
















Author: Беркутов А.М. Журавлев В.А. Кураева Г.А. Прошина Е.М.
Tags: формы лекарственных средств медицинские материалы оборудование физиотерапия радиотерапия другие терапевтические средства технология металлов машиностроение приборостроение физиотерапия и курортология медицина
ISBN: 5-93208-046-9
Year: 2000


Биомедицинская инженерия
системы
комплексной
ЭЛЕКТРОМАГНИТОТЕРАПИИ
Под редакцией
А. М. Беркутова, В. И. Жулева,
Г. А. Кураева, Е. М. Прошина
Рекомендовано
Учебно-методическим объединением Министерства образования РФ
в качестве учебного пособия для студентов вузов
по направлению «Биомедицинская инженерия»
МОСКВА
Лаборатория Базовых Знаний
БИНОМ
20 0 0
ББК 34.7+53.54
УДК 615.472.03:615.847.8
С 34
Авторский коллектив: Беркутов А.М., Виноградов А.Л., Глобин В.И., Гуржин С Г.,
Жулев В.И., Калакутский Л.И., Кириллов Ю.Б., Кряков В.Г.,
Кураев Г.А., Пришин Е.М., Ступаков Г П., Сучкова Ж.В.,
Швальб П.Г., Щербинина Н.В.
Рецензенты: — НИИ новых медицинских технологий, г. Тула (директор, декан
медицинского факультета ТулТГУ, профессор Хадарцев А.А.);
— председатель Учебно-Методических Советов по направлению
«Биомедицинская инженерия» и медико-технических специальностей
19.05.00 и 19.06.00 профессор Попечителев Е.П.
Системы комплексной электромагнитотерапии: Учебное пособие для
вузов / Под ред А.М. Беркутова, В.И. Жулева, Г.А. Кураева, Е.М.
Прошина. — М.: Лаборатория Базовых Знаний, 2000 г. — 376 с.: ил.
В книге рассмотрены вопросы создания устройств и систем, искуственно формиру-
ющих динамические магнитные поля, а также систем электростимуляции, применяемых
для лечения различных заболеваний. Изложены биофизические основы взаимодействия
электромагнитных полей с биообъектами, рассмотрены особенности расчета и проек-
тирования систем электромагнитотерапии, показаны результаты их использования в ле-
чебной практике, даны рекомендации по применению.
Учебное пособие рассчитано на преподавателей и студентов медико-технических на-
правлений и специальностей вузов, биологов, физиологов, врачей, в особенности фи-
зиотерапевтов, и инженеров, занимающихся разработкой и использованием электронной
медицинской техники.
Все права защищены Никакая часть этой книги не может быть воспроизведена в
любой форме или любыми средствами, электронными или механическими, включая
фотографирование, магнитную запись или иные средства копирования или сохранения
информации без письменного разрешения издательства.
По вопросам приобретения обращаться:
В Москве
«Лаборатория Базовых Знаний» (095)955-03-98, e-mail: lbz@aha.ni
«Познавательная книга» (095)170-66-74, e-mail: poznkn@orc.ni
В Санкт-Петербурге
«Диалект» (812)247-93-01, e-mail: dialcct@sndlct.iofTe.rssi.ru
© Беркутов А.М., Жулев В.И.,
ISBN 5-93208-046-9
'to’ ОСрку IUD П. JY1 -, U.FI
Кураев Е.М., Прошин Е.М.
© Лаборатория Базовых Знаний, 2000
П р едисловие
В последние десятилетия в России и за рубежом интенсивно разви-
вается перспективная область медицины — электромагнитотерапия, ос-
нованная на использовании биологического и лечебного действия
электромагнитных полей (ЭМП). Многочисленные лабораторные и кли-
нические опыты показали высокий лечебный эффект ЭМП, они активно
влияют на обмен веществ, оказывают противовоспалительное, обезбо-
ливающее, спазмолитическое действие и вызывают многогранные ответ-
ные реакции организма.
Широкое распространение электромагнитотерапии в практике со-
провождается созданием большого числа различных полесоздающих тех-
нических средств и методов их применения. Вопросы исследования ме-
ханизма действия ЭМП на организм, технологии лечения многих забо-
леваний, описания конкретных устройств опубликованы в ряде
монографий, трудах конференций, тематических сборниках и специали-
зированных журналах. В данной области знаний работают врачи, био-
логи, физиологи, инженеры и специалисты других профессий.
Однако, несмотря на многочисленные публикации, вопросы разра-
ботки единых подходов к оценке лечебного эффекта, унификации ме-
тодик воздействия ЭМП на организм, принятия единой терминологии,
создания учебников и учебных пособий не получили достаточного раз-
вития и освещения. Это в значительной мере сдерживает дальнейшее
развитие электромагнитотерапии. Поэтому для достижения высокой эф-
фективности электромагнитотерапии необходимо решение целого ряда
связанных между собой научных, технических и организационных задач.
Среди главных из них отметим необходимость более полного и точного
описания механизма действия поля на организм, развития методов и
средств диагностики заболеваний и выбора методик лечения, разработки
нормативной базы по приведению в единую систему понятий, класси-
фикаций, требований, методик, создания теории и инженерных методик
по проектированию электромагнитной аппаратуры, подготовки кадров
медицинского и медико-технического профиля, подготовки учебников
и учебных пособий.
Настоящее учебное пособие посвящено анализу состояния вопроса
по решению названных задач и систематизированному изложению тео-
ретических и практических основ электро- и магнитотерапии. С целью
4
Системы комплексной электромагнитотерапии
облегчения усвоения материала книги он изложен в виде двух частей.
В первой части, на наш взгляд, достаточно полно раскрыты вопросы
методологии, теоретических и практических аспектов развития магни-
тотерапии и ее технических средств. В ее подготовке и написании уча-
ствовали ученые Рязанской государственной радиотехнической акаде-
мии, Рязанского государственного медицинского университета, Рязан-
ского клинического кардиологического диспансера, Ростовского
государственного университета и Государственного научно-исследова-
тельского испытательного института МО РФ (авиационной и космичес-
кой медицины), г. Москва.
Вторая часть посвящена одному из наиболее разработанных видов
электротерапии и ее средствам — системам электронейростимуляции.
Данный раздел подготовлен учеными Самарского государственного аэро-
космического университета.
Учебное пособие рассчитано на преподавателей и студентов меди-
ко-технического направления, биологов, физиологов и медицинских ра-
ботников. Оно в значительной мере заполняет вакуум знаний по влия-
нию электромагнитных полей на биологические объекты и проектиро-
ванию электромагнитных систем терапевтического и диагностического
назначения.
Книга является трудом большого авторского коллектива, объединен-
ного целями и задачами Межвузовской научно-технической программы
«Автоматизированные системы медико-биологического назначения» (на-
учный руководитель — профессор Г. А. Кураев).
Авторы выражают благодарность профессору Кириллову С. Н. за
подготовку материала и написание раздела 7.8; докторам медицинских
наук, профессорам Дильдину А. С. и Манелису Э. С. за обеспечение
медицинского аспекта исследований систем электростимуляции; Вер-
бицкому Е. В., Волкову И. В., Коломийцу О. М., Орлову В. И., Светни-
кову О. Г., Юдаеву Ю. А. за любезно предоставленные материалы в
некоторые разделы книги.
В формировании направлений исследований, использовании их ре-
зультатов и подготовке книги большую роль сыграли и оказали под-
держку профессор Ю. В. Шленов и кандидат технических наук
С. К. Сергеев.
Авторы выражают глубокую признательность профессору А. А. Ха-
дарцеву, директору НИИ новых медицинских технологий (г. Тула) и
профессору Е. П. Попечителеву, председателю Учебно-Методических
Советов по направлению «Биомедицинская инженерия» и медико-тех-
нических специальностей 19.05.00 и 19.06.00 (г. Санкт-Петербург), взяв-
шим на себя труд по рецензированию книги.
Замечания и пожелания по книге просим направлять по адресу:
391000, ГСП, г. Рязань, ул. Гагарина, 59/1, Рязанская государственная
радиотехническая академия.
Авторы
Введение
В начале XX века на пересечении сфер интересов физики электро-
магнитных полей и биологии зародилась и стала бурно развиваться новая
наука — электромагнитная биология. Логическим продолжением собы-
тий явилось ее взаимодействие (объединение) с медициной, в результате
которого медицинская практика получила новые высокоэффективные
методы диагностики — магниторезонансные томографию и лечение —
комплексную магнитотерапию.
Лечебные электромагнитные поля (ЭМП) имеют большое разно-
образие по закону изменения во времени, частотному спектру, по
видам и геометрии в пространстве. В медицинской практике широкое
применение получили низкочастотные поля, которые можно рассмат-
ривать как «чистые» магнитные или электрические поля. В соответ-
ствии с этим используются термины магнитотерапии и электротера-
пии. Магнитные поля (МП) и электрические токи в заданном био-
контуре (электрические поля — ЭП) создаются техническими
средствами, включающими в себя полеформирующий индуктор и уст-
ройство управления им. По функциональным возможностям, уровню
структурной сложности и технологии взаимодействия средств с орга-
низмом их можно разделить на простые изделия (например, магнит-
ные клипсы, браслеты), аппараты и системы [1]. Изделия и аппараты,
как правило, оказывают местное воздействие на небольшую область
тела, отдельный орган или очаг поражения. Именно с созданием и
внедрением в клиническую практику широкой номенклатуры аппара-
тов локального действия развивалась электромагнитотерапия, которая
базировалась на представлениях, главным образом, физико-химичес-
кого и энергетического воздействия поля на клеточно-молекулярном
уровне. Данные представления, к сожалению, до сих пор не имеют
достоверных количественных описаний, что связано с недостаточной
изученностью механизма действия локальных полей, сложностью их
задания и описания.
Несмотря на неполную разрешенность теоретических и практичес-
ких задач терапии при локальном воздействии, в настоящее время ин-
тенсивно развивается электромагнитотерапия, основанная на воздейст-
вии полей на весь организм 12-9]. Она обеспечивает более высокий
биологический и лечебный эффект. На примере магнитотерапии легко
6
Системы комплексной элекгромагнитотерапии
показать необходимость комплексного подхода в методологии исследо-
ваний и лечения при воздействии полем на весь организм [10-14].
В самом деле, при общем воздействии (ОВ) представления о дейст-
вии поля только в виде физико-химического свойства явно недостаточ-
но, поскольку организованному воздействию подвергаются все клетки,
органы, системы организма, механизмы их взаимосвязей и взаиморегу-
лирования. При реализации ОВ создается сложная биотехническая сис-
тема (БТС), в которой главное звено — испытуемый биообъект, под-
вергающийся воздействию многих случайных и задаваемых факторов,
должно иметь адекватное описание до, во время и после воздействия
полем. Идеология общего воздействия, уровень совершенства техноло-
гии воздействия и технических средств, а также квалификация медпер-
сонала предполагают реализацию многоконтурной биотехнической об-
ратной связи, оперативную диагностику, оптимизацию процедур воздей-
ствия и значений биотропных параметров поля.
Магнитотерапию, основанную на вышеперечисленных принципах и
реализующую поименованные возможности, далее будем называть ком-
плексной магнитотерапией (КМТ), а структуры медико-технологичес-
ких, технических и организационных средств, реализующих КМТ, со-
ответственно, системами комплексной магнитотерапии (СКМ).
Важной проблемой магнитотерапии является проблема задания и
описания магнитного поля, расположения биообъекта в нем и представ-
ления медперсоналом картины поле-пациент. Даже поля простых изде-
лий и аппаратов из-за неоднородности и сложной формы не могут быть
описаны словами, и, тем более, какими-то нормально воспринимаемыми
формулами. Что же касается полей общего воздействия, где, как пра-
вило, используются импульсные бегущие или вращающиеся поля, про-
блема описания, формирования и представления поля перерастает в
неразрешимую проблему, не позволяющую лечащему врачу эффективно
использовать многочисленные характеристики и вариации поля. В связи
с этим возникает задача создания образного представления поля и его
наложения на биообъект, что, как ни парадоксально, в системах общего
воздействия может быть реализовано более продуктивно, чем в аппаратах
локального воздействия. Системы общего воздействия содержат полеза-
дающее устройство в виде скафандра, специальной кушетки или зам-
кнутого пространства с заданной известной геометрией, где пациент
имеет определенную фиксацию в пространстве и возможность задания
размеров. Удачные двух- и трехмерные представления поле-пациент для
врача, а может и для пациента, изображенные на современных дисплеях
с использованием цветового разделения признаков и задания оцифро-
ванных уровней поля в реальном масштабе времени, на наш взгляд,
значительно поднимут эффективность СКМ. Данная задача в постано-
вочном плане и частичное ее решение рассматриваются в настоящей
работе.
Другой, может быть, самой важной задачей комплексной магнито-
терапии на данном этапе, является задача обеспечения оперативного
Введение
7
контроля состояния систем организма пациента и их диагностика во
время процедуры общего воздействия. Участие всех систем организма
во взаимодействии с полем в редких случаях нарушения синхронизации
может привести к срыву адаптационных реакций, чего нельзя допускать.
Вместе с этим не менее важным является оперативное изменение ха-
рактеристик поля по мере воздействия на пациента в соответствии с его
самочувствием, т.е. важно реализовать оптимизацию воздействия для
получения максимального комфорта пациента или другого полезного
эффекта [2, 3, 14]. Возможность оперативной диагностики и осущест-
вление режима оптимизации воздействия может дать специальная, по-
мехозащищенная измерительная и диагностическая аппаратура, синхро-
низируемая биоритмами пациента и включаемая в контур биотехничес-
кой обратной связи. Понимая сложность рассматриваемого вопроса с
технической и, особенно, с математической стороны, авторы, тем не
менее, предприняли попытку осветить в книге основные предложения
и технические результаты в данном направлении.
Комплексность электромагнитотерапии еще более выпукло демон-
стрируется современной клинической практикой использования комби-
нированных методов и процедур. Получили широкое распространение
магнитолазеротерапия, термобаромагнитотерапия, магнитотерапия на
фоне медикаментозного лечения и т.п. Безусловно, сочетанные методы
хранят в себе огромные возможности и их эффективность может быть
выше в десятки и сотни раз, и это необходимо осваивать. Но при этом
возникают еще более сложные вопросы изучения и описания механизма
действия на организм последовательности или аддитивного воздействия
двух, трех и более факторов в различных сочетаниях по форме и уровню.
А задача управления воздействием и его оптимизации, видимо, долго
будет неразрешенной в полной мере. Несмотря на заметный пессимизм
в вопросе получения максимальной выгоды от сочетанных методов, в
данной книге представлены некоторые методики и результаты магнито-
терапии, используемой одновременно с другими методами.
Глава 1
ДЕЙСТВИЕ МАГНИТНЫХ ПОЛЕЙ
НА БИООБЪЕКТЫ
1.1. Прошлое и настоящее магнитобиологии
и магнитотерапии
Жизнь на Земле зародилась и развивалась в «магнитной колыбели»
Земного шара, что не могло не отразиться на структурных и функцио-
нальных особенностях всего живого. Надо полагать, что не случайно
преобладающие частоты электроэнцефалограммы мозга человека (ЭЭГ)
и низкочастотные пульсации геомагнитного поля (ГМП) имеют опре-
деленное сходство. Очевидно, что формирование внутренних биоритмов,
происходящее в процессе многовековой эволюции, не обошлось без
участия внешних ритмов магнитного поля Земли. Эта взаимосвязь была
отмечена еще с древних времен и эпизодические попытки использовать
магнитные поля (МП) в лечебных целях прослеживаются из глубины
веков. Однако официальной датой рождения магнитобиологии следует
считать 1780 год, когда врачи Анри и Туре на заседании Королевского
медицинского общества Франции впервые сообщили о возможности
лечебного применения магнитов. После этого магнитотерапия приобрела
целенаправленный и систематический характер [15].
Спустя 100 лет магнитотерапия получила новый импульс к развитию
в связи с возникшей модой на металлотерапию. В этот период как за
рубежом, так и в России стали более широко применять в лечебных
целях постоянные магниты как источники МП. В 1881 г. вышла первая
отечественная монография Н. И. Григорьева, посвященная терапевти-
ческому действию магнитов, которая заложила теоретические и практи-
ческие основы дальнейшего развития метода. Заметной вехой в развитии
магнитобиологии стало появление в 1901 году монографии известного
русского физиолога В. Я. Данилевского «Исследования над физиологи-
ческим действием электричества на расстоянии», в которой он изложил
и систематизировал многие вопросы электромагнитотерапии [16].
В начале 30-х годов XX столетия мировая медицинская практика
обогатилась рядом аппаратов, способных создавать различные типы маг-
нитных полей. В СССР на основе прибора, генерирующего низкочас-
тотное МП, был сконструирован аппарат, который позволял воздейст-
вовать не только на зону поражения при прикладывании к ней магнит-
ного индуктора, но и на все тело пациента. По-видимому, это было
10
Глава 1
первое магнитотерапевтическое устройство, позволяющее осуществлять
как общее, так и местное воздействия МП на организм. Дальнейшее
развитие магнитотерапии шло по пути реализации обоих этих направ-
лений. В Италии Эльман создал прибор для локальной магнитотерапии
(1-2 одновременно работающие катушки с сердечником), а в Дании К.
Эденфельс получил патент на аппарат, основной функциональной час-
тью которого были гибкие круглые соленоиды разного диаметра, что
позволяло воздействовать магнитным полем на весь организм. В США
были разработаны аппараты I-ON-CO, «Vitrona», «Theronoid» с индук-
тором-соленоидом, запитываемым синусоидальным током [17].
В этот же период заметным вкладом в развитие магнитотерапии
явились научные и инженерные разработки советского ученого, одного
из создателей Пермской школы магнитологов, В. И. Кармилова. Под
его руководством в 1938 году был сконструирован электромагнитный
аппарат для лечения больных со злокачественными опухолями (индук-
ция магнитного поля 60 мТл), однако только через десять лет, уже в
послевоенные годы, результаты этих и других исследований были обоб-
щены в сборнике научных работ «Биологическое и лечебное действие
магнитного поля и строго периодической вибрации», который явился
первым коллективным трудом в этой области [18]. К сожалению, аппа-
раты В. И. Кармилова производились в единичных экземплярах и, кроме
Перми, нигде не применялись, но работы Пермской школы вдохновили
многих исследователей нашей страны.
Послевоенные сороковые-пятидесятые годы в Советском Союзе оз-
наменовались для магнитобиологии как науки формированием ведущих
центров с оригинальными научными направлениями в Москве (АН
СССР), Витебске, Саратове, Перми, Куйбышеве, Ростове-на-Дону и
других городах. Стали проводиться глубокие фундаментальные исследо-
вания в области взаимодействия живых организмов с магнитными по-
лями. О. С. Шерстнева и Р. Г. Скачедуб (1951 и 1954 гг. соответственно)
защитили первые кандидатские диссертации, посвященные исследова-
нию влияния МП на фагоцитарную активность и на проницаемость
сосудов в мышечной ткани [19, 20]. В конце пятидесятых годов Ю. А.
Холодов, который в настоящее время является одним из ведущих маг-
нитологов мира, защитил диссертацию на тему «К физиологическому
анализу действия магнитного поля на животных» [21].
Растущая потребность в новых совершенных генераторах МП, при-
годных для использования в лечебных учреждениях, стимулировала ин-
женерную мысль. В 1959 г. В. Робеску сконструировал электромагнит-
ный терапевтический аппарат, а в 1969 г. в Румынии был создан новый,
более усовершенствованный аппарат «Магнитодиафлюкс». Отечествен-
ные ученые Н. Ф. Муравьев и Э. В. Картюков разработали устройство
для лечения травм и сосудистых заболеваний (индукция МП составляла
50 мТл).
Интенсивное накопление новых сведений о действии МП на чело-
века и животных, разнообразные методики и многочисленные преце-
Действие магнитных полей на биообъекты
11
денты применения МП в медицинской практике обусловили потреб-
ность в широком обсуждении и обобщении имеющейся научной инфор-
мации для координации дальнейших исследований. С этой целью в 1966
году в Москве было проведено I Всесоюзное совещание по магнитоте-
рапии, которое утвердило магнитобиологию в роли одного из направ-
лений медицинской науки, а магнитотерапию — как перспективный
метод физиотерапии.
Становление магнитобиологии как науки сопровождалось созданием
новых и совершенствованием уже имеющихся генераторов магнитных
полей. В конце 60-х годов в СССР был сконструирован первый аппарат
для промышленного производства «Полюс-1», который стал серийно
выпускаться с 1975 г. Несколько позже появились его модификации
(«Полюс-2», «Полюс-101»), а также аппараты других моделей: «Алимп-
1», «Маг-30», «Градиент-1», «ПДМТ-01» и др. Справедливости ради сле-
дует отметить, что все они предназначались для местного воздействия
на пораженный орган. Подробные характеристики приборов полно пред-
ставлены и хорошо описаны в книге Г. Р. Соловьевой [1].
В научном коллективе Рязанского радиотехнического института изна-
чально было избрано направление по созданию магнитотерапевтических
аппаратов общего действия. В семидесятых годах его сотрудниками в со-
дружестве с научными работниками медицинского института был создан
макетный образец магнитотерапевтического аппарата общего действия
«Звезда», с помощью которого были проверены обоснованность основных
принципов построения подобных аппаратов, его лечебный эффект и тех-
нология отпуска физиотерапевтических процедур. Полученные данные по-
зволили разработать и создать более совершенный магнитотерапевтический
аппарат, который под названием «Аврора МК-01» в 1991 г. прошел неза-
висимые клинические испытания и по рекомендации Комитета по новой
технике при М3 СССР стал производиться серийно.
В этот же период времени в СССР параллельно разрабатывались и
создавались конструкции и изделия с использованием постоянных маг-
нитов: листовые аппликаторы, магнитные ремешки, двухполюсные ме-
дицинские магниты, магнитные таблетки, клипсы и др. Таким образом,
к настоящему времени в России и за рубежом создано около 100 раз-
личных аппаратов и систем, генерирующих различные МП.
В 1975 г. в Болгарии была проведена 1-я Международная конфе-
ренция по основным направлениям бионики, на которой обсуждались
вопросы действия МП на информационные процессы в биообъектах и,
в частности, возможность управления с помощью МП деятельностью
организма в норме и патологии. Вскоре после этого события Минис-
терство здравоохранения СССР создало проблемную комиссию «Маг-
нитобиология и магнитотерапия в медицине». Возглавил комиссию из-
вестный в этой области ученый А. М. Демецкий. Роль комиссии в ко-
ординации исследований, организации всевозможных конференций,
стимуляции роста научных кадров и публикаций, в решении многих
других задач трудно переоценить.
12
Глава 1
Были проведены конференции в Ленинграде, Ростове-на-Дону, Са-
маре, Рязани и других городах, которые внесли существенные научные
вклады в теорию и практику магнитотерапии. На конференции в Рос-
тове-на-Дону (1989 г.) рассматривались механизмы действия магнитных
и электромагнитных полей на биологические системы различных уров-
ней организации. Научные группы из многих городов нашей страны
представили на обсуждение около 250 докладов. Наиболее значимыми
были работы Белорусской школы (А. М. Демецкий), Ростовской школы
(В. Н. Чернов, Л. X. Гаркави), Московской школы (Ю. А. Холодов). В
работах последней особое внимание привлекло положение о том, что
центральная нервная система вовлекается в физиологические механизмы
регуляции при воздействии магнитными полями [22].
Широкое освещение научных результатов фундаментальных иссле-
дований по действию МП на биообъекты, выполненных Самарской шко-
лой магнитологов, было сделано на Самарской конференции в 1991 году
[23]. Эти результаты существенно расширили рамки представлений о
явлениях и процессах в клетках, органах и системах организма.
В 1995 г. в Рязани проведена Всероссийская научная конференция
«Электромагнитные поля в медицине и биологии». В ее работе приняли
участие практически все ведущие специалисты и научные школы маг-
нитологии и магнитотерапии. При обсуждении главных научных направ-
лений повышенное внимание было уделено инженерным проблемам
магнитотерапии, особенно оптимизации построения, структур и техно-
логий применения систем общего воздействия. Впервые подробно рас-
сматривался вопрос организации биотехнической обратной связи при
воздействии магнитным полем на организм.
А. М. Демецкий (г. Витебск) в своем докладе систематизировал ре-
зультаты фундаментальных и прикладных исследований по магнитоло-
гии в России и за рубежом, сформулировал главные направления даль-
нейших исследований, отметил острую необходимость усиления коор-
динации работ, выпуска справочной и нормативной базы. Ю. А. Холодов
(г. Москва) информировал о последних фундаментальных исследовани-
ях, проведенных в РАН, по изучению реакции нервной системы человека
на электромагнитные поля. В. Н. Чернов (г. Ростов-на-Дону) обозначил
перспективы создания нового поколения электромагнитных терапевти-
ческих приборов с малой интенсивностью поля. Ю. Б. Кириллов (г. Ря-
зань) подробно изложил методологию практической магнитотерапии при
воздействии на весь организм импульсным бегущим магнитным полем
низкой интенсивности, подчеркнув возможность использования различ-
ных воздействий магнитным полем для лечения широкого спектра за-
болеваний, эффективность которых проверена на большом статистичес-
ком материале. В докладах А. М. Беркутова и Е. М. Прошина (г. Рязань)
описано семейство систем комплексной магнитотерапии «Аврора МК»,
обоснованы основные принципы построения, критерии их оптимизации.
Показаны одноконтурные и многоконтурные схемы организации обрат-
ной связи при воздействии и возникающие при этом дополнительные
Действие магнитных полей на биообъекты
13
задачи по созданию новых помехоустойчивых измерительных средств. С
содержательным обобщающим докладом по развитию магнитологии и
магнитотерапии в рамках Межвузовской НТП «Автоматизированные
системы медико-биологического назначения» выступил ее научный ру-
ководитель Г. А. Кураев (г. Ростов-на-Дону). Он подчеркнул, что наряду
с биологическими и медицинскими аспектами исследований, необходи-
мо развивать нормативную базу магнитотерапии, метрологическое обес-
печение ее исследований и практики.
Заканчивая краткий экскурс в историю использования МП в меди-
цинской практике и анализ современного состояния магнитобиологии,
необходимо отметить, что, несмотря на давнюю известность положи-
тельного лечебного действия МП, реальное научное обоснование для
применения их в медицине появилось лишь в последние 20-30 лет.
Созданные к настоящему времени различные магнитотерапевтические
аппараты местного и общего воздействия широко используются в прак-
тике здравоохранения. Однако дальнейшее расширение применения
магнитных полей в медицине сдерживается отсутствием единой об-
щепринятой теории влияния МП на человеческий организм, что
затрудняет разработку четко определенного перечня показаний для
применения МП, выбор вида МП при различных патологических
состояниях, подбор индивидуальных доз воздействия. В связи с этим
основными задачами в деятельности научного содружества инженеров
и врачей еще долгое время будут изучение и выбор оптимальных режи-
мов магнитных воздействий, поиск путей максимальной индивидуали-
зации лечебных программ.
1.2. Виды и классификация магнитных полей
Земля представляет собой постоянный магнит и создает так назы-
ваемое геомагнитное поле Земли (ГМПЗ) с индукцией около 50 мкТл.
ГМПЗ носит стационарный характер и является для человека в любой
точке Земли однородным и равномерным, так как размеры человека
ничтожно малы по сравнению с размерами источника.
Наряду с наличием стационарного ГМПЗ, на Земном шаре возмож-
но появление нестационарных МП. В первую очередь к ним следует
отнести так называемые магнитные бури, источником возникновения
которых являются энергетические взаимодействия с Солнцем планет
Солнечной системы, в том числе и Земли. При магнитных бурях, в
основном, формируются поля вихревой структуры. Кроме них следует
учитывать такой природный феномен, как грозовые разряды, рождаю-
щие мощные электромагнитные (ЭМ) импульсы очень широких спект-
ров. Помимо стационарных и нестационарных МП естественного про-
исхождения в последние десятилетия реальными факторами воздействия
становятся искусственные постоянные и переменные магнитные поля,
создаваемое промышленными объектами: электростанциями, линиями
14
Глава 1
электропередач, ускорителями частиц, мощными радиопередающими
устройствами, коммутаторами энергосетей, транспортом и другими тех-
ническими устройствами.
Таким образом, общая магнитная обстановка планеты складывается
как бы из двух компонент: постоянной составляющей, являющейся
ГМПЗ, и случайной (хаотической), складывающейся из нестационарных
природных полей и из всех видов искусственных полей. Взаимодействие
источников, формирующих хаотическую составляющую, нарушает одно-
родность и равномерность ГМПЗ.
Все вышесказанное диктует необходимость в детальном разборе ха-
рактеристик, механизмов и специфики формирования и действия элект-
рических, магнитных и электромагнитных полей на живые организмы.
Анализируя физические параметры постоянного электрического
поля и возможности его воздействия на биообъекты, следует отметить,
что оно образуется в пространстве вокруг неподвижного заряда или в
системе зарядов и обладает силовым действием на другие заряды (заря-
женные частицы, тела и т.п.). Силовое взаимодействие зарядов описы-
вается законом Кулона. Основной характеристикой электростатического
поля является его напряженность Е, которая определяется как сила,
действующая на единичный заряд. Силовые линии поля либо начина-
ются и оканчиваются на электрических зарядах, либо одним концом
уходят в бесконечность.
Во всех точках пространства, окружающего движущийся электри-
ческий заряд (электрический ток), всегда существует поле сил, называе-
мое магнитным полем. Между системами произвольных токов возника-
ют механические силы взаимодействия, т.е. магнитное поле обладает
силовым воздействием на движущиеся заряды или токи. Исчерпываю-
щей характеристикой магнитного поля, описывающей его состояние в
каждой точке пространства, является вектор напряженности поля Н.
Поскольку магнитное поле, в отличие от электрического, возбуждается
не магнитными зарядами (их не существует), а движением электрических
зарядов, то магнитные силовые линии не могут ни начинаться, ни кон-
чаться ни в каких точках поля. Следовательно магнитные силовые линии
могут быть либо замкнутыми, либо простираются из бесконечности в
бесконечность. Постоянное магнитное поле образуется постоянным
электрическим током или возбуждается постоянным магнитом. Поле
постоянных магнитов (намагниченных магнетиков), как и всякое маг-
нитное поле, создается циркулирующими в магнетике электрическими
токами и складывается из поля молекулярных токов, магнитных момен-
тов токов, соответствующих орбитальному движению электронов, и из
дипольных спиновых магнитных моментов электронов.
В системе, характеризующейся переменным током или переменным
зарядом, возникает электромагнитное поле, имеющее две компоненты:
электрическую и магнитную составляющие. Состояние такой системы
описывается уравнениями Максвелла [24]:
Действие магнитных полей на биообъекты
15
rotE = - —
с
ЭН
at ’
(1.1)
rotH = - —
с
ЭЕ 4л .
Э1 + с J
где j — вектор плотности тока проводимости, с — скорость света в
вакууме, из которых следует, что любое изменение магнитной состав-
ляющей поля порождает изменение электрической составляющей и на-
оборот.
Электромагнитное поле обладает энергией W3M, которая зависит от
его параметров [25]:
W3M = ^fDEdV + ifHBdV, (1.2)
V V
где D и В — векторы электрической и магнитной индукции поля, V —
объем пространства, занимаемого полем, и складывается из двух ком-
понент: электрической и магнитной. Соотношение между компонентами
зависит от физической природы источника поля и от расстояния до
этого источника. Установлено, что на расстоянии длины волны А, от
источника излучения поле имеет ярко выраженный электрический или
магнитный характер с подавляющим преобладанием энергии одной ком-
поненты [26]. На расстоянии (5...6)Х от источника поле принимает плос-
кую конфигурацию и распространяется в виде плоской волны, энергия
которой поровну распределяется между электрической и магнитной со-
ставляющими. Магнитные поля создаются преимущественно цепями с
низким волновым сопротивлением, большими токами при относительно
малых перепадах напряжения (индуктивные элементы), а электрические
поля — цепями с большим сопротивлением при высоких напряжениях
и малых токах (емкостные элементы).
Во всех известных на сегодняшний день магнитотерапевтических
аппаратах и системах переменное электромагнитное поле возбуждается
либо с помощью индукторов-соленоидов, либо с помощью индукторов-
электромагнитов в диапазоне частот от инфранизких до 10 кГц. Длина
волны, соответствующая частоте 10 кГц, составляет 30 км. Следователь-
но, во всех применяемых в медицине аппаратах для магнитотерапии
воздействие осуществляется практически чистым магнитным полем.
Более того, с теоретической точки зрения, учитывая геометрические
размеры человека, индуктивные источники электромагнитного излуче-
ния будут обладать подобным действием на частотах до 10 МГц (длина
волны 30 м). На более высоких частотах необходимо будет учитывать
распределение энергии между электрической и магнитной компонента-
ми электромагнитного поля.
Помимо этого следует помнить, что живая ткань в электрическом
отношении представляет собой проводник и, поэтому, практически про-
зрачна для магнитного поля. Исследования ряда авторов [1, 27] показали,
что глубина проникновения МП в проводящую среду, аналогичную
16
Глава 1
живой ткани, на частотах 10 Гц и 10 кГц составляет соответственно 120
и 4 м, что намного превышает габариты человека. Ослабление интен-
сивности поля в биообъекте на расстоянии 0,2 м от поверхности тела
составляет для этих частот всего 0,2% и 5%. Следовательно, в медицин-
ских исследованиях и биологических экспериментах поглощением энер-
гии МП живыми тканями можно пренебречь.
Ниже приводятся основные характеристики магнитных полей, пред-
ставляющих интерес в плане их использования в медицинских целях.
Постоянным магнитным полем (ПМП) является поле, индукция ко-
торого не изменяется во времени. В каждой точке пространства вектор
магнитного поля остается постоянным по значению и направлению.
ПМП образуется либо постоянным магнитом, либо постоянным элект-
рическим током, протекающим по какому-либо проводнику. Любой ис-
точник ПМП имеет два полюса: северный (N) и южный (S).
Переменное магнитное поле (ПеМП) образуется с помощью индук-
торов при питании их переменными токами. В ПеМП в каждой точке
пространства изменяются как значение, так и направление вектора маг-
нитной индукции в соответствии с законом изменения тока. Частным
случаем ПеМП является синусоидальное магнитное поле, которое об-
разуется при питании индуктора от промышленной сети переменного
тока или от специального генератора синусоидальных колебаний. Такое
поле является моногармоническим. Большинство промышленно выпус-
каемых магнитотерапевтических аппаратов либо непосредственно пита-
ются от сети переменного тока, либо имеют в одном из режимов питание
синусоидальным током. Поэтому в существующей научно-технической
литературе аббревиатура «ПеМП» относится, в основном, именно к си-
нусоидальным магнитным полям.
Пульсирующее магнитное поле (ПуМП) — частный случай перемен-
ного поля, у которого вектор магнитной индукции изменяется по уров-
ню, но не изменяется по направлению. Такое поле образуется в индук-
торе при питании его пульсирующим током, получающимся, например,
в результате одно- или двухполупериодного выпрямления. ПуМП явля-
ется полигармоническим, его спектр содержит несколько гармонических
составляющих.
Вращающееся магнитное поле (ВМП) характеризуется тем, что вектор
магнитной индукции перемещается в пространстве (например, относи-
тельно поверхности формообразующего цилиндра). Вращающееся поле
может быть как моногармоническим, так и пульсирующим. Создается
ВМП с помощью трех- или многофазных преобразователей. При этом
индукторы должны располагаться либо по окружности (для локальных
воздействий), либо по образующей цилиндра (для общих воздействий).
Использование ВМП позволяет индуцировать в электролитах однона-
правленные электродвижущие силы, т.е. обеспечивать направленное
перемещение электрически заряженных частиц [28], что в ряде случаев
существенно повышает эффективность лечения.
Действие магнитных полей на биообъекты
17
Импульсное магнитное поле (ИМП) формируется с помощью индук-
торов при питании их импульсным током заданной формы. В лечебной
практике применяются различные формы импульсов как моно-, так и
биполярные. Кроме того, импульсы характеризуются длительностью,
частотой (периодом повторения) или скважностью. ИМП обладают ши-
роким частотным спектром и отличаются большей биологической ак-
тивностью по сравнению с ПуМП, ПеМП, ПМП [29, 30]. Ритмичный
характер процессов в органах и тканях и импульсная терапия созвучны,
поэтому импульсные воздействия легче «усваиваются» организмом [31].
Импульсное бегущее магнитное поле (ИБМП) представляет собой
поле, перемещающееся в пространстве относительно неподвижного па-
циента и импульсно изменяющееся во времени. ИБМП обладает самым
большим набором биотропных параметров и имеет наибольшую магни-
тобиологическую активность. Поскольку у бегущего (перемещающегося)
поля имеется дополнительный позитивный фактор: изменение магнит-
ного потока еще по одной координате (пространственной), то это в
определенной степени усиливает эффекты взаимодействия. Воспроиз-
вести ИБМП можно двумя способами: механическим перемещением
источника импульсного магнитного поля относительно пациента и пос-
ледовательным переключением тока в группе неподвижных индукторов.
В абсолютном большинстве аппаратов подобного рода ИБМП форми-
руется вторым способом: эффект бегущего магнитного поля создается
переключением индукторов.
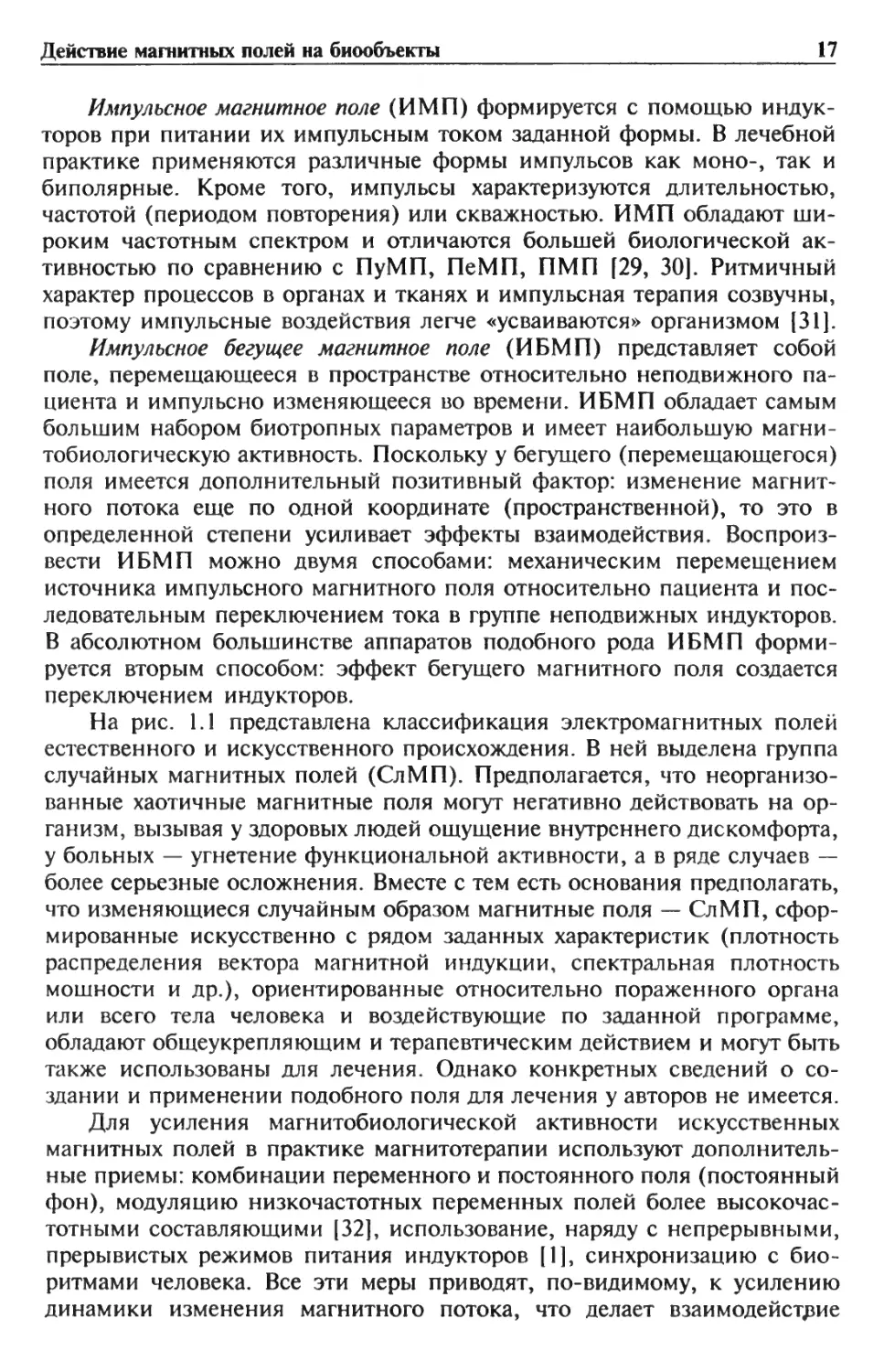
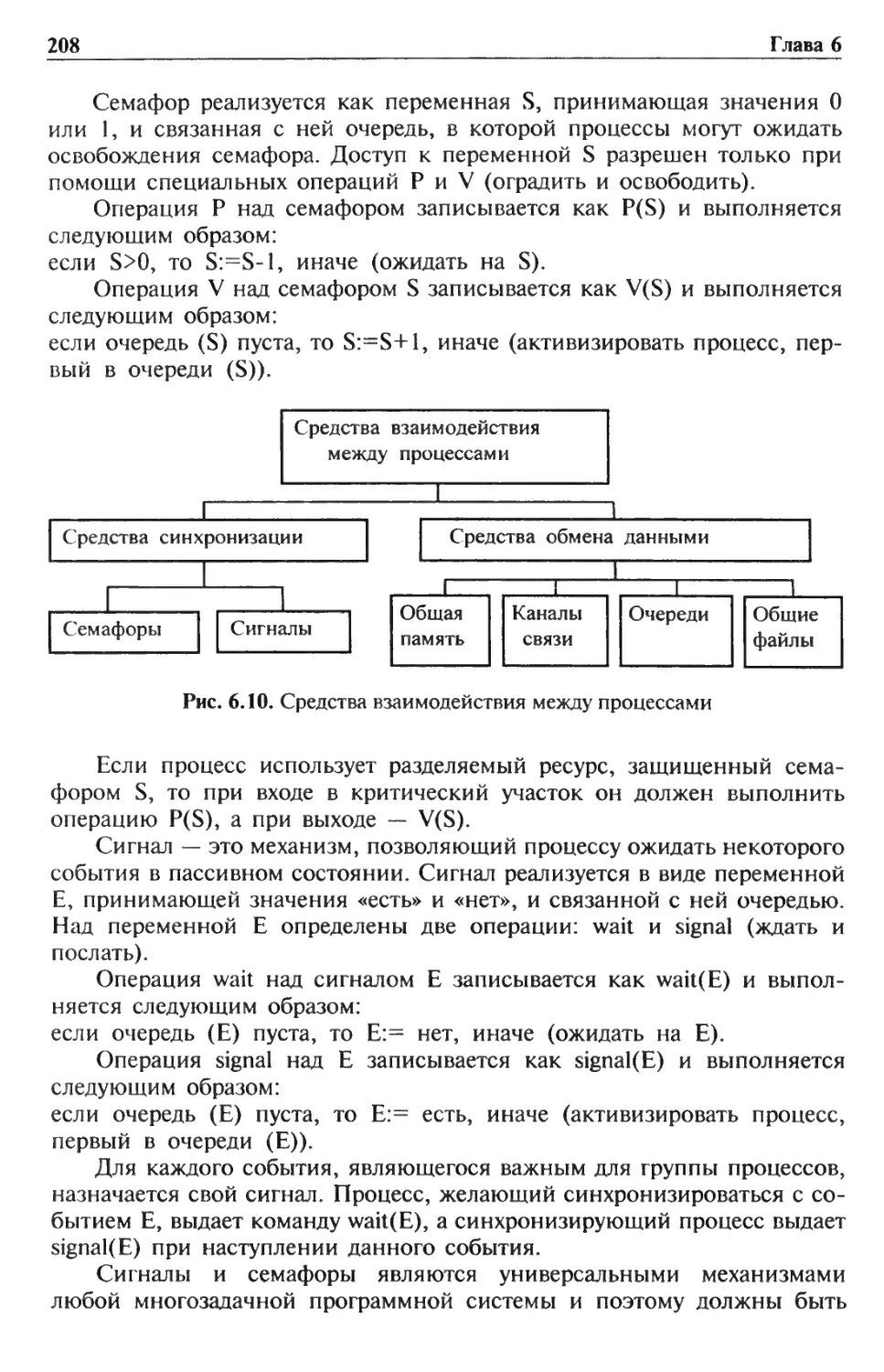
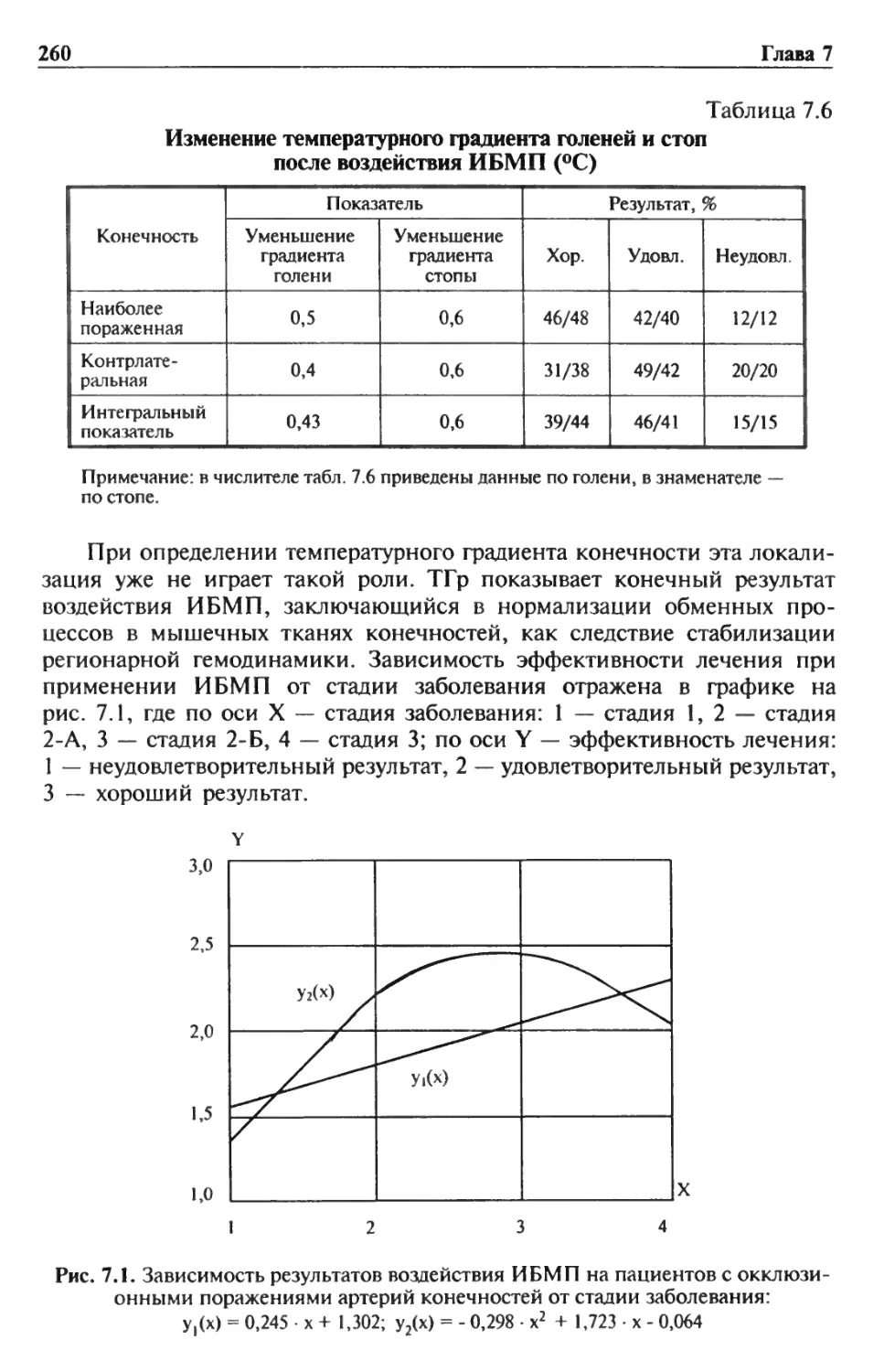
На рис. 1.1 представлена классификация электромагнитных полей
естественного и искусственного происхождения. В ней выделена группа
случайных магнитных полей (СлМП). Предполагается, что неорганизо-
ванные хаотичные магнитные поля могут негативно действовать на ор-
ганизм, вызывая у здоровых людей ощущение внутреннего дискомфорта,
у больных — угнетение функциональной активности, а в ряде случаев —
более серьезные осложнения. Вместе с тем есть основания предполагать,
что изменяющиеся случайным образом магнитные поля — СлМП, сфор-
мированные искусственно с рядом заданных характеристик (плотность
распределения вектора магнитной индукции, спектральная плотность
мощности и др.), ориентированные относительно пораженного органа
или всего тела человека и воздействующие по заданной программе,
обладают общеукрепляющим и терапевтическим действием и могут быть
также использованы для лечения. Однако конкретных сведений о со-
здании и применении подобного поля для лечения у авторов не имеется.
Для усиления магнитобиологической активности искусственных
магнитных полей в практике магнитотерапии используют дополнитель-
ные приемы: комбинации переменного и постоянного поля (постоянный
фон), модуляцию низкочастотных переменных полей более высокочас-
тотными составляющими [32], использование, наряду с непрерывными,
прерывистых режимов питания индукторов [1], синхронизацию с био-
ритмами человека. Все эти меры приводят, по-видимому, к усилению
динамики изменения магнитного потока, что делает взаимодействие
18
Глава 1
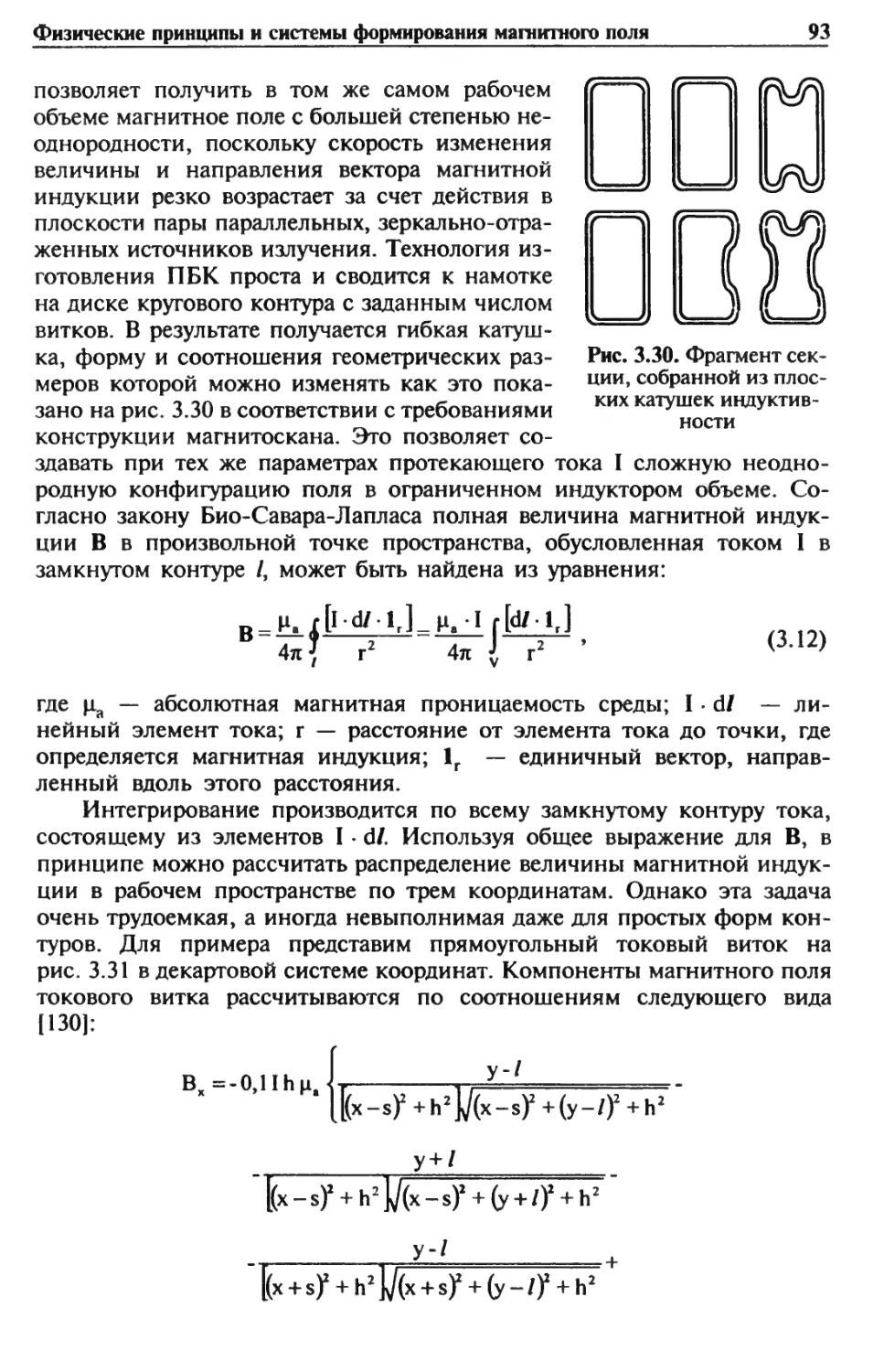
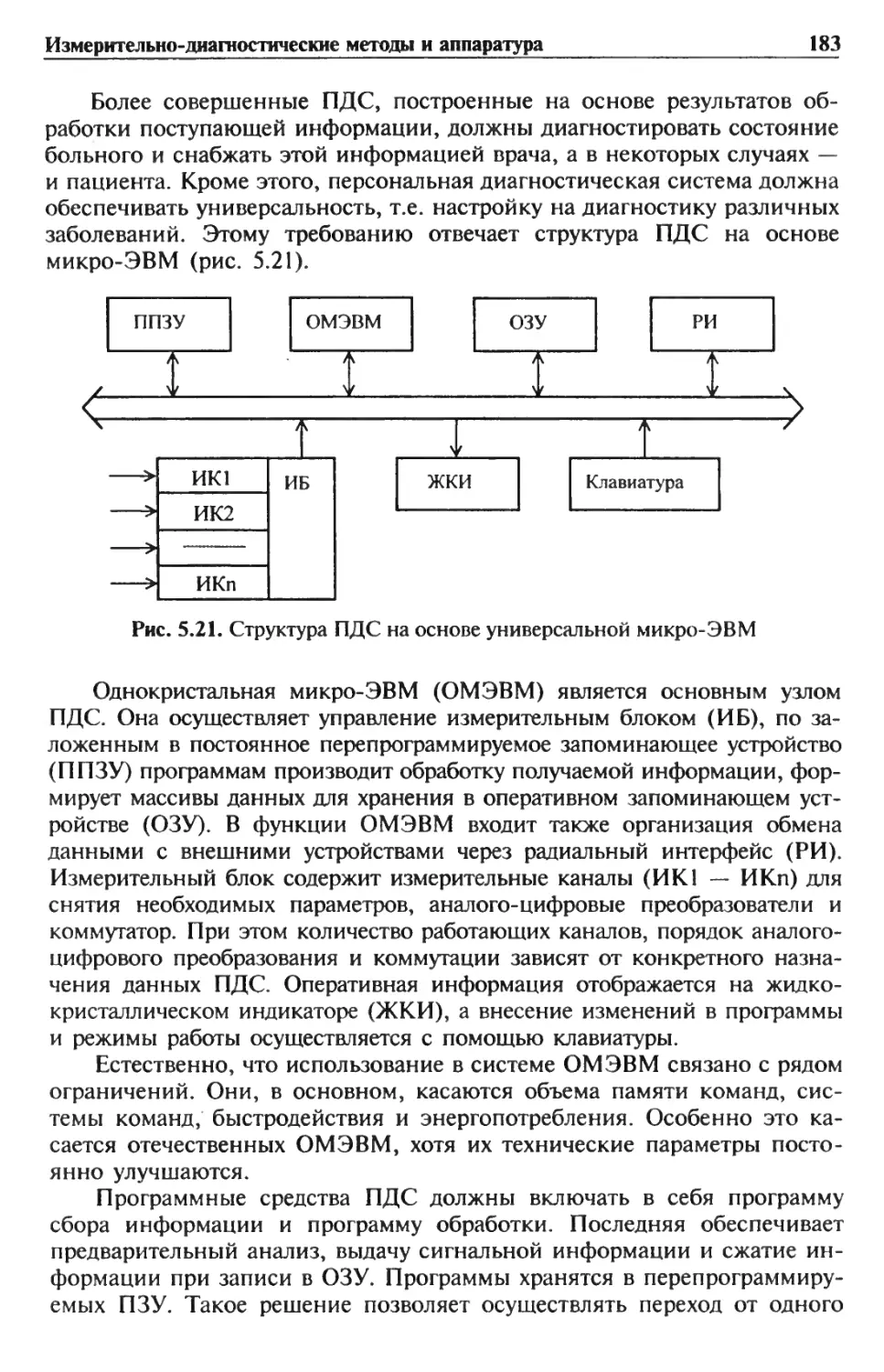
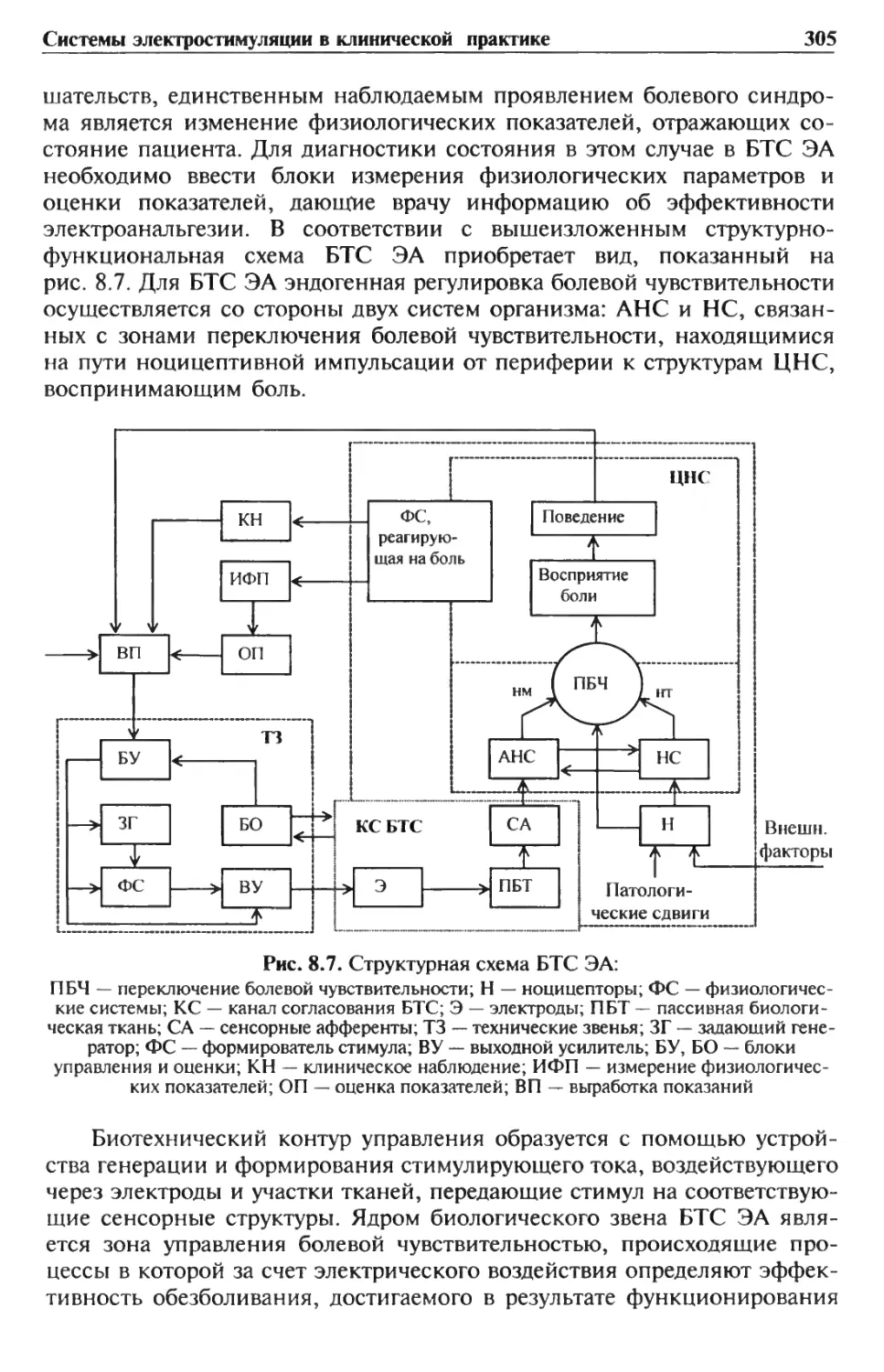
Рис. 1.1. Классификация электромагнитных полей
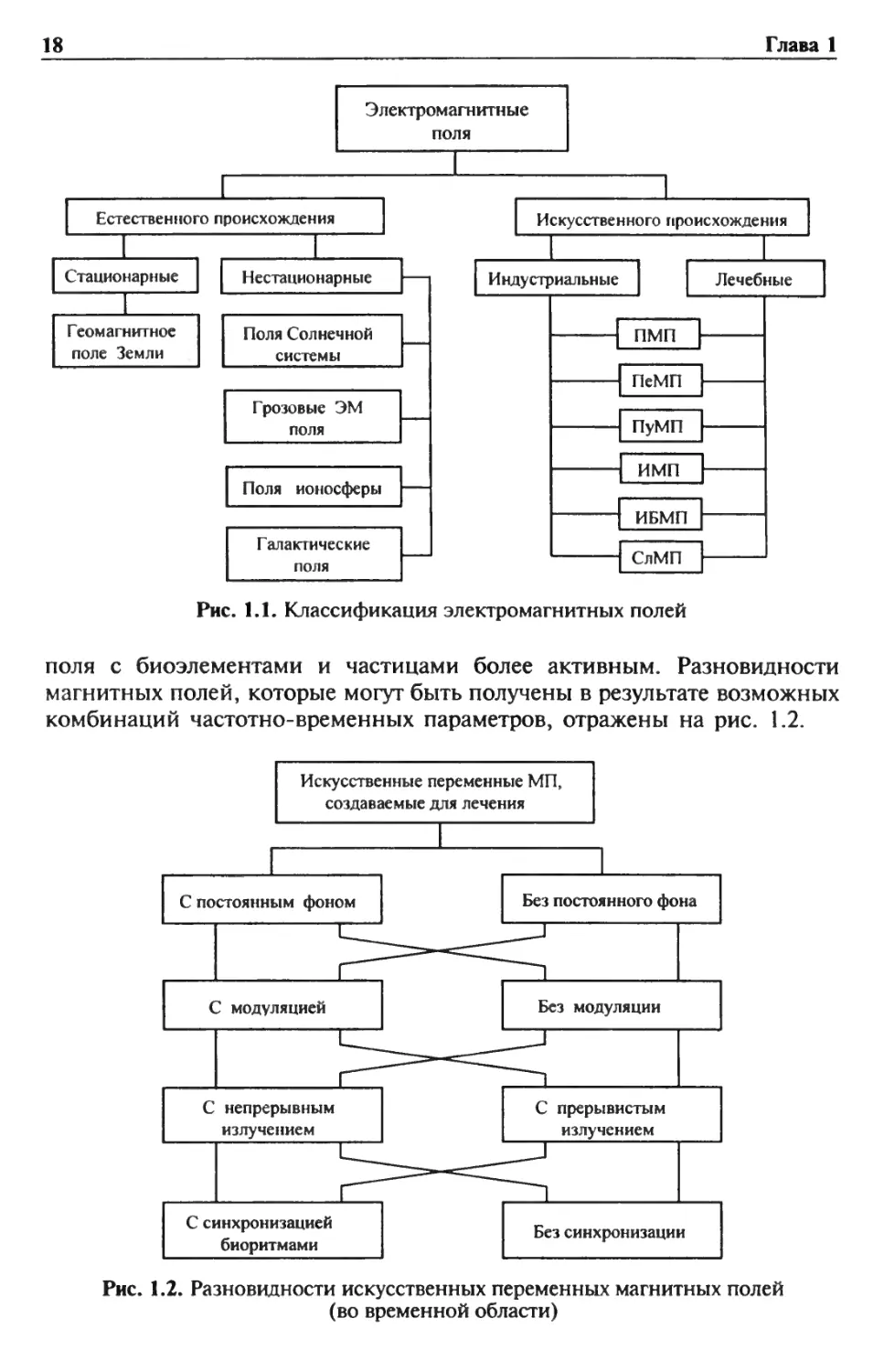
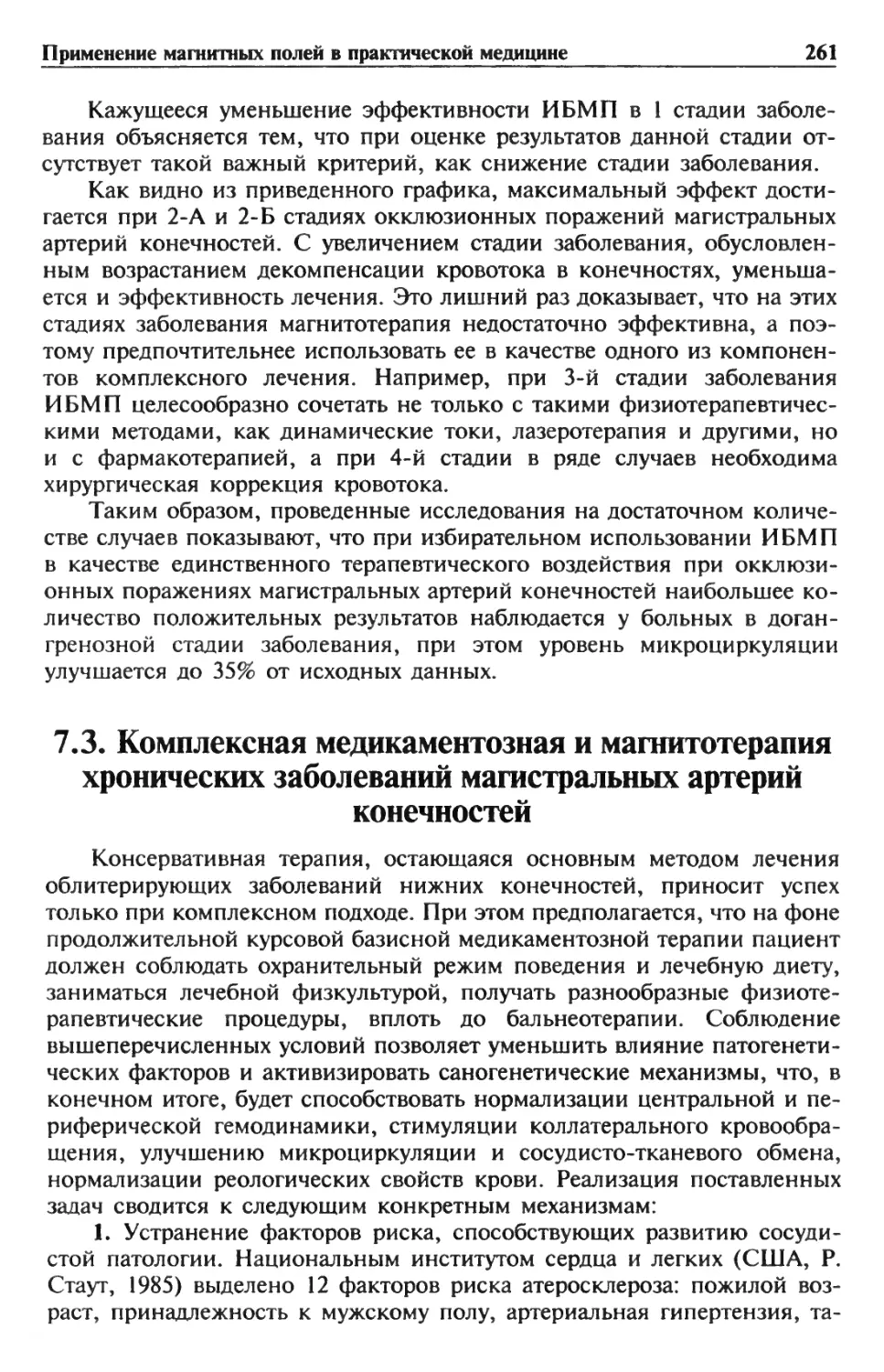
поля с биоэлементами и частицами более активным. Разновидности
магнитных полей, которые могут быть получены в результате возможных
комбинаций частотно-временных параметров, отражены на рис. 1.2.
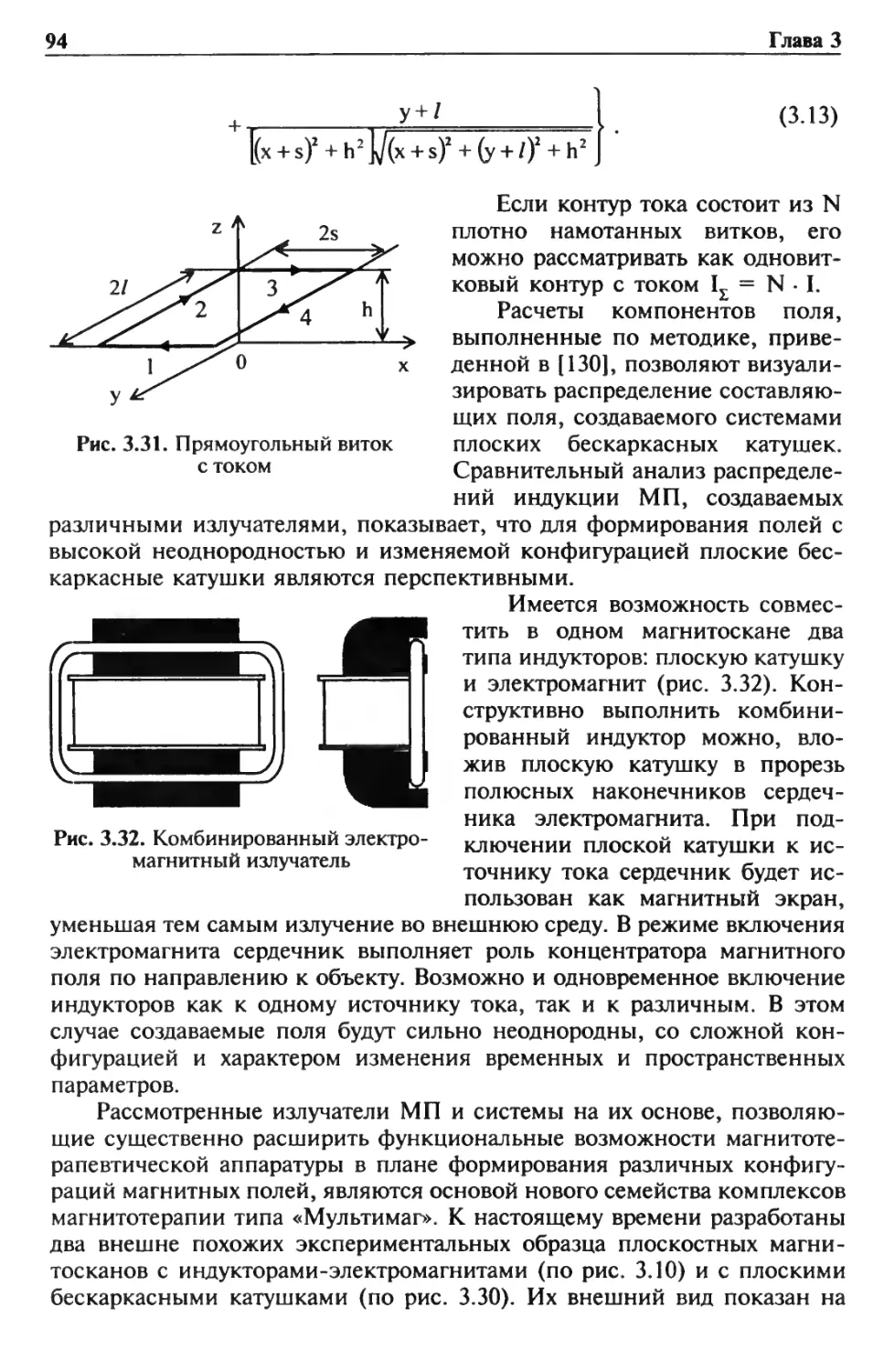
Рис. 1.2. Разновидности искусственных переменных магнитных полей
(во временной области)
Действие магнитных полей на биообъекты
19
Наличие противоречивости во взаимодействии МП с живыми сис-
темами обусловливает необходимость детального разбора и изучения
механизмов влияния их на организм человека. При решении этих задач
нам представляется крайне важным соблюдать дифференцированный
подход к оценке биологических эффектов физических полей различного
происхождения и структуры: электрических, магнитных и электромаг-
нитных, поскольку их влияние неоднозначно и имеет определенную
специфику. Помимо этого следует определиться в перечне параметри-
ческих характеристик физических полей — «биотропных параметров»,
благодаря которым предопределяется возможность воздействия на био-
объекты.
1.3. Биотропные параметры магнитных полей
Под термином «биотропные параметры» понимаются физические
характеристики МП, определяющие первичные, биологически значимые
физико-химические и информационные механизмы действия поля, обу-
словливающие формирование соответствующих реакций как отдельных
органов, так и на уровне целостного организма (М. А. Шишло) [33]. К
ним относятся: вид поля, индукция, энергия, градиент, вектор и частота
поля, форма во времени и пространстве, экспозиция и локализация
воздействия. От каждого из параметров, а также от их сочетания суще-
ственно зависит эффективность лечения того или иного заболевания.
Индукция (В) — основной параметр магнитного поля, представляет
собой плотность магнитного потока (магнитный поток, приходящийся
на единицу площади сечения). Индукция — величина векторная, опре-
деляется модулем и направлением. Единицей измерения индукции яв-
ляется тесла: 1 Тл = 1 В-с/м2.
Биологически активным является любое МП, величина которого
отличается как в сторону увеличения, так и уменьшения от геомагнит-
ного поля, составляющего десятки мкТл. Пороговые напряженности для
различных видов МП колеблются от 3 мТл для ПМП до 0,01 мТл для
ИБМП. Отмечена необходимость снижения интенсивности МП при воз-
действии на уровне целостного организма [33]. Предельно допустимый
уровень величины индукции МП на производстве составляет 1...2 Тл. В
серийно выпускаемой аппаратуре, предназначенной для магнитостиму-
ляции, величина индукции МП находится в пределах от 1500 до
4000 мТл; для воздействия на биологические активные точки — 100 мТл;
для воздействия на локальные участки частей тела человека — от 15 до
50 мТл; для воздействия на части тела и всего человека — от 0 до 5 мТл.
Налицо явная тенденция снижения интенсивности МП с увеличением
площади воздействия.
В зависимости от значений индукции магнитные поля, применяемые
в магнитотерапии, условно подразделяют на сверхслабые — < 0,5 мТл,
слабые — 0,5...50 мТл, средние — 50...500 мТл, сильные — > 500 мТл.
20
Глава 1
Наибольшее распространение в лечебной практике получили СЛАБЫЕ
МП. Если магнитная индукция не изменяется в пространстве, поле
является однородным. В однородном поле все векторы магнитной ин-
дукции имеют одно и то же значение и одно направление. При этом
градиент магнитной индукции равен нулю. Достаточно однородными
считаются поля в центральной части длинного соленоида и в центре
системы катушек Гельмгольца. Такого рода поля широко используются
при физиологических исследованиях, а в практике магнитотерапии их
применение ограничено.
Градиент магнитной индукции есть вектор, имеющий значение 0B/3N
и направленный по нормали N к поверхности равной индукции в сто-
рону наибольшего возрастания магнитной индукции:
gradB = H-N. (1.3)
о IN
Практически gradB определяется как изменение магнитной индук-
ции, приходящееся на единицу длины по каждой из координат. Как
физическая величина этот показатель характеризует динамику поля и
свидетельствует о его неоднородности. Единица измерения градиента
магнитной индукции — тесла на метр (Тл/м).
Ряд авторов (Н. И. Музалевская и др.) считают, что механизм дей-
ствия слабых МП однозначно определяется пространственно-временны-
ми градиентами поля [34], другие связывают усиление магнитобиологи-
ческих эффектов с увеличением пространственно-временной неоднород-
ности МП и при их интерпретации советуют учитывать перепад
напряженности МП по площади заинтересованных структур [35].
Вектор магнитного поля указывает направление магнитных силовых
линий. При изменении направления вектора меняется характер магни-
тобиологического эффекта, что, по-видимому, адекватно различному
действию северного и южного полюсов постоянного магнита. Ряд ис-
следователей отмечают большую активность поперечного магнитного
поля, т.е. в тех случаях, когда вектор магнитного поля перпендикулярен
поверхности тела человека, в отличие от продольного поля, при котором
вектор магнитной индукции параллелен поверхности тела человека. Соб-
ственный опыт авторов показывает, что довольно часто большей актив-
ностью обладает продольное поле. И это не является противоречием,
поскольку реальные искусственные МП, в особенности создаваемые ло-
кально-сосредоточенными источниками небольших габаритов, имеют
смешанный характер вектора магнитной индукции, обладающего как
продольной, так и поперечной составляющими. Помимо этого ряд уче-
ных в своих магнитобиологических исследованиях отмечают большую
активность МП с вертикальным направлением вектора, объясняя его
взаимодействием с геомагнитным полем [36].
Частота магнитного поля является весьма важным биотропным
параметром. В ходе длительной лечебной практики найдены «частотные
окна», в которых магнитобиологический эффект выражен заметно более
Действие магнитных полей на биообъекты
21
ярко. Например, в работе [37] показано, что воздействия магнитных
полей с частотой альфа-ритма электроэнцефалограммы человека
(8... 14 Гц) оказывают существенно более сильное влияние, чем другие
частоты с той же интенсивностью. Поэтому в ряде выпускаемых маг-
нитотерапевтических аппаратов предусмотрен режим питания с частотой
12,5 Гц. Наиболее часто в практике используются синусоидальное и
пульсирующее магнитные поля с частотой промышленной сети 50 Гц.
В настоящее время выпускаются приборы, имеющие набор фиксиро-
ванных частот или плавно перестраиваемые по частоте. Дальнейшим
развитием техники магнитотерапии в этом смысле является создание
аппаратуры, которая могла бы вырабатывать магнитные поля, синхро-
низируемые основными биоритмами человека. Например, в магнитоте-
рапевтическом комплексе «Аврора МК-01» (СССР) [7], имеющем набор
фиксированных частот 0,1;... 100 Гц, предусмотрена возможность син-
хронизации с ритмом пульса.
Форма магнитного поля во времени и пространстве. При использо-
вании в качестве источника магнитного излучения одного элементарного
индуктора форма поля в пространстве определяется конструкцией само-
го индуктора, а во времени — формой питающего тока. В этом смысле,
как уже отмечалось, предпочтительнее, чтобы индуктор вырабатывал
неоднородное поле, а ток питания был импульсным. При этом усили-
вается общая динамика изменения магнитного потока, что и несет в
себе, по-видимому, основной терапевтический эффект. Этот вывод под-
тверждается также в работе [38]. В случае использования систем общего
воздействия на человека [7, 32] открывается возможность формирования
магнитного поля требуемой конфигурации как в пространстве, так и во
времени.
Экспозиция — биотропный параметр, связанный с временем одного
сеанса воздействия магнитным полем и с числом сеансов. Интегрально
он несет информацию о времени взаимодействия (t.JKC) живого организма
с искусственным магнитным полем. В соответствии с традициями клас-
сической физиотерапии время сеанса устанавливается в пределах 10...30
мин [36] ежедневно в количестве от 10 до 25 процедур. По данным
многих исследователей, в том числе и авторов, физиотерапевтический
эффект при воздействии магнитным полем развивается после 5...7 про-
цедур, который закрепляется последующими процедурами. В целом экс-
позиция устанавливается лечащим врачом соответственно индивидуаль-
ным особенностям пациента, тяжести заболевания и т.п.
Локализация воздействия магнитным полем определяется, чаще всего,
непосредственной областью поражения — местом расположения пато-
логического очага, а также проекцией пораженного органа на поверх-
ность кожи. В первую очередь это относится к устройствам локального
(местного) воздействия, которое создается, как правило, одним индук-
тором. Наряду с этим, терапевтический эффект может быть получен при
действии МП на рефлексогенные зоны или биологически активные
точки, подчас отстоящие на значительном удалении от очага патологии
22
Глава 1
[36]. Вместе с тем, поскольку организм человека состоит из тесно вза-
имодействующих функциональных систем, деятельность которых регу-
лируется центральной нервной системой, то можно получить ответ це-
лостного организма, например, формирование адаптационных реакций
активации, не только воздействием на тело пациента, но даже быстрее
и эффективнее действуя переменным МП на голову (Е. В. Квакина).
При действии низкочастотного переменного МП количество поглощае-
мой энергии мало, поэтому существенно возрастает роль объема, взаи-
модействующего с физическим фактором. М. А. Шишло считает, что
«...соленоиды и магнитные установки с большими полезными объемами
являются более эффективными лечебными средствами» [33].
В магнитотерапевтических аппаратах, имеющих наборы индукторов,
предусмотрены режимы, при которых осуществляется воздействие, рас-
пределенное в заданной области пространства. В некоторых системах,
позволяющих осуществлять общее воздействие на весь организм чело-
века [7] (см. 3.2), представляется возможным на фоне пространственно
равномерной структуры поля формировать локально усиленные (ослаб-
ленные) поля (см. 5.3), а также неоднородности заданной формы. За-
метим, что поля, характеристики которых не изменяются в пространстве,
называют статическими, а поля, изменяющиеся и перемещающиеся в
пространстве, называют динамическими. Большинство выпускаемых
магнитотерапевтических аппаратов формируют, как правило, статичес-
кие поля. Комплекс «Аврора МК-01» имеет программно-аппаратные
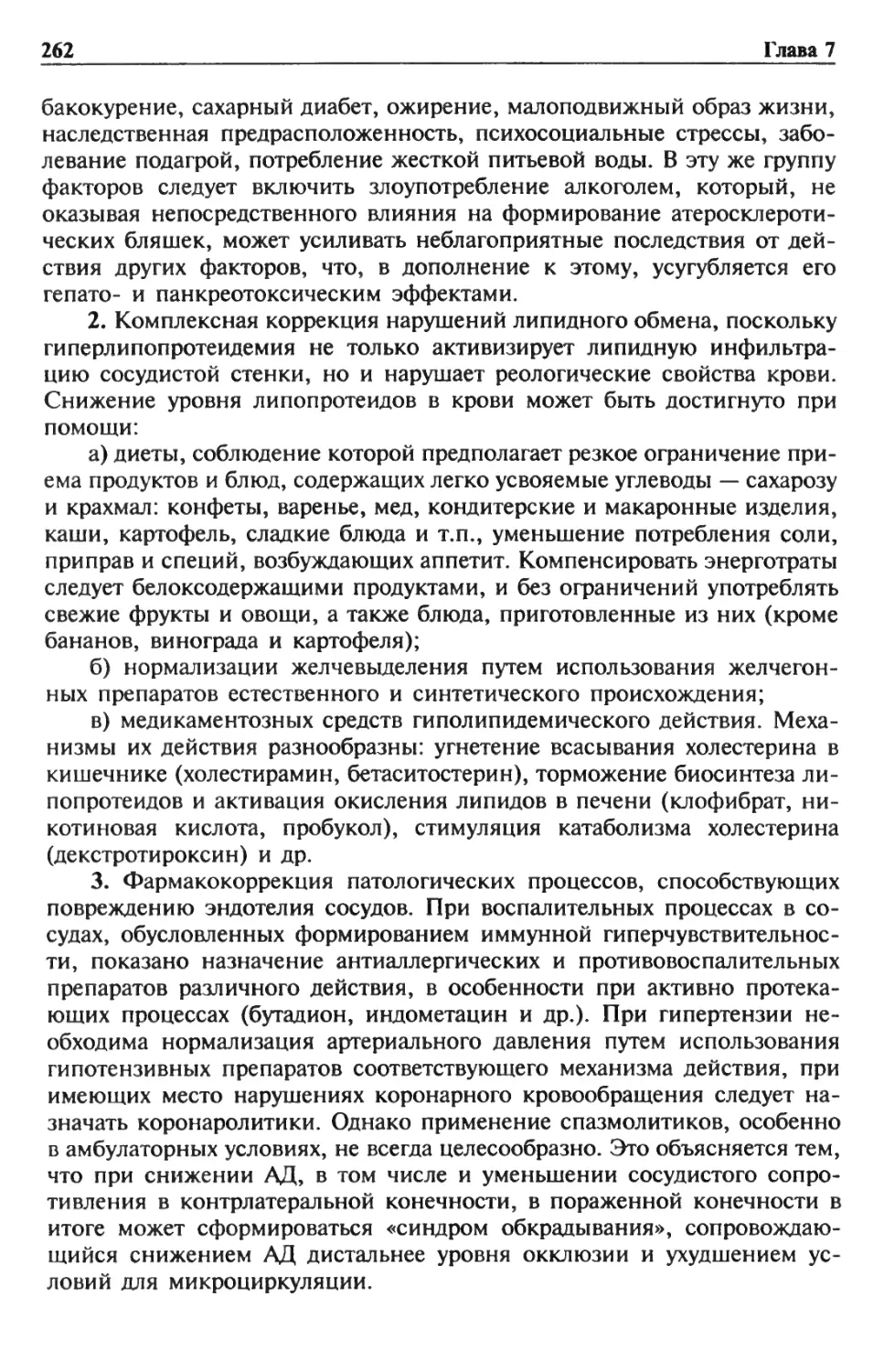
средства для создания как статических, так и динамических полей. Воз-
можное множество разновидностей пространственно-организованных
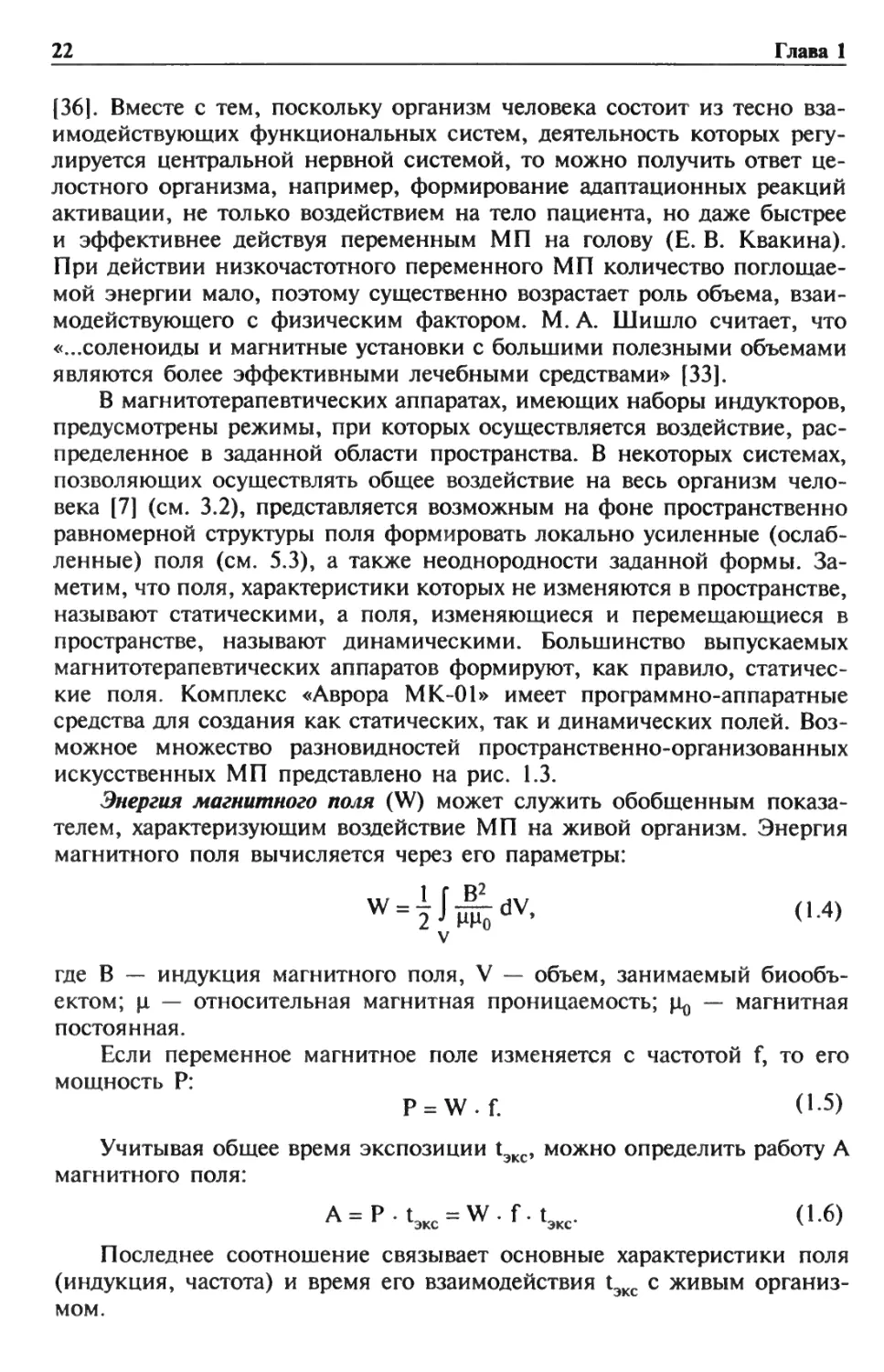
искусственных МП представлено на рис. 1.3.
Энергия магнитного поля (W) может служить обобщенным показа-
телем, характеризующим воздействие МП на живой организм. Энергия
магнитного поля вычисляется через его параметры:
w=^iWdV’ <L4>
V
где В — индукция магнитного поля, V — объем, занимаемый биообъ-
ектом; р. — относительная магнитная проницаемость; — магнитная
постоянная.
Если переменное магнитное поле изменяется с частотой f, то его
мощность Р:
P = W.f. (1-5)
Учитывая общее время экспозиции t3KC, можно определить работу А
магнитного поля:
A=Pt3KC = W.f.t3KC. (1.6)
Последнее соотношение связывает основные характеристики поля
(индукция, частота) и время его взаимодействия t3KC с живым организ-
мом.
Действие магнитных полей на биообъекты
23
Затрачивается работа магнитного поля, в основном, на перемещение
заряженных частиц биообъекта.
Рис. 1.3. Разновидности искусственных магнитных полей
(в пространственной области)
1.4. Влияние естественных электромагнитных полей
на живые организмы
По мнению А. С. Пресмана систематическое воздействие различных
факторов внешней среды на живые организмы способствовало созданию
у них тонких механизмов адаптации, позволяющих приспосабливаться
к изменяющимся условиям. Наиболее эффективно процесс формирова-
ния этих механизмов запускается возмущающими влияниями, в том
числе и имеющими электромагнитную природу, например, распределен-
ными по всему электромагнитному спектру, включая инфранизкие час-
тоты, геомагнитные и геоэлектрические поля [27, 39, 40]. Поскольку
независимо от природы фактора, способствовавшего их возникновению,
адаптационные механизмы играют важную роль в жизнедеятельности и
неспецифической резистентности организма, то возможность осознан-
ного управления процессами их формирования постоянно привлекает
внимание исследователей. Именно с этих позиций естественные и ис-
кусственные магнитные и электромагнитные поля представляют собой
область повышенного интереса.
24
Глава 1
Обширному спектру электромагнитных полей, которые регистриру-
ются вблизи поверхности Земли, свойственна максимальная представ-
ленность низких и сверхнизких частот (Н. А. Темурьянц и др.) [41, 42].
Это собственная частота ионосферного волновода (от 8 до 10 Гц при
интенсивностях электрического вектора 1 мВ/м, а магнитного вектора —
10 нТл ), микропульсация геомагнитного поля Земли (от 0,0001 до 5 Гц
при интенсивностях электрического и магнитного векторов соответст-
венно 1 мВ/м и 0,5...5 нТл ). Не следует также забывать о действии
других атмосферных явлений с частотными составляющими от 10 Гц до
100 кГц и о влиянии квазистатического поля, интенсивность которого
по электрическому и магнитному векторам составляет, соответственно,
10 мВ/м и 10 мкТл. Причем здесь указаны ориентировочные уровни
интенсивностей магнитных и электрических составляющих полей. Диа-
пазон их изменений превышает два порядка, а характер вариаций обу-
словлен географической широтой и другими факторами, из которых
наиболее существенным является солнечная активность.
Механизмы формирования многих явлений, связанных с ГМПЗ,
пока остаются невыясненными. К ним следует отнести его периодичес-
кие изменения, наличие магнитных аномалий — участков поверхности
Земли, где ГМПЗ резко усиливается или ослабляется, и ряд других
проявлений, связанных в первую очередь с влияниями Солнца [39].
По предположению В. Н. Шеповальникова и С. И. Сороко, в про-
цессе беспрерывного движения по эллиптической орбите солнечная сис-
тема постоянно пронизывается галактическими магнитными полями,
которые, влияя на «атмосферу Солнца» и взаимодействуя с ней, со-
вместно с другими потоками частиц высокой энергии становятся «рит-
моводителями», предопределяющими биотропность колебаний магнит-
ных полей на нашей планете [43]. Так, примерно через сорок часов
после мощной солнечной вспышки, амплитуда микропульсаций магнит-
ного поля в области частот около 1 Гц может возрасти в тысячу раз.
Учитывая значения частоты (единицы и десятки герц) и высокую ус-
тойчивость таких колебаний в течение длительных промежутков време-
ни, их можно считать одним из наиболее влиятельных магнитобиоло-
гических факторов.
По классификации А. П. Дуброва [44] геомагнитные возмущения
подразделяются на три вида:
1. Возмущения, возникающие одномоментно по всей поверхности Зем-
ного шара. Они протекают в одной фазе и называются синфазными.
2. Локальные возмущения, ограниченные определенной областью.
3. Перманентные возмущения (типа Р), наблюдаемые непрерывно.
В соответствии с таким делением всю Землю разделяют на 5 поясов
по проявлению указанных компонент. Так, первый пояс в пределах 45°
южной и северной широт характеризуется возникновением в нем син-
фазных возмущений, а последние два захватывают полярные шапки (от
70° до 90’). Эти области подвержены непрерывным возмущениям.
Действие магнитных полей на биообъекты
25
Основным признаком синфазных возмущений, которые и называ-
ются магнитными бурями, является их всемирный характер. Время их
осуществления весьма вариабельно, но, как правило, максимальная ин-
тенсивность приходится на первые часы развития бури. Выделяют маг-
нитные бури с внезапным и постепенным началом. При внезапном
начале на фоне спокойной магнитограммы происходит резкое изменение
ГМПЗ, отмечаемое одновременно (с разницей в 1...2 мин) на всех стан-
циях Земного шара. При этом горизонтальная составляющая ГМПЗ
внезапно увеличивается на десятки нТл. При постепенном начале воз-
мущение развивается путем плавного увеличения амплитуды всех со-
ставляющих, а начало бури в разных точках Земли может различаться
более чем на 1 час.
Дальнейшие события обычно включают три фазы. После сжатия
магнитосферы ударной волной и до начала развития главной фазы бури
имеют место несколько относительно спокойных часов (начальная фаза).
Затем амплитуда горизонтальной составляющей, предварительно упав до
минимума, начинает медленно подниматься до нормального значения.
Этот период развития бури называется главной фазой. В последующем
и остальные компоненты ГМПЗ возвращаются примерно к исходному
уровню (фаза восстановления). По интенсивности магнитные бури де-
лятся на очень большие, большие и умеренные. Локальные геомагнит-
ные возмущения могут наблюдаться повсеместно, однако их интенсив-
ность сильно зависит от широты. В качестве составляющих в них, как
правило, входят, так называемые, бухтообразные возмущения. Максимум
их интенсивности приходится на зону полярных сияний.
В настоящее время среди научных направлений, занимающихся про-
блемами взаимоотношений живых систем, в том числе и организма
человека, с факторами внешней среды, магнитобиология прочно зани-
мает одну из основных позиций, поскольку, как выяснилось, не только
искусственные магнитные поля, но и изменения естественного электро-
магнитного фона Земли способны оказать влияние практически на все
физиологические функции организма. Анализируя роль и место магнит-
ных и электромагнитных полей в живой природе, А. С. Пресман выделил
три основных варианта возможного взаимодействия:
— влияние ГМПЗ на процессы жизнедеятельности;
— установление электромагнитных связей между живыми организ-
мами;
— самостоятельное активное формирование и излучение живыми
структурами электромагнитных полей.
Ученые различных школ и направлений, занимающиеся проблемами
электромагнитной биологии, свидетельствуют, что человеческий орга-
низм, независимо от значения напряженности, уровня частот и других
биотропных параметров МП, чрезвычайно чувствителен к ним. При
астрофизическом анализе гелиобиологических эффектов по отношению
к биосистемам на основе имеющихся наблюдений было высказано пред-
положение, которое позже было подтверждено экспериментально, что
26
Глава 1
МП с частотой и напряженностью, характерной для естественных МП,
могут вызывать изменения в процессах жизнедеятельности организма на
различных уровнях: в функционировании головного мозга и миокарда
[45-48], отразиться на выработке у человека условных рефлексов с вы-
соким уровнем мотивации [49, 50]. В экспериментах на животных было
показано, что их поведение может изменяться при воздействии ЭМП с
напряженностью 10’3...10‘4 А/м [51, 52].
Интересные наблюдения были проведены Р. V. Sanker Narajan и S.
Subrahmaja [53, 54], в которых изменения электрофизиологических,
нейро- и биохимических показателей регистрировались при действии
ЭМП в полосе частот 0,01...20 Гц с индукцией 5 и 50 нТл. При этом
было отмечено, что выраженность эффектов зависела от ориентации
организма к ГМПЗ. Максимальной она была при расположении испы-
туемых головой на север. Эти данные перекликаются с достоверно ус-
тановленным в медицинской практике фактом, что биологические эф-
фекты при действии различных полюсов магнитов неодинаковы [55],
равно как и при магнитопунктуре отмечается седативное действие се-
верного полюса и тонизирующее действие южного полюса [56]. С тео-
ретической и технической точки зрения, по-видимому, в данном случае
корректнее говорить о неодинаковой восприимчивости живых организ-
мов к направлению вектора магнитного поля.
Установлено, что электромагнитное излучение (ЭМИ) со спектраль-
ным распределением, соответствующим, в той или иной степени, ес-
тественному фону, оказывает биологическое действие на рост организма
и развитие злокачественных образований. При этом с увеличением час-
тоты ЭМП знак эффекта изменялся на противоположный: от тормо-
жения роста злокачественного новообразования до его ускорения
(Е. Л. Франкевич, 1978) [57].
Все вышесказанное свидетельствует о биологической значимости
электромагнитных влияний и инициирует становление и развитие новых
научных дисциплин. Так, включение в сферу биологических исследова-
ний изучения ГМПЗ и, в частности, его влияния на биологические
ритмы, обусловило развитие экологического направления магнитобио-
логических исследований. Ведь известно, что изменение биологических
ритмов является одним из необходимых первичных компонентов адап-
тационных реакций организма. В связи с этим можно предположить,
что резкое увеличение напряженности ГМПЗ способно находить отра-
жение в состоянии биоритмологических структур. В масштабах эволю-
ционного процесса такое увеличение напряженности ГМПЗ может рас-
сматриваться как одномоментный скачок с неясными пока биологичес-
кими последействиями (Г. Ф. Плеханов, 1990) [58].
Что касается механизмов влияния ГМПЗ на тканевые структуры,
то, согласно одному из существующих предположений, высокая чувст-
вительность организмов к естественным ЭМП обусловлена не энерге-
тическим взаимодействием с веществом живых тканей, а информаци-
онным, так как эти поля оказывают влияние при напряженностях зна-
Действие магнитных полей на биообъекты
27
чительно ниже тех, которые могут обусловить возникновение тепловых
эффектов (А. С. Пресман, 1968; 1974) [27, 40]. К тому же в настоящее
время не вызывает сомнения то, что организмы широко используют
ЭМП для поддержания контакта с внешней средой (Н. А. Темурьянц,
1989; А. С. Пресман, 1974 ) [40, 59]. Нельзя не согласиться с тем, что
чрезвычайно высокая чувствительность живых организмов к магнитным
полям является одним из самых необычных свойств. Так, например,
экспериментально установлено, что восприимчивость организмов к
внешним ЭМП низкой и сверхнизкой частоты по напряженности соот-
ветствует величинам порядка 0,1 В/м; 0,1 нТл (Н. А. Темурьянц,
Б. М. Владимирский и др., 1992) [41]. Эти факты закладывают реальную
основу под гипотезы об использовании представителями животного мира
этой высокой чувствительности в целях ориентации.
Более 100 лет назад русский академик Миддендорф высказал пред-
положение о том, что птицы могут ориентироваться по МП Земли.
Сейчас уже неоспоримо установлено, что у многих живых организмов
есть магниточувствительная система навигации и ориентации, обеспе-
чивающая их миграцию, добычу пищи, нападение, защиту. Появляю-
щиеся магнитные возмущения отражаются на этих свойствах. Например,
у птиц в эти периоды возрастает количество навигационных ошибок.
Кстати и человек в этом плане не представляет исключения, поскольку
с магнитными бурями совпадает увеличение числа дорожно-транспорт-
ных происшествий (R. О. Becker, A. A. Marino, 1982) [60]. Предполага-
ется, что живые организмы используют для ориентации силовые линии
ГМПЗ, так как при тщательном электромагнитном экранировании на-
рушается, в частности, ориентация, обеспечивающая правильное воз-
вращение голубей (Н. А. Темурьянц и др., 1992) [41].
В 1987 г. в Женеве был выпущен сборник докладов «Магнитные
поля», созданный коллективом международной группы экспертов, в ко-
тором была представлена современная научная информация о взаимо-
действии биообъектов с магнитным полем Земли и подчеркивалась их
высокая чувствительность к МП низкой интенсивности. В качестве фе-
номенов, доказывающих и иллюстрирующих этот факт, приводились
примеры использования ГМПЗ в проявлениях жизни и деятельности
различных представителей живого мира:
— отыскание направлений передвижения рыб при миграции;
— ориентация и направленное плавание бактерий;
— кинетическое движение моллюсков;
— покачивающийся танец пчел;
— ориентация птиц при перелетах.
Однако не представляется возможным с подобной же определеннос-
тью рассуждать о взаимоотношениях МП и человеческого организма.
По-прежнему неизвестно, каким образом воспринимается МП, нет яс-
ности в механизмах реагирования и не найдено объяснение столь вы-
сокой степени чувствительности к их динамическим изменениям.
Ю. А. Холодовым, Ю. В. Берлиным и другими учеными неоднократ-
но предпринимались попытки выяснить уровни и механизмы сенсорной
28
Глава 1
индикации МП. То, что действие МП ощущается большинством людей,
не вызывает сомнения, но возникновение этих ощущений сопровожда-
ется у пациента появлением чувства теплоты, покалывания, ползания
мурашек и т.п., т.е. в них отсутствуют специфичные черты. Существенна
продолжительность латентного периода сенсорного восприятия МП, в
зависимости от свойств и характеристик поля она составляет 10...25 с.
Все это свидетельствует в пользу предположения, что МП воспринима-
ются рецепторами различных модальностей: тепловыми, температурны-
ми, химическими, афферентный импульс в которых формируется за счет
неспецифического изменения микроокружения рецепторов при дейст-
вии МП. С позиций этого механизма понятно более быстрое формиро-
вание реакций на динамично изменяющиеся магнитные поля. Предпо-
роговое значение магнитной индукции при воздействии ПМП, ПеМП
и ИБМП соответствует 8 мТл, 3 мТл и 0,1 мТл. [61, 62J. Из этого
следует, что любые магнитные возмущения, независимо от интенсив-
ности и величины магнитного потока, в том числе и геомагнитные бури
должны сказываться каким-то образом на функциональной активности
и процессах жизнедеятельности человеческого организма. Исследования
последних лет подтверждают это предположение.
Г. А. Усенко [63], изучая функционирование различных систем ор-
ганизма у летчиков в возрасте 28 лет с высоким и низким уровнем
тревожности в период геомагнитных возмущений, выявил увеличение
количества ошибок, снижение умственной работоспособности у летчи-
ков с высоким уровнем тревожности. Автор рассматривает это как сви-
детельство снижения функциональных возможностей ЦНС и организма
в целом. Кроме того, у этой группы людей отмечалось достоверное
изменение показателей гемодинамики, температуры тела, содержания
холестерина, кортизола. Все эти отклонения показателей гомеостаза ха-
рактерны для ситуаций, формирующихся при действии факторов риска
развития ишемической болезни сердца (ИБС).
Сейчас уже не возникает сомнений в наличии связи между солнеч-
ной активностью и обострением ряда заболеваний, в первую очередь,
сердечно-сосудистых. Солнечная активность влияет на ГМПЗ. В дни
магнитных бурь значительно выше частота обострений и смертность от
болезней, в особенности сопровождавшихся патологией сердечно-сосу-
дистой системы, чем в магнитоспокойные дни. О нарушении функци-
онировании миокарда и сосудов во время геомагнитных возмущений
свидетельствуют изменения электрокардиограмм (ЭКГ), повышение ар-
териального давления (АД). У хронических «гипертоников» развиваются
кризы, которые чаще осложняются нарушениями мозгового кровообра-
щения и психического статуса. Есть мнение, что все эти нарушения,
наблюдаемые в период магнитных бурь, связаны с изменением физико-
химических и электрических свойств крови при воздействии ЭМП: уве-
личивается ее вязкость, возрастает активность тромбоцитов, вследствие
повреждения структуры клеточных мембран. Дополнительное поступле-
ние фосфолипидов в кровь через поврежденные мембраны активизирует
коагуляцию и приводит к тромбозам [64].
Действие магнитных полей на биообъекты
29
Одни исследователи считают, что высокая чувствительность живых
организмов к изменениям ГМПЗ может быть обусловлена, прежде всего,
ферромагнетиками, так как магнетит, содержащий атомы железа различ-
ной степени окисления, — это единственное ферромагнитное образова-
ние, обнаруженное в цитоплазме магнитотоксических бактерий, в костях
черепа и шейных мышцах голубей, а также в серповидной складке мозга
дельфинов. У человека магнетитовые включения обнаружены в интакт-
ной ткани надпочечников, у обезьян-резусов — в среднем мозге и мо-
золистом теле (J. L. Kirschvinn, 1981) [65]. Кристаллы магнетита обладают
постоянным магнитным дипольным моментом, который взаимодействует
с ГМПЗ. В работах, выполненных за последние несколько лет, показано,
что некоторые организмы, похоже, могут использовать это взаимодей-
ствие для целей ориентации и миграции по силовым линиям ГМП.
С. А. Павлович (1985) настаивает на том, что сами органы и ткани
(жидкие и плотные) теплокровных животных магнитовосприимчивы
и магнитоиндуктивны [66]. Самый большой уровень диамагнетизма
имеет мозговая ткань, незначительно варьируя у большинства видов
от -0,51 • 10’6 до -0,53- 10‘6, затем — мышцы, сердце, селезенка, пе-
чень, кровь. Уровень диамагнетизма живой системы зависит от общего
содержания в ней элементов и веществ, обладающих парамагнитными
свойствами. Наиболее высокий уровень диамагнетизма отмечался у
кроликов (-0,49-10‘6), органы и ткани которых имели более или менее
одинаковые показатели магнитной восприимчивости. Магнитная вос-
приимчивость человека в среднем была меньше, чем у животных,
совпадая лишь по показателям крови, почек и мышц. Для тканей
мозга человека с высоким диамагнетизмом показано, что магнитная
восприимчивость мозжечка составляет -0,57 • 10’6, а мозговой ткани
больших полушарий -0,68 • 10’6. Неоднородность магнитной воспри-
имчивости вместе с биотоками (а точнее с биоионотоками) является
основным источником биомагнитных полей, объективно отражающих
общее состояние организма, отдельных его органов и систем. Можно
предположить, что органно-тканевое соотношение диа- и парамагне-
тизма связано с процессами жизнедеятельности организма, а резкие
сдвиги в диамагнетизме тканей происходят в организме человека при
заболеваниях.
