














































































































































































































































































































Author: Онищенко Г.Б.
Tags: инженерное дело техника в целом прикладные науки медицина технология электроэнергетика электротехника инженерия электричество электрические машины издательство москва электрический привод
ISBN: 5-85941-045-X
Year: 2003



Файл взят с сайта
www.kodges.ru,
на котором есть еще
много интересной
литературы
ГБ.Онищенко
ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Допущено УМО по образованию в области энергети-
ки и электротехники в качестве учебника для студен-
тов высших учебных заведений, обучающихся по на-
правлению 654500 «Электротехника, электромехани-
ка и электротехнология»
Москва 2003г.
ББК 31.291
УДК 62.83:6$ Г.31,4
Рецензенты.
профессор О.Д.Гольдберг
профессор С.К.Козырев
Редактор
канд.техн, наук, доцент О.М.Соснин
Онищенко Г.Б.
Электрический привод. Учебник для вузов - М.: РАСХН.
2003.-320.-ил.
ISBN 5-85941-045-Х
Излагаются общие представления об автоматизированном
электроприводе, его месте и роли в современном машинном про-
изводстве, сведения о составе и принципах построения электро-
приводов, свойствах и характеристиках электроприводов с двига-
телями постоянного и переменного тока, принципах управления
электроприводами, об элементной базе и современных системах
регулируемого электропривода, приводятся общие подходы к
выбору и проектированию электроприводов.
Для студентов, обучающихся по направлениям подготовки
«Электротехника, электромеханика и электротехнология» и
«Электроэнергетика» (специальность «Электроснабжение»)
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.............................................. 3
Глава 1. ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРОПРИ-
ВОДЕ.............................................. 5
1.1. Назначение и функции электропривода.... 5
1.2. Роль электропривода в современных ма-
шинных технологиях...................... 12
1.3. Структура электропривода.............. 14
1.4. Классификация электроприводов......... 18
1.5. Контрольные вопросы для самопроверки.. 22
Глава 2. ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИ-
ВОДА............................................. 23
2.1. Механические характеристики двигателя и
рабочего механизма...................... 23
2.2. Двигательный и тормозной режимы рабо-
ты электродвигателя..................... 28
2.3. Уравнение движения электропривода. 30
2.4. Приведенное механическое звено.... 35
2.5. Контрольные вопросы для самопроверки.. 41
Глава 3. НЕРЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД. 42
3.1. Общие сведения........................ 42
3.2. Электромеханические свойства асинхрон-
ных двигателей.......................... 44
3.2.1. Принцип работы асинхронного дви-
гателя................................ 44
3.2.2. Механические характеристики асин-
хронного двигателя.................... 49
3.2.3. Пуск асинхронного двигателя с фаз-
ным ротором........................... 56
3.2.4. Особенности характеристик асин-
хронных двигателей с короткозамкну-
тым ротором........................... 61
308
3.2.5. Энергетическая диаграмма асинхрон-
ного двигателя при работе в двига-
тельном режиме........................ 64
3.2.6. Изменение напряжения питания
асинхронного двигателя................ 66
3.2.7. Тормозные режимы асинхронных
двигателей............................ 69
3.2.8. Электромеханические характеристи-
ки многоскоростных асинхронных
двигателей............................ 76
3.3. Электромеханические характеристики
синхронных электродвигателей............ 78
3.3.1. Принцип работы синхронного двига-
теля.................................. 78
3.3.2. Режимы работы синхронного двига-
теля.................................. 83
3.3.3. Регулирование тока возбуждения
синхронного двигателя................. 86
3.4. Однофазные асинхронные двигатели.. 90
3.5. Контрольные вопросы для самопроверки. . 91
Глава 4. ОБЩИЕ ПРИНЦИПЫ РЕГУЛИРОВАНИЯ
ЭЛЕКТРОПРИВОДА................................... 93
4.1. Регулируемый электропривод - основной
вид автоматизированного электропривода. 93
4.2. Показатели регулирования скорости. 96
4.3. Контрольные вопросы для самопроверки. . 102
Глава 5. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С
ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА. 103
5.1. Электромеханические характеристики
двигателей постоянного тока независимо-
го возбуждения......................... 103
5.2. Электроприводы по системе тиристорный
преобразователь-двигатель постоянного
тока................................... 113
5.3. Электропривод с двигателями постоянного
тока с последовательным возбуждением.. 127
309
5.4. Электроприводы постоянного тока с ши-
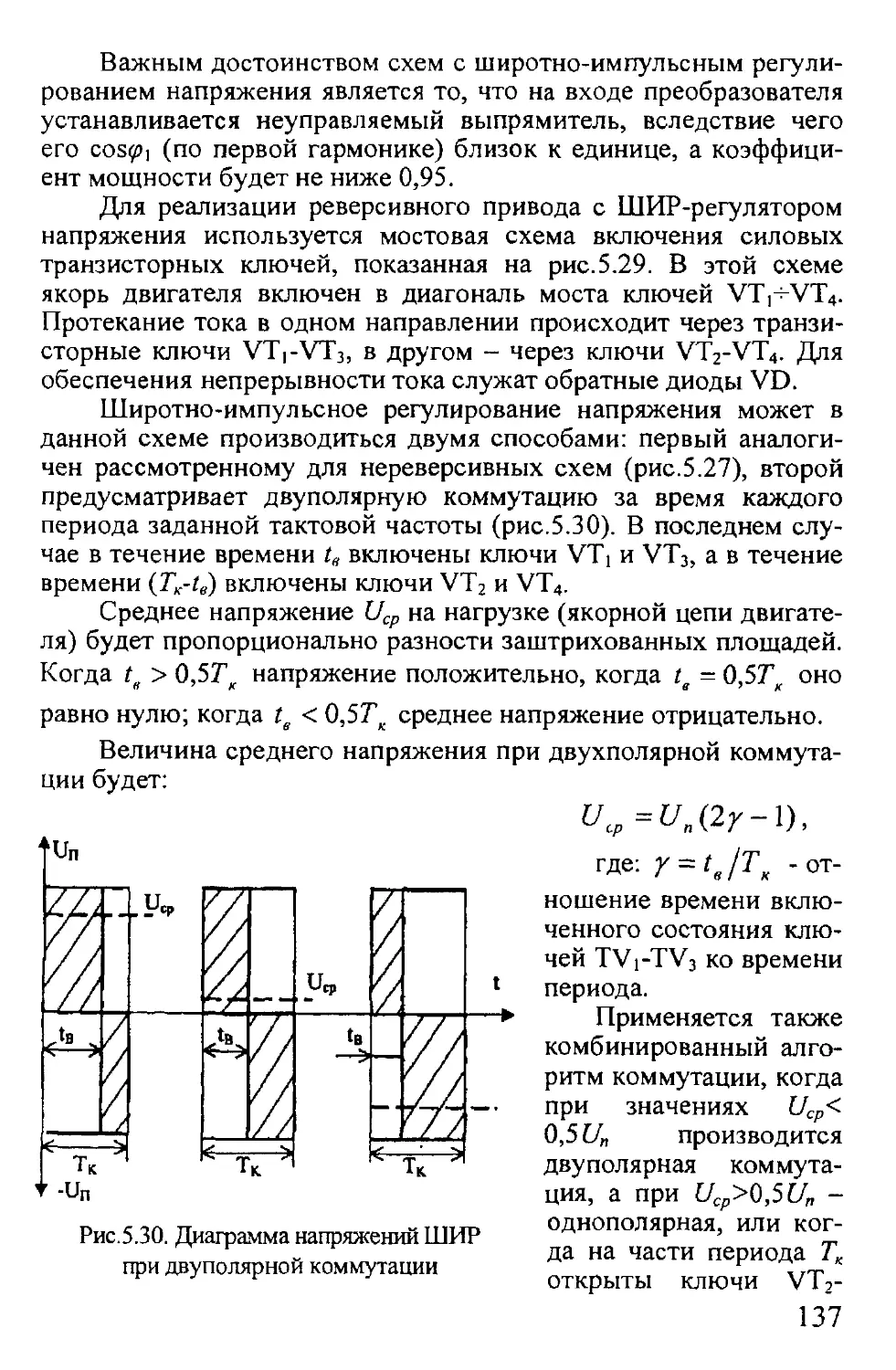
ротно-импульсным регулированием...... 134
5.5. Контрольные вопросы для самопроверки. . 138
Глава 6. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С
ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА. . 140
6.1. Способы регулирования асинхронного
двигателя............................. 140
6.2. Асинхронный электропривод с частотным
регулированием скорости............... 143
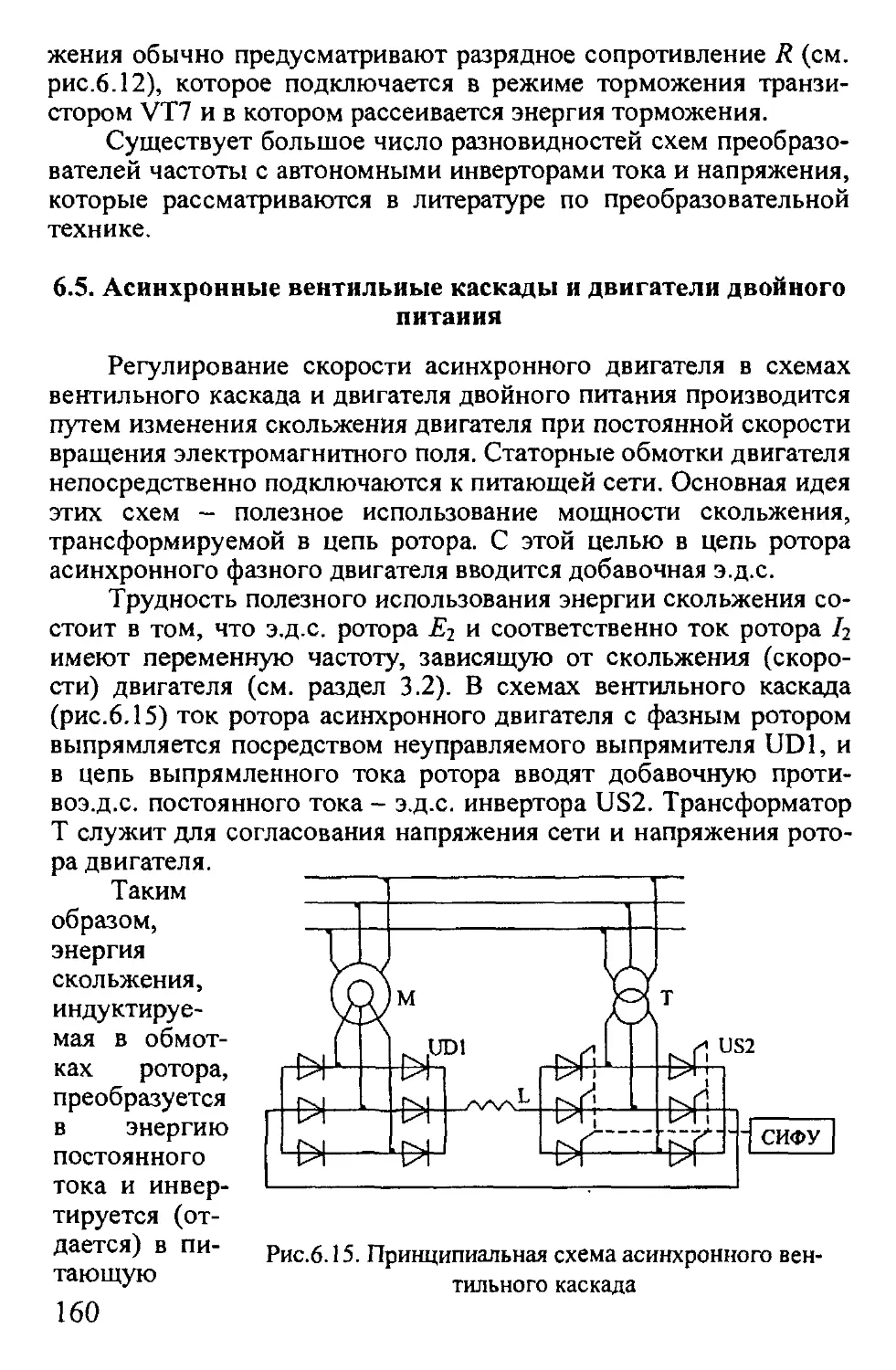
6.3. Электропривод по системе преобразова-
тель частоты с непосредственной связью -
асинхронный двигатель................. 151
6.4. Электропривод по системе преобразова-
тель частоты типа автономный инвертор -
асинхронный двигатель................. 154
6.5. Асинхронные вентильные каскады и дви-
гатели двойного питания............... 160
6.5.1. Двигатели двойного питания.. 166
6.6. Вентильный двигатель............. 170
6.6.1. Электропривод по системе транзи-
сторный коммутатор - вентильный
двигатель с постоянными магнитами.. 171
6.6.2. Электропривод по системе тиристор-
ный коммутатор - синхронный двига-
тель............................... 174
6.7. Контрольные вопросы для самопроверки.. 177
Глава 7. ИНДУКТОРНЫЕ, ШАГОВЫЕ И ЛИНЕЙ-
НЫЕ ЭЛЕКТРОПРИВОДЫ....................... 178
7.1. Вентильно-индукторный электропривод. . 178
7.2. Электропривод с шаговым двигателем.... 179
7.3. Электропривод с линейными двигателями. 183
7.4. Контрольные вопросы для самопроверки. . 186
Глава 8. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕК-
ТРОПРИВОДЕ..................................... 186
8.1. Общие сведения................... 186
310
8.2. Переходные процессы, определяемые ме-
ханической инерционностью электропри-
вода.................................. 191
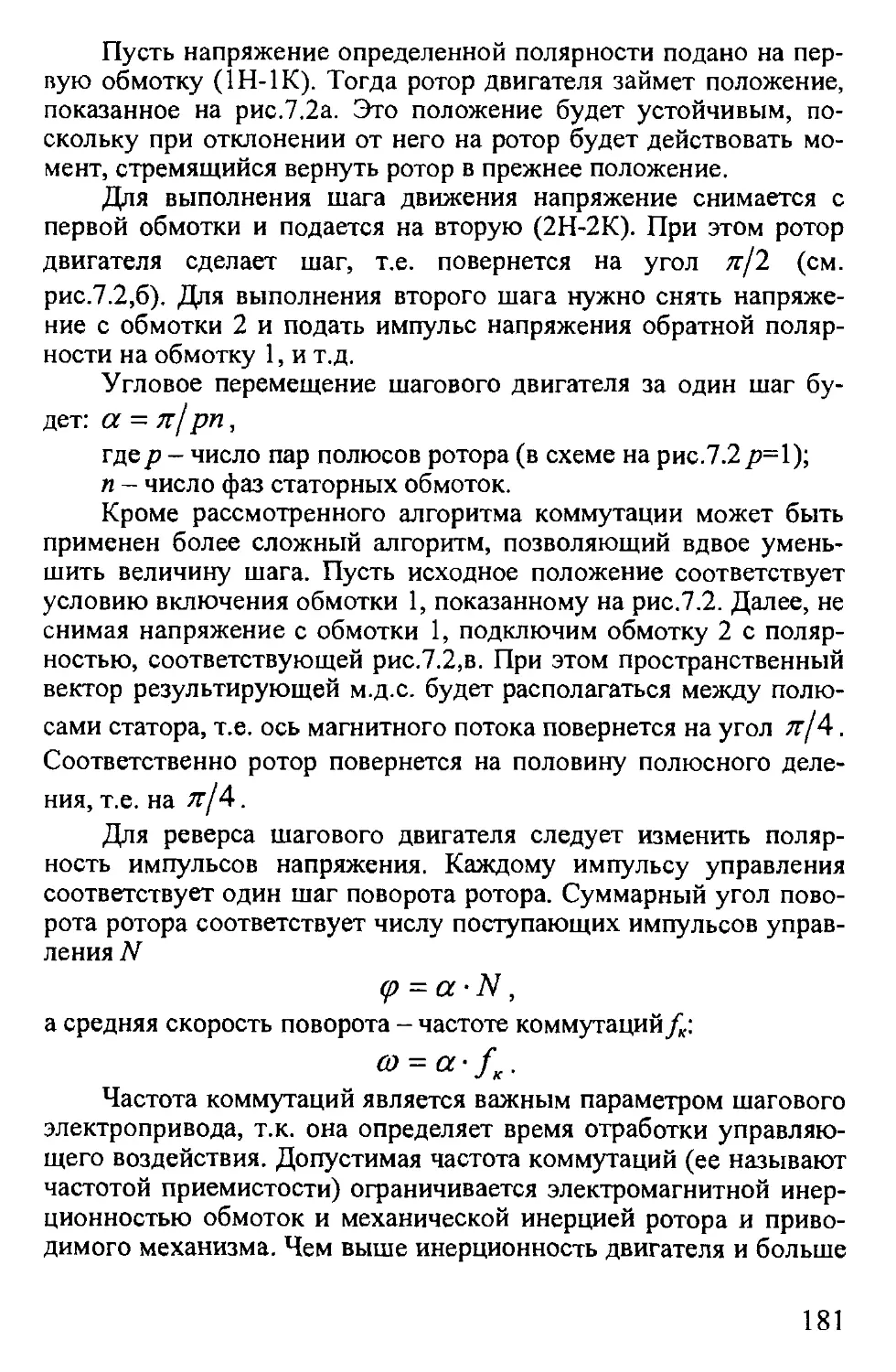
8.3. Переходные процессы в электроприводе
постоянного тока...................... 195
8.4. Контрольные вопросы для самопроверки.. 205
Глава 9. АППАРАТЫ И УСТРОЙСТВА УПРАВ-
ЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ........................... 206
9.1. Аппаратура управления и защиты элек-
троприводов........................... 206
9.2. Бесконтактные логические элементы. 210
9.3. Датчики механических и электрических
параметров............................ 212
9.4. Регуляторы........................ 217
9.5. Микропроцессорные средства управления
электроприводами...................... 219
9.6. Комплектные устройства управления
электроприводами...................... 223
9.7. Контрольные вопросы для самопроверки. . 225
Глава 10. ТИПОВЫЕ УЗЛЫ И СХЕМЫ УПРАВЛЕ-
НИЯ ЭЛЕКТРОПРИВОДАМИ............................. 226
10.1. Электрические защиты.............. 226
10.2. Релейно-контакторное управление элек-
троприводами .......................... 228
10.3. Принципы построения систем регулиро-
вания электроприводов.................. 236
10.4. Классификация замкнутых систем регу-
лирования.............................. 238
10.5. Система регулирования электропривода
постоянного тока с суммирующим усили-
телем.................................. 242
10.6. Многоконтурные системы с подчинен-
ным регулированием параметров элек-
тропривода............................. 246
311
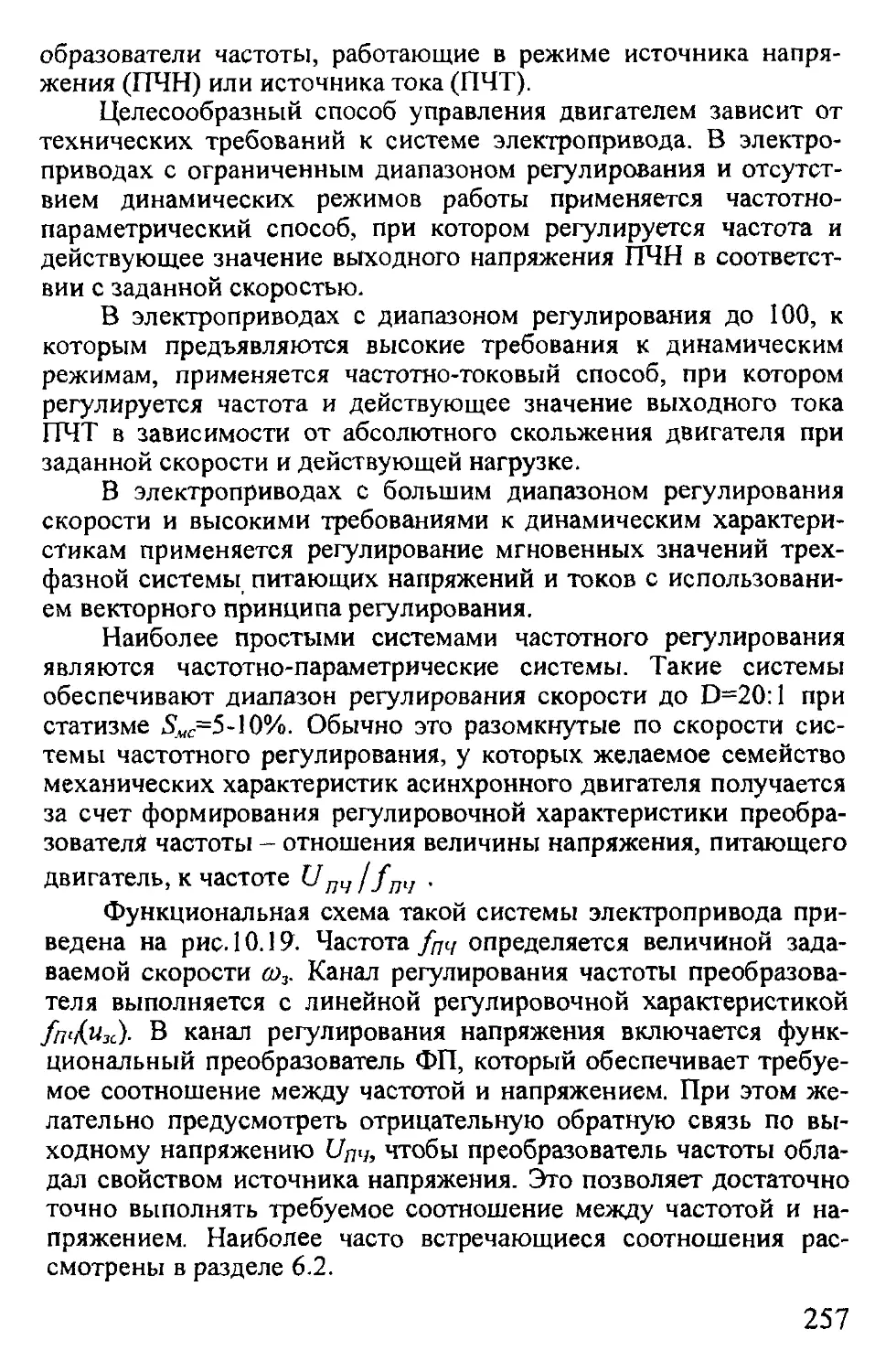
10.7. Типовые системы управления асинхрон-
ными частотно-регулируемыми электро-
приводами............................. 256
10.8. Контрольные вопросы для самопроверки. 262
Глава 11. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОПРИВОДОВ............................. 264
11.1. Энергетические показатели электропри-
вода................................. 264
11.2. Потери энергии в переходных режимах. . 268
11.3. Нагрев и охлаждение двигателя......... 270
11.4. Энергосбережение средствами электро-
привода.............................. 275
11.5. Контрольные вопросы для самопроверки. 279
Глава 12. ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
ЭЛЕКТРОПРИВОДОВ ПРОИЗВОДСТ-
ВЕННЫХ МЕХАНИЗМОВ.............................. 280
12.1. Общие требования, предъявляемые к
электроприводу....................... 280
12.2. Последовательность проектирования
электропривода....................... 282
12.3. Нагрузочные диаграммы и тахограммы.. 282
12.4. Расчет мощности и выбор типа электро-
двигателя............................ 287
12.5. Основные системы регулируемого элек-
тропривода........................... 295
12.6. Комплектные электроприводы............ 298
12.5. Контрольные вопросы для самопроверки. 306
ЛИТЕРАТУРА........................................... 307
312
ВВЕДЕНИЕ
Дисциплина «Электрический привод» входит в цикл обще-
профессиональных дисциплин для направлений подготовки ди-
пломированных специалистов:
654500 - Электротехника, электромеханика и электротехноло-
гия;
650900 - Электроэнергетика
и изучается всеми студентами электротехнических специально-
стей.
Содержание учебника отвечает требованиям Государственных
образовательных стандартов по указанным направлениям.
Развитие автоматизированного электропривода, повышение
его роли во всех областях машинного производства, в комму-
нальном хозяйстве, медицине и других сферах деятельности че-
ловека делает необходимым для инженера-электрика любой спе-
циальности знание основ автоматизированного электропривода.
Данный курс является введением в сложную область техники,
которой является автоматизированный электропривод.
Учебник может быть также полезен студентам машинострои-
тельных специальностей при выполнении электрической части
курсовых и дипломных проектов.
Задача данной дисциплины - дать студентам общее представ-
ление об автоматизированном электроприводе, его месте и роли в
современном машинном производстве, дать необходимые сведе-
ния о составе автоматизированных электроприводов, принципах
построения и физических основах их работы, об основных систе-
мах электропривода, используемых в настоящее время, научить
студента решать относительно простые технические задачи, свя-
занные с выбором, проектированием и использованием электро-
приводов в различных областях техники.
В учебнике излагаются основы электромеханического преоб-
разования энергии, механики рабочих машин, физические про-
цессы, свойства и характеристики электроприводов с двигателя-
ми постоянного и переменного тока, принципы управления элек-
троприводами, общие подходы к выбору и проектированию
электроприводов, а также даются сведения об элементной базе
3
современных электроприводов, и о наиболее распространенных
системах автоматизированного электропривода.
Более углубленно вопросы теории и технической реализации
современных электроприводов рассматриваются при изучении
специальных дисциплин.
Одна из особенностей данного учебника состоит в том, что в
нем дана иная, чем в ранее изданной учебной литературе по элек-
троприводу, трактовка понятия регулируемый электропривод,
что нашло отражение в структуре изложения материала.
Автор считает своим приятным долгом поблагодарить
А.И.Нитиевскую, без чьего непосредственного участия в работе
настоящий учебник не мог бы выйти в свет.
Улучшению содержания учебника, несомненно, способство-
вали замечания, сделанные при просмотре и рецензировании ру-
кописи профессорами О. Д. Гольдбергом, С. К. Козыревым,
В В.Москаленко и доцентом О.М.Сосниным, которым автор вы-
ражает свою искреннюю признательность.
4
Глава 1. ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРОПРИВОДЕ
1.1. Назначение и функции электропривода
Электропривод является технической системой, служащей
для преобразования электрической энергии в механическую, ко-
торая необходима для осуществления различных технологиче-
ских процессов в промышленности, сельском хозяйстве, на
транспорте, в коммунальной сфере, в быту, медицине и других
областях жизнедеятельности человека. Большинство рабочих
машин, агрегатов, технологических линий и комплексов приво-
дится в движение электрическим приводом.
Однако функции электропривода не ограничиваются только
преобразованием энергии - они существенно шире Каждая рабо-
чая машина нуждается в управлении: нужно включать и выклю-
чать двигатели, приводящие в движение рабочие органы маши-
ны, изменять скорость и усилие на рабочих органах в соответст-
вии с условиями ведения технологического процесса, осуществ-
лять необходимые защиты и блокировки, обеспечивающие без-
аварийную работу машин.
В тех случаях, когда рабочая машина или технологический
комплекс имеет несколько рабочих органов, каждый из которых
приводится в движение своим электроприводом, в задачу управ-
ления входит согласование движений рабочих органов в соответ-
ствии с требованиями технологического процесса.
Управление рабочей машиной может осуществляться опера-
тором вручную или автоматически посредством устройств авто-
матического или программного управления. Даже если рабочие
машины управляются вручную, ряд функций управления обычно
автоматизирован для облегчения работы оператора и более точ-
ного выполнения технологического процесса.
Вторую функцию электропривода можно определить как
управление движением исполнительных органов рабочей маши-
ны, причем это управление может осуществляться вручную с
элементами автоматики или автоматически.
Итак, современный электрический привод представляет со-
бой техническую систему, предназначенную для приведения в
движение рабочего органа машины и управления ее технологиче-
ским процессом.
Сочетание двух функций электропривода: преобразование
электрической энергии в механическую и управление параметра-
5
Рис.1.1. Схема электропривода вен-
тилятора
примеры электроприводов и выпол-
ми механической энергии (мощность, усилие, крутящий момент,
скорость, ускорение, путь и угол перемещения) с целью рацио-
нального выполнения технологического процесса, выполняемого
рабочей машиной, определяет назначение и роль электропривода
в машинном производстве.
Рассмотрим некоторые
няемых ими функций.
На рис. 1.1 показана
электрическая схема элек-
тропривода вентилятора,
служащего для обмена
воздуха в помещении. Пре-
образование электрической
энергии в механическую,
необходимую для приве-
дения рабочего колеса
вентилятора во вращение,
осуществляется асинхрон-
ным двигателем М. Однако
состав электропривода вен-
тилятора не ограничивает-
ся только двигателем.
Чтобы вентиляторная уста-
новка могла работать, двигатель нужно включать и отключать.
Эта функция управления реализуется с помощью магнитного
пускателя КМ и кнопок управления. При нажатии кнопки SB1
«пуск» катушка пускателя получает питание, и пускатель замы-
кает свои главные контакты, подключая двигатель к сети. Своим
нормально открытым (н.о.) блок-контактом КМ пускатель шун-
тирует кнопку «пуск», вследствие чего после отпускания кнопки
пускатель остается включенным. Отключение двигателя произ-
водится нажатием кнопки «стоп» SB2, разрывающей цепь катуш-
ки пускателя.
Схема, показанная на рис. 1.1, содержит также защитные уст-
ройства: защиту от токов короткого замыкания (к.з.) в проводни-
ках или в обмотке статора двигателя. Эта защита обеспечивается
автоматическим выключателем QF, имеющим максимальный
расцепитель. Защита двигателя от перегрузок реализуется по-
средством тепловых реле КК, входящих в состав магнитного пус-
кателя.
В качестве второго примера рассмотрим электропривод лиф-
тов. Лифт - автоматизированное средство пассажирского верти-
кального транспорта - хорошо всем знакомое электромеханиче-
ское устройство. Пассажир, войдя в кабину лифта, нажимает
кнопку нужного ему этажа, после чего автоматически закрыва-
ются двери кабины и лифтовой шахты. Кабина лифта движется в
нужном направлении и точно останавливается на уровне задан-
ного этажа, двери открываются. Электродвигатель через редук-
тор, канатоведущий шкив и канатную передачу приводит кабину
лифта в движение, выполняя преобразование электрической
энергии в механическую, необходимую для осуществления дви-
жения механической системы. Второй электромеханической сис-
темой является устройство открывания и закрывания дверей, со-
стоящее из электродвигателя и кинематических механических
звеньев.
Система управления лифтом осуществляет управление две-
рями, выбор направления движения кабины, обеспечивает плав-
ный пуск, движение с установившейся скоростью, торможение и
точную остановку кабины. Для обеспечения точности остановки
и комфортности пассажиров в кабине нужно регулировать ско-
рость движения по определенному закону. Для этого в лифтах со
скоростью движения до 1,4 м/с применяют двухскоростные асин-
хронные двигатели, а в более быстроходных лифтах - электро-
приводы с плавным регулированием скорости. Кроме управления
движением система управления лифтом содержит необходимые
защиты и блокировки, обеспечивающие безопасность пассажиров
и безаварийную работу оборудования, а также информацию о
положении кабины.
В качестве третьего примера рассмотрим электромеханиче-
скую систему бытового аппарата - автоматической стиральной
машины активаторного типа. Машина представляет собой элек-
тромеханическое устройство, содержащее многоскоростной элек-
тродвигатель вращения барабана, электронасос, электрические
клапаны и аппаратуру программного управления. В соответствии
с устанавливаемой программой машина автоматически произво-
дит стирку, полоскание и отжим белья, налив и слив воды. Работа
различных электрических и механических элементов функцио-
нально объединена устройством программного управления. Рабо-
ту отдельных элементов нельзя рассматривать порозонь, т.к. со-
вместно они образуют автоматическую электромеханическую
систему, выполняющую требуемый технологический процесс,
причем в состав этой электромеханической системы входят элек-
тродвигатели, осуществляющие преобразование электрической
энергии в механическую, необходимую для осуществления дан-
7
ного технологического процесса, и устройство управления, обес-
печивающее управление этим процессом.
Важная роль принадлежит электроприводу в создании энер-
госберегающих технологий. Многие технологические процессы
связаны с большими затратами электрической энергии, однако не
всегда эти затраты носят производительный характер. Характер-
ным примером такого положения являются системы тепло и во-
доснабжения. Насосные установки, подающие горячую и холод-
ную воду потребителям, ранее оборудовались нерегулируемым
электроприводом. Производительность насосов при этом не ре-
гулировалась или изменялась дросселированием на нагнетатель-
ном трубопроводе насоса. В то же время требуемая производи-
тельность насосных установок не остается постоянной, а сущест-
венно изменяется по времени суток и временам года. Регулиро-
вание производительности дросселированием связано с непроиз-
водительными потерями энергии и не может осуществляться в
автоматическом режиме.
В последние годы с появлением доступных технических
средств для регулирования скорости асинхронных двигателей для
привода насосов в системах тепло- и водоснабжения стали при-
меняться регулируемые электроприводы.
Регулируемый электропривод насоса выполняет две функ-
ции: преобразует электрическую энергию в механическую, необ-
ходимую для подачи воды потребителю, и управляет работой ус-
тановки таким образом, чтобы поддерживать требуемую величи-
ну напора и расхода воды. Это дает экономию электроэнергии
около 30%, воды - до 25%, тепла - до 10% [6]. Рассмотренный
пример показывает, что электропривод, позволяющий регулиро-
вать скорость рабочего органа механизма, обладает более широ-
кими возможностями оптимального ведения технологического
процесса, в частности, обеспечивает экономное расходование
электрической энергии.
Регулирование скорости
рабочих органов машины
является непременным усло-
вием работы многих рабочих
машин и механизмов.
Рассмотрим в этой связи
работу электропривода меха-
низмов горного экскаватора
типа механической лопаты
(рис. 1.2). Рабочим органом
Рис.1.2. Горный экскаватор типа
механической лопаты
8
экскаватора является ковш 1, размещенный на конце рукояти 2,
которая шарнирно закреплена на стреле 3. Разрушение породы и
наполнение ковша производится при поступательном движении
рукояти с помощью механизма напора и одновременном движе-
нии ковша вверх, осуществляемым механизмом подъема. После
наполнения ковша и подъема его на требуемую высоту включа-
ется механизм поворота, который вращает платформу 4 экскава-
тора с тем, чтобы подвести поднятый ковш экскаватора к месту
выгрузки. После этого ковш возвращается к забою, и цикл экска-
вации повторяется снова.
Структурная схема электромеханического комплекса экска-
ватора представлена на рис. 1.3. Электропитание экскаватора как
подвижной машины, осуществляется при напряжении 6(10) кВ по
гибкому кабелю. Кабель подсоединяется к приключательному
пункту. Для подачи электроэнергии на борт экскаватора служит
кольцевой токоприемник. Для коммутации и защиты высоко-
вольтных цепей служит высоковольтное распределительное уст-
ройство (РУ), от которого питается синхронный двигатель элек-
тромашинного преобразовательного агрегата.
Рис. 1.3. Структура электромеханического комплекса
горного экскаватора
9
Электропривод основных движений экскаватора: подъема,
напора ковша, поворота и передвижения, - осуществляется двига-
телями постоянного тока, которые получают питание от индиви-
дуальных генераторов постоянного тока. Для управления элек-
троприводами служат устройства управления и пульт-кресло ма-
шиниста Механическая часть электроприводов экскаватора
включает в себя редукторы, барабанно-канатную передачу, зуб-
чатую рейку привода напора и другие элементы. Общая схема
управления, объединяющая электромеханические системы от-
дельных механизмов экскаватора, строится из условий обеспече-
ния наилучших условий ведения процесса экскавации. Главным
условием является обеспечение высокой динамичности работы
электроприводов. Цикл экскавации для обеспечения его высокой
производительности составляет всего 20-30сек. Экскаватор с
ковшом емкостью 5-20м3 имеет общую массу в несколько сотен
тонн; велика масса ковша и других подвижных элементов маши-
ны. В то же время движение ковша экскаватора должно точно
соответствовать движению рукоятей управления, производимых
машинистом. Во избежание поломки механических частей долж-
но контролироваться усилие на ковше при разрушении породы.
Быстродействующее управление скоростью требует преодоления
механической инерции элементов экскаватора, что вызывает не-
обходимость применения достаточно сложных автоматических
систем управления электроприводами.
Особо сложные электроприводы имеют металлорежущие
станки с числовым программным управлением. Такой станок
служит для автоматической обработки деталей по заданной про-
грамме с высокой точностью. Станок включает в себя блок глав-
ного движения, осуществляющий резание металла, и один или
несколько механизмов подач, производящих позиционирование
детали и точное движение режущего инструмента или обрабаты-
ваемого изделия по заданной программе. Для электроприводов
главного движения и подачи характерна высокая точность вы-
полнения задания по скорости, а для приводов подачи - задания
по положению. Диапазон регулирования скорости составляет для
приводов главного движения 1000:1, а для приводов подач -
10000:1. При этом необходимы высокая точность поддержания
заданной скорости. Требуемая точность позиционирования для
механизмов подачи может достигать нескольких микрон. Таким
образом, современный металлорежущий станок (рис. 1.4) пред-
ставляет собой совокупность электромеханических устройств,
основу которых составляют высокоточные автоматизированные
10
электроприводы, работа которых объединена единой технологи-
ческой задачей и управляется вычислительным устройством -
системой числового программного управления.
Еще один пример приведем из
ки. Все большее распростра-
нение, особенно в США и
Японии, получают электромоби-
ли. Фирмой General Motors
созданы легковые электромоби-
ли, по своим эксплуатационным
характеристикам не уступающие
традиционным автомобилям. Ос-
новное достоинство электромо-
билей - экологическая безопас-
ность - обеспечит их широкое
использование в ближайшие
десятилетия. Существуют две
схемы электромобилей: гибрид-
ная и с зарядными устройствами.
области тпанспортной техни-
Рис.1.4. Обрабатывающий
центр модели МЦ-1 Саве-
ловского СПО
В обеих схемах колеса автомобиля приводятся во вращение элек-
тродвигателями. В гибридных схемах источником энергии слу-
жит двигатель внутреннего сгорания, работающий в постоянном
режиме, оптимальном с точки зрения расхода топлива и миними-
зации токсичности выхлопных газов. Двигатель внутреннего сго-
рания приводит во вращение электрический генератор, осущест-
вляющий подзарядку буферных аккумуляторных батарей. При-
водные электродвигатели переменного тока получают питание от
аккумуляторных батарей через полупроводниковый преобразова-
тель частоты.
В схеме электромобилей с зарядными устройствами дизель-
генераторная установка отсутствует, и приводные электродвига-
тели получают питание от аккумуляторных батарей, которые пе-
риодически заряжаются.
В состав электропривода входят электрические двигатели ко-
лес, источник электропитания, преобразователь частоты и систе-
ма управления, обеспечивающая регулирование скорости элек-
тромобиля и электрическое рекуперативное торможение с воз-
вратом энергии на подзарядку аккумуляторов.
Приведенные примеры, а их число может быть многократно
увеличено, показывают, что электрический привод является од-
ним из основных узлов каждой производственной машины или
технологического комплекса. Это, как правило, наиболее слож-
11
ная и дорогая часть рабочих машин Конструирование, изготов-
ление и эксплуатация электроприводов требует высокой квали-
фикации и разнообразных технических знаний.
1.2. Роль электропривода
в современных машинных технологиях
Современное промышленное и сельскохозяйственное произ-
водство, транспорт, коммунальное хозяйство, сферы жизнеобес-
печения и быта связаны с использованием разнообразных техно-
логических процессов, большинство из которых основано на
применении рабочих машин и механизмов Разнообразие и число
рабочих машин огромно. Там, где применяются технологические
машины - используется электропривод. Практически все процес-
сы, связанные с движением с использованием механической
энергии, осуществляются электроприводом. Исключение состав-
ляют лишь некоторые транспортные и сельскохозяйственные
машины (автомобили, тракторы и др.), но и в этой области пер-
спективы использования электропривода стали вполне реальны.
Электропривод - главный потребитель электрической энер-
гии. В развитых странах на долю электропривода приходится
свыше 60% всей вырабатываемой электроэнергии.
Электроприводы различны по своим техническим характери-
стикам- по мощности, скорости вращения, конструктивному ис-
полнению и другим. Мощность электроприводов прокатных ста-
нов, компрессоров газоперекачивающих станций и ряда других
уникальных машин доходит до нескольких тысяч киловатт.
Мощность электроприводов, используемых в различных прибо-
рах и устройствах автоматики, составляет несколько ватт. Элек-
тропривод бытовых приборов и машин обычно составляет от 10
до 1 000 Вт, электропривод станков - от 0,25 кВт до 100 кВт и т.д.
Диапазон мощности электроприводов очень широк. Также велик
диапазон электроприводов по скорости вращения. Так, скорость
вращения центрифуг доходит до 100000 об/мин. Есть механизмы,
у которых скорость вращения рабочего органа составляет менее
одного оборота в минуту.
Большинство производственных рабочих машин и механиз-
мов приводится в движение электрическими двигателями. Двига-
тель вместе с механическими устройствами (редукторы, транс-
миссии, кривошипно-шатунные механизмы и др), служащими
для передачи движения рабочему органу машины, а также с уст-
ройствами управления и контроля образует электромеханиче-
скую систему, которая является энергетической, кинематической
12
и кибернетической (в смысле управления) основой функциониро-
вания рабочих машин.
В более сложных технологических машинных комплексах
(прокатные станы, экскаваторы, обрабатывающие центры и дру-
гие), где имеется несколько рабочих органов или технологически
сопряженных рабочих машин, используется несколько электро-
механических систем (электроприводов), которые в сочетании с
электрическими системами распределения электроэнергии и об-
щей системой управления образуют электромеханический ком-
плекс.
Большие скорости обработки, высокая и стабильная точность
выполнения технологических операций потребовали создания
высокодинамичных электроприводов с автоматическим управле-
нием. Стремление снизить материальные и энергетические затра-
ты на выполнение технологических процессов обусловило необ-
ходимость технологической и энергетической оптимизации про-
цессов; эта задача также легла на электропривод. На этапе техни-
ческого развития машинного производства, достигнутого к концу
XX века, электромеханические комплексы и системы стали опре-
делять технологические возможности и технический уровень ра-
бочих машин, механизмов и технологических установок.
Создание современных электроприводов базируется на ис-
пользовании новейших достижений силовой электротехники, ме-
ханики, автоматики, микроэлектроники и компьютерной техники.
Это быстро развивающиеся области науки, что определяет высо-
кую динамичность развития электромеханических систем.
Автоматизированный электропривод получил в последние
десятилетия интенсивное ускоренное развитие. Это определяется,
в первую очередь, общим прогрессом машиностроения, направ-
ленным на интенсификацию производственных процессов, их
автоматизацию, повышение точностных характеристик и других
технических требований, связанных с обеспечением стабильно-
сти качества производимой продукции.
Вторым обстоятельством, обусловившим развитие электро-
привода, явилось распространение его применения не только на
промышленное производство, но и на другие сферы, определяю-
щие жизнедеятельность человека: сельское хозяйство, транспорт,
медицину, электробытовые установки и др.
Третья причина связана с наметившимся переходом от экс-
тенсивного развития производства электрической энергии к бо-
лее эффективному ее использованию. Повышение эффективности
электромеханического использования электроэнергии всецело
13
связано с развитием электропривода. Речь идет не только об
уменьшении потерь энергии при ее электромеханическом преоб-
разовании, но, главным образом, о том, что использование авто-
матизированного регулируемого электропривода позволяет оп-
тимизировать сами технологическое процессы с целью сокраще-
ния их энергоемкости.
Ускорение темпов технического прогресса в машинострое-
нии и других областях, сокращение сроков морального устарева-
ния поколений технических средств постоянно ставят новые за-
дачи по дальнейшему развитию элементов и систем автоматизи-
рованного электропривода. Новые технологии, связанные с меха-
ническим движением, стали базироваться исключительно на ис-
пользовании регулируемого автоматизированного электроприво-
да.
1.3. Структура электропривода
Электропривод - это техническая система, предназначенная
для приведения в движение рабочих органов машины и целена-
правленного управления рабочими процессами, состоящая из
электродвигательного, передаточного, преобразовательного и
информационно-управляющего устройств [1].
Электродвигательное устройство - это электрический двига-
тель, преобразующий электрическую энергию в механическую -
электромеханический преобразователь энергии. Двигатели могут
быть различными по виду создаваемого ими движения: враща-
тельного, линейного, шагового, вибрационные и др. Большинство
используемых электродвигателей - это машины вращательного
движения. Для передачи движения от электродвигателя к рабо-
чему органу машины служит механическое передаточное устрой-
ство: редуктор, трансмиссия, ременная передача, канатная пере-
дача, кривошипно-шатунный механизм, передача винт-гайка и
др. (см. рис. 1.5). Передаточный механизм характеризуется коэф-
фициентом передачи, представляющим собой отношение скоро-
сти на входе к скорости на выходе механизма. В некоторых рабо-
чих машинах (например, насосы, вентиляторы, центрифуги) ме-
ханическое передаточное устройство, как правило, отсутствует.
Преобразовательное устройство - это преобразователь элек-
трической энергии. Эти устройства применяются в регулируемом
электроприводе для целенаправленного и экономичного измене-
ния параметров движения электропривода: скорости, развиваемо-
го момента и др. Поскольку электроприводы получают электри-
ческую энергию, как правило, от промышленной электрической
14
сети трехфазного переменного тока частотой 50 Гц со стандарт-
ным значением напряжения: 220, 380, 660, 6000, 10000 В, то для
питания двигателей (например, постоянного тока) и для их регу-
лирования необходимо преобразование электрической энергии,
поступающей из сети, в электрическую энергию того вида, кото-
рый необходим данному электродвигателю. К электрическим
преобразовательным устройствам относятся управляемые вы-
прямители, преобразователи частоты и другие. В нерегулируе-
мых электроприводах преобразовательное устройство, как прави-
е) ж)
Рис. 1.5. Механические передаточные устройства: а - редуктор; б - зуб-
чато-реечная передача; в - барабанно-канатная передача; г - кривошип-
но-шатунный механизм; д- ременная передача; е - винтовая передача;
ж - шарико-винтовая передача
Электрическое преобразовательное устройство обычно пред-
ставляет собой преобразователь, выполненный на силовых полу-
проводниковых приборах: неуправляемых (диоды) и управляе-
мых (тиристоры, запираемые тиристоры, биполярные транзисто-
ры с изолированным входом - IGBT, и другие).
Электродвигательное, передаточное и преобразовательное
устройства образуют силовой канал электропривода (см. рис.
15
1.6), содержащий электрическую часть (сеть, преобразователь
электрической энергии, электродвигатель) и механическую часть
(подвижный элемент, например, ротор и вал электродвигателя,
механическая передача, рабочий орган машины).
Рис.1.6. Структура силового канала электропривода
При работе электропривода в двигательном режиме электри-
ческая энергия, поступающая из сети, преобразуется электродви-
гателем в механическую энергию, которая передается рабочему
органу машины и расходуется на выполнение технологического
процесса (резание в металлорежущих станках, подача воды насо-
сами, подъем груза краном и т.п.). Во всех звеньях силового ка-
нала часть энергии теряется. Следует стремиться сокращать по-
тери энергии при ее преобразовании и передаче. Энергетическую
эффективность электропривода обычно оценивают посредством
кпд, который при однонаправленном потоке энергии определяют
как отношение полезной мощности на рабочем органе к потреб-
ляемой мощности
Ч ЭЛ t-j Ч пр Ч ЭМП Ч МП ’
1 потр
Кпд электропривода равен произведению кпд электрическо-
го, электромеханического преобразователей и механической пе-
редачи. Для того чтобы оценить кпд рабочей машины в целом,
кпд электропривода нужно умножить на кпд самой рабочей ма-
шины Т] ри (например, насоса)
1 потр
Здесь Рты,, - технологически необходимая мощность для вы-
полнения данного производственного процесса.
Электроприводы могут работать не только в двигательном,
но и в тормозном режиме (например, спуск груза, принудитель-
ное торможение машины при останове и т.п.). В этом случае
энергия торможения - потенциальная энергия спускаемого груза
16
или кинетическая энергия движущихся масс, - поступает в элек-
тромеханический преобразователь, который работает в режиме
генератора. Эта энергия за вычетом потерь и совершаемой рабо-
чим органом в процессе торможения работы отдается в питаю-
щую сеть, если система допускает рекуперацию энергии. Если не
допускает — избыток энергии рассеивается в балластном сопро-
тивлении R. Направление потока энергии в режиме торможения
показано на рис. 1.6 пунктиром.
Важнейшей функцией электропривода является управление
преобразованной механической энергией, т.е. управление техно-
логическим процессом. Его реализует входящее в состав элек-
тропривода информационно-управляющее устройство. Общая
структура электропривода показана на рис. 1.7. Здесь пунктирной
линией обведены элементы системы, входящие в состав электро-
привода и образующие силовой и информационный каналы элек-
Рис.1.7. Структура автоматизированной электромеханической системы
Информационно-управляющее устройство состоит из аппа-
ратов управления и защиты, осуществляющих включение, пуск,
останов электропривода и защиту от аварийных и аномальных
режимов работы, а также из электронных и микропроцессорных
устройств управления и датчиков технологических, механиче-
ских и электрических параметров, характеризующих работу элек-
тропривода. Совокупность информационных и управляющих
устройств образует информационный канал электропривода,
предназначенный для управления параметрами (координатами)
электропривода в соответствии с требованиями технологического
процесса. Важной функцией системы управления является также
17
осуществление технологического процесса с минимальными за-
тратами электрической энергии.
В последние годы информационный канал электропривода
все в большей степени реализуется с использованием устройств
управляющей вычислительной техники: промышленных компью-
теров, программируемых контроллеров, микропроцессорных
средств и систем. Это позволяет, в частности, управлять отдель-
ными электроприводами от управляющих устройств более высо-
кого уровня (АСУТП), объединяющих управление всеми произ-
водственными машинами, обслуживающими данный технологи-
ческий процесс.
1.4. Классификация электроприводов
Электроприводы, используемые в различных технологиче-
ских установках, разнообразны по своим функциональным воз-
можностям, схемному и конструктивному исполнению, степени
автоматизации, что связано с большим разнообразием рабочих
машин. Классификация электроприводов по отдельным призна-
кам дана в таблице 1.1.
Электроприводы бывают индивидуальными и групповыми.
Если каждый рабочий орган машины приводится в действие
своим электроприводом, то он называется индивидуальным. Та-
кой привод может быть однодвигательным, либо многодвига-
тельным. При групповом электроприводе один двигатель приво-
дит в движение несколько рабочих органов. При этом усложняет-
ся кинематическая цепь рабочей машины и затрудняется управ-
ление рабочими органами, т.к. для раздельного управления рабо-
чими органами необходимо применять специальные механиче-
ские устройства: управляемые муфты, коробки передач, фрик-
ционы и др. По мере развития техники групповой электропривод
все больше вытесняется индивидуальным.
Классификация по виду движения электродвигателя. Наи-
большее, а до недавнего времени исключительное применение
получили электроприводы вращательного движения. В последнее
время значительное внимание уделяется линейным двигателям. В
тех механизмах, где рабочий орган совершает поступательное
или возвратно-поступательное движение применение линейных
двигателей конструктивно гораздо удобнее, чем использование
специальных кинематических пар: винт-гайка, шарико-винтовые
передачи, кривошипно-шатунный механизм и др. Из-за низких
энергетических и массогабаритных показателей линейные элек-
тродвигатели не находили применения. Создание новых эффек-
18
тивных конструкций линейных двигателей с питанием их от по-
лупроводниковых преобразователей частоты открывает новые
возможности использования линейных электроприводов для ряда
производственных машин, в первую очередь, для металлорежу-
щих станков.
Таблица 1.1
Классификация автоматизированных электроприводов
Классификационный признак Классификационные градации
По числу рабочих орга- нов, приводимых элек- троприводом 1. Индивидуальный 2. Миогодвигательный 3. Групповой
По виду движения элек- тродвигателя 1. Вращательного движения 2. Линейный 3. Многокоординатного движения
По способу соединения двигателя с рабочим органом 1. Редукторный 2. Безредукторный 3. Конструктивно-интегрированный
По регулируемости 1. Нерегулируемый 2. Регулируемый
По основному контро- лируемому параметру 1. Регулируемый по моменту 2. Регулируемый по скорости 3. Регулируемый по положению
По виду управления 1. С ручным управлением 2. С полуавтоматическим управлением З. С замкнутой САР скорости с ручным заданием или с заданием от системы управления технологическим процессом 4. С замкнутой САР положения, обеспечи- вающей точное позиционирование 5. С программным управлением 6. Следящий
Многокоординатные электроприводы на основе специальных
шаговых электродвигателей являются отечественной разработкой
и находят применение в высокоточных робототехнических уста-
новках, сборочных автоматах и для других целей. Многокоорди-
натные электроприводы позволяют осуществлять пространствен-
ные движения рабочего органа по нескольким координатам.
Электродвигатели соединяются с рабочим органом машины
либо непосредственно, либо через редуктор или другую кинема-
тическую передачу. Непосредственное соединение двигателя с
рабочим органом характерно для высокоскоростных рабочих ма-
шин, например, насосов и вентиляторов. В других рабочих ма-
19
шинах, где скорость вращения рабочего органа меньше номи-
нальной скорости электродвигателя, применяют редукторы, ко-
торые снижают скорость и увеличивают момент на валу рабочего
органа.
Для высокоточных механизмов и для машин, работающих в
динамичных режимах, стремятся исключать механические пере-
дачи между валом двигателя и рабочим органом. Такие электро-
приводы называют безредукторными. При этом, однако, возрас-
тают габариты и масса приводного двигателя, поскольку эти па-
раметры при одной и той же мощности двигателя примерно об-
ратно пропорциональны номинальной скорости двигателя.
В последние годы стремятся, особенно для высокоточных
электроприводов, конструктивно объединить рабочий орган с
приводным электродвигателем. Примерами таких конструктивно-
интегрированных электроприводов являются: электрошпиндели
(для шлифовальных станков), мотор-колеса (для транспортных
средств) и др.
Новым направлением в технике является создание электро-
механических модулей, включающих в себя рабочий орган, элек-
тромеханическое устройство (двигатель) с системой его регули-
рования и микропроцессорное управляющее устройство. Такие
модули, получившие название мехатронных, применяются в ро-
ботах и станках с числовым программным управлением.
Под регулируемостью понимается возможность изменения
или точного поддержания скорости, ускорения или момента
(усилия) приводного электродвигателя.
Исторически сложилось, что большинство существующих
электроприводов выполнено на базе короткозамкнутых асин-
хронных электродвигателей, не допускающих в стандартной схе-
ме их питания регулирования скорости или момента. Модифика-
цией односкоростных асинхронных электродвигателей являются
двух и трехскоростные двигатели. Электроприводы с многоско-
ростными двигателями дают возможность получать две или три
фиксированные рабочие скорости, но не могут обеспечить плав-
ного регулирования скорости в заданном диапазоне. К подобным
по управляемости можно также отнести электроприводы с рео-
статно-контакторным управлением. Такие приводы не дают воз-
можности регулировать момент и ускорение электропривода и
формировать требуемый характер изменения скорости во време-
ни. Поэтому электропривод с многоскоростными электродвига-
телями и с контакторным управлением в отличие от другой учеб-
ной литературы не рассматривается нами как регулируемый.
20
Понятие регулируемый электропривод, принятое в учебнике,
включает в себя выполнение следующих функций:
• установка требуемой скорости в пределах заданного диапазона;
• стабилизация установленного значения скорости с заданной
точностью при возмущающих воздействиях, например, измене-
нии нагрузки на валу двигателя;
• регулирование момента, развиваемого двигателем в двигатель-
ном и тормозном режимах, и ускорения (замедления) привода;
• формирование требуемого характера изменения скорости во
времени a>=f(t) с заданной точностью.
Современной тенденцией является все более широкое ис-
пользование регулируемых электроприводов.
В зависимости от технологических требований электропри-
вод должен осуществлять регулирование по одному из главных
контролируемых параметров: моменту, скорости или положению
рабочего органа машины. (Это не означает, что при этом не регу-
лируются другие параметры; при регулировании положения не-
обходимо регулировать скорость и т.п.).
Регулирование момента как основного регулируемого пара-
метра характерно для тех производственных машин, где контро-
лируется натяжение обрабатываемого материала: намоточные
устройства, линии обработки ткани и др. Наиболее часто основ-
ным контролируемым параметром является скорость. Механизмы
главного движения станков, клети прокатных станов, конвейеры,
питатели, насосы и многие другие машины по технологии своей
работы требуют регулирования скорости. Есть механизмы, кото-
рые требуют позиционирования рабочего органа или перемеще-
ния его по заданной траектории. Такие электроприводы управля-
ются по положению.
В зависимости от диапазона регулирования скорости, регу-
лируемые электроприводы разделяются на:
• регулируемые приводы с ограниченным диапазоном регулиро-
вания (не более 2:1);
• регулируемые приводы общего назначения с диапазоном регу-
лирования не выше 100:1;
• широкорегулируемые электроприводы (диапазон регулирова-
ния скорости порядка 1000:1);
• высокоточные электроприводы (диапазон регулирования
10000:1 и выше).
Классификация электроприводов по виду управления вклю-
чает в себя электроприводы с системами управления, различаю-
щимися по их функциональным возможностям и сложности.
21
Наиболее простые системы с ручным управлением характерны
для нерегулируемых электроприводов. Такие электроприводы
имеют систему управления на основе релейно-контакторной ап-
паратуры, выполняющей функции пуска, останова, защиты и
блокировки.
Электроприводы с полуавтоматическим управлением подра-
зумевают управление электроприводом оператором с помощью
командно-контроллера, кнопок управления и других аппаратов.
Система управления содержит элементы автоматического управ-
ления и регулирования, обеспечивающие автоматическое изме-
нение параметров электропривода (например, переключение сту-
пеней сопротивления пускового реостата в функции тока или
времени) в соответствии с командами оператора. Такие системы
характерны, например, для электропривода грузоподъемных кра-
нов.
Для регулируемого электропривода, как правило, использу-
ются замкнутые САР по току и скорости. В этом случае управле-
ние может осуществляться оператором, как это производится,
например, машинистами экскаваторов, прокатных станов и дру-
гих машин. Задание на скорость может также определяться сис-
темой технологической автоматики (например, бумагоделатель-
ные машины, дозаторы и другие машины). Следующей разновид-
ностью являются позиционные электроприводы, которые обеспе-
чивают точную остановку рабочего органа механизма в заданном
положении. Системы управления такими электроприводами со-
держат замкнутый контур положения, действующий постоянно
или при входе рабочего органа в зону точной остановки.
Если задающее воздействие на параметры движения рабоче-
го органа задается программными средствами, то такие электро-
приводы составляют класс электроприводов с числовым про-
граммным управлением (ЧПУ). Приводы с ЧПУ содержат замк-
нутые контуры регулирования по скорости и положению.
Если положение рабочего органа должно изменяться в соот-
ветствии с заданием, характер которого заранее неизвестен, то
функцией электропривода в этом случае является слежение и от-
работка этого задания с необходимой точностью. Такой электро-
привод называется следящим.
1.5. Контрольные вопросы для самопроверки
1. Дайте определение автоматизированного электропривода.
2. Укажите две основные функции электропривода.
22
3. Приведите примеры рабочих машин и их исполнительных
органов.
4. Какие устройства образуют силовой (энергетический) ка-
нал электропривода?
5. Каково назначение электрического преобразовательного
устройства в структуре электропривода?
6. Какие устройства входят в информационно-управляющий
канал электропривода?
7. Как классифицируются электроприводы по виду движения
электродвигателя?
8. Приведите классификацию электроприводов по виду
управления?
9. Выполнение каких функций определяет понятие регули-
руемого электропривода?
10. Какие причины определяют ускоренное развитие электро-
привода?
Глава 2. ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА
2.1. Механические характеристики двигателя и рабочего
механизма
Назначение электропривода - создавать движение рабочих
машин и управлять этим движением. Переменными величинами,
характеризующими движение, являются:
________________________________________Таблица 2.1
Поступательное движение Вращательное движение
Вели- чина Обозначе- ние Размер- ность Вели- чина Обозначе- ние Размер- ность
Путь S M Угол поворота <Р радиан
Ско- рость У^ dt м/с Угловая скорость (частота вращения) dtp СО = — dt рад/с; 1/c
Уско- рение dV d2S а = — = —- dt dt2 м/с2 Угловое ускорение dot d2<p E = ~dt~~di2 рад/с2; 1/c2
Сила F H Момент M Н.м
Масса tn КГ Момент инерции J кгм2
23
Изменение величин, характеризующих движение рабочих ор-
ганов машины, происходит при воздействии на их кинематиче-
скую цепь (механическую часть) сил F. Для вращательного дви-
жения физическим
аналогом силы яв-
ляется момент М.
Момент создается
силой, приложен-
ной к плечу (плечо
- кратчайшее рас-
стояние от оси вра-
щения до линии
действия силы), на-
пример, к радиусу
барабана грузо-
подъемной лебедки
Рис.2.1. Формирование крутящего момента
(рис.2.1,а); или па-
рой сил, возни-
кающих в электродвигателях вращательного движения (рис.2.1,6)
M = FR.
Электрический двигатель вращательного движения является
источником момента.
Знаки моментов, прикладываемых к механической части
электропривода, нужно соотносить со знаком скорости вращения.
Одно из направлений вращения вала двигателя (по часовой
стрелке «вперед» или против часовой стрелки «назад») условно
принимают за положительное направление; противоположное
направление - за отрицательное. Соответственно, скорость дви-
жения в направлении «вперед» будет иметь знак (+), а скорость
движения в направлении «назад» - знак (-). Также поступают при
определении знака скорости линейного движения, например ли-
нейного двигателя.
Момент, развиваемый электродвигателем, может быть поло-
жительным, когда двигатель при вращении в положительном на-
правлении работает в двигательном режиме, преобразуя электри-
ческую энергию в механическую, или отрицательным, тормоз-
ным (-Л/), когда двигатель работает в генераторном режиме, пре-
образуя механическую энергию в электрическую. При изменении
направления вращения знаки моментов изменяются на противо-
положные.
Момент двигателя зависит от его скорости. Взаимосвязь мо-
мента, развиваемого двигателем, и скорости вращения
24
М = f(co) определяет механические характеристики электро-
привода (электродвигателя). Механические характеристики изо-
бражаются в поле координат М - со .
Оси координат разде-
ляют поле на четыре
квадранта (рис.2.2). В пер-
вом квадранте изобра-
жаются механические ха-
рактеристики при работе
двигателя в двигательном
режиме и положительном
направлении скорости его
вращения, во втором - при
работе в тормозных ре-
жимах. В третьем квад-
ранте будут размещаться
механические характерис-
тики двигателя при работе в
двигательном режиме, но с
отрицательным направлени-
ем скорости вращения. В четвертом
квадранте - механические характе-
ристики двигателя при работе в
юрмозном режиме и отрицательном
направлении скорости вращения.
Обычно пользуются представлением
механических характеристик в
первых двух квадрантах.
