/




























Author: Николаев А.Б. Лопота А.В.
Tags: робототехника военное оборудование военная техника
Year: 2019



Text
Современные тенденции развития робототехнических комплексов
А.В. Лопота, А.Б. Николаев
РТК
НАЗЕМНЫЕ РОБОТОТЕХНИЧЕСКИЕ
КОМПЛЕКСЫ ВОЕННОГО И СПЕЦИАЛЬНОГО
НАЗНАЧЕНИЯ
Обзор современного развития РТК ВиСН
В настоящее время военные ведомства ведущих зарубежных государств рассматривают
роботизацию военной техники как одно из магистральных направлений развития средств
вооруженной борьбы, максимально исключающих пребывание личного состава в зоне
досягаемости огневых средств противника. Все ведущие державы мира осуществляют работы по
исследованию, производству и широкому применению роботизированных комплексов и боевых
роботов для достижения преимущества в вооруженном конфликте. Наибольших результатов в
данной области достигли США. Так, если в Ираке использовалось 365 единиц роботов различного
назначения 32 типов, то в рамках плана министерства обороны США «Интегрированная Дорожная
карта развития безэкипажных систем на период 2009-2034 гг.» в программе «Army Brigade
Combat Team Modernization» - модернизация боевых бригадных групп, предусматривается
создание и внедрение в войска уже около 200 типов наземных роботов. Среднегодовой объем
финансирования закупок наземных роботов и проводимых НИОКР поданной программе будет
составлять порядка $1,5 млрд. Программой предусматривается достижение к 2020 г. оснащения
наземными робототехническими комплексами различного назначения не менее 30 % от общего
количества боевой техники [1J. Подругой оценке [2J доля безэкипажных образцов военной техники
к 2030 г. может составлять до 70 % от числа экипажных боевых машин и 30 % - от общего состава
боевых машин. Ожидается, что выполнение программ разработки, приведет к существенному
повышению боевых возможностей вооруженных сил при одновременном сокращении
численности военнослужащих и техники. По оценкам американских военных боевые возможности
бригад нового типа возрастут в 2...2,5 раза [2]. В таблице 1 приведены численность личного состава,
вооружений и технических средств перспективных формирований (бригад) сухопутных войск (СВ)
США [2].
Г Личный состав, вооружения и технические средства перспективных формирований СВ США [2] Таблица 1 -и
Наименование Всего
Личный состав, человек 9 864
Количество ББМ, в т. ч: 971
- экипажных 319
- безэкипажных 167
Экипажные машины:
Танк со 120-мм пушкой 54
155-мм самоходная гаубица 18
120-мм самоходный миномет 24
Боевая разведывательная машина 27
Командно штабная машина 79
Боевая машина пехоты 78
Бронированнагремонтноэвакуационнаямашина 10
Медико-эвакуационная машина 29
Беззкипажные машины:
Боевая дистанционно управляемая машина (масса 6 т) 63
Многоцелеваядистанционно управляемая машина 59
Портативная дистанционно управляемая машина (14 кг) 45
Беспилотные летательные аппараты:
Летательный аппарат (для бригады) 16
Летательный аппарат (для батальона) 12
Летательный аппарат (для роты) 36
Летательный аппарат (для взвода) 36
з
Из таблицы 1 видно, что на уровне бригады планируется применение различных
типов безэкипажных наземных машин [1]:
• боевые наземные машины, оснащенные средствами разведки и поражения целей;
• многоцелевые наземные машины обеспечения боевых действий тактических
подразделений;
• портативные наземные машины поддержки боевых действий подразделения в населенных
пунктах;
• наземные машины общего и специального назначения различной весовой категории.
Обеспечение всесторонней интеграции и повышение уровня взаимодействия за счет
реализации новых принципов управления и ведения боевых действий с применением наземных
робототехнических комплексов (НРТК) военного назначения становится неотъемлемым
условием реформирования вооруженных сил стран НАТО и других развитых зарубежных стран.
Целеустремленно в этом направлении продвигается и Китай, военное руководство которого
следит за внедрением новых технологий в военной сфере. Стоит обратить внимание и на то,
что многие принципиально важные решения по конструкции, технологиям изготовления,
программному обеспечению и способам управления, отрабатываемые на образцах
промышленной и бытовой робототехники с активным участием международной федерации
робототехники (IFR), находят свое применение и при выполнении оборонных заказов [2].
За рубежом разработана достаточно большая номенклатура носимых (до 12 кг) РТК,
гусеничные и колесные шасси которых обеспечивают диапазон максимальных скоростей от 10
до 20 км/ч [3J. Данные РТК применяются для ведения разведки, доставки грузов, обеспечения
дымовой маскировки, картографирования.обеспечения целеуказания и т.п. (смотри рисунок 1).
Аналогичные отечественные РТК (весом от 8 до 15 кг), разработанные в интересах ФСБ
России, МВД России, МЧС России и ГК Росатом, обеспечивают максимальные скорости движения
от 2,5 до 10 км/ч, что не вполне удовлетворяет требованиям к носимым РТК военного назначения
[3J. Следует также отметить, что в настоящее время в отечественной промышленности
отсутствует налаженный выпуск необходимой элементной базы для создания данных РТК с
требуемыми характеристиками.
Переносимо-возимые РТК (12 - 200 кг) применяются, в основном, для работы на
урбанизированной территории (смотри рисунок 2). РТК данного класса являются самыми
массовыми в ВС зарубежных стран и, хотя их типов немного, они находят самое широкое
применение в «горячих точках».
4
Примеры переносммо-возимых РТК массой от 12 кг до 200 кг
Рисунок 2
Несмотря на большую массу переносимо-возимых РТК по сравнению с носимыми,
они обладают приблизительно такими же максимальными скоростями передвижения.
Отечественные образцы также уступают по этому параметру зарубежным аналогам, что связано
с той же проблемой отставания отечественной элементной базы от зарубежной.Возимо-
самоходные РТК (от 200 до 2500 кг), в основном, применяются на пересеченной местности
(рисунок 3).
Примеры возимо-самоходных РТК массой от 200 до 2500 кг
Рисунок 3
В материалах сайта «Новости ВПК» [4] содержатся сведения об ОКР «Базовые платформы
мобильных биоморфных роботов», целью которой является разработка базовых платформ «для
обеспечения перемещения мобильных биоморфных роботов» в сложной недетерминированной
обстановке и в условиях труднопроходимой местности. Разрабатываются две платформы -
среднего мобильного биоморфного робота массой до 400 кг (БПМБР-400) и мобильного робота
массой до 100 кг (БПМБР-100). Платформа должна послужить основой для создания мобильного
биоморфного робота путем установки на нее систем и аппаратуры управления и целевой
нагрузки.
В аппаратуру управления войдут бортовая информационно-управляющая система,
аппаратура технического зрения, передачи данных, навигации и ориентации, планирования
маршрутов и перемещений, управления движением за маяком (поводырем). В составе целевой
нагрузки могут быть средства разведки, платформа перевозки боеприпасов и амуниции,
средства разведки минно-взрывных заграждений, вооружение или средства эвакуации убитых
и раненых с поля боя (для БПМБР-400).
БПМБР-100 должен обеспечивать передвижение в условиях городской инфраструктуры
и по пересеченной местности, в том числе, в гололедицу, по снегу глубиной до 20 см и по
залитым водой поверхностям
глубиной до 30 см. Его хотят наделить
способностью бегать по лестницам,
преодолевать рвы шириной до 40 см
и стенки высотой до 30 см. Скорость
передвижения должна быть до 15
км/ч по равнинной местности и до
10 км/ч - по пересеченной.
