/


Author: Дубровский В.Н. Смородинский Я.А. Сурков Е.Л.
Tags: физика механика библиотечка квант серия библиотечка квант
Year: 1984




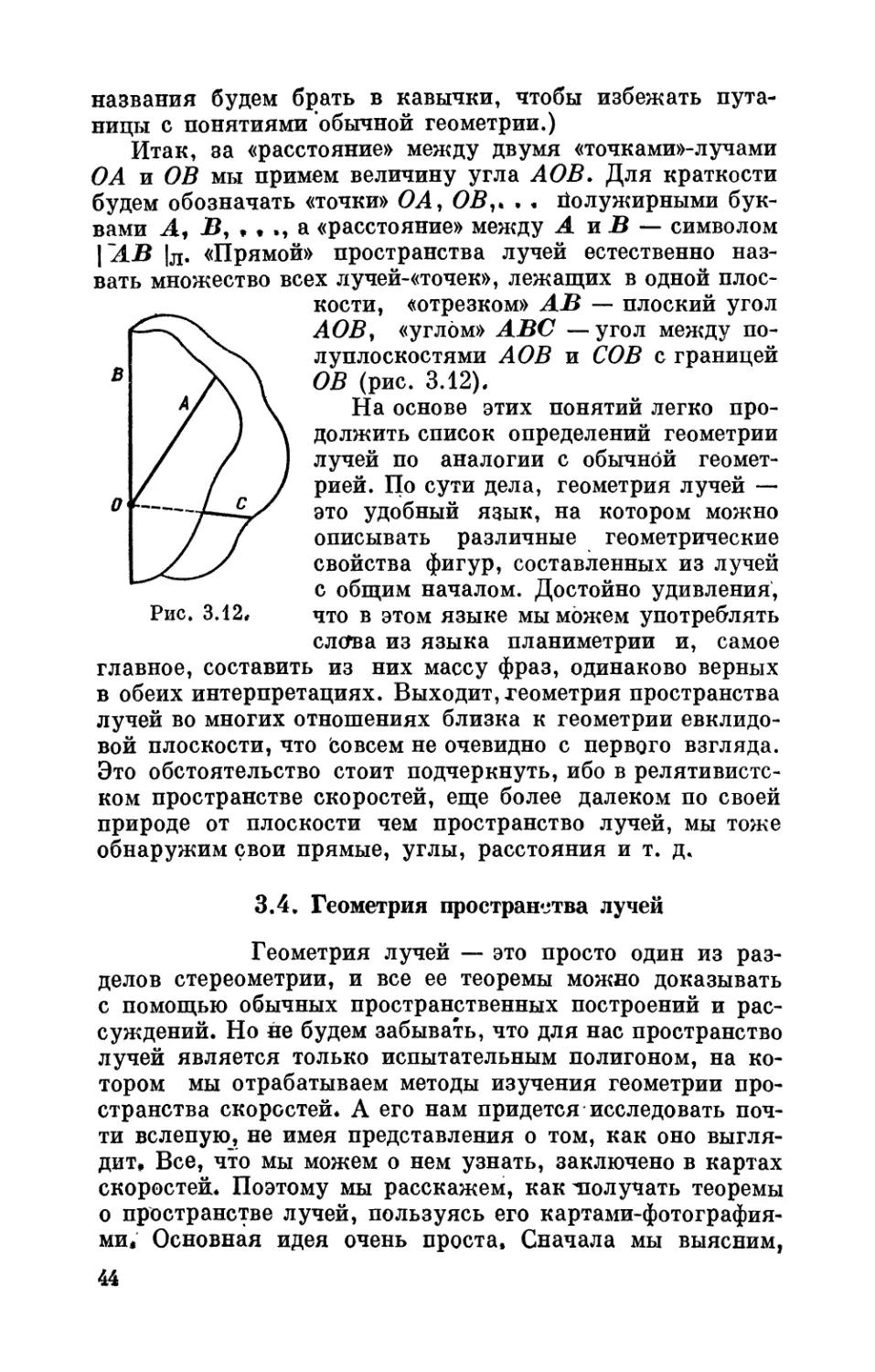
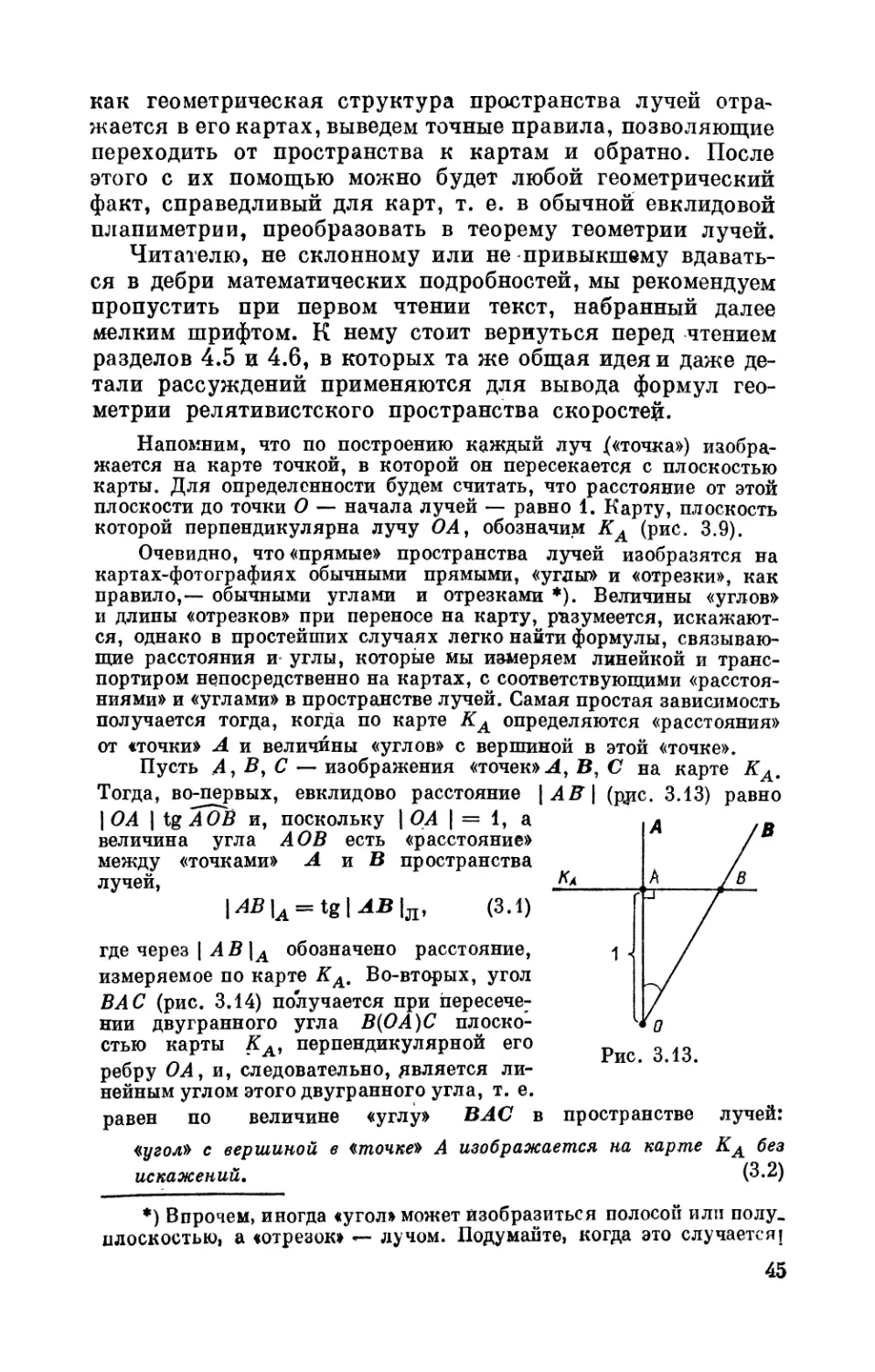
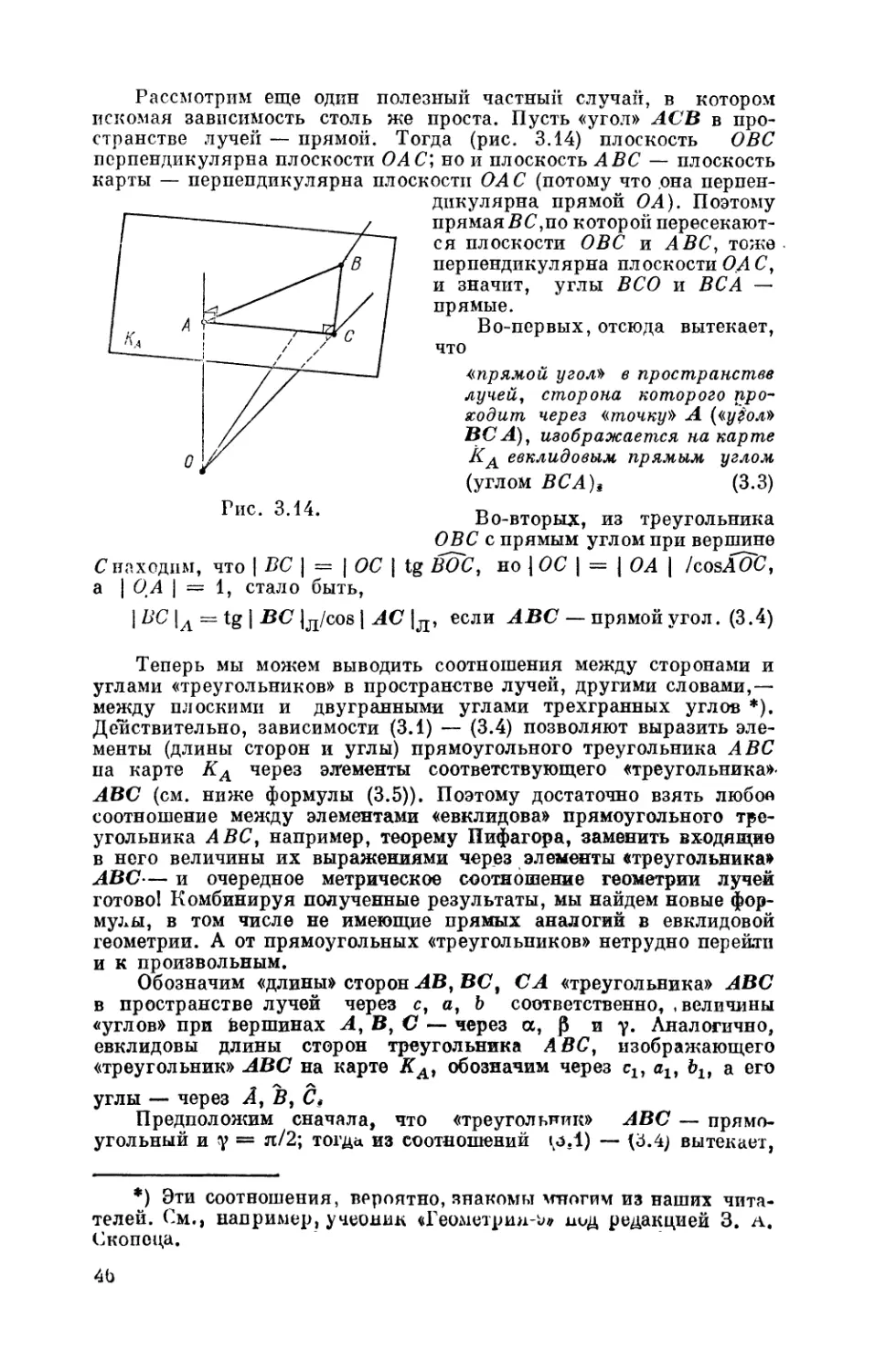
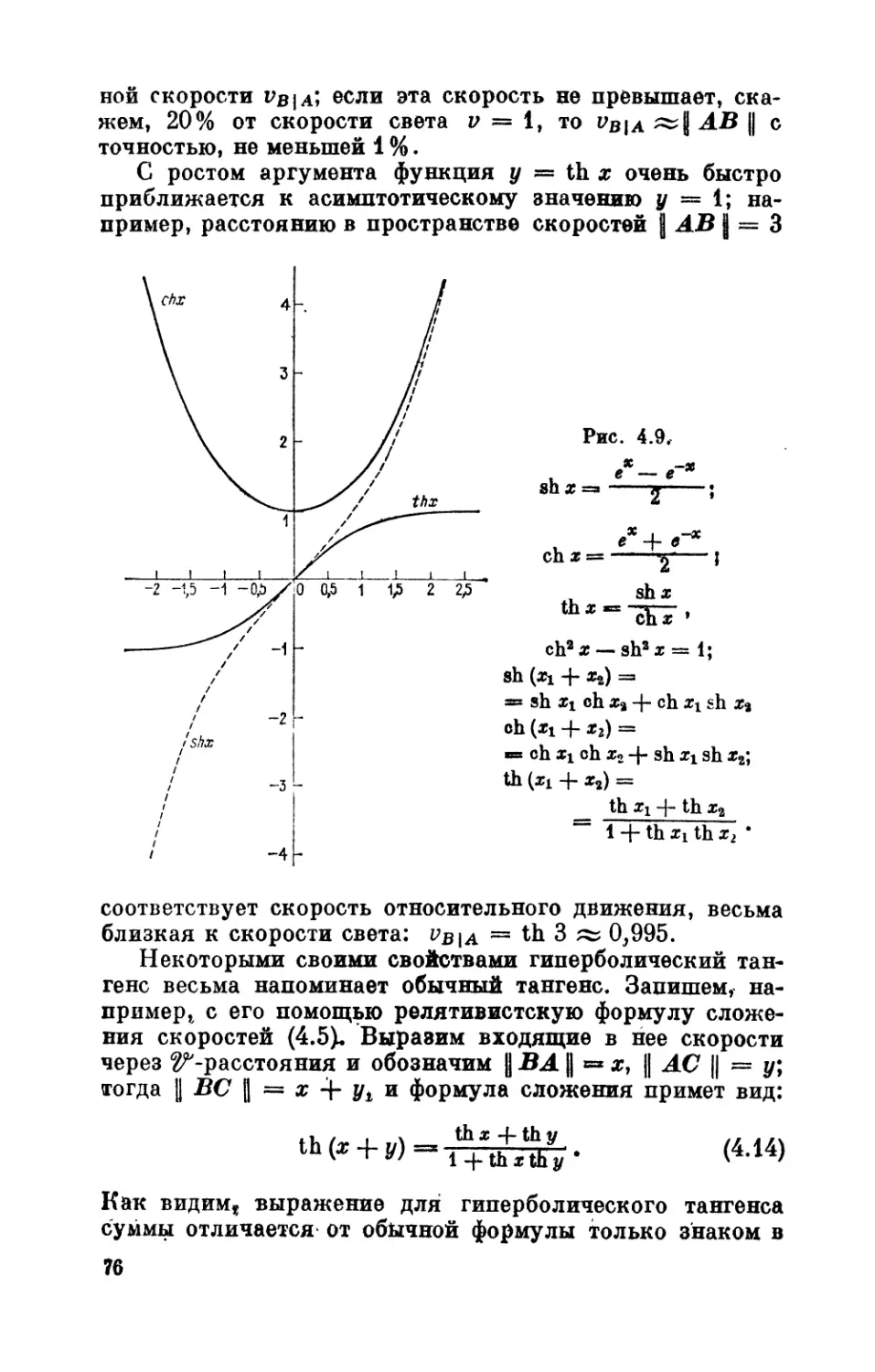
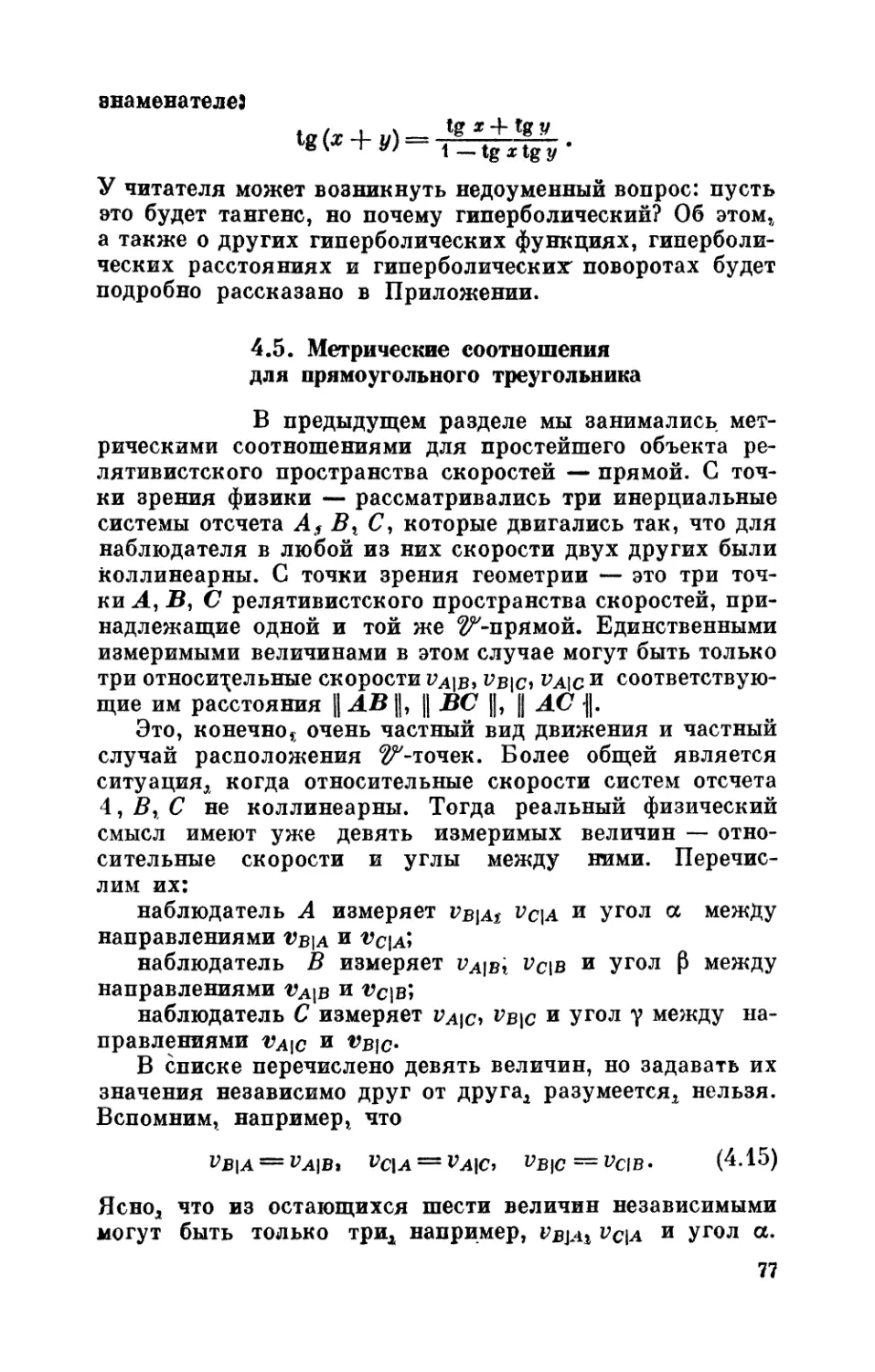
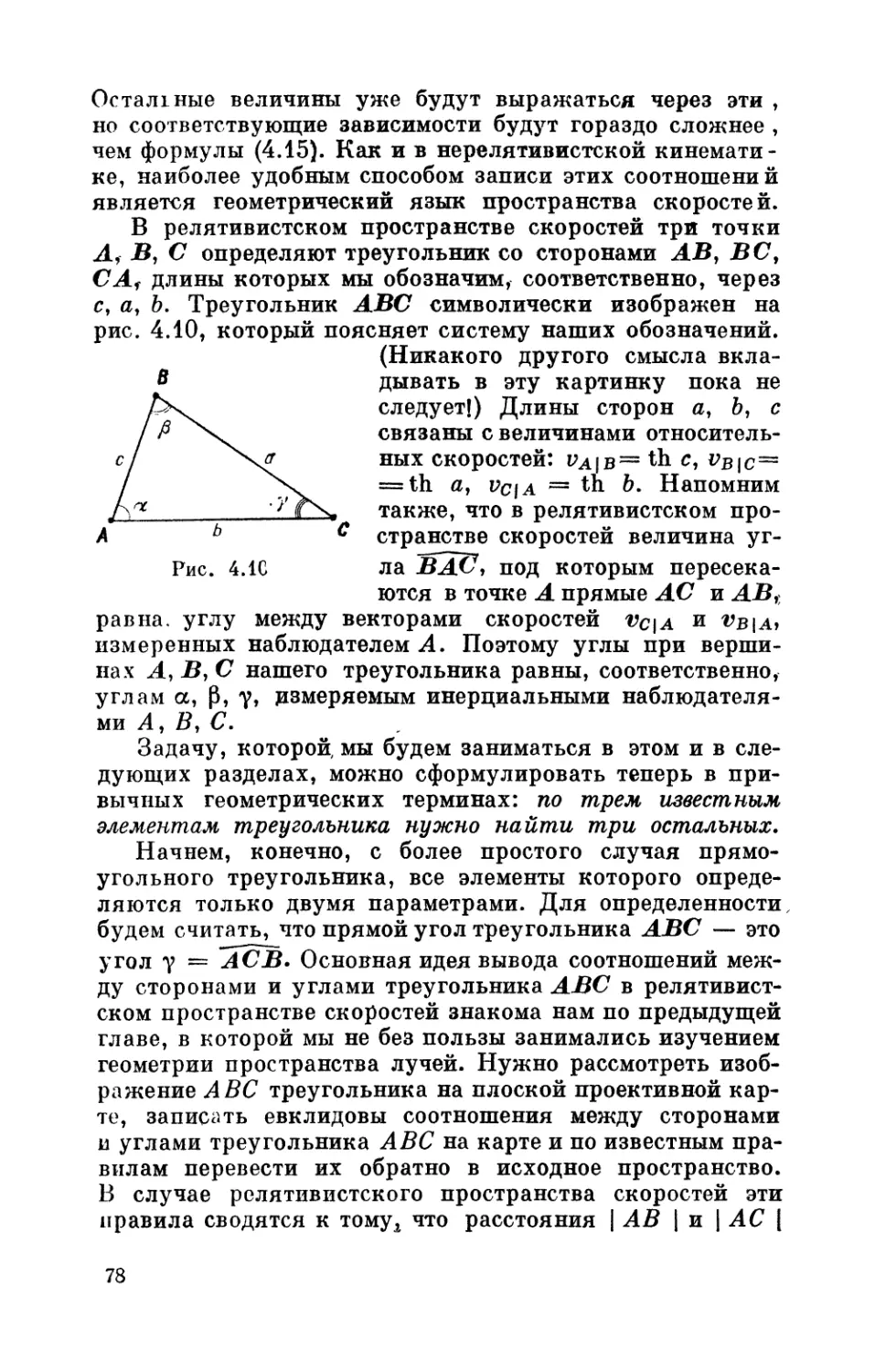
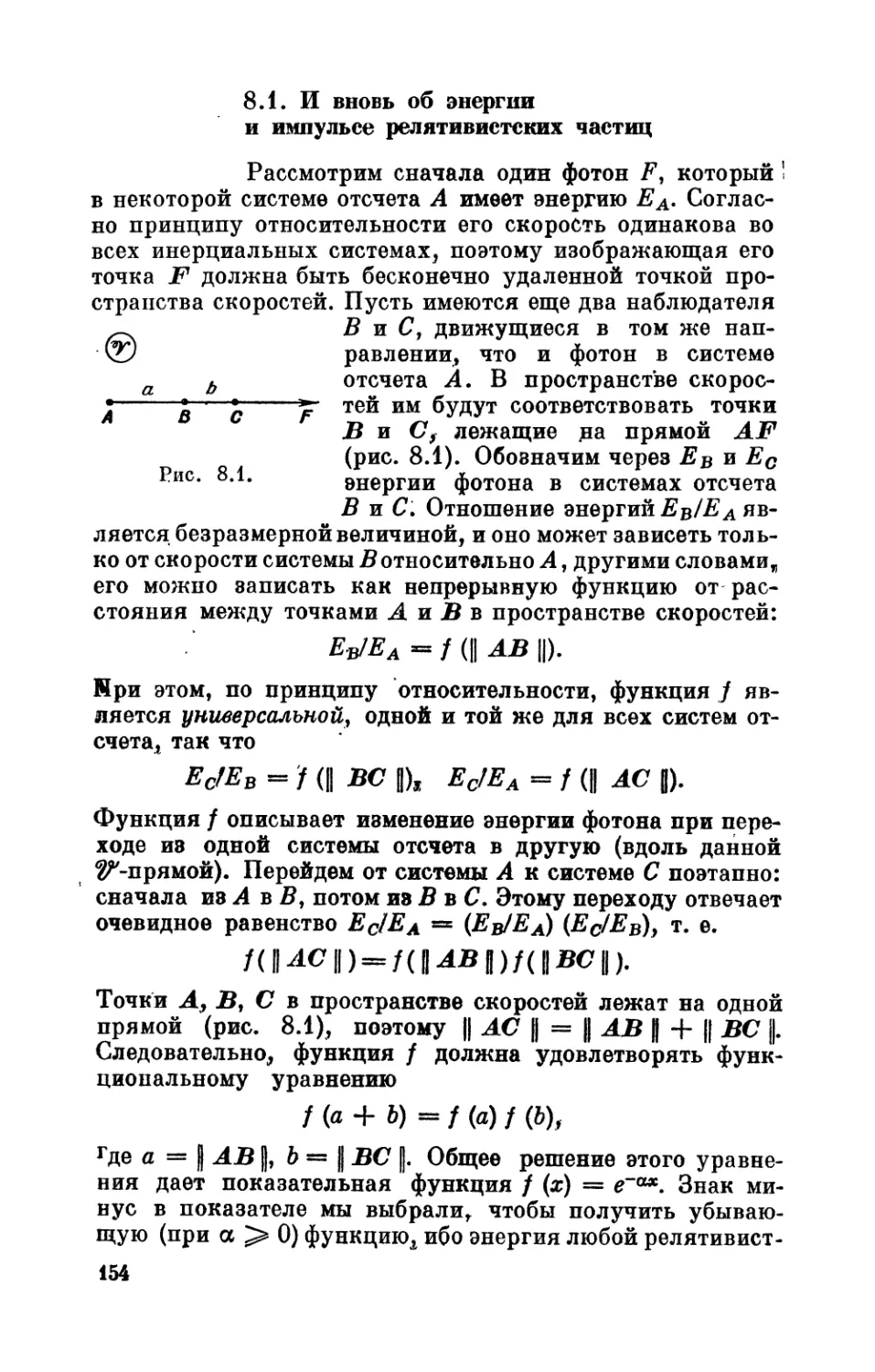
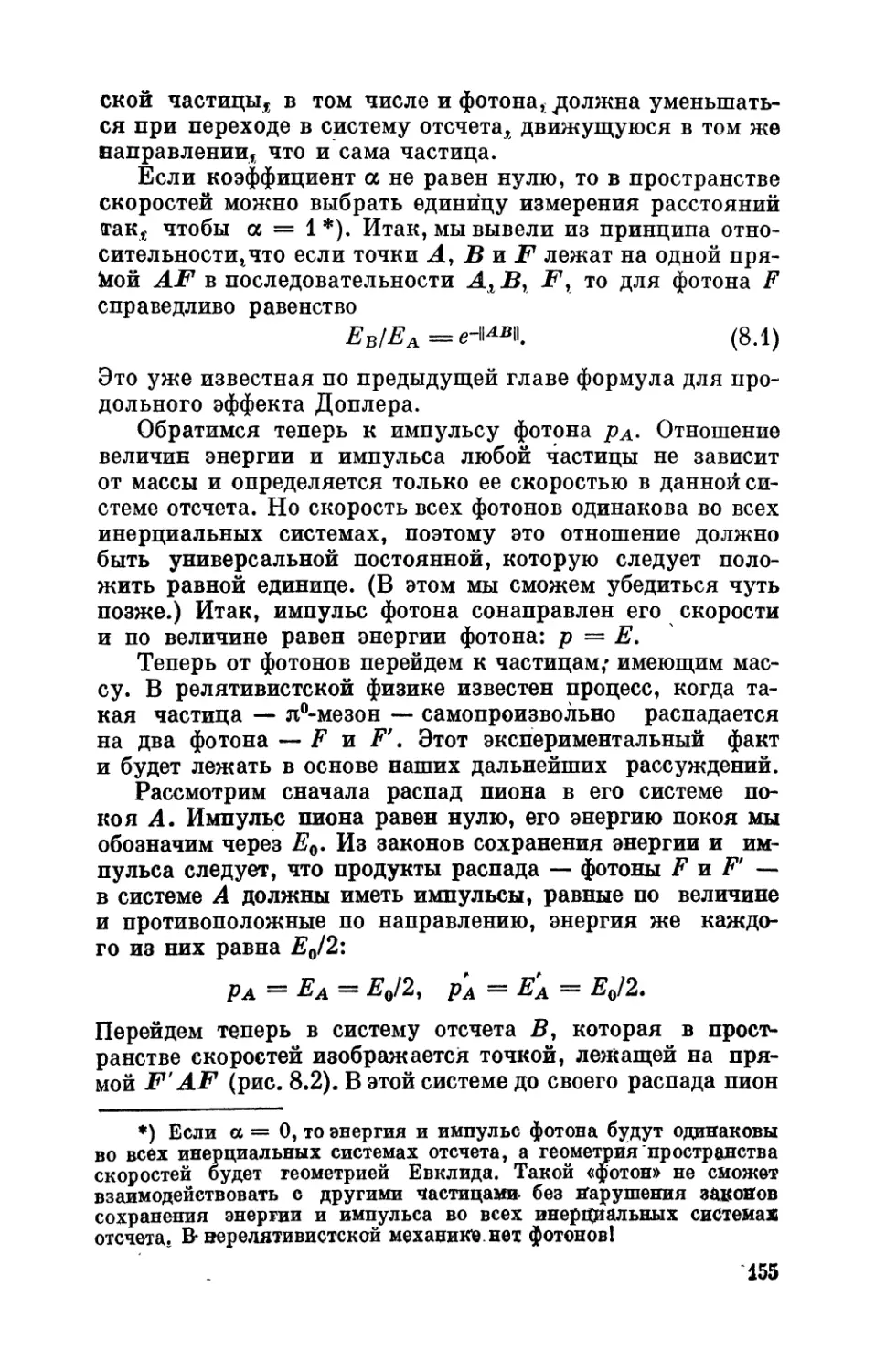
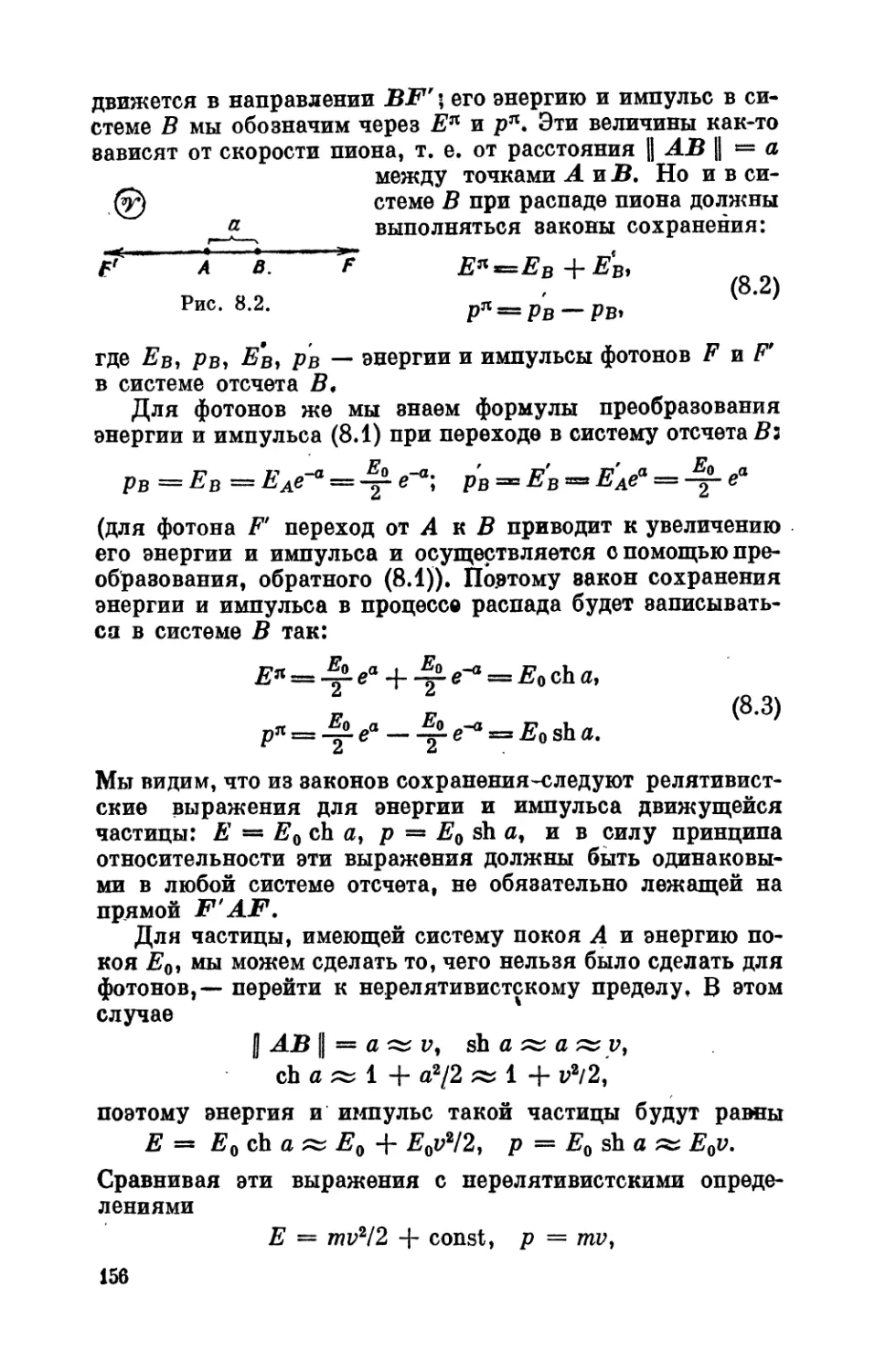
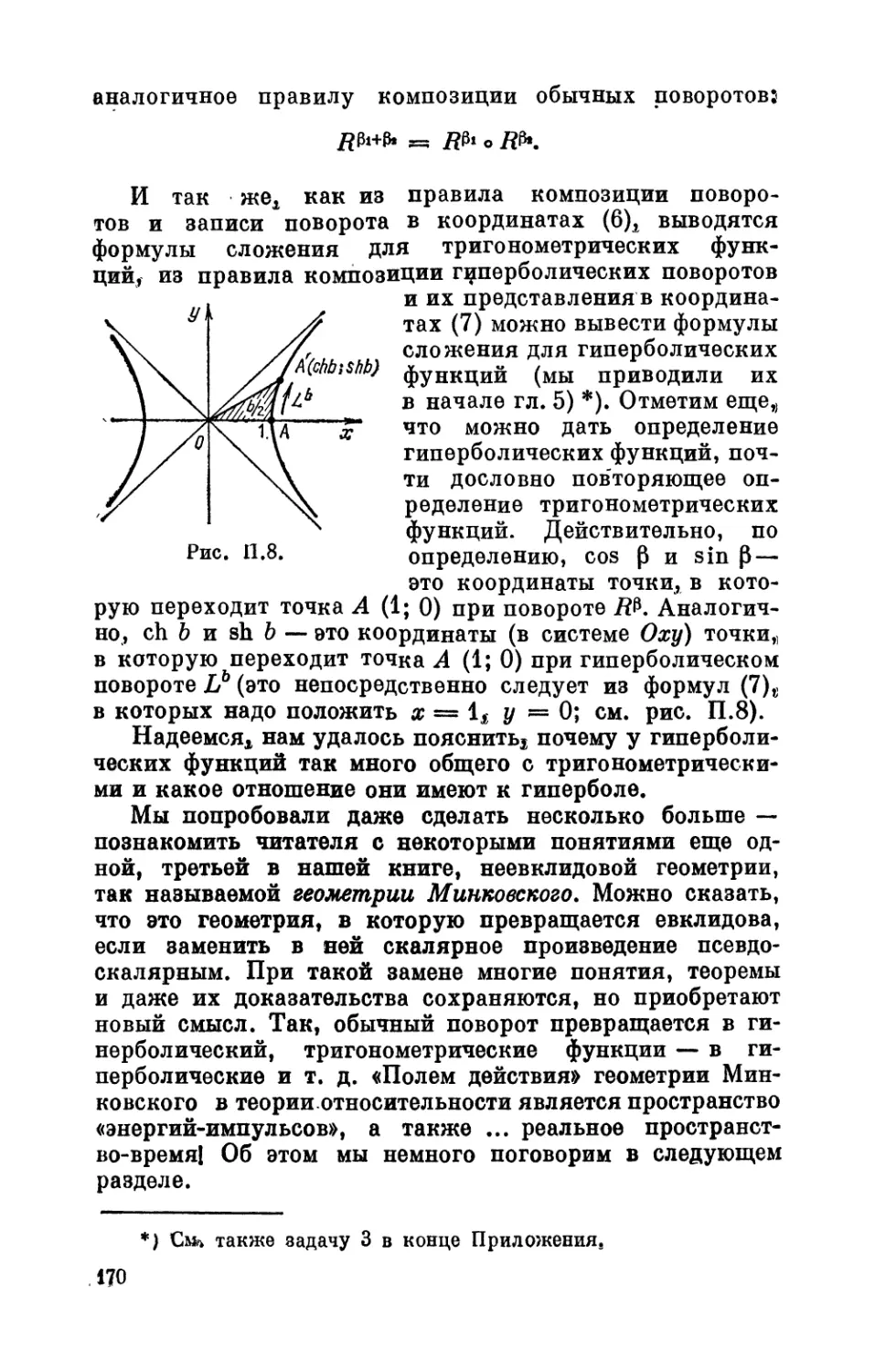
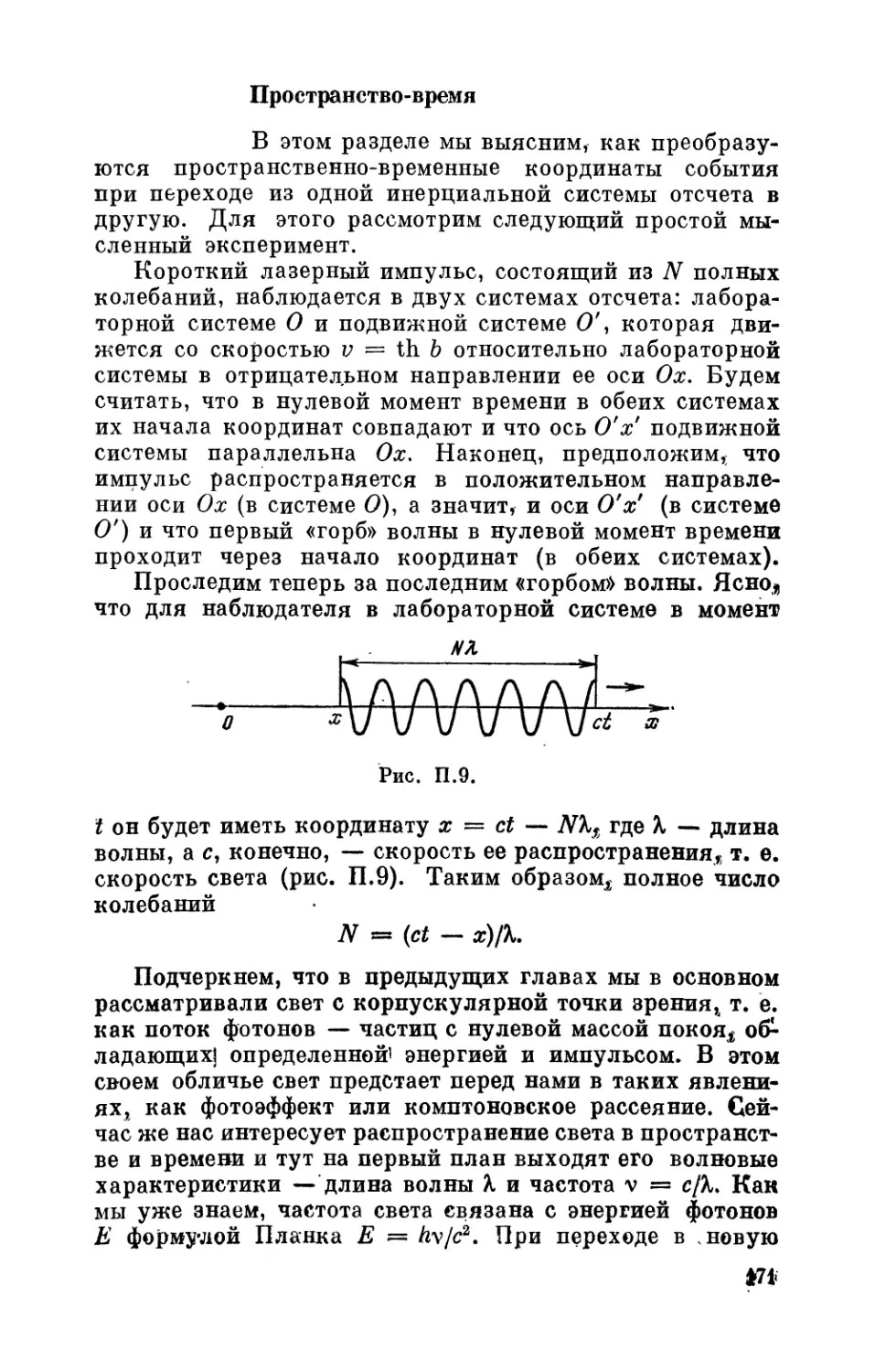
Text
БИБЛИОТЕЧКА-КВАНТ-
ВЫПУСК 34
В.Н. ДУБРОВСКИЙ
Я. А. СМОРОДИНСКИЙ
Е.Л. СУРКОВ
РЕЛЯТИВИСТСКИЙ
МИР
БИБЛИОТЕЧКА -КВАНТ
выпуск 34
В.Н. ДУБРОВСКИЙ
Я. А. СМОРОДИНСКИЙ
Е.Л. СУРКОВ
РЕЛЯТИВИСТСКИЙ
МИР
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1984
Scan AAW
22.313
Д 79
УДК 530.1
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
Академик И. К. Кикоин (председатель), академик А. Н. Кол-
могоров (заместитель председателя), профессор Л. Г. Асламазов
(ученый секретарь), член-корреспондент АН СССР А. А. Абрико-
сов, академик Б. К. Вайнштейн, заслуженный учитель РСФСР
Б. В. Воздвиженский, академик П. Л. Капица, профессор С. П. Ка-
пица, академик С. JI. Новиков, академик Ю. А. Осипьян, акаде-
мик АПЛ СССР В. Г. Разумовский, академик Р. 3. Сагдеев, про-
фессор Я. А. Смородинский, академик С. Л. Соболев, член-коррес-
пондент АН СССР Д. К. Фаддеев, член-корреспондент АН СССР
И. С. Шкловский
Редактор выпуска В. Ф. Пахомов»
Дубровский В. Н», Смородинский Я. А., Сурков Е. Л.
Д 79 Релятивистский мир.— М.: Наука, Главная редак-
ция физико-математической литературы, 1984. —
176 с. — (Библиотечка «Квант». Вып. 34.) — 30 к.
Когда скорости становятся близкими к скорости света, в механике
все изменяется, вместо законов Ньютона надо использовать законы тео-
рии относительности — физики релятивистского мира. В книге предла-
гается нетрадиционное изложение релятивистской механики, основан-
ное на ее удивительной связи с < воображаемой геометрией» Лобачев-
ского, причем все-главные результаты обеих теорий выводятся одно-
временно; решаются некоторые конкретные задачи релятивистской ме-
ханики, встречающиеся в современной физике.
Для понимания книги достаточно знания школьного курса физики
и математики.
Для школьников старших классов, студентов, преподавателей.
ББК 22.313
530.1
„ 1704020000-052
Д —/.;— 189-84
053(02)-84
Д
1794020000—052
U53(02)-84
189-84
© Издательство «Наука».
Главная редакция
физико-математической
литературы, 1984
ОГЛАВЛЕНИЕ
Введение 5
Глава 1.' НЕРЕЛЯТИВИСТСКОЕ ПРОСТРАНСТВО
СКОРОСТЕЙ 10
1.1. Упругие столкновения нерелятивистских частиц
(10). 1.2. Как выглядит упругое рассеяние в лабора-
торной системе отсчета (14). 1.3. Пространство скоро-
стей (19). 20
Задачи и дополнения
Глава 2. ПРИНЦИП ОТНОСИТЕЛЬНОСТИ 22
2.1. Что говорил об этом Галилей (22). 2.2. Принцип
относительности Эйнштейна (25).
Глава 3. ПРОСТРАНСТВА И КАРТЫ 30
3.1. Карты скоростей в теории относительности (30).
3.2. Немного географии (32). 3.3. Звездные карты и
звездное небо (41). 3.4. Геометрий пространства лучей
(44). 3.5. Что такое пространство скоростей? (49). 3.6.
Как устроено 'релятивистское пространство скоростей
(54). '
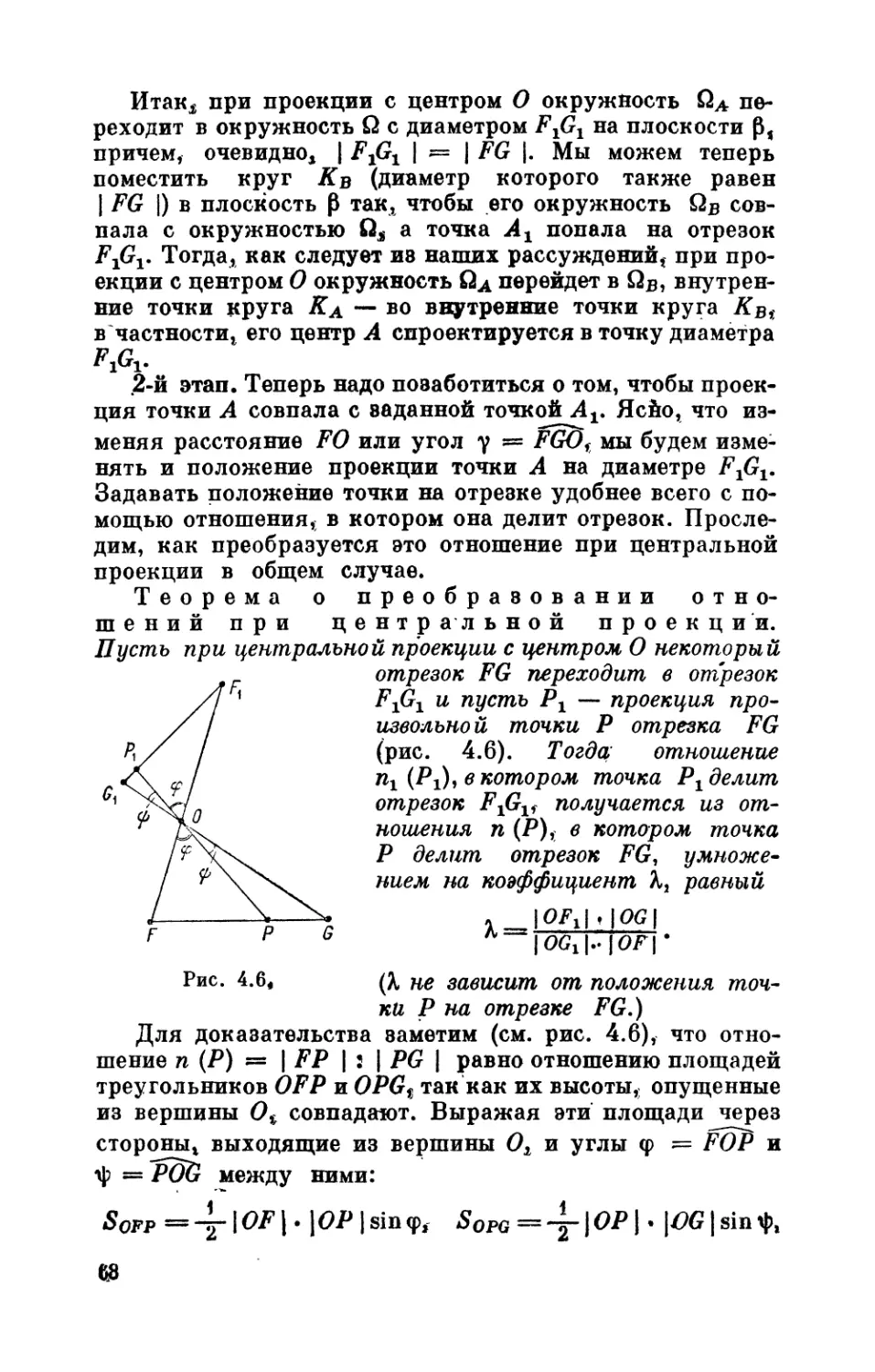
Задачи и дополнения 68
Глава 4. ГЕОМЕТРИЯ РЕЛЯТИВИСТСКОГО ПРО-
СТРАНСТВА СКОРОСТЕЙ 61
4.1. Релятивистские карты скоростей (61). 4.2. Преоб-
разование карт релятивистского пространства Скоростей
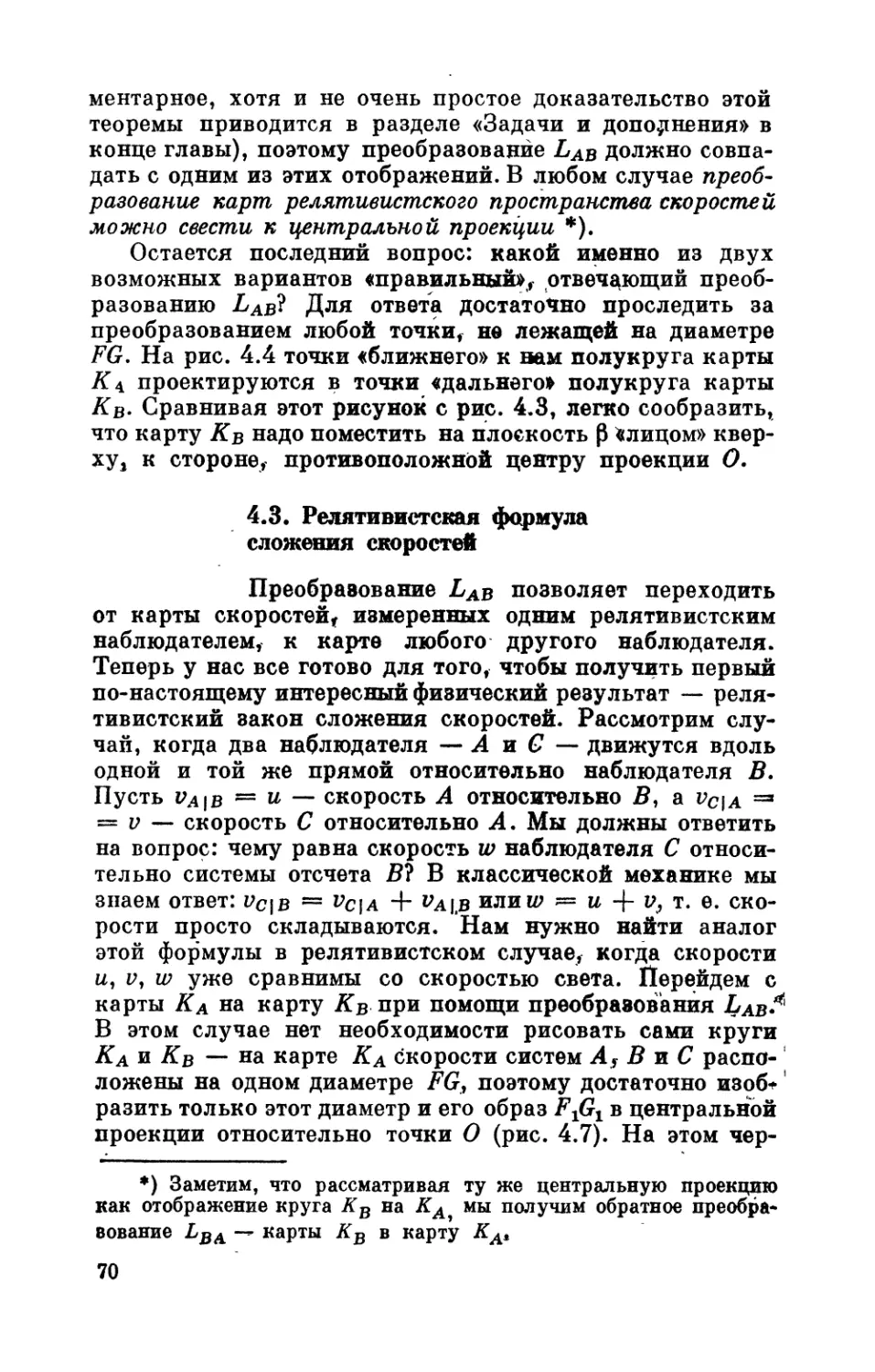
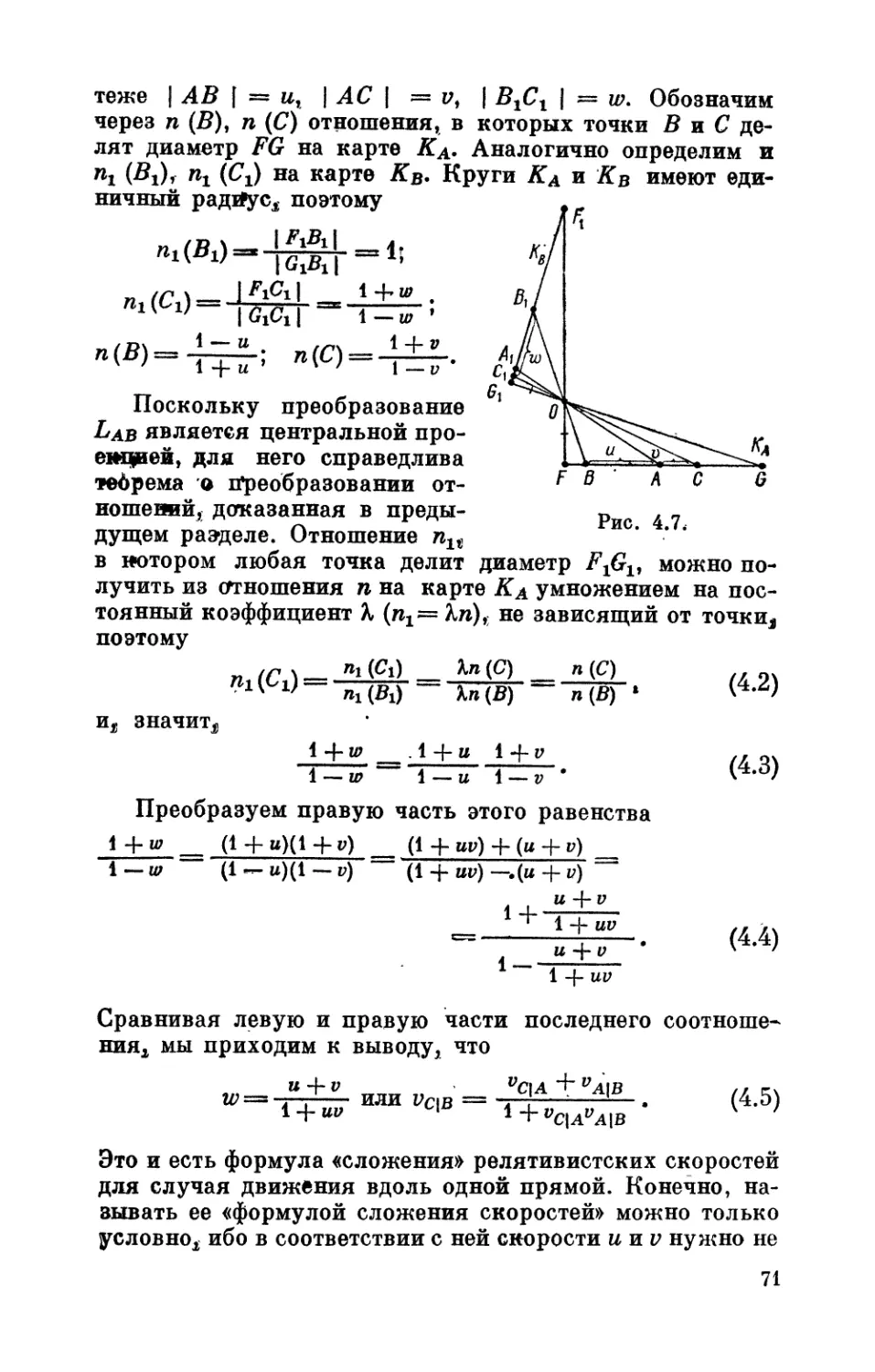
(64). 4.3. Релятивистская формула сложения скоростей
(70). 4.4. Определение расстояния* в пространстве ско-
ростей (72). 4.5. Метрические соотношения для прямо-
угольного треугольника (77). 4.6. Теоремы косинусов
и синусов (84). 4.7. Геометрия Лобачевского и прост-
ранство скоростей (88). 4.8. Сюрпризы геометрии Ло-
бачевского (91).