Основным параметром, опреде-
ляющим вид механической ха-
рактеристики, является ее жесткость
(рис.2.3).
dM AM Рис.2.3. К определению же-
/3 =----------. (2-1) сткости механических ха-
dco Ай) рактеристик
Если механическая характе-
ристика прямолинейна (1), то ее жесткость - величина посто-
янная и равная тангенсу угла наклона характеристики к оси
ординат; если характеристика криволинейна (2), то жесткость
определяется тангенсом угла наклона касательной к механиче-
ской характеристике в данной точке (например, в точке А). Жест-
Генераторный
режим:
М-а><0
(Л/<0; су>0)
М
II
III
Двигательный
режим:
Afa»O
(Л/<0; си<0)
Для противополс:
Двигательный
режим:
Л/-о>0
(М>0; а>>0)
ки
IV
Генераторный
режим:
Ма1<й
(М>0; о)<0)
жного направления
враг {ения
- ш
Рис.2.2. Поле координат М-а>
I
25
кость характеризует способность двигателя воспринимать при-
ложение нагрузки (момента) на его валу. Из (2.1) следует, что
А /У/
Ай) - ---•
р
Поскольку обычно с увеличением момента нагрузки скорость
уменьшается, то жесткость /? является величиной отрицатель-
ной.
Если при приложении нагрузки ДЛ/ скорость ДбУ умень-
шается незначительно, то механическая характеристика считает-
ся жесткой. Если при том же значении прикладываемой нагрузки
скорость изменяется значительно, то такую характеристику на-
зывают мягкой.
На рис.2.4 показаны
естественные механи-
ческие характеристики
основных видов электро-
двигателей вращатель-
ного движения:
1 - двигателя посто-
янного тока независи-
мого возбуждения; его
механическая характе-
ристика имеет высокую
жесткость, постоянную
во всех точках;
2 - двигателя посто-
Рис.2.4. Естественные механические
характеристики двигателей:
1 - постоянного тока независимого воз-
буждения; 2 - постоянного тока после-
довательного возбуждения; 3 - асин-
хронного; 4 - синхронного
янного тока последова-
тельного возбуждения;
жесткость его механи-
ческой характеристики
не постоянна, она мала
при малых нагрузках и
повышается по мере
возрастания момента;
3 - асинхронного двигателя; его механическая характеристи-
ка имеет две явно выраженные части: рабочую - с высокой посто-
янной отрицательной жесткостью и криволинейную часть с пе-
ременной положительной жесткостью; вторая часть характери-
стики используется только во время пуска двигателя;
4 - синхронного двигателя; он имеет абсолютно жесткую ме-
ханическую характеристику, параллельную оси абсцисс.
26
или в цепи обмоток вводятся
Рис.2.5. Зависимость момен-
тов сопротивления движению
от скорости для некоторых
рабочих машин
Приведенные на рис.2.4 характеристики называют естествен-
ными механическими характеристиками. Такие характеристики
соответствуют типовой схеме включения, номинальному напря-
жению и частоте питания и отсутствию в цепях обмоток двигате-
ля дополнительных элементов.
Искусственные (или регулировочные) механические характе-
ристики получаются, когда с целью регулирования изменяются
параметры питающего напряжения
дополнительные элементы (ак-
тивные или индуктивные сопро-
тивления, полупроводниковые
приборы и др.).
Момент сопротивления дви-
жению Мс, создаваемый на рабо-
чем органе машины, также мо-
жет являться функцией скорости.
Зависимость момента сопро-
тивления на валу рабочей маши-
ны от скорости Мс = f (со) (Мс и
со приведены к валу двигателя)
называют механической харак-
теристикой рабочей машины. Ее
отображают обычно в I квадранте
координатного поля М-со.
На рис.2.5 показаны механи-
ческие характеристики некоторых
рабочих машин. Характеристика 1
бочим органом резания; если толщина снимаемого резцом слоя
постоянна, то момент сопротивления такой машины не зависит от
скорости. Характеристика 2 отвечает условиям работы машин,
где момент сопротивления определяется, главным образом, сила-
ми трения (транспортеры, конвейеры и др. машины). В этом слу-
чае момент сопротивления также не зависит от скорости меха-
низма, однако, при пуске механизма момент, создаваемый силами
трения покоя, может существенно превышать момент сил трения
при движении.
Характеристика 3 относится к грузоподъемным механизмам,
где момент сопротивления движению создается, главным обра-
зом, силой тяжести. Особенностью данной характеристики явля-
ется то, что момент при подъеме груза несколько превышает мо-
мент сопротивления при спуске груза (характеристика 3), что
связано с учетом механических потерь в передачах.
соответствует машинам с ра-
27
Для турбомеханизмов (центробежных и осевых насосов, вен-
тиляторов и компрессоров) момент на валу механизма сущест-
венно зависит от скорости - характеристика 4. Для вентиляторов
эта зависимость носит квадратичный характер Мс = Ка>г.
Характеристикой 5, близкой к гиперболе, обладают намоточ-
ные устройства и другие машины, для которых технологически
необходима работа с постоянством мощности,
Отметим, что моменты на валу рабочей машины, определяе-
мые ее механической характеристикой, не учитывают динамиче-
ской составляющей момента, которая возникает при изменении
скорости двигателя.
2.2. Двигательный и тормозной режимы работы
электродвигателя
Любая электрическая машина, как электромеханический пре-
образователь энергии (ЭМС), может работать в двух режимах:
двигательном, преобразуя подводимую электрическую энергию в
механическую, или в тормозном (генераторном) режиме, преоб-
разуя подводимую механическую энергию в электрическую. В
двигательном режиме (см. рис.2.6,а) электрическая энергия, по-
требляемая из сети Рпотр, за вычетом потерь ДР в силовом кана-
ле электропривода преобразуется в механическую и передается
рабочему органу машины РО.
Тормозные режимы по своим энергетическим характеристи-
кам могут быть различными.
Режим рекуперативного генераторного торможения; в этом
режиме (рис.2.6,б) кинетическая энергия, запасенная в движу-
щихся элементах механической системы, или потенциальная
энергия, отбираемая от рабочего органа (например, в режиме
спуска груза), поступает на вал электродвигателя и преобразуется
им, как генератором, в электрическую энергию, которая за выче-
том потерь в электрической машине и преобразователе отдается в
питающую сеть; в этом режиме электродвигатель работает как
генератор параллельно с питающей сетью. Такой режим тормо-
жения энергетически является наиболее выгодным, т.к. энергия
торможения используется полезно.
Режим динамического торможения; в этом режиме двигатель
отключается от сети и работает как автономный генератор, на-
груженный на сопротивление; энергия торможения (см.
рис.2.6,в), поступающая на вал электродвигателя, преобразуется в
электрическую и вся расходуется на потери в электрической ма-
28
шине и (в случае необходимости) во включенных в цепи обмоток
машины сопротивлениях.
а) двигательный режим
б) рекуперативное торможение
в) динамическое торможение
Рис.2.6. Энергетические диаграммы режимов работы электропривода
Режим противовключения; в этом случае двигатель, вра-
щающийся в одном направлении, с целью торможения включает-
ся в другом направлении; двигатель при этом потребляет элек-
трическую энергию из сети и механическую энергию торможе-
ния, поступающую на вал электродвигателя (см. рис.2.6,г). Сум-
марная энергия расходуется на потери в электродвигателе и в со-
противлениях, включенных в цепи обмоток машины; этот режим
характеризуется большими потерями энергии.
Иногда режим противовключения используется в электро-
приводах грузоподъемных механизмов для создания подторма-
живающего момента при спуске груза; в рассматриваемом режи-
ме механизм движется под действием силы тяжести груза, а элек-
тродвигатель включается в направлении подъема груза, создавая
посредством устройств регулирования необходимый тормозной
момент. Энергетически этот режим идентичен режиму торможе-
ния противовключением.
При анализе энергетических диаграмм, характеризующих
процесс торможения электропривода, следует учитывать, что,
если при торможении технологический процесс продолжается, то
часть высвобождаемой кинетической энергии идет на соверше-
ние полезной работы.
29
2.3. Уравнение движения электропривода
К механической системе, совершающий вращательное дви-
жение относительно фиксированной оси вращения, прикладыва-
ются два момента: момент Л/, развиваемый двигателем, и момент
сопротивления движению Мс (см. рис.2.7).
Если момент, развиваемый электродвигателем, равен момен-
ту сопротивления движению.
М=МС или М-Мс=0, (2.1)
то механическая система будет совершать движение с постоян-
ной (установившейся) угловой скоростью со=соуст или находиться
в состоянии покоя (со=0).
Это положение соот-
ветствует Первому зако-
ну механики Ньютона -
закону инерции, - кото-
рый применительно к
вращательному движе-
нию может быть сфор-
мулирован следующим
образом: тело, имеющее
фиксированную ось вра-
щения, будет находиться
вращения, до тех пор, пока приложенные моменты не выведут
его из этого состояния
----= 0 , если / М, = 0,
dt--1
т.е., если алгебраическая сумма моментов, прикладываемых к
валу, равна нулю, то механическая система будет вращаться с
постоянной скоростью а) (или будет в состоянии покоя), т.е.
находиться в установившемся режиме.
Для поступательного движения условие установившегося
т _
режима формулируется как dV/dt = 0, если =0, т.е. если
1
сумма векторов сил, приложенных к механической системе, рав-
на нулю, то система будет двигаться с постоянной установив-
шейся скоростью V или находиться в состоянии покоя.
Момент сопротивления движению обычно называют стати-
ческим моментом, т.к. в соответствии с (2.2) он характеризует
установившийся режим работы электропривода.
30
Рис.2.7. Моменты, прикладываемые к
механической системе с одной фикси-
рованной осью вращения
в
состоянии покоя или равномерного
(2.2)
Рис.2.8. Графическое определение скорости установившегося режима
движения электропривода
Момент двигателя и статический момент зависят от скоро-
сти. Найти скорость установившегося режима работы механизма,
когда известны механические характеристики двигателя и рабо-
чего механизма, удобно графическим путем. Рис.2.8,а соответст-
вует механической системе, состоящей из вентилятора и асин-
хронного двигателя. Точка А пересечения механических характе-
ристик двигателя и вентилятора соответствует условию (2.2), т.е.
установившемуся режиму работы. На рис.2.8,6 показаны механи-
ческие характеристики грузоподъемной лебедки, работающей в
режиме спуска груза (скорость отрицательна). Для обеспечения
постоянной скорости спуска приводный электродвигатель пере-
водится в режим торможения противовключением, которому со-
ответствует механическая характеристика 2. Точка Б пересечения
этой характеристики с механической характеристикой лебедки
соответствует равенству моментов М=МС, т.е. установившемуся
режиму движения.
Статические моменты подразделяют на активные и реактив-
ные.
Мса - активный момент сопротивления движению приклады-
ваемый к рабочему органу машины; этот момент создается сила-
ми тяжести (например, в грузоподъемных механизмах, лифтах и
др.), силами ветра (механизм поворота башенных кранов), и др.;
активные моменты могут как препятствовать движению, так и
31
создавать движение, в соответствии с этим знак Мса может быть
отрицательным, если его направление противоположно знаку
скорости вращения и положительным, если направление момента
совпадает с направлением скорости вращения.
Мср - реактивный момент сопротивления движению, прикла-
дываемый к рабочему органу машины; этот момент возникает как
реакция на движение рабочего органа и всегда препятствует дви-
жению (например, момент от сил резания в механизмах главного
движения металлорежущих станков, момент от аэродинамиче-
ских сил вентиляторов и др,); при со=0 Л/ср=0; к реактивным мо-
ментам сопротивления относится также момент от сил трения в
подшипниках, передачах и других элементах кинематической
цепи рабочей машины; момент трения всегда препятствует дви-
жению.
Статический момент - полный момент сопротивления дви-
жению равен сумме его составляющих
Мс—Мса+Мср . (2.3)
Знаки всех моментов определяются в отношении знака ско-
рости вращения. Для положительного направления скорости
вращения, если момент способствует движению - он положите-
лен, если препятствует - отрицателен. Алгебраическая сумма
момента двигателя (М) и составляющих статического момента
определяет результирующий момент, прикладываемый к валу
электродвигателя
МХ=М+МС (2.4)
=+М + Мса -Мср, (2.5)
Для положительного направления движения в формуле (2.5)
знак момента М, развиваемого двигателем будет положительным,
если он работает в двигательном режиме, и отрицательным, если
работает в тормозном режиме. Знак активной составляющей ста-
тического момента Мса будет отрицательным, если этот момент
препятствует движению (например, подъем груза) и положитель-
ным, если этот момент способствует движению (например, спуск
груза). С учетом (2.3)
= М - Мс. (2.6)
Аналогично для поступательного движения
Fz = F + Fc =+F +Fca -Fcp - F -Fc,
где: F,Fc,Fca,Fcp - соответственно векторы сил линейного
двигателя и составляющих силы сопротивления движению.
32
Если результирующий момент равен нулю, то механи-
ческая система будет находиться в состоянии покоя или равно-
мерного установившегося движения. Если результирующий мо-
мент (или результирующая сила) не равен нулю, то происходит
изменение скорости механической системы: при положительном
значении - ускорение; при отрицательном значении - за-
медление. Режимы, при которых М£ 0, называют переходны-
ми или динамическими.
Изменение скорости определяется вторым законом Ньютона
- законом динамики, согласно которому для поступательного
движения - импульс силы равен изменению количества движения
Fzdt =
Импульс силы - это вектор, равный произведению вектора
результирующей силы на время ее действия. Количество движе-
ния - это вектор, равный произведению вектора скорости на мас-
су тела.
Если масса постоянна, то
Fz-m— = ma- (2.7)
dt
Этот закон устанавливает, что если результирующая сила не
равна нулю, то тело получает ускорение (замедление), величина
которого зависит от величины силы и массы.
Для вращательного движения относительно фиксированной
оси второй закон Ньютона формулируется следующим образом:
импульс момента равен изменению количества движения
Mydt = d(Ja). (2.8)
Количество движения - произведение момента инерции вра-
щающихся масс на их угловую скорость.
Момент инерции J (кгм2) - параметр, аналогичный по физи-
ческому смыслу массе при поступательном движении. Он харак-
теризует меру инерции тел, вращающихся относительно фикси-
рованной оси вращения. Момент инерции материальной точки с
массой m равен произведению массы на квадрат расстояния от
точки до оси вращения J = mR2.
Момент инерции тела есть сумма моментов инерции матери-
альных точек, составляющих это тело. Он может быть выражен
через массу тела и его размеры. Значения момента инерции для
тел вращения приводятся в каталогах и справочниках. Иногда в
каталогах дается значение махового момента GD2. Для того, что-
33
бы найти момент инерции нужно GD2 разделить на четыре
J~GD2/4.
Отметим, что механическая инерционность вращающегося
тела зависит не только от его массы, но и диаметра. При одной и
той же массе тело, имеющее больший диаметр, обладает значи-
тельно большим моментом инерции. Поэтому малоинерционные
электродвигатели стремятся конструировать с меньшим диамет-
ром ротора большей длины. Напротив, когда в состав кинемати-
ческой цепи рабочей машины включается маховик, его целесооб-
разно конструировать с большим диаметром.
Если момент инерции постоянен, то уравнение второго зако-
на Ньютона можно представить в виде
Mz = J—. (2.9)
1 dt
Исходя из того, что Л/х определяет динамику механической
системы, то результирующий момент часто называют дина-
мическим.
. (2.10)
at
Учитывая (2.5), получим
М-Мс =JZ—. (2.11)
dt
Это уравнение, отражающее второй закон Ньютона, называют
уравнением движения электропривода.
Отметим, что в этом уравнении все моменты приложены к ва-
лу двигателя, а момент инерции </Е отражает инерционности
всех масс, связанных с валом электродвигателя и совершающих
вместе с ним механическое движение.
Для поступательного движения уравнение движения электро-
привода соответственно будет
F-Fc=m^-, (2.12)
dt
где: F - усилие, развиваемое двигателем;
Fc - усилие сопротивления движению на штоке этого двига-
теля;
т - массы подвижных элементов, связанные со штоком дви-
гателя;
К - линейная скорость штока двигателя.
34
2.4. Приведенное механическое звено
Если рабочий орган машины непосредственно связан с валом
•лектродвигателя, то для анализа движения электромеханической
системы: двигатель - рабочий орган, можно пользоваться урав-
нением (2.11). Такая кинематическая схема характерна, напри-
мер, для вентиляторов, насосов и ряда других машин. Однако во
многих случаях рабочий орган машины связан с валом электро-
двигателя через систему передач: зубчатых, канатных, тексроп-
ных и других. В этом случае непосредственное использование
уравнения (2.11) невозможно, т.к. моменты М и Мс приложены к
разным валам, а инерционные массы вращаются с разными ско-
ростями.
Для возможности использования уравнения движения возни-
кает задача приведения всех моментов сопротивления и момен-
те инерции отдельных кинематических звеньев к одному валу,
обычно к валу электродвигателя. Такое приведение является
юлько расчетной операцией.
Принцип приведения моментов заключается в сохранении
равенства мощностей. Приведение моментов инерции произво-
дится на основе принципа сохранения кинетической энергии.
Рис.2 9 Приведение моментов сопротивления и инерции
к валу двигателя
Если рабочий орган машины (РО) соединяется с валом дви-
гателя (Д) через редуктор с передаточным числом i (см.
рис.2.9,а), то для того, чтобы привести момент сопротивления
Мсра, реально прикладываемый к рабочему органу, к валу двига-
теля нужно соблюсти условие равенства мощностей
М (О =М (О (213)
с.ро ро с
Здесь: Мсро- момент сопротивления движению (далее будем
называть его статический момент);
(ОрО - угловая скорость рабочего органа;
Мс - момент сопротивления, приведенный к валу электродви-
гателя;
35
на валу
к валу
(2-14)
а> - скорость вала двигателя.
Если учитывать потери в редукторе, то в уравнение (2.13)
вводится кпд передачи г}ред. Мср0 -(Оро = Мса>Г{ред.
Следовательно, если известен статический момент
рабочего органа, статический момент, приведенный
двигателя, находится по формуле:
J z ^С.рО М-с.ро
Мс =------------=-----—.
^^ро-Пред i-VpeO
Общее правило - для того, чтобы привести статический мо-
мент к валу двигателя нужно реальный статический момент на
валу рабочего органа разделить на передаточное число и кпд пе-
редачи.
Для приведения момента инерции рабочего органа к валу
двигателя нужно соблюсти равенство кинетических энергий
Jро® ро _ Jро пр®
2 “ 2
Следовательно, приведенный к валу двигателя момент инер-
ции рабочего органа находится по формуле:
Jponp^^r- (2.15)
Общее правило - для того, чтобы привести момент инерции к
валу двигателя нужно реальный момент инерции кинематическо-
го звена разделить на квадрат передаточного отношения.
В результате приведения статического момента и момента
инерции к валу двигателя вместо реальной кинематической схе-
мы получаем расчетную (рис.2.9,б), на основании которой можно
пользоваться уравнением движения электропривода.
М-Мс = (Jpom +Jpo.„p)~ или М
д/ at
В некоторых кинематических схемах рабочих машин присут-
ствуют звенья с поступательным движением. Рассмотрим такой
случай на примере кинематической схемы грузоподъемной ле-
бедки (рис.2.10).
Статический момент (активный) создается силой тяжести гру-
за на крюке лебедки
G = mipS.
36
Этот момент прикладывается к валу барабана лебедки и ра-
вен Мс(бар) ^m^gR^.
Для того чтобы
привести статический
момент к валу двигате-
ля, для случая подъема
груза нужно воспользо-
ваться формулой (2.14):
м = Мс<&р). =
1-Лред
= тгрё^6ар
''Прел
Особенность данно-
го случая при наличии
активного статического
Рис.2.10. Кинематическая схема
грузоподъемной лебедки
момента состоит в том, что приведенный статический момент для
режимов подъема и спуска груза будет различным. При подъеме
груза двигатель должен преодолевать сопротивление трения (по-
тери мощности) в редукторе и других элементах, поэтому приве-
денный к валу двигателя статический момент будет несколько
больше, что учитывается делением на кпд передачи. При спуске
груза, когда движение механической системы совершается под
действием активного статического момента, приведенный к валу
двигателя момент будет несколько меньше, так как силы трения
действуют согласно с тормозным моментом двигателя. Поэтому
при спуске груза кпд передачи следует вводить в числитель фор-
мулы (2.14):
4=^4^ (2.16)
Следует заметить, что эта особенность проявляется только в
случае приведения активного статического момента.
Для нахождения суммарного момента инерции механической
системы воспользуемся формулой (2.15) для приведения вра-
щающихся масс и принципом равенства кинетических энергий
для приведения поступательно движущейся массы тгр.
™!рУг _
2 2
37
Здесь: Jip - момент инерции массы т,,р> линейно движущейся
со скоростью V, приведенный к вращательному движению со
скоростью вала двигателя со.
т Bl
Так как V = 0)6apR6ap, то: J гр =
Суммарный приведенный к валу двигателя момент инерции
рассматриваемой системы (рис.2.9) будет:
г _ j j , ^2 +Лар грабар
J Ъ ~~ J рот + .2
где J рот > Jaap ^зкХ’^зкг - моменты инерции соответствующих
механических звеньев.
Уравнение движения электропривода для режима подъема
груза будет:
™?PgR6aP
М------------
i-r/pv)
dco
dt
j J зк2 "* Jбар + тграбар
рот зк\ + -2
Механическая часть электропривода включает в себя: ротор
(якорь) электродвигателя, рабочий орган машины и систему ме-
ханических передач и трансмиссий. Если все элементы механи-
ческой части во всех движениях имеют равную или пропорцио-
нальную скорость (вращения или линейную), то такая механиче-
ская система может рассматриваться как жесткая. В этом случае,
пользуясь формулами приведения параметров к валу двигателя,
можно рассматривать систему как жесткое механическое звено с
суммарным приведенным моментом инерции Л и для анализа ее
динамических характеристик пользоваться уравнением движения
электропривода (2.11). Такую механическую систему называют
одномассовой.
Во многих случаях кинематическая схема рабочей машины
содержит упругие элементы: торсионы, длинные валы, упругие
муфты, тексропные, канатные передачи и др. В реальных схемах
иногда приходится учитывать люфты и зазоры в зубчатых пере-
дачах и соединениях. В этих случаях кинематическую схему ра-
бочей машины нельзя рассматривать как жесткую одномассовую
систему. В особенности это касается высокоточных электропри-
водов и рабочих машин, работающих в интенсивном динамиче-
ском режиме.
В этом случае математическое описание процессов движения
таких систем, называемых многомассовыми, существенно ус-
38
ложняется, и их анализ целесообразно проводить с использовани-
ем компьютерного моделирования.
Задача 2.1. Грузоподъемная лебедка, имеющая кинематиче-
скую схему, показанную на рис.2.10, поднимает груз массой
1000кг. Максимальная скорость подъема груза - 1,0м/с; ускоре-
ние и замедление при достижении максимальной скорости и
снижении ее до нуля - 0,25м/с2. Момент инерции барабана -
80кгм2; момент инерции ротора двигателя - 1,5кгм2; момент
инерции ведущей и ведомой шестерни редуктора соответственно
0,1кгм2 и 5,0кгм2. Максимальная (номинальная) скорость враще-
ния двигателя - бООоб/мин. Кпд редуктора - 0,9. Высота подъема
груза - 24м. Радиус барабана - 0,25м.
Построить диаграмму изменения скорости и момента на валу
электродвигателя за время подъема груза.
Решение.
1. Время ускорения и замедления груза при подъеме
V 1,0
t -_Д2^ = _^_ = 4С .
1 3 а 0,25
2. Путь, проходимый грузом за время /] и /3:
„ „ at2 0,25 -42 э
3. Время движения с максимальной скоростью
H-(S,+S,) 24-(2 + 2)
4 2 ““ i.V'C' •
V 1
макс
4. Максимальная скорость вращения двигателя
®И(МС = ~‘Пл,а- = -’14'6QQ = 62,8 1/с.
30 30
5. Максимальная скорость вращения барабана
V 1
т - =_____= 4 1 /с
6л,акс R6 0,25
6. Передаточное отношение редуктора
^б.макс
7. Статический момент на валу барабана
Мс(6} = VR6 = 1000 • 9,81 • 0,25 = 2452ЯМ.
8. Статический момент, приведенный к валу двигателя
39
1 Л ped
2452
15,7-0,9
= 17472м.
9. Суммарный момент инерции механической системы, при-
веденный к валу двигателя
~ рот + ^эк\
, Jзк2 + Jб + тгр&б
лс а, 5 + 80 + 1000 0,252 2
= 1,5 + 0,1 +----------—:-----= 2,2кгм2
15,7
10. Момент на валу двигателя в период разгона Л-
M = M+J^ = \74 + 2,2— = 2UHm.
с * dt 4
11. Момент на
валу двигателя в
период движения с
установившейся
максимальной
скоростью
М = МС= \74Нм.
12. Момент на
ва-лу двигателя в
период торможения
h
Рис.2.11. Диаграмма скорости и момен-
та на валу двигателя
= 174-2,2— =
4
= 139,4 Нм
Диаграммы скорости и момента приведены на рис.2.11.
40
2.5. Контрольные вопросы для самопроверки
1. Что отражают механические характеристики двигателя и
рабочей машины?
2. Как, используя механические характеристики двигателя и
рабочей машины, определить скорость установившегося режима
работы машины?
3. Что такое жесткость механических характеристик, что она
определяет?
4. В каких квадрантах поля М-т располагаются механиче-
ские характеристики для двигательного режима работы?
5. Какую жесткость имеют механические характеристики
синхронного двигателя?
6. Какую жесткость имеют механические характеристики
грузоподъемного механизма?
7. В каких тормозных режимах могут работать электропри-
воды?
8. Чему равен суммарный (динамический) момент на валу
двигателя при работе в установившемся режиме?
9. Дайте определение жесткой механической системы.
10. Какова размерность момента инерции тела вращения?
11. Что нужно сделать, чтобы можно было пользоваться
уравнением движения электропривода, если рабочий орган ма-
шины связан с валом электродвигателя через механическое пере-
даточное звено?
12. В чем состоит принцип приведения статического момента
к валу двигателя?
13 Что нужно сделать, чтобы привести момент инерции ра-
бочего органа к валу двигателя, если между ними имеется меха-
ническая передача?
14. В каком случае возникает неустановившееся движение
)лектропривода?
15. У каких рабочих машин момент сопротивления пропор-
ционален квадрату скорости вращения?
41
Глава 3. НЕРЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
3.1. Общие сведения
Под нерегулируемым будем понимать электропривод, рабо-
тающий с постоянной (или изменяющейся в незначительных пре-
делах) скоростью вращения. К нерегулируемым приводам будем
также относить электроприводы с многоскоростными асинхрон-
ными двигателями и с асинхронными фазными двигателями с
релейно-контакторным управлением.
Наиболее распространенными типами нерегулируемых элек-
троприводов являются электроприводы с короткозамкнутыми
(к.з.) асинхронными двигателями, с асинхронными двигателями с
фазным ротором, а также электроприводы на базе синхронных
двигателей.
Для нерегулируемых электроприводов характерно непосред-
ственное включение электродвигателя в питающую сеть без про-
межуточных преобразователей электрической энергии (преобра-
зователей частоты и регуляторов напряжения). Для нерегулируе-
мых асинхронных короткозамкнутых электродвигателей обычно
используются следующие функции управления: включение и от-
ключение двигателя, реверсирование направления вращения,
иногда электрическое торможение двигателя. Для приводов с
синхронными двигателями кроме указанных функций необходи-
мо также регулирование тока возбуждения. При использовании
асинхронных двигателей с фазным ротором для обеспечения
плавности пуска и снижения пусковых токов в цепь ротора на
время пуска вводится добавочное сопротивление, величина кото-
рого ступенчато уменьшается по мере разгона двигателя.
Управление нерегулируемым приводом осуществляется чаще
всего с помощью контактной аппаратуры управления и защиты.
В последнее время для коммутации цепей обмоток асинхронных
двигателей используются также бесконтактные аппараты - тири-
сторные пускатели. На рис.3.1 представлены схемы включения и
реверсирования асинхронного к.з. двигателя с использованием
контактной и бесконтактной аппаратуры.
При включении контактора КМ I происходит пуск двигателя
в направлении «вперед» (см. рис.3.1,а). Для изменения направле-
ния вращения двигателя необходимо поменять порядок чередо-
вания фаз на статорных обмотках. Поэтому для пуска двигателя в
42
направлении «назад» включается контактор КМ2. При использо-
вании бесконтактных тиристорных пускателей каждый полюс
контактора заменяется двумя тиристорами, включенными
встречно - параллельно. При подаче импульсов на управляющие
электроды тиристоров VS11, VS12, VS13 двигатель включается в
направлении «вперед». При подаче импульсов на управляющие
электроды тиристоров VS21, VS12, VS23 двигатель включается с
обратным направлением вращения. Защита от токов короткого
замыкания и от перегрузки осуществляется автоматическим вы-
ключателем QF.
Рис.3.1. Схемы включения асинхронного короткозамкнутого двигателя
с использованием контактного (а) и бесконтактного (б) пускателей
Основной характеристикой нерегулируемого электропривода
являются номинальные данные приводного электродвигателя, т.е.
те данные, которые относятся к основному расчетному режиму
работы двигателя. Номинальная мощность определяется как
мощность на валу двигателя, на которую он рассчитан по услови-
ям нагревания в длительном режиме работы или в том режиме,
для которого этот двигатель предназначен. К номинальным дан-
ным относятся также частота и напряжение питания, скорость
вращения, ток в обмотках, кпд и cosp, соответствующие номи-
нальному режиму работы.
43
3.2. Электромеханические свойства асинхронных двигателей
3.2.1. Принцип работы асинхронного двигателя
Рис.3.2. Схемы включения об-
моток асинхронного двигателя
Наиболее распространен-
ными электрическими двигате-
лями в промышленности, сельс-
ком хозяйстве и во всех других
сферах применения являются
асинхронные двигатели. Можно
сказать, что они являются
основным средством преобра-
зования электрической энергии
в механическую.
Асинхронный двигатель яв-
ляется трехфазной индукцион-
ной электрической машиной
переменного тока. На статоре
двигателя располагаются три
распределенные обмотки, сдви-
нутые друг относительно друга
на 120°, если число пар полю-
сов машины 2рп =2, как это
показано на рис.3.2,а. Если чис-
ло пар полюсов (рп), образу-
емых обмотками, более одного,
то соответственно увеличивает-
ся число секций обмотки, и они
будут сдвинуты геометрически
друг относительно друга уже не
на 120°, а на120%„ .
Фазные статорные обмотки
асинхронного двигателя соеди-
няют в звезду (рис.3.2,б) или в
треугольник (рис.3.2,в). Обыч-
но асинхронные двигатели
малой и средней мощности
сконструированы на номиналь-
ное напряжение 380/220В. При
этом, если напряжение питания
380В, то обмотки соединяют в
звезду ( /*\ ), если напряжение
44
питания 220В, то обмотки соединяют в треугольник (Д). В обоих
случаях напряжение, прикладываемое к фазной обмотке статора
двигателя, равно 220В.
Работа асинхронного двигателя основана на формировании
силового электромагнитного поля статора. Благодаря простран-
ственному сдвигу обмоток на 120°/рп градусов и временному
сдвигу трех фаз напряжения, прикладываемого к обмоткам, (фазы
напряжений UA, UB> и Uc сдвинуты на 120 электрических граду-
сов - 2д/3 радиан), результирующий вектор магнитодвижущих
сил F , создаваемых токами в обмотках двигателя, равномерно
перемещается по окружности расточки статора со скоростью
где:^ - частота синусоидального тока в обмотках статора;
рп - число пар полюсов машины.
Поскольку воздушный зазор равномерен, машина симмет-
рична и обмотки статора равномерно распределены, магнитодви-
жущие силы создают магнитный поток, результирующий вектор
которого вращается в пространстве со скоростью 6УО. Принцип
образования вращающегося магнитного поля в обмотках статора
можно уяснить из рассмотрения рис.3.3. На рис.3.3,а представле-
на эпюра системы трехфазных токов, протекающих по обмоткам
статора (мгновенные значения токов в обмотках фаз а, в и с в за-
висимости от времени cot - 2л/7). Рассмотрим положение в про-
странстве результирующего вектора м.д.с. статора в момент
времени th
Вектор м.д.с. обмотки a FaX направлен по оси «а» в положи-
тельном направлении и равен 0,5/ЯЛ,ОИ; вектор м.д.с. обмотки с
FcX направлен по оси «с» в положительном направлении и равен
Сумма векторов FaX + FcX направлена по оси «в» в от-
рицательном направлении; с этой суммой складывается вектор
м.д.с. обмотки «в», равный /вЛ(яи. Сумма этих векторов образует
пространственный вектор Fx, пропорциональный величине
3/27А1ЖС и занимающий пространственное положение, как показа-
но на рис.3.3,б.
45
ia
По прошествии
времени cot = л/Ъ (при
частоте 50Гц через
1/300 с.) наступит мо-
мент времени Г2, при
котором вектор м.д.с.
обмотки «а» Fa2 имеет
максимальное поло-
жительное значение, а
векторы м.д.с. обмо-
ток «в» и «с» - поло-
винное отрицательное
значение. Результиру-
ющий вектор м.д.с. F2
займет в этот момент
положение, показанное
на рис. 3.3,6, т.е.
переместится по отно-
шению к предыдущему
положению F\ на
пространственный угол
Рис.3.3. Принцип образования вращаю-
щегося электромагнитного поля
60° по часовой стрелке. Нетрудно убедиться, что в момент време-
ни t3 результирующий вектор м.д.с. обмоток статора займет по-
46
ложение^,, т.е. будет продолжать перемещаться в пространстве
по часовой стрелке. За время периода питающего напряжения
результирующий вектор м.д.с. F совершит полный оборот по
часовой стрелке, занимая далее последовательно положение
Предоставляем читателю самому убедиться, что при измене-
нии порядка чередования фаз напряжения, подводимого к обмот-
кам двигателя (если, например, поменяем местами фазы В и С на
рис.3.2,б,в), результирующий вектор потокосцепления будет
вращаться против часовой стрелки, т.е. изменится направление
вращения магнитного поля, образуемого токами в обмотках ста-
тора.
Если число пар полюсов двигателя больше единицы, то уве-
личивается число секций обмоток, располагаемых по окружности
статора. Так, если число пар полюсов рп-2, то все три фазные
обмотки расположены на одной половине окружности статора,
соответственно и на второй его половине. В этом случае за время
одного периода питающего напряжения вектор м.д.с. статора F
пройдет половину окружности, т.е. повернется на 180 геометри-
ческих градусов, и скорость вращения магнитного поля статора
будет вдвое меньше, чем у машин с />/7=1. Следовательно, ско-
рость вращения магнитного поля статора <У0 (ее также называют
синхронной скоростью) обратно пропорциональна числу пар по-
люсов машины и будет в согласно (3.3) соответствовать значени-
ям, указанным в таблице 3.1.
Таблица 3.1
Зависимость скорости вращения асинхронных двигателей от чис-
ла пар полюсов
Число пар по- люсов Угловая ско- рость электро- магнитного по- ля статора, 1/с Синхронная скорость асин- хронного дви- гателя, об/мин Примерная ном. скорость двигателя, об/мин
2р„=2 й)0 =314 и0 = 3000 2940
2р„=4 <ув =157 п0 =1500 1450
2р„ = 6 й>0 =104,6 п0 =1000 980
2р„=8 <У0 =78,5 «о=75О 735
2 р. = 10 а>0 = 62,8 п0 = 600 585
2р„=12 со0 = 52,3 «о = 500 490
47
В зависимости от конструкции ротора асинхронного двига-
теля различают асинхронные двигатели с фазным ротором и с
короткозамкнутым ротором. В двигателях с фазным ротором на
роторе располагается трехфазная распределенная обмотка, со-
единенная обычно в звезду, концы обмоток соединены с контакт-
ными кольцами, через которые электрические цепи ротора выво-
дятся из машины для подключения к пусковым сопротивлениям с
последующим закорачиванием обмоток. В короткозамкнутых
двигателях обмотка выполнена в виде беличьей клетки - стерж-
ней, замкнутых накоротко с двух сторон кольцами. Несмотря на
специфическое конструктивное устройство, беличью клетку так-
же можно рассматривать как трехфазную обмотку, замкнутую
накоротко.
Электромагнитный момент М в асинхронном двигателе соз-
дается благодаря взаимодействию вращающегося магнитного по-
ля статора Ф с активной составляющей тока ротора
М = ЗкФ12а (3.4)
Ток ротора возникает благодаря э.д.с. Е2, которая индуктиру-
ется в обмотках ротора вращающимся магнитным полем. Когда
ротор неподвижен, асинхронный двигатель представляет собой
трехфазный трансформатор с обмотками замкнутыми накоротко
или нагруженными на пусковое сопротивление. Возникающая
при неподвижном роторе в его обмотках э.д.с. называется номи-
нальной фазной э.д.с. ротора Е2н. Эта э.д.с. приблизительно равна
фазному напряжению статора, деленному на коэффициент транс-
формации Кт
„ и>
Е2Н=— (3.5)
кт
Величина э.д.с. ротора Е2 при вращающемся двигателе и час-
тота этой э.д.с. (а значит, и частота тока в обмотках ротора)^ за-
висят от частоты пересечения вращающимся полем проводников
обмотки ротора (в короткозамкнутом двигателе - стержней). Эта
частота определяется разностью скоростей поля статора (Уо и
ротора О . Эта разность называется абсолютным скольжением
Sa6c =Ф0~Ф. (3.6)
При анализе режимов работы асинхронного двигателя с по-
стоянной частотой питающего напряжения (50Гц) обычно поль-
зуются относительной величиной скольжения
48
(3.7)
_ Sa6c _ ^0
6УО (Do
Когда ротор двигателя неподвижен, 5=1.
Наибольшая величина э.д.с. ротора при работе в двигатель-
ном режиме будет при неподвижном роторе (£2и); по мере увели-
чения скорости (уменьшении скольжения) э.д.с. Ег будет умень-
шаться
E2=Eu-S. (3.8)
Аналогично частота э.д.с. и тока ротора /г при неподвижном
роторе будет равна частоте тока статора/ь и по мере увеличения
скорости будет уменьшаться пропорционально скольжению
fi=fx-s. (3.9)
В номинальном режиме скорость ротора незначительно от-
личается от скорости поля, и номинальное скольжение составляет
для двигателей общего применения мощностью 1,5-200кВт всего
2-3%, а для двигателей большей мощности порядка 1%. Соответ-
ственно в номинальном режиме э.д.с. ротора составляет 1-3% от
номинального значения этой э.д.с. при 5=1. Частота тока ротора в
номинальном режиме будет составлять всего 0,5-1,5Гц. При 5=0,
когда скорость ротора равна скорости поля, э.д.с. ротора Ег и ток
ротора будут равны нулю, момент двигателя также будет равен
нулю. Этот режим является режимом идеального холостого хода.
Зависимость частоты э.д.с. и тока ротора от скольжения оп-
ределяет своеобразие механических характеристик асинхронного
двигателя.
3.2.2. Механические характеристики асинхронного двигателя
Рассмотрим работу асинхронного двигателя с фазным рото-
ром, обмотки которого замкнуты накоротко.
Как уже указывалось (3.4), момент двигателя пропорциона-
лен потоку Ф и активной составляющей тока ротора /2а, приве-
денного к статору. Поток, создаваемый обмотками, зависит от
величины и частоты питающего напряжения
Ф = —(3.10)
к<у0
Ток ротора 12 равен
49
T E2hS
(3.11)
^2
где Z2 - полное сопротивление фазы обмотки ротора.
Следует учитывать, что индуктивное сопротивление обмотки
ротора х2 является величиной переменной, зависящей от частоты
тока ротора, а, следовательно, от скольжения
। * 5^2 •
При неподвижном роторе при 5=1 индуктивное сопротивле-
ние обмотки ротора наибольшее. По мере роста скорости
(уменьшении скольжения) индуктивное сопротивление ротора х2
уменьшается и при достижении номинальной скорости составля-
ет всего 1-3% от величины сопротивления при 5=1. Обозначив
*2j=1 = Х2ном , ПОЛУЧИМ
(3.12)
Тогда
2 Г,-------72---2‘
у(Х2н3) +Г2
Активная составляющая тока ротора
Ла = Л COS(Z>2 = . E\22S 2 . (3.14)
(*2>Л) + Л
Г,
где cos <z>2 = -г===7 (3-15)
у1(Х2н3) +Г2
Приведем параметры цепи ротора к обмотке статора с учетом
коэффициента трансформации кт =U-JE2h . Приведение пара-
метров производится на основе сохранения равенства мощности.
^2 — i Л — 5 ^2 — ^2^ ’ Х2 — ^2^
кт
С учетом (3.16)
т' _ E2hS j _ E2nr2S
(3.16)
(3.17)
Разделив числитель и знаменатель формулы (3.17) на 5, полу-
чим
50
Проведен-
ная математи-
ческая опера-
ция - деление
числителя и
знаменателя на
л-, конечно, не
изменяет спра-
ведливость ра-
венства (3.18),
но носит фор-
мальный ха-
рактер, что
нужно учиты-
вать при рас-
смотрении
этого соотно-
шения. В дей-
ствительно-
сти, как это
следует из
исходной
формулы (3.13),
Рис.3.4. Схемы замещения асинхронного двигателя
от скольжения зависит величина индуктивного
сопротивления ротора х2, а активное сопротивление г2 остается
постоянным. Использование выражения (3.18) позволяет по ана-
логии с трансформатором составить схему замещения асинхрон-
ного двигателя, которая представлена на рис.3.4,а.
Для анализа нерегулируемого электропривода эту схему мож-
но упростить, перенеся контур намагничивания на зажимы
двигателя. Упрощенная П-образная схема замещения представ-
лена на рис. 3.4,6. Исходя из этой схемы, ток ротора будет равен:
2 —
2 ’
(3-19)
51
где: хк — + хг„ - индуктивное сопротивление короткого
замыкания.
Активная составляющая тока ротора будет:
(3.20)
Подставляя (3.10) и (3.20) в (3.4), получим выражение для
момента асинхронного двигателя
Это выра-
жение ото-
бражает меха-
ническую ха-
рактеристику
асинхронного
двигателя
s = f(M).
Характери-
стика асин-
хронного дви-
гателя с фаз-
ным ротором,
обмотки кото-
рого замкну-
ты накоротко,
представлена
на рис. 3.5.
Здесь же пред-
Рис.3.5. Примерные механическая (1) и электро-
механическая характеристики (2) асинхронного
двигателя с фазным ротором, замкнутым нако-
ротко
52
ставлена электромеханическая характеристика двигателя
5 = f(J\), определяемая из векторной диаграммы асинхронного
двигателя рис.3.6, Ц — /0 + Д.
Полагая ток намагничивания реактивным, получим
11 = д/<7о +Л sinp2)2+(Z2cos<z>2)2 =
= А2 +/22 +2/0 'A Sin^2
где: sin<p2 =
X,
(3.23)
.2
V г'+~
К s)
Приравняв производную dM/ds = Q, найдем максимальное
значение момента асинхронного двигателя Мк и соответствующее
ему значение критического скольжения
3t/,2
X /„2 .J
мк
(3-24)
Отношение макси-
мального момента к но-
минальному называется
перегрузочной способ-
ностью асинхронного
двигателя
2 = ^
Мн
Рис.3.6. Упрощенная векторная диа-
грамма асинхронного двигателя
(3-25)
Г2
,(3.26)
К
.2 ’
VI ’ "к
где: sK — критичес-
кое скольжение; знак
(+) означает, что эта
величина относится к
двигательному режиму,
знак (-) - к генераторному режиму рекуперативного торможения.
С учетом (3.24) и (3.25) формулу механической характери-
стики (3.21) можно преобразовать к более удобному для пользо-
вания выражению - формуле Клосса.
53
sK I s + s I sK + 2osa.
где: a = rjr2.
Для двигателей мощностью более 15 кВт сопротивление г}
невелико и при частоте 50Гц значительно меньше хк. Поэтому в
приведенных выше выражениях величиной можно пренебречь.
Тогда
зи.
Мк=—^-, (3.28)
2(У0хк
, или sK = sh(A + -Ja2 -1) (3.29)
Хк
Формула Клосса, если пренебречь гь будет иметь вид:
2М<
м =—• (з.зо)
sK/s + s/sK
По формулам (3.29) и (3.30) можно рассчитать механическую
характеристику асинхронного двигателя, пользуясь его паспорт-
ными данными, зная номинальный момент номинальное
скольжение sH и перегрузочную способность двигателя А.
Проанализируем особенности механической характеристики
асинхронного двигателя (см. рис.3.5). Она носит нелинейный ха-
рактер и состоит из двух частей. Первая - рабочая часть - в пре-
делах скольжения от 0 до $к. Эта часть характеристики близка к
линейной и имеет отрицательную жесткость. Здесь момент, раз-
виваемый двигателем, примерно пропорционален току статора Ц
и ротора 12. Так как на этой части характеристики s<sK, то второе
слагаемое знаменателя в формуле (3.30) существенно меньше
первого, и им можно пренебречь. Тогда рабочую часть механиче-
ской характеристики можно приближенно представить в линей-
ной форме, где момент пропорционален скольжению.
„, 2Mr М
М--------swwiM =—-s. (3.31)
Sk s„
Вторая часть механической характеристики асинхронного
двигателя при скольжениях, больших sK (s>sK) криволинейная, с
положительным значением жесткости fl. Несмотря на то, что ток
двигателя по мере роста скольжения увеличивается, момент, на-
54
против, уменьшается. Если обмотки ротора асинхронного двига-
теля с фазным ротором во внешней цепи замкнуты накоротко, то
пусковой ток такого двигателя (при (О = 0 и 5=1) будет очень
большим и превысит номинальный в 10-12 раз. В то же время
пусковой момент составит порядка 0,4-0,5 номинального. Как
будет показано в следующем параграфе, для короткозамкнутых
двигателей пусковой ток будет (5,5-7,0)/„, а пусковой момент
(0,9-1,3)Л/н.
Для объяснения такого несоответствия между величинами
пускового тока и момента рассмотрим векторные диаграммы це
пи ротора (рис.3.7) для двух
случаев: а) когда скольжение
велико (пусковая часть харак-
теристики); б) когда скольже-
ние мало (рабочая часть харак-
теристики). При пуске, когда
5= 1, частота тока ротора равна
частоте питающей сети
(/)=50Гц). Индуктивное со-
противление обмотки ротора
(см.3.12) велико и существенно
превосходит активное сопротив- g)
ление ротора г2, ток отстает от
э.д.с. ротора на большой угол
(р2, т.е. ток ротора, в основном,
реактивный. Поскольку э.д.с.
ротора в этом случае будет
велика £25=| = Е2н, то и пуско-
вой ток будет очень большим,
однако из-за малого значения
Рис.3.7. Векторная диаграмма
цепи ротора асинхронного
двигателя:
а - при большом скольжении;
б - при малом скольжении
cos<p2 активная составляющая
тока ротора 12а будет невелика,
а, следовательно, момент,
развиваемый двигателем, будет
также невелик.
При разгоне двигателя
скольжение уменьшается, э.д.с. ротора, частота тока ротора, ин-
дуктивное сопротивление ротора пропорционально уменьшают-
ся. Соответственно уменьшается величина полного тока ротора и
статора, однако, вследствие повышения cosg>2 активная состав-
ляющая тока ротора растет и возрастает момент двигателя.
55
Когда скольжение двигателя станет меньше sK, то частота то-
ка ротора уменьшится настолько, что индуктивное сопротивле-
ние станет уже меньше активного, и ток ротора будет практиче-
ски активным (см.рис.3.7,б), момент двигателя будет пропорцио-
нален току ротора. Так, если номинальное скольжение двигателя
5н=2%, то по сравнению с пусковыми параметрами частота тока
ротора уменьшится в 50 раз, соответственно уменьшится индук-
тивное сопротивление ротора. Поэтому, несмотря на то, что э.д.с.
ротора также уменьшится в 50 раз, она будет достаточна для соз-
дания номинального тока ротора, обеспечивающего номиналь-
ный момент двигателя. Таким образом, своеобразие механиче-
ской характеристики асинхронного двигателя определяется зави-
симостью индуктивного сопротивления ротора от скольжения.
(3.32)
3.2.3. Пуск асинхронного двигателя с фазным ротором
Исходя из изложенного, для пуска асинхронного двигателя с
фазным ротором нужно принять меры для увеличения пускового
момента и снижения пусковых токов. С этой целью в цепь ротора
включают добавочное активное сопротивление. Как следует из
формул (3.24, 3.26), введение добавочного активного сопротив-
ления не изменяет максимального момента двигателя, а лишь из-
меняет величину критического скольжения
г2 +2? 2д
SK =--------
ХК
где R2d - приведенное к статору добавочное сопротивление в
цепи ротора.
Введение добавочного активного сопротивления увеличивает
полное сопротивление роторной цепи, в результате чего умень-
шается пусковой ток и увеличивается cos^2 роторной цепи,
вследствие чего увеличивается активная составляющая тока ро-
тора и, следовательно, пусковой момент двигателя.
Обычно в роторную цепь двигателя с фазным ротором вводят
секционированное сопротивление, ступени которого перемыка-
ются пусковыми контакторами. Расчет реостатных пусковых ха-
рактеристик можно производить по формуле (3.30), используя
значение sK, соответствующее величине Ягэоб для каждой ступени
пускового сопротивления. Схема включения дополнительных
сопротивлений и соответствующие реостатные механические ха-
рактеристики двигателя показаны на рис.3.8. Механические ха-
рактеристики имеют общую точку идеального холостого хода,
56
равную скорости вращения электромагнитного поля статора «Уо,
а жесткость рабочей части характеристик уменьшается по мере
возрастания суммарного активного сопротивления роторной цепи
(r2 + RM) .
При пуске двигателя сначала вводится полное добавочное
сопротивление R\d06- По достижении скорости, при которой мо-
мент двигателя Л/ц становится близким к моменту сопротивления
Мс, часть пускового сопротивления шунтируется контактором К\,
и двигатель переходит на характеристику, соответствующую ве-
личине добавочного сопротивления R2do6- При этом момент дви-
гателя увеличивается до значения Л/j. По мере дальнейшего раз-
гона двигателя контактором К2 закорачивается вторая ступень
пускового сопротивления. После замыкания контактов контакто-
ра К3 двигатель переходит на естественную характеристику и бу-
дет работать со скоростью, соответствующей точке 1.
Величины добавочных сопротивлений легко определить гра-
фически. Проведем линию номинального момента двигателя и
отметим точки пересечения этой линии с механическими харак-
теристиками. Тогда отрезки, заключенные между точками, будут
пропорциональны величинам сопротивления ступеней.
Рис.3.8. Схема включения пусковых сопротивлений (а) и реостатные механиче-
ские характеристики асинхронного двигателя с фазным ротором (б)
57
Полное добавочное сопротивление Л1доб = /?2(1(бд/де).
Первая ступень сопротивления Ridg6 - R2do6 =R2it(zd/ae).
Вторая ступень сопротивления Rldofi - Rido6 = R2H(ez/ae\
Третья ступень сопротивления Rido6 = R2H(6e/ae).
Отрезок аб пропорционален сопротивлению обмотки фазы
ротора r2 =R1H[a6fae).
В приведенных соотношениях /?2„ - номинальное сопротив-
ление ротора, которое определяется по формуле:
где: Е2н тн - линейная э.д.с. ротора при 5=1;
12„ - номинальный ток ротора.
Задача 3.1. Рассчитать естественную механическую характе-
ристику асинхронного двигателя с фазным ротором типа
МТН611-6 краново-металлургической серии и построить пуско-
вые характеристики при реостатном пуске в 3 ступени. Опреде-
лить величины пусковых сопротивлений.
Основные данные двигателя:
Номинальная мощность при работе в длительном режиме -
75 кВт, номинальная скорость вращения л„ОЛ(=950 об/мин, напря-
жение статора (71=380 В, номинальное напряжение на кольцах
ротора jE,2hjiuh=270 В, максимальный момент двигателя Мк=2610
Нм, номинальный ток ротора /2,,=108 А. Момент сопротивления
на валу двигателя при пуске принять равным номинальному мо-
менту двигателя.
Номинальный момент двигателя
где со = = 99,4 1/с.
н 60
Перегрузочная способность двигателя
Номинальное скольжение
58
s = ”o ~n« = °}o~°}x 1000-950 r. 005
n0 co0 1000
Критическое скольжение на естественной характеристике
sK = sH (Л + Д*-1)= 0,05(3,46 + д/3,462 -1)= 0,33.
Расчет естественной характеристики производим по формуле
М _ 2Л
sk/ + s/
________________________Д А___________________________
5 1 0,8 0,6 0,4 0,33 0,2 0,1 0,05
s/sK 3,0 2,42 1,81 1,21 1 0,6 0,3 0,15
sK/s 0,33 0,41 0,55 0,82 1 1,65 з,з 6,6
М/М. 2,07 2,44 2,93 3,4 3,46 3,21 1,92 1,0
Построенная по расчетным данным естественная механиче-
ская характеристика представлена на рис.3.9.
Рис.3.9. Естественная и пусковые механические характе-
ристики асинхронного двигателя с фазным ротором
59
Для расчета пусковых характеристик нужно задаться значе-
ниями момента Л/ц, при котором происходит переключение сту-
пеней пускового реостата Л/ц=1,2Л/н о.е.
Пусковые значения момента М\ (см. рис. 3.9) находятся по
формуле Мх = 2'Л/П,
= 2
где Л'= --------— = i----------
. М / \ 0,05 • 1,2
г- А.
здесь т - число ступеней
М=2'1,2=2,4 о.е. Д<Н-
Построение пусковых механических характеристик произве-
дем, полагая, что при моментах от 0 до Л/[=2,4 о.е., т.е. на рабо-
чем участке характеристик, они носят прямолинейный характер.
Первую пусковую характеристику, соответствующую полностью
включенному в цепь ротора пусковому сопротивлению строим,
соединяя точки с координатами (5=0, М=0) и (5=1, На этой
характеристике двигатель разгоняется до скорости (скольжения),
соответствующей точке пересечения первой-пусковой характери-
стики с линией переключающего момента Л/ц. После чего часть
пускового сопротивления закорачивается контактором (см.
рис.3.8), и двигатель переходит на работку на второй пусковой
характеристике. Соединяя найденную точку на линии пиковых
моментов Mi с точкой холостого хода, построим вторую пуско-
вую характеристику. Аналогично найдем третью пусковую ха-
рактеристику.
Выше было показано, как определить пусковые сопротивле-
ния графическим путем. Можно величины ступеней пускового
сопротивления определять аналитически, что было использовано
при решении данной задачи.
Для расчета ступеней пускового сопротивления найдем но-
минальное сопротивление ротора
= 1,440м.
п ^2н.лин 270
Л, = ~г=-----= ~7=
Л-Л. Тзк
Сопротивление третьей ступени
U'-l) = М4 0,05(2 -1) = 0,072 Ом.
Сопротивление второй ступени
*2йоб 0,072-2 = 0,144 Ом.
Сопротивление первой ступени
К\Ооб ~ &2доб = (.^2доб ~ ^Здоб = 0,144 2 = 0,288 Ом.
60
Полное добавочное сопротивление
Я1доб=0,288+0,144+0,072=0,5040м.
3.2.4. Особенности характеристик асинхронных двигателей с
короткозамкнутым ротором
Формирование пусковых характеристик двигателей с фазным
ротором производится путем введения в цепь ротора дополни-
тельного активного сопротивления и уменьшения величины этого
сопротивления по мере разгона двигателя (уменьшения скольже-
ния).
В короткозамкнутых асинхронных двигателях введение до-
полнительного сопротивления в цепь ротора невозможно. Однако
тот же результат может быть получен, если воспользоваться эф-
фектом вытеснения тока на поверхность проводника. Сущность
этого явления состоит в следующем. Согласно закону электро-
магнитной индукции при протекании по проводнику переменного
тока в нем индуктируется э.д.с. самоиндукции, направленная
против тока
с!Ф r d(Im -sin art) r т
е. =------= -L-------------= -La>I cos cut (3.33)
dt dt
или eL = cos cot.
Величина этой э.д.с. зависит от величины тока 1т, его часто-
ты и индуктивности, определяемой характеристикой среды, ок-
ружающей проводник. Если проводник находится в воздухе, то
магнитная проницаемость среды очень мала, следовательно, мала
индуктивность L. В этом случае при частоте 50Гц (<у = 314 1 / с)
влияние э.д.с. самоиндукции незначительно. Другое дело, когда
проводник помещен в тело магнитопровода. Тогда индуктивность
многократно увеличивается и э.д.с. самоиндукции, направленная
против тока, играет роль индуктивного сопротивления, препятст-
вующего протеканию тока.
Рассмотрим проявление действия э.д.с. самоиндукции для
случая проводника (стержня обмотки ротора), помещенного в
глубокий паз магнитопровода ротора двигателя (рис.3.10,а). Ус-
ловно разделим сечение стержня на три части, которые соедине-
ны параллельно. Ток, протекающий по нижней части стержня
образует поток Фь магнитные силовые линии которого замыка-
ются по магнитопроводу. В этой части проводника возникает
э.д.с. самоиндукции большой величины, направленная против
тока z21.
61
-* е« >:> еи
Рис.3.10. Конструкция ротора асинхронного
к.з.двигателя с глубоким пазом (а), с двой-
ной клеткой (б) и эффект вытеснения тока
(в)
ра 12 пойдет по верхней части стержня.
Ток i2i, проте-
кающий по верхней
части стержня ро-
торной обмотки об-
разует поток Ф3, но,
так как силовые ли-
нии этого потока в
значительной части
своей длины замы-
каются по воздуху,
то величина потока
Ф3 будет гораздо
меньше, чем потока
Фх. Отсюда и э.д.с.
будет во много
раз меньше, чем
ei.\-
Указанное рас-
пределение э.д.с.
самоиндукции по
высоте стержня
характерно для то-
го режима, когда
частота тока ротора
велика — близка к
50Гц (см.3.33). В
этом случае, по-
скольку все три
части стержня ро-
тора соединены
параллельно (рис.
3.10,в), то ток рото-
Это явление называют
вытеснением тока на поверхность паза. При этом эффективное
сечение стержня, по которому идет ток, будет в несколько раз
меньше, чем общее сечение стержня обмотки ротора. Таким об-
разом, увеличивается активное сопротивление ротора г2. Отме-
тим, что поскольку э.д.с. самоиндукции зависит от частоты тока
(т.е. от скольжения), то и сопротивления г2 и х2 являются функ-
циями скольжения.
62
При пуске, когда скольжение велико, сопротивление г2 уве-
личивается (в цепь ротора как бы вводится добавочное сопротив-
ление). По мере разгона двигателя скольжение двигателя умень-
шается, эффект вытеснения тока ослабевает, ток начинает рас-
пространяться вниз по сечению проводника, сопротивление г2
уменьшается. При достижении рабочей скорости частота тока
ротора настолько мала, что явление вытеснения тока уже не ска-
зывается, ток протекает по всему сечению проводника, и сопро-
тивление г2 минимально. Благодаря такому автоматическому из-
менению сопротивления г2, пуск асинхронных короткозамкнутых
двигателей протекает благоприятно: пусковой ток составляет 5,0-
6,0 номинального, а пусковой момент 1,1-1,3 номинального.
Варьировать параметрами пусковой характеристики асин-
Рис.3.11. Примерные механические характери-
стики асинхронных к з. двигателей
хронного двига-
теля при конст-
руировании мо-
жно меняя фор-
му паза, а также
сопротивление
материала стерж-
ней (состав спла-
ва). Наряду с
глубокими паза-
ми применяются
двойные пазы,
образующие дво-
йную «беличью
клетку» (рис. 3.
10,6); использу-
ются пазы гру-
шевидной фор-
мы и другие.
На рис.3.11
представлены типовые механические характеристики для серий
асинхронный короткозамкнутых двигателей. Различают:
а) двигатели нормального исполнения;
б) двигатели с повышенным скольжением;
в) двигатели с повышенным пусковым моментом;
г) двигатели краново-металлургических серий.
Короткозамкнутые двигатели нормального исполнения ис-
пользуются для привода широкого класса рабочих машин и ме-
ханизмов, прежде всего для приводов, работающих в длительном
63
режиме. Для этого исполнения характерно высокое значение кпд
и минимальная величина номинального скольжения. Механиче-
ская характеристика в области больших скольжений имеет обыч-
но небольшой провал, характеризуемый величиной минимально-
го момента Ммин.
Двигатели с повышенным скольжением имеют более мягкую
механическую характеристику и используются в следующих слу-
чаях: когда два или более двигателя работают на общий вал, для
механизмов (например, кривошипно-шатунных) с циклически
изменяющейся нагрузкой, когда для преодоления сопротивления
движению целесообразно использовать кинетическую энергию,
запасаемую в движущихся частях электропривода, и для меха-
низмов, работающих в повторно-кратковременным режиме.
Двигатели с повышенным пусковым моментом предназначе-
ны для механизмов с тяжелыми условиями пуска, например, для
скребковых конвейеров.
Двигатели краново-металлургических серий предназначены
для механизмов, работающих в повторно-кратковременном ре-
жиме с частыми пусками. Эти двигатели имеют большую пере-
грузочную способность, высокий пусковой момент, повышенную
механическую прочность, но худшие энергетические показатели.
Аналитический расчет механических характеристик коротко-
замкнутых асинхронных двигателей достаточно сложен, поэтому
приближенно характеристику можно построить по четырем точ-
кам: при холостом ходе (5=0), при максимальном (М), пусковом
(Л/„) и минимальном (Ммин) моменте в начале пуска. Данные этих
характерных точек приводятся в каталогах и справочниках на
асинхронные двигатели. Расчет рабочей части механической ха-
рактеристики короткозамкнутого асинхронного двигателя (при
скольжениях от 0 до 5К) можно производить по формуле Клосса
(3.27, 3,30), поскольку эффект вытеснения тока в рабочем режиме
почти не проявляется.
3.2.5. Энергетическая диаграмма асинхронного двигателя при
работе в двигательном режиме
Работе в двигательном режиме соответствует скольжение 5 в
пределах от 1 до 0, причем рабочим режимом является диапазон
скоростей, при которых скольжение не превышает sK. В диапазо-
не скольжений от sK до 1 потери в роторе двигателя существенно
возрастают, поэтому этот участок механической характеристики
двигатель проходит только во время пуска. Проведем анализ рас-
64
пределения потоков электрической энергии при различных зна-
чениях скольжения асинхронного двигателя.
На рис.3.12 представлена энергетическая диаграмма асин-
Рис.3.12. Энергетическая диаграмма
асинхронного двигателя
хронного двигателя.
Мощность Рпотр, за-
бираемая двигателем, за
исключением потерь в
обмотках и стали ста-
тора (Л/5!) преобразу-
ется в мощность вра-
щающегося магнитного
поля - в электромагнит-
ную мощность Рэм. По-
скольку асинхронный
двигатель работает од-
новременно как двига-
тель и как трансформатор, то электромагнитная мощность разде-
ляется на два канала. Одна часть электромагнитной мощности
преобразуется в механическую мощность Рмех, создаваемую на
валу асинхронного двигателя. Эта мощность возникает как ре-
зультат взаимодействия вращающегося электромагнитного поля с
активной составляющей тока ротора. Другая часть электромаг-
нитной мощности трансформируется в виде электрической мощ-
ности в обмотку ротора, как во вторичную обмотку трансформа-
тора.
Электромагнитная мощность равна произведению скорости
вращения поля статора 6УО на момент М, который развивается на
валу асинхронного двигателя.
Лл<=^о- (3-34)
Электромагнитная мощность разделяется на две составляю-
щие:
Рэм = Рмех+Рз (3.35)
механическую мощность
Рмех=М® (3.36)
и электрическую мощность Р„ трансформируемую в обмотки ро-
тора, которая, как следует из (3.34) и (3.36), будет равна:
Л = Рэм - Рмех = М' “ М • ® = М' $абс = М • ^0 • * • (3 • 3 7)
Отсюда следует, что Р, мощность скольжения, выделяемая в
обмотках ротора, пропорциональна моменту на валу двигателя и
65
его скольжению. Эта мощность рассеивается в виде потерь в об-
мотках ротора двигателя (для фазных двигателей во время пуска
- также в пусковых сопротивлениях).