1.5. Искусственные магнитные поля
как антропогенный экологический фактор
Естественные и искусственные магнитные поля, возникающие хао-
тически, в подавляющем большинстве случаев оказывают негативное
влияние на живой организм. В эту группу не следует относить специ-
ально организованные искусственные электромагнитные поля, генери-
руемые магнитотерапевтическими и другими аппаратами, которые ока-
зывают благотворное, лечебное действие при правильном его примене-
30
Глава 1
нии. Настоящий раздел посвящен исследованию влияния на все живое,
в том числе и на человека, индустриальных и бытовых электромагнитных
полей, возникающих как сопутствующий фактор в сфере промышлен-
ного производства, при передаче энергии и информации, в транспортных
системах, а также в быту, где для обеспечения комфорта жизни исполь-
зуется техника, создающая их. Распространенность и масштабность
электромагнитных воздействий на человека становятся все более значи-
тельными, а, вместе с тем, они без сомнения являются вредными для
живых систем, и, поэтому, с ними необходимо вести борьбу, как с
экологическим загрязнением.
Большинство технических устройств, используемых в промышлен-
ности, на транспорте и в сельском хозяйстве, генерируют ЭМП про-
мышленной частоты, как, например, при электросварке, когда создается
МП значительной интенсивности частотой в 50 Гц [67]. Исследования
[68] показали, что величина напряженности МП промышленной частоты
на рабочих местах варьирует в широких пределах: от сотен до десятков
тысяч ампер на метр. У работающих под влиянием таких МП отмечаются
функциональные расстройства нервной и сердечно-сосудистой систем.
Экспериментально было доказано, что в их основе глубокие нарушения
углеводного, нуклеинового и белкового обменов, а также структуры
внутренних органов.
Комплексную оценку состояния здоровья лиц, работающих с подоб-
ными МП, провела В. П. Зоткина с соавторами [69]. Ими были выявлены
функциональные нарушения нервной системы (астено-вегетативный
синдром, вегето-сосудистая дистония и др.). Первые симптомы наруше-
ний появляются уже через несколько часов после начала работы, в даль-
нейшем процесс прогрессирует, что и приводит, в конечном итоге, к
общему ангиодистоническому синдрому. У лиц, подвергающихся воздей-
ствию МП промышленной частоты, отмечалась повышенная заболевае-
мость, а наклонность к спазмам выявлена у 53,9% обследованных, в от-
личие от контрольной группы, где таких же отклонений было всего 31,9%.
В исследованиях различных авторов неоднократно предпринимались
попытки выявить механизмы преимущественного воздействия ПеМП про-
мышленной частоты на нервную и сердечно-сосудистую системы. Посколь-
ку функционирование этих тканей постоянно требует высоких энергети-
ческих затрат, то одной из сфер приложения магнитных влияний мог
явиться обмен углеводов. В работе О. М. Чернышевой [70] показано, что
при действии ПеМП частотой в 50 Гц в зависимости от напряженности
(32 кА/м и 7,5 кА/м) имеют место неоднозначные изменения активности
гликолитических реакций и содержания гликогена, глюкозы и молочной
кислоты в миокарде, мышцах, мозге и печени, свидетельствующие о по-
вышенной чувствительности сердечной мышцы к МП.
Другой сферой приложения влияния магнитных полей мог явиться
электролитный обмен и, в частности, влияние на баланс электролитов
в плазме крови и трансмембранный транспорт катионов кальция. Воз-
можно, эти механизмы лежат в основе изменений, выявленных при
Действие магнитных полей на биообъекты
31
проведении клинико-гигиенических обследований людей, подвергав-
шихся неоднократным воздействиям рассеянных ПМП (12...24 кА/м на
голову и 28...400 кА/м на руки), у которых были обнаружены функци-
ональные нарушения сердечно-сосудистой системы (гипотензия, бради-
кардия, тахикардия) и др.
Необходимо отметить, что гемодинамические и тромбгеморрагичес-
кие нарушения могут быть вызваны искусственными ЭМП, применяе-
мыми не только в условиях производства, но и в быту [71].
Несмотря на разнообразие подходов и многочисленность исследо-
ваний, направленных на изучение влияния ЭМП различного происхож-
дения на нервную систему и опосредуемые через нее реакции организма,
в настоящее время не представляется возможным вести корректные рас-
суждения о механизмах действия и реализации эффектов МП на эту
ткань. Пока что все проводимые исследования только способствуют
накоплению информации об изменениях психофизиологических, пове-
денческих, двигательных и других реакций на уровне целостного орга-
низма при воздействии МП.
Внимание многих исследователей приковано к изучению психофи-
зиологического состояния людей, подвергавшихся воздействию ЭМП.
Так установлено, что ПеМП (50 Гц) способны приводить к нарушению
равновесия между процессами возбуждения и торможения, что прояв-
ляется в изменениях некоторых реакций [72]. При этом может проис-
ходить нарушение ритмики реагирования. Восстановление уровня реак-
ции до фонового происходило в течение 12...15 мин после действия МП,
что свидетельствует об обратимости наблюдаемых изменений. Ряд авто-
ров приходят к заключению, что ЭМП тормозят протекание нервных
процессов. Это подтверждается не только увеличением времени реакции,
но и уменьшением скорости нарастания сопротивления кожи.
Изменения имели место в различных проявлениях функциональной
деятельности нервной системы. Так, у людей, подвергшихся в условиях
производства хроническому, а в экспериментах на добровольцах — крат-
ковременному воздействию ЭМП, наблюдалось ухудшение памяти, не-
устойчивость внимания, изменялась длительность запоминания, появ-
лялась вялость и утомление. Видимо, ЭМП нарушают реализацию этих
психофизиологических функций.
Ухудшение работоспособности, снижение памяти сопровождается
изменениями в функционировании анализаторов. В большинстве слу-
чаев ЭМП вызывают достоверное увеличение времени простой двига-
тельной реакции, времени двигательной реакции на световые и звуковые
стимулы а также возрастание времени простой слуховой реакции.
Помимо этого установлено, что двигательная активность животных
изменяется в зависимости от напряженности и экспозиции ПеМП. При
напряженности ЭМП в 40 кА/м отмечалось увеличение двигательной
активности, а при 80... 160 кА/м — ее снижение. При напряженности в
320 кА/м имело место резкое торможение двигательной активности, а
в периоде последействия наступало ее усиление. Шестичасовое воздей-
32
Глава 1
ствие ЭМП (48...96 кА/м) способствовало резкому возрастанию двига-
тельной активности морских свинок, а при 360 кА/м — выраженному
угнетению [73-75].
Формирование вышеперечисленных эффектов, вероятно, объясня-
ется тем, что ЭМП, обладая высокой избирательной проникающей спо-
собностью, вызывают изменения не только в нейроглиальных клетках
мозга, но при более длительных или интенсивных воздействиях способ-
ны повлиять на структуру нейронов и кровеносных сосудов.
В заключение этого раздела, посвященного анализу эффектов дей-
ствия ЭМП на живые организмы на различных уровнях организации:
клеточном, органном, системном и в целом на функциональное состо-
яние организма, можно отметить, что геомагнитные и электромагнитные
поля способны оказывать влияние на жизнедеятельность организма. При
этом установлено, что действие МП неоднозначно, и могут иметь место
как отрицательные последствия, так и положительные результаты.
Вышесказанное предопределяет два основных направления дальнейших
исследований:
— необходимость тщательной проработки проблемы с позиций эко-
логии;
— дальнейшее изучение возможностей использования ЭМП в прак-
тической медицине.
Прогрессивное развитие этих направлений невозможно без дальней-
шего продолжения фундаментальных исследований, направленных на
изучение механизмов влияния ЭМП на живые системы.
1.6. Механизмы действия магнитных полей
на живой организм
В экспериментальной биологии и медицинской практике накоплен
громадный эмпирический опыт об эффектах ЭМП, требующий систе-
матизации и теоретического осмысления для расшифровки механизмов
их действия на живые объекты. Обилие гипотез по этой проблеме сви-
детельствует скорее о ее нерешенности, чем о достаточном уровне по-
нимания механизмов взаимодействия живого с естественными и искус-
ственными магнитными полями.
В попытках добиться решения этой проблемы следует исходить из
того, что организм представляет собой многоуровневую иерархическую
организацию. Особенности структуры каждого из этих уровней предоп-
ределяют характерную избирательность взаимодействия по различным
параметрам МП. В связи с этим для осмысления механизмов действия
МП на живые системы предлагается выделить следующие уровни, на
которых это взаимодействие прослеживается достаточно явно.
1. Ядерно-молекулярный уровень, включающий подуровни:
— электронно-ядерный;
— ионно-молекулярный.
Действие магнитных полей на биообъекты 33
2. Цитохимический уровень, в котором следует выделить:
— субклеточные структуры;
— структурные образования, обеспечивающие ионное равновесие в
клетках и тканевой жидкости;
— клеточные мембраны;
— биополимеры, определяющие вязкость и способность изменять аг-
регатное состояние жидких сред организма.
3. Тканевый уровень, на котором воздействие МП будет предопреде-
ляться:
— особенностями морфологии данной ткани;
— функциональной предназначенностью тканей;
— преобладающим характером метаболизма.
4. Органный уровень (воздействие на отдельные органы).
5. Системный уровень, включающий:
— центральную, периферическую и вегетативную нервные системы;
— сенсорные системы;
— сердечно-сосудистую систему;
— эндокринную систему;
— дыхательную, пищеварительную и выделительную системы;
— систему крови;
— опорно-двигательный аппарат и др.
6. Межсистемный уровень, описывающий взаимодействие между от-
дельными системами организма.
7. Общесистемный уровень, формирующийся при интегрировании вза-
имодействий между всеми системами.
8. Межличностный уровень, включающий:
— воздействие одного организма на другой через собственное излуче-
ние ЭМП;
— взаимодействие живых организмов во внешнем ЭМП.
Электронно-ядерный уровень. Изучение организма на квантовом
уровне показывает, что химические реакции, протекающие в условиях
in vivo, имеют много общего с «пробирочными» реакциями, а механизмы
действия МП на живой организм основаны на адекватном изменении
энергии химических связей в биологических процессах. Результатом хи-
мических реакций, как правило, является превращение молекул одних
веществ в другие за счет перестройки электронных оболочек ядер. Фи-
зические механизмы влияния МП связаны с вероятностью протекания
элементарных химических актов, когда в результате химических превра-
щений, вследствие распаривания электронов, появляются свободно-ра-
дикальные продукты реакции с некомпенсированными спинами [76].
Радикальные пары могут существовать в состоянии с общим спином
S=0 (синглетное состояние) и в состоянии с общим спином S=1 (три-
плетное состояние). Переход между различными спиновыми состояния-
ми пары возможен в случае воздействия внешним магнитным полем,
34
Глава 1
тем самым изменяется вероятность течения химических реакций и, как
следствие, имеет место проявление тех или иных магнитобиологических
эффектов. Так, в работе [77] рассматривается влияние постоянного МП
на перенос нервного импульса по седалищному нерву человека с точки
зрения гипотезы, в основе которой лежит влияние постоянного МП на
спиновые эффекты кинетики ионных каналов.
И, тем не менее, несмотря на обилие литературы, описывающей
влияние МП на биохимические процессы, в частности, на активность
ферментов, концентрацию продуктов химических реакций, данные из-
менения могут оказаться следствием совершенно иного, неизвестного
механизма воздействия МП.
Ионно-молекулярный уровень. Большую роль на ионно-молекулярном
уровне определяют слабые взаимодействия, имеющие электрическое
происхождение: ион — ион, ион — постоянный диполь, ион — инду-
цированный диполь, постоянный диполь — постоянный диполь (фик-
сированное ориентационное взаимодействие в жидкокристаллическом
состоянии), постоянный диполь — постоянный диполь (усредненное
ориентационное взаимодействие в газе или жидкости), постоянный ди-
поль — индуцированный диполь, индуцированный диполь — индуци-
рованный диполь [78]. Важность слабых взаимодействий внутри и между
биологических молекул в живых системах проявляется хотя бы в том,
что они определяют взаимодействие белков, являющихся поливалент-
ными ионами, с липидами, углеводами, нуклеиновыми кислотами, ма-
лыми молекулами. Слабые взаимодействия на межмолекулярном уровне
определяют строение и функциональную активность мембран клетки и
многое другое. Энергия некоторых типов слабых взаимодействий нахо-
дится в пределах уровней энергии ЭМП, генерируемых некоторыми
магнитотерапевтическими аппаратами, что предполагает возможность
влиять на них [79].
Попытки объяснить магнитобиологические влияния на надмолеку-
лярном уровне привели к появлению гипотез, основывающихся на маг-
нитогидродинамических, ориентационных, концентрационных, жидко-
кристаллических, ферромагнитных эффектах.
Магнитогидродинамические эффекты предполагают, что при дейст-
вии МП перпендикулярно потоку проводящей жидкости возникает сила,
противодействующая движению, которая уменьшает среднюю скорость
потока. В работах, описывающих процессы, моделирующие движение
крови по сосудам, отмечается, что эффект снижения скорости потока
возможен лишь в крупных сосудах в условиях действия магнитных полей
значительных интенсивностей. Так, замедление потока на 25% может
наблюдаться в полях с индукцией около 10 Тл [80]. Практика показы-
вает, что воздействие слабых МП на организм человека существенно
снижает артериальное давление, что находится в противоречии с данной
теорией и говорит о других механизмах действия МП.
Ориентационные эффекты предполагают способность свободных
молекул ориентироваться в пространстве, изменяя тем самым биологи-
Действие магнитных полей на биообъекты 35
ческие свойства системы. Экспериментально доказана ориентация ДНК
под воздействием постоянного МП [81]. Предполагается, что наиболь-
ший эффект будет наблюдаться в упругой биологической среде, а не в
жидкости.
Концентрационные эффекты могут иметь место в неоднородном
высокоградиентном поле, что проявляется в направленном движении
частиц, как, например, направленное прорастание семян и рост растений
в условиях динамической невесомости [82].
Жидкокристаллическое состояние вещества характеризуется наличи-
ем роев — больших групп молекул, причем в каждом рое молекулы
расположены вполне определенным образом, а сами рои расположены
хаотично. Внешнее МП производит их ориентацию. Особое значение
приобретает теория жидкокристаллических эффектов при рассмотрении
липидных компонентов биологических мембран как структур, имеющих
жидкокристаллическое состояние, что особенно важно для выполняемых
ими транспортных функций [83]. Однако объяснения магнитобиологи-
ческих эффектов с точки зрения вышеизложенной теории наталкиваются
на наличие в биомембранах больших электрических полей.
Ферромагнитные включения находят в структурах низших и высших
организмов, в том числе в составе внутренних органов человека. Но
если известно, что они являются чувствительным элементом соответст-
вующих рецепторов у насекомых, а у млекопитающих они выполняют
определенную ориентационную функцию, то роль их в организме чело-
века пока недостаточно ясна.
Внутриклеточный (мембранный) уровень. Понимание процессов, про-
исходящих в клеточной мембране, ведет, по мнению ряда авторов, к
объяснению механизмов биологического действия низкочастотного МП
на живые системы [44, 84]. На основе этих предположений была сфор-
мулирована концепция электрохимического информационного переноса
ионов через мембраны, исходя из которой была предложена импульсная
форма МП, вызывающая определенные магнитобиологические эффекты
[85, 86]. Недостатком этой концепции является невозможность описать
магнитобиологические эффекты гармонического магнитного поля.
У. Р. Эйди (1975; 1977; 1980; 1989), изучая влияние слабых полей, вы-
двинул гипотезу о том, что поверхность нейронной мембраны может
трансдуцировать слабые внеклеточные поля в качестве связывания и
высвобождения с мембранной поверхности макромолекул ионов кальция
[87]. Многие исследователи отводят мембране основную роль при дей-
ствии ЭМП (М. П. Шишло, 1971; А. П. Дубров, 1974; У. Р. Эйди, 1975-
1981) [85, 88-93].
Предполагают, что первичным эффектом, вызывающим изменения
проницаемости мембраны, могут быть явления, возникающие под вли-
янием ЭМП в водных средах организма (Л. Д. Кисловский, 1971; 1988)
[94, 95]. В биологических процессах вода, являясь сложно организован-
ной открытой системой, играет важную роль. В настоящее время из-
вестно 8 клатратных структур воды, элементами которых являются ме-
36
Глава 1
тастабильные образования, представляющие собой плоские пяти- или
шестиугольники, состоящие из молекул воды. При различных воздей-
ствиях, в том числе и магнитном, в естественных условиях в воде может
происходить разрушение комплексов, их исчезновение и образование
новых (М. В. Березин, 1988) [96]. Во внутренних средах организма такие
изменения происходят как фазовые переходы второго порядка. Процес-
сы образования и распада метастабильных комплексов сопровождаются
четкими биохимическими эффектами, возможно, вызывающими изме-
нение проницаемости мембран.
В опытах на тканях головного мозга крыс установлено, что слабые
переменные МП с индукцией порядка 0,045 мТл влияют на структуру
липопротеидных комплексов мембран эритроцитов и липопротеиды,
приводя к снижению осмотической резистентности эритроцитов [84].
Среди магнитобиологических эффектов можно отметить увеличение
выхода ионов натрия и водорода из растительной клетки при воздейст-
вии постоянным МП 25 мТл. Работы по стимуляции и ингибированию
выброса протона из клетки путем совместного и раздельного воздействия
постоянным и переменным электромагнитным полем привели к опре-
делению резонансного соотношения для протонного магнитного резо-
нанса [84, 97].
Известно, что любой электрический ток создает вокруг себя МП.
Движущаяся совместно с форменными элементами кровь также будет
представлять собой электромагнитную систему. Электрические заряды
эритроцитов при их движении и вращении создают конвекционные
токи, которые и порождают МП. Поэтому каждый эритроцит является
не только электрически заряженным диском, но еще и магнитом. Элект-
рические заряды эритроцитов одноименны, что способствует отталки-
ванию их друг от друга и предупреждает склеивание (явление электро-
распора).
Являясь электромагнитной системой, кровь очень чутко реагирует
на воздействия ЭМП. Наиболее чувствительны к ним мембраны клеток,
состоящие из фосфолипидов. Эти соединения обладают тромбопласти-
ческим эффектом и поэтому при освобождении их из мембран и по-
ступлении в циркуляцию они способствуют увеличению свертываемости
крови. Эти проявления и осложнения, связанные с ними, например,
коронаротромбоз, могут наблюдаться в период геомагнитных бурь, во
время которых на весь организм человека действуют неупорядоченные
хаотичные магнитные поля. Не исключено, что эффективной контрме-
рой для предупреждения и восстановления нарушенных механизмов ге-
мостаза может стать упорядоченное, регулируемое, системное электро-
магнитное воздействие на организм [98].
Тканевый уровень. Изучение механизмов действия магнитных полей
на тканевом уровне осуществлялось по двум направлениям:
— реакции клеток в изолированных тканевых культурах;
— морфо-функциональные изменения в тканях целостного организ-
ма.
Действие магнитных полей на биообъекты
37
Первый подход позволял выяснить варианты и механизмы реагиро-
вания отдельных клеток и их структур на МП, а второй давал возмож-
ность исследовать не только картину локальных изменений в тканях-
мишенях, но и разобраться в интегральных ответах организма в целом.
Для дальнейшей разработки и совершенствования методов магни-
тотерапии (самостоятельной или комбинированной с другими фактора-
ми) актуальными являются сведения не только по молекулярным меха-
низмам магнитобиологических реакций, но и данные о динамике этих
реакций, степени их выраженности, характере вызванных гистофизио-
логических отклонений, стадийных изменениях, не только в процессе
воздействия, но и после его отмены на клеточном и тканевом уровне.
По-прежнему сохраняется обостренный интерес к проблеме прямой маг-
ниточувствительности клеток и тканей к МП с различными характерис-
тиками.
Интересные исследования были проведены в этом направлении
В. И. Казаниным [99], который использовал методы микрокиносъемки,
иммуноморфологии и гистохимии. Он отмечает, что спустя 15 мин с
момента наведения ПМП постепенно увеличивается двигательная ак-
тивность фибробластов в культуре ткани под его воздействием, возрас-
тает размах колебаний внутриклеточных структур (митохондрий и других
включений). Данный уровень активности поддерживался в течение 2-х
часов, а затем несколько снижался. Эта стадийность сохранялась в те-
чение 5-часовых наблюдений. После отмены воздействия МП постепен-
но происходил возврат к исходному состоянию, а клетки достигали
первоначального уровня двигательной активности через 90 минут. Ре-
акция живых изолированных клеток на воздействие МП повторяет из-
вестные общебиологические закономерности в последовательности ста-
дий: латентный период, стадия активации, стадия ингибиции функций.
Автор четко доказал, что как изолированные клетки, так и ткани
живого организма чувствительны к МП, а их реакции характеризуются
стадийностью. Кроме этого было показано, что магнитобиологические
реакции обратимы и компенсация отмеченных отклонений происходит
достаточно быстро после окончания воздействия МП. Также может
иметь место тенденция к суперкомпенсации магнитобиологических ре-
акций, которая может составить основу для развития и становления
адаптивных механизмов. Стадийность, обратимость и компенсация маг-
нитобиологических реакций должны приниматься в расчет при разра-
ботке магнитотерапии.
Не меньший интерес с позиций практической медицины представ-
ляет расшифровка механизмов и способов оптимизации формирования
защитных реакций на клеточном уровне. М. Б. Миркцулава с соавторами
[99] изучили действие МП на противовирусную резистентность культуры
ткани, клетки которой перед заражением вирусом лихорадки подверга-
лись действию ПеМП (частота 2000 Гц, индукция в диапазоне
1...400 мкТл). Экспозиция от 5 до 90 минут. Уровень устойчивости счи-
тали удовлетворительным в тех случаях, когда клеточные структуры не
38
Глава 1
заражались в течение 168 часов инкубации. Авторы считают, что ПеМП
частотой в 2000 Гц обеспечивает необходимую резистентность клеток.
Она формируется в диапазоне от 0,2 до 300 мкТл при экспозиции
25...70 мин.
Различные ткани организма отличаются по чувствительности к МП,
причем наиболее высока она у нервной и кроветворной тканей, структур
эндокринных желез. Изучение реакции этих систем на магнитные поля
представляет существенный интерес не только в плане изменений, ко-
торые могут наблюдаться локально, но и возможностей управления
функциями других систем, поскольку клеточные изменения в нервной
и эндокринной тканях обязательно найдут отражение в регуляции на
уровне целостного организма.
Действие МП на нервные клетки и их микроокружение неоднознач-
но. Как было установлено в экспериментах на крысах Н. И. Артюхиной,
МП благоприятно действует на структурные компоненты тканей голов-
ного мозга. При двухчасовой экспозиции ПМП 10...50 мТл происходит
расширение капилляров мозга, иногда стазы. В последующие 3 дня на-
блюдается ослабление эффекта, а через 6 дней после однократного воз-
действия структура кровеносных сосудов возвращается к исходным пара-
метрам. Выраженность и стойкость сосудистых реакций зависят от крат-
ности воздействия МП [100].
Е. А. Бухарин с соавторами [101] исследовали структуру тканей моз-
жечка и изменения в костном мозге под влиянием ПМП различной
интенсивности и времени. Авторы приходят к выводу, что при длитель-
ном воздействии МП появляются первичные морфологические измене-
ния (деструкция в отдельных элементах тканей). Масштабы этих изме-
нений связаны с длительностью и характером воздействия. Не остаются
безучастными к воздействию МП структуры периферической нервной
системы. В. Б. Федосеевым установлено, что при ориентации МП вдоль
нерва его возбудимость повышается в среднем до 20% [102].
Ю. А. Холодов, проводя аналогию между эффектами, вызываемыми
МП и миллиметровым излучением, проникновение которого в организм
ограничивается кожей, считает, что на начальных этапах их возникно-
вение обусловлено взаимодействием ЭМП с болевыми рецепторами,
афферентная импульсация с которых запускает в дальнейшем реакции
целостного организма [61, 103].
Большой интерес представляют собой исследования, посвященные
влиянию МП на микрофункциональные параметры биологически ак-
тивных точек (БАТ) кожи и связанных с ними органов (Н. И. Вербицкая)
[104]. Эффект при возбуждении точек акупунктуры зависит от вида
раздражения, оно может иметь не только механическую, но и электро-
магнитную природу. Несомненно, что БАТ, имеющие повышенное
электрическое сопротивление, будут при воздействии ПеМП подвергать-
ся влиянию наводящейся электромагнитной индукции [105]. Проведен-
ные на белых мышах эксперименты показали, что у них во внутренних
органах расширяются сосуды микроциркуляторного русла, отмечаются
Действие магнитных полей на биообъекты
39
морфофункциональные изменения нервов. Высказывается предположе-
ние, что формирование адаптационно-трофических процессов обуслов-
лено различными факторами, в том числе и активацией БАТ. Исследо-
вание электропроводности кожи в активных точках в норме и при па-
тологии, а также после воздействия ПеМП, провели А. А. Тюряева и
др. [106]. В контрольной группе изменения электропроводности не вы-
явлено. При различных патологических состояниях отмечалась повы-
шенная электропроводность в БАТ. Эти проявления ряд авторов связы-
вают с изменением водно-солевого обмена, которым ведает симпатичес-
кая нервная система. В процессе лечения с использование ПеМП
электропроводность БАТ нормализовалась. Высказывается предположе-
ние, что МП действует на симпатоадреналовую систему, возможно из-
меняется потенциал клеток.
Как уже упоминалось выше, кроветворная ткань не остается интакт-
ной к воздействию МП [101]. При изучении в эксперименте механизмов
влияния на кровь МП было высказано предположение о его двояком
действии: на жидкую часть, приводящем к конформационным измене-
ниям белковых молекул, и на мембранную активность форменных эле-
ментов (С. М. Иванова) [107]. Оказалось, что в сыворотке и плазме
крови под действием ПМП происходят конформационные изменения
белковых молекул и их комплексация.
В оригинальных исследованиях, проведенных В. В. Демьяненко с
соавторами [108], отмечается, что определенное значение в биостиму-
лирующем влиянии при действии МП могут иметь продукты аутогенного
распада. Эффект биогенной стимуляции МП обусловлен способностью
патологически измененных структур-клеток и тканей подвергаться ау-
толизу под влиянием внешнего МП, что сопровождается одновременным
цитостабилизирующим влиянием здоровых клеток. Под влиянием МП
в организме формируется нестойкий по времени антигенный стимул
гуморального происхождения, достаточный, однако, по качественным и
количественным характеристикам для запуска механизмов биогенной
стимуляции, и, в то же время, неспособный вызвать перераздражение
иммунокомпетентной системы.
Таким образом, биостимулирующее влияние МП реализуется через
магнитореактивные сдвиги как в клеточных, так и во внеклеточных
компонентах тканей. Однотипность реакции различных организмов при
воздействии низкочастотного ЭМП заключается в том, что его воздей-
ствие приводит к повышению их реактивности, что проявляется в оп-
тимизации функционального состояния и повышении уровня неспеци-
фической резистентности.
Органный уровень. Заслуживает пристального внимания изучение ор-
ганной специфичности ответных биохимических реакций на воздействие
ПеМП промышленной частоты. Изучалось действие МППЧ частотой 50
Гц. Выявлено его влияние на показатели углеводного обмена. При
многократном воздействии ПеМП достаточно высокой напряженности
(32 кА/м) появляются однонаправленные изменения показателей глико-
гена, глюкозы, молочной кислоты (печень, мышцы, мозг).
40
Глава 1
При относительно низких интенсивностях МП (7,5 кА/м) показания
названных метаболитов снижаются в печени, мышцах и мозге, а в сердце
повышаются. Полученные данные с различной направленностью сдвигов
в сердце свидетельствуют о высокой чувствительности гликолитической
системы клеток миокарда, а большая выраженность сдвигов в мышцах
и печени обусловлена, видимо, их углеводной функцией организма.
Системный уровень. По степени чувствительности к МП органы и
ткани располагаются в следующей последовательности: наиболее чувст-
вительна к ним нервная ткань, затем следуют эндокринные железы,
органы чувств и кровь, оставшиеся системы и ткани идут в следующем
порядке — сердечно-сосудистая, мышечная, пищеварительная, выдели-
тельная, дыхательная и костная [109].
Особый интерес у магнитологов вызывают центральная и перифе-
рическая нервные системы. Это обусловлено тем, что при действии на
них ЭМП, помимо местного эффекта, наблюдаются изменения жизне-
деятельности во всем организме. Дело в том, что периферическая нерв-
ная система, благодаря своим рецепторам, первая реагирует на воздей-
ствие факторов внешней среды и поставляет информацию в вышестоя-
щие регуляторные центры ЦНС, которые автоматически осуществляют
регуляцию не только механизмов адаптации к воздействующему фактору,
но и поддержания постоянства внутренней среды. Таким образом, ком-
плексная деятельность периферической и центральной нервных систем
обеспечивает приспособление организма к изменяющимся условиям
внешней среды при сохранении гомеостаза.
Существенный вклад в изучение механизмов нервной деятельности
внесли отечественные исследователи. Учение И. П. Павлова о высшей
нервной деятельности признано во всем мире. Оно подтвердило замеча-
тельные идеи и открытия И. М. Сеченова о рефлекторной природе ре-
акций организма. И. П. Павлов доказал, что высший регуляторный ап-
парат работает по принципу рефлекса и его функционирование подчи-
няется тем же основным закономерностям, что и вся нервная система.
Им же было установлено, что кора головного мозга функционально свя-
зана с внутренними органами и ее регуляторные влияния могут изменять
их работу, что блестяще подтвердилось новейшими психофизиологичес-
кими экспериментами последователей Павловского учения за рубежом.
Высокая чувствительность нервной ткани к ЭМП объясняется тем,
что нервная система человека — это единая электрическая сеть. Нервные
импульсы имеют электрическую природу и порождают электромагнит-
ные колебания. Поскольку МП способны оказывать влияние на движе-
ние заряженных частиц, то в данном случае МП определенных конфи-
гураций могут добавлять энергию заряженным частицам, увеличивать
скорость их движения, т.е. влиять на функцию нервной ткани.
Реакция нервной системы на магнитные поля проявляется как в
структурных преобразованиях — увеличение числа астроцитов, так и
функциональных изменениях потенциалов электроэнцефалограммы
(ЭЭГ). В частности, при анализе ЭЭГ было выявлено, что «сильная»
Действие магнитных полей на биообъекты
41
нервная система реагирует более резкими сдвигами биоэлектрической
активности в сторону снижения мощности a-ритма и повышения а-диа-
пазона. При «слабой» нервной системе усиливается низкочастотный а-
ритм.
Выраженность функциональных реакций и морфологических изме-
нений в нервной системе предопределяется величиной характеристик
биотропных параметров МП, видом животного, локализацией индукто-
ра, местным или общим воздействием. Наиболее выраженные изменения
были при воздействии на весь организм, менее всего — при влиянии
на грудную клетку [110]. ЭМП, обладая высокой проникающей способ-
ностью даже при непродолжительном воздействии, вызывает изменения
в нейроглиальных клетках мозга [111]. При более длительных экспози-
циях регистрируются изменения структуры и функций нейронов и кро-
веносных сосудов.
Влияние импульсного МП на высшую нервную деятельность жи-
вотных исследовала Л. Ф. Зюбанова с соавторами [112], используя на
крысах методику выработки оборонительных условных рефлексов. Ими
было установлено, что ИМП оказывает влияние на ЦНС, причем ре-
зультат воздействия зависел как от интенсивности ИМП, так и от дли-
тельности межимпульсного интервала.
В собственных исследованиях изучалось влияние комбинированного
ЭМП на показатели электрической активности мозга (10 ежедневных
сеансов по 20 мин). Регистрировалась фоновая и вызванная активность
мозга, а также электрическая активность сердца (ЭКГ). При проведении
наблюдений анализировались слуховые длиннолатентные вызванные по-
тенциалы (ДСВП) в ответ на действие акустических сигналов фоновой
частоты (250 и 2000 Гц). Анализировались фоновая ЭЭГ и параметры
вызванного потенциала (ВП) на раздражители разной модальности.
Проведенные повторные исследования фоновой ЭЭГ у этих же ис-
пытуемых после курса воздействия МП не обнаружили достоверных
изменений в параметрах амплитудно-частотной характеристики ЭЭГ.
Однако были выявлены тенденции к увеличению количественной пред-
ставительности a-диапазона. Анализ временных характеристик зритель-
ных и длиннолатентных слуховых ВП обнаружил значительный уровень
их вариаций и не выявил четких закономерностей, связанных с влия-
нием МП.
На рис. 1.4 и 1.5 показана усредненная динамика процессов габи-
туации на действие зрительного раздражителя исследуемого параметра
ВП (амплитуда N2P2) от влияния комбинированного МП. Эти опыты
показали, что комбинированное МП способно оказывать значимое вли-
яние на изменение характера динамики процесса габитуации в условиях
предъявления зрительной стимуляции и акустического раздражителя при
небольшом числе усреднений ВП.
В следующей серии наблюдений на пациентах проводилось иссле-
дование выраженности пространственной асимметрии путем сопостав-
ления амплитуды ВП в симметричных отведениях методом знаковых
соответствий, что позволило сравнить выраженность этой асимметрии
42
Глава 1
Рис. 1.4. Усредненная динамика процессов габитуации на действие зрительного
раздражителя для выборки испытуемых при интенсивности вспышки 0,3 Дж:
У — выраженность межпиковой амплитуды N2P2 (мкВ); X — количество усреднений ВП;
1 — межпиковая амплитуда N2P2 до влияния ЭМП; 2 — то же после влияния; 3 — габитуа-
ция до влияния ЭМП; 4 — то же после влияния
до и после действия комбинированного МП. Анализ выраженности про-
странственной асимметрии зрительных ВП до влияния МП обнаружил
ее неравномерную представленность. Анализ меры представленности
пространственной асимметрии после влияния МП выявил разительные
изменения, связанные со сглаживанием представленности этого интег-
рального показателя, характеризующего динамику нервных процессов и
уровня функционального состояния. Представленность выраженной
асимметрии после действия МП вновь выглядела более равномерной в
сравнении с явно читающимся градиентом асимметрии до влияний.
Следовательно, можно констатировать, что паттерны комбинирован-
ного МП способны оказывать значимое влияние на изменение органи-
зации пространственной асимметрии электрической активности мозга,
уменьшая габитуацию показателей, вызванных потенциалов на разно-
модальные раздражители, повышая выраженность представленности а-
активности ЭЭГ у испытуемых. Все это в свою очередь свидетельствует
Рис. 1.5. Усредненная динамика процессов габитуации на действие зрительного
раздражителя для всей выборки испытуемых (обозначения те же, что на рис. 1.4)
Действие магнитных полей на биообъекты 43
о развитии процессов релаксации, вырабатывании способности организ-
мов испытуемых к изменению своего функционального состояния таким
образом, чтобы повысить вероятность перехода от активного, напряжен-
ного бодрствования к расслаблению, которое граничит с дремотой. Об
этом же, по-видимому, может говорить и обобщение субъективных от-
четов испытуемых, в которых отмечалась нормализация периода засы-
пания, повышение продолжительности субъективно необходимого сна.
Возможно, это является следствием активации комбинированным МП
адаптационных процессов, развитие которых, как известно, способно
нормализовать имеющиеся дисфункции в деятельности систем организ-
ма, а также в организации и поддержании оптимального функциональ-
ного состояния организма для обеспечения жизнедеятельности.
Таким образом, искусственные МП могут оказывать как непосред-
ственное воздействие на структуры головного мозга, так и рефлектор-
ное — через периферическую нервную систему.
Эндокринная система при действии ЭМП реагирует усилением
функций надпочечников, щитовидной железы, половых желез. ПМП,
ПеМП и ИМП с индукцией до 30 мТл при незначительной экспозиции
способствуют развитию реакции тренировки и повышению активности
всех отделов эндокринной системы [109].
Реакция сосудистой системы является следствием как прямого вли-
яния МП на ее структурные образования, так и опосредованных реф-
лекторных воздействий через ЦНС. Г. А. Кураев с соавторами исследо-
вали частоту сердечных сокращений (ЧСС) у человека до воздействия
ЭМП и на 20-й минуте от начала экспозиции. В процессе наблюдения
за испытуемыми была выявлена четкая тенденция к снижению АД. В
указанных исследованиях параллельно с регистрацией ЧСС пульсокси-
метром осуществлялось измерение насыщения гемоглобином артериаль-
ной крови. Оказалось, что ЭМП не оказывает существенного влияния
на степень насыщения кислородом гемоглобина.
Авторы проанализировали динамику изменений интегрального по-
казателя напряженности (ИПН) регуляторных процессов в организме.
В исходном периоде у испытуемого отмечалось, что при наличии первой
степени напряженности после 20 мин воздействия электромагнитного
поля показатель ИПН нарастал, что говорит об активации парасимпа-
тического отдела ВНС. Максимальным увеличение ИПН было после
2-го и 7-го воздействия ЭМП. Показатель ИПН в условиях ЭМП до-
стоверно снижался в 47,1% случаев (в фоновом периоде он увеличивался
в 22,4% случаев). У большинства испытуемых (8 из 11 чел.) в фоновом
периоде интегральный показатель напряженности соответствовал норме,
что отмечалось также и при воздействии ЭМП.
Если кратко подвести итоги по изучению показателей деятельности
сердечно-сосудистой системы в условиях действия ЭМП, можно отме-
тить его вегетонический эффект, снижение АД (активизация действия
парасимпатической нервной системы). В объяснении влияния МП, ви-
44
Глава 1
димо, ближе к истине находится точка зрения о фазовом характере
реакций сердечно-сосудистой системы на МП.
Межсистемный и общесистемный уровни. В течение ряда лет нами
для лечения больных используется магнитотерапевтический комплекс
«Аврора МК-01», способный генерировать МП различных видов, а ком-
поновка его (по типу скафандра) обеспечивает общее воздействие на
весь организм. Мы осознаем, что механизм действия МП на живой
организм намного сложнее, чем мы его представляем в общем плане по
начальным и конечным ответным реакциям. В решении этой проблемы
мы рассчитываем на помощь представителей теоретической медицины:
биохимиков, физиологов, патофизиологов и др., но практическая меди-
цина, поскольку в ней уже сегодня широко используются различные
магнитотерапевтические аппараты, остро нуждается в рабочей гипотезе,
способной обосновать терапевтические эффекты МП. Нами предлагает-
ся концепция общего действия МП на живой организм, использующая
положения учения П. К. Анохина о функциональных системах (рис. 1.6).
Рис. 1.6. Общая схема действия МП на живой организм
Информация об изменениях соответствующих параметров с пери-
ферических отделов передается по центростремительному каналу в
центральные регулирующие системы, обрабатывается там, и в виде
«командной» информации передается по центробежным каналам, воз-
вращаясь на периферию. Такие потоки информации постоянно пере-
мещаются в ту и другую сторону. При отклонении любого перифери-
ческого параметра, например, изменении АД в системе кровообраще-
ния, центром вырабатывается соответствующая «команда», должная
изменить соответствующие функции для стабилизации физиологичес-
ких процессов. Возможный вариант воздействия динамического МП
на регуляторные механизмы системы кровообращения приведен на
рис. 1.7. Данная функциональная система имеет широкие, но не без-
граничные корригирующие способности. Патология начинается там,
где исчерпываются регуляторные возможности.
Действие магнитных полей на биообъекты
45
Для иллюстрации предлагаемой нами модели воздействия магнит-
ного поля на организм пациента можно рассмотреть вариант регуляции
давления в периферических магистральных артериальных сосудах.
Одним из важных компонентов регуляции периферической гемодина-
мики является информация об уровне давления в сосудах. Эта инфор-
мация формируется непосредственно в сосудистой стенке в барорецеп-
торах и в виде кодированных сигналов передается по соответствующим
каналам в вазомоторные центры, где после обработки формируются
ответные командные сигналы, регулирующие диаметр просвета сосудов.
При окклюзионном поражении периферических сосудов происходит
формирование так называемого патоинформационного процесса. Во-пер-
вых, в склеротически измененных стенках сосудов создается и переда-
ется заведомо искаженная информация о существенном падении давле-
ния в сосудах ниже уровня окклюзии и, соответственно, выраженном
его повышении выше данного уровня. Во-вторых, превалирующие ги-
потензивные сигналы практически блокируют каналы передачи, имею-
щие ограниченную пропускную способность. В-третьих, данная инфор-
мация искажается в процессе передачи по нервным структурам и в ходе
обработки в вазомоторных центрах, также функционирующих в условиях
ишемии. И, наконец, в очередной раз искаженные исполнительные сиг-
налы вызывают неадекватную, с точки зрения адаптации, реакцию пе-
риферических сосудов, т.е. дополнительный ангиоспазм.
Рис. 1.7. Вариант воздействия динамического магнитного поля на регуляторные
механизмы системы кровообращения:
I — периферический отдел; II — канал передачи информации с синаптическими контакта-
ми; III — центр обработки информации 1-го уровня (спинной мозг); IV — центр обработки
информации 2-го уровня (головной мозг — талямическая область); 1 — периферический
сосуд; 2 — барорецепторы; 3 — возбуждающее волокно; 4 — пресинаптическое торможе-
ние; 5 — постсинаптическое торможение; 6 — постсинаптический нейрон; 7 — переклю-
чающий нейрон спинного мозга; 8 — клетки вазомоторного центра
46
Глава 1
Можно предположить, что под воздействием ИБМП происходит
переход патоинформации в нормоинформацию. В таком случае включаются
адаптационные механизмы, которые приводят к относительной стаби-
лизации периферической гемодинамики. Это проявляется, в частности,
в уменьшении периферического спазма сосудов, достоверно определяе-
мого методами функциональной диагностики, о чем речь пойдет в пос-
ледующих главах.
В настоящее время не представляется возможным указать конкрет-
ную зону влияния ИБМП. Скорее всего, воздействие происходит одно-
временно на всех уровнях обработки информации. Наиболее вероятными
мишенями нам представляются зоны синаптической передачи сигнала,
особенно в местах формирования первичного сигнала в барорецепторах.
Основываясь на этой предпосылке, можно указать некоторые пара-
метры ИБМП, использование которых должно повысить терапевтичес-
кую эффективность. Это синхронизация начала бегущей волны с час-
тотой сердечных сокращений, совпадение скорости перемещения самой
волны со скоростью кровотока в артериальных сосудах, соответствие
направления движения бегущей волны и вектора магнитной индукции
с направлением артериального кровотока. Именно с такой частотой, с
такой последовательностью и с таким временным интервалом форми-
руются импульсы, передаваемые с барорецепторов.
Поиск рациональных подходов к изучению биологического действия
импульсного бегущего магнитного поля (ИБМП) в норме и патологии
(клинике и эксперименте) базируется на фактах его клинической эф-
фективности в лечении хронических неспецифических окклюзионных
заболеваний артерий. Сравнительный химический анализ показывает,
что стабильный положительный эффект, по субъективным данным и
некоторым клиническим тестам, отмечается при курсовом применении
ИБМП следующих характеристик: синхронизированного с частотой сер-
дечных сокращений, равнонаправленного по вектору движения и век-
тору индукции с магистральным артериальным кровотоком, перемеща-
емого со скоростью, кратной скорости кровотока, с распределением
уровней магнитной индукции по заданному алгоритму в соответствии с
особенностями данного заболевания.
Выявление конкретных механизмов положительного влияния
ИБМП и перечисленных характеристик при заболеваниях с нарушением
артериального кровотока должно основываться на известных данных о
функциональных регуляторных принципах организации сердечно-сосу-
дистой системы. Проблема регуляции кровообращения включает:
а) нервно-рефлекторную регуляцию;
б) миогенный компонент;
в) химическую регуляцию сосудистого тонуса.
Сосудодвигательные рефлексы можно разделить на системные, при-
водящие к изменению артериального давления, и регионарные вазомо-
торные рефлексы. Согласно В. М. Хаютину [113], системные рефлексы
можно разделить на 2 группы. Одни из них возникают в ответ на из-
Действие магнитных полей на биообъекты
47
менения в самой сердечно-сосудистой системе и называются собствен-
ными или внутренними рефлексами сердечно-сосудистой системы. Вто-
рые, или «внешние» («сопряженные» по В.Н. Черниговскому) [114],
возникают в ответ на сигналы с рецепторов, расположенных вне сердца
и сосудов.
Применительно к поставленной задаче определения влияния мало-
изученного физического фактора на кровообращение, целесообразно ис-
пользование системного подхода к оценке всех основных известных фак-
торов, воздействующих на такой ведущий показатель артериального кро-
вотока как местный (локальный) радиус сосуда. Именно этот показатель
нужно считать определяющим, исходя из поставленной задачи выясне-
ния роли ИВМП при лечении заболеваний с артериальной недостаточ-
ностью. Схема, разработанная Bohr с соавторами, отражает значение каж-
дого из 22 блоков функциональной организации кровообращения в тка-
нях, являющихся конкретными звеньями возможного саногенетического
воздействия МП. Системный подход может помочь в рациональной по-
становке опытов и подборе клинических тестов для подтверждения воз-
можного влияния ИБМП на артериальный, а, следовательно, и капил-
лярный кровоток, тесно зависящий от первого. Как известно, объем
крови, протекающий через терминальное сосудистое ложе, регулируется
изменением тонуса артерий, в первую очередь артериол. Давление внутри
капилляра обеспечивается как нейрогенными, так и гуморальными ме-
ханизмами влияния на артериолы, а также состоянием посткапиллярных
сосудов, от которых зависит сопротивление в собирательных венулах.
Величина площади задействованных поверхностей стенок капилляров по
реализации обменных процессов зависит от активности прекапиллярных
сфинктеров, т.е. от влияния местных факторов химической регуляции
на гладкие мышечные ткани. Венозный отток в тканях зависит не только
от просвета сосуда, но и от реологических свойств крови (вязкости,
электрического заряда клеточных элементов и стенки сосуда, концент-
рации клеток и т.п.). Схема регуляции тонуса артерии, а, следовательно,
и уровня капиллярного кровообращения может быть использована для
дальнейшего экспериментального и клинического анализа биологичес-
кой и клинической эффективности МП.
Предлагаемая концепция механизма действия МП как внешнего
раздражителя, не претендует на оригинальность, она безусловно не рас-
крывает всех звеньев этого механизма, но она может быть использована
в практическом здравоохранении как рабочая гипотеза, приемлемая на
данном этапе.
Основываясь на собственном опыте эффективного использования
магнитотерапевтической установки класса «Аврора МК-01» для лечения
заболеваний сердечно-сосудистой системы, и, прежде всего, обусловлен-
ных нарушениями периферического кровообращения, в заключении
можно сделать вывод, что ЭМП является важным корригирующим фак-
тором в нормализации патологически измененной системы регуляции.
Можно полагать, что ИБМП создает условия для самоорганизации
48
Глава 1
функциональных комплексов, активизирует адаптационные механизмы
и, тем самым, способствует положительному лечебному эффекту в ши-
роком диапазоне возникающих патологических состояний.
Межличностный уровень (биомагнетизм). В настоящее время активно
развиваются исследования, связанные с регистрацией сверхслабых маг-
нитных полей, генерируемых различными органами живых объектов, и,
в первую очередь, сердцем и мозгом человека. Установлено, что интен-
сивность МП сердца составляет 10'6 от интенсивности ГМПЗ для сред-
них широт (0,05...0,07 мТл ), а интенсивность МП вблизи головы чело-
века имеет величину порядка 0,01...0,1 нТл и идентифицируется многими
исследователями как магнитная составляющая a-ритма электроэнцефа-
лограммы (Э. Э. Годик, Ю. В. Гуляев, 1990 ) [115]. Одной из основных
задач этого направления является разработка методов, пригодных для
выявления изменений в системах организма бесконтактным способом
(У. Р. Эйди и др., 1989) [84].
Освещая вопрос о магнитных полях биологических объектов, нельзя
не отметить исследования Ю. А. Холодова [116]. Он справедливо ука-
зывает, что для регистрации сверхслабых МП нужны сверхчувствитель-
ные магнитометры, работа которых основана на эффекте Джозефсона.
Такие приборы работают с использованием жидкого гелия и носят на-
звание СКВИД (сверхпроводящий квантовый интерференционный дат-
чик). Данное научное направление получило название «биомагнетизм»,
в отличие от магнитологии, которая изучает действие внешних МП на
биосистемы.
Интенсивность биомагнитных полей в миллионы раз ниже МП
Земли. Поэтому пока что регистрируются биомагнитные поля только у
тех объектов, которые могут в процессе жизнедеятельности создавать
заметные электрические токи, например, МП было зарегистрировано у
электрического сома. Считается, что МП электрических рыб, возникаю-
щее при их разряде, является наиболее сильным. Его регистрируют с
помощью индукционного датчика и усилителя. Запись магнитного и
электрического сигналов осуществляется на кинопленке с экрана ос-
циллографа. Во время электрического разряда, возникающего у рыбы,
можно зарегистрировать МП, проходящее через воду, стенки аквариума
и медный экран, где заключен индукционный датчик, воспринимающий
МП порядка 10-12 Тл в звуковом диапазоне частот. Имеются данные о
формировании МП у неэлектрических рыб (щука), возникающего во
время болевого раздражения.
1.7. Перспективы и задачи в развитии магнитотерапии
Все вышесказанное подтверждает тот факт, что в мировой науке
активно изучается проблема влияния МП на живой организм. Накоп-
ленный фактический материал позволил выдвинуть различные теории и
предположения, хотя ни одна из них до настоящего времени не получила
всеобщего признания. В зависимости от превалирующих склонностей в
Действие магнитных полей на биообъекты
49
работе, всех магнитологов можно подразделить на три группы: у одних
преобладают занятия научными экспериментами, другие применяют МП
чисто практически, не уделяя разработке теоретических основ большого
внимания, а третьи сочетают научные изыскания в теории и практике.
Несмотря на многочисленность, судя по печатной продукции, первой и
третьей групп, все же наиболее представительной является вторая груп-
па, которая состоит из опытных врачей практического здравоохранения,
которые применяют в лечебной практике тот или иной аппарат, не очень
вдаваясь в механизмы его действия. В результате их деятельности на-
коплен громадный клинический опыт и обширный фактический мате-
риал, требующий научного анализа и обобщения. Решение этой задачи
позволило бы разработать оптимальные схемы лечения и способствовало
бы созданию новых и улучшению старых конструкций магнитотерапев-
тических аппаратов.
Как известно, в магнитотерапевтической практике используются два
вида воздействия МП: локальное — на патологическую область и
общее — на организм пациента в целом. Несмотря на выраженные
внешние отличия, эти два способа лечения нельзя резко разграничивать,
так как любое местное влияние обязательно инициирует рефлекторные
механизмы, обеспечивая тем самым подключение к формированию от-
ветной реакции центральных регуляторных механизмов, хотя в целом
этот ответ несомненно будет слабее, чем при общем воздействии. В
практике отечественного здравоохранения используются выпускаемые
серийно и не серийно магнитотерапевтические аппараты, предназначен-
ные как для местного, так и общего воздействия. Однако последние
встречаются гораздо реже, что с нашей точки зрения совершенно не-
обоснованно. В связи с этим возникает настоятельная необходимость
достаточно аргументированно определиться в перечне показаний для
использования магнитотерапевтических аппаратов локального и общего
воздействия и обосновать реальную потребность в них.
Применяя локально действующее МП, мы влияем на конкретную
область организма, например, на коленный или голеностопный суставы,
позвоночник и т.д. Не вызывает сомнения факт, что аппараты местного
действия более удобны и подчас более эффективны при выраженных
местных процессах (остеохондроз, артроз и др.). Серьезным преимуще-
ством этих устройств является возможность использования их не только
в стационарах, как, например, широко распространенный и хорошо
известный «Полюс-1» — первый промышленный аппарат в СССР, пред-
назначенный для низкочастотной магнитотерапии (синусоидальные и
пульсирующие МП), но и в домашних условиях, где может быть при-
менен аппарат «МАГ-30» и ряд других. Вместе с тем, при местном
действии ЭМП лечебный эффект может быть достигнут только при
условии существенного повышения индукции МП, использования более
высоких частот и увеличения продолжительности воздействия.
Ряд исследователей предлагают компромиссный вариант магнитоте-
рапии, сочетающий оба подхода. При этом рекомендуется помимо мест-
ного влияния на очаг патологии воздействовать, опять же локально, на
50
Глава 1
область гипоталамуса, что предполагает запуск адаптивных реакций на
уровне целостного организма. Кстати, данный сочетанный вариант
может быть осуществлен на аппаратах, предназначенных для общего
воздействия на живой организм.
В аппаратах, предназначенных для влияния на целостный организм,
складывается иной характер взаимодействия между МП и системами
организма. Помимо неярко выраженного прямого действия МП низкой
интенсивности на все системы организма, запускаются механизмы не-
специфической адаптации организма к воздействующему фактору. Это
связано с тем, что МП, вне всякого сомнения, приводит к метаболи-
ческим сдвигам в микроокружении рецепторов различной модальности.
Возбуждение, которое при этом сформируется, будет реализовано через
центральные системы регуляции с подключением не только ЦНС, но и
гуморальных механизмов. Поскольку воздействие осуществляется на
значительной площади — на весь организм, то результативный ответ
может быть получен при использовании МП, величины биотропных
параметров которых существенно ниже применяемых при местных воз-
действиях. Исходя из принципа, что слабые раздражители способствуют
формированию в организме наиболее адекватных адаптивных реакций
[117], мы можем, используя МП слабой и сверхслабой индукции, ока-
зывать на организм тренирующие воздействия, при этом еще сохраня-
ется резервная возможность повышения их эффективности путем моду-
ляции параметров МП во времени и пространстве.
При общем и при местном действии МП по мере возрастания аб-
солютной величины действующего фактора происходит повторение
триад адаптационных реакций (тренировка — активация — стресс), фор-
мирующихся на разных уровнях реактивности и разделенных зонами
ареактивности [117]. Преимущество использования общего воздействия
состоит в том, что оно позволяет, применяя ЭМП малой интенсивности,
низкой частоты и короткой экспозиции, добиваться синхронной работы
нервной и эндокринной систем на энергетически выгодных низших
этажах реактивности, в то же время формируя защитные реакции орга-
низма высокой степени эффективности. Однако из вышесказанного не
следует делать вывод о необходимости полного перехода на использо-
вание магнитотерапевтических аппаратов только общего воздействия.
Практическое здравоохранение должно иметь возможность выбора и
оптимизации в лечении больных, используя аппараты соответствующей
предназначенности. Аппараты общего воздействия предпочтительнее в
тех случаях, когда нужна коррекция взаимодействия между различными
системами организма, что успешнее всего может быть осуществлено
путем мобилизации регуляторных механизмов центральной нервной и
эндокринной систем. Данный терапевтический подход оказался весьма
результативным при лечении заболеваний, связанных с патологией со-
судистой системы: облитерирующий эндартериит, диабетические анги-
опатии и др.
Действие магнитных полей на биообъекты
51
В аппаратах общего воздействия наилучший терапевтический эф-
фект достигается, как это следует из рекомендаций различных авторов,
при применении МП с ограниченной индукцией (5...50 мТл) и при
короткой экспозиции (10...30 мин). Помимо этого также указывается на
целесообразность более частого омагничивания, но с использованием
меньших доз воздействия. Видимо, оптимальное решение предполагало
бы отпуск процедур в соответствии с биоритмами пораженного органа
или системы организма. К сожалению, реализация такой возможности
сложна с организационных позиций.
Тем не менее, несмотря на столь оптимистические результаты, ко-
торые отмечены при использовании МП общего действия на организм,
следует соблюдать ряд ограничений при отпуске лечебных процедур:
— добиваясь повышения неспецифической резистентности организ-
ма, необходимо минимизировать воздействие на головной мозг,
стараться получить желаемый результат рефлекторным путем;
— при сочетании общих и местных воздействий строго соблюдать
принцип распределения воздействия: минимум — на ЦНС, мак-
симум — на очаг поражения;
— не следует форсировать количественные характеристики биотроп-
ных параметров МП при кажущемся отсутствии результатов. Не-
обходимо помнить, что могут иметь место отсроченные проявле-
ния эффектов (через 5...7 дней) при достаточно длительном пос-
ледействии.
Клинический опыт, накопленный при использовании уникальных
аппаратно-программных полимагнитных комплексов «Аврора МК-01» и
«Аврора МК-02», показывает, что они обладают широкими возможнос-
тями по реализации тех преимуществ, которые может дать общее воз-
действие магнитным полем на живой организм. Конструкции аппаратов
позволяют вносить дальнейшие изменения и модификации с целью их
усовершенствования.
В магнитотерапевтических комплексах «Аврора МК-01-02» генери-
руется низкочастотное магнитное поле, свободно проникающие в любые
биологические объекты и ткани. Эффективность воздействия таких
полей предопределяется еще и характеристиками биотропных парамет-
ров: интенсивности, градиента, векторности, формы импульса и т.д. В
создаваемом аппаратом импульсном бегущем магнитном поле представ-
лено наибольшее число биотропных параметров — семь, причем зало-
жена возможность проводить импульсную терапию синхронно с ритми-
ческими процессами в органах и тканях, что повышает эффективность
влияния и снижает степень адаптации организма.
Учитывая все вышесказанное, можно сформулировать основные на-
правления исследований:
1. Дальнейшее изучение в эксперименте и клинике механизмов дейст-
вия ЭМП как при местном, так и общем воздействии, соблюдая диф-
ференцированный подход в изучении МП при экспериментальных
исследованиях и в клинической практике. Если в эксперименте
52
Глава 1
можно использовать любые источники МП с самыми разнообразны-
ми параметрами, то в клинике допустимо применение МП в рамках
«физиологических параметров», т.е. не выходящих за пределы опреде-
ленных границ, например, индукция — 50 мТл, частота не выше 100
Гц. Причем при местном воздействии эти значения могут быть выше,
при общем — ниже.
2. Актуальным представляется продолжение углубленных исследований
механизмов действия ИБМП различных модификаций, как обладаю-
щих наибольшим набором биотропных параметров.
3. Учитывая, что в лечебной практике комплексный терапевтический
подход, как правило, является наиболее результативным, среди
первостепенных задач следует выделить разработку оптимальных схем
комбинированного использования магнитотерапевтических процедур
с другими физическими факторами — лазерное и ультрафиолетовое
излучение, тепловое воздействие, а также целенаправленного назна-
чения лекарственных препаратов, эффективность действия которых
может существенно возрастать под влиянием МП.
Проблема взаимодействия магнито- и лекарственной терапии далека
от решения. Любой из аспектов этой проблемы, например, магнитофорез
лекарственных препаратов, могут лечь в основу нового научного направ-
ления.
В плане создания новых и дальнейшего совершенствования суще-
ствующих магнитотерапевтических устройств авторам представляются
перспективными следующие направления разработок:
1. Создание узкоспециализированного магнитотерапевтического ком-
плекса («Аврора МК-02-03...»), предназначенного для лечения паци-
ентов с заболеваниями сосудов, как одной из часто встречающихся
форм патологии.
2. Создание аппаратов, предназначенных для использования в других
областях медицины: травматологии, ортопедии, гинекологии, невро-
логии и т.д. При этом должны быть проработаны возможности созда-
ния как универсального устройства, предназначенного для лечения
различных заболеваний, так и адаптированных для использования
при конкретных нозологических формах.
Вполне выполнимым является решение поставленных задач и реа-
лизация вышеуказанных направлений при дальнейшей модернизации
аппарата «Аврора МК-01»:
— разработка схемы, позволяющей каждому из шести блоков (по
два на верхние и нижние конечности, корпус и голова), работать
по отдельным программам, позволяющим генерировать МП с
отличающимися биотропными параметрами;
— осуществление реальной возможности динамического разворота век-
тора магнитной индукции (для артериальной и венозной волн);
— изменив структуру наборной платы (минимум до 32/16) и, соот-
ветственно, увеличив число магнитных индукторов до 16, можно
Действие магнитных полей на биообъекты
53
обеспечить изменение скорости перемещения магнитной волны
в соответствии со скоростью кровотока. В настоящее время диа-
пазон возможных скоростей перемещения магнитной волны со-
ставляет 15...20000 см/с. Как показывает клинический опыт, у
больных с патологией сосудов скорость кровотока в конечностях
снижена почти на всех уровнях и составляет 1...50 см/с;
— для расширения класса заболеваний, лечение которых может быть
эффективным на аппаратах типа «Аврора МК», наиболее логич-
ным представляется создание устройств, совмещающих положи-
тельные эффекты аппаратов общего и местного воздействия, т.е.
обеспечение возможности сочетанного влияния сильных высоко-
частотных узко локализованных полей на фоне бегущей магнит-
ной волны низкой интенсивности.
Заканчивая эту главу, необходимо отметить, что современный пе-
риод характеризуется активным внедрением магнитотерапии в России.
Сейчас ЭМП, создаваемые для целей лечения, применяются почти во
всех городах нашей страны. Необходима скоординированная наработка
и внедрение в клиническую практику совершенных методик лечения
конкретными аппаратами конкретных заболеваний с максимальным уче-
том индивидуальных особенностей пациентов.
Глава 2
ПРОМЫШЛЕННЫЕ МАГНИТОТЕРА-
ПЕВТИЧЕСКИЕ АППАРАТЫ.
ОБЗОР И АНАЛИЗ ТРЕБОВАНИЙ
2.1. Вводные замечания
В основу классификации серийно выпускаемых магнитотерапевти-
ческих приборов и аппаратов положена степень локализации поля воз-
действия на пациента, т. к. это является наиболее значимым фактором
с точки зрения построения самого аппарата, его сложности, а также
оконечного устройства формирования магнитного поля. В первой главе
были выделены три класса локализации воздействия:
— локального (местного) воздействия,
— распределенного воздействия,
— общего воздействия.
К первому классу отнесены аппараты, содержащие один или два
индуктора, предназначенные для облучения магнитным полем некото-
рого органа или участка тела пациента. К ним же отнесены аппараты
магнитопунктурного действия с возможностью облучения в любой мо-
мент времени только одной биологически активной точки. Особеннос-
тью этого класса является отсутствие пространственного перемещения
магнитного поля. К ним же относятся магнитотерапевтические изделия
с постоянными магнитами: браслеты, таблетки, клипсы и т.п., которые
в данной работе не рассматриваются.
Ко второму классу отнесены аппараты, содержащие ряд (три и более)
индукторов, с помощью которых можно охватить ряд органов пациента
или значительную область тела пациента и даже разместить на разных
частях тела. Этот класс характеризуется возможностью перемещения
магнитного поля в пространстве вокруг пациента.
В третий класс отнесена аппаратура с наиболее объемным оконеч-
ным устройством, в котором должен размещаться весь человек. В этих
аппаратах обеспечивается общее воздействие, и, как правило, в такой
аппаратуре предусматривается перемещение поля в пространстве и из-
менение во времени.
В первых двух классах непосредственно излучатели магнитного поля
имеют несложную конструкцию и зачастую организованы «россыпью»,
поэтому при лечении они могут устанавливаться произвольно, в зави-
симости от желания врача-физиотерапевта или в соответствии с меди-
цинскими методиками. При этом в общей стоимости аппарата излуча-
Промышленные магнитотерапевтические аппараты
55
тели составляют малую часть по сравнению с электронной частью, ге-
нерирующей силовые токи. Это особенно характерно для аппаратов рас-
пределенного действия и менее справедливо для аппаратов локального
действия, где нередко используются простейшие преобразователи тока
промышленной частоты.
В аппаратах третьего класса используют стационарные, достаточно
объемные оконечные устройства, в которые помешается пациент. Их
конструкция может быть самой разнообразной — от магнитного ска-
фандра до магнитной комнаты. Здесь стоимость оконечных устройств
порой превышает стоимость электронного блока управления, генериру-
ющего весь ансамбль силовых токов. Именно эти аппараты являются
предметом пристального внимания авторов книги, поскольку именно
они являются системами комплексной магнитотерапии.
Анализ принципов построения промышленных магнитотерапевти-
ческих аппаратов позволяет представить их обобщенную структурную
схему (рис. 2.1).
От внешнего устройства
Рис. 2.1. Обобщенная структурная схема МТА
С помощью блока управления задается набор биотропных парамет-
ров магнитного поля. Функционально блок управления может содержать
задатчики частотно-временных параметров, параметров синхронизации,
интенсивности магнитного поля и др.
Формирователь предназначен для получения тока определенной
формы в индукторах и в самом простейшем случае может содержать
преобразователь вида тока питания индуктора в виде выпрямительного
диода. Как правило, в состав формирователя входит усилитель мощнос-
ти.
Оконечное устройство предназначено для формирования магнитного
поля и представляет собой индуктор или набор индукторов (излучателей
магнитного поля), выполненных в виде электромагнитов, соленоидов,
коротких (плоских) катушек индуктивности.
56
Глава 2
2.2. Магнитотерапевтические аппараты
локального действия
Магнитотерапевтические аппараты (МТА) локального действия
можно разделить на портативные — индивидуального пользования и
переносные — общего пользования. В основе деления лежит взаиморас-
положенность блока управления и оконечного устройства — индуктора.
В качестве первого рассматриваемого МТА назовем «Маг-30». Он
предназначен для воздействия синусоидальным МП одной интенсивнос-
ти. Устройство представляет собой индуктор П-образной формы с двумя
катушками в пластмассовом корпусе и питается непосредственно от сети.
Его отличительной особенностью является отсутствие блока управления
как такового. Аппарат выпускается 4-х типоразмеров: 130x115x130 мм,
105x80x54 мм, 115x80x47 мм, 110x72x34 мм, потребляемая мощность не
более 50 Вт [118].
Следующий МТА «Магнитер» формирует синусоидальное и пульси-
рующее магнитные поля и выполнен в виде совмещенных в едином
конструктиве индуктора-электромагнита и преобразователя [119]
(рис. 2.2). Преобразователь представляет из себя устройство, формирую-
щее импульсы тока, питающие обмотку электромагнита. Регулировка
интенсивности производится коммутацией выводов обмотки. Аппарат
имеет габариты 243x93x48 мм и потребляет мощность не более 30 Вт.
Преобразователь > Индуктор- электромагнит
Рис. 2.2. Структурная схема МТА «Магнитер»
МТА «Полюс-2Д» формирует пульсирующее МП с плавно нараста-
ющим фронтом и спадом импульса. Индуктор состоит из 4-х электро-
магнитных катуыек, включенных последовательно. Особенностью аппа-
рата является наличие общего ферромагнитного экрана. Потребляемая
мощность не более 4 Вт [120].
Переносная магнитотерапевтическая аппаратура локального дейст-
вия представлена широким спектром приборов. Так, семейство аппара-
тов «Полюс» насчитывает свыше пяти наименований. «Полюс-1» пред-
назначен для воздействия на пациента синусоидальным или пульсиру-
ющим однополупериодным МП промышленной частоты в непрерывном
или прерывистом режимах. Аппарат имеет 4-х ступенчатую регулировку
интенсивности МП. Отличительной особенностью является наличие
таймера и устройства индикации, состоящего из сигнальных ламп, вклю-
ченных последовательно с индукторами. Задание прерывистого режима
осуществляется устройством управления, выполненным по схеме муль-
тивибратора. В комплект индукторов входят электромагниты 3-х типов:
цилиндрический, прямоугольный, полостной. Цилиндрический индук-
Промышленные магнитотерапевтические аппараты
57
тор представляет собой катушку с П-образным сердечником (110x60 мм),
полюса которого являются рабочей поверхностью. Прямоугольный ин-
дуктор имеет в качестве рабочей поверхности не только переднюю, но
и торцевые и боковые стенки (160x47x50 мм). На сердечнике укреплены
2 последовательно соединенные катушки. Полостной индуктор представ-
ляет собой катушку, внутри которой помещен сердечник (25x165 мм).
Потребляемая мощность не более 130 Вт [121].
Аппарат «Полюс-101» предназначен для воздействия синусоидаль-
ным магнитным полем повышенной частоты и имеет 4 ступени регули-
ровки интенсивности МП. Комплект индукторов состоит из двух соле-
ноидов (220x264x35 мм). Предусмотрен режим попеременного включе-
ния индукторов в прерывистом режиме. Потребляемая мощность не
более 50 Вт. Особенностью данного аппарата является то, что индукторы
и последовательно соединенные с ними конденсаторы образуют резо-
нансные контуры, что позволяет получить экономию в потреблении
мощности. Другой отличительной чертой является то, что для получения
тока синусоидальной формы в индукторах используется не питающая
сеть, а напряжение, формируемое отдельным генератором (122]
(рис. 2.3).
Задатчик частоты > Усилитель мощности > Индуктор - резонансный контур
Рис. 2.3. Структурная схема МТА «Полюс-101»
МТА «Полюс-2» предназначен для воздействия синусоидальным и
пульсирующим МП с 4-я ступенями регулирования интенсивности и
частоты импульсов МП. В комплект аппарата входят 3 типа индукторов:
цилиндрический (110x60 мм), прямоугольный (55x40x175 мм), внутри-
полостной (25x165 мм), индуктор-соленоид (240x265x150 мм) [123]. Ци-
линдрический индуктор выполнен в виде 4-х отдельных катушек с сер-
дечниками, размещенными по периметру индуктора. Отличительной
особенностью аппарата является автоматическое согласование интенсив-
ности магнитного поля индуктора при его смене с генератором и нали-
чие формирователя импульсов МП, позволяющего получать экспоне-
нциальную форму тока в цепи индуктора с регулировкой времени спада
(рис. 2.4).
Рис. 2.4. Структурная схема МТА «Полюс-2»
58
Глава 2
МТА «Градиент» предназначен для воздействия синусоидальным и
пульсирующим одно- и двухполупериодным МП частотой 50, 100 Гц в
непрерывном и прерывистом режимах с 8 ступенями регулировки ин-
тенсивности МП. В комплект прибора входят три типа индукторов-
электромагнитов (131x60; 85x60; 32x82 мм). Все индукторы магнитного
поля заключены в стальной экран. Прибор имеет встроенные цифровые
индикатор интенсивности МП и таймер. Отличительными особеннос-
тями являются: питание индуктора током, модулированным прямоуголь-
ными импульсами, и возможность работы от внешнего источника си-
нусоидального и импульсного сигнала [124].
Перечень серийно выпускаемых аппаратов локального действия, их
сравнительные технические характеристики и основные особенности
приведены в табл. 2.1.
Таблица 2.1
Отечественная и зарубежная аппаратура локального воздействия
Название аппарата Вид тока питания индуктора Макс, значение индукции, мТл (число ступеней) Частота МП Тип индуктора Отличительные особенности
1 2 3 4 5 6
Магнитер Sin, 1п/п 30 (2) 50 ЭМ -
Маг-30 Sin 30 (1) 50 ЭМ -
Полюс-2Д ПУ 40 (1) 12,5 эм -
Полюс-1 Sin, ПУ 1п/п 35 (4) 50 эм -
Полюс-101 Sin 1,5 (4) 700, 1000 Соленоид -
Полюс-2 Sin, имп., exp 75 (4) 50 ЭМ, соленоид -
Полюс-3 ПУ 30 (3) 12,5; 17; 25 ЭМ Магнитофорез, автоматический реверс МП
Полюс-4 ПУ 15(3) 12,5; 17; 25 ЭМ Автоматический реверс МП
Градиент-1 Sin, ПУ 1п/п и 2п/п 50(1) 50, 100 ЭМ Модуляция тока, работа от внешнего генератора
Биос Имп. — Програм- мируемая ЭМ Возможность синхронизации от датчика пульса
Магнис - 100 (плавно) - - Воздействие на БАТ
Каскад Имп. 15 0,8...2,5 ЭМ -
Промышленные магнитотерапевтические аппараты
59
Таблица 2.1 (продолжение)
Название аппарата Вид тока питания индуктора Макс, значение индукции, мТл (число ступеней) Частота МП Тип индуктора Отличительные особенности
1 2 3 4 5 6
Авимп Имп. 1500 0,17...0,76; 30;130 Соленоид Магнито- стимуляция
Биомаг Имп. 4000 (1) 0,2 Соленоид Магнито- стимуляция
НЛМ-1 Sin ПО (10) 50 ЭМ -
Алмаз Имп. 15 (2) 50 ЭМ -
Индуктор-2 Sin 3 (6) 5000 ЭМ -
Амит Имп. 57 (1) 2...5, 6, 8, 10,12,16 ЭМ —
Альфа- Пульсар Имп. 1,5 80 ЭМ -
БИАМП Имп. - 1...100 Соленоид Модуляция МП
Биомагне- тикс (Германия) Sin 2,5 1...100 Соленоид —
Магнето- трон (Германия) Sin 10 1...50 Соленоид —
Ронефор (Италия) Sin — — Соленоид Перемещение индуктора над телом пациента
Магнит-80 (Болгария) Sin 40 50 Соленоид -
Магнит-87 (Болгария) Sin 20 1...100 Соленоид -
УП-1 (Болгария, Германия) Sin Ю (5) 1,4, 8, 16, 25, 50 — —
Мела (Германия) Sin - 1...15 Соленоид -
Родмагне- тик- 100 (Германия) Имп. — 2, 4, 8, 10, 17, 25 — —
MES-10 (США) Имп. 2300 (3) — Соленоид —
60
Глава 2
Примечание. В таблице приняты следующие обозначения токов:
sin — синусоидальный; имп. — импульсный; ехр — экспоненциальный;
ПУ — пульсирующий; 1п/п и 2п/п — одно- и двухполупериодного вы-
прямления соответственно.
2.3. Магнитотерапевтические аппараты
распределенного действия
Большинство МТА локального действия имеют несколько режимов
работы, в одном из которых возможно осуществление распределенного
воздействия. Например, в МТА «Полюс-101» возможно попеременное
включение одной из двух катушек, что приводит как бы к перемещению
поля в пространстве. Однако для направленного перемещения, а тем
более создания бегущего или вращающегося поля требуется не менее
трех индукторов и трехфазного питающего тока.
МТА «Атос» (рис. 2.5) предназначен для лечения заболеваний в
офтальмологии вращающимся вокруг оптической оси глаза магнитным
полем, создаваемым шестиканальным источником, выполненным на
базе соленоидов и генерирующим переменное или импульсное ревер-
сивное магнитное поле частотой 50 или 100 Гц. Особенностью данного
аппарата является возможность воздействия одновременно на 3-х час-
тотах: частотой каждого соленоида в момент включения, частотой мо-
дуляции ИБМП, частотой коммутации соседних соленоидов.
Рис. 2.5. Структурная схема МТА «Атос»
МТА «Алимп-1» является 8-и канальным источником импульсного
бегущего МП частотой 10, 100 Гц с двухступенчатой регулировкой ин-
тенсивности поля. Аппарат снабжен комплектом индукторов 3-х типов,
образующих 2 соленоидных устройства, состоящих из 5-и и 3-х индук-
торов-соленоидов соответственно, и набор из 8-и соленоидов, разме-
щенных в карманах пакета (720x720x20 мм) [118] (рис. 2.6). Первое
соленоидное устройство (480x270x330 мм) представляет собой набор из
5 цилиндрических катушек, расположенных одна за другой. Второе
(450x450x410 мм) — конструкцию из 3-х цилиндрических катушек, рас-
положенных под углом друг к другу. Потребляемая мощность не более
500 Вт. Отличительной особенностью аппарата является использование
Промышленные магнитотерапевтические аппараты
61
импульсного бегущего МП, как обладающего более выраженным тера-
певтическим эффектом.
Рис. 2.6. Структурная схема МТА «Алимп-1»
Аппарат «Малахит-010П» является лечебно-диагностическим ком-
плексом, предназначенным для лечебного воздействия импульсным
сложно модулированным электромагнитным полем на больной орган и
его диагностики [125]. Аппараты подобного типа строятся по схеме,
изображенной на рис. 2.7.
Рис. 2.7. Структурная схема МТА «Малахит-ОЮП»
Отличительной особенностью устройства является наличие канала
связи с компьютером для автоматического управления параметрами МП
и оптимизации процесса лечения за счет обратной связи. Комплект
индукторов состоит из 12 электромагнитов.
Перечень аппаратов для магнитотерапии распределенного действия,
выпускаемых промышленностью, их основные технические характерис-
тики и особенности приведены в табл. 2.2.
Таблица 2.2
Отечественная и зарубежная аппаратура распределенного
воздействия
Название ап- парата Вид тока питания индуктора Макс, значение индукции, мТл (число ступеней) Частота МП Тип индуктора Отличительные особенности
1 2 3 4 5 6
Полемиг Имп. 30 (1) 0,5; 1,4, 7, 10 Соленоид -
62
Глава 2
Таблица 2.2 (продолжение)
Название ап- парата Вид тока питания индуктора Макс, значение индукции, мТл (число ступеней) Частота МП Тип индуктора Отличительные особенности
1 2 3 4 5 6
Малахит-01 Имп. 10 0,5—100 ЭМ Автоматическая регулировка параметров
Малахит- 010П Имп., сл.-мод 15 (4) 120 ЭМ Канал ОС, управление от ЭВМ
ПД МТ-01 ПТ, Sin, Имп. мп и бп 150 (14) 25, 50, 75, 100 эм —
Алимп-01 Имп. 5 (2) 10, 100 Соленоид Бегущее МП
Атос Имп. 33 (1) 50, 100 Соленоид Бегущее МП
Магнетайзер, тип M-CHR (Япония) Sin 20 (6) 50 ЭМ Магнитное поле + вибрация
Магнетайзер, тип М-РЗ (Япония) Sin 15 (6) 50 ЭМ Магнитное поле + вибрация
Магнето- диафлюкс (Румыния) ПУ 1п/п и 2п/п 5 50, 100, 50+100 ЭМ, соленоид Неритмичный режим работы
Примечание. В таблице приняты следующие обозначения токов:
ПТ — постоянный; сл.-мод — сложно модулированный; мп и бп —
моно- и биполярный соответственно; остальные обозначения такие же,
как в табл. 2.1.
2.4. Магнитотерапевтические аппараты общего
воздействия
Аппараты общего воздействия являются наиболее сложными и до-
рогими устройствами, поэтому освоенных промышленностью и серти-
фицированных Минздравом РФ совсем немного. К ним в настоящее
время можно отнести аппараты класса «Аврора-МК», аппараты типов
«Магнитотурботрон 2М» и «Магнитор-АМП» [32, 126] и комплекс «Био-
магнит-4». МТА «Аврора МК-01» предназначен для общего воздействия
на пациента сложным динамическим магнитным полем с очень большим
набором возможных конфигураций МП от «бегущих» до случайно пере-
мещающихся, которые программируются заранее и, в принципе, подби-
раются для каждого пациента индивидуально. Пациент располагается на
специальной кушетке, где в форме гибких плоскостей укреплены сис-
темы индукторов: отдельно для всех конечностей, головы и туловища
Промышленные магнитотерапевтические аппараты
63
человека. Затем каждая из частей охватывается гибкими плоскостями,
образуя замкнутый объем наподобие скафандра, внутри которого нахо-
дится пациент. В дальнейшем аппараты класса «Аврора-МК» будут рас-
смотрены подробно, как наиболее отвечающие задаче комплексной маг-
нитотерапии. Здесь же ограничимся приведением в табл. 2.3 основных
технических характеристик для сравнения с другими аппаратами.
Таблица 2.3
Магнитотерапевтическая аппаратура общего воздействия,
выпускаемая серийно
Название аппарата Вид тока питания индуктора Макс, значение индукции, мТл (число ступеней) Частота МП Тип индуктора Отличительные особенности
Аврора МК-01 ПТ, имп., комбини- рованный 5 (16) 0.1...100 ЭМ Возможность синхронизации си- датчика пульса, комбинированное ИБМП
Магнитор- АМП Имп.,Sin 5 50... 160 ЭМ Управление от ЭВМ, автоматический контроль температуры и пульса
Примечание. В таблице приняты обозначения токов такие же, как в
табл. 2.1 и 2.2.
МТА «Магнитор-АМП» предназначен для воздействия вращающим-
ся МП в диапазоне 50... 160 Гц с программируемой автоматической цик-
лично-периодической регулировкой интенсивности МП от 0 до 7,4 мТл
и с модуляцией напряженности по произвольному закону на все тело
пациента. Индуктор представляет собой объемный электромагнит, вы-
полненный в виде статора 3-х фазной 2-х полюсной электрической ма-
шины переменного тока, в котором размещается пациент [32, 126]
(рис. 2.8).
Контрольно-измерительный блок выполнен на базе ПЭВМ. Отли-
чительной особенностью аппарата является воздействие вращающимся
однородным МП на весь организм пациента с одновременным контро-
3-фазн.
сеть
Рис. 2.8. Структурная схема МТА «Магнитор-АМП
64
Глава 2
лем за частотой пульса и температурой тела пациента. Аппарат харак-
теризуется большой массой индуктора (около 500 кг), питанием от 3-
фазной сети, большим потреблением мощности (2,5 кВт).
МТА «Биомагнит-4» (или БМ-4) по представлению изготовителя
воздействует на пациента «особой электромагнитной средой, созданной
отфильтрованным от вредоносной компоненты биоактивным излучени-
ем при условии полного экранирования геоэлектрического поля и, час-
тично, геомагнитного поля». Пациент помещается в прямоугольную ка-
меру с плотно закрывающейся дверью, где может сесть на деревянное
кресло. Управление и диагностика осуществляется от ПЭВМ. В табл. 2.3
приведены основные сравнительные сведения по вышеприведенным
МТА общего воздействия.
Таким образом, развитие МТА идет по пути создания устройств,
генерирующих магнитные поля, обладающих все более широким набо-
ром биотропных параметров, увеличения площади воздействия, введения
элементов контроля за состоянием здоровья пациента, управления и
синхронизации с биоритмами пациента, введения режима обратной
связи на базе измерительно-диагностической аппаратуры общего и спе-
циального назначения и вычислительных средств.
2.5. Анализ задачи общего воздействия динамическим
магнитным полем на человека и формирование
требований на технические средства комплексной
магнитотерапии
Воздействию магнитных полей на организм человека посвящено
большое число работ и, хотя физика воздействия до сих пор проявлена
слабо, имеется значительный ряд исследований по установлению функ-
циональных связей состояния организма человека с параметрами маг-
нитных полей. На повестке дня стоит вопрос формирования динами-
ческих магнитных полей, имеющих определенную функциональную на-
правленность прежде всего для лечения различных заболеваний. Причем
формирование магнитных полей в локальной области уже не отвечает
многим требованиям медицины. Требуется формирование динамических
магнитных полей вокруг всего организма человека вначале как физио-
терапевтической процедуры, а в дальнейшем и как фактора среды оби-
тания [127].
Методологическое, математическое, физиологическое и, наконец,
техническое решение этой задачи для формирования магнитных полей
явилось бы прецедентом решения аналогичных задач для других видов
полей и, в конечном итоге, привело бы к решению глобальной задачи
формирования нужной структуры физических полей вокруг человека,
наличие которых помогло бы ему справиться с болезнями. Для развития
рассматриваемого направления с целью повышения эффективности ле-
Промышленные магнитотерапевтические аппараты 65
чения, расширения класса заболеваний, охватываемых системами маг-
нитотерапии, требуется решение следующих вопросов:
— разработка единичного универсального излучателя магнитного
поля, методики его расчета и оптимизации параметров в соот-
ветствии с заданными критериями;
— разработка способов формирования оптимальной конфигурации
поля в целом, соответствующей заданной методике лечения;
— конструирование эффективных технических средств для создания
заданных полей вокруг человека;
— исследование механизмов воздействия динамических магнитных
полей (ДМП) на организм человека и его важнейшие функции;
— разработка эффективных каналов обратной связи и отыскание их
параметров с целью автоматизированного управления характерис-
тиками ДМП в ходе воздействия на основе измерения реакций
пациента.
В настоящем разделе сконцентрировано внимание на формировании
динамических магнитных полей вокруг всего человека. Под динамичес-
ким магнитным полем будем понимать поле, изменяющееся во времени
и в пространстве заданного объема (в данном случае внутри и вокруг
человека) и имеющее ячеистую структуру, дискретность которой опре-
деляется элементами объекта восприятия (например, органы, сосуды,
ткани и т.п.), что позволяет обеспечить достаточную независимость уп-
равления векторами магнитного поля в соседних ячейках структуры.
Реализация этой идеи распадается на две задачи. Первая из них
связана с техническим решением формирования в заданной локальной
области пространства ничтожно малого объема (физическая точка,
далее — просто точка) вектора магнитной индукции, локализацией вы-
деленных точек, формированием объемных матриц векторов магнитного
поля, локализацией точек с учетом формы тела человека и его органов,
обеспечивающей необходимое распределение магнитного поля как внут-
ри тела человека, так и на поверхности. Эта задача обусловливает раз-
работку и создание источников магнитного поля, определение их числа,
размеров, пространственного расположения, взаимодействия и конфи-
гурации. Внешним проявлением решения данной задачи является вид
объема, в котором размещается человек. Это может быть магнитная
комната, магнитный бокс, магнитная камера, магнитная кушетка, маг-
нитный ложемент, магнитный скафандр и др. При этом конструкция
объема размещения источников излучения играет не последнюю роль в
эффективности воздействия, а тем более в системах, обеспечивающих
формирование заданной конфигурации динамического магнитного поля
в заданной области пространства.
Вторая задача связана с системой электронного формирования и
управления электрическими токами и напряжениями с целью получения
заданной динамики (перемещения во времени и пространстве) векторов
магнитной индукции в каждой ячейке заданного объема. Рассмотрим
эти задачи раздельно [128].
66
Глава 2
2.5.1. Формирование метрики векторов магнитного поля
Многомерный вектор динамического магнитного поля D = {Ит, 1т}
составлен из многомерного вектора пространственного расположения
индукторов Ит = {ИрИ^...^} и многомерного вектора токов, протека-
ющих через индукторы, Im = где s — число индукторов, п —
число каналов аппарата. В свою очередь последний составлен из векто-
ров канальных токов Ij = {I,P,T,t}, где I — интенсивность, Р — поляр-
ность, Т — время подключения, t — текущее время.
Таким образом поставленная задача может быть формализована в
следующих этапах:
— синтез пространственного расположения излучателей магнитного
поля и формирование параметров одиночного базового излуча-
теля;
— синтез канала формирования тока, изменяющегося во времени
по заданному закону в определенном диапазоне интенсивностей
и спектра, отражающему закон изменения магнитного поля во
времени;
— синтез многомерности каналов, имеющей заданную корреляци-
онную зависимость, отражающей заданную функциональную
связь между локалиями и формирующей закон изменения поля
в пространстве.
Наложим некоторые ограничения на решаемую задачу синтеза с
учетом биологических свойств объекта восприятия и технической реа-
лизуемости системы.
1. Изменения магнитного поля во времени и в пространстве должны
иметь периодический или квазипериодический характер, хотя и со
сложным периодом формирования. Это связано с периодичностью
основных биоритмов объекта (пульс, а-ритм, p-ритм) и периодичнос-
тью основной среды обитания (день, ночь и т.п.).
2. Изменения во времени и в пространстве должны учитывать периодич-
ность биоритмов объекта либо с целью синхронизации с ними, либо,
наоборот, с целью десинхронизации.
3. Скорость изменения магнитного поля во времени и в пространстве
должна быть одного порядка с основными скоростями функциониро-
вания организма объекта на макро-уровне (скорость кровотока, рас-
пространение ощущений, сокращение мышц и т.п.) и перекрывать их
на достаточные значения в обе стороны.
4. Дискретность структуры динамического поля во времени, в простран-
стве и по уровню должны быть одного порядка и функционально свя-
заны с обобщенной дискретностью макроэлементов объекта воздей-
ствия (органов человека).
5. Метрика динамического поля в пространстве должна быть согласова-
на с метрикой макроэлементов и процессов в человеке.
Рассмотрим задачу формирования динамического процесса во вре-
мени в одной точке пространства. Процесс квантования по уровню и
Промышленные магнитотерапевтические аппараты
67
Рис. 2.9. Диаграмма формирования полей, дис-
кретных по уровню и во времени
дискретизации по времени,
представленный на рис. 2.9,
характеризуется следующи-
ми размерностями: Нк —
интервал квантования, Ht —
интервал дискретизации, m
— число дискрет во време-
ни, п — число квантов по
уровню.
Оценим порядок раз-
мерностей процесса, ори-
ентируясь на следующие
рассуждения. Формирова-
ние ячеистой структуры
магнитного поля на одной конечности человека длиной L ограничено,
кроме всего прочего, способностью в концентрации поля. Так как зна-
чение индукции магнитного поля в однородной среде убывает пропор-
ционально квадрату расстояния, то по длине конечности в качестве
размера локальной ячейки примем область, на границах которой поле
убывает в два раза. Если принять, что магнитная индукция в центре
ячейки Вц = В4, а на границе Вг = В/2, можно определить ее размер D,
исходя из размера ячейки Ия и размера Rj области формирования одно-
родного поля:
A R?_i
BU"R2 2-
D = 2(Rj + R„).
(2.1)
Решая систему, получим:
(D/2 - R„) !
-2-
(2.2)
Из последнего соотношения определим размер эффективного дей-
ствия ячейки:
D = 2R„(1 + VT) « 4,82ИЯ.
(2.3)
Тогда размер ячейки составит Dfl = 2RM = D/2,41. Техническая ре-
ализуемость диктует размеры источника излучения в пределах DH = 3...5
см. Тогда размер одной элементарной ячейки магнитного поля D =
2,41 -DH = 2,41 (3...5) может быть определен в пределах D = 7... 12 см.
Следовательно, на длине конечности L=1 м должно быть сформи-
ровано от 8 до 14 ячеек, а по длине всего тела человека 16...30 ячеек.
Таким образом, порядок размерностей ячеек и процессов определился
в пределах 8...30, т.е. значения тип (рис. 2.9) также должны находиться
в пределах 8...30. При этом необходимо учесть, что определяющим фак-
тором в расчете размеров явилась физическая реализуемость источников
магнитного поля на современном уровне развития техники.
68
Глава 2
2.5.2. Анализ метрики поля
Выше проанализирована пространственная метрика ячеистой струк-
туры динамического магнитного поля, создаваемого вокруг человека.
Причем диаметр Оя одной ячейки магнитного поля должен находиться
в пределах 7... 12 см.
На следующем этапе анализа следует выяснить необходимое коли-
чество ячеек для формирования замкнутого магнитного поля вокруг
человека. Обозначим общую площадь поверхности тела человека Sn и
рассчитаем необходимое число ячеек в соответствии с выражением:
N = 4Sn/rcD2. (2.4)
Если принять общую площадь поверхности тела человека в среднем
равную Sn = 40000 см2 (с запасом на комфортное расположение паци-
ента), то общее число ячеек определится в пределах N = 400... 1000.
Обратимся теперь к вопросу формирования конфигурации объема
магнитного поля вокруг человека. Очевидно, что пространственная
структура макрополя, окружающая все тело пациента в целом, имеет
немаловажное значение для достижения высокоэффективного лечения.
Можно предложить множество моделей конфигурации ячеистой струк-
туры излучателей:
— в форме плоскости, на которой располагается человек;
— в форме двух плоскостей, между которыми располагается человек;
— в форме цилиндра, внутри которого располагается человек;
— по форме тела человека и др.
Конфигурации перечислены в порядке усложнения конструкции. Здра-
вый смысл подсказывает, что, по-видимому, наиболее эффективной будет
конструкция, учитывающая форму тела человека. Однако реализация ее в
виде гибкого эластичного костюма (напоминающего гидрокостюм) вряд
ли окажется целесообразной, прежде всего из-за массы конструкции (по-
рядка 100 кг). Поэтому безусловно требуется некоторый жесткий каркас,
воспринимающий всю нагрузку. В этом плане сформировались следующие
направления конструирования МТА общего воздействия.
В первом из них для всех конечностей, головы и туловища человека
формируются цилиндры жесткой конструкции, в которые необходимо
поместить пациента для проведения сеанса магнитотерапии, что не так
просто для больного человека.
Во втором для каждой конечности, головы и туловища создается
некая упруго сгибающаяся в цилиндр плоскость, которая держит свою
форму за счет упругих сил. Исходно на эти плоскости ложится пациент,
а затем уже на частях его тела формируются цилиндры.
В третьем изготавливаются две жесткие полусферы по форме тела
человека (скорлупы), в которых размещены индукторы. В нижнюю ук-
ладывается пациент и закрывается верхней.
Второй и третий подходы являются наиболее приемлемыми для кон-
струирования средства, обеспечивающего целесообразную модель кон-
фигурации магнитного поля, учитывающую форму тела человека.
Промышленные магнитотерапевтические аппараты
69
Таким образом, задача, связанная с техническим решением направ-
ленного формирования в заданной физической точке пространства век-
тора магнитной индукции, в конечном итоге наиболее целесообразно
решается путем генерации магнитного поля в конфигурации тела чело-
века с помощью конструкции, собираемой из излучающих плоскостей
ячеистой структуры с числом ячеек в пределах 400... 1000.
2.5.3. Анализ метрики управления
Перейдем к решению второй задачи, связанной с системой элек-
тронного формирования и управления электрическими токами и напря-
жениями с целью получения заданной динамики (перемещения во вре-
мени и пространстве) векторов магнитной индукции в каждой ячейке
заданного объема.
Прежде всего обратим внимание на то, что излучатели магнитного
поля исходно имеют вид плоскостей, из которых формируется затем
объем по форме тела человека. Следовательно, управление ячеистой
структурой на плоскости в общем виде наиболее целесообразно пред-
ставить матричной организацией NxM (рис. 2.10). Так как по нашим
расчетам число ячеек находится в пределах 400... 1000, то в случае ис-
Рис. 2.10. Ячеистая структура плоскости, созда-
ющей магнитное поле
пользования квадратной
матрицы ее размерность в
среднем равна 2020. Данная
размерность достаточно ве-
лика для реализации, хотя
и выполнима. Проанализи-
руем возможности ее
уменьшения. Прежде всего
обратимся к определенной
симметричности тела чело-
века и достаточному едино-
образию функционирова-
ния его частей. При этом
выделим 6 макрочастей
тела человека: 2 ноги, 2
руки, голова и туловище.
Четыре из выделенных час-
тей (ноги и руки) действи-
тельно обладают единооб-
разием функционирования, чего однако никак нельзя сказать относи-
тельно остальных частей. Тогда, принимая во внимание, что суммарная
площадь поверхности ног и рук составляет около 2/3 общей площади
поверхности тела человека, то независимой становится площадь, равная
1 2 S_
S = |s„ + j.-f-0,5S„,
(2.5)
70
Глава 2
или, в нашем случае, независимое управление достаточно организовать
в числе ячеек в пределах 200...500, при этом размерность квадратной
матрицы снижается в среднем до 16x16. Однако и эта размерность до-
статочна велика, поэтому для дальнейшего упрощения можно всю пло-
щадь разбить на шесть единообразных матриц, работающих параллельно.
Тогда независимое управление достаточно организовать в числе ячеек
60... 160 и свести к размерности матрицы управления 8x8, что особенно
удобно при использовании микропроцессорных средств управления.
Важной подзадачей электронного управления является формирова-
ние заданной величины и направления тока в одной ячейке матрицы
излучения независимо от других ячеек. Выделим ячейку и управляющие
элементы, представленные на рис. 2.11. Вектор индукции магнитного
поля B(I) = {Y,X,Uy,Ux} представляет собой функцию векторов управле-
ния ключами Ку (строка матрицы), 1^ (столбец матрицы) и векторов
напряжений Uy и Ux. Выделим множество, при котором В(1) отлично
от нуля. Это множество соответствует следующим условиям: Yj&Xj = 1,
Uy ф Ux. При этом вектор индукции магнитного поля пропорционален
B(I) = (Uy — Ux)/Q„, где QH — общее сопротивление индуктора, распо-
ложенного в ячейке. Упростим вектор управления с четырех- до трех-
мерного. Это оказывается возможным, если, например, сделать управ-
ляющее напряжение Ux = 0. Но тогда становится необходимой двухпо-
лярная реализация вектора Uy. Необходимо отметить, что если векторы
управления Y,X задать в булевском представлении, то вектор Uy оказы-
вается в представлениях бесконечнозначной логики. Сведем управление
ячейкой исключительно к булевым представлениям. Это оказывается
возможным, если применить широтно-импульсную модуляцию (ШИМ)
или цифро-аналоговое преобразование (ЦАП) при управлении вектором
индукции. Тогда структуру управления ячейкой можно представить в
виде, показанном на рис. 2.12, где Z — код управления ЦАП или ШИМ.
При этом вектор магнитного поля оказывается пропорционален В(1) =
Z(Y&X), что реализовать достаточно просто в цифровой форме, причем
наиболее просто реализуется ШИМ. Таким образом, управление ячей-
ками матрицы удалось свести к трехмерному управлению булевыми пере-
менными.
Рис. 2.11. Схема ячейки матрицы Рис. 2.12. Схема управления ячейкой мат-
излучения рицы излучения
Глава 3
ФИЗИЧЕСКИЕ ПРИНЦИПЫ
И СИСТЕМЫ ФОРМИРОВАНИЯ
МАГНИТНОГО ПОЛЯ
В ПРОСТРАНСТВЕ БИООБЪЕКТА
3.1. Виды ивдукторов и создаваемых ими полей
Искусственные постоянные и переменные магнитные поля могут
создаваться с помощью постоянных магнитов, катушек индуктивности
и электромагнитов. В терминологии, установившейся в научной лите-
ратуре по магнитобиологии и магнитотерапии, источник искусственного
магнитного поля называют индуктором. Постоянные магнитные поля,
а, следовательно, аппараты и устройства на основе постоянных магнитов
в настоящей книге не рассматриваются.
Для создания переменных, пульсирующих и импульсных магнитных
полей в магнитотерапии широко используются индукторы в виде соле-
ноидов, цилиндрических и нецилиндрических коротких катушек,
электромагнитов с сердечниками различной конфигурации, выполнен-
ными из различных материалов. Любой источник магнитного поля об-
ладает разными полюсами (N — северный, S — южный), имеет замкну-
тые силовые линии (принято направление от северного к южному). У
источников переменного магнитного поля полюса меняются периоди-
чески в соответствии с изменением направления тока. Магнитное поле
индуктора характеризуется вектором магнитной индукции В, вектором
напряженности магнитного поля Н, градиентом магнитной индукции
gradB.
Рассмотрим основные типы применяемых в медицинской практике
индукторов и характеристики создаваемых ими полей.
Соленоид. Цилиндрическую катушку, состоящую из большого числа
витков провода, образующих винтовую линию, называют соленоидом.
Если витки расположены вплотную друг к другу, катушка представляет
собою систему последовательно соединенных круговых витков одинако-
вого радиуса, имеющую общую ось. При протекании по виткам тока
образуется магнитное поле, силовые линии которого изображены на
рис. 3.1. Часть силовых линий проходит через обмотку. Линии магнит-
ной индукции длинного соленоида (при / >> г, где / — длина катушки,
г — радиус намотки) практически параллельны друг другу. Поле внутри
такого соленоида равномерно и однородно. Направление вектора маг-
нитной индукции определяется по правилу буравчика и совпадает с
направлением оси X. Внутри длинного соленоида существует только
72
Глава 3
аксиальная составляющая индукции Вх. Максимальное значение индук-
ции Bjfl на оси имеет место в точке, лежащей на середине соленоида
(129J:
В«о = 1 ’ (31)
где I — ток, протекающий через катушку; N — число витков; —
магнитная постоянная; ц — относительная магнитная проницаемость
среды.
Распределение значений индукции практически равномерно по всей
длине оси соленоида и снижается на концах (Х^ = ± 1/2) до значения
(рис. 3.1,в):
вХп> = WXoN • ijj (3.2)
Для соленоидов конечной длины значение индукции на оси рассчи-
тывается по формуле [130]:
Вх = WoN • . (33)
где Vj = х + //2,
v, = х - //2,
Vj = 1/2 - х,
v2 = х — 1/2
v2 = х + 1/2
v2 = x + 1/2
при
при
при
х > 1/2 ;
х < //2 ;
-1/2 < х <1/2 .
Распределение аксиальной составляющей индукции Вх по сечению
х = 0 соленоида показано на рис. 3.1, б. Ввиду того, что вне соленоида
поле быстро затухает, основной для целей лечения является его внут-
ренняя полость.
Известны экспериментальные и серийные магнитотерапевтические
установки, в которых используются рассматриваемые индукторы-соле-
Рис. 3.1. Однослойный соленоид: а) геометрия; б) распределение индукции Вх
по сечению; в) распределение индукции Вх по оси; г) силовые линии
Физические принципы и системы формирования магнитного поля 73
ноиды. Первые публикации относятся к установкам I-ON-A-CO,
«Theronoid» и «Vitrona» (США) [131-133], основу которых составлял ин-
дуктор-соленоид диаметром 45 см, питаемый синусоидальным током. В
комплекте аппарата «Полюс-2» (СССР) [123], имеются два соленоида
(размеры 0270x0265x150 мм), питаемые синусоидальным током. Ин-
дукторы-соленоиды (диаметры 30 и 50 см) используются в аппаратах
«Магнетотрон», «Биомагнетик» (Германия) [1], имеющих несколько ре-
жимов питания: непрерывный, прерывистый и ритмичный (во всех ре-
жимах ток синусоидальный). При проведении процедур индукторы-со-
леноиды обычно надевают на конечности, туловище или шею пациента.
Вектор магнитной индукции при этом направлен вдоль тела или конеч-
ностей человека.
Имеют применение аппараты, у которых используется торцевое поле
соленоида. При этом индукторы-соленоиды располагаются перпендику-
лярно поверхности тела человека (вектор магнитной индукции Вх также
перпендикулярен поверхности тела). В качестве примера можно привес-
ти аппарат «Ронефор» (Италия) [1], у которого индуктор-соленоид (диа-
метр 50 см) установлен вертикально и перемещается относительно не-
подвижно лежащего пациента.
Имеются сведения о применении соленоида для воздействия маг-
нитным полем на весь организм человека. Это физиотерапевтический
комплекс «Магнитор-АМП [32]. В данном случае пациент помещается
внутрь камеры с намотанной вокруг катушкой значительных размеров,
магнитные силовые линии которой пронизывают все тело в направлении
от ног к голове. Индуктор имеет габариты 2100x1190x1300 мм. Диаметр
рабочей полости составляет 700 мм. Запитывается индуктор от сети
380 В, 50 Гц через трехфазный преобразователь, создающий однородное
вращающееся магнитное поле с частотой вращения 50... 160 Гц и индук-
цией О...7,4 мТл. Управление значением индукции, частотой вращения,
видом модуляции магнитного поля осуществляется ПЭВМ IBM РС(ХТ).
Плоская цилиндрическая катушка (короткий соленоид). Конструкция
индуктора представляет собой цилиндрическую катушку, как правило,
многослойную, имеющую длину, существенно меньшую по сравнению
с диаметром. Поле симметрично относительно оси, неравномерно и
неоднородно. Силовые линии поля короткой катушки показаны на
рис. 3.2, г. Вектор магнитной индукции имеет аксиальную Вх и ради-
альную Вг составляющие. Значение максимальной индукции Вх0 на оси
в центре катушки со средним радиусом г находится из выражения [129]:
вхо = HHoN • I , (3.4)
а в произвольной точке х оси:
г2
ВХ = W*oN • 1 2(Г2 + х2)^ • (3'5)
Распределение значений индукции Вх вдоль оси представлено на
рис. 3.2, в. Указанные значения и распределения индукции могут быть
74
Глава 3
получены лишь в первом приближении и при условии, что размеры
катушки а,Ь « г (рис. 3.2, а). В этом случае катушка представляет собой
кольцо, которое можно рассматривать как эквивалентный виток с током.
Распределение значений аксиальной Вх и радиальной Вг составляющих
вектора магнитной индукции показано на рис. 3.2, б. Достаточно просто
можно учесть геометрические размеры катушки, подставив в выражения
(3.4), (3.5) вместо среднего радиуса г значение эквивалентного радиуса
гэ [134]:
Одной из разновидностей применяемых конструкций является плос-
кая цилиндрическая катушка (рис. 3.3) с радиусами г(, г2 и толщиной
а « b = г2 — Гр Значение магнитной индукции такой катушки по оси
рассчитывается по следующему соотношению [130]:
Рис. 3.2. Короткая цилиндрическая катушка: а) геометрия; б) распределение ин-
дукции Вх (кривая 1) и Вг (кривая 2) по сечению; в) распределение индукции Вх
по оси; г) силовые линии магнитного поля
При соизмеримых размерах а, b и г катушки расчет магнитной
индукции существенно усложняется. Кроме того приходится учиты-
вать конфигурацию катушки и рассеиваемую мощность. Формулы для
расчета радиальной Вг, аксиальной Вх составляющих и градиента gradB
магнитной индукции достаточно сложны. Инженерная методика рас-
четов приведена в [1].
Физические принципы и системы формирования магнитного поля
75
Короткие цилиндрические катушки широко применяются в маг-
нитотерапии. В аппарате «Полюс-101» [135,136] используются две ка-
тушки (размеры 0220x0264x35 мм), которые могут фиксироваться в
любом положении. Питание осуществляется синусоидальным током. Ап-
парат «Полемиг» [1] снабжен несколькими цилиндрическими (размеры
0126x0136x15 мм) и эллипти-
ческими (размеры 195x79x15
мм) катушками, питаемыми им-
пульсным током. Аппарату
«Алимп-1» [118,137] придаются
восемь катушек (внутренний
диаметр 105 мм и 185 мм), ко-
торые питаются импульсным
током и могут создавать бегущее
магнитное поле. В указанных
Рис. 3.3. Плоская цилиндрическая
катушка
устройствах индукторы могут как
надеваться на конечности пациента,
при этом вектор магнитной индукции Вх направлен вдоль конечностей,
так и накладываться на различные участки тела, при этом вектор Вх
перпендикулярен поверхности тела человека. В стационарном устройстве
«Магнетодиафлюкс» (Румыния) [138-140] имеются две больших катушки
(0540x0545x170 мм и 0275х 0365x50 мм), которые надевают на шею и
поясницу пациента. Линии магнитной индукции направлены вдоль тела
от ног к голове. Питаются индукторы пульсирующими токами несколь-
ких частот, а в устройстве предусмотрены различные режимы питания
(непрерывный, прерывистый, ритмичный, прерывистый неритмичный).
Напротив, в аппарате «Магнит Н-80» (Болгария) [141,142] имеются две
пары небольших по размерам индукторов (035x0130x30 мм и
015x070x17 мм), которые накладываются на различные участки тела,
осуществляя локальное воздействие (вектор магнитной индукции пер-
пендикулярен поверхности тела человека). В этом случае магнитные
поля концентрируется в небольшой области, что дает возможность воз-
действовать на биологически активные точки. Питание индукторов осу-
ществляется синусоидальным током.
Таким образом, у коротких цилиндрических катушек для лечения в
одинаковой степени используется как внутривитковое поле, где силовые
линии направлены вдоль тела и конечностей пациента, так и торцевое
поле, у которого аксиальная составляющая вектора магнитной индукции
перпендикулярна поверхности тела.
Система двух плоских цилиндрических катушек (катушки Гельмголь-
ца). Две плоские цилиндрические катушки, размещенные так, чтобы
разноименные полюса находились друг напротив друга, образуют сис-
тему Гельмгольца. Отличительной особенностью системы двух парал-
лельных катушек является то, что в пространстве между ними образуется
достаточно однородное и равномерное магнитное поле, картина силовых
линий которого изображена на рис. 3.4. Следовательно, в пространстве
между катушками существует практически только одна аксиальная со-
76
Глава 3
ставляющая Вх вектора магнитной индукции. С внешних сторон катушек
имеется и радиальная составляющая Вг. Значение индукции вдоль оси
X для двухконтурной системы рассчитывается по формуле [130]:
о к. I 0,2л
Вх = pp0N-I — ’
(3.8)
а в точке х = 0:
0,4л (ЧТ72
Bx0 = pp0N.I^-^ . (3.9)
Распределение аксиальной составляющей индукции Вх по оси по-
казано на рис. 3.4,в, а по сечению х = 0 — на рис. 3.4,6.
Рис. 3.4. Система двух плоских цилиндрических катушек: а) геометрия;
б) распределение индукции Вх по сечению х = 0;
в) распределение индукции Вх по оси; г) силовые линии магнитного поля
Влияние на структуру поля поперечных размеров катушек, откло-
нения от условия Гельмгольца, спиральности обмоток исследованы в
[134]. Распределение значений магнитной индукции Вх вдоль оси X
зависит от расстояния между ними. Подробная методика расчета сис-
темы двух катушек приведена в [1, 143], где показано, что оптимальное
расстояние между катушками (зазор /) не может превышать средний
радиус г.
Физические принципы и системы формирования магнитного поля
77
В упоминавшихся выше промышленных аппаратах «Полюс-101»,
«Полемиг», «Алимп-1», индукторы которых выполнены в виде колец
(коротких цилиндрических катушек), может быть реализован режим ра-
боты, определяемый системой Гельмгольца, для осуществления локаль-
ного воздействия.