Задачи и дополнения 96
Глава 5. РЕЛЯТИВИСТСКАЯ КИНЕМАТИКА 101
5.1. Как «решать треугольники» на плоскости Лоба-
чевского (101). 5.2. Еще один вывод формулы связи меж-
ду скоростью и ^-расстоянием (104). 5.3. Релятивист-
ский закон сложения скоростей (107). 5.4. Аберрация
света звезд (111). 5.5. Распад нейтрального пиона на два
гамма-кванта (114),
1* 3
Глава 6. ЗАКОНЫ СОХРАНЕНИЯ ЭНЕРГИИ И ИМ-
ПУЛЬСА В РЕЛЯТИВИСТСКОЙ МЕХАНИКЕ 117
6.1. Что мы знаем об энергии и импульсе? (118). 6.2 Ки-
нематический граф упругого столкновения (119). 6.3. Не-
релятивистский случай (122). 6.4. Энергия и импульс
в теории относительности (124). 6.5. Распад и рождение
релятивистских частиц (131).
Задачи и дополнения 135
Глава 7. КИНЕМАТИКА СТОЛКНОВЕНИЙ РЕЛЯ-
ТИВИСТСКИХ ЧАСТИЦ. ФОТОНЫ 137
7.1. .Упругое рассеяние частиц одинаковой массы (137).
7.2. Упругое рассеяние тяжелой частицы на покоя-
щейся легкой (141). 7.3. Упругое рассеяние легкой реля-
тивистской частицы на покоящейся тяжелой (142).
7.4. Эффект Комптона. Фотоны (144). 7.5. Эффект Доп-
лера (148).
Глава 8. ГЕОМЕТРИЧЕСКАЯ ФИЗИКА ИЛИ ФИЗИ-
ЧЕСКАЯ ГЕОМЕТРИЯ 153
8.1. И вновь об энергии | и импульсе релятивистских
частиц (154). 8.2. Распад нейтрального пиона и геомет-
рия Лобачевского (157).
Приложение. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 162
Преобразование энергии и импульса (162). Геометрия
преобразования Лоренца. Гиперболический поворот и
гиперболические функции (165). Пространство-время (171).
Задачи 174
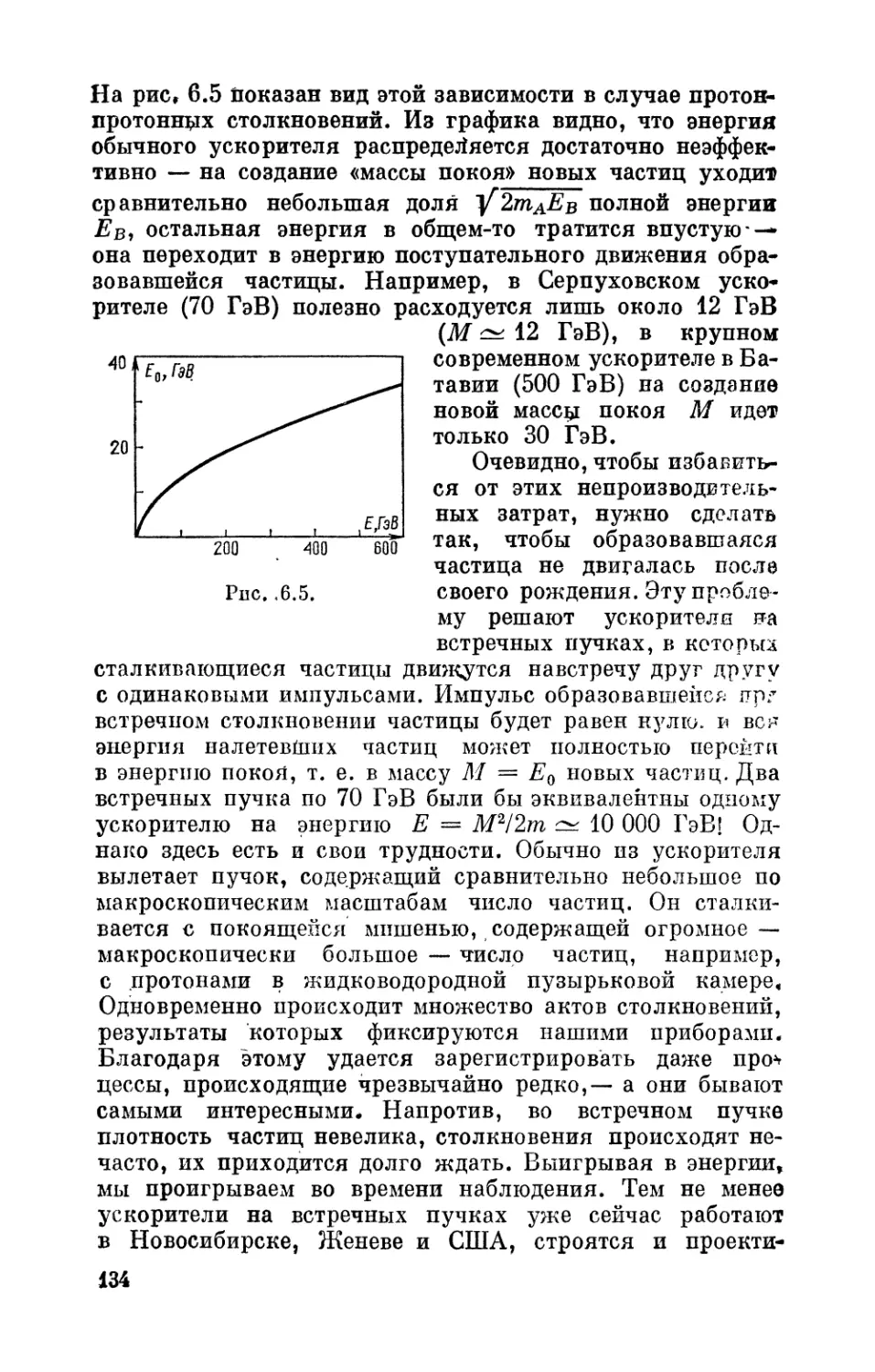
ВВЕДЕНИЕ
О специальной теории относительности на-
писаны сотни книг — от строго научных до совсе^м попу-
лярных. О ней писали физики, математики, философы.
Далеко не все авторы соглашались с выводами этой тео-
рии, столь странной для человека, привыкшего к картине
физического мира, которая была создана трудами физи-
ков XIX века. События сложились так, что именно на
теории относительности скрестили свои шпаги представи-
тели старого и нового мира. В 20-е годы в Германии даже
вышла книга с вызывающим названием: «Сто авторов
против теории относительности». Авторы таких книг пы-
тались найти ошибки в теории и заменить ее какой-ни-
будь другой, не столь непонятной по их мнению. Но по-
степенно голоса критиков стали слабеть, книги их забытыа
а теория относительности вошла в нашу жизнь.
Идеям и формулам теории относительности мы порой
обязаны совсем прозаическим вещам, таким, например,
как теплу в нашем доме. Атомные электростанции, кото-
рые скоро будут обогревать города, производят энергию
за счет деления ядер урана, а это возможно благодаря ве-
ликой формуле Е = тс2. В лабораториях мира, исследо-
вательских и заводских, работают ускорители, проекты
которых основаны на формулах механики специальной
теории относительности или, как принято говорить, реля-
тивистской механики. Все сейчас говорит о том, что ре-
лятивистская механика перестала быть наукой далеких
от практики ученых, а стала почти «домашней».
Когда какая-нибудь область науки достигает своей
зрелости, обнаруживаются новые пути ее изложения.
Совсем не обязательно, рассказывая о ней, следовать ис-
торическому пути, вспоминая все препятствия, которые
приходилось преодолевать. Хотя и справедливо древнее
утверждение, что в науке нет «царской» дороги, но су-
ществуют все же дороги более длинные и более короткие.
Мы попробуем пройти к решению задач теории относи-
5
тельности путем более коротким. Когда создавалась тео-
рия относительности, этот путь еще не был открыт. От-
крытие его связано с работами Клейна и Зоммерфельда
в Германии, Варичака в Сербии и замечательного гео-
метра Котельникова, работавшего в Казани.
В работах этих математиков и физиков было показано,
что мир специальной теории относительности, который был
построен на физическом постулате неизменности скорости*
света для любых движущихся наблюдателей и источников,
совпадает по своим свойствам с миром, в котором справед-
ливы законы геометрии, открытой великим Лобачевским.
Геометрия Лобачевского и механика (точнее кинемати-
ка) Эйнштейна оказались в тесной связи друг с другом:
релятивистская кинематика оказалась точнейшей реа-
лизацией «воображаемой геометрии», как назвал свое со-
здание Лобачевский.
Мы только что сказали «мир специальной теории отно-
сительности»; это не совсем точное название. Говоря <<мир»,
мы подразумеваем пространство. Но это не тот мир, не то
пространство, в котором мы живем и движемся, не то
пространство, в котором мы определяем расстояние «от
пункта А до пункта Б». Мостиком, который соединяет тео-
рию относительности и геометрию, является так называе-
мое пространство скоростей. Его точки изображают все-
возможные системы отсчета, движущиеся прямолинейно
и равномерно, а мерой удаленности одной точки от другой
служит относительная скорость соответствующих систем.
В этом пространстве действует своя геометрия со своими
прямыми, углами, треугольниками, со своими теоремами
синусов и косинусов и т. д. Характер этой геометрии
определяется физикой, а конкретно—законом сложения
скоростей. Пока скорости малы по сравнению со скоро-
стью света, векторы скоростей складываются так же, как
векторы перемещений, и геометрия пространства скоро-
стей будет такой же, как геометрия пространства, в ко-
тором мы живем,— евклидовой. Но в области больших
скоростей начинается странная арифметика: «любая ско-
рость-]- скорость света = скорость света» — разве не аб-
сурд? И этот «абсурдный» постулат арифметики скоро-
стей — постулат Эйнштейна — приводит к столь же «аб-
сурдному» постулату геометрии пространства скоростей —
постулату Лобачевского: «через точку, данную вне дан-
ной прямой, можно провести не менее двух прямых, не
пересекающих данную». Релятивистское пространство ско-
ростей обладает геометрией Лобачевского!
6
Этот замечательный вывод — итог довольно долгого и
непростого пути, который нам предстоит пройти. Труд-
ность заключается в том, что пространство скоростей
существует лишь в нашем воображении, его нельзя ни
увидеть, ни потрогать руками. Поэтому, прежде чем мы
начнем вплотную заниматься его геометрией, мы расска-
жем о вещах, которые кажутся далекими от нее (как
в гл. 3, посвященной различным пространствам и их плос-
ким изображениям — картам) или чересчур простыми
и тривиальными (как в гл. 1, где рассматривается нереля-
тивистский случай). Но мы надеемся, что каждый пример
и каждая аналогия в свой час сыграют свою роль ц об-
легчат читателю доступ в скрытый от глаз мир релятивист-
ских скоростей.
Мы будем изучать этот мир, вооруженные своеобразным
словарем. Он позволит нам превращать задачи кинема-
тики в чисто геометрические и решать их, пользуясь всем
арсеналом геометрических теорем. По ходу дела мы полу-
чим большинство основных результатов специальной тео-
рии относительности. Однако до самого последнего раз-
дела, являющегося своего рода данью традиции, читатель
не встретит рассуждений о пространстве-времени, масшта-
бах, длинах и часах, с доторых обычно начинается вся-
кая книга по теории относительности. Мы решили не пи-
сать ни о сокращении длин, ни о парадоксе близнецов,
ни о многих других удивительных релятивистских эф-
фектах. Обо всем этом написано уже не раз. Но теория —
это не просто набор фактов, а в не меньшей, если не в боль-
шей степени — совокупность методов их получения. По-
этому мы не стремились рассмотреть как можно больше
задач, но зато старались не упустить возможности решать
их различными путями.
Пространство скоростей особенно хорошо работает
в задачах о столкновениях — ив этом одна из причин,
побудившая нас рассказать о нем. Ведь эти задачи без
преувеличения можно назвать самыми часто решаемыми
физическими задачами. Ежедневно в десятках лаборато-
рий мира, в Серпухове и Женеве, в Дубне и Брукхей-
вене, обрабатываются сотни тысяч экспериментов по
рассеянию элементарных частиц высоких энергий. Это —
единственный способ познать самые глубокие законы стро-
ения материи. Энергии становятся все больше и больше,
физики стремятся зарегистрировать все более редкие
я интересные события «жизни и смерти» элементарных
частиц. Чтобы отобрать такие события^ приходится про-
7
сматривать огромное количество экспериментальных дан-
ных, фотографии и показаний счетчиков — и каждый раз
приходится решать ту или иную задачу кинематики столк-
новений (сейчас этим занимаются в основном автоматы
и ЭВМ).
Если бы неевклидова геометрия не была создана
в XIX веке, то ее наверно открыли бы, изучая кинематику
релятивистских частиц. Разум человека настолько могу-
ществен, что абстрактные идеи и открытия возникают за-
долго до того, как они находят практическую реализацию.
В этом сила науки и на этом основывается уверенность
в первостепенной важности фундаментальных исследо-
ваний.
Наша книга предназначена тем, кто хотел бы во всех
подробностях узнать, как из общих постулатов теории
относительности выводятся конкретные формулы реля-
тивистской кинематики, и попутно познакомиться с осно-
вами геометрии Лобачевского. Последовательность чтения
читатель может выбрать в зависимости от своей подгозсв-
ки и вкусов. Для достаточно подготовленных читателей
у нас припасен совсем короткий маршрут: он начинается
в разделе 3.5 и ведет сразу в гл. 8, вде одновременно
выводятся основные формулы и теории относительно-
сти; и геометрии Лобачевского. Быть может, этот путь
понравится читателю и у него появится желание прочесть
или просмотреть все остальное. Есть и два других сокра-
щенных пути: читатель, больше интересующийся матема-
тической стороной дела, может пропустить гл. 5 и 7, а
тот, кому ближе физика и кто готов принять на веру ос-
новные-формулы геометрии Лобачевского,— гл. 4 (наи-
более трудную в математическом отношении).
Книга возникла из лекций, прочитанных школьникам
9—10-х классов физико-математической школы-интер-
ната № 18 при Московском государственном университете
в 1969—1970 и 1979—1980 годах, и может оказаться по-
лезной для работы школьных факультативов по физике и
математике. С этой целью в конце почти каждой главы
помещены задачи для самостоятельного решения, расши-
ряющие и углубляющие ее содержание. Для чтения книги
не требуется знаний материала, выходящего за рамки
обычной школьной программы, и мы уверены, что разоб-
раться в ней может всякий, кто интересуется физикой
и математикой и, самое главное, чувствует себя способ-
ным по-настоящему поработать, чтобы узнать что-то новое
и не совсем обычное. (Стоит отдельно подчеркнуть^ что
8
очень важную роль у нас играет экспоненциальная функ-
ция у = вх. В школьном учебнике она определяется
как такая показательная функция, производная кото-
рой при х = 0 равна 1. В теории относительности этому
условию замечательным образом отвечает условие, что
при малых скоростях релятивистские формулы должны
переходить в формулы обычной — ньютоновской меха-
ники. Об этом рассказывается в гл. 8.)
Эта книга не для легкого чтения, нигде в ней точность
и доказательность не приносились в жертву «популярно-
сти». Зато читатель сможет научиться решать интересные
и трудные задачи теории относительности. Сможет, если,
конечно, поверив в свои силы, преодолеет все препятствия,
которые еще не очень давно отпугивали людей более опыт-
ных, но наверное не столь любознательных, как наш чи-
татель.
Авторы
ГЛАВА 1
НЕРЕЛЯТИВИСТСКОЕ
ПРОСТРАНСТВО СКОРОСТЕЙ
Прежде чем начать долгое и трудное путеше-
ствие в релятивистское пространство скоростей, мы хотим
вместе с читателем пройти по более легкому маршруту —
познакомиться с пространством скоростей в классической
механике. Здесь все нам будет привычно — и законы фи-
зики, и законы геометрии — самой обычной геометрии
плоскости, которую все мы изучаем в школе. Благодаря
этому мы сможем сосредоточить внимание на том, как
в физических задачах естественным образом возникает
геометрический объект — пространство скоростей, как
хорошо известные нам физические законы превращаются
в геометрические теоремы (например, закон сохранения
энергии — в теорему) Пифагора!) и наоборот. Приобре-
тенный здесь опыт сослужив нам хорошую службу в даль-
нейшем, когда мы попадем в релятивистский мир, физика
и геометрия которого большинству наших читателей, ве-
роятно, незнакомы.
1.1. Упругие столкновения
нерелятивистских частиц
Мы приступим к выполнению нашей про-
граммы с разбора простой, но очень нужной задачи —
задачи об упругом столкновении тел, скорости которых
малы по сравнению со скоростью света. Задача состоит
в следующем. Пусть какая-то частица пролетает мимо
другой. Это могут быть два протона — один из ускори-
теля, другой — в покоящейся мишени, или два электро-
на в двух встречных пучках в накопителе — большом
полом кольце-торе, помещенном в магнитное поле. Это
могут быть комета или космический корабль с выключен-
ными двигателями, пролетающие мимо Солнц&. Это мо-
гут быть и биллиардные шары, сталкивающиеся на глад-
ком столе.
Все эти события имеют общую черту. Когда сталкиваю-
щиеся частицы находятся далеко друг от друга, они летят
10
свободно, по инерции, с постоянными скоростями. С умень-
шением расстояния между ними начинает сказываться
взаимодействие — притяжение или отталкивание, их
траектории искривляются^ скорости меняют величину
и направление. Пролетев мимо друг друга, на большом
расстоянии они снова движутся равномерно и прямоли-
нейно, но уже с новыми скоростями. Какими будут по
величине и направлению эти скорости,; зависит от закона
взаимодействия, от того, какие силы действуют между
частицами и от того, насколько далеко друг от друга они
пролетели. Во всяком случае, эти скорости не могут быть
произвольными — если можно пренебречь взаимодей-
ствием с какими-то третьими телами, и если внутреннее
состояние частиц не меняется (упругие столкновения), то
при любом законе взаимодействия, при любых цроцессах
соударения должны быть выполнены два закона сохране-
ния: сумма импульсов обеих частиц и сумма кинетических
энергий до и после столкновения должны быть одинако-
выми. К каким следствиям это приводит?
Обозначим импульсы и энергии частиц Л и В с массами
тА и тв до соударения, когда частицы еще были столь да-
леки друг от друга, что их можно было считать свободны-
ми т. е. не взаимодействующими, через
Ра, Еа; рв, Ев.
Импульсы и энергии частиц после соударения, когда
частицы уже стали столь далеки друг от друга, что их опять
можно считать свободными, обозначим через
Ра, Еа\ р'в, Ев-
Заков сохранения импульса устанавливает, что в те-
чение столкновения полный импульс системы р, равный
сумме импульсов обеих частиц, р = рА + рв, остается
неизменным. В частности, полный импульс не меняется
и за все время соударения:
Р = р' или рА + Рв = РА + Рв- (1-1)
При упругом столкновении не меняется и полная кине-
тическая энергия системы:
Е = Е’ или ЕАЕв = ЕАЕв- (1*2)
Эти законы сохранения должны выполняться в любой
инерциальной системе отсчета, т. е. системе отсчета, дви-
жущейся по инерции равномерно и прямолинейно.
11
Запишем закон сохранения импульса в той системе
отсчета, в которой до столкновения,покоилась одна из
частиц, частица мишени A vA = 0:
mBvB = mAvA + mBvB*
Это соотношение означает, что векторы скоростей
частиц до и после рассеяния лежат в одной плоскости —
плоскости векторов vA и’г?в. Поэтому всюду в нашей книге
мы будем рассматривать только плоские движенияг когда
все частицы, наблюдатели и системы отсчета движутся
в одной и той же плоскости или, быть может, в параллель-
ных плоскостях. Это нисколько не ограничит общности
решаемых нами задач, но позволит сильно выиграть в на-
глядности и простоте изложения. Добавление третьего
измерения элементарно и никак не меняет ни сути наших
рассуждений, ни выводов, следующих из них. Договорим-
ся еще и об.обозначениях, которые мы будем использо-
вать в дальнейшем. Разные частицы, наблюдатели, системы
отсчета будут обозначаться прописными буквами Л, В,
Cf • . ., X; их скорости (векторы) будут обозначаться че-
рез Vx, а абсолютные значения скоростей —
vAf vB, . ., Vx\ если нам понадобится указать конкрет-
ную систему отсчета, относительно которой измеряются
эти скорости, мы будем использовать символ vA\c — это
скорость частицы (наблюдателя} А относительно системы
отсчета С.
Итак, какие же ограничения накладывают законы со-
хранения энергии и импульса на скорости частиц после
рассеяния?
Перейдем в систему отсчета О, в которой полный им-
пульсу = рА + рв = mAvA\0 + твгщо равен нулю. Ее
называют системой центра масс. В ней частицы движутся
навстречу друг другу, векторы их скоростей противо-
положны по направлению, величины скоростей частиц об-
ратно пропорциональны их массам: действительно, если
mAvA + mBvB = 0, то mAvA *= — твгв и
vA/vB = тв/тА. (1.3)
Это соотношение похоже на «правило рычага первого ро-
да». В процессе взаимодействия частиц друг с другом их
скорости меняются по величине и направлению, но в си-
лу закона сохранения импульса полный импульс все
время остается равным нулю. Это означает, что в каждый
момент времени векторы их скоростей противоположны
по направлению^ а модули скоростей удовлетворяют
12
«правилу рычага» (1.3). После того как частицы пролетят
друг мимо друга и взаимодействие между ними прекра-
тится, новые значения скоростей окажутся по величине
ра-вными старым. Это следует из закона сохранения энер-
гии при упругом столкновении ЕА + Ев = Е\ + Ев*
В самом деле, сумма их кинетических энергий до столк-
новения равна* в соответствии с правилом рычага^
Еа + Ев
mAvA , mBvB
2 "г 2
Аналогично, для энергий после столкновения мы можем
зависать* что
' тА /л тА \ '*
ЕА + Ев= —?— (1 + ——) Уд.
Приравнивая полные энергии до и после столкновения, мы
получаем, что vA = следовательно, из правила рычага
и Таким образом, в системе центра масс О век-
торы скоростей сталкивающихся частиц в результате взаи-
модействия могут только повернуться на некоторый угол,
не изменив своей величины, и останутся противоположны-
ми по направлению. Угол между направлениями скорости
частицы X в системе отсчета О до и после столкновения
называется углом рассеяния <р^|о частицы X в системе
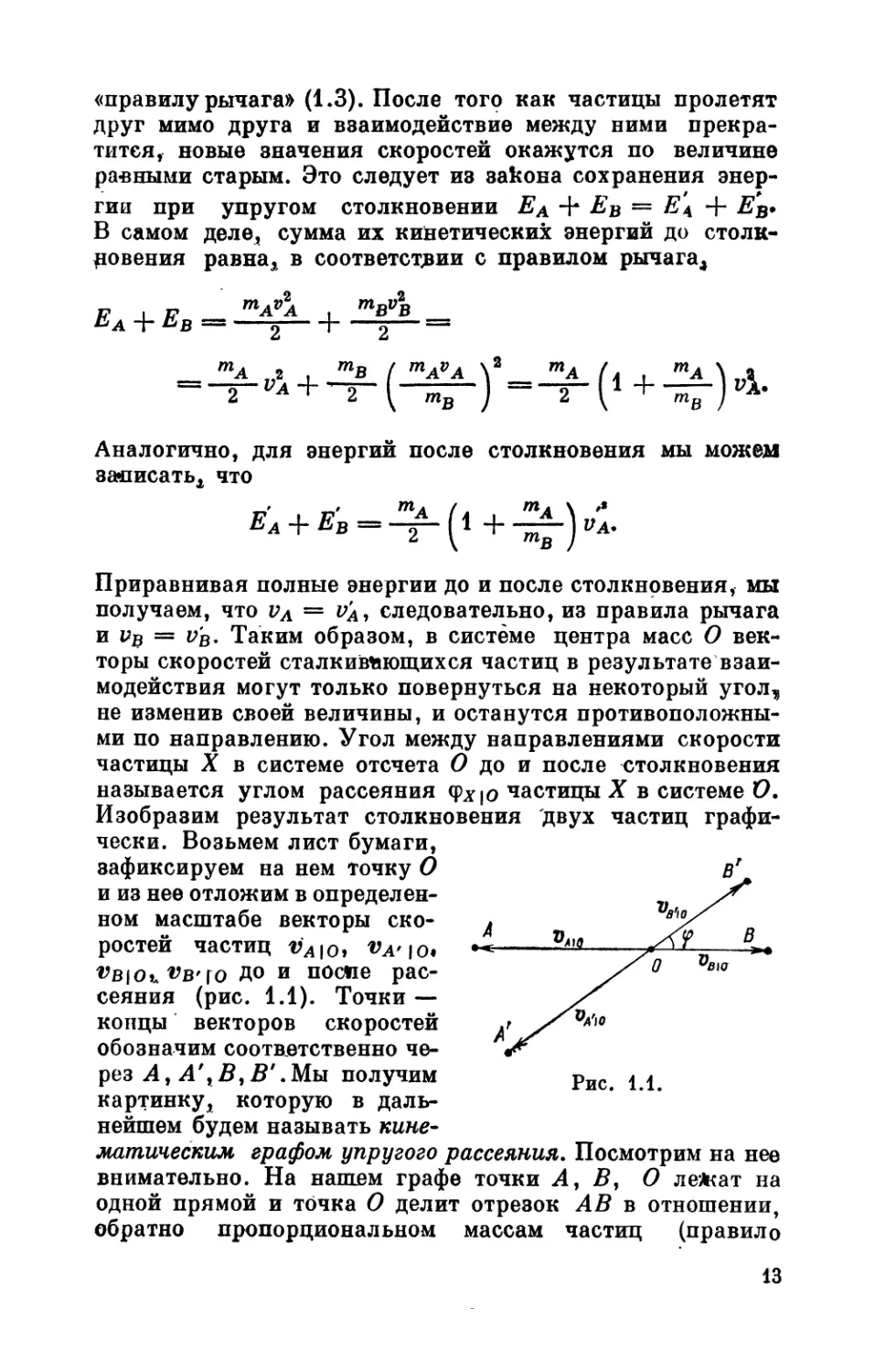
Изобразим результат столкновения двух частиц графи-
чески. Возьмем лист бумаги,
зафиксируем на нем точку О
и из нее отложим в определен-
ном масштабе векторы ско-
ростей частиц vA (о, vAf । о»
Д° и после рас-
сеяния (рис. 1.1). Точки —
концы векторов скоростей
обозначим соответственно че-
рез Л, Л', В, 2?'. Мы получим
картинку* которую в даль-
нейшем будем называть кине-
матическим графом упругого рассеяния. Посмотрим на нее
внимательно. На нашем графе точки Л, В, О леЯкат на
одной прямой и точка О делит отрезок АВ в отношении,
обратно пропорциональном массам частиц (правило
13
рычага):
' IО А | _
Д^1 - тА •
Скоростям частиц после рассеяния отвечают*точки Л', В',
лежащие на прямой АГВ\ проходящей через точку О,
причем длины отрезков. А'О и АО равны друг другу,
| А’О | = | АО |f так же как и | В'О | = | ВО |. Это есть
следствие законов сохранения энергии и импульса при
упругом столкновении. Но законы сохранения не опреде-
ляют величины, угла рассеяния фл|О ~ <Рвю» который
мы обозначили через ср на кинематическом графе (рис. 1.1).
Он может быть разным в зависимости от конкретных ус-
ловий рассеяния и принимать значения от нуля до л.
Если частицы пролетают далеко друг от друга и взаимодей-
ствие между ними мало, изменение скоростей частиц тоже
будет небольшим и угол рассеяния ср будет невелик. Чем
меньше расстояние сближения между частицами, тем силь-
нее проявляется взаимодействие, тем больше становится
угол рассеяния. Чисто «лобовому» столкновению отве-
чает значение <р = л. Реальные столкновения почти всегда
происходят не в плоскости, а в пространстве, поэтому для
векторов скоростей частиц после рассеяния всегда есть еще
одна степень свободы — листок бумаги с кинематическим
графом можно повернуть на произвольный угол вокруг
направления относительного движения налетающих час-
тиц, законы сохранения энергии и импульса будут выпол-
нены по-прежнему. Эту возможность мы будем иметь в ви-
ду, но не будем останавливаться на ней подробно2 ограни-
чившись изучением только плоских движений.
1.2. Как выглядит упругое рассеяние
в лабораторной системе отсчета
Мы убедились, что законы сохранения энер-
гии и импульса в системе центра масс приводят к очень
простым следствиям — векторы скоростей двух сталки-
вающихся частиц могут изменить только свое направле-
ние, но не величину, оставаясь все время противоположно
направленными. Но столкновения частиц чаще всего при-
ходится рассматривать в лабораторной системе отсчета,
в которой покоится одна из частиц — частица мишени А.
Другая частица В вылетает из ускорителя со скоростью
гв|А, взаимодействует с мишенью и рассеивается на не-
который угол фв|А1 который мы для краткости обозна-2
14
чпм через ft — Фв|а* Частица мишени в результате столк-
новения приобретает некоторую скорость vA>\A и выле-
тает под углом а к направлению движения пучка частиц.
Этот угол называют углом, отдачи.
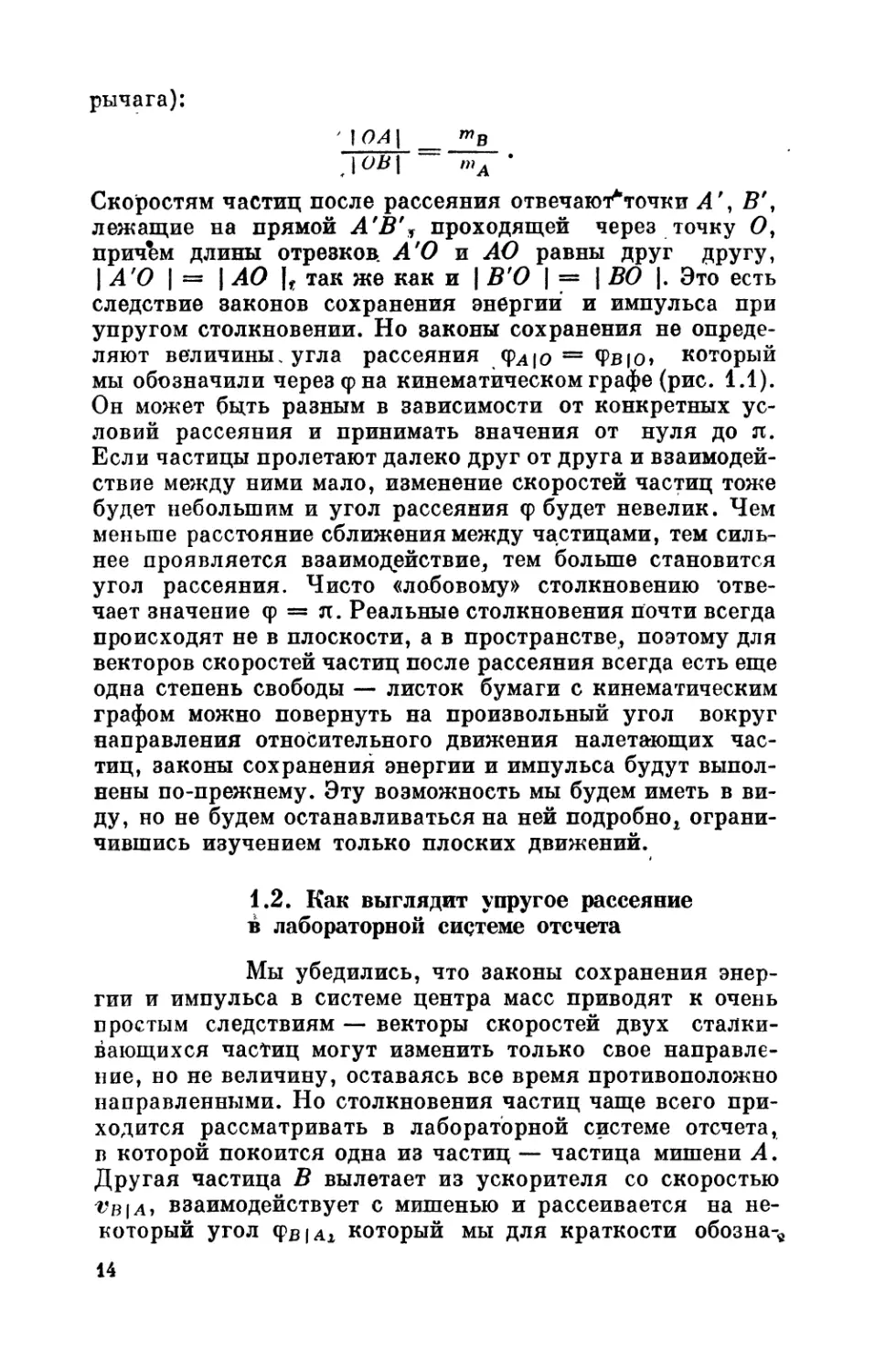
Наблюдатель в лабораторной системе отсчета А может
взять свой лист бумаги, зафиксировать на нем точку А
и отложить от нее векторы скоростей частиц до и после
рассеяния. В результате он получит свою карту скоро-
стей, измеренных в системе отсчета А,— карту КА.
Концы векторов скоростей он по-прежнему обозгачит точ-
ками А, Вi А', В'. Скорость частицы А до рассеяния была'
равна нулю, поэтому конец этого вектора нулевой длины
просто совпадет с точкой Л, выбранной в качестве исход-
ной для построения карты КА. Посмотрим, какие огра-
ничения на возможные скорости после столкновения Vb^a
и Va'ia накладывают законы сохранения энергии и им-
пульса.
В принципе, можно было бы вновь решить уравнения
(1.1) и (1.2), описывающие и в этой новой системе отсчета
законы сохранения энергии и импульса, но это было бы
неразумной тратой сил. Можно поступить значительно
проще. Для этого нужно вспомнить, как в нерелятивист-
ской механике преобразуются скорости при переходе из
одной инерциальной системы отсчета в другую. Это пра-
вило, известно как закон сложения скоростей, который на-
глядно можно сформулировать как «правило собаки»:
«если собака бежит по плоту, плывущему по реке, то ее
скорость относительно берега равна векторной сумме
скорости собаки относительно плота и скорости плота от-
носительно берега»:
Vx |А = Vx |О + Vo\A (1.4)
(X — собака, О — плот,
А — берег).
Теперь можно перейти из
системы центра масс О в ла-
бораторную систему отсчета
А. Для этого нужно к каж-
дому вектору, скорости на
карте Ко прибавить один и тот
же вектор скорости vq\a = -
движется относительно А\ Ре
карта скоростей КА — показан на рис. 1.2. Тонкими ли-
ниями обозначены скорости в системе О, жирными — по-
лучившиеся векторы скоростей частиц в лабораторной
^А|О»
с которой система О
такого сложения —
15
системе. Очевидно, что и на карте взаимное расположе-
ние точек А, В, А' ,В' ,0 остается таким же, как п па Ко —
структура*кинематического графа не изменится при пере-
ходе в другую инерциальную систему отсчета. По-прежне-
му точки А', О, В' лежат на одной прямой, по-прежнему
выполняется правило рычага | АО | : | ВО | = | A 'О | :
: | В'О | = тв : тпА, по-прежнему его «плечи», не меняют-
ся в результате рассеяния: jA'O |= |АО|, | В'О| = |ВО|.
Более того, точки А, В, О, А', В' — кинематического гра-
фа на картах КА и Ко просто совпадают, меняется лишь
начало отсчета — на карте Кр векторы скоростей прове-
дены из точки О, на карте же КА векторы скоростей про-
ведены из точки А в те же самые точки А', В' 9 В, О. Вся
информация о результате упругого рассеяния уже зафик-
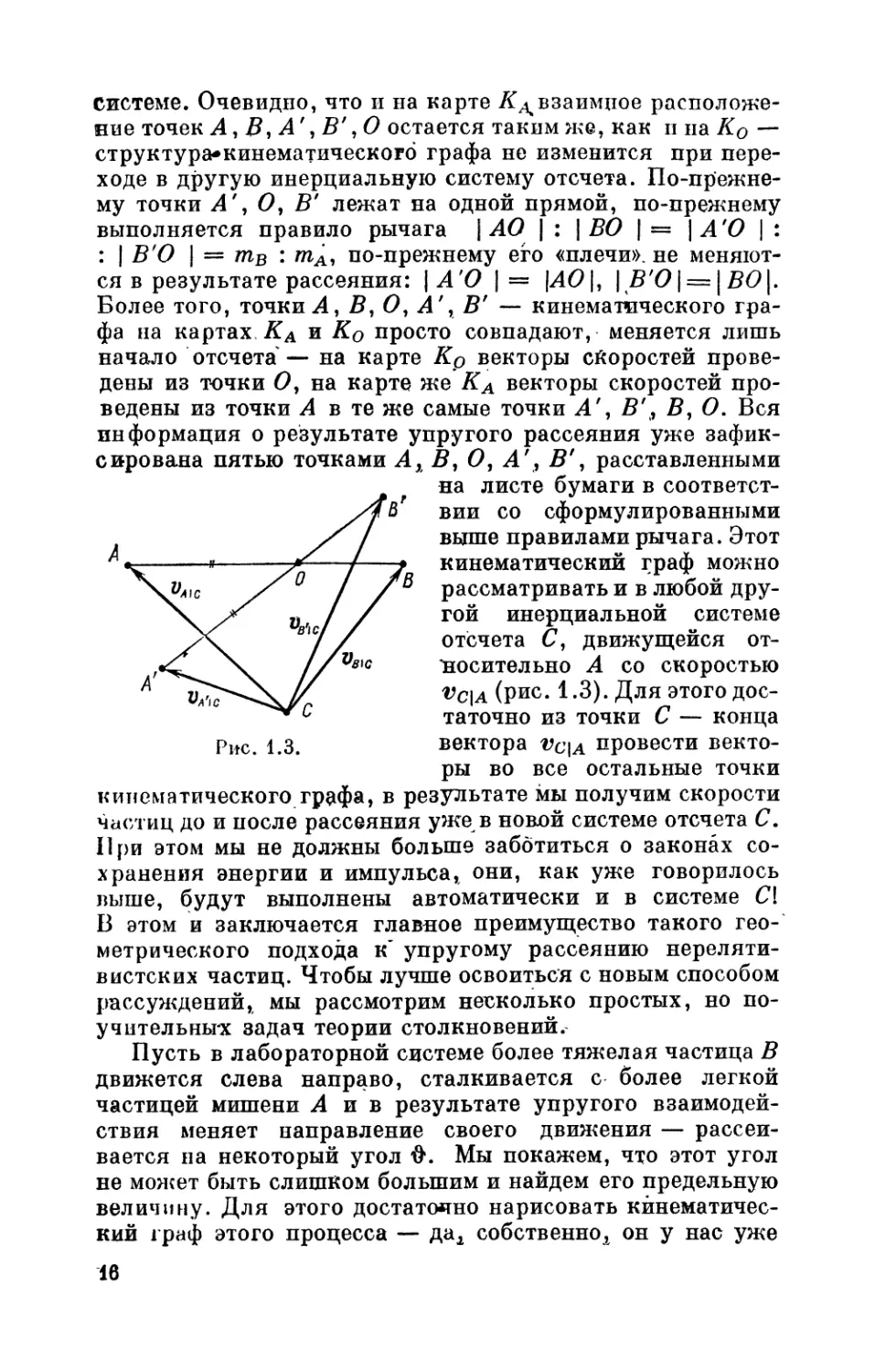
сирована пятью точками АЛ 5, О, А', 5', расставленными
на листе бумаги в соответст-
вии со сформулированными
выше правилами рычага. Этот
кинематический граф можно
рассматривать и в любой дру-
гой инерциальной системе
отсчета С, движущейся от-
носительно А со скоростью
Vc\a (рис. 1.3). Для этого дос-
таточно из точки С — конца
Рис. 1.3. вектора vc\A провести векто-
ры во все остальные точки
кинематического графа, в результате мы получим скорости
частиц до и после рассеяния уже в новей системе отсчета С.
При этом мы не должны больше заботиться о законах со-
хранения энергии и импульса, они, как уже говорилось
выше, будут выполнены автоматически и в системе С\
В этом и заключается главное преимущество такого гео-
метрического подхода к' упругому рассеянию нереляти-
вистских частиц. Чтобы лучше освоиться с новым способом
рассуждений, мы рассмотрим несколько простых, но по-
учительных задач теории столкновений.
Пусть в лабораторной системе более тяжелая частица В
движется слева направо, сталкивается с более легкой
частицей мишени Айв результате упругого взаимодей-
ствия меняет направление своего движения — рассеи-
вается на некоторый угол Ф. Мы покажем, что этот угол
не может быть слишком большим и найдем его предельную
величину. Для этого достаточно нарисовать кинематичес-
кий граф этого процесса — да2 собственно, он у нас уже
16
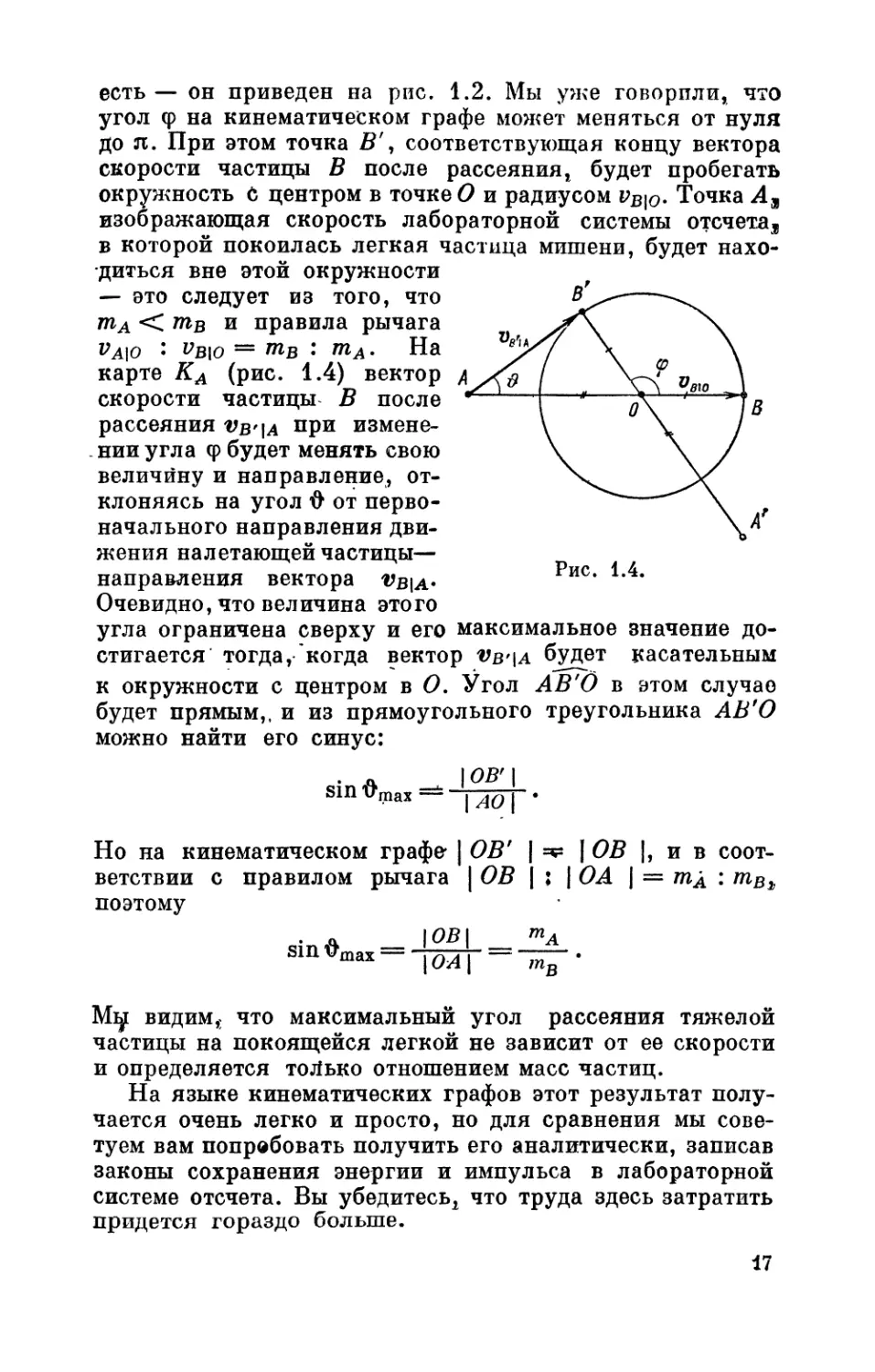
есть— он приведен на рис. 1.2. Мы уже говорили, что
угол ф на кинематическом графе может меняться от нуля
до я. При этом точка В', соответствующая концу вектора
скорости частицы В после рассеяния, будет пробегать
окружность с центром в точке О и радиусом vB\0. Точка Аа
изображающая скорость лабораторной системы отсчета^
в которой покоилась легкая частица мишени, будет нахо-
диться вне этой окружности
— это следует из того, что ----
< тпв и правила рычага
Va\o : vBio = тв : тА. На \ \
карте КА (рис. 1.4) вектор л /6 / Оя1о \
скорости частицы В после ---------г *---jy—*—
рассеяния vb^\a при измене- \ \ /
нии угла ф будет менять свою \ \ /
величину и направление, от-
клоняясь на угол О от перво- \ f
начального направления дви-
жения налетающей частицы—
Ртлг 1 А
направления вектора vB\A. и •
Очевидно, что величина этого
угла ограничена сверху и его максимальное значение до-
стигается тогда, когда вектор Vb'\a будет касательным
к окружности с центром в О. Угол АВ'О в этом случае
будет прямым,, и из прямоугольного треугольника АВ'О
можно найти его синус:
•а | ОВ' |
Sin flmax — | Л0|
Но на кинематическом графе* | ОВ' | =₽ | ОВ |, и в соот-
ветствии с правилом рычага | ОВ | : | ОА | = тА : тВг.
поэтому
sin 'O'max
\ОВ\ = ™А
|<М| тв
Mi£ видим, что максимальный угол рассеяния тяжелой
частицы на покоящейся легкой не зависит от ее скорости
и определяется только отношением масс частиц.
На языке кинематических графов этот результат полу-
чается очень легко и просто, но для сравнения мы сове-
туем вам попробовать получить его аналитически, записав
законы сохранения энергии и импульса в лабораторной
системе отсчета. Вы убедитесь, что труда здесь затратить
придется гораздо больше.
17
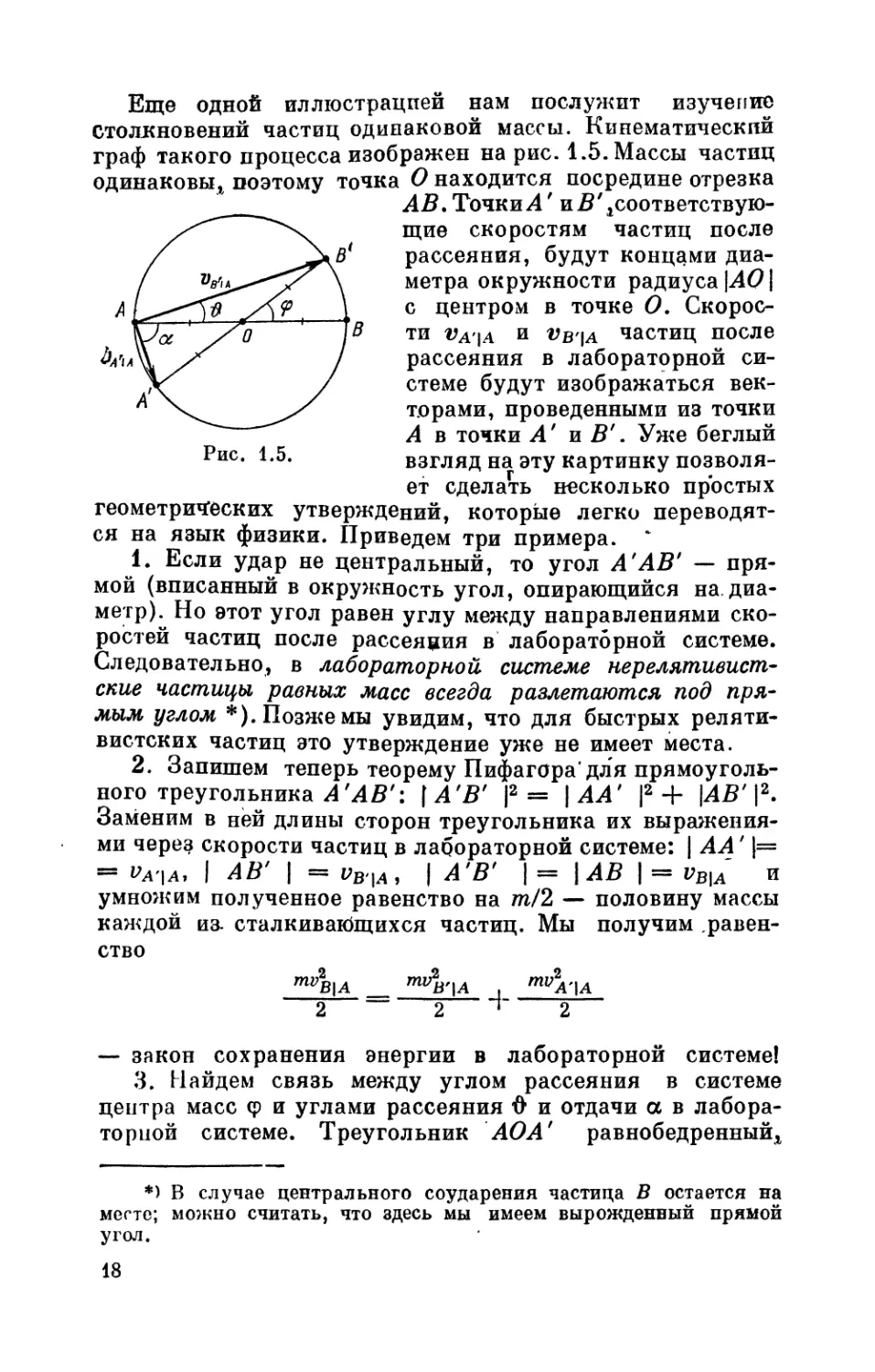
Еще одной иллюстрацией нам послужит изучение
столкновений частиц одинаковой массы. Кинематический
граф такого процесса изображен на рис. 1.5. Массы частиц
одинаковы, поэтому точка О находится посредине отрезка
АВ. Точки Л' и/^соответствую-
щие скоростям частиц после
рассеяния, будут концами диа-
метра окружности радиуса \АО\
с центром в точке О. Скорос-
ти Va'\a и Vb'ia частиц после
рассеяния в лабораторной си-
стеме будут изображаться век-
торами, проведенными из точки
А в точки А' и В'. Уже беглый
взгляд на эту картинку позволя-
ет сделать несколько простых
геометрических утверждений, которые легко переводят-
ся на язык физики. Приведем три примера.
1. Если удар не центральный, то угол А'АВ' — пря-
мой (вписанный в окружность угол, опирающийся на.диа-
метр). Но этот угол равен углу между направлениями ско-
ростей частиц после рассеяция в лабораторной системе.
Следовательно, в лабораторной системе нерелятивист-
ские частицы равных масс всегда разлетаются под пря-
мым углом *). Позже мы увидим, что для быстрых реляти-
вистских частиц это утверждение уже не имеет места.
2. Запишем теперь теорему Пифагора’для прямоуголь-
ного треугольника Л'Л В': \А'В' |2 = |ЛЛ' |2 + |ЛВ'|2.
Заменим в ней длины сторон треугольника их выражения-
ми через скорости частиц в лабораторной системе: | ЛЛ' [=
« vA'\Ai I АВ' I = иВЛА, | А'В' I = I АВ I = vB\A и
умножим полученное равенство на т/2 — половину массы
каждой из. сталкивающихся частиц. Мы получим равен-
ство
™B|A _ тг^'\А , mvA'lA
2 — 2 2
— закон сохранения энергии в лабораторной системе!
3. Найдем связь между углом рассеяния в системе
центра масс ф и углами рассеяния ft и отдачи а в лабора-
торной системе. Треугольник АО А' равнобедренный,,
*) В случае центрального соударения частица В остается на
месте; можно считать, что здесь мы имеем вырожденный прямой
угол.
18
поэтому ср + 2а = л или а= ----. Внешний угол ВОВ’^
= Ф равнобедренного треугольника А£)В' равен сумме
двух его внутренних углов ОАВ' = ОВГА = О. Поэтов
О' = ф/2, т. е. при упругом столкновении частиц равных
масс угол рассеяния в лабораторной системе равен поло-
вине угла рассеяния в системе центра масс.
Эти примеры показывают^ что кинематика нерелятивист-
ских столкновений, законы сохранения энергии и им-
пульса теснейшим образом связаны с геометрией Евкли-
да. И причиной этого является сформулированный выше
закон сложения скоростей’ (правило параллелограмма)
при переходе из одной инерциальной системы отсчета
в другую.
