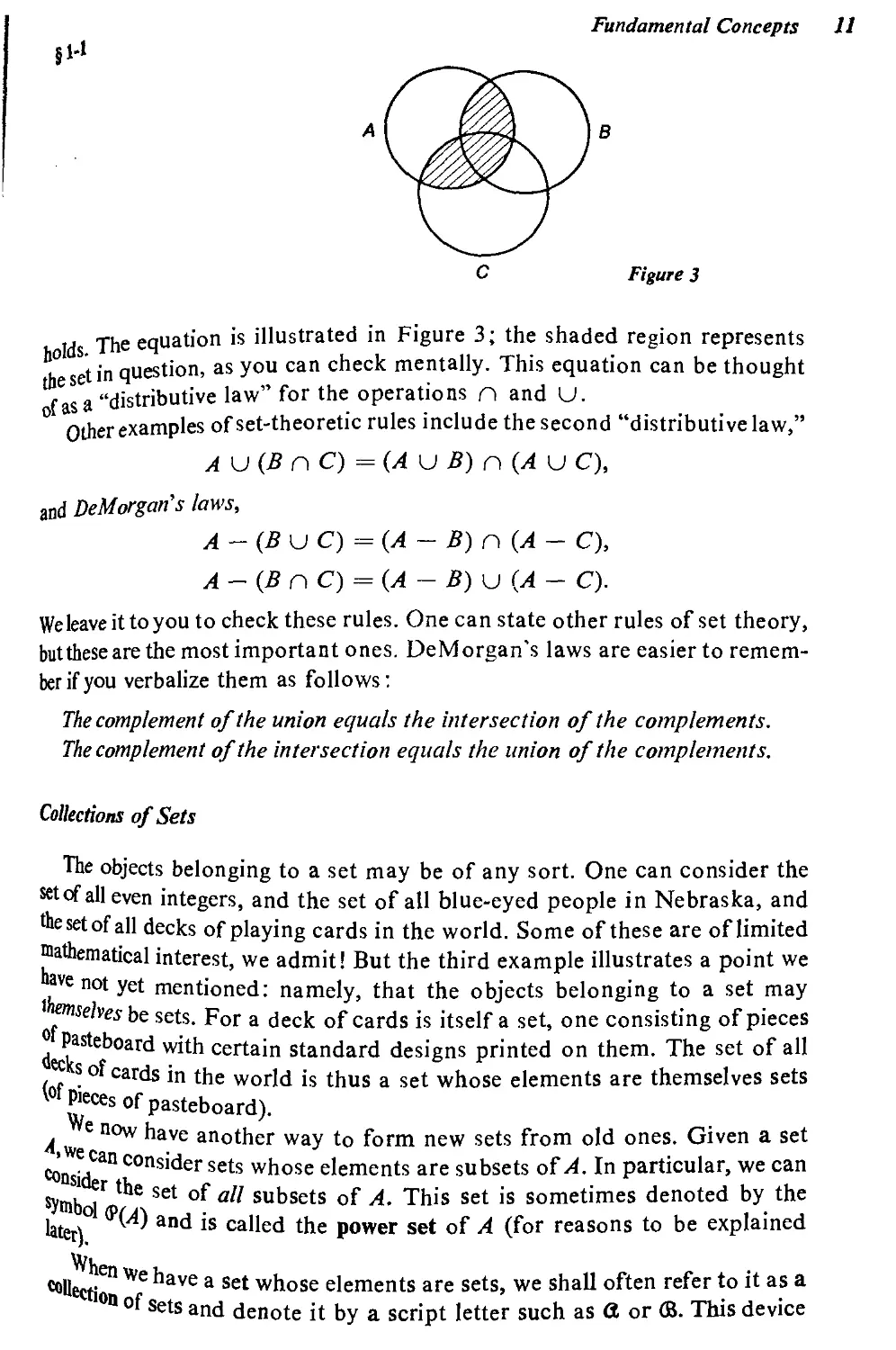
combinations of operations lead to the same set;
Fundamental Concepts 11
Figure 3
, The equation is illustrated in Figure 3; the shaded region represents
Tesetin question, as you can check mentally. This equation can be thought
fas a "distributive law" for the operations n and U.
Other examples of set-theoretic rules include the second "distributive law,"
AU(B nC) =(Aij B) n(Au C),
and DeMorgarCs laws,
A-{B\jC)={A- B)n{A- C),
A-(BnC) = (A- B)U(A- C).
We leave it to you to check these rules. One can state other rules of set theory,
buttheseare the most important ones. DeMorgarfs laws are easier to remem-
remember if you verbalize them as follows:
The complement of the union equals the intersection of the complements.
The complement of the intersection equals the union of the complements.
Collections of Sets
The objects belonging to a set may be of any sort. One can consider the
setof all even integers, and the set of all blue-eyed people in Nebraska, and
4e set of all decks of playing cards in the world. Some of these are of limited
mathematical interest, we admit! But the third example illustrates a point we
Mvenotyet mentioned: namely, that the objects belonging to a set may
themselves be sets. For a deck of cards is itself a set, one consisting of pieces
i Pasteboard with certain standard designs printed on them. The set of all
-f ^ of cards in the world is thus a set whose elements are themselves sets
W Pieces of pasteboard).
A e n°w have another way to form new sets from old ones. Given a set
^nskk^ °Onsider sets whose elements are subsets of A. In particular, we can
symboT ^ SCt °f al1 subsets of A- This set is sometimes denoted by the
latert° ^ and 's called the power set of A (for reasons to be explained
^ W° have a Set whose elements are sets, we shall often refer to it as a
n of ^ts and denote it by a script letter such as a or <B. This device
12 Set Theory and Logic aP-1
ill helo us in keeping things straight in arguments where we have to consider
^Irts and sets of objects, and collections of sets of objects, all at the same
f£fFor example, we might use a to denote the collection of all decks of
cards in the world, letting an ordinary capital letter A denote a deck of cards
and a lower-case letter a denote a single playing card.
A certain amount of care with notation is needed at this point. We make
a distinction between the object a, which is an element of a set A, and the one-
element set {a}, which is a subset of A. To illustrate, if A is the set [a, b, c],
then the statements
a e A, [a}<= A, and {a} e 6>(A)
are all correct, but the statements [a] e A and a <= A are not.
Arbitrary Unions and Intersections
We have already defined what we mean by the union and the intersection
of two sets. There is no reason to limit ourselves to just two sets, for we can
just as well form the union and intersection of arbitrarily many sets.
Given a collection a of sets, the union of the elements of a is defined by the
equation
{jAea A = {x\x e A for at least one A e a}.
The intersection of the elements of a is defined by the equation
fW A ={x\x e A for every A e a}.
There is no problem with these definitions if one of the elements of G
happens to be the empty set. But it is a bit tricky to decide what (if anything)
these definitions mean if we allow a to be the empty collection. Applying the
definitions literally, we see that no element x satisfies the defining property for
the union of the elements of a. So it is reasonable to say that
Daeo. A = 0
if a is empty. On the other hand, every x satisfies (vacuously) the defining
property for the intersection of the elements of a. The question is, every x
in what set? If one has a given large set X that is specified at the outset of the
discussion to be one's "universe of discourse," and one considers only subsets
of X throughout, it is reasonable to let
h*~Pty- Not a" nafowiMlclans follow this convention, however.
dlffic""ty. we shall not define the intersection when a is empty.
Cartesian Products
theStTonoff «n°!,her WEy °f f°rmin« new sets fr°m old ones; it involves
notion of an ordered pair" of objects. When you studied analytic geome-
Fundamental Concepts 13
§!-»
thing you did was to convince yourself that after one has chosen
try,thenrs^ axjs jn the p]ane, every point in the plane can be made to
an x-axis a ^ unique ordered pair (x, y) of real numbers. (In a more sophis-
po" { of geometry, the plane is more likely to be defined as the
^rordered pairs of real numbers!)
h notion of ordered pair carries over to general sets. Given sets A and
d fine their cartesian product A x B to be the set of all ordered pairs
* AI for which a is an element of A and b is an element of B. Formally,
A X B = {(a, b)\a e A and b e B}.
This definition assumes that the concept of "ordered pair" is already given.
It can be taken as a primitive concept, as was the notion of "set"; or it can be
given a definition in terms of the set operations already introduced. One defini-
definition in terms of set operations is expressed by the equation
{a,b) = [{a},{a,b}};
it defines the ordered pair {a, b) as a collection of sets. If a =£ b, this definition
says that (a, b) is a collection containing two sets, one of which is a one-element
set and the other a two-element set. The first coordinate of the ordered pair
is defined to be the element belonging to both sets, and the second coordinate
is the element belonging to only one of the sets. If a = b, then (a, b) is a collec-
collection containing only one set [a], since {a, b] = [a, a) = {a} in this case. Its
first coordinate and second coordinate both equal the element in this single set.
I think it is fair to say that most mathematicians think of an ordered pair
as a primitive concept rather than thinking of it as a collection of sets!
Let us make a comment on notation. It is an unfortunate fact that the
notation (a, b) is firmly established in mathematics with two entirely different
meanings. One meaning, as an ordered pair of objects, we have just discussed.
The other meaning is the one you are familiar with from analysis; if a and b
are real numbers, the symbol (a, b) is used to denote the interval consisting of
aN numbers* such that a < x < b. Most of the time this conflict in notation
* cause no difficulty, because the meaning will be clear from the context,
enever a situation occurs where confusion is possible, we shall adopt a
1 went notation for the ordered pair (a, b), denoting it by the symbol
a x b
Exercises
I. jj* *° d'Stributive Iaws f0r U and n, and DeMorgan's laws.
D- Had° wh'^h °f the foIIowinS statements are true for all sets A, B, C, and
°ut>Ie implication fails, determine whether one or the other of the pos-
Set Theory and Logic ChaP-1
sible implications holds. If an equality fails, determine whether one or the other
of the possible inclusions holds.
(a) A => C and B => C <^=> (A U B) => C.
{h) A ^ Cot B => C<=>(A u B) ^ C.
(c) A => Cand B => C<=> (A n B) => C.
(d) A => Cor B => C<=^(A n B) => C.
(e) A-(A-B) = B.
(f) A-(B-A) = A-B.
(g) An(B-C) = (AnB)-(An C).
(h) AU(B-C) = (AUB)-(AU C).
(i) (/)ni)uM-*) = '<.
(j) ^cCand«cfl^(/(xB)c(Cxi)).
(k) The converse of (j).
A) The converse of (j), assuming that A and B are nonempty.
(m)(A x B)U(C x £>) = (/( U C) x E u £>).
(n) (/4 x B) n (C x D) = M n C) x E n /)).
(o) /(x(J-C) = Mx«)-(/lx C).
(p) (/(-S)x(C-fl) = (/)xC-fi x C)-/(xfl.
(q) (A xB)-(Cx D) = (A - C) x E - D).
3. (a) Write the contrapositive and converse of the following statement: "If
x < 0, then x1 — x > 0," and determine which (if any) of the three state-
statements are true,
(b) Do the same for the statement "If .v > 0, then .v2 — .v > 0."
4. Let A and B be sets of real numbers. Write the negation of each of the following
statements:
(a) For every a e A, it is true that a2 e B.
(b) For at least one a e A, it is true that a1 e B.
(c) For every a e A, it is true that a1 £ 5.
(d) For at least one a £ A, it is true that a2 e B.
5. Let a be a nonempty collection of sets. Determine the truth of each of the
following statements, and of their converses:
(a) x e {JAea A => x e A for at least one A e a.
(b) a: e IJ-iea A =>■ x e A for every /4 e ft.
(c) x e H^ea ^ => x e /4 for at least one A e a.
(d) x e H-iea -4 =>■ x e /f for every A e ft.
6. Write the contrapositive of each of the statements of Exercise 5.
7. Given sets A, B, and C. Express each of the following sets in terms of A, B,
and C, using the symbols u, O, and —.
D = [x\x e Aand(x e Bor x e C)},
E ~ [x\ (x e A and x e B) or x e C],
F = [x\x e A and (x e B =»• x e C)}.
8. If a set /f has two elements, show that 6>(A) has four elements. How many ele-
elements does <9(A) have if A has one element? Three elements? No elements?
Why is <P(/f) called the power set of A ?
Functions 15
§1-2
te the set of real numbers. For each of the following subsets of
'• Ut ^ dUermine whether it is equal to the cartesian product of two subsets
,°.wrv v)\x is an integer}.
fd) f(r'y)|v is not an integer and y is an integer}.
1-2 Functions
The concept of function is one you have seen many times already, so it is
., necessary to remind you how central it is to all mathematics. Tn this
ction we give the precise mathematical definition, and we explore some of
the associated concepts.
A function is usually thought of as a rule that assigns, to each element of
aset/4, an element of a set B. In calculus a function is often given by a simple
formula such as f{x) = 3x2 + 2, or perhaps by a more complicated formula
such as
One often does not even mention the sets A and B explicitly, agreeing to take
A to be the set of all real numbers for which the rule makes sense and B to
be the set of all real numbers.
As one goes further in mathematics, however, one needs to be more pre-
precise about what a function is. Mathematicians think of functions in the way
we just described, but the definition they use is more exact. First, we define
the following:
Definition. A rule of assignment is a subset r of the cartesian product
c X D of two sets, having the property that each element of C appears as the
fost coordinate of at most one ordered pair belonging to r.
Thus a subset cofCx D is a rule of assignment if
[(c, d)&r and (c, d') e r] ==> [d = d'].
for V k °f r aS a Way of ass'gning to the element c of C the element d of D
rule of assignment r, the domain of r is defined to be the subset of
gOf a11 ^rSt coordinates of elements of r, and the image set of r is
^the subset of D consisting of all second coordinates of elements of
domain r = {c\ there exists de D such that (c, d) e r},
image r = {d\ there exists c e C such that (c,d) & r}.
Chap.
U Set Theory and Log*
B
«■ .• „ fh a rule of assignment r, together with a set
Definition. A function/.a rule or^^ ^ ^ ^ ^ ^ ^^ ^^ ^
rroT^SnVTlhe image set of Ms also called the image set of/;
and the set B is called the range of/.t
,f/is a function having domain A and range B, we express this fact by
ting f:A->B,
which is read '/is a function from A to B," or "/is a mapping from A into B,"
or simply '/maps /I into B." One sometimes visualizes/as a geometric trans-
transformation physically carrying the points of A to points of B.
Iff: A—>B and if a is an element of A, we denote by /(a) the unique
element of B which the rule determining/assigns to a; it is called the value
of/at a, or sometimes the image of a under/ Formally, if/- is the rule of the
function/ then f(a) denotes the unique element of B such that (a, f(a)) e r.
Using this notation, one can go back to defining functions almost as one
did before, with no lack of rigor. For instance, one can write (letting R denote
the real numbers)
"Let/be the function whose rule is {(x, x3 + l)|.r e R] and whose
range is R,"
or one can equally well write
"Let/: A—> R be the function such that/(.v) = x3 + 1 "
Example 1 Let R h
negative reals. Consider'the^nc^ns1 """^ ^ let *+ denote the
definedby
defined by g(x)
Functions 17
i1*2
h: R —»- R+ defined by h(x)
k: R + —> R+ defined by k(x)
■ n * is different from the function /, because their rules are different
The fa"ction* R. .t ,s ^ restriction of/to the set Jf+. The function A is also
subsets or* ^ thQugh thejr ru,es are thc same set; because the range
dmTd for h is different from the range specified for/ The function * is differ-
fm all of these. These functions are pictured in Figure 4.
Figure 4
Let/: A — B.IT Ao is a subset of A, we denote by f(A0) the set of all
images of points of Ao under the function/; this set is called the image of Ao
under/ Formally,
f(A0) ={b\b =/(«) for some a e Ao}.
On the other hand, if Bo is a subset of B, we denote by f~l{B0) the set of all
elements of A whose images under/lie in Bo; it is called the preimage of Bo
under/(or the "counterimage," or the "inverse image," of Bo). Formally,
rl(B0)={a\f(a)eB0}.
Of course, there may be no points a of A whose images lie in Bo; in that case,
/~W is empty.
Some care is needed if one is to use the/and /"' notation correctly. The
operation /"'.for instance, when applied to subsets of B, behaves very nicely;
* Preserves inclusions, unions, intersections, and differences of sets. But the
Peration/, when applied to subsets of A, does not preserve all these set
0Perat.ons. See Exercises 2 and 3.
/(/-uan°ther examPle. it is not true in general that /"'(/(^o)) = ^o and
o)) = Bo, as the following example shows. The relevant rules, which
'e to you to check, are the following: If/: A —> B, then
f-'(f(A0)) = Ao {otA0cA,
f(f-'{B0)) c Bo foi BocB.
IS Set Theory and Logic
Chap,
1
6
T 5
I 4
\ 3
2
1
I I
-2
1
y = f(x)
J
i i
1 2
Figure 5
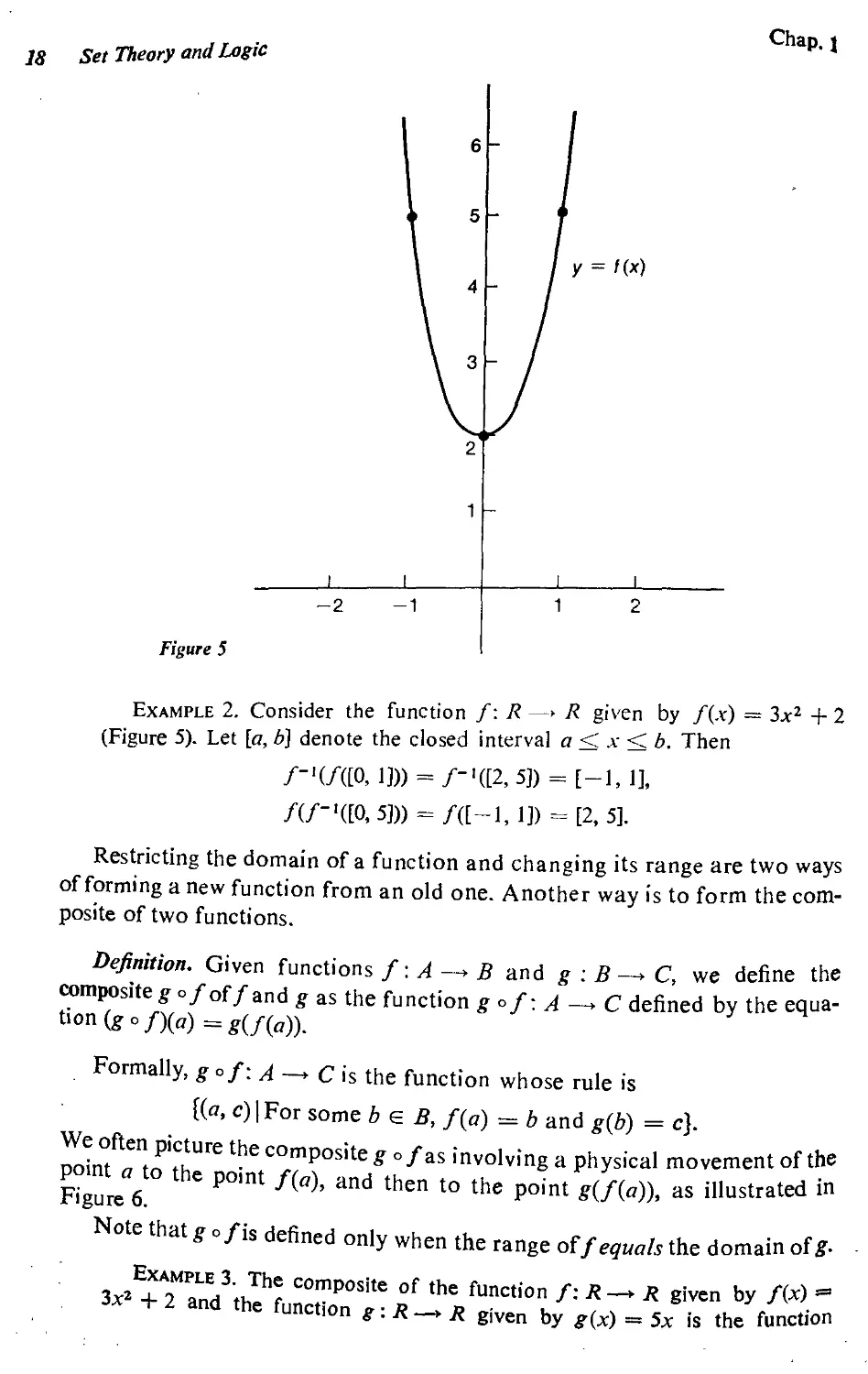
Example 2. Consider the function f:R —> R given by f(x) = 3x2 + 2
(Figure 5). Let [a, b] denote the closed interval a < x < b. Then
/-'(/([0, 1])) = /-i([2, 5]) = [-1, 1],
Restricting the domain of a function and changing its range are two ways
of forming a new function from an old one. Another way is to form the com-
composite of two functions.
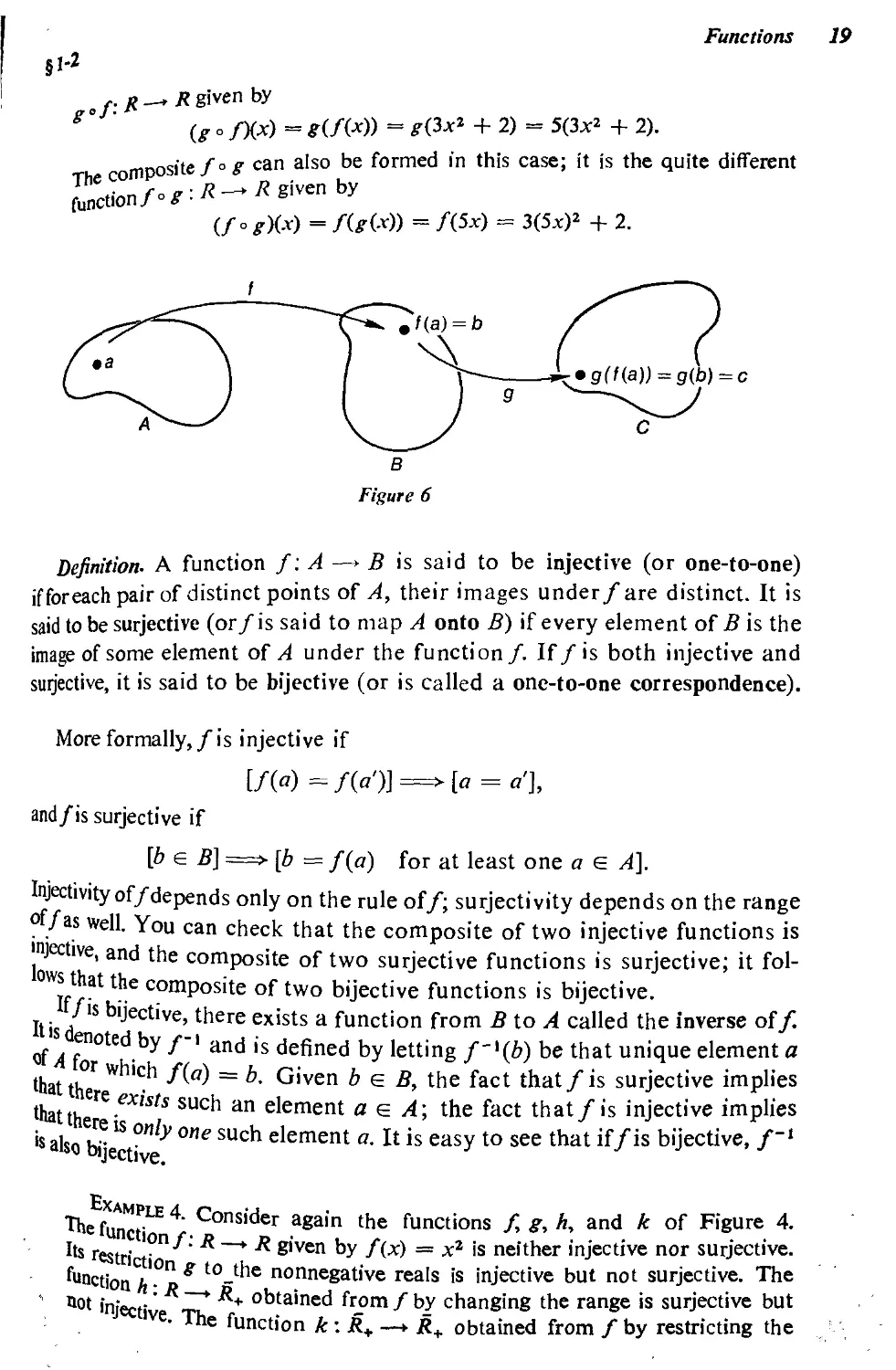
Definition. Given functions /: A — B and g : B — C, we define the
composite y o/of/and g as the function g of: A — C defined by the equa-
Formally, * „/: ^ — C is the function whose rule .g
{{a, c) | For some b e B, f(a) = A and *F) = c}.
e thC COmP°site « ° /as involving a physical movement of the
pomt /(«), and then to the point g(f(a)), as illustrated in
Note that g of is defined only when ^ fange of/e?I/fl& ^ domain of ^
E
the
the
g: R _ j, given by
function
Functions 19
§1-2
f.£--+R given by
{gofKxi- *(/(•*» = * C*2 + 2) - 5C*2 + 2).
can also be formed in this case; it is the quite different
= /Ex) = 3ExJ + 2.
g(l(a)) = g(b) = c
9
Definition. A function /: ^ —► B is said to be injective (or one-to-one)
if foreach pair of distinct points of A, their images under/are distinct. It is
said to be surjecdve (or/is said to map A onto B) if every element of B is the
image of some element of A under the function/. If/ is both injective and
surjective, it is said to be bijective (or is called a one-to-one correspondence).
More formally,/is injective if
[f{a)=f{al)]=>[a = al],
and/is surjective if
[b e B] => [b = f{a) for at least one a e A].
Injectivity of/depends only on the rule of/; surjectivity depends on the range
«/as well. You can check that the composite of two injective functions is
"njective, and the composite of two surjective functions is surjective; it fol-
ows that the composite of two bijective functions is bijective.
Iti H b'Jective> there exists a function from B to A called the inverse of/
of \ftedby ■/"' and is defined by letting /"'(&) be that unique element a
thatth"^ Wh'Ch ^ = b' Given b e B> the fact that/is surjective implies
thatthCre eXhtS SUCh a" element a e A> the fact that/is injective implies
i ^. * only °"e such element a. It is easy to see that if/is bijective, /"«
The fw" Consider aSain *e functions /, g, h, and k of Figure 4.
Its restt' '°n^ * ~* R given by ^^ = xl is neltrier injective nor surjective.
tion^10" 8 t0-the n°nnegative reals is injective but not surjective. The
infecf 'R~* R* obtained from / by changing the range is surjective but
ve. The function k : £+ —► jR+ obtained from / by restricting the
20 Set Theory and Logic Chap, j
domain and changing the range is both infective and surjective, so it has at,
inverse. Its inverse is, of course, what we usually call the square-root function.
A useful criterion for showing that a given function/is bijective is the
following, whose proof is left to the exercises:
Lemma 2.1. Letf:A~^B. If there are functions g : B -^ A and h : B —. A
such that g(f(a)) = a for every a in A and f(h(b)) = b for every b in B, then f
is bijective and g = h = f.
Note that if/: A — > B is bijective and Bo c B, we have two meanings for
the notation f~l(B0). It can be taken to denote the preimage of Bo under the
function / or to denote the image of Bo under the function /-' : B —► A.
These two meanings give precisely the same subset of A, however, so there is
no ambiguity.
Exercises
1. Let/: A—>B. Let Ao a A and Bo a B.
(a) Show that /-'(/(Ao)) => /40 and that equality holds if/is injective.
(b) Show that /(/~l(B0)) a Bo and that equality holds if/is surjective.
2. Let /: /4 — > B and let /4, a A and B, <= B for / = 0 and / = 1. Show that
/-' preserves inclusions, unions, intersections, and differences of sets:
(a) Bo cz B, =y/-'(B0) c /-'(By).
(b) /"'(Bo uB,)=/-i(B0) U/-'(B,).
(c) /-'(Bo n B,) =/-'(B0) n /-'(B,).
(d) /"'(Bo -B,)=/-'(Bo)-/-■(£,).
Show that/preserves inclusions and unions only:
(e) /*o<=/<i=>/(/io) <=/(/*,)•
@ /(^o U ^i) =/(^0) U/(/4,)-
(g) /(^o n /<i) c= /(^0) n /(Ai); give an example where equality fails,
(h) /(Ao — A,) => /(Ao) — f(A{); give an example where equality fails.
3. Show that (b), (c), (f), and (g) of Exercise 2 hold for arbitrary unions and
intersections.
4. Let/: A —► B and ^: B —► C.
(a) If Co c C, show that (*■ <./)-'(C0) =/-'(^-'(C0)).
(b) If /and *■ are injective, show that g ° /is injective.
(c) If £ o/is injective, what can you say about injectivity of/and g ?
(d) If/and ^ are surjective, show that g o/is surjective.
(e) If *■ o/is surjective, what can you say about surjectivity of/and g ?
(f) Summarize your answers to (b)-(e) in the form of a theorem.
5. In general, let us denote the identity function for a set C by ic. That is, define
ic: C —► C to be the function given by the rule ic(x) = x for all x e C. Given
Relations 21
A—*B we say that a function g : B —♦ A is a left inverse for/iff /= iA\
d we say that /;: B — /f is a right inverse for / if /° h = ;B.
an sh£)W that if/has a left inverse,/is injective; and if/has a right inverse,
/Ms surjective.
h\ Give an example of a function that has a left inverse but no right inverse.
i Give an example of a function that has a right inverse but no left inverse.
A\ Can a function have more than one left inverse? More than one right
inverse ?
) Show that if/has both a left inverse g and a right inverse /;, then /is bijective
and g = *=/-'.
Let/' /?—>./? be the function f(x) = .v3 — x. By restricting the domain and
' range of/appropriately, obtain from/a bijective function g. Draw the graphs
of g and g~l- (There are several possible choices for g.)
1-3 Relations
A concept that is in some ways more general than that of function is the
concept of a relation. In this section we define what mathematicians mean by
a relation, and we consider two types of relations that occur with great fre-
frequency in mathematics: equivalence relations and simple order relations.
Definition. A relation on a set A is a subset C of the cartesian product
AxA.
If Cisa relation on A, we use the notation xCy to mean the same thing as
(x,y) G C. We read it "x is in the relation C to y."
A rule of assignment /-for a function/: A —> A is also a subset of A x A.
But it is a subset of a very special kind: namely, one such that each element of
A appears as the first coordinate of an element of/■ exactly once. Any subset of
Ax Aha relation on A.
Example 1. Let P denote the set of- all people in the world, and define
D <= P x P by the equation
D = ((*> y) \ x is a descendant of y}.
D is a relation on the set P. The statements "x is in the relation D to /'
x is a descendant of y" mean precisely the same thing, namely, that
(*>H 6 D. Two other relations on P are the following:
B = {(x,y)\x has an ancestor who is also an ancestor of y],
s ~ {(*, y) \ the parents of x are the parents of y).
Ca" B the "blood relation" (pun intended), and we can call S the
rel?tion ' These three relations have quite different properties. The
relationship is symmetric, for instance (if x is a blood relative of y,
22 Set Theory and Logic Cha
p,
then y is a blood relative of x), whereas the descendant relation is not. tye
shall consider these relations again shortly.
Equivalence Relations and Partitions
An equivalence relation on a set A is a relation C on A having the follow-
following three properties:
A) (Reflexivity) xCx for every x in A.
B) (Symmetry) If xCy, then yCx.
C) (Transitivity) If xCy and yCz, then xCz.
Example 2. Among the relations defined in Example 1, the descendant
relation D is neither reflexive nor symmetric, while the blood relation B is not
transitive (I am not a blood relation to my wife, although my children are!)
The sibling relation S is, however, an equivalence relation, as you may check.
There is no reason one must use a capital letter—or indeed a letter of any
sort—to denote a relation, even though it is a set. Another symbol will do
just as well. One symbol that is frequently used to denote an equivalence
relation is the "tilde " symbol ~. Stated in this notation, the properties of
an equivalence relation become
A) x ~ x for every x in A.
B) If x ~ y, then y ~ x.
C) If x ~ y and y ~ z, then x ~ z.
There are many other symbols that have been devised to stand for particular
equivalence relations; we shall meet some of them in the pages of this book.
Given an equivalence relation ~ on a set A and an element x of A, we
define a certain subset E of A, called the equivalence class determined by x, by
the equation
Note that the equivalence class E determined by x contains x, since x ~ x.
Equivalence classes have the following property:
Lemma 3.1. Two equivalence classes E and E' are either disjoint or equal.
Proof. Let E be the equivalence class determined by x, and let E' be the
equivalence class determined by x'. Suppose that E n E' is not empty; l
be a point of E n E'. (See Figure 7.) We show that E = E'.
Figure 7
Relations 23
• 1-3
• ■ «,e have v ~ x and y ~ x'. Symmetry allows us to conclude
By definition, we^ ^ trans;tivity it follows that x ~ x'. If now w is
that x ~ ■''f r Jehave w ~ * by definition; it follows from another applica-
any point °'f' thflt >v „ X'. we conclude that £<=£'.
o-on of transm j< sl-tuatl-on allows us to conclude that E' c £ as well,
The symmetry ol LUC °
sothat^^'' □
■ an equivalence relation on a set A, let us denote by S the collection
„ ^equivalence classes determined by this relation. The preceding lem-
h vs that distinct elements of S are disjoint. Furthermore, the union of
lements of S equals all of A, because every element of A belongs to an
'he C ^ence class. The collection S is a particular example of what is called a
partition of A:
Definition. A partition of a set A is a collection of disjoint subsets of A
whose union is all of A.
Studying equivalence relations on a set A and studying partitions of A are
really the same thing. Given any partition 3D of A, there is exactly one equiv-
equivalence relation on A from which it is derived.
The proof is not difficult. To show that the partition 3D comes from some
equivalence relation, let us define a relation C on A by setting xCy if x and y
belong to the same element of 3D. Symmetry of C is obvious; reflexivity fol-
follows from the fact that the union of the elements of 3D equals all of A; transi-
transitivity follows from the fact that distinct elements of SD are disjoint. It is
simple to check that the collection of equivalence classes determined by C is
precisely the collection 3D.
To show there is only one such equivalence relation, suppose that C, and
C2are two equivalence relations on A that give rise to the same collection of
equivalence classes 3D. Given x e A, we show that yC,x if and only if yC2x,
trom which we conclude that C, = C2. Let E, be the equivalence class deter-
determined by x relative to the relation C,; let E2 be the equivalence class deter-
determined by x relative to the relation C2. Then Et is an element of 3D, so that it
relation C2. Then Et is an element of 3D, so that it
equalTw ^ U"'qUC element D of D that contains x. Similarly, E1 must
sL f \i °W by definii
« oi all y such that yC^x sinc£ ^ = D =
Tw ^ U"'qUC element D of D that contains x. Similarly, E1
f \i °W by definition> £1 consists of all y such that yC,x; and E
oi all y h th
2 con-
the saAMPLE 3' Defin° tW° points in the plane t0 ^ equivalent if they lie at
hold trT- f'Stance from the or'gin- Reflexivity, symmetry, and transitivity
v'aily. The collection S of equivalence classes consists of all circles
at the origin, along with the set consisting of the origin alone.
same^ Define two P°"nts of the plane to be equivalent if they have the
straight Hi**-?' The c0llectI0n of equivalence classes is the collection of all
"nes m the plane parallel to the *-axis.
Chap I
24 Set Theory and Logic
Fxample 5 Let £ be the collection of all straight lines in the plane parallel
m the line v = -x Then £ is a partition of the plane, since every point lies
on som such line and each pair of distinct lines are disjoint. The partition £
comes from the equivalence relation on the plane that declares the po.nts
(x,,yt) and (x2,yi) to be equivalent if .v, + y, = x2 + yi-
Example 6 Let £' be the collection of all straight lines in the plane. Then
£' is not a partition of the plane, for distinct elements of £' are not necessarily
disjoint; two lines may intersect without being equal.
Order Relations
A relation C on a set A is called an order relation (or a simple order, or a
linear order) if it has the following properties:
A) (Comparability) For every x and y in A for which .v ^ y, either xCy
or yCx.
B) (Nonreflexivity) For no x in A does the relation .vC.v hold.
C) (Transitivity) If xCy and yCi, then xC:.
Note that property A) does not by itself exclude the possibility that for some
pair of elements x and y of A, both the relations xCy and yCx hold (since "or"
means "one or the other, or both"). But properties B) and C) combined do
exclude this possibility; for if both xCy and yCx held, transitivity would
imply that xCx, contradicting nonreflexivity.
Example 7. Consider the relation on the real line consisting of all pairs
(x, y) of real numbers such that .v < y. It is an order relation, called the
"usual order relation," on the real line. A less familiar order relation on the
real line is the following: Define xCy if x1 < y2, or if x1 = y1 and x < y.
You can check that this is an order relation.
Example 8. Consider again the relationships among people given in Exam-
Example 1. The blood relation B satisfies none of the properties of an order relation,
and the relation S satisfies only C). The descendant relation D does some-
somewhat better, for it satisfies both B) and C); but comparability still fails. Rela-
Relations that satisfy B) and C) occur often enough in mathematics to be given a.
ttemlaterm(SeeT§ieyifre ^"^ sMcl par"aI order relations; we shall consider
"lestfhl^T"tildC^ 7' iS thC gCneric symbo1 for an equivalence relation, the
in thi notaSf ?h <> '* COmmonly used to denote an order relation. Stated
th, notation, the propen.es of an order relation become
1 \][x*rth™^
1 \][r>™
B) If x < y, then x ^ y.
C) If x < y and y < z, then x < z.
Relations 25
II se the notation x < y to stand for the statement "either x < y or
^C "■ nd we shall use the notation y > x to stand for the statement
* ^y '" We write x < y < z to mean "x < y and j> < z."
. .- _ if X is a set and < is an order relation on X, and if a < b, we
use *e notation (a, b) to denote the set
[x\a < x < b);
lied an open interval in X. If this set is empty, we call a the immediate
11 'd cessor of b, and we call b the immediate successor of a.
Definition. Suppose that A and B are two sets with order relations <A
nd <«» respectively. We say that A and B have the same order type if there
is a bijective correspondence between them that preserves order; that is, if
there exists a bijective function/: A —* B such that
ai<Ad2 ==> f(a,) <Bf(a2).
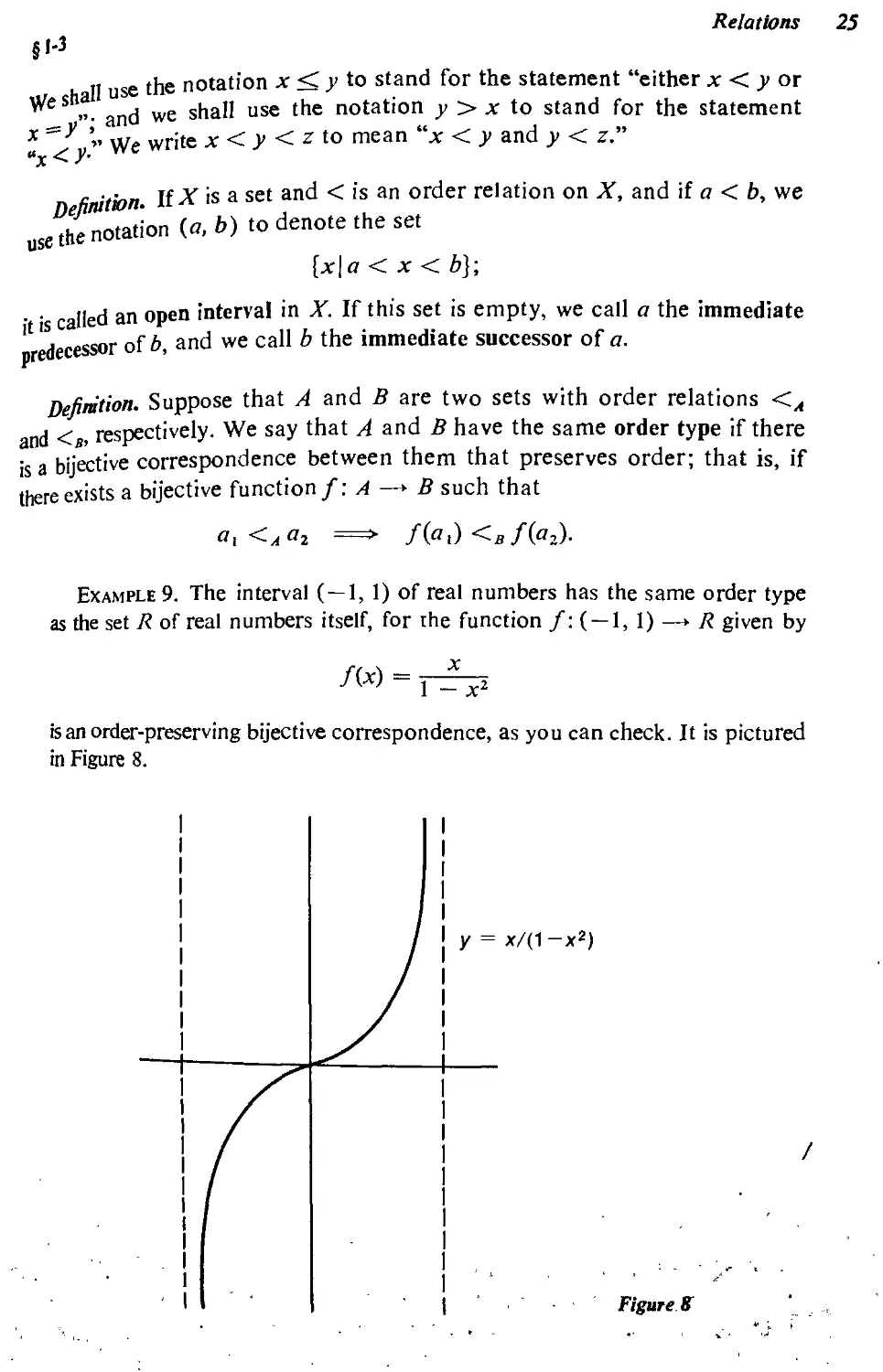
Example 9. The interval ( — 1, 1) of real numbers has the same order type
as the set R of real numbers itself, for the function /: ( —1, 1) —► R given by
Ax) =
1 - x1
is an order-preserving bijective correspondence, as you can check. It is pictured
in Figure 8.
y = x/A-x2)
FigureS
Chap.j
26 Set Theory and Logic
Example 10. The subset A - {0} U A. 2) of it has the Same order type „
the subset [0, 1) = W»^ * < ^
of*.ThefuncL-on/:^[0,l)definedby
/@) = 0,
/(jr) = jr-l for x 6 A,2)
is the required order-preserving correspondence.
One interesting way of defining an order relation, which will be useful to
us later in dealing with some examples, is the following:
Definition. Suppose that A and B are two sets with order relations <4
and <B, respectively. Define an order relation < on A x B by defining
• a, X &i < a2 X b2
if a, <A a2, or if a, = a2 and 6, <B b2. It is called the dictionary order relation
on A X B.
Checking that this is an order relation involves looking at several separate
cases; we leave it to you.
The reason for the choice of terminology is fairly evident. The rule defin-
defining < is the same as the rule used to order the words in the dictionary. Given
two words, one compares their first letters and orders the words according to
the order in which their first letters appear in the alphabet. If the first letters
are the same, one compares their second letters and orders accordingly. And
so on.
Example 11. Consider the dictionary order on the plane R X R. In this
order, the point p is less than every point lying above it on the vertical line
through p, and p is less than every point to the right of this vertical line.
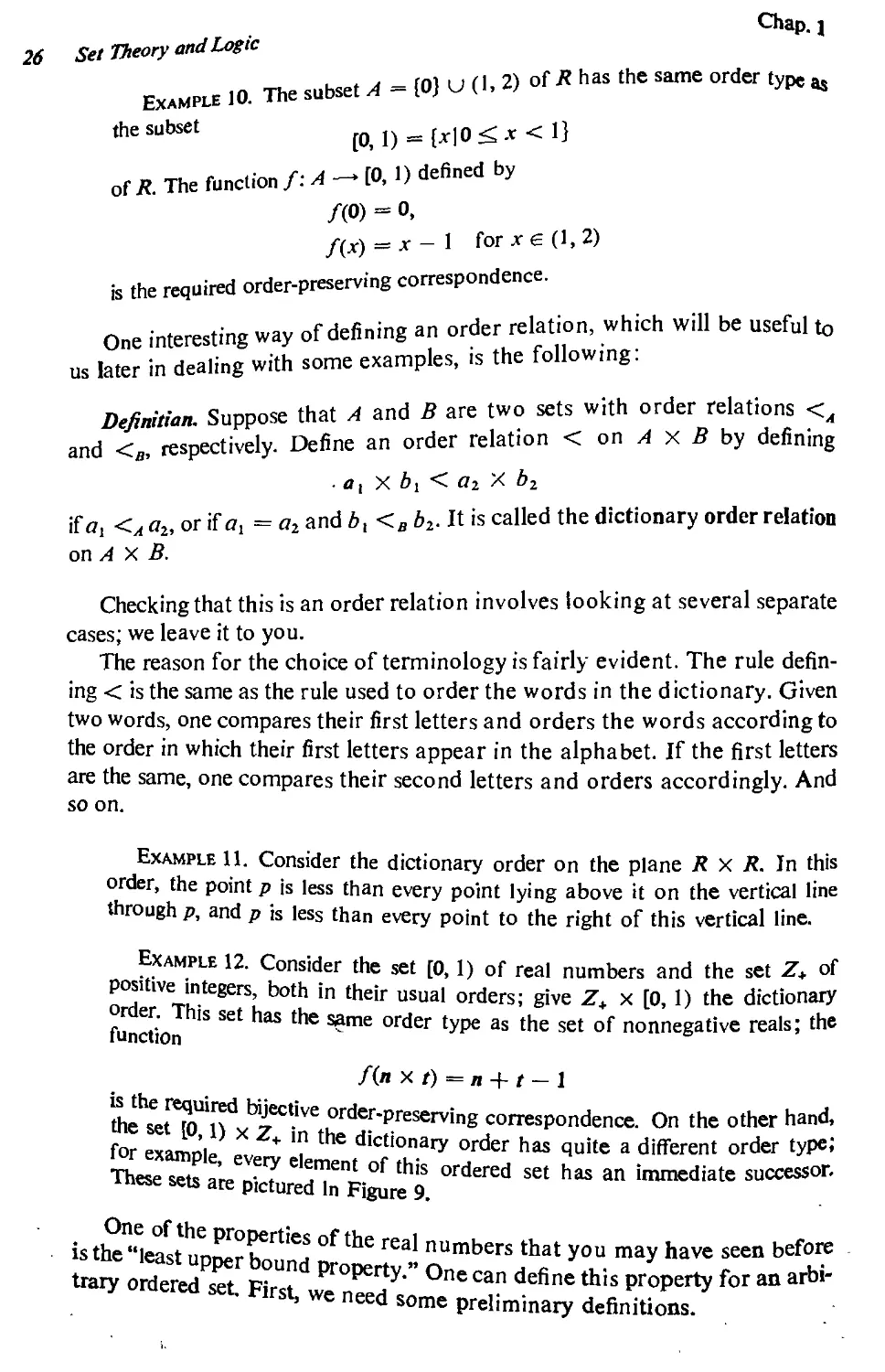
Example 12. Consider the set [0,1) of real numbers and the set Z+ of
positive integers, both in their usual orders; give Zt x [0, 1) the dictionary
function S6t HaS thC ^^ °rder tyPC 3S thE SEt °f nonneSative reals; the
f(nxt)=n + t~l
fotUntfv? *T:t-iVe order-Preservi"g correspondence. On the other hand,
for examni X '" dict'onary order has quite a different order type;
i^^'SSTiifordered set has an immediate successor'
irrroruieHS °f thE real numbers tha' you may have seen before
need some preliminary definiUons.
Relations 27
2+ X [0,1)
[0,1) X
Figure 9
Suppose that /f is a set ordered by the relation <. Let Ao be a subset of
A We say that the element b is the largest element of Ao if b e Ao and if
x< b for every x e /40. Similarly, we say that a is the smallest element of
Aja e Ao and if a< x for every x e /<„. It is easy to see that a set has at
most one largest element and at most one smallest element.
We say that the subset Ao of A is bounded above if there is an element b
dA such that x < b for every x e Ao; the element b is called an upper bound
IotAo. If the set of all upper bounds for An has a smallest element, that ele-
element is called the least upper bound of Av. It is denoted by lub At); it may or
may not belong to An. If it does, it is the largest element of Av.
Similarly, Ao is bounded below if there is an element a of A such that a < x
for every xe Ao; the element tf is called a lower bound for Aa. If the set of all
lower bounds for/40 has a largest element, that element is called the greatest
lower bound of Aa. It is denoted by gib Aa; it may or may not belong to Ao.
K it does, it is the smallest element of Aa.
Now we can define the least upper bound property.
definition. An ordered set A is said to have the least upper bound property
^every nonempty subset Aa of A that is bounded above has a least upper
e nal°g°usly, the set A is said to have the greatest lower bound property if
boundn\vemPty SUbSEt A° °^A that is bounded below has a greatest lower
pro ' .e leave 't to the exercises to show that A has the least upper bound
y lf and only if it has the greatest lower bound property.
orderXA"PLE J.3- Consider the set A = (-1,1) of real numbers in the usual
Propert •Um8 the faCt that the real numbers have the least "PP151" bound
y. it follows that this set has the least upper bound property. For, given
Set Theory and Logic Chap, j
any subset of A having an upper bound in A, it follows that its least uPPer
bound (in the real numbers) must be in A. For example, the subset
{-l/2n|n 6 Z+] of /f, though it has no largest element, does havea least up.
per bound in A, the number 0.
On the other hand, the set B = (-1, 0) u @, 1) does not have the least
upper bound property. The subset {-l/2n\it e Z+], for instance, is bounded
above by any element of @, 1); but it has no least upper bound in B.
Exercises
Equivalence Relations
1. Define two points (.t0, >"o)and(A-|, >>,)of the plane to be equivalent if.y0 - xl =
yt — Xi. Check that this is an equivalence relation and describe the equiva-
equivalence classes.
2. Let C be a relation on a set A. If Ao <= A, define the restriction of C to Ao to
be the relation C n (Ao x Ao). Show that the restriction of an equivalence
relation is an equivalence relation.
3. Here is a "proof" that every relation C that is both symmetric and transitive
is also reflexive: "Since C is symmetric, aCb implies bCa. Since C is transitive,
aCb and bCa together imply aCa, as desired." Find the flaw in this argument.
4. Let/: A —► B be a surjective function. Let us define a relation on A by setting
ao ~ cti if
(a) Show that this is an equivalence relation.
(b) Let A* be the set of equivalence classes. Show there is a bijective corre-
correspondence of A* with B.
5. Let 51 and 5" be the following subsets of the plane:
S = {(x,y)\y = x + 1 and 0 < x < 2},
•S' = {(x, y)\y - x is an integer}.
(a) Show that 5" is an equivalence relation on the real line and 5" => 51. Describe
the equivalence classes of 5".
(b) Show that given any collection of equivalence relations on a set A, their
intersection is an equivalence relation on A.
(c) Describe the equivalence relation Ton the real line that is the intersection
of all equivalence relations on the real line that contain 51. Describe the
equivalence classes of T.
Order Relations
6. Define a relation on the plane by setting
(xo,yo) <(*!,>>,)
if either y0 - xl < yt - x\, or y0 - xl = >>, - x] and x0 < *,. Show that
■ this js an order relation on the plane and describe it geometrically.
The Integers and the Real Numbers 29
§1-4
that the restriction of an order relation is an order relation.
7# Check that the relation defined in Example 7 is an order relation.
Check that the dictionary order is an order relation.
9 i i Show that the map /: (-1, 0 —► R of Example 9 is order-preserving.
"•(* |J|0W that the equation g(y) = lylU + A + 4>>2I2] defines a function
(W ./{_(-1, 1) that is both a left and a right inverse for /.
Show that an element in an ordered set has at most one immediate successor
d at most one immediate predecessor. Show that a subset of an ordered set
has at most one smallest element and at most one largest element.
2. LetZ+ denote the set of positive integers. Consider the following order relations
Z
(i) The dictionary order,
(ii) (-vo.^o) < (•*!• y^ if either x0 — y0 < x, - yx, or .v0 — y0 = x, — yt
and>>o < yt-
(iii) (x0, yo) < (xi, yi) if either xo + >'o <xi + yu or x0 + y0 = .v, + yv
and>-o <^i-
In these order relations, which elements have immediate predecessors ? Does the
set have a smallest element? Show that all three order types are different.
13. Prove the following:
Theorem. If an ordered set A has the least upper bound property, then it has
the greatest lower bound property.
14. If C is a relation on a set A, define a new relation D on A by letting (b, a) e D
\({a,b)eC.
(a) Show that C is symmetric if and only if C = D.
(b) Show that if C is an order relation, D is also an order relation.
(c) Prove the converse of the theorem in Exercise 13.
15. Assume that the real line has the least upper bound property,
(a) Show that the sets
[0, 1]=}>
[0, l) = {x\0<x < 1}
have the least upper bound property.
) Does [0, l] x [0,1] in the dictionary order have the least upper bound
property? What about [0, 1] x [0, 1)? What about [0, 1) x [0, 1]?
1-4 The Integers and the Real Numbers
fo>">dathtSr WE have been discussing what might be called the logical
Now we t ourstudy of topology—the elementary concepts of set theory
•""• What WC m'ght CaU the mathemati^l foundations for our
and the real number system. We have already used them
Set Theory and Logic Chap j
in an informal way in the examples and exercises of the preceding sections
Now we wish to deal with them more formally.
One way of establishing these foundations is to construct the real number
system, using only the axioms of set theory—to build them with one's bare
hands, so to speak. This way of approaching the subject takes a good deal of
time and effort and is of greater logical than mathematical interest.
A second way is simply to assume a set of axioms for the real numbers
and work from these axioms. In the present section we shall sketch this ap-
approach to the real numbers. Specifically, we shall give a set of axioms for the
real numbers and shall indicate how the familiar properties of real numbers
and the integers are derived from them. But we shall leave most of the proofs
to the exercises. If you have seen all this before, our description should
refresh your memory. If not, you may want to work through the exercises in
detail in order to make sure of your knowledge of the mathematical founda-
foundations.
First we need a definition from set theory.
Definition- A binary operation on a set A is a function / mapping A x A
into A.
When dealing with a binary operation/on a set A, we usually use a nota-
notation different from the standard functional notation introduced in §1-2.
Instead of denoting the value of the function/at the point (a, a') by f(a, a),
we usually write the symbol for the function between the two coordinates of
the point in question, writing the value of the function at (a, a') as afd.
Furthermore (just as was the case with relations), it is more common to use
some symbol other than a letter to denote an operation. Symbols often used
are the plus symbol +, the multiplication symbols • and o, and the asterisk
*; but there are many others.
Assumption
We assume there exists a set R, called the set of real numbers, two binary
operations + and • on R, called the addition and multiplication operations,
respectively, and an order relation < on R, such that the following properties
hold:
Algebraic Properties
A) (x + y) + 2 = x + (y + 2),
(x-y)-z = x-(yz) for all x, y, z in R.
B) x + y=y + x,
x-y = y-x for all x, y in R.
C) There exists a unique element of R called zero, denoted by 0, such that
x + 0 = xfora.l\x e R.
The Integers and the Real Numbers 31
§1-4
There exists a unique element of R called one, different from 0 and
denoted by 1, such that x-\ = x for all * e *.
For each x in R, there exists a unique j» in R such that * + y = 0.
Foreach * in R different from 0, there exists a unique y in R such that
E)
+ z) = (*..y) + (*-z) for all x, y, z e R.
A Mixed Algebraic and Order Property
F) Ifx>J'. then* + z> y + z.
If .v > y and z > 0, then x-z > .y-z.
Order Properties
G) The order relation < has the least upper bound property.
(8) If x < y, there exists an element z such that x < z and z < y.
From properties (l)-E) follow the familiar "laws of algebra." Given x, one
denotes by —x that number y such that x -|- y = 0; it is called the nega-
negate of x. One defines the subtraction operation by the formula z — x =
2+ (—x). Similarly, given x ^t 0, one denotes by l/.v that number;* such that
x-y=\\ it is called the reciprocal of x. One defines the quotient z/x by the
formula z/x = z-(l/;c). The usual laws of signs, and the rules for adding and
multiplying fractions, follow as theorems. These laws of algebra are listed in
Exercise 1 at the end of the section. We often denote x-y simply by xy.
When one adjoins property F) to properties (l)-E), one can prove the
usual "laws of inequalities," such as the following:
If x > y and z < 0, then x-z < yz.
— 1 < 0 and 0 < 1.
The laws of inequalities are listed in Exercise 2.
We define a number x to be positive if x > 0, and to be negative if x < 0.
We denote the positive reals by R+ and the nonnegative reals (for reasons to
M explained later) by^+.
Properties (l)-F) are familiar properties in modern algebra. Any set with
fi ,°.?!nary operations satisfying (l)-E) is called by algebraists a field; if the
(Uias an order relation satisfying F), it is called an ordered field.
rert ^ and ^' on the other hand> are familiar properties in topo-
mvolve only the order relation; any set with an order relation
satisf •
N8
y
'S Called by toPologists a linear continuum.
h
Now8- ^ and ^ 'S Called by toPologists a linear continuum.
[pro ll haPPens that when one adjoins to the axioms for an ordered field
the result" r~^ the axioms for a linear continuum [properties G) and (8)],
** Proved"8 contains some redundancies. Property (8), in particular, can
z ■= (x + wf conse(luence of the others; given x < y, one can show that
W/(l + 1) satisfies the requirements of (8). Nevertheless, we in-
Set Theory and Logic Chap. 1
elude (8) in our list of basic properties of the real numbers to emphasize the
fact that it and the least upper bound property are the two crucial properties
of the order relation for R. From these two properties many of the topofo-
gical properties of R may be derived, as we shall see in Chapter 3.
Now there is nothing in this list as it stands to tell us what an integer is.
We now define the integers, using only properties (l)-F). First, we make the
following definition: A subset A of the real numbers is said to be inductive
if for every x in A, the number x + 1 is also in A.
Definition. Let a be the collection of all inductive subsets of R that contain
1. Then the set Z+ of positive integers is defined by the equation
Z+ = I lAea A-
Note that the set R+ of positive real numbers contains 1 and is inductive
(if x > 0, then x + 1 > 0), so that R+ belongs to a. Therefore, Z+ c R+> $o
the elements of Z+ are indeed positive, as the choice of terminology suggests.
Indeed, one sees readily that 1 is the smaliest element of Z+, because the set
of all real numbers x for which x > 1 is inductive and contains 1.
The basic properties of Z+, which follow readily from the definition, are
the following:
A) 1 £ Z+.
B) Z+ is inductive.
C) (Principle of induction). If Zo is an inductive set of positive integers
that contains 1, then Zo = Z+.
We define the set Z of integers to be the set consisting of the positive integers
Z+, the number 0, and the negatives of the elements of Z4. One proves that
the sum, difference, and product of two integers are integers, but the quo-
quotient is not necessarily an integer. The set Q of quotients of integers is called
the set of rational numbers.
One proves also that, given the integer n, there is no integer a such that
n < a <n + 1.
All these are familiar facts. One property of the positive integers that may
not be quite so familiar, but will be very useful, is the following:
Theorem 4.1 (Well-ordering property). Every nonempty Subset ofZ+ has
a smallest element.
Proof. If n e Z+, we use {1,. .. ,«) to denote the set [x\x e Z+ and
1 ^ x <,«). Because there is no integer a between n and n + 1,
H «+l} = [l «)U{n+l).
We first prove "by induction" that, for each n e Z+> the following state-
statement holds: Every nonempty subset of [I «} has a smallest element.
Let Zo be the set of all positive integers n for which this statement holds.
The Integers and the Real Numbers 33
ontains 1, since if n = 1, the only nonempty subset of {1 n]
1 fil itself. Then, supposing Zo contains n, we show that it contains
is the set {U^beanonempty subset of the set {1>- . .,« + 1). If C consists
njr 1. So e ^ment w _|_ j^ then that element is the smallest element of C.
of the smg ^ons.der thg set c n [1,. . . , «), which is nonempty. Because
OthT'this set has a smallest element, which will automatically be the small-
" "' of C also. Thus Zo is inductive and contains 1, so we conclude
esteem^ ^ whence the statement is true for all n e Z+.
^Now we p'rove the theorem. Suppose that D is a nonempty subset of Z+.
^ an element n of D. Then the set A = £> n {1 , n} is nonempty,
h M has a smallest element A:. The element k is automatically the smallest
dement of 2> as well. D
Everything we have done up to now has used only the axioms for an
ordered field, properties (l)-F) of the real numbers. At what point do you
need G), the least upper bound axiom?
For one thing, you need the least upper bound axiom to prove that the
setZ+ of positive integers has no upper bound in R. This is the Archimedean
ordering property of the real line. To prove it, we assume thatZ+ has an upper
bound and derive a contradiction. If Z¥ has an upper bound, it has a least
upper bound b. There exists seZ, such that n > b — 1; for otherwise,
ft- 1 would be an upper bound for Z+ smaller than b. Then n + 1 > b,
contrary to the fact that b is an upper bound for Z+.
The least upper bound axiom is also used to prove a number of other
things about R. It is used for instance to prove the existence of a unique
positive square root v^for every positive real number. This fact, in turn,
can be used to demonstrate the existence of real numbers that are not rational
numbers; the number *J~2 is an easy example.
We use the symbol 2 to denote 1 + 1, the symbol 3 to denote 2 + 1, and
so on through the standard symbols for the positive integers. It is a fact that
s procedure assigns to each positive integer a unique symbol, but we never
need thls fact and shall not prove it.
afew°?hS °f thESe properties of the integers and real numbers, along with
follow r°PertieS WC ShaU "eed later' are outlined ln the exercises that
Exercises
' (i°If !hlf°ll0Wlng "laws of algebra" for R, using only axioms (l)-E):
(b) 0 _ = *' then y = °'
(c) 11 ~ °"lHint: Compute (x + 0).x.]
Set Theory and Logic Chap,
(e) x(-y) = -(xy) = (~x)y- .
(f) (-1)*= -*•
(g) x(y - r) = *v - Arz-
(i) If x *= 0 and X-.V = x, then >> = 1.
(j) .r/.vr = l ifx*=O.
(k) x/1 = x.
A) a: =*= 0 and y =*= 0 => a->> =*= 0.
/()if ^0
(m)(/>)(W
(n) (x/yKw/z) = (xw)l(yz) if y, z * 0.
(o) (a7>0 + (»'/•?) = (•« + K>0/(^) if y> z
(p) x^0=*l/.v^0.
(q) l/(if/z) = 2/Vf if w, z^O.
(r) (xly)l(w/z) = (-vz)/(>-»') if >-, »'. ^ *= °-
(s) (av)/>- = «(.v/>-) if >- ^= 0.
(t) (-x)ly = -r/(->-) = -(.v/y) if >- ^ 0.
2. Prove the following "laws of inequalities" for R, using axioms (l)-F) along with
the results of Exercise 1:
(a) x > y and w>z=>x + w>y + z.
(b) x > 0 and >>>0=>.r + >>>0 and x-y > 0.
(c) x > 0 o -a- < 0.
(d) a- > >-o -.V < -y-
(e) a: > y and z < 0 => xz < yz.
(f) x ^ 0 => x2 > 0, where x2 = x-x.
(g) -1 <0< 1.
(h) x>> > 0 o .r and y are both positive or both negative.
(i) x> 0=> \/x> 0.
(j) x > y > 0 => I/a- < l/>>.
(k) a- < y => a- < (a- + >-)/2 < >-.
3. (a) Show that if a is a collection of inductive sets, then the intersection of the
elements of a is an inductive set.
(b) Prove the basic properties A), B), C) of Z+.
4. (a) Show that tfeZ+=><7-leZ+u {0}. [Hint: Let X = \x\x e R and
■* — 1 £ -Z+ u {0}j; show that Xis inductive and contains 1.]
(b) Show that if n e Z, there is no a e Z such that n < a < n + 1. [#'>rf;
Prove it first for « e Z+.]
5. (a) Prove by induction that given n e Z+> every nonempty subset of {1,.. ■.")
has a largest element.
(b) Explain why you cannot conclude from (a) that every nonempty subset of
Z+ has a largest element.
6. Prove the following properties of Z and Z+:
(a) a,b<=Z+=>a + be Z+. [Hint: Show that given a e Z+, the set X =
[x\x 6 /? and a + a- e Z+) is inductive and contains 1J
(b) a,b£Z+=>a-beZ+.
(c) c,deZ=>c + deZ. [Hint: Prove it first for d = 1J
The Integers and the Real Numbers 35
- deZ.
, uta6/?. Define inductively
'" a1 = a,
a"*' = tf"-tf
Z (See §1-7 for a discussion of the process of inductive definition.)
Show that for », m e Z+ and a. b e R,
a"o» = a"*m,
(a")m = a"m,
ambm = (ab)m.
These are called the laws of exponents. [Hint: For fixed n, prove the formulas
by induction on «.]
8 Letoe /? and a^ 0. Define fl° = 1, and for // e Z., a"" = I/a". Show that
the laws of exponents hold for a, b =£ 0 and //, m e Z.
9. Assume the least upper bound axiom.
(a) Show that glb{l//i|« eZ4) =0.
(b) Show that given a with 0 < a < 1, gib [a"\u e Z-,} = 0. [i//7i/: Let /j =
A - a)la, and show that a" < 1/A + «/;).]
10. Assume the least upper bound axiom.
(a) Show that every nonempty subset of Z that is bounded above has a largest
element.
(b) If x <£ Z, show there is exactly one n e Z such that n < x < n + 1.
(c) If x — y > 1, show there is at least one « e Z such that y < n < x.
(d) If y < x, show there is a rational number z such that y < z < x.
11. Assuming the least upper bound axiom, show that every positive number a
has exactly one positive square root, as follows:
(a) Show that if x > 0 and 0 < I, < 1, then
(x + hY < x1 + hBx + 1),
(x - hY ^ x2 - hBx).
(b) Let x > o. Show that if x1 < a, then (x + hI < a for some h > 0; and
? > a> then <-x ~h)*> a for some h > 0.
Given o > o, let B be the set of all real numbers x such that x2 < a. Show
at B is bounded above and contains at least one positive number. Let
b = lub B; show that />* = a
tHat lf b and ^ afe P°sitive and bl = c2) then * = c-
' We Say that m is even if m/2 e Z) and m is odd otherwise,
at ,f m is odd> m = 2n + j for some nsZ [Hint. Choose „ so
(b)Sh0 /2<" + L]
°w that if p and 9 are odd, so arep-q and/?", for any n e Z+.
Chap, i
36 Set Theory and Logic
«. t if a > 0 is rational, then a = mln for some j»,»6Z( where
(C> Sh°bothaL and » are even. [Hint: Let n be the smallest element of the set
}]
(d) Theorem. ^ b irrational.
Arbitrary Cartesian Products
We have already defined what we mean by the cartesian product A x B
f two sets Now we introduce cartesian products of arb.tranly many sets.
We consider first some special cases, and then we give the general definition.
As usual let {1 . • • , m] denote the set of all positive integers a such that
1 < a<, m.'Given a set X, we define an m-tuple of elements of X to be a
function
x:{l,... ,m]—> X.
If x is an /n-tuple, we often denote the value of x at i by the symbol x, rather
than x(i). And we often denote the function x itself by the symbol
(x,,...,.rj.
We let Xm denote the set of all w-tuples of elements of X.
Now we can define the cartesian product.
Definition. Suppose that {A,, . . . , Am] is a collection of sets, indexed
with the positive integers from 1 to m. Let X = A, U • • • U Am. The carte-
cartesian product of this indexed collection of sets, denoted by
II" i A, or A, X ••• X Am,
is defined to be the set of all m-tuples (x,, . . . , xm) of elements of Zsuch that
x, e A, for each ;'.
Example 1. We now have two definitions for the symbol A X B. One
definition is, of course, the one given earlier, under which A X B denotes the
set of all ordered pairs (a, 6) such that a e A and b e B. The second definition,
just given, defines/f X B as the set of all functions x:{l, 2] — AuB such that
x(l) e A and xB) e B. There is an obvious bijective correspondence between
these two sets, under which the ordered pair {a, 6) corresponds to the function
x defined by x(l) = a and xB) = b. Since we commonly denote this function
X in tuple notation" by the symbol (a, b), the notation itself suggests th
correspondence. Thus for the cartesian product of two sets, the general defini
tion of cartesian product reduces essentially to the earlier one.
Example 2. How does the cartesian product A x B x C differ from the
cartesian products A x (B x C) and (A x B) x C? Very little. There are
e
Arbitrary Cartesian Products 37
correspondences between these sets, indicated as follows:
(a, b, c) <—> (a, F, c)) <—> ((a, b), c).
eralize the preceding definition, we proceed by analogy. Given a
IT define an (o-tuple of elements of X to be a function
set x'
x . Z+ —> X;
call such a function a sequence, or an infinite sequence, of elements of
Weif is an cu-tuple, we often denote the value of x at / by x, rather than x(i),
fnd Je denote x itself by the symbol
(x,,x2,...) or (xn)nCZ,.
We let X" denote the set of all co-tuples of elements of X.
Definition. Suppose that {A, /(„,...} is a collection of sets, indexed
with the positive integers. Let X be the union of the sets in this collection. The
cartesian product of this indexed collection of Sets, denoted by
Tliez, A, or A, X A2 X •••,
is defined to be the set of all co-tuples (xu x2, . ..) of elements of X such that
x, e A, for each i.
Nothing in these definitions requires the sets A, to be different from one
another. Indeed, they may all equal the same set X. In that case, the cartesian
product At x • • • X Am is just the set Xm of all w-tuples of elements of X;
and the product A, X A2 x ••• is just the set X" of all co-tuples of elements
dX.
Example 3. If R is the set of real numbers, then Rm denotes the Set of all
m-tuples of real numbers; it is often called euclidean m-space (although Euclid
would never recognize it). Analogously, R" is sometimes called "infinite-
dimensional euclidean space"; it is the set of all co-tuples (*,, x2, . . .) of real
numbers, that is, the set of all functions x : Z+ —> R.
j °w we turn to the general definition of cartesian product, which will
by " «theSe ^ sPecial cases- First we must make more precise what we mean
jan indexed collection of sets," a concept tacitly assumed above.
surjecf T"' Leiabea collection of sets. An indexing function for d is a
a> togeth .tion-ffrom some set J, called the index set, to a. The collection
with the indexing function/, is called an indexed family of sets.
c**
And we"!i!hn fllement a of J> we shall denote the set /(a) by the symbol A..
na" denote the indexed family itself by the symbol
38 Set Theory and Logic Chap, i
which is read "the family of all A,, as a ranges over/." Sometimes we write
merely {A.}, if it is clear what the index set is.
Note that although an indexing function is required to be surjective, it is
not required to be injective. It is entirely possible for A. and Af to be the same
set of ft, even though a ^/?.
One way in which indexing functions are used is to give a new notation
for arbitrary unions and intersections of sets. Suppose that/:/—, a is an
indexing function for a; let Aa denote /(a). Then we define
U«e/ A* = ix Ifor at least °ne ct e J, x e A.},
and
n«e/A"= f* ifor evefy *e J'x 6 A*}~
These are simply new notations for previously defined concepts; one Sees at
once (using the surjectivity of the index function) that the first equals the
union of all the elements of a and the second equals the intersection of all the
elements of a.
The main use of indexing functions comes when we define arbitrary
cartesian products:
Let / be an index set. Given a set X, we define a /-tuple of elements of X
to be a function x : / — > X. If a is an element of/, we often denote the value
of x at a by x, rather than x(a). And we often denote the function x itself by
the symbol
which is as close as we can come to a "tuple notation" for an arbitrary index
set /. We denote the set of all /-tuples of elements of X by X1.
Definition. Let [A.},BJ be an indexed family of sets; let X = |J«E/ A..
The cartesian product of this indexed family, denoted by
II«e/ ^«.
is defined to be the set of all /-tuples (x.).e, of elements of X such that
x, e A. for each a e /.
Said differently, this cartesian product is just the set of all functions
such that x(a) e A. for each a e /.
pI ,??KTly T den°te the prodoct simP'y by n^., and its general
element by (*„), ,f the index set is understood
all the sets A. are equal to one set X, then the cartesian product
LL.,A. is just the set X' of all /-tuples of elements of X. In dealing with the
we use'T St°met;mes use "tuP'e notation" for its elements, and sometimes
we use funct.onal notation, depending on which is more convenient.
Finite Sets 39
§1-6
Exercises
how there is a bijective correspondence of A X B with B X A.
1 (a)°show that if n > 1 there is a bijective correspondence of
AxX---xAB with (/f, X ••• X /*„_,) X /(„.
Let./ be an index set; write J = K U L, where K and £ are disjoint and non-
nonempty- Show there is a bijective correspondence of
U^jA" with (U^kA.) X(T[^lA.).
Let/ be a (nonempty) index set. Consider two indexed families {A.}.e, and
' <B i CJ, Prove the following:
(a)" If X "= A* for a" a e ^ then ^'eJ A* C ^-6/ ^.-t
(b) The converse of (a) holds if n^'- is nonempty.
(c) oi.^.)n (n«^ B'~> = n.« (^«n #«)•
(d) (ii.e/ ^«)u (n»^ 5«)c n.e/ m« u sj.
(e) If at least one/(« is empty, thenJI.e/-4. is empty. What can you say if each
,4. is nonempty? (See Exercise 4 of §1-9.)
4. Letm,ne^+- Let Z^ 0.
(a) If m < n, find an injective map/: A'm —> X".
(b) Find a bijective map g : Xm x X" —> Xm+".
(c) Find an injective map h : X" —► Z™.
(d) Find a bijective map & : X" x A'™ —> Z™.
(e) Find a bijective map I: X" x X™ —> Z™.
(f) If A a B, find an injective map m : XA —► Xs.
5. Which of the following subsets of Ra can be expressed as the cartesian product
of subsets of Rl
(a) {x\x, is an integer for all i}.
(b) Wat, > i for all i}.
(c) {x\x, is an integer for all i ^ 100}.
1-6 Finite Sets
are
'nite sets and infinite sets, countable sets and uncountable sets, these are
disT SdS ^at ^°U may have encountered before. Nevertheless, we shall
«andSth 'n th'S Section and the next' not on'y t0 make sure y°u under-
•hat ...em.thorou«hly, but also to elucidate some particular points of logic
^^'se later on. First we consider finite sets.
^
t*°» brforeSjfakln£.if We aK g'Ven a function x mapping/into \JA'a, we must change its
technicality whT"^ .?)ns'dered as a function mapping/into \JA.. We shall ignore this
«y when dealing with cartesian products.
Chap.,
40 Set Theory and Log*
Reca.1 that if, is a positive integer, we use A -} to denote the set
{x|xeZ+and I <*<");
it is ca..ed a section of the positive integers. The sets {1 n] are the pr0-
lotypes for what we call the finite sets.
Definition. A set A is said to be finite if it is empty or if there is a bijective
correspondence
f:A—>{l,..-,"}
for some n e Z+. In the former case, we say that A has 0 elements; in the lat-
latter case, we say that A has n elements.
For instance, the set {1,...,«} itself has n elements, because it is in
bijective correspondence with itself under the identity function.
Now note carefully: We have not yet shown that, given the finite set A,
the number of elements "which A has" is uniquely determined by A. As far as
we know, there might exist bijective correspondences of a given set A with
two different sets {1, ...,/(} and [1, . . . , m}. The possibility may seem ridic-
ridiculous, for it is like saying that it is possible for two people to count the marbles
in a box and come out with two different answers, both correct. Our experience
with counting in everyday life suggests that such is impossible, and in fact
this is easy to prove when n is a small number such as 1,2, or 3. But a direct
proof when n is 5 million would be impossibly demanding.
Even empirical demonstration would be difficult for such a large value of
n. One might, for instance, construct an experiment by taking a freight car
full of marbles and hiring 10 different people to count them independently.
If one thinks of the physical problems involved, it seems likely that the
counters would not all arrive at the same answer. Of course, the conclusion
one could draw is that at least one person made a mistake. But that would
mean assuming the correctness of the result one was trying to demonstrate
empirically. An alternative explanation could be that there do exist bijective
correspondences between the given set of marbles and two different sections
of the positive integers.
In real life we accept the first explanation. We simply take it on faith that
our experience in counting comparatively small sets of objects demonstrates
a truth that holds for arbitrarily large sets as well
t»V tvTT; m mathematics (« opposed to real life), one does not have to
teke this statement on faith. If it is formulated in terms of the existence of
it k21TT rCCS mther thSn in terms of the Phy^cal act of counting,
h re do not .T?.em?tical Proof- We shall prove shortly that if n * m.
ttere do not exist bijecfve functions mapping a given set A onto both the
Finite Sets 41
§1-6
are a number of other "intuitively obvious" facts about finite sets
re capable of mathematical proof; we shall prove some of them in this
tha' ar6and leave the rest to the exercises. Here is an easy fact to start with:
Lemma 6.1- Let nbea positive integer. Let A be a set; let a0 be an element
. 77ien there exists a bijective correspondence f of the set A with the set
n n+ 1] if and only if there exists a bijective correspondence g of the set
A'i{a0}with{l,..-,n}.
Proof There are two implications to be proved. Let us first assume that
there is a bijective correspondence
g: A — {a0} —*{1,...,«}.
We then define a function/: A —> [1, . . . , n + 1} by setting
f(x) = g(x) for x e A - {a0},
f(ao)=n+ 1.
One checks at once that /is bijective.
To prove the converse, assume there is a bijective correspondence
f:A—>[l,...,n + 1}.
If/maps a0 to the number n + 1, things are especially easy; in that case, the
restriction f\ A — {a0} is the desired bijective correspondence of A — [a0]
with {1,..., «}. Otherwise, let f(a0) = m, and let a, be the point of A such
that/(a,) =n + 1. Then at =£ a0. Define a new function
h:A—>{{,...,„ + 1}
by setting
h{a0) =/i + 1,
= f{x) for * g /( - {«„} - {«,}.
(See Figure 10.) It is easy to check that h is a bijection
irrtiith {ery car^thnestriction b' A~ [a°} is the desired
^j^. . '77^ A ^r
. a, , . a, . 7
^^ ^ ( i..... m, . . . , n + 1 J
Figure 10
42 Set Theory and Logic
From this lemma a number of useful consequences follow:
Theorem 6.2. Let A be a set; suppose that th?re exists a bijection f: A -_
{1 , n}for some n e Z+. Let B be a proper subset of A. Then there exists
no bijection g : B — {1, .. • , nj; but (provided B ^ 0) there does exist a
bijection h : B — [1, .. • , m}/or some m < n.
Proof. The case in which B = 0 is trivial, for there cannot exist a bijec-
bijection of the empty set B with the nonempty set {1, ...,«}.
We prove the theorem "by induction." Let Zo be the subset of Z+ con-
consisting of those integers n for which the theorem holds. We shall show that
Zo contains the number 1 and is inductive. From this we conclude that
Zo =Z+, so the theorem is true for all positive integers n.
First we show the theorem is true for n = 1. In this case A consists of a
single element [a], and its only proper subset B is the empty set.
Now assume that the theorem is true for n; we prove it true for /; -f- 1,
Suppose that /: A —* [1, ...,« + 1] is a bijection, and B is a nonempty
proper subset of A. Choose a point a0 in B and a point at in A — B. We
apply the preceding lemma to conclude there is a bijection
g:A-[ao}—>[l,...,n}.
Now B — [a0] is a proper subset of A — [a0], for ax belongs to A — [a0] and
not to B — {a0}. Because the theorem has been assumed to hold for the
integer n, we conclude the following:
A) There exists no bijection h : B — [a0] —> {1, . . . , /;}.
B) Either B — [a0] = 0, or there exists a bijection
k:B — {a0)—>{\,...,p] for some p < n.
The preceding lemma, combined with A), implies that there is no bijection
of B with [1,.. . , „ + 1}. This is the first half of what we wanted to prove.
To prove the second half, note that if B - [a0] = 0, there is a bijection of B
with the set {1}; while if B - {a0} * 0, we can apply the preceding lemma,
along with B), to conclude that there is a bijection of B with f 1, ...,/>+ 1}.
as desired0356' ^^ " * biJeCti°n °f B with 0. ••..*} for some m < n + 1,
principle now shows that the theorem is true for all
is finite, there is no bijection of A with a proper subset
B 1S S Pr°per SUbset of A a«d that /: A - B is a
lT i; Tis ahbUetction g: A- <>. ••..»}for some *
Edicts th'e preceding theorem □' ° * ^ lh '''' "}'
Finite Sets 43
orolhry 6.4. The number of elements in a finite set A Is uniquely determined
^ Proof. Let m < n. Suppose there are bijections
f:A —>[\,...,n],
g:A —>[l,...,m}.
Then the composite
gcf-> :{1, n)—>{\ ,m}
•Sa bijectionof the finite set {1, ...,«} with a proper subset of itself, contra-
contradicting the corollary just proved. □
Corollary 6.5. //B is a subset of the finite set A, then B is finite. //B is a
roper subset of A, then the number of elements in B is less than the number
of elements in A.
Corollary 6.6. Z+ is not finite.
Proof. The function /: Z+ — Z+ — {1} defined by /(«) = n + 1 is a
bijection of Z+ with a proper subset of itself. □
Theorem 6.7. Let B be a nonempty set; let n be a positive integer. Then the
following are equivalent:
A) There is a surjective function f : [1, . . . , n} —► B.
B) There is an injective function g '. B —» [1, . . . , n}.
C) B is finite and has at most n elements.
Proof. We prove that A) => B) => C) => A); this will suffice to show
the statements are equivalent. Let A = [1, . . . , n}.
A)=> B). Given a surjective function f:A—*B, define g : B —* A by
the equation
g(b) = smallest element of f'l({b}).
ttause/is surjective, the set f-\{b}) is nonempty. We know by the well-
™ «'ng property that every nonempty subset of Z+ has a unique smallest
•*Srrwf IS Wdl defined Th° map 8 'S inJective' for if b * b'> then the
different ^ ^~'^*'^ are disJoint> so their smallest elements must be
the funrtion*' ^f/ : ^ ~* A be injective- Let C be the ima«e set S(B); then
Because r -g C obtained from g by changing its range is bijective.
0. D)f'S a SUbSet °f A = U> • • •, bJ, there is a bijection h : C-*
O.-.".',pj OTICp^H- The composite A o^' is a bijection of B with
Chap, i
44 Set Theory and Logic
1 m^nts where 1< m < >'■ Then there is a
C) =>A). Let B have m elements, Wti
bijection /,:{!,..., />.}-* *
■ ntinn of ,4 onto 5, as desired. If m < «, we extend
If «, = n, then /, is a surject.on of ^ on ^ ^.^ ^ = ^^ ^
A to the desired surject.on/. 1U ■ • ■ > i
m <i< "• D
JZi\nhe index set Us finite,
LU->A« a"d TL*£>A*
are finite.
To put it succinctly, this theorem states that/?,;;/, unioas and finite pro-
ducts of finite sets are finite. The proof is left to the exercses.
Exercises
1. (a) Make a list of all the injective maps
/:{1,2,3}—> [1,2, 3,4}.
Show that none is bijective. (This constitutes a direct proof that a set A
having three elements does not have four elements.)
(b) How many injective maps
/:[!,....8}—>{!,..., 10}
are there? (You can see why one would not wish to try to prove directly
that there is no bijective correspondence between these sets.)
2. Show that if B is not finite and B <= A, then A is not finite.
3. Let X be the two-element set [0, 1}. Find a bijective correspondence between
X" and a proper subset of itself.
4. Let A be a nonempty finite simply ordered set.
(a) Show that A has a largest element. [Hint: Proceed by induction on the
number of elements in A.]
(b) Show that A has the order type of a section of the positive integers.
5. (a) Show that A U B is finite if and only if A and B are finite.
(b) Lety ,6 0. Show that if J is finite and each set A. for a G J is finite, then
U«€/ At is finite.
(c) To what extent does the converse of (b) hold?
6. (a) Show that A x B is finite if A and B are finite.
fa"finite 0' SH0W tHat if y iS finite and eaCh set A' is finite' then n"€/ A'
(c) To what extent does the converse of (b) hold ?
Countable and Uncountable Sets 45
i. i if A is finite, then the set <P(A) of all subsets of A is finite. [Hint:
1. Sh°*J^ the ,wo element set {0, 1}. Define a bijection of <P(/f) with the cartesian
product XA-]
A and B be sets; let ff be the set of all functions /: A
*■ ^nd ^"are finite, then ff is finite.
B. Show that if
1-7 Countable and Uncountable Sets
I t as the sets [1, • • • , "} are tne prototypes for the finite sets, the set
fall the positive integers is the prototype for what we call the countably
■ *fi He sets. In this section we shall study such sets; we shall also construct
ome sets that are neither finite nor countably infinite. This study will lead us
into a discussion of what we mean by the process of "inductive definition."
Definition. A set A is said to be infinite if it is not finite. It is said to be
countably infinite if there is a bijective correspondence
/: Z+ —> A.
Example 1. The set Z of all integers is countably infinite. One checks
easily that the function /: Z —> Zf defined by
f2n if n > 0,
= \
1-2/; + 1 if n< 0
is a bijection.
Example 2. The product Z+ x Z+ is countably infinite. If we represent the
elements of the product Z+ x Z+ by the integer points in the first quadrant,
then the left-hand portion of Figure 11 suggests how to "count" the points!
that is, how to put them in bijective correspondence with the positive integers.
Y\
• •
"«• a,
b5.
t t
• • •
t \ \
Figure 11
46 Set Theory and Logic ChaP-1
A picture is not a proof, of course, but this picture suggests a proof. FiRt>
we cTs^uct a bijec.ion /: Z+ x Z+ - A, where ^ .s the subset of z. x £
consTsting of pairs (,,,) for which ,£x,by the equanon
f(x,y)*=(x + y- Uy)-
Then we construct a bijection of A with the positive integers, defining
g: A —> Z± by the formula
*(.v,j>)=4(*-l).v + j'.
We leave it to you to show that/and g are bijections.
Another proof that Z¥ x Z± is countably infinite will be given later.
Definition. A set is said to be countable if it is either finite or countably
infinite. A set that is not countable is said to be uncountable.
There is a theorem concerning countable sets that is similar to Theorem
6.7 about finite sets. It is the following:
Theorem 7.1. Let B be a nonempty set. Then the following are equivalent:
A) There is a surjective function f : Z+ —> B.
B) There is an infective function g : B —> Z+.
C) B is countable.
Proof. We prove the implications A) => B) => C) => A).
A) => B). Let/: Z+ —» B be a surjection. Define g : B —► Z+ by the equa-
equation
g(b) = smallest element of f'l{{b}).
Because/is surjective, /"'({A}) is nonempty; thus g is well defined. The map
g is injective, for if b ^ b', the sets /"'({A}) and /"'({*'}) are disjoint, so their
smallest elements are different.
B) => C). Let g : B —> Z+ be an injection; we wish to prove Bis counta-
countable. By changing the range of g, we can obtain a bijection of B with a subset
of Z+. Thus to prove our result, it suffices to show that every subset of Z+ is
countable. So let C be a subset of Z+.
If Cis finite, it is countable by definition. So suppose that C is infinite. We
nave to prove Cis countably infinite; that is, we have to construct a bijection
" • •£+ —► C.
"by induction" Define h{\) to be the smallest element of C;
Kn) = smallest element of [C - Ml, ., „ _ 1})].
The set C— Ml „ in • '
A • {1 „ _ W '''r " ls not emPty; for if it were empty, then
Theorem 6 7) Ih^hl^^ TrJeCtive' whence C would be finite (by
for aU „ Hi () Wdl defined By induction, we have denned h(n)
Countable and Uncountable Sets 47
th t h is injective is easy. Given m < n, note that h{m) belongs
foshowtna ^ ^ whereas h(n), by definition, does not. Hence
• *" S.7 '" "
b(n) * **■ ''. t h js surjective, let c be^ny element of C; we show that c lies
Xoshow ^ ^ ^.^t ^^^ that ^Zj cannot be contained in the finite
jn the image becausg ;^Zj js innnite (since h is injective). Therefore, there
setf1'-;'' such that /»(«) > c. Let w be the smallest element of Z+ such
is an « in * Then for all / < m, we must have A(z) < c. Thus c does not
that«W-he"set ^^ m_ jj) Sjnce h(m) is defined as the smallest
^'""nt'of the set C - K{U ■■■>>»- 1}), we must have h{m) < c. Putting
f ™wo inequalities together, we have h(m) = c, as desired.
m=>n\ Suppose that B is countable. If B is countably infinite, there is
. ctjon/- z+ — B by definition, and we are through. If B is finite, there
,* abgection h : {1, ...,»}-> ^ for some n > 1. (Recall that B * 0.) We
„„ extend A to a surjection/: Z+ — B by defining
ja(/) for 1 < / < n,
\h(\) for / > n.
Xhis completes the proof of the theorem. □
Corollary 7.2. A subset of a countable s?t is countable.
Corollary 7.3. The set Z+ x Z+ is countably infinite.
Proof. In view of the preceding theorem, it suffices to construct an injec-
injective map/: Z+ x Z+ -*Z+. We define/by the equation
/(«, m) = 2-3™.
It is easy to check that/is injective. For suppose that 2m = 2«. If n < p,
then 3" = 2'-', contradicting the fact that 3m is odd for all m. Therefore,
»-P- As a result, 3? =3'. Then if m < q, it follows that 1 = 3'"", another
contradiction. Hence m=q. Q
For^ 3' THe SEt ?+ °f positive rational numbers is countably infinite.
we can define a surjection g; Z+ x Z+ -* Q+ by the equation
g(ny m) = mjn.
* f+X Z+ 'S Countable' there is a surjection /: Z+-^Z+x Z+. Then
*e tomtf' re is a surjection /: Z+^Z+x Z+. Then
ofcoun=P AE^ ■ ;Z+~^ ^+ is a surjection, so that Q+ is countable. And,
We lw • 'S ' ite because » contains Z+.
ab'y infinite " ^ Sn CXercise t0 show the set 2 of all rational numbers is count-
ciPles of loricP01 utinTthC proof of Theorem 7.1 where we stretched the prin-
^ occurred at the point, in proving the implication
we said that "using the induction principle" we had defined
4S Set Theory and Logic Cl>ap. 1
,hP function h for all positive integers ,,. You may have seen arguments like
the function n i v jons raised concerning their legitimacy. We
^erreaSy usldluch In lament ourselves, in the exercises of §1-4,^
WE Rufthtrfis a problem here. After all, the induction principle states only
that ifZ is an inductive set of positive integers and Zo contains 1, thenZ0 =
Z To use the principle to prove a theorem "by induction," one begins the
proof with the statement "Let Zo be the set of all positive integers n for which
the theorem is true," and then one goes ahead to prove that Zo contains 1 and
that Zo is inductive, whence Zo must be all of Z+.
In the preceding theorem, however, we were not really proving a theorem
by induction, but defining something by induction. How then should we start
the proof? Can we start by saying, "Let Zo be the set of all integers n for
which the function h is defined" ? But that's silly; the symbol h has no meaning
at the outset of the proof. It only takes on meaning in the course of the proof.
So something more is needed.
What is needed is another principle, which we call the principle of recur-
recursive definition. In the proof of the preceding theorem, we wished to assert the
following:
Given the infinite subset C of Z+, there is a unique function h :Z+—+C
satisfying the formula:
. . /'(') = smallest element of C,
fi(O = smallest element of [C — A({1,... , / — 1})] for all / > 1.
The formula (*) is called a recursion formula for /;; it defines the function/; in
terms of itself. A definition given by such a formula is called a recursive defini-
definition.
Now one can get into logical difficulties when one tries to define something
recursively. Not all recursive formulas make sense. The recursive formula
h(>) = smallest element of [C — /;({1,...,/+ 1})],
for example, is self-contradictory; although /;(;) necessarily belongs to the set
(U,..., i + l}), this formula says that it does not belong to the set. Another
example is the classic paradox:
Let the barber of Seville shave every man of Seville who does not shave himself.
Who shall shave the barber?
hE bSrber aPpears twice> once i" 'he phrase "the barber of
of whom ?h TT ^ Clement °fthe set "men of Seville"; and this definition
' Sha" ShSVe iS S reCursive one-II also haPPenS t0 be Sdf'
Countable and Uncountable Sets 49
§1-7
ome recursive formulas do make sense, however. Specifically, one has
the following principle:
• • le of recursive definition. Let Abe a set. Given a formula that defines
niaue element ofA, and for i > 1 defines h(i) uniquely as an element
kintermsofthe values of h for positive integers less than i, this formula
"Iter'mines a unique function h : Z+ — A.
This is the principle we actually used in the proof of Theorem 7.1. You
simply accept it on faith if you like. It may however be proved rigorously,
^ing the principle of induction. We shall formulate it more precisely in the
^ext section and indicate how it is proved.
Mathematicians seldom refer to this principle specifically. They are much
more likely to write a proof like our proof of Theorem 7.1 above, a proof in
which they invoke the "induction principle" to define a function when what
they are really using is the principle of recursive definition. We shall avoid
undue pedantry in this book by following their example.
Now we give some further rules for determining whether or not a set is
countable.
Theorem 7.4. A countable union of countable sets is countable.
Proof. Let {^,},eJ be an indexed family of countable sets, where the index
set/is countable. The case J = 0 is trivial; so let us assume that J ^ 0.
Assume also that each set A, is nonempty, for convenience; this assumption
does not change anything.
Because each Aa is countable, we can choose, for each a, a surjective
function /„: Z+ —> Aa. Similarly, we can choose a surjective function
?:Z+—>/. Now define
h : 2+ X Z+ —> U«eJ Aa
by the equation
h(n, m)=fg(n){m).
!pond hSt * 'S surJ'ective- Slnce z* X z+ ^ in bijective corre-
71 nCE W"h Z+> the C0Untability °f the union follows from Theorem
eorent 7.5. A finite product of countable sets is countable.
%<intabie Th* fet USsh°W that the Product °f two countable sets A and B is
f V reSUlt 'S tr'il f A B i Oh
<intabie Th P e ses A and B is
functions V 7 reSUlt 'S tr'vial 'f A or B is emPty- Otherwise, choose surjective
AxB defin 7f A and * : Z+ ~^ B' Then the function h : Z+ X Z+ —
A X B thC eqUat'On h(" m> (/() ()) i jti t
B defin 7f + +
A X B ^ count blthC eqUat'On h("' m> = (/(«), g(m)) is surjective, so that
SO Set Theory andLoff'c C^P.\
r oneral we proceed by induction. Assuming that A, x ... x A
W^f each X is countable, we prove the same thing for the p^'*
untable d eactyj^ ^ ^ ^ .g & ^.^ correspondence ««t
W^f each X is countab, p
countable d eactyj^ ^ ^ ^ .g & ^.^ correspondence
defined by the equation
«(*„....*.) = ((*i. ••••*-')•*«>•
Since the set A, X • •• X Am.t is countable by the induction assumption and
A is countable by hypothesis, the product of these two sets is countable, as
proved in the preceding paragraph. We conclude that At x •. • x A, h
countable as well. Q
It is very tempting to assert that countable products of countable sets
should be countable; but this assertion is in fact not true:
Theorem 7.6. Let X denote the two element set [0, 1}. T/isii the set X" is
uncountable.
Proof. We show that, given any function
g '■ Z+ —> Xm,
g is not surjective. For this purpose, let us denote g(n) as follows!
g(n) = (*„„ xnl, xn3, ..., xnm,.. .),
where each xtJ is either 0 or 1. Then we define a pointy = (ylt y2, ...,/„,...)
of X" by letting
fO if jc.b = 1,
y"
(If we write the numbers xnl in a rectangular array, the particular elements
xm appear as the diagonal entries in this array; we choose y so that its nth
coordinate differs from the diagonal entry *„„.)
Now y is a point of X", and y does not lie in the image of g; given n, the
point g{n) and the point y differ in at least one coordinate, namely, the «th.
Thus g is not surjective. Q
The cartesian product {0, l}-» is one example of an Uncountable set.
Another is the following:
Theorem 7.7. The set 6>(Z+) of all subsets of Z+ is uncountable.
Proof One proof consists of showing that (P(Z+) is in bijecti ve correspon-
correspondence with the set {0,1}». This we leave to the exercises.
Anotner proof is more direct. We shall prove that if A is an arbitrary set,
Countable and Uncountable Sets SI
here is no surjective function g: A - 9{A). Then, in particular, the set
S{Z^) is "°t.C°U^a(p(/4) be a function. For each a e A, the image g{a) of a
S°'h et of A which may or may not contain the point a itself. Let B be
'S a ubset oM consisting of all those points a such that g(a) does not contain
"; B=[a\a e A - g{a)}.