Электромагнит. Устройство, состоящее из катушки индуктивности,
как правило, многослойной и ферромагнитного сердечника называют
электромагнитом. Наличие сердечника с большой относительной маг-
нитной проницаемостью ц многократно усиливает и концентрирует маг-
нитный поток. Это позволяет при одних и тех же параметрах магнитного
поля существенно уменьшать габариты индукторов. Кроме того, исполь-
зуя соответствующую конструкцию, технологию и материал сердечника,
можно формировать поля заданной формы, обеспечивать требуемую глу-
бину проникновения, необходимую степень локализации и т.п. Охарак-
теризовать распределение магнитного поля в областях пространства, час-
тично занятых ферромагнитным материалом, представляет собой чрез-
вычайно сложную задачу. Зависимость скалярного магнитного
потенциала <рм и неравномерно распределенной намагниченности М по
объему ферромагнетика описывается уравнением Пуассона:
V2<pM = -divM. (3.10)
Решение этого уравнения затруднено, главным образом, тем, что
распределение величины М неизвестно. Результаты исследований [144]
показывают, что в общем случае векторы индукции В, напряженности
магнитного поля Н и намагниченности М не совпадают по направлению,
кроме точек, лежащих на оси (рис. 3.5).
Фактически произвести достаточно точный расчет магнитных полей
и параметров разомкнутых электромагнитов возможно только методами
моделирования с обработкой на ЭВМ.
Распределение магнитной индукции по сечению сердечника нерав-
номерно (рис. 3.6, б,в).
Максимум индукции Во достигается в
среднем сечении. Распределение индукции
Вх по оси соответствует выражению [1,
145]:
Bx = BoG-k^r|. (311)
< с >
где /с — длина сердечника, к — коэффи-
циент, зависящий от конструкции сердеч-
ника: к = 0,9 — для сердечника круглого
сечения; к = 0,75 — для сердечника пря-
моугольного сечения.
Моделирование на ЭВМ и многочис-
ленные эксперименты, проведенные авто-
Рис. 3.5. Распределение маг-
нитной индукции В и напря-
женности Н магнитного поля
в разомкнутом образце ферро-
магнитного материала
78
Глава 3
Рис. 3.6. Индуктор-электромагнит: а) геометрия; б) распределение индукции Ву
по сечению х = 0; в) распределение индукции Вх по оси сердечника
рами, показали, что по сечению магнитная индукция Ву распределена
как это показано на рис. 3.6,6. Максимум достигается на поверхности
сердечника в сечении х = 0. Индукция убывает пропорционально квад-
рату расстояния.
В практике магнитотерапии используются индукторы-электромагни-
ты самых разнообразных форм и конструкций. В первую очередь — это
электромагниты с осесимметричными полями (рис. 3.7), у которых по-
Рис. 3.7. Индукторы-электромагниты с осесимметричными полями: а) сердеч-
ник круглого сечения; б) сердечник прямоугольного сечения
л юса располагаются на противоположных торцах прямых сердечников.
Такие индукторы различаются формой сечения сердечника (как правило,
круглая или прямоугольная), а также отношением длины к диаметру
(площади поперечного сечения). Имеют применение электромагниты с
расположением полюсов в одной плоскости (П-образный сердечник,
рис. 3.8), магнитное поле которых неравномерно и неоднородно, лока-
лизовано, в основном, в пространстве между полюсами и в сторону от
полюсов.
Ферромагнитные сердечники позволяют создавать направленные
магнитные поля требуемой конфигурации. Например, цилиндрический
сердечник с центральным вырезом обеспечивает формирование узкона-
правленного магнитного поля, силовые линии которого показаны на
Физические принципы и системы формирования магнитного поля
79
Рис. 3.8. Электромагнит с П- Рис. 3.9. Электромагнит на основе цилиндричес-
образным сердечником кого сердечника с центральным вырезом
рис. 3.9. Если у осесимметричного электромагнита с плоским сердечни-
ком (рис. 3.7, б) ввести полюсные наконечники (рис. 3.10), то симметрия
поля в какой-то мере нарушается. При этом с одной стороны несколько
увеличивается глубина действия силовых линий магнитного поля.
Рис. 3.10. Электромагнит на основе плоского сердечника с полюсными наконеч-
никами
В магнитотерапевтических аппаратах индукторы-электромагниты
имеют весьма широкое применение. Так, например, в составе аппарата
«Полюс-1» (СССР) [121, 146] имеется набор сменных электромагнитов ци-
линдрической и прямоугольной форм (размеры 0110x60 мм; 025x65 мм;
160x47x50 мм). Индукторы запитываются синусоидальным или пульсиру-
ющим током в непрерывном, прерывистом или ритмичном режимах. Ана-
логичные электромагниты входят в состав аппарата «Полюс-2» (СССР)
[123], имеющего также режим питания импульсным током. Электромагнит
портативного устройства «Маг-30» (СССР) [1] состоит из двух катушек,
размещенных на П-образном сердечнике, и опрессован пластмассой (раз-
меры одной из модификаций 120x85x50 мм). Устройство включается не-
посредственно в сеть переменного тока 50 Гц, 220 В. Аппарат для магни-
тотерапии «Градиент-1» (СССР) [124] снабжен сменными цилиндрически-
ми индукторами (размеры 0131x60 мм; 085x60 мм; 032x82 мм) и питается
синусоидальным или пульсирующим током. В магнитотерапевтическом
комплексе «Аврора МК-01» (СССР) [5, 7] используются 400 плоских ин-
дукторов с сердечником прямоугольного сечения (размеры 70x17x14 мм),
пространственно организованных особым образом и питаемых импульсным
током, регулируемым по частоте и амплитуде.
80
Глава 3
В числе зарубежных можно выделить магнитотерапевтический ап-
парат «Магнетайзер» (Япония) [1], укомплектованный прямоугольными
и цилиндрическими электромагнитами (размеры рабочих поверхностей
излучателей составляют 85x195 мм и 075 мм соответственно), которые
питаются непрерывным синусоидальным током, а также «Магнетодиаф-
люкс» (Румыния) [138-140], снабженный прямоугольными электромаг-
нитами (размеры 200x100x60 мм). Режимы питания индукторов описаны
выше.
Следует отметить, что в ряде рассмотренных магнитотерапевтичес-
ких аппаратов («Полюс-2», «Магнетодиафлюкс») применяются наборы
индукторов, в которые входят как соленоиды, так и электромагниты
различных типов и размеров.
3.2. Виды систем индукторов общего воздействия
Рассмотренные в 3.1 элементарные индукторы магнитных полей в
подавляющем большинстве аппаратов применяются для организации ло-
кальных (местных) воздействий на ограниченных участках тела человека
(при лечении переломов, ушибов, оклюзий, суставов, гинекологических
заболеваний и т.п.) [127]. При этом могут использоваться как один, так
и несколько индукторов одновременно (в зависимости от возможностей
конкретного аппарата). Такой подход характеризует первый этап разви-
тия техники и клиники магнитотерапии.
Накопленный многолетний клинический опыт лечения магнитными
полями позволил подняться до нового уровня понимания механизмов
воздействия биологических систем с полями, физико-химических и
электрических процессов, происходящих в организме под воздействием
магнитного поля. Это обусловило второй этап в развитии техники маг-
нитотерапии и методики ее клинического использования. Речь идет об
организации магнитных полей заданной конфигурации и протяженности
в пространстве с заданным законом изменения характеристик во вре-
мени и пространстве. В этом случае появляется возможность воздейст-
вовать магнитным полем на целую конечность (две, три, или все четыре
конечности), на значительную область туловища (например, на весь
позвоночник) и т.п. Подобный подход позволил существенно увеличить
область применения методов магнитотерапии и расширить класс изле-
чиваемых заболеваний.
Известны промышленные образцы устройств, в которых реализуется
принцип пространственной организации магнитного поля. В стационар-
ном аппарате «Магнетайзер» (Япония) типа M-CHR [1] используются
пять индукторов-электромагнитов, расположенных на кресле (схематич-
но показано на рис. 3.11).
Индукторы расположены вдоль продольной оси пациента в области
затылка, лопаток, поясницы, ягодиц и ступней. Питаются электромаг-
ниты синусоидальным током в непрерывном режиме. Одновременно
Физические принципы и системы формирования магнитного поля
81
могут включаться от одного до пяти индукторов. Имеется возможность
регулирования интенсивности магнитного поля (6 уровней).
Магнитотерапевтический аппарат «Алимп-1» (СССР) [118,137] со-
держит два соленоидных устройства и набор отдельных соленоидов.
Одно из устройств состоит из пяти соленоидов, собранных в единый
блок (рис. 3.12,а), а другое собра-
но из трех соленоидов, как пока-
зано на рис. 3.12,6. Внутренний
диаметр соленоидов в устройст-
вах — 185 мм. При лечении ко-
нечность или ее сегменты поме-
щают в соответствующее устрой-
ство. Набор из восьми
индукторов-соленоидов диамет-
ром 105 мм используется для ор-
ганизации перемещающегося
магнитного поля вдоль значи-
тельного участка тела человека
(рис. 3.13). Аппарат вырабатыва-
ет прямоугольные импульсы типа
меандр с частотой 10 или 100 Гц,
Рис. 3.11. Расположение индукторов-
электромагнитов в аппарате «Магнетай-
зер» M-CHR
которые через распределитель
поочередно поступают на индукторы. В индукторах магнитное поле
переключается с частотой 1,25 или 12,5 Гц. В результате магнитное поле
перемещается в пространстве (эффект бегущего поля). В аппарате пред-
усмотрено 2 ступени регулирования интенсивности поля.
Рис. 3.12. Соленоидные устройства аппарата «Алимп-1» (изображено схематич-
но): а) при лечении конечностей; б) при лечении сегментов конечностей
Третий этап развития техники магнитотерапии характеризуется осо-
знанием необходимости воздействия магнитным полем на весь организм
человека (принцип: лечение не болезни, а больного). При этом осущест-
вляется упорядоченное влияние на центральную и периферийную нерв-
ные системы в целом, на систему кровообращения в целом и т.д. Речь
идет уже не об отдельных индукторах и их наборах, а о системах ин-
дукторов, организованных и функционирующих по определенным пра-
вилам.
82
Глава 3
Одним из представителей аппаратов общего воздействия является
магнитотерапевтическая установка типа «Магнитотурботрон» [126], из-
лучающее устройство которой первоначально представляло собой статор
3-фазной 2-полюсной машины переменного тока, используемой в
электротурбоагрегатах. В установке создается однородное вращающееся
магнитное поле с максимальной индукцией 6 мТл, воздействующее на
весь организм пациента. Конструкция отличается большой массой (4 т)
и значительным энергопотреблением (10 кВт).
Рис. 3.13. Набор соленоидов аппарата «Алимп-1» для лечения импульсным бегу-
щим магнитным полем
В более поздней модификации установки («Магнитор-АМП» [32])
значительно расширены функциональные возможности в плане управ-
ления параметрами МП (изменение частоты, модуляция и др.), увели-
чено значение максимальной индукции до 7,4 мТл, снижены масса (500
кг) и энергопотребление (2,5 кВт). Внешний вид установки «Магнито-
турботрон 2М» [147] показан на рис. 3.14.
Обратимся к вопросу формирования конфигурации объема магнит-
ного поля вокруг человека с помощью систем индукторов. Очевидно,
что пространственная структура макрополя, окружающая все тело па-
циента в целом, имеет немаловажное значение для достижения высоко-
эффективного лечения. Можно предложить следующие модели конфи-
гурации:
— в форме плоскости, на которой располагается человек;
— в форме двух плоскостей, между которыми располагается человек;
— в форме цилиндра, внутри которого располагается человек;
— по форме тела человека.
Здравый смысл подсказывает, что, по-видимому, наиболее эффек-
тивной будет конструкция, учитывающая форму тела человека. Рассмот-
Физические принципы и системы формирования магнитного поля
83
Рис. 3.14. Внешний вид магнитотерапевтической установки
«Магнитотурботрон 2М»
рим данный вопрос в эволюции и проанализируем возможные варианты
технических решений.
Во-первых, исходя из естественных пространственных положений
человека, устройства магнитного воздействия могут быть реализованы
на основе кушетки, кресла, лифта, в которых, соответственно, обеспе-
чиваются: горизонтальное положение пациента (лежа), положение сидя
(полулежа) и вертикальное положение (стоя), как это показано на
рис. 3.15, а,б,в. Последнее положение, по всей вероятности, не найдет
практического применения в медицине ввиду существенных изменений
кровотока под воздействием гравитационного поля Земли, а также в
силу очевидных неудобств длительного нахождения больного человека
на ногах.
Кроме того, устройства магнит-
ного воздействия могут быть реали-
зованы различными конструктив-
ными способами:
— в виде жесткого и полужест-
кого костюмов (рис. 3.16,
а,б), которые монтируются
на кушетке;
— в виде гибкого костюма
(рис. 3.16, в), который может
использоваться автономно;
— по принципу «чемодана»,
«пенала» (рис. 3.16, г,д) и
другими способами.
Рис. 3.15. Основа для размещения
системы индукторов магнитотерапев-
тического аппарата: а) кушетка;
б) кресло; в) лифт
84
Глава 3
В основу разработки и проектирования устройств магнитного воз-
действия могут быть положены различные критерии: эффективность ле-
чения; комфортность для пациента; удобство и простота обслуживания
для медицинского персонала; технологичность в производстве; себесто-
имость; эстетичность и пр.
Очевидно, что главным критерием является, безусловно, критерий
эффективности лечения. Однако, к сожалению, до сих пор этот критерий
не может быть практически использован ввиду недостаточного на се-
годняшний день уровня математического и физического описания ме-
ханизма воздействия магнитного поля на живые организмы, недостаточ-
ности статистического материала по результатам лечения конкретных
групп больных и видов заболеваний. Поэтому при разработке и проек-
тировании устройств магнитного воздействия необходимо принимать во
внимание и другие, перечисленные выше критерии.
Таким образом, до-
статочно большое множе-
ство принципиально воз-
можных технических ре-
шений и конструктивных
вариантов сужается до не-
которого класса практи-
чески реализуемых уст-
ройств магнитного воз-
действия, а именно: на
основе кушетки или крес-
ла, в виде жесткого или
полужесткого костюма,
«чемодана» и их разно-
видностей. Заманчивая на
первый взгляд конструк-
ция в виде гибкого элас-
тичного магнитного кос-
тюма (напоминающего
гидрокостюм, как показа-
но на рис. 3.16, в) неце-
лесообразна, прежде всего
из-за своей большой
массы при реально дейст-
вующих магнитных полях,
Рис. 3.16. Конструктивные варианты устройств
магнитного воздействия: а) жесткий костюм;
б) полужесткий костюм; в) эластичный костюм;
г) «чемодан»; д) «пенал»
которая по расчетам со-
ставляет более 100 кг. Поэтому, безусловно, требуется некоторый жест-
кий каркас (или основание), воспринимающий всю нагрузку. В этом
плане сформировались два направления.
В одном из них, исторически складывавшемся первым, основой
магнитотерапевтического аппарата является горизонтально расположен-
ное основание, на котором смонтирована система индукторов, состоя-
Физические принципы и системы формирования магнитного поля
85
Рис. 3.17. Схематичное изображение
конструкции магнитного скафандра,
собранного из коротких соленоидов
щая из 48 цилиндрических катушек (коротких соленоидов) с соотноше-
нием D// » 1 (D и / — соответственно диаметр и длина катушки). Вся
система разделена на 6 сегментов: один — для головы, один — для
туловища и по два — для ног и рук (рис. 3.17). Каждый сегмент состоит
из восьми индукторов. Размеры индукторов (диаметр внутренний):
0295x35 мм (для головы); 0500x50 мм (для туловища); 0250x100 мм
(для ног); 0200x40 мм и 0170x80 мм (для рук). Ввиду некоторого внеш-
него сходства эта конструкция получила название магнитного «скафанд-
ра».
Таким образом, магнитный ска-
фандр представляет собой конструк-
цию из жестких цилиндров, в кото-
рые пациент помещается на время
сеанса, т.е. положение человека при
лечении — горизонтальное (лежа).
Индукторы в сегментах пронумеро-
ваны с №1 по №8. Один из вари-
антов запитки индукторов состоит в
следующем. Все индукторы с одина-
ковым номером включаются парал-
лельно и образуют один канал (всего
их восемь). Запитываются каналы
скафандра импульсным током от
блока управления, имеющего восемь
выходов, по каждому из которых
возможно независимое плавное ре-
гулирование амплитуды тока (при
этом индукция МП на внутренней
поверхности соленоидов может быть
установлена в пределах 0...5 мТл) и
изменение его направления (изме-
нение вектора магнитной индук-
ции). Каналы переключаются поочередно с заданной частотой. В ре-
зультате система индукторов скафандра формирует импульсное бегущее
магнитное поле, пронизывающее волной весь организм человека. Струк-
тура силовых линий магнитного поля отдельных соленоидов такая же,
как показано на рис. 3.2, г. При поочередном переключении каналов
поле индукторов будет перемещаться вдоль тела и конечностей пациента
с сохранением неизменной структуры силовых линий. Возможны другие
схемы соединения и, соответственно, другие способы перемещения маг-
нитного поля в пространстве.
На основе рассматриваемой системы индукторов из коротких ци-
линдрических катушек было выпущено несколько макетных образцов
магнитотерапевтических аппаратов «Звезда» (СССР) [4], на которых про-
водилась отработка первых медицинских методик лечения сердечно-со-
судистых заболеваний. Внешний вид магнитного скафандра аппарата
86
Глава 3
«Звезда» показан на рис. 3.18. Наряду с неоспоримыми преимуществами
по сравнению со всеми рассмотренными выше устройствами магнито-
терапии аппарату «Звезда» присущи и существенные недостатки: слож-
ность пространственного перемещения частей аппарата и возникающие
из-за этого трудности помещения пациента в устройство и выхода из
него; наличие массивных направляющих, затрудняющих работу меди-
цинского персонала; значительная масса устройства (порядка 400 кг);
конструктивно технологические сложности при изготовлении, значи-
тельное излучение в окружающее пространство.
Рис. 3.18. Внешний вид скафандра магнитотерапевтического аппарата «Звезда»
□□□□□□00
00000D00
OODDOCOO
OODCOODO
Отмеченные недостатки аппарата «Звезда» привели к появлению
другой, принципиально новой конструкции, в которой для головы, ту-
ловища и каждол конечности человека формируется некая упруго сги-
бающаяся в цилиндр плоскость, которая держит свою форму за счет
упругих сил. Исходно на эти плоскости ложится пациент, а затем на
частях его тела формируются
цилиндры. Основу устройства
составляет ячеистая плоскость
матричного типа (рис. 3.19), в
ячейки которой вставляются
малогабаритные плоские ин-
дукторы-электромагниты (на-
пример, по рис. 3.10). Всего ис-
пользуется 400 индукторов, ко-
торые распределяются по 6
сегментам (для головы, тулови-
Рис. 3.19. Ячеистая плоскость матричного Ша и всех конечностей). Гибкие
типа с индукторами-электромагнитами ячеистые плоскости примене-
Физические принципы и системы формирования магнитного поля
87
ны в аппаратно-программном магнитотерапевтическом комплексе «Ав-
рора МК-01» (СССР) [5, 7]. Существует несколько модификаций маг-
нитных скафандров комплекса.
В одном из первых вариантов (так называемый «мягкий» скафандр)
индукторы уложены по матричной структуре в матерчатые ячейки и
прошиты между двумя слоями ткани (рис. 3.20).
Рис. 3.20. «Мягкие» скафандры аппарата «Аврора МК-01»
Такая конструкция имеет бесспорные преимущества: удобство по-
мещения пациента в установку (плоскость предварительно разворачива-
ется, больной ложится и его, как одеялами, накрывают излучающими
плоскостями), форма излучающей поверхности за счет своей гибкости
и мягкости повторяет форму тела человека. Однако есть и существенный
недостаток: значительная масса излучающих плоскостей (около 100 кг),
а распределенная масса, приходящаяся на тело пациента, составляет
около 30 кг, что, безусловно, вызывает дискомфорт для пациента й
ограничивает время проведения сеанса лечения.
Дальнейшим развитием комплекса «Аврора МК-01» является созда-
ние гибкой конструкции, основанной на применении жестких пласт-
массовых корпусов в форме прямоугольного параллелепипеда, в каждый
из которых помещен индуктор-электромагнит [148] (рис. 3.21). Из от-
дельных корпусов собираются ремри (рис. 3.22) по подобию траков
гусеничных движителей, а ремни объединяются в плоскости (сегменты)
для головы, туловища и всех конечностей соответственно. В данной
модификации сохраняется матричный принцип пространственного рас-
положения индукторов. Процесс помещения пациента в аппарат несложен,
т.к. излучающие плоскости предварительно раскладываются (рис. 3.23) и
88
Глава 3
Рис. 3.21. Плоский электромагнит в футля-
ре: а) основание с укрепленным электромаг-
нитом; б) крышка
человек просто ложится как на
обычную кушетку. Затем плос-
кости формируются в цилинд-
ры вокруг частей тела, но, в
отличие от «мягкого» скафанд-
ра, излучающие плоскости не
давят на больного, поскольку
приобретают форму цилиндров
(за счет технологических отли-
вок в форме параллелепипедов,
ограничивающих угол склады-
вания) как это показано на
рис. 3.24.
Картина силового поля
единичного индуктора приве-
дена на рис. 3.10. В индукторах-электромагнитах используются полюс-
ные наконечники, обращенные к телу пациента, что деформирует поле
и увеличивает глубину его действия. Многочисленные эксперименталь-
Рис. 3.22. Ремень, собранный из корпусов
с индукторами
ные исследования, а также моделирование на ЭВМ, проведенные авто-
рами, позволили установить характер магнитного поля в ремне, состо-
ящем из индукторов и свернутом в кольцо, а также в излучающей плос-
кости из ремней, свернутой в цилиндр (рис. 3.25). Характер изменения
индукции ремня относительно линии г = const показан на рис. 3.25, а,
а на рис. 3.25, б показано изменение индукции вдоль любой оси (в
данном случае оси X и Y), проходящей через центры противоположных
индукторов (подробнее о расчетах и моделировании полей в ячеистых
плоскостях см. в §3.3). На рис. 3.26 в осевом сечении представлена
картина силовых линий фонового (постоянного) магнитного поля яче-
истой плоскости, составленной из ремней и свернутой в цилиндр, а на
рис. 3.27 изображены суммарные композиции при одновременном воз-
действии фонового и импульсных магнитных полей. Рис. 3.27, а иллю-
стрирует случай согласного включения источников фонового и импульс-
ного полей, причем на участке 1 показано суммарное воздействие фо-
нового поля и импульсного поля, образованного в одном ремне, а на
участке 2 показано одновременное включение импульсного поля в двух
Физические принципы и системы формирования магнитного поля
89
Рис. 3.23. Магнитный скафандр комплекса «Аврора МК-01»
в развернутом состоянии
соседних ремнях. Рис. 3.27, б иллюстрирует случай одновременного
включения импульсного поля в трех ремнях, причем в одном из них
согласно с фоновым полем, а в двух соседних — встречно с фоновым
полем.
При этом в ремнях, обращенных друг к другу одноименными по-
люсами, возникает некоторое выпучивание поля (усиливается состав-
ляющая вектора магнитной индукции, перпендикулярная оси цилиндра).
Рис. 3.24. Магнитный скафандр комплекса «Аврора МК-01» в рабочем состоянии
90
Глава 3
Рис. 3.25. Изменение магнитной индукции внутри ремня, собранного из индук-
торов-электромагнитов и свернутого в кольцо: а) относительно линии г = const;
б) вдоль осей X и Y
У следующей модификации комплекса «Аврора МК-01» устройство
магнитного воздействия выполнено в виде магнитного кресла
(рис. 3.28). В основу этой разработки были положены следующие со-
ображения. Во-первых, у ряда пациентов наблюдается боязнь замкну-
того пространства. В аппаратах «Звезда» и «Аврора» эффект замкнутого
пространства у больных этой группы имеет место. Во-вторых, у людей
с сильно пораженными нижними конечностями возникают трудности,
связанные с помещением их в аппарат на основе кушетки, и, в осо-
бенности, выхода из него. Конструкция устройства воздействия в виде
кресла снимает эти вопросы. На кресле размещены две грудные секции,
две секции для рук, две секции для ног и полусекция для головы. Все
секции выполнены в виде гиб-
ких листов из пенополиуретана,
на которых размещены 400 ин-
дукторов (плоских электромаг-
нитов). Секции обшиты кожза-
менителем. По существу это
другое конструктивное испол-
нение «мягкого» скафандра с
уменьшенными массогабарит-
ными характеристиками систе-
мы индукторов. Последнее об-
стоятельство, а также верти-
Рис. 3.26. Картина силовых линий
фонового (постоянного) магнитного поля
в цилиндре, образованном из ремней
индукторов
кальное положение туловища
пациента (или положение полулежа) обеспечивают достаточно комфорт-
ные условия для человека во время проведения сеанса лечения.
Физические принципы и системы формирования магнитного поля
91
Рис. 3.27. Композиция фонового и импульсного магнитных полей в цилиндре,
собранном из ремней индукторов: при согласном включении ремней в случае пи-
тания импульсным током одного ремня (участок 1) и при встречном включении
• одного ремня (участок 2)
Примечание. В разрывах указаны значения магнитной индукции в мТл.
Рис. 3.28. Комплекс «Аврора МК-01», укомплектованный магнитотерапевтичес-
ким креслом
92
Глава 3
Рис. 3.29. Схематичное изображение кон-
струкции плоскостного магнитоскана
Направлением дальнейшего совершенствования оконечных уст-
ройств магнитотерапевтических комплексов семейства «Аврора МК» яв-
ляется разработка плоскостных магнитосканов (рис. 3.29). Данная мо-
дель в значительной степени учитывает недостатки предыдущих разра-
боток и отвечает ранее сформулированным критериям качества.
Отличительной особеннос-
тью конструкции является
размещение системы индук-
торов в двух плоскостях:
нижней — прямолинейной и
верхней — криволинейной.
Нижняя плоскость — это по-
верхность кушетки, а верх-
няя — подъемный навес. Для
удобства пользования верх-
няя плоскость может быть
разделена на две части. Раз-
мещение индукторов и
электромонтажа в жестких плоскостях придает конструкции новые по-
ложительные свойства. Внешний вид приобретает привычные формы
бытовой мебели и известных физиотерапевтических устройств (напри-
мер, типа солярия), чем исключается психологический фактор у паци-
ентов (настороженность, беспокойство). Существенно повышается на-
дежность и электробезопасность конструкции. Значительно упрощается
работа медперсонала по укладке пациента, которая сводится к поднятию
и опусканию навеса. Причем вес верхних плоскостей сбалансирован
силой трения в осевых опорах, силой растяжения или сжатия пружин
и (или) газовых амортизаторов.
Если для конструкций магнитосканов определены технические и
эксплуатационные требования и критерии качества, то в отношении
индукторов — электромагнитных излучателей (ЭМИ) такой четкости
нет, что вызвано, прежде всего, недостатком клинических испытаний
для получения сравнительных данных при использовании магнитосканов
с различными индукторами, в особенности, последних разработок. Поэ-
тому усовершенствования индукторов возможны в направлении сниже-
ния массо-габаритных показателей, упрощения и удешевления техноло-
гии изготовления ЭМИ при условии сохранения или улучшения достиг-
нутых ранее энергетических и пространственных показателей. Во всех
рассмотренных модификациях магнитосканов комплексов «Аврора МК»
использованы индукторы-электромагниты, показанные на рис. 3.10. Од-
нако одним из перспективных направлений является использование
плоских бескаркасных катушек (ПБК) индуктивности (рис. 3.30), ори-
ентированных своей осью перпендикулярно объекту излучения и легко
размещаемых в конструкции плоскостного магнитоскана. Это расширяет
возможности аппаратуры в поиске и создании других конфигураций
полей, эффективных для магнитотерапии. Применение таких катушек
Физические принципы и системы формирования магнитного поля
93
позволяет получить в том же самом рабочем
объеме магнитное поле с большей степенью не-
однородности, поскольку скорость изменения
величины и направления вектора магнитной
индукции резко возрастает за счет действия в
плоскости пары параллельных, зеркально-отра-
женных источников излучения. Технология из-
готовления ПБК проста и сводится к намотке
на диске кругового контура с заданным числом
витков. В результате получается гибкая катуш-
ка, форму и соотношения геометрических раз-
меров которой можно изменять как это пока-
зано на рис. 3.30 в соответствии с требованиями
конструкции магнитоскана. Это позволяет со-
здавать при тех же параметрах протекающего тока I сложную неодно-
родную конфигурацию поля в ограниченном индуктором объеме. Со-
гласно закону Био-Савара-Лапласа полная величина магнитной индук-
ции В в произвольной точке пространства, обусловленная током I в
замкнутом контуре /, может быть найдена из уравнения:
д_Н. Jl «1/ 1 [[<»•»,]
4л * г2 4л | г2
Рис. 3.30. Фрагмент сек-
ции, собранной из плос-
ких катушек индук гив-
ности
(3.12)
где ца — абсолютная магнитная проницаемость среды; I d/ — ли-
нейный элемент тока; г — расстояние от элемента тока до точки, где
определяется магнитная индукция; 1г — единичный вектор, направ-
ленный вдоль этого расстояния.
Интегрирование производится по всему замкнутому контуру тока,
состоящему из элементов I • dZ. Используя общее выражение для В, в
принципе можно рассчитать распределение величины магнитной индук-
ции в рабочем пространстве по трем координатам. Однако эта задача
очень трудоемкая, а иногда невыполнимая даже для простых форм кон-
туров. Для примера представим прямоугольный токовый виток на
рис. 3.31 в декартовой системе координат. Компоненты магнитного поля
токового витка рассчитываются по соотношениям следующего вида
[130]:
__________ У+1
[(х - s)2 + h2 )У(х -s)2 + (у + // + h2
___________ У-1
[(x + s)2 + h2]7(x + s)2 + + h2
94
Глава 3
____________ У + l
[(х + s)2 + h2 ]/(x + s)2 + (у + /)2 + h2
(3.13)
Рис. 3.31. Прямоугольный виток
с током
Если контур тока состоит из N
плотно намотанных витков, его
можно рассматривать как одновит-
ковый контур с током 1£ = N • I.
Расчеты компонентов поля,
выполненные по методике, приве-
денной в [130], позволяют визуали-
зировать распределение составляю-
щих поля, создаваемого системами
плоских бескаркасных катушек.
Сравнительный анализ распределе-
ний индукции МП, создаваемых
различными излучателями, показывает, что для формирования полей с
высокой неоднородностью и изменяемой конфигурацией плоские бес-
Рис. 3.32. Комбинированный электро-
магнитный излучатель
каркасные катушки являются перспективными.
Имеется возможность совмес-
тить в одном магнитоскане два
типа индукторов: плоскую катушку
и электромагнит (рис. 3.32). Кон-
структивно выполнить комбини-
рованный индуктор можно, вло-
жив плоскую катушку в прорезь
полюсных наконечников сердеч-
ника электромагнита. При под-
ключении плоской катушки к ис-
точнику тока сердечник будет ис-
пользован как магнитный экран,
уменьшая тем самым излучение во внешнюю среду. В режиме включения
электромагнита сердечник выполняет роль концентратора магнитного
поля по направлению к объекту. Возможно и одновременное включение
индукторов как к одному источнику тока, так и к различным. В этом
случае создаваемые поля будут сильно неоднородны, со сложной кон-
фигурацией и характером изменения временных и пространственных
параметров.
Рассмотренные излучатели МП и системы на их основе, позволяю-
щие существенно расширить функциональные возможности магнитоте-
рапевтической аппаратуры в плане формирования различных конфигу-
раций магнитных полей, являются основой нового семейства комплексов
магнитотерапии типа «Мультимаг». К настоящему времени разработаны
два внешне похожих экспериментальных образца плоскостных магни-
тосканов с индукторами-электромагнитами (по рис. 3.10) и с плоскими
бескаркасными катушками (по рис. 3.30). Их внешний вид показан на
Физические принципы и системы формирования магнитного поля
95
Рис. 3.33. Внешний вид конструкции плоскостного магнитоскана
рис. 3.33. Эти магнитосканы могут использоваться как в комплексах «Ав-
рора», так и в комплексах «Мультимаг».
В целях расширения функциональных возможностей, улучшения
технических характеристик и эксплуатационных качеств (удобство для
пациента и для работы медицинского персонала), достижения современ-
ного дизайна и прогрессивных конструкторско-технологических реше-
ний разработана конструкция магнитоскана для магнитотерапевтических
комплексов семейства «Мультимаг» (рис. 3.34). В этой модели макси-
Рис. 3.34. Конструкция магнитоскана магнитотерапевтических комплексов
семейства «Мультимаг»
96
Глава 3
мально упрощена операция укладывания пациента и обеспечено его
комфортное расположение, при котором весь вес конструкции с индук-
торами переносится на общее основание. Верхняя плоскость магнитос-
кана закреплена шарнирно и поворачивается относительно нижней на
заданный угол подъемным устройством с помощью штока, приводимого
в движение электродвигателем.
Все модификации устройств магнитного воздействия комплекса «Ав-
рора МК-01» запитываются от единого унифицированного электронного
блока, имеющего 8 выходов.
Блок обеспечивает формирование фонового постоянного магнитно-
го поля с индукцией 0...1 мТл, а также импульсного бегущего магнитного
поля или другого динамического, изменяющегося во времени и про-
странстве с частотой 0...100 Гц и индукцией на внутренних поверхностях
излучающих плоскостей 0...5 мТл. Подробно принципы построения и
структурные решения электронного блока описаны в главе 4.
3.3. Моделирование магнитных полей магнитоскана
Расчетам магнитных полей (МП), создаваемых элементарными из-
лучателями (соленоид, плоская катушка и др.) уделено в литературе
достаточно много внимания. Инженерный расчет магнитного поля ин-
дуктора-электромагнита можно произвести по методике, приведенной в
[1]. Однако она дает приемлемые результаты лишь в области его торце-
вой части. Сложность расчета заключается в том, что магнитное поле
создается системой токопроводов и вторичными источниками МП —
ферромагнитными сердечниками и распространяется в трех средах (воз-
дух, тело человека, сердечник). Кроме того, геометрические характерис-
тики исследуемой системы могут быть таковы, что результирующее МП
не будет обладать какими-либо степенями симметрии. В этом случае
количественные результаты можно получить только с помощью числен-
ного моделирования.
Основное преимущество моделирования магнитных полей в слож-
ных системах воздействия на биологические объекты заключается в зна-
чительном сокращении временных, материальных и энергетических за-
трат. Применение компьютерного моделирования целесообразно также
в тех случаях, когда традиционные методы измерения характеристик
магнитных полей или неприменимы, или дают значительную погреш-
ность.
Основные методы, описывающие поведение магнитного поля в раз-
личных системах, базируются на уравнениях в частных производных,
поэтому применение аналитических методов решения (метод конформ-
ных преобразований, метод изображений, метод разделения переменных)
сопряжено с определенными трудностями или вообще невозможно в
силу сложной геометрической конструкции объектов, нелинейности ха-
рактеристик материалов и других факторов. В этом случае единствен-
Физические принципы и системы формирования магнитного поля
97
ними методами решения являются численные методы, в основе которых
лежит дискретизация. Уравнение поля в частных производных, в данном
случае уравнение Лапласа для скалярного магнитного потенциала, пре-
образуется в систему алгебраических уравнений, решение которой дает
аппроксимацию поля в дискретных точках пространства [149].
Метод конечных разностей позволяет получать решения с удовле-
творительной точностью для многочисленных задач, но при этом важное
место отводится составлению алгоритма и проведению проверочного
эксперимента. Сложный характер математической модели заставляет
вносить упрощения в математическую модель и делать физические до-
пущения. Таким образом, любая программа, предназначенная для мо-
делирования работы магнитного устройства, должна проходить три ос-
новных этапа:
1) создание физической модели;
2) создание математической модели;
3) согласование результатов моделирования с экспериментальными
данными.
Такой подход к проблеме моделирования позволяет выделить гра-
ницы, в рамках которых возможно получение корректных результатов.
Один из вариантов, который позволяет найти распределение маг-
нитного поля магнитоскана, состоит в определении скалярного магнит-
ного потенциала <рм с использованием соотношения:
В = р.а grad <рм . (3.14)
Для численного нахождения распределения скалярного магнитного
потенциала, как функции точек на плоскости (х, у), необходимо решить
уравнение Лапласа, которое в прямоугольной системе координат имеет
следующий вид:
ЭЧ(*,У) п (3.15)
Эх2 + Эу2 “
В основе решения уравнений в частных производных методом ко-
нечных разностей лежит конечно-разностная аппроксимация производ-
ных. Аппроксимация осуществляется в три этапа (рис. 3.35). Сначала в
области решения вводится равномерная сетка «узловых точек», соответ-
ствующая характеру задачи и граничным условиям. Затем решаемое урав-
нение в частных производных записывается в наиболее удобной системе
координат и, при представлении производных в конечно-разностной
форме, оно приводится к виду разностного уравнения. Полученное раз-
ностное уравнение используется в дальнейшем для описания функцио-
нальной связи между соседними узлами сетки. Разностное уравнение
записывается для всех узлов сетки и в результате получается система из
п уравнений с п неизвестными. На последнем этапе полученная система
решается одним из численных методов [150, 151].
98
Глава 3
Рис. 3.35. Основные этапы численного решения дифференциальных уравнений
для моделирования магнитных полей в устройствах магнитотерапии
(3.16)
Основную трудность при моделировании магнитных полей представ-
ляет задание граничных условий. Характеристики подобной системы
связаны соотношением:
+ = i. w
НоНс Но
где Вс — индукция в ферромагнитном сердечнике; Вв — индукция в
воздухе, /с — длина магнитной линии в сердечнике, /в — длина магнитной
линии в воздухе, — магнитная постоянная, цс — магнитная про-
ницаемость материала сердечника, i — ток в обмотке, W — число витков.
В данной формуле, выражающей закон полного тока, присутствуют
две неизвестные величины: Вв и 7В. Чем меньше величина воздушного
зазора, тем корректнее может быть полученный результат. Можно пред-
положить, что в формулу (3.16) возможно введение эмпирического ко-
эффициента к, учитывающего пространственную конфигурацию сердеч-
ника. Тогда соотношение (3.16) преобразуется к виду:
В = kp0|iciW.
(3.17)
В первом приближении коэффициент к оценивается по длине рас-
пространения магнитного потока по сердечнику /с и по воздуху /в:
4/
(3.18)
Переход к заданию граничных условий для магнитного потенциала
срм осуществляется, исходя из зависимостей:
b = = ву=мо^; <319>
ч>мУ=/Вуау; 4>Mx = fBxdx-
Физические принципы и системы формирования магнитного поля 99
Граничные условия могут быть получены из следующих соображе-
ний. Соотношение скалярных значений магнитных потенциалов на гра-
нице раздела можно найти на основе граничного условия нормальной
составляющей вектора индукции:
В1п=В2п> (3.20)
где индексы 1 и 2 относятся к воздуху и материалу сердечника, со-
ответственно.
Отсюда, с учетом того, что В = ца grad(pM, находим:
К, grad<P«, = Нй grad4>M2, <3-21)
где ца1 = ца2 = Pq|1c — абсолютные магнитные проницаемости воз-
духа и материала сердечника соответственно.
На основе данных условий можно вычислить значения В(х,у), осуще-
ствив переход от фм к В (рис. 3.36 и 3.37). При использовании рассматри-
ваемого метода были получены результаты моделирования магнитных
полей, создаваемых как отдельными индукторами-электромагнитами раз-
личной конфигурации, так и их совокупностями, образующими реальные
рабочие поверхности магнитоскана [151].
Рис. 3.37. Распределение силовых линий
магнитного поля, создаваемого одиноч-
ным индуктором-электромагнитом с по-
люсными наконечниками:
1 — 5,4 мТл; 2 — 3,7 мТл; 3 — 2,5 мТл;
4—1,8 мТл; 5—1,2 мТл
Рис. 3.36. Распределение силовых
линий магнитного поля, создаваемо-
го одиночным индуктором-электро-
магнитом:
1 — 4 мТл; 2 — 2,8 мТл; 3 — 2,2 мТл;
4—1,6 мТл; 5 — 0,8 мТл;
6 — 0,5 мТл
Примечание. На рисунках: по осям цена деления — 5 мм. Параметры индукто-
ров: 1 = 0,4 A; W = 1200; L = 60 мм
Результаты анализа распределения магнитного поля позволяют сде-
лать обоснованный выбор элементарного излучателя магнитоскана. При
этом установлено, что введение полюсных наконечников, выполняющих
100
Глава 3
роль концентраторов магнитного поля, в индуктор-электромагнит по-
вышает интенсивность магнитного поля в рабочей зоне излучателя до
10%, как показано на рис. 3.36 и 3.37, что позволяет снизить энерго-
потребление устройства в целом.
Определенный интерес представляет картина распределения магнит-
ного поля вдоль тела пациента (сектор магнитоскана), образованная
набором индукторов, составляющих n-канальную структуру. На рис. 3.38
и 3.39 приведены картины распределения магнитного поля, полученные
Рис. 3.38. Распределение эквипотенциалей индукции в сегменте магнитоскана:
1 — 4,8 мТл; 2 — 3,4 мТл; 3 — 2,5 мТл; 4—1,8 мТл; 5—1,2 мТл; I = 0,4 А;
W= 1200; L = 60 мм
в результате сечения этой структуры плоскостью, перпендикулярной оси
сегмента, на который осуществляется воздействие, например, конечнос-
ти и проходящей через ось симметрии сердечников секции магнитоска-
на, и плоскостью, проходящей вдоль конечности также через ось сим-
метрии индуктора.
Применение методов моделирования позволяет разработать инфор-
мационную базу распределений магнитного поля интересующих сово-
купностей индукторов-электромагнитов, образующих композиционное
магнитное поле различных конфигураций.
С целью достижения универсальности представляемых результатов
часть численных экспериментов проводилась в безразмерном виде.
Электромагниты находились на окружности радиусом R и их количество
при моделировании изменялось от 1 до 24. В качестве иллюстрации на
Физические принципы и системы формирования магнитного поля
101
Рис. 3.39. Распределение эквипотенциален индукции в секторе магнитоскана
при одновременном включении 3-х секций (значения индукции и параметры ин-
дукторов те же, что и на рис. 3.38)
Рис. 3.40. Качественная картина распределения интенсивностей магнитного
поля 16 индуторов-электромагнитов сегмента магнитоскана
102
Глава 3
рис. 3.40 изображена картина распределения магнитного поля для 8-и
индукторов-электромагнитов, формообразованных в кольцо. Полному
заполнению окружности электромагнитами соответствовал идеальный
случай распределения магнитного поля внутри индукторов, когда зна-
чение поля во всех внутренних точках, ограниченных окружностью с
радиусом R, постоянно и нормировано к единице.
На рис. 3.41 приведены нормированные значения интенсивностей
магнитных полей в сечениях по осям X и Y соответственно. Анализ этих
зависимостей позволяет сделать вывод о степени неоднородности маг-
нитного поля внутри каждого сегмента магнитоскана.
Рис. 3.41. Пронормированная по осям X (а) и Y (б) интенсивность магнитного
поля совокупностей индукторов-электромагнитов сегмента магнитоскана, фор-
мообразованных в кольцо:
I — 24 индуктора; 2—16 индукторов; 3 — 8 индукторов; 4 — 4 индуктора; 5 — 3
индуктора; 6 — 2 индуктора; 7 — 1 индуктор
При проектировании устройств магнитотерапии для интерпретации
тех или иных магнитобиологических эффектов большое значение имеет
информация об отклонении создаваемого магнитного поля от идеаль-
ного в рабочей зоне магнитоскана. На рис. 3.42 показаны пронормиро-
ванные зависимости отклонения создаваемого магнитного поля в рабо-
чей зоне сегмента магнитоскана по радиусу R от идеального магнитного
поля при разном количестве индукторов (1 — в центре, 2 — 1/3 R, 3 —
2/3 R). На рис. 3.43 приведены пронормированные зависимости откло-
нения создаваемого магнитного поля от идеального на внутренней по-
верхности сегмента магнитоскана при различном количестве индукто-
ров-электромагнитов.
Достоверность полученных результатов моделирования подтвержда-
ется тем, что распределения индукции магнитного поля, создаваемые
Физические принципы и системы формирования магнитного поля
103
индукторами различных конфигураций, полученные экспериментальным
путем посредством измерений с помощью измерителя магнитной ин-
дукции Ш1-8, отличаются не более, чем на 20% от полученных с по-
мощью выбранного метода численного моделирования.
Рис. 3.42. Пронормированные зависимости отклонения создаваемого магнитно-
го поля в рабочей зоне сегмента магнитоскана по радиусу от идеального магнит-
ного поля при разном количестве индукторов:
1 — в центре, 2 — 1/3 R, 3 — 2/3 R
Рис. 3.43. Пронормированные зависимости отклонения создаваемого магнитно-
го поля в рабочей зоне сегмента магнитоскана от идеального при различном ко-
личестве индукторов-электромагнитов:
1 — 1 индуктор; 2 — два индуктора; 3 — 3 индуктора; 4 — 4 индуктора;
5 — 8 индукторов; 6—16 индукторов; 7 — 24 индуктора
Данная погрешность вполне допустима для предварительной оценки
картины распределения МП, создаваемого различными совокупностями
излучающих элементов, образующих рабочие зоны магнитоскана.
Глава 4
МЕТОДЫ И СРЕДСТВА
ФОРМИРОВАНИЯ СИГНАЛОВ
УПРАВЛЕНИЯ ИЗЛУЧАТЕЛЯМИ
МАГНИТНОГО ПОЛЯ
4.1. Обобщенная структура блока управления систем
комплексной магнитотерапии
В качестве параметров динамического магнитного поля определены
следующие: число независимых каналов управления, частотно-времен-
ные параметры сигнала, уровни интенсивности поля, последовательнос-
ти подключения каналов, направления векторов и параметры синхро-
низации с биоритмами.
Если число независимых каналов формируется на стадии проекти-
рования аппарата, то все остальные параметры должны перестраиваться
в процессе работы, т.е. выбираться в зависимости от вида заболевания,
индивидуальных особенностей и методики лечения. Тогда исходная
обобщенная структура блока управления системы может быть изобра-
жена в виде, представленном на рис. 4.1.
Рис. 4.1. Обобщенная структура блока управления
Система функционирует следующим образом. Задатчик частотно-
временных параметров (ЗЧВ) формирует длительность либо частоту так-
тов, а также частоту модуляции в такте, если она присутствует. Задатчик
последовательности (ЗП) определяет алгоритм включения и выключения
силовых источников, а также задает число тактов, через которое цикл
динамики магнитного поля повторяется. Задатчик интенсивности (ЗИ)
формирует уровни тока в индукторах или напряжения на них. Форма
Методы и средства формирования сигналов
105
задания имеет, как правило, матричный вид, соответствующий заданной
последовательности, ширина столбцов которого фиксирует временной
такт, ширина строки — номер канала, а элемент матрицы — интенсив-
ность тока, как это показано в табл. 4.1.
Таблица 4.1
Форма задания матрицы интенсивности
1 канал 16 12 10 05 00 00 00 00 00 00
2 канал 00 05 10 12 16 12 10 05 00 00
i канал
m канал 00 00 00 00 05 10 12 16 12 00
Такты 1 2 3 4 5 6 7 8 9 п
Задатчик направления вектора (ЗНВ) в общем случае определяет
направление вектора магнитного поля в индукторах, что для блока уп-
равления, по существу, определяет полярность выходного тока силовых
источников (СИ). Матрица задания направления вектора, имея размер-
ность, аналогичную табл. 4.1, в каждой своей ячейке формирует битовую
размерность — (N, S), как это показано в табл. 4.2.
Таблица 4.2
Матрица задания направления вектора
1 канал N N N N N S S S S S
2 канал S N N N N N S S S S
i канал
m канал S S S S S S S N N N
Такты 1 2 3 4 5 6 7 8 9 п
Задатчик параметров синхронизации (ЗПС) во многом согласуется
своими возможностями и алгоритмом с задатчиком частотно-временных
параметров. Синхронизация может быть потактовой и поцикловой, с
прореживанием или без оного. В качестве синхронизирующего сигнала
может быть любой из биоритмов пациента (пульс, частота дыхания,
скорость распространения нервных импульсов и т.д.), выбираемых де-
кодером (ДК). Вопрос использования датчиков синхросигналов будет
рассмотрен отдельно.
Процессорный блок системы в соответствии с заданными парамет-
рами и последовательностью формирует электрические сигналы и уп-
равляет работой силовых источников СИ. Силовые источники СИ1, СИ2
и др., количество которых определяется числом независимых каналов
управления, нагружены непосредственно на индукторы, формирующие
конфигурацию магнитного поля. Даже для создания относительно не-
106
Глава 4
больших магнитных полей (порядка 5 мТл), требуются источники с
силой тока в несколько ампер и мощностью около 100 Вт в каждом
канале. Поэтому в СИ используются достаточно мощные транзисторные
или тиристорные ключи.
В структуре, представленной на рис. 4.1, для изменения параметров
поля и его конфигурации, например, при смене пациента, требуется
заново воспользоваться всеми задатчиками и перенастроить блок управ-
ления. Причем определено, что для каждой патологии требуется своя
конфигурация магнитного поля и можно сформировать определенный
банк конфигураций, из которого выбирать требуемую в зависимости от
состояния пациента и его заболевания.
Тогда структура блока управления модифицируется к виду, пред-
ставленному на рис. 4.2.
Рис. 4.2. Аппаратно-программная структура блока управления
Здесь структура снабжена тремя дополнительными блоками: блоком
создания и модификации конфигурации магнитного поля (КМП), ин-
формационным блоком КМП и блоком-декодером КМП.
Блок создания и модификации КМП служит для получения новой
или модифицированной конфигурации, учитывающей новые виды па-
тологии, либо индивидуальные особенности пациента, причем конфи-
гурации после создания заносятся в информационный блок КМП, от-
куда в доли секунды может быть вызвана и запущена любая из них.
Информационный блок хранит набор конфигураций для стандарт-
ных патологий, по которым уже отработана методика и получены явно
положительные результаты. Каждая методика для экономии памяти хра-
нится в сжатом виде и может быть вызвана для эксплуатации. Доста-
точно несложно создать информационный банк на несколько десятков
конфигураций. Информационный блок может наполняться новыми
КМП, либо менее эффективные КМП могут заменяться более эффек-
тивными.
Методы и средства формирования сигналов
107
Так как конфигурация хранится в информационном банке в сжатом
виде, то при выборе конкретной реализации КМП она должна быть
декодирована и в виде параметров заложена в задатчики. Из структуры
рис. 4.2 видно, что ее реализация может быть как аппаратной, так и,
во многом, программной, в зависимости от наполнения процессорного
блока.
В структурах по рис. 4.1 и 4.2 реализована концепция детермини-
рованного управления и выбора КМП в зависимости от желания и
профессионального видения лечащего врача-оператора. Некоторая связь
с пациентом через датчики синхронизации вряд ли может изменить эту
концепцию априорной детерминированности. Поэтому в рассматривае-
мой системе ключевой фигурой является врач, назначающий или фор-
мирующий процедуру. Естественно, что врачу необходимо помочь при
получении информации как о заболевании пациента, так и в процессе
лечения о его текущем состоянии и направлениях изменений параметров
воздействий. Для этого необходимо сформировать измерительно-диа-
гностическую систему, отслеживающую изменения состояния пациента
в процессе лечения и выдающую необходимую информацию для орга-
низации коррекции в процедуре лечения. Завершающим этапом является
организация обратной связи, когда данные с измерительно-диагности-
ческой системы после соответствующей обработки используются для
изменения конфигурации магнитного поля с целью получения более
действенного лечебного эффекта. Подобная обобщенная структура по-
казана на рис. 4.3.
Рис. 4.3. Замкнутая структура блока управления
108
Глава 4
В этой структуре датчики измерительно-диагностической системы
подключены к пациенту на время процедуры магнитотерапии. Данные
с системы поступают в процессорный блок, где после соответствующей
обработки целенаправленно изменяют параметры используемой КМП.
Наиболее сложным здесь является алгоритм обработки и изменения
КМП, который, безусловно, должен иметь заданные ограничения и по-
стоянно контролироваться лечащим врачом. Для этого комплекс должен
иметь развитое отображающее устройство, показывающее как состояние
пациента, так и состояние всего аппаратно-программного комплекса.
Структура, приведенная на рис. 4.3, должна обладать элементами искус-
ственного интеллекта и непрерывно совершенствоваться в процессе ис-
следования и эксплуатации.
В следующих разделах будет прослежена цепь создания конкретных
систем комплексной магнитотерапии, постепенно прогрессирующих от
структуры рис. 4.1 к структуре рис. 4.3.
4.2. Полимагнитная система «Звезда»
Одна из первых систем общего воздействия, созданная в 70-х годах
нынешнего столетия, полимагнитная система «Звезда» [4] состояла из
магнитного скафандра и электронного блока управления. Система, в
основном, предназначалась для исследовательских целей. При ее разра-
ботке ставилось несколько задач:
— исследовать воздействие магнитного поля на весь организм па-
циента;
— исследовать влияние различных видов динамического поля (бе-
гущего от центра к периферии, от периферии к центру, пульси-
рующего в пространстве, реверсивно перемещающегося и др.);
— исследовать влияние различных скоростей перемещения магнит-
ного поля в пространстве;
— исследовать влияние различных интенсивностей поля;
— исследовать влияние различных частот изменения динамического
магнитного поля;
— исследовать эффекты, связанные с синхронизацией динамики
поля и основных биоритмов человека;
— оценить лечебный эффект и получить первые рекомендации по
практическому клиническому применению.
В соответствии с поставленными задачами, выполнено несколько
макетных образцов, структуры которых основывались на базовой схеме
(рис. 4.1). В конкретной реализации структурная схема полимагнитной
системы «Звезда» была представлена в виде, показанном на рис. 4.4.
Генератор импульсов (G) с перестраиваемой частотой тактирует ра-
боту программного логического блока (ПЛБ), который по желанию опе-
ратора формирует программу и последовательность включения и выклю-
чения 8-и регулируемых источников тока (РИТ). Каждый РИТ нагружен
Методы и средства формирования сигналов
109
а б з
Рис. 4.4. Структура полимагнитной систе-
мы «Звезда»
на соленоиды магнитного скафандра — оконечного устройства системы.
Магнитный скафандр состоит из блоков многосекционных соленоидов,
предназначенных для отдельного охвата всех макрочастей человека (го-
ловы, рук, ног, туловища).
Каждый блок многосекционных соленоидов включает 8 независи-
мых соленоидов по 1000 витков в каждом, внутренний диаметр которых
согласован с размерами соответствующей части тела человека. Подклю-
чение соленоидов к РИТам показано на рис. 4.4, из которого видно,
что РИТ1 с выходом «а» нагружен на соленоиды группы «а», РИТ2 с
выходом «б» соответственно нагружен на соленоиды группы «б» и т.д.
Ток каждого регулируемого источника тока контролируется устройством
отображения, которое сформировалось в панорамное индикаторное уст-
ройство.
Рассмотрим подробнее устройство каждого из блоков структуры
рис. 4.4. Схема генератора показана на рис. 4.5. Основу схемы составляет
блокинг-генератор на тран-
зисторе VT2 и трансформато-
ре Тр1. Основная задача, ко-
торая решалась в рамках этой
схемы, — это обеспечение
большого диапазона регули-
рования частоты (0,01... 100)
Гц и получение инфранизкой
частоты следования импуль-
сов (0,01 Гц). Для этой цели
повышение чувствительности
блокинг-генератора к сраба-
тыванию при малых токах
110
Глава 4
разряда емкости С1 достигается дополнительным транзистором VT1, а
обеспечению малого тока разряда емкости для инфранизкой частоты
способствует включение диода VD1, устраняющего разряд через входную
цепь транзистора блокинг-генератора. Ток разряда осуществляется через
стабилизатор тока на транзисторе VT3. Значение тока разряда, а следо-
вательно и период срабатывания блокинг-генератора, регулируется ре-
зистором R1.
Схема программного логического блока показана на рис. 4.6. Схема
состоит из четырехразрядного двоичного счетчика СТ2, дешифратора
DC, коммутатора из восьми блоков по 16 ключей в каждом и восьми
логических сборок ЛС. С помощью ключей коммутатора на логические
Рис. 4.6. Программатор полимагнитной системы «Звезда»
сборки можно подать любую из комбинаций 16-и последовательностей
импульсов. Коммутатор сформирован в виде программируемого поля,
показанного на рис. 4.7. Одна строка поля соответствует одному блоку
ключей, подключенных к логической сборке одного канала РИТ. Зам-
к
а
н
а
л
ы
Рис. 4.7. Панель программатора
Методы и средства формирования сигналов
111
кнутое положение ключа соответствует подключенному такту, разомкну-
тое — выключенному. На рис. 4.7 зачерненные элементы поля соответ-
ствуют замкнутому положению ключа. Логические сборки обеспечивают
функцию дизъюнкции шестнадцати входных сигналов. На выходе каж-
дой сборки формируется последовательность импульсов во времени в
зависимости от замкнутых ключей коммутатора одного из блоков. Сиг-
нал с выхода каждой сборки поступает на регулируемый источник тока.
Схема регулируемого источника тока вместе со схемой индикации
в данном канале показана на рис. 4.8. На транзисторе VT1 собрана
схема, стандартизирующая амплитуду импульсов, поступающих на вход
со сборки. Транзисторы VT2 и VT3 усиливают сигнал по мощности и
управляют выходным источником тока, собранным на мощном транзис-
Рис. 4.8. Регулируемый источник тока
торе VT4. Регулировка тока осуществляется резистором R5, установлен-
ным в цепи эмиттера транзистора VT4. Ток регулируется в пределах от
0,1 до 1 А. Измерительное сопротивление R6 небольшой величины слу-
жит для измерения тока в соленоидах. Индикация значения тока в
соленоидах осуществляется с помощью линейного газоразрядного при-
бора ЛИ1 со стандартной схемой включения. Восемь линейных газораз-
рядных приборов объединены в панорамный индикатор, на котором
отображаются не только значения токов в каналах, но и контролируется
правильность последовательности включения.
Внешний вид блока управления полимагнитного комплекса «Звезда»
(программируемая полимагнитная система ППС-5) показан на рис. 4.9,
а магнитного скафандра — на рис. 3.17.
4.3. Аппарат полимагнитный терапевтический
«Аврора МК-01»
Продолжительный опыт использования систем класса «Звезда» в
клинической практике выявил ряд недостатков и ограничений по функ-
112
Глава 4
Рис. 4.9. Внешний вид блока управления ППС-5 системы «Звезда»
циональным и техническим возможностям аппаратуры. Созданию более
совершенной разработки послужило и общее развитие элементной базы,
а также требования по подготовке к промышленному производству. В
своей основе новая разработка сохраняет лишь идею общего воздействия
магнитным полем на организм пациента, но принципиально отличается
от предшествующих аппаратов способом формирования импульсных
магнитных полей, количеством дозируемых параметров поля, дискрет-
ностью и точностью дозировки, а также новизной и оригинальностью
конструкции магнитоскана (скафандра), конструкцией источников из-
лучения электромагнитного поля — индукторов, обеспечивающей эф-
фективное воздействие на пациента и исключительно малое излучение
во внешнее пространство [5, 7]. Отличительные особенности позволили,
с одной стороны, сделать аппаратуру более экономичной, а с другой
стороны повысить лечебный эффект и расширить область применения
для других видов заболеваний. Основным показателем эффективности
данной разработки служит гораздо более широкий набор задаваемых
параметров магнитного поля, возможности их изменения и контроля. К
ним относятся:
— изменяемый вектор магнитного поля;
— уровень магнитной индукции;
— частота магнитной волны;
— форма магнитной волны за период;
— фоновая (постоянная) составляющая магнитного поля;
— пространственное распределение магнитного поля;
— синхронизация частоты магнитного поля с частотой сердечных
сокращений с изменяемой кратностью.
Сочетание различных режимов работы, вариация параметров поля
и их значений позволяет задавать большое многообразие лечебных ме-
тодик и адаптировать воздействие индивидуально к больному. Конкрет-
ное исполнение узлов аппарата на элементах цифровой техники делает
Методы и средства формирования сигналов
113
возможным устанавливать перечисленные параметры поля кодом или
программировать вид воздействия.
Аппарат «Аврора МК-01» состоит из двух функционально самосто-
ятельных частей: блока управления (электронная управляющая часть) и
магнитоскана (системы индукторов, объединенных по заданной элект-
рической схеме и формирующих заданное поле).
Установка параметров поля производится оператором на передней
панели прибора. Выходом блока управления являются восемь независи-
мых токовых шин, к которым подключаются индукторы в качестве на-
грузки. Поскольку ток, протекающий по индукторам, вызывает пропор-
циональное значение магнитной индукции, то все установленные пара-
метры тока адекватны параметрам магнитного воздействия. Таким
образом, основным элементом блока управления является силовой ис-
точник тока по каждому независимому каналу с изменяемыми парамет-
рами, и все вышеперечисленные параметры магнитного поля адекватно
в виде параметров тока задаются в аппарате «Аврора МК-01» и, следо-
вательно, определяют его структуру, представленную на рис. 4.10.
Блок управления (БУ) выполняет два основных назначения: задание
(управление) необходимых параметров тока через индукторы магнитос-
кана и контроль (отображение) этих параметров в режимах «установка»
и «работа», т.е. с отключенной и подключенной нагрузкой (магнитос-
каном).
В соответствии с назначением БУ можно представить в виде средств
управления и средств отображения, которые выполняют следующие
функции:
— включение и выключение аппарата;
— задание и отображение направления вектора магнитной индукции
по восьми независимым каналам;
— задание и отображение уровня магнитной индукции отдельно по
каждому каналу от 0 до 5 мТл;
— задание и отображение уровня фона магнитной индукции (по-
стоянной составляющей), общего для всех каналов, от 0 до 1 мТл;
— задание и отображение частоты волны от 0 до 100 Гц;
— задание и отображение временной последовательности импульсов
тока на периоде заданной частоты магнитной волны;
— задание непрерывной синхронизации от внутреннего таймера или
ждущей синхронизации от внешнего датчика пульса;
— задание внешнего ритма с понижением его кратности от 1 до 4
раз;
— задание режима установки параметров с отключением магнитос-
кана и режима работы с формированием магнитного поля в маг-
нитоскане.
Таким образом, функциональный состав БУ обеспечивает преобра-
зование управляющих воздействий в соответствующие токи индукторов
по восьми независимым каналам и отображение необходимой инфор-
мации. Средства управления и отображения образуют в БУ панель за-
114
Глава 4
Рис. 4.10. Структура полимагнитной терапевтической системы «Аврора МК-01»
дания и индикации, причем при соответствующем выборе возможно
совмещение некоторых функций управления и отображения, когда со-
стояние органа управления одновременно несет информацию о тех или
иных характеристиках процесса. Измерение и контроль динамики маг-
нитного поля осуществляется в режиме работы путем съема значений
токов, протекающих через магнитоскан.
В результате всех перечисленных функдий и технических возмож-
ностей структура аппарата «Аврора МК-01» сводится к следующей пос-
ледовательности блоков (рис. 4.10):
— таймер-распределитель с задатчиками внешнего режима и внут-
ренней частоты;
— коммутатор (КП) временной последовательности импульсов с за-
датчиком и индикатором;
— восемь силовых источников (СИ) с задатчиком и индикатором
уровня (силы) тока;
— коммутатор (КН) направления протекания токов «север-юг» (N-
S);
— магнитоскан (система электромагнитов);
— переключатель (SW) режима «установка» или «работа» (Уст/Раб);
— задатчик (ЗФ) уровня фона.
Раскроем более подробно функциональный состав и назначение бло-
ков магнитотерапевтического аппарата.
Таймер-распределитель предназначен для выработки импульсной
временной последовательности заданной частоты по принципу бегущей
волны в непрерывном режиме и режиме внешнего запуска. Обеспечивает
формирование последовательности из шестнадцати импульсов и возмож-
ность ступенчатого понижения частоты внешнего запуска в два и четыре
раза. Функциональная схема таймера-распределителя представлена на
рис. 4.11. Таймер-распределитель состоит из преобразователя кода (ПК),
Методы и средства формирования сигналов
115
Рис. 4.11. Функциональная схема таймера-распределителя
преобразователя «напряжение-частота» (ПНЧ), распределителя (Р), ум-
ножителей (У), задатчика ритма (ЗР), триггера (Тг), переключателя SW
"Ритм".
Электромеханический задатчик кода (ЗК) с переключателем SW
"Частота", расположенный на передней панели аппарата, служит для
установки и отображения двумя десятичными разрядами значения час-
тоты. ПК предназначен для преобразования двоично-десятичного кода,
поступающего от ЗК, в двоичный код. ПНЧ служит для преобразования
двоичного кода в частоту следования импульсов. Распределитель (Р)
предназначен для преобразования частоты во временную последователь-
ность из шестнадцати импульсов. Умножитель (У) служит для обеспе-
чения светодиодной индикации последовательности импульсов в индук-
торах магнитоскана. ЗР предназначен для задания режима внешнего
запуска и управления кратностью понижения частоты внешнего запуска.
Тг служит для организации ждущего режима работы таймера-распреде-
лителя при внешнем запуске.
Таймер-распределитель работает следующим образом. Двоично-деся-
тичный код частоты, поступающий от ЗК, преобразуется с помощью ПК
в двоичный. ПНЧ формирует на своем выходе последовательность импуль-
сов, частота следования которых (в герцах) равна установленному с помо-
щью ЗК значению. Импульсы, поступающие на Р, последовательно выда-
ются на его выходы, начиная с первого и заканчивая шестнадцатым, об-
разуя бегущую волну из шестнадцати тактов. В непрерывном режиме Тг
удерживается постоянным сигналом по входу «Уст. 1» в положении, раз-
решающем генерацию в ПНЧ. В синхронном режиме (внешнего запуска)
импульс с шестнадцатого выхода Р сбрасывает Тг, который блокирует ПНЧ.
Триггер Тг вновь устанавливается в единичное положение по сигналу от
ЗР, который пропускает каждый 1-й (2-й, 3-й, 4-й) сигнал от датчика
пульса в зависимости от положения переключателя ритма.
Коммутатор последовательности КП предназначен для задания тре-
буемой временной последовательности включения или выключения тока
по каждому из восьми каналов в моменты времени, определенные шест-
116
Глава 4
Рис. 4.12. Схема программатора системы «Аврора МК-01»
надцатью тактами установленной частоты. Функциональная схема ком-
мутатора КП представлена на рис. 4.12. Коммутатор (программатор)
состоит из наборного поля в виде матрицы 16x8 и формирователей
уровней (ФУ). Наборное поле представляет собой 128 микропереключа-
телей (SW1...SW128) и светодиодов (VD1...VD128), включенных в узлы
матрицы, т.е. в местах пересечения строк (каналов) и столбцов (тактов)
матрицы. ФУ служат для согласования уровней ТТЛ-логики с опорными
уровнями ЦАП на входах СИ. Светодиоды обеспечивают индикацию
задаваемой временной последовательности независимо в каждом канале.
Индикатор уровней предназначен для отображения динамики маг-
нитного поля в магнитоскане и относительного значения магнитной
индукции и фона в каждом из восьми каналов управления. Индикатор
также позволяет контролировать рабочее состояние аппарата по наличию
подсветки в элементах индикации. Функциональная схема индикатора
уровней одного канала
представлена на рис. 4.13.
Индикатор состоит из вось-
ми идентичных схем, содер-
жащих усилитель У, схему
управления СУ и линейный
газоразрядный индикатор
ЛИ. На вход усилителя по-
канапа
Рис. 4.13. Индикатор уровня индукции систе-
мы «Аврора МК-01»
ступает сигнал от соответствующего силового источника тока, где амп-
литуда его повышается до необходимого уровня. Схема управления обес-
печивает вначале поджег вспомогательного катода, а затем основного
катода элемента индикации. При подключенном напряжении анода воз-
никает тлеющий разряд в виде светящегося столбца, длина которого
пропорциональна значению тока, протекающего по каналу управления.
Силовые источники тока (СИ) предназначены для формирования
импульсов тока заданного уровня в соответствии с последовательностью
управляющих импульсов, поступающих от коммутатора последователь-
Методы и средства формирования сигналов
117
ностей. Заданный уровень фона (ЗФ) предназначен для управления по-
стоянной составляющей тока на выходе всех СИ. На рис. 4.14 представ-
лены функциональные схемы одного силового источника СИ (остальные
идентичны), задатчика уровня фона (ЗФ) и схемы режима с начальным
сбросом. СИ состоит из входного регистра-счетчика (РСч1), шинного
формирователя (ШФ1), цифро-аналогового преобразователя (ЦАП1),
операционного усилителя (ОУ1), широтно-импульсного модулятора
(ШИМ), выходного ключевого транзистора (VT), дешифрирующего
Рис. 4.14. Функциональная схема силового источника тока
системы «Аврора МК-01»
118
Глава 4
диода (VDfl), фильтра частоты 25 кГц (L,C), ограничивающего диода
(VDorp), измерительного резистора (ЯД резистора обратной связи (R^),
резистора защиты (R3), схемы защиты (СЗ), резистора фона (Яф), ключа
1 (Кл1), ключей 2 (Кл2), схем И (& 1.1, & 1.2). ЗФ состоит из входного
регистра-счетчика (РСч2), шинного формирователя (ШФ2), цифро-ана-
логового преобразователя (ЦАП2), операционного усилителя (ОУ2), ге-
нератора опорного напряжения (ГОН), генератора частоты перемещения
(ГЧП).
Схема режима и сброса состоит из схемы начального сброса (ССб),
задающей цепочки (VDC и Сс), триггера установка-работа (Тг), схемы
ИЛИ (1), схемы И (& 2.1, & 2.2), светодиодного индикатора (VDH)
«установка — работа».
В момент включения тумблера «Сеть» схема начального сброса
(ССб) формирует импульс, которым прежде всего обнуляются входные
регистры-счетчики (РСч) ЗФ и всех СИ по входу R. Этим же импульсом
производится автоматическая установка триггера режима работы (Тг) в
единичное состояние по прямому выходу. Кроме того, в режиме уста-
новки отключаются выходные транзисторы (VT) путем блокировки по
входу стробирования широтно-импульсного модулятора (ШИМ) через
схему защиты (СЗ), а индикаторы уровней переключаются с выхода
измерительного резистора (RH) на выход операционного усилителя (ОУ).
По истечении 3-х секунд может производится установка параметров
тока в каналах с помощью переключателя SW1, расположенного на
передней панели. В автономном режиме частота 1 Гц, формируемая
генератором частоты перемещений (ГЧП), поступает на все схемы И
(&), проходит на входы сложения (+) или вычитания (-) входных реги-
стров счетчиков (РСч), если дается разрешение переключателем SW1 на
увеличение или уменьшение кода. Счетчики работают в выбранном на-
правлении до устанавливаемого значения. Выходной код счетчика по-
дается на цифро-аналоговый преобразователь (ЦАП) и при условии под-
ключенного опорного напряжения (-СОП|) ключом 1 (Кл1) преобразуется
в пропорциональное напряжение на выходе операционного усилителя
(ОУ). Ключ 2 (Кл2) замыкает данное напряжение на индикатор уровней,
который отображает устанавливаемое значение тока по данному каналу.
Установка значения фона производится аналогичным образом, толь-
ко с помощью общего переключателя фона. Напряжение, пропорцио-
нальное установленному коду фона, преобразованное в ток на резисторах
Вф, суммируется с токами в каналах и присутствует в виде постоянной
составляющей. В режиме установки шинные формирователи (ШФ) от-
ключены от общей шины данных потенциалом «Вывод».
После всех возможных установок параметров аппарат переключают
в режим работы. При этом триггер режимов (Тг) переходит в нулевое
состояние по прямому выходу, светодиод (VDH) гаснет. Ключ 2 (Кл2)
подсоединяет индикатор на выход измерительного резистора (RH), сни-
мается блокировка с широтно-импульсного модулятора (ШИМ) через
схему защиты (СЗ) и тем самым подключается выходной транзистор
Методы и средства формирования сигналов
119
(VT) к цепям управления. Напряжение, пропорциональное коду уста-
новленного тока канала, сравнивается с опорным пилообразным сигна-
лом частотой 25 кГц в широтно-импульсном модуляторе (ШИМ) и пре-
образуется соответственно в длительность импульсов, переключающих
выходной транзистор (VT). В этом случае транзистор работает в ключе-
вом режиме, что резко повышает его КПД. Далее фильтром (L,C) вы-
деляется среднее из модулированного сигнала, или заданная форма и
значение тока, который, протекая по нагрузке (индуктору) и последо-
вательно включенному с ней измерительному резистору (RH), формирует
сигнал обратной связи через резистор (R^) для стабилизации заданного
тока.
В случае короткого замыкания нагрузки или замыкания нагрузочных
проводов на корпус резко возрастает ток в цепи транзистора, что при-
водит к увеличению падения напряжения на резисторе защиты (R^ и
вызывает срабатывание схемы защиты и отключение транзистора от цепи
управления. Индикатор соответствующего канала гаснет, что свидетель-
ствует о неисправности цепи управления и сигнализирует оператору о
необходимости отключения аппарата. Блок управления запитывается от
вторичного источника питания импульсного тока, выполненного по ори-
гинальной схеме с высоким КПД и общей выходной мощностью около
800 Вт.
Внешний вид блока управления магнитотерапевтического комплекса
«Аврора МК-01» показан на рис. 4.15.
Рис. 4.15. Внешний вид блока управления МТА «Аврора МК-01»
Магнитоскан, схема объединения индукторов, его конструкция,
параметры и техническое исполнение индуктора подробно описаны в
других разделах книги, поэтому здесь не рассматриваются.
120
Глава 4
4.4. Аппаратно-программный комплекс управления
динамическим магнитным полем «Аврора МК-02»
Комплекс предназначен для формирования 16-и независимых токов
либо напряжений, регулируемых по значению, длительности тактов, по-
лярности, моментам включения и выключения, причем все параметры
регулируются независимо в пределах 32-х тактов работы.
Аппаратно-программная структура комплекса представлена на
рис. 4.16, а структура аппаратной части показана на рис. 4.17 [2, 3].
Комплекс (рис. 4.17) включает блок создания или модификации
конфигурации магнитного поля (КМП), под которой понимается кон-
кретная последовательность появления выходных токов с заданными
интенсивностями, атрибутами и длительностями. Набор сформирован-
ных КМП, в том числе и записанных ранее, хранится в информацион-
ном банке КМП на носителях (постоянных запоминающих устройст-
вах — ПЗУ), перепрограммируемом ПЗУ (ППЗУ) и энергонезависимом
оперативном запоминающем устройстве (ОЗУ). Конфигурации хранятся
в сжатом виде для экономии памяти.
Рис. 4.16. Аппаратно-программная структура системы «Аврора МК-02»
Для работы выбранный файл КМП вначале декодируется. При этом
параметры интенсивности размещаются в специальном, независимо (от
процессора) опрашиваемом оперативном запоминающем устройстве
(СпОЗУ) с помощью счетчика СТА и регистра RGA адреса, а частот-
но-временные параметры с атрибутами (полярность, модуляция) зано-
сятся в ОЗУ процессора и находятся под его постоянным наблюдением.
При этом частотно-временные параметры в работе процессором пере-
носятся в специальные таймеры и по ним процессор формирует вре-
менные интервалы. Процессорный блок имеет пользовательское про-
Методы и средства формирования сигналов
121
граммное обеспечение для синтеза КМП, вывода и декодирования и,
наконец, для работы в реальном масштабе времени.
Силовые источники (СИ) токов (16 шт.) воспринимают информа-
цию в виде 16-и разрядного кода по принципу один разряд — один
силовой источник (СИ). Два дополнительных входа на СИ определяют
его атрибутику (полярность, модуляцию). Пример формата сигнала на
одном из любых выходов комплекса, например, СИ1 показан на
рис. 4.18.
Рис. 4.18. Пример формата сигнала на выходе одного
из силовых источников тока
Основу сигнала составляет цикл состояний из 32-х тактов. В свою
очередь, каждый такт разделяется на два интервала: интервал такта (тт)
и интервал паузы (тп), причем каждый из них задается отдельно. Ин-
тервал такта заполняется заданным по интенсивности, полярности и
122
Глава 4
частоте модуляции выходным током. Длительность любого интервала
такта устанавливается независимо от других интервалов и находится в
диапазоне от 10 мс до 4 с.
Интервал паузы заполняется нулевой интенсивностью, а длитель-
ность ее находится в диапазоне от 0 до 4 с и также независима от других
интервалов. Для паузы предусмотрена возможность заканчиваться по
внешнему сигналу, что дает возможность синхронизироваться, напри-
мер, биоритмами пациента.
В интервале такта возможны следующие атрибуты интенсивности
тока:
— положительной полярности 32-х уровней (см. 1, 2 такты);
— отрицательной полярности 32-х уровней (см. 3, 4 такты);
— модулированной заданной частотой fm положительной полярности
(см. 5-й такт);
— модулированной заданной частотой отрицательной полярности;
— модулированной заданной частотой двухполярной интенсивности.
Уровень интенсивности формируется с помощью ШИМ-сигнала,
подаваемого от независимо опрашиваемого СпОЗУ на силовые источ-
ники токов.
Для примера рассмотрим формирование интенсивности Ij для пер-
вого такта (т1т), при этом будем считать, что в силовом источнике СИ1
ток I, = 17 (семнадцатый уровень интенсивности). ШИМ-сигнал для
первого такта СИ1 показан на рис. 4.19, а, а ШИМ-сигнал для другого
выхода (СИ2) с уровнем 13 показан на рис. 4.19, б. Частота ШИМ-сиг-
нала превышает 20 кГц, поэтому специальные фильтры, расположенные
в силовых источниках, преобразуют ШИМ-сигналы в сигналы квазипо-
стоянного тока.
Рис. 4.19. Формирование разных интенсивностей в каналах за счет
ШИМ-модуляции
На рис. 4.19 можно также заметить, что начальные фазы ШИМ-
сигналов в разных СИ сдвинуты друг относительно друга, что позволяет
равномернее распределять нагрузки на источник питания и ослабить
импульсную помеху.
Методы и средства формирования сигналов
123
Работу программно-аппаратного комплекса «Аврора МК-02», внеш-
ний вид которого представлен на рис. 4.20, можно разделить на три
этапа.
Первый этап — создание либо модификация конфигурации магнит-
ного поля (КМП). Этот этап поддерживается программой SINTEZ. Здесь
можно вызвать любую из конфигураций, хранящихся в виде файлов в
информационном банке КМП, либо начать с «пустого» файла-конфи-
гурации.
На экране дисплея возникает обобщенная модель конфигурации
магнитного поля (КМП) в виде 16-ти форматов сигналов, пример для
одного из которых показан на рис. 4.21. Под каждым тактом высвечи-
ваются цифровые значения длительности интервала такта, интенсивнос-
ти и длительности интервала паузы.
Выбор параметра установки осуществляется с помощью подвода
маркера к соответствующему местоположению параметра. По команде
установки формат сигнала увеличивается на весь экран, чтобы повысить
точность установки. Затем перемещением маркера устанавливаются не-
обходимые интенсивности и атрибуты в каждом такте формата сигнала.
Длительности интервалов такта и интервалов пауз устанавливаются под-
водом маркера к соответствующему местоположению на экране и пос-
ледовательным набором цифр. После формирования или модификации
новая КМП записывается в виде файла с заданным именем в инфор-
мационном банке КМП.
Рис. 4.20. Внешний вид аппаратно-программного комплекса «Аврора МК-02»
124
Глава 4
Второй этап — выбор КМП, декодирование и размещение парамет-
ров. Этот этап поддерживается программой ZAGR. Здесь выбранная
КМП показывается на экране дисплея в виде обобщенной модели со
всеми графическими и буквенно-цифровыми данными.
Одновременно все параметры КМП, записанные, как было указано
выше, в сжатом виде, декодируются и размещаются в заданных местах
комплекса. Так, значение интенсивности в каждом такте, хранящееся в
цифровом виде в КМП (6-разрядный код), преобразуется в ШИМ-сиг-
нал следующим образом. Уровень интенсивности, например, 17 преоб-
разуется в последовательность 17 единиц и 47 нулей, состоящую из 64-х
бит, а уровень интенсивности, например, 13 преобразуется в последо-
вательность 13 единиц и 51 нуля, состоящую из 64-х бит. Полученные
последовательности заносятся в специальное СпОЗУ (16-и разрядное
ОЗУ) в младшие 6 разрядов, старшие 5 разрядов которого выбираются
в зависимости от номера такта в цикле. Данное СпОЗУ является внеш-
ним для процессора и призвано, в основном, работать самостоятельно
под управлением своего генератора и счетчика адреса. Только в режиме
декодирования и записи адресация данного ОЗУ переходит к процессору.
Значения длительностей интервалов такта, интервалов пауз, частот
модуляции, а также атрибутики, записанные в КМП в виде мантиссы
и порядка, преобразуются в целые числа и записываются в процессорном
ОЗУ, где находятся под полным контролем процессора.
Третий — этап непосредственной работы (генерирование КМП и ее
контроль в реальном масштабе времени). Этап можно проследить по
Рис. 4.21. Обобщенная модель конфигурации магнитного поля
Методы и средства формирования сигналов 125
структуре рис. 4.17 и формату сигнала (рис. 4.18 и рис. 4.19). Работа
поддерживается программой RABOT. Вначале процессор устанавливает
старшие адреса СпОЗУ, относящиеся к первому такту интенсивности
(рис. 4.18), а младшие разряды начинают перебираться специальным
счетчиком адреса СчА с высокой частотой f0 (около 2 МГц). Так как в
каждом разряде СпОЗУ записана последовательность единиц и нулей по
образцу рис. 4.19, то на выходе его каждого разряда появляется ШИМ-
сигнал установленной интенсивности первого такта. Одновременно в
один из таймеров заносится код интервала такта интенсивности, а в ре-
гистры атрибутики заносятся коды полярностей и модуляции первого
такта для каждого разряда, а, по существу, — для каждого выхода. Ком-
плекс начинает вырабатывать по всем 16-и выходам ШИМ-сигналы 1-го
такта. Так как формирование ШИМ-сигналов идет при этом без участия
процессора, то последний переключается на обслуживание программы
CONTROL, которая призвана контролировать токи на выходах СИ с по-
мощью АЦП и отображать на экране действительную картину работы.
При этом периодически процессор возвращается к таймеру, отсле-
живая оставшееся время на первый такт интенсивности. Как только
интервал на первый такт заканчивается, процессор заносит в этот же
таймер значение интервала паузы, обнуляет все выходы СИ, и снова
переходит на обслуживание программы CONTROL, отслеживая в то же
время оставшееся время на паузу. По окончании паузы процессор пере-
ключает старшие адреса СпОЗУ, соответствующие второму такту интен-
сивностей, считывает код интервала второго такта интенсивностей, за-
носит последний в таймер, считывает и заносит в регистр RG значение
атрибутики на каждом выходе. Комплекс начинает вырабатывать по всем
16-и выходам ШИМ-сигналы 2-го такта. Освободившийся на время
такта процессор снова переходит на обслуживание программы CON-
TROL, которая продолжает отображать действительную картину токов
на экране дисплея. С окончанием времени 2 такта интенсивностей про-
цессор включает интервал паузы аналогично первому такту.
С началом 3-го такта процессор повторяет алгоритм, изложенный
выше для первых двух тактов, и так до 32-го такта или, если в служебной
ячейке № 14 выбранной КМП записано число, меньшее 32-х, то до
номера такта, записанного в ячейке № 14 служебной информации вы-
бранного файла КМП. При этом в конце цикла процессор оценивает
оставшееся время всей процедуры и, если время остается, то процессор
возвращается к первому такту работы комплекса. Работа подобным об-
разом продолжается до окончания времени всей процедуры, значение
которой записано в служебной ячейке № 15 выбранной КМП и запи-
санной процессором в специальном таймере. Еще один таймер исполь-
зуется для генерации частоты модуляции fm, значение которой устанав-
ливается вместе с установкой атрибутики на каждом такте. В процедуре,
поддерживаемой программой CONTROL, осуществляется визуальный
контроль за работой комплекса и сравнение действительных параметров
с заданными.
126
Глава 4
С самого начала при выборе файла КМП, как отмечалось выше, на
экране дисплея появляется обобщенная модель выбранной КМП. При
включении на работу обобщенная модель приобретает полутоновое изо-
бражение и только конкретно в данный момент часть формата, соот-
ветствующая работающему такту, высвечивается полной яркостью в те-
чение полного времени данного такта. По окончании очередного такта
и включении следующего полная яркость перемещается на соседнюю
часть формата. Одновременно действительные значения интенсивностей
на 16 выходах комплекса измеряются с помощью АЦП, вводятся в
процессор, сравниваются с заданными значениями и в виде знаков от-
клонения демонстрируются на экране, что позволяет однозначно оце-
нивать нормальную работу комплекса в процессе проведения процедуры.
Описание программы декодирования загрузки и работы.
Программа состоит из двух блоков: программы распаковки-декоди-
рования и программы загрузки и работы.
Программа распаковки-декодирования включает три процедуры:
— процедура распаковки амплитуд «RASPO»;
— процедура распаковки атрибутов «ATRO»;
— процедура распаковки времен «ТАУО».
В процедуре «RASPO» осуществляются следующие операции:
— выделяется место в ОЗУ на 128 слов, которое предварительно
очищается;
— считываются амплитуды первого такта всех 16 каналов;
— в каждом из них выделяются младшие 5 разрядов;
— преобразуются в последовательность стольких единиц, каков код
в числе, которые заносятся в выделенное место в ОЗУ;
— записанный массив первого такта переносится в буферное запо-
минающее устройство СпОЗУ, которое является внешним по от-
ношению к ЭВМ;
— переключаются на амплитуды следующего такта, которые распако-
вываются аналогично и записываются в СпОЗУ, предварительно
изменив страницу СпОЗУ путем переключения старших разрядов;
— переходят на процедуру «ATRO», при этом в процедуре распа-
ковки атрибутов «ATRO» осуществляются следующие подпроце-
дуры:
— выделяются 6, 7, 8-е разряды массива амплитуд;
— декодируются в соответствии с таблицей кодировки и заносятся
в ОЗУ контроллера в виде распакованного массива атрибутов;
— переходят на процедуру распаковки «ТАУО», в процедуре распа-
ковки времен «ТАУО» осуществляется следующее:
— считывается очередной код временного интервала;
— выделяются пять младших разрядов;
— выделяются три старших разряда;
— пять младших разрядов умножаются на число, равное двум в
степени кода в трех старших разрядах, т.е. сдвигаются влево
столько раз, каков код в выделенных трех старших разрядах;
Методы и средства формирования сигналов
127
— полученное произведение умножается в 15,5 раз и в качестве
16-разрядного кода записывается в массив времен тактов и, ана-
логично, — в массив времен пауз и периодов модуляции, фор-
мируя тем самым три массива времен.
Блок программы загрузки и работы выполняет следующую последо-
вательность операций:
— загружает общее время процедуры в специальный таймер и вклю-
чает его работу на вычитание частотой 50 Гц;
— загружает старшие 5 разрядов адреса запоминающего устройства
СпОЗУ (для первого такта заносится нулевой адрес);
— загружает атрибуты первого такта во внешние регистры управле-
ния силовыми источниками токов;
— загружает время такта в таймер такта, включает его и включает
доступ к счетчику младших разрядов адреса СпОЗУ опорной час-
тоты, начинается работа силовых источников (СИ);
— запускает программу контроля, которая высвечивает на экране
конфигурацию магнитного поля и сравнивает реальные значения
с заданными;
— проверяет состояние таймера такта и, если времени достаточно,
то возвращается к контролю, если же времени мало, то ждет
окончания времени такта;
— с приходом конца времени такта, загружает время паузы в таймер
такта, отключает СИ и ждет конца паузы;
— с приходом конца паузы возвращается к алгоритму загрузки стар-
ших 5-и разрядов адреса запоминающего устройства СпОЗУ, уве-
личивая код последних на единицу, и повторяет все вышеизло-
женные элементы последовательности 32 раза, соответствующие
32-м тактам;
— проверяет состояние таймера времени общей процедуры и, если
время не вышло, то возвращается к алгоритму загрузки адресов
старших разрядов СпОЗУ, обнуляя адрес;
— продолжает исполнять вышеизложенную последовательность до
обнуления таймера времени общей процедуры;
— после обнуления таймера времени общей процедуры останавли-
вает работу и включает звуковой сигнал.
4.5. Магнитотерапевтический комплекс
«Мультимаг МК-03»
Комплекс предназначен для приема с ПЭВМ и запоминания кон-
фигурации магнитного поля с последующим автономным формирова-
нием силовых токов для питания индукторов магнитоскана на время
такта, паузы и цикла магнитотерапевтического комплекса «Мультимаг
МК-03» [11, 13]. Структура всего комплекса представлена на рис. 4.22.
128
Глава 4
Комплекс состоит из следующих блоков:
1. ЭВМ, программно совместимая с IBM.
2. Интерфейс с АЦП, встраиваемый в ЭВМ и имеющий следующие ха-
рактеристики:
— цифровые сигналы: 8 бит — данные, 2 бита — сопровождение;
— аналоговые сигналы: 8 каналов, диапазон ±2 В, разрядность 12
бит, частота дискретизации — 10 кГц.
Рис. 4.22. Структурная схема комплекса «Мультимаг МК-03»
3. Блок управления, в память которого от ЭВМ заносится массив кон-
фигурации магнитного поля и который по команде включается в ра-
боту, формируя силовые токи для питания индукторов магнитоскана.
4. Магнитоскан — специальная кушетка с индукторами для формирова-
ния динамического магнитного поля вокруг пациента.
5. Датчики диагностики, которые формируются в зависимости от ре-
шаемой задачи и в стандартном наборе включают: датчики температу-
ры, реограммы, кардиосигналов, давления крови и др.
6. Диагностическая аппаратура, которая содержит усилительно-преоб-
разующие устройства, воспринимающие сигналы с датчиков и фор-
мирующие нормированные сигналы для подачи на АЦП.
Технические характеристики блока управления:
— число каналов...........................8;
— интенсивность (тока).................до 3 А(±);
— число тактов.........................до 32;
— такты могут разделяться паузами;
— полярность тока независима по каналам;
— пауза независима по каналам;
— для контроля тока имеется выход с каждого канала
с амплитудой...........................до 1 В;
— объем памяти..........................8x2048;
— частота встроенного генератора............2 МГц.
Методы и средства формирования сигналов
129
• цифровой сигнал
----> аналоговый сигнал
Рис. 4.23. Структура блока управления
Ток в индукторах измеряется и поступает
управления для преобразования в АЦП.
Структура блока управ-
ления показана на рис. 4.23.
В память контроллера
СпОЗУ заносится массив
конфигурации магнитного
поля. При работе память
опрашивается встроенным
генератором. Информация в
виде ШИМ-сигнала распре-
деляется по 8 каналам сило-
вых источников (СИ) тока
вместе с заданием поляр-
ности и паузы независимо
по каналам. Каждый сило-
вой источник нагружается
на соответствующие индук-
торы магнитоскана (Ij-I8).
на аналоговый выход блока
Функциональная схема контроллера блока управления приведена на
рис. 4.24. Адрес блока выбирается схемой АБ. Регистр RG1 служит для
адресации регистров и режимов. Запись в RG1 осуществляется сопро-
вождающим сигналом OUTA и только тогда, когда выбран данный блок
схемой АБ. Формат адресации и режимов показан в табл. 4.3.
Данные от ЭВМ распределяются в зависимости от последнего ад-
реса, записанного в регистре RG1. Данные сопровождаются сигналом
OUTB и записываются в следующие регистры:
— регистр адреса памяти RAM, составленный из регистра RG3 (стар-
шие 5 бит) и счетчика СТ2 (младшие 6 бит);
— регистр данных RG2 для памяти RAM;
Рис. 4.24. Функциональная схема контроллера блока управления
130
Глава 4
— регистр полярности RG5;
— регистр паузы RG6.
После занесения всех данных в регистры и в память RAM, в регистр
RG1 заносится сочетание 00 (в разряды а4, аЗ), которое включает блок
управления в режим проверки и контроля правильности установки. Если
же в разряды а4, аЗ занести сочетание 10, то при этом блок управления
включается в режим «работа». В этом режиме внутренний генератор G
(2 МГц) с помощью счетчика СТ2 перебирает младшие 6 разрядов па-
мяти RAM, в котором записаны коды ШИМ-сигналов всех 8 каналов.
Регистр RG4 на выходе RAM формирует ШИМ-сигналы, которые до-
полнительно стробируются паузами с регистра RG6 и поступают на
выход контроллера для управления силовыми источниками СИ.
Таблица 4.3
Формат адресации и режимов
а7 аб а5 а4 аЗ а2 а! аО Назначение
Адрес блока Режим установ. 0 10 0 0 0 10 0 1 0 10 10 0 10 11 0 110 0 0 110 1 0 1110 0 1111 Нет команды Запись в счетчик мл. разр. адреса RAM Запись в регистр ст. разр. адреса RAM Запись в регистр данных RAM Запись в RAM Запись в регистр полярности Запись в регистр пауз Нет команды
Адрес блока Режим контроль 0 0 0 0 0 0 0 0 0 0 0 0 111 Контроль тока 1 -го канала без работы Контроль тока 2-го канала без работы Контроль тока 8-го канала без работы
Адрес блока Режим работа 1 0 0 0 0 10 0 0 1 10 111 Работа и измерение тока 1-го канала Работа и измерение тока 2-го канала Работа и измерение тока 8-го канала
XXX 1 1 X X X Нет команды
В память ШИМ коды записываются на весь цикл работы. Длитель-
ность же такта и паузы отслеживается ЭВМ специальным таймером,
расположенным в интерфейсе. С концом такта или паузы ЭВМ инкре-
ментирует старшие из 5 разрядов памяти RAM, переписывает, возможно
с изменениями, данные по полярности и по паузе и запускает работу
на новый такт или паузу. Код в младших разрядах (а2,а1,а0) регистра
RG1 определяет канал, с которого измеряется ток в индукторах (в форме
напряжения) для выдачи в ЭВМ.
Функциональная схема одного из силовых источников тока СИ по-
казана на рис. 4.25.
Методы и средства формирования сигналов
131
Рис. 4.25. Функциональная схема силового источника
В зависимости от бита полярности (ПОЛ) открыты либо нечетные
ключи (Кл1, КлЗ) и тогда ток в индуктор И поступает одного направ-
ления, либо при другом бите ПОЛ открыты четные ключи (Кл2, Кл4)
и тогда ток в индуктор поступает другого направления. Ключи Кл1 и
Кл2 дополнительно коммутируются сигналом ШИМ, обеспечивая тем
самым регулировку интенсивности тока в индукторе. Пульсация ШИМ
сглаживается фильтром Ф. Резистор R4 служит датчиком перегрузки и
в случае превышения потребления тока в силовом источнике схема
защиты СЗ отключает данный источник. Резистор R0 служит измери-
тельным датчиком тока через индуктор, напряжение с которого через
мультиплексор pS поступает на плату АЦП в ЭВМ. Выбор канала для
измерения осуществляется кодом шины S. Делитель Rl, R2, R3 является
Рис. 4.26. Внешний вид системы электронного формирования токов комплекса
«Мультимаг МК-03»
132
Глава 4
датчиком правильной установки параметров силового источника и его
работоспособности. При контроле установки ключи КлЗ и Кл4 размы-
каются, а сигналы ШИМ через указанные резисторы как через делитель
поступают на мультиплексор и далее в качестве аналогового сигнала —
на вход АЦП в ЭВМ. Ток в индукторе при этом отсутствует.
Внешний вид системы электронного формирования токов комплекса
«Мультимаг МК-03» показан на рис. 4.26.
4.6. Программное обеспечение
магнитотерапевтического комплекса.
Описание программного пакета «МК-03»
Назначение.
Программный пакет «МК-03» предназначен для работы в составе
аппаратно-программного комплекса «Мультимаг МК-03», в сочетании с
IBM-совместимыми ПЭВМ.
Состав пакета:
MK03.EXE; READMY.TXT; *.DAT;
MK03.HLP; MK03.RES; LITR.CHR.
Основные функции.
Исполняемый модуль MK03.EXE позволяет выполнять следующие
функции:
1. Выбор методики',
2. Просмотр параметров методики;
3. Редактирование параметров методики (для версии 2);
4. Работа с комплексом «Мультимаг МК-03» (для версий 1,2);
5. Информация о программе.
При запуске программы на экране появляется основное меню по
вышеперечисленным функциям. Выбор функции осуществляется с по-
мощью клавиш управления курсором (-», *-). При этом перемещается
подсветка функции. Для выбора необходимо нажать клавишу «Enter».
Рассмотрим последовательно выбираемые функции.
Выбор методики.
Данная функция позволяет выбрать файл КМП (конфигураций маг-
нитного поля) с расширением «.DAT» и «.КМР» для последующей ра-
боты или модификации. Пример изображения на экране показан на
рис. 4.27.
Выбор осуществляется с помощью клавиш управления курсором (<-,
Т, X, ->). При этом перемещается подсветка файла. Подтверждение вы-
бора осуществляется клавишей «Enter», отмена выбора — клавишей
«Esc». Выбранная методика графически отображается на экране, один
из примеров которого показан на рис. 4.28. Здесь помимо основного
меню появляется поле КМП, состоящее из нескольких областей.
Методы и средства формирования сигналов
133
Рис. 4.27. Отображение режима «Выбор методики»
Основное поле занято матрицей интенсивностей (8x32), где 8 строк
соответствуют 8 каналам силового блока магнитотерапевтического ап-
парата, а 32 столбца соответствуют тактам во времени подключения
Рис. 4.28. Графическое изображение методики на экране
134
Глава 4
соответствующих интенсивностей в каналах. Длительности тактов могут
быть разными по строкам и отображаются в логарифмическом масштабе
специальной строкой внизу. Здесь же отображаются также в логариф-
мическом масштабе длительности пауз между тактами.
В самом низу экрана появляется область справочной информации:
по виду заболевания, по названию файла, по длительности процедуры.
Справа от основного поля располагается столбец «Отклонения», где во
время работы будет отображаться соответствие установленных парамет-
ров по интенсивностям действительным. Под ним располагается область
высвечивания усредненных временных параметров.
Просмотр параметров позволяет определить конкретные параметры
конфигурации магнитного поля. В этом режиме одна из ячеек основного
поля обрамляется белым цветом, а значения параметров в этой ячейке
отображаются в окне, которое появляется справа на экране. Перемеще-
ние между отдельными элементами поля осуществляется клавишами (<-,
?, X, PgUp, PgDn, End, Home).
Изображение на экране принимает вид, показанный на рис. 4.29. В
окне в правой стороне экрана показываются следующие числовые пара-
метры:
— интенсивность поля; — длительность такта;
— длительность паузы; — параметры модуляции;
— вид модуляции.
Выход
Мультимаг (/<-03
Г" Рязань PI Р' \
Bl (брать методику
I Работа с методикой I
О программе
С р-дняя
1 такта 2л8(мс)
F .иста 4,0 (Гц)
Просмотр
Рис. 4.29. Изображение на экране в режиме «Просмотр!
ПРОСМОТР
ПАРАМЕТРОВ КМП
интенсивность
30
длит такта
2*3 мс
длит, паузы
0 мс
част, модуляция
10 мс
== АТРИБУТЫ ==
немодул/модул
[ х ] положит. ( ]
[ ] отрицат. [ |
двухуровн.( ]
= доп. инф F3 3
[Ок]
Методы и средства формирования сигналов
135
Клавиша F3 позволяет перейти к просмотру дополнительной ин-
формации, единой для всего файла:
— номер версии методики;
— название файла-методики;
— основное назначение;
— количество тактов в методике.
Изображение на экране при этом принимает вид, показанный на
рис. 4.30. Данная информация также постоянно показывается в нижней
строке экрана вне зависимости от режима работы. Выход из режима
просмотра осуществляется с помощью клавиши «Esc». Из режима про-
смотра дополнительной информации выход осуществляется в режим
просмотра информации о тактах, поэтому требуется двукратное нажатие
клавиши «Esc».
Редактирование.
Функция редактирования позволяет изменять параметры отдельных
тактов и дополнительную информацию. Вызывается из режима «Про-
смотр» нажатием клавиши «F4». Перемещение по основному полю ме-
тодики осуществляется совместным нажатием клавиш Ctrl + (<—, ?, X, —>,
PgUp, PgDn, End, Home). Выбор редактируемого параметра клавишами:
(«Tab», «Enter», X) — перемещение вниз; («Shift+ТаЬ», Т) — перемещение
вверх.
г. Рязань РГ РТА
Муль-.имаг КЖ-ОЗ
Выбрать методику
Работа с методикой
О программе
Выход
Для лечения: арт. вен. пат. верх
krnpaOl
---|';Радняя
1 | I Такта 248 (мс)
J-Jf гикта 4,0 (Гц)
Время 15 мин.
Просмотр
интенсивность
длит, такта
kmpa 01
длит, паузы
арт вен. пат. верх
част, модуляции
[Ок]
~ г-— .
версия КМР
имя файла
ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
ПРОСМОТР
ПАРАМЕТРОВКМП
количество тактов б
общее время процедуры
назначение методики:
== АТРИБУТЫ ==
иемодул./модул.
[ х ] положит. [ ]
[ ] отрицат. [ ]
двухуровн [ ]
= доп. инф F3 =
[Ок]
ей
Рис. 4.30. Изображение на экране в режиме
«Просмотр дополнительной информации»
136
Глава 4
Подтверждение изменений при редактировании осуществляется кла-
вишами выбора параметров такта и клавишами перемещения между
тактами. Отмена изменений в текущем редактировании осуществляется
клавишей «Esc». Переход в режим редактирования дополнительной ин-
формации осуществляется с помощью клавиши «F3». Выход из режима
редактирования осуществляется клавишей «Esc». Из режима редактиро-
вания дополнительной информации выход осуществляется в режим ре-
дактирования информации о тактах. Из режима редактирования инфор-
мации о тактах выход осуществляется в режим просмотра.
При выходе из режима просмотра, если были произведены измене-
ния в методике, программа предложит записать методику в файл с име-
нем, указанным в «Дополнительной информации», как название мето-
дики.
В режиме редактирования строки:
— клавиша «Ins» — переключает режим вставки-замены (первона-
чально работа осуществляется в режиме замены);
— Т, X, End, Home — перемещение по строке.
Если не было нажато ни одной клавиши перемещения курсора, то
перед вводом новой строки старая строка стирается.
В режиме редактирования метода модулирования:
— , Т, >1, —— выбор режима;
— «Пробел» — смена режима.
О программе.
Информация о программе показывает:
— версию программы;
— организацию, обладающую авторскими правами на программу;
— телефон, по которому вы можете высказать все свои пожелания
и замечания, а также получить квалифицированную помощь в
работе с программным продуктом.
Работа с методикой.
Данный режим является основным, предназначенным для запуска
выбранной КМП и загрузки ее в силовой блок магнитотерапевтического
аппарата «Мультимаг». При обращении к данному режиму (нажатием
клавиши «Ввод») на экране возникает динамика перемещения одной
ячейки поля (белого фона) по строке тактов в соответствии с заданными
параметрами и запуск в работу силового блока магнитотерапевтического
аппарата «Мультимаг» также в соответствии с заданными параметрами.
В правом нижнем углу заполняется строка времени отпуска процедуры
и по завершению ее заполнения включается звуковой сигнал конца
процедуры. При нажатии любой клавиши звуковой сигнал прерывается.
Столбец под названием «Отклонения» показывает соответствие установ-
ленных уровней интенсивностей поля с действительными уровнями, ко-
торые поступают из силового блока. Под столбцом «Отклонения» дается
информация по усредненным значениям длительности тактов и средней
частоты тактов включения. Преждевременно процедуру можно прервать
клавишей «Esc».
Методы и средства формирования сигналов
137
Программное обеспечение комплекса «МК-03» продолжает совер-
шенствоваться и, прежде всего, в плане расширения возможностей по
модификации и созданию новых КМП.
4.7. Синхронизация магнитотерапевтического
воздействия с биологическими ритмами
Современные представления о механизмах лечебного действия сла-
бых МП позволяют выдвинуть гипотезу о том, что в основе биоэнерго-
информационной саморегуляции организма, как динамической системы,
лежит принцип биорезонанса. Вследствие этого, используя биорезонанс-
ный эффект, можно целенаправленно влиять на функциональное состо-
яние организма в плане его ускоренного восстановления путем воздей-
ствия определенными факторами и, в частности, слабыми магнитными
полями.
Точку зрения о том, что в основе лечебного воздействия магнитных
полей лежит принцип биорезонанса, подтверждают исследования ряда
зарубежных ученых (Н. S. Konig, Р. R. Popp, D. Snidtke, Н. Presman), в
которых показана тесная взаимосвязь между магнитными полями и био-
резонансными свойствами биологических систем. Ими доказывается,
что электромагнитные колебания используются в биологических систе-
мах как способ вне- и внутриклеточных взаимодействий. В этих иссле-
дованиях отмечается важная роль колебаний ЭМП в переносе биологи-
ческой информации, что позволяет биологическим системам оперативно
реагировать на изменения внутренней и внешней среды. Анализируя
выводы отечественных и зарубежных исследователей, можно заключить,
что любой организм является структурой разнопороговых серий взаи-
модействия систем и подсистем, которые гармонично настроены по
отношению друг к другу с помощью когерентных электромагнитных
частот. С точки зрения современной биоэнергетики, разбалансировка
подобных гармонических частотных взаимодействий в биологической
системе может приводить не только к функциональным нарушениям
систем организма, но и к появлению тех или иных патологических
изменений.
Бегущая волна ИМП представляет собой ритмический процесс, ле-
жащий в том же диапазоне частот, что и многие биологические ритмы.
Синхронизация работы магнитотерапевтической аппаратуры (МТА)
одним или несколькими биоритмами, например сердечным, существен-
но изменяет характер воздействия на пациента.
При этом возможны три режима запуска МТА.
7. Асинхронный режим.
Частота работы МТА вырабатывается генератором Г по заданной
программе (рис. 4.31, а). При определенных условиях физиологические
ритмы подстраиваются к этой частоте и ее гармоникам (субгармоникам).
2. Синхронный режим.
138
Глава 4
Ритм работы МТА полностью определяется синхронизирующим рит-
мом (сердечным, дыхательным и т.п.), определяемым датчиком Д, что
позволяет производить терапевтическое воздействие в заданной фазе
физиологического ритма (рис. 4.31, б). Недостатки такого способа свя-
заны с нестационарностью синхронизирующих биологических процес-
сов, поэтому сбои в ритмах, например, вследствие аритмии или арте-
фактов движения из-за мгновенной обратной связи увеличивают общую
нестабильность системы пациент—МТА.
Рис. 4.31. Режимы запуска МТА
3. Режим с инерционной синхронизацией.
Ритм работы МТА задается генератором, управляемым напряжением
(ГУН), частота и фаза которого соответствуют синхронизирующему
ритму пациента, определяемому датчиком Д (рис. 4.31, в). Это обеспе-
чивается системой фазовой автоподстройки частоты (ФАПЧ), включаю-
щей кроме ГУН еще фазовый детектор ФД и фильтр низких частот
ФНЧ. Благодаря ФНЧ отдельные сбои «игнорируются» и не нарушают
ритма МТА. Более того, управляя фазовым сдвигом в контуре ФАПЧ,
появляется возможность «подтягивать» физиологические ритмы к ста-
бильной частоте генератора. Данный режим применяется редко из-за
слабой исследованности и отсутствия математической модели воздейст-
вия МТА на динамику физиологических ритмов, что вызывает трудности
обеспечения устойчивости ФАПЧ.
Рассмотрим вопросы создания датчиков для синхронизации МТА
сердечным ритмом, являющимся наиболее значимым при магнитотера-
певтическом воздействии на сердечно-сосудистую систему. Работа МТА
связана с высоким уровнем электромагнитных помех, что затрудняет
использование сигналов электрического напряжения, (электрокардио-
граммы) или сопротивления (реограммы). Поэтому информацию о ра-
боте сердца предпочтительнее получать с помощью физических величин
и методов, слабо зависящих от электромагнитных полей. Это механи-
ческие колебания сердца и сосудов — пульс (сейсмические методы),
возникающие при этом шумы (акустические методы), изменение про-
зрачности тканей в зависимости от кровенаполнения (фотометрические
методы).
Методы и средства формирования сигналов
139
В автоматических измерителях пульса чаще всего используется фо-
тометрический метод. Структурная схема фотометрического датчика по-
казана на рис. 4.32.