При проектировании и использовании асинхронных двига-
телей стремятся уменьшить мощность скольжения, чтобы умень-
шить потери электроэнергии, снизить нагрев двигателя и
повысить его кпд. Асинхронные двигатели конструируются та-
ким образом, чтобы номинальное скольжение составляло всего
несколько процентов. Для экономичной эксплуатации асинхрон-
ных электроприводов важным условием является работа с мини-
мальным скольжением. Это правило должно выдерживаться и
для регулируемых асинхронных электроприводов. Исключения
составляют каскадные схемы включения асинхронного двигателя
с фазным ротором, где мощность скольжения используется по-
лезно.
3.2.6. Изменение напряжения питания
асинхронного двигателя
Величина потока асинхронного двигателя пропорциональна
напряжению питания Ut> величина э.д.с. ротора, а, следовательно,
и ток ротора 12 также пропорциональны напряжению статора. По-
этому момент асинхронного двигателя, в том числе максималь-
ный момент, пропорциональны квадрату напряжения U\ (см.3.21,
3.24). Это обстоятельство определяет недопустимость значитель-
ного снижения напряжения питания при пуске и работе асин-
хронного двигателя. Так, при снижении питающего напряжения
на 30% его максимальный момент уменьшится примерно в два
раза и при значительном статическом моменте двигатель может
«опрокинуться», т.е. остановиться и оказаться под пусковым то-
ком. Этот режим является для двигателя аварийным. Такая же
ситуация может сложиться, если напряжение питания снижено
при пуске двигателя под нагрузкой. Указанные случаи имеют ме-
сто в слабых электрических сетях, что обуславливает большую
аварийность асинхронных короткозамкнутых двигателей. Во из-
бежание этого должны предусматриваться необходимые защит-
ные средства, предотвращающие длительное нахождение асин-
хронного двигателя под пусковым током.
В то же время преднамеренное снижение (регулирование)
напряжения, подаваемого на статорные обмотки, иногда исполь-
зуется для регулирования скорости асинхронного двигателя и для
обеспечения плавности пуска.
66
Регулирование скорости асинхронного двигателя путем из-
менения питающего напряжения сопряжено с возможностью пе-
регрева его ротора и может производиться лишь при определен-
ных условиях:
- при малом диапазоне снижения скорости относительно
номинальной;
- при сниженном относительно номинального моменте со-
противления на валу двигателя;
- использовании двигателя с повышенным скольжением.
Рассмотрим механические характеристики асинхронного ко-
роткозамкнутого двигателя с повышенным скольжением при ре-
гулировании напряжения статора (рис.3.13). При снижении на-
пряжения С/] критическое скольжение двигателя и скорость иде-
ального холостого хода <У0 остаются постоянными, а максималь-
ный момент Мк двигателя уменьшается примерно пропорцио-
нально квадрату снижения напряжения, соответственно снижает-
ся жесткость рабочей части механической характеристики двига-
теля. Регулирование скорости возможно в диапазоне
6904-<y0(l-SK).
Предположим, что момент сопротивления на валу двигателя
остается постоянным и равным номинальному Мс = Мн. При
снижении напряжения до величины Un двигатель будет работать
со скоростью, равной £У0(1 - sp) со скольжением sp. Как следует
из энергетической диаграммы асинхронного двигателя (3.37),
мощность скольжения Ps, выделяемая в виде потерь в роторе дви-
гателя будет равна Ps = Мн -COQ-sp и пропорциональна заштри-
хованной площади прямоугольника Оавзр. Электромагнитная
мощность Р<зм =МС -й)0 пропорциональна площади Оаг1, полез-
ная мощность на валу двигателя Ммех~Мс -й) = Мс -CO0(\.-sp)
будет пропорциональна площади ^в,г1.
Номинальная мощность скольжения, на рассеяние которой
рассчитана конструкция двигателя, пропорциональна площади
Oa6sH. Сравним эту площадь с заштрихованной (Oaesp), которая
отражает потери в роторе двигателя при работе в точке «в». Она
примерно в 3 раза превосходит номинальные потери в роторе.
Естественно, что при длительной работе в указанном режиме ро-
тор двигателя будет перегреваться и двигатель выйдет из строя.
Для того, чтобы можно было применить данный способ регули-
67
рования, нужно установленную мощность двигателя завысить в 3
раза или применить специальную конструкцию интенсивного
теплоотвода.
Рис.3.13. Механические характеристики асинхронного двигателя
при регулировании напряжения питания
а) при постоянном моменте; б) при вентиляторном моменте нагрузки
Поэтому регулирование скорости изменением напряжения
питания возможно в том случае, если момент сопротивления Мс
при снижении скорости существенно меньше номинального. Та-
кой способ регулирования применяется иногда для привода насо-
сов и вентиляторов, у которых момент сопротивления на валу
резко снижается при уменьшении скорости. Этот случай рас-
смотрен на рис.3.13,6. Поскольку со снижением скорости Мс
уменьшается примерно в квадрате от величины снижения скоро-
сти, то мощность скольжения Р5 со снижением скорости растет не
столь существенно. Если нагрузка на валу двигателя носит вен-
тиляторный характер, то максимальная величина мощности
скольжения составляет 15% от мощности на валу при номиналь-
ной скорости. Поэтому для привода вентиляторов и насосов дос-
таточно увеличение установленной мощности двигателя с повы-
шенным скольжением в 1,5-2 раза.
Снижение напряжения на статоре асинхронного двигателя
иногда используется для уменьшения пусковых токов двигателя.
Это возможно, если момент сопротивления на валу двигателя при
68
пуске не превышает 0,3-0,4ЛУ„ (насосы, вентиляторы или другие
рабочие машины, пуск которых производится вхолостую). В этом
случае посредством тиристорного регулятора напряжение, под-
водимое к обмотке статора, снижается, а затем по мере разгона
двигателя увеличивается до номинального значения. Этим обес-
печивается «плавный пуск» двигателя с уменьшенными пуско-
выми токами и сниженными динамическими нагрузками на рабо-
чую машину.
3.2.7. Тормозные режимы асинхронных двигателей
Полная механическая характеристика асинхронного двига-
теля во всех
квадрантах по-
ля M-s, пред-
ставлена на
рис.3.14.
Асин-
хронный двига-
тель может ра-
ботать в трех
тормозных ре-
жимах: рекупе-
ративного тор-
можения, дина-
мического тор-
можения и тор-
можения про-
тивовключени-
ем; специфи-
ческим тормоз-
ным режимом
является также
конденсатор- Рис.3.14. Полная механическая характеристика
ное торможе- асинхронного двигателя
ние.
Рекуперативное генераторное торможение возможно, когда
скорость ротора выше скорости вращения электромагнитного
поля статора, чему соответствует отрицательное значение
скольжения <у > <у0; 5 < 0 .
Для того, чтобы ротор двигателя перешел синхронную ско-
рость и разогнался до скорости выше синхронной, к его валу
69
должен быть приложен внешний совпадающий со знаком скоро-
сти вращающий момент. Это может быть, например, в приводе
подъемной лебедки в режиме спуска груза.
Механическая характеристика асинхронного двигателя в ре-
жиме рекуперативного торможения идентична (с учетом угловой
симметрии) характеристике двигателя в двигательном режиме.
Расчет характеристик может производиться по формуле Клосса
(3.27). Максимальный момент в режиме рекуперативного тормо-
жения несколько выше, чем максимальный момент в двигатель-
ном режиме. Для рекуперативного режима
зи?
2й>0Ь +х2к)
Мкг
Несколько большая величина максимального момента в ге-
нераторном режиме
объясняется тем, что
потери в статоре (на
сопротивлении г,) в
двигательном режиме
уменьшают момент на
валу, а в гене-
раторном режиме
момент на валу
должен быть больше,
чтобы покрыть поте-
Рис.3.15. Энергетическая диаграмма ри в статоре,
асинхронного двигателя в режиме реку- Энергетический
перативного торможения баланс в режиме ре-
куперативного гене-
раторного торможения определяется следующим (рис.3.15). Ме-
ханическая мощность, поступающая на вал двигателя, преобразу-
ется в электромагнитную мощность вращающегося поля Рзм и
электрическую мощность, трансформируемую в роторную цепь
двигателя. По аналогии с (3.35) получим
РМех = Ры ~PS= Ма>0 ~ M(OQS .
Электромагнитная мощность, за исключением потерь в ста-
торе, отдается в питающую сеть, а мощность скольжения рассеи-
вается в роторной цепи. Отметим, что в режиме рекуперативного
торможения асинхронный двигатель генерирует и отдает в сеть
активную мощность, а для создания электромагнитного поля
асинхронный двигатель и в режиме генератора должен обмени-
70
ваться с сетью реактивной мощностью. Поэтому асинхронная
машина не может работать автономным генератором при отклю-
чении от сети. Возможно, однако, подключение асинхронной
машины к конденсаторным батареям, как к источнику реактив-
ной мощности (см. рис.3.19).
Рис.3.16. Схемы подключения асинхронного двигателя в режиме дина-
мического торможения
Способ динамического торможения характеризуется тем, что
статорные обмотки отключаются от сети переменного тока и
подключаются к источнику постоянного напряжения (см.
рис.3.16). При питании обмоток статора постоянным током соз-
дается неподвижное в пространстве электромагнитное поле, т.е.
скорость вращения поля статора 0)Мт = 0 . Скольжение будет
равно
где: б>он - номинальная угловая скорость вращения поля ста-
тора.
71
Рис.3.17. Механические характеристи-
ки асинхронного двигателя в режиме
динамического торможения
Вид механических характеристик (см. рис.3.17) подобен ха-
рактеристикам в режиме рекуперативного торможения. Исходной
точкой характеристик является начало координат. Регулировать
интенсивность динамического торможения можно изменяя вели-
чину тока возбуждения
1дт в обмотках статора.
Чем выше ток, тем
больший тормозной мо-
мент развивает двига-
тель. При этом, однако
нужно учитывать, что
при токах 1дт > /1н на-
чинает сказываться на-
сыщение магнитной це-
пи двигателя.
Для асинхронных
двигателей с фазным
ротором регулирование
тормозного момента мо-
жет производиться так-
же введением дополни-
тельного сопротивления
в цепь ротора. Эффект
от вы 1сния добавочно-
го сопротивления анало-
гичен тому, которое
имеет место при пуске асинхронного двигателя: благодаря улуч-
шению cos (рг повышается критическое скольжение двигателя и
увеличивается тормозной момент при больших скоростях враще-
ния.
Работу асинхронного двигателя в режиме динамического
торможения можно рассматривать как работу трехфазного асин-
хронного двигателя при питании его постоянным током, т.е. то-
ком при частоте /1=0. Второе отличие заключается в том, что об-
мотки статора питаются не от источника напряжения, а от источ-
ника тока. Следует также иметь в виду, что в схеме динамическо-
го торможения ток 1дт протекает (при соединении обмоток в звез-
ду) не по трем, а по двум фазным обмоткам.
Для расчета характеристик нужно заменить реальный 1дт эк-
вивалентным током 1экв, который, протекая по трем фазным об-
моткам, создает ту же намагничивающую силу, что и ток /дт.
72
Для схемы рис.3.16,б-/э„»=0,8164т.
Для схемы рис.3.16,в - 7,ke=0,472/dm.
С учетом указанных особенностей векторная диаграмма
асинхронной машины в
(рис.3.18) будет опреде-
ляться соотношением:
= L + Л •
f4 JKO
Ток намагничивания
зависит от тока ротора
при постоянном 1экв. По
мере роста скольжения
ток намагничивания будет
уменьшаться под дейст-
вием реактивного тока
ротора.
Упрощенная формула
для приближенного рас-
чета механических харак-
теристик (не учитываю-
щая насыщение двигате-
режиме динамического торможения
Рис.3.18. Векторная диаграмма асин-
хронного двигателя в режиме динами-
ческого торможения
ля) подобна формуле Клосса для двигательного режима
М =
™дтк
Sdm ! Sdmx + S дтк ! S дт
Зх272
Здесь Мдтк =- ....-4 7-,
2а)0(х2 +xj
с — + К?-доб
Л дтк ' ,
х2 +хр
Следует подчеркнуть, что критическое скольжение в режиме
динамического торможения существенно меньше критического
скольжения в двигательном режиме, т.к. » Хк. Для получе-
ния максимального тормозного момента, равного максимальному
моменту в двигательном режиме ток 1зкв должен в 2-4 раза пре-
вышать номинальный ток намагничивания 10. Напряжение источ-
ника питания постоянного тока будет значительно меньше номи-
нального напряжения и примерно равно Udm = (2,5 ч- .
Энергетически в режиме динамического торможения асин-
хронный двигатель работает как синхронный генератор, нагру-
женный на сопротивление роторной цепи двигателя. Вся механи-
ческая мощность, поступающая на вал двигателя, при торможе-
73
нии преобразуется в электрическую и идет на нагрев сопротивле
ний роторной цепи.
Возбуждение асинхронной
машины в режиме динамиче-
ского торможения может осу-
ществляться не только подачей
постоянного тока в обмотки
статора машины, но также в
режиме самовозбуждения путем
подключения конденсаторов к
цепям статора асинхронной
машины, как это показано на
рис.3.19. Такой способ тормо-
жения называют конденсатор-
ным торможением асинхронных
двигателей. По энергетической
сущности этот вид торможения
идентичен динамическому тор-
можению, т.к. энергия, поступа-
ющая с вала, преобразуется в
электрическую и выделяется в
Рис.3.19. Схема включения
асинхронного двигателя в ре-
жиме динамического торможе-
ния с самовозбуждением от
конденсаторов
виде потерь в роторе двигателя.
Процесс самовозбуждения асинхронного двигателя проис-
ходит следующим образом. Под действием остаточного потока
ротора в обмотках статора наводится э.д.с., под действием кото-
рой возникает намагничивающий ток, протекающий через кон-
денсаторы. При этом увеличивается поток машины, следователь-
но, наводимая э.д.с. и ток намагничивания. Верхняя и нижняя
границы режима самовозбуждения и величина тормозного мо-
мента зависят от величины емкости конденсаторов. Данный спо-
соб торможения применяется для приводов малой мощности (до
5кВт), т.к. требует установки конденсаторов значительного объе-
ма.
Торможение противовключением может быть в двух случа-
ях:
- в первом, когда при работе двигателя необходимо его
экстренно остановить, и с этой целью меняют порядок чередова-
ния фаз питания обмоток статора двигателя;
- во втором, когда электромеханическая система движется
в отрицательном направлении под действием спускаемого груза,
а двигатель включается в направлении подъема, чтобы ограни-
чить скорость спуска (режим протягивающего груза).
74
В обоих случаях электромагнитное поле статора и ротор двигате-
ля вращаются в разные стороны. Скольжение двигателя в режиме
противовключения всегда больше 1
пв
а>й+со
«о
Рис.3.20. Режим противовключения
асинхронного двигателя
1, 1’ - естественные механические ха-
5
В первом случае (см.рис.3.20) двигатель, работавший в т.1,
после изменения порядка чередования фаз двигателя переходит в
тормозной режим в т.Г, и скорость привода быстро снижается
под действием тормозного момента Мт и статического момента
Мс. При замедлении до
скорости, близкой к ну-
лю, двигатель необходи-
мо отключить, иначе он
будет разгоняться в про-
тивоположном направ-
лении вращения.
Во втором случае
после снятия механиче-
ского тормоза двигатель,
включенный в направле-
нии вверх, под действи-
ем силы тяжести спус-
каемого груза будет
вращаться в противопо-
ложном направлении со
скоростью, соответст-
вующей точке 2. Работа
в режиме противовклю-
чения под действием
протягивающего груза
рактеристики при включении «вперед»
и «назад»
2 - механическая характеристика дви-
гателя с фазным ротором со включен-
ным добавочным сопротивлением в
возможна при использо-
вании двигателей с фаз-
ным ротором. При этом
в цепь ротора вводится
значительное добавоч-
цепьротора. ное сопротивление, ко-
торому соответствует
характеристика 2 на рис.3.20.
Энергетически режим противовключения крайне неблаго-
приятен. Ток в этом режиме для асинхронных короткозамкнутых
двигателей превосходит пусковой, достигая 10-кратного значе-
ния. Потери в роторной цепи двигателя складываются из потерь
75
короткого замыкания двигателя и мощности, которая передается
на вал двигателя при торможении
АРе = Мок + Мб) .
т 0 от
Для короткозамкнутых двигателей режим противовключения
возможен только в течение нескольких секунд. При использова-
нии двигателей с фазным ротором в режиме противовключения
обязательно включение в цепь ротора добавочного сопротивле-
ния. В этом случае потери энергии остаются такими же значи-
тельными, но они выносятся из объема двигателя в роторные со-
противления.
3.2.8. Электромеханические характеристики многоскоро-
стных асинхронных двигателей
Поскольку скорость вращения электромагнитного поля ста-
тора, как это следует из (3.3), зависит от числа пар полюсов дви-
гателя р„, то имеются специальные модификации асинхронных
короткозамкнутых двигателей, позволяющие изменять число пар
полюсов машины и тем самым получать две или более (3 и 4) ра-
бочие скорости двигателя. Конструктивно изменение числа пар
полюсов может быть достигнуто двумя способами. При первом в
пазы статора укладываются две или три независимые обмотки с
различными значениями р„. При этом значительно увеличивают-
ся габариты двигателей, но возможно получение любого соотно-
шения числа пар полюсов.
При другом способе используется для получения различного
числа пар полюсов одна и та же обмотка, а изменение р„ достига-
ется переключением секций этой обмотки. Наибольшее распро-
странение получили две схемы обмоток: звезда ( А ) - двойная
звезда (А-Д) и треугольник (А) - двойная звезда.
Рассмотрим схему звезда - двойная звезда (см. рис.3.21). В
этой схеме каждая из фазных обмоток состоит из двух секций,
которые могут включаться параллельно или последовательно.
При параллельном соединении напряжение подводится к сред-
ним точкам обмоток, а начала обмоток замыкаются между собой.
Образуются две параллельно включенные системы обмоток, со-
единенные в двойную звезду (Л-А ). Такое соединение соответст-
вует меньшему числу пар полюсов рп. Этой схеме соединения
отвечает механическая характеристика с индексом на
рис.3.21,б.
При последовательном соединении секций обмоток число
пар полюсов увеличивается вдвое, поэтому номинальная ско-
76
рость двигателя в этом случае будет вдвое меньше. Так, напри-
мер, если схеме соединения АчА соответствует число пар полю-
сов Рп-2, то номинальная скорость вращения будет 1470об/мин
(ио=1500об/мин). Переключив обмотки для соединения в звезду
(А,), получим/7п=4 и номинальную скорость вращения 735об/мин
(и0=750об/мин).
Рис.3.21. Схема (а) и механические характеристики (б) двухскоростного
асинхронного двигателя со схемой соединения обмоток/^-АчА,
Поскольку длительно допустимый ток в обмотках должен
остаться неизменным, то номинальная мощность на валу двига-
теля будет:
при схеме Рдв = 3^1 ' cos Ф\' "Пн >
при схеме А Рдв = 3Ц ' 1 u cos (Р\'Г1Н^
Т.е. мощность двигателя при высокой скорости будет примерно в
2 раза выше, чем при низкой скорости. Однако длительно допус-
тимый номинальный момент сохраняется постоянным, т.к.
Рассмотрим схему треугольник - двойная звезда (рис.3.22). В
этой схеме соединение обмоток двойная звезда соответствует вы-
сокой скорости.
77
При последовательном включении полуобмоток и соедине-
нии их в треугольник число пар полюсов увеличивается вдвое,
следовательно, вдвое снижается скорость двигателя.
Рис.3.22. Схема и механические характеристики двухскоростного дви-
гателя
Мощность двигателя при этом будет:
Pde=3y/3UiIiHcos<piTjH,
здесь С71 - фазное напряжение питания.
Длительно допустимый момент при соединении обмоток в Д
будет в л/з раз больше, чем при соединении в двойную звезду.
Таким образом, при обеих схемах соединения двигатель пример-
но сохраняет свою мощность.
Двух и многоскоростные двигатели применяются в тех слу-
чаях, когда по условиям технологии необходимо иметь две или
более фиксированные скорости вращения приводного электро-
двигателя.
3.3. Электромеханические характеристики синхронных
электродвигателей
3.3.1. Принцип работы синхронного двигателя
Для нерегулируемых электроприводов большой мощности
(свыше 160кВт) широко применяются синхронные электро-
двигатели с электромагнитным возбуждением. Схема включения
такого двигателя показана на рис.3.23.
78
Конструкция статора синхронного двигателя аналогична
конструкции статора асинхронного двигателя. Токи, протекаю-
щие по трехфазной обмотке статора, создают намагничивающие
силы, результирующий вектор которых образует вращающееся в
пространстве электромагнитное поле статора Ф}. Скорость вра-
щения поля статора равна согласно (3.3)
«о =----1
Рп
и является рабочей скоростью синхронного двигателя.
На роторе синхронного двигателя расположена обмотка
возбуждения, которая питается постоянным током от независи-
мого регулируемого источника напряжения - возбудителя. Ток
возбуждения создает электромагнитное поле Фй, неподвижное
относительно ротора и вращающееся в установившемся режиме
вместе с ротором со скоростью <У0. Магнитные силовые линии
поля ротора сцепляются с вращающимся синхронно с ним элек-
тромагнитным полем статора. Взаимодействие полей статора и
ротора создает электромагнитный момент на валу синхронной
машины.
Рис.3.24. Пространственные векторы электро-
магнитных полей синхронного двигателя
а) идеальный холостой ход;
б) при нагрузке на валу
Рис.3.23. Схе-
ма включения
синхронного
двигателя
79
При отсут-
ствии нагрузки
векторы поля
статора и по-
ля ротора Фо
совпадают в
пространстве
(см. рис.3.24,а) и
совместно вра-
щаются со ско-
ростью <У0. При
появлении на ва-
лу двигателя мо-
мента сопротив-
ления векторы
Ф1 и ф0 расхо-
дятся (как бы
растягиваются
Рис.3.25. Механические характеристики син-
хронного двигателя
1 - характеристика синхронного режима
2 - пусковая характеристика (асинхронный ре-
жим)
подобно пружине) на угол 0, называемый углом нагрузки, при-
чем, если вектор Фо отстает от вектора Ф, (см. рис. 3.24,6), то
синхронная машина работает в двигательном режиме и электро-
магнитный момент на ее валу положителен. Если синхронная
машина работает генератором, приводимым во вращение первич-
ным двигателем, то вектор поля ротора опережает вектор поля
статора на угол {-0 ) и электромагнитный момент на валу маши-
ны отрицателен. Изменению нагрузки на валу машины соответ-
ствует изменение угла О . Образно это соответствует растяже-
нию-сжатию пружины. Максимальный момент Ммакс будет иметь
место при в ~ л / 2 . Если нагрузка на валу машины будет боль-
ше Ммакс, то синхронный режим нарушается и машина выпадает
из синхронизма.
Механическая характеристика синхронной машины пред-
ставляют собой прямую, параллельную оси абсцисс и ограничен-
ную значениями момента ± Ммакс (рис.3.25). Жесткость меха-
нической характеристики равна бесконечности.
Поскольку ротор двигателя вращается с синхронной скоро-
стью и скольжение отсутствует, то вся мощность электромагнит-
ного поля статора Рэм преобразуется в механическую мощность
80
на валу синхронного двигателя. Если пренебречь потерями в ста-
торе, то Рзм = 3UJ{ costp = Mcd0 , откуда
3U.Lcosq>
м = ——----------
£У0
Рассмотрим векторную диаграмму
хронной машины (рис.
3.26) . Двигатель с неяв-
(3.39)
неявнополюсной син-
нополюсным ротором
имеет симметричную в
магнитном отношении
конструкцию. Пренебре-
гая активным сопротив-
лением статора, получим
Здесь £| - э.д.с.,
наводимая в обмотках
статора вращающимся
вместе с ротором полем
Фо-
Из векторной диаг-
раммы следует:
Рис.3.26. Векторная диаграмма син-
хронного двигателя
Ut sin 0 = cos(<p -0)
_ U. sin 0
или Ц -------'--------
х, cos(<p - 0)
Ui cos д> = Е, cos(<p - 0) .
Подставляя эти значения в (3.39), получим выражение для
угловой характеристики неявнополюсной синхронной машины
F
М =—— sin#. (3.40)
Из этого выражения и соответствующей ему угловой харак-
теристики (рис.3.27) следует, что по мере нагружения синхрон-
ной машины угол нагрузки увеличивается и момент достигает
максимума при 0 = 71 / 2 . Учитывая пропорциональность между
э.д.с. Е\ и магнитным потоком Фо, т.е. током возбуждения 1В
(Ei=kbIb), получим, что максимальный момент синхронной ма-
шины будет равен
81
(3-41)
Ммакс =---------
ад
т.е. максимальный момент синхронного двигателя (в отличие от
асинхронного) зависит от величины питающего напряжения в
первой степени и в определенных пределах (когда не сказывается
насыщение магнитной цепи) пропорционален величине тока воз-
буждения. Исходя из соотношения (3.41), в большинстве схем
автоматического регулирования возбуждения синхронных двига-
телей для сохранения постоянной перегрузочной способности
двигателя предусматривается автоматическое увеличение тока
возбуждения при приложении ударной нагрузки или снижении
величины питающего напряжения.
Рис.3.27. Угловая характеристика синхронного двигателя: а) неявнопо-
люсной машины; б) явнополюсной машины
1 - при номинальном потоке возбуждения;
2 - при форсировке возбуждения
Для синхронного двигателя явнополюсной конструкции, ко-
торый имеет несимметричную магнитную цепь, кроме момента,
вызванного полем ротора, возникает реактивный момент, опре-
деляемый стремлением ротора занять такое положение, при кото-
ром магнитная проницаемость для пути потока статора была бы
максимальной. Угловая характеристика (см. рис.3.27,б) для тако-
го двигателя описывается уравнением:
., 3U& . Q 3Uf
М - —1—-sin 0 + —1
<»Oxd '2.(Oi
1 1
-------------sin 20,
'о Xd ;
82
где xrf их,- индуктивное сопротивление по продольной и
поперечной осям.
3.3.2. Режимы работы синхронного двигателя
Поскольку синхронный двигатель имеет в синхронном ре-
жиме одну рабочую скорость, то пуск этих двигателей осуществ-
ляется в асинхронном режиме. Для этого в конструкции ротора
предусмотрена короткозамкнутая обмотка, конструкция которой
аналогична клетке ротора асинхронного короткозамкнутого дви-
гателя. В синхронных двигателях со скоростью вращения 3000
об/мин ротор имеет массивную конструкцию и роль пусковой
клетки играет само тело ротора. При разгоне до подсинхронной
скорости двигатель работает как асинхронный короткозамкнутый
с механической характеристикой 2 (см. рис.3.25). По достижении
подсинхронной скорости (точка а), которая должна быть не ме-
нее чем 0,95 <у0 , в обмотку возбуждения подается постоянный
ток, и двигатель втягивается в синхронизм, переходя на работу в
точке б, соответствующей синхронному режиму.
При работе в установившемся режиме с синхронной скоро-
стью ток в пусковой клетке не протекает. Пусковая клетка ротора
рассчитывается на кратковременный режим работы, и длительная
(свыше 20-3 Ос) работа в асинхронном режиме недопустима.
Кроме обеспечения режима пуска, пусковая клетка играет
роль демпферной обмотки, стабилизируя переходные процессы
при работе двигателя в синхронном режиме.
Синхронные двигатели промышленного назначения имеют
электромагнитное возбуждение от независимого источника по-
стоянного тока, в качестве которого используются: генераторы
постоянного тока (возбудители), которые могут располагаться на
одном валу с синхронным двигателем (рис.3.28,б) или приво-
диться во вращение отдельным двигателем (рис.3.28,а), тири-
сторные управляемые выпрямители, которые могут получать
питание от промышленной сети (рис.3.28,в), либо от специально-
го генератора переменного тока, располагаемого на одном валу с
синхронным двигателем. В последнем случае (рис.3.28,г) полу-
проводниковые выпрямители располагаются на роторе синхрон-
ной машины (система с вращающимися выпрямителями), вслед-
ствие чего не требуются щетки и кольца для подвода тока к об-
мотке возбуждения, т.е. синхронная машина становится бескон-
тактной.
83
Во время разгона, когда двигатель работает в асинхронном
режиме, возбудитель может быть подключен к обмотке ротора
при снятом напряжении возбудителя (схема с глухоподключен-
ным возбудителем), а может быть отключен от обмотки возбуж-
дения контактором КМ (см., например, схемы рис.3.23 и 3.28). В
последнем случае обмотка возбуждения замыкается на сопротив-
ление или замыкается накоротко. Оставлять концы обмотки
возбуждения во время разгона разомкнутыми нельзя, т.к. в
обмотке при больших скольжениях наводится значительная э.д.с.
скольжения.
При использовании в качестве возбудителя тиристорного
преобразователя или вращающихся выпрямителей во время пуска
обмотка возбуждения закорачивается через шунтирующие тири-
сторы.
Рассмотрим схему рис.3.28,в. При пуске двигателя в асин-
хронном режиме напряжение тиристорного преобразователя UD
равно нулю. В обмотке возбуждения индуктируется переменная
э.д.с. скольжения, под действием которой через стабилитроны
VD открываются вспомогательные тиристоры VS, и обмотка воз-
буждения закорачивается на разрядное сопротивление R. Когда
двигатель достигает подсинхронной скорости, э.д.с. скольжения
становится малой, стабилитроны запираются, и тиристоры VS
отключают разрядное сопротивление, после чего в обмотку воз-
буждения подается постоянный ток от преобразователя UD.
В последние годы получили распространение возбудители,
встроенные в конструкцию синхронной машины (рис.3.28,г).
Возбудитель состоит из синхронного генератора G, ротор которо-
го расположен на валу синхронного двигателя М, неуправляемо-
го выпрямителя, вспомогательных тиристоров VS и разрядных
сопротивлений R2 и R3, также размещенных на валу синхронного
двигателя. Регулирование тока возбуждения производится изме-
нением тока возбуждения возбудителя G. По достижении под-
синхронной скорости цепи, шунтирующие обмотку возбуждения,
размыкаются и в обмотку подается постоянный ток, после чего
двигатель втягивается в синхронизм, его скорость достигает син-
хронной, и в дальнейшем он работает в синхронном режиме.
84
~6кВ
б)
85
3.3.3. Регулирование тока возбуждения синхронного двигателя
Регулирование тока возбуждения двигателя при работе в
синхронном режиме осуществляется, как правило, САР возбуж-
дения. САР возбуждения выполняет две основные функции. Пер-
вая - обеспечение устойчивой работы в синхронном режиме. При
набросах нагрузки или при снижении величины питающего на-
пряжения САР возбуждения форсирует (увеличивает) ток возбу-
ждения, благодаря чему увеличивается максимальный момент
двигателя в синхронном режиме (см. рис.3.27). Вторая - осуще-
ствление автоматического регулирования величины реактивной
мощности, циркулирующей в статорной цепи двигателя.
Важным достоинством синхронных двигателей является
возможность регулирования величины реактивной мощности,
циркулирующей в цепи статора, в том числе возможность, рабо-
тая двигателем, т.е. потребляя активную мощность, одновремен-
но генерировать реактивную мощность, т.е. работать компенса-
тором реактивной мощности, потребляемой другими параллельно
работающими приемниками электрической энергии, прежде все-
го асинхронными двигателями.
Рис.3.29. Векторные диаграммы синхронного двигателя при разных то-
ках возбуждения и одинаковой нагрузке на валу
Применение на предприятиях наряду с асинхронными син-
хронных двигателей позволяет уменьшить реактивную мощ-
ность, потребляемую предприятием в целом, и поддерживать
86
нормативное значение cos^ в энергосистеме данного предпри-
ятия.
Возможность регулирования реактивной мощности в цепи
статора двигателя путем изменения тока его возбуждения иллю-
стрируется векторными диаграммами на рис.3.29.
Векторная диаграмма (а) соответствует току возбуждения
меньше номинального; при этом вектор тока статора 1Х отстает
от вектора напряжения сети Ux на угол ср, т.е. двигатель работает
с отстающими cos(р (реактивная мощность «потребляется»). При
увеличении тока возбуждения э.д.с. Ех, наводимая в обмотках
статора, увеличивается и может достигнуть такого значения, при
котором ток статора 1Х будет совпадать по фазе с напряжением
Ux, т.е. cos <р = 1 (см. рис.3.29,б). Момент на валу двигателя при
этом будет такой же, как и в предыдущем случае, но реактивная
мощность будет равна нулю. Очевидно (это следует из формулы
(3.39)) ток статора /| при данном моменте нагрузки будет мини-
мальным. Этот режим является энергетически наиболее выгод-
ным для синхронного двигателя, т.к. потери в статоре будут ми-
нимальны.
Если еще бо-
льше увеличить
ток возбуждения,
то ток статора
будет опережать
по фазе напряже-
ние [7,, cos <р
станет опережа-
ющим, и синх-
ронный двига-
тель будет гене-
рировать реак-
тивную мощ-
ность (см. рис.
3.29,в). Зависи-
мость тока стато-
Рис.3.30. U-образные характеристики син-
хронного двигателя
ра от тока воз-
буждения син-
хронного двига-
теля отражается
87
[/-образными характеристиками синхронного двигателя, пред-
ставленными на рис.3.30.
Рис.3.31. Схема включения
двигателей
Задача 3.2.
Два двигателя (см. рис.3.31):
М\ - асинхронный с коротко-
замкнутым ротором, и М2 -
синхронный получают питание
от шин 6 кВ. Двигатель Мх
работает с постоянной номи-
нальной нагрузкой на валу.
Двигатель М2 работает с посто-
янной нагрузкой на валу,
составляющей 50% от номи-
нальной. Режим работы дви-
гателей - продолжительный.
Определить,какой ток следует
установить в обмотке возбуж-
дения синхронного двигателя,
чтобы cos?) на шинах,
питающих двигатели, был бы
равен единице. Технические
данные двигателей:
Синхронный - типа СД2, напряжение статора С/]л=6000В;
мощность Рн=800кВт, номинальный ток статора /1н=90А; ско-
рость вращения - 1000об/мин, номинальный ток возбуждения
/в„=175А, номинальный кпд - >/„=95,6; номинальный коэффици-
ент мощности - соз?)и=0,9(опережающий).
Асинхронный - тип АН2-15-57-10, напряжение С71л=6000В,
номинальный ток статора - 80А, номинальная скорость -
592об/мин, cos?)=0,8.
Решение.
Реактивная мощность, циркулирующая в цепи статора асин-
хронного двигателя
Qad = ^1Л s’n Фн ~ ' 6000 • 80 • 0,6 = 500 кВАр.
Для компенсации этой реактивной мощности синхронный
двигатель должен работать с опережающим cos?) и реактивным
током
Л ~
->-= 5°0-000 =48,2 А.
4зи1л V3-6000
88
Активная составляющая тока статора при нагрузке на валу
0,5 номинальной:
I = = ^.800000
" '/зи.л.со 7з -6000 0,95
Полный ток статора синхронного двигателя в этом режиме
А = +Jp = л/40,62 + 48,22 = 63 А.
Коэффициент мощности синхронного двигателя в этом ре-
жиме
cos (pCD = — = = 0,644 (опер).
7) 63
Для того, чтобы определить величину тока возбуждения
синхронного двигателя в рассматриваемом режиме воспользуем-
ся упрощенным уравнением угловой характеристики синхронно-
го двигателя (3.40).
Сначала определим из условий номинального режима пара-
метры синхронного двигателя: х1 и EiH.
т.к. перегрузочная способность данного
Ммакс Ж = 2, то sin 0Н = 0,5 и 0 = 30°.
Из векторной диаграммы рис.3.26 имеем
и1ф sin# = 7^] cos(^ - 0)
для номинального режима
и1Ф51п0и _ 3470-0,5 _.ллгл
cos(<pH - 0И) 90cos(- arccos0,9 - 30 )
Е _ 800000-34,4 2 ’
— j/yU о.
1 3(710sin#„-3-3470-0,5
Из (3.42) получим
и1ф sin# = Zlx1(cos^-cos# + sin^-sin#),
С7]и -Z^sinp
Для заданного режима
н ’
двигателя
(3-42)
89
д 63-34,4 0,644
tgO =---------------------г = 0,27
3470 -63- 34,4(- 0,77)
sin# = 0,277
Из уравнения угловой характеристики (3.40) найдем величи-
ну 2^, соответствующую заданному режиму
Е - 3824-104,6-34,4 _ 4770В
1 3(71<psin# 3-3470-0,277
где: М = 0,5Л/ = 0,5 ^- = 05 800000 = 3824 Нм.
со0 104,6
Полагая, что э.д.с. £i пропорциональна току возбуждения,
найдем, что заданному режиму будет соответствовать ток возбу-
ждения,
/ = / A = 175^ZZ°
" ен 5290
= 157,8 А.
3.4. Однофазные асинхронные двигатели
Для приводов бытовых и других рабочих машин мощностью
примерно до 5 кВт часто используются однофазные асинхронные
двигатели. Применение таких двигателей становится необходи-
мым, когда источником электроэнергии является однофазная сеть
переменного тока.
Однофазные асинхронные двигатели имеют на статоре две
обмотки: рабочую и пусковую. Ротор двигателя выполняется ко-
роткозамкнутым в виде беличьей клетки. Рабочая обмотка двига-
теля (рис.3.2,а) подключается к однофазной сети переменного
тока (обычно фаза - нуль). Однофазный ток, протекающий по
этой обмотке, создает не вращающееся, как в трехфазных двига-
телях, а пульсирующее магнитное поле. Пульсирующее поле
можно разложить на два поля, имеющиеся равные амплитуды, но
вращающееся в противоположные стороны с одинаковой скоро-
стью щ0 = 2nfjp„
Этим вращающимся магнитным полям соответствуют меха-
нические характеристики 1 и 2 на рис.32,б. Результирующая ме-
ханическая характеристика двигателя (характеристика 3) получа-
ется сложением моментов по характеристикам 1 и 2 при одной и
той же скорости. Особенность характеристики двигателя состоит
в том, что пусковой момент (при а>=0) равен нулю, вследствие
чего пуск двигателя невозможен. Поэтому для пуска однофазных
90
асинхронных двигателей используется дополнительная пусковая
обмотка. Эта обмотка расположена в пазах статора двигателя со
смещением на 90°. Как правило, по окончании пуска пусковая
обмотка отключается. Наилучшие пусковые характеристики име-
ет схема с подключением пусковой обмотки через конденсатор.
а) б)
Рис.3.32. Схема (а) и механические характеристики (б) однофазного АД
При необходимости в случае питания от однофазной сети мо-
гут использоваться и обычные трехфазные асинхронные двигате-
ли с короткозамкнутым ротором. В этом случае в качестве пуско-
вой используется одна из фазных обмоток, которая для создания
временного сдвига фазы тока на 90° подключается к сети через
конденсатор. При использовании стандартных асинхронных
трехфазных двигателей мощностью до 10 кВт при питании их от
однофазной сети 220 В емкость конденсатора обычно принимает-
ся равной 30 мкФ на каждый кВт номинальной мощности двига-
теля. Следует использовать металлобумажные конденсаторы на-
пряжением не менее 600 В.
3.5. Вопросы для самопроверки
1. Что нужно сделать, чтобы изменить направление вращения
асинхронного двигателя?
2. Номинальная скорость вращения асинхронного двигателя
735об/мин. Каково число пар полюсов этого двигателя?
91
3. В паспорте асинхронного двигателя с фазным ротором ука-
зано, что номинальная э.д.с. ротора ЕР=240В. При какой скорости
вращения двигателя напряжение на кольцах ротора будет равно
указанному значению?
4. Как зависит максимальный момент асинхронного двигателя
от величины питающего напряжения?
5. Что нужно сделать, чтобы изменить критическое скольже-
ние асинхронного двигателя?
6. При каких скольжениях асинхронный двигатель работает в
режиме рекуперативного торможения, торможения противовк-
лючением?
7. От чего зависит величина индуктивного сопротивления об-
мотки ротора асинхронного двигателя?
8. Почему у асинхронного короткозамкнутого двигателя пус-
ковой ток составляет 5,5-6 от номинального, а пусковой момент
близок к номинальному?
9. Как реализуется способ динамического торможения асин-
хронного двигателя?
10. Поясните принцип изменения числа пар полюсов много-
скоростного асинхронного двигателя.
И.Чему будут равны потери в роторе асинхронного двигате-
ля, если он путем снижения величины питающего напряжения
работает со скоростью 70% от синхронной при номинальном мо-
менте на его валу?
12. Для чего в цепь ротора асинхронного двигателя с фазным
ротором при пуске включают добавочные сопротивления?
13. Что показывает угловая характеристика синхронного дви-
гателя?
14 .Для чего служит короткозамкнутая обмотка (беличья клет-
ка) на роторе синхронного двигателя?
15 .Какие источники тока используются для возбуждения син-
хронного двигателя?
16 .С какой целью регулируют ток возбуждения синхронного
двигателя?
17 .Что нужно сделать, чтобы коэффициент мощности в цепи
статора синхронного двигателя стал опережающим?
18 .Синхронный двигатель работал в режиме, при котором
cos <рх = 1. Как изменится ток статора, если при той же нагрузке
на валу увеличить ток возбуждения?
19 .Асинхронный двигатель имеет номинальную скорость 980
об/мин. Какова будет частота тока ротора при работе его в номи-
нальном режиме?
92
Глава 4. ОБЩИЕ ПРИНЦИПЫ РЕГУЛИРОВАНИЯ ЭЛЕК-
ТРОПРИВОДА
4.1. Регулируемый электропривод - основной вид автоматизи-
рованного электропривода
Применение регулируемого электропривода в составе тех-
нологических машин и агрегатов обычно связано с одним из сле-
дующих обстоятельств:
- необходимостью оперативного управления ходом техноло-
гического процесса (электроприводы грузоподъемных кранов,
экскаваторов, реверсивных прокатных станов и других машин);
- необходимостью устанавливать и точно выдерживать тех-
нологический режим (электроприводы станов непрерывной про-
катки, бумагоделательных машин, отделочных агрегатов тек-
стильной промышленности и др.);
- необходимостью корректировки технологического процес-
са (электроприводы питателей, дозаторов и др.);
- автоматическим управлением режимом обработки мате-
риала (электроприводы станков с ЧПУ и др.);
- стремление оптимизировать технологический процесс по
затратам электроэнергии (электроприводы насосов, вентилято-
ров, компрессоров).
Приведенный перечень обстоятельств, обуславливающих не-
обходимость или целесообразность применения регулируемого
электропривода, может быть расширен и дополнен.
По мере развития рабочих машин и механизмов, применения
высоких технологий потребность в регулируемых электроприво-
дах существенно возросла, и автоматизированный регулируемый
электропривод составляет энергетическую и кибернетическую (с
точки зрения управления) основу большинства рабочих машин и
агрегатов во всех технологических областях.
Автоматизированный электропривод выполняет две техно-
логические функции:
- преобразование электрической энергии в механическую,
необходимую для осуществления данного технологического про-
цесса;
- управление технологическим процессом, причем с опреде-
ленной степенью оптимизации этого процесса по ряду критериев,
таких как: обеспечение максимальной производительности, точ-
ности и качества обработки, минимального расхода энергии и
93
т.п.; конкретные задачи управления многообразны и определяют-
ся характером технологического процесса.
Вторая функция автоматизированного электропривода все-
цело связана с необходимостью регулирования величин, характе-
ризующих движение электропривода (скорости, момента, поло-
жения рабочего органа). Выполнение этой функции возможно
только посредством использования регулируемого электроприво-
да. Использование для целей регулирования механических или
гидравлических средств (вариаторы, коробки передач, гидромуф-
ты и др.) сегодня является технически и экономически
неоправданным.
Под регулируемым электроприводом понимается электро-
привод, обеспечивающий плавное с необходимой точностью ре-
гулирование скорости (или момента) в заданном диапазоне. Од-
нако требования к регулируемому электроприводу этим не огра-
ничиваются. Система управления регулируемого электропривода
должна обеспечивать также заданный характер переходных про-
цессов при изменении скорости, момента или других параметров
электропривода.
Поскольку по своим электромеханическим свойствам элек-
тродвигатели в естественной схеме включения в питающую сеть
не могут обеспечить регулирование параметров движения элек-
тропривода с нужным качеством, для создания регулируемого
электропривода приходится преобразовывать электрическую
энергию, подводимую к (или отводимую от) двигателю. Преобра-
зование электрической энергии осуществляется посредством по-
лупроводниковых преобразователей.
Регулируя параметры преобразованной электрической энер-
гии (частоту, напряжение, форму и длительность импульсов и
др.) удается получить требуемые для регулируемого привода ме-
ханические и динамические характеристики. Для управления па-
раметрами (напряжение, частота и др.) полупроводниковых пре-
образователей, входящих в состав регулируемого электроприво-
да, служат внутренние контуры автоматического регулирования -
это регуляторы тока, э.д.с., тока возбуждения и др. В этом смысле
регулируемый электропривод всегда является автоматизирован-
ным, т.к. содержит средства автоматического управления, фор-
мирующие характеристики электропривода.
Внешние контуры регулирования определяют переменные,
характеризующие движения электропривода: скорость или поло-
жение рабочего органа. Обычно эти контуры регулирования яв-
ляются замкнутыми, т.е. содержат отрицательную обратную
94
связь по регулируемому параметру и соответствующий регуля-
тор. Типичная схема замкнутого контура регулирования скорости
представлена на рис.4.1.
PC эп
Рис.4.1. Структурная схема контура регу-
лирования скорости
иж - задание скорости; ижс - сигнал обрат-
ной связи по скорости; PC - регулятор
скорости с передаточной функцией
^рс(р); кс - коэффициент обратной связи
по скорости; W3n(p) - передаточная
функция электропривода с внутренним
контуром регулирования
Задание на скорость
их может формиро-
ваться вручную - ма-
шинистом экскавато-
ра, крановщиком, опе-
ратором и др., или
автоматически - от
системы числового
программного управ-
ления (системы ЧПУ в
приводе станков), от
технологических регу-
ляторов или управля-
ющих устройств верх-
него уровня автомати-
зации.
Передаточная функция
регулятора скорости
Wpdp) выбирается такой, чтобы обеспечить требуемое качество
регулирования по статическим (диапазон, точность) и по дина-
мическим показателям (быстродействие, перерегулирование, ко-
лебательность).
Двигатели, полупроводниковые преобразователи электриче-
ской энергии, датчики и устройства автоматического регулирова-
ния в своей совокупности образуют систему регулируемого элек-
тропривода. Эти системы различаются, прежде всего, по виду
приводного электродвигателя, а также по виду используемых по-
лупроводниковых преобразователей электрической энергии, пи-
тающих двигатель.
Регулирование скорости - это принудительное посредством
системы управления изменение скорости, исходя из требований
технологического процесса. Такое регулирование производится
при подаче на вход системы регулирования управляющего воз-
действия. Однако регулирование скорости может производиться
и при неизменном управляющем воздействии, когда задача регу-
лирования заключается в стабилизации скорости при появлении
возмущающих воздействий, например при изменении нагрузки,
прикладываемой к валу электродвигателя.
95
4.2. Показатели качества регулирования скорости
Одним из осно-
вных показателей,
характеризующих
регулирование ско-
рости электропри-
вода, является диа-
пазон регулирова-
ния. Диапазон регу-
лирования D - это
отношение макси-
мальной установив-
шейся скорости эле-
ктропривода к ми-
нимальной при из-
менении нагрузки
Рис.4.2. К определению диапазона регулиро-
вания по скорости
на валу двигателя в
заданных пределах.
Определение вели-
чины диапазона регулирования показано рис.4.2.
Положим, что электропривод имеет прямолинейные меха-
нические характеристики. Прямая 1 соответствует максимальной
по скорости механической характеристике.
Положим, что регулировочные характеристики привода бу-
дут перемещаться вниз параллельно характеристике 1, имея ту же
жесткость Д что характерно для большинства современных сис-
тем регулируемого электропривода. Нижняя предельная характе-
ристика, которая будет обеспечивать требуемый максимальный
момент, будет характеристика 2. Диапазон регулирования будет
равен отношению максимальной скорости к минимальной, кото-
рые определяются по среднему моменту из заданных минималь-
ного и максимального его значений [8]
Д/ = ~ MUH
ср 2
Г) _ ®макс _
Из графиков рис.4.2. найдем:
(4.1)
96
(О
мин
Ш .иа„с =а}0-----Г7------
Z/J
2Р
Подставляя эти значения в (4.1), получим:
D =
(4.2)
Здесь и далее fl - абсолютное значение жесткости.
Из формулы (4.2) следует, что диапазон регулирования зави-
сит от жесткости механических характеристик привода: чем
больше жесткость, тем больше диапазон регулирования.
Вторым важным показателем качества регулирования явля-
ется точность регулирования скорости. Статическая ошибка
характеризует реакцию электропривода на приложение (снятие)
нагрузки. Если мы анализируем регулируемый электропривод,
имеющий линейные (линеаризованные) механические характери-
стики, которые в зависимости от управляющего воздействия мо-
гут плавно перемещаться вниз от основной с постоянной жестко-
стью /3 (см. рис.4.3), то абсолютная статическая ошибка будет
равна:
Эта ошибка
при постоянной
жесткости ме-
ханических ха-
рактеристик бу-
дет одна и та же
во всем диапа-
зоне регулиро-
вания.
Относи-
тельная вели-
чина ошибки
находится как
отношение аб-
солютной ошиб-
ки к базовой (за-
(4.3)
А Мс
97
данной) скорости. Она тем больше, чем меньше заданная ско-
рость.
(4.4)
Из (4.3) и (4.4) следует, что величина статической ошибки,
связанной с возмущением по нагрузке, обратно пропорциональна
жесткости механических характеристик: чем больше жесткость,
тем меньше статическая ошибка.
Нижнее значение скорости а>мин заданного диапазона регу-
лирование скорости может ограничиваться также требуемой точ-
ностью регулирования (статизмом). В соответствии с (4.4) точ-
ность поддержания заданной скорости, как величина относитель-
ная, будет тем хуже, чем меньше заданная минимальная скорость.
Поэтому условие выполнения заданной точности будет
, Л®
ДС =----< Д^.
®мт
Учитывая, что
Д^у — макс Ммии
2/?
получим
(4-5)
макс мт
мии~
Тогда диапазон регулирования скорости из условия обеспе-
чения заданной точности будет
п _ ®макс _ А^(2^о ~ Ммтс - Ммин)
^мин Ммакс ~ мт
Обычно жесткость механических характеристик электро-
привода с разомкнутой системой управления недостаточна для
достижения требуемого диапазона регулирования и требуемой
статической точности. Потому в регулируемых электроприводах,
как правило, используются замкнутые по скорости системы регу-
лирования.
Рассмотрим влияние отрицательной обратной связи по ско-
рости на механические характеристики электропривода.
На рис.4.4 представлена структурная схема электропривода
с разомкнутой системой управления (рис.4.4,а) и с системой
управления, включающей в себя отрицательную жесткую обрат-
ную связь по скорости, т.е. с замкнутой по скорости системой
98
управления (рис.4.4,б). При разомкнутой системе управления за-
б)
Рис.4.4. Структурная схема
электропривода с линейными
механическими характери-
стиками
а) разомкнутая;
б) замкнутая по скорости
данная скорость определяется как
^зад = КуХзад (СМ- рИС.4.4,а).
Величина статической ошиб-
ки, возникающей при приложении
момента нагрузки Мс, будет зави-
сеть от жесткости механических
характеристик (см. 4.3). Разомк-
нутая система управления не мо-
жет автоматически компенсиро-
вать или уменьшить ошибку по
возмущению.
В замкнутой системе управ-
ления с жесткой отрицательной
обратной связью по контролируе-
мому параметру (в рассматривае-
мом случае по скорости) величина
этого параметра через датчик ско-
рости с передаточным коэффици-
ентом кс подается с отрицатель-
ным знаком на вход системы ре-
гулирования
хосс = К С(О (4.6)
Таким образом, регулиро-
вание скорости производится по
величине ошибки, т.е. разности
между заданным и действующим
значениями скорости
ХУ=Х^-ХОСС- (4-7)
Рассмотрим механизм действия отрицательной обратной
связи (см. рис.4.5). Пусть характеристики 1 - механические ха-
рактеристики привода с разомкнутой системой управления. Если
задано значение скорости (Оозад, то при Мс=0 привод будет рабо-
тать с заданной скоростью. При приложении нагрузки Мс и ра-
зомкнутой системе регулирования скорость двигателя снизится
на величину Ад?, пропорциональную отрезку ав. При этом двига-
тель работает на механической характеристике, определяемой
прямой (Оозад-е, имеющей жесткость /3, и просадка скорости опре-
деляется величиной А(УС = Мс/(3.
99
Рис.4.5. Пояснения действия отрица-
тельной обратной связи по скорости
(4-9)
В замкнутой
системе регулирова-
ния процесс измене-
ния скорости проте-
кает иначе. После
приложения нагруз-
ки скорость начнет
снижаться. При этом
будет уменьшаться
сигнал обратной
связи по скорости
кса>, в результате
чего разность (хзад-
Хосс) увеличится, а,
следовательно, уве-
личится сигнал за-
дания СКОРОСТИ 0)зад
Увеличение сигнала
задания скорости холо-
стого хода произойдет до величины и двигатель автоматиче-
ски перейдет на механическую характеристику й)о6-б и после за-
вершения переходного процесса будет работать в точке б. В ре-
зультате установившаяся ошибка скорости составит &й)зал1К, оп-
ределяемую отрезком аб, существенно меньшим, чем это было
бы в разомкнутой системе
^С1али! _ аб
&со ав
Если статический момент равен Мсг, то привод будет рабо-
тать в точке г, если МС=*МС1!, то привод будет работать в точке е.
Мы видим, что механическая характеристика замкнутой сис-
темы представляет собой совокупность точек а>озад-г-б-д-е, при-
надлежащих механическим характеристикам разомкнутой систе-
мы с различными значениями скорости холостого хода. Жест-
кость PmiK механической характеристики замкнутой системы
(прямая 2) будет выше жесткости характеристик разомкнутой
системы.
Механическая характеристика замкнутой системы будет
Л/с
<У = й>0
h' замк
100
где ю0 определяется из (4.8)
( \ М<
Ю = Ку\Х,ао-ХОсс)-—
мс
(о = кухзад-кукссо--^-
КуХ1ад Мс
\ + кукс /?(1 + к?кс)’
откуда со =
обозначив КуКс=К - коэффициент усиления разомкнутой системы
(при разрыве обратной связи по скорости), получим
кух^ Мс
\ + К 0(\ + К)
или
мс
{3) = КуХ^.3аМК--^-’
Рзамк
где /?(* + *) (4.10)
Мы видим, что жесткость механических характеристик в
замкнутой системе увеличивается по сравнению с жесткостью
механических характеристик разомкнутой системы в (1+Я) раз.
Следовательно, статическая ошибка уменьшается в (1+А) раз
(4.11)
1 + Л
Сопоставив с (4.9), получим (см. рис.4.5)
аб 1
ав 1 + Я
Таким образом, введение отрицательной обратной связи по
скорости повышает жесткость механических характеристик при-
вода, уменьшает статическую ошибку, расширяет диапазон регу-
лирования скорости. Введение обратной связи по скорости также
сказывается на динамических характеристиках привода - повы-
шается быстродействие привода. Показатели качества регулиро-
вания, характеризующие динамические свойства привода, рас-
смотрены в главе 8.
Задача 4.1. Электропривод имеет линейные механические
характеристики с жесткостью /? = 10 Нм.с. Номинальный момент
М=50Нм. Наибольшее значение скорости холостого хода
<Уо=Ю4,6 1/с. Найти величину диапазона регулирования скорости,
101
который обеспечивает данный электропривод, если момент на
валу двигателя может изменяться в пределах 0,15Л/„<Л/с<1,2Л/„и
требуемая точность поддержания заданной скорости составляет
10%. Какой должна быть жесткость механических характеристик,
чтобы достичь диапазона регулирования Z>=100.
Диапазон регулирования определим по формуле (4.5):
D = = Ао™(1 2 3 4^о ~Ммакс ~ммин) =
мин Ммакс мин
_ •10 •104’6 7 * * ~ !>2 •50 - °>15 •50) = з 86
1,2-50-0,15-50 ~ ’
Для того, чтобы достичь диапазона регулирования Р^ЮО,
жесткость механических характеристик нужно повысить до зна-
чения
„ = макс ~ М мин) + А^Я макс + М мин ) _
2«оАаои
- 1 Мр’2 •50 - °»15 • 5°) + °Л0.2 50 + 0,15 • 50) ’
2-104,6-0,1
Увеличения жесткости механических характеристик можно
добиться, применив замкнутую по скорости систему регулирова-
ния и повысив общий коэффициент усиления разомкнутой сис-
темы.
4.3. Контрольные вопросы для самопроверки
1. Назовите технические требования, которые определяют
необходимость применения регулируемого электропривода.
2. Что такое диапазон регулирования по скорости?
3. От какого параметра зависит диапазон регулирования ско-
рости электропривода?
4. В чем разница между абсолютной и относительной стати-
ческими ошибками?
5. Какая обратная связь применяется для повышения жест-
кости механических характеристик электропривода?
6. Во сколько раз повышается жесткость механических ха-
рактеристик электропривода с замкнутой системой управления
по сравнению с разомкнутой?
7. Во сколько раз уменьшается статическая ошибка при ис-
пользовании замкнутой по скорости системы управления по
сравнению с разомкнутой?
102
8. Что представляет собой механическая характеристика
электропривода с замкнутой по скорости системой управления?
9. Какие меры следует принять в системе управления, чтобы
повысить диапазон регулирования электропривода?
10. Что дает с точки зрения улучшение статических характе-
ристик привода введение отрицательной обратной связи по ско-
рости?
Глава 5. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С ДВИ-
ГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
5.1. Электромеханические характеристики двигателей посто-
янного тока независимого возбуждения
Двигатели постоянного тока традиционно являлись основой
регулируемого электропривода и широко применяются во всех
областях техники. Только в последние годы началось интенсив-
ное использование регулируемых электроприводов на базе двига-
телей переменного тока.
Двигатели постоянного тока могут иметь независимое, по-
следовательное или смешанное возбуждение. В зависимости от
схемы возбуждения существенно разнятся и электромеханиче-
ские характеристики двигателей.
Двигатели независимого возбуждения могут иметь электро-
магнитное возбуждение, (рис.5.1,а) и возбуждение от постоянных
магнитов (рис.5.1,6). Последнее применяется для высокодина-
мичных двигателей
мощностью до 20
кВт.
Реверсирование
(изменение направ-
ления вращения)
двигателей незави-
симого возбуждения
а) б)
Рис.5.1. Схема включения двигателей посто-
янного тока независимого возбуждения
а) с электромагнитным возбуждением;
б) с возбуждением от постоянных магнитов
производится изме-
нением полярности
напряжения, подво-
димого к якорю дви-
гателя или к обмотке
его возбуждения.
103
Напряжение, подводимое к якорной цепи двигателя, в уста-
новившемся режиме уравновешивается падением напряжения на
сопротивлениях цепи якоря и противоэ.д.с. якоря, которая наво-
дится в обмотке якоря при его вращении в электромагнитном по-
ле, создаваемом обмоткой возбуждения (см.рис.5.1,а)
ия=Ея+Кя1я. (5.1)
7?я - сопротивление якорной цепи, складывающееся из со-
противления обмотки якоря Ro>l, обмотки дополнительных полю-
сов Rd„, компенсационной обмотки RK0 (если она имеется) и внут-
реннего сопротивления источника питания двигателя Rn (если оно
учитывается)
R« = Ro„ + Rdn + R«, + Rn
Э.д.с. якоря Ея равна
Ея = кФй) , (5.2)
где Ф - поток возбуждения (Вб);
к = pnN/2na - конструктивная постоянная двигателя; где
р„ - число пар полюсов машины; N - число активных проводни-
ков обмотки якоря; а - число параллельных ветвей обмотки яко-
ря.
Момент, развиваемый двигателем, пропорционален току яко-
ря и потоку возбуждения
М = кФ1я. (5.3)
Из уравнений (5.1), (5.2) и (5.3) легко получить зависимость
скорости от тока якоря <У = /(7я), которая называется электро-
механической характеристикой двигателя, и зависимость скоро-
сти от момента двигателя со = f(M) - механическую характери-
стику привода.
RXIX
кФ
RXM
(5-4)
(5.5)
(5-6)
ия
(0 =—-
кФ
кФ (кФ)
Если двигатель во всех режимах работает с постоянным по-
током возбуждения, то величину кФ считают постоянной
кФ = С.
Тогда приведенные выше уравнения будут иметь вид:
Л/= С7Я
Е = Ссо
(5-7)
(5-8)
104
со = —----------
(5.9)
СО = —
(5.10)
С
С2
Строго говоря, при изменении нагрузки на валу, когда изме-
няется ток якоря, поток двигателя вследствие размагничивающе-
го влияния реакции якоря не остается постоянным. Для устране-
ния влияния тока в цепи якоря на поток возбуждения на крупных
машинах используют компенсационную обмотку, которая вклю-
чается последовательно с обмоткой якоря и располагается на по-
люсах машины, усиливая поток возбуждения. Однако и для не-
компенсированных машин в инженерных расчетах обычно пре-
небрегают размагничивающим действием реакции якоря, возла-
гая обеспечение линейности механической характеристики дви-
гателя на замкнутые системы регулирования. В двигателях с воз-
буждением от постоянных магнитов реакция якоря практически
не проявляется.
Естественная механическая характеристика двигателя посто-
янного тока независимого возбуждения показана на рис.5.2.
Рекуперативное генераторное торможение 1<О Двигательный режим 0 м ►
Рис.5.2. Естественная механическая ха-
рактеристика двигателя постоянного тока
независимого возбуждения
Жесткость естествен-
ной механической харак-
теристики р для рассмат-
риваемых двигателей
обычно высока и равна
(5.П)
Я, я.
Механические харак-
теристики двигателя по-
стоянного тока независи-
мого возбуждения пред-
ставляют собой прямые,
пересекающие ось ординат в точке идеального холостого хода а>0,
величина которой равна
й>0= —= —. (5.12)
° кФ С
С учетом (5.11) получим удобное выражение для механиче-
ской характеристики при постоянном потоке возбуждения
105
м
СО = й)п---------.
0 р
(5.13)
Регулирование скорости двигателя постоянного тока незави-
симого возбуждения может производиться тремя способами:
1. Введением добавочного сопротивления в цепь якоря,
2. Изменением величины напряжения, питающего якорную
цепь двигателя, при посто-
янном потоке возбуждения.
3. Изменением тока
возбуждения, т.е. измене-
нием магнитного потока
двигателя.
При вводе добавочного
сопротивления в цепь якоря
скорость холостого хода to0
остается неизменной, а из-
меняется наклон механиче-
ских характеристик, т.е.
уменьшается их жесткость
(см. рис.5.3). Данный способ
регулирования скорости в
настоящее время не ис-
пользуется, поскольку вве-
дение добавочного сопро-
Рис.5.3. Реостатные механические
характеристики двигателя посто-
янного тока независимого возбуж-
дения
тивления сопряжено с потерями энергии в этом сопротивлении.
Основным способом регулирования скорости двигателей по-
стоянного тока независимого возбуждения (ДПТ-НВ) является
регулирование напряжения, подводимого к якорю двигателя.
Изменение скорости при этом производится вниз от основ-
ной (номинальной) скорости, определяемой естественной харак-
теристикой (рис.5.4). При уменьшении напряжения якоря умень-
шается скорость холостого хода сд0, а жесткость механических
характеристик остается постоянной. Повышение напряжения пи-
тания выше номинального не рекомендуется, т.к. это может
ухудшить коммутацию на коллекторе.
Плавность регулирования, отсутствие дополнительных по-
терь энергии при регулировании и высокая жесткость механиче-
ских характеристик составляют основные достоинства этого спо-
соба регулирования скорости.
106
Рис.5.4. Механические характеристики двигателя постоянного тока неза-
висимого возбуждения при регулировании напряжения якоря
Регулирование скорости выше основной производится
уменьшением тока (потока) возбуждения. При уменьшении маг-
нитного потока Ф согласно (5.5) происходит увеличение скоро-
сти холостого хода а>о и одновременно снижается жесткость ме-
ханических характеристик двигателя (см.рис.5.5,а).