1.3. Пространство скоростей
Вернемся еще раз к нашим примерам. По-
строение «геометрической модели» упругого столкновения
двух частиц — его кинематического графа — мы начина-
ли с выбора системы отсчета, например, системы центра
масс О. Затем на карте скоростей Ко мы рисовали «ежик
скоростей» сталкивающихся частиц, т. е. откладывали
от точки О векторы скоростей частиц А и В до и после
рассеяния. То же самое мы можем проделать на любой
другой карте скоростей, например, на КА — карте скоро-
стей относительно лабораторной системы. «Ежик скоро-
стей» на карте КА будет выглядеть иначе, чем на Ко-
Но точки Л, 5, 4', В' и О (концы его «иголок» — векто-
ров скоростей) на обеих картах располагаются совершенно
одинаково — срабатывает правило сложения скоростей
(1.4). В этом смысле кинематический граф не зависит от
карты, на которой мы его рисуем. Поэтому хотелось бы,
чтобы все наши построения с самого начала не зависели
от выбора системы отсчета.
Легко сообразить, как этого добиться. Представим,
что все карты скоростей нарисованы на прозрачной пленке.
Сотрем теперь на каждой карте все векторы, оставив
только то?ки — их начала и концы. Тогда можно сложить
карты стопкой так, чтобы одноименные точки на них
(т. е. концы векторов скоростей одних и тех же частиц)
совместились. В результате вместо нескольких разных
карт для разных наблюдателей мы получим одну —
универсальную — карту. Любой инерциальной системе
отсчета будет отвечать точка на универсальной карте.
19
Скажем, в наших примерах лабораторной системе отве-
чает точка А, системе центра масс — точка О, системе,
в которой частица В покоилась до столкновения,—
точка В и т. д. По этой универсальной кацте легко узнать*
какие результаты получит любой инерциальный наблю-
датель С, измеряя скорости тех же сталкивающихся' частиц
А и В. Достаточно провести из точки С векторы в точки
Л , В, А1 и В* 9 измерить их длины линейкой и углы между
ними транспортиром. Но делать заново все эти измерения
для каждой новой системы нет необходимости. Интересую-
щие нас величины можно вычислять с помощью всем из-
вестных теорем косинусов и синусов евклидовой гео-
метрии.
Подведем итог. Мы убедились* что
каждой инерциальной системе х отсчета можно сопо-
ста( итъ точку плоскости так] что вектор скорости
системы Y относительно системы X будет равен
1 >
вектору XY$ соединяющему соответствующие точки
плоскости.
Эта плоскость и называется нерелятивистским простран-
ством скоростей.
Различным понятиям геометрии теперь можно прида-
вать кинематический смысл. Например, расстояние между
двумя точками пространства скоростей — то величина
относительной скорости соответствующих систем отсчета;
точкам* лежащим на прямой АВ, отвечают системы отсче-
та* движущиеся вдоль одной и той же прямой относитель-
но системы А (или В), и т. д. Пользуясь этим, можно
решать многие геометрические задачи с помощью физики.
Однако в нашей книжке порядок действий будет обрат-
ным: мы будем решать задачи кинематики с помощью
геометрии. Только движения* которые мы будем рассмат-
ривать, происходят с очень большими, околосветовыми
скоростями и подчиняются законам теории относитель-
ности. И в пространстве скоростей• будет действовать не
привычййя нам евклидова геометрия,* а геометрия Лоба-
чевскох’о.
Задачи и дополнения
Геометрия помогает физике.
1. Частица Л массы тА налетает со скоростью vA на
псксртпутося частицу В массы тпр. Происходит упругое соударение,
после которого частица В движется под углом а = л/4 к направле-
нию движения частицы А до столкновения» Найдите угол рассеяния
20
0 частицы А и величины скоростей vA и частиц А и В после
соударения.
2. При бомбардировке гелия а-частицами, имеющими энергию Е,
налетающая частица рассеялась на угол 0 = л/3. Определите угол
отдачи и энергии а-частицы и ядра гелия после столкновения.
3. Нейтрон с энергией Е испытал упругое соударение с ядром
4Ве. В системе центра масс угол рассеяния <р оказался равным
л/2. Найдите угол рассеяния и энергии частиц после соударения
в лабораторной системе.
4. а-частица, летящая со скоростью Val испытываем упругое
столкновение с неподвижным ядром и рассеивается на угол 0 =
== л/2. При каком соотношении масс а-частицы та и ядра Мя это
возможно?-Определите скорости а-частицы и ядра после столкно-
вения и величину угла отдачи.
5. Частица массы т упруго сталкивается с покоящейся части-
цей, масса которой М > тп, и отклоняется на угол Ол/2 от
первоначального направления движения. Найти угол отдачи а.
6. Нейтрон (массовое число 1) испытал упругое столкновение
с первоначально покоившимся дейтоном (массовое Число 2). Какую
часть кинетической энергии теряет нейтрон при рассеянии на угол
О = л/4?
7. Частица массы т сталкивается с покоящейся более тяжелой
частицей массы М, и при столкновении теряетсй (1 — Л2)-я часть
механической энергии в системе центра масс (неупругий удар).
Под каким углом разлетятся частицы в лабораторной системе, если
тяжелая частица вылетела под наибольшим возможным углом отда-
чи а?
Физика помогает геометрии^
8. Докажите, что если в некоторой системе отсчета S
векторы скоростей двух частиц образуют равные углы с вектором
скорости их центра масс, то импульсы этих частиц в системе S
равны по величине. Выведите отсюда теорему о биссектрисе тре-
угольника: биссектриса SO треугольника SAB делит сторону АВ
на отрезки, отношение | АО | : | ОВ | которых равно отношению
прилежащих сторон | AS | : | SB |.
9. Пользуясь законом сохранения энергии, докажите, что сумма
квадратов расстояний от любой точки до двух противоположных
вершин прямоугольника равна сумме квадратов расстояний от нее
до двух других вершин.
10. Пусть О —точка на стороне АВ треугольника SAB. Дока-
жите формулу Стюарта для длины отрезка SO:
[SO|2. |ЛВ| = |5Л|*. I ВО I +q SB\*- |ЛО| — |ЛО| .|ВО|. |ЛВ|.
(Указание: пусть точки Л и В изображают скорости двух упру-
го сталкивающихся частиц, О — скорость их центра масс, S —
скорость некоторой системы отсчета. Запишите в системе отсчета S
закон сохранения энергии при столкновении для случая, когда
скорости частиц А и В относительно S после столкновения направ-
лены вдоль скорости центра масс.)
ГЛАВА 2
ПРИНЦИП ОТНОСИТЕЛЬНОСТИ
2.1. Что говорил об этом Галилей
Мы убедились* что свойства кинематическо-
го графа не зависят от скорости равномерно движущегося
наблюдателя. И это не случайно. Оказывается, в разных
инерциальных системах отсчета одинаковы все физические
законы, они не зависят от относительного движения двух
разных инерциальных наблюдателей. Впервые этот прин-
цип был сформулирован для механики Галилео Галилеем
в сочинении, которое называлось «Диалог о двух главней-
ших системах мира». Это то самое сочинение, которое на-
влекло на него гнев церкви. Оно было опубликовано
в 1632 г., а в 1633 г. стало предметом разбирательства
трибуналом инквизиции. Галилей излагал свои идеи вели-
колепным литературным языком, считая необходимым
сделать их понятными для многих. Персонажи его книги
обсуждают много вопросов, связанных с механикой
и мирозданием. Среди них и вопрос о том, как протекают
разные физические явления в системе, которая движется
равномерно и прямолинейно. Галилей писал *):
«Уединитесь с кем-либо из друзей в просторное поме-
щение под палубой какого-нибудь корабля,; запаситесь
мухами, бабочками и другими подобными мелкими летаю-
щими насекомыми; пусть будет у вас там также большой
сосуд с водой и плавающими в нем маленькими рыбками;
подвесьте, далее, наверху ведерко^ из которого вода будет
капать капля за каплей в другой сосуд с узким горлыш-
ком, подставленный внизу. Пока корабль стоит неподвиж-
но, наблюдайте прилежно, как мелкие летающие живот-
ные с одной и той же скоростью движутся во все стороны
помещения; рыбы, как вы увидите, будут плавать безраз-
лично во всех направлениях; все падающие капли попадут
*) Галилео Галилей. Избранные сочинения в двух томах,
т. Г.— М.: Наука, 1964.
22
в подставленный сосуд и вам, бросая какой-нибудь пред-
мет, не придется бросать его с большей силой в одну сто-
рону, чем в другую, если расстояния будут одни и те
hw; и если вы будете прыгать сразу двумя ногами, то
сделаете прыжок на одинаковое расстояние в любом на-
правлении. Прилежно наблюдайте все это, хотя у нас не
возникает никакого сомнения в том, что пока корабль
стоит неподвижно, все должно происходить именно так.
Заставьте теперь корабль двигаться с любой скоростью,]
и тогда (если только движение корабля будет равномер-
ным и без качки в ту и другую сторону) во всех названных
явлениях вы не обнаружите ни малейшего изменения и ни
по одному из них вы не сможете установить, движется
корабль или стоит на месте неподвижно. Прыгая, вы
переместитесь по полу на то же расстояние,.что и раньше,
и не будете делать больших прыжков в сторону кормы,
чем в сторону носа, на том основании, что корабль быстро
движется, хотя за то время, как вы будете в воздухе, пол
под вами будет -двигаться в сторону, противоположную
вашему прыжку, и, бросая какую-нибудь вещь товарищу,
вы не должны будете бросать ее с большей силой, когда
он будет находиться на носу, а вы на корме, чем когда
ваше взаимное положение будет обратным; капли, как и
ранее, будут падать в нижний сосуд, и ни одна не упадет
ближе к корме, хотя, пока капля находится в воздухе,
корабль пройдет много пядей; рыбы в воде не с больший
усилием будут плыть к передней, чем к задней части собу-
да; настолько же проворно они бросятся к пище, положен-
ной в какой угодно части сосуда; наконец, бабочки’и
мухи по-прежнему будут летать во всех направлениях,
и никогда не случится того, чтобы они собрались у стен-
ки, обращенной к корме, как если бы устали, следуя за
быстрым движением корабля, от которого они были
совершенно обособлены, держась долгое время в воздухе;
и если от капли зажженного ладана образуется немного
дыма, то видно будет, как он восходит вверх и держится
наподобие облачка, двигаясь безразлично в одну сторону
не более, чем в другую...».
Учебники нашего времени не столь многословны.
В них идея формулируется короче — в виде принципа от-
носительности Галилея. Одна из такй« формулировок
гласит: «В системе отсчета, движущейся прямолинейно и
с постоянной скоростью, все механические процессы про-
текают так же, как и в покоящейся системе» — или,
несколько иначе, — «Никакие механические опыты не
23
могут обнаружить равномерное и прямолинейное движе-
ние системы, если они проведены внутри самой системы».
Только выглянув в окно каюты, мы увидим, что корабль
движется, но даже в этом случае будет обнаружено лишь
движение берега относительно корабля. Облокотившись
о гранитный парапет Невы, можно заставить себя вооб-
разить, что куда-то движешься относительно неподвиж-
ных вод реки. Движение и его скорость всегда относитель-
ны, и ни одним опытом нельзя отдать предпочтения ни
наблюдателю на берегу, ни наблюдателю на корабле*
если только движение равномерное. Этот принцип в наше
время представляется очевидным, и замечание о том, что
равномерное движение всегда относительно, кажется
почти лишенным информации. Скажем, корабль движется
относительно берега, ракета ускоряется относительно
Земли, Земля вращается относительно неподвижных
звезд — все эти утверждения выглядят совершенно оди-
наковыми. На самом же деле это далеко не так. Внутри
плавно идущего автомобиля все происходит так же, как
и в покоящемся автомобиле (автомобиль, конечно, «мыс-
сленный», без,тряски). Но когда автомобиль резко тормо-
зит перед вспыхнувшим красным сигналом светофора,,
то едва не скинувший вас с сиденья рывок неопровержимо
свидетельствует, что ускоренная система отличается от
улицы, где никто из пешеходов не упал от резкого изме-
нения вашей относительной скорости. Так что ускорение*
в отличие от скорости, можно измерить внутри ускоряю-
щейся системы и не выглядывая наружу. То же самое
можно сказать и об «относительности» вращения. Даже
в пасмурную погоду, когда не видно звезд, можно обна-
ружить вращение Земли вокруг своей оси. Вспомним зна-
менитые опыты с маятником Фуко,, подвешенным под ку-
полом Исаакиевского собора: плоскость качания маятни-
ка поворачивается, и этот эксперимент,- проведенный
внутри системы отсчета без всяких ссылок на неподвиж-
ные звезды, доказывает нам абсолютность вращения
Земли. Так что принцип относительности Галилея — это
не закон логики, а далеко идущий результат осмысления
реальных экспериментов. Из него вытекает, что в любой
инерциальной системе одинаковы как форма физических
законов, так и численные значения физических констант*
фигурирующих в этих законах,— например массы частиц.
Механик будет рассчитывать отклонение траектории меж-
планетной станции Юпитером по тем же законам, по ко-
торым он рассчитывает ее отклонение Сатурном^ хотя
24
планеты и движутся друг относительно друга. Значения
физических величин, например скоростей движения тел.,
могут, быть разными в разных системах отсчета, но они
подчиняются одним и тем же физическим законам, одним
и тем же уравнениям, и со времен Галилея никто, ни
в одной лаборатории мира, не смог обнаружить отклоне-
нии от этого великого принципа.
2.2. Принцип относительности Эйнштейна
Если мы перейдем теперь от механики к
электродинамике Максвелла, то сразу же возникает очень
нелегкий вопрос — справедлив ли принцип относитель-
ности для электромагнитных явлений? Вот что писал об
этом в 1905 г. А. Эйнштейн в своей знаменитой статье
«К электродинамике движущихся тел» *):
«Известно, что электродинамика Максвелла в совре-
менном ее виде приводит в применении к движущимся
телам к асимметрии, которая несвойственна, по-видимомуа
самим явлениям. Вспомним, например, электродинамиче-
ское взаимодействие между магнитом и проводником
с током. Наблюдаемое явление зависит здесь только от
относительного движения проводника и магнита, в то
время, как, согласно обычному представлению, два слу-
чая., в которых движется либо одно, либо другое из этих
тел, должны быть строго разграничены. В самом деле^
если движется магнит, а проводник покоится, то вокруг
магнита возникает электрическое поле, обладающее не-
которым количеством энергии, которое в тех местах, где
находятся части проводника, порождает ток. Если же
магнит находится в покое, а движется проводник, то
вокруг магнита не возникает никакого электрического
поля; зато в проводнике возникает электродвижущая
сила, которой самой по себе не соответствует никакая
энергия, но которая — при предполагаемой тождествен-
ности относительного движения в обоих интересующих
нас случаях,— вызывает электрические токи той же
величины и того же направления, что и электрическое
поле в первом случае».
Еще более трудным в то время представлялся вопрос
о скорости распространения электромагнитных волн, т. е.
скорости света. Дело в том, что она входит в уравнения
электродинамики в виде конкретного числа с 3*108 м/с.
♦) Azalea der Physik, 1905, Bd 17, H. 5.
25
Но относительно чего измеряется эта скорость — относи-
тельно источника излучения, относительно движущегося
приемника или относительно некой гипотетической среды,
в которой распространяется свет,— эфира? Механизм
распространения всех других типов волн — например,
волн на воде или звуковых волн, был достаточно ясен,
но электромагнитные волны не укладывались в эту строй-
ную картину. Казалось, что для существования волны
всегда нужна среда, в которой распространялась бы эта
волна,— отсюда и возникла гипотеза эфира. Но тогда
в природе существовала бы некая выделенная система
отсчета, связанная с эфиром, что противоречило бы
принципу относительности в механике, т. е. равноправ-
ности всех инерциальных систем отсчета. Эта нелегкая
ситуация вызвала много размышлений и споров среди
физикрв в конце XIX — начале ХК века.
Точка зрения Эйнштейна была радикальной: принцип
относительности должен быть справедлив и для электро-
динамики, поэтому входящая в'уравнения Максвелла
скорость света с == 3«108 м/с должна быть одинаковой
для любого инерциального наблюдателя!
В той же статье Эйнштейн писал: «Примеры подобного
рода, как и неудавшиеся попытки обнаружить движение
Земли относительно «светоносной среды», ведут к пред-
положению, что не только в механике, но и в электроди-
намике никакие свойства явлений не соответствуют по-
нятию абсолютного покоя и даже, более того,— к пред-
положению, что для всех координатных систем, для кото-
рых справедливы, уравнения механики, справедливы
те же самые электродинамические и оптические законы, как
это уже доказано для величин первого порядка. Это пред-
положение (содержание которого в дальнейшем будет
называться «принципом относительности») мы намерены
превратить в предпосылку и сделать, кроме того, добавоч-
ное допущение, находящееся с первым лишь в кажущем-
ся противоречии, а именно, что свет в пустоте всегда рас-
пространяется с определенной скоростью с, не зависящей
от состояния движения излучающего тела. Эти две пред-
посылки достаточны для того, чтобы, положив в . основу
теорию Максвелла для покоящихся тел, построить про-
стую, свободную от противоречий электродинамику дви-
жущихся тел... Дальнейшие соображения опираются на
принцип относительности и на принцип постоянства ско-
рости света. Мы формулируем оба принципа следующим
образом.
26
1. Законы, по которым изменяются состояния физиче-
ских систем, не зависят от того, к которой из двух коор-
динатных систем, движущихся относительно друг друга
равномерно и прямолинейно^ эти изменения состояния
относятся.
2. Каждый луч света движется в «покоящейся» систе-
ме координат с .определенной скоростью с, независимо от
того,, испускается ли этот луч света покоящимся или
движущимся телом. При этом
путь луча света
скорость =------------------.»
г промежуток времени
В 1905 г. это казалось открытым вызовом здравому
смыслу и интуиции. Потребовались долгие годы и смена
поколения ученых, чтобы привыкнуть к нелепой на пер-
вый взгляд мысли о том, что некая скорости имеет одну и
ту же величину в разных системах отсчета^ движущихся
друг относительно друга. Эта мысль поистине удивительна
и с точки зрения обычных житейских представлений.
Представьте себе ракету с включенным прожектором^
которая мчится мимо вас со скоростью 100 000 км/с.
Скорость света относительно ракеты равна 300 000 км/с.
Если вы теперь сами измерите скорость света, то увиди-
те, что она равна не 400 000 км/с, как можно было бы
ожидать, а все тем же 300 000 км/cl
Механика Ньютона, конечно же, подчиняется прин-
ципу относительности. Но в ней неявна предполагается^
что взаимодействие между частицами распространяется
мгновенно, с бесконечно большой скоростью. Любое
изменение положения одной частицы сразу же сказывает-
ся на всех остальных. Вспомните хотя бы третий закон
Ньютона — «силы, с которыми взаимодействуют между
собой две частицы, всегда равны по величине и противо-
положны по направлению». Однако опыт показывает, что
всякое взаимодействие распространяется хотя и с боль-
шой, но конечной скоростью. Изменение положения одной
частицы, например заряженного электрона, начинает
влиять на другие заряды только через некоторое время,
необходимое для того, чтобы взаимодействие, осуществ-
ляемое через посредство электромагнитного поля, успело
распространиться из одной области пространства в дру-
гую. Взаимодействие между радиопередатчиком и прием-
ником осуществляется с помощью электромагнитных
волн, распространяющихся со скоростью с^З-108м/с,
а взаимодействие между громкоговорителем и ухом чело-
27
века осуществляется с помощью звуковых волн, распро-
страняющихся со скоростью 3,3 *102 м/с. Среди всех
возможных скоростей распространения взаимодействия
есть максимальная^ самая большая возможная скорость
^тах* Ни одна частица не йожет двигаться со скоростью,
большей Vmaxt ибо в противном случае взаимодействие
можно было бы просто передавать от одних тел к другим
с помощью таких сверхбыстрых частиц. Ив принципа от-
носительности следует, что эта максимальная скорость
распространения взаимодействий должна быть универ-
сальной постоянной^ одинаковой для всех инерциальных
систем отсчета. Как показывает опыт,) с такой максималь-
ной скоростью распространяется в пустоте электромагнит-
ное поле и его частный случай — видимый свет:
утах = с « 2,997 925 -108 м/с.
Можно задать вопрос: почему именно скорость света
играет в природе такую фундаментальную роль? Не может
ли быть так, что скорость гравитационных волн, если ее
когда-нибудь удастся измерить, окажется вдвое больше
скорости света, и именно она будет являться новой макси-
мальной скоростью распространения взаимодействия?
Или, может быть, через сто лет откроют новый,: совершен-
но неизвестный пока нам вид взаимодействия, которое
будет распространяться ,со скоростью 10 ci На эти вопро-
сы можно с уверенностью ответить: нет! В лабораториях
всего мира, на ускорителях во всех частях света ежеднев-
но проводится огромное количество экспериментов по
рассеянию, рождению и взаимодействию элементарных
частиц, и каждый из них свидетельствует о том, что
в природе действительно существует максимальная
возможная скорость и ее численное значение равно именно
2,997 925* 108 м/с. Если бы инженеры, проектирующие
ускорители, и физики,; обрабатывающие эксперименты,;
проводимые на них,; подставили в свои расчетные форму-
лы не это число, а какое-то другое,, то построенные по этим
проектам ускорители не смогли бы работать, а результа-
ты обработки экспериментов противоречили бы Друг дру-
гу и всему на свете. В том,; что ртах *= 2,997 925 *108 м/с,
можно быть уверенным так твердо^ как только можно
быть в чем-то уверенным вообще. Поэтому скорость гра-
витационных волн, если ее когда-нибудь удастся изме-
рить, обязательно будет меньше или равна Umax* (Впро-
чем, логично думать, что такие фундаментальные взаимо-
действияЛ как гравитационное и электромагнитноеЛ рас-
28
пространяются именно с этой фундаментальной скоростью
2,997 925-108 м/с.)
Объединение принципа относительности с конец*
ностью скорости распространения взаимодействий на*
зывается принципом относительности Эйнштейна.
Последовательное проведение этого принципа заста-
вило отказаться от механики Ньютона, закона сложения
скоростей по правилу параллелограмма (вспомните при-
мер с прожектором на ракете|), привычных представлений
о свойствах пространства и времени, но позволило сохра-
нить в неприкосновенности электродинамику Максвелла.
Нужно сказать, что каждая новая физическая теория не
отбрасывает предшествующие теории как неправильные^
но включает их в себя как отдельные частные случаи^
справедливые только в определенных областях явлений^
и одновременно очерчивает границы их применимости.
Так произошло и со специальной теорией относительно-
сти Эйнштейна, которая включила в себя механику Нью-
тона в качестве хорошего приближения к действительно-
сти в тех случаях, когда скорости движущихся тел малы
по сравнению с максимальной скоростью распространения
взаимодействий ртах. Ведь даже по сравнению с косми-
ческими скоростями в 10 км/с скорость света —
300 000 км/с — уже почти бесконечно велика!
ГЛАВА 3
ПРОСТРАНСТВА И КАРТЫ
3.1. Карты скоростей
в теории относительности
Давайте попытаемся перенести метод кине-
матических графов, о котором рассказывалось в гл.
в теорию относительности.
Представим себе двух инерциальных наблюдателей А
и В, движущихся друг относительно друга, которые за-
меряют скорости различных объектов С, D, Ел . . . и
наносят на листок бумаги результаты измерений по сле-
дующему правилу. Измерив скорость очередного объек-
та X, каждый из наших наблюдателей на своем листке
откладывает от точки, изображающей его самого, вектор,
длина которого в выбранных единицах измерения равна
величине скорости объекта Ху а направление совпадает
с направлением движения этого объекта. (Напомним, что
рассматриваются только равномерные и прямолинейные
движения, причем все они происходят в одной плоскости
или, если угодно, параллельны одной плоскости.) Точка
листа бумаги, на которую приходится конец отложенного
вектора, и служит изображением скорости объекта X; она
обозначается той же буквой X. К концу измерений на
листках наблюдателей А и В появляются наборы точек
А, Ё, С, D, Е, . . которые мы называем картами ско-
ростей, измеренных наблюдателями А и или, коротко,,
^-картами КА и Кв- Правило построения 2^-карт запи-
сывается очень просто: на карте КА
лх=^|А, (3.1)
где Vx\a — вектор скорости объекта X относительно
наблюдателя А.
Чтобы с помощью этих карт найти, скажем, скорость
объекта С относительно А, надо измерить расстояние
между точками Л и С на карте КА] угол между направле-
ниями скоростей объектов D и Е относительно В равен
30
величине угла DBE на карте Кв и т. д. В нерелятивист-
ском случае, как мы видели, у всех инерциальных наблю-
дателей карты скоростей совпадают — если наложить,
например, карту Кв на карту К а так, чтобы совместились
отмеченные на них пары точек А и В, то совместятся и
все остальные соответственные точки С, Z), Е, . . . Благо-
даря этому, можно обойтись одной универсальной картой,;
в качестве которой годится и КА, и Кв, и Кс -— все эти
карты одинаковы. Любая ее точка X может служить
началом отсчета, и вся информация, содержащаяся в карте
Кх, т. е. все сведения о скоростях различных объектов
относительно системы отсчета X, уже заложена в уни-
версальной карте. На это и опирается метод кинемати-
ческих графов.
В теории относительности дело обстоит уже не так.
Карты скоростей КА и Кв двух разных наблюдателей
оказываются различными! Вспомним, что согласно второй
части принципа относительности Эйнштейна никакая
инерциальная система не может двигаться со скоростью,)
превышающей некоторую максимальную величину pmaxs
причем эта величина не зависит от системы отсчета и рав-
на скорости света с. Поэтому наблюдатель 4, строя свою
карту скоростей, обнаружит, что все точки попадают
в круг с центром в точке А и радиусом с. Этот круг яв-
ляется как бы картой всех мыслимых скоростей,; и карта КА
уже не занимает всей плоскости, как это было в нереляти-
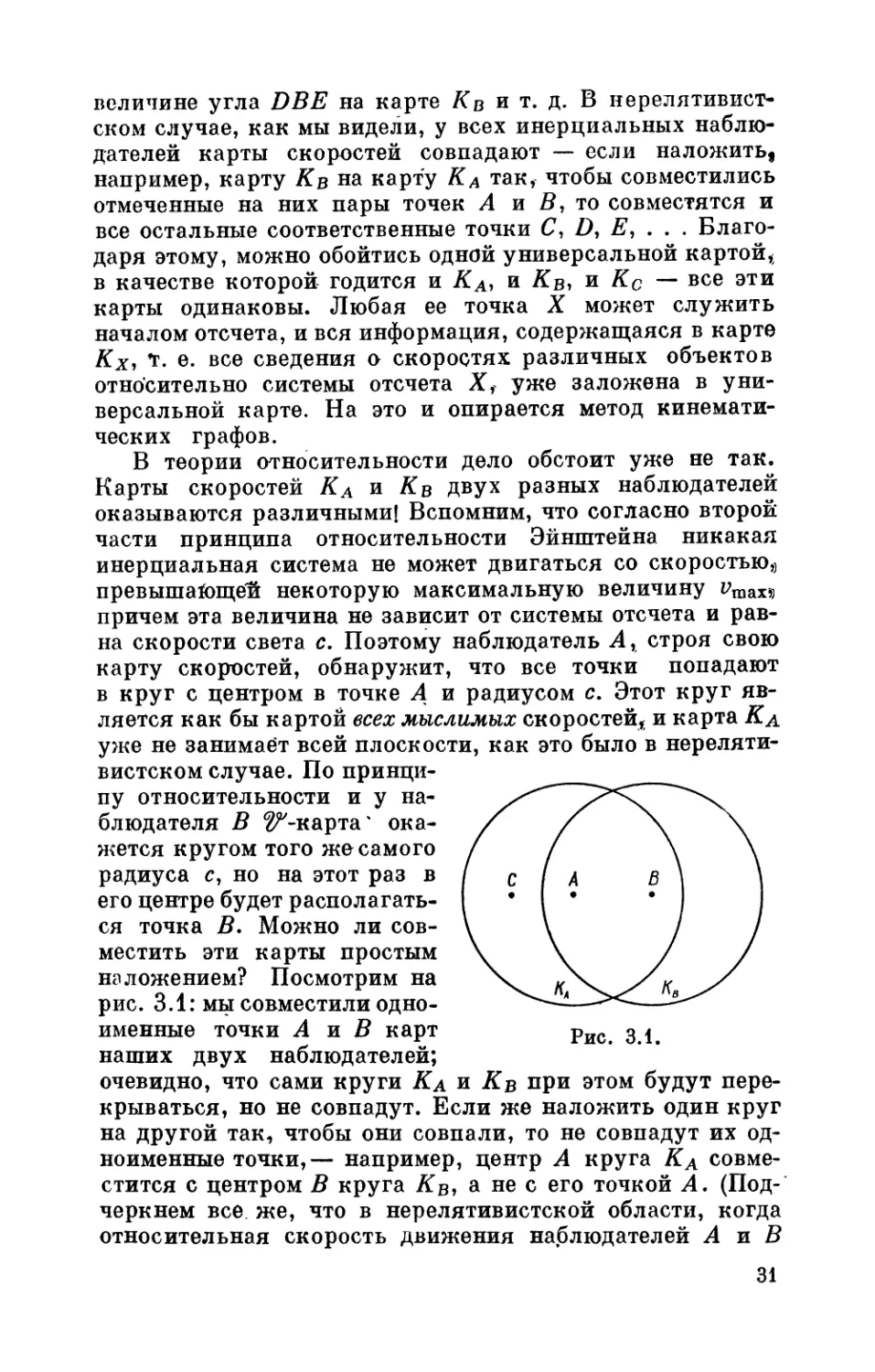
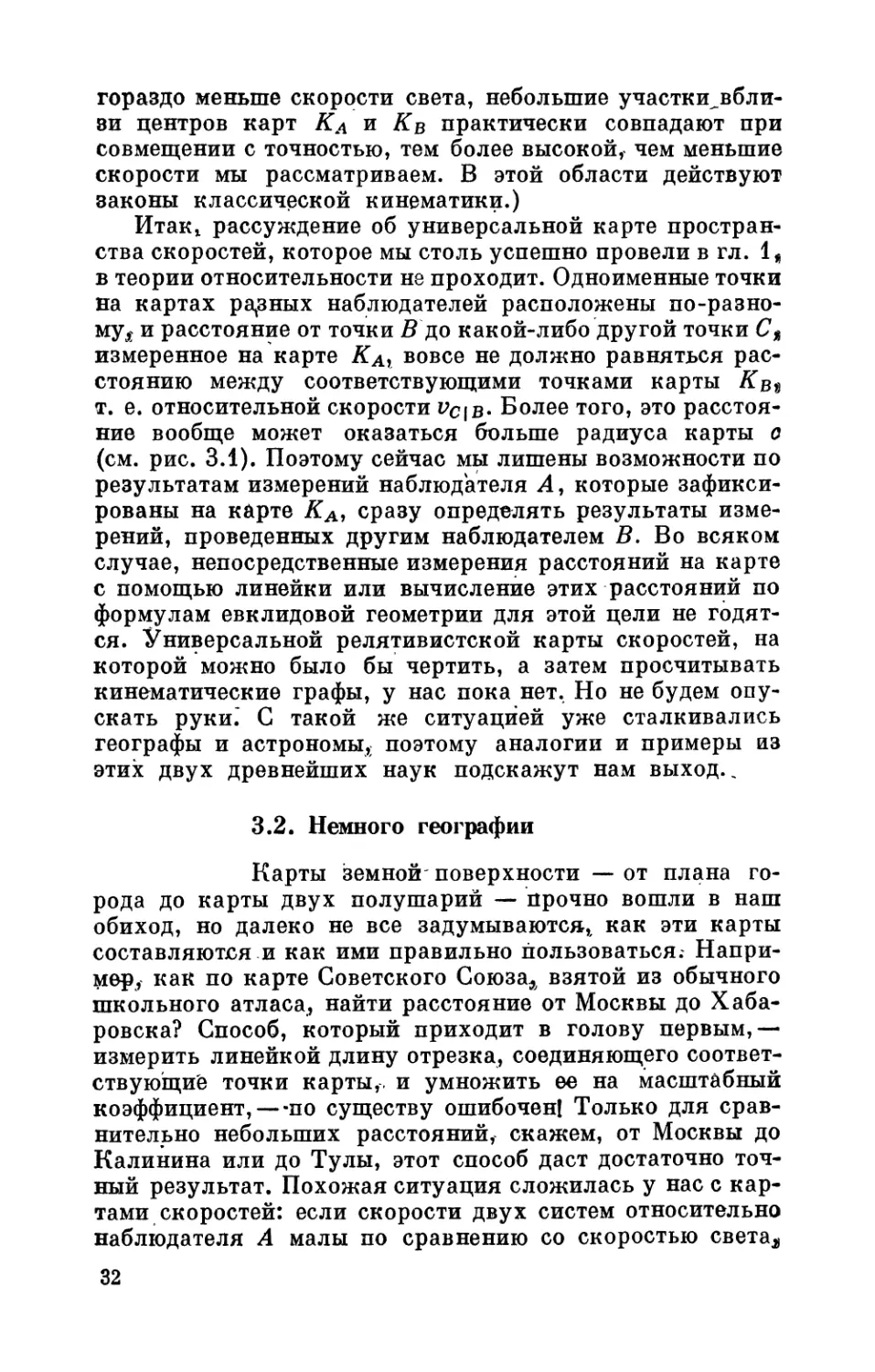
вистском случае. По принци- _____ ____
пу относительности и у на- ~~~
блюдателя В 2^-карта' ока- / / X X
жется кругом того же самого / / \ \
радиуса с, но на этот раз в / с / д $ \ \
его центре будет располагать- I • I • • I I
ся точка В. Можно ли сов- \ \ / /
местить эти карты простым \ \ / /
наложением? Посмотрим на X. /(Хул
рис. 3.1: мы совместили одно-
именные точки А и В карт Рис 3
наших двух наблюдателей;
очевидно, что сами круги К а и Кв при этом будут пере-
крываться, но не совпадут. Если же наложить один круг
на другой так, чтобы они совпали, то не совпадут их од-
ноименные точки,— например, центр А круга КА совме-
стится с центром В круга Кв, а не с его точкой А, (Под-
черкнем все же, что в нерелятивистской области, когда
относительная скорость движения наблюдателей А и В
31
гораздо меньше скорости света, небольшие участки вбли-
зи центров карт К а и Кв практически совпадают при
совмещении с точностью, тем более высокой, чем меньшие
скорости мы рассматриваем. В этой области действуют
законы классической кинематики.)
Итак% рассуждение об универсальной карте простран-
ства скоростей, которое мы столь успешно провели в гл. 1я
в теории относительности не проходит. Одноименные точки
на картах равных наблюдателей расположены по-разно-
муи расстояние от точки В до какой-либо другой точки С*
измеренное на карте КАг вовсе не должно равняться рас-
стоянию между соответствующими точками карты Кв$
т. е. относительной скорости Рс(в« Более того, это расстоя-
ние вообще может оказаться больше радиуса карты о
(см. рис. 3.1). Поэтому сейчас мы лишены возможности по
результатам измерений наблюдателя А, которые зафикси-
рованы на карте КА, сразу определять результаты изме-
рений, проведенных другим наблюдателем В. Во всяком
случае, непосредственные измерения расстояний на карте
с помощью линейки или вычисление этих расстояний по
формулам евклидовой геометрии для этой цели не годят-
ся. Универсальной релятивистской карты скоростей, на
которой можно было бы чертить, а затем просчитывать
кинематические графы, у нас пока нет. Но не будем опу-
скать руки.' С такой же ситуацией уже сталкивались
географы и астрономы, поэтому аналогии и примеры из
этих двух древнейших наук подскажут нам выход.,
3.2. Немного географии
Карты земной поверхности — от плана го-
рода до карты двух полушарий — прочно вошли в наш
обиход, но далеко не все задумываются,, как эти карты
составляются и как ими правильно пользоваться. Напри-
мер, как по карте Советского СоюзаА взятой из обычного
школьного атласа, найти расстояние от Москвы до Хаба-
ровска? Способ, который приходит в голову первым,—
измерить линейкой длину отрезка, соединяющего соответ-
ствующие точки карты,, и умножить ее на масштабный
коэффициент,—по существу ошибочен! Только для срав-
нительно небольших расстояний, скажем, от Москвы до
Калинина или до Тулы, этот способ даст достаточно точ-
ный результат. Похожая ситуация сложилась у нас с кар-
тами скоростей: если скорости двух систем относительно
наблюдателя А малы по сравнению со скоростью светал
32
то скорость одной из них относительно другой численно
равна расстоянию между соответствующими точками на
^-карте К а, при переходе же к околосветовым скоростям
такой метод вычисления скорости по карте приведет
к большим ошибкам.
Эту аналогию, очень важную для нас, можно углу-
бить. Обратимся опять к «картографам» А и В, но теперь
пусть они будут не наблюдателями в двух движущихся
друг относительно друга системах отсчета, а геодезиста-
ми, находящимися в двух разных пунктах. Допустим, чтэ
они составляют карты какого-то не очень большого участ-
ка, на котором расположены объекты С, D, Е, . . . Для
этого, скажем, геодезист А, вооружившись оптическим
дальномером, угломером, чертежными инструментами и
листком бумаги, поочередно измеряет расстояния до
В, С, В, Е и углы между направлениями на эти объекты.
Измерив расстояние до очередного объекта X и его угло-
вую координату (азимут), он откладывает на своем листке
бумаги от точки 4, изображающей его самого, вектор,
равный по длине (в заданном масштабе) этому расстоя-
нию и направленный на объект X, и отмечает на карте
его конец — точку X. Точно так же строит свою карту и
геодезист В. Ясно, что пока дело касается небольшого
участка земной поверхности, который можно без особой
погрешности считать плоским (рельефом мы, разумеется,,
пренебрегаем), геодезист В трудится понапрасну: его
карта не будет отличаться от карты геодезиста А. Други-
ми словами, одну карту можно наложить на другую так„
что точки — изображения любого объекта на обеих кар-
тах совместятся. Таким образом, как и в случае карт ско-
ростей в нерелцтивистской области, карта небольшого,,
практически плоского участка, построенная из произволь-
ной начальной точки отсчета, универсальна — любую
ее точку можно принять за новое начало отсчета, а расстоя-
ния (в подходящих единицах) и углы на карте равны соот-
ветствующим расстояниям и углам на поверхности Земли.
Теперь увеличим измеряемый участок и расстояние
между геодезистами. Чтобы разница стала ощутимей,,
отправим А на Северный полюс, а В — на экватор,,
в «центр» Восточного полушария^ Принцип составления
карт оставим прежним: каждый геодезист заботится лишь
о том, чтобы правильно передать на_карте расстояния от
пункта его местонахождения до других объектов и углы
между направлениями на всевозможные объекты из этого
пункта. При этом под расстоянием между двумя пункта-
2 В. Н. Дубровский и др.
33
ми понимается конечно, длина кратчайшего пути, веду-
щего по поверхности Земли из одного пункта в другой,;
т. е., как легко сообразить, длина дуги большой окруж-
ности *) Земли, соединяющей эти пункты. Например,
расстояние от точки А до любой точки X равно длине дуги
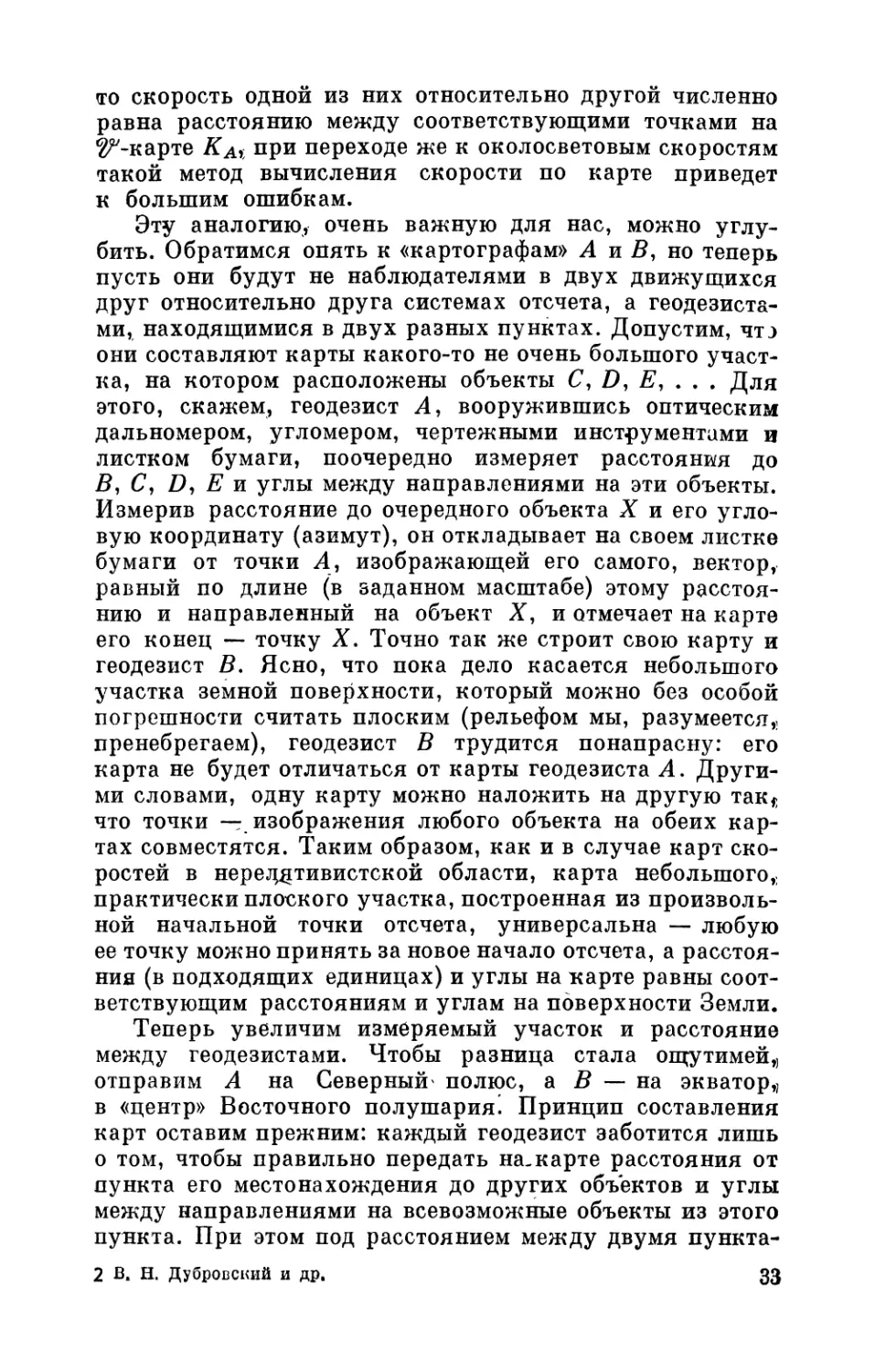
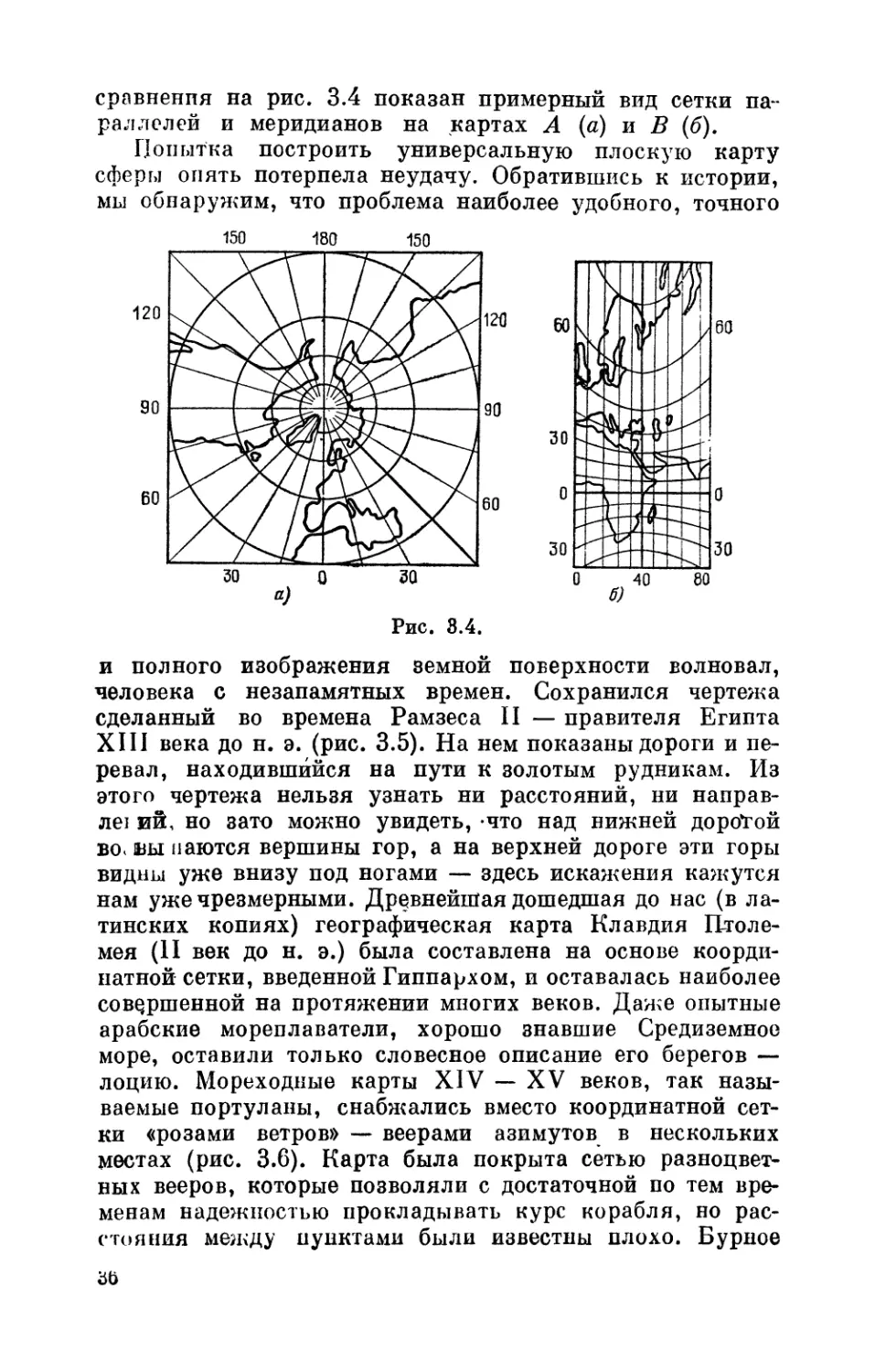
АХ меридиана, проходящего через точку X. На рис. 3.2,
а, б показан примерный вид сетки параллелей и меридиа-
нов на картах А и В. Нижний полукруг на рис. 3.2г а
Рис. 3.2.
и верхний на рис. 3.2, б изображают одну и ту же часть
земной поверхности — ее северо-восточную «четверть».
Как видим, эти две карты невозможно совместить так,
чтобы все одноимённые точки на них совпали. Это озна-
чает, что' земные расстояния на наших картах вообще
говоря, искажаются. Это хорошо видно на рис. 3.2. Рас-
стояние между любыми двумя из точек А, В и С по поверх-
ности Земли равно четверти большой окружности земной
сферы: АВ и АС —четверти меридианов, а ВС —чет-
верть экватора. В то же время на рис. 3.2г а расстояния
\АВ | и \ АС | одинаковы (и равны, по построению, их
реальным .значениям), а | ВС | — в |Л2 раз больше, а на
рис. 3.2, б | АВ | == | ВС | =# | АС |. Более того, сами
большие окружности — кратчайшие линии на сфереЛ т. е.
«сферические прямые»,— изображаются на наших картах
по-разному, например, из одинаковых дуг ABr ACS AD
и ВС геодезист А первые три изобразит отрезками, а чет-
вертую — дугой окружности (рис. 3.2,/а)2 у геодезиста В
♦) Так называются окружности, но которым сфера пересекается
с плоскостями, проходящими через ее центр.
34
(рис. 3.2, б) только путь А В изобразится так же, как у Л,
а меридиан AD вообще не прямая и не окружность!
Но может быть, недостатки этих карт коренятся в са-
мих картах, вернее, в способе их составления? Что ж,
давайте попытаемся строить карты по-другому.
Процесс съемки карт-планов небольших участков
можно представить так. Пусть, нанося на карту точку X,
геодезист А измеряет оптическим дальномером расстоя-
ние до вертикальной вешки, установленной в точке X.
Чем дальше расположена точка X, тем длиннее должна
быть вешка — ведь поверхность Земли искривляется.
(Даже если взять вешку высотой с Останкинскую теле-
башню, расстояние, с которого ее можно было бы еще уви-
деть, составит всего около 80 км!) Однако это не мешает
нам мысленно представить, как будет выглядеть карта
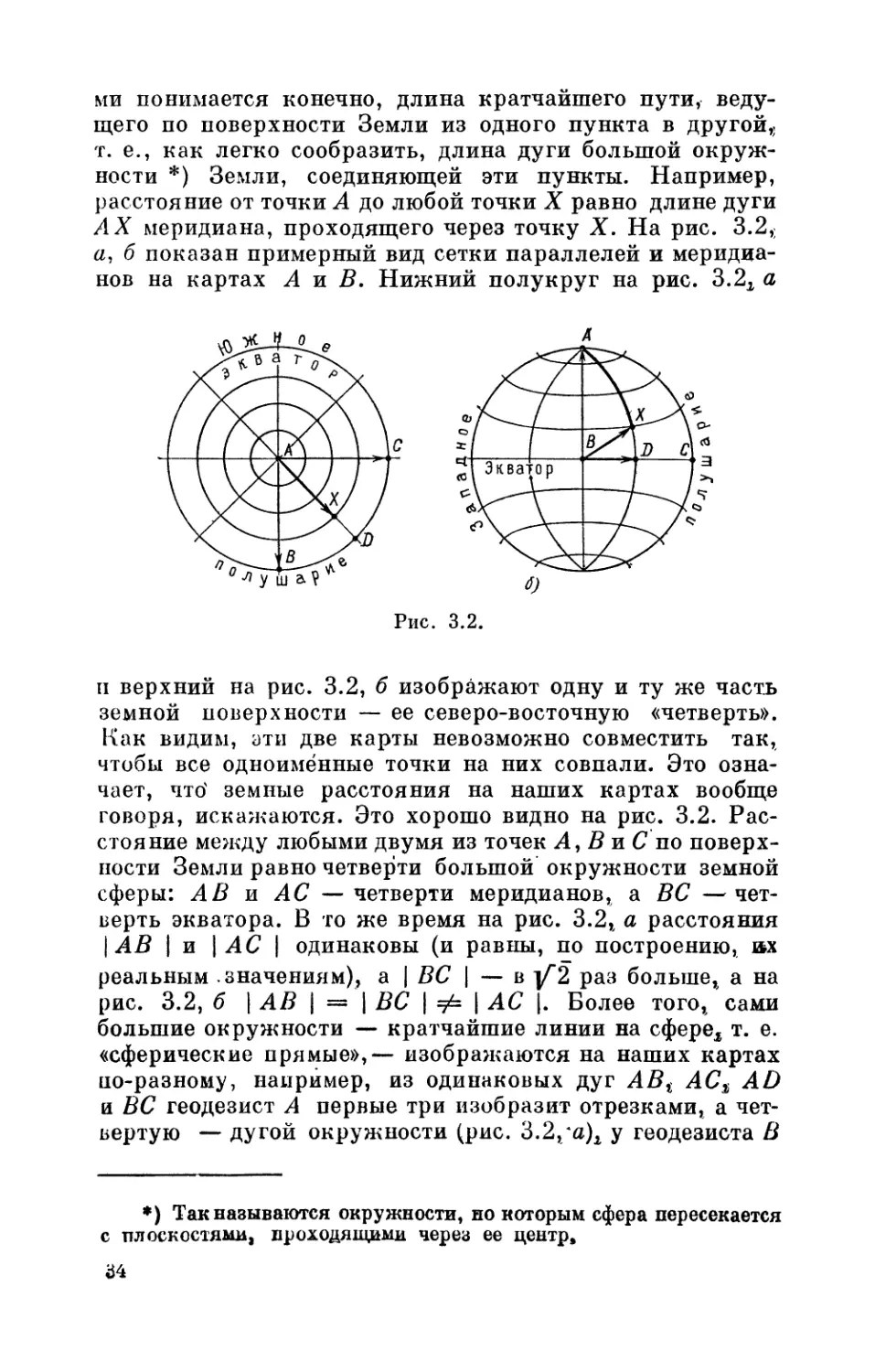
Земли, составленная с помощью таких вешек. Оптический
дальномер нашего геодезиста измеряет расстояние по ка-
сательной к земному шару в точке Л до прямой ОХ, где
О — центр Земли (рис. 3.3), т. е. расстояние от Л до точ-
ки X' пересечения прямей ОХ
с плоскостью а, касающей-
ся сферы в точке Л. Точка
X' называется центральной
проекцией точки X на плос-
кость а из центра О. При этом
новом способе построения
карта большого участка Зем-
ли получается в результате
центрального проектирова-
ния сферы на касательную к
ней в точке А плоскость. По
сравнению с первым вариан-
том этот способ обладает важ-
ным достоинством: любая «сферическая прямая», т.е. боль-
шая окружность сферы, изображается при центральной про-
екции обычной прямой (по которой пересекается плоскость,
содержащая эту большую окружность, с плоскостью а).
Но хотя на картах обоих геодезистов А и В кратчайшие
линии на сфере изображаются одинаково — прямыми,
совместить эти карты все равно не удается. Действитель-
но, даже заняв под карту всю плоскость, мы -сможем
уместить на ней только половину сферы и то без ограничи-
вающей ее большой окружности, и на карте геодезиста Л,
находящегося на Северном полюсе, вообще не найдется
точки для геодезиста В^ расположенного на экваторе. Для
сравнения на рис. 3.4 показан примерный вид сетки па-
ра ял ел ей и меридианов на картах А (а) и В (б).
Попытка построить универсальную плоскую карту
сферы опять потерпела неудачу. Обратившись к истории,
и полного изображения земной поверхности волновал,
человека с незапамятных времен. Сохранился чертежа
сделанный во времена Рамзеса II — правителя Египта
XIII века до н. э. (рис. 3.5). На нем показаны дороги и пе-
ревал, находившийся на пути к золотым рудникам. Из
этого чертежа нельзя узнать ни расстояний, ни направ-
лю ий, но зато можно увидеть, что над нижней дорогой
во<выпаются вершины гор, а на верхней дороге эти горы
видны уже внизу под ногами — здесь искажения кажутся
нам уже чрезмерными. Древнейшая дошедшая до нас (в ла-
тинских копиях) географическая карта Клавдия Птоле-
мея (II век до н. э.) была составлена на основе коорди-
натной сетки, введенной Гиппархом, и оставалась наиболее
совершенной на протяжении многих веков. Даже опытные
арабские мореплаватели, хорошо знавшие Средиземное
море, оставили только словесное описание его берегов —
лоцию. Мореходные карты XIV — XV веков, так назы-
ваемые портуланы, снабжались вместо координатной сет-
ки «розами ветров» — веерами азимутов в нескольких
местах (рис. 3.6). Карта была покрыта сетью разноцвет-
ных вееров, которые позволяли с достаточной по тем вре-
менам надежностью прокладывать курс корабля, но рас-
стояния между пунктами были известны плохо. Бурное
Рис. 3.5,
Рис. 3.6
38
развитие мореплавания и торговли в эпоху великих гео-
графических открытий было бы невозможно без создания
все более совершенных карт. Важнейший шаг в этом на-
правлении был сделан Герардом Меркатором (XVI век).