Палец или мочка уха пациента просвечивается излучением в свето-
вом или инфракрасном диапазоне. Модулированное излучение воспри-
нимает фотоприемник (фотодиод или фоторезистор). Далее сигнал уси-
ливается усилителем У и поступает на устройство выделения пульса
Рис. 4.32. Структурная схема фотометрического датчика пульса
(УВП) для выработки импульса синхронизации. Авторами было разра-
ботано и исследовано несколько типов таких датчиков, показана воз-
можность их применения для синхронизации МТА, но обнаружен и ряд
недостатков. У различных пациентов амплитуда полезного сигнала имеет
значительный разброс из-за различной прозрачности кожи. Особенно
слаб сигнал у больных с пониженным тонусом периферийных сосудов
и часто оказывается ниже уровня помех от микродвижений и тремора.
Слабый уровень сигнала требует специальных мер подавления помех от
внешней засветки и наводок на фотоприемник, который, к тому же,
сложно заэкранировать. В разработанных датчиках применялись гальва-
ническая развязка, модуляция светового потока с синхронным детекти-
рованием и фильтрация, что усложняет их схемы. Кроме того, исполь-
зование фиксирующих зажимов на пальце или мочке уха сдавливает их
в течение всей процедуры (5...20 минут) и раздражает пациента. И,
наконец, недостатком является также то, что пульсовая волна в пери-
ферических сосудах отстает во времени от сердечных сокращений, при-
чем это отставание различно у различных пациентов.
Были проведены также эксперименты по использованию акустичес-
ких и сейсмических методов. Обнаружено, что максимум пульсовых
колебаний лежит в диапазоне около 10...20 Гц, причем эти частоты лучше
воспринимаются сейсмоприемником, чем микрофоном. Акустические
колебания в звуковом диапазоне (тоны) слабы, имеют большой разброс
по уровням и частоте и их сложно использовать при внешних звуковых
помехах. Сейсмический же метод пригоден лишь для неподвижного па-
циента (лежащего или сидящего), однако это как раз и обеспечивается
при проведении магнитотерапевтических процедур. При этом сейсмо-
датчик кладется на область сердца пациента, где максимальна амплитуда
пульсовых колебаний. Структурная схема сейсмического датчика пульса
приведена на рис. 4.33.
140
Глава 4
Сейсмоприемник представляет собой немагнитный (свинцовый)
грузик на упругих элементах с демпфированием, связанный с преобра-
зователем колебаний в электрический сигнал. Это может быть пьезо-,
фото-, емкостной преобразователь или преобразователь другого типа, не
использующий магнитного поля. Удобно оказалось использовать труб-
чатый пьезокристалл ЭП4Т-2, а в качестве элемента связи применялась
упругая трубка, исключающая поломку пьезокристалла при резких уда-
Рис. 4.33. Структурная схема сейсмического датчика пульса
рах. Сигнал U(t) (пульсограмма) усиливается усилителем У и детекти-
руется двухполупериодным детектором ДД, необходимость которого свя-
зана с неопределенностью начального положения датчика и, соответст-
венно, начальной полярности сигнала. Устройство выделения пульса
УВП преобразует аналоговый сигнал в импульс запуска и представляет
собой в простейшем случае пороговое устройство. Типовая пульсограмма
с сейсмического датчика U(t) представляет собой сигнал с нестабильной
амплитудой и постоянной составляющей, имеющий, как правило, два
максимума за период сердечных сокращений (рис. 4.34).
В таких условиях простое пороговое устройство может давать сбои
из-за дрейфа постоянной составляющей, изменения амплитуды и нали-
чия второго максимума.
Пульс
Пропуск импульсов
—к
Рис. 4.34. Типовая пульсограмма с сейсмического датчика
Для устранения ложных срабатываний при сохранении высокой чув-
ствительности можно использовать временную селекцию: блокировку
устройства на время 0,1...0,3 с после срабатывания. Схема простого
устройства, сочетающего свойства гистерезиса с временной селекцией,
показана на рис. 4.35, а, а ее временные диаграммы приведены на
Методы и средства формирования сигналов
141
рис. 4.35, б. Компаратор К с резисторами Rl, R3 образует триггер Шмит-
та с величиной гистерезиса Ur = UBbIX [Rl/(Rl+R3)]. Добавление в по-
ложительную обратную связь цепи R2,C формирует экспоненциально
затухающий импульс, складывающийся с порогом. Благодаря этому уст-
ройство нечувствительно к сигналу запуска, пока напряжение на неин-
вертирующем входе компаратора UH не уменьшится, как это показано
на временной диаграмме рис. 4.35.
Рис. 4.35. УВП с экспоненциальным порогом
Более высокое качество выделения сигнала пульса по сравнению с
устройством с экспоненциально изменяющимся порогом обеспечивает
УВП на основе пикового детектора, функциональная схема и временные
диаграммы которого приведены на рис. 4.36, а и 4.36, б соответственно.
Рис. 4.36. УВП на основе пикового детектора
142
Глава 4
Пиковый детектор построен на основе инвертирующего усилителя
У, диодов VD1, VD2, конденсатора С и высокоомных резисторов R1,
R2. Конденсатор С заряжается при превышении сигналом напряжения
на нем, т. е. начальный порог срабатывания определяется амплитудой
предыдущей пульсовой волны. Ток заряда конденсатора С вызывает
падение напряжения на резисторе R3 и срабатывание компаратора К.
Напряжение с компаратора UK запускает одновибратор блокировки ОВ.
Во время действия блокировки диод VD3 закрыт высоким уровнем вы-
ходного напряжения и конденсатор разряжается медленно через резистор
R2. После окончания блокировки емкость начинает разряжаться через
диод VD3 и резистор R4, быстро уменьшая порог срабатывания. Это
позволяет выделить сигналы пульса даже при значительном разбросе их
амплитуд.
На основе описанных устройств разработан датчик пульса, представ-
ляющий собой пьезоэлектрический сейсмопреобразователь (габариты
50x40x15 мм), связанный экранированным кабелем длиной 2,5 м с элек-
тронным блоком (габариты 80x75x25 мм), который, в свою очередь,
подключается к МТА. На электронном блоке имеется светодиод, инди-
цирующий удары пульса. Диапазон надежной регистрации пульса со-
ставляет 50... 100 ударов в минуту. При частоте ниже 50 уд/мин возрастает
вероятность срабатывания по второму максимуму, а выше 100 уд/мин —
вероятность пропуска импульсов. Диапазон напряжений питания 10... 15
В, потребляемый ток составляет 25...50 мА, выходной сигнал — ТТЛ
уровня.
4.8. Биотехническая обратная связь в системах
магнитотерапии
Приведенные в предыдущих разделах данные свидетельствуют о том,
что магнитное поле, как воздействующий физический фактор, является
достаточно сильным стимулятором, на действия которого реагируют все
функциональные системы организма и, в первую очередь, — центральная
нервная система, сердечно-сосудистая система, система крови, эндо-
кринная система.
Суммарный эффект воздействия МП на живой организм описать в
виде физической или математической модели на сегодняшний день не
представляется возможным. Задача усложняется тем, что каждый паци-
ент — это уникальный организм и лечить или оздоравливать его при
помощи такого мощного инструмента с широким спектром действия,
как искусственная полимагнитная система, представляется возможным
лишь при достоверных измерениях и контроле соответствия параметров
МП параметрам состояния пациента. Поэтому определить закон соот-
ветствия в настоящее время возможно только эмпирическим путем. В
природе действует правило: чем острее, интенсивнее инструментарий
воздействия, тем точнее, более выверенными должны быть действия по
Методы и средства формирования сигналов 143
его использованию, т.е. информативнее должно быть измерение состо-
яния объекта воздействия.
Обработка большого числа информационных данных ориентирована
на получение такой «дозировки» воздействия инструментом, которая
создавала бы в различных фазах лечебно-восстановительного процесса
положительный градиент состояния — терапевтический эффект в лече-
нии и восстановлении запасов здоровья. Решение этой задачи в условиях
реального времени, отводимого для лечебно-восстановительных меро-
приятий, врачу, не вооруженному высокоэффективной техникой обра-
ботки информации, становится невозможным. В связи с этим компью-
теризация магнитотерапии является необходимым процессом в силу
того, что врачу, как лицу, принимающему решение о тактике лечения
или восстановления, необходима высокая информовооруженность, важ-
ной компонентой которой является наличие накапливаемой информа-
ции об индивидуальных особенностях организма пациента, в том числе
и тех, которые проявляются как результат воздействия МП.
Человек живет и действует в среде, содержащей множество одно-
временно воздействующих стрессовых факторов. Создать же условия,
при которых можно было бы однозначно определить реакцию только
на действие МП, практически нереально. Следовательно, можно гово-
рить о выделении «фоновой» составляющей, не относящейся к магнит-
ному воздействию. Однако это требует еще большей интеллектуализации
компьютерных алгоритмов, а сама магнитотерапия становится в ряд
интеллектуальных технологий с личностно-ориентированной стратегией
в проведении лечебно-восстановительных мероприятий [10, 12, 14].
Основой такой технологии является биотехническая обратная связь,
с помощью которой биологический объект, на который осуществляется
воздействие, приводится в состояние, близкое к «норме». На рис. 4.37
представлена обобщенная структура системы комплексной магнитотера-
пии, которая реализует в качестве основного управляемого воздейст-
вия — воздействие низкочастотным импульсным бегущим магнитным
полем, охватывающим весь организм пациента (индивидуума) [10, 14].
Схема включает следующие основные блоки: ТСН — типовые сред-
ства измерения и диагностики (электрокардиограф, реограф, измеритель
давления, термометр и др.); ЭБ — электронный блок, вырабатывающий
заданную форму и последовательность электрических сигналов для уп-
равления магнитосканом; ПУСИ — специальные помехоустойчивые
средства измерения (в условиях действия сильных электромагнитных
помех); ЭКА — блок экспресс-анализа; П — носимая персональная
измерительно-диагностическая система.
На схеме можно выделить три цепи обратной связи или три контура
управления: I, II, III с различными постоянными времени тр т2 и т3.
Первый контур управляет процессом оптимизации уровня здоровья во
время сеанса магнитного воздействия. Он характеризуется малой посто-
янной времени т1 (секунды, минуты) и сложной системой критериев
оптимизации. Получение максимального эффекта в данный момент вре-
144
Глава 4
оценка
уровня
здоровья
Сеанс
Несколько сеансов
Весь цикл оптимизации (восстановления)
Рис. 4.37. Обобщенная структура системы комплексной магнитотерапии
мени еще не означает достижения глобального экстремума оптимизиру-
емого уровня здоровья и его сохранение на длительное время.
Второй контур управления включается через несколько процедур
(несколько суток) и базируется на устойчивых, накапливаемых измене-
ниях в показателях здоровья и их сочетаниях. Он функционирует до
завершения всего цикла восстановления или оптимизации уровня здо-
ровья, после чего индивидуум переходит к обычному образу жизни, а
носимая персональная измерительно-диагностическая система реализует
третий, самый медленно действующий контур обратной связи. Посту-
пающая от персональной системы П информация показывает динамику
изменения запаса здоровья за счет накопления резервов и проявления
отдаленных эффектов. В то же время в носимой системе П из базы
знаний корректируется персональная модель здоровья индивидуума.
Врач, общаясь с такой системой, на основе собственного опыта и пред-
ложенных системой альтернатив, принимает решение о плане проведе-
ния лечебно-восстановительного процесса, стратегии и тактике его ре-
ализации. При этом он имеет возможность обратиться в базу знаний и
получить всю информацию о конкретном пациенте. Таким образом, с
компьютеризацией магнитотерапии, с накоплением и оперативной об-
работкой большого клинического материала становится возможной ор-
Методы и средства формирования сигналов
145
ганизация личностно-ориентированного, индивидуализированного про-
цесса лечения и восстановления.
При использовании магнитотерапевтических методов лечения, как
и любых других, необходим контроль за ответными реакциями организма
на воздействия. В этом смысле можно выделить два типа изменений,
происходящих в организме: на макроуровне, которые накапливаются в
течение длительного времени в результате применения нескольких про-
цедур лечения, и реакции, возникающие непосредственно в ходе сеанса
магнитотерапии. Изменения первой группы на уровне систем организма
(нервная, эндокринная, сердечно-сосудистая и др.) и органов исследу-
ются с помощью традиционных методов медицины с использованием
аналитических приборов и систем (микроскопические исследования,
анализы, общая диагностика и т.п.). Результаты таких исследований
позволяют судить о ходе лечения, его эффективности, дают возможность
врачу на основе его опыта корректировать параметры магнитного поля
(интенсивность, частота, экспозиция и др.), принимать решение о про-
должении или прекращении сеансов лечения.
Изменения второй группы связаны с реакциями организма в течение
короткого времени (непосредственно в ходе сеанса магнитотерапии). В
связи с этим возникают две задачи: узкая — отследить внезапное ухуд-
шение состояния больного, и, более широкая, — по изменениям обоб-
щенных показателей организма скорректировать параметры магнитного
поля с целью обеспечения наибольшей эффективности воздействия.
Хотя в целом в практике магнитотерапии резко отрицательного влияния
магнитного поля на организм человека, вызывающего предельные со-
стояния (шок, инфаркт, гипертонический криз и пр.) не замечено, ве-
роятность таких проявлений остается, причем совсем необязательно от
воздействия магнитного поля, а в силу множества других причин. Поэ-
тому очень важным становится вопрос текущего контроля состояния
пациента во время сеанса магнитотерапии. В качестве обобщенных могут
быть использованы обшетерапевтические показатели: артериальное дав-
ление, температура, параметры ЭКГ и электроэнцефалограммы, рео-
граммы, в особенности биологически активных точек [152] и др. Таким
образом, становится актуальным создание автоматизированного измери-
тельно-диагностически-терапевтического комплекса, способного выра-
батывать магнитные поля с заданным набором управляемых параметров,
вести непрерывный контроль жизненно важных показателей пациента,
осуществлять экспресс-диагностику и прогнозирование его состояния,
изменять режимы воздействий по заданным алгоритмам и их продол-
жительность, вплоть до отключения магнитного поля при ухудшении
состояния пациента.
Для практической реализации может быть использована структурная
схема комплекса, изображенная на рис. 4.38 [2, 12].
На схеме обозначено: Д1 — группа датчиков для снятия показателей
жизнедеятельности человека, Д2 — датчики для измерения реальных
параметров магнитного поля в аппарате, ДЗ — датчики биоритмов па-
циента, ИДС — измерительно-диагностическая система.
146
Глава 4
Рис. 4.38. Структура магнитотерапевтического комплекса с биотехнической
обратной связью
Если в рассматриваемом комплексе исключить ПЭВМ, то получится
разомкнутая система со средствами диагностики и ручным управлением,
где основная нагрузка по слежению за показателями и принятию реше-
ний ложится на врача. При наличии в составе комплекса ПЭВМ система
становится замкнутой с биотехнической обратной связью, где получение
основных информационных потоков первичной информации и управ-
ление параметрами поля автоматизировано, но, безусловно, под общим
контролем врача.
В заключение необходимо отметить, что магнитотерапевтические
комплексы семейств «Аврора МК» и »Мультимаг МК» постоянно об-
новляются и совершенствуются как по пути создания новых конфигу-
раций магнитных полей и способов управления ими, так и по пути
оптимизации параметров излучателей, конструкций магнитосканов и их
электронных блоков [153-155].
Глава 5
ИЗМЕРИТЕЛЬНО-ДИАГНОСТИЧЕС-
КИЕ МЕТОДЫ И АППАРАТУРА
ДЛЯ КОМПЛЕКСНОЙ
МАГНИТОТЕРАПИИ
5.1. Особенности измерений и диагностики
в комплексной магнитотерапии
Контроль за отпуском процедур магнитотерапии, а также объектив-
ная оценка результатов лечения требуют проведения операций измере-
ния параметров магнитного поля и ряда физиологических показателей
организма пациента. Выбор числа и номенклатуры физиологических
параметров определяется существующим на сегодняшний день представ-
лением о механизме воздействия магнитного поля на биологический
объект и спецификой заболевания.
К настоящему времени накоплен большой экспериментальный ма-
териал, свидетельствующий о том, что магнитные поля активно влияют
на биологические процессы в живых тканях. Однако теория этого вза-
имодействия еще находится в стадии становления, поэтому выбор диа-
гностируемых параметров базируется на некоторой концептуальной мо-
дели, в основу которой положены следующие постулаты:
1) человеческий организм представляет собой открытую систему;
2) за основу функционирования и характеров ответов на магнитное
воздействие принимаются принципы адаптации и законы гомеостаза;
3) при внешнем воздействии наблюдается значительная инерцион-
ность компенсаторной реакции;
4) имеется пороговое значение внешнего воздействия, приводящее
к возникновению компенсаторной реакции;
5) существует определенная зависимость компенсаторной реакции
от интенсивности внешнего воздействия;
6) организм обладает памятью на внешнее воздействие, накапли-
вающей изменения характеристик при повторных воздействиях;
7) имеется минимальное число параметров, достаточное для описа-
ния ответа на любое внешнее воздействие.
Изложенные принципы являются достаточно общими, но, в то же
время, они формируют определенные требования к выбору методик из-
мерения, алгоритмов обработки информации и диагностирования.
Особенностью применения аппаратов магнитотерапии является то,
что в клинической практике наблюдаются значительные различия в ин-
тенсивностях применяемых полей и дозировках процедур. Естественно,
148
Глава 5
достижение наибольшего терапевтического эффекта возможно только
при знании реакций пациента на воздействие магнитным полем и кон-
троле за ходом лечения.
Таким образом, вырисовываются три возможности использования
измерительной аппаратуры при магнитотерапии:
— предварительная оценка магнитотропной реакции пациента;
— оперативный контроль состояния пациента при отпуске проце-
дуры;
— оценка состояния пациента до лечения и результатов лечения в
течение длительного времени.
Предварительная оценка магнитотропных реакций пациента прово-
дится по методике, разработанной в институте клинической и экспери-
ментальной медицины СО АМН СССР в 1989 г. Согласно этой методике
[127] у пациента определяются исходные значения артериального дав-
ления, показатели электропроводности в определенных биологически
активных точках и значения кожной температуры. После двукратных
замеров каждого показателя дается магнитная нагрузка. К подошвенной
поверхности стопы подводятся индукторы, генерирующие постоянное
магнитное поле с максимальной индукцией 28...33 мТл. На ушной ра-
ковине устанавливаются магнитные наушники с эластичными постоян-
ными магнитами. В течение 10 минут воздействия магнитного поля
проводят три серии измерений физиологических показателей. Количе-
ственная оценка реакции определяется по степени изменения каждого
показателя в определенных заданных пределах и исчисляется по 3-х
бальной системе. В зависимости от набранного числа баллов произво-
дится оценка реакции пациента: высокая, средняя и низкая. Такая оцен-
ка выраженности магнитотропных реакций позволяет отбирать больных
для магнитотерапии и осуществлять персонализацию методики лечения.
Опыт работы с установками магнитотерапии показал, что индиви-
дуальная оценка магниточувствительности может производиться и по
более упрощенной методике. В [127] предложено проводить измерение
лишь одного артериального давления при наложении на мочку уха па-
циента магнитных клипс, формирующих постоянное магнитное поле с
индукцией 50+10 мТл, и прикладывании к ладоням и подошвам посто-
янных магнитов, дающих поле с индукцией 35±5 мТл. Продолжитель-
ность магнитного воздействия составляет 5 мин. В результате у пациента
может наблюдаться снижение артериального давления в пределах 5...25
мм рт. ст. Подобная упрощенная методика также позволяет классифи-
цировать пациентов по трем группам магниточувствительности.
Оценка состояния пациента и измерение его физиологических пара-
метров на этапе изучения реакции и результатов лечения может быть
выполнена стандартной медицинской измерительно-диагностической
аппаратурой, и особых проблем при этом, как правило, не возникает
(см. 5.4).
Значительно сложнее решается вторая задача — контроль состояния
пациента во время отпуска процедуры и реализация на этой основе
Измерительно-диагностические методы и аппаратура
149
биотехнической обратной связи. В данном случае работа многих стан-
дартных средств измерения осложняется или становится вообще невоз-
можной из-за сильных помех, создаваемых воздействующими магнит-
ными полями и электронными блоками управления магнитосканом.
Проведенные детальные измерения уровня сетевых и радиопомех, со-
здаваемых аппаратом «Аврора МК-01», показали наличие электромаг-
нитного излучения с интенсивностью, близкой к предельно допустимым
нормам помех для радиоаппаратуры в широком диапазоне частот
0,015...80 МГц. Наличие такого паразитного излучения объясняется ком-
мутацией мощных токов в индукторах магнитотерапевтического аппара-
та. Высокий уровень создаваемых системами магнитотерапии помех ста-
вит под сомнение саму возможность использования измерительной и
диагностической аппаратуры во время лечебного сеанса.
Изложенное выше указывает на необходимость создания специали-
зированных измерительно-диагностических устройств, обладающих вы-
сокой помехозащищенностью, а также применения специальных мате-
матических методов компьютерной обработки информации.
5.2. Магнитные измерения в магнитотерапии
При создании средств измерения параметров магнитных полей, от-
вечающих требованиям комплексной магнитотерапии, необходимо учи-
тывать специфические особенности, присущие рассматриваемой задаче.
Во-первых, это связано с необходимостью визуализации неоднородного
объемно распределенного магнитного поля, которая предполагает орга-
низацию многомерной измерительной процедуры (по нескольким коор-
динатам) с требуемым разрешением, дискретностью и ориентацией, что
заставляет осуществлять множество измерений во множестве точек за-
данного объема. Во-вторых, для обработки больших массивов измери-
тельной информации с целью получения изображения распределения
МП требуется выполнение множества вычислительных операций по за-
данным алгоритмам. И, кроме того, необходимо обеспечить повторяе-
мость результатов, т.е. обеспечить заданную точность в одних и тех же
точках при периодических повторных измерениях.
Реализация вышеуказанных требований значительно расширяет
функциональные возможности аппаратуры, при этом появляется гиб-
кость в управлении, в установке параметров и режимов работы, повы-
шается уровень, оперативность и качество приема, хранения, обработки
и представления больших массивов измерительной информации. Учи-
тывая общие подходы и тенденции в развитии измерительной техники,
а также сложность и многофакторность решаемой задачи, магнитоизме-
рительные системы для комплексной магнитотерапии строятся на основе
ПЭВМ. Основными компонентами подобных систем, обеспечивающими
их метрологические характеристики, являются магниточувствительные
элементы и преобразователи, особым образом организованные в соот-
ветствии с системным принципом.
150
Глава 5
5.2.1. Магниточувствительные элементы и преобразователи
Основным элементом, обеспечивающим метрологические характе-
ристики измерителя МП, является магниточувствительный преобразо-
ватель, выбор которого определяет также и измерительную схему, эле-
менты управления и условия работы. Принято сравнивать датчики МП
по четырем информационным показателям:
1. Чувствительность или совокупность его коэффициентов преобра-
зования. Последние могут быть найдены, если известно уравнение пре-
образования q = f(m), где m и q — информативные параметры входного
и выходного сигналов соответственно. Если q — магнитная индукция,
ат — электрическое напряжение или частота, то оценка коэффициентов
преобразования должна производиться в вольтах на теслу (В/Тл) или
герцах на теслу (Гц/Тл).
2. Порог чувствительности, который выражается в единицах изме-
ряемой величины и вполне характеризует предельные возможности пре-
образователей. Логично считать пороговым значением измеряемой ве-
личины такое, при котором обеспечивается отношение сигнал-шум, рав-
ное единице.
3. Ориентационная зависимость, свойственная для измерительных
преобразователей параметров векторных величин, обычно представляет-
ся диаграммами направленности, т.е. зависимостью q(a), где a — угол
поворота преобразователя при неизменных положении и значении век-
тора В в заданной плоскости относительно некоторого начального на-
правления. Мерой чувствительности преобразователя к изменению его
ориентации относительно проекции вектора В на плоскость вращения
преобразователя, является дифференциальный коэффициент преобразо-
вания dq/da.
4. Разрешающая способность выступает здесь в виде некоего обоб-
щенного показателя, характеризующего информационные возможности
средства измерения (СИ) в зависимости от его погрешностей и ширины
рабочего диапазона. Если представить функцию преобразования СИ
q = f(m) условно линией, ограниченной с двух сторон зоной неопреде-
ленности (последняя вызвана наличием случайной составляющей по-
грешности СИ), и проквантовать ее в пределах зоны, то число уровней
квантования будет зависеть от ширины зоны неопределенности и рабо-
чего диапазона. Чем уже зона и шире диапазон, тем количество разли-
чимых градаций больше, т.е. выше разрешающая способность.
Указанные показатели [156] наиболее полно отражают общие, а
также специфические свойства и параметры разнообразных магниточув-
ствительных преобразователей (МЧП). В настоящее время промышлен-
ностью выпускается большой парк магнитоизмерительной техники, ос-
нованной на различных физических явлениях и эффектах [157]. Для
сравнительного анализа существующих МЧП воспользуемся классифи-
кацией преобразователей по виду используемого физического явления
или эффекта, объединяя их в группы, которые связаны общим призна-
ком.
Измерительно-диагностические методы и аппаратура 151
Принцип действия известных МЧП подчиняется трем основным
свойствам магнитного поля, проявляющего себя как силовое взаимодей-
ствие с: а) заряженными элементарными частицами; б) элементами тока;
в) контурами тока. Учитывая, что главной характеристикой МП является
вектор магнитной индукции, можно выделить МЧП в три группы по
следующим признакам.
1. В первую группу входят МЧП, протекающие процессы в которых
основаны на силовом взаимодействии тел или частиц, обладающих маг-
нитным моментом, с измеряемым полем. Обобщенное уравнение пре-
образования для них можно записать выражением в векторной форме:
М = Рм В, (5.1)
где М — механический момент тел или частиц; Рм — суммарный маг-
нитный момент; В — вектор измеряемой магнитной индукции.
К данной группе относят магнитомеханические и квантовые преоб-
разователи. Первые из них в качестве чувствительного элемента содержат
магнитное тело (постоянный магнит или катушка с током). Реакция на
внешнее магнитное поле у них проявляется в виде механического дви-
жения тела (вращения, вибрации, качания, перемещения или изменения
геометрических размеров — магнитострикции).
Квантовые преобразователи содержат в качестве чувствительного
элемента рабочее вещество, поглощающее или излучающее электромаг-
нитную энергию на некоторой частоте, зависящей от значения индукции
МП. В уравнение преобразования в этом случае входят Рм = Щ —
суммарный магнитный момент вещества (щ — магнитный момент одной
частицы) и у — гиромагнитное отношение частицы. Об измеряемом
значении модуля магнитной индукции В = |В| обычно судят по частоте
прецессии вектора Рм вокруг вектора В, т. е. по значению сор = у-В [158].
В зависимости от природы частиц различают электронные, ядерные и
атомные прецессионные преобразователи.
2. Ко второй группе относят МЧП, протекающие процессы в кото-
рых так или иначе связаны с законом электромагнитной индукции. Они
реагируют на магнитный поток Ф, который служит интегральной харак-
теристикой МП:
Ф = jB-dS . (5.2)
s
Поскольку в качестве чувствительного элемента потока может быть
использован только контур, то выходной величиной в них является
наведенная э.д.с. в контуре при изменении его потокосцепления с МП
во времени. Обобщенное уравнение преобразования представляется в
виде:
е = - = - 4^ fB dS^ • (53)
at \ at / at J
\ s 7
где у — полный магнитный поток или потокосцепление; Ф — маг-
нитный поток, пронизывающий контур; со — число витков контура;
152
Глава 5
S — вектор площади, ограниченной контуром; В — вектор магнитной
индукции; t — время.
Различают индукционные, ферромодуляционные МЧП, а также пре-
образователи, основанные на эффектах сверхпроводимости.
Индукционные преобразователи содержат в качестве чувствительно-
го элемента катушку. Если измеряемое МП постоянно, то э.д.с. возни-
кает за счет изменения во времени эффективной площади контура
(путем вращения, вибрации, перемещения катушки или модуляции ее
размеров — электрострикции) и пропорциональна скорости этих изме-
нений, то есть производной dS/dt. Величину S считают основным пара-
метром контура.
Ферромодуляционные преобразователи являются индукционными ц -
типа, в которых за счет внешней энергии осуществляется модуляция (воз-
буждение) магнитной проницаемости ферромагнитного сердечника, охва-
ченного катушкой. Выходная э.д.с. в нем при постоянстве измеряемой
индукции пропорциональна производной dp/dt, где ц — параметр маг-
нитной цепи преобразователя, зависящий от напряженности МП — Н.
Преобразователи, основанные на эффектах сверхпроводимости,
имеют выходную величину либо в виде э.д.с., возникающей в контуре,
охватывающем тело, которое может переходить из обычного состояния
в сверхпроводящее и обратно, либо в виде напряжения на переходах,
обладающих свойствами переходов Джозефсона [156]. Измерительные
преобразователи, применяемые в приборах, представляют собой сверх-
проводящее кольцо с двумя (для постоянного тока) или одним (для
переменного тока) джозефсоновскими переходами (туннельными кон-
тактами).
3. Третью группу МЧП составляют датчики, протекающие процессы
в которых связаны с силовым действием МП на движущиеся в провод-
никах и полупроводниках заряженные частицы. В результате взаимодей-
ствия образуются две, противоположные по направлению, силы. Одна
из них, сила Лоренца, искривляет траекторию движения носителей за-
ряда и тем самым создает разность потенциалов на боковых гранях
проводника. Другая сила вызвана образованием электрического поля
(э.д.с. Холла) между теми же гранями проводника и действует на заря-
женные частицы в противоположном направлении. Таким образом, про-
цесс накопления носителей зарядов на боковых гранях проводника будет
продолжаться до тех пор, пока действие электрического поля Холла не
уравновесит действие силы Лоренца. Условие равновесия и определяет
обобщенное уравнение преобразования третьей группы МЧП в вектор-
ной форме:
Е = V В, (5.4)
где Е — вектор электрического поля Холла; V — вектор скорости но-
сителей заряда (электронов или дырок).
К третьей группе МЧП относят преобразователи, объединенные
общим названием — гальваномагнитные. В зависимости от происходя-
щих изменений в полупроводниковых структурах, связанных с воздей-
Измерительно-диагностические методы и аппаратура 153
ствием МП на движущиеся заряженные частицы (изменение проводи-
мости, подвижности, концентрации, равновесного состояния носителей
заряда), различают и используют в магнитоэлектронике следующие галь-
ваномагнитные эффекты: эффект Холла — возникновение поперечной
разности потенциалов при прохождении электрического тока в попере-
чном ему МП; эффект магнитосопротивления — возрастание сопротив-
ления полупроводника в МП; эффект Суля — отклонение линий тока
инжектированных носителей в МП к одной из граней полупроводника;
гальваномагниторекомбинационный эффект — изменение концентрации
носителей при прохождении тока в поперечном МП в полупроводнике
со смешанной проводимостью вследствие изменения роли поверхностей
рекомбинации; магнитодиодный эффект — изменение в МП неравно-
весной проводимости полупроводниковых структур с большим по срав-
нению с длиной диффузионного смещения расстоянием от инжектиру-
ющего контакта до неактивного. Известны и другие гальваномагнитные
явления, не нашедшие еще должного практического использования.
Поскольку все названные эффекты наблюдаются в полупроводни-
ках, которые являются основой твердотельной микроэлектроники с ос-
военными и развитыми интегральными технологиями, то данная группа
МЧП получила наиболее широкое применение в различной электронной
технике.
Серийно изготавливаются и используются при разработке магнито-
метрической аппаратуры стандартные (унифицированные) ряды гальва-
номагнитных преобразователей: датчики Холла, магниторезисторы, маг-
нитодиоды, магнитотранзисторы, магнитотиристоры, магниточувстви-
тельные интегральные микросхемы [159].
Следует отметить, что в большинстве рассмотренных преобразова-
телей одновременно в той или иной мере могут возникать несколько
или же все известные гальваномагнитные эффекты. Вместе с тем спе-
цифические особенности преобразователей, например конструктивные,
способствуют наиболее сильному проявлению одного из эффектов.
В качестве яркой иллюстрации функциональных и метрологических
возможностей, а также перспектив развития представителей МЧП тре-
тьей группы, приведем характеристики и структуру магниточувствитель-
ной микросхемы (МЧМ), изготовленной по КМОП-технологии с поли-
кремниевым затвором. Магниточувствительным элементом в ней служит
латеральный параллельно-полосковый биполярный магнитотранзистор с
планарной осью магнитной чувствительности. Сочетание достоинств
К МОП-технологии с высокой чувствительностью магнитотранзистора
обеспечивает превосходство характеристик и. параметров микросхемы
над известными приборами на эффекте Холла [160] и характеризуется:
— малым током потребления;
— сверхвысокой чувствительностью к МП;
— возможностью программной установки значений магнитной ин-
дукции срабатывания и ширины гистерезиса;
— экстермостабильностью магнитных характеристик микросхемы;
154
Глава 5
— многорежимностью (предусмотрены варианты нормально закры-
тых и открытых микросхем, работающих в прямом, инверсном,
биполярном режимах управления МП).
В табл. 5.1 приведены основные параметры, а на рис. 5.1 — структура
магниточувствительной микросхемы.
Таблица 5.1
Основные параметры МЧМ
Диапазон измерения магнитной индукции, мТл 0...15
Шаг настройки индукции срабатывания, мТл 0,7... 1,0
Ширина гистерезиса, мТл 1,0...2,0
Вытекающий выходной ток, мА 5
Температурный коэффициент индукции срабатывания, мТл/K 0,1
Температурный коэффициент ширины гистерезиса, мТл/К 0,01
Диапазон рабочих температур, °C -20...+85
Напряжение питания, В 5... 12
Ток потребления, мА 0,2... 1,2
На схеме обозначено: ЦАП — цифро-аналоговый преобразователь
формирования фиксированного напряжения настройки индукции сра-
батывания; ДМП — датчик магнитного поля; ОУ — операционный уси-
литель; ТКУ — транзисторный каскад усиления (выходной p-МОП тран-
зистор); ИОН — источник опорного напряжения. Входы МЧМ: 2°...23 —
четырехразрядный двоичный код, подаваемый на ЦАП для настройки
индукции срабатывания; R — вход сдвига кодовой настройки индукции
срабатывания.
Существующие в настоящее время методы исследования и контроля
параметров МП основаны на последовательном сканировании рабочего
объема возле магнитных объектов (МО) путем перемещения измеритель-
ного зонда с одиночным преобразователем Холла (ПХ), а при оператив-
ном контроле параметров МО — с помощью зонда, содержащего неко-
торое число дискретных ПХ, расположенных заданным образом. Оба
способа несовершенны, т. к. отличаются высокой трудоемкостью и не-
достаточной достоверностью при оценке распределения МП и его ло-
кальных неоднородностей. Поэтому для исследования параметров МО
Рис. 5.1. Структура МЧМ
Измерительно-диагностические методы и аппаратура
155
с высокой разрешающей способностью и оперативного контроля с вы-
сокой точностью рекомендуется использовать многоэлементные ПХ в
виде матриц. Такие преобразователи изготовляются по тонкопленочной
технологии на основе гетероэпитаксиальных структур антимонида индия
(161].
Предложены структуры микросхем для топографирования МП, пере-
секающего плоскость, позволяющие одновременно измерять магнитную
индукцию в тысячах точек, а затем выдавать результат в виде телевизи-
онного сигнала. Разработаны новые детекторы состояния МП (ДСМП),
в основе которых лежат принципы функционирования и технология
приборов с зарядовой связью (ПЗС), совмещенные конструктивно с
гальваномагнитными элементами. В результате такого сочетания достиг-
нуты: повышенная магнитная чувствительность, способность запомина-
ния результата измерения, возможность управления детектором и про-
стой коммутации выходных цепей без применения дополнительных
электронных ключей, высокое быстродействие и точность регистрации.
Оригинальны и заслуживают внимания отдельные варианты исполнения
ДСМП [162, 163].
В основе первого варианта детектора ДСМП1 лежит прибор с заря-
довой связью, у которого расщеплен на две симметричные части при-
нимающий электрод (рис. 5.2).
При трансляции заряда q в зависимости от величины и направления
МП с индукцией В, перпендикулярного плоскости детектора, происхо-
дит перераспределение генерируемого заряда между принимающими
электродами. В результате информацию о величине и направлении несет
разность зарядов под принимающими электродами. Магниточувстви-
тельность £ ДСМП1 определяется выражением:
; = 2v//b, <5-5)
где v — подвижность электронов; / и b — конструктивные параметры.
ДСМП может быть использован и для линейного измерения маг-
нитной индукции. Симметрия прибора позволяет ослабить влияние на
результат измерения свойственных ПЗС паразитных явлений.
В основе второго варианта де-
тектора ДСМП2 лежит полевой
магнитотранзистор, конструкция
которого представлена на
рис. 5.3.
Удаленность канала проводи-
мости от поверхности полупро-
водника в полевом транзисторе
со встроенным каналом или с уп-
равляющим р-n переходом гаран-
тирует сохранение высокой по-
движности заряда, что уже при-
водит к увеличению напряжения
Рис. 5.2. Детектор ДСМП 1 на приборе с
зарядовой связью
156
Глава 5
Рис. 5.3. ДСМП2 на основе полевого
магнитотранзистора
Холла. А если электроды
Холла расположить вблизи
«горловины» канала, то
ДСМП2 обеспечивает теоре-
тически максимальное на-
пряжение Холла, которое до-
стижимо в обычных датчиках
Холла только в импульсном
режиме: Ux = bBVHac, где
VHac — максимальная ско-
рость носителей .заряда в ка-
нале. Наличие затвора позво-
ляет удобно управлять
ДСМП2.
Анализ магниточувствительных преобразователей названных клас-
сов, выпускаемых промышленностью, показал, что для задач магнито-
терапии подходят лишь гальваномагнитные и индукционные. Основны-
ми критериями при анализе послужили следующие признаки: а) габа-
ритные размеры преобразователя; б) диапазон измеряемых значений
индукции В (10“7...10-1 Тл); в) непосредственная электрическая совмес-
тимость с элементами электронной аппаратуры; г) отсутствие особых
условий работы.
Широкое развитие интегральных технологий и тенденция к микро-
миниатюризации делают предпочтительным использование в магнито-
измерительной аппаратуре гальваномагнитных датчиков и МЧМ.
Построение микродатчиков на основе интегральной технологии, не-
посредственно сопряженных с электронной схемой и образующих еди-
ную функциональную схему, расположенную на одной общей подложке,
имеет целый ряд преимуществ, к которым относятся:
а) более низкая стоимость;
б) повышенная надежность работы за счет устранения промежуточ-
ных соединений;
в) повышенная температурная стабильность;
г) высокое значение выходного сигнала, позволяющее без дополни-
тельного усиления использовать его в практических схемах;
д) устраняется проблема борьбы с наводками, поскольку датчик и
усилитель находятся на одной подложке, а это приводит к устранению
длинных соединительных проводников.
Весьма существенным также является то обстоятельство, что интег-
ральные схемы на гальваномагнитных датчиках непосредственно сопря-
гаются со стандартными элементами других схем: как с ДТЛ, так и с
ТТЛ, причем источник питания у них общий с напряжением +5 В.
5.2.2. Магнитоизмерительные системы
Поскольку МП — это пространственное энергетическое явление, то
для его регистрации и представления необходимы многоточечные объ-
Измерительно-диагнос гические методы и аппаратура
157
емные измерения. Учитывая различную степень неоднородности МП
промышленных аппаратов магнитотерапии, накладывается еще одно тре-
бование по пространственной разрешающей способности.
Реализовать поставленную задачу можно путем построения магни-
точувствительного узла в виде матрицы из датчиков Холла или магни-
торезисторов. Однако подобные преобразователи на сегодняшний день
имеют малую чувствительность и малые значения амплитуды сигнала
на выходе. Указанные недостатки можно обойти применением магни-
тодиодов или магнитотранзисторов в качестве магниточувствительного
элемента матрицы. В этом случае можно рассмотреть один из вариантов
структурной схемы магнитовизора, представленного на рис. 5.4.
В ее состав входят: пространственный измерительный преобразова-
тель ПИП; магниточувствительный узел МЧУ; коммутатор информаци-
онных сигналов К; управляемый усилитель УУ; блок развертки БР; уст-
ройство аналогового ввода УАВ; персональная ЭВМ (ПЭВМ) с видео-
контрольным устройством (ВКУ); шаговый двигатель ШД.
Принцип действия преобразователя заключается в следующем. Под-
вергающееся контролю и измерению рабочее пространство вокруг маг-
нитного излучателя МИ, создающего неоднородное MIL разбивается на
ряд сечений. Каждое сечение представлено двухкоординатной плоскос-
тью матрицы N • М элементов магниточувствительного узла МЧУ
(рис. 5.5).
Рис. 5.4. Структура магнитоизмерительной системы (магнитовизора)
Под действием магнитного поля происходит изменение концентра-
ции носителей заряда в базе магнитодиода, что приводит к появлению
на поверхности матрицы электропотенциального рельефа, определяемо-
го индукцией магнитного поля. Для получения максимальной чувстви-
тельности применяется принцип накопления. В этом случае ток видео-
сигнала, поступающий от каждого магнитодиода, пропорционален пол-
ному магнитному потоку, действующему на магнитодиод за полный
период между коммутациями, то есть за время кадра. Каждый конден-
сатор, шунтирующий магнитодиод, в момент коммутации заряжается
158
Глава 5
Рис. 5.5. Магнитоизмерительный зонд
(матричный)
максимально, а между комму-
тациями начинает разряжать-
ся до напряжения, зависящего
от индукции МП, действую-
щего на магнитодиод, и, сле-
довательно, от сопротивления
магнитодиода. Опрос и под-
ключение соответствующего
элемента матрицы (датчика)
ко входу измерительного ка-
нала осуществляется блоком
развертки, выполненным в
виде счетчика, дешифратора и
набора аналоговых ключей. С
целью сокращения количества
подводящих проводов, исключения дополнительных помех при передаче
информации, экономии аппаратных средств в пространственный изме-
рительный преобразователь (ПИП) введены блоки коммутатора инфор-
мационных сигналов (К) и усилителя (У).
Для снятия информации в исследуемом объеме плоскость матрицы
перемещают дискретно по третьей координате с помощью шагового
двигателя (ШД), а управление элементами матрицы и шаговым двига-
телем производится по общей шине кодами и сигналами, поступающими
от ПЭВМ.
Поскольку количественной характеристикой величины магнитной
индукции в каждой точке пространства является значение модуля
В = + В’ + В2
(5.6)
или составляющих его компонент Вх, Ву, Bz, то регистрация МП и
полнота представления зависят от метода измерения в этой точке. Если
использовать однокомпонентный датчик МП в качестве элемента мат-
рицы, что, как правило, и делают, то в этом случае необходимо пос-
ледовательно проводить измерения в каждой точке по трем составля-
ющим, в прямоугольной системе координат, т.е. ориентировать плос-
кость матрицы каждый раз по трем направлениям и строго под прямым
углом. Данный метод существенно увеличивает время измерения, зна-
чительно усложняет реализацию процедуры измерения и естественно
вносит дополнительные погрешности ориентации в пространстве.
Устранение названных недостатков возможно с применением в ка-
честве элемента матрицы трехкомпонентного гальваномагнитного пре-
образователя, выполненного по интегральной технологии, желательно
на базе полевых рекомбинационных магнитотранзисторов (МТ). Целе-
сообразность их использования для магниточувствительного измеритель-
ного узла вызвана прежде всего линейной характеристикой передачи,
т.е. зависимостью выходного напряжения МТ от тока и магнитной ин-
дукции, повышенной на несколько порядков чувствительностью преоб-
Измерительно-диагностические методы и аппаратура
159
разователя к МП и достаточно широким диапазоном измеряемых зна-
чений магнитной индукции от 10"7 до 10-1 Тл. Таким образом, путем
сканирования электронным способом в плоскости матрицы и механи-
ческим способом — плоскостью матрицы в объеме, получают совокуп-
ность точечных трехмерных результатов измерений с заданной дискрет-
ностью по всему исследуемому пространству.
В процессе сканирования последовательно информация от каждой
точки передается через коммутатор и усилитель на вход цифрового ре-
гистратора. В качестве последнего на сегодняшний день могут быть
использованы три варианта устройств: а) цифровой осциллограф; б) блок
управления магнитотерапевтического комплекса «Аврора МК-02»; в)
встраиваемая плата аналогового ввода для ПЭВМ. Варианты «а» и «б»
имеют ограниченные возможности по объему запоминаемых данных, а
также по обработке и представлению измерительной информации. Тре-
тий вариант построения измерительной системы является наиболее гиб-
ким с широким набором функциональных возможностей и программ-
ного обеспечения. Очень важное значение имеет визуализация прост-
ранственного распределения магнитной индукции, что с помощью
стандартного пакета программ трехмерной графики делает эту операцию
наиболее доступной и наглядной.
Оценку количественного распределения МП в исследуемом объеме
можно получить не только пространственными измерениями его пара-
метров в множестве фиксированных точек, но и с помощью математи-
ческих методов построения изображений по интегральным траекториям,
характеризующим распределение МП, измеренным по многим направ-
лениям (проекциям).
Используемый в настоящее время для целей клинической диагностики
перспективный метод компьютерной томографии (КТ) позволяет получить
любое количественное физическое распределение путем измерения значе-
ний его интегральных параметров [164]. В связи с этим может быть реа-
лизован оригинальный метод получения изображения МП, как векторной
величины, с использованием алгоритма КТ. Этот метод позволяет строить
изображение распределения магнитной индукции каждой компоненты по
напряжению, индуцируемому в токоведущей линии и прямоугольной
рамке, движущейся в МП с постоянной скоростью.
Методом КТ возможно воспроизвести распределение (Р) любой фи-
зической величины за счет измерения ряда интегральных значений Р
для многих, пересекающихся под различными углами траекторий Р, что
иллюстрируется на рис. 5.6, где любое значение Р физической величины
А(х,у) может быть представлено интегральным значением P(g,Q) вдоль
оси соотношением:
P(g,Q) = J A(x,y)d/. (5.7)
Воспроизведение изображения каждой компоненты Р может быть
получено измерением значения проекции каждой компоненты, что для
магнитной индукции В(х,у) записывается следующим образом:
160
Глава 5
Px(g,Q) = J Bx(x,y»d/,
Py(g,Q) = j By(x,y)d/,
Pz(g,Q) = j Bz(x,y)d/,
(5.8)
Принцип измерения магнитной индукции и задания исходных дан-
ных на основе алгоритма КТ можно проиллюстрировать рис. 5.7.
Рис. 5.6. Иллюстрация метода компьютерной томографии
Представим, что в плоскости формирования изображения над МО
движется проводник (токоведущая линия) с постоянной скоростью V.
При пересечении проводником силовых линий МП, в нем индуцируется
электрическое поле Е в соответствии с законом: Е = VB.
Рис. 5.7. Измерение компоненты Bz(x,y) с помощью линейного проводника
Электрическое поле, в свою очередь, создает напряжение U на кон-
цах проводника:
U = -J(VB)d/,
(5.9)
Измерительно-диагностические методы и аппаратура 161
а так как скорость V = const, то
U = - vjBz(x,y)dZ. (5.10)
Поскольку напряжение U пропорционально интегралу Z-компонен-
ты индукции вдоль проводника, то измерение напряжения в процессе
движения проводника обеспечивает получение проекционных данных
лишь под одним из углов Bz(x,y). Соответственно, полные данные о
проекциях по каждому углу достигаются измерением напряжения в раз-
личных направлениях (под разными углами Q).
С другой стороны, проекции х и у компонент В не могут быть
получены повторением измерений под различными углами Q, т. к. углы
между осями х, у и координатами g, Z зависят от угла проекции Q. В
этом случае, для восполнения недостающих данных производят измере-
ния линейных интегралов g и / компонент распределения Р индукции
В вдоль оси /, как показано на рис. 5.8, тогда значения х и у компонент
индукции В находят из следующих выражений:
[Bx(x,y)d/= cosQ [в (x,y)d/-sinQ [B/(x,y)dZ,
J (5.11)
jBy(x,y)dZ = sinQ jBg(x,y)dZ + cosQ jB;(x,y)dZ.
Линейные интегралы Bg(x,y) по оси Z могут быть измерены с помо-
щью прямоугольной рамки, движущейся с постоянной скоростью в на-
правлении оси g по плоскости х,у, расположенной над МО. В рамке
наводится, в соответствии с законом электромагнитной индукции, на-
пряжение U, равное:
u = -d0/dt, (5.12)
где Ф — магнитный поток, пересекающий рамку из нескольких витков.
Рис. 5.8. Измерение недостающих компонент Вх(х,у) и Ву(х,у) с помощью прямо-
угольной рамки
162
Глава 5
Предполагая m — ширину рамки в направлении Z достаточно малой
и плотность потока в рамке однородной, запишем выражение для Ф
как:
Ф= m jBg(x,y)dZ. (5.13)
Учитывая то, что V = dg/dt, выражение для напряжения U в рамке
примет вид:
U = - m • V — [(В (х,у) dZ 1. (5.14)
dg J 8
Следовательно, напряжение, индуцируемое в рамке, движущейся в
плоскости измерений с постоянной скоростью, пропорционально диф-
ференциальному значению линейного интеграла Bg(x,y). Поэтому, изме-
ряя напряжение в процессе движения рамки, фактически определяется
значение линейного интеграла Bg(x,y) по оси Z, исходя из формулы:
[в (x,y)d/= —!—fudg. (5.15)
j » my j
Среднее значение линейного интеграла В/х,у) по оси Z можно рас-
сматривать как нулевое в соответствии с нижеприведенной аппрокси-
мацией. Если измеряемое МП считать безвихревым, то скалярный маг-
нитный потенциал <рм может быть включен в следующее равенство:
jB/(x,y)dZ = p0((pM1 -<рм2), (5.16)
где (рМ| и <рм2 — потенциалы граничных измерений; — магнитная
постоянная.
Предполагается, что диапазон измерений является достаточно ши-
роким и может рассматриваться как безграничный, потенциал в грани-
цах измерений считается нулевым, тогда:
J В, (x,y)dZ = О,
и в результате:
JВх(х,y)dZ = cosQ JBg(x,y)dZ,
J By (x, y)d I = sinQ J Bg (x, y)dZ.
Поэтому, измерением только линейных интегралов Bg(x,y) по оси Z
можно получить проекции х и у компонент индукции В.
Измеряя проекции магнитной индукции Вх(х,у) и Ву(х,у) для каждого
угла Q и применяя алгоритм КТ к этим проекциям, можно восстановить
значения Вх(х,у) и Ву(х,у) для формирования изображения распределения
магнитного поля.
Структура магнитоизмерительной системы, реализующей рассмот-
ренный метод, изображена на рис. 5.9. В ее состав входят: линейный
проводник; прямоугольная рамка; плоскость сканирования и позицио-
(5.17)
(5.18)
Измерительно-диагностические методы и аппаратура
163
Рис. 5.9. Магнитовизор на основе метода компьютерной томографии
нирования; измерительные усилители (ИУ1, ИУ2); аналого-цифровые
преобразователи (АЦП1, АЦП2); устройство сопряжения (УС) — адап-
тер; исполнительный механизм сканирования и позиционирования
(ИСМП); схема управления механизмом (СУМ); ЭВМ; монитор ЭВМ
(М).
Предложенный метод измерения параметров МП и архитектура сис-
темы съема и визуализации его характеристик позволяют, с одной сто-
роны, существенно упростить конструкцию, технологию изготовления и
снизить производственные затраты на создание магниточувствительного
зонда, а, с другой стороны, полностью автоматизировать процесс изме-
рения с расширением функций управления и обработки и свести к
минимуму результирующую погрешность. Поскольку в качестве МЧП
используются элементы электрических цепей: катушка индуктивности и
проводник тока, выходной измеряемой величиной которых является на-
пряжение U, наведенное в них при сканировании исследуемого про-
странства над МО, то точность измерений будет, в основном, зависеть
от трех факторов:
1) точности расчетов и качества конструктивного исполнения рамки
и проводника (линейности на заданной длине, постоянства размеров в
направлении каждой из координат, выбора размеров элемента разреше-
ния);
2) точности сканирования и позиционирования (сохранение посто-
янства скорости и прямолинейности движения, эквидистантности на-
правлений перемещения рамки и проводника Q1 = Q2 = ••• = QN и
выбора шага дискретности);
3) помехозащищенности измерительного зонда в целом (исключение
возможности паразитных наводок на рамку с проводником, а также на
кабель съема информации; изготовление элементов исполнительного ме-
164
Глава 5
ханизма из немагнитных материалов с целью устранения искажений
измеряемого МП; использование в качестве механизмов привода изде-
лий, не излучающих собственное электромагнитное поле).
Таким образом, получение полных проекционных данных для вос-
становления изображения распределения МП возможно путем измере-
ния напряжений, индуцированных в проводнике и рамке при переме-
щении их в плоскости по разным направлениям. Принцип действия
механизма сканирования и позиционирования более наглядно представ-
лен на рис. 5.10.
Рис. 5.10. Исполнительный механизм сканирования (V)
и позиционирования (Q, h)
Механизм состоит из: 1) плоскости с жестко фиксированными на
ней рамкой и проводником; 2) рейки, вдоль которой перемещается плос-
кость с постоянной скоростью V (направление сканирования перпенди-
кулярно проводнику и площади рамки); 3) штанги, соединенной осью
вращения с серединой рейки; 4) стойки, вдоль которой перемещается
штанга под прямым углом.
Перед измерением необходимо установить с помощью ПЭВМ ис-
ходные параметры сканирования и позиционирования:
1) скорость перемещения V вдоль рейки;
2) число направлений сканирования или углов поворота рейки;
3) шаг дискретности углов;
Измерительно-диагностические методы и аппаратура
165
4) количество уровней квантования или сечений исследуемого про-
странства;
5) шаг квантования;
6) количество повторных измерений для статистической обработки
данных и анализа достоверности результатов.
Далее в режиме измерения напряжения U] и U2, наведенные соот-
ветственно в рамке и проводнике, через кабель связи подаются на вход
стандартной платы сопряжения с ПЭВМ — устройство ввода аналоговой
информации. Текущие значения напряжений масштабируются и преоб-
разуются в код с заданным коэффициентом, динамическим диапазоном
и точностью и далее передаются для хранения и обработки в ПЭВМ.
По окончании процесса измерения из полученного массива данных в
соответствии с заложенным алгоритмом визуализации на экране мони-
тора формируется изображение распределения МП.
Промышленностью выпускается аппаратура для измерения параметров
постоянных и переменных магнитных полей: измерители напряженности
МП, тесламетры, градиентометры и др. [157]. Характеристики отдельных
приборов, предназначенных для измерения параметров МП в диапазоне
магнитной индукции от долей до единиц мТл, приведены в табл. 5.2.
Таблица 5.2
Отечественная и зарубежная аппаратура
для измерения параметров МП
Наименование, тип прибора, страна Диапазон измерения магнитной индукции, мТл Погреш- ность измерения, % Частотный диапазон, Гц Вид датчика Вид инди- кации
Микротесламетр Г- 77 (СССР) 5 ЮЧ.ЛО3 2 0 Холла Ц
Микротесламетр Г-703 (СССР) 5-10‘5...! 10 20...2105 Индук- ционный А
Микротесламетр Г-74М (СССР) 2-1О'3...1О 15 0 Ферро- зондовый А
Магнитометр G 856 (США) 210’5...9 0,5 0 Протонный Ц
Магнитометр G 813 (США) 21О’5...9 0,05 O...51O5 Протонный Н
Трехкомпонентный магнитометр-градиенто- метр 1.131 (ФРГ) 1,27-10-3... 1,27 2,5 0 Ферро- зондовый А, Ц
Примечание. В таблице приняты обозначения: А — аналоговая индикация; Ц — цифро-
вая индикация.
Необходимо отметить, что вся промышленно выпускаемая магнито-
измерительная аппаратура предназначена для точечных измерений пара-
метров МП, что не позволяет эффективно использовать ее для решения
задач комплексной магнитотерапии в части визуализации пространст-
венного распределения поля в объеме магнитоскана.
166
Глава 5
5.3. Измерение и задание характеристик поля,
создаваемого реальным магнитосканом
В магнитотерапевтическом комплексе «Аврора МК-01» [7] имеется
возможность для задания конфигурации магнитного поля (МП) одно-
временно во всех сегментах, каждый из которых образован 8-ю ремнями
индукторов. Установка формы МП в каналах (ремнях) и по тактам
одного временного цикла воздействия производится с помощью множе-
ства (816) микропереключателей, оформленных в виде матрично-орга-
низованного блока под названием «Программа» и расположенного на
передней панели прибора. Включенное состояние каждого из микропе-
реключателей подтверждается находящимся рядом светодиодом. Значе-
ние индукции (уровень) МП в каналах плавно устанавливается в пре-
делах 0...5 мТл с помощью органов управления «>» (больше), «<» (мень-
ше) электронного блока МТК «Аврора МК-01» по отградуированному
панорамному индикатору. Для точного измерения и задания параметров
МП в конкретных точках объема магнитоскана может быть использована
серийная аппаратура — тесламетры [157]. Выпускаемые промышленнос-
тью приборы (см. 5.2) предназначены для измерения, в основном, по-
стоянных и переменных (средние или действующие значения) магнит-
ных полей. Как правило, датчик МП (измерительная катушка, датчик
Холла и др.) располагают в выносном щупе, который должен быть ори-
ентирован определенным образом относительно направления вектора
магнитной индукции. При такой процедуре с учетом того, что в магни-
тоскане магнитотерапевтического комплекса «Аврора МК-01» направле-
ние вектора может изменяться, у врача возникнут затруднения по ис-
пользованию серийной аппаратуры для магнитных измерений, а также
неоправданные затраты времени. Результат же измерения все равно будет
усредненным по объему датчика. Кроме того, в аппарате предусмотрены:
возможность установки частоты в диапазоне 0...100 Гц с дискретностью
1 Гц, установка фонового (постоянного) МП, а также режим синхро-
низации МП с частотой основных биоритмов человека (в комплексе
«Аврора МК-01» — до 4-х биоритмов). Комплекс настраивается для
каждого пациента персонально, причем возможности аппаратуры позво-
ляют производить только ручную настройку, что увеличивает время под-
готовки и снижает пропускную способность кабинета.
Пользователю (врачу) гораздо удобнее иметь набор стандартных ме-
тодик (программ формирования МП), а также иметь возможность легко
и быстро мнемонически создавать любую требуемую конфигурацию поля
и программу воздействия им. Такого рода комплекс может быть построен
на основе персональной ЭВМ. Идея заключается в том, что на экран
дисплея ЭВМ выводится одним цветом, например, схематичное изобра-
жение магнитоскана, а другим цветом — изображение магнитных сило-
вых линий или распределения индукции МП в сегментах. На рис. 5.11
показано двумерное изображение проекции магнитоскана (магнитного
скафандра) на плоскость и кривые распределения индукции МП отно-
Измерительно-диагностические методы и аппаратура
167
Рис. 5.11. Изображение проекции магнитос-
кана на плоскость и кривые распределения
магнитной индукции в сегментах:
— места расположения датчиков для измере-
“ ния МП;
= — линия раздела левой и правой половин
магнитоскана;
s' — кривые распределения магнитной индук-
ции в сегментах
сительно осевых линий сегментов. Поле каждого из сегментов разделено
на квадраты по числу индукторов, расположенных в данном сегменте.
Зачерненные квадраты соответствуют местам расположения датчиков
магнитного поля. Поскольку лечение некоторых заболеваний предусмат-
ривает в ряде случаев различные воздействия для левой и правой поло-
вин тела человека, сегменты для головы и туловища разделены на две
части каждый.
Работа с комплексом сводится к тому, что врач вводит курсор (маркер)
в нужный сегмент и деформирует по своему усмотрению линию распре-
деления индукции МП. При совмещении курсора с заштрихованным квад-
ратом на экране автоматически высвечивается окно (рис. 5.12), где появ-
ляется информация о данном сегменте (голова, туловище, конечность),
стороне (левая или правая) и
представляется возможность
установить параметры МП
(фон, индукция ИМП, часто-
та или режим синхрониза-
ции). После этого в ремне,
где расположен датчик МП, с
помощью аппаратуры для из-
мерения МП и следящей сис-
темы будет установлено за-
данное значение индукции на
поверхности индуктора, а в
остальных ремнях значения
индукции рассчитываются по
алгоритмам в соответствии с
заданной формой кривой рас-
пределения индукции данно-
го сегмента и устанавливают-
ся с помощью источников
тока аппарата «Аврора МК-
01». После установки конфи-
гурации и параметров поля во
всех сегментах набранная
программа для лечения кон-
кретного пациента записыва-
ется в память ЭВМ и при по-
вторных сеансах просто вы-
зывается на дисплей. Если в
ходе лечения требуется кор-
рекция программы воздейст-
вия в какой-либо части, то она в любой момент осуществляется так же,
как это описано выше.
Структура аппаратной части автоматизированного магнитотерапев-
тического комплекса изображена на рис. 5.13. При добавлении измери-
168
Глава 5
Сторона левая
Сегмент туловище
Фон, мТл 0,5
Индукция, мТл 4,0
Частота, Гц 12
Синхронизация 1 2 3 4
Рис. 5.12. Окно-подсказка для уста-
новки параметров магнитного поля
ма воздействия, зафиксированная
пользоваться в качестве исходной
можны и любые другие сочетания
Изменения в накапливаемых от сеанса к сеансу программах воздействия
несут в себе важную информацию об эффективности процесса лечения
и для анализа тенденций изменения общего состояния пациента.
тельно-диагностической аппаратуры,
оценивающей общее состояние паци-
ента (каналы измерения рео-, ЭКГ-,
ЭЭГ-сигналов, артериального давле-
ния, температуры и др.), рассмотрен-
ный комплекс легко трансформиру-
ется в систему с биотехнической об-
ратной связью [14] (см. 4.8). При
этом начальная установка параметров
и конфигурации МП осуществляется
аналогично описанному выше, а в
ходе сеансов магнитотерапии харак-
теристики поля могут изменяться
автоматически под воздействием
сигналов обратной связи. Програм-
в конце текущего сеанса, может ис-
для очередного сеанса лечения. Воз-
и варианты использования программ.
Рис. 5.13. Структура комплекса, обеспечивающего автоматизированное задание
значений и конфигурации МП в магнитоскане
Измерительно-диагностические методы и аппаратура
169
Следующим этапом в развитии, повышающим универсальность и
гибкость комплекса и позволяющим формировать поля более тонкой
структуры, является матричное управление магнитосканом (независимое
управление каждым индуктором), а также использование трехмерных
изображений магнитного скафандра и конфигурации создаваемого маг-
нитного поля на дисплее с возможностью поворота изображений вокруг
любой из осей. Такого рода магнитотерапевтические комплексы могут
найти применение в исследовательских центрах как для лечения, так и
для целей проведения уникальных биолого-технических экспериментов.
5.4. Методы и средства диагностики
в магнитотерапии
Магнитотерапия представляет собой комплекс физиотерапевтичес-
ких процедур воздействия магнитным полем с заданными свойствами
на пациента в определенном порядке в зависимости от цели воздействия.
Среди главных целей можно назвать: лечение, восстановление функций,
коррекция состояния, тренировка, профилактика, создание тестовых
воздействий и др. Метод магнитотерапии может быть монометодом ле-
чения, когда другие методы неэффективны или противопоказаны, на-
пример, при аллергических осложнениях от медикаментозных форм ле-
чения. Он может использоваться как основной метод в сочетании с
другими, а также быть дополнительным к определяющему стратегию
лечения методу, например, хирургическому.
Магнитотерапия не имеет особых или дополнительных противопо-
казаний к применению по отношению к общеизвестным физиотерапев-
тическим методам и показана для лечения большинства патологий ан-
гиологического, кардиологического, неврологического и травматологи-
ческого классов. Она успешно может применяться в предоперационной
подготовке и послеоперационной реабилитации. Поэтому рекомендацию
по использованию конкретной магнитотерапевтической методики для
пациента может дать врач-специалист, опираясь на традиционные ме-
тоды и средства диагностики, сопутствующие современным медицин-
ским технологиям. Учитывая направленность данной книги и опираясь
на работы Е. П. Попечителева [165, 166], представим перечень методов
медико-биологических исследований и диагностики в виде классифика-
ционных таблиц, где отражены их причинно-логические связи и сопод-
чинение.
Все методы диагностики можно разделить на группы, объединенные
общим признаком, отражающим форму проявления жизнедеятельности
человека или систему воздействия на организм и биопробу и анализ
полученной реакции. На рис. 5.14 представлена схема подобного разде-
ления.
Каждая группа включает в себя большой набор методов, подметодов
и методик, имеющих высокую эффективность и широкое применение
170
Глава 5
Рис. 5.14. Классификация методов исследования и диагностики
для диагностирования вполне определенного узкого класса заболеваний.
В рамках данной работы рассмотреть подробно все группы методов нет
возможности. Поэтому ниже раскрыты только электрографические и
термографические методы диагностики, имеющие наиболее полное при-
менение при назначении магнитотерапии и мониторинга в ходе ее ре-
ализации.
На рис. 5.15 представлена классификационная схема методов и под-
методов, составляющих электрографическую группу. Следует подчерк-
нуть, что в настоящее время наиболее информативными и реализуемыми
в технологии магнитотерапии являются электрокардиография, импе-
дансная электроплетизмография, окклюзионная, дермо- и реовазогра-
фия. Не менее распространенная объективная диагностика заболеваний,
основанная на изучении процессов теплопродукции и теплообмена, рас-
полагает тремя главными методами получения информации (рис. 5.16).
Первый метод — термометрия — реализуется за счет различных
эффектов преобразования значения температуры биотела в сигнал, удоб-
ный для восприятия оператором. В соответствии с этим различают ра-
диометрическую и люминесцентную термометрию, а также термометры,
основанные на расширении объема чувствительной среды, на изменении
диэлектрической и магнитной проницаемости и др.
Второй метод — термография — обладает повышенной информа-
тивностью. Он включает в себя яркостную и цветовую термографию и
термографию суммарного потока.
Измерительно-диагностические методы и аппаратура
171
— Методы электрографии (метрии)
— Общая реография
Реокардиография
Реоэнцефалография
Реогепатография
Импедансные методы Реодермография
—
1 Реография артерий и аорты
Реография окклюзионная
Импедансная электроплетизмография
Импедансная пневмография
Кожнорезистивная реакция
Диэлектрография
Электроемкостная плетизмография
— Электрокардиография (скал., вектор.)
Вариационная пульсометрия
Методы, основанные на регистрации (измерении) биопотенциалов
— Электроэнцефалография
Электрокортикография
—
Электроцеребелография
— Электромиография
Электроокулография
Электроретинография
—
Электрогастрография
Кожногальваническая реакция
Рис. 5.15. Классификация методов электрографии
Третий метод изучения теплообмена — калориметрия, основанный на
явлениях преобразования количества тепла в информационный сигнал,
получил широкое распространение при исследовании свойств биопроб.
172
Глава 5
Рис. 5.16. Классификация методов исследования процессов теплопродукции
и теплообмена
При разработке и создании, экспериментальной и клинической про-
верке эффективности систем комплексной магнитотерапии (в частности,
комплекса «Аврора МК») из множества физиологических показателей в
качестве определяющей была выбрана минимизированная группа пара-
метров, в которую вошли показатели электрокардиологической, реогра-
фической направленности, параметры кровяного давления и температура
в различных точках тела.
Именно на эти четыре группы параметров была ориентирована раз-
работка измерительно-диагностической системы для экспресс-анализа
состояния пациента непосредственно перед отпуском и после окончания
процедуры магнитотерапии. Задача была решена по принципу агрегати-
рования выпускаемых серийных приборов в мобильную систему с уп-
равлением от ПЭВМ, входящей в магнитотерапевтический комплекс.
Кроме того, именно для измерения названных параметров во время
воздействия магнитным полем разработаны помехоустойчивые методы
и измерительные каналы, которые описаны ниже.
5.5. Агрегатирование стандартных диагностических
средств
Ряд физиологических параметров, подлежащих контролю при маг-
нитотерапевтическом сеансе (МТС), определен в 1-й главе и соответст-
вует, в основном, сердечно-сосудистым заболеваниям. Практически с
помощью нескольких основных групп приборов общего пользования,
включающих энцефалограф, кардиомонитор (КМ), реограф (РГ), изме-
Измерительно-диагностические методы и аппаратура
173
ритель артериального давления (ИАД), измеритель температуры кожного
покрова (ИТ), можно достаточно точно определить состояние пациента.
Цель, которую ставят в процессе контроля за состоянием параметров
пациента во время МТС, — индивидуализация процедуры с учетом осо-
бенностей конкретного заболевания (или их группы). Такой подход по-
зволяет не только эффективно использовать процедуру магнитотерапии,
но и определить полезные зависимости между параметрами воздейству-
ющего магнитного поля и физиологическими показателями пациента.
Вполне очевидно, что для удобства контроля упомянутый перечень
приборов должен быть объединен в систему и иметь выход как для
визуального контроля оператором, так и для хранения и последующей
обработки информации. Этим требованиям удовлетворяет измеритель-
но-диагностическая система (ИДС), реализованная по принципу агре-
гатирования стандартных средств измерений и диагностических прибо-
ров, структурная схема которой приведена на рис. 5.17.
Рис. 5.17. Структурная схема измерительно-диагностической системы
Система содержит первичные датчики ПД, аналоговый блок АБ и
блок цифровой обработки БЦО. Аналоговый блок включает в себя кар-
диомонитор КМ, реограф РГ, измеритель артериального давления ИАД,
измеритель температуры кожного покрова ИТ. В состав БЦО входит
персональная электронно-вычислительная машина (ПЭВМ) со встроен-
ной платой аналогово-цифрового интерфейса АЦИ. Достоинство при-
веденной структурной схемы заключается в возможности формирования
АБ из серийно выпускаемых приборов, которые с помощью датчиков
(электродов) связаны с пациентом. Имеется дополнительная связь маг-
нитотерапевтического комплекса (МТК) с ИДС для регистрации мгно-
венных значений параметров воздействующего магнитного поля. Для
того чтобы правильно выбрать компоненты аналогового блока системы
174
Глава 5
из всего многообразия существующих устройств, целесообразно рассмот-
реть взаимодействие ИДС с пациентом и МТК в процессе отпуска про-
цедуры (в реальном масштабе времени). Определение места ИДС в дан-
ном взаимодействии позволит конкретизировать требования к приборам
общего пользования, составляющим аналоговый блок. В связи с этим
рассмотрим схему взаимодействия в системе пациент-ИДС с магнито-
терапевтическим аппаратом (рис. 5.18).
Рис. 5.18. Схема взаимодействия пациент — ИДС — МТК
На схеме магнитотерапевтический комплекс представлен блоком уп-
равления МТК (БУ МТК) и магнитосканом. Пациент с помощью пер-
вичных датчиков связан с аналоговым блоком ИДС, и информация о
его состоянии через АЦИ поступает на ПЭВМ. Перед началом сеанса
в результате преобразования в i-м канале системы реализуется функция
F(t)Dj интересующего нас параметра пациента без влияния МТК.
Обозначим воздействие МТК на пациента через некоторые парамет-
ры Pjp(t). Можно априорно предположить, что и функция F(t)Di также
претерпит некоторые изменения и может быть записана в виде
F(t, P/Xt))^
Кроме воздействия на пациента, МТК влияет также на отдельные
элементы и блоки ИДС, создавая дополнительные изменения в функции
F(t, Pjp(t))Di. При аддитивном их характере можно записать:
F(t)D1 —> F(t. + F(Pj(t))Di, (519)
где F(Pj(t))Di — результат воздействия МТК на ИДС в i-м канале, а
P£(t) — некоторые параметры воздействия МТК на ИДС.
Измерительно-диагностические методы и аппаратура 175
Анализируя преобразование (5.19), сформулируем требования, ха-
рактеризующие наилучший вариант преобразования:
1. Максимально высокая чувствительность к полезному сигналу (т.е.
F(t, Pjp(t))Di -4 max).
2. Минимальное значение F(Pj(t))Dj — требование высокой помехозащи-
щенности от факторов воздействия МТК.
3. Необходимое амплитудное согласование выходных сигналов АБ с
входами АЦИ.
Анализ работы диагностической аппаратуры общего назначения по-
казал, что существующие кардиомониторы и измерительные кардиока-
налы не позволяют проводить измерения в процессе отпуска магнито-
терапевтической процедуры.
Таким образом, для осуществления диагностики в процессе магни-
тотерапевтического воздействия требуется разработка специализирован-
ных методов измерения и диагностической аппаратуры, способной ра-
ботать в условиях действия электромагнитных помех.
5.6. Специальные измерительно-диагностические
средства
Импульсные магнитотерапевтические комплексы (ИМТК) представ-
ляют собой источники мощных электромагнитных помех. Излучателями
этих помех являются как индукторы формирователя бегущего магнит-
ного поля, так и источники питания этих индукторов [167].
С целью упрощения минимизации помехи F(Pj(t))Dj целесообразно
разделить аналоговые измерительные каналы системы по способу связи
с пациентом на электропроводные и диэлектрические. К первому типу
относятся кардиомонитор и реограф, ко второму — измерители артери-
ального давления и температуры кожного покрова.
Поскольку природа воздействия МТК — электромагнитная, то сле-
дует ожидать дополнительных наведенных токов через входные цепи
кардио- и реоканалов. Для эффективного решения вопроса повышения
помехоустойчивости измерительных кардиоканалов диагностических
систем необходимо изучить и сравнить свойства полезного сигнала и
помехи [168].
Первая группа помех характеризуется спектром частот от единиц Гц
до сотен кГц, создаваемых импульсами с частотой следования, равной
частоте формирования бегущего магнитного поля: единицы-сотни Гц.
Следовательно, частотный спектр импульсных помех полностью пере-
крывает частотный спектр кардио- и реосигналов (100 Гц). Было выяв-
лено, что размах помех существенно превышает диапазон измерения
кардиосигнала и достигает 30% от размаха сигнала на входе реоканала
для реографа Р4-02. Вторая группа помех полностью определяется ис-
точником питания индукторов и занимает частотный диапазон от де-
сятков Гц до сотен МГц.
176
Глава 5
Помимо импульсных помех на пациента и диагностическую аппа-
ратуру наводятся фоновые помехи промышленной частоты. Соотноше-
ние размаха фоновой помехи к размаху кардиосигнала достигает 30%, а
к размаху реосигнала — 20%. Кроме внешних помех, на результат кон-
троля за состоянием пациента влияют и внутренние помехи самой диа-
гностической аппаратуры.
При измерении артериального давления пациента и температуры его
кожного покрова, как показывают практические исследования, влияни-
ем импульсных и фоновых помех можно пренебречь.
Для подавления внешних помех необходимо исследовать процесс их
возникновения в системе «ИМТК — пациент — электрокардиограф» и
«ИМТК — пациент — реограф». Исследование известных моделей вза-
имодействия «пациент — электрокардиограф» с учетом специфики по-
строения ИМТК типа «Аврора МК» позволило разработать модель вза-
имодействия «ИМТК — пациент — электрокардиограф» для первого
стандартного отведения [169].
При магнитотерапевтическом сеансе пациент помещается внутрь
магнитоскана. Магнитоскан представляет собой некоторую подвижную
(условно гибкую) конструкцию индукторов (излучателей магнитного
поля), изолированных от пациента диэлектрическим корпусом. Таким
образом, пациента можно представить в качестве неоднородного про-
водника, поверхность которого является одной из обкладок конденса-
тора. Второй обкладкой конденсатора является поверхность сети индук-
торов, также обладающей электрической неоднородностью. В силу ус-
ловной гибкости магнитоскана, не представляется возможным
обеспечить плотный физический контакт диэлектрической поверхности
магнитоскана с каждой точкой поверхности пациента. Следовательно,
диэлектрическая проницаемость образованного зазора определяется ди-
электрической проницаемостью изолятора магнитоскана, занимающего
фиксированное положение в зазоре, и диэлектрической проницаемостью
воздушного зазора, имеющего переменное значение по всей площади.
Более того, воздушный зазор изменяется не только от пациента к па-
циенту, но и от сеанса к сеансу у одного пациента. Объясняется это
тем, что при переходе от одного сеанса магнитотерапии к другому не-
возможно абсолютно одинаково разместить пациента внутри магнитос-
кана. Кроме указанной емкостной связи, в силу конечности сопротив-
ления изоляции корпуса магнитоскана, между пациентом и сетью ин-
дукторов существует и омическое сопротивление. Таким образом, между
пациентом и магнитосканом существует пространственный импеданс,
который в дальнейшем будем называть полным пространственным им-
педансом взаимодействия ИМТК и пациента, через который ИМТК
воздействует на пациента не только магнитным полем, но и электри-
ческим. Особый интерес вызывает анализ вторичного воздействия
ИМТК (электрического поля) на измерительные каналы во время маг-
нитотерапевтического сеанса. Для этого рассмотрим электрическую мо-
дель взаимодействия «ИМТК — пациент — электрокардиограф».
Измерительно-диагностические методы и аппаратура
177
В этой модели (рис. 5.19) пациент представлен четырьмя элемента-
ми: Zj, Z2 — полный внутренний импеданс биообъекта, приведенный к
точкам наложения электродов электрокардиографа «R» и «L» соответст-
венно относительно электрода «F», и ёк1 и ёк2 — эквивалентные ЭДС
кардиосигнала. Контактные импедансы электродов «R», «L», «F», а также
полные импедансы проводной линии, соединяющей электроды с входом
электрокардиографа, обозначены через Z3, Z4, Z7 соответственно. Отве-
дения, используемые при анализе, соответствуют первому стандартному
отведению по Эйнтховену. Электрокардиограф представлен в модели
полными входными импедансами Z5, Z6 по входам «R» и «L» соответ-
ственно, а также сквозным импедансом блока питания электрокардио-
графа ZK, характеризующим связь входного устройства электрокардио-
графа с питающей сетью. Элементы ZR, ZL, ZF соответствуют приведен-
ным к точкам наложения электродов «R», «L», «F» полным
пространственным импедансам взаимодействия ИМТК и пациента. Они
непосредственно соединены с Zn, определяющим сквозной импеданс
ИМТК, и через эквивалент ЭДС питающей сети ёс — с ZK. Мгновенное
значение импульсной помехи ИМТК на рис. 5.19 обозначено ёи. Токи
iL и iR, протекающие через входные цепи кардиографа Z5 и Z6, являются
функциями элементов модели. Определить их значения можно одним
из известных методов: узловых потенциалов, контурных токов и др.
[169]. В зависимости от значений параметров модели возможны следую-
щие соотношения элементов схемы:
178
Глава 5
h.j “ *Rj * 0’ ^5 - Z6 * *Lj “ *Rj * ^5 * ^6»
*ц * *Rj * 0» ^5 ~ ^6 * О» *и * iRj * Z5 * Z6 * 0, (5.20)
где j — индекс, определяющий природу возникновения помехи: им-
пульсная или сетевая.
Данные соотношения необходимо учитывать при анализе результа-
тов измерений.
Предложенная модель взаимодействия ИМТК — пациент —
электрокардиограф может использоваться не только для анализа возник-
новения помех и разработки методов и средств борьбы с ними, но и
для выявления через ЭКГ влияния воздействия на пациента полезного
(рабочего) сигнала электромагнитного поля ИМТК, сетевой и импульс-
ной помех ИМТК. При анализе этого воздействия следует обращать
внимание на то, что указанные источники воздействия вызывают на-
водки не только на электрокардиографе, но и на самом пациенте. На-
водки на пациенте с одной стороны выступают помехой, наложенной
на ЭКГ, а с другой стороны вызывают ответную реакцию организма,
изменяющую форму ЭКГ [170]. Одной из составляющих является про-
тиво-ЭДС поляризации тканей пациента [171]. Эта составляющая нахо-
дит свое отражение в ЭКГ. Значение противо-ЭДС поляризации (либо
емкость поляризации, либо коэффициент поляризации) несет дополни-
тельную диагностическую информацию. В известных моделях взаимо-
действия пациент-электрокардиограф противо-ЭДС поляризации, по-
видимому, из-за малой величины наводок, вызывающих ее, не учиты-
валась. При рассмотрении взаимодействия ИМТК — пациент —
электрокардиограф, где в качестве ИМТК используются аппараты типа
«Аврора МК», создающие мощные импульсные электромагнитные по-
мехи, пренебрегать регистрацией противо-ЭДС не следует, и в модели
взаимодействия она должна учитываться в цепи последовательно с ис-
точниками полезного сигнала ёк1 и ёк2.
Фоновая и импульсная помехи, как показывают практические ис-
следования [15], для кардиосигнала первого стандартного отведения
имеют синфазный характер. Борьба с внешними помехами в этом случае
сводится к увеличению коэффициента подавления синфазной помехи
во всем частотном спектре полезного сигнала. Ее можно подавить во
входной части электрокардиографа или в проводном канале передачи
кардиосигнала от электродов к измерителю [172].
Для подавления помехи в проводном канале используется экрани-
рование проводов с подключением экрана к «земле» электрокардиогра-
фа. Подавить синфазную помеху в проводном канале можно путем ор-
ганизации обратной связи. Для этого на экран подводящих проводов
следует подать усиленный сигнал, инверсный синфазной помехе, выде-
ленной в измерительной части электрокардиографа. Такой метод, как
показывают экспериментальные исследования, позволяет ослабить син-
фазную помеху в 3-4 раза.
Совмещение описанных выше способов борьбы с помехами дает
третий метод с суммарным эффектом. Подводящие провода в этом слу-
Измерительно-диагностические методы и аппаратура
179
чае защищают двойным экраном. Внешний экран подключается к
«земле» входного каскада электрокардиографа, а внутренний — к выходу
с сигналом, инверсным синфазной помехе. Для подавления синфазной
помехи во входной части электрокардиографа необходимо увеличить
коэффициент подавления синфазной помехи входной части электрокар-
диографа во всем диапазоне полезного сигнала или создать высокосим-
метрированные входные фильтры каналов электрокардиографа. Можно
также осуществить фильтрацию программными средствами.
Важным является вопрос снижения внутренних помех электрокар-
диографа. Используемая для повышения безопасности гальваническая
развязка датчиков на пациенте от питающей сети в электрокардиографе
выполняется, как правило, на основе трансформатора с высокочастот-
ным преобразованием низкочастотного сигнала при широтно- или час-
тотно-импульсной модуляции и демодуляции. Эта процедура требует
высокой идентичности модулятора и демодулятора. На практике данное
условие выполнить затруднительно. Кроме этого, вследствие импульсных
модуляционных процессов на чувствительных цепях электрокардиографа
наводятся помехи. Замена гальванической развязки с импульсной мо-
дуляцией на оптоэлектронную позволяет исключить внутреннюю гене-
рацию наводок. Однако это сопровождается нелинейностью амплитуд-
ной характеристики и дрейфом постоянной составляющей температур-
ной нестабильности.
Для ослабления действия перечисленных факторов измерительная
цепь кардиосигнала разделяется на два гальванически развязанных ка-
нала, один из которых используется как выходной, а второй — как канал
отрицательной обратной связи. Амплитудная нелинейность и темпера-
турная нестабильность прямого канала, как показывают практические
исследования, значительно снижаются и определяются уровнем техно-
логического разброса параметров оптоэлектронных приборов [173].
Представленный подход позволил разработать помехоустойчивый кар-
диоканал (рис. 5.20), входящий в систему функциональной диагностики
СФД МК-02.
Усиление биопотенциалов в электрокардиографе производится клас-
сической схемой усиления слабого электрического сигнала в условиях
действия синфазной помехи — инструментальным усилителем (Al, А2,
АЗ).
Исключение входного коммутатора, используемого обычно в
электрокардиографах, позволяет повысить чувствительность канала. Эле-
менты А4 и А5 обеспечивают дополнительное повышение коэффициента
ослабления синфазного сигнала.
Для борьбы с продольной помехой, создаваемой внешними электро-
магнитными полями, и для обеспечения электробезопасности пациента
в канале использованы гальванические развязки по цепям питания и
оптоэлектронный блок гальванической развязки (БГР) по информаци-
онному выходу системы.
Уровень собственных шумов, приведенный ко входу разработанного
электрокардиографа, не превышает 0,12 мВ, а коэффициент ослабления
180
Глава 5
синфазного сигнала составляет ПО дБ в частотном диапазоне входных
сигналов 10... 100 Гц.
Методы снижения внешних и внутренних помех реографа связаны
с учетом следующих факторов [174]:
Рис. 5.20. Структурная схема помехоустойчивого входного
усилителя кардиоканала
— непостоянства контактных сопротивлений ZK во времени, от уси-
лия прижима электродов, площади контактов, состояния паци-
ента и ряда других условий (методическая погрешность);
— нестабильности выходных параметров Пвых, ZBblx генератора зон-
дирующего тока, работающего в режиме источника тока либо
источника напряжения, в зависимости от величины ZK;
— нестабильности входного сопротивления ZBX измерительной цепи
(инструментальная погрешность);
— влияния сопротивления объемного кровотока пациента Zon между
близкорасположенными токовыми и потенциальными электрода-
ми (методическая погрешность).
Для уменьшения влияния указанных погрешностей предлагается
увеличить число электродов и производить измерения импедансов при
разных комбинациях тетраполярного включения электродов и последую-
щей обработки результатов измерений [174, 175].
Измерительно-диагностические методы и аппаратура 181
Считая неизвестными и постоянными на небольшом отрезке времени
параметры ZK, UBbIX, ZBblx, ZBX, Zon, получаем, что для вычисления импеданса
Zo объемного кровотока между одной парой электродов требуется 2(х + 1)
комбинаций тетраполярного включения электродов, где х — число
электродов. С ростом х растет и число у возможных комбинаций тетра-
полярного включения электродов. Условие 2(х + 1) > у, необходимое для
вычисления Zo, начинает выполняться при х > 7. Таким образом, мини-
мальное число уравнений, которое необходимо составить и решить для
определения Zo, равно 16. Для упрощения методики измерения и вы-
числения Zo применяют метод образцовых мер. Образцовое сопротивле-
ние может быть включено в зондирующую цепь последовательно с ис-
точником зондирования. Анализ получаемых схем дает возможность за-
писать лишь одно дополнительное уравнение. Образцовое сопротивление
в этом случае нет смысла делать переменным. Достаточно либо включать
его в цепь зондирования, либо закорачивать.
Таким образом, введение образцового сопротивления дает возмож-
ность лишь удвоить число измерений и уравнений при том же числе
электродов. Из вышеизложенного следует, что для нахождения Zo до-
статочно шести электродов. При вводе образцового сопротивления в
измерительную цепь получаем аналогичные результаты. Ввод образцо-
вого сопротивления как в зондирующую цепь, так и в измерительную
цепь сопровождается снижением относительной погрешности измерения
напряжения на ZBX.
Для учета влияния импульсной электромагнитной помехи на резуль-
тат измерения реографа помеху можно рассматривать как дополнитель-
ный источник зондирования, и все вышеприведенное будет справедливо
и при наличии импульсных помех.
В заключение необходимо отметить, что в системе функциональной
диагностики СФД МК-02 кроме упомянутых выше электрокардиографа
и реографа имеется измеритель температуры кожного покрова пациента
и измеритель артериального давления пациента [176]. Погрешность из-
мерения температуры составляет 0,1 С, а погрешность измерения арте-
риального давления — 3 мм рт. ст.
5.7. Персональные диагностические системы
В настоящее время электроника широко используется в медицине.
Одна из областей ее применения — наблюдение за состоянием пациента.
Особенно важен контроль при заболеваниях, вызывающих быстрое из-
менение состояния больного от удовлетворительного до критического.
Для больных такими заболеваниями необходимы средства и методы кон-
троля и надежного прогнозирования динамики состояния или же сред-
ства непрерывного контроля состояния пациента [177, 178].
Непрерывный контроль состояния представляется более перспек-
тивным, так как в этом случае возможно не только анализировать оп-
182
Глава 5
ределенный набор параметров, характеризующих состояние человека, но
и исследовать динамику их изменения. Стационарная аппаратура вполне
способна решать (и решает) такие задачи, однако пациент оказывается
«привязанным» к такой аппаратуре, что создает определенные трудности.
С другой стороны, компактная и легкая носимая аппаратура, предостав-
ляя больше возможностей для исследования больных в «свободном со-
стоянии», имеет ограниченные средства обработки данных или вообще
только регистрирует их.
Таким образом, насущной задачей является создание носимых ком-
плектов аппаратуры непрерывного контроля состояния пациента. Аппара-
тура этого типа особенно необходима на этапе интенсивной терапии для
оценки состояния пациента после лечебных сеансов как в стационаре, так
и вне стен лечебного заведения в целях предупреждения нежелательных
осложнений и своевременной коррекции курса лечения. Подобная аппа-
ратура по регистрируемым параметрам должна производить оценку состо-
яния человека и выдавать необходимые сигналы медицинскому персоналу
а, возможно, и самому пациенту. Очевидно, что такая аппаратура должна
быть ориентирована на конкретное заболевание, конкретного пациента и
его личную «норму» параметров, характеризующих состояние. В дальней-
шем электронное устройство, выполняющее эти задачи, будем называть
персональной диагностической системой (ПДС).
При создании ПДС кроме чисто технических задач: уменьшения
энергопотребления, массы и размеров устройства, возникает еще и «ин-
формационная» задача. Суть ее в следующем: надежную длительную
регистрацию можно обеспечить только по ограниченному числу пара-
метров, например, температуре тела, пульсу, частоте дыхания, содержа-
нию кислорода в крови, электрокардиограмме и реограмме. Другие важ-
ные показатели трудно измерить в нестационарных условиях. Но для
врачей мгновенные значения перечисленных выше параметров несут
мало диагностической информации, а большинство методик контроля
состояния использует в основном те показатели, которые трудно реги-
стрировать вне стационара. Таким образом, задача, названная выше
«информационной», предусматривает два пути ее решения:
— создание новых методов и средств съема информации с пациента;
— создание новых методик и алгоритмов обработки уже доступной
информации.
Итак, ПДС в своем «минимальном наборе» должна выполнять сле-
дующие функции:
1. Регистрировать параметры, характеризующие состояние пациента (о
них говорилось выше).
2. Обрабатывать хотя бы в малом объеме поступающую от пациента ин-
формацию.
3. Фиксировать выход из нормы наиболее существенных параметров и
сигнализировать об этом.
4. Хранить полученную информацию до момента ее передачи в базу дан-
ных ЭВМ.
Измерительно-диагностические методы и аппаратура
183
Более совершенные ПДС, построенные на основе результатов об-
работки поступающей информации, должны диагностировать состояние
больного и снабжать этой информацией врача, а в некоторых случаях —
и пациента. Кроме этого, персональная диагностическая система должна
обеспечивать универсальность, т.е. настройку на диагностику различных
заболеваний. Этому требованию отвечает структура ПДС на основе
микро-ЭВМ (рис. 5.21).
Рис. 5.21. Структура ПДС на основе универсальной микро-ЭВМ
Однокристальная микро-ЭВМ (ОМЭВМ) является основным узлом
ПДС. Она осуществляет управление измерительным блоком (ИБ), по за-
ложенным в постоянное перепрограммируемое запоминающее устройство
(ППЗУ) программам производит обработку получаемой информации, фор-
мирует массивы данных для хранения в оперативном запоминающем уст-
ройстве (ОЗУ). В функции ОМЭВМ входит также организация обмена
данными с внешними устройствами через радиальный интерфейс (РИ).
Измерительный блок содержит измерительные каналы (ИК1 — ИКп) для
снятия необходимых параметров, аналого-цифровые преобразователи и
коммутатор. При этом количество работающих каналов, порядок аналого-
цифрового преобразования и коммутации зависят от конкретного назна-
чения данных ПДС. Оперативная информация отображается на жидко-
кристаллическом индикаторе (ЖКИ), а внесение изменений в программы
и режимы работы осуществляется с помощью клавиатуры.
Естественно, что использование в системе ОМЭВМ связано с рядом
ограничений. Они, в основном, касаются объема памяти команд, сис-
темы команд, быстродействия и энергопотребления. Особенно это ка-
сается отечественных ОМЭВМ, хотя их технические параметры посто-
янно улучшаются.
Программные средства ПДС должны включать в себя программу
сбора информации и программу обработки. Последняя обеспечивает
предварительный анализ, выдачу сигнальной информации и сжатие ин-
формации при записи в ОЗУ. Программы хранятся в перепрограммиру-
емых ПЗУ. Такое решение позволяет осуществлять переход от одного
184
Глава 5
круга задач, решаемых с помощью системы, к другому — путем замены
измерительных каналов и ППЗУ на другие, необходимые для решения
новых задач.
Вопрос сокращения избыточности информации является в ПДС одним
из важнейших [179, 180]. По назначению к ПДС близки носимые карди-
ографы, которые записывают информацию на магнитную ленту в течение
8... 12 часов (мониторинг по Холтеру). При этом в общем объеме инфор-
мации интерес представляет лишь та небольшая часть, которая характери-
зует отклонение от нормы на данном этапе восстановительного периода.
Большая же часть информации в кардиограмме будет избыточной.
Поступающая с датчиков информация должна обрабатываться и ана-
лизироваться в ПДС каким-либо образом и, тем не менее, необходимо
сохранять не только результаты обработки, но и, по крайней мере, фраг-
менты кардиограмм для создания архива и истории болезни. Полностью
фиксировать кардиограмму не представляется возможным, т.к. суточный
объем информации по одному каналу составляет около 100 Мбайт.
Поскольку электрокардиосигнал в процессе аналого-цифрового пре-
образования подвергается дискретизации, то первый этап сокращения
избыточности связан с выбором частоты и способа дискретизации. При
равномерной дискретизации частота выборок определяется исходя из
способа восстановления сигнала и требуемого критерия точности. В
электрокардиосигнале недопустимы незарегистрированные выбросы сиг-
нала, поэтому необходимо, чтобы разность между сигналом и аппрок-
симирующей функцией не превосходила некоторой, наперед заданной,
величины. Если для восстановления сигнала используются методы поли-
номиальной интерполяции, то частоту дискретизации зависит от мак-
симума (п+1)-й производной на интервале интерполяции Т, где п —
степень интерполяционного полинома. Но, устанавливая частоту выбо-
рок таким образом, неизбежно получают избыточные отсчеты в те мо-
менты, когда сигнал изменяется медленно.
Можно предложить две методики для устранения избыточности:
1. Включение между устройством, осуществляющим равномерную дис-
кретизацию, и потребителем устройства, сокращающего количество
отсчетов до необходимого в данной ситуации (устройства сокращения
избыточности).
2. Введение адаптивной дискретизации с неравноотстоящими отсчета-
ми, при которой интервал между отсчетами будет согласован с теку-
щей тенденцией сигнала. Неравномерная дискретизация на основе
полинома первого порядка сокращает объем выборки в десятки раз.
Еще одна из дополнительных возможностей основана на коррели-
рованное™ соседних отсчетов. Корреляция между выборочными отсче-
тами лежит в основе методов дельта-модуляции. В основе этих методов
лежит принцип кодирования не величин отсчетов, а их приращений.
При дельта-модуляции фиксируется только знак приращения, таким
образом кодирование осуществляется одноразрядным кодом. Разностная
дельта-модуляция (РДМ) отличается от дельта-модуляции лишь тем, что
Измерительно-диагностические методы и аппаратура
185
приращение сигнала кодируется малоразрядным (2-3 разряда) кодом.
Очевидно, что частота выборок сигнала таких систем должна быть выше,
чем у тех, в которых кодируются сами отсчеты, но тем не менее дости-
гается сокращение объема информации.
В кардиосигнале корреляционные связи существуют не только между
соседними выборочными значениями, но и между соседними кадрами
электрокардиограммы, что позволяет распространить принципы, положен-
ные в основу дельта-модуляции и РДМ, и на регистрацию кадров. Целе-
сообразна регистрация только «существенных» кадров, несущих новую ин-
формацию, характеризующих отклонение от нормы, характеризующих кри-
зис. Реализация этой идеи возможна различными способами:
1. На основе субъективных критериев. Такой способ отбора кадров широко
используется в современных портативных кардиосистемах. Пациент сам
инициирует запись информации в моменты появления боли, плохого
или аномального самочувствия. Запись автоматически прекращается
через некоторый, заранее определенный отрезок времени.
2. На основе объективных критериев. Надежность субъективных оценок
невелика, известны случаи и бессимптомного развития болезни, поэ-
тому эффективный путь выделения существенной информации из
кардиосигнала состоит в его экспресс-анализе и выделении части его
параметров, по которым делается заключение о необходимости запи-
си. Этот способ достаточно сложен в реализации на ПДС, поскольку
требуется быстрая и простая обработка кардиосигнала маломощными
средствами. Успешность воплощения этого пути зависит от развития
элементной базы и, главное, от отработки алгоритмов и критериев
экспресс-анализа.
Кроме того, появление нового типа запоминающих устройств —
флэш-памяти (flash) фирмы Intel [181], несколько сглаживает остроту
проблем, возникающих при разработке ПДС. Элемент памяти типа
«флэш» представляет собой высоко интегрированное энергонезависимое
полупроводниковое запоминающее устройство, обладающее большой
емкостью (1-4 Мбайт) и малым потреблением электрической энергии и
допускающее запись, чтение и стирание информации электрическим
способом. Имеется также возможность наращивания объема за счет под-
ключения дополнительных микросхем. Важной особенностью такого ЗУ
является его энергонезависимость в режиме хранения. Последнее обсто-
ятельство позволяет оформить одну или несколько микросхем ЗУ в виде
отдельной карты памяти — своеобразной «дискеты», вставляемой в ПДС.
Когда процесс записи закончен или карта полностью заполнена, она
заменяется новой. Записанная карта помещается в считывающее уст-
ройство, которое связано с ЭВМ и передает всю информацию.
Современный уровень развития информационно-измерительной
техники, микроэлектроники и медицины делает возможным постановку
и решение задачи создания ПДС. Решение этой задачи требует объеди-
нения усилий специалистов в области измерительной техники, микро-
электроники и медицины.
Глава 6
МЕТОДОЛОГИЯ ПОСТРОЕНИЯ
МАГНИТОТЕРАПЕВТИЧЕСКИХ
КОМПЛЕКСОВ И КАБИНЕТОВ
6.1. Лечебно-диагностический комплекс
Комплекс имеет смысл формировать уже при наличии одного маг-
нитотерапевтического аппарата типа «Аврора МК-01». Дополнительно
требуется диагностическая аппаратура. Структура лечебно-диагностичес-
кого комплекса может быть представлена в виде, показанном на рис. 6.1.
Рис. 6.1. Структура лечебно-диагностического комплекса
Минимальный набор диагностической аппаратуры должен в соот-
ветствии с 5.5, 5.6 включать кардиомонитор, реограф, измеритель арте-
риального давления, измеритель температуры кожного покрова (термо-
метр).
Организационно в состав обслуживающего персонала комплекса це-
лесообразно включить врача-физиотерапевта, медицинскую сестру, а
также инженера-электроника.
Методологическое обеспечение включает стандартный набор мето-
дик лечения и диагностики в зависимости от вида заболеваний, инди-
видуальных особенностей пациента и стадии заболеваний.
Методология построения магнитотерапевтических комплексов 187
Каждая методика лечения включает вид конфигурации магнитного
поля (КМП), таблицу интенсивностей, направления векторов магнит-
ного поля, частоту тактов, а также длительность и число процедур.
Диагностическая методика содержит перечень измеряемых параметров
и порядок осуществления измерений. Врач назначает методику, а меди-
цинская сестра в соответствии с этой методикой отпускает процедуры.
Она проводит диагностические измерения до, во время и после сеанса,
помещает пациента в магнитоскан, включает аппарат и следит за вы-
полнением процедуры в течение заданного времени. Она может времен-
но прервать сеанс для проведения диагностических измерений, если это
определено в методике. По завершению процедуры медсестра вновь
выполняет диагностические измерения. Результаты диагностических из-
мерений должны быть обязательно зафиксированы на специальном
бланке. Примерная форма бланка показана в табл. 6.1.
Таблица 6.1
Примерная форма бланка для записи результатов
диагностических измерений
Бланк прилагается к истории болезни или амбулаторной карте боль-
ного. Если в процессе лечения врач счел нужным изменить методику
лечения (КМП, интенсивности, полярности, частоту), то это отражается
в новом бланке совместно с датой перехода на новую методику. Ком-
плекс рассчитан на обслуживание 15-18 пациентов за смену.
188
Глава 6
6.2. Компьютеризированный
лечебно-диагностический комплекс
6.2.1. Структура комплекса
Следующим шагом в направлении повышения эффективности маг-
нитотерапии является создание лечебно-диагностического комплекса
высшего уровня, а именно автоматизированного рабочего места врача-
специалиста (АРМ ВС). АРМ ВС освобождает медицинский персонал от
рутинной работы по ручному измерению физиологических параметров
организма больного, по их обработке и документированию, по выбору
оптимальной методики лечебного воздействия. Повышение уровня авто-
матизации технологии диагностики и лечения открывает новые возмож-
ности не только в практике лечения, но и при проведении исследований
по выработке принципиально новых подходов и решений. Структурная
схема АРМВС, который может использоваться в качестве компьютери-
зированного лечебно-диагностического комплекса, показана на рис. 6.2.
Основой АРМВС служит персональный компьютер (ПК), как пра-
вило, IBM-совместимый. Сигналы от диагностической системы посту-
пают на лабораторный интерфейс. В этом интерфейсе аналоговые сиг-
налы преобразуются в цифровую форму. Оцифрованные сигналы обра-
Рис. 6.2. Структура компьютеризированного
лечебно-диагностического комплекса
Методология построения магнитотерапевтических комплексов
189
батываются компьютером, записываются на диск и далее их можно
вывести на экран, принтер или плоттер.
На основе анализа текущей диагностической информации и данных,
хранящихся в базе данных компьютера, врач, используя возможности
экспертной системы, установленной на компьютере, формирует мето-
дику магнитного воздействия, которая в той или иной форме поступает
на блок управления аппарата «Аврора», создавая требуемую конфигура-
цию магнитного поля.
При наличии помехозащищенных измерительных каналов целесо-
образно вести мониторинг физиологических параметров пациента с
целью оперативного подбора наиболее рациональной КМП, отвечающей
индивидуальным особенностям больного.
Подключение персонального компьютера обеспечивает более эф-
фективное применение лечебно-диагностического комплекса. Резко со-
кращаются затраты времени на ведение медицинской документации.
Принимая во внимание то, что врачам удобнее всего иметь дело с теми
средствами, с которыми они уже знакомы, программа ПК должна вос-
производить на экране карты показателей и прочие формы, которыми
повседневно пользуются медики.
Снабженный соответствующими лабораторными интерфейсами, ПК
может осуществлять контроль за состоянием пациента, управление по-
леформирующими индукторами, сбор первичных данных с их последу-
ющим анализом и принятием решения.
Диагностические сведения, собираемые с пациента во время сеанса
(а также за 2 минуты до и через 2 минуты после сеанса), поступают на
ПК, за пультом которого располагаются врач и оператор-инженер. Все
поступающие сведения обрабатываются специальной программой и в
сжатом наглядном виде представляются врачу и оператору. Врач следит
за состоянием пациента и вносит необходимые коррективы в работу
комплекса.
Методическое программное обеспечение (ПО) предлагается несколь-
ких уровней.
ПО первого уровня имеет базу данных по конфигурациям магнитных
полей (КМП) и их параметрам и базу данных по пациентам. Последняя
формируется по образу бланка, представленного в табл. 6.1, поэтому
отпадает необходимость в работе с бумагами. Результаты диагностики в
каждом сеансе заносятся в базу данных избирательно для каждого па-
циента автоматически. Кроме этого, ПО первого уровня имеет програм-
му обработки диагностических сведений для выявления трендов и про-
грамму наглядного отображения процесса воздействия и лечения.
База данных КМП и их параметров включает все стандартные ме-
тодики, наработанные на практике, и формируется в пакеты в зависи-
мости от вида заболеваний, индивидуальных особенностей и стадии
заболеваний. Выбирается КМП в соответствии с пирамидальным меню,
как это показано на рис. 6.3.
190
Глава 6
База данных КМП непрерывно пополняется новыми, либо более
эффективными КМП, либо для новых видов заболеваний, либо полнее
учитывающими индивидуальные особенности пациента. Они разрабаты-
ваются в специальных кабинетах, имеющих персонал более высокого
профессионального уровня и снабженных аппаратным, программным и
математическим обеспечением более высоких уровней.
Рис. 6.3. Пирамидальное меню для выбора КМП
ПО второго уровня, во-первых, полностью реализует задачи первого
уровня и, во-вторых, дает возможность ликвидировать имеющиеся стан-
дартные методики и создавать новые. При этом врач, работающий с ПО
второго уровня, должен получить дополнительный сертификат обучения
с оценкой знаний и умений в области магнитотерапии выбранных им
заболеваний.
Методология построения магнитотерапевтических комплексов
191
ПО третье! о уровня, включая все возможности первого и второго
уровней, будет снабжено дополнительно экспертной системой и мате-
матической моделью воздействия магнитных полей на пациента, что
позволит замкнуть обратную связь. То есть в зависимости от априорных
и текущих диагностических сведений и результатов их обработки ПЭВМ
может самостоятельно модифицировать включенную КМП и ее пара-
метры для оптимизации процесса лечения. Система при этом должна
обладать элементами искусственного интеллекта, основным кредо кото-
рого должно быть поставлено условие «Не навреди». ПО третьего уровня
находится на стадии разработки. Естественно, что ПО всех уровней будут
постоянно совершенствоваться и улучшаться.
Организационное обеспечение кабинетов осуществляется врачом,
оператором-инженером и двумя медицинскими сестрами на смену. Про-
пускная способность кабинетов находится на уровне 45-50 человек за
смену (учитывая время подготовки аппарата перед сеансом, время про-
цедуры и при наличии в кабинете 2-х аппаратов «Аврора МК-01»).
Процесс сбора и обработки данных при проведении лечебно-диа-
гностической процедуры можно условно разбить на три этапа: сбор
данных, анализ данных, представление данных (рис. 6.4). Для каждого
этапа используются специальные программно-аппаратные средства, ко-
торые обычно называют подсистемами.
Рис. 6.4. Этапы сбора и обработки данных
На первом этапе обычно происходит нормализация аналоговых сиг-
налов — усиление, фильтрация, коммутация и т.п. Основной задачей
подсистемы, осуществляющей эти операции, является доведение пара-
метров сигналов, получаемых от первичных преобразователей, до зна-
чений, применяемых для восприятия используемой подсистемой преоб-
разования данных. В свою очередь последняя выполняет непосредствен-
но аналого-цифровое преобразование аналоговых сигналов.
На втором этапе подсистема обработки данных осуществляет пер-
вичный анализ данных по алгоритмам, особенным для каждого диагнос-
тического признака. Здесь, как правило, используются методы цифровой
фильтрации, анализа в частотной и временной областях, средства мат-
ричной алгебры, методы регрессионного анализа и другие статистичес-
кие методы. В некоторых случаях врач на основе получаемых данных
или иной информации имеет возможность активно воздействовать на
192
Глава 6
ход лечебной процедуры, изменяя параметры магнитного поля. Для этих
целей служит подсистема управления.
Третий этап предполагает представление полученных в результате
обработки параметров физиологического состояния больного в виде гра-
фиков, таблиц или диаграмм. На этом этапе происходит как оперативная
визуализация, так и документирование полученных результатов.
В АРМ ВС рассмотренные функции могут различным образом рас-
пределяться между программно-аппаратными средствами компьютера и
специализированными измерительно-вычислительными средствами. На-
пример, диагностическая подсистема может быть организована следую-
щим образом. Компьютер соединен по стандартному интерфейсу (IEEE-
488. RS-232) с многофункциональными контрольно-диагностическими
приборами (кардиограф, реограф, измеритель артериального давления),
в которых предусмотрено выполнение не только функций преобразова-
ния аналоговых сигналов, но и многих функций анализа, представления
данных и формирования сигналов управления. На компьютер в этом
случае возлагаются обычно функции общего управления, более деталь-
ного анализа (вторичной обработки), а также документирования резуль-
татов.
Другим вариантом компоновки АРМ ВС является использование ла-
бораторного интерфейса, выполненного на отдельных модулях расши-
рения, которые устанавливаются в свободные слоты компьютера. Этот
вариант, конечно, реализует меньше аппаратных возможностей, чем
многофункциональные приборы. Однако сравнительно малая стоимость
этого варианта и доступность широкому кругу пользователей в сочетании
с гибкой программной реализацией процедур, выполняемых специали-
зированными приборами, делают этот вариант наиболее предпочтитель-
ным для построения АРМ ВС.
В составе АРМ ВС можно выделить три основных компонента:
— аппаратная платформа,
— программное обеспечение,
— интеллектуальные средства.
Аппаратное и программное обеспечение — традиционные составные
части любой информационно-вычислительной системы, в данном при-
ложении отличаются некоторыми особенностями, которые будут обсуж-
даться ниже. Столь же важным следует признать и третий компонент —
знания и умение работать с аппаратурой и программным обеспечением.