Аналогичными способностями
будет обладать и БПМБР-400, с
той лишь разницей, что полоса
препятствий для него будет сложней.
Согласно контракту (разработчик
ОАО «ВНИИ «Сигнал», Ковров),
государственные испытания опытных образцов должны пройти в январе - июне 2019 года.
Следует также отметить разработку Заводом им. Дегтярева совместно с Фондом
перспективных исследований (ФПИ) гусеничной платформы «Нерехта» [5], которая может быть
использована для разведки, корректировки или ведения огня, а также транспортировки грузов
(смотри рисунок 4). Впервые робот был представлен на «Дне инноваций» Минобороны РФ в
октябре 2015 г. и предполагается к испытаниям в 2016 г.
Современные технологии конструирования моторно-трансмиссионной и ходовой части
возимо-самоходных РТК позволяют обеспечить их движение со скоростями не ниже, чем у
экипажной боевой техники (до 60-70 км/ч на дорогах с твердым покрытием, до 25 - 35 км/час
по пересеченной местности). При этом следует подчеркнуть, что реально достижимые скорости
РТК ограничены, в первую очередь, техническими характеристиками систем наружного
видеонаблюдения и дистанционного управления.
Не имея возможности проведения полноценных испытаний РТК данной весовой категории
и проверки функционирования их подсистем в условиях, приближенных к боевым, наши
разработчики вынуждены проводить, в основном, теоретические исследования и иногда -
разработку отдельных экспериментальных образцов РТК.
Применительно к вопросу создания РТК на базе штатных экипажных образцов ВВТ следует
отметить, что в настоящее время за рубежом разработаны унифицированные комплекты
навесного (встраиваемого) оборудования для оснащения колесных или гусеничных машин с
целью перевода их в класс дистанционно-управляемых. Такие машины находят применение
при работах в опасных зонах и с опасными предметами, в первую очередь, при расчистке
дорог, преодолении заграждений, разминировании, а также при постановке дымовых завес для
обеспечения боевых действий. Первые образцы машин этой категории применялись войсками
США в Боснии (инженерными подразделениями), а также в ходе боевых действий в Афганистане
и Ираке.
В нашей стране также разрабатываются комплекты навесного (встраиваемого)
оборудования для оснащения штатных образцов броневого и танкового вооружения и техники
6
(БТВТ). Например, в публикации [6] приводится сообщение об успешных испытаниях новой
боевой машины с принципиально новой для бронетехники двигательной установкой: «Военно-
промышленная компания (ВПК) завершила испытания боевой колесной машины с гибридной
энергоустановкой и электротрансмиссией на базе БТР-90 «Росток». Новый бронетранспортер
способен бесшумно передвигаться и в перспективе может стать беспилотным», - сообщил
пресс-секретарь компании ВПК Сергей Суворов. Самое главное, по словам представителей
ВПК, то, что «Крымск» - это практически готовая дистанционно управляемая платформа.
Аппаратные возможности электронных систем экспериментального макетного образца уже в
настоящее время позволяют реализовать дистанционное управление им, а при незначительных
доработках и разработке соответствующих алгоритмов управления и программ - создать
роботизированную платформу». Среди других отличительных преимуществ нового 22-х тонного
БТР можно отметить, что при мощности двигателя почти в 1,5 раза меньшей, чем у прототипа
БТР-90, испытуемый образец нового гибридного бронетранспортера показал значительно
лучшие результаты. «Крымск» способен развивать скорость в 80 километров в час за 33 секунды,
а максимальная скорость движения составляет 97 километров в час.
Экспериментальная машина «Крымск» Рисунок 5
Среди других разработок изделий и продуктов наземной военной и специальной
робототехники, свидетельствующих об определённых успехах, достигнутых российскими
разработчиками, можно отметить следующие:
— Согласно публикации (7J: «Концерн «Созвездие» (Воронеж), входящий в «Объединенную
приборостроительную корпорацию» Госкорпорации Ростех, готовится запустить в серийное
производство новую военную разработку - роботизированную малогабаритную систему
мониторинга - комплекс 1К144 для разведывательных подразделений сухопутных войск.
Комплекс 1К144 способен в режиме реального времени определять количество техники и ее
тип (включая низколетящие вертолеты), число движущихся людей, характеризуя, вооружен
боец или нет, а также выдавать координаты и направление движения объектов, оставаясь при
этом незамеченным.
Размер разработки не превышает 20 сантиметров, вес в зависимости от комплектации
составляет 150-600 грамм. Устройство устанавливается под землей и фактически находится
под ногами противника. Засечь датчики комплекса практически невозможно - для этого нужны
особые разведывательные навыки и специальная техника, которой сегодня у противника
нет. Во-первых, для обработки информации и передачи данных каждому датчику хватает
0,01 секунды. Во-вторых, антенна находится под землей, что обеспечивает дополнительную
скрытность. Информация передается на портативный пульт оператора (если боец находится в
тылу врага) или на автоматизированное рабочее место. Для увеличения охвата контролируемой
территории могут использоваться радиоретрансляторы, каждый из которых расширяет
зону передачи данных до 15 км. Устройства, входящие в комплекс, выдерживают диапазон
температур от -40 до +50 °C, влагоустойчивы и работают в условиях продолжительных
проливных дождей. Литиевая батарея обеспечивает непрерывную работу датчика в течение
30 дней при 2 тысячах срабатываний в сутки. Комплекс не нуждается в дополнительном
обслуживании и может эксплуатироваться в течение 5 лет. Устройство может полноценно
функционировать при разрыве снаряда на расстоянии от него 5 метров.
Комплекс 1К144 имеет несколько степеней адаптации - по частоте, времени, мощности, в
том числе, структурную адаптацию (способность самостоятельно организовываться в сети). То
есть система самостоятельно подстраивается под уровень помех и способна при необходимости
переходить на другие частоты, мощности и тщ. В случае потери связи с пунктом управления
комплекс способен самостоятельно принимать решения. В настоящее время прорабатываются
вопросы возможности его самоустановки на территории противника.
Первые 10 комплексов должны были поступить в войска в 2015 году (соответствующий
приказ МО России о постановке комплекса 1К144 на снабжение подписан);
Комплекс РЭБ «Красуха-2», комплекс РЭБ «Москва-1» Рисунок 6
«Красуха 2». Источник: Фото: miiitaryrussia.ru
«Москва 1». Источник НПО "Квант’
— Согласно материалам статьи [8]: «Комплекс РЭБ «Красуха-2» может «ослепить» и
«оглушить» не только самолеты дальнего радиолокационного наблюдения типа АВАКС, но
и космическую компоненту систем ракетного наведения. «Красуха-2», как только АВАКС
входит в зону ее действия, «встраивается» в защищенные каналы связи, а затем начинает
к
искажать передаваемые и принимаемые летающим командным пунктом сигналы. По мнению
специалистов (и это как бы подтверждено испытаниями) очень быстро АВАКС перестает
различать цели, и «не понимает», чем, собственно, надо управлять. Итогом вполне может
стать атака на собственные военные объекты, принятые как вражеские. В случае крайней
необходимости комплекс может «выжечь» электронные системы самолета, высокоточной
ракеты или низкоорбитального спутника.