Ему впервые удалось создать карты, правильно переда-
вавшие величины углов на поверхности Земли, причем
меридианы изображались на них параллельными пря-
мыми. Такие карты особенно удобны для кораблевожде-
ния, потому что прямая, соединяющая любые два пункта
на карте, пересекает все меридианы под одним и тем же
углом и, следовательно, тем же свойством обладает соот-
ветствующая линия на земной поверхности — локсодро-
мия (греч. «кособегущая»). Вести корабль по локсодромии
проще всего — надо следить только за тем, чтобы его курс
составлял постоянный угол со стрелкой компаса, всегда
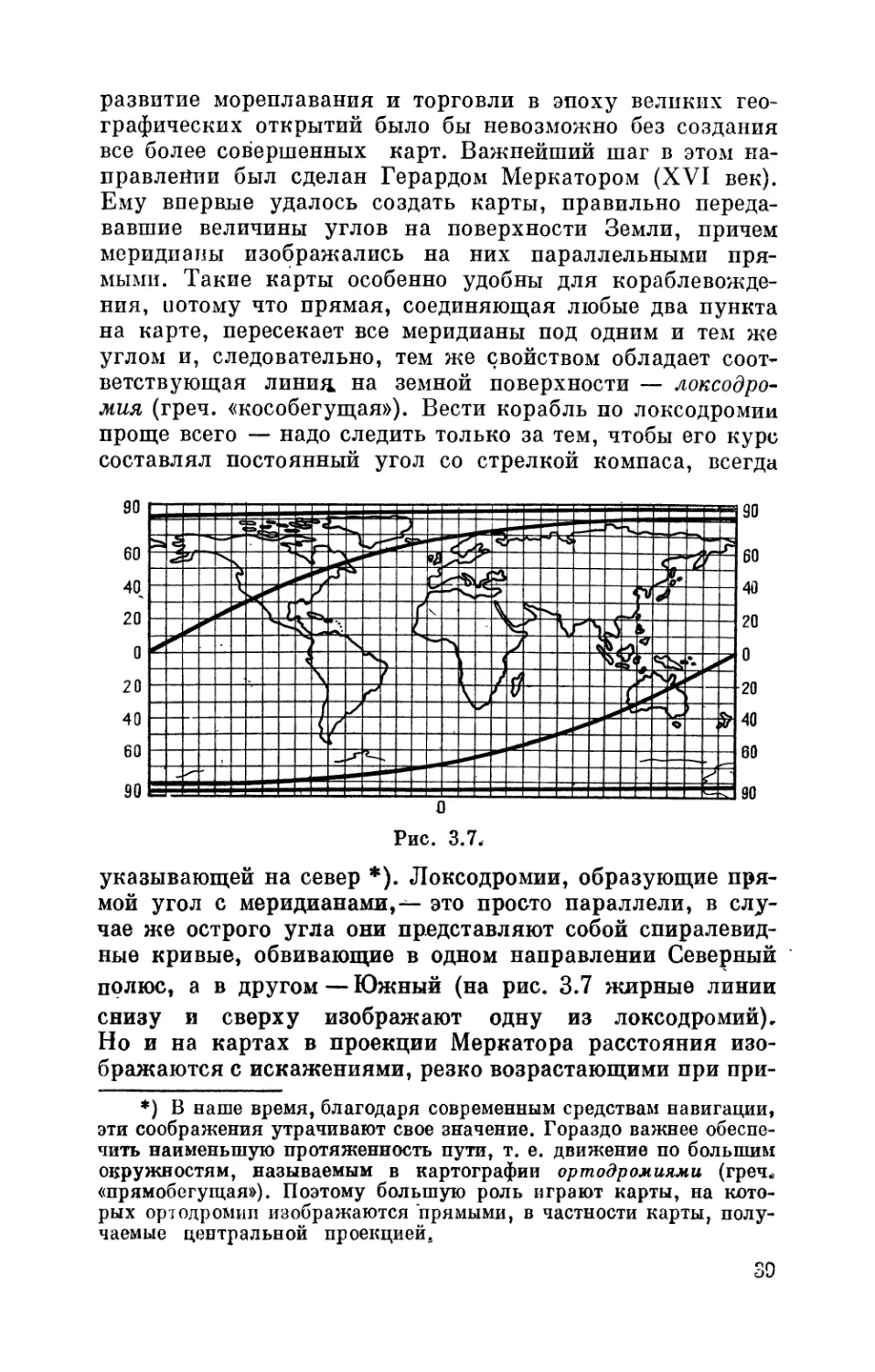
указывающей на север *). Локсодромии, образующие пря-
мой угол с меридианами, — это просто параллели, в слу-
чае же острого угла они представляют собой спиралевид-
ные кривые, обвивающие в одном направлении Северный
полюс, а в другом—Южный (на рис. 3.7 жирные линии
снизу и сверху изображают одну из локсодромий).
Но и на картах в проекции Меркатора расстояния изо-
бражаются с искажениями, резко возрастающими при при-
*) В наше время, благодаря современным средствам навигации,
эти соображения утрачивают свое значение. Гораздо важнее обеспе-
чить наименьшую протяженность пути, т. е. движение по большим
окружностям, называемым в картографии ортодромиями (гречл
«прямобегущая»). Поэтому большую роль играют карты, на кото-
рых ортодромии изображаются прямыми, в частности карты, полу-
чаемые центральной проекцией.
39
блпжении к полюсам (полная такая карта заняла бы беско-
нечную* полосу).
После Меркатора было придумано множество других
картографических проекций. (Например, на рис. 3.7
сохранены пропорции вдоль каждого меридиана и каж-
дой параллели и прямые углы между ними, зато разные
параллели имеют одну и ту же длину.)
Но карта, на которых земные расстояния изобража-
лись бы без искажений, так и не была создана. Пора уже
нам «открыть карты» — ее' и невозможно построить. Сог-
ласно теореме, доказанной Леонардом Эйлером в 1777 г.,
никакой, даже сколь угодно малый, кусочек сферы не
может быть развернут на плоскость, т. е. отображен на
нее так, чтобы расстояние между любыми двумя его точ-
ками, измеренное по сфере, в точности равнялось бы рас-
стоянию между их образами на плоскости. Сфера искрив-
лена — вот почему принципиально невозможно построить
для нее универсальную плоскую царту.
И все-таки универсальная карта Земли существует и
всем хорошо известна, только она не плоская. Это — гло-
бус! Если бы наши геодезисты рисовали карты не на плос-
ком листе бумаги, а на поверхности шара, то они, конеч-
но, получили бы одинаковые карты — глобусы. Геоде-
зист Л, построивший глобус по результатам собственных
измерений, произведенных из его собственного пункта
отсчете, может легко восстановить результаты измерений,
проделанных любым геодезистом В, измеряя расстояния
на своем глобусе от точки В до других точек. Если такой
глобус построен, то любую его точку можно принять за
новое начало отсчета и определить расстояние до любой
другой точки глобуса — Земли. Так не следует ли нам
предположить, что и наиболее подходящим полем для ре-
лятивистских кинематических графов является не плос-
кость, а какая-то кривая поверхность — «глобус скоро-
стей»? И так же, как обычный глобус — уменьшенная
копия Земли, глобус скоростей — это копия какого-то
неведомого нам искривленного «пространства скоростей»?
Пусть такая гипотеза не покажется вам чересчур стран-
ной, ведь в современной физике зачастую даже самые не-
обычные гипотезы и модели приводят к правильным вы-
водам и результатам. А сначала мы сделаем еще одно от-
ступление и познакомимся с более наглядным и осязаемым,
но тоже не совсем обычным пространством, геометрия ко-
торого очень близка к геометрии релятивистского про-
странству скоростей,
40
3.3. Звездные карты и звездное небо
Второй пример карт, который мы рассмот-
рим,— это карты звездного неба. Проще всего получить
звездную карту фотосъемкой. Именно такие карты-фото-
графии мы и будем рассматривать, причем будем считать,
что съемка производится самым примитивным фотоаппа-
ратом — так называемой «камерой-обскурой». Это—не-
прозрачный ящик, в одной стенке которого сделано ма-
ленькое отверстие О (объектив), а на противоположной
укрепляется фотопластинка. Звезда А (рис, 3.8) отпеча-
тается там, где прямая О А пересека- * в
ет плоскость пластинки. С похожим /
способом составления географических I Лл
карт мы уже встречались; напомним, / /
что он называется центральной про- / /
екцией *). Любопытно, что самая / /
древняя дошедшая до нас звездная 0 /
карта Фалеса Милетского тоже была /\1>отверсти8
построена в центральной проекции. / Л /
Попытаемся с помощью звездных / / \ /
карт-фотографий и звездного неба
разобраться в той ситуации, с кото- Фотопластинка8'
рой мы столкнулись, начав зани- рис g
маться релятивистской кинематикой. ’ ‘ ’
Карты скоростей К а и Кв, составленные двумя разны-
ми наблюдателями А и В, можно сравнить с двумя раз-
ными фотографиями К а и Кв звездш го неба, снятыми
при двух различных положениях фотоаппарата,— когда
он нацелен на звезду А и на звезду В. Измерениям вели-
чин и направлений скоростей, производимым определен-
ным наблюдателем, соответствуют измерения расстояний
и углов непосредственно по данной фотографии, а переходу
из одной системы отсчета в другую — переход от одной
фотографии к другой. Как разные карты скоростей, так
и разные фотографии выглядят по-разному, их нельзя
совместить простым наложением. Однако все фотографии
суть изображения одного и того же звездного неба, а раз-
ница между ними обусловлена только изменением положе-
ния камеры. Точно так же карты скоростей связаны с си-
стемой отсчета или, если угодно, с «точкой зрения» кон-
кретного наблюдателя и потому отличаются друг от дру-
*) В картографии центральную проекцию чаще называют гно-
монической (гномон — солнечные часы).
41
рме. 3.9.
га. По по этим разрозненным картам можно попробовать
составить общую картину, общее представление о про-
странстве скоростей, которое уже не зависит от конкрет-
ной точки зрения, хотя и «видится» каждому наблюдате-
лю по-своему. Чтобы построить это пространство, разо-
браться в его структуре, нам надо будет понять, как свя-
зан л между собой данные измерений разных наблюда-
телей, научиться преобразовывать одну карту в другую.
Когда же это пространство будет построено и изучено, о
преобразованиях карт скоростей можно будет забыть..
Данные любого наблюдателя мы сумеем сразу перевести
па язык этого универсального пространства, а затем пере-
считать их в систему отсчета лю-
бого другого наблюдателя. Наме-
ченный нами путь проделать не-
легко, но, на наше счастье, с ос-
новными его этапами можно поз-
накомиться на более привычном и
простом примере звездного неба
и его карт. Этим мы и займемся.
Сначала разберемся с преобра-
зованиями звездных карт. В даль-
нейшем нам будет удобнее проек-
тировать на плоскость а, распо-
ложенную перед точкой О, а не за
ней, как в фотоаппарате (рис. 3.-9).
Ясно, что это почти ничего не меняет. Из способа но-
строения карт сразу же следует, что
из другой с помощью централь-
ной проекции. Действительно
(рис. 3.10), произвольная звез-
да X изображается на картах
К а и Кв точками и X в—точ-
ками пересечения одной и той
же прямой ОХ с плоскостями
К а и Кв, так что, скажем, Хв
есть проекция Ха из центра О
на плоскость Кв* Подчеркнем
одно очевидное, но очень важ-
ное свойство этого преобразования:
одна карта получается
любая прямая не
одной карте проектируется в прямую на другой карте*
Это свойство так и называют проективностью} ему суж-
дено сыграть решающую роль при изучении геометрии
релятивистского пространства скоростей.
Сейчас же мы перейдем к изучению геометрии звездного
неба, попробуем получить формулы, которые позволили бы
переходить от одной карты-фотографии к другой, минуя
не очень эффективный путь — центральное проектирова-
ние. Для этого нужно прежде всего построить подходящую
математическую модель звездного неба, некое простран-
ство, картами которого служили бы наши фотографии.
Заметим, что одной точке на фотографии отвечает не одна,
а сразу много точек окружающего нас пространства,
а именно, все точки луча с началом в центре проекции
(пункте наблюдения) О. Можно сказать, что звездная кар-
та является картой «пространства», в котором роль точек
играют всевозможные лучи с началом О,— пространства
лучей. Мы приходим к несколько неожиданному выводу:
наиболее адекватная модель «звездного неба» — это про-
странство лучей. Впрочем,, ничего особо непривычного
в том, чтобы* называть луч «точкой», нет. В любой книжке
или статье по астрономии вы встретите фразы вроде сле-
дующей: «такую-то звезду можно увидеть в такой-то точ-
ке небесной сферы», однако здесь вовсе не подразумевает-
ся точка какой-то определенной сферы или даже просто
конкретная точка пространства — имеют в виду направ-
ление, вдоль которого надо посмотреть, чтобы увидеть
звезду. Конечно, не стоило бы за-
водить разговор о пространстве лу-
чей, если бы все ограничилось пе-
реименованием лучей в «точки». Суть
дела намного глубже: • оказывается,
пространство лучей обладает геомет-
рией не менее богатой, чем евклидо-
ва геометрия плоскости.
Приступая к рассказу о ней, мы
должны прежде всего уяснить, какой
смысл имеют в пространстве лучей
основные геометрические понятия —
расстояние, прямая, угол. Это совсем
Рис. 3.11.
легко; мы иногда даже пользуемся ими на практике, но
отдавая себе в этом отчета. Вспомним, например,
популярное правило приближенного определения положе-
ния Полярной звезды: надо мысленно соединить две край-
ние звезды ковша Большой Медведицы (а и Р на рис. 3.11)
прямой и отложить на ней пять раз расстояние между
ними. Любой из нас, не задумываясь, справится с этим
воображаемым построением. Если вникнуть в то, что при
этом выпш >яется фактически, то вы'Поймете, как следует
определять основные понятия геометрии лучей. (Их
43
названия будем брать в кавычки, чтобы избежать пута-
ницы с понятиями обычной геометрии.)
Итак, за «расстояние» между двумя «точками»-лучами
ОА и ОВ мы примем величину угла АОВ. Для краткости
будем обозначать «точки» ОА, ОВ,* * * Полужирными бук-
вами А, В, 9 9 а «расстояние» между А и В — символом
('И.В |д. «Прямой» пространства лучей естественно наз-
вать множество всех лучей-«точек», лежащих в одной плос-
кости, «отрезком» АВ — плоский угол
АОВ, «углом» АВС —угол между по-
луплоскостями А ОВ и СОВ с границей
в X \ ОВ (рис. 3.12).
у \ \ На основе этих понятий легко про-
/ у \ должить список определений геометрии
/ / ) лучей по аналогии с обычной геомет-
/ / J рией. По сути дела, геометрия лучей —
0 ----4—Lx это удобный язык, на котором можно
/ / описывать различные геометрические
>/^х свойства фигур, составленных из лучей
с общим началом. Достойно удивления,
Рис. 3.12, что в этом языке мы можем употреблять
слова из языка планиметрии и, самое
главное, составить из них массу фраз, одинаково верных
в обеих интерпретациях. Выходит, геометрия пространства
лучей во многих отношениях близка к геометрии евклидо-
вой плоскости, что Совсем не очевидно с первого взгляда.
Это обстоятельство стоит подчеркнуть, ибо в релятивистс-
ком пространстве скоростей, еще более далеком по своей
природе от плоскости чем пространство лучей, мы тоже
обнаружим свои прямые, углы, расстояния и т. д.
3.4. Геометрия пространства лучей
Геометрия лучей — это просто один из раз-
делов стереометрии, и все ее теоремы можно доказывать
с помощью обычных пространственных построений и рас-
суждений. Но не будем забывать, что для нас пространство
лучей является только испытательным полигоном, на ко-
тором мы отрабатываем методы изучения геометрии про-
странства скоростей* А его нам придется исследовать поч-
ти вслепую, не имея представления о том, как оно выгля-
дит» Все, что мы можем о нем узнать, заключено в картах
скоростей* Поэтому мы расскажем, как получать теоремы
о пространстве лучей, пользуясь его картами-фотография-
ми* Основная идея очень проста, Сначала мы выясним,
44
как геометрическая структура пространства лучей отра-
жается в его картах, выведем точные правила, позволяющие
переходить от пространства к картам и обратно. После
этого с их помощью можно будет любой геометрический
факт, справедливый для карт, т. е. в обычной евклидовой
планиметрии, преобразовать в теорему геометрии лучей.
Читателю, не склонному или не привыкшему вдавать-
ся в дебри математических подробностей, мы рекомендуем
пропустить при первом чтении текст, набранный далее
мелким шрифтом. К нему стоит вернуться перед чтением
разделов 4.5 и 4.6, в которых та же общая идея и даже де-
тали рассуждений применяются для вывода формул гео-
метрии релятивистского пространства скоростей.
Напомним, что по построению каждый луч {«точка») изобра-
жается на карте точкой, в которой он пересекается с плоскостью
карты. Для определенности будем считать, что расстояние от этой
плоскости до точки О — начала лучей — равно 1. Карту, плоскость
которой перпендикулярна лучу ОА, обозначим КА (рис. 3.9).
Очевидно, что «прямые» пространства лучей изобразятся на
картах-фотографиях обычными прямыми, «углы» и «отрезки», как
правило,— обычными углами и отрезками ♦). Величины «углов»
и длины «отрезков» при переносе на карту, разумеется, искажают-
ся, однако в простейших случаях легко найти формулы, связываю-
щие расстояния и углы, которые мы измеряем линейкой и транс-
портиром непосредственно на картах, с соответствующими «расстоя-
ниями» и «углами» в пространстве лучей. Самая простая зависимость
получается тогда, когда по карте КА определяются «расстояния»
от «точки» А и величины «углов» с вершиной в этой «точке».
Пусть А, В, С — изображения «точек»Л, В, С на карте КА,
Тогда, во-первых, евклидово расстояние | А В | (рдс. 3.13) равно
| ОА | tg АОВ и, поскольку | ОА | = 1, а
величина угла АОВ есть «расстояние»
между «точками» А и В пространства
лучей,
|АВ|а = tg| ЛВ |л, (3.1)
где через [ АВ 1А обозначено расстояние,
измеряемое по карте КА. Во-вторых, угол
ВАС (рис. 3.14) получается при пересечен
нии двугранного угла В(ОА)С плоско-
стью карты КА, перпендикулярной его
ребру ОА, и, следовательно, является ли-
нейным углом этого двугранного угла, т. е.
равен по величине «углу» ВАС в
Рис. 3.13.
в
пространстве
«угол» с вершиной в «точке» А изображается на карте
искажений.
лучей:
КА без
(3.2)
*) Впрочем, иногда «угол» может изобразиться полосой или полу,
плоскостью, а «отрезок» — лучом. Подумайте, когда это случается!
45
Рассмотрим еще один полезный частный случай, в котором
искомая зависимость столь же проста. Пусть «угол» АСВ в про-
странстве лучей — прямой. Тогда (рис. 3.14) плоскость ОВС
перпендикулярна плоскости О А С', но и плоскость АВС — плоскость
карты — перпендикулярна плоскости ОАС (потому что она перпен-
Рис. 3.14.
С находим, что | ВС | — | ОС |
а I О А 1 = 1, стало быть,
дпкулярна прямой О А), Поэтому
прямая ВС,по которой пересекают-
ся плоскости ОВС и ЛВС, тоже
перпендикулярна плоскости С.А С,
и значит, углы ВСО и ВСА —
прямые.
Во-первых, отсюда вытекает,
что
«прямой угол» е пространстве
лучей, сторона которого про-
ходит через «точку» А («уёол»
ВСА), изображается на карте
КА евклидовым прямым углом
(углом ВСА)3 (3.3)
Во-вторых, из треугольника
ОВС с прямым углом при вершине
tg ВСС, но | ОС | = | О А | /cosAOC,
| ВС |А = tg | ВС |л/со8 | АС |л, если АВС — прямой угол. (3.4)
Теперь мы можем выводить соотношения между сторонами и
углами «треугольников» в пространстве лучей, другими словами,—
между плоскими и двугранными углами трехгранных углов *).
Действительно, зависимости (3.1) — (3.4) позволяют выразить эле-
менты (длины сторон и углы) прямоугольного треугольника АВС
па карте КА через элементы соответствующего «треугольник а»-
АВС (см. ниже формулы (3.5)). Поэтому достаточно взять любое
соотношение между элементами «евклидова» прямоугольного тре-
угольника АВС, например, теорему Пифагора, заменить входящие
в него величины их выражениями через элементы «треугольника»
АВС— и очередное метрическое соотношение геометрии лучей
готово! Комбинируя полученные результаты, мы найдем новые фор-
мулы, в том числе не имеющие прямых аналогий в евклидовой
геометрии. А от прямоугольных «треугольников» нетрудно перейти
и к произвольным.
Обозначим «длины» сторон АВ, ВС, С А «треугольника» АВС
в пространстве лучей через с, а, b соответственно, , величины
«углов» при Ьершинах А, В, С — через а, р и у. Аналогично,
евклидовы длины сторон треугольника АВС, изображающего
«треугольник» АВС на карте КА, обозначим через q, ах, Ъ19 а его
углы — через Л, В, С,
Предположим сначала, что «треугольник» АВС — прямо-
угольный и у = зт/2; тогда из соотношений ^.1) — (3.4) вытекает,
*) Эти соотношения, вероятно, знакомы многим из наших чита-
телей. См., например, учеоник «Геометр им-э* иод редакцией 3. а.
Скопоца.
46
что
ci = tg с, . Ьг = tg b, af = tg a/cos b, (3.5)
Л=а, С = у = л/2.
Выведем некоторые наиболее..характерные метрические соот-
ношения для «треугольника» ЛВС.
Катет, гипотенуза и угол между ними. На карте имеет место
формула Ьх = cos Л; отсюда, в силу (3.5), в пространстве лучей
tg b = tg с cos а. (3.6)
Два катета и угол, прилежащий к одному из них. На карте:
ai = tg Л; в пространстве лучей: tg akvs b = tg & tg а или
tg a = sin b tg a. (3.7)
Два катета и гипотенуза (теорема Пифагора)# На карте:
ci = ai + В пространстве лучей; tg2 с = tg2 akes* b + tg2 b.
Преобразуем это равенство, пользуясь тождеством tg2 х 4- 1 =
= 1/cos2 х:
_±__1б!с + 1 = _^£. + 182(,+ 1 =
= tg2a 1 1
eos2 b cos2 b = cos2 a cos2 Ъ
или cos2 с = cos2 a cos2 b. Если «длины» сторон «треугольника»
ЛВС, т. е. углы АОВ, ВОС лАОС не превосходят л/2 (а фактически
это подразумевается, ибо в противном случае «треугольник»
АВС не уместился бы на карте КА см. рис. 3.14), то числа
cos с, cos а и cos Ъ положительны, следовательно,
cos с = cos a cos b. (3.8)
Это и есть «теорема Пифагора» геометрии лучей. Нетрудно дока-
зать, что на самом деле формула (3.8), так же, как (3.6) и (3.7),
справедлива для любого прямоугольного «треугольника».
Следующее соотношение мы выведем из (3.7) и (3.8). С евклидов
вой точки зрения оно представляется довольно неожиданным.
Два угла и гипотенуза (!). Все доказанные нами формулы вы-
ражают определенные факты геометрии лучей и сами по себе ника-
кого отношения к каким бы то ни было картам не имеют. Например,
соотношение типа (3.7) в равной степени справедливо для обоих
непрямых ♦) углов «треугольника», в частности, tg b = sin a tgfk
Перемножая правые и соответственно левые части этого равенства
и равенства (3.7), получим, tg a tg b = sin a sin b tg a tg £ или
cos a cos b = ctg a ctg pt Отсюда по «теореме Пифагора» (3.8)
имеем
ctg a <Jtg P = cos c., (3.9)
Итак, зная два непрямых угла прямоугольного «треугольника»,
можно вычислить его «гипотезу», а значит, и «катеты» — следова-
тельно, в этом случае «треугольник» пространства лучей полностью
♦) Мы не говорим «острых», потому что в прямоугольном
«треугольнике» могут иметься даже два тупых угла (приведите
пример).
47
определяется своими углами. Более того, оказывается, что любые
два «треугольника» с соответственно равными углами в геометрии
лучей конгруэнтны!
Еще одно интересное следствие из (3.9) получается, если учесть,
что cos.с <1 и потому ctg а < tg Р = ctg (л/2 — Р). Отсюда выте^
кает, что а > л/2 — р, т. е. сумма углов а+(3 + т~а+₽ +
+ л/2 прямоугольного «треугольника» АВС больше л. Это можно
доказать и для произвольного «треугольника», разбивая его на пря-
моугольные.
Следующий шаг — научиться «решать» любые треугольники
в пространстве лучей. Но здесь мы остановимся, приведя только
одро соотношение:
cos а = cos Ъ cos с + sin b sin с cos а. (3.10)
Оно называется «теоремой косинусов» геометрии лучей (и, судя
по записи, вполне заслуживает такого названия). С «теоремой си-
нусов» и еще одной (!) «теоремой косинусов» читатель может позна-
комиться в дополнении 4 к этой главе. Все эти теоремы доказывают-
ся точно так же, как одноименные теоремы геометрии релятивист-
ских скоростей, о которых мы подробно расскажем в разделе 4.6.
Заканчивая разговор о пространстве лучей, мы хотим
извиниться за то, что сознательно старались подольше
сохранить в секрете его подлинное лицо. Впрочем, надеем-
ся, наш проницательный читатель давно уже раскрыл этот
Маленький секрет: пространство лучей и сфера — это,
в сущности, одно и то же! Действительно, рассмотрим сфе-
ру радиуса 1 с центром в точке О — начале всех лучей.
Каждой ее точке Р соответствует одна и только одна «точ-
ка» Р пространства лучей — луч ОР. При этом «расстоя-
ние» между любыми двумя «точками» Р и Q, т. е. угол
POQ, очевидно, равно по величине длине дуги Р^.большой
окружности сферы. Но ведь эта длина и есть расстояние
между точками Р и Q, измеренное по сфере. Далее, любо.й
«прямой» пространства лучей (плоскости) отвечает «сфери-
ческая прямая» (большая окружность, по которой эта плос-
кость пересекается со сферой). Вообще, любому понятию
геометрии лучей будет отвечать совершенно адекватное
ему понятие сферической геометрии, а любую из формул
(3.6) —- (3.10) можно читать как формулу «сферической
тригонометрии», например, «теорема косинусов» (3.10)
может одинаково успешно служить и для'определения по
звездной карте Ка углового расстояния между звездами В
и С, и для вычисления но географической карте расстоя-
ния между Москвой и Хабаровском. Как гласит извесг-
ный афоризм,? математика — это искусство называть раз-
ные вещи одинаковыми именами, а одни и те Яке вещи —
разными именами. Пользуясь нашей картографической
терминолохией, можно сказан^ что сфера явля.е,юя уни~
43
версалъной картой пространства лучей. И мы знаем, что
такие карты — звездные глобусы — действительно при-
меняются. Пространство лучей и процесс построения его
универсальной карты можно даже увидеть воочию —
в планетарии, где лучи, исходящие из проекционного ап-
парата, высвечивают изображения звезд и планет на сфе-
рическом куполе.
Мы неспроста выбрали для рассказа о сферической гео-
метрии и ее изучении с помощью карт остраненный язык
пространства лучей. Нам хотелось показать, что геомет-
рической структурой могут обладать множества, состоя-
щие из точек самой произвольной природы (например, из
лучей). Чтобы геометрия Заработала, необходимо лишь
наличие четких определений основных понятий — рао
стояния, прямой и т. д. В следующем разделе мы начнем
изучение геометрической структуры совсем абстрактного
релятивистского пространства скоростей. Надеемся, что
благодаря нашему.’ отступлению в область географии и
астрономии (возможно, несколько затянувшемуся), мно-
гое в экзотическом мире релятивистских скоростей пока-
жется читателю уже знакомым.
3.5. Что такое пространство скоростей?
Рассмотренные нами примеры позволяют
предположить, что разные Карты скоростей можно истол-
ковать как разные плоские изображения единого цро-
странства, как бы его «фотографии», сделанные в разных
ракурсах. Причем в теории относительности это простран-
ство, судя по всему, Является искривленным, и поэтому
его не удается изобразить на плоскости точно, без иска-
жений. Теперь наша задача — развить эту идею, и прежде
всего установить, какой смысл имеют в геометрии ско-
ростей слова «точка», «прямая», «расстояние» и т. п. Мы
должны научиться говорить о кинематике на языке гео-
метрии.
Посмотрим, как решается эта задача в нерелятивист-
ском случае, которым мы занимались в гл. 1. Тогда мы
почти обошлись без всяких абстрактных разговоров о
«пространстве скоростей», его «точках», «прямых» и тому
подобных вещах, настолько очевидной и органичной была
связь между кинематикой и евклидовой геометрией. Вспом-
ним: выбирая на плоскости произвольную точку А,
отвечающую какой-то инерциальной системе отсчета Л,
и сопоставляя всякому движущемуся с достоянной ско-
49
ростью объекту X (системе отсчета, материальному телу,
частице, наблюдателю — чему угодно) точку плоскости X.
по правилу АХ = v^ia, мы получаем карту скоростей /Гд*
И здесь нам везет. Мы можем забыть, что начинали
с определенной системы отсчета А. В установленном соот-
ветствии между точками плоскости и инерциальными си-
стемами отсчета все точки и все системы оказываются равно-
правными. В силу правила сложения скоростей, для
любых двух систем В и С вектор относительной скорости
Vc/в будет равен по величине и направлению вектору ВС,
соединяющему соответствующие точки плоскости. Поэ-
тому любая задача об относительных скоростях моменталь-
но превращается в задачу евклидовой планиметрии.
В теории относительности дело обстоит иначе. На реля-
тивистской карте скоростей наблюдателя А — круге Ка —
имеется выделенная точка — его центр А. Классический
закон сложения скоростей здесь не действует, и простое
равенство ЛХ = которое мы кладем в основу по-
строения ?^-карты КА, уже нельзя распространить на лю-
бые две точки этой карты. Карты скоростей, которые в не-
релятивистском случае можно было отождествить друг
с другом и сразу рассматривать как универсальное про-
странство скоростей, теперь выступают как разные плос-
кие изображения одного и того же «универсального»
пространства. О том, что оно собой представляет, нам за-
ранее ничего неизвестно, поэтому мы должны начать с оп-
ределений основных геометрических понятий в простран-
стве скоростей. А поскольку геометрический язык призван
служить для решения задач кинематики, то и эти понятия
надо выразить через основные величины, рассматриваемые
в кинематике, т. е. прямо через относительные скорости.
Это совсем легко сделать в нерелятивистском случае, ведь
любое понятие евклидовой геометрии можно описать с по-
мощью векторов, а вектор, соединяющий две точки в не-
релятивистском пространстве скоростей, попросту равен
вектору относительной скорости двух соответствующих
систем отсчета^ Полученные таким образом определения мы
постараемся распространить и на теорию относительности.
Итак, допустим, что каждой-инерциальной системе от-
счета сопоставлена ровно одна точка некоторого множества
W — пространства скоростей. В нерелятивистском слу-
чае в качестве такого множества можно взять плоскость^
В теории относительности у нас не будет столь же нагляд.
50
ного представления о нем, но, зафиксировав систему от-
счета А, мы можем стандартным способом изобразить это
пространство на плоскости в виде круга — карты скоро-
стей Ка- При этом каждой точке X карты отвечает ровно
одна инерциальная система X (движущаяся относительно
системы А со скоростью vx\a = АХ) и, следовательно,
ровно одна точка пространства скоростей
любому сбъекту X, движущемуся равномерно и прямо-
линейно относительно инерциальных систем отсчета^
в пространстве скоростей отвечает единственная точ~
на,(которую мы условимся в дальнейшем обозначать X)-
Конечно, та же самая точка отвечает и всем другим
объектам, неподвижным в системе покоя X. Иногда нам
будет удобнее говорить, что «точка JT изображает в про-
странстве 2^ скорость объекта X». Это не вполне правиль-
но, но вполне понятно: задав любую систему отсчета Л,
мы сумеем узнать все, что возможно, об относительной ско-
рости V\\a по расположению точекгX и А в пространстве
скоростей.
Теперь надо деревести на кинематический язык слова
«прямая», «угол», «расстояние». Эти и другие понятия гео-
метрии скоростей мы часто будем коротко называть
^-прямой, ^-углом и т. д.
Начнем с -прямых. Три точки А, В и С нереляти-
вистского пространства скоростей — евклидовой плоско-
сти — лежат на одной прямой тогда и только тогда, когда
векторы АВ и АС коллинеарны, т. е. когда коллинеарны
векторы скоростей Vb\a и Vc\a. Это условие мы можем
беспрепятственно перенести в релятивистское ^-простран-
ство, Итак, ЧУ-точка С лежит на ^-прямой АВ тогда и
только тогда, когда относительные скорости Vc\A и Vbia
коллинеарны. На карте скоростей наблюдателя А точки А,
В и С располагаются на прямой, точнее, на одном из диа-
метров круга К а* Очевидно, то же самое верно и для
2^-карт Кв и Кс. Поясним наглядный смысл нашего опре-
деления. Поскольку нас интересуют только относитель-
ные скорости, а не местонахождение наблюдателей А, В
и С, можно считать, что в какой-то момент времени они
находились в одном и том же пункте. Тогда с точки зрения
любого из них два других наблюдателя будут двигаться
с постоянными скоростями по одной и той же прямолиней-
ной «дороге», на которой стоит и он сам. Например, вело-
сипедисты, которые едУт с постоянными (но, может быть,
5^
разными) скоростями по прямому участку шоссе, теле-
оператор, пролетающий над ними на вертолете, и теле-
комментатор, находящийся на финише гонки,— все они
изобразятся в пространстве скоростей точками одной и той
же 2^-прямой.
В нерелятивистском случае УУ-угол ВАС между
^-лучами АВ и АС. очевидно, равен углу между векторами
АВ и АС. т. е. углу между векторами скоростей Гв|а и
Vc\a частиц В и С с точки зрения наблюдателя в системе
отсчета А. Это соотношение мы должны сохранить и в тео-
рии относительности. Действительно, можно уменьшать
величины скоростей частиц В и С относительно наблюда-,
теля Л, не меняя их направлений. В пространстве ско-
ростей соответствующие 2^-точки В и С будут приближать-
ся к 2^-точке А по двум лучам — сторонам угла ВАС9
При этом 2^-угол ВАС и угол между векторами скоростей,
конечно, будут оставаться постоянными, а в нерелятивист-
ском пределе, когда скорости станут малы по сравнению
со скоростью света, мы получим, что
ТВАС
— УВ\А1 ^С|А-
До сих пор все у нас шло очень гладко, определения
сами собой переносились с классического случая на реля-
тивистский. Но теперь, когда мы подошли к последнему,
и, пожалуй, самому важному моменту — определению
-расстояния.-— мУ столкнемся с особенностью, прису-
щей именно теории относительности и связанной с огра-
ниченностью скорости распространения взаимодействий.
Расстояние между двумя точками А и В нерелятивист-
ского пространства скоростей равно длине вектора ЛВ,
т. е. величине относительной скорости vb\a • I ЛВ | =
= 1>в|а- Эта формула прекрасно согласуется с класси-
ческим законом сложения скоростей. Действительно, рас-
смотрим системы отсчета В и С. движущиеся в одном и
том же направлении относительно системы Л так, что
в пространстве скоростей точки А. В и С лежат на одной
прямой, причем В находится между А и С. Тогда расстоя-
ние | АС | равно сумме | АВ | + | ВС |, или vC\a в
= Vb\a + ус|в? как и должно быть. Но в теории относи-
тельности обычный закон сложения скоростей не дейст-
вует2 иначе' можно было бы в результате сложения доста-
точно больших скоростей получить скорость, превышаю-
щую скорость света. С другой стороны, мы хотим, чтобы
«закон сложения расстояний» [АС | — [ ЛЦВ | + [ВС |
52
был выполнен и в релятивистском пространстве скоростей.
Поэтому равенство | АВ | = vB\a нам придется заменить
более общей зависимостью
М-В || = г (i>B|A)s (3.11)
где || АВ || — релятивистское 2^-расстояние, а г (у) —
какая-то неизвестная функция, которая призвана как бы
согласовать закон сложения расстояний на ^-«глобусе»
и релятивистский закон преобразования скоростей. Яв-
ный вид функции г (р) мы сумеем найти только тогда,
когда научимся выражать скорость vC\A через иВ\А и
vc\b> Этому посвящена значительная часть следующей
главы. Однако уже сейчас можно утверждать, что при
скоростях, малых по сравнению со скоростью света
(p<i^e), эта функция будет практически линейной:
г (р) fcp, потому что такие скорости складываются
почти по классическому закону. На другом конце шкалы
скоростей расположены фотоны, которые, согласно прин-
ципу относительности Эйнштейна, движутся с одной
и той же скоростью ртах = с 3*108 м/с относительно
любого инерциального наблюдателя. Соответствующие
им точки пространства скоростей должны быть равно-
удалены от всех остальных («обычных») точек. Как же это
согласовать с «законом сложения расстояний»? Выход
может быть только один — считать, что фотонам отве-
чают особые «бесконечно удаленные» точки пространст-
ва 2^, лежащие на бесконечном расстоянии от любой обыч-
ной точки. При этом получается, что г (с) = оо и г (р) —> оо
при р -> с. Совокупность бесконечно^ удаленных точек
называют абсолютом пространства Абсолют — это
как бы линия горизонта пространства скоростей: сколько
к нему ни приближайся, он остается все таким же беско-
нечно далеким. Понятно, что на карте Кх абсолют изо-
бражается граничной окружностью.
Может показаться странным, что принцип относитель-
ности и требование конечности скорости распространения
света приводят к бесконечности пространства скоро-
стей 2^, хотя любая его карта Кх представляет собой ко-
нечный круг радиуса с. Но ничего странного в этом нет —
просто функция г (и) такова, что когда v стремится к ско-
рости- света с, г (р) стремится к бесконечности. Таких
функций можно придумать много, но не каждая из них
удовлетворяет принципу относительности. Какая же
именно — мы установим в следующей главва
53
3.6. Как устроено релятивистское
пространство скоростей
Сделаем важный шаг: посмотрим, какие
условия накладывает на геометрию пространства ско-
ростей принцип относительности Эйнштейна' и попробуем
объяснить, почему она должна быть геометрией Лобачев-
ского. Это займет у нас .несколько следующих страничек
и... несколько следующих глав. Пути от физических
предпосылок к точным и лаконичным математическим фор-
мулам могут быть разными. В следующих главах мы не
только узнаем о теснейшей связи между релятивистской
кинематикой и геометрией Лобачевского, но и достаточно
подробно познакомимся с самой этой геометрией. Сейчас
же мы наметим другой путь. Он позволяет очень быстро
определить общее строение релятивистского пространства
скоростей, но никаких конкретных формул мы получать
не будем. Чтобы воспроизвести детали рассуждений, нам
пришлось бы выйти далеко за рамки школьной математи-
ки, поэтому мы ограничимся нестрогими объяснениями^
а читателю пока придется многое принять на веру.
Первая часть принципа относительности требует,
чтобы все инерциальные системы были полностью рав-
ноправны. На геометрическом языке это означает, что
пространство скоростей в каждой своей точке ♦) должно
быть устроено совершенно одинаково. Это условие одно-
родности является очень жестким. Например, Евклид
с его помощью пытался выделить прямые из всех других
линий на плоскости. Определение 4 «Начал» гласит:
«Прямая есть линия, которая равно расположена по
отношению к точкам на ней». Автор «Начал» не обратил
внимания на то, что окружности тоже обладают этим
свойством. Других же таких линий на плоскости нет!
Впрочем, нас интересуют не одномерные, а двумерные
пространства — поверхности. Два примера «однородных»
поверхностей нам хорошо известны — это плоскость (не-
релятивистское пространство скоростей) и сфера. «Одно-
родность» этих поверхностей проявляется в том, что их
можно передвигать по себе, не изменяя расстояний между
их точками, при этом любой отрезок на плоскости (или
дугу па сфере) можно совместить с любым другим равным
ему отрезком (дугой). Поэтому любое геометрическое
соотношение, установленное в одном месте плоскости
*' «Особые» точки абсолюта в эт<ж разделе мы рассматривать
не оудемэ
04
или сферы, должно выполняться и во всяком другом
месте. Например, расстояние между концами двух перпен-
дикулярных отрезков данной длины на плоскости, прове-
денных из одной точки А (рис. 3.15), не зависит ни от вы-
бора точки Л, ни от направления этих отрезков, потому
что получающиеся треугольники всегда можно совместить
друг с другом, двигая плоскость ио себе. Аналогичное ут-
верждение должно быть справедливо и для. пространства
скоростей. Относительная скорость двух систем, движу-
щихся в какой-то системе отсчета А с заданными ско-
ростями в перпендикулярных направлениях, будет одной
и той же независимо от того, как движется «сама система А.
Или, на геометрическом языке, длина гипотенузы прямо-
угольного треугольника в пространстве скоростей пол-
ностью определяется длинами его катетов ине зависит от
расположения этого треугольника в пространстве. Подоб-
но плоскости или сфере, пространство скоростей «однород-
но» — его можно свободно «передвигать» по себе, и любой
заданный ^-отрезок при этом
можно всегда совместить с любым
другим 2^-отрезком той же длины.
Полезно рассмотреть и «неод-
нородную» поверхность, например
эллипсоид (рис. 3.16). Очевидно,j
он уже не может скользить по
себе как сфера или плоскость. И
свойства треугольников на «по-
люсе» эллипсоида будут отли-
чаться от свойств треугольников на его «экваторе».
Если изготовить кусочек жести, точно повторяющий форму
эллипсоида в каком-то одном месте, то сдвинуть его с
этого места такА чтобы он все время плотно прилегал
55
к поверхности, нам не удастся — в разных точках эллип-
соид искривлен по-разному. Напротив, поверхности, ко-
торые допускают движения по себе, всюду должны быть
искривлены одинаково. Их называют поверхностями по-
стоянной кривизны. Всего существует три типа таких
поверхностей.
Первый — это поверхности нулевой кривизны. Так
называют поверхности, к которым в любом месте можно
плотно, без складок и разрывов, приложить плоский кусо-
чек жести (или, скажем, толстой бумаги), быть может,
предварительно изогнув его.* Кроме плоскости к ним от-
носятся еще, например, цилиндры. Однако, если такая
поверхность допускает движения, совмещающие не толь-
ко любые две точки, но и любые два равных отрезка, т. е.
сдвиги и вращения, то она может быть только евклидовой
плоскостью. Сумма углов любого треугольника на по-
верхности нулевой кривизны всегда равна я.
Второй тип — так называемые поверхности по-
стоянной положительной кривизны. Положительность
кривизны означает, что в окрестности любой своей точки
такая поверхность устроена наподобие сферической ша-
почки. Если попытаться обернуть такую поверхность
листком плотной бумаги, то на нем непременно образуют-
ся складки. В этом случае природа оказалась скупа —
любая поверхность постоянной положительной кривизны
является сферой. Сумма углов треугольника на ней всегда
больше я (мы показали это в разделе 3.4).
Наконец, бывают еще поверхности третьего ти-
па, на которых сумма углов любого треугольника
меньше я — поверхности посто-
✓гх янной отрицательной кривизны.
Маленький участок такой по-
/ верхности напоминает седло
\ I ]\/ (рис. 3.17). Чтобы плотно при-
t / жать к ней листок бумаги, его
\ / [ХУ'' обязательно придется надор-
вать. Читателю, склонному к
эксперименту, можно предло-
Рис. 3.17.з жить с помощью кусочка бума-
ги определить области положи-
тельнойж нулевой и отрицательной кривизны на поверх-
ности какой-нибудь вазы или кувшина. А мы приводим
пример поверхности отрицательной кривизны (правда,
не постоянной) и треугольника на ней с суммой углов
5я/6 в задаче 6. Доказано^ что в евклидовом npocipauciBe
56
на любой поверхности постоянной отрицательной кривиз-
ны обязательно имеются особые линии или точки, за кото-
рые ее нельзя продолжить. Одна из таких" поверхностей
с краем показана на рис. 3.18. Ясно, что двигать ее по
себе с достаточной свободой нельзя — граничная линия
должна оставаться на месте. Однако ничто не мешает изу-
чать двумерные пространства отри-
цательной кривизны, допускающие
произвольные сдвиги и вращения,
чисто теоретически. Все эти прост-
ранства устроены одинаково—от-
личие между ними такое же, как
между сферами, разных радиусов.
Их геометрия похожа и на сферичес-
кую (особенно соотношения в треу-
гольниках), и на евклидову. Более
того, аксиомы, описывающие эту гео-
метрию, отличаются от евклидовых
только в одном пункте... Вероятно, вы уже догадались,;
что речь идет об «аксиоме параллельных». В двумерном
пространстве постоянной отрицательной кривизны через
любую точку можно провести много прямых, не пересе-
кающихся с данной, а не только одну, как на плоско-
сти. И геометрия такого пространства есть не что иное,
как геометрия Лобачевского.
Поскольку пространство скоростей в силу принципа
относительности допускает произвольные сдвиги и пово-
роты, для его геометрии у нас имеются всего три возмож-
ности: геометрия Евклида, сферическая геометрия и гео-
метрия Лобачевского. Первый вариант реализуется в не-
релятивистском случае. Второй мы должны отвергнуть
потому, что сфера ограничена — расстояние между любы-
ми двумя ее точками не превосходит половины длины
большой окружности, а расстояния между точками
пространства скоростей могут . быть сколь угодно
большими.
Есть и другой аргумент против сферы. Если двигаться из
некоторой ее точки по «сферической прямой» (большой ок-
ружности) в одном и том же направлении, то в конце кон-
цов мы вернемся в исходную точку. В кинематике этому
соответствовало бы весьма странное явление: постепенно
увеличивая скорость объекта В относительно системы
отсчета А (и не меняя ее. направления) мы добились бы2
чтобы этот объект остановился! Итак2 остается предпо-
ложит^ что
геометрия релятивистского пространства скоростей
есть геометрия Лобачевского *).
К сожалению, нам так и не удалось показать читате-
лю «глобус» релятивистского пространства скоростей. Но
тут виноваты не мы — как говорилось, это принципиально
невозможно. Да и нужды большой в нем нет, так же, как
нет нужды в «глобусе пространства лучей» для изучения
его геометрии. Гораздо важнее и полезнее то, что у нас
есть плоские изображения пространства — -карты
скоростей. И в этом мы убедимся очень скоро — в следую-
щей главе.
Задачи и дополнения
1. Невозможность развертки сферы. Разверткой
поверхности называется такое ее отображение на плоскость, при ко-
тором длина любой кривой на поверхности равняется длине со об-
раза на плоскости.
Допустим, что какой-то кусочек сферы можно развернуть
на плоскость. Докажите, что тогда любая сферическая окружность
со на этом кусочке обязана перейти в окружность со' на плоскости,
Причем длина окружности о' будет больше длины окружности о.
Следовательно, развертка сферы невозможна (теорема Эйлера).
2. Картографические проекции. «Идеальной» плоской карты
сферы, на которой бы расстояния передавались без искажений,
не существует (см. задачу 1). Однако имеются проекции, обладаю-
щие другими, более или менее хорошими свойствами. Одна из них —
«гномоническая» — центральная проекция сферы на плоскость пз
ее центра. При этой проекции сферические прямые переходят в
прямые плоскости. Две другие «хорошие» проекции рассматривают-
ся ниже.
1) Равновеликая проекция. Опишем вокруг сферы цилиндр.
Из каждой точки Р сферы опустим перпендикуляр на ось цилиндра
и продолжим его за точку Р до пересечения с поверхностью цилинд-
ра в точке Р'. Затем разрежем цилиндр по образующей и развернем
его в прямоугольник. Каждой точке Р сферы отвечает ровно одна
точка Р' прямоугольника (исключение составляют две точки сфе-
ры — какие?). Как изобразятся на прямоугольнике параллели
и меридианы, если считать, что цилиндр касается сферы по эква-
тору? Докажите, что площадь любой области на сфере равна площа-
*) Надо признаться, здесь мы поспешили. Пока что ниоткуда
не следует, что геометрия релятивистского пространства скоростей
не может быть евклидовой. Но в дальнейшем (раздел 5.2) мы до-
кажем, что характер геометрии однозначно определяет зависимость
между ^-расстоянием и относительной скоростью — функцию
г (v) в формуле (3.11). В частности; в случае евклидовой геометрии
^-расстояние должно быть пропорционально скорости, а это про-
тиворечит второй части принципа относительности — ограничен-
ности скорости распространения взаимодействий, поскольку
^-расстояния могут быть сколь угодно большими.
58
ди соответствующей области на прямоугольнике (этим объясняется
название проекции).-
2) Равноугольная проекция. Пусть N и S — диаметрально про-
тивоположные точки сферы. Спроектируем сферу из точки N на
плоскость, касающуюся ее в точке S (стереографическая проекция).
Докажите, что, во-первых, угол между любыми двумя кривыми на
сфере равен углу между их образами на плоскости, и, во-вторых,
что любая окружность на сфере перейдет в окружность или пря-
мую на плоскости.
3. Сравнение евклидовой и сферической геометрий. Ниже при-
водится ряд хорошо известных теорем элементарной планиметрии.
Попробуйте понять, какой смысл они приобретают, если читать их
как утверждения сферической геометрии или геометрии пространст-
ва лучей. Выясните, остаются ли они при таком
«переводе» истинными. Если да — докажите их,
если нет — подберите им подходящую замену.
1) Через точку можпо провести одну пря-
мую, перпендикулярную данной прямой.
2) Множество точек, равноудаленных от
данных точек А и В есть серединный перпенди-
куляр к отрезку А В.
3) Сумма двух сторон треугольника боль-
ше его третьей стороны.
4) Внешний угол треугольника
а) равен сумме двух внутренних, не смеж-
ных с ним;
б) больше любого из этих двух углов.
5) Треугольник является равнобедренным
тогда и только тогда, когда
а) его углы при одной из сторон равны;
б) одна из его медиан совпадает с высотой;
в) одна из его медиан совпадает с биссектрисой.
6) Медиана треугольника меньше полусуммы сторон, имею-
щих с ней общую вершину.
7) Биссектрисы треугольника пересекаются в одной точке.
То же для медиан, высот, серединных перпендикуляров к его сто-
ронам.
8) Два треугольника, имеющие равные углы, подобны.
4. Сферическая тригонометрия.
1) Соотношения (3.6) — (3.9) мы доказали для «треугольника»
АВС пространства лучей, целиком помещающегося на карте КАл
Покажите, что они справедливы для произвольных «треугольников».
2) Пусть а, 5, с — длины сторон ВС, С А и АВ произвольного
сферического треугольника АВС на сфере радиуса 1, а, 0 и ?-
величины его углов. Докажите следующие соотношения между
ними:
sin a sin b sin с
1шсГ="ашр- = -ЖТ<теорема синусов):
cos с == cos a cos Ъ 4* sis a sin b cos у (первая теорема косинусов);
—cos у = cos a cos 0 sin а sin 0 cos с (вторая теорема косинусов).
3) Найти расстояние от Москвы до Хабаровска, зная радиус
Земли R = 6400 км и географические координаты Москвы —
56у сЛ ш.} 38° в. д, и Хабаровска — 48° с4 ш.: 135е в.
59
5. Площадь сферических многоугольников. Докажите, что
площадь сферического n-угольника АгА2 . . . Ап равна (Лх + Л2 4-
4- . . . + Ап — (м — 2) л)Л2, где R — радиус сферы, а Лп Л2, . . .
. . ., Ап — величины углов n-угольника. (Указание: найдите
сначала площадь двуугольника —• дольки, вырезаемой на сфере
двумя меридианами.)
6. Поверхность отрицательной кривизны. Будем вращать куб
вокруг оси, проходящей через центры его оснований (рис. 3.19).
Докажите, что при этом каждая из диагоналей боковых граней
куба опишет одну и ту же поверхность вращения (так называемый
однополостный гиперболоид), осевым сечением которой является
гипербола. Найдите сумму углов криволинейного треугольника на
этой поверхности, две вершины которого совпадают с центрами
двух смежных боковых граней куба, а третья — с вершиной куба,
принадлежащей обеим этим граням^ (О т в е т: 5л/6,)
ГЛАВА 4
ГЕОМЕТРИЯ РЕЛЯТИВИСТСКОГО
ПРОСТРАНСТВА СКОРОСТЕЙ
4.1. Релятивистские карты скоростей
В предыдущей главе мы уже сформулировали
нашу основную задачу—изучение геометрии релятивист-
ского пространства скоростей с помощью его карт,
построенных различными инерциальными наблюдателя-
ми. Каждая такая карта КА представляет собой круг^
центр которого — точка А — изображает скорость самого
инерциального наблюдателя А. Вектор АХ, проведенный
из центра А в произвольную точку X круга, определяет
величину и направление скорости системы отсчета X от-
носительно наблюдателя А — в определенном масштабе
Vx\a — АХ. Объектам, движущимся с максимально воз-
можной скоростью — скоростью света с, на карте КА
соответствуют точки, лежащие на окружности радиу-
са с, которая ограничивает круг КА. Эту окружность мы
будем называть абсолютом карты КА. Очень удобно
выбрать такую систему единиц измерения, в которой
численное значение скорости света равнялось бы едини-
це. Например, в качестве эталона длины можно было бы
взять расстояние, которое проходит свет за одну секунду
(в астрономии используется аналогичная величина —
световой год). Тогда скорости будут измеряться естествен-
ной единицей — скоростью светаА одинаковой для любого
инерциального наблюдателя. В этих единицах скорость
любого тела пересчитывается по формуле
*_ уобычн
С
В дальнейшем мы будем пользоваться именно этой систе-
мой единиц^ поэтому радиус любой -карты будет равен
единице.
Выясним, как изображаются на 2^-картах прямые
релятивистского пространства скоростей. Но определе-
61
нию, три точки Д, С и F пространства скоростей лежат
на одной ^-прямой, если векторы скоростей Vc\a и
коллинеарны. На -карте наблюдателя А такие точки
изобразятся центром А круга КА и точками С и F, лежа-
щими на одном диаметре (рис. 4.1). Другими словами, лю-
бая V-прямая, проходящая через ?^-точку Д, изобра-
жается диаметром круга Яд. Оказывается,- что и на
любой другой -карте Кв изображения этих точек лежат
на одной евклидовой прямой) На этом чрезвычайно важном
для дальнейшего обстоятельстве нам надо остановиться
подробнее.
Итак, пусть ^-точки Д, С и F лежат на одной прямой
пространства скоростей. Для. определенности предполо-
жим, что коллинеарные векторы Vq\a и Vf\a имеют одина-
ковые направления и что F — точка абсолюта простран-
ства 2^. (Все последующие рассуждения легко приспосо-
бить и к любым трем точкам, лежащим на одной ^-пря-
мой.) На рис 4.1 показано, как эта
©ситуация изображается на карте
КА, Физически ее можно реализо-
вать таким мысленным экспери-
ментом: представим себе, что инер-
циальные наблюдатели А и С (в
пространстве скоростей им соот-
ветствуют ^-точки Д и С), летят
па двух космических кораблях и
в какой-то момент встречаются *).
Спустя некоторое время после
Рис.4.1. встречи космонавт Я испускает ко-
роткий направленный лазерный
импульс F, которому отвечает 2^-точка F. Направление
скорости vf\a фотонов импульса совпадаете направлением
движения ракеты С относительно Л, поэтому еще через не-
которое время этот импульс достигнет космонавта С. Посмо-
трим теперь, как это выглядит с точки зрения третьего
инерциального наблюдателя — космонавта В. Допустим,
что в момент встречи кораблей Л и С космонавт В проле-
тает рядом с ними,— три .космонавта на лету пожимают
друг другу руки и тут же В включает свой секундомер.