Для того чтобы научиться эффективно эксплуатировать АРМ ВС,
медицинскому персоналу необходимы направленная работа и помощь
со стороны инженеров. Как бы ни были хороши аппаратные средства
и как бы ни было приспособлено к пользователю программное обеспе-
чение, для приобретения новых знаний требуются время и постоянные
усилия.
Методология построения магнитотерапевтических комплексов
193
6.2.2. Аппаратная платформа АРМВС
Лабораторный интерфейс
В обычный комплект поставки большинства компьютеров не входят
какие-либо блоки для регистрации физиологических сигналов в условиях
клиники. Значит, для того чтобы с помощью компьютера можно было
записывать или производить какие-то операции с теми электрическими
сигналами, которые интересуют врача-специалиста, необходимо под-
ключить к разъему расширения компьютера лабораторный интерфейс.
Для того чтобы сделать квалифицированный выбор лабораторного
интерфейса для комплектования АРМВС или сформулировать обосно-
ванное техническое задание на его разработку, необходимо знать воз-
можности современных интерфейсов и вносимые ими погрешности, а
также структурные, схемотехнические и конструкторско-технологичес-
кие решения. Выбор лабораторного интерфейса определяется рядом тре-
бований к скорости сбора данных, числу каналов, уровням входных
напряжений, разрешающей способности и полосе частот аналого-циф-
рового преобразователя (АЦП) — наиболее сложной и часто используе-
мой подсистемы лабораторного интерфейса, Немаловажным фактором
является и стоимость. Важно найти такое устройство, функции и пара-
метры которого наилучшим образом соответствуют вашим целям. При
выборе лабораторных интерфейсов также не следует забывать о необхо-
димости написания программного обеспечения для работы с ними.
Иногда наличие в комплекте поставки соответствующих программ может
оказаться решающим фактором выбора.
Аналоговый тракт лабораторного интерфейса характеризуется сле-
дующими основными параметрами:
— время преобразования — интервал времени с момента подачи
команды начала преобразования до появления на выходе АЦП
цифрового кода, соответствующего входному напряжению;
— погрешность сдвига — смещение характеристики преобразования
в точке начала координат;
— погрешность усиления — отклонение характеристики преобразо-
вания в конечной точке от идеальной после устранения сдвига;
— интегральная нелинейность — максимальное отклонение кванто-
ванного сигнала от идеальной характеристики преобразования за
вычетом половины идеальной величины шага квантования;
— дифференциальная нелинейность — максимальная разность вы-
ходных кодов АЦП при подаче на вход последовательно двух
сигналов, различающихся на шаг квантования;
— апертурная задержка — задержка момента фактического начала
преобразования относительно момента поступления команды
преобразования;
— апертурная неопределенность — переменная составляющая апер-
турной задержки;
— разрешающая способность — параметр, обычно равный половине
шага квантования АЦП;
194
Глава 6
— входная полоса частот — диапазон частот входного сигнала, в
котором параметры аналогового тракта выдерживаются с задан-
ной точностью;
— коэффициент нелинейных искажений — отношение суммы мощнос-
тей гармоник к мощности основной спектральной составляющей;
— отношение сигнал/шум — отношение среднеквадратических зна-
чений сигнала и шума в заданной полосе частот;
— эффективная разрядность — разрядность, учитывающая все виды
погрешностей.
В табл. 6.2 приведены сравнительные характеристики некоторых
лабораторных интерфейсов для персональных компьютеров.
Таблица 6.2
Сравнительные характеристики лабораторных интерфейсов
Тип платы Шина компью- тера Число каналов Число разрядов Отноше- ние сигнал/ шум, дБ Время преобразова- ния, мкс Изготови- тель
ADC 12-200 ISA/16 16 12 -69 6 НТК «Инстру- ментальные системы»
L202 ISA/16 8/16 12 -65 4 Lcard
ВН435 ISA/8 8 12 -60 20 Бинар
Nat 10/32 ISA/8 8 10 -62 32 Natex
ЛА-8М1 ISA/16 16 12 -60 10 ЗАО «Руднев- 111 ил яев»
Обобщенная структурная схема типового лабораторного интерфейса
приведена на рис. 6.5, где обозначено: К — коммутатор аналоговых
сигналов на 8/16 каналов; У — дифференциальный усилитель; УВХ —
устройство выборки-хранения; ADC — аналого-цифровой преобразова-
тель; 8255А_1, 8255А_2 — программируемые периферийные интерфейсы,
выполненные на БИС 580ВВ55А; DMA/INTR — схемы управления пре-
рываниями и каналом прямого доступа в память; DACI, DAC2 — цифро-
аналоговые преобразователи; 8253_1, 8253_2 — программируемые интер-
вальные таймеры, выполненные на БИС 580ВИ53; RG_INTR — регистр
состояний локальных запросов прерывания.
Подключение лабораторного интерфейса к исследуемому объекту
осуществляется через 40-контактный разъем, номера контактов и на-
именование сигналов которого указаны на рисунке: 10,..., 115 — входные
аналоговые сигналы; Ex st — сигналы внешнего запуска ADC; DAC1,
DAC2 — аналоговые выходы; STB_A, STB B — входы стробирования
цифровой информации в порты общего назначения РА7...РА0 и
РВ7...РВ0; AGND, PGND, Iref — аналоговая, цифровая и референтная
«земля».
Методология построения магнитотерапевтических комплексов
195
17- 1
115-2
16-3
114-4
15-5
113-6
14-7
112-8
13-9
111-10
12-11
110-12
II - 13
19- 14
10- 15
18- 16
Рис. 6.5. Обобщенная структурная схема лабораторного интерфейса
Персональный компьютер
Анализ ситуации, имевшей место на рынке компьютерного обору-
дования в последнее время, показывает, что основная его доля прихо-
дится на IBM-совместимые компьютеры на базе процессоров Pentium.
Может быть рекомендована следующая типовая конфигурация ап-
паратной платформы АРМ ВС:
— системная плата на основе процессора Pentium;
— объем ОЗУ от 16 Мб (желательно 32);
196
Глава 6
— накопитель на гибком диске емкостью 1,44 Мб;
— накопитель на жестком магнитном диске емкостью от 1 Гб;
— привод CD-ROM;
— видеоадаптер SVGA;
— устройство ведения архива на магнитооптическом диске;
— устройство вывода на бумагу — струйный или лазерный принтер.
Приведенная конфигурация является минимально необходимой. Ее
можно наращивать в соответствии с решаемыми задачами.
6.2.3. Программное обеспечение АРМВС
Состав программного обеспечения
При создании компьютеризированного МТК необходимо учитывать
следующее важное обстоятельство. Затраты на разработку программного
обеспечения существенно превышают стоимость оборудования. Из этого
следует вывод о приоритетном отношении к разработке программного
обеспечения. Приступая к формированию АРМВС, сначала нужно сфор-
мулировать желательные свойства программного обеспечения, а затем
выбирать компьютер, подходящий для этого программного обеспечения.
Поток поступающего в продажу программного обеспечения столь
велик и трактовка терминов и определений в этой области столь раз-
нообразна, что дать строгую и подробную классификацию программных
продуктов довольно сложно. На рис. 6.6 представлена обобщенная струк-
турная схема типового состава программного обеспечения, которое
может быть установлено на АРМВС.
Можно выделить две большие категории программного обеспече-
ния — системные и прикладные программы. В свою очередь эти кате-
гории можно разбить на большое число различных подразделов.
Потребности пользователя АРМВС, т.е. врача, представляются в
компьютере и удовлетворяются прикладными программами. Другими
словами, прикладные программы предназначены для реализации кон-
кретных нужд пользователя, а именно: обработка текстов историй бо-
лезни, регистрация, анализ и отображение физиологических каналов.
Для того чтобы пользователь мог управлять компьютером, необхо-
димы общие правила запуска программ и управления данными. Для
создания нормально работающих программ также нужны некоторые
обобщенные методы доступа к ресурсам компьютера. Все это обеспечи-
вается системными ОС.
Для использования в АРМВС весьма привлекательным может ока-
заться многозадачный режим, ориентированный на одного пользователя.
В таком режиме могут параллельно выполняться несколько программ
(от 2-х до 4-х), обеспечивая врачу возможность одновременного выпол-
нения следующих задач. Во-первых, диагностическое исследование —
сбор, первичную обработку, визуализацию и архивирование физиологи-
ческих сигналов, поступающих от пациента. Во-вторых, отправление
лечебной процедуры — управление полеформирующими индукторами.
Методология построения магнитотерапевтических комплексов
197
Рис. 6.6. Типовой состав ПО для АРМ ВС
И, наконец, в-третьих, в интерактивном режиме вести просмотр накоп-
ления данных, составлять отчет и распечатывать результаты исследова-
ния. В настоящее время совместную обработку позволяет осуществить
и операционная система MS-DOS, если применять дополнительную про-
грамму, создающую пользователю операционную оболочку типа Тор
View или Microsoft Windows. Этот вариант очень заманчив, поскольку
обеспечивает увеличение производительности, не требуя отказа от ог-
ромного числа ценных прикладных программ, составленных для опера-
ционной системы MS-DOS.
Операционная оболочка Windows является универсальной и пригод-
на для составления программ произвольной предметной ориентации. За
универсальность приходится платить повышенными требованиями к ап-
паратной платформе. Это обстоятельство может служить основанием для
приобретения или разработки специализированной многозадачной опе-
рационной оболочки. Специализация и учет специфических особеннос-
тей решаемых задач позволяет добиться той же производительности
АРМ ВС при существенном снижении стоимости оборудования.
Можно выделить два способа организации программного обеспече-
ния: изолированные программы и интегрированные программные сис-
темы (рис. 6.6). В первом запуск и завершение программ, их взаимо-
действие между собой и оператором реализуется средствами операцион-
ной системы. Обмен данными между программой-поставщиком и
программой-потребителем осуществляется через файлы заданной струк-
туры. Этот подход отличается сравнительной простотой комплектования
программного обеспечения АРМ ВС. Программы могут приобретаться и
разрабатываться изолированно с несущественными ограничениями, оп-
198
Глава 6
ределяющими тип операционной системы и структуру файлов данных.
Однако инициирование отдельных прикладных программ для каждого
вида работ на АРМ ВС только средствами операционной системы при-
водит к неудобствам пользователя, замедляет общий процесс работы,
усложняет обучение. Действительно, врач должен быть хорошо знаком
с особенностями каждой программы, свободно владеть командным про-
цессором операционной системы, следить за перемещением данных из
файла в файл, фиксируя их имена. По этой причине использование
изолированных программ может быть оправдано только на начальном
этапе внедрения АРМ ВС в клиническую практику, когда еще не до
конца ясны функции, требующие автоматизации, не закончена отработ-
ка алгоритмов и подходов к решению тех или иных задач. Перечислен-
ные недостатки послужили побудительным мотивом появления интег-
рированных прикладных систем.
Целью создания интегрированной системы является объединение в
одной среде всех программ, используемых в АРМ ВС. Известно следую-
щее определение: «Интегрированной называется система, которую поль-
зователь включает утром и работает на ней весь день, не испытывая
никакой потребности в других программах». Это определение объясняет
привлекательность интегрированной системы для АРМВС, поскольку с
его помощью каждодневно решаются примерно одни и те же задачи.
Преимущества интегрированных систем проявляются в первую очередь
в том, что они удобны для пользователя. Система предоставляет одина-
ковые средства для доступа к различным программам. Упрощается сты-
ковка программ по данным. Увеличивается скорость работы, т.к. пере-
ключение с одной программы на другую осуществляется простым вы-
бором соответствующих позиций в управляющем меню. Главный
недостаток интегрированных систем — повышенные требования к раз-
меру оперативной памяти — с лихвой компенсируется преимуществами
таких систем для пользователя.
Как показывает практика, окончательный выбор структуры про-
граммного обеспечения АРМ и его отдельных компонентов может быть
сделан только на основе тщательного анализа потребности в автомати-
зации диагностических и магнитотерапевтических процедур, выявления
требуемых характеристик автоматизированной системы, а также уровня
затрат, необходимых на ее установку. В свою очередь сведения, необ-
ходимые для такого анализа, могут быть получены и сформулированы
врачом и инженером только на основании опыта практической эксплу-
атации магнитотерапевтических комплексов первого уровня.
Приступая к созданию программного обеспечения АРМВС, следует
также иметь в виду, что оно относится к так называемым индустриально
организованным программным продуктам. Системы такого типа обычно
имеют большое время жизни и обслуживают большое количество поль-
зователей, результаты работы которых во многом зависят от нормального
функционирования предложенных программных средств. Существенной
чертой индустриально организованных программных средств является
Методология построения магнитотерапевтических комплексов
199
их большая сложность, практически невозможно охватить все тонкости
системы одним разработчиком.
Способ управления сложными системами был известен еще в древ-
ности: «divide et impera» (разделяй и властвуй). При проектировании
программного обеспечения АРМВС необходимо составить его из не-
больших подсистем, каждую из которых можно отладить независимо от
других. Причем именно правильная декомпозиция непосредственно оп-
ределит сложность, присущую программному обеспечению. На рис. 6.7
приведена типовая последовательность действий при создании про-
граммного обеспечения.
На этапе анализа происходят первые встречи разработчиков и бу-
дущих пользователей — врачей, которые, исходя из особенностей по-
ставленной задачи, пытаются найти между собой общий язык. Целью
анализа является описание проблемы. Описание должно быть полным,
последовательным, доступным для чтения и обзора всеми заинтересо-
ванными сторонами, позволяющим проводить сравнения с реальными
условиями. Продукт анализа используется затем для описания основных
функций АРМВС. Здесь функция — не алгоритмический термин. В
контексте анализа требований к АРМВС функция — это обособленный,
наблюдаемый и контролируемый фрагмент поведения.
Представляется целесообразным выделить следующие функции
АРМВС компьютеризированного магнитотерапевтического комплекса.
1. Функция мониторинга — непрерывный контроль параметров био-
электрических сигналов, поступающих от пациента.
2. Функция управления — вычисление и вывод вектора управления по-
леформирующими индукторами в соответствии с методикой лечения.
3. Функция сопровождения базы данных — ввод, хранение, актуализа-
ция, документирование и защита измерительной и текстовой инфор-
мации о пациенте.
4. Функция цифровой обработки сигналов — вторичная обработка изме-
рительной информации с целью определения диагностических при-
знаков состояния больного.
5. Функция экспертной системы — обеспечение лечащему врачу уровня
компетентных (специальных) знаний врача-эксперта.
6. Функция интерфейса пользователя — обеспечение общения врача и
компьютера.
Каждую из этих функций можно рассматривать как отдельную задачу
и оформить их в виде законченных исполняемых программ. Для удобства
работы пользователя они могут быть интегрированы графической окон-
ной оболочкой в единую систему. При необходимости вызывается одна
из программ, результатом которой будет файл на диске, твердая копия
отчета и т.п.
Строго упорядоченная во времени последовательность вызова задач
позволяет построить программное обеспечение, опираясь на методы пос-
ледовательного программирования, поддерживаемые однозадачной опе-
рационной средой.
200
Глава 6
Рис. 6.7. Типовая последовательность действий при создании программного
обеспечения АРМ ВС
Однако при таком подходе обращают на себя внимание две трудно
преодолимые проблемы. Во-первых, все задачи образуют единый про-
граммный комплекс услуг в рамках АРМ ВС и требуется их активное
взаимодействие в процессе работы. Организация этого взаимодействия
через файлы на диске приведет к значительным временным затратам
из-за необходимости перезагрузки задач, являющихся поставщиками
требуемой для обработки информации. (Напомним, что интегрирован-
ные прикладные системы только повышают удобство работы пользова-
Методология построения магнитотерапевтических комплексов
201
теля, но не снимают этой проблемы.) Во-вторых, некоторые задачи, как
например мониторинг, работают в реальном масштабе времени и не
допускают своего удаления из памяти из-за возможной потери инфор-
мации, поступающей извне (в нашем примере от АЦП). Поэтому при
работе одной из таких задач все остальные задачи блокируются, что
крайне расточительно с точки зрения использования вычислительных
ресурсов, поскольку высокопроизводительный процессор в этом случае
подавляющую часть времени может находиться в состоянии ожидания.
Один из вариантов решения этих проблем состоит в отказе от пред-
ставления, что задачи АРМВС выполняются последовательно, т.е. в каж-
дый момент времени работает только один исполнитель. Будем считать,
что для достижения какой-либо цели может одновременно работать кол-
лектив задач. Слово «коллектив» подчеркивает, что между задачами име-
ются каналы оперативной связи. Такой подход оправдан еще и тем, что
некоторые из задач, например, мониторинг, разбиваются на несколько
частей, которые описываются логически независимыми алгоритмами и
должны работать в реальном масштабе времени, и набор этих частей
может меняться в зависимости от поставленной цели (рис. 6.8). Меха-
низм, управляющий как коллективом задач, так и коллективом частей
в рамках одной задачи может быть (и должен быть) одним и тем же.
Для строгости дальнейшего изложения введем общепринятое поня-
тие процесса и определим его как логически завершенную программную
единицу, конкурирующую за ресурсы компьютера для своего выполне-
ния. Под задачей мы будем понимать программу, реализующую одну из
Сбор
Програм-
мирование
11ДП АЦП
Переключе-
ние буферов
в ОЗУ
(ФНЧ, ФВЧ и т.п.)
Визуализация
Графические
окна
Текстовые
окна
Сжатие и форматирова-
ние буфера В/В
Специальная обработка (ЧСС,
идентификация аритмий и т.д.)
Слежение (контроль выхода
за допустимые пределы)
Рис. 6.8. Структура задачи мониторинга
202
Глава 6
функций АРМ ВС. Тогда задача является либо одним процессом (напри-
мер, процесс цифровой обработки сигналов), либо представляет собой
коллектив процессов.
Например, в рамках задачи мониторинга функционируют процессы
сбора, первичной обработки, визуализации и архивирования. На рис. 6.9
приведен пример возможной ситуации при работе АРМ ВС. Процессы
на рисунке представлены прямоугольниками, показаны задачи, поро-
дившие тот или иной процесс, а также отмечено, работает ли данный
процесс в реальном масштабе. Работа в реальном времени означает, что
имеются жесткие временные ограничения из-за возможной потери ин-
формации, поступающей извне.
Совокупное поведение коллектива таких процессов нельзя описать
строго упорядоченной во времени последовательностью действий, по-
скольку состояние, в котором находится один процесс, никак не зависит
от состояния других процессов. Такие процессы называют асинхронны-
ми. Именно асинхронные процессы наиболее адекватно моделируют
желаемое поведение АРМВС, но проектирование такой модели в тер-
минах последовательного программирования встречает непреодолимые
трудности. Очевидно, что организация взаимодействия асинхронных
процессов может быть выполнена только с помощью средств, постав-
ляемых внешней средой. В качестве такой внешней среды выступает
многозадачная операционная система или многозадачная операционная
оболочка.
Важное значение в этих условиях приобретает выбор технологии
программирования. В настоящее время существует ряд приемов про-
граммирования, наиболее известные из которых приведены на рис. 6.7.
Это процедурное, модульное и объектно-ориентированное программи-
-> Командный процессор ЛС
В/В ЛС
Локальная
сеть
Основное
меню
Связь с оператором
Рис. 6.9. Задачи и порождаемые ими процессы
Методология построения магнитотерапевтических комплексов
203
рование. По заключению специалистов объектно-ориентированное про-
граммирование — единственная методология, позволяющая справиться
со сложностью, присущей самым большим системам. Объектный подход
включает принципы абстрагирования, ограничения доступа, модульнос-
ти, иерархии, типизации, параллелизма и устойчивости. По-видимому
можно назвать только непринципиальные причины, по которым при-
менение объектно-ориентированного программирования может оказать-
ся нецелесообразным — это неподготовленность персонала или отсут-
ствие соответствующих технических средств. Последнее обстоятельство,
тем не менее, не должно ставить под сомнение принцип выбора аппа-
ратных средств после выбора программного обеспечения.
Рассмотрим наиболее характерный случай оформления программ-
ного обеспечения АРМВС в виде интегрированной прикладной системы,
функционирующей в однозадачной операционной среде MS-DOS. Ос-
новываясь на этом выборе, проанализируем особенности реализации
отдельных функций АРМВС.
6.2.4. Интегрированный пакет прикладных программ
Методология проектирования программного обеспечения для
АРМВС выбиралась исходя из того, что АРМВС является сложной сис-
темой, поскольку имеет все основные признаки последней [182]:
— во-первых, она состоит из взаимозависимых подсистем, которые,
в свою очередь, также могут быть разделены на подсистемы (т.е.
имеет иерархическую структуру);
— во-вторых, внутриэлементные связи сильнее межэлементных свя-
зей, что обуславливает разделение системы на автономные части,
которые можно изучать и проектировать по отдельности;
— в-третьих, во всех частях структурной иерархии имеется большое
число «унифицированных элементов» (экономия средств выра-
жения).
Известно, что сложные системы имеют тенденцию к развитию во
времени. Работающая сложная система неизбежно оказывается резуль-
татом развития работающей простой системы.
Следствием вышесказанного является необходимость организации
коллективной работы программистов, разрабатывающих параллельно от-
дельные части общей программы. Современный подход к решению по-
добных проблем основан на декомпозиции, когда сложная программная
система составляется из небольших подсистем, взаимодействующих друг
с другом по хорошо определенным и простым правилам. Если достигнуть
этой цели, то разработка отдельных модулей может осуществляться раз-
личными людьми независимо друг от друга, при этом объединенная
программа будет функционировать правильно. Основной вопрос те-
перь — каким образом осуществить декомпозицию.
Методологии, используемые на этой стадии, делятся на две группы:
ориентированные на обработку (алгоритмическая декомпозиция) и ори-
204
Глава 6
ентированные на данные (объектно-ориентированная декомпозиция).
Опыт показывает, что полезнее применять объектный подход [182]. Он
позволяет лучше понять структуру программной системы и дает возмож-
ность сокращать ее размер путем использования общих механизмов,
обеспечивающих необходимую экономию выразительных средств. Объ-
ектно-ориентированные системы более открыты и легче поддаются мо-
дернизации. Кроме того, объектная декомпозиция уменьшает риск со-
здания сверхсложных программных систем, так как она предполагает
эволюционный путь развития системы на базе относительно небольших
подсистем. Поэтому представляется целесообразным использование ме-
тода объектно-ориентированного проектирования. Это, в свою очередь,
дает возможность выбрать инструментальное программное обеспечение,
определить правила построения межзадачного интерфейса, а также на-
метить стратегию оптимального использования оперативной памяти
компьютера — самого дорогого ресурса.
В качестве инструментального программного обеспечения могут
быть рекомендованы объектно-ориентированные языки Borland Pas-
cal 7.0, Borland C++ 3.1. Данный выбор в значительной степени обу-
словлен наличием в комплекте поставки объектно-ориентированной
библиотеки Turbo Vision 2.0, которая является иерархией объектов для
построения оболочек оконной программы, управляемой событиями, и
библиотеки Supervision, являющейся расширением Turbo Vision для гра-
фического режима. Добавляя к данным иерархиям новые объекты,
можно достаточно легко строить высококачественные разветвленные
пользовательские интерфейсы, уделяя при этом основное внимание со-
держательной части программы. При работе в среде Windows хорошие
результаты дает использование языка Object Pascal и средств визуального
программирования Delphi 2.
Поскольку отдельные задачи АРМВС (мониторинг, база данных,
процессор цифровой обработки сигнала (ЦОС) и т.д.) являются объек-
тами со слабым взаимодействием (т.е. без интенсивного обмена данны-
ми), то их можно оформить как оверлеи без существенного снижения
общей производительности системы. Оверлеи — это части программы,
которые разделяют общую область памяти. Только те части программы,
которые требуются для выполнения данной функции, размещаются в
памяти в это время, затем они могут быть перекрыты другими програм-
мами. Оверлеи могут значительно сократить количество памяти, требуе-
мое для выполнения программ, поскольку в каждый момент времени
размещается только часть программы.
Определим теперь механизмы взаимодействия между различными
элементами АРМВС. Выше было отмечено, что в сложных системах
внутриэлементные связи сильнее межэлементных. В силу этого требу-
ются различные механизмы для реализации этих связей. В данном случае
под межэлементными связями будем понимать связи между макрообъек-
тами (база данных, мониторинг и т.д.), а под внутриэлементными —
между объектами в пределах одного макрообъекта.
Методология построения магнитотерапевтических комплексов
205
Для внутриэлементных связей удобно использовать механизм управ-
ления событиями, который встроен в Turbo Vision. События — это
небольшие пакеты информации, описывающие отдельные случаи, на
которые программа должна реагировать. Событиями являются, напри-
мер, каждое нажатие клавиши, каждое действие «мыши», любое условие,
генерируемое другими компонентами программы. Механизм управления
событиями универсален и удобен, но не приспособлен для передачи
информации между объектами. Для этого нужно создать посредников,
которые имеют стандартные свойства, известные всем взаимодействую-
щим элементам программы. Тогда межэлементное взаимодействие может
быть осуществлено через этих посредников. В принципе обмен данными
между элементами можно осуществлять через глобальные статические
переменные. Однако в силу интерактивной природы системы, заранее
точно неизвестно какая именно информация и в каком объеме потре-
буется, поэтому при взаимодействии через статические переменные
нужно резервирование памяти на «худший» случай, что приведет к зна-
чительным расходам последней. После анализа возможных решений для
межэлементных взаимодействий выбраны так называемые каналы, пред-
ставляющие собой объекты, в которые встроены стандартные средства
для передачи информации от поставщика к потребителю. (Подобный
механизм используется как средство межзадачного взаимодействия в
некоторых операционных системах, например OS/2 [183].) Все постав-
щики и потребители «знают» как обмениваться информацией с каналом,
а канал «умеет» обрабатывать ошибочные ситуации при обмене (напри-
мер, переполнение). Поэтому вне зависимости от того, сколько объектов
участвует в обмене, взаимодействие не усложняется, т.к. оно встроено
внутрь взаимодействующих элементов. Каналы могут динамически со-
здаваться и уничтожаться по мере необходимости, поэтому памяти они
расходуют столько, сколько нужно в данный момент.
С точки зрения программной реализации канал представляет собой
объект, имеющий циклический буфер и набор методов для обслужива-
ния операций обмена с этим буфером. Может быть несколько постав-
щиков информации в один канал, но потребитель должен быть единст-
венный.
Выводы:
— каждая компонента (задача) АРМ ВС может программироваться и
тестироваться отдельно;
— интегрированный пакет имеет оверлейную структуру;
— для программирования используется объектно-ориентированный
язык с активным использованием существующих иерархий объ-
ектов и событийного программирования;
— нужно стремиться к минимальному использованию глобальных
статических данных;
— в качестве стандартного средства связи между задачами исполь-
зуются каналы.
206
Глава 6
6.2.5. Мониторинг
Принципы организации
Мониторинг — одна из важнейших функций АРМВС, состоящая в
непрерывном контроле биомедицинских параметров организма на за-
данном отрезке времени. Такой контроль может осуществляться на всех
этапах лечения. Во-первых, на этапе диагностики, когда врачу необхо-
димы объективные показатели о состоянии больного. Во-вторых, непо-
средственно на этапе отправления лечебных процедур для оперативного
слежения за динамикой хода лечения. И, наконец, в заключительной
стадии, когда формулируются итоги проведенного лечения.
Сущность мониторинга заключается в выполнении следующих ос-
новных операций:
— регистрация физиологических сигналов (например, ЭКГ, ЭЭГ и
т.п.), т.е. сбор первичной информации;
— получение информации о фактическом состоянии пациента, о
признаках и показателях этого состояния в терминах медицин-
ской практики: частота сердечных сокращений (ЧСС), артери-
альное давление, частота дыхания, температура участков тела, т.е.
выявление первичных параметров. Эта операция, как правило,
сопровождается предварительной цифровой фильтрацией, на-
правленной на улучшение качества сигнала и повышение эффек-
тивности алгоритмов его дальнейшей обработки;
— сопоставление первичных параметров с заранее установленными
требованиями, нормами, критериями, т.е. обнаружение соответ-
ствия или несоответствия фактических значений параметров тре-
буемым и сигнализация тревоги в случае выхода какого-либо
показателя за допустимые пределы. Последние две операции
обычно объединяют одним термином — первичная обработка.
Сопоставление параметров может производиться как автомати-
чески, так и при непосредственном участии врача. Для этого
физиологические сигналы должны отображаться на экране тер-
минала в удобной для врача графической форме. Все регистра-
ционные данные или их часть по выбору врача могут сохраняться
на магнитных носителях и документироваться (выводиться на
плоттер или принтер). Важнейшим отличительным свойством мо-
ниторинга следует считать реальный масштаб времени выполне-
ния всех операций.
Итак, мониторинг — это выполнение в реальном времени следую-
щих операций:
а) сбор первичной информации;
б) первичная обработка измерительной информации;
в) визуализация сигналов и их параметров;
г) архивирование данных;
д) документирование данных.
Методология построения магнитотерапевтических комплексов
207
Рассмотрим теперь вопросы программной реализации функций мо-
ниторинга. В основу программной модели положены понятия задачи и
процесса. Именно совокупное поведение коллектива процессов и опи-
сывает программную модель мониторинга. При разработке таких про-
граммных систем должны быть учтены интересы трех сторон:
— отдельного процесса;
— коллектива процессов;
— внешнего по отношению к коллективу объекта, поставляющего
информацию для обработки в реальном масштабе времени.
С точки зрения отдельного процесса следует считать, что одновре-
менно с ним выполняются другие процессы, с которыми он может
взаимодействовать. Минимальный набор средств взаимодействия про-
цессов, определяющий горизонтальные связи между ними, должен обес-
печивать:
— возможность создания и удаления процесса;
— возможность синхронизации с другими процессами;
— возможность обмена данными с другими процессами.
С точки зрения коллектива процессов нужен механизм, регулирую-
щий совместное использование процессами общих ресурсов компьютера.
Общие ресурсы — прежде всего процессорное время, которое нужно тем
или иным способом распределять (планировать) между многими про-
цессами; это периферийные устройства, которые доступны нескольким
процессам; наконец, это общие процедуры, т.е. процедуры, которые
могут вызываться из многих процессов. В соответствии с этим для уп-
равления коллективом процессов требуются:
— планировщик процессорного времени;
— супервизор ввода-вывода;
— монитор системных функций (директив).
С точки зрения внешнего объекта-поставщика информации в сис-
тему, последняя должна обладать высокой реактивностью на внешние
события, т.е. система должна иметь малое время реакции на внешние
прерывания. В противном случае возможна потеря входных данных, и
работа в реальном масштабе времени будет некорректна. Таким образом,
работа в реальном масштабе времени требует эффективного механизма
обработки внешних прерываний с малым временем реакции.
Рассмотрим несколько подробнее вопрос программирования функ-
ций мониторинга с точки зрения отдельного процесса. На рис. 6.10
представлены средства взаимодействия процессов.
Семафор — это механизм, обеспечивающий последовательный до-
ступ нескольких процессов к разделяемому ресурсу. Семафором поль-
зуются для того, чтобы в рамках одного процесса ограждать критические
участки (код, реализующий доступ к разделяемому ресурсу, называется
критическим участком) от возможного влияния других процессов. С
помощью сигналов процессы могут, с одной стороны, сообщать друг
другу о событиях, становящихся им известными, с другой стороны, они
могут пассивно (в очереди) ждать поступления этих событий.
208
Глава 6
Семафор реализуется как переменная S, принимающая значения 0
или 1, и связанная с ней очередь, в которой процессы могут ожидать
освобождения семафора. Доступ к переменной S разрешен только при
помощи специальных операций Р и V (оградить и освободить).
Операция Р над семафором записывается как P(S) и выполняется
следующим образом:
если S>0, то S:=S-1, иначе (ожидать на S).
Операция V над семафором S записывается как V(S) и выполняется
следующим образом:
если очередь (S) пуста, то S:=S+1, иначе (активизировать процесс, пер-
вый в очереди (S)).
Рис. 6.10. Средства взаимодействия между процессами
Если процесс использует разделяемый ресурс, защищенный сема-
фором S, то при входе в критический участок он должен выполнить
операцию P(S), а при выходе — V(S).
Сигнал — это механизм, позволяющий процессу ожидать некоторого
события в пассивном состоянии. Сигнал реализуется в виде переменной
Е, принимающей значения «есть» и «нет», и связанной с ней очередью.
Над переменной Е определены две операции: wait и signal (ждать и
послать).
Операция wait над сигналом Е записывается как wait(E) и выпол-
няется следующим образом:
если очередь (Е) пуста, то Е:= нет, иначе (ожидать на Е).
Операция signal над Е записывается как signal(E) и выполняется
следующим образом:
если очередь (Е) пуста, то Е:= есть, иначе (активизировать процесс,
первый в очереди (Е)).
Для каждого события, являющегося важным для группы процессов,
назначается свой сигнал. Процесс, желающий синхронизироваться с со-
бытием Е, выдает команду wait(E), а синхронизирующий процесс выдает
signal(E) при наступлении данного события.
Сигналы и семафоры являются универсальными механизмами
любой многозадачной программной системы и поэтому должны быть
Методология построения магнитотерапевтических комплексов
209
встроены либо в операционную среду, либо в системные функции ПО
АРМ.
Для выбора средств обмена данными между процессами зададимся
конкретной ситуацией, которая может возникнуть при функционирова-
нии АРМВС. Пусть требуется провести комплексный мониторинг сле-
дующих параметров с сохранением результатов на диске:
1) двух кардиоотведений с подавлением наводок сети и отображе-
нием электрокардиограмм на дисплее; по первому отведению определять
частоту сердечных сокращений (ЧСС), выводить его текущее значение
на экран и сигнализировать о выходе ЧСС за установленные границы;
2) реограммы с выводом графика на экран;
3) температуры пациента с отображением текущего значения.
Из анализа поставленной задачи следует, что требуется вводить ин-
формацию по четырем каналам АЦП, обрабатывать ее различными спо-
собами и выводить результаты на экран и диск. При такой постановке
задача может быть решена с помощью блоковых передач совместно с
тройным буферированием [184]. Блоковая передача — это ввод-вывод,
использующий метод прямого доступа в память (ПДП). Обмен данными
между процессами сбора, обработки и визуализации производится через
общие блоки памяти (буферы), которые синхронно переключаются про-
цессом сбора. Схема переключения буферов при такой организации
мониторинга показана на рис. 6.11.
Рис. 6.11. Обмен данными между процессами с тройным буферированием
АЦП по каналу 0 ПДП заполняет информацией буфер 1. Одновре-
менно с этим процессор занят обработкой буфера 2, в который инфор-
мация была загружена от АЦП в предыдущем цикле. Из буфера 3, где
содержатся результаты обработки, полученные в предыдущем цикле, по
каналу 1 ПДП информация записывается на диск. Данный способ связи
между процессами позволяет достичь максимального быстродействия,
но имеет ряд серьезных недостатков. Во-первых, память компьютера
может использоваться нерационально, например, в том случае, когда
210
Глава 6
требуется значительный размер буфера для ввода информации с АЦП,
а после обработки объем сохраняемой информации уменьшается на не-
сколько порядков. Во-вторых, данный способ обмена данными не яв-
ляется универсальным, поскольку процессы, использующие его, должны
быть строго синхронизированы друг с другом и работать по цикличес-
кому алгоритму. Поэтому организация связи через общие буферы между
асинхронными процессами, обслуживающими локальную сеть или мед-
ленно действующие периферийные устройства (например, принтер),
представляется затруднительной.
С точки зрения универсальности, внимание привлекает способ об-
мена данными, реализуемый с помощью каналов (транспортеров, поч-
товых ящиков) [183, 185, 186]. По логике своей работы канал похож на
последовательный файл, в который один или несколько процессов-ис-
точников могут только записывать информацию, а единственный про-
цесс-приемник — только считывать. Канал реализуется в виде цикли-
ческого буфера, работающего по принципу FIFO (первый пришел —
первым выйдешь). Обмен данными через такой канал показан на
рис. 6.12.
Рис. 6.12. Обмен данными между процессами по каналу
На рис. 6.13 схематично изображено выполнение поставленной
выше задачи мониторинга, дополненной для общности задачами локаль-
ной сети и СУБД, с использованием каналов как средства обмена дан-
ными между процессами. Такое представление поможет определить не-
обходимые свойства, которыми должны обладать в данном случае кана-
лы.
Процессы, существующие в данный момент, показаны прямоуголь-
никами и расположены в рамках породивших их задач. Каналы изобра-
жены в виде окружностей. Мониторинг осуществляют 13 параллельных
процессов, обменивающихся данными через 8 стандартных каналов, а
всего зарегистрировано 17 процессов и открыто 10 каналов.
АЦП связан с процессом сбора через общую память посредством
двойного буферирования. Это единственное место, где не может быть
применен стандартный канал из-за природы блоковой передачи, кото-
рую использует АЦП для записи измерительной информации в память
(процессор в этом случае не является инициатором обмена и, следова-
тельно, программные указатели, используемые для управления каналом,
не работают).
Процесс сбора переключает, когда нужно, буферы, программирует
АЦП на блоковый ввод и дает сигнал о том, что информация в буфере
Методология построения магнитотерапевтических комплексов
211
обновилась. Этот сигнал активизирует процесс, который распределяет
информацию из буфера по соответствующим каналам и обеспечивает
для каждого канала требуемую частоту дискретизации путем прорежи-
вания (если это требуется). Заполнение каналов вызывает активизацию
процессов-потребителей, которые после обработки поступившей в их
входной канал информации переходят в пассивное состояние до тех пор,
пока канал вновь не заполнится. Некоторые из процессов являются
также поставщиками в другие каналы и, записав туда информацию,
вызывают тем самым активизацию других процессов. Такая каскадная
схема представляется универсальной и легко перестраиваемой. Для этого
случая основные требования к каналу можно определить следующим
образом:
— в канале должен присутствовать механизм, активизирующий про-
цесс-потребитель при заполнении этого канала;
— канал должен уметь обслуживать несколько процессов-потреби-
телей (рис. 6.14).
Рис. 6.13. Структура задачи мониторинга:
К — канал; ГО — графическое окно; ТО — текстовое окно; ФНЧ — фильтр нижних частот
212
Глава 6
Рис. 6.14. Канал с несколькими процессами-потребителями
Рассмотрим некоторые аспекты управления коллективом процессов,
обусловленных наличием в системе общих ресурсов и асинхронной при-
родой процессов.
Однопроцессорная архитектура компьютера порождает необходи-
мость в механизме переключения процессора с выполнения одной задачи
на другую. Этот механизм называется планировщиком, а акт планиро-
вания заключается в оценке состояния системы с целью выбора процесса
для активизации. Логика выбора следующего процесса определяет эф-
фективность работы коллектива в целом.
Существуют два основных метода, позволяющих реализовать пере-
ключение процессов [183, 185]:
— переключение по событию;
— разделение времени.
При переключении по событию активный процесс добровольно от-
дает процессор при ожидании некоторого важного для себя события и
машинное время предоставляется другому процессу.
Метод разделения времени основан на использовании внешнего сиг-
нала, поступающего через равные интервалы времени. Обычно это ап-
паратные прерывания от таймера. Когда возникает такое прерывание,
активный процесс приостанавливается с сохранением его контекста и
осуществляется акт планирования.
Каждый из этих методов в чистом виде не применяется при проек-
тировании реальных систем, а является только стратегией планирования.
Переключение по событию эффективно в многопользовательских
интерактивных системах, где продолжительные расчеты редки, а опера-
ции ввода-вывода многочисленны. В нашем случае, напротив, система
является однопользовательской с преобладанием задач обработки изме-
рительной информации, и поэтому стратегия, основанная на методе
разделения времени, представляется более предпочтительной.
При планировании необходимо учитывать специфику некоторых
процессов. Например, процессы, работающие в реальном масштабе вре-
мени, должны пользоваться предпочтением при выборе следующего ак-
тивного процесса. Это можно сделать, присвоив каждому процессу оп-
ределенный приоритет и учитывая эти приоритеты при планировании.
Методология построения магнитотерапевтических комплексов
213
Для повышения производительности коллектива в целом процесс
не должен ожидать событий, находясь в активном состоянии — это
приводит к непроизводительным расходам машинного времени. В таких
случаях активный процесс должен иметь возможность добровольно ос-
вободить ЦП до истечения отпущенного ему кванта времени (в этом
случае будет произведено планирование по событию).
Теперь можно определить возможные состояния процесса:
— состояние готовности к выполнению («готов»);
— состояние выполнения или активное («выполняется»);
— состояние блокировки («блокирован»).
Возможные переходы процесса из состояния в состояние и причины,
вызывающие эти переходы, отражены в табл. 6.3 и на рис. 6.15.
Таблица 6.3
Переходы процесса из одного состояния в другое
Причина смены состояния Начальное состояние Конечное состояние
Активизация процесса Готов Выполняется
Истечение кванта Выполняется Готов
Блокирование Выполняется Блокирован
Пробуждение процесса Блокирован Готов
В результате мы определили требования к планировщику:
1) стратегия планирования — метод разделения времени в сочетании
с системой приоритетов;
2) должны поддерживаться три состояния процесса («готов», «вы-
полняется», «блокирован») и четыре операции по смене этих состояний.
Интерфейс пользователя
Процедуру мониторинга можно разбить на следующие этапы:
— определение параметров мониторинга;
— настройка и конфигурирование аппаратных средств сбора данных;
— выполнение процесса мониторинга.
Определим требования к каждому этапу с точки зрения врача-спе-
циалиста. Определение параметров мониторинга, во-первых, должно
производиться в терминах предметной области и, во-вторых, должно
быть лишено рутинных операций. Настройка и конфигурирование ап-
паратных средств сбора данных должны быть как можно более скрыты
от врача, но в случае, если они все же потребуются, каждый шаг этого
этапа должен сопровождаться системой контекстной подсказки и помо-
щи.
214
Глава 6
Рис. 6.15. Состояния процесса и их изменения
При выполнении мониторинга врач должен иметь простые и понят-
ные средства оперативного управления с возможностью возврата на шаг
назад при ошибочном вводе команды.
Параметрами мониторинга выбраны отведения ЭКГ, реограмма,
температура и артериальное давление пациента.
Существуют различные системы отведений ЭКГ. Каждое отведение
регистрирует разность потенциалов, существующую между двумя опре-
деленными точками электрического поля сердца, в которых установлены
электроды. Для каждого отведения имеются положительные (+) и отри-
цательные (-) электроды. В настоящее время в клинической практике
наиболее широко используются 12 отведений ЭКГ: три стандартных
отведения (1, 2, 3), три усиленных однополюсных отведения от конеч-
ностей (aVR, aVL, aVF) и шесть грудных отведений (VI, V2, V3, V4, V5,
V6). Используемое отведение получается в результате наложения
электродов по соответствующей методике.
Каждый электрод накладывается обычно на соответствующую ему
точку тела: R — правая рука; L — левая рука; F — левая нога; С1...С6 —
грудные электроды; N — правая нога (электрод для заземления).
Например, 1-е стандартное отведение регистрируют как разность
потенциалов между электродами L и R (L — R), 2-е стандартное отве-
дение — (F — R), 3-е — (F — L), отведение VI получают как разность
потенциалов между электродом С1 и объединенным электродом Виль-
сона, образуемым при соединении через дополнительное сопротивление
электродов R, L и F.
Кроме отведений ЭКГ, параметрами мониторинга могут быть тем-
пература (Т), два параметра реограммы (Z и dZ). Поскольку измерение
артериального давления пока полностью не автоматизировано и в про-
цессе измерения требуется интерактивное взаимодействие с оператором,
то непрерывный мониторинг по данному параметру проводить нельзя.
Для контроля и отладки системы введен тестовый параметр мониторинга
(Test).
Методология построения магнитотерапевтических комплексов
215
Этап определения параметров мониторинга существенно упрощается
при использовании готовых методик. В качестве прототипа можно взять
следующие методики, используемые в промышленном электрокардио-
графе ЭК-64-01: 1) измерение ЭДС сердца во фронтальной плоскости
(по Bayley), использующее регистрацию отведений 1, 2, 3, aVR, aVL,
aVF; 2) измерение ЭДС сердца в горизонтальной плоскости (по Wilson),
использующее регистрацию отведений VI, V2,..., V6; 3) смешанная ме-
тодика, при которой регистрируются отведения aVL, aVF, V1,...,V4.
Кроме выбора стандартных методик, нужно иметь редактор, позво-
ляющий создавать новые методики, сохранять их и редактировать.
При аппаратной настройке и конфигурировании, во-первых, для
каждого канала должны быть определены такие характеристики, как тип
входа (дифференциальный / недифференциальный), диапазон входного
сигнала (0...+ 10В / -5...+5В), коэффициент усиления (1, 2, 5 или 10) и
подключенный датчик (один из кардиоэлектродов, Т, Z, dZ или Test).
Во-вторых, должны быть определены общие для всех каналов установки
АЦП, включающие в себя частоту дискретизации и объем выборки.
В-третьих, используя данные из выбранной методики об используемых
параметрах мониторинга и данные о подключении датчиков, определя-
ются используемые каналы АЦП и последовательность их подключения
при сборе информации.
Вышеописанный подход использовался при построении пользова-
тельского интерфейса задачи мониторинга.
Задача мониторинга становится активной при выборе в главном
меню (рис. 6.16) окна мониторинга, при этом последнее раскрывается
на весь экран (рис. 6.17).
Если требуется изменять какие-либо параметры мониторинга, то
нужно выбрать пункт локального меню «Планирование». При этом вы-
зывается окно «Планирование мониторинга», в котором можно произ-
вести все установки (рис. 6.18).
Таблица «Список каналов» позволяет в систематизированном виде
просмотреть все текущие настройки по всем каналам АЦП и при необ-
ходимости менять их. Для этого соответствующее поле таблицы нужно
отметить курсором мыши. Текущее поле выборки выделяется рамкой и
его можно менять клавишами управления курсором. При перемещении
по списку каналов в таблицах «Метод», «Диапазон», «Усиление», «Дис-
кретизация», «База выборки», «Датчик» устанавливается информация,
соответствующая текущему состоянию выбранного канала.
Изменение параметров измерительного канала осуществляется на-
жатием радиокнопки, помечающей требуемое значение параметра. При
этом следует помнить, что частота дискретизации и объем выборки
(«База выборки») являются общими для всех каналов и их можно уста-
новить в одно из фиксированных значений, представленных соответст-
вующими радиокнопками.
По желанию оператора датчику и измерительному каналу можно
присвоить произвольное содержательное имя. Для этого нужно нажать
216
Глава 6
Рис. 6.16. Главное меню интегрированного ППП для АРМВС
Рис. 6.17. Окно мониторинга
кнопку «Имена датчиков» и в выпадающем окне (рис. 6.19) отредакти-
ровать соответствующую строку.
Создав необходимую конфигурацию системы сбора данных, опера-
тор имеет возможность сохранить ее, присвоив ей определенное имя в
поле «Имя методики» и нажав кнопку «Добавить». Убедиться в том, что
Методология построения магнитотерапевтических комплексов
217
Рис. 6.18. Окно планирования мониторинга
Рис. 6.19. Окно редактирования имен датчиков
методика записана в список, можно, нажав кнопку максимизации окна
«Имя методики» (рис. 6.20).
Запуск методики на исполнение осуществляется выбором ее имени
из списка имен скролингом «Выбор методики» и нажатием кнопки
218
Глава 6
«Применить». На экране в реальном масштабе времени будут отобра-
жаться измерительные сигналы, поступающие в компьютер по выбран-
ным каналам (рис. 6.21). Запись информации на диск инициируется
нажатием кнопки «Запись».
В процессе мониторинга можно оперативно управлять параметрами
визуализации. Щелчок мыши в поле отображаемого параметра делает
Рис. 6.20. Окно списка имен методик
Рис. 6.21. Окно текущего мониторинга
Методология построения магнитотерапевтических комплексов
219
его текущим. Для текущего канала с помощью соответствующих кнопок
можно установить смещение и усиление по вертикальной оси и вклю-
чить прореживание по горизонтальной оси.
Процесс мониторинга может быть приостановлен и потом продол-
жен с помощью кнопки «Пауза». Окончание мониторинга происходит
при нажатии кнопки «Закрыть».
6.2.6. Процессор цифровой обработки сигналов
Основы цифровой обработки биомедицинских сигналов
Постановка диагноза, составление прогноза и выбор методики ле-
чения в значительной степени опираются на объективный анализ био-
электрических сигналов, регистрируемых в ходе мониторинга. В неко-
торых случаях возможна и ручная обработка сигналов, тем не менее
автоматический расчет информативных параметров с помощью компью-
тера дает большие преимущества и требует меньших усилий. Наиболее
важные преимущества автоматической обработки данных состоят в сле-
дующем: 1) обработка данных осуществляется по одинаковой схеме; 2)
результаты представляются в стандартном виде; 3) можно использовать
стандартную терминологию. Некоторые же показатели просто не могут
быть получены путем ручной обработки, и в этих случаях преимущества
компьютера совершенно очевидны.
Данные, получаемые при регистрации сигналов, чаще всего пред-
ставляются в виде кривых ЭКГ, реограмм, давления крови, температуры,
передаваемых в компьютер в виде последовательности чисел x(j). При
обработке таких данных компьютеры выполняют следующие задачи:
фильтрация, распознавание образов, измерение параметров и интерпре-
тация данных.
Фильтрация повышает качество записи сигнала и подавляет шумы,
которые связаны в основном с мышечным тремором, смещением электро-
дов и электрическими помехами. Обычно применяют низкочастотные циф-
ровые фильтры. Их можно подразделить на три основных класса.
1. Фильтр скользящего среднего. Это самый первый и самый простой
тип цифровых фильтров. Каждое выходное значение y(j) рассчитыва-
ется исходя из ограниченного набора входных точек x(j) по формуле:
уG) = £ w(n)x(j-n) , (6-1)
П--Р
где w(n) — набор (2р+1) весовых коэффициентов.
Данное уравнение подразумевает, что используется равное число дис-
кретизированных значений до и после х(п) — точки, в окрестности ко-
торой в данный момент времени производится сглаживание. При до-
полнительном ограничении, состоящем в том, что весовые
коэффициенты симметричны относительно х(п), т.е. w(i) — w(-i),
сдвиг фаз становится равным 0 или л; такой фильтр можно отнести к
фильтрам с нулевым фазовым сдвигом.
220
Глава 6
2. Рекурсивный фильтр. Для расчета выходных параметров используют-
ся не только входные, но и предшествующие выходные значения, по-
ступающие через цепь обратной связи. Для запуска повторяющегося
процесса необходимы начальные выходные данные. В общем случае
для входа х(п) выход y<j) вычисляется по формуле:
у (j) = Е u(n) y(j - и) + Е v(n) x(j - n) ,
n=l n=m
где u(n) и v(n) — заданные коэффициенты. Величина р определяет по-
рядок фильтра (в смысле классического анализа электрической цепи).
3. Частотный фильтр. Этот фильтр осуществляет фильтрацию сигнала в
определенной области частот с помощью дискретного преобразова-
ния Фурье. Из набора сигналов х(к) рассчитываются коэффициенты
S(j), соответствующие частотам 0, 1/Т, 2/Т,..., (N-l)/T, где Т — время
между соседними регистрациями:
N- 1
S(J) = (1/N) Е x(k)wkj ,
k-О (б.З)
где w = exp (- 2jp/N), j = 0, 1,..., N-l.
Далее эти коэффициенты умножаются на дискретные значения час-
тотной характеристики фильтра. Затем с помощью обратного преоб-
разования восстанавливается отфильтрованный временной сигнал из
соответствующим образом усиленных или сглаженных гармоник.
Самой трудной задачей, возникающей при обработке биомедицин-
ских сигналов, является задача распознавания характерных элементов
на кривой сигнала (например, для ЭКГ — это обнаружение желудочко-
вого комплекса, т.е. установление факта его наличия на анализируемом
участке и определение характерных точек комплекса).
Можно выделить несколько основных групп методов распознавания
при оперативном анализе кривой сигнала [187]:
— простейшие пороговые методы;
— структурные методы;
— методы сравнения с образцами (корреляционные методы);
— методы на основе цифровой фильтрации.
Программная реализация этих методов существенно упрощается,
если допустить интерактивную работу оператора с про!раммой. Резуль-
таты выявления характерных элементов реализации сигнала и измерения
их параметров заносятся в базу данных и используются экспертной
системой для интерпретации кривой с целью постановки правильного
диагноза.
Вариант реализации процессора цифровой обработки сигналов
Функция АРМВС по вторичной обработке измерительной инфор-
мации реализована в виде законченной исполняемой программы — про-
цессора цифровой обработки сигналов (ПЦОС). Загрузка ПЦОС осу-
ществляется оверлейно из корневого модуля интегрированного пакета
прикладных программ (ИППП). Поскольку вторичная обработка инфор-
Методология построения магнитотерапевтических комплексов
221
мации осуществляется в виртуальном времени, в качестве канала взаи-
модействия ПЦОС с другими задачами пакета использован специали-
зированный файл стандартной структуры, что позволило резко снизить
требования к объему оперативной памяти компьютера. В ПЦОС при-
меняется оконная архитектура, соответствующая стандарту CUA.
Рассматриваемая версия ПЦОС обеспечивает выполнение следую-
щих функций:
1. Просмотр графических данных обследования с отображением на эк-
ране до 8 реализаций одновременно.
2. Скролинг реализаций синхронно по всем отображаемым окнам.
3. Наложение оцифрованной координатной сетки на изображение сиг-
нала.
4. Грубое и точное перемещение двух вертикальных линий маркеров по
всей длине реализации.
5. Оперативное вычисление координат точек пересечения линий марке-
ров с реализацией сигнала, а также расстояний между ними по шкале
времени и амплитуды.
6. Просмотр в увеличенном масштабе участка реализации, заключенно-
го между маркерами.
7. Выделение произвольного непрерывного фрагмента реализации сиг-
нала и вычисление временных, амплитудных, а впоследствии — энер-
гетических, спектральных и других параметров выделенного фрагмен-
та.
8. Фильтрация зарегистрированного сигнала при помощи программных
ФНЧ, ФВЧ и режекторных фильтров с регулируемыми частотами
среза и полосой режекции.
ПЦОС отличает открытая для расширения модульная архитектура.
Пользователь может работать не только с базовой конфигурацией, но и
дополнить ее необходимыми ему специализированными программами,
отвечающими требованиям программного интерфейса ПЦОС.
Порядок работы с ПЦОС
1. Активизировать ПЦОС из главного меню ИППП путем выбора соот-
ветствующего окна с помощью мыши. Под выбором понимается уста-
новка курсора мыши на плоскость окна и однократное нажатие кноп-
ки (рис. 6.22).
2. Выбрать пункт локального меню «Операции». В результате появится
выпадающее меню (рис. 6.23).
Операция «Фильтровать» реализует полосовую фильтрацию сигна-
лов, зарегистрированных во время мониторинга пациента.
Операция «Ритмограмма» обеспечивает построение динамического
ряда кардиоинтервалов и вычисление интегрального показателя актив-
ности регуляторных систем по методике Р. М. Баевского [188].
222
Глава 6
Рис. 6.22. Окно ПЦОС
Операция «Параметры QRST-комплекса» позволяет в интерактив-
ном режиме ввести в компьютер координаты характерных точек карди-
ограммы с целью повышения достоверности ее автоматического анализа.
Дальнейший порядок работы рассмотрим для операции «Фильтро-
вать».
Рис. 6.23. Выпадающее меню операций, реализуемых ПЦОС
Методология построения магнитотерапевтических комплексов
223
3. Вызвать пункт «Фильтровать». При этом появляется экранная форма
«Открытие файла исследований» с полосой скролинга (рис. 6.24).
Если работа ведется с конкретным пациентом, зарегистрированным в
базе данных АРМВС, то отображаются только файлы, содержащие ре-
зультаты обследования именно этого пациента.
4. Вызвать на отображение требуемый файл двойным нажатием кнопки
мыши (рис. 6.25).
Рис. 6.24. Экранная форма для выбора файла исследования
Рис. 6.25. Отображение выбранного файла на экране
224
Глава 6
5. Кнопками соответствующего цвета переместить маркеры так, чтобы
они ограничивали интересующий оператора участок. При этом в окне
«Параметры» оперативно отображаются временные и амплитудные
параметры зарегистрированного сигнала.
6. Для просмотра в увеличенном масштабе участка, заключенного между
двумя маркерами, следует нажать экранную кнопку с изображением
линзы со знаком плюс. Появится окно, представленное на рис. 6.26.
Рис. 6.26. Просмотр в увеличенном масштабе
7. Чтобы возвратиться в окно обычного просмотра, следует нажать
кнопку с изображением линзы со знаком минус.
8. Нажать кнопку «Фильтр» (пиктограмма «Решето» на рис. 6.25). При
этом появится экранная форма, включающая три окна (рис. 6.27). В
первом окне отображается спектр исходного сигнала и АЧХ фильтра,
параметры которой можно изменять скролингами FH — нижняя и FB —
верхняя частоты пропускания полосового фильтра. Во втором окне
отображается исходный сигнал, а в третьем — сигнал на выходе
фильтра.
9. Нажать кнопку «Файл» и записать отфильтрованный сигнал на диск.
10. Выход из ПЦОС осуществляется последовательным нажатием закры-
вающих экранных кнопок.
6.2.7. База данных
Введение
При посещении медицинских учреждений до сих пор обращают на
себя внимание кипы бумаги в служебных помещениях и больничных
Методология построения магнитотерапевтических комплексов
225
Рис. 6.27. Установка параметров фильтра и получение
отфильтрованной электрокардиограммы
регистратурах. К сожалению, даже простая регистрация всего, что про-
исходит, отнимает у врача массу дорогостоящего времени. Начиная с
первоначального опроса пациента, результаты каждого физиологическо-
го обследования, лабораторных анализов, диагноз, процедуру лечения
необходимо тщательно регистрировать во всех деталях. С целью избав-
ления от бумажных завалов, по крайней мере в кабинете магнитотера-
пии, в состав функций АРМВС включается сопровождение базы данных.
База данных — это среда для хранения данных, обладающая свой-
ством единства и разделения ресурсов [182]. Под единством подразуме-
вается возможность рассмотрения всех файлов базы данных как единой
структуры с максимальной избыточностью. Под разделением ресурсов
понимается возможность работы нескольких пользователей с любыми
фрагментами базы данных. Централизация управления базой данных
позволяет разрешить возникающие противоречия при разделении ресур-
сов, стандартизировать механизмы, обеспечить защиту данных и об-
щность управления.
Структура системной базы данных в общем виде показана на
рис. 6.28. Пользователь через программу или непосредственно с терми-
нала посылает в базу данных требование на обработку. Это требование,
записанное на каком-либо языке запросов (например, SQR—structured
query language — язык структурированных запросов) и дополненное не-
обходимой информацией из описания этих данных (например, инфор-
226
Глава 6
Рис. 6.28. Структура системы базы данных
мацией о структуре и т.д.), приводимого в словаре данных, пересылается
в систему управления базой данных (СУБД).
СУБД анализирует это требование, запрашивает из словаря данных
информацию о наличии требуемых данных, об их физической структуре
и т.д. и передает требование в форме запроса на физический доступ к
данным в операционную систему. Операционная система осуществляет
доступ к требуемым данным, обращаясь к дискам или другим запоми-
нающим устройствам, и передает результат в СУБД. Последняя подвер-
гает этот результат более детальной обработке и выполняет такие опе-
рации над затребованными пользователем данными, как пересылка в ра-
бочую область пользователя, переписывание базы данных и т.д.
В наиболее полном варианте СУБД может иметь следующие ком-
поненты:
1. Среда пользователя, дающая возможность непосредственного управ-
ления данными с клавиатуры.
2. Алгоритмический язык для программирования прикладных систем
обработки данных, реализованный как интерпретатор. Последнее по-
зволяет быстро создавать и отлаживать программы.
3. Компилятор для придания завершенной программе вида готового
коммерческого продукта в виде независимого исполняемого файла.
4. Программы-утилиты быстрого программирования рутинных опера-
ций (генераторы отчетов, экранов, меню и других приложений).
Собственно СУБД — это, конечно, оболочка пользователя. Ввиду
того, что такая среда ориентированна на немедленное удовлетворение
его запросов, это всегда система-интерпретатор. В ней должны быть
развиты средства непосредственного доступа к данным, в том числе
реализован язык управления запросами SQL.
Методология построения магнитотерапевтических комплексов 227
Наличие в СУБД языка программирования позволяет создавать
сложные системы обработки данных, ориентированные на конкретные
задачи и даже под конкретного пользователя. Есть также СУБД, которые
имеют только язык и не имеют оболочки пользователя. Они предназна-
чены исключительно для программистов — это системы компилирую-
щего типа. Последнее обстоятельство особенно ценно при реализации
задачи сопровождения базы данных в составе интегрированного пакета
для АРМВС.
При этом представление данных, которыми оперирует вся система,
может, как правило, осуществляться на следующих трех уровнях: 1)
внутреннем или физическом, 2) логическом, 3) концептуальном или
внешнем.
Представление на внутреннем уровне — это форма представления
данных, размещенных на магнитных дисках, соответствующая физичес-
кому расположению данных на диске. Представление на логическом
уровне отражает логическую структуру и семантику данных, эта форма
представления не связана с физическим расположением данных. Пред-
ставление на внешнем уровне отражает структуру данных и их семантику
так, как видит их пользователь. В отличие от представления на логи-
ческом уровне, отражающего структуру и семантику данных в том виде,
в каком они заданы для всей базы данных, в случае представления на
внешнем уровне учитывается точка зрения конкретного пользователя.
Проектирование базы данных представляет собой достаточно труд-
ную задачу, поскольку приходится удовлетворять противоречивые тре-
бования. Необходимо обеспечить не только функциональные свойства
базы данных, но и учесть факторы быстродействия и размеры исполь-
зуемой памяти. База данных, которая слишком долго ищет требуемые
данные, становится практически бесполезной, так же как функциональ-
ная неэффективность поглощает все ресурсы компьютера или требует
многочисленного обслуживающего персонала.
В соответствии с трехуровневым представлением данных можно вы-
делить три этапа проектирования базы данных:
1) проектирование информационной структуры предметной области;
2) логическое проектирование;
3) физическое проектирование.
Проектирование информационной структуры предметной области
Первым этапом проектирования базы данных любого типа является
анализ предметной области, который заканчивается построением ин-
формационной структуры (концептуальной схемы).
На данном этапе анализируются запросы врачей, выбираются ин-
формационные объекты и их характеристики и на основе проведенного
анализа структурируется предметная область. Анализ предметной облас-
ти является общезначимым этапом, не зависящим от программной и
технической сред, в которых будет реализовываться база данных.
228
Глава 6
Анализ предметной области целесообразно разбить на три фазы:
а) анализ концептуальных требований и информационных потреб-
ностей;
б) выявление информационных объектов и связей между ними;
в) построение концептуальной схемы базы данных.
Требования врачей к разрабатываемой базе данных представляют
собой список запросов с указанием их интенсивности и объемов данных.
Эти сведения разработчики базы данных получают в диалоге с врачами.
Здесь же выясняются требования к вводу, обновлению и корректировке
информации. Требования врачей уточняются и дополняются при анализе
имеющихся и перспективных приложений.
Рассмотрим примерный состав вопросника при анализе интересую-
щей нас предметной области — магнитотерапии.
1. Сколько больных может находиться на учете?
2. Какое количество МТК может быть использовано?
3. Каков перечень методик лечения?
Анализируя вопросы, выявляют запросы, которые могут быть пред-
ставлены следующим перечнем:
1. Выдать список пациентов.
2. Выдать данные по конкретной методике.
Вторая фаза анализа предметной области состоит в выборе инфор-
мационных объектов, определении необходимых характеристик каждого
объекта, выявление связей между объектами, определении ограничений,
накладываемых на информационные объекты и типы связей между
ними. Выделение информационных объектов — процесс итеративный.
Он осуществляется на основании анализа информационных потоков и
интервьюирования потребителей. Характеристики информационных
объектов определяются теми же методами.
Продолжим начатый выше пример. После беседы с рядом врачей и
просмотра истории болезни было выяснено, что интерес, помимо про-
чего, могут представлять, например, следующие информационные объ-
екты.
ПАЦИЕНТ (ФИО, дата рождения, пол, № истории болезни, дата
поступления).
МЕТОДИКА (название, конфигурация магнитного поля, частота и
напряженность магнитного поля, продолжительность воздействия).
МТК (вариант исполнения, год выпуска, цена, габаритные размеры,
масса).
Далее выделяют связи между информационными объектами. В ходе
этого процесса стараются ответить на вопросы:
1. Какие типы связей существуют между информационными объекта-
ми?
2. Какое имя можно присвоить каждому типу связей?
3. Каковы возможные типы связей, которые могут быть использованы
впоследствии?
Методология построения магнитотерапевтических комплексов
229
Связи могут быть различных свойств, характера и избирательности.
При проектировании базы данных принято рассматривать взаимосвязи
между информационными объектами трех типов: «один к одному», «один
ко многим», «многие ко многим». На рис. 6.29 показаны информаци-
онные объекты ПАЦИЕНТ, МЕТОДИКА, МТК и возможные взаимо-
связи между ними.
Один ко многим
МЕТОДИКА
МЕТОДИКА
Рис. 6.29. Информационные объекты базы данных
Задавая ограничения на объекты, их характеристики и связи, пыта-
ются ответить на следующие вопросы:
1. Какова область значений для числовых характеристик?
2. Каковы функциональные зависимости между характеристиками
одного информационного объекта?
В общем случае рассматриваются три вида ограничений: внутренние,
семантические и смешанные. Внутренние ограничения в основном связаны
с моделью данных, поддерживаемой СУБД. Семантические ограничения
вводятся для расширения возможностей представления семантики данных.
Например, исходя из требований министерства здравоохранения, индукция
магнитного поля воздействия не должна превышать 5 мТл.
Заключительная фаза анализа предметной области состоит в проек-
тировании ее информационной структуры (или концептуальной схемы).
Описывать предметную область или проектировать концептуальную
схему можно средствами достаточно большого количество моделей, со-
зданных специально для этих целей.
В рамках базы данных концептуальные схемы обобщаются в кон-
цептуальную модель, выраженную абстрактными средствами, позволя-
ющими увидеть все информационное содержание предметной области.
Поиск идеальной модели, полностью отражающей реальный мир, весьма
проблематичен. Выбор модели диктуется прежде всего характером пред-
метной области и требованиями к базе данных. Другим немаловажным
обстоятельством является независимость концептуальной модели от
СУБД, которая должна быть выбрана после построения концептуальной
схемы.
230
Глава 6
В литературе описаны достаточно разнообразные модели, применяе-
мые при анализе предметной области, классификация которых приве-
дена в (189]. Остановимся на наиболее известной ER-модели (Entity
Relationship — связь сущностей). Основными конструкциями данной
модели являются сущности и связи.
Под сущностью на языке ER-модели понимают информационный
объект. При этом различают тип сущности или просто сущность и эк-
земпляр сущности. Под типом сущности обычно понимают набор одно-
родных объектов, выступающих как целое. Понятие «экземпляр сущ-
ности» относится к конкретному предмету.
Например:
Тип сущности — пациент; экземпляр сущности — Иванов, Петров
и др.
Сущность принято определять поименованными характеристиками,
называемыми атрибутами. Наименование атрибута должно быть уни-
кальным для каждого экземпляра сущности, хотя оно может повторяться
для различных типов сущности.
Например:
Тип сущности — врач;
атрибуты: ФИО, год рождения, адрес, квалификация и т.д.
Тип сущности — пациент;
атрибуты: ФИО, диагноз, № истории болезни.
Различают тип атрибута (или атрибут) и экземпляр атрибута. Тип
атрибута задает свойство сущности, а экземпляры атрибута отражают
различные значения этого свойства. Например, если тип атрибута «дата
рождения», то экземпляры атрибута могут быть 1 мая 1941 года, 13
декабря 1950 года и т.д.
Естественно, что абсолютное различие между сущностью и атрибу-
том отсутствует. Атрибут является типом только в связи с выбранной
сущностью, а в другом контексте этот атрибут может выступать как
сущность.
Для идентификации уникальной сущности необходимо ее задать
ключевым атрибутом сущности. Ключевой атрибут должен, во-первых,
однозначно идентифицировать сущность, во-вторых, учитывать ее при-
ложения.
Выберем следующие сущности:
ПАЦИЕНТ МТК МЕТОДИКА
Зададим каждую сущность набором атрибутов:
ПАЦИЕНТ (ФИО, дата рождения, пол, № истории болезни, дата
поступления).
МТК (номер изделия, вариант исполнения, год выпуска, цена, га-
баритные размеры, масса).
МЕТОДИКА (наименование, конфигурация магнитного поля, час-
тота, напряженность магнитного поля, продолжительность воздействия).
Методология построения магиитотерапевтических комплексов
231
В каждом наборе атрибутов, характеризующих сущность, необходи-
мо выбрать ключевые атрибуты, т.е. атрибуты, делающие сущность уни-
кальной. При задании атрибутов ключевые атрибуты подчеркивались.
Проанализируем связи между сущностями.
Название связи Связываемые сущности
Назначение Поддерживает Закреплен Пациент, методика МТК, методика Пациент, МТК
После выбора сущностей, задания атрибутов и анализа связей пере-
ходят к проектированию информационной (концептуальной) схемы базы
данных. Концептуальную схему можно представить ER-диаграммой
(ERD), в которой множество сущностей обозначается прямоугольника-
ми, множество связей — ромбами. На ERD допустимо множество ат-
рибутов обозначать овалами. Концептуальная схема простейшего фраг-
мента базы данных для АРМВС в виде ERD представлена на рис. 6.30
(атрибуты сущностей на схеме не показаны).
Рис. 6.30. Концептуальная схема фрагмента базы данных
Логическое проектирование
Основной задачей логического проектирования является разработка
логической схемы, ориентированной на выбранную СУБД. По сути дела
логическое проектирование является моделированием всей информаци-
онной системы и ее отдельных составляющих в форме, соответствующей
реальной СУБД.
Процесс логического проектирования состоит из следующих этапов:
1. Выбор конкретной СУБД.
2. Отображение концептуальной схемы на логическую схему.
Теоретически при решении вопроса о выборе инструментальной
СУБД для реализации проекта базы данных АРМВС следует принимать
во внимание десятки факторов. Однако в реальной практике решение
проблемы выбора СУБД существенно упрощается. Проектировщики ру-
ководствуются, по существу, лишь собственными интуитивными экс-
пертными оценками и требованиями к выбираемой системе по несколь-
232
Глава 6
ким важнейшим количественным и качественным характеристикам. К
числу таких характеристик относятся:
— тип модели данных, которую поддерживает СУБД, ее адекватность
потребностям моделирования рассматриваемой предметной об-
ласти;
— характеристики производительности системы;
— наличие в СУБД средств разработки приложений;
— удобство и надежность СУБД в эксплуатации.
Одним из основных критериев выбора СУБД является оценка того,
насколько эффективно внутренняя модель данных, поддерживаемая сис-
темой, способна описать концептуальную схему.
По способу установления связей между данными различают реля-
ционную, иерархическую и сетевую модели.
Реляционная модель является простейшей и наиболее привычной фор-
мой представления данных в виде таблицы. В теории множеств таблице
соответствует термин «отношение» (relation), который и дал название мо-
дели. Для нее имеется развитый математический аппарат — реляционное
исчисление и реляционная алгебра, где для баз данных (отношений) опре-
делены такие хорошо известные теоретико-множественные операции, как
объединение, вычитание, пересечение и др. Достоинством реляционной
модели является сравнительная простота инструментальных средств под-
держки, недостатком — жесткость структуры данных (невозможность,
например, задания строк таблицы переменной длины) и зависимость ско-
рости ее работы от размера базы данных. Для многих операций, опре-
деленных в такой модели, может оказаться необходимым просмотр всей
базы.
Иерархическая и сетевая модели предлагают наличие связей между
данными, имеющими какой-либо общий признак. В иерархической мо-
дели такие связи могут быть отражены в виде дерева — графа, где
возможны только односторонние связи от старших вершин к младшим.
Это облегчает доступ к необходимой информации, но только если все
возможные вопросы отражены в структуре дерева. Никакие иные запро-
сы удовлетворены быть не могут.
Указанный недостаток снят в сетевой модели, где, по крайней мере
теоретически, возможны связи «всех со всеми». Поскольку на практике
это, естественно, невозможно, то приходится прибегать к некоторым
ограничениям. Использование иерархической и сетевой моделей уско-
ряет доступ к информации в базе данных. Но поскольку каждый элемент
данных должен содержать ссылки на некоторые другие элементы, тре-
буются значительные ресурсы как дисковой, так и основной памяти
ЭВМ. Нехватка основной памяти, конечно, снижает скорость обработки
данных. Кроме того, для таких моделей характерна сложность реализа-
ции СУБД.
Хотя известны попытки создания СУБД, поддерживающих сетевую
модель для персональных компьютеров, в настоящее время реляционные
системы лучше соответствуют их техническим возможностям и вполне
Методология построения магнитотерапевтических комплексов
233
удовлетворяют большинство пользователей. Скоростные характеристики
этих СУБД улучшаются специальными средствами ускоренного доступа
к информации — индексированием баз данных.
Рассмотрим подробнее реляционную модель данных.
Пусть имеется п множеств DI, D2,..., Di,..., Dn; a R есть отношение
этих множеств, если оно представляет собой множество элементов вида:
<dl, d2,..., di,..., dn>,
где di eDi, i = 1,..., n.
Другими словами, R есть подмножество декартова произведения ука-
занных множеств. Исходные множества DI,..., Dn принято называть
доменами отношения R, а элементы отношения — кортежами.
Напомним, что декартовым (прямым) произведением множеств X и
Y называют множество, обозначенное X*Y и состоящее из всех тех и
только тех упорядоченных пар, первая компонента которых принадлежит
множеству X, а вторая — множеству Y. Таким образом, элементами
декартова произведения являются двухэлементные кортежи вида (х,у).
Формальное определение:
X*Y = {(х,у)/хеХ, yeY}.
Пусть X = {1, 2}; Y = {1, 3, 4}.
Тогда: X*Y = {(1, 1); (1, 3); (1, 4); (2, 1); (2, 3); (2, 4)}.
Операция декартова произведения легко распространяется и на
большее число множеств. Декартовым произведением множеств XI,
Х2,... Хг называют множество, обозначаемое как Х1*Х2*...*Хг и состоя-
щее из всех тех и только тех кортежей длины г, первая компонента
которых принадлежит XI, вторая — Х2 и т.д.
Итак, отношением называется некоторое подмножество декартова
произведения одного или более доменов. Применительно к базам данных
целесообразно обсуждать только конечные отношения.
Отношение удобно представлять как таблицу, где каждая строка есть
кортеж, а у каждого столбца есть имя, называемое атрибутом. При при-
своении столбцам отношений имен атрибутов порядок столбцов стано-
вится несущественным. Столбец или набор столбцов отношения назы-
вают возможным ключом этого отношения, если значение ключа одно-
значно идентифицируют кортежи отношения. Если отношение имеет
больше одного ключа, то вводится понятие первичного ключа.
Отобразим рассмотренный фрагмент концептуальной схемы базы
данных, изображенной в виде ERD, на реляционную модель. Каждая
сущность описывается в виде отношения. Ключи задаются в виде па-
раллельных штрихов #. Произведем также оценку требуемого объема
памяти на хранение базы данных.
234
Глава 6
Пример 1
Отношение Пациент
ФИО Дата # рождения Пол № истории болезни Дата поступления
48 10 1 3 10
На одну таблицу необходимо 48 + 10 + 1 + 3+ 10 = 72 байта. Всего
пациентов 1000, т.е. на хранение всех таблиц с данным отношением
требуется 72*1000 = 72000 байт.
Пример 2
Отношение МТК
Номер # изделия Вариант исполнения Год выпуска Цена Габаритные размеры Масса
10 13 4 12 9 4
На одну таблицу необходимо 10 + 12 + 4+ 12 + 9 + 4 = 51 байт.
Всего изделий 20, т.е. на хранение всех таблиц с данным отношением
требуется 51*20 = 1020 байт.
Пример 3
Отношение Методика
Наименование # Конфигурация магнитного поля Частота магнитного поля Напряженность магнитного поля Продолжи- тельность воздействия
30 30 6 6 4
Одна таблица занимает 76 байт. Всего методик 1000, итого 76*1000
= 76 Кбайт.
Итак, в первом приближении на хранение рассматриваемого фраг-
мента базы данных требуется 72 Кбайт + 1,02 Кбайт + 76 Кбайт = 149,02
Кбайт.
При проектировании базы данных могут быть альтернативные схемы
отношений. Нужно помнить, что наиболее важной целью создания базы
данных является хранение каждого факта в одном месте. Это снижает
избыточность информации, упрощает процесс модификации данных,
обеспечивает целостность базы данных (внутреннюю устойчивость и
непротиворечивость) и снижает объем занимаемой памяти.
Для достижения этой цели разработана теория нормализации. Рас-
смотрим понятие функциональной зависимости. Пусть R (Al, А2,...,
Ai,..., Ап) — схема отношения R. Обозначим через Dom(Aj) множество
возможных состояний атрибута Aj. Будем говорить, что атрибуты Ai и
Aj отношения R связаны функциональной зависимостью, т.е.
Методология построения магнитотерапевтических комплексов
235
f: Dom(Ai) -» Dom(Aj),
которую будем понимать как множество упорядоченных пар:
{<a,b>/a е Dom(Ai), b g Dom(Aj)},
где f — имя функциональной зависимости, символ —» разделяет правую
и левую части выражения.
При этом в каждый момент элементу [а е Dom(Ai)] соответствует
не более одного элемента [b е Dom(Aj)].
Функциональная связь доменов инвариантна по отношению к схеме
конкретного отношения. Понятие функциональной зависимости позво-
ляет определить ключ отношения.
Выявим функциональные зависимости в отношении Пациент. R Па-
циент (ФИО, дата рождения, пол, номер истории болезни, дата поступ-
ления).
f: ФИО —> пол
номер истории болезни —> ФИО
номер истории болезни -> дата рождения
номер истории болезни —> пол
номер истории болезни -> дата поступления
(ФИО, дата рождения) -> пол
( то же ) —> номер истории болезни
( - " - ) -» дата поступления.
Легко видеть, что в этом отношении имеются два ключа: номер
истории болезни и (ФИО, дата рождения). В качестве первичного вы-
бираем столбцы (ФИО, дата рождения).
Если определенным образом ограничить наличие функциональных
зависимостей в схеме отношения, то получим нормальные формы от-
ношения. Нормальные формы имеют несколько уровней, каждый из
которых основывается на предыдущих.
Схема отношения R находится в первой нормальной форме (1НФ ),
если значения в Dom(Ai) являются атомарными для каждого Ai в R, т.е.
значения элементов в домене не являются ни списками, ни множест-
вами.
Схема отношения R находится во второй нормальной форме (2НФ),
если она соответствует 1НФ и каждый атрибут определяется своим клю-
чом (атрибуты функционально независимы).
Определение 2НФ можно уточнить, если ввести понятия первич-
ного атрибута, т.е. атрибута, входящего в ключ отношения, и не пер-
вичного — не входящего в этот ключ. Схема отношения R находится
в 2НФ, если каждый не первичный атрибут полностью зависит от
каждого ключа для R.
Рассматриваемое нами отношение R Пациент не соответствует 2НФ,
т.к. не первичный атрибут пол функционально не полно зависит от
ключа.
236
Глава 6
Приведем отношение R Пациент к 2НФ путем его декомпозиции с
помощью проекции — унарной операции реляционной алгебры. Суще-
ство этой операции состоит в том, что берется исходное отношение,
удаляются некоторые его компоненты, а оставшиеся переупорядочива-
ются. В итоге получаем:
R1 (ФИО, пол);
R2 (ФИО, дата рождения, номер истории болезни, дата поступле-
ния).
Схема отношения R находится в третьей нормальной форме (ЗНФ),
если она соответствует 2НФ и ни один атрибут не содержит фактов о
других атрибутах (совместная независимость атрибутов). Форма ЗНФ не
допускает функциональных зависимостей между не первичными атри-
бутами отношения, т.е. транзитивная зависимость не первичных атри-
бутов от ключа исключается. (Некоторое бинарное отношение f обладает
свойством транзитивности, если из (a f Ь) и (b f с) следует, что (a f с),
где а, Ь, с — элементы.)
Приведем отношение R2 к ЗНФ. Это также осуществляется через
проекцию исходного отношения:
R3 (ФИО, дата рождения, номер истории болезни);
R4 (ФИО, дата рождения, дата поступления).
Считается, что схема базы данных находится в определенной форме,
если схема каждого отношения базы данных находится в соответствую-
щей форме.
Язык структурных запросов
Врачу необходимо предоставить возможность выполнения некото-
рого набора стандартных операций над данными рассмотренных таблиц.
Возможно, придется включить в таблицы новых пациентов, удалить ус-
таревшие МТК или изменить параметры методик лечения. Следует также
обеспечить доступ к данным таблиц. Например, мы можем затребовать
список всех пациентов с определенным диагнозом, а также список па-
циентов, удовлетворяющих некоторому количественному критерию —
числу полных лет. Может, наконец, потребоваться исчерпывающий отчет
с указанием пациентов, у которых улучшение определенного объектив-
ного показателя физиологического состояния произошло в заданных
пределах в течение оговоренного срока. Такого рода операции реализу-
ются почти во всех реляционных СУБД на языке структурных запросов
SQL. Язык SQL используется как в программном, так и в интерактивном
режимах.
Основной конструкцией SQL является оператор выбора, существую-
щий в следующих форматах:
SELECT <список атрибутов>
FROM <отношение>
WHERE <условие>.
Например, чтобы запросить ФИО пациентов, возраст которых мень-
ше 30 лет, следует записать:
Методология построения магнитотерапевтических комплексов 237
SELECT ФИО
FROM Пациент
WHERE Возраст < 30.
Возможны и более сложные запросы. Можно, например, затребовать
ФИО пациентов женского пола моложе 30 лет:
SELECT ФИО
FROM Пациент
WHERE Возраст < 30
AND Пол = ж.
Такой запрос называется соединением, поскольку в нем объединя-
ются два и более условия в одно общее условие. Приведенный выше
запрос не создает новую таблицу, а лишь возвращает некоторое число
строк. Вместо этого можно сформировать фактическую таблицу с ре-
зультатами выполнения запроса. Такая таблица называется отчетом и
может использоваться для дальнейших операций наряду с другими таб-
лицами. Отчеты позволяют различным пользователям получить нужную
именно им информацию из базы данных.
Для рассматриваемой здесь задачи язык SQL является абстракцией
низкого уровня. Однако мы не можем требовать от врачей знания SQL,
и этот язык не является элементом словаря предметной области. SQL
следует использовать только в реализации процедур внутри системы,
скрыв этот язык от пользователя системы.
Физическое проектирование
Задачами физического проектирования являются:
1. Определение структуры физической записи.
2. Распределение хранимых записей во внешней памяти.
3. Выбор метода доступа к хранимым данным.
Эти задачи решаются при ограничениях на время поиска, цену ап-
паратных средств, на сложность обслуживания базы данных.
Исходными данными для решения задач физического проектирова-
ния являются логическая структура базы данных и оценки логической
структуры.
В современных СУБД выполнение этих трех задач в той или иной
степени автоматизировано, поэтому дальнейший ход проектирования
зависит от выбора конкретной СУБД, как-то: Clipper, FoxPro, Paradox
и т.п., изучение которых представляет самостоятельный интерес.
6.2.8. Экспертная система
Прежде чем поставить диагноз и на этой основе сделать правильный
выбор магнитотерапевтической методики, врач должен установить, рас-
познать и оценить весьма разнообразные и комплексные связи, что
возможно лишь при наличии точных и глубоких знаний, многолетнего
опыта и известного искусства в ходе лечения, т.е. того, что делает врача
экспертом. Включение экспертной системы в состав АРМВС преследует
238
Глава 6
именно эту цель — обеспечить с помощью компьютера требуемый уро-
вень компетентности при использовании каждого магнитотерапевтичес-
кого комплекса. Врач работает с экспертной системой принципиально
интерактивно. Экспертная система запрашивает сначала необходимые
данные о пациенте, симптомах болезни, ходе заболевания, фиксирует
результаты лабораторных исследований и формирует гипотезы относи-
тельно возможных методов лечения, включая магнитотерапию. При этом
врач управляет процессом логического вывода путем запроса объясне-
ний, комментариев к полученным результатам, вследствие чего процесс
решения проблемы в экспертной системе становится полностью понят-
ным врачу. Это является определяющим для принятия окончательного
решения врачом и пациентом. Таким образом, к экспертной системе
обычно предъявляются следующие требования:
1) программа должна быть полезной для врача-пользователя, т.е. она
должна давать заслуживающие доверия рекомендации, не уступающие
по качеству рекомендациям, даваемым экспертом-человеком, и должна
быть удобна в эксплуатации;
2) программа должна быть ориентирована на приобретение и моди-
фикацию знаний;
3) программа должна уметь вести диалог, в ходе которого она могла
бы объяснить получаемый ею результат;
4) программа должна являться инструментом, помогающим врачу,
а не заменяющим его.
Схема обобщенной экспертной системы представлена на рис. 6.31.
Типичная экспертная система имеет следующие компоненты: 1) база
знаний, хранящая множество правил; 2) рабочая память, хранящая дан-
ные (база данных); 3) интерпретатор, решающий на основе имеющихся
в системе знаний предъявленную ему задачу; 4) лингвистический про-
цессор, осуществляющий диалоговое взаимодействие с пользователем
(экспертом) на естественном для него языке (естественный язык, про-
фессиональный язык, язык графики); 5) компонента приобретения зна-
ний; 6) объяснительная компонента, дающая объяснение действий сис-
темы и отвечающая на вопросы о том, почему некоторые заключения
были сделаны или отвергнуты.
Экспертная система работает в двух режимах: в режиме приобрете-
ния знаний и в режиме решения задач. В режиме приобретения знаний
в общении с экспертной системой участвует эксперт (через посредство
инженера по знаниям). В этом режиме эксперт наполняет систему зна-
ниями (правилами), которые позволяют ей в режиме решения самосто-
ятельно решать задачи из области магнитотерапии. Для того чтобы убе-
диться в достаточности знаний (т.е. убедиться в том, что процесс отладки
задачи завершен), эксперт дает системе тестовые примеры и в случае,
если результат, полученный системой, не удовлетворяет эксперта, он с
помощью объяснительной компоненты получает сведения о том, как
был сформирован результат.
Методология построения магнитотерапевтических комплексов
239
Рис. 6.31. Схема обобщенной экспертной системы
По окончании процесса отладки система передается в эксплуатацию
пользователям. В режиме решения данные о задаче пользователя после
обработки их лингвистическим процессором поступают в рабочую па-
мять. Лингвистический процессор выполняет следующие действия: 1)
преобразует входные данные, представленные на ограниченном естест-
венном языке, в представление на внутреннем языке системы; 2) пре-
образует сообщения системы, выраженные на внутреннем языке, в со-
общения на ограниченном естественном языке.
Интерпретатор на основе входных данных о пациенте (анамнез,
результаты обследования и т.п.), правил и общих фактов о заболевании
и имеющихся методиках формирует решение, т.е. рекомендует набор
методик, ранжированный по степени доверия к ним. Если ответ системы
непонятен врачу, то он может потребовать, чтобы система объяснила,
как этот ответ был получен. Обычно объяснительный блок сообщает
следующее: 1) как правила используют информацию врача; 2) почему
использовались (не использовались) данные правила; 3) какие были
сделаны выводы. Все объяснения даются на ограниченном естественном
языке.
Методология построения экспертных систем
Проектирование экспертных систем имеет существенные отличия от
проектирования обычного программного продукта. Учитывая неформа-
лизованность решаемых задач, при проектировании экспертных систем
используется концепция «быстрого прототипа». Суть этой концепции
состоит в том, что разработчики не пытаются сразу построить конечный
продукт. На начальном этапе они создают прототип экспертной системы.
Прототип должен продемонстрировать пригодность методов проектиро-
вания для области магнитотерапии. В случае успеха эксперт с помощью
инженера по знаниям расширяет знания прототипа о проблемной об-
ласти.
При неудаче может потребоваться разработка нового прототипа или
разработчики могут придти к выводу о непригодности методов эксперт-
ной системы для данного приложения.
При создании прототипа, как правило, используются разнообразные
средства, ускоряющие процесс проектирования. Эти средства в общем
240
Глава 6
виде называют инструментарием. Скорейшее получение результата обес-
печивает использование пустых или базовых экспертных систем, т.е.
систем, не содержащих знаний ни о какой предметной области. При-
мером может служить инструментальная система EMYCIN, предназна-
ченная в первую очередь для решения задач диагностики, что соответ-
ствует назначению экспертной системы для магнитотерапии.
Рассмотрим этапы разработки экспертной системы (ЭС), приве-
денные на рис. 6.32, и выделим основные проблемы проектирования
[190].
Начало ЭС
Рис. 6.32. Этапы разработки экспертной системы
Этап идентификации
На данном этапе решаются следующие задачи:
— определяются участники процесса проектирования и их роли;
— идентифицируется проблема;
— определяются ресурсы и цели.
Задача определения участников и их ролей сводится к определению
количества экспертов и инженеров по знаниям, а также формы их вза-
имоотношений (например, эксперт может выступать либо в роли учи-
теля, либо в роли информирующего). На этом же этапе определяются
источники знаний (книги и инструкции).
Идентификация проблемы заключается в составлении неформаль-
ного (вербального) описания решаемой проблемы. В этом описании
указываются общие характеристики проблемы, ключевые понятия и от-
ношения; входные данные; предположительный вид решения. На этом
этапе важно убедиться, что данную проблему можно решить с помощью
компьютера.
При проектировании экспертной системы типичными ресурсами яв-
ляются: источники знаний, время разработки, вычислительные и ин-
струментальные средства, объем финансирования. При определении ре-
Методология построения магнитотерапевтических комплексов
241
сурсов необходимо иметь в виду, что сроки разработки и внедрения
экспертной системы составляют не менее 2-х лет при трудоемкости от
пяти до десяти и более человеко-лет.
При формулировании целей построения экспертной системы важно
отличать их от задач, которые она должна решать. Целью экспертной
системы для магнитотерапии является улучшение качества решений,
принимаемых лечащим врачом, и автоматизация рутинных аспектов его
работы.
Этап концептуализации
На этом этапе эксперт и инженер по знаниям эксплицируют (разъ-
ясняют) ключевые понятия, отношения, упомянутые на этапе иденти-
фикации. Опыт показывает, что для этого целесообразно составить де-
тальный протокол действий и рассуждений эксперта в процессе решения
хотя бы одной конкретной задачи. Такой протокол обеспечивает инже-
нера по знаниям словарем терминов и некоторым приблизительным
представлением о тех стратегиях, которые использует эксперт.
Этап формализации
На данном этапе все ключевые понятия и отношения, введенные
ранее, выражаются на некотором формальном языке, предложенном ин-
женером по знаниям, т.е. формируются структуры знаний.
Знания о проблемной области могут быть представлены в системе
в виде:
— фактов;
— правил;
— дерева целей;
— дерева контекстов;
— фиксированной иерархии объектов.
Знания, используемые системой, делятся на статические и динами-
ческие. Статические знания хранятся в базе знаний и не зависят от
конкретного диалога. Они включают в себя сведения о болезнях, мето-
диках лечения, правила вывода и сведения о иерархии объектов. Дина-
мические знания включают в себя дерево контекстов, дерево целей,
активные факты и правила (т.е. факты и правила, использованные в
ходе данного диалога).
Структура диалога системы с врачом предопределяется иерархией
объектов предметной области. В системе хранится фиксированная ие-
рархия объектов: 1) пациент; 2) заболевание; 3) методика лечения. Сис-
тема ведет диалог в соответствии с этой иерархией и динамически строит
дерево объектов (называемое также деревом контекстов). Фрагмент де-
рева контекстов приведен на рис. 6.33, где указано, что пациент может
быть подвержен нескольким видам заболеваний, причем для каждого
может быть рекомендовано несколько методик лечения.
Все знания, получаемые в ходе диалога с врачом, организуются в
тройки: объект — атрибут — значение. Конечная задача системы —
242
Глава 6
Рис. 6.33. Фрагмент дерева контекстов
определить значения всех атрибутов всех объектов, введенных в диалоге.
Каждой тройке может приписываться коэффициент определенности,
представляющий собой число, указывающее на степень уверенности сис-
темы в том, что данный атрибут объекта имеет данное значение.
Основным источником знаний о проблемной области во многих
экспертных системах являются продукционные правила. Правила имеют
вид «предпосылка действие». Типичный способ представления правил
иллюстрируется табл. 6.4. Здесь при истинности «условия» выполняется
действие, стоящее за указателем ТО, а при ложности — действие, сто-
ящее за указателем ИНАЧЕ.
Таблица 6.4
Способ представления продукционных правил
<правило> = (ЕСЛИ <условие> ТО <действие> ИНАЧ1 <действие>)
<условие> = (И{<предложение>})
<предложение> = (ИЛИ{<предложение>})|(<предикат> <тройка>)
<тройка> = (<объект> <атрибут> <значение>)
<действие> = {<заключение>}|{<процедура>}
<заключение> = (<тройка> коэффициент определенности^
Сущности, стоящие в фигурных скобках, могут появляться в правиле
один или более раз. Так, например, «условие» есть конъюнкция одного
или более «предложений», а «предложение» есть: 1) дизъюнкция одного
или более «предложений» или 2) предикат (высказывание), применен-
ный к тройке «объект — атрибут — значение». Поскольку медицина —
это та область, в которой рассуждения могут быть неточны, приблизи-
Методология построения магнитотерапевтнческих комплексов
243
тельны, необходим механизм, учитывающий данную особенность. В пра-
виле для учета неточности умозаключения указывается коэффициент
определенности правила, определяющий какова уверенность системы в
Рис. 6.34. Движение по цепочке
вперед
выводит суждение о Н.
движении по цепочке назад система сначала рассматривает
Н, желая установить справедливость его существования. Огля-
назад, она выясняет, что для установления Н ей нужно знать
верности правила.
В целом существуют два метода поиска решений в экспертных сис-
темах — это так называемое движение по цепочке вперед (от данных к
цели, т.е. к диагнозу или к методике магнитного воздействия) и назад
(от цели к данным).
Движение по цепочке
вперед показано на рис. 6.34.
Если правило Е1 верно, то
переход к Е2, если и оно
верно, то переход к ЕЗ и т.д.
к Н (цели). Итак, чтобы уста-
новить Н, все отношения El, Е2, ЕЗ должны быть истинными. Другими
словами, системе задается Е1, после этого Е2, затем ЕЗ и, наконец,
система
При
правило
дываясь
ЕЗ. А чтобы знать ЕЗ, ей требуется знать Е2, а чтобы знать Е2, ей надо
знать Е1. Поэтому система запрашивает данные о El, Е2, а затем и ЕЗ.
После этого она может двигаться вперед — снова к Н. Разница между
этими методами особенно заметна, если существует большое количество
различных целей, к которым система может придти, и способов дости-
жения поставленных целей. Рассмотрим иллюстрацию на рис. 6.35.
Рис. 6.35. Движение по цепочке
назад
предпосылки воз-
значения число из
Здесь Н легче всего установить, за-
просив ЕЗ, а не Е1. Рассмотрим этот
процесс подробнее. Сначала выбирают-
ся все правила {Е}, в заключение кото-
рых устанавливается какой-либо диа-
гноз. Затем предпринимается попытка
вычислить предпосылки правил из мно-
жества {Е}. Каждая предикатная функ-
ция в предложении
вращает в качестве
интервала (m, М). Над полученными
значениями выполняются функции «И» и (или) «ИЛИ», определенные
в предпосылке. Если значение предпосылки превосходит некоторое
число Р, то считается, что предпосылка удовлетворена (истинна), если
значение меньше числа Q, то предпосылка ложна. Числа Р и Q являются
эмпирически выбранным порогом, зависящим также от чисел Мит.
Для правил, предпосылки которых удовлетворены, выполняется заклю-
чение, содержащееся в действии правила.
Заключению приписывается значение коэффициента определеннос-
ти (КО), вычисляемое по формуле:
244
Глава 6
КО (значения-заключения) = < КО предпосылки > х < КО правила >.
Если значение некоторого предложения в предпосылке не может
быть выделено из-за того, что неизвестны значения входящих в это
предложение атрибутов, то значения этих атрибутов объявляются новы-
ми подцелями и процесс поиска решения рекурсивно продолжается. В
ходе поиска решения строится дерево, называемое деревом целей.
Этап выполнения
Задача этапа выполнения состоит в создании одного или нескольких
прототипов экспертной системы, решающих требуемые задачи. Затем по
результатам этапов тестирования и опытной эксплуатации на данном
этапе создается конечный продукт, пригодный для промышленного ис-
пользования. Разработка прототипа состоит в программировании его
компонент (или выборе их из имеющихся инструментальных средств) и
наполнении базы знаний. При этом обычно оставляют в стороне во-
просы, требующие значительных трудозатрат: понимание и синтез фраз
ограниченного естественного языка, учет сложных временных и при-
чинных отношений, понимание намерений экспертов, моделирование
рассуждений, содержащих неточные понятия. Таким образом, в прото-
типе реализуется простейшая процедура вывода. При его разработке
основная цель состоит в том, чтобы получить решение задачи, не забо-
тясь пока о его эффективности. И только после завершения разработки
прототипа начинаются исследования, направленные на повышение эф-
фективности работы системы.
Этап тестирования
В ходе этого этапа осуществляется оценка выбранного представле-
ния знаний и всей системы в целом. Как только система оказывается
в состоянии обработать от начала до конца 2-3 примера, необходимо
начинать проверку на более широком круге примеров для того, чтобы
определить недостатки базы знаний и процедур вывода. Задача инженера
по знаниям заключается в подборе примеров, обеспечивающих всесто-
роннюю проверку экспертной системы.
Этап опытной эксплуатации
На данном этапе проверяется пригодность экспертной системы для
конечного пользователя. Здесь система занимается решением всех воз-
можных задач при работе с различными пользователями. Целесообразно
организовать эксплуатацию системы не у разработчика, а на месте ра-
боты пользователя, т.е. в больницах. К этому этапу следует переходить
лишь после того, как система, по мнению эксперта, будет успешно
решать практически все требуемые задачи, чтобы ошибки в решениях
не создавали у врачей отрицательного представления о системе. При-
годность системы для врача определяется в основном удобством работы
с ней и ее полезностью. По результатам эксплуатации может потребо-
ваться модификация не только программ и данных (совершенствование
или применение языка общения, диалоговых средств, средств обнару-
Методология построения магиитотерапевтических комплексов
245
жения и исправления ошибок, настройка на пользователя и т.д.), но и
изменение устройств аппаратной платформы в связи с ее непримени-
мостью для пользователя, т.е. может быть принято решение о переносе
системы на другую ЭВМ.
Модификация системы
В ходе построения экспертной системы почти постоянно осущест-
вляется ее модификация. Можно выделить следующие виды модифика-
ции системы: переформулирование понятий и требований, переконстру-
ирование представлений и усовершенствование прототипа (см.
рис. 6.32). Усовершенствование прототипа осуществляется в процессе
циклического прохождения через этапы выполнения и тестирования с
целью отладки правил и процедур вывода. Циклы повторяются до тех
пор, пока система не будет вести себя ожидаемым образом. Если в
процессе усовершенствования желаемое поведение не достигается, то
необходимо осуществить более значительные модификации архитектуры
системы и базы знаний. Возврат из этапа тестирования на этап форма-
лизации приводит к пересмотру выбранного ранее способа представле-
ния знаний. Данный цикл называют переконструированием. Если воз-
никшие проблемы еще более серьезны, то после неудачи на этапе тес-
тирования может потребоваться возврат на этапы концептуализации и
идентификации. В этом случае речь будет идти о переформулировании
понятий, используемых в системе, т.е. о проектировании всей системы
практически заново.
Стадии экспертной системы
Для характеристики степени проработанности и отлаженности экс-
пертных систем можно выделить следующие стадии их существования:
— демонстрационный прототип;
— исследовательский прототип;
— действующий прототип;
— промышленная система;
— коммерческая система.
Рассмотрим их несколько подробнее, чтобы получить обобщенное
представление о трудоемкости и времени выполнения типового проекта
экспертной системы для магнитотерапии.
Демонстрационным прототипом называется экспертная система, ко-
торая решает часть требуемых задач, демонстрируя жизнеспособность
метода экспертных систем. При наличии развитых инструментальных
средств для разработки демонстрационного прототипа требуется в сред-
нем примерно 3 месяца. Демонстрационный прототип работает, имея в
базе знаний порядка 50-100 правил. Исследовательским прототипом на-
зывают экспертную систему, которая решает все требуемые задачи, но
неустойчива в работе и не полностью проверена. На доведение эксперт-
ной системы до стадии исследовательского прототипа уходит примерно
1-2 года. Исследовательский прототип обычно имеет в базе знаний 200-
500 правил, описывающих предметную область.
246
Глава 6
Следующей стадией существования экспертной системы является
действующий прототип. Этот прототип надежно решает все задачи, но
для решения сложных задач может требовать чрезмерно много времени
и памяти. Доведение экспертной системы до этой стадии требует при-
мерно 2-3 года, при этом количество правил в базе знаний увеличивается
до 500-1000 правил.
Экспертная система, достигшая стадии промышленной системы,
обеспечивает высокое качество решения всех задач при минимуме вре-
мени и памяти. Обычно процесс преобразования действующего прото-
типа в промышленную систему состоит в расширении знаний до 1000-
1500 правил и требует примерно 2-4 года. Обобщение задач, решаемых
экспертной системой на стадии промышленной системы, позволяет
перейти к стадии коммерческой системы, т.е. к системе, пригодной не
только для собственного использования, но и для продажи различным
потребителям. Доведение экспертной системы до коммерческой стадии
требует примерно 5-6 лет, при этом база знаний системы увеличивается
до 1000-3000 правил.
В заключение приведем список некоторых экспертных систем ме-
дицинского назначения, а также инструментальных систем (табл. 6.5),
которые могут быть использованы для построения экспертной системы
по магнитотерапии. Этот перечень, конечно же, носит лишь иллюстра-
тивный характер. Происшедшее в последнее время расширение сферы
применения экспертных систем означает, что претендовать на полный
список невозможно, поскольку он устареет почти сразу же после его
опубликования.
Таблица 6.5
Перечень экспертных и инструментальных систем
Наименование системы Назначение системы Стадия системы Количество правил
MYC1N PUFF CADUCEUS GUIDON ROSIE HEARSAY III Диагностика и лечение инфекционных заболеваний крови Анализ нарушения дыхания Диагностика внутренних болезней человека Медицинское обучение Построение экспертных систем Построение экспертных систем Коммерческая Действующий прототип Действующий прототип Исследовательская 1200 100 (База знаний о 50 болезнях)
Методология построения магнитотерапевтических комплексов
247
6.3. Магнитотерапевтический кабинет
Если имеется несколько МТК или ЛДК, то возникает задача орга-
низации оптимальной их работы для обеспечения максимальной про-
пускной способности. Для решения этой задачи целесообразно все МТК
интегрировать в одном кабинете. При этом легче осуществлять плани-
рование загрузки каждого МТК, техническое обслуживание и ремонт.
Кроме того, не требуется жесткой привязки конкретного пациента к
конкретному МТК, и в случае выхода из строя одного из МТК пациентов
можно распределить равномерно между оставшимися комплексами.
Планирование работы МТ кабинета заключается в том, что, с одной
стороны, для каждого пациента определяется методика и продолжитель-
ность воздействия магнитным полем, число и периодичность сеансов,
а с другой — все это должно быть увязано с суммарной пропускной
способностью всех МТК. Кроме того, для развития методов магнитоте-
рапевтического воздействия важное значение имеет набор статистики
по лечению различных заболеваний.
Нетрудно представить, что при развертывании в кабинете более трех
МТК появится много рутинной работы по планированию оптимальной
загрузки кабинета и по документированию процесса лечения, т. к. поток
пациентов будет весьма значительным.
Данная проблема, в основном, решается, если вместо одного МТК
в кабинет ввести АРМВС и все рутинные операции переложить на
компьютер, входящий в состав АРМ. В этом случае, во-первых, облег-
чается этап определения методики лечения для каждого пациента, так
как АРМВС может проводить мониторинг по важнейшим физиологи-
ческим параметрам, имеет специализированные средства обработки по-
лученной информации и включает в свой состав экспертную систему.
Во-вторых, при использовании базы данных, входящей в состав АРМВС,
автоматизируются регистратура кабинета, а также сбор и обработка ста-
тистики по лечению.
Но при этом возникает проблема совместного использования одного
компьютера персоналом различных МТК, что не всегда удобно, а иногда
и невозможно. Поэтому для более эффективного использования всех
МТК необходим множественный доступ к компьютеру АРМВС и прежде
всего к базе данных, расположенной на нем. Эта задача может быть
решена организацией в кабинете либо локальной вычислительной сети
(ЛВС), либо многопользовательской системы (МПС). Рассмотрим каж-
дый подход и определим, какой и в каком случае является оптимальным
для магнитотерапевтического кабинета.
Локальной вычислительной сетью обычно называется некоторое
число независимых компьютеров, которые соединены между собой
каким-либо коммуникационным оборудованием. При этом прикладное
программное обеспечение, работающее на этих компьютерах, должно
иметь достаточно простые и быстрые средства передачи данных через
имеющееся коммуникационное оборудование. Компьютеры такой сети
обычно расположены на небольшом расстоянии друг от друга (порядка
248
Глава 6
1...5 км). Для работы локальной сети необходимо выполнить следующие
действия. Во-первых, соединить компьютеры посредством какой-либо
коммуникационной аппаратуры. Во-вторых, запустить на этих компью-
терах специальное сетевое программное обеспечение, которое будет вы-
полнять необходимые операции в локальной сети.
Многопользовательская система связывает аппаратные средства в
единый комплекс другим способом: к главному компьютеру подсоеди-
няются терминалы «неинтеллектуального» типа (рабочие станции без
процессора).
Разница между ЛВС и МПС очевидна. В ЛВС каждая рабочая стан-
ция или «узел» — это персональный компьютер со своей операционной
системой и собственной копией сетевой ОС. В сети каждый узел при-
нимает участие в обработке информации: чем сложнее сеть, тем более
сложным образом взаимодействуют ее узлы. В отличие от ЛВС, в много-
пользовательской системе рабочая станция не принимает участия в об-
работке данных. Здесь пользователь работает на недорогом терминале,
в котором отсутствуют процессор, дисковые накопители и другие важные
узлы персонального компьютера. Вся обработка осуществляется на мощ-
ном центральном ПК — главном компьютере. Пользователь обращается
к ресурсам главного компьютера и работает с прикладными программами
и файлами, находящимися на этой машине постоянно. Каждому поль-
зователю предоставляется свой раздел памяти, находясь в котором он
воспринимает работу с главным ПК как взаимодействие с однопользо-
вательской машиной. Создаваемые файлы сохраняются в центральной
подсистеме памяти, подключенной к главному компьютеру.
На рис. 6.36 показана организация магнитотерапевтического каби-
нета на базе локальной вычислительной сети, а на рис. 6.37 — на базе
многопользовательской системы.
Рис. 6.37. Организация магнито-
терапевтического кабинета на
базе многопользовательской сис-
темы:
MX — мультиплексор, Т — терминал
«неинтеллектуального» типа
Рис. 6.36. Организация магнитотерапевти-
ческого кабинета на базе локальной вычис-
лительной сети:
ПК — персональный компьютер, А — адаптер
сети
Методология построения магнитотерапевтических комплексов
249
Следует отметить, что возможности ЛВС в магнитотерапевтическом
кабинете будут использоваться в незначительном объеме, так как ин-
тенсивный обмен данными между отдельными ПК (узлом сети) не тре-
буется, а необходим только централизованный доступ к базе данных и
принтеру. Кроме того, отдельные ПК также будут эксплуатироваться
крайне неэффективно, поскольку никакой локальной обработки данных
не требуется. И последнее замечание касается администрирования и
технического обслуживания. Здесь многопользовательские системы об-
ладают явным преимуществом по сравнению с ЛВС. После установки,
тестирования и последующего запуска многопользовательская система
работает без каких-либо проблем. Задачи диагностики также решаются
гораздо проще для системы с одним процессором, чем для сети с мно-
жеством процессоров. Многопользовательская система практически не
нуждается в администрировании, тогда как для ЛВС требуется ставка
системного программиста для поддержания сети в работоспособном со-
стоянии.
Основываясь на вышесказанном, при организации одного магнито-
терапевтического кабинета предоставляется целесообразным использо-
вать многопользовательскую систему, применив в качестве главного ком-
пьютера ЭВМ, входящую в состав АРМВС. Такая система будет иметь
относительно низкие начальные и эксплуатационные расходы и позво-
лит автоматизировать рутинные операции, связанные с ведением реги-
стратуры кабинета, сбором и обработкой статистики по лечению.