B may be empty, or it may be all of A, but that does not matter. We
t that B is a subset of A that does not lie in the image of g. For suppose
tat B = giflo) for some a° e A- We ask the 9uestion: Does a° belong t0 B
or'not? By definition of B,
a0 e B <=> a0 e A - g(a0) <> a0 e A - B.
In either case, we have a contradiction. □
Now we have proved the existence of uncountable sets. But we have not
yet mentioned the most familiar uncountable set of all—the set of real num-
numbers. You have probably seen the uncountability of R demonstrated already.
If one assumes that every real number can be represented uniquely by an
infinite decimal (with the proviso that a representation ending in an infinite
string of 9's is forbidden), then the uncountability of the reals can be proved
by a variant of the diagonal procedure used in the proof of Theorem 7.6.
But this proof is in some ways not very satisfying. One reason is that the in-
infinite decimal representation of a real number is not at all an elementary
consequence of the axioms but requires a good deal of labor to prove. Another
reason is that the uncountability of R does not, in fact, depend on the
infinite decimal expansion of R or indeed on any of the algebraic properties
of R; it depends only on the order properties of R. We shall demonstrate the
uncountability of R, using only its order properties, in a later section (§3-6).
Exercises
1- Show that Q is countably infinite.
2" Show that the maps/and g of Examples 1 and 2 are bijections.
• t A be a set; let X be the two-element set {0, 1}. Show that there is a bijective
JTespondence between the set <P(/f) of all subsets of A and the cartesian prod-
• a) A real number x is said to be algebraic (over the rationals) if it satisfies
me polynomial equation of positive degree
*" + a*-,*"-' + • • • + a,x + a0 = 0
coefficients "•■ Assuming that each polynomial equation has
any roots, show that the set of algebraic numbers is countable.
52 Set Theory and Logic
(b) A real number is said to be transcendental if it is not algebraic. Assu •
the reals are uncountable, show that the transcendental numbers are "^
countable. (It is a somewhat surprising fact that only two transcend """
numbers are familiar to us: c and n. Even proving these two numb^
transcendental is highly nontrivial.) R
5. Determine, for each of the following sets, whether or not it is countable. Justif
your answers.
(a) The set A of all functions/: {0, 1} —* Z+.
(b) The set Bn of all functions/: {1,. . ., n] — Z+.
(c) The set C = U»ez. B-
(d) The set D of all functions/: Z+ —> Z+.
(e) The set E of all functions /: Z+ —-> {0, 1}.
(f) The set F of all functions/: Z+ —> {0, 1} that are "eventually zero." [\ye
say that/is eventually zero if there is a positive integer N such that f(n) = o
for all /( > N.]
(g) The set C of all functions /: Z+ —> Z+ that are eventually 1.
(h) The set H of all functions /: Z+ —> Z+ that are eventually constant,
(i) The set / of all two-element subsets of Z+.
(j) The set J of all finite subsets of Z+.
6. We say that two sets A and B have the same cardinality if there is a bijection of
A with B.
(a) Show that if B a A and if there is an injection
/: A —> B,
then A and B have the same cardinality. [Hint: Define A\ — A,BX = B, and
for n > 1, An = /Mn-i) and Bn = /(#„_,). (Recursive definition again!)
Note that A, r> B, r> A2 => B2 => A3 => • ■ ■. Define /; : A ~> B by the rule
if x G An — Bn for some n,
otherwise.]
(b) Theorem {SchrOeder-Bemstein theorem). If there are injections f:A-^>C
and g: C —► A, then A and C have the same cardinality.
7. Show that the sets D and E of Exercise 5 have the same cardinality.
8. Let A" denote the two-element set {0, 1}; let <B be the set of all countable subsets
of X". Show that X" and <B have the same cardinality.
9. (a) The recursion formula
A0) = 1,
(*) hB) = 2,
h(n) = [h(n + I)]2 - [h(n — I)]2 for n ^ 2
is not one to which the principle of recursive definition applies. Show
that nevertheless there does exist a function h:Z+—+R satisfying this
formula. [Hint: Reformulate (*) so that the principle will apply and require
A to be positive.] , . .. ,
The Principle of Recursive Definition S3
thftt the formula (.) of part (a) does not determine h uniquely.
(W gE- SisapSe funciion satisfying (♦), tot /@ - «0 for « * 3, and
function /,: Z+ - * satisfying the recursion formula
Ml) = 1,
h{2) = 2,
A(/l) = [/,(/, + DP + [h(n - DP for n > 2.
*i-# r/»e Principle of Recursive Definition
Before considering the general form of the principle of recursive defini-
definition let us first prove it in a specific case, the case that was used in the proof
of Theorem 7.1. That should make the underlying idea of the proof much
clearer when we consider the general case.
So, given the infinite subset C of Z4, let us consider the following recursion
formula for a function h : Z+ — > C:
/,(]) = smallest element of C,
^ /((() = smallest element of [C - h([ 1, .. . , ;" — 1})] for i > 1.
We shall prove that there exists a unique function // : Z+ —» C satisfying this
recursion formula.
The first step is to prove that there exist functions defined on sections
{1,...,«} of Z+ that satisfy (*):
Lemma 8.1. Given n e Z+, there exists a function
f:{l,...,„}—>C
that satisfies (*)for all i in its domain.
Proof. The point of this lemma is that it is a statement that depends on n,
and therefore it is capable of being proved by induction. Let Zo be the set of
Ji«'torAvhuch the lemma holds. We show that Zo contains 1 and is inductive.
«then follows that Zo =Z+.
equation™ * "^ {oTn = l' since the function/: {1} - C defined by the
satisfies (.). /(O = smallest element of C
f0r " - l> we Prove [i true f^ »■ By
■ • U« " " >J - C satis^-B M ^ all
_► c by the equations
/(')= /'(.-) for/g {!,...,„_ 1}>
/(») = smallest element of [C - /'({I, .,.,„_ i))].
Chap. 1
54 Set Theory and Log*
c ■* fh not surjective; hence the set C - /'({I, ...,«_ 1}.
Knee C is infinite./ snot ^ ^^ ^ that this definitiOn is an ac-
is not empty, *™ ^ define/in terms of ft«//but in terms of thegiVen
ceptable one; it Qo ■
function f. that/satisfies (*) for all i in its domain. The function/
satisfies^) for' < n - I because it equals /' there. And/satisfies (.) £
fa=Sn because, by definition,
m = smallest element of [C - /'({I ,...,*•- I})]
and /•({I,---."- '))=/({'. ■■■.»- '»■ O
»* 5.2. SWC« »** f: {1, ■ ■ ■. "} - C ««/ g: {1, m] -.c
6*fA wfu/V (*)for all i w ^i> respective domains. Then f(i) = g(i)/or a//, ;„
6of/i domains.
Proof. Suppose not. Let i be the smallest integer for which /(i) ^ g(f).
The integer f is not 1, because
/(I) = smallest element of C = g(l),
by (*). Hence i > I, and for ally < i, we have f(j) = ^(y). Because/andg
satisfy (*),
/@ = smallest element of [C — /({I,...,('— I})],
g@ = smallest element of [C — g({l,. .. ,i — 1})]-
Since /({I,..., i - 1}) = g([l,...,(- 1}), we have /(;") = ^@, contrary
to the choice of i. Q
Theorem 8.3. There exists a unique function h: Z+ —► C satisfying (*)
for all i g Z+.
Proof. By Lemma 8.1, there exists for each n a function that maps
[I,...,«} into C and satisfies (*) for all i in its domain. Given n, Lemma 8.2
shows that this function is unique; two such functions having the same
domain must be equal. Let/,: {I, ...,«}—> C denote this unique function.
Now comes the crucial step. We define a function h : Z+ — C by defining
its rule to be the union V of the rules of the functions /„. The rule for/, is a
subset of {!,...,«} x C; therefore, U is a subset of Z+ X C. We must show
that V is the rule for a function h:Z+—>C.
That is, we must show that each element i of Z+ appears as the first coor-
coordinate of exactly one element of V. This is easy. The integer i lies in the
domain of/, if and only if „ > ,-. Therefore, the set of elements of U of which
i is the first coordinate is precisely the set of all pairs of the form (,-,/.@). for
f T^82 te"S US thSt m -'"■« if "' m * «■ The^fore, all
The Principle of Recursive Definition SS
ft-*
To show that h satisfies (.) is also easy; it is a consequence of the fol-
'°*ingfaCtS: Hi) =/.(») for.<«,
/„ satisfies (*) for all; in its domain,
proof of uniqueness is a copy of the proof of Lemma 8.2. \J
Now we formulate the general principle of recursive definition. There are
new ideas involved in its proof, so we leave it as an exercise.
Theorem 8.4 (Principle of recursive definition). Let A be a set; let a0 be
„ element of A. Suppose p is a function that assigns, to each function f map-
mapping a section of the positive integers into A, an element of A. Then there exists
a unique function
h : Z+ —> A
such that
h(l)=a0)
W l,...,i - 1}) for\> 1.
The formula (*) is called a recursion formula for h. It determines /((I), and
it expresses the value of /; at i > I in terms of the values of /; for positive
integers less than i.
Example 1. Let us show that Theorem 8.3 is a special case of this theorem.
Given the infinite subset C of Z+, let a0 be the smallest element of C, and
define p by the equation
p(f) = smallest element of [C — (image set of /)].
Because C is infinite and /is a function mapping a section of Z+ into C, the
image set of/is not all of C; therefore, p is well defined. By Theorem 8.4 there
exists a function h:Z+-,C such that h(\) = a0, and for i > 1,
= smallest element of [C - (image set of h\{\,. . ., i - 1})]
= smallest element of [C - h({\,. .., i — 1})],
as desired.
Example 2. Given a e R, we "defined" a", in the exercises of §1-4, by the
recursion formula
a1 = a,
a" = a"~1-a.
•"Attat 5 T-y Theorem 84 t0 define a function h:Z+ — R rigorously
"nd defin iT °"' T° ap?Iy this theorem'Iet "o denote the element a of R
ne P by the equation />(/) = f(m)-a, where /maps a section of 2*
56 Set Theory and Logic
into R and m is the largest element of the domain of/. Then there exists a uniqile
function h:Z+-* R such that
MO = "o,
//(/)=/>(//1 {!.- -.,''-I)) fori> 1.
This means that *(!)=«, and //(/) = «i - !)•« for / > 1. If we denote *0)
by a', we have
a' = a,
at _ ,,/- i . Oj
as desired.
1. Let F,, 62,. ■ ■) be an infinite sequence of real numbers. The sum 2*-i bk is
defined by induction as follows:
S*-i**=*i for// = l,
2Z= ■ 6* = (S*" > **> + 6» for " > ' •
Let A be the set of real numbers; choose p so that Theorem 8.4appliesto define
this sum rigorously. We sometimes denote the sum £" =, bk by the symbol
bt + b2 + ■ ■ ■ + bn.
2. Let Fj, b2,...) be an infinite sequence of real numbers. We define the product
IK=i bk by the equations
ILUi6*=6i,
m=■ bk = cnr=' **) • 6n for«> 1.
Use Theorem 8.4 to define this product rigorously. We sometimes denote
II*=i bk by the symbol b,b2 ■ ■ ■ bn.
3. Obtain the definitions of a" and n\ for « g Z+ as special cases of Exercise 2.
4. The Fibonacci numbers of number theory are defined recursively by the formula
A, = A2 = r,
An = AB_i + An_2 for n > 2.
Define them rigorously by use of Theorem 8.4.
5. Show that there is a unique function h:Z+-*R+ satisfying the formula
MD = 3,
[( ) + i] for/> j
«• (a) Show that there is no function h : Z+ _» j?t satisfying the formula
= 3,
for/>1.
why this example does not violate the principle of recursive defini-
§1-9
Infinite Sets and the Axiom of Choice 57
Consider the recursion formula
«1) = 3.
for/>1
Show that there exists a unique function //: Z+ —» R+ satisfying this for-
formula.
7, Prove Theorem 8.4.
1-9 Infinite Sets and the Axiom of Choice
We have already obtained several criteria for a set to be infinite. We know
for instance that a set A is infinite if it has a countably infinite subset, or if
there is a bijection of A with a proper subset of itself. It turns out that either
of these properties is sufficient to characterize infinite sets. This we shall now
prove. The proof will lead us into a discussion of a point of logic we have
not yet mentioned—the axiom of choice.
Theorem 9.1. Let Abe a set. The following statements about A are equiva-
equivalent:
A) There exists an injective function f: Z+ —> A.
B) There exists a bijection of A with a proper subset of itself.
C) A is infinite.
Proof. We prove the implications A) => B) => C) => A). To prove that
A) => B), we assume there is an injective function/: Z+ —<■ A. Let the image
set /(Z+) be denoted by B; and let /(«) be denoted by «„. Because/is injec-
" ' '" m. Define
tive, an^am if n ■
by the equations
g:A~>A -{a,}
£(«„) = an+l for an 6 B,
g(x) =x for x s A ~ B.
S is indicated schematically in Figure 12; one checks easily that it
A -8
Figure 12
S8 Set Theory and Logic aP-1
T, „ lmni1Cation B) => C) is just the contrapositive of Corollary 6.3, so
,t his a X ten proved. To prove that C) ~ A) we assume that A »
fit, and construct "by induction" an injective function /: Z+ — A
' First, since the set A is not empty, we can choose a point a, of A; define
f(\~\ to be the point so chosen.
Then assuming that we have defined /(I), ...,/(«- D, we wish todefine
/■(„) The set ^ - /({I. ...,»-!})« not emP?: for |f " w«e empty, the
a /"• f 1 , « — 1} —' ^ would be a surjection and ^ would be finite.
Hence we can choose an element of the set A - /({I,...,«- 1}) and define
/(/,) to be this element. "Using the induction principle," we have defined/
for all// e Z+.
It is easy to see that/is injective. For suppose that m < n. Then /(«)
belongs to the set /({I, ...,«- 1}), whereas /(«), by definition, does not.
Therefore, f{n) ^ f(m). D
Let us try to reformulate this "induction" proof more carefully, so as to
make explicit our use of the principle of recursive definition.
Given the infinite set A, we attempt to define/: Z¥ — > A recursively by
the formula
v ' /(/) = an arbitrary element of [A - /((I, ...,/— 1})] for / > 1.
But this is not an acceptable recursion formula at all! For it does not define
/(/) uniquely in terms of / |{1, ...,/— 1}.
In this respect this formula differs notably from the recursion formula we
considered in proving Theorem 7.1. There we had an infinite subset C of Z+,
and we defined h by the formula
h(\) = smallest element of C,
h(i) = smallest element of [C - h({\ /" — 1))] for i > 1.
This formula does define h(i) uniquely in terms of h \ {1 i - 1).
Another way of seeing that (*) is not an acceptable recursion formula is
to note that if it were, the principle of recursive definition would imply that
there is a unique function/: Z+ — A satisfying (*). But by no stretch of the
imagination does (*) specify/uniquely. In fact, this "definition" of/involves
infinitely many arbitrary choices.
What we are saying is that the proof we have given for Theorem 9.1 is
not actually a proof. Indeed, on the basis of the properties of set theory we
i^S ^ ^ * " ^ P°SSible t0 Pr°Ve th'S theorem Something
more is^Sd ^ " ^ P°SSible t0 Pr°Ve th'S theorem- Something
^Previously, we described certain definite allowable methods for specifying
A) Defining a set by listing its elements, or by taking a given set A and
Infinite Sets and the Axiom of Choice 59
§1-9
specifying a subset B of it by giving a property that the elements of B
„. ^unions or intersections of the elements of a given collection of
( its o°r taking the difference of two sets.
n\ Taking the set of all subsets of a given set.
ia\ Takin" cartesian products of sets.
thi rule for the function/is really a set: a subset of Z+ X A. Therefore,
the existence of the function /we must construct the appropriate
t0 pr°VfZ X A using the allowed methods for forming sets. The methods
s"bSed' ° iven simply are not adequate for this purpose. We need a new way
ofasserting the existence of a set. So, we add to the list of allowed methods
of forming sets the following:
Axiom of choice. Given a collection Q, of disjoint nonempty sets, there exists
a set C having exactly one element in common with each element of (X; that is,
such that for each A e a, the set C n A contains a single element.
This axiom asserts the existence of a set that can be thought of as having been
obtained by choosing one element from each of the sets A in Ct.
The axiom of choice certainly seems an innocent-enough assertion. And,
in fact, most mathematicians today accept it as part of the set theory on
which they base their mathematics. But in years past a good deal of contro-
controversy raged around this particular assertion concerning set theory, for there
are theorems one can prove with its aid that some mathematicians were
reluctant to accept. One such is the well-ordering theorem, which we shall
discuss shortly. For the present we shall simply use the choice axiom to clear
up the difficulty we mentioned in the preceding proof.
First we prove an easy consequence of the axiom of choice:
lemma 9.2 {Existence of a choice function). Given a collection <$, of non-
nonempty sets {not necessarily disjoint), there exists a function
c : (B —> \JBea B
** Aat c(B) is an element of B, for each B s <B.
The dffCti°n C ^ Ca"ed a °h0iCe function for the collection <B.
this lemm thCnCe betWeen this lemma and the axiom of choice is that in
example * **** °f the collection ® are not required to be disjoint. For
Siven set.01* ^ a"°W ® t0 be the collection of all nonempty subsets of a
00 of the lemma. Given an element B of <B, we define a set B' as follows:
5,j . B' = [(B,x)\x<=B}.
e collection of all ordered pairs, where the first coordinate of
Set Theory and Logic Chap. |
the ordered pair is the set B, and the second coordinate is an element or*
The set B' is a subset of the cartesian product
<B X \JB&a B.
Because B contains at least one element x, the set B' contains at least the
plement (B x), so it is nonempty.
Now we claim that if Bt and B2 are two different sets in <B, then the sets
B' and B\ are disjoint. For the typical element of B\ is a pair of the form
(B x ) and the typical element of B2 is a pair of the form (Blt x2). No two
such elements can be equal, because their first coordinates are different.
Now let us form the collection
Q = {B'\B e <&};
it is a collection of disjoint nonempty subsets of
« X (Joe® B.
By the choice axiom there exists a set c having exactly one element in com-
common with each element of 6. Our claim is that c is the rule for the desired
choice function.
In the first place, c is a subset of
(B x LU® B-
In the second place, c contains exactly one element from each set B'\ therefore,
for each B e (&, the set c contains exactly one ordered pair (B, x) whose first
coordinate is B. Thus c is indeed the rule for a function from the collection
<B to the set \JBe® B. Finally, if (B, x) <= c, then x belongs to B, so that
c(B) g B, as desired. □
A second proof of Theorem 9.1. Using this lemma, one can make the proof
of Theorem 9.1 more precise. Given the infinite set A, we wish to construct
an injective function/: Z+ —» A. Let us form the collection (B of all nonempty
subsets of ,4. The lemma just proved asserts the existence of a choice function
for <B; that is, a function
c:<&—*\JM&tB = A
such that c(B) s B for each B e (B. Let us now define a function /: Z+ — A
by the recursion formula
/(/) = C(A - /({l / _ i})) f0r ,- > i.
Because A is infinite, the set A - f{{\ z - 1}) is nonempty; therefore,
the right side of this equation makes sense. Since this formula defines f(i)
uniquely m terms of /1 [1,...,/_ i}; the principle of recursive definition
I appliesfWe conclude that there exists a unique function/: Z, - A satisfy-
^jng (*) for all t e Z+. Injectivity of/follows as before. Q
Infinite Sets and the Axiom of Choice 61
§1-?
• mnhasized that in order to construct a proof of Theorem 9.1
Hargc2 correct, one must make specific use of a choice function, we
that is l°g ca y nd admjt that in practice most mathematicians do no such
D0VV Thev so on with no qualms giving proofs like our first version, proofs
thl"^ olve an infinite number of arbitrary choices. They know that they are
thatl" • the choice axiom; and they know that if it were necessary, they
d out their proofs into a logically more satisfactory form by introducing
hoice function specifically. But usually they do not bother.
aeAnd either will we. You will find few further specific uses of a choice
ction in this book; we shall introduce a choice function only when the
roof would become confusing without it. But there will be many proofs in
which we make an infinite number of arbitrary choices, and in each such case
we will actually be using the choice axiom implicitly.
Now we must confess that in an earlier section of this book there is a
proof in which we constructed a certain function by making an infinite num-
number of arbitrary choices. And we slipped that proof in without even men-
mentioning the choice axiom. Our apologies for the deception. We leave it to you
to ferret out which proof it was!
Let us make one final comment on the choice axiom. There are two forms
of this axiom. One can be called the finite axiom of choice; it asserts that given
a finite collection Q, of disjoint nonempty sets, there exists a set C having
exactly one element in common with each element of a. One needs this weak
form of the choice axiom all the time; we have used it freely in the preceding
sections with no comment. No mathematician has any qualms about the finite
choice axiom; it is part of everyone's set theory.
The stronger form of the axiom of choice, the one that applies to an
arbitrary collection a of nonempty sets, is the one that is really properly
"lied "the axiom of choice." When a mathematician writes, "This proof
epends on the choice axiom," it is invariably this stronger form of the axiom
that is meant.
Exercises
'ln^'^u111^ /: Z+ - X"' where X is the two-element set {0,1],
using the choice axiom.
^ch? a Ch°iCe funCtiOn for each of the ^'lowing collections, without
noiCe axiom:
( ) T noiCe axiom:
I!6*'0" * °f nonemPty subsets of Z+.
® °f n°t b
& TheSM' pty subsets of Z-
(d> The coll!w!0n i°f nonemPty subsets of the rational numbers Q.
3> SuPPose thaM nonemPty subsets of X", where X = fO, 1}.
■' 1S a set and if'}'**, is a given indexed family of injective functions
/-•"{I n}—> A.
Set Theory and Logic Chap. j
Show that A is infinite. Can you define an injective function f:Z.^A
without using the choice axiom?
4 Show that the choice axiom is equivalent to the statement that for any indexed
family {4»W of nonempty sets, with J^0, the cartesian product
is not empty.
5 There was a theorem in §1-7 whose proof involved an infinite number of arbi-
' trary choices. Which one was it? Rewrite the proof so as to make explicit the
use of the choice axiom. (Several of the earlier exercises have used the choice
axiom also.)
6. (a) Use the choice axiom to show that if/: A —> B is surjective, then/has a
right inverse h : B —> A.
(b) Show that if /: A —> B is injective and A is not empty, then/has a left
inverse. Is the axiom of choice needed ?
(c) Show that if A is any set, there is no injective map /: 6>(A) —* A, where
<9{A) is the set of all subsets of A.
7. Most of the famous paradoxes of naive set theory are associated in some way
or other with the concept of the "set of all sets." None of the rules we have given
for forming sets allows us to consider such a set. And for good reason—the
concept itself is self-contradictory. For suppose that Ct denotes the "set of all
sets."
(a) Show that (P(Ct) <= Q,; derive a contradiction.
(b) (Russell'sparadox). Let (B be the subset of ft consisting of all sets that are
not elements of themselves;
(B = {A | A e a and A £ A}.
(Of course, there may be no set A such that A e A; if such is the case, then
<B = ft.) Is (B an element of itself or not ?
8. Let A and B be two nonempty sets. If there is an injection of B into A, but no
injection of A into B, we say that A has greater cardinality than B.
(a) Conclude from Theorem 9.1 that every uncountable set has greater cardi-
cardinality than Z+.
(b) Show that if A has greater cardinality than B, and B has greater cardinality
than C, then A has greater cardinality than C.
(c) Find a sequence Au A2,... of infinite sets, such that for each n £ Z+,
the set A^ has greater cardinality than An.
(d) Find a set that for every n has cardinality greater than Aa.
*9. Show that (P(Z+) and R have the same cardinality.
A famous conjecture of set theory, called the continuum hypothesis, asserts
that there exists no set having greater cardinality than Z+ and lesser cardinality
than R. The generalized continuum hypothesis asserts that given A infinite, there
is no set having greater cardinality than A and lesser cardinality than <?&)•
Surprisingly enough, both of these assertions have been shown to be indepen-
independent of the usual axioms for set theory. For a readable expository account, see
[Sm].
§1-10
Well-Ordered Sets 63
1-10 Weil-Ordered Sets
f the useful properties of the set Z+ of positive integers is the fact
°h fits nonempty subsets has a smallest element. Generalizing this
thate!f i^,ds to the concept of a well-ordered set.
propt* v
,. • • * A set /* with an order relation < is said to be well-ordered if
every nonempty subset of A has a smallest element.
Example 1. Consider the set {1, 2] x Z+ in the dictionary ordering. Sche-
tically <t can be represented as one infinite sequence followed by another
infinite sequence:
at' a2' a3> • ■ •> "i> , b3, . . .
with the understanding that each element is less than every element to the right
of it It is not hard to see that every nonempty subset C of this ordered set has
a smallest element: If C contains any one of the elements an, we simply take the
smallest element of the intersection of C with the sequence at,a2, . . .; while if
Ccontains no am then it is a subset of the sequence bu bz,. ■ . and as such has
a smallest element.
Example 2. Consider the set Z+ x Z+ in the dictionary order. Schemat-
Schematically, it can represented as an infinite sequence of infinite sequences. We assert
that it is well-ordered. Let X be a nonempty subset of Z+ x Z+. Let A be the
subset of Z+ consisting of all first coordinates of elements of X. Now A has a
smallest element; call it aQ. Then the collection
{b\aa x be X]
is a nonempty subset of Z+; let b0 be its smallest element. By definition of the
dictionary order, a0 x b0 is the smallest element of X. (See Figure 13.)
Figure 13
Set Theory and Logic Chap. \
Example 3 The set of integers is not well-ordered in the usual order- the
subset consisting of the negative integers has no smallest element. Nor is the
set of real numbers in the interval 0 < x < 1 well-ordered; the subset consisting
of those x for which 0 < x < 1 has no smallest element (although it has a
greatest lower bound, of course).
There are several ways of constructing well-ordered sets. Two of them are
the following:
A) If A is a well-ordered set, then any subset of A is well-ordered in the
restricted order relation.
B) If A and B are well-ordered sets, then A X B is well-ordered in the
dictionary order.
The proof of A) is trivial; the proof of B) follows the pattern given in Exam-
Example 2.
It follows that the set Z+ x (Z+ X Z+) is well-ordered in the dictionary
order; it can be represented as an infinite sequence of infinite sequences of
infinite sequences. Similarly, (Z+L is well-ordered in the dictionary order. And
so on. But if you try to generalize to an infinite product of Z+ with itself, you
will run into trouble. We shall examine this situation shortly.
Now, given a set A without an order relation, it is natural to ask whether
there exists an order relation for A that makes it into a well-ordered set. If A
is finite, any bijection
f.A—>{\,...,n]
can be used to define an order relation on A under which A has the same
order type as the ordered set {1, . . . , «). In fact, every order relation on a
finite set can be obtained in this way:
Theorem 10.1. Every nonempty finite ordered set has the order type of a
section {1,..., n) ofZ+, so it is necessarily well-ordered.
Proof. This was given as an exercise in §1-6; we prove it here. First, one
shows that every finite ordered set A has a largest element: If A has one ele-
element, this is trivial. Supposing it true for sets having n — 1 elements, let A
have n elements and let a0 e A. Then A — {a0} has a largest element au and
the larger of {aQ, a,) is the largest element of A.
Second, one shows there is an order-preserving bijection of A with
U>.-.,«} for some n: If A has one element, this fact is trivial. Suppose that
it is true for sets having n - 1 elements. Let b be the largest element of A. By
hypothesis, there is an order-preserving bijection
f':A-{b}—+[l,...,n-l).
Define an order-preserving bijection/: A -> [1,.. . , n] by setting
/(*)-/'(*) for x *b,
Well-Ordered Sets 65
§1-10
u a finite ordered set has only one possible order type. For an infinite
seJhin^ are quite different. The well-ordered sets
A,...,n] X Z+,
Z+ X Z+,
Z+ X (Z+ X Z+)
* al, countably infinite, but they all have different order types.
Ill the examples we have given of well-ordered sets are ordenngs of
ntable sets. It is natural to ask whether one can find a well-ordered un-
C0UThe obvious uncountable set to try is the countably infinite product
/=ztxztx-= (z+y
of z with itself. One can generalize the dictionary order to this set in a
natural way, by defining
(a,,fl2, ...) <(bl,b2,. ..)
if for some n> 1,
a, = b; for i < n and an < bn.
This is, in fact, an order relation on the set X; but unfortunately it is not a
well-ordering. Consider the set A of all elements x of X of the form
x = (l,..., 1,2, 1, 1,...),
where exactly one coordinate of x equals 2, and the others are all equal to 1.
The set A clearly has no smallest element.
We have seen that the dictionary order at least does not give a well-order-
well-ordering of the set (Z+)". Is there some other order relation on this set that is a
well-ordering? No one has ever constructed a specific well-ordering of (Z+)".
Nevertheless, there is a famous theorem that says such a well-ordering exists:
Theorem (Well-ordering theorem). If A is a set, there exists an order rela-
"on on A that is a well-ordering.
matM the°rem was Proved by Zermelo in 1904, and it startled the mathe-
' world. There was considerable debate as to the correctness of the
"nco ' \ C 'aCk °f a"y COnstructive procedure for well-ordering an arbitrary
dosel th ^ 'ed many t0 be skePtIca'- When the proof was analyzed
"as a co °nly.P°int at which !t was found that there might be some question
aeonstr UCtl°n involving an infinite number of arbitrary choices, that is,
Some" I involvin8-«« ^oice axiom.
l« a le£r matlcians reJected the choice axiom as a result, and for many
»ice ajdo^ qUestion about a new theorem was: Does its proof involve
°m or not? A theorem was considered to be on somewhat shaky
Set Theory and Logic ChaP. I
around if one had to use the choice axiom in its proof. Present-day mathe-
ScTans, by and large, do not have such qualms. They accept the axiom of
choice as a reasonable assumption about set theory, and they accept the well-
ordering theorem along with it.
In this book we are not going to prove the well-ordenng theorem. It is
lone (although not exceedingly difficult) and primarily of interest to logicians.
For those interested, a proof is outlined in the supplementary exercises at the
end of the chapter.
One seldom needs the well-ordenng theorem to prove theorems of topol-
topology in any case; we shall use it to prove a theorem only twice, once in the
exercises of §4-5 and again in §6-3. For us, its primary function will be to
provide us with a particular counterexample that will be very useful.
We shall not, in fact, need the full strength of the well-ordering theorem
to construct the example we want. We shall need only the following weaker
result, which we now assume:
Corollary. There exists an uncountable well-ordered set.
(It is of some interest to note that one can prove this weaker assertion
without use of the choice axiom; see the supplementary exercises.)
To construct the desired example, we first need some terminology.
Definition. Let X be an ordered set. Given a, 6 X, the set
S, = [x\x e Zand x < <x}
is called the section of X by a.
Theorem 10.2. There exists an uncountable well-ordered set, every section
of which is countable.
Proof. By assumption, there exists an uncountable well-ordered set X.
From this fact it follows that there exists an uncountable well-ordered set Y,
at least one section of which is uncountable. The set [1, 2} x X in the diction-
dictionary order is one such set; its section by any element of the form 2 X X is
uncountable. Consider the subset of Y consisting of those elements, a for
which the section S« is uncountable; let Q be the smallest such element. Then
Sa is a well-ordered set, it is uncountable, and every section of Sa is count-
The well-ordered set of this theorem is called a minimal uncountable well-
ordered set; the reason for the choice of terminology is fairly obvious. Its
order type ,s, in fact, uniquely determined by the requirements of the theorem.
(bee the supplementary exercises.) We shall denote it throughout this book
Z? f ??oT USe the Symbo1 *• thro"ghout to denote the well-ordered
set ^o u |S2].
Well-Ordered Sets 67
fl-lO
The most useful property of the set Sa for our purposes is expressed in the
following corollary:
Corollary 10.3- //A is a countable subset o/SD, then A has an upper bound
10 p t Let A be a countable subset of Sa. For each a e A, the section So
ntable Therefore, the union B = \JasA 5« is also countable. Since Sa
l f S l b it f 5 tht is nt in
ntable Therefore, the union JasA «
'S ountable the set B is not all of Sa; let .v be a point of 5n that is not in
« "-Then -v is an upper bound for A. For if x<a for some a in ^, then x
belongs to Sa and hence to B, contrary to choice. □
Exercises
1 Show that every well-ordered set has the least upper bound property.
2 (a) Show that in a well-ordered set, every element except the largest (if one
exists) has an immediate successor.
(b) Find a set in which every element has an immediate successor that is not
well-ordered.
3. Both A,2} x Z+ and Z+ x {1,2} are well-ordered in the dictionary order.
Do they have the same order type ?
4. (a) Let Z. denote the set of negative integers in the usual order. Show that a
simply ordered set A fails to be well-ordered if and only if it contains a
subset having the same order type as Z._.
(b) Show that if A is simply ordered and every countable subset of A is well-
ordered, then A is well-ordered.
5. Let Sa be the minimal uncountable well-ordered set.
(a) Show that Sa has no largest element.
(b) Show that for every a, <Q, the set
{x\a <x <Q]
is uncountable.
(c) Let Xa be the subset of Sa consisting of all elements x such that x has no
immediate predecessor. Show that XQ is uncountable.
LeU be a well-ordered set. A subset Jo of / is said to be inductive if for every
(■S. <= -A>) ==> « e Jo.
eorem (The principle of transfinite induction). If J is a well-ordered set and
° "an lnduct™ subset ofJ, then Ja = /.
' foT^r "?' ^ Ca" a SUbSet J° of the we"-°rdered set / "semi-inductive" if
tymeanl T™31' K s J°'the immediate successor of a (if any) is in y0. Show
inductive °ra" examP|e that if-^o contains the smallest element of /and is semi-
g Llve, Jo need not equal all of /.
^' and Az ** disJ°int sets> well-ordered by <, and <2) respectively,
an order relation on Ax u Az by letting a < b either if a, b e Ax
68 Set Theory and Logic Chap. \
and a <i b, or if a, b e /*2 and a <2 6, or if a e /«, and 6 s ^
that this is a well-ordering.
(b) Generalize (a) to an arbitrary family of disjoint well-ordered sets, indexed
by a well-ordered set.
9. (a) Show that (Z+)" has the order type of a section of (Z+)"+>, both in the dic-
dictionary order.
(b) Find a well-ordered set that for every // has a section having the order type
of(Z+)».
10. Theorem. Let J and C be well-ordered sets: assume that there is no surjeclive
function mapping a section of J onto C. Then there exists a unique function
h:J —> C satisfying the equation
(*) h(.\) = smallest [C - //E,)]
for each x e J, where Sx is the section ofjby x.
Proof.
(a) If/; and k map sections of J, or all of J, into C and satisfy (*) for all x in
their respective domains, show that h(x) = A-(.v) for all .v in both domains.
(b) If there exists a function h : Sx --> C satisfying (*), show that there exists
a function k: 5a U (a} —► C satisfying (*).
(c) If K <= J and for all (X e K there exists a function //„ : 5, —> C satisfying
(*), show that there exists a function
satisfying (*).
(d) Show by transfinite induction that for every a e J, there exists a function
h : 5. —> C satisfying (*).
(e) Prove the theorem.
11. Let A and B be two sets. Assuming the well-ordering theorem, prove that either
they have the same cardinality, or one has cardinality greater than the other.
[Hint: If there is no surjection/: A —> B, apply the preceding exercise.]
12. Theorem (Principle of transfinite recursive definition). Let J be a well-ordered
set with smallest element <X0. Let C be a set. Let ff be the set of all functions mapping
sections of] into C (including the empty function mapping S^o into C). Suppose
that a function p-.'S —> C is given. Then there exists a unique function h:J—*C
such that
for each x e J.
[Hint: The proof follows the pattern outlined in Exercise 10.]
*1-11 The Maximum Principle*
We have already indicated that the axiom of choice leads to the deep
theorem that every set can be well-ordered. The axiom of choice has another
•fThis section will be assumed in Chapter 5.
The Maximum Principle 69
§ 1-11
nee which is even more important in mathematics. It is the principle
C°lTthe maximum principle, which we now discuss
F t we make a definition. Given a set A, a relation < on A is called a
. v ' a;tial order on A if it has the following two properties:
nWNonreflexivity) The relation a < a never holds.
il) (Transitivity) If a < b and b < c, then a<c.
Thse are just the second and third of the properties of a simple order (see
J1.3V the comparability property is the one that is omitted. In other words,
strict partial order behaves just like a simple order except that it need not
be true that for every pair of distinct points ,v and y in the set, either x -< y
If-< is a strict partial order on aset^, it can easily happen that some sub-
subset B of A is simply ordered by the relation; all that is needed is for every pair
of elements of B to be comparable under -<.
Now we can state the maximum principle.
Theorem {The maximum principle). Let A be a set; let -<. be a strict partial
order on A; let B be a subset of A that is simply ordered by ~<. Then there
exists a maximal simply ordered subset C of A containing B.
Said differently, there exists a subset C of A containing B such that C is
simply ordered by -< and such that no subset D of A properly containing C
is simply ordered by -<.
Example I. If a is any collection of sets, the relation "is a proper subset
or is a strict partial order on a. Suppose that a is the collection of all circular
regions (interiors of circles) in the plane. One maximal simply ordered sub-
collection of a consists of all circular regions with centers at the origin. Another
maximal simply ordered subcollectton consists of all circular regions bounded
by circles tangent from the right to the j>-axis at the origin. See Figure 14.
Now the maximum principle guarantees not only that a has a maximal
simply ordered subcollection but also that starting with any simply ordered
Figure 14
Chan i
Set Theory and Logic
, ■ ffi of a there is a maximal simply ordered subcollection e of
""? nmimtfIPi» insists of a single circular region * i, is easy ,0 „„]
a t«il simply °rdered -collections of a tha, contain the
several different ^^.^ g| and g2 indicated in F.gure 14 are two such.
B consists of a more complicated collection, such as the three regions
[in Figure 15, it is more work to find a maximal simply ordered sub-
._ ^tainfnii'(B. We leave it to you.
collection containing'(B. We leave it to you.
Figure 15
Example 2. If (xo,yo) and (.v,,;',) are two points of the plane R1, define
(•vo.;'o) -< Ui,;'i)
if Jo = y\ and .v0 < -v,. This is a partial ordering of /?- under which two points
are comparable only if they lie on the same horizontal line. The maximal
simply ordered sets are the horizontal lines in R-.
One can give an intuitive "proof" of the maximum principle that is rather
appealing. It involves a step-by-step procedure, which one can describe in
physical terms as follows. Take a box, and put into the box all the elements
of B. Then examine the remaining elements of A one by one. First pick an
element of A not in B. If it is comparable with everything in B, put it in the
box; if not, throw it away. At the general step, you will have a collection of
elements in the box and a collection of elements that you have tossed away.
Take one of the remaining elements of A. If it is comparable with everything
in the box, toss it in the box, too; otherwise, throw it away. Similarly contin-
continue. After you have checked all the elements of A, the elements you have in
the box will be comparable with one another, and thus they will form a simply
ordered set. Every element not in the box will be noncomparable with at least
ZT^Tl-" u b°X> f°r that was why il was toss<=d away. Hence the simply
A
y ^
^Ifi v°n?h thG Ta,k P°int in the »recedinS "Proof" comes when we
r-f 1 h"Vet,ChfCked a" the elements of ^." How do you know you
r geuhrough checking all the elements of A ?
* Should happen to be countable, it is not hard to make this intui-
The Maximum Principle 71
§1-"
real proof Let us take the countably infinite case; the finite
e,ements of A _ B with the positive integers,
a- tinct integers correspond to distinct points of A - B. This indexing
letting dls"" decjding what order to test the elements of A - B in, and how
^TnoCwhen one has tested them all.
<; cifically we define a function h : Z+ — {0, 1 ], which assigns the
0 to / if we "put a, in the box," and the value 1 if we "throw a, away."
To be more formal, consider the following recursion formula:
/,(,) = 0 if a, is comparable with every element
of the set B U {a, | 1 <j < I - 1 and /;(/) = 0},
f,(f) = 1 otherwise.
Bv the principle of recursive definition, this formula determines a unique
function h : Z+ — {0, 1}. It is easy to check that
is a maximal simply ordered subset of A.
If A — B is not countable, a variant of this procedure will work, if we as-
assume the well-ordering theorem. Instead of indexing the elements of A — B
with the set Z+, we index them (in a bijective fashion) with the elements of
some well-ordered set J:
A- B = {aJaeJ}.
For this we need the well-ordering theorem, so that we know there is a bijec-
bijective correspondence between A — B and a well-ordered set J. Then we can
proceed as in the previous paragraph, letting the section 5a replace the section
(I,...,;— 1} in the argument. Strictly speaking, you need to generalize
the principle of recursive definition to well-ordered sets as well. (See Exercise
12 of the preceding section.)
This discussion is far from complete. But it does indicate that the well-
Ordering theorem and the maximum principle are related. It turns out that
P'are in fact equivalent; either of them implies the other. Furthermore, each
'"em <s equivalent to the choice axiom.
would T nOt 8°inS l° pr°Ve the maximum Principle in this book; that
«inni US to° far afield- For thoSe interested, a proof is outlined in the
suPPlementary exercises.
on a "etfi"al remark- We have defined what we mean by a strict partial order
Partial ' rf W° haVC not Said what a Partial order itself is- Let ~< be a strict
*• Then th °n * SCt A' Suppose that we define a ^ b if either a -< b or a =
6 rdti
l rf
*• Then th °n * SCt A' Suppose that we define a ^ b if either a -< b or a =
sion relatj6 rdation ^ is called a Partial order on A. For example, the inclu-
inclusion '°n <= on a collection of sets is a partial order, whereas proper
>s a strict partial order.
72 Set Theory and Logic Chap. J
Many authors prefer to deal with partial orderings rather than strict
nartial orderings; the maximum principle is often expressed in these terms.
Which formulation is used is simply a matter of taste and convenience.
Exercises
1 If a and b are real numbers, define a < b if b - a is positive and rational. Show
' this is a strict partial order on R. What are the maximal simply ordered subsets?
2. Complete the discussion in Example 1.
3. (a) Let < be a strict partial order on the set A. Define a relation on A by letting
a < b if either a < b or a = b. Show that this relation has the following
properties, which are called the partial order axioms:
(i) a < a for all a e A.
(ii) a <, b and b <, a => a = b.
(iii) a < b and b < c =* a < c.
(b) Let P be a relation on A that satisfies properties (i)-(iii). Define a relation
S on A by letting aSb if a/Y> and a ^ b. Show that S is a strict partial order
on A.
4. Let A be a set with a strict partial order <; let x e A. Suppose that we wish
to find a maximal simply ordered subset C of A that contains x. One plausible
way of attempting to define C is to let C equal the set of all those elements of
A that are comparable with x;
C — {y\y e A and either x < y or y < x}.
But this will not always work. In which of Examples 1 and 2 will this procedure
succeed and in which will it not?
5. Complete the proof of the maximum principle in the case where A — discount-
discountable, by showing that B u {a,\h(j) = 0] is a maximal simply ordered subset of
A,
*6. Given two points (x0, y0) and (*„ y,) of R\ define
(Xo,yo)< (xt,yi)
if x0 < xi and yo<,yi. Show that the curves y = x3 and y = 2 are maximal
simply ordered subsets of R\ and the curve y = x1 is not. Find all maximal
simply ordered subsets.
* Supplementary Exercises:
Well-Ordering
aJ]h!le/OlkTn8 exerdSes> w »* you t0 Prove- w«hout using the choice axiom,
!lll f,an "ncountab'e well-ordered set. We also ask you to prove the
EfT 1CC aX1'°m' the ^"-oKkring theorem, and the maximum
2
Supplementary Exercises: Well-Ordering 73
l. that the proof of the principle of transfinite recursive definition does not
21 choice axiOm. (See Exercise .2 of §.-«00
• o the choice axiom, prove the following:
Without us,ng he en wdl_ordered sets. lfJ has the order type of a subset
Xn7
Proof. Let e0 be a fixed element of E Define A : 7 -> £ by the formula
(smallest (E - h(Sj) if h(S.) =£ E,
) \
/I(a) = \eo
fa) By hypothesis, there is an order-preserving map /: 7 — £. Show that we
have WO < i(a) for all <X e /; conclude that A satisfies the formula
= smallest (E — h(S,))
for all a.
(b) Show that A(Sa) is a section of E for each a; conclude that A(/) equals E
or a section of f.
(c) Show that h is order preserving.
(d) Show that if k : J —♦ E is any order-preserving map such that AG) equals
£ or a section of E, then k satisfies (*) and hence is unique.
3. Without using the choice axiom, prove the following:
Theorem. If A andB are two well-ordered sets, then either they have the same
order type, or one has the order type of a section of the other.
[Hint: Consider the well-ordered set constructed in Exercise 8(a) of §1-10.]
Corollary. If A and B are two uncountable well-ordered sets all of whose
sections are countable, then A and B have the same order type.
4. Without using the choice axiom, construct an uncountable well-ordered set,
as follows. Let a be the collection of all pairs (A, <), where A is a subset of
Z+ and < is a well-ordering of A. (We allow A to be empty.) Define (A, <) ~
^.' 5'^ ""^' <^ an<* (^'> </) 'nave tne same order type. It is trivial to show
this is an equivalence relation. Let [(A, <)] denote the equivalence class of
(A, <); let E denote the collection of these equivalence classes. Define
{.(A, <)] < [{A', <')]
<f W, <) has the order type of a section of (A', <').
(a) Show that the relation « is well defined, and is a simple order on E. Note
(V\ Qh thC equivalence class [@,0)] is the smallest element of E.
W bhow that if a = [(A, <)] is an element of E, then (A, <) has the same order
VPe as the section Sa(E) of E by a. [Hint: Define a map /: A — £ by set-
to ' e ',W = KJ*(/Q, restriction of <)] for each x e A.]
(I erClUde that E is well-ordered by «.
gim M E iS uncountab'e- Mint: If *: IT-. Z+ is a bijection, then A
Sjves rise to a well-ordering of Z+J
Proves'S(wT afrgument' with z+ rePlaced by an arbitrary well-ordered set X,
whose cZ r USC °f the Choice axiom) the ex»stence of a well-ordered set E
* cardinality )s greater than that of AT.
Set Theory and Logic
5 Let A- be a set; let a be the collection of all pairs (A, <), where A is a subset of
A" and < is a well-ordering of A. Define
(A, <) < (A', <0
if (A, <) equals a section of (A', <')•
(a) Show that < is a strict partial order on <*•
rb Let CB be a subcollection of a that is simply ordered by <. Define B' to be
the union of the sets B, for all (B, <) e CB; and define <' to be the union
of the relations <, for all (B, <) e CB. Show that (B', <') is a well-ordered
set.
6. Assuming Exercises I and 5, prove the following:
Theorem. The maximum principle is equivalent to the well-ordering theorem.
7. Assuming Exercises 1-3 and 5, prove the following:
Theorem. The choice axiom is equivalent to the well-ordering theorem.
Proof. Let X be a set; let c be a fixed choice function for the nonempty sub-
subsets of X. If T is a subset of X and < is a relation on T, we say that G", <) js
a tower in X if < is a well-ordering of 7" and if for each .v e 7",
x = c(X - 5,G")),
where 5,G") is the section of 7" by .v.
(a) Let G",, <:) and G\, <2) be two towers in X. Show that either these two
ordered sets are the same, or one equals a section of the other. [Hint: If
T, and T2 are well-ordered sets and h : 7", —> T2 is order preserving and
h(T{) equals T2 or a section of 7, then h(Sx(Tt)) — Sh(x)(T2) for all x.
If 7": and 7 are towers, then h(x) = ,v for all .v.]
(b) Let {(Tk, <k)\k e K] be the collection of all towers in X. Let
T={Jk&KTk and < = U*£«(<*)-
Show that (r, <) is a tower in X Conclude that T = X.
2. Topological Spaces
and Continuous Functions
The concept of topological space grew out of the study of the real line
andeudidean space and the study of continuous functions on these spaces.
In this chapter we define what a topological space is, and we study a number
of ways of constructing a topology on a set so as to make it into a topological
space. We also consider some of the elementary concepts associated with
topological spaces. Open and closed sets, limit points, and continuous func-
functions are introduced as natural generalizations of the corresponding ideas
for the real line and euclidean space.
2-1 Topological Spaces
in ?edefinltlon of a topological space that is now standard was a long time
other'- formulated- Var<ous mathematicians—Frechet, Hausdorff, and
decades Pf°P0Sed d'fferent definitions over a period of years during the first
on theS 'S CentUry> but il took q^^ a while before mathematicians settled
thatWa°ne k seemed most su<table. They wanted, of course, a definition
the vario^ d aS possible' so that it would include as special cases all
eXamples tht l
the vario p' at it would include as special cases all
'"finite-dim eXamples that were useful in mathematics—euclidean space,
ensional euclidean space, and function spaces among them—
75
76 Topological Spaces and Continuous Functions
Chap.
but they also wanted the definition to be narrow enough that the standard
theorems about these familiar spaces would hold for topological spaces in
general. This is always the problem when one is trying to formulate a new
mathematical concept, to decide how general its definition should be. The
definition finally settled on may seem a bit abstract, but as you work through
the various ways of constructing topological spaces, you will get a better
feeling for what the concept means.
Definition. A topology on a set X is a collection 3 of subsets of X having
the following properties:
A) 0 and X are in 3.
B) The union of the elements of any subcollection of 3 is in 3.
C) The intersection of the elements of any finite subcollection of 3 is
in 3.
A set X for which a topology 3 has been specified is called a topological space.
Properly speaking, a topological space is an ordered pair (X, 3) consisting
of a set X and a topology 3 on X, but we often omit specific mention of 3
if no confusion will arise.
If X is a topological space with topology 3, we say that a subset U of X
is an open set of X if U belongs to the collection 3. Using this terminology,
one can say that a topological space is a set X together with a collection of
subsets of X, called open sets, such that c and X are both open, and such
that arbitrary unions and finite intersections of open sets are open.
Example 1. Let X be a three-element set, X = [a, b, c}. There are many
possible topologies on X, some of which are indicated schematically in Figure
1. The diagram in the upper right-hand corner indicates the topology in which
Figure I
Topological Spaces 77
§2-1
Y 0 ta b], {h}, and [b, c}. The topology in the upper left-
the open sets are^^ only' x and 0, while the topology in the lower right-
hand corner ^^.^ every subset of x. You can get other topologies on X
by permuting ^a^p]e you can see that even a three-element set has many
Fr°mt oologies. But not every collection of subsets of X is a topology on
difl!,re"herofthe collections indicated in Figure 2 is a topology, for instance.
Figure 2
Example 2. If Xis any set, the collection ofa//subsets of Xis a topology on
r- it is called the discrete topology. The collection consisting of X and 0
only is also a topology on X; we shall call it the indiscrete topology, or the
trivial topology.
Example 3. Let X be a set; let 3/ be the collection of all subsets U of X
such that X — U either is finite or is all of X. Then 3/ is a topology on X,
called the finite complement topology. Both X and O are in 37, since X — X
is finite and X — 0 is all of X. If {(/»} is an indexed collection of elements of
3f, to show that \JUX is in 37, we compute
The latter set is finite because each set X — U. is finite. If U,, . .., (/„ are
elements of 37, to show that f^\U, is in 37, we compute
x-m.i i// = Ui"=i(*-i/i).
The latter set is a finite union of finite sets and therefore finite.
Example 4. Let X be a set; let 3C be the collection of all subsets U of X
such that X-U either is countable or is all of X. Then 3C is a topology on
X, as you can check.
3, ^finit'on. Suppose that 3 and 3' are two topologies on a given set X If
=> 3, we say that 3' is finer than 3; if 3' properly contains 3, we say that
3 * strictly finer than 3.
sdp-,6alS0say that 3 is coarser than 3', or strictly coarser, in these two re-
Wive situations.
S0metWniT 'S suggested by linking of a topological space as being
Elections f * a truckload ful1 of gravel—the pebbles and all unions of
smallerone Pebbles being the open sets. If now we smash the pebbles into
liice the graS> i Co!lection of °Pen sets has been enlarged, and the topology,
ve|. is said to have been made finer by the operation.
78 Topologkal Spaces and Continuous Functions Chap.2
Two topologies on X need not be comparable, of course. In Figure ,
preceding, the topology in the upper right-hand corner is strictly finer than
each of the three topologies in the first column and strictly coarser than each
of the other topologies in the third column. But it is not comparable with
any of the topologies in the second column.
Other terminology is sometimes used for this concept. If 3' =, a, Some
mathematicians would say that 3' is larger than 3, and 3 is smaller than 3'.
This is certainly acceptable terminology, if not as vivid as the words "finer"
and "coarser."
Many mathematicians use the words "weaker and "stronger" in this
context. Unfortunately, some of them (particularly analysts) are apt to say
that 3' is stronger than 3 if 3' zd 3, while others (particularly topologists)
are apt to say that 3' is weaker than 3 in the same situation! If you run across
the terms "strong topology" or "weak topology" in some book, you will
have to decide from the context which inclusion is meant. We shall not use
these terms in this book.
2-2 Basis for a Topology
For each of the examples in the preceding section, we were able to specify
the topology by describing the entire collection 3 of open sets. Usually this
is too difficult. In most cases one specifies instead a smaller collection of
subsets of X and defines the topology in terms of that.
Definition. If A" is a set, a basis for a topology on A" is a collection (B of
subsets of X (called basis elements) such that
A) For each x e X, there is at least one basis element B containing x.
B) If .v belongs to the intersection of two basis elements 5, and B2, then
there is a basis element B, containing x such that B, <= 5, n B2-
Definition. If (B is a basis for a topology on X, the topology 3 generated
by (B is described as follows: A subset U of X is said to be open in * (that is,
to be an element of 3) if for each x e U, there is a basis element B e (B such
that x e B and B a U.
Note that each element of (B is open in X under this definition, so that
« c 3. It is easy to check that this collection of subsets of X is a topology
on X. But first let us consider some examples.
Example 1. Let (B be the collection of all circular regions (interiors of
circles) in the plane. Then (B satisfies both conditions for a basis. The second
condition is illustrated in Figure 3. In the topology generated by (B, a subset U
01 the plane is open if every x in U lies in some circular region contained in V.
Basis for a Topology 79
B\
•
X
Figure 3
Figure 4
Example 2. Let (&' be the collection of all rectangular regions (interiors of
rectangles)in the plane, where the rectangles have sides parallel to the coordinate
axes Then (&' satisfies both conditions for a basis. The second condition is
illustrated in Figure 4; in this case, the condition is trivial, because the inter-
intersection of any two basis elements is itself a basis element (or empty). As we
shall see later, the basis (&' generates the same topology on the plane as the
basis (B given in the preceding example.
Example 3. If Xis any set, the collection of ail one-point subsets of X is
a basis for the discrete topology on X.
Let us check now that the collection 3 generated by the basis (B is, in fact,
a topology on X. If U is the empty set, it satisfies the defining condition of
openness vacuously. Likewise, X is in 3, since for each x e X there is some
basis element B containing x and contained in X. Now let us take an indexed
family [U.],^ of elements of 3 and show that
U = U.« U.
^longs to 3. Given x e U, there is an index <x such that x e c/a. Since U,
■sopen, there is a basis element B such that x e B cz Ua. Then x e B and
B c V, so that U is open, by definition.
Now let us take two elements U, and C/2 of 3 and show that [/, n V2
such"* t0 3' G'Ven X £ U' ° Ul' choose a basis element *i containing x
^ at B, c; t/,; choose also a basis element Bz containing x such that
ment fi2 s^ond condition for a basis enables us to choose a basis ele-
and B 3 C°"taininS x such that ^3 <= Bl n 52. See Figure 5. Then x e B3
FinaH ° Ul> S° Ux ° Ul belongs t0 3> by definition.
of eleme ^ WtSh°W by inducti°n that any finite intersection U, n • • • O Un
n-1 a^S 'S '" 3- This fact is trivial for » = I; we suppose it true for
' and Prove it for „. Now
_,) n
*v and Continuous Functions Chap, 2
Figure 5
By hypothesis, U, n • • • n (/„_, belongs to 3; by the result just proved,
the intersection of Ul n • • ■ n £/„-, and i/» also belongs to 3.
Thus we have checked that the collection of open sets generated by a
basis (B is, in fact, a topology.
Another way of describing the topology generated by a basis is given in
the following lemma:
Lemma 2.1. Let X be a set; let (B be a basis for a topology 3 on X. Then 3
equals the collection of all unions of elements of ($>,
Proof. Given a collection of elements of (B, they are also elements of 3.
Because 3 is a topology, their union is in 3. Conversely, given U e 3, choose
for each x e U an element Bx of <B such that jc e Bx c U. Then U = LUf B*>
so £/ equals a union of elements of (B. □
When topologies are given by bases, it is useful to have a criterion in
terms of the bases for determining whether one topology is finer than another.
One such criterion is the following:
Lemma 2.2. Let (B and <&' be bases for the topologies 3 and 3', respectively,
on X. Then the following are equivalent:
A) 3' is finer than 3.
B) For each x e X and each basis element B e <$> containing x, there
is a basis element B' e ffl' such that x £ B' c B.
Some students find this condition hard to remember. "Which way does
tr™ S thCy aSk- II ^ be easier t0 remember if you recall the
analogy between a topological space and a truckload full of gravel. Think
Basis for a Topology 81
§2-2
c u nebbles as the basis elements of the topology; after the pebbles are
t d to dust the dust particles are the basis elements of the new topology,
fjnew topology is finer than the old one, and each dust particle was con-
conned inside a pebble, as the criterion states.
Proof of the lemma. B) => A). Given an element U of 3, we wish to show
V £ 3'. Let x e U. Since (B generates 3, there is an element B e (B
h that x e B aU. Condition B) tells us there exists an element B' e (&'
S"ch that xe B' c B. Then x e B' c U, so U e 3', by definition.
S" (i) => B). We are given x e X and B e (B, with xe.fi. Now 5 belongs
to 3 by definition and 3 c 3' by condition A); therefore, B e 3'. Since
3'is generated by «', there is an element B' e «' such that x e B' cz B. □
Example 4. One can now see that the collection (B of all circular regions
in the plane generates the same topology as the collection (B' of all rectangular
regions; Figure 6 illustrates the proof. We shall treat this example more formally
when we study metric spaces.
Figure 6
We have described in two different ways how to go from a basis to the
topology it generates. Sometimes we need to go in the reverse direction,
from a topology to a basis generating it. Here is one way of obtaining a
basis for a given topology; we shall use it frequently.
Lemma 2.3. Let X be a topologkal space. Suppose that e is a collection of
open sets ofX such that for each open set VofXand each x in U, there is
an element Cofe such that x £ C cz U. Then Q is a basis for the topology
oj X.
e P™f- We must show that 6 is a basis. The first condition for a basis is
asy. Given x b X, since X is itself an open set there is by hypothesis an
x v . ® SUCn that x e C cz X. To check the second condition, let
are °n8 to C.' n C*' where c' and C2 are elements of 6. Since C, and C2
C in^"* S° 1S C' ° C*" Therefore, there exists by hypothesis an element
j m l. such that x e C3 cz C, n C2.
of X Tfe den°te thC toPol°gy on x generated by 6; let 3 be the topology
• me preceding lemma shows that 3' is finer than 3. Conversely, since
82 Topologkal Spaces and Continuous Functions Vbn^x
each element of 6 is an element of 3, so are arbitrary unions of elements
of e. Therefore, by Lemma 2.1, 3' c 3. We conclude that 3' = 3. Q
There are two interesting topologies on the real line R which can be de-
described in terms of bases:
Definition. If ® is the collection of all open intervals in the real line
(a,b) = {x\a <x<b],
the topology generated by (B is called the standard topology on the real line.
If (B' is the collection of all half-open intervals of the form
[a, b) = {x | a < x < b],
where a < b, the topology generated by (&' is called the lower limit topology
on R. When R is given the lower limit topology, we denote it by R,.
It is easy to see that both (B and (B' are bases; the intersection of two basis
elements is either another basis element or is empty.
Whenever we consider R, we shall suppose that it is given the standard
topology unless we specifically state otherwise. The lower limit topology
will prove very useful to us in constructing counterexamples. The relation
between these two topologies is the following:
Lemma 2.4. The lower limit topology 3' on R is strictly finer than the standard
topology 3.
Proof, Given a basis element (a, b) for 3, and a point x of (a, b), the basis
element [x, b) for 3' contains x and lies in (a, b). Therefore, 3' is finer than
3. On the other hand, given a basis element [x, d) for 3', there is no open in-
interval (a, b) satisfying the condition
x <= (a, b) <= [x, d);
therefore, 3 is not finer than 3'. fj
A question may occur to you at this point. Since the topology generated
by a basis (B may be described as the collection of arbitrary unions of ele-
elements of (B, what happens if you start with a given collection of sets and
take finite intersections of them as well as arbitrary unions? This question
leads to the notion of a subbasis for a topology.
Definition. A subbasis S for a topology on A' is a collection of subsets of
X whose union equals X. The topology generated by the subbasis S is defined
to be the collection 3 of all unions of finite intersections of elements of §•
We must of course check that a is a topology. For this purpose it will
suffice to show that the collection (B of all finite intersections of elements of
Basis for a Topology 83
§2-2
• hasis for then the collection 3 of all unions of elements of (B is a topol-
bv Lemma 2.1. Given x e X, it belongs to an element of g and hence
08I'n element of <&; this is the first condition for a basis. To check the second
condition, let
Bi=s,n ■■■ nsm and B2 = S\ n • ■ ■ n 5;
be two elements of®. Their intersection
B1nB1 = (S1n ■■■ nSjn(S\n •■■ n SI)
is also a finite intersection of elements of §,, so it belongs to (B.
Subbases will prove useful to us only occasionally, so we shall not study
them in detail.
Exercises
1. Let X be a topological space; let A be a subset of X. Suppose that for each
x e A there is an open set U containing x such that U cr A. Show that A is
open in X.
2. Consider the nine topologies on the set X — {a, b, c) indicated in Example 1
of §2-1. Compare them; that is, for each pair of topologies, determine whether
they are comparable, and if so which is the finer.
3. Show that the collection 3C given in Example 4 of §2-1 is a topology on the set
X. Is the collection
3» = {U\ X — U is infinite or empty or all of X]
a topology on XI
4. (a) If {3.} is a collection of topologies on X, show that |"K. is a topology on
X. Is (JO. a topology on XI
(b) Let {3a} be a collection of topologies on X. Show that there is a unique
smallest topology on ^containing all the collections 3a, and a unique largest
topology contained in all 3a.
to If *= {a, 6, c}, let
3, = [0, X, {a}, {a, b}} and 32 = {0, X, {a}, {b, c}}.
Find the smallest topology containing 3, and 32, and the largest topology
contained in 3j and 32.
• Show that if a is a basis for a topology on X, then the topology generated by
equals the intersection of all topologies on X that contain a. Prove the same
" a is a subbasis.
• Consider the following collections of subsets of R:
®i={(a6)|6}
^Zil^ers^b]lx\a<x<,b},
«« ~ «, u {B - K\B e «,}, where K = {l/«|« e Z+},
3-{(«,+oo)|ae/f}, h(+) {|}
84 Topological Spaces and Continuous Functions Chap.j
(B6 = {(-oo, a)\a e R), where (—00, a) -» {x|x < a},
(B7 = {B|/f- Sis finite}.
(a) Show that each ffi, is a basis for a topology on R.
(b) Compare these seven topologies with one another.
(c) Show that (B5 u (B6 is a subbasis that generates the same topology as ffi
7. (a) Apply Lemma 2.3 to show that the countable collection
<S>\ = [(a, b)\a < b, a and b rational}
is a basis that generates the standard topology on R.
(b) Show that the collection
(B^ = {[o; b)\a < b, a and 6 rational]
is a basis that generates a topology different from the lower limit topology
on R.
2-3 The Order Topology
If X is a simply ordered set, there is a standard topology for X, defined
using the order relation. It is called the order topology; in this section we
consider it and study some of its properties.
Suppose that X is a set having a simple order relation <. Given elements
a and b of X such that a < b, there are four subsets of X that are called the
intervals determined by a and b. They are the following:
(a, b) = {x I a < x < b],
(a,b) = {x\a<x<b},
[a,b) = {x\a<^x<b},
[a,b) = {x\a<x<b}.
The notation used here is familar to you already in the case where Xis the
real line, but these are intervals in an arbitrary ordered set. A set of the first
type is called an open intervai in X, a set of the last type is called a dosed
intervai in X, and sets of the second and third types are called half-open
intervals. The use of the term "open" in this connection suggests that open
intervals in X should turn out to be open sets when we put a topology on
X. And so they will.
Definition. Let AT be a set with a simple order relation assume X has more
than one element. Let (B be the collection of all sets of the following types:
A) All open intervals (a, b) in X.
B) All intervals of the form [o0, b), where aa is the smallest element (if
any) of X.
C) All intervals of the form (o, ba\, where b0 is the largest element (if
\ _ C tr
J
any) of X.
§2-3
topology-
The Order Topology 85
(& is a basis for a topology on X, which is called the order
ogy
If X has no smallest element, there are no sets of type B), and if X has
n0 largest element, there are no sets of type C).
One has to check that (B satisfies the requirements for a basis. First,
te that every element x of A" lies in at least one element of (B: The smallest
element (if any) lies in all sets of type B), the largest element (if any) lies in
e.. sets of type C), and every other element lies in a set of type A). Second,
te that the intersection of any two sets of the preceding types is again a
set of one of these types, or is empty. Several cases need to be checked; we
leave it to you.
Example 1. The standard topology on R, as defined in the preceding
section, is just the order topology derived from the usual order on R.
Example 2. Consider the set R x Rin the dictionary order; we shall denote
the general element of R x R by jc x y, to avoid difficulty with notation.
The set R x R has neither a largest nor a smallest element, so the order topology
on R x R has as basis the collection of all open intervals of the form
(a x b,c x d) for a < c, and for a = c and b < d. These two types of intervals
are indicated in Figure 7. The subcollection consisting of only intervals of the
second type is also a basis for the order topology on R x R, as you can check.
aXb
cXd
x „
Figure 7
3' V* P0Sitive inte§ers Z+ form an o^ered set with a smallest
° Ter t°P°1°?y °" Z+ * the diSCrete topolo8y' for ev^ °ne-
= , I' the one-Point set M - (« - 1. « + 1) is a basis
" = 1. the one-point set {1} = [1, 2) is a basis element.
I1!? Se! X=^>V x z+ jI> *e dictionary order is another
S6t With a smallest element- Denoting 1 x n by a
m we can represent X by
* Topological Spaces and Continuous Functions Chap. 2
The order topology on * is not the discrete topology. Most one-point sets are
w,t there is an exception-the one-point set {6,}. Any open set containing
T^cSS^Sl^ ab0Ut *« (by definiti°n)' and any baSiS 6lement
containing 6, contains points of the a, sequence.
Definition If Jf is an ordered set, and a is an element of X, there are f0Ur
subset! of X that are called the rays determined by a. They are the following:
(—oo, ci\ = i^n-*" ~*~~~ Qj9
[a, + oo) = {*|*>«},
(-oo,fl] = {*|*<fl}.
Sets of the first two types are called open rays, and sets of the last two types
are called ciosed rays.
The use of the term "open" suggests that open rays in JVare open sets in
the order topology. And so they are. Consider, for example, the ray (a, +00).
If X has a largest element b0, then (a, + 0°) equals the basis element (a, b0].
If X has no largest element, then (a, +00) equals the union of all basis
elements of the form (a, x), for x > a. In either case, (a, +00) is open.
A similar argument applies to the ray ( — 00, a).
The open rays, in fact, form a subbasis for the order topology on X;
we leave this for you to check.
2-4 The Product Topology on X x Y
If X and Y are topological spaces, there is a standard way of defining
a topology on the cartesian product X X Y. We consider this topology now
and study some of its properties.
Definition. Let X and Y be topological spaces. The product topology on
X x Y is the topology having as basis the collection (B of all sets of the form
[ U X V, where l/isan open subset of X and Kis an open subset of Y.
Ck ?at ® iS a basis- The first condition is trivial, since XxY
r nt' The SeCond condition is almost as easy, since the
aDy tW° bai d th
r
and th I fl X Kl) ° {Ul X Vz) = iUi n ^ X
Note that the collection ffi is not a topology on^x F. The union of the
The Product Topology on X X Y
87
§2-4
two rectangles pictured in Figure 8, for instance, is not a product of two sets,
so it cannot belong to (B; but it is open in X X Y.
Each time we introduce a new concept, we shall try to relate it to the
concepts that have been previously introduced. In the present case, we ask:
What can one say if the topologies on X and Y are given by bases? The
answer is as follows:
Theorem 4.1. Jf(& is a basis for the topology of X, and Q is a basis for the
topology of Y, then the collection
20 = {BxC|Bs(B and C e 6}
is a basis for the topology ofXxY.
Proof. We apply Lemma 2.3. Given an open set W of X X Y and a point
x X y of W, by definition of the product topology there is a basis element
V X Ksuch that xy.yeUy.VcW. Because <S and e are bases for X and
y, respectively, we can choose an element B of (B such that x e B c U, and
an element C of e such that y e C c V. Then xxysByCcfV. Thus
the collection £ meets the criterion of Lemma 2.3, so 30 is a basis for
XXY. □
Example 1. We have a standard topology on R: the order topology.
n>e product of this topology with itself is called the standard topology on
h? h R1' U haS as baSis the collection of a11 products of open sets of R,
"t the theorem just proved tells us that the much smaller coliection of all
Products (a, b) x (c, d) of open intervais in R will also serve as a basis for the
pci ogy of Ri. Each such set can be pictured as the interior of a rectangie in
2 of §22 thC Standard toPoi°8y on R2 is i^t the one we considered in Exampie
Topical Spaces and Continuous Functions Chap. 2
the product topology in terms of a sub-
, , ,Kvy_,Ibe defined by the equation
efinition. Let «,. * * ■*
Definition
let *2: * X
7-> 7 be defined by the equation
The maps «, and », are caUed the projections of X X 7 onto its first and
second factors, respectively.
We use the word "onto" because «, and *2 are surjective (unless one
of Te spaces X or Y happens to be empty in wh.ch case X X Y „ empty
^of VS - J^U is Precise, the set , x ,
which is open in X X 7. Similarly, if K is open in Y, then
«2-'(K) = X X F,
which is also open in X X Y. The intersection of these two sets is the set
t/ x V, as indicated in Figure 9. This fact leads to the following theorem:
Theorem 4.2. The collection
§ = {a-\\J)| U open in X} U {nl\V) \ V open in Y}
is a subbasisfor the product topology on X X Y.
(V)
u
Figure 9
The Subspace Topology 89
of dements of S, since
Therefore, V X V belongs to 5', so that 3 c 5' as well. Q
2-5 JAe Subspace Topology
Definition. Let X be a topological space with topology 5. If Y is a subset
of X, the collection
is a topology on 7, called the subspace topology. With this topology, Y is
called a subspace of X; its open sets consist of all intersections of open sets
of X with Y.
It is easy to see that 3y is a topology. It contains 0 and Y because
0 =Y n 0 and Y = Y n X,
where 0 and Xare elements of 3. The fact that it is closed under finite in-
intersections and arbitrary unions follows from the equations
(£/, n r) n • • • n (£/, n 7) = (£/, n • • • n £/„) n r,
U.« (tf. n 7) = (U.« tf.) n 7.
Lemma 5.1. If(& is a basis for the topology ofX, then the collection
(BY = {Bn Y|B G (&}
^ a basis for the subspace topology on Y.
Proof Given C/ open in X and given y e £/ O 7, we can choose an ele-
element 2? of ffi such that j, G B czU. Then ysBnYczUnY. It follows
Lemma 2.3 that (By is a basis for the subspace topology on 7. □
^knlT n8 W'th a SPaCe ^ and a subsPace Y> one needs t0 be careful
of y Tne US6S thC term "open set-" Does one mean an element of the topology
If y isran e'ement of the topology of XI We make the following definition:
t0 Y) if -?^aCe °f X' WC Say that a Set U ls open in Y (°r °Pen relative
• wbsrt ofy°uf t0 thC t0P°l08y of Y> this imPlies in particular that it is
There is ^ that V 'S °pen in Xlt lt belon8s t0 the topology of X.
in X; a sPecial situation in which every set open in 7 is also open
90 Topological Spaces and Continuous Functions Chap. 2
Lemma 5.2. Let Y be a subspace ofX. IfV is open in Y and Y is open /„
X, then U is open in X.
Proof. Since U is open in Y, U = Y O V for some set V open in X.
Since Kand Fare both open in X, so is Y O K □
Example i. Consider the subset Y= [0, i] of the reai iine R, in the
subspace topology. The subspace topology has as basis all sets of the form
(a, b) n Y, where (a, b) is an open interval in R. Such a set is of one of the fol-
following types:
(a, b) if a and b are in Y,
[0, b) if only 6 is in Y,
(a,b)n Y= (flJ] ifonlyflisin Y,
Y or 0 if neither a nor 6 is in y.
By definition, each of these sets is open in Y. But sets of the second and third
types are not open in the larger space R.
Note that sets of the first three types are the basis elements for the order
topology on Y. Thus we see that in the case of ihe set Y = [0, I], its subspace
topology (as a subspace of R) and its order topology are the same.
Lest you think this remark utterly trivial, here is a subset of R for which the
two topologies are not the same:
Example 2. Let Ybe the subset [0, i) u B) of R. in the subspace topology
on Y the one-point set B} is open, because it is the intersection of the open
set (J, §) with Y. But in the order topology on Y, the set B} is not open. Any
basis element for the order topology on Y that contains 2 is of the form
(a- I .v 6 Y and a < x < 2}
for some a e Y; such a set necessarily contains points of Y less than 2.
The anomaly illustrated in Example 2 does not occur if Fis an interval
or a ray in the ordered set X; one has the following theorem, whose proof
is left to the exercises:
Theorem 5.3. If X is an ordered set in the order topology and if Y is an
interval or a ray in X, then the subspace topology and the order topology on
Y are the same.
To avoid any ambiguity, let us agree that whenever we consider a sub-
subset of an ordered set X, we shall assume that it is given the subspace topology
unless we specifically state otherwise.
Fortunately, there is no such ambiguity involving subspaces when one
is dealing with the product topology:
Theorem 5.4. If A is a subspace ofX and B is a subspace ofY, then the
lZtZ AXB " "
The Subspace Topology 91
§2-5
f The set UX Vis the general basis element for X X Y, where U
Pr°°f' JandVisopenin Y Therefore, A/ X V) n M X S) is the general
pen m tl o i X « Now
£ dement for the subspace topology on A X B. Now
n A and V O B are the general open sets for the subspace topologies
on A and B, respectively, the set (U O A) X {V O B) is the general basis
°," ent for the product topology on A X B.
The conclusion we draw is that the bases for the subspace topology on
A x B and for the product topology on A X B are the same. Hence the
topologies are the same. G
Exercises
1 Show that if Y is a subspace of X, and A is a subset of Y, then the subspace
topology on A as a subspace of Y is the same as the subspace topology on A
as a subspace of X.
2. If 3 and 3'are topologies on A" and 3' is strictly finer than 3, what can you say
about the corresponding subspace topologies on the subset Y Of XI
3. Consider the set Y = [— 1, 1] as a subspace of R. Which Of the following sets
are open in Yl Which are open in /??
A = {x\l<\x\<\).
= {x\i<\x\<\},
1},
E = {x\0 <\x\ < 1 and l/x $ Z+).
4. A map/: X —» y is said to be an open map if for every open set U of X, the set
/(t/) is open in K. show that n,: X x Y—* Xanditi : X X Y—* Y are open
maps.
• Let A" and A" denote a single set in the topologies 5 and 5', respectively; let
r and y denote a single set in the topologies 01 and 01', respectively.
W Snow that if 3' => 5 and 01' => 01, then the product topology on X' X Y'
'I er than the Product topology on X x Y.
(I xvt* the COnverse of (a> h°ld? Justify your answer,
w What can you say if 3' => 3 and 01' => 01 and 01' ^ 01?
Show that the collection of open rays in an ordered set A is a subbasis fc5r"
(b) U t0P°'°gy on ,4.
in ty- M a" °rdered set in the order topology. Let Y be an interval or ray
then' . (~°°' "> and (°. +°°) be open rays in X. Show that if a e I7,
' the nrH f the ^ .(~°°' O) n Y and (fl' +OO) n Y is an °Pen ray of
of y red *** Y> whi'e if a £ r, each of these sets is either empty or all
92 Topological Spaces and Continuous Functions Ch»p. 2
(c) Conclude that if Y is an interval or ray in X, then the order topology tnd
the subspace topology on Y are the same.
7. Show that the countable collection
{(a, b) x\c,d)\a <b and c < d, and a, b, c, dare rational}
is a basis for R1.
8. Show that the dictionary order topology on the set R x R is the same as the
product topology Rd x R, where Rd denotes the set R in the discrete topology.
Compare this topology with the standard topology on R2.
9. Let R denote the reals in their usual topology; let R, denote the reals in the lower
limit topology. If/, is astraight line in the plane, describe the topology/, inherits
as a subspace of R, x R and as a subspace of Rt x R,. In each case it is a
familiar topology.
10. Let /denote the subspace [0, 1] of R. Compare the product topology on / x /,
the dictionary order topology on / x /, and the topology Id x /, where /,,
denotes / in the discrete topology.
2-6 Closed Sets and Limit Points
Now that we have a few examples at hand, we can introduce some of
the basic concepts associated with topological spaces. In this section we
treat the notions of closed set, closure of a set, and limit point. These lead
naturally to consideration of a certain axiom for topological spaces called
the Hausdorff axiom.
Closed Sets
A subset A of a topological space X is said to be closed if the set X — A
is open.
~ Example 1. The subset [a, b] of R is closed because its complement
! R — [", b] = (-oo, a) U (b, +oo),
is open. Similarly, [a, +oo) is closed, because its complement (-oo, a) is open.
These facts justify our use of the terms "closed interval" and "closed ray."
The subset [a, b) of R is neither open nor closed.
Example Z In the plane Ri, the set . ' .
"■''-• [xXy\x^.O and y^.0] ...... ... I - .
is closed, because its complement is the union of the two sets
(-oo.O) XR and /Jx(-oo.O),
each of which is a product of open sets of R and is therefore open in &■
Closed Sets and Limit Points 93
S*6
Examples. In the discrete topology on the set X, every set is open; it
follows that every set is closed as well.
Example 4. Consider the following subset of the real line:
Y = [0, 1] U B, 3),
•„ thesubspace topology. In this space, the set [0, 1] is open, since it is the inter-
tv of the opeTset (-J, |) of R with Y. Similarly, B, 3) is open as a subset
Tv it is even open as a subset of R. Since [0, 1] and B, 3) are complements in
K of each other, we conclude that both [0, 1] and B, 3) are closed as subsets
oiY
These examples suggest that an answer to the mathematician's riddle,
"How is a set different from a door?" should be, "A door must be either
open or closed, and cannot be both, while a set can be open, or closed, or
both, or neither!"
The collection of closed subsets of a space X has properties similar to
those satisfied by the collection of open subsets of X:
Theorem 6.1. Let X be a topological space. Then the following conditions
hold:
A) 0 andX are closed.
B) Arbitrary intersections of closed sets are closed.
C) Finite unions of closed sets are closed.
Proof. A) 0 and Xare closed, because they are the complements of the
open sets Jfand 0, respectively.
B) Given a collection of closed sets {Ax}xeJ, we apply DeMorgan's law,
X -n.« A. = {J^,(X -A,).
Since the sets X — Ax are open by definition, the right side of this equation
represents an arbitrary union of open sets, and is thus open. Therefore,
I 1-4, is closed.
C) Similarly, if A, is closed for i = 1 n, consider the equation
aJ ^'.l" the "ght side of this equation is a finite intersection of open sets
a 1S therefore open. Hence \jAt is closed. Q
»PacTbTd-°-f USm8 0Pe" SetS' °ne C0Uld inst as we" sPecify a topology on a
threepronT8 afC°lleCti°n °f SetS (t0 be called "closed sets") satisfying the
Pkments Ofi th'S theorem-One could then define open sets as the com-
Particularad f ^^ a"d proceed just as before- This procedure has no
Prefer tn n V " ge °ver the one We have adopted, and most mathematicians
«3 use open sets to define topologies. .
Topological Spaces and Continuous Functions Chap. 2
Now when dealing with subspaces, one needs to be careful in using the
term "closed set." If Y is a subspace of X, we say that a set A is closed in y
if A is a subset of Fand if A is closed in the subspace topology of y (that is,
if Y — A is open in Y). We have the following theorem:
Theorem 6.2. Let Y be a subspace ofX. Then a set A is closed in Y if and
only if it equals the intersection of a closed set ofX with Y.
Proof. Assume that A = C n Y, where C is closed in X. (See Figure 10.)
Then X - C is open in X, so that (X - C) n Y is open in Y, by definition
of the subspace topology. But (X - C) n r = Y - A. Hence y - a is
open in Y, so that ,4 is closed in Y. Conversely, assume that A is closed in
y. (See Figure 11.) Then Y — A is open in Y, so that by definition it equals
Figure 10
Figure 11
the intersection of an open set U of X with Y. The set X — U is closed in
X, and A = Y r\ (X — U), so that A equals the intersection of a closed set
of X with 7, as desired. □
A set A that is closed in the subspace Y may or may not be closed in the
larger space X. As was the case with open sets, there is a criterion for A to
be closed in X; we leave the proof to you :
Theorem 6.3. Let Y be a subspace ofX. If A is closed in Y and Y is closed
in X, then A is closed in X.
Closure and Interior of a Set
Given a subset A of a topological space X, the interior of A is defined as
the union of all open sets contained in A, and the closure of A is defined as
the intersection of all closed sets containing A.
Closed Sets and Limit Points 95
§2-6
■ fPrior of A is denoted by Int A or by A, and the_ closure of'A is
ThVh CM or by A. Obviously A is an open set and A is a closed set;
denoted by
furthermore, A cz A cz A.
■ nen A = A' while if A is closed, /I = A.
UAwl shall'not make much use of the interior of a set, but the closure of
will be quite important.
"vflien dealing w,th a topological space X and a subspace Y, one needs
erase care in taking closures of sets. If A is a subset of Y, the closure
'f Tin Kand the closure of A in X will in general be different. In such a
° ation, we reserve the notation A to stand for the closure of A in X. The
T'ure of /I in Yean be expressed in terms of A, as the following theorem
shows:
Theorem 6.4. Let Y be a subspace ofX; let A. be a subset ofY; let A denote
the closure of A in X. Then the closure of A in Y equals A n Y.
Proof. Let B denote the closure of A in Y. The set A is closed in X, so
/n Yis closed in Y by Theorem 6.2. Since A n Y contains A, and since
by definition B equals the intersection of all closed subsets of Y containing
A, we must have B <= {A n Y).
On the other hand, we know that B is closed in Y. Hence by Theorem
6.2, B = C n Y for some set C closed in X. Then C is a closed set of X
containing/!; because A is the intersection of all such closed sets, we conclude
that A c C. Then (A D Y) cz (C n Y) = B. □
The definition of the closure of a set does not give us a convenient way
for actually finding the closure of specific sets, since the collection of all
closed sets in X, like the collection of all open sets, is usually much too big to
work with. Another way of describing the closure of a set, useful because it
involves only a basis for the topology of X, is given in the following theorem,
irst let us introduce some convenient terminology. We shall say that
M intersects a set B if the intersection A n B is not empty.
(a) 7ThZem 6'5i Let Abea S"bset °fthe t0P°l°Sical sPace x-
Xe ^ and onty if every open set U containing x intersects A.
e topol°sy ofX is given by a basis, then x e A if and only
element B containing x intersects A.
tetrafder *e !tatement in (a)-II is a statement of the form PoQ.
*el°gicall °™ CaCh imPlication t0 its contrapositive, thereby obtaining
following: y eqmvalent statement (not P) o (not 0. Written out, it is the
X at Jd ^s^^ , ■ ■
intersect ,* * CX1StS an °pen Set ^ containing x that does not
96 Topological Spaces and Continuous Functions Chap ^
In this form our theorem is easy to prove. If x is not in A, the set U = X - £
is an open set containing x that does not intersect A, as desired. Conversely
if there exists an open set U containing x which does not intersect A, then
X — U is a closed set containing A. By definition of the closure A, the set
X — U must contain A; therefore, x cannot be in A.
Statement (b) follows readily. If every open set containing x intersects
A, so does every basis element B containing x, because B is an open set.
Conversely, if every basis element containing x intersects A, so does every
open set U containing x, because U contains a basis element that contains
x. □
Mathematicians often use some special terminology here. They shorten
the statement "U is an open set containing x" to the phrase
"U is a neighborhood of x."
Using this terminology, one can write the first half of the preceding theorem
as follows:
If A is a subset of the topological space X, then x e A if and only
if every neighborhood of x intersects A.
Example 5. Let X be the real line R. If A = @, 1], then A = [0,1], for
every neighborhood of 0 intersects A, while every point outside [0, 1] has a
neighborhood disjoint from A. Similar arguments apply to the following sub-
subsets of X:
If B = {l/n\n e Z+}, then i = [0|u8, If C = {0} U (I, 2), then C =
{0} u [1, 2]. If Q is the set of rational numbers, then Q = R. If Z+ is the set
of positive integers, then Z+ = Z+. If R+ is the set of positive reals, then the
closure of R+ is the set R+ u {0}. (This is the reason we introduced the notation
R+ for the set R+ u {0}, back in §1-2.)
Example 6. Consider the subspace Y = @, 1] of the real line R. The set
A = @, £) is a subset of Y; its closure in R is the set [0, £], and its closure in
Y is the set [0, £] n Y = @, £].
Some mathematicians use the term "neighborhood" differently. They
say that A is a neighborhood of x if A merely contains an open set containing
x. We shall not follow this practice.
Limit Points
There is yet another way of describing the closure of a set, a way that
involves the important concept of limit point, which we consider now.
UA 1S a subset of the topological space X and if x is a point of X, we
say that x is a limit point (or "cluster point," or "point of accumulation")
. or a it every neighborhood of x intersects A in some point other than x itself-
Closed Sets and Limit Points 97
§2-6
*•* mntlv a: is a limit point of A if it belongs to the closure of A - {*}•
Said dinere y, ^ ^ ^ nQt_ fof thjs definition it does not matter,
•rjiepoint-t m«v
mple 7 Consider the real line R. If A = @, 1], then the point 0 is a
•t oint of A and so is the point |. In fact, every point of the interval [0, 1]
hm' limit point of A, but no other point of R is a limit point of A.
'S If B = {l/"l" e Z+J' then ° is the only limit p0'nt °f B' Every °ther P°'nt
TR has a neighborhood that either does not intersect B at all, or it intersects
Ronly in the point x itself. If C = {0} u A, 2), then the limit points of C are
the points of the interval [1,2]. If Q is the set of rational numbers, every point
f R is a limit point of Q. If Z+ is the set of positive integers, no point of R is
a limit point of Z+. If R+ is the set of positive reals, then every point of {0} u R+
is a limit point of R+-
Comparison of Examples 5 and 7 suggests a relationship between the
closure of a set and the limit points of a set. That relationship is given in the
following theorem:
Theorem 6.6. Let A. be a subset of the topological space X; let A' be the
set of all limit points of A. Then
A = A U A'.
Proof. If x is in A', every neighborhood of x intersects A (in a point
different from x). Therefore, by Theorem 6.5, x belongs to A. Hence A' c A.
Since by definition A <= A, it follows that A U A' cz A.
To demonstrate the reverse inclusion, we let x be a point of /fand show
that* e A u A'. If x happens to lie in A, it is trivial that x e A U A';
suppose that x does not lie in A. Since x e A, we know that every neighbor-
neighborhood U of x intersects A; because x $ A, the set U must intersect A in a
Point different from x. Then x e /!', so that x <= A\J A',zs desired. □
5,7- A subset Qj- a (opoIogical e is dosed y and . .r i(
Wins all its limit points.
'-T1* SCt A is closed if and on'y if -4 = ^T, and the latter holds if
if A' c A. Q
paces
Une aTdn^06 W'th °Pen a"d C'°Sed SetS and Hmit points in the real
topo'ogical C °an be misleadin8 when one considers more general
always has fPa°es:.ForexamPle. «n the order topology on R the interval (a, b}
etal. as a llmit PoJnt. But this is not true in order topologies in gen-
another example, consider the fact that in R or R\ each one-point
98 Topological Spaces and Continuous Functions
set {x0} is closed. This fact is easily proved; every point different fro
a neighborhood not intersecting {.v0}, so that [x0] is its own cloT *'
f i f bit tplil *1*
has a
a neighborhood not intersecting {.v0}, so that [x0] is its own cloT *'
But this fact is not true for arbitrary topological spaces. Consider on*1*'
the very first examples we had of a topological space; the tl ^f
three-point set [a, b, c} indicated in Figure 12. In
set b is not closed, for its complement is not open.
Figure 12
Topologies like this one are not really very interesting to mathematicians
for they seldom occur in other branches of mathematics. And the theorems
that one can prove about topological spaces are rather limited if such ex-
examples are allowed. Therefore, one often imposes an additional condition
that will rule out examples like this one, bringing the class of spaces under
consideration closer to those to which one's geometric intuition applies.
The condition was suggested by the mathematician Felix Hausdorff, so math-
mathematicians have come to call it by his name.
Definition. A topological space X is called a Hausdorff space if for each
pair xu x2 of distinct points of X, there exist neighborhoods Ut and U2 of
xt and x2, respectively, that are disjoint.
Theorem 6.8. Every finite point set in a Hausdorff space X is closed.
Proof. It suffices to show that every one-point set {*„} is closed. If x is
a point of X different from x0, then x and x0 have disjoint neighborhoods
V and V, respectively. Since U does not intersect {*„}, the point x cannot
belong to the closure of the set {x0}. As a result, the closure of the set [xa]
is {*„} itself, so that it is closed. □
Theorem 6.9. Let X be a Hausdorff space; let A. be a subset of X. Then
the point x is a limit point of A. if and only if every neighborhood ofx contains
infinitely many points of A.
Proof. If every neighborhood of x intersects A in infinitely many points,
it certainly intersects A in some point other than x itself, so that x is a limit
point of A.
Conversely, suppose that x is a limit point of A, and suppose some neig '
borhood U of x intersects A in only finitely many points. Then U also inter-
intersects A - {x} in finitely many points; let {x, xm) be the points o
Closed Sets and Limit Points 99
M)ThesetX-(x1,..>xm]isanopensetofX,sincethefinite
--W- lSed;then
n(X_{xi,...,Xm])
intersects the set A - [*J not at all. This contra-
UOV--W- }iscl0Sed;then
pointsetf*,,...> Un(X_
T. Hausdorff condition is stronger than is needed to prove Theorems
T H ^9 The proofs would still hold if one assumed only the follow.ng
6^er condition, which is usually called the T, axiom:
Given two distinct points a and b of X, each has a ne.ghborhood
not containing the other.
We shall give a few exercises involving this axiom; apart from that, we shall
not use the T, axiom in this book.
In order to prove many of the interesting theorems of topology one needs
the Hausdorff condition anyhow. Furthermore, most of the spaces that are
important to mathematicians are Hausdorff spaces. The following theorem,
whose proof is left to the exercises, gives some substance to the latter remark.
Theorem 6.10. Every simply ordered set is a Hausdorff space in the order
topology. The product of two Hausdorff spaces is a Hausdorff space. A sub-
space of a Hausdorff space is a Hausdorff space.
For this reason the Hausdorff condition is generally considered to be a
very mild extra condition to impose on a topological space. Indeed, in a
first course in topology some mathematicians go so far as to impose this
condition at the outset, refusing to consider spaces that are not Hausdorff
spaces. We shall not go this far, but we shall certainly assume the Hausdorff
condition whenever it is needed in a proof without having any qualms about
limiting seriously the range of applications of the results.
The Hausdorff condition is one of a number of extra conditions one can
impose on a topological space. Each time one imposes such a condition, one
ran prove stronger theorems, but one limits the class of spaces to which the
wems apply. Much of the research that has been done in topology since
^ Jgmnings has centered on the problem of finding conditions that will
satisfy"8 en°U8h t0 enab'e °ne t0 prove interesting theorems about spaces
the Jn c conditions' and yet not so strong that they limit severely
Je applications of the results.
The Hau'lrf" T^ * nUmber of such conditions in the next two chapters.
Editions ,C°ndltiOn 3nd thC Tl axiom are but two of a ejection of
•*ww Othe t0°ne another that arc called collectively the separation
Pac">ess andf C ltlons incl"de the countability axioms, and various com-
^ir Cmnectedness conditions. Some of these are quite stringent
. as you will see. • .
700 Topological Spaces and Continuous Functions Chap. 2
Exercises
1 Let 6 be a collection of subsets of the set X. Suppose that 0 and X are in e
' and that finite unions and arbitrary intersections of elements of e are in e'
Show that the collection
5 = {#- C\C e 6}
is a topology on X.
2. Show that if A is closed in Y and Y is closed in X, then /( is closed in X.
3. Show that if A is closed in X and S is closed in Y, then /( xfiis closed in
4. Show that if U is open in X and A is closed in X, then (/ - ^ is open in X,
and A — U is, closed in X.
5. Let X be an ordered set in the order topology. Show that (o, b) a. [a, b].
Under what conditions does equality hold?
6. Let A, B, and /4a denote subsets of a space X. Prove the following:
(a) A U B = /T_u S.
(b) \JA, => U^aJ give an example where equality fails.
7. Criticize the following "proof" that [JA, a \JA^: If {A*} is a collection of sets
in X and if a: e U^** then every neighborhood U of .v intersects IJ'4.- Thus
(/ must intersect some /<„, so that x must belong to the closure of some A..
Therefore, x e U^-
8. Let A, B, and Ax denote subsets of a space X; let A' denote the set of limit points
of A. Determine whether the following equations hold; if an equality fails,
determine whether one of the inclusions aorc holds.
(a) A n B = A_n B.
(b) fl^a = fVa-
(c) A - B = A - B.
(d) (A U B)' ■= A' \J B'.
(e) (A n BY = A' n B'.
9. Let /( <= X and S c Y. Show that in the space X x Y
A x B = A x B.
10. Show that every order topology is Hausdorff.
11. Show that the product of two Hausdorff spaces is Hausdorff.
12. Show that a subspace of a Hausdorff space is Hausdorff.
13. Show that X is Hausdorff if and only if the diagonal A = [x x x\x e X] is
closed in X x X.
14. (a) Show that the T, axiom is equivalent to the requirement that finite point
sets be closed.
(b) Given a set X, show that the finite complement topology 3/, defined in
example 3 of §2-1, satisfies the T, axiom and is contained in every Ti
topology on X. Does 3r satisfy the Hausdorff axiom ?
Continuous Functions 101
{2 ,.n topologies on R given in Exercise 6 of §2-2.
„ O*** «»f ^ c,osure of the set K - Vln\n e ZJ under each of these
{a) De'ermine
,opologi«-these topologies satisfy the Hausdorff axiom? The T, axiom?
(b) WhichJ ^ topo|ogies on R given in Exercise 7 of §2-2. Determine the
and B-
nder each of these topologies.
et A" = [0 1] x [0. I] in the dictionary order topology. Determine
"■Siosut'of the following subsets of X:
A = {(\ln) x0|« e Z+},
B = {(| -l/«) x (\)\n e Z+],
C = {x x0\0<x< 1},
D = {.v x j|0 < a: < 1},
£ = {£ x j|0 <j < I}.
U, if ^ c X, we define the boundary of A by the equation
Bd A = /I n (X- /().
(a) Show that Int A and Bd ^ are disjoint, and A = Jnt A u Bd ^.
(b) Show that BdA = 0 o A is both open and closed.
(c) Show that U is open ■£> Bd U =-■ 0 — U.
(d) If U is open, is it true that U = Int {0I Justify your answer.
19. Find the boundary and the interior of each of the following subsets of R2:
(t)A = {xXy\y = 0}
(b) B = {* x y\x > 0 and y ^ 0}
(c) C = ^uS
(d) /) = {x x j|a: is rational}
(e) £ = {a: x j|0<a:2 + j2 < 1}
(f) f = {x x j|a: 9i 0 and y < 1/^}
**" *u7?towski) Consider the collection of all subsets A of the topological space
X. The operations of closure A —» A and complementation /4 — X - /* are
wicuons from this collection to itself.
how that starting with a given set A, one can form no more than 14 distinct
(b) Fd applying these two operations successively.
md a subset A of R (in its usual topology) for which the maximum of 14
B obtained.
2-7 Continuous Functions
T1.^ C°ntinU0US function is basic to much of mathematics.
cont "S °n thC feal 'ine aPPear in the first Pages of a"y calculus
"uous functions in the plane and in space follow not far
102 Topological Spaces and Continuous Functions Chap^
behind More general kinds of continuous functions arise as one goes further
in mathematics. In this section, we shall formulate a definition of continuity
that will include all these as special cases; and we shall study various prcJ.
erties of continuous functions. Many of these properties are direct general!
zations of things you learned about continuous functions in calculus and
analysis.