В системе отсчета, связанной с наблюдателем В, корабли
Л и С, в соответствии с принципом относительности^
*) Предположение о встрече никак не ограничивает общности,
поскольку нам важны только относительные скорости наблюдате-
лей.^
62
равномерно движутся по прямым, проходящим через
точку Во — место встречи космонавтов, в пашем реаль-
ном трехмерном пространстве, а корабль В, конечно,
покоится в этой точке. Если обозначить положения
кораблей А, В, С в момент t в • этой системе отсчета
через At, Bt = BQ и Ct, то векторы перемещений кораб-
лей за время t можно следующим образом выразить
через скорости:
A0At BqAi — VA\st, CqCi = BqCi =vc\b^
BqBi = Vbib? = 0.
Пусть световой импульс F был испущен в момент
(по часам космонавта В) и достиг корабля С в момент Z2;
тогда вектор его перемещения в системе В за время от tr
до t2 равен AtlCt2 = BQCt2 — BoAtl = — ^A|B*i.
Но с другой стороны, импульс F распространяется отно-
сительно В равномерно и прямолинейно со скоростью
' —
поэтому тот же вектор его перемещения AflCfa =s
= Vf\b (t2 — h). Следовательно,
^F|B (£2 — tl) = Vc\Bh — VAtBh
или
(t^AJB — VF\b) tl = (VciB — Vf\b) t2.
Рассмотрим теперь карту Кв (рис. 4.2). Ее центр В±
изображает ^-точку В, а точки А19 Clf Ft — -точки
• .....................—>•
Л, С и F, причем ВхАг = Va\Bi
= W|B- Запишем разности векто-
ров скоростей:
Va\b — Vf\b — B]Ai — BiF i = F гА1г
vqb — Vf\b — BjCi — B^F 1= F1C1
и подставим эти выражения в по-
лученное выше соотношение:
F^^tx = Мы видим^ что
векторы F1A1 и F1C1 коллинеар-
ны, но ведь это и означаетt что
точки Сг и Fr карты Кв лежат
на одной прямой, которую можно просто провести через
точки С1Л F± с помощью обычной линейки|
63
Подведем итог. Мы доказали, что
любые три точки пространства скоростей, лежащие
на одной ^-прямой, изображаются на любой ^-карте
тремя точками, лежащими на одной евклидовой пря-
мой (в релятивистском случае — на хорде круга).
Доказательство, по существу, опиралось только па
первую часть принципа относительности: равномерное и
прямолинейное движение остается равномерным и прямо-
линейным для любого инерциального наблюдателя. Вместо
светового импульса космонавт А мог бы послать любое
«пробное тело» F, поэтому наши рассуждения в равной
мере справедливы и в релятивистском, и в нерелятивист-
ском случаях.
Пользуясь доказанным фундаментальным свдйством
^-карт, мы в следующем разделе опишем преобразование,
которое позволяет по карте одного наблюдателя построить
карту любого другого наблюдателя: мы научимся как бы
«совмещать» разные -карты.
4.2. Преобразование карт релятивистского
пространства скоростей
Карта КА релятивистского пространства
скоростей, составленная инерциальным наблюдателем Л,
содержит всю информацию о скоростях различных объек-
тов относительно этого наблюдателя, но пока молчит
о результатах измерений скоростей, проделанных другими
инерциальными наблюдателями. Чтобы заставить ее за-
говорить, мы исследуем преобразование ЬАВ, переводя-
щее карту КА в карту Кв, составленную другим инерциаль-
ным наблюдателем В, движущимся относительно А.
Пусть произвольной точке Р пространства скоростей
отвечает на карте КА точка Р, а на карте Кв — точка Рг
(рис. 4.3). Тогда, по определению, преобразование ЬАВ
переводит точку Р в например, центр А круга КА при
этом преобразовании переходит в какую-то точку
круга Кв, уже не совпадающую с его центром Вг. Что
можно сразу сказать об этом преобразовании? Прежде
всего, круг КА оно отображает на круг Кв, причем абсо-
лют первого круга (окружность QA), очевидно, отобра-
жается иа абсолют QB круга Кв„ Далее, любая хорда FG
круга КА служит, как мы показали в предыдущем разде-
ле,; изображением некоторой ^-прямой FG. На карте Кв
эта 2^-прямая также изобразится хордой. Следовательно^
64
произвольная хорда FG круга КА при преобразовании
Lab переходит в хорду F^ круга КВ.С отображениями;
переводящими прямые в прямые мы уже встречались^
когда рассматривали карты сферы и пространства лучей»
Рис. 4.3.
Напомним, что такие преобразования называются проект
тивными, поэтому мы можем коротко сказать, что
преобразование ЬАв есть проективное отображение
круга К а на круг Кв.
Но этого маловато, ведь нам нужно конкретное и точ*
ное описание преобразования карт. Отметим на картах
К а и Кв положения ^-точек А и В: точки А и В± попадут»
соответственно, в центры кругов КА и Кв, а точки В
(на карте КА) и А± (на карте Кв) будут отстоять от цент*
ров кругов на расстояния | АВ | = рВ|а и | ApBj |
= ^а|в = ^в|А = I АВ I (рис. 4.3). Оказывается (см. зада-*
чи и дополнения в конце главы), что проективное отобра-
жение одного круга на другой почти однозначно задает-
ся образами двух точек. Поясним это для нерелятивистско-
го случая, когда преобразование карты КА в карту ,КВ
сводится просто к наложению одной карты на другую.
Если фиксировать в плоскости одной карты точки А и Bs
а в плоскости другой — точки и Вг так, чтобы
| AjBi |= | АВ то, очевидно, имеются ровно два
способа наложить одну плоскость на другую так, чтобы
точка А совпала с Alf а В — с Вг, зависящие от того,
какой стороной одна плоскость «прикладывается» к дру-
гой. Точно так же существуют ровно два проективных
отображения круга КА на круг Кв, при которых точки А
и В переходят, соответственнох в точки Аг и В±. Поэтому,
3 В. Н. Дубровский и др. 65
если мы сумеем предъявить два таких отображения f
можно не сомневаться, что преобразование LAB совпадет
с одним из них. С каким именно, определить будет не-
трудно.
Вспомним еще раз о проективных картах сферы (или
пространства лучей). Преобразование одной из них
в другую сводилось к центральной проекции. Попытаемся
приспособить ее и к преобразованию релятивистских
карт. Заметим^ однако^ что центральная проекция кругам
как правило сама не является кругом. В этом можно
убедиться воочию, если присмотреться к форме пятнах
высвечиваемого настольной лампой с круглым абажу-
ром на поверхности стола. Граница света и тени обычно
представляет собой одно из так называемых конических
сечений — эллипс, гиперболу или параболу. Но можно
повернуть абажур и так, чтобы пятно стало правильным
кругом. И мы попытаемся расположить круги КА и Кв
и центр проекции так, чтобы один круг проектировался
на другой, и при этом его центр переходил в заданную
точку, не совпадающую с центром второго круга.
Обозначим через а плоскость круга КА. Через его
точки А и В проведем диаметр' FG (рис. 4.4). Из точки
F — одного из концов этого диаметра — восставим пер-
пендикуляр к плоскости выберем на нем произвольную
точку О (будущий центр проекции) и соединим ее прямой
со вторым концом диаметра G. На продолжении отрезка
GO отметим точку на расстоянии | OGr | = | OF | от
точки О и через точку GT проведем плоскость р, перпенди-
66
кулярную прямой Gfi. Наконец, рассмотрим проекцию
плоскости а на плоскость р из центра О. Симметрия
нашего построения? позволяет надеяться, что при этой
проекции круг Ка перейдет в круг К того же радиуса.
Если поместить круг Кв в плоскость р на место круга К*
то мы получим проективное отображение круга КА на Кв»
Из рис. 4.4 видно, что центр А круга Ка при этом спроек-
тируется в точку, отличную от центра Кв- А используя
свободу в выборе центра проекции О на перпендикуляре
FO£ можно попытаться подобрать такое его положение^
чтобы эта точка совпала с заданной точкой Аг круга Кв»
т. е. чтобы расстояние от этой точки до центра равня-
лось относительной скорости vAib == Vbja наблюдателей
А и В.
Строгое обоснование этих соображений проведем в два
этапа. Сначала мы докажем, что центральная проекция
окружности Qa на плоскость Р действительно является
окружностью,,— из этогоа конечно,; вытекает, что и проек-
ция круга К а — тоже круг. На втором этапе будет выбрано
правильное расположение центра проекции О.
1-й этап. Пусть Р — произвольная точка окружности
Од» ограничивающей Ка, Р± — ее проекция на плоскость
Р ив центра О. Покажем,; что угол (где Fr — проек-
Рис. 4.5.
плоскости OPF-. прямой
ция*Р на плоскость р — см.
рис. 4.5) — прямойА т. е. что
точка Рг лежит на окруж-
ности с диаметромG^F^ Этот
угол получается при пересе-
чении двугранного угла, об-
разованного плоскостями
OP^F^ и OPfiv плоскостью ра
перпендикулярной к его гра-
ни OPfix (по построению
Р | OGy). Поэтому достаточ-
но доказать, что плоскости
OP1Fl и ОР^ или, что то же
самое, OPF и OPG перпен-
дикулярны. Для доказатель-
ства заметим, что прямая PG
перпендикулярна двум прямым
OFX потому что OF JLa(=FPG) и прямой FP, потому
что угол FPG вписан в окружность Qa и опирается на ее
диаметр FG> Следовательно, прямая PG перпендикуляр-
на плоскости OFP, а значит, и содержащая эту прямую
плоскость OPG перпендикулярна OFP.
3*
67
Итак, при проекции с центром О окружность йл пе-
реходит в окружность й с диаметром F1G1 на плоскости р,
причем, очевидно, | FrGr | s= | FG |. Мы можем теперь
поместить круг Кв (диаметр которого также равен
| FG |) в плоскость Р так, чтобы его окружность йв сов-
пала с окружностью И, а точка попала на отрезок
F-fi^ Тогда, как следует из наших рассуждений, при про-
екции с центром О окружность йд перейдет в йв, внутрен-
ние точки круга Кд — во внутренние точки круга Кв,
в частности, его центр А спроектируется в точку диаметра
2-й этап. Теперь надо позаботиться о том, чтобы проек-
ция точки А совпала с заданной точкой Ясйо, что из-
меняя расстояние FO или угол у ~ FGO, мы будем изме-
нять и положение проекции точки А на диаметре F1G1.
Задавать положение точки на отрезке удобнее всего с по-
мощью отношения, в котором она делит отрезок. Просле-
дим, как преобразуется это отношение при центральной
проекции в общем случае.
Теорема о преобразовании отно-
шений при центральной проекции.
Пусть при центральной проекции с центром О некоторый
отрезок FG переходит в отрезок
/1 1 и пусть Р± — проекция про-
/ / извольной точки Р отрезка FG
Р,/ / (рис. 4.6). Тогда отношение
/ их (Рх), в котором точка Рх делит
отрезок Ffi^ получается из от-
ношения п (Р), в котором точка
гР \\ F делит отрезок FG, умноже-
/ нием на коэффициент Л, равный
/-----Ч—Ч
Г Р G IOGJ.. |OF| •
Рис. 4.6, (А не зависит от положения точ-
ки Р на отрезке FG.)
Для доказательства заметим (см. рис. 4.6), что отно-
шение п (Р) ~ | FP | 5 | PG | равно отношению площадей
треугольников OFP и OPGf так как их высоты, опущенные
из вершины О, совпадают. Выражая эти площади через
стороны, выходящие из вершины О, и углы ф == FOP и
= РО& между ними:
Sofp=-y\OF\-|OP|sin<p, 5opg=^-|OP|. pG|sint|>,
получим
/ nv dOFP I OF I sin Ф'
' ' ^OPQ | OG | sin
Точно так же
«i (Pl) = | FtPi 1: | p AI = “ TOTOT •
^OPiGi |(/Gl|2>m\p
Составляя отношение этих двух отношений, убеждаемся^
что оно не зависит от углов <р и следовательно, и от
выбора точки Pi
(4Л>
Доказанная, теорема в дальнейшем сыграет важную
роль, сейчас же мы применим ее в частном случае. Пусть
FG — это диаметр круга К а (рис. 4.4), Ffit — его проек-
ция на плоскость 0 из центра Ох а точка Р = А — середи-
на отрезка FG, т. е. центр круга КА. Тогда п (Л) = 1 и,
согласно (4.1)i «i (^i) = (I :| 0Gt |) . (| OG |:| OF|),
где Ах — проекция точки А. Но j OF | : | 0G | =я
= sin FGOx а I OGX[: | OFJ = sin причем, очевид-
но, GJ\O = fG& S= Ya поэтому nr (A J == 1/sin2 у. С дру-
гой стороны^ учитывая^ что радиус круга Кв равен еди-
нице, а расстояние от точки Ах до его центра —
| AXBV j « pA|Bi находим^ что | FlA1 | = 1 f yAJSj
| А| == 1 — рЛ|ва и2 следовательно^ nt (AJ =з
= I I : I Afii | == (1 + Vaib) : (1 — vAiB). Прирав-
нивая два выражения для отношения nt (AJ, мы полу-
чаем следующее правило выбора центра проекции 02
угол FGO =» у определяется условием
sin у =
1 + VA|B
При таком выборе угла у точка А проектируется в точку
At. Но тогда точка В автоматически попадает при проек-
ции в центр круга Квх поскольку | АВ | == | АХВХ |.
Тем самым мы завершили построение проективного
отображения круга КА на круг переводящего точки
А и В первого круга в точки Аг и Вх второго. Можно
предъявить даже два таких отображения: ведь «листок
бумаги» с картой К в можно наложить на круг К плос-
кости р той или другой стороной. Мы уже говорил^ что
всего два таких отображения и существуют (вполне эле-
69
ментарное, хотя и не очень простое доказательство этой
теоремы приводится в разделе «Задачи и дополнения» в
конце главы), поэтому преобразование ЬАв должно совпа-
дать с одним из этих отображений. В любом случае преоб-
разование карт релятивистского пространства скоростей
можно свести к центральной проекции *).
Остается последний вопрос: какой именно из двух
возможных вариантов «правильный», отвечающий преоб-
разованию LABi Для ответа достаточно проследить за
преобразованием любой точки, не лежащей на диаметре
FG. На рис. 4.4 точки «ближнего» к нам полукруга карты
К 4 проектируются в точки «дальнего» полукруга карты
Кв- Сравнивая этот рисунок с рис. 4.3, легко сообразить,
что карту Кв надо поместить на плоскость (J «лицом» квер-
ху j к стороне, противоположной центру проекции О.
4.3. Релятивистская формула
сложения скоростей
Преобразование ЬАв позволяет переходить
от карты скоростей; измеренных одним релятивистским
наблюдателем, к карте любого другого наблюдателя.
Теперь у нас все готово для того, чтобы получить первый
по-настоящему интересный физический результат — реля-
тивистский закон сложения скоростей. Рассмотрим слу-
чай, когда два наблюдателя — А и С — движутся вдоль
одной и той же прямой относительно наблюдателя В.
Пусть ^4|в = w - скорость А относительно В, a vC\A
= и — скорость С относительно А. Мы должны ответить
на вопрос: чему равна скорость ш наблюдателя С относи-
тельно системы отсчета В? В классической механике мы
знаем ответ: Vc\b = Vcia + ^д|,в илиw = и + т. е. ско-
рости просто складываются. Нам нужно найти аналог
этой формулы в релятивистском случае, когда скорости
u, р, w уже сравнимы со скоростью света. Перейдем с
карты КА на карту Кв при помощи преобразования Lab?
В этом случае нет необходимости рисовать сами круги
КА и Кв — на карте КА скорости систем A f В и С распо-
ложены на одном диаметре FG, поэтому достаточно изоб*
разить только этот диаметр и его образ F1Gl в центральной
проекции относительно точки О (рис. 4.7). На этом чер-
♦) Заметим, что рассматривая ту же центральную проекцию
как отображение круга Кв на КА мы получим обратное преобра-
вование ЬВА — карты Кв в карту КА*
70
теже | АВ [ = u, | АС | = р, | В1С1 | == w. Обозначим
через п (В), п (С) отношения, в которых точки В и С де-
лят диаметр FG на карте Ка. Аналогично определим и
ni (#i), Th (Ci) на карте ЛГд. Круги Ка и Кв имеют еди-
ничный радиус, поэтому
"<в) = 4?т-: "<с)
диаметр F±G
можно по-
1 — и 9
Поскольку преобразование
Lab является центральной про-
еждеей, для него справедлива
тедрема о Преобразовании от-
ношений, доказанная в преды-
дущем разделе. Отношение nlt
в котором любая точка делит
лучить из отношения п на карте К а умножением на пос-
тоянный коэффициент % (пх= Хп), не зависящий от точкил
поэтому
m(G) _ ln(Q _ «(С)
~ п {В) 1
Hf значит^
1 Ц- zp __. 1 4- u 1 4- и
1 — w 1 — и 1 — v 9
Преобразуем правую часть этого равенства
1 4- ш _ (1 4- u)(l 4" v) _ (1 4~ ^0 4“ О
1 — ip (1 u)(l — р) (14- uv) —.(и 4- р)
(4.2)
(4.3)
1 4~ UP
(4.4)
соотноше*
(4.5)
4 --!---
1 4- up
Сравнивая левую и правую части последнего
ниях мы приходим к выводу, что
U + Р VC\A + VA\B
--- ИЛИ VC|B — —J----:---!- .
14-UP i+vC\AVA\B
Это и есть формула «сложения» релятивистских скоростей
для случая движения вдоль одной прямой. Конечно, на-
зывать ее «формулой сложения скоростей» можно только
условно^ ибо в соответствии с ней скорости и и v нужно не
71
только сложить, как это было в нерелятивистском случае,
но и поделить результат на знаменатель 1 + uv. Этот
знаменатель несуществен, когда скорости и и и малы по
сравнению со скоростью света (и, и<^1),— тогда в нем
можно пренебречь произведением uv по сравнению с еди-
ницей. В этом случае мы приходим к привычной нереля-
тивистской формуле w ~ и + v. Но если и и v не малы,
то знаменатель начинает играть определяющую роль,
обеспечивая выполнение принципа относительности. На-
пример, результат w сложения двух скоростей и и v не
может получиться большим скорости света, т. е. едини-
цы. Действительно, (1 4- uv) — (u + v) = (1 — и) (1 —
— и) > 0, если их V <Л, поэтому знаменатель 1 + uv
больше числителя, и w всегда будет меньше единицы.
Ёсли одна из скоростей,; например и, будет равна скорости
света для наблюдателя А, т. е. v = 1, то и для другого
инерциального наблюдателя В она также будет равна
единице:.
и 4- v и + 1 А
W = -J----— .. Т-_ — 1;
1 + UV 1 + U«1
естественно, что релятивистская формула сложения ско-
ростей согласуется с принципом постоянства скорости
света в любой инерциальной системе отсчета.
4.4. Определение расстояния
в пространстве скоростей
Наконец мы можем положить последний ка-
мень в фундамент геометрии релятивистского пространст-
ва' скоростей — выяснить, как 2^-расстояние || PQ || вы-
ражается через относительную скорость ppiq. Общий вид
этой зависимости мы выписали еще в разделе 3.5:
irPQ|| =r(vP1Q). (4.6)
Тогда же мы поняли, из каких соображений надо подби-
рать функцию г (и): она должна превращать закон «сло-
жения» скоростей в закон сложения ^-расстояний. И вот
сейчас, когда конкретный вид релятивистского закона
«сложения» скоростей нам известен (формула (4.5)), мож-
но составить уравнение для функции г. Пусть точки Afj
В, С лежат на одной прямой, А — между ВнС (рис. 4.8);
тогда || ВС || = || В А || + || АС ||, т. е. согласно (4.6)
Г (»в1С) = г \vB[A) + г (уА[с). (4.7)
72
Но в соответствии с релятивистской формулой (4.5) сложе-
„ и 4- v
пия скоростей vB\c = w = > где = ^В|дг у — ^а|с«
поэтому нужная нам функция г должна удовлетворять
соотношению
г(тйг)=г (“) +г в “ а/ с
Это уравнение для опреде- Рис. 4.8,
ления т (v) выглядит страш-
новатог но у нас уже есть готовая формула, существенно
упрощающая задачу — формула (4.3). Скорости и, и и w
входят в нее одинаково — от каждой из них вычисляется
функция у= .Введем новую величину, определенную
для любых двух точек JP и Q пространства скоростей:
{PQ}= ; (4.8)
1 VP\Q
тогда равенство (4.3) перепишется особенно просто:
{ВС} = {ВА} - {АС}. (4.9)
Имеет смысл поэтому искать выражение для ^-расстоя-
ния между точками Р и Q в виде некоторой функции от
В PO||=f({PQ}).
Обозначим {1L4} через я, { J.C} через у.; тогда из (4.9) по-
лучаем {ВС} = xyt и правило || ВС Ц = || В А 11 +11^11
сложения расстояний на отрезке перепишется в следую-
щем виде:
/(^) = /(*) + Ш- (4.10)
Это уравнение выглядит уже совершенно знакомо, его
решение угадывается сразу — это логарифмическая функ-
ция / (х) ~ к In xt где к — положительное число *). Это
число можно выбрать произвольно,^ оно фактически опре-
деляет единицу измерения расстояний в релятивистском
пространстве скоростей^ но целесообразней положить
к » 1/2. Во-первыхж при этом будут проще дальнейшие
выкладки и формулы. Во-вторыхх что, пожалуй, важнее^
♦) Действительно, In (ху) — In х + In у. Более того, можно
доказать, что логарифмическая функция является единственным
решением уравнения (4.^0), точнее, любая неотрвдцатёльная (при
ж>1) функция / (л), удовлетворяющая уравнению (4.9), имеет
вид к In х£
73
при малых скоростях мы получим при к = 1/2 уже из-
вестные нам нерелятивистские формулы.
Действительно, запишем окончательное выражение
^-расстояния между точками Р и Q через скорость отно-
сительного движения систем Р и Ql
II PQ|| = 4-ln } (4.11)
4 1 PP|Q
тогда при малых х имеем:
1 1 / 1 + ж \' 1 , /л .л . 2х2 \ 1 о
Т1 п () = Т1п (1 + 2х + Т=Т ) * Т • 2х = х>
т. е. при vP\q 1 формула (4.11) переходит в нереляти-
вистскую: | PQ | *= Vp|Q.
Определенное таким образом расстояние в ^-прост-
ранстве обладает всеми свойствами, присущими общему
математическому понятию расстояния:
1) ^-расстояние симметрично: || PQ || » || QP ||, ибо
Vp|Q = VQ\p.
2) Расстояние || PQ || всегда неотрицательно и обраща-
ется в нуль тогда и только тогда, когда Р — Q, посколь-
ку величина (1 + Vpjq)/(1 — Vp^q) всегда больше или рав-
на единице.
Можно также доказать (см. разд. 4.8), что
3) -расстояние удовлетворяет так называемому <те-
равенству треугольника»: для любых трех -точек Pt Qt
R имеет место неравенство
I pq кцрлгц + DWII.
Отметим, что если скорость относительного движения
Vp.\q приближается к скорости света v » 1, то ^-расстоя-
ние между точками Р и Q неограниченно растет. Это озна-
чает, что движению со скоростью света в релятивистском
пространстве скоростей отвечают бесконечно удаленные
точки. На карте скоростей К а любого инерциального на-
блюдателя А они изображаются точками абсолюта — ок-
ружности ограничивающей круг КА- ^-расстояние
от любой точки круга К а ДО точки абсолюта равно беско-
нечности, как этого и следовало ожидать из качественных
соображений, высказанных нами в предыдущей главе.
Евклидово же расстояние на карте Ка^ измеренное между
любыми двумя точками Р mQ, которые являются изобра-
жениями точек Р и Q релятивистского пространства ско-
ростей, не превышает диаметра круга К а, равного 2. Здесь
мы встречаемся с проявлением замечательной двойствен-
74
ности — бесконечное пространство V постоянной отри-
цательной кривизны изображается на проективной карте
конечным кругом КА, в то время как конечное пространст-
во %? постоянной положительной кривизны — сфера, или
пространство лучей,— требует для своего проективного
изображения карты в виде бесконечной плоскости. И этой
плоскости все-таки не хватает для изображения всех
точек. Р остальном способы изображения этих двух прост-
ранств постоянной кривизны на проективных картах име-
ют удивительно много общего, и мы можем почти дослов-
но перенести в релятивистское пространство скоростей
те идеи и тот опыт, который мы приобрели при изучении
геометрии пространства лучей и его проективных карт.
Аналогию вы увидите во всем, даже в названиях и свойст-
вах тех функций, которые естественно возникают в этих
двух геометриях. Вспомним, например, формулу, которая
выражает в геометрии лучей зависимость расстояния
| АВ |д между двумя точками 4, В и расстояния | АВ |А
между их изображениями А3 В на карте КА:
I АВ |А = tg | АВ |л.
Аналогичная формула в геометрии релятивистского
пространства скоростей связывает евклидово расстояние
I АВ |д ~ vbia на карте КА с расстоянием || АВ || между
точками А и .В в пространстве скоростей v. Ее можно
вывести из формулы (4.11):
е2|ИВ||_ч еМВ|| _ е-||ЛВ||
|АВ|а. vbia ег||лвц + 1 — емвц + еН|лвц • V4-12)
{Возникающая здесь функция у
еХ — е
------— тоже называется
е + е~х
тангенсом, но тангенсом гиперболическим и обозначается
у s= th х. G ее помощью можно коротко переписать фор-
мулу (4.12),- выражающую относительную скорость через
расстояние в пространстве скоростей:
yB|A = th || JJB||.
(4.13)
Запомним эту формулу — нам придется ею пользоваться
на протяжении всей книги.
Познакомимся с гиперболическим тангенсом немного
поближе. На рис. 4.9 изображен график гиперболическо-
го тангенса. Видно, что при малых значениях аргумента
th х xf значит, расстояние в пространстве скоростей
{ 4LB Ц численно почти совпадает с величиной относитель-
75
ной скорости i>b|a; если эта скорость не превышает, ска-
жем, 20% от скорости света v = 1, то i>b|a АВ || с
точностью, не меньшей 1 %.
С ростом аргумента функция у ~ th х очень быстро
приближается к асимптотическому значению у ~ 1; на-
пример, расстоянию в пространстве скоростей | АВ | = 3
Рис. 4.9.
shx =з
-----2-----5
х । —х
, е + g
ch х = ---у-----I
, shx
ch2 x — sh2 x = 1;
sh (xi + ^) ==
s= sh Xi ch + ch xt sh x*
ch («i + хг) =
« ch «i ch x2 + sh Xi sh x2;
th (xi -j- xa) =
__ th Xx + th x2
“ 1 + th Xi th Xi *
соответствует скорость относительного движения, весьма
близкая к скорости света: рв|а == th 3 » 0,995.
Некоторыми своими свойствами гиперболический тан-
генс весьма напоминает обычный тангенс. Запишем, на-
пример, с его помощью релятивистскую формулу сложе-
ния скоростей (4.5}. Выразим входящие в нее скорости
через ^-расстояния и обозначим || ВА || » х, || АС || = у\
тогда || ВС (| = х + У), и формула сложения примет вид:
th (х + у)
th х + th у
1 + th х th у *
(4.14)
Как видим? выражение для гиперболического тангенса
суммы отличается от обычной формулы только знаком в
76
знаменателе:
_ tg ж Ч- tg у
1 — tg X tg у •
У читателя может возникнуть недоуменный вопрос: пусть
это будет тангенс, но почему гиперболический? Об этом,,
а также о других гиперболических функциях, гиперболи-
ческих расстояниях и гиперболических поворотах будет
подробно рассказано в Приложении.
4.5. Метрические соотношения
для прямоугольного треугольника
В предыдущем разделе мы занимались мет-
рическими соотношениями для простейшего объекта ре-
лятивистского пространства скоростей — прямой. С точ-
ки зрения физики — рассматривались три инерциальные
системы отсчета Af Вх С, которые двигались так, что для
наблюдателя в любой из них скорости двух других были
коллинеарны. С точки зрения геометрии — это три точ-
ки А, В, С релятивистского пространства скоростей, при-
надлежащие одной и той же 2^-прямой. Единственными
измеримыми величинами в этом случае могут быть только
три относительные скорости vajb, рв|с» ^а\с и соответствую-
щие им расстояния || АВ ||, || ВС ||, || АС «Ц.
Это, конечно? очень частный вид движения и частный
случай расположения 2^-точек. Более общей является
ситуация, когда относительные скорости систем отсчета
4, В, С не коллинеарны. Тогда реальный физический
смысл имеют уже девять измеримых величин — отно-
сительные скорости и углы между ними. Перечис-
лим их:
наблюдатель А измеряет Vb\ai Vc\a и угол а между
направлениями 1>в|д и
наблюдатель В измеряет vAiBi vC\b и угол р между
направлениями гА|в и Vc\b',
наблюдатель С измеряет ^в|с и угол У между на-
правлениями VA\c И VBIC-
В списке перечислено девять величин, но задавать их
значения независимо друг от друга, разумеется, нельзя.
Вспомним, например, что
VBIA — ^А|В» Vc\A — VA\C, VB]C = ^CIB. (4.15)
Ясно, что из остающихся шести величин независимыми
могут быть только три, например, Гврц Vc\a и угол а.
77
Осталгные величины уже будут выражаться через эти ,
но соответствующие зависимости будут гораздо сложнее ,
чем формулы (4.15). Как и в нерелятивистской кинемати-
ке, наиболее удобным способом записи этих соотношений
является геометрический язык пространства скоростей.
В релятивистском пространстве скоростей три точки
А, В, С определяют треугольник со сторонами АВ, ВС,
С А, длины которых мы обозначим, соответственно, через
с, а, Ъ. Треугольник АВС символически изображен на
рис. 4.10, который поясняет систему наших обозначений.
(Никакого другого смысла вкла-
0 дывать в эту картинку пока не
/X. следует!) Длины сторон а, Ь, с
/ связаны с величинами относитель-
с/ НЫХ CK0P0CTe®: уА|В= th С, Гв|С =
/ =th a, vcia *= th b. Напомним
также, что в релятивистском про-
А ь с странстве скоростей величина уг-
Рис. 4.10 ла ВАС7, под которым пересека-
ются в точке А прямые АС и АВ,
равна, углу между векторами скоростей Vc\a и ^в|а,
измеренных наблюдателем А. Поэтому углы при верши-
нах А, В, С нашего треугольника равны, соответственно,
углам а, |3, у, измеряемым инерциальными наблюдателя-
ми А, В, С.
Задачу, которой, мы будем заниматься в этом и в сле-
дующих разделах, можно сформулировать теперь в при-
вычных геометрических терминах: по трем известным
элементам треугольника нужно найти три остальных.
Начнем, конечно, с более простого случая прямо-
угольного треугольника, все элементы которого опреде-
ляются только двумя параметрами. Для определенности
будем считать, что прямой угол треугольника АВС — это
угол у == АСВ. Основная идея вывода соотношений меж-
ду сторонами и углами треугольника АВС в релятивист-
ском пространстве скоростей знакома нам по предыдущей
главе, в которой мы не без пользы занимались изучением
геометрии пространства лучей. Нужно рассмотреть изоб-
ражение АВС треугольника на плоской проективной кар-
те, записать евклидовы соотношения между сторонами
и углами треугольника АВС на карте и по известным пра-
вилам перевести их обратно в исходное пространство.
В случае релятивистского пространства скоростей эти
правила сводятся к тому2 что расстояния | АВ | и | АС [
78
на ^-карте Ка выражаются через соответствующие
^-расстояния формулами | АВ | = th || АВ ||, | АС | ~
s= th || AC\\t а угол ВАС равен ?^-углу Т1АС. Но в эти
формулы входят только три из шести элементов треуголь-
ника, поэтому они еще не позволяют получить какие-ни-
будь содержательные результаты. При выводе метриче-
ских соотношений в пространстве лучей недостающие
зависимости можно было извлечь непосредственно из прост-
ранственной конструкции карт (см. формулу (3.4)). Сей-
час такой возможности мы лишены, зато знаем, как пере-
ходить с одной карты на другую. Поэтому нам придется,]
кроме карты KAi воспользоваться и другой ^-картой
(более всего для этого подходит карта Кс) и перенести
на карту КА зависимости между элементами ^-треуголь-
ника АВС и его изображения А1В1С1 на карте Кс с по-
мощью преобразования ЬсА.
Итак, рассмотрим изображения АВС и А1В1С1 прямо-
угольного треугольника АВС на картах КА и Кс- (Все
обозначения будут понятны из рис. 4.11.) Прямой угол
Рис. 4.11»
АС В нашего треугольника на карте KCi очевидно, изобра-
зится евклидовым прямым углом AxCtBu поскольку его
вершина попадает в центр карты. Оказывается, что и на
карте КА соответствующий угол АСВ будет прямым^Это
отнюдь не тривиальное обстоятельство: позже мы увидим^
что, как правило, величины углов пространства скоростей
передаются на проективных картах с искажениями (ес-
ли, конечно, изображение вершины угла не совпадает с
центром карты). Представим переход Lca с карты Кс
на карту Ка в виде центральной проекции (рис. 4.12}.
Тогда угол АС& будет центральной проекцией прямого
угла А^С^В^ Рассмотрим плоскость 0 *=> (OFG), в которой
Лежат точки А, С, А± и Съ. Из построения вытекает, что
она перпендикулярна плоскости а круга Ка и плоскости
Р круга Кс. Кроме того, поскольку прямая В1С*1 перпен-
дикулярна прямой А1С1 и лежит в плоскости р, плоскость
о перпендикулярна и прямой В1С1, а, следовательно, плос-
кости у, проходящей через точки Blf Сг и В, С. Таким об-
разом, прямая ВС принадлежит двум плоскостям — а и у,
перпендикулярным к плоскости о, значит, она сама пер-
пендикулярна этой плоскости. В частности, прямая ВС
перпендикулярна прямой С4, лежащей в плоскости о, т. е.
ВСА — прямой угол.
Пользуясь той же проекцией^ вырарим длину стороны
ВС на карте К а через 2^-длины сторон треугольника JJBCL
Нам известно, что | C^BJ *= th || СВ || == th а, | СГМГ | ® 1
(это радиус карты Кс^ а| СМ | ₽= У| АМ\* — [АС |2=«
= У1 — th2 Ъ по теореме [Пифагора для прямоугольного
треугольника АВС на карте КА (рис. 4.11). Из подобия
треугольников ОВС и ОВГС^ ОМС и ОМ1С1 (см.
рис. 4.13, где показана только плоскость у) вытекает, что
I ВС | : | В1С1 | = | ОС Н I | =[ СМ |: | СГМГ |. Сле-
довательно,
I ВС | - | В1С1 I . (I СМ | ! I CtMx I) = th ayi -th2 &
(4.16)
80
Сравним эту формулу с аналогичной формулой (3.4) для
катета ВС прямоугольного треугольника АВС на проек-
тивной карте КА пространства лучей. В пространстве
лучей «обычный» тангенс «длины» катета ВС' исходного
треугольника делится на косинус «длины» другого катета;
в пространстве скоростей гиперболический тангенс
ны а катета ВС умножается на коэффициент — th2 £>»
где b — ^-длина другого катета. Вспомним еще стан-
дартную тригонометрическую формулу 1 + tga ₽ == 1/соз2 (J.
Похоже, что у нас есть
все основания ввести спе-
циальную функцию ch b==
= 1/1^1 — th2 Ь и назвать
ее гиперболическим коси-
нусом. Теперь формула
(4.16) принимает вид, впол-
не аналогичный формуле
(3.4):
1ВС1=-£Ь 0-17)
У нас появились уже
две гиперболические функ-
ции. Стоит рассказать о
них немного подробнее.
Гиперболический косинус
очень просто выражается
действительно:
Рис* 4.13*
через показательную функцию
4 / оХ X
и—-=1— th2^=l— (~у
ch2 х \ ех
,-х
4-ях
е е )
- е'х
ех — е~х \ _ 2ех 2е'х
ех+е~х ) в* + Г*
/ 2 \2
\ ех + е~х J ’
©ледов ательнод;
ch я
Теперь введем третью «недостающую» гиперболическую
функцию — гиперболический синус sh х. Определим ее
так, чтобы выполнялось равенство th х = sh x/ch х. Оче-
виднох что для этого необходимо положить
— еГх
sh х -----о---.
81
Вспомним основное тригонометрическое тождество:
cos2 х 4- sin2 х = 1. Простой подстановкой можно убе-
диться, что основное «гиперболическое» тождество выгля-
дит так:
ch2 х — sh2 х = 1.
Запомните его так же хорошо, как вы помните основное
тригонометрическое тождество,— оно пригодится нам еще
не раз! Вообще, «гиперболические» формулы очень похо-
жи на тригонометрические, только в некоторых местах
вы встретите в них знак плюс вместо минуса и наоборот.
Это, конечно, не случайно, ведь те и другие функции «са-
ми собой» возникают при изучении геометрий пространств®
которые очень похожи (имеют постоянную кривизну) и в
то же время — различны: в одном случае кривизна поло-
жительна (пространство лучей), а в другом — отрица-
тельна (релятивистское пространство скоростей). Разни-
ца станет особенно заметной, если взглянуть на графики
гиперболических функций на рис. 4.9. Там же приведены
и основные формулы «гиперболической тригонометрии».
Удивительно, сколь различны графики тригонометриче-
ских и гиперболических функций и как при этом сходны
алгебраические соотношения между ними *). Что значит
кое-где «перепутать» знак!
’ Но вернемся к нашей основной задаче — выводу мет-
рических соотношений в прямоугольном ^-треугольнике.
Все для этого уже готово и нам остается только собрать
урожай.
Рассмотрим прямоугольный треугольник АВС на карте
КА (рис. 4.11). Три его стороны и два угла выражены че-
рез стороны и углы его прообраза — треугольника АВС
в релятивистском пространстве скоростей:
ВАС = а, ВС2 = у = л/2,
| АС | = th Ь, | АВ ] s= th с£ ] ВС | == th a/ch b.
(4.18)
Записывая евклидовы метрические соотношения в тре-
угольнике АВС, мы будем получать соответствующие мет-
рические соотношения в треугольнике АВС в пространст-
ве скоростей.
Катет, гипотенуза и угол между ними. В треугольнике
АВС имеет место формула | AC | | АВ | cos а. Под-
ставляя в нее | А С | == th b, | АВ | = th с£ получим соот-
♦) Глубокие причины этой аналогии прояснятся в Приложении.
82
ветствующую формулу для треугольника J.BC;
th b = th с cos a. (4.1S)
Два катета и острый угол. В треугольнике АВС%
| ВС 1 = | АС | tg а. Отсюда
th и . . > sh Ъ
-EKr = thdtga = -SErtga,
следовательно^
th а = sh Ъ tg a. (4.20)
Два катета и гипотенуза (теорема Пифагора). В тре-
угольнике АВС'. | АВ |4 = | АС |4 + | ВС\\ поэтому
‘ь’»=тй- + |Ъ’‘-
Преобразуем] это равенство, выражая квадраты гипер-
болических тангенсов через косинусы схюмощью форму-
лы th2 а = 1-----:
ch2 a
л 1 th2a , - 1 _
ch2c ~ ch2b "г 1 ch2& —
— 1 — 1 — th* a _ .1
ch2 b ch2 a ch2 b 9
Сравнивая левую и правую части? получим^ что ch2 с =з
= ch2 a ch2 Ь или
ch с ~ ch a ch Ь. (4-21)
Гипотенуза, катет и противоположный ему угол. В тре-
угольнике АВС имеем: | ВС | = | АВ | sin а. Отсюда
находим^ что
tha ,1
—T-г- — th с sin a.
cn b
Преобразуем левую частьг воспользовавшись «теоремой
Пифагора» (4.21):
th а sh a sh a
ch b ch a ch b ch c
Подставляя этот результат в левую часть предыдущего
соотношения и вспоминая, что th с = sh c/ch с, для тре-
угольника АВС мы получим:
sh a - sh с sin a. (4.22)
Формулами (4.19) — (4.22) исчерпываются те метриче-
ские соотношения в прямоугольном треугольнике прост-
83
ранства скоростей ^которые можно вывести непосредственно
из евклидовых соотношений для прямоугольного тре-
угольника. Но, комбинируя эти'формульц можно полу-
чить ряд новых, интересных и полезных соотношений,
не имеющих прямых аналогий в евклидовой геометриц.
Гипотенуза и два острых угла. По формуле (4.20)
имеем tg а = th а/sh Ъ. Для другого острого угла Р тре-
угольника АВС будет справедлива аналогичная формула
tg р s= th fe/sh а. Перемножим эти равенства:
. . о th a th Ь 1 1
tg а tgp = —г-/- v— — —г—гт- = —-г—.
ь & r sh b sh a ch a ch b ch с
Здесь мы воспользовались темА что th х ~ sh л/ch х и «тео-
ремой Пифагора» ch с ® ch a ch Ь. .В результате мы по-
лучим, что гипотенуза прямоугольного ^-треугольника
однозначно определяется двумя его острыми углами:
ch с =? ctg a ctg р. (4:23)
Теперь ясно, что и его катеты вычисляются по двум ост-
рым углам; предлагаем читателям самостоятельно дока-
затьА что
ch а = cos а/sin р. (4.24)
В последующих разделах этой главы мы еще обсудим за-
мечательные геометрические свойства релятивистского
пространства скоростей, отражениями которых являются
эти формулы. Пока же ограничимся тем, что еще раз под-
черкнем удивительное сходство соотношений между сто-
ронами и углами прямоугольного треугольника в сфери-
ческой геометрии (или геометрии пространства лучей)
и в геометрии релятивистского пространства скоростей.
Все наши формулы можно получить из формул сфериче-
ской геометрии, если в последних заменить тригонометри-
ческие функции сферических расстояний на соответствую-
щие гиперболические функции ^-расстояний в прост-
ранстве скоростей!
4.6. Теоремы косинусов и синусов
При изучении геометрии трудно обойтись
без чертежей и рисунков. Но читатель уже понимает, что
на плоском листе бумаги невозможно нарисовать ни одной
геометрической фигуры из пространства скоростей без
искажения расстояний или углов. Можно было бы по-
стоянно пользоваться какой-нибудь конкретной картой
84
^-пространства, но тогда мы лишились бы многих про*»
имуществ, заключенных в самой идее релятивистского
пространства скоростей. Ведь конкретная карта связана
с конкретным наблюдателемх отражает его «конкретный
взгляд» на какую-либо фигуру или граф в релятивистском
^-пространстве, другой наблюдатель на своей карте дол-
жен изобразить ту же фигуру уже по-другому. Основная
идея релятивистского пространства скоростей как раз
и состоит в том, чтобы отвлечься от этого конкретного
взгляда и рисовать в ^-пространстве графы и фигуры,
на которые может затем посмотреть любой наблюдатель
и построить свою собственную карту, отражающую ре-
зультаты уже его собственных измерений.
Поэтому мы договоримся изображать на листе бумаги
непосредственно сами геометрические фигуры (или гра-
фы) релятивистского пространства скоростей, нарочно
внося в рисунки некоторые искажения, например, одни
2^-прямые у нас будут изображаться евклидовыми пря-
мыми, другие — кривыми линиями, символизирующими
кривизну самого пространства Теперь пространство
скоростей будет занимать как бы всю плоскость чертежа^
точки абсолюта будут действительно «бесконечно удалец
ны», а любую ^-прямую на чертеже можно будет неогра-
ниченно продолжать (мысленно, конечно) в любую сто-
рону. Те или другие условности неизбежны, когда мы
котором
с
Рис. 4.14,
а
С-1
в
рисуем на плоскости нечто,' в плоскость не укладываю-
щееся,— будь то чертеж детали или портрет человека.
Первым таким рисунком будет рис. 4.14. На нем изо-
бражен произвольный 2^-треугольник АВС, в
из вершины С на сторону АВ
опущена высота CD. Мы вос-
пользуемся этим рисунком при
Доказательстве трах важней- д
прах теорем «^-тригономет- ~
рии»: двух (|) теорем коси-
нусов и теоремы синусов. Все
основные результаты преды-
дущего раздела суть их частные случаи. Доказательства
этих теорем проводятся по тому же плану, что и дока-
зательства обычных школьных теорем косинусов и сину-
сов. Высота CD разбивает наш треугольник на два прямо?
угольных (мы предполагаем, что ?^-точка D лежит между
Ии В; в противном случае рассуждения потребуют совсем
Небольших изменений, внести которые мы предоставим
читателю). Выписав подходящие соотношения для прямо-
85
у гольных треугольников ACD и BCD и исключив из них
промежуточные величины, например длину высоты CD*
мы получим искомые соотношения. Прежде чем присту-
пить к выполнению этой программы^ выпишем и докажем
формулу для гиперболического косинуса разности двух
аргументов. Она очень похожа на аналогичную формулу
для тригонометрических функций:
ch (х — у) = ch х ch у — sh х sh у. (4.25)
Доказательство сводится к простой цепочке преобра-
зований:
ch х ch у — sh х sh у =
=4~ —e~xw—**)]=
= 4~ \e*ev 4- e^e-v 4- e*e~v 4-
4- — exev — e~xe~y 4- exe~v 4“ e~xev] —
«= 4" • 2 + e-<-x-v>] = ch (x — y).
Обозначим ?Р-длины сторон треугольника ЛВС че-
рез а = || ВС (|t Ъ == || АС || и с »= || АВ ||,; а величины его
углов — через а = Л, Р = JB и у = О; пусть еще d »
s= || CD || — длина высоты^ а == Ц AD так что || DB || =*
*= с — cv
Первая теорема косинусов.
ch а == ch b ch с — sh Ь sh с cos а. ” (4.26)
Доказательство. Применим «теорему Пифа-
гора» (4.21) к прямоугольному треугольнику BCD*. ch a ==s
— ch d ch (с — q). Далее воспользуемся формулой (4.25)
и снова «теоремой Пифагора» — для треугольника ACD1
ch а == ch d ch (с — сх) s= ch d (ch c ch c± — sh c sh q) =a
~ ch d ch cr (ch c — sh c th cx) ==chbchc —
— sh c ch b th q =? ch b ch c — sh b sh c cos'a.
В последнем преобразовании мы учлил что в силу (4.19)
имеем th == th b cos at и поэтому ch b th « sh b cos a.
Вторая теорема косинусов,
cos a = —cos p cos у + sin p sin у ch a. (4.27)
Доказательство. Обозначим величины углов
ACD и DCB через и соответственно. Применим
86
формулу (4.24) к треугольникам ACD и BCD\
1 j cos a cos 6 Q sin уг
ch d = —:-----= r , откуда cos a = cos p —.—— =
smyi sinya ’ J r siny2
„ sin (y — y2)
= cos P-----V---—
r sin
Раскроем теперь sin (7 — у2):
cos a ?= cos p sin 7 ctg y2 — cos p cos 7 ==»
~ —cos p cos 7 + sin p sin 7 ch a
поскольку,; согласно (4.23), имеет место соотношение
cos р ctg 72 s= cos р tg р ch a = sin р ch a.
Теорема синусов,
sh a sh b sh c
sin a sin p sin у *
(4.28)
Доказательство. Пользуясь формулой (4.22),
из двух прямоугольных треугольников JLCI) и BCD вы-
разим катет CD через их гипотенузы и противолежащие
углы:
sh d sh Ь sin a; sh d » sh a sin p.
Отсюда мы получаем^ что
sha _ sh& .
sin a — sinp * (4.2У)
Аналогично доказывается и второе равенство, входящее
в утверждение теоремы.
Очевидно сходство (первой) теоремы косинусов и тео-
ремы синусов геометрии релятивистского пространства
скоростей с одноименными евклидовыми теоремами. Преж-
де всего, те и другие теоремы позволяют решать одинако-
вые задачи, например, теоремы синусов в обеих геомет-
риях позволяют находить две стороны треугольника по
третьей стороне и прилежащим к ней углам. Но между
ними есть и болёе глубокая связь. Когда длиньГ сторон
^-треугольников становятся малыми, формулы ^-три-
гонометрии переходят в соответствующие теоремы плани-
метрии. Другимй словами, геометрия релятивистского
пространства скоростей становится почти евкцидовой^
если скорости малы по сравнению со скоростью света.
Это является геометрическим отражением того*факта, что
при малых скоростях релятивистская кинекТЬтика перехо-
дит в классическую. Разберем этот предельный переход
на примере теоремы синусов.
87
Найдем производную функции sh х: (sh х)' =
(ас, -х \9 ос , -г
--------j — l---— ch х. (Еще одна анало-
L I-----------------I
гйя с обычными тригонометрическими функциями, ведь
(sin xf = cos х.) Так как chO = 1я при малых х
имеем sh х ^х. Поэтому при малых а9 с 2^-тео-
рема синусов переходит в обычную евклидову теорему
синусов
тп Ь с
sin a sin Р sin у *
Аналогично, используя при малых х приближенное
равенство ch х 1 + я2/2,: можно убедиться^ что первая
^-теорема косинусов в пределе переходит в евклидову
теорему косинусов (проверьте]). Неясной остается только
роль второй теоремы косинусов. Устремим в ней величи-
ну а к нулю; тогда ch а -> 1, и мы получим равенство:
cos а = —cos р cos у + sin [3 sin у » cos (л — Р — у).
(4.30)
Отсюда вытекает^, что а 4- Р + у « nf, так что второй
^-теореме косинусов в нерелятивистском пределе отве-
чает евклидова теорема о сумме углов треугольника.
4.7. Геометрия Лобачевского
и пространство скоростей
В 1829 г. в журнале «Казанский вестник^
издававшемся Казанским университетом, был опублико-
ван мемуар Н. И. Лобачевского «О началах геометрии».
В этой работе была разрешена проблема^ волновавшая
в течение почти двух тысяч лет математиков разных вре-
мен и стран — от Птолемея до Лежандра — проблема
пятого постулата Евклида. Сейчас его обычно формули-
руют в виде аксиомы параллельных: «через точку, лежа-
щую вне данной прямой, можно провести к ней не более
одной параллельной прямой» (т. е. лежащей в одной плос-
кости с данной и не пересекающей ее). Среди других пос-
тулатов и аксиом, предпосланных Евклидом первой кни-
ге своих знаменитых «Н&чал», пятый постулат (особенно
в оригинальной формулировке. Евклида) резко выделялся
сложностью и неочевидностью. Поэтому с глубокой древ-
ности геометры пытались исключить его из числа исход-
ных предложений геометрии, принимаемых без доказа-
88
тельства. Одни ясно отдавали себе отчет в том, что
построить геометрию без этого или эквивалентного ему по-
стулата невозможно, но предлагали заменить его на более
очевидное по их мнению утверждение. Другие же пробо-
вали логически вывести пятый постулат из установлен-
ных независимо от него и не вызывавших сомнения ут-
верждений. Вот что писал швейцарский математик и фи-
лософ XVIII века Генрих Ламберт в сочинении «Теория
параллельных линий» об этих попытках: «Доказательства
евклидова постулата могут быть доведены столь далеко,
что остается, по-видимому, ничтожная мелочь. TFIo при
тщательном анализе оказывается, что в этой кажущейся
мелочи и заключается вся суть вопроса: обыкновенно она
содержит либо доказываемое предложение, либо равно-
сильный ему постулат». Чаще всего доказательства пято-
го постулата проводились от противного — предполага-
лось, что пятый постулат неверен, т. е. что через точку
вне данной прямой проходит более одной прямой, не пере-
секающейся с ней, а затем строилась цепочка логических
следствий из этого предположения в надежде получить
утверждение, противоречащее теоремам, доказанным на
основе других аксиом и постулатов.
Лобачевский также исходил из этого предположения.
Но постепенно он пришел к выводу, что оно никогда не
приведет нас к противоречию, что совокупность его след-
ствий образует новую геометрическую систему, столь же
последовательную, как и геометрия Евклида. Конечно,
в ней было много удивительного и непривычного, проти-
воречившего традиционному здравому смыслу, воспи-
танному нашими непосредственными ощущениями. Од-
нако внутренняя стройность и логичность этой теории,
названной Лобачевским «воображаемой геометрией», ее
разветвленность и глубина, убеждали всякого, кто изу-
чил ее, в том, что она непротиворечива. Правда, стать сви-
детелем триумфа своих идей ни Н. И. Лобачевскому, ни
другому творцу неевклидовой геометрии, замечательному
венгерскому математику Яношу Бойяи не довелось.
Бойяи независимо от Лобачевского и почти одновременно
с ним пришел к сходным результатам, но опубликовал
их несколько позже — в 1832 г. И в России, и в Европе
новая теория натолкнулась на стену непонимания. Слиш-
ком велика оказалась сила инерции, слишком непривыч-
ны новые идеи, к тому же изложены они были чрезвы-
чайно сжато. Даже «король математиков» — великий
К. Ф. Гаусс, который, как стало известно из его пере-
89
пискп, тоже разрабатывал неевклидову геометрию, не
только не решился издать собственные исследования, но
и обязывал всех, кто был с ними ознакомлен, хранить их
в строжайшей тайне. Он прекрасно понимал, какую бурю
негодования может вызвать столь еретическая ломка ве-
ками устоявшихся представлений.
Геометрию Лобачевского, возникшую внутри «чистой»
математики, долгое время считали не имеющей никакого
отношения к реальному физическому миру. И лишь почти
через сто лет, после создания теории относительности,
стало ясно, что две такие необычные, такие революцион-
ные теории, как геометрия Лобачевского и теория отно-
сительности А. Эйнштейна связываются в одно целое,
объединенное понятием «релятивистского пространства ско-
ростей». Изучая геометрию этого пространства, мы од-
новременно изучали и геометрию Лобачевского, ибо в
релятивистском пространстве скоростей’ выполняется ее
основной постулат: через точку вне прямой проходит бо-
лее чем одна прямая, не пересекающаяся с данной.
Действительно, вернемся к изображению ^-простран-
ства на его карте, круге Ка> Каждая 2^-прямая прост-
ранства скоростей будет изображаться на карте некоторой
хордой PQ круть КА (рис. 4.15). Граничные точки Р и Q
хорды PQ лежат на абсолюте КА,
т. е. соответствуют бесконечно уда-
/ \ \ ленным точкам ^-пространства. Че-
/ \ рез точку В, лежащую вне прямой
-----------V—j PQ, можно провести больше одной
\ I хорды, не пересекающейся с хор-
\----------у дой PQ внутри круга Ка, напри-
\ мер, хорды РВ и ВС на рис. 4.15.
Z? Это означает, что в ^-пространстве
через точку JB, лежащую вне пря-
Рис. 4.15$ мой проходит более одной пря-
мой, не пересекающейся с данной
2^-прямой PQ.
Итак, в релятивистском пространстве скоростей ев-
клидова аксиома параллельных неверна. В то же время,
пользуясь картами скоростей, можно проверить, что все
остальные аксиомы евклидовой геометрии *) в пространст-
ве 2У (из которого выброшен абсолют) выполняются.
♦) Список этих аксиом можно найти в школьных учебниках
геометрии:! в конце Геометрии 6—8 под редакцией А* Н* Колмого-
рова или в § 1 Геометрии 6—10 А* В$ Погорелова*
90
Большей частью эта проверка нетрудна, и, как нам ка-
жется, послужит читателям полезным упражнением; не-
которые более сложные моменты обсуждаются в дополне-
ниях в конце главы. Теперь мы с полным правом можем
сформулировать наш главный вывод:
геометрия релятивистского пространства скоростей
есть геометрия Лобачевского»
4.8. Сюрпризы геометрии Лобачевского
Подробный рассказ о геометрии Лобачев-
ского не входит в нашу задачу — нас интересуют ее при-
менения в физике. Но искушение оказалось слишком вели-
ко и мы решили все-таки познакомить читателя с некото-
рыми фактами геометрии Лобачевского, сопоставляя их
с соответствующими евклидовыми теоремами.