Приведем некоторые замечания по построению многопользователь-
ской системы. В зависимости от типа терминала и способа его подклю-
чения к главному ПК, в терминале должны быть предусмотрены либо
телефонное гнездо RJ-11, либо разъем последовательного порта RS-232.
Возможно применение сравнительно дешевых отечественных термина-
лов. В качестве терминалов могут применяться ПК, оснащенные про-
граммами, эмулирующими работу этих устройств, и имеющими интер-
фейс RS-232. Подключение терминалов к главному компьютеру осу-
ществляется обычно через платы с коммуникационными портами и
кабели. Подобные платы различаются по стоимости и сложности, не-
которые модели плат содержат до 16 портов. Простейшие платы выпол-
няют лишь коммуникационные функции и используются в качестве
обычных последовательных портов. Имеются конструктивные исполне-
ния этих плат с четырьмя и восемью портами. Кроме того, выпускаются
«интеллектуальные» коммуникационные платы (например, 4- и 8-пор-
товые платы Series II компании Maxpeed), в состав которых входит
процессор, управляющий последовательным обменом данных, что по-
зволяет снять часть нагрузки с главного процессора. Недорогой способ
подключения терминалов заключается в использовании витой телефон-
ной пары. Некоторые терминалы имеют разъемы последовательного ин-
терфейса RS-232. Они соединяются с помощью кабелей и обычно при-
меняются для подключения модемов и лазерных принтеров. Расстояние
между терминалом и главным компьютером может достигать без уста-
250
Глава 6
новки дополнительных повторителей 25...30 м. Кроме аппаратных
средств в многопользовательскую систему входит еще системное про-
граммное обеспечение. Так как ПО АРМВС работает в среде MS-DOS,
то и многопользовательская операционная система, устанавливаемая на
главном компьютере, должна быть полностью совместима с этим ПО.
Существует несколько многопользовательских ОС, совместимых с MS-
DOS: PC-MOS (Компания The Software Link); Concurrent DOS/386 (Digi-
tal Research); VM/386 (IGC). Большинство систем допускают подключе-
ние 5-10 пользователей, что вполне достаточно для одного кабинета.
В заключение следует отметить, что если в лечебном учреждении, в
котором организуется магнитотерапевтический кабинет, уже существует
какая-либо разветвленная ЛВС и есть инженерно-технический персонал,
обсуживающий ее, то возможно проще и быстрее организовать кабинет
как сегмент существующей сети, т.к. не потребуется ни нового про-
граммного обеспечения, ни аппаратных средств, которые нужно осваи-
вать какое-то время.
Глава 7
ПРИМЕНЕНИЕ МАГНИТНЫХ ПОЛЕЙ
В ПРАКТИЧЕСКОЙ МЕДИЦИНЕ
С ОЗДОРОВИТЕЛЬНЫМИ
И ЛЕЧЕБНЫМИ ЦЕЛЯМИ
7.1. Научно-теоретические
и экспериментально-клинические обоснования
использования магнитных полей в медицине
В первой главе был дан теоретический анализ механизмов реализа-
ции биотропных эффектов магнитных полей в живых системах. Насто-
ящая глава посвящена прикладной проблеме — непосредственному ис-
пользованию магнитных полей в здравоохранении. Следует подчеркнуть,
что внедрение магнитобиологии в медицинскую практику идет с суще-
ственным опережением фундаментальных исследований, которые, каза-
лось бы, должны были вначале подвести научно-теоретическую базу
перед воплощением идей в жизнь. Тем не менее, уже сейчас с опреде-
ленной долей уверенности можно говорить о конкретных точках при-
ложения действия и механизмах влияния магнитных полей (МП) на
организм человека.
В обстоятельном исследовании А. М. Демецкого и А. В. Цецохо
[191], посвященном практическому применению МП в терапии, утверж-
дается, что в настоящее время накоплен убедительный фактический
материал о положительном лечебном действии ПМП и ПеМП на орга-
низм человека при различных патологических процессах. Наибольшее
внимание врачей привлекают противовоспалительный, спазмолитичес-
кий, обезболивающий, гипотензивный, гипокоагуляционный и другие
терапевтические эффекты. Особый интерес представляет стимулирующее
воздействие на регенерацию травмированных тканей.
Вышесказанное подтверждается многочисленными исследованиями
других авторов. В экспериментальных работах И. И. Гунько [192] и
Г. Ф. Хабировой [193], а также в экспериментально-клинических иссле-
дованиях И. М. Митрейна и В. Д. Маняхина [194] показано, что воз-
действие МП на зону оперативного вмешательства или асептического
повреждения костной ткани способствует более раннему срастанию кос-
тей и восстановлению дефектов. Аналогичные результаты были отмече-
ны при использовании МП у детей, оперированных по поводу врож-
денного вывиха бедра [195]. Положительное влияние МП на процессы
восстановления кровообращения и заживления наблюдались при экспе-
252
Глава 7
риментальных и клинических операциях на других тканях [196, 197].
Терапевтические эффекты были отмечены при использовании МП с
различными биотропными параметрами при лечении процесса воспале-
ния, независимо от локализации, причин возникновения и механизмов
его развития: экспериментальное микробное инфицирование органов
малого таза или заболевания женской половой сферы [198, 199], ревма-
тоидный артрит [200], язвенная болезнь желудка и двенадцатиперстной
кишки [201, 202].
Во всех вышеперечисленных патологических состояниях пусковым
фактором выступала альтерация (повреждение), а ведущим патогенети-
ческим механизмом — воспаление. В основе развивающегося процесса
воспаления, который по своей сути является защитно-приспособитель-
ной реакцией организма, лежит совокупность физиологических меха-
низмов, обеспечивающих функционирование тканей как в норме, так и
в патологии: сосудистые реакции микроциркуляторных звеньев, фаго-
цитоз, иммунные реакции лимфоидных клеток, пролиферативная актив-
ность паренхимы и клеток соединительной ткани. Вероятно, положи-
тельные эффекты магнитных полей опосредуются путем влияния на эти
физиологические процессы, и, прежде всего, они обусловлены оптими-
зацией микроциркуляции и стимуляцией пролиферации в тканях, что
не только подчеркивается в вышеприведенных исследованиях, но и под-
тверждается работами других авторов [203, 204].
Вместе с тем не могут не привлечь внимание работы, объектом
исследования в которых являлась центральная нервная система: реакции
ее структурных компонентов и микроциркуляторного русла [100, 205].
Было установлено, что МП могут оказывать влияние как на структурные
компоненты самой нервной ткани, в особенности нейроглию, так и на
сосуды микроциркуляторного русла, вызывая в них реактивные и де-
структивные изменения. Последствия таких влияний являются далеко
не всегда однозначно положительными и, во многом, предопределяются
характеристиками биотропных параметров воздействующих МП: с на-
растанием интенсивности и кратности воздействий развиваются выра-
женные деструктивные нарушения. Эти данные еще раз указывают на
необходимость дифференцированного подхода при дозировании лечеб-
ных процедур ввиду неодинаковой чувствительности органов и тканей
к магнитотерапевтическим воздействиям.
Положительные эффекты МП при облитерирующих поражениях со-
судистого русла предопределили их широкое использование в комплекс-
ной терапии облитерирующего эндартериита, ишемической болезни
сердца, диабетических ангиопатий и другой сосудистой патологии. Ле-
чебное действие МП в этих случаях реализуется благодаря спазмолити-
ческому, аналгезирующему, гипокоагуляционному эффектам МП, сти-
муляции коллатерального кровообращения и другим проявлениям их
действия [206-210]. Многообразие получаемых результатов невозможно
объяснить только локальными реакциями сосудов и окружающих тканей,
даже в тех случаях, когда зона воздействия МП ограничивается пора-
Применение магнитных полей в практической медицине 253
женным органом. Очевидно, что магнитное воздействие не оставляет
индиферрентными системы центральной регуляции. Косвенным под-
тверждением тому явились наблюдения, согласно которым наилучшие
терапевтические результаты были получены при сочетании местных и
общих воздействий МП на организм [229]. Исходная теоретическая по-
сылка, предполагающая, что действие МП не ограничивается локальны-
ми изменениями метаболизма и функций клеток, была подтверждена
многочисленными исследованиями различных авторов, показавших, что
в процессы саногенеза всегда вовлекаются центральные нервные и эн-
докринные механизмы регуляции.
А. М. Демецкий, А. В. Цецохо [191], основываясь на собственных
исследованиях и литературных данных, утверждают, что под воздейст-
вием МП развивается системная реакция эндокринных желез, направ-
ленная на повышение резистентности организма. К таким же выводам
пришли Н. А. Удинцев [211], А. Г. Ибрагимова и Р. Ф. Валеева [212],
считающие, что помимо гипофизарно-надпочечниковой регуляторной
оси через центральные механизмы регуляции в процесс вовлекаются все
остальные железы внутренней секреции, при этом существенную роль
играет активация симпато-адреналовой системы [213, 214].
Запуск и активация вышеперечисленных центральных регуляторных
влияний могут быть осуществлены как при непосредственном воздей-
ствии МП на морфологические образования головного мозга, так и
путем влияния на периферические структуры: рецепторы различной мо-
дальности, биологически активные точки кожи и проприорецепторы.
Нами уже отмечалась возможность повреждения образований централь-
ной нервной системы на различных уровнях при непосредственном воз-
действии МП на головной мозг [100, 205, 215-217]. В аналитическом
обзоре Всемирной организации здравоохранения, посвященном влия-
нию МП на биосистемы и использованию их в практике здравоохране-
ния, также звучат предостережения о возможных негативных последст-
виях воздействия МП на нервные структуры [38].
В связи с вышесказанным весьма обнадеживающими и перспектив-
ными представляются те направления исследований, в которых удава-
лось добиться повышения специфической и неспецифической резис-
тентности организма путем воздействия на периферические образования
нервной системы. До сих пор у человека не обнаружены специфические
рецепторы, способные реагировать на действие МП. Вероятно, их от-
сутствие может быть объяснено тем, что тысячелетняя эволюция чело-
веческого организма и его предков протекала в условиях константного
геомагнитного поля. Вместе с тем не вызывает сомнения тот факт, что
искусственные МП (ПМП повышенной напряженности или динамич-
ные изменения ПеМП), влияя на физико-химические свойства и изме-
няя параметры среды микроокружения в тканях [103, 106, 209, 218, 219],
могут вызывать неспецифическую активацию любых сенсорных датчи-
ков, включая периферические рецепторы различной модальности и био-
логически активные точки поверхности тела и внутренних органов. Дан-
254
Глава 7
ное предположение находит подтверждение в работах различных школ
магнитобиологов. Исследования С. И. Баженовой и соавторов [226, 227],
проведенные на добровольцах, показали, что МП воспринимаются че-
ловеческим организмом, хотя ощущения, возникающие при этом, имеют
необычайно длительный латентный период и носят неспецифический
характер. По мнению Ю. А. Холодова [103], слабые болевые ощущения,
появляющиеся при действии ЭМП, свидетельствуют о реакции ноци-
цептивной системы, что обусловливает развитие интегративного защит-
ного ответа организма. Н. И. Вержбицкая [219] считает, что и для аку-
пунктурных точек характер действующего фактора не играет роли и их
активация происходит под влиянием раздражителей различной природы,
в том числе и при действии МП.
При достаточной интенсивности совокупность потоков афферент-
ной импульсации, независимо от причин и механизмов, их вызвавших,
воспринимается организмом как воздействие внешней среды, дестаби-
лизирующее гомеостаз. Детальный анализ современных представлений
о механизмах формирования ответных реакций организма свидетельст-
вует, что независимо от характера воздействующего фактора, помимо
специализированных систем, ответственных за адаптацию именно к
этому фактору, в приспособительные реакции обязательно вовлекаются
те системы, афферентные рецепторы которых подверглись действию раз-
дражителя: стресс-реализующие и стресс-лимитирующие системы, ноци-
и антиноцицептивные механизмы боли, а при раздражении акупунктур-
ных точек — соответствующие системы реагирования на эти воздействия
[221-225]. Характерной особенностью развивающихся событий является
формирование феномена функциональной конвергенции: по мере про-
движения информационных сигналов к исполнительным блокам сни-
жается число задействованных систем, а в заключение конечный резуль-
тат обеспечивается вовлечением в процесс одних и тех же структурно-
функциональных образований:
— на уровне центрального управления таковыми являются гипота-
ламические структуры и гипофиз, продуцирующие регуляторные
олигопептиды, включая рилизинг-факторы и опиоиды (эндорфи-
ны и энкефалины), тропные гормоны гипофиза;
— промежуточное регуляторное звено представлено периферически-
ми эндокринными железами и структурными образованиями
АПУД-системы (англ. APUD — Amine Precursor Uptane Decar-
boxylation — нейро-эндокринно запрограммированная клеточная
организация с высокой функциональной активностью) с их гор-
монами, регуляторными олигопептидами и биогенными аминами;
— на клеточном уровне в процесс вовлекаются системы клеточных
рецепторов, аденилат- и гуанилатциклазные механизмы, антиок-
сидантная и простагландиновая системы, совокупность клеточ-
ных белков стресс-индуцибельной фракции — HSP70 (heat shock
proteins — белки теплового шока).
Применение магнитных полей в практической медицине 255
Интенсивность афферентного потока предопределяет характер ин-
тегрального ответа организма: отсутствие заметных реакций при одно-
кратных и подпороговых воздействиях, запуск механизмов адаптации
при тренирующих уровнях и, наконец, возможно истощение приспосо-
бительных резервов при действии факторов, чрезвычайных по силе или
продолжительных по времени [211, 220].
Несмотря на то, что адаптивные реакции по своей сути являются
стохастическими, они, тем не менее, а, может быть, именно поэтому,
обеспечивают возможность приспособления организма к любому потен-
циально агрессивному фактору внешней среды. При этом под влиянием
внешних воздействий тренирующего или терапевтического уровня обес-
печивается повышение неспецифической резистентности организма за
счет оптимальной сбалансированности регуляторных влияний стресс-ре-
ализующей и стресс-лимитирующей систем, подключения к интегратив-
ному ответу механизмов ноци- и антиноцицепции и других систем. Все
это не только способствует стабилизации гомеостаза, но и закладывает
материальную основу долгосрочных механизмов адаптации путем нара-
щивания мощностей исполнительных структур. По образному выраже-
нию Ф. 3. Меерсона, происходит формирование структурного следа
адаптации и феномена адаптационной стабилизации структур [221-223].
Разрушение порочных кругов патогенеза, происходящее благодаря во-
влечению в саногенез собственных регуляторных систем всех уровней,
является главным преимуществом таких терапевтических подходов. Ве-
роятно, этим и объясняется наблюдаемое при магнитотерапии много-
образие спектра положительных результатов при самых различных за-
болеваниях.
Неспецифический характер лечебного влияния МП допускает с
одной стороны возможность комбинирования их с физиотерапевтичес-
кими процедурами аналогичного механизма действия, в частности с
лазеротерапией; а с другой — не исключает применениях их в сочетании
со средствами специализированного воздействия на патологический
очаг, например, целенаправленной фармакокоррекцией. Эти потенци-
альные возможности еще больше расширяют сферу вероятного исполь-
зования магнитотерапии в практической медицине.
7.2. Магнитотерапия при хронических заболеваниях
магистральных артерий конечностей
Несмотря на наметившийся определенный прогресс в терапии хро-
нических неспецифических окклюзионных заболеваний магистральных
артерий конечностей, их лечение до настоящего времени представляет
собой достаточно трудную и многоплановую задачу. Больные с облите-
рирующими заболеваниями сосудов конечностей практически всю жизнь
вынуждены систематически проходить курсы консервативной терапии,
а операции, которым подвергается часть больных, являясь очень важным
256
Глава 7
звеном в цепи лечебных мероприятий, далеко не всегда приносят же-
лаемый эффект. Поэтому появление любых новых методов лечения,
способных облегчить страдания и улучшить состояние здоровья этой
категории больных, встречается с определенным интересом и быстро
внедряется в клиническую практику.
Многообразие клинических проявлений при окклюзионных заболе-
ваниях сосудов обусловливается, в основном, состоянием магистраль-
ного, коллатерального кровотока и периферической микроциркуляции.
Помимо этого в их патогенезе немаловажную роль играют реологические
свойства крови и уровень центральной гемодинамики. В связи с тем,
что МП могут оказывать влияние на главные патогенетические звенья
при окклюзионных заболеваниях сосудов, в течение последних 5 лет
проводились интенсивные исследования терапевтических эффектов
ИБМП, генерируемого полимагнитной системой (ПМС) «Аврора МК-
01» при общем воздействии на пациентов с этой группой патологии. За
этот период было пролечено более 2000 человек с окклюзионными за-
болеваниями артерий нижних конечностей [228, 229]. Для того чтобы
иметь возможность провести сравнительный анализ эффективности раз-
личных методов, при лечении 760 пациентов использовалась только маг-
нитотерапия.
Возраст больных колебался от 29 до 82 лет. У 87,8% был диагнос-
тирован облитерирующий атеросклероз магистральных сосудов нижних
конечностей, 12,2% были больны облитерирующим эндартериитом. У
84% продолжительность заболевания была менее 10 лет. Все больные
находились в догангренозной стадии, в 78% случаев процесс медленно
прогрессировал. Среди поступивших в стационар 18% больных ранее
подвергались оперативным вмешательствам: шунтирование — 1,6%,
тромбэндартерэктомия — 3,0%, симпатэктомия — 5,9%, ампутация сег-
мента конечности — 7,5%.
На курс лечения назначались от 16 до 20 процедур, продолжитель-
ностью до 20 минут каждая. Программное обеспечение магнитотерапев-
тического комплекса позволяло задавать избранные параметры воздей-
ствующего ИБМП:
— уровень магнитной индукции 0,5...5 мТл, что с общепринятых
позиций расценивается как МП слабой интенсивности;
— зона воздействия устанавливалась в зависимости от уровня ок-
люзии сосудов конечности;
— линейная скорость перемещения ИБМП подбиралась кратной
скорости кровотока в магистральных сосудах конечностей;
— вектор перемещения бегущей волны МП и вектор магнитной
индукции устанавливались равнонаправленными с направлением
артериального кровотока.
Динамика основных жалоб и данных клинического обследования
пациентов до и после лечения представлена в табл. 7.1 и 7.2.
Применение магнитных полей в практической медицине
257
Таблица 7.1
Динамика основных жалоб больных (результаты выражены в %)
Безболевая дистанция в метрах
Срок иссле- дования Боли в покое Боли при нагрузке До 50 До 100 До 200 До 300 До 500 Свыше 500
До лечения 22 78 28 20,3 22,3 15,6 13,8 0
После лечения 6 94 0 8,1 24,8 17,4 31,3 8,4
Как видно из таблицы 7.1, после лечения жалобы на боли в покое
из 22% больных остались лишь у 6%, и, хотя боли при ходьбе у боль-
шинства больных (94%) сохранились, произошло существенное качест-
венное изменение — значительно увеличилась безболевая дистанция: в
результате лечения 49,7% больных преодолевали расстояние в 500 м и
более, в то время как до лечения это могли осуществлять только 13,8%
больных, а пройти безостановочно более 500 м не мог ни один больной.
Из таблицы 7.2 видно, что патологическая окраска кожи (бледность,
синюшность, мраморность), являющаяся одним из характерных призна-
ков заболевания, при поступлении наблюдалась у 66,4%, после лечения
этот симптом сохранялся только у 14,2%. Лечебный курс способствовал
переводу заболевания в более легкую форму течения.
Наиболее объективная оценка результатов лечебного воздействия
ИБМП была получена при исследовании периферического кровотока, с
использованием следующих методов функциональной диагностики:
1) ультразвуковой допплерографии (УЗДГ);
2) импедансной реовазографии (РВГ);
3) радиоизотопного исследования капиллярного кровотока (РИИКК);
4) термографии (ТГр).
По УЗДГ рассчитывалось изменение скорости магистрального кро-
вотока в процентах от среднестатистической величины. По показателям
РВГ производился расчет динамики реографического индекса (РИ).
Таблица 7.2
Динамика данных клинического обследования
(результаты представлены в %)
Срок иссле- дования Окраска кожи Стадия заболевания (по А. В. Покровскому)
Патология Норма 1 2А 2Б 3 4
До лечения 66,4 33,6 0 29,2 51,2 19,6 0
После лече- ния 14,2 8,8 0 67,1 22,6 10,3 0
258
Глава 7
По данным РИИКК определялась динамика периода полувыведения
I131, а уменьшение остаточной активности препарата (в процентах) —
на 15-й минуте. По ТГр рассчитывалось изменение температурного гра-
диента на стопах и голенях (градусы Цельсия).
При комплексной интерпретации результатов лечения использова-
лась градация их на «хорошие», «удовлетворительные» и «неудовлетво-
рительные».
Хорошим считался результат, при котором после лечения безболевая
дистанция увеличивалась в 2 и более раз, облегчалось течение заболе-
вания и снижалась его стадия, на 10% и более возрастала скорость
магистрального кровотока, на 20% и более повышался РИ, уменьшался
период полувыведения I131 на 5 мин и остаточная активность изотопа
на 15-й мин уменьшалась на 10%, а температурный градиент конечнос-
тей — на 0,5С.
Результат лечения оценивался как удовлетворительный в том случае,
если благоприятные сдвиги выше перечисленных показателей не дости-
гали указанных ранее величин. Неудовлетворительным считался резуль-
тат при отсутствии положительной динамики всех перечисленных пара-
метров.
В табл. 7.3 — 7.6 представлена динамика изменений показателей
периферического кровообращения, полученных с использованием ука-
занных функциональных методов обследования. Из табл. 7.3 отчетливо
видно, что в более пораженной конечности среднее увеличение скорости
магистрального кровотока после курса магнитотерапии составляло 17%,
а в контрлатеральной — 23%. Интегральный показатель равен 21,6%.
Анализ таблицы 7.4 показывает, что интегральное увеличение рео-
графического индекса на нижних конечностях составило 9%. Хорошие
и удовлетворительные результаты по показателю РИ имели место у 69,9%
больных.
Таблица 7.3
Динамика изменений показателей УЗДГ у больных атеросклерозом
после магнитотерапии (дистальные артерии голеней в %)
Конечность Показатель: увеличение скорости, % Результат, %
Хор. Удовл. Неудовл.
Пораженная 17,0 52,4 11,7 35,9
Контрлате- ральная 23,0 61,3 10,2 28,5
Интегральное значение 21,6 57,8 10,8 31,4
Применение магнитных полей в практической медицине
259
Таблица 7.4
Динамика РИ у больных атеросклерозом после магнитотерапии
Конечность Показатель: увеличение РИ, % Результат, %
Хор. Удовл. Неудовл.
Более пораженная 11 44,1 28,7 27,2
Менее пораженная 5 27,6 39,3 33,1
Интегральное значение 9 36,5 33,4 30,1
В табл. 7.5 представлена динамика РИИКК у больных с атероскле-
розом сосудов нижних конечностей после курса магнитотерапии. Из
таблицы видно, что интегральные показатели уменьшения периода полу-
выведения I131 и остаточной активности данного препарата на 15-й мин
составляли соответственно 5 мин и 8,2%. Хорошие и удовлетворительные
результаты по данным показателям отмечены у 75,7% пациентов.
В табл. 7.6 представлены данные об уменьшении температурного
градиента голеней и стоп у больных артериальной окклюзионной пато-
логией нижних конечностей после воздействия ИБМП. При анализе
данных, приведенных в табл. 7.6, следует отметить, что при данном
методе обследования наблюдается наиболее высокий процент хороших
и удовлетворительных результатов — 85%.
Это объясняется тем, что он отражает интегральное состояние пе-
риферического кровообращения, в отличие от ранее рассмотренных ме-
тодов функциональной диагностики, каждый из которых характеризует
состояние только одного из компонентов сложной системы кровообра-
щения. Например, УЗДГ — кровоток в магистральных артериях конеч-
ности, РИИКК — капиллярный кровоток и т.д. В зависимости от того,
в каком звене наиболее выражены патологические изменения, там и
будет максимально выражена динамика показателей, определяемых со-
ответствующими методами.
Таблица 7.5
Динамика показателей РИИКК после магнитотерапии
у больных с атеросклерозом артерий конечностей
Конечность Показатель Результат, %
Уменьшение периода полувыведения препарата, мин Уменьшение остаточной активности препарата, % Хор. Удовл. Не- удовл.
Наиболее пораженная 7 9,6 49,2 30,6 20,2
Контрлате- ральная 4 7,4 26,5 44,7 28,8 ж
Интегральный показатель 5 8,2 36,3 39,4 24,3
260
Глава 7
Таблица 7.6
Изменение температурного градиента голеней и стоп
после воздействия ИБМП (°C)
Конечность Показатель Результат, %
Уменьшение градиента голени Уменьшение градиента стопы Хор. Удовл. Неудовл.
Наиболее пораженная 0,5 0,6 46/48 42/40 12/12
Контрлате- ральная 0,4 0,6 31/38 49/42 20/20
Интегральный показатель 0,43 0,6 39/44 46/41 15/15
Примечание: в числителе табл. 7.6 приведены данные по голени, в знаменателе —
по стопе.
При определении температурного градиента конечности эта локали-
зация уже не играет такой роли. ТГр показывает конечный результат
воздействия ИБМП, заключающийся в нормализации обменных про-
цессов в мышечных тканях конечностей, как следствие стабилизации
регионарной гемодинамики. Зависимость эффективности лечения при
применении ИБМП от стадии заболевания отражена в графике на
рис. 7.1, где по оси X — стадия заболевания: 1 — стадия 1, 2 — стадия
2-А, 3 — стадия 2-Б, 4 — стадия 3; по оси Y — эффективность лечения:
1 — неудовлетворительный результат, 2 — удовлетворительный результат,
3 — хороший результат.
Рис. 7.1. Зависимость результатов воздействия ИБМП на пациентов с окклюзи-
онными поражениями артерий конечностей от стадии заболевания:
у,(х) = 0,245 • х + 1,302; у2(х) = - 0,298 • х2 + 1,723 • х - 0,064
Применение магнитных полей в практической медицине
261
Кажущееся уменьшение эффективности ИБМП в 1 стадии заболе-
вания объясняется тем, что при оценке результатов данной стадии от-
сутствует такой важный критерий, как снижение стадии заболевания.
Как видно из приведенного графика, максимальный эффект дости-
гается при 2-А и 2-Б стадиях окклюзионных поражений магистральных
артерий конечностей. С увеличением стадии заболевания, обусловлен-
ным возрастанием декомпенсации кровотока в конечностях, уменьша-
ется и эффективность лечения. Это лишний раз доказывает, что на этих
стадиях заболевания магнитотерапия недостаточно эффективна, а поэ-
тому предпочтительнее использовать ее в качестве одного из компонен-
тов комплексного лечения. Например, при 3-й стадии заболевания
ИБМП целесообразно сочетать не только с такими физиотерапевтичес-
кими методами, как динамические токи, лазеротерапия и другими, но
и с фармакотерапией, а при 4-й стадии в ряде случаев необходима
хирургическая коррекция кровотока.
Таким образом, проведенные исследования на достаточном количе-
стве случаев показывают, что при избирательном использовании ИБМП
в качестве единственного терапевтического воздействия при окклюзи-
онных поражениях магистральных артерий конечностей наибольшее ко-
личество положительных результатов наблюдается у больных в доган-
гренозной стадии заболевания, при этом уровень микроциркуляции
улучшается до 35% от исходных данных.
7.3. Комплексная медикаментозная и магнитотерапия
хронических заболеваний магистральных артерий
конечностей
Консервативная терапия, остающаяся основным методом лечения
облитерирующих заболеваний нижних конечностей, приносит успех
только при комплексном подходе. При этом предполагается, что на фоне
продолжительной курсовой базисной медикаментозной терапии пациент
должен соблюдать охранительный режим поведения и лечебную диету,
заниматься лечебной физкультурой, получать разнообразные физиоте-
рапевтические процедуры, вплоть до бальнеотерапии. Соблюдение
вышеперечисленных условий позволяет уменьшить влияние патогенети-
ческих факторов и активизировать саногенетические механизмы, что, в
конечном итоге, будет способствовать нормализации центральной и пе-
риферической гемодинамики, стимуляции коллатерального кровообра-
щения, улучшению микроциркуляции и сосудисто-тканевого обмена,
нормализации реологических свойств крови. Реализация поставленных
задач сводится к следующим конкретным механизмам:
1. Устранение факторов риска, способствующих развитию сосуди-
стой патологии. Национальным институтом сердца и легких (США, Р.
Стаут, 1985) выделено 12 факторов риска атеросклероза: пожилой воз-
раст, принадлежность к мужскому полу, артериальная гипертензия, та-
262
Глава 7
бакокурение, сахарный диабет, ожирение, малоподвижный образ жизни,
наследственная предрасположенность, психосоциальные стрессы, забо-
левание подагрой, потребление жесткой питьевой воды. В эту же группу
факторов следует включить злоупотребление алкоголем, который, не
оказывая непосредственного влияния на формирование атеросклероти-
ческих бляшек, может усиливать неблагоприятные последствия от дей-
ствия других факторов, что, в дополнение к этому, усугубляется его
гепато- и панкреотоксическим эффектами.
2. Комплексная коррекция нарушений липидного обмена, поскольку
гиперлипопротеидемия не только активизирует липидную инфильтра-
цию сосудистой стенки, но и нарушает реологические свойства крови.
Снижение уровня липопротеидов в крови может быть достигнуто при
помощи:
а) диеты, соблюдение которой предполагает резкое ограничение при-
ема продуктов и блюд, содержащих легко усвояемые углеводы — сахарозу
и крахмал: конфеты, варенье, мед, кондитерские и макаронные изделия,
каши, картофель, сладкие блюда и т.п., уменьшение потребления соли,
приправ и специй, возбуждающих аппетит. Компенсировать энерготраты
следует белоксодержащими продуктами, и без ограничений употреблять
свежие фрукты и овощи, а также блюда, приготовленные из них (кроме
бананов, винограда и картофеля);
б) нормализации желчевыделения путем использования желчегон-
ных препаратов естественного и синтетического происхождения;
в) медикаментозных средств гиполипидемического действия. Меха-
низмы их действия разнообразны: угнетение всасывания холестерина в
кишечнике (холестирамин, бетаситостерин), торможение биосинтеза ли-
попротеидов и активация окисления липидов в печени (клофибрат, ни-
котиновая кислота, пробукол), стимуляция катаболизма холестерина
(декстротироксин) и др.
3. Фармакокоррекция патологических процессов, способствующих
повреждению эндотелия сосудов. При воспалительных процессах в со-
судах, обусловленных формированием иммунной гиперчувствительнос-
ти, показано назначение антиаллергических и противовоспалительных
препаратов различного действия, в особенности при активно протека-
ющих процессах (бутадиен, индометацин и др.). При гипертензии не-
обходима нормализация артериального давления путем использования
гипотензивных препаратов соответствующего механизма действия, при
имеющих место нарушениях коронарного кровообращения следует на-
значать коронаролитики. Однако применение спазмолитиков, особенно
в амбулаторных условиях, не всегда целесообразно. Это объясняется тем,
что при снижении АД, в том числе и уменьшении сосудистого сопро-
тивления в контрлатеральной конечности, в пораженной конечности в
итоге может сформироваться «синдром обкрадывания», сопровождаю-
щийся снижением АД дистальнее уровня окклюзии и ухудшением ус-
ловий для микроциркуляции.
Применение магнитных полей в практической медицине
263
4. Восстановление нарушенных реологических свойств крови, бла-
годаря чему можно быстро достичь положительных результатов за счет
улучшения микроциркуляции и транскапиллярного обмена. Наиболее
эффективными являются препараты — трентал, курантил, реополиглю-
кин, тиклид. Так как при этих заболеваниях имеет место тенденция к
гиперкоагуляции, которую не всегда удается предупредить или устранить
традиционными методами комплексной медикаментозной терапии, то в
отдельных случаях следует прибегнуть к использованию препаратов с
антитромботической направленностью действия: аспирин, производные
никотиновой кислоты и непрямые антикоагулянты (фенилин, пелентан).
Для улучшения периферического кровообращения наряду с дезагреган-
тами можно использовать такие препараты, как андекалин, депот-паду-
тин, ангиотрофин и др.
5. Стимуляция коллатерального кровотока с использованием раз-
личных методов лечебной физкультуры. Наиболее простым и результа-
тивным из них является адекватная физическая нагрузка — дозированная
ходьба. Больным рекомендуется ежедневно совершать прогулки продол-
жительностью до 1,5...2 часов. Если при ходьбе появляются боли в по-
раженной конечности, то следует остановиться до их полного исчезно-
вения. Развитию коллатерального (окольного) кровообращения также
способствуют физиотерапевтические процедуры: баротерапия, динами-
ческие токи и др. Эффективно применение средств бальнеотерапии:
сероводородных, радоновых, углекислых, кислородных и других ванн.
6. Коррекция метаболических нарушений в пораженной конечности.
В условиях ишемии используют препараты метаболического действия
(витамины, антиоксиданты, солкосерил, АТФ). При декомпенсации пе-
риферического кровообращения оправдано применение анаболических
средств. В случаях тяжелой артериальной недостаточности в пораженных
конечностях могут развиваться трофические язвы. Эффективная терапия
их возможна только при сочетании общих и местных лечебных меро-
приятий. Под общими подразумеваются все вышеизложенные подходы
к терапии хронических поражений сосудов нижних конечностей, а при
местном лечении должна быть предусмотрена санация язв антисептика-
ми и ферментами. На поздних стадиях допускаются оперативные вме-
шательства.
Как уже указывалось выше, магнитотерапия обладает набором са-
ногенетических эффектов, необходимых для лечения больных с хрони-
ческими окклюзионными заболеваниями артерий: способствует оптими-
зации не только центральной и периферической гемодинамики, но и
улучшает микроциркуляцию, стимулирует коллатеральное кровообраще-
ние и нормализует реологические свойства крови. Исходя из этого, был
использован комплексный подход в лечении этой категории больных,
который заключался в проведении адекватной медикаментозной терапии
на фоне магнитотерапевтических процедур. В общей сложности такому
лечению было подвергнуто 424 больных, находящихся в догангренозной
стадии заболевания. Достаточно полное диагностическое обследование
264
Глава 7
показало, что основные клинические характеристики данной группы
больных (пол, возраст, длительность заболевания, характер предшеству-
ющего лечения), в основном, соответствовали показателям пациентов,
подвергавшихся избирательному лечению МП (см. 7.2).
Курс магнитолечения проводился на аппарате «Аврора МК-01» и
состоял из 16-20 процедур продолжительностью до 20 минут каждая.
Аппаратом генерировалось ИБМП с индукцией 0,5...5 мТл и линейной
скоростью перемещения, кратной скорости кровотока в магистральных
сосудах конечностей. Вектор перемещения бегущей волны МП и вектор
магнитной индукции устанавливались равнонаправленными с направле-
нием артериального кровотока в организме пациента.
На фоне данного стандартного курса магнитотерапии проводилось
следующее медикаментозное лечение: через день в локтевую вену ин-
фузировались растворы 5% глюкозы по 300 мл, 0,25% новокаина по 200
мл, реополиглюкина по 400 мл и трентала по 5 мл. Всего назначалось
10 инфузий. Динамика жалоб больных и данных клинического обсле-
дования представлены в табл. 7.7, 7.8.
Таблица 7.7
Динамика жалоб пациента (в %) после сочетанного лечения
Срок ис- следования Боли в покое Боли при нагрузке Безболевая дистанция в метрах
До 50 До 100 До 200 До 300 До 500 Свыше 500
До лечения 19 81 32 26 17 10,7 14,3 0
После лечения 5 95 0 6,2 18,8 16 39 20
Таблица 7.8
Динамика некоторых данных клинического обследования
пациентов (в %) после сочетанного лечения
Срок иссле- дования Окраска кожи Трофические расстройства Стадия заболевания
Патология Норма Есть Нет 1 2-А 2-Б 3 4
До лечения 65,7 34,3 6,3 93,7 0 25 56 12,7 6,3
После лечения 13,8 86,2 3,2 96,8 0 75 20 1,8 3,2
Как видно из представленных таблиц, у пациентов наблюдалась
положительная тенденция в динамике некоторых клинических показа-
телей при сочетанном применении магнито- и фармакотерапии. После
комплексного лечения у 59% больных безболевая дистанция составляла
500 м и более, в случае применения «чистой» магнитотерапии их коли-
Применение магнитных полей в практической медицине
265
чество составляло 49,7%. Улучшение с переходом в 2-А стадию заболе-
вания при комплексном лечении (табл. 7.8) составило 75% (при одной
магнитотерапии — 67,1 %).
Для характеристики изменений периферического кровотока исполь-
зовались методы функциональной диагностики, описанные в 7.2.
Сравнительная оценка показателей ультразвуковой допплерографии
(табл. 7.9) у пациентов, получавших комплексную терапию и подверг-
нутых «чистой» магнитотерапии (7.2), свидетельствует о более высокой
эффективности комплексного лечения, при котором имел место прирост
скорости кровотока в пораженной конечности с 17% до 23%, а в кон-
тралатеральной — с 23% до 26%.
Таблица 7.9
УЗДГ-динамика у больных с атеросклерозом после
сочетанного лечения (дистальные артерии голеней)
Конечность Показатель: увеличение скорости, % Результат, %
Хор. Удовл. Неудовл.
Пораженная 23 58,4 29,2 12,4
Контрлате- ральная 26 69,1 14,7 16,2
Интегральное значение 24,5 64,5 20,7 14,8
В табл. 7.10 представлена динамика изменений РИ после сочетан-
ного лечения. Сравнивая эти показатели с теми, что наблюдались у
пациентов, получавших лечение только ИБМП (см. 7.2), можно конста-
тировать более выраженный прирост показателя РИ в наиболее пора-
женной конечности — с 11% до 14%. Хорошие и удовлетворительные
результаты были получены у 81,5% пациентов (при «чистой» магнито-
терапии — в 69,9% случаев).
Таблица 7.10
Динамика РИ у больных с атеросклерозом после сочетанного лечения
Конечность Показатель: среднее увеличение РИ, % Результат,%
Хор. Удовл. Неудовл.
Более пораженная 14 52,3 32,9 14,8
Менее пораженная 9,4 35,4 43,3 21,3
Интегральное значение 12,2 45,1 36,4 18,5
266
Глава 7
В табл. 7.11 представлены результаты радиоизотопных исследований
капиллярного кровообращения (РИИКК) у больных с атеросклерозом со-
судов нижних конечностей после комбинированного лечения. Из таблицы
видно, что интегральные показатели уменьшения периода полувыведения
I131 и остаточной активности данного препарата на 15-й минуте у пациентов
после комплексной фармакомагнитотерапии превосходят аналогичные дан-
ные после «чистой» магнитотерапии (см. 7.2). В первом случае они соста-
вили соответственно: 5 минут и 8,2%, во втором — 2 минуты и 3,2%.
Количество хороших и удовлетворительных результатов по этим показате-
лям увеличилось с 75,7% (см. 7.2) до 85% (табл. 7.11).
Таблица 7.11
Динамика показателей РИИКК после сочетанного лечения
у больных с атеросклерозом магистральных артерий нижних конечностей
Конечность Показатель Результат, %
Уменьшение периода полувыведения препарата, мин Уменьшение остаточной активности препарата, % Хор. Удовл. Неудовл.
Наиболее пораженная 3 5,5 57,3 32,2 10,5
Контрлате- ральная 1 1,0 36,4 43,1 20,5
Интегральный показатель 2 3,2 42,3 42,7 15,0
В табл. 7.12 представлены изменения температурного градиента го-
лени и стоп после комбинированного лечения (ИБМП и фармакотера-
пия). Интегральный показатель уменьшения температурного градиента
голеней и стоп при лечении только ИБМП (см. 7.2) составил 0,43 и 0,6;
при комбинированной терапии — соответственно 0,97 и 0,92.
Зависимость результатов сочетанного лечения от стадии заболевания
представлена на рис. 7.2.
Таблица 7.12
Уменьшение температурного градиента
нижних конечностей у больных после курса сочетанного лечения (С)
Конечность Показатель Результат, %
Уменьшение градиента голени Уменьшение градиента стопы Хор. Удовл. Неудовл.
Наиболее пораженная 1,2 1,0 64/58 33/39 3/3
Контрлате- ральная 0,8 0,9 44/42 44/46 12/12
Интегральный показатель 0,97 0,92 54/50 38/42 8/8
Примечание: в числителе табл. 7.12 приведены данные по голени, в знаменателе — по стопе.
Применение магнитных полей в практической медицине 267
При сопоставлении кривых рис. 7.2 и аналогичного графика на
рис. 7.1, отражающего результаты только магнитотерапевтического воз-
действия, выявляется возрастание эффективности сочетанного лечения
у данной группы больных при 3-й стадии заболевания. Недостоверное
снижение эффективности воздействия ИБМП в начальных стадиях обу-
словлено отсутствием выраженных изменений периферической гемоди-
намики.
Таким образом, клинические наблюдения показывают, что, несмот-
ря на достаточно высокую эффективность (от 70% до 80%) самостоя-
тельной магнитотерапии (7.2), комбинированное воздействие, при ко-
тором на фоне магнитотерапии проводится медикаментозное лечение,
обладает еще более высокой результативностью (80-92%).
Рис. 7.2. Зависимость результатов сочетанного лечения больных с окклюзионны-
ми поражениями артерий конечностей от стадии заболевания:
у,(х) = 0,208 • х + 1,683; у2(х) = - 0,158 • х2 + 1,158 • х + 0,550
Необходимо отметить, что продолжительность ремиссии после
любых способов терапии зависит от стадии заболевания, предшествую-
щих методов лечения, активности, полноты и вида настоящей терапии,
наличия сопутствующих заболеваний. Все это учитывается, корректиру-
ется в процессе лечения и диспансерного наблюдения.
7.4. Комплексная магнито-лазерная терапия
хронических заболеваний магистральных артерий
конечностей
Как уже указывалось выше, высокая частота и крайне неблагопри-
ятные последствия облитерирующих заболеваний сосудов нижних ко-
нечностей (ОЗСНК) в сочетании с недостаточной эффективностью как
268
Глава 7
терапевтических, так и хирургических методов лечения, побуждает ан-
гиологов к поиску новых путей реабилитации этих больных.
В современной литературе имеется достаточно сведений о положи-
тельном опыте раздельного применения лазеролечения [230, 235], а
также магнитотерапии [228, 232] при облитерирующих заболеваниях
нижних конечностей. Публикации о сочетанном использовании этих
методов единичны [229].
Исходя из того, что сферы приложения лечебного воздействия ла-
зерного излучения и магнитных полей различны, тем не менее оба
физиотерапевтических метода дают положительный эффект при обли-
терирующих заболеваниях нижних конечностей, целесообразно исполь-
зовать сочетание этих методов у данной категории больных. Подобран-
ная для лечения группа состояла из 60 мужчин с облитерирующим
атеросклерозом в догангренозной стадии заболевания.
Структурный состав этой группы характеризовался показателями:
— возраст пациентов колебался от 42 лет до 81 года, максимальная
продолжительность заболевания составляла 22 года. При этом
больных со сроком заболевания до 3 лет было 18,3%, до 10 лет
— 49,6% и свыше 10 лет — 32,1%;
— в соответствии с классификацией А. В. Покровского среди них
были 22 человека с 2-А стадией, 34 больных — в 2-Б стадии и 4
человека — с 3-й стадией заболевания;
— одностороннее поражение сосудов имело место у 22,4% пациен-
тов, двухстороннее — у 77,6%. Расположение очагов поражения
по сегментам было следующим: аорто-подвздошное — 22,4%, бед-
ренно-подколенное — 38,4%, дистальное — 14,4%, «многоэтаж-
ная» локализация поражений имела место в 20,8%.
Как видно из приведенных данных, все больные с атеросклерозом
сосудов нижних конечностей были в зрелом и пожилом возрасте, с
многолетней продолжительностью заболевания и преобладанием двусто-
роннего и «разноэтажного» поражения. Оперативное лечение таких ка-
тегорий больных, даже в тех случаях, когда оно имеет определенные
показания, например, при поражении аорто-подвздошного сегмента, не
всегда приносит желаемый результат, в особенности при анализе эф-
фектов в отдаленные сроки. Вместе с тем, даже в этих случаях, обяза-
тельным условием успеха при оперативном лечении является интенсив-
ная консервативная терапия до и после операции. Больные, включенные
в исследуемую группу, на протяжении многих лет с переменных успехом
подвергались традиционным консервативным способам лечения. При
этом часть из них, в связи со сформировавшимися в процессе лечения
аллергическими реакциями на некоторые препараты, не могла получать
полноценную фармакотерапию. Все вышесказанное было учтено при
составлении индивидуальных схем лечения пациентов и обусловило вы-
деление особой группы больных, лечение которых проводилось только
при помощи магнито- и лазеротерапии, без использования других
средств.
Применение магнитных полей в практической медицине
269
Сеансы магнитотерапии продолжительностью по 15-20 минут про-
водились ежедневно в течение 20 дней и предусматривали воздействие
ИБМП на весь организм с уровнем индукции 0,25...5 мТл и с частотой
0,1... 1,0 Гц. Лазеротерапия проводилась ежедневно в течение 10 дней
путем облучения крови через кварцевый световод, введенный в куби-
тальную вену. Продолжительность сеанса составляла 30 минут. В каче-
стве генератора использовался аппарат «АЛОК-1», создававший на конце
световода мощность излучения 1,7...2,0 мВт. Курсы магнито- и лазеро-
терапии комбинировались в различных вариантах.
Контроль состояния пациентов в динамике и эффективности про-
водимого лечения осуществлялся с использованием комплекса различ-
ных показателей, характеризующих общее состояние сердечно-сосуди-
стой системы, центральную кардио- и гемодинамику, периферическое
кровообращение. Для этих целей использовались методы реовазографии
голеней, ультразвуковая доплеросфагманометрия, тетраполярная грудная
реография и поликардиография. При оценке использовались следующие
показатели: лодыжечный индекс давления (ЛИД), реографический ин-
декс голеней (РИ), ударный объем сердца (УО), минутный объем крови
(МОК), общее периферическое сопротивление (ОПС), фаза асинхрон-
ного сокращения (АС), фаза изометрического сокращения (IC), период
напряжения (Т), период изгнания (Е), длительность механической сис-
толы (Sm), длительность общей систолы (So), индекс напряжения ми-
окарда (ИНМ), внутрисистолический показатель (ВСП), механический
коэффициент Бромберга (МК), средняя скорость опорожнения левого
желудочка (V,). Клиническая динамика состояния больных и изменения
функциональных показателей в результате лечения представлены в табл.
7.13 и 7.14, из которых отчетливо видно, что чем легче стадия заболе-
вания, тем выше шансы на успешное лечение.
Таблица 7.13
Динамика изменений безболевой дистанции у пациентов
с ОЗСНК при сочетанной магнито-лазерной терапии
Расстояние, м Кол-во больных До 50 До 100 До 200 Свыше 200 Свыше 500
До лечения 10 10 18 16 6
После лечения 2 5 13 24 16
В табл. 7.15 представлен спектр изменений функциональных пока-
зателей сердечно-сосудистой системы в ходе магнито-лазерной терапии,
из которой видно, что наиболее выраженные проявления отмечаются со
стороны центральной гемодинамики, например, увеличение МОК в
среднем до 2,0 литров крови.
В табл. 7.16 проведено сопоставление результатов комбинированной
магнито-лазеротерапии с данными, полученными при изолированном
использовании этих способов лечения. Сравнительная оценка этих трех
270
Глава 7
методов лечения была произведена по основным показателям централь-
ной и периферической гемодинамики.
Таблица 7.14
Динамика изменений стадий заболевания у пациентов
с ОЗСНК при комбинированной магнито-лазерной терапии
Кол-во больных Стадия ^заболевания 2-А 2-Б 3
До лечения 20 34 6
После лечения 40 20 -
Таблица 7.15
Динамика показателей сердечно-сосудистой системы
при сочетанной магнито-лазерной терапии (М-тп)
Величины Показатель Должные До лечения После лечения
РИ 0,68 ±0,08 0,25 ±0,03* 0,33 ±0,04
лид 1,00 0,54 ±0,04* 0,62 ±0,05
УО - 62,2 ±4,6 71,0 ±3,4
мок 5,35 ±0,15 4,37 ±0,32* 6,30 ±1,29**
ОПС 1370 ±104 2608 ±271* 2106 ±181
АС 0,04 ±0,07 0,069 ±0,007 0,072 ±0,006
IC 0,02 ±0,05 0,038 ±0,006 0,042 ±0,008
т 0,06 ±0,11 0,108 ±0,007 0,113 ±0,006
Е 0,249 ±0,050 0,244 ±0,009 0,239 ±0,008
Sm 0,280 ±0,019 0,284 ±0,016 0,279 ±0,019
So 0,338 ±0,018 0,353 ±0,017 0,352 ±0,018
ИНМ 20...29 30,6 ± 1,9 31,8 ± 1,2
ВСП 85...94 85,9 ±2,1 85,6 ± 2,2
мк 2,5-4,5 2,33 ±0,9 2,25 ±0,8
VI 200-500 256,8 ±24,7 293,0 ±27,9**
Примечание: * — данные статистически достоверны по сравнению с должными ве-
личинами; ** — по сравнению с исходными (Р< 0,05), Р — уровень значимости дове-
рительной вероятности.
Как явствует из этой таблицы, наиболее выраженные положитель-
ные сдвиги центральной гемодинамики наблюдались в 3-й группе (маг-
нитное поле + лазерное излучение): увеличение сердечного выброса
составило в среднем 31%, тогда как при раздельной лазеро- или магни-
тотерапии (1-2 группы) 4% и 23% соответственно; снижение ОПС в
среднем было при магнито-лазеро-терапии на 19%, а в 1 и 2 группах —
11% и 12% соответственно. Менее значимыми в группе комплексной
терапии (магнитное поле + лазер) оказались положительные сдвиги в
периферическом кровообращении — повышение ЛИД в среднем дости-
гало 13% (в 1 и 2 группах — 18% и 11% соответственно).
Применение магнитных полей в практической медицине
271
Таблица 7.16
Сравнительная характеристика различных методов лечения
ОЗСНК по данным функционального обследования (М±т)
Вид леме- ху НИЯ Пока- \ затель \ Лазеротерапия Магнитотерапия Комплексный метод
До лечения После лечения До лечения После лечения До лечения После лечения
МОК (л) Р 4,11 ±0,54 4,29 ±0,52 >0,05 3,18 ±0,41 4,12 ±0,43 <0,05 4,37 ±0,32 6,30 ±1,39 <0,05
ОПС Р 2463 ±53 2181 ±57 <0,05 2787 ±109 2443 ±128 <0,05 2608 ±271 2106 ± 181 <0,05
лид р 0,42 ± 0,05 0,51 ±0,07 >0,05 0,47± 0,06 0,53 ±0,05 >0,05 0,54± 0,04 0,62 ±0,05 >0,05
Таким образом, несмотря на то, что лазерная и магнитная терапия
при изолированном применении являются эффективными при лечении
окклюзионных заболеваний сосудов нижних конечностей, сочетанная
магнито-лазерная терапия характеризуется по ряду показателей опреде-
ленными преимуществами, что проявляется в значительном улучшении
клинического состояния больных, положительном влиянии как на цент-
ральную гемодинамику, так и на периферическое кровообращение. Все
это диктует необходимость дальнейших исследований по использованию
рассматриваемого метода при лечении окклюзионных поражений арте-
рий.
7.5. Магнитотерапия в комплексном лечении
диабетических ангиопатий
Сахарный диабет (СД) в структуре заболеваемости населения Земли
по-прежнему занимает ведущее место среди болезней, возникновение и
развитие которых обусловлено нарушениями гормональной регуляции.
По данным Всемирной организации здравоохранения (ВОЗ) в настоящее
время 3% населения страдают этим заболеванием, причем каждые 15-20
лет количество больных удваивается.
Сахарный диабет является относительно частой причиной артерио-
патий различной локализации, однако поражение сосудов нижних ко-
нечностей по мнению ряда авторов достигает 80-97%. Микроангиопатии
в сосудах микроциркуляторного русла проявляются в утолщении базаль-
ных мембран, что не только влияет на трофику окружающих клеток, но
и, затрудняя периферический кровоток, способствует развитию гипоксии
тканей. Для макроангиопатий характерно поражение крупных и средних
272
Глава 7
артерий, в интиме которых происходит формирование атеросклероти-
ческих бляшек, приводящих к регионарному нарушению кровообраще-
ния в органах и тканях. Это способствует снижению трофики и про-
цессов биохимического окисления. На начальных этапах развития па-
тологии клинические проявления сводятся к возникновению при
физической нагрузке болей в нижних конечностях, которые по мере
прогрессирования могут появляться и в покое. В последующем наруше-
ние кровообращения вызывает трофические изменения кожи стопы и
голени, развитие гангрены. Углубление дистрофических процессов
может являться причиной деструкции суставов и других некробиотичес-
ких проявлений.
Развитие диабетических ангиопатий в других органах приводит к
формированию клинических симптомов, характерных для нарушения их
функции: энцефалопатии, ретинопатии, нефропатии, диабетической
дерматопатии и т.п. Все это возводит сосудистые проявления СД в ранг
серьезной социальной проблемы, т. к. именно они приводят к глубокой
инвалидизации больных или становятся причиной летального исхода
заболевания.
Лечение ангиопатий представляет сложную проблему, успех в реше-
нии которой во многом определяется не только стадией заболевания и
выраженностью процесса, но и адекватностью терапевтических меро-
приятий.
Преимущественная частота поражений сосудов нижних конечностей
при СД любого типа предопределяет госпитализацию этой категории
больных в специализированные сосудистые отделения. При этом только
у 2-3% поступающих пациентов клиническое состояние диктует необ-
ходимость хирургических вмешательств вплоть до ампутаций конечнос-
тей при наличии гангренозных изменений. Вместе с тем у подавляющей
части больных нарушения кровообращения в нижних конечностях еще
не привели к необратимым дистрофическим изменениям, в связи с чем
при проведении адекватной комплексной медикаментозной терапии, со-
четающейся с использованием физиотерапевтических процедур, возмож-
но достижение значительного улучшения состояния пациентов [230,
231].
Большая распространенность этой патологии и невозможность ра-
дикальной хирургической коррекции оправдывают поиски новых эф-
фективных консервативных методов лечения в догангренозной стадии.
Многолетний положительный опыт применения МП у больных с
облитерирующими заболеваниями сосудов нижних конечностей [228,
229, 231, 232] позволил предложить воздействия ИБМП для лечения
сосудистых проявлений, наблюдающихся при СД.
Общее количество пациентов, находившихся под наблюдением, со-
ставило 520 человек, из них инсулинозависимый диабет (I тип) имел
место у 291 больного (56%), инсулинонезависимым диабетом (II тип)
болели 229 человек (44%). В ходе первоначального этапа исследований
в процессе отработки и внедрения методик терапевтического воздейст-
Применение магнитных полей в практической медицине
273
вия было обследовано и подвергнуто лечению 150 пациентов. Из них
были выделены: контрольная группа пациентов, состоящая из 50 боль-
ных, получавших традиционное медикаментозное лечение, и основная
группа пациентов, в которую были включены 100 человек, подвергнутых
дополнительному магнитотерапевтическому воздействию на фоне меди-
каментозного лечения. Данные, полученные от этих групп пациентов
были использованы для сравнительной оценки результатов.
Основная группа состояла из пациентов, болеющих сахарным диа-
бетом I (52%) и II (48%) типов с проявлениями диабетической ангио-
патии нижних конечностей I-III стадий, в возрасте от 17 до 78 лет
(средний возраст 50 ± 2,3 года), с длительностью основного заболевания
от 0,5 до 33 лет (в среднем 12 ± 1,1 года), а сосудистых проявлений от
0,5 до 21 года (в среднем 5,4 ± 0,7 года).
Логика исследований продиктовала необходимость подразделения
пациентов основной группы не только по типу сахарного диабета, т. к.
характер патологии сосудов накладывает определенный отпечаток не
только на тяжесть клинических проявлений, но и предопределяет выбор
терапевтических воздействий. В связи с этим были выделены подгруппы
с диабетическими микроангиопатиями при сахарном диабете I и II
типов, а также подгруппы из пациентов, имеющих комбинированную
сосудистую патологию: микроангиопатию в сочетании с атеросклерозом
нижних конечностей.
У 12% пациентов СД сочетался с ишемической болезнью сердца,
80% имели проявления в виде диабетических нейро-, ретино- или неф-
ропатий. У 6% больных имелись трофические расстройства в виде язв
голени или стопы диаметром до 2,5...3 см и глубиной до 0,5 см.
В контрольной группе пациентов показатели, характеризующие ее
состав, были близки к данным общей группы: средний возраст пациен-
тов — 55,2 ± 4,2 года, продолжительность заболевания СД — 12,2 ± 2,0
года, а сосудистых проявлений — 5,7 ± 1,0 год. По типу СД (I и II) эта
группа была разделена на две подгруппы по 20 (40%) и 30 (60%) человек
соответственно.
Исходя из того, что в стационар поступали больные, в основном,
со средней и тяжелой степенью сахарного диабета, проведение магни-
тотерапии как монолечения было нецелесообразным.
Основная группа подвергалась магнитотерапевтическому воздейст-
вию на аппарате «Аврора МК-01». Курс лечения состоял из 16-20 про-
цедур с продолжительностью каждой процедуры 20 минут, уровень маг-
нитной индукции изменялся по программе от 0,25 до 2 мТл. Линейная
скорость перемещения ИБМП была кратной скорости кровотока в ма-
гистральных сосудах конечностей. Вектор перемещения бегущей волны
МП и вектор магнитной индукции устанавливались равнонаправленны-
ми в соответствии с артериальным кровотоком в конечностях пациента.
Результаты комплексного лечения, а также динамика сосудистых
изменений в основной и контрольных группах оценивались по субъек-
тивным данным и методами функциональной диагностики. К субъек-
Т14
Глава 7
тивным данным, свидетельствующим о сосудистой патологии, были от-
несены:
— жалобы пациентов на боли в нижних конечностях;
— развитие утомления мышц при дозированной ходьбе;
— зябкость нижних конечностей даже в теплых помещениях;
— периодически возникающие судорожные сокращения икронож-
ных мышц и мышц пальцев стопы;
— отеки нижних конечностей различной степени выраженности.
Основываясь на собственном опыте, из большого числа методов
исследования гемодинамики были выбраны наиболее показательные:
— ультразвуковая допплерография (УЗДГ);
— реовазография (РВГ);
— радиоизотопное исследование капиллярного кровотока с опреде-
лением периода полувыведения и остаточной активности I131
(РИИКК);
— изучение биоптатов кожи голени;
— исследование сосудов глазного дна;
— лазерная флоуметрия.
Все показатели оценивались в динамике. При комплексной оценке
результатов лечения использовались те же подходы и критерии оценки,
позволяющие трактовать их как «хорошие», «удовлетворительные» и «не-
удовлетворительные» (см. 7.2). Хорошие и удовлетворительные резуль-
таты были получены у 74% больных. Тенденция к заживлению некро-
тических язв выявлена у всех пациентов. В контрольной группе (стан-
дартное лечение без применения МП) хорошие и удовлетворительные
результаты составили всего 28% от количества больных в ней.
По отдельным показателям в группе больных, получавших магни-
тотерапевтические воздействия, выявлена следующая динамика: по
УЗДГ — хороший и удовлетворительный результат в 68%, по РИ — в
70%, по РИИКК — в 76%, по данным лазерной флоуметрии — в 88%
случаев. При обследовании глазного дна наблюдалось уменьшение спаз-
ма артериол. При биопсии кожи голени (до и после магнитотерапии на
фоне традиционного лечения) отмечалось уменьшение дистрофических
изменений в эпидермисе, ослабление признаков периваскулита и изме-
нение соотношения компонентов микроциркуляторного русла с увели-
чением количества капилляров, например с 224 до 336, и артериол с 76
до 100 на см2.
Выявлено влияние импульсного бегущего магнитного поля на тонус
сосудистой стенки, скорость магистрального и периферического крово-
тока. Разработаны показания и противопоказания к воздействию ИБМП.
Применение магнитотерапии в комплексном лечении диабетических ан-
гиопатий позволило улучшить терапевтический эффект на 7,5% по срав-
нению с контрольной группой. Установлено также, что при комплекс-
ном лечении с применением магнитотерапии количество койко-дней и
стоимость курса лечения уменьшается в 1,5 раза.
Применение магнитных полей в практической медицине 275
Приведенные данные показывают целесообразность применения
МП на фоне традиционного лечения СД и его сосудистых проявлений,
поскольку этот метод лечения имеет преимущества и дает более выра-
женные и стойкие положительные эффекты [233, 234]. Вместе с тем
проблема требует дальнейшего изучения и продолжения исследований.
7.6. Магнитотерапия при ишемической болезни
сердца и эссенциальной гипертензии
Разработка новых путей профилактики и способов лечения болезней
сердечно-сосудистой системы стала одной из первоочередных задач ме-
дицинской науки и практического здравоохранения. Глубокий интерес
к этому разделу медицины предопределяется широким распространени-
ем этой группы заболеваний, тенденцией к нарастанию их у лиц моло-
дого возраста, огромной ролью в инвалидизации и смертности населе-
ния. Все это придает проблеме не только медицинское, но и социальное
значение. В современной медицине все большее внимание уделяется
немедикаментозным методам лечения. Два последних десятилетия ха-
рактеризовались интенсивным поиском путей и возможностей исполь-
зования физических факторов, в том числе и магнитных полей, для
лечения и реабилитации больных с сердечно-сосудистой патологией.
Изучение механизмов воздействия магнитных полей на биосистемы
на различных уровнях структурной организации, в том числе на кровь
и систему кровообращения, свидетельствует, что в ряде случаев многие
эффекты могут быть объяснены изменениями физико-химических и
электромагнитных характеристик структурных компонентов живой
ткани. Если допустить, что кровеносные сосуды являются неподвижны-
ми электродами, и учесть, что движущаяся по ним кровь обладает хо-
рошей электропроводностью, то можно прийти к заключению, что воз-
действие МП будет приводить к возникновению в системе электричес-
кой разности потенциалов. При этом действию электрических токов
смещения и проводимости подвергаются клеточные и неклеточные ком-
поненты крови, эндотелий сосудов и биологические мембраны этих
структур (А. Д. Виноградов, 1974; М. И. Кондратов, 1977), что может
обусловить появление избирательной проницаемости мембран для от-
дельных ионов, изменение реологических свойств крови, уровня агре-
гационной и адгезионной активности форменных элементов, а также
активизации коагуляционных и антикоагуляционных свойств плазмен-
ных белковых систем. В свою очередь, совокупность этих влияний может
отразиться на микроциркуляции и участии сосудистой стенки в метабо-
лизме. Эти предположения подтверждаются многочисленными работа-
ми, в которых подчеркивается, что основной зоной приложения дейст-
вия МП являются микроциркуляторные элементы, а поскольку направ-
ленность и масштабы изменений в них во многом предопределяются
параметрами воздействующего МП, то при соблюдении определенных
276
Глава 7
условий воздействия можно добиться оптимизации кровообращения, ги-
потензивного и гипокоагулирующего эффектов. Все вышесказанное объ-
ясняет стремление магнитологов применить МП для лечения сердечно-
сосудистых заболеваний, в частности ишемической болезни сердца
(ИБС) и эссенциальной гипертензии (гипертонической болезни — ГБ).
В последние годы появились сообщения о положительном опыте
применения ПМП и ПеМП при лечении ИБС. В качестве источников
МП использовались соленоиды различных конструкций, подковообраз-
ные магниты, магнитофоры, а также импульсное бегущее МП
(И. Г. Алексеева, 1983), но при этом чаще оказывалось локальное дей-
ствие на организм.
Особенности конструкции полимагнитной системы «Аврора МК-
01», как уже отмечалось выше, позволяют воздействовать на организм
человека в целом, генерируя МП различных типов и конфигураций, и,
в соответствии с заданной программой, синхронизировать их параметры
с основными биоритмами пациента, например, с частотой сердечных
сокращений.
Помимо литературных данных, побудительным мотивом, обусловив-
шим наше стремление применить МП для лечения нарушений коронар-
ного кровообращения и сосудистого тонуса, явились собственные на-
блюдения, полученные при лечении больных с патологией сосудов ниж-
них конечностей на магнитотерапевтическом комплексе «Аврора
МК-01» [228]: в ходе комплексного диагностического обследования этих
пациентов регулярно (до, во время и после курса лечения) снимались
ЭКГ, при анализе которых было замечено, что у 42% больных имели
место положительные сдвиги в показателях, характеризующих деятель-
ность миокарда: у одного пациента переход от блокады второй степени
в простое замедление атриовентрикулярной проводимости, улучшение
кровообращения в миокарде в 21 случае, нормализация ритма сердечных
сокращений (прекращение тахикардии) у 5 больных. Однако справедли-
вости ради следует отметить, что у 42% больных в ходе лечения не
произошло электрокардиографических изменений, а у 6 больных на ЭКГ
было зафиксировано временное ухудшение состояния миокарда (по
одному случаю имели место гипоксия и снижение метаболических про-
цессов в сердечной мышце, нарушение ритма миокарда по типу тахи-
кардии в сочетании с субэндокардиальной ишемией у 4 человек). Эти
изменения на ЭКГ не сопровождались другими клиническими проявле-
ниями, а в последующем, после снижения воздействующей дозы МП,
они перестали обнаруживаться и на ЭКГ.
С целью изучения наблюдаемого явления и обоснования возмож-
ности использования МП при ИБС, не сопровождающейся нарушения-
ми сосудистого тонуса, а также протекающей в сочетании с ГБ, были
подобраны две группы больных, сопоставимые по возрасту, полу, ста-
диям и длительности заболевания. У пациентов обеих групп перед ле-
чением проводился общий анализ крови, в плазме определялись уровни
холестерина, протромбина, сахара, изучалось состояние глазного дна,
Применение магнитных полей в практической медицине 277
снимались ЭКГ. Пациентам, включенным в контрольную группу, про-
водилось традиционное медикаментозное лечение. Пациентам, получав-
шим сеансы магнитотерапии, коронаролитики и гипотензивные пре-
параты не назначались.
Полный курс лечения состоял из 20 сеансов магнитотерапии, про-
должительностью по 20 минут каждый. Частотный диапазон МП коле-
бался от 1 до 100 Гц, магнитная индукция составляла от 0,5 до 5 мТл.
У 10 пациентов со средины курса магнитотерапии была добавлена ла-
зеротерапия.
По этой программе было проведено лечение ПО больных. В соот-
ветствии с особенностями течения заболевания, они были разделены на
3 основные группы, к каждой их которых была подобрана соответст-
вующая контрольная группа:
1 группа — 40 больных с 1-го по 3-й функциональный класс (ФК)
ИБС — стабильная стенокардия;
2 группа — 56 больных с ИБС (1-3 ФК), сочетающейся с ГБ;
3 группа — 14 больных с ИБС 3-го и 4-го ФК.
В первой группе были больные со стабильной стенокардией, в ос-
новном, 2-3 ФК. У 8 человек этой группы был диагностирован постин-
фарктный кардиосклероз, с давностью инфаркта не менее 6 месяцев. В
контрольной группе, не получающей сеансов магнитотерапии, было 20
пациентов. Во второй группе были больные, у которых ИБС сочеталась
с ГБ. При этом 10 из них имели в анамнезе острый инфаркт миокарда.
Для 16 больных этой группы магнитотерапия сочеталась с лазеротера-
пией. В контрольной группе было 26 больных. Третья группа (14 человек)
была представлена наиболее тяжелыми больными с ИБС 3-4 ФК. Курс
магнитотерапии проводился для них в щадящем режиме и на фоне
медикаментозного лечения. В контрольную группу вошли 14 пациентов.
При поступлении на лечение главной жалобой больных первой груп-
пы были загрудинные боли давящего и сжимающего характера, возни-
кающие при физических и эмоциональных нагрузках. У ряда пациентов
такие боли имели место и в покое, практически все пациенты отмечали
одышку и сердцебиение при нагрузках. Для купирования болевого син-
дрома пациенты использовали нитроглицерин.
Положительный эффект от магнитотерапии у 60% больных наступил
через 10 дней после начала курса лечения, в эти же сроки в контрольной
группе, получавшей традиционное консервативное лечение, — только у
32% пациентов. К концу курса магнитотерапевтических процедур 80%
больных практически не пользовались нитроглицерином. В контрольной
группе таких пациентов набиралось только 48%. Помимо этого, для
достижения стабильного положительного эффекта пациентов контроль-
ной группы приходилось лечить на 1-2 недели дольше. И все же у 5
больных (12,5%) первой основной группы улучшение не наступило. У
них оставались боли при физической нагрузке, хотя и отсутствовали в
покое.
Т1Ъ
Глава 7
Во второй группе больных (ИБС + ГБ) из 56 человек к 10-му дню
с момента начала курса магнитотерапии наблюдался положительный
эффект у 34 пациентов (61%), в то время как в контрольной (без маг-
нитотерапии) — только у 7 человек (27%). К концу курса лечения по-
ложительный результат в основной группе составил в 84% (47 больных),
в то время как в контрольной — 34% (8 больных). Критериями эффек-
тивности проводимого лечения являлись: стабильное снижение артери-
ального давления (АД), улучшение общего состояния, купирование
болей в сердце, нормализация сна, пульса, исчезновение одышки при
нагрузке. На фоне курсового лечения с использованием магнитотера-
певтических процедур имело место снижение систолического АД в сред-
нем по группе на 16,2%, диастолического — на 15,1%. У ряда пациентов
некоторое снижение АД отмечалось уже во время первого сеанса маг-
нитотерапии: у 12% больных — систолического и у 9% — диастоличес-
кого. Вместе с тем, у небольшой группы больных первые сеансы маг-
нитного воздействия приводили к подъему АД, но повышение было
незначительным и непродолжительным. Стойкий положительный эф-
фект у большинства больных наступал к 10-11 сеансу. Наиболее эффек-
тивной магнитотерапия оказалась для больных с ИБС 1-2 ФК, сочета-
ющейся с ГБ 1 «б» и 2 «а» стадий. При ИБС с 3 ФК и ГБ с 2 «б»
стадией эффективность лечения была ниже, а улучшение состояния на-
ступало позже.
Обследование больных, проведенное при поступлении в клинику,
выявило у некоторых из них повышенный уровень холестерина и про-
тромбина в крови. У пациентов I группы, состоящей из 40 больных эти
показатели превышали норму у 29 человек, в контрольной группе — у
14. На фоне магнитотерапии снижение уровня холестерина и протром-
бина в опытной группе было отмечено у 26 человек (65%), тогда как в
контрольной — всего у 8 больных (40%).
Весьма показательной была динамика изменений на ЭКГ. В I группе
больных ИБС патологические отклонения на ЭКГ до лечения имели
место у 28 больных (70%). Они свидетельствовали о снижении интен-
сивности метаболических процессов в желудочках миокарда у 16 боль-
ных, развивающейся гипоксии миокарда у 8 пациентов, и у 4 больных
обнаружилась синусовая тахикардия. В соответствующей контрольной
группе нарушения на ЭКГ были обнаружены у 12 человек (60%), из них
снижение метаболических процессов в желудочках миокарда — у 7 боль-
ных, гипоксия миокарда — у 2 пациентов, синусовая тахикардия — у
троих. Улучшение этих показателей, вплоть до нормализации, наступило
после курса лечения в опытной группе у 22 больных (78%), в контроль-
ной — у 7 пациентов (50%). Во II группе больных, у которых ИБС
сочеталась с ГБ, изменения на ЭКГ до лечения были у 48 больных
опытной группы, а в контрольной — у 18 больных. К концу курса
лечения улучшение на ЭКГ было зафиксировано у 39 пациентов (69,6%)
опытной группы, и у И человек (42%) в контроле. В III группе больных
с наиболее тяжелой формой течения заболевания улучшение в основной
Применение магнитных полей в практической медицине 279
группе наступило значительно позже — лишь на 3-4 неделе от начала
лечения, а в соответствующей контрольной — на 5-6 неделе.
Все приведенные данные позволяют утверждать, что применение
низкочастотного МП в указанном режиме оказывает благоприятное воз-
действие на течение заболевания у пациентов с ИБС. Вероятно, лечебное
действие МП обусловлено не только непосредственным влиянием на
сердечную мышцу и микроциркуляцию в ней, но и в целом на меха-
низмы нервной и гуморальной регуляции деятельности сердечно-сосу-
дистой системы, о чем свидетельствует повышение адаптационных воз-
можностей миокарда к нагрузкам, а также достаточно высокий терапев-
тический эффект не только при изолированно протекающей ИБС, но
и сочетающейся с артериальной гипертензией, осложненной тахикар-
дией и т.п. Этим лечебное действие МП выгодно отличается от методов
терапии, использующих другие физические факторы.
В институте авиационной и космической медицины (г. Москва) был
проведен ряд исследований по использованию ИБМП для лечения лиц
летного состава с вегето-сосудистой дистонией гипертонического типа
(ВСД) и ГБ 1-2 стадии (Г. П. Ступаков с сотрудниками). В качестве
источника МП использовался аппарат «Аврора МК-01», на котором с
учетом индивидуальных особенностей пациента задавались параметры
воздействия, аналогичные представленным выше. В зависимости от со-
путствующих заболеваний, большая часть больных прошла курс магни-
тотерапии по «артериальной» программе, меньшая — по «венозной».
Изучался «чистый» магнитотерапевтический эффект, т.е. в опытной
группе пациентов не применялись другие методы лечения.
В ходе лечения осуществлялся постоянный контроль за состоянием
пациентов, для оценки которого использовались следующие объектив-
ные методы обследования:
— контроль АД и ЧСС производился ежедневно, в том числе до и
после каждой магнитотерапевтической процедуры;
— комплекс иммунобиохимических исследований проводился перед
началом магнитотерапии, после 8-й и 15-й процедур и через 2
месяца после окончания курса магнитолечения;
— ЭКГ снимались до и по окончании курса магнитотерапии.
Анализируя полученные результаты, следует отметить, что реакция
сердечно-сосудистой системы на МП является весьма сложной и много-
плановой.
В процессе лечения наблюдалась не выраженная тенденция к сни-
жению АД, которое после 15-й процедуры составляло 10... 15 мм рт. ст.,
параллельно с этим наблюдалось урежение сердечного ритма, в среднем
на 10 сокращений в 1 минуту. Положительные изменения в деятельности
миокарда были отмечены на ЭКГ, в частности, возрастала амплитуда
зубцов и несколько удлинялась внутрижелудочковая проводимость (с
0,08 с перед первой процедурой до 0,10...0,12 с после окончания курса
магнитотерапии).
280
Глава 7
В качестве показателей, характеризующих состояние в организме
пациентов метаболизма и механизмов гемостаза, были использованы:
содержание общего и альфа-холестерина, уровень глюкозы в крови, а
также протромбиновое время, протромбиновый индекс и время лизиса
эуглобулиновых фракций плазмы крови. Их изменения свидетельствуют,
что воздействие МП приводит к умеренным положительным сдвигам в
липидном спектре крови. В частности, по окончании курса магнитоте-
рапии наблюдалась тенденция к снижению концентрации общего хо-
лестерина, которое сопровождалось увеличением содержания антиате-
рогенной альфа-фракции, что приводило к соответствующему снижению
коэффициента атерогенности. Колебания концентрации глюкозы в
крови под влиянием МП имели индивидуальный и разнонаправленный
характер. Однако этот параметр может стать информативным при рас-
смотрении его корреляционных отношений к другим показателям.
Для оценки иммунного статуса производилось определение уровня
иммуноглобулинов А, М и G (Ig.A, Ig.M и Ig.G) в крови, а также
динамических реакций клеточного иммунитета. Полученные результаты
позволяют сделать заключение о некоторой активации механизмов кле-
точного иммунитета с одновременным нарастанием концентрации в
крови иммуноглобулинов G.
Все эти результаты свидетельствуют о нормализации метаболических
процессов в миокарде, увеличении его сократительной способности, а
также повышении адаптационных ресурсов организма в целом.
7.7. Магнитотерапия неврологических заболеваний
сосудистого генеза
Неэффективность традиционных методов лечения неврологических
заболеваний, в патогенезе которых имеют место нарушения кровоснаб-
жения, обусловленные патологией сосудов, побуждает представителей
научной и практической медицины к поиску новых подходов в их ле-
чении. Одним из перспективных направлений в этих поисках, на наш
взгляд, является магнитотерапия. Исследования этой проблемы привели
к подбору пациентов с неврологическими заболеваниями со следующими
нозологическими формами и клиническими проявлениями:
— обширная группа больных с симптомами начинающихся наруше-
ний кровообращения в головном мозге, в основном субъектив-
ного характера: шум в ушах, снижение памяти, головные боли и
т.п.;
— пациенты с транзиторными церебрально-ишемическими атаками,
в том числе и прединсультные состояния, с проявлениями в виде
мерцающих сосудистых и неврологических симптомов;
— больные в подострых и хронических периодах инсультов (мы
имеем опыт лечения нескольких таких больных спустя 6-8 меся-
цев после инсульта с хорошими результатами);
Применение магнитных полей в практической медицине
281
— большая группа больных с шейным остеохондрозом и «мозговы-
ми» симптомами — задний шейный синдром, хроническая и ост-
рая вертебро-базиллярная недостаточность, акропарастезии и др.;
— пациенты с хронической спинальной сосудистой недостаточнос-
тью, проявляющейся преимущественно вегетативным и сосудис-
тым синдромами на почве атеросклероза, гипертонической бо-
лезни, остеохондроза;
— больные с ангиоспастическими периферическими симптомами, в
определенной степени напоминающие синдром Рейно.
Перечень заболеваний, протекающих с сосудисто-нервным компо-
нентом, при которых может быть показана магнитотерапия как само-
стоятельный метод лечения или в комбинации с другими, можно суще-
ственно расширить: остеохондроз позвоночника с сосудистыми и веге-
тативными проявлениями, посттравматические парезы, каузалгии,
ангиоспазм, диэнцефальные синдромы неопухолевого происхождения,
состояния, связанные с изменением мышечного тонуса (ДЦП, болезнь
Паркинсона и др.).
В течение двух лет 54 пациента неврологического отделения, в от-
ношении которых не производилось строгого отбора по нозологическому
принципу, после консультации хирурга-ангиолога получали на фоне тра-
диционного лечения сеансы магнитотерапии с использованием аппарата
«Аврора МК-01». Курс лечения состоял из 16-20 сеансов, продолжитель-
ностью 15...20 минут. Дозирование интенсивности воздействия и подбор
других параметров магнитного поля производился с учетом индивиду-
альных особенностей течения заболевания.
Самая большая группа в 37 человек была представлена пациентами,
болеющими остеохондрозом с выраженным корешковым синдромом и
другими нейрососудистыми проявлениями. Курс лечения МП (индукция
4 мТл, частота 9... 10 Гц), проводился на фоне фармакотерапии. Улуч-
шение наступило у 34 больных, состояние не изменилось у 2 пациентов,
ухудшение имело место у одного больного. При положительной дина-
мике к концу курса лечения у пациентов почти полностью исчезали
боли и чувство анестезии в пальцах стоп, больные стали преодолевать
большие расстояния, возросла амплитуда возможных движений позво-
ночника.
Группа больных с цереброваскулярной болезнью и артериальной
гипертензией состояла из 7 человек. При поступлении они жаловались
на головные боли, нарушение сна, у них стойко удерживалось высокое
АД. Им также проводился курс комплексного лечения, включающего
магнитотерапию (индукция МП — 3 мТл, частота — 9... 10 Гц). Значи-
тельное улучшение наступило у 5 больных: у них снизилось АД (систо-
лическое — на 25...30 мм рт. ст., диастолическое — на 15...20 мм рт.
ст.), улучшилось общее состояние и самочувствие, нормализовался сон,
практически исчезли или значительно уменьшились головные боли.
В оставшуюся группу из 10 человек включили пациентов с различ-
ными заболеваниями: токсический полиневрит, воспалительные заболе-
282
Глава 7
вания ЦНС, последствия черепно-мозговой травмы, синдром Рейно и
др. Практически у всех этих больных, за исключением пациента с ток-
сическим полиневритом, была отмечена явная тенденция к улучшению
состояния.
Наблюдение за контрольными группами пациентов с такими же
диагнозами и аналогичным течением заболеваний, но не получавших в
ходе комплексного лечения магнитотерапевтические процедуры, пока-
зало, что как непосредственные, так и отдаленные результаты лечения
во всех этих группах были хуже.
Полученные при лечении неврологических больных с нарушениями
кровообращения обнадеживающие положительные результаты побудили
проведение целенаправленных исследований у наиболее перспективных
групп пациентов с использованием для контроля состояния объективных
методов исследования: электроэнцефалографии, допплеросонограции,
реоэнцефалографии (РЭГ), электромиографии, реовазографии (РВГ).
7.8. Магнито-сверхвысокочастотная терапия
Целесообразность метода
Одним из возможных сочетанных методов лечебного применения
магнитотерапии является магнито-сверхвысокочастотная (МСВЧ) тера-
пия. При этом методе использование физических процедур магнито- и
СВЧ терапии производится одновременно на одну и ту же область тела
человека. Целесообразность комплексной МСВЧ терапии вызвана слож-
ным патогенезом большинства заболеваний и вовлечением в патологи-
ческий процесс многих систем организма.
В настоящее время исследован терапевтический эффект от изоли-
рованного действия магнито- и СВЧ терапии [236-239 и др.], а также
таких сочетанных методов магнитотерапии, как магнито-лазеротерапия,
магнито-фонотерапия, магнито-фонофорез и магнито-форез. В [31] по-
казано, что сочетанное использование лечебных физических факторов
является более эффективным по сравнению с комбинированным, т.е.
последовательным применением этих факторов. Сочетанные методы фи-
зиотерапии обеспечивают качественно новый уровень воздействия при
более низких дозировках по сравнению с действием отдельных физи-
ческих процедур. Терапевтическая эффективность сочетанного МСВЧ
воздействия зависит от методики, характеристик и дозировки как маг-
нитного, так и СВЧ полей. Кроме того, эффективность физиотерапев-
тического воздействия определяется различными факторами внешней
среды, причем большинство этих факторов имеет электромагнитную
природу.
Особенностью взаимодействия электромагнитных излучений (ЭМИ)
с живыми организмами является сочетание как энергетического, так и
информационного характера воздействий. При информационном харак-
тере воздействия чувствительность организма оказывается намного
Применение магнитных полей в практической медицине 283
выше, чем при тепловом воздействии ЭМИ. Это явление свойственно
только целостным высокоорганизованным организмам. У изолирован-
ных органов или клеток эффект информационного воздействия суще-
ственно ниже. В значительной степени процессы жизнедеятельности
организмов на информационном уровне зависят от состояния электро-
магнитной биосферы планеты, включающей электрическое и магнитное
квазистатические поля, атмосферное электричество, радиоизлучение Со-
лнца и галактик, а также поля искусственного происхождения.
Известна [40] высокая степень влияния солнечной активности на
уровень магнитного поля и радиоизлучения в диапазонах СВЧ и КВЧ
волн и на все виды биологической, а также физиологической деятель-
ности организмов. В частности, меняется состав крови, лимфы и кле-
точной протоплазмы, происходит рост инфекционных заболеваний, из-
меняется деятельность центральной нервной системы [40, 240, 241]. Цик-
лические изменения магнитного поля и ЭМИ оказывают более мощные,
чем другие факторы, регулирующие действия. Случайные изменения био-
сферы приводят к нарушению процессов жизнедеятельности, особенно
в периоды роста, развития и при патологических состояниях организма,
когда защитные механизмы еще не сформированы или ослаблены.
Таким образом, в живой природе происходит непрерывное сочетан-
ное воздействие квази постоя иного магнитного, а также электромагнит-
ных полей СВЧ диапазона, находящихся в зоне радиопрозрачности зем-
ной атмосферы. Внутренняя система регуляции при сочетанном воздей-
ствии магнитного и СВЧ полей управляет колебательным характером
процессов как на уровне организма (биоритмы системы), так и на мо-
лекулярном, а также клеточном уровне. Эта колебательная система имеет
иерархическую структуру и на всех уровнях жестко засинхронизирована.
Макромолекулы, совершающие конформационные колебания [40] с
одной частотой, «захватывают» частоты колебаний других макромолекул,
при этом образуются синхронно колеблющиеся ансамбли макромолекул
в органеллах клетки. Аналогичные явления происходят и на других уров-
нях органелл и клеток. Длина волны этих колебаний соответствует час-
тотному диапазону СВЧ и, следовательно, взаимодействия между осцил-
ляторами происходят на расстояниях порядка нескольких сантиметров,
т.е. ЭМИ СВЧ диапазона осуществляют сигнализацию между различ-
ными иерархическими уровнями целостного организма. Следовательно,
сочетанный метод МСВЧ терапии является новым методом физической
терапии, позволяющим эффективно влиять на процессы, протекающие
как на уровне организма в целом, так и в ограниченных областях че-
ловеческого тела.
Биофизические основы метода
Основную роль в механизмах взаимодействия СВЧ полей с биологи-
ческими тканями на молекулярном уровне играют колебания ионов и
вращения молекул воды. Отмечено [239] значительное разрастание клеточ-
ной мембраны и высокая чувствительность раковых клеток к СВЧ воздей-
284
Глава 7
ствию и, в частности, остро резонансный характер взаимодействия мил-
лиметровых волн с биологическими объектами [242]. При этом реакция
организмов на ЭМИ не связана с нагревом тканей, а имеет информа-
ционный характер. Эффект облучения зависит от значений резонансных
частот и исходного состояния облучаемого организма. В частности, ре-
зонансное поглощение ЭМИ может объясняться существованием мно-
жества конфигураций распределения в молекуле протонов, при этом
происходят диполь-дипольные взаимодействия, стимулированные до-
полнительным квантом СВЧ энергии. Процесс взаимодействия ЭМИ с
биологическим веществом определяется уровнем организации живого
организма.
К наиболее вероятным механизмам воздействия СВЧ полей на био-
логические объекты относятся: детектирование ЭМИ в мембранах нерв-
ных клеток и влияние ЭМИ на способность ионов проникать через
мембраны нервных клеток. Кроме физико-химических механизмов вза-
имодействия наиболее мощное влияние на организм в целом оказывает
информационное воздействие ЭМИ.
Вторичные эффекты при воздействии поля СВЧ на живые организмы
проявляются как способность накапливать информационное воздействие,
оказывать стимулирующее действие и повышать чувствительность организ-
ма к последующим воздействиям ЭМИ. Обнаружено снижение приспо-
собляемости организма к другим видам воздействия при предварительном
облучении СВЧ полем [239]. «Нетепловой» механизм действия ЭМИ про-
является и в виде «слухового эффекта», который заключается в прослуши-
вании щелчков при облучении головы человека импульсным СВЧ полем
[243]. Этот эффект может быть объяснен детектированием модулированных
СВЧ полей в мембранах нервных клеток. Обнаружено также явление из-
менения потока ионов кальция при действии на биологические объекты
синусоидально модулированных с частотами 50, 147 и 450 МГц СВЧ полей
[239]. Данный эффект проявляется при определенных частотах модуляции
и не зависит от несущей частоты. В настоящее время в известной литера-
туре отсутствует объяснение этого важного эффекта, тем более, что кальций
играет значительную роль в регуляции многих биохимических и биофизи-
ческих процессов.
Усиление действия модулированных СВЧ полей на живые организ-
мы находит объяснение с позиций ядерного магнитного резонанса
(ЯМР) [244]. Так как все вещества находятся в магнитном поле планеты,
то часть ядер имеет ориентацию, согласованную с направлением этого
поля. При действии модулированного СВЧ поля на живые организмы
создается значительная плотность ЭМИ в локальных точках вещества.
Детектирование модулированных СВЧ полей в мембранах клеток создает
условия для ЯМР и, следовательно, усиливает эффект от действия ЭМИ.
Данное явление можно использовать в рамках сочетанного воздействия
магнитного и модулированного СВЧ полей на живые организмы.
Другое сочетанное воздействие магнитного и СВЧ полей на биообъ-
екты, при котором существенное значение имеет частота несущего ко-
Применение магнитных полей в практической медицине
285
лебания, может быть осуществлено в рамках явления электронного пара-
магнитного резонанса (ЭПР). Сочетанное воздействие при ЭПР может
быть более выраженным, чем при ЯМР, т.к. эффективность поглощения
в спектрах ЯМР мала по сравнению с ЭПР. Метод ЭПР используется
при изучении кинетики процессов с участием парамагнитных частиц
[244]. В частности, метод ЭПР позволяет исследовать окислительно-вос-
становительные превращения ионов таких металлов как Fe, Со, Ni, Си,
Мп, а также анализировать триплетные состояния, возникающие в ходе
фотобиологических реакций. По характеристикам спектров ЭПР можно
судить о структурно-динамическом состоянии биологической системы
при введении в мембраны или макромолекулы стабильных свободных
радикалов. Явление ЭПР исследовалось при действии внешних полей с
длинами волн 0,2; 0,4; 1,25 и 3 см, относящиеся к КВЧ и СВЧ диапа-
зонам [244]. Изменяя в заданных пределах частоту ЭМИ при постоянстве
напряженности магнитного поля или напряженность при постоянстве
частоты, можно получить резонансное поглощение. В спектрометрах
ЭПР обычно применяется второй способ получения резонанса. При этом
кривая поглощения имеет размытый характер, т.к. магнитный момент
не спаренного электрона взаимодействует не только с внешним, но и с
различными внутренними полями.
Правильным выбором параметров магнитного и модулированного
СВЧ полей можно обеспечить одновременное выполнение требований
ЯМР и ЭПР, как сочетанного МСВЧ воздействия.
Лечебное действие МСВЧ терапии
Преимущество МСВЧ терапии по сравнению с другими физиотера-
певтическими процедурами, в особенности с любыми методами радио-
активного и рентгеновского облучения, заключается в меньшей опас-
ности вредного воздействия. Сложный характер взаимодействия магнит-
ного и СВЧ полей с живыми организмами проявляется как в виде
местных изменений в тканях, так и на уровне организма в целом. В
последнем случае эти изменения затрагивают деятельность нервной, сер-
дечно-сосудистой, гормональной и других систем организма. По этой
причине МСВЧ терапия может использоваться для лечения многих за-
болеваний. Современной концепцией влияния ЭМИ на живой организм
является представление о действии магнитных и СВЧ полей как раздра-
жителей. Адаптационные реакции на эти раздражители проявляются в
виде реакции тренировки, активации или стресса. Та или иная реакция
живого организма определяется набором биотропных параметров и ин-
дивидуальными особенностями организма. Положительный терапевти-
ческий эффект от воздействия магнитных и СВЧ полей объясняется
улучшением местного кровотока, усилением кровообращения, уменьше-
нием спазмов, нормализацией тонуса и эластичности сосудов [236].
Под влиянием ЭМИ происходит увеличение диаметров и количества
функциональных капилляров, снижаются артериальное давление и воз-
будимость нервной системы, улучшается белковый и углеводный обме-
286
Глава 7
ны. ЭМИ стимулирует функции гипофиз-надпочечниковой системы, об-
ладает бактериостатическим и противовоспалительным действием, бло-
кирует болевые импульсы, идущие от соматических болевых рецепторов
на различные уровни нервной системы. С помощью направленного воз-
действия ЭМИ на функции различных эндокринных желез имеется воз-
можность управлять процессами метаболизма, иммуногенеза и регене-
рации. При использовании нетепловых доз ЭМИ понижается проница-
емость тканей и уменьшается содержание медиаторов воспаления.
Сочетанное воздействие магнитного и СВЧ полей регулирует деятель-
ность сердца и дыхания в результате изменения интегративной функции
на уровне корковых и подкорко-стволовых отделов мозга [237]. В работе
[40] выдвигалась гипотеза о возможности образования опухолей из-за
нарушения электромагнитных связей между клетками в тканях организ-
ма. Если эта гипотеза верна, то МСВЧ терапия может быть использована
для лечения злокачественных новообразований помимо СВЧ гипертер-
мии. Наиболее чувствительными к действию ЭМИ являются гипотала-
мус и кора головного мозга как центры нервной и гуморальной регуля-
ции организма. Воздействие на центральную и вегетативную нервные
системы оказывает регулирующее влияние на сердечную деятельность и
дыхание [237]. При однократных воздействиях ЭМИ наблюдается сти-
муляция высшей нервной деятельности, многократные повторные воз-
действия приводят к торможению функций высших отделов головного
мозга. Кратковременные однократные воздействия магнитных полей
приводят к синхронизации в деятельности секреторных клеток, усиле-
нию синтеза нейросекрета и функциональной активности всех долей
гипофиза, тогда как длительное воздействие магнитных полей вызывает
угнетение нейросекреторной функции и развивает в клетках центральной
нервной системы продуктивно-дистрофические процессы [31].
К действию ЭМИ чувствительны сегментарная и надсегментарная
нервные системы, а также спинной мозг. Согласно информационной
теории, различные терапевтические эффекты объясняются вносимой в
биологическую систему информацией, вызывающей перераспределение
энергии в самой системе [40].
Усиления терапевтического МСВЧ воздействия можно достигнуть
соответствующим выбором параметров магнитного и СВЧ полей, обес-
печивающих условия ЯМР и ЭПР. В настоящее время полностью не
оформлены границы лечебного применения МСВЧ терапии. Основные
показания для МСВЧ терапии включают в себя клинику нервных, сер-
дечно-сосудистых и внутренних болезней. Возможно применение МСВЧ
установок при дегенеративно-воспалительных заболеваниях, а также в
качестве противоболевых рефлексотерапевтических приборов.
Противопоказаниями к назначениям МСВЧ терапии являются вы-
раженная гипотония, системные заболевания крови, базедова болезнь,
беременность, постинфарктный период.
Для МСВЧ терапии предлагается использовать установку, структур-
ная схема которой изображена на рис. 7.3.
Применение магнитных полей в практической медицине
287
Рис. 7.3. Структурная схема установки для МСВЧ терапии:
1 — СВЧ генератор, 2 — ферритовый вентиль, 3 — амплитудный модулятор, 4 — направлен-
ный ответвитель, 5 — амплитудный детектор, 6 — устройство контроля, 7 —• схема управле-
ния амплитудой и частотой, 8 — делитель СВЧ мощности, 9 — регулируемый аттенюатор,
10 — регулируемый фазовращатель, 11 — облучатели, 12 — электромагниты, 13 — схема уп-
равления электромагнитами, 14 — ПЭВМ, 15 — биологический объект
СВЧ генератор 1 представляет собой бескорпусной диод Ганна, по-
мещенный в радиатор. Диапазон рабочих частот генератора 8... 12 ГГц
разрешен для медицинских целей Международным союзом радиосвязи
[245]. Максимальная выходная мощность составляет 10...30 мВт, что
значительно ниже теплового уровня воздействия. Вентиль 2 предназна-
чен для пропускания СВЧ колебаний в одном направлении. С помощью
аттенюатора 9 можно регулировать уровень выходной мощности в диа-
пазоне 70 дБ. Схема управления амплитудой и частотой 7 осуществляет
частотную модуляцию генератора 1, а также амплитудную модуляцию
СВЧ колебаний в модуляторе 3. Частотная модуляция производится в
диапазоне 9... 11 ГГц, что обеспечивает условия для ЭПР, а амплитудная
модуляция — в диапазоне 1...500 МГц, необходимом для ЯМР. Направ-
ленный ответвитель 4, амплитудный детектор 5 и устройство контроля
6 обеспечивают контроль уровня мощности и других параметров СВЧ
колебаний. Делитель СВЧ мощности 8 поровну распределяет мощность
СВЧ колебаний между двумя плечами установки, в которых имеется
возможность изменять уровень и фазу колебаний СВЧ излучения с по-
мощью регулируемых аттенюатора 9 и фазовращателя 10. Облучение
биологического объекта 15 когерентным электромагнитным СВЧ полем
осуществляется двумя облучателями 11 размером 50x50 мм. Внешнее
магнитное поле создается электромагнитами 12, управляемыми схемой
13. Ориентацией аппликаторов и электромагнитов обеспечивается соче-
танное магнито-СВЧ воздействие на локальную область тела человека.
Общее управление установкой осуществляет ПЭВМ в соответствии с
заданным программным обеспечением.
288
Глава 7
В настоящее время для СВЧ физиотерапии используются аппараты
«Ромашка» (40 Вт, 434 МГц), «Волна-2» (160 Вт, 434 МГц), «Луч-2»
(20 Вт, 2450 МГц), «Луч-58» (150 Вт, 2450 МГц), которые осуществляют
не модулированное одноканальное СВЧ воздействие на определенной
частоте колебаний.
По своим функциональным возможностям СВЧ часть рассмотрен-
ной установки превосходит серийные аппараты для СВЧ физиотерапии.
Предварительный анализ терапевтического эффекта при использовании
установки показал более высокую эффективность метода по сравнению
с изолированным применением магнито- и СВЧ терапии.
В целом механизм терапевтического действия МСВЧ терапии сло-
жен и требует дальнейших исследований как с точки зрения клиники
заболеваний, так и методики использования сочетанного воздействия.
Глава 8
СИСТЕМЫ ЭЛЕКТРОСТИМУЛЯЦИИ
В КЛИНИЧЕСКОЙ ПРАКТИКЕ
8.1. Электростимуляция в диагностике и терапии
В практике современного здравоохранения широко используются
медицинские системы электростимуляции органов и тканей. Техничес-
кие устройства генерируют различные электрические токи, которые, вза-
имодействуя с функциональными системами организма, оказывают на
него лечебное воздействие или дают информацию, используемую для
постановки диагноза и в ходе дальнейшего лечения.
Лечебные эффекты, возникающие при воздействии электричества
на организм человека, были замечены достаточно давно. Еще римский
ученый Скрибониус Ларгус (49 г. н. э.) прикладывал к телу больных
электрическую рыбу «Торпедо» для лечения головных болей и подагры
[246]. Работы Л. Гальвани, опубликованные в 1791 г. и связанные с
проблемой «животного электричества», изобретение А. Вольта первых
химических источников тока, по существу, положили начало исследо-
ваниям по изучению действия электрического тока на живые организмы.
Однако первые ощутимые практические результаты применения элект-
рического тока в медицине появились лишь в начале XX века, когда
прогресс в развитии науки и техники позволил создать аппараты, спо-
собные генерировать электрические токи необходимых характеристик и
появились высокочувствительные измерительные приборы, которые
могли быть использованы для исследования биоэлектрической актив-
ности, а уровень развития биологических наук в этот период времени
позволил обоснованно применять эти средства в медицине. В настоящее
время методы электрического воздействия применяются практически во
всех областях медицины как с лечебной, так и диагностической целью.
В соответствии с медицинской терминологией воздействие электричес-
кого тока на органы и ткани стали чаще всего называть электрической
стимуляцией, подчеркивая при этом то обстоятельство, что электричес-
кий ток в биологических тканях вызывает усиление функциональной
активности систем, органов и тканей. Наиболее выражен этот эффект
в возбудимых тканях: нервной и мышечной.
Электрическая стимуляция успешно сочетается с традиционной ле-
карственной терапией, а в ряде случаев позволяет добиться лечебного
эффекта там, где другие методы лечения не дают положительного ре-
290
Глава 8
зультата [247]. Методы электростимуляции, применяемые в клинической
медицине, зависят от конкретного объекта воздействия. Их можно раз-
делить по функциональному признаку (рис. 8.1) в соответствии с ис-
пользованием в медицине.
Электрокардиостимуляция (ЭКС) применяется для устранения пос-
ледствий, возникающих из-за нарушения генерации и проведения фи-
зиологического возбуждения в сердечной мышце. При ЭКС один из
стимулирующих электродов должен находиться в непосредственном кон-
такте с тканью миокарда, а генератор стимулов располагаться либо вне
организма (при временной стимуляции), либо имплантироваться внутрь.
Многообразие сердечных патологий предопределяет достаточно большое
число методов и разновидностей ЭКС [248].
Область приложения
ЭС
Рис. 8.1. Методы электростимуляции органов и тканей
В клинической практике одной из первых начала применяться асин-
хронная ЭКС, навязывающая сердцу постоянный, заданный ритм со-
кращений. Появление биоуправляемой ЭКС, при которой генератор сти-
мула функционирует, используя оценку собственных потенциалов серд-
Системы электростимуляции в клинической практике
291
ца, значительно расширило применение стимуляции для лечения нару-
шений сердечного ритма.
При R-запрещающей ЭКС стимул генерируется только тогда, когда
полностью отсутствует спонтанная активность желудочков, а появление
собственного возбуждения блокирует работу генератора [249]. Данный
метод ЭКС можно уподобить «дежурной» функции атриовентрикуляр-
ного узла, обеспечивающего генерацию возбуждения в сердце. При этом
используется «жесткая» программа работы, предотвращающая увеличе-
ние межсистолического интервала сверх заданного значения.
Р-синхронизированная ЭКС в качестве управляющего сигнала ис-
пользует потенциалы Р-зубцов, представляющие собой электрическую
активность предсердий [250]. Эти сигналы с определенной задержкой
запускают генератор стимула, который воздействует на желудочки.
Таким образом, данный метод ЭКС заменяет собой проводниковую сис-
тему сердца.
Приведенные методы ЭКС способны нормализовать работу сердца
при брадиаритмиях. При тахикардиях используются методы ЭКС, уре-
жающие сердечный ритм. Урежение ритма сердечных сокращений яв-
ляется более сложной задачей, т. к. здесь необходима точная синхрони-
зация стимула с определенными параметрами фаз сердечного цикла.
Непосредственное измерение требуемых параметров: рефрактерного пе-
риода, экстрасистолической латентности затруднено из-за помех от сти-
мулирующих импульсов, поэтому эти параметры могут быть определены
расчетным путем или способом тестирования. При тестировании задерж-
ка стимулов периодически изменяется и по ответу сердца судят о тре-
буемой ее величине. Данный метод ЭКС использует гибкую программу,
перестраивающуюся при изменении временных соотношений фаз сер-
дечного цикла, что делает его наиболее перспективным [250].
Электростимуляция опорно-двигательного аппарата (ЭС ОДА) и его
высших отделов применяется с целью предупреждения мышечной атро-
фии при резком ослаблении двигательных функций, для увеличения
силы мышечного сокращения при дистрофиях, для временного поддер-
жания функционального состояния денервированных мышц. Простей-
шая методика ЭС ОДА заключается в подведении электрических сти-
мулов от генератора возбуждения к паре электродов, расположенных
накожно в проекции мотонейронов, мышечных волокон или в двига-
тельных точках (рис. 8.2). Различают подпороговый, пороговый и над-
пороговый режимы электростимуляции.
При подпороговом режиме не происходит видимого сокращения
мышцы, однако мышечный тонус поддерживается на более высоком
уровне, чем в покое [251]. Пороговая электростимуляция вызывает не-
значительные сокращения мышечных групп, но при этом увеличивается
сила мышц и улучшается их функциональное состояние. При надпоро-
говом режиме происходит сокращение мышц различной выраженности,
связанное с интенсивностью воздействующего стимула.
292
Глава 8
Рис. 8.2. Электростимуля-
ция опорно-двигательного
аппарата:
1,2 — воздействие на ЦНС,
3 — СМ, 4 — периферические
нервы, 5 — мышцы
Для профилактики и лечения гипокине-
зии применяется многоканальная програм-
мируемая электростимуляция, имитирую-
щая работу мышц-антагонистов при выпол-
нении произвольных движений с учетом их
анатомо-физиологических особенностей
[252]. Для биоуправления параметрами сти-
муляции используется отведение биопотен-
циалов здоровых мышц, которые модулиру-
ют сигналы воздействия. Биоэлектрическая
активность может быть записана на магнит-
ную ленту и многократно использоваться
для управления движениями. Для коррекции
нарушений ходьбы разработаны методы ЭС
ОДА, использующие отведение биопотенци-
алов здоровых мышц-антагонистов и соот-
ветствующих мышц здоровой конечности
[252].
При тяжелых поражениях двигательных
функций используется церебро-спинальная
электростимуляция. В этом случае стимулы
подводятся к областям спинного или голов-
ного мозга с помощью имплантированных
электродов. Управление процессом стимуля-
ции осуществляется по радиоканалу, кото-
рый может также применяться для подзаряд-
ки имплантированных источников питания
[253, 254]. Для электростимуляции структур центральной нервной сис-
темы разработаны специальные фиксированные программы, включае-
мые извне с помощью радиочастотного программирующего устройства
[255, 256]. Методы церебро-спинальной ЭС ОДА применяются при ле-
чении спинномозговых травм, центральных расстройств движения, ре-
абилитации двигательных функций [257].
Электростимуляция дыхания (ЭСД) используется при расстройствах
функции внешнего дыхания, вызванных угнетением дыхательного цент-
ра, патологией периферических или центральных механизмов, наруше-
нием исполнительных механизмов дыхательного акта вследствие травм
или хирургических вмешательств в области грудной клетки. ЭСД осу-
ществляется путем непосредственной стимуляции диафрагмы или диа-
фрагмальных нервов, благодаря которой под действием плавно нараста-
ющих стимулов сокращается дыхательная мускулатура и осуществляется
активный вдох, а выдох происходит пассивно за счет эластичности диа-
фрагмы и легких (рис. 8.3). Частота подводимых стимулов определяет
ритм дыхательных движений.
Стимуляция диафрагмальных нервов производится с помощью чрес-
кожных, трансвенозных или имплантируемых электродов. При чрескож-
Системы электростимуляции в клинической практике
293
ном воздействии стимулы под-
водят к двигательной точке
диафрагмального нерва, распо-
ложенной на шее выше клю-
чицы. Однако трудности, свя-
занные с нахождением точки и
фиксацией на ней активного
электрода, препятствуют дли-
тельной ЭСД. Метод трансве-
нозной стимуляции наиболее
полно отвечает задачам аде-
кватного управления диафраг-
мальным дыханием [258]. С
помощью этого метода удается
получить стабильный эффект в
течение длительного времени
без отрицательных воздействий
на структуру диафрагмального
нерва. При непосредственной
стимуляции с помощью имп-
лантируемых электродов ис-
пользуется радиочастотная
передача стимула от экстракор-
порального генератора воздей-
Рис. 8.3. Электростимуляция дыхания:
1 — диафрагмальный нерв; 2 — диафрагма; 3 —
электроды; 4 — приемная часть; 5 — излучающая
антенна; 6 — стимулятор
ствия к имплантируемому приемнику, соединенному с электродами, на-
кладываемыми на нерв [259].
Биоуправляемая ЭСД позволяет синхронизировать стимулы с рит-
мом естественного дыхания. Для управления стимулами используется
регистрация дыхательных движений диафрагмы, определяемых, напри-
мер, с помощью термисторного датчика, реагирующего на движение
воздуха во внешних дыхательных путях [260]. Эффективность биосин-
хронизированной ЭСД оказывается существенно выше несинхронизи-
ро ванной.
Электростимуляция депрессорных нервов (ЭСДН) предложена как
способ лечения гипертонической болезни [261]. Особенностью барореф-
лекса, возникающего при ЭСДН, является кратковременность эффекта
из-за наступающей адаптации. Длительное и стойкое снижение артери-
ального давления можно получить, воздействуя стимулами поперемен-
но — на правый и левый депрессорный нервы, таким образом, чтобы
каждое последующее воздействие перекрывало предыдущее [262]. Метод
ЭСДН может найти применение в клинике для купирования гиперто-
нических кризов, осложняющих течение гипертонической болезни и
представляющих особую опасность.
Противоболевая электронейростимуляция представляет собой новый
метод купирования болевых синдромов различного происхождения. Эф-
фект периферической электроанальгезии у пациентов возникает при
294
Глава 8
электронейростимуляции сенсорных афферентов, связанных с зоной бо-
левого раздражения. Клинический опыт применения показал, что этот
метод позволяет добиться успеха при лечении послеоперационных болей,
болей травматического и неврологического происхождения [263-266].
Достоинством метода является то, что он позволяет частично или пол-
ностью отказаться от применения анальгетиков, в том числе и нарко-
тического ряда, которые не всегда безвредны для организма больного,
особенно при длительном использовании.
При тяжелых болевых синдромах, встречающихся в неврологической
практике, возможно применение спинномозговой стимуляции, осущест-
вляемой с помощью электродов, имплантированных в спинномозговой
канал [267]. Связь с источником стимулов может осуществляться по
радиоканалу или непосредственно через проводники, выходящие на по-
верхность кожи. Сообщается о высокой эффективности метода, оцени-
ваемой по сравнению с методом перидуральной анестезии [268].
Электростимуляция нерва каротидного синуса используется для ле-
чения стенокардии и гипертензии при неэффективности или наличии
противопоказаний к другим видам терапии. Стимуляция осуществляется
с помощью имплантированных электродов с радиочастотной передачей
сигнала от внешнего стимулятора-передатчика. При гипертонии посто-
янная стимуляция нерва каротидного синуса приводит к ослаблению
симпатической регуляции сердечной деятельности, что приводит к сни-
жению частоты сердечных сокращений, ударного объема и давления
крови. При стенокардии под влиянием стимуляции улучшается питание
и происходит мобилизация резерва метаболических ресурсов миокарда.