Continuity of a Function
Let X and / be topological spaces. A function /: X—> Y is said to be
continuous if for each open subset V of /, the set f^\V) is an open subset
of A".
Recall that f'l(V) is the set of all points x of X for which f(x) e K; it
is empty if V does not intersect the image set f(X) off.
Continuity of a function depends not only upon the function/itself, but
also on the topologies specified for its domain and range. If we wish to
emphasize this fact, we can say that / is continuous relative to specific to-
topologies on X and /.
Let us note that if the topology of the range space Y is given by a basis
<B, then to prove continuity of/it suffices to show that the inverse image of
every basis element is open: The arbitrary open set V of Y can be written as a
union of basis elements
Then
r\y) = \j.e,r\Bj,
so that f'l(V) is open if each set /"'E«) is open.
If the topology on Y is given by a subbasis §, to prove continuity of/
it will even suffice to show that the inverse image of each subbasis element is
open: The arbitrary basis element B for Y can be written as a finite inter-
intersection S, n • ■ • n 5, of subbasis elements; it follows from the equation
/-1(B) = /-E,)n---n/-E.)
that the inverse image of every basis element is open.
Example 1. Let us consider a function like those studied in analysis, a
real-valued function of a real variable,"
f:R >R.
In analysis, one defines continuity of/via the "e-S definition," a bugaboo over
the years for every student of mathematics. As one would expect, the e-0
definition and ours are equivalent. To prove that our definition implies the
e-0 definition, for instance, we proceed as follows-
Given x0 in R, and given e > 0, the interval V - (/(*„) - e, /(*o) + ()
Continuous Functions 103
s 2-7
, of the range space R. Therefore, /-»(>0 is an open set in the
fc an open set of the £« » con(ains (he point ^ ■„ contains some bas.s
domainfrT> aboTvo We choose <5 to be the smaller of the two numbers
el^aLd6 i Ttenif |* - jc.1 < 3,the point x must be in (a, b), so that
^l^L^haUhl^^finltil^plSourdefinition is no harder; we leave
it to you We shall return to this example when we study metric spaces.
pv^ple 2 In calculus one considers the property of continuity for many
kinS^f functions. For«xample, one studies functions of the following types:
f. r ■> & (curves in the plane)
f- r —> R} (curves in space)
f. ri >. r (functions /(*, y) of two real variables)
f. ri —v R (functions f(x, y, z) of three real variables)
j. ri —j. ri (vector fields v(<, y) in the plane)
Each of them has a notion of continuity defined for it. Our general definition
of continuity includes all these as special cases; this fact will be a consequence
of general theorems we shall prove concerning continuous functions on product
spaces and on metric spaces.
Example 3. Let R denote the set of real numbers in its usual topology,
and let R, denote the same set in the lower limit topology. Let
f.R >R
be the identity function; /(*) = x for every real number x. Then/is not a
continuous function; the inverse image of the open set [a, b) of R, equals itself,
which is not open in R. On the other hand, the identity function
g : R, —> R
"continuous, because the inverse image of (a, b) is itself, which is open in R,.
In analysis, one studies several different but equivalent ways of formulat-
and L lhon of c°ntinuity. Some of these generalize to arbitrary spaces,
finition" 3I! C°nsldered in the theorems that follow. The familiar "e-S de-
denary ,J ™ "convergent sequence definition" do not generalize to arbi-
spaces; they will be treated when we study metric spaces in §2-10.
topolog'Cal sPaceS' let f: X — Y. Then the
U) * Is continuous.
Z Tl Tel A lX ^ f(A)
'" Y> '^ ^ f"
sh°w thanf(?^U?e that/ is c°ntinuous. Let A be a subset of X.
XZA, then fix) e f(A). Let V be a neighborhood of
104 Topological Spaces and Continuous Functions Chap.
f-HV) is an open set of X containing x; it must intersect
Thei KinterScts /(^) in the point /(,). Hence /W 6
6
35 midC) Let B be closed in Y and let /( = /"(«). We wish to prove
that i is closed in X; we show that A <= A._ By elementary set theory, We
have f(A) a B. Therefore, if x is a poin^of A,
) S B
so that x e/-E) = 1- Thus / e= /( as desired.
C) ==> A). Let K be an open set in Y. Let B = r — K; then 5 is closed
in Y. Since C) holds, /"'(S) <s closed in X. By elementary set theory,
f-i{V)= f~\Y- B) = f-\Y)- f->{B)= X - f~\B),
so that /"'(P) <s open, as desired. □
Homeomorphisms
Let A" and rbe topological spaces; let/: X —♦ F be a bijection. If both
the function/and the inverse function
/-':r—> X
are continuous, then/is called a homeomorphism.
The condition that /"' be continuous says that for each open set U of
X, the inverse image of U under the map f~x:Y—> A' is open in Y. But
the inverse image of U under the map /"' is the same as the image of Uunder
the map/ See Figure 13. So another way to define a homeomorphism is to
say that it is a bijective correspondence/: A'—* Y such that /(£/) is open if
and only if U is open.
Figure 13
This remark shows that a homeomorphism/: *— Y gives us a bijective
correspondence not only between X and Y but between the collections of
dSLh °; andr°f Y- As a result' a"y Pr°Pe'ty °f * ^at is entirely ex-
expressed m terms of the topology of X (that is, in terms of the open sets of
Y Surf71 conespondence/, the corresponding property for the space
Y. Such a property of Xis called a topological proper^ of X.
Continuous Functions 105
9 r
have studied in modern algebra the notion of an isomorphism
Y°U Teebraic objects such as groups or rings. An isomorphism is a
between Correspondence that preserves the algebraic structure involved.
bijecuve ^ COncept in topology is that of homeomorphism; it is a bijective
^"ondence that preserves the topological structure involved.
/"WreSD suppose that f:X—Y is an injective continuous map, where
are topological spaces. Let Z be the image set f{X), considered as
of Y; then the function f: X—-Z obtained by restricting the
asuu^F- bijective. If/' happens to be a homeomorphism of X with Z,
""say that the map /: X—> Y is a topological imbedding, or simply an
imbedding, of A'in Y.
Example 4. The function f:R —> R given by f(x) = 3x + 1 is a home-
homeomorphism. See Figure 14. If we define g :/?—>/? by the equation
then one can check easily that f(g(y)) = y and g(f(x)) = .v for all real numbers
xandy. It follows that /is bijective and that g =/"'; the continuity of /and
g is a familiar result from calculus.
Example 5. The function F: (—1, 1) —> R defined by
is a homeomorphism. See Figure 15. We have already noted in Example 9 of
§1-3 that Fh a bijective order-preserving correspondence; its inverse is the
function C defined by
°{y) = 1 +A +4^2)"
The fact that F is a homeomorphism can be proved in two ways. One way is
onote that because F is order preserving and bijective, /^carries a basis element
me order topology in (-1, I) onto a basis element for the order topology
f(x) = 3x
figure U
I
Figure 15
106 Topological Spaces and Continuous Functions q^ ^
!„ R and vice versa. As a result, F is automatically a homeomorphism «
-1 'n with R (both in the order topology). Since the order topology ^
(_1,' 1) and the usual (subspace) topology agree, Fisa homeomorphiSm
of(-l, 1) with/?. .
A second way to show Fa homeomorphism is to use the continuity Of the
algebraic functions and the square-root function to show that both F and G
are continuous. These are familiar facts from calculus.
Example 6. A bijective function /: X—> Y can be continuous without
being a homeomorphism. One such function is the identity map g:Rt-^R
considered in Example 3. Another is the following: Let S1 denote the unit
circle,
Sl ={x X y\.xz + y2 = 1],
considered as a subspace of the plane R1, and let
be the map defined by /(/) = (cos 2nt, sin 2nt). The fact that / is bijective
and continuous follows from familiar properties of the trigonometric functions.
But the function/" is not continuous. The image under/of the open set U =
\p,\) of the domain, for instance, is not open in S1, for the point p =/@)
lies in no open set V of Rz such that Vn S1 c f(U). See Figure 16.
HU)
0 JL
Figure 16
Example 7. Consider the function
^ : [0, 1)—>ri
: function / of the preceding example by expanding the
mni?he P«Ung example by expanding
^bedding ' " *" eXample °f a conti™°™ injective map that is not an
Constructing Continuous Functions
\lter9Thg COntinUOus functions from °T
another? There are a number of methods used in anal-
Continuous Functions 107
§2-7
.. h some generalize to arbitrary topological spaces and others
»* °V tudy first some constructions that do hold for general topological
donOtTf,rrine consideration of the others until later,
spaces, deterruie
72 (Rules for constructing continuous functions). Let X, Y, and
l^%Ttan?funcUon) Iff.X^Y maps all ofX into the single point
Vv then fis continuous.
^ (b) (Inclusion) If A is a subspace ofX, the inclusion function j : A —> X
it continuous.
(c) (Composites) Iff- X — Y and g : Y —» Z are continuous, then the map
f • x —-» Z is continuous.
(d) (Restricting the domain) If f: X — Y is continuous, and if A is a
subspace of X, then the restricted function f|A:A—»Y is continuous.
(e) (Restricting or expanding the range) Let f: X —> Y be continuous.
If Us a subspace of Y containing the image set f(X), then the function
g-X—♦ Z obtained by restricting the range of f is continuous. If' Z is a space
hating Y as a subspace, then the function h : X —> Z obtained by expanding
the range of f is continuous.
(f) (Local formulation of continuity) The map f: X —► Y is continuous if
X can be written as the union of open sets U. such that f j Ua /.s continuous for
each a.
(g) (Continuity at each point) The map f:X—> Y w continuous if for
eachx e X a«rf eacA neighborhood V o/f(x), /Aere « a neighborhood UofX.
such that f(U) <= V.
If the condition in (g) holds for a particular point x of Z, We say that/
is continuous at the point x.
nan'(a) Ut /W =>70 for every * in x- Let K be °Pen in Y- The set
IK J equals JTor 0, depending on whether Kcontains >;„ or not. In either
v*c) it is open.
K then^'^) = VnA, which is open in A by defini-
subspace topology.
^ ^ 0Pe" ^ Z the" r'(U) is °Pen in ^andZ-fe-'d/)) is open
^^ set theory.
m the map /•. jT v^wequals the composite of the inclusion mapy :A-*X
(e) Let ?• v- ~C th of which are continuous.
iJ^^be_continuous. If /(JT) <= Z <= 7, we show that the
obtained from/is continuous. Let B be open in Z. Then
Topological Spaces and Continuous Functions
B=Z C\ U for some open set U of Y. Because Z contains the entire
set f{X),
/-(i/)=r'W.
by elementary set theory. Since f''(U) is open, so is £-'(#)•
To show h: *—> Z is continuous if Z has Y as a subspace, note th
/; is the composite of the map f:X—> Y and the inclusion map j; Y—,7
(f) By hypothesis, we can write A' as a union of open sets V. such that
f\U, is continuous for each a. Let V be an open set in Y. Then
because both expressions represent the set of those points x lying in U, for
which /(a-) e V. Since /| l/« is continuous, this set is open in V, and hence
open in X. But
so that /"'(K) is also open in X.
(g) Let Kbe an open set of Y\ let .v be a point of f~l{V). Then f(x) e F,
so that by hypothesis there is a neighborhood Ux of x such that f{Ux) c V.
Then O, <= /"'(K). It follows that /"'(K) can be written as the union of
the open sets Ux> so that it is open. □
Theorem 7.3 {The pasting lemma). Let X = A U B, where A and B are
closed in X. Let f: A —> Y awe/ g : B —> Y be continuous. If f(x) = g(x)/or
every x e An B, /Ae/z f and g combine to give a continuous function h: X —> Y,
defined by setting h(x) = f(x) ;/x e A, aw/h(x) = g(x) ;/x e B.
Proof. Let C be a closed subset of Y. Now
/r'(C)=/-'(C)ur'(C),
by elementary set theory. Since/is continuous,/"'(C) is closed in A and
therefore closed in X. Similarly, g~'(Q is closed in B and therefore closed
in X. Their union h~l(C) is thus closed in X. □
This theorem also holds if A and B are open sets in X; this is just a special
case of the "local formulation of continuity" rule [Theorem 7.2@]-
Example 8. Let us define a function h:/{—»/{ by setting
_ [x for x ^ 0>
~ L/2 for i^O.
Each of the "pieces" of this definition is a continuous function, and they agree
on the overlapping part of their domains, which is the one-point set {0}. Since
their domains are closed in R, the function h is continuous. (See Figure 1'•)
■ One needs the "pieces" of the function to agree on the overlapping part of their
domains in order to have a function at all. The equations
§2-7
Continuous Functions 109
k(x) = f
<x-2 forx<0,
x + 2 for x ^ 0,
ce do not define a function. On the other hand, one needs some
on the sets A and B to guarantee continuity. The equations
jx - 2 for x < 0,
\x + 2 for x S; 0,
instance, do define a function / mapping R into R, and both of the pieces
°r continuous. But / is not continuous; the inverse image of the open set
m 3), for instance, is the nonopen set [0, 1).
'{X)
Figure 17
Theorem 7.4 (Maps into products). Let f: A —♦ X X Y be given by the
equation
f(a) = (f,(a), f2(a)).
Then Us continuous if and only if the functions
fi : A —y X and f2 : A —>- Y
are continuous.
maps/, and/2 are called the coordinate functions of/.
^lcn^f* ,r~" X and *2: X X Y^ Y be Pr°Jections onto
«T»(Cnj n Ty ia °rS' resPective'y- These maps are continuous: For
n. Note ^1^7/^ K> and th£Se "^ ^ °Pen lf U and V
fun«i
onS
are composites of continuous
-~u, We shDw"ttot7"T u y*™"**' suPP°se that/, and/2 are
•p x y.itsinvelL 7 h baS1S element ^ X K for the topology
ThetefOre( WS('XI'. that is, if and only if /,(«) 6 y and y^j 6 ^
HO Topological Spaces and Continuous Functions q^
/-■(£/x v)=f;'(U)nfV(V).
Since both of the sets /r W and fV{V) are open, so is their intersec-
intersection. □
There is no useful criterion for the continuity of a map f:AXB~,x
whose domain is a product space. One might conjecture that/is continuous
if it is continuous "in each variable separately, but this conjecture is not
true. (See Exercise 13.)
Example 9 In calculus, a parametrized curve in the plane is defined as a
continuous map /: [a, b] -> R2. It is often expressed in the form /(,) =
(v@,K'));andone frequently uses the fact that/is a continuous function of
/if both a'and y are. Similarly, a vector field in the plane
v(.v, y) = P(.\; y)\ + Q(x, y)'i
= (P(x, y), Q(x, y))
is said to be continuous if both P and Q are continuous functions, orequiva-
lently, if v is continuous as a map of R2 into R2. Both of these statements are
simply special cases of the preceding theorem.
One way of forming continuous functions that is used a great deal in
analysis is to take sums, differences, products, or quotients of continuous
real-valued functions. It is a standard theorem that if/, g : X—<■ R are con-
continuous, then/+g,/— g, and f-g are continuous, and f/g is continuous
if g(x) jt 0 for all a:. We shall consider this theorem in §2-10.
Yet another method for constructing continuous functions that is familiar
from analysis is to take the limit of an infinite sequence of functions. There
is a theorem to the effect that if a sequence of continuous real-valued func-
functions of a real variable converges uniformly to a limit function, then the
limit function is necessarily continuous. This theorem is called the Uniform
Limit Theorem. It is used, for instance, to demonstrate the continuity of the
trigonometric functions, when one defines these functions rigorously using
the infinite series definitions of the sine and cosine. This theorem generalizes
to a theorem about maps of an arbitrary topological space X into a metric
space Y. We shall prove it in §2-10.
Exercises
1. Prove that for functions /:/?_/?, the e_g definition of continuity implies
the open set definition.
2. Suppose that/: *_ Y is continuous. If x is a limit point of the subset A of
X, is it necessarily true that /(*) is a limit point of /(/*)?
3' Ym f ^ J("^enote a single set in the two topologies 3 and 3', respectively.
"it i: X — X be the identity function.
Continuous Functions 111
SZ-7
♦hat / is continuous o 3' is finer than 3.
(a>Sh0Wh! is a homeomorphism o 3' = 3.
(b) Sho* *atifine a topology 3. on It by adjoining to the usual basis of open
(c) If" e " ° oint set {n}. Show that (R, 3,) and (R, 32) are homeomorphic,
sets the one-p
but that 3i 9* ^2-
rand >'o e r, show that the maps/: *
y() X y0 and ^0') = *0 X y
areimbeddings.
nd y(^ two ordered sets in the order topology. Show that if the
5. (») ** , x_^ y is bijective and order preserving, it is a homeomorphism.
w n e 2V Suppose you are given that for each real number .v 2^0, there
(W l unique real number b > 0 such that 6" = .v. Denote b by ^"/ .v . Show
i R R defined b g(x) ' x is continuous
isl unq
that the function g: R+—> R+ defined by g(x) = v' x is continuous,
(c) ( 1) u [0 o) of R Define/: X R by t
that the function g: R+ + y g() v
Let A1 be the subspace (-co, -1) u [0, oo) of R. Define/: X --* R by the
equation
+1 if-v < -1,
Show that/is bijective and order preserving and continuous. Is/a homeo-
homeomorphism ?
{.Show that the subspace (a, b) of R is homeomorphic with @, 1), and the
subspace [a, b] of R is homeomorphic with [0, ]].
7. Find a function/: R —> R that is continuous at precisely one point.
8. (a) Suppose that/: R —» R is "continuous from the right," that is,
lim,^+ f{x) = f(a),
for each a e /f. Show that/is continuous when considered as a function
from R, to R.
(b) What sort of functions/: R —, /f are continuous when considered as maps
from R to R,? As maps from Rt to R,?
• Let y'bean ordered set in the order topology. Let / g ; X —» K be continuous.
W Show that the set [x\fM <; ^W} is ciosed in X.
*'Let*:Jr—y be the function
10 ^ at * 'S continuous- [««'• Use the pasting lemma.]
that/|i,k.aC0llecti0n of subsets of X- let JT= U ^.- Let/: JT-. r; suppose
(a) s^ IS ^ntrnuous for each a.
bcontinuous6 C°llect'°n {/4-} is finite and ^ch set A' is closed' then/
clonsedanh,e!TPle Where the collect'on {^.} is countable and each A. is
(c) AnIndex S "°l Continuous'
a T f SEtS {A'} is sa!d t0 ^ locaUy fin!te ff each P°!nt x
eighborhood that intersects Am for only finitely many values of
112 Topological Spaces and Continuous Functions Chap. 2
a. Show that if the family {A.} is locally finite and each A. is closed, then
/is continuous.
11 Let / A -* B and g : C -* D be continuous functions. Let us define a map
' fx g:A x C—> B x D by the equation
) ()
fx g
{fxg)(a x
Show that / x ,? is continuous.
Show that / x ,?
12 Let /=■■ A" x Y-* Z. We say that F is continuous in each variable separately
' if for each yQ in Y, the map //: X —> Z defined by /i(a) = f (* x Jo) is con-
continuous, and for each xa in X, the map k : Y —> Z defined by *(>-) = /r(Xo x ^
is continuous. Show that if^rs continuous, then F\s continuous in each variable
separately.
13. Let F: R x R —► R be defined by the equation
Jaj/(a-2 + y1) lfxXy^OxO.
F()[
(a) Show that .Fis continuous in each variable separately.
(b) Compute the function g:R-^R defined by g(x) = F(x x x).
(c) Show that Fis not continuous.
14. Let A c X; let/: A —» Y be continuous; let y be Hausdorff. Show that if/
may be extended to a continuous function g : A —> Y, then g is uniquely deter-
determined by/
15. Recall that a map /: X—> Y is an open map if for every set U that is open in
X, the set f(V) is open in K. Which of the statements (a)-(O of Theorem 7.2
remain true if one replaces the word "continuous" throughout by the word
"open"?
2-8 The Product Topology
We now return, for the remainder of the chapter, to the consideration
of various methods for imposing topologies on sets.
Previously, we defined a topology on the product X X Y of two topolog-
topological spaces. In the present section we generalize this definition to arbitrary
cartesian products. There are two ways of generalizing the definition; the one
that will later prove to be the more important we shall call the product to-
topology.
One way to impose a topology on a product space is the following; it
is a direct generalization of the way we defined a basis for the product to-
Pology on X x Y:
Definition. Let [X.].6J be an indexed family of topological spaces. Let us
take as a basis for a topology on the product space
The Product Topology 113
§2-8
X for each <x e /. The topology generated by this basis
• ollection satisfies the first condition for a basis because IT x. 's 'ts
^'element- and it satisfies the second condition because the intersection
basis elements is another basis element:
This topology is not the most useful one for the product space n*«> as we
S £'a second way to generalize the previous definition is to generalize the
subbasis formulation of the definition. Let
ft? • n«e^ %* —y x#
be the function assigning to each element of the product space its /?th coor-
coordinate,
it is called the projection mapping associated with the index 0.
Definition. Let §fl denote the collection
S/» = [n}\Uf)\Uf open in Xp),
and let § denote the union of these collections,
The topology generated by the subbasis $ is called the product topology.
In this topology J[,ej X, is called a product space.
How does the product topology differ from the box topology? It is easier
^answer this question if we look at the basis <B that $ generates. The collec-
V01181 -°f a11 fin'tC 'ntersect;°ns of elements of $. If we intersect
- °ns of elements of $. If we intersect
v on8'ng t0 ^ same one of the sets $B we do not get anything
because
15 ^ahTaTT °f tW° elements of S" or of finitely many such elements,
elements f" & ^M °f ^"' We get something new only when we intersect
** ^sctib^111 erent sets §/»• The typical element of the basis (B can thus
ft0*theind " f°Ws: LetA Abea finite set of distinct indices
ex set J<Md I* Vf, be an open set in Xfi, for / = 1,..., n. Then
«anP, ''^n^n-nii'W ' . '
911 element of®. - -..
114 Topological Spaces and Continuous Functions
There is another way to describe this basis element which is particuiaH
useful. Note that a point x = (*.) is in B if and only if its /?,th coordinate
is in £/„, its jff2th coordinate is in Vfl, and so on. There is no restriction
whatever on the ath coordinate of x if a is not one of the indices /?„.. o
As a result, we can write B as the product * -
B = II.e, U.>
where i/« denotes the entire space X, if a ^ /?,,. . ., /?„.
All this is summarized in the following theorem:
Theorem 8.1 {Comparison of the box and product topologies). The box
topology on Y[X. has as basis all sets of the form II U«, where U, is open in
X. for each a. The product topology on ]7Xa has as basis all sets of the form
]TU., where U. is open in X,for each a, and U. e^ya/j X. except for finitely
many values of a,.
Two things are immediately clear. First, for finite products T[!Ui ■*« the
two topologies are precisely the same. Second, the box topology is in general
finer than the product topology.
What is not so clear is why we prefer the product topology to the box
topology. The answer will appear as we continue our study of topology. We
shall find that a number of important theorems about finite products will
also hold for arbitrary products if we use the product topology, but not if
we use the box topology. As a result, the product topology is extremely
important in mathematics. The box topology is not so important; we shall
use it primarily for constructing counterexamples. Therefore:
Whenever we consider the product T[ %•> we shall assume it is given
the product topology unless we specifically state otherwise.
Some of the theorems we proved for the product X x Y hold for the
product JIX. no matter which topology we use. We list them here:
Theorem 8.2. Suppose the topology on each space X. is given by a basis
©«. The collection of all sets of the form
IL« B.,
where B. £ (Ba for each a,, will serve as a basis for the box topology on
n€,x
a f a,, will serve as a basis for the box topogy
n.€,x..
The collection of all sets of the same form, whereh. £ (B. for finitely many
indices a, and B. = X. for alt the remaining indices, will serve as a basis for the
product topology on ]J.6, X..
Theorem 8.3. Let A. be a subspace of X., for each a £ J. Then IIA. is a
subspace of J[X. if both products are given the box topology, or if both products
are given the product topology. ■ .
The Product Topology 115
§2-8
8 4 If each space X. Is a Hausdorff space, then FIX. is a Hausdorff
b the box and product topologies.
ofs of these theorems follow the pattern of the proofs already
f fv x Y, so the details are left to you.
? r no reason has appeared for preferring the product to the box
i° It is when we try to generalize our previous theorem about con-
topology. .nto product spacgs (hat a difference first arises. Here is a
I that does not hold if II Xm is given the box topology:
Theorem 8.5. Let f: A — II«e, X* be given by the equation
f(a) = (f.(a)).6J,
where f.: A — X, for each a. Let fl*. have the product topology. Then the
function (is continuous if and only if each function fa is continuous.
Proof. Let nf be the projection of the product onto its /?th factor. The
function nf is continuous, for if Uf is open in Xf, the set Kj\Uf) is a subbasis
element for the product topology on Xa. Now suppose that /: A — > J[X,
is continuous. The function/^ equals the composite 7^ of; being the com-
composite of two continuous functions, it is continuous.
Conversely, suppose that each coordinate function/, is continuous. To
prove that/is continous, it suffices to prove that the inverse image under/
of each subbasis element is open in A; we remarked on this fact when we
defined continuous functions. A typical subbasis element for the product
topology on J[X. is a set of the form n}\Uf), where ft is some index and
V, is open in Xf. Now
/~'(VW) =fi\V,),
because ff = nf °/ Since /, is continuous, this set is open in A, as de-
ared. □
Why dOes this theorem fail if we use the box topology ? Probably the most
wincing thing to do is to look at an example. See Example 2 following.
oJlbUrV- CDOnsider eucl'dean n-space R". A basis for R consists of all
of the fom '" henCe a baS'S f0r the toP°lo§y of R" consists of all products
sin m (fl>. *i) x (a2, bi) x • • • x (a., b,).
*ett,reidera/?^n"eprt!dUCt> the box and product toP°'ogies agree. Whenever
fica»y state otheroise ^^^ tha' " '* SiVe" th'S topology- unless we sPeci"
C°DSider jR"' the countab'y infin«e product of /{ with
116 TopicalSpaces WContinuous functions Chap.2
v n for each n Let us define a function /: R -> #» by the equation
where*,-* /(/) = (,,,,,,...);
„,• ,P function of /is the function /„(/) = r. Each of the coordinate
the/rthcoord.natefuncuo^^^ therefOre, the function/is continuous if
functions/:*--; topology. But/is not continuous if R« is given the
£.'££&'. <°- —* r TV1:::'
±±) (fJ) x
r TV:::
TV
s = (_l,l) x (±,±) x (fJ)
i WP assert that /"'(B) is not open in /?. If /"'(S) were
f°r then? itTuSSn* n some interval (-*.*) about the point 0. This wouU
open mi?, it would£o ^ ^ ^ appiying ^ to both sides Qf ^ .^.^
meantnai/u w, ^//
S'thft'/^^^^so'^raPP^ng ^'to both sides of the
for all n, a contradiction.
1. Prove Theorem 8.2.
2. Prove Theorem 8.3.
3. Prove Theorem 8.4.
4. Show that (X, x • • • x *„_,) x Xn is homeomorphic with X, x • • • X Xn.
5. Let {X,} be a family of spaces; let A, <= Xr for each a.
(a) Show that if A. is closed in Xr, then J\AX is closed in n*.-
(b) Show that
IM. = IL*~
(c) Which of (a) and (b) remain true if you use the box topology instead of the
product topology?
6. A sequence (xn) of points of X is said to converge to the point x of X if for every
neighborhood U of x there is an TV such that xn e U for n > N. Let (xn) be a
sequence of points of the product space n«e; *«• Show that the sequence (x.)
converges to x if and only if the sequence 7r«(xn) converges to 7T«(x) for each
a e /. Is this true if you use the box topology instead of the product topology •
7. Let R" be the subset of Rf» consisting of all sequences that are "eventually
zero," that is, all (x,, x2,...) such that x, ^ 0 for only finitely many values of i.
What is the closure of R" in R" in the box and product topologies ? Justify
your answer.
8. Show that the product topology is the coarsest (smallest) topology on
relative to which each projection function nf is continuous.
9. Let A be a set; let {X.}xSJ be an indexed family of spaces; and let {/«}«e/ **
an indexed family of functions /« : A —> X,.
(a) Show there is a unique coarsest topology 3 on A relative to which each of
the functions /« is continuous. ;
The Metric Topology 117
(b) U* ^ = [f;'(Uf)\U, is open in Xf},
, . c - I IS» Show that § is a subbasis for 3.
and let J> uo/»- continuous relative to 3 if and only if each
(A Show that a map g ■
f °g is continuous.
-> II^« >« defined by the ectuatl0n
Z denote the subspace /(/I) of the product space n*- Show that the
image under/of each element of 3 is an open set of Z.
2-9 The Metric Topology
One of the most important and frequently used ways of imposing a
topology on a set is to define the topology in terms of a metric on the set.
Topologies given in this way lie at the heart of modern analysis, for example.
In this section, we shall define the metric topology and shall give a number
of examples. In the next section, we shall consider some of the properties
that metric topologies satisfy.
Definition. A metric on a set X is a function
d:Xx X—>R
having the following properties:
A) d(x,y)>0 for all x,y & X; equality holds if and only if x = y.
B) d(x,y) = d(y, x) for all x, y e X.
C) (Triangle inequality) d(x, y) + d(y, z) > d(x, z), for all x, y, z e X.
Given a metric d on X, the number d(x, y) is often called the distance
between x and y in the metric d. Given e > 0, consider the set
Ux,e) = [y\d(x,y)<e}
ofan points y whose distance from x is less than e. It is called the e-ball
thk hn a* *' Sometimes we omit the metric d from the notation and write
fall s.mply as B(x> f)> when no confusion win afise
or v °n the set X' then the collection of all f-balls
;n/, ^J , and e > 0> is a basis for a apology on X, called the metric
niauced by d.
^(JScteu r a basis is trivia1' s!nce * G B(x> 0 forany e > 0.
"*the basis elem SD/°nd condition for a basis> we show that if y is a point
y that« contain m"' 'f)'then there is a basIs element B(y, 8) centered at
nea in B(x, €). Define 8 to be the positive number e - rf(x, y).
Topological Spaces and Continuous
Then B(y, <*) <= B(x< f)' for lf Z
which we conclude that
Functions Chap.
rf(., )
SeeNo8wIocheck the second condition for a basis, let Bx and fi2 be two basis
■ . nH M ve B n B,. We have just shown that we can choose posi-
rs£ " ^:»« *■ «=* - SS' '^n; u"in8'
be the smaller of*, and <J2, we conclude that B{y,5) cz B, n B2.
Figure 18
Using what we have just proved, we can rephrase the definition of the
metric topology as follows:
A set U is open in the metric topology induced by d if and only if for each
y G U, there is a 5 > 0 such that Bd{y, 5) c U.
Clearly this condition implies that U is open. Conversely, if U is open, it
contains a basis element B = Bd(x, e) containing y, and B in turn contains
a basis element Bd(y, 5) centered at y.
Example 1. Given a set X, define
d{x, y) = 0 if x = y.
It is trivial to check that d is a metric. The topology it induces is the discrete
topology; the basis element B(x, 1), for example, consists of the point x alone.
Example 2. The standard metric on the real numbers R is defined by the
equation
d(x,y) = \x-y\.
t0, Check that d is a metric- ^e topology it induces is the same as the
°£By: ^ bl l
ln£ ^ bSS elemetU ("' 6> f0r tlle
for the metric topology; indeed,
The Metric Topology 119
§2-9
and € = (b - a)/2. And conversely, each f-ball B{x, f)
the interval (x — e,x + e).
a >•„„ If A- is a topological space, X is said to be metrizable if there
DCfi Zicdon the set X that induces the topology of X. A metric space
jfmeXable space X together with a specific metric d that gives the to-
topology of x-
Many of the spaces important for mathematics are metrizable, but some
not Metrizability is always a highly desirable attribute for a space to
are " s'for the existence of a metric gives one a valuable tool for proving
fheorems about the space.
It is therefore a problem of fundamental importance in topology to rind
conditions on a topological space which will guarantee that it is metrizable.
One of our goals in Chapter 4 will be to find such conditions; they are ex-
expressed there in the famous theorem called Urysohn's melrization theorem.
Further metrization theorems appear in Chapter 6. In the present section
we shall content ourselves with proving merely that R" and R'" are metrizable.
Although the metrizability problem is an important problem in topology,
the study of metric spaces as such does not properly belong to topology as
much as it does to analysis. Metrizability of a space depends only on the
topology of the space in question, but properties that involve a specific
metric for X in general do not. Therefore, they are not topological properties.
For instance, one can make the following definition in a metric space:
Definition. Let Xbe a metric space with metric d. A subset A of X is said
to be bounded if there is some number M such that
B)< M
for every pair au a, of points of A. If A is bounded, the diameter of A is
defined to be the number
diam/l =
PaSrmetriclhf 7 g Ppty' for Jt dePends
with metric "hen ,.? * """ * For inStanCe' if X is a metric P
relativetowhth, I eX'St/ a metfiC d WWch giv6S the tOpol°gy <* x>
which every subset of X is bounded. It is defined as follows!
*>*eqZbn'UlXbe°me'rkSpaCe Wi melrkd- Defi"ea: X X X-, R
u {(,y),
5 a melric <h" Educes the topology ofX.
j, called th
120 Topological Spaces and Continuous Functions Chap. 2
Proof Checking the first two conditions for a metric is trivial. Let us
check the triangle inequality:
Now if either d(x y) 2;1 or d{y, z)^\, then the right side of this inequality
U at least 1 • since the left side is (by definition) at most 1, the inequality holds.
It remains io consider the case in which d(x, y) < 1 and d(y, z)< 1. In this
case, we have
d(x, z) < d(x, y) + d(y, z) = d(x, y) + d(y, z).
Since d\x, z) < d{x, z) by definition, the triangle inequality holds for d.
The fact that rfand rf induce the same topology follows from the inclusions
Bd(x, e) cz B3(x, e),
Bd(x, S) c= Bd(x, e),
where 5 = min {e, 1}. We merely apply the following lemma, fj
Lemma 9.2. Let d and d' be two metrics on the set X; let 3 and 3' be the
topologies they induce, respectively. Then 3' is finer than 3 if and only if for
each x in X and each e > 0, there exists a 5 > 0 such that
Bd.(x, S) cz Bd(x, e).
Proof. Suppose that 3' is finer than 3. Given the basis element Bd(x, e)
for 3, there is by Lemma 2.2 a basis element B' for the topology 3' such that
x e B' cz Bd(x, e). Within B' we can find a ball Bd(x, 5) centered at x.
Conversely, suppose the S-e condition holds. Given a basis element B
for 3 containing x, we can find within B a ball Bd(x, e) centered at x. By the
given condition, there is a S such that Bd(x, 5) <= Bd(x, e). Then Lemma 2.2
applies to show 3' is finer than 3. □
Now let us show that R" and R" are metrizable.
Definition. Given x = (x,,... , xn) in R", we define the norm of x by the
equation
llx||=M+ •••+x>)">;
and we define the euclidean metric d on R" by the equation
</<*,y) = ||x - y|| = [(x, - Viy + ... + (Xn _ y.yy>\
We define the square metric p by the equation
The proof that d is a metric requires some work; it is probably already
ramiiiar to you. If not, a proof is outlined in the exercises. We shall seldom
have occasion to use the euclidean metric on R\
To show that p is a metric is easier. Only the triangle inequality is non-
The Metric Topology
'IL. From the triangle inequality for R it follows that for each positive
integer'' ^ _ Zt\<\x,-y,\ + \y, - z,\.
by definition of p,
y \<(xy) + P(y*)
AS a reSU ' p(x, z) = max [| x, - z, |} < />(x, y) + p(y, z),
^if'The real line /? = /?', these two metrics coincide with the standard
•"for/? In the plane R\ the basis elements under dean be pictured as
drcular regions, while the basis elements under p can be pictured as square
16 Each of these metrics induces the usual topology on R":
Theorem 9.3- The topologies on R" induced by the euclidean metric d and
the square metric p are the same as the product topology on R".
Proof. Let x = (*,,..., *„) and y = 0',, . . . , yn) be two points of R".
It is simple algebra to check that
p(x, y) < d(x, y) < ^/Tp(x, y).
The first inequality shows that
Bd(x, e) cz Bf(x, €)
for all x and f, since if d(x, y) < e, then p(x, y) < e also. Similarly, the second
inequality shows that
Bp(x> f/V"»~) c Bd(x, e)
for all x and f. It follows from the preceding lemma that the two metric
topologies are the same.
s that given by the
B = (al,bl) X ... x (aa,bn)
choose e - ^ ~ '" *'
^ t
tni'n,\\'' ff}-Then B>(x' f) c 5> as you can readily check,
ert iZ (Tfu™ u™ ^ Pr°dUCt t0P°l0^
y\B>(*>e), we need to L? \ dement f°r the ^toPol°gy- Given
s«chthat 6ed t0 find a basis element B for the product topology
b
122 Topological Spaces and Continuous Functions Chap ^
But this is trivial, for
Bf(x, e) = (x, — e, x, + f) x • • • x (xn — f, xn + e)
is itself a basis element for the product topology. □
The preceding theorem is a metrization theorem for R\ We seek to gen-
generalize it to R".
As a first try for a metric on R", it is natural to try to generalize either
the euclidean metric or the square metric, by defining
and
p(x,y) = lub{\xl-yl\}.
But these formulas simply do not make sense on all of R°>; the series need
not converge, and the set may not be bounded.
We can avoid the difficulty with the metric p, however, by first replacing
the metric \x — y\ on R by its bounded counterpart d. This idea gives us our
second try for a metric on R°>.
Suppose that we take the standard bounded metric on R,
d(a,b) = min [\a — b\, 1);
and, given two points x = (x,, x2,, . .) and y = (y,,y2, . ..) of/?", define
It is easy to check that p is a metric on Rm. Unfortunately, however, it does
not induce the product topology, as we shall see. Therefore, it is of no use
for proving R" metrizable. It is, however, very important in its own right;
it will appear frequently in this book (and in other parts of mathematics).
There is nothing special about R°> as far as this metric is concerned; one
can define it on RJ for arbitrary / as follows:
Definition. Given an index set /, and given points x = (x.).ey and y =
CvJ.ey of RJ, let us define a metric p on R1 by the equation
/>(x, y) = lub {d(x., y,) | a e /},
where d is the standard bounded metric on R. The metric p is called the
uniform metric on RJ, and the topology it induces is called the uniform to-
topology.
The relation between this topology and the product topology is the fol-
following:
Theorem 9.4. The uniform topology on R} is finer than the product topology!
they are different ifj is infinite.
The Metric Topology 123
§2-9
„ f SuDDOse that we are given a point x = (x.).e, and a product
J?basement UU. about x. Let «„..., «„ be the .nd.ces for wh.ch
y°V f Then for each a,, choose f, > 0 so that
' ' Bd(x.t, e.) c t/..;
^s we can do because t/., is open in R. Let e = min {f,,..., f.}; then
B,(x, e) c n^.-
For if z 's a Point of R' SUch that ^(x> Z^ < f> then ^" ^ < f f°r aU "'
It is easy to show that these two topologies are different if/ is infinite;
we leave it to you. □
We still have not found what we want, a metric that gives the product
topology on R". But we are almost there. It turns out that by modifying
the uniform metric only slightly one can obtain the desired metric:
Theorem 9.5. Let d(a, b) = min{\a — b|, 1} be the standard bounded
metric on R. If'x and y are two points ofR°>, define
Then D is a metric that induces the product topology on R".
Proof. The properties of a metric are satisfied trivially except for the
tnangle inequality, which is proved by noting that for all /,
whence
iopology requires a ■
we find an open
an f-ball BD(le)
that llN<e-Finaiiy> iet lh°
124 Topological Spaces and Continuous Functions _
'-nap. 2
If y is in V, this expression is less than f, so that V c BD(x, e), as de '
Conversely, consider a basis element
for the product topology, where U, is open in R for i = a,,. . ., an and U —
R for all other indices i. Given x e U, we find an open set V of the metr?
topology such that x e V cz U. Choose an interval (x, — f„ x, + f) ;n
R centered about x, and lying in U, for i = a,, . . ., an; choose each e, ^ i
Then define
f = min {eji\i = a,,..., a,}.
We assert that
x £ 5c(x, f) cz U.
Let y be a point of BD(x, e)■ Then for all i,
Now if ;" = a a,,, then f < eji, so that d(xit y,) < f, < 1; it follows
that \x, — y,\ < €,. Therefore, y e \\U,, as desired. □
It is natural to ask whether this theorem can be generalized still further.
Can one perhaps prove that RJ is metrizable for arbitrary /? The answer is
"no," as we shall see in the next section. The situation is no better if we use
the box topology instead of the product topology; in fact, under the box
topology not even Ra is metrizable, as we shall see.
Exercises
1. (a) In R", define
d'(.x, y) = l*i - y\ I + • • • + \x» - y,\.
Show that d' is a metric that induces the usual topology of R". Sketch the
basis elements under d' when « = 2.
(b) More generally, given p > 1, define
d'(.x,y) = [?,U,\xl-y,\>'V">
for x, y e R". Assume that d' is a metric. Show that it induces the usual
topology on R".
2. Let A' be a set; let d be a metric on X. Show that the topology on X induced by
d is the coarsest topology relative to which the function d: X X X—+ & 1S
continuous. • ,
3. Show that R X R in the dictionary order topology is metrizable.
4. (a) Compare the box, product, and uniform topologies on R°.
The Metric Topology 125
A() (,iU
,n which topologies do the following sequences converge?
Wl-A,1,1.1....), x, -A,1,1,1,...).
W2 =@,2,2,2,...), x,=@.i.i.i....),
w, = @,0,3,3,...), x3 = @,0,4,-$,...),
y, ='A,0,0,0,...), z, =0,1,0,0....).
5. Let /f" be the subset of if" consisting of all sequences that are eventually zero.
What is the closure of R~ in R" in the uniform topology? Justify your answer.
6. Let p be the uniform metric on if". Given x = (*,, Xi,...) e R" and given
0<f < 1, let
t/(x,e) = (x, - f, x, + f) x • • • x (xn - f, xn + f) x • • •.
(a) Show that U(x, f) is not equal to the f-ball .ff/x, f).
(b) Show that t/(x, f) is not even open in the uniform topology.
(c) Show that
Bf(x, f) = {Ji« U{x, 5).
7. Let A" be a subset of R°> having the property that for every pair x, y of points
of X, the series
converges. On X we have the three topologies it inherits as a subspace of R»
w the box, uniform, and product topologies. We also have the topology given
by the metric
(The fact that d is a metric follows from Exercise 9 )
jLT ** ln 8eneral ab°Ut h th f0Ur toPol°g''es °a ^e set
(b) What ^ wu say if X is the subset
to «*. ^" = fei. x2,.. .)|x, = 0 for i
W What can you say if A-is the subset
canyousayifA-istheHIlbertcube '
126 Topological Spaces and Continuous Functions
8. Show that the euclidean metric d on R" is a metric, as follows: If x,y g »,
and c e R, define
x + y = (a-, + yx xn
CX = (C.V|, .. . ,CXn),
x • y = -Y|.yi + ••• +-v,^.
(a) Show that x • (y + z) = (x • y) + (x • z).
(b) Show that |x • y| < ||x|| ||y ||. [Hint: If x, y jt o, let a = |/||x|| and
b = l/||y||, and use the fact that \\ax ± 6y|| > 0.]
(c) Show that ||x + y|| < l|x|| + ||y||. [Hint: Compute (x + y) . (x + y)
and apply (b).]
(d) Verify that d is a metric.
9. Let I1 denote the subset of ^consisting of all sequences (x,, x2,...) such that
2 x? converges. (You may assume the standard facts about infinite series. In
case they are not familiar to you, we shall give them in Exercise 11 of the next
section.)
(a) Show that if x, y e C2, then £ l-v,>v I converges. [Hint: Use (b) of Exercise
8 to show that the partial sums are bounded.]
(b) Let c e R. Show that if x, y e I1, then so are x 4- y and ex.
(c) Show that
</(x,y) = [££.(*,-tfJ]''2
is a well-defined metric on (,l. It is called the I1-metric.
10. Show that d'(x,y) = d(x,y)/(] + d(x,y)) is a bounded metric for X if d is a
metric for X.
2-10 The Metric Topology (continued)
In this section we discuss the relation of the metric topology to the con-
concepts we have previously introduced.
Subspaces of metric spaces behave the way one would wish them to,"
if A is a subspace of the topological space X and d is a metric for X, then the
restriction of d to A X A is a metric for the topology of A. This we leave to
you to check.
About order topologies there is nothing to be said; some are metrizable
(for instance, Z+ and R), and others are not. See Example 3.
The Hausdorff axiom is satisfied by every metric topology. If x and y
are distinct points of the metric space (X, d), we let f = %d(x, y); then the
triangle inequality implies that Bd(x, f) and Bd(y, f) are disjoint.
The product topology we have already considered in special cases; we
have proved that the products R" and R<° are metrizable. It is true in general
that countable products of metrizable spaces are metrizable; the proof fol-
follows a pattern similar to the proof for R", so we leave it to the exercises.
The Metric Topology {continued) 127
Consideration
,nuous functions there is a good deal to be said.
AboU^C°"n"ccupy the remainder of the section.
of this topic win « c^tinuous functions on metric spaces, we are about
When we siuj ^ calcu|us and analysis as we shall come in this book.
85 cl°Se "iTn Slings we want to do at this point.
The«are nt *o show that the familiar "e-5 definition" of continuity
FifSt> ^Jgeneral metric spaces, and so does the "convergent sequence
definition ° ^°wa]]t tQ consjder two additional methods for constructing
SeCOn id i §27 O i h
^wa]
us functions, besides those discussed in §2-7. One is the process
C°D"kL sums, differences, products, and quotients of continuous real-
^Ud functions'. The other is taking limits of uniformly convergent sequences
of continuous functions.
Theorem 10.1. Let f: X —> Y; let X and Y be metrizable with metrics
i and d respectively. Then continuity of f is equivalent to the requirement
tkt given x e X and given e > 0, there exists 3 > 0 such that
dx(x,y)<<* =* dY(f(x), f(y)) < f.
Proof. Suppose that/is continuous. Given x and f, consider the set
/-Wto.0),
which is open in Xand contains the point x. It contains some <J-ball B(x, 8)
centered at x. If y is in this <J-ball, then f{y) is in the f-ball centered at f(x),
as desired.
Conversely, suppose that the e-S condition is satisfied. Let V be open in
rjweshow that/-'(K)is open in X. Let x be a point of the set/-' (V). Since
/We V, there is an f-ball B(f(x), e) centered at /(*) and contained in V.
flax* C°ndltlOn' there is a ^-b311 5(^. ^) centered at x such that
(uik C, 5(/W> f)- Then 5(*> J) is a neighborhood of x contained in
/ n so that /--(K) is open, as desired. Q
w we turn to the convergent sequence definition of continuity.
TT ^ 3 Sequence of P°'nts of a set X ^ simply a function
S> 'tlS anelementof the space *». We usually denote
(*.) or (x,,Xl,...).
"" Point * o'f y^Uence (*» x^ • • •) of points of X is said to converge to
■*•* wch th«t r r 6Very neighborh°°d J7 of x there exists a positive in-
nat x' "es in U for all i > iV.
sequence (x.) converges to x, we write
■x.
Topological Spaces and Continuous Functions Chap ^
Of course, a sequence need not converge at all. But if it does converge jt
converges to only one point, provided that X is Hausdorff. For if (*„) converge
to x and if y ^ x, we need merely choose disjoint neighborhoods V and y
of And y, respectively, and note that since U contains the points x, for all
but finitely many values ofi, the set Vcannot.
It is intuitively believable from one's experience in analysis that if x ijes
in the closure of a subset A of the space X, then there should exist a sequence
of points of A converging to x. This is not true in general, but it is true fOr
metrizable spaces.
Lemma 10.2 (The sequence lemma). Let X be a topological space; let
A <= X. If there is a sequence of points of A. converging to x, then x e A;
the converse holds ifX is metrizable.
Proof. Suppose that xn —• x, where xn 6 A. Then every neighborhood U
of x contains a point of A, so x e A by Theorem 6.5. Conversely, suppose
that X is metrizable and x e A. Let d be a metric for the topology of X.
For each positive integer n, take the neighborhood Bd(x, 1/n) of radius 1/n
of x, and choose xa to be a point of its intersection with A. We assert that
the sequence xn converges to x: Any open set U containing x contains an
f-ball Bd(x, f) centered at x\ if we choose N so that \/N < e, then U contains
x, for all i>N. O
Theorem 10.3. Let f: X —► Y; let X be metrizable. The function f is con-
continuous if and only if for every convergent sequence xn —► x in X, the sequence
f(xn) converges to f(x).
Proof. Assume that/is continuous. Given xn —► x, we wish to show that
/(*«)—»/(*)• Let Vbe a neighborhood of f(x). Then f~l(V) is a neighbor-
neighborhood of x, and so there is an N such that xn £ f~'(V) for n > N. Then
/(*„) e V for n > N.
To prove the converse, assume that the convergent sequence condition
is satisfied. Let A be a subset of X; we show that f(A) <= f(A). If x e A,
then there is a sequence xn of points of A converging to x (by the preced-
preceding lemma). By assumption, the sequence /(*„) converges to f(x). Since
/(*«) e /(/*), the preceding lemma implies that f(x) e /(^j. (Note that
metrizability of 7 is not needed.) Hence f(A) c J\A), as desired. Q
Incidentally, in proving Lemma 10.2 and Theorem 10.3 we did not use the
full strength of the hypothesis that the space X is metrizable. All we really
needed was the countable collection Bd(x, 1/n) of balls about x. This fact leads
us to make a new definition.
A space X is said to have a countable basis at the point x if there is a countable
collection {t/n}nez, of neighborhoods of x such that any neighborhood U of
x contains at least one of the sets Un. A space X that has a countable basis at
each of its points is said to satisfy the first conntability axiom.
The Metric Topology {.continued) 129
countable basis [«.} at a-, then the proof of Lemma 10.2 goes
[hZcsTZ\y replaces the ball B&. Un) throughout by the set
thr0US ' B. = U,nU2n"'nU,.
u nrnnf of Theorem 10.3 goes through unchanged.
a trizable space always satisfies the first countability axiom, but the
"I true, as we shall see. Like the Hausdorff axiom, the first counta-
i is a requirement that we sometimes impose on a topological space
n'orderto prove theorems about the space. We shall study it in more detail in
Chapter 4.
Now we consider additional methods for constructing continuous func-
functions. We need the following lemma:
Lemma 10.4. The addition, subtraction, and multiplication operations are
continuous functions from R X R 1/7/0 R; and the quotient operation is a
continuous function from R X (R — {0}) into R.
You have probably seen this lemma proved before; it is a standard "f-<5
argument." If not, a proof is outlined in Exercise 12 below; you should have
no trouble filling in the details.
Theorem 10.5. IfX is a topological space, and if f, g : X -— R are continu-
continuous functions, then f + g, f - g, and f-g are continuous. //g(x) * Ofor all x,
then f/g is continuous.
Proof. The map h : X -> R x R denned by
"(x)=f(x)x g(x)
Won operation fUnCt''°n ' + 8 ^ the Composite of
+ :RxR—+r;
jis u g is continuous. Similar arguments apply to /- g, f.g, and
Finally vve r-
* functions. ^ t0 the notion »f ""iform convergence for a sequence
Definition. Let f ■ y
££?spa- *£Z* th emaetSSr/y°w Unctf°,ns from the set x t0
»n,formIy to the func^en^ £r_JyWe say that the :
> 0, tire
forall«
r vprpence depends not only on the topology of y, but
Uniformity of c°nv^ following theorem about uniformly conver-
also on its metric, we rui
also on its
gent sequences:
it theorem). Let fD: X -> Y be a sequence of
X£z£"' """"-v"
converges uniformly to t, men
Proof, Let V be open in K; let *. be a point of /-("). We wish to find
ihborhood ^ of^such^t /(t/)-
Proof, Let V be open in ; .
a neighborhood ^ of^such^t /(t/)^ ^ ^ ^ ^ ^
K. Then^using uniform convergence, choose N so that for all n > N and all
xe X,
d(f.(x),Ax))<e/4.
Finally, using continuity of/*, choose a neighborhood 1/ of ^0 such that/,,
carries U into the f/2 ball in Y centered at /*(■*„)•
We claim that/carries £/ into B(y0, e) and hence into K, as desired. For
this purpose, note that if x e U, then
d{f(x),Mx)) < f/4 (by choice of N),
d(fN(x)JN(xJ) < ell (by choice of I/),
rf(/*(-*-o),/(*o)) < f/4 (by choice of N).
Adding and using the triangle inequality, we see that d(f(x), f{x0)) < e,
as desired. Q
Let us remark that the notion of uniform convergence is related to the
definition of the uniform metric, which we gave in the preceding section.
Consider, for example, the space Rx of all functions /: X —> R, in the uni-
uniform metric p. It is not hard to see that a sequence of functions/,: X—> R
converges uniformly to/if and only if the sequence (/„) converges to/when
they are considered as elements of the metric space (Rx, p). We leave the
proof to the exercises.
We conclude the section with some examples of spaces that are not
tnzable
metnzable.
Example 1 r. /„ the box Wpohgy fa ^ melfUabk
^ t°W thtth
the^etor t that-thC SeqUence lemma does not "old f°r *"• Let A •"
tnesubset or*- cons.sting of those points all of whose coordinates are positive:
, xl3.. .)|*, > o for all /
The Metric Topology {continued) 131
E ery coordinate,,, is positive, so we can construe, a basis element B' for the
Apology on R by setting
B' = (—-Vn, a'h) x (—xn.xzx) x •••.
■n. «' contains the origin 0, but it contains no member of the sequence
TTthe p"canno. belong to B' because its ,,th coordinate *„ does not
Sng to the interva. (-*„„, -O- Hence the sequence (..) cannot converge to
0 in the box topology.
Example 2. An uncountable product of R with itself is not metrizable.
Let J be an uncountable index set; we show that R1 does not satisfy the
sequence lemma (in the product topology).
Let A be the subset of R1 consisting of all points (.v«) such that x« — 0 for
finitely many values of a and a-. = I for all other values of a. Let 0 be the
"origin" in R', the point each of whose coordinates is 0,
We assert that 0 belongs to the closure of A. Let l\Ux be a basis element
containing 0. Then C/« ^ R for only finitely many values of a, say for (X =
Hi,...,a,. Let (xa) be the point of A defined by letting xa = 0 for a =
a,,..., <*„ and xa = I for all other values of a; then (a-,) g A O Y[U«, as
desired.
But there is no sequence of points of A converging to 0. For let an be a
sequence of points of A. Each point an is a point of the product space having
only finitely many coordinates equal to 0. Given //, let /„ denote the subset of
/consisting of those indices a for which the ath coordinate of an is zero. The
union of all the sets /„ is a countable union of finite sets and therefore countable.
Because J itself is uncountable, there is an index in J, say /?, that does not lie
m any of the sets yn. This means that for each of the points an, its /Jth coordinate
n-<(Ln 'etr" te the °Pen interval (-1> ') in /?> and let U be the open set
points '" hi ThC *' U 'S a ne!8nbornood °f 0 that contains none of the
»; therefore, the sequence an cannot converge to 0.
RecdUhar' V"*- Wf'ordered set S" » »°> metrizable in the order topology.
§1-'O, and that ? !f C mmmal unc°untable well-ordered set constructed in
l°8y, n is a Hmi" °teVhe set Sa U W- No(e first that, in the order topo-
§> for the set S u'fOi ^ ^ 'S the reason we introduced the notation
Staining n it m J '" §10-) For if (a> Q] is any bas's element
• "ust intersect Sa; otherwise we would have
although c • ft ^ v Itf j»
»s« ■ uncountable and Sa is countable. -. . , , *
m
Topoloeical Spaces and Continuous Functions ^ ^
We assert that there is no sequence of points of Sa converging to a. FOr
■f t O is^ny s quence of points of Sa, then the set {x | „ e Z+) 1S a countabl
,f (a.) is any seque^ ^^ ^ ^ upper bound & (ha( ,,es m ^ (Coro,,aiy »
of Chapter"). Then (b,Q] is a basis element containing Q that contains no
Joint whatever of the sequence (.vj.
Exercises
1 Let A <= Xlfrfis a metric for the topology ofA", show that rf| ,4 x yf is a metric
for the subspace topology on yf.
X Let A" and Y be metric spaces with metrics ds and rfr, respectively. Let
r. x—> rhave the property that for every pair of points x,, a-2 of X,
Show that/is an imbedding. It is called an isometric imbedding of A" in Y.
3. Show that a countable product n^ of metrizable spaces is metrizable.
[Hint: Let dn be a metric for Xn that is bounded by I. Define D(x,y) =
lub {tUxn,y.)ln}.]
4. Show that the spaces Sa and R, satisfy the sequence lemma. (This does not, of
course, imply that they are metrizable.)
5. Theorem. Let xn —» x andyn —► y in the space R. Then
Xn + yn > x + y,
xn - yn > x - y,
Xnyn > xy,
and provided that each yn^0 and y jt 0,
xjyn —y x/y.
[Hint: Apply Theorem 10.3 and Lemma 10.4; recall that if xn —* x and
y, ~+ y, then xn x y, —► x X y.]
6' ?^"^ f"''[0> '] ~" R by the ecluat'on fix) = x". Show that the sequence
AW) conver8es for each x e [0, I], but that the sequence (/„) does not
converge uniformly.
f^rnf^,3 **" ^ l6t/": ' -* * ** a sec»uence °f functions. Let p be the uni-
^ !lC°n '^ SP3Ce **• Show that the «Q«»««* (/») converges uniformly
f ? ^ * r
metric »»»«• Let /,: X-^ K be
Let xn be a sequence of points of ^con-
sequence (/»} conver^ -«to /•then
12-10
The Metric Topology {continued) 133
the function
rsee Figure 19.) Let/: R — R be the zero function.
L Show that/„(-*•) — /(-v) for each x e R.
' cjjfnv thatX does not converge uniformly to /. (This shows that the con-
converse of Theorem 10.6 does not hold; the limit function/may be continuous
even though the convergence is not uniform.)
Figure 19
10. Using the closed set formulation of continuity (Theorem 7.1) show that the
following are closed subsets of R2:
4 ={x X y\xy= 1},
S' ={■*• Xy\x2 +y2 = i],
B2 ={x X y\x2 +y2<l}.
u p S6t B1 is called 'he (closed) unit ball in R2.
"^Show £SJ* StandKafd facts ab0"' '"finite series:
„ * X'S l~* SCqUenCe °f rCal -*« a"d - ^ - to
W ** a sa>uence of real numbers; define
W ■<■»
*, we say that the infinite series
to
-d 2c,
134 Topological Spaces and Continuous Functions q^
(d) Given a sequence of functions/.: * — R, let
*„(*) = 2?= ■/<(•*>•
Prove the Weierstrass M-test for uniform convergence:
if I A*)I < b, for all x e X and all i, W 1/ the series 2>, converges,
then the sequence fo.) «««»»« "/"/"""/y W a function s.
[Hint: Let r. = £,"-.+ > 6" Show that if * > "' then l*kM ~ s^\ S r.;
conclude that |*(.v) - j.(a)| < »•»•]
IX Prove continuity of the algebraic operations on R, as follows: Use the metric
d(a, b) = \a - b\ on R and the metric
p((x, y), (-Vo, yo)) = max (l-v ~ -Yo I. \y ~ y» 13
(a) Show that addition is continuous. [Hint; Given f, let 5 = e/2 and note that
d(x + y, x0 + yo) < \x - -vo I + \y -
(b) Show that multiplication is continuous. [Hint: Given (.v0> .Vo) and f > 0,
let _
3<5 = min[f/(|xo| + \y01 + D, V f ]
and note that
d(xy, xoyo) <\xo\\y - yo\ + \y<,\\x - xo\ + \x - xo\\y - yo\.]
(c) Show that the operation of taking reciprocals is a continuous map from
R - [0} to R. [Hint: Given ,v0 ^ 0 and f > 0, let 5 = min (| a |/2, xJf/2}.
Note that (/(I/a-, I/.y0) = |-v — xo|/|.v.vo|. If \x — x0 \ < 5, then \xx0 — xl\
< |-vo|2/2, so .vx0 — xl > —xo/2 and xx0 > xl/2 > 0.]
(d) Show that the subtraction and quotient operations are continuous.
*2~11 The Quotient Topology1!
Unlike the topologies we have already considered in this chapter, the
quotient topology is not a natural generalization of something you have
already studied in analysis. Nevertheless, it is easy enough to motivate. One
motivation comes from geometry, where one often has occasion to use
"cut-and-paste" techniques to construct such geometric objects as surfaces.
The torus (surface of a doughnut), for example, can be constructed by taking
a rectangle and "pasting" its edges together appropriately, as in Figure 20.
And the sphere (surface of a ball) can be constructed by taking a disc and
collapsing its entire boundary to a single point; see Figure 21. Formalizing
these constructions involves the concept of quotient topology.
tThis section will be used when we prove the Jordan curve theorem in Chapter 8.
The Quotient Topology 135
b
<L
bk\
Figure 20
Figure 21
Definition. Let X and Y be topological spaces; let p : X— Y be a sur-
surjective map. The map p is said to be a quotient map, provided a subset U
of yisopen in 7if and only if/>-'(£/) is open in X.
This condition is stronger than continuity; some mathematicians call
it "strong continuity." An equivalent condition is to require that a subset
A of Ybe closed in Y if and only if p~l(A) is closed in X. Equivalence of the
two conditions follows from the equation
Another way of describing a quotient map is as follows: We say that a
subset C of X is saturated (with respect to the surjective map p: X —> Y) if
C contains every set p'l{{y}) that it intersects. Thus C is saturated if it
^ as p 'Q>(C)). To say that p is a quotient map is equivalent to saying
P is continuous and p maps saturated open sets of X to open sets of
atUrated d°Sed SelS °f X t0 ClOSed setS of y)'
R n Wnds °f 9uotient maps are the open maps and the closed
h a map-(: * -"* y is said to be an °Pen maP if for each °Pen
/(f/) is open in Y-ll is said t0 be a closed maP if for each
iS °l0Sed in Y' U follows immediately from
's a surJective continuous map that is either
ei*er oi*n ' p is a ^"otient map. There are quotient maps that are
°I*n nor closed. (See Exercise 2.) . .......
open or closed
ei*er '
p is a
136 Topological Spaces and Continuous Functions q^ 2
Definition. If X is a space and A is a se/ and if p : X -— ,4 is a surjective
map then there exists exactly one topology 3 on A relative to which p \s a
quotient map; it is called the quotient topology induced by p.
The topology 3 is of course defined by letting it consist of those subsets
V of A such that p~ l(U) is open in X. It is easy to check that 3 is a topology.
The sets 0 and A are open because p'\0) = 0 and p-'(A) = X. The other
two conditions follow from the equations
Example 1. Let 7T, : A" x r — X be the projection map; n, is continuous
and surjective. If U x K is a basis element for A" x Y, the image set
n,(U x V)= U is open in X It follows readily that 71, is an open map. In
general, tt, is not a closed map; the projection nt : R x R —> R carries the
closed set [x x y\xy = 1} onto the nonclosed set R - {0}, for instance.
Example 2. Let A"be the subspace[0, I] u [2, 3] of R, and let Ybe the sub-
space [0, 2] of R. The map p: X —>Y defined by
\x for x e [0, I],
P(X)=U-1 ror.ve[2,3]
is readily seen to be a surjective. continuous, closed map. It is not, however,
an open map; the image of the open set [0, 1] of A" is not open in Y.
Example 3. Let p be the map of the real line R onto the three-point set
A = [a, b, c] defined by
(a if x > 0,
p(x) = \b ifx<0,
[c if x = 0.
You can check that the quotient topology on A induced by p is the one indi-
indicated in Figure 22.
Figure 22
There is a special situation in which the quotient topology occurs par-
particularly frequently. It is the following:
Definition. Let X be a topological space, and let X* be a partition of X
into disjoint subsets whose union is X. Let p : X -+ X* be the surjective map
that carries each point of JTto the element of X* containing it. In the quotient
topology induced by p, the space X* is called a quotient space of X.
The Quotient Topology 137
12-11
•hematicians call X* a decomposition space or an identification
/.tor they think of X* as having been obtained by "identifying all
space ot *■ partition class to a single point."
t"eelemen describe ihe topology of X* in another way. A subset U of X*
^Son of equivalence classes, and the «,p-(C/) is just the union of
isaatence classes belonging to U. Thus the typical open set of X* is
the """'ion of equivalence classes whose union is an open set of X.
Example 4. Let X be the rectangle [0, 1] x [0, 1]. Define a partition X*
Xas follows: It consists of all the one-point sets {.v x y] where 0 < x < 1
and 0 <y < '. the following types of two-point sets
{.v x 0, x x 1} where 0 < x < 1,
{0 x .y, 1 x ^} where 0 < y < 1,
and the four-point set
[0 x 0,0 x 1, 1 x 0, 1 x 1}.
Typical open sets in A" of the form ;>-'(£/) are pictured by the shaded regions
in Figure 23; each is an open set of X that equals a union of equivalence classes.
x X 1
0X0
u
/\
\ r
\
V
{
1 X y
XOX y
X X 0
Figure 23
xue3Ch °f theSe Sets UndeTp is an °Pen set of X*> as indicated in
I description of X* is J«st the mathematical way of saying what
S '" P'CtUreS Wh d he edges of a rectangle t08ether t0
P(V)
p{W)
Figure 24
138 Topological Spaces and Continuous Functions Chap.2
Example 5. Let X be the closed unit ball
{* xy\x2+yz^l]
in J?2 and let X* be the partition of X consisting of all the one-point sets
[x x y} for which ** + y2 < 1, along with the set S» = {x x y |*» + y« * n
Typical open sets in X of the form />-«(#) are pictured by the shaded regions
in Figure 25. One can show that A'* is homeomorphic with the subspace of lp
called the unit 2-sphere, defined by
S* = {(x, y, z)\x2 +y2 +z* = I}.
It is pictured in Figure 26.
p{U)
■p(V)
Figure 25 Figure 26
Now we explore the relationship between this new concept, that of quo-
quotient topology, and the concepts we have treated previously. It is interesting
to note that many of these concepts do not behave the way one might wish.
It is not hard to see that subspaces do not behave well: If p: X —* Y
is a quotient map and A is a subspace of X, then the map p': A —* p(A)
obtained by restricting both the domain and range of p need not be a quotient
map. See Example 6 below. If it should happen, however, that A is open in
Xand p is an open map, then p' is a quotient map; the same is true if both
A and/? are closed. This we leave to you to check.
Example 6. Consider the subspace A = [0,1] u B, 3] of R; it is a subspace
of the space X of Example 2. Suppose that we restrict the map p of Example
2 to A. Then q = p\A : A — [0, 2] is continuous and surjective, but it is not
a quotient map. The set
for instance, is closed in the domain space A; but A, 2] is not closed in the
image space Y = [0, 2].
Composites of maps behave nicely; it is trivial to check that the composite
of two quotient maps is a quotient map.
On the other hand, the product of two quotient maps need not be a quo-
The Quotient Topology 139
1 *'" _ s and ^ : C — /) are quotient maps, it does not fol-
v x c) =/>(«) x <?(c) is a <luotient maP' See Example
defined W <* * «J conditions on either the maps or the spaces in order
8 One needStrue Onesuch, a condition on the spaces, is called heal com-
for this to ru • ^ exercises of §3-8.) Another, a
^erncw. wc ma is the condition that both the maps p and q be
condition of^ ^ ^ .^ ^ ^ {q ^ ^ p x q is also an open map,
*iUS*^"continuousfunctions on quotient spaces there is something to be
vfwhen we studied product spaces, we had a criterion for determining
h map/:Z— \JX. into a product space was continuous. Its coun-
" ^ in the theory of quotient spaces is a criterion for determining when
f. x* —- Z out of a. quotient space is continuous. One has the follow-
following theorem:
Theorem 11.1. Let p: X —» Y be a quotient map. Let Z be a space and let
g: X — Z be a continuous map that is constant on each sei p'' ({y)), for y e Y.
Thin g induces a continuous map f: Y —• Z such that f ° p — g.
Y—~
f
Proof. For each y e Y, the set #(/r'({>})) is a one-point set in Z (since
fisconstanton /r'(M). If we let /(>■) denote this point, then we have defined
a map/; Y-^Z such that for each x e X, f(p(x)) = g(x). To show that
/iscontmuous, let Kbe an open set in Z. Continuity of g implies that
BoPen in X. Because p is a quotient map, f'(V) must be open in Y. \J
does not behave weU: even though one starts with
^Hausdorff Th ^ 'S "° reaS0" that the potent space needs to
Quotient space^If ^ * S'mple c.ondition for °ne-point sets to be closed in
*>$ed in y if h ^= X ~* Y is a ^"ot'ent map, then one-point sets are
^Wition Tx ? , CaCh setp"(W) is closed in JT. Therefore, if X*
space a-* r n,t0 closed sets- a» one-point sets are closed in the quo-
^ There'is a", 1OnS that W'U CnSUre that X* is "ausdorff are harder
* °™CWhat implicated condition called upper semicon-
n impose on the partition X* to ensure that it is Hausdorff
140 Topohgical Spaces and Continuous Functions q^
(See Exercise 13 of §4-2.) There is, however, one situation in which it is ^
to see that X* is a Hausdorff space:
Theorem 11.2. Let g : X — Z be a surjeetive continuous map. Let X* be
the following collection of subsets ofX:
X» = [g"({z])|zeZ).
Give X* the quotient topology.
(a) If 7. is Hausdorff, so is X*.
(b) The map g induces a bijective continuous map f: X* — Z, which is
a homeomorphism if and only if g is a quotient map.
K
X*—~Z
f
Proof. By the preceding theorem, g induces a continuous map/: X*-^Z;
it is clear that / is bijective. If Z is Hausdorff, then given distinct points
of X*, their images under / are distinct and thus possess disjoint neighbor-
neighborhoods t/and V. Then f~'(U) and f~'(V) are disjoint neighborhoods of the
two given points of X*.
Suppose that/is a homeomorphism. Then both / and the projection
p : X—* X* are quotient maps, so that g — /° p is a quotient map. Con-
Conversely, suppose that g is a quotient map. Given an open set V of X*, we
compute
which is open in X (because p is continuous). Therefore, f(V) is open in
Z, because g is a quotient map. Hence / maps open sets to open sets, so it
is a homeomorphism. □
When dealing with quotient spaces, one must be careful not to rely too
much on one's intuition as to what the spaces look like. Consider the follow-
following example:
Example 7. Let A' be the union of all straight lines in the plane of the form
L, = R x {«}, for n e Z+. LetZ be the union of all straight lines in the plane
passing through the origin and having positive integral slope. That is, letZ =
U£i» where
L', = {x x (nx)\xz R).
Both are subspaces of RK Let g: X — Z be the map
g(x x n)=x x (nx), .
which carries each line £„ linearly onto L'n. See Figure 27. We assert that the
map g is not a quotient map.
The Quotient Topology 141
Figure 27
That is, we assert that the quotient topology on Z induced by the map g
is not the same as the subspace topology on Z.
To prove this fact, let us take, for each n, an open interval {/„ of length \/n
in the line L'm centered at the origin; and let us define U = \JUn. Then U is
open in Z in the quotient topology induced by 4', since the set,?- '(U) is open in
X. But Uis not open in the subspace topology on Z; in that topology, the origin
is a limit point of the complement Z — U of U.
To say the same thing in a different way, suppose that we form a quotient
space X* from A'by collapsing the set 0 x Z+ to a single point. It is tempting
to think of X* as being essentially the same as the subspace Z of the plane.
But it is not. The map g induces a bijective continuous map h : X* —► Z. But
since g is not a quotient map, h is not a homeomorphism.
Example 8. The product of two quotient maps need not be a quotient map.
Let us take the spaces X and Z of the preceding example, but now let us
give Z the quotient topology induced by g.
Consider the space R" (in the product topology). Let i :/?"—> R" be the
identity map; being a homeomorphism, it is a quotient map. We shall prove
tfiat the map
f = g x i: X x R°> > Z x R°>
8 not a quotient map. Recall that X = R x Z+.
•ven« 6 ^+! define ^ t0 be the following subset of ,R x z+) x /po.
^ U" = K' x «) x (xu x2,...);\ /jr. | < 1}.
»K open in A' x R°>, because it is the cartesian product of the open set
K» P'ane, the open set
"<*• See Figure 28.
{/»} in Z+, and the open sets R in all the other
Topical Spaces and Continuous Functions
chap. i
Figure 28
Define U to be the open set
= VjnEZ.
of X x R". We assert the following:
(a) /"'(/(£/)) = £/.
(b) /(£/) is not open in Z x R".
It follows, since /"'(/(£/)) is open in X x /f» and /(£/) is not open in Z x R°>,
that the map / is not a quotient map.
(a) If /-'(/(£/)) is different from £/, then there must exist two points x e U
and y £ £/ such that /(x) = /(y). But in the present situation, /(x) = /(y)
for x ^fc y only if
x = @ x m) x (x,, .y2, . ..),
y = @ x n) x (x,,x2,. . .),
for some point (.v,, x2,....) of R°>. And these two points both belong to U,
since |0-xm| < 1 and |0-xn| < 1.
(b) Suppose that /(£/) is open in Z x R°>. The set /(£/) contains 0x0,
so it contains a basis element V x YlW, about 0x0. Here V is open in Z,
and W, is open in R; and W, = R for all but finitely many i. Choose N so that
WN = R. Since /((/) contains K x n W/, the set £/ = /"'(/(£/)) contains
/-1(KxIIW()=^-"(K) x IIW|.Now^-'(K)isanopensetin ^containing
the entire set 0 x Z+. In particular, g-*(V) contains some point t0 X # for
r0 # 0. Choose aw > i/|^0|, and consider the point
(h x N) x @ 0, aN, 0,...) •>■. ■
The Quotient Topology 143
$2-1'
*» Because WH = *. *«* Point lies in rW X II"'/- Because
rf * X San I, ft does not lie in U. But U contains ,-»(»0 * II^-
Contra*"-
Exercises
Check the details of Example 3.
R y. R—.R be projection on the first coordinate.
1 fut -f be the subspace @ x R) u (/? x 0) of /? x /?; let g = nl\X. Show
that ? is a closed map butnot an open map.
,w Let Y be the subspace (J?+ x /?) u (/? x 0) of R x /?; let h=nt\ Y.
Show that A is neither open nor closed, but it is a quotient map. [Hint:
h-'(U) n(K x0) = U xOJ
Letc A" ► y be surjective and continuous; let A be a subspace of X. Show
that if A is open in Jf and p is an open map, then p\A is an open map; con-
conclude ihaXp'.A —*P(A) is an open map. Show that if A and p are closed, p\A
is closed, and so is p'.
4. Let Xbe a space; let A be a set; let p : X —> A be a surjective map. Show that
the quotient topology on A induced by p is the finest (largest) topology relative
to which p is continuous.
5. (a) Define an equivalence relation on the plane X as follows:
x0 X y0 ~ xi x y, if .v0 + yl = x, + y\.
Let X* be the collection of equivalence classes, in the quotient topology.
X* is homeomorphic to a familiar space; what is it?
(b) Repeat (a) for the equivalence relation
*o X y0 ~ x, x y, if xl + yl = xf + JV?.
«• (a) Define «■: /?* —, r by the equation ^(a- x y) = x + y*. Show that g is a
quotient map.
(b) Define^: Ri — ^+ by the equation ^(.v x >) = x2 + y2. Show that g is
a quotient map.
(c) Compare (a) and (b) with Exercise 5.
1 (R X 0) U (° X ^ Of ^2- Define * '■ R% —'Z by the
«(^X)') = xxO if a;^ 0,
f@x>) = 0x>.
*) Show r'-611' maP? Is * continu°«s?
Hausdorff '" 'he quotient topology induced by g, the space Z is not
" tC- be the subspace of R> defined by . . ...
144 Topological Spaces and Continuous Functions Ox^.x
Let Y be the subspace
r=LUz.C.
of R2, and let X be the subspace C, X Z+ of R2 x tf. Define g:X-*Y by
the equation
£((* X y) X «) = (x/n,y/n).
Show that,? is continuous and surjective, but g is not a quotient map.
9. Let {X.} be a family of spaces and let [p.] be a family of maps pa : X. — ^
where /4 is a set.
(a) Show there is a unique finest topology 3 on A relative to which each map
p, is continuous.
(b) Show that a map/: A —> r is continuous relative to 3 if and only if each
map/° p. is continuous.
* Supplementary Exercises:
Topological Groups
In these exercises we consider topological groups and some of their properties.
The quotient topology gets its name from the special case that arises when one
forms the quotient of a topological group by a subgroup.
A topological group G is a group that is also a topological space, satisfying the
requirements that the map of G x G into G sending x x y into x-y, and the map of
G into G sending x into x'1, are continuous.
1. Show that G is a topological group if the map ofCx C into G sending x x y
into x'^-y is continuous, and conversely.
2. Show that the following are topological groups:
(a) (Z, +)
(b) (R, +)
(c) (*♦• •)
(d) (S\ •), where we take S' to be the space of all complex numbers z for which
1*1 = 1.
(e) The general linear group GL(«), under the operation of matrix multiplica-
multiplication. (GL(«) is the set of all nonsingular n by n matrices, topologized by
considering it as a subset of iJ'"'i in the obvious way.)
@ (.&, +) in the product, uniform, and box topologies.
3. Let (G, •) be a topological group; let a be an element of G. Show that the
maps /«,g.:G—*G defined by
/«(*) = cc-x and g,(x) = x-a.
are homeomorphisms of G. Conclude that G is a homogeneous space. (This
means that for every pair x, y of points of G, there exists a homeomorphism
of G Onto itself that carries x to y.)
Supplementary Exercises: Topological Groups 145
utaroupofff.If^e G, define .vtf-[*■*!* 6 H); this set is called
4 te,//be a subgroup^ ^ ^ ^^ the co,lection of ,eft cosets of W in G;
* left c*Vt.°'"f C |f G is a topological group, give C/// the quotient topology.
iHsapartili ^ ff the mapyi Qf the preceding exercise induces a homeo-
(a) Show^ ^ ^^ carrying A// to (a-.v)M Conclude that G/// is a homo-
peneous space.
,M show that the quotient map p:G-> G\H is open.
\ Show that if H is a closed set in the topology of G, then one-point sets are
closed in GjH.
Show that if//is a normal subgroup of G, then G/H is a topoiogical group.
f2 +) is a normal subgroup of (/?,+). The quotient R/Z is a familiar topolog-
topological group; what is it?
Let G be a topological group with identity element e. If A and B are subsets
of G let -4-fi denote the set of all points a-b (or a e A and b e B. Let -4"'
denote the set of all points a"', for a e A.
(a) If 1/ is a neighborhood of e, show there is a neighborhood V of e such that
K-F-' c £/.
(b) If A is a closed set not containing e, show there is a neighborhood V of e
such that the open sets V and
are disjoint. (/« is the map defined in Exercise 3.)
(c) Suppose that one-point sets are closed in G. Show that C is Hausdorff.
In fact, show that C satisfies the following stronger separation axiom,
which is called the regularity axiom: Given a closed set C and a point .v
not in C, there exist disjoint open sets containing C and x, respectively.
7. Let H be a subgroup of G that is closed in the topology of G; let p : G —■+ G/H
be the quotient map. Show that G/H satisfies the regularity axiom. [Hinf
Urader ftst the case where A is a closed set in G/H not containing p(e). Let
«~P W). Find a neighborhood U of e disjoint from B and let V»• Kc C/
inen consider the sets K-//and K-5.]
»• Show that if H is a subgroup of G, so is the closure of H.
3. Connectedness
and Compactness
In the study of calculus, there are three basic theorems about continuous
functions, and on these theorems the rest of calculus depends. They are the
following:
Intermediate value theorem. If/: [a, b] —* R is continuous and if r is a
real number between f{a) and f{b), then there exists an element c e [a, b)
such that f{c) = r.
Maximum value theorem. If/: [a, b] —> R is continuous, then there exists
an element c e [a, b] such that /(*) < /(c) for every x e [a, 6].
Uniform continuity theorem. \f f;[a,b]—* R is continuous, then given
f > 0, there exists 5 > 0 such that |/(x,) — /(x2)| < f for every pair of
numbers *„ x2 of [a, 6] for which \x,- x2\<d.
These theorems are used in a number of places. The intermediate value
theorem is used for instance in constructing inverse functions, such as^x
and arcsin x; and the maximum value theorem is used for proving the mean
value theorem for derivatives, upon which the two fundamental theorems of
calculus depend. The uniform continuity theorem is used, among other
things, for proving that every continuous function is integrable.
We have spoken of these three theorems as theorems about continuous
Junctions. But they can also be considered as theorems about the closed
146
Connected Spaces 147
of real numbers. The theorems depend not only on the con-
[a, °l °l Qn properties of the topological space [a, b].
uity Vb":v of the space [a, b] on which the intermediate value theorem
^e propeny ty caned connectedness, and the property on which the
ends is 'he P _i^ property called compactness. In this chapter, we shall
er wo d^. f arbitrary topological spaces and shall prove the
depen ^ property called compactness. In ths cp,
other wo d^.es for arbitrary topological spaces, and shall prove the
de/ine these P ^j.^ versions of these theorems.
appf°Prla s e qUOted theorems are fundamental for the theory of calculus,
ASt!r 'otLns of connectedness and compactness fundamental in higher
so*1*. ometIy and topology—indeed, in almost any subject for which
jS'ff topological space itself is relevant.
3-1 Connected Spaces
The definition of connectedness for a topological space is a quite natural
e One says that a space can be "separated" if it can be broken up into two
"slobs"—disjoint open sets. Otherwise, one says that it is connected. From
this simple idea much follows.
Definition. Let X be a topological space. A separation of X is a pair U, V
of disjoint nonempty open subsets of X whose union is X. The space X is
said to be connected if there does not exist a separation of X.
Connectedness is obviously a topological property, since it is formulated
entirely in terms of the collection of open sets of X. Said differently, if X is
connected, so is any space homeomorphic to X.
Another way of formulating the definition of connectedness is the fol-
following:
A space X is connected ifand only if the only subsets ofX that are both
open and closed in X are the empty set and X itself.
mfA is a nonempty proper subset of X which is both open and closed in
they aTe "*'- = A a"d V = X ~ A constitute a separation of X, for
f and P'f1'611' dlS^°int> and nOnempty, and their union is X. Conversely, if
anditi<h°!raSeparation of X>then Uis nonempty and different from X,
¥oS b°th open and closed in X.
LbtlPa!e Kof a toPological space X, there is another useful way of
the definition of connectedness:
none>nPty sets'k VS ° subspace °/X> a separation ofY is a pair of disjoint
of">e other n ^"^ U"io" " Y) neither °f which contains a limit point
space Y is connected if there exists no separation ofY.
148 Connectedness and Compactness Chap. 3
Proof Suppose first that A and B form a separation of Y, Then A is both
open and closed in Y. The closure of A in J is the set AnY (where ^ as
2S denotes the closure of ^ in X). Since ^_,s closed in Y, A- AnY;Ot
to say the same thing, AnB=0. Since A is the union of A and its limi,
points, B contains no limit points of A. A similar argument shows that A
contains no limit points of B. .
Conversely, suppose that /4 and 5 are disjoint nonempty sets whose union
is Y neither of which contains a limit point ofthe other. Then A_ n B = 0
and'/4 n 2? = 0 ; whence we conclude that An Y = /4 and 5 n r = a.
Thus both /4 and 5 are closed in Y, and since A = 7 - B and 5 = y _ A>
they are open in Y as well. D
Example 1. Let X denote a two-point space in the indiscrete topology.
Obviously there is no separation of X, so X is connected.
Example 2. Let Y denote the subspace [-1, 0) u @, 1] ofthe real line R.
Each ofthe sets [ — 1, 0) and @, 1] is nonempty and open in Y (although not in
R); therefore, they form a separation of Y. Alternatively, note that neither of
these sets contains a limit point of the other. (They do have a limit point 0 in
common, but that does not matter.)
Example 3. Let X be the subspace [-1, 1] ofthe real line. The sets [-1, 0]
and @, 1] are disjoint and nonempty, but they do not form separation of X,
because the first set is not open in X. Alternatively, note that the first set
contains a limit point, 0, ofthe second. Indeed, there exists no separation ofthe
space [—1, 1]. We shall prove this fact shortly.
Example 4. The rationals Q are not connected. Indeed, the only connected
subspaces of Q are the one-point sets: If Y is a subspace of Q containing
two points p and q, one can choose an irrational number a lying between p
and q, and write Y as the union of the open sets
Yn(—oo, a) and Kn(a, +oo).
Example 5. Consider the following subset of the plane R2:
X = {x X y\y = 0} u {x X y\x> 0 and ^ = 1/x}.
Then X is not connected; indeed, the two indicated sets form a separation of
X, because neither contains a limit point of the other. See Figure 1.
We have given several examples of spaces that are not connected. How
can one construct spaces that are connected? We shall now prove several
Figure 1
Connected Spaces 149
Pi u , ,,11 how to form new connected spaces from given ones. Then
theorems that tell how theorems to construct some specific
I* nex« ^"^s"nteTvals in X. and balls and cubes in *■. F.rst, a
^teo sp
lemma:
2 If the sets C and Dform a separation ofX, and if Y is a con-
Umml tofX, then Y lies entirely within either C or D.
mC'edSUf w Cand D are both open in X, the sets C n Kand D n Xare
y Ttesc two sets are disjoint and their union is Y; if they were both
™'" , would constitute a separation of Y. Therefore, one of them
Y must lie entirely in C or in D. □
r*<w<?m /.5. The union of a collection of connected sets that have a point
jn common is connected.
Proof Let {A,} be a collection of connected subsets of a space X; let p
be a point of f]A.. We prove that the set Y = \JA. is connected. Suppose
that Y= C U X) is a separation of r. The point p is in one of the sets C or
D- suppose/) G C. Since the set A, is connected, it must lie entirely in either
C or D, and it cannot lie in D because it contains the point p of C. Hence
A, c C for every a; whence [JA, c C, contradicting the fact that D is non-
nonempty, n
Theorem 1.4. Let A be a connected subset o/X. If A c B c A, then B
is also connected.
Said differently: If B is formed by adjoining to the connected set A some
or all of its limit points, then B is connected.
Proof. Lex A be connected and let A c B c A. Suppose that B = C uD
H?n]iOn °f * % LCmma L2' A- mUSt lie entirely in C or in ^ SUP"
P that A c C. Then /I c C; since C and D are disjoint, B cannot intersect
• ins contradicts the fact that D is a nonempty subset of B. Q
^ 'mage °fa comected sPace ™der a continuous map is
Pr°°f. Let/"- x vk
10 Pfove the irnapp ~7 / cont'nuous map; let X be connected. We wish
/fay restricts itf™ =/W 1S connected- Since the map obtained from
«the case of a I T Space Z is also c°ntinuous, it suffices to consid-
a continuous surjective map
»„ g:X—>Z.
suPpose that Z = j
** Open « Z. Then r >uf and "-1 m*^ ^ '^ tW° diSJ°int n°nempty
S (A) and g iE) are disjoint sets whose union is X;
ISO Connectedness and Compactness Chap. 3
thev are open in X because g is continuous, and nonempty because g is SUrjec_
live. Therefore, they form a separation of X, contradicting the assumption
that X is connected. D
Theorem 1.6. Tlie cartesian product of connected spaces is connected.
Proof We prove the theorem first for the product of two connected
spaces X and Y. This proof is easy to visualize. Choose a "base point" a x b
in the product X X Y. Note that the "horizontal slice" X x b is connected,
being homeomorphic with X, and each "vertical slice" x x Yh connected,
being homeomorphic with Y. As a result, each "T-shaped" space
Tx = (X X b) U (x X Y)
is connected, being the union of two connected sets that have the point x x b
in common. See Figure 2. Now form the union \JxSX Tx of all these T-shaped
spaces. This union is connected because it is the union of a collection of con-
X Y
a X b
X x
Figure 2
nected sets that have the point a X b in common. Since this union equals
X x Y, the space X x Y is connected.
The proof for any finite product of connected spaces follows by induction,
using the fact (easily proved) that X, x ■■■ x Xn is homeomorphic with
(X, X ■■■ XX..,) XX..
The proof for an arbitrary product now proceeds as follows. Let {X,},*i
be an indexed family of connected spaces, and let
Choose a "base point" b = (&.).„ for X.
Given any fin.te set {a «„} of indices in J, let us define a subspace
Wi. • •-,«„) otX; it consists of all points (xj.e, such that xa = b. for
t ""' ^^ ^ X(a" •••'«») is homeomorphic with the
product
X.. X
andhence is connected: For the obvious b
XX.
ijection between these spaces, map-
Connected Spaces 151
a - a- and J'« = b* for a" other values of a> car"
.'x ••• X X., to a basis element for X(oc,, . . .,<*„).
^ ^ sUb'space r of ^ which is the union of these subspaces
; this is the subspace
the union extends over all finite subsets fa, a_} of J. For the
vi a ) are connected, and they all contain the base point
spaces JT(Oi. - • • - ""•'
* Ids'tempting to think that the proof is finished. But it is not, for Y is not
f X The space /consists of all points (.vj,ey of X having the property
t • =b for all but finitely many values of a. So in some sense Y is only
' * rv'small'part of X. But now the fact that we are using the product topo-
for /comes in. We assert that under the product topology for X, the
closure of /equals all of X. Once we prove this fact, the connectedness of
Xfollows from Theorem 1.4.
Let us take an arbitrary point (xj of X, and an arbitrary basis element
{/= \\U, about (.v.), and prove that U intersects Y. Each set £/„ is open in
I,, and U, = X, except for finitely many indices, say a = a,, . . . , «,„. Con-
Construct a point O'J of X by setting
_ f.x. for a = a,,..., a,,
[&„ for all other values of a.
Then (y,) is a point of Y, because it belongs to the space X(alt . . . , a_).
Also 0'.) is a point of U, because ya = x. e £/. for a = a, a. and
/. =4. e X, for all other values of a. Hence £/ intersects Y, as desired. □
^ This theorem is not true if one uses the box topology on X. See Exercise
Exercises
of X
^LtTmp^att !(
1 Sh<>w that 7 n* co™ectedness in the other?
" 'S C°nneCted and nonemPty. then each X. is connected.
°f '•such tha< ^ - ^- - *
. ^ow^t^ j 7d s"b-'^ of X; let A be a connected subset
Sh0* that if v: ' 0 f°r a" a' then ^ ^ CJA.) is connected.
152 Connectedness and Compactness £.
6. A space is totally disconnected if its only connected subsets are one-point„
Show that a finite Hausdorff space is totally disconnected. sets-
7. Is it true that if X has the discrete topology, then X is totally disconnected7
Does the converse hold?
8. Is it true that if X is connected, then for every nonempty proper subset A of
X, we have Bd A ^ 0 ? Does the converse hold? (Recall that Bd A L
A n X - A.)
9. Let A c= X. Show that if C is a connected subset of X that intersects both a
and X - A, then C intersects Bd A.
10. Is the space H, connected? Justify your answer.
11. Show that R'° is not connected in the box topology by showing that the set A
of all bounded sequences is both open and closed. What happens if R<° has the
uniform topology?
12. Let Y <= X; let X and Y be connected. Show that if A and B form a separation
of X — Y, then Y U A and 7 U B are connected.
J-2 Connected Sets in the Real Line
The theorems of the preceding section show us how to construct new con-
connected spaces out of given ones. But where ran we find some connected spaces
to start with ? The best place to begin is the real line. We shall prove that every
interval and every ray in R is connected.
One application is the intermediate value theorem of calculus, suitably
generalized. As another application, we show that such familiar spaces as
balls and spheres in euclidean space are connected. The proof of this fact
leads to a new notion, called path connectivity, which we also discuss.
The fact that intervals and rays in R are connected may be familiar to you
from analysis. We prove it again here, in generalized form. It turns out that
this fact does not depend on the algebraic properties of R, only on its order
properties. To make this clear, we shall prove the theorem for an arbitrary
ordered set that has the order properties of R. Such a set is called a linear
continuum.
Definition. A simply ordered set L having more than one element is called
a linear continuum if the following hold:
A) L has the least upper bound property.
B) If x < y, there exists z such that x < z < y.
Theorem 2.1. If X is a linear continuum in the order topology, then L is
Connected and so is every interval and ray in L.
Proof. Let Y be a subset of L that equals either L or an interval or a ray
in L. The set Y is "convex," in the sense that if a and b are any two points ol
Connected Sets In the Real Line 153
h then the entire interval [a, b] of points of L is contained in the
* Y- A B be two disjoint nonempty sets that are open in Y. We shall
Let v* AUB, thereby demonstrating that there exists no separation
jhow ^at / *=
oiY' pointaof/«anda point b of B; assume the notation so chosen
Ch°°T (Do not make the mistake of assuming that every point of A is
*at I every point of B; that need not be true.) Because Y is "convex," we
less than ^^ find a int of ^ ^ tha{ belongs t0 neither A nor
have [o. °J c '
D
' Consider the sets
Ao = A n [a, b] and 50 = B n [a, 6].
These sets are open in [a, 6] in the subspace topology (which is the same as
the order topology). Let
c = lub Ao.
We shall show that c belongs to neither Ao nor Bo.
Case I. Suppose that c e Bo. Then c ^ a, so either c -- b or a < c < b.
In either case, it follows from the fact that Bo is open in [a, b] that there
is some interval of the form (d, c] contained in /?„. See Figure 3. If <■ -- b. we
have a contradiction at once, for d is a smaller upper bound on A0 than c. If
c < A, we note that (c, b] does not intersect Ao (because c is an upper bound
on At). Then
(d, b] = (d, c] U (c, b]
does not intersect ,*„. Again, d is a smaller upper bound on Ao than c, con-
contrary to construction.
Case 2 Suppose that c e /<„. Then c ^ b, so either c = a or a < c < b
Z '7Pe" 'lnJfl *L thCre mUSt be SOme interval of the form I*. 0
... of
ose a point z of L such that c < z <" » '
that c is an upper bound for Ao. fj
~ z
a
Figure 4
154 Connectedness and Compactness Chap. 3
Corollary 2.2. The real line R is connected and so is every interval and
ray in R.
As an application, we prove the intermediate value theorem of calculus,
suitably generalized.
Theorem 2.3 (Intermediate value theorem). Let f : X — Y be a continuous
map of the connected space X into the ordered set Y in the order topology.
jZld b are two points of X and if r is a pomt ofY lymg between f(a) and
f(b), then there exists a point c ofX such that f(c) = r.
The intermediate value theorem of calculus is the special case of this theo-
theorem that occurs when we take X to be a closed interval in R and Y to be R.
Proof Assume the hypotheses of the theorem. The sets
A = f(X) n (-00, r) and B = f(X) n 0, +00)
are disjoint, and they are nonempty because one contains f(a) and the other
contains f(b). Each is open in f(X), being the intersection of an open ray in
y with f(X). If there were no point c of X such that f(c) = r, then f(X)
would be the union of the sets A and B. Then A and B would constitute a
separation of f(X), contradicting the fact that the image of a connected space
under a continuous map is connected. □
Example 1. One example of a linear continuum different from R is the space
/ x / in the dictionary order topology, where / = [0, 1]. We check the least
upper bound property. (The second property of a linear continuum is trivial
to check.) Let A be a subset of / x /; let n, : I x I —► / be projection on the
first coordinate; let b = lub7T,(/0. If b e k,(A), then A intersects the subset
b x / of / x /. Because b x / has the order type of /, the set A n {b x /)
will have a least upper bound b X c, which will be the least upper bound of A.
See Figure 5. If b £ n,{A), then b x 0 is the least upper bound of A; no element
ir,(A)X0
bXc
K
Figure S
Connected Sets in the Real Line 1S5
, x , with b> < b can be an upper bound for A, for then b' would
If Xis a well-ordered set, then X x [0, 1) is a linear continuum
ofd r; this we .eave to you to check. This set can be thought
o ' b ufit(i .„„ a set of the order type of @, 1)
lof Xand its immediate successor, provided X has no
largest element.
Connectedness of intervals in H gives rise to an especially useful criterion
rshowing that a space X is connected; namely, the condition that every
p£rSof points of A-can be joined by apatli in X:
Definition. Given points x and y of the space X, a path in X from x to y
isacontinuous map/: [a, b] -> X of some closed interval in the real line into
X, such that f(a) = x and f(b) = y. A space A' is said to be path connected
if every pair of points of X can be joined by a path in X.
It is easy to see that a path-connected space X is necessarily connected.
Suppose X = A U B is a separation of ^V. Let /: [a, b] —► X be any path in
I. Being the continuous image of a connected set, the set f([a, b]) is connect-
connected, so that it lies entirely in either A or B. Therefore, there is no path in X
joining a point of A to a point of B, contrary to the assumption that X is
path connected.
The converse does not hold; a connected space need not be path con-
connected. See Examples 6 and 7 below.