Рис.5.5. Механические (а) и электромеханические (б) характеристики дви-
гателя постоянного тока независимого возбуждения при уменьшении по-
тока возбуждения и номинальном напряжении якоря
Увеличение тока возбуждения выше номинального нецеле-
сообразно, так как вследствие насыщения магнитной цепи маши-
ны существенного возрастания магнитного потока не произойдет,
107
Рис.5.6. Двухзонное регулирование скорости двига-
теля постоянного тока
а тепловой режим двигателя нарушится. Электромеханические
характеристики двигателя при ослаблении поля (о = /(/я) будут
иметь вид, показанный на рис.5.5,б. Эти характеристики, как сле-
дует из (5.4), на оси абсцисс сходятся в одной точке, соответст-
вующей току короткого замыкания - U я /Яя . Заметим, что
масштаб по оси абсцисс на рис.5.5,а и 5.5,6 различен.
При анализе механических характеристик при ослаблении
поля следует иметь в виду, что при работе с постоянным статиче-
ским моментом ток якоря по мере ослабления потока увеличива-
ется. Так, если статический момент на валу двигателя будет равен
номинальному, то при номинальном напряжении якоря (7ЯН дви-
гатель будет работать в т.1 (см. рис.5.5,а). Если, например, осла-
бить поток возбуждения в 2 раза, то скорость холостого хода дви-
гателя (йог увеличивается в 2 раза. Если момент двигателя сохра-
нится постоянным и равным номинальному, то двигатель будет
работать в т.4.
Однако, как
это следует из ®
(5.3) ток якоря
при этом уве-
личится в 2
раза. Поэтому
длительная
работа двига-
теля в т.4 не-
допустима. Из
этого примера
следует, что
одновременно
с повышением
скорости не-
обходимо
снижать дли-
тельно допус-
тимый по ус- ।
ловия нагрева
(номинальный)
момент. Линия
номинального
момента при ослаблении поля отображается кривой 1-2-3. Анало-
гично при ослаблении поля уменьшается допустимый макси-
мальный момент, определяемый по условиям коммутации на
108
коллекторе. Поскольку при ослаблении поля скорость увеличива-
ется примерно пропорционально степени ослабления поля
/Фосл, а длительно допустимый момент Мдоп уменьшается
пропорционально отношению Ф^/Ф,,, то длительно допустимая
мощность двигателя Р = Мдопсо остается примерно постоянной.
Поэтому регулирование ослаблением поля называют регулирова-
нием с постоянной мощностью в отличие от регулирования изме-
нением напряжения якоря при постоянном потоке возбуждения,
которое называют регулированием с постоянным моментом.
Для электроприводов многих механизмов используют ком-
бинированное управление, так называемое двухзонное регулиро-
вание скорости. Механические характеристики для этого способа
управления показаны на рис.5.6. В первой зоне скорость двигате-
ля в диапазоне от нуля до основной скорости а>о„ регулируется
изменением напряжения якоря при постоянном потоке возбужде-
ния Фн. Во второй зоне регулирование производится изменением
тока (потока) возбуждения при постоянном номинальном напря-
жении якоря. Соответственно номинальный момент в первой зо-
не регулирования остается постоянным, а во второй зоне снижа-
ется пропорционально уменьшению потока. Максимально допус-
тимая скорость двигателя при ослаблении поля определяется ме-
ханической прочностью якоря и условиями коммутации на кол-
лекторе. Эта скорость указывается в каталоге на двигатели.
Ослабление поля используется и при однозонном регулиро-
вании скорости для установления основной (максимальной) ско-
рости. В отличие от синхронных и асинхронных двигатели по-
стоянного тока не имеют жестко определенной номинальной ско-
рости. В каталогах указывается номинальная и максимальная
скорости. Например, если указано, что двигатель мощностью
100кВт имеет номинальную скорость 1000об/мин и максималь-
ную - 2000об/мин, то основная скорость может быть установлена
в этих пределах выбором соответствующего значения тока воз-
буждения, например, - 1600об/мин. При этом мощность двигате-
ля останется равной 100кВт. Это удобно при конструировании
кинематической схемы рабочей машины.
Для высокодинамичных электроприводов небольшой мощ-
ности (до 20кВт) эффективно использование высокомоментных
двигателей постоянного тока с возбуждением от постоянных
магнитов. Благодаря применению высокоэнергетических посто-
янных магнитов на основе редкоземельных элементов (например,
сплава самарий-кобальт), эти двигатели особенно при малых ско-
109
ростях вращения (когда условия коммутации тока на коллекторе
более легкие) способны развивать большой крутящий момент.
Отношение пускового момента такого двигателя к номинальному
составляет 8-10, в то время как у двигателей с электромагнитным
возбуждением это отношение не превышает 2-4. Двигатели нахо-
дят применение в металлорежущих станках с числовым про-
граммным управлением, в приводах роботов и следящих элек-
троприводах различного назначения.
В некоторых случаях двигатели независимого возбуждения
снабжают «легкой» обмоткой последовательного возбуждения,
создающей м.д.с. при номинальном токе якоря около 20% от
м.д.с. обмотки независимого возбуждения. Высокодинамичные
двигатели смешанного возбуждения применяются в случаях мно-
годвигательного привода, когда два или несколько двигателей
работают на один вал или их валы связаны механически (напри-
мер, лентой конвейера), В этом случае скорость всех двигателей
будет одинаковой, но из-за неидентичности характеристик двига-
теля возникает задача равномерного распределения нагрузки ме-
Рис.5.7. Механические характеристики двигателя
постоянного тока в двигательном режиме и ре-
жиме рекуперативного торможения
годаря нали-
чию последо-
вательной об-
мотки возбуж-
дения в более
нагруженном
двигателе уве-
личивается по-
ток и возраста-
ет противоэ.д.с.
якоря, что ве-
дет к сниже-
нию тока яко-
ря. Напротив,
менее нагру-
женный двига-
тель будет
иметь несколь-
ко меньший
поток, его э.д.с. будет ниже и ток якоря соответственно возраста-
ет. Таким образом, благодаря наличию слабой последовательной
обмотки происходит выравнивание тока якоря между двигателя-
ми, питающимися от общего источника напряжения.
110
Электродвигатели постоянного тока независимого возбуж-
дения могут работать в трех тормозных режимах; режиме реку-
перативного торможения, динамического торможения и тормо-
жения противовключением.
Режим рекуперативного генераторного торможения имеет
место, когда скорость двигателя превышает скорость холостого
хода о)>а)0 (рис. 5.7). При этом э.д.с. якоря Ея превышает величи-
ну напряжения питания якорной цепи Ея>ия и ток в якорной цепи
пойдет под действием э.д.с. якоря Ея, знак тока будет противопо-
ложен знаку напряжения питания, что означает, что энергия тор-
можения отдается в сеть питания постоянного тока. Отсюда сле-
дуют три условия существования режима рекуперативного тор-
можения.
1. Цепь питания должна обеспечивать возможность протека-
ния тока встречно напряжению источника питания; это условие
особенно важно в случае питания двигателя постоянного тока от
полупроводниковых преобразователей, элементы которых обла-
дают односторонней проводимостью тока.
2. Источник питания должен обладать возможностью вос-
принимать отдаваемую двигателем энергию и передавать ее в
питающую сеть; так режим рекуперативного торможения невоз-
можен, если привод получает питание от автономной дизель-
генераторной установки.
3. Для того чтобы рекуперативное торможение было воз-
можно в пределах заданного диапазона регулирования скорости,
регулирование должно производиться путем изменения напряже-
ния, подводимого к якорной цепи двигателя.
В режиме рекуперативного торможения уравнения (5.1) и
(5.5), учитывая, что ток 1Я и момент Л/будут отрицательны, при-
нимают вид:
Ея = ия + Кя1я-
ия
О =—- +—-—7-
кФ (кФ)
Основными достоинствами рекуперативного торможения яв-
ляются: энергетическая эффективность, связанная с полезным
использованием энергии торможения; высокая жесткость меха-
нических характеристик; плавный переход из двигательного в
тормозной режим на одной и той же характеристике. Благодаря
такому характеру механических характеристик улучшается каче-
ство управления приводом. Вернемся к рассмотрению рис.5.7.
111
Пусть двигатель работал в
ским моментом Л/с.
Если оператор хочет
уменьшить скорость, он
уменьшает напряжение
источника питания с ия1
до иЯ2. Скорость двигате-
ля из-за механической
инерции мгновенно не
может измениться, и
двигатель переходит на
работу в т.2. При этом на
валу двигателя возникает
тормозной момент, рав-
ный сумме тормозного
момента двигателя и
статического момента.
Скорость двигателя быс-
т.1 в двигательном режиме со статиче-
Рис,5.8. Схема динамического тор-
можения ДПТ-НВ
тро снижается до скорос-
ти й)ог и далее под
действием статического
момента до скорости, определяемой т.З, где М=М0.
Вторым воз-
можным тормоз-
ным режимом явля-
ется режим дина-
мического тормо-
жения. В этом
режиме якорь дви-
гателя отключается
от источника Rdm
постоянного тока
(см. рис.5.8) и за-
мыкается на сопро-
тивление динами-
ческого торможе-
ния. Питание об-
Рис.5.9. Механические характеристики ДПТ- мотки возбуждения
НВ в режиме динамического торможения
при этом должно
быть обязательно
сохранено. В указанном режиме двигатель М работает как гене-
ратор постоянного тока, нагруженный на сопротивление Rdm.
112
Энергия торможения расходуется на нагрев сопротивления Rdm и
обмоток цепи якоря двигателя.
Механические характеристики при динамическом торможе-
нии представлены на рис.5.9. Если Д)т=0, якорная цепь двигателя
будет замкнута накоротко и механическая характеристика (при Ф
= Ф„) будет иметь жесткость естественной характеристики. При
увеличении Rrjm жесткость характеристик будет уменьшаться в
С1
соотношении р ----------, и механические характеристики бу-
дут линейными и расходиться веером из начала координат.
Как следует из (5.5), при Ц,=0 уравнение механических ха-
рактеристик динамического торможения будет:
(кФ)2
Недостатками режима динамического торможения являются:
потери энергии торможения, расходуемой на нагрев элементов
привода, и невозможность торможения привода до полной его
остановки.
Достоинством режима динамического торможения является
его высокая надежность, определяемая тем, что этот режим мо-
жет осуществляться при исчезновении питающего напряжения и
в случае выхода из строя источника питания цепи якоря, когда
режим рекуперативного торможения становится невозможен. Ис-
ходя из этого, динамическое торможение в приводах постоянного
тока часто используется в качестве средства аварийного тормо-
жения.
Торможение противовключением не характерно для двига-
телей постоянного тока независимого возбуждения. Этот режим
может использоваться в приводах малой мощности с широтно-
импульсным регулятором тока, позволяющим ограничить ток
торможения допустимой величиной.
5.2. Электроприводы по системе тиристорный преоб-
разователь-двигатель постоянного тока
Для питания двигателей постоянного тока независимого воз-
буждения используются регулируемые источники питания:
- электромашинные агрегаты - генератор постоянного тока -
двигатель переменного тока (система Г-Д);
- тиристорные преобразователи (выпрямители) с фазовым
управлением (система ТП-Д);
113
- полупроводниковые выпрямители с регулированием вели-
чины выпрямленного напряжения методом широтно-
импульсного регулирования (ШИР-Д).
Рис.5 10. Силовые схемы электрогриводов
тп-д
а) однофазная мостовая неревер-
сивная
б) трехфазная мостовая нереверсив-
ная
в) трехфазная мостовая встречно-
параллельная реверсивная схема с
раздельным управлением
114
Система генератор-двигатель, в которой двигатель постоян-
ного тока получает питание от электромашинного агрегата, в на-
стоящее время морально устарела и в стационарных установках
не применяется. Система Г-Д продолжает использоваться для
мобильных установок, например экскаваторов.
Основной системой регулируемого электропривода с двига-
телями постоянного тока является система ТП-Д (тиристорный
преобразователь - двигатель постоянного тока), наиболее рас-
пространенные схемы которой приведены на рис.5.10.
Основу схем тиристорных преобразователей составляют по-
лууправляемые силовые полупроводниковые приборы - тиристо-
ры. Неполная управляемость тиристоров определяется тем, что
включение тиристора контролируется системой управления
(СИФУ) - при подаче отпирающего импульса на управляющий
электрод тиристора он открывается и остается открытым после
снятия отпирающего импульса. Закрывается тиристор после из-
менения полярности напряжения анод-катод и спадания тока до
нуля. Запирание тиристоров по цепи управления невозможно.
Сказанное выше относится к однооперационным тиристорам.
Существуют запираемые тиристоры, которые допускают запира-
ние по цепи управления, однако эти приборы в системах электро-
привода ТП-Д пока не применяются.
Тиристорный преобразователь в схемах электропривода по-
стоянного тока выполняет две функции: выпрямление перемен-
ного напряжения питающей сети и регулирование средней вели-
чины выпрямленного напряжения.
Принцип регулирования среднего значения выпрямленного
напряжения тиристорного преобразователя с импульсно-фазовым
управлением рассмотрим на примере однофазной мостовой схе-
мы (рис.5.10а).
Если отпирающие импульсы на тиристоры VS1 и VS4 (и со-
ответственно тиристоры VS3 и VS2 при другой полуволне сину-
соиды питающего напряжения) подаются в момент естественного
открывания, когда напряжение катод - анод становится положи-
тельным, то среднее выпрямленное напряжение, определяемое
заштрихованной площадью на рис.5.11.а), будет максимальным и
равным.
ЕМ=КсРл, (5.14)
где U,, - линейное напряжение на стороне переменного тока;
ксх - коэффициент схемы выпрямления, который равен:
для однофазной мостовой схемы - 0,9; для трехфазной мостовой
схемы - 1,35; для трехфазной нулевой схемы - 0,675.
115
Если отпирающие импульсы на тиристоры будут подаваться
с запаздыванием относительно момента естественного открыва-
ния на угол а (угол управления тиристорами), то среднее вы-
прямленное напряжение преобразователя будет уменьшаться, как
это показано на рис.5.11,6,в. При этом тиристоры VS1 и VS4 бу-
дут проводить ток до тех пор, пока не откроются тиристоры VS3
и VS2, т.е. и в то время, когда напряжение катод-анод будет от-
рицательным. Это объясняется тем, что в цепи выпрямленного
тока имеется достаточно большая индуктивность обмотки якоря
двигателя Ья, и ток будет протекать под действием э.д.с. самоин-
дукции. Если же в цепи выпрямленного тока не было бы индук-
тивности (чисто активная нагрузка), то ток прекратился бы при
переходе анодного напряжения через нуль; ток в этом случае был
бы прерывистым. При достаточно большом значении индуктив-
ности Ья соотношение между средним выпрямленным напряже-
нием преобразователя и углом а будет:
Ed=Ed0cosa (5.15)
Рис.5.11. Эпюры напряжений однофазного мостового тиристорного преоб-
разователя при различных углах управления а
116
Среднее выпрямленное напряжение определяется разностью
заштрихованных площадей. При значении угла регулирования
а = я/2 среднее выпрямленное напряжение (см.рис.5.11,в) будет
равно нулю.
Тиристорный преобразователь может работать в выпрями-
тельном и в инверторном режимах. Выпрямительный режим име-
ет место при углах регулирования а = 0 -г тг/2. При этом среднее
выпрямленное напряжение должно быть больше э.д.с. в цепи вы-
прямленного тока (противоэ.д.с. якоря двигателя) Ed > Ея. На-
правление выпрямленного тока совпадает со знаком выпрямлен-
ного напряжения преобразователя.
Если угол а увеличить сверх л-/2(« = л-/2ч-11л-/12), то пло-
щадь отрицательной полуволны, при которой открыты тиристо-
ры, будет больше площади положительной полуволны
(см.рис.5.11,г) и, следовательно, среднее выпрямленное напряже-
ние преобразователя будет отрицательным, что следует также из
формулы (5.15). Возникает инверторный режим работы преобра-
зователя, который может быть использован для обеспечения ре-
куперативного торможения привода.
Под действием отрицательного напряжения преобразователя
ток пойти не может из-за односторонней проводимости тиристо-
ров. Поэтому инверторный режим преобразователя возможен при
соблюдении трех условий:
1. В цепи выпрямленного тока должен быть источник э.д.с.,
величина которой превосходит среднее значение выпрямленной
противоэ.д.с. инвертора; в схемах тиристорного привода посто-
янного тока - э.д.с. якоря двигателя должна быть больше Ed ин-
вертора Ея > |Erf|.
2. Источник э.д.с. (якорь двигателя) должен быть так под-
ключен к преобразователю, чтобы было возможно протекание
тока под действием э.д.с. якоря.
3. Угол управления тиристорами должен быть больше
л/2(« > я/2).
При соблюдении этих условий двигатель постоянного тока
будет работать в генераторном режиме, вырабатывая энергию
постоянного тока, которая преобразуется тиристорным преобра-
зователем в энергию переменного тока и отдается в питающую
сеть. Электропривод ТП-Д, в котором двигатель питается от двух
встречно-включенных преобразователей, называется реверсив-
ным (см. рис.5.10,в).
117
Как источник напряжения постоянного тока тиристорный
преобразователь характеризуется э.д.с. Ed, регулируемой посред-
ством угла управления а, и внутренним сопротивлением Rn, со-
стоящим из двух слагаемых.
Rn=Ra+ Rr
(5.16)
Ra - активное сопротивление источника питания на стороне
переменного тока (сетевого реактора или трансформатора);
Ry - условное сопротивление, связанное с падением напряже-
ния в процессе коммутации тиристоров.
Преобразователи подсоединяются к питающей сети или че-
рез трансформатор, служащий для согласования напряжения
питающей сети и двигателя, или через сетевой реактор.
Сетевые реакторы в бестрансформаторных схемах питания
выполняют две функции: ограничивают ток короткого замыкания
в преобразователе и уменьшают негативное влияние преобразо-
вателя на питающую сеть. И трансформаторы, и реакторы обла-
дают активным и индуктивным сопротивлением.
Активное сопротивление фазы трансформатора, приведенное
ко вторичной обмотке, может быть определено по паспортным
данным трансформатора Rm
&Р
КЗ
3Z2
где: 12ф - номинальный фазный ток вторичной обмотки
трансформатора;
ДР„ - потери короткого замыкания трансформатора.
Процесс
коммутации тиристоров
поясняется рис.5.12.
Вернемся к рассмот-
рению схемы рис.5.10,а.
Пусть преобразователь
работает с углом а. До
момента ток проводят
тиристоры VS1 и VS4.
В момент времени tt
Рис.5.12. Коммутация тока между тири-
сторами в однофазном мостовом преоб-
разователе
подаются отпирающие
импульсы на тиристоры
VS3 и VS2. Последние
отпираются. Однако из-
за наличия индуктивности на стороне сети ток через тиристоры
VS1 и VS4 не может мгновенно упасть до нуля, и некоторое вре-
мя, измеряемое углом коммутации у, одновременно будут откры-
118
ты все четыре вентиля, которые шунтируют цепь нагрузки, В ре-
зультате среднее выпрямленное напряжение снижается на вели-
чину, пропорциональную заштрихованной площади. Это падение
напряжения зависит от величины выпрямленного тока Id и будет
равно:
LU =—х Л.
г 2л- ° “
т
Условно величину --ха можно принять за некоторое со-
2я
противление 7?у, вызывающее падение напряжения в преобразова-
теле
(5.17)
2л-
где: т - число коммутаций за период;
ха - индуктивное сопротивление на стороне переменного
тока;
_ и»'.
Х‘ ' 100/w '
здесь и2ф - фазное напряжение вторичной обмотки транс-
форматора;
ек - напряжение короткого замыкания трансформатора, %.
Следует иметь в виду, что падение напряжения на сопротив-
лении Ry не связано с потерями мощности в нем, поскольку оно
вызвано индуктивным сопротивлением на стороне переменного
тока; оно ухудшает коэффициент мощности преобразователя.
Таблица 5.1,
Основные показатели схем выпрямления
Схема II вмакс ^d0 Л Л sm Ed<Jdn Ьз1 >3 3 т
Однофаз- ная мосто- вая 0,9 1,57 1,0 1,П 1 2
Трехфазная мостовая 1,35 1,045 0,815 1,045 2 6
71 - ток в линии на стороне переменного тока;
Sm - мощность трансформатора, ВА;
119
UevaKC - максимальное напряжение, прикладываемое к тири-
сторам;
Rm - сопротивление вторичной обмотки трансформатора (или
реактора).
Таким образом, среднее значение напряжения преобразова-
теля в режиме непрерывного тока (внешняя характеристика пре-
образователя, как источника напряжения) будет:
Ud =Ed0cosa-IdRn. (5.18)
Выпрямленный ток имеет непрерывный характер, если ин-
дуктивность в цепи выпрямленного тока достаточно велика
Ld —> оо. Если ток якоря принимает прерывистый характер, то-
гда механические характеристики привода становятся нелиней-
ными (см. рис.5.13).
Индуктивность якорной цепи двигателя постоянного тока
независимого возбуждения может быть определена по формуле:
(5.19)
Ъя = кь
1нРпан
где: kl - конструктивный коэффициент; для компенсирован-
ных машин принимается (0,1-0,25), для некомпенсированных
(0,5-0,6);
U,„ - номинальные напряжение, ток якоря и угловая
скорость двигателя;
р„ - число пар полюсов.
При конечных значениях индуктивности в цепи выпрямлен-
ного тока на условие непрерывности тока оказывают также влия-
ние величина тока и угол регулирования. Граничное (минималь-
ное) значение тока, при котором ток еще остается непрерывным
определяется соотношением
^»sina(i_£c,„£).
314А(/ т т
Влияние режима прерывистого тока проявляется в увеличе-
нии среднего значения выпрямленного напряжения в зоне преры-
вистого тока. Механические характеристики нереверсивного
привода ТП-Д показаны на рис.5.13.
Наиболее часто применяемые силовые схемы тиристорного
электропривода постоянного тока (ТП-Д'' показаны на рис. 5.10.
Схемы 5.10,а и 5.10,6 относятся к нереверсивным электроприво-
дам. В этих схемах изменение полярности питающего напряже-
ния и направления тока в якорной цепи невозможно.
(5.20)
т
120
Если полагать, что привод работает в режиме непрерывного
тока (при Ld —> оо), то механические характеристики будут
иметь вид наклонных прямых параллельных друг другу, причем
t»o уменьшается по мере уменьшения выпрямленного напряжения
(увеличения угла а).
Механические ха-
Рис.5.13. Механические характери-
стики нереверсивного привода ТП-Д
рактеристики описы-
ваются в этом случае
следующей формулой,
полученной на основе
(5.5).
Еиа cos а
со = ——-------
кФ
я +Rn
кФ2
При конечных
значениях индуктивно-
сти якорной цепи Ld в
области малых значе-
ний момента (тока яко-
ря) - левее граничной
линии 1гр - механические характеристики теряют линейность и
загибаются вверх. Это является следствием перехода в зону пре-
рывистых токов. Линия, определяющая границу непрерывного
тока, определяется уравнением (5.20).
При желании уменьшить зону прерывистых токов последо-
вательно с якорем двигателя включают сглаживающий дроссель,
величина индуктивности которого может быть определена по
формуле:
Ld> Е“ (5.22)
2яг • fcJ т т
где 1гр - требуемое значение граничного тока при со=0.
Заметим, что механические характеристики нереверсивного
привода ТП-Д не переходят ось ординат, т.к. изменение направ-
ления тока в нереверсивных схемах невозможно. Следовательно,
отсутствует режим рекуперативного торможения. В случае необ-
ходимости изменения направления вращения приводного двига-
теля в нереверсивных приводах по системе ТП-Д изменяют на-
правление тока в обмотке возбуждения двигателя.
121
Для того, чтобы получить электропривод, работающий во
всех четырех квадрантах поля М-а>, необходимо использование
реверсивного тиристорного преобразователя, обеспечивающего
протекание тока якоря в обоих направлениях. Реверсивные тири-
сторные преобразователи содержат две группы тиристоров,
включенные встречно-параллельно друг другу. Наиболее распро-
страненная схема реверсивного тиристорного электропривода
показана на рис.5.10,в. В этой схеме два тиристорных преобразо-
вателя UZ(B) и UZ(H), собранные каждый по трехфазной мосто-
вой схеме, включены параллельно друг другу с противоположной
полярностью на стороне выпрямленного тока. Подавать отпи-
рающие импульсы одновременно на обе группы тиристоров нель-
зя, т.к. произойдет короткое замыкание. Поэтому в данной схеме
может работать только одна группа тиристоров UZ(B) или UZ(H);
другая группа должна быть закрыта (отпирающие импульсы сня-
ты). Такая реверсивная схема называется схемой с раздельным
управлением группами тиристоров.
При раздельном управлении включается только та группа ти-
ристоров, которая в данный момент должна проводить ток. Вы-
бор этой группы зависит от направления движения привода
(«вперед» или «назад») и от режима работы: двигательный режим
или рекуперативное торможение. В соответствии с этим выбор
нужной группы вентилей можно представить в виде таблицы 5.2.
Таблица 5.2.
_______ Режим работы Направление— движения Двигательный Тормозной
Вперед UZ(B) UZ(H)
Назад UZ(H) UZ(B)
В системах управления выбор и включение нужной группы
тиристоров производится автоматически посредством логическо-
го переключающего устройства ЛПУ, принцип построения кото-
рого показан на рис.5.14.
Примем направление тока якоря при работе «вперед» в дви-
гательном режиме за положительное. При положительном сигна-
ле задания скорости a>3Od, соответствующем движению вперед, и
сигнале ошибки по скорости, которая в двигательном режиме
также будет (<уздд - <у) > 0, сигнал, поступающий на ЛПУ от ре-
гулятора тока, будет иметь знак (+). В соответствии с этим ЛПУ
включит электронный ключ К(В), который подает отпирающие
импульсы на тиристорную группу UZ(B). Угол управления ав ус-
танавливается системой автоматического регулирования в соот-
122
ветствии с сигналом выхода регулятора тока РТ. Обе СИФУ (В) и
(Н) работают согласованно - так, что сумма углов
ав+ан=л. (5.23)
UZ(B) К(В)
Рис.5.14. Принцип работы логического переключающего устройства
ЛПУ
Таким образом, на тиристорную группу, работающую в вы-
прямительном режиме, подаются отпирающие импульсы с углом
= 0-е-тг/2. При этом СИФУ(Н) вырабатывает импульсы
управления с углом ан = л — ав, т.е. с углом управления, соот-
ветствующем инверторному режиму работы преобразователя
UZ(H). Однако, поскольку электронный ключ К(Н) разомкнут,
импульсы управления на тиристоры группы UZ(H) не поступают.
Преобразователь UZ(H) закрыт, но подготовлен к работе в инвер-
торном режиме.
Такой принцип согласованного управления, определяемый
(5.23) позволяет согласовать механические характеристики при-
вода в двигательном и тормозном режимах, что показано на
рис.5.15.
При необходимости торможения привода уменьшается сиг-
нал задания скорости а)]ад. Ошибка по скорости меняет знак (а>зад-
сц)<0, и на входе ЛПУ знак сигнала изменяется с (+) на (-), в со-
ответствии с чем отключается контакт К(В) и включается контакт
К(Н). Однако включение контакта К(Н) происходит не сразу, а с
некоторой выдержкой времени, которая необходима, чтобы ток
якоря уменьшился до нуля и тиристоры UZ(B) восстановили за-
пирающие свойства. Спадание тока до нуля контролируется дат-
123
чиком тока ДТ и нуль-органом НО (в других схемах для этой це-
ли используются датчики проводимости вентилей ДПВ).
Рис.5.15. Механические характеристики реверсивного привода ТП-Д с раз-
дельным согласованным управлением
Когда ток спадет до нуля, по прошествии некоторой выдерж-
ки времени, включается ключ К(Н) и вступает в работу преобра-
зователь UZ(H), уже подготовленный к работе в инверторном
режиме. Привод переходит в режим рекуперативного торможе-
ния. Общее время переключения тиристорных групп составляет
5-10 миллисекунд, что является в большинстве случаев допусти-
мым для обеспечения высокого качества управления.
При работе в двигательном режиме в направлении «назад»
знак задания скорости отрицателен, а абсолютное значение
ошибки по скорости [<yjad - <д| положительно, поэтому на вход
ЛПУ поступает отрицательный сигнал, и включается ключ К(Н).
Работает преобразователь UZ(H) в выпрямительном режиме. Ло-
гические правила работы ЛПУ иллюстрируются таблицей 5.3.
Находят применение также и другие схемы ЛПУ. Механиче-
ские характеристики реверсивного привода ТП-Д с раздельным
управлением показаны на рис.5.15. При непрерывном токе якоря
они описываются уравнением (5.21).
124
Таблица 5.3.
Знак ^зад Знак К*-®! Знак на входе ЛПУ Включен ключ Работает преобра- зователь Режим работы привода
+ + + К(В) UZ(B) Двигательный
+ - - К(Н) UZ(H) Тормозной
- + - К(Н) UZ(H) Двигательный
- - + К(В) UZ(B) Тормозной
В режиме прерывистых токов в области малых значений мо-
мента линейность характеристик нарушается. В современных
замкнутых по току и скорости системах регулирования, благода-
ря применению адаптивных регуляторов, удается линеаризовать
механические характеристики и при малых значениях момента.
Тиристорные преобразователи в приводе ТП-Д получают пи-
тание либо от трансформаторов, согласующих напряжение пи-
тающей сети с номинальным напряжением двигателя постоянно-
го тока, либо, если такое согласование не требуется, от однофаз-
ной или трехфазной сети 380/220В. В последнем случае на входе
преобразователя используются реакторы (см. рис.5.10).
Мощность трансформатора при трехфазной мостовой схеме
преобразователя определяется выражением
тр — 7
^^миЛр^п
Здесь Ujh, Цн - номинальные выпрямленное напряжение и
ток трансформатора;
^=1,05 - коэффициент, учитывающий искажение
формы тока;
амин - минимальный угол управления тиристорами,
соответствующий номинальному выпрямленному напряжению;
Утр, Цп ~ кпд трансформатора и кпд преобразователя.
Кпд тиристорного электропривода определяется произведе-
нием кпд его узлов, преобразующих энергию
^ТП-Д = Vmp^nVde
Кпд трансформатора лежит в пределах 0,9-0,95, увеличиваясь
с возрастанием мощности. Потери в тиристорном преобразовате-
ле невелики, т.к. они определяются, главным образом, потерями
мощности в полупроводниковых приборах. Для мостовой схемы
АР = 21,
л ан тир7
125
где: А (7тир ~2В - падение напряжения на открытом тири-
сторе.
Обычно кпд преобразователя составляет 0,95-0,98. Прини-
мая средний кпд двигателя постоянного тока 7de=0,88, получим,
что кпд привода ТП-Д при номинальной нагрузке составляет по-
рядка 7т.д=0,78-0,82, что является высоким показателем.
Недостатком привода ТП-Д с энергетической точки зрения
является низкое значение средневзвешенного коэффициента
мощности и искажение формы тока в питающей сети.
Тиристорные преобразователи искажают форму тока в пи-
тающей сети переменного тока, делая форму тока отличной от
синусоиды. Несинусоидальный ток можно разложить на ток пер-
вой гармоники с частотой сети и токи высших гармоник, частота
которых превышает частоту сети в (итп+1) раз, где т - число
пульсаций выпрямленного напряжения за один период частоты
сети, п - натуральные числа 1, 2, 3 и т.д. Переменный ток мосто-
вых преобразователей имеет примерно трапецеидальную форму,
его можно разложить на сумму тока первой гармоники и токов
высших гармоник
I„c = 4i sin a>t + 45 sin(5<ur + <р5) + Iml sin(7orf + <p7) и т.д.
Особенно проявляются 5, 7 и 11 гармоники тока. Мощность,
определяемая высшими гармониками тока и напряжением первой
гармоники, образует так называемую мощность искажения, кото-
рая по существу является реактивной (ее среднее значение равно
нулю). Мощность искажения оказывает вредное воздействие на
питающую сеть и потребители электроэнергии, включенные па-
раллельно тиристорному преобразователю. Степень искажения
тока оценивают коэффициентом искажения v
v= I
]72+72+72+ '
Коэффициент искажения тока для трехфазных мостовых
схем составляет порядка 0,95.
Под коэффициентом мощности тиристорного преобразова-
теля будем понимать произведение cos<p для первой гармоники
тока по отношению к первой гармонике напряжения, умножен-
ному на коэффициент искажения
КМТП =vcos<pr (5.23)
Ток в цепи питания тиристорного преобразователя отстает от
соответствующего напряжения на угол запаздывания открывания
126
тиристоров (угол управления а). Поэтому можно приближенно
считать, что
cos^] =cosa (5.24)
Т.к. cos tz = Ed/EdV , то при работе привода на высоких ско-
ростях, когда Ed примерно равно номинальному напряжению
якоря двигателя, cosa будет близок к единице и коэффициент
мощности тиристорного преобразователя будет высоким. По ме-
ре снижения скорости будет уменьшаться выпрямленное напря-
жение преобразователя и соответственно снижаться cos^. Мож-
но приближенно полагать, что cos^ « a>l<nH
Если привод ТП-Д длительное время работает с пониженны-
ми скоростями, то средневзвешенный коэффициент мощности
будет низким. Поэтому энергетические показатели привода ТП-Д
следует оценивать не по номинальному значению, когда cos^i
высокий, а по его средневзвешенному значению. Особенно низ-
кое значение cos^i будет при пуске привода. Поэтому для мощ-
ных тиристорных приводов пуск сопровождается значительными
бросками реактивной мощности.
Исходя из изложенного, рекомендуется совместно с тири-
сторными преобразователями включать фильтрокомпенсирую-
щие устройства, которые повышают cosp преобразователей и
улучшают гармонический состав тока в питающей сети, тем са-
мым, компенсируя вредное влияние преобразователей на питаю-
щую сеть.
5.3. Электропривод с двигателями постоянного тока с по-
следовательным возбуждением
В рассматриваемых двигателях постоянного тока обмотка
возбуждения включается (рис.
5.16) последовательно с
обмоткой якоря, в результате
чего ток возбуждения равен
току якоря и создаваемый им
поток Ф будет пропорционален
току якоря
Ф = alя (5.25)
Здесь а - нелинейный
коэффициент нели-
нейность этого коэффициента
Рис.5.16. Схема включения двига-
теля постоянного тока последова-
тельного возбуждения
127
связана с формой кривой намагничивания и размагничивающим
действием реакции якоря; оба этих фактора проявляются при
больших токах 1я > 0,7 - 0,8/яя; при малых токах якоря коэффи-
циент а можно считать величиной постоянной. При токах якоря
Рис.5.17. Схема реверсиро-
вания двигателя постоян-
ного тока последовательно-
I я > 21 ян машина насыщается, и вели-
чина потока мало зависит от тока якоря.
Зависимость потока возбуждения от
нагрузки (см. 5.25) определяет своеоб-
разие электромеханических характери-
стик двигателя постоянного тока после-
довательного возбуждения.
Для изменения направления вра-
щения двигателя последовательного
возбуждения недостаточно изменить
полярность напряжения, подводимого к
двигателю, т.к. при этом изменится
одновременно и направление тока в
обмотке якоря и полярность потока
возбуждения. Поэтому для реверси-
рования двигателя нужно изменить на-
правление тока в одной из частей машины, например в обмотке
возбуждения, оставив направление тока в обмотке якоря неиз-
менным, как это показано на схеме рис.5.17.
Подставив (5.25) в (5.2) и (5.3), получим основные со-
отношения для рассматриваемых двигателей.
М = ка!я (5.26)
Ея=ка1яй) (5-27)
Соответственно, выражение для электромеханической и ме-
ханической характеристик двигателя последовательного возбуж-
дения будут:
а> = ——или а> = — -В-, (5.28)
ка/я ка Iя
а> = или а> = - В . (5.29)
^каМ ка
128
рней. 1 8. Естественная и «идеальная» меха-
ническая характеристика двигателя после-
довательного возбуждения
В первом прибли-
жении механическую
характеристику дви-
гателя постоянного то-
ка последовательного
возбуждения, если не
учитывать насыщение
магнитной цепи, можно
представить в виде
гиперболы, не пересе-
кающей ось ординат, а
асимптотически приб-
лижающуюся к ней.
Если положить
(Ra+Re^O, то характе-
ристика (см. рис.5.18)
не будет пересекать и
ось абсцисс. Такая
характеристика назы-
вается «идеальной»;
выше нее характеристики быть не могут. Реальная естественная
характеристика пересекает ось абсцисс в точке, соответствующей
току короткого замыкания (момент Мк). Если учитывать насыще-
ние двигателя, то при
моментах меньших 0,8Л/к
характеристика криволи-
нейна и носит гипербо-
лический характер; при
больших значениях тока
и момента поток вследст-
вие насыщения становит-
ся постоянным и харак-
теристика выпрямляется.
Характерной осо-
бенностью характеристик
двигателя последова-
тельного возбуждения
является отсутствие точ-
ки идеального холостого
хода. При уменьшении
нагрузки скорость дви-
гателя существенно воз-
Рис.5.19. Реостатные механические харак-
теристики двигателя последовательного
возбуждения
129
растает, вследствие чего оставлять двигатель без нагрузки недо-
пустимо.
Важным достоинством двигателей последовательного воз-
буждения является большая перегрузочная способность на низ-
ких скоростях. При перегрузке по току в 2,25-2,5 раза двигатель
развивает момент 3,0-3,5 номинального. Это обстоятельство оп-
ределило широкое использование двигателей последовательного
возбуждения для электрических транспортных средств, где наи-
большие моменты необходимы при трогании с места. Вторым
важным достоинством двигателей последовательного возбужде-
ния является отсутствие источника питания для цепи возбужде-
ния двигателя.
Искусственные механические характеристики могут быть
получены тремя способами: включением добавочного сопротив-
ления в цепь якоря, изменением величины питающего напряже-
ния и шунтированием обмотки якоря добавочным сопротивлени-
ем.
При введении добавочного сопротивления в цепь якоря же-
сткость механических характеристик уменьшается и уменьшается
значение Мк (см. рис.5.19). Этот способ регулирования использу-
ется при пуске двигателя, когда ступени сопротивления перемы-
каются пусковыми контакторами KI, К2, КЗ. На рис.5.19 показа-
ны пусковые характеристики, соответствующие трехступенчатой
схеме пуска. Длительная работа на реостатных характеристиках
сопряжена со значительными потерями энергии в сопротивлени-
стики двигателя последовательного
возбуждения при изменении питаю-
щего напряжения
ях.
Наиболее экономичным
способом регулирования
скорости двигателя после-
довательного возбуждения
является изменение вели-
чиины подводимого к двига-
телю напряжения. Механи-
ческие характеристики, со-
ответствующие этому спо-
собу регулирования, показа-
ны на рис.5.20. По мере
уменьшения напряжения
они смещаются вниз парал-
лельно естественной харак-
теристике. Внешне искусст-
венные характеристики при
130
регулировании изменением напряжения схожи с реостатными
характеристиками, однако, есть существенная разница в этих
способах регулирования. Реостатное регулирование сопряжено с
потерей энергии в добавочных сопротивлениях, а при регулиро-
вании изменением напряжения дополнительные потери отсутст-
вуют.
Двигатели последова-
тельного возбуждения час-
то получают питание от
сети постоянного тока или
источника постоянного
тока с нерегулируемой ве-
личиной напряжения. Регу-
лирование напряжения на
зажимах двигателя в этом
случае целесообразно про-
изводить способом широт-
Рис.5.21. Схема регулируемого
электропривода с двигателем посто-
янного тока последовательного воз-
буждения и широтно-импульсным
регулятором напряжения
но-импульсного регулирования, который рассмотрен ниже. Уп-
рощенная схема регулируемого электропривода с двигателем по-
стоянного тока последовательного возбуждения и широтно-
импульсным регулятором напряжения показана на рис.5.21.
Рис.5.22. Схема и механические характеристики двигателя последовательно-
го возбуждения при шунтировании обмотки якоря
Изменение потока возбуждения в рассматриваемых двигате-
лях возможно, если зашунтировать обмотку якоря сопротивлени-
ем (см. рис.5.22,а). В этом случае ток возбуждения будет равен
в я R»’
т.е. содержит постоянную составляющую, не зависящую от на-
грузки двигателя. При этом двигатель приобретает свойства дви-
131
гателя смешанного возбуждения: независимого и последователь-
ного. Благодаря независимому возбуждению механические ха-
рактеристики приобретают большую жесткость и пересекают ось
ординат. Примерные механические характеристики для этого
способа регулирования показаны на рис.5.22,б. Шунтирование
якоря позволяет получить устойчивую пониженную скорость при
отсутствии нагрузки на валу двигателя. В данной схеме возможен
переход двигателя в режим рекуперативного торможения при
скорости со > й90! или со > <о02. Существенным недостатком рас-
сматриваемого способа регулирования является его неэкономич-
ность, обусловленная большими потерями энергии в шунтирую-
щем сопротивлении.
Для двигателей последовательного возбуждения характерны
два режима торможения: противовключением и динамический. В
режиме противовключения необходимо включение добавочного
сопротивления в цепь якоря двигателя. На рис.5.23 показаны ме-
ханические характеристики для двух вариантов режима проти-
вовключения. Характеристика 1 получается, если при работе дви-
гателя в направлении «вперед» (точка в) изменить направление
тока в обмотке возбуждения и одновременно ввести в цепь двига-
теля добавочное сопротивление. При этом двигатель переходит в
режим противовключе-
ния в точке а с тормоз-
ным моментом Мтори,
под действием которо-
го будет происходить
торможение двигателя.
При этом благода-
ря тому, что в цепь
двигателя включено
большое добавочное
сопротивление (кото-
рому соответствует ха-
рактеристика 2), двига-
Рис.5.23. Механические характеристики
двигателя последовательного возбуждения
в режиме противовключения
тель под действием
момента, создаваемого
грузом, вращается в
обратном направлении
и будет работать в точ-
ке б, в которой активный статический момент Мгруза уравновеши-
вается тормозным моментом двигателя, работающего в режиме
противовключения. Режим противовключения сопряжен со зна-
132
читальными потерями энергии в
сопротивления.
Рис.5.24. Схема динамического
торможения двигателя последова-
тельного возбуждения
цепи двигателя и добавочного
Режим динамического
торможения для двигателей
последовательного возбуж-
дения возможен в двух вари-
антах. В первом - якорь
двигателя замыкается на
сопротивление, а обмотка
возбуждения питается от сети
через добавочное сопротивле-
ние. Характеристики двигате-
ля в этом режиме подобны
характеристикам двигателя
независимого возбуждения в режиме динамического торможения.
Во втором варианте, схема которого показана на рис.5.24,
двигатель работает как генератор с
самовозбуждением. Особенность дан-
ной схемы состоит в том, что при пе-
реходе из двигательного режима в
режим динамического торможения
необходимо сохранить направление
тока в обмотке возбуждения во избе-
жание размагничивания машины. При
размыкании контактора КМ ток в об-
мотке возбуждения становится рав-
ным нулю, но, так как магнитопровод
машины был намагничен, то сохраня-
ется остаточный поток возбуждения,
благодаря которому в обмотке якоря
вращающегося двигателя наводится
э.д.с., под действием которой при
замыкании контактов КВ в цепи
обмотка якоря - обмотка
возбуждения - сопротивление R
м и
О
Рис.5.25. Механические
характеристики двигателя
последовательного возбу-
ждения в режиме динами-
протекает ток, и машина
самовозбуждается. Этот процесс
происходит, если скорость двигателя
будет больше граничной скорости
веского торможения с са-
мовозбуждением
й)гр. Механические характеристики в режиме динамического
торможения с самовозбуждением показаны на рис.5.25.
133
Режим рекуперативного торможения в обычной схеме вклю-
чения двигателя последовательного возбуждения невозможен.
Для его осуществления необходимо шунтирование якоря двига-
теля, либо применение отдельной дополнительной обмотки неза-
висимого возбуждения.
5.4. Электроприводы постоянного тока с широтно-
импульсным регулированием
Развитие силовой преобразовательной техники, прежде всего
силовых транзисторов с изолированным затвором (IGBT - бипо-
лярные транзисторы с изолированным затвором) открыло широ-
кие возможности создания регулируемых источников постоянно-
го напряжения (тока), которые находят широкое применение в
электроприводах постоянного тока.
Основные достоинства IGB-транзисторов: высокие парамет-
ры силовой цепи (напряжение до 1500В, ток до 500А с возмож-
ностью параллельной работы), малая мощность управления; вы-
сокая частота переключений - десятки кГц; модульная конструк-
ция, объединяющая транзистор, быстродействующий обратный
диод и элементы цепей управления и защиты, - делают эти при-
боры идеальными ключами, позволяющими с высокой частотой
производить коммутацию электрических цепей.
Принцип работы привода с двигателем постоянного тока не-
зависимого возбуждения и транзисторным широтно-импульсным
регулятором напряжения уясняется из рассмотрения схемы
рис.5.26.
VT
Рис.5.26. Схема электропривода постоянного тока с широтно-
импульсным регулятором напряжения
В этой схеме якорная цепь двигателя периодически подклю-
чается к источнику питания постоянного тока (неуправляемый
выпрямитель UZ), имеющему постоянную величину напряжения
С7„. Включение - отключение напряжения питания осуществляет-
ся ключом - транзистором VT. Частота коммутаций цепи посто-
134
янная, равная fK - \/Т к .
Величина среднего напряжения Ucp, поступающего к якорю
двигателя, определяется отношением времени включенного со-
стояния ключа ко времени периода коммутаций Тк = + ?0,
как это показано на рис.5.27. Если время включенного состояния
велико и составляет порядка tH = 0,95Tk, то среднее напряжение,
поступающее на двигатель, будет максимально и составлять
[/ мк = 0,95J7„. Если уменьшать время включенного состояния
ключа VT, то среднее значение напряжения будет уменьшаться
(оно пропорционально заштрихованной площади на рис.5.27, де-
ленной на время Th).
Из рис.5.27 следует, что среднее напряжение широтно-
импульсного регулятора равно
и = ип у- = Гип (5.30)
1 к
Величину у — („1Тк называют скважностью импульсов.
При размыкании ключа VT ток в якорной цепи двигателя
прекратиться мгновенно не может, т.к. цепь якоря обладает зна-
чительной индуктивностью. Поэтому после отключения VT ток
будет под действием э.д.с. самоиндукции обмотки якоря проте-
кать через шунтирующий диод VD2. Переход тока якоря от тран-
зистора VT к диоду VD2 иллюстрируется диаграммами, пред-
ставленными на рис.5.28. Величина пульсаций тока зависит от
частоты коммутаций fK - выше частота, меньше амплитуда пуль-
саций. В настоящее время широтно-импульсные регуляторы
(ШИР) проектируются с частотой 2-10кГц и более. При высоких
частотах амплитуды пульсаций тока будут незначительными и
135
Рис.5.28. Диаграммы напряжения и токов в
широтно-импульсном регуляторе
существенно меньше,
чем при использова-
нии тиристорных пре-
образователей с им-
пульсно-фазовым
управлением, питаю-
щихся от промышлен-
ной сети напряжением
частотой 50Гц.
Среднее напряже-
ние, поступающее на
якорную цепь двига-
теля, будет равно
= U„Y и, следова-
тельно, механические
характеристики элек-
тропривода в данной
схеме будут описываться выражением (см.5.30)
д и.г .
кФ (кФ)1
Заметим, что величина скважности у может изменяться от О
до 0,95. Величина U„ зависит от схемы выпрямления. При доста-
точно мощном фильтровом конденсаторе она приближается к
амплитудному значению линейного напряжения переменного
тока.
Механические характеристики нереверсивного привода по-
стоянного тока независимого возбуждения с ШИР регулятором
напряжения аналогичны характеристикам на рис.5.13, но зона
прерывистых токов гораздо меньше.
Рис.5.29. Схема реверсивного электропривода постоянного тока с ши-
ротно-импульсным регулятором напряжения
136
Важным достоинством схем с широтно-импульсным регули-
рованием напряжения является то, что на входе преобразователя
устанавливается неуправляемый выпрямитель, вследствие чего
его cos^i (по первой гармонике) близок к единице, а коэффици-
ент мощности будет не ниже 0,95.
Для реализации реверсивного привода с ШИР-регулятором
напряжения используется мостовая схема включения силовых
транзисторных ключей, показанная на рис.5.29. В этой схеме
якорь двигателя включен в диагональ моста ключей VTI-^VT4.
Протекание тока в одном направлении происходит через транзи-
сторные ключи VT|-VT3, в другом - через ключи VT2-VT4. Для
обеспечения непрерывности тока служат обратные диоды VD.
Широтно-импульсное регулирование напряжения может в
данной схеме производиться двумя способами: первый аналоги-
чен рассмотренному для нереверсивных схем (рис.5.27), второй
предусматривает двуполярную коммутацию за время каждого
периода заданной тактовой частоты (рис.5.30). В последнем слу-
чае в течение времени включены ключи VTj и VT3, а в течение
времени (TK-te) включены ключи УТ2 и УТ4.
Среднее напряжение Ucp на нагрузке (якорной цепи двигате-
ля) будет пропорционально разности заштрихованных площадей.
Когда с > 0,57\ напряжение положительно, когда te - 0,5Тк оно
равно нулю; когда ts < 0,5Тк среднее напряжение отрицательно.
Величина среднего напряжения при двухполярной коммута-
ции будет:
Рис.5.30. Диаграмма напряжений ШИР
при двуполярной коммутации
Ucp=Un(2y-l),
где: у = te /Тк - от-
ношение времени вклю-
ченного состояния клю-
чей TV1-TV3 ко времени
периода.
Применяется также
комбинированный алго-
ритм коммутации, когда
при значениях Ucp<
0,5 U„ производится
двуполярная коммута-
ция, а при Ucp>0,5U„ -
однополярная, или ког-
да на части периода Тк
открыты ключи VT2-
137
VT4, на части все ключи закрыты.
Процесс торможения в реверсивном электроприводе посто-
янного тока с ШИР (см. рис.5.29) происходит следующим обра-
зом. Если в двигательном режиме для выбранного направления
вращения работали транзисторные ключи VTi и VT3, то в режиме
торможения эти ключи будут закрыты и открываются ключи VT4
и VT2, которые также работают в широтно-импульсном режиме.
Ток в цепи якоря двигателя меняет свое направление, совпадая по
направлению с э.д.с. якоря Ея. Величина тока ограничивается на
требуемом уровне посредством широтно-импульсного регулиро-
вания работы ключей VT4 и VT2. Ток якоря попеременно прохо-
дит через эти ключи, когда они открыты, и через обратные диоды
VD, включенные встречно параллельно ключам VT| и VT3 (когда
ключи VT4 и УТ2 закрыты). В первом случае энергия торможения
накапливается в индуктивности обмоток якоря. Во втором случае
энергия торможения расходуется на подзаряд конденсатора С,
напряжение на котором под действием суммы э.д.с. якоря и э.д.с.
самоиндукции обмоток якоря растет. Благодаря этому источник
питания UZ в самом начале процесса торможения оказывается
заперт. Когда напряжение на конденсаторе достигнет определен-
ной величины, открывается транзистор VT5 и происходит час-
тичный разряд конденсатора на тормозное сопротивление R.
В схемах с широтно-импульсными регуляторами и нерегули-
руемым источником постоянного тока режим торможения с отда-
чей энергии в сеть невозможен.
5.5. Контрольные вопросы для самопроверки
1. Назовите основные способы регулирования скорости дви-
гателя постоянного тока независимого возбуждения?
2. Как изменится скорость двигателя постоянного тока при
уменьшении тока возбуждения, если момент на валу не превыша-
ет номинальный?
3. Почему при регулировании скорости двигателя постоян-
ного тока независимого возбуждения выше номинальной ослаб-
лением поля снижается номинальный и максимальный момент
двигателя?
4. В чем состоит способ двухзонного регулирования скоро-
сти двигателя постоянного тока независимого возбуждения?
5. Поясните разницу в регулировании скорости с постоян-
ным моментом и постоянной мощностью.
138
6. Какова должна быть скорость двигателя постоянного тока
независимого возбуждения, чтобы он работал в режиме рекупе-
ративного торможения?
7. В каких тормозных режимах может работать двигатель
постоянного тока независимого возбуждения?
8. Приведите классификацию управляемых тиристорных
выпрямителей, используемых в приводе ТП-Д.
9. Поясните принцип действия управляемого тиристорного
выпрямителя.
10. Какова особенность тиристорного преобразователя для
реверсивного электропривода по системе ТП-Д?
11. Каково назначение логического переключающего уст-
ройства в реверсивном приводе по системе ТП-Д?
12. В чем заключается принцип раздельного управления ре-
версивным тиристорным преобразователем.
13. Каково должно быть соотношение между углами управ-
ления реверсивного тиристорного преобразователя, чтобы меха-
нические характеристики привода ТП-Д в двигательном и тор-
мозном режимах были согласованы?
14. Поясните принцип действия силового транзисторного
регулятора напряжения.
15. Что такое скважность импульсов?
16. Чему примерно равен коэффициент мощности электро-
привода по системе ТП-Д?
17. Что нужно сделать, чтобы изменить направление вра-
щения двигателя постоянного тока последовательного возбужде-
ния?
18. Назовите способы регулирования скорости двигателя
постоянного тока последовательного возбуждения, какой из этих
способов более экономичный?
19. Почему двигатель постоянного тока последовательного
возбуждения не может работать в режиме холостого хода?
20. Что такое инверторный режим работы управляемого ти-
ристорного выпрямителя, каковы условия реализации этого ре-
жима?
139
Глава 6. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ С ДВИ-
ГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
6.1. Способы регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым элек-
трическим двигателем. Эти двигатели выпускаются мощностью
от 0,1 кВт до нескольких тысяч киловатт и находят применение во
всех отраслях хозяйства. Основным достоинством асинхронного
двигателя является простота его конструкции и невысокая стои-
мость. Однако по принципу своего действия асинхронный двига-
тель в обычной схеме включения не допускает регулирования
скорости его вращения. Особое внимание следует обратить на то,
что во избежание значительных потерь энергии, а, следовательно,
для короткозамкнутых асинхронных двигателей во избежание
перегрева его ротора, двигатель должен работать в длительном
режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости
асинхронных двигателей (см. рис.6.1). Скорость двигателя опре-
деляется двумя параметрами: скоростью вращения электромаг-
нитного поля статора а>0 и скольжением 5:
(О — со0 — (Oas
(6.1)
Дм короткозамкнутых асинхронных
двигателей --------------------
Для асинхронных двигателей с фазным ротором
Рис.6.1. Классификация способов регулирования асинхронных
двигателей
140
Исходя из (6.1) принципиально возможны два способа регу-
лирования скорости: регулирование скорости вращения поля ста-
тора и регулирование скольжения при постоянной величине а>0.
Скорость вращения поля статора определяется двумя
параметрами (см.3.3): частотой напряжения, подводимого к
обмоткам статора /, и числом пар полюсов двигателя рп. В
соответствии с этим возможны два способа регулирования
скорости: изменение частоты питающего напряжения
посредством преобразователей частоты, включаемых в цепь
статора двигателя (частотное регулирование), и путем изменения
числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной ско-
рости вращения поля статора для короткозамкнутых асинхрон-
ных двигателей возможно путем изменения величины напряже-
ния статора при постоянной частоте этого напряжения. Для асин-
хронных двигателей с фазным ротором, кроме того, возможны
еще два способа: введение в цепь ротора добавочных сопротив-
лений (реостатное регулирование) и введение в цепь ротора до-
бавочной регулируемой э.д.с. посредством преобразователей час-
тоты, включаемых в цепь ротора (асинхронный вентильный кас-
кад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразо-
вательной техники созданы и серийно выпускаются различные
виды полупроводниковых преобразователей частоты, что опре-
делило опережающее развитие и широкое применение частотно-
регулируемого асинхронного электропривода. Основными досто-
инствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механиче-
ских характеристик, что позволяет регулировать скорость в ши-
роком диапазоне;
- экономичность регулирования, определяемая тем, что
двигатель работает с малыми величинами абсолютного скольже-
ния, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются слож-
ность и высокая стоимость (особенно для приводов большой
мощности) преобразователей частоты и сложность реализации в
большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования
скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов
асинхронного двигателя позволяет получать несколько (от 2 до 4)
значений рабочих скоростей, т.е. плавное регулирование скоро-
сти и формирование переходных процессов при этом способе не-
141
возможно. Поэтому данный способ имеет определенные области
применения, но не может рассматриваться, как основа для по-
строения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменени-
ем величины питающего напряжения при постоянной (стандарт-
ной) его частоте было подробно рассмотрено в разделе 3. Было
установлено, что этот способ регулирования для асинхронных
двигателей с короткозамкнутым ротором имеет весьма ограни-
ченное применение вследствие того, что регулирование скорости
здесь сопряжено с потерями энергии скольжения, выделяющими-
ся в роторе двигателя и ведущими к его перегреву. Получаемые
при этом способе механические характеристики неблагоприятны
для качественного регулирования. Диапазон регулирования не
превышает 1,5:1; более глубокое регулирование скорости можно
допускать только кратковременно. Исходя из данной оценки, ре-
гулирование изменением величины питающего напряжения при-
меняется, главным образом, только для обеспечения плавного
пуска нерегулируемых асинхронных электроприводов или для
кратковременного снижения скорости. Иногда этот способ регу-
лирования используется для регулирования скорости насосов и
вентиляторов (механизмов с вентиляторным характером нагруз-
ки) небольшой мощности (до 15кВт), однако и в этом случае не-
обходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирова-
ние скорости может производиться воздействием на роторную
цепь двигателя. При введении добавочного сопротивления в цепь
ротора энергия скольжения рассеивается не в объеме двигателя, а
в сопротивлениях. Этот способ регулирования оценивается как
неэкономичный. При использовании релейно-контакторных схем
исключается плавность регулирования скорости. В настоящее
время управление с введением добавочных сопротивлений в цепь
ротора используется, в основном, для пуска асинхронных двига-
телей с фазным ротором. Электроприводы с реостатно - контак-
торным управлением не рассматриваются нами, как регулируе-
мые электроприводы.
Все способы регулирования, основанные на изменении
скольжения асинхронного двигателя, связаны с выделением энер-
гии скольжения в роторной цепи двигателя. В рассматриваемых
выше способах эта энергия расходовалась на нагрев обмотки ро-
тора и роторных сопротивлений. Существуют системы регули-
руемого электропривода, в которых энергия скольжения не теря-
ется в сопротивлениях, а используется полезно - возвращается в
142
питающую сеть, что делает регулирование в этих системах эко-
номичным. К таким системам регулируемого привода относятся
асинхронные вентильные каскады и двигатели двойного питания.
Особенностью каскадных схем асинхронного привода является
ограниченный диапазон регулирования - не больше, чем 2:1. В
этом диапазоне каскадные схемы обеспечивают плавное и эконо-
мичное регулирование скорости. Такие системы электропривода
наиболее целесообразны для мощных турбомеханизмов - насосов
и вентиляторов.
6.2. Асинхронный электропривод с частотным регулировани-
ем скорости
Возможность частотного регулирования скорости асинхрон-
ного двигателя - регулирование путем изменения частоты пи-
тающего напряжения - вытекает из того обстоятельства, что ско-
рость вращения электромагнитного поля статора пропорциональ-
на частоте питающего напряжения
2?г-/
^0=-------------(6.2)
рп
Следует также учесть, что
поскольку с изменением частоты
питающего напряжения изменяется и
величина потока двигателя
то в большинстве случаев одновременно
с изменением частоты питающего
напряжения необходимо регулировать и
его амплитуду. Необходимость регули-
рования напряжения при уменьшении
частоты вниз от номинальной связана с
тем, что из-за уменьшения индиви-
дуального сопротивления обмоток
двигателя ток намагничивания будет
возрастать, что приведет к насыщению
магнитопровода двигателя и его
перегреву. Регулирование напряжения следует производить та-
ким образом, чтобы скольжение двигателя было минимальным.
fc - const
Uc - const
Рис.6.2. Схема вклю-
чения асинхронного
двигателя с питанием
от преобразователя
частоты
143
Для реализации способа частотного регулирования асин-
хронный короткозамкнутый двигатель включается в питающую
сеть с параметрами Uc и fc через преобразователь частоты UF
(см.рис.6.2). В качестве преобразователей частоты в настоящее
время используются, в основном, полупроводниковые преобразо-
ватели частоты.
При частотном регулировании величина относительного
скольжения Sj зависит как от разности скоростей вращающегося
электромагнитного поля и ротора - абсолютного скольжения
sa6c =й?о > так и от относительного значения Д* частоты пи-
тающего напряжения
А _ f
~Г~ J\*, (6.4)
7i н
(6.5)
Здесь fj, a>Oj, Sj - регулируемые значения частоты напряже-
ния статора и соответствующие значения скорости вращения по-
ля и скольжения;
/|ни а>Он- номинальные значения частоты статора и скорости
поля, соответствующие паспортным данным двигателя.
С учетом (6.2)
sj = 1-----^-7- • (6-6)
^Ои ' fl*
Для анализа электроме-
ханических характеристик
двигателя при частотном ре-
гулировании рассмотрим Т-
образную схему замещения
двигателя (рис.6.3). В отли-
чие от ранее приведенной
схемы замещения в данном
Рис.6.3. Схема замещения асин-
хронного двигателя
случае приходится учитывать, что реактивные сопротивления
двигателя зависят от частоты питающего напряжения и изменя-
ются с изменением частоты.
Х1 j ~ Х1и ' /1* > Xpj ~ Хрн ' /1* ’
(5.7)
Х2 ~ Х2н ’ /1* ’ Хк ~ Хкн ' fl* •
В связи с этим нужно заметить, что при номинальной часто-
144
те 50Гц индуктивное сопротивление контура намагничивания хрн
на порядок (для машин малой мощности) или на два порядка (для
машин большой мощности) больше, чем активное сопротивление
обмотки статора Поэтому при анализе и расчете электромеха-
нических характеристик асинхронных двигателей, работающих
при постоянной номинальной частоте питающего напряжения,
сопротивлением и обычно пренебрегают. Если же двигатель ра-
ботает с переменной частотой напряжения, то при снижении час-
тоты сопротивление становится соизмеримым с реактивными
сопротивлениями машины и учет сопротивления и является не-
обходимым.
Мощность скольжения, выделяемая в цепи ротора, расходу-
ется на нагрев обмоток ротора как следует из (3.37)
Р5 = Ma>ojsj = 37/ г2, откуда
312г
(6.8)
aojsj
Из схемы замещения, учитывая, что отношения и
х2н/х>ш гораздо меньше единицы и ими можно пренебречь, оп-
ределим значение
2
(6.9)
1'2
У \ Sj) >
Подставив (6.9) в (6.8), получим формулу для механических
характеристик при переменных значениях величины и частоты
напряжения питания
зцу;
(6.10)
г/2
COqjS J
Заметим, что если положить т\/.
'хр.
мула (6.10) станет идентичной формуле для механических харак-
теристик нерегулируемого по частоте асинхронного двигателя
(см.3.21).
145
Положив dMjds} = 0, найдем значения максимального мо-
мента и критического скольжения
Знак (+) соответствует двигательному режиму, знак (-) - ре-
жиму рекуперативного торможения.
Анализируя выражение (6.11), можно установить, что, если
пренебрегать величиной активного сопротивления статора (ri=0),
то, для того чтобы при частотном регулировании (уменьшении
частоты вниз от номинальной) сохранять критический момент
постоянным, нужно величину напряжения изменять пропорцио-
нально изменению частоты.
гт ____b
Механиче-
ские характери-
стики, соответ-
ствующие час-
тотному регули-
рованию при
выполнении со-
отношения
(6.13) И Г!=0,
показаны на
рис.6.4 (сплош-
ными линиями).
В первом при-
ближении про-
порциональное
146
Рис.6.4. Механические характеристики асин-
хронного двигателя при частотном регулиро-
вании при Ut */fi *=const
регулирование напряжения в соответствии с соотношением (6.13)
обеспечивает работу двигателя с постоянным потоком.
В действительности при малых значениях частоты (/;.<0,3)
падение напряжения на сопротивлении Г] существенно снижает
величину напряжения, прикладываемого к контуру намагничива-
ния (напряжение Ua6 на рис.6.2).