Займемся сначала свойствами самых простых фигур —
прямых. Рассмотрим снова ^-прямую РО, точку В. не
лежащую на ней, и их изображения на Ка (рис. 4.15),
Все непересекающиеся с PQ прямые можно разбить на
два класса: прямые типа ВСУ не имеющие общих точек
с PQ в круге Ка (их называют расходящимися с PQ),
и две прямые PJ3 и JBQ, которые «пересекаются» с FQ
на абсолюте, т. е. в бесконечно удаленных точках Р и Q
пространства V. Эти прямые называются «параллельны-
ми (в сторону Р и в сторону Q) к прямой PQ в смысле
Лобачевского».
Очевидно, прямую ВР, параллельную в смысле Лоба-
чевского к данной прямой PQ (рис. 4.16),можно рассмат-
ривать как предельное положение прямой ВА\ пересе-
кающей PQ в точке А', когда точка А' уходит в бесконеч-
ность — на абсолют. (Кстати, в этом параллельные по
Лобачевскому и по Евклиду вполне аналогичны.) По-
91
знакомимся с некоторыми интересными следствиями этого
предельного перехода.
Будем считать, что прямая В А перпендикулярна PQ
и [| ВА || = а. Применяя формулу (4.20) к прямоугольному
треугольнику АА'В, получим (см. рис. 4.16, на котором
указаны все обозначения):
tg а *4j”1 = о (4.31)
6 sh i| А А || shh 4 '
при Ь = J АА' Ц ->oot т. е. при А' -+Р. Это означает^
что и сама величина а угла А А'В стремится к 0 при
Л'->Р; другими*словами, па-
раллелъные {по Лобачевскому)
/ в ^-прямые сходятся на абсо-
/ \ люте под нулевым углом. Под-
/ tha \ черкнем^ однако, что на карте
1 скоростей соответствующий ев-
Р \ ^д' А А № клидов угол между хордами А Р
\ / и ВРл конечно, не равен нулю
\ / (рис. 4.17)^ — мы уже гОвори-
X. КАли, что ?Р-углы изображаются
----------на картах скоростей с искаже-
Рис 4.17< ниямид и порой весьма, значи-
тельными.
В том, что угол между параллельными прямыми равен
нулю, ничего неевклидовского еще нет. Но давайте вы-
числим угол ф = АВР (рис. 4.16) между прямой ВР
и перпендикуляром АВ к параллельной ее прямой PQ
(в геометрии Евклида этот уголу конечно, прямой). Пусть
Р — угол между секущей В А' и перпендикуляром АВ;
тогда р ->ф, когда А' удаляется на абсолют {А' ->Р).
По формуле (4.19) cos р == th a/th [| В А' || и, поскольку
|| ВА' И ->oof a th {J BA' || -41 при А' ->РА переходя,
к пределу, получим: соз ф « th а. Отсюда видно, что угол
Ф всегда острый (ибо 0 < th а<С 1)! Этот угол называется
углом параллельности и обозначается П (а); он полностью
определяется расстоянием а от точки В до прямой~PQ.
Итак, мы вывели знаменитую формулу Лобачевского
созП (а)» th ал (4.32)
игравшую в его труде ключевую роль. (В следующей гла-
ве мы увидим, что угол параллельности имеет прямое от-
ношение к аберрации света звезд.)
Посмотрим теперь, как меняется расстояние от точек
одной из двух параллельных прямых до другой (в евкли^
92
довой геометрии оно одинаково для всех точек). Буде»
снова пользоваться обозначениями рис. 4.16. Перейдем
на карту КА (рис. 4.17). Из подобия треугольников АВР
и А’В'Р следует^ что р = । . Выразим (обычные)
длины отрезков на карте Кл в этом равенстве через соот-
ветствующие 2^-расстояния (см. формулы. (4.18)):
\А'В9 | = th a'/ch b% | АВ | « th ая | АР 1 ~ 1а
|Л'Р| «= J АР |- \АА’\ « 1 - th Ьл
(где а9 == [| АВ' |]4 fe = Д ДА' ||). Отсюда
th а' __________________________л
ch b (1 — thTj“ — а
или
th а9 » th a (ch Ь — sh Ъ) == th (4.33j
Эту формулу мы вывели^ считая, что точки А9 и В9
находятся по ту же сторону от прямой АВчто и точка Pf
в которой наши параллельные ^-прямые сходятся на аб-
солюте. Если же точки А9 и В9 расположены с другой сх-
роны от АВ (рис. 4.18)2 то
th а9 « th а*еь. (4.34)
вытекает следующая тео-
Рис. 4.18.
Доказывается эта формула точно так же, как (4.33). Из
формул (4.33) и (4.34) сразу же
рема геометрии Лобачевского:
расстояния от точек одной из
двух параллельны^ прямых до
другой стремятся к нулю при
смещении в сторонуэ где эти
прямые сходятся на абсолюте и
неограниченно возрастают в
противоположном направлении.
Заметим, что при приближе-
нии точки А9 к Q вдоль прямой
PQ наблюдается совсем уже
необычное с евклидовской точки
зрения явление: в некоторый
момент перпендикуляр A'JB' к
прямой становится параллельным (по Лобачев-
скому!) к прямой РР, параллельной PQ (прямая
AqBq на рис. 4.18). Это критическое положение AqBq
легко найти из формулы (4.34): при А9 -> Ао левая часть
этой формулы должна стремиться к 1 (а9 ->оо), поэтому
th а>еь* = 1Д Ьо = || АА0 ||t или fc0 == — in th а. Если
93
передвинуть основание перпендикуляра еще дальше, за
точку Л0 (прямая Л/В* на рис. 4.18), он станет расходя-
щимся ст прямой ВР. Рис. 4.19 иллюстрирует эту ситуацию
в самом /^-пространстве.
Аналогично доказывается, что расстояние от точек
одной из двух расходящихся прямых до другой прямой
неограниченно возрастает при приближении к абсолюту
в любом направлении (рис. 4.20).
Теперь обсудим некоторые простейшие свойства тре-
угольников в геометрии Лобачевского. Прежде всего до-
кажем «неравенство треугольника» — сумма любых двух
сторон треугольника больше третьей стороны (мы упо-
минали о нем в разделе 4.4). Пусть а — наибольшая сто-
рона треугольника, Ь и в — две другие его стороны, а —
угол между ними (рис. 4.21). Достаточно доказать, что
а < Ь 4- в. По теореме косинусов
@ уА ch а ~ ch Ь ch с — sh Ь sh с cos а <
с/ Л \ъ < ch bch sh Ъ sh с = ch (b + с);
отсюда а < Ъ + с, поскольку функ-
“--------ция ch х возрастает при х > 0.
Второе важнейшее свойство, кд,-
Рис. 4.21, тороемы выведем,— теорема о сумме
углов треугольника: сумма углов тре-
угольника в геометрии Лобачевского всегда меньше л. Эта
теорема доказывается почти так же, как неравенство тре-
угольника, только первую теорему косинусов нужно за-
менить на вторую — для углов (рис. 4.21): cos а =
= — cos р cos у + sin Р sin у ch а. Учитывая, что ch а >
1, получаем: cos а > — cos 0 cos у + sin Р sin у ==
— — cos (Р + у), т. е. cos а 4-cos (Р 4-у) > 0 или
cos а + | + cos*-£±?~~a > 0. (4.35)
94
Будем считать* что а — наибольший угол треугольника!
тогда Р + у < а + л, кроме того, очевидно, Р + У >
я В -4- V — а я «.
>а — л, поэтому—g-<, ----\~и ВТ0Р0И сомно-
житель в неравенстве (4.35) положителен. Следовательноа
сх -4- В -4- v л л
cos--- g > 0, откуда а + Р + У <С
Итак, мы подтвердили основной результат гл. 3 —
релятивистское пространство скоростей является прост-
ранством постоянной отрицательной кривизны.
Отметим еще один замечательный факт? вытекающий
из второй теоремы косинусов. Зная величины углов тре-
угольника, можно найти и длины его сторон (например^
ch а = (cos а + cos р cos y)/sin р sin у). Поэтому в гео-
метрии Лобачевского два треугольника с соответственно
равными углами имеют и соответственно равные стороны^
т. е. конгруэнтны. Отсюда сле-
дует, что в геометрии Лобачев-
ского нет подобных (но не кон-
груэнтных) треугольников! ♦).
На рис. 4.22 символически
изображено несколько равно-
сторонних треугольников в
^-пространстве. Чем длиннее
их стороны,; тем меньше углы,
а у самого большого «треуголь-
ника», все вершины которого
лежат на абсолюте, углы ну-
левые. Вообще, с уменьшением
суммы углов треугольника его площадь растет, точнее, пло-
щадь треугольника пропорциональна его угловому дефекту
Д = л — со — р — у (в то же время в сферической геомет-
рии площадь треугольника пропорциональна его угловому
избытку Д' «в а + Р + у — л, см. дополнение 5 к гл. 3).
Завершая наш краткий экскурс в геометрию Лобачев-
ского, нельзя не подчеркнуть того поразительного фак-
та, что «воображаемая геометрия», возникшая чисто умо-
зрительно из попыток доказать пятый постулат Евклида,
почти через сто лет нашла свое реальное физическое воп-
лощение в релятивистском пространстве скоростей, сос-
тоящем, правда, из несколько необычных «точек». Мы
обнаруживаем здесь одно из наиболее впечатляющих
♦) Это также следует из задач, сформулированных в дополне-
нии 8 к этой главе.
95
проявлений того, что американский физик, лауреат Но-
белевской премии Е. Вигнер назвал «непостижимой эф-
фективностью математики в естественных науках» *)_.
Задачи и дополнения
1. Прямые в пространстве скоростей. Пусть Л, 0,
С — три точки пространства скоростей, изображающие скорости
частиц Л, В и С, которые движутся равномерно и прямолинейно
и в некоторый момент времени оказываются в одном и том же мес-
те. Докажите, что ^-точки Л, В и С лежат на одной ^-прямой
тогда и только тргда, когда в любой системе отсчета частицы Л, В
и С в каждый момент находятся на одной прямой.
2. Проективные отображения круга на круг. Напомним, что
отображение L круга К на круг К' называется проективным, если
любую хорду PQ первого круга оно переводит в хорду P'Q' второ-
го (Р' = L (Р), Q' = L (Q)). В разделе 4.2 мы пользовались тем,
что существует не более двух проективцых отображений одного кру-
га на другой ♦♦), переводящих центр и еще одну заданную точку
первого круга в две заданные точки второго. Приведем подробный
план доказательства этого утверждения. Детали предлагается вос-
становить читателю самостоятельно. Ниже нам придется рассмат-
ривать в основном отображения круга на себя; такие отображения
называют преобразованиями круга,
1) Рассмотрим проективные отображения круга К на круг
К', переводящие точки Л и В в Л' и В'. Пусть £0 — одно из них;
тогда любое такое отображение L можно представить как результат
последовательного выполнения (композицию) проективного преоб-
разования П круга X, оставляющего точки Л и В неподвижными,
и отображения Во, т. е. L = Во о П.
Указание. Композиция В”1 о L есть проективное преоб-
разование круга К, оставляющее точки Л и В на месте.
В силу 1) нам достаточно доказать следующую теорему:
существуют ровно два проективных преобразования круга К.
оставляющих на месте его центр А и некоторую его точку В
(а именно, тождественное преобразование Е и симметрия 8
относительно прямой АВ).
Пусть Л — центр круга К, П — проективное преобразование
круга К такое, что П (Л) = Л, X'-— образ произвольной точки
X, т. е. X' = П (X), Q — граничная окружность круга X, F#
точка окружности Q, диаметрально противополояшая ее точке А
Наконец, через о PQ обозначим дугу окружности Q с концами Р
и Q, причем условимся рассматривать только дуги, меньшие полу*
окружности.
2) Образы двух диаметрально противоположных точек при пре*
образовании П будут снова диаметрально противоположны.
3) Если X е о PQ, то X' е о P'Q'.
У Казани е. Точка X лежит на дуге PQ тогда и только тог^
да, когда хорды PQ и ХР пересекаются.
*) В и г н е р Е. Этюды о симметрии.— М.: Мир, 1971,
с. 182.
♦♦) Речь шла о релятивистских ^-картах КА и Кв, но сейчао
это для нас несущественно.
96
4) Пусть F — середина дуги PQ окружности Q, тогда F'
середина дуги P'Q'* _
Указание, Заметим, что хорда PQ параллельнаPQ. Рас-
смотрим трапецию, ограниченную прямыми PQ, PQ, FP и FQ.
Согласно известной теореме прямая, соединяющая точку пересе-
чения продолжений боковых сторон трапеции и точку пересечения
ее диагоналей, делит пополам ее основания. Поэтому точка /'’дуги
PQ является ее серединой тогда и только тогда, когда диагонали
построенной трапеции пересекаются на диаметре Ft (см. рис. 4.23),
Последнее условие выполняется' для Р, Q и Р, следовательно,
в силу 2) и 3), и Для Р', Q' и F'.
5) Хорды PQ и P'Q' параллельны тогда и только тогда, когда
середина F дуги PQ при преобразовании П либо неподвижна, либо
переходит в диаметрально противоположную точку F.
Теперь воспользуемся условием неподвижности точки Р, ко-
торое до сих пор нам не требовалось. Проведем через точку В par
Рис. 4.23.
F
Рис. 4.24.
диус AF и перпендикулярную ему хорду PQ, а через А — диаметр
ММ, перпендикулярный к AF (рис. 4.24).
6) При преобразовании П хорда PQ переходит в себя, а точки
F и F неподвижны. При этом либо Р' = Р « Q, чотрд и М' «
«= М, либо Р‘ =s Q, a Q' = Р, тогда М' = М.
Указание. Заметим, что F — середина ^JPQ, М — сере-
дина \jPQ и что хорда PQ и диаметр FF рроходят через неподвиж*
ную точку В. После этого остается использовать 5).
Итак, возможны два случая: Pr = Р (и Mf = М) или Р' =
== Q (М‘ = М). Рассмотрим первый из них. 9
7) Все точки окружности Q неподвижны при преобразова-
нии П.
Указание. Точки F, М, F и М неподвижны. Следователь-
но, в силу 4), неподвижны середины четырех дуг с концами в этих
точках. Аналогично, неподвижны и середины половинок этих четы*
рех дуг, и вообще, все точки X е Q, для которых угол XAF равен
пп/2т (и, т = 0, 1*, 2, * * .). Неподвижность остальных точек выте-
кает из 3). f ;
8) Преобразование П (в случае Р' ~ Р) является тождест-
венным. ')
Указание. Любая точка круга есть пересечение двух хорд;
их концы неподвижны. ’г~
4 В. Н. Дубровский и др.
97
9) Если Р' «= Q, то П есть осевая симметрия S.
Указание. Проективное преобразование П$ = 5 © П
оставляет на месте точки А, В, Р, и к нему применимы утвержде-
ния 7) и 8). В то же время П = S © Пр
Доказательство закончено.
3. Измерение ^-расстояний на картах скоростей. Пусть X
и У — точки 2^-карты КА, изображающие 2^-точкиХ и У, и пусть
PQ — содержащая их хорда круга К'А, причем точка X расположе-
на между Р и У. Докажите, что
и-т
=JLin (IQ*! lQyl \
2 |ХР| • |УР ir
Указание. Перейдите к 2^-карте Кх с помощью преобра-
зования ЪАХ. Воспользуйтесь теоремой о преобразовании отноше-
ний при центральной проекции и формулой (4.11).
4. ^-перемещения. Как и в обычной геометрии, перемещения
релятивистского пространства скоростей (^-перемещения) опреде-
ляются как такие его преобразования, при которых сохраняются
^-расстояния. Любому ^-перемещению F можно сопоставить пре-
образование Fa карты К А. если X — изображение 2^-точки X на
этой карте, то FA (X), по определению,— изображение W-точки
F (X), Докажите следующие свойства 2^-персмещений:
1) Для любого 2^-пер.емещения F преобразование FA круга КА
проективно. Обратно, любому проективному преобразованию кру-
га КА отвечает некоторое ^-перемещение.
2) Существуют ровно два ^-перемещения, переводящих один
заданный луч пространства скоростей в другой.
У казание. Перейдите на карту скоростей с центром в на-
чале одного из лучей. Воспользуйтесь предыдущей задачей, допол-
нением 2 и результатами раздела 4.2. В
./? евклидовой геометрии это утверждение
иногда принимают за аксиому («аксиома
/ \ л подвижности плоскости») *).
/ 3) Любые две пары параллельных
/ \ (в смысле Лобачевского) 2^-прямых «рав-
| I ны>>> т* е* МОГУТ быть совмещены 2^-пере-
I Рг мощением.
\ / \/7 б. Центральная симметрия. Простей-
\ / ший пример ^-перемещения — централь-
\/ ная симметрия с центром О или поворот
пространства 2^ вокруг точки О на 180°.
Соответствующее преобразование карты
Рис. 4.25в Ко — это обычная (евклидова) централь-
ная симметрия относительно центра к ар-
ты8 Переходя с карты Ко на произвольную карту КА с помо-
щью отображения Ь0А, мы получим, что
1) пары точек Р и Р', Q и Q', R и 2?', X и X' на рис. 4.25 служат
изображениями на карте КА пар 2^-точек, центрально-симметрич-
ных относительно О (докажите). Отсюда вытекает правило построе-
♦) См., например, школьный учебник Геометрия 6—8 под ре-
дакцией А. Н. Колмоюроваг
98
ния на ^-карте образа любой точки при центральной симметрии
(«неевклидовой») с заданным центром. В чем оно состоит?
2) Докажите, что если на рис. 4.25 | OR | = | OR' |, то и
| ОХ | = | ОХ' | («теорема о бабочке»).
3) Докажите, что любая пара расходящихся ^-прямых а и Ь
имеет единственный центр симметрии О и единственный общий пер-
пендикуляр, причем точка О — середина этого перпендикуляра.
Как построить изображение общего перпендикуляра на 2^-карте?
6. Измерение углов на картах скоростей. Пусть на карте
КА изображение PXQ 2^-угла PXQ (Ри Q — точки абсолю-
та). Требуется найти его ^-величину. Ес- г
ли вершина угла PXQ совпадает с цент- Р
ром карты, то ^-величина угла PXQ рав- \
На евклидовой величине угла PXQ. В про- S 1\ X.
тивном случае достаточно построить на г / I \ \
карте изображение угла Р'Л©', равного & \ \о X '
(по i^-величине) углу PXQ, например, /
симметричного углу P-XQ относительно I д \ 1
середины О отрезка АХ (рис. 4.26). Это \ \\ У
построение мы умеем выполнять (см. вы- \ \л /
ше), если задано изображение центра сим- У?
метрии О. В следующих двух задачах объ-
ясняется, как можно построить точку О<
1) Восставим перпендикуляры к отрез- Рис. 4.26.
ку АХ (на карте из его концов по
разные стороны от него. Докажите, что хорда, соединяющая
точки пересечения перпендикуляров с абсолютом, проходит] че-
рез точку О.
2) Проведем через точку X хорду PR, Докажите, что точка О
лежит на дуге окружности, пересекающей абсолют QA в точках Р
и R под прямым углом ♦) (рис. 4.27).
У к азание. При центральной симметрии относительно О
прямая PR перейдет в^Р-прямую, которая на карте КА изображает-
ся диаметром Р'Д'. Пользуясь этим, найдите (евклидову) величину
угла POR.
*) Угол между дугами равен, по определению, величине угла
между касательными к ним в точке их пересечения*
4*
99
Но можно найти ^-величину угла P-TQ и не прибегая к цент-
ральной симметрии.
3) Докажите, что касательная к дуге POR в точке О парал-
лельна диаметру P'R' (рис. 4.27).
4) Рассмотрим две пересекающиеся хорды PR и QS на -карте
и построим дуги POR и QOS, перпендикулярные к абсолюту
(рис. 4.28). Докажите, что ^-величина угла между ^-прямыми PR
и QS равна евклидовой величине угла между дугами.
7. Равноугольные карты релятивистского пространства скоро-
стей. Каждой точке X пространства скоростей на -карте КА отве-
чает определенная точка X. Сопоставим точке X новую точку х
круга КА — течку, изображающую на карте КА середину ^-отрез-
ка АХ. Другими' словами, произведем как бы i^-гомотетию с коэф-
фициентом х/2 карты КА. Мы получим новую карту РА, точнее, но-
вым будет соответствие между -точками и точками карты, сама же
она по-прежнему будет кругом радиуса 1. Из предыдущего допол-
нения вытекает, что ^-прямые изображаются на карте РА дугами
окружностей, перпендикулярными к абсолюту (или диаметрами
круга РА), причем евклидов угол между двумя такими дугами ра-
вен по величине 2^-углу между соответствующими ^-прямыми.
Поэтому карту РА можно назвать равноугольной. Докажите, что
1) для любых 2^-точек X и Y выполнено равенство ]| XY || =
1 / IQx| IQyI \
= -7£- In |’7р |" : " > где Р и Q — концы дуги, изображаю-
щей" ^-прямую XY (точка х. лежит между Р и Q);
2) ^-окружности изображаются на равноугольных картах обыч-
ными окружностями;
3) сумма углов ^-треугольника всегда меньше л (воспользуй-
тесь равноугольными картами!). . .
4) Проведите аналогию между проективными и равноугольны-
ми картами пространства с одной стороны, и сферы — с другой
стороны (см. дополнение 2 к гл.З).
Проективные и равноугольные карты ^-пространства — это,
в сущности, не что иное, как известные модель Клейна и модель
Пуанкаре плоскости Лобачевского. Подробнее об этих моделях
и вообще о геометрии Лобачевского можно прочитать, например,
в книге И. М. Яглома «Геометрические преобразования», т. 2 — М.:
Физматгиз, 1956 (Библиотечка математического кружка, вып. 8).
8. Преобразования подобия в геометрии Лобачевского. Допус-
тим, что F — такое преобразование пространства при котором
все расстояния умножаются на одно и то же число к (преобразование
подобия). Докажите, что при этом преобразовании прямые должны
переходить в прямые, а величины всех углов должны сохраниться
(воспользуйтесь предельным переходом в первой теореме косинусов,
когда длины сторон треугольника стремятся| к нулю). Выведите
отсюда, что коэффициент к не может отличаться от 1, т. е. F явля-
ется перемещением. Таким образом, в геометрии Лобачевского не
только нет подобных [треугольников а но и вообще отсутствует по-
нятие подобия,
ГЛАВА §
РЕЛЯТИВИСТСКАЯ КИНЕМАТИКА
Главный итог предыдущих глав выражается
в нескольких формулах — формулах тригонометрии для
плоскости Лобачевского^ и 'одной фразе: релятивистское
пространство скоростей обладает геометрией Лобачев-
ского. С этим небольшим^ но ценным багажом можно сме-
ло отправляться дальше. Но не будем спешить. Сейчас
самбе время приостановиться и с высоты напшх знаний
оглянуться на пройденный путь. Новых понятий мы вво-
дить не станем; однако если раньше при исследовании
геометрической структуры пространства скоростей мы
чаще всего шли от физических соображений к их геометри-
ческим следствиям^ то в этой главе мы попробуем пока-
зать, как работает обратная связь. С помощью уже изве-
стных нам формул геометрии Лобачевского мы заново
выведем зависимость между величиной скорости и рас-
стоянием в пространстве скоростей^ правило сложения
скоростей, рассчитаем некоторые интересные физические
эффекты. Для удобства соберем в одном месте все геомет-
рические формулы2 которые понадобятся нам в дальнейшем.
5.1. Как «решать треугольники»
на плоскости Лобачевского
В трех пространствах постоянной кривиз-
ны *)— евклидовой плоскости (кривизна нулевая), сфере
(кривизна положительная) и плоскости Лобачевского
(кривизна отрицательная) — действуют сходные форму-
лы^ выражающие одни элементы треугольника через дру-
гие. Особенно похожи друг на друга формулы сферической
геометрии и геометрии Лобачевского: последние получа-
ются из первых заменой тригонометрических функций
сферических «угловых» расстояний (sin хъ cos я, tg х) на
соответствующие гицерболические функции расстояний
на плоскости Лобачевского (sh хх ch хл th х) и кое-гдо
») См, раздел 3,7,
102
переменой знака. Выпишем те и другие формулы параллель-
но, слева—для тригонометрических функций и сферических
треугольников, справа — для гиперболических функций
и «треугольников Лобачевского». Начнем с определений
и основных соотношений для тригонометрических и ги-
перболических функций.
Определения *)
sin х = -X (е1х — е~гх) sh x = (ex — e~x) (5.1)
cos X = -4“ (егх + е”1*) ch x — -i- (ex + e~x) (5.2)
tg х = sin я/cos х th x = sh я/ch я. (5-3)
Основные соотношения cos2 х + sin2 х = 1 ch2 x — sh2 я = 1 (5.4)
sin(x + у) = — sin х cos у + cos x sin у sh (я + y) = = sh я ch у 4- ch я sh у (5.5)
cos(# + i/) = = cos x cos у — sin x sin у ch (я + у) = == ch я ch у + sh я sh у (5-6)
^х + у) = ^+^У, \ 1 я' 1 + th я th i/ (5-7)
Поведение при малых аргументах х 1
sin я я sh я я
cos x ~ 1 — я2/2 ch я 1 + я2/2 (5.8)
tg я x x th я я
Графики гиперболических функций можно увидеть на
рис. 4.9; в Приложении мы подробно обсуждаем их опре-
деления и свойства.
Теперь приведем метрические соотношения между сто-
ронами и углами треугольников в двух геометриях. Ко-
нечно, главными среди них являются теоремы косинусов и
синусов. Остальные формулы — их частные случаи.
Пользуясь приближениями (5.8), легко проверить, что
♦) В этих определениях i = V —1 — так называемая «мнимая
единица». Читатель, не знакомый с комплексными числами, может
воспринимать это как чисто формальное обозначение. Рекомендуем
проверить, однако, что, обращаясь с выражением е™ как с обычной
экспонентой и заменяя, при необходимости, Й
на —1, мы можем получить все стандартные тригонометрические
формулы точно так же, как из определений (5.1) и (5.2) выводятся
формулы (5*4) — (5*6) и им подобные* См* также Приложение*
102
для малых расстояний и левыеЛ и правые формулы пре-
вращаются в хорошо известные формулы евклидовой пла-
ниметрии.
Тригонометрия прямоугольного треугольника (обозна-
чения ясны из рис. 5.1)
Рис. 5.1.
tg b = tg c cos a th b = th c cos а (5-9)
sin a — sine sin а sha = shcsina (5.10)
tg a = sin b tg а th a = sh b tg Ci (5.11)
cose = cos a cos & ch c = ch a ch b (5.12)
cos c = ctg ct ctg 0 ch c = ctg a ctg 0 (5.13)
cosa = cosa/sin0 ch a = cos a/sin0. (5.14)
Тригонометрия произвольного треугольника (обозна-
чения ясны из рис. 5.2)
b ь
Рис. 5.2.
Первая теорема косинусов
cos с «=» cos a cos b + I ch с == ch a ch Ь —
4- sin a sin b cos у | — sh a sh Ь cosy. (5.15)
Вторая теорема косинусов
cos у = —cos a cos 0 + I cos у = — cos а cos 0 +
+ sin а sin 0 cos с | 4- sin а sin 0 ch с. (5.16)
Теорема синусов
sin а _ sin 5 ч sine I sha _ sh& _ she
sin a sin 0 sin у ] sin a sin0 sin у *' ‘ '
5.2. Еще один вывод формулы связи
между скоростью и 2^-расстоянием
Эту формулу мы получили в разделе 4.4г
pA|B = th||4B|h (5.18)
но, руководствуясь принципом «повторение — мать уче-
ния», выведем ее снова, другим способом. В гл. 4 мы Сна-
чала нашли вид формулы связи5 а потом с ее помощью по-
лучили метрические соотношения (5.9) — (5.17) для реля-
тивистского пространства скоростей. Сейчас порядок бу-
дет обратным. Мы постараемся доказать равенство (5.18),
исходя из того, что в пространстве скоростей справедливы
соотношения (5.9) — (5.17) геометрии Лобачевского (в дей-
ствительности нам хватит одной только формулы (5.9)).
Запишем зависимость между относительной скоростью
двух систем отсчета А и В и расстоянием *) между соот-
ветствующими точками в пространстве скоростей* в общем
виде;
гл|в=Г(МВ||).
Чтобы найти функцию F, рассмотрим движение некоторой
частицы В с точки зрения двух инерциальных наблюдате-
лей А и С. Пусть частица В (рис. 5.3) движется из начала
Рис. 5.3s
системы координат Аху, точки с постоянной скоростью
и направление ее движения составляет угол а с осью
координат Ах. Через время t после начала движения час-
тица окажется в точке с координатами х = v cos
z/ = ysina*t Пусть другая система отсчета Сх'у'
♦) В англййской литературе для скорости vA^B и расстояния
|] АВ || в пространстве скоростей используются два термина —
«velocity» и «rapidity»; в русской им соответствуют («скорость» и
«быстрота». В нашей книге мы предпочли последнему геометриче-
ский термин «расстояние^
1U4
движется вдоль оси Ах со скоростью v cos а, причем в на-
чальный момент времени координатные оси Сх'у' совпа-
дают с осями Аху. За время t система Сх'у' пройдет вдоль
оси Ах путьц равный v cos a«t Координаты точек В и С
по оси Ах в любой момент одинаковы,; поэтому с точки
зрения наблюдателя А частица В постоянно находится на
прямой Су'. Но то же самое, увидит и наблюдатель С}
Следовательно^, векторы скоростей системы А и частицы
В, измеренные наблюдателем С? будут перпендикулярны.
Посмотрим теперь, как все это будет выглядеть в прост-
ранстве скоростей (рис. 5.4). Точки At В, С изображают
скорости наблюдателей А, С й частицы В. Они образуют
треугольник со сторонами, которые мы обозначим через
аг Ъх с. Длина с отрезка АВ определяет относительную
скорость частицы В и наблюдателя А;
v = F (с). (5.19)
Аналогично, длина Ъ отрезка АС определяет относи-
тельную скорость наблюдателей А и С:
v cos a = F (Ъ}. (5.20)
Угол GAB нашего треугольника равен углу а между век-
торами скоростей частицы В и наблюдателя С относи-
тельно наблюдателя А. Угол же ВСА — прямой, так как
для наблюдателя С векторы скоростей va\c и Гв,с пер-
пендикулярны друг другу. Мы видим, что рассматривае-
мому случаю в пространстве скоростей отвечает прямо-
угольный треугольник. Запишем формулу (5.9), связываю-
щую в тригонометрии Лобачевского его гипотенузу^ ка-
тет и угол между ними:
th Ъ = th с cos a. (5.21)
С другой стороныf из соотношений (5.19) — (5.20) сле-
дует равенство
F (Ь) =; F (с) cos a. (5.22)
Поделим теперь (5.22) на (5.21); cos а сократится, и мы
получим^ что
F (b)l\h Ъ = F (c)/th с. (5.23)
Меняя угол а, мы можем изменять с при неизменном
при этом равенство (5.23) не должно нарушаться. Это
возможно только тогда,; когда отношение F (c)/th с равно
некоторой константе кх не зависящей от Ь и аз
F (c)/th с = R (b)/th Ъ = к.
£05
Итак, мы приходим к выводу, что относительная скорость
любых двух систем отсчета А и С должна быть пропор-
циональна гиперболическому тангенсу расстояния || АС ||
между точками 4 и С в пространстве скоростей:
vA[C = kth || АС ||.
Чему же равна константа к? Напомним, что мы поль-
зуемся системой единиц, в которой максимально возмож-
ная скорость — скорость света — численно равна 1.
В пространстве скоростей она изображается бесконечно
удаленными точками, точками абсолюта. Если скорость
Ра\с стремится к скорости света, то ^-расстояние || АС ||
стремится к бесконечности. Переходя к пределу, получим
^света '— к th (сю) = 1,
где th (оо) = lim th х = 1. Поэтому в нашей системе еди-
Х—>00
ниц к =* 1.
Мы еще раз вывели важнейшую формулу нашей теории:
uA|C = th || АС ||,
т. е. относительная скорость vA\C инерциальных Наблюь
дателей А и С, измеренная в единицах скорости света •
равна гиперболическому тангенсу расстояния (| АС || меж-
ду точками А и С в пространстве скоростей.
Если бы пространство скоростей имело не геометрию
Лобачевского, а геометрию Евклида, то соотношение
th Ъ = th с cos а для прямоугольного треугольника АВС
на плоскости Лобачевского мы должны были бы заменить
на соответствующую евклидову формулу, связывающую
гипотенузу, катет и угол между ними: Ъ = с cos а. Поде-
лив на нее почленно равенство F (b) = F (с) cos ал мы бы
обнаружили^ что
F(b) = F (с)
Ь с
Поэтому в1 случае евклидовой геометрии пространства
скоростей относительная скорость обязана быть пропор-
циональна расстоянию
VA|C = ^'MC'l-
А поскольку расстояние между точками плоскости может
быть сколь угодно большим, то и скорости а этом случае
могут быть сколь угодно большими.
ДОО
В случае евклидовой геометрии пространства скоростей
физические объекты могут двигаться с любой сколь угодно
большой скоростью.
Теперь можно поставить все точки над i в рассуждении^
намеченном в конце гл. 3. Там, в разделе 3.6, мы непо-
средственно из принципа относительности вывели, что
пространство скоростей непременно является двумерным
пространством постоянной кривизны. Случай положитель-
ной кривизны — сфера — был отвергнут по простым ка*
чественным соображениям. Только что мы убедились в
том, что случай нулевой кривизны—евклидова плоскость—
отвечает нерелятивистской механике. Остается третий
вариант: релятивистское пространство скоростей имеет
постоянную отрицательную кривизну. Исходя только из
этого% чисто математическими средствами (существенно
неэлементарными) можно досконально исследовать его
геометрию их конечно, получить все формулы (5.9) — (5.17),
а потомА как мы показали^ и формулу связи (5.18).
5.3. Релятивистский закон
сложения скоростей
Основную задачу релятивистской кинемати-
ки можно поставить следующим образом. Пусть в инер-
циальной системе отсчета А заданы скорости Vx\a каких-
то тел X. Требуется найти скорости этих тел в другой
инерциальной системе В£ движущейся относительно А*
Эту задачу можно решать двумя разными способами. Пер-
вый способ — нанести известные скорости Vx\a на карту
скоростей КА наблюдателя А, затем произвести описанное
в гл. 4 преобразование карты КА в карту скоростей Кщ
сводящееся к центральной проекции, и «снять» с карты
Кв новые значения скоростей. Но прямо пользоваться
этим методом не слишком удобно — уж очень он громоздкий
и неточный:’от численных данных к’чертежу, потом, через
геометрические построения, — к другому чертежу и опять
к численным данным! Гораздо более привлекателен другой
способ,, так сказать «геометрически-аналитический». От
заданных скоростей Vx\Ai Vb\a следует перейти непосредст-
венно в релятивистское пространство скоростей где им
будут соответствовать точки Л, JB, . . ., X, ^-расстояния
между которыми связаны с величинами скоростей соот-
ношениями Vxia = th ||-Х\4||.
Чтобы встать на точку зрения инерциального наблю-
дателя ВЛ достаточно соединить точки X с точкой В
107
^-прямыми и решить чисто геометрическую задачу о нахож-
дении неизвестных длин и углов с помощью теорем коси-
нусов, синусов или других формул геометрии Лобачев-
ского, приведенных в разделе 5.1. После этого с помощью
тех же соотношений vX\b = th || ХВ || можно вернуться из
^-пространства непосредственно к скоростям, но измеряе-
мым уже произвольным наблюдателем
Проиллюстрируем этот метод несколькими примерами.
Рассмотрим еще раз самую простую кинематическую за-
дачу — задачу о движении трех наблюдателей вдоль
одной прямой (см. раздел 4.3). Пусть с Земли 3 был
запущен космический корабль К. Когда он разогнался
до околосветовой скорости рх, с него стартовала в том же
направлений небольшая разведывательная ракета Р. Ее
скорость относительно корабля равна р2. С какой скоро-
стью будет двигаться ракета относительно Земли?
Перейдем в пространство скоростей. Соответствующие
точки 3, К, Р будут лежать на одной 2^-прямой. Расстоя-
ние || ЗК || = а± определяется скоростью корабля относи-
тельно Земли: » th аи а расстояние между точками
К и Рх || КР || = а2 — скоростью ракеты относительно
корабля v2 *= th а2. Скорость же ракеты относительно
Земли определяется расстоянием || РЗ || = а. Геометри-
ческая часть задачи чрезвычайно проста — она сводится
к утверждению, что длина отрезка ЗР равна сумме длин
отрезков ЗК и К?:
и = лх 4”
— в релятивистском случае складываются не скорости^
а расстояния в пространстве скоростей. Теперь мы можем
вернуться к измеряемым скоростям:] с точки зрения на-
блюдателя на Земле ракета будет двигаться со скоростью
v = th а = th (аг + а2).
Остается вспомнить^ как выражается гиперболический
тангенс суммы через гиперболические тангенсы слагаемых
(формула (5.7))
v = th (ах 4- аа)
th at + th а2
1 4- th at th а2
Vi + ib
*
Это уже известная нам релятивистская формула сло-
жения скоростей. Конечно^ при малых скоростях4 много
меньших скоростисветдЛкогда vu v2<^ 1, она переходит
в нерелятивистскую формулу сложения скоростей и»
= vt 4- Поучительно прикинуть^ когда эти формулы на-
10b
, Рис. 5.5.
чинают существенно отличаться друг от друга. На рис. 5.5
построены графики зависимости результирующей ско-
рости и£ вычисленной по релятивистской и нерелятивист-
ской формулам в случае равных слагаемых иг = и2. Вид-
но, что оба закона сложения скоростей дают практически
одинаковые результаты для скоро-
стей, не превышающих 0,2 0,4
скорости света. Современные же
космические ракеты имеют скоро-
сти порядка 10"4 от скорости све-
та. Похожеt наша задача для ра-
кет будет иметь прикладное зна-
чение еще очень и очень не скоро!
В следующем примере мы рас-
смотрим сложение скоростей; на-
правленных под углом друг к
ДРУГУ *)•
Пусть два наблюдателя В и С
движутся относительно А с оди-
наковыми по величине скоростями,
причем угол между векторами vB'a и Vc\a равен л/3/ В
нерелятивистской кинематике три ^-точки А, В,,С были
бы вершинами правильного треугольника в пространстве
скоростей, и для наблюдателя В ско-
рости двух других наблюдателей были
бы также равны и направлены под уг-
лом л/3 друг к другу. В теории относи-
тельности это уже не так. Рассмотрим
соответствующую картинку в прост-
ранстве скоростей (рис. 5.6). Три точки
А,В и С являются вершинами равно-
бедренного треугольника со сторона-
ми || АВ || = (I АС || = Ъ и углом при
вершине At равным л/3, причем рв|а =*
~vc\a = у = th Ъ, Для наблюдателя В
векторы скоростей гл\в и Vc\b будут оп-
ределяться длинами сторон || JBJ. || = Ъ и |] ВС || ~ а
треугольника ВАС и углом а между ними.
Возникает геометрическая задача: найти основание и
угол при основании равнобедренного треугольника^ зная
*) Термин «сложение скоростей» больше подходит для нереля-
тивистской кинематики, где скорости действительно складываются
по правилу параллелограмма: vC|A == VpjjL + vC|B. В релятивист-
ском случае правильнее было бы говорить о «преобразовании»
скоростей при переходе в другую систему отсчетае
109
его боковые стороны и угол при вершине. Основание
а = || ВС || нашего треугольника находится по теореме
косинусов (5.15):
ch а = ch Ь ch b — sh Ь sh b cos =•
о
= ch2 Ь —sh2 Ь = 14--5-sh® 6 (5.24)
(мы воспользовались основным тождеством для гипербо-
лических функций (5.4)). Чтобы вычислить угол а ==* AB(ji
запишем вторую теорему косинусов (5.16):
cos В = cos а = — cos а cos -у + sin а sin у ch 6 ==<
cos а . . 1 т
—------------------р . F— sin а ch b.
Za &
(Нелишне подчеркнуть: и в геометрии Лобачевского углы
при основании равнобедренного треугольника равны —
докажите!) Таким образом, угол а между векторами ско-
ростей наблюдателей А и С относительно наблюдателя В
определяется по формуле
. ch & 1 1
ctg а = —т=- == ——-г ,
/3 ]<3 /1— th2 6
пли через скорость рЛ|в ==* v = th Ъ\
1 1
ctga= yrg '
В релятивистском случае он будет меньше л/3, так как
1
> /3
ch &>1 и, следовательно, ctg а
— ctg -т~. Если ско-
О
рость z?b|a стремится к скорости света с = 1 (ультраре-
лятивистский предел), то а будет стремиться к нулю — пря-
мые АВ и ВС перейдут в прямые, параллельные в смысле
Лобачевского, которые пересекаются под нулевым углом
в бесконечно удаленной точке В, лежащей на абсолюте 2^-
пространства. На рис. 5.7 изображена зависимость угла а
от величины скорости Рв|а = у» Мы видим, что в реляти-
вистском случае угол между векторами скоростей г>А|в
и vcib начинает существенно отличаться от своего нере-
лятивистского значение л/3 только при и 0,4. При
v = 0,2 это отличие не превышает и одного процента.
Скорость наблюдателя € относительно наблюдателя В
равна гиперболическому тангенсу известного нам из (5.24)
НО
расстояния между точками В и С в релятивистском про-
странстве скоростей: рС|в th а, где ch а — 1 + (sh26)/2,
a th Ъ = v. Проделав несложные вычисления, можно
выразить vCjB через Vbja =* v:
У4 —Зу2
приведен на рис. 5.8. При
График этой зависимости
малых скоростях v этот график практически не отличает-
ся от прямой рС|в = если скорость v стремится к ско-
рости света8 т. е. к единице, той иС\в, конечно, тоже стре-
мится к единице, причем нигде отличие релятивистс-
кого результата от нерелятивистского не превышает 5%
от скорости света.
Можно отметить (и это видно на рассмотренных при-
мерах), что погрешность «ньютоновского» сложения ско-
ростей (по правилу параллелограмма) не превышает 1 %
вплоть до скоростей порядка 0,2 -т-0,4 от скорости света.
При этом релятивистские поправки по порядку величины
равны произведению складываемых скоростей. Существен-
ные отличия релятивистской и нерелятивистской тео-
рии начинают проявляться только при скоростях, боль-
ших примерно половины скорости света.
5.4. Аберрация света звезд
Рассмотрим еще один полезный пример.
Пусть в системе отсчета С частица А движется вдоль осп
у со скоростью vAi а наблюдатель В — вдоль оси х со ско-
ростью Рв« Определим величину и направление скорости
частицы относительно наблюдателя. Нарисуем в простран-
стве скоростей картинку, соответствующую нашей задаче
Ш
(рис 5.9). Точка С изображает скорость исходной системы
отсчета, точка В — скорость наблюдателя, А — скорость
частицы. Треугольник АВС — прямоугольный с прямым
углом при вершине Cf и его катеты определяют соответ-
ствующие скорости: Рд th Ь, ив = th а. Величина ско-
рости частицы относительно наблюдателя В определяется
гипотенузой ci ис\в th а направление — углом
а = В треугольника АВС.
Теперь надо опять решать чисто геометрическую за-
дачу: по известным катетам а и Ь прямоугольного ^-тре-
угольника найти его гипотену-
зу с и угол а. Заглянем в свод-
ку формул: нам подойдут тео-
рема Пифагора (5.12) и соот-
ношение (5.11), связывающее
два катета и острый угол пря-
моугольного треугольника ЛВС:
ch с ch a ch &; th b = sh a tg a.
Готово! Задача решена. Надо
только переписать ответ через
скорости Рд и 1>в. Для этого
все гиперболические функции
выразим через гиперболический тангенс:
1 th ж , 1
sh# = - ; ch а; .•
/1 — th2 ж /1 — th2 a:
и подставим вместо тангенсов соответствующде скорости.
После простых преобразований мы получим, что
vaib = va + vb — vaVb’ tga = ^-Vl — VB. (5.25)
VB
В нерелятивистском пределе малых скоростей в пер-
вой формуле можно пренебречь произведением иАи$ по
сравнению с остальными членами, а во второй — вели-
чиной Vb по сравнению с единицей. Результат легко пред-
сказать — этох конечно^ обычные нерелятивистские фор-
мулы
VAiB = VA + VB, tga = -^-.
VB
Гораздо интереснее другой предельный случай. Пусть
скорость Рд частицы А увеличивается, приближаясь по
величине к Скорости света: vA ->1. В пространстве ско-
ростей точка л. при этом уходит на абсолют, а ^прямые
С А и ВЛ становятся параллельными в смысле Лобачев-
112
ского. Подставляя в (5.25) vA = 1, мы найдем, что
^А|В = V3 + 1 — Vb — 1,
Первое соотношение тривиально — скорость частицы'
А у движущейся со скоростью света относительно системы
отсчета С, должна быть равна единице и для наблюдателя
В. Второе можно преобразовать с помощью формул обыч-
ной тригонометрии: вспомнив, что tg а = — 1,
получим изящную (и уже знакомую нам — см. (4.30))
формулу
cos а = = th а. (5.26)
С геометрической точки зрения а — это угол параллель-
ности Лобачевского (угол между прямой ВА и перпенди-
куляром ВС, опущенным на параллельную ей в смысле
Лобачевского прямуюСЛ; см. раздел 4.7). Он непосредст-
венно связан с реальным физическим эффектом — абер-
рацией света звезд.
Что же это такое? Измеряя углы, под которыми видны
с Земли далекие звезды,; можно заметить, что в течение
года они слегка изменяются. Объяснить это просто. До-
пустим, что летом наблюдатель вцдит звезду точно под
углом 90° к направлению движения Земли вокруг Солнца.
Через полгода направление скорости движения Земли
изменится на противоположное. Поскольку^ величина
орбитальной скорости Земли в
обычной системе единиц ^земли»
»30 км/с ~ Ю-4 с, «летняя» и
«зимняя» скорости движения Зем-
ли изобразятся в пространстве
скоростей точками С и В, распо-
ложенными на ^-расстоянии af
таком, что th а = р = 2*10“4. Пусть
2^-точка А, лежащая на абсолюте,
изображает скорость фотонов, ле-
тящих от наблюдаемой звезды к
Земле (рис. 5.1в). Летом вектор
этой скорости образует с направ-
лением движения Земли угол в
90°з поэтому угол при вершине С
^-пространстве прямой. Зимой звезда видна под углом а
к тому же направлению, равным, очевидно, углу при вер-
шине В треугольника АВС. Изменение ф ~ 90° — а
треугольника АВС в
113
угловой координаты звезды за* полгода находится по фор-
муле (5.26)
sin ф = cos а = v.
В самом явлении аберрации нет ничего специфически ре-
лятивистского. Каждому из нас приходилось видеть, как
следы от дождевых капель на боковом стекле автомобиля
отклоняются от вертикали, когда он начинает двигаться.
В классической кинематике угол отклонения определя-
ется ИЗ очевидного равенства tg \|) = Равтомобиля/^капли (если
нет ветра). Аналогично, аберрация света звезд в класси-
ческой, теории описывается законом tg гр = v. При v =
== 2Рземли/с = 2*10"4 получаемое отсюда значение угла
аберрации гр настолько мало, что в пределах достигнутой
точности измерений не отличается от релятивистского
(sinip = и). Поэтому результаты экспериментов по изме-
рению аберрации света звезд одинаково хорошо объясняют-
ся классической теорией и теорией относительности. Но
не стоит думать, что так бывает во всех практически важ-
ных случаях. Макроскопические объекты в Солнечной
системе, и естественные и искусственные, имеют слишком
малые скорости, чтобы с их помощью можно было заметить
релятивистские эффекты. Иное дело — объекты микроми-
ра: элементарные частицы, которые прилетают на Землю
с космическими лучами или искусственно разгоняются до
околосветовых скоростей в ускорителях. Здесь уж реля-
тивистская кинематика начинает работать в полную силу.
Мы расскажем о том, как она помогла открыть нейтраль-
ный л-мезон.
5.5. Распад нейтрального пиона
на два гамма-кванта
При взаимодействии вещества мишени и пуч-
ка протонов, вылетающих из ускорителя, образуется мно-
жество разнообразных частиц, в том числе так называе-
мые л-мезоны„ или пионы. Имеются три сорта л-мезонов:
заряженные положительно (л+),; отрицательно (л~) и
электрически нейтральные (л°). Последние живут недолго
и обычно распадаются на два фотона большой энергии —
два у-кванта. Их-то и можно зарегистрировать счет-
чиком у-излучения. Сам же л°-мезон остается невидимым —
поскольку его электрический заряд равен нулю, он не
вступает в электрическое взаимодействие с атомами и не
114
оставляет следа ни в фотоэмульсии, ни в пузырьковой®
Камере или в камере Вильсона.
Посмотрим, как будет выглядеть распад л°-мезона в
двух разных системах отсчета — лабораторной системе А,
где покоятся счетчики у-квантов, и в системе покоя л°-
мезона — системе отсчета В. В системе покоя два у-кван-
та ух и у2 разлетаются со скоростью света в противополож-
ные стороны. Поэтому в пространстве скоростей точки ух
и у2 лежат на абсолюте и одновременно на одной ^-прямой,
проходящей через точку В, изображающую скорость л°-
мезона (рис. 5.11). Точка А изображает скорость лабора-
торной системы отсчета, в которой
распавшийся пион двигался со ско-
ростью v = th а. Выясним теперь,
как будут направлены скорости у-
квантов в ' лабораторной системе А.
Соединим в пространстве скоростей
точку А с точками абсолюта ух и у2
прямыми .Аух и Лу2. Эти прямые пе-
ресекаются с прямой У1Ву2 на абсо-
люте, т. е. параллельны ей в смысле
Лобачевского. Угол между ними
УхАу2 =2а, т. е. угол между направ-
лениями скоростей у-квантов в лабо-
раторной системе отсчета будет равен
удвоенному углу параллельности Лобачевского.Опустим из
точки А на прямую ухВу2 перпендикуляр АС и обозначим
его длину через Ь. Угол параллельности Лобачевского
определяется длиной этого перпендикуляра (см. (5.26)):
cos а = th Ъ,
(5.27)
Рассмотрим угол ф между прямыми ВА и ухВу2. Он
может меняться от 0 до л — ведь в системе покоя у-кван-
ты могут вылететь в любом направлении. При этом в лабо-
раторной системе отсчета будет меняться угол 2а между
направлениями вылета двух у-квантов. В каких же пре-
делах? Когда <р = 0 или л два у-кванта и в лабораторной
системе будут лететь в противоположных направлениях;
при этом 2а = л, а длина, перпендикуляра Ь = 0. Когда
Ф возрастает от 0 до л/2, длина перпендикуляра Ъ будет
увеличиваться от нуля до максимального значения, рав-
ного расстоянию а между точками А и В,: а угол разлета
двух квантов в лабораторной системе будет, соответствен-
нох уменьшаться от л до некоторого минимального значе-
ния 2amiQA которое дается формулой Лобачевского
115
(5.27):
COS OtmjQ th- ^тят “ th d V*
Итак, в лабораторной системе существует наименьший
угод разлета двух у-квантов^ образовавшихся в резуль-
тате распада, нейтрального л-мезона. Экспериментальная
проверка наличия этого наименьшего угла разлета яви-
лась первым подтверждением существования л°-мезона *).
Два счетчика у-квантовж включенные по схеме совпадений^
были расположены под углом друг к другу и направлены
в то место,: где Предположительно распадались л°-мезоны,
имеющие примерно одинаковую скорость р. При умень-
шении угла между счетчиками интенсивность счета рез-
ко уменьшалась по достижении угла amini cos amin = v.
Замечательно4 что даже столь отвлеченные геометри-
ческие понятия^ как параллельные Лобачевского и угол
параллельности приобрели такой конкретный физический
смысл! Правда^ времени для этого потребовалось немало.
*) Steinberger J., Panovs к у W,KSH„ S tel-
le г J.— Physical Review, 1950, v* 78, p, 802*
ГЛАВА 6
ЗАКОНЫ СОХРАНЕНИЯ ЭНЕРГИИ
И ИМПУЛЬСА
В РЕЛЯТИВИСТСКОЙ МЕХАНИКЕ
Если мы не хотим заниматься только движе-
нием частиц по инерЦии,— а мы этого, конечно, не хотим,—
то первым делом надо понять, как в релятивистской
механике выглядят самые «главные» законы, описываю-
щие процессы взаимодействия,— законы сохранения энер-
гии и импульса. И вряд ли мы удивим читателя тем, что в
Теории отнобйтельности классические определения энер-
гии и импульса частицы
Е « mu2/2i p^mv (6.1)
приходится пересмотретьL Ведь согласно этим определе-
ниям энергия и импульс частицы массы т не могут быть
больше* чем 2?mak «= те2/2 и = тле* потому чго ее
скорость не может превысить скорость света *). Но пред-
ставим себе* что это заряженная частица в кольцевом ус-
корителе — циклотроне. S процессе ускорения она
периодически и многократно проходит одно и то же разго-
няющее электрическое поле* двигаясь по круговой орби-
те в магнитном поле. При каждом обороте электрическое
поле совершает одну и ту же работу* идущую (по закону
сохранения энергии!) на увеличение кинетической энер-
гии частицы. Чем больше делается оборотов, тем выше
становится энергия частицы* и* в принципе, она может
стать сколь угодно большой (если магнитное поле* удер-
живающее частицу на орбите* удастся увеличивать над-
лежащим образом). А классическая формула для энергии
в сочетании с эйнштейновским принципом относительности
«не позволяет» энергии частицы расти неограниченно.
Нерелятивистские выражения для энергии и импульса
(6.1) справедливы лишь приближенно* когда скорости
♦) В нашей системе единиц скорость частицы безразмерна:
v = %бычн^с‘ Поэтому удобно в дальнейшем измерять энергию п
импульс частицы в единицах массы; Е = Р = ?обы<пА
где с — скорость света*
Ш
частиц малы по сравнению со скоростью света. При боль-
ших же скоростях они не согласуются с законами со-
хранения. Что ж, поищем им замену.
6.1. Что мы знаем об энергии и импульсе?
Понятия энергии и импульса потому и вво-
дятся в физике, что для них справедливы законы сохра-
нения. Именно из этого мы будем исходить при выводе
новых, релятивистских, выражений для энергии и импуль-
са частицы.
Поставим задачу точнее. Импульс частицы — это век-
тор, направленный вдоль ее скорости, величина которого
зависит от массы частицы и ее скорости относительно дан-
ной системы отсчета. Энергия частицы — это скалярная
величина, также зависящая от массы и скорости частицы.
В нерелятивистском случае эти зависимости задаются
формулами (6.1). А как они выглядят в теории относи-
тельности,; нам предстоит] выяснить. Разумеется,;’ при
небольших скоростях новые формулы должны переходить
в старые.
Законы сохранения энергии и импульса утверждают^
что, вычисляя энергию всех участвующих в каком-то вза-
имодействии частиц (полную энергию системы частиц) и
векторную сумму их импульсов (полный импульс) , мы
всегда будем получать одни и те же значения,, если толь-
ко данная ^система частиц изолирована*). Короче говоря^
в изолированной системе взаимодействующих частиц
сохраняются подлая энергия и полный импульс системы.