Example 3. Define the unit ball B" in R" by the equation
5» = {X;||X||<1}>
where
/(/) = A - /)x + /y
lles "> *. For if x and y are in B" and / is in [0, 1],
^^ft'oS in TT^ ?"*?*" SP3Ce t0 te the sPace ^" " {0}>
?rdiff=rent from 0 we cfn'rl >,th'S SpaCe is path connec'ed: Given x and
**« Path do« noTgo thr k 1^ y by thC straight-'ine P^h between them
Zn°t on ,he lineS ° f "* °ngin- °therwise> we ™ *°™ a point
« Path do« noTgo thr k 1 y traight'ine P^h between them
Zan°t on ,he lineSg x ° f "* °ngin- °therwise> we ™ *°™ a point
411A «*n from z to y y> Md take the br0^n-Iine path from x to z,
156 Connectedness and Compoctness
Cha
'P. 3
Example 5, Define the unit sphere S"-' in R« by the equation
S"~' = [x;||x|| = 1],
If n > 1, it is path connected. For the map g : R" - [0] —► S"-i defin
g(x) = x/)|x|| is continuous and surjective; and it is easy to show that the
tinuous image of a path connected space is path connected, COn"
Example 6, The space I x I in the dictionary order topology is con
but not path connected.
Being a linear continuum, / x / is connected. Let p = 0 x 0 and
1 x 1, We suppose there is a path/: [a, b] —► / x /joining p and q and der*
a contradiction. The image set f([a, b]) must contain every point x x vof/ y f
by the intermediate value theorem. Therefore, for each x e /, the set '
Vx =/"'(* x @,1))
is a nonempty subset of [a, b]; by continuity, it is open in [a, b]. See Figure 6
Choose, for each x e /, a rational number qx belonging to Ux. Since the s t
Figure 6
* X @, 1)
Vx are disjoint, the map x —> qx is an infective mapping of / into Q. This con-
contradicts the fact that the interval /is uncountable (which we shall prove later).
Example 7, Here is another connected space that is not path connected;
it is a subspace of the plane. Let K denote the set A/,, |,, e Z+], and define
C = ([0, 1] x 0) u (K x [0, 1]) u @ x [0, 1]),
The space C is called the comb space, for obvious reasons. See Figure 7, The
pace S obtained by deleting from C the points of the vertical interval 0 x @,1)
is called the deleted comb space
X X
3 2
Figure 7
Connected Sets in the Real Line 157
The comb space Cis clearly path connected. The deleted comb space D
dily seen to be connected, for it is the union of the path connected set
A = ([0, 1] X 0) u (.K X [0, 1])
d the limit point p = 0 x 1 of A We shall prove that D is not path con-
Suppose that/: [a, b] —► D is a path in D beginning at p. We assert that the
setf~'({pT>is *""h open and closed ln ["• bk from this it follows by connectivity
that /"'rt"l) = ["•*]• We coriclude that 'here exists no path in D joining p
i^hat r'ttPj) «s closed is trivial' sinCe fP) is closed and/is continu-
TTn show 1. /->({/») is open, we choose a neighborhood Cof,.n
vhfch dolsno. intersect .hex-axis, as illustrated in Figure 8. Then, given an
Figure 8
arbitrary point xa of /"'([/>]), we choose a basis element t/about x0 such that
/(J/)c v. We assert that C/is contained in /-'([/>}). so /"'([p]) is open.
Note that U is connected, being a basis element for the order topology
on [a, b]. Therefore, f{U) is connected. Then f{U) cannot contain any point
different from p; Given a point q = A/n) x /0 of D different from p and
Vmg in V, choose r so that l/(n + 1) < r < 1/n. Then consider the following
•wo disjoint open subsets of R*:
(—oo, r) x .R and (r, +oo) x R.
*«use/(t/) lies in Z> and does not touch the x-axis, it does not intersect the
ir n theref!ore' " lies in the Union of these tw0 sets. Since f(U) is con-
nwteir !
nf th and COntains the Point p of the first set, it cannot contain the point q
me second set. Thus /({/) - {p\ as asserted.
. Let 5 denote the following subset of the plane:
m Connect a,,* Compactness Chap, 3
c ■ ,he image of the connected set @, 1] under a continuous map, s
Because S is *?«"»«"* dosure S in R> is also connected. The set $ is a
is connected. T™r!" , caMed the topologist's sine curve. It is illustrated
classical example n topo k curye ^ cQnnected but not path connec
SSSiS^1'* p-f we gave for the deleted Mmb space-
Figure 9
Exercises
1. (a) Show that no two of the spaces @, I), @, I], and [0, I] are homeomorphic,
(b) Suppose that /: X —> Y and g : Y—-> X are imbeddings. Show by means
of an example that X and Y need not be homeomorphic,
2. Let n be a positive integer. Given that the function f; R —► R defined by
/(.v) = x" is continuous, show that for each a > 0 there is exactly one b >l 0
such that tf = a.
3. Let/: -f— X be continuous. Show that if X = [0, I], there is a point x such
that f(x) = jr. The point x is called a fixed point of/. What happens if X equals
[0, 1) or @, 1)?
4. Let X be an ordered set in the order topology. Show that if X is connected, then
X is a linear continuum,
5. Consider the following sets in the dictionary order. Which are linear continua?
(a) Z+ x [0, 1)
(b) [0,1) x Z+
(c) [0,1) x [0, 1]
(<J) [0,1] x [0, 1)
7' !K J!
(cl If
tCt f Pa'h-^ec'ed spaces necessarily path connected?
v U Pa'h connected- is -4" necessarily path connected?
Components and Path Components 159
of path-connected subsets of X and if (V- * ®>
^^*H connect
R' and J? are not homeomorphic if n > 1.
j. show that untab|e. Show that if /* is a countable subset of *2,
, Ass"* IW * ls "h connected. [Hint: How many lines are there passing
'thCn*hagiven point of *»?]
thr0" r,; is an open connected subset of R\ then t/ is path connected,
l0 Show that ii u £ ^ the set of points that can be joined to x0 by
"SKi open and dosed in <,.]
SKibo* p
onnected subset of X, are Int A and Bd /( necessarily connected?
11 Jjs'theconverse hold? Justify your answers,
hat the topologist's sine curve is connected but not path connected,
11 L denote the ordered set Sn X [0, 1) in the dictionary order, with its
'* allest element deleted. The set L is a classical example in topology called the
Theorem. The long line is path connected and locally homeoniorphic to R,
but it cannot be imbedded in R.
Proof.
(a) Let X be an ordered set with smallest element a0. Let
A = [flo] U {x\[a0, x) has the order type of [0, I)}.
Show that if for each x e X there is a y > x such that [,v, y) has the order
type of [0, I), then A is open in X. Show that if X satisfies the "sequence
lemma," then A is closed in X. [Hint: If a is a limit point of A not in A,
there is an increasing sequence of points of A converging to a.]
(b) Show that L is locally homeomorphic to R; that is, each point of Z. has a
neighborhood homeomorphic to an open subset of R.
(c) Show that L is path connected.
(d) Show that L cannot be imbedded in R, or indeed in R" for any n. [Hint:
Anysubspace Y of R" has a countable basis for its topology; therefore,
any collection of disjoint open sets in Y is countable.]
*3-3 Components and Path Components^
' arbltrary space X, there is a natural way to break it up into
re connected (or path connected). We consider that process now.
"efinUion, Given v a c
!fthere'Saconn t h *" equivalence rela"on on X by setting x~y
^sarecalledTh ^^ of A'COntaining b°th x and y. The equivalence
he components (or "connected components") of X.
Symmetry and r fl ■ •
-^ enexivity of the relation are obvious. Transitivity follows
B ^"on win be assumed in Chapter 8.
160 Connectedness and Compactness Chap, j
by noting that if A is a connected set containing x and y, and if B is a
"ec"ed Jt containing>' and r, then /( U B is a set conta,mng x and z, which s
connected because A and * have the po.nt ym common.
The components of X can also be descnbed as follows:
Theorem 3.1. The components of X are connected disjoint subsets of ^
whose union is X, such that each connected subset ofX intersects only one of
them
them.
Proof. Being equivalence classes, the components of X are disjoint and
their union is X. Each connected set A in X intersects only one of them. For
if A intersects the components C, and C2 of X, say in points x{ and x2
respectively, then x, ~ x2 by definition; this cannot happen unless C, = c2'
To show the component C is connected, choose a point x0 of C. For each
point x of C, we know that x0 ~ x, so there is a connected set /(, containing
x0 and x. By the result of the preceding paragraph, Ax <= C. Therefore,
c = LUc 4,.
Since the sets Ax are connected and have the point x0 in common, their union
is connected. Q
Definition. We define another equivalence relation on the space X by
defining x ~ y if there is a path in X from x to y. The equivalence classes are
called the path components of X.
Let us show this is an equivalence relation. First we note that if there
exists a path/: [a, b] —> X from x to y whose domain is the interval [a, b],
then (because any two closed intervals [a, b] and [c, d] in R are homeomor-
phic) there is also a path g from x to y having [c, rf] as its domain. Now the
fact that x ~ x for each x in A' follows from the existence of the constant
path/: [a, b] —> A'defined by the equation /(/) = x for all t. Symmetry fol-
follows from the fact that if/: [0, 1] — A-is a path from x to y, then the "reverse
patrT g: [0, 1] — A-defined by g(t) = /(I - /) is a path from >> to x. Finally,
transitivity is proved as follows: Let/: [0, 1] — X be a path from x to .y, and
let g: [I, 2] —► X be a path from j> to z. We can "paste/and g together" to
get a path h : [0, 2] — X from x to z; the path h will be continuous by the
pasting lemma," Theorem 7.3 of Chapter 2.
One has the following theorem, whose proof is immediate:
Theorem 3.2. The path components ofX are path-connected disjoint subsets
oj X whose union is X, such that each path-connected subset ofX intersects only
one of them.
Example 1. The components of the subspace
y=l-l, 0)u@, 1]
,e real line
of
Local Connectedness 161
R are the two sets [-1, 0) and @, 1]. These are also the path
, The deleted comb space D of the previous section is a space
Example 2. lheu (because it is connected) and two path corn-
having * single,'° a °ace Y by adjoining to the deleted comb space D all
ponents. If w>™ q{ t"he jnterva, 0 x [0, 1], we obtain a space having only
thC wm'ponent but uncountably many path components.
*3~4 Local Connectedness4*
r nnectivity is a useful property for a space to possess. But for some pur-
it is more important that the space satisfy a connectivity condition
f*//'•' Roughly speaking, local connectivity means that each point has
'Arbitrarily small" neighborhoods that are connected. More precisely, one
has the following definition:
Definition. A space X is said to be locally connected at x if for every
neiehborhood (/of x, there is a connected neighborhood Kof x contained in
{/.If X is locally connected at each of its points, it is said simply to be locally
connected.
To phrase it differently, X is locally connected if there is a basis for X
consisting of connected sets. Local connectedness and connectedness of a
space are not related to one another; a space may possess one or both of these
properties, or neither.
Definition. A space A'is said to be locally path connected at x if for every
neighborhood (/of x, there is a path-connected neighborhood V of x con-
connedm U If AT is locally path connected at each of its points, then it is said
10 be locally path connected.
and^liv '" EaCh 'nterVal and each ray in the real line is b0'h connected
but i?.lTeCted- ThC SubSpace C—1.0) ^ @, I] of R is not connected,
«»nnec.J bu nnTr6^- "^ de'e'ed COmb Space (Example 7 of §3> is
"Or locally connected C°nnected- The nationals Q are neither connected
fo. bTx .. ? w 'S !°fa!'y path con"ected, since each of the basis elements
"nnected; each ofTf, , *\ Pa'h connected. Similarly, R» is locally path
h °f "s standard basis elements is path connected.
162 Connectedness and Compactness Chap,
Example 3. If we form a space Y by adjoining to the deleted
„" the points of the form 0 x (l/n) for n e Z+, we obtain a
L.1s locally connected a. the origin but no. locally path connected ,
origin.
The most important facts about locally connected spaces are given in the
following theorems:
Theorem 4.1. A space X is locally connected if and only if for every open
set U ofX, each component ofV is open in X.
Proof. Suppose that A'is locally connected; let U be an open set in X; let
Cbe a component of U. If x is a point of C, we can choose a connected neigh-
borhood V of* such that V <= U. Since Kis connected, it must lie entirely in
the component C of U. Therefore, C is open in A'.
Conversely, suppose that components of open sets in A'are open. Given
a point xof Xand a neighborhood i/of .v, let Cbe the component of Ucon-
Ucontaining .v. Now C is connected; since it is open in X by hypothesis, X is locally
connected at x- □
A similar proof holds for the following theorem:
Theorem 4.2. A space X is locally path connected if and only if for every
open set U ofX, each path component of\J is open in X.
The relation between path components and components is given in the
following theorem:
Theorem 4.3. ffX is a topological space, each path component of X lies
in a component ofX. IfX is locally path connected, then the components and
the path components ofX are the same.
Proof. Let C be a component of X; let x be a point of C; let P be the
path component of X containing x. Since P is connected, P c C We wish to
show that if A'is locally path connected, P = C. Suppose that P & C. Let Q
denote the union of all the path components of X that are different from?
and intersect C; each of them necessarily lies in C, so that
C = P u Q.
Because X is locally path connected, each path component of X is open in X.
iherefore, P (which is a path component) and Q (which is a union of path
STCut8) 3re °Pen '" X' So they institute a separation of C. This con-
conthe fact that C is connected. □
Local Connectedness 163
I*4
Exercises
,he components and path components of *,?
t^^e components and path components of JT (in the product
C)
topology)? unjform t0pology. Show ^ x and y lie in the same com-
(W ConS^eof>. if and only if the sequence
x -y;
., ^ in the box topology. Show that x and y lie in the same com-
(C) Z, nf /f» if the sequence x - y is "eventually zero."
»(d) Prove the converse of (c).
, m a snace X, let us define x ~ y if there is no separation X = A U B of X
So Sotat open sets such that * e /( and y e B. Show this is an equivalence
relation We shall call the equivalence classes the quasi components of X. Show
[hat each component of X lies in a quasicomponent of X.
4 Determine the quasicOmponents, components, and path components of the
' following subspaces of R2. [Here K denotes the set {l//i|« e Z+] and -K
denotes the set {-l/»|n e Z+}.]
A = (K x [0,1]) U @ x [0, 1]),
C = 5 U ([0,1] x 0),
D = (Kx [0,1]) u (-AT x [-1, 0]) U ([0, 1] x -K) U ([-1, 0] x K),
5. Show that if X is locally connected, then the quasicomponents of X are the
same as the components of X.
t- If/: X—> Yis continuous and X is locally connected, is f(X) necessarily locally
connected? What if/is both continuous and open?
7. Show that / x I in the dictionary order topology is locally connected but not
locally path connected. What are the path components of this space?
■ L« Xbe locally path connected. Show that every connected open set in X is
P«h connected.
■ ^t * denote the rational points of the interval [0, 1] x 0 of A2. Let T denote
(a) ShoTtht r'me Segments •ioinin8 the P°int P = 0 x 1 to points of X.
0» Find a subs i* f^i COnnected' but is loca"y connected only at the point p.
°f 'ts points tHat 'S Path connected but is loca"y connected at none
10.
ofTfterekfl'0 te c°nnect«« im kleinen at * if for every neighborhood U
Sl)o* that if A-is Z SUbSCt ^ °f V that contains a neighborhood of x.
wnaected. W;«- lu ^ lm kleinen at <*■<* of its points, then X is locally
'• bhow that components of open sets are open.]
164 Connectedness and Compactness
11 Consider the "infinite broom" X pictured in Figure 10. Show that
' locally connected at p, but X is connected im kleinen at p. [Hint: Any
neighborhood of p must contain all the points a,.]
Figure 10
3-5 Compact Spaces
The notion of compactness is not nearly so natural as that of connected-
connectedness. From the beginnings of topology, it was clear that the closed interval
[a, b] of the real line had a certain property that was crucial for proving such
theorems as the maximum value theorem and the uniform continuity theorem.
But for a long time it was not clear how this property should be formulated
for an arbitrary topological space. It used to be thought that the crucial prop-
property of [a, b] was the fact that every infinite subset of [a, b] has a limit point,
and this property was the one dignified with the name of compactness. Later,
mathematicians realized that this formulation does not lie at the heart of the
matter, but rather that a stronger formulation, in terms of open coverings of
the space, is more central. The latter formulation is what we now call com-
compactness. It is not as natural or intuitive as the former; some familiarity with
it is needed before its usefulness becomes apparent.
Definition. A collection G of subsets of a space X is said to cover X, or to
be a covering of X, if the union of the elements of G is equal to X. It is called
an open covering of X if its elements are open subsets of X.
Definition. A space A'is said to be compact if every open covering & of X
contains a finite subcollection that also covers X.
Example 1. The real line R is not compact, for the covering of R by open
intervals
« ={(/i,/i+ 2) |« eZ}
contains no finite subcollection that covers R.
Example 2. The following subspace of R is compact:
X = {0] u{l/«|« e Z+}.
Given an open covering e of X, there is an element U of C containing 0. The J
i
Compact Spaces 165
& . ., bt finitely many of the points 1/n; choose, for each point
t {/contains ail ^ ofa containing it. The collection consisting of these
of *aot K*' Ha with the element U, is a finite subcollection of a that covers
X-
Any space X containing only finitely many points is necessarily
^"because in this case every open covering of X is finite.
Ple4. The interval @, 1] is not compact; the open covering
d ={(!/". 1]|" e Z+}
• s no finite subcollection covering @, 1]. Nor is the interval @, 1)
mcf the same argument applies. On the other hand, the interval [0, 1] is
C°»cf' you are probably already familiar with this fact from analysis. In
my case' we shall prove it shortly.
In general, it takes some effort to decide whether a given space is compact
otnot^First we shall prove some general theorems that show us how to con-
construct new compact spaces out of given ones. Then in the next section we shall
show certain specific spaces are compact. These spaces include all closed
intervals in the real line, and all closed and bounded subsets of R".
Let us first prove some facts about subspaces. If Y is a subspace of X, a
collection a of subsets of X is said to cover Y if the union of its elements
contains Y.
Lemma 5.1. Let Y be a subspace of X. Then Y is compact if and only if
mry catering ofY by sets open in X contains a finite subcollection covering Y.
Proof. Suppose that Y is compact and G = {A,}.QJ is a covering of Y by
*ts open in X. Then the collection
{A. ny|«e/j
8»covering of y by sets open in Y; hence a finite subcollection
covers ^" ° *''''' A" ° y]
Conversed ^"" " ' *""*■ K * Subcollection of a that covers Y-
PactLetO' = JmPkT thC g'Ven condition holds; we wish to prove 7com-
'* A open in X Such thaT^ °f * ^ ^ °Pe" '" Y' ¥°T ™Ch "' ch°°SC
* finite subcollectio "(A °0Vering of Y by sets °Pen in x- By hypothes:
^lection of n' .l n "" ' * ■' ^«n} covers y. Then \A! A' ) is
n 01« that covers Y. Q l " '''' "J
Theorems2 £
veryc'osed subset ofa compact space is compact.
166 Connectedness and Compactness
Proof. Let Y be a closed subset of the compact space X. Give
Chap.j
:nacOVfefin.
Proof. Let Y be a p p . Given
a of Y by sets open in X, let us form an open covering <B of X by
to a the single open set X — Y, 8
<B = fl U {X - Y}.
Some finite subcollection of (B covers X. If this subcollection contains the
X — Y, discard A'— 7; otherwise, leave the subcollection alone. TheresuT'
ing collection is a finite subcollection of a that covers Y. Q
Theorem 5.3. Every compact subset of a Hausdorff space is closed.
Proof. Let Y be a compact subset of the Hausdorff space X. We shall
prove that X — Y is open, so that Y is closed.
Let x0 be a point of X — Y. For each point y of Y, let us choose disjoint
neighborhoods U, and V, of the points x0 and y, respectively (using the
Hausdorff condition). The collection [Vy\y e Y] is a covering of Y by sets
open in X; therefore, finitely many of them V,,, . . . , Vyn cover Y. The open
set
V = Vyi U • • • U Vy,
contains Y, and it is disjoint from the open set
U = Uyt n • • • n £/„„
formed by taking the intersection of the corresponding neighborhoods of xt.
See Figure 11. For if z is a point of V, then z G Vyi for some i, whence z $. Uyi
and so z <£ U.
Figure 11
Therefore, £/is a neighborhood of x0 disjoint from 7. Hence X-Y&
open, as desired. □
The statement we proved in the course of the preceding proof will be
useful to us later, so we repeat it here for reference purposes:
Compact Spaces 167
y is a compact subset of the Hausdorff space X and x0 is
A- J :,t Aivoint open sets U and V ofX containing x0 and Y,
ist disjoint open
Once we prove that the interval [a, b] in R is compact, it follows
Example 5. ^ any closed subse( of fa y {s cOmpact. on the other
from Theorem ^ -^^ TheOrem 5.3 that the intervals (a, b] and (a, b) in R
hand, '< act (Which we knew already) because they are not closed in the
Hau" iotff space R-
6 One needs the Hausdorff condition in the hypothesis of
ExAMP5L3 consider, for example, the topology 3/ on the real line consisting
'ftoand all complements of finite sets. The only proper subsets of R that
closed in this topology are the finite sets. But every subset of R is com-
^ this topology, as you can check.
Theorem 5.5- The image of a compact space under a continuous map is
compact-
Proof. Let/: X — Ybe continuous; let X be compact. Let G be a cover-
iogoftheset /(A') by sets open in Y. The collection
[f'KA)\A G G)
is a collection of sets covering X; these sets are open in X because/is con-
continuous. Hence finitely many of them, say
. Then the sets /4, /4n cover f(X). Q
One important use of the preceding theorem is as a tool for constructing
"wneomorphisms:
"""Pact a //v l ^: X ~* Y be a bijective continuous function. If X is
* h Hausdorff, then f is a homeomorphism.
k y;this^in ShaU Pr°VC that 'mageS of closed sets of X under/are closed
°Ve Cii
• -> by Th°Ve C0ntinuity of the maP /"'• If A is closed in X, then A is
"""Pact Since v'-T 5" Therefore> by the theorem just proved, f{A) is
is Hausdorff, /(/() is closed in Y, by Theorem 5.3. Q
worem 5.7 t-j
""" f. W ' ^ Pr°duct °f finitely many compact spaces is compact.
ren) follow<fh°V*thatthe Product of two compact spaces is compact;
oy induction for any finite product.
168 Connectedness and Compactness
Step 1.
Chap. 3
: that we are given spaces A'and Y, with K compact X
int of X, and N is an open set of X x Y containing tt
x x Y of XX K. We prove the following: s ne
There is a neighborhood W o/x0 in X such that N contains the entire set
W X Y.
The set W X Y is often called a tube about x0 X Y.
First let us cover x0 X 7 by basis elements £/ X K (for the topology of
XX Y) lying in N. The space *0 X Y is compact, being homeomorphic to
Y. Hence we can cover x0 X Y by finitely many such basis elements
U,xV,,...,UnX Vn.
(We assume that each of the basis elements U, X V, actually intersects
x x Y, since otherwise that basis element would be superfluous; we could
discard it from the finite collection and still have a covering of x0 x Y.)
Define W=(/,n • ■ ■ n Un.
The set W is open, and it contains x0 because each set U, X V, intersects
x0 x Y.
We assert that the sets U( X V,, which were chosen to cover the slice
x0 X Y, actually cover the tube W x Y. See Figure 12. Let x x y be a point
of If x 7. Consider the point ,v0 X y of the slice x0 x Y having the same
^-coordinate as this point. Now x0 x y belongs to U, X V, for some /, so
"lat y e v But x e V, for every j (because x e W). Therefore, we have
* X y e C/( x V,, as desired.
Since all the sets U, X V, lie in N, and since they cover W X Y the tube
rr x. i nes in TV also.
Compact Spaces 169
**"* ,w .heorem Let X and Y be compact spaces. Let
SKP2. Now we P-ve'he theor-L ^ heslice,o x yis compact
abc'nopenc-nngo ^y. ^ ^ d 0
7mav therefore be cov containing x0 X Y, by
^ "'« V^nta^e * X y about ,D X 7, where ^is
p 1, the^1 ^ y°s covered by finitely many elements At, ...,Amof
l0 w in J we can choose a neighborhood Wx of x such that
^rrcanb^ covered by finitely many elements of a. The col-
W xfo^ ds Wx is an open covering of X; therefore by
e"" ofV, there exists a finite subcollection
covering X. The union of the tubes
W,xY,...,WtxY
•sail of X X 7; since each may be covered by finitely many elements of a,
so may XX Y be covered. Q
The statement proved in Step 1 of the preceding proof will be useful to
us later, so we repeat it here as a lemma, for reference purposes:
Lemma S.8 (The tube lemma). Consider the product space X X Y, where
Y is compact. If N is an open set ofXxY containing the slice x0 X Y of
X X Y, then N contains some tube W X Y about x0 X Y, where W is a
neighborhood of x0 in X.
Example 7. The tube lemma is certainly not true if Y is not compact. For
example, let Y be the >>-axis in R2, and let
N = [xxy;\x\<l/(y* + l)}.
Then N is an open set containing the set 0 X R, but it contains no tube about
0 x R, It is illustrated in Figure 13.
nere is an obvious question to ask at this point. Is the product of infinitely
M\nrmP°C* SPaCa Comp.actl One would h°Pe that the answer is "yes,"
*e nam 11' ^ feSUlt 'S imP°rtant (and difficult) enough to be called by
h Ptov! hT Wh° Pr°Ved k; k 'S Ca"ed the Tychonoff theorem.
nected WeTrS Z t 'hat * cartesian Product of connected spaces is con-
*" ^ T St f°r ^ products and derived the general case from
d WeTr Z t p
^ provTn ft St f°r ^ products and derived the general case from
ver there ^ ^ Cartesian products of compact spaces are compact,
ecasedem "h ^ l° g° fr°m finite Products to infinite ones. The
Because ona^S«anfntirely new aPProach> and the proof is a difficult
ssicm itt this ch ^ and als° to avoid los!ngthe main thread °f our
chapter, we have decided to postpone it until later. How-
170 Connectedness and Compactness
Chap. 3
Figure 13
ever, you can study it now if you wish; the section in which it is proved (§5-1)
can be studied immediately after this section without causing any disruption
in continuity.
There is one final criterion for a space to be compact, a criterion that is
formulated in terms of closed sets rather than open sets. It does not look very
natural nor very useful at first glance, but it in fact proves to be useful on a
number of occasions. First we make a definition.
Definition. A collection 6 of subsets of X \s said to satisfy the finite inter-
intersection condition if for every finite subcollection
of e, the intersection C, (~*\ • • • O Cn is nonempty.
Theorem 5.9. Let Xbe a topological space. Then X is compact if and only
if for every collection Q of closed sets in X satisfying the finite intersection con-
condition, the intersection Hcse c of all the elements ofQ is nonempty.
Proof. Given a collection a of subsets of X, let
e = {X-A\A<=a)
be the collection of their complements. Then the following statements hold:
A) a is a collection of open sets if and only if 6 is a collection of closed
sets.
B) The collection a covers *if and only if the intersection (\<*Cd
all the elements of e is empty.
C) The finite subcollection {A,,..., A,} of a covers X if and only if the
intersection of the corresponding elements C, = X - A, of <5 's
empty. .
Compact Spaces
^ statement is trivial, while the second and third follow from DeMor-
J lw:
s law:
P
x (J
f of the theorem now proceeds in two easy steps: taking the
PIX!(of the theorem), and then the complement (of the sets)!
contrapos'ti i ^ ^^ compact ;s equivalent to saying: "Given any col-
^ f open subsets of X, if a covers X, then some finite subcollection
)ection a o ^ ^ statement is equivalent to its contrapositive, which is
°f *f llowing- "Given any collection a of open sets, if no finite subcollection
% overs X, then fl does not cover X" Letting 6 be, as above, the collection
fv~A\A e a} and applying (l)-C), we see that this statement is in
turn equivalent to the following: "Given any collection 6 of closed sets, if
verv fi"'te intersection of elements of 6 is nonempty, then the intersection
of all the elements of 6 is nonempty." This is just the condition of our
theorem. □
A special case of this theorem occurs when we have a nested sequence
C, d C2 3 ... Cn => Cn+, => ... of closed sets in a compact space X. If
each ofthesetsCn is nonempty, then the collection & = {Cn)nez> automatical-
automatically satisfies the finite intersection condition, as you can easily check. Then the
intersection
is nonempty.
We shall use the closed set criterion for compactness in the next section
toprove the uncountability of the set of real numbers, in Chapter 5 when we
prove the Tychonoff theorem, and again in Chapter 7 when we prove the
S^f? heOrem Atll i i
p
f? n y' in Pr°ving the Tychonoff theorem, we
the foBowmg slight reformulation of it, whose proof we leave to
* tS C°mpaCt V^only if for every collection
the finite intersection condition, the intersection
**+ closures is nonempty. ^ *
iUta,,,,,. Exercises
• does ^pactne^of ^und'f °" °? SCt *'* SUPPose that 3' = *■ What
. ft) J** under the other" ™* °* """ topol^"es ™P* about com
*■ ' **flOW that if v • *
3=3' - •% iSSSSTunder both
172 Connectedness and Compactness Chap. 3
2 (a) Show that every subset of R is compact in the topology 3/. (See Example 6)
(b) Is [0, 1] compact as a subspace of R in the topology •>
3 = {/j I ^{ — A is countable or all of R) ?
In the lower limit topology «;?
3. Show that a finite union of compact sets is compact.
4 Show that every compact subset of a metric space is bounded in that metric
" and is closed. Find a metric space in which not every closed bounded subset
is compact.
5. Let A and B be disjoint compact subsets of the Hausdorff space X. Show that
" there exist disjoint open sets V and V containing A and B, respectively.
6. Show that if/: X —» Y is continuous, where X is compact and Y is Hausdorff,
" then/is a closed map (that is,/carries closed sets to closed sets).
7. Prove Corollary 5.10.
8. Show that if Y is compact, then the projection n, : X x Y—> X is a closed
map.
9. Theorem. Let f: X —> Y; let Y be compact Hausdorff. Then f is continuous
if and only if the graph off,
Gf = {x X /(a) | a e X),
is closed in X X Y.
[Hint: If Gf is closed and V is a neighborhood of /(.v0), find a tube about
x0 x (Y — V) not intersecting Gf.]
10. Generalize the tube lemma as follows;
Theorem. Let A and B be subsets of X and Y, respectively; let N be an open
set in X x Y containing A x B. If B is compact, then there exists an open set
U in X such that
AxB^UxBczN.
If A and B are both compact, then there exist open sets U and V in X and Y,
respectively, such that
11. (a) Prove the following partial converse to the uniform limit theorem:
Theorem. Letf,:X—*Rbea sequence of continuous functions, withfn(x) —>
fix) for each x e X. Iff is continuous, and if the sequence f, is monotone increas-
increasing, and if X is compact, then the convergence is uniform. [We say that f, is
monotone increasing if /„(*) <fn+l(x) for aI, „ and x]
(b) Give examples to show that this theorem fails if you delete the requirement
that X be compact, or if you delete the requirement that the sequence be
monotone. [Hint: See Exercise 9 of §2-10.]
e xercise 9 of §2-10.]
rln nJ°rCm' U' Xbea ™mP"ct Hausdorff space. Let a be a collection of
closed connected subsets of X which is simply ordered by proper inclusion. Then
Is connected.
Compact Sets in the Real Line 173
'** , n is a separation of Y, choose disjoint open sets V and V
l*»': IfC°r and /respectively, and show that
^^ containing0 anu ' M _ (# u K))
isnot empty-] hav£ s(udied t0p0|0gica| groups:
osed
^ y) = ^.^ ]f c ^ A.
3-6 Compact Sets in the Real Line
■n, theorems of the preceding section enable us to construct new com-
, m, from old ones; but in order to get very far we have to find some
Sc compact sets. The natural place to start is the real line. We prove
ht every closed interval in R is compact. As an application, we prove the
maximum value theorem of calculus, suitably generalized. Other applications
include a characterization of all compact subsets of /?", and a proof of the
uncountability of the set of real numbers.
It turns out that in order to prove every closed interval in 7? is compact,
we need only one of the order properties of the real line—the least upper
bound property. We shall prove the theorem using only this hypothesis;
then it will apply not only to the real line, but to well-ordered sets and other
ordered sets as well.
Theorem 6.1. Let X be a simply ordered set haying the least upper bound
property, h the order topology, each closed interval in X is compact.
Proof. Given a < b, let G be a covering of [a, b] by sets open in [a, b] in
foesubspace toP°l°gy (which is the same as the order topology). We wish to
prove the existence of a finite subcollection of a covering [a, b].
from?tt F'f WC pr°Ve the fol[owinS: If * « a point of [a, b] different
fecovered '* " ^ V > * '" ["' b] SUCh that the interVal ^ ^ can
'«i Dy at most two elements of a.
Wx vlon" ''T2?316 SU°CeSSor in X> let y be this ^mediate successor.
111051 two eCn S °p^ tW° P°'ntS * and y> S0 that H can be covered by at
^«Uofa7nf'a' "° immediate successor in X, choose an
ittterval of the form rimnf f Be°aUSe X * b and A is °Pen> A contains an
ften * interval r?ir C)> 'Z™ ° ''" k b]' Ch°0Se a Point V in (*• &.
™ [x, y] ,s covered by the single element A of a.
Y > ° °f ^ ^ ^ that the interval
many elements of a. Applying Step 1 to the
174 Connectedness and Compactness
Chap. 3
case x = a, we see that there exists at least one such>\ Let c be the least
bound of the set C; then a < c < b. Upper
Step 3. We show that c belongs to C; that is, we show that the
[a, c] can be covered by finitely many elements of a. Choose an elemenT!!
of a containing c; since A is open, it contains an interval of the form (rf \
for some d in [a, b]. If c is not in C, there must be a point z of C lying in th
interval (d, c), because otherwise d would be a smaller upper bound on C
than c. See Figure 14. Since z is in C, the interval [a, z] can be covered b
finitely many, say /;, elements of G. Note that [z, c] lies in the single element
A of G, whence [a, c] = [a, :] U [z, c] can be covered by n + 1 elements of
G. Thus c is in C, contrary to assumption.
or y
a d c a c b
Figure 14 Figure 15
Step 4. Finally, we show that c = b, and our theorem is proved. Suppose
that c < b. Applying Step 1 to the case x = c, we conclude that there exists
a point y > c of [a, b] such that the interval [c, y] can be covered by finitely
many elements of G. See Figure 15. We proved in Step 3 that c is in C, so
[a, c] can be covered by finitely many elements of G. Therefore, the interval
[a, y] = [a, c] U [c, y]
can also be covered by finitely many elements of G. This means that;' is in C,
contradicting the fact that c is an upper bound on C. Q
Corollary 6.2. Every closed interval in R is compact.
Now we characterize compact subsets of R":
Theorem 6.3. A subset A of Rn is compact if and only if it is closed and is
bounded in the euclidean metric d or the square metric p.
Proof. It will suffice to consider only the metric p\ the inequalities
p(x, y) <, d(x, y) <> */~n~p(x, y)
imply that A is bounded under d if and only if it is bounded under p-
Suppose that A is compact. Then, by Theorem 5.3, it is closed. Consider
the collection of open sets ,
Compact Sets in the Real Line 175
l>$ ■ ,„ of R" Some finite subco.lection covers A. It followsi that
^e union '"» ** M Therefore, for any two points x and y of A, we
A c B,@> MJ° Thus A is bounded under A
have^'v)r nose that /I is closed and bounded under p; suppose that
/-inversely. suPr r __•_,, c , rhnncp n noint x« of A. and
ave^r «nose that /I is closed and b p
Conversely, suppose th ^ ^^ g pojnt ^ of ^
&»*£ 'rSSngie'neiality implie. that „(*, 0) < N -f-6 for
let />(-*<>• W 'if^ = ^ + 6> then ^ is a subset of the cube [-P, P]", which is
SactnBeing closed, ^ is also compact. Q
often remember this theorem as stating that the collection of
t sets in a metric space equals the collection of closed and bounded
compTahCjs statement is clearly ridiculous as it stands, because the question as
^k-h'ch sets are bounded depends for its answer on the metric, whereas
vhich sets are compact depends only on the topology of the space.
Example 1. The unit sphere S"~' and the closed unit ball B" in R" are
compact, since they are closed and bounded. The set
A ={.v x (I/.v)|0<x< 1}
is closed in R1, but it is not compact because it is not bounded. The set
S = {x x (sin (i/.v))|0 <-v< 1}
is bounded in R1, but it is not compact because it is not closed.
Now we prove the maximum value theorem of calculus, in suitably gener-
generalized form.
Theorem 6.4 (Maximum and minimum value theorem). Let f : X —> Y be
continuous, where Y is en ordered set in the order topology. IfX is compact,
'hen there exist points c and d in X such that f(c) < f(x) <£ f(d) for every
T °fca'CuIus is the sPecial ca^ of this theo-
en we take X to be a closed interval in R and Y to be R
com-
W^lXZT /W com
^"'and MbeLit ! geSt e'ement M a"d a Smallest el™t »• Then
^s cand dot X ' WC mUSt h3Ve m = ^c) and " = /CO for some
lU h
"° 'arSest e'ement, then the collection
formsann K~°°, a)\a e A]
f;- Si"Ce ^ is compact, some finite subcollection
^ £££££? ■>■■»-«, bd.-,, ,„
simi'arareum f u thcy cover A-
r^ent shows that ^has a smallest element. D
176 Connectedness and Compactness _,
Finally, we prove that the real numbers are uncountable. The
thing about this proof is that it involves no algebra at all—no decimV
binary expansions of real numbers or the like—just the order properties f ^
In fact, we prove the following more general result: •
Theorem 6.S. Let X be a (nonempty) compact Haiisdorff space If ev
point ofX is a limit point ofX, then X is uncountable. ry
Proof. Step I. First we show that, given a (nonempty) open set V of V
and given x e X, there exists a (nonempty) open set V contained in V such
that V does not contain x.
The point x may or may not be in U. But in either case, we can choose
point y in U that is different from x. This is possible if x is in U because x i
a limit point of X (so that U must contain a point y different from x). And 't
is possible if x is not in U because [/is nonempty. Let W, and I-K, be disjoint
neighborhoods of x and y, respectively; then V = U n W-, is the desired
open set, whose closure does not contain x. See Figure 16.
x or x
Figure 16
Step 2. We show that given/: Z+ — X, the function/is not surjective.
It follows that X is uncountable.
Let x, = f(n). Apply Step 1 to the nonempty open set U = X to choose
a nonempty open set Vl cz X such that K, does not contain .v,. In general,
given KB_, open and nonempty, choose Vn to be a nonempty open set such
K" c K»-' and v« d°es not contain xn. Consider the nested sequence
Pi = ^ ^ ...
of nonempty closed sets of X Because Zis compact, there is a point x B f\K
oy ineorem 5.9. The point x cannot equal *„ for any n, since a: belongs to
K and jr. does not. Q
OmXfaty <J.,J. Every closed interval in R is uncountable.
Compact Sets in the Real Line 177
Exercises
titxb an ordered set in which every closed interval is compact,
, prove that i bound property.
*" \Ta clntld Iric space having more than one point is uncountable.
* ^^ric space with metric d; let A be a subset of X Recall that the
'0% is defined by the equation
exists. Show that if A is compact, then diam A exists and equals </(a,, «2)
for some <*i, e ^>
, ffc,i metric space with metric d; let A <= X
4Jf,f,e™, define «/(*,,« = gib (*«)l<£4 Show that the map
carrying a:' into d(x, A) is a continuous map of X into R.
(b) Is it true that for some a e /f, we have rf(x, -4) = d(x, a)l Is this true if A
is closed? If A is compact ?
(c) Is it true that x e Ait and only if d(x, A) = 0?
(d) Define the (-neighborhood of A in X to be the union
V{A, €) = LUx #/(«. f).
Show that £/(/f, f) equals the set
{x\d(x,A)<e}.
(e) Show that if A and B are disjoint closed subsets of X and 5 is compact,
then for some f, the f-neighborhoods of A and B are disjoint.
(f) Does (e) hold if B is not compact?
5. Let Xbe a compact Hausdorff space. Show that if{/4n] is a countable collection
ofclosedsetsin X, each of which has empty interior in X, then there is a point
of Jwhich is not in any set An. [Hint: Imitate the proof of Theorem 6.5.]
This is a special case of the Batre category theorem, which we shall study in
Chapter 7.
•6. LeMo be the closed interval [0, 1] in R. Let At be the set obtained from AD
oy deleting its "middle third" (j, *). Let A2 be the set obtained from A, by delet-
«* its "middle thirds" (J, |) and (J, f). In general, define An by the equation
A
intersection
V 3 3 /
C n«-z.A.
(aiT* tl^Cantor set^ i» is a subspace of [0,1].
S°W 3' °is tot" disconnected.
slowS.
of length [li^A 1" ^ auUnion °f finitely many disJ°int closed intervals
Show that Ive'rvlr, ^ ** end P°intS °f theSe intervaIs Iie in C.
Conclude thl^^ °f CIS a limit point of C.
"ciude that Cis uncountable.
l78 Connectedness and Compactness Chap. 3
3.7 Limit Point Compactness
As indicated when we first mentioned compact sets, there are other fOr.
Ulat ons of the notion of compactness that are frequently useful. In this
s^ct on we introduce one of them. Weaker in general than compactness, it
coincides with compactness for metrizable spaces One application is the
thWd theorem of calculus quoted at the beginning of the chapter, the uniform
continuity theorem, which we shall prove in suitably generalized form.
Definition. A space X is said to be limit point compact if every infinite
subset of* has a limit point.
In some ways this property is more natural and intuitive than that of
compactness. In the early days of topology, it was given the name "com-
"compactness," while the open covering formulation was called "bicompactness."
Later, the word "compact" was shifted to apply to the open covering defini-
definition, leaving this one to search for a new name. It still has not found a name
on which everyone agrees. On historical grounds, some call it "Frechet com-
compactness"; others call it the "Bolzano-Weierstrass property." We have
invented the term "limit point compactness." It seems as good a term as any;
at least it describes what the property is about.
Theorem 7.1. Compactness implies limit point compactness, but not con-
conversely.
Proof. Let *be a compact space. Given a subset A of X, we wish to prove
that if A is infinite, then A has a limit point. We prove the contrapositive—if
A has no limit point, then A must be finite.
So suppose that A has no limit point. Then A contains all its limit points
and is therefore closed. Being a closed subset of a compact space, it is com-
compact. For each a in A, we can choose a neighborhood Ua of a such that Ua
does not intersect A - {a}, since a is not a limit point of A. The set A is cov-
covered by the open sets Ua; being compact, it can be covered by finitely many,
say n, of them. Since each set Ua contains only one point of A, the set A itself
contains n points.
The example following describes a space that is limit point compact but
not compact. Q
*' Consider the minimal uncountable well-ordered set Sa, to
°Og? Th Space * is not comPact, for it is not closed in&.
?? omPact, for it is not clos
a sublet flnf J?v! P°im C°mpaCt: Ut A be an infinite subset of Sa- Ch°°Se
f 1iat
a sublet flnf J?v!
upper bofnd i1niat.1thC°U»tabIy infi"ite- Bei"g COUntabIe> th6 Set B ^ *"
is thesmanl °\ f" BlS* subset of the interv*l l<">- « of Sn, where*.
* the smallest element of Sa. Since Sa has the least upper bound property, the
Limit Point Compactness
> r Al is compact. By the preceding theorem, B has a limit point x
.n(erval [ao, *I* aIsQ a Ijmjt poim of A Thus Sa is Iimit point compact.
>n [a" \ 1 know 5n is not metrizable, for it does not satisfy the "sequence
WC file 3 of §7-10). Once we prove that compactness and limit point
lemma' <fc^™ equivaIent in metrizable spaces, it follows that Sa is not
a<eeither even though it does satisfy the sequence lemma. For Sn is
t compact but not compact.
derto prove the uniform continuity theorem, we need first to prove
!" lemma concerning open coverings of metric spaces. Recall that
of a bounded subset A of a metric space (X, d) is the number
2)|fli,fl2 G A}.
Lemma 7.2 {The Lebesgue number lemma). Let d be an open covering of
the metric space (X, d). IfX is compact, there is a 8 > 0 such that for each
subset o/X /laving diameter less than d, there exists an element of Q. containing
it.
The number 5 is called a Lebesgue number for the covering G.
Proof. Step 1. Because X is compact, it is necessarily limit point compact.
We shall prove that limit point compactness of X in turn implies that every
infinite sequence CO in X has a convergent subsequence. That is, there is an
increasing sequence
n, < n2 < ■ ■ ■ <//,<
of positive integers such that the sequence
*„„ *„„ ..., *„„ ...
converges.
*fS£S£X£?Y has a conversent subsequence> we say
Given the sequence (*„), let us consider the set
= {x.\neZ+}.
Sthat^-Tffi WC assert that ^"e is a
*rtion,iet/;z !~,'S ' ,"' Y "^ ValU£S °f "• tTo P™ve this as-
J« Z is the union of heI'" X'?,g fUnCti°n defined * A») = *.. Then
^S f
suppose th *.. e^(*,l).
Ae P°Sitive inte^r «'- • » given. Because the ball B(x, 1/0
180 Connectedness and Compactness Chap. 3
intersects A in infinitely many points, we can choose an index n, > ^ tuch
a-., e B(x, I/i).
Then the subsequence *.„ .*_,. • - converges to x.
Step 2. Now we show that if X is sequentially compact, then every open
covering a of X has a Lebesgue number <5.
We shall prove the contrapositive: Suppose there is no 5 > 0 such that
every set of diameter less than 5 lies in at least one element of a. Then X is
not sequentially compact.
So let us assume there is no such S. This means that for each <5 > 0, there
exists a subset of X having diameter less than 5 which does not lie inside any
element of a. In particular, for each // e Z+, we can choose a set C, having
diameter less than I/// which is not contained in any element of a. Choose, for
each n, a point a-, of Cn. We assert that the sequence (*„) has no convergent
subsequence.
Suppose that (*„) had a convergent subsequence (.%•„,), converging to x,
say. Now x belongs to some element A of a, and because A is open, there is
an e > 0 such that 5(.v, e) <= /I. Choose / large enough that
</(*„„ -v) < f/2 and I//i, < e/2.
Now Cni lies in the I/«, neighborhood of .v,,,: it follows that
C., c fl(.v, e).
Then Cn, <= /I, contradicting the choice of the sets Cn. □
The preceding proof is a typical proof of nonconstructive nature—it
shows 5 exists without giving any hint of how to find it.
Now we prove the third of the theorems of calculus stated at the begin-
beginning of the chapter, in suitably generalized form.
Theorem 7.3 (Uniform continuity theorem). Let f : X —» Y be a continuous
map of the compact metric space (X, dx) to the metric space (Y, dY). Then f is
uniformly continuous. That is, given e > 0, there exists ad>0 such that for
any two points xls x2 of X,
dx(x1)x2)<5 ==> dy(f(x,), f(x2))< f.
«dSS Lelabet? °' takC the°Pen C0Venn8 °f Y * ba"S £()'' f/2) °f
under fChn si °Pe" C°Venng of X ^ the inverse images of these balls
^0"! S t0 be a LebesS"e number for the covering a. Then if ft
f/2, Then ^^^^''SKf*^ ^'"
Limit Point Compactness 181
that compactness and limit point compactness are equiva-
7d LetXbeantetrizablespace. Then the following are equivalent:
Theorem /•*•
i\\ X is compact.
filx't'segue'>''iallyC0"'paC'-
/■We have proved above that A) =* B) => C); see the proofs of
'7 1 and Lemma 7.2. We have also proved that sequential com-
^"^implies that every open covering of X has a Lebesgue number. We
pactness 1 ^ ^ proof by showing that sequential compactness of X implies
""jTcUiess of X So assume that X is sequentially compact.
Step I- First we show that for every f > 0, there exists a finite covering
f/by f-balls. And once again, we prove the contrapositive: If for some
° 0 /cannot be covered by finitely many f-balls, then X is not sequentially
compact.
So suppose that X cannot be covered by finitely many f-balls. Construct
asequence of points xn of Afas follows: First choose x, to be any point of X.
Noting that the ball B(xu e) is not all of AT (otherwise A'could be covered by a
single f-ball), choose xt to be a point of X not in B(xu e). In general, given
xt,. ■ ■, x,, choose xn+, to be a point not in the union
B(xt,e)u ••• uB(xn,e),
using the fact that these balls do not cover X. Note that by construction
rf(*»+i>*() > € for i = 1, .. ., n. Therefore, the sequence (a-,) can have no
convergent subsequence; in fact, any ball of radius f/2 can contain xn for at
most one value of n.
Step 2. Now we prove X compact. Let a be an open covering of X.
ince X B sequentially compact, the covering a has a Lebesgue number 5.
XhJu n V' Ch°°Se a finite covering of X by balls of radius 512. Each of
an Z, t Idmmeter at m°St 2S/3'So We can choose for each of the^ balls
covers ™ q contain'ng it. We thus obtain a finite subcollection of a that
Exercises
f omPa:: topoiogy-show that ^ >< ^is
Sh°w that [0 1T» ,• ■•
topologies. ' nOt llmlt point impact in either the box or the uniform
182 Connectedness and Compactness
Chap. 3
3. Show that the set [0,1] is not limit point compact as a subspace of R
4. A space X is said to be countably compact if every countable open cover"
X contains a finite subcollection covering X. ng °f
(a) Show that countable compactness implies limit point compactness
(b) Prove the converse if X is Hausdorff. [Hint: If no finite subcollecf
{£/„} covers X, choose xn i £/, U • • • U £/„.] on of
5. Let X be limit point compact.
(a) If/: X—> Y is continuous, is f(X) necessarily limit point compact?
(b) It A is a closed subset of X, is A necessarily limit point compact?
(c) If X is a subspace of Z, is X necessarily a closed set in Z?
(d) Repeat (a)-(c) under the additional assumption that the spaces involved
are Hausdorff.
*(e) It is not in general true that the product of two limit point compact spaces
is limit point compact, even if the Hausdorff condition is assumed. But the
examples are fairly sophisticated. See [S-S], Example 112.
6. Let X, Y, and Z be metric spaces.
(a) If/: X —► Y and g : Y—> Z are uniformly continuous, is g°f: X—>Z
necessarily uniformly continuous?
(b) If /: X—> Y is a homeomorphism and / is uniformly continuous, is /-'
necessarily uniformly continuous?
7. Let (X, d) be a compact metric space. Let /: X —> X be a continuous map.
(a) We say that / is a contraction if there is a number a < 1 such that
d(f(x), f(y)) <, <*d(x, y)
for all points x, y e X. Show that if/is a contraction, there is a unique
point x of X such that f(x) = x. [Hint: Consider C\f"(X).]
(b) We say that/is an isometry if d(f(x), f{y)) = d(x, y) for all points x,y e X.
Show that if/is an isometry, then /is surjective. [Hint: If x £ f(X), let the
f-neighborhood of* be disjoint from f(X). Define x, = * and, in general,
*»+i = /(*„). Show that d(xm xm) > € for n ^ m.]
(c) Give examples to show these theorems fail if X is not compact.
*8. Show that [0, I]1" is compact in the product topology.
*3-8 Local Compactness^
In this section we study the notion of local compactness, and we prove the
basic theorem that any locally compact Hausdorff space can be imbedded in
a certain compact Hausdorff space, called its one-point compactification.
Definition. A space X is said to be locally compact at x if there is some
compact subset C of X that contains a neighborhood of x. If X is locally
compact at each of its points, X is said simply to be locally compact.
fThis section will be assumed in §5-3, in Chapter 7, and in §8-12.
Local Compactness 183
a co
mpact space is automatically locally compact.
P , The real line R is locally compact. The point .v lies in some
*Z») JchTn turn is contained in the compact se, [a. bl The sub-
^' of rational numbers is not locally compact, as you can check.
■> The space R" is locally compact; the point .v lies in some basis
Exam -■ ^ ^ ^ whjch Jn (urn |ies in the conlpact set
eIenie')tx .'. x [o../>J. The space R" is not locally compact; none of its
fasis elements are contained in compact sets. For if
B = (a,.b,) x ■ • • x (</„. bn) x R x ■ ■ • x i? x • • •
were contained in a compact set, then its closure
B = [a,, b,] x ■ • ■ x [<?„. 6,,] X /? x • ■ •
would be compact, which it is not.
Example 3. Every simply ordered set A" having the least upper bound prop-
property is locally compact: Given a basis element for X, it is contained in a closed
interval in X, which is compact.
Two of the most well-behaved classes of spaces to deal with in mathe-
mathematics are the metrizable spaces and the compact Hausdorff spaces. Such
spaces have many useful properties, which one can use in proving theorems
and making constructions and the like. Jf a given space is not of one of these
types, the next best thing one can hope for is that it is a subspace of one of
these spaces. Of course, a subspace of a metrizable space is itself metrizable,
so one does not get any new spaces in this way. But a subspace of a compact
Hausdorff space need not be compact. Thus arises the question: Under what
conditions is a space homeomorphic with a subspace of a compact Hausdorff
space? Wegive one answer here. We shall return to this problem in Chapter
JWhen we study compactifications in general.
outff"k°"' UtXbe a locally comPact Hausdorff space. Take some object
formiT t den°ted by the symbo1 °° for convenience, and adjoin it to X,
ODenl8, hC S5 y== XU f°°}- ToPologize Y by defining the collection of
,',,ln Y t0 be all sets of the following types:
g ^. where U is an open subset of X,
C h
The spa yC> Whefe ° 'S a comPact subset of X.
e * is called the one-point compactification of X.
'■"P'/seth!aVt116^ that th'S collection is> in ^ct, a topology on Y. The
that'he intersect T @> a"d the SpaCe Yis a set of tyPe &■ Checking
section of two open sets is open involves three cases-
l84 connectedness and Compactness Chap. 3
£/, n Ui isof type(l).
(Y — Ci) n (y w) ~ ^ '
rfn(Y— C,) = ^1 n (A"— Ci) is of type A),
because G is closed in X. Similarly, one checks that the union of any col-
u
e C,
of open sets is open:
U(y _ C,) = Y - (fl^,) = r - C is of type B).
(UW u or- c,)) = t/ u (r- C) = r- (c - t/),
which is of type B) because C-Uisa closed subset of C and therefore com-
Pa<The basic properties of the one-point compactification are given in the
following theorem.
Theorem 8.1. Let X be a locally compact Hausdorff space which is not
compact; let Y be the one-point compactification of X. Then Y is a compact
Hausdorff space; X is a subspace 0/Y; the set Y — X consists of a single
point; and X = Y.
Proof. First we show that A" is a subspace of Y and X = Y. Given any
open set of Y, its intersection with X is open in X, since U O X = U and
(K — C) n Jf = A" — C, both of which are open in X. Conversely, any set
open in JT is a set of type (l)and therefore open in Y. Since A" is not compact,
each open set Y — C containing the point 00 intersects X. Therefore, 00 is a
limit point of X, so that X = Y.
To show that Y is compact, let a be an open covering of Y. The collection
a must contain an open set of type B), say Y — C, since none of the open
sets of type A) contain the point 00. Take all the members of a different from
Y - C and intersect them with X; they form a collection of open sets in X
covering C- Because C is compact, finitely many of them cover C; the cor-
corresponding finite collection of elements of a will along with the element
Y-C, cover all of Y.
To show that /is Hausdorff, let x and y be two points of Y. If both of
them he in X, there are disjoint sets U and V open in X containing them,
respectively. On the other hand, if x e Zand y = 00, we can choose a com-
dki ^1 '\u COntaim'ng a neighborhood U of x. Then U and Y - C are
d.sjo.nt ne.ghborhoods of x and 00, respectively, in Y. Q
comPactification of the real line R is homeo-
the snarl r r h<™eomorphic to the sphere S*. If & is
Local Compactness 1S5
§ our definition of local compactness is not very satisfying.
In some ways ^ ^ ^ satisfies a given property "locally" if every
Usually onefybitrariiy small" neighborhoods having the given property.
x e f-^nf local compactness has nothing to do with "arbitrarily small"
"•'■"n° js some question whether we should call it local
compactness^an^. formuIation of local compactness, one more truly "local"
HerelSjt is equivalent to our definition when X is Hausdorff.
8 2 Let X be a Hausdorff space. Then X is locally compact at
, '' An,,lv if for every neighborhood U ofx, there is a neighborhood V ofx
Jch that Vis compact and V czV.
Proof it is clear that this new formulation implies local compactness;
the set C = V is the desired compact set containing a neighborhood of x.
Conversely, suppose that Cis a compact set containing a neighborhood of x.
Let £/be an arbitrary neighborhood of x. Let A = C — U; being closed in
C, the set A is compact. Apply Lemma 5.4 to choose disjoint open sets W
and W about x and A, respectively. See Figure 17. Let V = W n (int C);
recall thatlnt Cis the union of all open sets contained in C. Then Kisa neigh-
neighborhood of x. Since X\s Hausdorff, C is closed in X; therefore, V a C, so
that V is compact. Because Kis contained in W, which is disjoint from IV',
the set V cannot intersect A. Therefore, V a C — A, so that V cz U. □
Figure 17
A s°mewhat slmnlPr nrnnC . .
ot this lemma is available if X is locally
he fact that the complement of U in the
. - ■ WIu kk of v a a v !r ^P*** One chooses disjoint neigh-
1Sc°mpact and ic • ~ ' resPect»vely. Then the closure V of V
"u ls contained in U.
186 Connectedness and Compactness £.
Corollary 8.3. Let X be locally compact Hausdorff; let Y be a subspa
ofX. IfY is closed in X or open in X, then Y is locally compact. c*
Proof. Suppose that Y is closed in X. Given y e Y, let C be a compact
set in X containing the neighborhood C/of y in Z. Then Cr\ Yis closed in
C and thus compact, and it contains the neighborhood U r\ Y of y {„ y
(We have not used the Hausdorff condition here.)
Suppose that Y is open in X. Given ye Y, we apply the previous lemma
to choose a neighborhood V of .y in X such that K is compact and V c y
Then C = K is a compact set in Y containing the neighborhood V of y [a
Y □
Corollary 8.4. A space X is homeomorphic to an open subset of a compact
Hausdorff space if and only ifX is locally compact Hausdorff.
Proof. This follows from Theorem 8.1 and Corollary 8.3. □
Exercises
1. Show that the rationals Q are not locally compact.
2. (a) Show that if \[Xa is locally compact, then each X* is locally compact and
Xx is compact for all but finitely many values of a. (Assume that each
X* is nonempty.)
(b) Prove the converse, assuming the Tychonoff theorem.
3. Let X be a locally compact space. If/: X—> Y is continuous, is the space
f(X) necessarily locally compact? What if / is both continuous and open?
Justify your answer.
4. Show that [0, Vf is not locally compact in the uniform topology.
5. Show that the conditions in Theorem 8.1 characterize the one-point compacti-
fication up to homeomorphism.
6. Show that the one-point compactification of R is homeomorphic with the circle
S".
7. Show that the one-point compactification of Sa is homeomorphic with Sa-
8. Show that the one-point compactification of Z+ is homeomorphic with the
subspace {0} u {l/n\n e Z+} of R.
*9. Show that the one-point compactification of R2 is homeomorphic with the two-
sphere S2.
10. Show that if G is a locally compact topological group and H is a subgroup,
then G/H is locally compact.
•11. (a) Prove the following:
Lemma. lfp:X-^Yisa quotient map and ifZ is a locally compact Haus-
Hausdorff space, then the map
Supplementary Exercises; Nets 187
jt = p x tg : X x Z >- Y x Z
iS<">Hlt- If s~'(/0 is open and contains -v x >> choose open sets I/, and K
• h /compact, such that .v x ^ e I/, x K and I/, x V c *->(/<). Given
*"' y c s->(/4), choose an open set l/i+, containing p~'(p(U,)) such that
J^j/c «-»(/<)■ Let u = U^i; show that ji(C/ x K) is a neighborhood
of'«(.* x ^ containecl in ^
(b) Prove:
Theorem. Let p: A~-> B and q : C —> D be quotient maps. If B and C are
locally compact Hausdorff spaces, then p x q ; A X C —> B X D is a quotient
map-
* Supplementary Exercises:
Nets
We have already seen that sequences are "adequate" to detect limit points,
continuous functions, and compact sets in metric spaces. There is a generalization
wtion of sequence, called a net, that will do the same thing for an arbitrary
■ical space. We give the relevant definitions here, and leave the proofs as
js Recall that a relation < on a set A is called a partial order relation if
the following conditions hold :
A) a < a for all a.
B) If a < 0 and 0 < a, then a = p.
C) If a < P and P < y, then a < y.
Now we make the following definition:
A directed set J is a set with a partial order < such that for each pair &, P of
elements of J, there exists an element y of J having the property that a < y and
Hi-
1. Show that the following are directed sets:
(a) Any simply ordered set, under the relation <.
(b) The collection of all subsets of a set S, partially ordered by inclusion (that
is, A < B if A c b).
(c) A collection a of subsets of S that is closed under finite intersections,
parhally ordered by reverse inclusion (that is, A < B if A => B).
Hie collection of all closed subsets of a space X, partially ordered by inclu-
"ion.
sudfT KoUis said to ** cofinaI in J if f°r each « e J, there exists 0 e K
that a ^ p. show that if J is a directed set and K is cofinal in J, then K
1Sa directed set.
into X^ t0pological sPace- A ne* in X is a function / from a directed set /
symbol /A6 J> WC USUally denote/(oc) by ^^ Wedenote the net/i'self by the
Thenit T''^ mCKly by ^ if the index set is understood.
e U«) is said to converge to the point x oT X (written x* —* x) if for
188 Connectedness and Compactness Chap. 3
each neighborhood U<Jx, there exists « e/such that
Show that these definitions reduce to familiar ones when / = Z+.
A. Suppose that
(Xa)tS). >xir\X and Ck.)«£/-—>- y in Y.
Show that
(jr. X ya) *■ x x y
in X x j .
5. Show that if Xis Hausdorff, a net in Xconverges to at most one point.
6. Theorem. Let A e X Then x e A if and only if there is a net ofpoints ofA
converging to x.
[#/>//■ To prove the implication =>, take as index set the collection of all
neighborhoods of x, partially ordered by reverse inclusion.]
7. Theorem. Let f: X— K. TVn / w continuous if and only if for every con-
' vergent net (jr.) in X converging to x, say, the net (/(x.)) converges to f(x),
8. Let/: J—> Xbe a net in X; let /(a) = *a. If .STis a directed set and g : K-*J
is a function such that
(i) i<J=>g(O<g(J),
(ii) ,?(#) is cofinal in /,
then the composite function/" g : K —> X is called a subnet of (a-J. Show that
if the net (*,) converges to x, so does any subnet.
9. Let (*a)«e/ be a net in X. We say that x is an accumulation point of the net (jr.)
if for each neighborhood U of x, the set of those a for which *a e G is cofinal
in/
Lemma. The net (*„) Aas the point x as an accumulation point If and only if
some subnet of(x^) converges to x.
[Hint: To prove the implication =>■, let K be the set of all pairs (a, U) where
a e / and U is a neighborhood of x containing x*. Define (a, U) < @, V) if
a < P and V c G. Show that JsTis a directed set and use it to define the subnet.]
10. Theorem. X Is compact if and only if every net in X has a convergent subnet.
[Hint: To prove the implication =>, let Bx = {xp \ 0C < 0} and show that
{£«) satisfies the finite intersection condition. To prove <=, let a be a collection
of closed sets satisfying the finite intersection condition, and let (B be thecollec-
tion of all finite intersections of elements of a, partially ordered by reverse
inclusion.]
11. Corollary. Let G be a topological group; let A and B be subsets ofG. If A is
closed In Gand B is compact, then A-Bis closed in G.
1 '• tlTst glve a Proof using sequences, assuming that G is metrizable.]
exercises remain correct if condition B) is °mtt»
'. Many 1
4, Countability
and Separation Axioms
The concepts we are going to introduce now, unlike compactness and
connectedness, do not arise naturally from the study of calculus and analysis.
They arise instead from a deeper study of topology itself. Such problems as
imbedding a given space in a metric space or in a compact Hausdorff space
are basically problems of topology rather than analysis. These particular
problems have solutions that involve the countability and separation axi-
axioms.
We have already introduced the first countability axiom; it arose in con-
connection with our study of convergent sequences in §2-10. And we have also
studied one of the separation axioms—the Hausdorff axiom. In this chapter
we shall introduce other, and stronger, axioms like these and explore some
of their consequences. Our basic goal is to prove the Urysohn metrization
theorem. It says that if a topological space X satisfies a certain countability
axiom (the second) and a certain separation axiom (the regularity axiom),
then A" can be imbedded in a metric space and is thus metrizable. This classi-
081 theorem may be considered the culmination of Part I of the book.
Another imbedding theorem, important to geometers, appears in the
hirfwi-On °f thC chapter- Given a sPaCe which is a compact manifold (the
gner-d,mensional analogue of a SUrfaCe)) We show that it can be imbedded
some finite-dimensional euclidean space.
189
190 Countability and Separation Axioms ^
4-1 The Countability Axioms
Recall the definition we gave in §2-10:
Definition. A space X is said to have a countable basis at x if there is a
countable collection (B of neighborhoods of x such that each neighborhood
of x contains at least one of the elements of (B. A space that has a countable
basis at each of its points is said to satisfy the first countability axiom.
We have already noted that every metrizable space satisfies this axiom-
see §2-10.
The most useful fact concerning spaces that satisfy this axiom is the fact
that in such a space, convergent sequences are adequate to detect limit points
of sets and to check continuity of functions. We have noted this before;
now we state it formally as a theorem:
Theorem 1.1. Let X be a space satisfying the first countability axiom.
(a) The point x belongs to the closure A of the subset AofX if and only
if there is a sequence of points of A converging to x.
(b) The function f : X — > Y is continuous if and only if for every convergent
sequence (xn) in X, converging to x, say, the sequence (f(xn)) converges to f(x).
The proof is a direct generalization of the proof given in §2-10 under the
hypothesis of metrizability, so it will not be repeated here.
Of much greater importance than the first countability axiom is the fol-
following:
Definition. A topological space Xis said to satisfy the second countability
axiom if X has a countable basis for its topology.
Obviously the second axiom implies the first: If (B is a countable basis
for the topology of X, then the subset of (B consisting of those basis elements
containing the point x is a countable basis at x. The second axiom is, in fact,
much stronger than the first; it is so strong that not even every metric space
satisfies it.
Why then is the property interesting? Well, for one thing, many familiar
spaces do have this property. For another, it is a crucial tool used in proving
the Urysohn metrization theorem, as we shall see.
Example 1. The real line R has a countable basis—the collection of all
open intervals (a, 6) with rational end points. Likewise, R" has a countable
basis—the collection of all products of intervals having rational end points-
Even 7f» has a countable basis—the collection of all products J[,ez. V"
where Un is an open interval with rational end points for finitely many values
of n, and Un = R for all other values of n.
The Countability Axioms 191
1 , m.heuniformtopology,^satisfiesthefirstcountabrf.tyaxiom
***** \X But U does not sa.isfy the second. Consider the uncountable
MmetT»»ble)nBu ■ nces of O's and IV If (B is a bas.s for the
TZ7T^ for each xeC'an eIement m
a( ^ Jf ^ and
andI W^ ^ B/Jox p(.x,y) = l.sothat, £ A. We conclude
well behaved with respect to the operat.ons
12 A subspace of a first-countable space is first-countable, and
of first-countable spaces is first-countable. A subspace
bl d tbl dt f
Zvroduct of firstcouna p fi
" cond countable space is second-countable, and a countable product of
icmd-cmmtable spaces is second-countable.
Proof. Consider the second countability axiom. If (B is a countable basis
X then {B n A\B e <&} is a countable basis for the subspace A of X.
If(B i'sa countable basis for the space X,, then the collection of all products
Till, where U, £ <B, for finitely many values of / and U, = X, for all other
values of i, is a countable basis for X[Xt.
The proof for the first countability axiom is similar. □
Two consequences of the second countability axiom that will be useful
to us later are given in the following theorem. First, a definition:
Definition. A subset A of a space X is said to be dense in X if A = X.
Theorem 1.3. Suppose that X has a countable basis. Then:
(a) Every open covering ofX contains a countable subcollection covering X.
(b) There exists a countable subset ofX which is dense in X.
Proof. Let {£„} be a countable basis for X.
(a) Leta bean open covering of X. For each positive integer n for which
The Mi?- Ch°°Se a" element A- of a containing the basis element Bn.
subset fTn G' °f the SCtS A" is countable. since it is indexed with a
o. the poSlt1Ve integers. Furthermore, it covers X: Given a point
« a hii, T C a" dement A of a containing x. Since /(is open, there
^hesetTH 5 SUCh th3t X e B" C ^ SinCe B» lies in an element of
^1' is a"rn, * ufd f°r the index n' since A" contains Bn, it contains x.
(b) From ?We SubcoUectjon of « that covers X
k?nnempty b3Sis dement B« choose a P°int *-• The set
X e X> every basis element about x
1 he two
ftive«o«ntab,°1w USted '" TheOrem 1-3 are sometimes taken as alter-
1 Notable wbcl*^.IOms- A sPac« for which every open covering contains
venng ls usuaUy caUed a Lindelbf space. A space having
192 Countability and Separation Axioms
Chap.,
a countable dense subset is often said to be separable (an unfortunate
of terminology).t Weaker in general than the second countability axiom
of these properties is equivalent to the second countability axiom wh '^
space is metrizable (see Exercise 7). They are less important than the <
countability axiom, but you should be aware of their existence, for th
sometimes useful. It is often easier, for instance, to show that a space Xh*
a countable dense subset than it is to show that X has a countable basi ?r
the space is metrizable (as it usually is in analysis), solving the easier proble
solves the harder problem as well. em
We shall not use these properties to prove any theorems, but one of the
—the Lindelof condition—will be useful in dealing with some exampl
Neither of them is as well behaved as one might wish under the operations
of taking subspaces and cartesian products, as we shall see in the examples
that follow. (See also Exercise 10.)
Example 3. The space R, satisfies all the countability axioms but the second
Given x e R,, the set of all basis elements of the form [a-, x + \jn) is a
countable basis at x. And it is easy to see that the rational numbers are dense
in Rt.
To see that Rt has no countable basis, let (B be a basis for R,. Choose for
each a-, an element Bx of (B such that a- e Bx cz [x, x + 1). If x =£ y, then
Bx =£ By, since .v = gib Bx and y = gib By. Therefore, (B must be uncountable.
To show that Rt is Lindelof requires more work. It will suffice to show that
every open covering of Rt by basis elements contains a countable subcollection
covering R,. (You can check this.) So let
a = {[a., b.)Uj
be a covering of R by basis elements for the lower limit topology. We wish
to find a countable subcollection that covers R. Let C be the set
considered as a subspace of R. Then C satisfies the second countability axiom.
Because the collection {(o«, b*)} consists of sets open in C, it must contain a
countable subcollection that covers C, consisting, say, of the elements (a,, b,)
for a = a,, a2, Then the collection
also covers C.
We assert that the set R — C is countable. From this our result follows:
Choose for each point of R - C an element of a containing it; adjoining these
elements to a', one obtains a countable subcollection of a that covers all of A.
So let x be a point of R — C. Necessarily x = a. for some <X e J. Choose
qx to be a rational number belonging to the interval {a., ba); because this inter-
tThis is a good example of how a word can be overused. We have already define
what we mean by a separation of a space; and we shall discuss the separation axioms
shortly. .
The Countability Axioms 193
<*■
„ ■ r so is the interval (.v.*). It follows that the function
. ,s contain^ in C, * c int0 the set Q of rational numbers, so that
, - * iS a" TS [For if * and y are two points of R - C and a- <y, then
* „ r is countable.^ otherwlSe > would belong to (.v.*,). although y is in
■^KvlTis stained inc.]
' ' ^ 7Sf wo<*/f / of two Lindelof spaces need not be Lindelof For
Example 4. " J and we s]ia|] show that the space ^2 is noti
' 'S 'is an extremely useful example in topology called the Sor-
e. plane. It'has as basis all sets of the form [a, b) x [r, d) in the plane,
raider the subspace
C L={xx(.-x)\xe R,}
o' it is easy to check that L is closed in Rf. Let us cover Rf by the open set
# 11 and by all basis elements of the form
[a, b) x [-a, d).
Each of these basis elements intersects L in at most one point. Since L is
uncountable, no countable subcollection covers Rf. See Figure 1.
aX(-a)
Figure 1
[a,fa) X [-a,cQ
* " countable dlTZ °f "space havi"S « countable dense subset need not
1*! coorditdT/n nV*** '° ** that the Set of Points havin6
Jkt \ h BlU thesubsP^eL has the discrete topology]
it cannot have a countable dense subset.
194 Countabiiity and Separation Axioms q^
Example 6. The space Sa satisfies the first countabiiity axiom, but has mn.
of the other countabiiity properties.
Given a in Sa, let b be the immediate successor of a. The collection of all
intervals whose end points are less than or equal to b is countable, so £Q has a
countable basis at a.
Clearly, Sa has no countable dense subset, since any countable subset of
Sa has an upper bound in Sa. Similarly, Sa is not Lindelof: Consider thecollec-
tion of open sets
a ={[ao,b)\b e Sa]
covering So, where a0 is the smallest element of Sa. If &' is a countable sub-
collection of a, the right-hand end points of the intervals in a' have an upper
bound b in 5Q; then b is contained in no element of a'. Therefore, a' does not
cover Sa, so Sa is not Lindelof. As a consequence, Sa cannot have a countable
iis.
Note that the space Sa is Lindelof (being compact), and the subspace SQ is
basis
not.
Exercises
1. (a) A Gs set in a space A'is a set A that equals a countable intersection of open
sets of X. Show that in a first-countable Hausdorff space, every one-
point set is a Gs set.
(b) There is a familiar space in which every one-point set is a Gs set, which
nevertheless does not satisfy the first countabiiity axiom. What is it?
2. Show that every compact metrizable space X has a countable basis. [Hint:
Let an be a finite covering of X by 1/n-balls.]
3. Show that if X has a countable basis, every collection of disjoint open sets in
X is countable.
4. Let JThave a countable basis; let A be an uncountable subset of X.
(a) Show that the subspace topology on A is not the discrete topology.
(b) Show that A contains at least one of its limit points.
(c) Show that A contains uncountably many of its limit points.
5. Show that if X has a countable basis {Bn}, then every basis 6 for X contains
a countable basis for X. [Hint: For every pair of indices n, m for which it is
possible, choose C,m e C such that Bn <= Cn m <= Bm. Let C be the collection
of the sets C,,m.]
6. Show that in a Hausdorff space with a countable basis, all four varieties of
compactness (compactness, limit point compactness, sequential compactness,
countable compactness) are equivalent.
7. Let X be metrizable.
(a) Show that if X has a countable dense subset, X has a countable basis.
. - (b) Show that if X is Lindelof, X has a countable basis. [Hint: CmP
Exercise 2.]
The Separation Axioms 195
i*-2 nd / x / in the dictionary order topology are not metrizable.
t Sho* that *J^ ^^ are satisfied by XT in the uniform topology?
,_ vi*i<* cow* u ^ countabIe product of spaces having countable dense sub-
,„. Sho* that >fa;JShas a C0Untable dense subset.
** , if X is Lindelof and Y is compact, then XxYh Lindelof.
„. Show that^se( e(/> ^ of aII continuous functions/: I-^ R, where / = [0, 1],
tl in the metric ^ ^ = ^ {| /w ^ ]}
., MCe has a countable dense subset, and therefore has a countable
Show that lnCo^sjder (he set ^ of aii continuous functions whose graphs are
**& !f'of finitely many line segments having rational end points.]
"Tow that the product space /', where / = [0, 1], has a countable dense subset.
' Qh w that the space t\ in the ^-metric, has a countable dense subset and
il therefore has a countable basis. (See Exercise 9 of §2-9.)
4-2 The Separation Axioms
In this section, we introduce three separation axioms and explore some
of their properties. One you have already seen—the Hausdorff axiom. The
others are similar but stronger. As always when we introduce new concepts,
we shall examine the relationship between these axioms and the concepts
introduced earlier in the book.
Recall that a space A" is said to be Hausdorff if for each pair x, y of distinct
points of X, there exist disjoint open sets containing x and y, respectively.
Definition. Suppose that one-point sets are closed in X. Then X is said
to be regular if for each pair consisting of a point x and a closed set B dis-
jwnt from x, there exist disjoint open sets containing x and B, respectively.
of jrth*Xh- sa'd '° be normal if for each pair A> B of disi°int closed sets
. Here exist disjoint open sets containing A and B> respectively.
regular (W * "^ * K&XhT SpaCe is Hausdorff. and that a normal space is
Wofthed fi"^ '° mclude the condition that one-point sets be closed as
^•Atwo-poi " °f regularity and normality in order for this to be the
ftedtfinitio'nsof ^T ■" 'hC indiscrete topology satisfies the other part of
Fot wamples hreg. nty and normality, even though it is not Hausdorff.)
'"""■".andnorm^1"8 "* reSularity axiom stronger than the Hausdorff
lhe« axiomT y Str°nger than ^^ari'y. see Examples 1 to 3.
U?re Called i
lhe« axiomT ger than ^^ari'y. see Examples 1 to 3.
V0lveUseparatw?re Called seParation axioms for the reason that they in-
^'^ have usL ih kmdS °f SetS from one another by disjoint open
me word "separation" before, of course, when we studied
196 Conntability and Separation Axioms
Cha,
'P. 4
Hausdorff
Regular
Figure 2
connected spaces. But in that case, we were trying to find disjoint open sets
whose union was the entire space. The present situation is quite different, be-
because the open sets need not satisfy this condition.
The three separation axioms are illustrated in Figure 2.
There are other ways to formulate the separation axioms. One formulation
that is sometimes useful is given in the following lemma:
Lemma 2.1. Let X be a topological space. Let one-point sets in X be closed.
(a) X is regular if and only if given a point xofX and a neighborhood U
off., there is a neighborhood V of x such that Vcl).
(b) X is normal if and only if given a closed set A and an open set U con-
containing A, there is an open set V containing A such that VcU.
Proof, (a) Suppose that X is regular, and suppose that the point x and
the neighborhood U of x are given. Let B = X — U; then B is a closed set.
By hypothesis, there exist disjoint open sets V and W containing x and B,
respectively. The set V is disjoint from B, since if y e B, the set W is a neigh-
neighborhood of y disjoint from V. Therefore, V cz U, as desired.
To prove the converse, suppose the point x and the closed set B not con-
containing x are given_. Let U = X — B. By hypothesis, there is a neighborhood
V of x such that VcU. The open sets V and X — V are disjoint open sets
containing x and B, respectively. Thus X is regular.
(b) This proof uses exactly the same argument; one just replaces the point
x by the set A throughout. □
Now we seek to relate the separation axioms with the concepts previously
introduced. First we study the various kinds of topologies that were intro-
introduced in Chapter 2 and see what separation axioms they satisfy. And we
prove two theorems which show that in the presence of compactness, or o
The Separation Axioms 197
weak separation properties become strong. This gives us
of theorems to remember, but luckily most of the proofs
oft
17 fa) A subspace of a Hausdorffspace is Hausdorff; a product
theorem i-*- w ' '
ffofa "regular space ts regular; a product of regular spaces
^ subspace of a normal space need not be normal; a product of normal
spaces need not be normal(!)
, /a^ Let ;^be Hausdorff. Let .v and / be two points of the subspace
fX if U and Kare disjoint neighborhoods in Jf of * and y, respectively,
° y'n yan<j Vn Yare disjoint neighborhoods of .v and y in Y.
Let {X.} be a family of Hausdorff spaces. Let x = [xj and y = (;'«)
be distinct points of the product space \\X«. Since x ^ y, there is some index
n such that Xfj^Xf Choose disjoint open sets U and V in Xp containing
v and;> respectively. Then the sets n'f\U) and nj, \V) are disjoint open sets
in ][XI containing x and y, respectively.
(b) Let 7 be a subspace of the regular space X. Since Y is Hausdorff,
one-point sets are closed in Y. Let .v be a point of Y and let B be a closed
subset of 7disjoint from x. Now B n Y =- B, where B denotes the closure
of Bin X. Therefore, .v ^ B, so, using regularity of X, we can choose dis-
disjoint open sets t/and V of Xcontaining .v and B, respectively. Then U n Y
and Vn y are disjoint open sets in Y containing x and B, respectively.
Let {X.} be a family of regular spaces; let X ~ l\X,. By (a), X is Haus-
Hausdorff, so that one-point sets are closed in X. We use the preceding lemma
to prove regularity of X. Let x = (.Y.) be a point of X and let U be a neigh-
neighborhood of x in X. Choose a basis element \[U. about x contained in V.
Ujoose, for each a, a neighborhood Ka of *. in *. such that V a U ■ if
jt happens that f/a = X., choose Ka = X.. Then K = I[ Ka is a'neighbor-
^KZZ:assert that ^ »p-h foiiows ^ 8
theT}!!n}ie show that if "■ - z»for .
n/ L,t ;1°V; „ l^5 an exercise in §2"8-} Supp°se that y =
l §} ppe ha
TtS.^ t \ ^ ^^ C°ntaininS ^ Since
t /"so we can choose a P°int z-^
' £rtt thi Thus y is in ><
h at for a^ Siven inde* A
? neighborhood of y»- ^en W?'(^) is a neigh-
198 Countability and Separation Axioms O»p.A
mal is rather difficult. So is the problem of finding a product of nor
spaces that is not normal. There happens to be a single space that will Suffi '
for both purposes; it is given in Example 2. Q
The following three theorems give three very important sets of hypotheses
under which normality of a space is assured.
Theorem 2.3. Every metrizable space is normal.
Proof. Let X be a metrizable space with metric d. Let A and B be disjoint
closed subsets of X. For each a G A, choose ea so that the ball B{a, ej does
not intersect B. Similarly, for each b in B, choose eb so that the ball B{b, ffc)
does not intersect A. Define
U = [JaeA B(a, eJ2) and V = U<.-:« A*, ft/2).
Then U and K are open sets containing A and B, respectively; we assert
they are disjoint. For if r G U n V, then
z e B(a, eJ2) n B(bt eb!2)
for some a e A and some b ^ B. The triangle inequality applies to show
that d{a, b) < (ea + f6)/2. If f, < f6, then d(a, b) < eb, so that the ball
B{b, eb) contains the point a. If eb < ea, then d(a, b) < e», so that the ball
B{a, eJ contains the point b. Neither situation is possible. Q
Theorem 2.4. Every compact Hcuisdorff space is normal.
Proof. Let A" be a compact HausdorlT space. We have already essentially
proved that X is regular. For if ,v is a point of X and B is a closed set in X
not containing x, then B is compact, so that Lemma 5.4 of Chapter 3 applies
to show there exist disjoint open sets about .v and B, respectively.
Essentially the same argument as given in that lemma can be used to show
that X is normal: Given disjoint closed sets A and B in X, choose, for each
point a of A, disjoint open sets Ua and Va containing a and B, respectively.
(Here we use regularity of X.) The collection {£/„} covers A; because A is
compact, A may be covered by finitely many sets £/„„ . . . , £/„„. Then
U =Uai\J ... \j Uan and V =Vatn ■■■ C\ Va.
are disjoint open sets containing A and B, respectively. □
Theorem 2.5. Every regular space with a countable basis is normal.
Proof. Let X be a regular space with a countable basis <B. Let A and B
be disjoint closed subsets of X. Each point x of A has a neighborhood V
not intersecting B. Using regularity, choose a neighborhood V of * whose
closure lies ,n U; finally, choose an element of <B containing x and contained
m K. ay choosing such a basis element for each * in A, we construct a count-
countable covering of A by open sets whose closures do not intersect B. Since
The Separation Axioms 199
§4-2
■ oof A is countable, we can index it with the positive integers;
this covering
smflariy ^h countabIe coIIection fK») of °Pen sets coverine B>
^h that each set K, is disjoint from A.
The sets U = \JU* and K= UK» are °Pen sets containing ,4 and B,
nectively, but they need not be disjoint. We perform the following simple
re kto construct two open sets that are disjoint. Given n, define
u: = U.-\j!.iV, and K = V.-\J;^Ut.
See Figure 3. Note that eachset U'n is open, being the difference of an open
set U, and a closed set (J"-i K- Similarly, each set V'n is open. The collection
\U',} covers A, because each x in A belongs to Un for some /;, and x belongs
to "none of the sets Vt. Similarly, the collection {¥'„} covers B.
Finally, the open sets
U' = \J»ez. U'm and V = U,z. K
Figures
200 Countability and Separation Axioms
are disjoint. For if x e U' n V, then x e V, n £ for some, and fc. S
nose thaty < *. « follows from the defimt.on of V, that x e l/,; and ,;,£
j<^ k it follows from the definition of Vk that x $ V,. A similar contradic-
contradiction arises if y ;> £• D
We shall use the following theorem in dealing with some examples:
Theorem 2.6. Every well-ordered set X is normal in the order topology
It is, in fact, true that every order topology is normal (see Example 39
of FS-SJ); but we shall not have occasion to use this stronger result.
Proof. Let X be a well-ordered set. We assert that every interval of the
form {x,y\ is open in X: If X has a largest element and y is that element,
(x,y] is just a basis element about ;•. If y is not the largest element of X,
then (.v,;'] equals the open set (.y, /), where >■' is the immediate successor
of y.
Now let A and B be disjoint closed sets in X; assume for the moment
that neither ,4 nor B contains the smallest element a0 of X. For each a e A,
there exists a basis element about a disjoint from B; it contains some interval
of the form (.v, a]. (Here is where we use the fact that a is not the smallest
element of X.) Choose, for each a e A, such an interval (.va, a] disjoint from
B, Similarly, for each b e B, choose an interval (yb, b] disjoint from A. The
sets
U = \J.eAx.. a] and V = \Jb(=B (yb, b]
are open sets containing A and B, respectively; we assert they are disjoint.
For suppose that z e U n V. Then z e {xa, a] n (yb, b] for some a e A
and some b e B. Assume that a < b. Then if a < yb, the two intervals are
disjoint, while if a > yb, we have a e {yb, b], contrary to the fact that (yb, b]
is disjoint from A. A similar contradiction occurs if b < a.
Finally, assume that A and B are disjoint closed sets in X, and A contains
the smallest element a0 of X. The set {«„} is both open and closed in X.
By the result of the preceding paragraph, there exist disjoint open sets t/and
V containing the closed sets A - {a0} and B, respectively. Then U U {a0}
and Kare disjoint open sets containing A and B, respectively. Q
Example 1. Here is an example showing the regularity axiom stronger
than the Hausdorff axiom. Let AT be the subset
of the real line R. Define a topology for R by taking as basis all sets of the
following types:
A) Every open interval (a, b).
B) Every set (a, b) — K.
It is easy to check that this is a basis for a topology on R; the intersection of
The Separation Axioms 201
another basis element or empty. The space is
points of R have disjoint open intervals
bout them- _. , K is cIosed in this topology, and it does not
V * U nOit08 ppose «ha« thereexist disjoint open sets t/and Kcontam-
°"'ainlhe/re £2'Choose a basis element containing 0 and lying .n U
, respect veiy f B) since each basls element of
fSekment about l/« contained in K; it must be a bas.s
Coose a bass e ^^ ^ ^ that z < ]//( and r > max {^ „„
M> MoLs to both J/and K, so they are not disjoint. See Figure 4.
hen z feionB5
Figure 4
Example 2. 77i<? product space Sa x 5n u not normal.']
Consider the well-ordered set Sa, in the order topology, and consider the
subset Sa, in the subspace topology (which is the same as the order topology).
Both spaces are normal, by Theorem 2.6. We shall show that the product
space & x Sa is not normal.
This example serves three purposes. First, it shows that a regular space
need not be normal, for Sn x Sa is a product of regular spaces and therefore
regular. Second, it shows that a subspace of a normal space need not be normal,
forSn x So is a subspace of Sn x Sa, which is a compact Hausdorff space and
therefore normal. Third, it shows that the product of two normal spaces need
not be normal.
First consider the space Sa x Sa, and its "diagonal" A = [x x x \ x e £„}.
Because^is Hausdorff, A is closed in Sa x Sa: If U and Kare disjoint neigh-
neighborhoods of * and y, respectively, then [/xKisa neighborhood of x x y
that does not intersect A.
Therefore, in the subspace Sa x Sn, the set
A = A n (,sa x So) = A - [Q. x £2}
B closed. Likewise, the set
?and/aredton?w "u'^" °f thl'S Pr°duCt space' See Fi§ure 5- The
ets* X 4 con an T6 " 3SSUme there exist disioint °Pen sets ^and
Given x % °ntainin«/ «nd B, respectively, and derive a contradiction.
«** Point jj ;Tth"S'de; the^«tical slice * x 5O. We assert that there is
^^d all points ^v R ? SUf '^ * X fi "eS outside tt For if U
^ rants x x fi for ^ < p < Q> then ,he (op pojnt ^ x Q Qf {he
attnbutes ,his example ,o J. Dieudonni and A. P. Morse independently.
202 Countability and Separation Axioms
OX|)
Figure 5
slice would be a limit point of U, which it is not because Kis an open set disjoint
from U containing this top point.
Choose y?(.v) to be such a point: just to be definite, let P(x) be the smallest
element of Sn such that x < P(x) < Q. and x x /?(.v) lies outside U. Define
a sequence of points of Sa as follows: Let x, be any point of Sa. Let x2 =
/?(*,), and in general, xn+l = (}(xn). We have
A'l < A < . . . ,
because /?(*) > x for all x. The set {*„} is countable and therefore has an upper
bound in Sa; let b e Sn be its least upper bound. Because the sequence is
increasing, it must converge to its least upper bound; thus xn —<■ b. But
P(xn) = avm, so that /?(*„) —> A also. Then
xn x /?(*„) —> b x b
in the product space. See Figure 6. Now we have a contradiction, for the point
b X b lies in the set A, which is contained in the open set U; and U contains
none of the points xn x ft(xn).
Example 3. The space R, is normal, but the space Rf is not.
This example serves two purposes. It shows that a regular space Rl need
not be normal, and it shows that the product of two normal spaces need not be
normal.
It is easy to see that R, is normal. Suppose that A and B are disjoint closed
sets in R,. For each point a of A choose a basis element [a, x.) not intersecting
The Separation Axioms 203
x, X /5(x,r
b x b
Figure 6
B; and for each point b of B choose a basis element [b, xb) not intersecting /(.
The open sets
V = U«^ [". -v«) and K = U*. « [*. ■»'*)
are disjoint open sets about A and 5, respectively.
It is much harder to show that Rf is not normal. Let L be (he line
L = {x x (-.v)|-v e /?,},
as usual. Then L is closed in Rf, and i has the discrete topology as a subspace of
S}. Therefore every subset A of L, being closed in L, is closed in Rf. If /?;2
is normal, this means that for every nonempty proper subset A of L, one can
choose disjoint open sets of Rf containing the closed sets A and L — A of Rf,
respectively.
Using a simple "cardinality argument," one can prove that this is not possi-
b|e; the proof is outlined in Exercise 14 below.
One specific subset of L for which it proves impossible to pick such open
s is the subset A consisting of points having irrational coordinates. The
Proof that this particular choice will work requires a strong tool: the special
that thC BairC cate8orv 'heorem we gave as an exercise in §3-6. Assuming
s^lse- we Prove that this particular set will work.
s«ppose th k *e SUbSCt °f L consistin8 of Points having irrational coordinates.
^PecihJI V and V are disjoint °Pen sets in Ri containing A and L ~ A,
«>at the hi'- , each point x x (-x^ of A>there is a Positive integer n such
K oasis element
X [-a:, -a:
204 Countabitity and Separation Axioms
U. Let Km denote the set consisting of those irr
which this basis element lies in a. Then U*.
-S^SScSSr^ in V I. .hen since U*n con,ains
•, data's aM irrational numbers in [0, 1]. Therefore, we can write [0,1]
The union of the closed sets X, (for n e Z+) and the one-point s
T a a. ona" number in [0, 1]). By Exercise 5 of §3-6, at leas, one
mt interior in [0 1] It cannot be one of t
r a a. on , 1]). By Exercise 5 of §36, at leas, one of ,£
Z must have nonempty interior in [0 1]. It cannot be one of the one-poim
lets {</}. Therefore, there is an n such that the set Kn contains an open interval
("' By^efi'nition, for each c in K. the basis element
[c, c +
[-c, -c +
[,
for /?/ lies in £/. We assert that the union of these basis elements, fore e Kn
contains the entire "parallelogram region"
P = {.v x y\a < x < b and -.v < y < -x + l/«},
so that /" lies in U. See Figure 7.
To prove this fact, let ,v0 x y0 be a point of/1. Using the fact that Kn n (a, b)
Figure 7
The Separation Axioms 205
§ , m «* can choose a point c of K,C\ (a, 6) such that c X (-c)
is dense *(«.**« ,. ,0 and to the left of the line x = x0. It is then simple to
IieSber J X^ to in «he basis element [c,c+Mn) x [-e -c + !/«)•
^ ?o££ to be a point of *. in the interval (max {a, -yo], xB). Then
^ lities
; have i
c < x0 and — c < yo < —*o + i/n.
imply that c < x0 < c + 1/n and -c < y0 < -c + U"-]
w-../ Take any rational number q of the interval (a, b). It is clear
1!teIDoinV7>< (-</) is a Iimit point of the ParaIIeI°gram re8ion P' in
^topology of Rf- Then because P a U, this point is a limit point of U. This
ntradicts the fact that Kis an open set in Rf containing? x (-</) and disjoint
from V.
Example 4. If J is uncountable, the product space RJ is not normal. The
proof is fairly difficult; we leave it as a challenging exercise (see Exercise 15).
This example serves three purposes. It shows that a regular space R1 need
not be normal. It shows that a subspace of a normal space need not be normal,
for R' is homeomorphic to the subspace @, iy of [0, 1]J, which (assuming
the Tychonoff theorem) is compact Hausdorff and therefore normal. And it
shows that an uncountable product of normal spaces need not be normal.
It leaves unsettled the question as to whether a finite or a countable product
of normal spaces might be normal. For that we need one of the two preceding
examples.
Exercises
1. Show that if jt is regular, every pair of points of X have neighborhoods whose
closures are disjoint.
pair of disjoim ciosed sets have -^borhoods
3- Show that a closed subspace of a normal space is normal.
<• Show that every order topology is regular.
' *^/. iI^J^Olff' °r regUlar' or nomaI>then s° * X,. (Assume
^T^tTf^r^r' d tW° topO'°gies 3 and 3'- respectively;
tha, ijir S" " "^^ (
c z riocaiiy compact pce
. U, Af„' ^ rC8Ular Li«delbf space is normal.
^TStT that Yis Hausdo^ Show that
fa ^ Pr°duct toP°lo8y? In the uniform topology?
206 Countability end Separation Axioms Chap. 4
It is not known whether R»is normal in the box topology. Mary-Ellen Rudin
has shown that the answer is affirmative if one assumes the continuum hypo-
hypothesis [R]. In fact, she shows it satisfies a stronger condition called paracom-
pactness.
11. A space X is said to be completely normal if every subspace of X is normal.
Show that X is completely normal ifand only if for every pair A, B of separated
sets in X (that is, sets such that A n B = 0 and A n B = 0), there exist
disjoint open sets containing them. [Hint: If X is completely normal, consider
X-(An B).]
12. Which of the following spaces are completely normal ? Justify your answers.
(a) A subspace of a completely normal space.
(b) The product of two completely normal spaces.
(c) A well-ordered set in the order topology.
(d) A metrizable space.
(e) A compact Hausdorff space.
(f) A regular space with a countable basis.
(g) The space R,.
13. Let p:X-> Y be a quotient map. Show that if p is closed and X is normal, then
Y is normal. (Classically, a partition X* is said to be upper semicontinuous if the
quotient map p: X —» X* is closed.)
*14. Show that Rf is not normal, as follows: Suppose that for each nonempty
proper subset A of L, there exist disjoint open sets UA and VA of Rf containing
A and L — A, respectively. Let D be the set of points of Rf having rational
coordinates. Let 9(L) and 6>{D) denote the collections of all subsets of L and
D, respectively. Define 9 : ff'(L) — 9(D) as follows:
6{A) = UAn D ifA^0 and A ^ L,
0@) - 0,
B(L) = D.
(a) Show that 6 is injective.
(b) Construct an injective map <9(D) —> L.
(c) Derive a contradiction.
*15. Theorem. If J is uncountable, then R1 is not normal.
Proof. (This proof is due to A. H. Stone, as adapted in [S-S].) It will suffice
to show that {Z+Y is not normal, since (Z+Y is closed in R'. Let X denote the
space (Z+Y; use functional notation for the elements of X.
(a) Define i>, cr X to be the set of those functions x : J — Z+ such that for
each ; ^ 1 the set x"'@ contains at most one element. Define P2 to be the
set of those x such that for each i ^ 2, the set x~'(') contains at most one
element. Show that P, and Pz are disjoint, and are closed in X.