Рис.6.5. Зависимость величины
напряжения питания от частоты
1-<7,.=Л
2-У, =«„/,.+/„г,(1- /,-)
Падение напряжения на индуктивном сопротивлении Xj
уменьшается с уменьшением частоты и поэтому не оказывает та-
кого влияния на напряжение 6/об, как падение напряжения на ак-
тивном сопротивлении гь которое не зависит от частоты.
При более точном расчете
с учетом падения напряжения
на сопротивлении Г] меха-
нические характеристики име-
ют вид, показанный на рис. 6.4
пунктиром. При малых значе-
ниях частоты, когда относи-
тельное значение падения
напряжения на сопротивлении
Г] становится значимым, поток
двигателя уменьшается и
соответственно уменьшается
максимальный момент Мк, что
следует также из формулы
(6.11).
Поэтому для того чтобы
регулировать скорость двига-
теля, сохраняя максимальный
момент двигателя постоянным,
нужно величину напряжения
уменьшать в меньшей степени, чем уменьшается частота, при-
мерно в соотношении:
a,=i/u/,.+V,(i(«и)
Такой способ регулирования напряжения называют «про-
порциональное регулирование с 1г компенсацией». Зависимость
Ц. = /(/^) показана на рис.6.5. При регулировании напряжения
в соответствии с соотношением (6.14) механические характери-
стики будут иметь вид, показанный на рис.6.4 сплошными ли-
ниями.
147
Следует иметь в виду, что величина 1г компенсации зависит
от относительной величины гь которая для двигателей мощно-
стью более 100кВт незначительна и ею, как правило, можно пре-
небрегать; для двигателей мощностью до 15кВт учет Г] обязате-
лен.
В ряде случаев, в частности, при вентиляторном характере
нагрузки, нет необходимости при снижении скорости поддержи-
вать критический момент двигателя равным номинальному. В
этом случае более целесообразно выдерживать постоянным соот-
ношение между статическим и максимальным моментами двига-
теля Мс /Мк = const. При этом следует пользоваться следую-
щим соотношением между частотой и напряжением (формула
М.П. Костенко):
(6.15)
где Мс, = MjМн - относительное значение статического
момента при данной частоте (скорости).
Так, для привода вентилятора при снижении скорости в 2
раза, статический момент снижается в 4 раза. Тогда, в соответст-
вии с (6.15) при снижении скорости и частоты в 2 раза, напряже-
ние можно уменьшить в 4 раза. При этом сокращаются потери в
обмотке статора и магнитопроводе машины.
При стандартной частоте питания 50Гц невозможно полу-
чить скорость асинхронного двигателя выше 3000 об/мин. Для
получения более высокой скорости необходимо питать асин-
хронный двигатель напряжением с частотой более 50Гц. Для
многих механизмов: машины текстильной промышленности,
шлифовальные станки, центрифуги и другие, - необходимы ско-
рости рабочего органа 6000, 9000, 1200 об/мин и более. В этом
случае применяют преобразователи частоты с выходной частотой
более 50Гц. Однако повышение напряжения выше стандартного,
как правило, невозможно или затруднено. В этом случае исполь-
зование соотношения (6.13) невозможно, и регулирование скоро-
сти повышением частоты выше номинальной производится при
постоянном напряжении t/pM.
Очевидно, что в этом случае ток намагничивания 1ц умень-
шается с ростом частоты, соответственно падает поток двигателя.
Как следует из (6.11), максимальный момент снижается примерно
обратно пропорционально квадрату частоты. Однако, поскольку
ток ротора 12 можно за счет увеличения скольжения длительно
поддерживать равным номинальному, то длительно допустимый
148
номинальный момент уменьшается обратно-пропорционально
частоте в первой степени. Поскольку с увеличением частоты ско-
рость двигателя увеличивается, то длительно допустимая мощ-
ность на валу двигателя остается примерно постоянной. Поэтому
регулирование повышением частоты сверх номинальной при со-
хранении постоянства напряжения относят к регулированию с
постоянством мощности. Механические характеристики для это-
го случая приведены на рис.6.6. Регулирование изменением час-
тоты вниз от номинальной с одновременным регулированием на-
пряжения в соответствии с соотношением (6.14) относят к регу-
лированию с постоянным моментом.
Рис.6.6. Механические характеристики асинхронного двигателя при частот-
ном регулировании
Задача 6.1. Частотно-регулируемый электропривод состоит
из асинхронного короткозамкнутого двигателя типа 4А132М4УЗ
и преобразователя частоты типа инвертора напряжения.
Технические данные двигателя Ри=11кВт, ?71Л=380В,
со = 1455об/мин=157 /, М ]М = 2,2, Г]=0,43Ома,
г2'= 0,32Ома, хк=1,5 Ома, х^=320ма.
Требуется рассчитать механические характеристики привода
при следующих соотношениях частоты и напряжения двигателя
149
[Л
1. — = const, fi изменяется от 5 до 50Гц
2. Uj = const, f изменяется от 50 до 100Гц.
Решение.
1. Номинальный момент двигателя
Рн 11000
М„ - —- =-------- 72 Нм.
152
2. Номинальное скольжение двигателя
_ _ппи-пн _ 1500-1455
" пон 1500
3. Расчет механических характеристик сводим в таблицу 6.1.
За базовые величины при расчете принять а>0 = а>Он =157 1/с;
Л/н=72Нм. Расчет производится по формулам: a>Oj - (6.2); sKj -
(6.12); М, -(6.11); Л/-(6.10).
Таблица 6.1
Расчет механических характеристик асинхронного двигателя при
частотном регулировании
Характеристи- ка fl-, o.e. co c CDoj, 1/C Skj, o.e. Me, o.e. (Do,-, o.e. Sj-, o.e. COj-, o.e. M., o.e.
Естественная х-ка 1,0 220 157 0,155 2,35 1,0 0,0 1,0 0,0
220 В 1,0 220 157 0,155 2,35 1,0 0,03 0,97 l.o
50Гц 1,0 220 157 0,155 2,35 l.o 0,155 0,845 2,35
Uff = const 0,6 132 94,2 0,20 1,98 0,6 0,0 0,6 0,0
30Гц 0,6 132 94,2 0,20 1,98 0,6 0,1 0,54 1,56
0,6 132 94,2 0,20 1,98 0,6 0,2 0,48 1,98
Uj f= const 0,3 66 47,1 0,4 1,54 0,3 0,0 0,3 0,0
15Гц 0,3 66 47,1 0,4 1,54 0,3 0,2 0,24 1,21
0,3 66 47,1 0,4 1,54 0,3 0,4 0,18 1,54
Uf f = const 0,1 22 15,7 0,6 0,6 0,1 0,0 0,1 0,0
5 Гн o.l 22 15,7 0,6 0,6 0,1 0,3 0,07 0,485
o.l 22 15,7 0,6 0,6 0,1 0,6 0,04 0,6
Ц=220 В 1,5 220 235,5 0,1 1,1 1,5 0,0 1,5 0,0
fi=75 Гц 1,5 220 235,5 0,1 1,1 1,5 0,05 1,42 0,9
1,5 220 235,5 0,1 1,1 1,5 0,1 1,35 1,1
t/^220 В 2,0 220 314 0,08 0,72 2,0 0,0 2,0 0,0
/i=100 Гц 2,0 220 314 0,08 0,72 2,0 0,04 1,9 0,55
2,0 220 314 0,08 0,72 2,0 0,08 1,85 0,72
Как видно из полученных характеристик (рис.6.6), при сни-
жении частоты с одновременным снижением напряжения в соот-
150
ношении (7,. / f. = const, критический момент при низких час-
тотах питающего напряжения существенно снижается, что связа-
но с падением напряжения на активном сопротивлении rh Для
того, чтобы критический момент остался постоянным, напряже-
ние нужно снижать в меньшей степени, чем частоту, компенси-
руя падение напряжения на активном сопротивлении статора, т.е.
следует пользоваться соотношением (6.14). При повышении час-
тоты сверх номинальной и сохранении величины напряжения,
равной номинальной, скорость двигателя возрастает, но макси-
мальный момент уменьшается.
6.3. Электропривод по системе преобразователь частоты с
непосредственной связью - асинхронный двигатель
Существующие вентильные (полупроводниковые) преобра-
зователи частоты мож-
но разделить на две
группы:
1 - преобразова-
тели с непосредствен-
ной связью питающей
сети и нагрузки,
сокращенно НПЧ;
2 - преобразова-
тели частоты с
промежуточным зве-
ном постоянного тока.
Преобразователь
непосред-
с вязью
в статор-
асинхрон-
Рис.6.7. Блок-схема преобразователя час-
тоты с непосредственной связью
частоты с
ственной
включается
ную цепь
ного двигателя и служит для преобразования напряжения стан-
дартной частоты в регулируемое в определенных пределах на-
пряжение по величине и частоте.
Преобразователи частоты с непосредственной связью обычно
представляют собой три согласованно работающих реверсивных
тиристорных преобразователя постоянного тока. Блок схема не-
посредственного преобразователя частоты представлена на
рис.6.7.
151
Каждая фаза асинхронного двигателя питается от своего ре-
версивного преобразователя. Напряжение, прикладываемое к об-
мотке статора, будет равно:
Уф =KaUccosa.
где Uc - напряжение питающей сети.
Если угол регулирования а устанавливать в соответствии с
текущим значением частоты, например,
cos б/ =...7=^-‘и-1—
и поддерживать неизменным в течение одного полупериода вы-
ходной частоты преобразователя, а в течение второй полуволны
переключать группы вентилей преобразователя с углом управле-
ния ан=ав, то
получим переменное
напряжение прямо-
угольной формы за-
данной частоты.
Сдвинув моменты
включения преобра-
зователей, питающих
фазы В и С двигателя
соответственно на
2/3 я и 4/3д’, полу-
чим трехфазную сис-
тему напряжений
прямоугольной фор-
мы заданной частоты
т—
фи»
2^
Рис.6.8. Эпюры напряжений преобразователя
частоты с непосредственной связью при
и соответствующей прямоугольной форме напряжения
ей амплитуды напря-
жения (рис.6.8).
Если величину ав и ан в течение каждого полупериода задан-
ной частоты регулировать по арккосинусоидальному закону
ав = ан = Aarccos^^jt)
где А — 1 , то среднее значения фазных напряжений
КсР с
будут иметь синусоидальную форму
152
Ua = Л sin(2^/^ Ue = A sin^2fl// + Uc = Л .
Для получения приемлемой формы выходного напряжения
частота напряжения питающей сети должна быть в несколько раз
выше частоты выходного напряжения.
Преобразова-
тели частоты с не-
посредственной
связью по схеме
рис.6.7 дают воз-
можность при час-
тоте питания 50Гц
получать выход-
ную частоту в пре-
делах 0-20Гц. По-
этому асинхронные
электроприводы
данного типа чаще
всего применяются
для тихоходных
безредукторных
электроприводов
средней и большой
мощности.
Основным дос-
Рис.6.9. Механические характеристики
электропривода НПЧ-АД
тоинством преобра-
зователей частоты с непосредственной связью является естест-
венная коммутация вентилей под действием напряжения питаю-
щей сети, как это происходит в управляемых тиристорных пре-
образователях (выпрямителях), используемых в приводе посто-
янного тока. Благодаря возможности перевода преобразователя
из выпрямительного в инверторный режим, в рассматриваемых
схемах возможно торможение асинхронного двигателя с отдачей
энергии торможения в сеть (рекуперативное торможение). Меха-
нические характеристики асинхронного электропривода с преоб-
разователем частоты с непосредственной связью показаны на
рис.6.9.
153
U\=var
Рис.6.10. Блок-схема электропривода с преобразо-
вателем частоты с промежуточной цепью постоян-
ного тока
6.4. Электропривод по системе преобразователь частоты типа
автономный инвертор - асинхронный двигатель
В этой системе используются преобразователи частоты с
промежуточной цепью постоянного тока. Блок схема такого пре-
образователя представлена на рис.6.10.
Перемен-
ное напряже-
ние промыш-
ленной сети
сначала вы-
прямляется
посредством
регулируемого
или нерегули-
руемого вы-
прямителя
UD, а затем подается на автономный инвертор, преобразующий
постоянное напряжение (или ток) в напряжение (или ток) регули-
руемой частоты и величины.
Регулирование величины напряжения (или тока) промежу-
точного звена постоянного тока может производиться управляе-
мым выпрямителем UD, либо (в инверторах напряжения) в каче-
стве первого звена используется неуправляемый выпрямитель, а
регулирование напряжения осуществляется инвертором методом
широтно-импульсной модуляции. В первом случае функции
управления четко разделены: выпрямитель управляет величиной
тока или напряжения, а инвертор - значением выходной частоты
преобразователя. Во втором случае обе этих функции возлагают-
ся на инвертор.
Важным узлом преобразователей с промежуточным звеном
постоянного тока является фильтр F. Этот фильтр выполняет две
функции: сглаживает пульсации выпрямленного напряжения (или
тока) и служит устройством для накопления и отдачи энергии,
что необходимо для обеспечения циркуляции реактивной мощно-
сти между обмотками асинхронного двигателя и фильтром. По-
скольку на входе преобразователя установлен полупроводнико-
вый выпрямитель, то циркуляция реактивной мощности между
асинхронным двигателем и сетью невозможна.
Преобразователи частоты по типу автономного инвертора,
используемые в электроприводах, позволяют получать выходную
частоту от долей герца до нескольких сотен Гц. Верхний предел
ограничивается возможной частотой коммутации вентилей ин-
154
вертора, нижний - качеством выходного напряжения или тока;
при несинусоидальной форме тока в обмотках двигателя при ма-
лых частотах нарушается равномерность вращения ротора.
Jt=const
Uc“consl
Рис.6.11. Схема частотного электропривода с автономным инвертором
тока
При частотно-токовом управлении асинхронным двигателем
применяются автономные инверторы тока (см. рис.6.11). Отличи-
тельной особенностью этих инверторов является наличие мощно-
го дросселя (индуктивного фильтра L) в цепи постоянного тока и
отсутствие обратных диодов в мостовой схеме инвертора. Для
коммутации тиристоров используются коммутирующие конден-
саторы С. Переключение тиристоров VSRVS6 производится в
порядке возрастания их номеров. Принцип коммутации состоит в
следующем (см. рис.6.11). Пусть открыты тиристоры VS1 и VS2.
Ток проходит через фазы двигателя «а» и «с». Конденсатор С]3
заряжен с положительным зарядом на верхней обкладке. При по-
даче отпирающего импульса на тиристор VS3 он открывается, и
образуется короткозамкнутый контур Cn-VSl-VS3-Ci3, по кото-
рому происходит перезаряд конденсатора С13. Под действием то-
ка перезаряда тиристор VS 1 закроется, и ток далее будет проте-
155
кать через тиристор VS3, фазы «в» и «с» двигателя и тиристор
VS2. Полярность заряда конденсатора Св изменится на обрат-
ную. Затем открывается тиристор VS4 и ток переходит с фазы
«с» на фазу «а» (в обратном направлении) и т.д. За время периода
заданной частоты происходит 6 коммутаций тиристоров, в ре-
зультате чего по обмоткам статора двигателя будет протекать
трехфазный переменный ток заданной частоты.
Величина тока контролируется регулятором тока РТ, в соот-
ветствии с выходным сигналом которого изменяется угол управ-
ления тиристорами и на выходе выпрямителя UD устанавливает-
ся необходимая величина выпрямленного напряжения. Выходная
частота преобразователя определяется блоком управления венти-
лями инвертора БУИ в соответствии с заданием частоты.
Достоинствами инвертора тока являются относительная про-
стота схемы, возможность ее реализации на тиристорах, что по-
зволяет выполнять преобразователи на большую мощность и вы-
сокое напряжение. В приводах с инвертором тока возможен ре-
жим рекуперативного торможения. Для этого, не изменяя на-
правление тока в звене постоянного тока, управляемый выпрями-
тель переводится в инверторный режим (угол а устанавливается
больше я/2).
Недостатками инверторов тока является несинусоидальная
форма тока в обмотках статора, а также невозможность питания
от одного преобразователя нескольких асинхронных двигателей.
Из-за несинусоидальности формы тока при /(<5Гц теряется рав-
номерность вращения ротора, что ограничивает диапазон регули-
рования скорости электропривода по схеме рис.6.11.
Рис.6.12. Схема частотного асинхронного
электропривода с транзисторным инвер-
тором напряжения
156
В настоящее время большинство преобразователей изготав-
ливаются по схеме автономного инвертора напряжения. Это свя-
зано с появлением полностью управляемых силовых полупро-
водниковых приборов: IGB - транзисторов и запираемых тири-
сторов. Типичная схема электропривода с инвертором напряже-
ния на полностью управляемых приборах дана на рис.6.12. Схем-
ной особенностью инвертора напряжения является наличие об-
ратных диодов VD1-VD6 и фильтрового конденсатора С.
В отличие от инверторов тока, для которых характерным яв-
ляется работа в каждый момент времени по одному вентилю в
анодной и катодной группах, в инверторах напряжения более це-
лесообразна одновременная работа двух вентилей в одной группе
и одного в другой. При этом продолжительность работы каждого
вентиля составляет л. Допустим, что в некоторый момент време-
ни работают транзисторные ключи VT1, VT2 и VT6. Тогда ток
протекает по всем трем фазным обмоткам двигателя, причем 2/3
напряжения Ud прикладывается к фазе «а» и к двум параллельно
включенным фазам «в» и «с» (см. рис.6.13). При запирании клю-
ча VT6 и включении ключа VT3 ток в фазе «в» не может мгно-
венно измениться и замыкается через диод VD3 на конденсатор
С, чем обеспечивается циркуляция реактивной мощности между
обмотками двигателя и конденсатором С. После включения клю-
ча VT4 ток будет протекать по параллельно включенным фазам
«а» и «с» и по фазе «в» и т.д. Линейное фазное напряжение, при-
кладываемое к обмоткам двигателя, будет иметь форму, показан-
ную на рис.6.13.
Требуемая выходная частота определяется частотой пере-
ключения вентилей инвертора и задается каналом регулирования
частоты. Регулирование величины выходного напряжения может
производиться двумя способами:
1) использованием управляемого выпрямителя на входе ин-
вертора, с помощью которого регулируется величина Ud,
2) использованием способа широтно-импульсного регулиро-
вания, осуществляемого вентилями инвертора; в этом случае
входной выпрямитель может быть неуправляемым.
Первый способ характеризуется двумя недостатками: сту-
пенчатой формой выходного напряжения (см. рис.6.13) и низким
коэффициентом мощности преобразователя.
157
Работают ключи:
VT1 VT4 VT3 VT6 VT5 . VT2 . и..' ud 0 -Ud и. 2/3Ud l/3Ud 0 -l/3Ud -2/3Ud 1,5,6 1,6,2 3,2,1 3,2,4 5,4,3 5,4,6 5,1,6 Wot
я/3 2n/3 7C 4яУЗ 5л/3 2л it/3 *
<oot(
wot
Wot
Wot
wot
wott
Wot
Рис.6.13. Диаграмма работы ключей 1-6 и кривые линейного и фазного
напряжений
158
Более современным является второй способ. При широтно-
импульсном способе регулирования возможно не только регули-
рование средней величины напряжения за период, но и коррекция
формы выходного напряжения. Такое регулирование называется
широтно-импульсной модуляцией (ШИМ), которая основана на
принципе широтно-импульсного регулирования (см. раздел 5.4).
Принцип широтно-импульсной модуляции синусоидального на-
Рис 6.14. Принцип широтно-импульсной модуляции напряжения и тока
фазы автономного инвертора напряжения ((7„ и ц - фазные напряжение и
ток статора)
Так как для двуполярной коммутации
то, регулируя непрерывно скважность по синусоидальному зако-
ну, / = Y'l (Ц* sin(2?r • fK]t) +1) можно получить среднее фазное
напряжение, также изменяющееся по синусоиде.
Изменяя с помощью системы управления амплитуду 17,. и
угловую частоту СОХ, = ft, можно производить регулирова-
ние частоты и величины выходного напряжения преобразователя.
При использовании инверторов напряжения для реализации
режима рекуперативного торможения асинхронного двигателя
необходимо на входе устанавливать реверсивный преобразова-
тель с двумя группами вентилей, что усложняет схему преобра-
зователя и снижает ее надежность. Поэтому в инверторах напря-
159
жения обычно предусматривают разрядное сопротивление R (см.
рис.6.12), которое подключается в режиме торможения транзи-
стором VT7 и в котором рассеивается энергия торможения.
Существует большое число разновидностей схем преобразо-
вателей частоты с автономными инверторами тока и напряжения,
которые рассматриваются в литературе по преобразовательной
технике.
6.5. Асинхронные вентильные каскады и двигатели двойного
питания
Регулирование скорости асинхронного двигателя в схемах
вентильного каскада и двигателя двойного питания производится
путем изменения скольжения двигателя при постоянной скорости
вращения электромагнитного поля. Статорные обмотки двигателя
непосредственно подключаются к питающей сети. Основная идея
этих схем - полезное использование мощности скольжения,
трансформируемой в цепь ротора. С этой целью в цепь ротора
асинхронного фазного двигателя вводится добавочная э.д.с.
Трудность полезного использования энергии скольжения со-
стоит в том, что э.д.с. ротора £2 и соответственно ток ротора 12
имеют переменную частоту, зависящую от скольжения (скоро-
сти) двигателя (см. раздел 3.2). В схемах вентильного каскада
(рис.6.15) ток ротора асинхронного двигателя с фазным ротором
выпрямляется посредством неуправляемого выпрямителя UD1, и
в цепь выпрямленного тока ротора вводят добавочную проти-
воэ.д.с. постоянного тока - э.д.с. инвертора US2. Трансформатор
Т служит для согласования напряжения сети и напряжения рото-
ра двигателя.
Таким
образом,
энергия
скольжения,
индуктируе-
мая в обмот-
ках ротора,
преобразуется
в энергию
постоянного
тока и инвер-
тируется (от-
дается) в пи-
тающую
160
Рис.6.15. Принципиальная схема асинхронного вен-
тильного каскада
сеть. Благодаря такому последовательному преобразованию
энергии эти системы получили название каскадов. Энергетиче-
ская диаграмма, характеризующая преобразование энергии в кас-
кадной схеме, показана на рис.6.16.
Рис.6.16. Энергетическая диаграмма
асинхронного вентильного каскада
Мощность Pi, забирае-
мая по цепи статора
двигателя из сети, за вычетом
потерь в статоре /±Р}, пре-
образуется в мощность вра-
щающегося магнитного поля
- электромагнитную мощ-
ность Рэм. Последняя разде-
ляется на две части: меха-
ническую Рмех, реализуемую
на валу асинхронного
двигателя, и электрическую,
трансформируемую в обмот-
ки ротора двигателя - мощ-
ность скольжения Ps. Мощ-
ность скольжения, за вычетом потерь &Р2 в роторе двигателя, вы-
прямителе, инверторе и трансформаторе инвертора, возвращается
в питающую сеть - Рре1е. Таким образом, результирующая, по-
требляемая приводом из сети мощность Рпотр будет равна разно-
сти Р}-Ррек. Это определяет высокий кпд вентильного каскада.
Мощность скольжения после выпрямления тока ротора бу-
дет
Л = (KcXEpHS~^r^dp, (6.16)
где 5 - скольжение;
Ерн - номинальная (при 5=1) линейная э.д.с. ротора;
Idp - выпрямленный ток ротора;
к„=1,35 - коэффициент мостовой схемы выпрямления;
ДЦ - падение напряжения, обусловленное коммутацией
вентилей выпрямителя;
kJ,X„S
= dP Р , (617)
т/2
Здесь Xр = Хк IК? - индуктивное сопротивление рассеяния
фазы асинхронного двигателя, приведенное к обмотке ротора.
Подставляя (6.17) в (6.16), получим
161
Л =1,355 Е„1ф-^-
I 5/2
Момент асинхронного двигателя равен
-.&EI
СОП г
dpp
V2
М = —
<»os
В первом прибли-
жении (при М<М„)
можно считать, что
момент пропорциона-
лен выпрямленному
току ротора Id. При
больших значениях
момента эта пропор-
циональность наруша-
ется.
Величина вы-
прямленного тока ро-
тора определяется раз-
ностью выпрямленной э.д.с. ротора Edp, э.д.с. инвертора Edt и со-
противлением цепи R3Ke (см. рис.6.17).
, _ ^dp ~ Е<и
рн1 dp
(6.18)
dp
dp
^UD\
Кзкв
|1,35ЕрД
—о------К
t \,35U21COsP
UDI
L
Рис.6.17. Схема замещения роторной цепи
асинхронного вентильного каскада
R3Ke
1,35EpHs - 1,35U2T cos /7
(6.19)
(6.20)
7?экв
где: Uit - линейное напряжение вторичной обмотки транс-
форматора;
Р
Р = л - а;
угол управления вентилей инвертора
Л „ Зх 5 Зх,
— 2r2 +rd + 2г2Г ч I .
Tt п
Здесь г2> Гл и Ггт - активное сопротивление соответственно:
обмотки ротора; сглаживающего дросселя и вторичной обмотки
трансформатора;
162
3xps Зхг
и - - эквивалентные сопротивления, вызванные
ZT----------п
коммутацией вентилей выпрямителя и инвертора;
Хг - сопротивление фазы трансформатора, приведенное ко
вторичной обмотке.
Регулируя величину угла управления вентилей инвертора Д
можно регулировать величину тока ротора Idp и, следовательно,
момента асинхронного двигателя.
Если EpHS = U2T COS Р , то ток ротора и момент будут рав-
ны нулю. Скольжение s0, соответствующее этому условию, будет
скольжением холостого хода двигателя в схеме вентильного кас-
када
50 =cos/? = £•• cos/7. (6.21)
Ерн
Таким образом, изменяя угол управления Д можно регули-
ровать скорость холостого хода двигателя.
Максимальная величина скольжения холостого хода опреде-
ляется максимальным значением противоэ.д.с. инвертора, кото-
рая будет при р - рмт «15°.
= V21 cos рмии = £ • COS рмин = Е • cos рмт . (6.22)
Преобразовав уравнение (6.20) с учетом (6.21), получим:
1,35£ , ч
(6-23)
Кэкд
Решая совместно уравнения (6.18) и (6.23), получим выраже-
ние для механических характеристик вентильного каскада
. 6£рн 5 — 5а
м = 0 (6.24)
Я®0*р S + P
5-50 А , Мк
или, обозначая ---= Аг и л =--, получим:
5 + Р М/
M = 3,82A(AS-AS2). (6.25)
163
Здесь p = —
XP
Механические
дены на рис.6.18.
Механические
характеристики
имеют сравни-
тельно высокую
жесткость (при-
мерно в 2 раза
меньше, чем у ес-
тественной меха-
нической характе-
ристики асин-
хронного двигате-
ля) и перемещают-
ся параллельно
друг другу вдоль
оси ординат по
3£2
2®0Хр
характеристики вентильного каскада приве-
Рис.6.18. Механические характеристики асин-
хронного двигателя в схеме вентильного кас-
када
мере увеличения
противоэ.д.с. ин-
вертора Edi (по
мере уменьшения
угла управления р). Уравнения (6.24) и (6.25) позволяют рассчи-
тать механические характеристики при значениях момента до
0,72Мк. Вследствие того, что ток ротора несинусоидален, крити-
ческий момент двигателя в схеме каскада не достигается и мак-
симальный момент составляет MMaKC=Q,%3MK, т.е. перегрузочная
способность асинхронного двигателя в схеме каскада снижается
на 17%.
Принцип регулирования скорости в рассматриваемой схеме
следующий. Если установить угол управления /?=90°, то проти-
воэ.д.с. инвертора Edi будет равна нулю. Этому условию соответ-
ствует верхняя механическая характеристика. Если при наличии
статического момента Мс на валу двигателя уменьшить угол р
(например установить /?=60°), то увеличится противоэ.д.с. инвер-
тора Ел и она станет больше, чем выпрямленная э.д.с. ротора Edp.
Тогда ток ротора Idp уменьшится до нуля (в обратную сторону ток
пойти не может из-за односторонней проводимости выпрямите-
ля). Момент двигателя станет равным нулю, и под действием ста-
тического момента скорость двигателя будет уменьшаться и, сле-
164
довательно, возрастать скольжение. По мере роста скольжения
увеличивается э.д.с. ротора. Когда скольжение станет больше 502
(для рассматриваемого примера), по цепи ротора пойдет ток, и
двигатель перейдет на работу на механической характеристике,
соответствующей 502. Скорость двигателя будет определяться
точкой пересечения линии статического момента с данной меха-
нической характеристикой. Для дальнейшего снижения скорости
нужно еще более увеличить противоэ.д.с. инвертора, т.е. умень-
шить угол р.
Для увеличения скорости уменьшают противоэ.д.с. инверто-
ра Ец, ток ротора возрастает, момент увеличивается, и двигатель
разгоняется. По мере увеличения скорости уменьшаются вы-
прямленная э.д.с. ротора, ток и момент двигателя. Разгон двига-
теля будет происходить до тех пор, пока момент двигателя не
уменьшится до значения, соответствующего статическому мо-
менту.
Глубина возможного регулирования скорости определяется
относительным значением напряжения трансформатора U2t, от
величины которого зависит максимальное скольжение s0Mmc (см.
формулу 6.22). Это обстоятельство определяет целесообразность
применения вентильных каскадов для привода механизмов с вен-
тиляторным характе-
ром нагрузки (насо-
сов, вентиляторов и
др.), для которых не
требуется, как пра-
вило, снижение ско-
рости ниже 50% от
номинальной. Тогда
трансформатор и ин-
вертор могут иметь
мощность в 2 раза
меньше, чем мощ-
ность асинхронного
двигателя, что
уменьшает стои-
мость электроприво-
да‘ _ Рис.6.19. Схема пуска вентильного каскада
Ориентировочно
требуемая мощность
трансформатора инвертора определяется соотношением
165
$тр
f S
дв макс
0,9657/* ’
т.е. составляет часть мощности двигателя, пропорциональную
максимальному скольжению.
В случае регулирования в схеме каскада в неполном диапа-
зоне скорости возникает задача пуска двигателя до нижней рабо-
чей скорости в схеме каскада. Обычно в этом случае использует-
ся схема реостатного пуска.
Одна из возможных схем показана на рис.6.19. В этой схеме
двигатель разгоняется при включенном контакторе КМ1 и от-
ключенном КМ2 по схеме реостатного пуска. По достижении оп-
ределенной скорости выше, чем <Уо(1-5аиаТО), включается контак-
тор КМ2 и затем отключается КМ1, и двигатель переходит на ра-
боту в схеме вентильного каскада.
6.5.1.Двигатели двойного питания
В отличие от схем вентиль-
ного каскада, где поток энергии
скольжения направлен только в
одну сторону - от ротора двига-
теля к инвертору и далее в пи-
тающую сеть, в схемах двигате-
ля двойного питания в цепь ро-
тора включается преобразова-
тель (рис.6.20), обеспечивающий
двухсторонний обмен энергией,
как от ротора двигателя в пи-
тающую сеть, так и от сети в об-
мотки ротора асинхронного дви-
гателя. Таким преобразователем
является преобразователь часто-
ты с непосредственной связью.
При этом добавочная э.д.с., вво-
димая в цепь ротора, может быть
направлена как против э.д.с. ро-
тора, согласно с ней или под не-
которым углом (гг-<5). В общем
случае
й =и „я*-5')
U доб U добе
Ток ротора будет опреде-
Рис.6.20. Принципиальная схема
двигателя двойного питания
166
пяться из уравнения равновесия напряжений в контуре ротора
Т - 2 + ^до6 - ^2hS e>~j^ . ^доб Ех-6-<рг)
J. 2 ~~ ““ *' *' *'
Z2 z2 Z2
Активная и реактивная составляющие тока ротора будут
равны:
(6.26)
^-cos(<5 + (р2) ,
Е2н J
^sin(£ + ^2) .
Е2н J
- текущая и номинальная (при 5=1)
т Е2н
12а =-^~ s-cos<p2 -
Z2 .
т Е2н
I2p =-J- s-sm(p2 -
z2 L
В этих формулах: Е2, Е2н
э.д.с. ротора;
z2 = 7г2 +(^25)2 >^2 ~ arccos—.
z2
Активная составляющая тока ротора определяет момент дви-
гателя М и механическую мощность двигателя
рмех =Л/й>0(1-5).
Реактивная составляющая тока ротора определяет реактив-
ную мощность, циркулирующую в статорной и роторной цепях
двигателя
s0 = ^^-(cos#-sin# tgtp2). (6.27)
Е2н
Равенства (6.26) и (6.27) показывают, что, регулируя величи-
ну и фазу добавочного напряжения £7доб , вводимого в цепь ро-
тора, можно управлять активной и реактивной мощностями дви-
гателя. Из этого положения также следует, что при соответст-
вующих значениях U2 и 5 активная составляющая тока ротора
может быть отрицательна при положительных скольжениях 5>0 и
положительна при отрицательных скольжениях 5<0. Это означа-
ет, что в системе двойного питания асинхронный двигатель мо-
жет работать в несвойственных ему в обычных схемах включения
режимах: генераторном при скорости ниже синхронной и двига-
тельном при скорости выше синхронной. Энергетические диа-
граммы для указанных режимов приведены на рис.6.21,а.
167
ДР(
Рис.6.21. Энергетические диа-
граммы двигателя двойного
питания:
а) - в режиме генераторного
торможения при скорости ниже
синхронной;
б) - в двигательном режиме
при скорости выше синхронной
Направление потока энергии в режиме генераторного тор-
можения при скорости ниже синхронной противоположно тому,
какое было в двигательном режиме (см. рис.6.16).
Мощность торможения
Рмех в рассматриваемом случае
недостаточна для создания
электромагнитной мощности
Рэм, поэтому из сети через
трансформатор и роторный пре-
образователь забирается и на-
правляется в ротор двигателя
недостающая мощность, про-
порциональная скольжению
Ps = Mcdqs . Сумма механиче-
ской мощности, поступающей с
вала, и мощность скольжения
Р + Р = Мсо — Р
мех s эм
образует электромагнитную
мощность, которая рекупериру-
ется в питающую сеть. Отда-
ваемая в сеть мощность равна
разности рекуперируемой мощ-
ности, отдаваемой по цепи ста-
тора, и мощности, забираемой
со стороны трансформатора
Р - Р - Р
отд рек тр '
В двигательном режиме
при скорости выше синхронной
(рис.6.21,6) в роторную цепь
двигателя добавляется мощ-
ность скольжения, забираемая из сети со стороны трансформато-
ра. Она складывается с электромагнитной мощностью, посту-
пающей в двигатель со стороны статора. Сумма этих мощностей
преобразуется в механическую мощность на валу двигателя,
обеспечивая работу двигателя с моментом М при скорости выше
синхронной
Рпотрст + Рпотр.тр ~ + &Ррот) = McoG (1 + |s|) = Рмех.
Заметим, что, несмотря на to, что скольжение в этом случае
отрицательно, двигатель развивает двигательный момент.
168
В обоих рассматриваемых режимах преобразователь частоты
работает таким образом, что энергия от трансформатора поступа-
ет в ротор двигателя, т.е. двигатель питается как со стороны ста-
тора, так и ротора.
Поскольку частота /2 э.д.с. и тока ротора определяется
скольжением двигателя f2 = fxs , то и частота добавочной э.д.с.
Udo6, вводимой в цепь ротора, должна совпадать с частотой э.д.с.
ротора и изменяться при изменении скольжения двигателя.
Максимально возможный диапазон регулирования скорости
вниз и вверх от синхронной определяется двумя параметрами -
возможными максимальными значениями частоты /2 и напряже-
ния t/доблакс на выходе преобразователя частоты, служащего для
питания цепи ротора. Максимальный диапазон регулирования
скорости будет равен
® макс _ $Ъмакс
®мин 1 $ Омаке
Абсолютное значение максимального скольжения равно
ПОлижс
Так как преобразова-
тель частоты с непос-
редственной связью, как
правило, обеспечивает ре-
гулирование частоты в
пределах 20Г ц (при
частоте питания 50Гц),
чему соответствует мак-
симальное скольжение
Кокс 1 = 0,4, то макси-
мальный диапазон регу-
лирования скорости дви-
гателя двойного питания
будет равен
Д = 1,4й>0/О,6й>0«2,3:1.
Цдоб
Е1Х
Регулирование ско- Рис.6.22. Механические характеристики
рости в схеме двигателя двигателей двойного питания
двойного питания произ-
водится изменением величины и знака относительного значения
169
добавочной э.д.с. s ~ Uda6/Е2н , при этом частота на выходе пре-
образователя автоматически поддерживается равной частоте тока
ротора. Механические характеристики двигателя двойного пита-
ния при е=0,2 приведены на рис.6.22. Пуск двигателя до значения
минимальной рабочей скорости производится так же, как и в
схемах вентильного каскада (см. рис.6.19).
Основным достоинством схем вентильного каскада и двига-
телей двойного питания является высокий кпд, сохраняющийся
при регулировании скорости в заданном диапазоне. Поскольку
эти системы регулируемого асинхронного привода имеют огра-
ниченный диапазон регулирования, как правило, не выше 2:1, то
эти системы применяются, главным образом, для привода мощ-
ных (выше 250кВт) турбомеханизмов: вентиляторов, центробеж-
ных насосов и других машин.
6.6. Вентильный двигатель
Под вентильным двигателем понимают систему регулируе-
мого электропривода, состоящую из электродвигателя перемен-
ного тока, конструктивно подобного синхронной машине, вен-
тильного преобразователя и устройств управления, обеспечи-
вающих коммутацию цепей обмоток электродвигателя в зависи-
мости от положения ротора двигателя. В этом смысле вентиль-
ный двигатель подобен двигателю постоянного тока, в котором
посредством коллекторного коммутатора подключается тот виток
обмотки якоря, который находится под полюсами возбуждения.
Двигателям постоянного тока присущи серьезные недостат-
ки, обусловленные, главным образом, наличием щеточно-
коллекторного аппарата.
1. Недостаточная надежность коллекторного аппарата, необ-
ходимость его периодического обслуживания.
2. Ограниченные величины напряжения на якоре и, следова-
тельно, мощности двигателей постоянного тока, что ограничива-
ет их применение для высокоскоростных приводов большой
мощности.
3. Ограниченная перегрузочная способность двигателей по-
стоянного тока, ограничение темпа изменения тока якоря, что
существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляют-
ся, поскольку здесь щеточно-коллекторный коммутатор заменен
бесконтактным коммутатором, выполненным на тиристорах (для
приводов большой мощности) или на транзисторах (для приводов
170
мощностью до 200кВт). Исходя из этого, вентильный двигатель,
который конструктивно выполняется на базе синхронной маши-
ны, часто называют бесконтактным двигателем постоянного тока.
По управляемости вентильный двигатель также подобен двигате-
лю постоянного тока - его скорость регулируется изменением
величины подводимого постоянного напряжения. Благодаря сво-
им хорошим регулировочным качествам вентильные двигатели
получили широкое применение для привода различных промыш-
ленных машин и механизмов.
6. 6.1. Электропривод по системе транзисторный коммутатор -
вентильный двигатель с постоянными магнитами
Вентильный двигатель рассматриваемого типа выполнен на
базе трехфазной синхронной машины с постоянными магнитами
на роторе. Трехфазные обмотки статора питаются постоянным
током, подаваемым поочередно в две последовательно соединен-
ные фазные обмотки. Переключение обмоток производится тран-
зисторным коммутатором, выполненным по трехфазной мосто-
вой схеме. Транзисторные ключи открываются и закрываются в
зависимости от положения ротора двигателя. Схема вентильного
двигателя представлена на рис.6.23.
Рис.6.23. Схема вентильного двигателя с транзисторным коммутатором
Момент, создаваемый двигателем, определяется взаимодей-
ствием двух потоков: статора Фь создаваемого током в обмотках
статора, и ротора Ф2, создаваемого высокоэнергетическими по-
171
стоянными магнитами (на основе сплавов самарий-кобальт и дру-
гих).
М = кФ,Ф2 sin
где: в - пространственный
угол между векторами потоков
статора и ротора;
рп - число пар полюсов.
Магнитный поток статора
стремится повернуть ротор с
постоянными магнитами, так,
чтобы поток ротора совпал по
направлению с потоком ста-
тора (вспомним магнитную
стрелку компаса).
Наибольший момент,
(6.27)
Рис.6.24. Зависимость момента
двигателя от угла между векторами
потоков статора и ротора (прир„=1)
создаваемый на валу ротора,
будет при угле между век-
торами потоков равным 90° и
будет уменьшаться до нуля по
мере сближения векторов
потоков. Эта зависимость показана на рис.6.24.
Рассмотрим пространственную диаграмму векторов потоков,
соответствующую двигательному режиму (при числе пар полю-
сов /?п=1). Предположим, что в данный момент включены транзи-
сторы VT3 и VT4, (см. схему рис.6.23). Тогда ток проходит через
обмотку фазы Вив обратном направлении через обмотку фазы
А. Результирующий вектор м.д.с. статора будет занимать в про-
странстве положение F3 (см. рис.6.25). Если ротор занимает в
этот момент положение, показанное на рис.6.26., то двигатель
будет развивать в соответствии с (6.27) максимальный момент,
под действием которого ротор будет поворачиваться по часовой
стрелке. По мере уменьшения угла 0 момент будет уменьшаться.
Когда ротор повернется на 30°, необходимо в соответствии с гра-
фиком на рис.6.24, переключить ток в фазах двигателя, так, что-
бы результирующий вектор м.д.с. статора занял положение F4
(см. рис.6.25). Для этого нужно отключить транзистор VT3 и
включить транзистор VT5. И далее следует переключать транзи-
сторы в порядке возрастания номеров.
Переключение фаз выполняет транзисторный коммутатор
VT1-VT6, управляемый от датчика положения ротора DR; при
172
этом угол 0 поддерживается в пределах 90°±30°, что соответству-
ет максимальному значению момента с наименьшими пульса-
циями. При рп= 1 за один оборот ротора должно быть произведено
шесть переключений, благодаря которым м.д.с. статора совершит
полный оборот (см. рис.6.25). При числе пар полюсов больше
единицы поворот вектора м.д.с. статора, а, следовательно, и ро-
тора, составит 360//?л градусов.
Рис.6.25. Пространственная Рис.6.26. Пространственная диаграмма
диаграмма м.д.с. статора при потоков в двигательном режиме
переключении фаз двигателя
Регулирование величины момента производится изменением
величины м.д.с. статора, т.е. изменением средней величины тока
в обмотках статора
U -Е
* , (6.28)
' 2R}
где R\ - сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводи-
мая в двух последовательно включенных обмотках статора будет
пропорциональна скорости ротора. Уравнение электрического
равновесия для цепей статора будет
U{ = кФ2 • (О + 2I.R. +2L^L. (6.29)
dt
где L\ - индуктивность обмотки статора.
При отключении ключей ток в обмотках статора мгновенно
не исчезает, а замыкается через обратные диоды и фильтровый
конденсатор С.
173
Следовательно, регулируя напряжение питания двигателя
Ui, можно регулировать величину тока статора и момента двига-
теля
М = КмФ211. (6.30)
Нетрудно заметить, что выражения (6.28 - 6.30) подобны
аналогичным выражениям для двигателя постоянного тока,
вследствие чего механические характеристики вентильного дви-
гателя в данной схеме подобны характеристикам двигателя по-
стоянного тока независимого возбуждения при Ф-const.
Изменение напряжения питания вентильного двигателя в
рассматриваемой схеме производится методом широтно-
импульсного регулирования. Изменяя скважность импульсов
транзисторов VT1-VT6 в периоды их включенного состояния с
помощью регулятора Reg, можно регулировать среднюю величи-
ну напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы
транзисторного коммутатора должен быть изменен таким обра-
зом, чтобы вектор м.д.с. статора отставал от вектора потока рото-
ра. Для этого нужно изменить U\ до значения U\<Ea. Тогда мо-
мент двигателя станет отрицательным. Поскольку на входе пре-
образователя установлен неуправляемый выпрямитель, то реку-
перация энергии торможения в сеть в данной схеме невозможна.
При торможении происходит подзаряд конденсатора фильтра С.
Ограничение напряжения на конденсаторах осуществляется пу-
тем подключения разрядного сопротивления через транзистор
VT7. Таким образом, энергия торможения рассеивается в разряд-
ном сопротивлении.
6. 6.2. Электропривод по системе тиристорный коммутатор -
синхронный двигатель
В вентильном двигателе средней и большой мощности
обычно используются синхронные двигатели обычной конструк-
ции с электромагнитным возбуждением. Поскольку двигатели
большой мощности имеют напряжение статора 6,0 или 10,0кВ, то
в качестве вентильного коммутатора используется тиристорный
преобразователь, состоящий из управляемого выпрямителя VT! и
инвертора VT2 (см. рис.6.27). Инвертор выполняет функции ком-
мутатора, переключение которого производится от датчиков по-
ложения ротора DR. Поскольку тиристоры являются полууправ-
ляемыми приборами, то инвертор работает, как зависимый, ком-
мутируемый за счет э.д.с. двигателя, наводимой в обмотках ста-
174
тора вращающимся электромагнитным полем ротора. Для обес-
печения устойчивой коммутации вентилей инвертора предусмат-
ривается опережение
угла их открывания на
угол р, который со-
ставляет не менее 15°,
что ведет к некоторо-
му уменьшению мо-
мента вентильного
двигателя
М - кФа1\ sin(0 - Д).
Возбуждение двигате-
ля осуществляется
возбудителем VTL.
Благодаря вклю-
чению в цепь посто-
янного тока дросселя
L со значительной ве-
личиной индуктивно-
сти, преобразователь
VT1-VT2 работает как
Рис.6.27. Схема двигателя с тиристорным
коммутатором
источник тока, вели-
чина которого регули-
руется путем им-
пульсно-фазового р егулирования выходного напряжения выпря-
мителя VT1
KaUc cos а - кФ0со
где: R3Ke - эквивалентное сопротивление цепи обмоток ста-
тора;
Uc - напряжение питания выпрямителя;
Фо - поток ротора, создаваемый обмоткой возбуждения.
Регулируя величину тока, можно изменять момент, разви-
ваемый двигателем. Регулирование скорости в приводах рассмат-
риваемого типа обычно производится введением внешнего кон-
тура регулирования скорости (рис.6.28). При этом механические
характеристики вентильного двигателя (см. рис.6.29) будут по-
добны характеристикам системы ТП-Д.
Поскольку в данной схеме входной выпрямитель принят
управляемым, то возможен режим рекуперативного торможения,
когда э.д.с. двигателя кФйа> > kciUс cos а cos Д .
175
Рис.6.28. Структурная схема регулируемого электропривода с вен-
тильным двигателем
PC - регулятор скорости; РТ - регулятор тока; ДС - датчик скорости;
ДТ - датчик тока; CS - датчик положения ротора
Определенным недостатком рассматриваемой схемы являет-
ся усложнение коммутации тиристоров инвертора при малых
скоростях (ниже 0,1сон),
т.к. при этом э.д.с.
двигателя становится
недостаточной для естес-
твенной коммутации
вентилей зависимого ин-
вертора. В этом случае,
при пуске двигателя до
скорости 0,1со„ для обес-
печения запирания вен-
тилей инвертора прихо-
дится прерывать ток,
Рис.6.29. Механические характеристи-
ки вентильного двигателя по схеме
рис.6.28
запирая тиристоры вы-
прямителя, что усложня-
ет схему его управления.
В последние годы с
появлением IGB-транзисторов и запираемых тиристоров стали
применять схемы с принудительной коммутацией вентилей ин-
вертора, что повышает регулировочные свойства вентильного
двигателя и дает возможность его использования для динамич-
ных электроприводов с широким диапазоном регулирования
скорости.
176
6.7. Контрольные вопросы для самопроверки
1. Приведите классификацию способов регулирования асин-
хронных двигателей.
2. При каких способах регулирования асинхронный двига-
тель работает с малыми значениями скольжения?
3. Для чего используется введение добавочных сопротивле-
ний в цепь ротора асинхронного двигателя с фазным ротором?
4. Какое число рабочих скоростей может иметь многоскоро-
стной асинхронный двигатель?
5. Какой основной недостаток характерен для способа регу-
лирования скорости асинхронного двигателя при изменении ве-
личины питающего напряжения?
6. При каком способе регулирования асинхронный двига-
тель работает с большими значениями скольжения, однако этот
способ является экономичным?
7. В каких единицах измеряется абсолютное скольжение
асинхронного двигателя?
8. Почему при уменьшении частоты питающего напряжения
ниже номинальной необходимо одновременно регулировать ве-
личину напряжения?
9. Каковы соотношения между частотой и величиной пи-
тающего напряжения при частотном регулировании асинхронно-
го двигателя?
10. Как сказывается падение напряжения на активном сопро-
тивлении обмоток статора на механические характеристики
асинхронного двигателя при частотном регулировании?
11. Как изменится (по сравнению с номинальным) длительно
допустимый момент асинхронного двигателя, если увеличивать
частоту напряжения выше номинальной, сохранив величину на-
пряжения, равной номинальной?
12. Приведите классификацию полупроводниковых преобра-
зователей частоты, используемых в частотно-регулируемых асин-
хронных электроприводах.
13. Какой диапазон изменения выходной частоты характерен
для преобразователей частоты с непосредственной связью?
14. Каковы схемные отличия в преобразователях частоты с
автономным инвертором тока и автономным инвертором напря-
жения?
15. Сколько двигателей можно питать от одного преобразо-
вателя частоты типа инвертора тока?
177
16. Какие способы регулирования величины выходного на-
пряжения используются в преобразователях частоты с промежу-
точной цепью постоянного тока и инвертором напряжения?
17. Из каких основных элементов состоит вентильный двига-
тель как система регулируемого электропривода?
18. Почему вентильный двигатель называют бесщеточным
двигателем постоянного тока?
19. Для чего в вентильных двигателях используется датчик
положения ротора?
Глава 7. ИНДУКТОРНЫЕ, ШАГОВЫЕ И ЛИНЕЙНЫЕ
ЭЛЕКТРОПРИВОДЫ
7.1. Вентильно-индукторный электропривод
Одной из перспективных систем
регулируемого электропривода являя-
ются вентильно-индукторные электро-
приводы, использующие индукторную
электрическую машину с пассивным
ротором. На статоре такой машины
располагаются электромагниты - ин-
дукторы (см. рис.7.1), по обмоткам
которых поочередно пропускается
постоянный ток. Ротор двигателя не
имеет обмоток (пассивный) и содержит
ряд зубцов, число которых не совпадает
с числом зубцов магнитопровода
статора.
На рис.7.1 показана машина,
имеющая 6 зубцов магнитопровода на
статоре и 4 - на роторе. Машина
управляется вентильным (транзис-
торным) коммутатором VT, осущес-
твляющим переключение обмоток
индукторов. Основная особенность
вентильно-индукторных приводов за-
ключается в том, что переключение
обмоток индукторов производится в
Рис.7.1. Функциональ-
ная схема вентильно-
индукторного привода
178
соответствии с положением ротора, для чего в схеме применяется
датчик положения DR.
Принцип работы вентильно-индукторного привода состоит в
поочередном последовательном включении индукторов (а-а, в-в,
с-с), поток которых замыкается через зубцы ротора. Возбуждение
индуктора вызывает возникновение электромагнитных сил при-
тяжения между зубцами индуктора и ближайшими к ним зубцами
ротора.
Под действием этих сил (момента) ротор поворачивается и
занимает согласованное положение, когда зубцы ротора устанав-
ливаются напротив зубцов возбужденной фазы. Так как число
зубцов статора и ротора различно, то в согласованном положении
для одного индуктора для следующего индуктора зубцы ротора
окажутся в несогласованном положении. Поэтому при отключе-
нии первого индуктора и включении последующего ротор снова
повернется на одно полюсное деление. Последовательная комму-
тация индукторов с помощью датчика положения через систему
управления CS обеспечивает непрерывное создание вращающего
момента и, следовательно, непрерывное вращение ротора двига-
теля.
Величина электромагнитного момента определяется средней
величиной тока, подаваемого в обмотки индукторов. Поэтому
регулирование момента двигателя производится изменением на-
пряжения, подводимого к обмоткам индуктора. В схеме рис.7.1
изменение напряжения производится методом широтно-
импульсного регулирования. Для точного регулирования скоро-
сти в рассматриваемых приводах вводится внешний контур регу-
лирования.
Вентильно-индукторные электроприводы отличаются конст-
руктивной простотой и экономичностью. Они находят примене-
ние для общепромышленных механизмов мощностью примерно
до 50кВт, не предъявляющих высоких требований к качеству ре-
гулирования. Особенно эффективно использование вентильно-
индукторных приводов для высокоскоростных механизмов с но-
минальной скоростью бОООоб/мин и выше.
7.2. Электропривод с шаговым двигателем
Исполнительные органы некоторых рабочих машин и меха-
низмов должны совершать строго дозированные перемещения с
фиксацией своего положения в конце движения. Типичными
примерами таких механизмов являются механизмы подачи неко-
торых металлорежущих станков, сборочных агрегатов, манипу-
170
ляторов и других машин. Для привода подобных машин исполь-
зуются шаговые электродвигатели. Особенностью таких двигате-
лей является то, что их движение (угол поворота для двигателей
вращательного движения или перемещение для двигателей по-
ступательного движения) носит не непрерывный, а дискретный
характер - шагами. Электропривод с такими двигателями часто
называют дискретным электроприводом.
Широкое применение дискретного электропривода опреде-
ляется тем, что по принципу своей работы он естественным обра-
зом сочетается с цифровыми системами управления: микропро-
цессорами и устройствами числового программного управления,
которые все шире применяются во всех областях техники. Шаго-
вые двигатели выпускаются промышленностью мощностью от
нескольких ватт до нескольких киловатт [11]. Двигатели характе-
ризуются развиваемым моментом (усилием) и величиной шага
(дискреты). Чем меньше величина шага, тем с большей точно-
стью осуществляется перемещение рабочего органа машины.
Принцип действия шагового двигателя рассмотрим на при-
мере простейшей схемы двухфазного двигателя с активным рото-
ром (рис.7.2). Такой шаговый двигатель имеет на статоре две па-
ры явно выраженных полюсов, на которых находятся обмотки
возбуждения, образующие две фазы двигателя. На роторе распо-
лагается постоянный магнит (активный ротор). Питание обмоток
осуществляется импульсами напряжения, поступающими с уст-
ройства управления, которое преобразует последовательность
управляющих импульсов, равную заданному числу шагов, в мно-
гоканальную последовательность импульсов, где число каналов
равно числу фаз двигателя.
Рис.7.2. Упрощенная схема шагового двигателя с активным ротором
180
Пусть напряжение определенной полярности подано на пер-
вую обмотку (1Н-1К). Тогда ротор двигателя займет положение,
показанное на рис.7.2а. Это положение будет устойчивым, по-
скольку при отклонении от него на ротор будет действовать мо-
мент, стремящийся вернуть ротор в прежнее положение.
Для выполнения шага движения напряжение снимается с
первой обмотки и подается на вторую (2Н-2К). При этом ротор
двигателя сделает шаг, т.е. повернется на угол д/2 (см.
рис.7.2,б). Для выполнения второго шага нужно снять напряже-
ние с обмотки 2 и подать импульс напряжения обратной поляр-
ности на обмотку 1, и т.д.
Угловое перемещение шагового двигателя за один шаг бу-
дет: а = Д’/ рп,
гдер - число пар полюсов ротора (в схеме на рис.7.2 /?= 1);
п - число фаз статорных обмоток.
Кроме рассмотренного алгоритма коммутации может быть
применен более сложный алгоритм, позволяющий вдвое умень-
шить величину шага. Пусть исходное положение соответствует
условию включения обмотки 1, показанному на рис.7.2. Далее, не
снимая напряжение с обмотки 1, подключим обмотку 2 с поляр-
ностью, соответствующей рис.7.2,в. При этом пространственный
вектор результирующей м.д.с. будет располагаться между полю-
сами статора, т.е. ось магнитного потока повернется на угол Д’/4.
Соответственно ротор повернется на половину полюсного деле-
ния, т.е. на Д"/4.
Для реверса шагового двигателя следует изменить поляр-
ность импульсов напряжения. Каждому импульсу управления
соответствует один шаг поворота ротора. Суммарный угол пово-
рота ротора соответствует числу поступающих импульсов управ-
ления N
(р =a-N,
а средняя скорость поворота - частоте коммутаций fK:
(o = a-fK.
Частота коммутаций является важным параметром шагового
электропривода, т.к. она определяет время отработки управляю-
щего воздействия. Допустимая частота коммутаций (ее называют
частотой приемистости) ограничивается электромагнитной инер-
ционностью обмоток и механической инерцией ротора и приво-
димого механизма. Чем выше инерционность двигателя и больше
181
статический момент на валу двигателя, тем меньше частота
приемистости.
Современные шаговые двигатели различны по конструктив-
ному исполнению. Двигатели бывают однофазными, двухфазны-
ми и многофазными с активным и пассивным ротором.
Конструкция активного ротора обычно содержит постоян-
ные магниты и имеет величину шага от тг/12 до тг/2. Частота
коммутаций таких двигателей ограничена величиной примерно
500Гц.
Для шаговых двигателей с
малой величиной шага
используют пассивный ротор, не
содержащий обмоток и
магнитов. Статор реактивного
шагового двигателя имеет явно
выраженные полюсы, на
которых нарезаны зубцы Zc (см.
рис.7.3). На роторе равномерно
по окружности нарезано четное
(но не делящееся на 4) число
зубцов 7.р. Выбором числа
зубцов ротора достигается сме-
щение в любом положении зуб-
цов ротора по отношению к
зубцам смежных полюсных вы-
ступов статора на !4 зубцового
Рис.7.3. Поперечный разрез
четырехполюсного шагового
двигателя с пассивным ро-
тором
деления.
Работа шаговых двигателей с пассивным реактивным рото-
ром заключается в том, что при подаче напряжения на какую-
либо фазу статора ротор стремится занять такое положение, что-
бы зубцы ротора встали против зубцов соответствующего полюса
и проницаемость магнитной цепи, по которой замыкается поток
данной фазы, была бы наибольшей.
При подаче тока в следующую фазу статора ротор повернет-
ся на один шаг, так, чтобы зубцы ротора совпали с зубцами по-
люса следующей фазы. Величина шага при этом равна
Z -Z
а = 2тг —------.
z„ze
р с
Шаговые двигатели применяются в приводах, где требуется
регулирование положения рабочего органа, а также широко ис-
пользуются для привода часов.
182
7.3. Электропривод с линейными двигателями
Подавляюще большинство электродвигателей является элек-
тродвигателями вращательного движения. В то же время многие
рабочие органы производственных машин должны по технологии
своей работы осуществлять поступательное (например, конвейе-
ры, транспортеры и др.) или возвратно-поступательное движение
(механизмы подачи станков, манипуляторы, поршневые и другие
машины). Преобразование вращательного движения в поступа-
тельное осуществляется посредством специальных кинематиче-
ских звеньев: винт-гайка, шарико-винтовая передача, шестерня-
зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является
желание использовать для привода рабочих органов, совершаю-
щих поступательное и возвратно-поступательное движение, дви-
гатели, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, ис-
пользующие линейные асинхронные, вентильные и шаговые дви-
гатели. Принципиально линейный двигатель любого типа может
быть образован из двигателя вращательного движения путем ли-
нейной развертки цилиндрического статора в плоскость [11].
Представление об устройстве линейного асинхронного дви-
гателя можно получить, если развернуть статор асинхронного
двигателя в плоскость. При этом вектор намагничивающих сил
статора будет линейно перемещаться вдоль развертки статора,
т.е. при этом образуется не вращающееся (как в обычных двига-
телях), а бегущее электромагнитное поле статора. В качестве
вторичного элемента может использоваться ферромагнитная по-
лоса, располагаемая с небольшим воздушным зазором вдоль раз-
вертки статора. Эта полоса играет роль короткозамкнутого рото-
ра. Вторичный элемент увлекается движущимся полем статора и
линейно перемещается со скоростью, меньшей скорости движе-
ния поля статора на величину линейного абсолютного скольже-
ния.
Линейная скорость бегущего электромагнитного поля будет
Ио = Зт • /], м/с, где т, м - полюсное деление - расстояние между
соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента Ё=КО(1-5Л), где s, - относи-
тельное линейное скольжение.
При питании двигателя напряжением стандартной частоты
получаемые скорости поля будут достаточно велики (более 3 м/с),
что затрудняет использование этих двигателей для привода про-
183
мышленных механизмов. Такие двигатели применяются для вы-
сокоскоростных транспортных механизмов. Для получения более
низких скоростей движения и регулирования скорости линейного
асинхронного двигателя его обмотки питают от преобразователя
частоты.
Применяются несколько вариантов конструкций линейного
асинхронного двигателя. Одна из них показана на рис.7.4. Здесь
вторичный элемент 2, соединенный с рабочим органом, переме-
щается по направляющим 1 под действием бегущего электромаг-
нитного поля, создаваемого статором 3. Такая конструкция удоб-
на для компоновки с рабочей машиной, однако, она сопряжена со
значительными потоками рассеяния поля статора, вследствие че-
го cosp двигателя будет низким.
Рис.7.4. Конструкция линейного Рис.7.5.Линейный двигатель
однокоординатного двигателя цилиндрической конструкции
Для увеличения электромагнитной связи между статором и
вторичным элементом, последний размещают в прорезь между
двумя статорами, либо конструкция двигателя выполняется в ви-
де цилиндра (см. рис.7.5). В этом случае статор двигателя пред-
ставляет собой трубку 1, внутри которой расположены цилинд-
рические наборные катушки 2, являющиеся обмоткой статора.
Между катушками размещены ферромагнитные шайбы 3, яв-
ляющиеся частью магнитопровода. Вторичный элемент - шток
трубчатой формы выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обра-
щенную конструкцию, когда вторичный элемент неподвижен, а
перемещается статор. Такие двигатели обычно применяются на
транспортных средствах. В этом случае в качестве вторичного
элемента используется рельс или специальная полоса, а статор
размещается на подвижной тележке.
184
Недостатком линейных асинхронных двигателей является
низкий кпд и связанные с этим потери энергии, прежде всего, во
вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться
синхронные (вентильные) двигатели. Принцип работы вентиль-
ного двигателя рассмотрен в главе 8 и сохраняется в применении
к линейному варианту его исполнения. Конструкция такого дви-
гателя аналогична представленной на рис.7.4. Статор двигателя
развернут в плоскость, а на вторичном элементе размещаются
постоянные магниты. Возможен вариант обращенной конструк-
ции, когда статор является подвижной частью, а вторичный эле-
мент с постоянными магнитами неподвижен. Переключение об-
моток статора производится в зависимости от относительного
положения магнитов. С этой целью в конструкции предусмотрен
датчик положения 4 (рис.7.4).
Для позиционных приводов эффективно применяются также
линейные шаговые двигатели. Если развернуть в плоскость ста-
тор шагового двигателя, показанного на рис.7.3, а вторичный
элемент выполнить в виде пластины, на которой путем фрезеро-
вания канавок образованы зубцы, то при соответствующем пере-
ключении обмоток статора вторичный элемент будет совершать
дискретное движение, шаг которого может быть весьма малым -
до долей миллиметра. Часто применяется обращенная конструк-
ция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется вели-
чиной зубцового деления т, числом фаз т и частотой переключе-
ния V - tf /т.
Получение высоких скоростей движения не вызывает труд-
ностей, поскольку увеличение зубцового деления и частоты не
лимитируется технологическими факторами. Ограничения суще-
ствуют для минимального значения т, т.к. отношение зубцового
деления к величине зазора между статором и вторичным элемен-
том должно быть не меньше 10.
Использование дискретного привода позволяет не только
упростить конструкцию механизмов, совершающих линейное
однокоординатное движение, но и дает возможность с помощью
одного привода получить двух или многокоординатное движе-
ние. Если на статоре подвижной части расположить ортогонально
две системы обмоток, а во вторичном элементе выполнить канав-
ки в двух перпендикулярных направлениях, то подвижный эле-
мент будет совершать дискретное движение в двух координатах,
т.е. обеспечивать перемещение на плоскости. В этом случае воз-
185
никает задача создания опоры для подвижного элемента. Для ее
решения может использоваться воздушная подушка - напор воз-
духа, подаваемого в пространство под подвижным элементом.