Как показывает эксперимент^ законы сохранения
энергии и импульса выполняются всюду и всегда,, какими
бы сложными и запутанными ни были процессы, происхо-
дящие с частицами. И в полном соответствии *с принципом
относительности эти законы справедливы во всех инер-
циальных системах отсчета.
Но сложные взаимодействия нам не понадобятся. Мы
займемся простейшим из них — упругим столкновением
двух частиц. Природа сделала нам ценный подарок: ока-
зывается, можно построить кинематический граф упругого
столкновейия, не зная точных формул для энергии и им-
пульса. Наоборот, с помощью графа эти формулы можно
вывести, если потребовать, чтобы в любой системе отсчета
*) То есть на нее не действуют внешние тела*
118
выполнялись законы сохранения энергии и импульса
при упругом столкновении. Мы увидим, что этим требо-
ванием зависимость энергии и импульса частицы от ее
массы и скорости определяется совершенно однозначно.
6.2. Кинематический граф
упругого столкновения
Итак, рассмотрим упругое столкновение
двух частиц А и В. Будем исходить из того, что полная
энергия и полный импульс системы из этих двух частиц
в результате столкновения не меняются. Что можно тогда
сказать о расположении в пространстве скоростей точек
В, А' и В', изображающих скорости этих частиц, соот-
ветственно, до и после рассеяния?
Возьмем на отрезке АВ произвольную точку О и по-
смотрим на происходящее из отвечающей ей системы от-
счета О. В этой системе отсчета скорости, а значит, и им-
пульсы частиц А и В противоположно направлены, а их
величины зависят от положения точки О на отрезке.
В частности, если точка О совпадает с концом отрезка А,
то скорость и импульс частицы А относительно системы
отсчета О равны нулю, а импульс частицы В — ненуле-
вой. Если же точка О совпадает с В, то, наоборот, импульс
частицы В в системе О будет равен нулю, а частицы А —
нет. Поэтому, перемещая точку О по отрезку из одного
конца в другой, мы сумеем найти такое положение, для
которого импульсы частиц будут
равны по величине, оставаясь про- fir) д
тивоположными ;по направлению. ,
Полный импульс в соответствую- у г
щей системе отсчета равен нулю, *—
другими словами, это система \
центра масс. Отметим ее на графе <
(см. рис. 6,1). Поскольку полный \
импульс сохраняется при вэаимо-
действиях, в системе центра масс Рис 6 ।
и после столкновения импульсы
частиц А и В будут равны по ве-
личине и противоположно направлены. Отсюда сразу
следует, что отрезок А'В в пространстве скоростей про-
ходит через точку О*
Теперь, пользуясь законом сохранения энергии, мы
докажем равенство длин отрезков О А иОА', ОВ и ОВ'*
Допустим, например, что отрезок ОА' длиннее отрезка
d!9
О А. Это означает, что в результате столкновения скорость
частицы А увеличилась. Следовательно, увеличились ее
энергия и ее импульс. Но импульсы частиц А и В в системе
центра масс равны по величине. Выходит, что импульс
частицы В, а вместе с ним ее скорость и энергия тоже уве-
личились. В итоге получается, что полная энергия системы
возросла, чего не может быть. Так же доказывается, что
отрезок О А' не может быть короче отрезка О А. Поэтому
отрезки О А и О А', ОВ и ОВ' должны быть попарно
равны.
Первый пункт нашего плана выполнен — не зная фор-
мул для энергии и импульса частицы и исходя только из
того, что полная энергия и полный импульс двух частиц
в их системе центра масс сохраняются при упругом столк-
новении, мы установили вид кинематического графа
(рис. 6.1):
в результате упругого столкновения отрезок АВ про-
сто поворачивается вокруг точки О, при этом точка
А переходит в А!, а В — в В! ♦
Угол поворота законами сохранения энергии и импульса
не определяется, он может быть любым.
Обратно:
описанная структура графа автоматически обеспечи-
вает сохранение полной энергии и импульса в системе
центра масс О»
Действительно, из равенства отрезков ОАъОА', ОВ и
ОВ' вытекает, что скорости частиц Л и В в системе центра
масс по величине не меняются. По-
® . д этому и величины энергии и импуль-
са каждой из частиц в системе отсчета
d р\ ° О останутся прежними, независимо
от того, как именно они выражаются
через скорости.
\0 Перейдем теперь из системы цент-
в ра масс в любую другую систему от-
счета S* Ясно, что при вращении
Рис. 6.2.- отрезка АВ вокруг точки О на ки-
нематическом графе (рис. 6.2), т. е.
при изменении угла ср *= 80А, длины а и Ъ отрезков
8 А и 8В будут изменяться. Это значит, что в системе от-
счета S скорости частиц А и В в результате столкнове-
ния меняются не только по направлению; но и по величи-
не. Вместе с ними меняются энергии ЕА и Ец и импульсы
120
рА и рв частиц. Но законы сохранения должны выпол-
няться и в системе 5! И сейчас они вовсе не следуют сами
собой из вида графа. Перед нами встает задача: найти та-
кие формулы для энергии и импульса, которые при всех
вариантах разлета частиц после столкновения, т. е. при
всевозможных значениях угла ср на графе, давали бы оди-
наковые, не зависящие от угла <р, значения полной энер-
гии
Еа + Ев — Е
и полного импульса
Ра + Рв = р.
Последнее равенство — векторное. Его удобно переписать
в проекциях на подходящие оси. Заметим, что вектор пол-
ного импульса р в системе отсчета S направлен вдоль
вектора скорости системы центра масс относительно S3
р || Vo is* Действительно, вектор р не меняется при из-
менении угла <р. Но при <р = 0 точки А и В в пространстве
скоростей лежат на прямой SO. Поэтому при ср = 0 им-
пульсы частиц Л и В в системе 5, всегда направленные по
скоростям частиц, будут коллинеарны вектору Vo\s*
Следовательно, и полный импульс р = рА + Рв колли-
неарен этому вектору. Отсюда вытекает, что проекция
вектора р на направление движения системы центра масс
равна просто величине р полного импульса. В то же время
проекция вектора импульса
частицы Л на это направление
равна pa cos а, где рА — ве-
личина импульса, а а — угол
между скоростями частицы
А и системы отсчета О отно-
сительно S (на графе это угол
A SO ] см. рис; 6.2). Анало-
гично, проекция импульса рв
частицы В на то же направ-
ление ^£авна рв cos 0, где
0 ss BSO. Таким образом,
Ра cos а + рв cos 0 == р (рис»
6.3)» Точно так же полу-
чается уравнение для проекций импульсоь частиц на
направление, перпендикулярное скорости центра масс
(рис. 6.3);
Ра sin а — рв sin 0 = 0.
Окончательно, в системе отсчета S законы сохранения
энерхнии имиульсапри упругом столкновении принимают
121
форму трех уравнений:
ЕА + Ев = Е (Е не зависит от ф)» (6.2)
рА cos а + pBcosP = p (р не зависит от ф), (6.3)
Ра sin а — рв sin [J = 0. (6.4)
Теперь мы должны догадаться, какие комбинации из
масс и скоростей частиц нужно подставить вместо энергий
и импульсов в левые части этих уравнений, чтобы полу-
чить величины, не меняющиеся при вращении отрезка
АВ вокруг точки О, т. е. не зависящие от-ф*
Мы начнем с нерелятивистского случая, когда ответ из-
вестен, и попробуем понять, в чем, так сказать, «геометри-
ческий механизм» постоянства полной энергии и импуль-
са. Потом мы запустим этот же механизм на плоскости
Лобачевского — и, как по волшебству, он выдаст нам це-
лый ворох важных и полезных формул теории относи-
тельности. И среди них, конечно, релятивистские формулы
для энергии и импульса частицы. Только, поскольку наш
«механизм» все-таки геометрический, договоримся выра-
жать энергию и импульс не через скорости частиц А и В,
а через соответствующие . геометрические величины —
2^-расстояния а и 6.
6.3. Нерелятивистский случай
Поскольку скорость частицы в данной си-
стеме отсчета в нерелятивистском случае равна расстоя-
нию между соответствующими точками пространства ско-
ростей, энергии и импульсы частиц А и В в системе S
равны:
2?а = 7ПАа2/2, ра =
Ев = ?пв62/2, рв = твЬ9
где тпа и тв — массы частиц. Проверим, что эти выраже-
ния действительно удовлетворяют условиям (6.2), (6,3)
и (6.4).
Начнем с энергий. Надо доказать, что величина
тпал2/2 + тв&р» не зависит от ф (см. (6.2)). Выразим каждое
слагаемое непосредственно через угол ф и величины, от ф
не зависящие. По теореме косинусов для треугольников
08А и OSB
а2 == ао + d2 — 2a^d cos ф,
62 « + d2 -|- 2bQd cos ф
122
(во втором равенстве мы сделали замену cos (л — <р) на’
—cos ср), где а0, Ьо и d — длины отрезков О А, ОВ и 08
(рис. 6.2). Умножая первое равенство на тпд/2, а второе —
ца тпв/2 и складывая их, получим:
Еа -J- Ев = тАа2/2 тявЬ2/2 — Щдо2/2 -f- твЬц/2 -|-
+ (^д + ^в) <^/2 — (тпда0 — твЪ0) d cos <р. (6.5)
Первые три слагаемых, в пр’авой части не зависят от ср,
а последнее содержит множителем выражение тпда0 —
— твЬ0. Но ведь это разность величин импульсов частиц
в системе их центра масс О, где полный импульс равен ну-
лю! Следовательно, последнее слагаемое равно нулю и
условие (6.2) выполнено. Отметим попутно, что громоздкая
формула (6Ч.5) имеет очень простой смысл. Действительно,
обозначим через Eq полную кинетическую энергию ча-
стиц в системе центра масс: Ео = тАа^/2 + твЪ1/2.
а через М = Ша + тв — их общую массу. Тогда (6.5)
перепишется в виде:
Е = Еа + Ев = Е» + М&12. (6.6)
Это известная теорема Кёнига о кинетической энергии
кинетическая энергия двух частиц в произвольной системе
отсчета равна сумме кинетической энергии их движения
относительно центра масс и кинетической энергии движе-
ния самого центра масс Md?!2 (напомним, d — i?o|S).
Запомним «механизм» вывода закона сохранения энер-
гии: надо записать теоремы косинусов для-треугольни-
ков 08А и OSB, умножить их на соответствующие массы
и сложить.
Перейдем к закону сохранения импульса в проекции
на направление движения центра масс (6.3). Сумма про-
екций импульсов частиц на это направление равна
тпда cos а + твЬ cos р. Ее легко преобразовать с по-
мощью теоремы косинусов для сторон О А и ОВ треуголь-
ников 08А и О8В:
«о = л2 + & — 2 da cos а,
bl == Ь* + d2 - 2 db cos ₽•
Умножим первое равенство на тпд/2, второе на тв12
и сложим:
тдао/2 + тпвЬо/2 == тАа2/2 + твЬ2/2 +
+ (^а + тв) d?/2 — d (тла cos а + твЬ cos Р)*
123
Отсюда
Шал cos а + твЬ cos £ = - -g £'° + Мd
и по теореме Кёнига (6,6) имеем!
Ра сое а + рв cos £ =* Md (6.7)
— проекция полного импульса на направление движе-
ния центра масс не зависит от <р«
Наконец, рассмотрим последнее соотношение (6,4) —
закон сохранения импульса в проекции на направление,
перпендикулярное скорости центра масс. Соответствую-
щая проекция полного импульса равна тпда sin а —
— твЬ sin £. По теореме синусов для треугольников
08 А и О8В имеем:
а sin а = а0 sin <р,
Ь sin Р « Ьо sin (л — <р) » 60 sin ф<
Следовательно,
Ра sin а — рв sin Р тпла0 sin ф — твб0 sin ф
«* (тпАа0 — апв&о) sin Ф (6*8)
поскольку в скобках стоит величина полного импульса
в системе центра масс,
Из формул (6.7) и (6,8) следует, что вектор полного им-
пульса равен произведению полной массы на вектор ско-
рости центра масс:
P = Mvq\b (6.9)
— движение центра масс похоже на движение одной «со-
ставной» частицы с массой М и скоростью Vo\$. Эту ана-
логию можно будет увидеть и в релятивистском случае. По-
следнюю формулу Для полного импульса мы могли бы вы-
вести гораздо быстрее, но ведь нам нужна не сама фор-
мула, а «механизм» ее вывода, который должен работать
и на плоскости Лобачевского! Этот «механизм» — теоремы
косинусов и синусов»
6.4. Энергия и импульс
в теории относительности
Теперь у нас есть схема действий и мы по-
стараемся применить ее в релятивистском случае. Един-
ственное отличие будет в том, что теперь нам придется
пользоваться теоремами синусов и косинусов геометрии
124
релятивистского пространства скоростей — геометрии
Лобачевского, а не геометрии Евклида. Однако кинемати-
ческий граф чертить заново не нужно — можно пользо-
ваться рис. 6.2.
Будем повторять рассуждения предыдущего раздела»
Это нам позволит сначала угадать ответ — формулы для
энергии и импульса, потом проверить его, а затем и дока-
зать, что эти формулы определяются единственным обра-
зом.
Начнем с того, что выразим стороны а и Ъ в треуголь-
никах OS А и OSB (рис. 6.2) по теореме косинусов геомет-
рии Лобачевского (ср. с выводом формулы (6.5)):
ch а = ch aoch d — sh aQ sh d cos ф,
ch b =s ch boch d + sh bQ sh d cos <p* (6.10)
Умножим первое равенство на тА, второе на тв и сложим:
тА ch а + тв ch Ъ = (тА ch а0 + тв ch Ьо) ch d —
— (mAsh а0 — тв sh Ьо) sh d cos <p. (6.11)
Давайте сравним эту формулу с выражением для полной
энергии в нерелятивистском случае (6.5), А чтобы это было
проще, выпишем его еще раз:
тАаЧ2 + тв62/2 = тАа,у2 + твЬу2 + M&I2 -
— (тАа — твЬ) d cos ф*
Аналогия очевидна! Мы видим, что полная энергия двух
релятивистских частиц будет сохраняться при упругом
столкновении, если определить энергию и импульс ча-
стицы следующим образом:
энергия релятивистской частицы X в системе отсчета
S равна произведению ее массы тх на гиперболический ко-
синус расстояния |] SX || = х между точками простран-
ства скоростей^ изображающими скорости системы от-
счета S и частицы Х\
Ех 5=5 тх ch X) (6.12)
импульс частицы X в системе S равен произведению ее
массы на гиперболический синус расстояния ж:
Рх =* тх sh^. * (6ДЗ)
Действительно, при таком определений множитель
mA sh а0 — тв sh 60 перед cos ф в равенстве (6.11) пред-
ставляет собой разность величин импульсов частиц в си-
стеме центра масс и, следовательно, равен нулю» Поэтому
Д25
правая часть этого равенства, а значит, й полная энергия
Е = тА ch а + тв sh Ь не зависят от <р. Более того, для
полной энергии получается выражение, аналогичное не-
релятивистской формуле (6.6):
£=£'ochd, (6Л4)
где Eq = тА cha0 + тв ch 60 — полная энергия двух
частиц в системе центра масс*
Отметим попутно еще одно важное соотношение. Ум-
ножая теорему косинусов (6.10) на массу частицы А, мы
получаем, что
Е — mA ch а — ЕА\о ch d — (ра\о cos ср) sh <?, (6.15)
где ЕА\о — энергия частицы А в системе отсчета О, а
рА\о cos <р — проекция ее импульса на направление дви-
жения системы S относительно О. Эта формула показы-
вает, как преобразуется энергия частицы при переходе из
системы О в систему 5. Мы еще вернемся к этому преобра-
зованию в Приложении.
Отложим пока обсуждение новых определений энер-
гии и импульса — нам надо поскорее удостовериться, что
не только полная энергия, но и полный импульс сохра-
няется при упругих столкновениях.
Проекция полного импульса на направление движе-
ния системы центра масс (6.3) принимает теперь вид
mA sh a cos а + тв sh Ь cos р. Преобразуем эту сумму
так же, как в нерелятивистском случае. Запишем теоре-
му косинусов геометрии Лобачевского для стороны О А
треугольника OSA (рис, 6.2):
ch aQ = ch a ch d — sh a sh d cos a
и умножим это равенство на
mA ch a0 = Еа\о = ch d — рА cos a sh d
(ср. с формулой (6.15)), Аналогично получаем
Ев\о = Ев ch d — рв cos Р sh d.
Складывая эти равенства и выражая из них нужную про-
екцию полного импульса, получим
PaCOs«4-/>b cosP = -^(£chd — Ей) =
= E0^^- = E0shd (6Д6)
126
(мы использовали формулу (6.14) для полной энергии и'
основное гиперболическое тождество ch2 d — sh2 d = 1).
Величина EQ sh d не зависит от угла <р, следовательно,
закон сохранения импульса в проекции на направление
движения центра масс выполняется.
Остается доказать, что проекция полного импульса
на перпендикулярное направление тпд sh a sin а —
— тв sh b sin 0 равна нулю (см. (6.4)). По теореме сину-
сов геометрии Лобачевского для треугольников OSA и
OSB (ср. вывод формулы (6.8)1) имеем:
sh a sin а = sh а0 sin <р, sh b sin 0 « sh Ьо sin <pt
Отсюда получаем:
тд sh a sin а — тв sh b sin 0 —
= (тпд sh а0 — тв sh Ьо) sin ф = О, (6.17)
так как в скобках стоит величина полного импульса в си-
стеме центра масс.
Придирчивому читателю полученные нами формулы
для энергии и импульса могут показаться недостаточно
обоснованными. Ведь мы их просто угадали. И где гаран-
тия, что нельзя написать другие формулы, для которых то-
же были бы справедливы условия (6.2), (6.3) и (6.4),—
законы сохранения энергии и импульса при упругом столк-
новении? Ответ заключен в самих этих законах. Возь-
мем, например, импульс. Как бы он ни был определен,
закон сохранения полного импульса двух частиц в про-
екции на направление, перпендикулярное вектору ско-
рости их центра маце, требует, чтобы эта проекция равня-
лась нулю (уравнение (6.4)), т. е.
Ра sin а = рв sin 0,
где Ра и рв — импульсы частиц/ а а и 0 — углы между их
скоростями и скоростью центра масс. В то же время, со-
гласно (6.17),
тд sh a sin а = тв sh Ь sin 0.
Разделив первое равенство на второе, получим
Ра = Рв
тА sh а тв sh Ъ
Импульс частицы должен полностью определяться ее мас-
сой и скоростью, поэтому левая часть здесь зависит толь-
ко от тд и а (скорость частицы А равна th а), а правая —
127
только от тв и Ь, Можно зафиксировать массу и скорость
частицы В, т. е. тв и &, и произвольно менять массу и
скорость частицы А, При этом отношение Ра1шд sh а
должно оставаться постоянным. Следовательно, рд =*
= ктд sh а, где к — постоянная, не зависящая от ско*
рости и массы частицы» Из одних только законов сохра-
нения постоянную fc, конечно, определись нельзя. Но мы
хотим, чтобы в нерелятивистском пределе (при малой по
сравнению со скоростью света скорости и движения час-
тицы) импульс приобретал обычный вид Ра = гпду. Для
этого надо положить к = 1, потому что при и 1 v ~ а ~
sh а.
Аналогично обстоит дело с энергией. Формально закон
сохранения энергии не нарушится, если вычислять ее как
krm ch а + &2, где кг и к2 — произвольные постоянные *)•
Посмотрим, однако, что дает нам формула E = mcha
в нерелятивистском пределе:
Е = т ch a^m(i + а2/2) » т + тм2!2
(напомним, что ch а 1 + а2/2). Отсюда видно, что мно-
житель в этой формуле изменить нельзя, если мы хотим
сохранить правильную зависимость кинетической энер-
гии от скорости в нерелятивистском пределе, т. е. кг = 1«
И прибавка к кинетической энергии — масса частицы
т — появилась у нас не случайно. Найдем релятивист-
скую энергию покоящейся частицы: Ео = т ch 0 = тп.
Это так называемая энергия покоя] в нашей системе еди-
ниД она раЛа массе частицы. В релятивистской физике,
где возможны превращения одних частиц в другие, закон
сохранения энергии обязывает нас учитывать энергию
покоя в составе полной энергии. Поэтому в формуле £ =**
= т ch а ни прибавить, ни отнять ничего нельзя, даже
если баланс энергии при упругих соударениях и не нару-
шился бы при этом. Это подтверждается многочисленны-
ми экспериментами, например, распадом л°-мезона, о ко-
тором рассказывалось в разделе 5.5. Энергия покоя л°-
мезона при этом распаде целиком переходит в энергию
у-квантов.
Теперь можно по-новому взглянуть на формулу для
полной энергии двух частиц (6.14):
Е = Eq ch d
*) Более того, как и в случае импульса, можно доказать, что
выражение для энергии обязано иметь именно такой вед (смл допол-
нение 6.2 в конце главы).
128
и их полного импульса (6.16):
Р = Ра cos а + рв cos Р = Ео sh d (6.18)
(полный импульс совпадает по величине с его проекцией
на направление движения центра масс, потому что вто-
рая его проекция равна нулю). Из этих формул видно, что
движение пары частиц с точки зрения их энергии и им-
пульса можно рассматривать как движение воображае-
мой «составной» частицы со скоростью v = Vo\s = th
причем масса М этой «составной» частицы равна Е9 —
суммарной энергии пары частиц в системе их центра масс.
Полная энергия и полный импульс пары частиц равны
энергии и импульсу «составной» частицы. Концы с конца-
ми прекрасно сошлись: энергия одной частицы в ее систе-
ме центра масс — энергия покоя — равна ее массе, а «об-
щая масса» М пары частиц равна их полной энергии в си-
стеме их центра масс. Энергия = массе и, наоборот, мас-
са = энергии]
Отметим еще одно важное обстоятельство. Из вывода
выражений для, полной энергии и полного импульса вид-
но, что законы сохранения релятивистской энергии и им-
пульса тесно связаны друге другом. Например, сохранение
полного импульса в произвольной системе отсчета S воз-
можно только одновременно с сохранением энергии (со-
отношение (6.16)); в свою очередь, для сохранения энер-
гии необходимо, чтобы сохранялся полный импульс в си-
стеме центра масс (соотношение (6.11)). Эти законы просто
не могут выполняться друг без друга, они объединяются
в единый релятивистский закон сохранения энергии-им-
пульса.
Подведем итог. Если релятивистская частица массы
т движется относительно
= th а, то ее импульс р == т sh а, а энергия Е = т ch а9
Полезно иметь выражения импульса и энергии и непосред-
ственно через скорость частицы. Вспоминая, Ито sh a =s
= th alyf 1 — th2fl, a ch a = 1/y 1 — th2a, получим:
p ——• r... , ht — r
V\~vl ft— V*
Когда скорость частицы приближается к скорости света
(v -> 1)', ее импульс и энергия неограниченно растут.
Но реально они всегда остаются конечными, поэтому
частица, обладающая ненулевой массой покоя т, никогда
не сможет двигаться со скоростью света, хотя ее можно
5 В. Н, Дубровский и др. 129
наблюдателя со скоростью и =*
(6.19)
разогнать до скорости, сколь угодно близкой к с. Напри-
мер, на ускорителе в Батавии (США), одном из самых
мощных на сегодня, протоны ускоряются до энергии
Е = 500 ГэВ ♦). Масса покоя одного протона- т
~ 1 ГэВ. Пользуясь формулой (6.19), можно прикинуть
скорость протонов в этом ускорителе: она достигает ве-
личины v ~ 0,999 998 скорости света.
В разных инерциальных системах отсчета значения
энергии и импульса одной и той же частицы будут, конечно,
различными. Однако они связаны друг с другом очень важ-
ным соотношением: если вычесть из квадрата энергии
квадрат импульса, то получится величина, одинаковая для
tcex инерциальных наблюдателей — квадрат массы ча-
•тицы:
Е2 — р2 = тп2 ch2 а — zn2sh2 а = т2 (ch2 а — sh2 а) — т2-1<
Таким образом,
Е2 - р2 = т2. (6.20)
Величины, не изменяющиеся при переходе из одной инер-
циальной системы отсчета в другую, называются реляти-
вистскими инвариантами. Мы вернемся к ним в Прило-
жении. Вскоре мы познакомимся с некоторыми приме-
нениями фундаментальной формулы (6.20) в эксперимен-
тальной физике.'
Релятивистские выражения для энергии и импульса
мы вывели, опираясь на законы сохранения. Поэтому
может возникнуть сомнение в ценности самих этих зако-
нов — стоит ли удивляться тому, что они выполняются,
если мы определили энергию и импульс так, чтобы они
выполнялись! Но в наших рассуждениях рассматривался
только очень частный вид взаимодействия частиц — упру-
гое столкновение, при котором «индивидуальность» взаимо-
действующих частиц (их масса, заряд и другие внут-
ренние характеристики) остается прежней, а меняются
только их энергии и импульед. Теперь же мы собираемся
распространить законы сохранения на все встречающиеся
взаимодействия! Такой способ рассуждения весьма типи-
чен для современной физики и науки вообще. Исследуя
*) 1 ГэВ = 109 эВ (электронвольт), 1 эВ — энергия, которую
приобретает частица с зарядом, равным заряду электрона, пройдя
разность потенциалов в 1 вольт. В экспериментальной физике массу
частицы принято выражать в энергетических единицах =- элек-
тронвольтах,
130
один круг явлений (например, упругое рассеяние), мы
выводим какие-то закономерности (законы сохранения
энергии и импульса), придаем им более общий характер
и затем пытаемся перенести их на другой круг явлений
(например, на рождения и распады релятивистских ча-
стиц или на их взаимные превращения). И, как правило,
природа идет нам навстречу — многие предсказания под-
тверждаются экспериментом. Так и происходят открытия
«па кончике пера».
6.5. Распад и рождение
релятивистских частиц
Выпишем еще раз выражения для полного
импульса и полной энергии пары частиц А и В в системе
отсчета , S (см. (6.14), (6.18) и (6.19)):
Ра + Рв =Р = Mvlyf 1 — V2, плч
____ (6.21)
ЕА + EB=E^Miy\-v\
где v = — скорость движения системы центра масс
частиц А и В относительно системы 5, а М — «эквива-
лентная масса» двух частиц, равная их суммарной энер-
гии Ео в системе центра масс. Слева в (6.21) могут стоять
суммы импульсов и энергий двух частиц как до, так и
после упругого рассеяния — в этом проявляются законы
сохранения импульса и энергии. Но формулы (6.21) мож-
но прочитать и иначе. Вообразим себе релятивистскую
частицу массы М, которая движется со скоростью и в си-
стеме отсчета S (ее импульс и энергия равны, соответствен-
но, р и Е), а затем распадается на две частицы А и В
с массами тА 1\тв, импульсами рА и рв и энергиями ЕА
и Ев. Согласно (6.21) релятивистские законы сохранения
энергии и импульса в этом гипотетическом процессе нару-
шаться не будут! И это не только гипотеза. Как показы-
вают эксперименты, огромное количество элементарных
частиц действительно нестабильно (они живут короткое
время, а затем самопроизвольно распадаются на другие
частицы), и в каждом процессе распада выполняются ре-
лятивистские законы сохранения энергии и импульса
(при этом сумма масс покоя продуктов распада всегда
меньше массы покоя распавшейся частицы: М = EQ
= тА ch а + тв ch & > тА + mB, так как ch х 1).
Как же обнаружить эту частицу, при помощи каких
«весов» можно измерить ее массу, если время ее жизни
5* 131
составляет обычно всего 10 “33 — 10 ~23 с? Даже если
она мчится со скоростью света, за это время она успеет
пролететь только ~10“2 — 10“12 см, и обнаружить ее след
па фотографии практически невозможно] Ключевую роль
здесь играет формула (6.20), недаром мы выделили ее
в рамку. Нужно измерить энергию частицы Е — для
этого можно, воспользовавшись законом сохранения
энергии, просуммировать энергии частиц — продуктов
Рис. 6.4.
распада. Аналогично, воспользовавшись законом сохра-
нения импульса, можно измерить ее импульс /?, сложив
по правилу параллелограмма импульсы всех продуктов
распада.. Останется только воспользоваться формулой
(6,20). Если для большого числа экспериментальных дан-
ных значения Е2 — р2 * будут скапливаться около опре-
деленной величины тп2, то можно предполагать, что
в некоторой реакции действительно рождалась и быстро рас-
падалась частица (или так называемый «резонанс») с мас-
сой т. Если же разброс значений Е2 — р2 в изучаемой се-
рии экспериментов велик, то почти наверняка происхож-
дение наблюдаемых частиц не связано с распадом неких
недолго проживших частиц-«ро дител ей». Результаты та-
кой серии экспериментов изображают на специальном гра-
фике, так называемой гистограмме (рис. 6.4). По оси
абсцисс откладывают значение т2 = Е2 — р2, а по оси ор-
динат — число событий, при которых наблюдалось опре-
деленное значение т. На рис. 6.4; а изображена гисто-
грамма в случае, когда распавшаяся частица с массой mQ
действительно имелась, на рис. 6.4, б — результаты ре-
акции, в которой такой промежуточной частицы, по-ви-
димому, не было.
Раз частицы могут распадаться, то естественно предпо-
ложить, что возможен и обратный процесс, также не про-
132
тиворечащий законам сохранения энергии и импульса
(6.21),— процесс рождения, когда при столкновении двух
частиц А и В с массами тА и тв, импульсами рА и рв
и энергиями Еа и Ев образуется новая частица с массой
М > тА + тв, импульсом р и энергией Е. Не следует
думать, однако, что такая частица появляется обязатель-
но для каждого такого значения массы М. Если частицы
с массой М нет в природе, то она и не родится при столк-
новении. Законы сохранения энергии и импульса лишь
не запрещают ее возможного появления. Если такая ча-
стица действительно существует, и в предполагаемой ре-
акции ее рождения не будут нарушены другие законы сох-
ранения (например, законы сохранения электрического
заряда, барионного числа и др.), то она, как правило,
в этой реакции рождается (при условии, конечно, что
энергии сталкивающихся частиц достаточно для ее рожде-
ния). Вычислим величину возможной массы М этой гипо-
тетической частицы. Воспользуемся соотношением (6.20)
и законами сохранения энергии и импульса:
М2 = Е2 — р2 = (Ед + Ев)а ~ (Ра + рв)2 =
= Ед 4- Ев + %ЕаЕв —Ра — Рв — %РаРв
« (Е2а — рА) + (Ер — рв) + 2ЕдЕв —- %РаРв cos # =»
— тА + т2в + 2 (ЕаЕв — РаРв cos О'),
где через О' обозначен угол между векторами импульсов
частиц рА и рв*
Наибольший практический интерес представляет собой
частный случай этой формулы, когда одна из частиц (части-
ца мишени А) покоится в лабораторной системе отсчета
(рд = 0, Ед = тд), а другая частица (В) вылетает из ус-
корителя с энергией Ев и сталкивается с мишенью. В этом
случае получаем:
М2 = тА + тв •+ 2тАЕв.
Для медленных частиц- Ев тв, поэтому М2 = тд +
+ тв + 2тАтв = (тд + тв)2 — приближенно выпол-
няется закон сложения масс. В современных же ускори-
телях энергия частиц пучца обычно много больше масс
покоя (Ев ~ 100 ГэВ, mA, тв ~ 1 ГэВ), поэтому с хорошей
точностью
М у2тАЕв.
433
На рис» 6.5 показан вид этой зависимости в случае протон-
протонщлх столкновений. Из графика видно, что энергия
обычного ускорителя распределяется достаточно неэффек-
тивно — на создание «массы покоя» новых частиц уходит
сравнительно небольшая доля У2т^Ев полной энергии
Ев, остальная энергия в общем-то тратится впустую -*
она переходит в энергию поступательного движения обра-
зовавшейся частицы. Например, в Серпуховском уско-
рителе (70 ГэВ) полезно расходуется лишь около 12 ГэВ
(М~12 ГэВ), в крупном
современном ускорителе в Ба-
тавии (500 ГэВ) на создание
новой массц покоя М идет
только 30 ГэВ.
Очевидно, чтобы избавить-
ся от этих непроизводитель-
ных затрат, нужно сделать
так, чтобы образовавшаяся
частица не двигалась после
своего рождения. Эту пробле-
му решают ускорители на
встречных пучках, в которых
сталкивающиеся частицы движутся навстречу друг другу
с одинаковыми импульсами. Импульс образовавшейся прг
встречном столкновении частицы будет равен нулю, и вся
энергия налетевших частиц может полностью перейти
в энергию покоя, т. е. в массу М = Ео новых частиц. Два
встречных пучка по 70 ГэВ были бы эквивалентны одному
ускорителю на энергию Е = М2/2т 10 000 ГэВ! Од-
нако здесь есть и свои трудности. Обычно из ускорителя
вылетает пучок, содержащий сравнительно небольшое по
макроскопическим масштабам число частиц. Он сталки-
вается с покоящейся мишенью, содержащей огромное —
макроскопически большое — число частиц, например,
с протонами в жидководородной пузырьковой камере«
Одновременно происходит множество актов столкновений,
результаты которых фиксируются нашими приборами.
Благодаря этому удается зарегистрировать даже про*
цессы, происходящие чрезвычайно редко,— а они бывают
самыми интересными. Напротив, во встречном пучке
плотность частиц невелика, столкновения происходят не-
часто, их приходится долго ждать. Выигрывая в энергии,
мы проигрываем во времени наблюдения. Тем не менее
ускорители на встречных пучках уже сейчас работают
в Новосибирске, Женеве и США, строятся и проекти-
134
руются новые ускорители и повышающие их эффектив-
ность накопительные кольца, в том числе и в Серпухове
на энергию порядка 3000 ГэВ. Встречные пучки с энер-
гией 3000 ГэВ эквивалентны] обычному ускорителю про-
тонов с покоящейся мишенью, энергия частиц в котором
должна была бы равняться 4500 000 ГэВ1 *).
Эту главу хочется закончить следующим замечанием.
Мы выводили выражения для энергии и импульса реля-
тивистских и нерелятивистских частиц, используя свой-
ства кинематического графа упругих столкновений и тео-
ремы синусов и косинусов геометрии Лобачевского и гео-
метрии Евклида. Все эти рассуждения можно почти дос^
ловно перенести и на воображаемый случай сферической
геометрии пространства скоростей. Быть может, природа
где-то использует и эту возможность, и в некотором гипо-
тетическом мире гипотетических «сферонов» при столк-
новениях частиц выполняются законы сохранения энер-
гии и импульса, но энергия и импульс этих странных ча-
стиц связаны между собой соотношением Е2 + р2 =₽- т\
Мы хотим предоставить читателям редчайшую возмож-
ность самостоятельно развить новую теорию — механику,,
сличающуюся от механики Ньютона и Эйнштейна. По-
пробуйте шаг за шагом установить все основные формулы
и следствия этой «воображаемой механики».
Задачи и дополнения
1. Преобразование импульса при переходе в новую
систему отсчета. Найдите составляющую импульса частицы А в
системе отсчета S, цараллельную направлению движения системы
отсчета О, если известны: такая же составляющая импульса и энер-
гия частицы А в системе О и скорость системы О относительно У,
А каи изменяется перпендикулярная составляющая импульса?
(Ответ и подробное обсуждение можно найти в Приложении.
Формулу преобразования энергии мы вывели выше — см. (6.15).)
2. Релятивистская энергия частицы. В разделе 6.4 с помощью
кинематического графа из сохранения полного импульса при упру-
гом столкновении в системе S мы вывели, что импульс частицы А
массы тА, движущейся со скоростью vA\S = th а, обязан иметь вид
ктА sh а, и показали, что к = 1. Как доказать аналогичное утвер-
ждение для энергии?
Указание. Пусть частица А упруго сталкивается с части-
цей В массы скорость которой равна г B|S = th Ъ (см. рис. 6.2),
;; ) В ЦЕРНе (Женева) сейчас работает,ускоритель на встречных
протон-антипротонных пучках с суммарной энергией £0 = 270 ф?
+ 270 = 540 ГэВ. Эквивалентная этому энергия обычного уско-
рителя равна 146 000 ГэВ*
183
Энергия частицы определяется ее массой и скоростью, поэтому мояг
Но считать, что энергия ЕА частицы А равна /А (ch а), а £в =а
<== /B(ch Ь), где fA (л) и /в (х) - какие-то функции (индексы А и В
указывают на зависимость этих функций от масс частиц), Сумма
fA (ch а) -{- /в (ch В) » Е это сохраняющаяся полная^ энергия
системы. Выразите в этом равенстве ch а и ch & через угол <р и не
зависящие от него отрезки а6, &0, d (см. рис. 6.2) и продифференци-
руйте его по ф. Покажите, что при любых а и b fA (ch а) : /в (ch b) ш
== тА : тв. Выведите отсюда, что энергия частицы массы т при
скорости движения v = th х равна к^тп ch х + кТ
3. Нерелятивистский случай. Пользуясь кинематическим графом
упругого столкновения и законами сохранения, докажите, что в
нерелятивистском случае р = kmv, Е == к^ти* 4е к^
1 2? 4- р
4 Докажите формулу а == у In где Яир энергий и
импульс частицы, движущейся со скоростью v = th а,
ГЛАВА 7
КИНЕМАТИКА СТОЛКНОВЕНИЙ
РЕЛЯТИВИСТСКИХ ЧАСТИЦ.
ФОТОНЫ
Все* что мы знаем сейчас об элементарны!
частицах^— это результат напряженной работы экспери-
ментаторов и теоретиков,, изучающих столкновения ча-
стиц высоких энергий у во многих лабораториях мира.
Здесь мы не можем подробно останавливаться на том, как
именно это делается* хотя рассказ об этом мог бы быть
захватывающим и интересным *). Наша цель более про-
ста — познакомиться только с основными понятиями ре-
лятивистской кинематики* с законами сохранения энер-
гии-импульса и освоить язык кинематических графов
в релятивистском пространстве скоростей. Этот язык
привлекает как геометрической наглядностью, так и своей
универсальностью — он автоматически учитывает законы
сохранения энергии и импульса в произвольной системе
отсчета. Чтобы лучше овладеть им, ^мы рассмотрим не-
сколько классических задач релятивистской теории столк-
новений.
7.1. Упругое рассеяние частиц
одинаковой массы
На рис. 7.1 приведена фотография, сделан-
ная в камере Вильсона: быстрый электрен* летящий слева,
рассеивается на покоящемся электроне. Следы частиц,
участвующих в столкновении, видны на фотографии
в виде цепочки капелек сконденсировавшегося пара. Эти
следы носят название треков**). Обратите внимание на
угол между треками рассеянного электрона и электрона
отдачи, т.е. угол* под которым разлетаются электроны после
♦) Можно указать, например, на книги, уже вышедшие в серии
«Библиотечка «Квант»: Копылов Г.И. Всего лишь кинемати-
ка. Вып. 11; Б о р о в о й А. А. Как регистрируют частицы.
Вып. 15.
♦*) Искривление треков обусловлено магнитным полем, с по-
мощью которого определялись импульсы электронов,
137
столкновения. Он значительно отличается от прямого,
что полностью противоречит предсказаниям, сделанным
нами в гл. 1 для рассеяния нерелятивистских частиц.
Попробуем объяснить это явление -и попутно вычислим
скорость, с которой двигался налетавший электрон.
Рис. 7.1.
Рис. 7.2.
Построим в пространстве скоростей кинематический
граф, отвечающий этому процессу (рис. 7.2). Точками А
и В изображаются скорости электронов до столкновения^
точками А' и В' — их скоро-
сти после рассеяния. Массы
частиц одинаковы, поэтому то-
чка О, отвечающая системе
центра масс, является середи-
ной обоих отрезков АВ и
АВ’ Так как язык кинема-
тических графов автомати-
чески учитывает законы сох-
ранения энергии и импульса,
то нам остается совсем нем-
ного — установить соответст-
вие между графом и тем, что мы видим и можем измерить
на фотографии. Другими словами, на графе нужно выб-
рать точку, отвечающую лабораторной системе отсчета,
в которой была сделана фотография. Выбор очевиден,
ибо один из электронов, скажем электрон А, до столкнове-
ния покоился в лабораторной системе. Соединив точку
А на графе прямыми с точками А! и мы получим еле-
138
дующие три угла (рис. 7.2) : -О* s= BAB1 — угол рассеяния
в лабораторной системе Л , а = А*АВ — угол отдачи^
под которым вылетает покоившийся электрон^ и р =»
«= А'АВ' = а + *& — угол разлета^ т. е; угол между
направлениями скоростей электронов после столкнове-
ния, равный углу между их треками на фотографии. Те-
перь слово за геометрией.
Чтобы вычислить угол разлета р » а + найдемл
кг к связан каждый из углов а и О по отдельности с углом
рассеяния ф — ВОВ1 в системе центра масс. Связь между
углами рассеяния Ф и ф в этих двух системах отсчета —
лабораторной и системе центра масс — полезна и сама
по себе. Дело в том, что для теоретических расчетов удоб-
нее система центра масс, а эксперименты ставятся в лабо-
раторной системе, где покоится мишеньт а потому прихо-
дится пересчитывать формулы из первой системы во вто-
рую. Вывести зависимость между # и ф совсем легко. Из
точки О опустим перпендикуляр ОВ на прямую АВ\
В прямоугольном треугольнике АОВ угол ==
а угол АО В =1/2 AOBf х/з (л — ф), потому что, как
и в евклидовой геометрии, высота ОВ равнобедренного
треугольника АОВ' в пространстве скоростей совпадает
с его биссектрисой. (Это видно из соображений симметрии;
строгое доказательство проведите самостоятельно.) За-
пишем теперь соотношение (5.13) геометрии Лобачевского
между гипотенузой || АО || = а треугольника АОВ и при-
лежащими к пей углами:
ctg 'ftctg —= ch а, т. е. tg # = tg , (7.1)
где = 2т ch а — суммарная энергия частиц в системе
центра масс. Точно так же вычисляется угол отдачи а.
Опуская из точки О высоту треугольника АОА\ найдеМ|
что
ctg a ctg — = ch а, т. е. tga= ctg-j- . (7.2)
В нерелятивистском пределе, когда Ео 2т£ формулы
(7.1) и (7.2) приводят нас к уже известному по гл. 1 резуль-
тату: tg ft — tg ф/2, tg а = ctg ф/2, т. е.
О = <р/2,- а = п/2 — ф/2.
Угол разлета частиц будет в этом случае прямым* [3 s=s
s= а + Ф ?= л/2. Этот факт можно объяснить и по-дру-
139
тому. В равнобедренных треугольниках AOAS и АОВ'
углы при основаниях равны, т. е. = бАА' == а,
бвга = олЬ' » О. Следовательно, угол р - а + О
равен половине суммы всех углов треугольника АА’В\
Это верно и в нерелятивистском, и в релятивистском слу-
чае. Но в первом случае геометрия пространства скоростей
евклидова, сумма углов треугольника равна л и угол раз-
лета всегда прямой. Во втором ясе случае действуют за-
коны геометрии Лобачевского, сумма углов треугольника
меньше л и угол разлета частиц должен быть меньше пря-
мого, что прекрасно видно на фотографии (рис. 7.1). Так
что ее можно рассматривать как прямое эксперименталь-
ное подтверждение неевклидовости геометрии релятиви-
стского пространства скоростей!
Исследуем поведение угла (3 при существенно реляти-
вистском столкновении более детально. В формулу для
котангенса суммы а и О:
ctg р = ctg (а + •&) =
tg иь -"Г* tg и
подставим выражения для tg а и tgO из (7.1) и (7.2)5
CtgP
1 - (2m/£0)» i / Ео 2т \ _
„ / <р <р\~2\2т Ео )S1D
(2m/£o)^t,g — + ctg -уJ
(7.3)
Если угол ф мал, то в лабораторной системе быстрая части-
ца тоже рассеивается на небольшой угол О (см. (7.1))f
точки А и А1 на графе близки друг к другу и частица от-
дачи А? движется почти перпендикулярно к направлению
движения налетающей частицы В. Здесь мы имеем дело
с практически нерелятивистским случаем, ибо ctg [5 О
и р ж л/2. С увеличением угла ф правая часть равенства
(7.3) возрастает, а угол разлета |3 убывает и достигает свое-
го наименьшего значения при ф = л/2. При этом в лабора-
торной системе частицы разлетаются симметрично отно-
сительно направления движения налетающего электрона.
Как раз такой случай и зафиксирован на фотографии
(рис. 7.1). Минимальный угол разлета ртщ определяется
любой из двух эквивалентных формул:
ctg Pmin — ~(~2^ ёг) Я™ et? 2~ ~ ~2т ’
На рис. 7.3 мы построили график зависимости pmln от от*
440
ношения Z?0/2m, где Ео — энергия двух частиц в системе
их центра масс. При симметричном рассеянии в ультра-
релятивистском пределе
(Ео 2т) угол разлета |Jmin
стремится к нулю. На нашей
фотографии угол р равен при-
мерно 55°, EQ/2m ?= cha ==
= 2,17. Расстояние а между
точками О и А найдем с по-
мощью формул (7.4), оно рав-
но 1,41. Теперь мы можем
вычислить скорость налетаю-
щего электрона в лаборатор-
ной системе: v — th 2а s= 0^
Рис. 7.3.
. Она оказывается равной
0^887с — электрон действительно релятивистский.
7.2. Упругое рассеяние тяжелой частицы
на покоящейся легкой
Эта задача уже знакома нам по гл. 1^ посвя-
щенной нерелятивистской кинематике. Там мы устано-
вили, что налетающая тяжелая частица не может рассе-
яться на слишком большой угол, в этом случае существу-
ет максимальный угол рассеяния, который определяется
отношением масс двух стал-
кивающихся частиц: sin'O'max»
тл/шв* Что же изменит-
ся в релятивистском случае^
когда скорость налетающей
тяжелой частицы В сравнима
со скоростью света? Постро-
им в пространстве скоростей
кинематический граф этого
процесса (рис. 7.4). Скорость
центра масс сталкивающихся
частиц будет изображаться
точкой О, положение которой на отрезке JLB определяется
релятивистским правилом рычага гпдзЬ а = тв sh b. Точ-
ки Б!, изображающие возможные скорости рассеянной
тяжелой частицы, располагаются на окружности радиуса
Ь с центром в точке О. Лабораторной системе отсчета^
в которой покоилась легкая частица мишени Л , отвечает
на графе точка А. Она лежит вне окружности, ибо, как
следует из правила рычага^ || О А |] » а Ь. Поэтому
угол рассеяния й тяжелой частицы в лабораторной си-
141
стеме€ т. е. угол ВАВ' на графе, не может быть слишком
большим —- его максимальное значение достигается тогда,
когда прямая АВ' касается окружности (докажите это,
пользуясь теоремой синусов геометрии Лобачевского).
В этом случае треугольник АВ*О — прямоугольный^ и для
пего можно записать соотношение (5.10),; выражающее ка-
тет || ОВ' |] a* b через гипотенузу (| О А | =з в и противо-
лежащий угол А = ^тах*
sh Ь ® sh a sin Отах*
Согласно релятивистскому «правилу рычага» sh Ь : sh а =»
е= тА : твч поэтому мы получаем точно ту же фор-
мулу для 'Отах» что и в нерелятивистском случае;
sin “Отах = sh Ь/sh а = шл/тз
— в лабораторной системе максимальный угол рассеяния
тяжелой частицы на легкой зависит только от отношения
их масс и не зависит от энергий. Измеряя максимальный
угол в достаточно большой серии экспериментов, в принци-
пе, можно определить массу тяжелых рассеивающих час-
тиц, так как масса частиц мишени нам-обычно известна,
7.3. Упругое рассеяние легкой
релятивистской частицы
на покоящейся тяжелой
Этот процесс мы рассмотрим более подробно,
причем постараемся выяснить, как меняется энергия час-
тиц при рассеянии. Впоследствии это позволит нам обсу-
дить один из важнейших физических экспериментов —
опыт Комптона по рассеянию рентгеновского излучения
в веществе'.
Схема эксперимента выглядит примерно так: пучок
частиц с определенной энергией Е рассеивается на мише-
ни и измеряется распределение рассеянных частиц по
энергиям Е' при различных заданных углах рассеяния
в*. Найдем зависимость Е' от й при упругохм столкновении
легкой частицы с тяжелой. Кинематический граф этого
процесса приведен на рис. 7.5. Точка* А соответствует тя-
желой частпЦе с массой тА = Л/, покоящейся в лабора-
торной системе, точка В изображает скорость налетаю-
щей легкой частицы массы тз = т, а точка В' — ее ско-
рость после рассеяния. Обозначим* через с длины равных
между собой отрезков АВ и А' В', через с1 и d — длины
142
отрезков АВ' и ВВ' соответственно. Тогда энергия легкой
частицы до рассеяния равна Е т ch || АВ || — т ch
а после рассеяния равна £'=
= т ch || АВ' || = т ch с . Вос-
пользуемся тем, что закон со-
хранения энергии справедлив
в любой системе отсчета. Удоб-
нее всего взять систему покоя
В’ легкой частицы после рас-
сеяния, где этот закон прини-
мает вид т ch || В'В (I +
+ М ch || В' А || = т +
4- М ch || В' А' || (напомним, что
энергия покоя легкой частицы равна ее массе тп),
т ch d 4" М ch с = т 4“ М ch с9
т. е,
(7.5)
Найдем зависимость от угла рассеяния О = ВАВ' пер-
вого слагаемого в левой части щ Ch d. Выразим его с по-
мощью теоремы косинусов для треугольника АВВ'ъ
ch d « ch с ch с — sh с sh с' cos О =
= ch с ch с (1 — th с th с' cos О).
Теперь вспомним, что th с = v и th с' = и' — это скорости
легкой частицы, а т ch с = Е и т, ch с’ = Е’ — ее энер-
гии до и после рассеяния в лабораторной системе, и,
следовательно,
ch d = — — (1 — vv' cos О).
m m v '
Йодставляя это выражение в закон сохранения энергии
(7.5), мы получим окончательную формулу, связывающую
начальную и конечную энергии налетавшей частицы с
углом ее рассеяния
М (Е - Е'} = ЕЕ' (1 - vv' cos О) - (7.6)
Опа представляет наибольший интерес в ультрареля-
тивистском, пределе, когда энергия Ег а значит и мно-
го больше массы покоя легкой частицы: Е3 Е' т. Ее
скорость до и после рассеяния в этом случае очень близ-
ка к скорости света, v ~ 1А v' ~ 1А кроме того4 в правой
части (7.6) можно пренебречь квадратом массы т2 по срав-
нению с первым членом, содержащим произведение ЕЕ'.
В результате мы получим простое соотношение4 которое
известно как формула Комптона:
М (Е - Е') = ЕЕ' (1 - cos ft). (7.7)
143
7А. Эффект Комптона. Фотоны
Частота рассеянных-фотонов
Рис* 7*6,
В 1923 г. Артур Комптон, наблюдая рассея-
ние рентгеновских лучей на графитовой мишени, обнару-
жил, что часть рассеянного излучения имеет частоту v'e
меньшую, чем частота v падаю-
щего пучка. С точки зрения
классической теории этого эф-
фекта быть не должно. Она объ-
ясняла рассеяние любого элек-
тромагнитного излучения сле-
дующим образом. Переменное
электрическое поле падающей
волны действует на легкие за-
ряженные частицы — электро-
ны, всегда имеющиеся в веще-
стве, и заставляет их совер-
шать вынужденные колебания
с частотой, равной частоте па-
дающей волны. Колеблющиеся
электроны в свою очередь излу-
чают «рассеянную» электромаг-
нитную волну, частота которой
совпадает с частотой колеба-
ний излучающего электрона,
т. е. с частотой первоначальной
волны.
Давайте теперь посмотрим на
результаты измерений проде-
ланных Комптоном. На рис. 7.6
представлены графики зависи-
мости интенсивности рассеян-
ного излучения от его частоты
при четырех значениях угла
рассеяния О. Правый пик на
этих графиках отвечает частоте
падающего рентгеновского из-
лучения v, но при углах рас-
сеяния, отличных от нуля, по-
является второй пик интен-
сивностид максимум которого приходится на меньшую
частоту причем с увеличением угла рассеяния этот пик
смещается в область меньших частот.
Эти результаты находились в очевидном противоречии
с классическими взглядами на электромагнитное излуче-
144
ние и его взаимодействие с веществом. Выход был найден
в синтезе релятивистской механики и квантовых идей.
Еще в работах М. Планка об излучении черного тела
(1900 г.) и А. Эйнштейна о фотоэффекте (1905 г.) было по-
казано, что электромагнитное излучение необходимо при-
знать состоящим из отдельных порций — квантов, или
фотонов, которые обладают вполне определенной энер-
гией добычи = Av *) и движутся со скоростью, равной
скорости света (собственно, они и есть свет). Представле-
ние об электромагнитном излучении как о потоке час-
тиц — фотонов позволяет легко дать качественное объяс-
нение результатов Комптона. В самом деле, каждый квант
рентгеновского излучения (фотон) может столкнуться со
\ свободным или слабо связанным электроном в веществе z
мишени. В результате фотон рассеется на какой-то угол
О, и его энергия, а с ней и частота уменьшатся, так как
часть первоначальной энергии налетающего фотона будет
унесена электроном отдачи. Эти качественные рассужде-
ния нужно подкрепить и количественным расчетом. Как
же его провести, если все полученные нами до сих пор
формулы относились к «обычным» частицам, движущимся
с досветовой скоростью? Можно попытаться перейти в них
к пределу, устремляя соответствующие скорости к ско-
рости света. Но даже с чисто формальной стороны это
удается далеко не всегда. Уже самые основные формулы^
определяющие энергию и импульс релятивистской час-
тицых
Е = т ch а = » »
V1 —
(7.8)
* nw
p = msha== ----------
/1 -
теряют смысл для фотонов и, вообще, любых частиц, дви-
жущихся со скоростью света: при и = 1 они дают беско-
нечные значения энергии и импульса. Чтобы спасти по-
ложение, необходимо считать массу фотона т равной ну-
лю. Но и это мало помогает, потому что при т —> 0, v —> 1
в формулах (7.8) возникает неопределенность — и чис-
лители, и знаменатели обращаются в нуль. Таким образом,;
♦) Напомним, что в нашей системе единиц скорость света равна
единице, а энергия и импульс измеряются в единицах массы. Таким
образом, для фотонов получаем Е = E^^Jc? = hvlc\ р =
= РобычтА» гДе h посто!янная Планка (h = 6,6256 ЛО”34 кг-ма/с)
и v — частота электромагнитного излучения,
6 В. Н. Дубровский и др. 145
формулы (7.8)* взятые по отдельности, неприменимы к фи-
зическим объектам, движущимся со скоростью света. Од-
нако из них можно вывести соотношения, остающиеся
вполне осмысленными и при переходе к таким объектам.
Первое из них получается, если исключить из (7.8) массу
частицы, поделив выражение для импульса на выраже-
ния для энергии: р/Е = v или
р = Ей.
Из него следует, что plE —> 1, когда скорость частицы
стремится к'скорости света, а при и = 1 оно становится
совсем простым:
для любых частиц, движущихся со скоростью света9
импульс равен энергии.
Второе соотношение можно получить, исключив из (7.8)
скорость частицы. Это хорошо известная нам формула для
квадрата массы:
Е2 — р2 = т2.
Вместе с равенством Е ~ р она еще раз поясняет, почему
масса частиц, движущихся со скоростью света, равна
нулю.