(b) Assume that U and Pare disjoint open sets containing i>, and Plt respec-
respectively. Show that you can choose a sequence
of distinct elements of /, and a sequence of integers
"o = 0 < nx < rii < • • •,
The Urysohn Lemma 207
'** f r each positive integer U the se, V, defined be.ow is contained in
^that1 t of all x such that
positive integ U
,Ms1h set of all x such that
^He*^" for 1
x(a/)"tl for n,-, <;<"'■
,,,sZ, Show you can choose a finite subsetB of/ such
@ No-« ^^nefbe.ow is contained in K Here K, is the set of all
that the set yb
th0SexsucMha, ^^ hr ^ e B n A,
x(«) = 2 for « e 5 - -4.
(d) Show that for some t«n^0.
A is every regular topological group normal ?
4-5 T/te Urysohn Lemma
Now we come to the first deep theorem of the book, a theorem that is
commonly called the "Urysohn lemma." It asserts the existence of certain
^-valued continuous functions on a normal space X. It is the crucial tool
used in proving a number of important theorems. One of these, the Tietze
extension theorem, we prove in this section. Another, the Urysohn metriza-
tion theorem, we prove in the next section. And yet another, an imbedding
theorem for manifolds, appears in the last section of the chapter.
Whydowecall the Urysohn lemma a "deep" theorem? Because its proof
involves a really original idea, which the previous proofs did not. Perhaps
we can explain what we mean this way: By and large, one would expect
tiiatifone went through this book and deleted all the proofs we have given
up to now and then handed the book to a bright student who had not studied
topology, that student ought to be able to go through the book and work
out the proofs by himself. (It would take a good deal of time and effort,
Tn81 °ne W°Uid not eXpeCt him t0 handle the trickier examples.)
■ rySOhn lemma is on a different level. It would take considerably
l8inaIlt.y tha" most of us P°ssess t0 Prove this lemma unless we
pious hints!
^rysohn lemma)- Let X be a normal space; let A and B be
, °fX' ^ [3> b] be a Closed interVal in the real line-
s a continuous map
~ , f:X—>[a,b]
every x in K md f(x> = hf
Where the intcrvaI i
aSe follows from th^ one.
proof is to construct, using normality, a certain famUy
208 Countability and Separation Axioms Chap. 4
U of open sets of X, indexed by the rational numbers. Then one uses these
sets to define the continuous function/.
f/*o ' Let P be the set of all rational numbers in the interval [0, i].t
We shall define, for each p in P, an open set U, of X, in such a way that when-
whenever p < ?, we have
Thus the sets U. will be simply ordered by inclusion in the same way their
subscripts are ordered by the usual ordering in the real line.
Because P is countable, we can use induction to define the sets Up (or
rather the principle of recursive definition). Arrange the elements of P in
an infinite sequence in some way; for convenience, let us suppose that the
numbers 1 and 0 are the first two elements of the sequence.
Now define the sets Up as follows: First, define Ut = X — B. Second,
since A is a closed set contained in the open set Uu we may by normality
of X choose an open set Uo such that
A c Uo and Uo <= £/,.
In general, let Pn denote the set consisting of the first n rational numbers
in the sequence. Suppose that Up is defined for all rational numbersp belong-
belonging to the set Pn, satisfying the condition
(*) P < q => U, <= Ur
Let r denote the next rational number in the sequence; we wish to define U,.
Consider the set Pn+t — Pn u {/•}. It is a finite subset of the interval
[0, I], and, as such, it has a simple ordering derived from the usual order
relation < on the real line. In a finite simply ordered set, every element
(other than the smallest and the largest) has an immediate predecessor and
an immediate successor. (See Theorem 10.1 of Chapter 1.) The number 0
is the smallest element, and 1 is the largest element, of the simply ordered set
P,+ l, and r is neither 0 nor 1. So r has an immediate predecessor p in />„+,
and an immediate successor q in Pn+l. The sets V„ and Uq are already defined,
and U, c U, by the induction hypothesis. Using normality of X, we can
nnd an open set U, of X such that
V, <= Ur and U, <= V,.
^tt% 1 ThoIds for every pair of elements °f *.♦,.If both ele-
SUh other "' W ° dS by the induction hypothesis. If ow of them is r
the other „ a polnt , of ^ then dther g ^ ^ ^.^ ^
U,c:Upc Ur,
anycountabIe ^se subset of [0,1] will do, providing it contains the points
The Urysohn Lemma 209
7 in which case
'' UrczU,c: U,.
of elements of />„, relation (*) holds.
of elements of /„, re
have U, defined for all p
e P.
To illustrate, let us suppose we started with the standard way of arranging
the elements ofP in an infinite sequence:
P = {l,0.i,b hhlhl f.-.J
After denning Ua and U,, we would define £/i/2 so that Uo <= Ul/Z and
Q 1<zUi- Then we would fit in U1/3 between Ua and UU1; and [/2/3 between
^ and Ui. And so on. At the eighth step of the proof we would have the
situation pictured in Figure 8. And the ninth step would consist of choosing
an open set J/2,j to fit in between U\/3 and £A/2. And so on.
Figure 8
all
11 "
**» 'me
ifp<0,
if P > L
numbers p in R by defini
y0U
210 Countability and Separation Axioms ^
Step 3. Given a point x of X, let us define g(x) to be the set of tho
rational numbers p such that the corresponding open sets v, contain *
0(*) = {/>|* e I/,}.
This set contains no number less than 0, since no x is in U, Tor p < 0. And
it contains every number greater than 1, since every x is in Uf for p > ,
Therefore, Qix) is bounded below, and its greatest lower bound is a pOjn|
ofthe interval [0,1]. Define
f(x) = gib Qix) = gib [p | x e I/,}.
5/fp ¥. We show that/is the desired function. If x e A, then * e (/
for every /> > 0, so that Qix) equals the set of all nonnegative rationals'
and f(x) = gib Qix) = 0. Similarly, if x e 5, then x e Ur for no p ^ 1'
so that g(x) consists of all rational numbers greater than 1, and f(x) = 1'
All this is easy. The only hard part is to show that/is continuous. For
this purpose, we first prove the following elementary facts:
A) x e V, =* f{x) < r.
B) xiUr=> f{x) > r.
To prove A), note that if x e 0r, then iei/, for every s > r. Therefore,
Q(x) contains all rational numbers greater than 1; so that by definition we have
f(x) = gib Qix) < r.
To prove B), note that if x ^ {/,, then x is not in £/, for any s < r.
Therefore, Qix) contains no rational numbers less than r, so that
/(*) = gib Qix) > r.
Now we prove continuity of/ Given a point x0 of Xand an open interval
(c, rf) in R containing the point fix0), we wish to find a neighborhood U of
x0 such that /(£/) c (c, rf). Choose rational numbers p and q such that
c < P < /Oo) < ? < d.
We assert that the open set
v=vq-u,
is the desired neighborhood of xB. See Figure 9.
/(x0)
«**
The Urysohn Lemma 211
ut x eU Necessarily x0 e U,, because xB $ U,
wlsh°T ^\ >V Also, Xo t V,, because *„ e V, imp'-es by
j^^ (Crf). Let * e V. Then * e tfc= U
Second, we sl»w /^ ^ ^ ^ ^ ^ ^ ^ ^ and /(jf) ^ ^ by B).
so*»«/5%T ' j c (r, rf), as desired. D
Thtts/(-v t [/"'J
• if i and B are two subsets of the topological space X, and if
^t" luous funct.cn /: *- [0. 1] such that f(A) = {0j and
*"* ''rn 1 «v that A and 5 can be separated by a continuous function.
f(B)~W> *
The Hrvsohn lemma says that if every pair of disjoint closed sets in X
^narated by disjoint open sets, then each such pair can be separated
Ta Sous function. The converse is trivial, for if/: X -> [0, 1] is the
function, then /"([<),]-)) ™d /-(& 0) are disjoint open sets conta.n.ng
^ and 5, respectively.
This fact leads to a question that may already have occurred to you:
Why cannot the proof of the Urysohn lemma be generalized to show that in
a regular space, where you can separate points from closed sets by disjoint
open sets, you can also separate points from closed sets by continuous func-
functions?
At first glance, it seems that the proof of the Urysohn lemma should go
through. You take a point a and a closed set B not containing a, and you
begin the proof just as before by defining U, = X — B and choosing Uo
to be an open set about a whose closure is contained in £/, (using regularity
of X). But at the very next step of the proof, you run into difficulty. Suppose
that/i is the next rational number in the sequence after 0 and 1. You want
to find an open set Up such that UB <= Up and fjp <=[/,. For this regularity
is not enough.
Requiring that one be able to separate a point from a closed set by a
Minuous function is, in fact, a stronger condition than requiring that one
new Jarate them by disJ°int °Pen sets. We make this requirement into a
*»2? °naX'Om' WhlCh WCSha11 Study further in ChaPter 5: A sPace
for every ° C°mpletely ^^^ 'f °ne-point sets are closed in X, and if
exisu a co^mt a °[X and every closed set B not containing a, there
a{1] a cont,nuous function /: X-. [0, 1] such that f(a) = 0 and f(B)
S^ ther Comment on the Urysohn lemma: Note that the
1101 assert the existence of a continuous function/
this condition is satisfied; see Exercise 5.
corollary of the Urysohn lemma is the useful theorem
xiauwn theorem. It states that any continuous function
Countability and Separation Axioms Chap 4
/mapping a closed subset of a normal space into the reals may be extended
to a continuous map of the entire space into the reals. Although we shall
not use the Tietze theorem in this book (except in the exercises), it is very
important in the applications of topology.
Theorem 3.2 (Tietze extension theorem). Let X be a normal space; let A
be a closed subset o/X.
(a) Any continuous map of A into the closed interval [a, b] of R may be
extended to a continuous map of all ofX into [a, b].
(b) Any continuous map of A into the reals R may be extended to a con-
continuous map of all ofX into R.
Proof. The idea of the proof is to construct a sequence of continuous
functions sn defined on the entire space X, such that the sequence sn Converges
uniformly, and such that the restriction of sn to A approximates/more and
more closely as n becomes large. Then the limit function will be continuous,
and its restriction to A will equal/.
Step 1. The first step is to construct a particular function g defined on
all of X such that g is not too large, and such that g approximates/on the
set A to a fair degree of accuracy.
To be more precise, let us take the case/: A —> [—r, >•]. We assert that
there exists a continuous function g : X—> R such that
\g(x)\<%r for all x e X,
\g(a)- f(a)\<\r for all fl e A.
The function g is constructed as follows:
Divide the interval [—r, r] into three equal intervals of length %r;
I, = [~r, -\r], I, = [-\r, \r], /3 = [\r, r).
Let B and C be the subsets
B =/-(/,) and C = /-•(/,)
of A. Because/is continuous, B and C are closed disjoint subsets of A. There-
Therefore, they are closed in X. By the Urysohn lemma, there exists a continuous
function
g:X—>[-$r,}r]
having the property that g(x) = -\r for each x in B, and g(x) = jr for each
x in C. See Figure 10.
Then \g(x)\ ^ \r for all x. We assert that for each a in A,
There are three cases. If a e B, then both f(a) and g(a) belong to/,. If a e C,
then f(d) and g(d) are in /,. And \f a $ B \J C, then f(a) and g(a) are in
h- In each case, |g(tf) -/(a)| f
The Urysohn Lemma 213
1*3
Figure 10
fS
IT
theorem in the f[
A into an ^itrary <*«d i
^f f-A - [-»• »]• Here , = 1. We
gt defined on all of X such that
We
-*.(«) I
for
^ e
step l-we obtain a
I } ~
for x eX,
; Q). for fl e ^. •
-" -*»•And so -•
functions ?I(.... ^ defined on
214 Countability and Separation Axioms Chap. 4
all of X such that
for a e A. Applying Step 1 to the function/- g, g., with r = (|)»(
we obtain a real-valued function gntt defined on all of A'such that
tor x eX,
\A°) - •?.(") *■♦ 'WI ^ ®"+l for fl e ^
By induction, the functions gn are defined for all n.
We now define
«C*) = S.--.«^*)
for all -v in X Of course, we have to know that this infinite series converges.
But that follows from the comparison theorem of calculus; it converges by
comparison with the geometric series
Since this geometric series converges to 1 (as you can check), it follows that
\g(x)\< 1, so that g maps X into [— I, 1], as desired.
We assert that g{a) = /(a) for a e A. Let sn(x) = 2"-i &(*). the nth
partial sum of the series. Then g(x) is by definition the limit of the infinite
sequence s,(x) of partial sums. Since
\A<>) - L?-i g/L«)\ = l/(fl) - ^Wl < A)"
for all a in A, it follows that jn(a) —> /(a) for all a e /4. Therefore, we have
/(a) = ^(o) for a e A.
To show that g is continuous, we have to show that the sequence s» con-
converges to g uniformly. This fact follows at once from the "Weierstrass M-
test" of analysis. Without assuming this result, one can simply note that if
k > n, then
Holding n fixed and letting k —> 00, we see that
for all igl Hence sn converges to g uniformly.
Step 3. We now prove part (b) of the theorem, in which/maps A into
R. We can replace R by the open interval (—1, 1), since this interval is
homeomorphic to jR.
So let /be a continuous map from A into (-1, 1). The half of the Tietze
theorem already proved shows that we can extend/to a continuous map
g : X—[—l, 1] mapping X into the closed interval. How can we find a
map h carrying Zinto the open interval?
The Urysohn Lemma 215
us define a subset D of X by the equation
ra])
closed subset of X. Because g{A) = /(/<), which
'^Hftiset " is disjoint fr°m * By thC ^Thn oTaTd'
tainedcon inuous function # :*-*>,!] such that *!>> = {0} and
** iS;n Define
^) = 1J' *(*) = #*)*(*>•
discontinuous, being the product of two continuous functions. Also,
^ex'nsionof/.sincefor.in,,
() #&() I «(«) = /(«)
= I
r »Hv /. maps all of X into the open interval (- I, 1). For if x e D, then
Sjio gW =0. And if .v $ D, then |g(.v)| < 1; it follows at once that
|Atv)|<l-U(.v)l<l- □
Example 1. The hypothesis that the sets involved are dosed is needed in
the Urysohn lemma and the Tietze theorem. For example, the sets
^ = @,1) and B = A,2)
are disjoin' subsets of the normal space R, but there is no continuous function
/: R —> [0,1] that carries A into 0 and B into 1. Where could/carry the point
lofinB?
/
lofinB?
Exercises
1. Examine the proof of the Urysohn lemma, and show that for given r,
P, q rational.
1 Show that 'he Tietze extension theorem implies the Urysohn lemma.
• W Show that a connected normal space having more than one point is uncount-
uncountable.
Show that a connected regular space having more than one point is uncount-
aole.T [Hint: Any countable space is Lindelof.]
OOSho* \re8Ular Spa°e W'th a countable basis; let u ^ °Pen >n X.
ft) Show h V eqUa'S a countable union °f dosed sets of X.
for* i „ lS 3 continuous function /: Z-> [0, 1] such that f(x) > 0
5, ^ * e Uand /W = 0 for x $ V.
of °Pen sets of &x°' %<A" '" XlfAis the 'ntersection of a countable collection
"- e°rem(S'ro»gform of the Urysohn lemma). Let A and B be closed disjoint
Exampi. W rf^j0"* Cxist a connected Hausdorff space that is countably
216 Countability and Separation Axioms
ChaM
subsets of the normal space X. There exists a continuous fu r
such that /-'({O}) = A andf{B) = {1} if and only ifA is ac'Zr^1^
6. Let X be metrizable. Show that the following are equivalent-
(i) X is bounded under every metric that gives the topology of v
(ii) Every continuous function 0 : X—* R is bounded,
(iii) X is compact.
[Hint: If 0 is not bounded, map X into X x R by the map X—>
If (*„) is a sequence of distinct points having no convergent subsequ* X ^''
a continuous function 0 with <f)(xn) = n.] nce. find
7. Let Zbe a topological space. If Y is a subspace of Z, we say that yi a
ofZ if there is a continuous map /■: ^— ysuch that r(y) = ^ for each vgy
(a) Show that if Z is Hausdorff and Y is a retract of Z, then y js do^ in ,'
(b) Let /4 be a two-point set in Rz. Show that A is not a retract of Jp
(c) Let S1 be the unit circle in R2; show that 5' is a retract of Jjz — [0], where
0 is the origin. Can you conjecture whether or not Sl is a retract of 'jp?
8. A space Y is said to have the universal extension property if for each triple
consisting of a normal space X, a closed subset A of X, and a continuous func-
function/: A —► Y, there exists an extension of/to a continuous map of Jfinto Y.
(a) Show that RJ has the universal extension property.
(b) Show that if yis homeomorphic to a retract of RJ, then yhas the universal
extension property.
9. Let Xx e= X2 <= • • • be a sequence of spaces, where X, is a closed subspace of
Xn.! for each ;. Let X = \JX,. Suppose that we define a subset t/of JTtobe
open in X if [/ n ^- is open in Xt for each i. The topology we obtain is calW
the topology on X coherent with the spaces X,.
(a) Show that X, is a subspace of X in this topology.
(b) Show that if each space Xt is normal, so is the space X. [Hint: Use the lie
theorem.]
*10. The subspace R" of R", consisting of all sequences (,xux2,.. •) such lha xi
for i> n, has a standard topology. Suppose that we give the set K 'f
the topology coherent with the subspaces R". Compare this topology
with the topology it inherits from the box topology on /?"■
4-4 The Urysohn Metrization Theorem
thai S'**5
Now we come to the major goal of this chapter, a thfPfe roOfweaveS
us conditions under which a topological space is metrizable.T e.°uSeS fesulB
together a number of strands from previous parts of the boo , ^ ^jt-
on metric topologies from Chapter 2 as well as facts colfer^r The W5*
ability and separation axioms proved in the present chap ^i
construction used in the proof is a simple one, but very use •
it several times more in this book, in various guises. ^
There are two versions of the proof, and since each na
§ 4-4 The Urysohn Metrization Theorem 217
zations that will appear subsequently, we present both of them here. The
first version is the one we shall use in Chapter 5 to prove an imbedding
theorem for completely regular spaces. The second version will be generalized
in Chapter 6 when we prove the Nagata-Smirnov metrization theorem.
Theorem 4.1 {Urysohn metrization theorem). Every regular space X with
a countable basis is metrizable.
Proof. We shall prove that X is metrizable by imbedding x in a metriz-
metrizable space Y; that is, by showing X homeomorphic with a subspace of Y.
The two versions of the proof differ in the choice of the metrizable space Y.
In the first version, Y is the space R" in the product topology, a space that
we have previously proved to be metrizable (Theorem 9.5 of Chapter 2).
In the second version, the space Y is also R°, but this time in the topology
given by the uniform metric p (see §2-9). In each case, it turns out that our
proof actually imbeds X in [0, 1]". Let [Bn] be a countable basis for X.
Step 1. We prove the following: There exists a countable collection of
continuous functions /„ : X—► [0, 1] having the property that given a point
x0 of X and given a neighborhood U of x0, there exists an index n such that
/, is positive at x0 and vanishes outside U.
The construction of the functions/, is simple. We apply Exercise 4 of the
preceding section to choose, for each basis element Bn, a continuous function
/„ : X —> [0, 1] such that f{x) > 0 for x e Bn and f(x) = 0 for x <£ Bn.
The collection {/„} satisfies our requirement. Given x0 and given a neighbor-
neighborhood U of x0, we can choose a basis element Bn with x0 e Bn cz U; then the
function/, will be positive at x0 and vanish outside U.
Another way to construct the collection {/„}, which does not rely on the
exercise cited, is the following: For each pair n, m of indices for which Bn a Bm,
apply the Urysohn lemma to choose a continuous function gn,m : X—> [0, I]
such that ?„,„(£„) = [1} and gn.m(X - Bm) = [0}. Then the collection {>„,„,}
satisfies our requirement: Given x e U, one can choose a basis element Bm
such that x e Bm a U. Using regularity, one can then choose Bn so that
x0 e Bn and §„ <= Bm. Then the function g,_m is defined, and^n,m is positive at
-v0 and vanishes outside U. Because this collection is indexed by a subset of
Z+ x Z+, it is countable; therefore it can be reindexed with the positive integers,
giving us the desired indexed family {/,}.
Step 2 (First version of the proof). Given the functions/„ of Step 1, take
-R" in the product topology and define a map F : X — R™ by the rule
F(x) = (/,(*),/,(*), • • •)•
We assert that F is an imbedding.
First, Fis continuous because R" has the product topology and each/;
Coumability and Separation Axioms
Chap. 4
is continuous. Second, F is injective because given x ^ y, We know there'
an index n such that/.fr) > 0 and/Xv) = 0; therefore, F(x) * f^) K
Finally, we must prove that F is a homeomorphism of X onto itsima
the subspaceZ = F(X) of #». We know that /"defines a continuousbijectfo"
of X with Z, so we need only show that for each open set U in Xt the *"
/•([/) is open in Z. Let z0 be a point of F(U). We shall find an open set Wof
Z such that
W
zo
F(U).
Let ^0 be the point of U such that F(x0) = z0. Choose an index ^for
which fN(x0) > 0 andfN(X - U) = {0}. Take the open ray @, +oo) in Rt
and let K be the open set
K = 7^'(@, +«.))
of /?". Let PK = K D Z; then f-K is open in Z, by definition of the subspace
topology. See Figure 11. We assert that z0 e W cz F(U). First, z0 e W
w = vnz
Figure 11
because
Second,
n^z) e @,
F(U). For if
Si
= Kjv(F(*o))=/v(*o)>O. and
for some x e -^ ..
vanishes op®*
e W> then z =
= »-(fW) =AW. an
k he" ^ = ^W * in W as desired.
F is an imbedding of X in *-.
The Urysohn Metrization Theorem 219
Step 3 (Second version of the proof). In this version, we imbed X in the
metric space (K°, p). Actually we imbed x in the subspace [0,1]» on which
p equals the metric
Kx,y)=lub{|*/-.v,|}.
We use the countable collection of functions/„: X—[0, 1] constructed in
Step I. But now we impose the additional condition that/0) <; \jn for all
x. (This condition is easy to satisfy; we can just divide each function/n by «.)
Define F: X—»[0, 1]™ by the equation
as before. We assert that F is now an imbedding relative to the metric p on
[0, 1]™. We know from Step 2 that F is injective. Furthermore, we know that
if we use the product topology on [0, 1]", the map F carries open sets of X
onto open sets of Z = F(X). This statement remains true if one passes to
the finer (larger) topology on [0, 1]™ induced by the metric p.
The one thing left to do is to prove that F is continuous. This does not
follow from the fact that each component function is continuous, for we
are not using the product topology on R" now. Here is where the assumption
/(.v) < 1/n comes in.
Let a-0 be a point of X, and let e > 0. To prove continuity, we need to
find a neighborhood U of .v0 such that
-v e U=>p(F(x),F(xo))<e.
First choose N large enough that l/N < f/2. Then for each n = I,..., N,
use the continuity of/, to choose a neighborhood £/„ of xa such that
l/Xv)-/*(*o)l<e/2
for x e U,. Let U = U, n ■ ■ ■ D UN; we show that U is the desired neigh-
neighborhood of .v0. Let x e U. If /; < N,
by choice of U. And if n > N, then
because/, maps X into [0, 1/n]. Therefore for all x e U,
p(F(x),F(xo))<e/2<e,
as desired, fj
In Step 2 of the preceding proof, we actually proved something stronger
than the result stated there. For later use, we state it here:
220 Countability and Separation Axioms
V4
Theorem 4.2 {Imbedding theorem). Let X be Hausdorff, s
{ f«}«£i w « collection of continuous functions f. : X — R satisfP-'">S( lha
quirement that for each point x0 o/X and each neighborhood M of ^ ""'*'
an index a such that f. is positive at x0 and vanishes outside U TA X°' '*Wf *
tionFiX — R1 */««/ &y ' "*tf
F(x) = (f.(x)).eI
w fln imbedding o/X /« R1.
The proof is almost a copy of Step 2 of the preceding proof; one merely
replaces n by a and R° by i?J throughout. '
A collection {/„} of continuous functions satisfying the hypotheses of this
theorem is said to separate points from closed sets in X.
Exercises
1. Give an example showing that a Hausdorff space with a countable basis need
not be metrizable.
2. Give an example showing that a space can be completely normal, and satisfy
the first countability axiom, the Lindelof condition, and have a countable dense
subset, and still not be metrizable.
3. Let X be a compact Hausdorff space. Is it true that if X has a countable basis,
then X is metrizable? What about the converse?
4. Let A" be a locally compact Hausdorff space. 1^
(a) Is it true that if X has a countable basis, then X is metrizable? What a
the converse ? uo(.
(b) Let ybe the one-point compactification of X. Is it true that ifJfhasa
able basis, then Y is metrizable? What about the converse? ^
5. A space X is locally metrizable if each point x of * has a neie^borhd°o0rfr space
metrizable in the subspace topology. Show that a compact H^us.(eunionof
* is metrizable if it is locally metrizable. [Hint: Show that Jf isatm
open subspaces, each of which has a countable basis.] (rizal*
6. Show that a regular Lindelof space is metrizable if it is l0,C^(yisessential;
[Hint: A closed subspace of a Lindelof space is Lindelof.] Regula
where do you use it in the proof? .
7. Show that if Y is a normal space with basis <B, then Yean be l
[0, I]7, where J is some subset of CB x CB.
8. Check the details of the proof of Theorem 4.2. »-tha|se(*
9. Show that if {/.} is a family of real-valued continuous f^^
rates points from closed sets, then the topology of X is t ^^
topology relative to which all the functions/, are contm • ^for
10. Show that if X is comple tely regular, then JTcan be imbedd
J.
§4-4
The Urysohn Metrization Theorem 221
11. Let Y be a normal space. Then Y is said to be an absolute retract (AR) if when
ever one has an imbedding h : Y— Z of Y into a normal spaced such tha't
h(Y) is closed in Z, then h(Y) is a retract of Z. Show that if Y is compact the
following statements are equivalent:
(i) Y is homeomorphic to a retract of [0, 1]J for some /. '
(ii) y is homeomorphic to a retract of RJ for some /.
(iii) Yhas the universal extension property.
(iv) Yis an absolute retract.
In fact, show that (i) => (ii) => (iii) => (iv) wi(hou( assuming Y compact and
(iv) => (i) if Y is compact. [Hint: Assume the Tychonoff theorem so you
know that [0, \]> is normal.]
12. (a) Show the logarithmic spiral
C = {0 X 0} U {e< cos t x e- sin t\ t e R]
is a retract of R2. Can you define a specific retraction r: R1 —» C?
(b) Show that the "knotted *-axis" K of Figure 12 is a retract of R3.
Figure 12
*13. Prove the following:
Theorem. Let Y be a normal space. Then Y is an absolute retract if and only if
Y has the universal extension property.
[Hint: If *and /are disjoint normal spaces, A is closed in X, and/: A-+Y
is a continuous map, define the adjunction space Zf to be the quotient space
obtained from XUXby identifying each point a of A with the point J(a)
and with all the points of/-({/(a)})- Using the Tietze theorem, show that tt
is normal.]
*14. A subspace Y of a space Z is called a neighborhood retract of Z if Y is a retract
of some open set of Z. A normal space Y is called an absolute n^rjood
retract (ANR) if i, is a neighborhood retract of every normal space Z.n M
it is imbedded as a closed subspace. We say that Y has the umvereaI ne.ghbor
hood extension property if every continuous map /: A -> Y, where /.is a
subset of the normal space X, has a continuous extension to an open set m X
about A. Generalize Exercises 11 and 13 to neighborhood retracts.
222 Countability and Separation Axioms
Chap. 4
*4-5 Partitions of Unity"!
We have shown that every regular space with a countable basis
imbedded in the "infinite-dimensional" euclidean space R> it ■ a
to ask under what conditions a space Jean be imbedded in somefi
dimensional euclidean space RN. One answer to this question is given bekT"
we show that every compact manifold can be imbedded in R" for some V
A more general answer will be obtained in Chapter 7, when we study diW
sion theory.
The proof uses a certain family of functions {<j>a} on X that form what
is called a "partition of unity." Such families have proved to be very useful
tools in analysis, geometry, and topology. We shall consider only the case
of finite partitions of unity (which is all we need) and leave the general case
to the exercises.
First, we need some terminology.
If <j>: X—► R, then the support of <f> is defined to be the closure of the
set <f)~l(R — {0}). Thus if x lies outside the support of0, there is some neigh-
neighborhood of .v on which 0 vanishes.
Definition. Let {(/,,..., U,} be a finite indexed open covering of the space
X. An indexed family of continuous functions
<j>,:X—>[0, 1] for / = ),...,//,
is said to be a partition of unity dominated by {U,} if.'
A) (support 0,) c: U, for each ;.
B) Z?=i 0.-W = ' for each x.
Theorem 5.1 (Existence of finite partitions of unity). Let {Uu--->^
be a finite open covering oft lie normal space X. Then there exists a par
of unity dominated by {U,}. .,
Proof Step 1. First, we prove that one can "shrink" the coverm
to an open covering {K,,. . . , Vn] of X such that V, cz U, for each i.
We proceed by induction. First, note that the set
A = X - [Uz U • ■ • U U.)
is a closed subset of X. Because [U,, .. . , U.} covers X, the set
in the open set [/,. Using normality, choose an open set K,
such that V, cz U,. Then the collection [Vlt U2,. ■ ■ , U.) co^e
In general, given open sets K,, . .. , Vk-, such that th
{Vu...,Vk-t,Uk,Uk+i,...,U»)
covers X, let
tThis section will be used when we study dimension theory in § - ■
§4-5
Partitions of Unity 223
*-*-(r.U...UFi_1)-.Wl+lU...ul0
Then A is a closed subset of X which is contained in the open set U Chn
Vk to be an open set containing A such that Vk c [/4. 7^ *- Choose
covers X At the nth step of the induction, our result is proved
Step 2. Now we prove the theorem. Given the open covering {U,
[/„} of X, choose an open covering {F, K] of x such ^ p-'-
for each ;. Then choose an open covering [W.,. \y) of Y *Ju >u [
Wt = F, for each /. Using the Urysohn lemma, choosef'or each fa corZnuo*
function
Vt-X~>[0,l]
such that Wi(W,) = {1} and Vl{X- V,) = {0}. Since Vr'(R - {0}) is con- ■
tained in V,, we have
(support y/,) c K, c: ^,.
Because the collection {W,} covers Z, the sum <P(x) = 2,-., ^.(x) is positive
for each x. Therefore, we may define, for each j,
It is easy to check that the functions <f>lt. . . , <j>n form the desired partition
of unity. Q
Definition. An m-manifold is a HausdorflF space X with a countable basis
such that each point x of X has a neighborhood that is homeomorphic with
an open subset of Rm.
A 1-manifold is often called a curve, and a 2-manifold is called a surface.
Manifolds form a very important class of spaces; they are much studied in
differential geometry and algebraic topology.
We shall prove that if Jf is a compact manifold, then Zcan be imbedded
in a finite-dimensional euclidean space. The theorem holds without the
assumption of compactness, but the proof is a good deal harder.
Theorem 5.2. If X is a compact m-manifoid, then X can be imbedded in
RN/or some positive integer N.
Proof. Cover X by finitely many open sets [Uu .... U.}, each of which
may be imbedded in R™. Choose imbeddings *,:#, — *™ f°r each !\BelnS
compact and HausdorflF, X is normal. Let 0,,. . . , & be a partition of
unity dominated by {£/,}; let A, = support <(>,. For each / = 1 »>
define a function h,\ X —* Rm by the rule
for* 6%
Countability and Separation Axioms
Chap. 4
[Here <f>,(x) is a real number c and g,(x) is a point y — (v
the product c-y denotes of course the point (cyu ... ,cy )'of T^'ru ^*'
tion h, is well defined because the two definitions of/;, agree on th ■ func-
tion of their domains, and ht is continuous because its restricti lnters*"
open sets U, and X — A, are continuous. "*
Now define
i7: X—> (R X ■■ ■ X Rx Rm X ■■■ XRm)
n times n times
by the rule
F(x) = ((*,<»,.... <*„<», *,(*),.... *,(*)).
Clearly /" is continuous. To prove that F is an imbedding we need only to
show that F is injective (because X is compact). Suppose that F(x) =F(y)
Then <f)t(x) = 0,O) and //,(*) = K{y) for all /. Now 0,(x) > 0 for some i
[since 2 0/W = !]• Therefore, 0,(^) > 0 also, so that ^,;£ £/,. Then
Because 0,(x) = 0,0') > 0, we conclude that g,(x) = g,(y)- But g,::U<—>A"
is injective, so that * = ^, as desired. □
In many applications of partitions of unity, such as the one just given,
all one needs to know is that the sum ^2 <f>,(x) is positive for each x. In others,
however, one needs the stronger condition that 2 4>i(.x) — '■ ^ee ^*'-
Exercises
1. Prove that every manifold is regular and hence metrizable. Where do you
the Hausdorff condition?
2. Let X be a compact Hausdorff space. Suppose that for each x 6 ^'"^j j,
neighborhood U of x and a positive integer k such that £/can be imW
/?*. Show that X can be imbedded in RN for some positive integer A.
3. An indexed collection {/<«} of subsets of X is said to be a point-fin*1" *'
family if each x e X belongs to A. for only finitely many values ol -^ ^ tf
Lemma (The shrinking lemma). Let X be a normal space: let I jJ'J^jig
point-finite indexed open covering ofX. Then there exists an indexed op
{ V.Uj of X such that V. <= U. for each a. „ & it*
(a) Prove the lemma in the case J = Z+> by induction. Where ao /
fact that [£/„} is point-finite? . vWH-or*re'i
*(b) Use transfinite induction to prove the lemma for an arbitrary
index set J.
4. Let Xbeaspace. An indexed family{/<.}«6/of subsets of A'issaid
finite indexed family if each point of A" has a neighborhood th
for only finitely many values of a.
Supplementary Exercises: Review of Part I 225
lions'' {U'Uj ^ ^ indCXed °Pen C0Venne °f * A famUy of con«nuous func-
4>a : X—► [0, l],
indexed by a e /, is said to be a partition of unity dominated by \U \ if
(i) (support 0.) c Um for each a e J, V l a] "
(ii) {support $.}.<=,, is locally finite,
(iii) S«ey 0,(x) = 1 for each x.
[The sum makes sense because for given x, we have fa(x) ^ 0 for only finitely
many values of a.] Assuming the shrinking lemma, prove the following-
Theorem. If X is a normal space and (f{Um)met is a locally finite indexed
family of open sets covering X, then there exists a partition of unity dominated
by [U.l
5. If [Ut]ae, is a collection of subsets of X, a collection {VP}^K is said to refine
{[/,} if for each set Vf, there is at least one set U, containing it.
Theorem. Let X be a normal space, and let[U.].SJbe an indexed open covering
of X. If there is an open covering {Vf]fsK of X which refines {U.} and is locally
finite, then there exists a partition of unity dominated by {£/„}.
[Hint: Choose/: K— ► / so that Vf cr U/if). Let W, be the union of those
Vf for which /(/?) = a; show that [W,],e/ is locally finite.]
A Hausdorff space X is said to be paracompact if every open covering of X
has a locally finite refinement that is an open covering of X. We shall study
paracompact spaces in Chapter 6.
6. The Hausdorff condition is an essential part of the definition of a manifold;
it is not implied by the other parts of the definition. Consider the following subset
of i?2:
X=(RxO)U(R+ x 1).
Topologize X by taking as basis all sets of the following types:
(i) (a, b) x 0 for a < b,
(ii) (a, b) x 1 for 0 < a < b,
(iii) ((a, 0) x 0) U ([0, ft) x 1) for a < 0 < ft.
(a) Show that this is a basis. _ «■*«•*-
(b) Show that each of the subspaces R x 0 and (R- x 0) U (R+ x 1) ot X
is homeomorphic to R. . Y
(c) Show that X has a countable basis, that finite point sets are closed in A,
and that each point of X has a neighborhood homeomorphic with an open
set in R.
(d) Show that X is not Hausdorff.
* Supplementary Exercises:
Review of Part I
Consider the following properties a space may satisfy:
A) connected
B) path connected
226 Countability and Separation Axioms
C) locally connected ^1
D) locally path connected
E) compact
F) limit point compact
G) locally compact Hausdorff
(8) Hausdorff
(9) regular
A0) normal
A1) first-countable
A2) second-countable
A3) Lindelof
A4) has a countable dense subset
A5) locally metrizable
A6) metrizable
1. For each of the following spaces, determine (if you can) which of these prop-
properties it satisfies. (Assume the Tychonoff theorem if you need it)
(a) Sa
(b) Sa
(c) Sa x Sa
(d) Sn x [0,1) in the dictionary order
(e) / x / in the dictionary order, where / = [0,1]
(f) Hi
(g) Rf
(h) R* in the box, uniform, and product topologies
(i) R' in the product topology
(j) R in the finite complement topology
2. Which of these properties does a metric space necessarily have?
3. Which of these properties does a compact Hausdorff space have?
4. Which of these properties are preserved when one passes to asubspace.
closed subspace? To an open subspace? ^
5. Which of these properties are preserved under finite products,
products? Arbitrary products?
6. Which of these properties are preserved by continuous maps- ^
7. After studying Chapters 5, 6, and 7, repeat Exercises 1-6 for the o
erties:
A7) completely regular
A8) paracompact
A9) topologically complete ^
You should be able to answer all but one of the 336 q.ue^°£i* 7. H**
ercises 1-6, and all but one of the 63 questions involved in
are unsolved; see the remark in Exercise 10 of § 4-2-
5. The Tychonoff Theorem
We now return to a problem we left unresolved in Chapter 3. We shall
prove the Tychonoff theorem, to the effect that arbitrary products of compact
spaces are compact. The proof makes use of the maximum principle of set
theory (see §1-11).
The Tychonoff theorem is of great usefulness to analysts (less so to geo-
geometers). We apply it in §5-2 to obtain an interesting characterization of
completely regular spaces. Another application appears in §5-3, where we
construct the Stone-Cech compactificationand explore its properties; in this
section we assume §3-8, Local compactness.
5-1 The Tychonoff Theorem
Like the Urysohn lemma, the Tychonoff theorem is what we call a "deep"
theorem. Its proof involves not one but several original ideas; it is anything
but straightforward. We shall discuss the crucial ideas of the proof in some
detail before turning to the proof itself.
In Chapter 3, we proved the product X X Y of two compact spaces to
be compact. For that proof the open covering formulation of compactness
was quite satisfactory. Given an open covering of X x Yby basis elements,
229
230 The Tychonoff Theorem
Chap.
we covered each slice x x Y by finitely many of them, and proceeded fr0
that to construct a finite covering of X x Y. m
Try as we may, we cannot make this approach work for an infinite pr0(j
uct of compact spaces. So the first idea involved in the proof of the Tychonoff
theorem is to abandon open coverings and to approach the problem usin
instead the closed set formulation of compactness. Actually what we use
the formulation expressed in Corollary 5.10 of Chapter 3 which states that
Xh compact if and only if for every collection a of subsets of X satisfying
the f.i.c. (finite intersection condition), the intersection PUa^of the closures
of the elements of d is nonempty.
To see how this approach might work, let us consider first the simplest
possible case: the product of two compact spaces X, x X2. Suppose that
a is a collection of subsets of X, x X2 satisfying the f.i.c. Consider the
projection map vt, : X, x X2 —* X,. The collection
{iti(A)\A e a]
of subsets of X, also satisfies the f.i.c, since if x e At n • • • n An, then
7t,(jc) e n^Ai) n ■ • ■ D n,(An), so the latter set is nonempty. Compactness
of X, guarantees that the intersection of all the sets n^A) is nonempty. Let
us choose a point xt belonging to this intersection. Similarly, let us choose
a point x2 belonging to all the sets ti2(A). The obvious conclusion we would
like to draw is that the point xt x x2 lies in n.<e« A, for then our theorem
would be proved.
But that is unfortunately not true. Consider the following example, in
which X, = X2 = [0, 1] and the collection a consists of all elliptical regions
bounded by ellipses that have the points p — A, j) and q = (\, |) as their
foci. See Figure 1. Certainly a satisfies the f.i.c/Now let us pick a point x,
in the intersection of the sets [n,(A)\A e a}. Any point of the interval
Figure I
§5-1
The Tychonoff Theorem 231
r^l will do; suppose we choose x, = \. Similarly, choose a point x2 in
the intersection of the sets {n1(,A)\A e a}. Any point of the interval [j, Z]
will do; suppose we pick x2 = \. This proves to be an unfortunate choice,
for the point
*i X x2 = \ x \
does not lie in the intersection of the sets A.
"Aha!" you say, "you made a bad choice. If after choosing *, = i you
had chosen x2 = 7. then you would have found a point in f\A^a A" The
difficulty with our tentative proof is that it gave us too much freedom in
picking Xi and x2; it allowed us to make a "bad" choice instead of a "good"
choice.
How can we alter the proof so as to avoid this difficulty?
This question leads to the second idea of the proof: Perhaps if we expand
the collection a (retaining the f.i.c, of course), that expansion will restrict
the choices of xt and x2 sufficiently that we will be forced to make the "right"
choice. To illustrate, suppose that in the previous example we expand the
collection a to the collection D consisting of all elliptical regions bounded
by ellipses that have/7 = (j, ])as one focus and any point of the line segment
pq as the other focus. This collection is illustrated in Figure 2. The new collec-
Figure 2
''on a still satisfies the f.i.c. But if you try to choose a point x, in
'he only possible choice for x, is ^. Similarly, the only possible choice_for
xi « \. And ^ x ^ does belong to every set D, and hence to every set A. In
°ther words, expanding the collection a to the collection 2) forces the proper
ch°ice on us.
232 The Tychonoff Theorem
Chap.j
Now of course in this example we chose D carefully so that th
would work. What hope can we have for choosing D correctly in *
Here is the third idea of the proof: Why not simply choose ffl to be a cT^
tion that is "as large as possible"—so that no larger collection satisfied th"
f.i.c.—and see whether such a D will work? It is not at all obvious that
a collection D exists; to prove it, we must appeal to the maximum princil
of set theory. But after we prove that D exists, we shall in fact be able t
show that 2) is large enough to force the proper choices on us. °
Now let us apply these ideas:
Theorem 1.1 (The Tychonoff theorem). An arbitrary product of compact
spaces is compact in the product topology.
Proof. Step 1. Let X be a set; let a be a collection of subsets of Xsatis-
Xsatisfying the f.i.c. We show that there is a collection D of subsets of X such that
A) D r> a.
B) D satisfies the f.i.c.
C) If S ^ D, then S does not satisfy the f.i.c.
We often express conditions B) and C) by saying that D is "maximal with
respect to the f.i.c."
Recall the maximum principle. It states that if -< is a strict partial order
relation on the set A, and if B is a subset of A that is simply ordered by -<,
then there is a maximal simply ordered subset C of A containing B. We need
a special case of this principle, the case where B is a one-element subset of
A; such a subset is automatically simply ordered. Thus what we need is the
following:
If A is a set with a strict partial order and if a. is an element of A, then
there is a maximal simply ordered subset C of A such that a e C.
We shall apply this principle in the case where A is not a set, nor even a
collection of sets, but rather a set whose elements are collections of sets.
For purposes of this proof, we shall call such a set a "superset" and shall
denote it by an outline letter. To summarize the notation:
c is an element of X,
C is a subset of X,
C is a collection of subsets of X,
C is a superset of collections of subsets of X.
We are given the collection a of subsets of X, satisfying the f.i.c. w
A denote the superset consisting of all collections of subsets of A'that sa isj
the f.i.c. Then a e A. Let us use proper inclusion ? as the stn<* P\'
order on A. By the special case of the maximum principle just cited, tne
exists a maximal simply ordered subsuperset C of A such that a e C.
Define D to be the union of the elements of C;
We assert that 33 is the collection we want.
§54 The Tychonoff Theorem 233
First, note that 8cS, because 8e£. Second, we show that 33 satisfies
the f.i.c Let Du ..., D. be elements of 3). Since 3) is the union of the ele-
elements of C, for each i there is an element e, of £ such that D, e 6 Now
C is simply ordered by proper inclusion. Therefore, the superset {e, ' e \
is also simply ordered by proper inclusion. Being finite, it has a largest'ele-
largest'element; that is, there is an index k such that 6, c ek for i = 1,..., „. ln par.
ticular, the sets Du ..., Dn all belong to ek. Since ek satisfies t'he'f.i.c. by
hypothesis, D, O • • • O Dn is nonempty.
Third, we show 33 is maximal with respect to the f.i.c. Let 3D £ S and
suppose that S satisfies the f.i.c. Then we can form a new superset C by ad-
adjoining the element S to C;
C' = C u {s}.
Now 6 c 3) for every 6 e C, and D £ S. Therefore, every two elements
of C are comparable under proper inclusion, so that C is simply ordered.
This contradicts the maximality of C.
Step 2. Let D be a collection of subsets of X that is maximal with respect
to the f.i.c. Then:
(a) Any finite intersection of elements o/2D belongs to 33.
Let B be the intersection of finitely many elements of 33. Define a collec-
collection S by adjoining B to D, so that S = D U {B}. We show that S satisfies
the f.i.c.; then maximality of D implies that S = 3D, whence B e 3D as de-
desired.
Take finitely many elements of S. If none of them is the set B, then their
intersection is nonempty because 3D satisfies the f.i.c. If one of them is the
set B, then their intersection is of the form
D, n ■ ■ ■ n Dm n b.
Since B equals a finite intersection of elements of 3D, this set is nonempty.
(b) If A is any subset ofX that intersects every element o/3D, then A be-
belongs to ID.
Given A, define S = 3D U {A}. We show that S satisfies the f.i.c, from
which we conclude that A belongs to 3D. Take finitely many elements of S.
If none of them is the set A, their intersection is automatically nonempty.
Otherwise it is of the form
D, n • • • n Dn n A.
Now D, n • • ■ n Dn belongs to 3D, by (a); therefore, this intersection is
nonempty, by hypothesis.
Step 3. Now we prove the Tychonoff theorem. Let
X = Ha ej Xa)
where each space X. is compact. Let a be a collection of subsets of X satis-
234 The Tychonoff Theorem
Chap. 5
fying the f.i.c. We prove that the intersection
CUmtA
is nonempty. Compactness of AT follows.
Applying Step 1, choose a collection D of subsets of X such that S>
and S> is maximal with respect to the f.i.c. It will suffice to prove Z?£
intersection f)DeI) D is nonempty. te
Given i6/, let n, : X -> X, be the projection map, as usual. Consider
the collection '
[n.(D)\D e 33}
of subsets of X,. This collection satisfies the f.i.c. because 33 does. By com-
compactness of Xa, we can for each a choose a point x. of Xa such that
x. e CVo *«@).
Let x be the point (.va)a6J of X. We shall show that x e D for every D e £>;
then our proof will be finished.
First we show that if 7i^[(Uf) is any subbasis element (for the product
topology on X) containing x, then n'f\Vf) intersects every element of 3);
The set Uf is a neighborhood of xf in Xr Since x0 e ~nJP) by definition,
11^ intersects n^D) in some point ^(y), where y e D. Then it follows that
y e n;'(Uf) r\D.
It follows from (b) of Step 2 that every subbasis element containing x
belongs to D. And then it follows from (a) of Step 2 that every basis element
containing x belongs to 2X Since D has the f.i.c, this means that every basis
element containing x intersects every element of 33; whence x e D for every
D e D, as desired. □
Exercises
1. Let X be a space. Let D be a maximal collection of subsets of Xsatisfying the
(a) Show that x e 5 for every D e D if and only if every neighborhood of*
belongs to D. Which implication uses maximality of £>?
(b) Let D E D. Show that if /I = A then ^eD. . t0
(c) Show that if X is Hausdorff, there is at most one point belongi s
2. A collection a of subsets of X satisfies the countable fnterse^tfon
(c i c) if every countable intersection of elements of a is nonempty- jsfy.
X is a Lindelbf space if and only if for every collection a of subsets
ing the c.i.c,
pUea^^ 0•
3. Consider the three statements: K,atisfyingtheci'C"
(i) If Xi% a set and a is a collection of subsets of X satistying
§5 Completely Regular Spaces 235
then there is a collection 33 of subsets of X such that SD => a and 3) f.
maximal with respect to the c.i.c.
00 Suppose 33 is maximal with respect to the c.i.c. Then countable intersec-
intersections of elements of 33 are in 33. And if A is a subset of Xthat interacts
every element of 33, then necessarily A e 33.
(iii) Products of Lindelof spaces are Lindelof.
(a) Prove (ii).
(b) Show that (i) and (ii) together imply (iii).
(c) Given a set X, show there exists a maximal collection of subsets of X
satisfying the c.i.c. Why is this not adequate to prove (i)?
(d) The space R, is Lindelof and the space R} is not. (See Example 4 of §4-1).
Therefore, (i) does not hold. Where does the proof of (i) break down?
4. Here is another theorem whose proof uses the maximum principle. Recall that
if A is a space and if x, y e A, we say that a- and y belong to the same quasi-
component of A if there is no separation A = C \j D oiA into two disjoint sets
open in A such that x e C and y e D.
(a) Let X be a compact Hausdorff space; let x, y e X. Let ft be a collection of
closed sets of A'such that for each A e 8, the points x and y lie in the same
quasicomponent of A. If ft is simply ordered by proper inclusion, show that
x and y lie in the same quasicomponent of
Y = fWa /*•
[//;>//: See Exercise 12 of §3-5.]
(b) Prove the following:
Theorem, If X is compact Hausdorff, the quasicomponents of X equal the
components of X.
[Hint: If x and y lie in the same quasicomponent of X, let ft be the collec-
collection of all closed sets A in JTsuch that .v and y lie in the same quasicomponent
of A. Let ft' be a maximal simply ordered subcollection and show that
rw a
is connected.]
(c) Prove the following:
Corollary. Let X be compact Hausdorff; let x e X. The intersection of all
those sets A containing x which are both open and closed in X equals the com-
component of X containing x.
5-2 Completely Regular Spaces
We have already mentioned that the failure of the proof of the Urysohn
lemma to generalize to regular spaces leads us to formulate a new separa-
separation axiom, the axiom of complete regularity. In this section we study some
of the properties of spaces satisfying this axiom. One jus^cat'on for oU
interest in this class of spaces comes from an imbedding theorem we shal
prove, which shows that the class of completely regular spaces is identical
The Tychonoff Theorem Chap. 5
with a class of spaces we have already considered, the class of all subspaces
of compact Hausdorff spaces.
Definition. A space X is completely regular if one-point sets are closed
in Zand if for each point x0 and each closed set A not containing *„, there
is a continuous function/: X—> [0, 1] such that f{x0) = 1 and f(A) = [0}.
A normal space is completely regular, by the Urysohn lemma, and a
completely regular space is regular, since given/, the sets /~'([0,|)) and
/""'(Oz, 1]) are disjoint open sets about A and x0, respectively. As a result,
this new axiom fits in between regularity and normality in the list of separa-
separation axioms. Note that in the definition one could just as well require the
function to map x0 to 0, and A to {1}, for g{x) = 1 — f{x) satisfies this
condition.
Theorem 2.1. A subspace of a completely regular space is completely
regular. A product of completely regular spaces is completely regular.
Proof Let X be completely regular; let Y be a subspace of X. Let x0
be a point of Y, and let A be a closed set of Y disjoint from x0. Now A =
A n Y, where /denotes the closure of A in X. Therefore, x0 <£ A. SinceX
is completely regular, we can choose a continuous function /: X—> [0,1]
such that/(.v0) = 1 and /(/) = {0}. The restriction of/to Yis the desired
continuous function on Y.
Let X = JlXa be a product of completely regular spaces. Let b =(A.)
be a point of Xand let A be a closed set of X disjoint from b. Choose a basis
element J[U. containing b that does not intersect A; then Ua = Xa except
for finitely many a, say a = a,, .. . , «,„. Given / = I, ... ,11, choose a con-
continuous function
/,: Xai -> [0, 1]
such that f{bj = 1 and f{X- UJ = {0}. Let 0,(x) =/(*«,(x)); then <j>,
maps X continuously into R and vanishes outside 7r«,'(£4,). The product
/W=D,(x).^2(x) 0.(x)
is the desired continuous function on X, for it equals 1 at b and vanishes
outside n^«. □
Example 1. The space Sn x Sa is a space that is completely regular, since
it is a subspace of the normal space Sn x Sa. But it is not normal; see Example
2 of §42
2 of §4-2.
2 of §42.
A space that is regular but not completely regular is much harder to find-
Most of the examples that have been constructed for this purpose are difficult,
and require considerable familiarity with cardinal numbers. Fairly recently,
however, John Thomas [T] has constructed a much more elementary example,
which we utlin i Ei 6
which we outline in Exercise 6.
§5-2 ComPleteIy Regular Spaces 237
The separation of disjoint closed sets by continuous real-valued functions
is the crucial tool used in proving the Urysohn metrization theorem- one
uses it to imbed the space ATinto the product space R°. In a completely regular
space, we can separate points from closed sets by continuous functions, so
it is natural to ask whether one can prove a similar theorem under the hy-
hypothesis of complete regularity. One can. It does not turn out to be a metriza-
metrization theorem, but it is an interesting imbedding theorem:
Theorem 2.2. IfX is completely regular, then X can be imbedded in [0, \]s
for some J.
Proof. Let {/„}«€/ denote the set of all continuous functions from X
into the interval [0, 1], indexed by some index set J. Complete regularity
of X guarantees that this collection separates points from closed sets in X.
Therefore, by the Imbedding theorem of §4-4, the map
is an imbedding of X in [0, \)J. □
Corollary 2.3. Let X he a space. The following are equivalent:
A) X is completely regular.
B) X is homeomofphic to a subspace of a compact Hausdorff space.
C) X is homeomorphic to a subspace of a normal space.
Exercises
1. Show that every locally compact Hausdorff space is completely regular.
2. Show that although R} is not normal, it is completely regular.
3. Let A" be completely regular; let A and B be disjoint closed subsets of X. Show
that if A is compact, there is a continuous function /: X-*[0,1] such that
/G4) {/ {
*4. Show that &• in the box topology is completely regular. (This fact is an imme-
immediate consequence of the following theorem, but give a direct proof.)
*S. Prove the following:
Theorem. Every Hausdorff topological group is completely regular.
Proof. Let Ko be a neighborhood of the identity element e, in the topolo-
topological group G. In general, choose V. to be a neighborhood of e such. tha
y.-V.c K.-,. Consider the set of all dyadic rationals p that is. all rational
numbers of the form A/2", with k and n integers. For each dyadic rational p
i @,1], define an open set U(p) inductively as follows: CAD - V* a"a
i = K,. Given n, if C/(*/2") is defined for 0 < W<, 1, define
in
238 The Tychonoff Theorem q.
for 0 < k < 2". For p <. 0, let U(p) = 0; and for p > 1, iet
Show that
Vn • U(k/2") <= U((k
for all k and n. Proceed as in the Urysohn lemma.
This exercise is adapted from [M-Z], to which the reader is referred fo
further results on topological groups.
♦6. Define a set X as follows: For each even integer m, let Lm denote the line
segment m x [-1,0] in the plane. For each odd integer n and each integer
k 2> 2, let Cn,t denote the union of the line segments (n + 1 — l/k) x [-1 oj
and (« — 1 + 1/*) x [—1. 0] and the semicircle
{x xy[(x-nJ+y2 = (l-l/kJ and y^O]
in the plane. Let />„.* denote the topmost point ux(l-l|t) of this semi-
circle. Let A" be the union of all the sets Lm and Cn, k, along with two extra points
a and b. Topologize X by taking sets of the following four types as basis ele-
elements :
(i) The intersection of A" with a horizontal open line segment that contains
none of the points pn.k.
(ii) A set formed from one of the sets Cn,t by deleting finitely many points,
(iii) For each even integer m, the union of [a] and the set of points x x y
of X for which x < m.
(iv) For each even integer m, the union of [b] and the set of points x x y
of X for which x > m.
(a) Sketch X; show that these sets form a basis for a topology on X.
(b) Let / be a continuous real-valued function on X. Show that for any c, the
set/-•(<:) is a G6 set in X. (This is true for any space X.) Conclude that the
set Sn,k consisting of those points p of Cn%k for which f(p) ¥= /(?»*)is
countable. Choose d e [-1,0] so that the line y = d intersects none of the
sets Sn,k. Show that for n odd,
/((n - 1) x d) = \\m f(p^k) = /((« + 1) x d).
Conclude that f(a) = f(b).
(c) Show that X is regular but not completely regular.
5-3 The Stone-Cech Compactification
We have already studied one way of compactifying a topological sPa'*
X, the one-point compactification (§3-8); it is in some sense the ^nan
compactification of X. The Stone-Cech compactification of X is in so
sense the maximal compactification of X. We introduct it here as anintere
ing application of the Tychonoff theorem. It has a number of appli^00
in modern analysis, but these lie outside the scope of this book.
§ 5-3 " The Stone-dech Compactification 239
Definition. A compactification of a space X is a compact Hausdorff space
Y containing X such that X is dense in Y (that is, such that X = Y). Two
compactifications Y{ and Y2 of X are said to be equivalent if there is a
homeomorphism h : Y\ —♦ Y2 such that h(x) = x for every x e X.
In order for Af to have a compactification, A'must be completely regular.
Conversely, every completely regular space has at least one compactification.
One way of obtaining a compactification of X is as follows:
Let X be completely regular. Choose an imbedding h : X —> Z of X in
a compact Hausdorff space Z. Let A^ denote the subspace h(X) of Z, and
let Ya denote its closure in Z. Then Ko is a compact Hausdorff space and
Xa = Ya; therefore, Yo is a compactification of A"o.
We now construct a space K containing X such that the pair (X, Y)
is homeomorphic to the pair (Xo, Yo). Let us choose a set A disjoint from
X that is in bijective correspondence with the set Yo — Xo under some map
k : A —» Ko — AV Define K = A" U A, and define a bijective correspon-
correspondence H : Y — y0 by the rule
//(x) = A(a-) for x e X,
H(a) = A(fl) for a e A.
Then topologize K by declaring U to be open in Y if and only if H{U) is
open in Ya. The map // is automatically a homeomorphism; and the space
A" is a subspace of Y because H equals the homeomorphism /; when restricted
to the subset X of Y.
The space Y is called the compactification of A" induced by the imbedding h.
We summarize the preceding construction as follows: If h\X-^>Z
is an imbedding of X in the compact Hausdorff space Z, then h induces a
compactification Y of X. It has the property that the imbedding h can be
extended to an imbedding H : Y —> Z.
In general, there are many different ways of compactifying a given space
X. Consider for instance the following compactifications of the open interval
* = @,l):
Example 1. Take the unit circle S1 in Rz and let h: @, 1) — S> be the map
h(t) = (cos 2jw) x (sin 2nt).
The compactification induced by the imbedding h is equivalent to the one-
point compactification of X.
Example 2. Let Y be the space [0, 1]. Then Y is a compactification of X;
it is obtained by "adding one point at each end of @, 1)."
Example 3. Consider the square [-1, l]2in«2and let A:@, 1) — [-1, I]2
be the map
240 The Tychonoff Theorem
Chap. 5
h(x) = x x sin(l/;t).
The space Yo = hJX) is the topologist's sine curve (see Example 8 f s
The imbedding h gives rise to a compactification of @, 1) quite differ
the other two. It is obtained by adding one point at the right-hand ^
@, 1), and an entire line segment of points at the left-hand end! °f
A basic problem that occurs in studying compactifications is the foil
ing: w"
If Y is a compactification ofX, under what conditions can a continuous
real-valued function f defined on X be extended continuously to Y1
The function / will have to be bounded if it is to be extendable, since its
extension will carry the compact space Y into R and will thus be bounded
But boundedness is not enough, in general. Consider the following example:
Example 4. Let X = @, 1). Consider the one-point compactification of A"
given in Example 1. A bounded continuous function/: @, 1) —► R is extendable
to this compactification if and only if the limits
lim /(.v) and lim /(.v)
exist and are equal.
For the ''two-point compactification" of X considered in Example 2, the
function/is extendable it and only if both these limits simply exist.
For the compactification of Example 3, extensions exist for a still broader
class of functions. It is easy to see that /is extendable if both the above limits
exist. But the function /(.v) = sin (l/.v) is also extendable to this compacli-
fication: Let H be the imbedding of Kin R~ which equalsh on thesubspace*.
Then the composite map
is the desired extension of/. For if .v e X, then H(x) =*(■*)=* x ^"C^
so that n2(H(x)) = sin (l/.v), as desired.
There is something especially interesting about this last compactification-
We constructed it by choosing an imbedding
A:@, 1)—>R2
whose component functions were the functions a- and sin(l/-v- ^m_
found that both the functions x and sin (l/.v) could be extended to j* ded
pactification. This suggests that if we have a whole collection o\ ° „,
continuous functions defined on @, 1), we might use them as c°Tb(al-n
functions of an imbedding of @, 1) into R1 for some /, and there ^^
a compactification for which every function in the collection is e; J(
This idea is the basic idea behind the Stone-Cech compacting
is defined as follows: ruction of11
Let A" be a completely regular space. Let {/.}.« be the coiieci
§ 5-3 The Stone-dech Compactification 241
bounded continuous real-valued functions on X, indexed by some index set
J. For each cc e J, choose a closed interval /, in R containing f,(X). To be
definite, choose
h = [glb/.W, Iub/.(A0].
Then define h : X —<■ H«e/ h by the rule
Kx) = (Ux))aeJ.
By the Tychonoff theorem, ]T h is compact. Because X is completely regular,
the collection {/,} separates points from closed sets in X. Therefore, by the
Imbedding theorem of §4-4, h is an imbedding.
The compactification of X induced by h is called the Stone-Cech com-
compactification of X. It is commonly denoted by fi(X).
Many mathematicians avoid using the arbitrary index set /when defining
the Stone-Cech compactification. Instead, they use the collection JF of all
bounded continuous real-valued functions on X as its own index set, letting
/ = JF and letting the indexing function f-.J—> JF be the identity function.
This choice of indexing is not essential for the definition, however; and we feel
it leads to notational confusion.
The crucial property of the Stone-Cech compactification is the following
extension property:
Theorem 3.1. Let X be completely regular; let fi(X) be its Stone-Cech
compactification. Then every bounded continuous real-valued function on X
can be uniquely extended to a continuous real-valued function on fi(X).
Proof. The compactification fi(X) is induced by the imbedding h : X —>
II h defined above. This means there is an imbedding H: fi(X) -^Yih that
equals h when restricted to the subspace X of fi(X). Given a continuous
bounded real-valued function on X, it equals ff for some fi e /. Now if
*t '■ II h —<■ If is projection onto the /fth coordinate, then the composite map
7cf o H: fi(X) —■> If is the desired extension of ff. For if x e X, we have
nf{H(x)) = nf{h{x)) = np((fMUj) =/,>«•
Uniqueness of the extension is a consequence of the following lemma. Q
Lemma 3.2. Let A c X; let f .• A — Z be a continuous map of A into the
Hausdorff space Z. There is at most one extension off to a continuous fund ion
g : A — Z.
Proof. This lemma was given as an exercise in §2-7; we give a proof here.
Suppose that g, g' : A—> X are two different extensions of/; choose x so
that g(.v) 7t g'(x). Let U and U' be disjoint neighborhoods of g(x) and g'(x),
respectively. Choose a neighborhood V of x so that g{V) c Uand g\V) c
The Tychonoff Theorem Chap. 5
U' Now V intersects A in some point y; then g(y) e U and g'(y) 6 „,
But since jeiwe have g(.y) = /GO and g'(y) = /G>). This contradict
the fact that U and V are disjoint. Q
We now prove a theorem to the effect that the Stone-Cech compactig.
cation is essentially unique, and is characterized by the extension property.
Theorem 3.3. Let X be completely regular. Let Y, and Y2 be two compactifi.
cations o/X having the extension property of Theorem 3.1. Then there is a
homeomorphism $ o/Y, onto Y2 such that 0(x) = xfor each x e X.
Proof. Step 1. We first prove the following fact: Suppose Y is a com-
pactification of X having the extension property stated in Theorem 3.1.
If Z is any compact HausdorfF space and g : X—> Z is any continuous func-
function, then g can be extended to a continuous function k mapping Y into Z.
To prove this fact, note that Z is completely regular, so that it can be
imbedded in [0, l]y for some J. So we may as well assume that Z cz [0, If.
Now consider g : X—► Z cz [0, l]y cz R>, Each component function &
of the map g is a continuous bounded real-valued function on X; by hypothe-
hypothesis, g, can be extended to a continuous map k« of Y into R. Define k : Y—>
RJ by setting k{y) = (k,(y))«ej- The map k is continuous because R' has the
product topology. We assert that k actually maps Y into the subspace Z.
For g{X) is contained in Z, and k(X) ■-=■- g(X). Since Z is closed in R', it
follows that k(X) cz Z. By continuity of k,
k{Y) = k{X) cz k(X).
Therefore, k maps Y into Z.
Step 2. Now we prove the theorem. Consider the inclusion mapping
Ji '■ X — Y2. It is a continuous map of ^Tinto the compact HausdorfF space
Yz. Because K, has the extension property, we may, by Step I, extend/:
to a continuous map/, : Y, — Yz. Similarly, we may extend the inclusion
map y, : X—> Yx to a continuous map/, : Y2 — K, (because r2 has the
extension property and Y, is compact Hausdorff).
The composite /, «,/, : y, — y, has the property that for every x e X,
one has/,(/,(*)) = x. Therefore,/, o/, is a continuous extension of the iden-
identity map ix:X~> X. But the identity map of y, is also a continuous ex-
extension of /,. By uniqueness of extensions (Lemma 3.2),/, o/2 must equal
the ufcntity map of y,. Similarly,/, o/l must equal the identity raapof Tr
lhus/, and/2 are homeomorphisms. Q
S 5'3 The Slone-dech Compactification 243
Exercises
1. Verify the statements made in Examples 1 and 4.
2. Show that the bounded continuous function g: (o,!)—»/? defined by g(x) =
cos (l/.v) cannot be extended to the compactification of Example 3. Define an
imbedding h : @, 1) —>■ R* such that the functions x, sin (I/*), and cos (l/x)
are all extendable to the compactification induced by h.
3. Under what conditions does a metrizable space have a metrizable compactifica-
compactification?
4. Let Y be an arbitrary compactification of X; let fi(X) be the Stone-Cech com-
compactification. Show there is a continuous surjective closed mapg-.fi(X) ► Y
that equals the identity on X.
[This exercise makes precise what we mean by saying that fi(X) is the "maxi-
"maximal" compactification of X. If you are familiar with quotient spaces, you will
recognize that g is a quotient map. Thus every compactification of A"is equiva-
equivalent to a quotient space of fi{X).]
5. (a) Show that every continuous real-valued function defined on Sn is "even-
"eventually constant." [Hint: First prove that for each f, there is an element
a of Sa such that |/(yff) - f{OL)\ < e for all fi > a. Then let e = 1/n for
n e Z+ and consider the corresponding points an.]
(b) Show that the one-point compactification of Sa and the Stone-Cech
compactification are equivalent.
(c) Conclude that every compactification of Sn is equivalent to the one-point
compactification.
6. Let X be completely regular. Show that X is connected if and only if P(X) is
connected. [Hint: If X = A U B is a separation of X, let /(.v) = 0 for x e A
and /(.v) = 1 for x e B.]
7. Let X be discrete; consider fi(X).
(a) Show that if A c X, then A and X - A are disjoint [closures taken in fi(X)].
(b) Show that if V is open in fi(X), then 0 is open in fi(X).
(c) Show that P(X) is totally disconnected.
8. Show that 0{Z+) has cardinality at least as great as 1', where / = [0, 1]. [Him:
I1 has a countable dense subset, by Exercise 13 of §4-1.]
9. Show that if fi(X) * X, then 0(X) is not metrizable. [Hint: Show that if A"is
normal and y is a point of fi(X) - X, then y is not the limit of a sequence of
points of X.]
6. Metrization Theorems
and Paracompactness
The Urysohn metrization theorem of Chapter 4 was the first step—a giant
one—toward an answer to the question: When is a topological space metriz-
able? It gives conditions under which a space X is metrizable: that it be
regular and have a countable basis. But mathematicians are never satisfied
with a theorem if there is some hope of proving a stronger one. In the present
case, one can hope to strengthen the theorem by rinding conditions on X
which are both necessary and sufficient for A'to be metrizable, that is, con-
conditions which are equivalent to metrizability.
We know that the regularity hypothesis in the Urysohn metrization theo-
theorem is a necessary one, but the countable basis condition is not. So the obvi-
obvious thing to do is try to replace the countable basis condition by something
weaker. Finding such a condition is a delicate task. The condition has o
strong enough to imply metrizability, and yet weak enough that all metnza
spaces satisfy it. In a situation like this, discovering the right hypothesis
more than half the battle. . y
The condition that was eventually formulated, by J. Nagata an ^
Smirnov independently, involves a new notion, that of local finiteness.f
say that a collection a of subsets of a space X is locally finite if every po &
X has a neighborhood that intersects only finitely many eI^men tabIe'js
Now one way of expressing the condition that the basis <& iscoun
to say that (B can be expressed in the form
244
§ 6-1 ■■■.:■■ z,ocai Finiteness 245
where each collection <$>„ is finite. This is an awkward way of saying that (B
is countable, but it suggests how to formulate a weaker version of it. The
Nagata-Smirnov condition is to require that the basis <B can be expressed in
the form
where each collection <$>„ is locally finite. We say that such a collection (B is
countably locally finite. Surprisingly enough, this condition, along with
regularity, is both necessary and sufficient for metrizability of X.
In §6-1 we study the notion of local finiteness. In §6-2 we show that the
Nagata-Smirnov condition for X, along with regularity, implies metrizability
of X; the proof is an adaptation of the proof of the Urysohn metrization
theorem. In §6-3 we prove that metrizability implies the Nagata-Smirnov con-
condition; this proof uses the well-ordering theorem.
There is another concept in topology which involves the notion of local
finiteness. It is a generalization of the concept of compactness called "para-
compactness." Although of fairly recent origin, it has proved useful in many
parts of mathematics. We introduce it here so that we can give another set of
necessary and sufficient conditions for a space X to be metrizable. It turns
out that X is metrizable if and only if it is both paracompact and locally
metrizable. This we prove in §6-5.
Some of the sections of this chapter are independent of one another. The
dependence among them is expressed in the following diagram:
. §6-1 Local finiteness.
Nagata-Smirnov metrization theorem (sufficiency).
§6-3 The Nagata-Smirnov theorem (necessity).
§6-4 Paracompactness.
§6-5 The Smirnov metrization theorem.
6-1 Local Finiteness
In this section we prove some elementary properties of locally finite col-
collections.
Definition. Let A' be a topological space. A collection a of subsets of X
is said to be locally finite if every point of X has a neighborhood that inter-
intersects only finitely many elements of a.
Example 1. The collection of intervals
G = {(«, n + 2)| n eZ]
246 Metrization Theorems and Paracompactness
is locally finite in the topological space X, as you can check. So is the coll
<B={(«,2n)|neZ+}. eC<1On
On the other hand, the collection
C = {@, l/n)|neZ+j
is not locally finite in R, nor is the collection
Lemma 1.1. Let a be a locally finite collection of subsets ofX. Then:
(a) Any subcollection of a is locally finite.
(b) The collection <B = {A}Aea of the closures of the elements of a is locally
finite.
(c) Ul^A = UAea A.
Proof. Statement (a) js trivial. To prove (b), note that any open set U
which intersects the set A necessarily intersects A. Therefore, if U is a neigh-
neighborhood of x that intersects only finitely many elements A of a, then C/can
intersect at most the same number of sets of the collection (B. (It might inter-
intersect fewer sets of (B, since At and /F2 can be equal even though A, and Az are
different.)
To prove (c), let Y denote the union of the elements of «:
In general, [JA c Y; we prove the reverse inclusion, under the assumption
of local finiteness. Let x e Y; let U be a neighborhood of x that intersects
only finitely many elements of a, say Au . . . , Ak. We_assert that x belongs to
one of the sets Alt. . . , Ak, and hence belongs to \JA. For otherwise, the set
U — A, — ■ ■ ■ — Ak would be a neighborhood of x that intersects no ele-
element of a and hence does not intersect Y, contrary to the assumption
that x e Y. □
In the exercises of §2-7 and §4-5, we defined a concept of local finiteness
for an indexed family of subsets of X. The indexed family {A.].*i is said to
a locally finite indexed family if every x e A" has a neighborhood that k*1**
A. for only finitely many values of a. What is the relation between Ite ^
formulations of local finiteness? It is easy to see that [A.].*/ is alocally
indexed family if and only if it is locally finite as a collection of sets ana
nonempty subset A of A" equals A* for at most finitely many values ot .
We shall not be concerned with locally finite indexed families in tnis en v
except in one or two exercises.
Definition. A collection <B of subsets of X is said to be conntably
finite if (B can be written as the countable union of collections «„
which is locally finite.
§ 6-2 Ue NaS"f-Smirnov Metrization Theorem (.sufficiency) 247
Most authors use the term "cr-Iocally finjte" for this concept. The<r comes
from measure theory and stands for the phrase "countable union of" Note
that both a countable collection and a locally finite collection are countably
locally finite.
Exercises
1. Check the statements in Example l.
2. Check the relation stated above between local finiteness for a collection of sets
and for an indexed family of sets.
3. Find a point-finite open covering G of R that is not locally finite. [The collection
G is point-finite if each point of R lies in only finitely many elements of «.]
4. Give an example of a collection of sets a that is not locally finite, such that the
collection (B = [A\ A e «} is locally finite.
5. Show that if A" has a countable basis, a collection ft of subsets of A"is countably
locally finite if and only if it is countable.
6. Take R" in the box topology. Find a collection of subsets of R" that is countably
locally finite but is neither countable nor locally finite.
7. Many spaces have countable bases; but no Hausdorff space has a locally finite
basis unless it is discrete Prove this fact.
8. Find a space that has a countably locally finite basis but does not have a count-
countable basis.
6-2 The Nagata-Smirnov Metrization Theorem
(sufficiency)
Now we prove that regularity and the Nagata-Smirnov condition suffice
to prove a space metrizable.
The proof follows very closely the second proof we gave of the Urysohn
metrization theorem. In this proof we constructed a map of the space X
into R" that was an imbedding relative to the uniform metric p on R". So let
us review the major elements of that proof. The first step of the proof was to
prove that every regular space with a countable basis is normal. The second
step was to construct a countable collection {/„} of real-valued functions on
^that separated points from closed sets. And the third step was to use the
functions/, to imbed A'in the metric space (/?", p).
Each of these steps needs to be generalized in order to prove the Nagata-
Smirnov theorem. First, we prove that a regular space X with a countably
locally finite basis is normal. Second, we construct a certain collection of
real-valued functions {/.} on X. Third, we use these functions to imbed X
in the metric space (RJ, p) for some /.
in
248 Metrization Theorems and Paracompactness
Chap.
Before we start, we need to recall a notion we have already intiwi
the exercises, that of a Gs set. lr°auced
Definition. A subset A of a space X is called a G, set in X if it equals th
intersection of a countable collection of open subsets of X.
Example 1. Each open subset of X is a G6 set, trivially. In a first-countabl
Hausdorff space, each one-point set is a G6 set. The one-point subset {Qj Of
Sa is not a G6 set, as you can check.
Example 2. In a metric space X, each closed set is a Gd set. Given AcX
define
) = LUx B(-v, e).
If .4 is closed, you can check that
a = rw.
Lemma 2.1. Let X be a regular space with a basis (B that is countably
locally finite. Then X is normal, and every closed set in X is a G6 set in X.
Proof. Step I. Let W be open in X. We show there is a countable col-
collection {£/„] of open sets of X such that
W --= \JU. = [jUn.
Since the basis (B for X is countably locally finite, we can write (B = \J&,,
where each collection (&„ is locally finite. Let 6n be the collection of those basis
elements B such that 5 ~ «„ and 5 c W. Then e, is locally finite, being a
subcollection of ($>„. Define
Then [/„ is an open set, and by Lemma I.I,
Therefore, £/„ c W7, so that
U u
We assert that equality holds. Given x e IV, there is by regularity a basis
element B e ffl such that x e 5 and 5 c H7. Now 5 e <&n for some". "
fi g e, by definition, so that x e Un. Thus ff <= IJt/,,, as desired.
Step 2. We show that every closed set C in X is a G6 set in Jf. Given ^
let fK = A' — C. By Step I, there are sets U, in X such that W - UU'-
so that C equals a countable intersection of open sets of X.
Step 3. Now we show X is normal. Let Cand D be disjoint closed seM»
X. Applying Step I to the open set X - A we construct a countable
§ 6-2 The Nagata-Smirnov Metrizathn Theorem (sufficiency) 249
tion {£/„} of open sets such that \JUn = \JUn = X - D. Then {£/„} covers C
and each set Un is disjoint from D. Similarly, we construct a countable
covering [Vn] of D by open sets whose closures are disjoint from C.
Now we are back in the situation which arose in the proof that a regular
space with a countable basis is normal (Theorem 2.5 of Chapter 4). We can
repeat that proof verbatim. Define
U'n = Un- \J{., V, and Vn = V. - \J-_, &,.
Then the sets
U' = \J.ez.V. and V' = \J.ez.K
are disjoint Open sets about C and D, respectively. Q
Theorem 2.2. Let X be a regular space with a basis (B that is countably
locally finite. Then X is metrizable.
Proof. Step I. First we show that if W is open in X, there is a continuous
function f:X—+ [0, I] such that f(x) > 0 for x e W and f(x) = 0 for
x $ W.
By the preceding lemma, each closed set of A' is a countable intersection
of open sets of X. Passing to complements, it follows that the open set Wis a
countable union of closed sets An of X. Using normality, choose for each
positive integer n, a continuous function/^ : X —> [0, I] such that/,(^n) = {1}
and fXX - W) = {0}. Define /(.v) = S/n(.v)/2". The series converges
uniformly, by comparison with ]T] 1/2", so that / is continuous. Also, / is
positive on f^and vanishes outside W.
Step 2. Let (B = |J(Bn, where each collection <&„ is locally finite. For
each positive integer n, and each basis element B e <&n, choose a continuous
function
/..»:*—►[0,I/«]
such that fn<B(x) > 0 for x e B and /» = 0 for x $ B. The collection
{/«,a} separates points from closed sets in X: Given a point xa and a neigh-
neighborhood U of xa, there is a basis element B such that xa e B a U. Then
B e <S>n for some n, so that/nfl(.v0) > 0 and/B.a vanishes outside U.
Let / be the subset of Z+ X (B consisting of all pairs (n, B) such that
B belongs to (Bn. Define
F:X—^[0>I]/
by the equation
F(x) = (/n,flW)(,,B)s/.
Relative to the product topology on [0, \]J, the map Fis an imbedding, by
the Imbedding theorem of §4-4.
Of course, [0, l]J is not metrizable in general, so we have not yet proved
the metrization theorem.
Metrization Theorems and Paracompactness
Chap. 6
Step 3. Now we give [0, I]' the topology induced by the uniform •
p and show that F is an imbedding relative to this topology as well Th'
uniform topology is finer (larger) than the product topology. Theref
relative to the uniform metric, the map F is injective and carries open s t"*'
.AT onto open sets of the image space Z = F{X). We must give a separate pr* f
that F is continuous.
Note that on the subspace [0, 1]' of R1, the uniform metric equals the
metric
To prove continuity, we take a point x0 of X and a number e > 0, and find a
neighborhood W of xa such that
x g W=>p(F(x),F(xo))<e.
Let n be fixed for the moment. Choose a neighborhood Un of xa that
intersects only finitely many elements of the collection (Bn. This means that as
B ranges over (£„, all but finitely many of the functions/, B are identically
equal to zero on £/„. Because each function /, fl is continuous, we can now
choose a neighborhood Vn of .v0 contained in £/„ on which each of the remain-
remaining functions/,, jj, for B e ($>„, varies by at most e/2.
Choose such a neighborhood Vn of a for each n e Z+. Then choose #
so that l/N < e/2, and define W = K, n • • • D VN. We assert that W\% the
desired neighborhood of .v0. Let x s IV. If n <Z N, then
!/„,*(*)-/».*(*o)l<f/2
because the function/, B either vanishes identically or varies by at mostf/2
on W. \fn > N, then
!/,.*(*)-/U-OI <i/«<f/2
because/,^ maps X into [0, 1/n]. Therefore,
p(F(x), F(x0)) < e/2 < e,
as desired. □
Exercises
1. (a) Show that in a metric space, every closed set is a G6 set.
(b) Show that the irrationals are a Gd set in R.
2. A subset Wot Xh said to be an "F_ set" in Xit Wequals ac°unfiJ!f!"f^i
closed sets of X Show that Wis an Fa set in ^if and only if X- "
[The terminology comes from the French. The "F"'stands f°^*'
which means "closed," and the "a" for "somme," which means
§6'3 The Nagata-Smirnov Theorem (necessity) 251
3. Let (X, d) be a metric space. Show that if u is open in X, then the function
/to = d(x, X - V)
defined in
6-3 The Nagata-Smirnov Theorem (necessity)
We now prove that every metrizable space has a countably locally finite
basis. This will complete the proof of the Nagata-Smirnov metrization theo-
theorem.
Definition. Let G be a collection of subsets of the space X. A collection
(B of subsets of X is said to be a refinement of G (or is said to refine a) if for
each element B of <&, there is an element A of a containing B. If the elements
of® are open sets, we call (B an open refinement of G; if they are closed sets,
we call (B a closed refinement.
The first step in proving the necessity of the Nagata-Smirnov condition
is the following lemma. It will be generalized in the next section.
Lemma 3.1. Let X be a metrizable space. If G is an open covering ofX,
then there is a collection D of subsets ofX such that:
A) D is an open covering ofX.
B) D is a refinement ofd.
C) 2) is countably locally finite.
Proof. We shall need to use the well-ordering theorem in order to prove
this theorem. Choose a well-ordering < for the collection G. Let us denote
the elements of G generically by the letters U,V,W, .. ..
Choose a metric for X. Let >i be a positive integer, fixed for the moment.
Given an element U of G, let us define Sn(U) to be the subset of Uobtained by
"shrinking" U a distance of l/»/. More precisely, let
SJLU) = {x\B(x, I/n) <= U}.
(It happens that S (U) is a closed set, but that is not important for our pur-
purposes.) Now we use the well-ordering < of G to pass to a still smaller set. For
each U in G, define
S'lU) = SlU) - VJv<o V-
The situation where G consists of the three sets V<V<W* pictured
in Figure 1. Just as the figure suggests, the sets we have formed are disjoint.
Indeed, we assert that they are separated by a distance of at least l/». That is,
252 Metrization Theorems and Paracotnpactness
Figure 1 U < V < W
if Kand W are distinct elements of a, we assert that
(*) x e S'n(V) and y e S'n{W) => d(x,y)>\/n.
To prove this fact, assume the notation has been so chosen that V< W.
Now a- e S'n(V) implies that x e 5n(K). And>> e S'n(W) implies by definition
that y $ V (since V < W). Since .v e 5,(K) and >■ £ K, we must have
rf(A-,j-)> 1/".
The sets 5^( U) are not yet the ones we want, for we do not know that they
are open sets. (In fact, they are closed.) So let us expand each of them slightly
to obtain an open set £„(£/). Specifically, let £„(£/) be the I/3n neighborhood
ofS'n(U); that is,
In the case U < V < W, we have the situation pictured in Figure 2. As
the figure suggests, the sets we have formed are disjoint, and indeed they are
separated by a distance of at least I/3«. That is, if V and J-Kare distinct ele-
elements of a, we assert that
x e En(V) and y e En(W) => d(x,y)> I/3«-
This follows at once from (*) and the triangle inequality. Note also that for
each V e a, the set En(V) is contained in V.
Now let us define
£„ = [E.(U)\U e a}.
We claim that £„ is a locally finite collection of open sets and that S, refines
a. The fact that S, refines a comes from the fact that En(V) c V for «
V e a. The fact that Sn is locally finite comes from the fact that for any
X, the I/6n neighborhood of x can intersect at most one element of S.-
Of course, the collection S, will not cover*. (Figure 2 illustrates that
§6'3 The Nagata-Smirnov Theorem (necessity)
253
£n(V)
Figure 2
But we assert that the collection
s = LUz.sn
does cover X.
Let x be a point of X. The collection a with which we began covers X;
let us choose U to be ihe first element of a (in the well-ordering <) that con-
contains x. Since U is open, we can choose n so that B(x, 1/n) cz U. Then, by
definition, x e Sn(U). Now because U is the first element of a that contains
x, the point x belongs to S'»(U). Then x also belongs to the element £„(£/) of
&„, as desired.
The lemma follows; S is the required collection of open sets. Q
Theorem 3.2. Let X be a metrizable space. Then X has a basis that is
countably locally finite.
Proof. Choose a metric for X. Given m, let a- be the open covering of X
by all open balls of radius 1/m;
er = [B(x,l/m)\x e X}.
By the preceding lemma, there is an open covering »" of Refining a"such
that »- is countably locally finite. Note that each element of ST hasd.ameter
at most 2/m. Let
Because each collection O- is a countTbte union of locallyfinite collect ions,
so is 3). We assert that 3) is a basis for X; then our theorem proved^
We prove that given, e Xznc.giver,e > CJ. ere, an element ^ ^
containing * and contained in *(*, e). Fir^n ^fV1 containing x.
Then because IT covers X, we can choose an e emenl:D• ol ^.^ ^
Since Z) contains x and has diameter at most 2/m < f.
^follows from Lemma 2.3 of Chapter 2 that 3) is a basis for X. □
254 Metrication Theorems and Paracompactness
Exercises
1. Let a be the following collection of subsets of R:
a = {(«,« + 2)|« e Z}.
Which of the following collections refines ft?
(B = {(*,* + 1I* e /{},
A collection ft of subsets of X is said to be locally discrete if each point of X
has a neighborhood that intersects at most one element of a. A collection (B
is countably locally discrete (or "<7-locally discrete") if it equals a countable
union of locally discrete collections. Prove the following:
Theorem (Bing metrizalion theorem). A space X is metrizable if and only if it
is regular and has a basis that is countably locally discrete.
6-4 Paracompactness
The concept of paracompactness is one of the most useful generalizations
of compactness that has been discovered in recent years. Particularly is it
useful for applications in algebraic topology and differential geometry. We
shall give just one application, a metrization theorem, which we prove in the
next section.
Many of the spaces that are familiar to us already are paracompact. For
instance, every compact Hausdorff space is paracompact; this will be an im-
immediate consequence of the definition. It is also true that every metrizable
space is paracompact; this is a theorem of A. H. Stone, which we shall
prove. Thus the class of paracompact spaces includes the two most important
classes of spaces we have studied, the compact Hausdorff spaces and the
metrizable spaces. It includes other spaces as well. (See Exercise 2.)
To see how paracompactness generalizes compactness, we recall the defi-
definition of compactness: A space X\s said to be compact if every open covering
a of X contains a finite subcollection a' that covers X. An equivalent way
of saying this is the following:
A space X is compact if every open covering a of X has a finite open
refinement (B that covers X.
This definition is equivalent to the usual one; given such a refinement .
one can choose for each element of (B an element of a containing it; in thlS
way one obtains a finite subcollection of a that covers X.
This new formulation of compactness is an awkward one, but it sugg«s
a way to generalize:
Paracompactness 255
Definition. A space A'is paracompact if it is Hausdorff and if every open
covering a of A' has a locally finite open refinement (B that covers X.
Example 1. Any compact Hausdorff space is paracompact, trivially. The
real line R is a paracompact space that is not compact. The fact that R is para-
paracompact is a consequence of the theorem that every metrizable space is para-
paracompact. But a direct proof can be given as follows:
Suppose we are given an open covering ft of R. For each integer n, choose
a finite number of elements of ft that cover the interval [n, n + 1] and intersect
each one with the open interval (n — 1, n + 2). Let the resulting collection of
open sets be denoted (Bn. Then the collection
is a locally finite open refinement of ft that covers R, as you can check.
Some of the properties of a paracompact space are similar to those of a
compact Hausdorff space. For instance, a subspace of a paracompact space
is not necessarily paracompact; but a closed subspace is paracompact. Also,
a paracompact space is necessarily normal. In other ways, a paracompact
space is not similar to a compact Hausdorff space; in particular, the product
of two paracompact spaces need not be paracompact.
One of the most useful properties of a paracompact space is the fact that
given an indexed open covering {£/„} of a paracompact space X, there exists a
partition of unity dominated by {£/J. A proof of this fact was outlined in the
exercises of §4-5. We shall prove in this section the other properties of para-
paracompact spaces we have mentioned.
Theorem 4.1. Every paracompact space X is normal.
Proof. The proof is somewhat similar to the proof that a compact Haus-
Hausdorff space is normal.
First one proves regularity. Let a be a point of X and let B be a closed set
of X disjoint from a. The Hausdorff condition enables us to choose, for each
b in B, an open set Ub about b whose closure is disjoint from a. Cover X by
the open sets Ub, along with the open set X — B; take a locally finite open
refinement e that covers X. Form the subcollection 3D of 6 consisting of every
element of e that intersects B. Then 3D covers B. Furthermore, if D e 3D, then
D is disjoint from a. For D intersects B, so it lies in some set Ub, whose closure
is disjoint from a. Let
then Vis an open set in ^containing B. Because 3D is locally finite,
v = LUd d,
so that V is disjoint from a. Thus regularity is proved.
256 Metrization Theorems and Paracompactness
Chap. 6
To prove normality, one merely repeats the same argument renla •
by the closed set A throughout and replacing the Hausdorff condit 1"
regularity. □ lon ty
Theorem 4.2. (a) Every closed subspace of a paracotnpact space is na
compact. p^a'
(b) An arbitrary subspace of a paracotnpact space need not be paracotnpact
(c) A product of paracotnpact spaces need not be paracotnpact.
Proof, (a) Let Y be a closed subspace of the paracompact space X- let
« be a covering of Y by sets open in Y. For each A e «, choose an open set
A' of X such that A' n Y = A. Cover X by the open sets A\ along with the
open set X — Y. Let fflbea locally finite open refinement of this covering
that covers X. The collection
e = {B n Y\B e (B}
is the required locally finite open refinement of a.
Examples demonstrating (b) and (c) follow. □
Example 2. The spaced x Sa is compact Hausdorff, so it is paracompact.
The subspace Sa x Sa is not paracompact, for it is not even normal (see
§4-2).
Example 3. The space Ri is paracompact; we leave the proof to the exer-
exercises. But Rf is not paracompact, for it is not normal (see §4-2).
Theorem 4.3 (Stone's theorem). Every metrizable space is paracompact.
Proof. Let X be a metrizable space. We already know from Lemma 3.1
that every open covering of X has an open refinement that covers A'and is
coimtably locally finite. It remains to prove that the latter condition implies
that every open covering of X has an open refinement that covers * and is
locally finite. This is a consequence of the following lemma. □
Lemma 4.4- Let X be regular. Then the following conditions on X are
equivalent:
Every open covering o/X has a refinement that is:
A) An open covering o/X and countably locally finite.
B) A covering ofX and locally finite.
C) A closed covering o/X and locally finite.
D) An open covering ofX and locally finite.
Proof. It is trivial that D) =» A). What we need for Stone's *«^°"
the converse. In order to prove the converse, we must go 'hrougtv ^
A) _» B) => C) => D) anyway, so we have for convenience listed tn
ditions in the statement of the lemma. ^fi
A) =» B). Let « be an open covering of X. Let (B be an open ren
Paracompactness 257
of a that covers X and is countably locally finite; let
<B = (J(B,
where each <&„ is locally finite. Denote the elements of <B senericallv bv
u,v,w,.... y
Now we apply essentially the same sort of shrinking trick we have used
before to make sets from different (Bn's disjoint. Given i, let
K = Uuea, U.
Then for each n e Z+ and each element U of (Bn, define
£„(£/) = U - U/<- K.
[Note that £„(£/) is not necessarily open, nor closed.] Let
1 u e ay.
Then e, is a refinement of ©„, because £„(£/) c £/ for each U e (Bn.
Let 6 = |jen. We assert that e is the required locally finite refinement of
Ct, covering X.
Let x be a point of X. We wish to prove that x lies in an element of e,
and that x has a neighborhood intersecting only finitely many elements of e.
Consider the covering (B = |J (B,,; let N be the smallest integer such that x
lies in an element of CBA.. Let U be an element of ($>N containing x. First, note
that since .v lies in no element of (B, for / < N, the point x lies in the element
SN(U) of 6. Second, note that since each collection <&„ is locally finite, we can
choose for each /; = 1, . . . , N a neighborhood Wn of x that intersects only
finitely many elements of (Bn. Now if W'„ intersects the element Sn{V) of Qn, it
must intersect the element Kof ($>„, since Sn(V) c: K Therefore, ^intersects
only finitely many elements of 6,. Furthermore, because U is in ($>N, U
intersects no element of £„ for /; > N. As a result, the neighborhood
w, n w» n • • • n W* n tf
of .v intersects only finitely many elements of 6.
B) => C). Let G be an open covering of X. Let (B be the collection of all
open sets U of X such that 0 is contained in an element of a. By regularity,
<B covers X. Using B), we can find a refinement e of (B that covers X and is
locally finite. Let
» = {C| C e e}.
Then » also covers A'; it is locally finite by Lemma 1.1; and it refines a.
C) =» D). Let a be an open covering of X. Using C), choose & to be a
refinement of « that covers X and is locally finite. (We can take (B to be a
closed refinement if we like, but that is irrelevant.) We seek to expand each
element B of (B slightly to an open set, making the expansion slight enough
that the resulting collection of open sets will be still be locally finite and will
still refine a.
Metrization Theorems and Paracompactness
Chap. 6
This step involves a new trick. The previous trick, used several times, con
sisted of ordering the sets in some way and forming a new set by subtractine
off all the previous ones.t That trick shrinks the sets; to expand them we need
something different. We shall introduce an auxiliary locally finite closed
covering e of X and use it to expand the elements of (B.
For each point x of X, there is a neighborhood of x that intersects only
finitely many elements of (B, The collection of all open sets that intersect only
finitely many elements of (B is thus an open covering of X. Using C) again
let e be a closed refinement of this covering that covers A'and is locally finite'
Each element of e intersects only finitely many elements of (B.
For each element B of (B, let
eE) = [C\ C e e and C c X - B},
Then define
E(B) = X — (Jceew C,
Because C is a locally finite collection of closed sets, the union of the elements
of any subcollection of e is closed, by Lemma I.I. Therefore, the set E(B) is
an open set. Furthermore, E(B) =d B by definition. (See Figure 3, in which
Figure 3
the elements of (B are represented as closed circular regions and line segments,
and the elements of C are represented as closed square regions.)
Now we may have expanded each B too much; the collection {E(B)j may
not be a refinement of a. This is easily remedied. For each B e <&, choose an
tSee Lemma 3,1 and the proof A) => B) just given.
Paracompactness 259
element F(B) of « containing 5. Then define
V = {E(B) n F(B)\ B e <&}.
The collection » is a refinement of «. Because S c (E(B) n F(S)) and (B
covers X, the collection 3D also covers X.
We have finally to prove that 2D is locally finite. Given a point x of X,
choose a neighborhood Wof x that intersects only finitely many elements of
C say C,, .. ., Q. Then W <= C, U • • • u Ct, because e is a covering of
X Now if an element C of e intersects the set E(B) n F(B), it cannot lie in
X— B (by definition of £E)); thus C must intersect B. Because the element
C of e intersects only finitely many elements B of (B, it intersects at most the
same number of elements of the collection 2D = {£(£) n F{B)}. Then since
each C, intersects only finitely many elements of 2D, so does the set W. □
1. Give an example to show that if X is paracompact, it does not follow that for
every open covering & of X, there is a locally finite subcollection of G that covers
A".
2. (a) Show that every regular Lindelof space is paracompact,
(b) Conclude that Ri is paracompact.
3. (a) Show that the product of a paracompact space and a compact Hausdorff
space is paracompact. [Him: Use the tube lemma of §3-5.]
(b) Conclude that Sa is not paracompact.
(c) Show that Sn x [0, 1) in the dictionary order is not paracompact. [Him:
Sa is homeomorphic to the closed subspace Sa x 0.]
4. Let A" be a Hausdorff space. Suppose there exists a countable open covering
{!/„} of X such that for each n, Un is compact and U, <= l/n+t. Show that A"is
paracompact. [Him: See Example 1.]
5. Let A" be a regular space. Show that if there is a countable covering [V.) of A"
by open sets whose closures are paracompact, then X is paracompact.
6. Is every locally compact Hausdorff space paracompact?
7. One has a "shrinking lemma" for point-finite open coverings of a normal
space; see the exercises of §4-5. Here is an "expansion lemma" for locally finite
indexed families in a paracompact space:
Lemma. Lei [A.Uj be a locally finite indexed family of subsets of the para-
paracompact space X. Then there is a locally finite indexed family [V.],ej of open
sets such that A, <= U*for each a e J.