Линейные шаговые двигатели развивают относительно низкое
тяговое усилие и имеют низкий кпд. Основной областью их при-
менения являются легкие манипуляторы, легкие сборочные стан-
ки, измерительные машины, станки для лазерной резки и другие
устройства.
Благодаря применению линейных двигателей отпадает необ-
ходимость применения кинематических звеньев, преобразующих
вращательное движение в поступательное.
7.4. Контрольные вопросы для самопроверки
1. Почему в вентильно-индукторном электроприводе число
зубцов магнитопровода статора не совпадает с числом зубцов
магнитопровода ротора?
2. Что такое дискретный электропривод?
3. Для привода каких механизмов и устройств целесообразно
применение шаговых электродвигателей?
4. Что такое частота приемистости шаговых двигателей?
5. В чем состоит основное преимущество линейных электро-
двигателей?
6. В чем состоит основное отличие линейных асинхронных
двигателей от линейных синхронных (вентильных) двигателей?
Глава 8. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В
ЭЛЕКТРОПРИВОДЕ
8.1. Общие сведения
При пуске и останове электродвигателя, при его реверсе, из-
менении задания на скорость в регулируемом электроприводе,
при приложении (или снятии) к валу двигателя механической на-
грузки изменяются параметры электропривода: ток, момент, ско-
рость и другие. При этом привод переходит из одного устано-
вившегося режима работы с одними параметрами движения в
другой установившийся режим с другими параметрами. Однако
этот переход не может быть мгновенным, т.к. ток в двигателе из-
за электромагнитной инерционности его цепей не может изме-
няться мгновенно, также не может изменяться мгновенно ско-
186
рость двигателя из-за механической инерционности движущихся
масс электропривода.
Переходным процессом (переходным режимом) электропри-
вода называется протекающий во времени процесс перехода от
одного установившегося режима работы (или отключенного со-
стояния) к другому установившемуся состоянию.
Причиной возникновения переходных процессов могут
быть:
• управляющие воздействия (включение - отключение
электропривода, изменение задания на скорость привода и др.);
• возмущающие воздействия, главным из которых является
изменение нагрузки на валу двигателя (изменение Л/с).
Необходимость изучения, а затем и формирования переход-
ных процессов, определяется тем, что многие электроприводы
работают в интенсивных динамических режимах, в которых про-
исходит резкое приложение нагрузки, необходимо быстрое изме-
нение скорости и т.д. Таковы электроприводы металлорежущих
станков, горных экскаваторов, прокатных станов и других ма-
шин. Для этих машин возникает задача сокращения длительности
переходных процессов, т.е. повышение быстродействия электро-
привода.
Есть рабочие машины, для которых важнейшим требовани-
ем является стабильность скорости вращения (например, машины
для производства бумаги, пленки и т.п.). Здесь при приложении
возмущающих воздействий важна минимизация величины откло-
нения от заданных параметров движения.
Рис.8.1. Динамическая (переходная)
характеристика системы регулирования
Большое значе-
ние имеет анализ пе-
реходных процессов
для следящих элек-
троприводов, которые
работают, как прави-
ло, в переходных ре-
жимах, отрабатывая
изменяющееся зада-
ние скорости и поло-
жения.
Переходные про-
цессы могут быть ко-
лебательными или
апериодическими, как
показано на рис.8.1, и
187
характеризуются следующими показателями.
Время переходного процесса tnn - время, начиная с которого
регулируемый параметр У входит и остается в зоне допустимых
отклонений от заданного значения УЗЯ(). Обычно в системах элек-
тропривода эта зона принимается равной ±2% или ±5% от задан-
ной величины регулируемого параметра.
Время нарастания до заданного значения tH - время, когда
регулируемый параметр У первый раз достигает заданного значе-
ния.
У - У
Перерегулирование <у = —а™£--=^^-100% - это выраженное в
Yjad
процентах относительное превышение максимального значения
регулируемого параметра над заданным значением.
Эти показатели качества переходных процессов приводятся
для случая, когда на систему регулирования действует ступенча-
тое (единичное) управляющее или возмущающее воздействие.
Для расчета и анализа переходных процессов необходимо
найти переходную функцию - зависимость параметров электро-
привода (скорости, тока, момента и др.) от времени.
Переходные функции описываются дифференциальными
уравнениями. Порядок дифференциального уравнения будет оп-
ределяться числом инерционностей, которые учитываются при
рассмотрении данного переходного процесса. Ниже перечислены
основные инерционности, характерные для электроприводов.
Механическая инерционность, связанная с накоплением и
отдачей кинетической энергии; величина механической инерци-
онности определяется для вращательного движения моментом
инерции приведенным к валу электродвигателя; при анализе
переходных процессов механическая инерционность оценивается
электромеханической постоянной времени
где Р - абсолютная величина (без учета знака) жесткости ме-
ханической характеристики электропривода.
Электромагнитная инерционность, связанная с накоплением
(отдачей) энергии электромагнитного поля; эта инерционность
оценивается электромагнитной постоянной времени
Л =4. <8.2)
К
188
где L и R - индуктивность и активное сопротивление элек-
тромагнитного устройства (например, обмотки двигателя).
Электростатическая инерционность, связанная с накоплени-
ем (отдачей) энергии электростатического поля; эта инерцион-
ность оценивается постоянной времени
Tc=RC, (8.3)
где С - емкость конденсатора, R - сопротивление цепи его
заряда-разряда.
Существуют инерционности и другой физической природы,
которые иногда следует учитывать при анализе переходных про-
цессов.
Если предположить, что инерционности отсутствуют или
они пренебрежимо малы, то переходные процессы будут проте-
кать мгновенно. Наличие в реальных системах инерционностей
различной физической природы обуславливает затягивание пере-
ходных процессов, связанное с тем, что в процессе перехода сис-
темы из одного состояния в другое происходит накопление (за-
пасание) или отдача энергии, которые не могут происходить
мгновенно.
Если потоки энергии однонаправлены, то переходный про-
цесс при приложении постоянного по величине воздействия но-
сит монотонный характер. Таков, например, процесс нарастания
тока в обмотке возбуждения двигателя постоянного тока при по-
даче напряжения на эту обмотку (рис.8.2,а).
Процесс изменения тока во времени при подаче напряжения
на обмотку описывается дифференциальным уравнением
U = iR + L—,
dt
приводя который к нормализованному виду с учетом (8.2), полу-
чим:
т 1 р Iуст' (8-4)
СИ К
где 1усп - установившееся значение тока возбуждения,
или в операторной форме, заменяя символ дифференцирования
d/dt на оператор р
i(T3p + 1.) = 1уст.
Решение этого уравнения будет
(8-5)
уст уст нач
тэ
(8.6)
189
ПРИ = 0
Рис.8.2. Переходные характеристики при включении обмотки возбуж-
дения
Переходная характеристика i = f (?) носит экспоненциаль-
ный характер (рис.8.2,б). За время, равное Тэ, ток в обмотке воз-
буждения возрастает до значения 0,63ZKm; за время ЗТЭ - до значе-
ния Q,95Iycm; за время 5ТЭ - до значения 0,996/кта. Практически
можно считать, что время переходного процесса при экспоненци-
альном характере составляет 3-5 постоянных времени. Если нуж-
но ускорить нарастание тока в обмотке возбуждения, то это мож-
но сделать единственным способом - увеличить напряжение,
подводимое к индуктивности (обмотке возбуждения) на время
протекания переходного процесса. Если, например, мы увеличим
напряжение в а раз до значения иф - aIycmR, то ток в обмотке
возбуждения будет нарастать быстрее, как это следует из харак-
теристики 2 на рис.8.2,б. По достижении током значения Iycm на-
пряжение на обмотке возбуждения следует уменьшить до значе-
ния U = IycmR.
Таким образом, для уменьшения времени переходного про-
цесса нужно применить форсировку напряжения, которая затем
снимается. Отношение а = U ф /U называется коэффициентом
форсировки.
190
8.2. Переходные процессы, определяемые механической
инерционностью электропривода
Переходные процессы в электроприводе, когда изменяются
ток, момент и скорость двигателя, представляют собой сложное
явление - одновременное протекание электромагнитных и меха-
нических переходных процессов. Характер переходного процесса
зависит от числа инерционностей, участвующих в данном про-
цессе, и соотношения между характеризующими их постоянными
времени.
Переходные процессы в зависимости от характера объекта
могут описываться линейными или нелинейными дифференци-
альными уравнениями. Если нелинейности несущественны, мож-
но прибегнуть к линеаризации уравнений.
В случае линейных систем анализ переходных процессов
(расчет переходных характеристик) может производиться анали-
тическими методами. В случае нелинейных систем целесообраз-
но пользоваться численными методами решения уравнений на
ЭВМ или методами компьютерного моделирования.
Если постоянные времени по величине отличаются на два и
более порядка, то можно малыми постоянными времени пренеб-
регать.
Проведем анализ электромеханической системы, состоящей
из двигателя с линейной механической характеристикой, и жест-
кого механического звена.
Движение такой электромеханической системы определяет-
ся уравнением движения электропривода (см. раздел 2.3)
(8.8)
at
где Л и Мс - суммарный момент инерции и момент сопро-
тивления движению, приведенные к валу двигателя.
Линейная механическая характеристика описывается урав-
нением
М - fl(coQ - со) (8.9)
здесь со0 - скорость идеального холостого хода.
Совместное решение (8.8) и (8.9) позволяет получить урав-
нение, описывающее переходные процессы двигателя, опреде-
ляемые механической инерционностью электропривода
А
dco
-----+ со = со „
dt 0
(8.10)
191
Величина Мс/(i представляет собой падение скорости от
нагрузки - статическую ошибку Дй>с (см. раздел 4.2), а величина
(бУ0 -Мс/Р) - установившееся значение скорости 0)уст после
окончания переходного процесса, когда М станет равным Мс (см.
рис.8.3,а).
1 - механическая характеристика
2 - переходная характеристика
Тогда, обозначив
получим выражение для переходной характеристики электропри-
вода.
ТмЦ+ й} = ^- (812)
Переходные процессы, определяемые одной механической
инерционностью, суммарным приведенным к валу двигателя мо-
ментом инерции Л, описываются дифференциальным уравнени-
ем первого порядка. Решением этого уравнения является пере-
ходная характеристика, имеющая вид экспоненты с постоянной
времени Ти (см. рис.8.3,б).
& = (8-13)
при сонач = О
192
а = ауст
(8.14)
Задача 8.1. Построить характеристики переходного процес-
са при пуске двигателя постоянного тока независимого возбуж-
дения вхолостую с дальнейшим приложением номинального мо-
мента нагрузки. Пуск производится подачей номинального на-
пряжения на якорь двигателя; обмотка возбуждения была вклю-
чена заранее. Для ограничения пускового тока в цепь якоря дви-
гателя введено добавочное сопротивление, ограничивающее мак-
симальное значение тока при пуске 1пуск = 2,51 н. По окончании
пуска добавочное сопротивление должно быть закорочено.
Технические данные двигателя: мощность Ря=6,5 кВт, номи-
нальная скорость вращения сои-104,5 1/с; номинальное напряже-
ние (7я=220 В; номинальный ток якоря 7^=33,5 А; сопротивление
цепи якоря 7?я=0,77 Ом; индуктивность якоря £я=0,01 Гн; момент
инерции привода JL= 1,0 кг.м\
Решение.
1. Номинальный момент двигателя
Ри 6500 г
М ~ — =---------= 62,2 Нм.
сон 104,5
2. Машинная постоянная
С = = j 86Нм/А=1,86В.с.
Л 33,5
3. Скорость холостого хода при U„ =UH = 220В.
<у0 =^- = — = 118,3 1/с.
С 1,86
4. Добавочное сопротивление, вводимое в цепь якоря
U 220
Rdo6 = -—-]{ =-----------0,77 = 1,86 Ом.
1пуск 2,5-33,5
5. Максимальный момент при пуске
М=2,54=2,5-62,2=155,5 Нм.
6. Жесткость естественной механической характеристики
193
_ С2 1,862
В = — =-------= 4,5 кг.м /с.
R„
7. Жесткость пусковой механической характеристики
= .!*' = 1,32кг.мус.
Я,+Ям 0,77 + 1,86
8. Электромеханическая постоянная времени при работе
естественной характеристике
1,0
Тм = -^ = ~ = 0,22с.
м /3 4,5
9. Электромеханическая постоянная времени при работе
пусковой характеристике
Тмп = — = 0,76с.
Рп 1,32
10. Электромагнитная постоянная времени при работе
естественной характеристике
на
на
на
Тя =Ь. = ^21 = о,О13 с.
я Rx 0,77
Поскольку ТЯ«ТМ, то ею можно пренебречь.
11. Построим характеристику переходного процесса при пус-
ке вхолостую по формуле (8.14)
со = <yof 1 - "1 = 118,3(1 - е’1>31/).
\ 7
12. По окончании переходного процесса пусковое
сопротивление будет закорочено, после чего к валу двигателя
будет приложен момент МС=МН. Построить переходный процесс
изменения скорости, связанный с приложением нагрузки.
13. У становившееся значение скорости после приложения
нагрузки
=®о- —= П8,3-—= Ю4,5 1/с.
4,5
14. Построим характеристику переходного процесса при при-
ложении нагрузки по формуле (8.13)
со = 104,5 - (104,5 -118,3>'4’55'.
194
Характеристики переходных процессов показаны на рис.8.4.
Рис.8.4. Переходные процессы при пуске и набросе нагрузки
8.3. Переходные процессы в электроприводе постоянного то-
ка
Рассмотрим динамические характеристики электропривода
постоянного тока по системе тиристорный преобразователь -
двигатель постоянного тока (ТП-Д). Тиристорный преобразова-
тель будем рассматривать как безынерционное звено с постоян-
ным передаточным коэффициентом кп.
Электромеханические процессы при постоянном потоке воз-
буждения описываются следующей системой уравнений (см. раз-
дел 5.1):
ия = Сю + 1яКя + ЬЯ^
dt
М = С1Я
(8.15)
da
М - Л/ = ----
dt
Здесь С=кФ - машинная постоянная при неизменном потоке
возбуждения.
Электромагнитная и механическая инерционности двигателя
отражаются соответственно электромагнитной Тя и электромеха-
нической Тм постоянными времени. Для двигателя постоянного
тока
195
(8.16)
г Л=£ф (g.17)
pc
Решая уравнения (8.15) с учетом (8.16) и (8.17), получим
(818)
at at
ия
W. *\cm= —--------~f--
Полученное уравнение (8.18) является общим для двигателей
с линейной механической характеристикой, вид которой опреде-
ляется величиной ее жесткости /?.
Переходя к операторной форме записи, полагая d/dt = р,
получим исходную для построения структурной схемы систему
уравнений
М = С1Я (8.19)
С2
М-Мс=—Тмра>
Данная система уравнений отражается структурной схемой
двигателя постоянного тока независимого возбуждения, состоя-
щей из четырех типовых динамических звеньев (рис.8.5).
Рис.8.5. Структурная схема двигателя постоянного тока при постоянном
потоке возбуждения. ЭМП - электромеханический преобразователь
Механическая часть двигателя характеризуется интегри-
рующим звеном с постоянной времени Тм, величина которой оп-
ределяется суммой момента инерции якоря двигателя и момента-
196
ми инерции всех движущихся частей рабочей машины, приве-
денными к валу двигателя. Электромеханическое преобразование
энергии отражается пропорциональным звеном с коэффициентом
передачи С, которое указывает, что момент двигателя пропор-
ционален току якоря. Электрическая цепь якоря двигателя пред-
ставлена инерционным звеном с постоянной времени Тя. Это зве-
но характеризует, как изменяется ток якоря при изменении раз-
ности напряжений (U^E^. Э.д.с. якоря Ея=кФа> отражается в ви-
де отрицательной обратной связи. Такая связь является внутрен-
ней, т.к. она соответствует природе физических процессов в опи-
сываемом объекте, а не создана системой регулирования.
Передаточная функция двигателя по управляющему воздей-
ствию при регулировании скорости изменением напряжения яко-
ря будет:
1/С
W(р) - =--------у--------. (8.20)
Л7 и,(Р) тмтяР2+тмР+1 }
Характер переходных процессов, определяется видом кор-
ней характеристического уравнения (см.8.18).
ТмТяр2 + Глр + 1 = 0.
-T+Jt2-4TT.
(8.21).
Корни этого уравнения рхг-
2Т Т
м я
Если7\ > 47\, то корни будут вещественными и отрица-
тельными. В этом случае решение уравнения (8.18) имеет вид:
СО = °>уст + С\еР'‘ + С1еР2' • (8.22)
Рис.8.6. Переходные характеристики электропривода с линейной
механической характеристикой при пуске
197
Переходный процесс в этом случае будет носить монотон-
ный характер с изменением скорости по закону, соответствую-
щему инерционному звену второго порядка (см. рис.8.6).
Если Тм < 4Тя , то корни будут комплексными сопряжен-
ными с отрицательной вещественной частью р{ 2 ~ а ± >
где
а = -
1
2?я
(8.23)
Решение дифференциального уравнения (8.18) при этом бу-
дет:
й) = а>уст + (Cj cos Ot + С2 sin Ot)e°“. (8-24)
Постоянные интегрирования С] и С2 находятся из начальных
или конечных условий переходного процесса.
Переходный процесс в этом случае характеризуется перио-
дическими колебаниями с частотой Q и затухающей амплитудой.
Время переходного процесса ориентировочно может быть оцене-
но, как tnn — (6 — 1 Qi)Tя . Колебательность процесса связана с
тем, что происходит периодическое преобразование кинетиче-
ской энергии в электромагнитную и обратно.
Выражение переходной характеристики для тока I я - f(t)
может быть получено из уравнения движения.
I = । Л
я С С dt ’
(8-25)
т.е. ток является суммой двух составляющих: статического тока
Ic = MjC и динамического тока, который пропорционален
производной от скорости (ускорению).
Передаточную функцию для тока при управляющем воздей-
ствии найдем из структурной схемы рис.8.5.
Р
w(P)=-^- - Л^+IAP). (8.26)
с тт,р + t.p+i
где 1С - статический ток, соответствующий статическому
моменту.
198
На рис.8.7 показаны переходные характеристики скорости и
U/ л
тока при пуске двигателя до скорости соуст = /q~ПРИ
наличии на валу двигателя реактивного статического момента;
будем полагать, что в рассматриваемом случае Т^>^ТЯ. В течение
времени tQ (см. рис.8.7,а) ток якоря нарастает до значения
1С = Мс /С . Нарастание происходит по экспоненциальному за-
• Ux fl I
Когда ток станет равным статическому, начинается движе-
ние вала двигателя. Динамический ток возрастает, вследствие
чего растет ускорение двигателя. Затем под действием увеличи-
вающейся противоэ.д.с. якоря ток начинает спадать, и скорость
двигателя асимптотически приближается к установившемуся
значению.
а) б)
Рис.8.7. Графики переходных характеристик для тока и скорости
а) при ru>47;; б) при ТМ<АТЯ
Если 7^<47^, то в кривых тока и скорости появится колеба-
тельная составляющая (см. рис. 8.7,6).
Рассмотрим теперь динамические процессы при приложении
нагрузки к валу двигателя при постоянном напряжении, подво-
димом к якорной цепи двигателя. Схема на рис.8.6 удобна для
анализа переходных процессов по управляющему воздействию,
когда изменяется U. В нашем случае величина задания скоро-
сти остается постоянной, а изменяется момент нагрузки Мс. Для
удобства анализа процессов и нахождения передаточной функции
электропривода по возмущающему воздействию преобразуем
199
структурную схему так, чтобы входным воздействием являлся
статический момент Л/с, а выходным параметром - скорость со.
Структурная схема для этого случая показана на рис.8.8. Примем,
что двигатель работал вхолостую при Л/с=0 со скоростью
(Уо = UjC, ток якоря Д=0, так что приложенное напряжение
уравновешива-
лось э.д.с. якоря
U„=E„.
Если к валу
двигателя скач-
ком приложить
нагрузку - стати-
ческий момент
Рис.8.8. Структурная схема двигателя постоян-
ного тока независимого возмущения при при-
ложении возмущения по нагрузке
Mc=CIL, то ско-
рость двигателя
начнет снижать-
ся, э.д.с. якоря
будет умень-
шаться и в цепи якоря начнет нарастать ток (см. рис.8.9)
U.-Ca-L,^-
т -__ at
R
Рис.8.9. Переходные характеристики тока
и скорости при приложении нагрузки
Если индуктив-
ность якорной цепи
велика (постоянная
времени ТЯ>У^ТМ),
то нарастание тока
будет отставать от
темпа снижения ско-
рости и к моменту,
когда скорость сни-
зится до нового уста-
новившегося значения
ауст = ^~^с =
= <*>0 -Ч/А
ток якоря еще не дос-
тигнет величины 1С,
200
при которой момент двигателя был бы равен моменту сопротив-
ления Мс. Поэтому скорость будет продолжать падать до тех пор,
пока ток якоря не станет равным статическому, затем скорость
начнет возрастать и после ряда колебаний достигнет установив-
шегося значения. Обратим внимание, что кривые со = f(f) и
1 я = f (t) взаимосвязаны - точкам максимума и минимума ско-
рости, когда dco/dt = 0, соответствует момент пересечения кри-
вой тока линии статического тока.
Если индуктивность якорной цепи невелика Тя > У Тм, то
процесс снижения скорости при приложении нагрузки будет
иметь монотонный характер.
При постоянной величине Uя передаточная функция элек-
тропривода по возмущающему воздействию будет
si 2 7*
^(р) =---------п~ г МГР---------(8.27)
л/с->д<у
C2T.pR,(T.P + i)
Выполнив преобразования, получим:
= ~7тт~'Лт .х.1» (8’28)
рТмТяр +Тмр + \
где /? = С2//?Я - жесткость механической характеристики
электропривода.
Из выражения (8.28) следует, что при приложении нагрузки
Мс скорость двигателя снизится на величину А а>с. По окончании
переходного процесса (р=0) установившаяся ошибка будет
л
А&> =—
Р
т.е. установившаяся величина снижения скорости (статическая
ошибка Ай>с) пропорциональна величине приложенного момента
и обратно пропорциональна жесткости механической характери-
стики электропривода.
201
тп дпт
Рис.8.10. Структурная схема электропривода ТП-Д с замкнутой по скоро-
сти системой управления
ТП - тиристорный преобразователь, ДПТ - двигатель постоянного тока
Как уже отмечалось в главе 4, для повышения точности ре-
гулирования скорости применяются замкнутые системы регули-
рования с обратной связью по скорости. Структурная схема элек-
тропривода по системе ТП-Д с обратной связью по скорости
представлена на рис.8.10. Тиристорный преобразователь будем
рассматривать как безинерционное звено с передаточным коэф-
фициентом к„. Передаточная функция по управляющему воздей-
ствию, составленная по схеме рис.8.10, будет:
1
КуКпКс j
с(тмтяр2 + тмр+\)
Обозначим [кукпкс)/С = К - коэффициент усиления ра-
зомкнутой системы (при разрыве обратной связи по скорости).
Тогда после преобразований получим:
У(р)= Л -------------------Ц----------. (8.29)
U,^a> кДК +1) f 2 1 М !
ЛЧ1 я К + Г
Передаточная функция показывает, что в замкнутой по ско-
рости системе регулирования электромеханическая постоянная
времени Тм, характеризующая инерционность механической час-
ти электропривода, как бы уменьшается в (А"+1) раз. Это связано
с тем, что жесткость механических характеристик (5 в замкнутой
системе увеличивается в (А"+1)раз, что было показано в разделе 4.
Это важное свойство - повышение быстродействия привода,
- которое дает отрицательная обратная связь по скорости, сопря-
202
жено с существенным недостатком - возрастанием колебательно-
сти переходных процессов.
Обычно электромеханическая времени Тм больше, чем 4ТЯ, и
в разомкнутой системе регулирование скорости во времени пере-
ходных процессов колебания не наблюдаются. Введение отрица-
тельной обратной связи по скорости уменьшает эквивалентную
электромеханическую постоянную времени, причем чем больше
коэффициент обратной связи кс, тем меньше Тмэкв. Поэтому в
замкнутых по скорости системах регулирования Тмзкв становится
меньше 4ТЯ, и переходные процессы в электроприводе приобре-
тают колебательный характер. Для снижения колебательности в
систему регулирования вводятся корректирующие звенья. Спосо-
бы формирования переходных процессов требуемого характера
рассмотрены в главе 10.
В общем случае можно предложить следующий порядок
анализа переходных процессов в системах электропривода, если
эти процессы описываются линейными (или линеаризованными)
дифференциальными уравнениями.
1. Определяется, какие инерционности следует учитывать
при анализе данного переходного процесса.
2. Находят постоянные времени, характеризующие каждую
инерционность. Если постоянные времени отличаются на 2 и бо-
лее порядка, то меньшими в инженерных расчетах, как правило,
можно пренебречь.
3. Число инерционностей определяет порядок дифференци-
ального уравнения, описывающего переходный процесс.
4. Находят характеристическое уравнение, соответствующее
левой части однородного линейного дифференциального уравне-
ния, описывающего исследуемый переходный процесс (см., на-
пример, (8.18)).
Переходный процесс в случае линейных зависимостей перемен-
ных и скачкообразного (единичного) характера управляющего
или возмущающего воздействий будет описываться уравнением
х = f(f), (где х - исследуемый параметр электропривода - ток,
момент, скорость).
Задача 8.2. Определить, какой характер будут иметь пере-
ходные процессы в электроприводе ТП-Д с разомкнутой и замк-
нутой по скорости системами регулирования.
Основные данные приводного двигателя постоянного тока:
номинальное напряжение якоря 17ян=220 В; сопротивление якор-
ной цепи Rx=0,6 Ом; индуктивность обмотки якоря £я=0,02 Гн;
203
машинная постоянная С=1,9 В.с.; номинальная скорость <z>„=104,5
1/с. Момент инерции привода Л= 1,0 кг.м2.
Данные по системе управления Uy изменяется от 0 до 10В;
изменению напряжения тиристорного преобразователя от 0 до
300В линейно соответствует изменение напряжения, подаваемого
на систему управления ТП - от 0 до ЗОВ; коэффициент обратной
связи по скорости кс=0,09В.с.
Решение
1. Электромагнитная постоянная времени якорной цепи
т = 2^ = 0,033 с.
0,6
2. Электромеханическая постоянная времени
7^=2ф = Ц2 = 0,16с.
С2 1,9
3. Коэффициент усиления усилителя кур в разомкнутой сис-
теме
UyTn„ _ 220 30 _ 2 2
к
ур итпн иун 300 10
4. Напряжение управления ТП, соответствующее 6/777=220 В
UyTn=UyKyp=\Q-2;i = 22b.
5. Коэффициент усиления ТП
С7Я„ 220
иутп 22
6. Коэффициент усиления усилителя ку, в замкнутой системе
регулирования найдем из соотношения
иутп =^у-ио„>у,, откуда
UvTn 22
к =-----------=---------------= 36,6.
уз Uy-KC(OH 10-0,09-104,5
7. Коэффициент усиления разомкнутой системы
v кУ,кпкс 36,6-10-0,09
С 1,9
8. Эквивалентная электромеханическая постоянная времени
Тмжв в замкнутой по скорости системе
Т = -2*- = °А6......= 0,009 с.
мх‘ К + \ 17,3 + 1
9. В разомкнутой системе регулирования
204
Тм >4Тя,т.к. 0,16 >4-0,033.
Это означает, что переходный процесс будет монотонным,
носить апериодический характер.
В замкнутой по скорости системе регулирования
Тмзкв <4ГЯ; 0,009 <4-0,033.
Это означает, что переходный процесс носит колебательный
характер с затуханием.
8.4. Контрольные вопросы для самопроверки
1. В каком случае возникают переходные процессы в элек-
троприводе?
2. Каким уравнением описывается процесс изменения тока в
обмотке возбуждения двигателя после ее подключения к источ-
нику питания?
3. Что нужно сделать, чтобы уменьшить время нарастания
постоянного тока в активно-индуктивной нагрузке после подачи
на нее напряжения?
4. От каких параметров зависит величина электромеханиче-
ской постоянной времени?
5. От каких параметров зависит электромагнитная постоян-
ная времени якорной цепи двигателя постоянного тока?
6. Каким типовым динамическим звеном описывается меха-
ническая часть электропривода?
7. От чего зависит характер переходных процессов в элек-
тромеханической системе, имеющей механическую и электро-
магнитную инерционность?
8. Как по передаточной функции электропривода при воз-
мущающем воздействии определить величину установившейся
ошибки по скорости при приложении статического момента?
9. Почему при приложении нагрузки к валу двигателя по-
стоянного тока увеличивается ток якоря?
10. Из каких динамических звеньев состоит структурная
схема двигателя постоянного тока?
11. Каким должно быть соотношение между электро-
механической и электромагнитной постоянными времени, чтобы
переходный процесс носил апериодический характер?
12. Какое влияние на характер переходных процессов в
электроприводе оказывает отрицательная обратная связь по ско-
рости?
205
Глава 9. АППАРАТЫ И УСТРОЙСТВА УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
9.1. Аппаратура управления и защиты электроприводов
Для управления электроприводами используется разнооб-
разная аппаратура, посредством которой реализуется информа-
ционный канал электропривода, предназначенный для управле-
ния параметрами движения рабочего органа машины в соответст-
вии с требованиями технологического процесса (см. раздел 1.3).
Совокупность аппаратов управления и датчиков электрических,
механических и технологических параметров образует информа-
ционно-управляющее устройство электропривода.
Для коммутации силовых электрических цепей, устройств
защиты и блокировок применяются, как правило, контактные
электрические аппараты. Для выполнения логических функций
управления, оптимизации параметров движения электропривода
все в большей степени используются устройства и системы
управляющей вычислительной техники: микропроцессорные
средства и системы, программируемые контроллеры и промыш-
ленные компьютеры.
Электромеханические аппараты управления электроприво-
дами различаются по их функциям, величине коммутируемого
тока и напряжения.
По выполняемым функциям:
- аппараты защиты: автоматические выключатели, реле мак-
симального и минимального тока, плавкие предохранители, теп-
ловые реле;
коммутационная аппаратура, предназначенная для
оперативной коммутации электрических цепей; основными
видами этих аппаратов являются пускатели и контакторы;
- реле управления: промежуточные, реле времени, тока, на-
пряжения;
- аппараты оперативного управления: кнопки, переключате-
ли, команд оконтролл еры.
Автоматические выключатели (автоматы). Предназначены
для защиты электрических линий и приемников электроэнергии
от токов короткого замыкания и токов перегрузки.
Отключение автоматов происходит под действием расцепи-
телей: максимальных, тепловых и независимых. Защита от токов
короткого замыкания осуществляется максимальными расцепи-
206
телями электромагнитного типа. Тепловые расцепители служат
для защиты от токов перегрузки. В настоящее время используют-
ся отечественные автоматические выключатели серий АК-63, АЕ-
1000, АЕ-2000, АЗ 100, А3700, ВА, Электрон.
Автоматические выключатели выбираются по номинально-
му току, составу расцепителей и номинальному току расцепите-
лей.
Для силовых электрических аппаратов принят ряд номи-
нальных значений токов: 10, 16, 25, 40, 63, 100, 160, 250, 400, 630,
1000А и более.
Электромагнитные контакторы. Служат для оперативного
дистанционного включения и отключения силовых электриче-
ских цепей. Контакторы различаются по роду тока (постоянного
и переменного); по числу главных контактов (одно и двухполюс-
ные постоянного тока, трехполюсные переменного тока); по на-
пряжению питания катушки управления; числу блок-контактов и
другим параметрам. Так как контакторы коммутируют значи-
тельный по величине ток в цепях, содержащих индуктивности,
они снабжаются устройствами гашения дуги на главных контак-
тах.
Промышленностью выпускаются контакторы постоянного
тока одно- и двухполюсные серий КП и КПД на токи от 25 до
250А и контакторы постоянного тока однополюсные для частых
включений серий КПВ600, КПВ620 на токи от 100 до 630 А. Кон-
такторы переменного тока серий КТ6000, КТ7000, КТП600 вы-
пускаются на токи от 63 до 1000А и имеют от двух до 5 (чаще
всего 3) главных контактов.
Контакторы серии МК на токи до 160А используют в цепях
постоянного и переменного тока с катушкой управления только
на постоянном токе.
Магнитные пускатели. Это специализированные контакторы,
предназначенные для управления асинхронными короткозамкну-
тыми двигатели. В состав пускателя входят: коммутирующее
устройство в виде контактора (может быть нереверсивным и ре-
версивным, т.е. содержать 2 контактора), тепловые реле защиты,
иногда сигнальные лампы и кнопки управления). Выпускаемые
магнитные пускатели различаются на нереверсивные и реверсив-
ные, по величине номинального тока на 6 габаритов (10, 25, 40,
63, 100, 160А), наличию тепловых реле и других встраиваемых
элементов.
В настоящее время промышленностью выпускаются магнит-
ные пускатели серий ПМЛ, ПАЕ, ПА, ПМЕ и другие. Схема
207
управления асинхронным двигателем посредством магнитного
пускателя нереверсивного (а) и реверсивного (б) показана на
рис.9.1.
Для пуска двигателя нужно включить выключатель QF и
нажать кнопку пуска SB 1. Получает питание катушка контактора
КМ, который своими главными контактами подключает обмотки
статора двигателям к сети. Блок-контакт КМ шунтирует кнопку
«пуск», так что после ее отпускания контактор КМ остается
включенным. Для отключения двигателя нужно нажать кнопку
«стоп» SB2, после чего контактор КМ отключается. Защита от
коротких замыканий в схеме рис.9.1,а осуществляется плавкими
предохранителями FA, а в схеме рис.9.1,6 - автоматическим вы-
208
ключателем QF и предохранителями FA. Защита двигателя от
токов перегрузки производится тепловым реле КК, разрывающим
при срабатывании цепь катушки контактора. Возврат теплового
реле после срабатывания осуществляется нажатием имеющейся
на нем кнопки. Защита от самопроизвольного включения двига-
теля после исчезновения (снижения) напряжения питания реали-
зуется блок-контакгом КМ, шунтирующим кнопку SB1.
В реверсивном пускателе (рис.9.1,6) имеются два контактора
КМ1 и КМ2, подключающих обмотки статора к сети с разным
порядком чередования фаз. Для исключения одновременного
включения двух контакторов, что приведет к короткому замыка-
нию, предусмотрены механическая и электрическая блокировки
(введением нормально закрытых (н.з.) блок-контакгов контакто-
ров в цепи катушки другого контактора).
Реле управления и защиты. В системах управления и защиты
широко используются электромагнитные реле, служащие для
коммутации цепей управления. Коммутационная способность
контактов реле не превышает, как правило, 6А.
Промежуточные реле предназначены для передачи команд
из одной цепи в другую и для увеличения числа одновременно
срабатывающих контактов, а также для увеличения мощности
передаваемого дискретного сигнала. Реле напряжения использу-
ются в цепях защиты от исчезновения или недопустимого сниже-
ния напряжения. Катушки реле напряжения и промежуточных
рассчитаны на напряжение постоянного тока 12, 24, 48, ПО и
220В. Промежуточные реле могут иметь до 8 нормально откры-
тых (н.о.) и нормально закрытых (н.з.) контактов.
Реле времени предназначены для осуществления задержки
по времени при передаче управляющего сигнала (команды). Наи-
более распространены электромагнитные реле времени постоян-
ного тока серии РЭВ800. Выдержка времени у этих реле создает-
ся при отключении их катушки; контакты реле при этом удержи-
ваются определенное время (от 1 до 15 сек) за счет магнитного
потока, создаваемого вихревыми токами в гильзе, надетой на
магнитопровод реле.
Кроме электромагнитных используют пневматические, ме-
ханические и электронные реле времени. Пневматическое реле
представляет собой электромагнитное реле с пневматическим
демпфером, замедляющим движение якоря реле при включении.
Пневматические реле дают выдержку при включении от 0,5 до
180 сек.
209
Электромагнитные реле тока и напряжения являются изме-
рительными реле, которые срабатывают (включаются или отклю-
чаются) при достижении контролируемой величиной заданного
значения. Ток (напряжение) срабатывания регулируется измене-
нием силы натяжения возвратной пружины.
Тепловые реле служат для защиты электродвигателей от пе-
регрузки. Чувствительным элементом этих реле является биме-
таллическая пластина, которая при нагреве прогибается, вызывая
размыкание контакта реле.
Промышленностью выпускается большое число типов реле
различного назначения. Наиболее распространены промежуточ-
ные реле РПУО, РПУ1, 2, 3, 4, электромагнитные реле тока, на-
пряжения и времени РЭВ800, пневматические реле РВП-72 теп-
ловые реле ТРН и ТРТП и многие другие.
В системах управления электроприводами, кроме указанных
используются и другие контактные электрические аппараты.
Сведения о них можно найти в специальной литературе [18] и
справочниках.
9.2. Бесконтактные логические элементы
В схемах управления электроприводами широко использу-
ются бесконтактные переключающие устройства, получившие
название логических элементов. Они используются взамен элек-
тромагнитных контактных реле управления. На основе логиче-
ских элементов формируются бесконтактные схемы, выполняю-
щие логические функции управления, защиты и блокировок. Дос-
тоинством таких схем является высокая надежность, малые
габариты, низкое энергопотребление.
Логический элемент имеет два состояния: «включено» и
«выключено», которые обозначаются соответственно цифрами 1
и 0. Состояние 1 указывает на наличие напряжения на его выхо-
де, состояние 0 обозначает отсутствие напряжения.
Основными логическими элементами являются:
логический элемент ИЛИ - сигнал 1 на выходе элемента бу-
дет в том случае, когда на хотя бы одном из его входов будет
присутствовать сигнал 1;
логический элемент И - сигнал 1 на его выходе будет в том
случае, когда на всех его входах будет присутствовать сигнал 1;
логический элемент НЕ - осуществляет функцию инверсии:
когда сигнал на входе 1, сигнал на выходе 0; если сигнал на входе
0, сигнал на выходе 1;
210
логический элемент памяти, который выполняет функцию
запоминания дискретного сигнала, реализуется на основе стати-
ческого RS-триггера; при подаче сигнала 1 на вход S получают
сигнал 1 на прямом выходе и 0 на инверсном выходе; при снятии
входного сигнала на входе S триггер остается в прежнем состоя-
нии, т.е. запоминает сигнал; для замены сигнала 1 на прямом вы-
ходе нулевым сигналом нужно подать сигнал 1 на вход R, после
чего происходит переключение триггера с запоминанием нулево-
го сигнала на выходу у.
Условные обозначения типовых логических элементов даны
на рис.9.2.
Рис.9.2. Условные обозначения типовых логических элементов
Кроме указанных в состав набора логических элементов
входят элементы, реализующие выдержки времени, счетчики,
дешифраторы, регистры и другие функциональные логические
элементы, а также усилители мощности выходных сигналов и
другие элементы, служащие для согласования работы логических
схем управления с контактными аппаратами: кнопками, выклю-
чателями, реле, датчиками и др. В качестве элементов гальвани-
ческой развязки применяются миниатюрные герконовые реле ти-
па РПГ-6 (реле, контакт которого заключен в герметическую кап-
сулу, наполненную инертным газом).
Логические элементы выпускаются в составе серии инте-
гральных логических микросхем, таких как серии К155 и К511 и
др.
Базовым элементом серий обычно являются элементы И-НЕ.
Схема типового транзисторного элемента И-НЕ показана на
рис.9.3. При подаче сигнала 0 на любой из трех входов транзи-
стор VT1 открывается, что приводит к запиранию транзисторов
VT2 и VT4 и открыванию транзистора VT3. В результате на вы-
ходе появится сигнал 1. При единичных сигналах на всех трех
входах транзистор VT1 будет заперт, что приведет к отпиранию
211
транзисторов VT2 и VT4 и
формированию сигнала О
на выходе (функция И-
НЕ).
Дальнейшим развити-
ем конструкции логиче-
ских элементов является
их интеграция в много-
функциональные про-
граммируемые устройства.
Примером таких уст-
ройств являются устрой-
ства логические програм-
мируемые типа УПЛ, по-
зволяющие реализовать
Рис.9.3. Схема логического эле-
мента И-НЕ
сложные разветвленные схемы логического управления.
Принцип работы УПЛ заключается в последовательном оп-
росе входных сигналов, их логической обработке и выдаче соот-
ветствующих команд в выходные каналы. Число входов до 256,
число выходов - 16. Программирование осуществляется вводом с
пульта команд в постоянное запоминающее устройство.
9.3. Датчики механических и электрических параметров
В системах автоматического управления электроприводами
применяют четыре основных вида датчиков: скорости, положе-
ния, тока и напряжения.
По принципу действия датчики делятся на аналоговые, где
измеряемая входная величина преобразуется в пропорциональ-
ный по величине электрический сигнал, и дискретные, где вход-
ная величина преобразуется в цифровой или импульсный сигнал.
Аналоговыми датчиками скорости являются тахогенераторы
- малогабаритные генераторы постоянного или переменного то-
ка, расположенные на валу двигателя. Наиболее часто применя-
ются тахогенераторы постоянного тока с электромагнитным воз-
буждением типа ПТ или возбуждением от постоянных магнитов
типа ЭТ. В конструкции тахогенераторов предусмотрены меры
по снижению пульсаций выходного напряжения, при малых ско-
ростях вращения. Выходное напряжение тахогенератора итг про-
порционально скорости вращения его вала, а знак напряжения итг
отражает направление вращения двигателя. Основное требование
к тахогенераторам - линейность характеристики игг = /(б»).
212
В современных системах автоматизированного электропри-
вода с большим диапазоном регулирования скорости точность
тахогенераторов может оказаться недостаточной. Для высоко-
точных электроприводов используются цифровые датчики скоро-
сти [12].
Цифровой датчик содержит две основные части: датчик им-
пульсов, преобразующий угол поворота вала в число импульсов,
и кодовый преобразователь - счетчик импульсов. Частота им-
пульсов fdu будет пропорциональна скорости вращения вала.
(9.1)
UCI
Рис.9.4. Кодовый диск фотоэлектри-
ческого датчика импульсов
гтуэ- ч£]-5£2
UC2
f = —N
J ди ~ Jvdu>
2л
где Ndu - число импульсов на один оборот вала.
Датчик импульсов может быть выполнен на основе фото-
электрического кодового диска или индуктосина. В любом вари-
анте датчик вырабатывает
две серии импульсов,
сдвинутых по фазе на л/2,
которые используются для
определения величины уг-
ловой скорости и ее знака.
На рис.9.4 показан прин-
цип действия фотоэлектри-
ческого датчика импульсов
На двух дорожках
расположены щели, про-
пускающие свет от источ-
ников UC1 и UC2 на фото-
диоды ВЫ и BL2. Когда свет попадает на фотодиод, он открыва-
ется; когда щель выходит из луча света, фотодиод закрывается.
Посредством электронной схемы сигналы из цепи фотодиода
преобразуются в последовательность импульсов прямоугольной
формы постоянной длительности и амплитуды. Число импульсов
определяет угол (путь) поворота вала.
Возможны два способа определения скорости вращения ва-
ла.
Первый - подсчитывается число импульсов У за определен-
ное время Т. Это число импульсов W = fduT будет характеризо-
вать среднее значение скорости за время Т. Точность измерения
составит 8 = 1/W, т.е. будет тем выше, чем больше измеряемая
скорость и период измерения Т. Уменьшение погрешности при
низких скоростях путем увеличения периода Т нежелательно, т.к.
213
Рис.9.5. Схема СКВТ
при этом увеличивается расхождение между средним и мгновен-
ным значениями скорости.
Другой вариант определения скорости состоит в измерении
интервала времени между двумя импульсами путем подсчета
числа высокочастотных импульсов, помещаемых на измеряемом
интервале. Данный способ дает высокую разрешающую способ-
ность на низких скоростях. При
повышении скорости точность
измерения снижается.
В цифровых системах
управления электроприводами
получили распространение
датчики скорости и положения
типа ПДФ, дающие от 125 до
2500 импульсов за один оборот
вала.
Кроме фотоимпульсных
находят применение аналого-
вые или аналого-цифровые
датчики положения и скорости
на основе вращающихся
трансформаторов. На рис.9.5
показана схема синускосинус-
ного вращающегося трансфор-
матора (СКВТ). СКВТ пред-
ставляет собой индукционную
электрическую машину, имею-
щую 2 обмотки на статоре: об-
мотку возбуждения ОВ и ком-
пенсирующую ОК, и по две
обмотки на роторе, сдвинутые
на 90°.
К обмотке возбуждения
подводится однофазное переменное напряжение. Ток в обмотке
создает магнитный поток, который во вторичных обмотках наво-
дит э.д.с.: в обмотке OU1 пропорциональную синусу, а в обмотке
OU2 - косинусу угла в поворота оси ротора относительно оси
статора. Используя аналого-цифровой преобразователь, напряже-
ние на измерительных обмотках можно преобразовать в цифро-
вой код.
Устройства, аналогичные по принципу действия, - индукто-
сины, применяются для измерения линейных перемещений.
214
К устройствам, осуществляющим измерение угла поворота,
относятся также сельсины, имеющие одну обмотку возбуждения
на статоре и три фазных обмотки на роторе. Напряжение, сни-
маемое с обмоток ротора, пропорционально углу поворота сель-
сина. Сельсины применяются также в следящих электроприводах
в качестве датчиков рассогласования углов поворота задающего и
исполнительного органов.
В системах автоматизации приводов находят широкое при-
менение датчики положения, фиксирующие определенное поло-
жение исполнительного органа машины. Это путевые и конечные
выключатели. Конечные выключатели применяются для предот-
вращения выхода рабочего органа за пределы допустимой зоны,
например, датчики переподъема в грузоподъемных механизмах.
Путевые выключатели используются для подачи команд в систе-
му управления в определенных точках движения рабочего органа,
например, этажные выключатели в лифтовых установках. Конеч-
ные и путевые выключатели служат также для реализации раз-
личных блокировок, например, отключения питания при откры-
вании дверей распределительного устройства и т.д.
Путевые и конечные выключатели бывают контактными и
бесконтактными. В контактных выключателях замыкание или
размыкание контакта производится под воздействием рычажного
или нажимного привода с возвратной пружиной.
Из бесконтактных пу-
тевых выключателей наи-
большее распространение
получили индукционные
выключатели. Принцип дей-
ствия этих выключателей
поясняется схемой на
рис.9.6.
Импульсный датчик
имеет катушку индуктивно-
сти с разомкнутым магнито-
проводом. Когда магнито-
провод 1 разомкнут, индуктивное сопротивление катушки 2 мало
и по цепи катушки реле 4 протекает ток, достаточный для того,
чтобы реле находилось во включенном состоянии. Когда магнит-
ный шунт 3, закрепленный на рабочем органе при его движении
занимает положение над магнитопроводом, сопротивление ка-
тушки 2 возрастает, реле отключается и происходит переключе-
ние его контактов 5. Для более четкого срабатывания парал-
Рис.9.6.Бесконтактный датчик
положения
215
дельно катушке датчика
цепи при замкнутом
магнитопроводе резо-
нанс токов.
В качестве датчи-
ков переменного тока
используются, главным
образом, трансформато-
ры тока, во вторичную
включен конденсатор 6, создающий в
цепь которых включает-
ся реле максимального Рис.9.7. Использование трансформато-
тока. Иногда трансфор- ра тока в качестве датчика тока
маторы тока использу-
ются для реализации обратной связи по току. В этом случае (см.
схему рис.9.7) вторичная обмотка трансформатора тока ТТ замы-
кается на сопротивление RH. Величина этого сопротивления
должна быть такой, чтобы ток в нем был бы равен номинальному
току вторичной обмотки трансформатора (обычно 5А) при номи-
нальном токе главной цепи. Напряжение на выходе выпрямителя
в такой схеме (при малых токах потребления) пропорционально
измеряемому току Utba = к!
Датчики постоянного тока служат для формирования напря-
жения, пропорционального измеряемому току, и гальванической
развязки силовых цепей, по которым протекает измеряемый ток,
от цепей управления. Структура датчика постоянного тока пока-
зана на рис.9.8 Г12].
Рис.9.8. Структурная схема датчика постоянного тока
Датчик стоит из трех частей: измерительного устройства ИУ,
в качестве которого обычно используется измерительный шунт,
разделителя потенциалов ПР и выходного усилителя ВУ. Напря-
жение UKX, снимаемое с шунта, пропорциональное измеряемому
току I, с помощью модулятора М преобразуется в переменное и
далее с помощью демодулятора ДМ преобразуется в постоянное.
Между модулятором и демодулятором включено устройство по-
тенциальной развязки ПР (трансформатор или оптронная схема).
216
Модулятор-демодулятор коммутируется посредством высокочас-
тотного генератора тактовых импульсов. Аналогичным образом
строятся датчики напряжения постоянного тока.
В качестве датчиков тока иногда используются устройства
на основе датчиков Холла, на которые воздействует магнитное
поле, создаваемое измеряемым током.
9.4. Регуляторы
Электрический силовой канал регулируемых электроприво-
дов состоит из двигателя и полупроводникового преобразователя,
питающего двигатель. Регулирование развиваемого двигателем
момента и его скорости производится изменением параметров
преобразованной электрической энергии: напряжения, тока, час-
тоты. В главах 5 и 6 были рассмотрены основные системы регу-
лируемого электропривода постоянного и переменного тока. Для
управления этими параметрами необходимы регуляторы тока,
скорости, положения и др., которые вырабатывают сигналы
управления преобразователем, обеспечивающие заданное изме-
нение контролируемых параметров в установившихся и переход-
ных режимах.
Техническая реализация управляющих устройств, в том чис-
ле регуляторов, достаточно разнообразна. Можно выделить две
основные ветви: аналоговые устройства регулирования и
дискретные или цифровые устройства. Находят также
применение цифро-аналоговые системы регуляторов.
Цифровые системы регулирования в настоящее время реали-
зуются на базе микропроцессорной техники. В данном параграфе
рассмотрены регуляторы для аналоговых систем регулирования
электроприводов.
Такие регуляторы - это электронные усилители, реализую-
щие требуемую по условиям регулирования передаточную функ-
цию
w (р\=
рЛР) uApY
где ивых - выходной аналоговый сигнал регулятора;
Uex - входной аналоговый сигнал регулятора.
В соответствии с передаточной функцией регулятора будет
происходить изменение во времени выходного сигнала регулято-
ра. Переходная характеристика регулятора - это зависимость
217
U аых = /(О ПРИ подаче на его вход ступенчатого единичного
сигнала Соле-
промышленностью выпускается унифицированная блочная
система регуляторов аналогового действия, построенная на инте-
гральных микросхемах - УБСР-АИ. В состав этой системы вхо-
дят унифицированные регуляторы. В системе УБСР принят уни-
фицированный электрический аналоговый сигнал: 0-±10В и 0-
±5мА.
Основу аналогового регулятора составляет операционный
усилитель, выполненный на базе микросхем серий К140УД или
К533УД.
Операционный усилитель - это усилитель постоянного тока
с высоким коэффициентом усиления в разомкнутом состоянии.
Для реализации требуемой передаточной функции операционный
усилитель охватывается обратной связью, состоящей из активно-
емкостных сопротивлений. Передаточные коэффициенты опре-
деляются соотношением сопротивлений обратной связи и вход-
ного сопротивления
и Ар) zAp)
В аналоговых системах регулирования электропривода при-
меняются, главным образом, пропорциональные (П-регуляторы),
интегральные (И-регуляторы), пропорционально-интегральные
(ПИ-регуляторы) и пропорционально - интегрально - дифферен-
циальные регуляторы (ПИД-регуляторы). В таблице 9.1. приве-
дены схемы, передаточные функции и переходные характеристи-
ки указанных типов регуляторов.
Таблица 9.1
218
Необходимыми элементами регуляторов являются устройст-
ва ограничения, ограничивающие выходной сигнал регулятора на
заданном уровне. Одна
из схем ограничения
показана на рис.9.9.
Ограничение вы-
ходного сигнала осуще-
ствляется с помощью
стабилитронов EDI,
VD2, включенных па-
раллельно операцион-
ному усилителю. При
достижении ивых вели-
чины напряжения про-
боя стабилитрона, даль-
нейшее увеличение ивых
Рис.9.9. Схема ограничения выходного
напряжения регулятора
становится невозмож-
ным и оно остается на
этом уровне.
9.5. Микропроцессорные средства управления электроприво-
дами
Микропроцессор (МП) - это программно управляемое уст-
ройство, предназначенное для обработки цифровой информации,
представленной в двоичной форме, и управления процессом этой
обработки, реализованное на одной или нескольких больших ин-
тегральных схемах (БИС); другими словами, МП - это стандарт-
ное универсальное устройство, позволяющее реализовать приём,
обработку и передачу цифровой информации.
Микропроцессорная система (МПС) — это совокупность
взаимосвязанных устройств, включающая один или несколько
(МП), память (ЗУ), устройство ввода-вывода и ряд других уст-
219
ройств, предназначенных для выполнения некоторых чётко опре-
делённых функций.
Микроконтроллер (МК) - устройство, выполняющее функ-
ции логического анализа (сложные последовательности логиче-
ских операции) и управления; реализуемое на одной или не-
скольких БИС. МК - это микропроцессорное устройство, в кото-
ром за счёт сокращения функций по выполнению арифметиче-
ских операций можно уменьшить его аппаратную сложность и
развить функции логического управления.
Микропроцессорный комплект интегральных схем (МПК
ИС) - это совокупность микропроцессорных БИС (базовый МПК)
и других ИС, однотипных по конструктивному, технологическо-
му исполнению, для которых обеспечена функциональная, струк-
турная, информационная и энергетическая совместимость при
использовании в МПС. Микропроцессорную систему, исполь-
зуемую для управления электроприводами и технологическими
комплексами часто называют управляющей вычислительной ма-
шиной (УВМ).
Структура и взаимосвязь основных средств микропроцес-
сорной техники (МТ) в рамках микропроцессорных УВМ показа-
на на рис.9.10.
Рис.9.10. Структура микропроцессорной УВМ
МП включает арифметико-логическое устройство (АЛУ),
устройство управления (УУ) и блок регистров (БРГ), в который
входят регистры, аккумулятор адреса, флаговые состояния, про-
граммный счётчик общего назначения и т.д. АЛУ предназначено
220
для выполнения арифметических и логических операций с дан-
ными, представленными в двоичной форме.
МПС включает помимо МП (одного или нескольких), опера-
тивное и постоянное запоминающее устройство (ОЗУ и ПЗУ),
устройства ввода-вывода (УВВ), ряд других. Особый класс уст-
ройств в составе УВМ составляют устройства связи с объектом
(УСО).
Взаимодействие частей УВМ осуществляется посредством
шин: адресной (ША), данных (ШД), и управления (ШУ), связы-
вающих в единую систему компоненты МПС, а также шин изме-
рения, контроля и управления, которые совместно с соответст-
вующими устройствами связи с объектом (процессом) обеспечи-
вают непосредственное взаимодействие МПС с управляемым
объектом или процессом.
МПС могут быть конструктивно подготовлены для работы с
человеком-оператором, т.е. иметь клавиатуру, дисплей и другие
необходимые компоненты - в этом случае её называют микро-
ЭВМ. МПС могут предназначаться для агрегатирования, т.е. для
работы в конструктивно и функционально едином комплексе ап-
паратуры.
Микропроцессор - это управляющее устройство с гибким
алгоритмом работы, который программно закладывается в память
процессора. Микропроцессор (МП) является универсальным уст-
ройством в том смысле, что заложенная программа может быть
изменена или полностью заменена для выполнения других функ-
ций управления.
Возможность программирования определяет широту исполь-
зования МП для решения различных задач управления.
Последовательность команд, обеспечивающих реализацию
требуемого алгоритма управления, образует программу. Коман-
ды, заложенные в программу, выполняются МП в пошаговом ре-
жиме в записанной последовательности. Каждая команда про-
граммы содержит информацию о том, что нужно делать с исход-
ными данными (операндами) и по какому адресу поместить ре-
зультат операции. Первая часть команды содержит код операции
КОП (например, сложение, логическое сравнение и др.). Вторая
часть команды - адресная - содержит адреса расположения опе-
рандов, с которыми производится данная операция и адрес реги-
стра или ячейки памяти, куда должен быть помещен результат.
Бывают и безадресные команды.
Команды, адреса и операнды МП выражаются многоразряд-
ными двоичными кодами. Современные микропроцессоры, пред-
221
назначенные для управления электроприводами, оперируют с 16-
разрядными словами - это количество информации, обрабаты-
ваемой за цикл работы МП.
Программа может быть записана различными способами.
Возможна запись команд непосредственно в машинном коде в
двоичном виде. Это трудоемкий способ составления программы и
он применяется только при составлении малых по объему про-
грамм.
Более удобно использование языков программирования.
Язык низкого уровня типа Ассемблер представляет собой средст-
во непосредственного общения с МП с помощью команд, пред-
ставленных в условных мнемокодах. МП воспринимает эти ко-
манды, но оперирует в своей работе, по-прежнему, с двоичными
числами.
Еще большие возможности для программирования пред-
ставляют языки программирования высокого уровня: Бейсик, СИ,
Паскаль и другие, а также специализированные объектно-
ориентированные языки. Составленные на этих языках програм-
мы далее переводятся (транслируются) с помощью специальных
кросс-программ в систему машинных кодов, которыми оперирует
МП.
Память ОЗУ и ПЗУ в составе МПС служит для размещения
данных, программы и результатов обработки данных. Для расши-
рения возможностей МПС могут использоваться и внешние за-
поминающие устройства (ВЗУ).
Устройства ввода-вывода информации (УВВ) служат для
взаимодействия МПС с оператором и управляемым объектом. К
УВВ относятся пульты управления и программирования, дисплеи
и другие внешние устройства, а также БИС параллельного и по-
следовательного интерфейсов.
Устройства связи УСО обеспечивают связь МПС с внешни-
ми для МПС устройствами: датчиками, несущими информацию,
подлежащую обработке в МП, и устройствами управления сило-
вой частью электропривода. Поскольку некоторые датчики и уст-
ройства управления могут быть аналоговыми, возникает задача
перевода аналоговой информации в цифровую и обратно. Эта
операция осуществляется аналого-цифровыми преобразователя-
ми ПАП и цифро-аналоговыми АЦП, входящими в состав УС.
Интерфейс ИУ - это совокупность аппаратных средств и
программ, обеспечивающих управления передачей информации
между МП, памятью и внешними устройствами.
222
По назначению МПС можно разделить на универсальные и
специализированные. Универсальные МПС используют стан-
дартные языки программирования, имеют широкий набор пери-
ферийных устройств и могут использоваться для выполнения
разнообразных задач управления и вычислительных операций, в
частности реализации требуемых передаточных функций опера-
ционных регуляторов.
Специализированными называют МПС, ориентированные на
выполнение конкретных задач управления. Наиболее широко ис-
пользуемые специализированные МПС - это программируемые
контроллеры и микроконтроллеры.
Они имеют ту же структуру, что и универсальные МПС, но
за счет сокращения объема выполнения арифметических опера-
ций, увеличения числа устройств ввода-вывода и устройств связи
с объектом аналогового и дискретного типа эти МПС более при-
способлены для управления технологическими процессами. Про-
граммируемые контроллеры имеют, как правило, объектно-
ориентированные более простые в использовании языки про-
граммирования.
В настоящее время выпускается и используется большое
число типов программируемых контроллеров: Деконт, MCS-
196/296 и другие.
9.6. Комплектные устройства управления электроприводами
Аппараты и устройства управления компануются в ком-
плектные устройства управления. Низковольтным комплектным
устройством (НКУ) называется электротехническое устройство
напряжением до 1000В, представляющее собой совокупность
электрических аппаратов, силовых полупроводниковых элемен-
тов, электронных устройств и приборов, смонтированных на еди-
ной конструктивной основе и предназначенных для выполнения
функций распределения электрической энергии, управления
электроприводами и технологическими установками.
Основными конструктивными элементами, образующими
комплектные устройства управления, являются: платы, блоки,
панели.
Электронные и микроэлектронные устройства управления
монтируются на печатных платах, однослойных, двухслойных и
многослойных. Для внешних соединений печатные платы снаб-
жаются контактными разъемами. Если система управления со-
держит несколько печатных плат, они выполняются в виде ячеек
и размещаются в кассетах или блоках. В системах управления
223
электроприводами широкое распространение получили блочные
унифицированные конструкции (БУК).
Силовые полупроводниковые элементы конструктивно
обычно размещаются в силовых полупроводниковых блоках.
Низковольтные контактные аппараты управления: контакто-
ры реле и другие, обычно монтируются на изоляционных панелях
или на реечных конструкциях.
Низковольтные комплектные устройства для электроприво-
да могут быть открытыми и защищенными. Для защиты электро-
оборудования от воздействия внешней среды (пыль, влага) и для
защиты персонала от соприкосновения с токоведущими частями
блоки и панели размещают в металлических шкафах (шкафное
исполнение) или в металлических или пластмассовых ящиках.
Защищенность электрооборудования определяется степенью за-
щиты оболочек IP по ГОСТ 14254-80.
Исполнение НКУ по степени защиты оболочек
Защита от попадания твердых тел Защита от попадания влаги Характеристика
Защита отсутствует Защита отсутствует 0
Не более 50 мм Капли под углом 0° 1
Не более 12 мм Капли под углом 15° 2
Не более 2,5 мм Дождь 3
Не более 1,0 мм Брызги 4
Пыль Струи 5
Непроницаемая Волны 6
Погружное исполнение 7
Защищенность оболочки обозначается ГР XjX2; первая циф-
ра X! характеризует защиту от попадания твердых тел, вторая Х2
- защиту от попадания влаги. НКУ, предназначенные для работы
в помещениях, обычно выполняются со степенью защиты ГР21;
НКУ, работающие в пожароопасных, влажных, запыленных по-
мещениях и т.п., выполняются со степенью защиты IP44 или
ГР54.
Если НКУ состоит из нескольких открытых панелей, уста-
навливаемых на общем каркасе, оно образует открытый щит
управления; НКУ, состоящее из нескольких шкафов называется
закрытым щитом управления.
В закрытых низковольтных комплектных устройствах, пре-
жде всего содержащих полупроводниковые преобразователи, вы-
деляется тепло, требующее отвода. В зависимости от устройств
теплоотвода различают шкафы (или блоки) с самовентиляцией
или с принудительной вентиляцией от встроенного вентилятора.
224
ГОСТ 22789-77 устанавливает следующие виды НКУ, ука-
занные на схеме рис.9.11.
Рис.9.11. Схема, поясняющая состав стандартных видов конструктив-
ных исполнений управляющих устройств
9.7. Контрольные вопросы для самопроверки
1. Назовите основные виды контактных электрических ап-
паратов, используемых в системах управления и защиты электро-
привода.
2. Какие расцепители входят в состав автоматических
выключателей?
3. Каким образом осуществляется нулевая защита с помо-
щью магнитных пускателей?
4. Каким образом осуществляется выдержка времени в
электромагнитных реле времени?
5. При каких сигналах на входе логического элемента И-
НЕ, имеющего три входа, на выходе будет сигнал «1»?
6. Поясните принцип работы фотоэлектрического датчика
положения.
7. Каким образом с помощью фотоэлектрического датчика
измерить скорость вращения вала?
8. Из каких частей состоит датчик постоянного тока?
9. Поясните принцип действия бесконтактного индукцион-
ного конечного выключателя.
10. Назовите основные типы аналоговых регуляторов, ис-
пользуемых в системах регулирования электропривода.
225
11. Какую передаточную функцию имеет пропорциональ-
ный регулятор, пропорционально-интегральный регулятор?
12. Какие функции выполняет микропроцессор?
13. Укажите основные способы программирования
микропроцессорных систем.
14. Назовите основные виды конструкций низковольтных
комплектных устройств управления.
15. Как классифицируются степени защиты оболочек ком-
плектных устройств управления?
Глава 10. ТИПОВЫЕ УЗЛЫ И СХЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
10.1. Электрические защиты
Асинхронные двигатели напряжением до 1000 В защищают
от межфазных и однофазных коротких замыканий, от перегрузок,
от возможности произвольного повторного включения после
исчезновения напряжения, от превышения температуры обмоток.