В 2015 году войска должны были получить два мобильных комплекса «Красуха-2». Кроме
того, согласно заявлениям представителей службы РЭБ Южного военного округа ВС РФ, в рамках
программы перевооружения в войска округа поступила новая техника РЭБ: БЛА «Леер-3» (для
ведения разведки источников излучения), многофункциональный комплекс «Красуха-4» (для
подавления линий связи бортовых радиолокационных станций (РЛС) самолетов и вертолетов,
а также систем дальнего радиолокационного оповещения). Планируются к поступлению:
комплексы «Борисоглебск-2В» (для разведки и подавления KB-линий связи в тактическом
звене управления), «Мурманск-БН» (для разведки и подавления KB-линий связи в оперативно-
стратегическом, оперативном и оперативно-тактическом звеньях управления), а также
«Лесочек» (для разведки и подавления УКВ-линий связи в тактическом звене управления, а
также подавления каналов радиоуправления взрывными устройствами и предотвращения
взрывов фугаса при проезде военных автомобилей и бронетехники), мобильное средство
радиотехнического контроля и защиты информации от утечки по техническим каналам
беспроводной связи «Свет-КУ», унифицированный мобильный автоматизированный пункт
сбора и обработки информации, управления силами и средствами комплексного технического
контроля «Лесс», комплекс средств автоматизации «Москва-1» и другие изделия. На рисунке 6
представлены некоторые из вышеупомянутых отечественных автоматизированных комплексов
РЭБ.
- Переносной мобильный робот «Сервосила «Инженер» компании «Сервосила»,
предназначенный для визуальной разведки мест техногенных катастроф, удалённого осмотра
помещений, а также для обезвреживания опасных предметов манипулятором типа «рука»
(смотри рисунок 7).
Переносной мобильный робот «Сервосила «Инженер» Рисунок 7
Особенностью изделия является сочетание его малой массы, позволяющей переносить
робота в рюкзаке одному человеку-оператору, со способностью поднимать до 8 кг «в руке»
и самостоятельно залезать по лестницам. «Сервосила «Инженер» имеет в своей конструкции
9
штатные жёсткие точки подвески внешних модулей целевой нагрузки, которые также
обеспечивают подключение устройства к бортовым шинам питания, CAN и Ethernet. Роботы
«Сервосила «Инженер» прошли опытную эксплуатацию в пожарной части МЧС РФ, что
позволило накопить материал для последующей модернизации.
- Проходящий сейчас испытания программный комплекс централизованного и
децентрализованного управления группой робототехнических комплексов, разработанный
«Объединённой приборостроительной корпорацией» («ОПК», входит в Ростех) [9]. Программный
комплекс позволяет управлять разнородными роботами: в группу могут входить летательные,
подводные аппараты, наземные машины различного назначения. Оператор осуществляет
руководство всей группой в целом, но задачи внутри группы роботы распределяют и
решают самостоятельно. «В разработанном программном комплексе реализованы процессы
интеллектуального управления на основе механизмов адаптивного управления. В частности,
машина умеет принимать разумные решения в нестандартной ситуации в реальном масштабе
времени. Роботы самостоятельно преодолевают неожиданно возникшие препятствия, например
упавшее дерево, выбирают оптимальный путь движения, динамически перераспределяют
задания», - объясняет представитель разработчика. Программный комплекс предусматривает и
полностью автономные сценарии действий роботов с согласия оператора. Такой подход может
быть применен в случае адаптации системы управления для решения боевых задач. Система
управления обладает многозадачностью, эффективно распределяет ресурсы вычислительной
системы, осуществляется взаимодействие между процессами (обмен данными, взаимная
синхронизация).
Сейчас технология отрабатывается на базе робототехнических комплексов «Пластун»,
созданных центром робототехники МГТУ имени Н.Э. Баумана (рисунок 8) . Машины,
имитирующие боевую технику, способны идентифицировать объекты на условном поле боя,
определять первоочередные цели, исходя из их опасности и возможностей своего вооружения.
Они могут самостоятельно осуществлять целераспределение, занимать выгодные позиции,
заменять выведенных из строя роботов, запрашивать у оператора разрешение на поражение
и даже поражать цели самостоятельно - в автоматическом режиме без участия оператора.
Как поясняют разработчики, в дальнейшем программный комплекс может быть перенесен
на реальную технику и настроен на решение самых разных задач - не только в военной, но и в
гражданской сфере. Например, группу роботов можно «научить» охранять здания и территории,
вести поисковые или спасательные работы и тщ.
-Технология мобильной децентрализованной широкополосной самоорганизующейся
локальной радиосети MANET (Mobile Ad Hoc Network) от компании ООО «СПИЛНЕТ» (SPILNET,
Москва) [10] для управления сенсорными сетями и группировками мобильных объектов
(роботы, дроны).
Технология MANET обеспечивает цифровую пакетную передачу различных видов
трафика (данные, речь, видео) с гарантированной доставкой информации абоненту, в том
числе, в режиме многоскачковой ретрансляции, с возможностью режима радиомолчания
и пониженным энергопотреблением. При использовании в робототехнике это позволит
ю
обеспечить постоянную (либо периодическую для реализации мероприятий маскировки) связь
с приданными оператору роботизированными устройствами и исполнительными механизмами,
представление видео, аудио и другой информации от робота, отдание команд конкретному
роботу на выполнение боевой задачи, самотестирование и тд. При этом топология радиосети
может быстро изменяться при движении абонентов, произвольного входа и выхода из сети, что
практически исключает возможность применения для данной задачи Mesh-сетей, созданных
на основе стандарта ZigBee и таблично-ориентированных протоколов маршрутизации. Суть
самоорганизующихся сетей - предоставление абоненту возможности доступа к различным
сетевым услугам посредством передачи и приема «своего» трафика через соседних абонентов,
без использования любого рода базовых станций, точек доступа и т.п.
Структура простейшей
самоорганизующейся сети
представляет собой большое
количество абонентов на некоторой
площади, которую упрощенно
можно назвать площадью покрытия
сети, и одну или несколько точек
доступа к внешним сетям. Каждое
из абонентских устройств, в
зависимости от его мощности,
обладает своим радиусом
действия. Если абонент, находясь
«на периферии» посылает пакет
абоненту, находящемуся в центре
сети, или на точку доступа,
происходит так называемый
Рисунок 8
Робототехнический комплекс
«Пластун*
многоскачковый процесс передачи пакета через узлы, находящиеся на пути заранее
проложенного маршрута. Таким образом, можно сказать, что каждый новый абонент за
счет своих ресурсов увеличивает радиус действия сети. Следовательно, мощность каждого
отдельного устройства может быть минимальной. А это предполагает как меньшие стоимости
абонентских устройств, так и лучшие показатели безопасности и электромагнитной
совместимости.
Технология SPILNET обладает масштабируемостью и позволяет наращивать количество
узлов в широких пределах. Увеличение размерности сети до сотен и тысяч узлов может
потребовать введения локализации управления, т.е. разделения сети на кластеры и
межкластерной ретрансляции через узлы-шлюзы. Пространство покрытия сетью зависит
от количества узлов, мощности передатчиков и используемых частот. При большом
количестве модулей на небольшой площади мощность передатчиков может быть снижена.
Для увеличения расстояния прямой передачи данных существует возможность реализации
модулей сети с различными рабочими диапазонами частот, например 433 МГц и 868 МГц.
Модули радиосети являются Master-устройствами по отношению к подключаемым датчикам и
исполнительным устройствам. Одновременно к одному модулю радиосети (смотри рисунок 9)
и
могут быть подключены до 5 датчиков по интерфейсам UART, SPI, I2C. За счет малого времени
маршрутизации (не более 400 мс) технология обеспечивает передачу речи в цифровом формате,
сервисных и геопозиционных данных.
Использование широкополосного приемопередатчика диапазона 2,4 ГГц позволяет
организовать высокоскоростной обмен данными. В отличие от стационарной иерархической
Mesh<e™ стандарта ZigBee, модули радиосети MANET не нуждаются в постоянном поддержании
связности сети и периодической рассылке пакетов присутствия или «маячков», что существенно
увеличивает автономность сети. В системе SPILNET не используется централизованное
управление доступом и канальная адресация, так как множественный доступ к сети производит
прослушивание эфира без обмена управляющими фреймами RTS-CTS. Это позволяет сохранять
радиомолчание до непосредственного обмена информативными данными. Проблема скрытого
узла решается за счёт задержек на передачу и доставки фрагментированных данных по
альтернативным маршрутам.