8. Determine which of the following spaces are paracompact in the dictionary
order topology:
(a) [0, 1] x [0, 1]
(b) [0, 1) x [0, 1]
*(c) [0, 1] x [0, 1)
260 Metrization Theorems and Paracompactness ' _
*9. Let
Let G be a locally compact, connected, Hausdorff topological grou
that G is paracompact. [Hint: Choose a neighborhood £/, of e having en
closure. In general, define £/„+, = £?„• £/,. Then G = IJf?,.] "^Wct
*10. Show that if G is a paracompact topological group and H is a compact k.
group, then G/tf is paracompact. [Hint: Show that />: G —-► G/# is a 1
map. Then show that if (B is a locally finite closed covering of G, the collect
[p(B) 15 e (B) is a locally finite closed covering of G/H.] ' '°n
6-5 The Smirnov Metrization Theorem
The Nagata-Smirnov metrization theorem gives one set of necessary and
sufficient conditions for metrizability of a space. In this section we give anoth-
another such metrization theorem. It is a corollary of the Nagata-Smirnov theorem
and was first proved by Smirnov.
Definition- A space X is locally metrizable if every point x of X has a
neighborhood U that is metrizable in the subspace topology.
Theorem 5.1 {Smirnov metrization theorem). A space X is metrizable if
and only if it is paracompact and locally metrizable.
Proof. Suppose that X is metrizable. Then X is locally metrizable; it is
also paracompact, by Stone's theorem.
Conversely, suppose that X is paracompact and locally metrizable. We
shall show that X has a basis ffi that is countably locally finite. Since Jis
regular (being paracompact), it will then follow from the Nagata-Smirnov
theorem that X is metrizable.
The proof is an adaptation of the proof of Theorem 3.2. Cover X by open
sets that are metrizable; then choose a locally finite open refinement 6 of
this covering that covers X. Each element C of e is metrizable; let the function
dc : C x C —» /? be a metric that gives the topology of C. Given x e C.Iet
5c(.v, e) denote the set of all points y of C such that dc(x, y) < e- Being open
in C, the set Bc(x, e) will also be open in X.
Given m e Z+, let <Xm be the covering of X by all open balls of radius
\/m in sets C of e;
am = {Bc(x, \/m)\C e e and x e C}.
Let Dm be a locally finite open refinement of am that covers X. (Here we use
paracompactness.) Let
D = \JDm;
then D is countably locally finite. We assert that D is a basis for X; our theo-
theorem follows.
S fi 5
The Smimov Metrlzation Theorem 261
Let x be a point of JTand let V be a neighborhood of x We seek to fi^
an element D of j) such that x e /> e tf. Now x belongs! S finiS
many elements of e, say to C,,... Ct Then r/nr;c ,, y
x in the set C,, so there is an I > 0 su"h that ' * ne'ghborhood *
BCi{x, e,) <=(Un c,).
Choose m so that l/« < * min {f, fJ. Because the coIIection ^
covers X, there must be an element D of »" containing x. Because D™ refines
ft", there must be an element Bc(y, \jm) of a™, for some C e e and some
y e C, that contains D. Then x belongs to C, so that C must be one of the
sets Ct,...,Ck. Say that C = C,. Then, using the triangle inequality, we
have
■° c 5C,(.V, 1/m) c Sc,(a-, f() <= [/,
as desired. Q
Example 1. We show that the space Sa is not paracompact. One proof of
this fact appeared in the preceding set of exercises; here is another.
Note first that Sa is locally metrizable: Let x e Sn; choose y so that
x < y < Cl. The open set Sy has a countable basis; indeed, the collection of
all intervals with end points in Sy is countable. It follows from the Urysohn
metrization theorem that Sy is metrizable.
If Sa were paracompact, it would follow from the Smirnov theorem that
Sn is metrizable. But we know that Sa is not metrizable, for it is limit point
compact but not compact (see Example 1 of §3-7).
Exercises
1. Compare Theorem 5.1 with Exercises 5 and 6 of §4-4.
2. Show that every connected locally compact metric space has a countable basis.
[Hint: Let e be a locally finite covering of X by open sets having compact
closures. Let £/, be a nonempty element of C and ingeneral let £/„+, bethe
union of all elements of e that intersect fjr Show U. is compact and X-
3. A more general notion of manifold than that defined in §4-5 is the J
A space X is called a paracompact-manifold if it is ^ Para^mpad pace and
there is an integer m such that each point of A"has a neighborhood that is home
morphic to an open subset of Rm.
(a) Show that a paracompact-manifold is metrizable. H
(b) Show that if X is a paracompact-manifold having only countably many
components, then Jfis a manifold; and conversely.
7. Complete Metric Spaces
and Function Spaces
The concept of completeness for a metric space is one you may have
seen already. It is basic for all aspects of analysis. Although completeness
is a metric property rather than a topological one, there are a number of
theorems involving complete metric spaces that are topological in character.
In this chapter, we shall study the most important examples of complete
metric spaces and shall prove some of these theorems.
The most familiar example of a complete metric space is euclidean space
in either of its usual metrics. Another example, just as important, is the set
Q(X, Y) of all continuous functions mapping a space X into a space Y.
This set has a metric called the uniform metric, analogous to the uniform
metric defined for RJ in §2-9. If Y is a complete metric space, then 6(J, Y)
is complete in the uniform metric. This we demonstrate in §7-1. As an ap-
application, we construct in §7-2 the well-known Peano space-filling <^rye'
One theorem of topological character concerning complete metric spaces
is a theorem relating compactness of a space to completeness. We prove i
in §7-3. An immediate corollary is a theorem concerning compact sets in *
function space e(X, /?"); it is the classical version of a famous theorem call
Ascoli's theorem. ..^
There are other useful topologies on the function space e(A", Y) oes\
the one derived from the uniform metric. We study some of them in S
and §7-5. We also prove a general version of Ascoli's theorem, in S - ■
262
§7-1
Complete Metric Spaces 263
Another theorem of topological character concerning complete metric
spaces is a theorem we prove in §7-7, to the effect that every complete metric
space belongs to the class of topological spaces called the Baire spaces.
The defining condition for a Baire space is a bit complicated to state, but
it is often useful in the applications. One application is the proof we give in
§7-8 of the existence of a continuous nowhere-differentiable real-valued
function.
Another application arises in that branch of topology called dimension
theory. In §7-9 we define a topological notion of dimension (due to Lebesgue),
and prove the classic theorem that every compact metrizable space of to-
topological dimension m can be imbedded in euclidean space R" of dimension
ft = 2m + I. This theorem generalizes the imbedding theorem for mani-
manifolds proved in §4-5.
Some of the sections of this chapter are independent of one another. The
dependence among them is expressed in the following diagram:
§7-1 Complete metric spaces
A space-filling curve
§7-3 Compactness in metric spaces
Pointwvse and compact convergence
§7-5 j The compact-open topology
§7-6 Ascoli's theorem
§7-7 Baire spaces
\\7-8 A nowhere-differentiable function
V-9 An introduction to dimension theory
Throughout the chapter, we assume §3-8,
study dimension theory, we shall make use of
as well as a bit of linear algebra.
7-1 Complete Metric Spaces
In this section we define the notionof completeness,«ci show that*
¥ is a complete metric space, then the funct.on P»«^^ imbedded
in the uniform metric. We also show that every metnc space
isometrically in a complete metric space.
264 Complete Metric Spaces and Function Spaces
Chap. 7
Definition. Let (X, d) be a metric space. A sequence (x ) of nnint* t
is said to be a Cauchy sequence in (X, d) if it has the property th.t ■
f > 0, there is an integer N such that Y ^
4*« xm) < e whenever n,m>N.
The metric space {X, d) is said to be complete if every Cauchy sequence •
A'converges. m
Any convergent sequence in A'is necessarily a Cauchy sequence, of course-
completeness requires that the converse hold. '
Note that a closed subset A of a complete metric space (X, d) is necessarily
complete in the restricted metric. For a Cauchy sequence in A is also a Cauchy
sequence in X, whence it converges in X. Because A is a closed subset of
X, the limit must lie in A.
Note also that if X is complete under the metric d, then X is complete
under the standard bounded metric
d(x, y) = min {d(x, y), 1}
corresponding to d, and conversely. For a sequence (x,) is a Cauchy sequence
under d if and only if it is a Cauchy sequence under d. And a sequence
converges under d if and only if it converges under d.
A useful criterion for a metric space to be complete is the following:
Lemma I.I. A metric space X is complete if every Cauchy sequence in
X has a convergent subsequence-
Proof. Let (>„) be a Cauchy sequence in (X, d). We show that if (xj has
a subsequence (*„,) that converges to a point x, then the sequence (xj itself
converges to x.
Given e > 0, first choose N large enough that
d(xn, xm) < 5/2
for all n,m>N [using the fact that (x.) is a Cauchy sequence]. Then choose
an integer / large enough that n,>N and
<<*,.., x) < 5/2 ^d
[using the fact that n, < n2 < . .. is an increasing sequence of ln.te^^u]t
x_, converges to x]. Putting these facts together, we have the desired
that for n > N,
d(xn, x) < d(xm xj + <Kxm, x)<e. □
Theorem 1.2. Euclidean space R" /* complete in either of its usual metric ,
the euclidean metric d or the square metric p. Cauchy
Proof. To show the metric space (Rk, p) is complete, let W^ * tf
sequence in (**. /»• Then the set {*„} is a bounded subset of (* , P>
S7 Complete Metric Spaces 265
we choose N so that
/>(*„> *„) <, 1
for all n, m ;> iV, then the number
M = max {/>(*„ 0) /?(*„_„ 0), />(*„, 0) + 1}
is an upper bound for p(xm 0). Thus the points of the sequence (xn) all lie
in the cube [—M, M]k. Since this cube is compact, the sequence (xn) has a
convergent subsequence, by Theorem 7.4 of Chapter 3. Then (Rk, p)\s com-
complete, by Lemma 1.1.
To show that (i?*, d) is complete, note that a sequence is a Cauchy se-
sequence relative to d if and only if it is a Cauchy sequence relative to p, and a
sequence converges relative to d if and only if it converges relative to p. Q
Example 1. An example of a noncomplete metric space is the space Q of
rational numbers in the usual metric d(x,y) = \x—y\. For instance, the
sequence
1.4, 1.41, 1.414, 1.4142,1.41421,...
of finite decimals converging (in R) to ^/~T is a Cauchy sequence in Q that
does not converge (in Q).
Example 2. Another noncomplete space is the open interval ( — 1,1) in
R, in the metric d(x, y) =■ \ x — y \. In this space the sequence (*„) defined by
x, = 1 - 1/"
is a Cauchy sequence that does not converge. This example shows that com-
completeness is not a topological property, that is, it is not preserved by homeomor-
phisms. For (-1, 1) is homeomorphic to the real line R, and R is complete in
its usual metric.
Example 3. There is a metric for the product topology on R" relative to
which R°" is complete. Consider the metric
D(\, y) = lub [d{x,, y,)/i]
on R°>, where d(a, b) = min [| a - b \, 1}. We showed in Theorem 9.5 of Chapter
2 that D is a metric for the product space /f. To show R" complete under D,
let (x_) be a Cauchy sequence under D. Let / be fixed for the moment. Let
n,: Rm —► R be projection on the /th coordinate. Since
dGt,(x), n,(y)) <, iD(x, y),
the sequence Gt((xn)) is a Cauchy sequence in (R, d). Therefore, it converges,
say to at. .
Let a be the point (a^z. of R°>- We assert that x, — a. For a typical basis
element containing a is of the form TJU,, where V, = R for 12; m. <~a°°s*
N, large enough that 7t,(x.) e V, for n 2; N,. Let N = max {M, • • •. /v»J>
then x, e HUt for n ^ M
266 Complete Metric Spaces and Function Spaces
Chap. 7
Although both the product spaces R" and Ra have metrics relaf
which they are complete, one cannot hope to prove the same result f"* **
product space RJ in general, because RJ is not even metrizableif Jisun"^
table (see §2-10). There is, however, a different topology on the set JT
one given by the uniform metric. Relative to this metric, R1 is complet C
we shall see. e>as
We define the uniform metric for Y' in general as follows:
Definition. Let (Y, d) be a metric space. Let d(a, b) = min {d(a,b\ \\
be the standard bounded metric on Y corresponding to d. Given an'index
set J, define a metric on the set YJ of all functions/../—, y by the rule
p(f, g) = lub W/(a), g(z))\ a e J}.
The function p is called the uniform metric on Y1 corresponding to the metric
d on Y; it is easy to check that it is a metric.
Note that here we have used functional notation for the elements of
Y' rather than "tuple" notation. We shall follow this practice thoughout
the chapter.
Theorem 1.3. If the space Y is complete in the metric d, then the space Y'
is complete in the uniform metric p corresponding to d.
Proof. Recall that if (Y, d) is complete, so is (Y, d), whererfis the bounded
metric corresponding to d. Now suppose that/,,/2, ... is a sequence of points
of YJ that is a Cauchy sequence relative to p. Given a in J, the fact that
<?(/,(«). J"»,(«))< PiLJJ
for all n, m means that the sequence/,(a),/2(a),... is a Cauchy sequence in
(K, d). Hence this sequence converges, say to a point y,. Let/:/—* Ybe
the function defined by /(a) = ya. We assert that the sequence (/„) converges
to/in the metric p.
Given e > 0, first choose N large enough that pTf.JJ < f/2 whenever
n, m > N. Then, in particular,
</(/„(«)> /.(«)) < f/2 .f
for n, m > N and a e X Letting n and a be fixed and m become arbitrany
large, we see that
</(/„(«), /(«)) < e/2.
This inequality holds for any a in J, provided merely that n ^ N. There
p(Uf)<e/2<e
for n>N, as desired. □
Now let us specialize somewhat, and consider the set Y* wheIJffect on
topological space rather than merely a set. Of course, this has n
§7"J Complete Metric Spaces 267
what has gone before; the topology of X is irrelevant when considering the
set of all functions /: X—► Y. But suppose that we consider the subset
e(X, Y) of Yx consisting of all continuous functions/: X —> Y. It turns out
that if Y is complete, this subset is also complete in the uniform metric.
Theorem 1.4. Let X be a topological space and let (Y, d) be a metric space.
The set C(X, Y) of continuous functions is closed in Yx under the uniform
metric. Therefore, ifY is complete, e(X, Y) is complete in the uniform metric.
Proof. This theorem is just the uniform limit theorem (Theorem 10.6
of Chapter 2) in a new guise. First, we show that if a sequence of elements
/„ of Yx converges to the element / of Yx relative to the metric p on Yx,
then it converges to /uniformly in the sense defined in §2-10, relative to the
metric d on Y. Given e > 0, choose an integer N such that
P(f, /,) < e
for all n > N. Then for all x e X and all n > N,
kfJLx), f(x)) < p{fn, /) < e.
Thus (/„) converges uniformly to/
Now we show that Q(X, Y) is closed in Yx relative to the metric p. Let
/be an element of Yx that is a limit point of <2(X, Y). Then there is a sequence
(/J of elements of G(X, V) converging to/in the metric p. By the uniform
limit theorem,/is continuous, so that/e Q(X, Y).
Since Yx is complete under p, so is the closed subset e(X, Y). □
Definition. Let (V, d) be a metric space; let Xbt either a set or a topolog-
topological space. Suppose that 5 is a subset of Yx having the property that for each
pair/ g of elements of ff, the set
{d(f(x),g(.x))\x e X]
is bounded. We define a metric p on 3 by the formula
/>(/, g) = lub {</(/(*), g(.x))\x e X};
it is called the square metric or, more commonly, the sup (supremum) metric.
How does this metric compare with the uniform metric p defined above?
It is an easy exercise to show that for/ g e 3,
p(f,g) = min{p(f,g), 1}-
This means that on a set 3 where both p and p are defined, p is just the
standard bounded metric derived from p. (This is the reason we originally
introduced the notation p for the uniform metric.) It follows that p and p
give the same topology on 3. And it follows that 3 is complete under p it
and only if it is complete under p. Therefore, for all practical purposes, they
are equivalent metrics. _
Many authors do not bother to define the metric p at all, but simply
268 Complete Metric Spaces and Function Spaces _
Chap. 7
limit themselves to spaces 3= where p is defined. We prefer to deal with rh
more general case and specialize to the metric p whenever it is useful t a
possible) to do so. ^
Example 4. Let (Y, d) be a metric space and let J be a finite index set
Then the square metric p is defined on all of Y'. Of course, in this case all th
various topologies for Y'—the box topology, the uniform topology, and the
product topology—are the same.
Example 5. Consider the space e(X, R) of all continuous real-valued
functions on the compact space X. Each such function is bounded, so the
metric
is defined on this space. Indeed, the maximum value theorem tells us that
max
The space G(X, R) is complete under the metric p.
We now prove a classical theorem, to the effect that every metric space
can be imbedded isometrically in a complete metric space. (A different proof,
somewhat more direct, is outlined in Exercise 8.) Although we shall not
need this theorem, it is useful in other parts of mathematics.
First, a lemma:
Lemma 1.5. Let X be a topological space. The set (B(X, R) of all bounded
functions f: X —> R is complete under the sup metric p.
Proof We show that <&{X, R) is closed in Rx in the uniform metric p.
It follows that <&{X, R) is complete under p. Since the metric p is defined on
this set, it is also complete under p.
Let / be the limit of a sequence (/„) of elements of (S(X, R). Choose N
so that p{fn, f) < 1 for n > N. Then since fN belongs to &(X, R), there is
an M such that \fN{x)\ < M for all x e X. Then
for all x e X, so that/is bounded. □
Theorem 1.6. Let (X, d) be a metric space. There is an isometric imbedding
ofX into a complete metric space.
Proof Let &{X, R) be the set of all bounded functions mapping
R. Let x0 be a fixed point of X. Given a e X, define 4>a : X-» R
equation
4>a(x) = d(x, a) — d(x, x0).
We assert that <f>a is bounded. For It follows from the inequalities
** 7"! Complete Metric Spaces 269
that we have | <f>£x) \ < d(a, x0).
Define <D : A' — (&(X, R) by setting
«(«) = K
We show that <D is an isometric imbedding of (X, d) into the complete metric
space {&{X, R), p). That is, we show that for every pair of points a, b e X,
we have
/>(&, <j>b) = d(a, b).
By definition,
<)-t,lx)\lx eX]
= lub{\d(x, a) - d(x, b)\ ; x e X}.
By the triangle inequality,
\d(x,a)~d(.x,b)\<d(a,b),
from which we conclude that
p(<f>a- 0*) < d(a, b).
On the other hand, this inequality cannot be strict, for when x = a,
\d(.x,a)~d(.x,b)\ = d(a,b). □
Definition. Let X be a metric space. If /; : X —> Y is an isometric fmbed-
ding of X into a complete metric space Y, then the subspace /i(A) of Y is a
complete metric space. It is called the completion of A'.
The completion of X is uniquely determined up to an isometry. See Ex-
Exercise 9.
Exercises
1. Let A" be a metric space.
(a) Suppose that for some e > 0, every e-ball in A" has compact closure. Show
that X is complete.
(b) Suppose that for each x e X there is an e > 0 such that the ball B(x, e) has
compact closure. Show by means of an example that A"need not be complete.
2. Let (X, dx) and (Y, dr) be metric spaces; let Y be complete. Let A <= X Show
that if/: A -> Y is uniformly continuous, then/can be uniquely extended to a
continuous function g : A —> Y, and g is uniformly continuous.
3. Consider the subset R" of R» consisting of sequences that are eventually zero.
Is R" complete in the uniform metric ?
270 Complete Metric Spaces and Function Spaces
Chap. 7
4. Show that the metric space (X, d) is complete if and only if for anv
sequence Ax => Az => • • • of nonempty closed sets of X such- that d
An —► 0,
C\n,Z, An =£ 0-
5. Let (X, d) be a complete metric space. Recall that a continuous map/- * —» y
is said to be a contraction if there is a number a < 1 such that ~*
</(/(*),/O)):S <*</(*, ?)
for all x,;y e X. Show that if/is a contraction, then there is a unique noint
x of X such that /(*) = x
6. A space X is said to be topologically complete if there exists a metric for the
topology of X relative to which X is complete.
(a) Show that a closed subspace of a topologically complete space is topolog.
ically complete.
(b) Show that a countable product of topologically complete spaces is topo-
topologically complete (in the product topology).
(c) Show that an open subset of a topologically complete space is topologically
complete. [Hint: If U <= X and X is complete under the metric d, define
(j>: U —> Ji by the equation
<f)(x) = l/d(x, X - U),
where d(x, A) = gib {d(x, a)\a e A}. Then define/: U —► X x Rby the
equation
fix) = x x <j>(x).]
(d) Show that if A is a Gs set in a topologically complete space, then A is topo-
topologically complete. [Hint: Let A be the intersection of the open sets V,,
for n e Z+. Consider the diagonal imbedding f(a) = (a, a,...) of A into
IU/.0
(e) Show that the irrationals are topologically complete.
7. Show that C2 is complete in the £2-metric (see Exercise 9 of §2-9).
8. Let (X, d)bea metric space. Show that there is an isometric imbedding h oiX
into a complete metric space (y, D), as follows: Let ;? denote the set ot au
Cauchy sequences
x = (xu x2,...)
of points of X. Define x ~ y if
d(x,,y,)-^ 0.
Let [x] denote the equivalence class of x; and let Y denote the set of these
equivalence classes. Define a metric D on Y by the equation
£([x],[y])= Jim </(*„,>-„).
(a) Show that ~ is an equivalence relation, and show that D is a well
metric. f ,h constan'
(b) Define h:X-^Y by letting AW be the equivalence class ot the
sequence (x, x,...);
§7-2
A Space-Filling Curve 271
Show that h is an isometric imbedding
(c) Show that h(X) is dense in Y; indeed, given x = (x
the sequence A(x.) of points of y converges to the U
mtricspac^
sequence in A converges in 2T, then Z is complete
(e) Show that (Y, D) is complete. '
" f v
adif r
9. Theorem (Uniqueness of the completion). Let h- X — Y and h' ■ Y v
be isometric imbeddings of the metric space (X d) in the comnhtp „,„,',
(£*> "rfCr.D-), respectively. Then /*« * « SCSffS
(h'(X), D') that equals h'h~« on the snbspace h(X). }> ] 'h
7-2 A Space-Filling Curve
As an application of the completeness of the metric space Q(X, Y) in the
uniform metric when Y is complete, we shall construct the famous "Peano
space-filling curve."
Theorem 2.1. Let I = [0, 1]. There exists a continuous map f :I—► I2
whose image fills up the entire square P.
The existence of this path violates one's naive geometric intuition in much
the same way as does the existence of the continuous nowhere-differentiable
function (which we shall come to later).
Proof. Step 1. We shall construct the map/as the limit of a sequence
of continuous functions/„. First we describe a particular operation on paths
which will be used to generate the sequence/,.
Begin with an arbitrary closed interval [a, b] in the real line and an arbi-
arbitrary square in the plane with sides parallel to the coordinate axes, and con-
consider the triangular path g pictured in Figure 1. It is a continuous map of
la, b] into the square. The operation we wish to describe replaces the path
g by the path g' pictured in Figure 2. It is made up of four triangular paths,
each half the size of g. Note that g and g' have the same initial point and the
same final point. You can write the equations for g and g' if you like.
Figure I
272 Complete Metric Spaces and Function Spaces
Chap. 7
Figure 2
This same operation can also be applied to any triangular path conn,*
ing two adjacent corners of the square. For instance, when applied to Z
path h pictured in Figure 3, it gives the path h'.
Figure 3
Step 2. Now we define a sequence of functions/, : /—» P. The first func-
function, which we label /„ for convenience, is the triangular path pictured in
Figure 1, letting a == 0 and 6 = 1. The next function/, is the function ob-
obtained by applying the operation described in Step 1 to the function/0;
it is pictured in Figure 2. The next function/2 is the function obtained by
applying this same operation to each of the four triangular paths that make
up/,. It is pictured in Figure 4. The next function/ is obtained by applying
the operation to each of the 16 triangular paths that make up/2; it is pictured
Figure 4
§7-2
A Space-Filling Curve 273
mlililiniiillnllli.lnilinlnil
Figure 5
V
/\
in Figure 5. And so on. At the general step,/, is a path made up of 4° trian-
triangular paths of the type considered in Step 1, each lying in a square of edge
length 1/2". The function/n+1 is obtained by applying the operation of Step
I to these triangular paths, replacing each one by four smaller triangular
paths.
Step 3. For purposes of this proof, let d(x, y) denote the square metric
onR1,
cl(x, y) = max {| x, -yl\,\x1-y11}.
Then we can let p denote the corresponding sup metric on S(/, P);
p(f,g) = iub{d(f(t),g(t))\t e 1}
Since P is closed in R2, it is complete in the square metric; then 6G, P) is
complete in the metric p.
We assert that the sequence of functions (/„) defined in Step 2 is a Cauchy
sequence under p. To prove this fact, let us examine what happens when we
pass from/, to/n+1. Each small triangular path in/n lies in a square of edge
length 1/2". The operation by which we obtain /„+, replaces this triangular
path by four triangular paths that lie in the same square. Therefore, in the
square metric on I2, the distance between /„(/) and /„+,(/) is at most 1/2".
As a result, />(/„, /n+1) < 1/2". It follows that (/„) is a Cauchy sequence,
since
Pi/., /.«) < 1/2" + l/2"+1 + • • • + 1/2"—1 < 2/2"
for all n and m.
Step 4. Because 6G, P) is complete, the sequence /„ converges to a
continuous function/: I—- P. We prove that/is surjective.
Let x be a point of P; we show that x belongs to /(/). First we note that,
given n, the path/ comes within a distance of 1/2" of the point x. For the
274 Complete Metric Spaces and Function Spaces
Chap. 7
path/, touches each of the little squares of edge length l/2» into wV >.
have divided P. S ' ° whic}» we
Using this fact, we shall prove that, given e > 0, the f-neiehborh a
x intersects /(/). Choose N large enough that of
/>(/*> /) < f/2 and 1/2" < f/2.
By the result of the preceding paragraph, there is a point /„ e /such «...
rf(*,/v('o)) < 1/2*. Then since d{fN{t), /(/)) < e/2 for all /, it follows t£
rf(x> /Co)) < f,
so the f-neighborhood of x intersects /(/).
It follows that x belongs to the closure of /(/). But / is compact, so /(/)
is compact and is therefore closed. Hence x belongs to /(/), as desired, n
Exercises
1. Given », show there is a continuous surjective map g : I —> /". [Hint: Consider
fxf:lx I— >/2 x IK]
2. Is there is continuous surjective map/: /—► K21
3. Show there is a continuous surjective map/: 7? —> R".
4. Is there a continuous surjective map/: 7? —> X if A" is the subspace R" of /P°
consisting of sequences that are eventually zero? What if X— /?"?
*5. (a) Let A" be a Hausdorff space. Show that if there is a continuous surjective
mapping /: / —> X, then X is compact, connected, locally connected, and
metrizable.
(b) The converse also holds; it is a famous theorem of point set topology called
the Hahu-Mcmirkiewicz theorem (see [H-Y], p. 129). Assuming this theorem,
show there is a continuous surjective map /: / —> /".
A Hausdorff space that is the continuous image of the closed unit interval
is often called a Peano space.
7-3 Compactness in Metric Spaces
We have already shown that compactness, limit point compactness, an^
sequential compactness are equivalent for metric spaces. There isstil ^.^
formulation of compactness for metric spaces, one that involves the no^
of completeness. We study it in this section. As an application, w
prove a theorem characterizing those subsets of e(X, *) which arecomp
in the uniform metric; it is the classical version of Ascoli's the°rel"- f J?
How is compactness of a metric space X related to comPle.te"!cessarlly
It follows from Lemma 1.1 that every compact metric space is
§7'3 ■■■-". Compactness in Metric Spaces 275
complete. The converse does not hold_a complete metric space need not
be compact It ,s reasonable to ask what extra condition one needs to impose
on a comp etc space to be assured of its compactness. Such a condition is
the one called total boundedness.
Definition. A metric space (X, d) is said to be totally bounded if for everv
f > 0, there is a finite covering of X by f-balls.
Total boundedness of a metric space clearly implies boundedness, but
the converse does not hold.
Example 1. Under the metric d(x, y) = \x-y\, the real line R is neither
bounded nor totally bounded. Under the metric d(x,y) = min[|;r — y\ ]}
the real line is bounded but not totally bounded.
Example 2. Under the metric |x - y\, the subspace (-1, 1) of R is totally
bounded, and so is the subspace Qn[-l,lJ. Neither of these spaces is com-
complete, however. The subspace [—1, 1] is both complete and totally bounded.
Theorem 3.1. A metric space (X, d) is compact if and only if it is complete
and totally bounded.
Proof. If A" is a compact metric space, then X is automatically complete,
as noted above. The fact that X is totally bounded is a consequence of the
fact that the covering of X by all open e-balls must contain a finite subcover-
ing.
Conversely, let X be complete and totally bounded. We shall prove that
A" is sequentially compact. This will suffice.
Let (*„) be a sequence of points of X. We shall construct a subsequence
of (*„) that is a Cauchy sequence, so that it necessarily converges. First
cover X by finitely many balls of radius I. At least one of these balls, say
51( contains x. for infinitely many values of n. Let/, be the subset ofZ+
consisting of those indices i> for which xn e B,.
Next, cover X by finitely many balls of radius {. Because /, is infinite,
at least one of these balls, say B2, must contain x, for infinitely many values
of n in /,. Choose J2 to be the set of those indices n for which n e/, and
xn e B2. In general, given an infinite set Jk of positive integers, choose Jk+l to
be an infinite subset of Jk such that there is a ball Bk+l of radius l/(fc + 1)
which contains *„ for all n e Jk+i.
Choose n, e/,. Given nk, choose nk+l e Jk+l such that nk+l>nk;
this we can do because Jk+l is an infinite set. Now for i,j >. k, the indices -
», and „, both belong to Jk (because /, => Jt => ■ - ■ is a nested sequence o
sets). Therefore, for all /, / >. k, the points xm and xv are contained in a ball
Bk of radius l/k. It follows that the sequence (*„,) is a Cauchy sequence, as
desired. □
276 Complete Metric Spaces and Function Spaces
Chap. 7
Now we apply this result to the function space e(X R«) in th
topology. We are going to be concerned only about the case whereV" "*
pact, so we shall use the metric s COm-
/>(/, g) = max {d(f(x), g(x))}
throughout. [Here d may denote either the euclidean metric or the so
metric on R".] q are
We have proved earlier that a subset of (R", d) is compact if and onlv
if it is closed and bounded. One might hope that the corresponding theorem
is true for (fi(X, R"), p). But it is not. One needs to assume that the subset
of e(X, R") satisfies an additional condition, called equicontinuity. It is defined
as follows:
Definition. Let (Y, d) be a metric space. Let 5 be a subset of the function
space G(X, Y). If ,v0 e X, the set 5 of functions is said to be equicontinuous
at x0 if given e > 0, there is a neighborhood U of x0 such that for all x e U
and all/ e 5,
d(f(x\ /(*„)) < e.
If the set 5 is equicontinuous at ,y0 for each x0 e X, it is said simply to be
equicontinuous.
Continuity of the function/at x0 means that given/and given e > 0, there
exists a neighborhood U of x0 such that d(f(x), f(x0)) < e for x e U.
Equicontinuity of 5 means that a single neighborhood [/can be chosen that
will work for all the functions/in the collection '5.
Equicontinuity has the following interesting interpretation when both
X and Y are compact:
Lemma 3.2. Let X be a compact space; let (Y, d) be a compact metric
space. Let 5 be a subset of 6(X, Y). Then 5 is equicontinuous if and only if
'S is totally bounded in the sup metric p.
Proof Suppose that SF is totally bounded under p. Given x0, we shoJ
is equicontinuous at jr0. Let e > 0 be given. Choose positive numbe
fl and e2 so that 2e, + e2 < e. Cover ff by finitely many open f,-e<"
Each function /, is continuous; therefore, we can choose a neighbor
U of x0 such that for x e U and i = 1,...,«,
d{f,{x\flxo))<e,.
We assert that if x e U and / e 5, then rf(/W. /W) < f'" thlS
equicontinuity. ,..,„,. *„ at least one of the
Let/be an arbitrary element of ff. Then/belongs to at leas
above erballs, say to 5,(/,, f ,)• Then
§7 ComPa<:»>ess in Metric Spaces 277
),/,(*))< fl>
< e2,
The first and third inequalities hold because/is in £,(/„ e,), and the second
holds because x e U. It follows from the triangle inequality that for all
x e £/, we have d{f(x), f(x0)) < e, as desired.
Conversely, suppose that <F is equicontinuous. Let f > 0 be given. We
wish to cover SF by finitely many open e-balls. Choose f, and e2 so that2e, +
f2 < f. Using equicontinuity of <F and compactness of A", cover A" by finitely
many open sets Vi,...,Uk, containing points xu . . . , xk, respectively, such
that
difix), fix,)) < e,
for x e U, and all / e 5. Cover Y by finitely many open sets Vu...,Vm
of diameter less than e2.
Let J be the collection of all functions a : {I,.. ., k} —> {I,..., tn}.
Given a e J, if there exists a function/of 5 such that /(>,) e K«(o for each
/ = I,. . . , k, choose one such function and label it/,. The collection {/„}
is indexed by a subset/'of the set 7 and is thus finite. We assert that the open
balls Bf(f., e), for a e J', cover SF.
Let /be an element of 3\ For each / = I,. . ., k, choose an integer a@
such that f(x,) e V^»- Then the function a is in/'. We assert that/belongs
to the ball £,(/,,, e).
Let x be a point of A". Choose / so that x e U,. Then
(/.(,),/.W)<fi-
The first and third inequalities hold because x e t/<( and the second holds
because fix,) and /„(*,) are in V.w. We conclude that d(f(x), f.(x)) < e.
Since this inequality holds for every x e A",
«) = max
Thus / belongs to Bpif,, e), as asserted. □
Now we prove the classical version of Ascoli's theorem. A more general
version, whose proof does not depend on this one, appears in §7-6.
Theorem 3.3 (Ascoli's theorem, classical version). Let X be a<c°™Pact
space; consider C(X, R") in the sup metric p. A subset 5 oj 6(A, K ; is
compact if and only if it is closed, bounded, and equicontinuous.
Proof. Step 1. We first show that if ff is bounded under p, then there is
a compact subset Y of R" having the property that /(x) e Y tor au/ t
278 Complete Metric Spaces and Function Spaces
Chap. 7
and all x e X. It then follows that 3= is contained in the subsnace Wv,
ofecarU") P«*e(*,y)
Choose an element /„ e 3\ Because 3= is bounded under p the •
number M such that />(/„, f)<M for all/ e 3=. Because X is compact?
is MX); therefore, we can choose a number N so that/0(Z) lies m the\ °w
5,@, N) in iJ». Then f{X) lies in the baU 5,@, M+ JV), for every/6 5
Choose y to be the closure of this ball; then /(x) e y for every x e Y a
every/ e 3\
Step 2. Suppose that 3= is compact. Then 3= is closed and bounded under
p. By Step 1, 3= is contained in some subspace e(X, Y) of Q{X, R"), where y
is compact. Since $ is compact, 31 is totally bounded under p, by Theorem
3.1. Because both X and Y are compact, Lemma 3.2 applies to show that J
is equicontinuous.
5. Suppose that 'S is closed and bounded and equicontinuous. Since
<S is a closed subset of the complete metric space (S(X, R"), p), it is necessarily
complete. Because $ is bounded, by Step 1 it is contained in some subspace
S(A", Y) of Q{X, R"), where Y is compact. Then since 'S is equicontinuous,
and X and Y are compact, Lemma 3.2 implies that $ is totally bounded. It
follows from Theorem 3.1 that tF is compact. Q
Exercises
1. Let (A", rf) be a metric space.
(a) Show that if A" is totally bounded, then A" is bounded.
(b) Show that X is totally bounded under d if and only if it is totally bounded
under d(x, y) = min [d(x, y), 1 j.
2. Let A be a su bset of the complete metric space X. Show that A is totally bounded
if and only if A is compact.
3. Consider a countable product X = TR« of metrhable spaces; use on
metric Z> that gives the product topology. (See Exercise 3 of §2-10.) Show ma
if each space A, is totally bounded, so is X. Conclude without using the Tyclio-
noff theorem that a countable product of compact metrizable spaces is compa
4. (a) Show that any finite set of continuous functions is equicontinuous. ^
(b) Suppose that 3= is a collection of differentiate functions /: P, >J ^
whose derivatives are uniformly bounded. [This means there is
such that | f'(x) \ <, M for all /in $ and all *.] Show that 3= is eq"ic°n«"
(c) Let /„: [0, 1] — R be the function /„(*) = *"; let 3= be the ~"«°" "^
Show that 3= is closed and bounded but has no limit point in M.'.
what point or points does 3= fail to be equicontinuous?
5. Let A" be compact; give 6(X, R") the sup metric p. We say that "
e(X, R") is uniformly bounded if it is bounded under p. We say it
8 '■■"' ComPactness in Metric Spaces 279
bounded if for each x e X, the set
** = {/(*)!/ 6 3=}
is a bounded subset of R".
(a) Show that if 3= is equicontinuous and pointwise bounded, it is uniformly
bounded. J
(b) Show that if 3= is equicontinuous, so is its closure.
(c) Theorem. Let X be compact; consider e(X, R») in the metric p. A subset <5
ofe(X, R") has compact closure if and only if it is equicontinuous andpointwise
bounded.
(d) Theorem (Arzela's theorem). Let X be compact; letfn e e(X, Rk). If the col-
collection {/„} is pointwise bounded ond equicontinuous, then the sequence (fy
has a uniformly convergent subsequence.
6. Let A" be locally compact HausdorfF. A subset 3= of e(X, R) is said to vanish
uniformly at infinity if given e > 0, there is a compact subset C of A"such that
| f(x) | < e for x e X - C and / e 3\ If 3= consists of a single function/, we say
simply that / vanishes at infinity. Let G0(X, R) denote the set of continuous
functions/: X—> R that vanish at infinity. The sup metric p is defined on
Ct(X, R).
Theorem. A subset $ of(Q0(X, R), p) is compact if and only if it is closed,
bounded, equicontiituous, and vanishes uniformly at infinity.
[Hint: Let Y denote the one-point compactification of X. Show that
Qo(X, R) is isometric with a subspace of Q(Y, R).]
*7. Let (X, d) be a metric space. If A <= X and e > 0, define
Let OC be the collection of all (nonempty) closed, bounded subsets of X. If
A, B e 3C, define
D(A,B) = gib [e\ A c U(B,€) and B <= U(A,€)}.
(a) Show that D is a metric on OC; it is called the Hausdorff metric.
(b) Show that if (X, d) is complete, so is CC, D). [Hint: Let A. be a Cauchy
sequence in 3C; by passing to a subsequence, assume D(A^ An+i) < 1/2".
Define A to be the set of all points x that are the limits of sequences
a-,,.v2, ... such that .v, e A, for each iandd(x,,xl+l) < 1/2'. ShowAn->A.}
(c) Show that if (X, d) is totally bounded, so is CC, D). [Hint: Given e, choose
8 < e and let S be a finite subset of X such that the collection
{Blx, S) | a- e S] covers A". Let G be the collection of all nonempty subsets
of S\ show that [BB(A, e)\A e «} covers 3C.]
(d) Ttorm. // A" * co/npoc/ ft rte metric d, then the spaced of all nonempty
closed bounded subsets of X is compact in the Hausdorff metric V.
8. Which half of the proof of Lemma 3.2 uses compactness of Y1
280 Complete Metric Spaces and Function Spaces
7-4 Pointwise and Compact Convergence
Chap. 7
There are other useful topologies on the spaces Yx and e^, Y) in add"
tion to the uniform topology. We shall consider two of them here; they a'"
called the topology of pointwise convergence and the topology of compact
convergence.
let
Definition. Given a point x of the set Xand an open set U of the space Y
S(x, U) = {f\feYx and /(x) e U}.
The sets S(x, U) are a subbasis for topology on Yx, which is called the
topology of pointwise convergence (or the point-open topology).
The general basis element for this topology is a finite intersection of
subbasis elements S(x, U). Thus a typical basis element about the function
/consists of all functions g that are "close" to/at finitely many points. Such
a neighborhood is illustrated in Figure 6; it consists of all functions g whose
graphs intersect the three vertical intervals pictured.
Figure 6
The topology of pointwise convergence on Yx is nothing new. It is J^
the product topology we have already studied. If we replace A"by/and o ^
the general element of / by a to make it look more familiar, hen
5(a, U) of all functions x :/ -> Y such that x(a) e U rs just the
§ 7-4 Pointwise and Compact Convergence 281
s;i(i/) of YJ, which is the standard subbasis element for the product to-
topology.
The reason for calling it the topology of pointwise convergence comes
from the following theorem:
Theorem 4.1. A sequence fn of functions converges to the function f in the
topology ofpointwise convergence if and only if for each x in X, the sequence
fB(x) of points of Y converges to the point f(x).
Proof. This is a standard fact about the product topology; we prove it
here using functional notation. Suppose that/, converges in the topology of
pointwise convergence. Given x e X, and given an open set U about /(*),
the set S(x, U) is a neighborhood of/ Therefore, there is an integer N such
that/, e S(x, U) for all n > N. Then/,(x) e U for all n > N.
Conversely, suppose/„(.*) converges to f(x) for each x. To show that/
converges to/in the topology of pointwise convergence, it suffices to show
that if S(x, U) is an arbitrary subbasis element about/ then5(x, U) contains
all/, for n sufficiently large. (Why?) But since/„(*) converges to f{x) and
f{x) e U, there must be an integer N such that//*) e U for n > N. Then
/ e S(x, U) for n > jV. G
Example 1. Consider the space R', where / = [0, 1]. The sequence (/„)
of continuous functions given byfn(x) = x" converges in the topology ofpoint-
ofpointwise convergence to the function/defined by
fO forO<.v<],
/(•v)
forx=l.
This example shows that the subspace e(/, R) of continuous functions is not
closed in R> in the topology of pointwise convergence.
We know that a sequence (/„) of continuous functions which converges
in the uniform topology has a continuous limit, and the preceding example
shows that a sequence which converges only in the topology of pointwise
convergence need not. One can ask whether there is a topology intermediate
between these two which nevertheless will ensure that the limit of a conver-
convergent sequence of continuous functions is continuous. The answer is "yes";
assuming the (fairly mild) restriction that the space X be compactly generated,
it will suffice if/n converges to /in the topology of compact convergence,
which we now define.
Definition. Let (Y, d) be a metric space; let Ibea topological space.
Given an element / of Yx, a compact subset C in X, and a number e > 0.
Iet *c(/, e) denote the set of all those elements g of Y* for which
lub {d(f(x), g(x))lx e C]<e.
282 Complete Metric Spaces and Function Spaces _
Chap, t
The sets Bc(f, e) form a basis for a topology on Yx. It is called the topolo
of compact convergence (or sometimes the "topology of uniform convere
on compact sets").
This topology differs from the preceding topology in that the general
basis element containing/consists of functions that are "close" to/not iust
at finitely many points, but at all points of some compact set.
Note that if g e Bc(f, e), then there is a 5 > 0 such that we have
Bc(g, 5) cBc(f,e); simply let
S=e-\ub{d(f(x),g(x))\x e C}.
It is then easy to check that these sets form a basis.
The justification for the choice of terminology comes from the following
theorem, whose proof is immediate.
Theorem 4.2. A sequence fn .- X —> Y of functions converges to the function
f in the topology of compact convergence if and only if for each compact subset
C ofX, the sequence f„ | C converges uniformly to f |C.
Definition. A space X is said to be compactly generated if it satisfies the
following condition: A set A is open in X if and only if A n Cis open in C
for each compact set C in X.
This condition is equivalent to requiring that a set B be closed in X'fi
and only if B n C is closed in C for each compact set C. It is a fairly mild
restriction on the space; many familiar spaces are compactly generated. For
instance:
Lemma 4.3. IfX is locally compact, or ifX satisfies the first countability
axiom, then X is compactly generated.
Proof. Suppose that X is locally compact. Let A n C be open in C for
every compact subset C of X. We show A is open. Given x e A, choose a
neighborhood U of x which lies in a compact set C. Since A n Cis openm
C by hypothesis, A n U is open in U, and hence open in X. Then A n
is a neighborhood of x contained in A, so that A is open in X.
Suppose that X satisfies the first countability axiom. If B n C is clos
in C for each compact subset C of A', we show that B is closed in X. e
x be a point of 5; we show that x e B. Since JT has a countable basis
x, there is a sequence (.vj of points of B converging to x. The set
C={x]U{x.\n e Z+]
is compact, so that B n Cis by assumption closed in C. Since 5 O Ccon
x» for every n, it contains * as well. Therefore, x e 5, as desired. U
§ 7-4 Pointwise and Compact Convergence 283
Theorem 4.4. Let Xbea compactly generated space; let (Y, d) be a metric
space. Then e(X, Y) is closed in Yx in the topology of compact convergence.
Proof. Let/ e Yx be a limit point of e(X, Y); we wish to show/is con-
continuous.
First we show that/|C is continuous for each compact set C in X. For
each n, consider the neighborhood Bc(f, \/n) of/; it intersects Q(X, Y),
so we can choose a function/, e Q(X, Y) lying in this neighborhood.'The
sequence of functions /„ | C : C —* Y converges uniformly to the function
f\ C, so that by the uniform limit theorem, f\ C is continuous.
It follows that /is continuous. Let V be an open subset of Y; we show
that f'l(V) is open in X. Given any subset C of X,
If C is compact, this set is open in C because f\ C is continuous. Since X is
compactly generated, it follows that f~'(V) is open in X. □
Corollary 4.5. Let X be a compactly generated space; let (Y, d) be a metric
space. If a sequence of continuous functions fn : X —> Y converges to f in the
topology of compact convergence, then f is continuous.
Now we have three topologies for the function space Yx, when Y is
metric. The relation between them is stated in the following theorem, whose
proof is straightforward.
Theorem 4.6. Let Xbea space; let (Y, d) be a metric space. For the function
space Yx, one has the following inclusions of topologies:
(uniform) => (compact convergence) => (pointwise convergence).
JfX is compact, the first two coincide, and if X is discrete, the second two
coincide.
Exercises
1. Show that the sets Bc(f, e) form a basis for a topology on Yx.
2. Prove Theorem 4.2.
3. Prove Theorem 4.6.
4. Consider Yx in the topology of compact convergence.
(a) Show Yx is regular. Is it normal ?
(b) Show that if Xequals a countable union of open sets with compact closures,
then Yx satisfies the first countability axiom.
5. Show that in general the set of bounded functions/: X-* R is not closed in
Kx in the topology of compact convergence.
284 Complete Metric Spaces and Function Spaces
6. Consider the sequence of continuous functions fn: K+ .
= i/nx.
Chap. 7
■ -R defined by
In which of the three topologies of Theorem 4.6 does this sequence conver
What about the sequence given in Exercise 9 of §2-10?
7. Consider the sequence of functions/„: (— 1,1) —> Rt defined by
/.(*) = 21., fa*.
(a) Show that (/„) converges in the topology of compact convergence; conclude
that the limit function is continuous. (This is a standard fact about power
series.)
(b) Show that (/„) does not converge in the uniform topology.
8. A function /: X—> Ji is said to have compact support if/vanishes outside
some compact set. Let GC(R, R) be the set of all continuous functions/: R—>R
having compact support. Define a metric on this set by the rule
- Si*)J
(a) Show that D is a metric. The topology given by D is called the topology of
mean convergence. [Hint: Define a "scalar product" by the rule
then imitate the proof given in Exercise 8 of §2-9 for the euclidean metric]
(b) In which of the four topologies we have for ec(X, Y) does the sequence/,
pictured in Figure 7 converge? What about the sequence £„ pictured in
Figure 8 ?
Figure 7
Figure S
(c)
Show that the mean convergence topology is not comparable with the othet
three.
The Compact-Open Topology 285
9. Let (Y, d) be a. metric space; let X be a space Define a t^ i
as follows: Given fe e(X, Y), and given a i3 iopolo&onQ(X, Y)
5 : X-* R+ on X, let g e" * Posltlve ««hnuous funaion
B(f, S)={g\ d(f(x), g(x)) < S(X) fop all x e *}.
(a) Show that the sets B(f, 8) form a basis for a topology on er* Y\ w,
call it the fine topology. ^ n CA> Y>- We
(b) Show that the fine topology contains the uniform topology
(c) Show that if X is compact, the fine and uniform topologies agree
(d) Show that if X is discrete, then e(X, Y) = Y* and the fine and box topol-
ogies agree. ^
10. Here is a theorem about compactly generated spaces. We say that/- X—* Y
is a proper map if for each compact set D in Y, the set /->(£) is compact in X.
Theorem. Let X be a space; let Y be a compactly generated Hausdorff space.
Iff'- X —» Y is continuous, injective, and proper, thenfisan imbedding andf(X)
is closed in Y.
7-5 The Compact-Open Topology
In defining the uniform topology and the topology of compact conver-
convergence on the function space Yx, we needed to assume a metric for the space
Y; both definitions involved this metric. (The topology of pointwise con-
convergence on the function space Yx does not involve a metric for Y.)
In general, topologists are concerned primarily with matters that depend
only on the topology of a space, not on its metric. So one naturally asks
whether either of these first two topologies depends only on the topology of
Y, rather than on the particular metric d.
There is no satisfactory answer to this question for the space Yx of all
functions mapping X into Y. But for the space e(X, Y) of continuous func-
functions, one can prove something; for this space, the topology of compact
convergence is independent of the particular metric chosen for Y.
To prove this, we define a certain topology on &{X, Y) called the compact-
open topology, whose definition does not involve a metric for Y. Then we
show that if Y happens to have a metric d, this topology agrees with the
topology of compact convergence. Therefore, the latter topology on e(Jf, /;
depends only on the space Y, not on the metric d. ..-..«
The compact-open topology is very important in its own right; it turn
out to have many useful properties. We shall use it ,n the next sect,on m
proving a generalized version of Ascoli's theorem. It also has close^connec-
close^connections with the notion of "homotopy," which is one of the fundamental
concepts in algebraic topology.
Definition. Let X and Y be topological space,. I f C is a compact subset of
Xand {/is an open subset of Y, define
286 Complete Metric Spaces and Function Spaces
Chap. 7
S(C, U) = {/|/ e e(X, Y) and f(Q c^. ..
The sets S(C, U) form a subbasis for a topology on e(X, Y) calleH *
compact-open topology. ' **
Note that both the compact-open topology and the point-open topolo
are defined without assuming a metric on Y. It is clear from the definiti
that the compact-open topology is in general finer than the point-open to!
pology.
Theorem S.I. Let X be a Space and let (Y, d) be a metric space. For the
space S(X, Y), the compact-open topology and the topology of compact con-
convergence coincide.
Proof. Step I. If A is a subset of Y and e > 0, we define
We call this set the "e-neighborhood" of A. If A is compact and Kisanopen
set containing A, we show there is an e > 0 such that U(A, e) cz V.
This was given earlier as an exercise (Exercise 4 of §3-6); we give a proof
here. For each a e A, choose 5(a) > 0 so that Bd(a, S(a)) cz V. Cover A
by finitely many open sets of the form
Bd(ai,U(a,)),..., Bd(an, tf(a,)).
Let e = min {|c5(a,)}. Then if a e A, the point a is in at least one of the sets
Bd(at, {E(a,)); the triangie inequality implies that
Bd(a, e) cz Bd(a,, 5@,)).
Since this holds for each a in A, it follows that U(A, e) cz V, as desired.
Step 2. We prove that the topology of compact convergence is finer than
the compact-open topology. Let 5(C, U) be a subbasis element for the
compact-open topology on e(X, Y) and let / be an element of S(C, U).
Because/is continuous, f(C) is a compact subset of the open set U. By Step
1, we can choose e so the e-neighborhood of /(C) lies in U. Then
BJLf, e) cz S(C, U).
Step 3. We prove the compact-open topology is finer than the topology
of compact convergence. Given an open set about/in the topology of com-
compact convergence, it contains a basis element of the form Bc(f, t)■ We
find a basis element for the compact-open topology that contains/and
m 5Ea(h point x of Xhas a neighborhood Vx such that f(K) lies m an open
set U of Y having diameter less than e. [For example,_choose V, so
f(Vx) lies in the f/4-neighborhood of f(x). Then ftVJ lies in the ei
§ 7-5 The Compact-Open Topology 287
neighborhood of /(*), which has diameter at most 2e/3.] Cover Cby finitely
many such sets V,, say for x = *,,..., xa. Let Cx = Vx n C. Then C
is compact, and the basis element *
CXI, uXl) n ■ • • n ^(c^, ux,)
contains/and lies in Bc(f, e), as desired. □
Corollary 5.2. Let Y be a metric space. The compact convergence topology
on the subspace S(X, Y) o/Yx does not depend on the metric o/Y.
The fact that the definition of the compact-open topology does not in-
involve any metric is just one of its useful features. Another is the fact that it
satisfies the requirement of "joint continuity." Roughly speaking, this means
that the expression f(x) is continuous not only in the single "variable"
x, but is continuous jointly in both the "variables" x and/. More precisely,
one has the following theorem :
Theorem 5.3. Let X be locally compact Hausdorff; let <2(X, Y) have the
compact-open topology. Then the map
e:X x e(X, Y)— Y
defined by the equation
e(x, f) = f(x)
is continuous.
The map e is called the evaluation map.
Proof. Given a point (x, f) of X X e(X, Y) and an open set V in Y
about the image point e(x, f) = /(a), we wish to find an open set about
(x, f) that e maps into V, First, using the continuity of/and the fact that
Xte locally compact Hausdorff, we can choose an open set U about x having
compact closure U, such that/carries U into V. Then consider the open set
U X S(U, V)
'n X x e(X, Y). It is an open set containing (x, /). And if (x\ /') belongs
to this set, then e{x', /') = /'(*') belongs to V, as desired. Q
A consequence of this theorem is the following theorem. We shall not
need to use it, but it is important in algebraic topology.
Corollary 5.4. Let X be a locally compact Hausdorff space; let 6(X, Y)
have the compact-open topology; let Z be an arbitrary topological space.
Then a map F : X X Z —* Y is continuous if and only if the induced map
F:Z —6(X,Y)
288 Complete Metric Spaces and Function Spaces
is continuous, where F is defined by the rule
) = F(x, z).
Chap. 7
Proof. Suppose that / is continuous. It follows that F is contin
since F equals the composite 0USi
X x Z -^ X x e(X, Y) —'-~ Y.
Suppose that Fh continuous; we prove that
F: Z — e(X, Y)
is continuous. (This part of the proof does not use the local compactness of
X.) To prove continuity, we take a point z0 of Z and a subbasis element
S(C, U) o(e(X, Y) containing F(z0), and find a neighborhood Wofz0that
is mapped by / into S(C, U). This will suffice.
The statement that F(z0) lies in S(C, U) means simply that (/(zo))(x) =
F(x, z0) is in U for all x e C. That is, F(C X z0) c U. Continuity of F
implies that F~\U) is an open set in X X Z containing C x z0. Then
/-•(£/) n(C X Z)
is an open set in C X Z about the slice C X z0; the tube lemma of §3-5
shows that there is a neighborhood IV of r0 in Z such that the entire tube
C x W lies in F^{U). See Figure 9. Then for z e Wand* e C, we have
F(x, z) e I/. Hence f(W) cr S(C, t/), as desired. Q
We discuss briefly the connections between the compact-open topology
and the concept of homotopy. . m0.
If/and g are continuous maps of X into Y, we say that /and ir are
topic if there is a continuous map
f:a-x[o, ij—y Fh
such that f(.v, 0) = /(.v) and f(.v, 1) - g(x) for each a- e X TTie map
called a homotopy between/and £.
Roughly speaking, a homotopy is a "continuous o
§7-6
Ali's Theorem 289
I,]Q(X,Y
which assigns, to each parameter valuer in [0
map from JTto Y. Assuming that *is locaHyJ^HaSS """""^
F is continuous if and only if / is continuous. TOs ml"s tW h^ "* that
between two continuous maps f,g : X-* y !«!!, homotopy F
Fin the function space Q(X, y) jLng the po^Tq/y) to^ Vf
We sha.. return to a more detai.ed study of homotopy i^henexi
1. Let C be a subspace of A'. Show that the restriction map r: <S(X, Y) — e(C, Y)
is continuous if both spaces have the point-open or compact-open topologies.
2. Show that in the compact-open topology, Q(X, Y) is Hausdorff if Y is Haus-
dorff, and regular if Y is regular. [Hint: If 0 <= V, then S(C, U) <= ^(C, V).]
3. Let y be a metric space. Show that if X is compact, the uniform topology on
G(X, Y) is independent of the metric chosen for Y.
4. Show that if y is locally compact Hausdorff, then composition of maps
e(x, Y) x G(Y,z) — e(x,z)
is continuous, provided the compact-open topology is used throughout. [Hint:
ltg°feS{C, U), find V such that/(C) c Kand g(V) c U.]
5. Lete'(A", Y) denote the set 6( A", y) in some topology 3. Show that if the evalua-
evaluation map
e : X X e'(X, Y)-*Y
is continuous, then 3 contains the compact-open topology. [Hint: Consider
i : Q'(X, Y) —> e(X, Y). Note that local compactness of X is not needed.]
6. Here is an (unexpected) application of Corollary 5.4 to quotient maps: Show
that if, : A-> 5 is a quotient map and * is locally compact Hausdorff then
ixxp XX A-^XXB is* quotient map. Compare Exerc.se 11 of §3-8
[Hint: LeT(X x B)' denote the set * X 5 in the quotient topology.nduced^y
ix x p- le w : A" X ^ - (X x 5)' be the quot.ent map. If *-^^
(AT x BY is the identity map, show that i°P = «; include that # ,s contmu
ous.]
/'j Theorem
p^j
the earlier one as a special case, we
course of the proof.
290 Complete Metric Spaces and Function Spaces
Chap. 7
Theorem 6.1 (Ascoli's theorem). Let X be locally compact ftw „
let (Y, A) be a metric space. Consider e(X, Y) in the compact-one, tonl*
( ) p e(X, Y) in the compact
A subset S of 6(X, Y) has compact closure if and only if it is eZicon^
and the subset »nwus
o/Y has compact closure for each x.
Proof Step 1. We first show that if a subset <5 of e(X, Y) is equicontinn-
ous, then the topologies it inherits from the topologies of pointwise conver-
convergence and compact convergence on Yx are the same.
In general, the compact convergence topology is finer than the pointwise
convergence topology; we wish to prove the reverse inclusion holds for the
subspace JF. Given/ e 3% consider the basis element 5C(/, e) for the compact
convergence topology. It consists of all functions g such that
Iub {d(g(x), f(x))\x e C}<e.
We find a basis element B for the pointwise convergence topology such that
/eBnJc Bc(f, e) n ff.
Choose e, and e2 so that 2e, + e2 < f • Using equicontinuity of? and com-
compactness of C, cover C by finitely many open sets £/,,..., Un of X such
that on each set Ut, each of the functions in % varies by at most e,. Choose
x, e U, for each /. Consider the subset B of Yx given by the equation
B = {g\d(gix,), fix,)) < e2 for i = 1,..., n};
we assert that it is the desired basis element for the pointwise convergence
topology.
Let g be an element of B n ST. Given x e C, choose i so that x belongs
to U,. Then
, /(*<)) < f 2'
(/(*,),/W)<e..
that d(g{x), f(x)) < e. This inequality holds for each x in C. Therefore,
max {digix), fix)) \x e Cj < e,
so that g e Bcif, e), as desired.
Step 2. Second, we show that if a subset iF of Yx is equicontinuous, JJ
its closure S in Yx relative to the topology of pointwise convergence
tqU^Z. Given ,. e ^and f > 0, choose a neighborhood
such that
(*) dif(x), fixoy) < f/3 for all/ e ? and all x e K
§7-6 -
■ - Ascoli's Theorem 291
We assert that if g belongs to 9, then d{g(X) g(x )) < „ f „
follows that 9 is equicontinuous. «W-*W>» < e for all x e 17. It
To prove this assertion, let x be a point of U Let V h» <u u
Y*. open in the pointwise convergence topology cons SL of n t^ °f
h of Yx such that Sy> consistlng of all elements
(**) dWx),g{x))<e/3 and «*(*„), «(*„))< e/3
Because g belongs to the closure of <F in this topology, the neighborhood
V of g must contain an element/ of <F. Applying the triangle inequaty^
(*)and(«),weseethatrfte(x),^0))<e>asasserted# 4 "^to
Now we prove the theorem. Suppose first that iF is equicontinuous
and that the set 3\, has compact closure in Y for each x e x
Let g denote the closure of JF in y* relative to the pointwise convergence
topology. Let S' denote the closure of JF in Yx relative to the topology of
compact convergence. Then JF <= g' <= g.
Because iF is equicontinuous, it follows from Step 2 that S is equicontinu-
equicontinuous. Therefore, by Step I, the topologies g inherits from the topologies of
pointwise convergence and compact convergence on Yx are the same. We
conclude that g' = g.
So far, we have used only the equicontinuity of JF. Now let Cx denote the
closure in Y of ffA. Consider the product J[xEX Cx; we have
by elementary set theory. The topology of pointwise convergence on Yx
is the same as the product topology. In this topology, the set nQ« is compact,
by the Tychonoff theorem. Since g is a closed subset of J[CX in this topology,
it is compact in this topology. Therefore, S is also compact in the topology
of compact convergence.
Now g is equicontinuous, so each function in S is continuous. Hence
g is contained in the set e(X, Y), a set on which the topology of compact
convergence equals the compact-open topology. Therefore, the cl0SUIVjt
SF in e(A\ Y) in the compact-open topology is the compact set S, as desirea.
Step 4. Give e(X, Y) the compact-open topology; suppose that iF has
compact closure <F in e(X, Y). We show that JF is equ.contmuousiand*
has compact closure. The proof makes use of the fact that the evaluation map
(XY)Y
is continuous; here we make our first use of the local
First, given X e X, We show ff, ^^Pf^
set x x § is compact in X X e(X, Y); therefore
Y. But e{x X JF) contains e(x X SF) = SF,. § is equicOn-
Second, we show JF equicontinuous at *„. In taci, we
292 Complete Metric Spaces and Function Spaces
Chap. 7
tinuous at x0. Choose a compact set C that contains a neighborhood f
It Will suffice to show the collection of functions *0>
is equicontinuous, since C contains a neighborhood of x0.
Consider the restriction map
r:e(X,Y)-*G(C,Y)
defined by r{f) =/ | C. Then (R = rE). If we give both spaces the compact-
open topology, r is continuous, as you can easily check. Therefore, (R is a
compact subset of 6(C, Y) in the compact-open topology.
On the space 6(C, Y), the compact-open topology equals the uniform
topology (because C is compact). Therefore, (R is compact in the uniform
topology; by Theorem 3.1, CR is totally bounded in the metric p. We assert that
there is a compact subset Yo of Ksuch that (R lies in the subspace e(C, Ya) of
6(C, Y). The theorem then follows at once from Lemma 3.2, for since C
and Yo are compact, total boundedness of (R implies equicontinuity of (R.
To find Yo is easy. The set C X J is compact in X x e(X, Y); let r0
denote its image under e. Because e is continuous, Yo is a compact subset
of Y; it contains /(.v) for every x e C and every / e ff. It follows that
<R e= e(C, y0). n
An even more general version of Ascoli's theorem may be found in
[K] or [Wd]. There it is not assumed that Y is a metric space, but only that
it has what is called a uniform structure, which is a generalization of the
notion of metric.
Exercises
1. (a) Which step in the proof of Ascoli's theorem uses the local compactness of
XI Which step uses the Tychonoff theorem ?
(b) Show that the classical version of Ascoli's theorem is a special caseoftfl
general version, and so is Exercise 5(c) of §7-3.
2. Prove the following generalized version of Arzela's theorem: ^
Theorem. Let X be locally compact Hausdorff with a countable baslS'
fn:X—>Rk. If the collection {/„} is pointwisc bounded and equicontinuous'.
the sequence (/„) has a subsequence that converges in the topology ofco
convergence.
3. Which of the following subsets of Q(.R, R) are pointwise bounded?
have compact closure relative to the topology of compact convergen
(a) The collection {/.}, where /„(.*) = x + sin nx.
(b) The collection {gn}, where ^,(.v) = x".
(c) The collection [hj, where h,(x) = \x\w:
§ 7 ....... Baire Spaces 293
(d) The collection of all polynomials of degree at most 10, whose coefficients
have absolute value less than 1.
4. Let ybe a metric space; let/,:X — Y be a sequence of continuous functions-
let /: X —* Y be a function (not necessarily continuous). '
(a) Show that if {/„} is equicontinuous and/, —/in the topology of pointwise
convergence, then/, -—/in the topology of compact convergence.
(b) Prove the converse of (a) if X is locally compact Hausdorff.
(c) Show that in either case,/is continuous.
7-7 Baire Spaces
The defining condition for a Baire space is probably as "unnatural look-
looking" as any condition we have yet introduced in this book. But bear with
us awhile.
In this section, we shall define Baire spaces and shall show that two im-
important classes of spaces—the complete metric spaces and the compact
HausdorfF spaces—are contained in the class of Baire spaces. Then we shall
give some applications which, even if they do not make the Baire condition
seem any more natural, will at least show what a useful tool it can be. In
fact, it turns out to be a very useful and fairly sophisticated tool in both
analysis and topology.
Definition. Recall that if A is a subset of a space X, the interior of A is
defined as the union of all open sets of X that are contained in A. To say that
A has empty interior is to say then that A contains no open set of X other
than the empty set.
Example 1. The set Q of rationals has empty interior as a subset of R, but
the interval [0, 1] has nonempty interior. The interval [0, 1] X 0 has empty
interior as a subset of the plane R2, and so does the subset Q X R.
Definition. A space Xis said to be a Baire space if the following condition
holds: Given any countable collection [An] of closed sets of A" each of which
has empty interior in X, their union [jAn also has empty interior in X.
Example 2. The set Q of rationals is not a Baire space. For each one-point
set in Q is closed and has empty interior in Q; and Q is the countable union of
its one-point subsets. , r
The set Z+, on the other hand, does form a Baire space. Every subset oi
Z+ is open, so that there exist no subsets of Z+ having empty interior, except
for the empty set. Therefore, Z+ satisfies the Baire condition vacuously.
More generally, every closed subset of R, being a complete metric space, is
a Baire space. Somewhat surprising is the fact that the irrationals in R also form
a Baire space; see Exercise 7.
294 Complete Metric Spaces and Function Spaces
Chap. 7
The terminology originally used by R. Baire for this concent i
the word "category." A space X was said to be of the first ca
equaled the union of a countable collection of closed sets in A'ha
interiors; otherwise, it was said to be of the second category. ^
terminology, we can say the following: 8 s
A space X is a Baire space if and only if every nonempty open set in X is
of the second category.
We shall not use the terms "first category" and "second category" in this
book.
The preceding definition is the "closed set definition" of a Baire space
There is also a formulation involving open sets that is frequently useful.
It is given in the following lemma.
Lemma 7.1. X is a Baire space if and only if given any countable collection
{UJ of open sets in X, each of which is dense in X, their intersection f]\J,
is also dense in X.
Proof Recall that a set C is dense in X if C = X. The theorem now fol-
follows at once from the two remarks:
A) A is closed in A'if and only if X — A is open in X.
B) B has empty interior in X if and only if X — B is dense in X. Q
There are a number of theorems giving conditions under which a space
is a Baire space. The most important is the following:
Theorem 7.2. If X is a compact Hausdorff space, or a complete metric
space, then X is a Baire space.
Proof. Given a countable collection {An} of closed sets in * having empty
interiors, we want to show that their union \JAn also has empty interior in
X. So, given the nonempty open set Uo of X, we must find a point x of C/o
that does not lie in any of the sets An.
Consider the first set A,. By hypothesis, A, does not contain
fore, we may choose a point y of Uo that is not in A,. Regularity o^
with the fact that Ax is closed, enables us to choose a neighborhood U,
y such that
0, n a, = 0,
°' ^ U"' thanl-
If X is metric, we also choose U, small enough that its diameter isIes* a°of
In general, given the nonempty open set Un.u we choose a P" T.
Un.l that is not in the closed set An, and then we choose U, to be a n s
hood of this point such that
Baire Spaces 295
diam V, < \jn in the metric case.
We assert that the intersection f|&. is nonempty. From this fact our
theorem will follow. For if x is a point of (~}U,, then x is in Uo, because 0 c
Ua. And for each n, the point x is not in A,, because £/„ is disjoint from A
The proof that C\U, is nonempty splits into two parts, depending on
whether X is compact Hausdorff or complete metric. If X is compact Haus-
Hausdorff, we consider the nested sequence £/, => Ut =3 ... of nonempty subsets
of X. The collection {£/„} satisfies the finite intersection condition; since X
is compact, the intersection (~}U, must be nonempty.
If X is complete metric, we apply the following lemma. □
Lemma 7.3. Let C, zd C, => • • • be a nested sequence of nonempty closed
sets in the complete metric space X. If diam Cn —> 0, then p|Cn 56 0.
iVoo/. We gave this as an exercise in §7-1. Here is a proof: Choose
xn e Cn for each n. Because xn, xm e CN for n, m > N, and because diam
CN can be made less than any given e by choosing N large enough, the
sequence (*„) is a Cauchy sequence. Suppose that it converges to x. Then
for given k, the subsequence xk, xk+t,. ■ ■ also converges to x. Thus x neces-
necessarily belongs to Ck — Ck. Then x e Hc*> as desired. □
The theorem just proved about Baire spaces is the one most frequently
applied, but it is not the strongest one that can be proved. One can prove
for instance that any G6 set in a compact Hausdorff space or a complete
metric space is a Baire space. These and other generalizations are given in
the exercises.
Example 3. The set Q of rationals is not a Gs set in the reals.
Suppose that Q is the intersection of the countable collection {IVr) of open
sets of R. For each q e Q, let V, be the open set R - {q}. Then the collection
a = [IVn\n eZ+]U{K,|?e Q)
is a countable collection of open sets of R. Each W» is dense in R, since Wn => Q.
And each set V, is dense in R, being the complement of a single point. Since R
is a Baire space, the intersection A of the elements of the countable collection a
must be dense in R. But any point belonging to all the sets IV, is rational, and
any point belonging to all the sets V, is irrational. Hence A is empty.
Example 4. The second application is more amusing than profound It
arises from a question that could be posed to a class in elementary calculus:
Is there a function f-.R-^R that is continuous precisely at the rational points
ofRl
296 Complete Metric Spaces and Function Spaces
The answer is no, and the proof goes as foil ows: Let /: R _» & ^
trary function. Give the positive integer n, let U. be the union of the Jwfbi*
of the following collection: elements
{U\ U is open in R and diameter /(t/) < l/n}.
Then [/„ is open in R. Furthermore, the set
c = n.ez. i/»
is precisely the set of points at which the function/is continuous, as you can
readily check. Thus the set of points at which /is continuous forms a G» set in
R. The set of rationals is not a Gs set in R; therefore, there can be no function
/: R —> R that is continuous precisely at the rational points.
Surprisingly enough, there does exist a function h that is continuous pre-
precisely at the irrational points. Choose a bijective function /: Z+ —♦ Q; ]et
gn = f(n). Then define h : R —» R by the rule
h(qn) = I In for n e Z+,
A(a-) = 0 for x irrational.
We leave it to you to check that h is the desired function.
Exercises
1. Let A' equal the countable union Ufi,. Show that if X is a Baire space and
nonempty, at least one of the sets 5, has a nonempty interior.
2. The Baire theorem implies that R cannot be written as a countable union of
closed subsets having empty interiors. Show this fails if the sets are not required
to be closed.
3. Show that every open subset of a Baire space is a Baire space.
4. Show that every locally compact Hausdorff space is a Baire space.
5. Show that if every point .v of X has a neighborhood that is a Baire space, then
X is a Baire space. [Hint: Use the open set formulation of the Baire condition.!
6. Show that if Y is a Gt set in X, and if X\s compact Hausdorff or complete^ memc
then Y is a Baire space in the subspace topology. [Hint: Suppose that Y-[] »
where IV, is open in X, and that £„ is closed in Kand has empty interior in ^
Given Uo open in X with Ua n Y ^ 0, find a sequence of open sets I/. °
with Un n y nonempty, such that
£?„ c £/„_„
0,r\5.= 0,
diam C < l/n in the metric case,
U. cz Wn.}
7. Show that the irrationals are a Baire space.
8. Show that every G, set in a locally compact Hausdorff space is a
§ 7-8
AN°»here'Differentiable Function 297
9. Check the statements made in Example 4 about C and h
10. Theorem {Uniform boundedness principle) Let X h?
and let S be a subset ofe(X, H) such that for eachxe
** = {/(*)(/£?]
is bounded. Then there is a nonempty open set U nf y „ u, , , r
9 are uniformly bounded; that is, thereTsZasftu/^^^ '"
\f{X)\^Mfora,,x e Uandallfls " "dammberMs"chthat
[Hint: Let AN = {x;|/(a)|^ Nfor all/e <F}j
11. Determine whether or not R, is a Baire space.
12. Show that IV is a Baire space in the box, product, and uniform topologies
*13. Show that if A is any Gt set in *, there is a function/: * _> *,ha, is continuous
at all points of A and discontinuous at all other points.
*14. Let A" be a topological space; let Y be a complete metric space. Show that
<B(X, Y) is a Baire space in the fine topology (see Exercise 9 of §7-4) [Hint-
Given basis elements £(/>, £•) such that <5, <£ i and dul£d,ft and
/;+i 6 5(/f, E,/3), show that
7-8 A Nowhere-Differentiable Function
We prove the following result from analysis:
Theorem 8.1. Let h : [0, 1] —> R be a continuous function. Given e > 0,
there is a function g : [0, 1] — R with |h(x) - g(x)j < e for all x, such that
g is continuous and nowhcre-differentiable.
Proof. Let / = [0, 1]. Consider the space e = e(/, R) of continuous maps
from / to R, in the metric
/>(/,£) = max {|/(*)-£(*) |}.
This space is a complete metric space, and therefore is a Baire space. We
shall define, for each n, a certain subset U. of e that is open in 6 and dense
in e, and has the property that the functions belonging to the intersection
are nowhere-differentiable. Since e is a Baire space this intersection is dense
in e, by Lemma 7.1. Therefore, given /, and e, th,s intersection must contam
a function g such that p{h,g) < e. The theorem Allows
The tricky part is to define the set Um properly. We fin£ take^a
/and consider its difference quotients. Given x e / and given 0
consider the expressions
f(x
and
-h
298 Complete Metric Spaces and Function Spaces
Chap. 7
Since h <, \, at least one of the numbers x + h and x — h belongs t
so that at least one of these expressions is defined. Let Af(x, h) denoted
larger of the two if both are defined; otherwise let it denote the one that'
defined. If the derivative /'(*) of/at x exists, it equals the limit of these
difference quotients, so that
\f'ix)\ = Km &f(x,h).
We seek to find a continuous function for which this limit does not exist
This gives us the idea for defining the set Un. Roughly speaking, U, will
consist of those functions such that Af(x, h) is large (bounded below by a
number greater than n) for values of h which are small (less than 1/n). More
precisely, given positive numbers a and h, with h < £, we define a set
{/(a, h) <= C(/, R) by setting
U(<x, h) = {/\ Af(x, h)>a, for every x e /}.
Then define £/„ to be the union of all those sets U(a, h) for which a>n
and /; < I/n. Note that Un => Un+l =>
Example 1. Let a be given. The function /(.v) = 4<X;t(l — x), whose graph
is a parabola, belongs to U(a, h) for /; = \. Geometrically speaking, what this
says is that for each x, at least one of the indicated secant lines of the parabola
in Figure 10 has slope of absolute value at least a. The function g pictured in
Figure 10 belongs to U(a, li) for any h<\; and the function k belongs to
U(a, ti) for any h < \.
x-l x x + 1
Figure 10
Now we prove the following facts about the set Un:
A) V. is open in C. Suppose that/6 U.. Then/e U(z,h) for
« > n and some h < I In. Let
fi 7-8
A Nowhere-Differentiable Function 299
We assert that if g is any function such that n(f g) < * thp , .
UQt\ h), where a' = (a + n)/2. Since a' > /this Jam W ? ? ^ t0
Un. Thus the ^-neighborhood of/belongs fo l^JToPen „ e ** *
T°POVe "* ^
g(x + h)- g(x)
If the first difference quotient is at least a in absolute value, then the second
one is in absolute value at least a - (a - «)/2 = a'. A similar computation
applies if Af(x, h) equals the other difference quotient.
B) Ua is dense in e. We must show that given/in e, given e > 0, and
given n, we can find an element g of Un within e of/
Choose a > /;. We shall construct g as a "piecewise-linear" function,
that is, a function whose graph is a broken line segment; each line segment
in the graph of g will have slope at least a in absolute value. It follows at
once that such a function g belongs to (/„. For let
0 = x0 < x, < .Vj < ■ ■ ■ < xk = 1
be a partition of the interval [0, 1] such that the restriction of g to each
subinterval /, = [.*,_,, .vj is a linear function. Then choose h so that
If* is in [0, 1], then x belongs to some subinterval /,. If* belongs to the first
half of the subinterval /,, then x + h belongs to /, and (g(x + A) -g(x))/h
equals the slope of the linear function g | /, Similarly, if* Wongs tc.the^sec-
tc.the^second half of /„ then x - /. belongs to /, and (g(* -I,) -^f'^^
the slope of g | /, In either case, Ag(*. h) > a, so g e f/(a, A) c: ^, as des red
Now given/, e, and a, we must show how to construct the desired^piece
wise-linear function g. First, we use uniform continuity of / to choose
partition of the interval
h,,inE ,he propTO J/^-'rS.-.^,1^.**
of this partition. For each i = 1, • • ■, m>'=no°sc L ns
then define a piecewise-linear function gl by the equations
for* e [f<-i. «J»
SiW = ],•/, ..g&^l&^Cx-a,) forxe[aB/J.
300 Complete Metric Spaces and Function Spaces
Chap. 7
a,
ft 1
</
a2
i 9
a3
n
\J -
a.
'3
U
Figure 11
/(';-i)> we require a, to be close enough to /,■ that
/, — a,
\f(t.) -/('■-■)I.
a
Then the graph of gl will consist entirely of line segments of slope zero and
line segments of slope at least a in absolute value.
Furthermore, we assert that p(g,, f) < e/2: On the interval /„ both
gl(x) and /(*) vary by at most e/A from /(/,_,); therefore, they are within
e/2 of each other. Then p(gl, f) = max {\gx{x) - f(x)\] < e/2.
The function gt is not yet the function we want. We now define a function
g by replacing each horizontal line segment in the graph of gt by a "sawtooth
graph that lies within e/2 of the graph of gl and has the property that each
edge of the sawtooth has slope at least a in absolute value. We leave t
part of the construction to you; it is not hard. The result is the desired piec
wise-linear function g. See Figure 12.
C) C\Un consists of nowhere-differentiable functions. Let / e \\V>-
shall prove that given x in [0, 1], the limit
lim Af(x, h)
h—*a - j
does not exist: Given n, the fact that/belongs to Un means that we can
a number hn with 0 < hn < \/n such that
, h.) > n.
§ 7-9 '
An Introduction to Dimension Theory 301
Figure 12
Then the sequence (/«„) converges to zero, but the sequence (Af(x, hj) does
not converge. As a result, /is not differentiable at x. □
You may find this proof frustrating, in that it seems so abstract and non-
constructive. Implicit in the proof, however, is a procedure for constructing
a specific sequence/ of piecevvise-linear functions that converges uniform y
to the nowhere-differentiable function/ And defining the funct.on/.n this
way is just as constructive as the usual definition of the sine function, for
instance, as the limit of an infinite series.
Exercises
1. Check the stated properties of the functions /, g, and k of Example 1
2. Given „ and «. define a continuous function /: /- * such that/6 tt and
7.9 An Introduction to Dimension Theory
We showed in §4-5 that if X is a
bedded in R» for some positive integer N
302 Complete Metric Spaces and Function Spaces
Chap. 7
theorem to arbitrary compact metrizable spaces, and we also d
how large a value of N is required. ■ erniine
We shall define, for an arbitrary topological space X, & notion of to
gical dimension. It is the "covering dimension" originally defined K
Lebesgue. We shall prove that each compact subset of Rm has topolo
dimension at most m. We shall also prove that the topological dimensio^of
any compact w-manifold is at most m. (His, in fact, precisely m, but this L
shall not prove.)
The major theorem of this section is the theorem that any compact
metrizable space of topological dimension m can be imbedded in R" for
N = 2m + 1. This value of N is in general the best possible. The proof is
■i application of the Baire theorem. It follows that every compact w-mani-
old can be imbedded in R2m+l. It follows also that a compact metrizable
space can be imbedded in RN for some N if and only if it has finite topological
dimension.
Much of what we shall do holds without requiring the space in question
to be compact. But we shall restrict ourselves to that case whenever it is
convenient to do so. Generalizations to the noncompact case are given in
the exercises.
Definition. A collection Q, of subsets of the space A'is said to have order
m + 1 if some point of X lies in m + 1 elements of G, and no point of X
lies in more than m + 1 elements of G.
Now we define what we mean by the topological dimension of a space X.
Recall that given a collection G of subsets of X, a collection (B is said to
refine G, or to be a refinement of G, if each element B of 63 is contained in
at least one element of G.
Definition. A space JHs said to be finite-dimensional if there is some integer
m such that for every open covering G of X, there is an open covering « o
JT that refines G and has order at most m + 1. The topological dimensim"
X is defined to be the smallest value of m for which this statement hold .
Some basic facts about topological dimension are given in the following
theorems:
Theorem 9.1. If Y is a closed subset of X, and if X has finite dimension,
then so does Y; and dim Y <; dim X.
Proof. Let dim X = m. Let G be a covering of Y by se£ ^" ^over
For each A e G, choose an open set A' of X such thai.A' Oj ' onent
X by the open sets A', along with the open set X - Y. Let » »" j
of this covering that is an open covering of X and has order at most m
Then the collection
{Bn Y\B e &}
§ 7-9 - ■ An Introduction to Dimension Theory S03
is a covering of Y by sets open in Y, it has order at most m + 1, and it refines
a. □
Theorem 9.2. Let X = Y U Z, w/im? Y anrf Z ai-e c/oflv/ «?/.y /» X having
finite topological dimension. Then
dim X = max {dim Y, dim Z}.
Proof. Let m = max {dim K, dim Z). By the preceding theorem, we know
that if X is finite dimensional, dim AT;> m. It remains to prove that dim X
exists and is at most m.
Step 1. First we prove the following: Suppose Y is a closed subspace of
X, and dim Y < m. If G is an open covering of X, then there is an open cover-
covering © of X that refines a , such that no point of Y lies in more than m+1
elements of C. (If C satisfies this condition, we say that "the restriction of C
to Y has order at most m +1".)
To prove this fact, consider the collection
{a n y | a e a}.
It is an open covering of Y, so it has a refinement (B that is an open covering
of Y and has order at most /w + 1. Given 5 e (B, choose an open set UB
of X such that £/* n Y = B. Choose also an element AB of a such that
B c= AB. Let e be the collection consisting of all the sets UB C\ AB, for B e (B,
along with all the sets /4 — Y, for ^ e a. Then e is the desired open covering
of X.
Step 2. Now let a be an open covering of X. Let (B be an open covering
of A'refining a, whose restriction to Y has order at most m + 1. Then let
C be an open covering of X refining (B, whose restriction to Z has order at
most m+1.
We form a new covering © of A' as follows: Define/: © — <B by choosing
for each C e e an element f(C) of (B such that C c /(C). Given B e (B,
define 2)E) to be the union of all those elements C of C for which /(C) = 5.
(Of course, D(B) is empty if B is not in the image of/.) Let © be the collec-
collection of all the sets D(B), for B e (B.
Now 2D refines (B, because £>E) <= 5 for each B; therefore, 3D refines
a. Also, 2D covers * because C covers * and C c= 2>(/(C)) for each C e e.
We show that 2D has order at most m + 1; then our theorem will be proved.
Suppose x e D(B,) n ■ ■ ■ H £Ek), where the sets £>(£,) are distinct.
We wish to prove that k <; m + 1. Note that the sets B,,...,Bk must be
distinct because the sets D(B,) are. Because x e £>E,), we can choose for
each i, a set C, £ C such that x e C, and /(C,) = 5,. The sets C, are distinct
because the sets B, are. Furthermore,
€[c:n ■■■ nck]c [D(B%) n ••• n D(Bk)] <= [5, n • • • n 5J.
Complete Metric Spaces and Function Spaces
Chap. 7
If* happens to lie in Y, then k<m+\ because the restriction of«t v
has order at most m + 1; and if x is in Z, then k^m+ blnVV
restriction of e to 2 has order at most m + 1. Q Se the
Corollary 9.3. Let X = Y, U • • • U Yt, where each Y, /, closed in X an*
is finite-dimensional. Then X and
dim X = max [dim Y,,.. ., dim Yk}.
Obviously, the dimension of X (if it exists) is a topological invariant
In the case where X is compact and metric, the definition can be formulated
in a way that involves the metric:
Lemma 9.4. Let X be a compact metric space. Then dim X < m if and only
if for every e > 0 there is a finite open covering (B ofX by sets of diameter
less than e such that (B has order at most m + 1.
Proof. Suppose that dim X < m. Take a covering a of A' by open f/3-
balls, and choose <&' to be a refinement of a that is an open covering of A'
and has order at most m + 1. Let (B be a finite subcollection of (B' that covers
X. Then (B has order at most m + 1, and the elements of (B have diameter
less than e.
To prove the reverse implication, let a be an arbitrary open covering of
X. Let e > 0 be a Lebesgue number for a, and choose a finite open covering
(B of X by sets of diameter less than e, such that (B has order at most m + 1.
Then (B is the desired refinement of a. [^]
Example I. The interval [a, b] has topological dimension 1. Given f > 0,
one can choose a subdivision
a - t0 < tt < ■■■ < /„ = b
such that /, — /,-_ i < f/2 for each /. Then the collection
<B = {[a, /,), (to, h), (/,, t}), (h, u),.... (t.-2, O, ('.-i. b]]
is an open covering by sets of diameter less than f, and (B has order 2. Hence
dim [a, b] < I. ,,
On the other hand, given € < b - a, let (B be any open covering of [a, m
lt 2 S"PP°
On the other hand, given € < b a, le y p
by sets of diameter less than e. We assert that (B has order at least 2.
that (B has order 1; then no two elements of (B intersect. Since the elemen
of (B have diameter less than e, the collection (B must contain more_ man o
element; let U be one element of <B, and let V be the union of all the oin ^j
Then V and V form a separation of [a, b], contrary to the fact that this mie
is connected.
Example 2. A (finite) linear graph C is a space that is homeomf* ^J|
union of finitely many line segments, each pair of which intersect.i
common end point. The end points of the line segments are caBed^ }}
of the linear graph. Two examples of linear ^^^^Jr; *»
The first is a diagram of the familiar ^BS^Mr-^^^ i
second is called the "complete graph on five vertices. Neither oi
§7-9
An Introduction to Dimension Theory 305
Figure 13
imbedded in the plane. [This is a highly nontrivial fact to prove; it depends on
the Jordan curve theorem. See the exercises of §8-13.]
Any linear graph has topological dimension I. There are of course many
spaces that are not linear graphs which also have dimension I (see Exercise 3).
Example 3. Any compact subset C of R1 has topological dimension at most 2.
To prove this fact, we construct a certain open covering fl of R2 that has
order 3. We begin by defining Ci2 to be the collection of all open unit squares
in R2 of the following form:
G2 = R", Hi I) x (m, m -+ I)| n, m integers}.
Note that the elements of G2 are disjoint. Then we define a collection Oli by
taking each (open) edge e of one of these squares,
e = {«} x (m, m -I- I) or e = (n, n + I) x [m],
and expanding it slightly to an open set £/, of R2, being careful to ensure that
if e ^ e', the sets Uc and £/„■ are disjoint. We also choose each £/, so that its
diameter is at most 2. Finally, we define <20 to be the collection consisting of all
open balls of radius % about the points /; x m. See Figure 14.
The collection of open sets ft = G2 U a, u flo covers Rz. Each of its ele-
elements has diameter at most 2. And it has order 3, since no point of R1 can lie
in more than one set from each G,-.
A
t
a,
Figure 14
306 Complete Metric Spaces and Function Spaces ^.
Chap. 7
Now we prove that any compact set C in R* has topological dimensio
most 2. Given e > 0, consider the homeomorphism /: & -* rz defined h
/(x) = ($e)x. Take the images under / of the open sets of the collection ft
They will form an open covering of & by sets of diameter less than € Cho
finitely many of them that cover C; this will be the desired open covering of°c
Of course, not every compact subset of R* has dimension exactly 2. A. one
point set has dimension 0, for instance, and a closed interval on the jc-axis has
dimension 1. It is, in fact, surprisingly nontrivial to prove that some subsets of
R2 do have topological dimension 2; the techniques of algebraic topology are
required. See Example 6 below.
Example 4. Every compact 2-manifold X has topological dimension at most
2. For X can be written as a finite union of subspaces that are homeomorphic
to the closed unit ball in R2; then Corollary 9.3 applies. The 2-sphere, the torus,
and the Klein bottle are typical examples of 2-manifolds (see Figure 27 of §8-10).'
Example 5. A finite simplicial 2-complex (called a 2-complex for short) is
a space X that is homeomorphic to a finite union of closed triangles and line
segments such that any two of them intersect in at most a common vertex or
(in the case of two triangles) a common edge. By Corollary 9.3, every 2-cornplex
has topological dimension at most 2. Pictured in Figure 15 is a 2-complex that
is not a manifold.
C \
\9
Figure 15
Properly speaking, a 2-complex must contain at least one triangle; ot er-
wise it would be a linear graph.
Example 6. Assuming a theorem we shall prove in the next^chapter
(in §8-8), we now show that any closed triangular region Tin R has i°p ^
dimension 2. It follows that every compact 2-manifold, and every 2-comp ,
topological dimension precisely 2.
The theorem in question is the following:
Let Bd T denote the union of the edges of the closed triangula.
Then there is no continuous map f: T— Bd T that carries each
into itself.
6 7-9
An Introduction to Dimension Theory 307
We know that T has dimension at most 2. To
st
« * -*'"«--«««»
less than 3. For each i = l „, choose a ver(ex Qf T
intersects two edges of T, let „ denote the vertex common to these edges 5
U, intersects only one edge of T, let „, be one of the vertices of this edge If U
intersects no edge of T, let v, be any vertex of T. '
Now let {(/>,] be a partition of unity dominated by f [/, f/1 rq,.i> ut >
Define*:r—i?* by the equation »J-^ee 54-5.)
Then g is continuous. Now each point of T lies in at most two elements of a.
Therefore, for each x e T, at most two of the functions fax) are nonzero.
Then
g(x) = v,
if x lies in only one open set V,, and
g(x) = /c, +(I -/)i;y
for some / with 0 < / <; 1 if x lies in two open sets U, and Uj. [Here we use the
fact that 20((-v) = '•] Thus g maps all of T into the union of the edges of T.
We claim further that g maps each edge of T into itself. Suppose that x
belongs to the edge vw of T. Then any open set U, containing x necessarily
intersects this edge, so that the vertex v, must be either v or w. Likewise, if
.v e Uj, we have vj = v or w. The above equations then show that,?(A-) belongs
to vw.
The existence of the map g violates the above-quoted theorem,
Now we prove the imbedding theorem mentioned earlier, to the effect
that every compact metrizable space of topological dimension m can be
imbedded in Rlm+i. This theorem is another "deep" theorem; it is not at
all obvious, for instance, why 2m + 1 should be the crucial dimension. We
shall discuss some special cases of the theorem before turning to the proof;
this discussion should illuminate why the dimension 2m + 1 occurs.
First let us consider the simplest possible case, that of a finite linear graph
G. In this case, the imbedding theorem states that every finite linear grapn
can be imbedded in RK It is not hard to give an ad hoc argument that will
work here. We shall give instead an argument that will generalize to higner
dimensions, an argument that involves the notion of general position.
A set A of points of R> is said to be in general position in R> *«°*"°f
the points are equal, no three are collinear, and no four are cophw.«B
easy to find sets of points in general position in *'. For instance, the set
. consisting of all points of the curve
308 Complete Metric Spaces and Function Spaces
Chap. 7
{(t, t\ t>)\t e R] . . .
is in general position in R3, as you can prove. .
Now, given a finite linear graph G with vertices »„ . v iet u
a set {Zl,. .., zj of points in general position in R3. We define a
Map/: C -> R> by letting/map ,, to z,, and letting/map the ££%$
A - />, of the line segment in G joining v, and », (if any) to the poj t
tz, + A - /)z, of the line segment in R3 joining z, and z,. It is clear thatf
is continuous. Also, / is injective: Let e = »,», and e' = ^, be two line
segments of G. If <? and e' have no vertex in common, then f(e) and /■('e'-v
are disjoint, for otherwise the points z,, z,, z*, and z, would be coplanar
And if e and e' have a vertex in common, say i = k, then f(e) and /(e')
can intersect only in the point z,; for otherwise z;, zp and z, would be col-
linear.
Now let us consider the next simplest case, that of a 2-complex. In order
to generalize the preceding argument, we must first study a bit of the analytic
geometry of RN. We shall need these results later anyway when we prove the
general imbedding theorem.
Analytic geometry in RN is really nothing more than the usual linear
algebra of vector spaces translated into somewhat different language. First
we make the following definition:
Definition. A set {x0, . . . , xA.} of points of RN is said to be geometrically
independent if
E*-=o ",xf = 0 with £*.„ a, =0]=> [each a, = 0].
It is clear that any set consisting of only one point is geometrically in-
independent. What does geometric independence mean if k > 0? It is simple
algebra to show that the set of points {x0,. .., xA.} is geometrically indepen-
independent if and only if the set of vectors
{x, — x0, x, — x0,.. ., x* — x0]
is linearly independent in the sense of ordinary linear algebra. This gives us
something to visualize: Any two distinct points form a geometrically in-
independent set. Three points form a geometrically independent set it my
are not collinear. Four points in R> form a geometrically independent
if they are not coplanar. And so on.
It follows from these remarks that the points
0 = @, 0,.... 0),
e, =A,0, ...,0),
e,=@,0 1) . .
are geometrically independent in R". It also follows that R" conta.ns
more than N + 1 geometrically independent points.
§7"9 An Introduction to Dimension Theory 309
Definition. Let {x0 x ] be a set of nnmu nf dn *u * •
independent. The plane , determined byl^i sis tl^Z^
of all points x of R" such that ° t0 be the set
x = S*=o '(X,, where £*,„ ,, = i. /
It is simple algebra to check that P can also be expressed as the set of
all points x such that
for some scalars a „ ..., ak. Thus P can be described not only as "the plane
determined by the points x0,..., xk," but also as "the plane passing through
the point x0 parallel to the vectors x, — x0,..., xk — x0."
Consider now the homeomorphism T : R» — R» defined by the equation
T(x) = x - x0. It is called a translation of RN. Expression (*) shows that
this map carries the plane P onto the vector subspace V of RN having as
basis the vectors x, — x0, . .. , xk — x0. For this reason, we often call P
a A-plane in RN.
Two facts follow at once: First, if k <N, the fe-plane P necessarily has
empty interior in RN (because Vk does). And second, if y is any point of R"
not lying in P, then the set
[x0, . . . , xk, y}
is geometrically independent. For if y ^ P, then T{yj = y — x0 is not in
V. By a standard theorem of linear algebra, the vector [x, — x0,...,
xk — x0, y — x0} are linearly independent, from which our result follows.
Definition. A set A of points of RN is said to be in general position in RN
if every subset of A containing N + 1 or fewer points is geometrically in-
independent.
In the case of R\ this is the same as the definition given earlier, as you
can check.
Lemma 9.5. Given a finite set [x,, . . . , xn] of points of R* and given S > 0,
there exists a set [y,, . . . , y0} of points of RN in general position in R , such
that | X[ — y, | < 5 for all i.
Proof We proceed by induction. Set y, = x,. Suppose that we are given
y,, •.., y, in general position in *". Consider the set of all planes in*
determined by subsets of [y,,. .., y,} that contain N or fewer demente.
Every such subset is geometrically independent and determines a *-plane
of R" for some k<.N-\. Each of these planes has empty interior mR.