Максимально-токовая защита от коротких замыканий осу-
ществляется чаще всего посредством автоматических выключа-
телей с максимально-токовыми расцепителями или посредством
плавких предохранителей. Номинальный ток автомата выбирает-
ся больше или равным номинальному току двигателя 1и дв.
Ток срабатывания максимального расцепителя автомата со-
ставляет обычно 10-12/нйв. Это позволяет исключить ложные сра-
батывания защиты при пуске асинхронных короткозамкнутых
двигателей, когда пусковой ток достигает (5,5-7,0)/Hde. Для асин-
хронных двигателей с фазным ротором, где нет столь больших
пусковых токов, максимально-токовая защита обычно настраива-
ется на ток срабатывания, равный 3/H de.
Защита от перегрузок двигателей выполняется с помощью
тепловых расцепителей автоматов, тепловых реле магнитных
пускателей или плавких предохранителей. Аппараты защиты от
перегрузок имеют характеристику тока срабатывания, зависящую
от времени перегрузки. При длительной перегрузке ток срабаты-
вания должен быть (1,2-1,4)4,^. Эта защита исключает недопус-
тимый нагрев двигателя при перегрузках за счет нарушения тех-
нологического режима или работы трехфазного двигателя на
двух фазах.
226
Нулевая защита или защита минимального напряжения
должна предотвратить самопроизвольное включение двигателя
после кратковременного исчезновения или глубокого снижения
напряжения. Аппаратом защиты минимального напряжения явля-
ется пускатель или контактор, который отключается при сниже-
нии напряжения меньше 0,6U„. При восстановлении напряжения
включение контактора не происходит, т.к. н.о. блок-контакт,
шунтирующий кнопку «пуск» (см., например, схему рис.9.1), бу-
дет отключен. Для включения двигателя оператор должен будет
вновь нажать кнопку «пуск».
В последние годы все большее применение находит темпе-
ратурная защита двигателей. В обмотки двигателя встраивается
датчик температуры (чаще всего терморезистор), который дает
сигнал на отключение двигателя, если температура его обмоток
достигла опасной величины. Применение температурной защиты
асинхронных двигателей особенно необходимо, если регулирова-
ние скорости асинхронного двигателя связано с регулированием
напряжения его питания.
В синхронных электроприводах применяют следующие ви-
ды защит: максимально-токовая защита от коротких замыканий в
силовой цепи; нулевая защита, если по технологии работы от-
дельно не оговаривается режим самозапуска при кратковремен-
ном исчезновении питающего напряжения; минимально-токовая
защита в цепи обмотки возбуждения, защищающая синхронный
двигатель от продолжительной работы в асинхронном режиме;
защита от затянувшегося пуска, реализуемая с помощью реле
времени пуска. Выдержка времени этого реле выбирается исходя
из времени, в течении которого синхронный двигатель может ра-
ботать в асинхронном режиме по условиям нагрева пусковой об-
мотки до максимально допустимой температуры. Если двигатель
за отведённое время не вышел на рабочую характеристику син-
хронного режима, то пуск должен быть прекращён, а двигатель
отключён от питающей сети.
В электроприводах постоянного тока применяются следую-
щие виды защит:
- нулевая защита, предотвращающая самозапуск электро-
привода при кратковременных исчезновениях питающего
напряжения;
- максимально-токовая защита от коротких замыканий в си-
ловой цепи;
- максимально-токовая защита, ограничивающая величину
тока якоря на предельно-допустимом уровне по условиям комму-
227
тации щёточно-коллекторного узла; эта защита в замкнутых сис-
темах регулирования выполняется с помощью схем токоограни-
чения;
- минимально-токовая защита с помощью реле минимально-
го тока в цепи обмотки независимого возбуждения; эта защита
отключает электропривод, препятствуя работе двигателя с недо-
пустимо высокими скоростями вращения, которые может развить
двигатель с сильно ослабленным потоком возбуждения при не-
больших нагрузках на валу.
10.2. Релейно-контакторное управление электроприводами
Электроприводы с питанием электродвигателей непосредст-
венно от сети, работающие в разомкнутых системах регулирова-
ния, широко распространены во всех отраслях промышленного
производства. Преимущественно это асинхронные электроприво-
ды с двигателями с короткозамкнутым или фазным ротором. В
таких системах применяют контактные или бесконтактные пере-
ключающие электрические аппараты релейного действия. Для
включения и отключения силовых цепей используются электро-
магнитные контакторы или тиристорные коммутаторы. Послед-
ние целесообразно применять при большой частоте циклов вклю-
чение-отключение двигателя.
Логические функции управления электроприводом в соот-
ветствии с технологическим процессом реализуются с помощью
электромагнитных и других типов реле, контакты которых имеют
ограниченную коммутационную способность, составляющую
обычно не более 5А. В современных системах электропривода с
дискретным управлением часто логические функции реализуются
на программируемых контроллерах с выходом на катушки кон-
такторов.
Типовые схемы нерегулируемого нереверсивного и ревер-
сивного асинхронного привода представлены на рис. 1.1 и 9.1.
Некоторые технологии требуют, чтобы процесс остановки
электропривода протекал интенсивнее, чем только под действием
статического момента. В этом случае в схемах управления ис-
пользуют различные виды электрического торможения - динами-
ческое торможение и торможение противовключением, а также
механическое торможение с помощью электромагнитных тормо-
зов.
На рис. 10.1 приведена принципиальная схема нереверсивно-
го электропривода, которая позволяет производить пуск и оста-
новку электродвигателя с динамическим торможением [11].
228
A
Рис. 10.1. Схема нереверсивного асинхронного электропривода с дина-
мическим торможением
Питание на схему подаётся автоматическим выключателем
QF, напряжение переменного тока на обмотку статора - линей-
ным контактором КМ1, напряжение постоянного тока - контак-
тором динамического торможения КМ2. Источник постоянного
тока содержит трансформатор Т и выпрямитель V1, подключае-
мые к сети контактором КМ2 только в режиме торможения.
Команда на пуск подаётся кнопкой 8В2-П. При ее нажатии
включается контактор КМ1, и двигатель подключается к сети.
Для остановки двигателя нажимают кнопку SB1-C, контактор
КМ1 отключается и отключает двигатель от сети переменного
тока. Одновременно нормально закрытым (н.з.) блок-контактом
КМ1 включается контактор КМ2, подающий в обмотки статора
двигателя постоянный ток. Двигатель переходит в режим дина-
мического торможения. Длительность подачи постоянного тока в
обмотки статора контролируется реле времени КТ. После отклю-
чения катушки КТ его контакт в цепи катушки КМ2 с выдержкой
времени размыкается.
В схеме применены нулевая, максимально-токовая и тепло-
вая защиты, осуществляемые соответственно линейным контак-
тором КМ1, автоматическим выключателем QF с максимально-
229
токовым расцепителем и тепловыми реле FR1 и FR2. Цепи
управления защищены предохранителями FU1 и FU2. При сраба-
тывании любой из защит отключается линейный контактор КМ 1.
Используемая в схеме блокировка н.з. блок-контактами КМ1 и
КМ2 запрещает одновременное включение контакторов КМ1 и
КМ2.
Когда по условиям технологического процесса необходимо
значительно ускорить процесс торможения, то применяют тор-
можение противовключением. Схема реверсивного асинхронного
электропривода, в которой реализуется торможение противовк-
лючением, приведена на рис. 10.2. Исходя из условий эксплуата-
ции электропривода, цепи управления питаются пониженным
стандартным напряжением от трансформатора ТС Г111-
Рис. 10.2. Схема реверсивного асинхронного электропривода с торможе-
нием противовключением
Схема позволяет осуществлять прямой пуск, реверс и оста-
новку электропривода торможением противовключением с кон-
тролем по скорости. При этом в качестве чувствительного эле-
мента используется электромеханическое реле контроля скорости
SR, устанавливаемое на валу электродвигателя. Оно замыкает
свои контакты SR(B) или SR(H) при скорости й>и>0,01 -й>Н()в.
230
Управляющие команды подаются в схему кнопками управ-
ления SB2-B («Вперёд»), SB3-H («Назад») и SB1 («Стоп») в зави-
симости от требуемого по технологии направления вращения.
Напряжение на обмотку статора подаётся контакторами КМ 1(B),
чередование фаз АВС, и КМ2(Н), чередование фаз СВА. Кнопка
остановки электропривода SB1-C включена в цепь катушки реле
торможения КТ, которое организует режим торможения проти-
вовключением при любом направлении вращения. В цепях кату-
шек контакторов КМ1-В и КМ2-Н находятся блокировочные
контакты SB3, КМ2 и SB2, КМ1, предотвращающие одновремен-
ное включение этих контакторов.
Управление электроприводом осуществляется следующим
образом. При нажатии кнопки SB2-B образуется цепь питания
катушки КМ1, контактор КМ1 срабатывает и подключает статор-
ную обмотку асинхронного электродвигателя к питающей сети.
При разгоне электродвигателя срабатывает реле контроля
скорости и замыкает свой контакт SR-B, подготавливая схему к
остановке электропривода, если будет нажата кнопка SB1-C
("Стоп").
Для реверсирования электропривода нужно нажать кнопку
SB3-H. После этого размыкается блокирующий контакт SB3 в
цепи катушки КМ 1. Контактор КМ 1 отключает статор двигателя
от питающей сети. Одновременно в цепи катушки КМ2 замыка-
ется блокирующий контакт КМ1. Катушка КМ2 получает пита-
ние, и контактор КМ2 подключает статорную обмотку к питаю-
щей сети, изменив чередование фаз. Магнитное поле электродви-
гателя начинает вращаться в противоположном направлении, а
ротор по инерции вращается в прежнем направлении. Поэтому
асинхронный двигатель переходит в режим торможения проти-
вовключением до полной остановки, а затем разгоняется в на-
правлении «Назад». При разгоне в направлении «Назад» реле
контроля скорости замыкает свой контакт SR-H, подготавливая
схему к остановке. Для останова привода при нажатии кнопки
SB1-C катушка реле торможения КТ получает питание, и реле КТ
включается. Контактор КМ2 теряет питание и отключает статор-
ную обмотку от питающей сети. При этом контактор КМ2 замы-
кает свой блокировочный контакт КМ2 в цепи катушки КМ1.
Контактор КМ1 включается. Статорная обмотка подключается с
прямым чередованием фаз «Вперёд», а ротор вращается по инер-
ции в направлении «Назад». Поэтому асинхронный двигатель
переходит в режим торможения противовключением. Когда ско-
рость снизится практически до нуля, реле контроля скорости SR
231
разомкнёт свой контакт SR-H и катушка КМ1 потеряет питание, а
контактор КМ1 отключит статорную обмотку от питающей сети.
В технологических установках иногда применяются элек-
троприводы с двухскоростными асинхронными электродвигате-
лями, у которых ступенчатое регулирование скорости достигает-
ся за счёт изменения числа пар полюсов путём изменения схемы
включения специально выполненной статорной обмотки
(см.раздел 3.2.8).
На рис. 10.3 приведена схема нереверсивного электроприво-
да с двухскоростным асинхронным двигателем. В схеме преду-
смотрено переключение статорной обмотки с треугольника на
двойную звезду (Д/YY). Такая схема применяется в электропри-
водах механизмов, если по технологии требуется регулирование
скорости с постоянной мощностью на рабочем органе.
Рис. 10.3. Схема управления двухскоростным асинхронным двигателем
232
Команды управления подаются трёхпозиционным командо-
контроллером SM [14]. В исходном положении, когда включены
автоматы QF1 и QF2 и командоконтроллер находится в нулевом
(левом) положении, включается реле напряжения KV и своим
блок-контактом KV становится на самопитание, обеспечивая ну-
левую защиту электропривода.
При переключении командоконтроллера в первое положение
(НС) получает питание катушка контактора КМ1-НС, контактор
срабатывает, замыкает свой контакт 3-6 в цепи катушки тормоз-
ного контактора КМТ и подключает статорную обмотку, вклю-
чённую в треугольник (А), к сети. В тоже время тормозной кон-
тактор КМТ срабатывает и подаёт питание на электромагнит
тормоза YB-T, тормоз растормаживается (поднимаются колодки),
и электродвигатель пускается на низкую скорость (число пар по-
люсов 2р).
При переключении командоконтроллера во второе положе-
ние (ВС) катушка контактора КМ1-НС отключает статорную об-
мотку от сети. Катушки контакторов КМ2-ВС и КМЗ-ВС полу-
чают питание и контакторы срабатывают. Контактор КМЗ-ВС,
замыкая свои контакты, образует нулевую точку двойной звезды.
Контактор КМ2-ВС замыкает свой контакт в цепи катушки тор-
мозного контактора КМТ, контактор КМТ срабатывает или оста-
ётся включённым. Одновременно контактор КМ2-ВС подключает
двойную звезду статорной обмотки к сети и двигатель пускается
на высокую скорость (число пар полюсов р). Чтобы остановить
электропривод необходимо переключить командоконтроллер в
нулевое положение. В этом случае контакторы теряют питание,
статорная обмотка отключается от сети, и контакты КМТ оказы-
ваются разомкнутыми. Контактор КМТ снимает питание с ка-
тушки электромагнитного тормоза, и тормозные колодки накла-
дываются на тормозной барабан. Электропривод останавливается
под действием момента сопротивления нагрузки Мс и момента
Ммт механического тормоза.
Схемы управления асинхронным двигателем с фазным рото-
ром включают в себя кроме аппаратов управления статорными
цепями двигателя аппаратуру для управления схемой пуска асин-
хронного двигателя. На рис. 10.4 показана схема панели типа
ПДУ6220, которая обеспечивает пуск асинхронного фазного дви-
гателя в две ступени и динамическое торможение [11].
У правление двигателем осуществляет оператор посредством
командоконтроллера SA. Начальное положение командоконтрол-
лера - нулевое. При переводе рукоятки SA, например, в третье
233
положение включается контакторы КМ2, подключающий к сети
обмотки статора, и КМ5, включающий электромагнитный тормоз
YA, который растормаживает машину.
Рис. 10.4. Схема панели управления АД типа ПДУ6220
Двигатель начинает разгоняться при полном пусковом со-
противлении в цепи ротора. В данной схеме принята двухступен-
чатая схема реостатного пуска. Переключение ступеней роторно-
го сопротивления производится автоматически в функции време-
ни.
После включения линейного контактора КМ2 отключается
катушка реле времени КТ1 и с выдержкой времени включает кон-
тактор КМЗ, закорачивающий часть пускового сопротивления в
цепи ротора двигателя.
При включении контактора КМЗ разрывается цепь реле вре-
мени КТ2, которое с выдержкой времени включает контактор
КМ4, полностью закорачивающий пусковое сопротивление. Пуск
закончен.
Для торможения двигателя рукоятка командоконтроллера
переводится в нулевое положение, контактор КМ2 отключается и
включается контактор КМ1, подающий в обмотки статора посто-
янный ток. Начинается динамическое торможение двигателя.
234
Длительность динамического торможения определяется реле
времени КТЗ, которое, потеряв питание, отключает контактор
динамического торможения KMI и контактор механического
тормоза.
Релейно-контакторные схемы управления синхронными
двигателями, кроме функций включения и отключения двигателя,
управляют также цепью возбуждения двигателя. На рис. 10.5 по-
казана широко используемая панель управления синхронным
двигателем с глухо подключенным возбудителем - генератором
постоянного тока, расположенном на одном валу с синхронным
двигателем.
Рис.10.5. Схема панели управления типа ПУ7502
Пуск синхронного двигателя М производится переводом ру-
коятки переключателя SA в положение Вкл. Реле KV2, KV3 кон-
тролируют наличие напряжения в цепи переменного тока. Если
напряжение есть, срабатывает реле KV1, которое включает ли-
нейный контактор КМ1. Начинается асинхронный пуск синхрон-
ного двигателя. Напряжение на возбудителе - генераторе G с са-
мовозбуждением возрастает и по достижении подсинхронной
скорости двигатель М втягивается в синхронизм.
При снижении напряжения в сети на 15-20% реле KV3 от-
ключается и замыкает свой н.з. контакт в цепи контактора КМ2,
который своим главным контактом шунтирует сопротивление
форсировки возбуждения R<p, вследствие чего возрастает напря-
жение возбудителя и ток возбуждения синхронного двигателя.
235
Это позволяет избежать выхода двигателя из синхронизма при
резком снижении напряжения сети.
Если напряжение в сети длительное время не восстанавлива-
ется, реле времени КТ отключает двигатель.
Релейно-контакторное управление двигателями постоянного
тока независимого возбуждения в настоящее время не применя-
ется. Эти двигатели управляются полупроводниковыми управ-
ляемыми выпрямителями, как это было рассмотрено в разделах
5.3, 5.4.
10.3. Принципы построения систем регулирования электро-
приводов
В современных автоматизированных регулируемых элек-
троприводах плавное регулирование скорости, положения, мо-
мента в заданном диапазоне достигается посредством регулиро-
вания параметров электроэнергии (величины тока, напряжения,
частоты), подводимой к обмоткам двигателя. Регулирование этих
параметров осуществляется полупроводниковыми преобразова-
телями электроэнергии (управляемыми выпрямителями, преобра-
зователями частоты) посредством электронных регуляторов или
микропроцессорных устройств.
В зависимости от
назначения и техниче-
ских требований, пре-
дъявляемых к элек-
троприводу, различа-
ют два типа построе-
ния систем регулиро-
вания:
разомкнутые
системы регулирова-
ния;
замкнутые сис-
темы регулирования.
Разомкнутой
системой регулиро-
вания электропривода
называется система, в
которой отсутствует
обратная связь по вы-
ходной регулируемой
координате. Функ-
Рис. 10.6. Функциональная схема разомк-
нутой (а) и замкнутой (б) систем управ-
ления электроприводом
236
циональная схема разомкнутой системы электропривода приве-
дена на рис. 10.6,а. В такой системе фактическое значение регу-
лируемой координаты Y существенно зависит от возмущений f
действующих на узлы системы и рабочий орган, так как сигнал
управления U=X3 не зависит от отклонения регулируемой коор-
динаты от заданного значения.
Основным видом возмущающего воздействия является из-
менение момента сопротивления Мс на рабочем органе машины.
Возмущающие воздействия могут быть и другими, например, из-
менение напряжения питающей сети.
Замкнутой системой регулируемого электропривода называ-
ется система, в которой имеется обратная связь по выходной ко-
ординате. Функциональная схема такой системы приведена на
рис. 10.6. На рисунках приняты следующие обозначения: П -
управляемый преобразователь, М - двигатель, Ред - редуктор, РО
- рабочий орган, Per - регулятор, ИПУ - информационно-
преобразовательное устройство, fMc - возмущение по моменту
сопротивления на валу двигателя.
В замкнутой системе регулирования сигнал управления U
формируется из сигнала задания Х3 и сигнала отрицательной об-
ратной связи Z, несущего информацию о фактическом значении
регулируемого параметра Y, которое зависит от возмущений,
действующих на узлы системы и рабочий орган электропривода.
В результате введения обратной связи ошибка регулирования
уменьшается до допустимого значения. Сигнал управления U
системы электропривода с обратной связью представляет собой
отклонение (ошибку) регулирования относительно сигнала зада-
ния Х3. При этом ни одно из возмущений не измеряется, а их
влияние на регулируемый параметр воспринимается системой по
каналу обратной связи. Следовательно, в системах с отрицатель-
ной обратной связью по выходному параметру реализуется
управление по отклонению.
Обратная связь представляет собой канал передачи и преоб-
разования информации с выхода системы регулирования или ее
узлов на вход с целью формирования результирующего сигнала
управления.
Уравнение сигнала управления (7=X±Z. В зависимости от
знака сигнала Z обратная связь бывает положительной или отри-
цательной. Если сигнал обратной связи Z суммируется с сигна-
лом задания Х3, то обратная связь называется положительной. Ес-
ли сигнал обратной связи Z вычитается из сигнала Х3, то обратная
связь называется отрицательной.
237
По характеру действия обратные связи подразделяются на
жесткие, гибкие и нелинейные обратные связи с зоной нечувст-
вительности, которые иначе называются связями с отсечкой.
Если обратная связь действует только во время переходных
процессов, то такая обратная связь называется гибкой. Если об-
ратная связь начинает действовать только с определенного уров-
ня регулируемого параметра У, то такая обратная связь называет-
ся задержанной или обратной связью с отсечкой. Жесткие обрат-
ные связи и обратные связи с отсечкой используются, в первую
очередь, для формирования статических характеристик электро-
привода. Кроме того, жесткие и особенно гибкие обратные связи
применяются для обеспечения устойчивости системы регулиро-
вания и получения желаемых динамических показателей, харак-
теризующих протекание переходных процессов при воздействии
на систему сигналов задания Х3 и возмущений f
В замкнутых систем регулирования электроприводов почти
всегда используется отрицательная обратная связь по скорости,
как главная обратная связь по контролируемому параметру. В
разделах 4.2 и 8.2 подробно были рассмотрены назначение, прин-
цип действия и влияние этой обратной связи на статические и
динамические характеристики электропривода. Было показано,
что отрицательная обратная связь по скорости повышает жест-
кость механических характеристик электропривода, увеличивает
точность регулирования, повышает быстродействие при отработ-
ке управляющих воздействий и возмущений по нагрузке, но
увеличивает колебательность переходных процессов.
10.4. Классификация замкнутых систем регулирования
Замкнутые системы электропривода классифицируются по
следующим признакам: по принципу действия, по выходному
регулируемому параметру и по выполняемым функциям.
Классификация по принципу действия
По принципу действия системы регулирования автоматизи-
рованных электроприводов классифицируются следующим обра-
зом.
1. Системы электропривода с непрерывным управлением.
2. Системы электропривода с релейным управлением.
3. Системы электропривода с импульсным управлением.
4. Системы электропривода с цифровым (например, микро-
процессорным) управлением.
238
Системы электропривода с непрерывным управлением - это
такие системы, в которых каждый из переменных управляющих
параметров (координат) непрерывно изменяется во времени или
остается постоянным. Соответственно непрерывно измеряется и
подается в систему управления информация о контролируемых
параметрах, в соответствии с которой осуществляется непрерыв-
ное воздействие на приводной двигатель. Функциональная схема
такой системы соответствует рис. 10.6,6.
Системы электропривода с релейным управлением - это
системы, у которых в прямом канале регулирования для управле-
ния электродвигателем имеется силовой релейный элемент РЭ с
двумя устойчивыми состояниями:
ивых=+ип, если t4>0,
иыл=0(или-ОД, ес-
ли ?7вл<0,
где Un - напряже-
ние питания электро-
двигателя.
Регулировочная
характеристика релей-
ного элемента приве-
дена на рис. 10.7.
Функционал ьная
б)
Рис. 10.7. Регулировочная характеристика
идеального релейного элемента
а - однополярный
б - двуполяриый
схема зам-кнутой
системы электропри-
вода с релейным
управлением приве-
дена на рис. 10.8.
Системы электропривода с импульсным управлением - это
системы, в составе которых в прямой цепи регулирования имеет-
ся импульсный элемент, преобразующий непрерывный сигнал в
непрерывную последовательность импульсов с определенными
характеристиками. Наиболее распространен в системах электро-
привода широтно-импульсный преобразователь (ШИМ), который
формирует последовательность импульсов с переменной дли-
тельностью и с постоянными периодом и амплитудой.
Цифровые системы регулирования - это такие системы, в
которых информация о переменных преобразуется в цифровой
код. Цифровые системы в настоящее время создаются на базе
микропроцессоров, реализующих в цифровой форме функции
регулятора Per и информационно-преобразовательного устройст-
ва ИПУ.
239
Сеть
Рис. 10.8. Функциональная схема замкнутой системы электропривода с
релейным управлением
Классификация по выходным регулируемым координатам
По типу выходной регулируемой координаты замкнутые
системы электропривода подразделяются на следующие группы.
Системы регулирования момента (усилия). К этому классу
относятся, например, электроприводы систем натяжения металла
в листопрокатном производстве в металлургии или системы на-
тяжения пленки в химико-технологическом производстве тонких
пленок. Закон регулирования момента (усилия) рабочего органа
определяется технологическим процессом.
Системы регулирования скорости. Они используются в
электроприводах многих технологических машин: металлообра-
батывающих станках, прокатных станах и многих других. Систе-
мы регулирования скорости делятся на две большие группы.
Системы стабилизации скорости, у которых скорость под-
держивается постоянной, несмотря на воздействие возмущений.
К таким системам относятся, например электроприводы бумаго-
делательных машин.
Системы управления скоростью, у которых скорость рабоче-
го органа регулируется с высокой точностью в широких пределах
в соответствии с требуемым характером протекания технологи-
ческого процесса. Это, например, электроприводы экскаваторов,
подъемно-транспортных машин и другие.
Системы регулирования положения рабочего органа. Эти
системы используются в электроприводах нажимных винтов про-
катных станов, в роботах и манипуляторах и многих других про-
мышленных установках. В этих системах положение рабочего
органа регулируется с заданной точностью в соответствии с тре-
бованиями технологического процесса. Существует два типа
замкнутых систем электропривода регулирования положения -
системы позиционирования и следящие системы.
240
Системы позиционирования - это такие системы, в которых
задается исходное и конечное положение рабочего органа, а па-
раметры перемещения не контролируются.
Следящие системы электропривода - это системы регулиро-
вания положения, в которых задается и непрерывно отрабатыва-
ется с заданной точностью вся траектория движения рабочего
органа.
Классификация по выполняемым функциям строится в соот-
ветствии с характером и особенностями технологического про-
цесса. При этом все замкнутые системы электропривода делятся
на следующие группы:
1. Системы стабилизации регулируемого параметра (момен-
та, скорости и т.п.). Основная особенность таких систем - это по-
стоянство сигнала задания регулируемого параметра в течение
продолжительного времени. Фактическое значение регулируемо-
го параметра должно оставаться постоянным, несмотря на воз-
действие возмущений.
2. Системы регулирования скорости, в которых задание ско-
рости определяется оператором и отрабатывается электроприво-
дом с требуемой точностью.
3. Следящие системы электропривода - это замкнутые сис-
темы регулирования положения в соответствии с произвольно
изменяющимся входным сигналом управления, обеспечивающим
воспроизведение рабочим органом движения объекта слежения.
Следящие системы применяются в электроприводах копироваль-
но-фрезерных станков, в системах наведения радиолокационных
станций, которые работают в режиме слежения за летящими и
при этом маневрирующими объектами и др.
4. Системы с программным управлением - это системы, в
которых при выполнении технологического процесса сигнал за-
дания и регулируемые параметр ы изменяются по заданному за-
кону, заложенному в программное устройство. Системы электро-
привода с числовым программным управлением находят приме-
нение в приводах металлорежущих станков.
5. Адаптивные системы - это такие замкнутые системы ре-
гулирования, в которых автоматически выбираются целесообраз-
ные режимы работы электроприводов в зависимости от конкрет-
ной технологической ситуации и условий работы объекта.
Системы регулирования электроприводов постоянного тока
ТП-Д выполняются
- с суммирующим усилителем;
241
- с подчиненным регулированием параметров электроприво-
да.
Системы регулирования частотно-управляемых асинхрон-
ных электроприводов по принципам регулирования различаются:
- системы параметрического управления;
- частотно-токовые системы управления;
- системы векторного управления.
10.5. Система регулирования электропривода постоянного
тока с суммирующим усилителем
Функциональная схема электропривода постоянного тока по
системе ТП-Д с обратной связью по скорости приведена на
рис. 10.9. Уравнение механических характеристик для этой сис-
темы в соответствии с (4.7) будет:
М
О) = (О0з -----=
Р замк
где: сооз - скорость холостого
ud м
С Р замк
(10.1)
хода в замкнутой системе ре-
гулирования;
Рзамк ~ абсолютные значения жесткости механических харак-
теристик в замкнутой системе управления;
Uj - э.д.с. преобразователя, питающего якорную цепь
двигателя.
Рис. 10.9. Функциональная схема системы ТП-Д с отрицательной обрат-
ной связью по скорости
Как было показано в разделе 4.2, в системах управления с
отрицательной обратной связью по скорости жесткость fl меха-
нических характеристик fl3aMK увеличивается по сравнению с же-
сткостью характеристик в разомкнутой системе в (J+K) раз, где К
242
- коэффициент усиления разомкнутой системы. Для рассматри-
ваемой схемы этот коэффициент будет
к к к
К= у . (10.2)
Здесь: ку - коэффициент усиления усилителя;
кп = Ed!uy - коэффициент усиления преобразователя;
кс = иосс/а) - коэффициент обратной связи по скорости;
С=кФ - машинная постоянная.
Электропривод с рассматриваемой схемой управления опи-
сывается следующей системой уравнений
«у =U3c-Uoee=U3c-Kc^
U,, = кки„
d у п у (10.3)
иа=С-<о + 1яКяц
М = С-1Я
Из этих уравнений получим выражение для механических
характеристик привода в замкнутой системе
-------м
«Д1 + Ю +
Механические характеристики и принцип их формирования
в замкнутой по скорости системе управления представлена на
рис.4.5. Из (10.4) следует, что для увеличения жесткости механи-
ческих характеристик нужно увеличивать коэффициент усиления
К, что может достигаться увеличением коэффициента усилителя
Ку.
Обычно по условиям эксплуатации технологических устано-
вок и условиям коммутации на коллекторе двигателя необходимо
ограничивать максимальный момент, развиваемый двигателем,
на уровне (2+3)Л/„. С этой целью в замкнутых системах электро-
привода применяется задержанная отрицательная обратная связь
по току якоря, называемая токовой отсечкой. Функциональная
схема электропривода постоянного тока с отрицательной обрат-
ной связью по скорости и токовой отсечкой приведена на
рис. 10.10. Токовая отсечка в этой схеме реализована на стабили-
тронах VS1 и VS2. Уравнения цепи обратной связи по току будет:
мо™=°> если |Л|
Uост (|Л| А>тс , еСЛИ |/я| > Iотс .
243
lomc - ток якоря, при превышении которого вступает в дейст-
вие отрицательная обратная связь по току;
иест - сигнал (напряжение) отрицательной обратной связи по
току.
Рис 10.10. Функциональная схема системы ТП-Д с отрицательной об-
ратной связью по скорости и отсечкой по току
В результате со-
вместного действия
отрицательных об-
ратных связей по
скорости и току фор-
мируется механиче-
ская характеристика
(см. рис. 10.11), кото-
рая состоит из двух
участков: рабочего(1)
с высокой жестко-
стью и участка (2)
ограничения момента.
На рабочем участке,
пока не действует
отрицательная об-
ратная связь по току,
механические харак-
Рис.10.11. Механические характеристики
системы ТП-Д с отрицательной обратной
связью по скорости и отсечкой по току
теристики описываются уравнением (10.4). При 1я>1отс работа
электропривода может быть описана следующими уравнениями
244
Uy = - Uoee ~ ижт =ип-К.С°- (Л - Цтс XГ
Ed = кукпиу
Ed =Ссо + 1яКяч
(10.5)
Л/=С7Я
В результате решения этой системы уравнений относительно
со получим уравнение механической характеристики для второго
участка
кук„ызс кукпкТМотс Кяц+кукпкТ М
СО —---------1----------------------------(1U.O1
C(l + tf) C2(1 + 7Q 1 + tf С2
Первые два слагаемых уравнения (10.6) определяют ско-
рость идеального холостого хода механической характеристики
для второго участка
®02 = ®01 А®02 •
Жесткость механической характеристики на втором участке
будет
_ _ С2 (1 + /Q
Э.д.с. преобразователя Ud при работе двигателя с замкнутой
системой управления не остается постоянной, а изменяется в со-
ответствии с уравнением
Ud =Сй) + ^М.
с
На рабочем участке механической характеристики скорость
примерно постоянна. С увеличением нагрузки на валу двигателя
Ud возрастает. После перехода на второй участок и дальнейшем
повышении нагрузки скорость снижается до нуля, наступает ре-
Т Т Т Т Мст 7?я1/
жим стопорения и Ud уменьшается до величины Ud =----------.
Таким образом, для формирования желаемой механической
характеристики преобразователь должен иметь необходимый за-
пас по величине Ed в соответствии с соотношением
Ud.uaKC +hmcR»4-
В этой случае жесткость верхней механической
характеристики будет постоянной при всех нагрузках
ВПЛОТЬ ДО ЛТотс-
245
10.6. Многоконтурные системы с подчиненным регулирова-
нием параметров электропривода
Для решения задач синтеза замкнутых систем электроприво-
да, обладающих хорошим быстродействием и желаемым харак-
тером переходных процессов, разработан инженерный метод
синтеза, получивший название метода последовательной коррек-
ции с подчиненным регулированием параметров или сокращенно
метод подчиненного регулирования.
После формирования требуемых статических характеристик
в электроприводе с системой регулирования с суммирующим
усилителем может оказаться, что его динамические характери-
стики (поведение системы в переходных режимах) будут непри-
емлемы: будет велика колебательность, перерегулирование, не-
достаточно быстродействие. В этом случае необходимо введение
в систему регулирования корректирующих устройств и/или гиб-
ких обратных связей, действующих только во время переходных
процессов. Методы коррекции динамических характеристик в
схемах с суммирующим усилителем рассмотрены в специальной
литературе, например в [4].
Поскольку системы с суммирующим усилителем сложны в
наладке, они в настоящее время применяются только для элек-
троприводов с невысокими требованиями к диапазону и качеству
регулирования, уступив место системам подчиненного регулиро-
вания параметров электроприводов.
Принцип подчиненного регулирования состоит в том, что
каждый для каждого из регулируемых параметров: тока, скорости
и, если нужно, положения, организуется свой контур регулирова-
ния, содержащий объект регулирования, регулятор и отрицатель-
ную обратную связь по регулируемому параметру. В системах
электропривода внутренним контуром является контур тока.
В системе привода ТП-Д объект регулирования в контуре
тока состоит из двух звеньев: тиристорного преобразователя ТП
и цепи якоря двигателя постоянного тока (см. рис.8.10).
Строго говоря, тиристорный преобразователь нельзя рас-
сматривать как пропорциональное звено с передаточной функци-
ей Ктп- Тиристорный преобразователь по принципу своей работы
является дискретным элементом. Воздействие на управляемый
преобразователь осуществляется импульсно, подачей отпираю-
щего импульса на управляющий электрод тиристора. После
включения очередного тиристора воздействие на преобразова-
тель возможно только спустя некоторое время, когда система им-
пульсно-фазового управления подает импульс на отпирание оче-
246
редного тиристора. Поэтому тиристорный преобразователь сле-
дует рассматривать как динамическое звено с запаздыванием или
приближенно как апериодическое звено с постоянной времени
равной средней величине запаздывания
(10.7)
Величина Тц принимается в пределах 0,0034-0,01 с.
Полупроводниковые преобразователи с широтно - импульс-
ным управлением также удобно представлять в виде апериодиче-
ского звена с постоянной времени
Т = —
1 ТП Г >
J к
где fK - несущая частота ШИР-преобразователя. Эти преоб-
разователи обладают высоким быстродействием, т.к. несущая
частота обычно составляет несколько кГц.
Якорная цепь двигателя описывается апериодическим зве-
ном с «большой» постоянной времени Тя (см.8.16)
Расчетная структурная схема контура тока представлена на
рис. 10.12.
Рис. 10.12. Расчетная структурная схема контура тока
Найдем передаточную функцию регулятора тока W(p)PT,
который включается последовательно с объектом регулирования.
Тип регулятора выбирается из условия, чтобы скомпенсировать
«большую» постоянную времени в объекте регулирования, т.е.
Тя. Для этого в составе регулятора должно быть форсирующее
звено W(p) = Тяр +1, которое компенсирует запаздывание,
247
обусловленное апериодическим звеном в объекте регулирования
(см. 10.8).
Поясним, что ликвидировать постоянную времени в объекте
регулирования нельзя, она вызвана физической природой объек-
та. Уменьшить вызванное ею запаздывание можно, приложив к
цепи якоря большее форсировочное напряжение, которое затем
регулятором будет снято.
Исходя из указанных соображений, передаточную функцию
регулятора тока принимают в следующем виде:
ЩрУп -------= КРТ + ~— (Ю-9)
а КШ^Т ТитР РГ Титр
UMT п 1 рТР
Л,
К к
где: Тит ~ амг ——- Т г - постоянная времени интегриро-
R* р
вания регулятора тока;
Крт - Тя /ТИ1 - коэффициент усиления регулятора тока.
Следовательно, регулятор тока представляет собой пропор-
ционально-интегральное звено. Передаточная функция контура
тока, оптимизированного в соответствии с (10.9) имеет вид:
= -------г~г-1-----------’
КТ аМтТртР + аМ7'ТртР + 1
Учитывая, что Т^г очень мало, это выражение можно упро-
стить и считать, что оптимизированный контур тока имеет пере-
даточную функцию
---------------. (10.10)
КТ аМТ Тftr Р + 1
При ступенчатом сигнале изТ установившаяся ошибка регу-
лирования тока равна нулю.
Передаточной функции контура тока в виде (10.10) соответ-
ствует так называемая настройка на модульный оптимум. При
стандартной настройке принимается равной амт = 2. При
такой настройке при подаче на вход контура единичного ступен-
чатого сигнала переходный процесс будет иметь следующие по-
казатели: время нарастания до заданного значения /н = 4,7ТцТ,
время переходного процесса tnn = 8,4ТиГ, перерегулирование
а = 4,3 %.
248
Переходный процесс в контуре тока у = Iя ~ f(f) при на
стройки на модульный оптимум показан на рис. 10.13.
Рис.10.13. Переходные функции у = контура регулиро-
вания, настроенного на модульный оптимум а„=2 при подаче на вход
единичного сигнал ах=1
Коэффициент обратной связи по току рассчитывается из со-
отношения
и т
_____ зТмакс
КТ ~ j
1 макс доп
где: ц3гл,а«=8В - для серийных операционных усилителей с
учетом возможных перерегулирований.
доп - максимально допустимый ток якоря.
ПИ-регулятор тока обычно реализуется на операционных
усилителях по схеме рис. 10.14. Для этой схемы
КрТ = ^oc/Rex • ТИт=К„хСм
249
В системе подчи-
ненного регулирования
заданием на контур тока
является выходной сиг-
нал регулятора скорости.
В контуре скорости
объектом регулирования
в соответствии со струк-
турной схемой двигателя
постоянного тока (см.
рис.8.5) является меха-
ническая часть электро-
привода, представляю-
щая собой интегрирую-
щее звено с передаточной
функцией (см.8.11)
Roc Сое
Рис. 10.14. Схема ПИ-регуляторатока
и контур тока, имеющий передаточную функцию (10.10)
Расчетная структурная схема контура скорости приведена на
рис.10.15.
Рис. 10.15. Расчетная структурная схема контура скорости
При настройке контура скорости на модульный оптимум бу-
дем стремиться компенсировать «большую» постоянную времени
Г„, а «малая» постоянная времени амтТг остается нескомпен-
сированной.
Полагая некомпенсируемую постоянную времени контура
скорости Т-сСыт-Т^, получим передаточную функцию регу-
лятора скорости, который должен иметь передаточную функцию
>T(pU= К^’-т = (10.11)
250
Таким образом, для настройки контура скорости на МО сле-
дует применять П-регулятор с коэффициентом усиления К,*. Зна-
чение амс при стандартной настройке принимают равным амс=2.
Передаточная функция контура скорости по задающему воз-
действию при настройке на модульный оптимум (МО) будет:
^(р)моих-^=~----------т2 2 /----------“7, (Ю.12)
КС амС^рсР + амС?рсР + 1
Характер переходного процесса у = со = f(t) в контуре
скорости при подаче на вход контура единичного сигнала х=1 и
кс=1 идентичен показанному на рис. 10.13: время нарастания до
заданного значения tH = 4,7Т, время переходного процесса
tnn = 8,4т, перерегулирование ст=4,3%, число колебаний лк=1.
Коэффициент обратной связи по скорости рассчитывается из
соотношения
и и
_____ оссмакс зсмакс
КС ~~
(!) G)
н н
где Изсмакс—^ В - для серийных операционных усилителей с
учетом возможных перерегулирований.
Передаточная функция контура скорости, по возмущению от
момента сопротивления при настройке на МО имеет следующее
выражение
Дм(р) °.с7’х- + ]3)
Мс(р) /ЗГ, а^р2 i-a^p + l’
Из передаточной функции (10.13) следует, что контур скоро-
сти при настройке но МО имеет статизм при воздействии по на-
грузке Мс, и установившееся отклонение скорости от ступенчато-
го воздействия момента сопротивления при равно
- -М. а-^-. (10.14)
Г* м
Соответственно модуль жесткости механической характери-
стики при настройке контура скорости на МО определяется соот-
ношением
В . Щ РГ.
• МО л гт> *
a® aMCTttC
251
Уравнение механической характеристики системы регули-
рования скорости при настройке контура скорости на МО
A U3C
®м0 = й>0 ~ = —
кс
Статизм по моменту
сопротивления при на-
стройке системы регули-
рования скорости на МО
вычисляется из соотно-
шения
с _ Лй? _
--------------
= амСТ^ КсАЛ/. 100[о/о]
U.c
где б)зад = их/кс -
заданная скорость элек-
тропривода.
Самый большой ста-
тизм система имеет на
нижней характеристике
диапазона регулирова-
ния. Поэтому с точки
зрения возможного диа-
пазона регулирования
скорости система с на-
стройкой на МО имеет
сравнительно низкие
Рис. 10.16. Переходные процессы
компенсации возмущения на Мс при
настройке контура скорости на МО
показатели и соответственно ограниченное применение.
На рис. 10.16 приведены графики переходных процессов
компенсации возмущения от Мс.
Реализация схемы подчиненного регулирования показана на
рис. 10.17.
В этой схеме электропривод по системе ТП-Д имеет двух-
контурную схему подчиненного регулирования с внутренним
контуром тока, настроенным на модульный оптимум, и внешним
контуром скорости, настроенным также на модульный оптимум.
Двигатель постоянного тока независимого возбуждения питается
от тиристорного преобразователя УП. Напряжение преобразова-
теля регулируется посредством системы импульсно-фазового
252
управления СИФУ. Управляющий сигнал иу на СИФУ поступает
с выхода регулятора тока. Обратная связь по току якоря реализу-
ется с помощью датчика тока ДТ. Измерительным элементом для
этого датчика является шунт RM, включенный в цепь якоря.
Рис.10.17. Схема двухконтурной системы регулирования привода ТП-Д
Контур тока подчинен контуру скорости. Задание на ток м37-
поступает с выхода регулятора скорости PC..Ограничение этого
задания (отсечка по току) реализуется с помощью стабилитронов
V1 и V2, включенных параллельно регулятору скорости.
Задание на контур скорости изс подается на вход регулятора
скорости. Обратная связь по скорости выполняется с помощью
тахогенератора ТГ.
Задача 10.1. Электропривод по системе ТП-Д с двухконтур-
ной системой подчиненного регулирования выполнен по струк-
турной схеме 10.17. Контуры тока и скорости настроены на мо-
дульный оптимум. Требуется рассчитать величины настроечных
резисторов Roc, R^, Rocc, R^c и емкости Сж.
Исходные данные. Двигатель постоянного тока с независи-
мым возбуждением имеет мощность Р,=18 кВт. [/яи=440 В,
/я„=41,4 А, а>и=104,5 1/с, С=4,16 в.с., РЯ1/=0’,45' Ома, £яч=0,01 Гн,
Л=0,9 кг.м2, мзс=0-8 В, 7^=0,0066 с, [7/7=48 В.
Решение.
1. Электромагнитная постоянная времени
Г =^Ж = 0.02,
Я., 0,45
2. Электромеханическая постоянная времени
253
3.
теля
4.
Л^=Р^=
С1 4,162
Передаточный коэффициент тиристорного преобразова-
^=_^=“0=55.
“ у.макс °
Коэффициент обратной связи по скорости
___ к.макс
кс ~
5.
= 0,077 в.с.
104,5
Коэффициент обратной связи по току
к = = —L_ s о,О97 В/А.
I 21 2-41,4
6. Принимаем ПИ-регулятор тока
W(p)pr = КРГ+—±—
?итР
гр амт^тпкт^>£г 2-55-0,097-0,0066 П1-д
ТцТ —-----------— =---------------------- 0,156 с.
ИТ R„ 0,45
Т 0 02
К =-1Д_ = -22ГГ_ = 0,13.
Р1 ТИТ 0,156
7. Величину резисторов и емкости в регуляторе тока нахо-
дим, полагая
R
ОС
Сж=2,0 мкФ.
7^ = 0J56 =78кОм
С„ 21(Г*
^=2К = 60ОкОм.
К„ 0,13
8. Принимаем П-регулятор скорости
_ ктСТм _ 0,097-4,16 -0,023
к амсКяксТрс 2-0,45-0,077-0,0132
где = 2 • 0,0066 = 0,0132 с.
9. Величина резисторов в регуляторе скорости
254
Ria =10 кОм,
RK = KPCR^ = 10,1-10 IO3 =101 кОм.
Если электропривод должен иметь большой диапазон регу-
лирования скорости или требуется высокая точность поддержа-
ния заданной скорости, то используется ПИ-регулятор скорости.
В этом случае контур тока настраивается на симметричный оп-
тимум.
Передаточная функция регулятора скорости, настроенного
на симметричный оптимум, будет
^(р)рссо = &рс + ™ > (10.16)
ТисР
a^Tl-Скг 4Т^
ZI СС pc . ]У" — L*- , _ о
ИС ~ ат ’ Крс ~ т ’ Осс °'
ктР?м Тис
Передаточная функция замкнутого контура скорости будет в
этом случае
1 47\-. р +1
W(p}.rrn ------------i---------------------------• (10.17)
JКССО «чЗ 3 , m2 2 . 'Т’ . 1 4 '
КС амсТ^р +амст1£р + aMCTflCp + l
При подаче на вход системы ступенчатого управляющего
сигнала изс
Переходный процесс в этом случае характеризуется сле-
дующими показателями качества:
^„=16,57^; Г„=3,1 Т.С-, о=43%.
Одним из главных достоинств настройки на симметричный
оптимум является то, что система регулирования будет астатиче-
ской по возмущению по нагрузке Мс, т.е. при приложении на-
грузки установившееся значение скорости останется неизмен-
ным, равным заданному, а статическая ошибка Дй)с = 0.
Для того, чтобы уменьшить колебательность переходного
процесса на вход регулятора скорости включают фильтр с пере-
даточной функцией апериодического звена
^=^71-
255
Тогда передаточная функция системы по сигналу задания
будет
----- —--------. (10.18)
а мсТ^р + aMCT/lCp +aMCTfjCp + l
^(Р) КС СОФ ~
кс
Переходный процесс при настройке на симметричный опти-
мум с фильтром на входе будет иметь вид, показанный на
рис. 10.18 со следующими показателями качества tnn — 13,37^;
Рис. 10.18. Переходные процессы в контуре скорости, настроенном на
СО
Включение фильтра не вносит изменения в процесс отработ-
ки возмущающего воздействия по Л/е; установившаяся ошибка по
скорости будет равна нулю.
Системы регулирования положения строятся как трехкон-
турные, где внешний контур положения управляет контурдм ско-
рости. '
10.7. Типовые системы управления асинхронными частотно-
регулируемыми электроприводами
Асинхронные регулируемые электроприводы переменногб
тока обычно строятся на базе асинхронных двигателей с коротко-
замкнутым ротором с частотным управлением. При этом в каче-
стве источников питания применяются полупроводниковые пре-
256
образователи частоты, работающие в режиме источника напря-
жения (ГТЧН) или источника тока (ПЧТ).
Целесообразный способ управления двигателем зависит от
технических требований к системе электропривода. В электро-
приводах с ограниченным диапазоном регулирования и отсутст-
вием динамических режимов работы применяется частотно-
параметрический способ, при котором регулируется частота и
действующее значение выходного напряжения ПЧН в соответст-
вии с заданной скоростью.
В электроприводах с диапазоном регулирования до 100, к
которым предъявляются высокие требования к динамическим
режимам, применяется частотно-токовый способ, при котором
регулируется частота и действующее значение выходного тока
ПЧТ в зависимости от абсолютного скольжения двигателя при
заданной скорости и действующей нагрузке.
В электроприводах с большим диапазоном регулирования
скорости и высокими требованиями к динамическим характери-
стикам применяется регулирование мгновенных значений трех-
фазной системы питающих напряжений и токов с использовани-
ем векторного принципа регулирования.
Наиболее простыми системами частотного регулирования
являются частотно-параметрические системы. Такие системы
обеспечивают диапазон регулирования скорости до D=20:1 при
статизме S„c=5-10%. Обычно это разомкнутые по скорости сис-
темы частотного регулирования, у которых желаемое семейство
механических характеристик асинхронного двигателя получается
за счет формирования регулировочной характеристики преобра-
зователя частоты - отношения величины напряжения, питающего
двигатель, к частоте Un4 /fn4 .
Функциональная схема такой системы электропривода при-
ведена на рис. 10.1?. Частота fn4 определяется величиной зада-
ваемой скорости а>3. Канал регулирования частоты преобразова-
теля выполняется с линейной регулировочной характеристикой
7/7'Xw^)- В канал регулирования напряжения включается функ-
циональный преобразователь ФП, который обеспечивает требуе-
мое соотношение между частотой и напряжением. При этом же-
лательно предусмотреть отрицательную обратную связь по вы-
ходному напряжению Un4, чтобы преобразователь частоты обла-
дал свойством источника напряжения. Это позволяет достаточно
точно выполнять требуемое соотношение между частотой и на-
пряжением. Наиболее часто встречающиеся соотношения рас-
смотрены в разделе 6.2.
257
Рис. 10.19. Функциональная схема системы асинхронного электроприво-
да с частотно-параметрическим регулированием
Электроприводы с частотно-параметрическим регулирова-
нием скорости примечаются в технологических установках, рабо-
тающих в продолжительном режиме с относительно медленным
изменением скорости. Наиболее часто они применяются для ре-
гулируемого привода насосов и вентиляторов. Такие системы це-
лесообразно также применять, если по технологии требуется од-
новременное регулирование скорости группы однотипных элек-
троприводов. В этом случае преобразователь частоты является
общим источником питания для группы приводов.
Асинхронные электроприводы с диапазоном регулирования
скорости до D=100:l и высокими требованиями к динамике, ко-
гда осуществляются частые пуски, торможения и реверсы, вы-
полняются как системы с частотно-токовым управлением. В та-
ких системах преобразователь частоты работает в режиме источ-
ника тока. Это достигается применением преобразователей час-
тоты типа ПЧТ или преобразователей частоты типа ПЧН, кото-
рые охватываются отрицательной обратной связью по току. Сис-
тема регулирования осуществляет задание частоты и величины
тока статора в соответствии с заданной скоростью и нагрузкой на
валу двигателя.
Функциональная схема асинхронного электропривода с час-
тотно-токовым управлением приведена на рис. 10.20. Система ре-
гулирования двухканальная: содержит канал частоты и канал то-
ка статора. Выходная частота преобразователя ПЧТ задается про-
порционально заданной скорости. Ток статора задается в зависи-
мости от величины рассогласования заданной и действительной
скоростей
258
<»01 ~^ = ^абс,
которое равно абсолютному скольжению. Величине абсолютного
скольжения примерно пропорционален ток ротора 12. Приведен-
ный к статору он определяет активную составляющую тока /,.
Реактивная составляющая, пропорциональная току намагничива-
ния 10 поддерживается постоянной (см. рис.3.6). Таким образом,
задание на ток статора будет
<у01 -(О
Рис. 10.20. Функциональная схема системы асинхронного электроприво-
да с частотно-токовым управлением
Это выражение для задания тока
формируется функциональным преоб-
разователем ФП, характеристика ко-
торого дана на рис.10.21. Для повы-
шения быстродействия контур тока
настраивается на модульный опти-
мум, для чего предусмотрен регулятор
тока РТ и обратная связь по току ста-
тора с датчиком тока ДТ. Измерение
скорости производится тахогенерато-
ром.
Рис. 10.21. Регулировочная
характеристика функцио-
нального преобразователя
Жесткость механических ха-
рактеристик в системе электропри-
вода по схеме рис. 10.20 близка к
жесткости естественной механиче-
ской характеристики асинхронного
259
двигателя. Поэтому достижимый диапазон регулирования скоро-
сти в этой системе может составить примерно D=20:1.
При необходимости получения большого диапазона регули-
рования следует внести в систему замкнутый контур регулирова-
ния скорости, как это показано на функциональной схеме
рис. 10.22. Данная система управления является двухканальной и
содержит контур скорости и контур тока, которые настраиваются
на модульный оптимум. На выходе регулятора скорости форми-
руется сигнал, пропорциональный частоте питания f\ и скорости
вращения поля статора. Вычитая из этого сигнала значение дей-
ствительной скорости со , формируется сигнал, пропорциональ-
ный абсолютному скольжению, который подается на вход ФП.
Функциональный преобразователь в соответствии с зависимо-
стью, указанной на рис. 10.21, вырабатывает сигнал задания тока
статора, который подается на вход контура тока, имеющего ПИ-
регулятор. Частотно-токовое управление может применяться
только для однодвигательных электроприводов.
Рис. 10.22. Функциональная схема системы асинхронного электро-
привода с частотно-токовым управлением
Наиболее высокие динамические характеристика и диапазон
регулирования скорости до 10000 могут быть получены при век-
торном управлении асинхронным двигателем. Принцип вектор-
ного управления состоит в определении и принудительном уста-
новлении мгновенных значений токов в обмотках двигателя та-
ким образом, чтобы обобщенные векторы токов и потокосцепле-
ний занимали в пространстве положение, обеспечивающее созда-
ние электромагнитного момента нужной величины.
260
Обобщенным вектором тока (потокосцепления) называется
пространственный вектор, образованный токами во всех обмот-
ках статора или ротора двигателя. Векторная диаграмма асин-
хронной машины показана на рис.10.23.
Электромагнитный момент, создаваемый двигателем, равен
_____M = k„F}*F2 = K„/H(f)sinA(r),
где F},F2 - пространственные векторы токов или потокос-
цеплений статора и ротора; Д (?) = | х |F21;
Л(() - пространственный угол между векторами F} и F2.
Очевидно, что минимальные значения токов а, следователь-
но, потерь в обмотках машины будет, если векторы F} и F2 пер-
пендикулярны. В системах векторного управления нет необходи-
мости определять абсолютное пространственное положение обо-
их векторов Ft и F2. Важно определять положение одного век-
тора относительно другого. Поэтому один из векторов принима-
ется за базовый, а положение другого контролируется углом
я(<).
С этой целью используют не обычные неподвижные про-
странственные координаты, связанные с конструкцией электри-
ческой машины, например со статором - (координаты а — [5), а
координаты, оси которых либо вращаются в пространстве с по-
стоянной скоростью (координаты х-у), либо координаты, связан-
ные с одним из контролируемых векторов - на рис. 10.23 - это
координаты g-i, связанные с вектором потокосцепления статора
Vs-
Системы векторного управления обычно строятся по прин-
ципу подчиненного регулирования. Внешний контур - контур
скорости осуществляет регулирование скорости и дает задание
внутреннему контуру - контуру момента, который выполняется в
векторной форме.
261
Рис. 10.23. Векторная диаграмма токов и потокосцеплений асинхронного
двигателя
10.8. Контрольные вопросы для самопроверки
1. Назовите виды электрических защит, применяемых в
электроприводах.
2. Какими аппаратами осуществляется максимально-токовая
защита?
3. Что такое нулевая защита?
4. Для чего нужна минимально-токовая защита в электро-
приводах постоянного тока?
5. Как реализуется температурная защита электрических
двигателей?
6. Сколько контакторов должно быть в схеме для управле-
ния двухскоростным асинхронным двигателем?
7. Как предотвращается возможность одновременного вклю-
чения контакторов «вперед» и «назад» в реверсивных магнитных
пускателях?
8. С помощью каких аппаратов производятся автоматиче-
ские переключения ступеней роторного сопротивления при пуске
асинхронного двигателя с фазным ротором?
262
9. В чем основное отличие замкнутых систем регулирования
от разомкнутых?
10. Назовите виды обратных связей, используемых в систе-
мах регулирования электроприводов.
11. Какие обратные связи используются для формирования
статических механических характеристик электропривода?
12. В каких режимах проявляется действие гибких обратных
связей?
13. Дайте классификацию систем регулирования по выпол-
няемым функциям.
14. С помощью каких обратных связей получают жесткие
механические характеристики с отсечкой по моменту (току)?
15. Поясните принцип подчиненного регулирования пара-
метров электропривода.
16. Укажите целесообразный тип регулятора для контура то-
ка.
17. Какие существуют стандартные настройки для контура
скорости?
18. Приведите характеристику переходного процесса в кон-
туре скорости, настроенном на модульный оптимум, если на вход
подать единичный сигнал.
19. Сколько контуров будет иметь система регулирования
положения?
20. Укажите основные разновидности систем регулирования
асинхронного привода с частотным управлением.
263
Глава 11. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕК-
ТРОПРИВОДА
11.1. Энергетические показатели электропривода
На долю электропривода приходится около 2/3 всей выраба-
тываемой электроэнергии, поэтому вопрос о том, насколько
эффективно используется эта электроэнергия, имеет огромное
техническое и экономическое значение.
Электрические приводы питаются (за исключением транс-
портных или мобильных машин) от промышленной сети пере-
менного тока частотой 50 Гц. Электроприводы потребляют (а при
работе в рекуперативном тормозном режиме и отдают) из сети
активную мощность. Активная мощность расходуется на совер-
шенствование полезной работы и покрытие потерь во всей элек-
тромеханической системе рабочей машины.
Анализируя эффективность использования электрической
энергии, следует различать энергетическую эффективность само-
го технологического процесса, который осуществляется рабочей
машиной с электроприводом, и эффективность собственно элек-
тропривода, характеризуемую его коэффициентом полезного
действия - кпд, который представляет собой отношение выход-
ной мощности данного устройства к входной мощности. Кпд оп-
ределяют также как отношение полезной мощности (или энергии)
к затраченной.
Р Р Р
„ _ вЫХ __ ПОЛ __ ПОЛ z | | 14
~ Р ~ Р ~ Р + ДР’ j
вх затр пол
где АР = —— - потери в данном устройстве.
7
Поскольку силовая часть электропривода состоит из элек-
тродвигательного, передаточного и преобразовательного уст-
ройств, то кпд электропривода в целом определяют как произве-
дение кпд этих устройств
~ Л дв ’ Л пер ’ Лпреоб '
Кпд электродвигателя есть отношение механической мощ-
ности на валу двигателя к потребляемой со стороны обмоток
статора (для машин постоянного тока - со стороны якоря).
Р Р
« __ мех __ мех
,дв~ р ~ р + др
Л затр Л мех
264
Номинальный кпд асинхронных двигателей мощностью от
0,1-15,0 кВт составляет 0,85-0,9. С ростом мощности номиналь-
ный кпд повышается и у крупных высокоскоростных двигателей
переменного тока мощностью свыше 1000 кВт может достигать
величины 0,97.
Кпд электродвигателей существенно зависит от нагрузки на
валу двигателя. Для анализа этой зависимости пользуются мето-
дом разделения потерь ДР на постоянные К и переменные V.
&P = K + V. (11.2)
Для нерегулируемых по скорости двигателей постоянные
потери складываются из:
- потерь в стали;
- механических потерь, в том числе на самовентиляцию;
- добавочных потерь.
Переменные потери зависят от квадрата тока в обмотках
машины и будут равны:
- для машин постоянного тока V = 12я Rx ;
- для асинхронных двигателей сумме потерь в обмотках
статора и ротора V = 312г\ + 3/2 г2.
Потери в роторной цепи согласно (6.8) пропорциональны
моменту на валу двигателя и скольжению
3/2 г2 = М • co0s .
Ориентировочно можно считать, что потери в обмотках ста-
тора относятся к потерям в обмотках ротора в соотношении
rjr2 . Тогда переменные потери для асинхронных двигателей
будут
V = М • 6УО5 1 +
(ИЗ)
Задача 11.1. Найти кпд асинхронного двигателя 4AH160S4
при работе с нагрузкой 50%. Номинальные технические данные
двигателя: Р„=18,5 кВт; а)ном =152 1/с; = 0,88 \ гJr'2 = 0,6.
Решение.
1. Потери в двигателе в номинальном режиме
7и 0,88
2. Переменные потери в номинальном режиме
265
-157- 0,033(1 + 0,6) = 1110 Вт.
Г„=—ад, 1 + 4 =-
к Г2 J
3. Постоянные потери
К = ДРИ-Г„ =2520-1110 = 1410Вт.
4. При нагрузке на валу Л/с=0,5Л/„ двигатель будет работать
со скольжением примерно равным 5=0,5s„. Тогда переменные по-
тери в этом режиме будут
И05 = 0,5A/,(&)o0,5sH 1 + Д
= 0,257„ = 0,25-1110 = 278Вт.
к '2 J
5. Потери в двигателе в этом режиме
ДР0>5 = К + Ко 5 = 1410 + 278 = 1688Вт.
6. Кпд двигателя при нагрузке 50% будет
0,5Р„ 0,5-18500
70,5 =
= 0,845.
05 0,5-18500 + 1688
Мы видим, что при работе с неполной нагрузкой кпд двига-
теля снижается. Типичная кривая зависимости кпд от загрузки
двигателя показана на рис. 11.1.
Рис. 11.1. Зависимость кпд асинхронного дви-
гателя от нагрузки (двигатель 4AM160S4)
Отсюда следу-
ет, что завышение
установленной
мощности двигате-
ля ведет к сниже-
нию его эксплуата-
ционного кпд, т.е. к
непроизводитель-
ному расходу элек-
троэнергии.
Кпд преобра-
зовательного уст-
ройства, если по-
следнее выполнено
на базе силовых
полупроводниковых приборов, довольно велико. Потери в преоб-
разователе определяются, главным образом, величиной прямого
падения напряжения в полупроводниковом приборе. В среднем
можно считать, что ДС7 = 2 В, для мостовых схем - 4,0В. Таким
образом, номинальные потери для преобразователей напряжени-
ем 440В составляют 1%, а для преобразователей напряжением
266
220В - 2%. С учетом потерь в реактивных элементах полупро-
водниковых преобразователей можно полагать, что их кпд со-
ставляет 0,95-0,98.
Потери в механическом передаточном устройстве: редукто-
ре, трансмиссии и др., определяются, главным образом, силами
трения. Величина этих потерь, а, следовательно, кпд механиче-
ской передачи зависит от типа используемых подшипников,
класса обработки зубчатых колес, систем смазки и др. Кпд меха-
нической передачи не остается постоянным, а существенно зави-
сит от величины передаваемого момента.
Под кпд рабочей машины понимают произведение кпд элек-
тропривода Т]эп на кпд собственно рабочей машины. Так, для
вентиляторной установки
= ея1о~3
вен.уст. вен^1эп р
1 затр
Здесь Q - производительность вентилятора, м3/с;
Н- напор, Па;
(11.4)
7вен - аэродинамический кпд вентилятора;
Рзатр - затраченная электрическая мощность.
Если рабочая машина работает в энергетически постоянном
режиме, то ее энергоемкость, выражаемая через кпд, определяет-
ся по (11.4). Если рабочая машина работает циклически (напри-
мер, лифты, грузоподъемные механизмы, продольно-строгальные
станки и многие другие), то более правильно кпд рабочей маши-
ны определять по затратам энергии за цикл работы
ц.пол
Л рм ту
" ц затр
Л
ц.пол
Ач.па, +MV4
(11.5)
где Ацпол = MV43amp = jPMmp(t)dt, = fcp(t)dt
0 0 0
- соответственно полезная работа за цикл, затраченная энергия за
цикл, потери энергии за рабочий цикл.
В сети переменного тока, питающей электропривод, цирку-
лирует реактивная мощность. Негативным результатом наличия
реактивной мощности является загрузка питающей сети реактив-
ным током, не создающим работы. Величина реактивной мощно-
сти оценивается величиной cos $9, где под углом (р понимается
фаза сдвига первой гармоники тока от первой гармоники напря-
267
жения. У асинхронных короткозамкнутых двигателей номиналь-
ный cos^? составляет примерно 0,7-0,8. Недогрузка асинхронно-
го двигателя ведет к дальнейшему снижению cos^.