Модули радиосети MANET системы SPILNET Рисунок?
По утверждению разработчиков компании данная технология, обладающая почти
мгновенным вхождением в сеть, повышенной надежностью, быстротой развертывания,
способностью к самоорганизации, малой ресурсоёмкостью и масштабируемостью весьма
перспективна, в частности, для управления, связи и взаимного позиционирования БПЛАс целью
объединения их в самоорганизующуюся сеть для выполнения общей целевой задачи. При этом
БПЛА обладают определённой самостоятельностью в принятии оперативных решений. Кроме
того технология обеспечивает устойчивость сети передачи данных между БПЛА и/или центром
управления даже в условиях регулярных потерь связи или задержках в передаче сигнала, что
актуально в условиях городской застройки и для быстро движущихся БПЛА.
Минимальное конфигурирование и быстрое развёртывание позволяют применять
самоорганизующиеся сети в чрезвычайных ситуациях, при боевых действиях и - когда
отсутствует какая-либо заранее развернутая инфраструктура связи.
12
Анализ полученной информации о наземных РТК ВиСН
Данные о современных военных конфликтах позволяют прогнозировать следующие
основные изменения в характере военных действий:
• повышение значимости различных способов дистанционного воздействия на
противника (особенно дальнего огневого и электронного воздействия), повышение роли
огневого поражения в достижении цели операции (боя) в целом;
• приоритет высокотехнологичным видам оружия - высокоточным, на новых физических
принципах, на основе «искусственного интеллекта»;
• расширение пространства ведения военных действий, увеличение рассредоточенности
формирований на поле боя, ведение боевых действий по отдельным, зачастую изолированным
направлениям при наличии значительных разрывов в боевых порядках и промежутков
в оперативном построении группировок наземных сил, значительный рост глубины
эшелонирования группировок войск вследствие увеличения дальности средств поражения
сторон;
• возрастание активности оборонительных действий за счет маневра силами и средствами
(«доминирующий» маневр), нанесения ответных и упреждающих ударов, значительное
снижение роли заблаговременного сосредоточения войск (сил) на основных направлениях;
• переход от вертикальных связей управления к глобальным сетевым защищённым
системам связи;
• повышение значимости действий разведывательно-диверсионных подразделений в
тылу противника;
• осуществление гибкого и целенаправленного материально-технического обеспечения
(«сфокусированное» снабжение) вместо создания рассредоточенных больших запасов ВВТ и
других материальных средств;
• интегрированное применение в совместных (межвидовых) операциях ударных (огневых)
систем поражения различных видов и родов войск.
Учитывая вышеуказанные тенденции, к основным областям военного и специального
применения робототехники можно отнести:
• разведку и наблюдение на всех театрах военных действий (поиск, обнаружение и
слежение за силами и средствами противника);
• уничтожение важных целей и объектов;
• использование совместно с пилотируемыми боевыми средствами в качестве компонента
их систем обеспечения и вооружения;
• операции по минированию, разминированию и нейтрализации взрывоопасных
объектов, минных заграждений и т.п.;
• патрулирование на заданных рубежах и боевое охранение;
13
• использование для решения задач противолодочной, противовоздушной и
противоракетной обороны;
• мероприятия по радиоэлектронной и информационной борьбе;
• поисковые и аварийно-спасательные работы, медицину;
• тыловое обеспечение и обслуживание военной инфраструктуры.
Соответственно, основными областями применения роботизированных образцов
военной техники Сухопутных войск являются [1]:
• ведение разведки;
• прорыв обороны противника;
• обеспечение обороны роботизированными огневыми точками;
• подавление огневого противодействия мобильными робототехническими комплексами
с автоматическим оружием и противотанковыми средствами;
• ликвидация нештатных ситуаций с опасными в обращении боеприпасами,
обезвреживание взрывоопасных предметов;
• проведение аварийно-восстановительных работ;
• эвакуация с поля боя личного состава и техники под огнем;
• инженерная разведка, минирование и разминирование, обеспечение преодоления
заграждений;
• доставка боеприпасов и горюче-смазочных материалов в зону огневого воздействия;
• патрулирование, охрана и оборона районов, мест дислокации частей, объектов,
перевалов и перекрестков дорог.
Широкий спектр потенциального применения робототехнических комплексов
определяет повышенные требования к функциональным возможностям соответствующих
систем управления. Например, в [1 ] приведён вариант мобильного пункта управления (МПУ)
мобильного робототехнического комплекса реактивной системы залпового огня (МРК-РСЗО,
(рисунок 10). МПУ должен осуществлять с автоматизированных рабочих мест операторов:
получение координат целей от радиолокационной и оптико-электронной разведки, приём
навигационных данных от спутниковой системы ГЛОНАСС, передачу данных в МРК-РСЗО,
автоматизированный ввод данных (маршрутов, координат целей, метеорологии и т.д.) в
центральный блок управления и навигации МРК-РСЗО, хранение идентификационных данных
и электронных навигационных карт района боевых действий, организацию связи и управление
огнем МРК-РСЗО в ходе ведения боя [1].
Специфика задач, решаемых в условиях боевого противостояния, накладывает на
устройства военной робототехники требование способности работы в реальной обстановке
при частичном или полном отсутствии исходной информации о среде функционирования.
14
Поэтому в настоящее время в развитых странах основное внимание уделяется созданию
робототехнических средств повышенной автономности.
Согласно проведённому американскими военными экспертами анализу, существующие
опытные образцы дистанционно-управляемых роботизированных машин по показателям
автономности действий не соответствуют требованиям современного боя.
Рисунок 10
Мобильный пункт управления МРК РСЗО (вариант)
Они не обладают достаточной подвижностью на сильнопересеченной местности,
насыщенной искусственными заграждениями и водными преградами, а также в городских
условиях. Применяемые в них источники энергии не обеспечивают функционирование машины
в течение заданного времени и не приспособлены к эксплуатации в различных климатических
условиях.
Выявлены также значительные недостатки в работе системы автоматического поиска,
обнаружения и распознавания неподвижных и движущихся объектов.
Кроме того, вследствие несовершенства средств искусственного интеллекта создание
полностью автономных машин на сегодняшний день является сложной научно-технической
задачей.
Наиболее сложными составляющими этой задачи являются:
• адаптация к изменениям обстановки;
• координация групповых действий;
• принятие самостоятельного решения на применение оружия (для боевых роботов), в
том числе, для самообороны.
15
Министерством обороны США принято решение о поэтапном наращивании возможностей
дистанционно-управляемых машин с постепенным исключением функций управления и
контроля со стороны оператора и обеспечением частичной автономности робота в рамках
общей поставленной задачи. С этой целью проводятся НИОКР, направленные на увеличение
дальности действия, повышение автономности НРТК, помехозащищенности каналов управления
и связи, совершенствование систем технического зрения, решение проблем автоматического
распознавания целей, анализа сцен и ситуаций, опознавания по принципу «свой - чужой»,
а также группового применения НРТК, в том числе, совместно со штатными экипажными
образцами вооружений и военной техники (ВВТ).
В публикации [2] приведена временная диаграмма, иллюстрирующая взгляды
американских специалистов на поэтапное наращивание возможностей дистанционно-
управляемых машин с постепенным исключением функций управления и контроля со
стороны оператора и повышением уровня автономности движения наземных роботов
(смотри рисунок 11).