Since there are only finitely many of them, their union also has empty
interior in R». (Recall that *" is a Baire space.) Choose y,+ 1 to be a pom
of R» within 5 of x,+, that does not lie in any of these planes. It follows at
once that the set
310 Complete Metric Spaces and Function Spaces
Chap. 7
■' ' ' ' c = {yi yP,yP+i} • ■, ,. ,
is in general position in RN. For let D be any subset of C containing V +
or fewer elements. If D does not contain yp+l, then D is geometrically
dependent by the induction hypothesis. If D does contain yp+i, then I)"~
{y,+,} contains N or fewer points and y,+ I is not in the pla'ne'determined
by these points, by construction. Then as noted above, D is geometricall
independent. □ ^
Now we can show how to imbed any 2-complex X in R$. Given the 2-
complex X with vertices «,,...,«„, let us choose a set z,,..., z, of points
that are in general position in Rs. We define a continuous map/: X—» R*
as follows: The general point of the triangle with vertices vt, v,y and wkcan
be written in the form
SV, + tVj + (\ — S — t)vk,
where s, t, and I — s — t are all nonnegative. (You can convince yourself
of this fact.) We let/map this point to the point sz, + tzs + (\ —s — t)ik
of the triangle in Rs having z,, z;, and zk as vertices. If v,vf is a line segment
that is not the edge of a triangle, we let/map it onto the line segment z,z;,
as before.
Because the points z, are in general position, the map/will be injective.
Several cases need to be checked. For instance, if vu vt, v3 andvitv5,v6are
the vertices, respectively, of two disjoint triangles a and a' of X, then f(a)
and f{a') cannot intersect, for that would imply that the points z,, for i =
1, .. . , 6, are not independent. [If x0 were a point of the intersection, we
would have
where Y^s,- = 2]'; = 1, or
where the sum of the coefficients is zero.] Similar arguments apply in the
other cases. .
With these special cases as motivation, let us now prove the genera
imbedding theorem.
Theorem 9.6 (The Imbedding theorem). Every compact metrizable space
X of topological dimension m can be imbedded in R2m+1.
Proof. Let N = 2m + 1. Let us denote the square metric for R" by
|x-y| = max {| *,-;■,!;/= l,...,N}.
Then we can use p to denote the corresponding sup metric on the spac
Q(X RN)'
p(f, S) = max [| f{x) - g(x)\; x e X}.
§7-9
An Introduction to Dimension Theory 311
The space e(X, R») is complete in the metric n since ™ ■
square metric. p'slnce R IS complete in the
Choose a metric d for the space X; because X is
Given a continuous map /: X —* R", 'let us define C°mpact> ls bounded.
= lub {diam /-'({z})| z e R"}.
The number A(/) measures how far f "deviate" f™m
A(/) - 0, each set /-.«,), consists of at^on/Z
Now, given * > 0, define U. to be the set of all those
/: X-,r for which A(/) < f; it consists of all thc^KSS
from being injective by less than e. We shall show that U is both open and
dense in Q(X, RN). It follows that the intersection
HnezMvn
is dense in Q(X, RN) and is in particular nonempty.
If/is an element of this intersection, then A(/) < l/n for every n. Hence
A(/) = 0 and/is injective. Because A'is compact,/is an imbedding. Thus
the imbedding theorem is proved.
(J) Uc is open in G(X, RN). Given an element/of Uc, we wish to find some
ball Bp(f, 5) about/that is contained in Ut. First choose a number b such
that A(/) < b < €. Note that if f(x) = f(y) = z, then x and y belong to
the set /"'({»)> so that <r/(.v, ;■) must be less than ^. It follows that if we let
A be the following subset of X X X,
A = {x xy\d(x,y)>b),
then the function j/O) — f(y)\ is positive on A. Now A is closed in X X JT
and therefore compact; hence the function \f(x)-f(y)\ has a positive
minimum on A. Let
<J = \ min fl/(;c) - f(y)\; x x y £ A}.
We assert that this value of 5 will suffice.
Suppose that g is a map such that /</,*) < * If * ^ e ^ then
|/W - /(,), * 2, by definition; since ,(x) and£), .« within. /W
and /(y), respectively, we must have |g(.v) - g(y)\> 0- wentc "• ,,
I * W-i0') I is positive on ^. As a result, if * and y are two.points such Mt
g(V=/w! then necessarily *,,)<*. We conclude that A* <:*<*.
as desired. ^
B) c. f, ^ /, «X. *>). This is the hard part of the proof^Wenced
to use the analytic geometry of*" discussed above. Let/ e c( , ,
e > 0 and given <J > 0, we wish to find a function * 6 e(X, K )
g s Ut and />(/, g) < <J- , „ i such that -
Let us cover X by finitely many open sets {£/, <J
A) diam i7, < e/2 in Z.
312 Complete Metric Spaces and Function Spaces
Chap. 7
B) diam f(U,) < d/2 in R".
C) {17, J7D} has order <,m+ 1.
(A Lebesgue number argument is involved here.) Let {0,} be a partition
unity dominated by {Us} (see §4-5). For each i, choose a point x, e U Th
choose, for each /, a point z, e /?" such that zt is within <5/2 'of the r^"!
/(*,), and such that the set P°mt
is in general position in RN. Finally, define g : X-+ R" by the equation
We assert that g is the desired function.
First, we show that />(/, g) < E. Note that
s(x) ~ f(x) = S"=i 0,(-v)z( — 2"=i &(*) /(*);
here we use the fact that £0,(x) = 1. Then
g(x) ~ f(x) = S0f(-v)(z< — /(x.)) + £0,-(*)(/(*i) — /(*)).
Now |z,. — /(x,)| < E/2 for each ;, by choice of the points z,. And if i is
an index such that 0,(.v) ?t 0, then x e £/,; because diam/((/,)< E/2, it
follows that |/(x,) — /(.y)| < E/2. Since 5]0,(x) = 1, we conclude that
- f(x)\ < 5. Therefore, p(g, f) < 5, as desired.
Second, we show that g e U,. We shall prove that if x, y e A'and g(x) =
), then x and >■ belong to one of the open sets Ult so that necessarily
d(x, y) < f/2 (since diam £/, < f/2). As a result, Afe) < f/2 < f, as desired.
So suppose g(x) = g(y). Then
Because the covering {t/,-} has order at most w + 1, at most m + 1 of ^
numbers 0,(x) are nonzero, and at most m + 1 of the numbers <j>t(y) are non-
nonzero. Thus the sum £ [0,(x) - 0,(>')]z, has at most 2m + 2 nonzero terms.
Note that the sum of the coefficients vanishes since
£ [«*) - *O0J =1-1 = 0.
The points z( are in general position in RN, so that any subset of them having
N + 1 or fewer elements is geometrically independent. And by hypothesis
N -f 1 = 2m + 2. (Aha!) Therefore, we conclude that
Now <j>,(x) > 0 for some i, so that x e Ut. Since 0,0') = <t>t(x)> we haV*
y e Ut also, as asserted. □
To give some content to the imbedding theorem, we need some mow
examples of spaces that are finite dimensional. We prove the to
h
theorem:
§ 7-9 ! An Introduction to Dimension Theory 313
Theorem 9.7. Every compact subset of RN has topological dimension at
mostN.
Proof. The proof is a generalization of the proof given in Example 3
above for R2. Let p be the square metric on RN.
Step I. We begin by breaking RN up into "unit cubes." Define <J to be
the following collection of open intervals in R:
3 = {(«, n+l)[neZ),
and define 3C to be the following collection of one-point sets in R:
X = {{n}\n e Z}.
If Mis an integer such that 0 < M < N, let QM denote the set of all products
C = Ai X A2 X • ■ • x AN,
where exactly M of the sets A, belong to g, and the remainder belong to
3C. If M > 0, then C is homeomorphic to the product @, \)M, and will be
called an M-cube. If M = 0, then C consists of a single point, and will be
called a 0-cube.
Let e = Co U C, U • • • ue,v. Note that each point x of RNlies in pre-
precisely one element of C, because each real number .v, lies in precisely one ele-
element of § U 3C. We shall expand each clement C of C slightly to an open
set U(C) of RN of diameter at most 2, in such a way that if C and C" are two
different M-cubes, then U(C) and U(C) are disjoint.
First, note that if C and C are two different M-cubes, then C n C" = 0.
This is easily checked; let C — A, X • • • X AN and C" = A\ X • • • X A'Nl
Choose an index / so that A, # ^,!- If A, and ^,- are disjoint, then so are C
and C". Otherwise, ^, must be an interval (n, n + 1) and A', must equal
{n} or {/; + 1). In that case, since both C and C" are A/-cubes, there must be
another index j for which A, is a one-point set {A-} and A) is an interval
(A / + 1). Then A, and A) are disjoint, so that C and C" are disjoint.
Second, note that the collection e.v, of all M-cubes is locally finite. Indeed,
if a is a point with integer coordinates, then the open set Bp(a, 1) intersects
only 3N different cubes of all dimensions.
Let x e C, where C is an M-cube. There is a neighborhood of x intersect-
intersecting only finitely many A/-cubes C" different from C. Since C n C = 0 for
each such C", we can choose f(x) so that the f(x)-neighborhood of x does
not intersect any M-cube C" different from C. Also, let f(x) < 1. Then we
define
U(C) = Ux.c B/x, ±f(x)).
It is straightforward to check that if C and C are different M-cubes, U(Q
and U(C) are disjoint.
S/ep 2. Given A/ with 0 < M < N, define a.w to be the collection of all
sets U(C), where C e eM. The elements of dM are disjoint, and each has
314 Complete Metric Spaces and Function Spaces m
Chap. 7
diameter at most 2. (For C has diameter 1, and each point of U(C) Ii« «,•«.•
ie(x) < J of a point x of C.) ^ Wlthln
The remainder of the proof is a copy of the proof given in Examni i
for R2. □ p J
Corollary 9.8. Every compact m-manifold has topological dimension at
most m.
Corollary 9.9. Every compact m-manifold can be imbedded in RJ«+i
Corollary 9.10. Let X be a compact metrizable space. Then X can be im-
imbedded in some euclidean space RN ;/ and only if X has finite topological
dimension.
As mentioned earlier, much of what we have proved holds without
assumption of compactness. We ask you to prove the appropriate generaliza-
generalizations in the exercises that follow.
One thing we do not ask you to prove is the fact that the topological
dimension of an m-manifold is precisely m. And for good reason; the proof
requires the tools of algebraic topology, which we have not studied.
Nor do we ask you to prove that A' = 1m + 1 is the smallest value of N
such that every compact metrizable space of topological dimension m can
be imbedded in RN. The reason is the same. Even in the case of a linear
graph, where m — I, the proof is nontrivial, as we remarked in Example 2
above.
For further results in dimension theory, the reader is referred to the classi-
classical book of Hurewicz and Wallman [H-W].
Exercises
1. Show that the Cantor set has dimension 0.
2. Show that any connected Hausdorff space having more than one point has
dimension at least 1.
3. Show that the comb space and the topologist's sine curve have dimension
4. Show that the subspace
([0, 1] x 0) u {.v x y\y = x sin (l/.v) and 0<x<,\]
of Rz has dimension 1. }
5. Show that the points 0,e,,ez,e3, and A, 1, 1) are in general ^
Sketch the corresponding imbedding into R3 of the complete
vertices.
6. (a) Verify that {x0 x*} is geometrically independent If and only '
vectors x, - x0,..., x* - x0 are linearly independent.
§?"9 An Introduction to Dimension Theory 315
^^fr=rr£^p-x:rinedbylxo ^"«-t—i.**
(c) Prove that a ^-dimensional subspace V of R« has empty interior in *»
7. Complete the proof that every 2-complex can be imbedded in RK
8. Show that the points of the curve x = t y => t1 z = O
in R\ Generalize to *. [Hint: Use theVander'monde SjJ P°SUi°n
*9. (a) Prove the following:
Theorem. Let X be a locally compact Hausdorff space having a countable
basis. Suppose that every point of X has a neighborhood whose closure has tope
logical dimension at most m. Then X has topological dimension at most m.
[Hint: Write X = \JCm where Cn is compact and CD c Int C,+1. Generalize
the proof of Theorem 9.2 to show that dim X <, m.]
(b) Prove:
Corollary. Every m-manifold has topological dimension at most m.
(c) Prove:
Corollary. Every closed subset of RN has topological dimension at most N.
*10. Theorem. Let X be a locally compact Hausdorff space with a countable basis,
having topological dimension m. Then X can be imbedded as a closed subset of
Proof.
(a) Let N = 2m + 1. Let d be a metric on X. Given a compact subset C of X
and given e > 0, define
U,(C) = {f\f 6 e(A", **<) and A(/1C) < e].
Show U,(C) is open and dense in (Q(X, R"), p), where p is the uniform
metric. [Hint: Use the Tietze extension theorem.]
(b) Show that given/ 6 C(A", /?") and given 5 > 0, there is a continuous injec-
tive map g : X — RN such that #/,*) < d. [Him: Write *= UC,,
where each €„ is compact and C, a CB+1 for each n. Consider ntfiMOJ
(c) Let /• X —♦ RN The map / is said to be proper if for each compact set O
in R», the set /-(£) is compact. Let X* and (*")* be the one-point.corn-
pactifications of these two spaces; extend /to a map F: X -* (K ) oy
letting F(co) = co. Show that /is proper and continuous if and only it t
(e) Construct a proper
theorem.
11. Assume the two preceding exercises.
^ IZem. Every m-manifold can be imbedded in *~" os a closed subset.
(t>) IZem. A space X can be
if and only if X is locally compact and Hau
finite topological dimension.
8. The Fundamental Group
and Covering Spaces
One of the basic problems of topology is to determine whether two given
topological spaces are homeoniorphic or not. There is no method for solving
this problem in general, but there do exist techniques that apply in particular
cases.
Showing that two spaces are homeomorphic is a matter of constructing a
continuous mapping from one to the other having a continuous inverse, and
constructing continuous functions is a problem that we have developed
techniques to handle.
Showing that two spaces are not homeomorphic is a different matter. For
that one must show that a continuous function with continuous inverse does
not exist. If one can find some topological property that holds for one space
but not for the other, then the problem is solved—the spaces cannot be
homeomorphic. The closed interval [0, I] cannot be homeomorphic to the
open interval @, 1), for instance, because the first space is compact and
second one is not. And the real line R cannot be homeomorphic to the ong
line" L, because R has a countable basis and L does not. Norca" esa
line R be homeomorphic to the plane Rz; deleting a point from R2 lea
connected space remaining, and deleting a point from R does not s
But the topological properties we have studied up to now do not ca /
316
Chap. 8 The Fundamental Group and Covering Spaces 317
very far in solving the problem. For instance, how does one show that the
plane R2 is not homeomorphic to three-dimensional space W> As one goes
down the list of topological properties—compactness, connectedness, local
connectedness, metrizability, and so on—one can find no topological'prop-
topological'property that distinguishes between them. As another example, consider such
surfaces as the 2-sphere S2, the torus T (surface of a doughnut), and the dou-
double torus T2 (surface of a two-holed doughnut). None of the topological prop-
properties we have studied up to now will distinguish between them.
So we must introduce new properties and new techniques. One of the most
natural such properties is that of simple connectivity. You probably have
studied this notion already, when you studied line integrals in the plane.
Roughly speaking, one says that a space A" is simply connected if every closed
curve in A'can be shrunk to a point in X. (We shall make this more precise
later.) The property of simple connectivity, it turns out, will distinguish
between R2 and R3; deleting a point from R3 leaves a simply connected space
remaining, but deleting a point from R2 does not. It will also distinguish
between S2 (which is simply connected) and the torus T(which is not). But it
will not distinguish between T and 7\; neither of them is simply connected.
There is an idea more general than the idea of simple connectivity, an
idea that includes simple connectivity as a special case. It involves a certain
group that is called the fundamental group of the space. Two spaces that are
homeomorphic have fundamental groups that are isomorphic. And the con-
condition of simple connectivity is just the condition that the fundamental group
of A'be the trivial (one-element) group. Thus the proof that S2 and Tare not
homeomorphic can be rephrased by saying that the fundamental group of S2
is trivial and the fundamental group of T\% not. The fundamental group will
distinguish between more spaces than the condition of simple connectivity
will. It can be used, for example, to show that Jand T2 are not homeomor-
homeomorphic; it turns out that T has an abelian fundamental group and Tz does
not.
In this chapter we define the fundamental group and study its properties.
Then we apply it to a number of problems, including the problem of showing
that various spaces, such as those already mentioned, are not homeomorphic.
Other applications include applications to vector fields and fixed points
and antipode-preserving maps of the sphere, as well as the well-known fun-
fundamental theorem of algebra, which says that every polynomial equation with
real or complex coefficients has a root. Finally, there is the famous Jordan
curve theorem, to the effect that every simple closed curve C in the plane
separates the plane into two components, of which C is the common bound-
boundary.
Some of the sections of this chapter are independent of one another. The
dependence among them is expressed in the following diagram:
318 The Fundamental Group and Covering Spaces
Chap, g
§8-1 Homotopy of paths ...
§8-2 The fundamental group ' • '
§8-3 Covering spaces ' ' \\
-§8-4 The fundamental group of the circle
§8-5^ The fundamental group of the punctured plane
i-6 The fundamental group of S"
i-7 Fundamental groups of surfaces
Essential and inessential maps
k SS-9 The fundamental theorem of algebra
\\
§8-10 Vector fields and fixed points
§8-11 Homotopy type
§8-12 The Jordan separation theorem
§8-13 The Jordan curve theorem
§8-14 Classification of covering spaces
Throughout the chapter, we assume familiarity with components and
local connectivity (§3-3 and §3-4). We also assume that the reader is familiar
with the elements of group theory. In §8-12, we assume familiarity with local
compactness (§3-8), and in §8-13, with quotient spaces (§2-11).
8-1 Homotopy of Paths
Before defining the fundamental group of a space X, we shall consider
paths on JT and an equivalence relation called path homotopy between the ■
And we shall define a certain operation on the collection of these equivaien
classes that makes it into what is called in algebra a groupoid.
Definition. If/and/' are continuous maps of the space JTinto *espa<*
Y, we say that/is homotopic to /' if there is a continuous map F: X X
6 8-1 ■*
ysuch that
Homotopy of Paths 319
and F{x,\)=f'{x)
for each x e X. (Here / = [0, ]].) The map Fis called a homotopy between/
and / . If/is homotopic to /', we write/~ /'. J
We think of a homotopy as a continuous one-parameter family of maps
from X to Y. If we imagine the parameter / as representing time, then the
homotopy F represents a continuous "deforming" of the map/to the map
/', as / goes from 0 to 1.
Now we consider the special case in which/is a path in X. Recall that if
/: [0, 1] —» X is a continuous map such that /@) = x0 and /(I) =*,, we
say that/is a path in Xfrom x0 to *,. We also say that x0 is the initial point,
and Xi the final point, of the path/ In this chapter, we shall for convenience
use the interval / = [0, 1] as the domain for all paths.
If/and /' are two paths in X, there is a stronger relation between them
than mere homotopy. It is defined as follows:
Definition. Two paths / and /', mapping the interval / = [0, 1] into X,
are said to be path homotopic if they have the same initial point x0 and the
same final point .v,, and if there is a continuous map F: I X /—> A'such that
F(s, 0) --= f(s) and F(s, 1) = f'{s),
F@,t)=xo and F{\,t)=xu
for each s e /and each / e /. We call Fa path homotopy between/and/'.
See Figure 1. If/is path homotopic to /', we write/~, /'.
The first condition says simply that F is a homotopy between/and /',
and the second says that for each /, the path
Figure 1
320 The Fundamental Croup and Covering Spaces
Chap. 8
is a path from x0 to *,. Said differently, the first condition says thatF
sents a continuous way of deforming the path / to the path /', and the s^"*"
condition says that the end points of the path remain fixed during the defo0^
Lemma J.I. The relations ^ and c±p are equivalence relations.
If/is a path, we shall denote its path-homotopy equivalence class by [/]
Proof. Let us verify the properties of an equivalence relation.
Given/, it is trivial that/-/; the map F(x, t) = /(*) is the required
homotopy. If/is a path, /"is a path homotopy.
Given/^ /', we show that /' ~/ Let F be a homotopy between/and
/'. Then G(x, t) = F(x, I — r) is a homotopy between /' and/ If Fis a path
homotopy, so is G.
Suppose that/~ /' and /' ~ /". We show that/~ /". Let F be a
homotopy between/and /', and let F' be a homotopy between /' and/".
Define G : X X I —> Y by the equation
(F(x, 2t) for t e [0, {],
\f\x. It - I) for t e [', I].
The map G is well defined, since if / = \,
F(x, 2t) = F(x, I) = f\x) = F'(x, 0) = F'{x, 2r - 1).
Because G is continuous on the two closed subsets X X [0, £] and X x [{, I]
of X x /, it is continuous on all of X X 7, by the pasting lemma. Thus G is
the required homotopy between /and /".
You can check that if F and F' are path homotopies, so is G. Figure 2
illustrates this situation. □
Example 1. Let / and g be any two maps of a space X into R2. It is easy
to see that/and g are homotopic; the map
G(x, t) =
Figure 2
8-1
is a homotopy between them.
Homotopy of Paths 321
Z222£5S£L
If/and g are paths from xB to v th •
can check. This situation is pictured in F^uiT" * " *** h°moto'*.« you
figure 5
Figure 4
Example 2. Let X denote the punctured plane, & - [0], which we shall
denote by & - 0 for short. The following paths in X,
f(s) = (cos ns, sin ns),
g(s) = (cos ns, 2 sin 7w)
are path homotopic; the straight-line homotopy between them is an acceptable
path homotopy. But the straight-line homotopy between/and the path
h(s) = (cos ns, —sin ns)
is not acceptable, for its image does not lie in the space X = R2 - 0. See
Figure 4.
Indeed, there exists no path homotopy in X between paths/and h. This
result is hardly surprizing; it is intuitively clear that one cannot "deform/past
the hole at 0" without introducing a discontinuity. But it takes some work to
prove. We shall return to this example later.
This example illustrates the fact that you must know what the range space
is before you can tell whether two paths are path homotopic or not. The paths
/and h would be path homotopic if they were paths in R1.
Now we introduce some algebra into this geometric situation. We define
a certain operation on path-homotopy classes as follows:
322 The Fundamental Croup and Covering Spaces
*
Chap. 8
Definition. If/is a path in * from *0 to *„ and \t g is a path in Xr
to Xi, we define the composition/* g of/and g to be the path h eivenT
the equations y n by
h{s) = \f^ for,e[0,i],
UBj-I) forje[|, I].
The function A is well-defined and continuous, by the pasting lemma- and
it is a path in * from x0 to xz. We think of h as the path whose first half is
the path/and whose second half is the path g.
We shall show that the operation of composition on paths induces a well-
defined operation on path-homotopy classes, so that we can define
[/]♦[*] = [/♦*].
Furthermore, the operation ♦ on path-homotopy classes turns out to satisfy
properties that look very much like the axioms for a group. They are called
the groupoid properties of *. The only difference from the properties of a
group is that [/] * [g] is not defined for every pair of classes, but only for
those pairs [/], [g] for which /(I) = g@).
Theorem 1.2. The operation * is well-defined on path-homotopy classes.
It has the following properties:
A) (Associativity) If[t] * ([g] * [h]) is defined, so is ([f] ♦ [g]) ♦ [h] and they
are equal.
B) (Right and left identities) Given x e X, let ex denote the constant path
e,. : I — ► X carrying all of I to the point x. If'fis a path in Xfrom x0 to x,, then
[n*[e,,] = [f] and [ej ♦ [f] = [f].
C) (Inverse) Given the path f in Xfrom x0 to x,, let Tbe the path definedby
f(s) = f(l — s). It is called the reverse o/f. Then
[f]*[f] = [ej and [f] * [f] = [ex,].
Proof Each of the preceding statements has an elementary geometric
proof. To show the operation well-defined, let F be a path homotopy between
/and /' and let G be a path homotopy between g and g'. Define
(FBs, t) for s e [0, \],
m') = \GBs-~ I,/) for^e & I].
Because F(I,/) = *.= G@, f) for all t, the map H is well-defined; it is con-
continuous by the pasting lemma. You can check that H is the required pa
homotopy between/* g and /' * g'. It is pictured in Figure 5.
A) To prove associativity, we need to show that/* ^*^({*,fr*/»
What exactly, do the paths /•(*♦*) and (/* *) * A look I.k£ V^
(g * A) the image of the point s traces out the .mage of/as i goes rom
£ it traces out the image of g as , goes from i to |, and it traces out the .mag
§8-1
Homotopy of Paths 323
Figure 5
of h as j goes from \ to I. Under (/♦ g) ♦ h, the point traces out the same
image, but at a different rate. It traces out the image of/as s goes from 0 to
\, of g as s goes from \ to £, and of/; as s goes from ^ to 1.
We define the homotopy F as follows: First map the unit square P onto
/ by the continuous map p which collapses each of the three quadrilaterals
A, B, and C in Figure 6 onto its base. Follow p by the map (/♦ g) * h. The
result will be the desired path homotopy F, as you can check mentally.
More formally, define
fDsl(t + 1)) for s e [0, (/ + l)/4],
F(s, 1) = gDs -t-l) for s e [(t + I)/4, (/ + 2)/4],
/i(Dj - / - 2IB - /)) for s e [(t + 2)/4, I].
You can check that 4s/0 + 1), 4s - t - I, and Dj - / - 2)/B - /) lie in
the domain [0, 1] of/ g, and A when they are supposed to, so these formulas
make sense, and that F is well-defined and hence continuous by the past.ng
lemma. It is straightforward to show that F is the required path homotopy.
324 The Fundamental Group and Covering Spaces
For instance,
Chap,
if* (g * A)X») =
fBs)
for * 6 [0,
f/Bi)
\(g * h){2s - 1) for s e [£, 1] or 2s - 1 e [o, \]
Thus we have
for*e[0,£],
I) for 2s- 1 6 [O.iJorie^,^
[hBBs - I) - I) for 2s - 1 e [J, 1] or j 6 [|, i].
And this is just F(s, 1), as you can check. Similarly, ((/♦ g) * h)(s) =F(s, 0)
B) We prove thatf~pf* ext. The desired path homotopy is constructed
as follows: First map the unit square I2 onto / by a continuous mapp that
collapses the quadrilateral A of Figure 7 onto its base, and collapses the
Figure 7
triangle B to its bottom vertex. Follow p by the map / The result is the
desired path homotopy G, as you can check mentally.
Formally, define
_ |/Bj/B - /)) for s e [0, B - 0/2],
<7(*'')-'U for. e [B -0/2,U-
You can check that G is well defined and continuous, and is the desired pa
homotopy.
The proof that ext *f~pf\s similar.
C) Now we show that/*/~, en. The intuitive idea °f theProoff,2
simple. The path/*/is a path that goes from x0 to *, and then comes oa
to x0 along the same route. Suppose that, for parameter value-I, «* '« '
the path which goes out from x0 partway along the route of/ as ta ^
point /(/). Then the homotopy we want is just the path «, * «,^
ceptable path homotopy, because it leaves both end points fixed at*-
Figure 8.
§8-1
' Homotopy of Paths 325
Figure 8
Formally, we define
\fBt(l-s))
It is easy to check that Its and 2t{\ — s) lie in the domain of/ when they are
supposed to, so the formulas make sense, that H is well-defined (and hence
continuous by the pasting lemma), and that H is the required path homotopy
between eXt and / * /.
A similar argument could be used to show that/*/~, exr But better
yet, note the following: We have shown that for any pathg, wehaveg*g~,
ex, where x is the initial point of g. In particular,/*/^, ex,, where/is the
reverse of/. But the reverse of/ is just/! Thus/*/— ,exi, as desired. □
Exercises
1. Show that ith,h':X-+Y are homotopic and k, k': Y^Zm homotopic,
then k ° h and k' ° h' are homotopic.
2. Suppose that X is a convex set in R"; that is, for every pair x,y of points of X
the line segment joining them lies in X. Show that any two paths in JThavmg
the same end points are path homotopic.
3. Consider the proof of Theorem 1.2. _
(a) Check that f (,, 0) = ((/ * g) * *X*) and F@,t) =■ *. andI/tU) - ^,-
(b) Check the statements made about the maps G and tf in B) and C).
4. Given spaces X and Y, let [X, n denote the set of homotopy classes of maps
« Uta 11. Show that for any *,the set M^ a
(b) Show that if r is path connected, the set [/, Yl has a
5. A space Xis said to be contracfible if the identity map ,x. X - X
to a constant map.
(a) Show that / and R are contractible.
326 The Fundamental Group and Covering Spaces
Chap. 8
(b) Show that a contractible space is path connected
(c) Show that if Y is contractible, then for any X, the set IX n h« ■
element. ' J1MS> s'ngle
(d) Show that if X is contractible and Y is path connected then [
single element. L
5-2 77re Fundamental Group
The set of path-homotopy classes of paths in a space X does not form a
group under the operation *, only a groupoid. But suppose we pick out a
point .v0 of X to serve as a "base point" and restrict ourselves to those paths
that begin and end at x0. The set of these path-homotopy classes does form
a group under *. It will be called the fundamental group of X.
In this section we shall prove several properties of the fundamental group.
In particular, we shall show that the group is, up to isomorphism, independent
of the choice of base point (provided that X is path connected). We shall also
show that the group is a topological invariant of the space X, the fact that is
of crucial importance in using it to study homeomorphism problems.
Definition. Let X be a space; let x0 be a point of X. A path in X that
begins and ends at x0 is called a loop based at x0. The set of path homotopy
classes of loops based at x0, with the operation *, is called the fundamental
group of X relative to the base point .v0. It is denoted by n\{X, x0).
It follows from the preceding theorem that the operation *, when restrict-
restricted to this set, satisfies the axioms for a group. Given two loops/and g based
at x0, the composition/* g is always defined and is a loop based at *o- As-
Associativity, the existence of an identity element [<?,,], and the existence of an
inverse [/] for [/] are immediate.
Sometimes this group is called the first homotopy group of X, which term
implies that there is a second homotopy group. There are indeed groups
nn(X, x0) for all n e Zt, but we shall not study them in this book. They are
part of the general subject called homotopy theory.
Example 1. Let R" denote euclidean n-space. Then ni(R",x0) is
group (the group consisting of the identity alone). For if /is a loop m Ji
at x0, the straight-line homotopy
F(s, t) = tx0 + A - t)f(s)
is a path homotopy between/and the constant loop ex,.
Example 2. More generally, if Xis any ™^ subset °f *"
is the trivial group. The straight-line homotopy «f «^ «"?
vexity of X means that for any two points x and>> of X, the
8'2
The Fundamental Group 327
between them lies in X. In particular, the unit ball Bn in R»
B" = {x\x\ + ... +xi^,l],
has trivial fundamental group.
To find a space with a nontrivial fundamental group is more difficult; this
we do in §8-4.
An immediate question one asks is the extent to which the fundamental
group depends on the base point. The answer is given in Corollary 2.2, which
follows.
Definition. Let a be a path in X from x0 to *,. We define a map
a : n,(X, x0) —> n^X, *,)
by the equation
«(M) = [«] * [/] * W.
The map a is pictured in Figure 9. It is well-defined because the operation
♦ is well-defined. If/is a loop based at ,v0, then a ♦ (/♦ a) is a loop based at
xy. Hence a maps 7ii(X, xa) into ni(X, xt), as desired.
Figure 9
Theorem 2.1. The map a, is a group isomorpliism.
Proof. To show that a is a homomorphism, we compute
= ([«] * I/] * W) * (W * [8] *
= [a]
This proof uses the groupoid properties of *, which we proved in Theorem
1.2.
To show that & is an isomorphism, we show that if fi denotes the path a,
328 The Fundamental Group and Covering Spaces
Chap. 8
which is the reverse of a, then j? is an inverse for &. We commite r
element [h] of n,{X, *,), compute, for each
L»] * [h] * [fi] = [a] * [A] * [a],
= [a] * ([a] * [A] * fa]) * fa] = \h].
A similar computation shows that j9(<2([/])) = f/] for each f/] e s,(
Corollary 2.2. If X As /wA connected and x0 <wrf x, aw /wo /,0/nw o/ X
n 7ti(X, x0) As isomorphic to re,(X, x,). '
Suppose that X is a topological space. Let C be the path component of
^containing x0. It is easy to see that Sl(C, *0) = *,(*, *„), since all loops
and homotopies in X that are based at x0 must lie in the subspace C. Thus
7i\(X, x0) depends only on the path component of Xcontainingx0, and gives
us no information whatever about the rest of X. For this reason, it is usual to
deal only with path-connected spaces when studying the fundamental group.
If X is path connected, all the groups n^X, x) are isomorphic, so it is
tempting to try to "identify" all these groups with one another, and to speak
simply of the fundamental group of the space X, without reference to base
point. The difficulty with this approach is that there is no natural way of
identifying n,(.X, x0) with n,(X, x,); different paths a and fi from xa to x,
may give rise to different isomorphisms between these groups. For this
reason, omitting the base point can lead to error.
It turns out that the isomorphism of 7ti(X, .v0) with n,(X, x,) is indepen-
independent of path if and only if the fundamental group is abelian. (See Exercise
2.) This is a stringent requirement on the space X.
Definition. A space X is said to be simply connected if it is a path-connected
space and if n^X, x0) is the trivial (one-element) group for some xa& X,
and hence for every .v0 e X. We often express the fact that n^X, x0) is the
trivial group by writing n,(X, x0) = 0.
Lemma 2.3. In a simply connected space X, any two paths having the same
initial and final points are path homotopic.
Proof. Let/and g be two paths from xa to *,. Then/* g is defined and
is a loop on X based at xa. Since X is simply connected,/* £—,*,.. Appiy»>s
the groupoid properties, we see that
f( f * Sr\ * frl — \p * ff] = \s I.
Ivy * 5) oj 1 -*• oJ loJ
[(/*£) * g] = lf*(i*g)] = If* e*J = [-fl-
Thus/and g are path homotopic. □
It is intuitively clear that the fundamental group is a topoloi
of the space X. A convenient way to prove this fact formally i
Se notion of the "homomorphism induced by a continuous map.
§ 8-2
* ,o .he poi., „ „, r we .CSS £«* * P"»,,. of
ing „(*. ,.) into ^Y,ya). We define it fl^fcST ""*
Definition. Let h : W ,o) _ (y>
by the equation *:*'<**.)
**(!/]) = [A o/].
The map A, is called the homomorphism induced by A relative to n, k
point x0. y • relal've to the base
homotopy between the loops h o/and /, „/'. It is a)so eaSy * che kthatl
is a homomorphism. For y hat "*
It follows that
- 1)) forj e [|, 1].
Thus h°(f*g) equals the composition (/; o /) * (/, o ^). it follows that
so that ht is a homomorphism.
The induced homomorphism /i* depends not only on the map h : X—> Y
but also on the choice of the base point xa. (Once xa is chosen, ya is deter-
determined by /;.) So some notational difficulty will arise if we want to consider
several different base points for X. If x0 and xt are two different points of A",
we cannot use the same symbol /;„ to stand for two different homomorphisms,
one having domain n^(X, x0) and the other having domain tzi(X, xt). Even
if AT is path connected, so these groups are isomorphic, they are still not the
same group. In such a case, we shall use the notation
(A..),:*i(*,*o)—>^(Y,y0)
for the first homomorphism and (hXl)t for the second. If there is only one base
point under consideration, we shall omit mention of the base point and denote
the induced homomorphism merely by ht.
The induced homomorphism has two properties that are crucial in the
applications. They are called the "functorial properties" of the induced
homomorphism, and are given in the following theorem:
330 The Fundamental Group and Covering Spaces
Chap. 8
Theorem 2.4. If h : (X, x0) -> (Y, y0) and k : (Y, y0) _> (Z 7 \
(k o h). - k. . h.. //i: (X, x0) - (X, x0) is the identity map, Lf'
identity homomorphism. *
/ The proof is a triviality. By definition,
(k ° hU[f]) = [(k ° h) ° f],
(K ° **)([/]) = kt(h,([/])) = *,([* o /]) = [/t o (h of)].
Similarly, /,([/]) = [i o /] = [/]. rj
Corollary 2.5. Ifh: (X, x0) — (Y, y0) ;j a homeomorphism of X
h+ ij an isomorphism of m(X, Xo) wM re,(Y, y0).
Proof. Let & : (Y, ya) —> (X, x0) be the inverse of h. Then lct°ht =
(k o £)„ = /„, where i is the identity map of (X, x0); and h\ o &„ = (A 0*%
=/„, where/ is the identity map of ( Y, y0). Since /„ and/,, are the identity
homomorphisms of the groups n^X, x0) and ni(Y,ya), respectively, kt is
the inverse of ht. □
Exercises
1. A subset /( of Rn is said to be star convex if for some point a0 of A, all the line
segments joining a0 to other points of A lie in A.
(a) Find a star convex set that is not convex.
(b) Show that if A is star convex, A is simply connected.
(c) Show that if A is star convex, any two paths in A having the same initial
and final points are path homotopic.
2. Let .v0 and .v, be two given points of the path-connected space X. Show that
7ii(X, .v0) is abelian if and only if for every pair a and 0 of paths from x0 to a,,
we have a = fi.
3. Let A c X and let r : X —> A be a retraction (see Exercise 7 of §4-3). Given
a0 e A, show that
r* : Tti(X, aa) —> iii(A, a0)
is surjective. [Hint: Consider the inclusion/: (A, a0) —► (X, a0)]
4. Let A be a subset of R"; let h ■ (A, a0) —> (Y, y0). Show that if h is extendable
to a continuous map of R" into Y, then h* is the zero homomorphism (the tnvi
homomorphism that maps everything to the identity element).
5. Let h : X —> Y be continuous. Show that if X is path connected, the homoI"^'e
phism induced by h is independent of base point, up to isomorphisms or
groups involved. More precisely, if h(x0) = y0 and h(x,) -*.jf™
there are isomorphisms 0 and y/ such that the following diagram
"commutes":
6 8-3 ■ „
* Covering Spaces 331
that is, such that V o (A,,), = (^,), 0 0. Conclude that if (A, v is the zero
homomorphism (or injective, or surjective), then so is (hx,)t.
6. Let G be a topological group with operation • and identity element x0 (See the
Supplementary Exercises for Chapter 2.) Let £2@, *0) denote the set of all loops
in G based at x0. Iff, g e D.(G, *„), let us define a loop /® *■ by the rule
(a) Show that this operation makes the set Q(G, *0) into a group.
(b) Show that this operation induces a group operation ® on 71,(G, x0).
(c) Show that the two group operations * and ® on 7t,(G,x0) are the same.
[Hint: Compute (/* ex.) ® (ex, * g).]
(d) Show that 7it(G, x0) is abelian.
8-3 Covering Spaces
We have not yet computed a nontrivial fundamental group. We shall
remedy that deficiency in the next section, when we compute the fundamental
group of the circle S'. We need first to introduce the notion of a covering
space. For us, covering spaces will serve mainly as a tool for computing
fundamental groups. But they are important in their own right, particularly
in the study of Riemann surfaces and complex manifolds. (See [A-S].)
Definition. Let p: E—> B be a continuous surjective map. The open set
U of B is said to be evenly covered by p if the inverse image p~'(U) can be
written as the union of disjoint open sets V. in E such that for each a, the
restriction of p to Va is a homeomorphism of Fa onto U. The collection {Fj
will be called a partition of p~\U) into slices.
If U is an open set that is evenly covered by p, we often picture the set
P'\U) as a "stack of pancakes," each having the same size and shape as C/,
floating in the air above U; the map p squashes them all down onto U. See
Figure 10.
Definition. Let p:E-> B be continuous and surjective. If every point
bofB has a neighborhood U that is evenly covered by p, then p is called a
covering map, and E is said to be a covering space of B.
Note that if p : £ — B is a covering map, then for each beB the subset
P-I(f>) of E necessarily has the discrete topology. For each slice V. is open
332 The Fundamental Group and Covering Spaces
Chap,
P 1 U)
Figure 10
E and intersects the set p~' (b) in a single point; therefore this point is open in
the subspace topology on p~l(b).
Example J. Let A' be any space; let /: X —-> X be the identity map. Then
/ is a covering map (of the most trivial sort). More generally, let E be the space
X x {1,.. ., n] consisting of n disjoint copies of X. The map p:E—*X
given by p{xt i) — x for all / is again a (rather trivial) covering map. In this
case, we can picture the entire space £asa stack of pancakes over X.
To eliminate trivial coverings of the pancake-stack variety, one often
requires the space E to be connected. A useful example of a covering of this
sort is given in the following theorem:
Theorem 3.1. The map p: R —* SJ given by the equation
p(x) = (cos 27ix, sin 2nx)
is a covering map.
One can picture p as a function that wraps the real line R around the circle
S1, and in the process maps each interval [n, n + 1] onto Sl.
Proof. The fact that/? is a covering map comes from elementary propertws
of the sine and cosine functions. Consider, for example, the subset V ot
consisting of those points having positive first coordinate. The set p I
consists of those points x for which cos 2nx is positive; that is, it is the u
of the intervals
8-3
Covering Spaces 333
Figure II
for all n e Z. See Figure 11. Now, restricted to any closed interval Vn, the
map/p is injective, because sin 2nx is strictly monotonic on such an interval.
Furthermore, p carries Vn surjectively onto U, and Fn to U, by the interme-
intermediate value theorem. Sip.ce Vn is compact, p\ Vn is a homeomorphism of K,
with U. In particular, p\Vn\s& homeomorphism of Vn with U.
Similar arguments can be applied to the intersections of S1 with the upper
and lower open half-planes, and with the open left-hand half-plane. These
open sets cover Sl, and each of them is evenly covered by p. Hence p : R—»
Sl is a covering map. [J]
Example 2. Consider the space T= S' x S1; it is called the torus. It is
a general fact that the product of two covering maps is a covering map. (See
Exercise 2.) Therefore, as pictured in Figure 12, the product
p x p:Rx R—►S1 x 5'
is a covering of the torus by the plane R>, where p denotes the covering map of
pXp
Figure 12
334 The Fundamental Group and Covering Spaces ~
v-hap. g
Theorem 3.1. Each of the unit squares [n, n + 1] x [m, m + 1] gets wraoned
by p x p entirely around the torus.
In this figure we have pictured the torus not as the product Sl x 51 ^ h
is a subspace of R* and therefore hard to visualize, but as the familiar 'dough
nut-shaped surface D in R3 obtained by rotating the circle C, in the^rz-plane of
radius j centered at A, 0, 0) about the z-axis. It is not hard to see that S1 x S>
k homeomorphic with the surface D. Let C2 be the circle of radius 1 in ihexy-
plane centered at the origin. Then let us map Cx x C2 into D by defining
f(a x b) to be that point into which a is carried when one rotates the circle
C\ about the z-axis until its center hits the point b. See Figure 13. The map/
will be a homeomorphism of Ci x C2 with D, as you can check mentally.
If you wish, you can write equations for /and check continuity, injectivity,
and surjectivity directly. (Continuity of /"' will follow from compactness of
C, x C.)
Figure 13
Example 3. Consider the covering map
p x i:Rx R*—*$' x R+>
where / is the identity map of *+ and p is the map of Theorem "^
the standard homeomorphism of 5' x R. wi.h IP - 0, sendmg
the composite gives us a covering
R x R+ —+ R1 - 0
of the punctured plane by the open upper half-Pla-Itis pfctured in
This covering map appears in ihe study of comP^J«™Wes
surface corresponding to ihe complex logar.thm funct.on
If p -.E^Bis, covering map, then p is
with B. That is, each point e of E has a ^f
as the following example shows.
§8-3 -
Covering Spaces 335
I—X
RXR.
\
Figure 14
Example 4. The map p: R+ —> S1 given by the equation
p(x) — (cos 2nxy sin 2nx)
is surjective, and it is a local homeomorphism. See Figure 15. Bui it is not a
covering map, for the point b0 = A, 0) has no neighborhood U that is evenly
covered by p. The typical neighborhood U of b0 has an inverse image consist-
consisting of small neighborhoods Vn of each integer n for n > 0, along with a small
interval Vo of the form @, e). Each of the intervals Vn for n > 0 is mapped
homeomorphically onto U by the map p, but the interval Vo is only imbedded
in V by p.
Figure 15
Example 5. The preceding example might lead you to think that the real
line J? is the only connected covering space of the circle S1. This is not so.
Consider, for example, the map p: Sl — Sl given in equations by
PV) = *2-
[Here we consider S • as the subset of the complex plane C consisting of those
complex numbers z with | z | = 1.] We leave it to you to check that p is a covering
map.
336 The Fundamental Group and Covering Spaces
Exercises \
1. Show that if p:E—* B is a covering map, then p is an open map.
2. Show that if p:E—* B and p': E'—* B' are covering maps, then
p X p': E X E' —* B X B' is a covering map.
3. Let Y have the discrete topology. Show that if p : X x Y —> X is proiectio
onto the first coordinate, then p is a covering map. n
4. Show that the map p of Example 5 is a covering map. Generalize to the ma
p(z) = z". P
5. Let p : E —♦ B be a covering map; let B be connected. Show that if/r'F0) has
k elements for some b0 e B, then p~{(b) has k elements for every b e B In
such a case, E is called a A-fold covering of A
6. Let />: A1 —► Y and 9 : Y —► Z be covering maps.
(a) Show that \{q~\z) is finite for each z e Z, then^o^; A'—>Zis a covering
map.
*(b) Show that the theorem fails if q~l(z) is not finite.
7. Let p: E —> B be a covering map. Assume that B is connected and locally
connected. Show that if C is a component of E, then /> | C: C —> B is a covering
map.
8. Write equations for the map f:C\ x C2 —► £> of Example 2 and check that
it is a homeomorphism.
ITte Fundamental Group of the Circle
The study of covering spaces of a space X is intimately related to the
study of the fundamental group of X. In this section, we establish the crucial
links between the two concepts, and compute the fundamental group of the
circle.
Definition. Let p : E — B be a map. If/is a continuous mapping of some
space JTinto B, a lifting of/is a map/: JT-+ £ such that/>»/=/
The existence of liftings when /»is a covering map is an important ^
studying covering spaces and the fundamental group. First, we slJ0*
for a covering space, paths can be lifted; and then we show that path n
topies can be lifted as well. First, an example:
The Fundamental Group oj the Circle 337
31"
Example 1. Consider the covering p ■ R
/: [0,1] -> Jt beginning at b0 = Af 0* *£ I?
to the path/to = ,/2 beginning at 0 and ending at { ThlnS ^
-sin ? lifts to the path #W = _j/2 beginni^ a O^nd'e "dinlr ^
path A(j) = (cos 4ns, sin 4u) lifts to the path iti* - , ™ .ng.at ~i- The
ending at 2. Intuitively, * wraps the !„«[ Iround X^8 ,* ° ?*
this is reflected in the fact that the lifted path /beg ns Ttzl h ,' ^
number 2. These paths are pictured in Rgure 16 Md ^ &t the
Figure 16
Lemma 4.1. Let p : E —► B be a covering map; let p(e0) = b0. Any path
f: [0, 1] —* B beginning at b0 has a unique lifting to a path f in E beginning at
e0-
Proof. Cover B by open sets U each of which is evenly covered by p. Find
a subdivision of [0, 1], say sa,. .. , sn, such that for each / the set f([s,, s,+i])
lies in such an open set U. (Here we use the Lebesgue number lemma.) We
define the lifting / step by step.
First, define /@) = ea. Then, supposing f(s) is defined for 0 < s < s,,
we define/ on [s,, sl+i] as follows: The set f([s,, st+i]) lies in some open set
U that is evenly covered by p. Let {Va} be a partition of p~'(tf) into slices;
each set F. is mapped homeomorphically onto U by p. Now f(st) lies in one
of these sets, say in Vo. Define f(s) for s e [s,, sl+i] by the equation
/M = (pl^r'(/(*))•
Because p | Vo: Fo -» {/ is a homeomorphism, / will be continuous on
[■Sj, £j+]].
Continuing in this way, we define /on all of [0,1]. Continuity of/follows
from the pasting lemma of §2-7; the fact that p ° f =/ is immediate from
the definition of/. ».
The uniqueness of/ is also proved step by step. Suppose that/is another
Kfting of/ beginning at e0. Then /@) = e0 = /@). Suppose that/W -/W
for all , such that 0 ^ s <: s,. Let Ko be as in the preceding paragraph; then
f°r ^ [,,, ,/+J,/(,) fs defined as (^ Fo)-'(/W). What can/(,)equa^? Since
/is a lifting of/, it must carry the interval [,„ *,+ 1] into the setp- (U) - U»V
338 The Fundamental Group and Covering Spaces
Chap. 8
The slices V. are open and disjoint; because the set ?(\s, , i\;«
it must lie entirely in one of the sets V.. Because /(I) J}(^ 1™™*'
V.. 1 must carry all of W ,,+1] into the set Vo. Thus for /£tisT i "I*
must equal some point j> of Fo lying in/,-•(/•(,)). But there is oriv'o.J. u
point* namely, Q,| Ko)-(/W)- Hence/W = /(*) for, e [,„ J,J "*
Lemma 4.2. Let p : E —► B be a covering map; let p(e0) = b Let th
map F:IxI-^B be continuous, with F@, 0) = b0. There is a lifting of I
to a continuous map
F:I x I—>E
such that F@, 0) = e0. 7/ F is a path homotopy, then F is a path homotopy
The lifting F of F is, in fact, unique, but this we shall not prove.
Proof. Given F we first define F@, 0) = e0. Next, we use the preceding
lemma to extend F to the left-hand edge Ox/ and the bottom edge/ x 0 of
7x7. Then we extend F to all of 7 x 7 as follows:
Choose subdivisions
s0 < si < • ■ ■ < sm,
«„<«, <■■■<«„
of 7 fine enough that each rectangle
I, XJ, = [Si-uS,] X [tj-i.tj]
is mapped by JF" into an open set of B that is evenly covered by/>. (Use the
Lebesgue number lemma.) We define the lifting F step by step, beginning with
the rectangle 7, x Ju continuing with the other rectangles I, X Jt in the
"bottom row"; then with the rectangles I, X J2 in the next row, and so on.
In general, given /„ andy'o, assume that F is defined on the set .4 which is
the union of 0 x 7 and 7 x 0 and all the rectangles "previous" to I,, xJj.
(those rectangles 7, x J, for which j < j0 and those for which; ==ja and / <
i0). Assume also that F is a continuous lifting of F\ A. We defineF on7,, X /,,.
Choose an open set U of B that is evenly covered by p and contains the set
F(Iia x 7Jo).Let{Fa} be a partition of p"'(^) into slices; each set Fa is map-
mapped "homeomorphically onto V by p. Now F is already defined on the se
C = A n (/,. X ■/,„). This set is the union of the left and bottom edges
the rectangle /,„ X Jh, so it is connected. Therefore, F(C) is connected, a^
must lie entirely within one of the sets K«. Suppose it lies in Vo. The
situation is as pictured in Figure 17. _ .
Let pQ: Vo — V denote the restriction of p to Vo. Since F is a
JF"J A, we know that for x e C,
so that F(x) ^p-^CFCx)). Hence we may extend F by defining
§8-4
The Fundamental Croup of the Circle 339
'■OXJ'o
Figure 17
for x e Jit X Jh. The extended map will be continuous by the pasting lemma.
Continuing in this way, we define F on all of/2.
Now suppose that F is a path homotopy. We wish to show that F is a
path homotopy. The map /"carries the entire left edge 0 X /of/2 into a single
point b0 of B. Because F is a lifting of F, it carries this edge into the set/r '(Z>0).
But this set has the discrete topology as a subspace of E. Since 0 x /is con-
connected and F is continuous, F@ x /) is connected and thus must equal a
one-point set. Similarly, /(I x /) must be a one-point set. Thus F is a path
homotopy. fj
The following theorem establishes the crucial link between covering spaces
and the fundamental group:
Theorem 4.3. Let p: E —• B be a covering map; let p(e0) = b0. Let f and
g be two paths in Bfrom b0 to b,; fe/ F<»«/ I be their respective liftings to paths
in E beginning at e0. If f and g are path homotopic, then f and send at the same
point of E and are path homotopic.
Proof. Let F: I x /-> B be the path homotopy between /and ^ Then
0, 0) = *0. Let F : / X / - £ be a lifting of f to £ such that P^, 0) - ^
the preceding lemma, / is a path homotopy, so that F(O X /;
X /) is a one-point set fe,]. _ r
The restriction f | / x 0 of F to the bottom edge of/ x
i at <■„ that is a lifting off | / X 0. By uniqueness of
7
"■
homotopy between them. Q
340 The Fundamental Group and Covering Spaces
Chap, g
Now we apply this theorem to the case of 5'.
Theorem 4.4. The fundamental group of the circle is infinite cyclic.
Proof. Let b0 be the point A, 0) of 5'. We shall construct an isomnmi,-
of the group *,(£', b0) with the group (Z, +) of integers. 1SomorPhlsm
For this purpose, consider the covering map p:R—*sl given bv th
equation p(x) = (cos 2nx, sin 2nx). If/ is a loop on 5' based at 6 \£ft
the lifting of/to a path on R beginning at 0. The point /(I) must be a noi t
of the set /T'(*>o); that is, /(I) must equal some integer n. The preceding
theorem tells us that this integer depends only on the path homotopy class
of/. Therefore, we can define
</>:n1(S\b0)—+Z
by letting 0([/]) be this integer. We assert that 0 is a group isomorphism.
The map </> is surjective. Let n be a point of /r >(Z>0). Because R is path con-
connected, we can choose a path /: [0, I] —► R in R from 0 to n. Define/=
p o /. Then / is a loop in S1 based at Z>0, and / is its lifting to a path in R
beginning at 0. By definition, 0([/]) = n.
The map 0 is injective. Assume that 0([/]) = n = 0([g]); we shall prove
that [/] = [g]. Let / and g be the liftings of/and g, respectively, to paths on
R beginning at 0; both / and g end at n, by hypothesis. Because R is simply
connected, / and g are path homotopic; \ziF be the path homotopy between
them. The map F = p ° F will be a path homotopy between/and g, as you
can check.
The map 0 is a homomorphism. Let/and g be two loops in S' based at
b0; let / and g be their liftings, respectively, to paths on R beginning at 0.
Let /(I) = n and g(l) = m. Define a path h on R by the equations
If Bs) forje[fl,i],
"{S) \n + gBs - I) for s e [{, I].
Then h is a path on .R beginning at 0. We assert that A is a lifting of/* g. Note
first that for all x, we have p(n + x) = /»(*), because the functions sine ana
cosine have period 2n. Then
jrtA*))-/(*) ^r, e [0,1
Thus poh=f* g, so that A is the lifting of/* g which begins at 0.
definition, <f,([f*g]) is A(I), which equals n + m. Therefore,
)
as desired. □
Most of the proof of the preceding theorem f
connected covering spaces. The only part specal to
§ 8 ^ . The Fundamental Group oj the Circle 341
was the existence of the addition operation in R; that operation enabled us
t0 show that 0 was a homomorphism. In a general covering space we have no
convenient addition operation; nevertheless, we can still get a good bit of
information about the fundamental group.
Theorem 4.5. Let p : (E, e0) — (B, b0) be a covering map. If E is path
connected, then there is a surjection
IfE is simply connected, 0 is a bijection.
Proof. The proof is almost a copy of the proof of Theorem 4.4; we leave
the details to you. □
Definition. If £ is a simply connected space, and if p : E—► B is a covering
map, then we say that £ is a universal covering space of B.
If B has a universal covering space £, then £ is uniquely determined up
to homeomorphism (provided B is locally path connected). See Exercise 12.
The reason we call £ a universal covering space is given in the same exercise.
We shall study in §8-14 conditions under which a space B possesses a
universal covering space.
Exercises
1. What goes wrong with the "path-lifting lemma" (Lemma 4.1) for the local
homeomorphism of Example 4 of §8-3?
2. In defining the map F in the proof of Lemma 4.2, why were we so careful about
the order in which we considered the small rectangles?
3. Let p : E —> B be a covering map. Let a and P be paths in B with a(l) = P@)\
let a and /? be liftings of them such that &A) = 0@). Show that a * P is a lifting
of a* p.
4. Consider the covering map p : R x R* — R1 - 0 of Example 3, §8-3. Find
liftings of the paths
/(/) = B - /, 0),
g(/) = ((l +/)cos27r/, A +/)sin:
A(/)=/*g.
Sketch these paths and their liftings.
5. LetneZ+. Consider the maps g, A : S1 — Sl rah<.nmie »alucl ,
V*". [Here we represent 5- as the set of complex numbers z of absolute^^
Compute the induced homomorphisms *♦.*• of the infinite cychc group
ni(S1,b0) into itself.
342 The Fundamental Group and Covering Spaces
Chap. 8
«. Show there is no retraction ,: ** _ *>, where B* is the unit ball fa *
7. Prove Theorem 4.5. ,
8. Show that if B is simply connected, then any covering map p ■ E — s r v
£ is path connected is a homeomorphism. * for which
9. Consider the covering map p x p: ^ x 7? — 51 x 5' of Examni,. 1 «.
Consider the path Sample 2, §8-3.
/« = (cos 27:/, sin 2tt/) x (cos Ant, sin 4tt/).
in 5' x SK Sketch what/looks like when S> x 5' is identified with thedouah
nut surface D. Find a lifting/ of / to R x R, and sketch it. Formulate a~
conjecture about the fundamental group of the torus, and prove it.
10. Prove the following generalization of Theorem 4.5:
Theorem. Let p : E -^ B be a covering map; let E be path connected- let
p(e0) = b0. Then
(a) Pt :ndE, e0) ^nt(B, b0) is injective.
(b) There is a bijection
^■■n^B^o^H—rp-Hbo),
where H = p*(nt(E, e0)) and nt(B, bo)IH is the collection of right cosets
of H inn,(B,b0).
11. Assume the hypotheses of the preceding theorem. If n,(B, b0) is infinite cyclic,
what can you say about nt(E, eo)l What if n,(B, b0) is finite and/? is a Wold
covering ?
*12. (a) Lemma (A lifting lemma). Let p : E —► B be a covering map; let p(e0) = 60.
Let f:(Y,y0) —► (B,b0) be a continuous map. If Y is locally path connected
and simply connected, then f can be lifted uniquely to a continuous map
f:Y—'E such that f(y()) = en.
[Hint: Given y e Y, choose a path a in yfrom^o to>s lift/" a to a path
in E beginning at ea, and define/OO to be the end point of this path.l
(b) Theorem. Let B be locally path connected. Suppose p:E—>B is a simply
connected covering space of B. If p': E' —> B is any path-connected covering
space of B, then there is a covering map q: E—^ E' such that p -P °1-
[Hint: Lift p to £".] This theorem shows why E is called a wiivewo/
covering space of B; it covers every other path-connected covering space
n
(c) Theorem (Uniqueness of the universal covering space). If B is localy P"
connected, and ifp:E-*B andp': E' — Bare two simply connected<cov
ing spaces of B, then there is a homeomorphism h:E-*E' such thatp °
P'
*13. Theorem. Let G be a topologicalgroup with operation ■; suppose p.
is a simply connected covering space of G. If C is locally path «£**' md
there is a multiplication QonG relative to which 0 is a topologxcal group
p is a homomorphism. ... .
[Hint: Let e be the identity element of G; choose Imp M-
§ 8-5 ,- The Fundamental Group of the Punctured Plane 343
in G, choose paths * and 0 from S to 3 and y, respectively. Let a(s) - DE.u\\
and fi(s) = ptfm. Take the path y(s) = «(,).#,) in G, lift it to a path y *
G that begins at S, and define X © j» to be the end point of y.]
The group G is called the universal covering group of G.
8-5 The Fundamental Group of the Punctured Plane
In this section, we shall prove that the fundamental group of the punc-
punctured plane R2 — 0 is infinite cyclic. We shall need this fact in several of the
applications. The proof will lead us into a short discussion of deformation
retracts and their relation to the fundamental group.
Theorem 5.1. Let x0 e S1. The inclusion mapping
j:(S\x0)—>(R2-0,x0)
induces an isomorphism of fundamental groups.
Proof. Let r : R1 — 0 —► Sl be the continuous map defined by r(x) =
xj\\x\\, where 11 x11 denotes the distance of x from the origin 0 in the euclidean
metric. The map r can be pictured as collapsing each radial ray in Rz — 0
onto the point where the ray intersects Sl; it maps each point x of 5' to itself.
We claim that r.M is an inverse Torj*. First consider the composite map
OS", x0) -±-~ (R1 - 0, jt,)-^. (S1, *0);
this map equals the identity map of S'. Therefore, by the functorial properties
of the induced homomorphism, r.M % is the identity isomorphism of
To show that jt ° r* is the identity isomorphism of n^R1 — 0, x0) with
itself, let us take a loop/in Rz - 0 based at x0. Then/*(/■*[/]) is the homo-
topy class of the loop g =j o r of: 1^ Rz - 0, which is given in equa-
equations by
8is)=urn'
We need to show that g ~p /; but this is easy. As indicated in Figure 18, we
just move the point /(j) gradually along its radial ray until it hits the point
8(s).
More formally, define F: I X /-> R1 - 0 by the equation
ir/§ir
ft is clear that F(s, t) is never equal to 0, for
+ Ao*o and
344 The Fundamental Group and Covering Spaces
Chap. 8
t(s)
Figure 18
Also, F@, t) = F{\, f) = x0 for all t. Thus F is the required path homotopy
between /and g. □
There is nothing special about the circle and the plane in the preceding
proof. Exactly the same proof applies to prove the following theorem:
Theorem 5.2. If\0 e S", the inclusion
j:(S°-\x0)—>(R°-0,x0)
induces an isomorphism of fundamental groups.
Of course, we have not yet computed the fundamental group of S"~l, so
this does not tell us much.
What made the preceding proof work? Roughly speaking, it worked
because we had a natural way of deforming the path/, which lies in R2 — »>
into the path r of which lies in Sl. Another way of looking at this proof is
to note that we can deform the entire space R% — 0 into the circle S1 if we
like, by gradually collapsing each radial line to the point where it intersec s
Sl. This deformation is the one that deforms the path / into the path r ■>/.
it is called a strong deformation retraction of R2 — 0 onto Sl.
Analyzing the proof in this way leads to a generalization of Theorem 5.^
Although we shall not have occasion to use it in this book, it is a theo
that is very useful in computing homotopy groups.
§8-5 The Fundamental Group ofthe Punctured Plane 345
Recall that if A is a subspace of X, we say that A is a retract of X if there
is a continuous map r : X—<■ A such that r(a) = a for every a e A. The
map r is called a retraction of JT onto ,4.
Definition. Let ,4 be a subspace of X Then /< is said to be a strong defor-
deformation retract of X if there is a continuous map H: X X /—> X such that
H(x, 0) = x for x 6 JT,
#(*, 1N/4 for x 6 X,
H(a, t) = a for <? 6 A and r 6 /.
The map H is called a strong deformation retraction.
Said differently, the space A is a strong deformation retract of X if JTcan
be deformed gradually into /4, with each point of A remaining fixed during
the deformation. At the end of the deformation, we have a retraction
of X onto A, mapping x into H(x, 1).
Example 1. The map H:(R" - 0) x /— (R" - 0) defined by
11*11
is a strong deformation retraction of R" — 0 onto 5""'; it gradually collapses
each radial line into the point where it intersects S"~l.
Theorem 5.3. Let A be a strong deformation retract of X. Let a0 6 A.
Then the inclusion map
j : (A, a0) —> (X, a0)
induces an isomorphism of fundamental groups.
The proof is similar to that of Theorem 5.1; we leave it to you. This theo-
theorem can be used to compute fundamental groups for a number of spaces, by
reducing the spaces involved to more familiar ones. Typical examples follow.
Example 2. Let B denote the z-axis in R3. Consider the space R3 - B.
It has the punctured .ry-plane (Rz - 0) x 0 as a strong deformation retract.
The map H defined by the equation
is a strong deformation retraction; it gradually collapses each line parallel to
the z-axis into the point where the line intersects the *>-plane. We conclude
that the space R3 — B has an infinite cyclic fundamental group.
Example 3. Consider /?* - p - q, the doubly punctured plane. We assert
it has the "figure eight" space as a strong deformation retract. Rather than
writing equations, we merely sketch the deformation retraction; it is the three-
stage deformation indicated in Figure 19.
346 The Fundamental Group and Covering Spaces
Chap.
Figure 19
Example 4. Another strong deformation retract of R1 —p—q is the
"theta space"
O^S* u@ x[-l,l]);
we leave it to you to sketch the maps involved. As a result, the figure eight (8)
and the theta space F) have isomorphic fundamental groups, even though
neither is a strong deformation retract of the other.
Of course, we do noi know anything about the fundamental group of the
figure eight as yet. But we shall.
We should remark that Theorem 5.3 remains true if one replaces the
condition
H(a, t) = a for a e A and t e I
by either of the weaker conditions
H(a, t) e A for a e A and t e /,
or
H(a, 1) = a for a e A.
But the proof in either of these cases is more difficult. (See Exercise 5 o
§8-11.) In practice, the theorem one usually applies is Theorem 5.3 anyway.
Exercises
1. Show that if A is a strong deformation retract of X, and Bis a strong deform
tion retract of A, then B is a strong deformation retract of X
§8 undamen'alG^^punctwl(me 347
2. Show that the paths/and A in Example 2 of 58 1 a
3. Prove Theorem 5.2. ^ "» "Ot path h°™toPic.
4. Prove Theorem 5.3. * ' "
5. For each of the following spaces, the fundamental <™ • •
cyclic, or isomorphic to the tm^mS^X^ ^- ***"-inflnite
for each space which of the three alternatives holds "^ ^^ Determine
(a) The "solid torus," Bz x S1.
(b) The torus T with a point removed.
(c) The cylinder Si x I.
(d) The infinite cylinder Si x R.
(e) R3 with the nonnegative x, y, and z axes deleted.
The following subsets of Rz:
(f) {Jt|||jt||> 1}
(g) WII*II>1}
(>) «S
(j) *
(k) S
A) f
:> u
■' u
:' u
[2 -
(R+
(R+
(R
(R+
X 0)
x R)
x 0)
X 0)
6. Let C denote the complex plane; let /be a loop in C — o based at x0.
(a) Let p : R —► S' be the standard covering map. Consider the loop h(s) =
f(s)/\\ f(s)\\ in .<?'; lift it to a path h in R. Then h(\) = £@) + n for some
integer n. Show that the path homotopy class of /determines n uniquely,
and conversely. The integer // is called the winding number of/with respect
to 0.
(b) Theorem. Suppose f is a piecewise-differenthble loop in C - 0. Then the
winding number off with respect to 0 equals the integral
J
2n i
[Hint: If * = g(s) is an arbitrary pIccewIseHdiffe^tiaHe path fa C - (^
consider the path , -> g(s)l\\Hs)\\ in 5' and let B be a lifting of it to the
covering space R. Then g(s) = \\8(s)\\e™». Compute J//]
equals the image of [/] under these isomorphisms.
G
7- (a) Show that *3 - 0 is simply connected, t^"; Gl^" ^e up of finitely
h hotopic toaloop mad P
ow that * i p ^; ^ ^e up o
based at .v0) first show that/is path homotopic toaloop mad P^
many straight-line segments, none of wh.ch are copia
segment joining x0 and the origin.]
(b) Show that S2 is simply connected.
348 The Fundamental Group and Covering Spaces
Chap, g
8-6 The Fundamental Group of Sn
Now we compute the fundamental group of S", showing that S" is sim 1
connected if n > 2. A proof for the case n = 2 was outlined in Exercise 7
of the preceding section. Here is a different proof, which uses a theorem w
shall need later anyway.
Theorem 6.1 {The special Van Kampen theorem). Let X = U U V, where
U and V are open in X and V n V is path connected. Let x0 be a point of
U n V. If both inclusions
i:(U, x0)—>-(X,x0) and j : (V, x0)—>-(X,x0)
induce zero homomorphisms of fundamental groups, then n^X, x0) = 0.
Note that both /'„ and j\ are necessarily zero homomorphisms if U and
Fare simply connected. This is the case we need for the following theorem.
We shall need the more general result in proving the Jordan separation theo-
theorem (§8-12).
Proof Let/: /—> X be a loop based at x0. We wish to show that/is path
homotopic to a constant loop.
Step 1. By the Lebesgue number lemma, there is a subdivision
0 = aa < a{ < ■ ■ ■ < an = 1
of the interval [0, 1] such that for each /, the set /([a,.,, a,]) lies entirely in
one of the open sets U or V. Among all such subdivisions, choose one for
which the number n of subintervals is minimal. Then it follows that for each
/, the point f{a) lies in U n V.
Suppose that /(a,) <£ U, for instance. Then neither /([a,_i,aj) nor
f([at, al+i\) lies entirely in U. Therefore, both of them must lie entirely in V.
We can then discard a, from the subdivision, and still have a subdivision of
[0, 1] for which the image of each subinterval lies either in U or in V. This
contradicts minimality. Hence /(a,) must belong to U.
Step 2. Consider the restriction of/to the interval [<?,_,, at]. Reparame-
trize it so that it is based on the interval [0, 1], defining
/((!- s)a,.t + sa,) for s e [0,1].
M)
We show that/, is path homotopic to a path that lies entirely in V.
Of course, if/, itself lies in U, nothing needs to be done. We denne-r,
be the trivial path homotopy F,(j, t) =/,(*) of/, to itself. nnnectivjty
If/ does not lie in U, then/ must lie entirely in V. Using path connect y
of U O V, let us choose paths g and h in U O Ffrom the base point *,
§8-6
The Fundamental Croup ofS* 349
Figure 20
points/@) and/((I), respectively. (See Figure 20.) Consider the composition
(g */■) * h; it is a loop in V based at .y0. Under the inclusion mapy, this loop
goes into a loop in X based at ,v0. Since j^ is the zero homomorphism, this
loop is path homotopic, in X, to the constant loop ext. Then/, is path homo-
topic (in X) to the path g * h (using the groupoid properties of * proved in
Theorem 1.2). Let F, be this path homotopy; it is a path homotopy (in X)
between/, and a path lying in U n V.
Now we reparametrize each path homotopy F, so as to get a map of
[a,_u a,] x / into -V, and then we paste the pieces together to get a path
homotopy F between /and a path that lies entirely in U. Specifically, define
F: I x / —> X by the equation
F(s, t) = ^
for s
Because each path homotopy F, leaves the end points fixed, /"is well-defined;
the pasting lemma shows it is continuous. Let f\s) = F(s, 1).
Step 3. We have shown/is path homotopic (in X) to a loop/' that lies
entirely in U. Because
■s the zero homomorphism, the loop /' must be path homotopic (in X) to.the
constant loop Bjc, Thus/^,/' ~, en. as loops in X This .s what wshed to
prove. □
This theorem is a special case of a famous theorem of topology called tbe
Van Kampen theorem, which expresses the fundamental group oHhe space
X quite generally in terms of the fundamental groups of tf and V ana
homomorphisms induced by the inclusions of Un V into U and r, pro
vided that U n K is path connected. (See [M].)
350 The Fundamental Group and Covering Spaces
Chap, g
Theorem 6.2. For n :> 2, the ^-sphere S" is simply connected. .
Proof. Let p = @, ..., 0, 1) 6 R*+i be the "north pole" of *. i
q = @,..., 0, -1) be the "south pole." P W ^' kt
Step I. First, we show that 5" — p is homeomorphic with R"
Let x = (*„.. ., jc-+i) be a point of S" different from/,. Suppose that«»
take the straight line in *+• determined by x and/, and intersect it with th
plane x.+ l = 0; let f(x) denote this point of intersection. The resulting man
f:S° — p-^R« is called stereographic projection.
More precisely, we define/by the equation
Obviously/is continuous. To show that/is a homeomorphism, one checks
that the map g : R" —> S" — p given by
g(yi,-.., y.) = 0ylt ty2, ...,ty.,\-1),
where t = 2/A + (>>,J + • • • + O'J2), is an inverse for/
Since 5" — q is homeomorphic to S" — p under the reflection map
p(.\\ , ,Vn, -Vn+ ,) = (X,, . . . , *„, —*„+,),
5" —17 is also homeomorphic to R".
Step 2. Now let U = 5" — p and V = S» — q. The space 5" equals the
union of the open sets £/ and V. Furthermore, the sets U and V are simply
connected, being homeomorphic with R". Once we show that U D Vis path
connected, we can conclude from Theorem 6.1 that the space 5° is simply
connected.
The intersection of U and V is the set 5" — p — q- To show that this set
is path connected, note first that it is homeomorphic with R" — 0 under
stereographic projection. It is easy to show that R" — 0 is path connected:
Any point x of R" — 0 can be joined to the point x0 = (I, 0,..., 0) by the
straight-line path in R- — 0, except for points x of the form (a, 0,..., Q).
where a < 0. In that case, we can take the straight-line path from x to xt -
@, 1, 0, . . . , 0), followed by the straight-line path from *, to *„. (Here we
use, of course, the fact that /» > 1.) □
Corollary 6.3. R" — 0 is simply connected if n > 2.
Proof. By Theorem 5.2, R- - 0 and 5-' have isomorphic fundamental
groups. □
Corollary 6.4. R° and R2 are not homeomorphic for n > 2.
Proof Deleting a point from R" leaves a simply connected space, win e
deleting a point from R2 does not. Q
§8 Fundamental Croups of Surfaces 351
This corollary has a generalization to higher dimensions- R° and R- are
not homeomorphic if n ?t m. But the proof requires more tools of algebraic
topology than we have developed.
Exercises
1. Let X be the union of two copies of S2 having a point in common. What is the
fundamental group of XI Prove that your answer is correct. [Be careful! The
union of two simply connected spaces having a point in common is not neces-
necessarily simply connected. See [S], p. 59.]
2. Let X be the union of two open sets U and V; let U n V be path connected;
let .vo e U n V. Let / and j be the inclusion maps, as in Theorem 6.1. If you
are given thaty* is the zero homomorphism, what can you say about itl
3. Criticize the following "proof" that S2 is simply connected: Let/be a loop in
Sz based at ,v0. Choose a point p of S2 not lying in the image of/ Since S2 — p
is homeomorphic with R2, and R2 is simply connected, the loop/is path homo-
topic to the constant loop.
8-7 Fundamental Groups of Surfaces
Recall that a surface is a HausdorfiT space with a countable basis, every
point of which has a neighborhood that is homeomorphic with an open sub-
subset of/?2. Surfaces are of interest in various parts of mathematics, including
geometry, topology, and complex analysis. What we do here is to consider
four familiar surfaces—the sphere S1, the projective plane P2, the torus T,
and the double torus 7\—and show by comparing their fundamental groups
that these surfaces are not homeomorphic.
One can, in fact, use the fundamental group to classify all compact
surfaces completely; but this we shall not attempt. The interested reader is
referred to Chapter 4 of [M].
First we consider the torus. To compute its fundamental group, we shall
need a theorem about the fundamental group of a product space.
Theorem 7.1. tt,(X x Y, x0 x y0) isisomorphic with 7r,(X, x0) x 7r,(Y, y0).
Proof. Recall that if A and B are groups with operation -, then the
cartesian product A X B is given a group structure by using the operation
(a X b)-(a' X b') = (a-a) X (*•*')•
Recall also that if h : C — > A and k : C — B are group homomorphisms, then
the map 0> : C— A X B defined by O(c) = h(c) X k(c) is a group homo-
homomorphism.
Now let p : X x K-. X and q: X x Y— Y be the projection map-
mappings. If we use the base points indicated in the statement of the theorem, we
352 The Fundamental Group and Covering Spaces
Chap. 8
have induced homomorphisms
q*:n1(XX Y, x0 Xyo)~
We define a homomorphism
*: *,(* X Y, x0 X ya) ~> „,(*, x0) x *,(}-, y0)
by the equation
*([/"]) = />*([/]) X <?,([/]) = [p°f]X[qof].
We shall show that 0> is an isomorphism.
The map 0> issurjective. Let # : /_ * be a loop based at *„• let A • / y
be a loop based at y0. We wish to show that the element [g] x [h] lieshlhe
image of 0>. Define/:/—. X x Y by the equation
Then/is a loop in ;r x Y based at x0 x ;■„, and
*([/]) = [/»»/] X [? o/] = [?] x[A],
as desired.
77;e Ae/vic/ o/O vanishes. Suppose that/: / —> X x 7is a loop in X x y
based at .v0 X ;•„, and 0>([/]) = [p ° f] X [f/ o/] is the identity element.
This means that p °/~p eXa and q °f~p eyc; let G and // be the respective
path homotopies. Then the map F': / X / —► X x 7 defined by
FO, /) = G(i, /) X H{s, t)
is a path homotopy between/and the constant loop based at xa x y0. D
Corollary 7.2. The fundamental group of the torus T = S1 x S1 is isomor-
phic to the group Z X Z.
Now we define the projective plane and compute its fundamental group.
Definition. The projective plane P2 is the space obtained from S2 by iden-
identifying each point x of S1 with its antipodal point —.v.
Formally, define an equivalence relation on S2 by setting x ~ x and
x „ (_.V); then P> is the set of equivalence classes. Up : S2 — P1 maps each
point x to its equivalence class, we topologize P2 by defining Fto be open in
P2 if and only if/r'(fO>s °Pen in SK . ■ rl;ve
The projective plane is the fundamental object of study in projecuv
goemetry, just as the euclidean plane R* is in ordinary euclidean geomet y.
Topologists are primarily interested in it as an example of a surface.
Theorem 7.3. The projective plane P2 is a surface, and the map p : S2 —
« tf covering map.
§ " Fundamental Groups of Surfaces 353
&; hence «({/) is open in s* Since ~ * ls a homeomorphism of
P'l(p(U))=Uua(U),
this set also is open in S>. Therefore, by definition, rftf) is open in i>2
Now we show that p is a covering map. Given a point y of i», choose
x e /r'OO- Then choose an e-neighborhood U of ^ in S2 for some f <-T
using the euclidean metric d of R>. Then {/contains no pair {z afe))ofantmn'
dal points of S\ since d(z, a(z)) = 2. As a result, the map '
is bijective. Being continuous and open, it is a homeomorphism. Similarly,
p:a(U) — p
is a homeomorphism. The set p~l(p(U)) is thus the union of the two disjoint
open sets {/and a(U), each of which is mapped homeomorphically by p onto
/>({/).
Then p(U) is a neighborhood of p(x) = y that is evenly covered by p.
Hencep is a covering map.
Since S2 has a countable basis {{/„}, the space ./" has a countable basis
We show P2 is Hausdorff. Let yt and ^2 be two points of P1. The set
P~'(yi) U /'"'O'i) consists of four points; let 2f be the minimum distance
between them. Let U, be the f-neighborhood of one of the points of p~:()'i)>
and let U2 be the f-neighborhood of one of the points of p-l(y2)- Then
{/, u a(Ut) and U2 U ff(^2)
are disjoint. It follows that />({/,) and p(U2) are disjoint neighborhoods of
yx and ^2, respectively, in P2.
Since 52 is a surface and every point of P2 has a neighborhood homeomor-
phic with an open subset of S2, the space P2 is also a syrface. □
Corollary 7.4. s,(P2, y) « <? ^ro«/» of order 2.
Proof. The projection />: 52 — P2 is a covering map. Since 52 is simply
connected, we can apply Theorem 4.5, which tells us there is a bijective cor-
correspondence between n,(P\ y) and the set p-'(y). Since this set is a two-ele-
two-element set, 7i,(P2, y) is a group of order 2.
Any group of order 2 is isomorphic to Z2, the integers mod 2, of course. U
One can proceed similarly to define P; for any n e Zt, as the space
obtained from S' by identifying each point x with its ant.pode -*, it is called
projective n-space. The proof of Theorem 7.3 goes throu«h^^SS
prove that the projection , : S- - P" is a covering map. Then because S*
354 The Fundamental Group and Covering Spaces
Chap. 8
simply connected for n ^ 2, it follows that *,(i>", y) is a two-element grouD
for n-^2. We leave it to you to figure out what happens when „ = i
We have not yet found any space whose fundamental group is not abelian'
Let us remedy that deficiency now.
Lemma 7.5. The fundamental group of the figure eight is not abelian.
Proof. The figure eight is the union of two circles A and B with a point
x0 in common. We now describe a certain covering space E for the figure
eight.
The space E is the subspace of the plane consisting of the *-axis and the
^-axis, along with tiny circles tangent to these axes, one circle tangent to the
,v-axis at each nonzero integer point and one circle tangent to the j^axis at
each nonzero integer point. See Figure 21.
The projection map, wraps the.v-axis
§8-7
case the
" ^^ Qroups °f Surfaces
Z^1TZETZZ^°lz- wislKd'but
the origin to the point 1 x 0. Let // t u V°ing alon8 the x-axis fm
along the ,axis from the origin^£^0*** *> =0 ^
pog; then/and ^are loops in the figure eiehihl ^ / = P°^ and * =
circles A and B, respectively. We asserUha /* '^ " ?'8Oin8 ar°Und *e
topic, so that the fundamental group of the fii,! .**^are not P^h honio-
To prove this assertio lt lif f ^1S "Ot abelian-
*~
the
ntal group of the fii,!
To prove this assertion, let us lift eachof fh
the origin. The path/., lifts to a path Z^
origin to 1 x 0, and then goes once around
1 X 0. On the other handfthe paS"!
the ^-axis from the origin to 0 X
tangentto the ^-axis at^ x 1. ^Z^
point,/* g and g */cannot be path homotopic.
The fundamental group of the figure eight is, in fact, the group that
algebraists call the "free group on two generators." But this we shall not
prove.
Theorem 7.6. The fundamental group of the double torus T2 is not abelian.
Proof. The double torus Tz is the surface obtained by taking two copies
of the torus, deleting a small open disc from each of them, and pasting the
remaining pieces together along their edges. We assert that the figure eight
is a retract of Tz. This fact implies that inclusion./ induces an injective homo-
morphism
j# : ;r,(8, x0) —> nt(T2, x0),
so that 7r,(r2, x0) is not abelian.
One can write equations for the retraction r:T2~+ 8, but it is simpler to
indicate it in pictures, as we have done in Figure 22. First one collapses the
figure 22
336 The Fundamental Group and Covering Spaces
Chap, g
dotted circle to a point, obtaining two tori with a point in common TV
collapses each of the two tori onto their "meridianal circles™ Q
Corollary 7J. The surfaces S'.P.T, and T2 are toPologically distinct.
Exercises
1. Compute the fundamental groups of the "solid torus" 5' x B* and theorod »
space S1 x S2.
2. Let X be the quotient space obtained from B1 by identifying each point x
of Sl with its antipode -x. Show that X is homeomorphic to the projective
plane/12.
3. Let p : E —► 8 be the map constructed in the proof of Lemma 7.5. Let E' be the
subspace of E which is the union of the .v-axis and the .y-axis. Show that/?|£'
is not a covering map.
4. Consider the covering map indicated in Figure 23. Here/? wraps A\ around A
twice and wraps B\ around B twice; p maps Ao and Bo homeomorphically onto
A and B, respectively. Use this covering space to show that the fundamental
group of the figure eight is not abelian.
Figure 23
5. Given a group G and a space X, an action of G on X is a function assigning, to
each element a of G, a continuous map
/!<X:A"—*X
,n such a_*grt[iheaf;ent.ty e)ement of G then ht is the identity map of X.
(ii) If a = jff-y, then A,, = hf ° hr. v 4-« defines an
(a) Show that denning h,:R-^Rby the equation h&) = * + " ^
action of the integers Z on. Jl. an ^ ofthe group
integers mod n) on S2.
ft Q Q '
Essential and Inessential Maps 357
(d) Show that the antipodal map of 5. defines an action of the group Zl
6. Given an action ofCon X, define the orbit space X1G to be the mm.- ♦
X determined by the following equivalent re.atlonxl* fr sT
some a e C. The orbit spaces under the actions defined it ^
5 are homeomorphic to familiar spaces. What are they?
7. An action of Con Xis said to be fixed point free if the only map A that possesses
a fixed point is the map he. Which of the actions defined in Exercise 5 arS
point free?
8. Theorem. Let there be given an action of the finite group G on the path-con-
path-connected Hausdorff space X; assume that the action is fixed point free. If X is
simply connected, then tt, (X/G, xj is isomorphic to G.
9. Consider S3 as the space of all pairs of complex numbers (z,, z2) satisfying the
equation | z, |* +1 z212 = 1. Given relatively prime positive integers n and ky define
h: S3 —► S3 by the equation
h(z,,z2) = ^e1'"", z2e2"""'»).
(a) Show that the maps /;, h1 = h » h, h3,.. . can be used to define an action
of Zn on Si that is fixed point free. The orbit space L(n, k) is called a lens
space.
(b) Show that L(n, k) is a compact 3-manifold.
(c) Assume Exercise 8. Show that if L(n, k) and L(n', k') are homeomorphic,
then n = n'. (In fact, L(n, k) is homeomorphic to !(«', k1) if and only if
n = n' and either k = k' (mod n) or **' = 1 (mod «)• The proof is decid-
decidedly nontrivial.)
8-8 Essential and Inessential Maps
We have already used the fundamental group to study the problem of
determining whether or not two given spaces are homeomorphic. Now we
apply it to a second problem of topology, that of determining whether or not
two given maps of one space into another are homotopic.
° . /. , ,,_•„*„ ^frminp whether or not a given map
o given maps of one space into anoinci <uc i,u—k~
The simplest such problem is to determine whether or not a
h : X-+ Y is homotopic to a constant map. We shall prove v^ - ^
L ... . . *i *h» Jn^rieed homomorphism n* ui'""
n . A —► I IS hOmOtOpiC IO a tuna""" —"K- - . j. fun_
homotopic to a constant map, then the induced homom°rp^Snm t* ta the
damental groups is trivial. (The converse holds it x n ppc
circle S1; see Exercise 2.) . . ,,,h-ther two arbitrary
We defer the more general problem of determining whe her two
maps h, k : X -^ K are homotopic to a later section (§8-11).
Definition. A n,ap /, : X- K is said to be initial if* I. homotopic
to a constant map. Otherwise, it is said to be essential.
The Fundamental Croup and Covering Spaces
Y. Then the following are equivalent:
Chap. 8
Lemma &2. Let h: S1
A) h is inessential.
B) h can be extended to a continuous map g: B2 —♦ Y.
Proof. A) => B). Suppose that H: Sl X I-^ Y is a homotopy between
h and the constant map k which carries S1 to y0. Let n : S1 x I—> £* be the
map
?r(x, 0 = A - 0*.
Then ?r carries S1 X [0, 1) bijectively onto B2 — 0, and it maps S1 x 1 to the
point 0. (You can check this.) Because S1 X /is compact and B2 is Hausdorff
7t is a closed map; that is, it carries closed sets of S1 X /to closed sets of B1.
Now the map H: S1 x I—* Y is constant on the set S'xl. Therefore,
H induces a map g : E1 —> T such that g o % = H. [It is defined by letting
g(x) = Nin'^x)) if x = o and g(x) = y0 if * = o.] The map # is continu-
continuous; this follows from the fact that n is a quotient map. [ Or one can prove it
directly by noting that if C is closed in Y, then H~l(C) is closed in 51 x /, so
that n{H~l{C)) = g~l(C) is closed in B2.] The map g is the desired extension
of A; for if x e Sl, then
g(x) - £(*(*, 0)) = H(x, 0) = A(x).
See Figure 24.
Figure 24
B, - A). Let ,:*• - y.be . co^nwj-
F.S1 X /-* y by the equation F(x, /) =
topy between A and a constant map. p
Theorem 8.X
us define
, homo.
§8-8 .
Essential and Inessential Maps 359
Proof. Consider first the case X = S1 We annlv th
Let g: 2»» - 7 be an extension of A; let / • 'SiZ K' M T^'"8 lemma'
jh L 6 & £ ^ "¥" T**
g; t / SZ K M T
Then goj-h. Let 6, be a point of & and kt £ =^ "¥ T
induced homomorphisms yi (t>l>- Consider the
By the functorial properties of the induced homomorphism h = e ;
Buty is the zero homomorphism, because its range is the' trivial group
Therefore, /;* is the zero homomorphism.
Now we consider the general case. Let/:/-. Jf be a loop in X based
atx0. Let p:I —> 51 be the standard loop
0CO = (cos 27r.y, sin )
Now/induces a map k:Sl ~> X, defined by the equation k(a) =
It is easy to check that k is continuous. By hypothesis, h is homotopic to a
constant; let H: X x / —► Y be the homotopy. Then /; ° A' is also homotopic
to a constant; the map H'(a, t) — H(k(a), t) is the required homotopy. It
follows from the preceding paragraph that (/; o A')* is the zero homomorph-
homomorphism. In particular, (/; o k),.{[^]) = 0. But
= [h c k o <f>] = [h o f] = //*([/]). □
As an application, we prove the theorem we used in §7-9, when we com-
computed the topological dimension of a triangular region.
Corollary 8.3. Let T be a closed triangular region in R2/ let Bd T denote
'he union of the edges of T. There is >io continuous map f: T -* Bd T that
m"ps each edge ofT into itself.
Proof. We suppose there is such a continuous map/: T— Bd T, and
derive a contradiction. . , r
Let g : Bd T — Bd T be the restriction of/. Because g maps each edge ot
T into itself, g is homotopic to the identity map. Indeed, the map
G(x, /) = /* + (!- t)g(x)
Bd r x / into Bd T; for if x belongs to Bd T, then x and g(x) lie in the
The Fundamental Croup and Covering Spaces
Chap,
same edge of T, so that the line segment joining them lies in this edge a
well. Thus G is a homotopy between g and the identity.
Now we use the fact that Bd T is homeomorphic to &. The identity ma
of Bd T does not induce the zero homomorphism of the fundamental grou^
so that it cannot be homotopic to a constant, by the preceding theorem
Therefore, g is not homotopic to a constant.
On the other hand, g is extendable to the continuous map/of Tinto
Bd T, so that g is homotopic to a constant. QJ
Exercises
1. Here is an easy "proof" that if h : X —> Y is inessential, then A* is the zero
homomorphism. Where is the fallacy? Let H: X x I—* K be a homotopy
between h and a constant map. Given a loop /in X based at x0, define a map
F: / x / —> Y by the equation F(s, t) = H(f(s), /). The map F is a homotopy
between h °/and a constant path, as desired.
2. Let fr.S1 —> Y. Show that if /i* is the zero homomorphism, then h is inessen-
inessential. [Hint: Let <f>: I —» 51 be the standard loop; let/= /» o 0. Show there is a
path homotopy Fbetween/and eyol and that F induces a map HiS1 X /—» K
such that // o @ x /y) = F. See Figure 25.]
^/
s'x/
25
3. Let ybe path connected. Show that ;tl(y,>'o)=0if and only if every map
/i; s1 —* Yis inessential.
§ s'9 Tne Fundamental Theorem of Algebra 36\
4. Recall that a space Y is said to be contractible if the identity map ir;Y—*Y
is inessential. Show that if Y is contractible, then Y is simply connected.
5. A map h : S" —> Sm is said to be antipode-preserving if h(-x) = ~h(x) for
every x 6 S".
Theorem. If h : Sl —> Sl is antipode-preserving and continuous, then h is
essential.
(a) Letp : 51' --* 51' be the map/>(z) = z%, where 2 is a complex number. Show
that h induces a continuous map g: S1 — Sl such that p°h =goP.
(b) Show that if/is any path in Sl from a point * to its antipode —x, then
/> <>/is a loop in 51' that is not path homotopic to a constant.
(c) Show that both p and g induce monomorphisms (injective homomor-
phisms) of the fundamental groups.
(d) Conclude that h is essential.
6. Assume Exercise 5.
(a) Prove the following:
Theorem (Borsuk-Ulam theorem for S1). There is no continuous antipode-
preserving map f: S2 —> S1.
[Hint: Consider the equator in S2.] It is in general true that there is no con-
continuous antipode-preserving map/: S" —» Sm if m < n. But the proof requires
more tools than we now possess.
(b) Prove:
Theorem. Given a continuous map f: S2 —> ,/J2, there is a point x of S2 such
that f(x) = /(-.*).
[Hint: Consider (/(.*) - f(~x))l\\f(x) - f(-x)\\.]
(c) Prove:
Theorem (A "theorem of meteorology"). At any given moment in time, there
exists a pair of antipodal points on the surface of the earth at which both the tem-
temperature and the barometric pressure are equal.
(d) Prove:
Theorem. Ifg:S2—>S2 is continuous and g(x) ^ g(-x) for all x, then g
is surjective.
*7. Generalize Exercise 5 as follows: Assume that h : 5' —» S> is antipode-pre-
antipode-preserving; let h(x0) = x,. Then A, maps a generator of nt(S\ x0) to an odd multi-
multiple of a generator of nt(S', .v,).
8-9 The Fundamental Theorem of Algebra
It is a basic fact about the complex numbers that every polynomial equa-
equation
of degree n with real or complex coefficients has n roots (if the roots are
counted according to their multiplicities). You probably first were told tnis
fact in high school algebra, although it is doubtful that it was proved for you
at that time.
362 The Fundamental Group and Covering Spaces
Chap. 8
The proof is, in fact, rather hard; the most difficult part is to prove tW
every polynomial equation of positive degree has at least one root There a
various ways of doing this. One can use only techniques of algebra- thi
proof is long and arduous. Or one can develop the theory of analytic functions
of a complex variable to the point where it becomes a trivial corollary of
Liouville's theorem. Or one can prove it as a relatively easy corollary of our
computation of the fundamental group of the circle; this we do now.
Theorem 9.1 {The fundamental theorem of algebra). A polynomial equation
x° + a^.x-1 + ■ ■ ■ + a,x + a0 = 0
of degree n > 0 with real or complex coefficients has at least one {real or com-
complex) root.
Proof. Step I. Consider the map /;: S' —► S' given by h{z) = z", where
z is a complex number. We show that the induced homomorphism
//»:*,(£', 60)—>nl{S',b0)
carries a generator of this infinite cyclic group to n times itself.
Let <j): /—> S' be the standard loop
<f>(s) = (cos 2ns, sin 2ns) = elnls
in S1. Its image under //* is the loop
li(<t>(s)) ■--= (e2"'')" = e2"'" = (cos Inns, sin Inns).
This loop lifts to the path s --> us in the covering space R. Therefore, the loop
h o <j) corresponds to the integer n under the standard isomorphism of
ni{S\ b0) with the integers, whereas <f> corresponds to the number 1.
Step 2. Now we prove a special case of the theorem. Given a polynomial
equation
z- + an_,z"-' + ■ ■ ■ + a,z + a0 = 0,
we assume that
l 1
and show that the equation has a root lying in the unit ball B\
Assume that the equation has no root in B*. Then we can define a map
g ■ gz _ /?: — 0 by the equation
g(z) = «" + *.-i*"-' + ■ • • + ".* + fl°"
Let ,. 5, _, Rl _ 0 be the restriction of g to 5'. Because/is extendable
t0 the'map , of B> into * - 0, the Wf"^*^?
On the other hand,/is homotopic: tc.the j.p* ■ Sj*
k{z) = z". For the homotopy F. £' X / a
§ 8'9 The Fundamental Theorem of Algebra 363
is the required homotopy; F(z, t) never vanishes because
= 1 -Kl«.-,l+ •■• + |«0|)>0.
Furthermore, the map k is essential. For k equals the composite of the map
h : S' — S' of Step 1, given by h(z) = Z", and the inclusion map j-.S1 —
/?* - 0. Since A* is "multiplication by «" and;,, is an isomorphism, k* is not
the zero homomorphism. Therefore, k must be essential.
Since/is homotopic to k, the map/also must be essential. Thus we reach
a contradiction.
Step 3. Now we prove the general case. Given a polynomial equation
x" + a,,-,*"-' + ••• + a,x + a0 = 0;
let us choose a real number c > 0 and substitute x = cy. We obtain the
equation
(cy)n + on_,(n')"'' + • • • + a,(cy) + a0 = 0
or
n ' an-\ ,n-l I _L ° > _i_ "o ft
^ ' "^"•J/ c"~'y c-
If this equation has the root y = yB, then the original equation has the root
x0 = cy0. So we need merely choose c large enough that
C
+
c2
+ ■■■ +
a,
c"-'
+
to reduce the theorem to the special case considered in Step 2. □
1. Given a polynomial equation
x" + a,.,*" + ■ • • + "ix + ao = °
with real or complex coefficients. Show that if |a,_, | + •; • +\"i\ +. Kl <j.
then fl// the roots of the equation lie interior to the unit ban Jf • I™ •
*U) = 1+«_,*+.■■ +«,*•- +-0*", and show that ,<*) * 0
2. Find a circle about the origin containing all the roots of thepo.ynomia. equation
f 1=0.
364 The Fundamental Group and Covering Spaces
Chap. 8
8-10 Vector Fields and Fixed Points
In this section we apply the fundamental group to two problems «f
geometry. One problem concerns the existence of vector fields taneent T
given surfaces. The second deals with the "fixed-point problem": Given X
does every continuous map/: X — X necessarily have a fixed point? '
We shall obtain only some of the simpler results. Deeper theorems, includ-
including some of current research interest, demand much more of the machinery
of algebraic topology than we have studied.
Theorem 10.1 Given a nonvanishing vector field on B2, there exists a point
o/S' where the vector field points directly inward and a point ofS' where it
points directly outward.
Proof. A vector field on B2 is an ordered pair (x, v(x)), where x is in B2
and v is a continuous map of B2 into R2. In calculus, one often uses the
notation
v(x) = «,(x)i + v2(x)j
for the function v, where i and j are the standard unit basis vectors in R2.