Эффективным является двухстороннее дискретное раздражение нерва,
при котором отмечается нормализация обмена в миокарде [269]. Пред-
ложена методика стимуляции, при которой параметры воздействия авто-
матически корректируются в зависимости от состояния сердечной дея-
тельности, анализируемой по результатам измерения ЭКГ. Для этого в
состав имплантированной части системы включается микропроцессор с
запоминающим устройством и схема управления [270]. Данная методика
стимуляции позволяет учесть индивидуальные особенности пациента, а
также корректировать воздействие при физических нагрузках и в покое.
Общая электроанестезия представляет собой воздействие электри-
ческим током на центральную нервную систему с целью формирования
наркотического состояния, достаточного для проведения хирургических
вмешательств. Достоинствами метода, привлекающими внимание иссле-
дователей, являются отсутствие токсического действия на организм,
мгновенное достижение анальгезии, быстрый выход из состояния элек-
тронаркоза, возможность точного дозирования [271]. Электростимуля-
ционное воздействие используется в настоящее время как основной
компонент общей электрофарманестезии. «Чистая» электроанестезия
чаще всего не применяется из-за возможной судорожной реакции па-
циента, а также в силу того, что у ряда лиц не происходит выключения
сознания [272]. При проведении общей электроанестезии используется
Системы электростимуляции в клинической практике
295
височно-затылочное расположение электродов, при котором ток охва-
тывает большинство структур мозга. Наряду с прямоугольными импуль-
сами продолжительностью в сотни микросекунд и при частоте тока
порядка сотен герц, используются интерференционные токи звуковой
частоты с расстройкой порядка сотен герц, подаваемые через две пары
электродов [273]. В последнее время высокую эффективность показал
метод общей электроанестезии, разработанный в Институте хирургии
имени А. В. Вишневского [275]. По этому методу для стимуляции ис-
пользуется импульсный ток в виде серий импульсов высокой частоты с
периодически переключаемой длительностью, что позволяет получить
стабильную анестезию в течение многочасовых операций [274].
Электростимуляция желудочно-кишечного тракта применяется как
метод борьбы с нарушениями моторной, моторно-эвакуаторной и сек-
реторной функций пищеварительной системы. При трансгастральной
электростимуляции желудка и двенадцатиперстной кишки в них через
пищевод вводят активный электрод — зонд. В случае униполярной сти-
муляции, охватывающей большую зону кишечника, чем при биполяр-
ной, индифферентный электрод в виде пластинки помещают на брюш-
ной стенке в эпигастральной области. При необходимости лечения ниж-
них отделов кишечника активный электрод располагается ректально, а
индифферентный — на передней брюшной стенке или на пояснице.
Используется также введение униполярного электрода через кишечные
свищи [276]. Для ликвидации послеоперационного пареза кишечника
применяют наиболее простой способ стимуляции с помощью электро-
дов, накладываемых на кожу в области гепатодуоденальной зоны [278].
Параметры стимулирующего воздействия определяются особенностями
возбуждения гладкой мускулатуры, сокращения которой, достигая боль-
шой силы, распространяются достаточно медленно. Частота следования
стимулов выбирается в диапазоне нескольких десятков герц при дли-
тельности стимула порядка единиц миллисекунд. Сообщается о высокой
эффективности метода при лечении больных нейрогеннодискинетичес-
кими колитами, при поражениях спинного мозга, при лечении функци-
ональной кишечной непроходимости [277].
Электростимуляция биологически активных точек (БАТ) (электро-
акупунктура, электропунктура) заключается в раздражении БАТ слабым
постоянным или импульсным низкочастотным током. Здесь использу-
ются игольчатые или конусные заостренные электроды, располагаемые
в области БАТ. Токи воздействия при игольчатых электродах не превы-
шают десятков-сотен микроампер при миллисекундных длительностях
стимула с частотой следования порядка десятков герц. Электростимуля-
ция БАТ является одним из основных методов рефлексотерапии, ис-
пользуемой практически во всех основных направлениях медицины
[288]. Усиление лечебного эффекта при электростимуляции БАТ может
быть достигнуто с помощью экстракорпоральной электрофорезопункту-
ры лекарственных препаратов (например, випраксина) непосредственно
перед сеансом воздействия [289]. Большой положительный опыт исполь-
296
Глава 8
зования электропунктуры накоплен в практике анестезиологии-реани-
матологии для борьбы с болевыми синдромами [290], в ортопедии и
травматологии [291].
Дефибрилляция сердца осуществляется путем воздействия на сердце
одиночным импульсом большой амплитуды. Причиной фибрилляции
является частичная или полная потеря синхронизации в генерации и
проведении возбуждения в сердце. При дефибрилляции происходит
одновременная деполяризация мембран всех клеток в результате их
одномоментного раздражения сильным импульсом тока. Нормальная ак-
тивность сердца восстанавливается в результате возникновения автоном-
ного возбуждения в синусовом узле. При проведении дефибрилляции
наиболее важным является выбор минимального по интенсивности им-
пульса тока, способного вызвать эффективное воздействие при одно-
кратном включении, так как сама процедура дефибрилляции не исклю-
чает возможности повреждения сердца электрическим током [292]. При
проведении кардиохирургических операций возможна прямая дефибрил-
ляция, при которой электроды накладываются непосредственно на по-
верхность сердца. Трансторакальная дефибрилляция осуществляется при
наложении электродов на поверхность грудной клетки больного. Опти-
мальной формой импульса для осуществления дефибрилляции считается
синусоидальная полуволна, возникающая при прохождении разрядного
тока конденсатора через индуктивность при малой добротности системы.
Амплитуда тока импульса достигает десятков ампер при длительности
порядка 10 мс [292].
Электростимуляция выделительных органов включает электростиму-
ляцию мочевого пузыря и сфинктеров и применяется при расстройствах
мочеиспускания. В зависимости от места приложения стимулов исполь-
зуется стимуляция соответствующих нервов, мышц мочевого пузыря и
непосредственно спинальных центров мочеиспускания [279]. В случаях,
когда трансректальное подведение стимулов становится неэффективным,
производят имплантацию электродов для непосредственной стимуляции
мочевого пузыря. Тогда передача стимулов может осуществляться по ра-
диоканалу. При лечении дисфункции сфинктеров стимулирующий ток
способствует напряжению мышц сфинктера и восстановлению их есте-
ственного тонуса. Так, для лечения энуреза используется методика дли-
тельной стимуляции с помощью электродов, располагаемых как эндоу-
ретрально, так и накожно [280]. При лечении анальной инконтиненции
электроимпульсное воздействие прикладывается через ректальный
электрод специальной формы к мышцам наружного сфинктера в целях
увеличения тонического напряжения мышц [281, 282].
Электростимуляция органов слуха и зрения применяется с целью те-
рапии и протезирования при утрате естественной функции органов. Для
улучшения слуха используется электростимуляция слухового нерва через
первичное раздражение рецепторных зон, а также соответствующих био-
логически активных точек [283]. При лечении больных с нейросенсорной
глухотой предложен метод электростимуляции слухового нерва коротки-
Системы элек гростимуляции в клинической практике
297
ми пачками монополярных импульсов, следующих с частотой акустичес-
кого сигнала. При этом число импульсов в пачке возрастает с увеличе-
нием интенсивности звука [284]. Имплантированная часть устройства со-
держит мультиэлектрод, соединенный со слуховым нервом, и микропро-
цессор, управляющий режимом стимуляции. Передача энергии от
внешнего передатчика осуществляется по радиочастотному каналу, а
передача информации — с помощью ультразвука, чем достигается раз-
вязка каналов [254]. Прямая электростимуляция зрительных нервов осу-
ществляется с помощью имплантированных биполярных электродов.
Электростимуляция способствует повышению уровня активности зри-
тельного нерва и зрительного анализатора в целом [285] и используется
как метод восстановления зрения при повреждении зрительных нервов.
Получены отчетливые лечебные эффекты в виде значительного повыше-
ния остроты зрения и расширения периферических границ полей зрения
[286, 287].
Диагностическая электростимуляция включает электроимпульсное
воздействие на нервные или мышечные структуры с целью их возбуж-
дения и регистрации вызванных возбуждением эффектов. Диагностичес-
кое направление возникло в различных областях медицины и в насто-
ящее время имеет самостоятельное значение.
Диагностическая стимуляция сердца используется, например, для
выявления скрытых форм нарушений проводимости в различных отделах
проводящей системы, определения резерва коронарного русла, слабости
синусового узла [293, 294]. Стимуляция в этом случае осуществляется с
помощью эндокардиального электрода, регистрация эффекта воздейст-
вия производится путем внутрисердечной электрографии.
Значительное распространение получила электростимуляционная
миография, с помощью которой проводят диагностику ряда заболеваний,
связанных с нарушением проводимости по нерву, нервномышечной
передачи. В данном случае стимулирующее воздействие в виде одно-
кратных или периодических импульсов наносится чрескожно в проекции
возбуждаемых структур. Эффект воздействия оценивается по регистра-
ции электромиограммы [295, 296]. Важное значение для клиники нерв-
ных болезней имеет исследование рефлекторного ответа мышцы, вызы-
ваемого электрической стимуляцией нерва, — так называемого Н-реф-
лекса. Это обусловлено в первую очередь тем, что величина Н-рефлекса
отражает функциональное состояние спинальных структур, которое, в
свою очередь, находится под супраспинальным контролем [297].
В анестезиологии используется стимуляция двигательных нервов для
определения степени нервно-мышечной блокады при введении опери-
руемому больному мышечных релаксантов [298]. Стимулы подаются,
например, на локтевой нерв в виде четырехимпульсной последователь-
ности при длительности стимулов 2 мс. При этом мышечное сокращение
большого пальца фиксируется с помощью датчика силы, а обработка
получаемых сигналов осуществляется микро-ЭВМ, выдающей величину
(в %) достигаемой нервно-мышечной блокады [299].
298
Глава 8
Важным направлением диагностической электростимуляции являет-
ся воздействие дозированными по интенсивности стимулами на кожу с
целью определения порогов тактильной и болевой чувствительности.
Измерение порогов чувствительности на определенных участках кожи
позволяет, в частности, судить о развитии патологических процессов в
центральной нервной системе. Определение порогов кожной чувстви-
тельности осуществляется с помощью электродов, питаемых от стиму-
лятора, работающего в режиме генератора тока [300]. Для оценки боле-
вой чувствительности в стоматологии стимулы прикладываются на кожу
щечной области лица или через специальные электроды непосредствен-
но на зуб. При этом фиксируется не только пороговое значение интен-
сивности стимула, но и вегетативные проявления болевой реакции по
сигналам с датчиков плетизмограммы и пневмограммы. Полученная ин-
формация анализируется с помощью ЭВМ [301].
Рассмотрение основных методик электростимуляции органов и тка-
ней показывает, что, несмотря на различие лечебных эффектов, возни-
кающих при возбуждении различных физиологических систем, в про-
цессах, происходящих при электростимуляции, наблюдается ряд общих
явлений и характерных закономерностей. Анализ процессов электрости-
муляции показывает, что можно выделить несколько типов структур,
являющихся объектом воздействия, близких по своим электрофизиоло-
гическим свойствам: это нервные структуры на уровне центральной
нервной системы, спинного мозга, периферических проводников и ре-
цепторов. Исследование систем электронейростимуляции позволяет на
основе анализа общих закономерностей функционирования систем раз-
работать эффективные методы и аппаратуру электронейростимуляции
для различных клинических применений.
8.2. Теория и практика периферической
электроанальгезии
8.2.1. Физиологическое обоснование применения электрического
воздействия при лечении болевых синдромов
Лечение хронических болевых синдромов по-прежнему остается
одной из важнейших задач и сложнейшей проблемой медицины. Боль
представляет собой многоплановый феномен, который, сигнализируя об
опасности повреждения, выполняет в организме информационные и
защитные функции, вместе с тем хроническая боль, истощая силы ор-
ганизма, снижая сопротивляемость, способствуя развитию осложнений,
становится механизмом патогенеза и основой для возникновения раз-
личных патологических нарушений. Хронические болевые синдромы яв-
ляются одной из наиболее частых причин нетрудоспособности человека.
В СССР около 20 миллионов людей, то есть практически каждый пятый
трудоспособный член общества, ежегодно страдали от боли [302]. Только
Системы электростимуляции в клинической практике
299
из-за хронической боли, связанной с заболеваниями опорно-двигатель-
ного аппарата, от 10 до 30% взрослого населения надолго выбывают из
сферы производства [303].
Защитная функция боли может быть наиболее полно проанализи-
рована с позиций теории функциональных систем П. К. Анохина [304],
согласно которой любая функциональная система имеет однотипную
структуру, ядром которой является системообразующий фактор — по-
лезный приспособительный результат. При отклонении жизненно важ-
ной функции от необходимого уровня включается специальный рецеп-
торный аппарат, широко представленный в организме. Рецепторы яв-
ляются первым звеном формирования так называемой обратной
афферентации — физиологической обратной связи, играющей сигналь-
ную роль в регуляции функций и в получении информации о результатах
действий, совершенных функциональной системой. Обратная афферен-
тация является основой, которая определяет целенаправленную деятель-
ность каждой функциональной системы.
Для удержания полезного результата на заданном уровне каждая
функциональная система имеет различные исполнительные механизмы,
которые реализуются посредством поведенческой, вегетативной, гумо-
ральной регуляции. Эффекторный аппарат функциональных систем яв-
ляется, в определенной степени, универсальным, т. к. одни и те же
исполнительные механизмы могут быть включены для выполнения раз-
личных функций организма. Системообразующий фактор каждой функ-
циональной системы обусловлен определенной биологической потреб-
ностью организма. Если считать боль своеобразной отрицательной по-
требностью организма [305], то можно вести речь, по крайней мере, о
двух приспособительных результатах, которые могут быть положены в
основу построения концепции функциональной системы с участием
боли: целостность покровных оболочек организма, т. е. защита от по-
вреждающих воздействий со стороны внешней среды, и необходимый
уровень окислительных процессов в тканях организма, т. е. защита от
воздействия веществ, которые нарушают химические тканевые процес-
сы, поддерживающие нормальную жизнедеятельность. Сформированная
на такой основе функциональная система с системообразующим фак-
тором — болью показана на рис. 8.4. Под действием болевой импуль-
сации, возникающей в рецепторном аппарате и передаваемой по каналу
обратной афферентации, в организме возникает ряд специфических и
неспецифических реакций, направленных на устранение причин воз-
никновения боли и восстановление гомеостаза [306].
Данные реакции можно разделить на несколько характерных групп:
— двигательные реакции, связанные с рефлекторной мышечной ак-
тивностью, например, реакции «отдергивания»;
— эмоционально-поведенческие, связанные, например, со щажени-
ем больного органа, и социально-поведенческие, обуславливаю-
щие процесс лечения;
300
Глава 8
Рис. 8.4. Функциональная система организма с участием боли
— вегетативные, вызывающие, например, расширение сосудов, уси-
ление деятельности сердечйо-сосудистой и дыхательной систем;
— гематологические, связанные с ускорением свертываемости крови,
лейкоцитозом;
— гуморальные, определяемые повышением активности гормонов;
— метаболические, вызывающие изменения обмена веществ.
Таким образом, данная функциональная система, охватывающая
практически все основные физиологические процессы, целенаправленно
защищает организм как от последствий болевого раздражения, так и от
возможных его повторений. Оценка указанных реакций организма на
боль позволяет найти физиологические корреляты болевого раздраже-
ния, которые имеют информационную значимость при исследовании
боли и методов обезболивания.
Раздражители, вызывающие ощущение боли, могут быть различны-
ми по своей природе: механическими, химическими, электрическими,
термическими. Кроме того, у человека боль может вызываться эмоцио-
нальными и психическими факторами [307]. Болевое ощущение в нор-
мальных физиологических условиях формируется в результате раздраже-
ния сложной афферентной системы, включающей рецепторный аппарат,
афферентные волокна, передающие ноцицептивную информацию, спи-
нальные зоны переключения, восходящие пути в структуры ЦНС.
В настоящее время существует несколько теорий рецепции и вос-
приятия боли. Наиболее традиционными являются теории специфич-
ности Фрея и теории неспецифического паттерна Гольдшейдера, пред-
ложенные в конце прошлого столетия [308]. Согласно первой основную
роль в рецепции боли играют неинкапсулированные свободные нервные
Системы электростимуляции в клинической практике
301
окончания, возбуждающиеся при повреждающих воздействиях. Вторая
теория придает основное значение при формировании боли простран-
ственно-временному соотношению афферентных сигналов в нервных
проводниках различного типа. Ни одна из этих теорий до настоящего
времени не отвергнута, более того, они продолжают подкрепляться со-
ответствующими экспериментальными и клиническими данными, а поэ-
тому имеют право на существование.
К рецепторам боли — ноцицепторам — относят низкопороговые и
высокопороговые соматические рецепторы и терминали, передающие
импульсацию по А-дельта и С-волокнам (по классификации Гассера),
которые по механизму реагирования можно разделить на механорецеп-
торы и хеморецепторы. Обработка ноцицептивных сигналов на уровне
спинного мозга изучалась в работах Р. Мелзака и П. Уолла [309, 310J,
явившихся по сути дела попыткой создать теорию боли, в которой, с
одной стороны, учитывалась физиологическая специализация, а с дру-
гой — осуществлялся анализ различных по интенсивности импульсных
потоков. Теория «воротного контроля» боли Р. Мелзака и П. Уолла
предполагает, что нейронный механизм задних рогов спинного мозга
(спинальные зоны переключения) осуществляет модуляцию потока им-
пульсации, идущей от периферических волокон в ЦНС. Степень умень-
шения или увеличения передачи импульсации определяется соотноше-
нием активности волокон, несущих ноцицептивную и сенсорную им-
пульсацию, а также влиянием тормозной нисходящей системы из
высших структур мозга. Согласно модели «воротного контроля» боли
(рис. 8.5), афферентные волокна проводят импульсацию в желатинозную
субстанцию и в передаточные Т-клетки. Модулирующее влияние, ока-
зываемое со стороны желатинозной субстанции на передачу импульса-
ции через Т-клетки, усиливается при возбуждении толстых волокон и
уменьшается при возбуждении тонких. Однако «воротная» теория боли
не смогла в полной мере объяснить явлений, возникающих при развитии
болевых синдромов и их лечении. Недостаток теории по мнению ряда
авторов состоит в том, что в ней торможение проведения болевой им-
пульсации объясняется, главным образом, пресинаптическими механиз-
мами на спинальном уровне, а центральному влиянию отводится вто-
ростепенная роль [311-313].
Открытие в середине 70-х годов эндогенной системы контроля бо-
левой чувствительности, а также выделение эндогенных веществ, вы-
полняющих функции нейромодуляторов болевой импульсации — опио-
идных пептидов (эндорфинов и энкефалинов), позволили раскрыть
более тонкие механизмы формирования болевой чувствительности у че-
ловека. В различных органах и тканях, в первую очередь в ЦНС, в
структурах спинного мозга, в кишечнике, печени, предсердиях и др.
были обнаружены так называемые опиатные рецепторы, с которыми
взаимодействуют эндорфины и энкефалины. Существуют, по крайней
мере, два вида данных рецепторов: мю-рецепторы, чувствительные к
морфинам, активность которых предопределяет болевую чувствитель-
302
Глава 8
Рис. 8.5. Модель «воротного» контроля боли:
1 — волокна большого диаметра, 2 — волокна малого диаметра, 3 — желатинозная субстан-
ция, 4 — Т-клетки, 5 — система центрального контроля, 6 — система действия
Возбуждение
Ноцицепция
Рис. 8.6. Регуляция болевой чувстви-
тельности с участием АНС и НС
ность, и дельта-рецепторы, посредством которых регулируется эмоцио-
нальное поведение.
В свете современных представлений формирование болевого ощу-
щения у человека происходит в результате взаимодействия двух антаго-
нистически функционирующих систем организма — ноцицептивной и
антиноцицептивной [314]. Ноцицептивная система (НС) восходит от
ноцицепторов к глубоким структурам мозга. НС содержит в своем со-
ставе нейрохимический аппарат генерации специфических и неспеци-
фических медиаторов болевой передачи — нейротрансмиттеров (НТ),
который, располагаясь по ходу путей, проводящих ноцицепцию, пре-
имущественно сосредотачивается в переключающих структурах. Типич-
ными НТ являются: ацетилхолин, норадреналин, серотин. В тех же зонах
представлены рецепторы антиноцицептивной системы (АНС), тормозя-
щей передачу болевой импульсации за счет генерации нейромодуляторов
(НМ) (рис. 8.6). Эксперименталь-
ные и клинические работы пос-
ледних лет показали, что болевые
ощущения у человека обусловле-
ны изменением динамического
соотношения между уровнями
НМ и НТ. АНС и НС в процессе
продукции НМ и НТ оказываются
взаимосвязанными, т. к. актива-
ция одной из систем приводит не
только к усилению ее функциони-
рования, но и вызывает торможе-
ние другой системы [315].
При воздействии ноцицеп-
тивного раздражителя происходит
торможение структур АНС и
затем с незначительной задерж-
кой — активация НС. При хрони-
Системы электростимуляции в клинической практике 303
ческих болевых синдромах АНС истощена, что характеризуется низким
уровнем НМ [316]. Активация НС в рамках данных представлений может
произойти без воздействий, угрожающих повреждением, например,
вследствие угнетения активности АНС. Так, введение блокаторов НМ
ведет к развитию гипералгезии, т. е. к уменьшению болевого порога и
возникновению спонтанных болевых ощущений [316]. Активация АНС,
вызывающая срабатывание эндогенных механизмов антиноцицепции и
приводящая к снижению болевой чувствительности, происходит при
различных видах воздействия на организм. Этими механизмами могут
быть объяснены анальгетические феномены, возникающие при акупунк-
туре, вибрационной и звуковой стимуляции, при чрескожной электро-
нейростимуляции и стимуляции спинномозговых проводящих путей.
Все вышесказанное позволяет утверждать, что в ответ на болевое
раздражение в организме возникает системная реакция, направленная
на устранение раздражения и характеризующаяся возбуждением основ-
ных физиологических систем. Передача болевого раздражения от ноци-
цепторов к структурам ЦНС, ответственным за восприятие боли, про-
исходит под контролем двух эндогенных систем организма — НС и
АНС, взаимосвязанных при своем функционировании. Модуляция аф-
ферентных потоков болевой импульсации возможна путем влияния на
активность данных систем. Возбуждение сенсорных структур, связанных
с областью болевого раздражения, возникающее при противоболевой
электронейростимуляции, активирует АНС и вызывает соответственное
изменение уровней НМ и НТ, приводящее к повышению болевого по-
рога. Данные механизмы могут быть использованы для объяснения про-
цессов регуляции боли при электронейростимуляции сенсорных структур
в ходе периферической электроанальгезии.
8.2.2. Биотехническая система электроанальгезии. Теоретическое
обоснование структуры и механизмов воздействия
Создание новых эффективных аппаратных методов и технических
средств для периферической электроанальгезии представляет собой про-
блему, решение которой требует комплексного подхода и всестороннего
учета ее технических, физиологических и клинических аспектов. Созда-
ние новой медицинской техники и аппаратных методов лечения должно
опираться, с одной стороны, на возможности современных технологий,
а с другой, — на глубокое понимание явлений, происходящих при вза-
имодействии технических средств и живого организма. Изучение такого
взаимодействия невозможно без использования системного подхода, в
соответствии с которым технические и биологические звенья должны
рассматриваться взаимосвязанно в рамках единой биотехнической сис-
темы (БТС) [317, 318]. Биотехнический системный подход становится в
настоящее время методологической основой для создания эффективных
аппаратных методов и технических средств, пригодных для использова-
ния в медицине. Сформулированные в общей теории БТС принципы
304
Глава 8
взаимного согласования параметров биологических и технических ком-
понентов системы, целевой функции, управления и регулирования по
биотехническому контуру обратной связи, позволяют определить пути
создания такой аппаратуры и разработки эффективных методов лечеб-
ного воздействия.
Для решения проблемы создания эффективных аппаратных методов
и технических средств периферической электроанальгезии ее следует
рассмотреть с этих же позиций и разработать БТС нового типа — био-
техническую систему электроанальгезии (БТС ЭА), объединяющую в
своем составе биологические и технические звенья, участвующие в про-
цессе обезболивания под влиянием электростимуляции.
Работа БТС ЭА строится на основе взаимодействия системы кон-
троля болевой чувствительности организма человека, являющейся фи-
зиологической частью БТС, и технического компонента системы, в за-
дачи которого должны входить не только формирование лечебного воз-
действия, но и оценка состояния физиологических показателей и
диагностических признаков для управления параметрами воздействия.
При развитии болевого синдрома система контроля болевой чувстви-
тельности возбуждается потоком ноцицептивной импульсации из очага
боли. Лечебное воздействие в виде стимулирующего электротока, созда-
ваемого блоком воздействия, будет формировать поток сенсорной аф-
ферентации, поступающий на управляемый вход системы контроля бо-
левой чувствительности. Блок воздействия включает в себя канал согла-
сования, содержащий возбуждаемые афференты, участки пассивной
передачи тока воздействия, стимулирующие электроды, а также устрой-
ство формирования электрического воздействия. Формирование управ-
ляющих сигналов, задающих параметры и режимы стимуляции, осущест-
вляется на основе оценки физиологических показателей и определения
диагностического признака. Реализация целевой функции БТС, заклю-
чающаяся в минимизации отклонения диагностического признака от
нормы, осуществляется различными способами в зависимости от функ-
циональных особенностей использования аппаратуры.
Диагностическим признаком в БТС ЭА служит степень выражен-
ности у пациента болевого синдрома, которая проявляется в виде боле-
вых ощущений, а также в виде характерного сдвига физиологических
показателей, косвенно связанных с интенсивностью боли.
При возникновении у пациента болевых ощущений управление
параметрами электронейростимуляции осуществляется врачом на основе
клинического обследования состояния больного, причем включение сти-
мулов и установка выбранного режима воздействия может происходить
автоматически по программе, составленной с учетом индивидуальных
особенностей проявления болевого синдрома. В определенных случаях,
например, при лечении хронических болей, управление параметрами
стимулов может осуществляться самим пациентом по инструкции врача.
В случаях, когда контакт с пациентом в ходе лечения затруднен или
вообще невозможен, например, во время проведения хирургических вме-
Системы электростимуляции в клинической практике
305
шательств, единственным наблюдаемым проявлением болевого синдро-
ма является изменение физиологических показателей, отражающих со-
стояние пациента. Для диагностики состояния в этом случае в БТС ЭА
необходимо ввести блоки измерения физиологических параметров и
оценки показателей, дающие врачу информацию об эффективности
электроанальгезии. В соответствии с вышеизложенным структурно-
функциональная схема БТС ЭА приобретает вид, показанный на
рис. 8.7. Для БТС ЭА эндогенная регулировка болевой чувствительности
осуществляется со стороны двух систем организма: АНС и НС, связан-
ных с зонами переключения болевой чувствительности, находящимися
на пути ноцицептивной импульсации от периферии к структурам ЦНС,
воспринимающим боль.
Рис. 8.7. Структурная схема БТС ЭА:
ПБЧ — переключение болевой чувствительности; Н — ноцицепторы; ФС — физиологичес-
кие системы; КС — канал согласования БТС; Э — электроды; ПБТ — пассивная биологи-
ческая ткань; СА — сенсорные афференты; ТЗ — технические звенья; ЗГ — задающий гене-
ратор; ФС — формирователь стимула; ВУ — выходной усилитель; БУ, БО — блоки
управления и оценки; КН — клиническое наблюдение; ИФП — измерение физиологичес-
ких показателей; ОП — оценка показателей; ВП — выработка показаний
Биотехнический контур управления образуется с помощью устрой-
ства генерации и формирования стимулирующего тока, воздействующего
через электроды и участки тканей, передающие стимул на соответствую-
щие сенсорные структуры. Ядром биологического звена БТС ЭА явля-
ется зона управления болевой чувствительностью, происходящие про-
цессы в которой за счет электрического воздействия определяют эффек-
тивность обезболивания, достигаемого в результате функционирования
306
Глава 8
биотехнического контура управления. Технические звенья, входящие в
состав биотехнического контура управления в соответствии с функцио-
нальным назначением в БТС ЭА — возбуждением сенсорных афферен-
тов — должны содержать каскады задающего генератора, формирователя
стимулов, выходного усилителя тока, а также блок управления парамет-
рами выходного тока стимула. Задающий генератор определяет частоту
следования стимулов и синхронизирует работу устройства, в формиро-
вателе происходит задание формы стимула и его временных параметров
(длительности, фронта, среза, заполнения и т.п.). Выходной усилитель
задает необходимую амплитуду тока стимулов и определяет условия со-
гласования с электродами и биологической тканью. Динамическое со-
гласование параметров стимулирующего тока и биологической ткани
может быть достигнуто введением блока оценки условий стимуляции,
осуществляющего обратную связь канала согласования БТС и блока
управления параметрами выходного тока. Блоки измерения физиологи-
ческих параметров и оценки показателей входят в информационное
звено БТС. В качестве измеряемых параметров для оценки выраженнос-
ти болевого синдрома и степени электроанальгезии могут быть выбраны:
параметры сердечно-сосудистой системы, являющейся надежным инди-
катором изменения состояния организма — сердечный ритм, гемодина-
мические показатели, а также показатели внешнего дыхания.
Структурное построение технических звеньев БТС ЭА в определен-
ной степени зависит от области медицинского применения. Аппаратура
для индивидуального пользования по инструкции врача должна иметь
минимум возможных вариаций ручных регулировок параметров стимула
и повышенную безопасность в работе. Для клинического использования
блок управления может включать программное устройство долговремен-
ного задания параметров. Информационные звенья целесообразно вклю-
чать в состав БТС в случаях интраоперационного обезболивания, когда
контакт с больным отсутствует. Таким образом, предложенная структура
БТС ЭА является функционально полной для описания различных ва-
риантов обезболивания путем периферической электронейростимуляции
сенсорных структур.
Основным вопросом, определяющим эффективность функциониро-
вания БТС ЭА, является выработка критериев формирования стимули-
рующего воздействия на основе анализа процессов, происходящих в зоне
регуляции болевой чувствительности биологического звена под действи-
ем управляющего воздействия. Данные критерии определяют алгоритм
функционирования БТС, направленный на реализацию ее целевой функ-
ции. Анализ структуры БТС ЭА показывает, что существуют два уровня
определения искомых критериев. На уровне канала согласования БТС
целесообразно определить критерии выбора стимулирующего воздейст-
вия, обеспечивающие наибольшую эффективность возбуждения сомати-
ческих афферентов, а на уровне зоны регуляции болевой чувствитель-
ности — критерии эффективной электроанальгезии.
Системы электростимуляции в клинической практике
307
Критерии канала согласования касаются выбора параметров и ре-
жимов стимуляции, формы стимулов, обеспечивающих высокую интен-
сивность импульсации в возбуждаемых нервных структурах. Критерии
зоны регуляции определяются на основе анализа процессов в НС и
АНС, определяющих уровень болевой чувствительности в организме.
При синтезе сигнала воздействия для БТС ЭА необходим совместный
учет критериев обоих уровней, в результате чего создаются условия для
эффективной электроанальгезии. С точки зрения теории БТС задание
подобных критериев является реализацией принципов адекватности и
единства информационной среды.
Определение данным путем характеристик и параметров стимулиру-
ющего воздействия позволяет провести синтез структуры технического
звена, в частности, электронейростимулятора на основе формирования
требований к отдельным его блокам, отвечающим конкретной техничес-
кой реализации. Алгоритмы функционирования технического звена це-
лесообразно определить, исходя из закономерностей изменения как
параметров канала согласования БТС, так и динамики процессов, про-
исходящих в зоне управления болевой чувствительностью, что необхо-
димо для обеспечения эффективного функционирования БТС в целом.
Ядром БТС электроанальгезии является зона управления болевой
чувствительностью, процессы в которой определяют эффективность
обезболивания, достигаемого за счет действия биотехнического контура
управления. Процессы, происходящие в зоне управления под влиянием
противоболевой электронейростимуляции, зависят от изменения уров-
ней НМ и НТ в структурах АНС и НС и интенсивностей ноцицепции
и стимуляции. Это позволяет описать процесс формирования болевой
чувствительности в зоне управления методом камерного моделирования,
позволяющим рассматривать процессы управления в биосистемах в тер-
минах «вход-выход-состояние» [319].
Под камерой обычно понимается некоторый легко формализуемый
элемент биосистемы, с которым связано перемещение или преобразо-
вание отдельною ее компонента, имеющего количественную характе-
ристику. Каждая камера биосистемы характеризуется одной переменной
состояния, а биосистема в целом — вектором состояния.
В камерных моделях открытых биосистем в качестве входных и
выходных переменных используются темпы изменения количества ве-
щества или энергии на входе и выходе биосистемы, а в качестве пере-
менных состояния — их уровни, регулирующие эти темпы [320, 321 [.
Такие представления отвечают закономерностям важнейших процессов
в биосистемах, описываемых с помощью обыкновенных дифференци-
альных уравнений, определяющих диффузионный и конвективный
транспорт вещества, ферментативные реакции, воздействие активных
веществ на органы и ткани, нейрогуморальные процессы.
Камерная модель, в отличие от существующих качественных методов
описания процессов формирования болевой чувствительности, позволя-
ет установить зависимость между темпами поступления входных пере-
308
Глава 8
менных, в данном случае — ноцицепции и сенсорной афферентации, и
уровнями НТ и НМ, определяющими порог болевого восприятия. Это
дает возможность использовать данную модель не только для анализа
процессов регуляции болевой чувствительности, но и для определения
наиболее эффективных параметров и режимов воздействия на АНС с
целью подавления болевых синдромов [322].
Анализ модели позволяет определить требования к формированию
стимулирующего воздействия для эффективного подавления боли. В
пределах линейности уравнений модели увеличение амплитуды тока сти-
мула ведет к повышению болевого порога. Эта зависимость хорошо
подтверждается клинически, однако в случае чрескожной стимуляции
возникновение электрокожных тепловых эффектов, сопровождающихся
болевыми ощущениями под электродами, ограничивает увеличение тока
[323]. Достижение обезболивания при ограниченных амплитудах тока
стимула возможно путем увеличения значения порога болевого раздра-
жения, которое зависит от выбранной формы стимулирующего тока.
Исследование возбудимости нервных волокон различного диаметра,
ответственных за проведение различных видов чувствительности пока-
зывает, что дифференциация порогов сенсорного и болевого раздраже-
ния возрастает с укорочением длительности стимула и увеличением кру-
тизны его фронта. Таким образом, для повышения эффективности про-
тивоболевого воздействия необходимо выбирать стимулы с коротким
фронтом, длительность которого не превышает единиц процентов от
длительности стимула. Уменьшение длительности прямоугольного сти-
мула ограничено величиной времени релаксации тока в тканях, окру-
жающих возбудимую структуру, т. к. при дальнейшем укорочении сти-
мула возрастает величина энергии, рассеиваемой в тканях [324].
При чрескожной электростимуляции требование уменьшения энер-
гии, рассеиваемой в тканях, усиливается, т. к. из-за падения амплитуды
стимула при его передаче к возбудимому звену приходится значительно
увеличивать ток, проходящий в ткани. Возникающие при этом чрескож-
ные эффекты в значительной степени зависят от соотношения состав-
ляющих, образующих частотный спектр стимула. Сравнение различных
форм стимула для чрескожной электронейростимуляции опорно-двига-
тельного аппарата, а также электростимуляции мышц показывает, что
уменьшение чрескожных эффектов в зоне расположения электродов при
больших токах стимула достигается путем увеличения частоты основных
спектральных компонент стимула [325], а также использования синусо-
идальных стимулирующих токов с частотой порядка 3...5 кГц [252]. При-
чем уменьшение частоты сопровождается усилением болезненности под
электродами, а значительное увеличение частоты приводит к резкому
падению эффективности стимуляции.
Исследование чрескожных эффектов действия тока показывает, что
минимальные пороги болевых ощущений наблюдаются в области «низ-
ких» частот порядка десятков-сотен герц. Здесь же достигают максимума
термические эффекты, обусловленные потерями стимулирующего тока
Системы электростимуляции в клинической практике
309
в тканях. С повышением частоты спектральных компонент стимулов
увеличивается шунтирующее действие проводимости межэлектродного
промежутка, что обуславливает падение напряжения стимулов на возбу-
димой структуре. Так, если для модели чрескожного импеданса восполь-
зоваться трехзвенной электрической эквивалентной схемой [326], то за-
висимость напряжения стимулов от частоты тока примет вид, показан-
ный на рис. 8.8.
Рис. 8.8. Частотные зависимости при синусоидальном стимуле:
а — модуль напряжения стимула; б — экспериментальные пороги возбуждения;
в — пороги, рассчитанные для модели
Здесь же показаны зависимости для порогов возбуждения М-ответов
срединного нерва для случая чрескожной регистрации при воздействии
стимулом, имеющим квазимонохроматический спектр, а также рассчи-
танная по модели канала воздействия для условий эксперимента.
Сопоставление зависимостей показывает, что для рассматриваемых
условий стимуляции в области «верхних» частот, где происходит падение
напряжения стимула, порог возбуждения, начиная с частот 10... 15 кГц,
удваивается и быстро растет. В области «средних» частот, там, где на-
пряжение уменьшается не более, чем в 2 раза, пороги возбуждения
оказываются минимальными.
Таким образом, рассмотрение зависимостей чрескожных эффектов
действия тока и характеристик возбудимости нервного волокна от час-
тотных компонент воздействующего тока, с точки зрения критерия ми-
нимального порогового воздействия и уменьшения ноцицептивных эф-
фектов под электродами, показывает существование области «средних»
адекватных частот стимулирующего тока.
Спектральное представление импульсного стимулирующего тока в
виде совокупности гармонических составляющих позволяет сформули-
310
Глава 8
ровать частотно-избирательный подход к формированию тока, основан-
ный на определении области адекватных частот составляющих спектра
стимула и синтеза воздействующего тока на основе частотно-временного
преобразования [327]. Частотный спектр импульса тока прямоугольной
формы имеет огибающую с максимумом, расположенным вблизи нуле-
вой частоты. Основная часть энергии спектра сосредоточена в области,
ограниченной нулевой частотой и частотой первого минимума [328].
Таким образом, при использовании стимулов миллисекундного диа-
пазона основные спектральные составляющие тока оказываются сосре-
доточенными в области наиболее низких значений болевого порога. Это
ограничивает применение прямоугольных стимулов большой амплитуды
для чрескожной противоболевой электронейростимуляции.
Спектр адекватного импульсного воздействия должен быть сосредо-
точен в той области частот, где электрокожные болевые пороги доста-
точно высоки, т.е. где активные потери достаточно малы. С этой точки
зрения целесообразно увеличение частоты основных компонент стиму-
лирующего тока. Однако с увеличением частоты происходит перерас-
пределение тока в тканях, что вызывает уменьшение напряжения на
возбудимой структуре.
Области адекватных частот спектральных составляющих стимулиру-
ющего тока можно ограничить значениями граничных частот, опреде-
ляемых со стороны «низких» частот величиной, на которой происходит
допустимое возрастание порога возбудимости нервной структуры.
Тогда спектр адекватного воздействия должен иметь параметры, оп-
ределяемые значениями граничных частот:
АГсп ” ^гр2 ~ ^гр1 ’ (8Д)
^Осп = ^гр! + ’
где ДГСП — ширина спектра, AfOcn — центральная частота спектра.
По мере уменьшения Afcn спектр воздействия вырождается в одну
гармоническую составляющую, а его вид во временной области пред-
ставляет непрерывное синусоидальное колебание. Однако необходи-
мость импульсного характера стимулирующего тока, обусловленная об-
щими закономерностями возбуждения нервных структур, требует выбора
конечной величины Afcn, не превышающей значения, определенного в
соответствии с (8.1). Синтез импульсного сигнала, спектр которого «впи-
сывается» в область адекватных частот, требует задания формы огибаю-
щей спектра и его параметров.
Спектры сигналов, расположенные симметрично относительно
центральной частоты, соответствуют амплитудно-модулированным ко-
лебаниям с несущей, равной центральной частоте. Закон изменения
амплитуды данного колебания определяется огибающей спектра, явля-
ющейся спектральной плотностью модулирующего колебания.
Системы электростимуляции в клинической практике
311
Задача синтеза временного вида сигнала по известной огибающей
спектра для случая минимально-фазовых цепей может быть решена с
помощью использования преобразования Лапласа [328].
Так, если для описания модуля огибающей спектра адекватного сиг-
нала использовать выражение:
S(<o) = А0со„ [(«>,; - со2 + рс2)2 + 4рс2<о2] , <8-2)
где рс — параметр, определяющий форму огибающей, то временная
форма сигнала может быть представлена в виде:
s(t) = Ao exp(-Pct) sincoot . (8.3)
Данное выражение описывает амплитудно-модулированное им-
пульсное колебание с несущей частотой и экспоненциально затухаю-
щей амплитудой с постоянной времени затухания, равной р"1. По мере
расширения спектра длительность стимула уменьшается (рис. 8.9). На
рис. 8.9, а (кривые 1) синтезированный сигнал имеет форму радиоим-
пульса, где То — период основной частоты.
Рассмотрение общих закономерностей электронейростимуляции по-
казывает, что воздействующий ток, вызывающий возбуждение нервной
структуры, должен быть униполярен. Вместе с тем, требование отсутст-
вия постоянной составляющей в стимулирующем токе с целью исклю-
чения электролизных эффектов делает предпочтительным использование
биполярного тока. Амплитудно-модулированные импульсные колебания,
показанные на рис. 8.9, удовлетворяют данным требованиям. Однако
целесообразно перейти к формам стимула, отличающимся от данного
вида более крутым фронтом, и использовать вместо заполняющего сти-
мул синусоидального колебания короткие униполярные импульсы тока
длительностью tH с частотой следования, равной частоте несущей, и
скважностью, равной 2 [265]. Форма огибающей спектра для данного
случая показана на рис. 8.9, а (кривые 2). Требование отсутствия по-
стоянной составляющей удовлетворяется за счет формирования спада
плоской вершины стимула и выброса противоположной полярности в
паузе между стимулами, равного по площади стимулу. Частота следова-
ния формируемых таким образом пачек коротких униполярных импуль-
сов тока выбирается исходя из диапазона частот естественной сенсорной
афферентации в периферических нервах, равной соответственно
100...250 Гц.
Эффективность подавления боли в БТС противоболевой электро-
нейростимуляции может быть повышена путем оптимального выбора
зон расположения электродов. Анализ условий достижения обезболива-
ния, рассмотренных выше, показывает, что эффективность стимуляции
может быть усилена за счет увеличения числа путей передачи, вызванной
стимулами сенсорной афферентации. На практике это может быть осу-
ществлено выбором таких зон расположения электродов, при которых
охватывается возбуждением максимальное количество афферентов из
312
Глава 8
Рис. 8.9. Огибающие спектра (а) и временные формы стимула (б, в)
очага болевого раздражения. Рассмотрение путей соматической иннер-
вации показывает, что при чрескожной передаче стимула целесообразно
располагать электроды паравертебрально в проекции задних корешков
спинного мозга, иннервирующих область источника боли [265]. Зоны
наложения электродов выбираются в соответствии с сегментарной ин-
нервацией кожных покровов и внутренних органов (табл. 8.1). Длину
электродов следует выбирать таким образом, чтобы они перекрывали не
менее 1-2 сегментов выше и ниже показанных в таблице границ [329].
Хороший эффект дает внутриполостное расположение электродов в
непосредственной близости от возбуждаемых нервных структур. При
терапии политопных болей целесообразно использование многоканаль-
ной стимуляции, при которой отдельные пары электродов располагаются
в различных местах, определяемых локализацией очагов болевого раз-
Системы электростимуляции в клинической практике
313
Таблица 8.1
Паравертебральная локализация электродов
в зависимости от источника болей
№ п/п Органы и ткани Сегменты спинного мозга
1 Щитовидная железа 3-4 шейные
2 Верхняя конечность 5-шейные, 1-грудной
3 Трахея, бронхи, легкие 2-7 грудные
4 Молочные железы 3-5 грудные
5 Желудок 6-9 грудные
6 Печень и желчный пузырь 5-8 грудные
7 Поджелудочная железа 6-8 грудные
8 12-перстная кишка 6-8 грудные
9 Слепая и восходящая кишки 9-11 грудные
10 Тонкая кишка 9-11 грудные
11 Нисходящая и сигмовидная кишки с 1 поясничного по 4 крестцовый
12 Матка и придатки с 10 грудного по 4 крестцовый
13 Нижняя конечность с 4 поясничного по 3 крестцовый
дражения. Так, при двухканальной стимуляции одна пара электродов
может располагаться паравертебрально, а вторая — в непосредственной
близости от источника болей (операционная рана, место травматичес-
кого повреждения тканей и т.п.) или в проекции нервных стволов при
их поражении патологическим процессом [330].
Рассмотрение условий достижения обезболивания на модели пока-
зывает, что усиление эффекта обезболивания происходит при вариации
внутренних параметров модели зоны управления болевой чувствитель-
ностью, что может, в частности, отражать действие анальгетиков. По-
скольку чувствительность модели к изменению внутренних параметров
высока, то применение относительно слабых средств на фоне стимуля-
ции значительно усиливает эффективность обезболивания. Таким обра-
зом, при формировании адекватного стимулирующего воздействия для
эффективного подавления боли следует учитывать как общие требования
к стимулу, определяемые основными закономерностями возбуждения
нервных структур, так и требования, полученные на основе анализа
камерной модели регуляции болевых ощущений. Повышение эффектив-
ности электронейростимуляции достигается применением стимулов с
крутыми фронтами, форма которых обеспечивает наибольшую диффе-
ренциацию порогов тактильной и болевой чувствительности. Для БТС
электроанальгезии, использующих чрескожную передачу стимулов, наи-
более важным является преодоление электрокожных раздражающих эф-
фектов, ослабевающих при выборе спектра стимула в области адекватных
частот, где пороги электрокожных тепловых эффектов достаточно вели-
ки, а падение возбудимости нервных структур является незначительным.
Существенным моментом, определяющим эффективность обезболива-
ния, является выбор зон расположения и длины электродов, которые
должны охватывать максимальное число неноцицептивных нервных про-
водников, идущих из области очага боли.
314
Глава 8
8.2.3. Алгоритм функционирования и структурная компоновка
аппаратного комплекса
Анализ процессов, возникающих в канале воздействия БТС электро-
анальгезии, показывает, что основными электрическими параметрами
воздействия, определяющими, в конечном счете, эффективность обез-
боливания, являются: амплитуда стимулирующего тока, частота следо-
вания, длительность, частота заполнения стимулов. Вариабельность ха-
рактеристик биологических тканей канала воздействия БТС определяет
необходимость регулировки основных параметров воздействия, так как
условия возбуждения нервных структур изменяются как в зависимости
от места расположения электродов на теле пациента, так и от индиви-
дуальных особенностей строения тканей в зоне стимуляции. Наиболь-
ший разброс параметров биологических тканей наблюдается при чрес-
кожной передаче стимула, так как здесь на условия стимуляции оказы-
вают дополнительное влияние такие факторы, как состояние контакта
электрод-кожа, структурное строение тканей, психофизические эффек-
ты, связанные с потоотделением, состояние периферического кровотока.
Результаты исследования импедансов пассивных биологических тканей
для случаев расположения электродов на различных участках кожи па-
циента и при расположении электродов на одинаковом участке кожи у
разных лиц показывают, что значения граничных частот, определяющие
положение спектральных составляющих адекватного стимула, могут из-
мениться в 1,5-2 раза в зависимости от условий воздействия. Поэтому
при разработке технических звеньев БТС необходимо предусматривать
регулировку параметров стимула, обеспечивающую достижение адекват-
ных условий стимуляции во всех возможных случаях использования
аппаратуры. Однако большое число ручных регулировок параметров воз-
действия, допустимое в исследовательской аппаратуре, становится не-
целесообразным в медицинских БТС, функционирующих в клинических
условиях и требующих максимальной простоты обслуживания. Парамет-
ры и режимы электронейростимуляции, нуждающиеся в регулировке в
процессе функционирования БТС, можно разделить на две группы. Пер-
вая группа включает параметры воздействия, связанные с дозировкой
лечебного эффекта. Эти параметры устанавливаются в соответствии с
величиной сигнала управления БТС, зависящей от полученного значе-
ния диагностического признака. Если управление техническими звенья-
ми БТС осуществляется со стороны медицинского персонала, то регу-
лировку параметров первой группы целесообразно выполнить вручную.
К этой группе относится, например, установка амплитуды стимулирую-
щего тока, определяющая градиент напряжения в тканях, степень охвата
необходимого количества возбуждаемых нервных проводников и, соот-
ветственно, глубину и силу достигаемого эффекта. Вторая группа пара-
метров воздействия, в которую входит длительность стимулов и частота
их заполнения, играет вспомогательную роль, обеспечивая отсутствие
нежелательных эффектов в зоне расположения электродов. Регулировка
этих параметров позволяет использовать большие интенсивности стиму-
Системы электростимуляции в клинической практике
315
лирующего тока, что необходимо для усиления эффективности лечеб-
ного воздействия. Для данной группы целесообразно введение автома-
тического управления параметрами воздействия в зависимости от харак-
теристик биологического звена БТС.
Рассмотрим структурную реализацию алгоритмов автоматической
установки параметров стимулов в БТС противоболевой электронейро-
стимуляции.
Автоматическое управление частотой заполнения стимула при чрес-
кожном воздействии можно осуществить на основе предварительного
измерения частотных свойств биологических тканей в зоне стимуляции,
определения значения граничной частоты адекватного диапазона спект-
ральных составляющих стимула и формирования несущей частоты сти-
мула в этом диапазоне. Определение граничных частот спектра стимула
можно провести с помощью измерения сдвига фаз между стимулирую-
щим током и напряжением. Фазовая характеристика биологических тка-
ней, отображаемых моделями, рассмотренными в [331], имеет экстре-
мум, приходящийся на минимум активных потерь тока в тканях, т.е.
находящийся в диапазоне адекватных частот спектра стимула.
Структурная схема управления частотой заполнения стимула, осно-
ванная на анализе фазовой характеристики тканей, показана на рис. 8.10
[332]. Тактовый генератор 1 вырабатывает короткие импульсы Uj, за-
пускающие генератор пилообразного напряжения 2. Линейно возрастаю-
щее напряжение U2 вызывает плановое изменение частоты генератора
3, сигнал с которого поступает на формирователь стимула 4, вырабаты-
вающий импульсное напряжение U3. Через усилитель стимула 5 и из-
меритель тока стимуляции 6 воздействие прикладывается к электродам
7, расположенным на коже
пациента. Фазометр 8 осу-
ществляет формирование на-
пряжения U4, пропорциональ-
ного сдвигу фаз между напря-
жением и током стимуляции в
течение действия стимула. В
момент, когда напряжение U4
проходит через максимум,
схема выделения максимума 9
генерирует короткий импульс
напряжения U5. Этот сигнал
воздействует на генератор пи-
лообразного напряжения 2,
вызывая остановку изменения
напряжения на его выходе и
запоминание этого напряже-
Рис. 8.10. Структурная схема (а) и времен-
ные диаграммы (б) автоматического управ
ления частотой заполнения стимула
ния до следующего такта ра-
боты. Процесс изменения час-
тоты генератора заполнения 3
316
Глава 8
прекращается, поскольку фазовый сдвиг достигает максимального зна-
чения, соответствующего области адекватных частот заполнения. Поиск
частоты генератора заполнения будет производиться в начале каждого
такта работы, длительность которого определяется периодом напряжения
Ur При изменении параметров биологической ткани будет изменяться
фазовое соотношение между стимулирующим током и напряжением и
устанавливаться новая частота заполнения, соответствующая области
адекватных частот.
Определение граничной частоты спектра стимула и формирование
адекватного сигнала стимуляции можно произвести методом избиратель-
ной фильтрации [333]. Структурная схема, реализующая данный метод,
показана на рис. 8.11.
Рис. 8.11. Структурная схема реализации метода избирательной фильтрации
Формирование адекватного стимула осуществляется путем пропуска-
ния широкополосного сигнала генератора 1, имеющего равномерный
спектр в области возможных несущих частот стимула, через перестраивае-
мый избирательный фильтр 2. Колоколообразная частотная характеристика
фильтра обеспечивает на выходе формирование амплитудно-модулирован-
ного сигнала. Несущая частота этого колебания определяется частотой
настройки фильтра 2, а импульсная периодичность — периодичностью
сигналов генератора 1. Полученный на выходе фильтра 2 сигнал через
коммутатор 3, усилитель 4 и измерительную схему 5 прикладывается к
электродам 6, расположенным на коже пациента. Частота настройки
фильтра 2 устанавливается следующим образом. Тактовый генератор 7 с
определенной периодичностью переводит схему в режим управления. При
этом коммутатор 3 подключает к цепи электродов широкополосный сигнал
от генератора 1. Отклик биологической ткани на широкополосный сигнал
через измерительную схему 5 подается на вход узкополосного фильтра 10.
С помощью тактового генератора 7 осуществляется периодическое скани-
рование частоты его настройки. Напряжение на выходе фильтра 10 уси-
ливается с помощью усилителя 9 и поступает на формирователь управля-
ющего напряжения 8, который запоминает значение напряжения скани-
рования фильтра 10 в момент максимального значения производной
напряжения на выходе усилителя 9. Запомненное напряжение с выхода
формирователя 8 подается на управляющий вход фильтра 2 и определяет
частоту его настройки и, тем самым, несущую частоту стимула. Таким
Системы электростимуляции в клинической практике
317
образом, несущая частота стимула оказывается связанной с участком
наибольшей крутизны частотной характеристики биологической ткани,
определяющей положение граничной частоты спектра адекватного сти-
мула. Алгоритм установки длительности стимулов основан на зависи-
мости длительности адекватного стимула от величины времени релак-
сации тока в тканях, окружающих электроды.
Формирование адекватной длительности стимулов, при которой до-
стигается минимизация пороговой энергии стимуляции и поддержание
этих условий в процессе длительного воздействия, требует контроля ве-
личины времени релаксации тока в зоне расположения электродов и вве-
дения управления в формирователь длительности стимулов [324, 334].
Структурная схема, реализующая данный принцип управления длитель-
ностью стимула, показана на рис. 8.12. Задающий генератор 1 определяет
частоту следования стимулов, длительность которых задается в управля-
емом формирователе 2, связанном через коммутатор 3 и усилитель 4 с
электродами 5, расположенными на участке биологической ткани. Сиг-
нал тактового генератора 6, синхронизированный с импульсами стиму-
ляции, переводит устройство в режим управления. В этом режиме на
электроды 5 подается сигнал с формирователя измерительного импульса 7,
представляющий собой импульс с прямоугольной огибающей. Возникаю-
щее на электродах под действием измерительного импульса экспоненци-
ально возрастающее напряжение поступает на измеритель переходного про-
цесса 8, который формирует временной интервал, соответствующий вре-
мени нарастания входного напряжения, т.е. контролируемой величине
времени релаксации тока. Для сохранения измеренного значения на весь
период управления служит запоминающее устройство 9, сбрасываемое в
начале каждого такта управления сигналом тактового генератора 6. Выход
запоминающего устройства 9 через устройство управления 10 связан с
управляющим входом формирователя длительности стимула 2. Таким об-
разом, длительность стимулов в режиме стимуляции устанавливается в
соответствии с измеренным значением времени релаксации тока в тканях
в предыдущем периоде управления. Период управления выбирается до-
статочно большим по сравнению с длительностью измерительного импульса
и периода стимуляции. Для отслеживания изменений релаксационных
свойств ткани в процессе стимуляции достаточно выбрать период управле-
ния равным 2...4 с, а дли-
тельность измерительного
импульса 1,5...2,0 мс. До-
стоинством данной схемы
является использование
одной пары электродов
для стимуляции и кон-
троля параметров, что уп-
рощает построение тех-
нического звена БТС.
Рис. 8.12. Структурная схема автоматического уп-
равления длительностью стимула
318
Глава 8
Рассмотренные алгоритмы автоматического управления параметра-
ми противоболевой электронейростимуляции позволяют сохранить аде-
кватность воздействия в условиях изменения свойств биологических тка-
ней, окружающих электроды. Следовательно, БТС, функционирующая
по данным алгоритмам, приобретает свойство адаптивности, позволяю-
щее сохранить эффективность воздействия при длительной стимуляции.
В то же время автоматическая установка параметров стимула предотвра-
щает адаптацию возбуждаемых нервных структур за счет периодического
изменения параметров стимула, обусловленного изменением импеданс-
ных свойств тканей, в зоне расположения электродов. Преодоление
адаптации возбуждаемых структур позволяет добиться стойкого аналь-
гетического эффекта при длительном обезболивании.
8.3. Технические характеристики и клинические
аспекты применения аппаратов типа «ЭЛИМАН»
для периферической электроанальгезии
Исследование структурной организации и моделей функционирова-
ния БТС ЭА позволяет определить основные требования к построению
и алгоритмам работы технических звеньев БТС, обеспечивающие эф-
фективное лечение болевых синдромов. Реализация данных требований
осуществляется путем разработки специальных технических средств —
аппаратуры периферической электроанальгезии, в состав которой входят
противоболевые электростимуляторы, осуществляющие формирование
электроимпульсного воздействия, системы электродов, закрепляемых на
теле пациента, диагностические устройства оценки выраженности боле-
вого синдрома и степени достигаемой электроанальгезии.
Структурное построение аппаратуры периферической электроаналь-
гезии должно обеспечивать формирование адекватного воздействующего
тока, а также отвечать требованиям по реализации необходимых режи-
мов стимуляции. Данная задача решается путем схемотехнического про-
ектирования отдельных каскадов электростимуляторов по заданным
электрическим параметрам воздействия. В то же время при разработке
аппаратуры периферической электроанальгезии необходимо учесть
общие требования, предъявляемые к аппаратуре для медицинского при-
менения [335]. Кроме того, конкретная область использования электро-
анальгезии в медицине, условия функционирования аппаратуры обуслав-
ливают определенные особенности ее конструктивных и эксплуатаци-
онных характеристик. Поэтому разработку технических средств для
электроанальгезии необходимо проводить на основе медико-технических
требований, базирующихся на результатах, полученных при анализе БТС
ЭА, а также учитывающих медицинские аспекты использования аппа-
ратуры.
Системы электростимуляции в клинической практике
319
Рассмотрим основные медико-технические требования к аппаратуре
для периферической электроанальгезии, включающие конструктивные и
эксплуатационные требования. Анализ области использования средств
периферической электроанальгезии показывает, что сфера применения
различных вариантов конструкций аппаратуры достаточно широка. Рас-
пространенность болевых синдромов различной этиологии, разная сте-
пень выраженности болей, неодинаковая продолжительность лечения, а
также различие условий использования аппаратуры (стационар, поли-
клиника, скорая медицинская помощь, лечение на дому) делают неце-
лесообразной разработку универсальных многоцелевых электростимуля-
торов. Лечение острых болей постоперационного, посттравматического,
нейрогенного характера, обезболивание в родах требует охвата стимуля-
цией обширных зон, связанных с очагами боли. В этих случаях целесо-
образно использование аппаратов, обеспечивающих достаточно большой
ток стимула и позволяющих применять электроды значительной площа-
ди. Данный тип электростимуляторов предназначен для использования
в специализированных палатах лечебных учреждений, где важное зна-
чение имеет способность аппаратуры работать непрерывно в течение
длительного времени. Это обуславливает целесообразность выполнения
аппаратуры в виде стационарных конструкций с питанием от сети пере-
менного тока.
Обезболивание после травмы, снятие острых и хронических болей
нейрогенного, артрогенного и другого происхождения предполагает ис-
пользование электростимуляторов, в первую очередь, в условиях поли-
клиники и травмпунктов, а также при оказании скорой медицинской
помощи или при лечении на дому. В данном случае необходимы кон-
струкции электростимуляторов, имеющих малые габариты, массу и спо-
собных функционировать при питании от батарей или аккумуляторов.
Использование периферической электроанальгезии в качестве компо-
нента общей анестезии при хирургических вмешательствах, при лечении
тяжелых болевых синдромов требует проведения длительных сеансов
воздействия в условиях, при которых подбор параметров стимула по
обычным показаниям затруднен в силу ограниченности или невозмож-
ности контакта с больным. Для этих случаев необходима разработка
аппаратуры с автоматической биорегулировкой параметров воздействия
по одному из предложенных алгоритмов функционирования БТС ЭА.
Это технически существенно усложняет электростимулятор, однако кли-
нические возможности его применения становятся более широкими.
Таким образом, реализация БТС ЭА в различных клинических условиях
требует разработки аппаратуры различного функционального предназна-
чения, содержащего следующие типы конструкций электростимуляторов:
— стационарную с питанием от сети переменного тока для исполь-
зования в палатах лечебных учреждений различного профиля;
— портативную с питанием от сменных батарей для лечения в ус-
ловиях учреждений скорой медицинской помощи и на дому по
назначению врача;
320
Глава 8
— стационарную, обеспечивающую автоматическую биорегулировку
параметров стимула, с питанием от сети переменного тока для
использования в хирургических и реанимационных отделениях
лечебных учреждений.
Периферическая электроанальгезия может быть реализована при не-
скольких вариантах подведения электроимпульсного воздействия к воз-
буждаемым нервным структурам: через накожно расположенные
электроды, внутриполостные и имплантируемые непосредственно в об-
ласть прохождения нервных столов. Наибольшее распространение по-
лучили первые два способа, характеризующиеся широким спектром ме-
дицинского применения, простотой и эффективностью обезболивания.
Электроды для чрескожной электронейростимуляции должны обеспечи-
вать надежность и удобство их фиксации на коже пациента в течение
всего периода лечебного воздействия. Материал электродов должен быть
биологически нейтральным, обладать устойчивостью к одному из рас-
пространенных методов стерилизации [336]. Выбор материала и кон-
струкции электродов в значительной степени определяется функцио-
нальным назначением электростимулятора. Для индивидуальных аппа-
ратов используются электроды прямоугольной формы, выполненные из
токопроводящих эластичных синтетических материалов. Относительно
большое удельное сопротивление материала таких электродов вызывает
неравномерное распределение стимулирующего тока по их длине, что
при необходимости использования электродов большой протяженности
требует увеличения их площади [337]. Поэтому электрод большой длины
необходимо выполнять из металлов в виде гибких лент тонкой фольги
или сетки [338].
Электроды для послеоперационного обезболивания закрепляются на
теле пациента на весь период лечения, продолжительность которого
может составлять несколько суток, поэтому к ним предъявляются до-
полнительные требования по эластичности, хорошему контакту с кожей
в течение длительного времени, отсутствию раздражающего воздействия
на кожу. Удобны в эксплуатации одноразовые электроды в стерильной
упаковке для воздействия на область операционной раны [339]. Электро-
ды изготавливаются в виде лейкопластыря с электропроводным адгези-
вом и обеспечивают значительное снижение сопротивления в зоне пере-
хода «электрод-кожа». Для электродов многоразового использования в
случае чрескожного воздействия разработан специальный материал, об-
ладающий малым удельным сопротивлением, эластичностью и малой
плотностью [340]. По своему конструктивному выполнению аппаратура
для периферической электроанальгезии должна соответствовать техни-
ческим требованиям, предъявляемым к электромедицинской аппаратуре
[335].
При разработке схемы электростимулятора необходимо применять
электрорадиокомпоненты, обеспечивающие высокую надежность, малые
габариты, массу и экономичность устройства. Неметаллические части
конструкции должны быть изготовлены из коррозийно стойких матери-
Системы электростимуляции в клинический практике
321
алов или защищены от коррозии соответствующими покрытиями.
Электростимулятор должен быть устойчив к дезинфекции одним из при-
меняемых в лечебных учреждениях способов. Конструкция электрости-
мулятора должна быть технологична при производстве, обеспечивать
удобство в работе и являться ремонтно-пригодной. Питание стационар-
ных аппаратов должно осуществляться от сети переменного тока 220 В
(10%) с частотой 50 Гц (1%). Для питания батарейных электростимуля-
торов необходимо использовать аккумуляторы или химические элементы
с возможно большим отношением энергоемкости к массе. При исполь-
зовании химических элементов желательно предусматривать возмож-
ность подключения нескольких типов батарей. Номинал питающего на-
пряжения должен быть выбран из стандартного ряда: 3, 6, 9, 12 В. По
климатическому исполнению аппаратура должна быть спроектирована
для работы в нормальных условиях:
— температура окружающей среды +10...+35 °C;
— относительная влажность до 80% при 25 °C;
— атмосферное давление 750 ± 30 мм рт. ст.
Аппаратура должна быть устойчива к механическим воздействиям:
— вибрации на одной частоте диапазона от 20 до 50 Гц;
— ударной нагрузке при частоте ударов 10...50 в минуту, длитель-
ности ударного импульса 10... 12,5 мс и максимальном ударном
ускорении 50 м/с2;
— транспортной тряске при частоте колебаний 2...3 в минуту и
максимальном ускорении 30 м/с2.
Важнейшей задачей, возникающей при разработке электромедицин-
ской аппаратуры, является обеспечение полной электробезопасности для
обслуживающего персонала и пациентов. Поэтому электростимуляторы
должны удовлетворять не только общим требованиям по технике без-
опасности, но и специальным, относящимся к изделиям медицинской
техники, регламентированным стандартом [341]. Согласно этим требо-
ваниям, противоболевые электростимуляторы стационарного типа, пи-
тающиеся от сети, необходимо отнести ко II классу, а переносные,
батарейные — к III классу электробезопасности. Степень защиты для
данных электростимуляторов выбирается типа BF, как для аппаратов,
имеющих электроды, находящиеся в электрическом контакте с телом
пациента. Требования по схемотехническому и конструктивному выпол-
нению аппаратов, отнесенных к данным классам, предусматривают, в
частности, надежную изоляцию доступных для прикосновения частей
аппаратуры, в том числе и электродов, от питающей сети. Указанные
выше требования положены в основу разработки функционально пол-
ного комплекса аппаратуры периферической электроанальгезии «ЭЛИ-
МАН». Данный комплекс включает чрескожные электростимуляторы
«ЭЛИМАН-101, -206, -401», представляющие различные типы конструк-
ции аппаратуры широкого применения, отличающиеся функциональным
назначением и областью использования в медицине. Все аппараты
«ЭЛИМАН» прошли государственные технические и клинические ис-
322
Глава 8
пытания и рекомендованы Комитетом по новой медицинской технике
к серийному производству. Аппарат «ЭЛИМАН-101» выпускается серий-
но предприятием отраслевого министерства с 1984 года, аппарат «ЭЛИ-
МАН-204» — с 1987 года, аппарат «ЭЛИМАН-401» — с 1991 года [342].
Аппарат «ЭЛИМАН-101» предназначен для чрескожной электроней-
ростимуляции в условиях хирургических, реанимационных и невроло-
гических отделений лечебных учреждений, в родильных домах с целью:
снятия послеоперационных болей, снятия острых посттравматических
болей, обезболивания родов, лечения хронических нейрогенных, анги-
огенных, вертеброгенных и онкогенных болевых синдромов. По своему
построению аппарат относится к первому типу конструкции электро-
стимуляторов из функционального ряда аппаратуры для периферической
электроанальгезии. Его структурная схема показана на рис. 8.13.
Аппарат представляет собой генератор импульсного тока с регули-
Рис. 8.13. Структурная схема аппарата
«ЭЛИМАН-101»
руемыми параметрами [343]. Задающий генератор частоты следования
стимулов 1 вырабатывает тактовые импульсы с частотой 100...250 Гц,
которые через согласующий каскад 2 запускают формирователь огибаю-
щей стимула 3, дающий прямоугольные импульсы длительностью
100...300 мкс. Генератор импульсов заполнения 4 вырабатывает короткие
прямоугольные импульсы длительностью 10 мкс со скважностью 2, ко-
торые поступают на первый вход схемы «И» 5, а на второй ее вход
поступают прямоугольные импульсы огибающей стимула. С выхода
схемы «И» пачки прямоугольных импульсов поступают на усилитель 6,
где осуществляется регулирование амплитуды стимула, и далее на вы-
ходной каскад 7 для усиления по току. Измеритель амплитудного зна-
чения тока стимуляции 8 служит для контроля и дозировки лечебного
воздействия [344]. Через переключатель полярности 9 стимулы прикла-
дываются к электродам 10, располагаемым на теле пациента. Источник
питания аппарата содержит сетевой выпрямитель 11, стабилизатор на-
пряжения 12 и преобразователь напряжения с выпрямителями 13, ко-
торые питают все узлы аппарата. Данное построение схемы питания
Системы электростимуляции в клинической практике
323
позволяет обеспечить двойную гальваническую развязку выходной цепи
от сетевой, что уменьшает утечки и повышает электробезопасность ап-
парата.
Основные технические характеристики аппарата «ЭЛИМАН-101»:
Частота следования пачек импульсов, Гц 100...250;
Длительность пачек импульсов, мкс 100...300;
Длительность импульсов в пачке, мкс Ю;
Частота импульсов в пачке, кГц 50;
Длительность фронта и среза импульсов, мкс, не более 2;
Неравномерность плоской вершины и относительные величины
выбросов, %, не более 15;
Амплитуда выходного тока на нагрузке 1к, мА 0...50;
Напряжение питания сети, В 220;
Частота, Гц 50;
Потребляемая мощность, В А, не более Ю;
Габариты, мм: аппарата 270x150x60,
электродов 250x18x0,2;
Масса, кг, не более 1,2.
Конструктивно аппарат «ЭЛИМАН-101» оформлен в виде перено-
симого блока. Выполнен по II классу защиты от поражения электри-
ческим током и не требует при эксплуатации заземления. Электроды,
предназначенные для многократного использования, выполнены из не-
ржавеющей стальной мелкоячеистой сетки. Для соединения их с кабелем
пациента, подключаемым к аппарату, последний снабжен контактными
пластинами с прорезями, покрытыми антикоррозийным покрытием.
Крепление электродов на коже осуществляется с помощью лейкоплас-
тыря, причем контактные пластины должны быть защищены от сопри-
косновения с кожей [329].
На лицевую панель аппарата вынесены ручки установки частоты
следования и длительности стимула, а также регулировки амплитуды
стимулирующего тока, снабженные оцифрованными шкалами. Стрелоч-
ный прибор, установленный на лицевой панели, дает показания ампли-
тудных значений тока стимула, что позволяет точно дозировать лечебное
воздействие независимо от временных параметров стимуляции. Клини-
ческие исследования аппарата «ЭЛИМАН-101» проводились на кафедре
факультетской хирургии, нервных болезней, акушерства и гинекологии
Самарского медицинского университета, в отделениях областной боль-
ницы им. М. И. Калинина, медсанчасти № 9 города Самары. Государ-
ственные клинические испытания опытных образцов аппаратов прово-
дились во Всесоюзном научном центре хирургии АМН СССР, институте
хирургии им. А. В. Вишневского (г. Москва), Центральном институте
усовершенствования врачей (г. Москва). Испытания и клиническое при-
менение аппарата «ЭЛИМАН-101» показали, что периферическая
электроанальгезия, создаваемая с его помощью, является наиболее про-
стым, безопасным и эффективным методом лечения болевых синдромов
различного происхождения.
324
Глава 8
Аппарат «ЭЛИМАН-206» реализует второй тип конструкции
электростимуляторов из функционального ряда аппаратуры для перифе-
рической электроанальгезии. Он выполнен в виде портативной кон-
струкции с батарейным питанием для использования в условиях поли-
клиник, травмпунктов, станций скорой медицинской помощи, лечения
на дому. Для повышения эффективности воздействия аппарат содержит
два независимых канала, что позволяет более полно выполнить условия
выбора зон расположения электродов. Это делает аппарат удобным при
терапии политопных болей. В отличие от существующих в отечественной
и зарубежной практике двухканальных электростимуляторов [345-347],
не позволяющих раздельно регулировать временные параметры стимула
по отдельным каналам воздействия, аппарат «ЭЛИМАН-206» обладает
независимой регулировкой как амплитуды, так и длительности стимулов
по каждому каналу. Необходимость в подобной регулировке вызвана
тем, что на достижение адекватных параметров стимулирующего тока
существенное влияние оказывают импедансные свойства тканей, кото-
рые при чрескожном приложении стимулов будут различными для раз-
личных участков тела в зонах расположения пар электродов. Это обу-
славливает необходимость индивидуального подбора длительности сти-
мула в каждом канале воздействия. Для снижения габаритов, массы,
энергопотребления в аппарате «ЭЛИМАН-206» применено совмещение
функций отдельных каскадов для обоих каналов стимуляции [348].
Структурная схема электростимулятора показана на рис. 8.14.
Задающий генератор частоты следования 1 вырабатывает короткие
импульсы с частотой 200 Гц, которые поступают на распределительный
триггер 2, где происходит деление входной частоты на 2. С выхода
триггера 2 импульсы с частотой 100 Гц, определяющие частоту следо-
вания стимулов обоих каналов, подаются на формирователи 3, 4 оги-
бающей стимулов 1-го и 2-го каналов, дающие прямоугольные импульсы
длительностью 100...300 мкс. Эти импульсы поступают на схему «ИЛИ»
5, где суммируются и далее управляют работой генератора заполнения
6. Сформированные стимулы в виде пачек импульсов подаются на стро-
бируемые предварительные усилители 7, 8 1-го и 2-го каналов, куда
введены регуляторы амплитуды. С выходов предварительных усилителей
7, 8 сигналы поступают на схему «ИЛИ» 9, где они вновь суммируются
и поступают на усилитель мощности 10, затем стимулы через строби-
руемые выходные каскады 11 и 12 подаются на электроды 13 и 14.
Таким образом, построение структурной схемы позволяет произво-
дить раздельную регулировку параметров стимулов каждого канала при
использовании одного генератора заполнения, усилителя мощности и
повышающего трансформатора. Тем самым сокращаются габариты,
масса и повышается экономичность устройства, что особенно важно при
батарейном питании.
Системы электростимуляции в клинической практике
325
Рис. 8.14. Структурная схема аппарата «ЭЛИМАН-206»
Основные технические характеристики аппарата «ЭЛИМАН-206»:
Число каналов стимуляции
Частота следования пачек импульсов, Гц
Длительность пачек импульсов, мкс
Длительность импульсов в пачке, мкс
Частота следования импульсов в пачке, кГц
Длительность фронта и спада импульсов, мкс, не более
Неравномерность плоской вершины огибающей пачки
и относительный выброс, %, не более
Амплитуда выходного тока на нагрузке 1к, мА
Напряжение питания (батарея из 6 элементов «316»), В
Габариты, мм:
аппарата
электродов
Масса, кг, не более
2;
100;
100...300;
Ю;
50;
2;
20;
0...50;
9;
200x100x40,
250x18x0,2;
0,5.
На лицевой панели аппарата размещены ручки установки длитель-
ности и амплитуды стимулов по каждому из каналов стимуляции. Ручки
регулировки амплитуды стимулов совмещены с выключателями, что по-
зволяет при работе в одноканальном варианте выключить неиспользуе-
мые каскады аппарата. Аппарат «ЭЛИМАН-206» комплектуется тем же
набором электродов, что и «ЭЛИМАН-101». Принципиальная электри-
ческая схема аппарата собрана на интегральных микросхемах серии
К561, что обуславливает минимальное потребление тока. Клинические
исследования аппарата «ЭЛИМАН-206» проводились на тех же клини-
ческих базах г. Самары, что и «ЭЛИМАН-101», что позволило выявить
особенности применения аппарата. Клинические испытания опытных
образцов аппаратов проходили в клинике факультетской хирургии Са-
марского медицинского университета, институте хирургии им.
А. В. Вишневского, детской клинической больнице № 13 им. Н. Ф. Фи-
латова (г. Москва), Главном военном клиническом госпитале им.
Н. Н. Бурденко (г. Москва) [349]. Испытания аппарата «ЭЛИМАН-206»
и его клиническое применение показали, что использование портатив-
326
Глава 8
ной, двухканальной конструкции электростимулятора расширяет воз-
можности эффективного применения периферической электроанальге-
зии в клинической практике. Использование периферической электро-
анальгезии в практике анестезиологии-реаниматологии требует разра-
ботки автоматизированной аппаратуры, позволяющей проводить
длительные сеансы обезболивания.
Чрескожный электростимулятор «ЭЛИМАН-401» построен по
третьему типу конструкции аппаратов из функционального ряда электро-
стимуляторов для периферической электроанальгезии. В основу работы
аппарата положена реализация временного алгоритма формирования
адекватной длительности стимулов. В соответствии с данным алгорит-
мом длительность стимула устанавливается в соответствии с измеренным
значением времени релаксации тока в тканях под электродами. Перио-
дическое повторение процессов измерения и корректировки длительнос-
ти стимула позволяет сохранить эффективность воздействия в течение
длительного обезболивания, т. к. периодическое изменение параметров
стимуляции способствует ослаблению влияния адаптационных процес-
сов к действию электрического тока. Введение биорегулировки позво-
лило расширить область медицинского использования аппарата [350].
Электростимулятор «ЭЛИМАН-401» предназначен для достижения
анальгезии при общей анестезии во время хирургических операций,
когда контакт с больным невозможен, для обезболивания во время
родов, для снятия интенсивных болей невралгического, травматического
характера, для послеоперационного обезболивания. Структурная схема
аппарата «ЭЛИМАН-401» показана на рис. 8.15.
Рис. 8.15. Структурная схема аппарата «ЭЛИМАН-401»
Схема содержит два канала: стимуляции и измерения [351]. Канал
стимуляции включает задающий генератор частоты следования стимулов
1, формирователь длительности стимулов 2, первый модулятор 3, ком-
мутатор 4, выходной каскад усиления тока стимуляции 5, схему изме-
рения тока 6 со стрелочным прибором 7, дающим показания, соответ-
ствующие амплитуде тока стимулов. Канал измерения необходим для
Системы электростимуляции в клинической практике
327
автоматической установки длительности стимула в формирователе 2 в
соответствии с измеренным значением времени релаксации тока в тка-
нях, окружающих электроды. Импульсы задающего генератора частоты
следования пачек импульсов 1 поступают на вход делителя частоты 9.
Перепад напряжения с выхода делителя частоты 9 запускает тактовый
генератор 10, на выходе которого формируется прямоугольный импульс,
передним фронтом которого сбрасывается запоминающее устройство 11,
а спадом запускается формирователь измерительного импульса 12. При
этом запоминающее устройство 11 переводится в режим измерения. Сиг-
нал с выхода формирователя измерительного импульса 12 через второй
модулятор 13 и коммутатор 4 подается на выходной каскад 5, где он
усиливается до требуемой амплитуды. С выхода схемы 5 промодулиро-
ванный измерительный импульс поступает к закрепленным на теле па-
циента электродам 8. Модуляция измерительного импульса заключается
в его заполнении короткими прямоугольными импульсами длительнос-
тью 2 мкс, следующими с частотой 50 кГц. Модуляция измерительного
импульса необходима для того, чтобы исключить неприятные ощущения
под электродами при их наложении, т. к. длительность измерительного
импульса выбрана равной 1,2 мс исходя из допустимой погрешности
измерения. С выхода измерительной схемы 6 снимается экспоненциаль-
но нарастающее напряжение, соответствующее току, протекающему в
цепи электродов. Это напряжение поступает на сигнальный вход поро-
гового устройства 14, на управляющий вход которого через делитель
напряжения 15 подается напряжение с выхода схемы выборки-хранения
16, полученное в предыдущем такте измерения, которое равно макси-
мальной амплитуде напряжения с выхода измерительной схемы. В мо-
мент равенства двух напряжений на выходе порогового устройства 14
формируется перепад напряжения прямоугольной формы, который по-
ступает на первый управляющий вход запоминающего устройства 11,
фиксируя значение измеренной длительности переходного процесса в
тканях, а также на второй управляющий вход схемы выборки-хранения
16, переводя ее в режим выборки. Информация о длительности пере-
ходного процесса в тканях с выхода запоминающего устройства 11 по-
ступает на управляющий вход формирователя длительности стимулиру-
ющего воздействия 2. В момент окончания измерительного импульса
перепад напряжения с выхода формирователя измерительного импульса
12 поступает на первый управляющий вход схемы выборки-хранения 16,
переводя ее в режим хранения до следующего такта измерения. После
окончания цикла измерения задающий генератор 1 запускает формиро-
ватель длительности стимулирующего воздействия 2, на выходе которого
формируются импульсы с длительностью, пропорциональной измерен-
ной величине времени релаксации тока в тканях. Сигнал с выхода фор-
мирователя длительности стимулирующего воздействия через первый
модулятор 3 и коммутатор 4 подается на выходной каскад 5, с выхода
которого стимулы поступают к закрепленным на теле пациента электро-
дам 8. При изменении времени релаксации тока в тканях, обусловлен-
328
Глава 8
ном, например, изменением условий в зоне расположения электродов,
происходит изменение скорости нарастания экспоненциального напря-
жения на выходе измерительной схемы 6, что приводит к соответству-
ющему изменению момента появления перепада напряжения на выходе
порогового устройства 14 и изменению длительности стимулов. Коэф-
фициент деления делителя частоты 9 выбран равным 100, т.е. частота
следования измерительных импульсов составляет 1...2,5 Гц, что вполне
достаточно для отработки процессов изменения импедансов тканей под
электродами. При изменении, например, при увеличении амплитуды
воздействующего тока, амплитуда импульсов на выходе измерительной
схемы 6 соответственно возрастает, возрастает и напряжение на выходе
схемы выборки-хранения 16 и, следовательно, — напряжение, подавае-
мое на управляющий вход порогового устройства 14. Таким образом,
при изменении амплитуды воздействующего тока сохраняется относи-
тельный уровень срабатывания порогового устройства, что обеспечивает
исключение погрешности в определении длительности переходного про-
цесса в тканях под электродами из-за изменения амплитуды воздейст-
вующих импульсов.
Принципиальная электрическая схема аппарата «ЭЛИМАН-401» по-
строена на интегральных микросхемах серий К140, К574, К155, что
обеспечивает малые энергопотребление, габариты и массу.
Конструктивно аппарат «ЭЛИМАН-401» выполнен аналогично аппа-
рату «ЭЛИМАН-101» в виде стационарного блока настольного типа. На
переднюю панель аппарата вынесены ручки управления амплитудой и час-
тотой следования стимулов, стрелочный прибор контроля тока стимуляции,
клавиши включения аппарата и изменения полярности электродов. Аппа-
рат комплектуется набором электродов, выполненных в виде сетки из
нержавеющей стали, спресованной проводящей резиной [338].
Клинические испытания аппарата «ЭЛИМАН-401» проводились в
клинике факультетской хирургии Самарского медицинского универси-
тета, роддоме № 3, областной больнице им. М. И. Калинина г. Самары.
Государственные клинические испытания опытных образцов аппаратуры
были проведены во Всесоюзном научном центре хирургии АМН СССР
и Институте неврологии АМН СССР.
Основные технические характеристики аппарата «ЭЛИМАН-401»:
Частота следования пачек импульсов, Гц 100...250;
Диапазон автоматической установки длительности стимула, мкс 50...500;
Длительность импульсов в пачке, мкс 10;
Частота импульсов в пачке, кГц 50;
Длительность фронта и среза импульсов, мкс, не более 2;
Неравномерность плоской вершины импульса в пачке и относи-
тельные величины выбросов, % 20;
Зависимость между длительностью стимула и величиной посто-
янной времени релаксации тока в тканях, пропорциональная с
коэффициентом 2;
Системы электростимуляции в клинической практике
329
Длительность огибающей измерительного импульса, мс 1,2;
Отношение частоты следования измерительного импульса к час-
тоте следования стимулов 0,01;
Амплитуда выходного тока на нагрузке 1к, мА 0... 100;
Напряжение питания сети, В 220;
Частота сети, Гц 50;
Потребляемая мощность, В А 15;
Габариты, мм:
аппарата 270x150x60,
электродов 250х18x2;
Масса, кг, не более 1,2.
Испытания аппарата «ЭЛИМАН-401» показали возможность прове-
дения длительных многочасовых сеансов обезболивания без снижения
эффективности электроанальгезии [352, 353].
8.4. Применение аппаратуры электроанальгезии
в клинике
8.4.1. Методы оценки клинической эффективности
электроанальгезии
Изучение обезболивающего действия аппаратуры для периферичес-
кой электроанальгезии при лечении болевых синдромов различной этио-
логии проведено на опыте ее применения у 600 больных. Больные,
получавшие чрескожную электронейростимуляцию (ЧЭНС) с целью ле-
чения болевого синдрома, составили основную группу. Для более до-
стоверного выявления эффективности обезболивания аппаратурой
«ЭЛ ИМ АН», а также с целью изучения влияния ЧЭНС на функции
организма была изучена контрольная группа больных. Лица, входившие
в контрольную группу, в этот же период времени находились в том же
отделении лечебного учреждения и получали лечение, аналогичное боль-
ным основной группы. Только обезболивание им осуществлялось пла-
новым назначением анальгетиков. В основной группе было 56% мужчин,
44% женщин. Возрастной диапазон наблюдаемых больных колебался от
15 до 88 лет с преобладанием возраста от 41 до 60 лет. При исследовании
эффективности электроанальгезии в послеоперационном периоде необ-
ходимо учитывать, что характер и интенсивность возникающего болевого
синдрома в значительной мере определяется доступом, которым выпол-
няется операция. У большинства наблюдавшихся больных были прове-
дены операционные вмешательства на различных органах брюшной по-
лости: желудке, двенадцатиперстной кишке, тонком и толстом кишеч-
нике и поджелудочной железе. В общей сложности 42% больных
основной группы были после разнообразных трансабдоминальных вме-
шательств. Число больных, перенесших различные операции на крове-
носных сосудах, составило 22%. В эту группу были отнесены операции
330
Глава 8
на аорте и крупных артериях, пластика почечных артерий, операции на
надпочечниках, почках и симпатических нервных стволах, сосудах верх-
них и нижних конечностей. Больных торакального профиля было 25%.
31-му больному ЧЭНС проводилась после ампутаций конечностей при
гангренозных стадиях облитерирующих заболеваний артерий. Источни-
ком болевых ощущений у них служили как операционная рана, так и
ишемические боли, а также ранние фантомные боли. Таким образом,
как в основной, так и в контрольной группах в подавляющем большин-
стве случаев операции были сложными и травматичными. Это вело к
развитию в раннем послеоперационном периоде выраженного болевого
синдрома, который требовал для своего купирования применения самых
мощных и эффективных средств.
Для изучения степени подавления боли, достигаемой с помощью
аппаратуры «ЭЛИМАН» при лечении ряда хронических заболеваний с
выраженным болевым синдромом, была изучена группа из 121 человека
с длительными болями, вызванными различными патологическими про-
цессами. Общим для этих больных являлось то, что болевой синдром у
них характеризовался высокой интенсивностью, постоянством и резис-
тентностью к применяемым традиционным средствам лечения. Основ-
ной причиной болевого синдрома у 27 больных явились облитерирующие
заболевания артерий с сильными ишемическими болями в конечностях,
которые только на короткий срок купировались наркотическими аналь-
гетиками. Другой, наиболее частой причиной хронических болей у на-
блюдавшихся больных являлась вертеброгенная патология. В 19 случаях
ЧЭНС назначалась при сильных болях, обусловленных воспалительными
и дегенеративными процессами периферических нервных структур: нев-
ритами, плекситами, невралгиями.
Для оценки эффективности электроанальгезии, получаемой с помо-
щью аппаратуры «ЭЛИМАН», а также с целью выяснения влияния
ЧЭНС на деятельность некоторых систем организма был проведен ряд
клинических и инструментальных исследований. Многогранное влияние
острой и хронической боли на жизнедеятельность организма, а также
отсутствие прямых объективных показателей наличия боли, доступных
для определения в клинической практике, требует комплексной оценки
эффективности электроанальгезии. Основными показателями, характе-
ризующими уровень обезболивания у оперированных больных и больных
с хроническими болевыми синдромами, были избраны:
— общеклинические тесты;
— изменения ряда параметров систем кровообращения и дыхания
в ответ на боль и применяемые методы обезболивания;
— показатели метаболических сдвигов в организме;
— изменение потребности в анальгетиках на фоне ЧЭНС;
— изменение некоторых видов кожной чувствительности.
В качестве клинических тестов изучалась двигательная активность
оперированных больных до и после обезболивания, их способность глу-
боко дышать, откашливать мокроту. Для субъективной оценки пациен-
Системы электростимуляции в клинической практике
331
том болевых ощущений была применена вербальная аналоговая шкала,
широко используемая при подобных исследованиях [354]. Были выбраны
6 градаций выраженности болевых ощущений: нестерпимая боль — 5
баллов; очень сильная боль — 4 балла; сильная боль — 3 балла; уме-
ренная боль — 2 балла; слабая боль — 1 балл; отсутствие боли — О
баллов.
Для определения реакции сердечно-сосудистой системы регистри-
ровались: частота сердечных сокращений, изменения артериального дав-
ления, а также проводился анализ ЭКГ в 3-х отведениях. Для проведения
данных исследований использовалась как стандартная аппаратура, так и
оригинальные методики измерения — непрерывная запись кардиоинте-
рвалов [355], автоматизированная запись изменения артериального дав-
ления [356].
Оценка легочной вентиляции проводилась с помощью функциональ-
ных проб Штанге и Саабразе с задержкой дыхания на вдохе и выдохе,
а также путем регистрации и последующего анализа спирограмм. По
спирограммам оценивалась динамика частоты дыхания, дыхательного
объема и минутного объема дыхания.
Биохимические исследования проводились у оперированных боль-
ных до и после сеансов обезболивания. Определялась динамика сахара
крови по методике Хагедорна-Йенсена, как одного из косвенных пока-
зателей напряжения симпато-адреналовой системы в ответ на боль и
операционную травму, и динамика кислотно-щелочного состояния
(КЩС) крови. КЩС исследовали в смешанной капиллярной крови мик-
рометодом на аппарате «Микро-Аструп». Исследования проводили до
сеанса ЧЭНС или до введения наркотиков, а затем через один час после
сеанса или после применения наркотических анальгетиков. При оценке
КЩС учитывались изменения истинного pH крови, буферных основа-
ний, стандартного и истинного бикарбонатов.
С целью выяснения некоторых механизмов анальгезии при ЧЭНС
у 22 больных с хроническими болевыми синдромами было проведено
исследование температурной и болевой кожной чувствительности до и
после проведения сеансов ЧЭНС. Определение чувствительности осу-
ществлялось специально разработанным прибором — измерителем тем-
пературной чувствительности кожи человека [3^7] по методу определе-
ния временного интервала от момента касания кожи электронагрева-
тельным элементом с фиксированной температурой до момента
появления соответствующего ощущения. Важным показателем адекват-
ности обезболивания у оперированных больных служили изменения по-
требления наркотических анальгетиков на фоне ЧЭНС.
332 Глава 8
8.4.2. Периферическая электроанальгезия в раннем
послеоперационном периоде
Для лечения использовалась методика, при которой обезболивание
проводилось паравертебральным наложением электродов [265]. ЧЭНС
начиналась после пробуждения больного от постнаркотического сна.
Зоны крепления электродов определялись видом операции и локализа-
цией оперативного доступа (табл. 8.1). Анализом клинических наблюде-
ний было установлено, что для получения необходимого уровня электро-
анальгезии амплитуда тока ЧЭНС должна быть не менее 40...50 мА.
Частота следования и длительность стимулов подбирались индивидуаль-
но таким образом, чтобы при минимальных раздражающих ощущениях
под электродами создавалась максимальная амплитуда тока. Продолжи-
тельность сеанса ЧЭНС определялась временем наступления максималь-
ного анальгетического эффекта и колебалась от 45 до 60 минут. Доста-
точный уровень анальгезии у большинства больных сохранялся в течение
1,5...3,0 часов. При возобновлении болей или их усилении возникала
потребность в повторном включении аппарата. В среднем за сутки каж-
дому оперированному больному проводилось 4-6 сеансов ЧЭНС. Дли-
тельность использования аппаратов в отделении реанимации каждым
больным составила в среднем 2,5 суток. При неосложненном течении
послеоперационного периода боль являлась основной и наиболее частой
причиной психоэмоционального напряжения и гиподинамии у всех на-
блюдавшихся больных.
Локализация болей была различной (таблица 8.2). Преобладали бо-
левые ощущения в области раны, боли и дискомфорт в местах выведен-
ных дренажей. Очень сильную боль (4 балла) испытывали больные после
вмешательств, сопряхенных с травматизацией обширных рефлексоген-
ных зон, например, по поводу аневризм аорты, после операций на ор-
ганах средостения.
Таблица 8.2
Индивидуальная оценка боли пациентами
Оцен- ка боли в баллах Основная группа Контрольная группа
До ЧЭНС После ЧЭНС До обезболивания После обезболивания
чел. % чел. % чел. % чел. %
5 7 1,4
4 122 25,6 3 0,6 52 29,7 - -
3 265 55,4 30 6,3 98 56,0 16 3,3
2 81 16,9 130 27,2 25 14,3 75 42,7
1 3 0,7 212 44,3 - 69 39,4
0 - - 103 21,5 - - 15 8,6
Острые послеоперационные боли в первую очередь приводили к
нарушениям функций дыхания и к угнетению двигательной активности
оперированных. Для колмественной оценки динамики данных симпто-
Системы электростимуляции в клинической практике
333
мов определялись три показателя по трем градациям: невозможно —
«н», затруднено — «з», возможно — «в» (табл. 8.3).
Таблица 8.3
Состояние дыхания и физической активности больных
Показатель Клини- ческая оценка Основная группа Контрольная группа
ДоЧЭНС После ЧЭНС До обезболивания После обезболивания
чел. % чел. % чел. % чел. %
Глубокое н 201 41,9 13 2,7 52 29,6 6 3,4
дыхание 3 112 23,6 26 5,4 46 23,6 33 19,0
в 165 34,5 439 91,9 77 44,1 136 77,6
Свободное
безболез- н 332 69,5 42 8,8 113 64,5 24 13,8
ненное от- 3 91 19,0 84 17,6 33 19,0 61 34,9
кашливание в 55 11,5 352 73,6 29 16,5 90 51,3
Активные н 239 50,0 10 2,1 95 54,0 13 7,2
движения 3 206 43,2 106 27,3 70 40,1 88 50,0
в 33 6,8 362 75,6 10 5,9 74 42,8
Прямая связь между оценкой интенсивности боли и клиническими
показателями отмечалась у всех оперированных трансторакальными и
забрюшинными доступами. На фоне ЧЭНС клиническая картина ран-
него послеоперационного периода значительно изменялась. После вклю-
чения аппаратуры через 10... 15 минут появлялся обезболивающий эф-
фект. У подавляющего большинства оперированных электроанальгезия
достигала своего максимума через 45...60 минут от начала воздействия
[266]. После проведения ЧЭНС значительно изменилась оценка боли
пациентами. Как видно из таблицы, 65,8% больных отмечали исчезно-
вение или резкое облегчение боли в результате ЧЭНС и не нуждались
в дополнительном медикаментозном обезболивании. Умеренная боль
сохранялась у 130 больных, которые после введения ненаркотических
анальгетиков давали минимальные оценки остаточным болевым ощуще-
ниям. В контрольной группе после введения наркотических анальгетиков
умеренные боли отмечали 42,7% больных, тогда как в основной — только
27,2%. В контрольной группе помимо не всегда достаточно полноцен-
ного устранения боли часто отмечались побочные действия наркотиков,
такие как головокружение, тошнота и рвота, у 4 больных была выяснена
непереносимость анальгетиков. Изучение состояния дыхания и физи-
ческой активности пациентов после ЧЭНС показало, что способность
к активным движениям получили 25,6% больных, а 91,9% получили
возможность свободно, безболезненно дышать с полной амплитудой,
подавляющее большинство больных смогли безболезненно откашливать
мокроту. В контрольной группе данные положительные сдвиги имели
место у гораздо меньшего количества пациентов из-за избыточного се-
дативного действия наркотиков. Все получавшие опиатоподобные аналь-
334
Глава 8
гетики отмечали появление сонливости, расслабленности. Активное ве-
дение послеоперационного периода, способствующее ускоренной реаби-
литации, наталкивалось здесь на определенные трудности. Центральное
угнетающее действие наркотиков на функцию дыхательного центра по-
давляло кашлевой рефлекс и снижало способность больных к свобод-
ному откашливанию мокроты.
Таким образом, по рассмотренным клиническим показателям можно
сделать вывод, что обезболивание аппаратурой «ЭЛИМАН» позволяет
получить снижение интенсивности послеоперационных болей вполне
сравнимое, а в ряде случаев и более значительное, чем после введения
наркотических анальгетиков. Преимуществом электроанальгезии перед
медикаментозным обезболиванием является отсутствие угнетающего и
избыточного седативного действия, обеспечение более высокой физи-
ческой активности оперированных, что не могло не оказать положитель-
ного влияния на функционирование многих жизненно важных органов
и систем. Изучение особенностей легочной вентиляции проводилось как
в основной, так и в контрольной группе у больных, перенесших опера-
тивные вмешательства трансабдоминальными и трансторакальными до-
ступами, при которых болевой синдром оказывает максимальное влияние
на функцию внешнего дыхания. На зарегистрированных по стандартной
методике спирограммах определялись: частота дыхания (ЧД), дыхатель-
ный объем (ДО), минутный объем дыхания (МОД) (табл. 8.4).
Таблица 8.4
Изменение показателей внешнего дыхания
Показатель Основная группа Контрольная группа
До ЧЭНС После ЧЭНС До обезбо- ливания После обезбо- ливания
ЧД, 1/мин ДО, см3 МОД, см3 Проба Штанге, с Проба Саабра 24,0 ± 0,9 395,8 ± 23,8 8940,0 ±838,7 23,8 ± 1,1 16,7 ±0,6 21,0 ±0,9 507,0 ± 25,6* 9968,2 ±758,1* 32,1 ± 1,2 19,4 ±0,7* 22,8 ± 1,1 438,7 ±43,2 9486,6 ± 508,9 32,2 ± 1,4 20,2 ± 1,4 22,6 ± 1,3 458,4 ± 72,2 9589,3 ± 926,0 34,0 ±2,3 20,3 ± 1,6
Примечание: звездочкой отмечены показатели, у которых р<0,05.
У больных обеих групп до обезболивания регистрировались призна-
ки перенапряжения функций системы внешнего дыхания — учащение
дыхания, снижение ДО, увеличение МОД, что было обусловлено воз-
растанием потребности организма в кислороде. Косвенным признаком
этого является снижение параметров функциональных проб с задержкой
дыхания. В контрольной группе после обезболивания наркотиками не
выявлено значительных положительных сдвигов параметров внешнего
дыхания. Это можно объяснить центральным угнетением наркотиками
дыхательного центра, о чем свидетельствовало и отмеченное на спиро-
Системы электростимуляции в клинической практике
335
граммах нарушение равномерности и ритма дыхания. В основной группе
при обезболивании ЧЭНС выявлялась отчетливая тенденция к норма-
лизации показателей спирограмм. Функциональная напряженность сис-
темы внешнего дыхания после ЧЭНС снижалась, о чем свидетельствовал
рост времени задержек дыхания при вдохе и выдохе. Отсутствовали
признаки нарушения ритма дыхания. Из исследовавшихся параметров
легочной вентиляции наиболее отчетливо реагировали на уровень
электроанальгезии показатели — ЧД и ДО, которые, по нашему мнению,
могут служить в качестве объективных критериев адекватности электро-
анальгезии.
Влияние обезболивания на показатели сердечно-сосудистой системы
оценивалось путем изучения изменений частоты сердечных сокращений
(ЧСС), длительности кардиоинтервалов, а также уровня артериального
давления (АД) у больных в контрольной и основной группах (табл. 8.5).
Таблица 8.5
Изменение ЧСС и АД у оперированных больных
Показатель Основная группа Контрольная группа
До ЧЭНС После ЧЭНС До обезбо- ливания После обезбо- ливания
ЧСС, 1/мин АД систол., мм рт.ст. АД диастол., мм рт.ст. 96,2 ± 1,5 138,5 ± 1,4 90,5 ± 1,4 90,5 ± 1,3* 133,0± 1,2* 81,4 ±0,8* 93,6 ±1,7 137,0 ±2,2 86,9 ±0,9 89,1 ± 1,5 134,5 ±2,8 86,6 ± 2,2
Примечание: звездочкой отмечены показатели, у которых р<0,05.
До проведения обезболивания в обеих группах было отмечено стой-
кое увеличение ЧСС. После обезболивания наблюдалось урежение пуль-
са, причем статистически достоверные данные получены только в ос-
новной группе. При отсутствии выраженного противоболевого эффекта
ЧЭНС положительные изменения в ЧСС не выявились.
Изучение структуры сердечного ритма — распределения числа кар-
диоинтервалов по узким временным коридорам, проводимое по мето-
дике вариационной пульсометрии с помощью аппаратуры «ЭЛОН», по-
казывает, что болевой синдром влияет не столько на среднюю величину
ЧСС, сколько на картину распределения, делая ее более сжатой во
времени (увеличивается амплитуда моды распределения, уменьшается
вариационный размах). Это соответствует увеличению активности сим-
патического отдела ВНС и свидетельствует о состоянии напряженности
системы регуляции ритма сердца. При снятии болевого синдрома с по-
мощью ЧЭНС регуляция ритма сердца приобретает дополнительные сте-
пени свободы, что проявляется в дезинтеграции сердечного ритма [358,
359].
Изменения АД в зависимости от использованного способа обезбо-
ливания были не столь выраженными и однородными как изменения
пульса. В обеих группах отмечалась тенденция к нормализации показа-
336
Глава 8
телей АД, причем в основной группе после ЧЭНС было выявлено ста-
тистически достоверное снижение систолического и диастолического АД
по сравнению с исходным. Однако, если рассмотреть изучение АД у
больных с хорошим эффектом электроанальгезии, то повышенное на
высоте болей АД после ЧЭНС снижалось до привычных для данного
больного уровней.
Исследование КЩС у оперированных больных проходило при боль-
ших колебаниях показателей, обусловленных исходной патологией,
видом проведенного оперативного вмешательства, адекватностью про-
водимой корригирующей терапии. Однако средние показатели, напри-
мер, истинного pH крови до и после проведения обезболивания, не
выходили за пределы нормы. Изучение динамики КЩС у отдельных
больных с исходными отклонениями позволило отметить положительное
влияние ЧЭНС, в первую очередь, на респираторный компонент КЩС.
После достижения электроанальгезии отмечалось уменьшение или пол-
ная ликвидация проявлений респираторного ацидоза и респираторного
алкалоза [360]. При нормальных исходных параметрах КЩС даже дли-
тельная ЧЭНС не вызывала их патологических отклонений.
Изучение уровня сахара крови проводилось у оперированных боль-
ных до сеанса ЧЭНС, непосредственно после сеанса и через один час
после окончания сеанса (табл. 8.6).
Таблица 8.6
Изменение сахара крови у оперированных больных
Показатель До ЧЭНС После ЧЭНС Через 1 час после ЧЭНС
Сахар крови, ммоль/л 7,46 ±0,07 6,43 ±0,05* 7,69 ±0,31*
Примечание: звездочкой отмечены показатели, у которых р<0,05.
У подавляк'щего большинства обследованных на высоте боли до
ЧЭНС выявлялась отчетливая тенденция к гипергликемии. После ЧЭНС
уровень сахара достоверно снижался, причем наибольшее снижение
уровня сахара было отмечено у больных с хорошим эффектом электро-
анальгезии. При неудовлетворительном обезболивании уровень сахара
крови возрастал. То же явление происходило через час после отключения
аппарата, когда боли у пациентов возобновлялись. В этом случае назна-
чался повторный сеанс ЧЭНС.
Одним из критериев адекватности послеоперационной электро-
анальгезии явилось сравнительное изучение потребления наркотических
анальгетиков у больных основной и контрольной групп за первые трое
суток послеоперационного периода. Число инъекций («доза», табл. 8.7)
и количество вводимых анальгетиков в основной и контрольной группах
определялись лечащими врачами в зависимости от жалоб пациентов на
усиление боли и по объективным клиническим признакам.
Системы электростимуляции в клинической практике
337
У всех больных, перенесших самые разнообразные операции, эф-
фективная электроанальгезия резко снижала потребность в назначении
наркотических анальгетиков. После сеанса ЧЭНС их применяли только
при умеренной и сильной остаточной боли.
Таблица 8.7
Расход наркотиков за первые трое суток после операции
в расчете на одного больного
Операции Основная группа Контрольная группа
Доза мг Доза мг
На желудке и кишечнике 1,5 ± 0,1 24,1 ±2,3 12,1 ±0,1 204,5 ± 3,5
На желчевыводящих 2,1 ±0,1 22,5 ± 2,8 13,0 ±0,2 250,7 ±6,0
путях На аорте и магистраль- ных сосудах 2,2 ±0,1 40,5 ±3,1 12,4 ±0,1 199,2 ±3,3
На легких и органах сре- 1,0 ± 0,1 32,5 ± 2,8 11,2 ±0,2 183,2 ±6,8
достения
В среднем на одного больного 1,9 ± 0,1 29,9 ±2,8 12,1 ±0,2 209,1 ±4,9
Примечание: во всех случаях р<0,01.
В течение первых суток в основной группе потребление наркотиков
каждым больным в среднем снизилось до 13,6 мг. На 2-3 сутки потреб-
ность в дополнительном введении наркотиков уменьшалась, и их общее
среднесуточное потребление снижалось. Только после операций на аорте
и магистральных сосудах к 3 суткам не отмечалось достоверного сни-
жения расхода опиатов по сравнению с первыми сутками, что в боль-
шинстве случаев можно было объяснить высокой травматичностью ан-
гиохирургических операций. В общей сложности за первые 3 суток после
операции применение ЧЭНС позволило сократить потребление нарко-
тических анальгетиков в 7 раз. Это еще раз подтверждает высокую аналь-
гетическую эффективность ЧЭНС.
Послеоперационная анальгезия, создаваемая с помощью ЧЭНС, не
маскировала развитие таких острых интраабдоминальных осложнений,
как несостоятельность анастомозов полых органов и перитонит. Анализ
клинических наблюдений показал, что в условиях электроанальгезии их
диагностика была более легкой и ранней, чем при обезболивании нар-
котическими анальгетиками. Причиной этого явилось то, что ЧЭНС не
вызывала полной анестезии, не угнетала ЦНС, и момент наступления
внутрибрюшной катастрофы отчетливо фиксировался больными. Отме-
ченный факт служит еще одним подтверждением преимуществ проти-
воболевой ЧЭНС по сравнению с опиатным обезболиванием в после-
операционном периоде.
В ходе анализа результатов применения аппаратуры «ЭЛИМАН» в
раннем послеоперационном периоде были выделены три группы боль-
ных в зависимости от степени достигаемого уровня электроанальгезии
(табл. 8.8).
338
Глава 8
Таблица 8.8
Эффект ЧЭНС в зависимости от вида оперативного вмешательства
Эффект Вид операции Хороший Удовлетворит. Неудовл етворит.
чел. % чел. % чел. %
Трансторакальные 83 67,5 34 27,6 6 4,9
Трансабдоминальные 143 70,8 51 25,2 8 4,0
Забрюшинные 49 59,8 24 29,3 9 10,9
Внеполостные 40 56,4 21 29,5 10 14,1
Всего 315 65,9 130 27,2 33 6,9
В группу с хорошим эффектом включены больные, у которых после
сеанса ЧЭНС отмечалось полное исчезновение боли или ее интенсив-
ность снижалась на 2-3 балла. Появлялась возможность активных дви-
жений, улучшались показатели легочной вентиляции, уменьшалась ис-
ходная тахикардия и нормализовались показатели АД. Больные данной
группы в течение всего времени ЧЭНС не испытывали потребности в
дополнительном медикаментозном обезболивании. В группу с удовле-
творительным эффектом отнесены больные, отмечавшие после сеанса
ЧЭНС значительное облегчение боли по сравнению с исходной, однако
ее остаточный уровень оценивался в 2 балла при движениях и 1 балл —
в покое. Физическая активность больных ограничивалась остаточными
болями в ране. Глубокое дыхание и откашливание были затруднены.
Тем не менее ЧСС достоверно снижалась. Для полного подавления боли
у данной категории больных применялось 2-х — 3-х разовое введение
ненаркотических анальгетиков (анальгин, баралгин), либо 10...20 мг про-
медола в сутки. В группу с неудовлетворительным эффектом вошли
больные, у которых после ЧЭНС отмечалось незначительное уменьше-
ние боли, или она оставалась на исходных уровнях. Данным больным
назначалось медикаментозное обезболивание, но и оно не всегда было
достаточно эффективным.