Направление развития наземных робототехнических комплексов [2]
Рисунок 11
ЭВОЛЮЦИЯ РОБОТОВ
1990 2010 2020
Телеуправление Автономность
Время
По мнению специалистов корпоративной научно-исследовательской лаборатории
армии США (ARL - Army Research Laboratory) перспективные технологии восприятия роботом
окружающей среды должны основываться на методах, которые дадут ему возможность
автономно и «разумно» передвигаться в условиях различной местности с требуемой скоростью
16
и маневренностью. Данные технологии напрямую связаны с развитием сенсорных технологий
и алгоритмами, которые обеспечивают обработку и анализ сенсорной информации в реальном
масштабе времени.
Наиболее важными являются алгоритмы обнаружения препятствий, классификации
местности и оценки текущей обстановки. Специалисты различают восприятие ближнего
пространства (до 100 м) для обеспечения локальной навигации и восприятие на расстоянии
средней дальности (до ~500 м) для обеспечения тактических действий и предотвращения
появления тупиковых ситуаций. Особо обращается внимание на разработку эффективных
методов восприятия в населенных пунктах и в загроможденной среде.
Методология интеллектуального управления в настоящее время концентрируется
на обеспечении эффективного взаимодействия различных типов роботов с экипажными
системами. Она основывается на иерархической структуре системы управления, разработанной
национальным институтом стандартов и технологии, и определяет требуемую структуру
информационных потоков в разнородных системах.
Разработки интерфейса взаимодействия «оператор-робот» направлены на сведение до
минимума рабочей нагрузки оператора (в том числе «познавательной») и включает выработку
критериев оптимального взаимоотношения между роботом и оператором. В настоящее время
разрабатывается интерфейс для интегрированного рабочего места экипажа в боевой машине,
обеспечивающий ведение экипажем стрельбы прямой наводкой и управление беспилотной
машиной и беспилотным летательным аппаратом. Разработка ведется в интересах центра
испытаний автобронетанковой техники сухопутных войск США. Значительный прогресс
достигнут также в разработке языкового интерфейса и решении проблемы распознавания речи
в шумовых условиях боевых машин [2].
На рисунке 12 представлен укрупнённый перечень основных направлений исследований
и разработок, необходимых для создания научно-технического задела при разработке
перспективных образцов военных робототехнических комплексов [2]:
Основные направления ведущихся в России работ в области развития наземных
робототехнических систем и комплексов военного назначения, в основном, совпадают с
зарубежными. Российские РТК также создаются либо путём дооснащения уже существующих
образцов вооружения, военной и специальной техники (ВВСТ) модульным встраиваемым
или навесным оборудованием, обеспечивающим их безэкипажное применение в режиме
дистанционного управления, либо путём создания перспективных специализированных
дистанционно управляемых, полуавтономных и автономных РТК для выполнения боевых,
разведывательных и обеспечивающих задач.
Однако номенклатура создаваемых боевых и обеспечивающих РТК ВиСН значительно
уступает зарубежной [3].
Особенно заметно отставание в области создания малоразмерных РТК в категории
свыше 200 кг. Тем более что большинство основных задач, решаемых РТК ВиСН, может быть
17
решено с применением именно данной техники. Такое положение усугубляется ещё и тем,
что в настоящее время в ведущих странах НАТО наряду с совершенствованием существующих
образцов малоразмерных РТК проводятся широкомасштабные работы по созданию боевых и
обеспечивающих РТК категории от 500 кг до 12 т.
По-видимому, целесообразно провести разработку отечественных унифицированных
базовых шасси РТК, массой 700 - 800 кг и 2000 - 2500 кг.
К основным проблемам состояния разработок отечественных мобильных роботов можно
отнести следующие:
• существующие шасси близки между собой по грузоподъемности, тя го вооружённости,
весам и габаритам и, как правило, не превышают массу 200 кг;
18
• выпускаемые на внутренний рынок мобильные роботы имеют низкий уровень
интеллектуализации и являются, по существу, дистанционно-управляемыми аппаратами,
требующими устойчивой радио- и телевизионной связи с оператором;
• имеющийся значительный задел в области фундаментальных и поисковых исследований
по различным проблемам искусственного интеллекта недостаточно реализован в реальных
разработках.
Следует отметить ещё одну характерную черту развития военной робототехники в России
[1]: «Из-за слабого финансирования в России боевые робототехнические комплексы начали
разрабатываться значительно позже, чем в США и других странах. Ввиду отсутствия решения
инженерами-разработчиками главной проблемы - автономного управления наземным боевым
робототехническим комплексом, направления развития наземных боевых роботов пока не
имеют ощутимых результатов. Не решены задачи по системе стабилизации системы вооружения,
которая входит в систему управления огнем наземного боевого робототехнического
комплекса, и многие другие задачи. Разработка наземного робототехнического ударного
комплекса охватывает достаточно широкий спектр вопросов из различных областей знаний: от
использования шасси и ракетно-пушечного вооружения до технологии производства волоконно-
оптических гироскопов инерциально-навигационных систем и программного обеспечения.
Отдельным аспектам этой проблемы посвящены многочисленные монографии.
Разнородный материал приводит к непониманию офицерами ракетных войск и артиллерии
(РВиА) Сухопутных войск Вооруженных Сил Российской Федерации технических характеристик
отдельных систем робототехнических комплексов, которые необходимы для выполнения
боевых задач подразделениями РВиА Сухопутных войск и, как следствие, отсутствию
технических заданий предприятиям военно-промышленного комплекса России».
Прогноз направлений развития РТК ВиСН
Направления развития военной робототехники определяются не только достижениями
научно-технического прогресса, открывающего новые технологические возможности, но
и глобальными социально-политическими изменениями, приобретающими в последнее
время всё более динамичный характер и оказывающими основное влияние на национальные
концепции безопасности и соответствующие им Военные доктрины (ВД).
В настоящее время концепция системы безопасности, формирующая стратегические задачи
в оборонной сфере и, соответственно, задающая направления развития оборонных технологий,
претерпевает существенные изменения. В материалах сайта [11] отмечается, что «В середине
XX века понятие безопасности и соответствующих оборонных исследований было простым
и понятным - существовало государство, которое планировало программы обеспечения
безопасности единого общества. Программы заключались, в основном, в системах защиты от
19
внешней, причем физической угрозы - таким образом «оборонные исследования» включали
в себя различные системы вооружения, ракетные технологии, оружие массового поражения,
тяжелую технику, и составляли обособленную часть экономики страны.
На рубеже XX и XXI века на первый план вышли проблемы значительно более сложные, чем
те, с которыми приходилось сталкиваться ранее. Проблема терроризма поставила на первый
план обеспечение внутренней безопасности; уязвимость информационной инфраструктуры
заставила задумываться не только о физической защите; развитие социальных коммуникаций
открыло сложную внутреннюю структуру общества и разнообразило понятие его безопасности.
Государство также перестало быть единой административной машиной, передавая свои
функции в сети и структуры общества и бизнеса.... Новые вызовы потребовали переосмыслить
понятия оборонных технологий и оборонных исследований.
Сейчас направления оборонных исследований включают в себя критические технологии,
от которых зависит безопасность систем сообществ public network, а не только государства в
целом. Структурирование общества на сообщества и «публичные сети» предъявляет новые
требования к безопасности, в том числе, по уровню сложности ...».
26 декабря 2014 года была введена в действие ВД Российской Федерации (ВД РФ). Отзывы
специалистов, опубликованные в открытых источниках, указывают на неоднозначный характер
её оценки.
Например, по мнению автора публикации [12], новая редакция ВД РФ обладает рядом
недостатков, среди которых самым серьёзным он считает отсутствие четких требований
и показателей к способности Вооруженных Сил обеспечивать военную безопасность
страны. В предыдущей редакции ВД РФ по утверждению автора [12] «существовали и
четкие количественные показатели масштабов военных конфликтов. Так, помимо целевых и
пространственно-временных показателей, отличительной чертой вооруженного конфликта
называлось участие в боевых действиях в каждой из сторон по 40- 100 тысяч человек. Локальная
война по этому показателю предполагала привлечение к боевым действиям группировок от
400 - 800 тысяч человек до миллиона и более. В региональной войне принимать участие могли
уже армии, насчитывающие по несколько миллионов человек (от 3 - 4 до 6 - 7 и более).