But we shall stick with simple functional notation. To say that a vector field
is nonvanishing means that v(x) =£ 0 for every x; in such a case v actually maps
B1 into R2 — 0.
We show first that given v, it must point directly inward at some point of
S'.
Consider the map w : S1 —> R2 - 0 obtained by restricting v to S'. If
there is no point x of 5' at which the vector field points directly inwand, then
for no x in 5' is w(x) equal to a negative multiple of x. It follows that w is
homotopic to the inclusion mapy: S1 —> R1 — 0, for the map F:S' X /—•
R2 — 0 given by the equation
F(x, t) = tx + A - t)w(x)
is the required homotopy. It is pictured in Figure 26. Obviously, Fis con-
continuous. To show that F never vanishes, note that if F(x, t) = 0, then
A — t)w(x) = —tx.
This equation is clearly false for t = 0 or t = 1, since x eSl and h"M£
For 0 < t < I, it says that w{x) = -«/(! - 0. so that w{x) equals a
multiple of x, which is forbidden. _
Since w is homotopic to the inclusion map j : S -> K «.
essential. On the other hand, W is extendable to the continuous mpj
i^ - 0, so that it is inessential. Thus we arrive at a contradiction, mer
v points directly inward at some point of SK result just
Consider now the nonvanish.ng vector field (*, -**))■ »Y
"l0 Vector Fields and Fixed Points 365
(*,/(*)) {x,w(x))
(Y.) M)
B, i B)) FigUre 26
proved, it points directly inward at some point of S'. Then v points directly
outward at that point. Q
We have already seen that every continuous map/: [0, 1] —► [0, 1] neces-
necessarily has a fixed point (see Exercise 3 of §3-2). The same is true for the ball
B1, although the proof is deeper:
Theorem 10.2 {Brouwer fixed-point theorem for the disc). Iff : B2 —► Bz
is continuous, then there exists a point x s B2 such that f(x) = x.
Proof. We proceed by contradiction. Suppose that f(x) ^ x for every x
in B1. Then defining v(x) = f(x) — x gives us a nonvanishing vector field
(x, v{x)) on B1. But the vector field v cannot point directly outward at any
point x of S', for that would mean
f(x) — x = ax
for some positive real number a, whence f{x) = A + a)x lies outside the
unit ball B2. We thus arrive at a contradiction. □
One might well wonder why fixed-point theorems are of interest in mathe-
mathematics. It turns out that many problems, such as problems concerning exist-
existence of solutions for systems of equations, for instance, can be formulated as
fixed-point problems. Here is one example, a classical theorem of Frobenius.
We assume some knowledge of linear algebra at this point.
Corollary 10.3. Let A be a 3 by 3 matrix of positive real numbers. Then A
has a positive real eigenvalue (characteristic value).
Proof Let T- R3 — R3 be the linear transformation whose matrix (rela-
(relative to the standard basis for R3) is A. Let B be the intersect.on of the
366 The Fundamental Group and Covering Spaces
2-sphere S2 with the first octant
{(*i, x2, x3) | x, > 0 and x2 > 0 and x3 ^ 0}
of J?3. It is easy to show that B is homeomorphic to the ball B1, so that the
fixed-point theorem holds for continuous maps of B into itself. '
Now if x = (*„ x2, x3) is in B, then all the components of x are non-
negative and at least one is positive. Because all entries of A are positive, the
vector T(x) is a vector all of whose components are positive. As a result, the
map x —> T(x)/\\ T(x)\\ is a continuous map of B to itself, which therefore has
a fixed point x0. Then
so that T (and therefore the matrix A) has the positive real eigenvalue
nn*a)ii. n
Before leaving the subject of vector fields, we should mention one of the
most interesting problems to which they lead:
Given a surface S, does if possess a nonvanishing tangent vector fieldl
Seemingly a problem of differential geometry, this is, in fact, a problem of
topology, for the answer depends only on the topological type of 5". It turns
out that among compacl surfaces, only the torus T and the Klein bottle K
(if you know what that is) have nonzero tangent vector fields. They are illus-
illustrated in Figure 27. [The torus, in fact, has two linearly independent vector
fields.]
The proof of this fact is outside the scope of this book. (See [G-P] for a
proof.) But we can proceed one step toward a solution by showing that the
sphere Sz, at least, possesses no nonvanishing vector field. We shall sketch
the proof geometrically, rather than carry it out formally using equations.
Figure 27
§ 8-10
Theorem 10.4. The sphere S2 possesses
field.
Vector Fields and Fixed Points
no nonvanishing tangent vector
367
Proof. Suppose that 5» had a nonvanishing vector field (* v(xi) Con
sider the north po ep = @,0, 1) of S*; we shall assume for con^en^e thai
at p the vector field is parallel to the ,-axis. Take a small openTil U in £
centered at p, so small that on the ball V the vector field does not vary more
than a few degrees from being parallel to the y-axis.
Now consider the map/: S> -p -* R* given by "stereograph* projec-
projection." (See Step 1 of the proof of Theorem 6.2.)
The map/is, in fact, a homeomorphism of Sz —p with R2. More than
that, it carries tangent vectors to Sz continuously into tangent vectors to R2.
How ? The easiest way to see what happens is to take a given tangent vector v
at a point .*, and to find a curve C in S having that vector as its velocity
vector at x. The map/carries the curve C into a curve in R2, and we let it take
the vector v into the velocity vector of the image curve /(C) at the point
f(x). Let us denote the image of (x, v) by (y, w). You can check by direct
computation that / is smooth (w is a well-defined, continuous function of
(x, v)) and nonsingular (w is nonzero if v is nonzero).
Now we ask the question: What happens to the nonvanishing vector
field {x, v) under this map? It is carried into a nonvanishing vector field
{y, w) on R2. In particular, consider the subspace S2 - U of S2, which the
B
Figure 28
368 The Fundamental Group and Covering Spaces
Chap, g
map/carries onto a ball B in R* of Urge radius about the origin WW a
the image of the vector field look like? We have sketched in Figure 28
it looks like on the large circle S that is the boundary of A
So far so good. But let us examine this vector field (y, w(y)) on fi mo
closely, particularly its restriction to the circle S. You can see from the nictur!
that the map h : S —> R* — 0 defined by
carries a generator of ^,E, x0) to twice a generator of n,(R2 - 0, x0). Intui-
lively, as y goes around the circle S once, the point h(y) goes around the
origin twice.
Now comes the contradiction. We know that h is extendable to a map of
B into R1 — 0, because (y, w(y)) is a nonvanishing vector field on B. Thus A
must be the zero homomorphism of fundamental groups. On the other hand,
we know both fundamental groups in question are infinite cyclic groups, and
that h* carries a generator of the first to twice a generator of the second. In
particular, h^ is not the zero homomorphism. □
These theorems have generalizations to higher dimensions, which are
discussed in Exercises 7 and 8.
Exercises
1. Show that if A is a retract of B1, then every continuous map/: A —* A has a
fixed point.
2. Show that if A is a nonsingular 3 by 3 matrix having nonnegative entries, then
A has a positive real eigenvalue.
3. Show that the set B of Corollary 10.3 is homeomorphic to B1.
*4. Try to give an algebraic proof of Corollary 10.3. (This exercise is for those stu-
students who are tempted by the thought that this result is trivial! You might try
the 2 by 2 case first.)
5. Show that if/: S' — S' is inessential, then/has a fixed point and/carries some
point x to its antipode ~x.
6. Show that given a continuous map/: S* — S\ either/has a fixed point or/
carries some point x to its antipode -x. [Hint: Use Theorem 10.4.J
7. Suppose that you are given the fact that for each n there is «^
, . B"* ■ — S". (This result can be proved using techniques of algebraic
ogy). Derive the following corollaries:
(a) The identity map i: S" —<■ S" is essential.
(b) The antipodal map a : S" —► S" is essential.
(c) The inclusion map/: 5" — *"+1 - 0 is essential.
§8-11 .
Homotopy Type 369
(d) Every nonvanishing vector field on S"+' points dir«-tiv n , a
point of S-. and direct.y inward at some pZtoiT* " " ""•
(e) Every continuous map /: B« —> B" has a fixed point
(f) Every n by « matrix with positive real entries has a positive real
(8) !4: 7"" meSSentia' th/h «
8. It is a theorem that S» has a nonvanishing tangent vector field if and only if
n is odd. The "if" part is easy. Show that if,, = 2/n - 1, then
v(x) = (-*2, at,, -x4, a-3 -x2m, x2m.,)
is a nonvanishing tangent vector field on 5". The "only if" part is more difficult-
see Exercise 7 of §8-11.
8-11 Homotopy Type
In §8-8 we considered the problem of determining whether or not a given
map h: X—> Y was homotopic to a constant map. Now we consider the
more general problem of determining whether or not two given maps h, k :
X—> Fare homotopic. We prove that a necessary condition for h and k to
be homotopic is that, up to an isomorphism of the groups involved, h* and
k; are equal.
It turns out that this theorem has an application to the problem of com-
computing fundamental groups. We have already noted, in §8-5, that two spaces
have isomorphic fundamental groups if one is a strong deformation retract
of the other, and we have used this fact in computing some fundamental
groups. But there is a relation more general than this, called homotopy
equivalence, which also implies that the spaces in question have isomorphic
fundamental groups. We study that relation in this section.
First, let us consider what happens when two maps are homotopic.
Theorem 11.1. Let h, k : X — Y. Let h(x0) = y0 and k(x0) = y,. Ifh
and k are homotopic, then there is a path a, in Y from y0 to y, such that k* -
S. o h*. 7/y0 = y,, and if the base point x0 remains fixed during the homotopy,
then k» = h».
*,(,y,)
Proof. Let H: X X /-> Y be the homotopy between A an _d *• then
*<*. 0) = /,(.v) and H(x, 1) = k(x) for x 6 X. Let « :I-Y be dtf nedby
the equation «(,) = H(x0, /); then a is a path in Y from ^o to y,. We assert
that kt = a o A*.
370 The Fundamental Croup and Covering Spaces
Chap. 8
That is, we assert that for every loop/: / —* X in X based at *0, we have
**([/]) = <*(**([/]))•
We must prove that [k o /] = [a] * [h o f] * [a], or, equivalently, that
(*) [a] * [Arc/]*[«] = [WJ-
Checking this equation requires the construction of a path homotopy c.
We describe G geometrically as follows: For given parameter value /, let
a, be the path that goes partway along a, from >-0 to a(f), reparametrized so
as to be based on the interval [0, 1]. And Jet fi, be the loop fi£s) = H(J(s), t)
/
V m
'i
a I
_—*-
w '
A
/ \
i
t
(h-f)
f)
)
/
/
in
Y based at a(/). See Figure 29. Then consider the loop
(a, * J3,) * a,
based at y0. When / = 0, this loop equals
0™
which is path homotopic to A ^/; and when / = 1, it equals the loop
(a * (k o /)) * a.
(
Thus setting G(s, t) - ((at * #) * a,)(s) gives us the path homotopy
rove equation (*).
Formally, we define
required
Thus setting G(, )
to prove equation (*).
l define G : I x I'—» Kas follows:
for
, 0 = f/(/D* - 1), 0 for s e
for j e
aB*(l - s))
for j e [i, 1]-
§8-11
Homotopy Type 371
You can check that these formulas make sense, that they agree when the
domains overlap, and that G is the required path homotopy
Finally, we note that if the homotopy H leaves the base point x fixed at
the point , then the path «(,) _/,(,,,,) h the ConstanPt „,£ ^
/J. Le/ h, k: X -> Y; to h(x0) = y0 Wk(x0) = y,. Suppose
that h and k are homotopic. //k* /J injective (or surjecthe, or the zero homomor.
phism), then so is h*. In particular, if h is homotopic to a constant map
then h* is the zero homomorphism.
Now we turn to the second problem we mentioned at the beginning of
this section, the problem of computing fundamental groups. We obtain a gen-
general condition under which two spaces have isomorphic fundamental groups.
Definition. A continuous map/: X—* Yh called a homotopy equivalence
if there is a continuous map g : Y—► Xsuch that go/is homotopic to the
identity map ix of X and/o g is homotopic to the identity map ir of Y. The
map g is said to be a homotopy inverse for the map/
It is easy to show that given any collection C of topological spaces, the
relation of homotopy equivalence is an equivalence relation on e. See Exer-
Exercise 2. Two spaces that are homotopy equivalent are said to have the same
homotopy type.
The notion of homotopy equivalence generalizes the notion of strong
deformation retraction, defined in §8-5; if A is a strong deformation retract
of X, then A has the same homotopy type as X. For \et j: A — X be the
inclusion mapping and let r: X-* A be the retraction mapping. Then the
composite r oj equals the identity map of A, and the compositey ° r is by
hypothesis homotopic to the identity map of X (and in fact each point of A
remains fixed during the homotopy).
Under the hypothesis that two spaces are homotopy equivalent, we can
prove that they have isomorphic fundamental groups:
Theorem 11.3. Le,f:X->Y be continues; let f(x0) = y0. Iff is a homo-
topy equivalence, then
f,:*,(X,xo)—**i(Y.yo)
is an isomorphism.
Proof. Lctg: Y^ X be a homotopy inverse for/ Consider the maps
(X,Xo)-^(Y,yo)-^(X,Xl)-^ (Y.K).
f(r \ We have the corresponding induced
where x, ^g(y0) and y, =/(*i)- we nave
homomorphisms:
372 The Fundamental Group and Covering Spaces
Chap, g
homom°rphisms
^entity map, there is
In particular, (g °/)» = g* o (/J+ is an isomorphism.
Similarly, because/og is homotopic to ;V, the homomorphism f/.rt
= (/*,)* ° g* ls an isomorphism.
The first fact implies that g* is surjective, and the second implies thatg,
is injective. Therefore, g* is an isomorphism. Applying the first equation once
again, we conclude that
(/«)• = (*•)-'• «>
so that (/,„)* is also an isomorphism.
Note that although g is a homotopy inverse for/, the homomorphism £,
is not an inverse for the homomorphism (/„)*. Q
The relation of homotopy equivalence is clearly more general than the
notion of strong deformation retraction. The theta space and the figure eight
are both strong deformation retracts of the doubly punctured plane; we
noted this fact in Examples 3 and 4 of §8-5. Therefore, they are homotopy
equivalent to the doubly punctured plane, and hence to each other. But
neither is homeomorphic to a strong deformation retract of the other; in
fact, neither of them can even be imbedded in the other. (See Exercise 4.)
It is a striking fact that the situation which occurs for these two spaces is
the standard situation with regard to homotopy equivalences. Martin Fuchs
has proved a theorem to the effect that two spaces X and Y have the same
homotopy type if and only if they are homeomorphic to strong deformation
retracts of a single space Z. The proof, while it uses only elementary tools,
difficult [F].
Exercises
1. Check the details concerning the homotopy G constructed in the proof of Theo-
1. Thow^that given a collection 6 of spaces, the relation of homotop
is an equivalence relation on C.
§ 8-1' '■.'-• Homotopy Type 373
3. Show that X has the homotopy type of a one-point space if and only if X is
contractible. (See Exercise 4 of §8-8.)
4. Show that neither of the spaces 6 and 8 can be imbedded in the other.
5. Let/< be a subspace of X;letj:A—> A"be the inclusion mapping; let/: X—* A
be a continuous map. Suppose that the map; °/: X—> Xis homotopic to the
identity map ix : X —► X under a homotopy H: X x / —► X.
(a) Show that if H(a, t) e A for every a e A, then/, and/, are isomorphisms.
(b) Show that if/is a retraction, then/, and/, are isomorphisms. [In this case,
H is called merely a deformation retraction rather than a strong deformation
retraction.]
(c) Give an example to show that/, and/, need not be isomorphisms in general.
6. We define the degree of a continuous map h : S1 —> S1 as follows:
Let b0 be the point A, 0) of S'; choose a generator y for the infinite cyclic
group it\(Sl, b0). (There are only two, differing in sign.) If x0 is any point of
S', choose a path a in S' from b0 to a-0, and define y(.x0) = dt(y). Then y(x0)
generates n^S1, .v0). The element y(x0) is independent of the choice of the path
a, since the fundamental group of Sl is abelian.
Now given h : S1 —► S', choose .v0 e S< and let h(x0) = x,. Consider the
homomorphism
//, :*,(£', *„)—>ni(S',xl).
Since both groups are infinite cyclic, we have
(*) /'*0'(.v0)) = d.y(X>)
for some integer d. The integer d is called the degree of h and is denoted by deg ft.
The degree of/; is independent of the choice of the generator y; choosing the
other generator would merely change the sign of both sides of (*).
(a) Show that d is independent of the choice of .v0-
(b) Show that if //, k: 5' —> S1 are homotopic, they have the same degree.
(c) Show that deg (/; ° k) = (deg /;)-(deg A).
(d) Compute the degrees of the identity map, the Teflection p(x,, x2) =
(ai, -.v2), the constant map, and the map h(z) = z", where z is a complex
number.
*(e) Show that if //, k : S< —♦ S1 have the same degree, they are homotopic.
7. Suppose that to every map //:£"—♦ S" we have assigned an integer, denoted by
deg/; and called the degree of//, such that:
(i) Homotopic maps have the same degree,
(ii) deg (// o k) = (deg /;)• (deg A).
(iii) The identity map has degree 1, the constant map has degree 0, and
the reflection map p(x,, .. . , avu) = (-Vi, • • •. -*»+i) has deS^e ~L
[One can construct such a function, using the tools of algebraic topology.
Intuitively, deg // measures how many times // wraps S" about itself; the sign
tells you whether ft preserves orientation or not.] Prove the following:
(a) There is no retraction r : B"+l —► S".
(b) If//: S» —♦ S" has degree different from (-1)"*1, then ft has a fixed point.
[Hint: Show that if ft has no fixed point, then ft is homotopic to the antipodal
map.]
374 The Fundamental Group and Covering Spaces Chap 8
(c) If h : S" -r* S" has degree different from 1, then h maps some point* to its
antipode —x.
(d) If Sn has a nonvanishing tangent vector field v, then n is odd. [Hint: If v
exists, show the identity map is homotopic to the antipodal map.]
(e) Every map h : Slm —► Slm has either a fixed point or a point x such that
h(x) = -x.
(f) Compare these results with Exercises 6, 7, and 8 of §8-10.
For the use of the notion of degree in differential geometry, see [G-P].
8-12 The Jordan Separation Theorem
We now consider one of the classical theorems of mathematics, the Jordan
curve theorem. It states a fact that is geometrically quite "obvious," the fact
that a simple closed curve always separates the plane into two pieces. But it
is quite difficult to prove by direct geometric arguments. Here we prove it as
a corollary of our study of covering spaces and the fundamental group.
There are actually three separation theorems involved. The first, which
we call the Jordan separation theorem, states that a simple closed curve in S1
(or in the plane) separates it into at least two components. The second says
that an arc does not separate S2 (or the plane). And the third, the Jordan curve
theorem proper, says that a simple closed curve C in Sz (or in the plane)
separates it into precisely two components, of which Cis the common boun-
boundary.
We shall prove the first of these theorems now. We need the following
fact:
Lemma 12.1. Let a and b be points o/S2; let A be a compact space; let
f:A —► S2 — a — b be a continuous map. Jfz. and b lie in the same component
o/S2 — f(A), then f is inessential.
Intuitively, this lemma says that if the set f(A) does not separate a from
b in Sz, then /can be shrunk to a point without touching a or b.
Proof. Step 1. We show there is a homeomorphism /; of Sz with the one-
point compactification Rz U {oo} of R2 such that h(a) = co and h(b) = 0.
To construct /;, we first take a rotation h, of Sz that carries a to the north
pole/?. We then take stereographic projection hz, mapping S2 — p homeomor-
phically onto R2; we extend it to S2 by letting hz(p) = oo. Finally, we take a
translation h3 of/?2 carrying //2(/z,F)) to the origin 0, and we extend it to
R2 u {o°}by letting/;3(oo) = oo. It is easy to check that h2 and h3 arehomeo-
morphisms, as is //,. Then h3 o h2 o h, is the desired homeomorphism.
Step 2. In view of Step 1, the lemma reduces to the following statement:
Let A be compact; let/: A —» R1 — 0 be a continuous map. If 0 lies in the
unbounded component of i?2 — f{A), then/is inessential.
§8-12
The Jordan Separation Theorem
This statement is easy to prove. Assume that 0 lies in the unbounded com-
component of Rz — /(^)- Choose a ball B centered at the origin, of sufficiently
large radius that it contains the set f(A). Choose a point p of R1 lying out-
outside B. Then 0 and p lie in the same component of R* — f(A).
Because R* is locally path connected, so is the open set R2 — f(A).
Therefore, the components and path components of Rz — f(A) are the same.
Hence we can choose a path a in R1 — /(A) from 0 to p. We define a homo-
homotopy F: A X /-— R1 — 0 by the equation
it is pictured in Figure 30. The homotopy Fis a homotopy between the map
/and the map g defined by g(x) = /(*) — p. Note that F(x, /) ^ 0 because
the path a does not intersect the set f{A).
Figure 30
Now we define a homotopy G : A X /--> R2 - 0 by the equation
G(x, I) = //(,) - p.
It is a homotopy between the map g and a constant map. Note that G(x, t) =*
0 because //(*) lies inside the ball B and p does not.
Thus we have proved that/is inessential. □
A ^efi!Ut'?"' A" ar° 'S a Space h°meomorphic to the unit interval [0, 11
A s.mple dosed curve is a space homeomorphic to the circle S'.
cseparation theorem)-Let cbe asimple chsed
— C is not connected.
575 The Fundamental Group and Covering Spaces
Chap. 8
■ Proof. Because S2 - C is locally path connected, its components and
path components are the same. We assume that S2 - C is path connected
and derive a contradiction.
We are going to apply Theorem 6.1, the special case we proved of the
Van Kampen theorem. It expresses the fundamental group of X = U u V'm
terms of the fundamental groups of U and V, provided the intersection U r\ V
is path connected.
Let us first write C as the union of two arcs A v and A2 that intersect only
at their end points a and b. Then let X denote the space S2 — a — b. The
space AT is homeomorphic to the punctured plane R2 — 0, so its fundamental
group is infinite cyclic.
Let XJ be the open set S2 — A v and let V be the open set S1 — A2; then
X = U U V. Now
u n v = s2 - (Al u a2) = s2 ~ c,
so that U D Vis path connected by assumption. Let x0 be a point of U n V.
If we can prove that the inclusions
i:(U,xo)—»(X,xa) and j: (V, xD) —* {X, x0)
induce zero homomorphisms of the fundamental group, Theorem 6.1 will
apply to show that n^X, x0) = 0. This contradicts the fact that x^X, x0) is
infinite cyclic, so our assumption that S2 — C is path connected must have
been mistaken.
Let us prove that /* is the zero homomorphism. Given a loop/:/—* V
based at x0, we show that /*([/]) is trivial. For this purpose, let <f> :I-~*Sl
be the standard loop generating n^S1,^). The map/:/—* U induces a
continuous map h : S1 —> U such that h o <j> =f. See Figure 31.
Consider the map i ° h : Sl -* £2 - tf - 6. By hypothesis, the set
/(ACS1)) = KS1) does not intersect the arc Ax joining a and b. Therefore, a
Figure 31
§8-12
The Jordan Separation Theorem 377
and * lie in the same component of Sz — i(h(S<)). By the preceding lemma, the
map i o h is inessential. It follows from Theorem 8.2 that (/ o h)* is the zero
homomorphism of fundamental groups. But
Therefore, /"*([/]) 's trivial, as desired. □
Exercises
1. By identifying S1 with R1 U {co}, prove that every simple closed curve in R1
separates R1.
2. We assumed in the proof of Theorem 12.2 that the simple closed curve C cannot
equal all of S2. Why is this justified?
3. Give examples to show that a simple closed curve in the torus may or may not
separate the torus.
4. (a) Lemma. Let A and B be closed connected subsets of S1 whose intersection
consists of precisely two points. Then A u B separates S1.
(b) Let C be a subset of S1 homeomorphic to the space which is the union of the
topologist's sine curve and the broken-line path from @, I) to @, —2) to
A, -2) to A, sin 1). (See Figure 32.) Show that C separates S1.
Figure 32
*5. This exercise leads to a proof of the invariance of domain theorem for R2.
(a) Prove the following:
Lemma (Homotopy extension lemma). Let X and X x / be normal; let A
be a closed subset ofX. Iff: A — R1 — 0 is a continuous map andf is inessential,
then f can be extended to a continuous map g ; X —► R2 — 0.
[Hint: Define a map of the subspace Y = (A x /) u (X x 1) of X x / into
R1 - 0 by using the homotopy between /and a constant map. Extend to a
neighborhood V of Y in X x /. Then construct a map of X x 0 into V that
equals the identity on A x 0J
(b) Prove:
Theorem (Borsuk). Let X be a compact subset o/R1. I/O lies in a bounded
378 The Fundamental Group and Covering Spaces
Chap. 8
component C of R} - X, then the inclusion map j- * — jp _ 0 /.
and conversely. ° b essential;
[Hint: Let B be a large ball that contains C and X.
that the inclusion map of B - C into R2 - 0 can
map of B into .R2 — 0.]
(c) Prove:
Weore/n (/< nonseparation theorem). No arc separates R2 ■ no soao hn
morphic to B1 separates R2. "°meo-
(d) Prove the following. Another proof is outlined in §8-13, Exercise 9
Theorem (Bronwer theorem on invariance of domain for R1). If Uisano
subset ofR2 andf: U —> R2 is continuous and injective, then /({/) & Open inZ
and f is an imbedding.
[Hint: If/: B2 — R2 is an imbedding, note that f(S<) separates W and
f(B2) does not; conclude that /(Int B2) must equal one of the components of
R2-f(S').] ^
8-13 The Jordan Curve Theorem
The special case of the Van Kampen theorem, which we just applied in
proving the Jordan separation theorem, tells us something about the funda-
fundamental group of the space X = U U V in the case where the intersection
U n Fis path connected. In the next two lemmas we examine what happens
when U n Fis not connected. In the first lemma we suppose that U C\ Khas
at least two components, and in the second we assume that it has at least three.
These lemmas will enable us to complete the proof of the Jordan curve
theorem. The proof we give is, as far as we know, a new one. It involves a
construction similar to that used in complex analysis to construct Riemann
surfaces. But it makes no use of normality or the Tietze theorem.
Lemma 13.1. Let X be the union of two open sets U and V. Suppose that
U n V can be written as the union of two disjoint open sets A and B. Let a e A
and b e B; suppose that a and b can be joined by paths in U and in V. Then
Proof. The proof is in many ways an imitation of the proof in §8-4 that
the fundamental group of the circle is infinite cyclic. As in that proof, the
crucial step is to find an appropriate covering space E for the space X.
Step 1. {Construction of E). We construct E by pasting together copies
of the subspaces U and V. Let us take countably many cop.es of U
countably many copies of V, all disjoint, say
U X {In) and V X B/t + 1)
§8-13
The Jordan Curve Theorem 379
space of Y by identifying the points
x X B«) and x x B/r — 1) for x e A
and by identifying the points
x X B«) and x X B« + 1) for x e 5.
Let ;r: Y~* E be the quotient map.
Now the map />: Y —* X defined by p(x x m) —x induces a map p:
£ , X; the map p is continuous because £ has the quotient topology. The
map p is also surjective. We shall show that p is a covering map.
The space E is illustrated in Figure 33.
u (-2) ! !
u
Figure 33
380 The Fundamental Group and Covering Spaces
Chap. 8
First let us show that the map n is an open map. Since Y\s the n • ,
the disjoint open sets [U X Bn)} and {V X Bn +1)}, it" m sufficeT* *
that n\iU X 2n) and *,(K x B« + ,)) are open ips. And Thfs 2 £?
Take an open set in U X 2«, for example; it will be of the form W *T"
Where W is open in U. Then ^X2">
tT'Gr(^ X 2n)) = [ICx 2n] U [(W n 5) x Bn + 1)]
U K^ n A) X B« - 1)],
which is the union of three open sets of yand hence open in Y. By definition
of the quotient topology, n(W X 2n) is open in E, as desired.
Now we prove that/? is a covering map; we show that the open sets Vmi
V are evenly covered by p. Consider U, for example. The set p-'(U) is the
union of the disjoint sets n(U X In) for n e Z. Each of these sets is open in
E because n is an open map. Let nln denote the restriction of n to the open
set U X 2n, mapping it onto n{U X In). It is a homeomorphism, because it
is bijective, continuous, and open. Then when restricted to n{U X In), the
map p is just the composite of the two homeomorphisms
n(U X 2n) -^*- U X In -^-* U
and is thus a homeomorphism. Therefore, p | n(U X 2n) maps this set hoineo-
morphically onto U, as desired.
Step 2. Now we prove that n^X, a) ^ 0. Take a path a in f/from a to
b, and a path /? in F from 6 to a. We assert that the loop a * /? based at a is
not path homotopic to a constant. Let us lift a * fi to a path on £ beginning
at the base point e0 = n(a X 0). Define
a(/) = n{a.(t) x 0),
£(/) = 7r(/?@ x 1).
Since a(l) = 7tF X 0) = n(b X 1) = A@), 'he path & * $ is defined. It is
easily seen to be a lifting of a * /?, because /? ° a = a and p ° ^ = /?• Since
the lifted path a * j5 begins at the base point e0 and ends at a point different
from the base point, the loop a * /? cannot be path homotopic to the constant
loop. □
Lemma 13.2. Let X be the union of two open sets UandV. f^^
U O V can be written as the union of three disjoint open sets A, A, an •
Let a e A, a' e A>Wb e B; suppose that all three points can be joined by
paths in U and in V. Then 7r,(X, a) is not infinite cyclic
Proof. Let . and P be paths in U and ^spectively,^JJjSn
from b to a, respectively. Let 5 and y be paths ,n </and^P™of tbe
fl to *' and from a' to a, respectively. Wnt.ng J/ n Kas the un.o
disjoint open sets
§8-13
The Jordan Curve Theorem 381
• A and A' u B>
we see from the proof of the preceding lemma that both the loop a * fi and
the loop S * y represent nontrivial elements of nx(Xt a).
Now if 7Ci(Xt a) were infinite cyclic, each of these loops would represent a
multiple of the generator of the group. Thus there would exist nonzero
integers n and m such that
n[a * ft] = m[S * y].
We shall prove that such integers do not exist.
Apply the construction of the preceding lemma to this situation, writing
U C\ V now as the union of the two disjoint open sets
A u A' and B.
One obtains the covering space £ of A' as before. See Figure 34. (Remember
that we never assumed A and B were connected when we constructed E.)
Figure 34
Now consider .he loops « . f and S . y and lift then, to paths
ring at <■„. It is easy to see that S . , lifts to a loop in E wh.Ie . .
More generally, every ,m,MPle of « . r »«' lift t0 a loOP "*^
nonzero multiple oTt.fi lifts to a path that begms at *. and ends
no mu,tiple of , . , can „ path homo.op,c to a
of
Now we prove that no arc in S2 scpmai*- ^ - —-- r
Exercise 5(c) of the preceding section. Here is another,
if you have worked the exercise cited.
382 The Fundamental Group and Covering Spaces
Chap, g
Theorem 13.3 {A nonsepamtion theorem). Let A be an arc in s*
S2 — A is connected. m * •
not in Z). We assert that if a and 6 can be joined by paths in S2 _ n
S2 - ZJ, then they can be joined by a path in S1 - D Figure is ,n !
the fact that this assertion is not entirely trivial. ' '"""rates
D,
fiffnrc 55
We suppose that a and b cannot be joined by a path in S1 — Z>and derive
a contradiction. We apply Lemma 13.1. Let X be the space S1 — d. Let U
and K be the open sets
U = S1 — Z>, and K = S2 — Z>2.
Then X = (/ U K, and (/ n K = 52 - Z>. By hypothesis, o and ft are points
of S2 — D that cannot be joined by a path in S1 — D. Therefore, Un V \s
not path connected. Let A be the path component of U n V containing a;
let B be the union of the other path components of U n V. Since U n ^1S
locally path connected (being open in S-), the path components of U O Kare
open; hence A and B are open in X We are given that a and b can be joined
by paths in U = S- - D, and K = S2 - D2. We conclude from Lemma 1J.I
that b^A', a) ^ 0. ,
But A- is the space S2 - d, which is homeomorphic to R1 and is m
simply connected. Hence it must be possible to join a and b by a pa
»<•/> 2. Now, given the arc A and the points a and b in S2 -A «
pose that a and ft cannot be joined by a path in 5J - A and derive
tradiction. This proves our theorem. ,
Choose a homeomorphism A : [0, 1] — A; let A, = MO, i» «"«>
§8-13 , \
We Jordan Curve Theorem 383
B2 = A([i, 1]). We conclude from Step ] tha TandfftT" r^'.*1*
paths in both S> - B, and S2 - 5, an"Ot bejOlned
Continue similarly. In this way we define a sequence
1 => 7, => ]2 =) ...
of closed intervals such that 7. has length ($)■ and such that for each* the
points a and ft cannot be joined by a path in S2 - *(/„). Compactness of
the unit interval guarantees there is a point x in f)lal since the lengths of
the intervals converge to zero, there is only one such point.
Then consider the space S1 - h(x). Since this space is homeomorphic to
R2, the points a and ft can be joined by a path a. in S1 — h{x). Since h(x) =
f~)h(In), the space S2 — h(x) equals the union of the open sets
(S2 - /;(/,)) <= (S* - /;G2)) c •••.
Because a(/) is compact, it must lie in the union of finitely many of these sets,
and hence in some one of them, say S2 — h{lm). But then a, is a path in
the set S1 — h(Im) joining a and b, contrary to hypothesis. □
Theorem 13.4 (The Jordan curve theorem). Let C be a simple closed curve
in S2. Then S2 — C has precisely two components W, anclW2, of which C is the
common boundary. [That is, C = W, - W, = W2 - W2.]
Proof. Step J. We first prove that S2 - C has exactly two components.
We apply Lemma 13.2. Write C as the union of two arcs C, and Cz having
precisely two points p and q in common. Let X be the space S1 - p - q- Let
U and V be the open sets
U = S2-C, and V = S*-C1.
Then X=UuV.AndUnV equals S2 - C, which has at least two com-
components, by Theorem 12.2. , ., b
Suppose that S2 - C has more than two components. Let A«AA*
two of the components and let B be the union of the remaining ones.1Kcause
S> - C is locally connected, each of the sets A, A', and i^^
and ft be points of ^, ^, and 5, respectively. By the precedmg *^
sets C/ = S2 - C, and V = 5> - C2 are path connected (s mce no
rates 5>). There/ore, a, a', and ft may be joined by pahs ,n U
mistaken.
384 The Fundamental Group and Covering Spaces ~
. Step 2. Now we show that C is the common boundary of W, and W
Because S2 is locally connected, each of the components W, and W of
S1 — Cis open in S2. In particular, neither contains a limit point of the other
so that (K,nH'!=»',n^ = 0. Since S2 is the disjoint union of W'
Wl3 and C, both the sets W, - W, and Wt - W% must be contained in C
To prove the converse, we show that if x is a point of C, every neighbor-
neighborhood U of x intersects the closed set w,—W,. It follows that x is jn
the set W, — W,.
So let U be a neighborhood of x. Because C is homeomorphic to the
circle S', we can break C up into two arcs C, and C2 that intersect only in
their end points, such that C, is small enough that it lies inside U See Figure
36.
Figure 36
Let a and b be points of W', and H^, respectively. Because C2 does not
separate S2 (by Theorem 13.3), we can find a path a, in S2 — C2 joining a
and ft. The set a{l) must contain a point y of the set fV, - Wu because
otherwise a(l) would be a connected set lying in the union of the disjoint open
sets Wx and S* — Wx and intersecting each of them. The point y necessarily
belongs to the closed curve C, since (W, - W,) a C. Because the path a
does not intersect the arc C2, the point y must therefore lie in the arc C,,
which in turn lies in the open set U. Thus U intersects W, — W, in the point
y, as desired. □
Example 1. The second half of the Jordan curve theorem, to the effect that
C is the common boundary of W, and Wlt may seem so obvious as hardly
to require comment. But, in fact, it depends crucially on the fact that C is homeo-
homeomorphic to S1.
§8-13 < -.:'.. •:■■:■ The Jordan Curve Theorem 385
For example, the subset C of the plane consisting of the union of the unit
circle S1 and the line segment [1, 2] x 0 separates S* into two components
W\ and fVz just as the circle does. But C does not equal the common boundary
of W, and Wt in this case. See Figure 37.
W,
Figure 37
There is a fourth theorem that is often considered along with these three
separation theorems. It is called the Schoeirflies theorem, and it states that if
Cis a simple_closed curve in S2 and C/and Fare the components of S2 — C,
then {/and V are each homeomorphic to the closed unit ball B2. We are not
going to prove this theorem. It is, however, a corollary of theRiemann map-
mapping theorem of complex variable theory.
The separation theorems can be generalized to higher dimensions as
follows:
A) Any subset C of S" homeomorphic to S"~' separates S".
B) No subspace A of S" homeomorphic to [0, 1] or to some ball Bm sepa-
separates S".
C) Any subset C of S" homeomorphic to S"'1 separates S" into two
components, of which C is the common boundary.
These theorems can be proved quite readily once one has studied singular
homology groups in algebraic topology. (See [S], p. 198.) The Brouwer theo-
theorem on invariance of domain for R" follows as a corollary.
The Schoenflies theorem, however, does not generalize to higher dimen-
dimensions without some restrictions on the way the space C is imbedded in S\
This is shown by the famous example of the "Alexander horned sphere," a
homeomorphic image of S2 in S3, one of whose complementary domains is
not simply connected! (See [H-Y], p. 176.)
The separation theorems can be generalized even further than this. The
definitive theorem along these lines is the famous Alexander-Pontryagin du-
duality theorem, a rather deep theorem of algebraic topology, which we shall
not attempt to state here. (See [S].) It implies that if C separates S" into k
components, so does any subset of S" that is homeomorphic to C (or even
homotopy equivalent to C). The separation theorems (l)-C) are immediate
corollaries.
386 The Fundamental Group and Covering Spaces
Chap. 8
Exercises
1. (a) Show that no arc in Ri separates R1.
(b) Show that a simple closed curve C in R* separates R* into two component
of which C is the common boundary. 'Ponents,
2. Show that under the hypotheses of Lemma 13.1, *,(*, a) contains an infinite
cyclic subgroup. '■■■■rate
3. Lemma. Let A and B be closed connected subsets of S* whose Intersection
consists of precisely twopoints. If neither A nor B separates S2,then S* ~(A\JB)
has precisely two components.
4. Recall that a theta space is a space which is the union of three arcs a, b, and c
each two of which intersect precisely in their end points.
(a) Show that a theta space in S2 separates S2 into precisely three components
[Hint: If C is the component of S2 - (a u b) not intersecting c, then Cue
separates S2 into precisely two components, by the preceding exercise.]
(b) Show that these three components have boundaries a u b,auc,andb\jc,
respectively. [Hint: Show that C is one of these components; then apply
symmetry.]
(c) Theorem. The gas-water-electricity graph cannot be imbedded in S2. (See
Figure 13 of §7-9.)
[Hint: Consider the theta space obtained by joining H, and H2 to G, W,
and E.I
5. Suppose that a,, a2, a3, and a4 are four distinct points of S2, and that foreach
pair a,, a, of these points (i^j), we have an arc a,a, in S2 joining them. Suppose,
moreover, that each pair of these arcs intersect in at most a common end point.
The union G4 of these arcs is called the complete graph on four vertices.
(a) Let C be the curve (aiaz) U (a2a3) u (a3ai) U (a4"i). whicn we denote
by 0,0203040, for short. Let A and B be the components of S2 - C. Show
that if A is disjoint from ata3, then B is disjoint froma204- [Hint: Assume
Exercise 4. Note that A is one of the three components of S2 -(Cu 0^3),
and these three components have boundaries C, ata2a3au and axa3a,.ax,
respectively.]
(b) Show that S2 — G4 has four components, whose boundaries are axa2a3ax,
a,a3a4a,, a,a2a4a,, and a1a3aia1, respectively.
(c) Theorem. The complete graph oil five vertices cannot be imbedded in 6 .(see
Figure 13 of §7-9.)
6. (a) Assume the hypotheses and notation of Lemma 13.1. Suppose V and\V
are path connected and *,(**) is infinite cyclic. Show that f**™*.
connected and [« * 0 ,«««<« *,(* ")■ t^ Use Exerc.se 10 of &U
(b) Consider the complete graph Gt on four vert.ces a be, d; Wl«*«
a subset of S>. Show that Up is an interior point of the arc « and ,
h th l bda enerates «« ^Jajn
a subset of S. Show that Up is a p
interior point of the arc bd, then the loop abeda generates «« ^Jajn
group of S* - /> - q. [Hint: Let tf = S2 - paba and V -S J^
x be an interior point of ad and y be an interior point of be,
§84 • The Classification ofCovering Spaces 387
T^ycZ}^ ^ d'fferent C°mpOnentS Of U" V- ^ *=xaby and
7. Prove the following:
Theorem. Let A be a simple closed curve in &; let 0 lie in the bounded com.
ponent of R* - A. Then A generates the fundamental group ofRi-o
Proof. Let 5 = «>u {oo} be the one-point compactification of ** Let B
be the bounded component of R* — A.
(a) Construct an arc D in S containing oo that intersects A in precisely its end
points a and c.
(b) Construct an arc E in S containing 0 that intersects A in precisely its end
points b and d, where b and d lie in different components of A - a - c.
[Hint: Show that if x and y are two points of the open, connected subset
U of S2, then (i) there is an arc in (/joining x and y, and (ii) there is an
homeomorphism h:S* —► S2 which equals the identity outside U and
maps x to y. Let A, and A2 be the components of A — a — c. Choose a
point x of B; join x to oo by arcs in S — A, and S — A2; obtain arcs
joining x to b and rf; then an arc from b to rf; then apply (ii) to obtain
an arc containing 0.]
(c) Apply Exercise 6.
8. Prove the following basic theorem of complex analysis:
Theorem. Let A be a piecetvise-differentiable simple closed curve in the com-
complex plane C; let z0 be a point of C not on A. Then the integral
has value ±1 ifz0 lies in the bounded component ofC — A, and it has value 0
lfz0 lies in the unbounded component.
[Hint: Use the preceding exercise and Exercise 6 of §8-5.]
9. A proof of the invariance of domain theorem for R2 was outlined in the exercises
of §8-12. Give an independent proof based on Exercise 7 of this section.
8-14 The Classification of Covering Spaces
Up to now we have used covering spaces primarily as a tool forcomputing
fundamental groups. Now we are going to turn things around and use tne
fundamental group as a tool for studying covering spaces. It turns out tnat
one can determine all possible covering spaces of a given space B, merely oy
examining the fundamental group of B. We explain this process now
If H, and H> are subgroups of a group G, you may recall from^gebn.
that they are said to be conjugate subgroups if H2 =«•«,-« ">r >
ment /of G. Said differently, they are conjugate if the .somorpus* ofG
with itself which maps x to «•*•«-' carries the group H, onte ft »^UP ^
It is easy to check that conjugacy is an equivalence relat.on on the collects
388 The Fundamental Group and Covering Spaces
Chap, $
of subgroups of G. The equivalence class of the subgroup H is called *
conjugacy class of H. " caned the
Now suppose we have a fixed path-connected space B and a fixed bas
point b0 e B.LetpiE-^Bbea. covering map, where E is path connected6
If we choose a point e0 in ;r ](&0) as a base point for E, then we have an
induced homomorphism
(which is, in fact, injective). The image group Ho =p*(ti1(E, e0)) depends of
course on the choice of the base point e0 in E, but in a very simple way. We
shall show that as e0 ranges over all the various points of/r>(&0), the image
subgroup ranges over those subgroups of G that are conjugate to Ho. Thus to
each path-connected covering space p : E —> B of B we can assign a certain
conjugacy class of subgroups of n^B, &„), the collection of the images of the
groups n,(E, e) under the homomorphisms induced byp, for e e p~'(b0).
It turns out that every conjugacy class corresponds to a covering space of
B under this assignment, and that this conjugacy class determines the cover-
covering space uniquely, up to homeomorphism. This is the basic classification
theorem for covering spaces.
More precisely, we define two covering spaces p : E —► B and p': E' —♦ B
to be equivalent if there is a homeomorphism h:E'—>E such that p ° h =p'.
B
Then the two main theorems concerning classification of covering spaces
can be stated as follows:
A) For every conjugacy class of subgroups of itt(B,bB), there exisib
path-connected covering space p : E - B of B such that the groups
/>,(*,(£, e% for e in/r'(*„), form this conjugacy class
B) Two path-connected covering spaces of B are equ.valent if andI o ny
if they correspond to the same conjugacy class of subgroups
*,(*,&,) «nder this correspondence.
By means of these theorems, the topolog.cal problem of .
f pace ^
By means of these theorems, the topolog.ca p .f^.
possible path-connected covering spaces of a S'ven space ^ »£*£ ^
pletely to the algebraic problem of determining all conjugacy classe
arbitrary path-connected space B. We shall ^
niceness" conditions on B in order to carry out the
14.3 and 14.4.)
§8-14
The Classification of Covering Spaces 389
Lemma 14.1. Let p : E —»• B be a covering map, where E and B are path
connected. Let b0 G B. As e ranges over the points of p~'(b0), the group
p,i(fti(E, e)) ranges precisely over a conjugacy class of subgroups ofn,(B, b0).
Proof. Given e0, e, e />"'(&„), let
ffo=P*(nl(E,eo)) and H, = pt(n,(E, ej).
Step I. Let y be a path in E from e0 to e,; let a, be the loop p » y in B
based at i0. We show that
[a]*H,*[a]-1 <=«■„.
Let [h] be an element of Hx; then [A] = pt[h] for some loop h in £ based
at e,. Let £ = (j> * Ti) * y. Then £ is a loop based at e0, and
Thus [a] * [h] * [a] e //■„, as desired. See Figure 38.
Figure 38
Step 2. It follows that Ho and H, are conjugate subgroups. For let y be
a path in E from e0 to eu and let a = p o j>. Then j> is a path from e, to eo>
and & =p o y. Applying Step 1 twice, we have
[a] • H, * [a.]-' <= Ho,
[&] * Ho * [a] c:Hx.
Thus Ha = [a] * H, * [a], as desired.
Step 3. Now given e0 e /r'Fo)» and given a subgroup H of 7^E, fr0)
conjugate to Ho, we wish to find a point e, of p-'(b0) such that the corre-
corresponding subgroup Hi equals #. By hypothesis, Ho = [a] * H * [a]"' for
390 The Fundamental Group and Covering Spaces p.
some loop a in B based at b0. Let y be the lifting of a to a path in £beginni
at e0, and let e, = y(l). Let H, = pt(n,(E, e,)). It follows from Step 2 that
Ho = [a] *Ht* [a]. Then H = Hu as desired. □
Equivalence of coverings
Now we prove that two coverings are equivalent if and only if they cor-
correspond to the same conjugacy class. We need the following generalized
version of the "lifting lemmas" of §8-4:
Lemma 14.2 (The general lifting lemma). Let p : E —► B be a covering
map; let p(e0) = b0. Let f: Y —► B be a continuous map, with f(y0) = b0.
Suppose Y is path connected and locally path connected. The map f can be lifted
to a map f: Y —► E such that f(y0) = e0 if and only if
f,(»,(Y,y,))cp»(S,(E,e,)).
Furthermore, if such a lifting exists, it is unique.
Proof. If the lifting / exists, then
/>*(*,(£, e0)).
This proves the "only if" part of ihe theorem.
Now we prove that if/ exists, it is unique. Given y, e Y, choose a path
a in Y from y0 to y,. Take the path/o a in B and lift it to a path y in E
beginning at e0. If a lifting/ of/ exists, then /(;',) must equal the end point
y(\) of j>, for / o a is a lifting of/o a that begins at e0, and path liftings are
unique.
Finally, we prove the "if" part of the theorem. The uniqueness part of the
proof gives us a clue how to proceed. Given y, e Y, choose a path a in Y
from y0 to yt. Lift the path/o a to a path y in E beginning at e0, and define
/(_,;,) = j»(l). See Figure 39. It is a certain amount of work to show that/is
well-defined, independent of the choice of a- Once we prove that, continuity
of/ is proved easily, as follows:
Given a neighborhood N of f(yt), we shall find neighborhood Wofy.
such that/(»O c: N. First, choose a neighborhood Uoff(y,) tHat is evenly
covered by p. Let Vo be the slice of /r'(t/) that contains/(.y,). Let/>0 be the
restriction of p to Vo. By passing to smaller neighborhoods if necessary,
can assume that Vo c N. Now choose a neighborhood Wof yt that is pa
connected and lies in/" <(U). We claim that f(W) c Vo- For, given/ & >
we can choose a path /?in Wfromy, to y. Consider the path/°)?; -tis
the path 5 =Po< o/o p in E, beginning at /(;>,)• Then y * 5 is defined,i
a lifting of/o (a * p), and it begins at e0. By definition, f(y) equals the
point of y * 3, which lies in Vo-
Now we show / is well defined. Given two paths a and fi in
yt, their images/o a and/o fi are paths in B. Let y and 5
§8-14
The Classification of Covering Spaces 391
Figure 39
respective liftings to paths on E beginning at <?„. We wish to show that
Let f be a lifting of/° ft to a path on £ beginning at y(\). See Figure 40.
Then y * e is defined and is a lifting to E of the loop (/o a) * (/o ft) in 5.
The homotopy class of this loop is/*([a * /?]), which by hypothesis belongs to
pJjtx{E, <?„)). Then there is a loop (j> in E based at <?„ such that
figure 40
392 The Fundamental Group and Covering Spaces
Chap. 8
It follows that e must end at e0. For by Theorem 4.3, if two path •
which are path homotopic are lifted to paths on E beginning at th *
point, they must end at the same point. Since p o 0 and (/o a) ^rT-
are path homotopic, their liftings 0 and y * e must end at the same °
Then y * e ends at e0> so e ends at erf. point-
Nowe is aliftingof/0/that begins at y(l) and ends ateo.Thenfisaliftin
of/°/3 that begins at e» and ends at y(l). The path 8 is another such lifting B?
uniqueness of path liftings, 5 = e. In particular, 5A) = },(]), as desired, n
Theorem 14.3. Let B &e /?a?A connected and locally path connected Let
p : E —► B and p': E' —► B be path-connected covering spaces of B- let
P(e0) = P'(e'o) = b0. Then p and p' ore equivalent covering maps if and only
'/P*(ti(E. e0)) fl«^ p'*(?ti(E'. e'o)) ore conjugate subgroups o/s,(B, b0).
Proo/. Suppose that the coverings are equivalent. Let A :E'—*E be a
homeomorphism such that p o h =p'. Let /z(e'o) = e,. Then because A is a
homeomorphism, A#(s,(£", e'o)) = Ki(£, e,). Applying /»# to both sides, we
have
/>;(*,(£•', e'o)) =/>*(*,(£>,))■
By Lemma 14.1, the latter subgroup is conjugate to pJjtx(E, e0)).
Now we prove the converse. Suppose that the two subgroups are con-
conjugate. In view of Lemma 14.1, we may by choosing a different base point in
E' obtain the situation where the two subgroups are equal. So let us suppose
this is done, and let e'o now denote the new base point.
We apply the preceding lemma. Consider the diagram
E'
E^B
where p' is a covering map. The space E is path connected; it is also locally
path connected, being locally homeomorphic to B. Furthermore,
/>*(«,(£, eo» <=/4(«i(£'. e'o);
in fact, these two groups are equal. By the preceding lemma, we can i
map/?: E —► B to a continuous map h : E—* E' such that h(e0) = <"o-
Reversing the roles of E and E' in this argument, we see that.the ma
p' :E' —* B can be lifted to a continuous map k:E'' —» E with kro) '
To show that h and k are inverses of each other, consider the
7116 Classification of Covering Spaces 393
Note that £ o A: £ _»£■ js a lifting to £ of the
the condition (* o h)(e0) = e.. Theidentity m p\J^ ^i
lifting*,. By uniqueness of liftings, * „ * nJt equal iE. sintilady
Example 1. Consider covering spaces of the circle B = S' Because
7it(B, b0) is abehan, two subgroups of «,(*, 60) are conjugate if and only if thev
are equal. Therefore two coverings of B are equivalent if and only if thev
correspond to the same subgroup of n,(B, b0).
Now n,(B, b0) is isomorphic to the integers Z. What are the subgroups of
Z1 It is standard theorem of modern algebra that, given a nontrivial subgroup
of Z, it must be the group Gn consisting of all multiples of n, for some n e Z+.
We have studied one covering space of the circle, the covering/7: R —» S*.
It must correspond to the trivial subgroup of 7t,(S<, b0), because R is simply
connected. We have also considered the covering p:S' —* S' defined by
p(z) = z", where 2 is a complex number. In this case, the map pt carries a gen-
generator of 7i,(S',b0) into n times itself. Therefore, the group pt(n,(S',*„))
corresponds to the subgroup Gn of Z under the standard isomorphism of
nx{S\ b0) with Z.
We conclude from the preceding theorem that every path-connected cover-
covering space of S' is equivalent to one of these coverings.
Existence of coverings
Now we show that given a subgroup H of n,(B, b0), there exists a covering
space /?:£—» B and a point e0 of /r'F0) such that pJn^E, e0)) = H. We
need to assume an additional condition on the space B, called "semilocal
simple connectivity."
Definition. A space B is said to be semilocally simply connected if every
point b of B has a neighborhood Ksuch that the homomorphism of n^V, b)
into n,(B, b) induced by inclusion is trivial.
If V is such a neighborhood of b and U is any neighborhoodI of b, then the
neighborhood U n V of b, which lies in U, also sat.sfies ^^T
Semilocal simple connectivity is weaker than true >^ ""P
which would require that within each neighborhood
a neighborhood V of b that is itself simply connected.
Theorem 14.4. Let B be par/, connected, locally path connected
locally simply connected. Let b, e B. <"">£?*% ?«£%
exists a path connected covering space p. E —
such that
p* (*,(E, e0)) = H.
394 The Fundamental Group and Covering Spaces
da. 8
Proof. Step 1. {Construction of E). The procedure for constructing v •
reminiscent of the procedure used in complex analysis for construct1 'S
Riemann surfaces. Let (P denote the set of all paths in B beginning at b&
Define an equivalence relation on 6> by setting a ~ 0 if a and 0 end at th
same point of B and the class [a • 0] belongs to the subgroup H. This is easi^
seen to be an equivalence relation. ^
Let E denote the collection of equivalence classes; denote the equivalence
class of the path a by a*. Define p : E -* B by the equation />(a*) = a(l)
Because B is path connected, p is surjective. We shall topologize E in such a
way that/; is a covering map.
We first note two facts:
A) If a =:„ 0, then a* = 0*.
B) If a* = 0*, then (a * 5)* = @ * d)* for any path 5 in B beginning
at a(l).
The first follows by noting that if a —, P, then [a * 0} is the identity element,
which belongs to H. The second follows by noting that a * 5 and p * 8 end
at the same point, and
[(a * 5) * {0 * S)] = [(a * 5) * (<5 * fj)] = [a * 0],
which belongs to H by hypothesis.
Step 2. (Topo/ogizing E). One way to topologize E is to give (P the com-
compact-open topology (see Chapter 7) and E the corresponding quotient topo-
topology. But we can topologize E directly as follows:
Let a be any element of (?, and let {/be any path-connected neighborhood
of a(l). Define
B(U, a) = {(a * df 15 is a path in U beginning at a(l)}.
We assert that the sets B(U, a) form a basis for a topology on E. See Figure
41. Note that a* belongs to B(U, «,).
First we show that if P* e B(U, a), then B(U, 0) = B{U, a). We are
given that 0* = (a * 5)* for some path 5 in U. The general element of
B(U, 0) is of the form @ * y)*, for some path y in U. By A) and B) above,
we have
@*y)* = ((a * S) * y)* = (a * E * y))*,
which lies in B{ol, U) by definition. Hence B{U, 0) c B{U, a). Conversely,
the general element of B(U, a) is of the form (a * e)*, where f is a path in v.
Again by A) and B),
(a * e)* = ((a *5)*(S* e))* = @*(S* f))#,
which lies in B(U, 0). Thus B(U, a) c B(U, 0). ^
Now we show the sets B{U, a) form a basis. If 0* belongs io
intersection B(U,,oc,)n B{U2, a2), we need merely choose a path-conn
§8-14
The Classification of Covering Spaces 395
Figure 41
neighborhood Kof y?(l) contained in U, n U2. The inclusion
B(V,fi)c:BXU,,fi)nB(Ut,fi)
follows from the definition of these sets, and the right side of the equation
equals B(UU a,) n B(Ut, a2) by the result just proved.
Step 3. The map p is continuous and open. It is easy to see that p is open,
for the image of the basis element B(U, a) is the open subset U of B: Given
x e U, we choose a path 8 in U from a(l) to x; then (a * 8)* is in B(U, a)
and /?((« * 8)*) = x.
To show that/? is continuous, let us take an element a* of £ and a neigh-
neighborhood W of p{a*). Choose a path-connected neighborhood U of the point
/>(«*) = a(l) lying in W. Then B(U, a) is a neighborhood of a* that/? maps
into W. Thus p is continuous at a*.
Step 4. The map p is a covering map. Given bt e B, choose U to be a
path-connected neighborhood of Z», that satisfies the further condition that
the homomorphism nx{U, bx) —> n,(B, bt) induced by inclusion is trivial. We
assert that U is evenly covered by p.
First, note that /?-'({/) equals the union of the sets B(U, a), as a ranges
over all paths in B from b0 to b,: Since/? maps each set B(U, a) onto U, it is
clear that p~'(U) contains this union. On the other hand, if fi* is in p~l(U),
then/?(l)isjn {/and we can choose a path 5 in {/frorriyff(l) to Z»,. Let a be the
396 The Fundamental Group and Covering Spaces _,
Chap. 8
path fi * 5 from b0 to b,: Then fi ~p a, * §, so that p* = (a „ §* ..
belongs to /?(£/, a). Thusp-'(U) is contained in the union of the sets 5A/°?
Second, note that distinct sets B(U, a) are disjoint. For if B* belons t
B(U, a,) n B{U, a2), then /?(</, a,) = B{U, fi) = /?«/, a2), by Step fl0
Third, we show that p defines a bijective map of B(JJ, a) with £/. it fol-
follows that p\B{U, a) is a homeomorphism, being bijective and continuous
and open. We already know that/? maps B(U, a) onto U. To prove injectivity
suppose that
/>((«• <5,)#)=/>((a*<52)*),
where £, and dz are paths in *7. Then 5,0) = <52A). Because the homomor-
phism n,(U, b{) -* n,(B, b,) induced by inclusion is trivial, 5, * 52 is path
homotopic in B to the constant loop. Then a * <5, =zp a * <52, so that we have
(a * di)* — (a * 5Z)*, as desired.
Step 5. The space E is path connected and the subgroup H equals
Pt(n,(E, e0)) for some e0 in p~'(b0). This completes the proof of the theorem.
First, we calculate specifically what the lifting of a path a in B looks like.
Let a be a path in B beginning at b0. Given t e [0, 1], let a,: /—♦ B denote
that "portion" of a, between the points b0 and a,(t), defined by the equation
a,(j) = aits) for s e [0, 1].
Then define a : /—► E by the equation
«(/) = («,)*•
We assert that a is a lifting of a; note that 3, begins at the point e0 = (ej*,
the equivalence class of the constant path, and ends at the point a*. It is easy
to see that p ° a = a, since />(«(')) =/>((<*,)*) = <*,0) = ^C''1)- The hard
part is to show that & is continuous.
Once we prove that fact, our theorem follows readily. To show Eis path
connected, we note that if a* is any point of E, then a, is a path in B begin-
beginning at b0, and its lifting g is a path in E beginning at e0 and ending at a ■
To show that PiGi,(E, e0)) => H, take an element [a] e H. Let 8 be the
lifting of a to a path on E beginning at e0 \ then & ends at a*. Now a is equiv-
equivalent to the constant path eb,, because [a. * ej = [a] e H. Therefore,
a* = (ej#, so that £ is a loop in £ based at e0. Since />*([«]) = [a], it follo*s
that [a] e />»(*,(£, £„))• Thus /f c ^(^(f, e0))-
To prove the reverse inclusion, take an element [a] e w,^, «). Lei ~
p o 8. and note that a is the unique lifting of a to £ beginning at e0. There to
a ends at a*; since a is a loop in E, we have dt(l) = e0- Therefore, a* °~ ^^
so a is equivalent to e6,, and hence [a] belongs to H. Thusp*(n,(E, e"^Cm.
We complete the proof by showing that £ is continuous. Take a PaI?
eter value f0 and a neighborhood B(U, a,,) in £ of the point 8(/^
(aj*. We shall find a number e > 0 such that whenever \t, — to\ < e>
§8-14
The Classification of Covering Spaces 397
have (a,,)* e B(U, a,,). This will prove continuity. Choose e small enough that
11, - to| < € => <x(t,) g U. We assert that if\t1-tB\<e, then a,, is path
homotopic to a,. * d for some path 5 lying in U, whence a(?,) = (a,,)* lies
in B(U, a,,), as desired.
Assume for convenience in notation that tB < t,. Let 6 be that part of the
path a lying between x(t0) and afrO, reparametrized appropriately. Figure 42
■"Co)
Figure 42
makes it clear that a,, is path homotopic to a,, * S. Formally, let
S(s) = a(d - s)tB + stt);
then 5 lies in */. Define F: / X /—♦ i? by the equation
F(s rt = /"(['•O ~ 0 + *i*]2j/[1 + 'D for s e [°. 0 + 0/2],
*' ~ f«('o(l - Bj - 1)) + *,Bj - 1)) for je[A+ i)\l, 1].
It is the required path homotopy. □
Corollary 14.5. Let B be path connected and locally path connected.
(a) If B has a universal covering space, that covering space is uniquely
determined up to equivalence.
(b) IfB is semilocally simply connected, then B has a universal covering
space.
Proof. Part (a) is an immediate consequence of Theorem 14.3; \ip -E-*
■Bis a universal covering space of B, then the groupp*(n,(E, e0)) is the trivial
subgroup of 7i,(fl, b0). To prove (b), we apply the preceding theorem to con-
construct a path-connected covering space /?:£■—► B such that/?*(&,(£ e0)) is
the trivial subgroup of n,(B, b0). Since pt is injective (a fact we leave to you
to prove), this means that E is simply connected and is thus a universal cover-
covering space of J3. Q
The Fundamental Croup and Covering Spaces „
Chap, g
Exercises
1. We know that n,(S' x S',box b0) is isomorphic to Z x Z, the isomorphism
being induced by the projections of £' x 51' onto its two factors.
(a) Consider the infinite cyclic subgroup of Z x Z generated by the element
1 X 0; find the corresponding covering space of S1 x S1.
(b) Find the covering space of £' x S< corresponding to the infinite cyclic
subgroup generated by 1 X 1.
(c) Find the covering space corresponding to the subgroup
// = {Bn, 2m)\n, m e Z}.
2. Let B be a topological space. Show that if B has a universal covering space, then
B is semilocally simply connected.
3. Let An be a circle of radius l/«in the A>>-pIane tangent to the >>-axis at the origin
Let X = {JAn.
(a) Show that X is not semilocally simply connected.
(b) Let C(X) be the subspace of R1 which is the union of all line segments
joining points of X to the point @, 0, 1). (It is called the cone on X.) Show
that C(X) is semilocally simply connected at the origin but not locally simply
connected there.
4. Let E and B be path connected and locally path connected. Lei p : E —>B be
a covering map. A homeomorphism /; : E —► E is called a deck transformation
(or covering transformation) if p ° h = p.
(a) Let e0 and <?, be points ofp- 'F0). Show that there exists a deck transforma-
transformation h : E—► E such that h(e0) = e, if and only if pt(Kt(E, e0)) -
p*Gli(E, e,)). Show that if h exists, it is unique.
(b) If //„ = p*Gi,(£, <?o)) '"s normal in x,(B, bo\ then p : E—> B is said to
be a regular covering map. Show that in this case, the group of deck trans-
transformations of E is isomorphic to the quotient group K,(B, ba)IHo- (Com-
(Compare Exercise 10 of §8-4.)
(c) Up:E—> B is a universal covering space of B, what can you say about the
group of deck transformations of El
5. Consider the usual covering map p: R x R—>S'xi'. Describe the group
of deck transformations of R x R.
6. Determine all deck transformations of the covering space of the figure eight
constructed in Lemma 7.5.
*7. Generalize Exercise 13 of §8-4, concerning covering spaces of topologica
groups, to the case where the covering space is path connected but not simp
connected.
Index
Abelian fundamental group, 330, 354, 355
Absolute neighborhood retract, 221
Absolute retract
vs. universal extension properly, 221
Accumulation point of a net, 188
Action of a group on a space, 356
Addition operation. 30
Adjunction space, 221
Alexander horned sphere. 385
Algebraic numbers, 51
a, 327
independence of path, 330
is isomorphism. 327
a", definition, 35, 55
ANR, 221
Antipodal map, 353
Antipodal point, 352
Antipode-preserving map, 361
AR, 221
Arc, 375
Archimedean ordering, 33
Arzela's theorem, 279, 292
Ascoli's theorem:
classical version, 277
general version, 290
Axiom of choice, 59
equivalent statements, 62, 74
finite, 61
B
Baire category theorem, 294
special case, 177, 203
Baire space, 293
compact Hausdorff space, 294
complete metric space, 294
fine topology on^lX Y), 297
G5 set, 296
irrationals, 296
locally compact Hausdorff space, 296
open subset, 296
RJ, 297
Ball, unit (see Bn)
Barber of Seville paradox, 48
Base point, 326
Base-point choice:
effect on fi», 330
effect on n,, 328
Basis for a topology, 78,81
Bd A, 101 .
401
402 Index
P(X) (see Stone-Cech compactification)
Bijective function, 19
Binary operation, 30
Bing metrization theorem, 254
B", 155
compactness, 175
path connectedness, 155
simple connectedness, 327
Bolzano-Weierstrass property. 178
Borsuk theorem. 377
Borsuk-Ulam theorem forS2, 361
Boundary, 101
Bounded above, 27
Bounded below, 27
Bounded metric, standard, 119
Bounded set, 119
Box topology, 113
basis for, 114
compactness properties, 181
Hausdorff condition, 115
vs. product topology, 114
subspace, 114
Brouwer fixed-point theorem:
for B", 369
for B2, 365
Brouwer invariance of domain, 378, 387
B2,133 (see also B")
fi(x, e), 117
Cantor set, 177
Cardinality:
comparability for two sets, 68
greater, 62
same, 52
Cartesian product:
general, 36~38
of two sets, 13
Cauchy sequence, 264
Choice axiom (see Axiom of choice)
Choice function, 59
Circle, unit (seeS1)
CIA, 95
Classification of covering spaces,
388,392,393
Closed graph, 172
Closed interval, 84
Closed map, 135,172
Closed ray, 86
Closed refinement, 251
Closed set, 92
in subspace, 94
Closure, 94
of a cartesian product, 100,116
of a connected set, 149
Closure (cont.)
in a subspace, 95
of a union, 100, 246
via basis elements, 95
via limit points, 97
via nets, 188
via sequences, 128, 190
Cluster point, 96
Coarser topology, 77
Cofinal, 187
Coherent topology, 216
Collection, 11
Comb space, 156
Compact convergence topology, 282
vs. compact-open topology, 286
convergent sequences in, 282
furst-countability, 283
independence of metric, 287
vs. pointwise convergence topology
283,290
regularity, 283
vs. uniform topology, 283
(see also Compact-open topology)
Compact Hausdorff space:
isBaire, 294
components, 235
G6 set is Baire, 296
imbedding in, 237
metrizability, 220
normality, 198
paracompactness, 255
quasicomponents, 235
Compactification, 238
induced by an imbedding, 239
one-point, 183
of@, 1), 239 v
(see also Stone-Cech compactification)
Compactly generated space, 282
Compactness, 164
of box topology, 181
of closed intervals, 174
closed set criterion for, 170
vs. completeness, 275
of continuous image, 167
of countable products, 278
in<g(X.Rn), 277, 279
\n<i(X, Y), 290
of finite products, 167
in Hausdorff metric, 279 ,,4
vs. limit point compactness, 178, !•'•
via nets, 188
in order topology, 173,177
of products, 232
in R, 174
in/?", 174
vs. second-countability, 194
via sequences, 181
Index 403
Compactness (cont.)
ofsubspace, 165
in .Tp 167
in uniform topology, 181
(see also Compact Hausdorff space)
Compact-open topology, 286, 290
vs. compact convergence topology, 286
continuity of evaluation map, 287
Hausdorff condition, 289
regularity, 289
Compact space, 164 (see also Compactness)
Compact support, 284
Comparability:
of cardinalities, 68
of well-ordered sets, 73
Complement, 10
Complete graph:
on five vertices, 304, 386
on four vertices, 386
Completely normal space, 206
Completely regular space, 211, 236
(see also Complete regularity)
Complete metric space, 264
Completeness:
vs. Baire condition, 294
of closed subspace, 264
vs. compactness, 275
of rif(X, Y) in uniform metric, 267
ofG6 set, 270
of irrationals, 270
of82, 270
of open subspace, 270
of products, 270
of/?", 264
of/?", 265
of sup metric, 267
of uniform metric, 266
Complete regularity;
of locally compact Hausdorff space. 237
vs. normality, 236
of products, 236
vs. regularity, 238
of/?2, 237
of R" in box topology, 237
of subspace, 236
of topological group, 237
Completion, 269, 270
uniqueness. 271
Component. 159
in a compact Hausdorff space, 235
vs. path component, 162
vs. quasicomponent, 163, 235
Composite, 18
of continuous functions, 107
of covering maps. 336
of quotient maps, 138
Composition of paths, 322
Conclusion, 7
Conjugacy class, 388
Conjugate subgroups, 387
Connected im kleinen, 163
Connectedness, 147
of box topology, 152
of closure, 149
of continuous image, 149
in a linear continuum, 152
vs. path connectedness, 156,158
of products, 150
\nR, 154
forsubspaces, 147
of !Tf, 151
(see also Path connectedness)
Connected space, 147
(see also Connectedness)
Constant path, 322
Continuity:
of algebraic operations in R, 129, 134
via bases, 102
after change of range, 107
closed set formulation, 103
via closures, 103
of composites. 107
of constant function. 107
e-6 formulation, 127
of fxg. 112
of inclusion, 107
local formulation, 107
of maps from quotient spaces, 139
of .maps into products, 109, 115
of metric, 124
via nets, 188
of nth root function, 111
at a point, 107
of restriction, 107
via sequences, 128, 190
via subbases, 102
of sums, differences, products, and
quotients, 129
of uniform limit, 130
in each variable separately, 112
Continuous function, 102 (see also
Continuity)
Continuous image:
of a compact space, 167
of a connected space, 149
Continuum hypothesis, 62
Contractible space, 325, 373
simple connectedness, 361
Contraction, 182,270
Contrapositive, 8
Convergent net, 187
Convergent sequence, 116, 127 (.seealso
Sequences)
Converges uniformly. 129
404 Index
Converse, 9
Convex set, 152, 325
Coordinate functions, 109
Coset, 145
Countability, 46
of algebraic numbers, 51
of countable unions, 49
of finite products, 49
ofrationals, 47
of subsets, 47
of Z, 45
ofZ, X Z,,45,47
Countable basis, 190 (see also
Second-countability)
Countable basis at a point, 128. 190
(see also First-countability)
Countable compactness, 182, 194
Countable dense subset, 191
in3°(/, R), 195
in/7, 195
in t2, 195
in product space, 195
vs. second-countability, 191, 194
in subspace, 193
Countable intersection condition, 234
Countable set, 46 (seealso Counlability)
Countably infinite, 45
Countably locally discrete, 254
Countably locally finite, 246
Counterimage, 17
Covering, 164, 165
Covering dimension, 302
Covering map, 331
composites, 336
induces injective liomomorphism, 342
vs. local homeomorphism, 334
products, 336
R ->-5l, 332, 393
R X R —*■ torus, 333
R X/?,->fl2-0,334
5'->5', 335,336,393
S2^-P2, 352
Covering space, 331
classification, 388, 392, 393
equivalence, 388
existence, 393
ft-fold,336
vs. it, of base space, 341, 342, 388
regular, 398
of topological group, 342, 398
Covering transformation, 398
Cube, 313
Curve, 223
simple closed, 375
^sednessin Yx, 267, 281, 283
compact subsets of, 290
10 (cont.)
completeness, 267
(see also Compact convergenc
Compact-open topo.ogy^
3, 119
Deck transformation, 398
Decomposition space, 137
Deformation retraction, 373 (seealso
Strong deformation retraction)
Degree of a map, 373
Deleted comb space, 156
components, 161
connectedness, 157
local connectedness, 162
De Morgan's laws, 11
Dense subset, 191
Diagonal map, 270
Diagonal set, 100,201
Diameter of a set, 119, 177
Dictionary order relation, 26
Difference of two sets, 10
Dimension, topological, 302 (seealso
Topological dimension)
Directed set, 187
Discrete topology, 77
Disjoint sets, 6
Distance. 117
Distributive laws for u and n, 11
Domain, 15, 16
Double torus, 355
Doubly punctured plane, 345
Doughnut surface, 334
Element of a set, 4
Empty interior, 293
Empty set. 6
c-ball, 117
6-neighborhoodofaset, 17/
Equality symbol, 4
Equicontinuity, 276
ofclosure.279,290
vs. compactness, 277, 2yu
vs. total boundedness, 276
Equivalence class. 22 ,J
Equivalence or compact.ficat.ons 23
Equivalence of covering spaces, » .
Equivalence relation, 22
Essential map, 357
Euclidean metric, 120,126
Euclidean space, 37
Evaluation map, 287
Index 405
Even integer, 35
Evenly covered, 331
Eventually zero, 52
ex (constant path), 322
Expansion lemma, 259
Exponents, laws of, 35
1/1,319
Family of sets, indexed, 37
F. i, c, 230
Field, 31
Figure eight space, 345, 373
fundamental group, 354
Final point, of a path, 3 19
Finer topology, 77
criterion for, 80
Fine topology on <<?(X Y), 285
isBaire, 297
Finite axiom of choice, 61
Finite complement topology, 77
(see also .Tf)
Finite-dimensional, 302
Finite intersection condition, 170
Finiteness, 40
of finite products, 44
of finite unions, 44
of subsets, 43
Finite set, 40
First category, 294
First coordinate of ordered pair, 1 3
First-countability, 128. 190
implies adequacy of sequences, 190
implies compactly generated, 282
of metric space, 128
of product, 191
of R,, 192
of Sn, 194
of subspace, 191
First-countable space, 128, 190 (see also
First-countability)
First homotopy group, 326 (see also
Fundamental group)
Fixed point, 158
Fixed-point free action. 357
Fixed-point theorem:
for B", 369
for B2, 365
for a contraction, 182,270
for a retract of B2, 368
for S", 373
for[0, 1), 158
Fourteen-set problem, 101
Frechet compactness, 178
Frobenius theorem, 365, 369
Fo set, 250
Function, 16
Functorial properties of ht, 329
Fundamental group, 326
when abelian, 330
of double torus, 355
of figure eight, 354
and homotopy equivalence, 371
nonabelian, 354, 355
of orbit space, 357
of a product, 351
0fP2, 352
of/?"'-0,344
of R2~ 0,343
of y, 350
of Sl, 340
of S2, 347, 350
of strong deformation retract, 345
of torus, 352
Fundamental theorem of algebra, 362
Gas-water-electricity graph, 304
nonimbeddability, 386
Gg set, 194,248
is fiaire, 296
closed set is a, 248, 250
f'Hc) is a, 215,238
irrationals, 250
points of continuity form a, 296, 297
rationals, 295
and strong Urysohn lemma, 215
is topologically complete, 270
Generalized continuum hypothesis, 62
General linear group, 144
General position:
in RN, 309
in/?3, 307
Geometrically independent, 308
G/N, 145
paracompactness, 260
regularity, 145
gib A, 27
Graph, 172
Greater cardinality, 62
Greatest lower bound, 27
Greatest lower bound property, 27
Groupoid properties, 322
H
dependence on base point, 330
dependence on homotopy class of ft, 30*
functotial properties, 329
406 Index
Hahn-Mazurkiewicz theorem, 274
Half-open interval, 84
Has n elements, 40
Hausdorff condition, 98
for box topology, 115
and closedness of diagonal, 100, 201
for manifold, 225
for metric space, 126
for order topology, 99
for product, 99, 115, 197
for quotient space, 139,140
vs. regularity, 195, 200
for subspace, 99, 197
vs, T| axiom, 99, 100
for topological group, 145
and uniqueness of extensions, 112, 241
(see also Compact Hausdorff space)
Hausdorff metric, 279
Hausdorff space, 98 (see also Hausdorff
condition)
Hilbertcube. 125
Homeomorphism, 104
vs. continuous bijective map, 106. 167
Homogeneous space, 144
Homomorpliism:
induced by a map. 329 (see h *)
induced by a path. 327 (see a)
product, 351
zero, 330
Homotopic maps, 318
Homotopy. 319
effect on/it> 369
equals path in K(X, Y). 289
straight-line, 321
Homotopy equivalence, 371
induces isomorphism of it p 371
vs. strong deformation retraction, 372
Homotopy extension lemma. 377
Homotopy inverse. 371
Homotopy type, 371
(ftXo)»,329 (see also A*)
Hypothesis, 7
Identification space, 137
Identity function, 20
"If... then," 7
/ X / in dictionary order:
closures in, 101
connectedness, 156
linear continuum, 154
local connectedness, 163
metrizability, 195
path connectedness, 156
//, countable dense subset, 195
Image, 16, 17 ■
Image set, 15, 16
Imbedding, 105 (see also Isometric
imbedding)
Imbedding theorem:
for a compact manifold, 223,314
for a completely regular space, 237
for a linear graph, 308
for a manifold, 315
for an m-dimensional space, 310 315
into RJ, 220
for a 2-complex, 310
Immediate predecessor, 25
Immediate successor, 25
Indexed family of sets, 37
Indexing function, 37
Index set, 37
Indiscrete topology, 77
Induced homomorphism (seeh,)
Induction, principle of, 32
transfinite, 67
Inductive definition (see Recursive
definition)
Inductive set:
in R, 32
in a well-ordered set, 67
Inessential map, 357
induces Zero homomorphism, 358, 371
Infinite broom, 164
Infinite sequence, 37
Infinite series, 133
Infinite set, 45,57
Initial point of a path, 319
lnjective function, 19
Int A, 95
Integers, 32
Interior of a set, 94
Intermediate value theorem:
of calculus. 146
general. 154
Intersection, 6, 12, 38
Intersects, 95
Interval, 25, 84
Intervals in /?:
compactness, 174
connectedness, 154
topological dimension, 304
lnvariance of domnii , 378, 387
Inverse function, 19
Inverse image, 17
Irrationality of v/2, 36
Irrationals:
Baire, 296
G6 set, 250
topologically complete, 2/u
Isometric imbedding, 132
into a complete space, 268, ^"
surjectivity, 182
Index 407
Isometry, 182
Isomorphism, 105
Jordan curve theorem, 383
Jordan separation theorem, 375
/-tuple, 38
K
£-fold covering, 336
fc-plane, 309
Kuratowski 14-set problem, 101
Larger topology, 78
Largest element of an ordered set, 27
Laws of algebra, 33
Laws of exponents, 35
Laws of inequalities, 34
Least upper bound, 27
Least upper bound property, 27
vs. greatest lower bound property, 29
for/?, 31
for well-ordered sets, 67
Lebesgue dimension, 302
Lebesgue number, 179
Lebesgue number lemma, 179
Left inverse, 21
Lens space, 357
Lifting of a map, 336
Lifting lemma:
general, 342, 390
for path homotopies, 338
for paths, 337
Limit point, 96
Limit point compactness:
vs. compactness, 178, 181,194
vs. countable compactness, 182
of products, 182
Limit point compact space, 178
Lindelof condition, 191
for products, 193, 195,235
for/?,, 192
for/?2, 193
vs. second-countability, 191,194
for Sn and Sn,194
for subspaces, 194, 220
(see also Regular Lindelof space)
Lindelof space, 191
Linear continuum, 31,152
compact sets in, 173
Linear continuum (cent.)
connected sets in, 152
Linear graph, 304
imbedding in R3, 308
topological dimension, 305
Linear order, 24
Local compactness, 182
implies compactly generated, 282
of products, 186
of R" andRw, 183
(see also Locally compact Hausdorff space)
Local connectedness, 161
vs. connectedness imkleinen, 163
vs. local path connectedness, 162
ofR"andRw, 161
Local homeomorphism, 334
Locally compact Hausdorff space:
is Baire, 296
complete regularity, 237
imbedding in RN,315
one-point compactification, 183
regularity, 205
second-countability, 261
Locally discrete collection, 254
Locally finite collection, 245
Locally finite indexed family, 111,224
vs. locally finite collection, 246
Local metrizability, 220
vs. metrizability, 220, 260
Local path connectedness, 161
Local simple connectedness, 393, 398
Logical equivalence, 8
Logical quantifiers, 9
Long line, 159
paracompactness, 259
Loop,326
Lower bound, 27
Lower limit topology, 82 (see also /?;)
B2, 126
completeness, 270
countable dense subset, 195
lub A, 27
M
Manifold, 223
Hausdorff condition is needed, 225
imbeds in RN, 223
imbeds in R2m*\ 314, 315
metrizability, 224
topological dimension, 306, 314, 315
Mapping, 16
Maximum principle, 69
applied, 232, 235
intuitive proof, 70
proof, 74
408 Index
Maximum value theorem:
of calculus, 146
general, 175
Mean convergence topology, 284
Metric, 117
Metric space, 119
Hausdorff condition, 126
82, 126
normality, 198
paracompactness, 256
R, 118
R , uniform metric, 122
R", 121
subspace, 126
YJ, uniform metric, 266
Mej-izability:
of / X / in dictionary order, 195
of manifolds, 224
of products, 126,132
of R, 118
otRJ, 131
of R,, 195
of R", 121
of /?<*», 123
of Rw in box topology, 130
of Sn, 179
of Sn, 131
Metrizable space, 119
Minimal uncountable well-ordered set, 66
(see also Sn)
m.tuple, 36
Multiplication operation, 30
N
Nagata-Smirnov condition, 245
Nagata-Smirnov metrization theorem:
necessity, 253
sufficiency, 2.49
Negation, 9
Negative number, 31
Neighborhood, 96
Neighborhood retract, 221
Nested sequence of sets, 171
Net, 187
Normality, 195
of adjunction space, 221
of closed subspace, 205
of coherent topology, 216
of compact Hausdorff space, 198
vs. complete regularity, 236
of metric space, 198
of paracompact space, 255
of product, 197,201,202, 205
vs regularity, 195, 201,202, 205
of regular Lindeldf space, 205
Normality (com.)
of Rh 202
of subspace, 197,201,205
of well-ordered set 200
Normal space, 195 (see also Normality)
Nonseparation theorems, 378 382
Norm, 120 '
Nowhere-differentiable function, 297
nth root function:
continuity, 111
existence, 158
Number of elements in a set, 40
uniqueness, 43
o
Odd integer, 35
w-tuple, 37
One, 31
One-point compactifjcation, 183
One-to-one function, 19
"Onto" function, 19
Open covering, 164
Open interval, 25, 84
Open map, 91, 135
Open ray, 86
Open refinement, 251
Open set, 76
relative to subspace, 89
Operation, binary, 30
"Or," meaning of, 5
Orbit space, 357
fundamental group, 357
(see also G/H)
Order of a collection, 302
Ordered field, 31
Ordered pair, 13
Order-preserving function, 25
Order relation, 24
Order topology, 85
compact sets in, 173,177
Hausdorff condition, 99
normality, 200
regularity, 205
subbasis, 91
vs. subspace topology, 90
(see also Well-ordered set)
Order type, 25
0(A),U
Pasting lemma, 108
Paracompact-manifold, 261
Index 409
Paracompactness, 255
of compact Hausdoiff space, 255
of long line, 259
vs. metrizability, 256,260
vs. normality, 255
and partitions of unity, 225
of product, 256, 259
of R, 255
of regular Lindelof space, 259
of 7?/, 256, 259
of Sn, 259, 261
of subspace, 256
Paracompact space, 225, 255
Partial order, 71
axioms, 72, 187
strict, 69
Partition of a set, 23
Partition of unity, 222, 225
Path, 155
Path component, 160
vs. component, 162
Path connectedness, 155
of B", 155
vs. connectedness, 156, 158
of deleted comb space, 157
of / X /in dictionary order, 156
of long line, 159
of R"- 0,155,350
of S", 156
of topologist'ssine curve, 158
Path homotopy, 319
Path-homotopy class, 320
Path-induced homomorphism, 327
Peano curve, 271
Peano space, 274
Piecewise linear function, 299
ffj(X, xQ), 326 (Seealso Fundamental
group)
Plane in RN, 309
Point of accumulation, 96
Point-finite collection, 247
Point-finite indexed family, 224
Point-open topology, 280
vs. compact convergence topology,
283,290
vs. compact-open topology, 286
convergent sequences in, 281
Pojntwise bounded collection, 278
Pointwise convergence topology, 280 (.see
also Point-open topology)
Positive integers, 32
Positive number, 31
Power set, 11
Preimage, 17
Principle of induction, 32
Principle of recursive definition, 49, 55
Principle of tiansfinite induction, 67
Principle of ttansfinite recursive definition,
Products:
.of continuous maps, 112
of covering maps, 336
of open maps, 139
of quotient maps, 138,141,187,289
Product space, 86,113
basis for, 87, 114
vs. box topology, 114
closures in, 100, 116
compactness, 167, 232, 278
complete regularity, 236
connectedness, 150
convergent sequences in, 116, 281
countable dense subset, 195
equals point-open topology, 280
first-countability, 191
fundamental group of, 351
Hausdorff condition, 99,115, 197
limit point compactness, 182
local compactness, 186
Lindelof condition, 193, 195, 235
metrizability, 131, 132
normality, 197, 201, 202, 205
paracompactness, 256, 259
vs. quotient topology, 138, 141,187, 289
regularity, 197
second-countability, 191
subbasis, 88, 113
vs. subspace topology, 90, 114
vs. uniform topology, on R , 122
Projection maps, 88,113
Projective n-space, 353
Projective plane, 352 (see also P*)
Proper map, 285,315
Proper subset, 4
P2,352
fundamental group, 353
surface, 352
Punctured euclidean space, 155 (see also
R"-0)
Punctured plane, 321 (see also R* - 0)
Q, 32
Quantifiers, logical, 9
Quasicomponent, 163
vs. component, 163,235
Quotient map, 135
composites, 138
products, 138,141,187, 289
Quotient operation in R, 31
Quotient space, 136
410 Index
Quotient topology, 136
Hausdorff condition, 139, 140, 206
normality, 206
vs. product topology, 138, 141,187 289
subspace, 138 '
R
R, 30
compact sets in, 174
connected sets in, 154
metric for, 118
paracompactness, 255
standard topology, 82
uncountability, 176
Rt,Rt,31
Range of a function, 16
Rational numbers, 32
Ray in ordered set, 86
Real numbers, 30 (see also R)
Recursion formula, 48, 55
Reciprocal, 31
Recursive definition, 48
principle, 49, 55
transfinite, 68
Refinement of a collection, 225, 251
Regular covering map, 398
Regularity. 195
vs. complete regularity, 238
aiG/H, 145
vs. Hausdorff condition, 195,200
vs. metrizability, 217, 249
vs. normality, 195, 200, 201, 205
of products, 197
of subspaces, 197
of topological groups, 145
Regular Lindelof space:
metrizability, 220
normality, 205
paracompactness, 259
Regular space, 195 {see also Regularity)
Relation, 21
Restriction:
of a function, 16
of a relation, 28
Retract, 2l6, 345 (see also Absolute retract
and Retraction)
Retraction, 330
gn + l _* y, 368,373
£2-»S',342
deformation, 373
r3 onto knotted x-axis, 221
/?2 onto logarithmic spiral, 221
strong deformation, 345
Reverse of a path, 320
p--\2°< 2"
Sup metric)
R~, 116, 125,274
R in box topology:
is Baire, 297
is topological group, 144
RJ in product topology:
is Baire, 297
metrizability, 131
normality, 205
is topological group, 144
R in uniform topology, 122
is Baire, 297
completeness, 266
is topological group 144
/?/, 82
countability axioms, 192
metrizability, 195
normality, 202
paracompactness, 256, 259
vs. standard topology on R, 82
Rf. 193
complete regularity, 237
Lindelof condition, 193
normality, 202
paracompactness, 256
R", 37
basis for, 115
compact sets in. 174
completeness. 264
local compactness, 183
local path connectedness, 161
metrics for, 121
second-countability, 190
simple connectedness, 326
Rn-0, 155
fundamental group, 344
path connectedness, 155, 350
/?", 37
Ru in box topology:
complete regularity, 237
components, 163
connectedness, 152
metrizability, 130
normality, 206
paracompactness, 206
(see also RJ in box topology)
Rw in product topology:
completeness, 265
local compactness, 183
local path connectedness, 161
metrizability, 123
second-countability, 190
(see also RJ in product topology)
Rw in uniform topology:
components, 163
Index 41A
Ru in uniform topology (com.)
second-countability, 191
(see also RJ in uniform topology)
R2, standard topology, 87
R2- 0,321
covering by R X /?,, 334
fundamental group, 343
Rule of assignment, 15
Russell's paradox, 62
Saturated set, 135
Schoenflies theorem, 385
Schroeder-Bernstein theorem, 52
Second category, 294
Second coordinate of ordered pair, 13
Second-countability, 190
of compact metric space. 194
of connected locally compact metric
space, 261
vs. countable dense subset, 191, 194
vs. Lindeldf condition, 191, 194
of products, 191
of/?", 190
ofRu, 190
of subspaces, 191
Second-countable space, 190 (see also
Second-countability)
Section:
of ordered set, 66
of Z,, 40
Semilocally simply connected, 393
Separable, 192 (see also Countable dense
subset)
Separation by continuous functions:
of closed sets, 211
of points from closed sets, 220
Separation of a space, 147
Separation theorems:
* by simple closed curve, 377, 386
S", 385
S2 by AuB, 377,386
S by simple closed curve, 375, 383
Sequence lemma, 128
Sequences, 37
vs. closure, 128, 190
vs. compactness, 179, 181
vs. continuity, 128, 190
in product spaces, 116,281
sums, differences, products and quotients,
132
Sequential compactness, 179
vs. compactness, 181, 194
Set, 3,4
^rules for specifying, 58
'Set of all sets" paradox, 62
Shrinking lemma, 224
o-locally discrete, 254
o-locally finite, 247
Simple closed curves 375
generates tt, of R* - 0, 387
separates R2, 377, 386
separatesS2,375,383
Simple order, 24
Simplicial 2-complex, 306 (see also
2-complex)
Simply connected space, 328
B", 327
contractible space, 361
R", 326
Rn- 0,350
S",350
S2, 347, 351
Slice:
in covering space, 3 31
in product space, 168
Smaller topology, 78
Smallest element of ordered set, 27
Smirnov metrization theorem, 260
S", 156
compactness, 175
fixed-point theorem for, 374
path connectedness, 156
simple connectedness, 350
vector fields on, 369, 374
sfi. 66
compactness properties, 178
countability axioms, 194
metrizability, 179
paracompactness, 259, 261
Stone-fiech compactification, 243
uniqueness, 73
Sn,66
metrizability, 131
sn x in-
incomplete regularity, 236
normality, 201
paracompactness, 256
S1, 106
covering by R, 332
coverings by Sl, 335, 336
covering spaces classified, 393
fundamental group, 340
Sorgenfrey plane, 193 (seealso Rt)
Space-filling curve, 271
Special Van Kampen theorem, 348
Sphere, unit, 138, 156 (see also S2; S")
Square metric, 120, 267 (see also
Sup metric)
Square root of 2, irrationality, 36
Square roots, existence, 35
Star convex set, 330
Stereographic projection, 350, 367
412 Index
Stone-fech compactification, 241
connectedness, 243
metrizability, 243
of Sn, 243
uniqueness, 242
of Z,, 243
Stone's theorem, 256
Straight-line homotopy, 321
Strictly coarser topology, 77
Strictly finer topology, 77
Strict partial order, 69
Strong deformation retract, 345
fundamental group, 345
Strong deformation retraction, 345
vs. homotopy equivalence, 372
of /?"-(> onto yl, 345
of/?2 -p-q onto 6 and eight, 345, 346
Stronger topology, 78
S2, 138
simple connectedness, 347, 351
vector fields on, 367
Subbasis for a topology, 82
Subnet, 188
Subsequence, 179
Subset, 4
Subspace, 89
basis for, 89
vs. box topology, 114
compactness, 165
complete regularity, 236
connectedness, 147
countable dense subset, 193
first-countability, 191
Hausdorff condition, 99, 197
Lindelbf condition, 194, 220
of metric space, 126
normality, 197, 201.205
vs. order topology, 90
paracompactness, 256
vs. product topology, 90, 114
vs. quotient topology, 138
regularity, 197
seeond-countability, 191
Subtraction operation, 31
Superset, 232
Sup metric, 267
completeness, 267, 268
vs. uniform metric, 267
Support, 222
Surface, 223
Surjective function, 19
^,77
compactness, 167
connectedness, 151
,Tf (com.)
Tj axiom, 100
Theta space, 346, 373
separates S2, 386
Tietze extension theorem 21?
Tj axiom, 99
Topological dimension, 302
of [a, b], 304
of a linear graph, 305
of a manifold, 314, 315
in a metric space, 304
of a set in/?W, 313,315
of a set in R2> 305
of a subspace, 302
of a triangular region, 306, 359
of a 2-complex, 306
of a 2-manifold, 306
of a union, 304, 315
Topological group, 144
closedness of A • B, 173, 188
complete regularity, 237
covering spaces of, 342, 398
Hausdorff condition, 145
normality, 207
paracompactness, 260
ff| is abelian, 331
regularity, 145
Topological imbedding, 105
Topologically complete space, 270 {seealso
Complete metric space)
Topological property, 104
Topological space, 76
Topologist's sine curve, 158
Topology, 76
generated by a basis, 78, 80
generated by a subbasis, 82
Torus, 134, 333
covering by R X R, 333
double, 355
equals doughnut surface, 334
fundamental group, 352
vector fields on, 366
Totally bounded, 275
Totally disconnected, 152
Tower, 74
Transcendental number, 52
Transfinite induction, 67
Transfinite recursive definition, 68
Translation of RN, 309
Triangle inequality, 117
Trivial group, 328
Trivial topology, 77
Tube, 168
Tube lemma, 169
generalized, 172
2-complex, 306
imbedding in Rs, 310
topological dimension, 306
2-sphere, 138 (see also S2)
Tychonoff theorem, 232
countable, 278
finite, 167
u
U(A, e),177
Uncountabtlity:
of/?, 176
of 0\Z,)> 50
of transcendental numbers, 52
of {0,1}W, 50
Uncountable set, 46
Uncountable well-ordered set, 66
existence, 73
(see also Sq)
Uniform boundedness principle, 297
Uniform continuity theorem:
of calculus, 146
general, 180
Uniform convergence, 129
Weierstrass Af-test, 134
Uniform convergence on compact sets, 282
(see also Compact convergence topology)
Uniform limit theorem, 130
converse fails, 133
partial converse, 172
Uniformly bounded, 278
Uniform metric, 122, 266
completeness, 266
vs. sup metric, 267
(see also Uniform topology)
Uniform structure, 292
Uniform topology,-122, 266
vs. compact convergence topology, 283
compactness properties, 181, 277, 279
independence of metric, 289
vs. pointwise convergence topology, 283
vs. product topology, 122
(see also Uniform metric)
Union, 5,12, 38
Universal covering group, 343
Universal covering space, 341
existence, 397
uniqueness, 342, 397
Universal extension property, 216
vs. absolute retract, 221
Universal neighborhood extension property,
221
Upper bound, 27
Utysohn lemma, 207
for completely regular spaces, 237
strong form, 215
Urysohn tnebization theorem, 217
/ndearl
Vacuously true, 7
Value of a function, 16
Vanishing at infinity, 279
Van Kampen theorem, 349
special, 348
Vector field, 364
on B", 369
On B2, 364
on Klein bottle, 366
on S", 369,374
on S2, 367
on torus, 366
Vertices of a linear graph, 304
W
Weaker topology, 78
Weierstrass Af-test, 134, 214
Well-ordered set, 63
AX B in dictionary order, 64
compactness in, 173
countable, 65
finite, 64
normality, 200
subsets, 64
uncountable, 66, 73
Z«,32
Zt X Z», 63
Well-ordering theorem, 65
applied, 224, 251
vs. axiom of choice, 74
vs. maximum principle, 74
Winding number, 347
as an integral, 347
of simple closed curve, 387
A, 36
A^.37
[X, H.325
Z, 32
Zermelo, 65
Zero, 30
Zero homomotphism, 330
Z.,32