В приводах по системе ТП-Д (см. раздел 5.3) cos $9 - cos а ,
что определяется запаздыванием, устанавливаемым системой
импульсно-фазового управления, открывания тиристоров. По-
этому в приводах ТП-Д при высокой скорости вращения cos ср в
питающей сети переменного тока будет высоким (0,8-0,9), по ме-
ре снижения скорости, когда угол а растет, cos^z? будет умень-
шаться. При включении привода ТП-Д имеют место броски реак-
тивной мощности.
В современных системах регулируемого электропривода
стремятся использовать неуправляемые выпрямители, осуществ-
ляя регулирование величины напряжения, подаваемого к обмот-
кам двигателя, широтно-импульсными методами (см. например,
схемы рис.5.29, 6.12). В этом случае cos^? в питающей сети бу-
дет не ниже 0,95.
С точки зрения компенсации реактивной мощности многих
потребителей электроэнергии эффективно использование для не-
регулируемых электроприводов синхронных двигателей большой
мощности, которые при перевозбуждении способны генерировать
реактивную мощность для ее компенсации в пределах энергосис-
темы данного предприятия.
11.2. Потери энергии в переходных режимах
Потери энергии в переходных режимах, как правило, возрас-
тают, поскольку эти процессы сопровождаются большими бро-
сками тока. Так, при пуске асинхронного короткозамкнутого дви-
гателя пусковые токи составляют 5-6 номинального. В процессе
разгона двигатель должен не только преодолевать момент сопро-
тивления, но и создавать динамический момент, идущий на уве-
личение кинетической энергии движущихся масс.
Рассмотрим потери энергии в короткозамкнутом асинхрон-
ном двигателе за время пуска вхолостую (Л/с=0). В процессе пус-
ка двигатель, разгоняясь, проходит скольжения от 1 до 0. В этот
период в роторе выделяются значительные потери энергии, что
особенно неблагоприятно для короткозамкнутых двигателей, где
эти потери не могут быть вынесены из машйны в пусковые со-
противления.
268
Так как потери в роторе пропорциональны моменту и сколь-
жению
ДР = М ct)os,
то потери энергии за один пуск будут:
ДА = -(o^s-dt. (11.7)
о
При пуске вхолостую М = Jz(da)/dt), подставляя это зна-
чение момента в (11.7) и соответственно заменяя пределы интег-
рирования, получим:
<У0 о>„
ДА = ^Jza>0sd<o = Jz |(<z>0 - a)dG),
о о
АЛ = ^-. (11.8)
2
Отсюда вытекает правило, что при пуске асинхронного дви-
гателя вхолостую потери в цепи его ротора равны запасу кинети-
ческой энергии, который получают приходящие в движение ма-
ховые массы ротора двигателя и рабочего механизма при их раз-
гоне до установившейся скорости.
Заметим, что потери в роторе не зависят от времени пуска,
пусковых токов и других параметров. Потери в статоре, напро-
тив, зависят от параметров пуска.
Во избежание перегрева для каждого короткозамкнутого
двигателя существует предельное значение суммарного момента
инерции, который может преодолеть данный двигатель. При пус-
ке значение указывается в каталогах. При отсутствии этих
данных величина }гпред может быть определена из следующих
соображений.
Допустимая величина энергии, выделяющейся в клетке ро-
тора массой тК1, не должна приводить к ее перегреву более чем
на Т„ = 300°С . Отсюда
где Ск., - Дж/кг.гр - теплоемкость материала клетки ротора.
Расчет проводится исходя из необходимости обеспечения
двух пусков подряд. Поэтому 2ДЯ < • См • 300. Из этих ус-
ловий получим:
260
т < •С» •300
й)02
Потери энергии в роторной цепи двигателя при динамиче-
ском торможении от скорости соа до минимальной скорости (за-
тормозить двигатель до нулевой скорости при динамическом
торможении нельзя) также равны запасу кинетической энергии,
которой обладали движущиеся массы ротора и рабочей машины.
При торможении противовключением двигатель работает
при еще больших скольжениях - от sHa4=2 до №1. Подставляя эти
значения в (11.7), получим, что
Д4 =3А^о.
првк 2
Для асинхронного двигателя важно определить потери при
пуске и торможении не только в роторной, но и в статорной цепи.
Ориентировочно эти потери можно найти, зная потери в роторе и
пользуясь соотношением
ЛА = ЛА А.
ст рот * ’
Г2
Потери в статоре могут быть сокращены, используя, напри-
мер, снижение напряжения на статоре при пуске (если это воз-
можно).
При плавном изменении й)0 в соответствии с заданным тем-
пом разгона (при частотном управлении асинхронным двигате-
лем или плавном повышением напряжения в приводах постоян-
ного тока) двигатель работает с малыми скольжениями и потери
в двигателе, как и в установившемся режиме, определяются ве-
личиной развиваемого момента.
11.3. Нагрев и охлаждение двигателя
Выделение потерь ДР в объеме двигателя вызывает его на-
грев. Проведем упрощенный анализ процессов нагрева и охлаж-
дения. Примем допущение, что двигатель в тепловом отношении
представляет собой однородное твердое тело, характеризующееся:
- теплоемкостью С Дж/гр, которая показывает сколько теп-
ловой энергии необходимо, чтобы повысить температуру двига-
теля на 1 градус;
- коэффициентом теплоотдачи А Дж/гр.с, показывающим
сколько тепла отдает двигатель окружающей среде за 1 сек при
270
превышении температуры двигателя т над температурой окру-
жающей среды в 1 градус.
Уравнение теплового баланса будет
ДР-Л = C-dr + A-t-dt, (П-11)
где т - превышение температуры двигателя над температу-
рой окружающей среды.
Первый член уравнения (11.11) характеризует потери в дви-
гателе, которые преобразуются в тепло, второй член - количество
тепла, идущее на нагрев двигателя, третий - количество тепла,
которое двигатель отдает окружающей среде. В первое время по-
сле включения двигателя, когда его температура еще мало отли-
чается от температуры окружающей среды (т =0), отдача тепла в
окружающую среду отсутствует и третий член уравнения (11.11)
равен нулю. По мере нагрева двигателя все большая часть выде-
ляемого в двигателе тепла передается в окружающую среду и,
когда достигается равновесие между количеством выделяемого
тепла и отдаваемого в окружающую среду, температура двигате-
ля становится постоянной-установившейся.
Преобразовав уравнения (11.11) к нормальному виду при
условии ДР = const, получим
С dr
-------1- т = т
A dt ycm
Решение этого уравнения будет
^ = ^устАГнаг-Туст\ (И-12)
Обычно принимают температуру окружающей среды, рав-
ной начальной температуре перегрева. Тогда тнач = 0
т = (11-13)
В полученных выражениях:
= ДР/А - установившееся значение температуры, кото-
рое зависит от величины потерь в двигателе, т.е. от его нагрузки;
Ти - С/А - постоянная времени нагрева двигателя.
Переходная характеристика нагрева двигателя приведена на
рис. 11.2. Она носит экспоненциальный характер. За время, рав-
ное Ти двигатель нагреется до температуры 0,63 туст .
271
Рис. 11.2. Кривые нагрева (1) и охлаждения (2) двигателя
Задача 11.2. Два одинаковых двигателя одновременно вклю-
чаются в работу. Нагрузка на валу первого двигателя равна номи-
нальной. Нагрузка на валу второго - 50% от номинальной. Посто-
янная времени нагрева двигателей - 20 мин. Определите, за какое
время каждый из двигателей нагреется до установившейся
температуры.
Решение.
Поскольку
постоянные на-
грева обоих дви-
гателей равны, их
температура дос-
тигнет своего ус-
тановившегося
значения за одно
и то же время,
примерно равное
1 часу (1„=ЗТН).
Величина уста-
новившейся тем-
пературы пере-
грева будет, конечно, разной. У более нагруженного двигателя
эта температура будет примерно в 2 раза выше (рис. 11.3).
При охлаждении характер изменения температуры во време-
ни также описывается уравнением (11.12).
Если двигатель отключается и будет остывать до температу-
ры окружающей среды (как показано на рис.11.2), то т = 0 .
272
Тогда т = тначе z " .
Следует иметь в виду, что для самовентилируемых двигате-
лей коэффициент теплоотдачи А существенно зависит от скоро-
сти, поэтому охлаждаются такие двигатели намного медленнее,
чем они нагреваются. Постоянная времени нагрева при охлажде-
нии Ти больше, чем при нагревании Тн >ТН.
Исходя из особенностей режимов нагрева и охлаждения дви-
гателей различают 8 режимов работы, основными из которых яв-
ляются: продолжительный S1, кратковременный S2 и повторно-
кратковременный S3.
1. Продолжительный режим (S1) - режим работы электро-
двигателя при неизменной нагрузке такой продолжительности,
при которой превышение температуры электродвигателя дости-
гает установившегося значения. Графики изменения мощности на
валу Р, потерь мощности ДР и температуры перегрева г, соответ-
ствующее режиму S1, приведены на рис. 11.4,а.
В паспортных данных двигателя указываются номинальная
мощность Р„, скорость вращения й)и, напряжение UH, ток 1Н, со-
ответствующие режиму S1.
2. Кратковременный режим (S2) - это режим, в котором пе-
риоды нагрузки чередуются с периодами отключения двигателя.
При этом за время работы двигателя, превышение температуры
не достигает установившегося значения, а при отключении все
части электродвигателя охлаждаются до температуры окружаю-
щей среды. Режим характеризуется мощностью (моментом) и
временем включения tp. Стандартная продолжительность рабоче-
го периода составляет 10, 30, 60, 90мин.
Графики, характеризующие кратковременный режим рабо-
ты, показаны на рис. 11.4,6.
3. Повторно-кратковременный режим (S3) - это режим, при
котором кратковременные периоды нагрузки чередуются с пе-
риодами отключения двигателя, причем за время работы превы-
шение температуры двигателя не достигает установившегося
значения, а при отключении двигатель не успевает остыть до
температуры окружающей среды (рис.11.4,в). Режим S3 характе-
ризуется нагрузкой и продолжительностью включения (ПВ):
77В = —-100% = —100% или £ = —. (11.14)
273
Рис. 11.4. Температурные характеристики двигателя при режимах работы:
а) продолжительном S1; б) кратковременном S2; в) повторно - кратковре-
менном S3
274
Стандартные значения ПВ, на которые рассчитываются и
выпускаются электродвигатели, предназначенные для работы в
режиме S3, составляют 15, 25, 40 и 60%. Максимальная продол-
жительность цикла не должна превышать 10 мин.
Номинальные режимы S4...S8 введены для того, чтобы уп-
ростить задачу выбора электродвигателей, работающих в этих
режимах. Здесь ограничимся лишь упоминанием этих режимов:
повторно-кратковременный режим работы с частыми пусками -
S4; повторно-кратковременный режим работы с частыми пусками
и электрическим торможением - S5; перемежающий режим рабо-
ты - S6, когда после периода работы электродвигатель не отклю-
чается, а продолжает работать вхолостую; перемежающий режим
работы с частыми реверсами - S7; перемежающий режим работы
с двумя и более скоростями - S8.
11.4. Энергосбережение средствами электропривода
Поскольку электропривод является главным потребителем
электроэнергии (до 65% в развитых странах), то проблема энер-
госбережения всегда является одной из основных в технике элек-
тропривода. Следует различать энергосбережение собственно в
электроприводе и создание энергосберегающих технологий на
базе автоматизированного регулируемого электропривода.
Энергосбережение собственно в электроприводе преследует
цель сократить потери на преобразование электрической энергии
в механическую и повысить энергетические показатели электро-
привода. Для достижения этой цели используется следующее:
1. Правильный выбор электродвигателя по мощности. Су-
ществующая практика завышения мощности двигателей приво-
дит к тому, что они работают со сниженными значениями кпд и
коэффициента мощности.
2. Использование в электрическом силовом канале электро-
привода силовых полупроводниковых преобразователей, позво-
ляющих преобразовывать электрическую энергию к нужному
виду и параметрам с минимальными потерями.
3. Отказ от использования реостатных способов регулиро-
вания скорости двигателей.
4. Применение фильтро-компенсирующих устройств в цепи
питания электропривода с целью повышения коэффициента мощ-
ности и фильтрации высших гармоник тока.
В вопросах энергосбережения гораздо важнее использовать
возможности, которые дает автоматизированный электропривод с
275
точки зрения энергетической оптимизации самих технологиче-
ских процессов.
Ведение технологического процесса в нужном автоматиче-
ски поддерживаемом режиме сокращает непроизводительные
затраты электроэнергии. Во всех установках, осуществляющих
подачу воздуха, воды, сыпучих и других материалов имеется
возможность экономить электроэнергию за счет выбора той про-
изводительности рабочей машины, которая соответствует объему
подачи, необходимому по условиям технологического режима в
данный момент.
Поскольку, как правило, номинальная производительность
машин, подающих воздух, воду, сырье и т.д. выбирается с боль-
шим запасом, то возникает необходимость регулирования режи-
ма их работы. Наиболее экономичным способом регулирования
производительности является изменение скорости движения ра-
бочего органа, для чего необходим регулируемый электропривод.
Рассмотрим возможности энергосбережения на примере на-
сосных установок водоснабжения. Необходимость регулирования
напора и расхода этих установок определяется двумя обстоятель-
ствами.
Первое состоит в том, что
необходимо согласовать ха-
рактеристику центробежного
насоса с Q-H характеристикой
гидравлической сети, на кото-
рую этот насос работает. Как
правило, насосы имеют более
высокий напор, чем это необ-
ходимо.
Второе условие, обуслав-
ливающее необходимость ре-
гулирования скорости, опре-
деляется тем, что потребное
количество воды меняется по
временам года и суток.
Для решения указанных
задач сегодня в большинстве
случаев используются гидравлические способы регулирования:
дросселирование или перепуск с нагнетания на всас (см. рис.
11.5).
При дросселировании с помощью задвижки 1 увеличивают
гидравлическое сопротивление сети. Рассмотрим процесс регу-
Рис.11.5. Гидравлическая схема на-
сосной установки
276
пирования на характеристиках насосной установки (рис. 11.6).
Эти характеристики представляют собой зависимость напора Н,
развиваемого насосом, от его расхода Q. Гидравлическая сеть, на
которую работает насос, имеет характеристику Нгеой-А, при кото-
рой насос будет давать расход Q\. Если требуется меньший рас-
ход, то с помощью задвижки увеличивают гидравлическое сопро-
тивление, получая характеристику сети Нге0<гВ, которой соответ-
ствует требуемый расход Q2. Однако, при этом значительная
часть мощности, пропорциональная площади Hd-Hb-B-D, будет
расходоваться на преодоление сопротивления задвижки, т.е. тра-
титься бесполезно.
Рис. 11.6. Характеристики насосной установки
Но-В-А-С - характеристика центробежного насоса;
HimtyD-A - характеристика гидравлической сети
Еще большие непроизводительные потери будут при регу-
лировании перепуском с нагнетания на всас. В этом случае не-
полностью открывают задвижку 2, уменьшая общее гидравличе-
ское сопротивление - характеристика Нгеод-С. Общий расход на-
соса при этом возрастает до Q3, складываясь из требуемого рас-
хода в сети Q2 и расхода на рециркуляцию (бз*02)- В этом случае
277
возникают непроизводительные затраты энергии, пропорцио-
нальные площади Q2-D-C-Q3.
Избежать непроизводительных затрат можно, если приме-
нить регулируемый электропривод насоса. Снизив скорость, мы
получим Q-H характеристику насоса, проходящую через току D
(характеристика Hw-D), и, не прибегая к использованию задви-
жек, получим требуемую величину расхода Q2. Дополнительные
потери, связанные с регулированием производительности насоса,
при этом не возникнут.
Переход к регулируемому электроприводу насосов, как по-
казал опыт, дает до 30% экономии электроэнергии [6].
Задача 11.3. Оценить годовой расход электроэнергии насос-
ной установки мощностью 15 кВт, работающей 6000 часов в го-
ду, из них с производительностью 90% - 4000 часов, с производи-
тельностью 45% - 2000 часов в год.
Параметры насоса: /4=30 м; 2„=140м3/час=0,039 м3/с;
Г)н = 0,76. Характеристика насоса описывается формулой Н=Н0-
7?„^z=39-5900Q2. Насос работает на сеть с гидравлическим сопро-
тивлением Лн=5900с2/м4 5 без геодезического напора Нгеод=0.
Решение.
1. Номинальная мощность насоса
р г100°-СЛ„ юоо-0,039-зо 15кСт
10277,, ~ 102-0,76
2. Напор, развиваемый насосом
при расходе 0,9(?н=0,035м3/с Я=//0-Лн (0,9-£Эм)2=39-5900
0,035 -33,8м
при расходе 0,45бн=0,0175м3/с H=H0-Rh (0,45-£>н)2=39-5900-
0,0175 -37,2м
3. Для реализации требуемых режимов требуется погасить
часть напора на задвижке. Принимаем ориентировочно кпд насо-
са и двигателя постоянными Г]и = 0,76; Т]йв = 0,9. Мощность,
потребляемая двигателем насосной установки, составит:
при Q=0,9QH
при £>0,45£?„
1000-0,035-33,8
102-0,76-0,9
1000-0,0175-37,2
102-0,76-0,9
= 16,9 кВт
— 9,3 кВт.
4. Расход электроэнергии за год будет
А=16,9-4000+9,3-2000=86200 кВтчас.
278
5. Если регулирование насосной установки будет произво-
диться изменением скорости вращения насоса посредством регу-
лируемого привода, то потери энергии, связанные с гашением
части напора на задвижке, будут отсутствовать. Ориентировочно
можно считать, что при регулировании изменением скорости ра-
бочего колеса расход насоса пропорционален скорости, напор -
квадрату скорости, а мощность на валу насоса пропорциональна
кубу скорости. Кпд регулируемого электропривода будет равен
Ппр = = °>9 • 0,95 = 0,855 . Тогда
при Q=0,9g„ Я=(0,9)2Я„=0,92-30=24,Зм
1000.0,035.24,3 =1 т
102-0,76-0,855
при С=0,45б„ Я=(0,45)2Я„=0,452-30=6,0м
п 1000-0,0175-6,0
р =---------1-----= 16 кВт
102-0,76-0,855
6. Годовой расход электроэнергии при использовании регу-
лируемого электропривода будет:
Л=12,8-4000+1,6-2000=54200 кВтчас.
Экономия электроэнергии при использовании регулируемо-
го электропривода насоса мощностью 15 кВт составит
ДЛ=86200-54200=32000 кВтчас.
Приведенный расчет является ориентировочным, однако он
дает наглядное представление об эффективности использования
регулируемого электропривода для насосных установок.
11.5. Контрольные вопросы для самопроверки
1. Назовите энергетические показатели электропривода.
2. Какая часть вырабатываемой электрической энергии рас-
ходуется на ее электромеханическое преобразование посредством
электропривода?
3. Дайте определение постоянной времени нагрева электро-
двигателя.
4. Как зависит постоянная времени нагрева от способа
охлаждения двигателя?
5. Какими параметрами определяется кпд силового полу-
проводникового преобразовательного устройства?
6. Как изменяется cos^> асинхронного двигателя при его
недогрузке?
279
7. Чем определяется cos^> привода по системе тиристор-
ный преобразователь - двигатель постоянного тока ТП-Д?
8. Из чего складываются переменные потери в нерегули-
руемом по скорости асинхронном электродвигателе?
9. Чему равны потери энергии в короткозамкнутом асин-
хронном двигателе и в синхронном двигателе при пуске вхоло-
стую?
10. Дайте характеристику кратковременного режима работы
S2.
11 .Что такое продолжительность включения ПВ?
12. Назовите радикальный способ повышения эффективности
использования электрической энергии в насосных установках.
13. Назовите основные направления энергосбережения сред-
ствами автоматизированного электропривода.
Глава 12. ОСНОВЫ ПРОЕКТИРОВАНИЯ АВТОМАТИЗИ-
РОВАННЫХ ЭЛЕКТРОПРИВОДОВ ПРОИЗВОДСТВЕН-
НЫХ МЕХАНИЗМОВ
12.1. Общие требования, предъявляемые к электроприводу
Производственные машины и механизмы составляют основу
большинства технологических процессов, используемых в про-
мышленности, сельском хозяйстве, на транспорте, в коммуналь-
ном хозяйстве - во всех сферах человеческой деятельности.
Большинство производственных машин оснащено автоматизиро-
ванным электроприводом и устройствами электроавтоматики.
Технологические процессы разнообразны по своему содер-
жанию и областям использования. Также разнообразны произ-
водственные машины и механизмы, осуществляющие различные
технологические процессы. Однако можно выделить группы ма-
шин и механизмов производственного назначения, характери-
зующиеся общностью выполняемых операций и принципом дей-
ствия.
К таким машинам относятся:
- турбомеханизмы: насосы, вентиляторы, турбокомпрессоры;
- грузоподъемные машины: краны, лифты, шахтные
подъемники и другие;
280
- Транспортные машины: конвейеры, транспортеры, эскала-
торы и другие;
- Металлообрабатывающие станки;
- машины возвратно-поступательного движения: поршневые
насосы и компрессоры, прессы;
- экскаваторы;
- прокатные станы.
Здесь перечислены производственные машины, которые
наиболее широко применяются в основных отраслях промыш-
ленности и поэтому могут быть названы типовыми производст-
венными механизмами.
Основное влияние на режим работы электропривода и на
требования, предъявляемые к нему, оказывает характер
технологического процесса. По характеру технологического
процесса все машины и механизмы можно разделить на две
большие группы: механизмы непрерывного действия и ме-
ханизмы циклического действия. В первой группе
технологический процесс протекает непрерывно, во второй -
рабочий процесс состоит из однотипных повторяющихся циклов.
Электроприводы механизмов непрерывного действия харак-
теризуются редкими пусками не требуют, как правило, реверси-
рования и точной остановки. Электроприводы механизмов цик-
лического действия - частыми пусками, реверсами, необходимо-
стью регулирования скорости и точной остановки.
Требования к электроприводу формируются отдельно для
каждого производственного механизма или для группы идентич-
ных механизмов. Но есть общие требования, которые предъявля-
ются к электроприводам всех механизмов. К таким требованиям
относятся:
1. Обеспечение заданного технологического процесса и тре-
буемой производительности.
2. Обеспечение требуемых условий пуска и торможения
производственных механизмов, а при необходимости - реверси-
рования и регулирования скорости.
3. Ограничение перегрузок, динамических и ударных.
4. Принципы управления электроприводом (ручное, автома-
тическое, программное и т.п.).
5. Требования по надежности, которые, как правило, отра-
жаются в заданном времени наработки на отказ.
6. Требования по конструктивной защищенности электро-
оборудования (степени защиты оболочек), по условиям окру-
жающей среды, климатическому исполнению.
281
7. Экономические показатели; к которым следует относить
стоимость электропривода и затраты электроэнергии на его рабо-
ту.
8. Экологические требования; к ним относят уровень шума
и ограничение влияния электропривода на питающую сеть, свя-
занное с искажениями, вызванными высшими гармониками тока.
В требованиях указываются также параметры электроснаб-
жения (величина напряжения, частоты, допустимые отклонения).
12.2. Последовательность проектирования электропривода
Проектирование электропривода производится обычно в
следующей последовательности:
- разработка требований, предъявляемых к электроприводу;
- расчет статических нагрузок и построение нагрузочной
диаграммы и тахограммы движения рабочего органа производст-
венного механизма;
- выбор системы электропривода на основании предвари-
тельного технико-экономического анализа;
- выбор безредукторного или редукторного привода с опре-
делением передаточного числа механической передачи;
- выбор типа приводного электродвигателя;
- предварительный выбор электродвигателя по мощности и
номинальной скорости вращения;
- расчет динамических нагрузок и построение нагрузочной
диаграммы электропривода;
- проверка электродвигателя на нагрев, перегрузочную спо-
собность и по условиям пуска;
- выбор и расчет полупроводниковых преобразователей для
питания электродвигателя;
- разработка функциональной и принципиальной схем элек-
тропривода;
- составление структурной схемы и расчет регуляторов сис-
темы автоматического регулирования;
- расчет или моделирование переходных процессов электро-
привода.
12.3. Нагрузочные диаграммы и тахограммы
Основой для выбора электропривода и расчета его мощности
являются нагрузочные диаграммы и диаграмма скорости (тахо-
грамма) (рис. 12.1). Нагрузочной диаграммой производственного
механизма называется зависимость приведенного к валу двигате-
282
ля момента сопротивления движению Мс (статического момента)
от времени Л/с =/(/). Эта диаграмма рассчитывается на основе
данных, характеризующих работу машины (механизма).
Рис. 12.1. Нагрузочные диаграммы и тахограмма:
а - нагрузочная диаграмма механизма; б - тахограмма; в - график ди-
намического момента; г - нагрузочная диаграмма электропривода
Нагрузочная диаграмма электропривода - это зависимость
момента, развиваемого двигателем от времени. Она рассчитыва-
ется как алгебраическая сумма статического и динамического
моментов Л/=Л/с+Л/<)и,,=_/(/). Тахограмма - это зависимость скоро-
283
сти рабочего органа машины или вала двигателя от времени
<*> = /(')•
Реальные нагрузочные диаграммы могут существенно отли-
чаться от расчетных. Это связано с различной загрузкой машин,
опытом машиниста и многими другими факторами. Однако все-
гда можно выделить наиболее вероятные производственные цик-
лы работы механизма, по которым и следует производить расчет
элементов электропривода.
Задача 12.1. Построить тахограмму движения и нагрузоч-
ные диаграммы механизма и привода подъема башенного крана.
Цикл работы состоит из подъема груза массой 500 кг и спуска
пустого крюка. Кпд передачи 0,9, диаметр барабана 0,6 м, номи-
нальная скорость двигателя 60 1/с, скорость подъема 1 м/с, ско-
рость спуска крюка 2 м/с (при ослабления поля двигателя). Мо-
мент инерции якоря двигателя и механизма (без груза), приве-
денный к валу двигателя - 0,2 кгм2, высота подъема 20 м.
Решение.
1 Найдем передаточное отношение от вала барабана к валу
двигателя
щн2?й_ 60-0,3
I _---- _ ------- = 1 о .
V 1
2. Статический момент на валу двигателя при подъеме груза
™ipgR6 500-9,81-0,3 Q1u
М„ =-------------------------------= 91 Нм.
с i-r) 18-0,9
Момент сопротивления движению при спуске крюка - мо-
мент потерь в передаче(ориентировочно)
М'с = 0,1^ =9,1 Нм.
3. Найдем параметры тахограммы движения, полагая уско-
рение и замедление а{ 3 = 1,0 м/с2;
V 1,0 , й - 2 • 0,5 • Г7. 20-1-1
/.=/,= — = — = 1 с; L =---------------L =---------= 19 с;
1 3 ах 1,0 2
. . V' 2,0
t. = t3 = — = — , 2
а, 1,0 2 1
Тахограмма показана на рис. 12.2.
V 1
п 20-2-0,5-2-2
= 2 с; t2 =----;-----= 16 с; t<y= 15с.
284
Рис. 12.2. Нагрузочная диаграмма и тахограмма привода
4. Приведенная к валу двигателя масса груза
, «Л' 500-0,3’ .... ,
= -i— = --g, =0,014 кгм’.
Суммарный момент инерции при подъеме груза
Л = -Л.» + Л» = 0,2 + 0,014 = 0,214 кгм2.
5. Моменты на валу двигателя
При подъеме груза:
М{ = Л/С+Л —= 91 + 0,214—= 103,8 Нм
с 1 Ы 1
Л/2=Мс=91Нм
М3 = МС -Jz —= 91-0,214—= 78,2 Нм
3 с 1 Ы 1
При спуске груза:
М\ =M'+Z —= -9,1-0,2—= -21,1 Нм
1 с 1 ДГ 2
Мг = Мс = -9,1 Нм
285
М' = М - J" ~ = -9,1 + 0,2 — = 2,9 Нм.
3 с Е Д/ 2
Нагрузочная диаграмма представлена на рис. 12.2.
Для примера на рис. 12.3 представлена тахограмма и нагру-
зочная диаграмма электропривода стола продольно-строгального
станка [14]. Рабочий ход станка - прямой, во время которого ре-
зец обрабатывает закрепленную на столе деталь. Обратный ход
является холостым, поэтому его скорость принимается больше
скорости холостого хода.
Рис. 12.3. Нагрузочная диаграмма и тахограмма прямого и обратного хода
электропривода главного движения продольно-строгального станка
Работа станка начинается с разгона стола с обрабатываемой
деталью до скорости V\ (время ^). При этом двигатель развивает
максимально допустимый момент М\=Ммакс. Момент нагрузки в
этом режиме равен Мс2> соответствующим усилию
Ft = /л(Сс + Gg), где Gc, Gg вес стола и детали, [Л - коэффици-
ент трения. Резец входит в деталь на установившейся скорости
(время t2). На участке t2 скорость стола и двигателя a>\=const.
286
Скорость при врезании не должна превосходить заданного по ус-
ловиям технологии значения.
На участке г3 усилие F3 = /z(Gc + Gg + Fy) + Fz (F3 - уси-
лие резания), а момент Л/3 соответствует усилию F3, резец нахо-
дится в соприкосновении с деталью. Далее стол разгоняется до
скорости прямого хода 7„р(а)пр) под действием момента
Мдин=Ммакс-Мз, который существенно меньше динамического мо-
мента при разгоне стола до соприкосновения резца с деталью
(время /]).
На участке t5 имеет место режим работы на установившейся
скорости, М$=Мз. На участке t6 осуществляется торможение при-
вода стола до скорости Ki(fOi), на которой резец выходит из дета-
ли. При торможении двигатель развивает максимальный момент
М6~МиаКс. На участке tq стол движется в прямом направлении со
скоростью И|(щ|), на которой резец выходит из детали. Затем
осуществляется реверс привода. Скорость движения стола в про-
тивоположном направлении Vo6p выбирается в 2...3 раза большей,
чем в прямом направлении. Разгон станка и его торможение про-
изводится при моменте Ммакс двигателя. Усилие на участках об-
ратного хода обусловлено только трением в направляющих
F| = /л(Ос + Gg ). По окончании обратного хода дается команда
на разгон электродвигателя в прямом направлении.
12.4. Расчет мощности и выбор типа электродвигателя
При выборе приводного электродвигателя решается ком-
плекс вопросов:
- расчет мощности электродвигателя;
- расчет номинальной скорости вращения (вместе с опреде-
лением передаточного отношения механической передачи);
- выбор двигателя в соответствии с режимом его работы по
условиям нагрузки;
- выбор двигателя по условиям пуска;
- определение необходимой степени защиты оболочки дви-
гателя;
- выбор конструктивного исполнения на соответствие усло-
виям окружающей среды;
- выбор системы охлаждения двигателя.
По условиям окружающей среды двигатели изготавливают в
следующих климатических исполнениях У, УХЛ, Т, М, ОМ
(ГОСТ 15543-70) (для умеренного, умеренного и холодного, тро-
пического и морского климата).
287
По степени защиты персонала от соприкосновения с токове-
дущими и движущимися частями и попадания посторонних тел
внутрь машины, а также степени защиты от проникновения воды
внутрь машины, они выпускаются в следующих исполнениях:
1Р00 - открытая электрическая машина, специальная защита
отсутствует;
1Р10, 1Р20 - машина, защищенная от прикосновения и попа-
дания посторонних предметов;
1Р11...1Р43 - машина, защищенная от капель воды, от при-
косновения и попадания посторонних предметов;
1Р44-1Р54 - закрытая машина, защищенная от брызг, при-
косновения и попадания посторонних предметов;
1Р55...1Р58 - закрытые машины, защищенные от водяных
струй (1Р55) и от проникновения воды внутрь при неограниченно
длительном погружении в воду (1Р58).
Кроме того, выпускаются машины для работы во взрыво-
опасной среде и в особых условиях окружающей среды.
По способу охлаждения двигатели подразделяют на машины
с естественным охлаждением, с самовентиляцией, имеющие вен-
тилятор на валу двигателя (защищенные или закрытые) и с неза-
висимой вентиляцией.
Для электроприводов, предназначенных для работы в дина-
мических режимах (механизмы циклического действия, следящие
электроприводы и другие) стремятся выбирать двигатель с пони-
женным моментом инерции ротора (якоря). Для таких условий
изготавливаются малоинерционные двигатели. Для машин с кри-
вошипно-шатунной кинематикой применяют двигатели с повы-
шенным моментом инерции. Для электроприводов, работающих в
повторно-кратковременном режиме и в неблагоприятных услови-
ях эксплуатации, связанных с механическими нагрузками, воз-
действием повышенной влажности, температуры и прочее, изго-
тавливаются двигатели специального конструктивного исполне-
ния - двигатели краново-металлургических серий.
При выборе номинальных параметров электропривода воз-
никает задача выбора величины передаточного коэффициента
редуктора (или другой передачи), соединяющего вал электродви-
гателя с рабочим органом машины. Синхронные и асинхронные
двигатели выпускаются с высокими скоростями вращения (син-
хронная скорость обычно 3000, 1500, 1000, 750, 600 об/мин), в то
время как скорость рабочего органа, как правило, требуется зна-
чительно ниже. Для снижения скорости и соответствующего по-
288
вышения момента на валу рабочего органа необходимо использо-
вание понижающей передачи (редуктора).
Следует иметь в виду, что масса, габаритные размеры элек-
тродвигателя (а, следовательно, его стоимость) определяются не
его номинальной мощностью, а номинальным моментом.
(12.1)
где Рн - номинальная мощность двигателя, Вт;
М„ - номинальный момент двигателя, Нм;
- номинальная угловая скорость двигателя, 1/с;
пн - номинальная скорость вращении, об/мин.
Номинальный момент двигателя пропорционален объему
активных частей электрической машины и принятыми для этой
машины величин электрических и электромагнитных нагрузок:
допустимой плотности тока в обмотках Я(А/мм2) и индукции в
магнитопроводе Б(Тл), т.е.
М„ =kD2LA-B
где D и L- диаметр и длина активной части ротора двигате-
ля.
Приближенно можно считать, что габариты и вес активных
частей двигателя пропорциональны номинальному моменту. На-
пример, двигатель с номинальной скоростью вращения (асин-
хронной) - 750 об/мин будет примерно в 4 раза больше (по ак-
тивным частям) и дороже, чем двигатель той же мощности, но с
номинальной (синхронной) скоростью 3000 об/мин.
Исходя из этого, конструктору при выборе кинематической
схемы привода следует выбирать, чему отдать предпочтение:
электродвигателю меньшего веса и меньших габаритов, но с ре-
дуктором, имеющим большое передаточное отношение, или
большему по габаритам и весу электродвигателю в сочетании с
более простым редуктором с меньшим передаточным отношени-
ем или вообще обойтись без механической передачи. Выбор про-
изводится, исходя из технико-экономических соображений и
удобства компановки конструкций рабочей машины в целом.
Для электроприводов малой и средней мощности (до 200
кВт), как правило, применяются редукторные электроприводы.
Современным конструкторским решением является использова-
ние мотор-редукторов, в которых электродвигатель и редуктор
объединены в один конструктивный узел.
289
Мощность приводного электродвигателя рассчитывается,
исходя, главным образом, из трех условий:
1. Нагрев двигателя во время работы не должен превосхо-
дить допустимый для данного класса изоляции.
2. Перегрузочная способность двигателя должна быть дос-
таточной, чтобы обеспечивать кратковременно максимальные
значения момента, определяемые, как правило, динамическими
режимами пуска или торможения.
3. В случае привода механизмов с большим моментом инер-
ции или для механизмов, имеющих большое число включений в
час пусковые потери в двигателе не должны приводить к пере-
греву ротора.
Нагрев двигателя сверх допустимого значения приводит к
ускорению старения изоляции и выходу двигателя из строя. До-
пустимый нагрев зависит от класса применяемой изоляции для
обмоток двигателя
Таблица 12.1
Допустимые температура нагрева и превышение температу
ры электродвигателя для различных классов изоляции
Параметры Класс изоляции
Е В F Н
Допустимая температура нагрева изоляционного материала (СТ-СЭВ 782-77), °C 120 135 155 180
Допустимая температура нагрева обмоток электродвигателя (ГОСТ 183-74), °C - 120 140 165
Допустимое превышение темпера- туры (ГОСТ 183-74), °C 75 80 100 125
Расчеты температуры перегрева двигателя в соответствии с
известной нагрузочной диаграммой являются весьма трудоемки-
ми. Наиболее точным методом является метод средних потерь
энергии в двигателе ДРср. Для каждой величины нагрузки опре-
деляют значение потерь в двигателе и далее находят среднее зна-
чение потерь за цикл работы. Такой метод редко применяется из-
за сложности расчета потерь. Поэтому на практике пользуются
косвенными методами оценки нагрева двигателя. Наиболее часто
применяются методы эквивалентных величин: тока, момента или
мощности.
Метод эквивалентного тока
Потери в двигателях примерно пропорциональны квадрату
тока в его обмотках. Зная график тока, протекающего по обмот-
290
кам двигателя, можно определить для каждого конкретного ре-
жима работы значение тока 13, характеризующее его нагрев.
Эквивалентный ток 13 - это такой неизменный по величине
ток, который вызывает такой же нагрев электродвигателя, как и
реально протекающий изменяющийся по величине ток в соответ-
ствии с графиком нагрузки механизма.
lit. + lit. + lit.
—--------(12.2)
4" ^3 4-
Условие проверки двигателя на нагрев будет:
I <1 .
э ном
(12.3)
Метод эквивалентного момента
Если момент двигателя пропорционален току, то можно
пользоваться методом эквивалентного момента.
Эквивалентный момент - это такой постоянный момент на-
грузки, который вызывает такой же нагрев двигателя, как и ре-
ально изменяющийся момент в соответствии с графиком работы
механизма.
Мэ
1м?(, +M^t2 + M3t3
\ ^1 + ^2 + + ^0
(12.4)
Условие правильности выбора двигателя - МЭ<МН.
Этот метод применим для двигателей постоянного тока с не-
зависимым возбуждением, для асинхронных двигателей и других,
когда момент пропорционален току.
Метод эквивалентной мощности
Если скорость двигателя изменяется мало и можно считать,
что мощность пропорциональна моменту и, следовательно, току,
то эквивалентная мощность будет:
о I1 '"Гп2л^ +P22G + Рз'3
Л = — \Р (t)dt = ----—------—. (12.5)
Vh о N tt + t2 +13 +10
Производить проверку двигателя на нагрев по эквивалент-
ной мощности можно для нерегулируемых по скорости электро-
двигателей, у которых момент пропорционален току. Условие
правильности выбора электродвигателя - Рэ < Рн.
Формулы (12.2), (12.4), (12.5) не учитывают условий ухуд-
шения охлаждения у двигателей с самовентиляцией при стоянке
291
во время пауз и при сниженной скорости вращения. С учетом
этого обстоятельства можно пользоваться более точной форму-
лой, например, для эквивалентного тока
j _ I Л G + AG + Л G ~
V + Р1^2 + Рз^З Ро^й
где Рх = Р3 = 0,5 - коэффициент, учитывающий ухудшение
условий охлаждения в процессе разгона и торможения двигателя;
fl0 = 0,3 - коэффициент, учитывающий ухудшение условий
охлаждения во время стоянки двигателя.
Задача 12.2. Двигатель постоянного тока независимого воз-
буждения работает в режиме, характеризующемся нагрузочной
диаграммой, представленной на рис. 12.1 при следующих значе-
ниях Л/1=160Нм; Л/2=100Нм; Л/3=40Нм; ^=^=10с; Z2=60c; /о=20с;
сомакс = Ю4,5 1/с. Циклы повторяются, что дает возможность
считать режим работы продолжительным. Определить требуе-
мую мощность двигателя по условиям нагрева.
Решение.
Так как двигатель работает с постоянным номинальным по-
током возбуждения, то можно воспользоваться методом эквива-
лентного момента.
„ 1м2/. + M2t2+M23t3 /1602 -lO + lOO2 -60 + 402 -10
Л/, = J--—------—------— = J---------------------------;
у +t2 + Pxt3 + PotQ у 0,5 10 + 60 + 0,5 • 10 + 0,3 • 20
4=Ю7,5Нм.
Номинальная мощность двигателя должна быть
Л =11,2 кВт.
Нагрев двигателя в значительной степени зависит от режима
работы двигателя. Если двигатель работает в продолжительном
режиме, то динамическая составляющая момента обычно мало
сказывается на нагреве двигателя, и определение его мощности
можно производить, исходя из статического момента.
Если двигатель работает в режиме частых пусков и остано-
вов, то динамическая составляющая момента может иметь суще-
ственное значение. В этом случае приходится сначала произво-
дить предварительный выбор двигателя из условия 4=1,25-1,34
и затем проверять его на нагрев, пользуясь одним из приведен-
ных методов. Предварительный выбор двигателя необходим,
чтобы знать его момент инерции для расчета динамической со-
292
ставляющей момента. Порядок расчета мощности двигателя за-
висит от режима его работы.
Продолжительный режим S1.
1. Определяется мощность производственного механизма,
причем если нагрузка за время работы изменяется, то определя-
ется эквивалентная мощность (момент или ток).
„ F-K-10'3 М-ш -10’3
Р =------------=--------------, (12.6)
где F, М - сила, момент сопротивления, приведенные к валу
двигателя, Н и Нм; V,,, а>н - номинальная линейная и угловая ско-
рости механизма и двигателя соответственно, м/с, с'1; г)п - кпд
передачи.
2. По каталогу выбирается электродвигатель из условия
Рндв>К3Р, (12.7)
где Рн,)«- номинальная мощность электродвигателя по ката-
логу; кэ=1,05*1,2 - коэффициент запаса, учитывающий неточно-
сти расчета сил сопротивления.
3. Электродвигатель при необходимости проверяется на пе-
регрузочную способность по условиям пуска
п
где Мс. Мй - статический и динамический моменты сопро-
тивления, Нм; - приведенный к валу электродвигателя суммар-
ный момент инерции, кгм2; tn - время пуска.
Асинхронные короткозамкнутые электродвигатели прове-
ряются по пусковому моменту Мп > Мсп • К3\ Мс„- момент со-
противления при скорости, равной нулю.
Кратковременный режим S2
1. Определяется мощность (момент) нагрузки и время рабо-
ты электродвигателя. Если нагрузка за время работы изменяется,
то определяется эквивалентная мощность (момент).
2. Для некоторых серий электродвигателей указывается до-
пустимая мощность при стандартных значениях продолжитель-
ности рабочего периода 10, 30, 60, 90 минут. Если время работы
tp не совпадает со стандартным, выбирают двигатель по бли-
жайшему большему значению времени работы. Обязательна про-
верка двигателя по перегрузочной способности.
293
3. Если двигатель рассчитан для продолжительного режима
работы, при кратковременном режиме его можно перегружать.
Для количественной оценки возможности перегрузки используют
коэффициент механической перегрузки рм - отношение мощно-
сти нагрузки двигателя в кратковременном режиме Рк к номи-
нальной мощности в продолжительном режиме
Рм
где а = К1Уипм
нальным переменным потерям в двигателе.
Если отношение t р jTи <0,35, электродвигатель проверяют
только по перегрузочной способности.
1 + а
-------т + а
9/
1-е /т*
- отношение постоянных потерь к номи-
НОМ
Повторно-кратковременный режим
1. Определяются мощность (момент), время работы и паузы
каждой операции в цикле.
2. Строятся нагрузочная диаграмма и тахограмма.
3. Если нагрузка переменная, то определяется эквивалент-
ный момент или ток.
4. Определяется продолжительность включения
У Г 100
№=& ' „ , (12.9)
Е',+Е<.
где: У tp, У tn - сумма времени работы и пауз, если в цикле
несколько операций.
5. Если ПВр=ПВст, то при соответствующем стандартном
ПВ% выбирают электродвигатель из условия Рм.дв^КзРз.ст-
В случае, если расчетная ПВ не соответствует стандартной,
то эквивалентную мощность приводят к стандартной по формуле
э.ст эр
\пвст
(12.10)
Задача 12.3. Электропривод работает в повторно-
кратковременном режиме. Цикл работы состоит из 2,5 мин рабо-
ты с моментом на валу 300 Нм и скоростью вращения 700 об/мин
и паузы продолжительностью 5 мин. Выбрать для этих условий
асинхронный электродвигатель краново-металлургической серии.
294
Решение.
1. Продолжительность включения
2.
ПВ = —^—100 =
Мощность на валу
2,5-100
2,5 + 5
= 33,3 %.
Р = М • (У = ЗОО^Л = 22кВт.
30
3. Приведем реальное значение мощности к стандартной ве-
личине 7ZBem=25%
p_.p[^=22|w =
\пвт у 25
Условиям задачи удовлетворяет двигатель типа МТКВ-
51108, имеющий номинальную мощность 28 кВт при 775=25%.
Для регулируемых электроприводов после выбора двигателя
решается задача выбора полупроводникового преобразователя:
управляемого выпрямителя для приводов ТП-Д или преобразова-
теля частоты для приводов ПЧ-АД.
Полупроводниковые преобразователи выбираются, как пра-
вило, по току и напряжению. Особенность выбора преобразова-
телей по току заключается в том, что полупроводниковые прибо-
ры имеют очень малые постоянные времени нагрева, вследствие
чего, преобразователи должны, как правило, выбираться не по
эквивалентному току двигателя, а по его максимальному значе-
нию.
12.5. Основные системы регулируемого электропривода
Важнейшим вопросом при проектировании является выбор
типа электропривода. При этом нужно всегда иметь в виду те
преимущества, которые дает применение регулируемого элек-
тропривода: автоматизация процессов, технологическая гибкость,
энергосбережение и другие.
Развитие систем регулируемого электропривода историче-
ски было связано с развитием преобразовательной техники. В
настоящее время все системы регулируемого электропривода вы-
полняются на основе силовых полупроводниковых преобразова-
телей, построенных на управляемых полупроводниковых прибо-
рах. В таблице 12.2 приведены основные характеристики наибо-
лее распространенных систем регулируемого электропривода.
295
Таблица 12.2
Основные системы регулируемого электропривода
Тип регулируемого электропривода Мощность, кВт Номинальная скорость, об/мин Диапазон регулиро- вания Области использо- вания
1. Частотно- ре- гулируемый асинхронный электропривод (ПЧ-АД)
1.1. На базе низковольтных (380В)асинхрон- ных к.з. двигате- лей общего при- менения и тран- зисторных пре- образователей частоты 0,5-250 До 3000 20:1 Различные технологи- ческие машины и оборудова- ние, насосы, вентилято- ры и др.
1.2. На базе специальных асинхронных двигателей и транзисторных преобразователей частоты 1,0-100 До 12000 1000:1 Электро- приводы главного движения металлоре- жущих и др. станков, текстильное оборудова- ние, цен- трифуги
1.3. На базе интегрированных конструкций (электрошпинде- ли, электровере- тена) 0,1-60 До 50000 400:1 Металлоре- жущие станки, тек- стильное оборудова- ние, цен- трифуги
1.4. На базе асинхронных двигателей на- пряжением до 6000В и транзи- сторных преобра- зователей часто- ты 500-3000 До 3000 20:1 Насосы, вентилято- ры, различ- ное техно- логическое оборудова- ние
296
1.5. На базе высоковольтных асинхронных двигателей и ти- ристорных пре- образователей частоты До 8000 До 3000 20.1 Различные технологи- ческие машины и оборудова- ние, насосы, турбоком- прессоры, вентилято- ры
2. Вентильный двигатель (бес- щеточная элек- трическая маши- на постоянного тока) - ВД
2.1. На базе синхронных дви- гателей с возбу- ждением от по- стоянных магни- тов и транзистор- ных коммутато- ров 0,1-50 До 6000 10000:1 и выше Приводы подач ме- таллорежу- щих стан- ков, роботы и другое высокоточ- ное обору- дование
2.2. На базе высоковольтных синхронных дви- гателей и тири- сторных комму- таторов 400-10000 До 3000 10:1 Насосы, турбоком- прессоры, горное и металлурги- ческое обо- рудование
3. Электроприво- ды постоянного тока с питанием от управляемого полупроводнико- вого выпрямите- ля (ТП-Д)
3.1. На базе высокомомент- ных двигателей постоянного тока или транзистор- ных широтно- импульсных управляемых преобразователей 0,5-30 До 1500 10000:1 Электро- приводы металлоре- жущих и других стан- ков, различ- ное высокоточ- ное обору- дование
297
3.2. На базе двигателей по- стоянного тока общего примене- ния и тиристор- ных преобразова- телей 1,0-1000 До 1500 100:1 Различное технологи- ческое обо- рудование, краны, подъемные машины
3.3. На базе двигателей по- стоянного тока индивидуального исполнения и тиристорных преобразователей 1000- 10000 До 1000 100:1 Металлур- гическое, горное и другое тех- нологиче- ское обору- дование
4. Асинхронный вентильный кас- кад (АВК) на базе асинхронных двигателей с фаз- ным ротором и тиристорных преобразователей 250-2000 До 1500 2:1 Электро- приводы насосов и вентилято- ров
10.6. Комплектные электроприводы
Регулируемые электроприводы выпускаются промышлен-
ными предприятиями в форме комплектных электроприводов,
представляющих собой конструктивно законченное устройство,
содержащее полупроводниковый преобразователь, системы
управления и регулирования, защитную аппаратуру. Предполага-
ется, что это устройство будет комплектоваться приводным элек-
тродвигателем.
Выпускается большое число типов комплектных электро-
приводов. В данном разделе более подробно рассмотрим два типа
наиболее распространенных электроприводов отечественного
производства.
Электроприводы унифицированные трехфазные
серии ЭПУ-1М
Устройства ЭПУ-1М предназначены для управления двига-
телями постоянного тока мощностью до 250 кВт. Двигатели мо-
гут иметь возбуждение от постоянных магнитов или с электро-
магнитным возбуждением. В состав комплектного устройства
ЭПУ-1М входит тиристорный (нереверсивный или реверсивный)
298
управляемый выпрямитель и полупроводниковая система регу-
лирования. Электроприводы на базе ЭПУ-1М предназначены для
применения в металлорежущих и деревообрабатывающих стан-
ках (электроприводы главного движения и электроприводы по-
дач), для механизмов металлургического производства, бумаго-
делательных машин, для машин по производству пленок, перера-
ботки пластмасс и для других производственных машин и меха-
низмов, требующих регулирования скорости в широком диапазо-
не.
Структура обозначения устройства
ЭПУ-1М-Х-ХХ-Х-Х-Х-Х
Заполняется следующим образом
Электропривод постоянного тока унифицированной первой мо-
дели, модифицированный
Первая циф- ра (X) - 1 - нереверсивный; 2 - реверсивный
Вторая и третья циф- ры - исполнение по номинальному току якоря двигателя: 34-25А; 37-50А; 39-80А; 40-100А; 43-200А; 46-400А; 48- 630А
Четвертая цифра - выпрямленное напряжение: 1-115В; 2-230В; 3-460В
Пятая цифра - напряжение трехфазной питающей сети: 4-220В; 7- 380В
Шестая циф- ра -Функциональная характеристика: П - для электроприводов подач с диапазоном регулиро- вания скорости до 10000 Д - для электроприводов главного движения с двухзон- ным регулированием скорости с диапазоном до 1000 М - с однозонным регулированием с обратной связью по скорости с диапазоном до 1000
Седьмая цифра - климатическое исполнение УХЛ4
Устройство ЭПУ-1М в комплекте с защитной и коммутаци-
онной аппаратурой предназначено для встраивания в шкафы
управления со степенью защиты IP-21. Конструктивно устройст-
во выполнено в виде моноблока.
Функциональная схема электропривода рассматриваемой
серии показана на рис. 12.4. Это высокоточный реверсивный
трехфазный тиристорный однозонный электропривод по системе
ТП-Д. Понятие однозонный означает, что регулирование скоро-
сти осуществляется в пределах 0-а>нои, т.е. вниз от основной ско-
рости. Поток возбуждения двигателя остается постоянным.
299
300
Рис. 12.4. Функциональная схема электропривода ЭПУ-1М-2П
Двигатель постоянного тока М питается от реверсивного ти-
ристорного преобразователя U1, выполненного по трехфазной
мостовой схеме с раздельным управлением (см. раздел 5.2). Пи-
тание тиристорного преобразователя производится от сети 380В,
если двигатель имеет номинальное напряжение 440В, или от
трансформатора Т1, если напряжение двигателя 220В. Для двига-
телей с электромагнитным возбуждением предусмотрен выпря-
митель U2 для питания обмотки возбуждения. Защита преобразо-
вателей U1 и U2 производится плавкими предохранителями F1-
F3 и F4-F6.
Система регулирования скорости - двухконтурная. Внешний
контур - контур скорости - содержит ПИ-регулятор PC и обрат-
ную связь по скорости от тахогенератора BR1. Обратная связь по
току заведена на вход управляющего органа УО. Измерительным
элементом для обратной связи по току служит трансформатор
тока, включенный в цепь переменного тока, питающую преобра-
зователь цепи якоря. Ток вторичной обмотки этого трансформа-
тора преобразуется датчиком тока ДТ в сигнал постоянного тока,
пропорциональный по величине току якоря двигателя. Однако
этот сигнал однополярный, т.е. не несет информацию о направ-
лении тока в цепи якоря.
Управление тиристорами производится от трехканальной
СИФУ, содержащей формирователи импульсов ФИ 1-ФИЗ.
Управляющий сигнал формируется управляющим органом УО; с
помощью переменных резисторов R16, R17 и R19 производится
установка углов амин, аыакс и начального угла а„ач. Переключение
импульсов управления с одной группы тиристоров (В) на другую
группу (Н) производится логическим устройством, которое рабо-
тает в зависимости от знаков сигнала заданного тока и сигнала
датчика проводимости вентилей ДП. Сигнал заданного направле-
ния тока поступает в логическое устройство с выхода нелинейно-
го звена НЗ. Звенья НЗ и ФПЕ с резистором R14 образуют уст-
ройство для линеаризации характеристик электропривода при
работе в зоне прерывистых токов.
Для согласования реверсивного сигнала на выходе НЗ с не-
реверсивной регулировочной характеристикой управляющего
органа УО служит переключатель характеристик ПХ, управляе-
мый логическим устройством ЛУ (ключи В и Н).
На входе регулятора скорости сравниваются сигналы зада-
ния скорости U3ad и обратной связи по скорости. Вместо ручного
потенциометрического задатчика скорости R1 задание может
301
вводиться от устройства высшего уровня автоматизации, напри-
мер от ЧПУ.
Токоорганичение в данной схеме обеспечивается за счет ог-
раничения выходного напряжения регулятора скорости с помо-
щью резистора R10, которым устанавливается максимальная ус-
тавка токоограничения. Узел зависимого токоограничения обес-
печивает снижение максимальной уставки токоограничения в
зависимости от скорости: чем скорость больше, тем меньшая до-
пускается перегрузка по току.
Блок защит БЗ производит блокирование выхода регулятора
скорости и снятие управляющих импульсов с тиристоров.
Электроприводы серии ЭПУ-1М выпускаются Чебоксарским
электроаппаратным заводом.
Частотно-регулируемый асинхронный привод АП-140
Промышленная группа «Приводная техника» выпускает ре-
гулируемые асинхронные электроприводы серии АП-140. Серия
имеет 2 ветви:
- АП-140-А для управления общепромышленными асин-
хронными двигателями мощностью 5,5-500 кВт;
- АП-140-Н для управления асинхронными электродвигате-
лями насосов и вентиляторов мощностью 5,5-500 кВт.
Типоразмеры преобразователей частоты, составляющих ос-
нову серии, и их маркировка приведены в таблице 12.3.
Таблица 12.3
АП- 140- - _и Модель
0К75 1К5 2К2 ЗК7 5К5 7К5 НК 15К 18К5 22К
Мощ- ность (кВт) 0,75 1,5 2,2 4 5,5 7,5 11 15 18,5 22
Номи- наль- ный ток (А) 2,5 3,7 5 8,5 13 16 25 32 38 45
АП- 140- - _(_) Модель
ЗОК 37К 45К 55К 75К 93К ПОК 132К 160К 187К
Мощ- ность (кВт) 30 37 45 55 75 93 НО 132 160 187
Номи- наль- ный ток (А) 60 75 90 НО 150 170 210 250 300 340
302
АП- 140- - _о Модель
200К 220К 250К 280К 315К 375К 400К 500К
Мощ- ность (кВт) 200 220 250 280 315 375 400 500
Номи- наль- ный ток (А) 380 415 470 520 600 680 750 920
Питание
преобразовате-
лей - от трех-
фазной сети 380
В. Структура
преобразователя
частоты пред-
ставлена на
рис. 12.5. Преоб-
разователь со-
стоит из трех
основных час-
тей: неуправ-
ляемого выпря-
мителя с фильт-
ром в цепи по-
стоянного тока
ЗПТ (рис. 12.6),
Силовой блок
мостового трех- Рис. 12.5. Структурная схема преобразователей
фазного инверто- частоты АП-140
ра, выполненного
на IGBT приборах (рис. 12.7) и системы управления. Выпрями-
тель осуществляет преобразование трехфазного переменного на-
пряжения питающей сети в выпрямленное напряжение постоян-
ной амплитуды 540В.
303
Выпрямитель Ограничитель Фильтр
зарядного тока
Рис. 12.6. Преобразователи частоты АП-140. Звено постоянного
тока (ЗПТ)
Рис. 12.7. Схема мостового трехфазного инвертора
Инвертор посредством ШИМ-управления транзисторными
ключами преобразует постоянное напряжение в переменное ква-
зи-синусоидальное регулируемой частоты f и амплитуды U. Через
цепь постоянного тока передается активная мощность - из сети к
двигателю. Для циркуляции реактивной мощности, которая необ-
ходима для создания электромагнитного поля асинхронного дви-
гателя, образуется цепь: обмотки статора двигателя - обратные
диоды, шунтирующие транзисторные ключи - конденсаторы
фильтра. При запирании ключей индуктивные токи замыкаются
через диоды на емкость фильтра, не вызывая перенапряжений.
Транзисторные ключи управляются драйверами, которые
осуществляют гальваническую развязку силовых цепей от цепей
управления и защиту транзисторов.
304
ПК
RS485
Аналоговые сигналы
задания (О-10В, 4-20мА)
X
I
г
входные
управляющие
сигналы
Напряжения
питания
Галываниче
ские
развязки
Контроллер
Пульт
управления
Обратная
Информа-
Сигналы мо-
ниторинга
току и
напряжению
Гальванические
развязки
сигналы
Рис. 12.8. Блок управления электропривода АП-140
Блок микропроцессорного управления включает в себя
(рис. 12.8) программируемый контроллер, аналого-цифровые пре-
образователи и пульт управления. Контроллер осуществляет ши-
ротно-импульсную модуляцию выходного напряжения преобра-
зователя с функциональной зависимостью амплитуды напряже-
ния от частоты (см. рис. 12.9).
U=A+Bf
Коэффициенты А и В програм-
мируются.
В контроллере может быть про-
граммно реализован ПИД-регулятор
технологического параметра (на-
пример, напора или расхода воды),
который должен контролировать
регулируемый электропривод. Сиг-
налы обратной связи по этому
параметру вводятся в контроллер
через АЦП.
Все параметры, связанные с
Рис. 12.9. Зависимость
управлением приводом, заносятся в величины напряжения от
память контроллера с помощью про- частоты преобразователя
граммирующего устройства или персонального компьютера ПК.
При необходимости преобразователь АП-140 может обеспе-
чить тормозной режим работы электропривода. Для этого в цепи
постоянного тока предусмотрены транзисторный ключ ТК и раз-
рядное сопротивление Rmnpu. Энергия торможения двигателя на-
305
капливается на конденсаторе фильтра, вызывая на нем повыше-
ние напряжения. Когда напряжение на Сф достигнет определен-
ной величины, открывается ключ ТК и избыток заряда конденса-
тора сбрасывается в тормозное сопротивление Яторм. Сопротив-
ление R0,,p в цепи постоянного тока служит для ограничения тока
заряда емкости фильтра при включении преобразователя в сеть.
При дальнейшей работе сопротивление Roep шунтируется.
Устройства АП-140 имеют следующие защиты:
- от перенапряжений по питанию
- от повышения напряжения питания
- от понижения напряжения питания
- от короткого замыкания в нагрузке
- от замыкания фазы на землю
- от перегрева двигателя
- от «опрокидывания двигателя
- от перегрузки
- от ошибок управления.
12.6. Контрольные вопросы для самопроверки
1. Назовите общие требования, предъявляемые к электро-
приводу.
2. Что характеризует нагрузочная диаграмма электроприво-
да?
3. Чем отличается нагрузочная диаграмма производственно-
го механизма от нагрузочной диаграммы электропривода?
4. По каким критериям рассчитывается мощность привод-
ного электродвигателя?
5. От какого номинального параметра электродвигателя за-
висят его масса и габаритные размеры?
6. Перечислите классы изоляции двигателя и соответст-
вующие им температуры нагрева.
7. Дайте определение эквивалентного тока двигателя.
8. Каким параметром характеризуется повторно-
кратковременный режим работы двигателя?
9. По каким параметрам выбираются полупроводниковые
преобразователи для питания электродвигателя в системах регу-
лируемого электропривода?
10. Назовите последовательность этапов проектирования
электропривода.
11. Почему следует стремиться к использованию регулируе-
мых электроприводов?
306
ЛИТЕРАТУРА
1. ГОСТ 50369-92 Электроприводы. Термины и определения
- М.: Изд-во стандартов, 1993.
2. Правила устройства электроустановок (Минэнерго РФ) -
М.: Энергоатомиздат, 2002-600с.
3. Зимин Е.Н., Кацевич В.Л., Козырев С.К. Электроприводы
постоянного тока с вентильными преобразователями - М.: Энер-
гоатомиздат, 1981. - 192с.
4. Зимин Е.Н., Яковлев В.И. Автоматическое управление элек-
троприводами - М.: Высшая школа, 1979. - 318с.
5. Ильинский НФ., Казаченко В.Ф. Общий курс электропри-
вода - М.: Энергоатомиздат, 1992.
6. Ильинский НФ. Основы электропривода - М.: Из-во МЭИ,
2000- 162с.
7. Ключев В.И, Терехов В.И Электропривод и автоматизация
общепромышленных установок - М.: Энергия, 1980. - 360с.
8. Ключев В.И. Теория электропривода. Учебное пособие для
вузов. Изд 2 - М.: Энергоатомиздат, 1998. - 704с.
9. Ковчин С.А., Сабинин Ю.А. Основы электропривода - С-П.:
Энергоатомиздат, 1954-496с.
\0.Москаленко В.В. Автоматизированный электропривод - М.:
Энергоатомиздат, 1986. -416с.
11.Москаленко В.В. Электрический привод - М.: Высшая шко-
ла, 1991.-430с.
12. Терехов В.М. Элементы автоматизированного электропри-
вода-М.: Энергоатомиздат, 1987. -224с.
ТЗ.Чиликин М.Г., Сандлер А.С. Общий курс электропривода-
ми Энергоиздат, 1981. - 576с.
14.Автоматизированный электропривод производственных
механизмов, /под общ.ред. Г.Б.Онищенко/- М.: РАСНХ - 2001. -
520с.
15.Справочиник по автоматизированному электроприводу
/Под ред. В.А.Алексеева и А.В.Шинянского/ - М.: Энергоатомиз-
дат, 1983. - 616с.
^.Микропроцессорные автоматические системы регулирова-
ния. Основы теории и элементы. Учебное пособие /Солодовников
В.В., Коньков В.Г, Суханов В.П., Шевяков О.В./ - М.: Высшая
школа, 1991. - 255с.
17.Комплектные тиристорные электроприводы: Справочник
/Под ред. В.М.Перельмутера/ - Энергоатомиздат. - 1988. - 319с.
18.Электрические и электронные аппараты. Учебник для вузов
/Ю.КРозанов, Е.Г.Акимов, Н.А.Ведешенков и др. Под ред.
Ю.КРозанова/2-е изд.-М.: Информэлектро. 2001.-420с.
307
Учебное издание
Онищенко Георгий Борисович
Электрический привод
Учебник для вузов
Подписано в печать 14.03.03. Формат 60/90
Усл. печ. листов 20. Учетно-изд листов 21,3- Тира5к 3000 экз. Заказ №166.
Отпечатано в типографии Россельхозакадемии
1 15598, Москва, ул. Ягодная, 12
313