Такие показатели и требования с учетом четко определенных методов и способа
парирования прогнозируемых военных угроз позволяли точно и обоснованно определять
требуемые численность и боевой состав ВС РФ, их структуру и систему вооружения.
Можно было спорить о том, эффективны или нет избранные методы и способы (часто
различные «специалисты» требовали создать принципиально новые способы нейтрализации
всех угроз, обвиняя военных профессионалов в рутинерстве), однако в наличии имелась
чёткая база обоснования требуемых показателей ВС. После 2010 года эти критерии из ВД РФ
исключили».
Также автор [12] обращает внимание на отсутствие в ВД РФ понятия «система
стратегического неядерного сдерживания», «под которой следует понимать совокупность
высокоточного оружия большой дальности наземного, морского и воздушного базирования,
20
их носителей, комплекс управления ими и их всестороннего обеспечения. То есть никаких
указаний на то, как система стратегического неядерного сдерживания должна развиваться и
совершенствоваться, в доктрине нет. Между тем в США концепция быстрого глобального удара
уже давно закреплена в соответствующих руководящих документах».
При этом важно учитывать изменение концептуальных взглядов ведущих государств
на ведение боевых действий. Так, в последние годы в технически развитых государствах
мира особое внимание уделяется активному развитию теории и практики ведения
сетецентрических войн, основной идеей которых является интеграция всех сил и средств в
едином информационном пространстве, позволяющая многократно увеличить эффективность
их боевого применения за счет синергетического эффекта.
В концептуально-теоретическом плане модель сетецентрической войны представляет
собой систему, состоящую из двух основных подсистем - средств разведки и средств поражения,
объединённых воедино органами управления и командования. РТК ВН могут эффективно
использоваться в качестве элементов обеих подсистем системы сетецентрической войны.
Поэтому уже при разработке роботизированных образцов ВВТ необходимо прорабатывать
вопросы их интеграции в единый контур управления войсками на различных уровнях
(тактический, оперативный, стратегический) [13,1].
Часто модель «сетецентрической» войны представляют как систему, состоящую из трех
подсистем (смотри рисунок 13), имеющих структуру решетки: информационной, сенсорной
(разведывательной) и боевой подсистемы (подсистемы отдельных тактических подразделений
и боевого управления) [14]:
Обобщённая модель концепции «сетецентрической» войны Рисунок В
21
Основой системы считается первая подсистема, на которую накладываются вторая и третья.
Элементами второй подсистемы являются силы и средства разведки, а третьей - средства
поражения, боевая техника и личный состав отдельных тактических подразделений.
Сетецентрическое ведение боевых действий характеризуется не только обеспечением
передачи развединформации всем участникам этих действий в реальном масштабе времени,
но и высоким уровнем организации (самоорганизации) функционирования элементов боевого
построения. Внедрение сетевых технологий в военную сферу направлено на повышение
боевых возможностей вооруженных сил не только за счет повышения огневых, маневренных
и других характеристик индивидуальных платформ вооружения, но, в первую очередь, за счет
сокращения цикла боевого управления [13].
Однако в настоящее время приходится констатировать, что в ВС РФ изучение и
освоение сетецентрических концепций носит разобщённый характер. Работы по созданию
единого информационного пространства ВС РФ (совокупности информационных ресурсов,
упорядоченных по единым принципам и правилам формирования, формализации, хранения
и распространения) находятся на начальном этапе, системный взгляд на сетецетрическое
развитие системы вооружения ВС РФ окончательно не сформирован [13].
Руководство ВС РФ осознаёт важность проблем роботизации ВВТ. На сегодняшний день
основными руководящими документами по созданию робототехнических комплексов военного
назначения являются:
• Государственная программа вооружения на период до 2020 года;
• «Концепция применения робототехнических комплексов военного назначения на
период до 2030 года» (утверждена 22 августа 2014 г.);
• комплексная целевая программа «Создание перспективной военной робототехники
на период до 2025 года с прогнозом до 2030 года» (КЦП «Роботизация-2025», утверждённая
Министром обороны Российской Федерации 10 октября 2014 г.);
• «Концепция роботизации наземного и морского вооружения, военной и специальной
техники ВС РФ в период до 2025 года» (утверждена 24 июля 2010 г.);
• «Концепция применения комплексов с беспилотными летательными аппаратами в ВС
РФ на период до 2025 года» (утверждена 17 апреля 2009 г.);
• «Межведомственная комплексная целевая программа развития отечественных
комплексов с БЛА и оснащения ими ВС РФ на период до 2025 года» (утверждена
27 сентября 2012 г.).
Перспективные проекты по созданию РТК ВиСН целесообразно рассматривать на примере
Соединенных Штатов Америки - страны, обобщившей и накопившей огромный мировой
опыт развития высоких технологий в сфере обороны и безопасности. В МО США роботы
создаются в соответствии с программами видов Вооруженных сил, «Объединенной программой
роботизации» (Joint Robotics Program), программой «Боевые системы будущего» (Future Combat
Systems).
В декабре 2007 года были утверждены основные направления развития (Unmanned
Systems Roadmap) безэкипажных и беспилотных систем на 2007 - 2032 г.г„ определяющие
цели и направления создания робототехнических средств наземного, морского и воздушного
базирования. Вышеназванный двадцатипятилетний план ежегодно корректируется с учетом
научно-технических достижений и изменений военно-политической обстановки.
22
В таблице 2 сформулированы основные требования, которым, по мнению авторов
дорожной карты «А Roadmap for U.S. Robotics From Internet to Robotics» (15], должны
удовлетворять наземные беспилотные системы в оборонном приложении через 5,10 и 15 лет.
Предполагаемые цели и задачи военных наземных беспилотных систем Таблица 2
Направления 5 лет 10 лет 15 лет
Информирование о районе боевых действий Само- устанавливающаяся для оптимального покрытия сектора Устройства раннего предупреждения само устанавливаемой и самоспасаемой небольшой боевой единицы Самоосведомленность о роли, выполняемой в пределах группы датчиков, обеспечивающих оптимальное покрытие сектора
Применение силы Возможность установки тяжелого оружия, пригодного к последующему использованию пехотой в боевых действиях. Л азерное целеуказание Скоординированные бои воздух-земля; земля-земля и земля воздух Кооперированный захват и возможность обеспечить огонь на подавление и выполнять маневры в отношении опорного пункта
Защита П роти вопожа рн ые системы Вооруженные системы, способствующие обеспечению безопасности флангов пехоты Совместный захват с беспилотным самолетом угрозы, находящейся на безопасном расстоянии
Логистика Комплексное пилотируемое/ беспилотное сопровождение в котором многочисленные транспортные средства (ведущие / ведомые) могут автономно перемещаться по заданным второстепенным до рогам под наблюдением оператора Беспилотная медицинская эвакуация; автономные погрузочно- разгрузочные операции UGV идентифицируют, разгружают, загружают и охраняют груз в распределительных центрах CONUS и OCONUS при любых условиях окружающей среды Полностью автоматизированная система управления следит за внутренним имуществом, грузом и маршрутом UGV с обеспечением необходимых материальных запасов за пределами прямой видимости через наземные линии связи для своевременного пополнения запасов без поступления информации человеку
Примечание- в таблице 2 приняты следующие сокращения:UGV - автоматический наземный TpancnoprCONUS - континентальная часть США; OCONUS - за пределами континентальной части США
23
Планы руководства МО США по развитию наземных робототехнических комплексов
основаны на анализе сформулированных выше перспективных требований (таблица 2),
тенденций развития мировой робототехники, доктринальных документах военно-технической
политики и учете научно-технических достижений.