Таким образом, анализ эффективности применения ЧЭНС для
послеоперационного обезболивания показал, что использование аппара-
тов «ЭЛИМАН» позволяло обеспечить полное подавление боли у 65,9%
больных после самых различных оперативных вмешательств. Эффектив-
ность электроанальгезии в значительной степени определялась исходной
патологией, а также характером операции и оперативным доступом.
8.4.3. Периферическая электроанальгезия в лечении хронических
болевых синдромов
При обезболивании хронических болевых синдромов использовались
аппараты «ЭЛИМАН-101», «ЭЛИМАН-206» и «ЭЛИМАН-401». В слу-
Системы электростимуляции в клинической практике
339
чаях одноканальной стимуляции электроды размещали паравертебраль-
но. Если имела место патология четко определенных изолированных
нервных стволов (тригеминальная невралгия, седалищный неврит, плек-
сит), то электроды фиксировали по ходу этих нервов, проксимальнее
зоны болезненных ощущений. При двухканальной ЧЭНС одна пара
электродов крепилась паравертебрально, а вторая — вблизи источника
болей. Особенностью использования аппаратуры «ЭЛИМАН» в рассмат-
риваемом случае явилась необходимость проведения сеансов ЧЭНС дли-
тельностью до 1,5...2,0 часов. При длительных сеансах использовался
аппарат «ЭЛИМАН-401», показавший при этом наибольшую эффектив-
ность. Больным, лечившимся амбулаторно, аппарат «ЭЛИМАН-206» вы-
давался на дом после предварительного обучения методике ЧЭНС.
Для определения эффективности электроанальгезии при использо-
вании аппаратуры «ЭЛИМАН» в лечении хронических болевых синдро-
мов были выделены группы больных, распределение в которые прово-
дилось в зависимости от причин, вызвавших болевой синдром, а также
в соответствии с особенностями возникновения и проведения ноцицеп-
тивной импульсации. Причинами ишемических болей у наблюдавшихся
больных служили обструктивные заболевания артерий. До начала ЧЭНС
все больные испытывали постоянную сильную боль в конечностях: 8
больных оценивали болевые ощущения в 4 балла, 19 — в 3 балла. Всем
больным проводилась медикаментозная терапия боли, 23 из них полу-
чали по 2-3 дозы наркотических анальгетиков в сутки. Продолжитель-
ность анальгезии после однократного введения препарата составляла
2,5±0,3 часа.
В результате проведения ЧЭНС интенсивность болей в среднем сни-
зилась до 1,3±0,1 балла (р<0,01). Однако у отдельных больных отмечались
значительные колебания в динамике болевых ощущений. Степень сни-
жения болевых ощущений коррелировала с характером патологических
изменений в конечностях. В случае эффективного подавления боли сни-
жалась потребность в анальгетиках. Из 28 больных, которым до начала
ЧЭНС назначались наркотики, 18 в условиях электроанальгезии полу-
чили возможность полностью отказаться от них, у 4 удалось сократить
введение наркотиков до 1 дозы в сутки, и только у 5 количество пре-
паратов не изменилось. Больные, у которых ЧЭНС устраняла или за-
метно снижала боли, отмечали улучшение общего состояния. У них
нормализовался сон, снималось психо-эмоциональное напряжение. Все
это позволяло в течение необходимого времени проводить консерватив-
ную терапию, направленную на обеспечение коллатерального кровотока.
По результатам действия ЧЭНС при ишемических болях с использова-
нием методики, рассмотренной в предыдущем разделе, хороший эффект
отмечен в 9 случаях, удовлетворительный — в 13, неудовлетворительные
результаты — в 5 случаях (табл. 8.9).
В группу с вертеброгенной патологией вошли пациенты с болевыми
синдромами при шейном, грудном и поясничном остеохондрозе позво-
ночника.
340
Глава 8
Таблица 8.9
Эффективность электроанальгезии в зависимости
от этиологии болевого синдрома
Этиологические факторы Эффект ЧЭНС Число
болевого синдрома Хороший Удовлетв. Неудовлетв. больных
Шейный и грудной
остеохондроз Поясничный 13 5 0 18
остеохондроз 41 8 3 52
Невриты, плекситы, невралгии 5 3 1 9
Облитерирующие заболевания артерий конечностей 9 13 5 27
Фантомные боли Злокачественные 3 1 0 4
опухоли 4 7 0 11
Всего 75 (62 %) 37 (30,6 %) 9 (7,4 %) 121
Особенностями данной группы больных являлись значительная дли-
тельность заболевания, а также наличие периодов обострения и непол-
ной ремиссии. Кроме выраженного болевого синдрома (10 пациентов
оценивали боль в 5 баллов, 13 — 4 балла, остальные — 3 балла), кли-
ническая картина характеризовалась резким угнетением двигательной
активности больных. Из неврологической симптоматики интерес пред-
ставляли изменения некоторых видов кожной чувствительности. Если
до ЧЭНС болевая чувствительность на пораженной конечности была
существенно угнетена, то после ЧЭНС наблюдалась тенденция к ее
нормализации.
Во всех наблюдениях при хронических болевых синдромах ЧЭНС
не назначалась в качестве первого средства подавления боли, а приме-
нялась после неэффективного медикаментозного обезболивания.
По результатам лечения болей, используя прежнюю методику оцен-
ки, были выделены группы с хорошим, удовлетворительным и неудов-
летворительным эффектом (табл. 8.9). В среднем в первых двух группах
остаточная интенсивность болей снижалась до 1,2±0,2 балла. Параллель-
но с уменьшением боли 33 пациента получили возможность совершать
безболезненные активные движения. Анализ результатов показал, что
эффективность электроанальгезии зависела от стадии заболевания —
обострения или неполной ремиссии, в которой начато лечение, а также
от патоморфологических изменений, послуживших причиной развития
болевого синдрома. Применение ЧЭНС в стадии обострения позволяло
существенно снизить интенсивность боли (до слабой по нашей града-
ции), а в ряде случаев — полностью устранить ее, хотя до этого боль
не купировалась даже наркотическими анальгетиками. Немаловажное
значение имела и исходная продолжительность заболевания. При дли-
тельности заболевания до 3 месяцев отмечен хороший анальгетический
эффект у подавляющего числа больных (11 из 13), при длительности до
Системы электростимуляции в клинической практике
341
I года требовалась большая продолжительность сеансов ЧЭНС для сни-
жения боли до 1 балла. При давности свыше 1 года после первого сеанса
боль полностью не купировалась. Однако достигнутый уровень электро-
анальгезии сохранялся дольше, чем у больных с коротким анамнезом.
Из 4 больных с послеампутационным фантомньм болевым синдро-
мом, у 3 ЧЭНС привела к хорошим результатам. У них исчезли как
боли, так и фантомные ощущения.
Таким образом, противоболевая ЧЭНС, примененная при разнооб-
разных хронических болевых синдромах, послужила важным звеном в
схеме их комплексного лечения. Лучшие результаты отмечены у больных
с вертеброгенной патологией и при болевых синдромах, связанных с
патологией периферических нервов, суставов и мышц. При ишемических
болях электроанальгезия была безусловно эффективной только при уме-
ренной ишемии конечностей и при постишемических невритах. Важны-
ми явились результаты применения ЧЭНС при онкогенных болях, по-
зволившие значительно сократить потребность в наркотических аналь-
гетиках.
8.4.4. Применение чрескожной электронейростимуляции
при родовспоможении
Под обезболиванием родов понимают комплекс мер, направленных
на профилактику и лечение нарушений сократительной деятельности
матки, коррекцию угрожающего состояния внутриутробного плода и
устранение выраженного дискомфорта у рожениц. Болеутоление в родах
является элементом родообезболивания. Вопрос о необходимой глубине
болеутоления окончательно не решен. Известно, что чрезмерная родовая
боль может нарушать нормальное течение родового акта, способствовать
развитию утомления в родах, формированию слабости и дискоординации
родовой деятельности. Вместе с тем достижение полной анальгезии в
родах нецелесообразно, так как у части рожениц при этом родовая
деятельность ослабевает или прекращается. Поэтому приемлемым явля-
ется сохранение умеренно выраженных болевых ощущений, не приво-
дящих к эмоциональному и физическому перенапряжению женщины
[361]. Подобная трактовка значимости родовой боли согласуется с со-
временным ее пониманием как отрицательной биологической потреб-
ности [362], формирующей функциональную систему, обеспечивающую
процесс родоразрешения.
Учитывая многокомпонентность формирования болевой реакции,
при обезболивании родов целесообразно использование комплексного
воздействия на различных уровнях системы регуляции болевой чувстви-
тельности. К обезболиванию родов следует приступать при следующих
условиях установившейся родовой деятельности: развитии регулярных
схваток, открытии шейки матки на 3...4 см, выраженных болевых ощу-
щениях и беспокойном поведении роженицы, отсутствии акушерских
п ротивопоказаний.
342
Глава 8
Паравертебралыая ЧЭНС представляется методом выбора для обез-
боливания нормальных родов в начале периода раскрытия, как наиболее
простая в применен™. Подача тока осуществляется через пару электро-
дов, закрепленных пластырем на коже, расположенных вдоль позвоноч-
ника на уровне преекции задних корешков Th 10 — L2. Для улучшения
контакта с кожей ia электроды предварительно наносят слой электро-
проводной пасты. Увеличивать амплитуду подаваемого тока следует
плавно, до появления субпороговых ощущений. При этом роженица
испытывает чувство тепла, легкого покалывания, жжения под электро-
дами, однако неприятных ощущений быть не должно. Если же они
появляются, амплитуду подаваемого тока следует уменьшить. В начале
первого периода родов достаточно увеличить силу тока до 20...30 мА.
Обычно через 5... 10 минут наступает уменьшение или исчезновение
болей в пояснице. Продолжать ЧЭНС можно в течение нескольких часов
до завершения первого периода родов. При усилении маточных сокра-
щений возможно усиление болей, поэтому по мере прогрессирования
родовой деятельности следует увеличить амплитуду тока, которая к
концу первого периода родов может достигать 40...50 мА. При исполь-
зовании аппарата «ЭЛИМАН-401» с автоматической биорегулировкой
длительности стимула увеличение амплитуды тока к концу первого пе-
риода родов обычно не требуется, т. к. сохраняется достаточный уровень
гипоальгезии.
Двухканальная ЧЭНС включает паравертебральную ЧЭНС и допол-
нительную стимуляцию источника боли. Она проводится либо с помо-
щью двух одноканальных электростимуляторов, либо с использованием
двухканального аппарата «ЭЛИМАН-206». Показанием к проведению
двухканальной ЧЭНС в родах служат выраженные боли внизу живота,
не купирующиеся паравертебральной ЧЭНС. При этом производится
стимуляция области нижнего маточного сегмента, часто являющегося
основным источником родовой боли. С этой целью вторую пару электро-
дов укрепляют пластырем либо с обеих сторон в паховых областях, либо
в надлобковой области (один электрод над другим). Амплитуда тока,
подаваемого на область нижнего маточного сегмента, может достигать
10...20 мА, большие амплитуды могут привести к временному ослабле-
нию родовой деятельности.
Возможен и другой вариант стимуляции области нижнего маточного
сегмента — ректальная электростимуляция (РЭС) [353], которая пока-
зана при расчесах, фурункулезе кожи в нижних отделах живота, а также
у тучных рожениц, у которых при накожном расположении электродов
происходит шунтирование подаваемого тока в подкожной жировой клет-
чатке. РЭС проводится следующим (кишку роженицы на уровне верхне-
или среднеампулярного отдела вводится активный электрод (обеззара-
женный шар из токопроводящего материала диаметром 2...3 см на гиб-
ком изолированном стержне), пассивный электрод в виде металличес-
кого пояса укрепляется вокруг туловища на уровне крыльев подвздош-
ной кости. Подача тока осуществляется только во время схватки путем
Системы электростимуляции в клинической практике
343
плавного увеличения амплитуды до 10...20 мА. В паузах между схватками
ток отключают. При подобном расположении электродов происходит
охват стимуляцией большего числа нервных элементов, что повышает
эффект болеутоления. Перемежающееся обезболивание методом РЭС
может проводиться самой роженицей после соответствующего инструк-
тажа, т.е. осуществляться аутоанальгезия. Каких-либо неприятных ощу-
щений в прямой кишке, ожогов слизистой, явлений проктита у рожениц
и родильниц после РЭС не отмечается.
ЧЭНС хорошо сочетается с нейролептиками (дроперидол) и атарак-
тиками (седуксен, реланиум), потенцирует их эффект и может заменить
анальгетики при обезболивании родов методом нейролептанальгезии или
атаралгезии. Показаниями для электрофармобезболивания служат пси-
хоэмоциональное возбуждение, эмоциональная лабильность, выражен-
ная тошнота и рвота, дискоординация родовой деятельности. У рожениц
с гипертонической болезнью ЧЭНС начинают после внутривенного или
внутримышечного введения 2...4 мл (5... 10 мг) дроперидола. Исключение
из данной схемы наркотического анальгетика позволяет при необходи-
мости начать родообезболивание раньше, чем общепринято — при от-
крытии шейки матки на 2...3 см.
Родообезболивание по схеме ЧЭНС + атарактик целесообразно про-
водить у рожениц с гестозом I-II степени после развития регулярной
родовой деятельности. Оптимальным является внутримышечное введе-
ние 5 мг седуксена (реланиума) и проведение паравертебральной ЧЭНС
аппаратом «ЭЛИМАН-401» с постепенным увеличением силы тока к
концу периода раскрытия до 70...85 мА. Подобная методика в большин-
стве случаев обеспечивает достаточное болеутоление при стабильных
гемодинамических показателях рожениц.
Использование ЧЭНС на фоне атараксии приводит к уменьшению
колебаний артериального давления и пульса как в ходе сократительного
маточного цикла, так и на протяжении всего родового акта, исключает
или значительно снижает потребность в применении сосудорасширяю-
щих и ганглиоблокирующих средств.
При недостаточном болеутолении возможно сочетание ЧЭНС с вве-
дением анальгетиков наркотического ряда. Дозу последних за счет по-
тенцирования эффекта можно снизить в 2-3 раза, при этом достигается
значительное пролонгирование действия наркотиков. Так, доза фента-
нила, равная 0,1 мг, на фоне ЧЭНС оказывается достаточной для эф-
фективного болеутоления у рожениц в течение 3...4 часов. Аналогичный
результат характерен и для промедола, что позволяет при проведении
ЧЭНС ограничиться введением редуцированных доз препарата
(10...15 мг). Пролонгирование эффекта действия наркотических аналь-
гетиков при использовании ЧЭНС позволяет достичь эффективного бо-
леутоления, избежать повторного введения наркоанальгетиков и свести
к минимуму опасность развития наркотической депрессии дыхания у
новорожденных.
344
Глава 8
При правильно выбранном режиме паравертебральная ЧЭНС не
оказывает отрицательного влияния на сократительную деятельность
матки, что подтверждается клиническими наблюдениями и данными
механогистерографии. Показатели внутренней гистерографии свидетель-
ствуют об умеренном (на 3...4 мм рт. ст.) снижении внутриматочного
давления, связанного со снижением базального тонуса миометрия при
проведении ЧЭНС. Токи малой амплитуды (20...30 мА) способствуют
усилению схваток, токи средней амплитуды (31...60 мА) не оказывают
существенного влияния на контрактильную функцию матки, токи боль-
шой амплитуды (61...100 мА) могут приводить к релаксации миометрия
и ослаблению интенсивности схваток. Таким образом, возможна регу-
ляция родовой деятельности с помощью оптимального подбора пара-
метров ЧЭНС в соответствии со сложившейся акушерской ситуацией.
Стимуляция области нижнего маточного сегмента (ЧЭНС, РЭС) при
силе тока выше 25...30 мА иногда приводит к временному ослаблению
родовой деятельности, что требует проведения родоусиления. Опыт сви-
детельствует об отсутствии отрицательного влияния ЧЭНС на состояние
внутриутробного плода и новорожденного. Более того, ЧЭНС способна
оказывать корригирующее влияние на состояние маточно-плацентарного
кровообращения. Доказательством этому служат: увеличение интенсив-
ности маточно-плацентарного кровообращения, обнаруженное методом
плацентарной сцинтиграфии после сеанса ЧЭНС. Данные реогистеро-
графии (отведение «шейка матки — проекция дна матки на передней
брюшной стенке») у беременных с гестозом I-П степени при сроке
гестации 32...39 недель выявили увеличение после сеанса ЧЭНС реогра-
фического индекса и амплитудно-частотного показателя, что свидетель-
ствует о возрастании объемного маточного кровотока.
Методом ультразвуковой допплерографии обнаружено увеличение
после ЧЭНС максимальной систолической и диастолической скоростей
кровотока в маточных артериях и пуповинных сосудах, снижение сис-
толодиастолического отношения и других показателей, свидетельствую-
щих об уменьшении сосудистого сопротивления в системе маточно-пла-
центарного и фетоплацентарного кровообращения и улучшения условий
циркуляции крови в указанных сосудистых бассейнах. Методом газовой
хроматографии выявлено более глубокое, при применении ЧЭНС, на-
сыщение закисью азота организма новорожденных, извлеченных путем
кесарева сечения. Так как переход закиси азота через плаценту осущест-
вляется путем простой диффузии, то при прочих равных условиях дан-
ный факт свидетельствует об усилении маточно-плацентарного крово-
тока и интенсивности плацентарного газообмена. Активация с помощью
ЧЭНС систем адаптации плода, увеличение выработки эндорфина, ка-
техоламина, простагландина «В» повышает резистентность плода к ро-
довому стрессу.
При дистрессе внутриутробного плода под воздействием ЧЭНС на-
блюдается положительная динамика показателей кардиотахограммы
плода (нормализация базального ритма, увеличение амплитуды мгновен-
Системы электростимуляции в клинической практике
345
ных колебаний и др.), а также аускультативных данных: улучшение темб-
ра, звучности сердечных тонов плода. Благоприятный эффект наступает
через несколько минут после начала процедуры ЧЭНС. Поэтому ЧЭНС
можно рекомендовать для профилактики и лечения дистресса внутри-
утробного плода при различных видах акушерской и экстрагенитальной
патологии (преждевременные роды, запоздалые роды, слабость родовой
деятельности, хорионамнионит и др.) как самостоятельно, так и в ком-
плексе с существующими методами лечения [363].
Проведение ЧЭНС не накладывает ограничений на тактику акушера
и анестезиолога и, более того, в ряде ситуаций она способствует дости-
жению лечебного эффекта. Например, при чрезмерной родовой деятель-
ности ЧЭНС (сила тока 60... 100 мА), начатая на фоне кратковременного
наркоза фторотаном, после прекращения ингаляции анестетика часто
обеспечивает нормализацию сократительной функции матки.
Число случаев асфиксии новорожденных после использования
ЧЭНС в родах уменьшается, дети лучше поддаются реанимационным
мероприятиям, течение раннего периода адаптации протекает легче. У
недоношенных новорожденных снижается частота и тяжесть развития
дыхательного дистресс-синдрома [363]. Включение ЧЭНС в схему пред-
операционной подготовки при кесаревом сечении за 20...30 минут до
начала операции позволяет добиться улучшения состояния внутриутроб-
ного плода, снизить дозу анестетика при вводном наркозе. Схема наркоза
при этом существенно не отличается от принятой в данном лечебном
учреждении и дополняется паравертебральной ЧЭНС.
Интраоперационная ЧЭНС позволяет в 2-3 раза снизить потребность
в наркотических анальгетиках (фентанил) после извлечения плода при
сохранении адекватного уровня наркоза. Во время операции лучше ис-
пользовать аппарат «ЭЛИМАН-401», силу тока выбирают 80... 100 мА.
При этом нарушений сократительной способности матки, увеличения
операционной кровопотери не отмечается.
Проведение преднаркозной ЧЭНС показано при преждевременной
отслойке нормально расположенной плаценты, слабости родовой дея-
тельности, хронической гипоксии внутриутробного плода и других си-
туациях, при которых имеются повышенные факторы риска для плода.
Вместе с тем, учитывая вазотропный эффект ЧЭНС, ее следует приме-
нять с осторожностью при гиповолемии, гипотонии у беременных и
рожениц. В этих случаях ее следует начинать после восполнения кро-
вопотери и стабилизации показателей гемодинамики на безопасном
уровне.
Обезболивание методом ЧЭНС после кесарева сечения можно про-
изводить уже в первые часы после операции до появления выраженного
болевого синдрома. Электроды укрепляются пластырем паравертебраль-
но на уровне ThlO — L4. Через 10... 15 мин у большинства родильниц
отмечается заметное уменьшение болей в области послеоперационной
раны, женщины становятся более активными, улучшается их самочув-
ствие. Продолжительность сеанса составляет 30...60 минут, после чего
346
Глава 8
электростимулятор можно выключить. При возобновлении болей сеансы
ЧЭНС можно повторять через каждые 3...4 часа. Можно обучить ро-
дильниц самостоятельному включению аппарата, что важно в психоло-
гическом плане, т. к. отсутствует беспокойство в связи с возможным
усилением боли.
При недостаточном противоболевом эффекте ЧЭНС необходимо на-
значение редуцированных доз нейролептиков, атарактиков и ненарко-
тических анальгетиков, обеспечивая при этом адекватное болеутоление.
Обычно обезболивание в первые сутки после операции балансируется
однократным назначением на ночь 20...40 мг промедола, на вторые-тре-
тьи сутки потребность в наркоанальгетиках отсутствует, достаточно вве-
дение анальгина.
При проведении ЧЭНС на фоне достижения анальгезии отмечается
снижение психоэмоционального напряжения, появляется возможность
выполнения активных движений, занятий дыхательной гимнастикой, ле-
чебной физкультурой. ЧЭНС не оказывает какого-либо угнетающего
влияния на функцию внешнего дыхания, что обеспечивает стабилизацию
основных параметров КЩС и газового состава крови.
Данные математического анализа ритма сердца свидетельствуют об
активации под влиянием ЧЭНС парасимпатического отдела вегетатив-
ной нервной системы, что обеспечивает нейровегетативную стабилиза-
цию у женщин после кесарева сечения, благоприятно влияя на психо-
эмоциональный и вегетативный компоненты регуляции болевой чувст-
вительности.
Важное значение имеет способность ЧЭНС оказывать благоприят-
ное влияние на функциональные состояния желудочно-кишечного трак-
та и мочевого пузыря при их нарушениях. У большинства родильниц
при использовании ЧЭНС к концу первых суток послеоперационного
периода восстанавливается моторная функция кишечника и самостоя-
тельное мочеиспускание, снижается вероятность развития пареза кишеч-
ника. Вместе с тем обезболивание ЧЭНС не маскирует развитие грозных
послеоперационных осложнений (несостоятельность швов на матке, пе-
ритонит, послеоперационная кишечная непроходимость и др.) и позво-
ляет, в случае необходимости, своевременно начать соответствующее
лечение. Исследование влияния ЧЭНС и наркотических анальгетиков
на инволюцию матки в раннем послеоперационном периоде у перворо-
дящих и повторнородящих женщин выявило, что под влиянием ЧЭНС
инволюция матки происходит более быстро.
Таким образом, ЧЭНС, как и наркотические анальгетики, обеспе-
чивает необходимый болеутоляющий эффект после кесарева сечения.
Однако нет основания для противопоставления этих двух методов, наи-
более целесообразно сочетанное использование обоих методов для ра-
ционального ведения раннего послеоперационного периода. Проведение
ЧЭНС, кроме обеспечения болеутоления, во многом решает проблемы
профилактики послеоперационных функциональных нарушений.
Заключение
Комплексная электромагнитотерапия относится к числу таких на-
учных направлений, для которых характерно постоянное «ежедневное»
обновление. Появление новых сведений о механизме действия электро-
магнитного поля на живой организм, описания оригинальных принци-
пов построения новых аппаратов и лечебных методик, сообщения об
эффективном лечении тяжелых заболеваний стимулируют развитие тео-
ретических основ и практической значимости электромагнитотерапии.
В настоящей работе подробно освещены вопросы зарождения и развития
магнитологии и этапы становления магнитотерапии. Рассмотрены ме-
тодологические аспекты реализации принципов комплексной магнито-
терапии в эксперименте и клинике, впервые предложены классифика-
ционные схемы, систематизирующие многие методики, процедуры, тер-
мины. На наш взгляд, глубоко раскрыты инженерные проблемы
магнитотерапии и сформулированы главные признаки систем комплекс-
ной магнитотерапии, разработаны основы проектирования электромаг-
нитозадающей и магнитоизмерительной аппаратуры. Весьма интересны-
ми в работе являются приведенные сочетанные методы и результаты
лечения с их помощью. Необходимо отметить, что исследованию тех-
нологии сочетанных методов и оценке результата воздействия несколь-
ких факторов большое внимание уделяет многочисленная группа ученых
медиков и клиницистов.
Обобщая материал книги, ее построение, тематическую направлен-
ность и акценты изложения глав, а также форму представления, можно
констатировать, что предлагаемая работа базируется на оригинальных
результатах большого числа НИОКР и представляется первым учебным
пособием для вузов по данному направлению.
Вместе с этим многие из поставленных вопросов не нашли полного
разрешения, на что авторы обращают особое внимание своих последо-
вателей. Среди наиболее важных вопросов, не нашедших достаточного
разрешения, отметим следующие:
1. Нет полной ясности по физико-химическому и физиологическому
механизму влияния магнитного поля на живое.
2. Отсутствует адекватная модель отклика живого организма на измене-
ния магнитного поля, что затрудняет организацию обратной связи в
магнитобиологии.
348
Системы комплексной элекгромагнитотерапии
3. Не установлены достаточно четкие грани между лечебными, безопас-
ными и вредными воздействиями электромагнитного поля.
4. Отсутствуют критерии эффективности лечебного действия различных
магнитных полей и алгоритмы их формирования.
Авторы выражают надежду, что совместные усилия ученых разных
областей позволят ответить на поставленные вопросы, особенно связан-
ные с механизмами влияния ЭМП на живое, являющиеся основопола-
гающими. Именно неразрешенность названных вопросов вынудила ин-
женеров создавать системы комплексной электромагнитотерапии более
исследовательского плана, чем лечебного, с большой избыточностью
возможностей в надежде, что эти системы помогут врачам и физиологам
быстрее ответить на кардинальные вопросы по механизмам воздействия
магнитного поля, и с пониманием, в то же время, насколько трудные
и дорогостоящие исследования могут прояснить этот вопрос в полной
мере.
Дальнейшее развитие систем комплексной электромагнитотерапии
возможно в нескольких направлениях. Одно из них уже обозначено в
настоящей книге и связано с математическим описанием взаимодейст-
вия электромагнитного поля с организмом человека, на основе которого
возможна автоматическая оптимизация воздействия за счет текущей диа-
гностики состояния человека и целенаправленного изменения биотроп-
ных параметров поля с целью получения наилучшего лечебного эффекта.
Другое направление связано с формированием виртуальной электро-
магнитной среды вокруг пациента, биотропными параметрами которой
во время лечебного сеанса управляет сам пациент, наблюдая изменения
обобщенного «портрета» среды с помощью какого-либо устройства ото-
бражения и ориентируясь на субъективные ощущения.
Оба эти направления должны учитывать фактор допустимых значе-
ний биотропности поля, опираясь на известный принцип врачей «не
навреди».
Список
основных сокращении
АД — артериальное давление;
АНС — антиноцицептивная система;
АРМВС — автоматизированное рабочее место врача-специалиста;
БАТ — биологически активная точка;
БТС — биотехническая система;
ВМП — вращающееся магнитное поле;
ГМП — геомагнитное поле;
ГМПЗ — геомагнитное поле Земли;
ИБМП — импульсное бегущее магнитное поле;
ИБС — ишемическая болезнь сердца;
ИМП — импульсное магнитное поле;
ИМТК — импульсный магнитотерапевтический комплекс;
ИПН — интегральный показатель напряженности;
КМП — конфигурация магнитного поля;
КМТ — комплексная магнитотерапия;
КТ — компьютерная томография;
МП — магнитное поле;
МТА — магнитотерапевтический аппарат;
МЧМ — магниточувствительная микросхема;
МЧП — магниточувствительный преобразователь;
НМ — нейромодулятор;
НС — ноцицептивная система;
НТ — нейротрансмиттер;
НТП — научно-техническая программа;
ОВ — общее воздействие;
ПБК — плоская бескаркасная катушка;
ПеМП — переменное магнитное поле;
ПК — персональный компьютер;
ПМП — постоянное магнитное поле;
ПМС — полимагнитная система;
ПО — программное обеспечение;
ПуМП — пульсирующее магнитное поле;
ПЭВМ — персональная электронно-вычислительная машина;
СКМ — системы комплексной магнитотерапии;
СлМП — случайное магнитное поле;
350 Системы комплексной элекгромапштотерапии
СУБД — система управления базой данных;
ЦНС — центральная нервная система;
ЧСС — частота сердечных сокращений;
ЧЭНС — чрезкожная электронейростимуляция;
ЭА — электроанальгезия;
ЭКГ — элктрокардиограмма;
ЭКС — электрокардиостимуляция;
ЭМИ — электромагнитов излучение;
ЭМП — электромагнитное поле;
ЭПР — электронный парамагнитный резонанс;
ЭСД — электростимуляция дыхания;
ЭСДН — электростимуляция депрессорных нервов;
ЭЭГ — электроэнцефалограмма;
ЯМР — ядерный магнитный резонанс.
Список литерат у р ы
1. Соловьева Г. Р. Магнитотерапевтическая аппаратура. — М.: Медицина,
1991. - 176 с.
2. Общее магнитное воздействие и его применение в лечебных и восстано-
вительных целях / Под. ред. А. М. Беркутова. — Рязань: Радиотехническая акад.,
1996. - 112 с.
3. Программирование лечебного действия динамических магнитных полей,
генерируемых полимагнитной системой «Аврора МК»: Методические рекомен-
дации / Под ред. Ю. И. Карташова. — Рязань: Радиотехническая акад., 1996. —
52 с.
4. А. с. 764191 (СССР), МКИ A 61N 2/00. Устройство для воздействия
магнитным полем / Ю. Б. Кириллов, А. Г. Епифанов, Е. М. Прошин и др.
5. Патент 2003361 С1 (РФ), МКИ A 61N 2/02. Устройство для воздействия
магнитным полем / А. М. Беркутов, С.В. Груздев, В. Г. Кряков и др. — Опубл.
1993, Бюл. № 43-44.
6. Патент 2033206 С1 (РФ), МКИ A 61N 2/04. Способ лечения артериальных
сосудистых заболеваний, осложненных патологией венозной системы, и устрой-
ство магнитотерапии / А. М. Беркутов, Ю. Б. Кириллов, В. Г. Кряков и др. —
Опубл. 1995, Бюл. №11.
7. Патент 2007198 С1 (РФ), МКИ A 61N 2/02. Полимагнитный терапевти-
ческий аппарат / А. М. Беркутов, В. Г. Кряков, С. Г. Гуржин и др. — Опубл.
1994, Бюл. № 3.
8. Патент 2069572 С1 (РФ), МКИ A 61N 2/04. Способ лечения сосудистых
заболеваний конечностей и устройство для магнитотерапии / Н. С. Барсук,
А. М. Беркутов, Е. М. Прошин и др. — Опубл. 1997, Бюл. № 26.
9. Патент 2090217 С1 (РФ), МКИ A 61N 2/00. Способ формирования сиг-
налов магнитотерапевтического воздействия и устройство для его осуществления
/ А. М. Беркутов, Е. М. Прошин, О. Г. Светников. — Опубл. 1994, Бюл. № 3.
10. Беркутов А. М., Кириллов Ю. Б., Прошин Е. М. Современные тенден-
ции и проблемы управления здоровьем // Вестник новых медицинских техно-
логий. - 1995. - Т.П, № 3-4. - С. 98-104.
11. Беркутов А. М., Карташев Ю. И., Прошин Е. М. Компьютерные инфор-
мационные технологии в медико-биологической практике // 100 лет радио: Сб.
научных трудов Рязанской государственной радиотехнической академии. — Ря-
зань: РГРТА, 1995. - С. 59-63.
12. Беркутов А. М., Жулев В. И., Кирьяков О. В. и др. Магнитотерапия как
высокая лечебно-восстановительная технология // Образование инвалидов:
352
Системы комплексной элекгромагнитотерапии
Межвуз. сб. научных трудов / Под ред. Л. А. Саркисяна. — М.: МИИ, 1997. —
С. 140-147.
13. Беркутов А. М., Гуржин С. Г., Жулев В. И. и др. Основы проектирования
магнитотерапевтической аппаратуры общего воздействия // Материалы II меж-
дународной НТК «Физика и радиоэлектроника в медицине и биотехнологии». —
Владимир, 1996. В 2-х частях. Ч. I. — С. 83-86.
14. Беркутов А. М., Кириллов Ю. Б., Прошин Е. М. Обратная связь в ком-
плексах магнитотерапии // Автоматизация испытаний и измерений: Сб. научных
трудов. — Рязань: РГРТА, 1995. — С. 4-10.
15. Райгородский Ю. М., Горенков В. Ф., Кудрин Ю. А. и др. Механизмы
воздействия ответных реакций живого организма (обзор по электронной техни-
ке) / В кн.: Применение искусственных магнитных полей в экспериментальной
и клинической медицине // Электроника СВЧ. Сер. I. — 1987. — Вып. 4 (1249).
16. Данилевский В. Я. Исследования над физиологическим действием элект-
ричества на расстоянии. — Харьков, 1901. В двух томах. Т.2. — 158 с.
17. Magnetic belts: report of the Council on physical therapy on the «Vitrona»
and «Theronoid» // J.A.M.A. - 1931. - Vol. 96, N 20. - P. 1693-1694.
18. Биологическое и лечебное действие магнитного поля и строго перио-
дической вибрации Ц Сб. статей / Под ред. В. И. Кармилова, М. Р. Могендо-
вича, А. В. Селезнева. — Молотов: Типогр. «Звезда», 1948. — 168 с.
19. Шерстнева О. С. Об изменениях фагоцитоза под влиянием магнитного
поля, электронаркоза и химического наркоза: Автореф. дис. ... канд. мед. наук. —
Молотов, 1951. — 7 с.
20. Скачедуб Р. Г. Материалы к физиологии внутренних анализаторов: Ав-
тореф. дис. ... канд. биол. наук. — Молотов, 1954. — 12 с.
21. Холодов Ю. А. К физиологическому анализу действия магнитного поля
на животных: Автореф. дис. ... канд. биол. наук. — М., 1958. — 15 с.
22. Проблемы нейрокибернетики // Материалы конференции. — Ростов-
на-Дону: Изд-во Ростовского ун-та, 1989. — 493 с.
23. Сборник научных трудов. Выпуск XIX // Материалы XXIV итоговой
НТК Куйбышевского мед. ин-та. — Куйбышев, 1991. — С. 298-335.
24. Ландау Л. Д., Лифшиц Е. М. Теория поля. — М.: Наука, 1967. — 460 с.
25. Тамм И. Е. Основы теории электричества. — М.: Наука, 1976. — 616 с.
26. Гроднев И. И. Электромагнитное экранирование в широком диапазоне
частот. — М.: Связь, 1972. — 112 с.
27. Пресман А. С. Электромагнитные поля и живая природа. — М.: Наука,
1968. - 288 с.
28. Малков Ю. В., Коробков А. И., Петрова Н. А. Аппарат для магнитоте-
рапии и магнитофореза «Полюс-3» // Мед. техника. — 1993. — №2. — С. 46-48.
29. Холодов Ю. А. Организм и магнитные поля // Успехи физиол. наук. —
1982. - Т.13, №2. - С. 48-64.
30. Сухотник И. Г. Сравнительная оценка эффективности использования
постоянных и переменных магнитных полей при лечении трофических язв //
Вестник хирургии. — 1990. — Т. 144, № 6. — С. 123-124.
31. Улащик В. С. Новые методы и методики физической терапии. — Минск:
Беларусь, 1986. — 176 с.
Список литературы
353
32. Гавинский Ю. В. Методическое пособие по применению в медицине
физио-терапевтического комплекса «Магнитор — АМП». — Бийск: Изд-во АО
«НПАП Алтаймедприбор», 1992. — 56 с.
33. Шишло М. А. О биотропных параметрах магнитных полей // Вопросы
курортологии и физиотерапии. — 1981. — №3. — С. 61-63.
34. Музалевская Н. И. Физиологические проявления действия магнитного
поля малой напряженности в диапазоне сверхнизких частот: Автореф. дис. ...
канд. биол. наук. — Л., 1978. — 23 с.
35. Гаркави Л. X. О роли частотных характеристик переменного магнитного
поля в механизме адаптационной деятельности организма // Материалы 1-й
Всероссийской конф. «Механизмы действия магнитных и электромагнитных
полей на биологические системы различных уровней организации». — Ростов-
на-Дону, 1989. — С. 24-26.
36. Карташев А. Г. Об эффективности МП с вертикальным вектором /
Цитир. по кн.: Демецкий А. М., Жуков Б. Н., Цецохо А. В. Магнитные поля в
практике здравоохранения. — Самара: Изд-во самарского мед. ин-та, 1991. —
157 с.
37. Холодов Ю. А., Шишло М. А. Электромагнитные поля в нейрофизио-
логии. — М.: Наука, 1979. — 168 с.
38. Гигиенические критерии состояния окружающей среды. Магнитные
поля. — Женева: Изд-во ВОЗ — Медицина, 1992. — 192 с.
39. Пресман А. С. Электромагнитные поля в биосфере. — М.: Знание,
1971. - 64 с.
40. Пресман А. С. Электромагнитная сигнализация в живой природе. Факты,
гипотезы, пути исследования. — М.: Сов. радио, 1974. — 64 с.
41. Темурьянц Н. А., Владимирский Б. М., Тишкин О. Г. Сверхнизкочас-
тотные электромагнитные сигналы в биологическом мире. — Киев: Наукова
Думка, 1992. — 187 с.
42. Данон Ж. Магнетизм и микроорганизмы // Наука и человечество. —
1986. - С. 187-191.
43. Шеповальников В. Н., Сороко С. И. Метеочувствительность человека. —
Бишкек: Илим, 1992. — 248 с.
44. Дубров А. П. Геомагнитное поле и жизнь. — Л.: Гидрометеоиздат,
1974. - 175 с.
45. Волынский А. М. Изменение сердечной деятельности и электрической
активности коры головного мозга у животных различного возраста при воздействии
электромагнитного поля низкой частоты и малой напряженности // Влияние
электромагнитных полей на биологические объекты. — Харьков, 1973. — С. 7.
46. Волынский А. М. Изменение сердечной и нервной деятельности у жи-
вотных различного возраста при действии электромагнитными полями низкой
частоты и малой напряженности // Проблемы космической биологии. — М.,
1982. - Т.43. - С. 98-100.
47. Волынский А. М., Владимирский Б. М. Моделирование воздействия маг-
нитной бури на млекопитающих // Солнечно-земная физика. — 1969. —
Вып.1. - С. 294-298.
48. Волынский А. М., Владимирский Б. М. Изменения сердечной деятель-
ности у животных при воздействии низкочастотными магнитными полями //
Экспериментальная и возрастная кардиология. — Владимир: Владимирский мед.
ин-т, 1970. - С. 25-26.
354
Системы комплексной элеюромагнитотерапии
49. Плеханов Г. Ф., Ведюшкина Н. И. Выработка сосудистого условного
рефлекса у человека на изменение напряженности электромагнитного поля вы-
сокой частоты И Журн. высш, нервн. деят. — 1966. — Т.16, №1. — С. 34-37.
50. Михайловский В. Н., Красногорская Н. Н., Войчишин Ю. С. и др. О
восприятии людьми слабых колебаний напряженности магнитных полей // Про-
блемы бионики. — М.: Наука, 1973. — С. 202-208.
51. Сидякин В. Г. Влияние глобальных экологических факторов на нервную
систему. — Киев: Наукова Думка, 1986. — 160 с.
52. Сидякин В. Г., Темурьянц Н. А., Макеев В. Б., Владимирский Б. М.
Космическая экология. — Киев: Наукова Думка, 1985. — 176 с.
53. Sanker Narajan Р. V., Subrahmajan S., Srinivazan T. M. A controlled magnetic
field enclosure for experiments in magnetic physiology // J. Biomed. — 1982. — V.2,
N2. - P. 25-29.
54. Subrahmajan S., Sanker Narajan P. V., Srinivazan T. M. Effects of magnetic
micropulsation on the biological system, a bioenvironmental study I I Int. J. Biome-
teor. - 1985. - V. 29, N3. - P. 193-203.
55. Амосов И. С., Никитина Р. Г., Калашникова Н. Н. К проблеме биоло-
гического действия постоянных магнитных полей на организм // Радиация и
организм. — Обнинск, 1984, С. 11-13.
56. Гавриков Н. А., Диженина И. И. Рефлекторная магнитопунктура при
ишемической болезни сердца и гипертонической болезни // Актуальные вопросы
магнитобиологии и магнитотерапии. — Ижевск, 1981. — С. 151-152.
57. Франкевич Е. Л. Магнитные поля и скорость реакции // Вестник АН
СССР. - 1978. - Т.2. - С .80-86.
58. Плеханов Г. Ф. Основные закономерности низкочастотной электромагни-
тобиологии. — Томск: Изд-во Томского ун-та, 1990. — 187 с.
59. Темурьянц Н. А. Нервные и гуморальные механизмы адаптации к дей-
ствию неионизирующих излучений: — Автореф. дис. ... докт. биол. наук. — М.,
1989. - 44 с.
60. Becker R. О., Marino A. A. Electromagnetism and life. — Albany: State Univ.
N.-Y. press, 1982. - 214 p.
61. Холодов Ю. А., Шишло M. П. Электромагнитные поля в нейрофизио-
логии. — М.: Наука, 1979. — 168 с.
62. Берлин Ю. В. Сенсорные реакции на различные магнитные поля //
Применение магнитных полей в медицине, биологии, сельском хозяйстве. —
Саратов, 1978. — С. 17-18.
63. Усенко Г. А. Психосоматический статус и качество пилотирования у
летчиков в период геомагнитных возмущений // Авиационная и экологическая
медицина. — 1992. — №4. — С. 23-27.
64. Мизун Ю. Г, Мизун П. Г. Магнитные бури и здоровье человека. — М.,
1990. - 46 с.
65. Kirschvink J. L. The horisontal magnetic dance of the honeybee is compatible
with a single-domain ferromagnetic magnetoreceptor // Biosystems. — 1981. — V.14,
N2. - P. 193-203.
66. Павлович С. А. Магнитная восприимчивость организмов. — Минск:
Наука и техника, 1985. — ПО с.
67. Скоринов Л. М. Разработка методики гигиенического прогнозирования
магнитных полей, создаваемых оборудованием контактной электросварки // Со-
Список литературы 355
временные проблемы гигиены труда и профпатологии в машиностроении и
химической промышленности. — Харьков, 1983. — С. 52.
68. Евтушенко Г. И., Карамышев В. Б., Петровская И. С., Зюбанова Л. Ф.
Итоги комплексных исследований по гигиене труда и биологическому действию
магнитных полей промышленной частоты // Современные проблемы гигиены
труда и профпатологии в машиностроении и химической промышленности. —
Харьков, 1983. — С. 55-56.
69. Зоткина В. П, Мокеева М. Б., Карпинская Т. В., Печенина Л. И. Ком-
плексная оценка состояния здоровья лиц, работающих с магнитными полями,
и вопросы медицинской профилактики // Современные аспекты профилактики
профессиональных заболеваний. — М., — 1986. — С. 69-74.
70. Чернышева О. М. Органная специфичность ответных биохимических
реакций на воздействие переменных магнитных полей промышленной частоты
И Современные проблемы гигиены труда и профпатологии в машиностроении
и химической промышленности. — Харьков, 1983. — С. 69-70.
71. Douri Р., Boisselier В., Bernard Т. Effect pathologiques sur 1 ehomme des
rayonnements electromagnetiques U.H.F Des aeriens radars A-propes dune observation
I I Sem. hop., Paris, - 1970. - V.42, N42. - P. 2681-2683.
72. Осинцева Г. К. Сенсомоторные реакции у работников, подвергшихся
воздействию электромагнитных полей промышленной частоты // Механизмы
биологического действия электромагнитных излучений. — Пущино, 1982. — С.
149.
73. Нахильницкая 3. Н., Стржижовский М., Климовская Л. Д. Магнитное
поле и жизнедеятельность организмов // Проблемы космической биологии. —
М.: - 1978. - Т.37. - 267 с.
74. Соловьев А. Н. К вопросу о механизмах биологического действия им-
пульсного магнитного поля // Доклады АН СССР. — 1963. — Т. 149, № 2. -
С. 438-442.
75. Холодов Ю. А. Влияние электромагнитных и магнитных полей на цент-
ральную нервную систему. — М.: Наука, 1966. — 284 с.
76. Бучаченко А. Л., Сагдеев Р. 3., Салихов К. М. Магнитные и спиновые
эффекты в химических реакциях. — Новосибирск: Наука, 1978. — 296 с.
77. Волобуев А. Н., Жуков Б. Н., Овчинников Е. Л., Труфанов Л. А. Спи-
новые механизмы влияния постоянного магнитного поля на перенос нервного
импульса // Магнитология. — 1993. — № 1. — С. 7-11.
78. Волькенштейн М. В. Биофизика. — М., 1981.
79. Викторов В. А., Малков Ю. В. К механизму лечебного действия низко-
частотного ЭМП И Магнитология. — 1993. — bfel. — С. 3-7.
80. Ванаг В. К., Кузнецов А. Н. Первичные механизмы действия магнитных
полей и спиновые эффекты // Биологические эффекты электромагнитных полей.
Вопросы их использования и нормирования. — Пущино, 1989. — С. 15-49.
81. Молекулярная биология. — М.: Наука, 1965. — 155 с.
82. Audus L. 1., Whish I. С., Magnetotropism // Biological effects of magnetic
fields: Plenum Press, — 1964. — N4. — P.170.
83. Ивков В. Г., Берестовский Г. Н. Липидный бислой биологических мем-
бран. — М.: Наука, 1982. — 224 с.
84. Реакции биологических систем на магнитные поля. — М.: Наука, 1978. —
216 с.
356
Системы комплексной элекгромагнитотерапии
85. Pilla A. A. Electrochemical information transfer at cell surfaces and junction-
application on the study and manipulation of cell regulation. Bioelectrochemistry. Ed.
H. Keyzer, F. Grutmann: Plenum Press. — 1980. — N4. — P. 353-396.
86. Pilla A. A. Electrochemical information transfer at living cell membrane. —
Ann. N.Y. Acad. Sci. - 1974. - V.238. - P. 149.
87. Adey W. R., Bavin S. M. Brain cell surfaces in cooperative binding and release
of calcium by low level electromagnetic fields // Symposium on the biological effects
of electromagnetic waves. Abstrs. — Helsinki, 1978, P. 53.
88. Шишло M. П. Влияние магнитного поля на биологические объекты. —
М.: Наука, 1971.
89. Эйди У. Р. Кооперативные механизмы восприимчивости мозговой ткани
к внешним и внутренним полям // Физиология человека. — 1975. — Т.1, №1. —
С. 59-68.
90. Эйди У. Р., Дельгадо X., Холодов Ю. А. Электромагнитное загрязнение
планеты и здоровье // Наука и человечество. — 1989. — С. 10-17.
91. Эйди У. Р. Частотные и энергетические окна при воздействии слабых
электромагнитных полей на живую ткань // Труды инженеров ин-та по электро-
технике и радиоэлектронике. — 1980. — Т.68, №1. — С. 140-148.
92. Adey W. R. Effects of electromagnetic radiation on the nervous system //
Ann. N.Y. Acad. Sci. - 1975. - V.247. - P. 15-20.
93. Adey W. R. Tissue integrations with non-ionizing electromagnetic fields //
Phys. Rev. - 1981. - V.61, N2. - P. 435-439.
94. Кисловский Л. Д. О возможном молекулярном механизме влияния со-
лнечной активности на процессы биосферы // Влияние солнечной активности
на атмосферу и биосферу Земли. — М.: Наука, 1971. — С. 260.
95. Кисловский Л. Д. О роли критических явлений при фазовых переходах
второго порядка в процессе самоорганизации неравновесных систем биосферы
И Проблемы космической биологии. — 1988. — Вып.55. — С. 121-128.
96. Березин М. В. Ляпин Р. Р., Салецкий Ф. М. Влияние слабых переменных
магнитных полей на рассеяние света водными системами (препринт / МГУ.
Физ. фак., №21). - М.: 1988. - 41 с.
97. Живые системы в электромагнитных полях. — Томск, 1978.
98. Казанин В. И. Стадийность, обратимость и компенсация магнитобио-
логических реакций в изолированных клетках и тканях // Медицинская радио-
логия. — 1986. — №4. — С. 63-66.
99. Мирцкулава М. Б., Цыбадзе А. Д.. Барнабишвили М. О., и др. Действие
переменного магнитного поля на противовирусную защиту клеток // Вопросы
курортологии и физиотерапии. — 1991. — №5. — С. 3-5.
100. Артюхина Н. И. Реакции структурных элементов головного мозга крыс
на воздействие магнитного поля // Проблемы электромагнитной нейробиоло-
гии. — М.: Наука. — 1988. — С. 48-64.
101. Бухарин Е. А., Владимиров В. Н., Тывин Л. И., Давыдова О. К Про-
блемы электромагнитной нейробиологии. — М.: Наука, 1988. — С. 42-48.
102. Федосеев В. Б. Исследование влияния магнитного поля на возбудимость
нервных клеток // Материалы 1-й Всесоюзной конференции. — Ростов-на-
Дону, 1990. - С. 102.
103. Холодов Ю. А. Роль ноцицептивной системы в реакциях организма на
электромагнитные поля // Сборник научных работ Военно-медицинского фа-
Список литературы
357
культета при Куйбышевском мединституте им. Д.И. Ульянова. — Куйбышев,
1991. Вып. XIX. - С. 298.
104. Вербицкая Н.И., Четвериков Г.Н., Шабанов М.А. Влияние магнитных
полей на микроциркуляторные параметры биологически активных точек кожи
и связанных с ними органов // Применение магнитных полей в медицине,
биологии и сельском хозяйстве. — Саратов, 1978. — С. 23-24.
105. Соковец И. Г., Плеханов Г. Ф. О возможности лечебного действия
переменного магнитного поля через точки акупунктуры // Клиническое приме-
нение магнитных полей. — Ижевск, 1977. — С. 8-9.
106. Тюряева А. А., Понизовский В. М. Изменение электропроводности
кожи в активных точках при патологии и под влиянием переменного магнитного
поля И Применение магнитных полей в медицине, биологии и сельском хозяй-
стве. — Саратов, 1987. — С. 158-159.
107. Иванова С. М. Некоторые биофизические аспекты механизма действия
магнитных полей на структурные компоненты крови // Применение магнитных
полей в медицине, биологии и сельском хозяйстве. — Саратов, 1978. — С. 33-37.
108. Демьяненко В. В., Рузаев К. Д., Демьяненко С. М. К анализу биости-
мулирующего влияния магнитных полей // Применение магнитных полей в
медицине, биологии и сельском хозяйстве. — Саратов, 1978. — С. 27-28.
109. Демецкий А. М. Современное представление о механизмах действия
магнитных полей // Магнитология. — 1991. — №1. — С. 6-11.
ПО. Самохина Л. А., Байгутанов Ж. Б., Жексенбиев Н. Ж. Биологическое
действие электромагнитных полей. — Пущино, 1982. — 167 с.
111. Толгская М. С, Никонова К. В. Гистологические изменения в орга-
низме белых крыс при хроническом воздействии электромагнитных полей вы-
сокой частоты И О биологическом действии электромагнитных полей радио-
частот. — М.: Наука, 1964. — С. 89-90.
112. Зюбанова Л. Ф., Литвишкова Е. И. Влияние импульсного магнитного
поля на высшую нервную деятельность животных // Проблемы электромагнит-
ной нейробиологии. — М.: Наука, 1988. — С. 21-24.
113. Хаютин В. М. Сосудодвигательные рефлексы. — М., 1964.
114. Черниговский В. М. Интерорецепторы. — М., 1960.
115. Годик Э. Э., Гуляев Ю. В. Физические поля человека и животных //
В мире науки. — 1990. — №5. — С. 75-82.
116. Холодов Ю. А., Козлов А. Н., Горбач А. М. Магнитные поля биоло-
гических объектов. — М.: Наука, 1987. — 145 с.
117. Гаркави Л. X., Квакина Е. Б., Уколова М. А. Адаптационные реакции
и резистентность организма. — Ростов-на-Дону: Изд-во Ростовского ун-та,
1990. - 224 с.
118. Белькевич В. И., Берлин Ю. В., Бувин Г. М. Аппаратура для лечения
бегущим импульсным магнитным полем // Электронная промышленность. —
1985. - № 1. - С. 59-62.
119. Инструкция по эксплуатации: И83 254 003 И15. Утв. М3 СССР 15.01.83.
Аппарат для магнитотерапии АМТ-01. — М.: Медицина, 1984. — 4 с.
120. Викторов В. А., Малков Ю. В. Основы разработки аппаратуры для
магнитотерапии и аппараты системы «Полюс» // Медицинская техника. —
1994. - № 3. - С. 26-32.
358
Системы комплексной электромагнитотерапии
121. Соловьева Г. Р., Еремин В. А., Горзон Р. Р. Аппарат для низкочастотной
магнитотерапии «Полюс-1» // Медицинская техника. — 1973. - № 5. - С.
29-33.
122. Еремин В. А., Соловьева Г. Р., Шишков В. А., Петрова Н. А. Пере-
носный аппарат для низкочастотной магнитотерапии «Полюс-101» // Медицин-
ская техника. — 1986. — № 5. — С. 56-58.
123. Малков Ю. В., Еремин В. А. Аппарат для магнитотерапии «Полюс-2»
И Новые методы и аппаратура для физиотерапии. — М., 1988. — С. 31-36.
124. А. с. 971351 (СССР), МКИ A 61N 1/42. Устройство для магнитотерапии
/ Б. Н. Кузьминский, В. К. Ивченко. — Опубл. 1982, Бюл. № 41.
125. Лечебно-диагностический комплекс «Малахит-010П» // Магнитоло-
гия. - 1991. - № 2. - С. 53-54.
126. А. с. 1588425 (СССР), МКИ А 61N 2/00. Магнитотерапевтическая
установка «Магнитотурботрон» / Д. А. Синицкий, С. Д. Синицкий. — Опубл.
1990, Бюл. № 32.
127. Демецкий А. М., Жуков Б. Н., Цецохо А. В. Магнитные поля в практике
здравоохранения. — Самара: Изд-во самарского мед. ин-та, 1991. — 157 с.
128. Беркутов А. М., Жулев В. И., Прошин Е. М. Анализ задачи общего
воздействия динамическим магнитным полем на человека // Вестник РГРТА. —
Рязань, 1997. — Вып. 3. — С. 73-79.
129. Яворский Б. М., Детлаф А. А. Справочник по физике. — М.: Физматгиз,
1963. - 848 с.
130. Саркисян Л. А. Аналитический расчет магнитостатических полей. —
М.: Изд-во МГУ, 1993. - 248 с.
131. I-ON-CO — the magic horse collar: The metamorphosis of a realtor into
magician // J.A.M.A. - 1927. - V. 88, N4. - P. 262-265.
132. Magnetic belts: report of the Council on physical therapy on the «Vitrona»
and «Theronoid» // J.A.M.A. - 1931. - V. 96, N 20. - P. 1693-1694.
133. Theronoid and vitrona. The magic horse collar: Campaign continues //
J.A.M.A. - 1931. - V. 96, N 20. - P. 1718-1719.
134. Штамбергер Г. А. Устройство для создания слабых постоянных маг-
нитных полей. — Новосибирск: Наука, 1972. — 176 с.
135. А. с. 676286 (СССР), МКИ A 61N 1/42. Устройство для магнитотерапии
/ Соловьева Г. Р. и др. — Опубл. 1979, Бюл. № 28.
136. Свид. на пром, образец 15727 (СССР). Аппарат для низкочастотной
магнитотерапии. МКПО 24-02 / Н. С. Канушкин и др. // Промышленные
образцы. Товарные знаки. — 1984. — № 3.
137. А. с. 697131 (СССР), МКИ A 61N 1/42. Устройство для воздействия
магнитным полем на биологические объекты / Берлин Ю. В. и др. — Опубл.
1979, Бюл. № 42.
138. Bittman-Coros L., Macelariu A. Experimenntelle Untersuchungen und
theoretische Betrachtungen uber die Wirkungsweise der durch den «Magnetodiaflux» —
Apparat erzeugten niederfrequenten Elektromagnetfelder // Arch. phys. Ther. —
1969. - Bd. 21, N2. - S. 127-134.
139. Dinkulesku T., Makelariu A. Untersuchungen uber therapeutische Wirk-
samkeit der neiderfrequenten Elektromagnetfelder (Magnetodiaflux) // Z. ges. inn.
Med. - 1963. - V.21. - S. 986-994.
Список литературы
359
140. А. с. 41088 (СРР), МКИ A 62N 1/42. Apparat elektromedikal pentru
tratemente / Robescu V. — Опубл. 1959.
141. Тодоров H. Аппарат за импулсно магнитно поле // Курортол. и фи-
зиотер. — София. — 1974. — № 3. — С. 139-141.
142. Тодоров Н. Магнитотерапия. — София: Медицина и физкултура,
1982. - ПО с.
143. Соловьева Г. Р., Хабаров В. В. Исследование и расчет аксиального
магнитного поля в системе двух многослойных соленоидов // Электричество. —
1987. - №11. - С. 69-71.
144. Сергеев В. Г., Шихин А. Я. Магнитоизмерительные приборы и уста-
новки. — М.: Энергоиздат, 1982. — 152 с.
145. Розенблат М. А. Коэффициенты размагничивания стержней высокой
проницаемости // Журн. техн, физики. — 1954. — Т.24, № 4. — С. 637-661.
146. Свид. на пром, образец 3476 (СССР). Аппарат для низкочастотной
магнитотерапии. МКПО 24-02 / Д. В. Симоненков и др. // Промышленные
образцы. Товарные знаки. — 1974, Бюл. № 3.
147. Магнитотерапевтическая установка «Магнитотурботрон 2М» // Vita.
Традиции. Медицина. Здоровье. — 1994, № 4. — С. 49.
148. Патент 2057755 С1 (РФ), МКИ A 61N 2/02. Устройство для воздействия
магнитным полем / А. М. Беркутов, О. А. Беркутов, Е. М. Прошин и др. —
Опубл. 1996, Бюл. № 2.
149. Кулон Ж. Л., Сабоннадьер Ж. К. САПР в электротехнике: Пер. с
франц. — М.: Мир, 1988. — 208 с.
150. Гуржин С. Г., Жулев В. И., Кряков В. Г., Юдаев Ю. А. Использование
методов математического моделирования для создания информационной базы
при проектировании оконечных устройств магнитотерапевтической аппаратуры
общего назначения // Материалы II международной НТК «Физика и радиоэлек-
троника в медицине и биотехнологии». — Владимир, 1996. В двух частях. Ч.
II. - С. 5-6.
151. Жулев В. И., Кряков В. Г., Федотов А. А., Юдаев Ю. А. Моделирование
магнитных полей магнитоскана // Вестник РГРТА. — Рязань, 1997. — Вып. 3. —
С. 90-97.
152. Гусев В. Г. Информационные свойства электрических параметров кож-
ного покрова. Уфа: Гилем, 1998. 173 с.
153. Гуржин С. Г., Жулев В. И., Кряков В. Г. Оптимизация параметров
магнитотерапевтических аппаратов «Аврора» // Материалы Всероссийской НТК
«Аппаратно-программные средства диагностики и лечения сердечно-сосудистых
заболеваний». — Самара, 1994. — 44 с.
154. Жулев В. И., Кряков В. Г. Оптимизация сканера магнитотерапевти-
ческого аппарата // Автоматизация испытаний и измерений: Сб. научных тру-
дов. - Рязань: РГРТА, 1995. — С. 28-38.
155. Беркутов А. М., Государев Н. А., Гуржин С. Г. и др. Особенности
построения МТА общего воздействия для больных с нарушением опорнодвига-
тельного аппарата // Тезисы докладов межвузовской научно-практической кон-
ференции «Здоровье студентов как комплексная проблема». — Тула, 1996. — С.
29-30.
156. Афанасьев Ю. В., Студенцов Н. В., Хорев В. Н. и др. Средства изме-
рений параметров магнитного поля. — Л.: Энергия, 1979. — 320 с.
360
Системы комплексной электромагнитотерапии
157. Приборы, средства автоматизации и системы управления // Обзорная
информация: Современная магнитоизмерительная аппаратура. — М.: Информ-
прибор, 1990. Вып. 3. — 48 с.
158. Померанцев Н. М., Рыжков В. М., Скроцкий Т. В. Физические основы
квантовой магнитометрии. — М.: Наука, 1972.
159. Егиазарян Г. А., Стафеев В. И. Магнитодиоды, магнитотранзисторы и
их применение. — М.: Радио и связь, 1987. — 88 с.
160. Магниточувствительная микросхема. Информ, листок АО «ПРО-
ТОН». - Орел, 1987.
161. Проблемы магнитных измерений и магнитоизмерительной аппаратуры
// Тезисы докладов 7-й Всесоюзной НТК. — Л.: 1989. В двух частях. 4.2. — С.
7, 20, 26, 34, 37.
162. А. с. 1636816, G 01R 33/06. Датчик для измерения магнитного поля /
Брякин Л. А. — Опубл. 1991, Бюл. № 11.
163. А. с. 1652951, G01 R 33/02. Устройство для топографирования магнит-
ного поля / Брякин Л. А. — Опубл. 1991, Бюл. № 20.
164. Визуализация распределения магнитной индукции, как векторной ве-
личины, методом компьютерной томографии // Экспресс-информация. Сер.
КИТ. - 1991. - Реф. 78, № 18.
165. Попечителев Е. П. Методы медико-биологических исследований. — Л.:
Л ЭТИ, 1979.
166. Попечителев Е. П. Инженерные аспекты медико-биологических иссле-
дований. — Л.: ЛЭТИ, 1982.
167. Беркутов А. М., Волков И. В., Штырков В. Н. Проблемы систем
диагностики в магнитотерапии // Тез. докладов Всероссийской НТК «Электро-
магнитные поля в медицине и биологии». — Рязань: РГРТА, 1995. — С. 36-37.
168. Харкевич А. А. Спектры и анализ. — М.: Гос. изд. тех.-теор. лит.,
1953. - 215 с.
169. Волков И. В., Штырков В. Н. Разработка кардиографических систем
для научных исследований в импульсной магнитотерапии // Тез. докладов Все-
российской НТК «Новые информационные технологии в научных исследовани-
ях радиоэлектроники». — Рязань: РГРТА, 1996. — С. 23.
170. Волков И. В., Штырков В. Н. Взаимодействие магнитотерапевтического
комплекса, пациента и кардиомонитора // Тез. докладов Всероссийской НТК
«Биотехнические, медицинские и экологические системы и комплексы». — Ря-
зань: РГРТА, 1996. - С. 80.
171. Волков И. В. Повышение информативности кардиографических иссле-
довательских систем в магнитотерапии // Тез. докладов Всероссийской НТК
«Новые информационные технологии в научных исследованиях радиоэлектро-
ники». — Рязань: РГРТА, 1996. — С. 60-61.
172. Волков И. В., Штырков В. Н. Методы снижения влияния внешних
помех на автоматизированную кардиографическую систему исследования реак-
ции пациентов на импульсное магнитное поле // Тез. докладов Всероссийской
НТК «Новые информационные технологии в научных исследованиях радиоэлек-
троники». — Рязань: РГРТА, 1996. — С. 61-62.
173. Волков И. В., Штырков В. Н. Способ снижения собственных шумов
и амплитудной нелинейности электрокардиографа // Тез. докладов Всероссий-
ской НТК «Электромагнитные поля в медицине и биологии». — Рязань: РГРТА,
1995. - С. 40.
Список литературы
361
174. Волков И. В., Штырков В. Н. Алгоритм снижения методических и
инструментальных погрешностей реографа в условиях воздействия магнитного
поля // Тез. докладов Всероссийской НТК «Электромагнитные поля в медицине
и биологии». — Рязань: РГРТА, 1995. — С. 37-38.
175. Штырков В. Н. Повышение информативности автоматизированной
системы исследования электроплетизмограмм в условиях импульсных электро-
магнитных помех // Тез. докладов Всероссийской НТК «Новые информацион-
ные технологии в научных исследованиях радиоэлектроники». — Рязань: РГРТА,
1996. - С. 57-58.
176. Виноградов А. Л., Волков И. В., Геращенко С. С. и др. Аппаратно-
программные средства автоматизации измерений артериального давления паци-
ента // Автоматизация испытаний и измерений: Межвуз. сб. научных трудов. —
Рязань: РГРТА, 1995, С. 21-28.
177. Жуковский В. Д. Автоматизированная обработка данных клинических
функциональных исследований. — М.: Медицина, 1985. — 352 с.
178. Панкратов Н. Н. Автоматизированная обработка ЭКГ в целях опера-
тивного врачебного контроля состояния больного // Программно-алгоритмичес-
кое обеспечение анализа данных в медико-биологических исследованиях: Ма-
териалы 1 Всесоюзной школы-семинара. — Пущино, 1986. — С. 99-104.
179. Кобер Е., Германн И. Цифровой сбор ЭКГ-данных и их накопление
как первый этап ЭКГ-анализа с помощью вычислительной техники // Теория
и практика автоматизации электрокардиологических и клинических исследова-
ний: Сб. научных трудов. 1981. — С. 62-65.
180. Чаподи Ч. Цифровая передача и хранение ЭКС с применением сжатия
данных. // Теория и практика автоматизации электрокардиологических и кли-
нических исследований: Сб. научных трудов. 1981. — С. 66-75.
181. Интегральные микросхемы энергонезависимой памяти 28F008SA,
28F008SA-L // Сост. В. В. Затишный. — М.: Бином-Конкорд, 1992. — 79 с.
182. Буч Г. Объектно-ориентированное проектирование с примерами при-
менения. — М.: Конкорд, 1992. — 519 с.
183. Гранже М., Менсье Ф. OS/2. Принципы построения и установка. —
М.: Мир, 1991. - 224 с.
184. Ю-Чжен Лю, Гибсон Г. Микропроцессорные семейства 8086/8088. Ар-
хитектура, программирование и проектирование микрокомпьютерных систем. —
М.: Радио и связь, 1987. — 510 с.
185. Дейтел Г. Введение в операционные системы. — М.: Мир, 1987. В 2-х
томах. — 359 с., — 400 с.
186. Керниган Б., Пайк Р. Unix: Универсальная среда программирования. —
М.: Финансы и статистика, 1992. — 302 с.
187. Кардиомониторы. Аппаратура непрерывного контроля ЭКГ: Учебное
пособие для вузов / Под ред. А. Л. Барановского и А. П. Немирко. — М.: Радио
и связь, 1993. — 248 с.
188. Баевский Р. М., Кириллов О. И., Клецкин С. М. Математический
анализ изменений сердечного ритма при стрессе. — М.: Наука, 1984. — 194 с.
189. Калиниченко Л. А. Методы и средства интеграции неоднородных баз
данных. — М.: Наука, 1983. — 422 с.
190. Попов Э. В. Экспертные системы. — М.: Наука, 1987. — 316 с.
191. Демецкий А. М., Цецохо А. В. Учебное пособие по применению маг-
нитной энергии в практике здравоохранения. — Минск, 1990. — 74 с.
362
Системы комплексной элекгромапштотерапии
192. Гунько И. И. Влияние импульсного магнитного поля на остеогенез в
эксперименте // Магнитология. — 1994. — № 1. — С. 7-8.
193. Хабирова Г. Ф. Васкуляризация и механическая прочность костного
регенерата в условиях воздействия постоянным магнитным полем // Примене-
ние магнитных полей в медицине, биологии и сельском хозяйстве: Межвуз.
тематический сб. — Саратов: Изд-во Саратовского ун-та, 1978. — С. 159-162.
194. Митбрейт И. М., Маняхин В. Д. Влияние низкочастотного магнитного
поля на репаративную регенерацию кости // Применение магнитных полей в
медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 139-140.
195. Золотова Н. Н., Джалилов П. С. Магнитотерапия при оперативном
методе лечения патологического вывиха бедра у детей // Сборник научных
работ. — Куйбышев: Куйбышевский мед. ин-т, 1991. — Вып. XIX. — С. 302-303.
196. Кипренский Ю. В., Гилинская Н. Ю., Игнатьева Е. Н., Савина Л. В.
Влияние магнитных полей различных характеристик на течение раневого про-
цесса в условиях трансплантации // Применение магнитных полей в медицине,
биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов: Изд-во
Саратовского ун-та, 1978. — С. 129-130.
197. Демецкий А. М., Луд Г. В., Базеко Н. П. Операции на кровеносных
сосудах в условиях воздействия магнитного поля // Применение магнитных
полей в медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. —
Саратов: Изд-во Саратовского ун-та, 1978. — С. 111-112.
198. Куницина Г. А., Слепышева Э. И., Радцева Г. Л. и др. Влияние пере-
менного магнитного поля низкой напряженности на репродуктивную систему
животных при экспериментально вызванном воспалении // Применение маг-
нитных полей в медицине, биологии и сельском хозяйстве: Межвуз. тематичес-
кий сб. — Саратов: Изд-во Саратовского ун-та, 1978. — С. 134-136.
199. Мельникова М. М., Куницина Г. А., Торопцев И. Д., Рыжков В. В.
Изменение гемодинамики органов малого таза у женщин при лечении воспа-
лительных заболеваний магнитным полем // Применение магнитных полей в
медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 137-138.
200. Никонова Л. В. Микроциркуляция больных с ревматоидным артритом
под воздействием переменного низкочастотного магнитного поля // Применение
магнитных полей в медицине, биологии и сельском хозяйстве: Межвуз. тема-
тический сб. — Саратов: Изд-во Саратовского ун-та, 1978. — С. 148-150.
201. Елисеева М. П., Туев А. В. Влияние переменного магнитного поля
малой интенсивности на функциональное состояние желудка у больных язвен-
ной болезнью И Применение магнитных полей в медицине, биологии и сель-
ском хозяйстве: Межвуз. тематический сб. — Саратов: Изд-во Саратовского
ун-та, 1978. - С. 117-118.
202. Гусева Н. Г. Магнитное поле в комплексном лечении больных язвенной
болезнью двенадцатиперстной кишки // Применение магнитных полей в меди-
цине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 109-110.
203. Анисимова В. М. Морфология органного кровеносного русла перикарда
в условиях воздействия постоянным магнитным полем напряженностью 300
эрстед // Применение магнитных полей в медицине, биологии и сельском хо-
Список литературы
363
зяйстве: Межвузовский тематический сборник. — Саратов: Изд-во Саратовского
ун-та, 1978, с.8-9.
204. Дирин В. А. Влияние низкочастотного (50 Гц) переменного магнитного
поля на периферическое кровообращение верхних конечностей у больных с
переломом дистального эпиметафиза лучевой кости // Применение магнитных
полей в медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. —
Саратов: Изд-во Саратовского ун-та, 1978. — С. 113-114.
205. Бухарин Е. А., Владимиров В. Н., Травин Л. И., Давыдова О. К.
Гистология тканей головного и костного мозга при воздействии магнитных
полей / В кн.: Проблемы электромагнитной нейробиологии. — М.: «Наука»,
1988. - С. 42-48.
206. Чернов В. Н., Глувштейн А. Я., Агабабов В. Э. Спазмолитические
эффекты электромагнитных полей низкой интенсивности // Сб. научных
работ. — Куйбышев: Куйбышевский мед. ин-т, 1991. — Вып. XIX. — С. 308.
207. Турзунски В., Сислар Г., Сирон А., Адамек М. Влияние магнитных
полей на реологические свойства крови в эксперименте на животных // Маг-
нитология. — 1994. — №1. — С. 86-87.
208. Алимов 3. 3., Ибрагимова А. Г., Белогорская В. Н., Алимова Н. 3.
Значение регионарно-сегментарного применения низкочастотного магнитного
поля для патогенетической терапии больных облитерирующим эндартериитом
и атеросклерозом нижних конечностей // Применение магнитных полей в ме-
дицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 100-101.
209. Кузьменко В. В., Кац Ю. Д. Применение магнитного поля в лечении
фантомного и ампутационно-болевого синдромов // Применение магнитных
полей в медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. —
Саратов: Изд-во Саратовского ун-та, 1978. — С. 133-134.
210. Сурганова С. Ф., Попова Л. И. Стимуляция коллатерального кровооб-
ращения магнитным полем // Применение магнитных полей в медицине, био-
логии и сельском хозяйстве: Межвуз. тематический сб. — Саратов: Изд-во Са-
ратовского ун-та, 1978. — С. 157-158.
211. Удинцев Н. А. О механизме биологической реакции на воздействие
переменного магнитного поля // Применение магнитных полей в медицине,
биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов: Изд-во
Саратовского ун-та, 1978. — С. 84-85.
212. Ибрагимова А. Г., Валеева Р. Ф. Влияние переменного низкочастотного
магнитного поля на функциональное состояние гипофизарно-надпочечниковой
и симпато-адреналовой систем у больных с коллагенозами // Применение маг-
нитных полей в медицине, биологии и сельском хозяйстве: Межвуз. тематичес-
кий сб. — Саратов: Изд-во Саратовского ун-та, 1978. — С. 122-124.
213. Сахарова С. А., Криушкин О. Э. Катехоламины и сосудистая реакция
под влиянием переменного магнитного поля // Применение магнитных полей
в медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Са-
ратов: Изд-во Саратовского ун-та, 1978. — С. 72-73.
214. Денисов В. Н., Гаврилов В. А., Иконникова И. Н. Изменение вегета-
тивных функций организма человека под влиянием переменного магнитного
поля Ц Применение магнитных полей в медицине, биологии и сельском хозяй-
стве: Межвуз. тематический сб. — Саратов: Изд-во Саратовского ун-та, 1978. —
С. 28-29.
364
Системы комплексной электромагнитотерапии
215. Углова М. В., Перевозчиков Б. Г. Морфофункциональные изменения
тимуса при воздействии постоянного магнитного поля // Сб. научных работ. —
Куйбышев: Куйбышевский мед. ин-т, 1991. — Вып. XIX. — С. 317-318.
216. Ирьянов Ю. М. Действие постоянного магнитного поля на ультра-
структуру нервной ткани млекопитающих: Автореф. дис. ... канд. биол. наук. —
Пермь, 1971. — 27 с.
217. Кикнадзе Г. И., Лазриев И. Л. Особенности ультраструктуры нейрог-
лиальных клеток при воздействии ПМП / В кн.: Функция нейроглии. — Тби-
лиси: Мецниереба, 1979. — С. 236.
218. Рыболовлев Е. В., Тюряева А. А., Чуев В. 3. К механизму лечебного
действия переменного магнитного поля // Применение магнитных полей в ме-
дицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 153-154.
219. Вержбицкая Н. И., Четвериков Г. Н., Шабанов М. А. Влияние маг-
нитного поля на морфофункциональные параметры биологически активных
точек кожи и связанных с ними органов // Применение магнитных полей в
медицине, биологии и сельском хозяйстве: Межвуз. тематический сб. — Саратов:
Изд-во Саратовского ун-та, 1978. — С. 23-24.
220. Удинцев Н. А., Мороз В. В. О механизме реакции гипофизарно-над-
почечниковой системы на стрессовое действие переменного магнитного поля //
Патологическая физиология и экспериментальная терапия. — 1976. — Вып. 6. —
С. 72-74.
221. Меерсон Ф. 3. Адаптационная медицина. Концепция долговременной
адаптации. — М.: Дело, 1993. — 138 с.
222. Меерсон Ф. 3., Малышев И. Ю. Феномен адаптационной стабилизации
структур и защита организма. — М.: Наука, 1993. — 158 с.
223. Руководство по физиологии. Физиология адаптационных процессов. —
М.: Наука, 1986.
224. Калюжный Л. В. Физиологические механизмы боли и анальгезии //
Физиологический журнал СССР им. И. М. Сеченова. — 1991. — Т.77, № 4. -
С. 123-133.
225. Овсянников В. Г. Боль (этиология, патогенез, принципы и механизмы
лечения). — Ростов-на-Дону, 1990.
226. Баженова В. Г. Индивидуальная чувствительность человека к действию
магнитных полей // БИОНИКА — 89: Тезисы докладов VII Республиканской
конференции. — Киев, 1989. — С. 102.
227. Лебедева Н. Н., Вехов А. В., Баженова С. И. О восприятии человеком
магнитных полей / В кн.: Проблемы электромагнитной нейробиологии. — М.:
Наука, 1988. - С. 85-94.
228. Кириллов Ю. Б., Швальб П. Г., Ластушкин А. В. и др. Магнитотерапия
при облитерирующих заболеваниях сосудов нижних конечностей // Вопросы
курортологии, физиотерапии и лечебной физкультуры. — 1992. — № 3. — С.
14-17.
229. Кириллов Ю. Б., Швальб П. Г., Ластушкин А. В. и др. Сочетанное
применение магнитолазерной терапии при лечении облитерирующих заболева-
ний сосудов конечностей // Вопросы курортологии, физиотерапии и лечебной
физкультуры. — 1993. - № 5. - С. 22-25.
Список литературы
365
230. Кузин Н. М. и др. Диабетическая ангиопатия: выбор метода лечения
И Материалы II Всеросийского симпозиума по хирургической эндокриноло-
гии. — Саратов, 1993. — С. 73.
231. Чернов В. Н. и др. Магнитотерапия диабетической ангиопатии // Ме-
дико-биологическое обоснование применения магнитных полей в практике здра-
воохранения: Сб. научных трудов. — Л., 1989. — С. 127.
232. Кириллов Ю. Б., Прошин Е. М., Ластушкин А. В. Обоснование к
применению магнитных полей в практическом здравоохранении // Материалы
I Всероссийской конференции. — Ростов-на-Дону, 1989. — С. 188-190.
233. Нурмамбетов Д. Н. Медикаментозное и хирургическое лечение больных
с диабетическими поражениями сосудов нижних конечностей // Материалы II
Всероссийского симпозиума по хирургической эндокринологии. — Саратов,
1993. - С. 83.
234. Швальб П. Г., Сигаев А. А., Качинский А. Е. Место лазерной терапии
в комплексном лечении облитерирующих заболеваний сосудов конечностей и
ишемической болезни сердца // Материалы НТК «Биомедицинское приборо-
строение: наука, промышленность, рынок». — Рязань, 1992. — С. 52-53.
235. Ларионов В. А., Строев Е. А., Швальб П. Г. и др. Клинические аспекты
лазерной терапии ишемической болезни сердца // Советская медицина. —
1990. - № 3. - С. 50-51.
236. Клиническая физиотерапия / Под ред. Оржешковского. — Киев: Здо-
ровье, 1984. — 448 с.
237. Яковлева М. И. Физиологические механизмы действия электромагнит-
ных полей. — Л.: Медицина, 1973. — 175 с.
238. Исмаилов Э. М. Биофизическое воздействие СВЧ излучений. — М.:
Медицина, 1987. — 195 с.
239. Хитров Ю. А., Шестиперов В. А. СВЧ в медицине: Обзоры по элек-
тронной технике. Сер. I. // Электроника СВЧ. — 1983. — Вып. 16 (998). — 99 с.
240. Холодов Ю. А. Мозг в электромагнитных полях. — М.: Наука, 1982. —
123 с.
241. Колиничева М. В., Колесникова С. В. Электроника — медицине: Об-
зоры по электронной технике. Сер. 1. // Электроника СВЧ. — 1990. — Вып. 19
(1592). - 29 с.
242. Девятков Н. Д., Голанд М. Б., Бецкий О. В. Миллиметровые волны и
их роль в процессе жизнедеятельности. — М.: Радио и связь, 1991. — 186 с.
243. Лин Дж. Ч. Слуховой эффект на СВЧ // ТИИЭР. — 1980. — Т. 68,
№ 1. - С. 83-89.
244. Современные методы биофизических исследований / Под ред. А. Б. Ру-
бина. — М.: Высшая школа, 1988. — 359 с.
245. Использование СВЧ техники для медицинских целей // Радиоэлектро-
ника за рубежом. — 1982. — Вып. 8 (954). — С. 1-10.
246. Omura J. Critical evalution of the metods of measurement of «Tingling
threshold», «Pain threshold» by electrical stimulation //Acupunc. and Electrother. —
1977. - V2, N3. - P. 161-236.
247. Бредикис Ю. Ю. Состояние и перспективы электрической стимуляции
органов и тканей // Медицинская техника. — 1986. - № 6. - С. 3-7.
366
Системы комплексной электромагнит»терапии
248. Медицинская электронная аппаратура для здравоохранения: Пер. с
англ. / Л. Кромвелл, М. Ардитти, Ф. Вейбелл и др. / Пер. под ред. Р. И. Утя-
мышева. — М.: Радио и связь, 1981. — 344 с.
249. Бредикис Ю. Ю., Жинджюс А. Е., Тамошюнос В. Т. Двадцатилетний
опыт применения электрической стимуляции сердца // Тезисы докладов II Все-
союзной конференции «Электростимуляция органов и тканей». — Киев, 1979. —
С. 105-108.
250. Geddes L., Fearnot N., Smith H. The exercisersponsive cardiac pacemaker
11 IEEE Trans, on Biomed. Engin. - 1984. - V.31, N12. - P. 736-770.
251. Колесников Г. Ф., Шпак В. В., Полубелов А. А. Опыт разработки
экспериментальных устройств для многоканальной электронейростимуляции
нервно-мышечных структур // Медицинская техника. — 1986. — № 6. — С.
31-36.
252. Алеев Л. С., Вовк М. И., Горбанев В. Н. «Миотон» в управлении
движениями. — Киев: Наукова думка, 1980. — 143 с.
253. Stohr Н., Gruuber Н., Losert V. An implantable muscle stimulation unit //
J. of Artif. Org. - 1982. - V.5, N3. - P. 215-216.
254. Meindl J. Biomedical Implantable Microelectronics // Scince-1980. — V.210,
N17. - P. 263-267.
255. Murawski S., Sennter D. An externally programmable, implantable, integrated
cerebellar stimulator // IEEE Front, of ENG. in Health Care. — 1982. — P. 608-618.
256. Ruckett J., Brasiles S., Peckhom B. Aflexible portable functional electrical
stimulation system // Proc. 36th ann. Conf. Eng. Med. and Biol., Columbus, Ohio. —
1983. - V.25. - P. 39.
257. Vodovnik L., Valencic V., Stroinik P. Improvement of some abnormal motor
functions by electrical stimulation // Med. Progr. Technol. — 1982. — V.9. — P.
141-147.
258. Огурцов Ю. H., Супер H. А., Лескин Г. С., Шинкаренко Ю. В. Выбор
параметров воздействия при трансвенозной электростимуляции диафрагмально-
го нерва И Новости медицинской техники. — 1980. — № 8. — С. 58-60.
259. Nochomovitz Н. Electrical activation of respiration // Eng. Med. Biol.
Med. - 1983, June. - P. 27-31.
260. Огурцов Ю. H. Применение электростимуляторов дыхания в интен-
сивной терапии и реанимации // Новости медицинской техники. — 1980. —
№ 7. - С. 61-69.
261. Лебедев А. А. О возможности снижения артериального давления путем
электростимуляции депрессоров // Материалы 1 Всесоюзной конференции
«Электростимуляция органов и тканей». — Каунас, 1975. — С. 137.
262. Лебедев А. А. Электростимуляция депрессорных нервов при артериаль-
ной гипертонии И Тезисы докладов II Всесоюзной конференции «Электрости-
муляция органов и тканей». — Киев, 1979. — С. 93-94.
263. Long D. Fefteen years Transcutaneous electrical stimulation for pain control
// Stereotact, funct. neurosuig. — 1991. — V.56. — P. 2-19.
264. Procacci P. Twenty years experiments with transcutaneous electric stimulation
I/ Schmezz/Pain/Douleur. - 1990. - V.ll. - P. 22-24.
265. A. c. 793582 (СССР), МКИ A61 N 1/32. Способ обезболивания / Г. Л.
Ратнер, А. С. Дильдин, Л. И. Калакутский и др. — Опубл. 1981. — № 1.
Список литературы
367
266. Дильдин А. С., Калакутский Л. И Обезболивание электрическим током
в раннем послеоперационном периоде // Вестник хирургии. — 1984. — Т. 132,
№ 1. - С. 125-128.
267. Lazorthes G. Clinical applications of electrical longtime neurostimulation,
past 1 // Akta medicotechnica. — 1982. — V.30, N4. — P. 137-141.
268. Meyrson B. Electrostimulating procedures: effects, presumed, retionale and
possible mechanisme // Proc. 3rd World Cong, of Pain. Edinburgh. 1981. — New.York,
1983. - P. 495-526.
269. Гильмиярова Ф. H., Денисов И. H. Метаболизм ишемизированного
миокарда при электростимуляции нерва каротидного синуса // Тезисы докладов
II Всесоюзной конференции «Электростимуляция органов и тканей». — Киев,
1979. - С. 159-161.
270. Ungethum М., Kold W. A search strategy used in individual optimization
of electrical parameters for Therapeutic Carotid Sinus Nerve Stimulation // IEEE
Trans. Biom. Eng. - 1989. - V.36, N7. - P. 668-675.
271. Дарбинян T. M., Кузин M. И., Шлозников Б. M. Показатели цент-
ральной и периферической гемодинамики как критерии адекватности анальге-
тического компонента общей электроанестезии // Анестезиология и реанима-
тология. — 1980. — № 3. — С. 3-9.
272. Иванов-Муромский К. А., Лукьянова О. Н. Основные направления,
достижения и перспективы развития нейробионики в институте кибернетики
АН УССР Ц Кибернетика. - 1982. - № 5. - С. 121-126.
273. Кузин М. И., Ливенцев Н. М., Жуковский В. Д. и др. Электронаркоз
в хирургии. — Ташкент: Медицина, 1966. — 184 с.
274. Stinus L., Anriacombe М., Tignol J., Transcronial electrical stimulation with
high frequency intermittent current (Limoge s) potentiates opiate-induced analgesia //
Pain. - 1990. - V.42. - P. 351-363.
275. Авруцкий M. Я., Харлап В. И., Шлозников Б. М. и др. Сочетанное
применение местной и общей электроанестезии во время хирургических вме-
шательств И Материалы Всероссийского съезда анестезиологов. — Красноярск,
1981. - Т.З. - С. 9-10.
276. Грачева К. II., Голубкова Г. М., Коробков А. И. Чрескожная электро-
стимуляция генатодуоденальной зоны у больных после операций на желчных
путях // Тезисы докладов II Всесоюзной конференции «Электростимуляция
органов и тканей». — Киев, 1979. — С. 284-285.
277. Лифшиц А. В., Колпачков В. А. Трансректальная электростимуляция
кишечника при поражениях спинного мозга // Новости медицинской техни-
ки. - 1980. - № 7. - С. 40-42.
278. Тупикова А. П., Подмаренкова Л. Ф., Большова Л. П. и др. Применение
аппарата «Эндотон-1» для лечения больных нейрогеннодискинетическими ко-
литами И Новости медицинской техники. — 1980. — № 7. — С. 46-49.
279. Севастьянова Н. А. Применение метода электростимуляции в лечении
энуреза // Тезисы докладов II Всесоюзной конференции «Электростимуляции
органов и тканей». — Киев, 1979. — С. 336-337.
280. Ермаков Н. А., Малеев С. И., Ситепанов Л. В. и др. Электростимуля-
торы для лечения энуреза // Труды института электромеханики. — 1981. — С.
29-30.
368
Системы комплексной электромагнитотерапии
281. Тупикова А. П., Подмаренкова Л. Ф., Дульцев Ю. В. и др. Электро-
стимуляция мышц анального сфинктера биполярными импульсами прямоуголь-
ной формы И Новости медицинской техники. — 1980. — № 7. — С. 43-45.
282. Казакавичус П. П. Конструкция анального электрода // Тезисы докла-
дов II Всесоюзной конференции «Электростимуляция органов и тканей». —
Киев, 1979. - С. 298-299.
283. Компанеец Е. Б., Бахтин О. М., Виницкий Н. Е. Влияние неинвазивной
электрической стимуляции на функциональное состояние слуховой системы //
Проблемы нейрокибернетики. — Ростов-на-Дону, 1992. — С. 101-102.
284. Богомильский М. Р., Тихомиров А. М. Принципы передачи звуковой
информации при одноканальном электродном протезировании улитки // Про-
блемы нейрокибернетики. — Ростов-на-Дону: Изд-во Ростовского университета,
1983. - С. 173-174.
285. Матвеев Ю. К., Лысков Е. Б. Нейрофизиологические показатели функ-
ционального состояния зрительного анализатора больных в процессе электро-
стимуляции зрительного нерва // Проблемы нейрокибернетики. — Ростов-на-
Дону: Изд-во Ростовского университета, 1983. — С. 177-178.
286. Шандурина А. Н., Хилько В. А., Никольская И. М. Обоснование нового
способа восстановления и протезирования зрения путем электростимуляции зри-
тельных нервов у человека // Проблемы нейрокибернетики. — Ростов-на-Дону:
Изд-во Ростовского университета, 1983. — С. 181-182.
287. Южаков А. М., Днестрова Г. И., Зуева М. В. Применение метода
чрескожной электростимуляции при различной глазной патологии // Проблемы
нейрокибернетики. — Ростов-на-Дону, 1992. — С. 119-120.
288. Теория и практика рефлексотерапии // Научно-технический сбор-
ник. — Саратов: Изд-во Саратовского ун-та, 1981. — 272 с.
289. Лошилов В. И., Мироненко Ю. П., Мельникова Т. С. Применение
электрофорезопунктуры для купирования диэнцефальных вегетативных парок-
сизмов у больных // Материалы II Всесоюзной научно-технической конферен-
ции «Проблемы техники в медицине». — Тольятти, 1981. — С. 156-157.
290. Трещинский А. И., Беспанов С. Н., Аснес С. В. и др. Анализ результатов
применения рефлексотерапии у 912 больных в практике анестезиологии-реани-
матологии И Тезисы докладов II Всесоюзной конференции «Электростимуляция
органов и тканей». — Киев, 1979. — С. 368.
291. Портнов Ф. Г. Электропунктурная рефлексотерапия. — Рига: Знание,
1987. - 352 с.
292. Niebauer М., Babbs Gh., Geddes L. The effective and safety defibrillation
10-millisecond trapezoidal waves of differentials // Med. Instrum. — 1984. — V.18,
N2. - P. 119-121.
293. Григоров С. С., Ежов Ю. С., Атопков В. А. и др. Электрофизиологи-
ческие исследования и стимуляционные пробы при атриовентрикулярных бло-
кадах и сложных нарушениях ритма // Тезисы докладов II Всесоюзной конфе-
ренции «Электростимуляция органов и тканей». — Киев, 1979. — С. 171-172.
294. Шилов А. М., Иванов К. М., Фищенко А. Д. и др. Диагностическая
электрическая стимуляция сердца у больных ишемической болезнью сердца //
Тезисы докладов II Всесоюзной конференции «Электростимуляция органов и
тканей». — Киев, 1979. — С. 190-192.
Список литературы
369
295. Котлик Б. А., Редько А. И., Смердов А. А. и др. Электростимулятор
для диагностики и исследования состояния нервно-мышечной системы // Но-
вости медицинской техники. — 1981. — № 2. — С. 23-25.
296. Павлов В. Г., Чупров П. В. Анализатор состояния нервно-мышечной
передачи АСНМП-01 // Медицинская техника. — 1983. — № 5. — С. 60-61.
297. Персон Р. С. Электромиографические исследования рефлекторных от-
ветов и волны в клинике. Препринт 5990 ИППИ АН СССР. — М., 1983. —
44 с.
298. Белоярцев Ф. Ф. Электромиография в анестезиологии. — М.: Меди-
цина, 1980. — 232 с.
299. Fiore М., Atlee J., Webster J. A Microcomputer-Based neuromuscular block-
ade monitor /I IEEE Trans, on Biomed. Eng. — 1981. — V.28, Nil. — P. 775-783.
300. Maresca M., Fassani T. The measurement of pain threshold in man by
means of electrical stimul // J. Neurosurg. Sci. — 1983. — V.27, N2. — P. 83-93.
301. Алекса А. Г., Шугайлов И. А. Комплекс аппаратуры для оценки болевой
чувствительности и электроанальгезии в стоматологии // Электронная промыш-
ленность. — 1985. — № 1. — С. 56-59.
302. Петровский Б. В., Бунятян А. А., Цибуляк В. Н. Состояние и перспективы
лечения болевого синдрома // Вестник АМН СССР. — 1980. — № 9. — С. 3-11.
303. Бакман А. М. Боль как биологический индикатор экологических на-
рушений И Биол. индикация в антропоэкол.: Матер. II Всесоюзн. совещания
по косм, антропоэкол. — Л., 1984. — С. 163-166.
304. Анохин П. К. Очерки по физиологии функциональных систем. — М.:
Медицина, 1975. — 448 с.
305. Калюжный Л. В. Физиологические механизмы регуляции болевой чув-
ствительности. — М.: Медицина, 1984. — 216 с.
306. Дионесов С. М. Боль и ее влияние на организм человека и животных. —
М.: Медгиз, 1963. — 359 с.
307. Кассиль Г. Н. Боль и обезболивание. — М.: Наука, 1965. — 320 с.
308. Дуринян Р. А. Физиологические механизмы боли и рефлекторного
обезболивания // Вестник АМН СССР. — 1980. - № 9. - С. 39-41.
309. Melzack R., Wall Р. Pain mechanisms: A new theory Ц Science. — 1967. —
V.150. - P. 971-979.
310. Wall P., Swee W. Temporary abolition of Pain man // Science. — 1967. —
V.150. - P. 108-109.
311. Дуринян P. А. Механизмы боли // Теория и практика рефлексотера-
пии. — Саратов: Изд-во Саратовского ун-та, 1981. — С. 11-18.
312. Крыжановский Г. Н. Генераторные механизмы центральных болевых
синдромов и обезболивания // Вестник АМН СССР. — 1980. — № 9. — С.
33-37.
313. Вальдман А. В., Игнатов Ю. Д. Центральные механизмы боли. — Л.:
Наука, 1976. - 191 с.
314. Edmeads J. The physiology of pain: a review // Progr. Neuro-Phychophar-
macol. and Biol. Psychiatry. — 1983. — V.7. — P. 413-419.
315. Terenius L. Neuropeptides in human cerebrospinal fluidrelation to pain //
Brain. Stem. Contr. of Spinal Meeh., Proc.l. Eric. Fernstrom Symp., Lund. 10-13. —
Nov., 1981. — Amsterdam, 1982. - P. 509-517.
370
Системы комплексной электромагнитотерапии
316. Progressive impairment of CSF-EP levels in migraine sufferers / A. Genaz-
zani, G. Nappi, F. Facchinetti et al. // Pain. — 1984. — V.18, N2. — P. 127-133.
317. Основы физиологии функциональных систем I Под ред. К. В. Суда-
кова. — М.: Медицина, 1985. — 219 с.
318. Биотехнические системы: Теория и проектирование / Под ред. В. М.
Ахутина. — Л.: Изд-во ЛГУ, 1981. — 220 с.
319. Jacquez J. A compartmental analysis in biology and medicine. — Amst.-
London. — N.Y., 1972. — 365 p.
320. Калакутский Л. И. Многокамерный анализ в биотехнических системах
электроанальгезии // Проблемы техники в медицине: Тезисы докладов IV Все-
союзной научно-технической конференции. — Тбилиси, 1986. — С. 29-30.
321. Новосельцев В. Н. Теория управления и биосистемы. — М.: Наука,
1978. - 320 с.
322. Калакутский Л. И. Двухкамерная модель регуляции болевой чувстви-
тельности при стимуляции сенсорных структур // Физиология человека. —
1987. - Т.13, № 1. - С. 153-157.
323. Burton С., Maurer D. Pain suppression by transcutaneous electrostimulation
I I IEEE Trans, on Biomed. Eng. - 1974. - V.21, N4. - P. 81-88.
324. Калакутский Л. И. Контроль и управление параметрами стимулов в
биотехнической системе подавления боли // Надежность и контроль в биотех-
нических системах. — Л.: ЛДНТП, 1985. — С. 85-87.
325. Колесников Г. Ф. Электростимуляция нервно-мышечного аппарата. —
Киев: Здоровье, 1977. — 167 с.
326. Калакутский Л. И., Вейнер В. А., Дильдин А. С. Эквивалентная схема
замещения тканей при чрескожной электростимуляции // Медицинская техни-
ка. - 1981. — № 1. — С. 18-21.
327. Калакутский Л. И. Биотехнические системы противоболевой электро-
нейростимуляции И Труды МВТУ им. Н. Баумана. — 1986. — № 457. — С.
62-73.
328. Гоноровский И. С. Радиотехнические цепи и сигналы. — М.: Сов.
радио, 1977. — 608 с.
329. Дильдин А. С., Калакутский Л. И. Инструкция по применениюю ап-
парата «ЭЛИМАН-101». - М., 1982. - И с.
330. Дильдин А. С., Калакутский Л. И., Тихонова Г. П. и др. Инструкция
по применению аппарата «ЭЛИМАН-206». — М., 1985. — 12 с.
331. Калакутский Л. И., Вейнер В. А. Импульсные измерения импеданса
биологических тканей с применением преобразования Лапласа / В кн.: Вопросы
медицинской электроники. — Таганрог, 1981. — Вып.З. — С. 120-126.
332. А. с. 865300 (СССР), МКИ А61 N 1/36. Электростимулятор / Л. И.
Калакутский, В. А. Вейнер, А. С. Дильдин. — Опубл. 1981, Бюл. № 35.
333. А. с. 1060192 (СССР), МКИ А61 N 1/36. Электростимулятор / Л. И.
Калакутский, В. А. Вейнер, А. С. Дильдин. — Опубл. 1983, Бюл. № 46.
334. Калакутский Л. И. Оптимизация сигнала воздействия в биотехнической
системе для подавления болевых ощущений // Проблемы нейрокибернетики. —
Ростов-на-Дону: Изд-во Ростовского ун-та, 1983. — С. 288.
335. ГОСТ 20790-83. Приборы, аппараты и оборудование медицинское. —
М.: Госстандарт, 1983. — 15 с.
Список литературы 371
336. ОСТ 42-2-2-77. Методы стерилизации и дезинфекции. — М.: Госстан-
дарт, 1977. — 20 с.
337. Brenner К. The characterization of transcutaneous stimulating electrodes //
IEEE Trans, on Biomed. Eng. — 1976. — V.23, N4. — P. 337-340.
338. А. с. по заявке № 4815237/28-14 (СССР), МКИ A61 N 1/04. Медицин-
ский электрод / Л. И. Калакутский, В. Г. Никитин, А. С. Дильдин и др. —
Опубл. 1993, Бюл. № 8.
339. Левинсон А. П., Огурцов Ю. Н., Гаврилин В. А. Некоторые тенденции
развития электролечебной аппаратуры // Медицинская техника. — 1981. —
№ 3. - С. 50-54.
340. А. с. 1165413 (СССР), МКИ А61 N 1/04. Материал для медицинских
электродов / Л. И. Калакутский, В. А. Вейнер, Е. И. Изжеуров и др. — Опубл. —
1985, Бюл. № 25.
341. Изделия медицинские электрические. Часть 1. Общие требования без-
опасности. Публикация 601-1. — Стандарт МЭК, 1991.
342. Калакутский Л. И., Дильдин А. С., Манелис Э. С. Опыт разработки и
клинического применения аппаратуры «ЭЛИМАН» // Актуальные вопросы раз-
работки аппаратуры и методов электронейростимуляции в медицине. — Куйбы-
шев, 1990. - С. 12-14.
343. Калакутский Л. И., Вейнер В. А., Карпухин В. А. и др. Противоболевой
чрескожный электростимулятор «ЭЛИМАН-101» // Медицинская техника. —
1983. - № 2. - С. 50-52.
344. А. с. 730358 (СССР), МКИ А61 N 1/36. Электростимулятор / Л. И.
Калакутский и др. — Опубл. 1980, Бюл. № 16.
345. Патент 4084595 (США), МКИ А61 N 1/36. Transcutaneous nerve stimu-
lator / Miller С. (США). - Опубл. 18.04.78; НКИ 128/422. - 5 с.
346. Патент 1488957 (Великобритания), МКИ А61 N 1/36. Apparatus for
electrostimulation / Humes А. (США). — Опубл. 19.10.77. — 8 с.
347. Шахов Е. П., Огурцов Ю. Н., Схиладзе А. А. и др. Двухканальный
электростимулятор для подавления боли «Дельта 102» // Медицинская техни-
ка. - 1986. - № 6. - С. 45-48.
348. А. с. 950407 (СССР), МКИ А61 N 1/34. Устройство для электроаналь-
гезии / Л. И. Калакутский, В. А. Карпухин, А. С. Дильдин. — Опубл. 1982,
Бюл. № 30.
349. Калакутский Л. И., Карпухин В. А., Дильдин А. С. Двухканальный
противоболевой электростимулятор «ЭЛИМАН-206» // Медицинская техни-
ка. - 1985. - № 2. - С. 16-19.
350. Калакутский Л. И., Головкин С. В., Дильдин А. С. Противоболевой
электростимулятор «ЭЛИМАН-401» с автоматической установкой длительности
стимула Ц Медицинская техника. — 1986. — № 6. — С. 50-53.
351. А. с. 1222282 (СССР), МКИ А61 N 1/36. Электростимулятор / Л. И.
Калакутский, С. В. Головкин, А. С. Дильдин. — Опубл. 1986, Бюл. № 13.
352. Калакутский Л. И., Дильдин А. С., Вейнер В. А. и др. Чрескожный
электронейростимулятор «ЭЛИМАН-401» с автоматической регулировкой дли-
тельности стимула // Проблемы техники в медицине: Тезисы докладов IV Все-
союзной НТК. — Тбилиси, 1986. — С. 112.
353. Манелис Э. С., Калакутский Л. И., Головкин С. В. Использование
периферической электронейростимуляции для обезболивания родов // Акушер-
ство и гинекология. — 1989. — № 5. — С. 47-50.
372
Системы комплексной электромагнитотерапии
354. Контроль и измерение боли человека: Обзор иностранной литературы
/ Р. А. Дуринян, С. М. Зарейская, С. С. Кривобокова // Мед. реф. журн. —
1981. - № 1. - С. 13-22.
355. Калакутский Л. И., Вейнер В. А., Головкин С. В. Измерительная
система для статистического анализа сердечного режима // Вопросы разработки
и внедрения радиоэлектронных средств при диагностике сердечно-сосудистых
заболеваний. — М.: Радио и связь, 1984. — С. 105.
356. Манелис Э. С., Калакутский Л. И., Головкин С. В. Применение сер-
дечного ритма для объективной оценки послеоперационного обезболивания ап-
паратами «ЭЛИМАН» // Современные научно-технические решения в медицин-
ской реабилитации. — Куйбышев, 1986. — С. 40-41.
357. Калакутский Л. И., Карпухин В. А., Дильдин А. С. Измеритель тем-
пературной чувствительности кожи человека // Физиология человека. — 1986. —
Т. 12, № 4. - С. 689-691.
358. Инструментальные методы исследования сердечно-сосудистой системы:
Справочник / Под ред. Т. В. Виноградовой. — М.: Медицина, 1986. — 416 с.
359. Калакутский Л. И., Конюхов В. Н., Манелис Э. С. Автоматизированная
система оценки состояния вегетативной регуляции при проведении хирургических
операций // Проблемы нейрокибернетики. — Ростов-на-Дону, 1992. — С. 265.
360. Дильдин А. С. О метаболических сдвигах в организме при послеопе-
рационной электроанальгезии // Актуальные вопросы разработки аппаратуры и
методов электронейростимуляции в медицине. — Куйбышев, 1990. — С. 6-8.
361. Расстригин Н. Н. Анестезия и реанимация в акушерстве и гинеколо-
гии. — М.: Медицина, 1978. — 336 с.
362. Персианинов Л. С., Каструбин Э. М., Расстригин Н. Н. Электроаналь-
гезия в акушерстве и гинекологии. — М.: Медицина, 1978. — 237 с.
363. Флорова М. А., Манелис Э. С. Сравнительная характеристика ближай-
ших и отдаленных результатов трех способов анальгезии в родах: медикамен-
тозной, физиопсихопрофилактики и чрескожной электростимуляции // Акту-
альные вопросы разработки аппаратуры и методов электронейростимуляции в
медицине. — Куйбышев, 1990. — С. 40-41.
С о д е р ж а н и е
Предисловие.................................................3
Введение....................................................5
Глава 1. Действие магниных полей на биообъекты..............9
1.1. Прошлое и настоящее магнитобиологии и магнитотерапии... 9
1.2. Виды и классификация магнитных полей...................13
1.3. Биотропные параметры магнитных полей...................19
1.4. Влияние естественных электромагнитных полей
на живые организмы.........................................23
1.5. Искусственные магнитные поля
как антропогенный экологический фактор.....................29
1.6. Механизмы действия магнитных полей на живой организм...32
1.7. Перспективы и задачи в развитии магнитотерапии........48
Глава 2. Промышленные магнитотерапевтические аппараты.
Обзор и анализ требований................................. 54
2.1. Вводные замечания.....................................54
2.2. Магнитотерапевтические аппараты локального действия...56
2.3. Магнитотерапевтические аппараты распределенного действия. ... 60
2.4. Магнитотерапевтические аппараты общего воздействия....62
2.5. Анализ задачи общего воздействия динамическим магнитным
полем на человека и формирование требований на технические
средства комплексной магнитотерапии........................64
Глава 3. Физические принципы и системы формирования
магнитного поля в пространстве биообъекта................. 71
3.1. Виды индукторов и создаваемых ими полей...............71
3.2. Виды систем индукторов общего воздействия.............80
3.3. Моделирование магнитных полей магнитоскана............96
Глава 4. Методы и средства формирования сигналов управления
излучателями магнитного поля............................. 104
4.1. Обобщенная структура блока управления систем комплексной
магнитотерапии............................................104
4.2. Полимагнитная система «Звезда».......................108
374
Системы комплексной элекгромагнитотерапии
4.3. Аппарат полимагнитный терапевтический «Аврора МК-01»...111
4.4. Аппаратно-программный комплекс управления динамическим
магнитным полем «Аврора МК-02»..............................120
4.5. Магнитотерапевтический комплекс «Мультимаг МК-03»......127
4.6. Программное обеспечение магнитотерапевтического комплекса.
Описание программного пакета «МК-03»........................132
4.7. Синхронизация магнитотерапевтического воздействия
с биологическими ритмами....................................137
4.8. Биотехническая обратная связь в системах магнитотерапии.142
Глава 5. Измерительно-диагностические методы и аппаратура
для комплексной магнитотерапии.............................. 147
5.1. Особенности измерений и диагностики
в комплексной магнитотерапии................................147
5.2. Магнитные измерения в магнитотерапии...................149
5.3. Измерение и задание характеристик поля, создаваемого реальным
магнитосканом...............................................166
5.4. Методы и средства диагностики в магнитотерапии.........169
5.5. Агрегатирование стандартных диагностических средств....172
5.6. Специальные измерительно-диагностические средства......175
5.7. Персональные диагностические системы...................181
Глава 6. Методология построения магнитотерапевтических
комплексов и кабинетов...................................... 186
6.1. Лечебно-диагностический комплекс.......................186
6.2. Компьютеризированный лечебно-диагностический комплекс ... 188
6.3. Магнитотерапевтический кабинет.........................247
Глава 7. Применение магнитных полей в практической медицине
с оздоровительными и лечебными целями....................... 251
7.1. Научно-теоретические и экспериментально-клинические
обоснования использования магнитных полей в медицине........251
7.2. Магнитотерапия при хронических заболеваниях магистральных
артерий конечностей.........................................255
7.3. Комплексная медикаментозная и магнитотерапия хронических
заболеваний магистральных артерий конечностей...............261
7.4. Комплексная магнито-лазерная терапия хронических
заболеваний магистральных артерий конечностей...............267
7.5. Магнитотерапия в комплексном лечении диабетических
ангиопатий..................................................271
7.6. Магнитотерапия при ишемической болезни сердца
и эссенциальной гипертензии.................................275
7.7. Магнитотерапия неврологических заболеваний сосудистого
генеза......................................................280
7.8. Магнито-сверхвысокочастотная терапия...................282
Содержание 375
Глава 8. Системы электростимуляции
в клинической практике.................................... 289
8.1. Электростимуляция в диагностике и терапии.............289
8.2. Теория и практика периферической электроанальгезии....298
8.3. Технические характеристики и клинические аспекты применения
аппаратов типа «ЭЛИМАН»
для периферической электроанальгезии........................318
8.4. Применение аппаратуры электроанальгезии в клинике.....329
Заключение....................................................
Список основных сокращений....................................
Список литературы.............................................