Фотоны и другие физические объекты, масса которых рав-
на нулю, могут находиться только в состоянии движения
со скоростью света,, их нельзя ни ускорить* ни замедлить.
Пока они существуют* эта постоянная скорость им при-
суща так же, как другим частицам присущи постоянная
масса или заряд. Но безмассовые частицы обладают впол-
не определенными энергиями и импульсами, которые мо-
гут меняться в процессе взаимодействия с другими час-
тицами. И при этом, как показывает эксперимент, в таких
взаимодействиях всегда выполняются законы сохранения
энергии и импульса. Примером такого эксперимента мо-
жет служить опыт Комптона, к которому мы сейчас вер-
немся.
Выведем формулу* определяющую сдвиг частоты рас-
сеянного излучения в этом опыте. Для этого сделаем пре-
дельный переход в формуле, задающей энергию Е' частицы
массы т после столкновения с частицей массы М (форму-
ла (7.6) предыдущего раздела):
М (Е — £") =в ЕЕ' (1 — uv' cos -б) — т2. (7.9)
Ж
Зафиксируем в этом равенстве величины Е и Е' энер-
гий налетающей частицы до и после рассеяния^ а ее мас-
су т устремим к нулю. Тогда ее скорости должны стре-
миться к скорости света: у, и' ~> 1. Так же как и в фор-
мулах р = Ev и Е2 — р2 = т2, никаких неопределенно-
стей и бессмысленных выражений при этом не возникает.
Во всех этих формулах мы можем беспрепятственно по-
ложить скорости равными 1, а массу т — равной 0, и по-
лучить соотношения уже для безмассовых частиц —
фотонов. В результате формула (7.9) превращается в зна-
комую нам ультрарелятивистскую формулу (7.7), отве-
чающую предельному случаю энергий Е и Ег, много
больших массы легкой частицы т:
М (Е - Е') = ЕЕ' (1 - cos ft).
Эксперимент показывает^ что такой способ получения
формул для безмассовых частиц всегда приводит к пра-
вильным результатам. В частности, экспериментальные
данные о зависимости энергии от угла рассеяния ft с хо-
рошей точностью совпали с предсказаниями, даваемыми
теоретической формулой Комптона. Опыты Комптона
подтвердили не только качественно, но и количественно
предположение о том, что фотон ведет себя как релятиви-
стская частица, обладающая энергией и импульсом р = Et
причем при взаимодействии со свободными электронами
полный импульс и энергия в системе «электрон + фотон»
действительно сохраняются.
Реально в опцте Комптона измерялась частота рас-
сеянной волны, поэтому формулу Комптона уместно пере-
писать в обычной системе единиц^ поделив одновременно
обе части на Е' = hv' и выразив энергию фотона через
его частоту:
= * + лЙ-О-созО). (7.10)
Частота фотона не меняется только при рассеянии на ну-
левой угол, при увеличении угла ft частота и энергия рас-
сеянного фотона уменьшаются, причем сдвиг частоты
максимален при рассеянии «назад», когда ft = л. Это и
наблюдал А. Комптон (левые пики на рис. 7.6). Чем же
тогда объяснить, что и при больших углах рассеяния на
графиках имеются пики, отвечающие частоте падающей
волны? Дело в том, что в столкновении фотона с электро-
ном, находящимся на близкой к ядру оболочке и потому
сильно связанным с ядром, участвует уже не отдельный
электрон^ а весь атом как целое. Но тогда в формулу (7.10)
6* 147
для сдвига частоты надо вместо массы электрона М подста-
вить массу всего атома, которая для графита более чем
в 20 тысяч раз превосходит массу электрона. При этом
добавкой-^^-(1 —cos*0)b правой части (7.10) можно пре-
небречь, следовательно, при рассеянии фотонов на таких
электронах сдвига частоты не происходит.
На формулу Комптона можно взглянуть и с другой
стороны. Перепишем ее так:
М = EE'(i-ws . (7.11)
Е — Е
Если рассеяние происходит на мишени, которая содержит
неизвестные нам частицы, то их массу можно вычислить,}
подставляя в эту формулу измеренные значения Е, Е' и О.
Если при разных углах рассеяния 0* мы будем получать од-
ну и ту же величину, то можно смело утверждать, что рас-
сеяние действительно происходило на почти свободных
частицах с массой М. Чтобы на .экспериментальном гра-
фике можно было уверенно различать присутствие двух
пиков с энергиями Е и £", энергия частиц налетающего
пучка должна быть достаточно велика (Е ~ М), одновре-
менно она должна быть существенно больше энергии взаи-
модействия неизвестных частиц с веществом, ведь формулу
Комптона мы выводили для рассеяния на свободных час-
тицах. Если эти условия соблюдены, как это и было в опы-
тах Комптона, то экспериментальные графики на рис. 7.6
можно интерпретировать следующим образом.
Два пика интенсивности рассеянных частиц при фик-
сированном угле 0* свидетельствуют о том, что в веществе
мишени присутствуют два сорта частиц. Это, во-первых^
тяжелые атомы, масса которых много больше энергии на-
летающих у-квантов Е\ рассеянию на них отвечает пра-
вый пик с Е' = Е. Левый пик отвечает рассеянию фотонов
на легких частицах, массу которых можно вычислить по
формуле (7.11) при разных углах рассеяния '0*. И всегда
при этом получается величина Л/, близкая к массе элек-
трона, уже известной из других, независимых, экспери-
ментов. Это позволяет окончательно'отождествить легкие
частицы в опытах Комптона с электронами.
7.5. Эффект Доплера
До сих пор мы почти не говорили о том? как
же реально измеряются скорости движущихся тел. А та-
кие задачи очень часто возникают в современной науке
148
и технике. Для коррекции орбиты межпланетной станции
нужно очень точно знать величину ее скорости в момент за-
пуска двигателя — с точностью до 1 м/с при скорости по-
рядка 10 км/с. Радиолокационные системы обнаружения
ракет и самолетов тоже должны точно измерять величину
и направление скоростей их полета. Астроном хочет из-
мерить скорость. далекой галактики, а автоинспектор —
скорость автомашин в потоке транспорта. И во всех этих
случаях используются приборы, принцип действия кото-
рых один и тот же — это эффект Доплера. Суть его заклю-
чается в том, что частота электромагнитных волн зависит
от относительной скорости источника излучения и наблю-
дателя. Этот эффект характерен для любого волнового
движения, и его можно наблюдать, например, когда мимо
платформы проносится гудящая электричка. Высокий
Звук сирены приближающегося поезда сменяется более
низким звуком с меньшей частотой, когда поезд удаляется
от наблюдателя. Сдвиг частоты зависит от того, с какой ско-
ростью движется источник звука. Эффект Доплера в об-
щем случае зависит как от скорости источника, так и от
скорости наблюдателя относительно среды,'в которой рас-
пространяются звуковые волны. Для электромагнитных
волн ситуация более проста — в соответствии с принци-
пом относительности сдвиг частоты может зависеть толь-
ко от вектора относительной скорости движения источни-
ка и наблюдателя; ни о какой «среде», в которой распро-
страняются электромагнитные волны, не может быть и
речи. Постараемся же определить эту зависимость.
Частота электромагнитных волн связана с энергией
фотонов формулой Планка £обычн = hv. Если мы найдем,
как меняется энергия фотонов при пере- ?
ходе из системы отсчета источника в си- V
стему движущегося наблюдателя,™ одно- |\
временно получим и формулу для допле- \ д'
ровского изменения частоты. Применим а I \
тот Ще прием, что и при выводе формулы I \
Комптона. Припишем фотону некоторую
конечную массу, определим его энергию
в новой системе отсчета,: а затем перей- *
дем к пределу т —>0, и—» 1. На рис. 7.7 Рис* 7.7.
изображен соответствующий граф в про-
странстве скоростей. Точка А — система отсчета излучате-
ля, в которой энергия частицы F с массой т равна Ед =*
*= т ch а. Точка В изображает скорость наблюдателя^
движущегося под углом $ к направлению движения час-
149
тицы F? причем vB\a *= th b. Энергия частицы F в системе
отсчета В будет равна Ев — тп ch а'. Ее можно найти
с помощью теоремы косинусов для треугольника ABFi
Ев = тп ch а' «= тп (ch a ch & — sh a sh b cos -S') =
== тп ch a (ch b sh b th a cos й).
Отношение энергий
EB/EA = m ch а'/тп ch a — ch b — sh b th a cos О
уже не будет зависеть от массы частицы и предельный пе-
реход к фотону оказывается очевидным: точка F уходит
на абсолют пространства скоростей, а скорость частицы
v = th а становится равной единице. В результате мы по-
лучаем формулу для преобразования энергии фотона,}
а одновременно и формулу для изменения частоты электро-
магнитной волны при переходе в другую инерциальную
систему отсчета:
vb/'va = hvB/hvA = Ев/Еа = sh b — ch b cos ft. (7.12)
Ее можно переписать и в стандартном виде, приводимом
во всех учебниках оптики:
vbIvA = (1 — v cos ^)/V 1 ““ у2- (7.13)
Здесь v — относительная скорость движения систем от-
счета А и В, а й - угол между направлением движения
фотона и системь! отсчета наблюдателя В относительно си-
стемы отсчета А. Два частных случая формулы Доплера
представляют наибольший интерес.
Пусть А — это далекая галактика, в которой возбуж-
денные атомы излучают кванты света с частотой vA. За-
коны физики одинаковы во всех частях наблюдаемой
Вселенной, поэтому спектры излучения атомов, находя-
щихся в одинаковых условиях на Земле и в галактике А
на расстояниях в* миллионы и миллиарды световых лет
от нас, должны быть совершенно одинаковыми. Но если
эта галактика удаляется от нас с большой скоростью, то
для наблюдателя на Земле каждая линия этого спектра,
излученная с частотой vA, окажется сдвинутой и из-за
эффекта Доплера будет иметь другую частоту vB, отлич-
ную от vA. В том случае, когда наблюдаемая галактика
удаляется от нас вдоль прямой, соединяющей ее с Землей,
угол <> между направлением движения Земли и скоростью
излученных фотонов в системе А будет равен нулю. Фор-
мула Доплера (7.12) приобретает при этом особенно
О
простой вид (мы обсудим ее в следующей главе):
vb/va = ch b — sh b = (eb + e b)----i- (eb — e~b) = e~\
(7.14)
т. e. принимаемая частота будет меньше излученной в еь
раз. Это явление было обнаружено экспериментально
и названо красным смещением из-за того, что спектр из-
лучения каждого атома смещается в сторону меньших
частот, т. е. в красную область видимой части спектра.
Таким образом были измерены скорости многих галактик:
thfe
eb_e-b Л-'В
еь-]-е-ь v^ + v* ‘
Согласно этим измерениям галактики удаляются друг от
друга со скоростью, пропорциональной расстоянию меж-
ду ними. Тем самым подтвердилось, что мы живем в рас-
ширяющейся Вселенной. Наиболее далекие из обнару-
женных к настоящему времени объектов, так называемые
«квазары», имеют красное смещение порядка vA : vB =
= 2 -г- 2,5, что соответствует скорости удаления v
0,6 — 0,7 от скорости света. Свет от них идет к нам
миллиарды лет и несет информацию о том, какой была
Вселенная в те давние времена.
Еще одно интересное явление, предсказываемое реля-
тивистской формулой (7.12),— наличие так называемого
поперечного эффекта Доплера. Его можно наблюдать
тогда, когда источник движется перпендикулярно направ-
лению наблюдения ('0* = л/2). В этом случае
vB/vA = ch а = 1/|< 1 — iA
Интересно оно тем, что при таком расположении наблюда-
теля и источника сдвиг частоты возникает только в случае
электромагнитных волн, для обычных же волн в средах
поперечный эффект Доплера отсутствует. Впрочем, и для
электромагнитных волн этот эффект, как правило, очень
слаб. При небольших скоростях сдвиг частоты практиче-
ски пропорционален квадрату отношения скорости источ-
ника к скорости света:
vBlvA = (1 — и2)-1/* ~ 1 + v2/2 или (vb — vA)/vA р2/2.
Эта величина обычно очень мала во всех сколько-нибудь
реальных ситуациях. Иное дело «продольный» эффект
151
Доплера. Когда в формуле (7.13) мы переходим к нереля-
тивистскому пределу малых скоростей v lt под корнем
можно пренебречь квадратом скорости по сравнению с еди-
ницей. В результате получается хорошо известная форму-
ла для классического эффекта Доплера:
•vb/va — 1 — V cos О или (vB — VA)/vA —
= V COS ft = (^обычн/с) COS 'ft.
Она-то и используется при реальном измерении скоростей
объектов, о которых мы говорили в начале этого раздела.
Например, на' космическом аппарате — спутнике или
межпланетной станции — устанавливают радиопередатчик
со стабилизированной частотой vA, а на Земле — радио-
систему^ которая позволяет с высокой точностью изме-
рить vb и co‘s О; по результатам этих измерений с помощью
формулы Доплера и определяется скорость космического
аппарата. Точно так же радиолокационные системы изме-
ряют скорости самолетов и ракет по изменению частоты
отраженного сигнала, и даже автоинспектор, оштрафо-
вавший вас за превышение скорости, использует, может
быть, сам того не зная, эффект Доплера, на котором осно-
ван принцип действия его хитрого прибора^ предназна-
ченного для измерения скорости.
ГЛАВА 8
ГЕОМЕТРИЧЕСКАЯ ФИЗИКА
ИЛИ ФИЗИЧЕСКАЯ ГЕОМЕТРИЯ
Мы прошли длинный и нелегкий путь, теперь
настала пора остановиться, оглядеться й осмыслить по*
дученные результаты, но уже с иной, более высокой точки
зрения. Восхождение в горы бывает трудным, каждый
раз видишь перед собой только ближайшую цель, бли*
жайшую вершину, за которой скрываются новые и новые.
Зато с самой высокой вершины перед человеком открыва-
ется панорама всей горной страны, возникает новый уро-
вень понимания того, что сделано,; становятся видны бо-
лее быстрые и короткие пути. Увидеть их можно только
с вершины,; и пройти по ним можно только тогда, когда
уже есть опыт и знания, приобретенные в нелегком вос-
хождении.
Вспомним основные этапы нашего пути: принцип от-
носительности — карты скоростей — релятивистское про-
странство скоростей и его геометрия — релятивистские
энергия и импульс в упругих столкновениях — законы
сохранения энергии и импульса в неупругих процессах,;
включающих рождение и распад элементарных частиц,—
представление о фотонах как релятивистских частицах,;
обладающих энергией и импульсом. По существу, это
была’цепочка логических предсказаний, даваемых тео-
рией. Однако только эксперимент может показать, верны
они или нет, следует ли им природа в действительности.
В том, что это так, нас убеждает вся совокупность имею-
щихся экспериментальных данных.
Теперь, когда перед глазами у нас есть эта общая кар-
тина, можно будет получить все основные физические и
геометрические формулы теории очень быстрым и эконом-
ным путем. В основе его будут лежать принцип относи-
тельности, законы сохранения энергии и импульса и не-
тривиальный экспериментальный факт: возможность рас-
пада л°-мезона на два у-кванта, каждый из которых имеет
определенный импульс и энергию. Мы будем верны себе.—
каждый важный результат нужно уметь получать разны-
ми способами.
153
8.1. И вновь об энергии
и импульсе релятивистских частиц
Рассмотрим сначала один фотон F, который!
в некоторой системе отсчета А имеет энергию ЕА. Соглас-
но принципу относительности его скорость одинакова во
всех инерциальных системах, поэтому изображающая его
точка F должна быть бесконечно удаленной точкой про-
странства скоростей. Пусть имеются еще два наблюдателя
В и С, движущиеся в том же нап-
\£) равлении, что и фотон в системе
а ь отсчета А. В пространстве скорос-
•-----Jтей им будут соответствовать точки
В и С, лежащие да прямой AF
(рис. 8.1). Обозначим через Ев и Ес
Рис. 8.1. энергии фотона в системах отсчета
В и С. Отношение энергий Ев/ЕА яв-
ляется безразмерной величиной, и оно может зависеть толь-
ко от скорости системы В относительно А, другими словами,,
его можно записать как непрерывную функцию от рас-
стояния между точками А и В в пространстве скоростей:
Ев!Еа - / (И АВ ||).
Кри этом, по принципу относительности, функция J яв-
ляется универсальной, одной и той же для всех систем от-
счета, так что
EcfEB - f (|| ВС |), Ес!Еа = / (|| АС |).
Функция / описывает изменение анергии фотона при пере-
ходе из одной системы отсчета в другую (вдоль данной
^-прямой). Перейдем от системы А к системе С поэтапно:
сначала из А в В, потом пэ В в С. Этому переходу отвечает
очевидное равенство ЕС!ЕА = (2?в/Ел) (ЕС!ЕВ), т. е.
/(цлс'||)=/(|лв||)/(8вс'||).
Точки А, В, С в пространстве скоростей лежат на одной
прямой (рис. 8.1), поэтому || АС || = || АВ Ц + || ВС ||.
Следовательно, функция / должна удовлетворять функ-
циональному уравнению
/(а + Ь)=/(а)/(Ь),
где а = Ц JLJB |, Ь ~ || ВС |. Общее решение этого уравне-
ния дает показательная функция / (х) = Знак ми-
нус в показателе мы выбрали, чтобы получить убываю-
щую (при а 0) функцию, ибо энергия любой релятивист-
154
ской частицы t в том числе и фотона, должна уменьшать-
ся при переходе в систему отсчета^ движущуюся в том же
направлении,; что и сама частица.
Если коэффициент а не равен нулю, то в пространстве
скоростей можно выбрать единицу измерения расстояний
так,; чтобы а = 1 *). Итак, мы вывели из принципа отно-
сительности, что если точки А, В и F лежат на одной пря-
мой 4jF в последовательности Ал В, F, то для фотона F
справедливо равенство
Ев1ЕА=е-№\\. (8.1)
Это уже известная по предыдущей главе формула для про-
дольного эффекта Доплера.
Обратимся теперь к импульсу фотона Ра- Отношение
величин энергии и импульса любой частицы не зависит
от массы и определяется только ее скоростью в данной си-
стеме отсчета. Но скорость всех фотонов одинакова во всех
инерциальных системах, поэтому это отношение должно
быть универсальной постоянной, которую следует поло-
жить равной единице. (В этом мы сможем убедиться чуть
позже.) Итак, импульс фотона сонаправлен его скорости
и по величине равен энергии фотона: р = Е.
Теперь от фотонов перейдем к частицам; имеющим мас-
су. В релятивистской физике известен процесс, когда та-
кая частица — л°-мезон — самопроизвольно распадается
на два фотона — F и F'. Этот экспериментальный факт
и будет лежать в основе наших дальнейших рассуждений.
Рассмотрим сначала распад пиона в его системе по-
коя 4. Импульс пиона равен нулю, его энергию покоя мы
обозначим через Ео. Из законов сохранения энергии и им-
пульса следует, что продукты распада — фотоны F и F' —
в системе А должны иметь импульсы, равные по величине
и противоположные по направлению, энергия же каждо-
го из них равна EJ2\
Ра = В а = Ё’о/2, Ра ~ ^а ~ FJ2»
Перейдем теперь в систему отсчета В, которая в прост-
ранстве скоростей изображается точкой, лежащей на пря-
мой F' AF (рис. 8.2). В этой системе до своего распада пион
♦) Если а = 0, то энергия и импульс фотона будут одинаковы
во всех инерциальных системах отсчета, а геометрия пространства
скоростей будет геометрией Евклида. Такой «фотон» не сможет
взаимодействовать с другими частицами- без нарушения законов
сохранения энергии и импульса во всех инерциальных системах
отсчета. В-нерелятивистской механике, нет фотонов!
155
движется в направлении BF'; его энергию и импульс в си-
стеме В мы обозначим через Еп и Эти величины как-то
зависят от скорости пиона, т. е. от расстояния || АВ || == а
между точками А и В. Но и в си-
@ стеме В при распаде пиона должны
выполняться законы сохранения:
F л £ 7 £« х=£в + Ев,
(8.2)
Рис. 8.2. ря = рв — рв»
где Ев. Рв, Ев, Рв — энергии и импульсы фотонов F и F'
в системе отсчета В.
Для фотонов же мы знаем формулы преобразования
энергии и импульса (8.1) при переходе в систему отсчета Bi
Рв=ЕВ — рв = Ёв - £> = -%- еа
(для фотона F' переход от А к В приводит к увеличению
его энергии и импульса и осуществляется с помощью пре-
образования, обратного (8.1)). Поэтому закон сохранения
энергии и импульса в процессе распада будет записывать-
ся в системе В так:
Ея = А еа + е-0 = сЬ а,
рл = Ае«_фе-«==Ео8Ьа.
& А
Мы видим, что из законов сохранения-следуют релятивист-
ские выражения для энергии и импульса движущейся
частицы: Е ~ Eq ch а. р ~ Eq sh а, ив силу принципа
относительности эти выражения должны быть одинаковы-
ми в любой системе отсчета, не обязательно лежащей на
прямой F' AF.
Для частицы, имеющей систему покоя А и энергию по-
коя Eq. мы можем сделать то, чего нельзя было сделать для
фотонов,— перейти к нерелятивистскому пределу. В этом
случае '
J АВ || = а v. sh а « а ж у.
ch а » 1 + а2/2 » 1 + и2/2,
поэтому энергия и импульс такой частицы будут равны
Е = Eq ch а Eq + Eov2/2, р = Eq sh а х EQv.
Сравнивая эти выражения с нерелятивистскими опреде-
лениями
Е = mv2/2 + const, р = mv,
156
(8.3)
мы приходим к выводу, что энергия покоя Е$ есть не что
иное, как масса частицы т (EQ = тп), поэтому для любой
релятивистской частицы мы вновь получаем уже извест-
ные определения релятивистской энергии и импульса!
Е = т ch а, р = т sh а.
Одновременно мы выполнили и данное раньше обеща-
ние — фактически мы доказали правильность выбора зна-
чения коэффициента, связывающего энергию и импульс
фотона (Е = р). Цепочка рассуждений выглядит так: от
фотонов к частицам с массой, затем переход к нереляти-
вистскому пределу, механика Ньютона и классические фор-
мулы для энергии и импульса частицы. Величину этого ко-
эффициента нельзя зафиксировать, не рассматривая ди-
намики взаимодействия. Релятивистская динамика слож-
на, поэтому нам и пришлось воспользоваться таким об-
ходным путем.
8.2. Распад нейтрального пиона
и геометрия Лобачевского
Рассмотрим тот же процесс распада с точки
зрения наблюдателя 5, система отсчета которого изобра-
жается в пространстве скоростей точкой, лежащей на
перпендикуляре АВ к прямой F' AF (рис. 8.3). Соединим
точку В с бесконечно удаленными точками F и F', изо-
бражающими скорости фотонов. Обозначим через а расстоя-
ние || АВ || и через П величину угла, под которым пересе-
каются в точке J3 прямые BF я В А. В силу симметрии угол
ABF' тоже будет равен П. (Мы уже знаем, что П — это
угол параллельности Лобачевского.) По определению уг-
ла между прямыми в пространстве скоростей, П равед
углу между направлениями скоростей пиона и фотона F
с точки зрения наблюдателя В.
Запишем теперь в системе отсчета В закон сохранения
энергии и импульса в проекции на направление ВА,
Ш
В силу симметрии графа энергии и импульсы фотонов равны
друг другу по величине, поэтому
El «= Ео ch а = Ев + Ев = 2£в, (8.4)
рв = Eq sh а = рв cos П + р'в cos П = 2Ев cos П (8.5)
(напомним, что энергия и импульс фотона равны между
собой: рв = Ев\
Закон сохранения импульса в проекции на перпенди-
кулярное ВА направление выполняется автоматически
в силу симметрии относительно прямой АВ. Закон сохра-
нения энергий (8.4) дает нам формулу для поперечного
релятивистского эффекта Доплера, т. е. устанавливает
связь между энергией фотона F в системе отсчета А,
Еа = Ео/2, и его энергией в системе отсчета В, движущей-
ся перпендикулярно направлению скорости фотона •
Ев = Еа ch а. (8.6)
Закон же сохранения импульса в проекции на направле-
ние ВА определяет величину угла параллельности Лоба-
чевского П. Действительно, подставив (8.4) в (8.5), мы
получим, что
Ео sh а = Eq ch a cos П
или
cos П = th а.
(8.7)
Обратим внимание на то, что экспериментальный факт
распада зт°-мезона на два фотона оказывается эквивалент-
ным геометрической аксиоме Лобачевского о параллель-
ных. Закон сохранения импульса требует, чтобы угол
параллельности П был меньше прямого, ибо у пиона есть
импульс, направленный по прямой В А. Поэтому и про-
дукты его распада — фотоны — должны иметь в системе
отсчета В ненулевую проекцию импульса на это направ-
ление, т. е. П < л/2.
Если бы пространство скоростей имело геометрию Ев-
клида, то угол параллельности П был бы равен прямому
и распад пиона на два у-кванта был бы запрещен законом
сохранения импульса. В нерелятивистской физике невоз-
можны процессы, идущие с изменением массы частиц! Мы
видим, как тесно и неразрывно связаны друг с другом
физика и геометрия. Здесь они предстают перед нами как
единая наука, которую можно назвать и геометрической
физикой, и физической геометрией. Но только этим связь
между ними не исчерпывается.
158
Рассмотрим тот же распад в произвольной системе
отсчета,, положение которой в пространстве скоростей за-
дадим следующим образом. Сместимся из точки А — си-
стемы покоя л°-мезона — на расстояние Ъ вдоль прямой
AF и из полученной точки С восставим перепендикуляр
СВ$ длину которого обозначим через а. Опять соединим
прямыми точку В с бесконечно удаленными точками, ко-
торые изображают скорости фотонов F и F1 (рис. 8.4).
Эти прямые по-прежнему будут пересекаться с перпенди-
куляром СВ под углом параллельности П,; причем
cos П == th а. Вычислим синус угла параллельности (на-
помним, что ch2 х — sh2 х s= 1):
sin П — Vl — cos2 П = 1/" 1--^2^- =
г У ch2 а
/ch2 а — sh2 а __ 1
ch2 а — cha **
Найдем теперь величину энергии и импульса фотонов
F и Ff в системе В, Последовательно используем сначала
поперечное преобразование Доплера (8.6) из точки В в
точку а затем продольное преобразование (8.1) из точ-
ки С в точку А:
рв = Ев = Ес ch а = EAe~b ch a = е"6 ch a*
А
рв = £в = ^ссЬа — £Aebcha — -^-ebch а.
В системе отсчета В энергия распавшегося л°-мезона оп-
ределяется расстоянием между точкой В и системой его
покоя Af т. е. гипотенузой прямоугольного треугольника
АВСЛ длину которой мы обозначим через с; Ев *=
s= Ео ch с. Запишем закон сохранения энергии в системе
В\ Ев Ев 4” Ев или
сЬ с «-Ф1 е‘Ь ch a + е6 ch a =-ф-ch « (е6 4-еЛ
л» и и
№
откуда следует, что
chc = chachb. (8.9)
Мы видим, что закон сохранения энергии есть не что иное%
как «теорема Пифагора» для прямоугольного треугольни-
ка в пространстве скоростей — уже известная нам форму-
ла геометрии Лобачевского.
В системе отсчета В импульс пиона имеет величину
рл Eq sh с, направлен по В А. и составляет угол 0 с пер-
пендикуляром JBC, импульсы же фотонов направлены fio
BF и BF' под углом параллельности П к тому же перпен-
дикуляру. Закон сохранения импульса в системе В в
проекции на направление,; перпендикулярное ВСХ за-
пишется в следующем виде:
Eq sh с sin р == рв sin П — рв sin П.
Подставляя сюда рв — е*ch а, рв = eftch а
и выражение (8.8) для синуса угла параллельности
sin П ~ 1/сЬах мы получим, что
Eq sh с sin Р — ch а (еь — е~ь) = Eq sh
ы CD Л
и отсюда — метрическое соотношение, выражающее в гео-
метрии Лобачевского катет прямоугольного треугольни-
ка через гипотенузу и противолежащий угол:
sh d — sh с sin р.
И, наконец,; запишем закон сохранения импульса в
проекции на направление ВС:
Еоshe cos р *= рв cos П + Рв cos П = (рв + Рв) cos П.
Заметим, что рв + р'в — Ев + Е'в = Z?B ~ Eochc, a
cos П = th а, поэтому закон сохранения этой проекции
импульса примет вид
sh с cos Р я= ch с th а.
Поделив обе части последнего равенства на ch cf мы при-
дем к соотношению, выражающему катет прямоугольно-
го треугольника через гипотенузу и прилежащий угол в
геометрии Лобачевского:
th a s= th с cos р.
Итак, формулы тригонометрии Лобачевского выступа-
ют перед нами как следствия законов сохранения энергии
160
и импульса в распаде л°-мезона на два фотона. И чувствует-
ся рука судьбы в. том, что эта элементарная частица и
угол параллельности у Лобачевского были обозначены
одной и той же буквой греческого алфавита (л — строчное,
а П — ее прописное написание).
Теперь мы могли бы получить и все остальные формулы
тригонометрии Лобачевского — теоремы косинусов и си-
нусов — так же, как мы получали их в гл. 4. Но не будем
повторяться, наш рассказ подходит к концу. Мы надеем-
ся, что убедили читателя в геометричности физики и фи-
зичности геометрии. Специальная теория относительности
предстала перед нами как геометрическая наука, став в
этом смысле похожей на общую теорию относительности
Эйнштейна — теорию гравитации^ которая не без основа-
ний носит еще одно название — геометродинамика. Мы
надеемся также, что читатель приобрел опыт, достаточный
для свободного обращения с геометрией релятивистского
пространства скоростей и сможет рассчитывать различные
реакции с участием релятивистских частиц^ используя
только такие понятия, как их энергии, импульсы, расстоя-
ния и углы в пространстве скоростей. Если это действи-
тельно так2 мы будем считать свою задачу выполненной.
ПРИЛОЖЕНИЕ
ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА
.Мы познакомили читателя с геометрическим
подходом к специальной теории относительности. Боле©
традиционным является аналитический, векторно-коор-
динатный подход. Соотношение между ними примерно та-
кое же? как между «чисто геометрическим» и векторным
методами в обычной геометрии: это два разных языка
одной теории и в принципе они эквивалентны, но в кон-
кретных’ ситуациях один из них может оказаться удобнееа
поэтому полезно знать оба.
Практически во всех книгах по теории относительности
принят «аналитический» подход, так что подробно гово-
рить о нем здесь нет смысла, и мы сделаем только первый
шаг: пользуясь геометрией пространства скоростей, вы-
ведем формулы,' по которым преобразуются основные фи-
зические величины при переходе в новую систему отсчета.
Преобразование энергии и импульса <
Пусть нам известны энергия Е и импульс
р частицы А с массой т в некоторой системе отсчета О.
Рассмотрим вторую систему отсчета 019 движущуюся от-
носительно первой с постоянной скоростью и =5 th Ъ.
В этой новой системе энергия и импульс частицы А будут
иметь другие значения,; Е* ир. Попробуем выяснить,;
как связаны новые значения с величинами Е и р, измерен-
ными в исходной,; «старой» системе отсчета О.
Рассмотрим в пространстве скоростей треугольник
ОО' А$ вершины которого изображают скорости систем от-
счета О и О1 и частицы А. Пусть а и а1 — ^-длины его сто-
рон О А и О'А] тогда величины энергии и импульса части-
цы в наших двух системах выражаются через а и а' по
формулам (см. гл. 6):
Е = т ch а, р = т sh а,
Е1 = т ch р' — т sh а'.
162
Отсюда сразу видно, что новое значение энергии можно
получить с помощью ^-теоремы косинусов (для стороны
О' А треугольника ОО’А)
ch а' = ch a ch Ъ + sh a sh Ъ cos а,
где а — внешний угол треугольника при вершине О *)
(рис. П.1), откуда после умножения на т получаем:
Е1 = т ch а *= Е ch Ъ + р cos a sh b.
Заметим, что величина р cos а есть проекция в системе от-
счета О вектора импульса частицы А на направление^
Рис. П.1. Рис. П.2.
противоположное направлению движения системы О' (по-
тому что а — это угол между векторами vA\o и — Vo<\o\
см. рис. П. 1 и П. 2). Другими словами, эта величина рав-
на координате рг вектора р в прямоугольной системе ко-
ординат Оргр^ связанной с системой отсчета О, в которой
ось Орг направлена против вектора Voqo (рис. П.2). Та-
ким образом,
Е' = Е ch b + рх sh &. (1)
Чтобы описать преобразование вектора импульса, про-
ведем в системе отсчета О1 оси координат О'р{ и О'р'21
параллельно осям Орг и Ор2, соответственно, т. е. ось
О'р\ направим вдоль вектора скорости Vo|<y, a О'р2 —
перпендикулярно этому вектору. Тогда координаты век-
тора ,р в этой системе равны *= pf cos а', р2 =
*= р' sin а', где а' — угол между векторами р* (или
*) Мы берем здесь внешний, а не внутренний угол треугольника,
чтобы ниже в формуле (1) получился знак плюс, а не минус. Разу-
меется, это дело вкуса.
163
Vaio) и Поскольку этот угол равен углу при верши*
не О' треугольника ОО'А в пространстве скоростей^ по
теореме косинусов для стороны ОА этого треугольника
получим:
Е == т ch а — т ch a' ch b — т sh a1 sh Ъ cos а* =»
= Е! ch Ь — р{ sh
и отсюда
р{ sh Ъ = Е' ch Ь — Е.
Подставим в правую часть выражение (1) для Е*1
Pi sh Ь = (Е ch b + pi sh b) ch Ъ — E =
= E (ch2 b — 1) + pi ch b sh b = (E sh b + рг ch&)sh&.
Следовательно,
Pi — E sh b + pi ch 6. (2)
Остается найти новое значение составляющей импульса€
перпендикулярной направлению относительного движе-
ния систем. По ^"-теореме синусов
sh a/sin а? = sha'/sin a,
отсюда
р2 рг sin а? *= т sh a' sin *= т sh a sin а «
= р sin а — р2. (3)
Соберем вместё соотношения (1), (2), (3);
Е1 = Е ch b + pi sh bt
Pi = E sh b 4- pi ch (4)
Рг == Рг*
Это й есть знаменитое преобразование Лоренца (для
энергии и импульса). В следующем разделе мы изучим его
подробно, а пока заметим, что составляющая импульса,;
перпендикулярная направлению относительного движения
систем, при преобразовании Лоренца не меняется; другая
же^ «продольная», составляющая как бы «перемешивает-
ся» с энергией. Поэтому достаточно рассмотреть преобра-
зовайие2 определяемое первыми двумя строчкам^ (4):
Е' = Е ch b + pi sh by
Pi — Е sh b + Pi ch b
на плоскости (Е, p^).
164
Геометрия преобразования Лоренца.
Гиперболический поворот
и гиперболические функции
Чтобы лучше понять?, как устроено преобра-
зование Лоренца,, мы будем рассматривать его вместе с
обычным поворотом плоскости. Выведем сначала форму-
лы преобразования координат точки при повороте осей.
Пусть в прямоугольной системе координат Оху точка
А имеет координаты^у). Повернем оси координат вокруг
начала О на угол £ и найдем коор-
динаты точки А в новой системе
Ох* у* (рис. П.З). Абсцисса я/ равна
проекции вектора ОА на ось Ох\
т. е. скалярному произведению
этого вектора на единичный век-
тор ех оси Ох*. Ясно, что коорди-
наты вектора е'х (в системе Оху)
равны (cos Р; sin £), поэтому
х* = ОАе'х = cos р + у sin р.
Аналогично (см. рис. П.З)^ координаты ву равны (—sin Р;
cos Р) и
У* = бАву ~ —я: sin Р 4- у cos Р«
ИтакА
х' = х cos р 4- у sin ря
(о)
у1 = —х sin р 4- у cos р.
Как видим, внешне формулы поворота очень похожи
на формулы преобразования Лоренца, только в одних
участвуют тригонометрические, а в других — гиперболи-
ческие функции. Но за внешним сходством кроется и бо-
лее глубокое геометрическое содержание. Чтобы объяс-
нить его, посмотрим на формулы (5) и (6) с другой точки
зрения. До сих пор мы считали, что,-скажем, в формулах
(6) (х\ у) и (я7; у') — это координаты одной и той же точки,
но относительно разных осей; теперь будем считать, что
система координат у нас одна, а точки две, и рассматри-
вать (6) как формулы, описывающие преобразование плос-
кости, при котором точка (яг, у) переходит в (я/; yf). Тогда
преобразование, определяемое этими формулами, есть по-
ворот плоскости вокруг начала координат на угол — |3.
Действительно^ яснрг что (см. рис. П.4) координаты
165
(#'; у-) точки А1 = (А) в системе Оху совпадают о
координатами точки л л ««
/Г5
0 хг
Рис. П.4.
А в системе Ох'у', полученной из
Оху поворотом осей на угол |3, а
значит, задаются формулами (6).
Что же представляет собой
с этой точки зрения преобразо-
V вание Лоренца? Выпишем еще
Аг\^ раз формулы (5), заменив обо-
I у' * значения координат Е и на
!___более привычные х и у:
х
х = х ch Ь + у sh Ъ*
(7)
y,j = х sh Ъ + у ch Ъ.
Составим разность и сумму этих уравнений, учитывая, что
cb b = (еь + е~ь)/2, sh Ь « (еь — е"ь)/2:
х — у* — х (ch b — sh b) + у (sh Ь — ch b) = е~ь (х — y)t
х* + у* *= х (ch Ъ + sh 6) + у (sh Ь + ch b) и еь (х 4- у).
Отсюда видно,: что это преобразование удобно изучатьа
пользу явь системой координат OXY$ осями которой слу-
жат биссектрисы координатных уг-
лов системы Оху (рис. П.5), пото-
му что по формулам (6) (с —45°)
точка с координатами (ж; у) отно-
сительно Оху будет в системе ОХУ
иметь координаты
Следовательно, при нашем преобразовании точка А (X; У)
переходит в точку А1 (X*; У')? где
Х'^е^Х, Y' = ebY.
Геометрически эти равенства означают, что плоскость рас-
тягивается по одной из осей ОХ и OY (при Ъ 0 — по
OY) в еь раз и во столько же раз сжимается по другой
оси. При этом произведение координат ХУ остается посто-
янным (Х*У* « e~bXebY s= XY)% т. е. точки плоскости как
бы скользят по гиперболам ХУ = const. Поэтому наше
преобразование называется гиперболическим поворотом]
мы будем обозначать его Lb. Говорят^ что величина ХУ
или, в исходных координатах, ж2 — у2 2XY является
инвариантом гиперболического поворота (от лат. «неиз-
менный»). В случае преобразования Лоренца энергии-
импульса этот инвариант нам хорошо знаком: Е* — р2 s=
*= т2 — квадрат массы покоя частицы с энергией Е и
импульсом Рь а масса покоя одинакова во всех системах
отсчета. Аналогичный инвариант есть и у обычного пово-
рота плоскости — это квадрат расстояния от точки до
центра поворота; в координатах — х2 + у2 (если центр по-
ворота совпадает с началом координат). Можно ска-
зать, что при обычном повороте точки плоскости«скользят»
по окружностям ГГ2 + Z/2 = const.
Существует и еще один инвариант гиперболического
поворота. Он характеризует пару векторов и аналоги-
чен скалярному произведению векторов в обычной гео-
метрии. Вид его легко найти, если в формулу, выражаю-
щую скалярное произведение aia2 векторов а± у±) и
а2 (лу, Уъ) через квадраты длин этих векторов и их сум-
мы —
== у (1 «1 + «212 — | ai Р — | «а |2),
подставить вместо обычных квадратов длин ^гиперболи-
ческие» (например, вместо |«i |а == Xi + у? взять xf —
— yi и т. д.). В результате такой замены мы получим ве-
личину
(«1, Ог) = у [(*i + — (V1 + У*)* — (*? — У1) —
— (4 — у!)] = — f/if/e,
которая не изменяется при гиперболических поворотах,
потому что выражения (хх + х2)2 — (рх + у2)а, xl — у2,
х% — Уъ инвариантны. Эту величину называют псевдо-
скалярным произведением векторов ах и а2. Поясним ее
физический и геометрический смысл.
Пусть А и В — две частицы с массами тА и тпв, имею-
щие в системе отсчета О энергии Еа и Ев и импульсы
Ра и рв- Для простоты будем рассматривать одномерный
случай, точнее, предположим, что в системе О частицы
А и В движутся в одном й том же направлении (по по*
воду общего случая см. задачу 4). Вычислим псевдоска*
лярное произведение векторов (Ед; рд) и {Ев', Рв), счмиы
известными скорости Рд|о = th а и l>b|o = th b;
ЬАЕВ — РаРв = тА сЬа-тв chh —
— тА sh а -тв sh Ь = тАтв ch {а — Ь),
167
Но | а — b | = с — это расстояние между точками А и В
в пространстве скоростей (поскольку эти точки лежат
на одной прямой с точкой О), следовательно,
ЕАЕВ — рАрв = mAmB ch с,
где the =» 1?в|д. Аналогичная формула справедлива и в об-
щем (не одномерном) случае — см. задачу 4. В правой ее
части стоит выражение, не зависящее от системы отсчета,
таким образом, мы получили еще одно подтверждение
того, что левая часть — псевдоскалярное произведе-
ние векторов (ЕА; рА) и (ЕВ} рв) — инвариантна.
Как получить похожую формулу из чисто геометри-
ческих соображений? Вспомним, что переходу из системы
покоя частицы А в систему покоя частицы В отвечает
преобразование Лоренца или гиперболический поворот
с параметром с = |] АВ ||. Возьмем теперь два произволь-
ных вектора ах (хх] ух) и а2 (х2\ у2). При гиперболическом
повороте L° вектор ах перейдет в некоторый вектор
а{ с координатами (х{\ у{), которые можно вычислить,
пользуясь формулами (7). Когда параметр с меняется
от — оо до оо, точка (х£;, у[) пробегает гиперболу (точ-
нее, одну ее ветвь), поэтому при некотором с вектор а[
будет пропорционален а2: а[ == ка^ т. е. (аь а{) =
=э h (ах, а2) (поясните!). Но
(aj, а[) = хх (хх ch с + ух sh с) —
— ух (хх sh с + ух ch с) = (х* — yl) ch с,
и, очевидно, к2 = (х'х — Ух)1(х1 — yl) = (xf — y2x)/(xl —
— yl). Следовательно,
(ai, а2) = Vxl— yr Vx* — y|chc
(конечно, при условии | Хх | | ух Ь | х21 > | у21;
в других случаях надо кое-где в этой формуле сменить
знаки). Для нас сейчас важно, что последняя формула
очень похожа на определение обычного скалярного про-
изведения векторов:
ага2 = | ai | • | aat cos у,
где у — угол между векторами ах иа2. В частности, мы
видим, что параметр гиперболического поворота анало-
гичен углу обычного поворота.
Приведем еще одно впечатляющее проявление этой
аналогии.
168
Угол р поворота R& при 0<$ 2л можно интер-
претировать как удвоенную площадь кругового сек-
тора АОА\ где А — произвольная точка единичной
окружности х* 4* У* ** А1 да R& (А) (рис. П. 6). Замеча-
тельно, что аналогичное утверждение верно и для гипербо-
лического поворота Lbi его параметр Ъ (при Ь>0) равен
удвоенной площади гиперболического сектора ЛОЛ%где
А—произвольная точка «единичной» гиперболы х2—z/2==l
Рис. П.7^
(или XY да 1/2), А- = Lb (Л). Для доказательства заме-
тим,7 что площадь сектора АО А1 равна площади криволи-
нейной трапеции Р!РАА\ расположенной под дугой ги-
перболы А А1 (рис. П.7)$ поскольку каждая из этих фи-
гур получается из криволинейного четырехугольника
ОРАА1 отсечением одного из двух равновеликих треуголь-
ников ОРА или OP'A* (S0PA = XY/2 XlYl/2 да 8ор>аъ
где (X; Y) и (X'; Y£) — координаты точек А и Л'}. Пло-
щадь криволинейной трапеции найдемА интегрируя функ-
цию Y да 1/2Х$ задающую нашу гиперболу:-
х
&Р'раа' \ 2t ~ 2 П X' 2 ~2Г
(напомним, что X- да е“&Х). Итака Ь да 2Saoa’* Точно
так же доказывается^ что при Ъ < 0 площадь сектора
АОА- равна —6/2$ но точка Л смещается по гиперболе
в другую сторону. Отсюда легко вывести соотношение *)
♦) См* также задачу 2 в конце Приложения.*
169
аналогичное правилу композиции обычных поворотов:’
Д31+3» 5=5 7?31 о R&.
И так жеЛ как из правила композиции поворо-
тов и записи поворота в координатах (6)х выводятся
формулы сложения для тригонометрических функ-
ций, из правила композиции гиперболических поворотов
и их представления в координа-
ч 1 / тах (7) можно вывести формулы
уч /7 сложения для гиперболических
\\ /jACchbtShb) функций (мы приводили их
1 № в начале гл* 5) *). Отметим еще?)
Л д *- что можно дать определение
/ \ гиперболических функций, поч-
// \\ ти дословно повторяющее оп-
у ределение тригонометрических
функций. Действительно, по
Рис. 11.8. определению, cos (3 и sin р~
это координаты точки, в кото-
рую переходит точка А (1; 0) при повороте Аналогич-
но, ch Ъ и sh Ъ — это координаты (в системе Оху) точки,;
в которую переходит точка А (1; 0) при гиперболическом
повороте Lb (это непосредственно следует из формул (7)в
в которых надо положить х = г/ — 0; см. рис. П.8).
Надеемсял нам удалось пояснитьж почему у гиперболи-
ческих функций так много общего с тригонометрически-
ми и какое отношение они имеют к гиперболе.
Мы попробовали даже сделать несколько больше —
познакомить читателя с некоторыми понятиями еще од-
ной, третьей в нашей книге, неевклидовой геометрии,
так называемой геометрии Минковского. Можно сказать,
что это геометрия, в которую превращается евклидова,
если заменить в ней скалярное произведение псевдо-
скалярным. При такой замене многие понятия, теоремы
и даже их доказательства сохраняются, но приобретают
новый смысл. Так, обычный поворот превращается в ги-
перболический, тригонометрические функции — в ги-
перболические и т. д. «Полем действия» геометрии Мин-
ковского в теории относительности является пространство
«энергий-импульсов», а также ... реальное пространст-
во-время! Об этом мы немного поговорим в следующем
разделе.
*) Сш также задачу 3 в конце Приложения8
.170
Пространство-время
В этом разделе мы выясним, как преобразу-
ются пространственно-временные координаты события
при переходе из одной инерциальной системы отсчета в
другую. Для этого рассмотрим следующий простой мы-
сленный эксперимент.
Короткий лазерный импульс, состоящий из N полных
колебаний, наблюдается в двух системах отсчета: лабора-
торной системе О и подвижной системе О', которая дви-
жется со скоростью v — th Ъ относительно лабораторной
системы в отрицательном направлении ее оси Ох. Будем
считать, что в нулевой момент времени в обеих системах
их начала координат совпадают и что ось О'х подвижной
системы параллельна Ох. Наконец, предположим, что
импульс распространяется в положительном направле-
нии оси Ох (в системе О), а значит, и оси О'х’ (в системе
О') и что первый «горб» волны в нулевой момент времени
проходит через начало координат (в обеих системах).
Проследим теперь за последним «горбом» волны. Ясно^
что для наблюдателя в лабораторной системе в момент
_____ЖЛ_____
-—л/wvwn
Рис. П.9.
t он будет иметь координату х = ct —- N\fj где % — длина
волны, а с, конечно, — скорость ее распространения^ т. е.
скорость света (рис. П.9). Таким образом^ полное число
колебаний
N — (ct — х)/к.
Подчеркнем, что в предыдущих главах мы в основном
рассматривали свет с корпускулярной точки зрения,, т. ё.
как поток фотонов — частиц с нулевой массой покоя^ о(ь
ладающих| определенной энергией и импульсом. В этом
своем обличье свет предстает перед нами в таких явлени-
ях, как фотоэффект или комптоновское рассеяние. Сей-
час же нас интересует распространение света в пространст-
ве и времени и тут на первый план выходят его волновые
характеристики —длина волны X и частота v — с/%. Как
мы уже знаем, частота света связана с энергией фотонов
Е формулой Планка Е = hvlc2. При переходе в .новую
систему отсчета энергия (и импульс) фотона меняются,
вместе с ними меняются и его волновые характеристики
Л и v. Закон изменения мы вывели в гл. 7 при изучении
эффекта Доплера (см. также гл. 8): если подвижная система
движется относительно лабораторной со скоростью v *=*
= th Ъ в ту же сторону, что и фотон, то энергия фотона,
а значит, и частота волны в подвижной системе будет в
еь раз меньше, чем в лабораторной:
Е' = e^Ei
если движение происходит в противоположном направле-
нии (с той же скоростью), то
Е' = еьЕъ v' = еьу*
Перепишем выражение для числа колебаний в лазер-
ном импульсе через частоту:
N=^-(ct-x).
Ясно, что это число будет одинаковым для наблюдателей
в обеих системах, т. е.
iV==-2L(ci' —х'),
где- v* = ebv — частота волны в подвижной системе (в
системе О направления движения волны и системы О* про*
тивоположны!), a f и х* — временная и пространственная
координаты последнего «горба» волны в системе О*. Срав-
нивая два выражения для Nt получаем{ что
cf — х‘ = е-ь (ci — х).
Эта формула справедлива для любых значений tux таких,
что х ctt поскольку в равенстве х = cf - NK величина
NK может принимать любые неотрицательные значения.
Рассматривая* аналогичный лазерный импульсу рас-
пространяющийся в отрицательном направлении оси Oxt
мы получим равенства
N = ~(с1 4- х) = ^-(ct' + х'),
где V s= е~ьу (теперь направления движения системы Ог
и импульса совпадают). Следовательно (при х > —ct\
ctl + х( ~ еь (ct + х).
т
Выпишем полученные соотношения рядом:*
ct' — х = е~ь (ct — х)%
ct' + х' 8= eb (ct + х).
Мы узнаем в них формулы гиперболического поворота —
или преобразования Лоренца — из предыдущего раздела
(в координатах ОХУ, где X = ct — х, Y = ct + х\ Что-
бы перейти к координатам (t\ х) (отвечающим системе ко-
ординат Оху предыдущего раздела), возьмем полусумму
и полуразность этих двух уравнений:
Ь -b ь _ -ь
ct' — е — ct + ——— х — & ch Ь + х sh 6,
б _ —ъ ь -ь
х' = ———?— ct + — у-— х — ct sh b + х ch &.
z z
Итак, при переходе в новую инерциальную систему
отсчета временная и пространственная координаты любого
события изменяются по тому же закону преобразования
Лоренца, как энергия и импульс частицы (точнее, состав-
ляющая вектора импульса, параллельная относительной
скорости двух систем отсчета)* Возвращаясь к системе
единиц, в которой с *= 1, принятой почти всюду в нашей
книжке, получим окончательные формулы*):
f s= t ch b + x sh ft,
(8)
x s= t sh b -f- x ch b.
(О тметим,что мы рассматривали только одну пространствен-
ную координату события; другие координаты, отвечающие
осям, перпендикулярным Ох меняться не будут, как и в
случае преобразования энергии-импульса.) Как мы зна-
ем, разность квадратов координат, t2 — ж2, при преобразо-
вании Лоренца не меняется. Этот релятивистский инва-
риант называется «интервалом».
В заключение проверим,; что полученные нами форму-
лы преобразования пространственно-временных коорди-
нат приводят к уже известному нам релятивистскому за-
кону сложения скоростей для случая одномерного движе-
ния. Пусть и и и1 — скорости некоторой частицы в лабо-
♦) Строго говоря, мы вывели формулы (8) только для случая
| х | < ct, но нетрудно показать, что их можно распространить
на все значения координат,
173
раторной и подвижной системах отсчета. Тогдал по опре-
делению,
и = Дж/Д/, и' =
Приращения координаты и времени в двух системах
отсчета подчиняются тем же преобразованиям Лоренца:
ДГ = Дг ch Ь + Дж sh 6,j
Дж' = \t sh Ь + Дж ch Ь. ।
Поделив теперь Дж' на Д£', мы получим уже хорошо нам
знакомую формулу:
, Дя' Д/ sh b + Дя ch b
U At' At ch b + Ax sh b =
Ax Ax
sh b 4- -7-7 ch b th b 4- -77 ,
‘At 1 At v + и
Ax Ax 14- vu
eh b + - д^- sh b 1 + th b
Это лишний раз подтверждает, что пространственные и
временные координаты какого-либо события в разных инер-
циальных системах отсчета связаны друг с другом преобра-
зованиями Лоренца. Время и координаты не-существуют
сами по себе, они объединяются в единое (четырехмерное)
пространство-время. Это приводит к таким следствиям,
как сокращение длин и изменение хода часов для наблю-
дателей, движущихся с большой скоростью друг относи-
тельно друга. Описанию этих и других пространственно-
временных эффектов в теории относительности посвящено
много прекрасных популярных книг, к которым мы и ото-
шлем заинтересованного читателя. Мы же поставим точку
в том месте, с которого обычно принято начинать изложе-
ние теории относительности А. Эйнштейна.
Задачи
1. Найдите формулы обратного преобразования Ло-
ренца, разрешив уравнения (7) относительно я, у. Покажите, что
преобразование, обратное к Lb, есть L~b.
2. Докажите, что Lbl+b2 =
а) непосредственным расчетом;
б) опираясь на физический смысл параметра Ь преобразования
Lb (th b — относительная скорость).
в) пользуясь представлением гиперболического поворота как
композиции растяжения и сжатия плоскости в двух перпендику-
лярных направлениях.
174
3. Пусть при повороте ЯР1 точка А (х\ у) переходит в А’(хг\у'\
при повороте 7?^ точка А* переходит в А* (х”\ у"). Выпишите
координаты (х'] у1) и (х”} у”). Выпишите координаты (х'"\ у"), поль-
зуясь тем, что Att = R$i+$a (Л). Получите отсюда формулы сложе-
ния тригонометрических функций. Выведите аналогичным сбразом
формулы сложения для гиперболических функций.
4. Пусть Л и В — две частицы с массами тА и тив. Докажите,
что величина ЕАЕВ — РдРв (произведение энергий частиц минус
скалярное произведение векторов импульса) равна тАтв ch с, где
th с = г?Л|В, и не зависит от системы отсчета, т. е. является ре-
лятивистским инвариантом.
5. Пользуясь преобразованием Лоренца, докажите, что из за-
кона сохранения полного импульса в двух движущихся друг от-
носительно друга системах отсчета вытекает и закон сохранения
энергии в этих системах.
Владимир Натанович Дубровский
Яков Абрамович Смородинский
Евгений Львович Сурков
РЕЛЯТИВИСТСКИЙ МИР
(Серия «Библиотечка «Квант»)
Редактор Л. А. Панюшкина
Техн, редактор Е. В. Морозова
Корректор И. Я, Кришталь
ИВ № 12101
Сдано в набор 21.11.83.
Т-06222. Формат 84 x!08V*i.
Обыкновенная гарнитура.
Условн. печ. л. 9,24. Условн. ..... .
Тираж 93 000 экз. Заказ JSft 3456.
Подписано к печати 14.02.84.
Бумага тип. № 3.
Высокая печать.
I. кр.-отт. 9,66. Уч.-изд. л. 9.39.
2123. Цена 30 коп.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
2-я типография изд-ва «Наука»
121099 Москва, Шубинский пер., 10
30 к.