Развитие наземных робототехнических комплексов
по основным направлениям
Таблица 3
Направления развития Годы
2015-2020 2021-2030 2031-2035
Способ управления По радиосвязи с использованием пульте управления Зашифрованная голосовая и/или условными сигналами кистями рук Разнообразные наборы звуковых, визуальных и других типов команд
Число взаимо действующих средств Один роботе оператором Несколько роботов с одним оператором Взаимодействие групп роботов
Диапазон Частот Фиксированные в радиодиапазоне Автоматическая смена частоты сигнала Многочастотная, с изменением режима связи
Сложность задач Определена операторо< перед запуском аппарата на задание Изменения не определены Автономная настройка режима работы в зависимости от условий
Условия для работы Ограничены внешней средой Частично ограничены суровыми условиями Не зависят от складывающейся обстановки
Заметность сигнала Высокая Средняя Низкая
Продол житель ность работы Часы Дни, месяцы Годы
Возможности, состав аппаратуры Датчики обеспечивают движение, обнаружена и частично распознавание объекте при прямой видимости Обеспечивание данными об обстановке за пределами прямой видимости Обмен данными между всеми средствами, расширяется база данных во время операции
Маневренность Несложные повороты, зависимость от наличие преград Датчики способны обеспечивать данными о сложившейся обстановке без задерже Автономное прогнозирование обстановки и оптимизация маршрута передвижения
Скорость, км/ч 30-35 50-70 120-140
Роль оператора Дистанционное управление или контроль Временный или периодический контроль Запуск на задание, автоматизированная обработка данных
Условия работы Необходима прямая видимость или прохождение радиосигнала Допускается временное нарушение связи Допускается отсутствие связи с оператором
Источник - Русинов В. Состояние и планы развития наземных
робототехнических комплексов США [16]
24
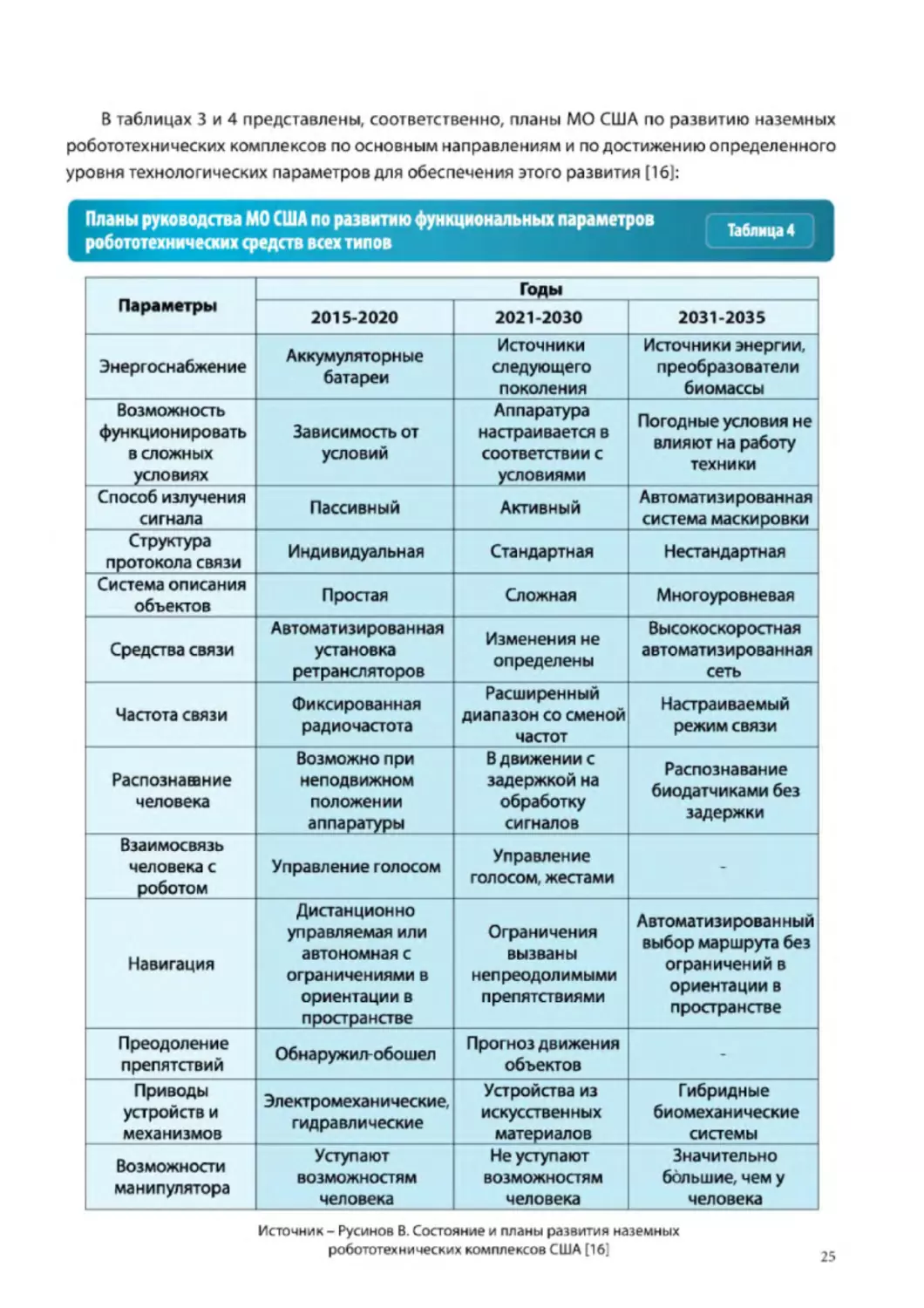
В таблицах 3 и 4 представлены, соответственно, планы МО США по развитию наземных
робототехнических комплексов по основным направлениям и по достижению определенного
уровня технологических параметров для обеспечения этого развития [16]:
Планы руководства МО США по развитию функциональных параметров робототехнических средств всех типов к Таблица 4 1 А
Параметры Годы
2015-2020 2021-2030 2031-2035
Энергоснабжение Аккумуляторные батареи Источники следующего поколения Источники энергии, преобразователи биомассы
Возможность функционировать в сложных условиях Зависимость от условий Аппаратура настраивается в соответствии с условиями Погодные условия не влияют на работу техники
Способ излучения сигнала Пассивный Активный Автоматизированная система маскировки
Структура протокола связи Индивидуальная Стандартная Нестандартная
Система описания объектов Простая Сложная Многоуровневая
Средства связи Автоматизированная установка ретрансляторов Изменения не определены Высокоскоростная автоматизированная сеть
Частота связи Фиксированная радиочастота Расширенный диапазон со сменой частот Настраиваемый режим связи
Распознавание человека Возможно при неподвижном положении аппаратуры В движении с задержкой на обработку сигналов Распознавание биодатчиками без задержки
Взаимосвязь человека с роботом Управление голосом Управление голосом, жестами -
Навигация Дистанционно управляемая или автономная с ограничениями в ориентации в пространстве Ограничения вызваны непреодолимыми препятствиями Автоматизированный выбор маршрута без ограничений в ориентации в пространстве
Преодоление препятствий Обнаружил обошел Прогноз движения объектов -
Приводы устройств и механизмов Электромехан и ческие, гидравлические Устройства из искусственных материалов Гибридные биомеханические системы
Возможности манипулятора Уступают возможностям человека Не уступают возможностям человека Значительно большие, чем у человека
Источник - Русинов В. Состояние и планы развития наземных
робототехнических комплексов США (16]
25
Таким образом, кратко формулируя требования к перспективным РТК ВиСН, можно
прогнозировать появление гибких (самоконфигурирующихся под конкретную задачу)
роботов, обладающих креативным интеллектом, способных приспосабливаться и работать в
неструктурированной среде, эффективно и безопасно взаимодействовать между собой и с
человеком.
Соответствующие этим требованиям пути решения лежат на направлениях развития
в РТК ВиСН:
• способности к восприятию;
• способности к адаптации (прежде всего, за счёт сенсорного обеспечения,
реконфигурируемости, комплексирования систем и развития интеллектуальности);
• способности к передвижению (в том числе, за счёт качественного (интерпретирующего)
управления движением);
• способности к изменению конфигурации;
• способности автономно принимать решения;
• уровня взаимодействия робота с человеком-оператором (включая управление от
человека-оператора, например, посредством интеллектуальных интерфейсов с виртуальной
реальностью) и другими роботами (особенно, при групповом применении и управлении);
• социальных способностей.
26
СПИСОК ИСПОЛЬЗОВАННЫХ источников
1. Мосиенко, С.А. Концепция построения наземного робототехнического ударного
комплекса [Текст] / С.А. Мосиенко, В.И. Лохтин - М.: ООО «Самполиграфист», 2014. - 124 с.
2. ОАО «ВНИИ «Сигнал», ОАО «Завод имени В.А. Дегтярева» (Ковров). Дорожная карта
«Наземные мобильные робототехнические комплексы» / ОАО «ВНИИ «Сигнал», ОАО «Завод
имени В.А. Дегтярева» - Ковров: ОАО «ВНИИ «Сигнал», 2014. -43 с.
3. Рубцов И.В. Вопросы состояния и перспективы развития отечественной наземной
робототехники военного и специального назначения [Электронный ресурс] // Известия ЮФУ
Технические науки. Рубрика Раздел I. Робототехника - 2013. - № 3. - С. 14-21. - Режим доступа:
http://izv-tn.tti.sfedu.ru/?p=2610. - Заглавие с экрана. - (Дата обращения: 09.04.2015).
4. Гундаров В."Зверинец"для Минобороны создадут за четыре года Независимое военное
обозрение 16.10.2015 [Электронный ресурс] // Новости ВПК: офиц. сайт. - Режим доступа: http://
vpk.name/news/142533_zverinec dlya_minoboronyi_sozdadut_za_chetyire_goda.html - Заглавие
с экрана. - (Дата обращения: 19.10.2015)
5. Испытания боевого робота «Нерехта» начнутся в 2016 году Военно-промышленный
курьер 15.10.2015 [Электронный ресурс] // Новости ВПК: офиц. сайт. - Режим доступа: http://
vpk.name/news/142413_ispyitaniya_boevogo_robota_nerehta_nachnutsya_v_2016_godii.html -
Заглавие с экрана. - (Дата обращения: 19.10.2015).
6. Последние новости науки и техники. Будь на пике технического прогресса.
Роботоперспективы армии России 02.08.2013 [Электронный ресурс] //Техномания: сайт.- Режим
доступа: http://texnomaniya.ru/voennaya-texnika/robotoperspektivi-armii-rossii.html. -Заглавие с
экрана. - (Дата обращения: 10.02.2015).
7. Разработана новейшая система обнаружения противника; ОПК организует производство
«подземных разведчиков» для Сухопутных войск [Электронный ресурс] // Ростех Новости -
Режим доступа: http://rostec.ru/news/4514963- Заглавие с экрана. - (Дата обращения: 14.01.2015).
8. Птичкин С. К истребителю ракета не прорвется. Боевую авиацию прикроют
непробиваемым полем. Российская газета 06.02.2015 [Электронный ресурс] // Новости ВПК:
офиц. сайт. - Режим доступа: http://vpk.name/news/126011_KJstrebitelyu_raketa_ne_prorvetsya.
html. - Заглавие с экрана. - (Дата обращения: 11.02.2015).
9. «ОПК» приступила к испытаниям интеллектуальной системы управления роботами
[Электронный ресурс] // Новости ВПК: офиц. сайт. - Режим доступа: http://vpk.name/
news/134619_opk_pristupila_k_ispyitaniyam_intellektualnoi_sistemyi_upravleniya_robotami.html
- Заглавие с экрана. - (Дата обращения: 24.09.2015).
27
10. [SpilNet] Мобильные самоорганизующиеся беспроводные
сенсорные сети [Электронный ресурс] - Режим доступа: https://docviewer.yandex.
ru/?url=http%3A%2F%2Fwww.startbase.ru%2Fdownload.html%3Ffile%3Dfile%2F6601860%
26title%3DSpilNet%2Belevator%2Bpitch%2Brus%2Bv3.pdf&lang =ru&c=56261 d 1 ef021 - Заглавие
с экрана. - (Дата обращения: 20.10.2015).
11. DARPA Программа 2015 [Электронный ресурс] И mipt.ru: сайт МФТИ. - Режим
доступа: http://mipt.ru/education/chairs/theor_cybernetics/government/upload/3af/Program_
darpa2015_rus.pdf. - Заглавие с экрана. - (Дата обращения: 04.02.2015).
12. Сивков К. Халтура в ответ на вызовы [Электронный ресурс] // Военно-
промышленный курьер - 2015. - № 4 (570). - Режим доступа: http://vpk.name/news/125839_
haltura_v_otvet_na_vyizovyi.html - Заглавие с экрана. - (Дата обращения: 15.07.2015.01.2015).
13. Кравченко, А.Ю. Проблемы и перспективы создания робототехнических
комплексов военного назначения [Текст] / А.Ю. Кравченко, Ю.Е. Стукало (ФГКУ «46 ЦНИИ»
Минобороны России, г. Москва) // «Перспективные системы и задачи управления»: сб.
материалов восьмой всероссийской научно-практической конф., Таганрог, 2013 г. / Изд-во ТТИ
ЮФУ. - 2013. - 378 с. - С. 22 - 28.
14. Ковалёв В.И., Малинецкий Г.Г., Матвиенко Ю.А."Концепция''Сетецентрической"
войны для армии Росси и: "Множитель силы" или "Ментальная ловушка?"//Сайт С.П. Курдюмова
- Режим доступа: http://spkurdyumov.ru/networks/koncepciya-setecentricheskoj-vojny/ - Заглавие
с экрана. - (Дата обращения: 18.03.2016).
15. A Roadmap for U.S. Robotics From Internet to Robotics [Electronic resource]. - 2013.
- Mode of Access: https://robotics-vo.us/sites/default/files/2013%20Robotics%20Roadmap-rs.pdf.
16. Русинов В. Состояние и планы развития наземных робототехнических комплексов
США [Электронный ресурс] //Зарубежное военное обозрение: информационно-аналитический
иллюстрированный журнал Министерства обороны России. - 2013. - № 3. - С. 44-56. - Режим
доступа: http://worldcrisis.ru/files/1251120/%С7%С2%СЕ_2013_03.pdf. - Заглавие с экрана. - (Дата
обращения: 16.01.2015);© Портал «Современная армия» 19.04.2013 Перспективные разработки;
Наземные военные роботы ВС США (Полковник В. Русинов, «Зарубежное военное обозрение»)
[Электронный ресурс]. - Режим доступа: http://www.modernarmy.ru/article/256/nazemnie-
voennie-roboti-ssha. - Заглавие с экрана. - (Дата обращения: 12.01.2015).
28
29
Государственный научный центр Российской Федераци
ЦНИИ робототехники и технической кибернетики
194064, Санкт-Петербург, Тихорецкий пр. 21
Телефон: +7 (812) 552-0110, факс: +7(812) 556-3692 \
www.rtc.ru, e-mail: rtc@rtc.ru